


















































































































































Author: Беспалов А.В. Харитонов Н.И.
Tags: химическая технология химическая промышленность автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика системы управления химические производства
ISBN: 978-5-94628-311-3
Year: 2007




ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ.. .... 11
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ 13
Глава 1. ВВЕДЕНИЕ В СИСТЕМЫ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ............................— . 20
1.1. Значение автоматического управления для развития химической
промышленности на современном этапе.........................20
1.2. Краткий очерк истории развития систем автоматического
управления...............................................^..21
1.3. Особенности управления химико-технологическим процессом... . 25
1.4. Технико-экономический эффект управления. Роль управления
в обеспечении безопасности химического производства и охраны
окружающей среды........................................ 28
1.5. Предмет «Системы управления химико-технологическими
процессами» и его взаимосвязь с другими дисциплинами . 29
Контрольные вопросы........ ........................ . 30
Глава 2. ОСНОВНЫЕ ПОНЯТИЯ УПРАВЛЕНИЯ ХИМИКО-
ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ...................................— • 31
2.1. Основные термины и определения... ..... .........31
2.2. Иерархия управления. Назначение систем управления химическим
предприятием и химико-технологическим процессом.............40
2.3. Принципы управления.................—.-------- 42
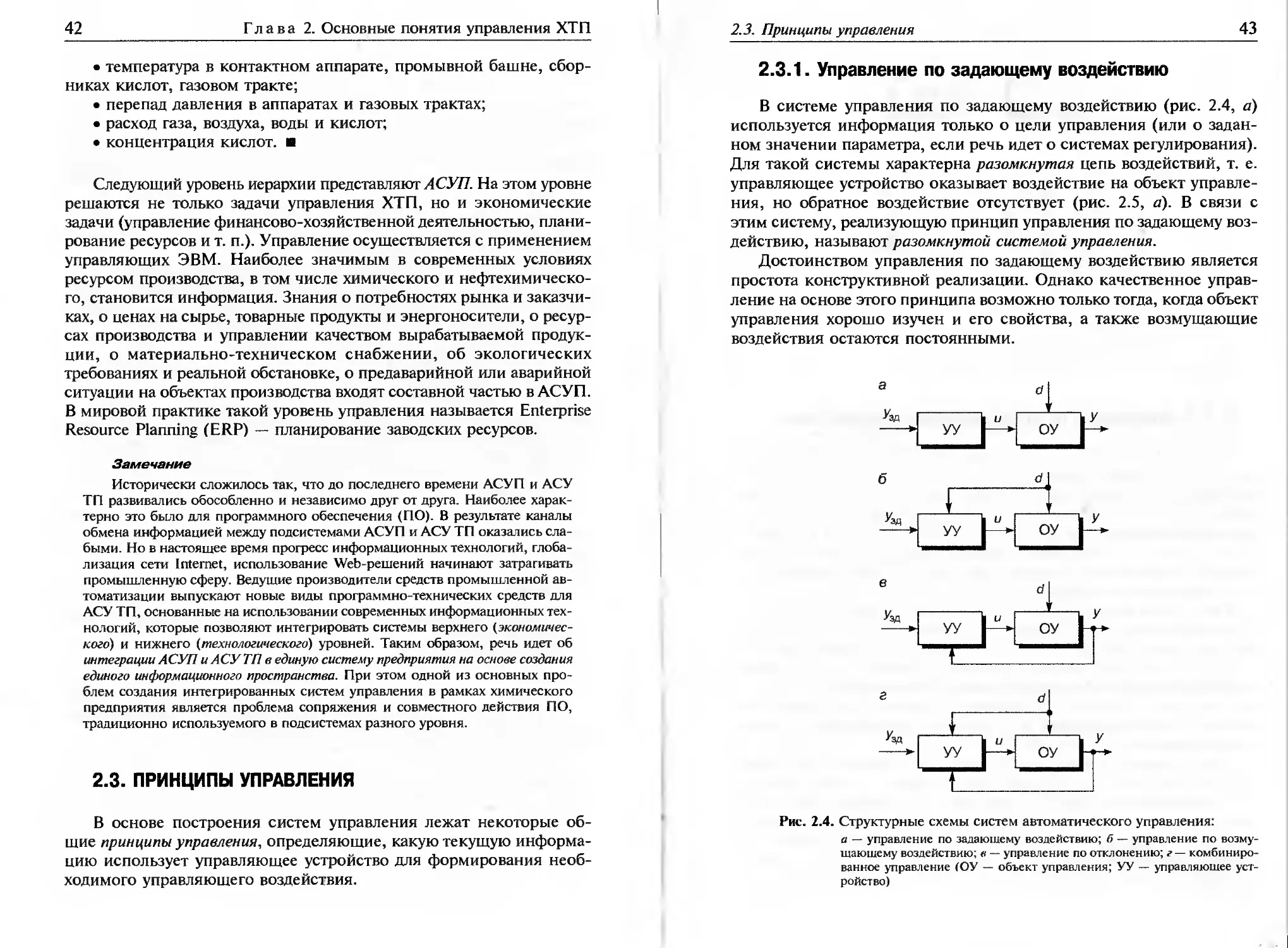
2.3.1. Управление по задающему воздействию.. . 43
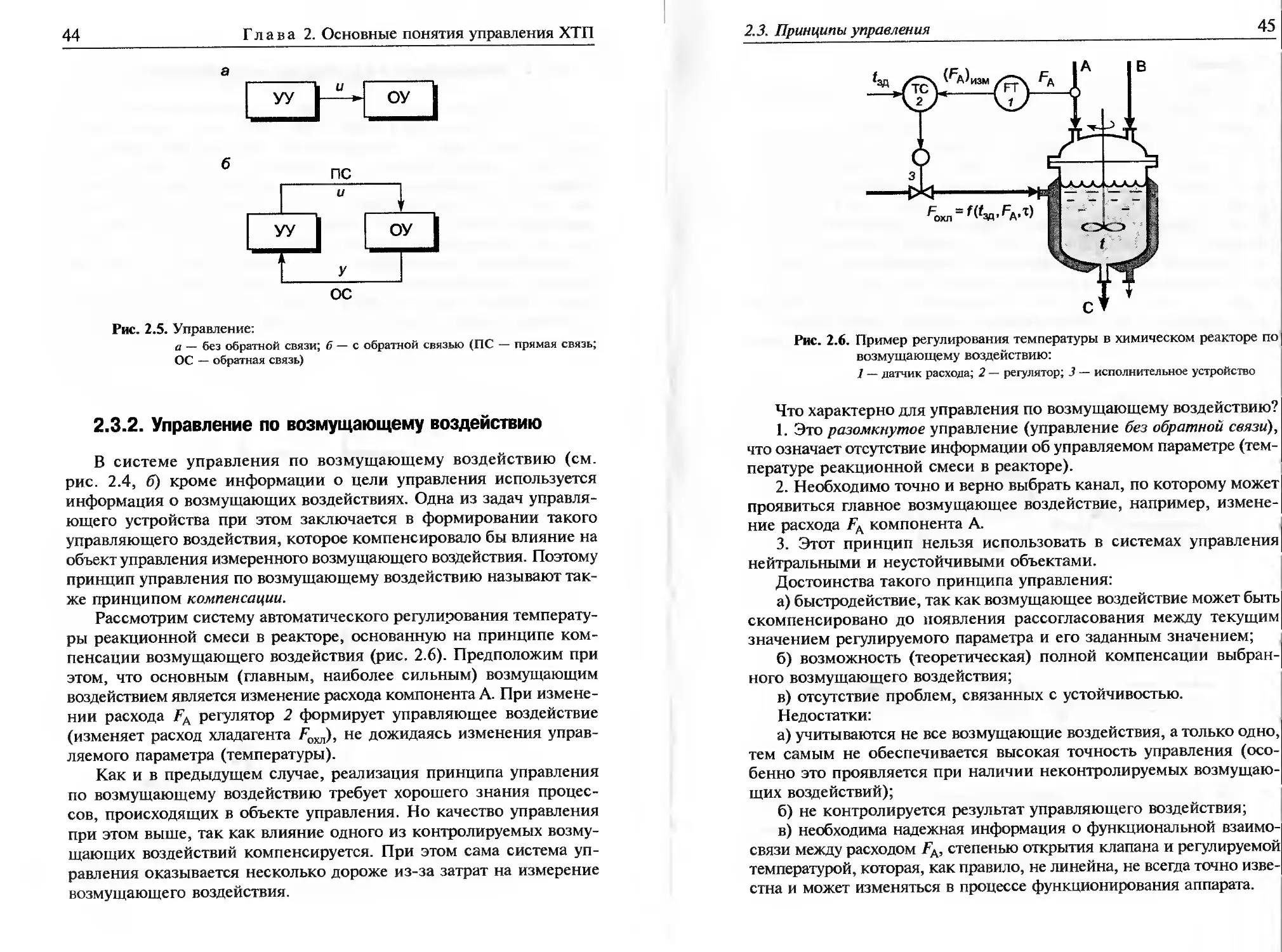
2.3.2. Управление по возмущающему воздействию.... . 44
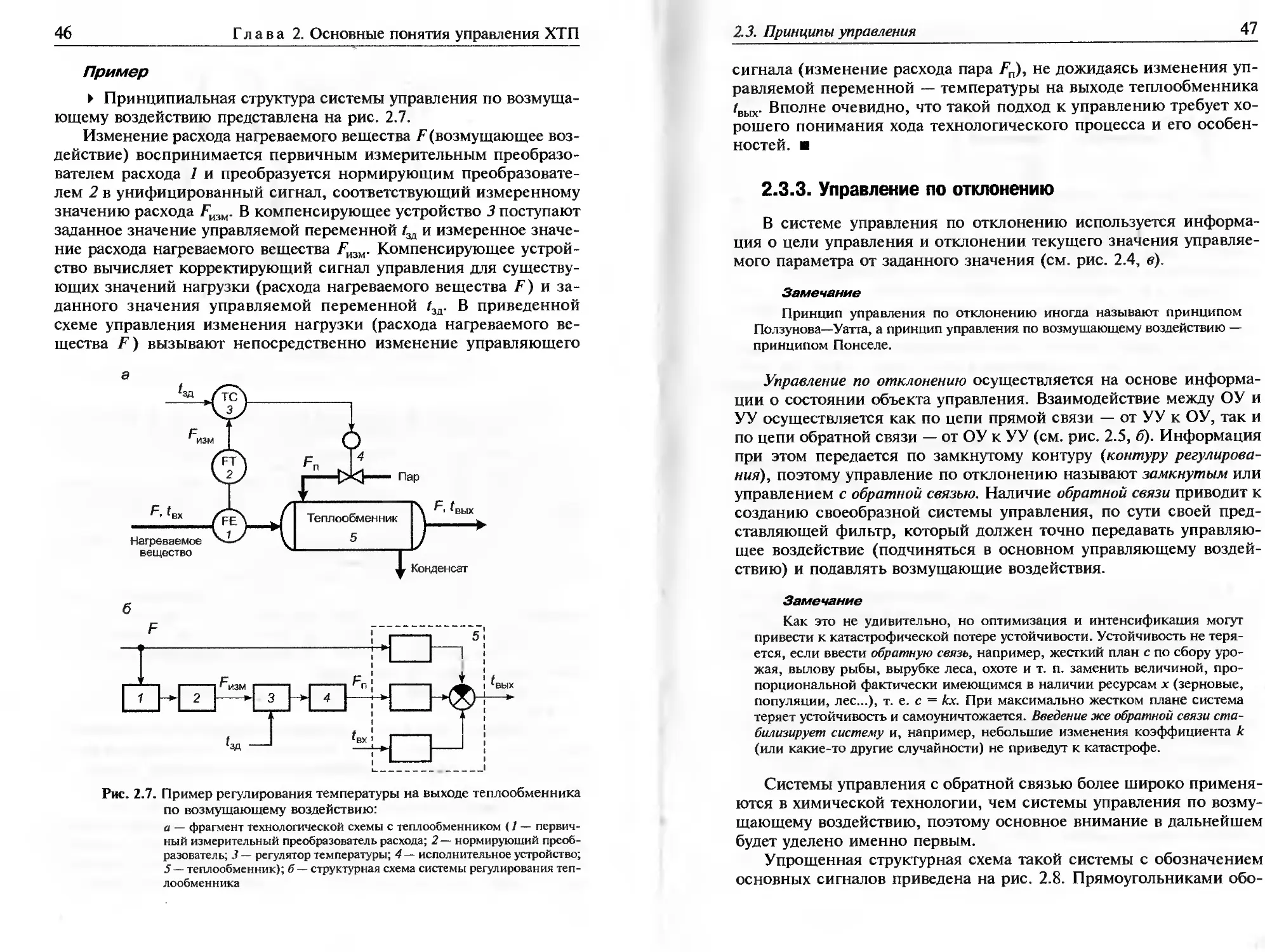
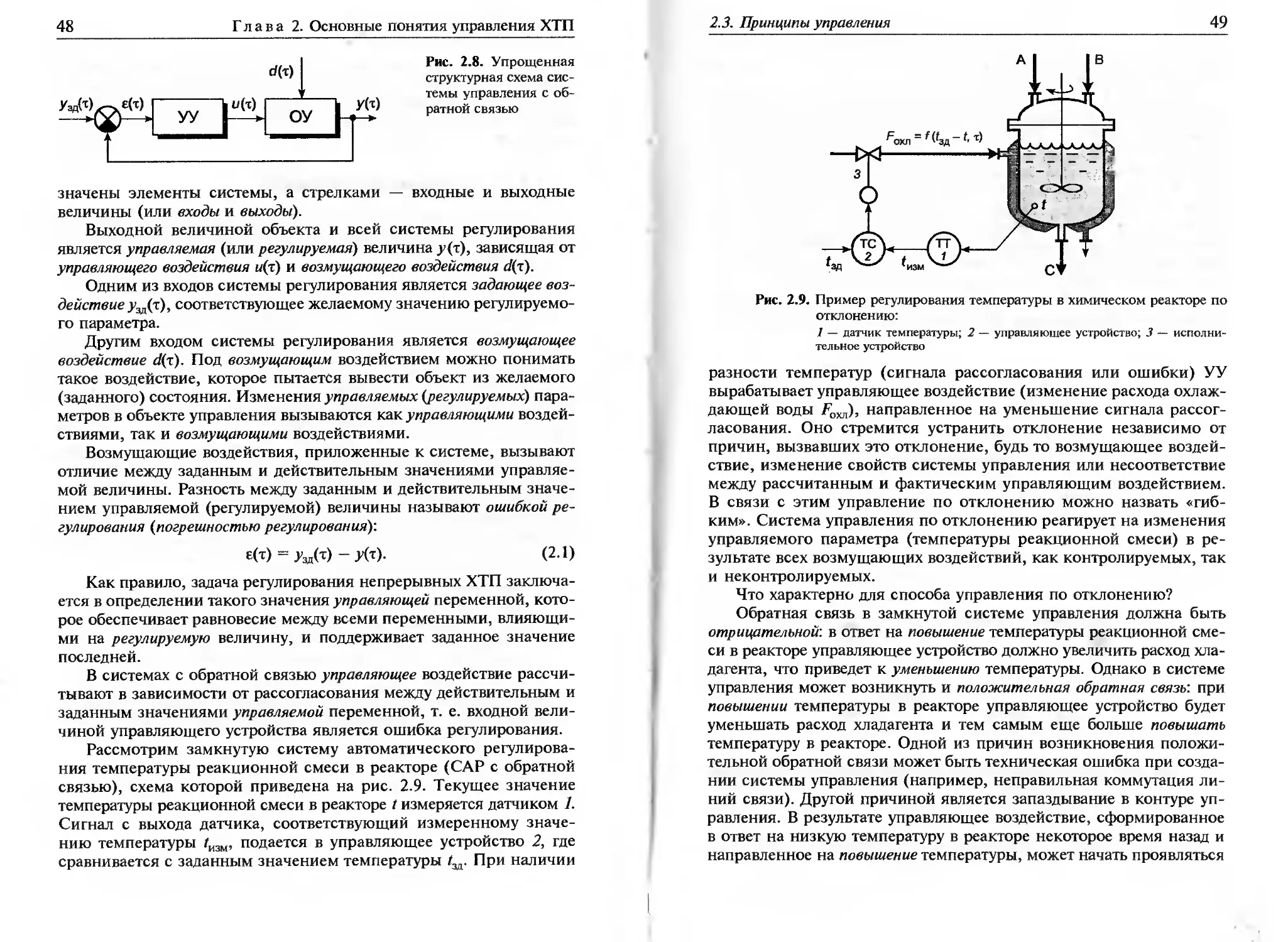
2.3.3. Управление по отклонению........«•............. . 47
2.3.4. Комбинированное управление................. 53
2.4. Классификация систем управления................ . 53
2.4.1. По характеру изменения задающего воздействия.... . 54
2.4.2. По числу контуров......................... . 55
2.4.3. По числу управляемых величии.... . 56
2.4.4. По характеру управляющих воздействий.................56
2.4.5. По виду зависимости установившейся ошибки от внешнего
воздействия..............................................57
2.4.6. По энергетическим признакам. . 58
2.4.7. По математическому описанию ... . 58
2.5. Структурные схемы САУ......... . 59
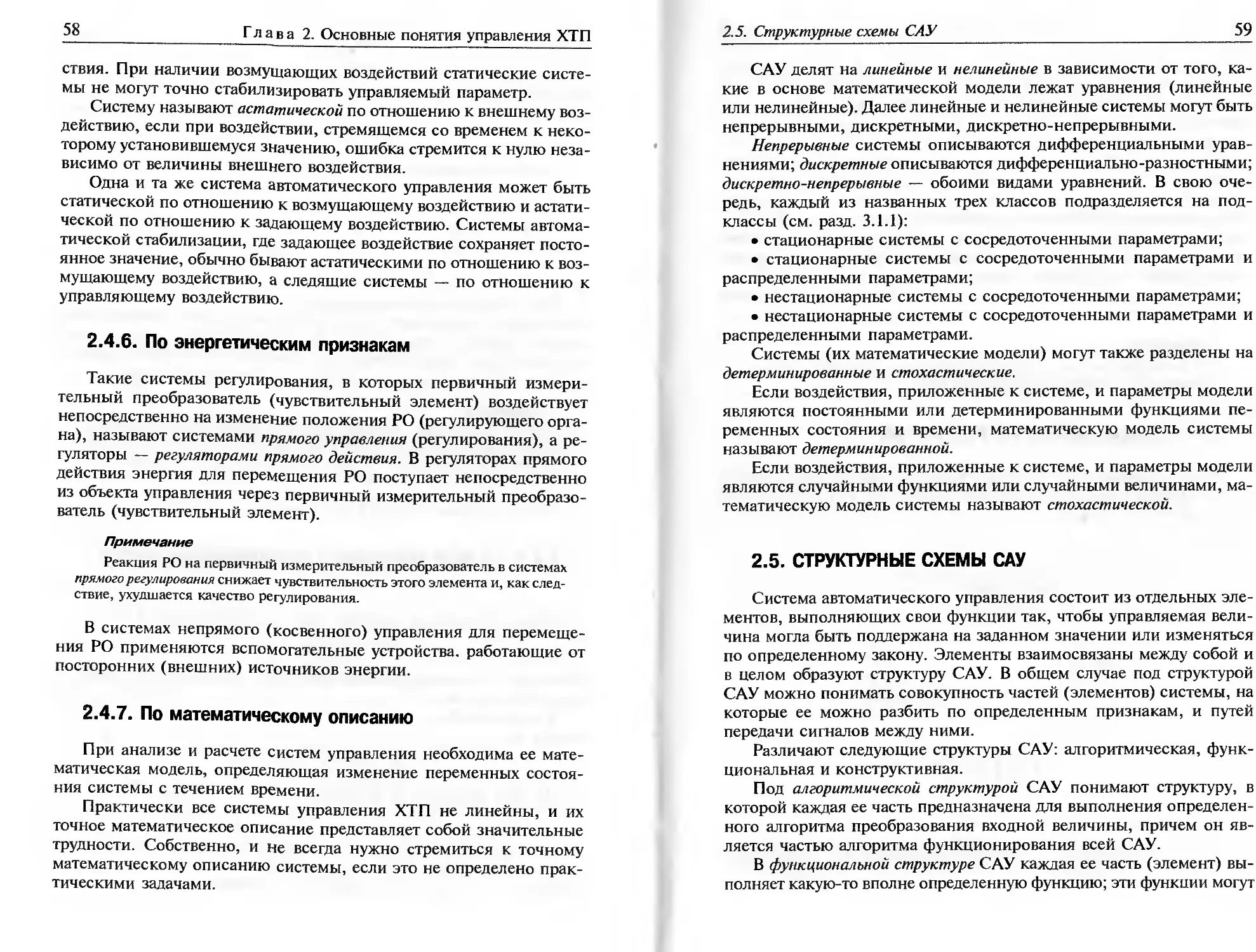
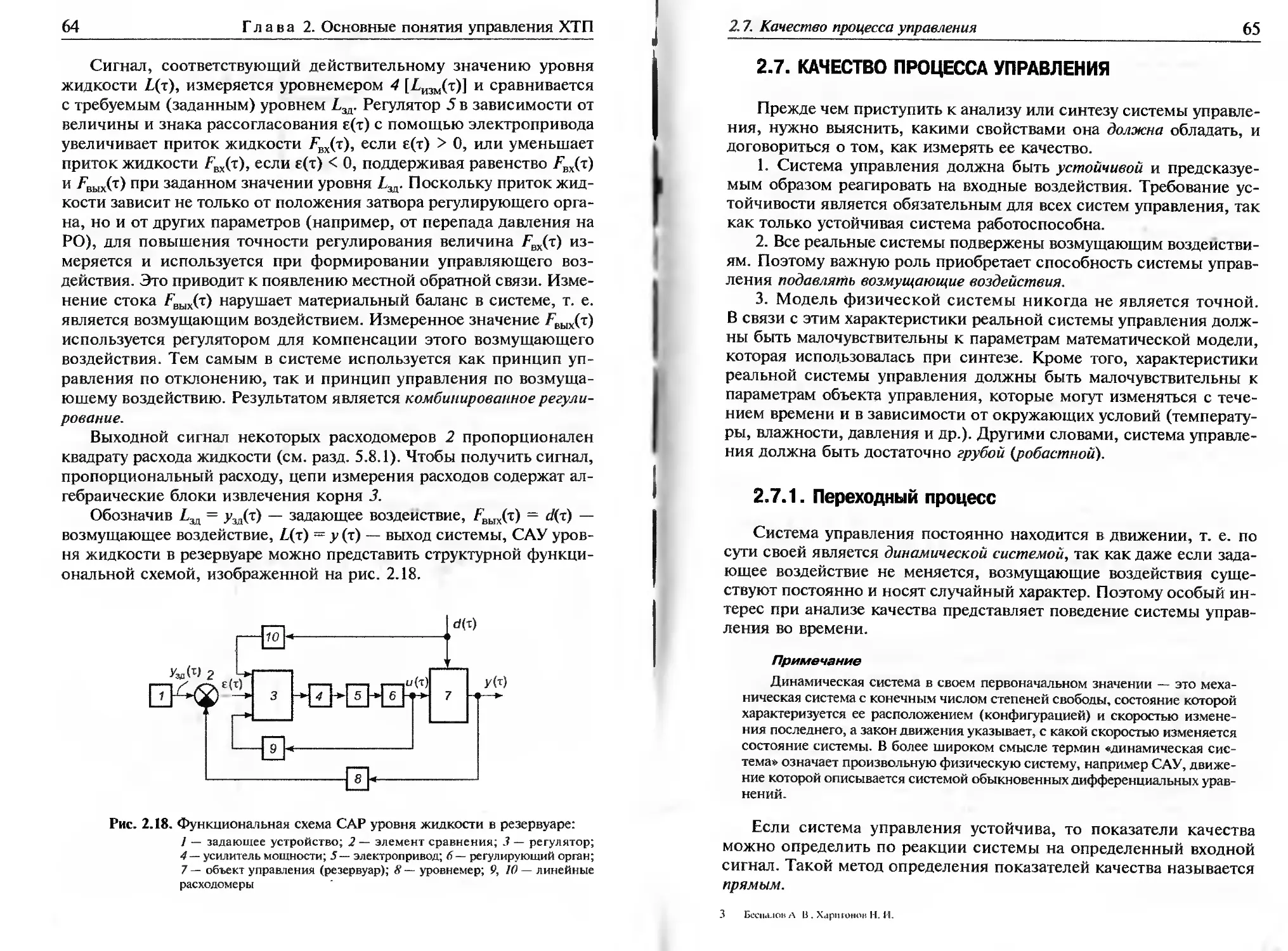
2.6. Функциональная структура САР ... . 60
2.7. Качество процесса управления... . 65
2.7.1. Переходный процесс .... . 65
2.7.2. Устойчивость .... i-wi j .................•*—- 68
2.7.3 Показатели, характеризующие точность регулирования .. . 69
2.7.4 Покиатели, характеризующие быстродействие........... 70
Оглавление
Оглавление
. 73
. 74
2.7.5. Показатели, характеризующие колебательность переходного
процесса........................................................ 70
2.7.6. Интегральные показатели качества регулирования..
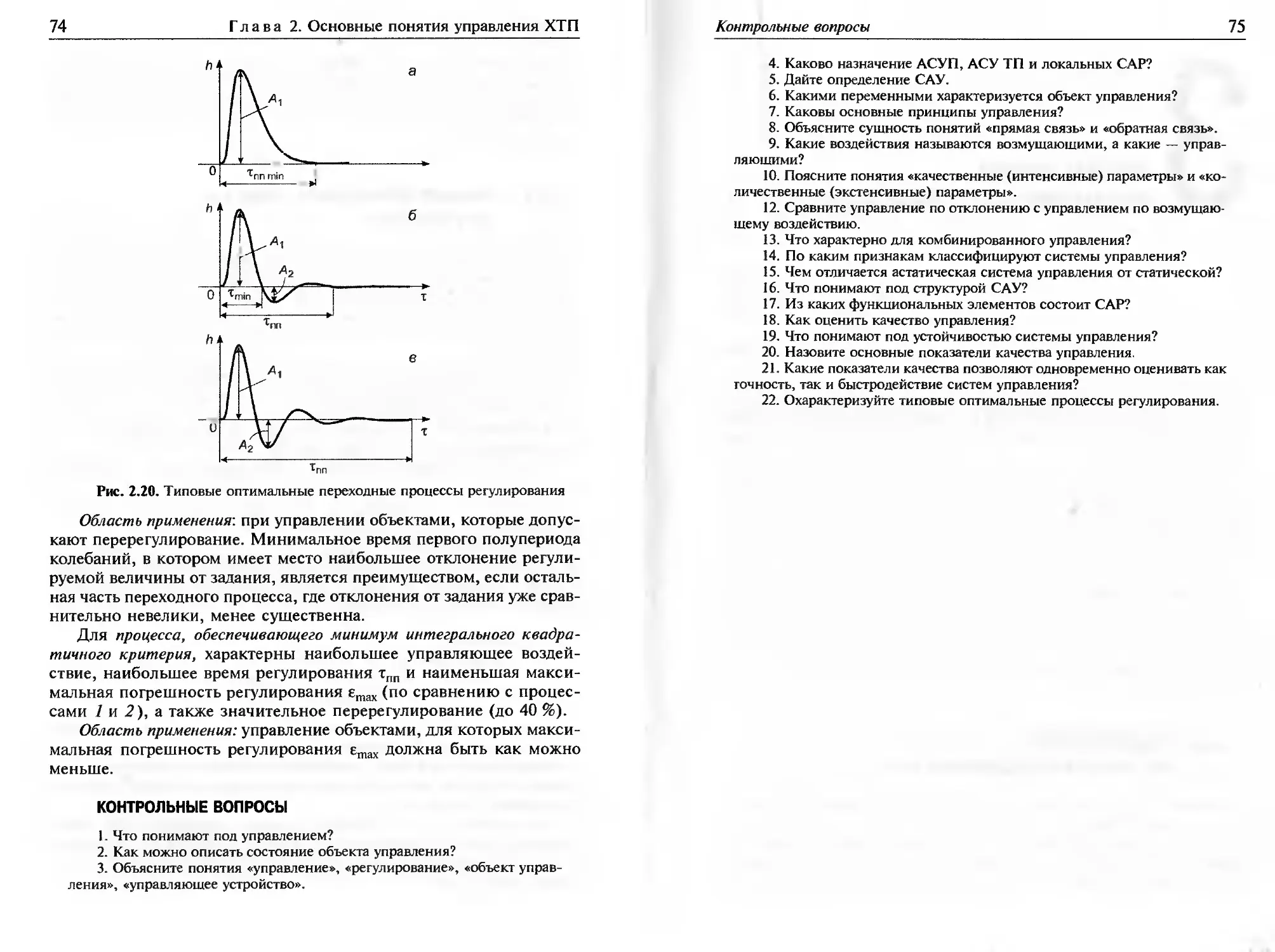
2.7.7. Типовые оптимальные процессы регулирования.....
Контрольные вопросы....« ............................. .
Глава 3. ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.......................76
3.1. Моделирование как метод исследования САУ................. -.76
3.1.1. Математические модели САУ .. •• 78
3.1.2. Декомпозиция САУ........................... >
3.1.3. Составление дифференциальных уравнений
элементов САУ......................................... .......
3.1.4. Линеаризация уравнений.....................
3.2. Динамические характеристики САУ..............................
3.2.1. Использование преобразования Лапласа для анализа САУ ..
3 2.1.1. Свойства преобразования Лапласа....— ..........
З .2.1.2. Передаточная функция звена..................
3.2.2. Временные характеристики......—..............- . .
3.2.2.1. Типовые входные воздействия..
3.2.2.2. Переходная характеристика .__. . -----.
3.2.2.3. Импульсная переходная функция.... ......« .....
3.2.2.4. Рамповая переходная функция..— -..............-
3.2.3. Частотные характеристики.............................. 100
З.2.З.1. Частотная передаточная функция.................... 102
3.2.3 2. Графическое представление частотных характеристик.106
3.2.3.3. Некоторые термины, используемые при частотном анализе
систем управления............................................109
3.2.4. Структурные схемы...................... •• ИЗ
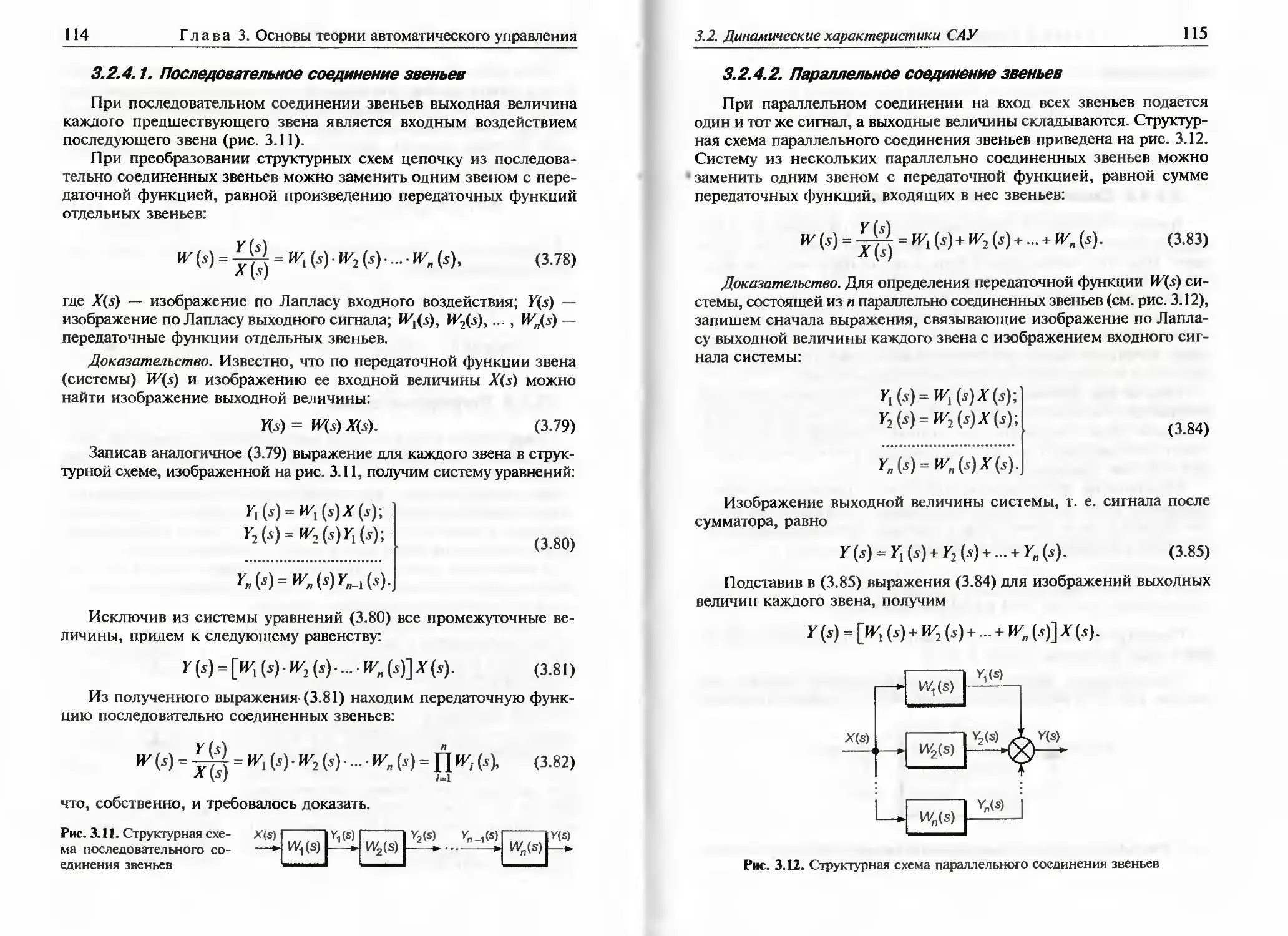
3.2.4.1. Последовательное соединение звеньев .. ........... 114
3.2.4.2. Параллельное соединение звеньев. —........ 115
3.2.4.3. Соединение с обратной связью...................... 116
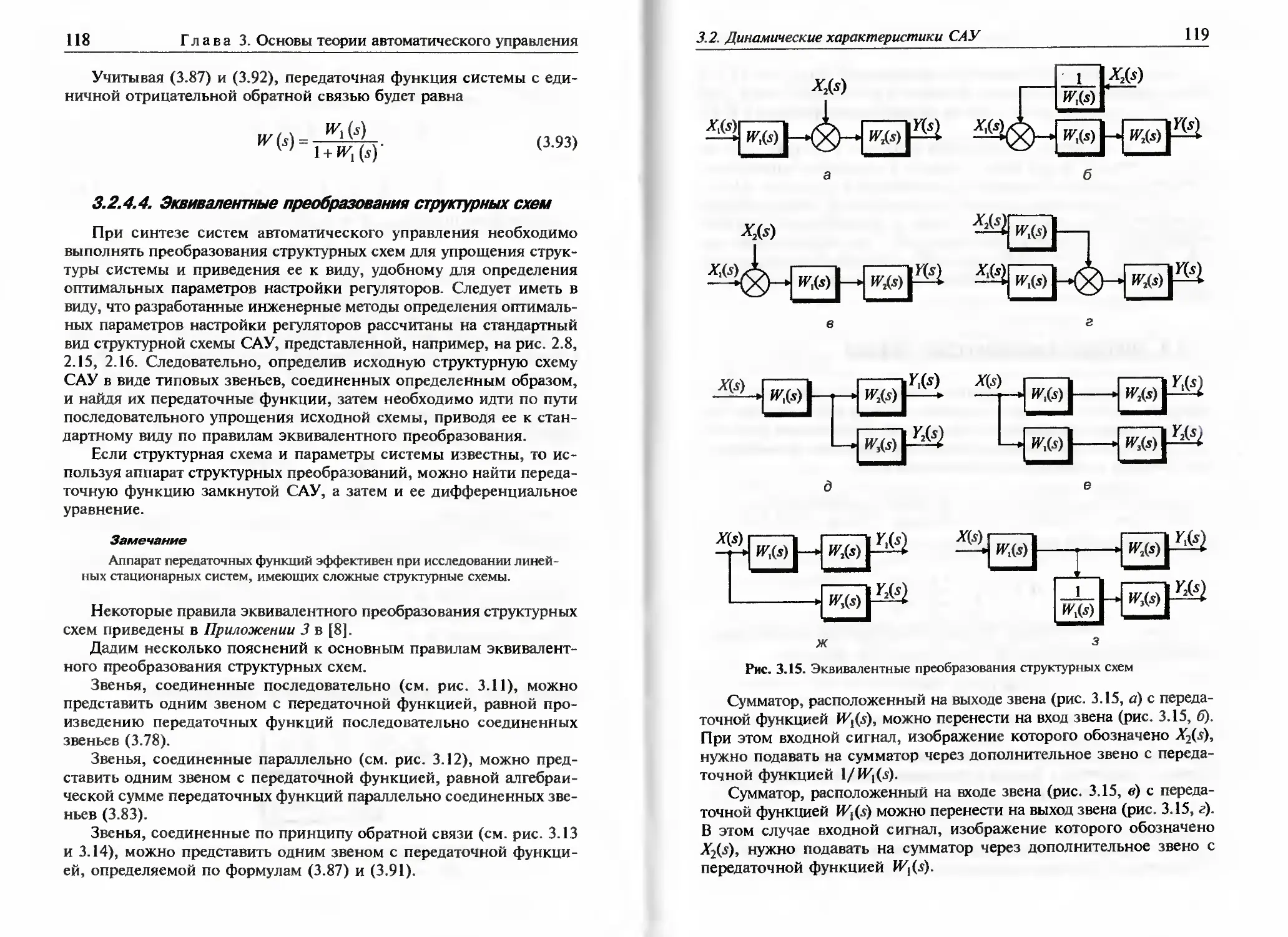
3.2.4.4. Эквивалентные преобразования структурных схем..... 118
3.3. Типовые динамические звенья....—...................-. —120
3.3.1. Статическое звено нулевого порядка.......... ..121
...122
.. 123
.....124
.....126
...130
.... 134
....138
- ....144
-....149
.....156
161
.....162
.....165
.170
.173
87
89
91
93
95
96
98
98
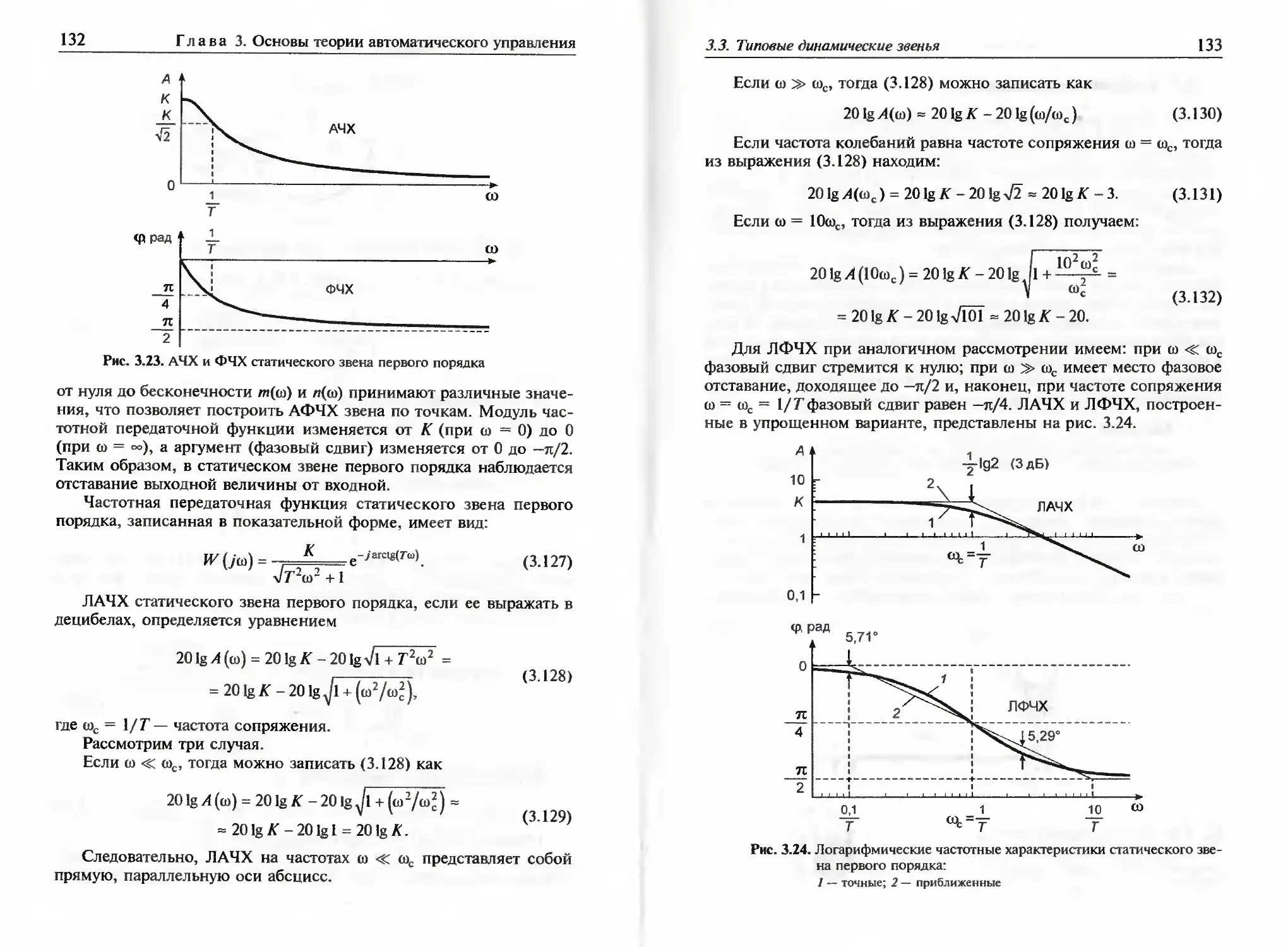
3.3.1.2. Частотные характеристики....м
3.3.2. Статическое звено первого порядка..
3.3.2.1. Временные характеристики. ....
3.3.2.2. Частотные характеристики.—...
3.3.3. Звено запаздывания...............
3.3.4. Статическое звено второго порядка
3.3.4.1. Переходная характеристика .. .
3.3.4.2. Частотные характеристики..
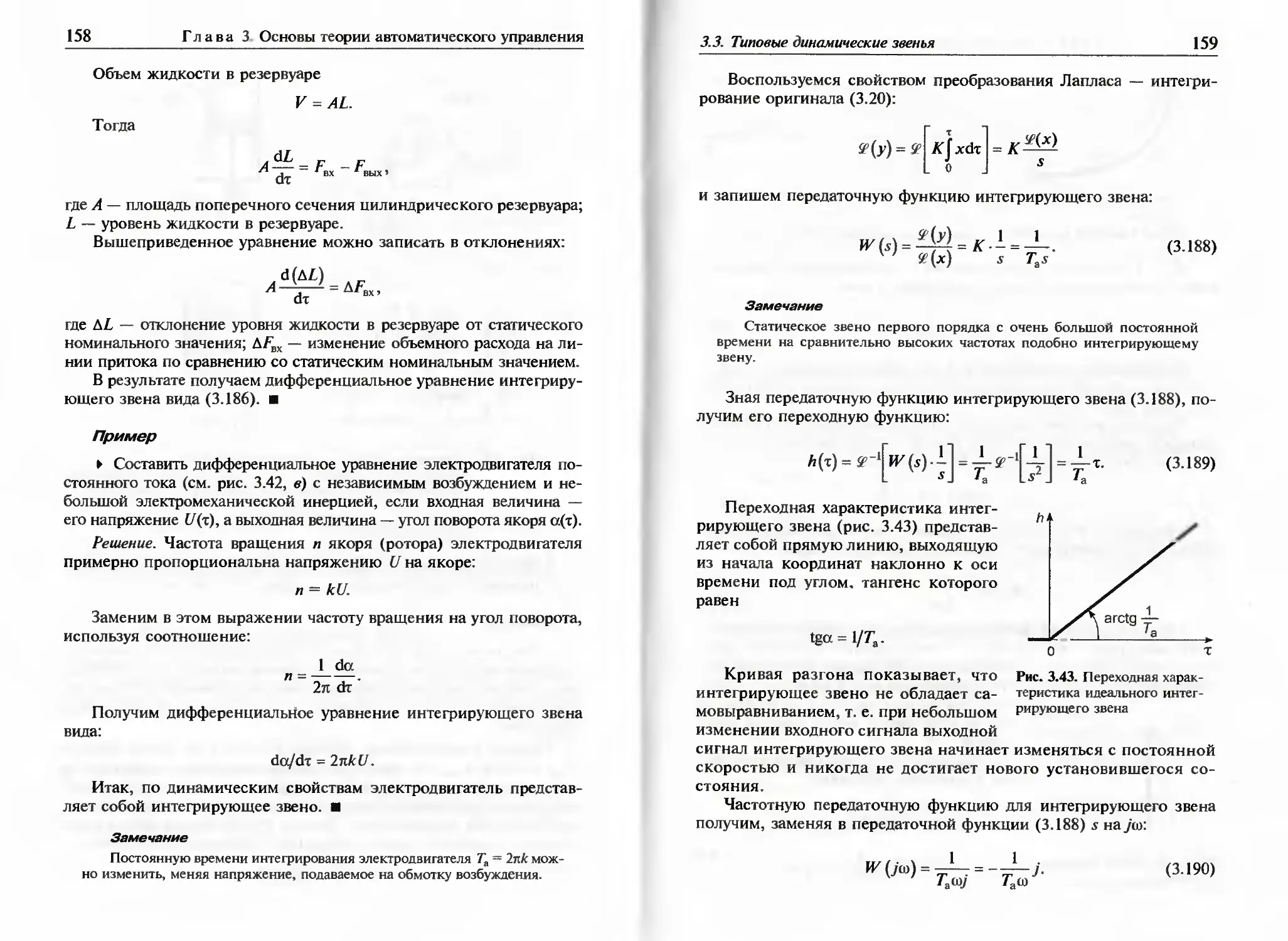
3.3.5. Идеальное интегрирующее звено ..
3.3.6. Реальное интегрирующее звено.......
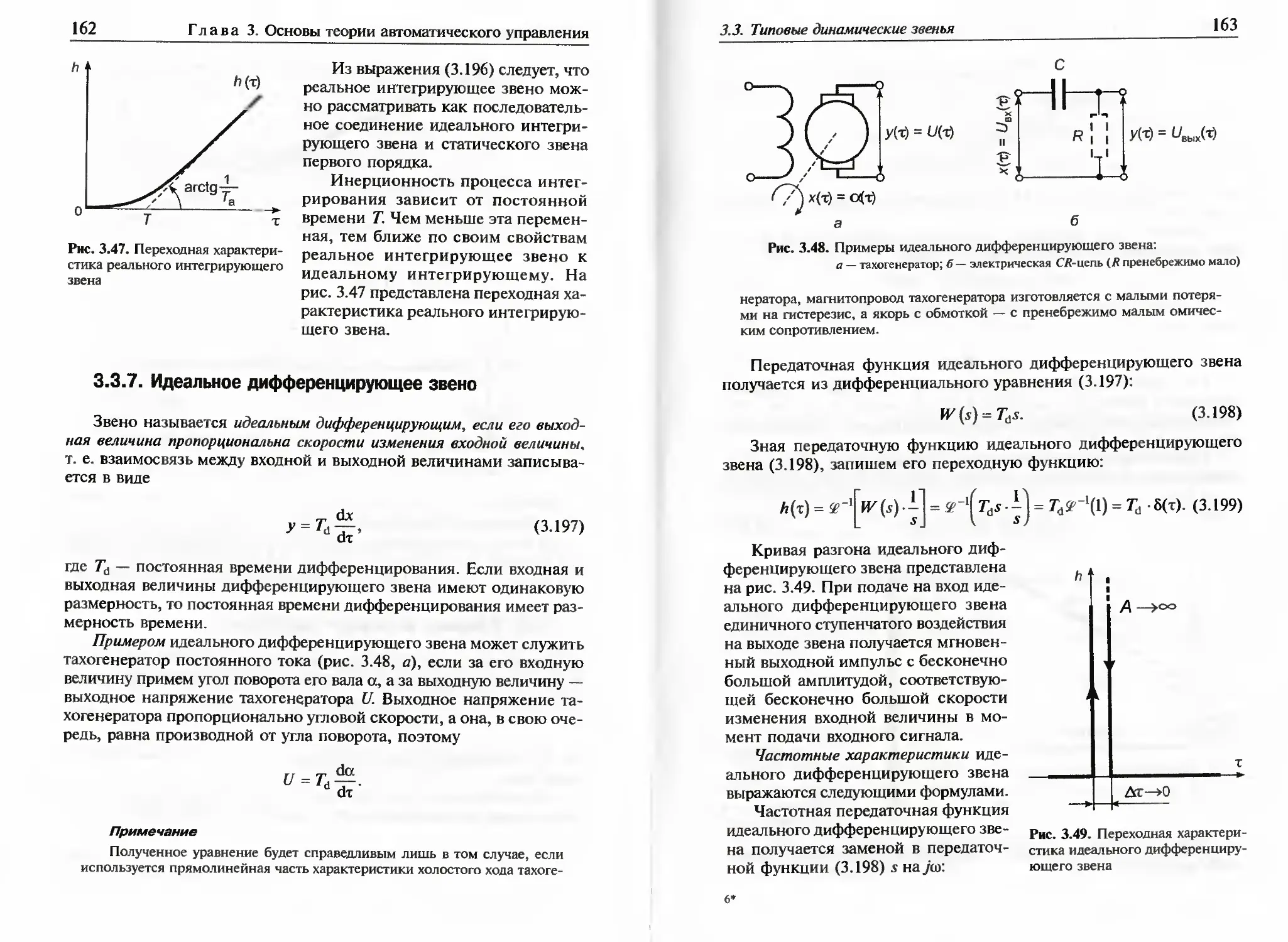
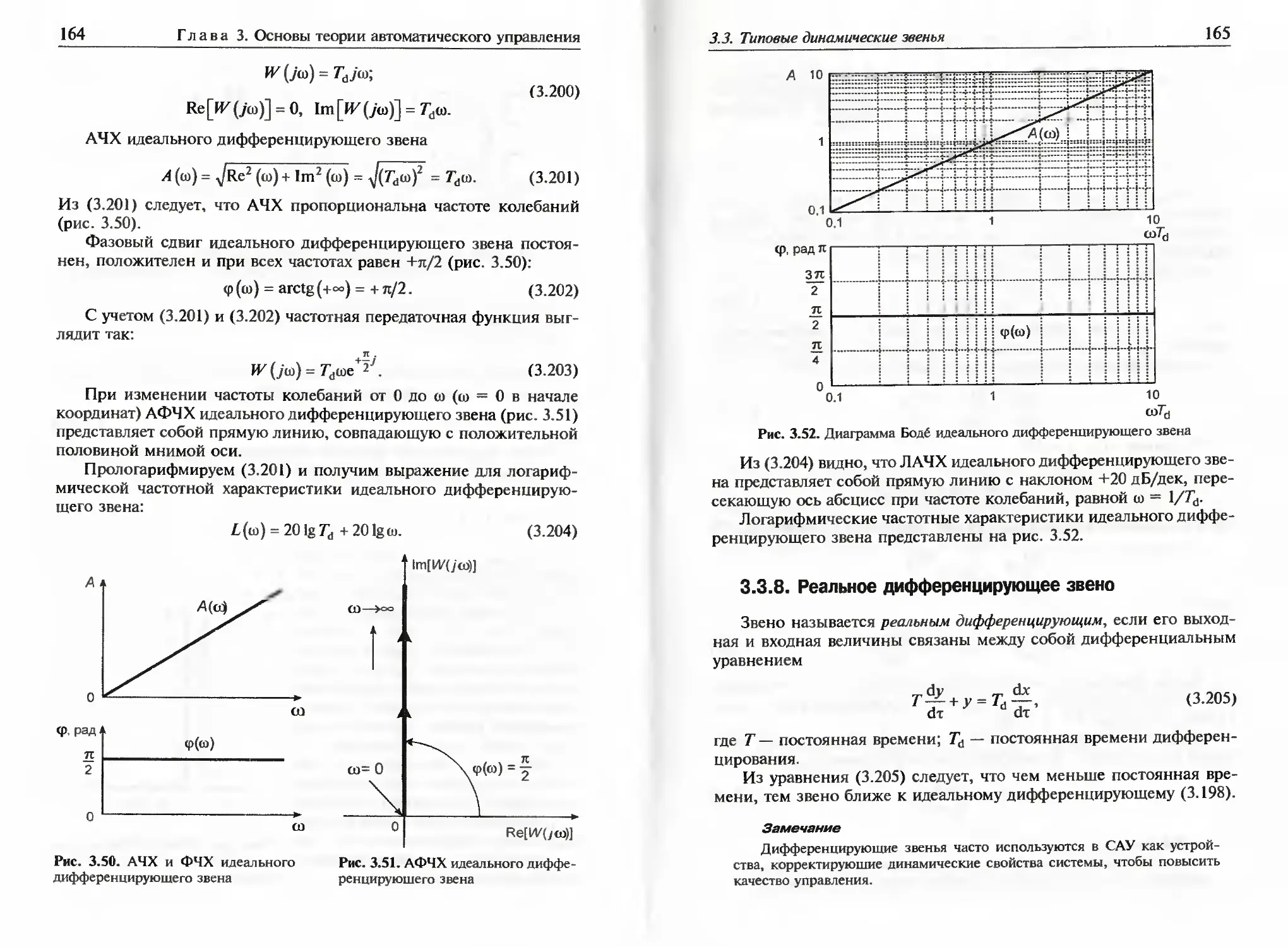
3.3.7. Идеальное дифференцирующее звено .
3.3.8. Реальное дифференцирующее звено ....
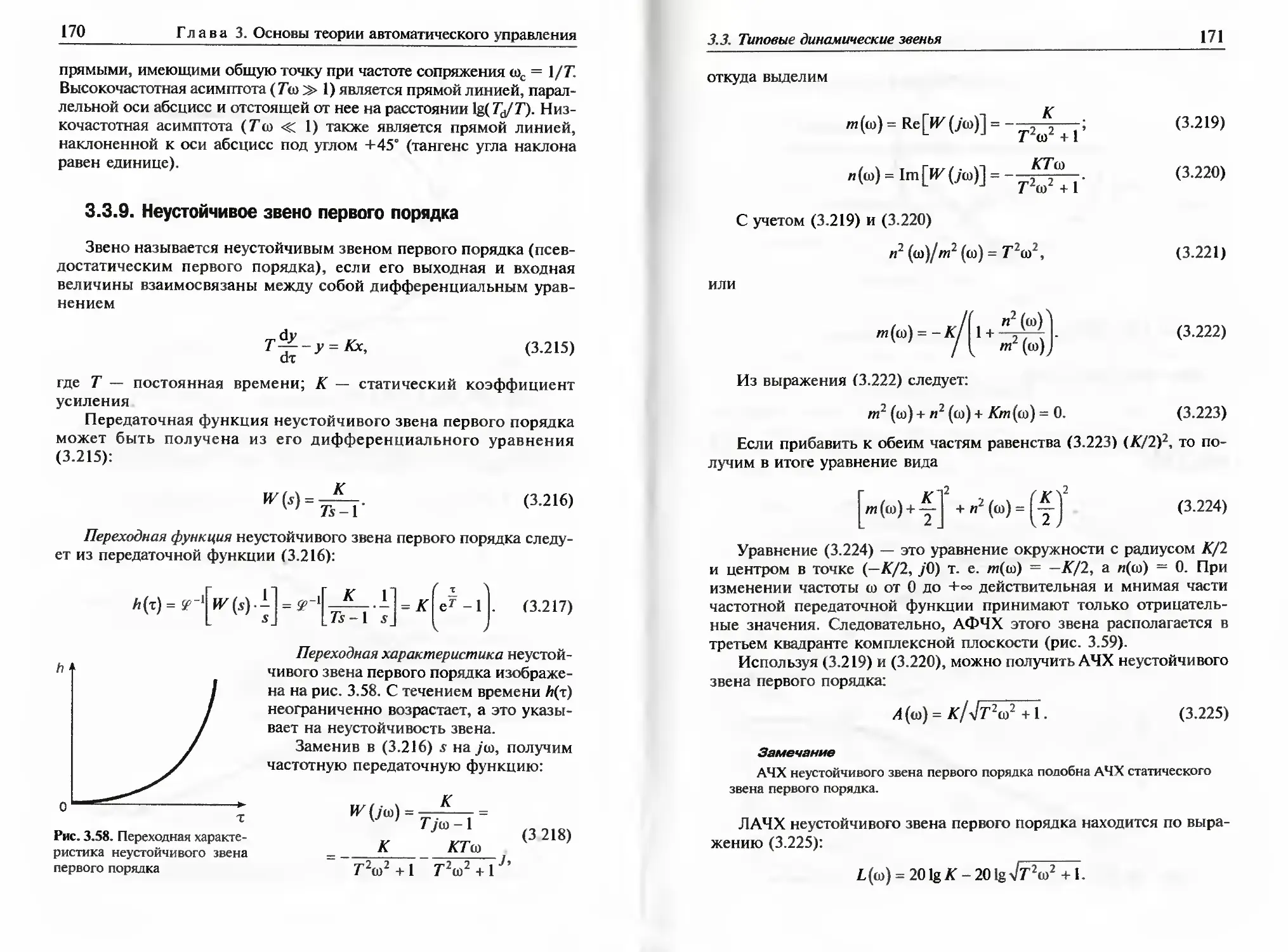
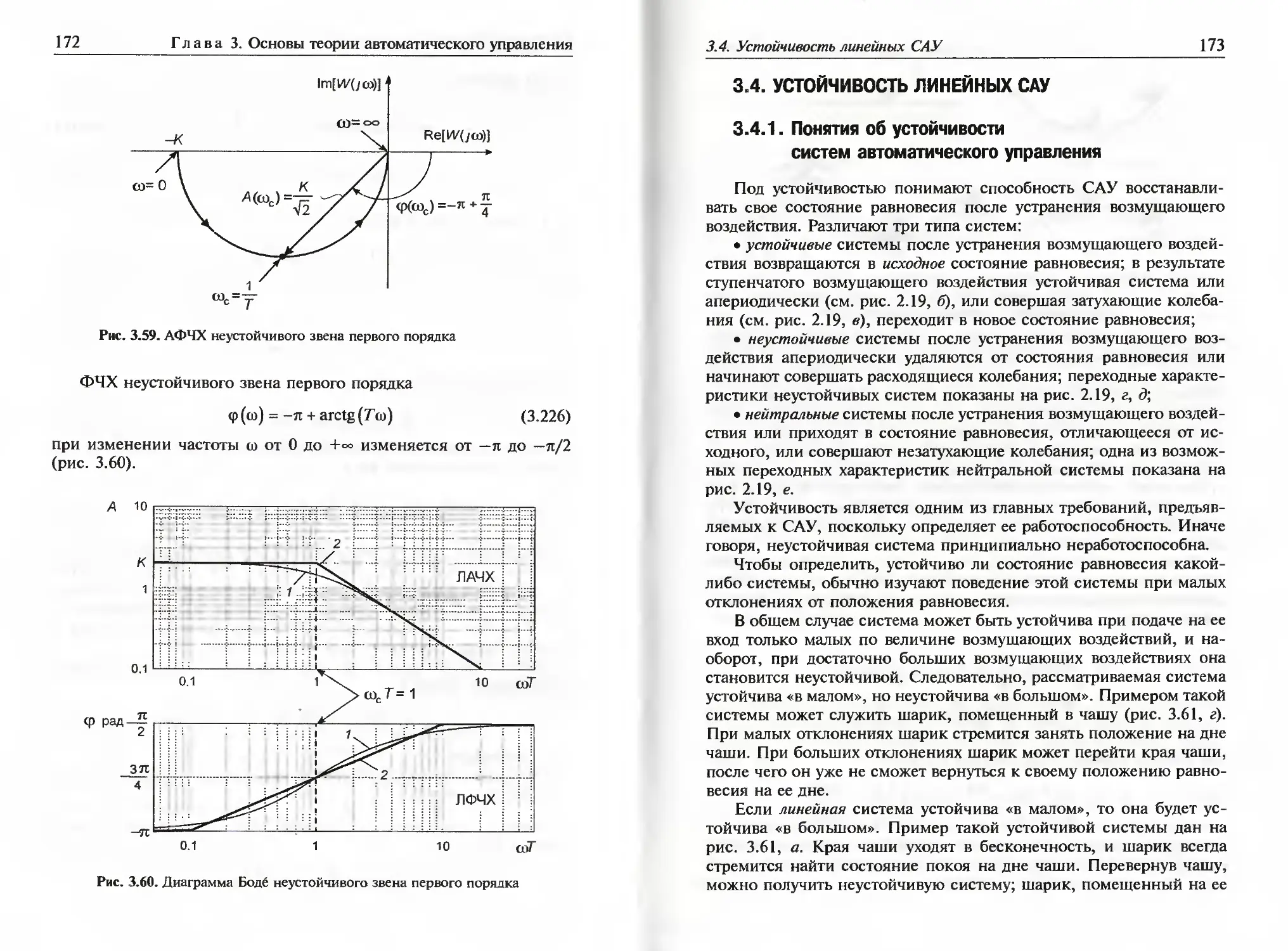
3.3.9. Неустойчивое звено первого порядка .
3 4. Устойчивость линейных САУ.............—........
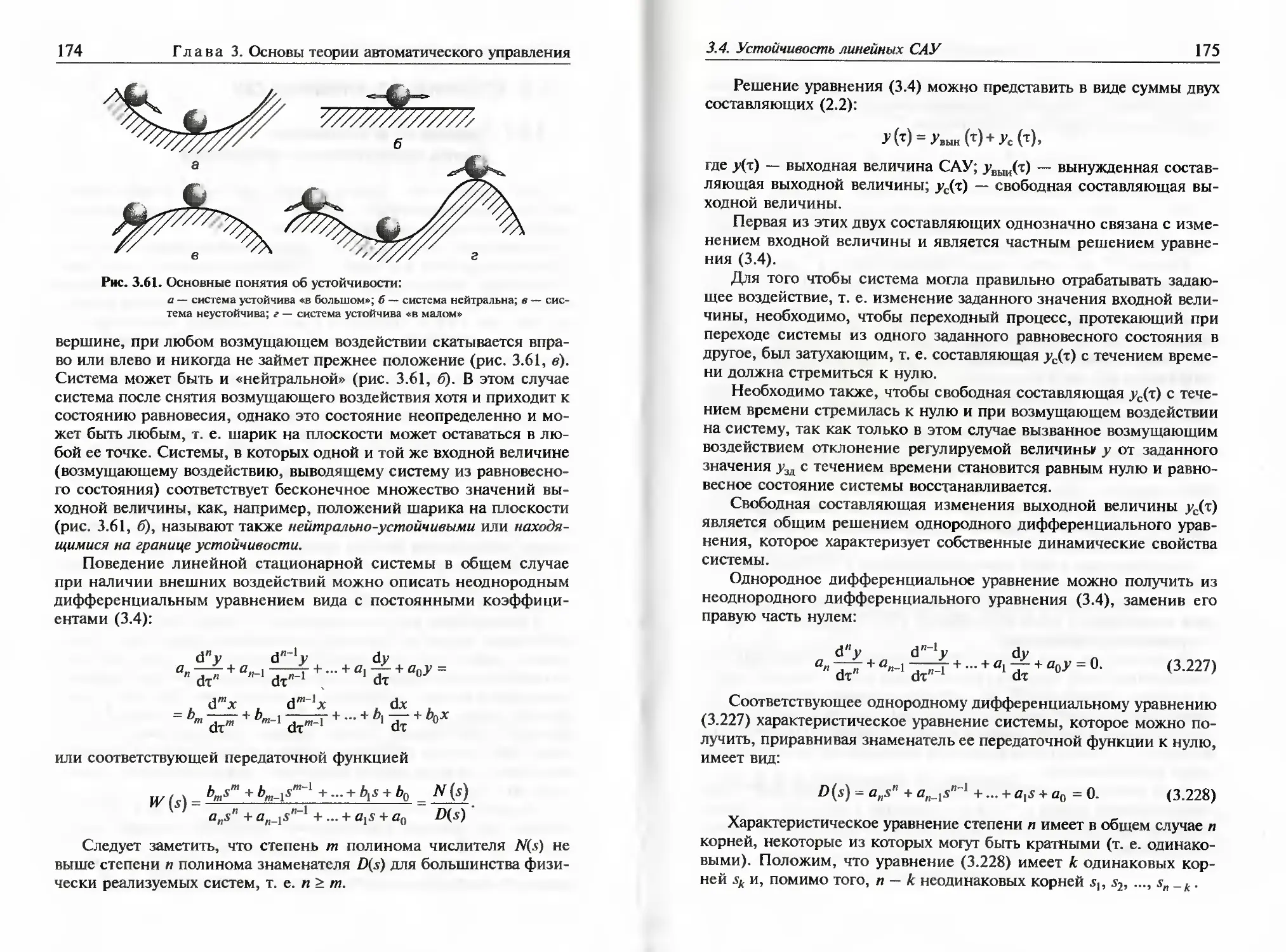
3 4 1. Понятия об устойчивости систем автоматического
управления ......................-..................
3.4.2. Устойчивость по Ляпунову............... . ....177
3.4.3. Алгебраические критерии устойчивости .. . - .... 179
З.4.З.1. Критерий Рауса—Гурвица. ......179
3.4.3.2. Критерий Льенара—Шипара.. ... 181
3.4.4. Частотные критерии устойчивости. ... 181
З.4.4 .1. Критерий Михайлова .. ... 181
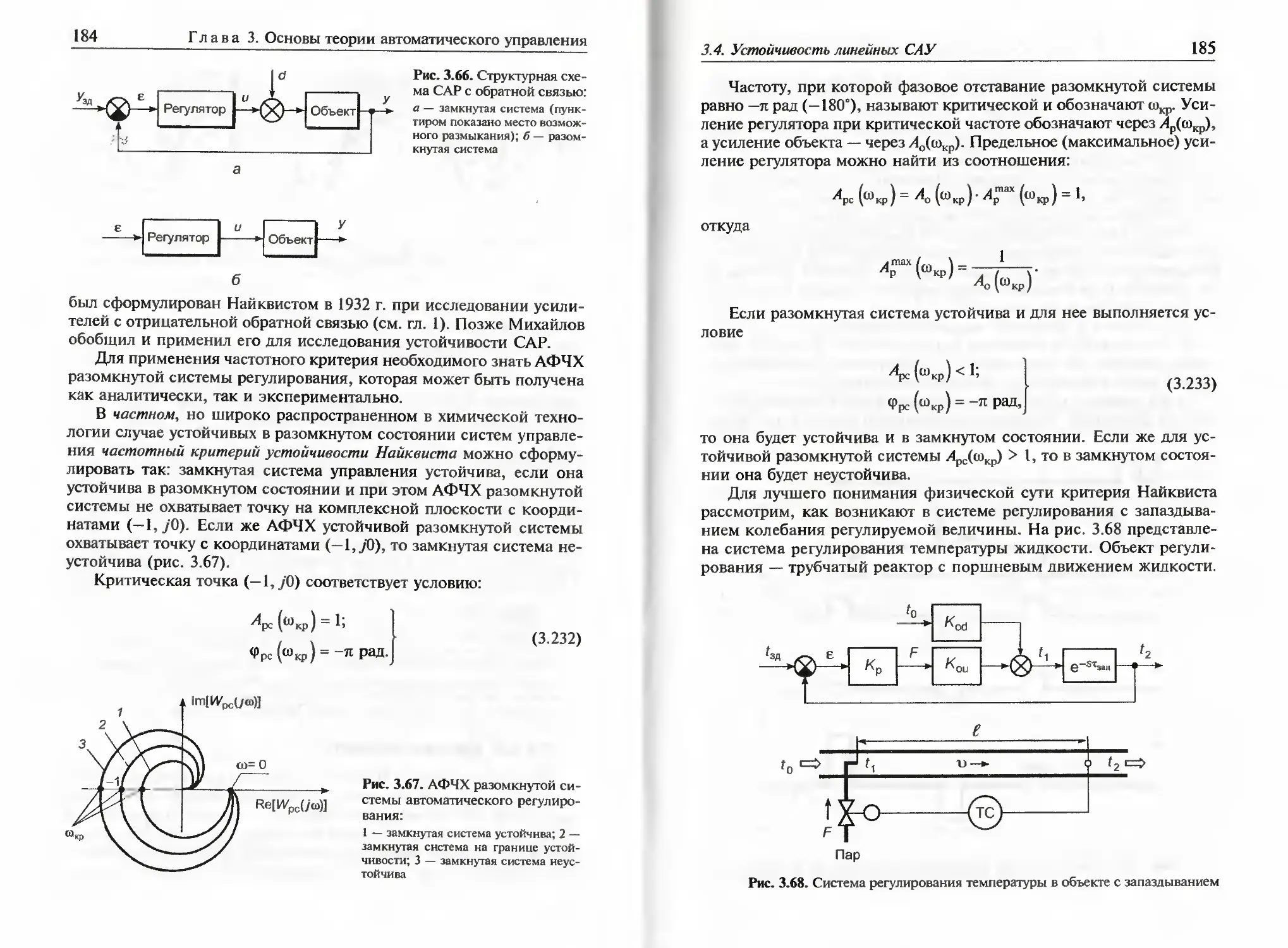
3.4.4 2. Критерий Найквиста... .183
3.4.5. Понятие о запасе устойчивости.........................189
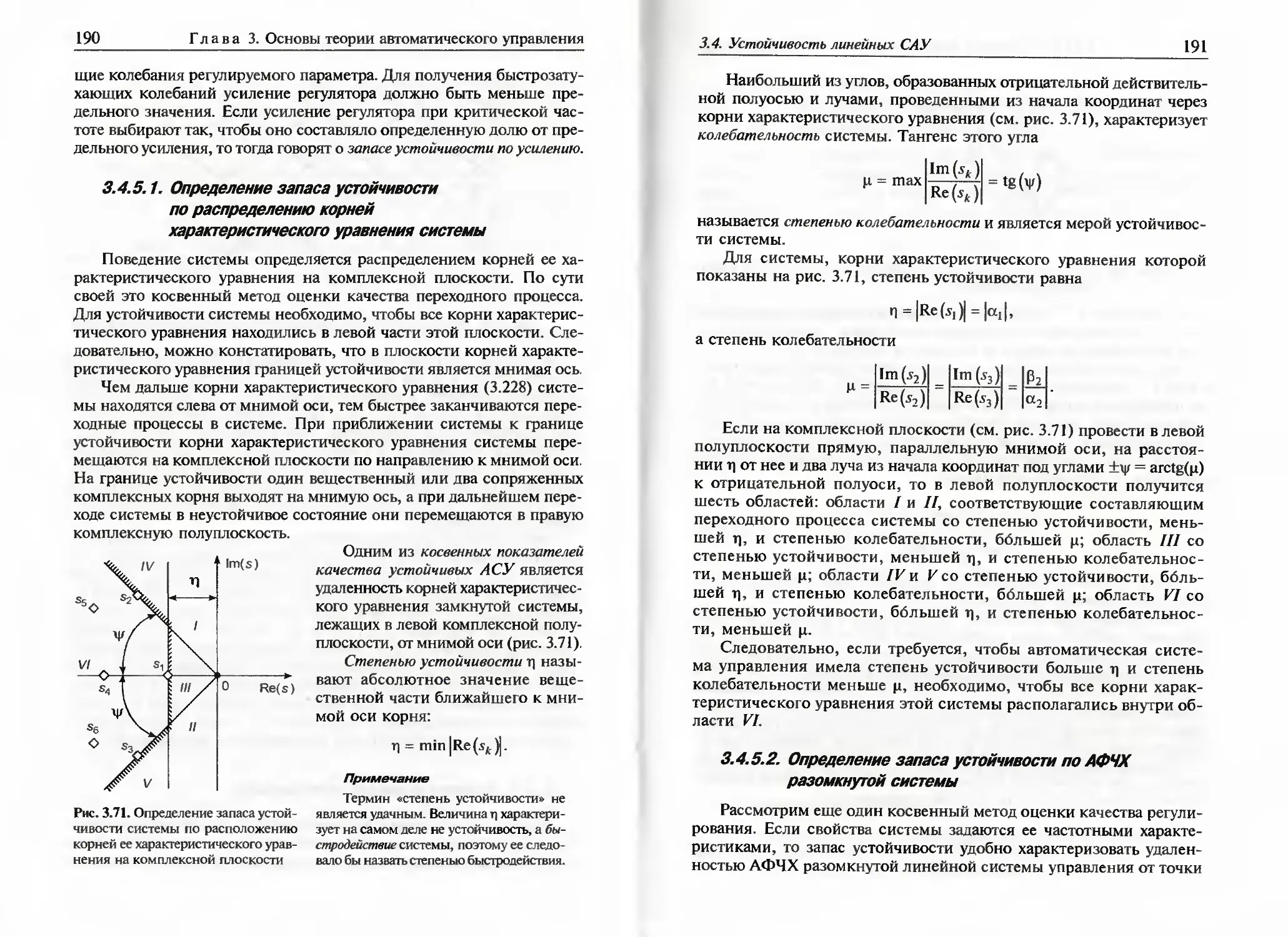
З.4.5.1. Определение запаса устойчивости по распределению корней
характеристического уравнения системы.................. 190
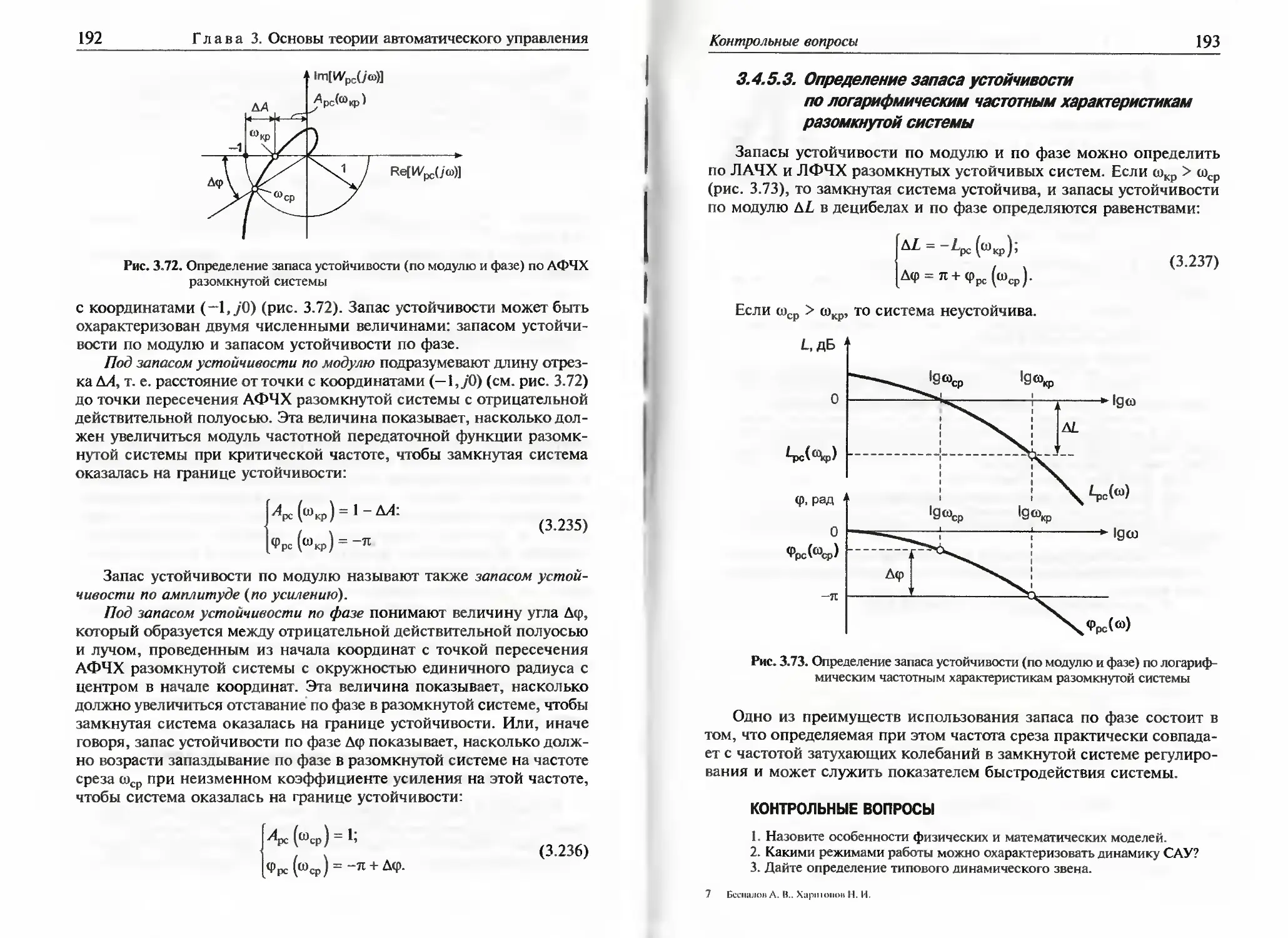
3.4.5.2. Определение запаса устойчивости по АФЧХ разомкнутой
системы.............................................. ...191
3.4.5.3. Определение запаса устойчивости по логарифмическим
частотным характеристикам разомкнутой системы.......... 193
Контрольные вопросы .................................—_.........193
Глава 4. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ......195
4.1. Объекты управления и их основные свойства.. -...__ ...195
4.1.1. Классификация объектов управления........................195
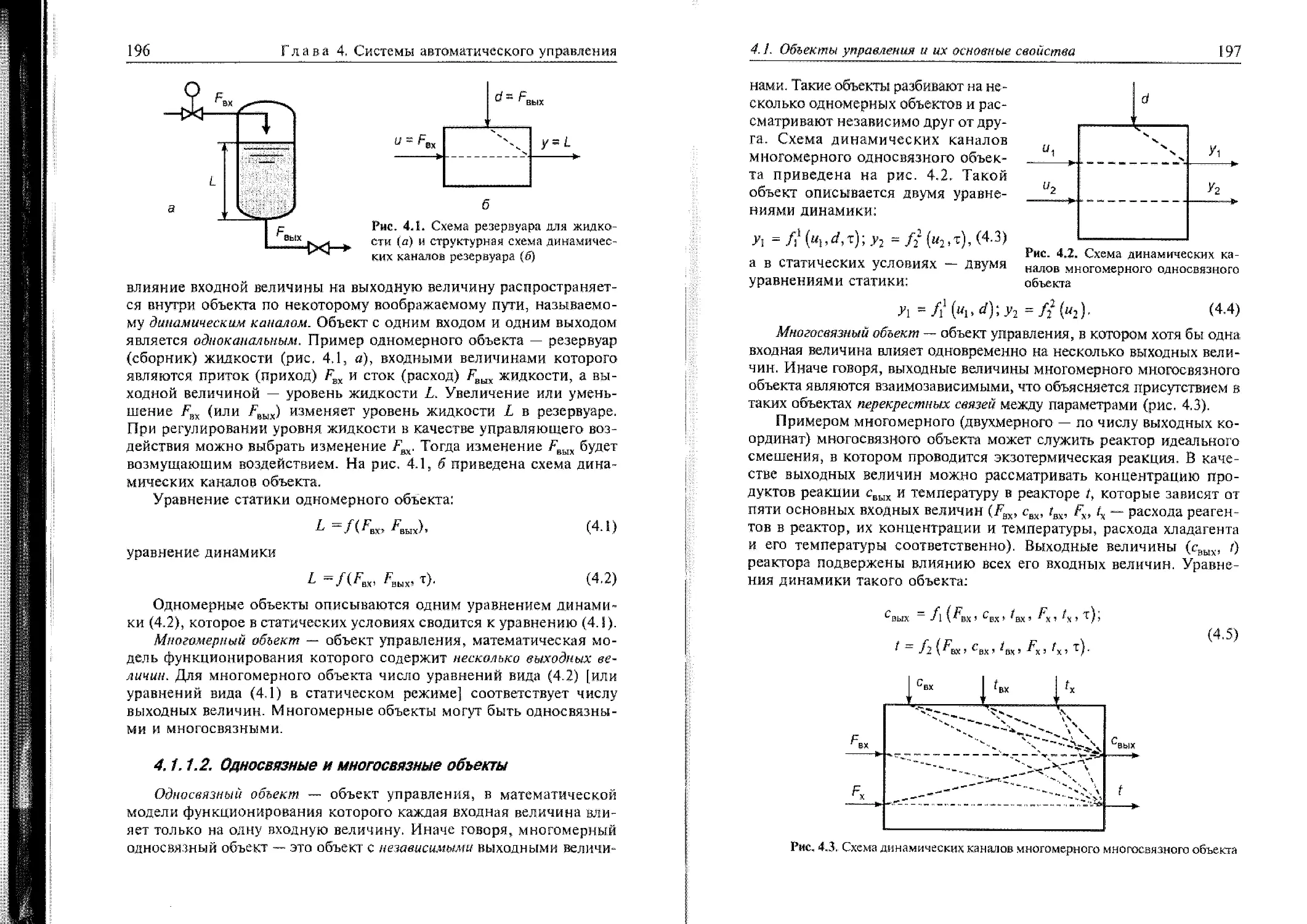
4.1.1.1. Одномерные и многомерные объекты................ 195
4.1.1.2. Односвязные и многосвязные объекты . ........196
4.1.1.3. Линейные и нелинейные объекты.....................198
4.1.1.4. Объекты с сосредоточенными и распределенными
параметрами.................« ... ........ .. .....198
4.1.2. Свойства объектов управления .... 200
4.1.2.1. Емкость....................................... ...201
4.1.2.2. Самовыравнивание .... .♦ . .................... ...205
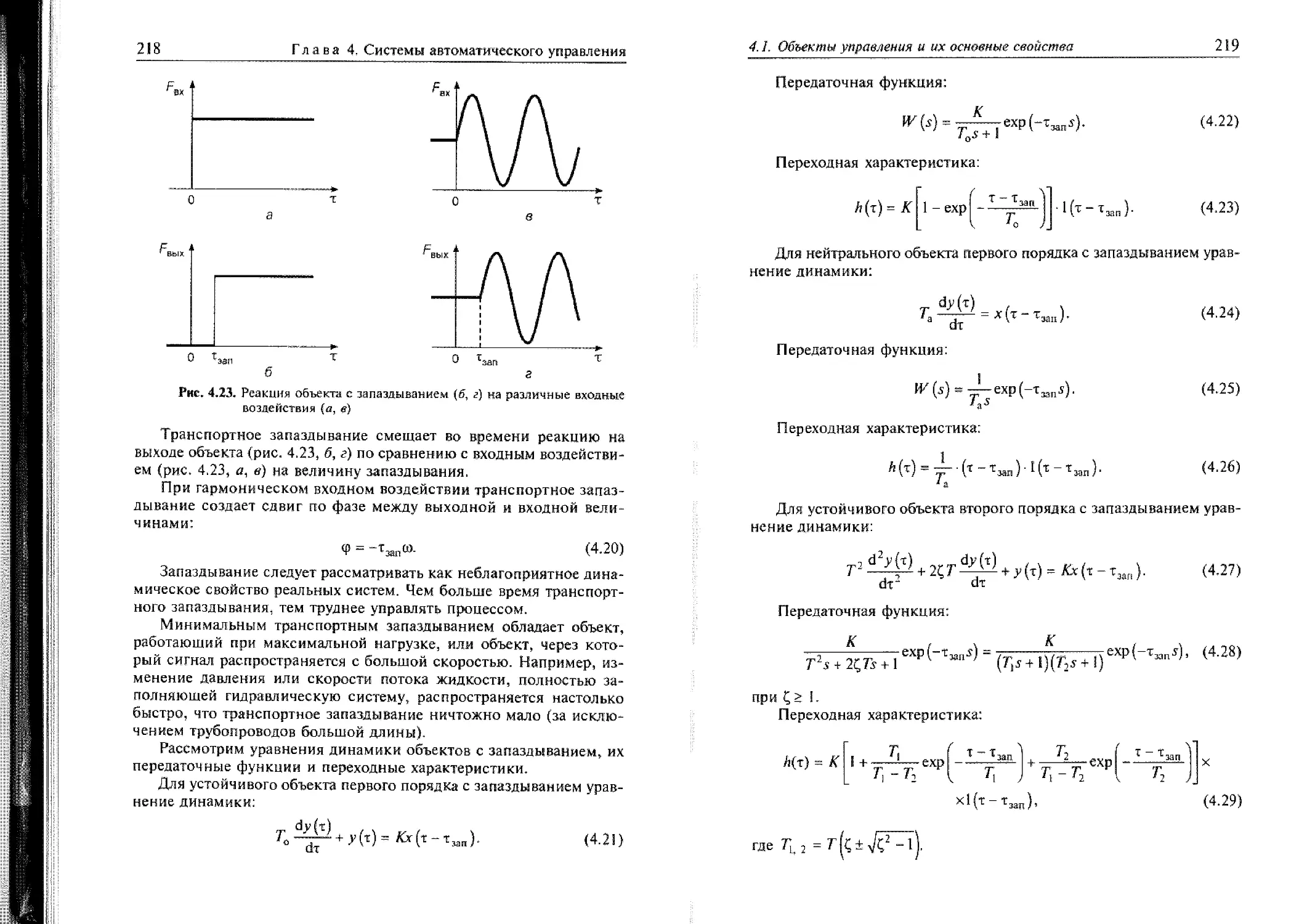
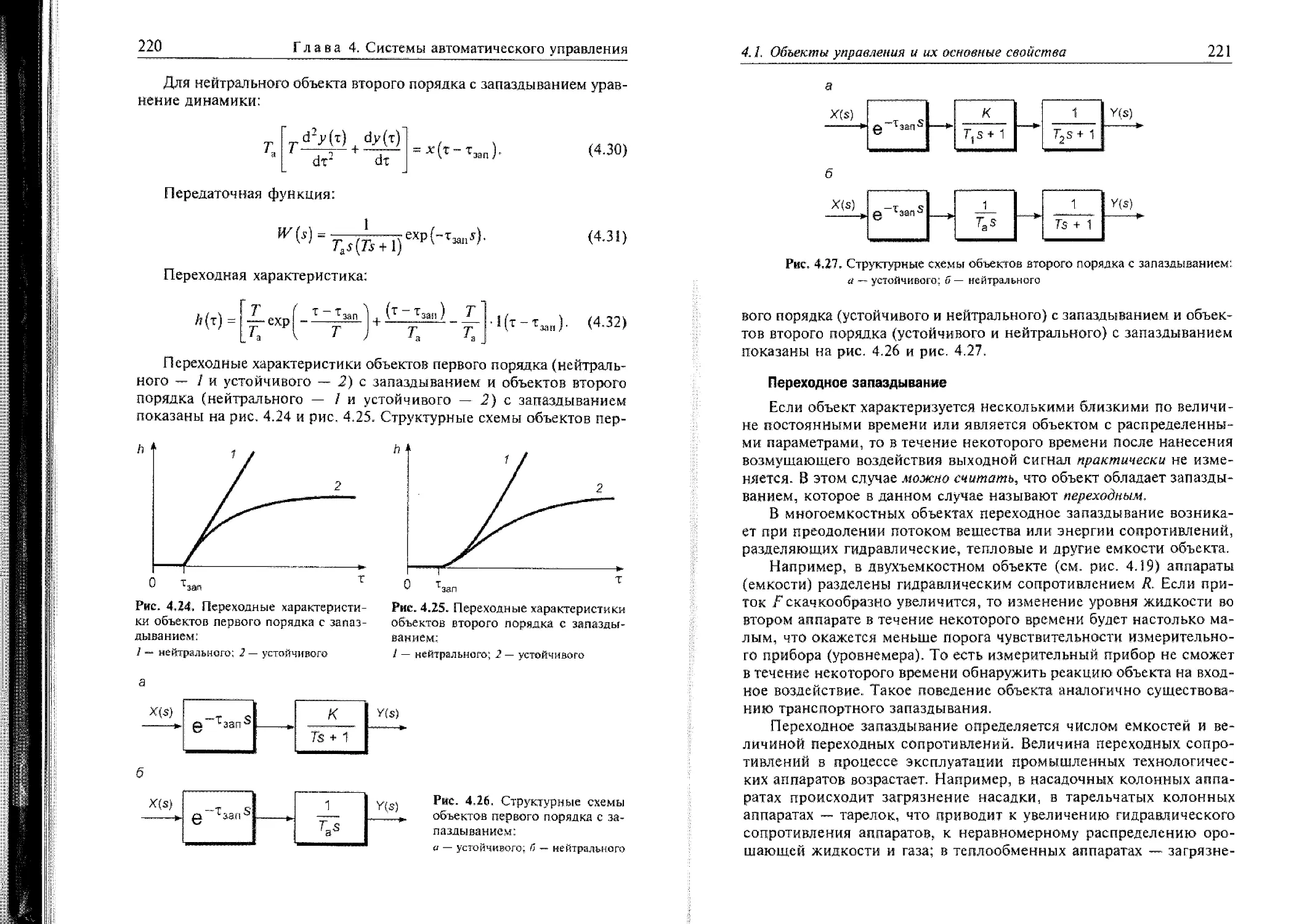
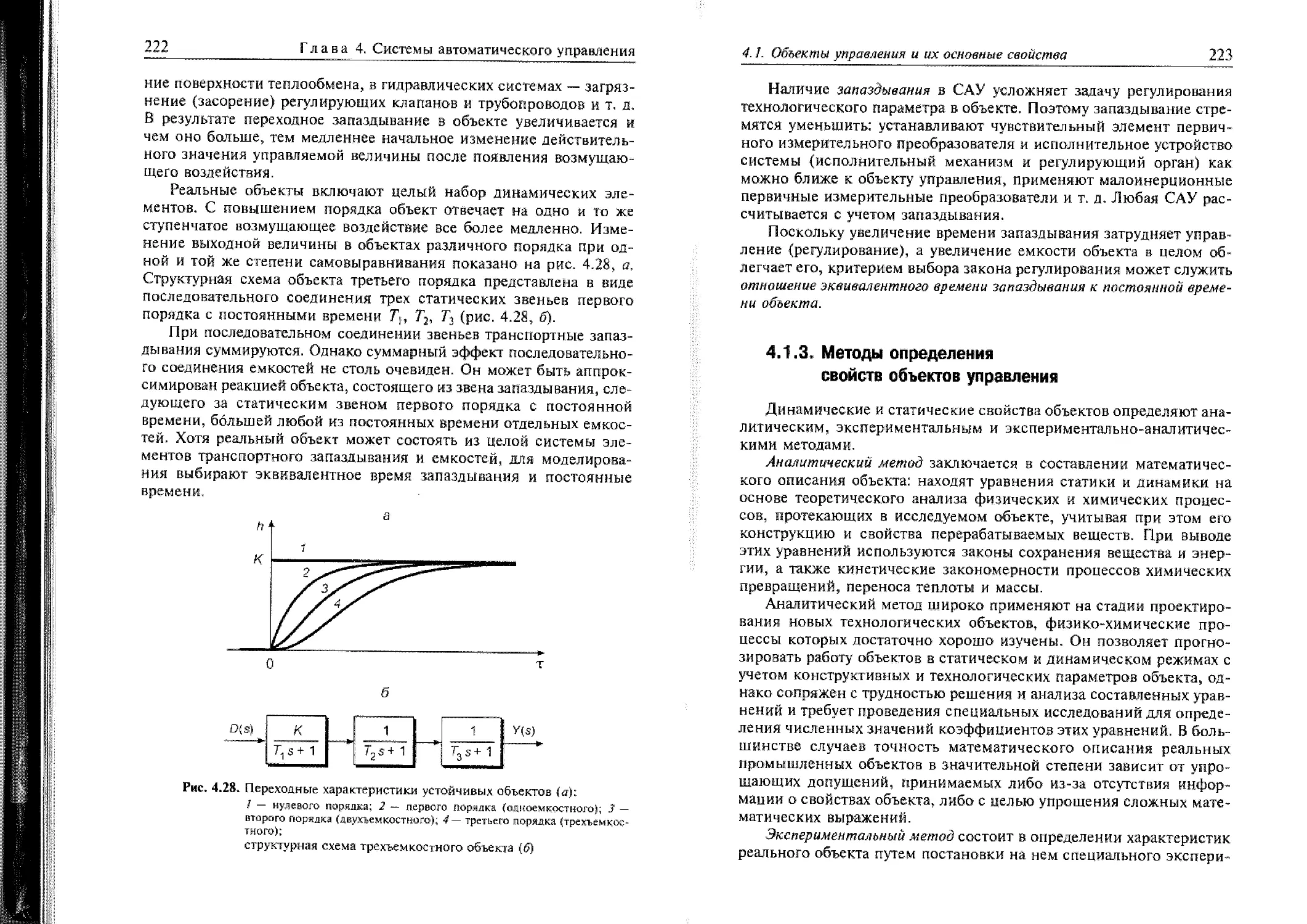
4.1.2.З. Запаздывание................................... ...216
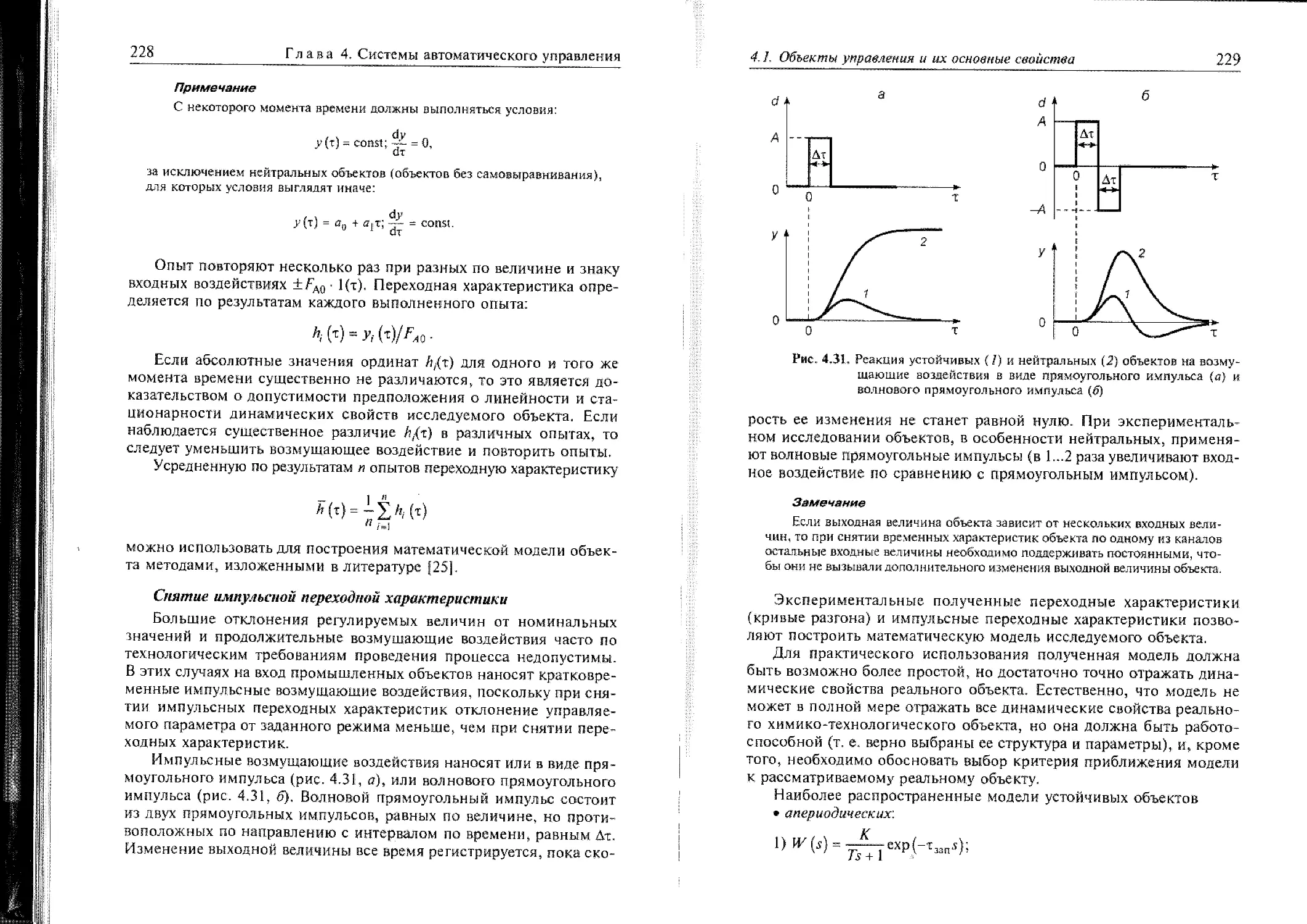
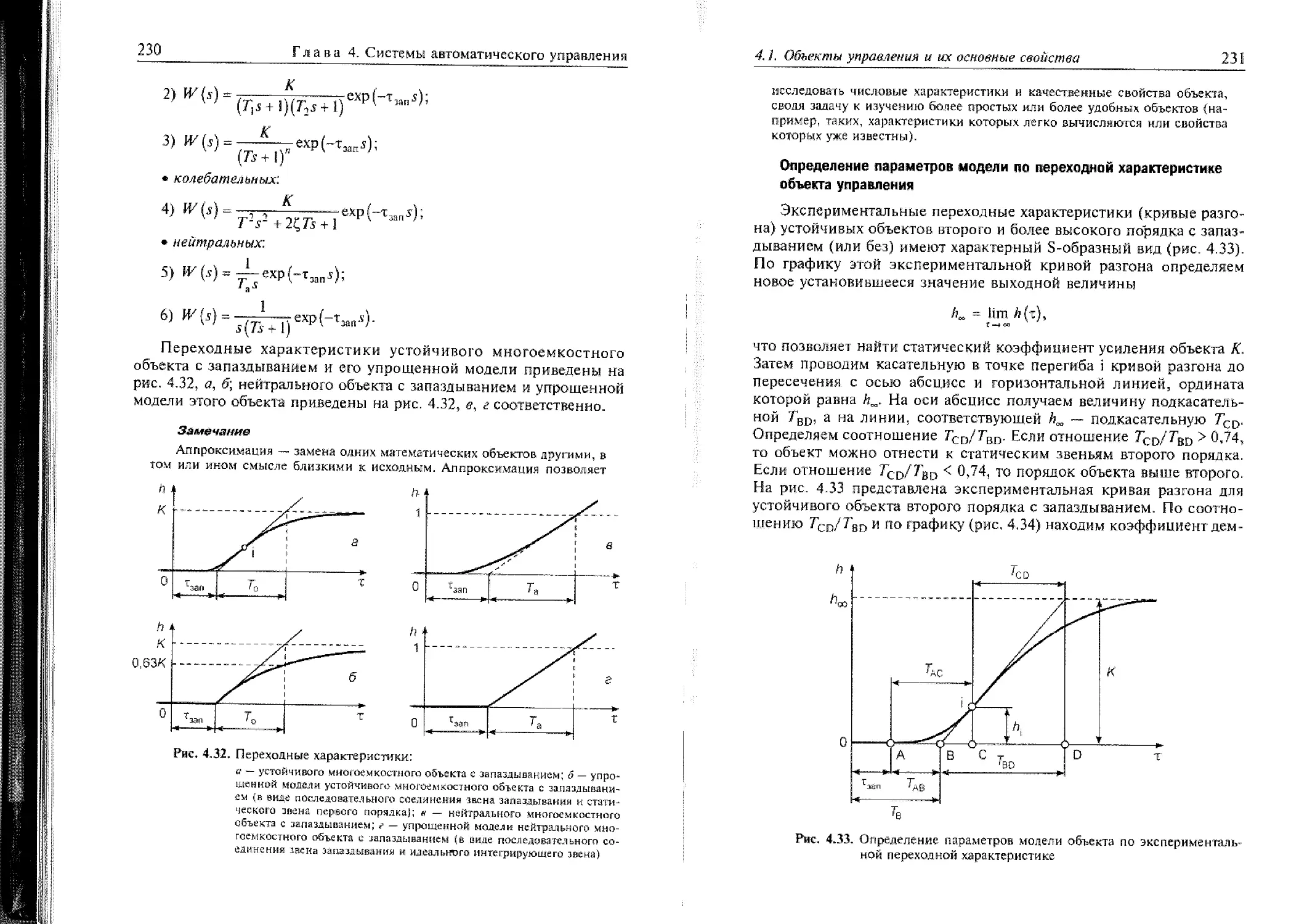
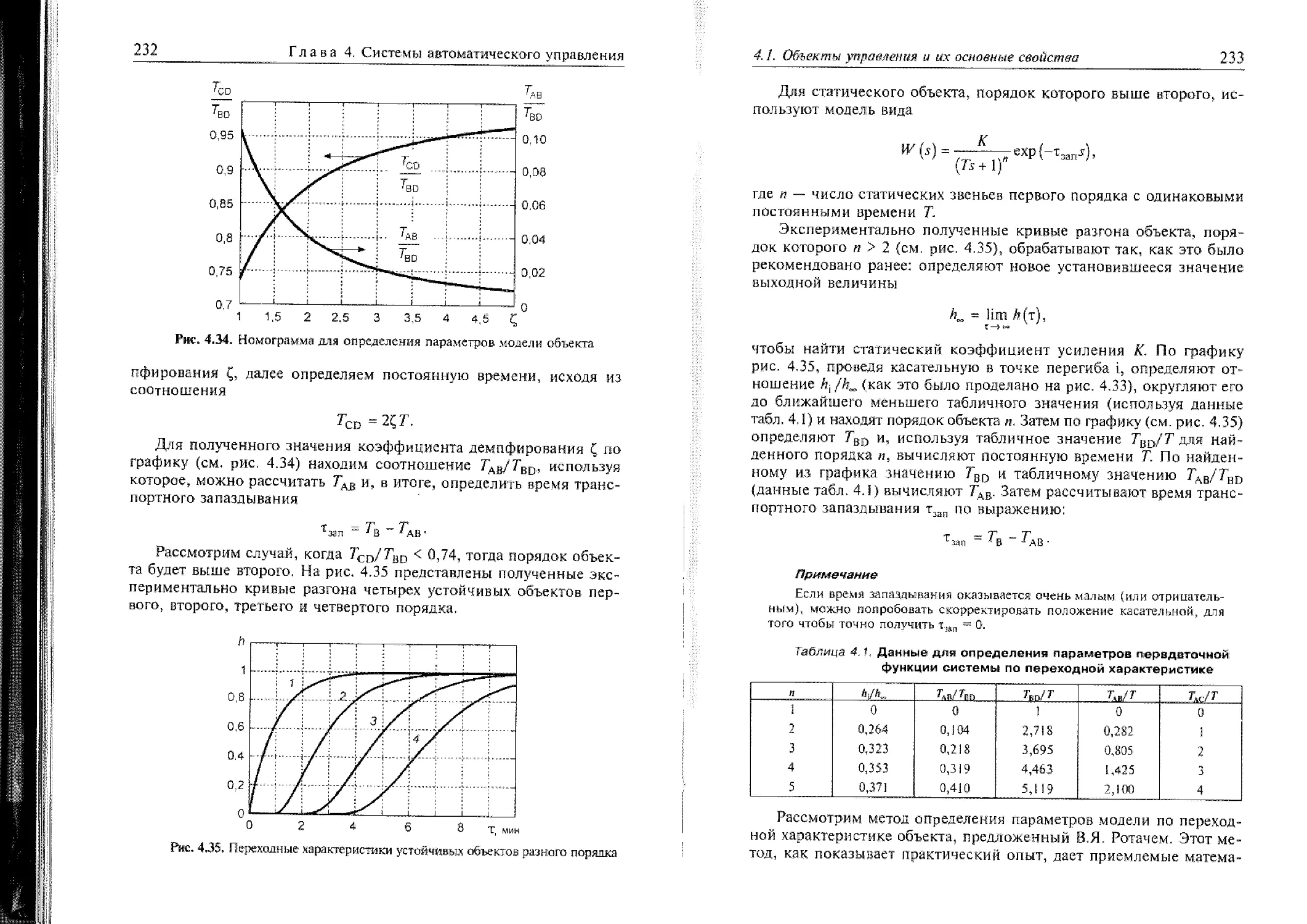
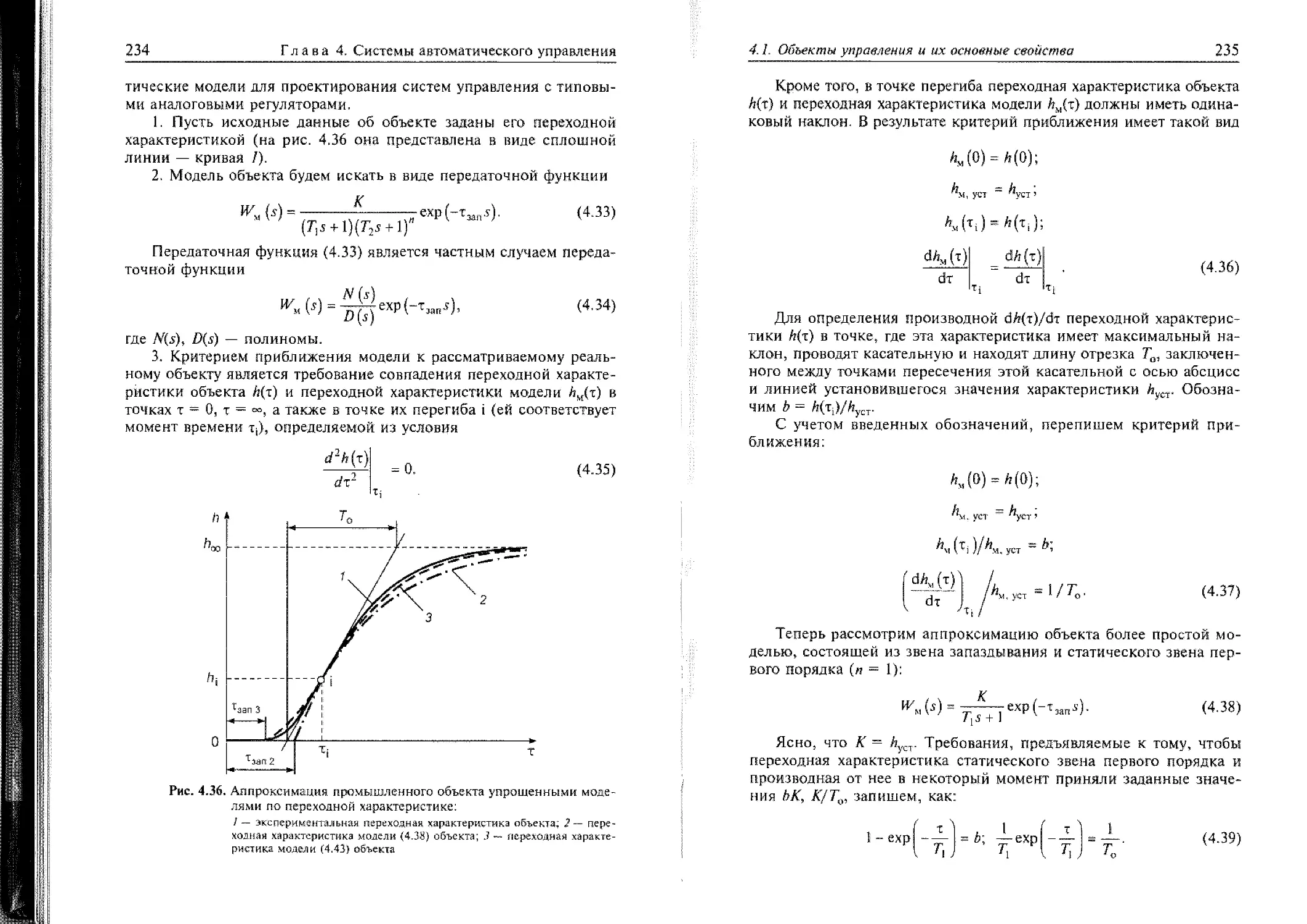
4.1.3. Методы определения свойств объектов управления___________223
4.1.З.1. Аналитический метод определения свойств объектов...225
4.1.З.2. Экспериментальное определение динамических свойств
объектов.....................................................226
4.1.З.З. Экспериментальное определение частотных характеристик.240
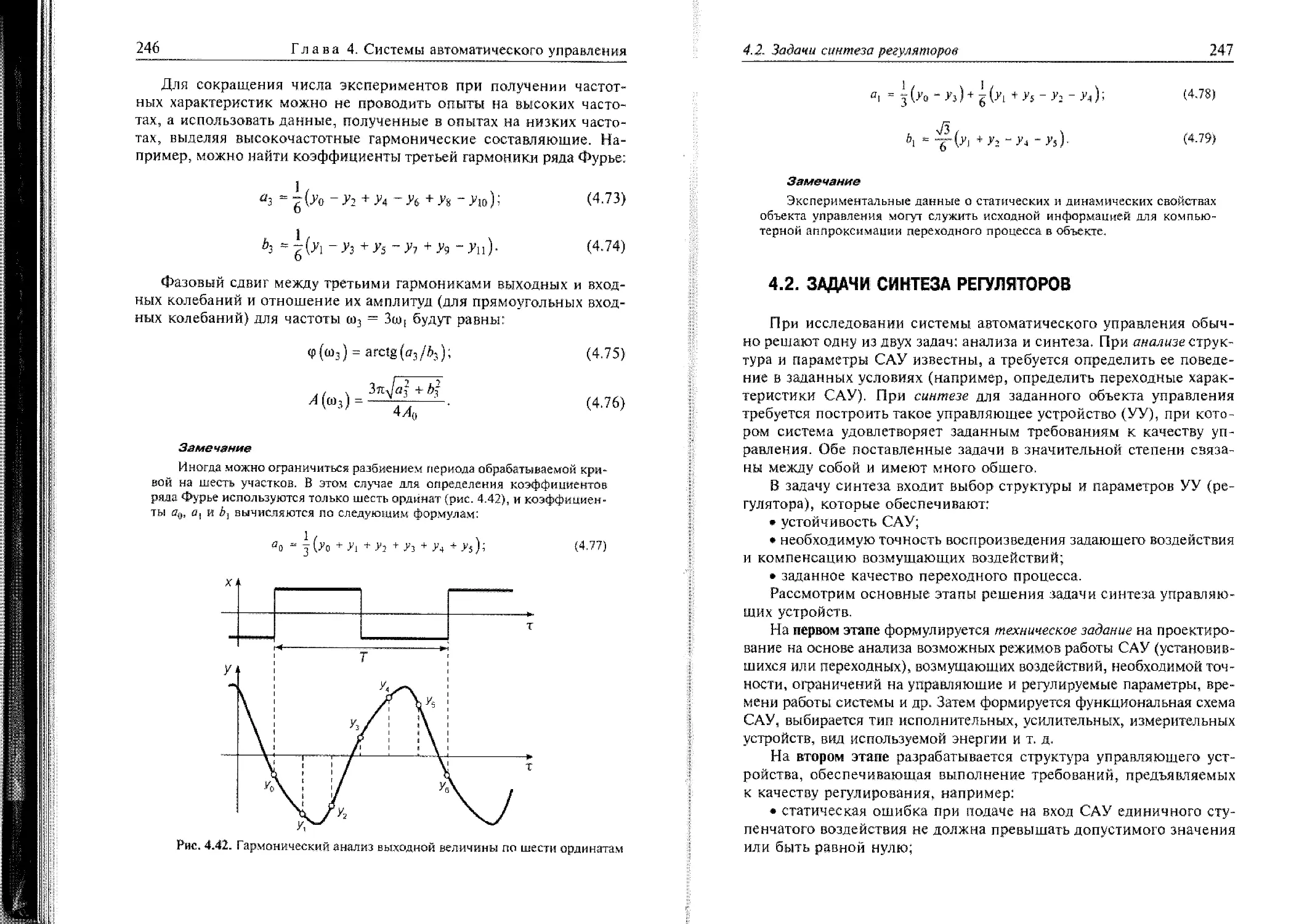
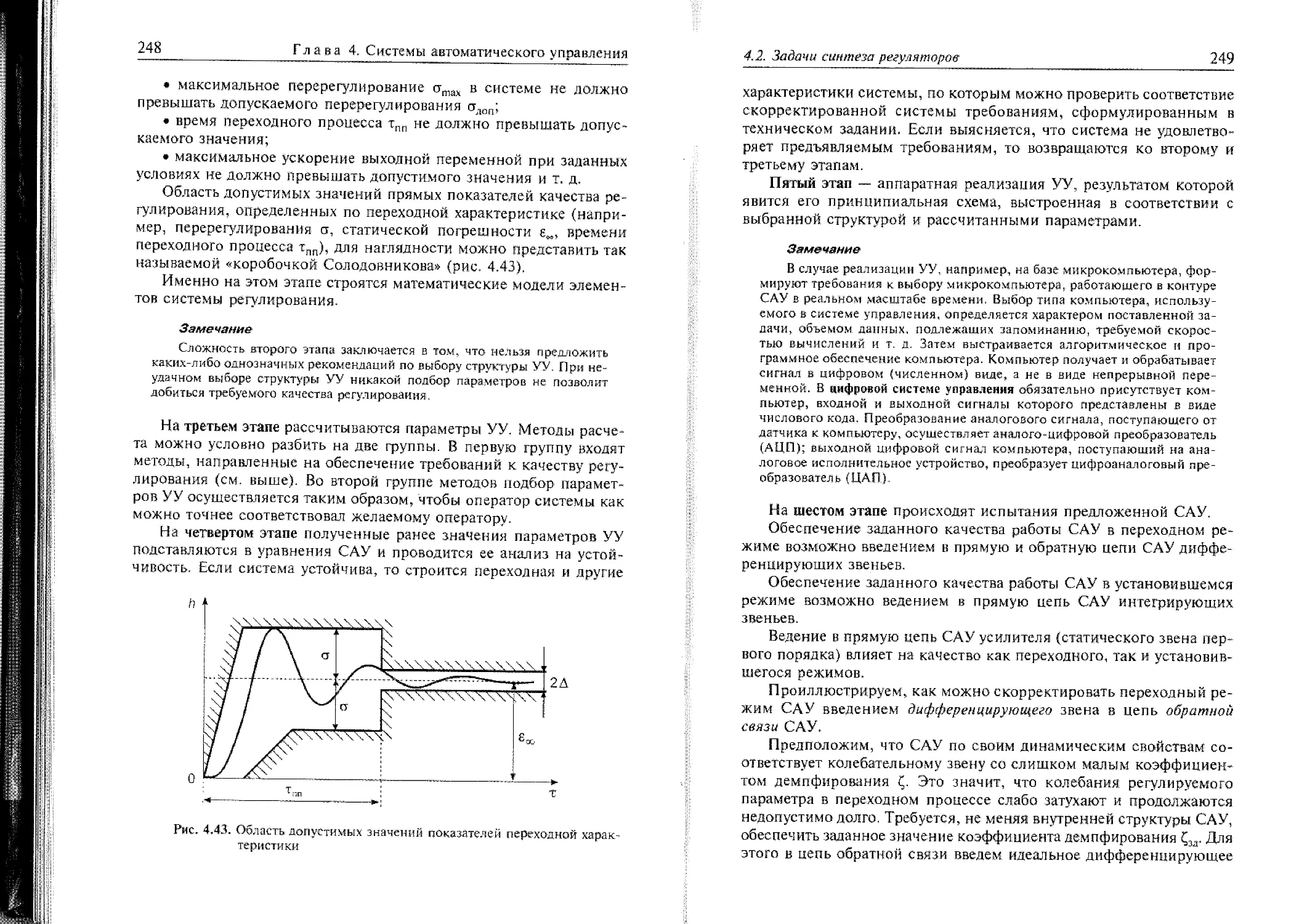
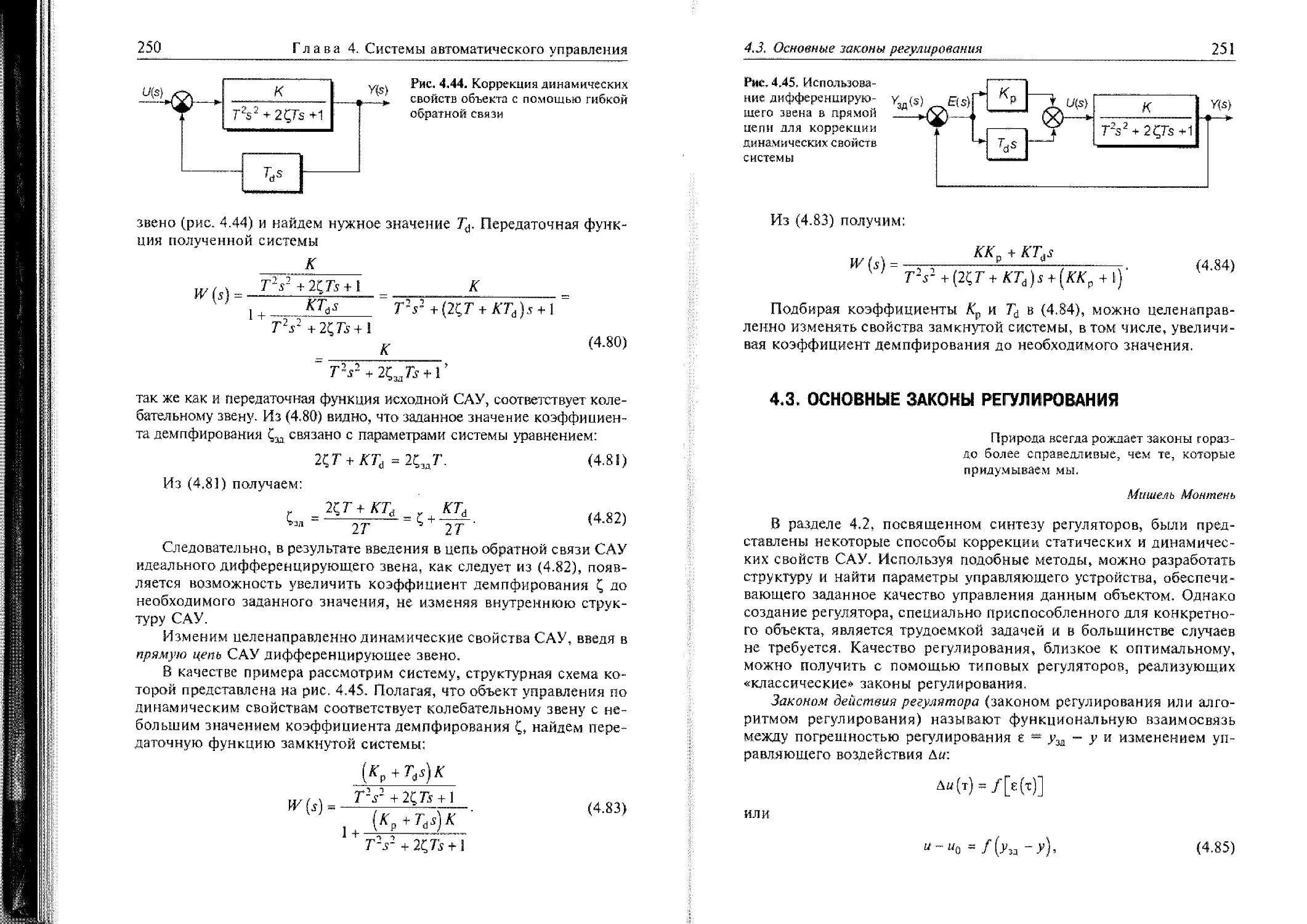
4.2. Задачи синтеза регуляторов........... ...247
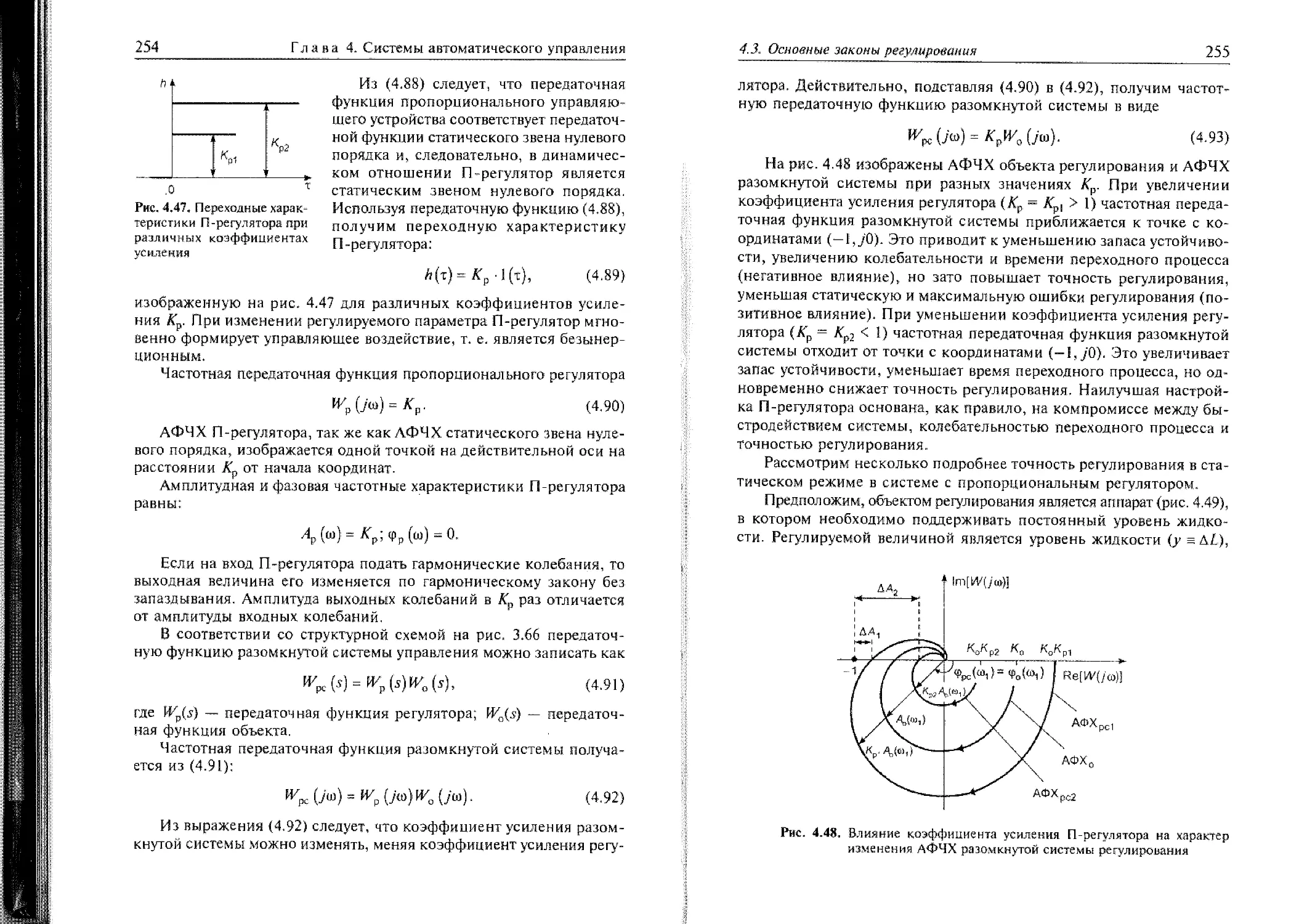
4.3. Основные законы регулирования........................... ...251
4.3.1. Пропорциональный закон регулирования... 252
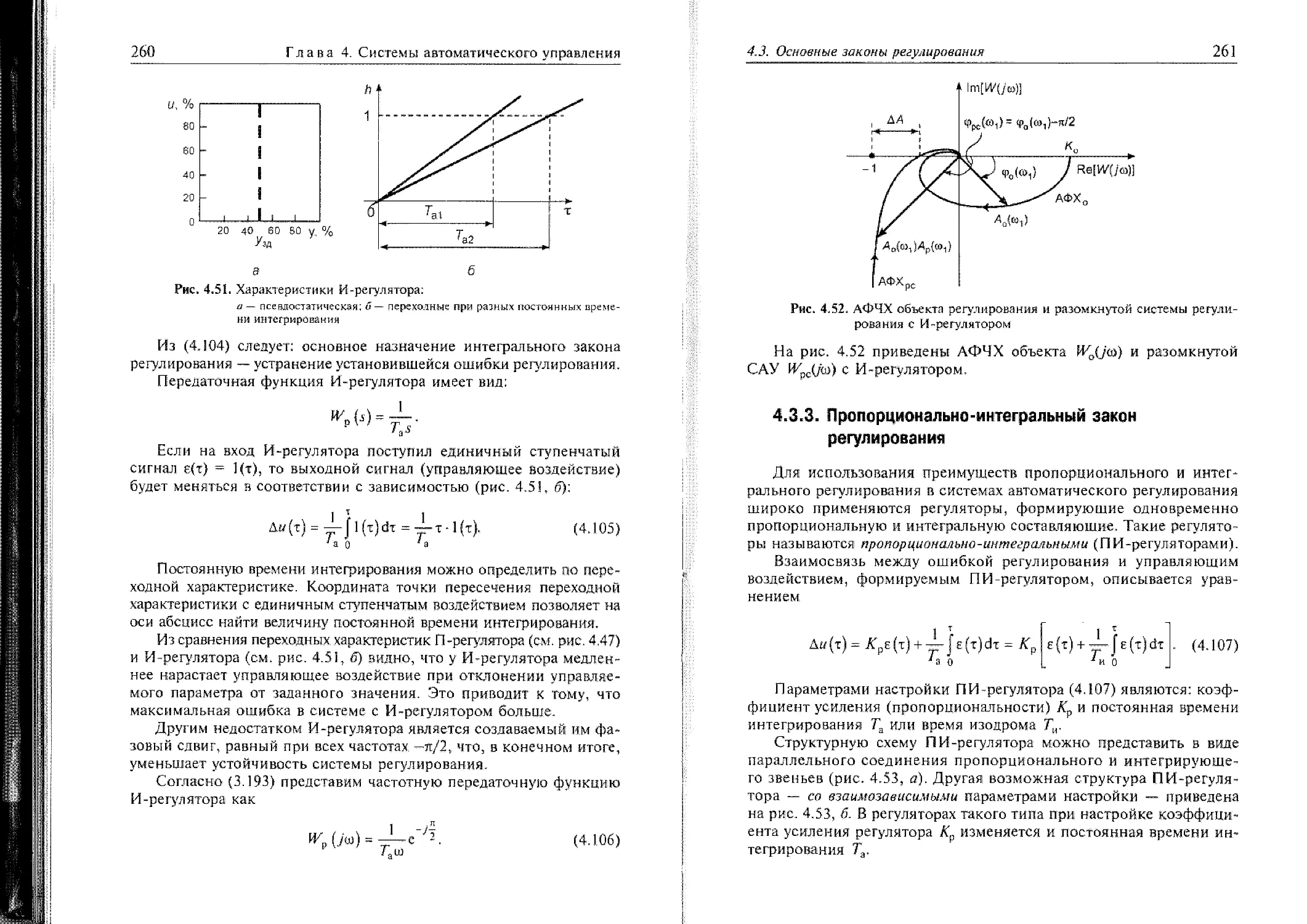
4.3.2. Интегральный закон регулирования.- ......................259
4.3.3. Пропорционально-интегральный закон регулирования.........261
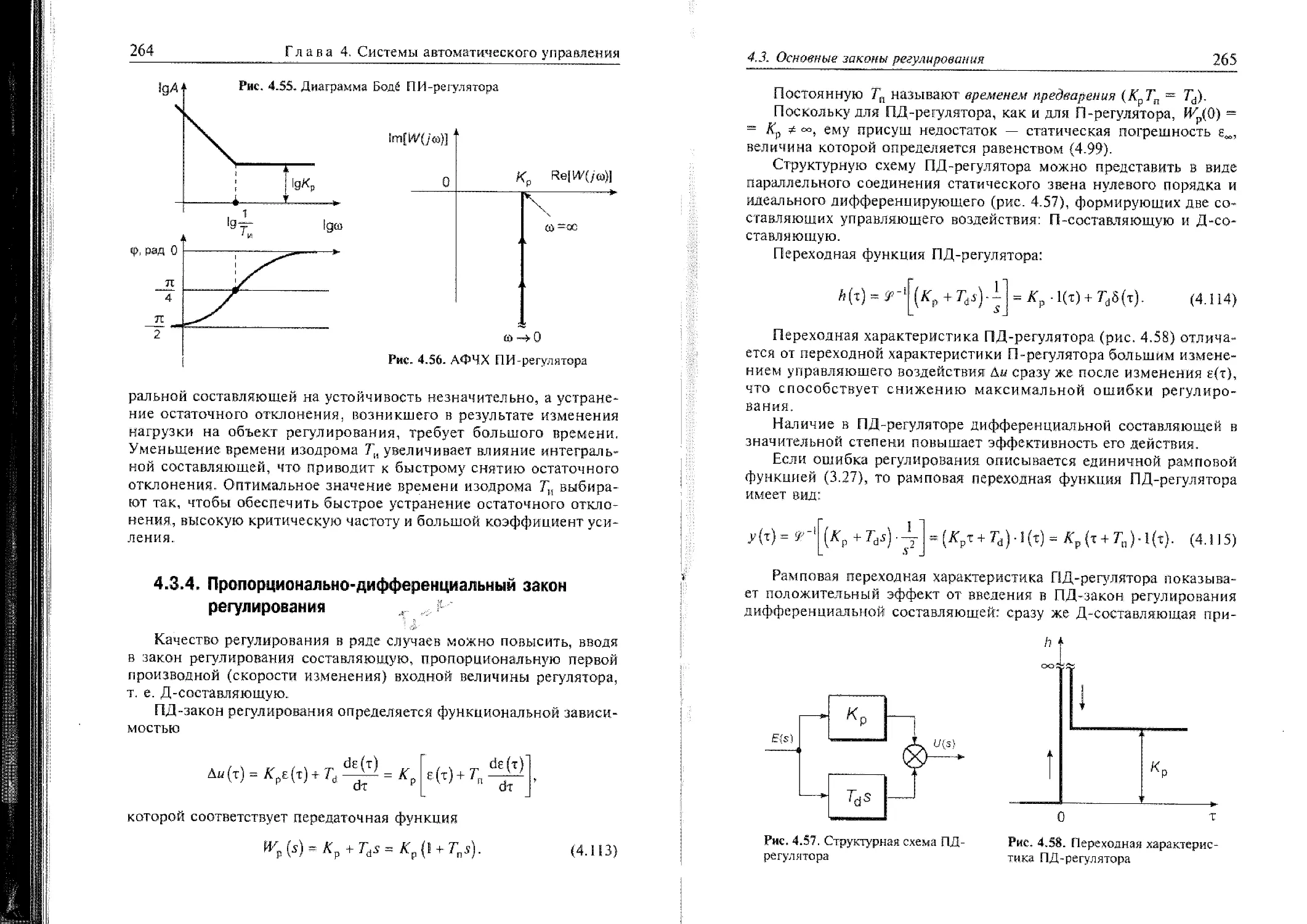
4.3.4. Пропорционально-дифференциальный закон
регулирования..............................................264
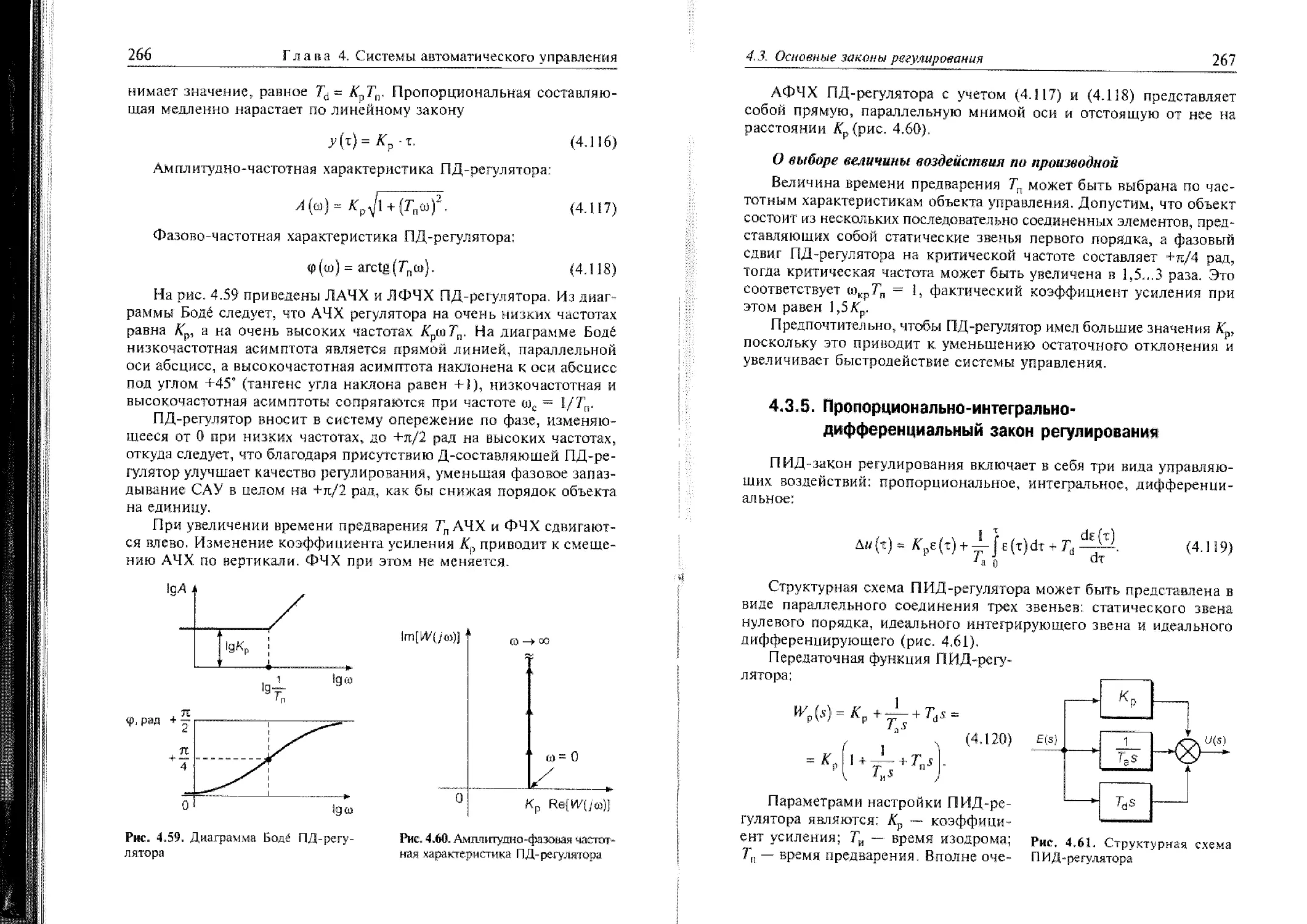
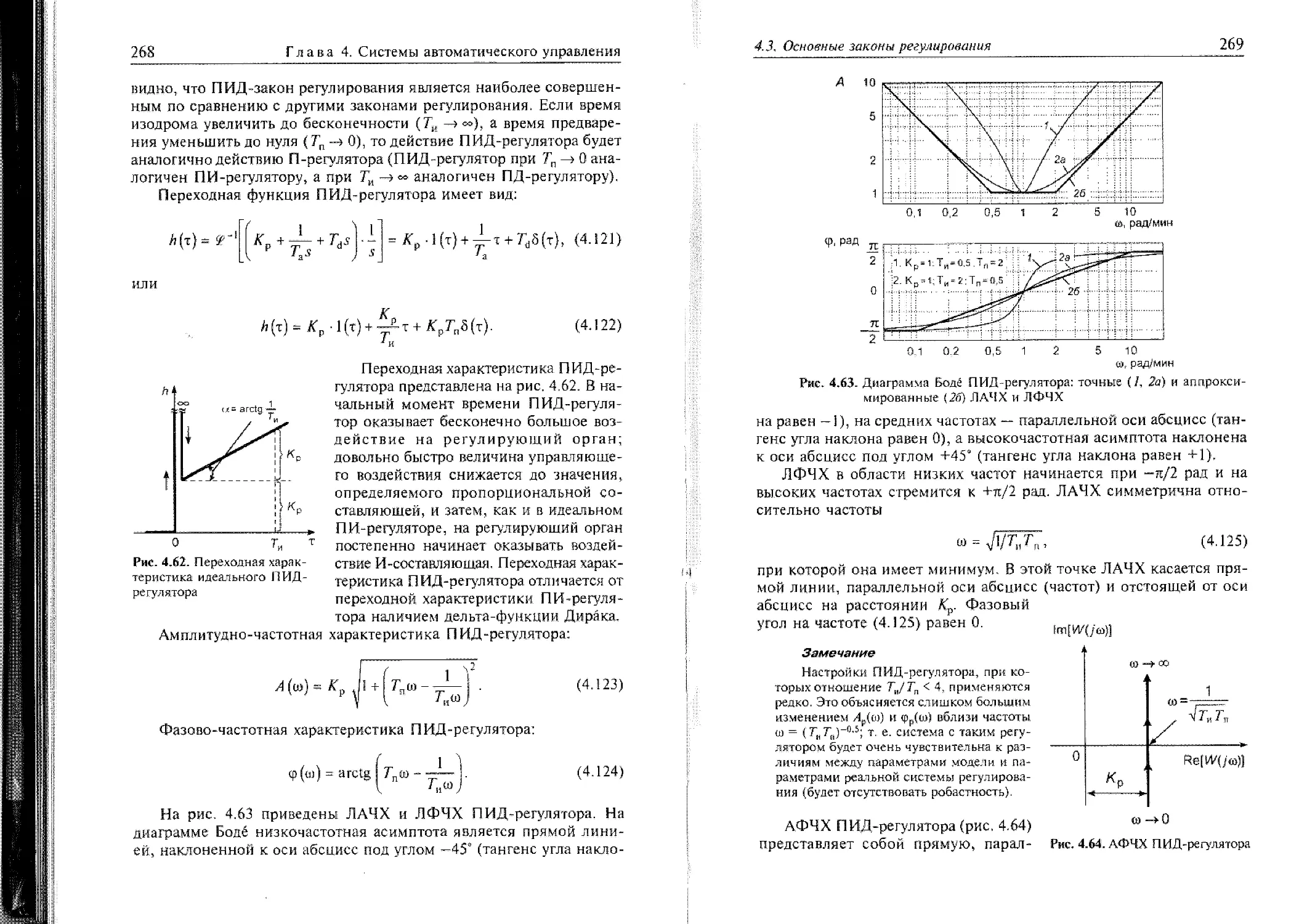
4.3.5. Пропорционально-интегрально-дифференциальный закон
регулирования..............................................267
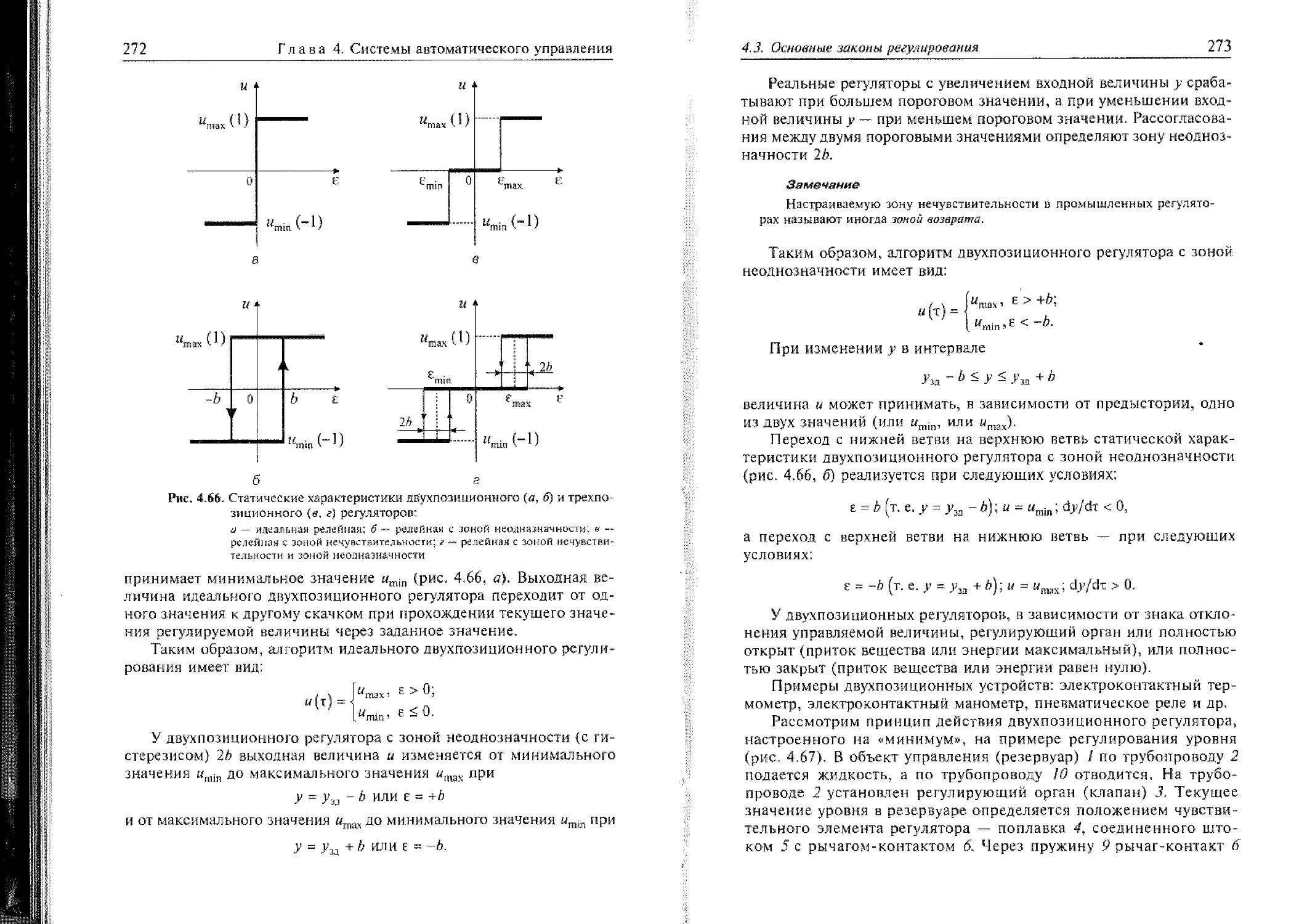
4.3.6. Позиционные регуляторы.......... 271
4.З.6.1. Двухпозиционные регуляторы .. ...271
4.3.6.2. Трехпозиционные регуляторы.__................. ..276
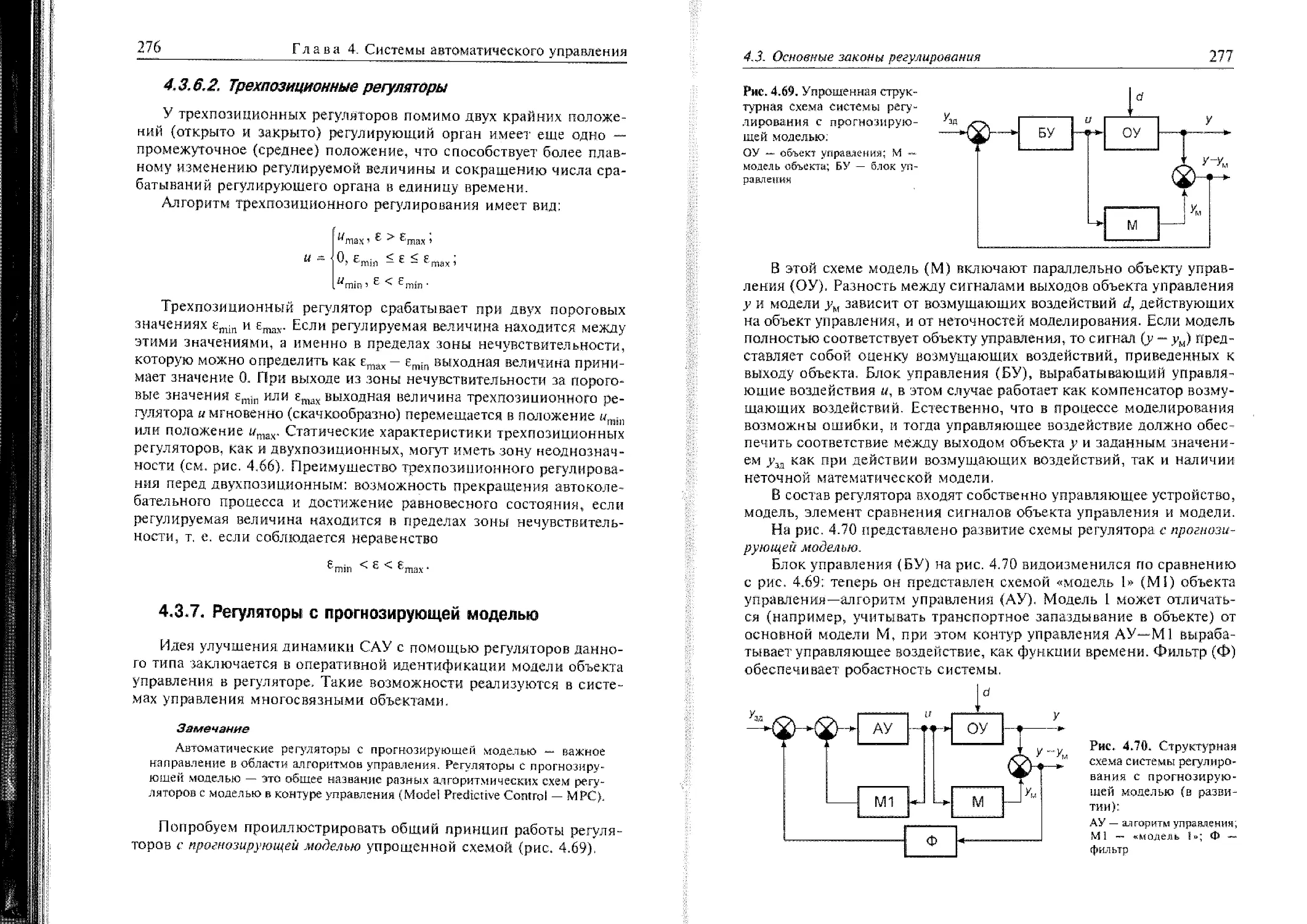
4.3.7. Регуляторы с прогнозирующей моделью................... ..276
4 3.8. Регуляторы на основе искусственных нейронных сетей....279
4.3.9. Определение оптимальных параметров настройки
промышленных регуляторов.............................. ...281
4 3.9.1. Метод незатухающих колебаний.. .. 282
4 3 9 2. Метод затухающих колебаний........................ 283
173
6
Оглавление
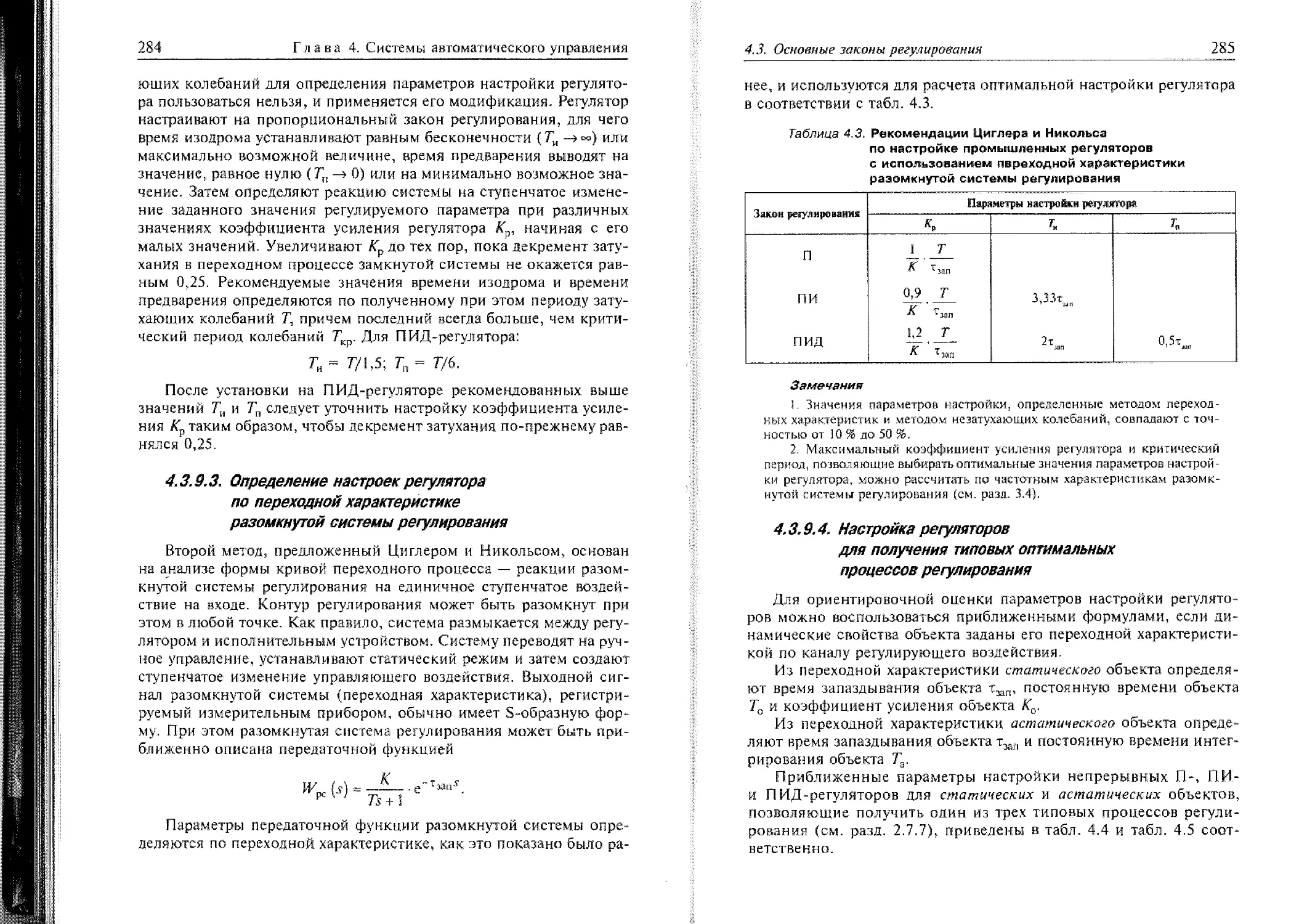
4.3.9.3. Определение настроек регулятора по переходной
характеристике разомкнутой системы регулирования ...284
4.3 9 4. Настройка регуляторов для получения типовых оптимальных
процессов регулирования.............................285
4.3.9.5. Самодиагностика и автоматическая настройка
регулятора...................................... . 286
Контрольные вопросы... — ............. ....289
Глава 5. ИЗМЕРЕНИЕ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ.........................290
5.1. Государственная система промышленных приборов и средств
автоматизации _.................................................. 290
5.2. Основные термины и определения метрологии. ... .........292
5.2.1. Физические величины................. • 294
5.2.2. Единицы физических величин ... - 295
5.2.3. Измерения физических величин... - 296
5.2.4. Средства измерительной техники......... - 298
5.2.5. Принципы, методы и методики измерений . . 308
5.2.6. Условия измерений............«.........*... -311
5.2.7. Результаты измерений физических величин ... -312
5.2.8. Погрешности измерений...................................313
5.2.9. Государственная система обеспечения единства измерений ..318
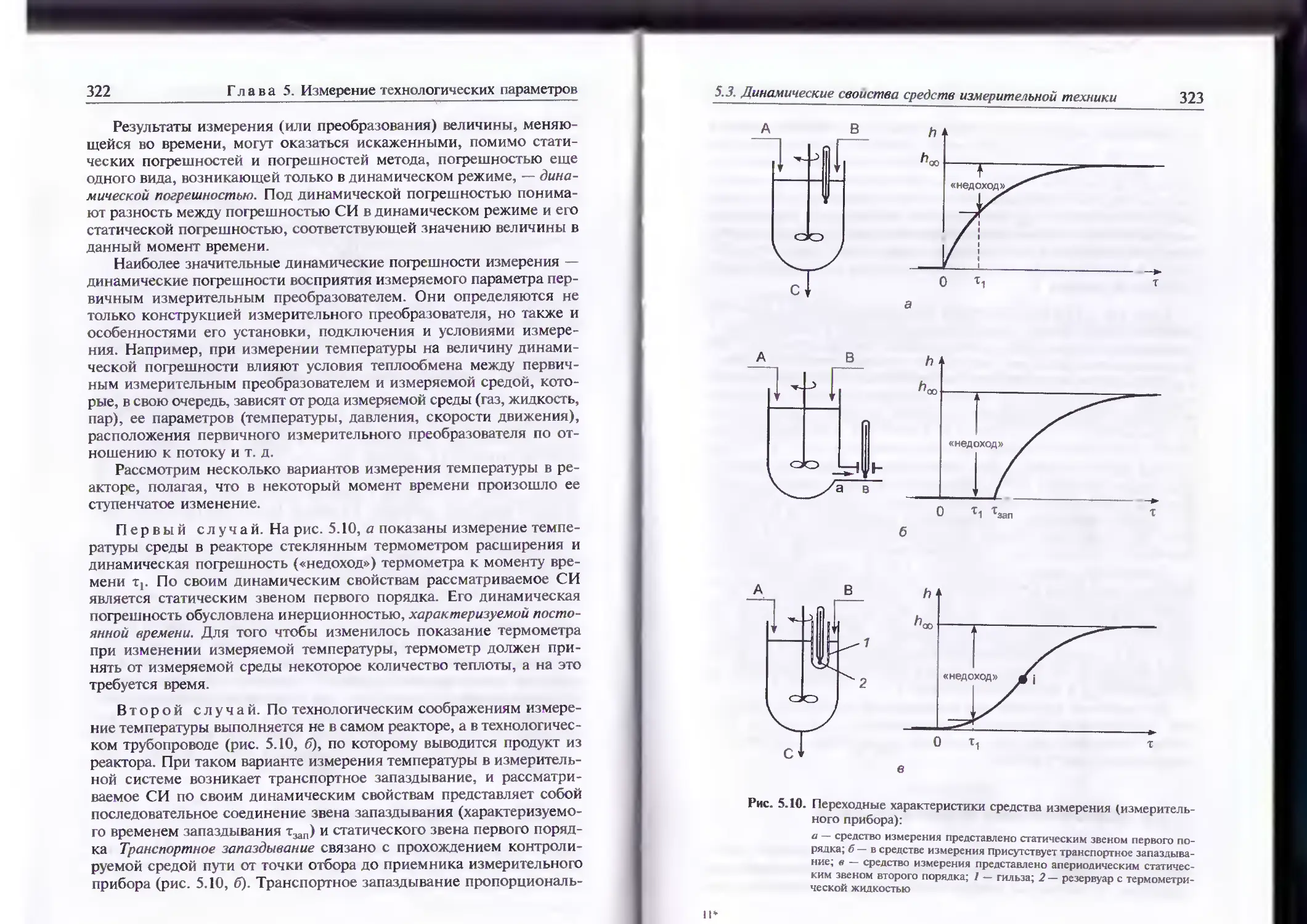
5.3. Динамические свойства средств измерительной техники.......... ...319
5.3.1. Динамические характеристики......... ... -319
5.3.2. Динамические погрешности............ — ...-.......321
5.4. Измерительные преобразователи.............< ...324
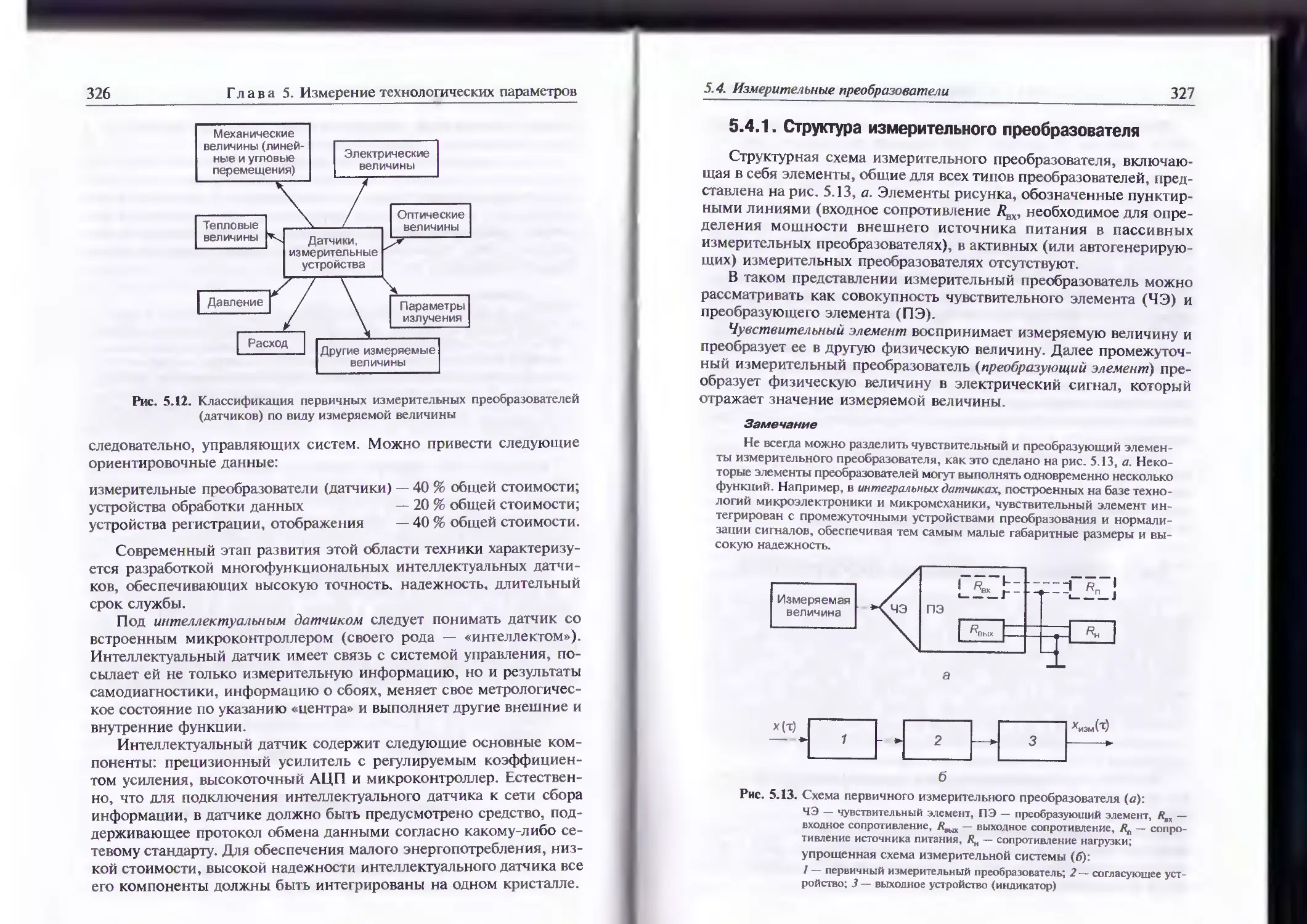
5.4.1. Структура измерительного преобразователя.....- -.327
5.4.2. Надежность измерительных преобразователей . — 328
5.4.3. Промежуточные преобразователи....... ............... ...329
5.4.3.1. Тензометрические преобразователи... —331
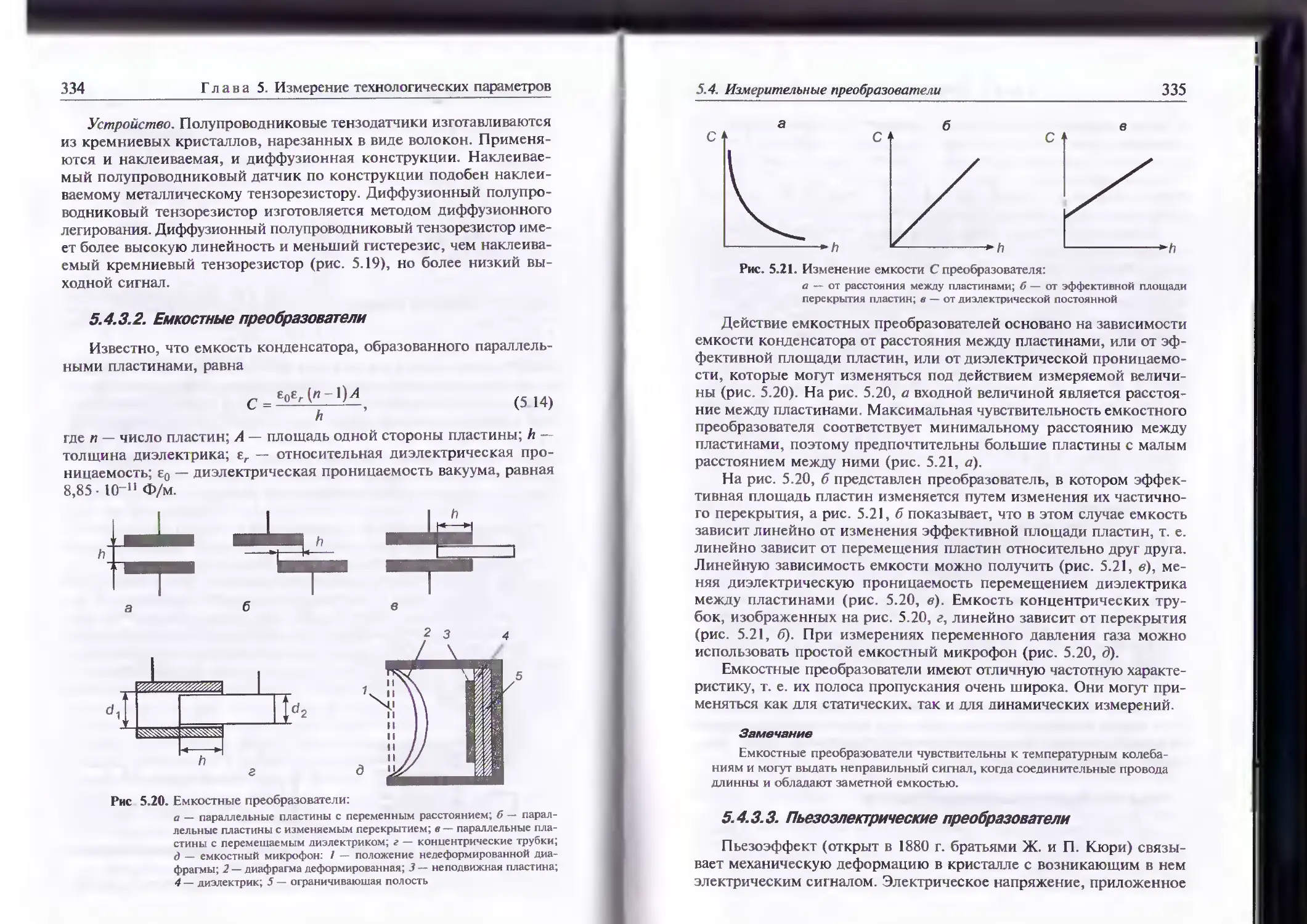
5.4.3.2. Емкостные преобразователи......- • 334
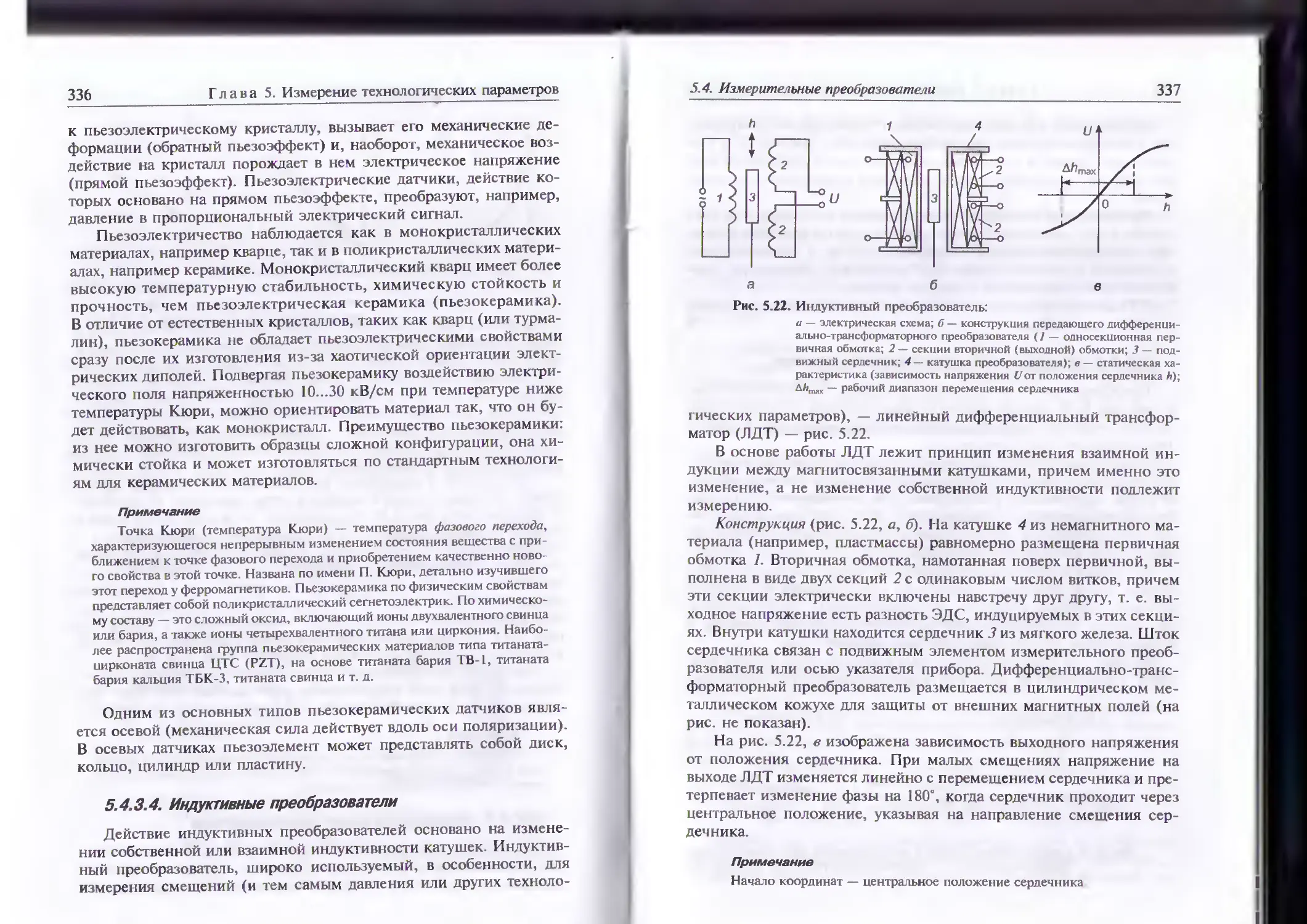
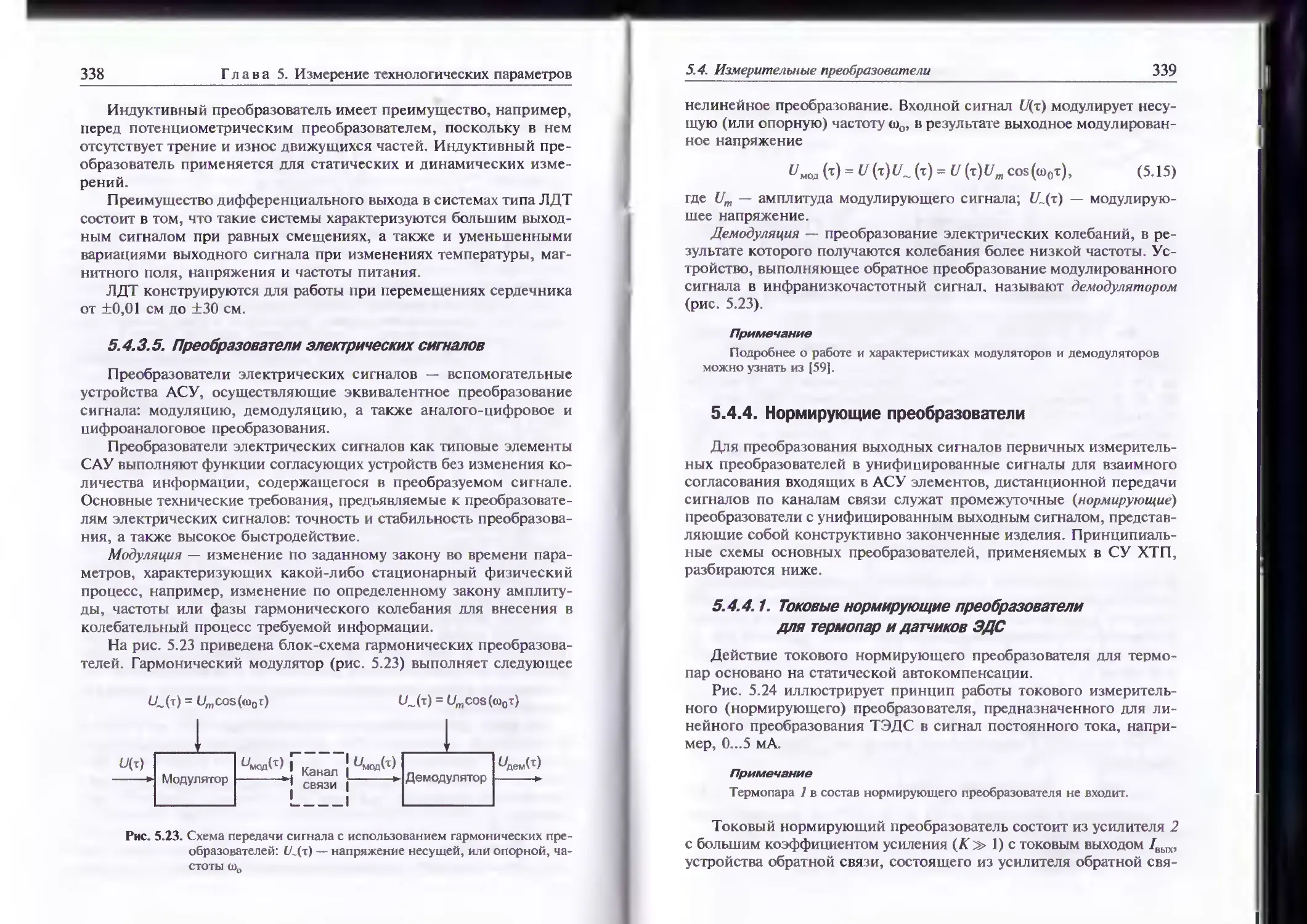
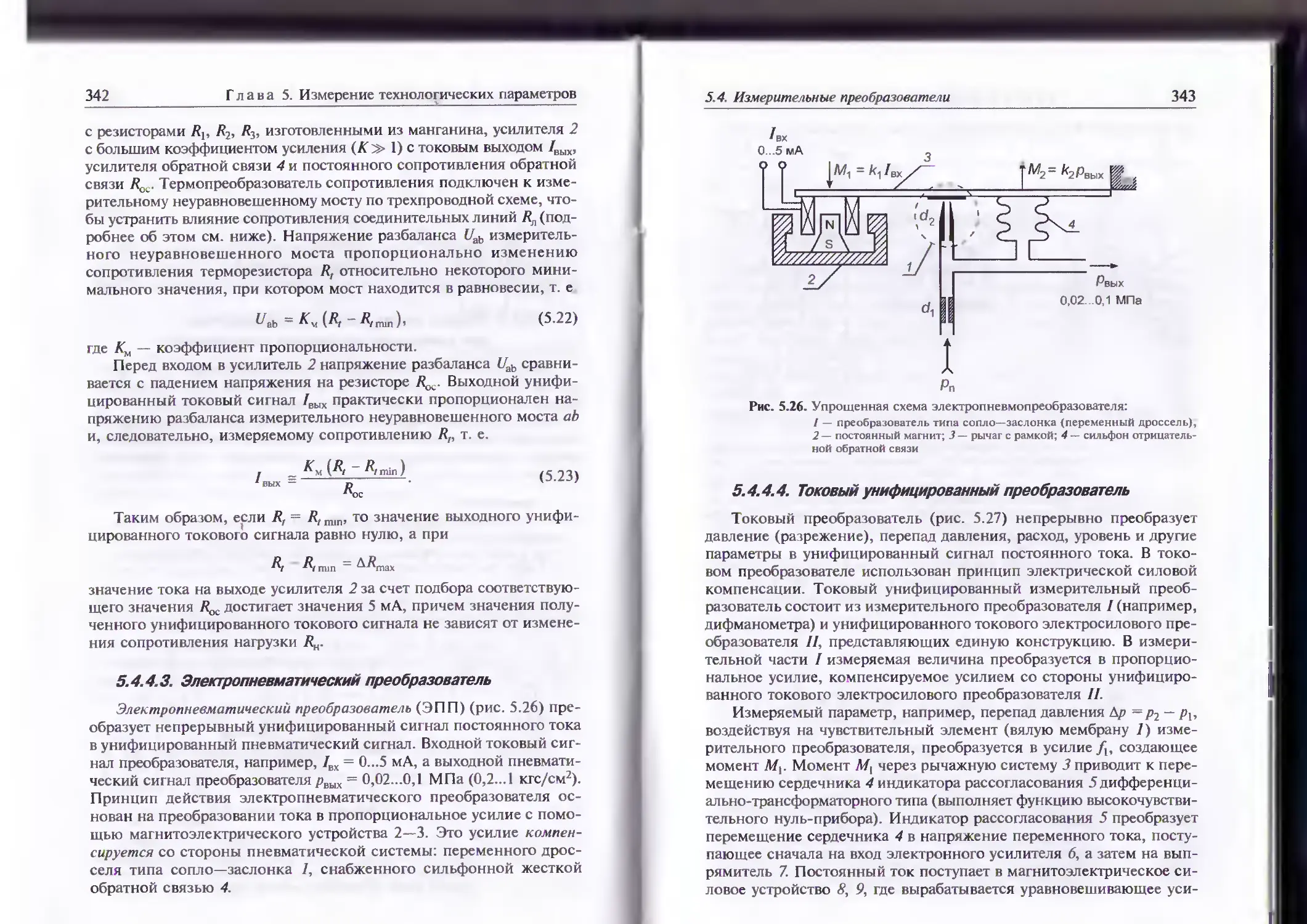
5.4.3.3. Пьезоэлектрические преобразователи... —335
5.4.3 4. Индуктивные преобразователи........— — 336
5.4.3.5. Преобразователи этектрнческих сигналов... —338
5.4.4. Нормирующие преобразователи.......................... — 339
5.4.4.1. Токовые нормирующие преобразователи для термопар
и датчиков ЭДС...........................——------ • 339
5 4.4.2. Токовые нормирующие преобразователи
для термопреобразователей сопротивления .... 341
5.4.4.3. Электропневматнческий преобразователь.. —342
5.4 4.4 Токовый унифицированный преобразователь.... . 343
5 4 4.5. Пневматический унифицированный преобразователь. ..345
5.4.5. Аналоговые и цифровые преобразователи ................ 346
5.4 5 I. Цифроаналоговые преобразователи.............— • 347
5.4.5.2. Различные способы аналого-цифрового преобразования -352
5.4.6. Линии связи.................-........................ -359
5.4. 6.1. Пневматические линии связи -359
5.4. 62. Электрические линии связи.... - 360
5.4 6 3 Волоконно-оптические линии связи............... -362
5.5. Измерение электрических величин носителей информации
о состоянии химико-технологического процесса.......................366
Оглавление
7
5.5.1 Уравновешенные и неуравновешенные мосты .. ... 367
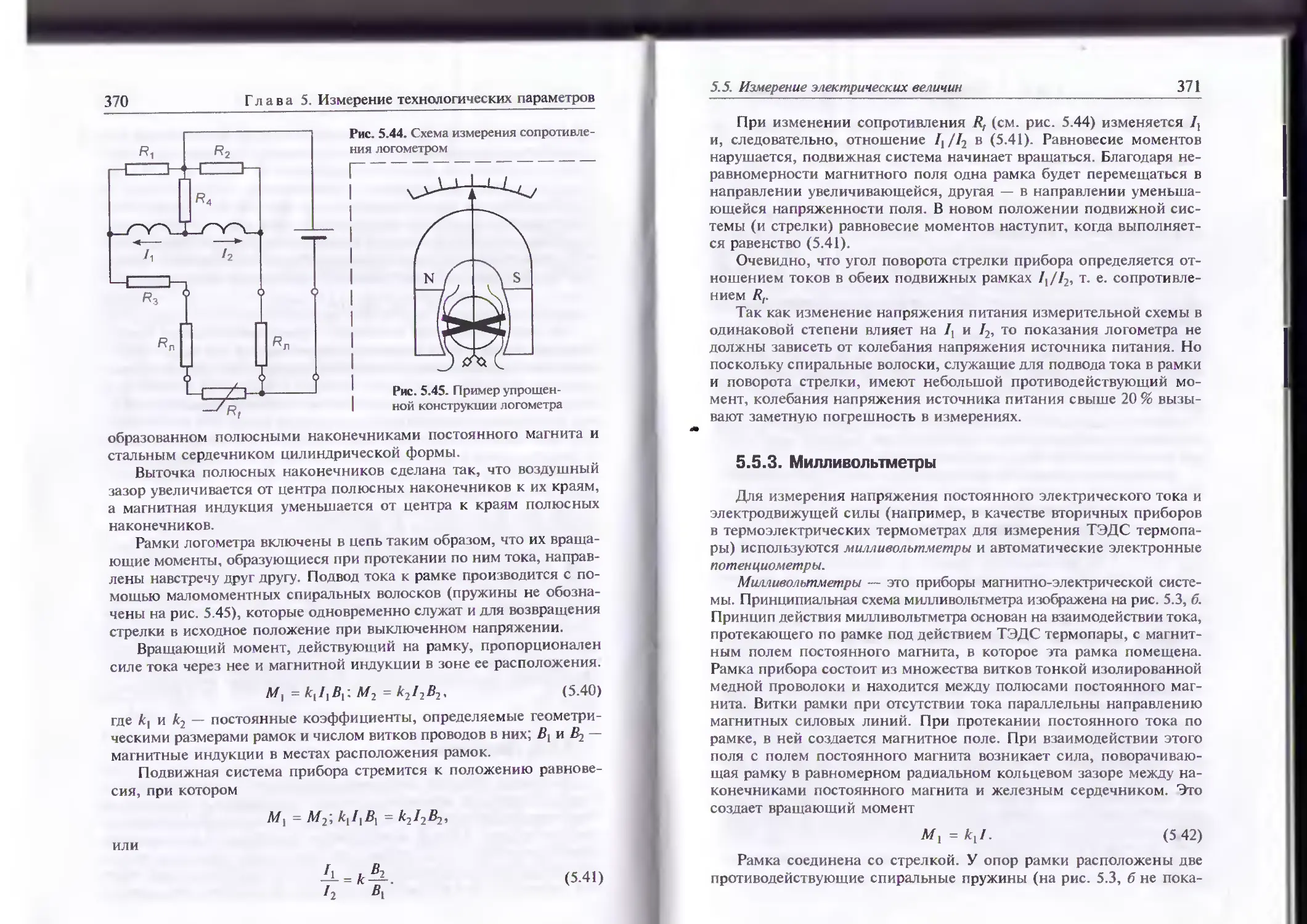
5.5.2. Логометры........................................ ...369
5.5.3. Милливольтметры................................... ...371
5.5.4. Цифровые измерительные приборы ... ...372
5.6. Измерение давления................. ... 377
5 6.1. Жидкостные манометры........................... ...378
5.6.2. Деформационные преобразователи давления . ..379
5.6.3. Промышленные преобразователи давления.......... .. 381
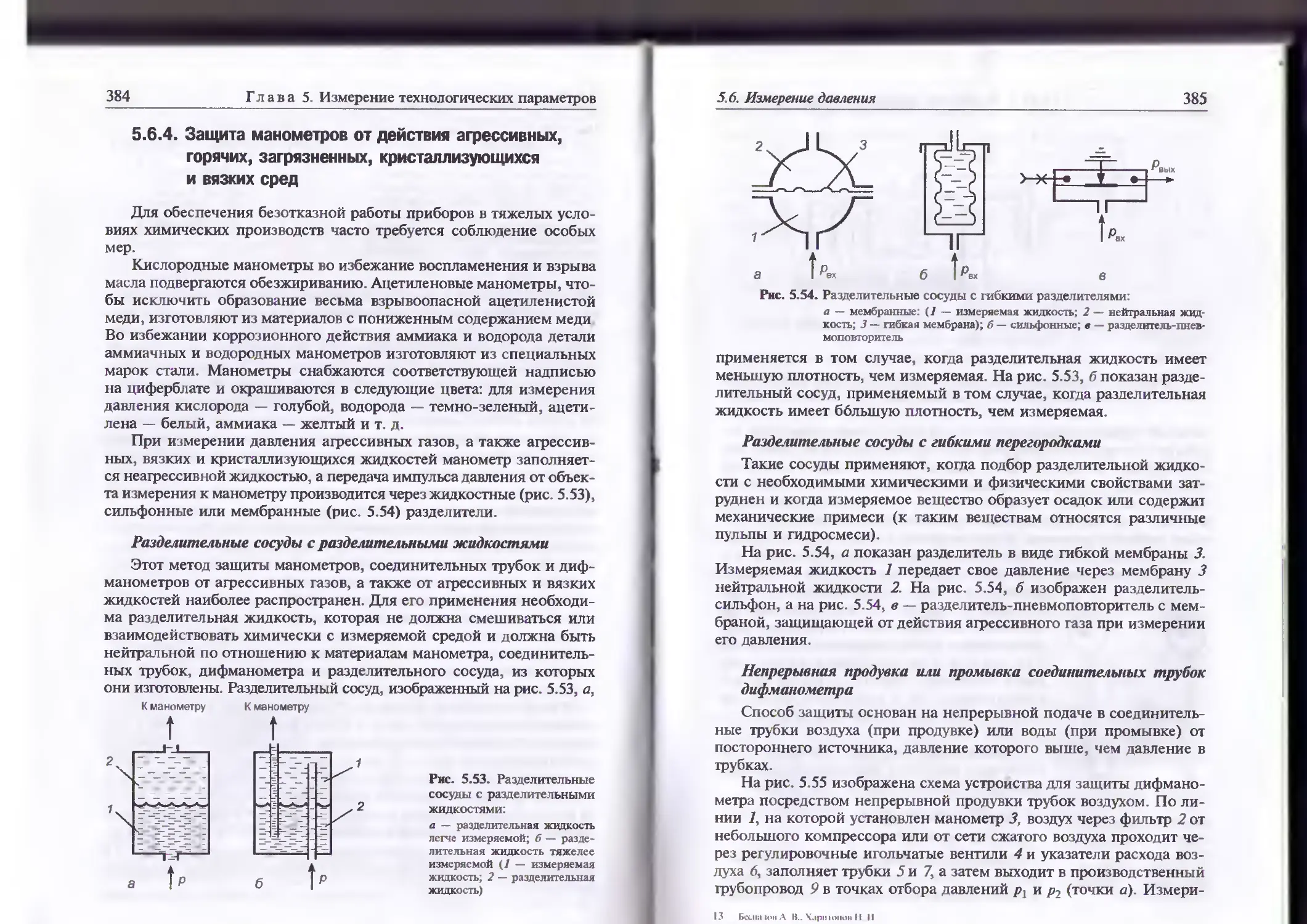
5.6.4. Зашита манометров от действия агрессивных, горячих,
загрязненных, кристаллизующихся и вязких сред......... .. 384
5.7. Измерение температуры........................ ...... ..387
5.7.1. Общие сведения об измерении температуры.. ..387
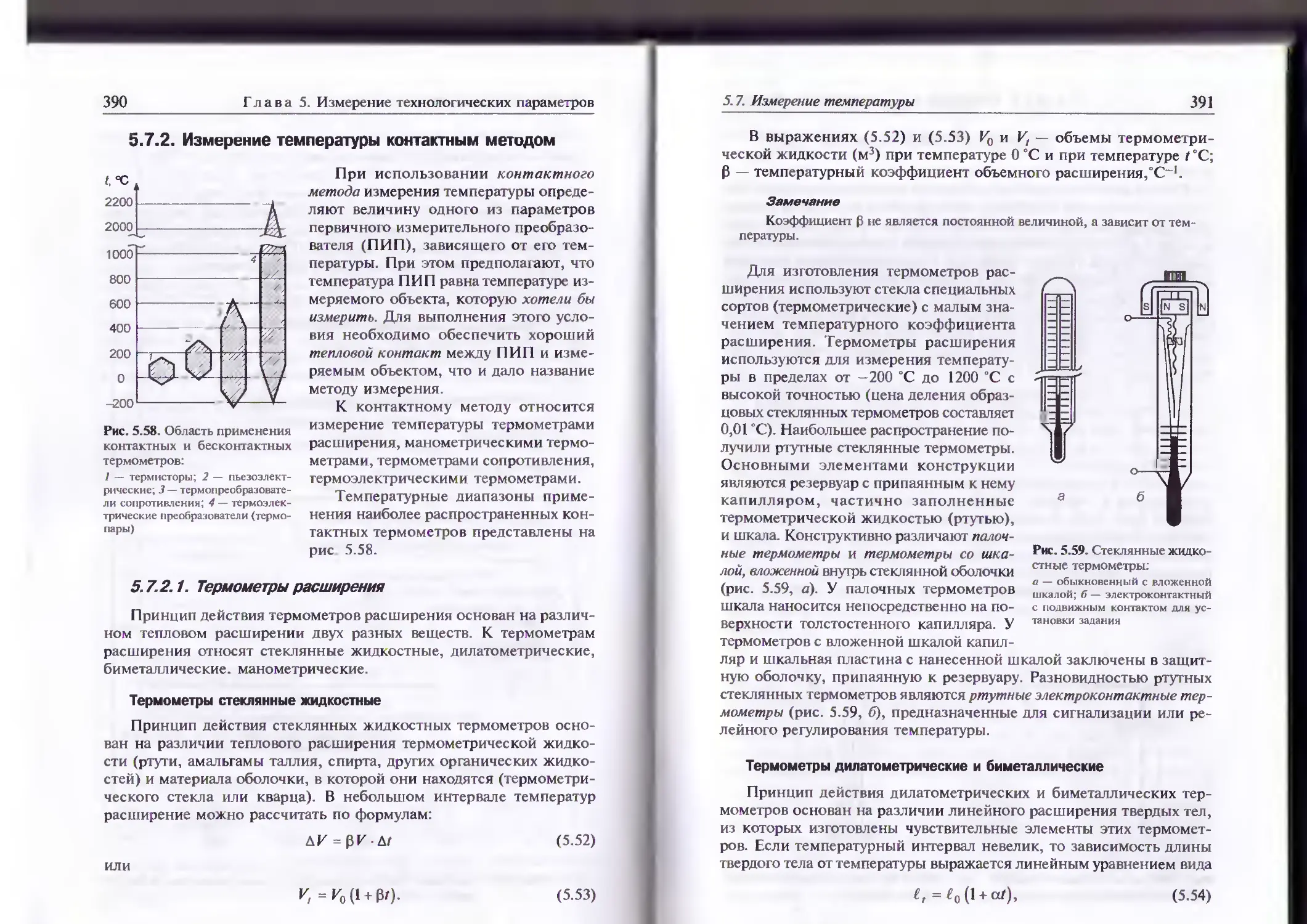
5.7.2. Измерение температуры контактным методом.. ..390
5.7.2.1. Термометры расширения........ ,, ..390
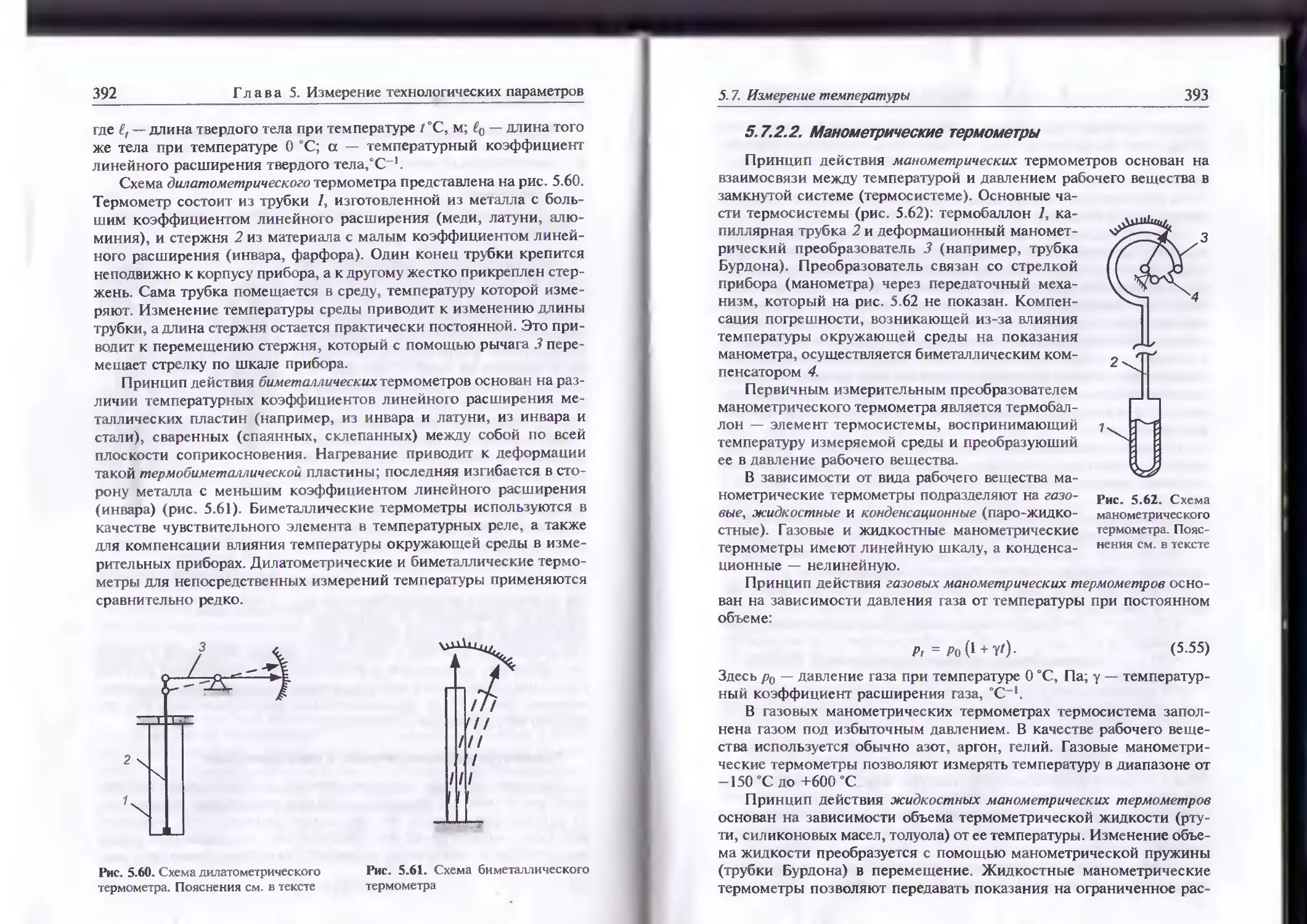
5.7.2.2. Манометрические термометры......... .. 393
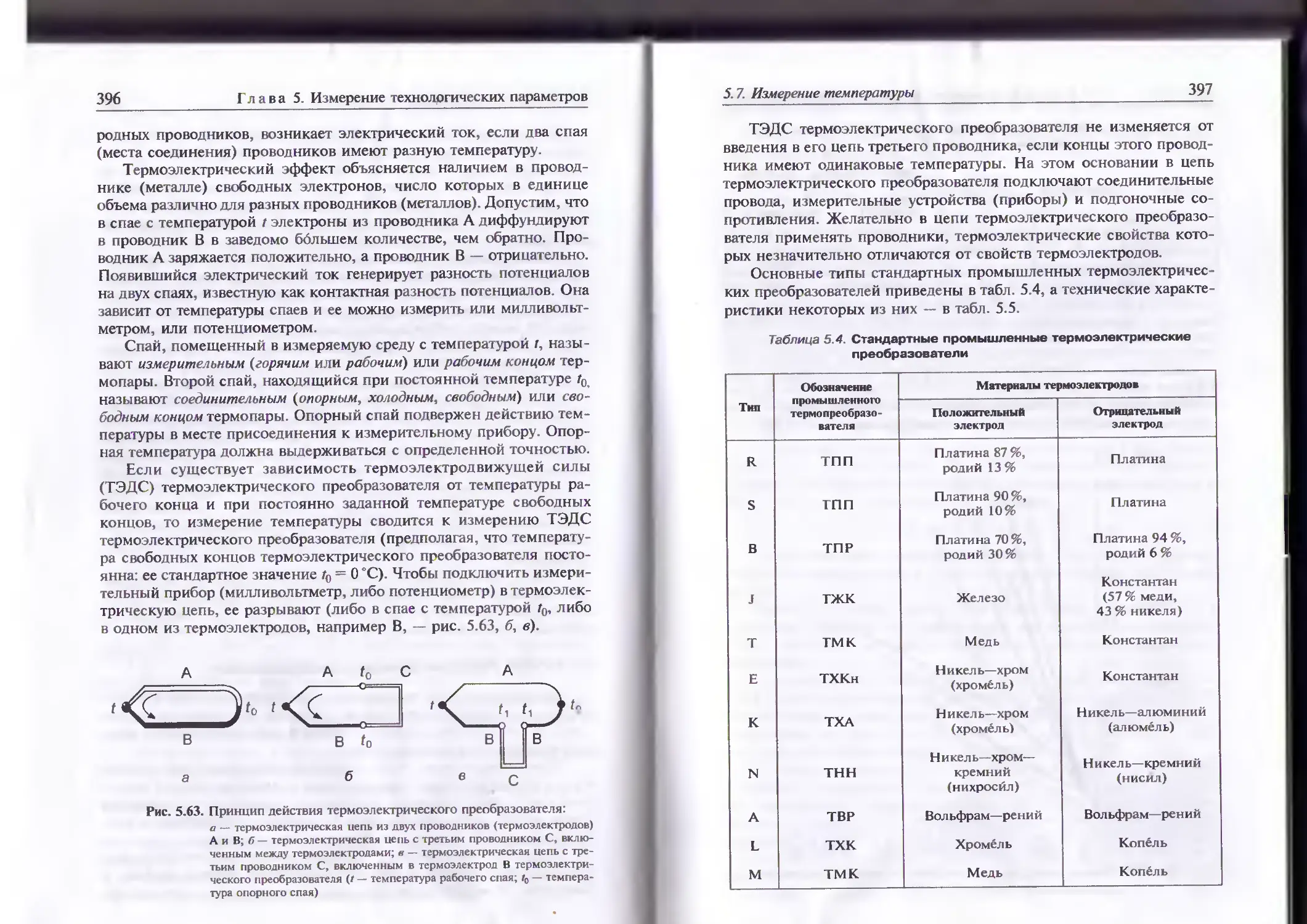
5.7.2.3. Термоэлектрические преобразователи .... .. 395
S.7.2.4. Термопреобразователи сопротивления ......... 403
5.7.2.5. Пьезоэлектрические термопреобразователи........410
5.7.2.6. Погрешности измерения температуры контактным методом.410
5.7.3. Измерение температуры бесконтактным методом..........411
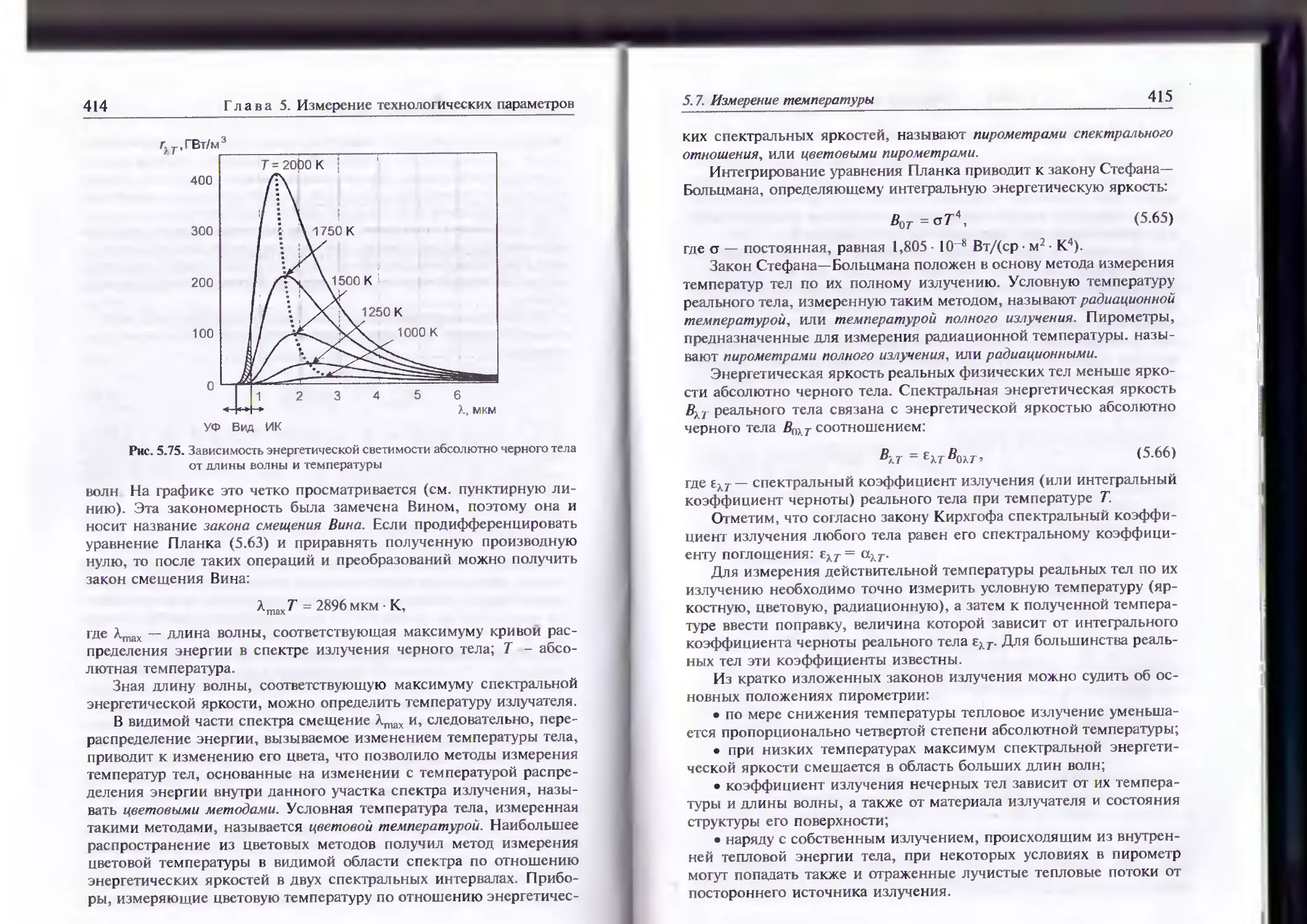
5.7.З.1. Теоретические основы измерения температуры по тепловому
излучению...............................................412
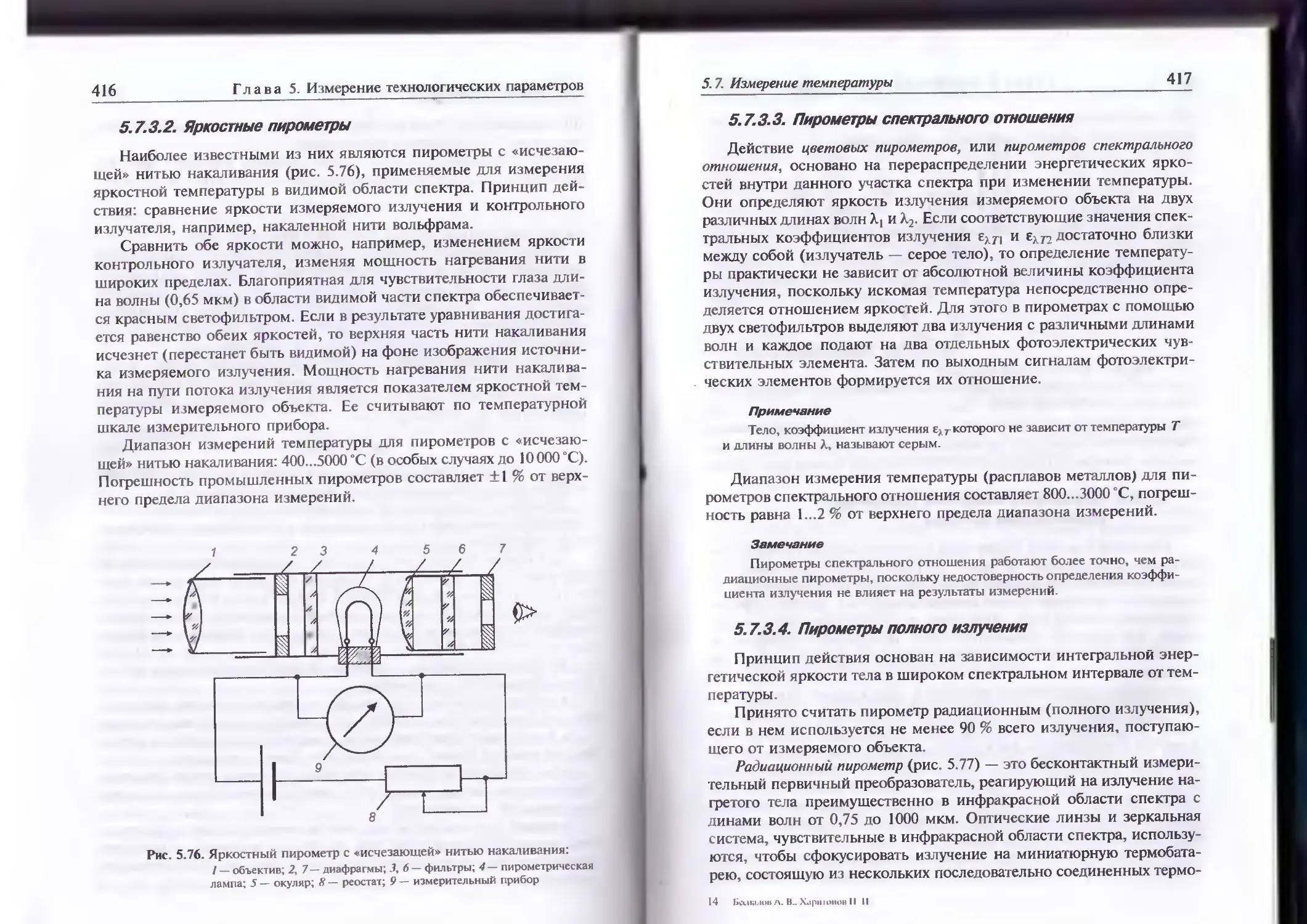
5.7.3.2. Яркостные пирометры......................... 416
5.7.3.3. Пирометры спектрального отношения 417
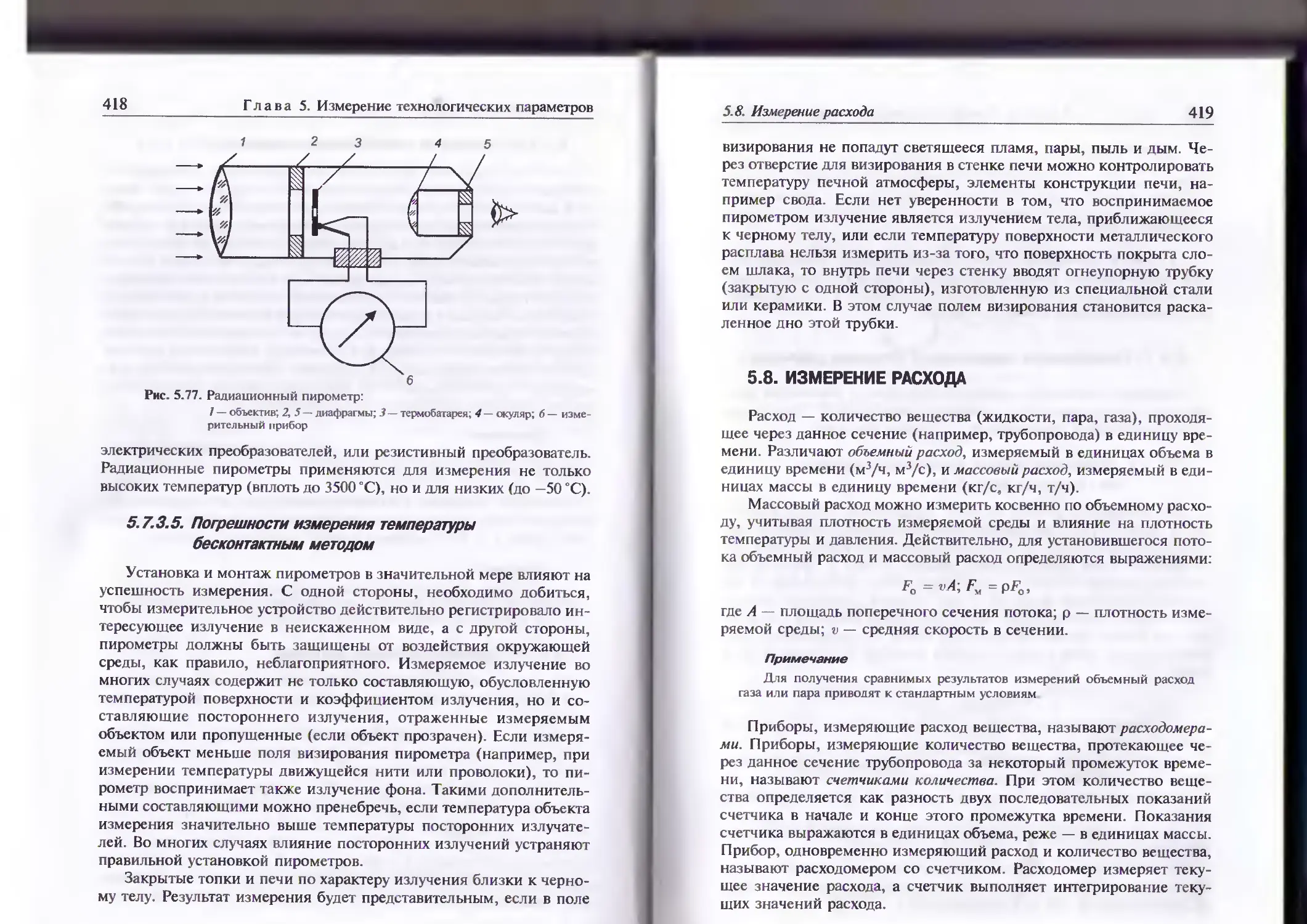
5.7.3.4. Пирометры полного излучения................ 417
5.7.3.5. Погрешности измерения температуры бесконтактным
методом.............................................. .418
5.8. Измерение расхода. ....419
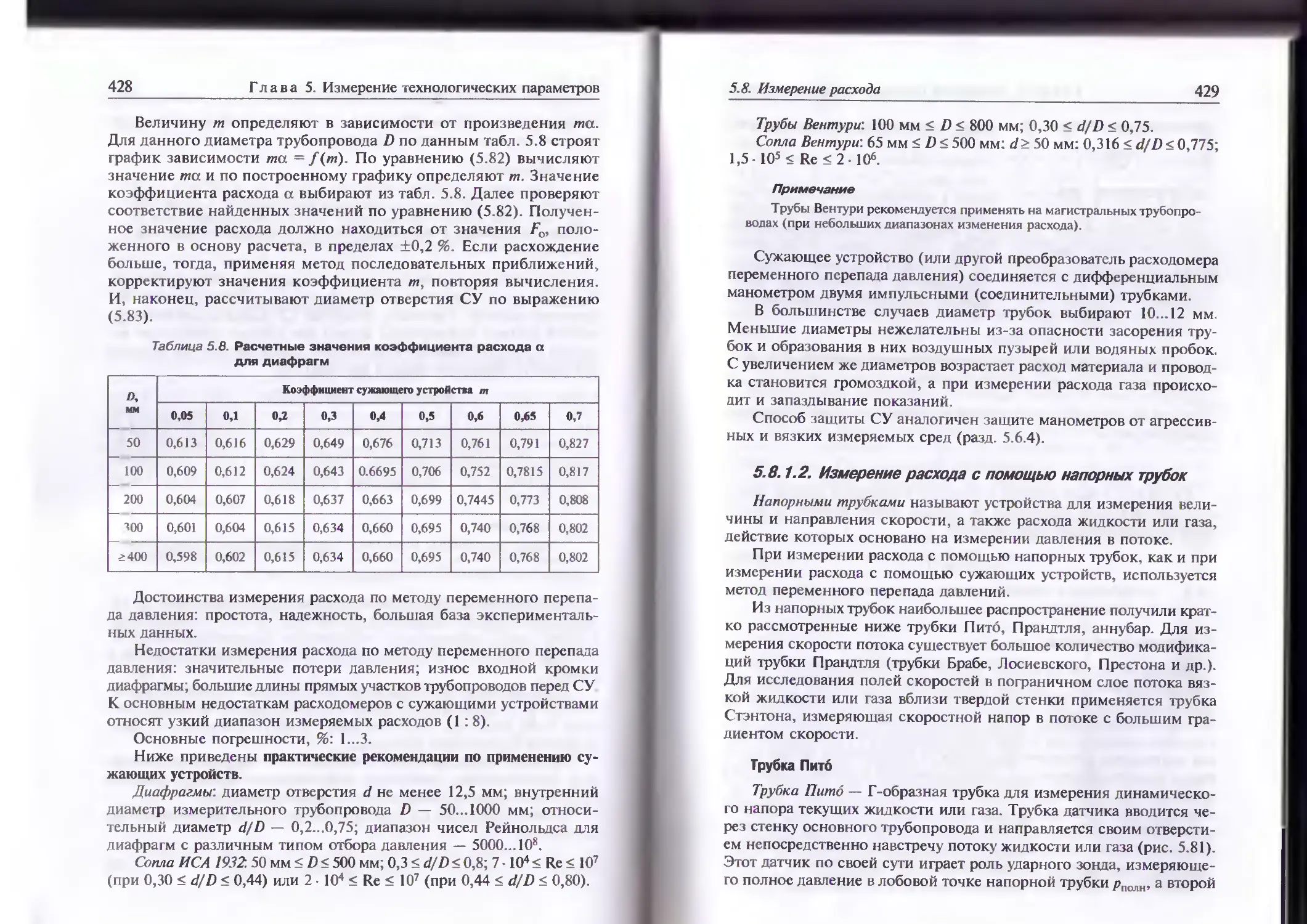
5.8.1. Расходомеры переменного перепада давления.......... 420
5.8.1.1. Измерение расхода по перепаду давления на сужающем
устройстве............................................ 420
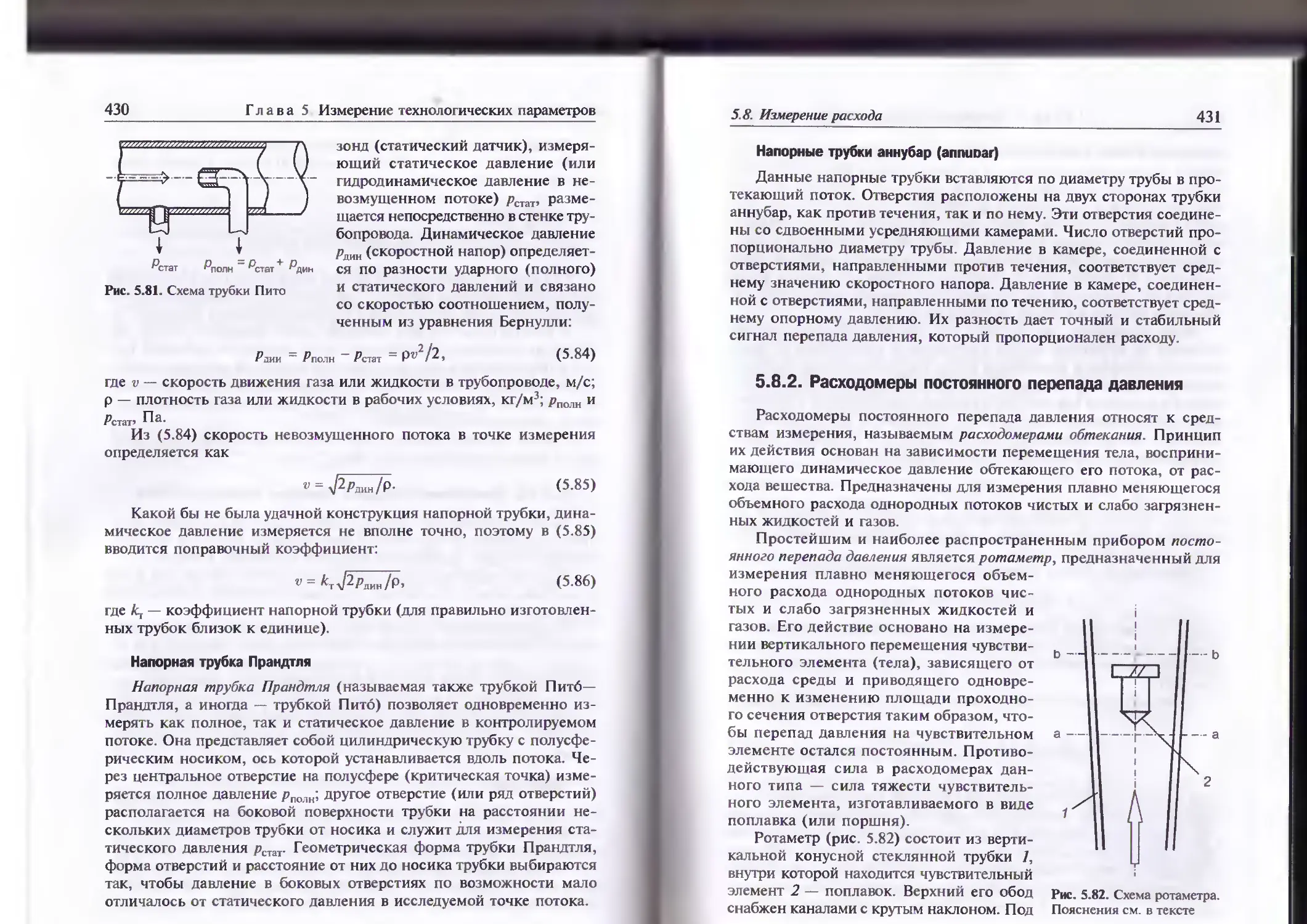
5.8.1.2. Измерение расхода с помощью напорных трубок...- ....429
5.8.2. Расходомеры постоянного перепада давления... ... 431
5.8.3. Объемные расходомеры и счетчики .*..._.......... ....433
5.8.З.1. Счетчики с овальными шестернями .. ....434
5.8.3.2. Ротационные счетчики .... ....434
5.8.3.3. Скоростные счетчики ..... ............. , ....435
5.8.4. Измерение расхода на основе тепловых явлений .... .. .436
5.8.4.1. Калориметрические расходомеры ... 436
5.8.4.2. Термоконвективные расходомеры .. ...437
58.4.3. Термоанемометры................................ 438
5.8.5. Электромагнитные расходомеры . 440
5.8.6. Вихревые расходомеры...... 443
5.8.7. Ультразвуковые расходомеры. .. 446
5.8.8. Кориолисовы расходомеры_______________________________448
5.9. Измерение уровня жидкости и сыпучих тел 449
5.9.1. Механические уровнемеры. 450
5.9.2. Гидростатические и пьезометрические уровнемеры ... 452
5.9.3. Кондуктометрические уровнемеры 453
5.9.4. Емкостные уровнемеры .. 454
5.9.5. Фотоэлектрические уровнемеры.................... ... 454
8
Оглавление
5.9.6. Ультразвуковые уровнемеры...........................
5.9.7. Измерение уровня с помощью радиоактивных изотопов
5.9.8. Акустические уровнемеры.............................
5.10. Измерение состава и физико-химических свойств веществ...
5.10.1. Физические газоанализаторы....................
5.10.1.1. Термокондуктометрические газоанализаторы..
5.10.1.2. Термохимические газоанализаторы...... -
5.10.1.3. Термомагнитные газоанализаторы.............
5.10.1.4. Оптические абсорбционные в ИК-области спектра
газоанализаторы.....................................—
5,10.1.5. Оптические абсорбционные в УФ-области спектра
газоанализаторы.........................——•••
5.10.2. Измерение концентрации растворов....
5.10.2.1. кондуктометрические анализаторы ..
5.10.2.2. Потенциометрические анализаторы---
5.10.2.3. Денсиметрические анализаторы..
5.10.2.4. Ультразвуковые анализаторы.
5.10.3. Химические газовые сенсоры...........
...455
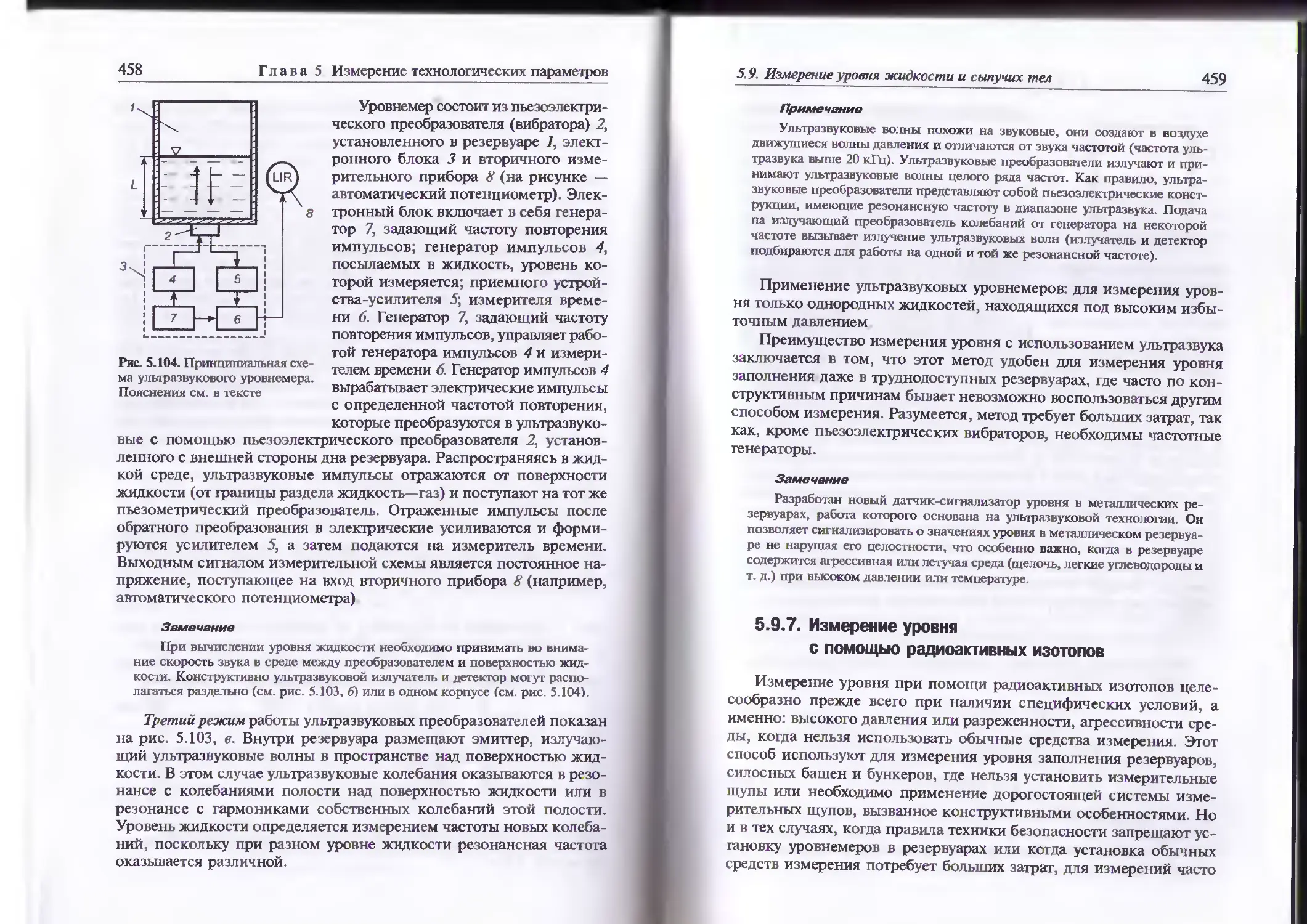
....459
. .461
.462
...462
.463
.464
.466
...467
..469
..469
..470
..471
..473
..474
..475
Контрольные вопросы
Глава 6. ОСНОВЫ ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ......р 478
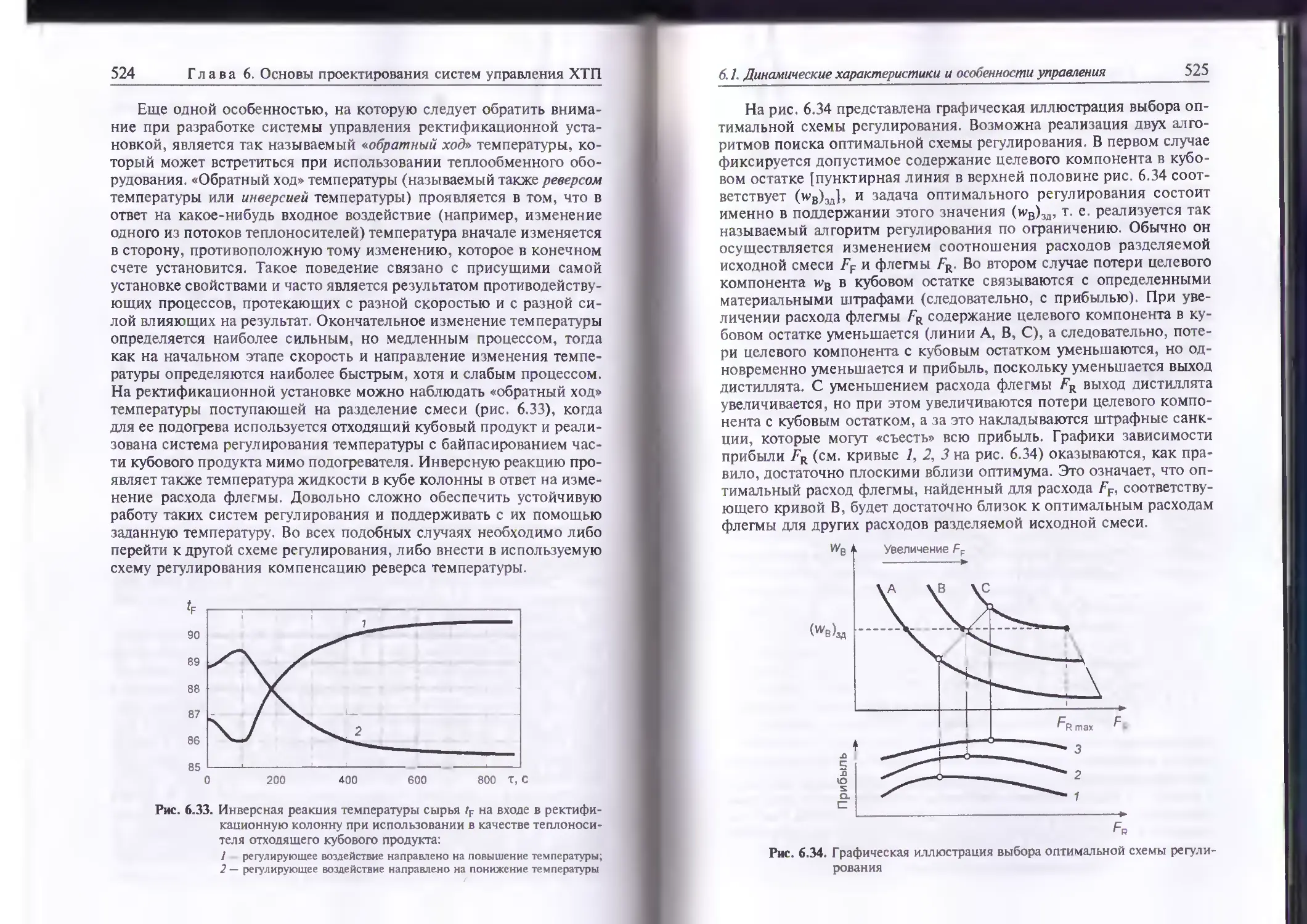
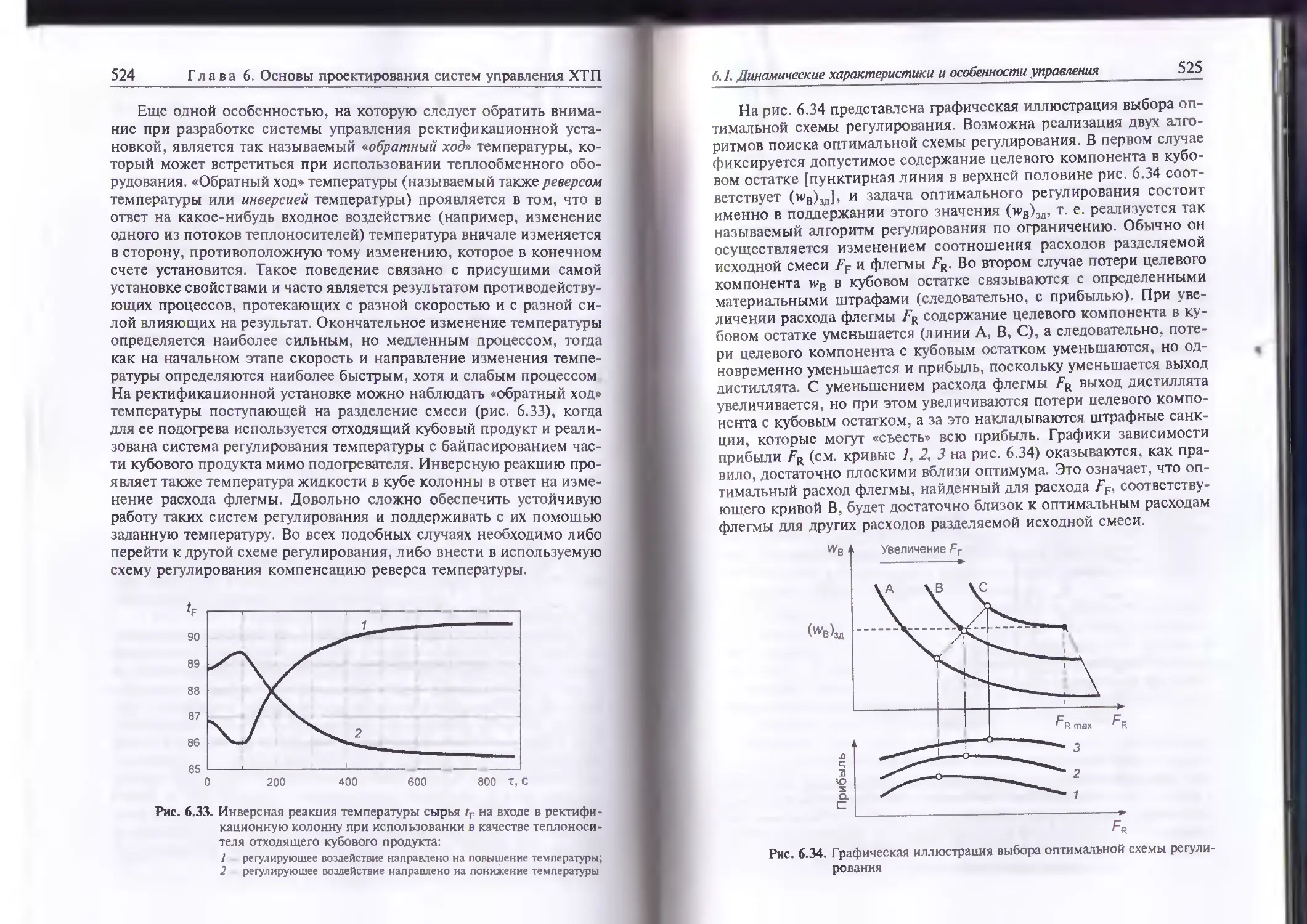
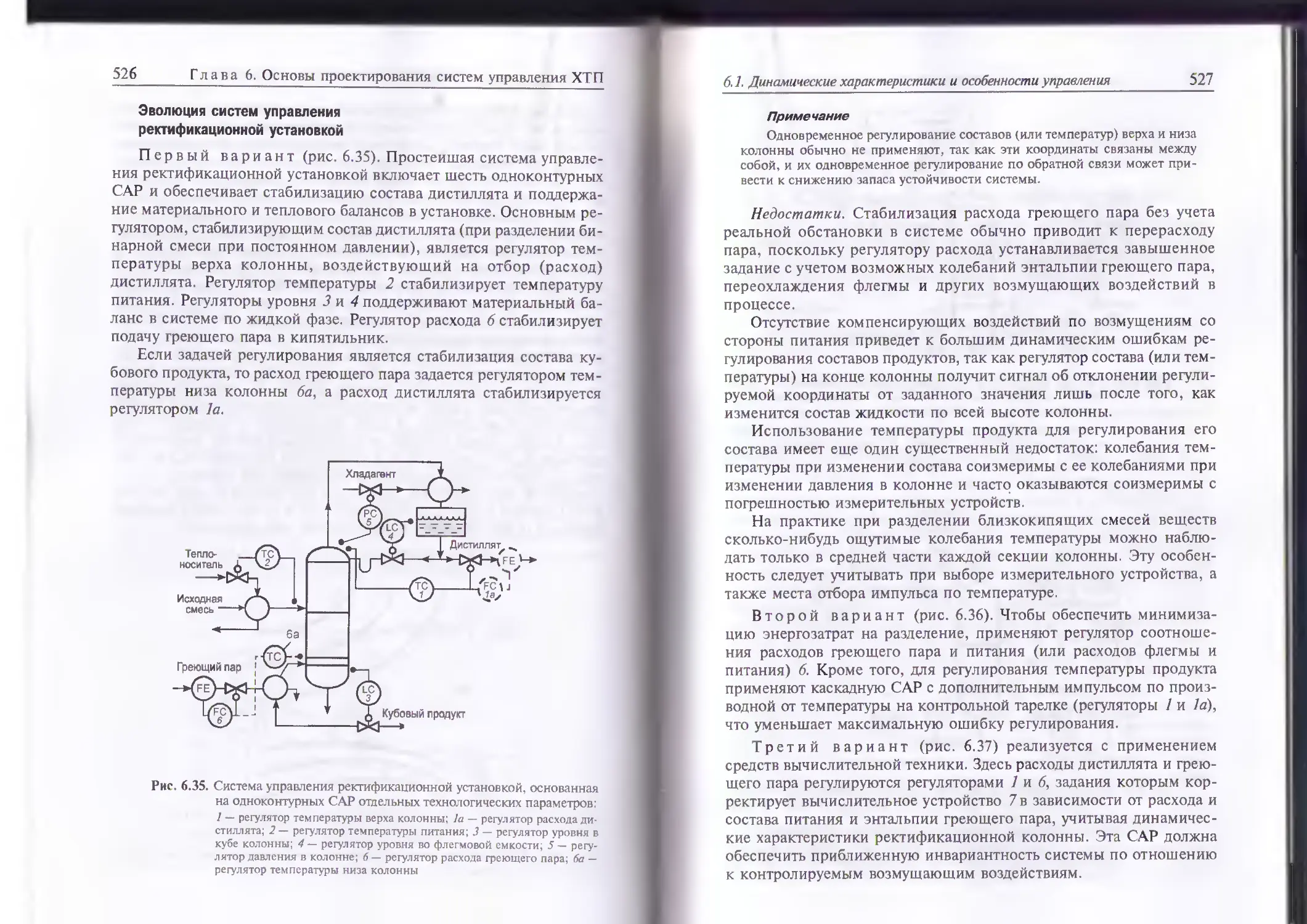
6.1. Динамические характеристики и особенности управления
типовыми процессами и аппаратами химической технологии.................478
6.1.1. Регулирования основных технологических параметров......... ...479
6.1.1.2. Регулирование устройств для перемещения жидкостей н газов.481
6.1.1.3. Регулирование уровня....................-
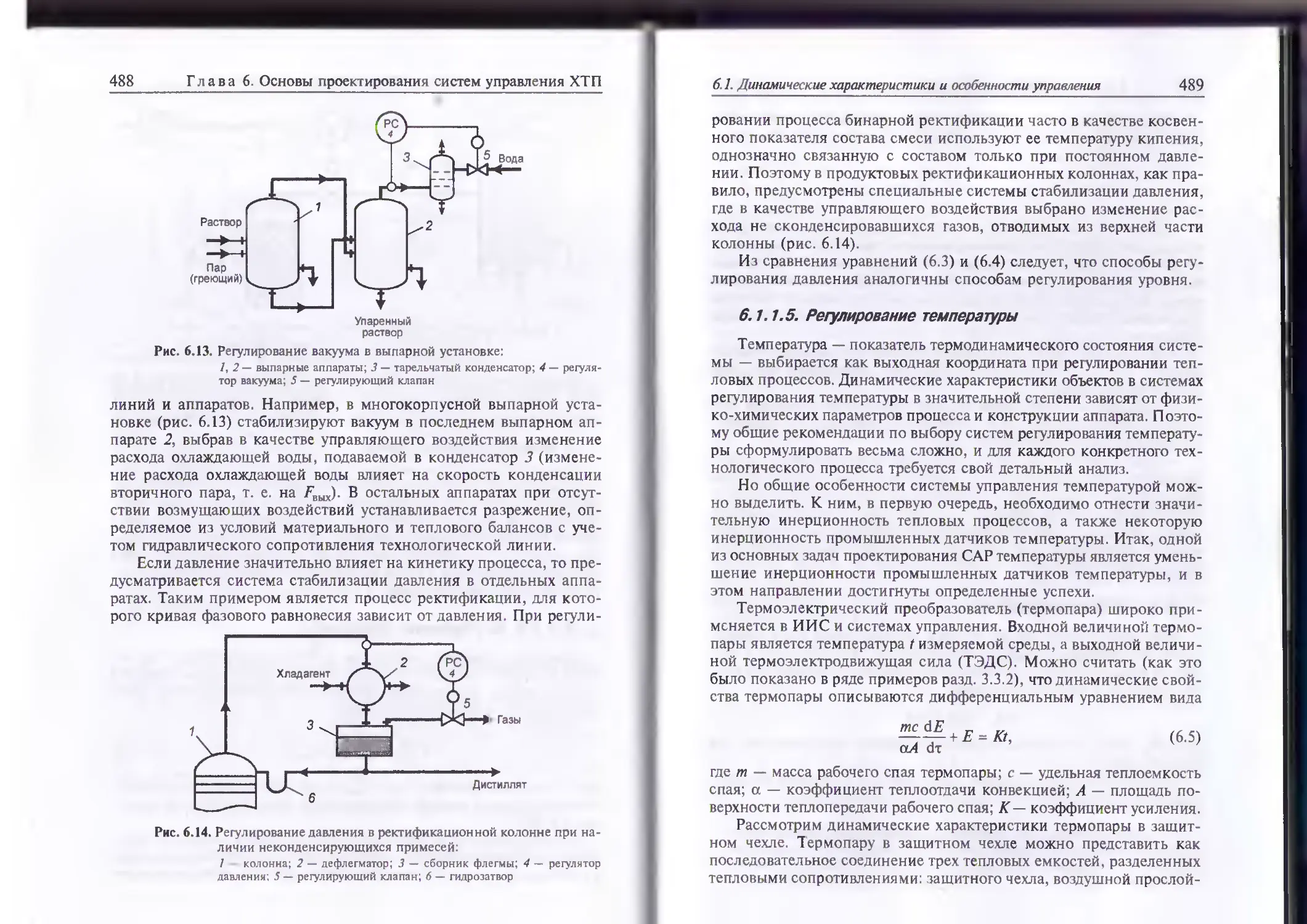
6.1.1.4. Регулирование давления .. —
6.1.1.5. Регулирование температуры.. . ... - ...
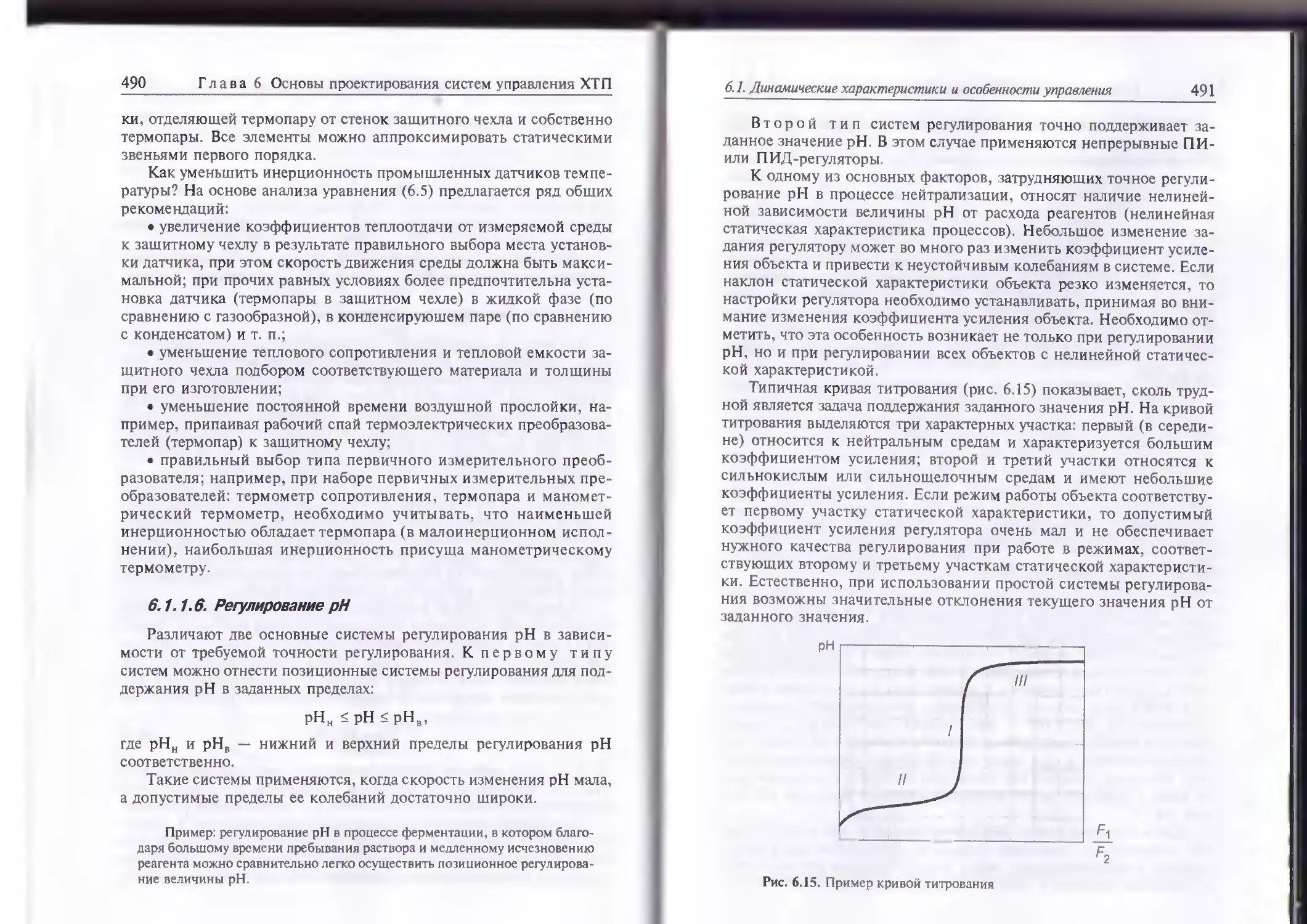
6.1.1.6. Регулирование pH---------—-------------—
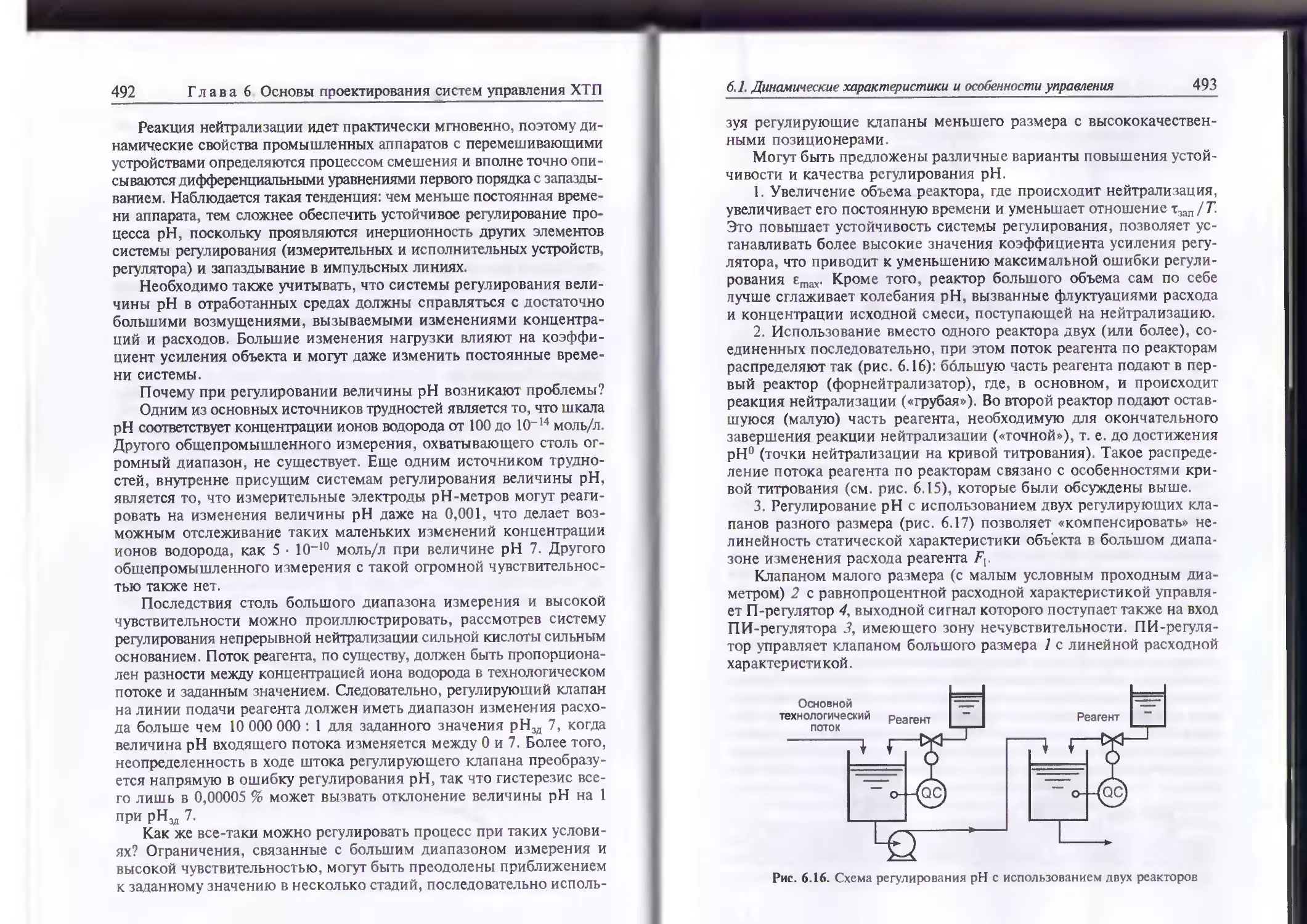
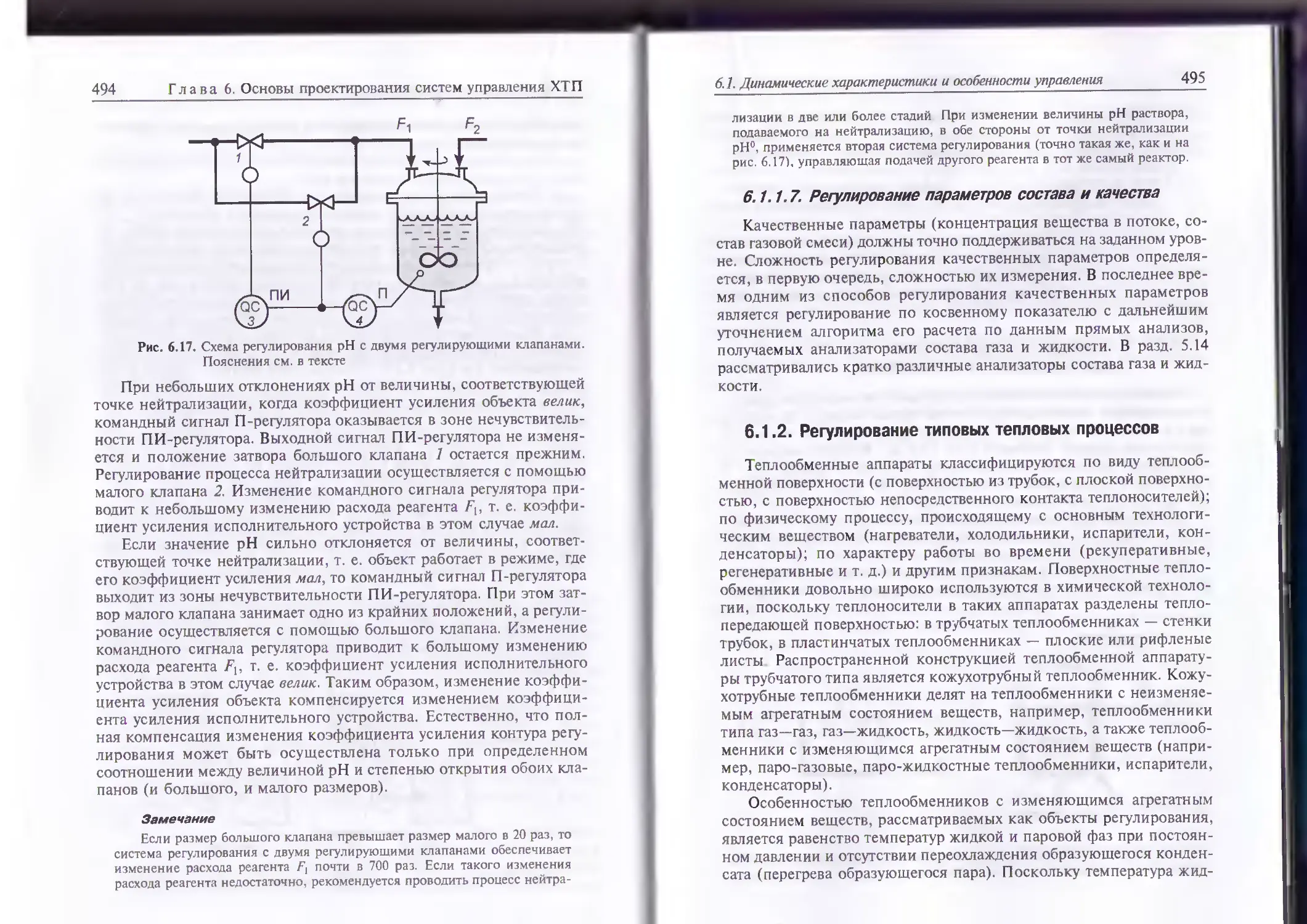
6.1.1.7. Регулирование параметров состава и качества ...
6.1.2. Регулирование типовых тепловых процессов......
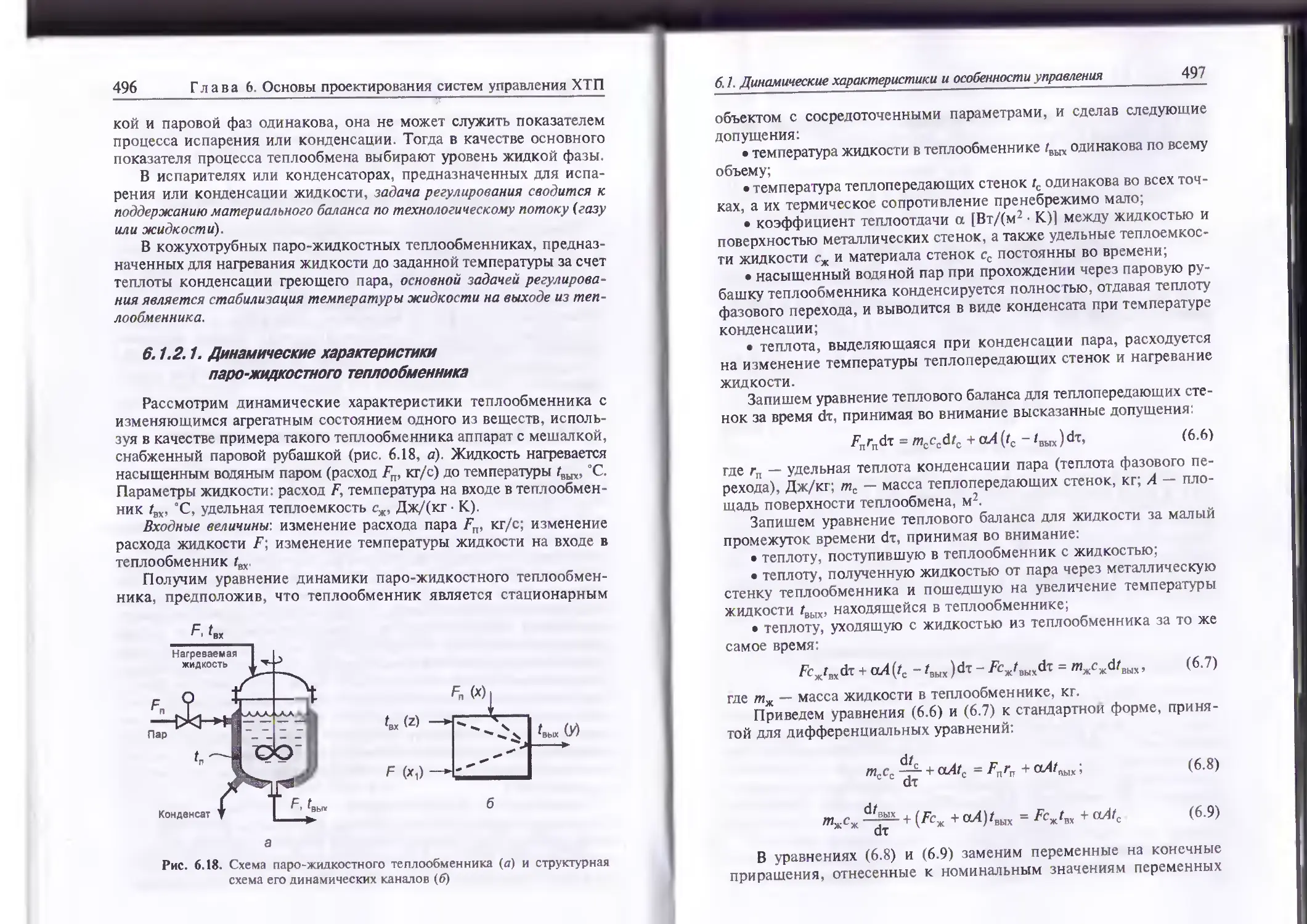
6.1.2.1. Динамические характеристики паро-жидкостного
теплообменника......................................
....487
....489
....490
....495
....495
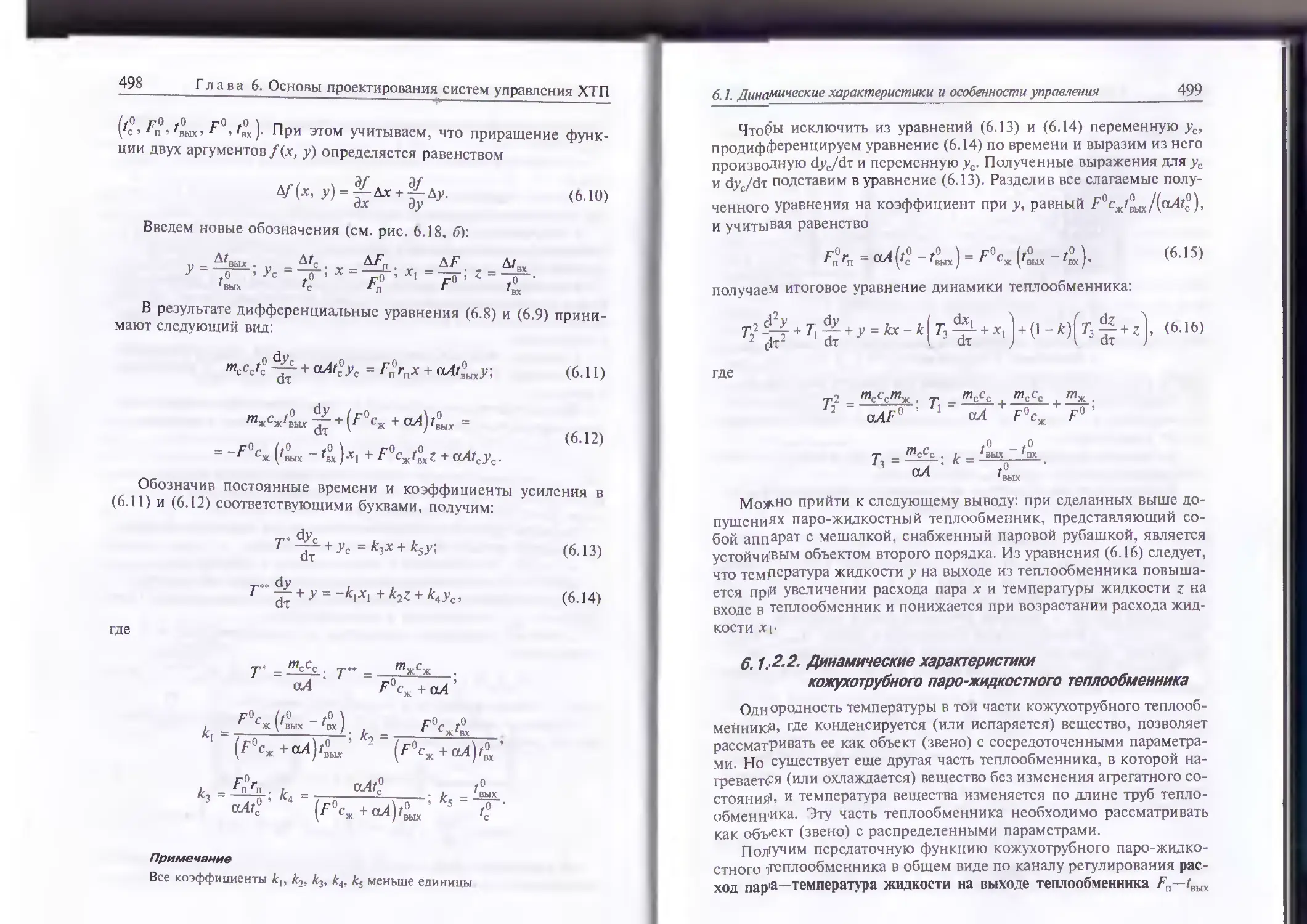
6.1.2.2. Динамические характеристики кожухотрубного
паро-жидкостного теплообменника........... ....
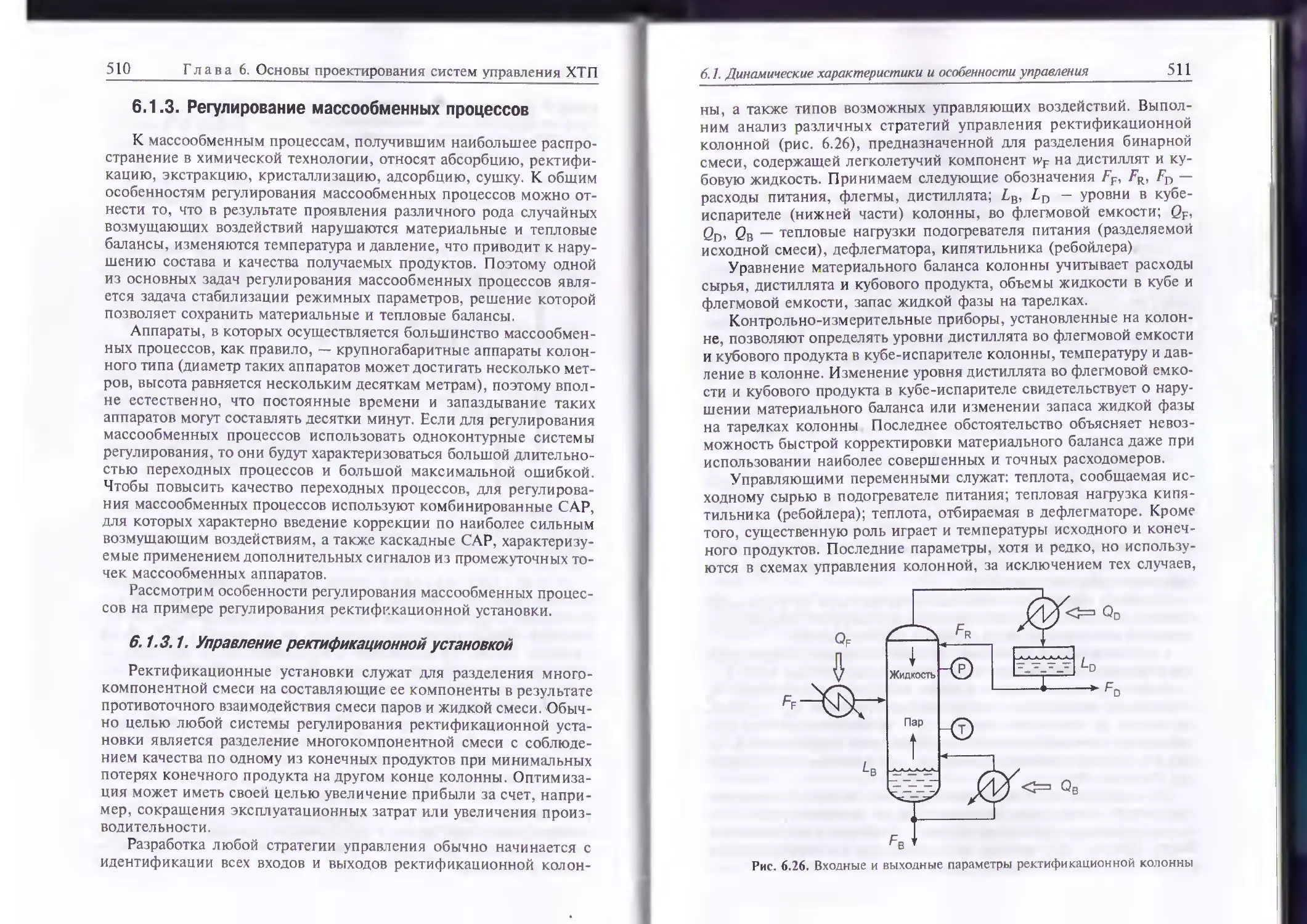
6.1.3. Регулирование массообменных процессов...—
6.1.3.1- Управление ректификационной установкой .....
6.1.3.2. Управление процессами в химических реакторах
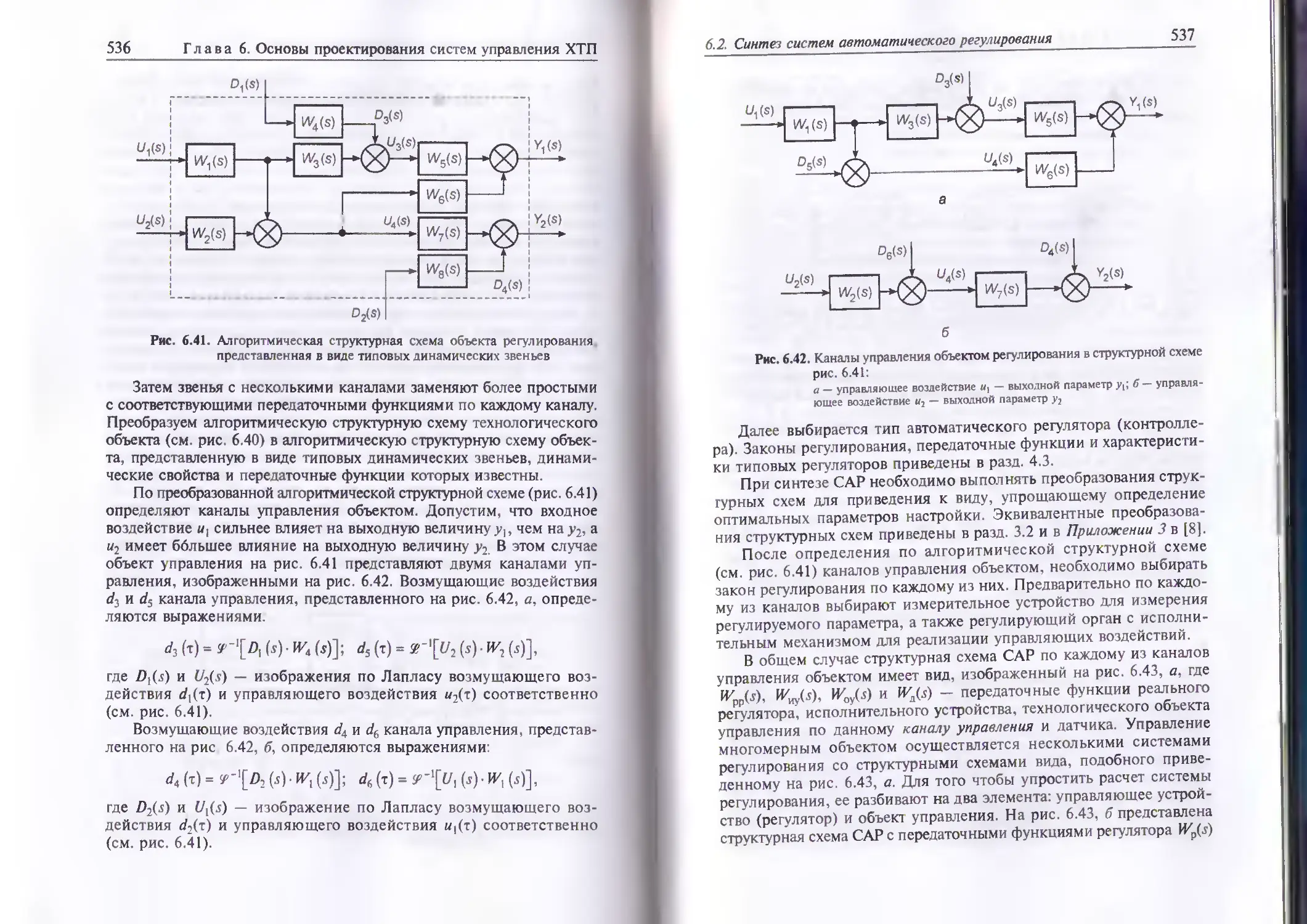
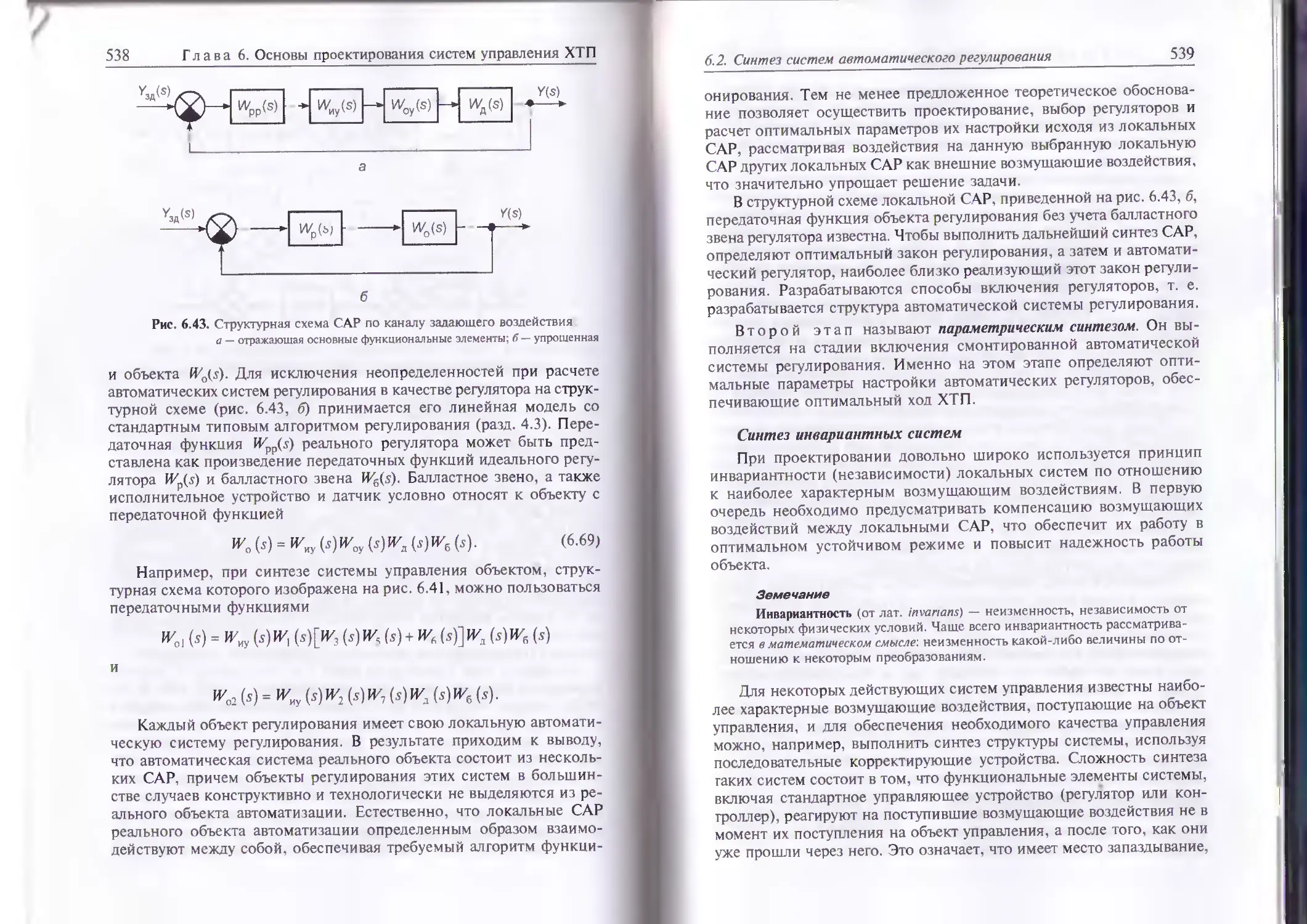
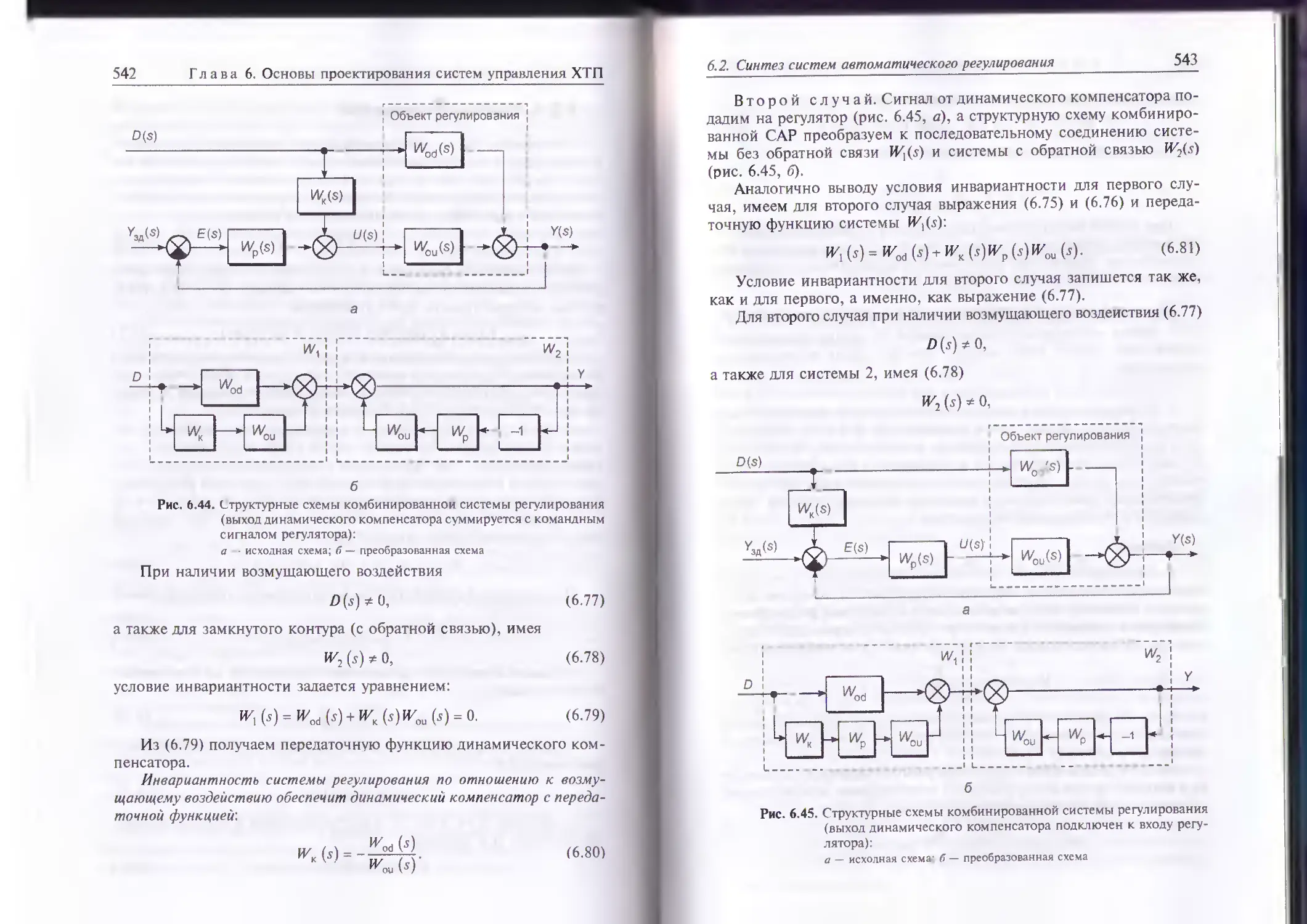
6.2. Синтез систем автоматического регулирования......
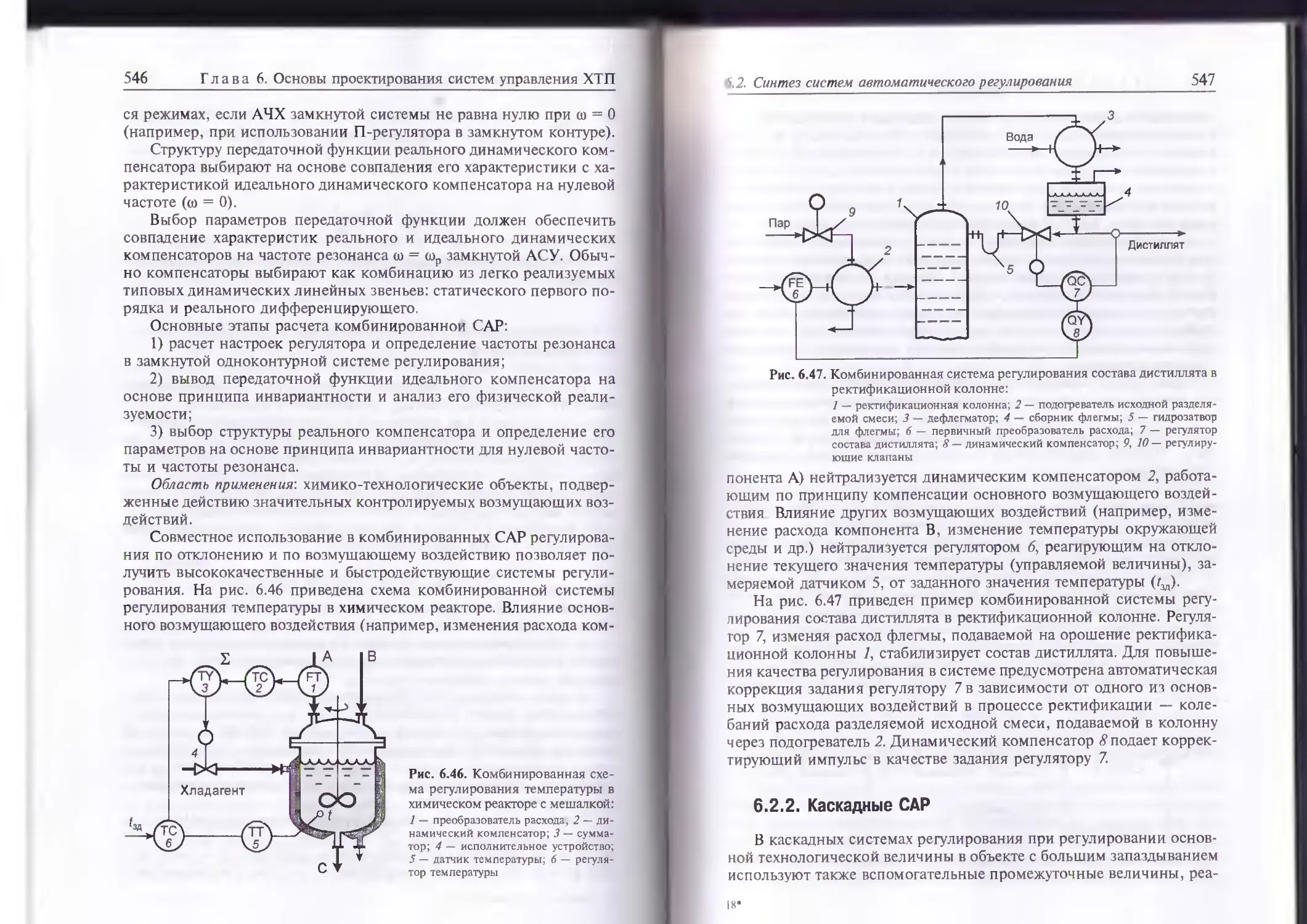
6.2.1. Комбинированные САР..........
6.2.2. Каскадные САР...............................;-
6.2 3. САР с дополнительным импульсом по производной
из промежуточной точки...................................
6.2.4 Регулирование многосвязных объектов ....
6.2.5. Регулирование объектов с запаздыванием
6.3. Технические средства систем автоматического управления
6.3 I Основные разновидности управляющих устройств,
применяемых в системах управления ХТП
...499
.510
..510
.529
..534
..541
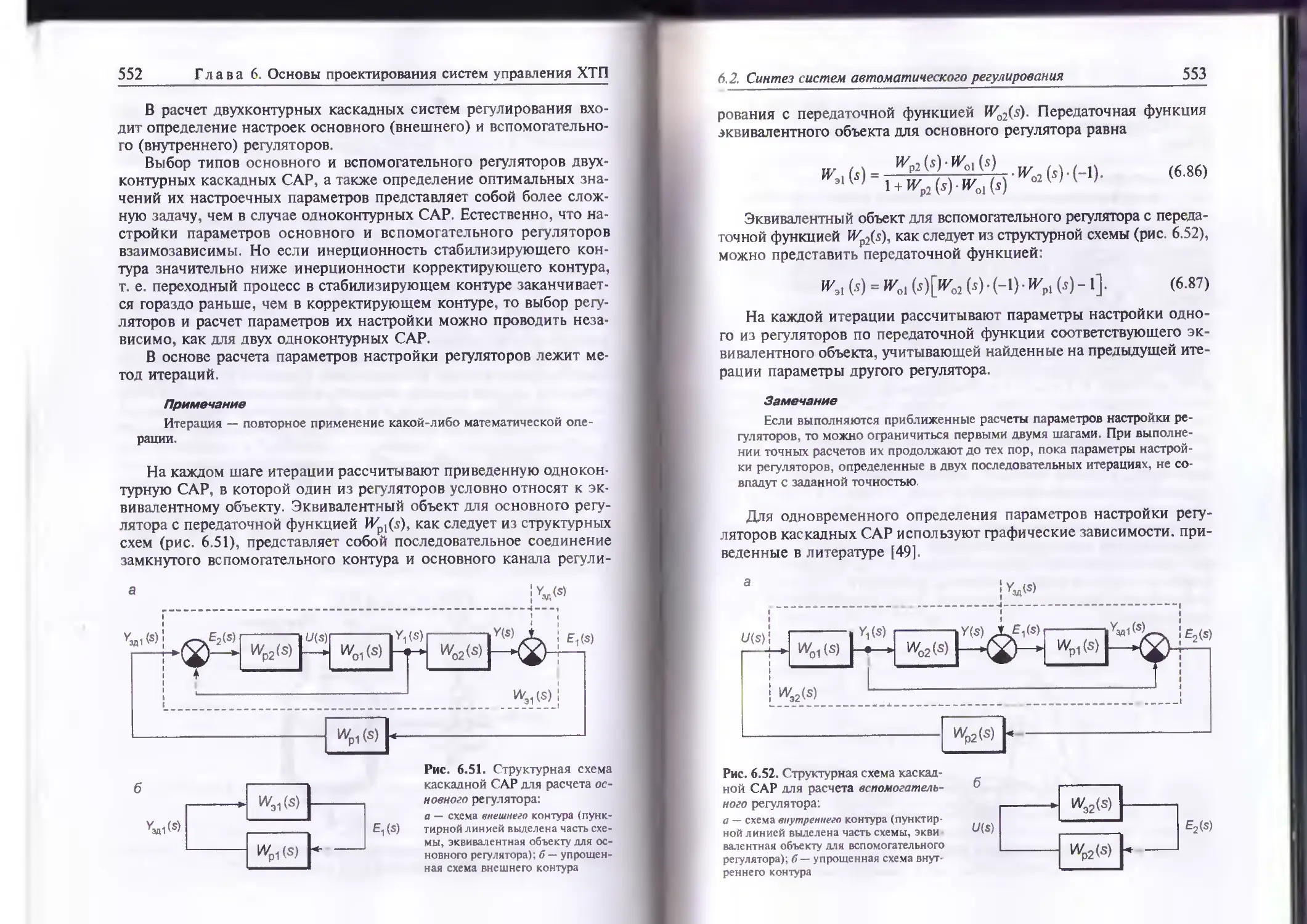
..547
..555
..555
...560
...562
...563
Оглавление 9
6.3.2. Автоматические регуляторы прямого и непрямого действия..565
6.3 2.1. Регуляторы прямого действия.......................565
6.3.2.2. Регуляторы непрямого действия............- . .. 567
6.3.3. Построение управляющих устройств с использованием
пневматических средств автоматизации........................ ..568
6.3.3.1. Первый уровень агрегатизации.............. .. 569
6.3 3.2. Второй уровень агрегатизации. ..576
6.3.3.3. Третий уровень агрегатизации .. .. 578
6.3.4. Исполнительные устройства_____________________________ 580
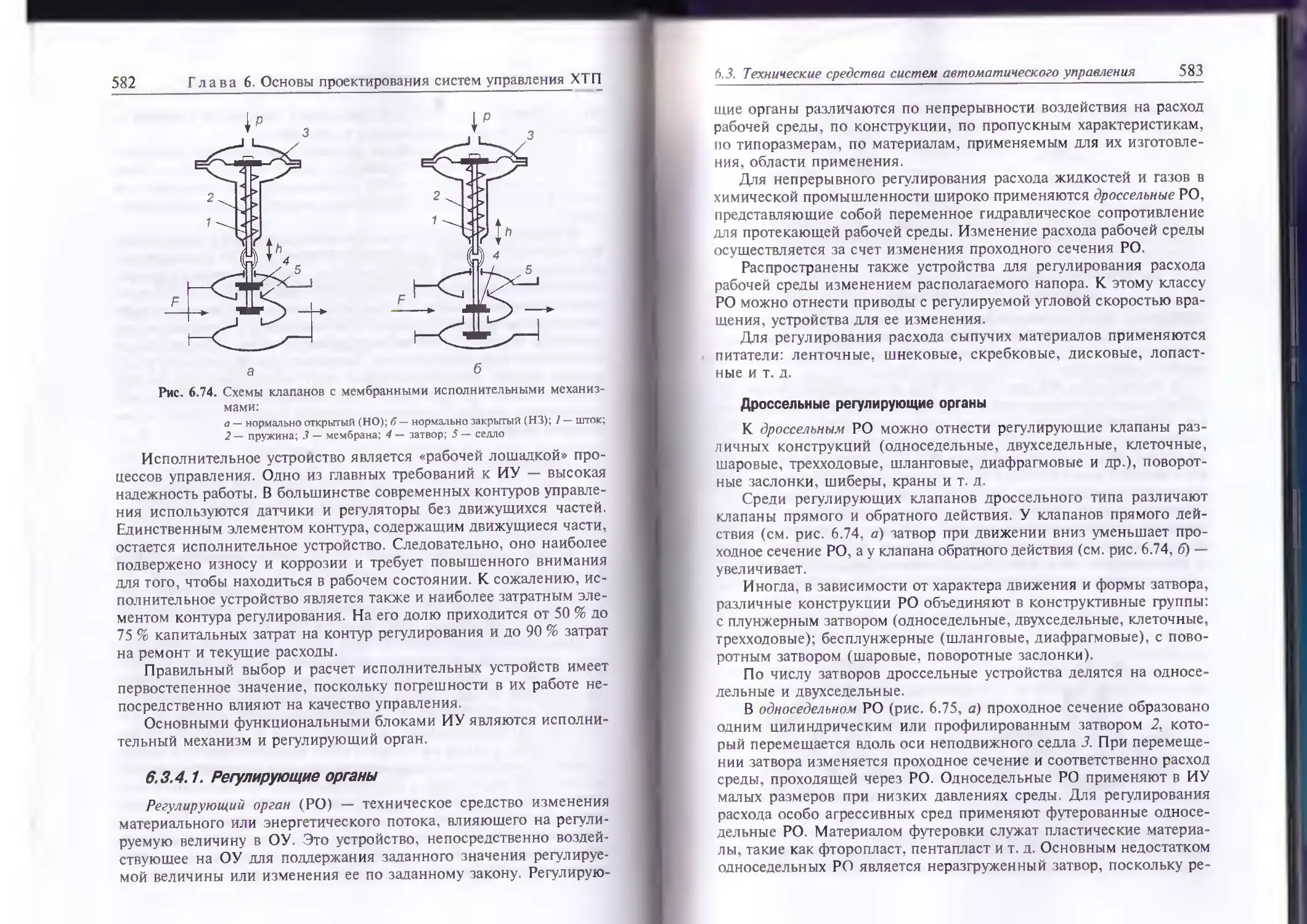
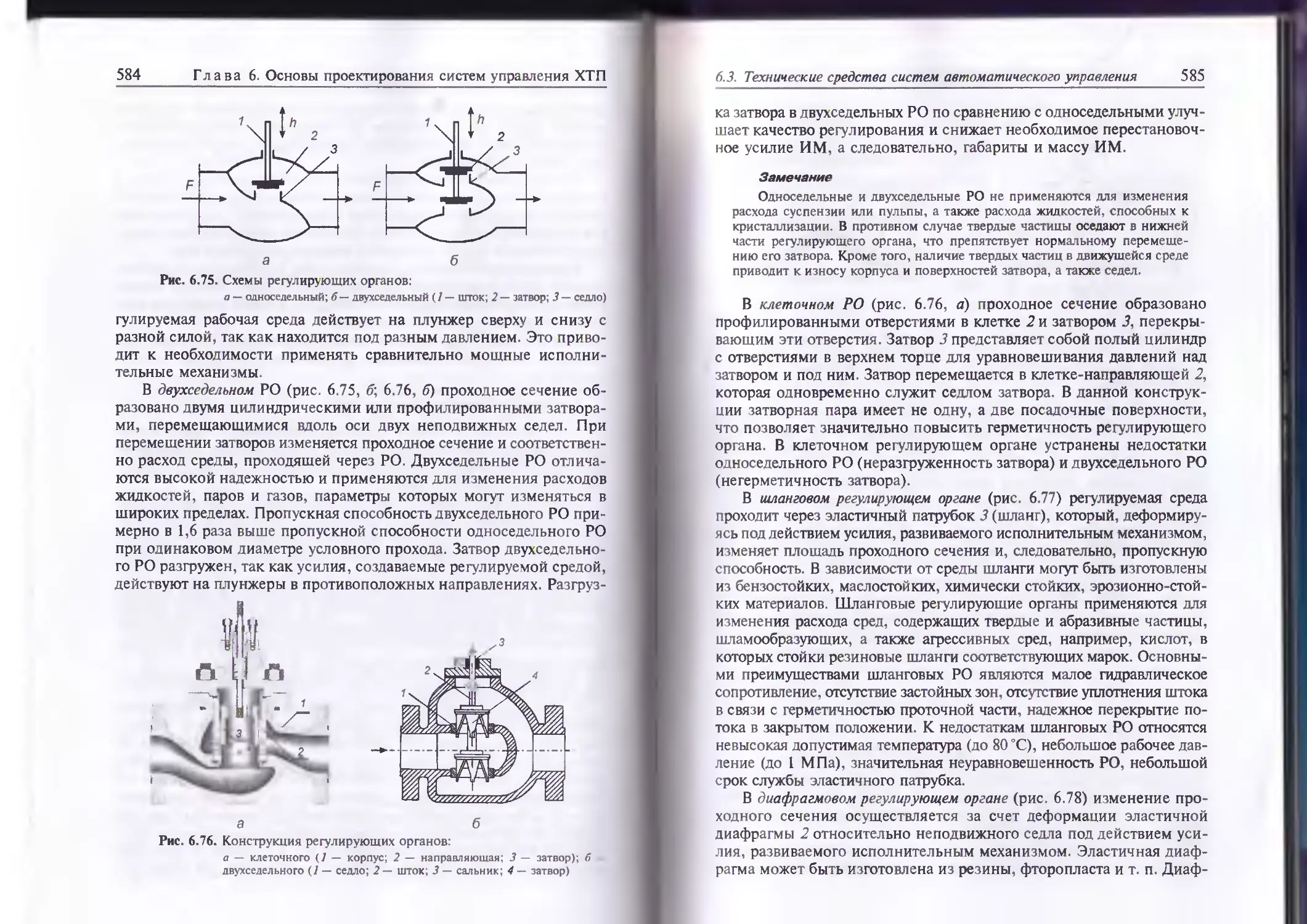
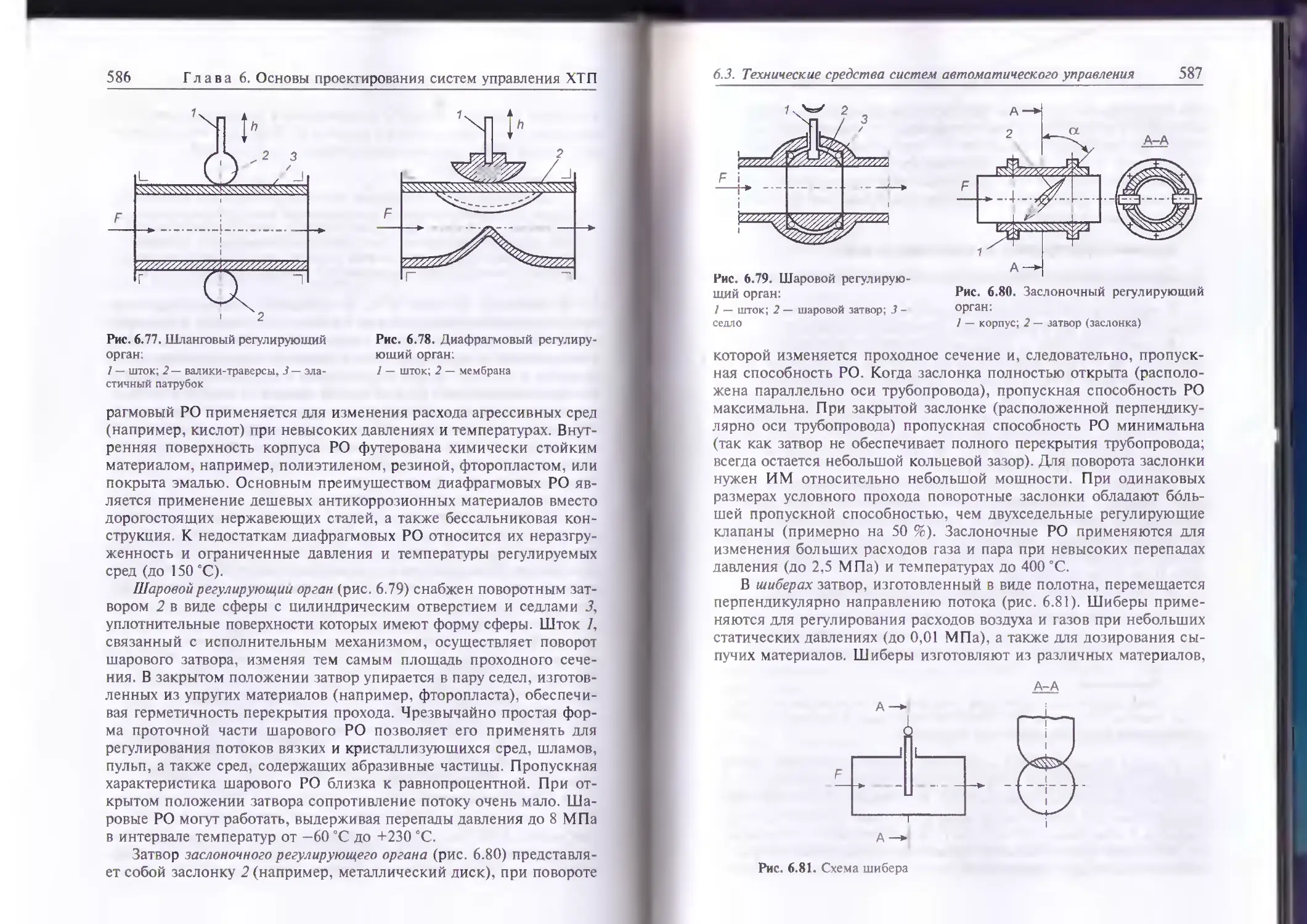
6.3.4.1. Регулирующие органы............... .. 582
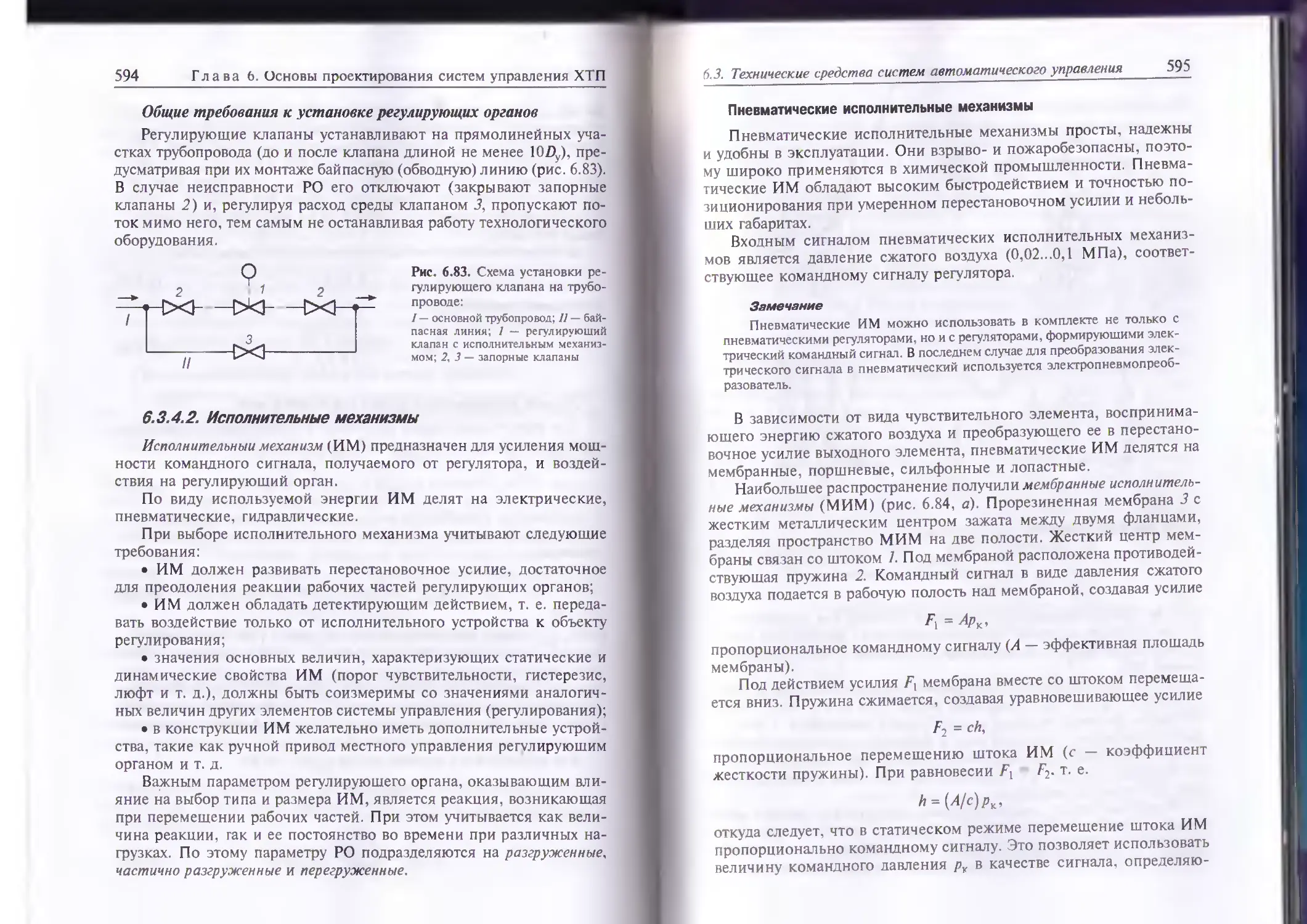
6.3.4.2. Исполнительные механизмы....................... ..594
6.3.4.3. Пьезокерамические исполнительные устройства . ..600
6.4. Стадии проектирования систем управления................... 601
6.4.1. Разработка технического задания......... . ..601
6.4.2. Эскизная разработка................................. ..605
6.4.3. Разработка технического проекта . ..605
6.4.4. Разработка рабочего проекта........................... 608
6.4.5. Ввод в действие АСУ ТП, внедрение и анализ
ее функционирования......................................... 608
Контрольные вопросы.. .... ..609
Глава 7. ОСНОВНЫЕ СВЕДЕНИЯ ОБ АСУ ТП В ХИМИЧЕСКОЙ
ПРОМЫШЛЕННОСТИ 611
7.1. Назначение АСУ ТП......... . .611
7.2. Основные функции АСУ ТП............................... 613
7.2.1. Информационная подсистема......................... 613
7.2.1.1. Сбор н первичная обработка информации .613
7.2.1.2. Расчет показателей качества продуктов.„ . ....615
7.2.1.З. Расчет технике-экономических показателей. ...........615
7.2.1.4. Контроль и техническая диагностика ХТП ... .616
7.2.2. Управляющая подсистема........................... 616
7.2.2.1. Регулирование отдельных технологических параметров . ..616
7.2.2.2. Программно-логическое управление.....................617
7 2.2.3. Оптимальное управление............... —..617
7.2.3. Вспомогательная подсистема .. .... ..........617
7.3. Разновидности АСУ ТП....................................617
7.3.1. АСУ ТП в которых все информационные и управляющие
функции выполняются без применения вычислительного
комплекса........................................... t ..618
7.3.2. АСУ ТП с вычислительным комплексом, выполняющим
информационно-вычислительные функции .... ............... 618
’.3.3. АСУ ТП с вычислительным комплексом, выполняющим
функции «советчика» оператора..........................._ ..618
7.3.4. АСУ ТП с вычислительным комплексом, выполняющим
функции центрального управляющего устройства
(супервизорное управление)............................ ..619
7.3.5. АСУ ТП с вычислительным комплексом, выполняющим
функции непосредственного (прямого) цифрового
управления ... ..619
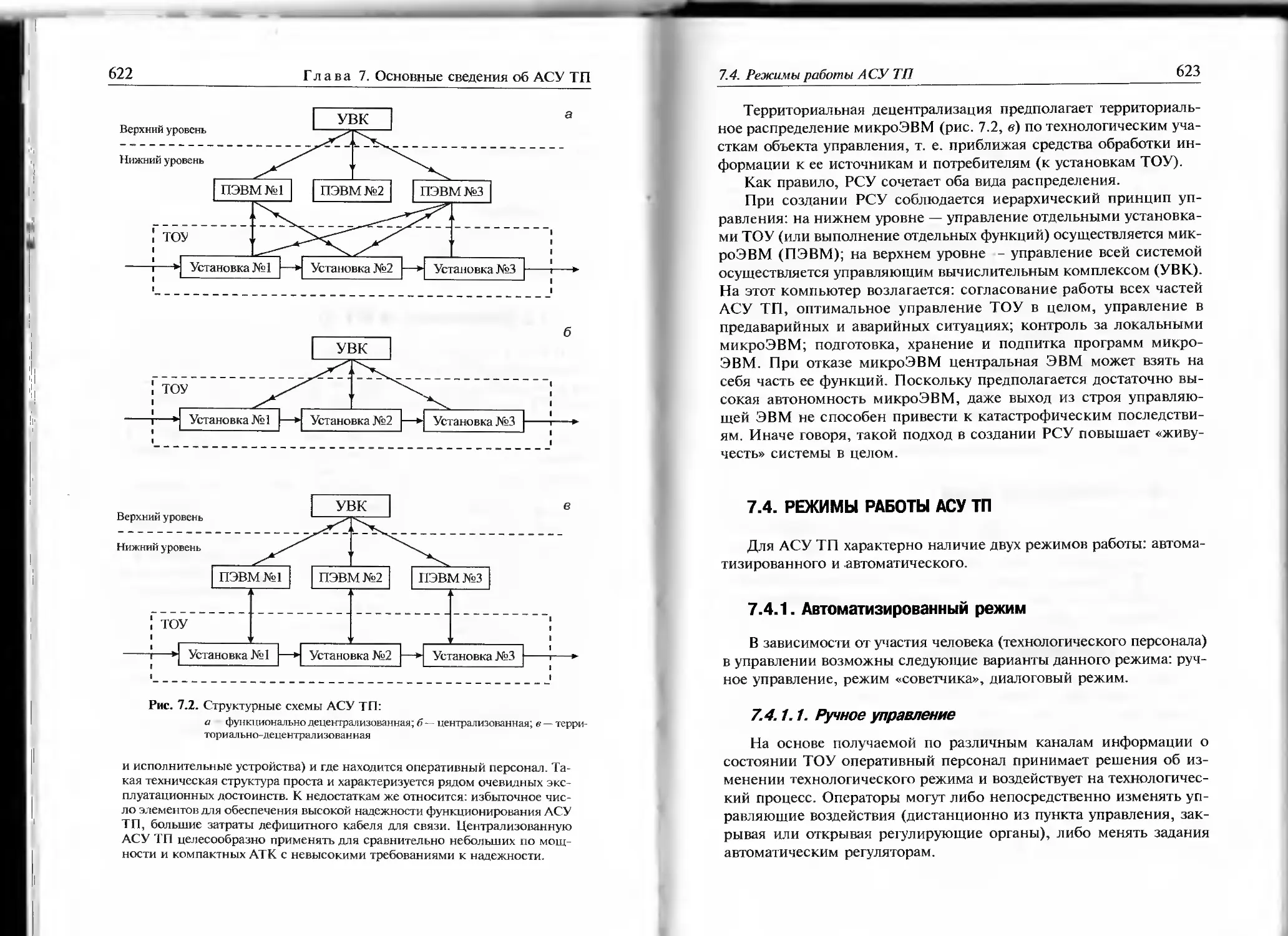
7.3.6 Распределенные АС. У 11)....................................621
10
Оглавление
....623
....623
....623
...624
....624
...624
...624
....624
....625
....625
....630
....630
.....631
....632
...632
......633
....633
.634
....634
....634
....637
...641
......641
....645
7А. Режимы работы АСУ ТП ...............
7.4.1. Автоматизированный режим
7.4.1.1. Ручное управление.
7.4.1.2. Режим «советчика» ...
7.4.1.3. Диалоговый режим ..
7.4.2. Автоматический режим....
7.4.2.1. Супервизорное управление ...........
7.4.2.2. Непосредственное цифровое управление ....
7.5. Обеспечение АСУ ТП.............................
7.5.1. Техническое обеспечение ..
7.5.2. Программное обеспечение............. _.«».....
7.5.2.1. Базовое программное обеспечение....
7.5.2.2. Прикладное программное обеспечение ..
7.5.3. Математическое обеспечение................
7.5.4. Информационное обеспечение ...
7.5.5. Метрологическое обеспечение
7.5.6. Лингвистическое обеспечение----- ---------
7.5.7. Организационное обеспечение .......
7.5.8. Оперативный персонал............
7.6. Надежность функционирования АСУ ТП.....................
7.7. Взаимодействие оператора с техническими средствами АСУ ТП
7.8. Примеры систем управления в химической промышленности...
7.8.1. АСУ ТП подготовки нефти ..........................
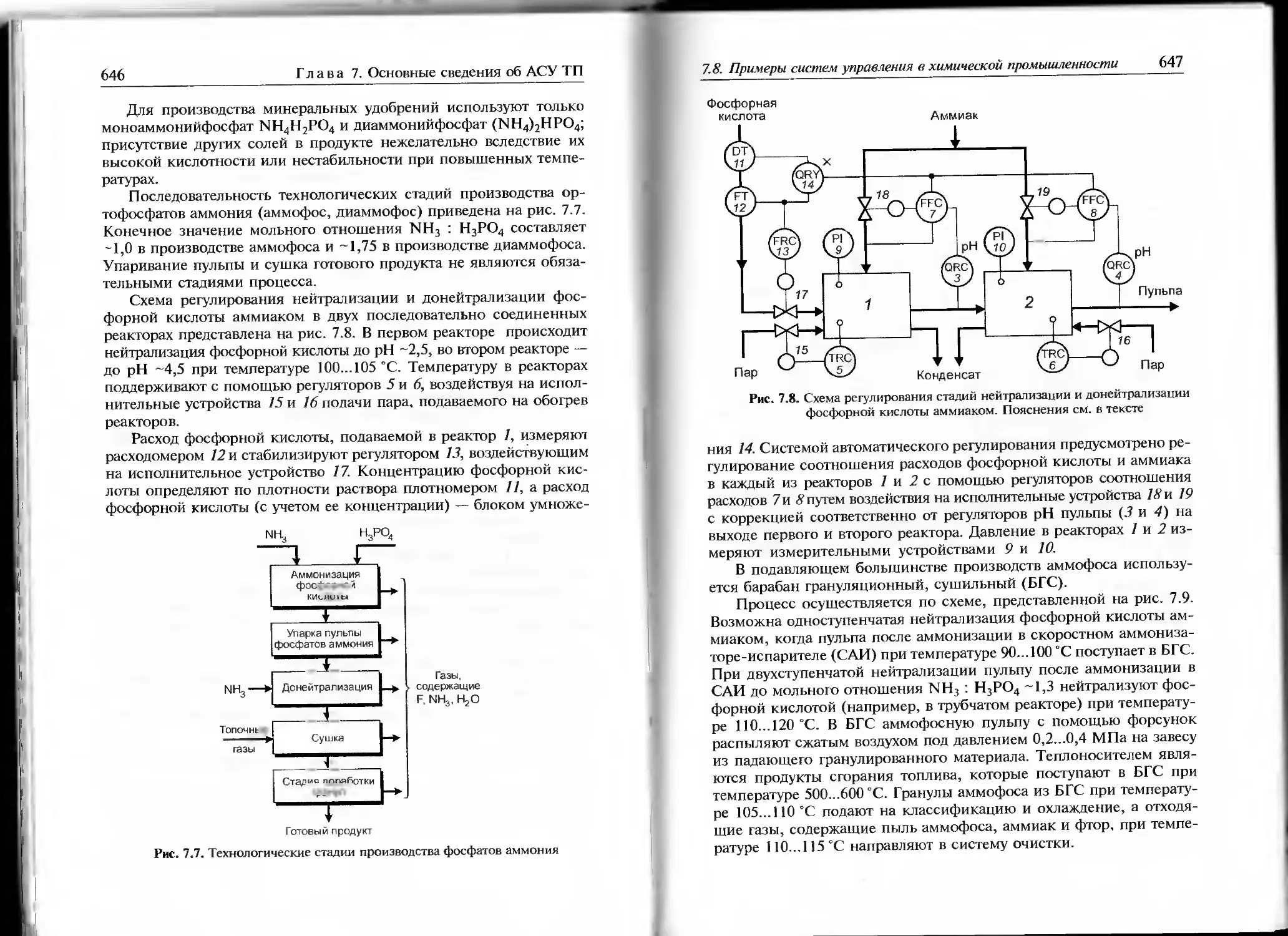
7.8.2. АСУ ТП в производстве минеральных удобрений .
Контрольные вопросы....................
ЗАКЛЮЧЕНИЕ ................................................ 653
ПРИЛОЖЕНИЯ....... „----- 656
Приложение 1
Свойства преобразования Лапласа ... ....656
Приложение 2
Преобразование Лапласа некоторых функций-
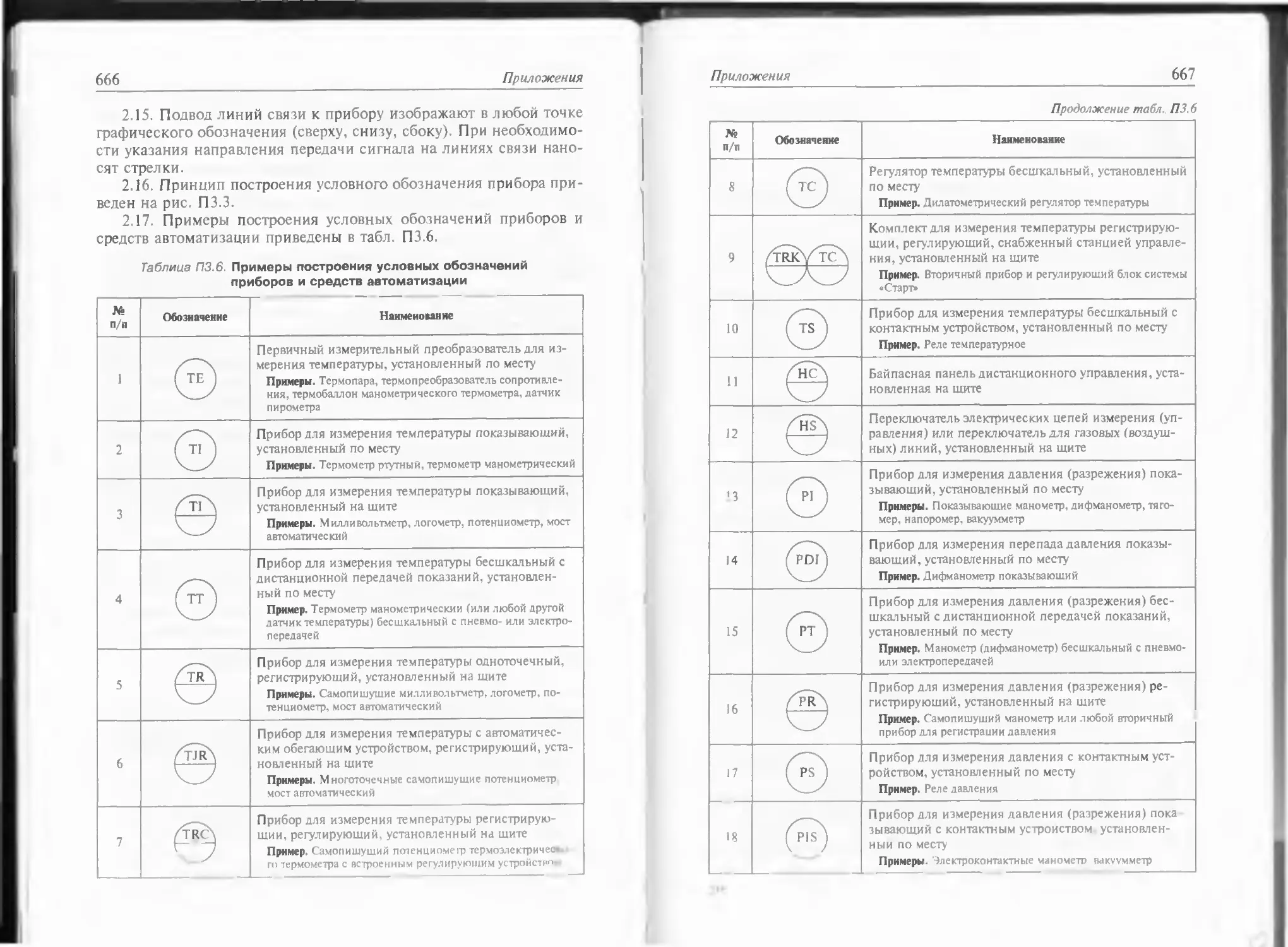
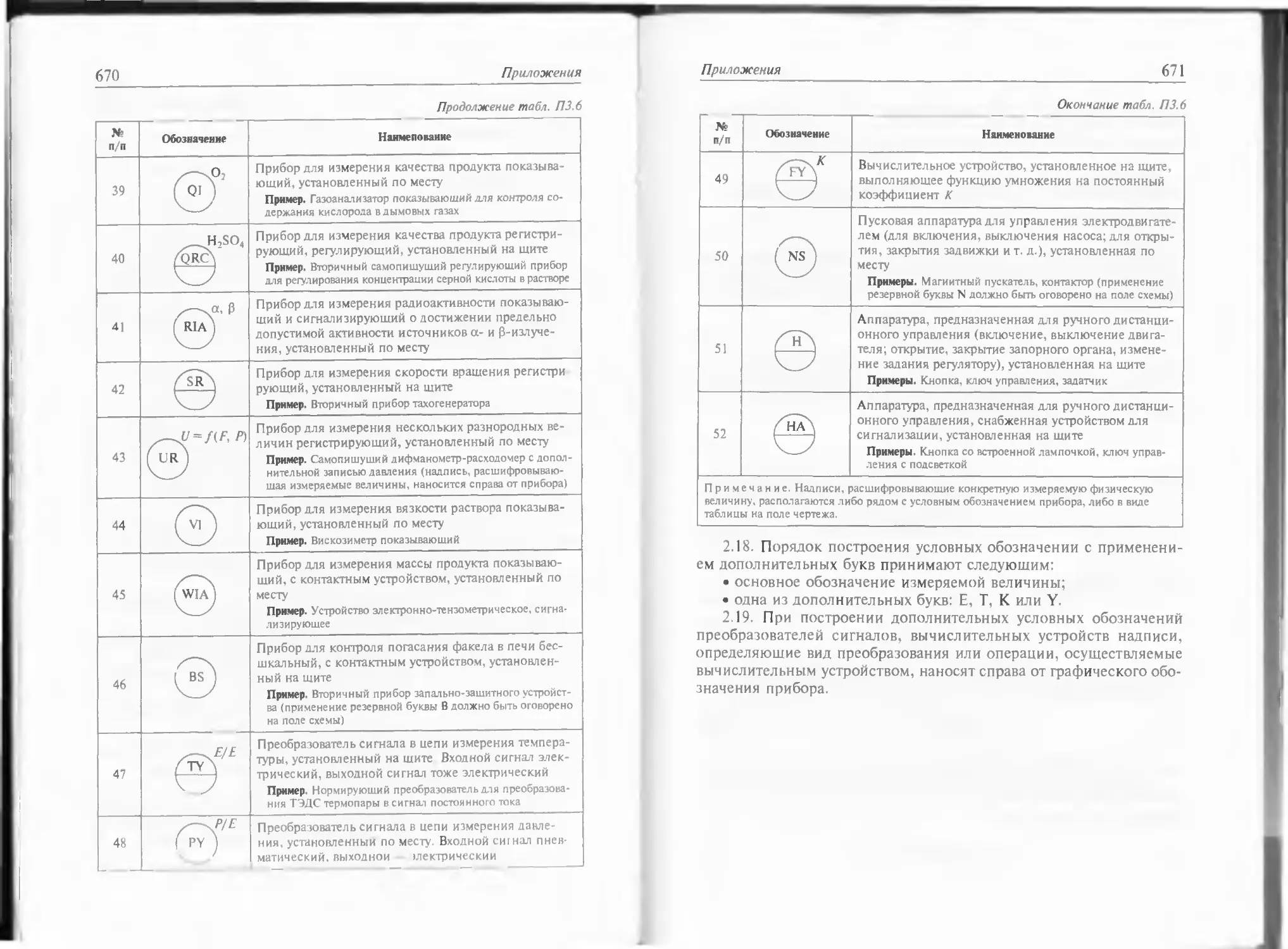
Приложение 3
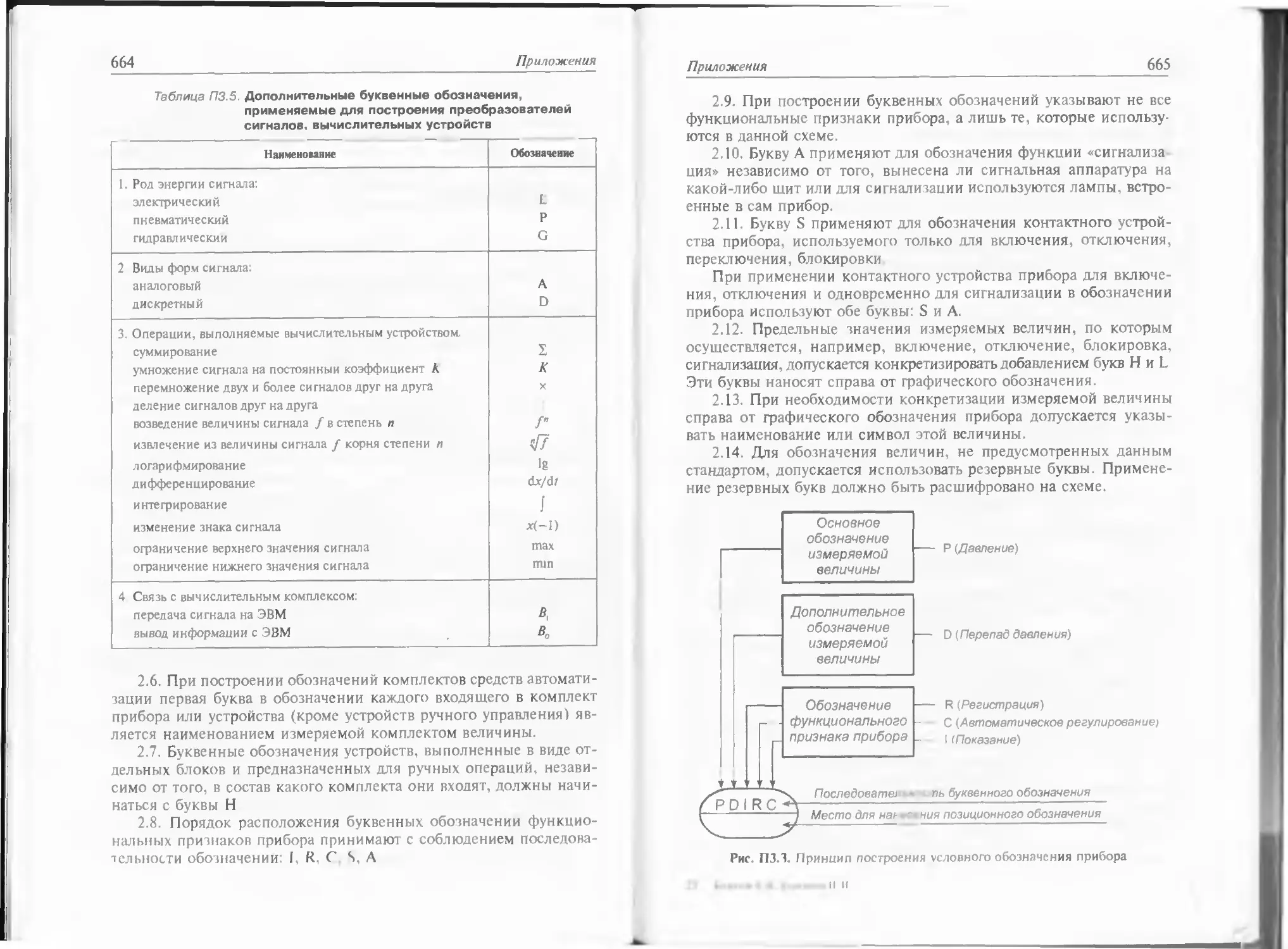
Основные условные обозначения приборов и средств автоматизации
в схемах по ГОСТ 21.404—85. .. . ....658
Приложение 4
Основные свойства комплексных чисел . ..672
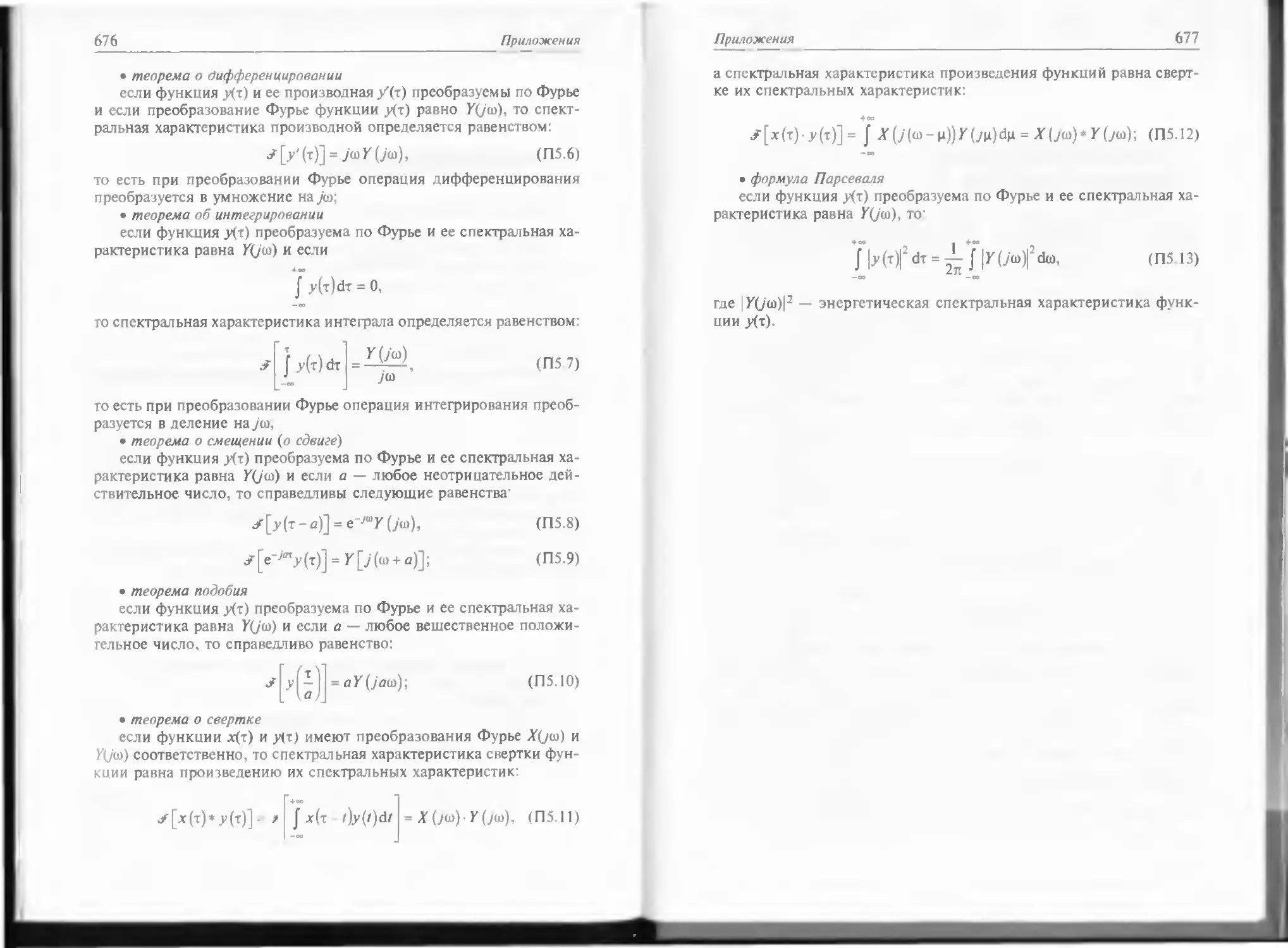
Приложение 5
Преобразование Фурье .. -675
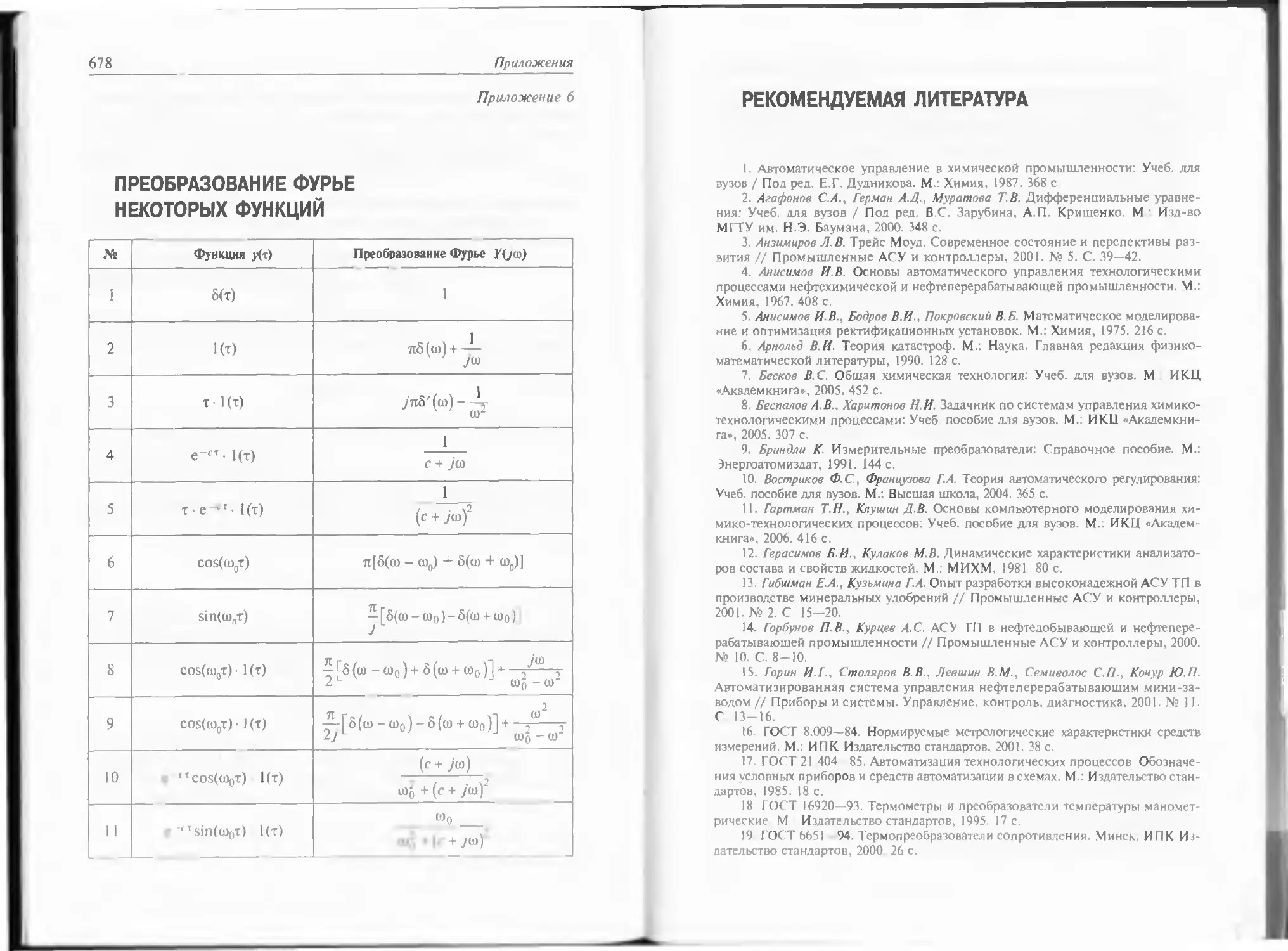
Приложение 6
Преобразование Фурье некоторых функций ... 678
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА 679
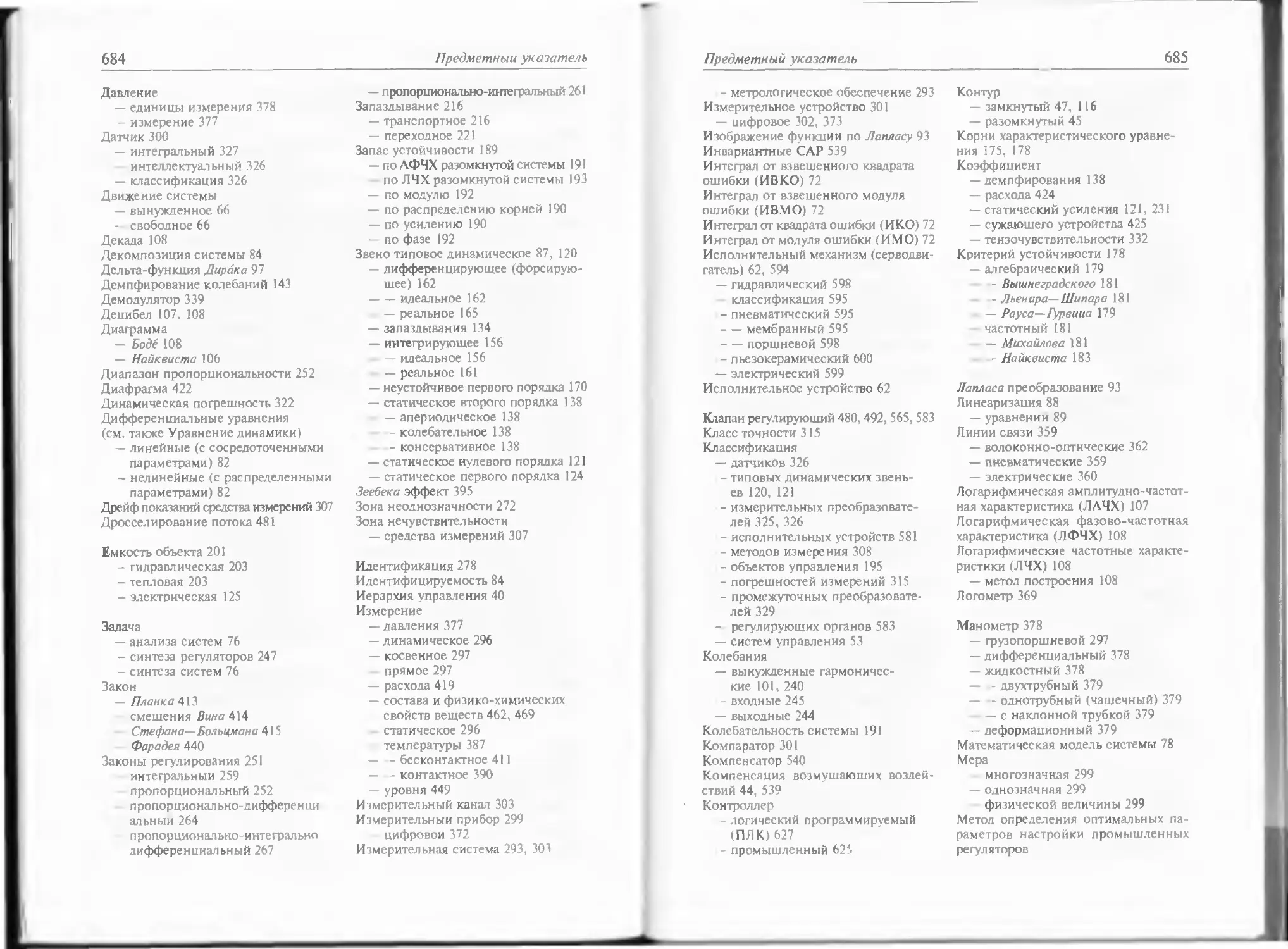
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
.683
ПРЕДИСЛОВИЕ
Химические предприятия, выходящие в настоящее время из кризи-
са, заняты в основном заменой морально устаревшей техники и освое-
нием современных программно-технических средств автоматизации Это
означает, что произошли значительные изменения в технологических
измерениях, в технических средствах управления химико-технологичес-
кими процессами и т. д., а это требует от инженера химика-технолога
знаний как в области теории автоматического управления, так и экс-
плуатации систем управления химико-технологическими процессами.
Перед авторами учебника «Системы управления химико-технологи-
ческими процессами» стояла довольно сложная задача: осознать и ос-
мыслить изменения, произошедшие в системах управления химико-тех-
нологическими процессами за последние пятнадцать лет, и в понятной
и доступной форме изложить их студентам высших учебных заведений,
обучающимся по химико-технологическим специальностям.
Назначение учебника
Ознакомление читателя с современными методами анализа стати-
ческих и динамических свойств технологических процессов как объек-
тов управления, структурой и функциями систем автоматического уп-
равления (САУ), методами и законами управления химико-технологи-
ческими процессами (ХТП), методами анализа и синтеза САУ ХТП,
сведениями о их проектировании, прогнозированием качества функци-
онирования, средствами измерения технологических параметров в хи-
мической промышленности.
Характеристики учебника
В учебнике разобраны основные положения, составляющие содержа-
ние теории автоматического управления. Изложение материала начина-
ется с основных понятий и особенностей автоматического управления
химико-технологическими процессами (сущность автоматического управ-
ления, принципы управления и т. д.) — главы 1 и 2, а заканчивается
сведениями о проектировании и анализом действующих промышлен-
ных систем управления ХТП (главы 6 и 7).
Изложение учебника имеет инженерную направленность (обстоя-
тельное изучение физических и содержательных сторон управления хи-
мико-технологическим процессом не всегда сопровождается строгими
математическими доказательствами), так как в разработке автоматичес-
ких систем диагностики и управления химико-технологическими про-
цессами особое место отводится инженеру химику-технологу. Именно
специалист в области химической технологии формулирует задачи, оп-
ределяет параметры технологического процесса, которые необходимо
ГЛАВА__________________________
ВВЕДЕНИЕ В СИСТЕМЫ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
Нет стремления более естественного,
чем стремление к знанию...
Мишель Монтень
1.1. ЗНАЧЕНИЕ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ДЛЯ РАЗВИТИЯ ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
НА СОВРЕМЕННОМ ЭТАПЕ
Наука об автоматических системах управления химико-техноло-
гическими процессами изучает законы их построения и действия,
методы исследования и настройки.
Технический уровень химической промышленности на совре-
менном этапе ее развития во многом определяется уровнем управ-
ления. Без наличия необходимых средств автоматической диагнос-
тики химико-технологического процесса и автоматического управ-
ления им в принципе невозможен технический прогресс в химической
промышленности. Современное химическое или нефтехимическое
производство является высокоавтоматизированным производством.
Информационная мощность крупного химического предприятия,
оцениваемая количеством измеряемых параметров, составляет бо-
лее 1500. Автоматическое управление химическим производством
позволяет значительно увеличить производительность труда и, что
имеет особое значение для химической промышленности, повыша-
ет социальную эффективность труда, т. е. облегчается труд обслужи-
вающего персонала, улучшаются санитарно-гигиенические условия
их работы, повышается культурный и профессиональный уровень
специалистов. На химических предприятиях появились работники,
владеющие компьютерами, специалисты по информационным тех-
нологиям. Автоматическое управление химическим производством
позволяет не только улучшить качество производимой продукции,
снижая ее себестоимость, но и уменьшить отрицательное воздей-
ствие химического предприятия на окружающую среду.
1.2. Краткий очерк истории развития САУ
21
Таким образом, понятия технический прогресс и уровень автома-
тического управления в химической промышленности неотделимы.
Возможности автоматического управления (с использованием
микропроцессорной техники) в химической технологии:
• автоматический пуск и останов химического производства;
• автоматический контроль технологических параметров;
• автоматическое прогнозирование ведения технологического
процесса;
• поддержание заданных (оптимальных) технологических режимов;
• повышение качества производимой продукции;
• повышение производительности технологического оборудова-
ния и увеличение объема производимой продукции;
• снижение затрат сырья, материалов и энергии на производство
единицы продукции;
• безопасное ведение химико-технологического процесса (умень-
шение вероятности нарушения технологического режима, приводя-
щее к нанесению вреда обслуживающему персоналу, оборудованию,
окружающей среде);
• увеличение надежности химико-технологических процессов и
в целом химико-технологической системы (сокращение простоев
оборудования из-за неполадок и увеличение межремонтных сроков
работы технологического оборудования);
• предупреждение загрязнения окружающей среды промышлен-
ными отходами и стоками.
1.2. КРАТКИЙ ОЧЕРК ИСТОРИИ РАЗВИТИЯ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
В истории развития САУ можно условно выделить четыре исто-
рических периода:
• греческая и арабская цивилизации (III век до н. э.—1200 год н. э.);
• промышленная революция в Европе (с третьей четверти XVIII века,
хотя корни ее прослеживаются и в начале XVII века);
• начало массовых коммуникаций (1910—1945);
• век освоения космоса, компьютерный век (с 1957 г. по наши
дни).
Простейшие автоматические регуляторы и устройства применя-
лись еще до новой эры. Известно, что системы регулирования с
обратной связью применялись в III веке до нашей эры, например,
для автоматического регулирования уровня воды в водяных часах с
помощью поплавкового регулятора, чтобы повысить точность их по-
казаний. Водяные часы представляют собой два резервуара. В пер-
22
Глава 1. Введение в системы управления ХТП
вом резервуаре водяных часов уровень воды должен быть постоян-
ным, постоянство его и поддерживает поплавковой регулятор. Этот
постоянный уровень обеспечивает постоянство расхода воды во вто-
рой резервуар через трубу, расположенную в днище первого резер-
вуара. Уровень воды во втором резервуаре, таким образом, зависел
от времени истечения воды из первого резервуара. Так был реализо-
ван принцип регулирования с обратной связью. Поплавковые регу-
ляторы использовались для регулирования уровня масла в лампах
для освещения, для дозированного разлива вина.
В средние века применялись центробежные регуляторы хода во-
дяных мукомольных мельниц. В 1657 г. X. Гюйгенс предложил ма-
ятниковый регулятор хода для механических часов. В это же время
были изобретены регуляторы температуры (для поддержания темпе-
ратуры при плавке металлов в печах; в инкубаторах для выведения
цыплят — 1624 г.). В конце XVIII века в Америке регуляторы темпе-
ратуры применяются в химических печах, в производстве стали и
фарфора.
Появление паровых машин приводит к изобретению регулято-
ров давления. В 1681 г. изобретен первый предохранительный кла-
пан для сброса давления пара. К первым промышленным регулято-
рам относят автоматический поплавковый регулятор уровня в паро-
вом котле паровой машины, построенной в 1765 г. И.И. Ползуновым,
и центробежный регулятор скорости для стабилизации угловой ско-
рости вращения вала паровой машины, сконструированный Д. Уат-
том (1788).
Вновь пробуждается интерес к регуляторам уровня. Слесарь То-
мас Креппер за изобретения сливных бачков с регуляторами уровня
в 1775 г. возводится в рыцарское достоинство английской короле-
вой Викторией.
Большой вклад в разработку и создание регуляторов для различ-
ных целей внесли русские ученые И.А. Вышнеградский, Н.Е. Жу-
ковский, А.М. Ляпунов и др.
Исследования И.А. Вышнеградского и Д.К.. Масквелла в облас-
ти устойчивости и качества процессов регулирования положили на-
чало развитию теории автоматического регулирования.
Отправной точкой предыстории теории автоматического управ-
ления можно считать 1868 г., когда Д.К.. Максвелл выполнил пер-
вый строгий математический анализ устойчивости системы управ-
ления с обратной связью. Он исследовал влияние параметров систе-
мы на устойчивость и показал, что система устойчива, если корни
характеристического уравнения имеют отрицательные действитель-
ные значения. Независимо от Д.К.. Максвелла в 1877 г. И.А. Выш-
неградский исследовал устойчивость регуляторов. В 1893 г. А.Б. Сто-
дола впервые вводит понятие постоянной времени системы и пред-
1.2. Краткий очерк истории развития САУ
23
лагает оценивать устойчивость системы по устойчивости характери-
стического уравнения. В 1892 г. А.М. Ляпунов опубликовал в Рос-
сии свое знаменитое сочинение «Общая задача об устойчивости дви-
жения». На Западе теория устойчивости по Ляпунову становится
известной лишь в I960 г. и получает свое признание. В 1892—1898 гг.
английский инженер О. Хевисайд исследует переходные характери-.
стики систем, вводя понятие передаточной функции.
В 1909 г. в России издается первый русский учебник по тео-
рии регулирования Н.Е. Жуковского «Теория регулирования хода
машин».
В 1932 г. американский ученый X. Найквист предложил для оцен-
ки устойчивости систем частотный критерий устойчивости. В 1940 г.
X. Боде исследовал устойчивость замкнутых систем, используя та-
кие понятия, как коэффициент усиления и запас устойчивости по
фазе. Н. Минорский (1922), рассматривая нелинейные эффекты в
замкнутых системах, впервые использует пропорционально-интег-
рально-дифференциальный регулятор. X. Хазен (1934) опубликовал
теорию сервомеханизмов (исполнительных механизмов).
До 50-х годов прошлого века классической теорией автоматичес-
кого регулирования (ТАР) было принято называть теорию устойчиво-
сти и качества процессов в системе объект—регулятор, базирующу-
юся на рассмотрении обыкновенных, преимущественно лйнейных,
дифференциальных уравнений. ТАР тесно соприкасается с теорией
устойчивости движения «в малом» А.М. Ляпунова, но имеет выра-
женную инженерную направленность.
В конце 50-х—начале 60-х годов появляются работы Л.С. Понт-
рягина, Р. Веллмана, Р. Калмана, которые заложили основы совре-
менной теории автоматического управления. Использование матема-
тических моделей не только на стадии проектирования, но и в про-
цессе функционирования систем является одной из характерных черт
современной теории автоматического управления. Важным разде-
лом современной теории автоматического управления является оп-
тимальное (и субоптимальное) оценивание параметров и характери-
стик по экспериментальным данным — идентификация.
Автоматическое регулирование и управление перестает быть ско-
рее искусством и становится наукой с появлением электронной вы-
числительной техники.
Первая электронная вычислительная машина (ЭВМ) была со-
здана в 1945 г. в США под руководством американских ученых
Дж.В. Моучли и Д.П. Эккерта и предназначалась для расчета бал-
листических таблиц (машина была построена по заказу артилле-
рий-ского управления). ЭВМ содержала 18 тысяч электронных
ламп и потребляла 150 кВт. Быстродействующая электронная счет-
ная машина (БЭСМ) была сконструирована в начале 50-х годов
24
Глава 1. Введение в системы управления ХТП
прошлого века в СССР коллективом ученых, во главе которых стоял
академик С.А. Лебедев.
В 1960 г. разработано второе поколение компьютеров с исполь-
зованием полупроводниковой технологии. С 1965 г. начинает разви-
ваться миникомпьютерная технология, а в 1969 г. В. Хофф изобрел
микропроцессор. В 1970—1980-е годы получает развитие идея об
использовании цифровых компьютеров для управления в промыш-
ленности, особенно химической. Основная мотивация такого подхо-
да — развитие ядерной технологии. К 1983 г. появляются первые
персональные компьютеры. Проектирование современных систем
управления при наличии прикладных пакетов компьютерных про-
грамм, включая такие, как ORACLS, Program СС, Control-C, РС-
Matlab, MATRIXx, Easy5, SIMNON и др., становится доступным для
рядового инженера.
Американский ученый Норберт Винер (1894—1964) был одним
из создателей кибернетики (от греч. kibernos — рулевой, кормчий) —
науки об общих законах управления. Кибернетика стала теорети-
ческой базой создания и внедрения автоматизированных систем
управления (АСУ).
Развитие АСУ в химической промышленности СССР (России)
Автоматизированным системам управления, действующим на
российских химических заводах, около 40 лет: именно столько вре-
мени усилиями многочисленных научно-исследовательских инсти-
тутов (ЦНИИКА, ВНИПиСАУ и др.), проектно-конструкторских
институтов (Гипрохим, ОКБА и др.), монтажно-наладочных орга-
низаций (Монтажавтоматика, Оргхим, Оргминудобрения и др.), орга-
низациями Госснаба (Химкомплект, Комплектавтоматика) и специ-
алистами самих химических и нефтехимических предприятий вне-
дрялись АСУ самых разных уровней.
Развитие систем управления ХТП невозможно представить без
Центрального научно-исследовательского института комплексной
автоматизации (ЦНИИКА), созданного в 1956 г. под руководством
проф. Е.П. Стефани и проф. Е.П. Дудникова. Становление систем
управления ХТП наглядно можно рассмотреть на примере развития
одного из химических предприятий.
В 70-е годы прошлого века в СССР была создана крупнейшая в
мире промышленность минеральных удобрений, что привело в свое
время к строительству огромных сернокислотных производств. Имен-
но в эти годы для печей кипящего слоя (КС-200) в цехе обжига
колчедана используется первая АСУ ТП «Куб», в функции которой
входили: централизованный сбор, хранение и представление инфор-
мации по 14 параллельно работающим печам обжига колчедана в
кипящем слое, сигнализация и учет отклонений параметров техно-
1.3. Особенности управления ХТП
25
логического процесса от норм технологического регламента. В 1975 г.
в этом цехе внедряется прямое цифровое управление технологичес-
ким процессом с распределением нагрузок по печам и коллекторам.
В 1980 г. на этом же предприятии в сернокислотных цехах СКЦ-1,
СКЦ-2, башенном сернокислотном цехе обжига колчедана внедря-
ется АСУ ТП «Купол», а в 1987 г. — АСУ ТП «Купол-1», «Купол-2»
для СКЦ (технологические линии СК 28, 41, 42), в которых было
реализовано непосредственное цифровое управление (НЦУ) техно-
логическим процессом.
В 2000—2002 гг. система «Купол» в сернокислотном контактном
производстве модернизирована на новой программно-технической
основе с использованием современных SCADA (Supervisory Control
And Data Acquisition — диспетчерское управление и сбор данных) —
систем и сетевых программируемых логических контроллеров (ПЛК).
Подобным образом шло развитие систем управления в произ-
водствах экстракционной фосфорной кислоты, минеральных удоб-
рений, полимеров и т. д.
1.3. ОСОБЕННОСТИ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ
Под химико-технологическим процессом (ХТП) понимают опре-
деленную последовательность процессов (химических, физико-хи-
мических, их сочетаний) целенаправленной переработки исходных
сырья и веществ в продукт. Химическое производство представляет
собой совокупность процессов и операций, осуществляемых в аппа-
ратах и машинах и предназначенных для целенаправленной перера-
ботки исходных веществ и сырья в продукты путем химических пре-
вращений.
Вопросам управления в химической технологии придается осо-
бое значение. Это, в первую очередь, связано со следующими осо-
бенностями ХТП:
1) сложность и высокая скорость протекания ХТП;
2) агрессивность и токсичность перерабатываемых веществ;
3) взрыво- и пожароопасность перерабатываемых веществ;
4) высокие (или низкие) температуры; высокие (сверхвысокие)
давления или глубокий вакуум;
5) высокая чувствительность ряда ХТП к нарушениям техноло-
гического режима и т. д.
Необходимо учитывать и такое важное обстоятельство для уп-
равления: не все технологические параметры (показатели), которы-
26
Глава 1. Введение в системы управления ХТП
ми необходимо управлять в процессе, доступны непосредственному
и непрерывному измерению. Из практики эксплуатации ХТП изве-
стно, что такому измерению трудно поддаются показатели состава и
качества перерабатываемого сырья, а также показатели состава и
качества получаемого продукта. Даже в случае прямого и непрерыв-
ного измерения, например расходов материальных потоков, как сле-
дует из сведения материальных балансов, на крупных химических
предприятиях потери исходного сырья и веществ, конечных про-
дуктов достигают 2,0...2,5 %.
Необходимо также помнить, что управление будет более эффек-
тивным, если выбранный управляемый параметр чувствителен к ус-
ловиям проведения ХТП. Тогда даже небольшие отклонения теку-
щих значений управляемого параметра от заданного вызовут к дей-
ствию систему управления.
Для химико-технологических процессов, осуществляемых в круп-
нотоннажных химических и нефтехимических производствах, харак-
терно запаздывание и параметры (показатели), выбранные для уп-
равления, при изменении условий проведения процесса не могут
изменяться мгновенно. Невозможность прямых и непрерывных из-
мерений параметров (показателей) процесса, отсутствие мгновен-
ной реакции параметров (показателей) процесса на возмущающие
воздействия усложняют систему управления ХТП.
Кроме того, все время необходимо учитывать степень воздей-
ствия химических производств на окружающую среду. В этой ситу-
ации системы управления ХТП должны обеспечить безопасность
химических производств, постоянно контролировать состав и каче-
ство перерабатываемого сырья и веществ, состав и качество конеч-
ных продуктов, окружающей среды.
Исходя из изложенных особенностей ХТП, перечислим функ-
ции, выполняемые устройствами автоматического управления в хими-
ческой технологии.
1. Диагностика оборудования, измерение и контроль технологи-
ческих параметров и определение причин возникновения аварий-
ных ситуаций.
2. Сигнализация (световая и звуковая) при отклонении техноло-
гических параметров от заданных режимов и аварийном состоянии
оборудования.
3. Логическое управление блокировками и защитой; аварийное
отключение (переключение) технологического оборудования.
4. Управление (регулирование) технологическими параметрами.
Современному состоянию работ в области управления соответ-
ствуют системы управления (см. гл. 7), реализуемые посредством
цифровых систем. Цифровые системы могут применяться во многих
1.3. Особенности управления ХТП
27
областях управления, таких как автоматическая сигнализация, бло-
кировка, встроенная линеаризация или компенсация сигнала. Од-
нако основная задача систем управления — управление технологи-
ческим процессом.
Автоматическое регулирование является частным случаем более
общего понятия автоматического управления. Теория автоматичес-
кого регулирования является основой построения первого уровня уп-
равления, а теория автоматического управления — основа всей иерар-
хической структуры информационных процессов управления слож-
ными химико-технологическими объектами.
Теория автоматического управления позволяет изучить свойства
системы, которые принято называть: наблюдаемостью, идентифици-
руемостью, управляемостью и адаптируемостью. АСУ представляет
собой сложную динамическую систему, поведение которой в реаль-
ных условиях требует соответственно сложного математического
описания, больших затрат времени на программирование и т. д.
Поэтому для математического описания АСУ необходима некото-
рая идеализация, следствием которой является получение прибли-
женных результатов. Уточнение их и окончательный выбор пара-
метров системы управления производится с применением средств
математического моделирования и вычислительной техники с пос-
ледующей настройкой параметров регуляторов в реальном масшта-
бе времени (в реальных условиях).
Сущность разработки АСУ заключается в том, чтобы, распола-
гая сведениями о свойствах объекта управления (статических и ди-
намических), а также заданными требованиями к системе управле-
ния в целом (запасу устойчивости, надежности, усилению по мощ-
ности, качеству и т. д.), подобрать соответствующую элементную
базу и составить схему управления, способную действовать в реаль-
ных условиях химического производства в соответствии с постав-
ленными требованиями. Естественно, что этот подход предполагает
наличие сведений об элементах, устройствах, входящих в состав АСУ,
а также то, что они должны рассматриваться во взаимодействии друг
с другом, и при этом вся система управления в целом должна быть
работоспособна и обладать требуемыми свойствами.
Система автоматического регулирования, как правило, предпо-
лагает наличие достаточно сложного логического устройства (авто-
матического регулятора — управляющего устройства, осуществляю-
щего автоматическое регулирование с помощью аппаратурной реа-
лизации алгоритмов управления), вырабатывающего регулирующее
воздействие (в соответствии с требуемым законом регулирования)
на объект управления в результате сравнения текущего значения
регулируемого параметра с заданным.
Управление происходит с заранее заданным алгоритмом.
28
Глава 1. Введение в системы управления ХТП
1.4. ТЕХНИКО-ЭКОНОМИЧЕСКИЙ ЭФФЕКТ УПРАВЛЕНИЯ.
РОЛЬ УПРАВЛЕНИЯ В ОБЕСПЕЧЕНИИ
БЕЗОПАСНОСТИ ХИМИЧЕСКОГО ПРОИЗВОДСТВА
И ОХРАНЫ ОКРУЖАЮЩЕЙ СРЕДЫ
На сегодняшний день не существует реальных и достаточно ре-
зультативных методов расчета экономической эффективности от
внедрения и эксплуатации АСУ. Из опыта внедрения и эксплуата-
ции АСУ следует, что процесс внедрения АСУ — процесс сложный,
во многом противоречивый, и не всегда сразу же проявляется жела-
емый положительный эффект. Не исключается риск при оплате за-
казчиком расходов на автоматическое управление и получением в
итоге ненадежной и убыточной системы управления. Многие хими-
ческие и нефтехимические производства — производства сложные,
непрерывные, многостадийные, с наличием агрессивных сред, взры-
вопожароопасных зон и т. д. Каков же должен быть уровень автома-
тического управления, какие АСУ нужны собственнику, какой кри-
терий оценки эффективности управления для него является самым
важным? Наиболее распространенным критерием оценки эффек-
тивности управления является прибыль.
Примечание
В 1993 г. исследователями США и Канады было опубликовано сооб-
щение о том, что только треть всех контуров управления на действующих
химических предприятиях работает эффективно. Тогда немногие этому
поверили. Недавнее обследование (2003 г.) более ста тысяч контуров уп-
равления на 350 действующих химических предприятиях США специали-
зированной фирмой Honeywell Process Solutions Phoenix подтвердило эти
данные: плохо или удовлетворительно работают 49 % обследованных кон-
туров управления; 32 % — работают в допустимых пределах отклонений
КПД от заданного; 16 % — не работают из-за забивки регулирующих кла-
панов и только 4,4 % обследованных контуров управления в последние два
года изменяли параметры настройки управляющих устройств.
Уровень автоматического управления химическим предприятием
определяется экономическими условиями. Затраты на автоматичес-
кое управление ХТП могут доходить до 20 % от стоимости основного
технологического оборудования. Практический опыт последних лет
показывает, что внедрение АСУ повышает технико-экономические
показатели производства даже без замены или реконструкции основ-
ных фондов. Экономическая эффективность достигается прежде все-
го за счет основных преимуществ АСУ перед человеком. Теперь для
управления ХТП в оптимальном режиме просто умения, интуиции,
знаний человека недостаточно. Автоматизация технологических объек-
тов управления повышает их технико-экономические показатели
1.5. Предмет «Системы управления ХТП» “ 29
(ТЭП) на 3...5 % при значительном (на 30...40 %) снижении трудоем-
кости получения целевого продукта. Например, на одном из пред-
приятий в производстве аммофоса в результате реконструкции про-
изводства и АСУ была увеличена производительность технологичес-
кого оборудования на 16 %, улучшено качество аммофоса, отмечено
снижение на 10 % выбросов аммиака в окружающую среду.
Автоматическое управление обеспечивает большую степень безо-
пасности, надежности и экономичности работы объектов управле-
ния, что сокращает время простоев технологического оборудования,
предотвращает загрязнение окружающей среды. Усиленно разраба-
тываются системы активного контроля наличия утечек потенциально
опасных сред (газовых, жидких) из технологического оборудования.
Например, разработана новая система контроля, состоящая из кон-
троллера, к аналоговым входам которого подключены газоаналити-
ческие датчики наличия утечек, а к аналоговым и дискретным выхо-
дам — исполнительные устройства (исполнительные механизмы и
регулирующие органы), позволяющие управлять безопасностью ХТП.
К последним достижениям в области управления безопасностью хи-
мических производств можно отнести разработку нейросетевых мо-
делей управления. На выходе нейронной сети в режиме реального
времени рассчитываются значения управляющих воздействий, направ-
ленных на предотвращение отказов технологического оборудования.
В современных условиях информационные технологии становят-
ся важнейшей составной частью ХТП, во многом определяющих хо-
зяйственные риски. Например, для анализа экологической обстанов-
ки, идентификации источника выброса и принятия решения по уп-
равлению качеством атмосферного воздуха разработаны ситуационные
советующие системы на основе алгоритмов нечетких логических рас-
суждений, позволяющие выполнять оперативный анализ состояния
воздушной среды. И если раньше информатизацию рассматривали как
затратную часть бюджета, то сейчас наблюдается тенденция вложения
денег в информационные технологии ради получения прибыли.
t
1.5. ПРЕДМЕТ «СИСТЕМЫ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ»
И ЕГО ВЗАИМОСВЯЗЬ С ДРУГИМИ ДИСЦИПЛИНАМИ
Основу курса «Системы управления химико-технологическими
процессами» составляет теория автоматического управления, пред-
ставляющая собой точную науку, поскольку она оперирует количе-
ственными характеристиками, базирующимися на математических
моделях.
30
Глава 1. Введение в системы управления ХТП
Для курса «Системы управления химико-технологическими про-
цессами» характерны преемственность и взаимосвязь его с общетео-
ретическими и общеинженерными, а также специальными дисцип-
линами. Курсу «Системы управления химико-технологическими
процессами» предшествует изучение высшей математики, физики,
вычислительной техники и вычислительной математики, примене-
ния ЭВМ в химической технологии, аналитической химии, физи-
ческой химии, электротехники, электроники и электрооборудова-
ния, теплотехники, процессов и аппаратов химической технологии,
обшей химической технологии, включающей в себя такие разделы,
как химические процессы и реакторы, химико-технологические си-
стемы, химические производства и т. д.
В зависимости от цели изучения систем управления химико-тех-
нологическими процессами (специализации обучающегося по на-
правлениям подготовки бакалавра, дипломированного специалиста,
объема подготовки, учебного плана) эта учебная дисциплина может
быть представлена в виде нескольких учебных курсов, например,
«Теория автоматического регулирования», «Технические средства
управления», «Технологические измерения» и т. д. В связи с этим
материал в учебнике излагается исходя из возможных вариантов
преподавания данного предмета.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Какие возможности открывают системы управления перед химичес-
кой технологией?
2. Перечислите особенности химико-технологических процессов.
3. Каковы функции управляющих устройств?
4. Каково отличие автоматического регулирования от автоматического
управления?
5. Чем определяется уровень автоматического управления в химичес-
кой технологии?
ГЛАВА_______________________
ОСНОВНЫЕ ПОНЯТИЯ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
Управление без обратной связи все-
гда приводит к катастрофам: важно, что-
бы лица и организации, принимающие
ответственные решения, лично, материаль-
но зависели от последствий этих решений.
Академик РАН
В. И. Арнольд
2.1. ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Управление — это процесс формирования и реализации управля-
ющих воздействий, направленных на достижение некоторой цели.
Объект управления — объект, для достижения результатов функ-
ционирования которого необходимы и допустимы специально орга-
низованные воздействия.
Под технологическим объектом управления (ТОУ) понимают со-
вокупность технологического оборудования и реализуемого в нем
технологического процесса. Под объектом управления (ОУ) в хими-
ческой технологии понимают технологический процесс, осуществля-
емый в определенном аппаратурном оформлении, в котором один
или несколько химико-технологических параметров, характеризую-
щих состояние процесса, поддерживаются на заданном уровне или
изменяются по определенному закону. В химической промышлен-
ности к типовым ОУ относят реакторы, массообменные колонны,
теплообменники, насосы, вентиляторы и другие аппараты и устрой-
ства технологических установок, включая трубопроводы.
Цель управления — достижение желаемых результатов функцио-
нирования объекта. Цель управления формируется вне системы уп-
равления и является входным сигналом системы управления. Для си-
стемы управления одним и тем же объектом цель управления может
быть сформулирована по-разному и может изменяться во времени.
Например, целью управления ректификационной установкой на неф-
теперерабатывающем заводе может быть:
32
Глава 2. Основные понятия управления ХТП
• получение максимального количества высококачественного
бензина при переработке 1 т нефти;
• получение максимума прибыли при переработке 1 т нефти;
• минимизация энергетических затрат на переработку 1 т нефти
и т. п.
Состояние объекта управления описывается функциями х,(т),
i— 1, 2,п, которые называются параметрами состояния (перемен-
ными состояния). Совокупность параметров состояния образует век-
тор состояния:
х(т) = х„(т)}.
Чтобы перевести объект управления в желаемое состояние, веду-
щее к достижению цели управления, необходимо воздействовать на
некоторые параметры состояния, называемые управляемыми (или
регулируемыми) параметрами. Обозначим их совокупность вектором
Хт) = thCO, Ук:(?)}; к < п.
Управляемые параметры являются выходными сигналами (выхо-
дами) ОУ (рис. 2.1).
В химической технологии к управляемым параметрам можно от-
нести температуру, давление, уровень, pH, плотность, концентрацию
и другие переменные, характеризующие состояние технологического
процесса, к управляющим переменным — расходы теплоносителя, хла-
дагента и т. д. (иногда выражаемые опосредованно через положения
затвора клапана, заслонки, обороты двигателя).
Состояние объекта управления может изменяться в результа-
те воздействий на него двух типов: управляющих и возмущающих
(см. рис. 2.1). Оба типа воздействий являются входными сигналами
(входами) ОУ. В системах управления ХТП управляющие воздей-
ствия представляют собой изменения материальных или энергети-
ческих потоков.
Объект управления является открытой системой и находится в
динамическом взаимодействии с внешней средой. Изменения внеш-
Рис. 2.1. Структурная схема объекта управления
2.1. Основные термины и определения
33
них условий, влияющие на состояние ОУ, называют возмущающими
воздействиями. Вектор возмущающих воздействий:
rf(T) = {d,(T), ..., dc(T)}
Возмущающие воздействия способны вывести ОУ из желаемого
состояния. Это своего рода «вредные» воздействия, нарушающие нор-
мальный ход технологического процесса в объекте управления. Вид,
характер изменения и величина возмущающих воздействий могут ока-
заться определяющими при выборе структуры системы управления.
Возмущающие воздействия делятся на:
• контролируемые и неконтролируемые;
• допускающие и не допускающие стабилизацию.
Контролируемые возмущающие воздействия можно измерить (на-
пример, изменение расхода вещества, подаваемого из одного аппа-
рата в другой, изменение температуры теплоносителя).
Неконтролируемые возмущающие воздействия невозможно или
нецелесообразно измерять непосредственно (например, падение ак-
тивности катализатора, изменение коэффициентов теплопередачи и
массопередачи, изменение давления греющего пара в заводской ма-
гистрали). Наличие такого рода возмущающих воздействий требует
применения САУ с обратной связью.
Возмущающие воздействия, не допускающие стабилизацию, по ус-
ловиям работы невозможно или недопустимо стабилизировать (на-
пример, изменение температуры окружающей среды).
Возмущающие воздействия, допускающие стабилизацию, — это из-
менения тех технологических параметров, которые могут быть ста-
билизированы с помощью специальной аппаратуры или с помощью
системы автоматического регулирования. Как правило, такими тех-
нологическими параметрами являются параметры входящих в аппа-
рат потоков. Например, можно сгладить колебания расхода на входе
в аппарат, установив перед аппаратом ресивер (буферную емкость),
а температуру входного потока можно стабилизировать, установив
перед аппаратом теплообменник с системой автоматического регу-
лирования температуры.
Иногда возмущающие воздействия делят на внешние и внутренние.
Внешним возмущающим воздействием (или просто возмущающим
воздействием) называют воздействие на систему внешней среды.
Например, температура окружающей среды влияет на объект регу-
лирования и может вывести его из желаемого состояния (резкое из-
менение температуры окружающей среды может привести даже к
останову химического реактора).
Внутренние возмущающие воздействия возникают внутри систе-
мы управления. Например, гранулы ванадиевого катализатора, за-
гружаемые в реактор окисления диоксида серы «внавал», образуют
2 Беспалов А. В.. Харитонов Н. И.
34
Глава 2. Основные понятия управления ХТП
неупорядоченный слой, генерирующий гидродинамические неодно-
родности, что приводит к появлению «температурных пятен», а это
в свою очередь — к изменению активности катализатора, к повы-
шенному его запылению и, как следствие, увеличению гидравличес-
кого сопротивления реактора. Таким образом, каталитический ре-
актор является нестационарным объектом, т. е. его свойства изменя-
ются во времени. Однако при исследовании систем управления проще
рассматривать объекты как стационарные, а влияние изменяющих-
ся свойств объекта на его состояние выражать с помощью внутрен-
них возмущающих воздействий.
С помощью управляющих воздействий система управления влия-
ет на состояние ОУ для достижения цели управления. Вектор управ-
ляющих воздействий:
и(т) = {«1(т), ..., и,„(т)}.
Управляющие воздействия формируются управляющим устройством
(УУ). Формирование управляющих воздействий включает:
• сбор, передачу и обработку необходимой информации;
• анализ информации;
• принятие решений, определяющих управляющие воздействия.
Реализация управляющих воздействий включает передачу управ-
ляющих воздействий и при необходимости преобразование их в
форму, непосредственно воспринимаемую объектом управления.
Примечание
В простейшем случае управляющим устройством является автомати-
ческий регулятор. В более широком смысле под управляющим устрой-
ством можно понимать совокупность персонала и автоматических уст-
ройств, связанных общей задачей управления, которую называют управ-
ляющей системой. Автоматические устройства, входящие в управляющую
систему, по своим функциональным признакам можно подразделить на
устройства контроля и диагностики, сигнализации, блокировки и заши-
ты, регулирования, управления. Сюда же можно отнести и вычислитель-
ную технику.
В любой момент времени состояние детерминированного объек-
та является функцией начального состояния объекта и входных воз-
действий (возмущающих и управляющих):
х(т) = /Мт0), и(т), </(т)}.
Используя введенные термины, можно сказать, что управление —
это определение состояния х(т), обеспечивающего достижение цели,
и управляющего воздействия и(т), которое приведет объект в это
состояние, удовлетворяя при этом ограничениям, которые наклады-
ваются на х(т) и «(т).
2 1. Основные термины и определения
35
Регулирование отличается от управления тем, что желаемое со-
стояние объекта известно {задано) и для достижения этого состоя-
ния необходимо определять только и(т).
Значение управляемого параметра, соответствующее желаемому
в данный момент состоянию ОУ, будем называть заданным значени-
ем и обозначать узд.
Системой автоматического управления (САУ) называется систе-
ма, представляющая собой совокупность объекта управления и уп-
равляющего устройства, взаимодействие которых между собой обес-
печивает процесс управления без участия человека.
Для системы управления входными величинами являются:
• возмущающие воздействия;
• цель управления.
Системой автоматического регулирования (САР) называется со-
вокупность объекта управления и управляющего устройства (назы-
ваемых в этом случае объектом регулирования и регулятором), ко-
торые без участия человека обеспечивают процесс регулирования.
Для системы регулирования входными величинами являются:
• возмущающие воздействия;
• задающее воздействие.
Человеко-машинную систему, обеспечивающую автоматизиро-
ванный сбор и обработку информации, необходимой для оптималь-
ного управления в различных сферах человеческой деятельности,
называют автоматизированной системой управления (АСУ). То есть
АСУ — это система управления, часть функций которой, главным
образом функцию принятия решений, выполняет человек.
Степень участия человека (оператора) в управлении может быть
различной и определяется задачами, стоящими перед системой уп-
равления, наличием разработанных методов управления и техничес-
ких средств управления. Возьмем в качестве примера управление хи-
мическим реактором непрерывного действия. Вывод реактора на ре-
жим, определяемый технологическим регламентом (например, после
капитального ремонта), или останов реактора являются довольно слож-
ными задачами управления и решаются с помощью АСУ, т. е. при
участии человека. После вывода реактора на технологический режим
управление реактором, а также контроль, сигнализация, блокировка
и защита реактора осуществляются системой управления без участия
человека. Тогда можно считать, что на этапе работы реактора в тех-
нологическом режиме система управления является автоматической.
Пример
► Определить входные и выходные переменные изотермичес-
кого химического реактора непрерывного действия как объекта уп-
равления. Выходные переменные — управляемые параметры: тем-
36
Глава 2. Основные понятия управления ХТП
пература реакционной смеси в реакторе, состав (концентрация)
продукта на выходе из реактора. Входные переменные — управля-
ющие воздействия: изменения расхода греющего пара, подаваемо-
го в рубашку реактора, изменения расхода реакционной смеси.
Входные переменные — возмущающие воздействия: изменения со-
става (концентрации) сырья, изменения давления греющего пара,
изменения температуры окружающей среды.
Пример
► Рассмотрим более подробно процесс, имеющий только одну
регулируемую величину, — широко распространенный в химической
технологии процесс теплообмена (рис. 2.2, а). Для стабилизации
температуры нагреваемого вещества на выходе из теплообменника
(регулируемой переменной) другая переменная, влияющая на нее,
должна использоваться в качестве управляющей. В этом примере
предполагается в качестве управляющей переменной использовать
расход греющего пара, для чего на линии подачи греющего пара
установлен регулирующий клапан с исполнительным механизмом.
Однако температура нагреваемого вещества на выходе из теплооб-
менника зависит не только от положения затвора регулирующего
• • ^вых
Рис. 2.2. Определение входных и выходных переменных процесса теплооб-
мена:
а — фрагмент технологической схемы с теплообменником (/ — первич-
ный измерительный преобразователь температуры; 2 — нормирующий
преобразователь; — сигнал, поступающий в регулятор; 3 — коман-
дный сигнал, поступающий с регулятора на исполнительное устройство 4)\
6 — входные и выходные переменные теплообменника
2.1. Основные термины и определения
37
клапана. Она зависит также от расхода нагреваемого вещества, его
входной температуры, энтальпии пара, величины отложений на стен-
ках теплообменника, температуры окружающей среды и т. д.
Видно, что даже в гаком простом случае, как регулирование про-
цесса теплообмена, можно выделить три вида переменных, свой-
ственных любому процессу регулирования (рис. 2.2, б):
• возмущающие воздействия — изменение температуры нагревае-
мого вещества на входе в теплообменник ZBX, изменение расхода на-
деваемого вещества F;
• управляемая (регулируемая) переменная — температура нагрето-
го вещества на выходе из теплообменника ZBblx;
• управляющее воздействие — изменение расхода греющего па-
ра Л1-
Дополнительная информация
Сигналы. Сигналами называются физические процессы, параметры кото-
рых содержат информацию. Параметры, содержащие информацию, называ-
ются информационными параметрами. Например, электрическое напряже-
ние — сигнал, информационный параметр — амплитуда сигнала. Сигнал на-
зывают аналоговым, если его информационные параметры могут принимать
любые значения в заданном промежутке. Сигнал называют дискретным, если
его информационные параметры могут принимать только дискретные значе-
ния (конечное множество). Измерительный сигнал — сигнал, содержащий ко-
личественную информацию об измеряемой физической величине
Системы. Понятие «система» употребляется в широком смысле, на-
пример система управления. Под системой понимают совокупность эле-
ментов (или устройств), находящихся в различных отношениях и взаимо-
связях между собой и образующих определенную целостность, единство.
Основная характеристика системы — ее структура, под которой понимают
совокупность элементов и связей между ними, определяемую исходя из
распределения функций и целей, поставленных перед системой. Свойства
системы — качества, позволяющие представить систему и выделить ее сре-
ди других систем. Свойства системы можно охарактеризовать совокупнос-
тью качественных и количественных параметров. Свойства системы про-
являются в процессе ее взаимодействия с внешней средой (т. е. с тем, что
находится вне системы). Систему называют изолированной, если у нее нет
внешней среды, или внешняя среда имеется, но система не обменивается с
внешней средой ни энергией, ни веществом. Закрытые системы обменива-
ются с внешней средой энергией, но не обмениваются веществом. Систему
называют открытой, если она имеет внешнюю среду и обменивается с ней
и энергией, и веществом. Объект управления можно определить как от-
крытую систему, следовательно, на объект влияет внешняя (окружающая)
среда, а объект оказывает свое влияние на внешнюю среду.
Интенсивные (качественные) и экстенсивные (количественные) параметры
технологического процесса. Параметры, описывающие локальное свойство, не
зависящее от размера системы (например, температура, давление, химичес-
кий потенциал), называются интенсивными переменными. Параметры, пропор-
циональные размерам системы (такие как объем вещества, количество веще-
ства, количество теплоты), называются экстенсивными переменными.
38
Глава 2. Основные понятия управления ХТП
Управляемыми параметрами, т. е. выходными параметрами объекта
управления, характеризующими состояние процесса, являются, как прави-
ло, интенсивные параметры. Каждому интенсивному параметру соответ-
ствует свой экстенсивный параметр: температуре — количество теплоты;
давлению — количество газа; уровню — количество жидкости и т. д. Ин-
тенсивные параметры могут изменяться во времени, так как объект обме-
нивается с внешней средой веществом и энергией. Количество вещества
или энергии, проходящее через объект в единицу времени, называют на-
грузкой объекта. Используя это понятие, можно определить возмущающее
воздействие как изменение нагрузки ОУ. Довольно часто регулируемая
переменная в одном технологическом процессе является переменной на-
грузки в другом технологическом процессе.
Изменение интенсивного параметра свидетельствует о нарушении ба-
ланса (материального или энергетического) в технологическом аппарате.
Так, температура — показатель теплового баланса в аппарате; концентра-
ция — показатель материального баланса по компоненту; давление — по-
казатель материального баланса по газовой фазе; уровень жидкости — по-
казатель материального баланса по жидкой фазе.
Чтобы воздействовать на управляемые параметры (интенсивные), не-
обходимо изменять экстенсивные параметры объекта управления. Следо-
вательно, возможные управляющие воздействия — это изменения матери-
альных или энергетических потоков на входе в объект управления или на
выходе из него.
Понятие об интенсивных и экстенсивных величинах впервые ввел в
1813 г. Гегель. Он обратил внимание на различные способы измерения
этих величин. Измерение экстенсивной величины заключается в сравни-
тельном анализе ее с другой, однородной с ней величиной. Например,
можно взять мерный сосуд, с его помощью наполнить резервуар жидко-
стью и подсчитать количество единиц объема, содержащихся в резервуаре.
Процедура измерения интенсивной величины состоит в использовании фун-
кциональной взаимосвязи между интенсивной величиной и изменением со-
пряженной с ней экстенсивной величины. Например, жидкостным термо-
метром измеряют не температуру (интенсивную величину), а объем жид-
кости (экстенсивную величину), иначе говоря, величину, зависящую от
температуры
Пример
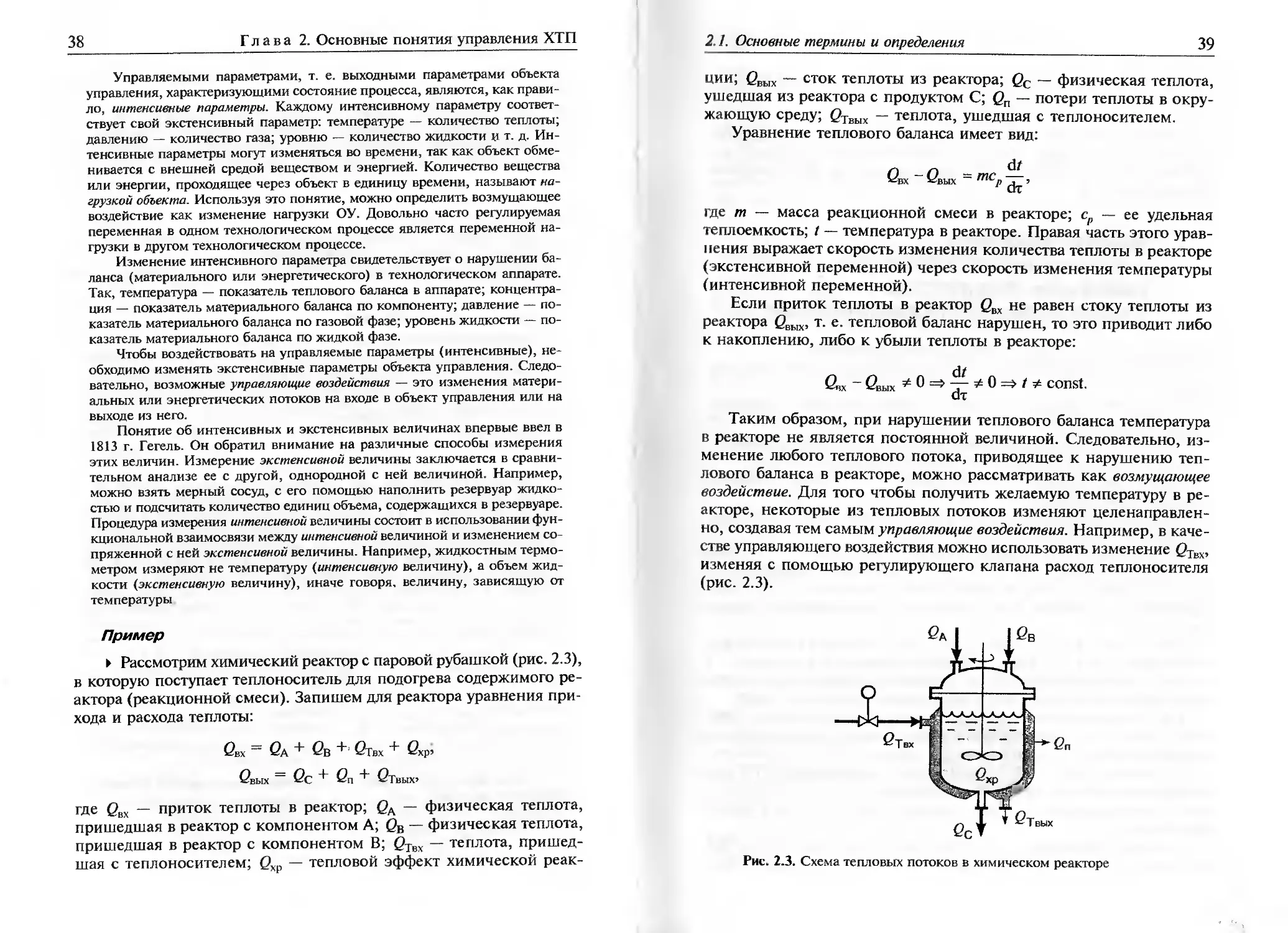
► Рассмотрим химический реактор с паровой рубашкой (рис. 2.3),
в которую поступает теплоноситель для подогрева содержимого ре-
актора (реакционной смеси). Запишем для реактора уравнения при-
хода и расхода теплоты:
еЕХ = еА + ев + Ствх + ехР,
Свых = Qc + Qn + Ствых>
где Свх — приток теплоты в реактор; QK — физическая теплота,
пришедшая в реактор с компонентом A; QB — физическая теплота,
пришедшая в реактор с компонентом В; (?Твх — теплота, пришед-
шая с теплоносителем; (?хр — тепловой эффект химической реак-
2.1. Основные термины и определения
39
ции; <2ПЫХ — сток теплоты из реактора; Qc — физическая теплота,
ушедшая из реактора с продуктом С; Qn — потери теплоты в окру-
жающую среду; 0Твых — теплота, ушедшая с теплоносителем.
Уравнение теплового баланса имеет вид:
Свх — Свых — т(-р ~Г~ ’
1 ат
где т — масса реакционной смеси в реакторе; ср — ее удельная
теплоемкость; t — температура в реакторе. Правая часть этого урав-
нения выражает скорость изменения количества теплоты в реакторе
(экстенсивной переменной) через скорость изменения температуры
(интенсивной переменной).
Если приток теплоты в реактор QBX не равен стоку теплоты из
реактора £?вых, т. е. тепловой баланс нарушен, то это приводит либо
к накоплению, либо к убыли теплоты в реакторе:
~ Свых const.
ат
Таким образом, при нарушении теплового баланса температура
в реакторе не является постоянной величиной. Следовательно, из-
менение любого теплового потока, приводящее к нарушению теп-
лового баланса в реакторе, можно рассматривать как возмущающее
воздействие. Для того чтобы получить желаемую температуру в ре-
акторе, некоторые из тепловых потоков изменяют целенаправлен-
но, создавая тем самым управляющие воздействия. Например, в каче-
стве управляющего воздействия можно использовать изменение £2Твх,
изменяя с помощью регулирующего клапана расход теплоносителя
(рис. 2.3).
Рис. 2.3. Схема тепловых потоков в химическом реакторе
40
Глава 2. Основные понятия управления ХТП
Если приток теплоты в реактор равен стоку теплоты из реактора
Свх ~ Свых ~
то количество теплоты в реакторе не меняется, и температура по-
стоянна. Следовательно, возмущающие воздействия на объект уп-
равления либо отсутствуют, либо скомпенсированы управляющими
воздействиями.
2.2. ИЕРАРХИЯ УПРАВЛЕНИЯ.
НАЗНАЧЕНИЕ СИСТЕМ УПРАВЛЕНИЯ
ХИМИЧЕСКИМ ПРЕДПРИЯТИЕМ
И ХИМИКО-ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ
В зависимости от объектов управления различают:
• АСУП — автоматизированная система управления предприя-
тием;
• АСУ ТП — автоматизированная система управления техноло-
гическим процессом;
• САР — локальные системы автоматического регулирования.
В АСУП объектом управления является предприятие; в АСУ ТП —
технологический процесс; в локальных САР — механизм, машина,
технологический аппарат.
Управление химическим предприятием осуществляется по мно-
гоуровневому иерархическому принципу.
На нижнем уровне иерархии находятся локальные САР, которые
регулируют отдельные технологические параметры. Локальные САР
входят в состав АСУ ТП и играют роль своеобразных усилителей
управляющих сигналов, формируемых на более высоких уровнях
управления.
Локальная САР состоит из объекта управления (ОУ) и управляю-
щего устройства (УУ), которые взаимодействуют между собой. ОУ
является динамической системой, состояние которой изменяется под
действием возмущающих J(x) и управляющих и(т) воздействий.
При нормальном протекании процесса технологические пара-
метры имеют номинальные значения. Возмущающие воздействия могут
изменять технологические параметры, выводя ОУ из установленно-
го регламентом режима. При регулировании непрерывных ХТП цель
регулирования на нижней ступени иерархии заключается в поддер-
жании определенных технологических параметров на заданном уровне с
помощью УУ.
Условно к управляющему устройству на нижнем уровне иерар-
хии можно отнести средства автоматического контроля (преобра-
2.2. Иерархия управления. Назначение систем управления
41
зователи и измерительные устройства), логические устройства (авто-
матический регулятор или программируемый логический контрол-
лер), технические средства изменения энергетических и материаль-
ных потоков (регулирующие клапаны и исполнительные механизмы).
АСУ ТП находятся на более высоком уровне иерархии. На этом
уровне управления решаются задачи отыскания оптимальных режи-
мов совместно работающих технологических аппаратов, распределе-
ния нагрузки между отдельными технологическими аппаратами с при-
менением управляющих ЭВМ. Системы управления обеспечивают:
• необходимый объем дистанционного контроля, управления и
автоматизации объектов управления;
• сигнализацию о состоянии технологического оборудования и от-
клонении технологических параметров объектов от их номинальных
значений (последние характеризуют нормальный технологический ре-
жим ведения процесса), что позволяет своевременно предупредить пер-
сонал о возможности возникновения аварийного режима работы;
• защиту окружающей среды от вредных воздействий (газовые
выбросы, жидкие стоки и т. д.);
• сбор, обработку (включая фильтрацию измеряемых величин —
выделение полезных сигналов), хранение полной достоверной и свое-
временной информации, представление ее на верхний уровень уп-
равления (АСУП) для просмотра и анализа состояния ХТП;
• улучшение диагностики технологического оборудования и про-
текания ХТП;
• повышение надежности и экономичности работы объектов уп-
равления, что сокращает время простоев технологического оборудо-
вания.
Пример
► Функциональные возможности АСУ производством контакт-
ной серной кислоты.
Система управляет:
• уровнями кислот в сборниках сушильной и абсорбционной ко-
лонн; концентрацией кислоты, подаваемой в абсорбционную колонну;
• расходом кислоты, подаваемой из сушильной колонны в аб-
сорбционную; насосами подачи серы в серную печь
Система осуществляет контроль и диагностику:
• оборудования;
• аварийной сигнализации;
• системы защиты компрессоров, пусковой топки, серной печи
и котла-утилизатора.
Система собирает информацию о технологических параметрах,
таких как:
• уровень в сборниках и резервуарах;
42
Глава 2. Основные понятия управления ХТП
• температура в контактном аппарате, промывной башне, сбор-
никах кислот, газовом тракте;
• перепад давления в аппаратах и газовых трактах;
• расход газа, воздуха, воды и кислот;
• концентрация кислот.
Следующий уровень иерархии представляют АСУП. На этом уровне
решаются не только задачи управления ХТП, но и экономические
задачи (управление финансово-хозяйственной деятельностью, плани-
рование ресурсов и т. п.). Управление осуществляется с применением
управляющих ЭВМ. Наиболее значимым в современных условиях
ресурсом производства, в том числе химического и нефтехимическо-
го, становится информация. Знания о потребностях рынка и заказчи-
ках, о ценах на сырье, товарные продукты и энергоносители, о ресур-
сах производства и управлении качеством вырабатываемой продук-
ции, о материально-техническом снабжении, об экологических
требованиях и реальной обстановке, о предаварийной или аварийной
ситуации на объектах производства входят составной частью в АСУП.
В мировой практике такой уровень управления называется Enterprise
Resource Planning (ERP) — планирование заводских ресурсов.
Замечание
Исторически сложилось так, что до последнего времени АСУП и АСУ
ТП развивались обособленно и независимо друг от друга. Наиболее харак-
терно это было для программного обеспечения (ПО). В результате каналы
обмена информацией между подсистемами АСУП и АСУ ТП оказались сла-
быми. Но в настоящее время прогресс информационных технологий, глоба-
лизация сети Internet, использование Web-решений начинают затрагивать
промышленную сферу. Ведущие производители средств промышленной ав-
томатизации выпускают новые виды программно-технических средств для
АСУ ТП, основанные на использовании современных информационных тех-
нологий, которые позволяют интегрировать системы верхнего (экономичес-
кого) и нижнего (технологического) уровней. Таким образом, речь идет об
интеграции АСУП и А СУ ТП в единую систему предприятия на основе создания
единого информационного пространства. При этом одной из основных про-
блем создания интегрированных систем управления в рамках химического
предприятия является проблема сопряжения и совместного действия ПО,
традиционно используемого в подсистемах разного уровня.
2.3. ПРИНЦИПЫ УПРАВЛЕНИЯ
В основе построения систем управления лежат некоторые об-
щие принципы управления, определяющие, какую текущую информа-
цию использует управляющее устройство для формирования необ-
ходимого управляющего воздействия.
2.3. Принципы управления 43
2.3.1. Управление по задающему воздействию
В системе управления по задающему воздействию (рис. 2.4, а)
используется информация только о цели управления (или о задан-
ном значении параметра, если речь идет о системах регулирования).
Для такой системы характерна разомкнутая цепь воздействий, т. е.
управляющее устройство оказывает воздействие на объект управле-
ния, но обратное воздействие отсутствует (рис. 2.5, а). В связи с
этим систему, реализующую принцип управления по задающему воз-
действию, называют разомкнутой системой управления.
Достоинством управления по задающему воздействию является
простота конструктивной реализации. Однако качественное управ-
ление на основе этого принципа возможно только тогда, когда объект
управления хорошо изучен и его свойства, а также возмущающие
воздействия остаются постоянными.
Рис. 2.4. Структурные схемы систем автоматического управления:
а — управление по задающему воздействию; б — управление по возму-
щающему воздействию; в — управление по отклонению; г — комбиниро-
ванное управление (ОУ — объект управления; УУ — управляющее уст-
ройство)
44
Глава 2. Основные понятия управления ХТП
а
б
ОУ
ОС
Рис. 2.5. Управление:
a — без обратной связи; б — с обратной связью (ПС — прямая связь;
ОС — обратная связь)
2.3.2. Управление по возмущающему воздействию
В системе управления по возмущающему воздействию (см.
рис. 2.4, б) кроме информации о цели управления используется
информация о возмущающих воздействиях. Одна из задач управля-
ющего устройства при этом заключается в формировании такого
управляющего воздействия, которое компенсировало бы влияние на
объект управления измеренного возмущающего воздействия. Поэтому
принцип управления по возмущающему воздействию называют так-
же принципом компенсации.
Рассмотрим систему автоматического регулирования температу-
ры реакционной смеси в реакторе, основанную на принципе ком-
пенсации возмущающего воздействия (рис. 2.6). Предположим при
этом, что основным (главным, наиболее сильным) возмущающим
воздействием является изменение расхода компонента А. При измене-
нии расхода FA регулятор 2 формирует управляющее воздействие
(изменяет расход хладагента Гохл), не дожидаясь изменения управ-
ляемого параметра (температуры).
Как и в предыдущем случае, реализация принципа управления
по возмущающему воздействию требует хорошего знания процес-
сов, происходящих в объекте управления. Но качество управления
при этом выше, так как влияние одного из контролируемых возму-
щающих воздействий компенсируется. При этом сама система уп-
равления оказывается несколько дороже из-за затрат на измерение
возмущающего воздействия.
2.3. Принципы управления
45
Рис. 2.6. Пример регулирования температуры в химическом реакторе по
возмущающему воздействию:
1 — датчик расхода; 2 — регулятор; 3 — исполнительное устройство
Что характерно для управления по возмущающему воздействию?
1. Это разомкнутое управление (управление без обратной связи),
что означает отсутствие информации об управляемом параметре (тем-
пературе реакционной смеси в реакторе).
2. Необходимо точно и верно выбрать канал, по которому может
проявиться главное возмущающее воздействие, например, измене-
ние расхода FK компонента А. I
3. Этот принцип нельзя использовать в системах управления
нейтральными и неустойчивыми объектами.
Достоинства такого принципа управления:
а) быстродействие, так как возмущающее воздействие может быть
скомпенсировано до появления рассогласования между текущим
значением регулируемого параметра и его заданным значением;
б) возможность (теоретическая) полной компенсации выбран-
ного возмущающего воздействия;
в) отсутствие проблем, связанных с устойчивостью.
Недостатки:
а) учитываются не все возмущающие воздействия, а только одно,
тем самым не обеспечивается высокая точность управления (осо-
бенно это проявляется при наличии неконтролируемых возмущаю-
щих воздействий);
б) не контролируется результат управляющего воздействия;
в) необходима надежная информация о функциональной взаимо-
связи между расходом степенью открытия клапана и регулируемой
температурой, которая, как правило, не линейна, не всегда точно изве-
стна и может изменяться в процессе функционирования аппарата.
46
Глава 2. Основные понятия управления ХТП
Пример
► Принципиальная структура системы управления по возмуща-
ющему воздействию представлена на рис. 2.7.
Изменение расхода нагреваемого вещества F (возмущающее воз-
действие) воспринимается первичным измерительным преобразо-
вателем расхода 1 и преобразуется нормирующим преобразовате-
лем 2 в унифицированный сигнал, соответствующий измеренному
значению расхода Рюы. В компенсирующее устройство 3 поступают
заданное значение управляемой переменной и измеренное значе-
ние расхода нагреваемого вещества Fmu. Компенсирующее устрой-
ство вычисляет корректирующий сигнал управления для существу-
ющих значений нагрузки (расхода нагреваемого вещества F) и за-
данного значения управляемой переменной Гзд. В приведенной
схеме управления изменения нагрузки (расхода нагреваемого ве-
щества F) вызывают непосредственно изменение управляющего
Рис. 2.7. Пример регулирования температуры на выходе теплообменника
по возмущающему воздействию:
а — фрагмент технологической схемы с теплообменником (1 — первич-
ный измерительный преобразователь расхода; 2 — нормирующий преоб-
разователь; 3 — регулятор температуры; 4 — исполнительное устройство;
5 — теплообменник); б — структурная схема системы регулирования теп-
лообменника
2.3. Принципы управления
47
сигнала (изменение расхода пара Fn), не дожидаясь изменения уп-
равляемой переменной — температуры на выходе теплообменника
/вых. Вполне очевидно, что такой подход к управлению требует хо-
рошего понимания хода технологического процесса и его особен-
ностей.
2.3.3. Управление по отклонению
В системе управления по отклонению используется информа-
ция о цели управления и отклонении текущего значения управляе-
мого параметра от заданного значения (см. рис. 2.4, в).
Замечание
Принцип управления по отклонению иногда называют принципом
Ползунова—Уатта, а принцип управления по возмущающему воздействию —
принципом Понселе.
Управление по отклонению осуществляется на основе информа-
ции о состоянии объекта управления. Взаимодействие между ОУ и
УУ осуществляется как по цепи прямой связи — от УУ к ОУ, так и
по цепи обратной связи — от ОУ к УУ (см. рис. 2.5, б). Информация
при этом передается по замкнутому контуру (контуру регулирова-
ния), поэтому управление по отклонению называют замкнутым или
управлением с обратной связью. Наличие обратной связи приводит к
созданию своеобразной системы управления, по сути своей пред-
ставляющей фильтр, который должен точно передавать управляю-
щее воздействие (подчиняться в основном управляющему воздей-
ствию) и подавлять возмущающие воздействия.
Замечание
Как это не удивительно, но оптимизация и интенсификация могут
привести к катастрофической потере устойчивости. Устойчивость не теря-
ется, если ввести обратную связь, например, жесткий план с по сбору уро-
жая, вылову рыбы, вырубке леса, охоте и т. п. заменить величиной, про-
порциональной фактически имеющимся в наличии ресурсам х (зерновые,
популяции, лес...), т. е. с = кх. При максимально жестком плане система
теряет устойчивость и самоуничтожается. Введение же обратной связи ста-
билизирует систему и, например, небольшие изменения коэффициента к
(или какие-то другие случайности) не приведут к катастрофе.
Системы управления с обратной связью более широко применя-
ются в химической технологии, чем системы управления по возму-
щающему воздействию, поэтому основное внимание в дальнейшем
будет уделено именно первым.
Упрощенная структурная схема такой системы с обозначением
основных сигналов приведена на рис. 2.8. Прямоугольниками обо-
48
Глава 2. Основные понятия управления ХТП
Рис. 2.8. Упрощенная
структурная схема сис-
темы управления с об-
ратной связью
значены элементы системы, а стрелками — входные и выходные
величины (или входы и выходы).
Выходной величиной объекта и всей системы регулирования
является управляемая (или регулируемая) величина у(т), зависящая от
управляющего воздействия ы(т) и возмущающего воздействия J(t).
Одним из входов системы регулирования является задающее воз-
действие узд(т), соответствующее желаемому значению регулируемо-
го параметра.
Другим входом системы регулирования является возмущающее
воздействие d(x). Под возмущающим воздействием можно понимать
такое воздействие, которое пытается вывести объект из желаемого
(заданного) состояния. Изменения управляемых (регулируемых) пара-
метров в объекте управления вызываются как управляющими воздей-
ствиями, так и возмущающими воздействиями.
Возмущающие воздействия, приложенные к системе, вызывают
отличие между заданным и действительным значениями управляе-
мой величины. Разность между заданным и действительным значе-
нием управляемой (регулируемой) величины называют ошибкой ре-
гулирования (погрешностью регулирования):
е(т) = узд(т) - у(т). (2.1)
Как правило, задача регулирования непрерывных ХТП заключа-
ется в определении такого значения управляющей переменной, кото-
рое обеспечивает равновесие между всеми переменными, влияющи-
ми на регулируемую величину, и поддерживает заданное значение
последней.
В системах с обратной связью управляющее воздействие рассчи-
тывают в зависимости от рассогласования между действительным и
заданным значениями управляемой переменной, т. е. входной вели-
чиной управляющего устройства является ошибка регулирования.
Рассмотрим замкнутую систему автоматического регулирова-
ния температуры реакционной смеси в реакторе (САР с обратной
связью), схема которой приведена на рис. 2.9. Текущее значение
температуры реакционной смеси в реакторе t измеряется датчиком 7.
Сигнал с выхода датчика, соответствующий измеренному значе-
нию температуры /изм, подается в управляющее устройство 2, где
сравнивается с заданным значением температуры При наличии
2.3. Принципы управления
49
Рис. 2.9. Пример регулирования температуры в химическом реакторе по
отклонению:
1 — датчик температуры; 2 — управляющее устройство; 3 — исполни-
тельное устройство
разности температур (сигнала рассогласования или ошибки) УУ
вырабатывает управляющее воздействие (изменение расхода охлаж-
дающей воды FOXJ1), направленное на уменьшение сигнала рассог-
ласования. Оно стремится устранить отклонение независимо от
причин, вызвавших это отклонение, будь то возмущающее воздей-
ствие, изменение свойств системы управления или несоответствие
между рассчитанным и фактическим управляющим воздействием.
В связи с этим управление по отклонению можно назвать «гиб-
ким». Система управления по отклонению реагирует на изменения
управляемого параметра (температуры реакционной смеси) в ре-
зультате всех возмущающих воздействий, как контролируемых, так
и неконтролируемых.
Что характерно для способа управления по отклонению?
Обратная связь в замкнутой системе управления должна быть
отрицательной', в ответ на повышение температуры реакционной сме-
си в реакторе управляющее устройство должно увеличить расход хла-
дагента, что приведет к уменьшению температуры. Однако в системе
управления может возникнуть и положительная обратная связь: при
повышении температуры в реакторе управляющее устройство будет
уменьшать расход хладагента и тем самым еще больше повышать
температуру в реакторе. Одной из причин возникновения положи-
тельной обратной связи может быть техническая ошибка при созда-
нии системы управления (например, неправильная коммутация ли-
ний связи). Другой причиной является запаздывание в контуре уп-
равления. В результате управляющее воздействие, сформированное
в ответ на низкую температуру в реакторе некоторое время назад и
направленное на повышение температуры, может начать проявляться
50
Глава 2. Основные понятия управления ХТП
в тот момент, когда температура в реакторе уже будет повышена за
счет возмущающих воздействий.
На рис. 2.11, а показаны возможные графики процесса управле-
ния выходной температуры с помощью контура управления, пред-
ставленного на рис. 2.10. Из рис. 2.11, а видно, как положительная
обратная связь вызывает неустойчивость: при возрастании темпера-
туры /вых (управляемой переменной) регулятор увеличивает расход
пара Fn (управляющее воздействие), что приводит к еще большему
росту температуры 1ВЫХ. На рис. 2.11, б показано действие того же
самого контура регулирования, но с регулятором, уменьшающим
расход пара Fn; при таком управлении очевидно стремление регуля-
тора вернуть регулируемый параметр к заданному значению, т. е.
отрицательная обратная связь обеспечивает устойчивость.
Наличие обратной связи и инерционность процесса теплообме-
на вызывают колебательную реакцию замкнутого контура на возни-
Рис. 2.10. Пример регулирования температуры на выходе теплообменни-
ка по отклонению:
а — фрагмент технологической схемы с теплообменником (1 — первич-
ный измерительный преобразователь температуры; 2 — нормирующий
преобразователь; 3 — регулятор температуры; 4 — исполнительное уст-
ройство; 5 — теплообменник); б — структурная схема системы регули-
рования теплообменника по отклонению
2.3. Принципы управления
51
Рис. 2.11. Переходные процессы в системе регулирования теплообменника:
о — при возникновении положительной обратной связи; б — в результате
действия отрицательной обратной связи; в — колебательные переходные
процессы (1 — статический номинальный режим; 2 — переходный режим)
52
Глава 2. Основные понятия управления ХТП
кающие нарушения. Характеристики колебательного контура ока-
зывают существенное влияние на качество управления. На рис. 2.11, в
показан типичный процесс колебательного характера. При правиль-
ном управлении колебания измеряемого сигнала (в данном случае
температуры нагреваемого вещества на выходе из теплообменника)
должны устойчиво затухать и заканчиваться возвратом к заданному
значению. Одновременно колебания выходного сигнала управляю-
щего устройства (автоматического регулятора) должны также зату-
хать и сходиться к новому установившемуся значению. По сути сво-
ей колебательный процесс в системе управления с обратной связью
представляет собой реализацию метода проб и ошибок для решения
задачи управления.
Замечание
Житейский пример обратной положительной связи: собака, кусающая
себя за хвост, причем, чем больнее собаке, тем яростнее она пытается уку-
сить себя за хвост
Достоинства способа управления по отклонению (с обратной
связью):
а) учитываются все возмущающие воздействия, оказывающие
влияние на управляемый параметр (температуру реакционной сме-
си в реакторе);
б) требуется минимум информации о процессе (в данном случае
информация только о температуре реакционной смеси в реакторе).
Недостатки:
а) управление по отклонению осуществляется методом проб и
ошибок;
б) в системе управления по отклонению присутствует запазды-
вание, поскольку учитываются все возмущающие воздействия (по
всем каналам изменения расходов компонентов А и В, продукта С,
изменения температуры окружающей среды и т. д. — см. рис. 2.9).
Управление по отклонению инерционными объектами затруднено
из-за отсутствия быстродействия;
в) при определенном сочетании свойств ОУ и УУ система управ-
ления с обратной связью может стать неустойчивой.
Пример
► Принципиальная структура системы управления с обратной
связью процессом теплообмена представлена на рис. 2.10. Цепочка
первичный измерительный преобразователь температуры 1 — нор-
мирующий преобразователь 2 измеряет текущее значение управляе-
мой переменной /вых, преобразует его в унифицированный сигнал и
посылает гизм в управляющее устройство 3 (регулятор), где /изм срав-
2.4. Классификация систем управления
53
нивается с заданным значением управляемой переменной /зд. В ре-
гуляторе 3 в соответствии с принятым законом регулирования выра-
батывается управляющее воздействие, направляемое на объект в виде
изменения положения затвора клапана исполнительного устройства 4,
с учетом знака и рассогласования между измеренным и заданным
значениями управляемой переменной. После того как рассогласова-
ние между управляющей переменной (изменение расхода греющего
пара F^) и переменными нагрузки вызовет отклонение управляемой
переменной /вых, регулятор, находящийся в цепи обратной связи,
начинает немедленно вырабатывать корректирующий выходной сиг-
нал. Как только выданный регулятором корректирующий сигнал
возвращает управляемую переменную Гвых к заданному установлен-
ному значению /зд (е = Гзд — /изм = 0), регулятор начинает поддержи-
вать свой выходной сигнал постоянным и продолжает отслеживать
управляемую переменную Гвых, ожидая другого возмущающего воз-
действия.
2.3.4. Комбинированное управление
Для комбинированных систем управления характерно использо-
вание информации о возмущающем воздействии, задающем воздей-
ствии и управляемом параметре (см. рис. 2.4, г).
Комбинированные системы управления имеют более высокое
качество управления, чем системы, работающие по отклонению,
поскольку информация о значении возмущающего воздействия по-
зволяет устройству управления работать с некоторым предвидени-
ем, т. е компенсировать основное внешнее возмущающее воздей-
ствие, вызывающее нарушение номинального режима, раньше, чем
появится достаточно большое отклонение текущего значения па-
раметра (температуры) от заданного. Комбинированная система
управления обладает точностью и быстродействием.
2.4. КЛАССИФИКАЦИЯ СИСТЕМ УПРАВЛЕНИЯ
Классификация САУ по принципу управления, рассмотренная в
предыдущем разделе, не является единственной. Существует много
других признаков, которые могут быть положены в основу класси-
фикации систем управления. Следует иметь в виду, что важность
того или иного признака, отличающего системы управления, опре-
деляется конкретной задачей, решаемой в процессе анализа или
синтеза САУ. Основанные на каком-то признаке различия систем
управления, существенные при решении одной задачи, могут ока-
54
Глава 2. Основные понятия управления ХТП
заться совершенно незначительными при решении другой задачи.
Ниже обсуждаются только некоторые из наиболее часто используе-
мых признаков классификации САУ.
2.4.1. По характеру изменения задающего воздействия
В зависимости от характера изменения задающего воздействия
УзД(т) САР с обратной связью подразделяются на три основных клас-
са: автоматической стабилизации, программного регулирования и
следящие системы.
В системах автоматической стабилизации задающее воздействие
представляет собой постоянную величину (см. рис. 2.9 при условии
(д — const). Область применения: непрерывные ХТП, в которых управля-
емый параметр нужно поддерживать на заданном постоянном значении.
В системах программного регулирования (рис. 2.12) задающее воз-
действие является известной функцией времени (изменяется по про-
грамме). Такие системы оснащены программными задатчиками, фор-
мирующими задающее воздействие, изменяющееся во времени. Об-
ласть применения: управление периодическими ХТП.
В следящей системе (рис. 2.13) задающее воздействие представ-
ляет собой неизвестную заранее функцию времени, связанную с
внешним по отношению к системе управления параметром, кото-
рый может изменяться случайным образом. Область применения'.
управление одним технологическим параметром (ведомым), находя-
щимся в зависимости от значения другого технологического пара-
метра (ведущего), изменяющегося произвольно (например, управле-
ние расходом воздуха, подаваемого на горелку, в зависимости от
расхода топлива). К следящим системам можно отнести систему
регулирования соотношения расходов двух веществ; в такой систе-
ме изменение расхода «ведомого» вещества находится в определен-
ном соотношении к изменению расхода «ведущего» вещества.
А
Рис. 2.12. Пример программной САР
2.4. Классификация систем управления
55
Рис. 2.13. Пример следящей САР
По способу организации основные процессы химической техно-
логии делятся на непрерывные, периодические и циклические.
Непрерывные химико-технологические процессы, как правило,
должны быть стационарны, т. е. параметры процесса в каждой точке
технологического аппарата должны оставаться неизменными во вре-
мени (при этом параметры процесса могут изменяться в простран-
стве от одной точки аппарата к другой). Следовательно, основной
задачей автоматических систем регулирования непрерывных про-
цессов является стабилизация технологических параметров.
Для периодических процессов характерно изменение во времени па-
раметров в технологическом аппарате в целом или в каких-либо его
частях, т. е. эти процессы являются нестационарными. Основной за-
дачей автоматических систем регулирования периодических процес-
сов является изменение технологических параметров в соответствии
с заранее заданной программой (программные системы регулирова-
ния) или в зависимости от текущего состояния какого-то другого
процесса (следящие системы регулирования).
Некоторые технологические аппараты работают в циклическом ре-
жиме: переменные, характеризующие состояние процесса, периоди-
чески изменяются. Примером циклического процесса является реге-
неративный теплообмен: насадка поочередно контактирует с горячим
и холодным потоками, передавая теплоту от одного потока другому.
Основное внимание в учебнике уделяется непрерывным ХТП.
2.4.2. По числу контуров
По числу контуров прохождения сигналов САУ делятся на одно-
контурные и многоконтурные. Такое деление относится к структу-
рам систем управления. Одноконтурная система управления — это
замкнутая система управления с одной регулируемой величиной,
56
Глава 2. Основные понятия управления ХТП
имеющая одну главную обратную связь (с одним контуром управле-
ния). Многоконтурная система управления — это замкнутая система
управления, имеющая помимо одного контура главной обратной
связи другие главные обратные связи (или местные обратные свя-
зи), т. е. это система с несколькими контурами управления.
2.4.3. По числу управляемых величин
По числу управляемых величин САУ делятся но одномерные и
многомерные. Одномерные системы управления имеют одну управ-
ляемую величину, а многомерные — несколько управляемых вели-
чин. Среди многомерных систем управления выделяют системы не-
связанного управления и системы связанного управления. Системы
несвязанного управления используют одноконтурные САР, не свя-
занные между собой. Объединяет эти контуры управления только
общий для них объект управления. В свою очередь системы несвя-
занного управления делятся на зависимые и независимые. В зависимых
системах несвязанного управления процессы управления различными
управляемыми параметрами нельзя рассматривать изолированно друг
от друга, поскольку на изменение одной из управляемых величин
влияют изменения других. В независимых системах несвязанного уп-
равления процессы управления различными управляемыми парамет-
рами можно рассматривать изолированно друг от друга, поскольку
изменение каждой из управляемых величин не зависит от измене-
ния других.
Область применения несвязанного управления', для объектов управ-
ления, в которых практически отсутствует взаимное влияние управ-
ляемых параметров.
Системы связанного управления используют многоконтурные САУ.
Чтобы ослабить присутствующее взаимное влияние управляемых
технологических параметров, управляющие устройства (контролле-
ры), предназначенные для управления различными технологичес-
кими параметрами одного и того же объекта управления, связывают
внешней связью, минуя объект управления.
2.4.4. По характеру управляющих воздействий
В зависимости от прохождения и характера сигнала в системе
автоматического управления они делятся также на непрерывные и
дискретные (прерывистые).
Управление называют непрерывным, если контроллер непрерыв-
но изменяет управляющее воздействие в зависимости от изменения
задающего воздействия и управляемой величины.
2.4. Классификация систем управления
57
Управление называют дискретным, если контроллер вырабаты-
вает управляющее воздействие, принимающее одно из нескольких
возможных значений. Для дискретных (прерывистых) систем харак-
терно, что в них через дискретные промежутки времени происходит
размыкание или замыкание цепи воздействия.
Системы дискретного (прерывистого) управления подразделяют-
ся на импульсные или релейные.
В импульсных системах размыкание цепи воздействий выполня-
ется принудительно и периодически специальным прерывающим
устройством. Импульсные системы содержат импульсные элемен-
ты, способные преобразовать непрерывное изменение входной ве-
личины в дискретную импульсную выходную величину.
В релейных системах размыкание или замыкание цепи воздей-
ствий выполняется одним из элементов системы при непрерывном
значении входного воздействия. Релейные системы содержат реле
или элементы, имеющие релейную характеристику, которая прини-
мает два значения: минимально и максимально возможное.
Замечание
Часто на практике, управляя сложными химико-технологическими
объектами, применяют совместное непрерывное и дискретное управление.
Например, управление температурой пара, вырабатываемого энергобло-
ком, выполняется непрерывным изменением положения регулирующего
клапана подачи воды на впрыск; при сильных изменениях нагрузки бывает
необходимо и переключение в схеме питательных магистралей.
2.4.5. По виду зависимости установившейся ошибки
от внешнего воздействия
Ранее было введено понятие ошибки регулирования (2.1):
е(т) = узд(т) - у(т).
Здесь узд(т) — задающее воздействие; j(t) — управляемый параметр
(выходная величина).
Для установившегося состояния системы уравнение (2.1) при-
нимает вид:
^уСт(^) [л’зд(^)]уст УуСтСО*
По виду зависимости установившейся ошибки ЕуСТ от внешнего
воздействия системы делят на статические и астатические.
Систему называют статической по отношению к внешнему воз-
действию, если при воздействии, стремящемся со временем к неко-
торому установившемуся значению, ошибка тоже стремится к по-
стоянному значению, зависящему от величины внешнего воздей-
58
Глава 2. Основные понятия управления ХТП
ствия. При наличии возмущающих воздействий статические систе-
мы не могут точно стабилизировать управляемый параметр.
Систему называют астатической по отношению к внешнему воз-
действию, если при воздействии, стремящемся со временем к неко-
торому установившемуся значению, ошибка стремится к нулю неза-
висимо от величины внешнего воздействия.
Одна и та же система автоматического управления может быть
статической по отношению к возмущающему воздействию и астати-
ческой по отношению к задающему воздействию. Системы автома-
тической стабилизации, где задающее воздействие сохраняет посто-
янное значение, обычно бывают астатическими по отношению к воз-
мущающему воздействию, а следящие системы — по отношению к
управляющему воздействию.
2.4.6. По энергетическим признакам
Такие системы регулирования, в которых первичный измери-
тельный преобразователь (чувствительный элемент) воздействует
непосредственно на изменение положения РО (регулирующего орга-
на), называют системами прямого управления (регулирования), а ре-
гуляторы — регуляторами прямого действия. В регуляторах прямого
действия энергия для перемещения РО поступает непосредственно
из объекта управления через первичный измерительный преобразо-
ватель (чувствительный элемент).
Примечание
Реакция РО на первичный измерительный преобразователь в системах
прямого регулирования снижает чувствительность этого элемента и, как след-
ствие, ухудшается качество регулирования.
В системах непрямого (косвенного) управления для перемеще-
ния РО применяются вспомогательные устройства, работающие от
посторонних (внешних) источников энергии.
2.4.7. По математическому описанию
При анализе и расчете систем управления необходима ее мате-
матическая модель, определяющая изменение переменных состоя-
ния системы с течением времени.
Практически все системы управления ХТП не линейны, и их
точное математическое описание представляет собой значительные
трудности. Собственно, и не всегда нужно стремиться к точному
математическому описанию системы, если это не определено прак-
тическими задачами.
2.5. Структурные схемы САУ
59
САУ делят на линейные и нелинейные в зависимости от того, ка-
кие в основе математической модели лежат уравнения (линейные
или нелинейные). Далее линейные и нелинейные системы могут быть
непрерывными, дискретными, дискретно-непрерывными.
Непрерывные системы описываются дифференциальными урав-
нениями; дискретные описываются дифференциально-разностными;
дискретно-непрерывные — обоими видами уравнений. В свою оче-
редь, каждый из названных трех классов подразделяется на под-
классы (см. разд. 3.1.1):
• стационарные системы с сосредоточенными параметрами;
• стационарные системы с сосредоточенными параметрами и
распределенными параметрами;
• нестационарные системы с сосредоточенными параметрами;
• нестационарные системы с сосредоточенными параметрами и
распределенными параметрами.
Системы (их математические модели) могут также разделены на
детерминированные и стохастические.
Если воздействия, приложенные к системе, и параметры модели
являются постоянными или детерминированными функциями пе-
ременных состояния и времени, математическую модель системы
называют детерминированной.
Если воздействия, приложенные к системе, и параметры модели
являются случайными функциями или случайными величинами, ма-
тематическую модель системы называют стохастической.
2.5. СТРУКТУРНЫЕ СХЕМЫ САУ
Система автоматического управления состоит из отдельных эле-
ментов, выполняющих свои функции так, чтобы управляемая вели-
чина могла быть поддержана на заданном значении или изменяться
по определенному закону. Элементы взаимосвязаны между собой и
в целом образуют структуру САУ. В общем случае под структурой
САУ можно понимать совокупность частей (элементов) системы, на
которые ее можно разбить по определенным признакам, и путей
передачи сигналов между ними.
Различают следующие структуры САУ: алгоритмическая, функ-
циональная и конструктивная.
Под алгоритмической структурой САУ понимают структуру, в
которой каждая ее часть предназначена для выполнения определен-
ного алгоритма преобразования входной величины, причем он яв-
ляется частью алгоритма функционирования всей САУ.
В функциональной структуре САУ каждая ее часть (элемент) вы-
полняет какую-то вполне определенную функцию; эти функции могут
60
Глава 2. Основные понятия управления ХТП
быть основными, такими как получение информации, ее переработ-
ка, сравнение сигналов, формирование законов управления, или
вспомогательными, такими как передача сигналов, преобразование
формы представления информации. Конечно, такое функциональ-
ное деление САУ условно.
Структуру САУ, в которой ее части (элементы) представляют
собой самостоятельные законченные конструкции, называют кон-
структивной структурой САУ. Графическое изображение структуры
САУ в виде прямоугольников с указанием в них условных обозначе-
ний путей передачи воздействий (сигналов) в виде линий со стрел-
кой в направлении передачи воздействий (сигналов) называют струк-
турной схемой САУ. С точки зрения теории автоматического управ-
ления большой интерес представляет функциональная структурная
схема.
Замечание
В дальнейшем изложении под термином «структурная схема» понима-
ется именно функциональная структурная схема.
2.6. ФУНКЦИОНАЛЬНАЯ СТРУКТУРА САР
Функциональная структурная схема системы автоматического
регулирования с одной регулируемой величиной j(t) представлена
на рис. 2.14.
Рис. 2.14. Функциональная схема САР
ОУ — объект управления; ПИП — первичный измерительный преобра-
зователь; НП — нормирующий преобразователь; И ИС — информацион-
но-измерительная система; Р — регулятор; ИУ — исполнительное уст-
ройство; ИМ — исполнительный механизм; РО — регулирующий орган
2.6. Функциональная структура САР
61
Система состоит из объекта управления (ОУ) и управляющего
устройства, к которому можно отнести измерительное устройство
(или информационно-измерительную систему, ИИС), автоматичес-
кий регулятор и исполнительное устройство. В химической техно-
логии ОУ может быть, например, реактор, в котором управляющее
устройство должно поддерживать заданный технологический режим.
Рассмотрим подробно функциональные элементы, входящие в
управляющее устройство.
Первичный измерительный преобразователь (ПИП — чувствитель-
ный элемент, сенсор) предназначен для преобразования регулируе-
мого параметра в сигнал измерительной информации в форме, удоб-
ной для обработки и дальнейших преобразований. Например, тер-
моэлектрический преобразователь, представляющий собой спай двух
разнородных проводников, преобразует температуру в термоэлект-
ролвижущую силу (ТЭДС).
Нормирующий преобразователь (НП) служит для взаимного со-
гласования входящих в систему управления элементов и дистанци-
онной передачи сигналов по каналам связи. Он осуществляет пре-
образование сигнала, полученного от ПИП, в эквивалентный ему
унифицированный сигнал. Возможно преобразование сигнала од-
ной физической природы в унифицированный сигнал той же самой
физической природы (например, преобразование ТЭДС в унифици-
рованный токовый сигнал от 0 мА до 5 мА) или в унифицированный
сигнал другой физической природы (например, преобразование ТЭДС
в унифицированный пневматический сигнал от 20 кПа до 100 кПа).
Полученный унифицированный сигнал соответствует текущему зна-
чению регулируемого параметра и может передаваться не только к
регулятору, но и к вторичному измерительному прибору или на си-
стемы более высокого уровня иерархии.
ПИП и НП являются элементами информационно-измеритель-
ной системы (ИИС).
Сигнал, соответствующий заданному значению регулируемого
параметра узд(т) формируется задающим устройством (на рис. 2.14
не изображено). Величина задающего воздействия может быть по-
стоянной или изменяться по определенному закону.
Примечание
В некоторых случаях задающее устройство конструктивно объединено
с регулятором.
Регулятор (Р) с помощью элемента сравнения определяет откло-
нение текущего значения регулируемого параметра от заданного
значения и формирует командный сигнал в соответствии с заложен-
ным в нем алгоритмом регулирования. Сигнал, формируемый регу-
62
Глава 2. Основные понятия управления ХТП
лятором, по мощности не всегда достаточен, чтобы управлять ИУ,
поэтому регулятор часто снабжается усилителем мощности.
Устройство автоматической системы управления, воздействую-
щее на технологический процесс в соответствии с полученным от
регулятора командным сигналом, называется исполнительным уст-
ройством (ИУ). Как правило, в нем можно выделить два функцио-
нальных элемента: регулирующий орган и исполнительный меха-
низм.
Исполнительный механизм (ИМ) предназначен для усиления мощ-
ности командного сигнала, получаемого от регулятора, и воздей-
ствия на регулирующий орган (РО).
Примечание
Исполнительный механизм, перемещающий затвор регулирующего
органа, часто называют исполнительным двигателем, или серводвигателем
(сервомеханизмом).
Регулирующий орган (РО) — техническое средство изменения
материального или энергетического потока, влияющего на регули-
руемую величину в ОУ. Это устройство, непосредственно воздей-
ствующее на ОУ для поддержания заданного значения регулируе-
мой величины или изменения ее по заданному закону.
При исследовании динамических свойств системы регулирова-
ния по каналу задающего воздействия (вход — задающее воздей-
ствие узд(т), выход — регулируемая величина у(т), возмущающее воз-
действие отсутствует или является постоянной величиной), систему
автоматического управления удобно изображать упрощенной струк-
турной схемой, представленной на рис. 2.15.
При исследовании динамических свойств системы регулирова-
ния по каналу возмущающего воздействия (вход — возмущающее
воздействие г/(т), выход — регулируемая величина у(т), задающее
воздействие является постоянной величиной) САР обычно изобра-
жают упрощенной структурной схемой, представленной на рис. 2.16.
Для повышения устойчивости и улучшения динамических свойств
системы управления в нее вводят корректирующие устройства (на
рис. 2.14 не показаны). В зависимости от способов подключения
корректирующие устройства делятся на последовательные и парал-
лельные. С помощью последовательных корректирующих устройств
происходит преобразование сигнала ошибки, и в управляющее
уЭД(1)в/<>Е('сМ р | °(т)I ~ b И(т)
Рис. 2.15. Структурная схе-
ма САР по каналу задаю-
щего воздействия
2.6. Функциональная структура САР
63
Рис. 2.16. Структурная схема САР по каналу возмущающего воздействия
воздействие вводятся составляющие, пропорциональные производ-
ной и интегралу от ошибки по времени. Параллельные корректиру-
ющие устройства (местные дополнительные обратные связи) пода-
ют сигнал с выхода элемента на вход одного из предыдущих. Функ-
ции корректирующих устройств могут выполнять компьютеры.
Рассмотрим конкретный пример автоматической системы регу-
лирования уровня жидкости в резервуаре. Принципиально система
регулирования может быть построена, как это показано на рис. 2.17.
Уровень жидкости £(т) зависит от разности управляющего воздей-
ствия — притока и возмущающего воздействия — стока Евых(т).
Если Евх(т) > Евых(т), то уровень жидкости в резервуаре 1 растет.
Если Евх(т) < Евых(т), то уровень жидкости в резервуаре уменьшает-
ся. Величина управляющего воздействия — притока Евх(т) определя-
ется положением затвора регулирующего органа (РО), перемещае-
мого электроприводом (ИМ).
Рис. 2.17. Схема САР уровня жидкости в резервуаре:
РО — регулирующий орган; ИМ — исполнительный механизм (элект-
ропривод); 1 — резервуар; 2 — измерители расхода;.? — алгебраические
блоки извлечения корня; 4— уровнемер; 5 — регулятор; 6— усилитель
мощности
64
Глава 2. Основные понятия управления ХТП
Сигнал, соответствующий действительному значению уровня
жидкости £(т), измеряется уровнемером 4 [£изм(т)] и сравнивается
с требуемым (заданным) уровнем £зд. Регулятор 5 в зависимости от
величины и знака рассогласования е(т) с помощью электропривода
увеличивает приток жидкости Fbx(t), если е(т) > 0, или уменьшает
приток жидкости Fbx(t), если е(т) < 0, поддерживая равенство FBX(r)
и РвыхСт) при заданном значении уровня £зл. Поскольку приток жид-
кости зависит не только от положения затвора регулирующего орга-
на, но и от других параметров (например, от перепада давления на
РО), для повышения точности регулирования величина £вх(т) из-
меряется и используется при формировании управляющего воз-
действия. Это приводит к появлению местной обратной связи. Изме-
нение стока £вых(т) нарушает материальный баланс в системе, т. е.
является возмущающим воздействием. Измеренное значение £вых(т)
используется регулятором для компенсации этого возмущающего
воздействия. Тем самым в системе используется как принцип уп-
равления по отклонению, так и принцип управления по возмуща-
ющему воздействию. Результатом является комбинированное регули-
рование.
Выходной сигнал некоторых расходомеров 2 пропорционален
квадрату расхода жидкости (см. разд. 5.8.1). Чтобы получить сигнал,
пропорциональный расходу, цепи измерения расходов содержат ал-
гебраические блоки извлечения корня 3.
Обозначив £зд = узд(т) — задающее воздействие, Гвых(т) = г/(т) —
возмущающее воздействие, £(т) = у (т) — выход системы, САУ уров-
ня жидкости в резервуаре можно представить структурной функци-
ональной схемой, изображенной на рис. 2.18.
Рис. 2.18. Функциональная схема САР уровня жидкости в резервуаре:
/ — задающее устройство; 2 — элемент сравнения; 3 — регулятор;
4 — усилитель мощности; 5— электропривод; 6— регулирующий орган;
7 — объект управления (резервуар); 8 — уровнемер; 9, 10 — линейные
расходомеры
2.7. Качество процесса управления
65
2.7. КАЧЕСТВО ПРОЦЕССА УПРАВЛЕНИЯ
Прежде чем приступить к анализу или синтезу системы управле-
ния, нужно выяснить, какими свойствами она должна обладать, и
договориться о том, как измерять ее качество.
1. Система управления должна быть устойчивой и предсказуе-
мым образом реагировать на входные воздействия. Требование ус-
тойчивости является обязательным для всех систем управления, так
как только устойчивая система работоспособна.
2. Все реальные системы подвержены возмущающим воздействи-
ям. Поэтому важную роль приобретает способность системы управ-
ления подавлять возмущающие воздействия.
3. Модель физической системы никогда не является точной.
В связи с этим характеристики реальной системы управления долж-
ны быть малочувствительны к параметрам математической модели,
которая использовалась при синтезе. Кроме того, характеристики
реальной системы управления должны быть малочувствительны к
параметрам объекта управления, которые могут изменяться с тече-
нием времени и в зависимости от окружающих условий (температу-
ры, влажности, давления и др.). Другими словами, система управле-
ния должна быть достаточно грубой (робастной).
2.7.1. Переходный процесс
Система управления постоянно находится в движении, т. е. по
сути своей является динамической системой, так как даже если зада-
ющее воздействие не меняется, возмущающие воздействия суще-
ствуют постоянно и носят случайный характер. Поэтому особый ин-
терес при анализе качества представляет поведение системы управ-
ления во времени.
Примечание
Динамическая система в своем первоначальном значении — это меха-
ническая система с конечным числом степеней свободы, состояние которой
характеризуется ее расположением (конфигурацией) и скоростью измене-
ния последнего, а закон движения указывает, с какой скоростью изменяется
состояние системы. В более широком смысле термин «динамическая сис-
тема» означает произвольную физическую систему, например САУ, движе-
ние которой описывается системой обыкновенных дифференциальных урав-
нений.
Если система управления устойчива, то показатели качества
можно определить по реакции системы на определенный входной
сигнал. Такой метод определения показателей качества называется
прямым.
3 Беспалов А В . Харитонов Н. И.
66
Глава 2. Основные понятия управления ХТП
Примечание
Существуют также косвенные методы анализа качества управления, на-
пример, по распределению корней характеристического уравнения систе-
мы (см. разд. 3.4.5).
Поскольку заранее не известно, каким в реальных условиях бу-
дет входное воздействие, при анализе качества системы управления
обычно выбирается некоторый типовой тестовый сигнал. Одним из
наиболее распространенных и тяжелых для систем управления ти-
повых тестовых сигналов является ступенчатый (рис. 2.19, а). Если
система управления удовлетворяет требованиям в условиях ступен-
чатого воздействия, она почти наверняка будет нормально работать
и в реальных условиях. Кроме того, системы управления в процессе
эксплуатации подвергаются внешним воздействиям, которые по виду
очень близки к ступенчатому воздействию.
Изменение выходной величины системы во времени с момента
нанесения воздействия до прихода ее в новое установившееся со-
стояние называют переходным процессом, т. е. процессом перехода из
одного установившегося состояния в другое. Протекание переход-
ного процесса определяется динамическими свойствами системы,
входными воздействиями, а также начальными условиями. Пере-
ходный процесс у(т) имеет две составляющие:
У(т) = УсСО + УвынСО- (2-2)
Составляющая ус(т) называется свободным (или собственным)
движением и зависит от свойств системы и начальных условий. Со-
ставляющая увын(т) называется вынужденным движением и зависит
от свойств системы и входного воздействия. Одно и то же входное
воздействие вызывает, в зависимости от динамических свойств сис-
темы, различные переходные процессы.
В случае, когда на систему, находившуюся при нулевых начальных
условиях, оказано единичное ступенчатое воздействие (рис. 2.19, а),
изменение во времени выходной величины системы обозначается
Л(т) и называется переходной функцией, а ее графическое изображе-
ние — переходной характеристикой (об этом подробнее см. разд. 3.2.2).
На рис. 2.19 приведены примеры переходных характеристик:
• апериодический сходящийся переходный процесс (рис. 2.19, б),
в котором наблюдается плавное отклонение выходной величины Л(т)
от первоначального установившегося значения и постепенный пе-
реход в новое установившееся состояние;
• колебательный сходящийся переходный процесс (рис. 2.19, в),
в котором выходная величина колеблется с постепенно затухающей
амплитудой и, в конечном итоге, приходит в установившееся состо-
яние, достигая
2.7. Качество процесса управления
67
3*
Рис. 2.19. Возможный вил переходных характеристик системы регулирования
68
Глава 2. Основные понятия управления ХТП
• апериодический расходящийся переходный процесс (рис. 2.19, г),
в котором наблюдается непрерывно возрастающее отклонение вы-
ходной величины от установившегося значения;
• колебательный расходящийся переходный процесс (рис. 2.19, Э),
в котором амплитуда колебаний выходной величины со временем
постепенно нарастает;
• колебательный гармонический переходный процесс (рис. 2.19, е),
в котором амплитуда колебаний выходной величины со временем
не меняется (характерен для консервативных систем).
Замечание
На качество и вид переходного процесса в системе управления оказы-
вают влияние как свойства технологического объекта управления, так и
свойства управляющего устройства и степень его воздействия на объект.
Увеличение воздействия управляющего устройства на объект приводит к
тому, что переходный процесс в системе управления изменяется от апери-
одического сходящегося до колебательного сходящегося. При слишком
большом воздействии система может даже стать неустойчивой.
2.7.2. Устойчивость
При синтезе системы управления ключевой проблемой является
обеспечение ее устойчивости.
Строгое определение устойчивости, пригодное на все случаи
жизни, дать очень сложно. При исследовании линейных систем
пользуются двумя определениями, приведенными ниже.
1. Ограниченный вход — ограниченный выход. Система считается
устойчивой, если при ограниченном входном сигнале ее выходной
сигнал также является ограниченным.
Примечание
Ограничения на выходной сигнал накладываются требованиями тех-
нологии. Если ограниченное входное воздействие приводит к такому изме-
нению управляемого параметра, при котором технологический режим ос-
тается приемлемым, то система управления считаются устойчивой. Если же
изменение управляемого параметра приводят к недопустимому технологи-
ческому режиму, то система управления считается неустойчивой.
2. Устойчивость по начальным условиям. Устойчивость определя-
ют по поведению системы управления, выведенной с помощью ка-
кого-то воздействия из состояния равновесия и предоставленной
самой себе после устранения этого воздействия. Система управле-
ния считается устойчивой, если она возвращается к исходному состо-
янию равновесия. Неустойчивая система удаляется от состояния рав-
новесия или совершает вокруг него колебания с нарастающей ам-
2.7. Качество процесса управления
69
плитудой. Если же система приходит в новое установившееся состо-
яние или совершает колебания с постоянной амплитудой, то гово-
рят, что она находится на границе устойчивости. Таким образом, под
устойчивостью понимают способность системы вернуться в исход-
ное равновесное состояние после устранения возмущающего воз-
действия, нарушившего ее равновесие.
Системы являются устойчивыми, если составляющая свободного
движения ус(т) со временем стремится к нулю:
Нгпус(т) = 0.
Устойчивы и, следовательно, работоспособны системы, в кото-
рых имеют место переходные процессы, показанные на рис. 2.19, б, в.
Ограниченно устойчивы системы, в которых наблюдается переход-
ный процесс, изображенный на рис. 2.19, е. Неустойчивы и, следо-
вательно, неработоспособны системы, которым соответствуют пе-
реходные процессы на рис. 2.19, г, д.
Устойчивость является необходимым, но не достаточным усло-
вием пригодности систем управления. Качество систем управления
оценивается также по их поведению в установившемся и переход-
ном режимах с помощью количественных параметров, называемых
показателями качества. Требования к системе управления, сформу-
лированные в виде ее показателей качества, позволяют ответить на
вопрос о том, насколько хорошо система выполняет задачу, ради
которой она была спроектирована.
2.7.3. Показатели, характеризующие
точность регулирования
Различие между желаемой и достигнутой целью управления ле-
жит в основе показателей, характеризующих точность управления.
В случае систем регулирования целью является заданное состоя-
ние объекта регулирования. Следовательно, точность регулирова-
ния определяется разницей между заданным и текущим значением
регулируемого параметра, т. е. ошибкой (погрешностью) регулирова-
ния (2.1):
е(т) = Узд(Т) - J(T).
Максимальная погрешность етах — наибольшее отклонение уп-
равляемого параметра от его заданного значения в процессе управ-
ления после нанесения на объект управления возмущающего воз-
действия. В общем случае величину максимальной погрешности стре-
мятся уменьшить до минимума.
70
Глава 2. Основные понятия управления ХТП
Статическая ошибка управления е„. Разность между новым ус-
тановившимся значением управляемого параметра и его задан-
ным значением определяет значение статической ошибки управ-
ления
е.„ - е(°°) = lim е(т). (2.3)
Статическая ошибка управления также должна стремиться к
минимуму.
2.7.4. Показатели, характеризующие
быстродействие
Время переходного процесса тпп — это продолжительность пере-
ходного процесса, охватывающего временной интервал от момента
нанесения возмущающего или управляющего воздействия до дости-
жения управляемым параметром нового установившегося значения
с заданной точностью:
|й(т)-/Ц<Д Vt > тпп, (2.4)
где = Л(~)= lim й(т).
Если * 0, то величину Д задают как некоторую долю от нового
установившегося значения, составляющую обычно от 2 % до 5 %,
иногда до 10 %, например, Д = 0,05Л„.
Время переходного процесса в системах регулирования называ-
ют иногда временем регулирования.
Время переходного процесса характеризует быстродействие сис-
темы и, как правило, должно быть минимальным.
Время достижения первого максимума ттах в колебательном схо-
дящемся процессе должно быть минимальным.
2.7.5. Показатели, характеризующие
колебательность переходного процесса
В системе регулирования с обратной связью, находящейся на
границе устойчивости, возникают незатухающие колебания регули-
руемой величины (рис. 2.19, е). Чем устойчивее система, тем быст-
рее затухают колебания в переходном процессе. Следовательно, по-
казатели, характеризующие колебательность переходного процесса,
характеризуют одновременно и запас устойчивости системы.
2.7. Качество процесса управления 71
Степенью затухания у называют отношение разности двух со-
седних, направленных в одну строну амплитуд, Л, и А3, к первой из
них А{:
V=[(Al-A3)/Al]100%. (2.5)
Как следует из выражения (2.5), возможны три типа колебатель-
ных процессов. Если у > 0, то колебания затухают (переходный про-
цесс 2 рис. 2.19, в). Если у = 0, то колебания являются незатухаю-
щими (переходный процесс 5 рис. 2.19, е). Если у < 0, то колебания
расходятся (переходный процесс 4 рис. 2.19, д).
Перерегулирование выражается иногда как отношение амплитуд
колебаний, направленных в разные стороны (например, второй ам-
плитуды — направлена вниз, к первой — направлена вверх):
о = (A2/At)- 100%. (2.6)
Перерегулирование также определяется выражением
с = [(Emax - eJ/Ej • Ю0%. (2.7)
Обычно САР настраиваются так. чтобы перерегулирование со-
ставляло от 10 % до 30 %.
Логарифмический декремент затухания'.
S = 1g (Л,/Л3). (2.8)
Колебательность системы можно охарактеризовать числом ко-
лебаний управляемой величины за время переходного процесса тпп.
Если в системе за время переходного процесса совершено число
колебаний меньше заданного, то система имеет требуемое качество
управления по колебательности.
2.7.6. Интегральные показатели
качества регулирования
Предъявляемые к системе управления требования по точности и
быстродействию, основанные на перечисленных выше показателях
качества, являются противоречивыми и не могут быть удовлетворе-
ны одновременно. Если настроить систему управления так, чтобы
точность регулирования была высокой, то переходные процессы в
ней будут продолжаться слишком долго. Наоборот, настройка сис-
темы управления, повышающая ее быстродействие, увеличивает
ошибки регулирования. Таким образом, оптимальная система регу-
лирования почти всегда основана на компромиссе между точностью
и быстродействием.
72
Глава 2. Основные понятия управления ХТП
Для совместной оценки точности и быстродействия систем уп-
равления используют интегральные показатели качества регулиро-
вания. В общем случае интегральный показатель качества имеет вид:
J = JZ[e(x), «(т), у(т), фт,
о
где f — некоторая функция ошибки, управляющего воздействия,
регулируемой величины и времени.
Оптимальной считается система управления, которой соответ-
ствует минимальное значение интегрального показателя качества.
Среди интегральных показателей качества регулирования наи-
большую практическую ценность представляют следующие четыре.
Янтеграл от Модуля Ошибки (ИМО)
ИМО = ||е(т)|дт (2.9)
о
используется при имитационном моделировании на компьютере.
Для уменьшения вклада большой первоначальной ошибки и учета
ошибки, появляющейся в дальнейшем, применяется Янтеграл от
взвешенного по Бремени Модуля Ошибки (ИВМО):
ЯБМО = J т |е (т)| dx (2.10)
о
Янтеграл от Квадрата Ошибки (ИКОу.
И КО = Jf2(r)dT. (2.11)
о
Янтеграл от взвешенного по Бремени Квадрата Ошибки (ИВКО)\
И В КО = jTE2(T)dT. (2.12)
о
Оценка качества по ИВМО из рассматриваемых является одной
из наилучших, поскольку с ее помощью проще всего находят мини-
мальное значение интеграла при изменении параметров системы.
Примечание
Верхний предел интегрирования выбирается достаточно произволь-
но, но лучше для практической оценки верхний предел брать равным
времени переходного процесса, т. е. чтобы интеграл стремился к конеч-
ному значению.
2.7. Качество процесса управления
73
Показатели качества выбирают в зависимости от требований,
предъявляемых к системе управления. Система управления обладает
необходимым качеством, если она удовлетворяет заданным услови-
ям качества, а переходный процесс не выходит из области допусти-
мых значений.
2.7.7. Типовые оптимальные процессы
регулирования
Оптимальным процессом регулирования называют процесс, ко-
торый соответствуют минимуму (или максимуму) какого-либо по-
казателя качества регулирования. В зависимости от регулируемого
технологического процесса и возмущающих воздействий наилучшими
могут быть признаны различные по своему характеру процессы ре-
гулирования.
Из устойчивых переходных процессов в качестве оптимального
(удовлетворяющего технологическим требованиям) выбирают один
из трех, приведенных на рис. 2.20:
1) граничный апериодический процесс с минимальным време-
нем регулирования тпп min (рис. 2.20, а);
2) процесс с 20-процентным перерегулированием и минималь-
ным временем первого полупериода колебаний (рис. 2.20, б);
3) процесс с минимальным значением интеграла от квадрата
ошибки (ИКО)тт (рис. 2.20, в).
Для граничного апериодического переходного процесса характер-
но отсутствие перерегулирования, наименьшее воздействие управ-
ляющего устройства на объект и минимальное время регулирования
тпп по сравнению с процессами 2 и 3.
Примечание
Наименьшее воздействие управляющего устройства на объект приво-
дит к наибольшей среди трех оптимальных процессов регулирования мак-
симальной погрешности регулирования етах.
Область применения: при значительном влиянии воздействия,
которое является управляющим для рассматриваемой регулируемой
величины, на другие технологические величины объекта (для кото-
рых оно является возмущающим воздействием), чтобы свести их
отклонение к минимуму.
Для процесса с 20-процентным перерегулированием характерны
большее управляющее воздействие и большее время регулирования
тпп, но меньшая максимальная погрешность регулирования (по срав-
нению с процессом /).
74
Глава 2. Основные понятия управления ХТП
Рис. 2.20. Типовые оптимальные переходные процессы регулирования
Область применения-, при управлении объектами, которые допус-
кают перерегулирование. Минимальное время первого полупериода
колебаний, в котором имеет место наибольшее отклонение регули-
руемой величины от задания, является преимуществом, если осталь-
ная часть переходного процесса, где отклонения от задания уже срав-
нительно невелики, менее существенна.
Для процесса, обеспечивающего минимум интегрального квадра-
тичного критерия, характерны наибольшее управляющее воздей-
ствие, наибольшее время регулирования тпп и наименьшая макси-
мальная погрешность регулирования Етах (по сравнению с процес-
сами 1 и 2), а также значительное перерегулирование (до 40 %).
Область применения: управление объектами, для которых макси-
мальная погрешность регулирования етах должна быть как можно
меньше.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Что понимают под управлением?
2. Как можно описать состояние объекта управления?
3. Объясните понятия «управление», «регулирование», «объект управ-
ления», «управляющее устройство».
Контрольные вопросы
4. Каково назначение АСУП, АСУ ТП и локальных САР?
5. Дайте определение САУ.
6. Какими переменными характеризуется объект управления?
7. Каковы основные принципы управления?
8. Объясните сущность понятий «прямая связь» и «обратная связь».
9. Какие воздействия называются возмущающими, а какие — управ-
ляющими?
10. Поясните понятия «качественные (интенсивные) параметры» и «ко-
личественные (экстенсивные) параметры».
12. Сравните управление по отклонению с управлением по возмущаю-
щему воздействию.
13. Что характерно для комбинированного управления?
14. По каким признакам классифицируют системы управления?
15. Чем отличается астатическая система управления от статической?
16. Что понимают под структурой САУ?
17. Из каких функциональных элементов состоит САР?
18. Как оценить качество управления?
19. Что понимают под устойчивостью системы управления?
20. Назовите основные показатели качества управления.
21. Какие показатели качества позволяют одновременно оценивать как
точность, так и быстродействие систем управления?
22. Охарактеризуйте типовые оптимальные процессы регулирования.
ГЛАВ А_______________________
ОСНОВЫ ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Никакой достоверности нет в науках
там, где нельзя приложить ни одной из
математических наук, и в том, что не име-
ет связи с математикой.
Леонардо да Вити
Теория, рассматривающая общие принципы построения систем
автоматического управления (САУ) и закономерности протекающих
в них процессов, получила название теории автоматического управ-
ления (ТАУ)
Основными задачами ТАУ являются задачи синтеза и анализа САУ.
Задача анализа (от греч. avaZvoio — разложение, расчленение) —
исследование поведения системы управления с заданными свойства-
ми в различных условиях, например, исследование возникающих в
системе управления переходных процессов.
Задача синтеза (от греч. <rijv0eaio — соединение, составление) —
построение системы управления с наперед заданным поведением
(или функционированием). В результате решения задачи синтеза
определяют состав, структуру и параметры всех устройств САУ, удов-
летворяющей заданным техническим требованиям к устойчивости,
качеству переходных процессов и точности управления в установив-
шихся режимах.
3.1. МОДЕЛИРОВАНИЕ
КАК МЕТОД ИССЛЕДОВАНИЯ САУ
Основу теории автоматического управления составляют матема-
тические модели, отражающие взаимосвязь элементов САУ друг с дру-
гом и с внешней средой. Прежде чем перейти к рассмотрению мате-
матических моделей систем, необходимо пояснить сущность модели-
рования. Как правило, экспериментально исследуют свойства не
3.1. Моделирование как метод исследования САУ
77
реальных систем, а их моделей. Модель — это материальный или мыс-
ленно представленный объект, который в процессе познания (изуче-
ния) используется вместо оригинала (например, химического реакто-
ра), сохраняя его основные свойства и отношения, важные для дан-
ного исследования. Моделирование — построение и изучение моделей
реально существующих систем, а также выполнение эксперимен-
тов на модели вместо прямых экспериментов на реальной системе.
Метод моделирования широко применяется как основной метод науч-
ного познания реальной действительности, являясь в ряде случаев
единственным средством познания сложных систем.
Многообразие исследуемых объектов и ХТП, различных целей и
задач моделирования привело к появлению значительного числа
моделей, разделяемых по способу построения на модели физичес-
кие и абстрактные.
Физическая модель — это материально реализованная система
(например, технологическая установка или аппарат), имеющая ту
же физическую природу, что и моделируемый объект, и предназна-
ченная для проведения экспериментальных исследований с целью
получения информации о моделируемом объекте (например, о ХТП).
В основе физического моделирования лежат теория подобия и
анализ размерностей. Необходимыми условиями физического мо-
делирования являются геометрическое подобие и физическое подо-
бие модели и моделируемого объекта: в сходственные моменты вре-
мени и в сходственных точках пространства значения переменных
величин, характеризующих явления в моделируемом объекте, долж-
ны быть пропорциональны значениям тех же величин для модели.
Замечание
В химической технологии теория подобия включает в себя геометричес-
кое, физическое, гидродинамическое, тепловое, диффузионное подобия.
Физические модели, предназначенные для выполнения экспе-
риментальных исследований в химической технологии, делятся на
три группы: лабораторные установки, пилотные установки и опыт-
но-промышленные установки. В лабораторных условиях решаются
отдельные задачи общего исследования процесса переработки срав-
нительно небольшого количества сырья (материальные ограниче-
ния сведены к минимуму). Размеры пилотных установок изменяют-
ся в достаточно широких пределах, но при этом учитываются все
особенности, характерные для промышленных условий проведения
процесса (наличие примесей в перерабатываемом сырье, работа в
течение длительного времени и т. п.). Если пилотные испытания не
позволяют ответить на все возникающие вопросы о масштабном
переносе, то эксперименты проводят на опытно-промышленных
78
Глава 3. Основы теории автоматического управления
установках. По существу, это промышленные установки в несколь-
ко уменьшенном масштабе (приблизительно 1/10 от размеров, не-
обходимых для обеспечения требуемой мощности производства). Но
даже опытно-промышленные установки не всегда позволяют полу-
чить информацию, надежную и достаточную с точки зрения масш-
табирования. Причина заключается в том, что процессы теплопере-
носа и массопереноса сложным образом зависят от размеров аппа-
ратов, и не всегда удается одновременно удовлетворить всем
необходимым критериям подобия.
Аналоговое моделирование основано на аналогии явлений, имею-
щих различную физическую природу, но описываемых одинаковыми
математическими уравнениями (дифференциальными, алгебраичес-
кими или какими-либо другими). Например, механические и элект-
рические колебания описываются одними и теми же дифференци-
альными уравнениями; поэтому с помощью механических колебаний
можно моделировать электрические, и наоборот. Аналоговое моде-
лирование применяется для замены изучения одних систем изучени-
ем других систем, более удобных для лабораторного исследования.
Так, на электрических моделях можно изучать механические, гидро-
динамические, акустические, химические и другие явления.
Решить проблему масштабного перехода, избежать дорогостоя-
щих экспериментов, сократить время на их проведение возможно,
используя для описания системы абстрактные модели, разновидно-
стью которых являются математические модели
В случае применения математического моделирования открыва-
ются широкие возможности количественного анализа систем управ-
ления с помощью современных математических методов. Другим
важным достоинством математического моделирования является
возможность использования одних и тех же моделей для исследова-
ния систем, имеющих различную физическую природу.
3.1.1. Математические модели САУ
На первом этапе исследования систем автоматического управ-
ления рассматривают их функциональные схемы (как, например, на
рис. 2.18), ограничиваясь качественным описанием. Такое описание
можно отнести к разряду содержательных (или неформальных), и
оно содержит информацию, достаточную для построения функцио-
нальной схемы, служащей для разработки формального (математи-
ческого) описания системы. Для решения задач анализа и синтеза
систем управления необходимы количественные характеристики,
поэтому кардинальным понятием теории систем является матема-
тическая модель (или оператор системы).
3.1. Моделирование как метод исследования САУ
79
Построение любой системы управления обычно начинается с
изучения свойств объектов управления и составления их математи-
ческих описаний.
Под математической моделью (математическим описанием) объек-
та управления в химической технологии можно понимать совокуп-
ность математических уравнений (систему дифференциальных или
конечно-разностных уравнений), отражающих взаимосвязь выход-
ных и входных величин объекта, дополненную ограничениями, на-
кладываемыми на эти величины условиями их физической реализа-
ции и безопасной эксплуатации.
Замечание
Подробно основы моделирования химико-технологических процессов
рассмотрены в [11].
Математические модели обычно строят на основе фундаменталь-
ных законов сохранения массы, энергии, импульса и количества
вещества. При этом в математическую модель не обязательно вклю-
чать большое количество алгебраических или дифференциальных
уравнений, в особенности, с частными производными, если это,
конечно, допустимо. Необходимо помнить, что более сложная мате-
матическая модель может точнее описать реальную физическую си-
стему, однако ее построение и проверка адекватности потребуют
больше экспериментальных данных. Кроме того, использование
сложной математической модели может привести к неоправданным
трудностям при анализе или синтезе системы управления. При со-
ставлении математического описания САУ приходится идти на свое-
образный компромисс противоречивых требований: математическая
модель должна быть простой, но в то же время наиболее полно и
верно отражать свойства реальной системы.
Дополнительная информация
Процесс математического моделирования, т. е. исследования явления
с помощью математического моделирования, подразделяют обычно на че-
тыре этапа
Первый этап: формулирование основных законов, связывающих ос-
новные объекты модели. Здесь требуется глубокое проникновение в изуча-
емое явление и необходимость сформулировать качественные представле-
ния о связях между объектами модели в математических терминах
Второй этап: исследование математических задач, к которым привело
математическое моделирование. На этом этапе необходимо решить прямую
задачу, иначе говоря, при анализе модели получить выходные данные для
их дальнейшего сопоставления с результатами наблюдения изучаемого яв-
ления. Важную роль играют на этом этапе математический аппарат и вы-
числительная техника.
80
Глава 3. Основы теории автоматического управления
Третий этап: выяснение вопроса о согласовании результатов наблюде-
ний с теоретическими следствиями модели в пределах точности наблюде-
ния, т. е. удовлетворяет ли принятая гипотетическая модель критерию прак-
тики. Поскольку часто при построении модели некоторые характеристики
не определяются, приходится решать обратные задачи, в которых характе-
ристики модели (параметрические, функциональные) определяются таким
образом, чтобы выходная информация была сопоставима в пределах точ-
ности наблюдений с результатами наблюдений изучаемого явления. Если
ни при каком выборе характеристик этим условиям нельзя удовлетворить,
то модель не пригодна для исследования изучаемого явления.
Четвертый этап: последующий анализ модели (в связи с накоплением
данных об изучаемом -явлении) и ее уточнение. Однако может наступить
момент, когда выводы, полученные на основе предложенной модели, не
соответствуют нашим знаниям о изучаемом явлении, и тогда необходимо
построить более совершенную модель.
Рассмотрим классический пример, иллюстрирующий характерные эта-
пы построения математической модели: модель Солнечной системы.
Первый этап: наблюдения звездного неба в далекой древности позво-
лили выделить планеты из всего многообразия небесных светил (выделе-
ние объектов изучения).
Второй этап: определение закономерностей движения планет (опреде-
ления объектов и их взаимосвязей являются исходными положениями —
«аксиомами» — гипотетической модели). Модели Солнечной системы под-
вергаются ряду усовершенствований: первая геоцентрическая модель Пто-
лемея, выдвинутая во II веке н.э. (планеты и Солнце вращаются вокруг
Земли), описывает движения планете помощью правил (формул). В 1543 г.
Н. Коперник предлагает новую качественную (но не математическую) ге-
лиоцентрическую модель, полагающую, что планеты вращаются вокруг
Солнца. Но пока еще не существует параметров системы (радиусов ок-
ружностей и угловых скоростей движения), приводящих в соответствие
количественные выводы теории с наблюдениями. Затем (начало XVII в.)
И. Кеплер предлагает кинематическую модель, описывая движение каждой
модели обособленно, не вскрывая причины, вызывающие эти движения.
Третий этап: И. Ньютон (вторая половина XVII в.) предлагает динами-
ческую модель, основанную на законе всемирного тяготения, которая со-
гласуется с кинематической моделью, поскольку из динамической системы
двух тел «Солнце—планета» следуют законы Кеплера.
Четвертый этап: К середине XIX в. выводы динамической модели, объек-
тами которой были видимые планеты, входят в противоречие с накоплен-
ными наблюдениями: движение Урана уклоняется от движения, теорети-
чески вычисляемого. И тогда У. Неверье (1846) расширяет систему наблю-
даемых планет новой гипотетической планетой (названной им Нептуном)
и строит новую математическую модель Солнечной системы, определяя
массу и закон движения новой планеты так, что противоречия с движения
Урана снимаются. Неверье указывает место новой планеты, образно говоря,
кончиком пера, и планету Нептун открывают. В 1930 г. таким же образом —
расхождением теоретической и наблюдаемой траекторий движения — от-
крывают планету Плутон.
3.1. Моделирование как метод исследования САУ
81
Математическая модель должна учитывать все наиболее суще-
ственные особенности объекта управления, важные с точки зрения
его управления, и достаточно полно и верно качественно и количе-
ственно описывать его свойства.
По своей физической сути процессы, протекающие в объекте
управления, делятся на детерминированные и стохастические.
Детерминированными называются такие процессы, в которых
определяющие величины изменяются непрерывно по вполне опре-
деленным закономерностям. При этом значения выходных величин,
характеризующих процесс, однозначно определяются значениями
входных величин. Для математического описания детерминирован-
ных процессов применяют методы классического анализа и числен-
ные методы.
Пример детерминированного процесса: перемешивание реакци-
онной смеси в проточном реакторе с мешалкой, в котором достига-
ется ее равномерное перемешивание.
Зная математическую модель детерминированной САУ, можно
предсказать, как будет изменяться выходная величина системы в
ответ на любое входное воздействие, что очень важно для оценки
работающих и проектирования новых САУ.
Любая САУ осуществляет преобразование информации, т. е. каж-
дой входной величине ставится в соответствие определенная выход-
ная величина. Допустим, что X и Y — множества входных и выход-
ных сигналов детерминированной САУ. Если каждому элементу xg X
ставится в соответствие определенный элемент у е У, то тем самым
задается оператор системы А. Взаимосвязь между входом и выходом
системы может быть записана в виде:
j’(t) = Ях(т): х(т) = Л“'у(т) (3.1)
Операторное уравнение (3.1) считают математической моделью
детерминированной САУ, так как оно устанавливает количествен-
ную взаимосвязь между входом х(т) и выходом Хт) системы.
В подавляющем большинстве случаев операторное уравнение
системы относится к классу дифференциальных уравнений (или экви-
валентных им интегральных уравнений).
Задать оператор системы означает задать правило определения
выходного сигнала этой системы по ее входному сигналу.
Стохастическими называются такие процессы, в которых опре-
деляющие величины являются случайными величинами с опреде-
ленным распределением вероятностей. При этом значения выход-
ных величин, характеризующих процесс, не находятся в четком со-
ответствии со значениями входных величин. Для математического
описания стохастических процессов применяют аппарат теории ве-
роятности и математической статистики.
82
Глава 3. Основы теории автоматического управления
Пример стохастического процесса: турбулентные течения жид-
костей и газов.
В соответствии с делением процессов, протекающих в объекте
управления, различают детерминированные и стохастические мате-
матические модели.
Замечание
Стохастические математические модели используются также при ана-
лизе больших химико-технологических систем.
САУ можно классифицировать по классам дифференциальных
уравнений, которыми они описываются. Следуя классификации си-
стем управления по математическому описанию, все системы уп-
равления делятся на два основных класса: линейные и нелинейные
(т. е. по виду дифференциальных уравнений, описывающих поведе-
ние системы в динамике). При этом каждый класс систем разбит на
четыре группы: стационарные с сосредоточенными параметрами;
стационарные с сосредоточенными и распределенными парамет-
рами; нестационарные с сосредоточенными параметрами; неста-
ционарные с сосредоточенными и распределенными параметрами
(см. разд. 2.4.7).
Первая группа систем описывается обыкновенными дифферен-
циальными уравнениями с постоянными коэффициентами. Во вто-
рой группе в системах с распределенными параметрами отдельные
устройства системы (или объект управления в ней) описываются
дифференциальными уравнениями с частными производными.
Если основные переменные ХТП изменяются только во време-
ни, то модели, описывающие такие процессы, называют математи-
ческими моделями с сосредоточенными параметрами и представляют
их в виде обыкновенных дифференциальных уравнений.
Если основные переменные ХТП изменяются и во времени, и в
пространстве, то модели, описывающие такие процессы, называют
математическими моделями с распределенными параметрами и пред-
ставляют их в виде дифференциальных уравнений с частными произ-
водными.
Полная математическая модель включает описание связей между
основными переменными процесса в статическом режиме (стати-
ческая модель) и во времени при переходе из одного режима в другой
(динамическая модель).
Статическая модель. Вначале анализируют физико-химические
закономерности технологического процесса, его целевое назначе-
ние, основные уравнения, которыми можно описать этот процесс и
его особенности. Затем выявляют входные (управляющие и возму-
щающие воздействия) и выходные (управляемые переменные) пе-
3.J. Моделирование как метод исследования САУ
83
ременные процесса. Далее определяют связи между названными пе-
ременными и граничные условия протекания процесса. Статичес-
кая модель содержит уравнение, описывающее поведение объекта в
статическом режиме, т. е. показывает взаимосвязь между входными
и выходными величинами объекта управления:
y=f(u,d), (3.2)
где и — управляющее воздействие; d — возмущающее воздействие.
Это уравнение называется уравнением статики и является алгеб-
раическим или дифференциальным уравнением, содержащим про-
изводные по какому-либо параметру, кроме времени (условие неиз-
менности координат во времени).
Динамическая модель. Построение динамической модели пред-
полагает определение динамических характеристик процесса экспе-
риментально, теоретически или сочетая оба способа. Динамическая
модель содержит уравнения динамики
y=f(u,d,i), (3.3)
устанавливающие взаимосвязь между основными переменными про-
цесса при изменении их во времени (т. е. описывающие поведение
объекта в динамическом режиме), а также ограничения, накладыва-
емые на переменные:
Утт — У — .Утах’
Snin — и — нтах •
Динамическая модель процесса может быть построена в виде
передаточных функций, в виде обыкновенных дифференциальных
уравнений или дифференциальных уравнений с частными произ-
водными, в виде конечно-разностных уравнений, в виде спектраль-
ных характеристик и т. д.
Уравнение статики можно получить из уравнения динамики, если
все входящие в него производные по времени приравнять к нулю.
Дополнительная информация
Наряду с применяемым методом переменных вход—выход в теории авто-
матического управления используется метод переменных состояния, который
оказывается более удобным для исследования таких свойств систем управле-
ния, как наблюдаемость, идентифицируемость, управляемость, адаптируемость.
Наблюдаемость. Измерение, наблюдение — необходимая составная часть
управления. «Наблюдение», «измерение» сопровождается измерением ко-
ординат, параметров и в понятия «наблюдение», «измерение» вкладывает-
ся практически одинаковый смысл. В отличие от понятий «наблюдение»,
«измерение» понятия наблюдаемость и измеримость отличаются различным
содержанием в теории автоматического управления. Под измеримостью по-
84
Глава 3. Основы теории автоматического управления
нимают возможность непосредственного измерения той или иной физи-
ческой величины, а под наблюдаемостью понимают возможность косвен-
ного определения величин на основе измерения некоторых других величин
и использовании априорной информации. Наблюдаемость рассматривают
как в пространстве состояний, так и в пространстве сигналов.
Идентифицируемость. Параметрическая идентифицируемость пред-
ставляет собой возможность определения параметров математической
модели системы или технологического процесса по результатам измере-
ния определенных выходных величин в течение некоторого интервала
времени
Управляемость. Понятие управляемости связано с переходом системы
из одного состояния в другое. Управляемости придают либо структурно-
качественный, либо количественный смысл. Структурно-качественный
смысл управляемости появляется как принципиальная возможность пере-
хода управляемой системы из одного заданного множества состояний в
другое множество состояний за конечное время. При количественном ис-
следовании управляемости рассматривают различные характеристики пе-
реходных процессов при простейших типовых управляющих воздействиях.
Управляемость, как правило, рассматривают применительно к детермини-
рованным процессам (возможно построение стохастических аналогов за-
дач управляемости). Рассматривают управляемость как динамических объек-
тов, не оснащенных регуляторами, так и систем, содержащих множество
замкнутых контуров управления. В любом случае управляемость зависит от
структуры системы, состава органов управления, значений параметров,
располагаемой энергии управления.
Адаптируемость рассматривают как частный случай управляемости
3.1.2. Декомпозиция САУ
Объекты управления химической технологии характеризуются
высокой сложностью и в общем случае являются инерционными,
вероятностными, многомерными, нелинейными, нестационарными
динамическими системами. Они описываются нелинейными диф-
ференциальными уравнениями с частными производными, реше-
ние которых в общем виде получить довольно сложно.
Большинство задач, связанных с исследованием САУ химико-
технологических объектов, решается на основе детерминирован-
ной, одномерной или многомерной, линейной, стационарной ма-
тематической модели с сосредоточенными параметрами. Такая
модель позволяет применять принцип суперпозиции, заключающийся
в том, что каждая входная величина системы создает свою состав-
ляющую выходной величины независимо от изменения других
входных величин. Другими словами, это позволяет рассматривать
поведение САУ отдельно по каждому каналу прохождения сигна-
ла от его входа к его выходу (рис. 3.1). Поэтому естественно жела-
ние описать динамическое поведение САУ линейными неодно-
3.1. Моделирование как метод исследования САУ
85
Рис. 3.1. Схема двухканаль-
ной системы, иллюстрирую-
щая принцип суперпозиции
родными дифференциальными уравнениями с постоянными ко-
эффициентами.
Примечание
Принцип суперпозиции (принцип наложения) — допущение, согласно
которому результирующий эффект сложного процесса воздействия пред-
ставляет собой сумму эффектов, вызываемых каждым воздействием в от-
дельности, при условии, что последние взаимно не влияют друг на друга.
Принцип суперпозиции строго применим к так называемым линейным сис-
темам. поведение которых описывается линейными соотношениями
Чтобы облегчить математическое описание, САУ разбивают на
отдельные элементы (динамические звенья), получить математичес-
кую модель каждого из которых проще, чем для САУ в целом. Такая
процедура называется декомпозицией
При анализе и синтезе САУ разделяю г на элементы не по функ-
циональному или конструктивному признаку, а по динамическим свой-
ствам, что позволяет разные элементы системы с различными прин-
ципами действия и с различным конструктивным оформлением опи-
сать одинаковыми уравнениями.
Полученные в результате декомпозиции САУ динамические зве-
нья должны быть направленного действия (сигнал в звене идет в од-
ном направлении — только от входа к выходу; сигнал на выходе
звена не оказывает никакого воздействия на сигнал на его входе).
Очевидно, что математическое описание (получение дифферен-
циального уравнения) всей САУ составляется из математических
описаний (дифференциальных уравнений) ее отдельных элементов,
причем стандартные средства автоматики, такие как управляющие
устройства (регуляторы, контроллеры), первичные измерительные
преобразователи (датчики), исполнительные устройства (регулиру-
ющие органы и исполнительные механизмы) и др., имеют заведомо
известные характеристики и описываются известными уравнения-
ми. Совокупность всех уравнений элементов позволяет получить
уравнение системы управления в целом.
Пример: на рис. 3.2, а изображен каскад, состоящий из двух
реакторов. На выходе из второго реактора поставлен насос, а патру-
бок из первого реактора не опущен во второй реактор. Если изме-
нить производительность насоса, то уровень реакционной смеси во
86
Глава 3. Основы теории автоматического управления
Рис. 3.2. Объект регулирования — каскад, состоящий из двух реакторов:
а — объект по каналу управляющего воздействия можно разбить на де-
тектирующие звенья (см. рис. 3.3); б — объект нельзя разбить на детек-
тирующие звенья. L2 — регулируемый параметр; F2 — возмущающее воз-
действие; F — управляющее воздействие
втором реакторе изменяется, однако это изменение не скажется на
притоке жидкости из первого реактора во второй. В этом случае
система реакторов разбивается на детектирующие звенья (рис. 3.3).
Патрубок на выходе из первого реактора удлинили и поместили во
второй реактор (рис. 3.2, б). Второй реактор перестает быть детекти-
рующим звеном, поскольку изменение уровня реакционной смеси
во втором реакторе при изменении производительности насоса вли-
яет на поступление жидкости из первого реактора во второй. В этом
случае система реакторов не разбивается на детектирующие звенья.
Рассмотрим локальную САУ как линейную систему. В этом слу-
чае уравнение динамики линейной системы и-го порядка представ-
ляет собой неоднородное линейное дифференциальное уравнение с
постоянными коэффициентами, записываемое так:
dny dn-‘y
а„ —— + ।-----—
" dr" dr'
dmx dm-*x
“ dT™ + ^-1 dTzn-l
dy
^r + - + aid7 + o°r =
+ - + bl^- + box.
ат
(3-4)
Рис. 3.3. Структурная схема
объекта (рис. 3.2, а), представлен-
ного в виде детектирующих зве-
ньев по каналу управляющего
воздействия
3.1. Моделирование как метод исследования САУ
87
Решить уравнение (3.4) — значит найти у = /(т) при известном
изменении входного воздействия х во времени.
Замечание
Если правая часть уравнения (3.4) будет равна 0, тогда получим одно-
родное линейное дифференциальное уравнение с постоянными коэффи-
циентами.
Для решения любой задачи, связанной с анализом динамики САУ,
необходимо располагать дифференциальным уравнением исследуе-
мой системы. Итак, при составлении дифференциальных уравнений
динамики системы автоматического управления (регулирования) ее
разбивают на динамические звенья и записывают уравнения каждо-
го звена в отдельности. Уравнения всех звеньев представляют собой
единую систему, которую возможно преобразовать к одному урав-
нению, исключая промежуточные переменные.
Такие динамические звенья отличаются друг от друга математичес-
кими зависимостями, связывающими входные и выходные параметры,
и обладают детектирующими свойствами (направленностью действия).
Итак, динамическое звено — это математическая модель системы
управления или любого ее элемента, отражающая определенные
динамические свойства элемента вне зависимости от физической
природы протекающих в нем процессов. Например, с точки зрения
динамических свойств термоэлектрический преобразователь, гидрав-
лическая емкость, электрическая RC-цепь, регулирующий клапан
являются одинаковыми динамическими звеньями, поскольку опи-
сываются одним и тем же дифференциальным уравнением.
3.1.3. Составление дифференциальных уравнений
элементов САУ
Составление дифференциальных уравнений основано, как пра-
вило, на законах сохранения массы и энергии и уравнениях связи
между качественными (интенсивными) и количественными (экстен-
сивными) параметрами. При составлении дифференциального урав-
нения выявляются все факторы, от которых зависит исследуемый
процесс. Как правило, для большого диапазона изменения управля-
емой величины уравнения статики не линейны.
Первый шаг в составлении уравнений динамики элемента систе-
мы управления — выявление физического закона, определяющего
его поведение: закон сохранения массы и энергии, второй закон
Ньютона, другие основные законы физики. Исходное дифференци-
альное уравнение элемента САУ — это, по существу, математичес-
88
Глава 3. Основы теории автоматического управления
Рис. 3.4. Схема резер-
вуара со свободным
истечением жидкости
кое выражение физического закона, определя-
ющего поведение этого элемента.
Затем, второй шаг — определение факторов,
от которых зависят переменные, входящие в
исходное дифференциальное уравнение, и ус-
тановление аналитических выражений, харак-
теризующих эту зависимость.
Рассмотрим пример (рис. 3.4) — резервуар
со свободным истечением жидкости, где FBX —
объемный расход поступающей в резервуар
жидкости (приток); fBbIX — объемный расход
жидкости на выходе из резервуара (сток); L —
уровень жидкости в резервуаре; V — объем жид-
кости в резервуаре; А — площадь поперечного
сечения резервуара (А = const).
Запишем уравнение материального баланса
резервуара:
(FBX-FBbIX)dT = dr.
(3-5)
Объем жидкости в резервуаре:
dV= d(AL) = AdL. (3.6)
Величина объемного расхода на линии стока определяется уров-
нем жидкости в резервуаре:
Л.ь,х = ovi, (3.7)
где коэффициент а зависит от гидравлического сопротивления и
площади поперечного сечения выходного патрубка. При небольших
изменениях расхода величину а можно считать постоянной
Подставим выражения (3.6) и (3.7) в уравнение (3.5)
ГТ Г~Г Л dL
^вх — L — А
ат
и преобразуем его, получив при этом:
Л dL
a dr
ГГ 1 г
+ 41-арвх.
(3.8)
Как мы уже говорили, реальные системы чаще всего можно опи-
сать нелинейными уравнениями. Действительно, даже в этом конк-
ретном случае статическая характеристика (3.7) не линейна. Жела-
тельно упростить это уравнение, т. е. заменить нелинейное уравне-
ние на линейное. Замена реальной нелинейной характеристики
линейной называется линеаризацией.
3.]. Моделирование как метод исследования САУ
89
3.1.4. Линеаризация уравнений
Линеаризуем нелинейную статическую характеристику рассмот-
ренного выше примера графическим методом (рис. 3.5). Линеариза-
цию проводят относительно некоторого статического режима, в каче-
стве которого удобно использовать номинальный статический режим.
Выберем на графике зависимости £вь|х = f(L) точку с координа-
тами (£0, £вых0), соответствующую заданному (или номинальному)
режиму работы резервуара. То есть £вых0 соответствует Lo в номи-
нальном режиме. Введем обозначения:
д£(т) = £(т)-£0;
(Т ) = FBUX (Т) - ЛыхО = Лых [£ W] - Л>ых (М‘
Величины Д£вых и Д£ называют отклонениями параметров от но-
минальных значений (или приращениями параметров), а уравне-
ния, в которых эти величины используются, называют «уравнения-
ми в отклонениях» (или «уравнениями в приращениях»).
Если отклонения уровня жидкости в резервуаре Д£ и стока жид-
кости ДГВЫХ достаточно малы, то криволинейный участок статичес-
кой характеристики £вых = f (£) в окрестностях точки (£0, FBUx0)
можно заменить прямой линией (касательной или секущей).
Проводя через точку (£0, Гвых0) касательную к линеаризуемой
статической характеристике, в определенных пределах заменяем кри-
волинейный участок статической характеристики на прямолиней-
ный. Рассматриваемый рабочий участок изобразим в новой системе
координат д£ — ДГВЫХ (рис. 3.6).
Запишем уравнение рабочего участка (прямой линии):
^Ых-^ь.хо=Л(1-^о)> (3-10)
Рис. 3.5. Графическая линеаризация
статической характеристики
Рис. 3.6. Линеаризованная
статическая характеристика.
Новая система координат со-
ответствует приращению па-
раметров
90
Глава 3. Основы теории автоматического управления
или, пользуясь обозначениями (3.9),
ДГВЫХ=£Д£, (311)
где к = tga определяет крутизну характеристики (3.11).
Математической основой такого метода линеаризации является
разложение непрерывной функции, дифференцируемой в окрестно-
стях точки (£0, £выхо)' соответствующей заданному (или номиналь-
ному) режиму работы системы, в ряд Тейлора, с ограничением его
линейными членами. Разложим функцию (3.7) в ряд Тейлора:
( AF )
F = F п + ВЬ|Х
* ВЫХ хВЫХ0 J
(£-£0) Jd2FBb.x
1! [ d£2
Ограничив ряд Тейлора (3.12) линейными членами, получим
приближенное уравнение
F - F Л
л вых ' вых 0
_ f С1£вы.х
d£ J.
(£ - £0),
(3.13)
которое окажется тем ближе к точному уравнению, чем меньше бу-
дет отклонение уровня от номинального значения.
Дифференцируя (3.7) по £ и подставляя £ = £0, получим выра-
жение для производной, входящей в уравнение (3.13):
_ Гд(а71)1 1
dl-' )l0 - d£ .z0 2 j
В результате вместо точной, но нелинейной статической ха-
рактеристики (3.7) получаем приближенную, но линейную харак-
теристику:
F - F п = —
л ВЫХ ‘ ВЫХ 0 2
(3.14)
или, используя обозначения (3.9), выражение (3.11):
Д£ = £д£.
Результатом линеаризации явилось уравнение объемного расхо-
да на линии стока в приращениях (или отклонениях), выраженное в
абсолютных единицах, причем каждый член уравнения имеет опре-
деленную размерность.
3.2. Динамические характеристики САУ
91
Замечание /
Довольно часто при исследовании САУ для удобства используют урав-
нения в относительных единицах с безразмерными коэффициентами (или с
коэффициентами, имеющими размерность времени в степени, соответству-
ющей порядку производной, при которой стоит данный коэффициент).
Чтобы дифференциальное уравнение в абсолютных отклонениях при-
вести к уравнениям в относительных единицах, выполняют следующие
операции.
1. Все члены уравнения делят на постоянную величину (например,
номинальное значение, максимальное значение, некоторое начальное зна-
чение данной переменной) с размерностью членов этого уравнения, в ре-
зультате чего каждый член исходного уравнения становится безразмерным.
2. Переходят к относительным единицам. Выбирают постоянное зна-
чение для каждой координаты, каждого приращения, входящего в полу-
ченное уравнение, и к нему относят его приращение.
3 Вводят обозначения относительных единиц и коэффициентов урав-
нения.
Замечание И
При анализе систем управления, элементы которых содержат суще-
ственно нелинейные характеристики, применяют методы нелинейной тео-
рии автоматического управления.
3.2. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ САУ
Системы автоматического управления являются динамическими
системами, поэтому их качество оценивается по поведению в двух
режимах работы: установившемся (частным случаем установившего-
ся режима является статический режим) и неустановившемся. или
переходном (динамическом).
Установившийся режим — это реакция системы, остающаяся спус-
тя большой промежуток времени с момента приложения входного сиг-
нала. В установившемся режиме решаются две основные задачи: со-
гласование диапазонов изменения переменных в элементах системы
управления с диапазоном изменения переменных объекта управления
и определение коэффициента усиления управляющего устройства.
Замечание
В установившемся режиме в общем случае регулируемая величина
может быть постоянной (системы стабилизации), изменяться по опреде-
ленному заданному закону (программные системы), изменяться по заранее
не известному закону в соответствии с изменением ведущей величины (сле-
дящие системы). Поэтому установившийся режим называют режимом невоз-
мущенного движения системы.
Переходный режим характеризуется переходом динамической
системы из одного равновесного состояния в другое. Для переход-
92
Глава 3. Основы теории автоматического управления
ного режима формулируются показатели качества управления, со-
ставляется математическое описание процессов, протекающих в
объекте управления, решается задача синтеза структуры управляю-
щего устройства с определением параметров настройки на основе
заданных показателей качества управления, выполняется анализ и
дается оценка работы системы в заданных условиях
Замечание
Переходный процесс в системе определяет возмущенное движение
системы, характеризующее отклонение координат системы и их производ-
ных от установившихся значений при невозмущенном движении системы.
Частному случаю установившегося режима — статическому ре-
жиму — соответствуют уравнения статики системы, а переходному
режиму — уравнения динамики системы.
Элементы САУ ХТП можно представить в виде типовых дина-
мических звеньев, а также их соединений (комбинаций) Понятие
типовых звеньев автоматических систем управления введено и в
инженерную практику, поскольку оно позволяет структурно пред-
ставить систему управления любой сложности в виде набора эле-
ментарных типовых звеньев, определенным образом связанных между
собой. Зная динамические и статические свойства элементарных
типовых звеньев, их характеристики и передаточные функции, мож-
но в значительной степени упростить задачи анализа и синтеза САУ.
При рассмотрении функциональной блок-схемы локальной САУ
выходная величина каждого предшествующего функционального
элемента является входным воздействием последующего функцио-
нального элемента (см. рис. 2.14). Отсюда, как было сказано выше,
следует, что САУ составлена из элементов направленного действия
(или детектирующих элементов), иначе говоря, выходная величина
любого элемента системы зависит от изменения только его входной
величины, а обратное влияние выходной величины непосредствен-
но через рассматриваемое звено на входную величину отсутствует.
Именно возможность раздробления САУ на типовые динамические
звенья направленного действия (декомпозиция) в значительной мере
упрощает исследования поведения рассматриваемых систем в пере-
ходных режимах. Для таких исследований обычно составляют струк-
турную схему системы управления, при этом звено условно обозна-
чают в виде прямоугольника с указанием входных и выходных вели-
чин, а также передаточной функции внутри него.
Замечание
Обращаем особое внимание на то, что при рассмотрении переходных
процессов, протекающих в звене, до начала процесса звено находится в дина-
мическом равновесии, иначе говоря, существуют нулевые начальные условия.
3.2. Динамические характеристики САУ
93
3.2.1. Использование преобразования Лапласа
для анализа САУ
Операционное исчисление — один из методов математического
анализа, получивший широкое распространение для решения раз-
личных сложных задач физики, электротехники, механики, хими-
ческой кинетики, автоматики. В основе метода лежит идея замены
изучаемых функций (оригиналов) некоторыми другими функциями
(изображениями), получаемых из первых по определенным прави-
лам. Одно из таких преобразований носит имя Лапласа (преобразо-
вание Лапласа).
Преобразование Лапласа — математический метод, позволяющий
сравнительно просто решать линейные дифференциальные уравне-
ния. В результате преобразования дифференциальное уравнение в
пространстве оригиналов приобретает форму алгебраического урав-
нения в пространстве изображений, в котором в качестве независи-
мой переменной вместо времени т используется комплексная пере-
менная 5. Применяя к решению полученного алгебраического урав-
нения обратное преобразование Лапласа, находим решение исходного
дифференциального уравнения. Как правило, уравнения переход-
ного процесса в САУ решаются именно этим методом из-за наличия
достаточно полных таблиц преобразований Лапласа. Другая причи-
на широкого распространения преобразования Лапласа — возмож-
ность ввести понятие передаточной функции и получить частотные
характеристики САУ.
Преобразование Лапласа функции/(т) действительной перемен-
ной т определяется соотношением:
F(s) = = JZ(т)е 5Tdr, (3.15)
о
где F(s) — функция комплексной переменной s; У — символ прямо-
го преобразования Лапласа. Функция /(т) называется оригиналом, а
функция F(s) — изображением (по Лапласу).
Функция /(т) действительной переменной т называется оригина-
лом, если она удовлетворяет условиям:
• /(т) = 0 при всех т < 0;
• на любом конечном отрезке [а, Ь] с [0, «>) функция /(т) имеет
не более конечного числа точек разрыва первого рода;
• существуют числа М > 0 и N > 0 такие, что
|/(т)| < MzN\ Vt > 0.
Наименьшее число N, для которого выполняется это неравен-
ство, называется показателем роста функции /(т).
94
Глава 3. Основы теории автоматического управления
Если функция/(т) является оригиналом, то она может быть пре-
образована по Лапласу, и ее изображение F(s) определяется форму-
лой (3.15).
3.2.1.1. Свойства преобразования Лапласа
1. Линейность
Если функции /|(т) и f2(r) являются оригиналами, изображения
которых f|(5) и F2(s) соответственно, и если величины ct и с2 не
зависят от т и s, то справедливо равенство
(т) + с2/г (т)] = С1 (-5) + c2F2 (л). (3.16)
2. Дифференцирование оригинала
Если функция /(т) и ее производная /'("О являются оригинала-
ми, то справедливо равенство
SP[/'(t)] = 5F(5)-/(O), (3.17)
где /(0) = Дто/(т).
В случае преобразования второй производной:
*[/" (т)] = s2F (а) - sf (0) - f (0). (3.18)
В случае преобразования производной порядка п:
v[f{n} (т)] = snF(s) - s"-‘ f (0) -... - sf^ (0) - /"-* (0), (3.19)
где /(и)(0) = lim — ^Т-.
v ' т-»+о dr”
Таким образом, дифференцированию оригиналов отвечает ум-
ножение изображений на s. Это свойство позволяет сводить реше-
ние линейных дифференциальных уравнений с постоянными коэф-
фициентами в области оригиналов к решению алгебраических урав-
нений в области изображений.
Чтобы упростить решение большинства задач автоматического
управления, дифференциальные уравнения записывают в отклоне-
ниях от режима, выбранного подходящим образом (обычно — но-
минального), что приводит к нулевым начальным условиям (началь-
ные значения функции и ее производных равны нулю).
Начальные условия — совокупность переменных величин процес-
са (например, температура, концентрация и т. д.) и некоторого их
числа производных в начальный момент времени (т = 0).
3.2. Динамические характеристики САУ
95
Нулевые начальные условия — переменные величины и их произ-
водные равны нулю в начальный момент времени.
Ненулевые начальные условия — хотя бы одно значение из пере-
менных или их производных при т = 0 не равно 0.
3. Интегрирование оригинала
Если функция /(т) является оригиналом и F(s) — его изображе-
ние, то справедливо равенство:
(3.20)
т. е. интегрированию в области оригиналов соответствует деление
изображения на s.
4. Теорема запаздывания
Если функция /(т) является оригиналом и F(s) — его изображе-
ние, то изображение смещенного оригинала $Р[/(т — c)J, где с > 0,
определяется равенством:
й’[/(т-с)]= F(s)e-C\
(3.21)
3.2.1.2. Передаточная функция звена
Передаточная функция показывает, какое действие совершает
звено над входным воздействием, иначе говоря, как изменяется сиг-
нал при его прохождении через звено (систему)
Передаточной функцией звена (линейной стационарной динами-
ческой системы) 1У(5) называется отношение изображения выход-
ного сигнала $Р[у(т)] к изображению входного сигнала У [х(т)] при
нулевых начальных условиях:
(3.22)
Передаточная функция (3.22) полностью характеризует динами-
ческие свойства системы. Если известны передаточная функция си-
стемы и вид входного воздействия, то возможно определить пере-
ходный процесс на выходе системы.
Итак, введение передаточной функции позволяет:
1) определить динамические свойства системы (звена);
2) перейти к частотным характеристикам (и с их помощью оце-
нить устойчивость системы),
3) определить тип звена.
96
Глава 3. Основы теории автоматического управления
(3.23)
Свойства передаточной функции
Передаточные функции устойчивых динамических систем обла-
дают следующими основными свойствами.
1. Передаточная функция W (s) представляет собой дробно-ра-
циональную функцию вида
= N(s) = bmsm + />m_15m~1 4-... 4- V + 60 .
D (5) a„sn + a^s"-1 +... + aj-s + а0
Отметим, что в реальной системе управления степень полинома
знаменателя больше (или равна) степени полинома числителя (л > т).
Замечание
Дробно-рациональная функция представляет собой частное двух мно-
гочленов.
2. Все постоянные коэффициенты b0, bt,..., b„, a0, а{,..., ат пере-
даточной функции W(s) действительны, поскольку они представля-
ют собой функции параметров системы, которые могут быть только
действительны.
3. Приравняв полином знаменателя передаточной функции (3.23)
к нулю, получим характеристическое уравнение системы
D(s) = 0. (3.24)
Корни характеристического уравнения (3.24) называются полю-
сами передаточной функции.
4. Корни полинома числителя передаточной функции называ-
ются нулями передаточной функции.
5. Недействительные нули и полюсы передаточной функции могут
быть лишь комплексно-сопряженными
6. Если все полюсы передаточной функции И^л) [корни уравне-
ния (3.24)] расположены в левой полуплоскости комплексной плос-
кости, то система устойчива.
7. Передаточная функция системы (3.23) перерождается в обыч-
ный коэффициент усиления системы, если 5 = 0.
8. Передаточная функция системы определяется, как отношение
полиномов правой и левой частей дифференциального уравнения
системы.
3.2.2. Временные характеристики
О динамических свойствах системы судят по ее реакции на ти-
повые входные воздействия (единичное ступенчатое, единичное
импульсное, с постоянной скоростью — рамповое и т. д.).
3.2. Динамические характеристики САУ
97
Временной характеристикой звена называют закон изменения
выходной величины звена во времени у(т) в ответ на изменение вход-
ного воздействия х(т) при условии, что до приложения входного
воздействия звено находилось в покое
3.2.2.1. Типовые входные воздействия
Единичное ступенчатое воздействие описывается единичной сту-
пенчатой функцией (функцией Хевисайда):
1(т) =
О при т < 0;
1 при т > 0,
(3.25)
изображение которой по Лапласу $\ 1(т)] = I/л (см. Приложение 2,
№2). График единичной ступенчатой функции (3.25) приведен на
рис. 3.7, а.
Единичное импульсное воздействие описывается единичной им-
пульсной функцией (дельта-функцией Дирйка), которая обладает
следующими свойствами:
0 при т * 0;
°° при т = 0,
(3.26)
J б(т)<1т = 1.
Дельта-функция Дирака относится к классу обобщенных функций
и не имеет графика с точки зрения классического математического
анализа. Ее можно рассматривать как предел последовательности им-
пульсов длительностью Дт и амплитудой 1/Дт при Дт —> 0 (рис. 3.7, б)
Изображение дельта-функции Дирака по Лапласу 5Р[б(т)] = 1 (см.
Приложение 2, № 1).
Рис. 3.7. Типовые входные воздействия:
а — единичное ступенчатое воздействие; б — единичное импульсное воз-
действие: в — единичное рамповое воздействие
4 Беспалов А. В.. Хартоно» Н. И.
98
Глава 3. Основы теории автоматического управления
Примечание
Обобщенная функция — математическое понятие, обобщающее клас-
сическое понятие функции. В обобщенной функции находит отражение
тот факт, что реально нельзя измерить значение физической величины в
точке, а можно измерить лишь ее среднее значение в достаточно малых
окрестностях данной точки. Обобщенная функция служит адекватным ап-
паратом описания распределений различных физических величин, поэто-
му обобщенные функции иногда называют распределениями. Введена впер-
вые в конце 20-х гг. XX века П. Дирйком в его исследованиях по квантовой
механике, где он систематически использует понятие дельта-функции и ее
производных
Единичное рамповое воздействие (воздействие с постоянной ско-
ростью) описывается единичной рамповой функцией:
изображение которой SP[т • 1(т)] = 1/л2 (см. Приложение 2, № 3).
График единичной рамповой функции (3.27) приведен на рис. 3.7, в.
3.2.2.2. Переходная характеристика
Переходная функция — аналитическое выражение отклика звена
на единичное ступенчатое входное воздействие при нулевых началь-
ных условиях:
Л(т) = S’ 1 РК (s) -
(3.28)
Произведение передаточной функции на изображение единично-
го ступенчатого воздействия, стоящее в квадратных скобках, соответ-
ствует изображению переходной функции, S’-1 — символ обратного
преобразования Лапласа. Графическое изображение переходной фун-
кции — переходная характеристика. График изменения выходного
сигнала при ступенчатом входном воздействии, отличающимся по
величине от единичного, называют обычно кривой разгона.
3.2.2.3. Импульсная переходная функция
Импульсная переходная функция (или функция веса) — аналити-
ческое выражение отклика звена на единичное импульсное входное
воздействие при нулевых начальных условиях:
w(t) = S? *[РК (л) • 1].
(3.29)
Графическое изображение импульсной переходной функции —
импульсная переходная характеристика (весовая характеристика).
3.2. Динамические характеристики САУ
99
3.2.2.4. Рамповая переходная функция
Рамповая переходная функция — аналитическое выражение от-
клика звена на единичное рамповое входное воздействие при нуле-
вых начальных условиях:
у(т) = 2?'1 •
s .
(3.30)
Графическое изображение рамповой переходной функции — рам-
повая переходная характеристика.
Переходная, импульсная переходная и рамповая переходная функ-
ции являются частными случаями временных характеристик.
Примечание
Иногда «характеристикой» называют не только графическое, но и ана-
литическое выражение отклика звена на входное воздейств! е В этом смысле
понятия «переходная функция» и «переходная характеристика» являются
синонимами.
Пример
► Найти изображение (по Лапласу) функции Хевисайда:
1(т) =
0, т < 0;
1, т > 0.
Решение. Находим изображение по формуле (3.15):
F(5) = Jl(t)e-STdT = -le-ST
о 5 о
S
Пример
► Найти изображение функции
/(т) = COST.
Решение. Представим/(т) = cost в виде линейной комбинации
функций:
е7 + е 7 lft 1 .
cost =-------= — eJ + —е
2 2 2
изображения которых известны:
Яе-Н = ——, = ——
' ' s-J ' ' s+J
4*
100
Глава 3 Основы теории автоматического управления
Согласно свойству линейности (3.16) получаем:
SP(cost) = #(^eJT + ^е Jx
1111 5
1---+Т-7=-Т—7-
2 s - j 2s + j sz+l
Пример
► Найти изображение функции
/(т) = 4 + 3е-т.
Решение. Функция f (т) является линейной комбинацией функ-
ций, изображения которых известны:
JP(1) = 1; 9р(е-’) = —.
S ' ' 5+1
Согласно свойству (3.16) линейности получаем:
У (4 + Зе-Т) = У [4 •!(?)] + у(3е“т) = 4^ + З-^-р
3.2.3. Частотные характеристики
Реакцию САУ или отдельных ее элементов на гармоническое
входное воздействие выражают с помощью частотных характерис-
тик. В отличие от временных характеристик, получаемых в переход-
ных режимах, частотные характеристики определяют в установившихся
колебательных режимах. Однако частотные характеристики имеют го-
раздо больший смысл, нежели просто описание реакции системы на
гармонический входной сигнал. Они связаны со структурой и свой-
ствами системы управления и широко используются в инженерной
практике как при анализе, так и при синтезе САУ.
Исследование систем управления с использованием частотных
характеристик называют исследованием в частотной области, а ме-
тоды исследования, в которых используются частотные характерис-
тики, — частотными методами.
Частотные методы очень хороши в практическом применении, и
большинство систем управления проектируется именно на основе
различных модификаций этих методов. Отличительной особеннос-
тью частотных методов является так называемая робастность (или
грубость). Это означает, что синтезированная с их помощью систе-
ма управления сохраняет требуемые характеристики, несмотря на
небольшие различия между моделью, на основе которой выполня-
лось проектирование, и реальной системой управления. Такая осо-
3.2. Динамические характеристики САУ
101
бенность имеет существенное значение из-за сложности построе-
ния точной модели реальной системы, из-за изменения параметров
системы при ее функционировании, а также в связи с тем, что мно-
гим системам присущи различного рода нелинейности, осложняю-
щие их анализ и синтез.
Частотные характеристики можно получить как на основе мате-
матической модели САУ, так и экспериментально. Эксперименталь-
ный метод получения частотных характеристик системы, не связан-
ный с определением ее математической модели, обладает рядом
преимуществ. Фактически это означает, что задачу синтеза системы
управления можно решать, располагая только частотными характе-
ристиками в случае невозможности получения математического опи-
сания из-за сложности или малой изученности системы.
Кроме того, одним из распространенных методов проверки адек-
ватности математической модели системы является построение на
ее основе частотных характеристик и сравнение их с частотными
характеристиками, полученными в результате экспериментального
исследования реальной системы.
К достоинствам частотных методов анализа и синтеза систем
управления можно также отнести и то, что они позволяют получить
характеристику системы в целом по характеристикам отдельных эле-
ментов системы независимо от их числа, в то время как анализ во
временной области (т. е. с использованием временных характерис-
тик) практически нецелесообразен для случая четырех и более эле-
ментов.
Частотные характеристики позволяют определить тип регулято-
ра, приемлемого в конкретной системе управления, и сравнительно
просто решить задачу об устойчивости САУ. Они дают информацию
о критической частоте и предельно допустимом усилении регулято-
ра, о запасах устойчивости и полосе пропускания системы управле-
ния. По частотным характеристикам можно также судить о времен-
ных характеристиках, что особенно важно при синтезе систем уп-
равления.
Если на вход устойчивого линейного стационарного динамическо-
го звена подать гармонический сигнал с частотой со и амплитудой Ах
х(т) = sin (сот)- 1(т), (3.31)
то после завершения переходного процесса в установившемся режи-
ме выходная величина динамического звена будет совершать вынуж-
денные гармонические колебания с той же частотой со, но с иной
амплитудой Ау и сдвинутые по фазе относительно входных колеба-
ний на угол ф (рис. 3.8):
.Увын (т) = АУ sin (шт + ф)• (3.32)
102
Глава 3 Основы теории автоматического управления
Рис. 3.8. Гармонические сигналы на входе х(т) и выходе увы„(т) устойчи-
вого линейного стационарного динамического звена в устано-
вившемся режиме
Положительное значение ф в выражении (3.32) означает опере-
жение по фазе, а отрицательное — отставание.
Для данного динамического звена отношение амплитуды коле-
баний выходной величины к амплитуде колебаний входного сигнала
Ау/Ах и фазовый сдвиг ф между колебаниями выходной величины и
входного сигнала зависят только от частоты колебаний со. Опреде-
ляя в установившемся режиме отношение амплитуд Ау/Ах и фазовый
сдвиг ф при разных частотах колебания входного сигнала (0 < со < °°),
можно экспериментально получить частотные характеристики ди-
намического звена.
Зависимость отношения амплитуды выходных колебаний к амп-
литуде входных колебаний Ау /Ах от частоты колебаний со называет-
ся амплитудной частотной (или амплитудно-частотной) характери-
стикой (АЧХ) и обозначается Л(со).
Зависимость фазового сдвига ф между выходными и входными
колебаниями от частоты со называется фазовой частотной (или фазо-
во-частотной) характеристикой (ФЧХ) и обозначается ф(со).
Замечание
В большинстве случаев возбудить гармонические колебания не очень
просто. При экспериментальном определении частотных характеристик
часто используют колебания в виде прямоугольной или трапецеидальной
волны, которые получить проще (см. разд. 4.1.3.3).
3.2.3.1. Частотная передаточная функция
Реакцию системы на гармоническое входное воздействие можно
не только определить экспериментально, но и рассчитать, если из-
вестно математическое описание системы.
3.2. Динамические характеристики САУ
103
Предположим, что гармонический сигнал (3.31) подан на вход
устойчивого линейного стационарного динамического звена, опи-
сываемого дифференциальным уравнением:
+ - + аоУ (т) = Ьт + - + box(z). (3.33)
Передаточная функция ^(s) такого динамического звена име-
ет вид:
= = Vm + - + A) = bmsm + ... + b0
*(5) s"+„. + a0 (s-pj + .^fc-p,,)’
где X(s) и Y (s) — изображения по Лапласу входного и выходного
сигналов; р{, ..., р„ — корни характеристического уравнения
з" +... + а0 = 0, (3.35)
называемые также полюсами передаточной функции. Следует заме-
тить, что для большинства реальных систем п > т.
Изображение входного сигнала по Лапласу равно (см. Прило-
жение 2)'
X(5) = в?[х(т)] = S?[Ax sin (ют) 1(т)] = АхШ . (3.36)
3 + 0Г
Чтобы найти изображение по Лапласу выходного сигнала, умно-
жим передаточную функцию на изображение входного сигнала:
У (5) = [у (г)] = W (5) • X (5) = W (5) . =
5 + (1)
ИЧл)________________• 7 =
(5 - ’ J
(3.37)
Выражение (3.37) можно разложить на простые дроби:
Y (s) = +... + —+ -Ь±1- + ,
•s - Р\ s- рп s - ju s + ум
(3.38)
где ch ..., с„+2 — постоянные величины, которые легко найти при-
равняв правые части уравнений (3.37) и (3.38):
_и/ц)л,ш _a_t (339)
(S - joy)(s + yiD) S - P\ s - pn s - Ju 3 + JCO
104
Глава 3. Основы теории автоматического управления
Теперь по изображению выходного сигнала (3.38) можно найти
реакцию динамического звена на гармоническое входное воздей-
ствие, выполнив обратное преобразование Лапласа:
у(т) = 5ГЧ_+... + 5Г1 —+JT1 +-Г1 =
\s ~ Рп ) {s + jo))
= clePiX +... + c„ePnX + c„+lejan + ся+2е"у"т = (3.40)
= Ус fc) + Увын fr)>
где ус(т) описывает собственное движение системы, зависящее от
начальных условий, и стремится к нулю, так как все полюсы пере-
даточной функции устойчивой системы имеют отрицательные дей-
ствительные части:
lim ус(т) = lim [qe**1 +... + qe^l = 0, (3.41)
Т >ОО Т—> со L J
а уВЬ1Н(т) описывает вынужденное движение системы в установившемся
режиме, зависящее от входного воздействия:
УВЫн(т) = Сл+1еУшх+с„+2е->-. (3.42)
Чтобы определить значение постоянной величины ся+1, умно-
жим обе части равенства (3.39) на (л — у<о). Получим уравнение
1Г(5)Лх(0 С1(5-У(0) C„($-yw) С„+2(5-ую)
--------—_ _ --------+ ... +-------+ С_. ] +-----;---,
(5 + УЮ) S- Pi S - р„ S + J<£>
которое должно быть справедливым при любом значении s. Поло-
жим 5 = jo>. Тогда уравнение (3.43) дает значение с„+1:
(344)
усо + усо 2у
Умножив обе части равенства (3.39) на (л + у'о) и принимая в
получившемся уравнении 5 = —yto, получим значение с„+2.
(3.45)
Таким образом, с„+1 и ся+2 являются комплексными сопряжен-
ными числами и могут быть записаны в следующем виде (см. При-
ложение 4):
(3.46)
3.2. Динамические характеристики САУ
105
са+2 = A-.|^(_yco)|eya^-/<a) =^jH/(7w)|e-'a*^4 (3.47)
Подставим значения с„+1 и си+2 из формул (3.46) и (3.47) в урав-
нение (3.42):
Увыи(т) = ^|^(У<»)|-
/[ют+ащИЧ/ш)] -7[<OT+arglF(ym)]
V V
(3.48)
2J
и применим к выражению, стоящему в фигурных скобках, формулу
Эйлера:
cos <р + j sin <р = еуш. (349)
В результате получим:
Увын W = Л • | ^ О)| sin [сот + arg W (усо)] =
= Ау (со) sin [сот + ср (со)].
Таким образом, при гармоническом входном воздействии после
завершения переходного процесса выходная величина динамичес-
кого звена также совершает гармонические колебания с частотой,
равной частоте входных колебаний. При этом колебания выходной
величины смещены по фазе относительно колебаний входного сиг-
нала на величину
Ф (со) = arg W (усо), (3.51)
зависящую от частоты входных колебаний со. Отношение амплитуд
выходных и входных колебаний также является функцией со:
А (со) = А}, (со)/Лд. = | Ж(усо)|. (3.52)
Формулы (3.51) и (3.52) показывают, что для определения уста-
новившейся реакции динамического звена с передаточной функци-
ей И7^) на гармонический входной сигнал достаточно знать комп-
лексную функцию IK(усо), получающуюся при замене в передаточ-
ной функции 5 наусо:
^«=ую=^(»- <3'53)
Функция И7(усо) называется частотной передаточной функцией,
или передаточной функцией по Фурье, или [комплексной] частот-
ной характеристикой, и равна по определению отношению изобра-
жения Фурье (см. Приложения 5, 6) выходного сигнала динамичес-
кого звена к изображению Фурье входного сигнала:
^(jco) =
^[Ит)] _ П-М
х(т) А" (усо)
(3.54)
106
Глава 3. Основы теории автоматического управления
Частотная передаточная функция характеризует динамические
свойства системы и не зависит от характера приложенных к системе
воздействий. С ее помощью можно определить реакцию системы не
только на гармонический входной сигнал, но и на любой другой
входной сигнал, который может быть преобразован по Фурье.
Частотную передаточную функцию можно представить или в виде
суммы действительной и мнимой частей
IF(jw) = Re[Hz (/w)] + j • 1ш[1К(У(о)] = w(co) + j • и (co), (3.55)
или в показательной форме
1Г(» = |H/(y(o)|eyarg’F(yw) = Л(со)еу<р(ш). (3.56)
Функции /и(со) и л(со) называются действительной (или веществен-
ной) и мнимой частотными характеристиками звена, а функции Л(со)
и ф(со) в соответствии с формулами (3.52) и (3.51) — амплитудной
частотной и фазовой частотной характеристиками. Взаимосвязь
между характеристиками определяется следующими уравнениями
(см. Приложение 4):
А (со) = у]т2 (со) + п2 (со), ср (со) = arctg
»(и)
т (со)
/и((о) = Л(со)-cos[cp(co)J, л(со) - H(co)-sin[<p(<o)].
(3.57)
Для каждого фиксированного значения частоты со = со, частот-
ная передаточная функция может быть изображена на комплекс-
ной плоскости радиусом-вектором, длина которого равна Л(со,), а
угол поворота относительно положительного направления оси абс-
цисс равен ср(св,).
3.2.3.2. Графическое представление
частотных характеристик
Существует несколько способов графического представления
частотных характеристик.
Амплитудно-фазовая частотная характеристика (АФЧХ), назы-
ваемая также диаграммой Найквиста, строится на комплексной плос-
кости и представляет собой годограф частотной передаточной функ-
ции при изменении частоты со от нуля до бесконечности. То есть
АФЧХ — это траектория, описываемая на комплексной плоскости
концом радиуса-вектора, модуль и аргумент которого соответствен-
но равны Л(ю) и ф(ш), при изменении частоты со от нуля до беско-
нечности (см., например, рис. 3.22).
3.2. Динамические характеристики САУ
107
Рис. 3.9. Частотные характеристики системы автоматического регулиро-
вания.
АЧХ — амплитудная частотная характеристика; ФЧХ — фазовая частот-
ная характеристика
Амплитудно-частотная характеристика А(ю) и фазово-частот-
ная характеристика <р(со) могут быть построены в линейных декар-
товых координатах (рис. 3.9), но такой способ представления час-
тотных характеристик находит ограниченное применение при ис-
следовании автоматических систем управления.
Весьма удобно использование логарифмических частотных ха-
рактеристик.
Логарифмическая амплитудно-частотная характеристика (ЛАЧХ)
строится в логарифмической системе координат. По оси абсцисс
откладывают частоту в логарифмическом масштабе, т. е. наносят
отметки, расположенные на расстоянии 1gсо от начала координат, а
возле отметок пишут само значение частоты со, выраженное в ради-
анах в единицу времени. Аналогично поступают и с осью ординат:
откладывают Ig^(co), а рядом с отметкой пишут само значение Л(со).
Иногда по оси ординат откладывают величину £(со), выраженную в
децибелах (дБ) и пропорциональную величине 1g 4(со). Соответствие
между 1цЛ((о) в натуральных единицах и £(со) в децибелах выражает-
ся равенством
£ (со) = 101g А2 (со) = 201g А (со). (3.58)
Бел представляет собой логарифмическую единицу измерения,
соответствующую десятикратному увеличению мощности. Один бел
соответствует увеличению мощности в 10 раз, 2 бела — в 100 раз и т. д.
108
Глава 3. Основы теории автоматического управления
Таким образом, величина £(со) характеризует изменение мощности
сигнала при его прохождении через систему.
Децибел равен одной десятой части бела. Так как Л(ш) представ-
ляет собой отношение амплитуд выходного и входного сигналов, а
мощность гармонического сигнала пропорциональна квадрату его
амплитуды, то увеличение Л(ш) в десять раз будет соответствовать
увеличению мощности в сто раз, что равно двум белам или двадцати
децибелам. Поэтому в правой части равенства (3.58) стоит множи-
тель 20.
При построении логарифмической фазово-частотной характерис-
тики (ЛФЧХ) по оси абсцисс откладывают частоту в логарифмичес-
ком масштабе так же, как при построении ЛАЧХ, а по оси ординат —
<р(со) в радианах (или угловых градусах), т. е. ЛФЧХ строится в полу-
логарифмической системе координат.
При использовании логарифмических характеристик интервалы
между частотами измеряются в декадах или октавах. Декадой назы-
вают интервал, на котором частота изменяется в 10 раз, а октавой —
в 2 раза.
Известно, что 1g 1 = 0, поэтому начало координат при построе-
нии логарифмических частотных характеристик соответствует часто-
те со = 1. Ось ординат может пересекать ось абсцисс в произвольном
месте в зависимости от интересующего нас диапазона частот, напри-
мер, в точке, соответствующей частоте со = 0,005, или со = 0,1, или
со = 100 и т. д. (естественно, исключая точку со = 0, так как 1g 0 = —<=°).
Важно учитывать, что точка пересечения ЛАЧХ с осью абсцисс
соответствует значению Л(со) = 1, иначе говоря, прохождению сиг-
нала через систему без изменения амплитуды. Ветвь ЛАЧХ, распо-
ложенная в верхней полуплоскости, соответствует усилению сигна-
ла [Л(со) > 1, т. е. Ау > Лх], а в нижней полуплоскости — ослаблению
сигнала [Л(со) < 1, т. е. Ау < Ял.|.
ЛАЧХ и ЛФЧХ строят либо раздельно, либо в виде совмещен-
ной диаграммы, носящей название диаграммы Боде (по имени уче-
ного, выполнившего фундаментальное исследование в области тео-
рии усилителей с обратной связью).
Логарифмические частотные характеристики широко применя-
ются при анализе и синтезе САУ благодаря нескольким достоин-
ствам.
Кусочно-линейная аппроксимация логарифмических частотных
характеристик, которую без существенной погрешности можно при-
менять в довольно большом диапазоне частот, значительно облегча-
ет их построение. Чтобы построить аппроксимированные таким об-
разом логарифмические частотные характеристики, достаточно оп-
ределить наклоны прямолинейных отрезков и координаты точек их
сопряжения.
3.2. Динамические характеристики САУ
109
Довольно просто построить общие логарифмические частотные
характеристики нескольких последовательно соединенных звеньев.
Для этого на диаграмме Боде сначала строят логарифмические час-
тотные характеристики каждого звена, а затем их складывают, так
как при последовательном соединении звеньев справедливы следу-
ющие соотношения:
1g Л (со) = £ 1g Л,-(со); /=1 (3.59)
ф(<0) = ^фДсй). (3.60)
Замечание
С помощью кусочно-линейной аппроксимации логарифмических час-
тотных характеристик можно составить предварительное суждение о свой-
ствах системы управления в частотной области. Подобная кусочно-линей-
ная аппроксимация особенно полезна при синтезе систем частотными ме-
тодами.
Частотные характеристики системы управления полностью оп-
ределяют ее свойства. Понимание взаимосвязи частотной переда-
точной функции со структурой и свойствами системы управления
чрезвычайно важно для инженера. Компьютерные программы, ис-
пользуемые в настоящее время при анализе и проектировании сис-
тем управления, также предполагают наличие у пользователя неко-
торого представления об общем виде частотной передаточной фун-
кции. Отсутствие ясного представления о частотных характеристиках
может привести к неправильным компьютерным расчетам некото-
рых систем управления.
Поскольку частотные характеристики дают возможность судить
о временных характеристиках, их знание крайне необходимо при
синтезе систем управления с заданными свойствами
3.2.3.3. Некоторые термины, используемые
при частотном анализе систем управления
Для иллюстрации некоторых терминов, применяемых при час-
тотном анализе, на рис. 3.9 показан возможный вид частотных ха-
рактеристик автоматической системы управления.
Показатель колебательности М = Лтах(й))/Л(0) характеризует
склонность системы к колебаниям. Система, показатель колебатель-
ности которой меньше единицы, обладает апериодической переход-
ной характеристикой. Чем больше М, тем слабее затухают возника-
110
Глава 3. Основы теории автоматического управления
ющие в системе колебания, и тем ближе система к границе устойчи-
вости. Таким образом, величина М может служить мерой запаса ус-
тойчивости системы. Как правило, в реальных системах регулирова-
ния 1,1 < М < 1,5. При этом в переходном процессе система совер-
шает быстро затухающие колебания с частотой, близкой к частоте
резонанса.
Резонансной частотой сор называют частоту, при которой АЧХ
имеет максимум:
А (шр) = Лтах (со). (3.61)
Гармонические колебания именно этой частоты претерпевают в
системе наибольшее усиление. Так как резонансная частота близка
к частоте колебаний системы в переходном процессе, она может
служить мерой быстродействия системы (или длительности пере-
ходных процессов).
Полоса пропускания системы — это интервал частот wcpl < со < соср2,
в котором выполняется условие:
к< Л(со)< Лтах (со), (3.62)
где к — положительное действительное число такое, что 0 < к < Ятах(со)
Частоты, соответствующие границам полосы пропускания, на-
зывают частотами среза соср. Если АЧХ равномерно убывает с рос-
том частоты, что характерно для многих систем управления с обрат-
ной связью в разомкнутом состоянии, то нижней границей полосы
пропускания будет частота со = 0, и система будет характеризоваться
лишь одной частотой среза, соответствующей верхней границе по-
лосы пропускания.
Замечание
В зависимости от конкретной ситуации выбор величины к может быть
основан на разных критериях. Наибольшее распространение получила ве-
личина к, определяемая равенством
к = : 201g/t = 201g Лтах (со)- Э,01 дБ (3.63)
J1
Определение к в соответствии с (3.63) означает, что на выходе системы
мощность гармонического сигнала, частота колебаний которого равна час-
тоте среза, будет в два раза меньше, чем мощность сигнала на частоте
резонанса, при условии, что на входе оба сигнала имели одинаковую мощ-
ность. В связи с этим используют термины «полоса пропускания по уров-
ню половинной мощности» и «полоса пропускания по уровню —3 дБ».
Другим распространенным значением величины к, которое использу-
ется при анализе системы управления с обратной связью по частотным
характеристикам разомкнутой системы, является значение к = 1. При та-
ком подходе под частотой среза шср понимается частота, при которой АЧХ
3.2. Динамические характеристики САУ
111
разомкнутой системы равна 1. Определенная таким образом частота среза
системы регулирования в разомкнутом состоянии близка частоте резонан-
са замкнутой системы и косвенно характеризует длительность переходного
процесса тпп. Так как колебания в переходном процессе «хорошо» настро-
енной системы регулирования затухают в течение одного или двух перио-
дов, то справедливо соотношение:
=(1...2)-—= (1...2)-—. (3.64)
^ср
Пример
► Найти частотную передаточную функцию резервуара со сво-
бодным истечением жидкости (см. рис. 3.4), если уровень жидкости
L связан с притоком жидкости в резервуар уравнением:
7’^1 + Д£ = £Г(д£вх), (3.65)
где Д£ — отклонение уровня жидкости в резервуаре от статического
номинального значения; д£вх — изменение притока по сравнению
со статическим номинальным значением; Т и К — постоянная вре-
мени и статический коэффициент усиления, зависящие от площади
сечения резервуара и гидравлического сопротивления стока.
Решение. Преобразуем дифференциальное уравнение (3 65) по
Фурье, воспользовавшись свойством линейности (см. Приложе-
ние 5)‘.
ТгГ
ёд£(т)
dr
+./ [Д£ (т)] = /Г ./ [ Д/^ (т)].
(3.66)
Затем, применяя теорему о дифференцировании, получим ал-
гебраическое уравнение
7>-зг[д£(т)] + аг[д£(т)] = К ^[Д£ю (т)], (3.67)
которое можно представить в виде
./ [Д£(т)] - (Tyco +1) = К ^[Д^ (т)]. (3.68)
Выразив из уравнения (3.68) отношение изображения Фурье
выходного сигнала к изображению Фурье входного сигнала, найдем
частотную передаточную функцию резервуара:
Ифсо) =
4д£(т)] К
.эг[АЛпх(т)] Tyco + Г
(3.69)
112
Глава 3. Основы теории автоматического управления
Замечание
Сравнив частотную передаточную функцию резервуара со свободным
истечением жидкости с его передаточной функцией
Гй-Я-Л <’’»>
' ’ #[дГ (т)] 7s+1
приходим к выводу: частотную передаточную функцию легко получить из
передаточной функции, заменяя в последней s на ju>.
Пример
► Получить аналитические выражения АЧХ и ФЧХ резервуара
со свободным истечением жидкости. Частотная передаточная функ-
ция резервуара со свободным истечением жидкости получена в пре-
дыдущем примере.
Решение. Для определения АЧХ и ФЧХ по известной частотной пе-
редаточной функции И7(/со) можно воспользоваться двумя способами.
Способ 1. Умножим числитель и знаменатель частотной пере-
даточной функции (3.69) на комплексную функцию (1 — Ты]), со-
пряженную со знаменателем, для того чтобы освободиться в знаме-
нателе от мнимой единицы (см. Приложение 4).
В результате частотную передаточную функцию можно предста-
вить в виде суммы действительной (вещественной) и мнимой частей:
и/(. . К \-Ты] К К Ты
w ' Гео; + 1 1 - Ты] Т2ы2 + 1 Т2ы2 + Г
Откуда
»(Ш) = Ке[Ж(»] = (372)
/10+1
и(со) = 1т[И7(»] = ?^т. (3.73)
Из выражений (3.72) и (3.73) видно, что при изменении частоты со
от 0 до +°° действительная часть частотной передаточной функции т(ы)
принимает только положительные значения, а мнимая часть л(ео) —
только отрицательные. Следовательно, АФЧХ этого звена распола-
гается в четвертом квадранте комплексной плоскости.
Теперь найдем АЧХ и ФЧХ рассматриваемого звена, используя
уравнения (3.57):
А (со) = yjm2 (со) + п2 (со) =
К
у1т2ы2 +1 ’
ер (со) = arctg
я(<°)
/и (со)
= arctg (-Гео) = -arctg (Гео).
(3.74)
(3.75)
3.2. Динамические характеристики САУ
ИЗ
Способ 2. Воспользуемся тем, что частотная передаточная фун-
кция является дробью, числитель и знаменатель которой представ-
ляют собой в общем случае функции комплексного переменного, и
для них можно определить модуль и аргумент. Тогда АХЧ может
быть получена делением модуля числителя на модуль знаменателя
(см. Приложение 4):
А (св) = |Ж (усо)| = 1--^ --I = |-Д~. = -К , (3.76)
Tcoj + 1 |Ло/ + 1| +1
а фазовая частотная характеристика — как разность аргументов чис-
лителя и знаменателя:
<p(w) = агё|^у + 1 J = arg(^) - arg(Twj +1) =
= arctg(О/AQ-arctg(7Ъ/1) = 0-arctg(Tco) = -arctg(Tw).
3.2.4. Структурные схемы
Структурной схемой в теории автоматического управления назы-
вают графическое изображение математической модели САУ в виде
соединения звеньев. Звено на структурной схеме условно обозначают
в виде прямоугольника с указанием входных и выходных величин, а
также передаточной функции внутри него. Точка на линии связи между
звеньями, в которой происходит разветвление линии (один и тот же
сигнал подается на входы других звеньев), называется узлом.
Сумматоры и элементы сравнения изображают в виде круга, раз-
деленного на секторы (рис. 3.10). В элементе сравнения сектор, на
который подается «вычитаемое», затемняют.
Структурные схемы широко используют-
ся при исследовании и проектировании САУ,
так как они дают наглядное представление о
связях между звеньями и преобразованиями
сигналов в системе. На основе понятия пере-
даточной функции в теории автоматического
управления построен аппарат структурных
преобразований, позволяющий найти переда-
точную функцию замкнутых систем управле-
ния, заданных структурными схемами. Сколь
ни была бы сложна структурная схема, ее мож-
но изобразить, используя три основных типа
соединения звеньев: последовательное, парал-
лельное и с обратной связью.
Рис. 3.10. Обозначения
сумматоров и элементов
сравнения на структур-
ных схемах
114
Глава 3. Основы теории автоматического управления
3.2.4.1. Последовательное соединение звеньев
При последовательном соединении звеньев выходная величина
каждого предшествующего звена является входным воздействием
последующего звена (рис. 3.11).
При преобразовании структурных схем цепочку из последова-
тельно соединенных звеньев можно заменить одним звеном с пере-
даточной функцией, равной произведению передаточных функций
отдельных звеньев:
" 'Wn(s)’
(3-78)
где X(s) — изображение по Лапласу входного воздействия; У($) —
изображение по Лапласу выходного сигнала; ^(л), И^л),..., И^(л) —
передаточные функции отдельных звеньев.
Доказательство. Известно, что по передаточной функции звена
(системы) W(s) и изображению ее входной величины X(s) можно
найти изображение выходной величины:
Y(s) = И/(л) Да).
(3.79)
Записав аналогичное (3.79) выражение для каждого звена в струк-
турной схеме, изображенной на рис. 3.11, получим систему уравнений:
Г, (5) =^(5)^(5);
^(5) = ^, (5)^(5);
(3.80)
^(^=^„(5)^(5).
Исключив из системы уравнений (3.80) все промежуточные ве-
личины, придем к следующему равенству:
Г(5) = [^(5)-1Г2(5).....И;(5)]У(5).
(3.81)
Из полученного выражения-(3.81) находим передаточную функ-
цию последовательно соединенных звеньев:
И' (*) = (а). (s)..... Wn (5) = П (4
(3.82)
что, собственно, и требовалось доказать.
Рис. 3.11. Структурная схе- X(s)
ма последовательного со- —► ^Ц(5)
единения звеньев *...
v,(s)
W2(s)
Vi<*>
v(s)
3.2. Динамические характеристики САУ
115
3.2.4.2. Параллельное соединение звеньев
При параллельном соединении на вход всех звеньев подается
один и тот же сигнал, а выходные величины складываются. Структур-
ная схема параллельного соединения звеньев приведена на рис. 3.12.
Систему из нескольких параллельно соединенных звеньев можно
заменить одним звеном с передаточной функцией, равной сумме
передаточных функций, входящих в нее звеньев:
Y fv)
W(5) = X(s) = Wy (5) + {j) + - + Wn (5)’ (3'83)
Доказательство. Для определения передаточной функции И'(з) си-
стемы, состоящей из и параллельно соединенных звеньев (см. рис. 3.12),
запишем сначала выражения, связывающие изображение по Лапла-
су выходной величины каждого звена с изображением входного сиг-
нала системы:
У1(з)=^1(з)2Г(з);
У2(з)=^2(з)Х(з);
(3.84)
Y„(s)=Wn(S)X(s).
Изображение выходной величины системы, т. е. сигнала после
сумматора, равно
Y (з) = (з) + Y2 (з) +... + Y„ (з). (3.85)
Подставив в (3.85) выражения (3.84) для изображений выходных
величин каждого звена, получим
У (з) = № (5)+и/2 (з)+... + и; (з)]х (з).
Рис. 3.12. Структурная схема параллельного соединения звеньев
116
Глава 3. Основы теории автоматического управления
откуда следует
W (5) = (5) + 1Р2 (5) + ... + Wn (5) = £ W, (j),
М
(3.86)
что и требовалось доказать.
3.2.4.3. Соединение с обратной связью
Принято считать, что звено охвачено обратной связью, если вы-
ходной сигнал звена подается на его вход через какое-либо другое
звено. При этом звенья прямой цепи и звенья обратной цепи обра-
зуют замкнутый контур (замкнутую цепь).
Если при прохождении по замкнутому контуру знак сигнала не
изменяется или изменяется четное число раз, то обратную связь
называют положительной. При этом увеличение сигнала на выходе
звена, вызванное каким-либо воздействием, приводит к еще боль-
шему его увеличению за счет действия обратной связи.
Если же при прохождении по замкнутому контуру знак сигнала
изменяется нечетное число раз, то обратную связь называют отри-
цательной. При этом увеличение сигнала на выходе звена за счет
какого-либо внешнего воздействия приводит к его уменьшению за
счет действия обратной связи.
Передаточная функция замкнутой цепи с отрицательной обрат-
ной связью равна дроби, числитель которой — передаточная функ-
ция прямой цепи, а знаменатель — единица плюс произведение пе-
редаточных функций прямой и обратной цепей:
Н*) ^(5
X(s) 1 + СО '
(3.87)
Структурная схема соединения звеньев с отрицательной обрат-
ной связью приведена на рис. 3.13.
Доказательство. Для соединения с отрицательной обратной свя-
зью (см. рис. 3.13) вводим обозначения: ^(л) — передаточная фун-
X(s)
V(s)
Рис. 3.13. Структурная схема соединения звеньев с отрицательной обрат-
ной связью
3.2. Динамические характеристики САУ
117
кция прямой цепи; И2(s) — передаточная функция обратной цепи.
Запишем для изображения выходной величины прямой цепи
r(i) = lT1(5)-[JV(5)-Z(5)], (3.88)
или
Y (s) = (5) X(5) - (5) Z (s), (3.89)
а для изображения выходной величины обратной цепи
Z{s) = W2(s)Y(s). (3.90)
Подставим (3.90) в (3.89) и после простых преобразований полу-
чим искомую передаточную функцию соединения с замкнутой от-
рицательной обратной связью (3.87).
Аналогичным образом можно найти передаточную функцию со-
единения с положительной обратной связью. Передаточная функ-
ция замкнутой цепи с положительной обратной связью равна дро-
би, числитель которой — передаточная функция прямой цепи, а
знаменатель — единица минус произведение передаточных функций
прямой и обратной цепей:
X М I-IZ.M^M-
(3.91)
Структурная схема соединения звеньев с положительной обрат-
ной связью изображена на рис. 3.14.
Если в качестве звена обратной связи применяется статическое
звено нулевого порядка (усилительное звено), то обратную связь
называют жесткой. В частном случае, когда коэффициент усиления
статического звена нулевого порядка в цепи жесткой обратной свя-
зи равен единице, т. е.
W = 1,
(3.92)
обратную связь называют единичной (или стопроцентной).
X(s)
Рис. 3.14. Структурная схема соединения звеньев с положительной обрат-
ной связью
118
Глава 3. Основы теории автоматического управления
Учитывая (3.87) и (3.92), передаточная функция системы с еди-
ничной отрицательной обратной связью будет равна
1Г(л) =
И1(*)
l + lTjj)’
(3.93)
3.2.4.4. Эквивалентные преобразования структурных схем
При синтезе систем автоматического управления необходимо
выполнять преобразования структурных схем для упрощения струк-
туры системы и приведения ее к виду, удобному для определения
оптимальных параметров настройки регуляторов. Следует иметь в
виду, что разработанные инженерные методы определения оптималь-
ных параметров настройки регуляторов рассчитаны на стандартный
вид структурной схемы САУ, представленной, например, на рис. 2.8,
2.15, 2.16. Следовательно, определив исходную структурную схему
САУ в виде типовых звеньев, соединенных определенным образом,
и найдя их передаточные функции, затем необходимо идти по пути
последовательного упрощения исходной схемы, приводя ее к стан-
дартному виду по правилам эквивалентного преобразования.
Если структурная схема и параметры системы известны, то ис-
пользуя аппарат структурных преобразований, можно найти переда-
точную функцию замкнутой САУ, а затем и ее дифференциальное
уравнение.
Замечание
Аппарат передаточных функций эффективен при исследовании линей-
ных стационарных систем, имеющих сложные структурные схемы.
Некоторые правила эквивалентного преобразования структурных
схем приведены в Приложении 3 в [8].
Дадим несколько пояснений к основным правилам эквивалент-
ного преобразования структурных схем.
Звенья, соединенные последовательно (см. рис. 3.11), можно
представить одним звеном с передаточной функцией, равной про-
изведению передаточных функций последовательно соединенных
звеньев (3.78).
Звенья, соединенные параллельно (см. рис. 3.12), можно пред-
ставить одним звеном с передаточной функцией, равной алгебраи-
ческой сумме передаточных функций параллельно соединенных зве-
ньев (3.83).
Звенья, соединенные по принципу обратной связи (см. рис. 3.13
и 3.14), можно представить одним звеном с передаточной функци-
ей, определяемой по формулам (3.87) и (3.91).
3.2. Динамические характеристики САУ
119
Рис. 3.15. Эквивалентные преобразования структурных схем
Сумматор, расположенный на выходе звена (рис. 3.15, а) с переда-
точной функцией 1F](5), можно перенести на вход звена (рис. 3.15, б).
При этом входной сигнал, изображение которого обозначено X2(s),
нужно подавать на сумматор через дополнительное звено с переда-
точной функцией
Сумматор, расположенный на входе звена (рис. 3.15, в) с переда-
точной функцией 1^(5) можно перенести на выход звена (рис. 3.15, г).
В этом случае входной сигнал, изображение которого обозначено
X2(s), нужно подавать на сумматор через дополнительное звено с
передаточной функцией 1F|(5).
120
Глава 3. Основы теории автоматического управления
Узел с выхода звена с передаточной функцией Wt(s) (рис. 3.15, д)
можно перенести на его вход, включая в отходящую линию свя-
зи дополнительное звено с той же передаточной функцией W'J.s)
(рис. 3.15, е).
Узел с входа звена с передаточной функцией W'jCs) (рис. 3.15, ж)
можно перенести на его выход, включая в отходящую линию связи
дополнительное звено с передаточной функцией 1/РИ](л) (рис. 3.15, з).
Используя основные правила эквивалентного преобразования
структурных схем, структурные схемы с перекрестными связями
можно преобразовать в структурные схемы без перекрестных свя-
зей, многоконтурные САУ представить одноконтурными, можно
выделить линейную часть в нелинейных системах автоматического
управления.
3.3. ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
Динамические звенья называют типовыми, если изменение про-
ходящего через них сигнала можно описать алгебраическим или
дифференциальным уравнением не выше второго порядка (как пра-
вило, линейным неоднородным дифференциальным уравнением с
постоянными коэффициентами), например:
d2y(x) dy(x) d2x(x) dx(x)
аг -ГТ- + -ST- + o0У (T) = b2 + + box (x),
dx ox dx" dx
или передаточными функциями вида
H/(j) = g?4+ а1Д + а°.
b2s2 +b{s + b0
Кроме того, к типовым динамическим звеньям относят звено
запаздывания с трансцендентной передаточной функцией
W (s) = е-Тзап5.
В основу классификации типовых динамических звеньев могут
быть положены различные признаки.
В зависимости от порядка дифференциального уравнения, или от
порядка передаточной функции, различают динамические звенья:
• нулевого порядка (а2 = = b2 = Ь{ = 0);
• первого порядка (а2 = Ь2 = 0, Ь{ * 0 и (или) Ф 0);
• второго порядка (й2 * 0 и (или) а2 * 0).
В зависимости от поведения в установившемся режиме динами-
ческие звенья разделяют, как правило, на три группы:
3.3. Типовые динамические звенья
121
• звенья статические, или позиционные (Z>0 * 0 и л0 * 0), входной
и выходной сигналы которых в статическом режиме связаны между
собой взаимно однозначной функцией
у = — х = Кх,
а0
называемой статической характеристикой (К — статический коэф-
фициент усиления, или коэффициент передачи звена);
• звенья интегрирующие, или астатические (Ьо * 0 и а0 = 0), вы-
ходной сигнал которых в установившемся режиме пропорционален
интегралу по времени от входного сигнала;
• звенья дифференцирующие, или форсирующие ((>0 = 0 и а0 * 0),
выходной сигнал которых в установившемся режиме пропорциона-
лен производной по времени от входного сигнала.
В зависимости от характера переходного процесса динамичес-
кие звенья бывают апериодические, колебательные, консервативные.
Кроме классификации по вышеперечисленным признакам ди-
намические звенья разделяют также на:
• устойчивые и неустойчивые;
• инерционные и безынерционные (или идеальные),
• минимально-фазовые и неминимально-фазовые.
Смысл используемых здесь терминов станет понятен позже при
знакомстве со свойствами типовых динамических звеньев.
Ниже рассмотрены свойства основных типовых динамических
звеньев. В этом разделе во всех случаях используются следующие
обозначения: у — выходной сигнал (зависимая переменная), т —
время (независимая переменная), х — входное воздействие (вынуж-
дающая функция).
3.3.1. Статическое звено нулевого порядка
Звено называют статическим звеном нулевого порядка (или безы-
нерционным, усилительным, пропорциональным), если его входная
и выходная величины связаны между собой зависимостью:
Яг)=Лх(т). (3.94)
Выходная величина статического звена нулевого порядка про-
порциональна входной величине не только в статическом, но и в
динамическом режиме в каждый момент времени.
Примерами статического звена нулевого порядка могут служить
рычаг (рис. 3.16, а), механические передаточные механизмы, напри-
мер, зубчатая передача (рис. 3.16, б), редукторы, усилители различ-
ных физических величин (электронный усилитель), регулирующие
122
Глава 3. Основы теории автоматического управления
Рис. 3.16. Примеры статического звена нулевого порядка:
а — рычаг; б — зубчатая передача
клапаны с линеаризованными расходными характеристиками (из-
менение расхода жидкости пропорционально изменению положе-
ния штока регулирующего клапана) и т. д.
Передаточная функция статического звена нулевого порядка яв-
ляется постоянной величиной и равна его коэффициенту усиления
(передаточному коэффициенту) К. Действительно, используя соот-
ношение (3.22), можно получить передаточную функцию статичес-
кого звена нулевого порядка:
W(s) =
= К.
(3.95)
3.3.1.1. Временные характеристики
При подаче на вход статического звена нулевого порядка еди-
ничного ступенчатого воздействия оно передает входной сигнал мгно-
венно, без всяких искажений и запаздывания (другими словами, без
динамического переходного процесса). Правда, может наблюдаться
изменение масштаба (увеличение или уменьшение) входного сигна-
ла Это изменение определяет величина статического коэффициен-
та усиления.
Переходная функция [см. выражение (3.28)]:
л(т) = «р-Чиф).!
I 5
(3.96)
/Г-1(т).
т
о *
Рис. 3.17. Переходная характе-
ристика статического звена
нулевого порядка
Переходная функция Л(т) = 0 при
т < 0 и й(т) = К при т > 0, так как 1 (?) = О
при т < 0 и 1(т) = 1 при т > 0, следова-
тельно, переходная функция повторяет
входную.
Переходная характеристика статичес-
кого звена нулевого порядка приведена
на рис. 3.17.
3.3. Типовые динамические звенья
123
Импульсная переходная функция [см. выражение (3.29)]:
м'(т) = ^-1{И'(5)-1} = АГ-8(т). (3.97)
Рамповая переходная функция [см. выражение (3.30)]:
у(т) = (sV-yl = Хт- 1(т).
I г]
(3.98)
3.3.1.2. Частотные характеристики
Частотная передаточная функция статического звена нулевого
порядка:
И^Сдо) = К. (3.99)
Так как частотная передаточная функция (3.99) содержит только
действительную часть, равную К, а мнимая часть равна нулю, то
амплитудно-фазовая частотная характеристика (АФЧХ) статическо-
го звена нулевого порядка может быть изображена на комплексной
плоскости одной точкой на действительной оси на расстоянии К от
начала координат (рис. 3.18).
Амплитудно-частотная и фазово-частотная характеристики (АЧХ
и ФЧХ) звена не зависят от частоты и равны:
Л(ш) = |И»| = К, (3.100)
<р (<в) = arctg
ы
(w)
(3.101)
Это означает, что сигналы любой частоты, поступающие на вход
статического звена нулевого порядка, усиливаются в одинаковой мере
без какого-либо фазового сдвига.
Логарифмическая амплитудно-частотная характеристика (ЛАЧХ)
статического звена нулевого порядка, выраженная в децибелах, оп-
ределяется формулой
£(w) = 201gX(<o) = 201g/r.
lm(W(/ro)]
К Re[W(/co)]
----•-----------------►
со= 0... °°
Рис. 3.18. АФЧХ статического звена нулевого порядка
124
Глава 3. Основы теории автоматического управления
Рис. 3.19. Диаграмма Боде статического звена нулевого порядка
На рис. 3.19 приведена диаграмма Боде для статического звена
нулевого порядка. ЛАЧХ статического звена нулевого порядка пред-
ставляет собой прямую, параллельную оси абсцисс и располагаемую
относительно нее в зависимости от величины коэффициента усиле-
ния: выше, если К > 1; ниже, если К < 1; ЛАЧХ совпадает с осью
абсцисс, если К — 1. ЛФЧХ статического звена нулевого порядка
при всех частотах совпадает с осью абсцисс, так как фазовый сдвиг
при всех частотах равен нулю (3.101).
3.3.2. Статическое звено первого порядка
Звено называется статическим звеном первого порядка (или инер-
ционным, устойчивым, апериодическим), если его входная и выход-
ная величины связаны между собой дифференциальным уравнением
а1 ^Г + аоУ = ьох> (3.102)
ОТ
или, обозначив К = Ь0/а0, Т = aja^,
Т^ + у = Кх, (3.103)
ат
где Т — постоянная времени (имеет размерность времени) статичес-
кого звена первого порядка.
Примеры статического звена первого порядка показаны на рис. 3.20.
Рассмотрим электрический ЯС-фильтр (рис. 3.20, а). Скорость
нарастания напряжения (/вых на конденсаторе (на выходе ЯС-филь-
тра) определяется силой тока и емкостью конденсатора:
3.3. Типовые динамические звенья
125
уЮ = Е($
Рис. 3.20. Примеры статического звена первого порядка:
а — электрический RC-фильтр; б — термопара; я — термометр расши-
рения; г — резервуар с сжатым газом; <> — резервуар со свободным
истечением жидкости
Из (3.104) находим силу тока
/ = сЁ^4ых. (З.Ю5)
dr
В соответствии со вторым правилом Кирхгофа
/Л + (/вых=(/вх. (3.106)
Подставим в (3.106) выражение для силы тока (3.105) и получим
дифференциальное уравнение для статического звена первого порядка:
RC^. + UBU> =Um. (3.107)
dr
Сравнив дифференциальное уравнение (3.107) с (3.103), нахо-
дим Т — RC, т. е. в электрических системах постоянная времени
равна произведению электрического сопротивления на электричес-
кую емкость.
Рассмотрим другой пример: термобаллон с ртутью термометра
расширения (рис. 3.20, в), быстро погружаемый в горячую жидкость
с температурой /. При этом оговорим следующие допущения: тепло-
126
Глава 3. Основы теории автоматического управления
вая емкость (аккумулирующая способность) стекла пренебрежимо
мала; температура ртути во всем ее объеме постоянна и равна 6.
Составим динамическое уравнение теплового баланса термомет-
ра расширения:
Приход — Расход = Накопление;
kA(t - 6) - 0 = тс^-,
dr
где т — масса ртути; с — удельная теплоемкость ртути; к — коэффи-
циент теплопередачи; А — площадь поверхности теплообмена.
После простых преобразований динамического уравнения теп-
лового баланса (3.108) получим
кА dr
(3.108)
или
(3.109)
Г^ + О = Г.
dx
Величина тс/кА в дифференциальном уравнении (3 109) имеет
размерность времени и называется постоянной времени звена (сис-
темы). Таким образом, постоянная времени представляет собой про-
изведение термического сопротивления \/кА (или А) на тепловую
емкость (аккумулирующую способность) тс (или С).
Замечания
1. Скорость реакции системы (в данном случае производная dO/dx)
обратно пропорциональна постоянной времени
2. Во многих случаях постоянную времени можно определить по вели-
чине сопротивления и емкости без составления динамического уравнения
материального или теплового баланса.
В гидравлических системах постоянная времени рассматривает-
ся как произведение гидравлического сопротивления потоку жид-
кости на величину гидравлической емкости.
Таким образом, постоянная времени системы равна произведе-
нию сопротивления переходу энергии (или вещества) из системы
(или в систему) на емкость системы.
3.3.2.1. Временные характеристики
Получим передаточную функцию статического звена первого
порядка. Для этого преобразуем дифференциальное уравнение (3.103)
по Лапласу, используя свойство линейности (3.16):
ГУ + ^(j) = O(x).
(3.110)
3.3. Типовые динамические звенья
127
Затем, применяя теорему о дифференцировании оригинала (3.17)
к (3.110). получим:
Т[5«(у)-у(0)] + «(у) = К<е(х). (3.111)
Учитывая, что по определению передаточной функции (3.22)
начальные условия являются нулевыми, т. е. у(0) = 0, из (3.111)
получим алгебраическое уравнение вида
5?(у)(7л + 1) = Л'5Р(х). (3.112)
Из (3.112) следует отношение изображений по Лапласу выход-
ной и входной величин:
' ' $ (х) Ts + 1
(3.113)
Переходная функция статического звена первого порядка
Получим переходную функцию статического звена первого по-
рядка, используя (3.28):
Воспользуемся таблицами преобразования Лапласа (см. Прило-
жение 2) и найдем изображение переходной характеристики стати-
ческого звена первого порядка и соответствующий ему оригинал:
й(т) = 9"
-|[ к
l7i + l
11 —
- = К 1-е т
s
т > 0.
(3.114)
Переходная характеристика (рис. 3.21, а) представляет собой
экспоненту, и это означает, что время, необходимое для достиже-
ния нового установившегося значения выходной величины hm, тео-
ретически бесконечно велико (поэтому статическое звено первого
порядка часто называют инерционным звеном первого порядка).
Постоянная времени определяет динамические свойства звена.
Чем больше постоянная времени, тем медленнее протекает пере-
ходный процесс в звене (системе) и тем более полога экспонента, и
наоборот, если постоянная времени — величина малая и в пределе
стремится к нулю, то экспонента уподобляется скачкообразно ме-
няющейся функции (это характерно для статического звена нулево-
го порядка). Допустим, что Т= 0, тогда инерционное звено превра-
щается в безынерционное (статическое звено нулевого порядка) и
переходный процесс в звене протекает мгновенно. Эти рассуждения
128
Глава 3. Основы теории автоматического управления
Рис. 3.21. Временные характеристики статического звена первого порядка:
а — переходная характеристика; б — импульсная переходная характери-
стика; в — рамповая переходная характеристика
приводят к пониманию физического смысла постоянной времени.
Постоянная времени — мера инерционности звена.
Геометрически постоянную времени можно определить как проек-
цию на ось времени отрезка касательной к экспоненте, заключенного
между точкой касания и точкой пересечения касательной с линией
установившегося значения выходной величины (см. рис. 3.21, а).
Длина этой проекции одинакова для касательных, проведенных к
любой точке экспоненты (например, к точке кривой разгона, соот-
ветствующей началу координат, или -ц). Геометрический смысл по-
стоянной времени очевиден (при т = 0):
Т = (3.115)
Если учесть геометрический смысл постоянной времени, то мож-
но дать следующее определение постоянной времени. Постоянной
времени звена (системы) называется время, в течение которого его
выходная величина достигает нового установившегося значения, если
она меняется с постоянной скоростью, равной начальному значению
после нанесения на вход звена (системы) единичного ступенчатого воз-
действия.
3.3. Типовые динамические звенья
129
Переходная характеристика (кривая разгона) статического звена
первого порядка обладает следующими свойствами:
• новое установившееся значение выходной величины равно ста-
тическому коэффициенту усиления, т. е. hm = К",
• в точке т = 0 скорость изменения выходной величины h рав-
на К/Т\
• касательная к кривой разгона в точке т = 0 пересекает асимп-
тоту в точке т = Т‘,
• величина подкасательной (проекция касательной на асимпто-
ту) равна Г и не зависит от точки проведения касательной;
• за время т = Т выходная величина звена достигает 63 % от своего
установившегося значения = К.
В инженерных расчетах считается, что время переходного про-
цесса статического звена первого порядка приблизительно равно
тпп = 4Т. (3.116)
Импульсная переходная функция статического звена
первого порядка
Импульсная переходная функция, используя (3.29), будет иметь
следующий вид:
и-(т) = г-‘{^(5)1} = 4₽-|1—^-1 = -^е’г, т>0. (3.117)
' ' 1 ' 1 17s + 11 Т
При т = Т получим и'(Т’) = 0,37 К/Т, а при т = 0 н'(О) = К/Т.
На рис. 3.21, б изображена импульсная переходная характерис-
тика (или характеристика веса) статического звена первого порядка.
Примечание
Характеристика веса или весовая характеристика — синонимы импульс-
ной переходной характеристики. Здесь речь не идете весе (mg), хотя термин
пришел из механики и обозначал реакцию механической системы на удар,
зависящую как раз от массы тела. Но в те времена между массой и весом
почти не делали различий. А теперь в словосочетании «характеристика веса»
слово «веса» надо воспринимать просто как имя характеристики.
Рамповая переходная функция статического звена первого порядка
Получим рамповую переходную функцию статического звена
первого порядка, используя (3.30). Иначе говоря, определим реак-
цию статического звена первого порядка на входной сигнал посто-
янной скорости:
у(т) = W)-U = 5Р-4-Д-4-1 = кт{е'т + ±_ Л
I S J I Is + 1 s j 1
т > 0. (3.118)
5 Беспалов А. В., Харитонов Н. И.
130 Г л а в a 3. Основы теории автоматического управления
После того как в процессе изменения выходного сигнала слага-
_ т
емое е г, характеризующее переходную составляющую движения,
окажется пренебрежимо мало (т. е. при т » Т), выходная величина
определяется соотношением
Я*) т т „ т
= т - I VT » / .
А
На рис. 3.21, в изображена кривая отклика на единичное рампо-
вое входное воздействие.
3.3.2.2. Частотные характеристики
Используя передаточную функцию (3.113) статического звена
первого порядка, перейдем к частотной передаточной функции, за-
меняя 5 на jw. Умножим числитель и знаменатель частотной переда-
точной функции на комплексную функцию (1 — Toy), сопряженную
со знаменателем, в результате чего частотную передаточную функ-
цию представим в виде суммы действительной (вещественной) и
мнимой частей:
. К {-Tty К КТы
“ 7до +1 ’ I - Т’су " Т2ы2 + 1 " Т2п2 +1J'
откуда
m ((d) = Re [IT (jw)] = -у*-—-; (3.119)
/ (0 +1
л(о>) = Im |> (»] = (3.120)
Т~ы +1
При изменении частоты колебаний от нуля до бесконечности
действительная часть /л((о) частотной передаточной функции при-
нимает только положительные значения, а ее мнимая часть и(ы) —
только отрицательные. Это означает, что АФЧХ статического звена
первого порядка располагается в четвертом квадранте комплексной
плоскости. Кроме того, анализ выражений (3.119) и (3.120) показы-
вает, что АФЧХ статического звена первого порядка представляет
собой полуокружность с радиусом К/2 и центром в точке (+К/2, у0)
(рис. 3.22).
Действительно, поскольку
л2 ((d) , ,
~^4 = T2(d2, (3.121)
m ((d)
3.3. Типовые динамические звенья
131
Рис. 3.22. АФЧХ статического звена первого порядка
то, подставив (3.121) в выражение (3.119), находим:
( \ к - Кт1 (ы)
л2 (о) т2 (w) + и2 ((d)
(3.122)
Из (3 122) можно записать
т2 (и) + п2 (о) - Кт ((d) = 0.
(3.123)
Если прибавить к обеим частям полученного равенства (К/2)2,
то (3.123) можно преобразовать к уравнению
(3.124)
Учитывая, что л(ш) < 0 для 0 < (D < уравнение (3.124) — это урав-
нение полуокружности с радиусом К/2 и центром в точке (+К/2, у’0) в
четвертом квадранте комплексной плоскости.
Выражение для АЧХ имеет вид;
Л((о) = ^л2
—----2Т~х К2 К2Т2а2
(со) + Л ((D) = I--т +-------7 =
^(rV+i) (rV + i)2
-=4—+т2^2 = I к
т 2(D2 +1 Vr2(D2 + 1
(3.125)
ФЧХ определяется выражением
Ф (w) = arctg[n((D)/w((D)] = arc tg (-Та) = -arctg(T(D). (3.126)
Графики АЧХ и ФЧХ изображены на рис. 3.23.
Из выражений (3.125) и (3.126) следует, что модуль и аргумент
являются функциями частоты. При изменении частоты колебаний ш
5*
132
Глава 3. Основы теории автоматического управления
Рис. 3.23. АЧХ и ФЧХ статического звена первого порядка
от нуля до бесконечности /п(<в) и л((о) принимают различные значе-
ния, что позволяет построить АФЧХ звена по точкам. Модуль час-
тотной передаточной функции изменяется от К (при ш = 0) до О
(при го = °о), а аргумент (фазовый сдвиг) изменяется от 0 до —л/2.
Таким образом, в статическом звене первого порядка наблюдается
отставание выходной величины от входной.
Частотная передаточная функция статического звена первого
порядка, записанная в показательной форме, имеет вид:
^(уы) = -—Л_е (3.127)
V7'2(d2 +1
ЛАЧХ статического звена первого порядка, если ее выражать в
децибелах, определяется уравнением
201g Л (w) = 20 lg Af - 201g<71 + Т2(й2 =
= 201g К - 201g^1 + (w2/(d2),
где (oc = \/T — частота сопряжения.
Рассмотрим три случая.
Если го < <ос, тогда можно записать (3.128) как
201g A (w) = 201g К - 201g ^1 + {(d2/(d2) =
» 20lgК - 20Igl = 201gК.
(3.128)
(3.129)
Следовательно, ЛАЧХ на частотах со (ос представляет собой
прямую, параллельную оси абсцисс.
3.3. Типовые динамические звенья
133
Если (о » й)е, тогда (3.128) можно записать как
201gH(<o) = 20 Ig A- -201g((o/G)c) (3.130)
Если частота колебаний равна частоте сопряжения w — wc, тогда
из выражения (3.128) находим:
201g>4((Dc) = 201gX-201g>/2 =201gK-3. (3.131)
Если со = 10сос, тогда из выражения (3.128) получаем:
201g Л(10<ос) = 201gAT - 201g 11+^4 =
’ ®с (3.132)
= 201g /Г - 201g VlbT = 201g АГ - 20.
Для ЛФЧХ при аналогичном рассмотрении имеем: при ы « <ос
фазовый сдвиг стремится к нулю; при и »(ас имеет место фазовое
отставание, доходящее до —л/2 и, наконец, при частоте сопряжения
со = о)с = 1/Т фазовый сдвиг равен —л/4. ЛАЧХ и ЛФЧХ, построен-
ные в упрощенном варианте, представлены на рис. 3.24.
Рис. 3.24. Логарифмические частотные характеристики статического зве-
на первого порядка:
I — точные; 2 — приближенные
134
Глава 3. Основы теории автоматического управления
3.3.3. Звено запаздывания
Для любого устройства, например, предназначенного для пере-
дачи или преобразования информации, естественно некоторое за-
паздывание выходной величины на время (обозначим его т.^) отно-
сительно момента поступления информации на его вход. В ряде слу-
чаев запаздывание может быть настолько малым, что им можно
пренебречь, но в химической технологии при наличии многотон-
нажных производств с коммуникациями этот временный сдвиг мо-
жет играть весьма существенную роль.
Звено запаздывания — это такое звено, которое не изменяет вид
входного сигнала (точно повторяет), а лишь задерживает во време-
ни, иначе говоря, если в момент т = 0 входная величина, ранее
неизменная, начинает изменяться по определенному закону, то спу-
стя время запаздывания по такому же закону начнет изменяться
и выходная величина. Время запаздывания называют временем транс-
портного (или чистого) запаздывания. В дальнейшем изложении
употребляется как время транспортного запаздывания.
Замечание
Звену запаздывания соответствует модель идеального вытеснения,
широко применяемая для расчета процессов химической технологии
На рис. 3.25 изображено усзройст во подачи сыпучего вещества в
объект управления. Вещество1из загрузочного бункера 7 поступает
на транспортер 2, а затем пересыпается:® приемный бункер 3 регу-
лируемого объекта. Количество поступающего вещества на транс-
портер регулируется шибером '4., При рабочей длине транспортера /
и скорости его перемещения v время транспортного запаздывания
(3.133)
’’•зап ~
v
Рис. 3.25. Пример звена запаздывания:
1 — бункер; 2 — ленточный транспортер; 3 —
приемный бункер; 4 — шибер дозировки сыпу-
чего вещества
^"вых
3.3. Типовые динамические звенья
135
Если 0 < т < Гил, то у(т) = О, т. е- выходная величина неизменна;
если т > тзап, то выходная величина в момент времени т будет точно
такой же, какой была входная величина в момент времени т — тзап,
т. е. уравнение звена запаздывания имеет вид:
у(т) = х(т - Тзап). (3.134)
Переходная характеристика звена запаздывания изображена на
рис. 3.26, а рис. 3.27 демонстрирует кривую отклика звена запазды-
вания на единичное рамповое входное воздействие.
Явление запаздывания (так называемого транспортного запаз-
дывания) имеет место в объектах управления, когда возмущающее
воздействие, распространяясь в ОУ с конечной скоростью, вызыва-
ет изменение управляемого параметра лишь спустя некоторое вре-
мя. Например, при регулировании уровня жидкости в реакторе воз-
мущающее воздействие в виде изменения расхода жидкости на сто-
роне притока изменяет расход жидкости в трубопровод, по которому
жидкость и подается в реактор. Естественно, что время транспорт-
ного запаздывания зависит от длины и наклона трубопровода.
АФЧХ звена запаздывания получить сравнительно легко. Дей-
ствительно, подадим на вход звена запаздывания гармонический
сигнал с частотой о и с амплитудой Ах и запишем его в комплекс-
ной показательной форме:
х(т) = Лхе>т. (3.135)
Спустя время, равное тзап, на выходе звена появятся колебания
той же частоты о и той же амплитуды (Ау = ЛЛ), т. е.
у(т) = Лл.еМм»">. (3.136)
Если взять отношение колебаний (3.136) и (3.135), то получим
выражение частотной передаточной функции звена запаздывания:
Рис. 3.27. Рамповая переходная ха-
рактеристика звена запаздывания
Рис. 3.26. Переходная характеристика
звена запаздывания
136
Глава 3. Основы теории автоматического управления
Таким образом, передаточная функция звена запаздывания мо-
жет быть получена заменой в (3.137) у<в на s:
ИДя) = е"”зап
(3.138)
Примечание
Передаточная функция (3.138) звена запаздывания может быть полу-
чена как прямое следствие теоремы запаздывания [см. (3.21)].
Так как АЧХ звена запаздывания равна единице,
Л (<о) = ^ («) = !,
(3.139)
и не зависит от частоты, а ФЧХ пропорциональна частоте с коэффи-
циентом пропорциональности, равным —т^, то АФЧХ звена запаз-
дывания представляет собой окружность с центром в начале коорди-
нат комплексной плоскости и радиусом, равным единице (рис. 3.28).
Фазовый сдвиг звена запаздывания отрицателен и пропорциона-
лен частоте, т. е.
ф((0) = -Тзап<0.
(3.140)
Из ФХЧ (3.140) следует, что звено запаздывания равномерно
пропускает все частоты колебаний при сдвиге фаз, пропорциональ-
ном времени транспортного запаздывания тзап.
При частоте <о = 0 вектор АФЧХ совпадает с положительной
действительной полуосью, а конец его расположен в точке с коорди-
натами (l,j0). С увеличением частоты конец вектора АФЧХ повора-
чивается по окружности по часовой стрелке (поскольку ФЧХ отрица-
тельна). При повороте вектора на 360° он займет первоначальное по-
ложение, при этом приращение фазы равно —2л. Следовательно,
можно записать
ф(<о) = -штзап = -2л.
Это означает, что в исходное положение вектор АФЧХ возвра-
щается при частоте со = При дальнейшем увеличении часто-
ты колебаний вектор АФЧХ занимает исходное положение при час-
тотах 2л/тзап, 4/Тзап, бл/Тзап и т. д. Отрицательная действительная по-
луось совпадает с вектором АФЧХ при частотах л/т.^,, З/т^, и
т. д., при этом конец вектора будет расположен в точке с координа-
тами (—1, у'О). При стремлении частоты к бесконечности (со —> °°)
вектор АФЧХ поворачивается вокруг начала координат бесчислен-
ное число раз.
3.3. Типовые динамические звенья
137
Рис. 3.28. АФЧХ звена запаздывания
Рис. 3.29. АЧХ и ФЧХ звена запаз-
дывания
Таким образом, в звене запаздывания имеет место отставание по
фазе выходных колебаний от входных, пропорциональное частоте
колебаний. Отставание по фазе звена запаздывания будет тем боль-
ше, чем больше время транспортного запаздывания и чем боль-
ше частота входных колебаний.
На рис. 3.29 приведены АЧХ и ФЧХ звена запаздывания.
ЛАЧХ звена запаздывания выглядит так
£(ю) = 201gl = О,
(3.141)
т. е. это прямая линия, совпадающая с осью абсцисс.
А 100
10
1
0,1
001
0,01 0,02 0,05 0,1 0,2 0.5 1
Рис. 3.30. Диаграмма Бодё звена запаздывания
138
Глава 3. Основы теории автоматического управления
Задаваясь значениями частоты по выражению (3.140) можно по-
строить ФЧХ в полулогарифмическом масштабе
На рис. 3.30 построены ЛАЧХ и ЛФЧХ звена запаздывания.
3.3.4. Статическое звено второго порядка
Статическим звеном второго порядка называется звено, входная
и выходная величины которого связаны между собой линейным диф-
ференциальным уравнением второго порядка:
d v dv
тг + а1а + аоУ = Ьох‘ (3-142>
d-r ат
Обозначив
К — Ь0/а0, Т2 -a-Ja^, 2^Т-а{/а0,
где К, Т, £ — коэффициент усиления, постоянная времени, коэффи-
циент демпфирования соответственно, получим
Т2^- + 2^Т^- + у = Кх. (3.143)
dr ат
В зависимости от значения коэффициента демпфирования раз-
личают следующие статические звенья второго порядка:
> 1 — апериодические',
0 < Q < 1 — колебательные;
£ = 0 — консервативные.
Если £ = 1, то демпфирование называют критическим.
Уравнение колебательного статического звена второго порядка
часто записывают в такой форме:
Wo dT2 w0 dT
+ у = Кх,
(3.144)
где соо — частота свободных колебаний (собственная частота) недем-
пфированной системы.
Примеры апериодического звена второго порядка.
Пример
► Рассмотрим две системы первого порядка, соединенных таким
образом, что выход первой системы является входом второй, напри-
мер, каскад двух реакторов, работающих в режиме идеального сме-
шения (рис. 3.31), в которых выходной переменной является концен-
трация. Структурная схема каскада реакторов приведена на рис. 3.32.
3.3. Типовые динамические звенья
139
Рис. 3.31. Пример апериодичес-
работающих в режиме идеального смешения
У=свых
Если реакция первой системы не зависит от условий во второй
системе, то такие системы являются детектирующими, и для опре-
деления реакции системы в целом достаточно перемножить переда-
точные функции двух систем первого порядка:
I р т I л 2*^ + *
кхк2 и
Т1Т252 +(Г1+Т2)5 + 1’
Пример
► В резервуар с нагретой жидкостью погрузили термометр.
И резервуар, и термометр можно рассматривать как детектирующие
элементы, и чтобы получить общую передаточную функцию систе-
мы, как и в предыдущем примере, достаточно перемножить переда-
точные функции резервуара (передаточная функция статического звена
первого порядка с постоянной времени резервуара Т{) и термометра
(передаточная функция статического звена первого порядка с посто-
янной времени резервуара Г2). В результате получим выражение пе-
редаточной функции системы, аналогичное предыдущему.
Замечание
Хорошим примером последовательного соединения детектирующих
гидравлических элементов может служить ректификационная или абсорб-
ционная тарельчатые колонны, снабженные, например, ситчатыми тарел-
ками с переливом, поскольку уровень жидкости на каждой тарелке изме-
няется при изменении расхода жидкости, поступающей на нее, однако уро-
вень на расположенной ниже тарелке не влияет на величину расхода
жидкости, поступающей с вышележащей тарелки.
140
Глава 3. Основы теории автоматического управления
Рис. 3.33. Примеры колебательного статического звена второго порядка:
а — электрическая цепь типа колебательного контура RCL; б — U-об-
разный жидкостный дифманометр; в — мембранный исполнительный
механизм (1 — шток; 2 — пружина; 3 — мембрана); г — механический
демпфер
Примеры колебательного звена показаны на рис. 3.33.
Пример
► Получить уравнение динамики и передаточную функцию пнев-
матического мембранного исполнительного механизма с регулиру-
ющим органом (рис. 3.33, в) с учетом силы вязкого трения и инер-
ции его подвижной системы.
Решение. В пространство над мембраной 3 поступает воздух под
давлением р, создавая усилие на мембрану. Под действием этого
усилия она прогибается вниз, перемещая вниз шток 1. Через клапан
проходит жидкость в количестве, зависящем от степени его откры-
тия. Перемещению h штока клапана с затвором препятствует сила
упругости пружины 2, трение штока в сальнике и затвора.
Рассмотрим в качестве входной величины пневматического мем-
бранного исполнительного механизма с регулирующим органом из-
3.3. Типовые динамические звенья
141
менение давления Др, а выходной — перемещение ДА штока с затво-
ром (отсчет ведем в малых приращениях от равновесного состояния).
Если трением и инерцией пренебречь нельзя, то уравнение рав-
новесия сил подвижной системы пневматического мембранного ис-
полнительного механизма с регулирующим органом имеет вид:
F» + Frp + ЛР = F,
где F — входное усилие (равно произведению давления воздуха на
площадь мембраны); FH — сила инерции (равна произведению мас-
сы подвижной системы на ускорение); FTp — сила вязкого трения
(пропорциональна скорости перемещения подвижной системы);
Епр — сила противодействия пружины (пропорциональна ее сжатию).
Подставив соответствующие выражения сил в уравнение равно-
весия, получим дифференциальное уравнение движения штока с
затвором в следующем виде:
d2(AA) d(AA)
dx2 dx
+ сДА = ЛДр,
(3.145)
где т — масса движущихся частей с учетом половины массы пружи-
ны; с — коэффициент жесткости пружины; г — коэффициент тре-
ния; А — площадь мембраны.
Перепишем уравнение (3.145), предварительно разделив обе его
части на с.
md (ДА) rd(AA) А.
----+-------з—- + =
с dx с dx с
(3.146)
Обозначив
mjc = Т2, г/с = 'IT.T, А/с = К,
получим из (3.146) уравнение динамики пневматического мембран-
ного исполнительного механизма (с регулирующим органом) с уче-
том силы вязкого трения и инерции его подвижной системы:
Т2 d (^0 + + да = АГ Др, (3.147)
dx dx
т. е. по сути своей получили уравнение (3.143), где х = Др, а у = ДА.
Для определения передаточной функции воспользуемся свой-
ствами преобразования Лапласа: линейностью (3.16) и дифферен-
цированием оригинала (3.17) (см также Приложение 1):
T2s2¥(&h) + 2£,Ts!jP(&h) + &(&h) = КУ^Ьр),
142
Глава 3. Основы теории автоматического управления
откуда следует отношение изображений по Лапласу выходной и вход-
ной величин:
U #(Др) T2s2 + 2£7s + l
(3.148)
Пример
► Получить уравнение динамики U-образного жидкостного диф-
манометра (рис. 3.33, б), связывающее показания дифманометра h с
измеряемой разностью давлений \р = рг — р2.
Решение. Запишем уравнение равновесия сил, для упрощения
пренебрегая плотностью паров над уровнем жидкости и предполо-
жив, что движение жидкости в трубке дифманометра поршневое, а
падение давления, вызванное трением, пропорционально скорости
потока:
Л, +^р + ^т = Л
где
„ 1 ё2Л
=Р^5—г
2 dr
— сила инерции (р — плотность жидкости, А — площадь поперечно-
го сечения трубки U-образного жидкостного дифманометра);
г . . 32ф 1 dh .
d 2 dr
— сила трения (Артр — потери давления на трение, определяемые по
уравнению Хагена—Пуазейля; у. — динамическая вязкость жидко-
сти; d — внутренний диаметр трубки дифманометра);
FT = Mpg
— сила тяжести, (g — ускорение свободного падения);
F = A(Pl-p2)
— сила, приложенная к жидкости со стороны измеряемого давления.
Подставляя эти выражения в уравнение равновесия сил, получим
р£А d2h 16р£Л dh
, . 2 +~^--r + PgM = ЛА .
2 ат ат
Разделив все члены уравнения на pgA, получим уравнение дина-
мики U-образного жидкостного дифманометра
£ d2A 16ц£ dh . 1
-----т + S =—Др,
2g dr pgd dT pg
3.3. Типовые динамические звенья
143
которое обычно записывают в следующем стандартном виде:
1 d2* К dh , .. , ._ч
-=—=- + -2-—+ Л = АГДр, (3.149)
о>о dt «>0 dr
где £ — коэффициент демпфирования; со0 — частота свободных коле-
баний (собственная частота) недемпфированной системы, рад/с.
Физический смысл ю0 и £ становится очевидным после анализа
решения уравнения (3.149) при единичном ступенчатом изменении
входного сигнала — измеряемого перепада давления. При коэффици-
енте демпфирования 0 < £ < 1 выходной сигнал будет совершать затуха-
ющие колебания (рис. 3.34). Такую систему называют слабо демпфиро-
ванной. При коэффициенте демпфирования £ = О (недемпфированная
система) выходной сигнал представляет собой незатухающие колеба-
ния (синусоидальный сигнал) с частотой а>0 и амплитудой К. Если ко-
эффициент демпфирования £ = 1, то имеет место критическое демпфи-
рование, и жидкость в дифманометре приходит к состоянию равнове-
сия без перерегулирования. При коэффициенте демпфирования £ > 1
изменение уровня жидкости в дифманометре происходит без колеба-
тельного процесса тем медленнее, чем больше коэффициент демпфи-
рования. Такие системы называют сильно демпфированными.
Замечание
Демпфирование (от англ, damping) — физическая величина, отчасти
подобная противодействующей силе, которая препятствует возвращению к
положению равновесия, применяется для характеристики противодейству-
ющей силы, например, маятника с трением или пружины с прикреплен-
ным грузом, помещенным в вязкую жидкость. Коэффициент демпфирова-
ния можно рассматривать как меру величины демпфирования.
Рис. 3.34. Переходные характеристики U-образного жидкостного дифмано-
метра при различных значениях коэффициента демпфирования
144 Глава 3. Основы теории автоматического управления
3.3.4.1. Переходная характеристика
Итак, запишем выражение для передаточной функции (3.148)
статического звена второго порядка:
РК(д)= , , К--------.
' T2s~ + 2£7s + l
Характер переходного процесса, определяемого дифференциаль-
ным уравнением звена, зависит от расположения корней его харак-
теристического уравнения
T2s2 + 2£Ts + l = 0 (3.150)
на комплексной плоскости.
Замечание
Характеристическое уравнение статического звена второго порядка можно
получить, приравняв знаменатель передаточной функции (3.148) к нулю.
Корни характеристического уравнения (3.150) равны:
5,.2 =(Ч±Т?ТТ)/7’. (3-151)
Запишем переходную функцию статического звена второго порядка:
<3152)
Вид переходной характеристики (3.152) статического звена вто-
рого порядка зависит от коэффициента демпфирования
В зависимости от знака дискриминанта (подкоренного выраже-
ния) (3.151) при нахождении оригинала по его изображению (3.152)
можно рассмотреть несколько случаев
Первый случай. При коэффициенте демпфировании £ > 1
оба корня характеристического уравнения (3.150) — действительные
отрицательные: = — ab s2 — —а2. Учитывая это обстоятельство,
выражение (3.152) можно представить как
Л(т) = У ’1|‘7П--w-------\~ (3.153)
' ’ [Т2 (5 + a])(s + a2) 5
Выполнив обратное преобразование Лапласа (см. Приложение 2),
получим переходную функцию статического звена второго порядка
для £ > 1:
h (т) = К . 1 - -2- e ai1 + —ai— e~“2t 1 -1 (т) (3.154)
\ a2 - al а2 - СЦ )
при <Х| * а2.
3.3. Типовые динамические звенья
145
Соответствующая (3.154) переходная характеристика имеет S-об-
разную форму (см. рис. 3.34) и является апериодической. Поэтому
при С > 1 статическое звено второго порядка называют апериодичес-
ким, а систему, по динамическим свойствам аналогичную такому
звену, — сильно демпфированной.
Второй случай. При коэффициенте демпфировании £ = 1
характеристическое уравнение имеет два одинаковых действитель-
ных отрицательных корня:
1
*1 = = -у = -«•
Учитывая это. выражение (3.152) можно представить в виде
(3.155)
Выполнив обратное преобразование Лапласа (см. Приложение 2),
получим переходную функцию статического звена второго порядка
для £ = 1:
Л(т)=АГ 1-(1 + у) -1(т).
(3.156)
Переходная характеристика, соответствующая (3.156), как и в
случае £ > 1, является апериодической. Поэтому при £ = 1 статичес-
кое звено второго порядка также называют апериодическим, а демп-
фирование — критическим.
Третий случай. При 0 < £ < 1 характеристическое уравнение
(3.150) имеет два сопряженных комплексных корня:
,,2.^±7£?»_а±л.
(3.157)
С учетом (3.157) можно представить (3.152) в виде:
Выполнив в (3.158) обратное преобразование Лапласа (см. При-
ложение 2), получим переходную функцию статического звена вто-
рого порядка для 0 < £ < 1:
I ОС 1
I — sinpT + cosP? I 1(т)
(3.159)
146
Глава 3. Основы теории автоматического управления
или
Л(т) = ЛГ
I е •
1----— Sin
рг
Рт + arctg
•1(т).
(3.160)
Переходный процесс, описываемый уравнением (3.160), явля-
ется колебательным, поэтому при коэффициенте демпфирования
0 < £ < 1 статическое звено второго порядка называют колебатель-
ным, а демпфирование — слабым. Частота колебаний в переходном
процессе равна мнимой части корня характеристического уравне-
ния Р, а амплитуда колебаний убывает по экспоненциальному зако-
ну е“от. Колебательное статическое звено второго порядка нельзя
разбить на другие более простые детектирующие рвенья.
Переходные процессы статического звена второго порядка в
зависимости от коэффициента демпфирования представлены на
рис. 3.35. Причем колебательному звену соответствуют переход-
ные характеристики с коэффициентом демпфирования 0 < £ < 1,
апериодическому звену — переходные характеристики с коэффи-
циентом демпфирования £> 1, при коэффициенте демпфирования
£ = 0 (недемпфированная система) выходной сигнал представляет
собой незатухающие колебания с частотой <о0 и амплитудой К (кон-
сервативное звено).
Из переходной характеристики (3.160) следует, что мнимая со-
ставляющая р корней характеристического уравнения (3.151) явля-
ется круговой частотой колебательного звена, а период колебаний
равен 2л/р.
Рис. 3.35. Переходные характеристики статического звена второго поряд-
ка при различных значениях коэффициента демпфирования
3.3. Типовые динамические звенья
147
Рис. 3.36. Переходная характеристика колебательного статического звена
второго порядка (0 < С, < 1)
Интенсивность затухания колебаний в колебательном звене ха-
рактеризуется отношением соседних амплитуд переходной характе-
ристики, направленных в одну сторону, например, At и А3 (рис. 3.36).
Оценить переходный процесс в колебательном звене возможно, ис-
пользуя показатель называемый степенью затухания колебаний (2.5).
Замечание
В главе 2 этот показатель использовали для оценки качества переход-
ного процесса систем управления.
Перепишем (2.5) в следующем виде:
^ = 1-Л3/Л1 (3.162)
Используя рис. 3.36, первую амплитуду колебаний можно выра-
зить как
Л=^е'аТ1- <3.163)
Третью амплитуду колебаний выразим как
^=^е'аТ2- (3-164)
С другой стороны, период колебаний можно определить как
Г=т2 —тР (3.165)
148
Глав»а 3. Основы теории автоматического управления
Учитывая (3.165), подставим значения амплитуд А} и А3 из выра-
жений (3.163) и (3.164) в (3.162) и получим степень затухания коле-
баний в виде
V = 1 - ехр (-2л а/Р). (3.166)
Из (3.166) видно, что степень затухания определяется отношени-
ем действительной составляющей а комплексных корней характери-
стического уравнения (3.150) к их мнимой составляющей р. Чем бли-
же к единице степень затухания, тем быстрее затухают колебания.
Отношение значения действительной части корней к их мнимой
части называют степенью колебательности'.
ц = а/р. (3.167)
Используя (3.161), выразим степень колебательности ц через
коэффициент демпфирования:
Н = (3-168)
С учетом (3.167) перепишем (3.166) и получим степень затуха-
ния в таком виде:
V = 1 -ехр(-2лц). (3.169)
Чем больше коэффициент демпфирования £, тем больше сте-
пень затухания у и меньше время переходного процесса. Однако
увеличивать коэффициент демпфирования для сокращения тпп можно
лишь до значения £ = 1/V2. Дальнейший рост коэффициента демп-
фирования приводит к апериодическому переходному процессу и
увеличивает время переходного процесса тпп.
Четвертый случай. При коэффициенте демпфирования £ = 0
характеристическое уравнение (3.150) имеет два сопряженных мни-
мых корня:
^,2=±7у (3.170)
Переходная характеристика звена равна:
й(т) =
1Г к
T2s2 +1
= Hl-COSyj-l(T) =
= К(1 - COS(00x) . 1(т),
(3.171)
т. е. переходный процесс представляет собой незатухающие колеба-
ния с частотой (Oq и амплитудой К. Консервативное звено называют
также недемпфированным.
3.3. Типовые динамические звенья
149
3.3.4.2. Частотные характеристики
Перейдем к рассмотрению частотных характеристик статичес-
кого звена второго порядка.
Найдем АФЧХ звена. Для этого в передаточной функции (3.148)
заменим 5 наум и в результате получим:
Т2 С/<о)2 + 2Т^(» + 1 " -Г2(о2 + у2ГС<о + 1 '
к (l-T2a>2)-j2T^ K(l-T2<o2)-j2T^K<o
(1 - Т2<о2) + jlTtp ' (1 - Г2(о2) - j2T& " (i _ Г2Ш2)2 + 47^ V
^(1~Г2(о2) 2T(jK<a
(1 - T2w2 )2 + 4Г Vto2 7 (1 - T2<o2 )2 + 4Г V<o2
= wi(<o) + jn(w).
(3.172)
Найдем АЧХ статического звена второго порядка:
А (<о) = I1K (у<о)| = т------------г =
1 U 71 |(1-Г2<о2) + 2С7>|
=___________К____________
у/(1 Г2(О2)2+(2СГсоУ
(3.173)
Частоту юс = l/Т, как и в случае статического звена первого
порядка, называют частотой сопряжения.
ФЧХ имеет вид:
<р (“) = -arctg777^7’ “ S “с = т ’
ф(со) = -Л - arctg-----Ю > “с = С77-
v 7 I - Т2(й2 т
(3.174)
Таким образом, частотная передаточная функция с учетом (3.173),
(3.174) в показательной форме имеет вид:
__________К__________
^(1-Т2<о2)2 +(2СТ<о)2
exp^-jarctg-j—^-2
(3.175)
На рис. 3.37 изображена АФЧХ статического звена второго по-
рядка, которая начинается (при частоте ю — 0) на действительной
150
Глава 3. Основы теории автоматического управления
Рис. 3.37. АФЧХ статического звена второго порядка при различных зна-
чениях коэффициента демпфирования
оси' комплексной плоскости в точке {К, уО). Вид АФЧХ зависит от
величины коэффициента демпфирования £.
АФЧХ консервативного звена представляет собой две полупря-
мые (рис. 3.37), первая из которых начинается при частоте колеба-
ний со = 0 на положительной действительной полуоси в точке (Х,у0)
и при возрастании частоты колебаний до ю = <о0 уходит по дей-
ствительной полуоси в положительном направлении в бесконечность.
Вторая полупрямая расположена на отрицательной действительной
полуоси, причем начало полупрямой находится в минус бесконечно-
сти при со = ю0, а ее конец совпадает с началом координат при со = °°.
На рис. 3.38 изображены АЧХ и ФЧХ статического звена второ-
го порядка для различных значений коэффициента демпфирования.
Колебательному характеру переходной характеристики (см. рис. 3.35)
соответствует наличие резонансного пика на АЧХ (рис. 3.38, а) при
резонансной частоте <ор. Отношение максимального значения АЧХ
к ее значению при нулевой частоте получило название показателя
колебательности'.
М = Л(<ор)/Л(0). (3.176)
Если продифференцировать выражение АЧХ статического звена
второго порядка, представленное в виде (3.173), по частоте <о и при-
равнять производную к нулю, то можно получить выражение для
расчета резонансной частоты звена (системы):
(ор=|71-2С2; (3.177)
3.3. Типовые динамические звенья
151
Рис. 3.38. АЧХ и ФЧХ колебательного статического звена второго по-
рядка
Подстановка полученного выражения (3.177) в предыдущие (3.173)
и (3.176) позволяет определить частотный показатель колебательно-
сти как:
М =----......; С < -к- (3.178)
2^1 -2С2
Показатель колебательности (3.178) и степень колебательности
(3.168) связаны равенством:
Л/ = (1 + р2)/2р. (3.179)
Из (3.169) следует, что степень затухания колебаний у связана
со степенью колебательности ц и, следовательно, с показателем ко-
лебательности М.
С уменьшением степени затухания колебаний степень колеба-
тельности ц уменьшается (от ц = °° при у = 1 до ц = О при у = 0),
показатель колебательности М растет (от М = 1 до М = °°), резо-
нансная частота шр (в рассматриваемом диапазоне значений степени
затухания колебаний) примерно равна собственной частоте колеба-
ний недемпфированной системы и0.
152
Глава 3. Основы теории автоматического управления
Замечание
Неустойчивые колебательные звенья имеют передаточные функции вида
=
К
T2s2 - 2£7i + 1
или IT (s) =
К
T2s2 + 2£7s - 1
На рис. 3.38, а видно, что при уменьшении коэффициента демп-
фирования £ максимум АЧХ увеличивается. Значение частоты, при
котором появляется этот максимум, также увеличивается, прибли-
жаясь к собственной частоте колебаний консервативного звена <о0.
При коэффициенте демпфирования £ = О Л(со0) = °°.
При частоте <о = 0 для различных значений коэффициента демп-
фирования £ все ФЧХ ф(<о) = 0 (рис. 3.38, б). При частоте <о = соо
для различных значений коэффициента демпфирования £ все ФЧХ
<р((й) = —л/2. При частоте ы -»<*> для различных значений коэффи-
циента демпфирования £ все ФЧХ ф(ш) -э —л. Все ФЧХ отрицатель-
ны, т. е. выходные колебания во всем диапазоне изменения частоты
колебаний <о отстают от входных.
Замечание
При £ = О фаза выходных колебаний совпадает с фазой входных коле-
баний в диапазоне частот 0 < <о < <о0. При частоте со = <о0 фаза изменяется
скачкообразно от <р(со) = 0 до ф(со) = —л. В диапазоне частот соо < со < фаза
выходных колебаний отстает от фазы входных колебаний на л.
Анализируя частотные характеристики статического звена вто-
рого порядка, можно сделать такой вывод: при малых частотах вход-
ных колебаний (со = 0) колебательное звено по своим свойствам при-
ближается к статическому звену нулевого порядка, а при больших
частотах входных колебаний практически не пропускает сигнала.
Построение асимптотической ЛАЧХ
Логарифмируем выражение АЧХ (3.173) и получим
L(о) = 201gК - 201g^(1-Г2ш2)2+(2СТ(о)2. (3.180)
Используя выражение (3.180), можно построить ЛАЧХ колебатель-
ного звена в зависимости от величины Тсо (рис. 3.39) при К = 1 для
различных значений коэффициента демпфирования £.
При Ты «с 1 ЛАЧХ асимптотически приближается к функции
Тнча (со) = 201g К - 201g 1 = 201g К, (3.181)
называемой низкочастотной асимптотой, которую в области низких ча-
стот можно использовать вместо точной ЛАЧХ. При К= 1 = 0.
3.3. Типовые динамические звенья
153
Рис. 3.39. ЛАЧХ и ЛФЧХ статического звена второго порядка при различ-
ных значениях коэффициента демпфирования
При высоких частотах (Ты <к 1) ЛАЧХ асимптотически прибли-
жается к функции
£вча (ш) = 20 1g (АГ/Г2) - 40 lg<o, (3.182)
называемой высокочастотной асимптотой, которую в области высо-
ких частот можно использовать вместо точной ЛАЧХ. £вча(<о) пред-
ставляет собой прямую линию с наклоном —40 дБ/дек.
Низкочастотная и высокочастотная асимптоты сопрягаются
при частоте, получившей название частоты сопряжения, в дан-
ном случае
(ос =ы0 =1/Т.
ЛФЧХ для различных значений коэффициента демпфирования £
изображены на рис. 3.39.
Замечание
Когда использование асимптотической ЛАЧХ приводит к слишком
большим погрешностям, можно построить точную ЛАЧХ, используя выра-
жение (3.180).
154
Глава 3. Основы теории автоматического управления
При коэффициенте демпфирования £ > 1 статическое звено второго
порядка становится апериодическим и его можно представить как пос-
ледовательное соединение двух статических звеньев первого порядка:
W = (7’1s + l)(7’2s + l) ’ (3’183)
где 1/7! и 1/?2 являются корнями характеристического уравнения (3.150).
Учитывая (3.125) и (3.128) из передаточной функции апериоди-
ческого звена второго порядка (3.183), получим
L (ш) = 201g К - 201g 7т;2ш2 + 1 - 201g^to2 + 1. (3.184)
Выполним асимптотическую аппроксимацию ЛАЧХ (3.184).
Положим, для определенности, что Т\ < Т2. Частотами сопряже-
ния асимптотической ЛАЧХ являются <ос1 = 1/Т2 и <ос2 = 1/7’1. При
коэффициенте демпфирования £ > 1 ЛАЧХ представляет собой ло-
маную линию, состоящую из прямой, параллельной оси абсцисс и
проходящей от нее на расстоянии, равном 20 IgAf, если <о < <ос1; пря-
мой с наклоном —20 дБ/дек на участке с частотами <ос1 < ю < <ос2;
прямой с наклоном —40 дБ/дек при частоте <ос2 < ю < °° (рис. 3.40).
<р, град
Рис. 3.40. Аппроксимированные ЛАЧХ и ЛФЧХ апериодического стати-
ческого звена второго порядка при £ > 1
3.3. Типовые динамические звенья
155
Учитывая (3.126), из передаточной функции апериодического
звена второго порядка (3.183) находим ЛФЧХ:
<р ((о) = -arctg (7]<о) - arctg (7"2со).
(3.185)
Для построения приближенной ЛФЧХ используем кусочно-ли-
нейную аппроксимацию (см. рис. 3.40). При этом ось частот разде-
ляют на пять интервалов.
При <о = 0 первая составляющая ЛФЧХ
<р, (со) = -arctg7](o = 0.
При (о = 0,1/7"!
<Pj (to) = -arctg 0,1 = -6°.
При со = 10/7]
<Pi (to) = -arctg 10 = -84°.
При со = оо
ср, (со) = -90°.
Это означав!, что на участке частот 0 < со < 0,1/7", первая состав-
ляющая ЛФЧХ апериодического звена второго порядка <р,((о) моно-
тонно уменьшается от 0 до —6°. На участке частот 10/7] < со < °°
первая составляющая ЛФЧХ <р,(<о) уменьшается от —84° до —90°.
Учитывая вышеприведенные выкладки в интервале частот 0 < со <
< 0,1/7], допускаем <р,(со) ~ 0, а в интервале частот 10/7] < со < °°
принимаем <р,(со) = —90°. Поскольку интервал частот 0,1/7", < со < 10/7,
равен двум декадам, то в нем <р,(со) можно аппроксимировать пря-
мой с наклоном —45°/дек.
Подобно можно аппроксимировать вторую составляющую ЛФЧХ
<р2(со) = - arctg (7"2<о)
в интервалах часто!
0 < со < 0,1/7"2;
1/Т"2 < со < 10/7/
Ю/Г2 < co < оо.
Поскольку при последовательном соединении звеньев фазовые
характеристики складываются, ЛФЧХ апериодического звена вто-
рого порядка приближенно выразим в виде суммы аппроксимиро-
ванных составляющих <р,(со) и <р2(со) (на рис. 3.40 изображены пунк-
тирными линиями). Итак, для коэффициента демпфирования £ > 1
156
Глава 3 Основы^теории автоматического управления
б
Рис. 3.41. Аппроксимация апериодичес-
кого статического звена второго поряд-
ка (£ > 1) в виде последовательного со-
единения звена запаздывания и статичес-
кого звена первого порядка
и 0,l/Z’i < Ю/Гз ЛАЧХ апериодического звена второго порядка при-
ближенно представим ломаной линией, состоящей из прямых:
при со < 0,1/Г2 — прямая <р(со) = 0;
при 0,1/Г2 < со < 0,1/7^ — прямая с наклоном — 45°/дек;
при 0, l/7"j < со < Ю/Т^ — прямая с наклоном — 90°/дек;
при 10/Т? < со < 10/7\ — прямая с наклоном —45°/дек;
при со > lO/Z’j — прямая <р(со) = —180°.
Примечание
Иногда прибегают к аппроксимации переходной характеристики апе-
риодического звена аторого порядка (коэффициент демпфирования £ > 1)
(рис. 3.41, а) в виде последовательного соединения звена запаздывания и
статического звена первого порядка (апериодического). Структурная схема
такого соединения представлена на рис. 3.41, б.
3.3.5. Идеальное интегрирующее звено
Звено называют интегрирующим (астатическим, нейтральным),
если скорость изменения его выходной величины пропорциональна
входной величине:
Га^ = х, (3.186)
ат
где Тя — постоянная времени интегрирования.
Можно дать и такое определение интегрирующего звена: выход-
ная величина интегрирующего звена пропорциональна интегралу
входной величины, т. е.
1 Г л
У = у J xdt.
'а о
(3.187)
3.3. Типовые динамические звенья
157
Рис. 3.42. Примеры идеального интегрирующего звена:
а — резервуар с насосом на линии стока, у которого производитель-
ность не зависит от уровня жидкости в резервуаре; б — поршневой гид-
равлический исполнительный механизм; в — электродвигатель посто-
янного тока; г — резервуар с тепловым потоком, не зависящим от тем-
пературы резервуара
Собственно из определения (3.186) и происходит название звена.
Примеры интегрирующего звена приведены на рис. 3.42.
Пример
► На линии стока из резервуара установлен насос, производи-
тельность которого не зависит от уровня жидкости в резервуаре
(рис. 3.42, а). Составить дифференциальное уравнение, связываю-
щее уровень жидкости в резервуаре L с притоком Гвх и стоком
жидкости.
Решение. Если объемные расходы жидкости на линии притока
(Гвх) и стока (ГВЬ1Х) не зависят от уровня жидкости в резервуаре, то
его можно рассматривать как интегрирующее звено (своеобразный
накопительный элемент). Запишем динамическое (дифференциаль-
ное) уравнение материального баланса резервуара, на линии стока
которого установлен насос с постоянной производительностью:
dV = (FBX - FBbIX)dT.
158
Глава 3 Основы теории автоматического управления
Объем жидкости в резервуаре
V = AL.
Тогда
Л — = F - F
' вх * вых ’
где А — площадь поперечного сечения цилиндрического резервуара;
L — уровень жидкости в резервуаре.
Вышеприведенное уравнение можно записать в отклонениях:
где Д£ — отклонение уровня жидкости в резервуаре от статического
номинального значения; Д£вх — изменение объемного расхода на ли-
нии притока по сравнению со статическим номинальным значением.
В результате получаем дифференциальное уравнение интегриру-
ющего звена вида (3.186).
Пример
► Составить дифференциальное уравнение электродвигателя по-
стоянного тока (см. рис. 3.42, в) с независимым возбуждением и не-
большой электромеханической инерцией, если входная величина —
его напряжение U(т), а выходная величина — угол поворота якоря а(т).
Решение. Частота вращения л якоря (ротора) электродвигателя
примерно пропорциональна напряжению U на якоре:
n = kU
Заменим в этом выражении частоту вращения на угол поворота,
используя соотношение:
1 da
п = ---.
2л dr
Получим дифференциальное уравнение интегрирующего звена
вида:
da/dx = Ink U.
Итак, по динамическим свойствам электродвигатель представ-
ляет собой интегрирующее звено.
Замечание
Постоянную времени интегрирования электродвигателя Га — 2пк мож-
но изменить, меняя напряжение, подаваемое на обмотку возбуждения.
3.3. Типовые динамические звенья
159
Воспользуемся свойством преобразования Лапласа — интегри-
рование оригинала (3.20):
$Р(у) = $
5
. о
и запишем передаточную функцию интегрирующего звена:
я (у)
s Tas
(3.188)
Замечание
Статическое звено первого порядка с очень большой постоянной
времени на сравнительно высоких частотах подобно интегрирующему
звену.
Зная передаточную функцию интегрирующего звена (3.188), по-
лучим его переходную функцию:
h(r) = STl
Т
га
4-L
у.
1
~ т х
га
(3.189)
Переходная характеристика интег-
рирующего звена (рис. 3.43) представ-
ляет собой прямую линию, выходящую
из начала координат наклонно к оси
времени под углом, тангенс которого
равен
tga = 1/Га.
Рис. 3.43. Переходная харак-
теристика идеального интег-
рирующего звена
Кривая разгона показывает, что
интегрирующее звено не обладает са-
мовыравниванием, т. е. при небольшом
изменении входного сигнала выходной
сигнал интегрирующего звена начинает изменяться с постоянной
скоростью и никогда не достигает нового установившегося со-
стояния.
Частотную передаточную функцию для интегрирующего звена
получим, заменяя в передаточной функции (3.188) 5 на уо>:
W (до) =
1
T^j
(3.190)
160
Глава 3. Основы теории автоматического управления
Рис. 3.44. АЧХ (а) и ФЧХ (б) идеального интегрирующего звена
Из (3.190) следует, что модуль АЧХ интегрирующего звена об-
ратно пропорционален частоте колебаний и равен
1
7^(1)
(3.191)
В декартовых координатах АЧХ интегрирующего звена изобра-
жается гиперболой, асимптотически приближающейся к координат-
ным осям (рис. 3.44, а).
Так как выражение частотной передаточной функции (3.190) не
содержит действительной части (Re(co) = 0), то фазовый сдвиг на
всех частотах постоянен (рис. 3.44, б) и равен
<р(щ) = arctg (-оо) = -^. (3192)
Учитывая (3.191) и (3.192), запишем частотную передаточную
функцию интегрирующего звена в показательной форме:
/аы
(3.193)
Анализ выражения (3.193) показывает, что АФЧХ интегрирую-
щего звена (рис. 3.45) совпадает с отрицательной половиной мни-
Рис. 3.45. АФЧХ идеального
интегрирующего звена
мой оси, т. е. lV(j(o) при изменении час-
тоты колебаний ы от 0 до <» (<о — °° в на-
чале координат) меняется по модулю от
—°° до 0, оставаясь всегда мнимой вели-
чиной.
Выражая ЛАЧХ интегрирующего зве-
на в децибелах, получим:
L (ш) = 201g А (щ) = 201g -L- =
1 (3-194)
= 20 lg^- - 201g о.
* a
3.3. Типовые динамические звенья
161
Рис. 3.46. Диаграмма Бодё идеального интегрирующего звена
Зависимость (3.194) представляет собой прямую линию с накло-
ном -20 дБ/дек, пересекающую ось абсцисс при частоте со = 1/73,-
На рис. 3.46 представлена диаграмма Бодё интегрирующего звена.
Для простоты по оси ординат отложен lg/l(to), а по оси абсцисс отло-
жен lgco7a. ЛФЧХ на всех частотах остается неизменной и равной -л/2.
3.3.6. Реальное интегрирующее звено
Динамика реального интегрирующего звена (или нейтрального звена
второго порядка) определяется дифференциальным уравнением вида
TTa^ + Ta^- = x, (3.195)
а dr2 dr
где Ta — постоянная времени интегрирования; Т— постоянная вре-
мени звена.
Передаточная функция реального интегрирующего звена, соот-
ветствующая дифференциальному уравнению (3.195), равна
6 Беспалой А. В.. Хари гопов И. II
162
Глава 3. Основы теории автоматического управления
Рис. 3.47. Переходная характери-
стика реального интегрирующего
звена
Из выражения (3.196) следует, что
реальное интегрирующее звено мож-
но рассматривать как последователь-
ное соединение идеального интегри-
рующего звена и статического звена
первого порядка.
Инерционность процесса интег-
рирования зависит от постоянной
времени Т. Чем меньше эта перемен-
ная, тем ближе по своим свойствам
реальное интегрирующее звено к
идеальному интегрирующему. На
рис. 3.47 представлена переходная ха-
рактеристика реального интегрирую-
щего звена.
3.3.7. Идеальное дифференцирующее звено
Звено называется идеальным дифференцирующим, если его выход-
ная величина пропорциональна скорости изменения входной величины,
т. е. взаимосвязь между входной и выходной величинами записыва-
ется в виде
гт dx
от
(3.197)
где Тй — постоянная времени дифференцирования. Если входная и
выходная величины дифференцирующего звена имеют одинаковую
размерность, то постоянная времени дифференцирования имеет раз-
мерность времени.
Примером идеального дифференцирующего звена может служить
тахогенератор постоянного тока (рис. 3.48, а), если за его входную
величину примем угол поворота его вала а, а за выходную величину —
выходное напряжение тахогенератора U. Выходное напряжение та-
хогенератора пропорционально угловой скорости, а она, в свою оче-
редь, равна производной от угла поворота, поэтому
и = тй^.
ат
Примечание
Полученное уравнение будет справедливым лишь в том случае, если
используется прямолинейная часть характеристики холостого хода тахоге-
3.3. Типовые динамические звенья
163
Рис. 3.48. Примеры идеального дифференцирующего звена:
а — тахогенератор; б — электрическая СЛ-цепь (Л пренебрежимо мало)
С
yW = Чых(т)
б
нератора, магнитопровод тахогенератора изготовляется с малыми потеря-
ми на гистерезис, а якорь с обмоткой — с пренебрежимо малым омичес-
ким сопротивлением.
Передаточная функция идеального дифференцирующего звена
получается из дифференциального уравнения (3.197):
W(s) = TAs. (3.198)
Зная передаточную функцию идеального дифференцирующего
звена (3.198), запишем его переходную функцию:
Л(т) = 1
иф)-
S
= ИГ1(таз = TdSP-,(l) = Td 8(т). (3.199)
( s)
Кривая разгона идеального диф-
ференцирующего звена представлена
на рис. 3.49. При подаче на вход иде-
ального дифференцирующего звена
единичного ступенчатого воздействия
на выходе звена получается мгновен-
ный выходной импульс с бесконечно
большой амплитудой, соответствую-
щей бесконечно большой скорости
изменения входной величины в мо-
мент подачи входного сигнала.
Частотные характеристики иде-
ального дифференцирующего звена
выражаются следующими формулами.
Частотная передаточная функция
идеального дифференцирующего зве-
на получается заменой в передаточ-
ной функции (3.198) 5 на j(o:
Рис. 3.49. Переходная характери-
стика идеального дифференциру-
ющего звена
6*
164 Глава 3. Основы теории автоматического управления
И7 (jw) = Tdjw,
(3.200)
Re [РГ (»] = 0, Im[iy(yw)] = Тйы.
АЧХ идеального дифференцирующего звена
А (<о) = ^Re2 (w) + Im2 (<о) = ^Таш)2 = 7>. (3.201)
Из (3.201) следует, что АЧХ пропорциональна частоте колебаний
(рис. 3.50).
Фазовый сдвиг идеального дифференцирующего звена постоя-
нен, положителен и при всех частотах равен +л/2 (рис. 3.50):
<р (со) = arctg (+°°) = + л/2. (3.202)
С учетом (3.201) и (3.202) частотная передаточная функция выг-
лядит так:
!R(;w) = rdtoe+27. (3.203)
При изменении частоты колебаний от 0 до о (ш = 0 в начале
координат) АФЧХ идеального дифференцирующего звена (рис. 3.51)
представляет собой прямую линию, совпадающую с положительной
половиной мнимой оси.
Прологарифмируем (3.201) и получим выражение для логариф-
мической частотной характеристики идеального дифференцирую-
щего звена:
£(ы) = 201g Тй + 201g <в. (3.204)
Рис. 3.50. АЧХ и ФЧХ идеального
дифференцирующего звена
Рис. 3.51. АФЧХ идеального диффе-
ренцирующего звена
3.3. Типовые динамические звенья
165
Из (3.204) видно, что ЛАЧХ идеального дифференцирующего зве-
на представляет собой прямую линию с наклоном +20 дБ/дек, пере-
секающую ось абсцисс при частоте колебаний, равной со = 1/7^.
Логарифмические частотные характеристики идеального диффе-
ренцирующего звена представлены на рис. 3.52.
3.3.8. Реальное дифференцирующее звено
Звено называется реальным дифференцирующим, если его выход-
ная и входная величины связаны между собой дифференциальным
уравнением
Т^ + у = Т^, (3.205)
dx dx
где Т — постоянная времени; Тй — постоянная времени дифферен-
цирования.
Из уравнения (3.205) следует, что чем меньше постоянная вре-
мени, тем звено ближе к идеальному дифференцирующему (3.198).
Замечание
Дифференцирующие звенья часто используются в САУ как устрой-
ства, корректирующие динамические свойства системы, чтобы повысить
качество управления.
166
Глава 3. Основы теории автоматического управления
*(т) = ^вх(т)
УСО = ЦыхФ
Рис. 3.53. Пример реаль-
ного дифференцирующе-
го звена: электрическая
СЛ-цепь
Примером реального дифференцирующего звена является элек-
трическая СЯ-цепь (рис. 3.53), где выходной величиной является
напряжение, снимаемое с сопротивления R. Получим дифференци-
альное уравнение электрической СЯ-цепи.
В равновесном состоянии запишем:
(7ВХ = Uc + (3.206)
где UBX — входное напряжение СЯ-фильтра; Uc — напряжение на
емкости; UR — выходное напряжение, снимаемое с сопротивления Я.
Продифференцировав уравнение (3.206) по х, получим
dCBX dCc dUR
—SE-= (3.207)
dr dx dx
Учитывая, что UR = /Я,
dUc 1 dg I f IUR
dr C dx С C R '
где q — заряд на обкладках конденсатора, перепишем уравнение (3.207):
dfrBX UR dUR
dr ЯС dx
или
ЯС^^ + Свых = RC^^. (3.208)
dx dx
Таким образом, для рассматриваемого случая получили уравне-
ние, аналогичное уравнению реального дифференцирующего звена
(3.205), в котором Т = Тй = ЯС.
Передаточная функция реального дифференцирующего звена
может быть получена из дифференциального уравнения (3.205):
(3209)
Замечание
Реальное дифференцирующее звено можно рассматривать как после-
довательное соединение идеального дифференцирующего звена и стати-
3.3. Типовые динамические звенья
167
ческого звена первого порядка. При стремлении постоянной времени Т к
нулю можно получить идеальное дифференцирующее звено с постоянной
времени дифференцирования, равной Тй (рис. 3.48, б).
Переходная функция реального дифференцирующего звена по-
лучена из передаточной функции (3.209):
й(т) = $г‘ = $Р
' TAs Г
Ts + 1 5
(3.210)
~ т е ’
Переходная характеристика реального дифференцирующего звена
(3.210) изображена на рис. 3.54. В момент нанесения единичного
ступенчатого воздействия выходная величина реального дифферен-
цирующего звена Л(т) возрастает до значения TJT. При т -> °° вы-
ходная величина звена Л(т) -» 0. Постоянная времени Т звена явля-
ется подкасательной к кривой разгона.
Частотная передаточная функция реального дифференцирующего
звена:
= (3-211)
Ту со +1
Умножим числитель и знаменатель частотной передаточной функ-
ции (3.211) на комплексную функцию (1 — Туш), сопряженную со
знаменателем, для того чтобы освободиться в знаменателе от мни-
мой единицы. В результате (3.211) представим в виде суммы дей-
ствительной (вещественной) и мнимой частей, откуда выделим:
«(“) = Re[FK(уш)] = t;
Рис. 3.54. Переходная характеристика реального дифференцирующего звена
168
Глава 3. Основы теории автоматического управления
Рис. 3.55. АФЧХ реального дифференцирующего звена
АФЧХ реального дифференцирующего звена (рис. 3.55) пред-
ставляет собой расположенную в первом квадранте комплексной
плоскости полуокружность радиусом Тй/2 Т с центром в точке с ко-
ординатами (Тй/2Т, JQ). Действительно, при изменении частоты со от
О до +°° и действительная, и мнимая части частотной передаточной
функции принимают только положительные значения. Следователь-
но, АФЧХ этого звена располагается в первом квадранте комплекс-
ной плоскости.
Частотная передаточная функция в показательной форме име-
ет вид:
W (уш) = Tdt° -exp
J'arctg-?-
Tu>
(3.212)
АФЧХ показывает, что при изменении частоты со от 0 до + °°
модуль амплитудно-фазовой характеристики меняется от 0 до неко-
торого конечного значения, равного Тй/Т, а фазовый сдвиг изменя-
ется от +л/2 до 0, причем при частоте сопряжения (ос = \/Т фазо-
вый сдвиг равен +45°. Следовательно, в реальном дифференцирую-
щем звене выходная величина опережает по фазе входную величину.
Аналитические выражения для АЧХ и ФЧХ приведены ниже:
Л((о) =
Тйы .
л/г2<о2 +1 ’
<р (со) = arctg - arctg (Гео)
(3.213)
(3.214)
На рис. 3.56 изображены АЧХ (3.213) и ФЧХ (3.214) реального
дифференцирующего звена.
3.3. Типовые динамические звенья
169
Рис. 3.56. АЧХ и ФЧХ реального дифференцирующего звена
На рис. 3.57 представлены логарифмические частотные характе-
ристики реального дифференцирующего звена. Асимптотическая
ЛАЧХ реального дифференцирующего звена изображается двумя
Рис. 3.57. Диаграмма Бодё реального дифференцирующего звена
170
Глава 3. Основы теории автоматического управления
прямыми, имеющими общую точку при частоте сопряжения wc = \/Т.
Высокочастотная асимптота (7w » 1) является прямой линией, парал-
лельной оси абсцисс и отстоящей от нее на расстоянии lg(7yT)- Низ-
кочастотная асимптота (Тш -с 1) также является прямой линией,
наклоненной к оси абсцисс под углом +45° (тангенс угла наклона
равен единице).
3.3.9. Неустойчивое звено первого порядка
Звено называется неустойчивым звеном первого порядка (псев-
достатическим первого порядка), если его выходная и входная
величины взаимосвязаны между собой дифференциальным урав-
нением
Т^-у = Кх,
dr
(3.215)
где Т — постоянная времени; К — статический коэффициент
усиления
Передаточная функция неустойчивого звена первого порядка
может быть получена из его дифференциального уравнения
(3.215):
(3216)
Переходная функция неустойчивого звена первого порядка следу-
ет из передаточной функции (3.216):
й(т) = £ 1 И'(s) - = £ 1
г Г 13 X
__2_ .Л =К ст _1
Ts -1 s
(3.217)
5
Рис. 3.58. Переходная характе-
ристика неустойчивого звена
первого порядка
Переходная характеристика неустой-
чивого звена первого порядка изображе-
на на рис. 3.58. С течением времени й(т)
неограниченно возрастает, а это указы-
вает на неустойчивость звена.
Заменив в (3.216) s на уш, получим
частотную передаточную функцию:
К КТш
Т2ы2 + 1 T2tn2 + 1 J’
(3 218)
3.3. Типовые динамические звенья
171
откуда выделим
= Re[(C (»] = --2-J + i;
л(ш) = ImjV (до)] =
(3.219)
(3.220)
С учетом (3.219) и (3.220)
п2 (<о)//л2 (ш) = Т2а>2
(3.221)
или
™ (со),
(3.222)
Из выражения (3.222) следует:
т2 (ш) + и2 (о) + Кт(ы) = 0.
(3.223)
Если прибавить к обеим частям равенства (3.223) (К/2)2, то по-
лучим в итоге уравнение вида
Уравнение (3.224) — это уравнение окружности с радиусом К/2
и центром в точке (—К/2, у'0) т. е. лт(го) = — К/2, а л(ю) — 0. При
изменении частоты w от 0 до +«> действительная и мнимая части
частотной передаточной функции принимают только отрицатель-
ные значения. Следовательно, АФЧХ этого звена располагается в
третьем квадранте комплексной плоскости (рис. 3.59).
Используя (3.219) и (3.220), можно получить АЧХ неустойчивого
звена первого порядка:
4(<o) = /f/7F2wr+7.
(3.225)
Замечание
АЧХ неустойчивого звена первого порядка подобна АЧХ статического
звена первого порядка.
ЛАЧХ неустойчивого звена первого порядка находится по выра-
жению (3.225):
£(ш) = 201g К - 20 ig л/Т2(02 +1.
172
Глава 3. Основы теории автоматического управления
Рис. 3.59. АФЧХ неустойчивого звена первого порядка
ФЧХ неустойчивого звена первого порядка
<р (со) = -п + arctg (То) (3.226)
при изменении частоты со от 0 до +« изменяется от —л до — л/2
(рис. 3.60).
Рис. 3.60. Диаграмма Бодё неустойчивого звена первого порядка
3.4. Устойчивость линейных САУ
173
3.4. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ САУ
3.4.1. Понятия об устойчивости
систем автоматического управления
Под устойчивостью понимают способность САУ восстанавли-
вать свое состояние равновесия после устранения возмущающего
воздействия. Различают три типа систем:
• устойчивые системы после устранения возмущающего воздей-
ствия возвращаются в исходное состояние равновесия; в результате
ступенчатого возмущающего воздействия устойчивая система или
апериодически (см. рис. 2.19, б), или совершая затухающие колеба-
ния (см. рис. 2.19, в), переходит в новое состояние равновесия;
• неустойчивые системы после устранения возмущающего воз-
действия апериодически удаляются от состояния равновесия или
начинают совершать расходящиеся колебания; переходные характе-
ристики неустойчивых систем показаны на рис. 2.19, г, д',
• нейтральные системы после устранения возмущающего воздей-
ствия или приходят в состояние равновесия, отличающееся от ис-
ходного, или совершают незатухающие колебания; одна из возмож-
ных переходных характеристик нейтральной системы показана на
рис. 2.19, е.
Устойчивость является одним из главных требований, предъяв-
ляемых к САУ, поскольку определяет ее работоспособность. Иначе
говоря, неустойчивая система принципиально неработоспособна.
Чтобы определить, устойчиво ли состояние равновесия какой-
либо системы, обычно изучают поведение этой системы при малых
отклонениях от положения равновесия.
В общем случае система может быть устойчива при подаче на ее
вход только малых по величине возмущающих воздействий, и на-
оборот, при достаточно больших возмущающих воздействиях она
становится неустойчивой. Следовательно, рассматриваемая система
устойчива «в малом», но неустойчива «в большом». Примером такой
системы может служить шарик, помещенный в чашу (рис. 3.61, г).
При малых отклонениях шарик стремится занять положение на дне
чаши. При больших отклонениях шарик может перейти края чаши,
после чего он уже не сможет вернуться к своему положению равно-
весия на ее дне.
Если линейная система устойчива «в малом», то она будет ус-
тойчива «в большом». Пример такой устойчивой системы дан на
рис. 3.61, а. Края чаши уходят в бесконечность, и шарик всегда
стремится найти состояние покоя на дне чаши. Перевернув чашу,
можно получить неустойчивую систему; шарик, помещенный на ее
174
Глава 3. Основы теории автоматического управления
Рис. 3.61. Основные понятия об устойчивости:
а — система устойчива «в большом»; б — система нейтральна; в — сис-
тема неустойчива; г — система устойчива «в малом»
вершине, при любом возмущающем воздействии скатывается впра-
во или влево и никогда не займет прежнее положение (рис. 3.61, в).
Система может быть и «нейтральной» (рис. 3.61, б). В этом случае
система после снятия возмущающего воздействия хотя и приходит к
состоянию равновесия, однако это состояние неопределенно и мо-
жет быть любым, т. е. шарик на плоскости может оставаться в лю-
бой ее точке. Системы, в которых одной и той же входной величине
(возмущающему воздействию, выводящему систему из равновесно-
го состояния) соответствует бесконечное множество значений вы-
ходной величины, как, например, положений шарика на плоскости
(рис. 3.61, б), называют также нейтрально-устойчивыми или находя-
щимися на границе устойчивости.
Поведение линейной стационарной системы в общем случае
при наличии внешних воздействий можно описать неоднородным
дифференциальным уравнением вида с постоянными коэффици-
ентами (3.4):
dny d"~1y dy
а„ —— + а„ ----т +... + a, -f- + аау =
п dx" dx"’1 . 1 dx 0Л
L dmx L dm~'x . dx .
= bm----- + bm, ——r- + ... + D, — + baX
dx'" dx”-1 dr 0
или соответствующей передаточной функцией
W (Л = bmsm+ bm_lSm~l+... + biS+by = N(s)
ansn + +... + <Zj5 + fl() D(s)
Следует заметить, что степень т полинома числителя Ms) не
выше степени п полинома знаменателя D(s) для большинства физи-
чески реализуемых систем, т. е. п > т.
3.4. Устойчивость линейных САУ
175
Решение уравнения (3.4) можно представить в виде суммы двух
составляющих (2.2):
где у(т) — выходная величина САУ; увыи(т) — вынужденная состав-
ляющая выходной величины; ус(т) — свободная составляющая вы-
ходной величины.
Первая из этих двух составляющих однозначно связана с изме-
нением входной величины и является частным решением уравне-
ния (3.4).
Для того чтобы система могла правильно отрабатывать задаю-
щее воздействие, т. е. изменение заданного значения входной вели-
чины, необходимо, чтобы переходный процесс, протекающий при
переходе системы из одного заданного равновесного состояния в
другое, был затухающим, т. е. составляющая ус(т) с течением време-
ни должна стремиться к нулю.
Необходимо также, чтобы свободная составляющая ус(т) с тече-
нием времени стремилась к нулю и при возмущающем воздействии
на систему, так как только в этом случае вызванное возмущающим
воздействием отклонение регулируемой величины» у от заданного
значения с течением времени становится равным нулю и равно-
весное состояние системы восстанавливается.
Свободная составляющая изменения выходной величины ус(т)
является общим решением однородного дифференциального урав-
нения, которое характеризует собственные динамические свойства
системы.
Однородное дифференциальное уравнение можно получить из
неоднородного дифференциального уравнения (3.4), заменив его
правую часть нулем:
d"y d"-1y dy -
йл^Г + ал-1^7Т + - + а1^- + соУ = °- (3-227)
dr dx dr
Соответствующее однородному дифференциальному уравнению
(3.227) характеристическое уравнение системы, которое можно по-
лучить, приравнивая знаменатель ее передаточной функции к нулю,
имеет вид:
D(s) = ansn + a^s"-1 +... + axs + a0 = 0. (3.228)
Характеристическое уравнение степени п имеет в общем случае я
корней, некоторые из которых могут быть кратными (т. е. одинако-
выми). Положим, что уравнение (3.228) имеет к одинаковых кор-
ней sk и, помимо того, я — к неодинаковых корней s2, ..., sn _к .
176 Глава 3. Основы теории автоматического управления
Определив все корни характеристического уравнения (3.228),
общее решение однородного дифференциального уравнения (3.227)
можно найти по известному выражению:
Ус (?) = + с2е^ +... + Ce_te^ + (3 229)
+ (СА.О + СА.1Т + — + ск,к-1хк *)е**Т»
где сь с2, ..., ckfi, скк _ j — постоянные интегрирования, которые
находятся из начальных условий.
Корни в общем случае могут быть нулевыми sk = 0, действи-
тельными (вещественными) sk = ак, комплексными сопряженны-
ми ^Л+1 = ак ± j£k.
Из общего решения (3.229) однородного дифференциального
уравнения следует, что переходная составляющая определяется сум-
мой членов, каждый из которых содержит экспоненциальную со-
ставляющую еат, где а представляет собой корень характеристичес-
кого уравнения, если он вещественный, или вещественную часть
этого корня в том случае, если корень комплексный. Число экспо-
ненциальных слагаемых, входящих в выражение переходной состав-
ляющей, равно числу корней характеристического уравнения.
Таким образом, чтобы каждый член выражения ус(т) со време-
нем стремился к нулю, необходимо и достаточно, чтобы все веще-
ственные корни характеристического уравнения были отрицатель-
ными, а в комплексных корнях отрицательной должна быть веще-
ственная часть корня.
Следовательно, корни характеристического уравнения в полной
мере определяют устойчивость САУ.
Итак, линейная система устойчива, если все вещественные кор-
ни и вещественные части комплексных корней характеристическо-
го уравнения отрицательны.
Если хотя бы один корень характеристического уравнения или
вещественная часть одного из комплексных корней положительны,
то система неустойчива. В этих случаях слагаемое переходной со-
ставляющей, соответствующее этому корню, содержит экспоненту в
положительной степени, значение которой со временем беспредельно
возрастает, т. е. теоретически значение регулируемой величины стре-
мится к бесконечности.
Если характеристическое уравнение (3.228) системы имеет толь-
ко один нулевой корень st = 0, а все остальные корни имеют отрица-
тельную вещественную часть, то решение уравнения (3.229) содер-
жит слагаемое
c,ei/T = С/ еОт =
3.4. Устойчивость линейных САУ
177
т. е. свободная составляющая решения с течением времени не зату-
хает, а стремится к некоторому постоянному значению с,-. Следова-
тельно, такая система является нейтрально-устойчивой. О такой си-
стеме говорят также, что она находится на апериодической границе
устойчивости.
Если характеристическое уравнение (3.228) системы имеет толь-
ко одну пару сопряженных мнимых корней (+1 = ±/р„ а все осталь-
ные корни имеют отрицательную вещественную часть, то решение
уравнения (3.229) содержит слагаемые
czeJ/T + = с,- еу₽-т + еме^ = csin(p,T + ф),
где с и ф определяются по постоянным с,- и с,-+1, зависящим от началь-
ных условий. Свободная составляющая решения в этом случае со-
вершает незатухающие колебания. Следовательно, такая система
тоже является нейтрально-устойчивой (находится на колебательной
границе устойчивости). Для линейных нейтрально-устойчивых сис-
тем, характеристическое уравнение которых имеет один корень s, = О,
характерно то, что выходная величина принимает произвольное зна-
чение, например, одному и тому же задающему воздействию соот-
ветствует бесконечное множество значений выходной величины у(х),
следовательно, система управления не справляется со своими функ-
циями.
Замечание
Если характеристическое уравнение линейной системы имеет не один
нулевой корень, а к нулевых корней q = 0, то решение уравнения (3.229)
содержит слагаемое
модуль которого с течением времени стремится к бесконечности.
Если характеристическое уравнение линейной системы имеет к пар
мнимых корней s/l+1 = ±ур,-, то решение уравнения (3.229) содержит сла-
гаемое
(с0 + qt +... + ck_Y т*“‘ )sin (р,- х + ф),
представляющее собой колебания, амплитуда которых стремится к беско-
нечности. Такие системы относят к неустойчивым системам
3.4.2. Устойчивость по Ляпунову
В действительности мы имеем дело почти всегда с нелинейны-
ми, но линеаризованными системами, представленными в виде ли-
нейных приближений (линейных моделей). Теорема Ляпунова гла-
сит, что если линейное приближение нелинейной системы устойчи-
178
Глава 3. Основы теории автоматического управления
во, то и система может быть устойчива, и наоборот, что следует
иметь в виду при рассмотрении реальных линейных моделей.
Анализируя характеристические уравнения системы, Ляпунов
сформулировал следующие теоремы устойчивости для нелинейных,
но линеаризованных систем (т. е. представленных линейными урав-
нениями):
1) нелинейная система устойчива в «малом», если отрицательны
все вещественные части корней характеристического уравнения си-
стемы (ее линейного приближения);
2) нелинейная система неустойчива в «малом», если хотя бы один
корень характеристического уравнения линейного приближения
имеет положительную вещественную часть;
3) если имеется нулевой или чисто мнимый корень, то поведе-
ние реальной системы становится неопределенным, т. е. она может
быть как устойчивой, так и неустойчивой.
Если линейные системы устойчивы в «малом», то устойчивы и в
«большом». Нелинейные системы могут быть устойчивы в «малом»,
но не устойчивы в «большом», т. е. при больших возмущающих воз-
действиях.
Итак, необходимое и достаточное условие устойчивости линей-
ных систем заключается в том, чтобы все корни характеристического
уравнения имели отрицательную вещественную часть, т. е. на комп-
лексной плоскости располагались слева от мнимой оси (рис. 3.62).
Для суждения об устойчивости системы нет необходимости вы-
числять корни его характеристического уравнения. Существуют кос-
венные признаки, называемые критериями устойчивости, которые
позволяют установить расположение корней характеристического
уравнения на комплексной плоскости. Ценность критериев устой-
чивости состоит не только в том, что устраняется необходимость
Левая полуплоскость
(область устойчивости)
Re(s) < О
Правая полуплоскость
lm(s) (область неустойчивости)
Re(s) > О
*«“«5-Ад •
^“«гДб
Re(s)
Рис. 3.62. Расположение корней характеристического уравнения устой-
чивой системы на комплексной плоскости
3.4. Устойчивость линейных САУ 179
вычисления корней характеристического уравнения. Они дают воз-
можность установить, как структура и параметры системы влияют
на устойчивость и как их следует изменить, чтобы система стала
устойчивой.
Так, например, необходимое (но не достаточное) условие устой-
чивости линейных систем заключается в положительном значении
всех коэффициентов характеристического уравнения. Для систем,
описываемых дифференциальными уравнениями первого и второго
порядков, это условие является необходимым и достаточным.
Замечание
Для систем, порядок уравнений которых выше второго, положитель-
ное значение коэффициентов характеристического уравнения не гаранти-
рует устойчивость системы.
Для оценки устойчивости более сложных систем применяют ал-
гебраические критерии: критерии устойчивости Вышнеградского,
Рауса—Гурвица, Льенара—Шипара и др.; частотные критерии: кри-
терий Михайлова; критерий Найквиста. Эти критерии определяют
необходимые и достаточные условия устойчивости системы.
3.4.3. Алгебраические критерии устойчивости
Алгебраические критерии устойчивости (критерий Вышнеград-
ского, критерий Рауса—Гурвица, критерий Льенара—Шипара) оп-
ределяют устойчивость системы управления по коэффициентам ха-
рактеристического уравнения.
3.4.3.1. Критерий Рауса-Гурвица
Раус предложил критерий устойчивости в виде неравенств, со-
ставленных по особым правилам (алгоритму) из коэффициентов ха-
рактеристического уравнения D(s) - 0 замкнутой системы. Практи-
чески одновременно с Раусом такой критерий предложил Гурвиц,
но с записью алгоритма в виде определителей, поэтому этот крите-
рий часто называют критерием Рауса—Гурвица.
Критерий Рауса—Гурвица может быть сформулирован в фор-
ме, предложенной Гурвицем: если система описывается линейным
дифференциальным уравнением, характеристическое уравнение
которого имеет вид (3.228), то для того, чтобы она была устойчива
(т. е. чтобы все вещественные корни и вещественные части комп-
лексных корней характеристического уравнения были отрицатель-
ны), необходимо и достаточно, чтобы все коэффициенты уравнения
имели бы один и тот же знак, а диагональный детерминант порядка
180
Глава 3. Основы теории автоматического управления
п — 1, составленный из коэффициентов уравнения, и все его диаго-
нальные миноры были бы положительны.
Диагональный детерминант составляется так:
Все диагональные миноры образуются из приведенного детер-
минанта последовательным вычеркиванием последней строки и пос-
леднего столбца предыдущего минора:
-It'
Л1 =ап-1-
Таким образом, чтобы система была устойчива, необходимо:
а„ > 0, а„ _ , > 0, ..., ci > 0, а0 > 0
и
Д„ _ I > 0, Д„ _ 2 > 0, ..., Д2 > 0, Д] > 0.
3.4. Устойчивость линейных САУ 181
Замечание
Каждой матрице А = |aj порядка п с действительными или комплекс,
ными элементами можно однозначно поставить в соответствие действи-
тельное или комплексное число Д = detA, которое называется детерминан-
том или определителем матрицы А.
Минором М„ элемента алА. называют определитель порядка п — 1,
получающийся из Д «вычеркиванием» /-Й строки и к-го столбца.
Частным случаем критерия устойчивости Рауса—Гурвица явля-
ется критерий устойчивости И.А. Вышнеградского.
3.4.3.2. Критерий Льенара-Шипара
Льенар и Шипар предложили критерий, упрощающий критерий
Рауса—Гурвица.
Критерий Льенара-Шипара формулируется так: если все коэф-
фициенты характеристического уравнения (3.228) положительны, то
необходимые и достаточные условия сводятся к тому, чтобы среди
определителей Гурвица Дь Д2, ..., Д„ были положительными или все
определители с четными индексами, или все определители с нечет-
ными индексами.
Итак, необходимым и достаточным условием устойчивости сис-
темы является:
а„ > 0. а„ _ , > 0.> 0, оо > 0,
Д2 > 0, Д4 > 0, Ag > 0, ...
или
а„ > 0, а„ _ , > 0, ..., > 0, а0 > 0,
Д, > 0, Д3 > 0, Д5 > 0, ..
3.4.4. Частотные критерии устойчивости
Частотные критерии устойчивости получили наиболее широкое
применение на практике: во-первых, они позволяют по более простой
передаточной функции разомкнутой системы судить об устой-
чивости замкнутой системы; во-вторых, анализ устойчивости можно
выполнить и по экспериментально найденным частотным характерис-
тикам и, в-третьих, используя частотные характеристики, можно оце-
нить качество переходных процессов в системах управления.
3.4.4.1. Критерий Михайлова
Михайлов первым предложил использовать частотные методы,
развитые в радиотехнике Найквистом, для анализа устойчивости
линейных систем регулирования. Рассмотрим суть этого критерия.
182 Глава 3. Основы теории автоматического управления
Используем для формулировки критерия устойчивости Михайлова
характеристическое уравнение замкнутой системы управления (3.228).
Произведем в характеристическом уравнении (3.228) замену s
на jo. В результате подстановки получим функцию комплексной
переменной
£XJw) = an(jw)n + + ... + a2(jto)2 + + a0, (3.230)
которая может быть представлена в виде суммы действительной и
мнимой частей
D(ju) = Re[ D(ja))] +jlm\D(Ju)] (3.231)
или в показательной форме
/)(Уш) = |Д(»|еу,и8^“).
Функцию D(joj) при фиксированном значении частоты <о можно
изобразить на комплексной плоскости радиусом-вектором, который
называют вектором Михайлова.
При изменении частоты ш от 0 до « вектор Михайлова будет
поворачиваться вокруг начала координат, меняя одновременно свою
длину.
Система, описываемая линейным дифференциальным уравне-
нием с постоянными коэффициентами, будет устойчива, если го-
дограф вектора Михайлова при изменении со от 0 до °° на комплек-
сной плоскости обходит последовательно в положительном направ-
лении, нигде не обращаясь в нуль, п квадрантов, где п — порядок
характеристического уравнения системы (рис. 3.63), т. е. поворачи-
вается на угол, равный п (тс/2). Если годограф вектора Михайлова
проходит через начало координат (рис. 3.64, а), не заходя в очеред-
ной квадрант, то система находится на колебательной границе ус-
тойчивости, совершая незатухающие колебания с частотой, соответ-
lm[D(j<o)]
Рис. 3.63. Примеры годографов
вектора Михайлова устойчивых
систем
Рис. 3.64. Примеры годографов вектора
Михайлова:
а — система четвертого порядка на границе ус-
тойчивости; б — неустойчивые системы чет-
вертого порядка
3.4. Устойчивость линейных САУ
183
Рис. 3.65. Графики функций Re[£)(/(u)l и Im[D(/(o)] вектора Михайлова:
а — для устойчивой системы; б — для системы на границе устойчивос-
ти: в — для неустойчивой системы
ствующей прохождению годографа вектора Михайлова через 0. При
нарушении указанного выше поведения вектора Михайлова — сис-
тема неустойчива (рис. 3.64, б).
Из критерия Михайлова следует, что необходимым и достаточ-
ным условием устойчивости линейной системы является наличие у
многочленов Re[Z</co)] и Im[ вещественных корней и их чере-
дуемость (рис. 3.65, а). Действительно, при ш = 0, 1т[Д(0)] = 0, а
Re[Z>(0)] = = const. Далее, при повороте вектора Михайлова на (л/2),
Re[Z>(jiO])] станет равной нулю, a ImlDOw,)] — положительна. При
повороте вектора еще на (л/2), RelZXjajj)] будет иметь какое-то отри-
цательное значение, а 1т[Д(/ш2)] ~ равна нулю и т. д. Следовательно,
корни Re[£)(j(o)] должны располагаться между корнями Im[D(j(o)].
Если Re[ZXjw)i и Im[D(j(D)] имеют при какой-то частоте равные
корни (рис. 3.65, б), то годограф Михайлова проходит через нуль и
система находится на границе устойчивости. Если корни Re[£>(y<jo)]
и Im[ZX/w)] не чередуются (рис. 3.65, в), то система не устойчива.
Замечание
Применение как алгебраических критериев устойчивости, так и крите-
рия Михайлова возможно в том случае, если известны коэффициенты ли-
нейного дифференциального уравнения системы. Применение этих крите-
риев для исследования линейных систем управления, представляемых урав-
нениями высоких порядков, не вполне оправданно. Кроме того, они сложны
для восприятия из-за отсутствия ясного физического смысла.
3.4.4.2. Критерий Найквиста
Частотный критерий Найквиста позволяет судить об устойчиво-
сти замкнутой линейной системы управления (объект и управляю-
щее устройство соединены по принципу обратной отрицательной
связи, рис. 3.66, с) по виду АФЧХ системы в разомкнутом состоя-
нии (в этом случае объект и управляющее устройство соединены
последовательно, рис. 3.66, б). Первоначально частотный критерий
184
Глава 3. Основы теории автоматического управления
Рис. 3.66. Структурная схе-
ма САР с обратной связью:
а — замкнутая система (пунк-
тиром показано место возмож-
ного размыкания); б — разом-
кнутая система
Регулятор
б
был сформулирован Найквистом в 1932 г. при исследовании усили-
телей с отрицательной обратной связью (см. гл. 1). Позже Михайлов
обобщил и применил его для исследования устойчивости САР.
Для применения частотного критерия необходимого знать АФЧХ
разомкнутой системы регулирования, которая может быть получена
как аналитически, так и экспериментально.
В частном, но широко распространенном в химической техно-
логии случае устойчивых в разомкнутом состоянии систем управле-
ния частотный критерий устойчивости Найквиста можно сформу-
лировать так: замкнутая система управления устойчива, если она
устойчива в разомкнутом состоянии и при этом АФЧХ разомкнутой
системы не охватывает точку на комплексной плоскости с коорди-
натами (— 1,/0). Если же АФЧХ устойчивой разомкнутой системы
охватывает точку с координатами (—1, J0), то замкнутая система не-
устойчива (рис. 3.67).
Критическая точка (—1, уО) соответствует условию:
^рс (“кр) - U
<Ррс (Юкр) = рад.]
(3.232)
Рис. 3.67. АФЧХ разомкнутой си-
стемы автоматического регулиро-
вания:
1 — замкнутая система устойчива; 2 —
замкнутая система на границе устой-
чивости; 3 — замкнутая система неус-
тойчива
3.4. Устойчивость линейных САУ
185
Частоту, при которой фазовое отставание разомкнутой системы
равно —л рад (-180°), называют критической и обозначают Уси-
ление регулятора при критической частоте обозначают через Лр(шкр),
а усиление объекта — через Ло(шкр). Предельное (максимальное) уси-
ление регулятора можно найти из соотношения:
ЛрС (шкР) = (шкр)-Лр“ (wKp) = 1,
откуда
Если разомкнутая система устойчива и для нее выполняется ус-
ловие
| (3.233)
Фрс (“кр) = -л рад,]
то она будет устойчива и в замкнутом состоянии. Если же для ус-
тойчивой разомкнутой системы Лрс(шкр) > I, то в замкнутом состоя-
нии она будет неустойчива.
Для лучшего понимания физической сути критерия Найквиста
рассмотрим, как возникают в системе регулирования с запаздыва-
нием колебания регулируемой величины. На рис. 3.68 представле-
на система регулирования температуры жидкости. Объект регули-
рования — трубчатый реактор с поршневым движением жидкости.
Рис. 3.68. Система регулирования температуры в объекте с запаздыванием
186 Глава 3. Основы теории автоматического управления
Обозначим температуру жидкости на выходе из трубчатого реактора t2,
а на входе в реактор Температуру /2 можно регулировать подачей
пара, изменяя его расход F. Пар смешивается с основным потоком,
имеющим перед реактором температуру t0.
Трубчатый реактор с поршневым движением жидкости можно
представить звеном запаздывания. Изменение Г1 повторится таким
же изменением /2 на выходе реактора, но через время = F/v, где
Z — длина реактора, as- линейная скорость жидкости в нем.
На рис. 3.69 рассматривается случай кратковременного импульс-
ного изменения температуры t0 поступающей жидкости (рис. 3.69, а).
Изменение температур и t2 после такого воздействия показано на
рис 3.69, б, в. Стрелками обозначена передача сигналов внутри сис-
темы регулирования. Видно, что:
1) изменение /0 мгновенно вызывает изменение tt;
2) поток жидкости переносит импульс теплоты до выхода труб-
чатого реактора, где через время т^ температура t2, изменившись
так же, как отклонится от заданного значения г2зд;
3) отклонение t2 от заданного значения является входным сигна-
лом для регулятора, мгновенно изменяющего расход пара, вслед-
Рис. 3.69. Реакция системы регулирования температуры в объекте с за-
паздыванием на импульсное возмущающее воздействие
3.4. Устойчивость линейных САУ
187
ствие чего температура tx снижается пропорционально ошибке регу-
лирования:
М =^(^зд-^) = ^; (3.234)
4) снижение tx через время проявится в виде снижения (2; и т. д.
Анализируя этот пример, можно сделать несколько выводов.
1. Из-за запаздывания действие регулятора сказывается на регу-
лируемой величине t2 не в момент ее отклонения от заданного зна-
чения, а спустя некоторое время, равное времени запаздывания т:1ап.
2. Возмущающее воздействие (кратковременное импульсное из-
менение температуры) создает в замкнутом контуре регулирования
циркулирующий сигнал (его движение на рис. 3.69 изображено из-
вилистой линией со стрелками). При этом регулируемая величина t2
совершает периодические колебания.
Замечание
Колебания z2 (и ^), как видно из рис. 3.69, б, в, — негармонические
(для рассматриваемого возмущающего воздействия они имеют сложную
форму). В реальных системах управления высокочастотные составляющие
этих колебаний сравнительно быстро затухают, и колебания постепенно
превращаются в гармонические.
3. Колебания регулируемой величины t2 имеют свойственные
данной системе период колебаний и частоту. Эти параметры коле-
баний связаны между собой известным соотношением
Т’кр = 2л/ю.
С другой стороны, для системы, состоящей из трубчатого реак-
тора и пропорционального регулятора (звена запаздывания и усили-
тельных звеньев), период колебаний:
Следовательно
“ban = 71
или
-Ь^зап = Ф(ш) = “Л,
т. е. отклонения выхода системы регулятор—объект сдвинуты от-
носительно отклонений, вызвавших их, на фазовый угол, равный
—л рад. В этом случае
<о = шкр
есть так называемая критическая частота системы регулирования,
зависящая от величины запаздывания т^.
188
Глава 3. Основы теории автоматического управления
4. Характер процесса регулирования зависит от усиления разом-
кнутой системы, иначе говоря, от усиления сигнала при прохожде-
нии через трубчатый регулятор и регулятор. Усилением разомкну-
той системы является отношение отклонения регулируемой величи-
ны t2 (выхода разомкнутой системы) к предыдущему отклонению /2,
которое служило входом регулятора и разомкнутой системы.
Усиление разомкнутой системы можно изменить, изменяя параметр
настройки регулятора К?. Если усиление разомкнутой системы KjK рав-
но единице, амплитуда колебаний не растет и не падает во времени,
а является величиной постоянной (рис. 3.69, в). На рис. 3.69, г пока-
зан характер колебаний /2 для коэффициента усиления разомкнутой
системы (трубчатый регулятор и П-регулятор), меньшего 1. Видно,
что для этого случая колебания затухают. Для усиления разомкну-
той системы, большего 1, колебания расходятся (рис. 3.69, д).
Из рис. 3.69 следует такой вывод: если усиление собственных
колебаний в разомкнутой системе меньше единицы, то колебания
затухают и система устойчива, а если усиление собственных колеба-
ний в разомкнутой системе больше единицы, то колебания расходят-
ся и система неустойчива.
В реальной системе регулирования возникают колебания различ-
ной частоты, которые по-разному усиливаются контуром регулирова-
ния. Частота, на которой фазовый сдвиг разомкнутой системы регу-
лирования равен —л рад (—180°), является резонансной частотой зам-
кнутой системы регулирования. Колебания параметра на этой частоте
в наибольшей мере усиливаются системой регулирования. Если уси-
ление колебаний на резонансной частоте окажется меньше единицы,
то усиление колебаний на любой другой частоте будет еще меньше, и
замкнутая система регулирования будет устойчива.
Рис. 3.70 поясняет влияние фазового сдвига на усиление колеба-
ний в контуре регулирования. Как правило, регулятор в замкнутой
системе регулирования должен создавать отрицательную обратную
связь. Однако при наличии запаздывания в элементах системы регу-
лирования управляющее воздействие сдвигается во времени по от-
ношению к возмущающему воздействию, которое вызвало его. Эф-
фект перехода от отрицательной связи к положительной можно про-
иллюстрировать рис. 3.70, на котором изображены три функции
времени: возмущающее воздействие d, управляющее воздействие и
и сумма возмущающего и управляющего воздействий d + и.
Рис. 3.70, а относится к системе регулирования без запаздыва-
ния. Фазового сдвига при прохождении сигнала через объект регу-
лирования и регулятор нет, а управляющее воздействие и находится
в противофазе по отношению к возмущающему воздействию d. При
и = d, т. е. при единичном усилении разомкнутой системы, отклоне-
ния регулируемой величины должны полностью устраняться.
3.4. Устойчивость линейных САУ
189
d + и
Рис. 3.70. Появление в системе регулирования обратной положительной связи
В системе, которой присуще запаздывание, и сдвинуто по фазе
по отношению к d (на рис. 3.70, б <р = —л/4 рад). В некоторые
промежутки времени и совпадает по знаку с d. Это значит, что если
возмущающее воздействие увеличивает приток (например, тепло-
ты), то управляющее воздействие тоже увеличивает приток. В дру-
гие промежутки времени d уменьшает приток и и также уменьшает
приток. В этом примере и равно d, но из-за сдвига фаз отклонения
регулируемой величины от заданного значения не устраняются, и
d + и (на рис 3.70 изображено пунктирной линией) совершает не-
прерывные колебания.
Фазовый сдвиг в разомкнутой системе может быть различным,
поскольку зависит от частоты. На рис. 3.70, в изображены d и и для
случая, когда фазовый сдвиг разомкнутой системы ср^ = —п рад
(—180°), а ее усиление равно единице. В этом случае и находится не
в противофазе с d, а наоборот, совпадает с ним по фазе. Это означа-
ет, что и не ослабляет действие d, а усиливает его, и суммарный
сигнал оказывается больше исходного возмущающего воздействия.
Таким образом, из-за запаздывания, вместо отрицательной обратной
связи, регулятор создает положительную обратную связь. Если усиле-
ние разомкнутой системы при указанном фазовом сдвиге превосхо-
дит единицу, то возмущение усиливается в системе с каждым пери-
одом колебаний, что приводит к неустойчивости регулирования.
3.4.5. Понятие о запасе устойчивости
Очевидно, что система регулирования не может функциониро-
вать при настройке регулятора на предельное усиление (3.232). В та-
ком случае любое случайное входное воздействие создаст незатухаю-
190 Г л а в a 3. Основы теории автоматического управления
щие колебания регулируемого параметра. Для получения быстрозату-
хающих колебаний усиление регулятора должно быть меньше пре-
дельного значения. Если усиление регулятора при критической час-
тоте выбирают так, чтобы оно составляло определенную долю от пре-
дельного усиления, то тогда говорят о запасе устойчивости по усилению.
3.4.5.1. Определение запаса устойчивости
по распределению корней
характеристического уравнения системы
Поведение системы определяется распределением корней ее ха-
рактеристического уравнения на комплексной плоскости. По сути
своей это косвенный метод оценки качества переходного процесса.
Для устойчивости системы необходимо, чтобы все корни характерис-
тического уравнения находились в левой части этой плоскости. Сле-
довательно, можно констатировать, что в плоскости корней характе-
ристического уравнения границей устойчивости является мнимая ось.
Чем дальше корни характеристического уравнения (3.228) систе-
мы находятся слева от мнимой оси, тем быстрее заканчиваются пере-
ходные процессы в системе. При приближении системы к границе
устойчивости корни характеристического уравнения системы пере-
мешаются на комплексной плоскости по направлению к мнимой оси.
На границе устойчивости один вещественный или два сопряженных
комплексных корня выходят на мнимую ось, а при дальнейшем пере-
ходе системы в неустойчивое состояние они перемещаются в правую
комплексную полуплоскость.
Рис. 3.71. Определение запаса устой-
чивости системы по расположению
корней ее характеристического урав-
нения на комплексной плоскости
Одним из косвенных показателей
качества устойчивых АСУ является
удаленность корней характеристичес-
кого уравнения замкнутой системы,
лежащих в левой комплексной полу-
плоскости, от мнимой оси (рис. 3.71).
Степенью устойчивости Т| назы-
вают абсолютное значение веще-
ственной части ближайшего к мни-
мой оси корня:
т) = min|Re(sft)|.
Примечание
Термин «степень устойчивости» не
является удачным. Величина г) характери-
зует на самом деле не устойчивость, а бы-
стродействие системы, поэтому ее следо-
вало бы назвать степенью быстродействия.
3.4. Устойчивость линейных САУ 191
Наибольший из углов, образованных отрицательной действитель-
ной полуосью и лучами, проведенными из начала координат через
корни характеристического уравнения (см. рис. 3.71), характеризует
колебательность системы. Тангенс этого угла
называется степенью колебательности и является мерой устойчивос-
ти системы.
Для системы, корни характеристического уравнения которой
показаны на рис. 3.71, степень устойчивости равна
n = |Re(51)| = |a1|,
а степень колебательности
= [lm(s2)| = |lm(j3)| = |р2|
|Re(J2)| |Reh)| |«2Г
Если на комплексной плоскости (см. рис. 3.71) провести в левой
полуплоскости прямую, параллельную мнимой оси, на расстоя-
нии л от нее и два луча из начала координат под углами ±у = arctg(p)
к отрицательной полуоси, то в левой полуплоскости получится
шесть областей: области I и II, соответствующие составляющим
переходного процесса системы со степенью устойчивости, мень-
шей т], и степенью колебательности, ббльшей р; область III со
степенью устойчивости, меньшей т), и степенью колебательнос-
ти, меньшей ц; области IV и Усо степенью устойчивости, ббль-
шей т], и степенью колебательности, ббльшей ц; область VI со
степенью устойчивости, ббльшей л, и степенью колебательнос-
ти, меньшей ц.
Следовательно, если требуется, чтобы автоматическая систе-
ма управления имела степень устойчивости больше т] и степень
колебательности меньше ц, необходимо, чтобы все корни харак-
теристического уравнения этой системы располагались внутри об-
ласти VI.
3.4.5.2. Определение запаса устойчивости по АФЧХ
разомкнутой системы
Рассмотрим еще один косвенный метод оценки качества регули-
рования. Если свойства системы задаются ее частотными характе-
ристиками, то запас устойчивости удобно характеризовать удален-
ностью АФЧХ разомкнутой линейной системы управления от точки
Глава 3. Основы теории автоматического управления
Рис. 3.72. Определение запаса устойчивости (по модулю и фазе) по АФЧХ
разомкнутой системы
с координатами (—1,/0) (рис. 3.72). Запас устойчивости может быть
охарактеризован двумя численными величинами: запасом устойчи-
вости по модулю и запасом устойчивости по фазе.
Под запасом устойчивости по модулю подразумевают длину отрез-
ка ДЛ, т. е. расстояние отточки с координатами (—1,у0) (см. рис. 3.72)
до точки пересечения АФЧХ разомкнутой системы с отрицательной
действительной полуосью. Эта величина показывает, насколько дол-
жен увеличиться модуль частотной передаточной функции разомк-
нутой системы при критической частоте, чтобы замкнутая система
оказалась на границе устойчивости:
[^рс(“кр) = 1-Л^;
|фрс(“кр) = -"
(3.235)
Запас устойчивости по модулю называют также запасом устой-
чивости по амплитуде (по усилению).
Под запасом устойчивости по фазе понимают величину угла Аф,
который образуется между отрицательной действительной полуосью
и лучом, проведенным из начала координат с точкой пересечения
АФЧХ разомкнутой системы с окружностью единичного радиуса с
центром в начале координат. Эта величина показывает, насколько
должно увеличиться отставание по фазе в разомкнутой системе, чтобы
замкнутая система оказалась на границе устойчивости. Или, иначе
говоря, запас устойчивости по фазе Аф показывает, насколько долж-
но возрасти запаздывание по фазе в разомкнутой системе на частоте
среза юср при неизменном коэффициенте усиления на этой частоте,
чтобы система оказалась на границе устойчивости:
[Лс (“ср) -
[фрс(юср) = -л + Аф-
(3.236)
Контрольные вопросы
193
3.4.5.3. Определение запаса устойчивости
по логарифмическим частотным характеристикам
разомкнутой системы
Запасы устойчивости по модулю и по фазе можно определить
по ЛАЧХ и ЛФЧХ разомкнутых устойчивых систем. Если wKp > а>ср
(рис. 3.73), то замкнутая система устойчива, и запасы устойчивости
по модулю А£ в децибелах и по фазе определяются равенствами:
Faz - Lpc (сокр);
|д<р = л + Фрс(Юср).
Рис. 3.73. Определение запаса устойчивости (по модулю и фазе) по логариф-
мическим частотным характеристикам разомкнутой системы
Одно из преимуществ использования запаса по фазе состоит в
том, что определяемая при этом частота среза практически совпада-
ет с частотой затухающих колебаний в замкнутой системе регулиро-
вания и может служить показателем быстродействия системы.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Назовите особенности физических и математических моделей.
2. Какими режимами работы можно охарактеризовать динамику САУ?
3. Дайте определение типового динамического звена.
7 Беспалов А. В.. Хартонон Н. И.
194
Глава 3. Основы теории автоматического управления
4. Объясните понятие декомпозиция САУ.
5. Поясните методику составления дифференциальных уравнений эле-
ментов САУ.
6. Зачем необходима линеаризация уравнений и что лежит в ее основе?
7. Почему для анализа и синтеза САУ, а также для исследования ее
динамического поведения используют преобразование Лапласа? Назовите
основные свойства преобразования Лапласа.
8. Что характеризует передаточная функция звена? Каковы ее воз-
можности?
9. Что такое временные характеристики? Для чего они необходимы?
Какие типовые входные воздействия используются для получения времен-
ных характеристик?
10. Для чего необходимы частотные характеристики?
11. Что характеризует частотная передаточная функция? Каковы ее
возможности?
12. Как графически представляют частотные характеристики?
13. Какая взаимосвязь существует между годографом частотной пере-
даточной функции и ЛАЧХ с ЛФЧХ?
14. Какие вы знаете комбинации звеньев?
15. Какие существуют эквивалентные преобразования структурных схем?
16. Приведите примеры типовых динамических звеньев (статических,
интегрирующих, дифференцирующих, неустойчивых, запаздывания).
17. Сравните переходные характеристики типовых динамических звеньев.
18. Сравните амплитудные и фазовые частотные характеристики типо-
вых динамических звеньев (статических, интегрирующих, дифференциру-
ющих, неустойчивых, запаздывания).
19. Дайте понятие устойчивости САУ.
20. Что характерно для линейных систем управления?
21. Как определяется устойчивость системы управления по Ляпунову?
22. Каковы особенности алгебраических и частотных критериев устой-
чивости?
23. Приведите формулировку и поясните физический смысл частотно-
го критерия устойчивости Найквиста для устойчивых в разомкнутом состо-
янии систем.
24. Как можно оценить запас устойчивости САУ?
4Г Л А В A____________________
СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Неужели вы скажете, что он сам со-
бою управил так? Не правильнее ли думать,
что управился с ним кто-то совсем другой?
М.А. Булгаков. Мастер и Маргарита
4.1. ОБЪЕКТЫ УПРАВЛЕНИЯ
И ИХ ОСНОВНЫЕ СВОЙСТВА
Как уже было сказано выше (см. разд. 2.1), объект управления,
являясь составной частью системы управления, представляет собой
динамическую систему, имеющую свои входы: управляющие воз-
действия и(т) — материальные и тепловые потоки, изменяемые с
помощью исполнительных устройств; разнообразные внешние и
внутренние возмущающие воздействия d(t) — изменение состояния
окружающей среды, изменение характеристик исходного сырья и
параметров энергоносителей, изменение состояния технологической
аппаратуры и др. и выходы — управляемые (регулируемые) величины
у(т), характеризующие состояние и протекание ХТП в объекте.
4.1.1. Классификация объектов управления
Классификацию ОУ можно провести по ряду признаков: по ко-
личеству выходных величин в математической модели объекта, по
классу дифференциальных уравнений, по функциональной зависи-
мости (линейной или нелинейной) между выходными и входными
величинами в статическом режиме и т. д
4.1.1.1. Одномерные м многомерные объекты
Одномерный объект — объект управления, математическая мо-
дель функционирования которого содержит одну выходную величину.
Входных величин может быть несколько. Можно представить, что
194
Глава 3. Основы теории автоматического управления
4. Объясните понятие декомпозиция САУ.
5. Поясните методику составления дифференциальных уравнений эле-
ментов САУ.
6. Зачем необходима линеаризация уравнений и что лежит в ее основе?
7. Почему для анализа и синтеза САУ, а также для исследования ее
динамического поведения используют преобразование Лапласа? Назовите
основные свойства преобразования Лапласа.
8. Что характеризует передаточная функция звена? Каковы ее воз-
можности?
9. Что такое временные характеристики? Для чего они необходимы?
Какие типовые входные воздействия используются для получения времен-
ных характеристик?
10. Для чего необходимы частотные характеристики?
11. Что характеризует частотная передаточная функция? Каковы ее
возможности?
12. Как графически представляют частотные характеристики?
13. Какая взаимосвязь существует между годографом частотной пере-
даточной функции и ЛАЧХ с ЛФЧХ?
14. Какие вы знаете комбинации звеньев?
15. Какие существуют эквивалентные преобразования структурных схем?
16. Приведите примеры типовых динамических звеньев (статических,
интегрирующих, дифференцирующих, неустойчивых, запаздывания).
17, Сравните переходные характеристики типовых динамических звеньев.
18. Сравните амплитудные и фазовые частотные характеристики типо-
вых динамических звеньев (статических, интегрирующих, дифференциру-
ющих, неустойчивых, запаздывания).
19. Дайте понятие устойчивости САУ.
20. Что характерно для линейных систем управления?
21. Как определяется устойчивость системы управления по Ляпунову?
22. Каковы особенности алгебраических и частотных критериев устой-
чивости?
23. Приведите формулировку и поясните физический смысл частотно-
го критерия устойчивости Найквиста для устойчивых в разомкнутом состо-
янии систем.
2.4. Как можно оценить запас устойчивости САУ?
4Г Л А В A____________________
СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Неужели вы скажете, что он сам со-
бою управил так? Не правильнее ли думать,
что управился С ним кто-то совсем другой?
М.А Булгаков. Мастер и Маргарита
4.1. ОБЪЕКТЫ УПРАВЛЕНИЯ
И ИХ ОСНОВНЫЕ СВОЙСТВА
Как уже было сказано выше (см. разд. 2.]), объект управления,
являясь составной частью системы управления, представляет собой
динамическую систему, имеющую свои входы: управляющие воз-
действия и(т) — материальные и тепловые потоки, изменяемые с
помощью исполнительных устройств; разнообразные внешние и
внутренние возмущающие воздействия rf(r) — изменение состояния
окружающей среды, изменение характеристик исходного сырья и
параметров энергоносителей, изменение состояния технологической
аппаратуры и др. и выходы — управляемые (регулируемые) величины
характеризующие состояние и протекание ХТП в объекте.
4.1.1. Классификация объектов управления
Классификацию ОУ можно провести по ряду признаков: по ко-
личеству выходных величин в математической модели объекта, по
классу дифференциальных уравнений, по функциональной зависи-
мости (линейной или нелинейной) между выходными и входными
величинами в статическом режиме и т. д.
4.1.1.1. Одномерные н многомерные объекты
Одномерный объект — объект управления, математическая мо-
дель функционирования которого содержит одну выходную величину.
Входных величин может быть несколько. Можно представить, что
Т
196
Глава 4. Системы автоматического управления
Рис. 4.1. Схема резервуара для жидко-
сти (а) и структурная схема динамичес-
ких каналов резервуара (б)
влияние входной величины на выходную величину распространяет-
ся внутри объекта по некоторому воображаемому пути, называемо-
му динамическим каналом. Объект с одним входом и одним выходом
является одноканальным. Пример одномерного объекта — резервуар
(сборник) жидкости (рис. 4.1, а), входными величинами которого
являются приток (приход) FBX и сток (расход) Faux жидкости, а вы-
ходной величиной — уровень жидкости L. Увеличение или умень-
шение FBX (или FBbH) изменяет уровень жидкости L в резервуаре.
При регулировании уровня жидкости в качестве управляющего воз-
действия можно выбрать изменение FBX. Тогда изменение FBbIX будет
возмущающим воздействием. На рис. 4-1, б приведена схема дина-
мических каналов объекта.
Уравнение статики одномерного объекта:
(4.1)
уравнение динамики
i ') (4.2)
Одномерные объекты описываются одним уравнением динами-
ки (4.2), которое в статических условиях сводится к уравнению (4.1).
Многомерный объект — объект управления, математическая мо-
дель функционирования которого содержит несколько выходных ве-
личин. Для многомерного объекта число уравнений вида (4.2) [или
уравнений вида (4.1) в статическом режиме] соответствует числу
выходных величин. Многомерные объекты могут быть односвязны-
ми и многосвязными.
4.1.1.2. Односвязные и многосвязные объекты
Односвязный объект — объект управления, в математической
модели функционирования которого каждая входная величина вли-
яет только на одну входную величину. Иначе говоря, многомерный
односвязный объект — это объект с независимыми выходными величи-
4.1. Объекты управления и их основные свойства
197
нами. Такие объекты разбивают на не-
сколько одномерных объектов и рас-
сматривают независимо друг от дру-
га. Схема динамических каналов
многомерного односвязного объек-
та приведена на рис. 4.2. Такой
объект описывается двумя уравне-
ниями динамики:
Л = У? («iXt); Ji = fi («1 л), (4-3)
а в статических условиях — двумя
уравнениями статики:
d
Рис. 4.2. Схема динамических ка-
налов многомерного односвязного
объекта
Л = // (W1, rf); у2 = f} (и2). (4.4)
Многосвязный объект — объект управления, в котором хотя бы одна
входная величина влияет одновременно на несколько выходных вели-
чин. Иначе говоря, выходные величины многомерного многосвязного
объекта являются взаимозависимыми, что объясняется присутствием в
таких объектах перекрестных связей между параметрами (рис. 4.3).
Примером многомерного (двухмерного — по числу выходных ко-
ординат) многосвязного объекта может служить реактор идеального'
смешения, в котором проводится экзотермическая реакция. В каче-
стве выходных величин можно рассматривать концентрацию про-
дуктов реакции свых и температуру в реакторе t, которые зависят от
пяти основных входных величин (Fm, свх, 1ВХ, Fx, у — расхода реаген-
тов в реактор, их концентрации и температуры, расхода хладагента
и его температуры соответственно). Выходные величины (свьк, /)
реактора подвержены влиянию всех его входных величин. Уравне-
ния динамики такого объекта:
СВЫХ f (^*ВХ ’ СВХ > ^ВХ 5 , У , т) ,
* /вх ,Fx,tx, т).
Рис. 4.3. Схема динамических каналов многомерного многосвязного объекта
198
Глава 4. Системы автоматического управления
Замечание
Прохождение сигналов по каждому динамическому каналу реактора
(см. рис. 4.3) можно выразить своим уравнением динамики или передаточ-
ной функцией.
4,1.1.3. Линейные и нелинейные объекты
Линейный объект — объект управления, в математической моде-
ли функционирования которого все зависимости между величинами
могут быть представлены линейными функциями.
В общем случае необходимым условием линейности объекта уп-
равления (как и любой другой системы) является соответствующая
взаимосвязь между входным воздействием х(т) и реакцией объекта
на это воздействие у(т). Если к объекту, находящемуся в состоянии
покоя, приложить возмущающее воздействие х^т), то на выходе по-
явится реакция у^т). Если при тех же условиях подвергнуть объект
воздействию х2(т), то он даст соответствующую реакцию у2(т). Необ-
ходимым условием линейности является то, чтобы при возмущаю-
щем воздействии Xj(t) +х2(т) объект давал реакцию у^т) + у2(т). Это
положение обычно называют принципом суперпозиции.
Кроме того, линейный объект должен обладать свойством гомо-
генности (однородности). Необходимо, чтобы при изменении вход-
ной переменной в к раз (к = const) реакция (выходная переменная)
объекта изменилась в то же число раз, т. е. оказалась равна Jty(r).
Объект, в котором взаимосвязь между входной и выходной пере-
менными определяется соотношением у — х2, не является линейным,
так как не удовлетворяет принципу суперпозиции. Если входная и вы-
ходная величины связаны соотношением у — ax + b (а = const, b = const),
то объект тоже не является линейным, так как не обладает свойством
гомогенности. Однако в последнем случае объект можно считать линей-
ным в окрестности некоторой рабочей точки (хф у0) относительно ма-
лых приращений Ах и Ду Если х = + Дх и у = у0 + Ду то получим
у - ах + Ь; у0 + Ду = ах0 + аДх + Ь,
и, следовательно, Ду = йДх.
Нелинейный объект — объект управления, в математической мо-
дели функционирования которого хотя бы одна зависимость между
величинами является нелинейной функцией.
4.1.1.4. Объекты с сосредоточенными
и распределенными параметрами
Выходные величины объектов с сосредоточенными параметрами
не зависят от пространственной координаты и имеют в данный мо-
мент времени одно и то же числовое значение в каждой точке внут-
4. L Объекты управления и их основные свойства
199
ри объекта. Примерами таких объектов являются: химический реак-
тор идеального смешения, резервуар со свободным истечением жид-
кости, газгольдер и т. д.
Объекты управления с сосредоточенными параметрами, свой-
ства которых не изменяются во времени, называются стационарны-
ми и описываются обыкновенными дифференциальными уравнени-
ями с постоянными коэффициентами. Дифференциальные уравне-
ния дополняются начальными условиями.
Выходные величины объектов с распределенными параметрами в
данный момент времени имеют разные числовые значения в раз-
личных точках объекта. Основные переменные процесса в объекте с
распределенными параметрами изменяются и во времени, и в про-
странстве. Математическая модель объекта управления с распреде-
ленными параметрами содержит хотя бы одно дифференциальное
уравнение с частными производными. Примерами объектов с рас-
пределенными параметрами являются трубчатые реакторы, массо-
обменные колонные аппараты (ректификационные, дистилляцион-
ные, абсорбционные, экстракционные), кожухотрубные теплообмен-
ники, теплообменники «труба в трубе» и т. д.
Рассмотрим фрагмент кожухотрубного теплообменника, где тем-
пература непрерывно изменяется по длине трубы (температура жид-
кости «распределена» подлине теплообменника). Предполагая, что
стенки труб прогреваются с одинаковой скоростью во всех точках, а
температура нагреваемой жидкости одинакова в любой точке попе-
речного сечения трубы, можно привести упрощенное уравнение теп-
лопередачи от стенки трубы к жидкости в каком-либо рассматрива-
емом сечении трубы (рис. 4.4):
f2(/’ + т)
Ц/+ df.T)
f#. т)
i яе :
Рис. 4.4. Пример объекта с распределенными параметрами (фрагмент трубы
кожухотрубного теплообменника)
200
Глава 4. Системы автоматического управления
где и f2 - температуры нагреваемой жидкости и стенки трубы; v —
скорость жидкости; £ — длина (текущая) трубы теплообменника до рас-
сматриваемого сечения «аа»; t — время; к — постоянный коэффициент.
Из уравнения следует, что выходная величина объекта (темпера-
тура нагреваемой жидкости /,) является функцией двух координат:
временнбй и пространственной.
Динамика объектов управления с распределенными параметра-
ми описывается дифференциальными уравнениями с частными про-
изводными, дополненными начальными и граничными условиями.
Естественно, что решение дифференциальных уравнений с частны-
ми производными сложнее, чем решение обыкновенных дифферен-
циальных уравнений. Поэтому при построении математической мо-
дели объектов с распределенными параметрами прибегают к такой
процедуре: их разбивают на ряд последовательно соединенных эле-
ментов с сосредоточенными параметрами и каждый из них описы-
вают обыкновенным дифференциальным уравнением.
Примечание
Точность такого описания тем выше, чем больше число разбиений. Сис-
тему с распределенными параметрами можно заменить на несколько после-
довательно включенных КС-цепочек, и такой подход окажется вполне удов-
летворительным и обеспечит необходимую точность. Если сопротивление и
емкость элемента с распределенными параметрами малы по сравнению с со-
противлениями и емкостями других элементов системы, то для аппроксима-
ции достаточно использовать одну или две RC-цепочки. Для аппроксимации
таких объектов с распределенными параметрами, как химический реактор,
теплообменник, абсорбционная насадочная колонна, потребуется от 5 до 10
RC-цепочек (иначе говоря, от 5 до 10 статических звеньев первого порядка).
Как было уже сказано в разд. 3.1, между механическими, элект-
рическими, гидравлическими, тепловыми и другими динамически-
ми системами существует аналогия. Во многих случаях эти системы
описываются однотипными дифференциальными уравнениями, что
указывает на сходство динамических процессов, протекающих в
объектах, и на возможность переноса результатов, полученных для
одних объектов, на объекты другой физической природы.
В дальнейшем в основном будут рассматриваться объекты с со-
средоточенными параметрами.
4.1.2. Свойства объектов управления
Для чего необходимо знать свойства объекта? Чтобы разработать
систему управления, обеспечивающую требуемое качество переход-
ного процесса САУ, т. е. верно выбрать закон регулирования и оп-
ределить оптимальные параметры настройки регулятора.
4.1. Объекты управления и их основные свойства
201
При всем разнообразии объектов управления в химической тех-
нологии наиболее часто встречающиеся из них могут быть разделе-
ны на сравнительно небольшое число типов, обладающих похожи-
ми динамическими характеристиками и основными свойствами:
емкостью, способностью к самовыравниванию, запаздыванием.
4.1.2.1. Емкость
Работа любого управляемого объекта связана с притоком (при-
ходом), стоком (расходом) и преобразованием материальных и энер-
гетических потоков, поэтому емкость является свойством, характер-
ным для всех объектов управления в химической технологии.
Под емкостью объекта (аккумулирующей способностью) обычно
понимают его способность накапливать или сохранять вещество или
энергию.
Накопление вещества или энергии возможно благодаря тому,
что в каждом объекте имеется сопротивление выходу потоку веще-
ства или энергии. Например, если бы не было гидравлического со-
противления сливного трубопровода на выходе из объекта, в кото-
ром регулируется уровень (см. рис. 4.1), жидкость не могла бы на-
капливаться в нем, и объект (резервуар) не обладал бы емкостью.
Объекты управления по числу емкостей подразделяются на од-
ноемкостные и многоемкостные. Одноемкостный объект управле-
ния состоит из одного сопротивления стоку (расходу) вещества или
энергии и одной емкости. К одноемкостным объектам относятся
резервуары и аппараты, в которых регулируется уровень жидкости;
аппараты, в которых регулируется давление газа или пара; теплооб-
менники смесительного типа с непосредственным контактом тепло-
носителя и нагреваемого (или охлаждаемого) вещества; участки тру-
бопроводов, на которых регулируется давление или расход, и др.
Многоемкостные объекты состоят из двух или более емкостей,
последовательно соединенных и разделенных сопротивлениями.
Большинство промышленных объектов управления (ректификаци-
онные и абсорбционные колонны, теплообменники, сложные гид-
равлические системы и др.) являются многоемкостными объектами.
На рис. 4.5 приведены примеры одноемкостных и многоемкост-
ных объектов.
В теплообменнике смешения (рис. 4.5, д) температура воды /вых
регулируется изменением подачи водяного пара Fn. Теплообменник
смешения — это одноемкостный объект. Здесь емкостью является
общая теплоемкость жидкости в теплообменнике, а сопротивление
потоку теплоты, уносимой из теплообменника нагретой водой, за-
висит от гидравлического сопротивления трубы на выходе.
202
Глава 4. Системы автоматического управления
Рис. 4.5. Примеры одноемкостного (а), двухьемкостного (б), многоемко-
стного (в) объектов
Кожухотрубный теплообменник (рис, 4.5, б), где по трубам про-
текает вода, а в межтрубном пространстве — пар, является двухъем-
костным объектом. Этот объект обладает следующими тепловыми
емкостями: пар в межтрубном пространстве, жидкость в трубах.
Сопротивлением здесь является термическое сопротивление метал-
ла труб и трубчатых решеток.
Многоемкостным объектом является, например, ректификаци-
онная колонна (рис. 4.5, в). Так, для ректификационной колонны с
ситчатыми тарелками число ее емкостей определяется числом таре-
лок, а сопротивлениями будут являться сопротивления переливных
труб для перетока жидкости с тарелки на тарелку.
Мерой емкости объекта служит емкость С (называемая иногда
коэффициентом емкости), определяемая соотношением
_ ^(экстенсивная переменная = количество энергии или вещества)
б(интенсивная переменная) q
Емкость можно определить так же как и количество вещества
или энергии, которое необходимо подвести к объекту, чтобы изме-
нить выходную величину на единицу.
Например, для гидравлического резервуара экстенсивной пере-
менной является объем жидкости в резервуаре V, а интенсивной
4.1: Объекты управления и их основные свойства
203
переменной — уровень жидкости в резервуаре L. Запишем выраже-
ние емкости для резервуара:
аи d(4Z)
dZ dZ ’
где А — площадь поперечного сечения резервуара.
Если А * /(Z), то
с-^-л.
dZ
Емкость объекта (4,6) может изменяться с изменением выходной
величины. Например, емкость гидравлического резервуара, площадь
поперечного сечения которого переменна по высоте (конического,
сферического и т. д.), зависит от уровня жидкости в резервуаре.
Емкость теплового объекта (например, химического реактора)
определяется количеством теплоты dQ, приводящим к приращению
температуры в нем на dr
С = = тс₽’ т * /И и ср * Ж
т. е. емкость теплового объекта зависит от массы т и удельной теп-
лоемкости вещества ср, а единица измерения емкости теплового
объекта — Дж/К.
Перепишем выражение (4.6) иначе и продифференцируем по
времени:
а(экст. перем.) = С6(интен. перем.)\
й(экст. перем.) _ й(интен. перем.)
dx dx
Левая часть уравнения (4.7) представляет собой скорость изме-
нения количества вещества или энергии в объекте, равную разности
между потоком вещества или энергии, входящим в объект (прито-
ком) Гвх, и потоком вещества или энергии, выходящим из объекта
(стоком) ZBbIX, т. е, — ZBbIx. Правая часть уравнения (4.7) является
скоростью изменения интенсивной переменной. Для гидравличес-
кого резервуара
— с— — = F -F =^C— = F ~F (С = Л)
dx dx’ dx вх вых dr DS "x 1 h
Из сказанного следует, что чем больше емкость объекта, тем
меньше скорость изменения выходной величины при одном и том
204
Глава 4. Системы автоматического управления
же изменении потока подаваемого в объект вещества или энергии.
Это означает, что емкость характеризует инерционность объекта.
Замечание
Инерционность оказывает фундаментальное влияние на качество уп-
равления в системах управления с обратной связью. Без знания причин
возникновения, характера и величины инерционности невозможно решить,
какой закон регулирования предпочтительнее в данном контуре управле-
ния, и может ли вообще управление с обратной связью достичь поставлен-
ной цели. Выделяют безынерционные и инерционные объекты,. Безынерцион-
ным объектом называется такой объект управления, изменения управляе-
мых параметров которого не отстают от вызвавших их изменений
управляющих воздействий. Безынерционный объект является идеализаци-
ей. Любая реальная система обладает инерционностью'. Однако на практи-
ке объект можно считать безынерционным в тех случаях, когда влиянием
инерционности на поведение объекта можно пренебречь.
Как емкость влияет на качество регулирования?
1. Ошибка регулирования. Рассмотрим систему регулирования с
обратной связью (рис. 4.6). Пусть
Запишем передаточную функцию' системы регулирования по
каналу возмущающее воздействие—ошибка регулирования:
^(Е) _ / л ____(д) _______________
W) 1U 1 + жои(^РМ..........ясу + 1 + ^ед'
Так как емкость входит в знаменатель выражения, то ее увеличе-
ние приводит к уменьшению' модуля ошибки при данном возмуща-
ющем воздействии. Для идеальной системы:
е э 0 Vd(z); У(е) = (s) «'(</), У(d) * 0 => (л) = 0,
т. е. для того, чтобы ошибка регулирования равнялась нулю при
любом возмущающем воздействии, знаменатель передаточной функ-
ции ГРДз) должен быть равным бесконечности. В реальных систе-
Рис. 4,6. Структурная схе-
ма системы регулирования
с обратной связью
4.1. Объекты управления и их основные свойства 205
мах знаменатель передаточной функции ^(з) не равен бесконеч-
ности. Но чем больше модуль знаменателя, тем меньше модуль
ошибки регулирования. Отсюда следует вывод: в системах стаби-
лизации, когда основной задачей регулирования является компен-
сация возмущающих воздействий, большая емкость объекта регу-
лирования является достоинством, так как уменьшает ошибку ре-
гулирования.
Для следящих и программных систем регулирования ситуация
выглядит иначе, поскольку для них важно рассматривать переда-
точную функцию по каналу задающее воздействие^ошибка регули-
рования’
ЛИ- -гм- 1 1
р v ’ RCs + I
С увеличением емкости модуль знаменателя передаточной фун-
кции ^(s) уменьшается, следовательно, ошибка регулирования воз-
растает.
Вывод: в следящих и программных системах регулирования, когда
основной задачей системы регулирования является изменение регу-
лируемого параметра в соответствии с изменяющимся во времени
заданием, большая емкость объекта регулирования является недо-
статком, так как увеличивает ошибку регулирования.
2. Быстродействие. Увеличение емкости С объекта регулирова-
ния приводит к увеличению времени переходного процесса тпп, т. е.
уменьшает быстродействие системы регулирования. Таким образом,
с точки зрения быстродействия большая емкость объекта является
недостатком.
3. Устойчивость. Емкость объекта регулирования влияет на ве-
личину постоянной времени Т и, следовательно, на соотношение
Тзап/Г, взаимосвязь которого с устойчивостью системы регулирова-
ния будет рассмотрена далее в разд. 4.1.2.3, посвященном запазды-
ванию.
4.1.2.2. Салювыравнивание
Состояние объекта может быть нарушено в результате изменения
материальных или энергетических потоков (притока или стока),
т. е. нанесением на объект возмушаюших воздействий. При этом
выходные величины будут увеличиваться или уменьшаться в зави-
симости от того, что окажется больше — приход или расход. По
способности восстанавливать равновесное состояние после нанесе-
ния на объект возмущающего воздействия объекты делят на нейт-
ральные, устойчивые, неустойчивые.
206
Глава 4. Системы автоматического управления
Объекты без самовыравнивания (нейтральные)
Объекты без самовыравнивания называют нейтральными, или
астатическими.
Выходные величины нейтральных объектов не оказывают воздей-
ствия на приток (приход) или сток (расход) вещества или энергии,
т. е. в нейтральных объектах отсутствует внутренняя обратная связь.
При отсутствии возмущающего воздействия нейтральный объект
может находиться в состоянии равновесия при любых значениях вы-
ходной величины. При нарушении равновесия в объекте скорость
изменения выходной величины пропорциональна величине возму-
Рис. 4.7. Схема объекта регули-
рования без самовыравнивания
щающего воздействия, т. е. при нали-
чии не скомпенсированного возмуща-
ющего воздействия статический режим
в нейтральном объекте не возможен.
Примером объекта без самовырав-
нивания является гидравлический ре-
зервуар, изображенный на рис. 4.7.
Жидкость из резервуара откачивается
насосом, производительность которого
не зависит от уровня жидкости в ре-
зервуаре.
Составим уравнение материально-
го баланса резервуара:
где И— объем жидкости в резервуаре, мэ; — приток жидкости (м3/с);
FBblx — сток жидкости (м3/с); t — время, с.
Скорость изменения объема жидкости в резервуаре:
— = F - f
ch “ ВЫ)1'
Принимая площадь поперечного сечения резервуара постоян-
ной по высоте, т. е. А - const, можно записать скорость изменения
уровня жидкости:
% - С..Л <«)
Из (4.8) следует, что скорость изменения уровня жидкости в ре-
зервуаре пропорциональна разности между притоком и стоком жид-
кости. Если - FBblx, то скорость изменения уровня жидкости рав-
на нулю и уровень жидкости постоянен во времени.
Если, например, в момент времени т = 0 (рис, 4.8, о), до которо-
го резервуар находился в статическом режиме (приток FBX 0 был ра-
4. J. Объекты управления и их основные свойства
207
а
б
Рис. 4.8. Поведение объекта регулирования без самовыравнивания при
ступенчатом возмущающем воздействии:
о — изменение расходов жидкости, б' — изменение уровня
вен стоку FBiil.Xi 0), скачкообразно увеличить приток (резко от-
крыть клапан), то при FBblx = const уровень жидкости в резервуаре
начнет возрастать (рис. 4.8, б), что может привести к нарушению
работы объекта.
Передаточная функция объекта, как следует из (4,8), равна:
JF(s) = 1/Лх. (4.9)
Используя выражение передаточной функции (4.9), можно по-
казать, что переходная характеристика рассматриваемого объекта
Д£ (т) = £ (т) - - ^вых) т (4 j 0)
Л
Переходный процесс в нейтральном объекте, соответствующий
ступенчатому изменению расхода жидкости (см. рис. 4.8, о), пред-
ставлен кривой разгона (см. рис. 4.8, б).
Нейтральный объект содержит одно интегрирующее звено, т. е.
передаточная функция нейтрального объекта, которую в общем виде
можно записать следующим образом:
1У(з) =
b„sm + ... + ba
s(a„sn + ... + а0)
exp(-r3anj),
(4.11)
содержит в знаменателе множитель л-.
Примечание
Уровень жидкости в резервуаре можно регулировать, изменяя вруч-
ную проходное сечение клапана на входе в резервуар. В противном случае,
если приход жидкости в резерв.уар будет отличаться от ее расхода
хотя бы на очень малую величину, резервуар в. конце концов либо пере-
полнится жидкостью, либо полностью опорожнится. Таким образом, ней-
тральный объект не может сам прийти в равновесное состояние: он не
208 Глава 4. Системы автоматического управления
имеет естественного состояния динамического равновесия или установив-
шегося режима. Нейтральные объекты нельзя на длительное время остав-
лять без надзора, если они не снабжены САР.
Большинство объектов, в которых регулируется уровень жидкости, от-
носится к нейтральным объектам. Обычно их регулирование не вызывает
трудностей, если особенности этих объектов учтены заранее. Одной из осо-
бенностей является наличие фазового сдвига в объекте. В нейтральных
объектах из-за присутствия идеального интегрирующего звена запаздыва-
ние по фазе возрастает на я/2 рад.
Объекты с самовыравниванием (устойчивые)
Способность объекта прийти после нанесения возмущающего
воздействия в новое установившееся состояние без вмешательства
управляющего устройства называется самовыравниванием (саморегу-
лированием).
Объекты с самовыравниванием называют статическими, или ус-
тойчивыми.
В объектах с самовыравниванием ступенчатое входное воздействие
изменяет выходную величину со скоростью, постепенно уменьшаю-
щейся до нуля. Самовыравнивание является результатом действия
внутренней отрицательной обратной связи в объекте (результатом
влияния выходной величины объекта на приток или сток вещества
или энергии). Чем больше величина самовыравнивания, тем мень-
ше отклоняется управляемый параметр от состояния равновесия,
имевшего место до возмущающего воздействия. Самовыравнивание
способствует стабилизации управляемой величины в объекте и, та-
ким образом, облегчает работу управляющего устройства.
Объект с самовыравниванием на стоке (резервуар со свободным
истечением жидкости) схематически изображен на рис. 4.9.
При ступенчатом возрастании прихода жидкости в резервуар
(рис. 4.10, а) уровень в первый момент времени начнет изменяться с
такой же скоростью, с какой он изменялся бы в объекте без самовы-
равнивания (см. выше), так как расход
FBX -—о (j?) Рис. 4J- Схема объекта с са« мовы равна ванием на стоке жидкости из резервуара еще не начал воз- растать. Одновременно начнет возрастать гид- ростатическое давление в плоскости слив- ной трубы, что приведет к увеличению расхода жидкости на линии стока FKblx. Такое действие, направленное на восста- новление равновесия в системе, называ- ют самовыравниванием. Влияние самовы- равнивания аналогично действию П-ре- гулятора, как бы находящегося внутри объекта (см. разд. 4.3.1).
4.1. Объекты управления и их основные свойства
209
Рис. 4.10. Поведение объекта регулирования с самовыравниванием на стоке
при ступенчатом возмущающем воздействии:
у — изменение расходов жидкости; б — изменение уровня
Зависимость расхода жидкости на стоке от уровня жидкости в
объекте:
^вых
(4.12)
где а — коэффициент, характеризующий геометрию отверстия ис-
течения.
С увеличением FB1!lx величина возмущающего воздействия &.F =
= FM — Хвых уменьшается, следовательно, будет уменьшаться и ско-
рость изменения уровня. По мере приближения FBUX к Гвх скорость
повышения уровня падает. Через некоторый промежуток времени
после нанесения ступенчатого возмущающего воздействия сток вновь
станет равным притоку, рост уровня жидкости L прекратится. Объект
придет в новое установившееся состояние, но при более высоком
значении уровня £„ (рис. 4.10, б).
Выражение (4.12) отражает характерное для устойчивых объектов
действие внутренней отрицательной обратной связи: выходная вели-
чина объекта L влияет на сток вещества
из объекта FBbIx.
Объект с самовыравниванием на при-
токе схематически показан на рис. 4.11.
В резервуар почти до самого дна опуще-
на труба, по которой поступает жидкость.
На линии стока установлен насос, про-
изводительность которого может скачко-
образно изменяться за счет ступенчатого
изменения угловой скорости вращения
асинхронного электромотора — привода
насоса (на рисунке не показан). П.ри рез-
ком увеличении производительности на-
соса расход на линии стока /'вых ступен-
Рис. 4.11. Схема объекта ре-
гулирования с самовыравни-
ванием на притоке
210
Глава 4. Системы автоматического управления
Рис. 4.12. Поведение объекта при ступенчатом возмущающем воздействии:
а — изменение расходов жидкости; 6 — изменение уровня
чато возрастает. Это приведет к плавному понижению уровня и
одновременно к уменьшению подпора в выходном сечении трубы.
С уменьшением подпора начнет возрастать приток (рис. 4.12, а).
Через некоторое время приток и сток уравняются FBX = /?вых, и
тогда уровень жидкости перестанет изменяться, достигнув нового
установившегося значения £„ (рис. 4.12, б).
Замечание
Если на линии стока вместо насоса установить вентиль, т. е. расход
сделать зависимым от уровня L, получим объект с самовыравниванием на
притоке и стоке.
Структурная схема устойчивого объекта первого порядка может
быть представлена в виде интегрирующего звена с передаточной
функцией, равной 1/Га5, охваченного отрицательной обратной свя-
зью (рис. 4.13). В цепи обратной связи находится звено с передаточ-
ной функцией К^. Передаточная функция устойчивого объекта пер-
вого порядка имеет вид
Го5 + Г
(4.13)
Рис. 4.13. Структурная схема, устойчи-
вого объекта регулирования
4.1. Объекты управления и их основные свойства
211
где Ко = 1/К^. — коэффициент усиления устойчивого объекта пер-
вого порядка; То = Та/Кж — постоянная времени устойчивого объекта
первого порядка.
В соответствии с полученной передаточной функцией (4.13), за-
пишем уравнение динамики устойчивого объекта первого порядка:
Т0^ + у = Кох. (4.14)
ат
Переходная характеристика устойчивого объекта первого поряд-
ка получена из передаточной функции (4.13):
Л(т)=£о[|-ехр(-т/Ш (4.15)
Влияние самовыравнивания объекта на переходный процесс по сути
своей аналогично действию управляющего устройства (автоматичес-
кого регулятора). Так, нейтральные объекты, не обладающие само-
выравниванием, самостоятельно не обеспечивают устойчивой рабо-
ты и требуют обязательного применения управляющих устройств.
Причем не каждый регулятор может справиться с задачей управле-
ния такими объектами. Например, применение интегрального регу-
лятора для управления нейтральным объектом (в силу свойств объекта
и регулятора, как это будет показано в этой главе ниже) не позволя-
ет получить устойчивой работы системы управления. Следователь-
но, отсутствие самовыравнивания в объектах усложняет задачу уп-
равления, а его наличие облегчает задачу поддержания выходной
величины объекта на заданном значении.
Замечание
В некоторых объектах самовыравнивание столь велико, что для под-
держания постоянного значения выходной величины объекта можно обой-
тись без установки регулятора. Например, тарелка ректификационной ко-
лонны является объектом с очень большой степенью самовыравнивания,
если входной величиной считать изменение притока жидкости, поступаю-
щей с вышележащей тарелки, а выходной — изменение уровня жидкости
на данной тарелке (например, ситчатой тарелке с переливом). Действи-
тельно, при некотором возмущающем воздействии количество жидкости,
поступившей на данную тарелку, уравняется количеством жидкости, поки-
нувшей ее (за счет испарения и перетока на нижележащую тарелку по слив-
ной трубе, имеющей достаточно большое сечение), при практически неиз-
менном уровне жидкости, определяемом высотой сливной трубы над та-
релкой.
Объекты с отрицательным самовыравниванием
(неустойчивые)
В объектах с отрицательным самовыравниванием (неустойчивых
объектах) изменение выходного параметра, вызванное возмущаю-
щим воздействием, приводит к еще большему неравенству между
212
Гл а в.a 4. Системы автоматического управления
притоком и стоком вещества или энергии, что в свою очередь вызы-
вает дальнейшее изменение выходной величины с постепенно уве-
личивающейся скоростью.
Примерами таких объектов могут служить аппараты, в которых
протекают автокаталитические реакции. Если процессом не управ-
лять, то при положительном автокатализе реакция самоускоряется,
стремительно нарастая, а при отрицательном автокатализе скорость
реакции уменьшается вплоть до ее прекращения. Другим примером
неустойчивого объекта является химический реактор, в котором
протекает экзотермическая реакция (подробнее см. разд. 6.1.3.2).
Предположим, что теплота химической реакции превышает теплоту,
отводимую системой охлаждения реактора. В этом случае температу-
ра в реакторе начнет повышаться, приводя к увеличению степени
превращения реагентов, а увеличение степени превращения реаген-
тов экзотермической реакции приводит к увеличению температуры,
при этом скорость изменения ее растет. Такое поведение объектов,
обладающих отрицательным самовыравниванием, можно объяснить
наличием в них внутренних положительных обратных связей. На
рис. 4.14, а приведена структурная схема неустойчивого объекта пер-
вого порядка. Интегрирующее звено с передаточной функцией, рав-
ной 1/Та5, охвачено положительной обратной связью. В цепи обрат-
ной связи находится статическое звено нулевого порядка с переда-
точной функцией Кж. Передаточная функция неустойчивого объекта
первого порядка имеет вид,:
где Ко = 1/Кж — коэффициент усиления неустойчивого объекта пер-
вого порядка; То = Та/Кж — постоянная времени неустойчивого
объекта первого порядка.
Рис. 4.14. Структурная схема неустойчивого объекта регулирования (а) и
его переходная характеристика (б)
4.1. Объекты управления и их основные свойства
213
В соответствии с полученной передаточной функцией (4.16) за-
пишем уравнение динамики неустойчивого объекта первого порядка:
То^-у = Кох. (4.17)
от
Используя передаточную функцию (4.16), запишем переходную
характеристику неустойчивого объекта первого порядка:
Л(т) = А'о [ехр(т/Го)-1]. (4.18)
На рис. 4.14, б построена кривая разгона неустойчивого объекта
первого порядка.
Самовыравнивание объектов характеризуется степенью (коэффи-
циентом) самовыравнивания р, который определяется следующей за-
висимостью:
р = 1/А0, (4.19)
где Ко — коэффициент усиления объекта.
Под степенью самовыравнивания можно понимать величину, об-
ратную коэффициенту усиления объекта, т. е. отношение измене-
ния входной величины к изменению выходной.
Коэффициент усиления (передачи) объекта, в свою очередь, оп-
ределяется по кривой разгона, как
где Х°°) — значение выходной величины в новом установившемся
состоянии (после переходного процесса); у(0) — значение выходной
величины в начальном установившемся состоянии (до переходного
процесса); М — изменение возмущающего воздействия на входе
объекта.
Переходные характеристики нейтрального, неустойчивого и ус-
тойчивых объектов с различной степенью' самовыравнивания при-
ведены на рис. 4.15.
Рис. 4.15. Переходные характеристики
объектов регулирования: 1, 2, J — ус-
тойчивые объекты (р, = р, > р, > 0),
4 — нейтральный объект (р4 = 0); 5 —
неустойчивый объект (р5 < 0)
214
Глава 4. Системы автоматического управления
Для устойчивых объектов степень самовыравнивания — вели-
чина положительная, т. е. р >0 (кривые 1—3). Кривая 7 (совпада-
ет с осью абсцисс) характеризует объект, обладающий степенью
самовыравнивания р = Управляемая величина не изменяет сво-
его значения при любых возмущающих воздействиях. Это объект с
идеальным самовыравниванием и он не нуждается в управляющих
устройствах.
Кривая 4 характеризует объект, не обладающий самовыравнива-
нием, т. е. нейтральный (р = 0). Кривая 5 характеризует неустойчи-
вый объект (р < 0).
Коэффициент самовыравнивания не является постоянной вели-
чиной, поскольку зависит от нагрузки объекта. Максимальной на-
грузке соответствует максимальный для данного объекта коэффи-
циент самовыравнивания.
Объекты, рассматриваемые выше (устойчивые, нейтральные,
неустойчивые), по виду дифференциальных уравнений могут быть
отнесены к объектам первого порядка.
Объекты химической технологии, динамика которых может быть
описана дифференциальными уравнениями второго порядка, отно-
сятся к объектам второго порядка и могут быть представлены в виде
двух емкостей, разделенных сопротивлением.
Устойчивые объекты второго порядка
Объект, изображенный на рис. 4.16, состоит из двух цилиндри-
ческих аппаратов, соединенных между собой трубопроводом, на
котором установлен вентиль с гидравлическим сопротивлением
Жидкость из второго аппарата отводится самотеком через гидравли-
ческое сопротивление Выходной величиной объекта является
изменение уровня жидкости L2 во втором аппарате. Такую систему
Рис. 4.16. Схема устойчивого объекта второго порядка (двухъемкостного)
4.1. Объекты управления и их основные свойства
215
Рис. 4.17. Структурная схема ус-
тойчивого объекта второго по-
рядка (двухъемкостного)
можно рассматривать как объект
второго порядка. Структурная схе-
ма данного объекта представлена
двумя последовательно соединен-
ными статическими звеньями пер-
вого порядка (рис. 4.17). Переход-
ная характеристика устойчивого
объекта второго порядка показана
на рис. 4.18. Скорость изменения
выходной величины Z2 вначале
увеличивается, так как изменение
Рис. 4.18. Переходная характерис-
тика. устойчивого объекта второго
порядка (двухъемкостного)
притока жидкости из первого ап-
парата во второй Ft растет быстрее, чем сток F2 из второго аппара-
та. Затем скорость изменения Z2 постепенно уменьшается до нуля,
поскольку увеличение уровня во втором аппарате приводит к росту
стока F2, и через некоторое время он компенсирует приток жидко-
сти во второй аппарат.
Примечание
Если гидравлическое, сопротивление Л, очень мало (Я, -э 0), то уро-
вень жидкости во втором аппарате при ступенчатом изменении изменя-
ется практически так же, как он изменялся бы в объекте, состоящем только
из второго аппарата. Такую систему следует рассматривать как. объект пер-
вого порядка.
Нейтральные объекты второго порядка
На рис. 4.19 представлен объект, состоящий из двух цилиндри-
ческих аппаратов, соединенных между собой трубопроводом, на
котором установлен вентиль с гидравлическим сопротивлением R.
Жидкость из объекта отводится не самотеком, как в предыдущем
случае, а насосом, производительность которого не зависит от уров-
ня жидкости, во втором аппарате. Первый аппарат объекта обладает
самовыравниванием, но второй аппарат является нейтральным зве-
ном (сравните с рис. 4.7), поэтому объект в целом нейтрален, и его
передаточная функция соответствует выражению (4.11).
Структурная схема нейтрального объекта второго порядка пред-
ставлена на рис. 4.20, а его переходная характеристика — на рис. 4.21.
При повышении уровня Lt в первом аппарате увеличивается гидро-
статический напор, что приводит увеличению стока F\ жидкости во
второй аппарат. Через некоторое время сток из первого аппарата
216
Глава 4. Системы автоматического управления
Рис. 4.21. Переходная характеристика нейтрального объекта второго по-
рядка (двухъемкостного)
сравнивается с притоком JF, и уровень Zj перестает расти. В началь-
ный момент времени скорость изменения уровня £2 во втором ап-
парате равна нулю, а потом постепенно нарастает за счет увеличе-
ния £), достигая постоянного значения, определяемого разностью
F1 - Л и площадью поперечного сечения второго аппарата.
4.1.2.3. Запаздывание
Транспортное запаздывание
Свойство объектов, проявляющееся в том, что между моментом
нарушения равновесия (входным воздействием) и началом измене-
ния выходной величины проходит некоторое время, называют за-
паздыванием. Запаздывание затрудняет регулирование процесса, и с
ним нельзя не считаться.
4.1. Объекты управления и их основные свойства
217
Во многих системах автоматического управления (регулирова-
ния) приходится иметь дело со значительным запаздыванием, воз-
никающим из-за транспортировки вещества, энергии через трубо-
проводы или иные элементы оборудования. Запаздывание такого
типа носит название транспортного запаздывания.
Замечание
Запаздывание может появляться в результате использования в системе
регулирования периодически действующих приборов, таких как газовый
хроматограф, или цифровая вычислительная машина, включенная в цепь
обратной связи.
Если время транспортного запаздывания составляет то вы-
ходной сигнал в течение тдап после изменения входного сигнала ос-
тается неизменным.
Пример объекта с транспортным запаздыванием показан на
рис. 4.22.
Шибер (регулирующий орган) 1 дозирует сыпучий материал на
движущуюся ленту транспортера 2. Ступенчатое изменение управ-
ляющего сигнала передается на шибер, изменение положения кото-
рого приводит к немедленному изменению расхода сыпучего мате-
риала, поступающего из бункера на ленту транспортера. Однако из-
менение расхода сыпучего материала на выходе транспортера
произойдет не сразу, а через определенное время (время запаздыва-
ния), которое соответствует времени прохождения материала от до-
зировочного устройства до выхода транспортера.
Время транспортного запаздывания можно выразить отношением
Тзап = //«,
где Z — расстояние от места нанесения возмущающего воздействия
(шибера) до места, где фиксируется изменение выходной величины
(датчика); и — скорость прохождения сигнала.
Рис. 4.22. Схема объекта с транспортным запаздыванием:
1 — шибер дозировки сыпучего вещества; 2 — ленточный транспортер
218
Глава 4. Системы автоматического управления
О то т
а в
О ^эл т о т
б г
Рис. 4.23. Реакция объекта с запаздыванием (6, г) на различные входные
воздействия (а, в)
Транспортное запаздывание смещает во времени реакцию на
выходе объекта (рис. 4.23, б, г) по сравнению с входным воздействи-
ем (рис. 4.23, а, в) на величину запаздывания.
При гармоническом, входном воздействии транспортное запаз-
дывание создает сдвиг по фазе между выходной и входной вели-
чинами:
Ф = -т^го. (4.20)
Запаздывание следует рассматривать как неблагоприятное дина-
мическое свойство реальных систем. Чем больше время транспорт-
ного запаздывания, тем труднее управлять процессом.
Минимальным транспортным запаздыванием обладает объект,
работающий при максимальной нагрузке, или объект, через кото-
рый сигнал распространяется с большой скоростью. Например, из-
менение давления или скорости потока жидкости, полностью за-
полняющей гидравлическую систему, распространяется настолько
быстро, что транспортное запаздывание ничтожно мало (за исклю-
чением трубопроводов большой длины).
Рассмотрим уравнения динамики объектов с запаздыванием, их
передаточные функции и переходные характеристики.
Для устойчивого объекта первого порядка с запаздыванием урав-
нение динамики:
То^1 + у(т) = Ал(т-тзап). (4.21)
4.1. Объекты управления и их основные свойства
219
Передаточная функция:
^Ьу^-техр^т^).
/ (Р + 1
(4.22)
Переходная характеристика:
А(т)=^ 1 - ехр[- Т...„Тза" 1 Цт-т^н).
\ ’‘о 7.
(4.23)
Для нейтрального объекта первого порядка с запаздыванием урав-
нение динамики:
ra^r = x(T"T-J’ (4'24)
Передаточная функция:
И/(5) = ^-ехр(-тза11з'). (4.25)
“а5
Переходная характеристика:
(4.26)
'а
Для устойчивого объекта второго порядка с запаздыванием урав-
нение динамики:
г- + + у(т) = Кх(т - тэаг|). (4.27)
dt" от
Передаточная функция:
К К
'(r,s+l)(7;j + l)eX₽*~T”"S'’ (4'28>
при £ > I.
Переходная характеристика:
Л(т) = К I + —expI -^->п-1 + -Д-expI - Т | х
Г]-Г, Ч Tj J Т^-Т^ 1Ч Т2 J
х1(т-тзап), (4.29)
где 7]<2 +
220
Глава 4. Системы автоматического управления
Для нейтрального объекта второго порядка с запаздыванием урав-
нение динамики:
Передаточная функция:
1Г(')=7ДЙО)еХр(-11“’)' <4'31>
Переходная характеристика:
Нт) =
— ехр
• л
т тзап + (т тзан ) _
т J та та
(4.32)
Т
' 1 (т тзап )
Переходные характеристики объектов первого порядка (нейтраль-
ного — 1 и устойчивого — 2) с запаздыванием и объектов второго
порядка (нейтрального — / и устойчивого — 2) с запаздыванием
показаны на рис, 4.24 и рис. 4.25. Структурные схемы объектов пер-
Рис. 4.24. Переходные характеристи-
ки объектов первого порядка с запаз-
дыванием:
/ — нейтрального; 2 — устойчивого
Рис. 4.25. Переходные характеристики
объектов второго порядка с запазды-
ванием:
1 — нейтрального; 2 — устойчивого
X(s)
g "'зап®
X(s)
gT3ans
К У!®)
7s+ 1 '
X(s)
Рис. 4.26. Структурные схемы
объектов первого порядка с за-
паздыванием:
о — устойчивого; б — нейтрального
а
4.1. Объекты управления и их основные свойства
221
а
б
Рис. 4,27. Структурные схемы объектов второго порядка с запаздыванием;
а — устойчивого; о — нейтрального
вого порядка (устойчивого и нейтрального) с запаздыванием, и объек-
тов второго порядка (устойчивого и нейтрального) с запаздыванием
показаны на рис. 4.26 и рис. 4.27.
Переходное запаздывание
Если объект характеризуется несколькими близкими по величи-
не постоянными времени или является объектом с распределенны-
ми параметрами, то в течение некоторого времени после нанесения
возмущающего воздействия выходной сигнал практически не изме-
няется. В этом, случае можно считать, что объект обладает запазды-
ванием, которое в данном случае называют переходным.
В многоемкостных объектах переходное запаздывание возника-
ет при преодолении потоком вещества или энергии сопротивлений,
разделяющих гидравлические, тепловые и другие емкости объекта.
Например, в двухъемкостном объекте (см. рис. 4.19) аппараты
(емкости) разделены гидравлическим сопротивлением R. Если при-
ток /"скачкообразно увеличится, то изменение уровня жидкости во
втором аппарате в течение некоторого времени будет настолько ма-
лым, что окажется меньше порога чувствительности измерительно-
го прибора (уровнемера). То есть измерительный прибор не сможет
в течение некоторого времени обнаружить реакцию' объекта на вход-
ное воздействие. Такое поведение объекта аналогично существова-
нию транспортного запаздывания.
Переходное запаздывание определяется числом емкостей и ве-
личиной переходных сопротивлений. Величина переходных, сопро-
тивлений в процессе эксплуатации промышленных технологичес-
ких аппаратов возрастает. Например, в насадочных колонных аппа-
ратах происходит загрязнение насадки, в тарельчатых колонных
аппаратах — тарелок, что приводит к увеличению гидравлического
сопротивления аппаратов, к неравномерному распределению оро-
шающей жидкости и газа; в теплообменных аппаратах — загрязне-
222
Глава 4. Системы автоматического управления
ние поверхности теплообмена, в гидравлических системах — загряз-
нение (засорение) регулирующих клапанов и трубопроводов и т, д.
В результате переходное запаздывание в объекте увеличивается и
чем оно больше, тем медленнее начальное изменение действитель-
ного значения управляемой величины после появления возмущаю-
щего воздействия.
Реальные объекты включают целый набор динамических эле-
ментов. С повышением порядка объект отвечает на одно и то же
ступенчатое возмущающее воздействие все более медленно. Изме-
нение выходной величины в объектах различного порядка при од-
ной и той же степени самовыравнивания показано на рис. 4.28, а.
Структурная схема объекта третьего порядка представлена в виде
последовательного соединения трех статических звеньев первого
порядка с постоянными времени Th Т2, Т3 (рис. 4.28, б).
При последовательном соединении звеньев транспортные запаз-
дывания суммируются. Однако суммарный эффект последовательно-
го соединения емкостей не столь очевиден. Он может быть аппрок-
симирован реакцией объекта, состоящего из звена запаздывания, сле-
дующего за статическим звеном первого порядка с постоянной
времени, большей любой из постоянных времени отдельных емкос-
тей. Хотя реальный объект может состоять из целой системы эле-
ментов транспортного запаздывания и емкостей, для моделирова-
ния выбирают эквивалентное время запаздывания и постоянные
времени.
б
Рис. 4.28. Переходные характеристики устойчивых объектов (а):
/ — нулевого порядка; 2 — первого порядка (одноемкостного); .? —
второго порядка (двухъемкостного); 4 — третьего порядка {трехъемкос-
тного);
структурная схема трехъемкостного объекта (б)
4.1. Объекты управления и их основные свойства
223
Наличие запаздывания в САУ усложняет задачу регулирования
технологического параметра в объекте. Поэтому запаздывание стре-
мятся уменьшить: устанавливают чувствительный элемент первич-
ного измерительного преобразователя и исполнительное устройство
системы (исполнительный механизм и регулирующий орган) как
можно ближе к объекту управления, применяют малоинерционные
первичные измерительные преобразователи и т. д. Любая САУ рас-
считывается с учетом запаздывания.
Поскольку увеличение времени запаздывания затрудняет управ-
ление (регулирование), а увеличение емкости объекта в целом об-
легчает его, критерием выбора закона регулирования может служить
отношение эквивалентного времени запаздывания к постоянной време-
ни объекта.
4.1.3. Методы определения
свойств объектов управления
Динамические и статические свойства объектов определяют ана-
литическим, экспериментальным и экспериментально-аналитичес-
кими методами.
Аналитический метод заключается в составлении математичес-
кого описания объекта: находят уравнения статики и динамики на
основе теоретического анализа физических и химических процес-
сов, протекающих в исследуемом объекте, учитывая при этом его
конструкцию и свойства перерабатываемых веществ. При выводе
этих уравнений используются законы сохранения вещества и энер-
гии, а также кинетические закономерности процессов химических
превращений, переноса теплоты и массы.
Аналитический метод широко применяют на стадии проектиро-
вания новых технологических объектов, физико-химические про-
цессы которых достаточно хорошо изучены. Он позволяет прогно-
зировать работу объектов в статическом и динамическом режимах с
учетом конструктивных и технологических параметров объекта, од-
нако сопряжен с трудностью решения и анализа составленных урав-
нений и требует проведения специальных исследований для опреде-
ления численных значений коэффициентов этих уравнений. 0 боль-
шинстве случаев точность математического описания реальных
промышленных объектов в значительной степени зависит от упро-
щающих допущений, принимаемых либо из-за отсутствия инфор-
мации о свойствах объекта, либо с целью упрощения сложных мате-
матических выражений.
Экспериментальный метод состоит в определении характеристик
реального объекта путем постановки на нем специального экспери-
224
Глава 4. Системы автоматического управления
мента. Экспериментальный метод позволяет более точно опреде-
лить свойства данного конкретного объекта, чем аналитический
метод. Вместе с тем он требует оснащения исследуемого объекта
экспериментальной аппаратурой и проведения специальных иссле-
дований.
Исследования статических и динамических свойств объекта про-
водят с помощью либо активного, либо пассивного эксперимента.
При использовании активного эксперимента статические харак-
теристики объекта получают так: последовательно изменяют вход-
ную величину х,- по исследуемому каналу и регистрируют установив-
шееся значение выходной величины у, стабилизируя все остальные
входные воздействия, способные оказать влияние на выходную ве-
личину. В ходе эксперимента внимательно следят за стабильностью
источников помех и шумов, регистрируя существенные, произволь-
но возникающие возмущения, с тем чтобы потом исключить их вли-
яние на выходную величину.
Для устранения влияния неконтролируемых помех опыт при
одних и тех же значения входной координаты проводят много-
кратно, и обработку полученных результатов производят методами
математической статистики.
При экспериментальном определении динамических характерис-
тик объекта наносят типовое возмущающее воздействие (единич-
ное ступенчатое, единичное импульсное, единичное рамповое, гар-
монические колебания и др.) и регистрируют изменение выходной
величины объекта у(т). Такой экспериментальный метод определе-
ния динамических характеристик относят к активному. Используя
полученные экспериментальные данные о переходном процессе у(т),
аппроксимируют объект линейным дифференциальным уравнением
с постоянными коэффициентами. Допущения, принимаемые при
таком исследовании:
• объект рассматривается как звено с сосредоточенными пара-
метрами;
• при допустимых изменениях входных величин х(т) изменения
выходной величины у(т) подчиняются принципу суперпозиции',
• динамические свойства объекта не меняются с течением времени.
В пассивном эксперименте используются случайные возмущаю-
щие воздействия, а определение статических характеристик заклю-
чается в нахождении связи между этими случайными величинами и
последующей оценке достоверности найденной связи.
В промышленных условиях, чтобы не нарушить технологичес-
кий режим ведения процесса или правила техники безопасности,
при определении динамических характеристик объекта не наносят
типовые входные возмущающие воздействия на объект создаваемые
искусственно, а определяют статистические характеристики случай-
4.1. Объекты управления и их основные свойства
225
ных процессов на входах и выходах исследуемого объекта с последу-
ющим вычислением по ним динамических характеристик. Естествен-
ные входные воздействия могут представлять собой случайные про-
цессы, причинами которых могут быть магнитные, электрические,
тепловые поля и др. Такой экспериментальный метод определения
динамических характеристик относят к пассивному.
Экспериментально-аналитический метод определения характери-
стик заключается в составлении уравнений, основанном на анализе
явлений, происходящих в исследуемом объекте. Численные значе-
ния коэффициентов полученных уравнений определяются экспери-
ментально на реальном исследуемом объекте. Являясь комбинацией
аналитического и экспериментального методов определения свойств
объектов, этот метод, естественно, учитывает их преимущества и
недостатки.
Замечание
Возможности аналитического и экспериментально-аналитического
методов исследования свойств объектов расширены в связи с интенсив-
ным развитием имитационных методов, имитаторов (тренажеров), разра-
боткой пакетов прикладных математических программ (например, Matlab,
LabView и т. д.), компьютерной техники.
4.1.3.1. Аналитический метод
определение свойств объектов
Математическое описание систем довольно подробно было ос-
вещено' в гл. 3. Тем не менее выделим еще раз основные этапы ма-
тематического описания объектов.
Составление математического описания объектов начинают с
составления уравнений его материального или энергетического ба-
лансов (за бесконечно малый промежуток времени di), выявления
кинетических закономерностей, гидродинамических условий и т. п.
В полученных уравнениях раскрывают значения неизвестных и ис-
ключают промежуточные переменные. Нелинейные дифференциаль-
ные уравнения, которым соответствуют непрерывные статические
характеристики с большим радиусом кривизны, подвергают линеа-
ризации.
Далее в линейной или линеаризованной математической модели
объекта от абсолютных значений входных и выходных величин пере-
ходят к их приращениям. Последние, в свою очередь, заменяют без-
размерными величинами, которые представляют собой отношения
абсолютных приращений величин к номинальным значениям пара-
метров (значениям, используемым при расчете оборудования и тех-
нологических процессов). В качестве таковых обычно используют зна-
чения величин в установившемся состоянии до нанесения возмуша-
Н Беспалом A, Ik. XapinmiOH Ц II,
226
Глава 4. Системы автоматического управления
ющего воздействия. Номинальные значения будем обозначать теми
же буквами, что и сами переменные, но с индексом нуль.
Полученные уравнения приводят к общепринятой форме пу-
тем группирования в левой части всех членов, содержащих выход-
ную величину объекта и ее производные, а в правой части — всех
членов, содержащих входную величину объекта и ее производные.
Эта операция завершается делением всех членов полученных урав-
нений на постоянный коэффициент при безразмерной выходной
величине.
Замечание
Уравнения динамики объектов химической технологии составляются с
приемлемой точностью для ограниченного числа сравнительно простых
объектов с небольшим числом входных и выходных величин (координат).
При большом числе возмущающих и управляющих воздействий, со слож-
ными взаимосвязями (перекрестными и пр.) между входными и выходны-
ми величинами математическое описание объектов усложняется, поэтому
появляются упрощающие допущения, снижающие его точность. Примеры
составления уравнений динамики объектов химической технологии приве-
дены в задачнике [8].
4.1.3.2. Экспериментальное определение
динамических свойств объектов
В химической технологии динамические свойства промышлен-
ных объектов, таких как химические реакторы, экстракторы, абсорб-
ционные, адсорбционные, ректификационные колонны и др., до-
вольно часто исследуют экспериментально.
Технологический объект оборудуется специальными средствами
диагностики, а также специальными устройствами для нанесения
типового входного воздействия известной формы, например ступен-
чатого, и измерения отклика объекта во времени.
Получение временных характеристик
Временные характеристики можно снять на реальном объекте,
оснащая его первичными измерительными преобразователями, из-
мерительными и исполнительными устройствами (рис. 4.29), быст-
Рис. 4.29. Структурная схема ус-
тановки для определения времен-
ных характеристик объекта:
I — объект; 2, 3— измерительные пре-
образователи входной и выходной ве-
личин соответственно; 4 — регистри-
рующий измерительный прибор; 5 —
исполнительное устройство; б — па-
нель дистанционного управления
4.1. Объекты управления и их основные свойства
227
родействие которых значительно превосходит быстродействие ис-
следуемого объекта, -Эксперимент с получением переходных харак-
теристик выполняют чаще всего благодаря относительной простоте
его проведения.
Снятие переходной характеристики (кривой разгона)
Предположим, что объектом испытания является химический ре-
актор непрерывного действия (рис, 4.30, а), и требуется определить
его переходную характеристику по каналу —> Сс. Для определения
переходной характеристики реактор сначала приводят в статический
режим, т. е. стабилизируют исходный режим так, чтобы в момент
времени, принимаемый за начало отсчета, выполнялись условия:
>(0) = const; —-(О) = 0; « 0.
Затем наносят ступенчатое входное воздействие, быстро изме-
нив с помощью исполнительного устройства расход компонента А
(рис. 4.30, б). Момент нанесения ступенчатого воздействия и его
величину фиксируют. Регистрацию изменения концентрации про-
дукта С (выходной величины) у(т) на выходе реактора выполняют
концентратомером (например, кондуктометром) таким образом, что-
бы зафиксировать исходный режим, и до тех пор, пока концентра-
ция продукта С у(т) не примет новое установившееся значение (но-
вый установившийся режим) — рис. 4.30, в.
Рис. 4.30. Экспериментальное определение переходной характеристики
реактора:
а — схема, установки; >5 — ступенчатое изменение расхода компонента
А (входное воздействие); в — изменение концентрации продукта С (пе-
реходная характеристика)
X*
228 Глава 4. Системы автоматического управления
Примечание
С некоторого момента времени должны выполняться условия:
dy
у (т) = const; = О,
ат
за исключением нейтральных объектов, (объектов без самовыравнивания),
для которых условия выглядят иначе:
i 1 dy
j(tJ = о0 + Ojt; - const.
Опыт повторяют несколько раз при разных по величине и знаку
входных воздействиях +FM- 1(т). Переходная характеристика опре-
деляется по результатам каждого выполненного опыта:
А' = Л Ы/^ао
Если абсолютные значения ординат Л,<т) для одного и того же
момента времени существенно не различаются, то это является до-
казательством о допустимости предположения о линейности и ста-
ционарности динамических свойств исследуемого объекта. Если
наблюдается существенное различие /г/т) в различных опытах, то
следует уменьшить возмущающее воздействие и повторить опыты.
Усредненную по результатам п опытов переходную характеристику
я ы
можно использовать для построения математической модели объек-
та методами, изложенными в литературе [25].
Снятие импульсной переходной характеристики
Большие отклонения регулируемых величин от номинальных
значений и продолжительные возмущающие воздействия часто по
технологическим требованиям проведения процесса недопустимы.
В этих случаях на вход промышленных объектов наносят кратковре-
менные импульсные возмущающие воздействия, поскольку при сня-
тии импульсных переходных характеристик отклонение управляе-
мого параметра от заданного режима меньше, чем при снятии пере-
ходных характеристик.
Импульсные возмущающие воздействия наносят или в виде пря-
моугольного импульса (рис. 4.31, а), или волнового прямоугольного
импульса (рис. 4.31, б). Волновой прямоугольный импульс состоит
из двух прямоугольных импульсов, равных по величине, но проти-
воположных по направлению с интервалом по времени, равным. Ат.
Изменение выходной величины все время регистрируется, пока ско-
4.1. Объекты управления и их основные свойства
229
Рис. 4.31. Реакция устойчивых (Г) и нейтральных (2) объектов на возму-
щающие воздействия в виде прямоугольного импульса (о) и
волнового прямоугольного импульса (б)
рость ее изменения не станет равной нулю. При эксперименталь-
ном исследовании объектов, в особенности нейтральных, применя-
ют волновые прямоугольные импульсы (в 1...2 раза увеличивают вход-
ное воздействие по сравнению с прямоугольным импульсом).
Замечание
Если выходная величина объекта зависит от нескольких входных вели-
чин, то при снятии временных характеристик объекта по одному из каналов
остальные входные величины необходимо поддерживать постоянными, что-
бы они не вызывали дополнительного изменения выходной величины объекта.
Экспериментальные полученные переходные характеристики
(кривые разгона) и импульсные переходные характеристики позво-
ляют построить математическую модель исследуемого объекта.
Для практического использования полученная модель должна
быть возможно более простой, но достаточно точно отражать дина-
мические свойства реального объекта. Естественно, что модель не
может в полной мере отражать все динамические свойства реально-
го химико-технологического объекта, но она должна быть работо-
способной (т. е. верно выбраны ее структура и параметры), и, кроме
того, необходимо обосновать выбор критерия приближения модели
к рассматриваемому реальному объекту.
Наиболее распространенные модели устойчивых объектов
• апериодических-.
1) |у^) = _^_ехр(_Тзап^;
230
Глава 4. Системы автоматического управления
К
2) и/(1) = (7^Т|Ж771)ехрН“"а);
(Ts + I)
• колебательных:
4) (у (j) = -гз-т— ехр(~тзап j) ;
Т s + 2t,Ts + 1
• нейтральных:
5) = у^ехрС-т^п*);
6| и/(х) = 7(ЙИ)ехрН»<‘)'
Переходные характеристики устойчивого многоемкостного
объекта с запаздыванием и его упрощенной модели приведены на
рис. 4.32, а, 6; нейтрального объекта с запаздыванием и упрошенной
модели этого объекта приведены на рис. 4.32, в, г соответственно.
Замечание
Аппроксимация — замена одних математических объектов другими, в
том или ином смысле близкими к исходным. Аппроксимация позволяет
Рис. 4.32. Переходные характеристики:
a — устойчивого миогоем костного объекта с запаздыванием: о — упро-
шенной модели устойчивого многоемкостного объекта с запаздывани-
ем (в виде последовательного соединения звена запаздывания и стати-
ческого звена первого порядка); в — нейтрального многоемкостного
объекта с запаздыванием; г — упрощенной модели нейтрального мно-
гоемкостного объекта е запаздыванием (в виде последовательного со-
единения звена запаздывания и идеального интегрирующего звена)
4,1, Объекты управления и их основные свойства 231
исследовать числовые характеристики и качественные свойства объекта,
сводя задачу к изучению более простых или более удобных объектов (на-
пример, таких, характеристики которых легко вычисляются или свойства
которых уже известны).
Определение параметров модели по переходной характеристике
объекта управления
Экспериментальные переходные характеристики (кривые разго-
на) устойчивых объектов второго и более высокого порядка с запаз-
дыванием (или без) имеют характерный S-образный вид (рис. 4.33).
По графику этой экспериментальной кривой разгона определяем
новое установившееся значение выходной величины
= lim й(т),
Г—» «ад
что позволяет найти статический коэффициент усиления объекта К.
Затем проводим касательную в точке перегиба i кривой разгона до
пересечения с осью абсцисс и горизонтальной линией, ордината
которой равна h„. На оси абсцисс получаем величину подкасатель-
ной TRD, а на линии, соответствующей й„ — подкасательную TCD,
Определяем соотношение rCD/TBD. Если отношение TCD/TBD > 0,74,
то объект можно отнести к статическим звеньям второго порядка.
Если отношение rCD/TBD < 0,74, то порядок объекта выше второго.
На рис. 4.33 представлена экспериментальная кривая разгона для
устойчивого объекта второго порядка с запаздыванием. По соотно-
шению rCD/TBD и по графику (рис. 4.34) находим коэффициент дем-
Рис. 4.33. Определение параметров модели объекта по эксперименталь-
ной переходной характеристике
232
Глава 4. Системы автоматического управления
Рис. 4.34. Номограмма для определения параметров модели объекта
пфирования далее определяем' постоянную времени, исходя из
соотношения
TCD =2?Г.
Для полученного значения коэффициента демпфирования £ по
графику (см. рис. 4.34) находим соотношение TAB/TBD, используя
которое, можно рассчитать ГАВ и, в итоге, определить время транс-
портного запаздывания
тзап ~ Т'в ~ ^ДВ
Рассмотрим случай, когда 7cd/^bd < 0,24, тогда порядок объек-
та будет выше второго. На рис. 4.35 представлены полученные экс-
периментально кривые разгона четырех устойчивых объектов пер-
вого, второго, третьего и четвертого порядка.
Рис. 4.35. Переходные характеристики устойчивых объектов разного порядка
4.1. Объекты управления и их основные свойства
233
Для статического объекта, порядок которого выше второго, ис-
пользуют модель вида
(7i+l)
где и — число статических звеньев первого порядка с одинаковыми
постоянными времени Т.
Экспериментально полученные кривые разгона объекта, поря-
док которого п > 2 (см. рис. 4.35), обрабатывают так, как это было
рекомендовано ранее: определяют новое установившееся значение
выходной величины
= Jim Л(т),
t—» ее
чтобы найти статический коэффициент усиления К. По графику
рис. 4.35, проведя касательную в точке перегиба i, определяют от-
ношение (как это было проделано на рис. 4.33), округляют его
до ближайшего меньшего табличного значения (используя данные
табл. 4.1) и находят порядок объекта и. Затем по графику (см. рис. 4.35)
определяют TBD и, используя табличное значение TBD/T для най-
денного порядка и, вычисляют постоянную времени Т. По найден-
ному из графика значению Гвг) и табличному значению ГАВ/ГВО
(данные табл. 4.1) вычисляют ГАВ. Затем' рассчитывают время транс-
портного запаздывания по выражению:
тзап = Гв - ГАВ.
Примечание
Если время запаздывания оказывается очень малым, (или отрицатель-
ным), можно попробовать скорректировать положение касательной, для
того чтобы точно получить т,ап = 0.
Таблица 4.1, Данные для определения параметров передаточной
функции системы по переходной характеристике
п ТлвДво т^т
1 0 0 1 0 0
2 0,264 0,104 2,718 0,282 1
3 0,323 0,218 3,695 0,805 2
4 0,353 0,319 4,463 1,425 3
5 0,371 0,410 5,119 2,100 4
Рассмотрим метод определения параметров модели по переход-
ной характеристике объекта, предложенный В.Я. Ротачем. Этот ме-
тод, как показывает практический опыт, дает приемлемые матема-
234
Глава 4. Системы автоматического управления
тические модели для проектирования систем управления с типовы-
ми аналоговыми регуляторами.
1. Пусть исходные данные об объекте заданы его переходной
характеристикой (на рис. 4.36 она представлена в виде сплошной
линии — кривая /).
2. Модель объекта будем искать в виде передаточной функции
= ---А------ еХр(_Тзап.5). (4.33)
+ 1)(г25 + 1)
Передаточная функция (4.33) является частным случаем переда-
точной функции
/V
(5) = _Иехр(-тзап5), (4.34)
где Ms), D(s) — полиномы.
3. Критерием приближения модели к рассматриваемому реаль-
ному объекту является требование совпадения переходной характе-
ристики объекта й(т) и переходной характеристики модели йм(т) в
точках т ~ 0, т — а также в точке их перегиба i (ей соответствует
момент времени ts), определяемой из условия
Рис. 4.36. Аппроксимация промышленного объекта упрощенными моде-
лями по переходной характеристике:
/ — экспериментальная переходная характеристика объекта" 2 — пере-
ходная характеристика модели (4.3S) объекта; 3 — переходная характе-
ристика модели (4.43) объекта
4.1. Объекты управления и их основные свойства
235
Кроме того, в точке перегиба переходная характеристика объекта
й(т) и переходная характеристика модели Лм(т) должны иметь одина-
ковый наклон. В результате критерий приближения имеет такой вид
М'о) = Мо);
h — h
уст ” ™уст ’
= Л(т>);
с!йм(т) _ йАг(т)
dr dr
Ti Tj
(4.36)
Для определения производной бй(т)/бт переходной характерис-
тики й(т) в точке, где эта характеристика имеет максимальный на-
клон, проводят касательную и находят длину отрезка То, заключен-
ного между точками пересечения этой касательной с осью абсцисс
и линией установившегося значения характеристики йуст. Обозна-
чим b = й(т;)/йуст.
С учетом введенных обозначений, перепишем критерий при-
ближения:
АМ(О) = Й(О);
лм,уст =Ч-СТ;
К, (т Ж. уст =
(4.37)
Теперь рассмотрим аппроксимацию объекта более простой мо-
делью, состоящей из звена запаздывания и статического звена пер-
вого порядка (л = 1):
К
ехр(~тиП4 (4.38)
/ р т 1
Ясно, что К = Луст. Требования, предъявляемые к тому, чтобы
переходная характеристика статического звена первого порядка и
производная от нее в некоторый момент приняли заданные значе-
ния ЬК, К/То, запишем, как:
t I т I I. ' I т I 1
1-ехр —ехр----------- =--
( 7) J 7] Ч TJ Т„
(4.39)
236 Глава 4. Системы автоматического управления
Из выражения (4.39) легко находим постоянную времени мо-
дели:
7]=(1-Ь)Т0. (4.40)
По найденной таким образом постоянной времени 7\ (4.40) вре-
мя т, при котором выполняется условие аппроксимации, определим
по формуле
т = 7)1п(7;Д). (4.41)
Время транспортного запаздывания
ban =*i (4.42)
Перейдем к более сложной модели (4.33), которую можно пред-
ставить и виде последовательного соединения двух статических зве-
ньев первого порядка (п — 1) и звена запаздывания. Запишем ее
передаточную функцию:
^М = (Г»1Х7-;^1)еХ|>(-Т"Д>- <4'43>
Здесь, в (4.43), как и ранее, К = Луст, а переходная характеристи-
ка модели без учета звена запаздывания может быть определена из
таблицы преобразований Лапласа:
= 1 ~ т * т Т1 wf-T^-bexpL-^ . (4.44)
Л 7 1 ~ ' 3 L 1'1/ к '2 )_
Запишем выражения для первой и второй производных:
I fdMT)1 1
К [ dt J.. 7] - Г,
(4.45)
I
К
1
-П - г.
1 Г т'! 1
- ехр + еХр
'1 1'1/ '2
(4.46)
Приравняв выражение (4.46) к нулю, получим условие для опре-
деления координаты точки перегиба i (ts м) (4.35):
(4.47)
4.1. Объекты управления и их основные свойства
237
Итак, в точке перегиба переходная характеристика модели и ее
первая производная определяются выражениями:
(П, м) . 1, 7) ] [
А" I. 7] J Д Т}
i, м
(4.48)
1 рйм(т)
щ ....."
11 Г Им
еХр
rj Ч Л
(4.49)
Введя безразмерные переменные х = Т}/Т2 и у = М/Т15 перепи-
шем выражения (4.47)—(4.49) в таком виде:
f У 1
xexp(-j) = ехр ;
(1 + х)ехр(-у) = 1- 6;
(4.50)
7)
— = е
т
о
Первое и второе соотношения в (4.50) являются системой транс-
цендентных уравнений, решение которой при заданном значении b
позволяет найти значения х и у. Затем по последнему соотношению
в (4.50) находим первую постоянную времени модели 7], что позво-
ляет далее найти и вторую постоянную времени Т2 = хТ\, а также
координату точки перегиба для аппроксимирующей модели = jTt.
Если найденное таким образом значение окажется меньше т15
найденного по переходной характеристике объекта й(т), в модель
необходимо ввести время запаздывания:
тзап = И -tj, м (4.51)
Аналогично можно получить решение для любого значения п в
передаточной функции (4.33).
Примечание
Трансцендентные уравнения — обычно уравнения, содержащие пока-
зательные, логарифмические, тригонометрические, обратные тригономет-
рические функции, т. е. уравнения, не являющиеся алгебраическими. Об-
щих приемов решения трансцендентных уравнений, кроме приближенных,
не существует.
Все вышеприведенные расчеты можно проводить с помощью
номограммы (рис. 4.37). Порядок, использования номограммы сле-
дующий.
238
Глава 4. Системы автоматического управления
Рис. 4.37. Номограмма для определения параметров модели объекта
(по В.Я. Ротачу)
1. По переходной характеристике определяем исходные данные
для выполнения аппроксимации йуст, h„ То.
2. В зависимости от полученного значения b = й(Т[)//!у(.т выби-
раем п.
Замечание
При выборе положения точки перегиба на переходной характеристи-
ке, как, собственно, и при выборе л, допускается некоторая вольность, что
является отражением того факта, что близким переходным характеристи-
кам могут соответствовать сильно различающиеся структуры передаточных
функций.
3. Исходя из найденных значений b и п, по номограмме (см.
рис. 4.37) определяем отношения Г(/Го, Т2/1\, что в дальней-
шем позволяет последовательно определить как постоянные време-
ни Т\ и Г2, так и м.
Пример
► Выберем в качестве упрощенной модели пароперегревателя
последовательное соединение звена запаздывания и статического
звена первого порядка (4.38) и определим, параметры модели по пе-
реходной характеристике пароперегревателя (см. рис. 4.36). Исход-
4.1. Объекты управления и их основные свойства 239
ные данные для расчета, полученные из приведенной переходной
характеристики, следующие:
°C ч
b = 0,3; Т; = 1,23 мин; То =2,1 мин; /и-, = 1---
' т
Из (4.40) и (4.42) находим Tt = 1,47 мин и = 0,71 мин. Сле-
довательно, искомая передаточная функция
Найденной передаточной функции соответствует переходная
функция
Лм (т) = [1 -.e-(T-0’7l)/1'47]. 1 (т - 0,71).
График переходной характеристики Ам(т) модели изображен на
рис. 4.36 штрихпунктирной линией (кривая 2).
Выберем теперь более сложную модель пароперегревателя в виде
последовательного соединения звена запаздывания и трех статичес-
ких звеньев первого порядка (4.33) и определим параметры модели.
Из номограммы (см. рис. 4.37) видно, что при b = 0,3 аппрокси-
мация может быть осуществлена передаточной функцией типа (4.33),
если п > 2. Выбираем п ~ 2. Тогда
5- = 0,43; = 0,42; ^- = 1,16
То ' 'Т} Г,
или
Г5 =0,9 мин, Т2 = 0,38 мин, т5>м - 1,04 мин, тмп =0,19 мин.
Следовательно, искомая передаточная функция выглядит так:
И7 (5) =---------!----------- e-0J9s.
(0,9.? + 1)(0,38j + I)2
Переходная функция, соответствующая этой передаточной фун-
кции, имеет такой вид:
йм (т) = (1,995 + 1,923т) e-W2T -2,995еч'1||т + 1.
График полученной переходной характеристики изображен на
рис. 4.36 штриховой линией (кривая J). Из рисунка видно, что бо-
лее сложная модель точнее отражает поведение пароперегревателя в
переходном режиме. Не следует, однако, забывать, что усложнение
модели объекта регулирования затрудняет расчет САР. Поэтому всегда
нужно искать разумный компромисс между сложностью и точнос-
тью используемых моделей.
240 Глава 4. Системы автоматического управления
4.1.3.3. Экспериментальное определение
частотных характеристик
Выражение (3.32) позволяет обоснованно подойти к экспери-
ментальному определению частотных характеристик объекта управ-
ления. Эксперимент заключается в возбуждении гармонических (си-
нусоидальных) колебаний входной величины по исследуемому ка-
налу, т. е. на вход динамической системы (или динамического звена)
подают гармоническое воздействие с угловой частотой колебаний ш
и амплитудой ЛЛ (см. рис. 3.8)
х(т) = Ах sin сот 1 (т).
В системе (звене) возникает переходный процесс и вынужден-
ные колебания с той же частотой ш. Если система устойчива, линей-
на и стационарна, то спустя какое-то время (через несколько пери-
одов колебаний) переходный процесс будет завершен и останутся
только вынужденные колебания, причем частота их будет равна ча-
стоте входного гармонического воздействия, но амплитуда колеба-
ний и фаза <р отличны от него (см. рис. 3.8). Амплитуда и угол
сдвига фазы <р выходного сигнала по отношению к входному зависят
от угловой частоты колебаний <и (3.32):
Лын (т) = 4,(®)sin [шг + ф(ш)].
Установившиеся выходные колебания сравнивают с входными
колебаниями. По результатам сравнения строят частотные характе-
ристики.
Динамические характеристики, полученные частотным методом,
точнее и надежнее, чем временные, благодаря значительной боль-
шей помехоустойчивости этого метода. В производственных ус-
ловиях, особенно при исследовании пусковых объектов часто не-
возможно избежать значительных помех, искажающих результа-
ты эксперимента, и тогда лучше получать частотные характеристики.
Правда, частотный метод более сложен и трудоемок: необходимо
создать специальное устройство для генерирования гармонических
колебаний.
На рис. 4.38 изображена принципиальная схема подключения
измерительной аппаратуры к объекту для определения его частот-
ных характеристик, позволяющая генерировать синусоидальные вход-
ные колебания различной частоты, измерять амплитуду колебаний
на входе объекта и выходе объекта и сдвиг фазы между этими колеба-
ниями. В состав измерительной аппаратуры входят низкочастотный
генератор периодических колебаний (НГПК) для генерирования вход-
ных колебаний различной формы (синусоидальной, прямоугольной.
4.1. Объекты управления и их основные свойства
241
Рис. 4.38. Структурная схема установки для экспериментального опреде-
ления частотных характеристик объекта управления (ОУ):
НГПК — низкочастотный генератор периодических колебаний; НФЧ —
низкочастотный фазометр-частотомер; ДПВ — двойной пиковый вольт-
метр; преобразователи П1 и П2
треугольной, трапецеидальной), а также одиночных импульсов раз-
личной формы (прямоугольной, треугольной, трапецеидальной);
низкочастотный фазометр-частотомер (НФЧ) для определения час-
тоты и фазы колебаний, которые измеряются с помощью счета им-
пульсов стандартной частоты (100 кГц) за время одного периода при
измерении частоты и за время между двумя смежными прохождени-
ями через нуль кривых входного и выходного напряжений при из-
мерении фазы; двойной пиковый вольтметр (ДПВ) для измерения
амплитуды на входе и выходе системы; преобразователи П1 и П2
для преобразования сигнала на входе и выходе объекта.
Приборы, рассчитаны на напряжение ±100 В и диапазон частот
от 0,001 до 100 Гц.
Относительно формы входных колебаний, подаваемых в иссле-
дуемый объект управления, имеется и такое мнение; синусоидаль-
ные колебания различных частот можно подавать не на все объекты.
Промышленные химико-технологические объекты обладают хоро-
шими фильтрующими свойствами, поэтому для получения частот-
ных характеристик иногда технически удобнее подать на вход ис-
следуемого объекта колебания прямоугольной волны (включение и
выключение регулирующего клапана), треугольной волны (равно-
мерное открытие и закрытие регулирующего клапана) и т.п.
Кривые отношения амплитуды выходного сигнала ууст к ампли-
туде входного сигнала (воздействия) х и сдвига фазы <р между ними
в зависимости от частоты и представляют собой экспериментально
найденные амплитудную Л(ш) и фазовую ф(ш) частотные характери-
стики исследуемого объекта управления.
Из-за трудности формирования гармонических колебаний на вход
объекта чаще всего подают возмущающее воздействие в виде прямо-
угольной волны (рис. 4.39). Для этого периодически (с периодом Т)
изменяют входное воздействие, мгновенно переставляя затвор регу-
лирующего органа из одного положения в другое. Если практически
мгновенная перестановка затвора регулирующего органа невозмож-
242
Глава 4. Системы автоматического управления
Рис. 4.39. Гармонический анализ входного воздействия в виде прямо-
угольной. волны:
Т— период волны; — амплитуда волны; и — амплитуды первой
и третьей гармоник
на, то на вход объекта подают возмущающее воздействие в виде
трапецеидальной волны (рис. 4.40).
В обоих случаях колебания входной и выходной величин отли-
чаются от гармонических колебаний, и для определения частотных
характеристик объекта требуется их дополнительная обработка —
выделение гармонических составляющих колебаний входной и вы-
ходной величин.
Любую периодическую функцию с периодом колебаний Т можно
представить в виде бесконечного тригонометрического ряда Фурье:;
х (т) = + У [ал cos (А; сот) + bk sin (Ахот)],
2 1=1
где ш = 2л/Г.
Рис. 4.40. Гармонический анализ входного воздействия в виде трапецеи-
дальной волны:
Ат — время перемещения затвора регулирующего органа от среднего до
крайнего положения
4.1. Объекты управления и их основные свойство
243
Каждое из выражений, стоящих в квадратных скобках, описыва-
ет гармоническое колебание частотой tok ~ кы, называемое fc-й гар-
моникой:
xk (т) = ak cos + bk sin (fetoz) = Ak sin (Лит + фА). (4,53)
Зная коэффициенты ак и Ьк, можно определить амплитуду Ак и
начальную фазу ср* к-н гармоники:
4 = -jaf+~^, ф* = arctg (ак /Ьк). (4.54)
Коэффициенты ряда Фурье могут быть определены из следую-
щих выражений:
flo=|:fxWd'r; (4-55)
1 о
э
ак - — j х(т)со5(Лнт)дт; (4.56)
* о
9 Т
bk = — J x(r)sin (Лит) dr. (4.57)
‘ о
Ряд Фурье, представляющий собой разложение прямоугольной
волны на сумму бесконечного числа гармоник, имеет вид
——Г sin (сот) +1 sin (Зит) + - sin (5ит) +.,
(4.58)
где 4 — амплитуда прямоугольной волны (см. рис. 4.39).
Для симметричной трапецеидальной волны ряд Фурье можно
записать следующим образом:
4Л0
х(т) = -—— sin (a) sin (сот) + ^5-sin (За) sin (Зит) + р- sin (5а) sin (Зсот) +... .
па
(4.59)
Здесь 4 — амплитуда трапецеидальной волны (см. рис. 4.40), а угол
а определяется по формуле
а = —Дт, (4.60)
где Дт — время перемещения затвора регулирующего органа от сред-
него до крайнего положения.
244
Глава 4. Системы автоматического управления
Из формул (4.58) и (4.59) следует, что первая гармоника прямо-
угольной волны описывается уравнением
ЛА „
Xj (т) = —isin (шт), (4.61)
п
а первая гармоника трапецеидальной волны. — уравнением
44
х (т) = -2- sin (a) sin (шт). (4.62)
ла
Амплитуды первых гармоник равны:
• для прямоугольной волны
4=^; (4.63)
71
• для трапецеидальной волны
4 J „
----sin (а). (4.64)
па
На рис. 4.39 и рис. 4.40 графики первых гармоник изображены
штриховыми линиями, а графики вторых гармоник — пунктирными
линиями.
Определение коэффициентов ряда Фурье для выходных колеба-
ний по приведенным выше формулам (4.55)—(4.57) не всегда воз-
можно аналитически, поэтому на практике часто используют при-
ближенный метод, при котором их подсчет осуществляется не с по-
мощью интегралов, а с помощью конечных сумм.
Для такого вычисления период функции Г= 2п делят на четное
число равных частей и находят значения ординат j(t) для каждой
точки деления (рис. 4.41). При четном числе ординат значения си-
нуса и косинуса по абсолютной величине повторяются в каждом
квадранте и. вычисления упрощаются. Удобно выбирать число орди-
нат, кратное четырем. Очевидно, расчет коэффициентов будет тем
точнее, чем меньше шаг деления. Для определения коэффициентов
первой гармоники л, и Ь} вычисление по 12 ординатам, как прави-
ло, дает вполне достаточную точность. Формулы (4.55), (4.56) и (4.57)
можно заменить в этом случае приближенными формулами:
(4.65)
О ы
и 1 £[л COS^30<!)J. (4 66)
° А=0
bi “ 7 sin(£30°)], (4.67)
° А=0
4.1. Объекты управления и их основные свойства
245
Рис. 4.41. Гармонический анализ выходной величины по двенадцати ор-
динатам
где ук — величина £-й ординаты графика выходных колебаний (см.
рис. 4.41).
Синусы и косинусы углов, кратных 30°, имеют значения 0, ±1,
±1/2 и ±х/з/2. С учетом этого, формулы для вычисления коэффици-
ентов постоянной составляющей и первой гармоники ряда Фурье
по двенадцати ординатам записываются в следующем виде:
= |(j0 + Ji +-- + Jio + Ju); (4.68)
1
Ф - 6
Ь \ < \
JO “ J<5 + 2^2 + ЯО - ±4 - Jd + —(±1 + Jll "Ji "J?)
£
6
1 V3
Ji - Jo + j(jl + Ji - J? - Jn) + y(j2 + j'4 - J8 - Jio)
; (4.69)
(4.70)
Разбивая период функции. Ят) на части, начало периода (точку с
ординатой у0) следует выбирать так, чтобы первая гармоника входных
колебаний имела нулевую фазу (см. рис. 4.41). Сдвиг по фазе между
первыми гармониками выходных и входных колебаний и отношение
их амплитуд (для прямоугольных входных колебаний) будут равны:
<p(wi) = arctg (фА);
(4.71)
п Jaf+ if
=
(4.72)
246 Глава 4. Системы автоматического управления
Для сокращения числа экспериментов при получении частот-
ных характеристик можно не проводить опыты на высоких часто-
тах, а использовать данные, полученные в опытах на низких часто-
тах, выделяя высокочастотные гармонические составляющие. На-
пример, можно найти коэффициенты третьей гармоники ряда Фурье-:
йз = |(Уо “Г: +>4 - Л +>8 ->ю); И.73)
Ьз =|(/1 -Уз + У5 -у7 +>9 - J11)- (4-74)
Фазовый сдвиг между третьими гармониками выходных и вход-
ных колебаний и отношение их амплитуд (для прямоугольных вход-
ных колебаний) для частоты <в3 = Зсо1 будут равны:
ф(шэ) = arctg (я3Д); (4.75)
, , . ЗпJal + bl
(4.76)
4Ло
Замечание
Иногда можно ограничиться разбиением периода обрабатываемой кри-
вой на шесть участков. В этом случае для определения коэффициентов
ряда Фурье используются только шесть ординат (рис. 4.42), и коэффициен-
ты а0, о, и Ь} вычисляются по следующим формулам:
aa “ |(j'o + Tj + Ъ + Уз + +У5); <4-77)
Рис. 4.42. Гармонический анализ выходной величины по шести ординатам
4.2. Задачи синтеза регуляторов
247
= |(д>-bhgU + з,5-у; - л); (4-78)
р,
bi = + у, - у4 - у5). (4.79)
Замечание
Экспериментальные данные о статических и динамических свойствах
объекта управления могут служить исходной информацией для компью-
терной аппроксимации переходного процесса в объекте.
4.2. ЗАДАЧИ СИНТЕЗА РЕГУЛЯТОРОВ
При исследовании системы автоматического управления обыч-
но решают одну из двух задач: анализа и синтеза. При анализе струк-
тура и параметры САУ известны, а требуется определить ее поведе-
ние в заданных условиях (например, определить переходные харак-
теристики САУ). При синтезе для заданного объекта управления
требуется построить такое управляющее устройство (УУ), при кото-
ром система удовлетворяет заданным требованиям к качеству уп-
равления. Обе поставленные задачи в значительной степени связа-
ны между собой и имеют много общего.
В задачу синтеза входит выбор структуры и параметров УУ (ре-
гулятора), которые обеспечивают:
• устойчивость САУ;
• необходимую точность воспроизведения задающего воздействия
и компенсацию возмущающих воздействий;
• заданное качество переходного процесса.
Рассмотрим основные этапы решения задачи синтеза управляю-
щих устройств.
На первом этапе формулируется техническое задание на проектиро-
вание на основе анализа возможных режимов работы САУ (установив-
шихся или переходных), возмущающих воздействий, необходимой точ-
ности, ограничений на управляющие и регулируемые параметры, вре-
мени работы системы и др. Затем формируется функциональная схема
САУ, выбирается тип исполнительных, усилительных, измерительных
устройств, вид. используемой энергии и т. д.
На втором этапе разрабатывается структура управляющего уст-
ройства, обеспечивающая выполнение требований, предъявляемых
к качеству регулирования, например:
• статическая ошибка при подаче на вход САУ единичного сту-
пенчатого воздействия не должна превышать допустимого значения
или быть равной нулю;
248
Глава 4. Системы автоматического управления
• максимальное перерегулирование сттах в системе не должно
превышать допускаемого перерегулирования стлоп;
• время переходного процесса тпп не должно превышать допус-
каемого значения;
• максимальное ускорение выходной переменной при заданных
условиях не должно превышать допустимого значения и т. д.
Область допустимых значений прямых показателей качества ре-
гулирования, определенных по переходной характеристике (напри-
мер, перерегулирования ст, статической погрешности е„, времени
переходного процесса тпп), для наглядности можно представить так
называемой «коробочкой Солодовникова» (рис. 4.43).
Именно на этом этапе строятся математические модели элемен-
тов системы регулирования.
Замечание
Сложность второго этапа заключается в том, что нельзя предложить
каких-либо однозначных рекомендаций по выбору структуры УУ. При не-
удачном выборе структуры УУ никакой подбор параметров не позволит
добиться требуемого качества регулирования.
На третьем этапе рассчитываются параметры УУ. Методы расче-
та можно условно разбить на две группы. В первую группу входят
методы, направленные на обеспечение требований к качеству регу-
лирования (см. выше). Во второй группе методов подбор парамет-
ров УУ осуществляется таким образом, чтобы оператор системы как
можно точнее соответствовал желаемому оператору.
На четвертом этапе полученные ранее значения параметров УУ
подставляются в уравнения САУ и проводится ее анализ на устой-
чивость. Если система устойчива, то строится переходная и другие
Рис. 4,43. Область допустимых значений показателей переходной харак-
теристики
4.2. Задачи синтеза регуляторов
249
характеристики системы, по которым можно проверить соответствие
скорректированной системы требованиям, сформулированным в
техническом задании. Если выясняется, что система не удовлетво-
ряет предъявляемым требованиям, то возвращаются ко второму и
третьему этапам.
Пятый этап — аппаратная реализация УУ, результатом которой
явится его принципиальная схема, выстроенная в соответствии с
выбранной структурой и рассчитанными параметрами.
Замечание
В случае реализации УУ, например, на базе микрокомпьютера, фор-
мируют требования к выбору микрокомпьютера, работающего в контуре
САУ в реальном .масштабе времени. Выбор типа компьютера, использу-
емого в системе управления, определяется характером поставленной за-
дачи, объемом данных, подлежащих запоминанию, требуемой скорос-
тью вычислений и т. д. Затем выстраивается алгоритмическое и про-
граммное обеспечение компьютера. Компьютер получает и обрабатывает
сигнал в цифровом (численном) виде, а не в виде непрерывной пере-
менной. В цифровой системе управления обязательно присутствует ком-
пьютер, входной и выходной сигналы которого представлены в виде
числового кода. Преобразование аналогового сигнала, поступающего от
датчика к компьютеру, осуществляет аналого-цифровой преобразователь
(АЦП); выходной цифровой сигнал компьютера, поступающий на ана-
логовое исполнительное устройство, преобразует цифроаналоговый пре-
образователь (ЦАП).
На шестом этапе происходят испытания предложенном САУ.
Обеспечение заданного качества работы САУ в переходном ре-
жиме возможно введением в прямую и обратную цепи САУ диффе-
ренцирующих звеньев.
Обеспечение заданного качества работы САУ в установившемся
режиме возможно ведением в прямую цепь САУ интегрирующих
звеньев.
Ведение в прямую цепь САУ усилителя (статического звена пер-
вого порядка) влияет на качество как переходного, так и установив-
шегося режимов.
Проиллюстрируем, как можно скорректировать переходный ре-
жим САУ введением дифференцирующего звена в цепь обратной
связи САУ.
Предположим, что САУ по своим динамическим свойствам со-
ответствует колебательному звену со слишком малым коэффициен-
том. демпфирования Это значит, что колебания регулируемого
параметра в переходном процессе слабо затухают и продолжаются
недопустимо долго. Требуется, не меняя внутренней структуры САУ,
обеспечить заданное значение коэффициента демпфирования Для
этого в цепь обратной связи введем идеальное дифференцирующее
250
Гл а в.a 4. Системы автоматического управления
Рис. 4.44. Коррекция динамических
свойств объекта с помощью гибкой
обратной связи
звено (рис. 4.44) и найдем нужное значение Тй. Передаточная функ-
ция полученной системы
К
T^+QXJs + l ___________К
, KTos TV + (2СТ + КТ. ).s + I
TV + 2^7У + 1
К
“ T2s2 + + 1 ’
(4.80)
(4.82)
так же как и передаточная функция исходной САУ, соответствует коле-
бательному звену. Из (4.80) видно, что заданное значение коэффициен-
та демпфирования связано с параметрами системы уравнением:
2^Г + КТ. = 2С,33Т. (4.81)
Из (4.81) получаем:
Г J^T + KT. КТ.
2Т <= 2Т
Следовательно, в результате введения в цепь обратной связи САУ
идеального дифференцирующего звена, как следует из (4.82), появ-
ляется возможность увеличить коэффициент демпфирования С, до
необходимого заданного значения, не изменяя внутреннюю струк-
туру САУ.
Изменим целенаправленно динамические свойства САУ, введя в
прямую цепь САУ дифференцирующее звено.
В качестве примера рассмотрим систему, структурная схема ко-
торой представлена на рис. 4.45. Полагая, что объект управления по
динамическим свойствам соответствует колебательному звену с не-
большим значением коэффициента демпфирования С, найдем пере-
даточную функцию замкнутой системы:
Т-? +2С71- + 1
+ T2s2 + 2TJS + 1
(4.83)
4.3. Основные законы регулирования
251
Рис. 4.45. Использова-
ние дифференцирую-
щего звена в прямой
цепи для коррекции
динамических свойств
системы
Из (4.83) получим;.
ККр + KT.s
T2s2 + (2^Г + КТй) s + (А'Л'р + 1) ‘
(4.84)
Подбирая коэффициенты Кр и Td в (4.84), можно целенаправ-
ленно изменять свойства замкнутой системы, в том числе, увеличи-
вая коэффициент демпфирования до необходимого значения.
4.3. ОСНОВНЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
Природа всегда рождает законы гораз-
до более справедливые, чем те, которые
придумываем мы.
Мишель Монтень
В разделе 4.2, посвященном синтезу регуляторов, были пред-
ставлены некоторые способы коррекции статических и динамичес-
ких свойств САУ. Используя подобные методы, можно разработать
структуру и найти параметры управляющего устройства, обеспечи-
вающего заданное качество управления данным объектом. Однако
создание регулятора, специально приспособленного для конкретно-
го объекта, является трудоемкой задачей и в большинстве случаев
не требуется. Качество регулирования, близкое к оптимальному,
можно получить с помощью типовых регуляторов, реализующих
«классические» законы регулирования.
Законом действия регулятора (законом регулирования или алго-
ритмом регулирования) называют функциональную взаимосвязь
между погрешностью регулирования е - ум — у и изменением уп-
равляющего воздействия Ди:
Ди(т) = Де(т)]
или
U-UO= f(y^-y),
(4.85)
252 Глава 4. Системы автоматического управления
где w — текущее значение управляющего воздействия; «0 — значе-
ние управляющего воздействия, соответствующее заданному значе-
нию управляемого параметра
К классическим законам регулирования, применяемым в САУ,
относят пропорциональный, интегральный, пропорционально-ин-
тегральный, пропорционально-дифференциальный и пропорциональ-
но-интегрально-дифференциальный законы регулирования, рассмат-
риваемые ниже. Регуляторы, реализующие эти законы, называются
П-регуляторами, И-регуляторами, ПИ-, ПД- и ПИД-регуляторами.
Замечание
Несмотря на разработку «современных» алгоритмов управления (ис-
пользующих методы нечеткой логики, реализованных с помощью нейрон-
ных сетей и др.), более чем в 90 % САУ используются классические законы
регулирования.
4.3.1. Пропорциональный закон регулирования
Пропорциональным называют линейный закон регулирования,
отражающий прямо пропорциональную зависимость между измене-
нием управляющего воздействия и погрешностью регулирования:
Ди(т) = А'ре(т), (4.86)
где Ар — коэффициент усиления, являющийся параметром настрой-
ки пропорционального регулятора.
Примечание
В промышленных П-регуляторах параметр настройки часто представ-
ляют в виде величины Д обратной коэффициенту усиления и выраженной
в процентах:
Д = —100%. (4.87)
Величину D называют диапазоном пропорциональности или полосой пропор-
циональности. Она показывает, какому отклонению управляемой величины
(в процентах от диапазона измерения датчика) соответствует перемещение
затвора регулирующего органа из одного крайнего положения в другое.
Статические характеристики П-регулятора для разных значений Кр
приведены на рис. 4.46. Анализируя их, можно сделать некоторые
выводы о связи между коэффициентом усиления регулятора и
точностью регулирования в статическом режиме, характеризуемой
статической погрешностью е„. Предположим, что для компенсации
некоторого возмущающего воздействия требуется управляющее воз-
действие и,. Для его формирования П-регулятору необходимо, что-
4.3. Основные законы регулирования
253
Рис. 4.46. Статические характеристики П-регулятора при различных ко-
эффициентах усиления Ар
бы регулируемый параметр принял новое значение, отличающееся
от заданного на некоторую величину (величину статической погреш-
ности е„). Чем больше Кр, тем круче статическая характеристика,
тем меньше статическая погрешность. При Кр = 0 (статическая ха-
рактеристика 1 — горизонтальная линия) отклонение текущего зна-
чения параметра от заданного значения не вызывает никакого пере-
мещения затвора регулирующего органа. Это равносильно отсутствию
регулятора, и возмущающее воздействие компенсировано быть не
может. При Ар = «> (статическая характеристика 5 — вертикальная
линия) пропорциональный регулятор не давал бы статической по-
грешности (ем = 0). Однако практически реализовать такой регуля-
тор нельзя. Более того, коэффициент усиления регулятора не дол-
жен превышать некоторого максимально допустимого значения, что
необходимо для обеспечения устойчивости САР. Отсюда следует,
что избавиться от недостатка, присущего пропорциональному зако-
ну регулирования — статической погрешности — принципиально не
возможно. Можно, однако, уменьшить статическую ошибку регули-
рования, увеличивая Кр.
Передаточная функция пропорционального регулятора
= <4-88>
где £(.?) - 5’|е(т)] — изображение по Лапласу ошибки регулирова-
ния; У(х) - #’'[«(т)] — изображение по Лапласу выходного сигнала
регулятора (управляющего воздействия).
254
Глава 4. Системы автоматического управления
Рис. 4.47. Переходные харак-
теристики П-регулятора при
различных коэффициентах
усиления
Из (4,88) следует, что передаточная
функция пропорционального управляю-
щего устройства соответствует передаточ-
ной функции статического звена нулевого
порядка и, следовательно, в динамичес-
ком отношении П-регулятор является
статическим звеном нулевого порядка.
Используя передаточную функцию (4.88),
получим переходную характеристику
П-регулятора:
(4.89)
изображенную на рис. 4.47 для различных коэффициентов усиле-
ния При изменении регулируемого параметра П-регулятор мгно-
венно формирует управляющее воздействие, т. е. является безынер-
ционным.
Частотная передаточная функция пропорционального регулятора
1-Гр(» = Хр. (4.90)
АФЧХ П-регулятора, так же как АФЧХ статического звена нуле-
вого порядка, изображается одной точкой на действительной оси на
расстоянии от начала координат.
Амплитудная и фазовая частотные характеристики П-регулятора
равны:
л₽(ш)= ‘Рр (ш) = а
Если на вход П-регулятора подать гармонические колебания, то
выходная величина его изменяется по гармоническому закону без
запаздывания. Амплитуда выходных колебаний в Кр раз отличается
от амплитуды входных колебаний.
В соответствии со структурной схемой на рис. 3.66 передаточ-
ную функцию разомкнутой системы управления можно записать как
= (4.91)
где И^з) — передаточная функция регулятора; — передаточ-
ная функция объекта.
Частотная передаточная функция разомкнутой системы получа-
ется из (4.91):
= (4.92)
Из выражения (4.92) следует, что коэффициент усиления разом-
кнутой системы можно изменять, меняя коэффициент усиления регу-
4.3. Основные законы регулирования
255
лятора. Действительно, подставляя (4,90) в (4.92), получим частот-
ную передаточную функцию разомкнутой системы в виде
Жрт(»=/ГрИ/0(». (4.93)
На рис. 4,48 изображены АФЧХ объекта регулирования и АФЧХ
разомкнутой системы при разных значениях Кр. При увеличении
коэффициента усиления регулятора (Кр = Kpl > 1) частотная переда-
точная функция разомкнутой системы приближается к точке с ко-
ординатами (—I,уО). Это приводит к уменьшению запаса устойчиво-
сти, увеличению колебательности и времени переходного процесса
(негативное влияние), но зато повышает точность регулирования,
уменьшая статическую и максимальную ошибки регулирования (по-
зитивное влияние). При уменьшении коэффициента усиления регу-
лятора (Лр = Лр2 < 1) частотная передаточная функция разомкнутой
системы отходит от точки с координатами (—1,у0). Это увеличивает
запас устойчивости, уменьшает время переходного процесса, но од-
новременно снижает точность регулирования. Наилучшая настрой-
ка П-регулятора основана, как правило, на компромиссе между бы-
стродействием системы, колебательностью переходного процесса и
точностью регулирования.
Рассмотрим несколько подробнее точность регулирования в ста-
тическом режиме в системе с пропорциональным регулятором.
Предположим, объектом регулирования является аппарат (рис. 4.49),
в котором необходимо поддерживать постоянный уровень жидко-
сти. Регулируемой величиной является уровень жидкости (у = AL),
Рис. 4.48. Влияние коэффициента усиления П-регулятора на характер
изменения АФЧХ разомкнутой системы регулирования
256
Глава 4. Системы автоматического управления
Рис. 4.49. Регулирование уровня в статическом (а) и астатическом (6)
объектах
управляющим, воздействием — изменение стока жидкости (и a Д.РВЫХ),
возмущающим воздействием — изменение притока жидкости (г/ = AFBX).
Структурная схема соответствующей системы регулирования приве-
дена на рис. 4.50, Входом П-регулятора является разность между
заданным и измеренным значением уровня е(т) (ошибка регулиро-
вания), а на выходе регулятора формируется командный сигнал,
который передается на исполнительное устройство и приводит к
изменению управляющего воздействия.
Замечание
При увеличении стока уровень жидкости в баке уменьшается, что учи-
тывается в передаточной функции Чтобы обратная связь в контуре
регулирования была отрицательной, необходимо использовать или регуля-
тор, или исполнительное устройство обратного' действия, т. е. такое уст-
ройство, выходной сигнал которого уменьшается при увеличении входного
сигнала.
Рис. 4,50. Структурная схема системы регулирования уровня в объекте
первого порядка П-регулятором
4.3. Основные законы регулирования
257
Статическую ошибку регулирования можно определить, вос-
пользовавшись свойствами преобразования Лапласа (см. Приложе-
ние 1, № 10):
= lim е (т) = lim sE (s) (4.94)
s~)0
Изображение ошибки регулирования E(s) в системе регулирова-
ния, структурная схема которой приведена на рис. 4.50, определяет-
ся выражением
где первое слагаемое в правой части уравнения характеризует со-
ставляющую ошибки, обусловленную изменением задания, а второе
слагаемое — возмущающим воздействием.
В случае единичного ступенчатого задающего воздействия
КщСО = l/s; в случае единичного ступенчатого возмущающего воз-
действия D(s) - l/s. Учитывая это, подставим (4.95) в (4.94). В ре-
зультате получим уравнение для расчета статической ошибки в сис-
теме регулирования:
е„ = lim
.. 1 _ _____________ _______
[1 + 0 1 + ^рс 0 J 1 + (0) ~ 1 + (0) ’
<4.96)
в котором использовано обозначение Mz(0) = lim И7 (j).
Передаточная функция разомкнутой, системы И^С?) равна про-
изведению передаточных функций всех элементов контура регули-
рования. Для случая, когда все элементы контура регулирования
являются статическими звеньями (см. рис. 4.49, </), передаточная
функция разомкнутой системы может быть представлена рациональ-
ной дробью
^pe0=^ou0^,0^0 =
a„s" + йя_|Л"-1 +... + ats + 1 ’
И0 (0) = <р0,
(4.97)
где Ка = Кои Кщ, — произведение статических коэффициентов уси-
ления объекта регулирования по каналу управляющего воздействия,
датчика и исполнительного устройства.
Передаточную функцию объекта регулирования (см. рис. 4,49, а)
по каналу возмущающего воздействия, т. е. передаточную функцию,
У Бс'Щщдин. А. В., Хд|.т|।ioiioii 11 II
258
Глава 4. Системы автоматического управления
связывающую изменение уровня жидкости в аппарате с притоком
жидкости, можно приближенно записать в виде:
= (4-98)
lli т 1
Подставив (4.97) и (4.98) в (4.96), определим статическую ошиб-
ку в системе регулирования, включающей статический объект регу-
лирования и П-регулятор, вызванную единичными ступенчатыми
задающим и возмущающим воздействиями:
1________^qd
\ + крк0 ~1 + КрК0~
(4.99)
Как видно из (4.99), статическая ошибка системы меньше стати-
ческой ошибки объекта в 1/(1 + КрК0) раз. Однако полностью уст-
ранить статическую ошибку в системе регулирования пропорцио-
нальный регулятор не может.
В случае, когда объект регулирования является астатическим
(см. рис. 4.49, б), передаточная функция разомкнутой системы мо-
жет быть представлена выражением
И'рс « = <РИ/ОЦ (5) И/и, (5) ИЛ, (5) = ———
T^\ans
^(0) = «,
крк0
+ аяЧ5я + ...+ 1)’
(4.100)
где Ко = Кд — произведение статических коэффициентов усиле-
ния датчика и исполнительного устройства; Т3 — постоянная време-
ни интегрирования объекта регулирования по каналу управляющего
воздействия.
Передаточную функцию объекта регулирования (см. рис. 4.49, б)
по каналу возмущающего воздействия можно приближенно запи-
сать в виде:
= = (4.Ю1)
Л-.'
полагая, что постоянные времени интегрирования объекта регули-
рования по каналам управляющего и возмущающего воздействий,
равны.
Подставив (4.100) и (4.101) в (4.96), получим выражение для оп-
ределения статической ошибки в системе регулирования, включаю-
щей астатический объект регулирования и П-регулятор:
£ов = 0-—, (4.102)
4.3. Основные законы регулирования
259
из которого видно, что задающее воздействие не приводит к стати-
ческой ошибке, а статическая ошибка, вызванная возмущающим
воздействием, обратно пропорциональна коэффициенту усиления
регулятора.
4.3.2. Интегральный закон регулирования
Управляющее воздействие, формируемое интегральным регуля-
тором, пропорционально интегралу по времени от ошибки регули-
рования:
ди(т) = -Х|Ё(т)ат,
О
где Ди — изменение управляющего воздействия; е — ошибка регули-
рования; Та — постоянная времени интегрирования.
Постоянная времени интегрирования является параметром на-
стройки И-регулятора. Изменяя Та, можно изменять воздействие
регулятора на объект регулирования.
Замечание
Иногда Та определяют как время изменения выходной величины на
1 % при отклонении входной величины от заданного значения на 1 %.
Интегральный закон регулирования можно записать в другой
форме:
из которой видно, что скорость изменения регулирующего воздей-
ствия пропорциональна ошибке.
Поскольку в написанном законе управления (4.103) однознач-
ной взаимосвязи между Ди и е нет, то и статическая характеристика
И-регулятора отсутствует, но тем не менее довольно часто прибегают
к рассмотрению так называемой псевдостатической характеристики
(рис. 4.51, а). При у = скорость перемещения затвора регулирую-
щего клапана равна нулю, а положение затвора регулирующего кла-
пана может быть любым. Это означает, что И-регулятор прекратил
свою работу и что он не терпит остаточного отклонения (установив-
шейся ошибки регулирования). С другой стороны, если
бДи(т)
у * ум, то —* 0. (4.104)
ат
260
Глава. 4. Системы автоматического управления
Рис. 4.51, Характеристики И-регулятора:
а — псевлостатическая; б — переходные при разных постоянных време-
ни интегрирования
Из (4.104) следует: основное назначение интегрального закона
регулирования — устранение установившейся ошибки регулирования.
Передаточная функция И-регулятора имеет вид:
Если на вход И-регулятора поступил единичный ступенчатый
сигнал е(т) = 1 (т), то выходной сигнал (управляющее воздействие)
будет меняться в соответствии с зависимостью (рис. 4.51, б):
Aw(t) = -U J1 (т) dr = - 1(т). (4.105)
'а О 1 а
Постоянную времени интегрирования можно определить по пере-
ходной характеристике. Координата точки пересечения переходной
характеристики с единичным ступенчатым воздействием позволяет на
оси абсцисс найти величину постоянной времени интегрирования.
Из сравнения переходных характеристик П -регулятора (см. рис. 4.47)
и И-регулятора (см. рис. 4.51, б) видно, что у И-регулятора медлен-
нее нарастает управляющее воздействие при отклонении управляе-
мого параметра от заданного значения. Это приводит к тому, что
максимальная ошибка в системе с И-регулятором больше.
Другим недостатком И-регулятора является создаваемый им фа-
зовый сдвиг, равный при всех частотах — л/2, что, в конечном итоге,
уменьшает устойчивость системы регулирования.
Согласно (3.193) представим частотную передаточную функцию
И-регулятора как
(4.106)
4.3. Основные законы регулирования
261
Рис. 4.52, АФЧХ объекта регулирования и разомкнутой системы регули-
рования с И-регулятором
На рис. 4.52 приведены АФЧХ объекта и разомкнутой
САУ (УрсС/ш) с И-регулятором.
4.3.3. Пропорционально-интегральный закон
регулирования
Для использования преимуществ пропорционального и интег-
рального регулирования в системах автоматического регулирования
широко применяются регуляторы, формирующие одновременно
пропорциональную и интегральную составляющие. Такие регулято-
ры называются пропорционально-интегральными (ПИ-регуляторами).
Взаимосвязь между ошибкой регулирования и управляющим
воздействием, формируемым ПИ-регулятором, описывается урав-
нением
(4.107)
Параметрами настройки ПИ-регулятора (4.107) являются: коэф-
фициент усиления (пропорциональности) Кр и постоянная времени
интегрирования Га или время изодрома Гн.
Структурную схему ПИ-регулятора можно представить в виде
параллельного соединения пропорционального и интегрирующе-
го звеньев (рис. 4.53, а). Другая возможная структура ПИ-регуля-
тора — со взаимозависимыми параметрами настройки — приведена
на рис. 4.53, б. В регуляторах такого типа при настройке коэффици-
ента усиления регулятора Кр изменяется и постоянная времени ин-
тегрирования Та.
262
Глава 4. Системы автоматического управления
Рис. 4.53. Структурная схема ПИ-регулятора:
й — с независимыми параметрами настройки; S— с взаимозависимыми
параметрами настройки
Передаточная функция ПИ-регулятора
(4.108)
Замечание
Если при настройке ПИ-регулятора установить очень большую вели-
чину постоянной времени интегрирования Га, то его действие будет ана-
логично действию П-регулятора, если установить очень малые значения Кр —
действию И-регулятора.
Переходная функция ПИ-регулятора выглядит так:
= кр+™т .l(t) = Up+-₽T L1(t).
\ *a J V 'и у
(4.109)
Переходная характеристика ПИ-регулятора представлена на рис. 4.54.
При отклонении регулируемой величины от заданного значения ПИ-
Рис. 4.54. Переходная характе-
ристика ПИ-регулятора
регулятор сразу же изменяет управля-
ющее воздействие пропорционально от-
клонению регулируемой величины от
заданного значения (пропорциональная
составляющая), а затем постепенно уве-
личивает управляющее воздействие за
счет интегральной составляющей.
Постоянную времени Гн в (4.108)
называют временем изодрома (или вре-
менем удвоения).
Физический смысл времени изод-
рома следует из переходной характери-
4.3. Основные законы регулирования
263
стики (4,109): при т = Т„ интегральная составляющая становится
равной пропорциональной составляющей, а выходной сигнал ПИ-
регулятора достигает значения (см. рис. 4.54)
Ди(Ти) = 2/(р. (4.110)
Таким образом, под временем изодрома понимают время, в те-
чение которого затвор регулирующего органа под действием интег-
ральной составляющей переместится точно так же, как и под дей-
ствием пропорциональной составляющей.
Амплитудно-частотная характеристика ПИ-регулятора:
Ap(a) = KpJu^Z. (4,111)
V 4®
Фазово-частотная характеристика:
Ф (оз) = arctg --J- . (4.112)
На рис. 4.55 приведены ЛАЧХ и ЛФЧХ ПИ-регулятора. При низ-
ких частотах АЧХ ПИ-регулятора стремится к A'p/Tj, ю = 1/Гаш, а на
высоких частотах — к Кр. На диаграмме Боде низкочастотная асим-
птота является прямой линией, наклоненной к оси абсцисс под уг-
лом —45° (тангенс угла наклона равен —1), а высокочастотная асим-
птота является прямой линией, параллельной оси абсцисс. Низко-
частотная и высокочастотная асимптоты сопрягаются при частоте
сйс = 1/7и.
При очень низких частотах фазовый сдвиг ПИ-регулятора равен
—90°, при частоте сопряжения (слс = ]/7"п) фазовый сдвиг ПИ-регу-
лятора равен —45°, а при высоких частотах <pp(w) стремится к нулю.
АФЧХ ПИ-регулятора (рис. 4.56) изображена прямой, параллель-
ной мнимой оси и отстоящей от нее на расстоянии Кр. При частоте
колебаний ш « соответствующая ей точка АФЧХ находится на
положительной действительной полуоси, а при частоте колебаний
ш = 0 прямая уходит в бесконечность.
Влияние параметров настройки ПИ-регулятора на устойчивость
системы регулирования
Интегральное воздействие вносит в систему регулирования от-
ставание по фазе, которое добавляется к фазовому сдвигу объекта
регулирования, в результате чего критическая частота системы по-
нижается. Понижение критической частоты системы приводит к
увеличению времени переходных процессов в системе регулирова-
ния. При большом значении времени изодрома Tit влияние интег-
264
Глава 4, Системы автоматического управления
ральной составляющей на устойчивость незначительно, а устране-
ние остаточного отклонения, возникшего в результате изменения
нагрузки на объект регулирования, требует большого времени.
Уменьшение времени изодрома Та увеличивает влияние интеграль-
ной составляющей, что приводит к быстрому снятию остаточного
отклонения. Оптимальное значение времени изодрома 7], выбира-
ют так, чтобы обеспечить быстрое устранение остаточного откло-
нения, высокую критическую частоту и большой коэффициент уси-
ления.
4.3.4. Пропорционально-дифференциальный закон
регулирования
Качество регулирования в ряде случаев можно повысить, вводя
в закон регулирования составляющую, пропорциональную первой
производной (скорости изменения) входной величины регулятора,
т. е. Д-составляюшую.
ПД-закон регулирования определяется функциональной зависи-
мостью
д«(т) = ^Е(т) + т;^. = ^ е(т)+т;^
которой соответствует передаточная функция
ед = <р + 7^ = хр(1 + т;5).
(4.113)
4.3. Основные законы регулирования
265
Постоянную Та называют временем предварения (КрТП = Td).
Поскольку для ПД-регулятора, как и для П-регулятора, И^(О) =
= Хр * ему присущ недостаток — статическая погрешность е„,
величина которой определяется равенством (4.99).
Структурную схему ПД-регулятора можно представить в виде
параллельного соединения статического звена нулевого порядка и
идеального дифференцирующего (рис. 4.57), формирующих две со-
ставляющих управляющего воздействия: П-составляющую и Д-со-
ставляющую.
Переходная функция ПД-регулятора:
(4.114)
Переходная характеристика ПД-регулятора (рис. 4.58) отлича-
ется от переходной характеристики П-регулятора большим измене-
нием управляющего воздействия Д« сразу же после изменения е(т),
что способствует снижению максимальной ошибки регулиро-
вания.
Наличие в ПД-регуляторе дифференциальной составляющей в
значительной степени повышает эффективность его действия.
Если ошибка регулирования описывается единичной рамповой
функцией (3.27), то рамповая переходная функция ПД-регулятора
имеет вид:
Рамповая переходная характеристика ПД-регулятора показыва-
ет положительный эффект от введения в ПД-закон регулирования
дифференциальной составляющей: сразу же Д-составляющая при-
Рис. 4.57. Структурная схема ПД-
регулятора
Рис. 4.58. Переходная характерис-
тика ПД-регулятора
266
Глава 4. Системы автоматического управления
нимает значение, равное Тл = К^Т(Г Пропорциональная составляю-
щая медленно нарастает по линейному закону
Амплитудно-частотная характеристика ПД-регулятора:
Л(т)= xJl + (7>)2. (4.117)
Фазово-частотная характеристика ПД-регулятора:
(p(<n) = arctg( Та(о). (4.118)
На рис. 4.59 приведены ЛАЧХ и ЛФЧХ ПД-регулятора. Из диаг-
раммы Бодё следует, что АЧХ регулятора на очень низких частотах
равна А'р, а на очень высоких частотах КразТп. На диаграмме Боде
низкочастотная асимптота является прямой линией, параллельной
оси абсцисс, а высокочастотная асимптота наклонена к оси абсцисс
под углом +45° (тангенс угла наклона равен +1), низкочастотная и
высокочастотная асимптоты сопрягаются при частоте шс — 1/Та.
ПД-регулятор вносит в систему опережение по фазе, изменяю-
щееся от 0 при низких частотах, до +л/2 рад на высоких частотах,
откуда следует, что благодаря присутствию Д-составляющей ПД-ре-
гулятор улучшает качество регулирования, уменьшая фазовое запаз-
дывание САУ в целом на +л/2 рад, как бы снижая порядок объекта
на единицу.
При увеличении времени предварения Тп АЧХ и ФЧХ сдвигают-
ся влево. Изменение коэффициента усиления Кр приводит к смеще-
нию АЧХ по вертикали. ФЧХ при этом не меняется.
Рис. 4.59. Диаграмма Б ещё ПД-регу-
лятора
Рис. 4.60. Амплитудно -фазовая частот-
ная характеристика ПД-регулятора
4.3. Основные законы регулирования 267
АФЧХ ПД-регулятора с учетом (4.117) и (4.118) представляет
собой прямую, параллельную мнимой оси и отстоящую от нее на
расстоянии Кр (рис. 4.60).
О выборе величины воздействия по производной
Величина времени предварения Тп может быть выбрана по час-
тотным характеристикам объекта управления. Допустим, что объект
состоит из нескольких последовательно соединенных элементов, пред-
ставляющих собой статические звенья первого порядка, а фазовый
сдвиг ПД-регулятора на критической частоте составляет +л/4 рад,
тогда критическая частота может быть увеличена в 1,5...3 раза. Это
соответствует шкрГп = 1, фактический коэффициент усиления при
этом равен 1,5^.
Предпочтительно, чтобы ПД-регулятор имел большие значения Кр,
поскольку это приводит к. уменьшению остаточного отклонения и
увеличивает быстродействие системы управления.
4.3.5. Пропорционально-интегрально-
дифференциальный закон регулирования
ПИД-закон регулирования включает в себя три вида управляю-
щих воздействий: пропорциональное, интегральное, дифференци-
альное:
Ли (т) = Кре (т) + j е (т) dr + Td (4.119)
6 о ат
Структурная схема ПИД-регулятора может быть представлена в
виде параллельного соединения трех звеньев: статического звена,
нулевого порядка, идеального интегрирующего звена и идеального
дифференцирующего (рис. 4.61).
Передаточная функция ПИД-регу-
лятора:
г х (4.120)
= <Р 1+^ + ГпЛ
\ 1 иJ J
Параметрами настройки ПИД-ре-
гулятора являются: К? — коэффици-
ент усиления; Ги — время изодрома;
Г„ — время предварения. Вполне оче-
Рис. 4.61. Структурная схема
ПИД-регулятора
268
Глава 4. Системы автоматического управления
видно, что ПИД-закон регулирования является наиболее совершен-
ным по сравнению с другими законами регулирования. Если время
изодрома увеличить до бесконечности (Ти —> «*), а время предваре-
ния уменьшить до нуля (Тп 0), то действие ПИД-регулятора будет
аналогично действию П-регулятора (ПИД-регулятор при Тп 0 ана-
логичен ПИ-регулятору, а при Ти ->=о аналогичен ПД-регулятору).
Переходная функция ПИД-регулятора имеет вид:
Л(т)=
1
* а
(4.121)
ИЛИ
й(т) = £р -1(т) + ^-т + А'р7п3(т).
* И
(4.122)
Рис. 4,62. Переходная харак-
теристика идеального ПИД-
регулятора
Переходная характеристика ПИД-ре-
гулятора представлена на рис. 4.62. В на-
чальный момент времени ПИД-регуля-
тор оказывает бесконечно большое воз-
действие на регулирующий орган;
довольно быстро величина управляюще-
го воздействия снижается до значения,
определяемого пропорциональной со-
ставляющей, и затем, как и в идеальном
ПИ-регуляторе, на регулирующий орган
постепенно начинает оказывать воздей-
ствие И-составляющая. Переходная харак-
теристика ПИД-регулятора отличается от
переходной характеристики ПИ-регуля-
тора наличием дельта-функции Дирака.
Амплитудно-частотная характеристика ПИД-регулятора:
1 +1 Гпш - ——
А (ш) =
(4.123)
Фазово-частотная характеристика ПИД-регулятора:
<р(ш) = arctg
(4.124)
На рис. 4.63 приведены ЛАЧХ и ЛФЧХ ПИД-регулятора. На
диаграмме Бодё низкочастотная асимптота является прямой лини-
ей, наклоненной к оси абсцисс под углом —45* (тангенс угла накло-
4.3. Основные законы регулирования
269
Рис. 4.63. Диаграмма Боде ПИД-регулятора: точные (Л 2а) и аппрокси-
мированные (26) ЛАЧХ и ЛФЧХ
на равен —1), на средних частотах — параллельной оси абсцисс (тан-
генс угла наклона равен 0), а высокочастотная асимптота наклонена
к оси абсцисс под углом +45° (тангенс угла наклона равен +1).
ЛФЧХ в области низких частот начинается при —п/2 рад и на
высоких частотах стремится к +л/2 рад. ЛАЧХ симметрична отно-
сительно частоты
(4.125)
при которой она имеет минимум. В этой точке ЛАЧХ касается пря-
мой линии, параллельной оси абсцисс (частот) и отстоящей от оси
абсцисс на расстоянии Х"р. Фазовый
угол на частоте (4.125) равен 0.
Замечание
Настройки ПИД-регулятора, при ко-
торых отношение Т„/Т„ < 4, применяются
редко. Это объясняется слишком большим
изменением Лр(ш) и фр(й>) вблизи частоты
<л = (Г„7’п)“0’5; т. е. система с таким регу-
лятором будет очень чувствительна к раз-
личиям между параметрами модели и па-
раметрами реальной системы регулирова-
ния (будет отсутствовать робастность).
АФЧХ ПИД-регулятора (рис. 4.64)
представляет собой прямую, парад-
270
Глава 4, Системы автоматического управления
дельную мнимой оси и отстоящую от нее на расстоянии Кр. Точке
пересечения АФЧХ с действительной осью соответствует частота
колебаний ш = ф/ТпТ„.
Замечания
Передаточные функции реальных регуляторов отличаются от рассмот-
ренных выше передаточных функций идеальных регуляторов, так как каж-
дой физической системе присуща инерционность и поэтому, например,
нельзя реализовать идеальное дифференцирующее звено. Как правило,
настройку регулятора рассчитывают исходя из передаточной функции иде-
ального регулятора, а различие между передаточными функциями реаль-
ного и идеального регуляторов учитывают с помощью некоторого допол-
нительного динамического звена, относя его к объекту управления.
На рис. 4.65 показаны переходные характеристики некоторого
объекта (О) и систем регулирования, состоящих из того же самого
объекта и регулятора, реализующего один из типовых алгоритмов
регулирования (П, И, ПИ, ПД, ПИД). Переходные характеристики
получены в ответ на ступенчатое изменение возмущающего воздей-
ствия; запас устойчивости всех систем регулирования одинаков. Наи-
большее время переходного процесса тпп и максимальная ошибка Em;w
наблюдаются в системе объект—И-регулятор, а наименьшее время
переходного процесса тП[1 — в системах объект—П-регулятор и
объект—ПД-регулятор. Для переходных процессов в системах с
П-регулятором и ПД-регулятором характерно наличие остаточного
отклонения регулируемой величины от заданного значения. Пере-
ходный процесс в системе объект—ПИ-регулятор заканчивается
позже, чем в системе объект—ПИД-регулятор. По сравнению с ПИ-
регулятором ПИД-регулятор уменьшает максимальную ошибку етах
Рис. 4.65. Переходные процессы в объекте и в системе объект—регулятор
4.3. Основные законы регулирования
271
на 25..,30 %. В системах регулирования с И-регулятором, ПИ-регу-
лятором, ПИД-регулятором отсутствует остаточное отклонение ре-
гулируемой величины от заданного значения.
4.3.6. Позиционные регуляторы
По сравнению с линейными алгоритмами (линейными закона-
ми регулирования) нелинейные алгоритмы распространены в мень-
шей степени.
Из нелинейных алгоритмов регулирования наиболее употреби-
тельны алгоритмы с релейной статической характеристикой: двухпо-
зиционный и трехпозиционный. Автоматические регуляторы, у кото-
рых при непрерывном изменении входной величины регулирующий
орган занимает ограниченное число определенных, заранее извест-
ных, положений, называются позиционными. Входной величиной
позиционного регулятора, как и выше разобранных регуляторов,
является рассогласование е между заданным узд и текущим у значе-
ниями регулируемой величины (е = уи — у), а выходной — управля-
ющее воздействие и. Такие регуляторы можно отнести к группе ре-
гуляторов дискретного действия.
4.3.6,1. Двухпозиционные регуляторы
Выходная величина двухпозиционного регулятора может прини-
мать только два значения: минимальное или максимальное. Для ра-
боты логического устройства в режиме двухпозиционного регулято-
ра требуется выходное устройство ключевого типа (электромагнит-
ное реле, транзисторная оптопара или оптосимистор), которое
используется для управления (включение-выключение) нагрузкой или
непосредственно, или через более мощные элементы, такие как пус-
катели, твердотельные реле, тиристоры или симисторы.
Замечания
I. Позиционные регуляторы иногда называют регуляторами типа «От-
крыто/Закрыто» или «Включено/Отключено».
2. Транзисторная оптопара применяется для управления низковольт-
ным реле (до 30 В). Оптосимистор включается в цепь управления мощного
симистора, может также управлять парой встречно-параллельно включен-
ных тиристоров.
Статические характеристики идеального и с зоной неоднознач-
ности двухпозиционного регулятора приведены на рис. 4.66. Допу-
стим, текущее значение у регулируемой величины меньше задан-
ного ум, т. е. е > 0, тогда выходная величина и регулятора принима-
ет максимальное значение umax. Если е < 0, то выходная величина и
272
Глава 4. Системы автоматического управления
Рис. 4.66. Статические характеристики двухпозиционного (а, б) и трехпо-
зиционного (в, г) регуляторов:
а — идеальная релейная; б — релейная с зоной неодназначности; в —
релейная с зоной нечувствительности; г — релейная с зоной нечувстви-
тельности и зоной неодназначности
принимает минимальное значение «IJljn (рис. 4.66, а). Выходная ве-
личина идеального двухпозиционного регулятора переходит от од-
ного значения к другому скачком при прохождении текущего значе-
ния регулируемой величины через заданное значение.
Таким образом, алгоритм идеального двухпозиционного регули-
рования имеет вид:
И(т) = !"гаах’ е > 0;
' и_,)п, е < 0.
L пип’
У двухпозиционного регулятора с зоной неоднозначности (с ги-
стерезисом) 2Ь выходная величина и изменяется от минимального
значения «min до максимального значения winax при
У = - Ь или е = +Ь
и от максимального значения «тахдо минимального значения игаЬ при
у = уад + b или е = -Ь.
4.3. Основные законы регулирования
273
Реальные регуляторы с увеличением входной величины у сраба-
тывают при большем пороговом значении, а при уменьшении вход-
ной величины у ~ при меньшем пороговом значении. Рассогласова-
ния между двумя пороговыми значениями определяют зону неодноз-
начности 2Ь.
Замечание
Настраиваемую зону нечувствительности в промышленных регулято-
рах называют иногда зоной возврата.
Таким образом, алгоритм двухпозиционного регулятора с зоной
неоднозначности имеет вид:
При изменении у в интервале
узя - b < у < уи + b
величина и может принимать, в зависимости от предыстории, одно
из двух значений (или или umax).
Переход с нижней ветви на верхнюю ветвь статической харак-
теристики двухпозиционного регулятора с зоной неоднозначности
(рис. 4.66, б) реализуется при следующих условиях:
е = b (т. е. у = yw -b);u = Hniin; dy/dt < О,
а переход с верхней ветви на нижнюю ветвь — при следующих
условиях:
е = -Ь (т. е. у = уи + b); и = umax; dy/dr > 0.
У двухпозиционных регуляторов, в зависимости от знака откло-
нения управляемой величины, регулирующий орган или полностью
открыт (приток вещества или энергии максимальный), или полнос-
тью закрыт (приток вещества или энергии равен нулю).
Примеры двухпозиционных устройств: электроконтактный тер-
мометр, электроконтактный манометр, пневматическое реле и др.
Рассмотрим принцип действия двухпозиционного регулятора,
настроенного на «минимум», на примере регулирования уровня
(рис. 4.67). В объект управления (резервуар) / по трубопроводу 2
подается жидкость, а по трубопроводу 10 отводится. На трубо-
проводе 2 установлен регулирующий орган (клапан) 3. Текущее
значение уровня в резервуаре определяется положением чувстви-
тельного элемента регулятора — поплавка 4, соединенного што-
ком 5 с рычагом-контактом 6. Через пружину 9 рычаг-контакт 6
274
Глава 4. Системы автоматического управления
Рис. 4.67. Схема системы регулирования уровня жидкости в резервуаре
двухпозиционным регулятором. Пояснения см., в тексте.
соединен с источником тока. Заданные значения верхнего и ниж-
него уровней определены положением передвижных упоров-кон-
тактов 7 и 8. Пусть уровень жидкости в резервуаре оказался выше
заданного (L > 1ЗЛ), тогда контакт 6 замыкает контакт 7и обмотка
Б электромагнита окажется под напряжением, сердечник 77 мгно-
венно переместится вверх и регулирующий орган закроет доступ
жидкости в резервуар. При понижении уровня жидкости в резер-
вуаре ниже заданного (L < £эл) контакт 6 замкнет контакт 8 и под
напряжением окажется обмотка А электромагнита, сердечник 11
переместится вниз, регулирующий орган откроется и жидкость
начнет поступать в резервуар.
Зона неоднозначности определяется в основном расстоянием
между контактами 7 и <?. Слишком малая величина зоны неодно-
значности вызывает частое переключение регулирующего органа из
положения «открыто» в положение «закрыто», и наоборот, что мо-
жет уменьшить надежность работы регулятора.
На рис. 4.68 изображены, установившиеся колебания выходной
величины и двухпозиционного регулятора в приращениях от за-
данного значения при аппроксимации объекта передаточной фун-
кцией вида
H/(j) = -A-exp(-T3anj).
Г J т 1
4.3. Основные законы, регулирования
275
Рис. 4.68. Переходный процесс в системе регулирования с двухпозицион-
ным регулятором
Характерной особенностью системы регулирования, в которой
присутствует двухпозиционный регулятор, является то, что регули-
руемая величина у совершает устойчивые колебания с постоянной
частотой и амплитудой.
Качество двухпозиционного регулирования характеризуется парамет-
рами автоколебаний, возникающих в системе (объект + регулятор):
амплитудой А, частотой <йкр = 2л/Гкр и смешением а0 среднего значе-
ния автоколебаний относительно заданного значения регулируемой
величины. Названные параметры автоколебаний зависят от величи-
ны запаздывания и емкости объекта, его нагрузки, величины зоны
неоднозначности регулятора и пределов изменения его выходной ве-
личины Ди = umax - umin. Чем меньше амплитуда автоколебаний Л и
смещение я0, тем выше качество регулирования. Частота автоколеба-
ний шкр при этом, не должна быть очень большой. С увеличением
зоны неоднозначности двухпозиционного регулятора качество регу-
лирования ухудшается, уменьшение зоны неоднозначности умень-
шает амплитуду и период автоколебаний. Если к точности регулиро-
вания предъявляются повышенные технологические требования, а
частота срабатывания не ограничена, рекомендуется применять регу-
ляторы с возможно меньшей зоной неоднозначности.
Область применения двухпозиционного регулятора: для регулиро-
вания технологических, параметров в инерционных объектах с боль-
шой емкостью и малым запаздыванием, когда не требуется особой
точности; для сигнализации о выходе контролируемой величины за
заданные границы.
276
Глава 4. Системы автоматического управления
4.3.6.2. Трехпозиционные регуляторы
У трехпозиционных регуляторов помимо двух крайних положе-
ний (открыто и закрыто) регулирующий орган имеет еще одно —
промежуточное (среднее) положение, что способствует более плав-
ному изменению регулируемой величины и сокращению числа сра-
батываний регулирующего органа в единицу времени.
Алгоритм' трехпозиционного регулирования имеет вид:
^max 1 ® > ’
^min — ” ®пмх ’
U -
ит!п ’ Е £min
Трехпозиционный регулятор срабатывает при двух пороговых
значениях enlin и emas.. Если регулируемая величина находится между
этими значениями, а именно в пределах зоны нечувствительности,
которую можно определить как Emax — Emjn выходная величина прини-
мает значение 0. При выходе из зоны нечувствительности за порого-
вые значения ею]я или ЕП1ах выходная величина трехпозиционного ре-
гулятора и мгновенно (скачкообразно) перемещается, в положение wmjn
или положение wmax. Статические характеристики трехпозиционных
регуляторов, как и двухпозиционных, могут иметь зону неоднознач-
ности (см. рис. 4.66). Преимущество трехпозиционного регулирова-
ния перед двухпозиционным: возможность прекращения автоколе-
бательного процесса и достижение равновесного состояния, если
регулируемая величина находится в пределах зоны нечувствитель-
ности, т. е. если соблюдается неравенство
4.3.7. Регуляторы с прогнозирующей моделью
Идея улучшения динамики САУ с помощью регуляторов данно-
го типа заключается в оперативной идентификации модели объекта
управления в регуляторе. Такие возможности реализуются в систе-
мах управления многосвязными объектами.
Замечание
Автоматические регуляторы с прогнозирующей моделью — важное
направление в области алгоритмов управления. Регуляторы с прогнозиру-
ющей моделью — это общее название разных алгоритмических схем регу-
ляторов с моделью в контуре управления (Model Predictive Control — MFC).
Попробуем проиллюстрировать общий принцип работы регуля-
торов с прогнозирующей моделью упрощенной схемой (рис. 4.69).
4.3. Основные законы регулирования
277
Рис. 4.69. Упрощенная струк-
турная схема системы регу-
лирования с прогнозирую-
щей моделью;
ОУ — объект управления; М —
модель объекта; БУ — блок уп-
равления
В этой схеме модель (М) включают параллельно объекту управ-
ления (ОУ). Разность между сигналами выходов объекта управления
у и модели ум зависит от возмущающих воздействий d, действующих
на объект управления, и от неточностей моделирования. Если модель
полностью соответствует объекту управления, то сигнал (у — ум) пред-
ставляет собой оценку возмущающих воздействий, приведенных к
выходу объекта. Блок управления (БУ), вырабатывающий управля-
ющие воздействия и, в этом случае работает как компенсатор возму-
щающих воздействий. Естественно, что в процессе моделирования
возможны ошибки, и тогда управляющее воздействие должно обес-
печить соответствие между выходом объекта у и заданным, значени-
ем узл как при действии возмущающих воздействий, так и наличии
неточной математической модели.
В состав регулятора входят собственно управляющее устройство,
модель, элемент сравнения сигналов объекта управления и модели.
На рис. 4.70 представлено развитие схемы регулятора с прогнози-
рующей моделью.
Блок управления (БУ) на рис. 4.70 видоизменился по сравнению
с рис. 4.69: теперь он представлен схемой «модель 1» (МI) объекта
управления—алгоритм управления (АУ). Модель 1 может отличать-
ся (например, учитывать транспортное запаздывание в объекте) от
основной модели М, при этом контур управления АУ—Ml выраба-
тывает управляющее воздействие, как функции времени. Фильтр (Ф)
обеспечивает робастность системы.
Рис. 4.70. Структурная
схема системы регулиро-
вания с прогнозирую-
щей моделью (в разви-
тии):
АУ — алгоритм управления;
Ml — «модель 1»; Ф —
фильтр
278
Глава 4. Системы автоматического управления
Именно выбор блоков схемы Ml и АУ, способы их взаимодей-
ствия между собой должны привести к реальному алгоритму управ-
ления с прогнозирующей моделью. При постановке задачи управле-
ния, обеспечивающей работу регулятора, необходимо учитывать ог-
раничения разного рода: на выходные переменные объекта, на
положение регулирующего органа.
В системах управления с регуляторами с прогнозирующей моде-
лью очень важно правильно выполнить идентификацию объекта.
Модель объекта можно получить любым традиционным способом:
аналитическим, экспериментальным, экспериментально-аналитичес-
ким (см. разд. 4.1).
В алгоритме управления (см. рис. 4.70) применяют вычислитель-
ные схемы решения задач оптимального и субоптимального управ-
ления. Основными параметрами настройки в регуляторах с прогно-
зом являются: горизонт управления (глубина памяти в модели объекта
и в алгоритме управления) и интервал замыкания ключей.
Замечание
Выработка управляющих воздействий требует достаточно большого
объема вычислений в цикле «ввод данных — вычисление программы уп-
равления — вывод управляющего воздействия». Затраты времени в этом
цикле ограничивают снизу значение интервалов ввода/вывода данных, по-
этому системы управления с прогнозирующей моделью работают в диск-
ретном времени с относительно большими интервалами ввода/вывода.
Регуляторы, с прогнозирующей моделью придают следующие
свойства системам управления, включая и многосвязные:
• работоспособность системы управления обеспечивается не па-
раметрами настройки, как это выполняется при наличии ПИД-ре-
гулятора, а включением в регулятор надежной модели;
• устойчивость системы определяется устойчивостью объекта,
модели объекта и фильтра (или фильтров для многосвязной систе-
мы управления) в отдельности;
• запас устойчивости обеспечивается настройкой фильтров;
• возможность переводить на ручное управление отдельные пе-
ременные в многосвязной системе управления при сохранении ав-
томатического режима управления для других переменных;
• сохранение устойчивости системы при выводе отдельного ре-
гулирующего органа в многосвязной системе на границу рабочего
диапазона (при этом управление менее ответственными переменны-
ми можно вывести из автоматического режима).
Обметь применения регуляторов с прогнозирующей моделью
САУ с прогнозирующей моделью применяются для управления
многосвязными инерционными объектами с большим запаздывани-
4.3. Основные законы регулирования
279
ем и объектами с очень большой инерцией (значения постоянных
времени составляют десятки минут и даже часы). В режиме стаби-
лизации САУ с прогнозирующей моделью основные возмущающие
воздействия по каналам (изменения состава сырья, изменения па-
раметров теплоносителей и пр.) нейтрализуют без вмешательства
операторов-технологов; При смене технологических режимов, на-
пример, в результате изменения нагрузки объекта, оператору-техно-
логу достаточно ввести задание на новый режим. САУ с прогнозиру-
ющей моделью отрабатывает все заданные ограничения на перемен-
ные процесса и по скорости их изменений. Выход отдельного
регулирующего органа в многосвязной системе управления на преде-
лы рабочего диапазона нейтрализуется «мягким» выводом менее от-
ветственной переменной за управление из автоматического режима
управления в свободный дрейф или переключения управления на
другой регулирующий орган.
4.3.8. Регуляторы на основе
искусственных нейронных сетей
Для управления объектами, в которых осуществляются периоди-
ческие процессы, применяют искусственные нейронные сети. Извест-
ны разработки промышленных самонастраивающихся нейро-ПИД-
регуляторов, в значительной степени повышающих качество управ-
ления периодическими, процессами по сравнению с классическими
алгоритмами управления. Искусственные нейронные сети (НС) при-
меняются также на стадии проектирования СУ ХТП и синтеза регу-
ляторов.
В основу создания НС положена биологическая модель нервной
системы человека, построенная из элементов, называемых нейрона-
ми. Удивительной способностью нейрона является прием, обработ-
ка и передача электрохимических сигналов по нервным путям, об-
разующим коммуникационную систему мозга человека. Известно,
что мозг человека способен решать чрезвычайно сложные задачи.
Такая же модель может быть реализована искусственными НС. Те-
ория НС возникла в результате исследований в области искусствен-
ного интеллекта, из воспроизведения способности нервных биоло-
гических систем обучаться и исправлять ошибки.
Искусственные НС составлены из множества простых элемен-
тов, действующих параллельно. НС можно обучать для выполнения
конкретной функции, регулируя значения коэффициентов (весов)
связи между элементами. Обычно искусственные НС настраивают-
ся или обучаются так, чтобы конкретные входы преобразовывались
в заданный целевой выход. Сеть настраивается (обучается) на срав-
280
Глава 4. Системы автоматического управления
нении сигналов выхода и цели до тех пор, пока выход сети не будет
соответствовать цели. Естественно, чтобы обучить сеть, при таком
управляемом обучении необходимо использовать много пар значе-
ний сигналов вход-цель.
Применение НС для решения задач управления позволяет выде-
лить два этапа проектирования:
• этап идентификации управляемого процесса;
• этап синтеза закона управления.
На первом этапе разрабатывается модель управляемого процесса
в виде НС, а на втором ее используют для синтеза регулятора (кон-
троллера).
ПИД-закон регулирования широко применяется и для его реали-
зации необходимо определять три параметра настройки Кр, Г„ и Ти.
Подстройка параметров регулирования ПИД-закона для управле-
ния температурой периодическими процессами требует сравнитель-
но большого времени. Для периодических процессов, например,
получения полиэтилена в реакторе периодического действия, разра-
ботаны самонастраивающиеся адаптивные системы управления на
основе ПИД-регулятора и НС. Блок НС в схеме самонастраиваю-
щегося ПИД-регулятора осуществляет адаптивное подстраивание па-
раметров настройки Кр, Тн и Тп ПИД-регулятора, используя алго-
ритм обратного распространения ошибок. Обратное распростране-
ние ошибок реализуется многослойной НС, состоящей из входного
слоя, выходного слоя и нескольких промежуточных слоев с нели-
нейными перерабатывающими элементами.
Такая система управления работает в двух режимах:
а) обычный режим управления, использующий только традици-
онный ПИД-регулятор;
б) самонастраивающийся режим управления на основе нейро-
ПИД-регулятора. В этом режиме управления ПК, используемый в
системе, обеспечивает выбор вила обработки данных в соответствии
с меню:
• сбор данных с установки;
• подбор параметров модели установки и самонастройка нейро-
ПИД-регулятора;
• разработка нейросетевой модели установки;
• моделирование работы установки;
• работа реальной установки.
Применение самонастраивающегося нейро-ПИД-регулятора для
управления температурой в периодическом реакторе полиэтилена
на 30 % улучшает качество регулирования по сравнению с ручным
режимом с использованием традиционного ПИД-регулмрования.
Более подробно о применении нейронных сетей в управлении
ХТП изложено в работе [42].
4.3. Основные законы регулирования
281
4.3.9. Определение оптимальных параметров
настройки промышленных регуляторов
В химической технологии широко распространены непрерыв-
ные законы регулирования: пропорциональный, пропорционально-
интегральный, пропорционально-интегрально-дифференциальный.
При выборе законов регулирования непрерывного действия необхо-
димо принимать во внимание следующие соображения.
П-регуляторы могут применяться для управления объектами с
самовыравниванием и без самовыравнивания при небольших изме-
нениях нагрузок, если технологическим режимом допустимо оста-
точное отклонение параметра от заданного значения (статическая
ошибка).
И-регуляторы не могут применяться на объектах, не обладающих
самовыравниванием. Система, состоящая из объекта управления без
самовыравнивания и И-регулятора, неустойчива. Поскольку быстро-
действие И-регулятора невелико, самовыравнивание объекта должно
быть значительным, запаздывание небольшим, а изменения нагрузок
плавными. Как правило, в системах управления технологическими
процессами И-регулятор самостоятельно не применяется.
ПИ-регуляторы применяют для регулирования как устойчивых,
так и нейтральных объектов при больших, но манных изменениях
нагрузок, когда, требуется высокая точность регулирования в стати-
ческом режиме (когда остаточные отклонения недопустимы).
ПД-регуляторы и ПИД-регуляторы (регуляторы с предварением)
обеспечивают относительно высокое качество регулирования объек-
тов, обладающих большим переходным запаздыванием (например,
теплообменных и массообменных аппаратов), а также в тех случаях,
когда нагрузка в объектах регулирования изменяется часто и быстро.
Замечание
Промышленные ПИД-регуляторы при соответствующей настройке
могут реализовать любой из типовых линейных законов регулирования (П,
И, ПИ, ПД, ПИД), поэтому, если свойства объекта точно неизвестны, ча-
сто используют ПИД-регулятор, настраивая его опытным путем.
В любом случае выбор того или иного закона управления опре-
деляется в первую очередь динамическим свойствами объекта уп-
равления, величиной и характером возмущающих воздействий, а
также заданными показателями качества регулирования. Следуя тех-
нологическим требованиям, в качестве заданного переходного про-
цесса выбирают один из трех типовых переходных процессов (см.
разд. 2.7.7):
• граничный апериодический с минимальным временем пере-
ходного процесса тП1] min;
282
Глава 4. Системы автоматического управления
• с 20 %-ным перерегулированием и минимальным временем пер-
вого полупериода колебаний;
• с минимальным значением интеграла от квадрата ошибки
Переходный процесс в системе управления зависит от свойств
химико-технологического объекта, от характера, величины и места
приложения возмущающих воздействий и от закона регулирования
и параметров настройки регулятора. Чтобы достичь требуемого ка-
чества регулирования для выбранного типового переходного про-
цесса, следует принять подходящий закон регулирования и опреде-
лить параметры настройки.
Предварительным критерием выбора структуры системы регу-
лирования и закона действия регулятора может служить величина
отношения времени запаздывания объекта и постоянной времени
объекта:
Тэап/т;. (4.126)
Для нейтральных объектов в (4.126) вместо Т^, (по существу по-
стоянная времени характеризует инерционность объекта) подстав-
ляют Та.
При соотношении т^.щ/7^ < I удовлетворительное качество регу-
лирования можно получить, используя одноконтурную систему ре-
гулирования.
В зависимости от величины этого отношения можно предвари-
тельно выбрать закон действия регулятора:
• при соотношении < 0,2 и небольших изменениях на-
грузки целесообразно использовать регулятор релейного действия;
• при соотношении тэа11/Го > 0,2 лучшее качество регулирования
обеспечивают регуляторы непрерывного действия, причем с ростом
соотношения тзап/Т0 для обеспечения требуемого качества регули-
рования необходимо выбирать более сложные законы регулирова-
ния (П -> ПИ -> ПИД).
Если Тзап/Гд > 1, то при использовании одноконтурной системы
регулирования ни один из линейных законов регулирования не дает
удовлетворительного качества регулирования. Тогда необходимо
использовать многоконтурные системы регулирования.
4.3.9.1. Метод незатухающих колебаний
Применение метода последовательного приближения для опреде-
ления оптимальных значений коэффициента усиления регулятора, а
также времени изодрома и предварения — процедура достаточно слож-
ная и трудоемкая, поскольку возможны самые разнообразные комби-
нации параметров настройки. Чтобы определить параметры настрой-
4.3. Основные законы регулирования
283
ки промышленных регуляторов, воспользуемся сравнительно простым
методом незатухающих колебаний (метод Циглера—Никольса).
Значения параметров настройки, достаточно близкие к оптималь-
ным, могут быть получены в результате исследования замкнутой
системы с П-регулятором. Для этого время изодрома Ги устанавли-
вают равным бесконечности (либо максимально возможному значе-
нию), время предварения Та — равным нулю (либо минимально воз-
можному значению) и определяют реакцию системы на ступенчатое
изменение заданного значения управляемого параметра при различ-
ных значениях коэффициента усиления регулятора.
Значение коэффициента усиления, при котором в системе воз-
никают незатухающие колебания с постоянной амплитудой — это и
есть максимальный коэффициент усиления А'™ах. Период колеба-
ний при максимальном коэффициенте усиления называется пре-
дельным (или критическим) периодом колебаний и обозначается
Для определения К™* и Гкр достаточно провести небольшое число
опытов, поскольку по декременту затухания первой полученной кри-
вой переходного процесса уже можно судить, насколько коэффици-
ент усиления близок к своему максимальному значению.
В табл. 4.2 приведены значения параметров, настройки для наи-
более распространенных промышленных законов регулирования,
рекомендованные Циглером и Никольсом.
Таблица 4.2. Рекомендации Циглера и Никольса
по настройке промышленных регуляторов
методом незатухающих колебаний
Закон дефлирования Параметры настройки petyn агора
г,
П 0,50
ПИ 0.45К“х VI,2
ПИД 0,60Х™ V2 V8
Для большинства систем, регулирования эти настройки обеспе-
чивают декремент затухания около 0,25, а также период колеба-
ний, близкий к предельному периоду, и малую максимальную ошиб-
Настройку промышленного регулятора обычно выбирают так,
чтобы обеспечить запас устойчивости по амплитуде или по фазе.
4.3.9.2. Метод затухающих колебаний
Многие объекты не допускают даже кратковременной работы в
режиме незатухающих колебаний. В этом случае методом незатуха-
284 Глава 4. Системы автоматического управления
ющих колебаний для определения параметров настройки регулято-
ра пользоваться нельзя, и применяется его модификация. Регулятор
настраивают на пропорциональный закон регулирования, для чего
время изодрома устанавливают равным бесконечности (Ги —>») или
максимально возможной величине, время предварения выводят на
значение, равное нулю (Т„ 0) или на минимально возможное зна-
чение. Затем определяют реакцию системы на ступенчатое измене-
ние заданного значения регулируемого параметра при различных
значениях коэффициента усиления регулятора Кр, начиная с его
малых значений. Увеличивают /Грдо тех пор, пока декремент зату-
хания в переходном процессе замкнутой системы не окажется рав-
ным 0,25. Рекомендуемые значения времени изодрома и времени
предварения определяются по полученному при этом периоду зату-
хающих колебаний Т, причем последний всегда больше, чем крити-
ческий период колебаний Гкр. Для ПИД-регулятора:
Та = Г/1,5; Тп = Т/6.
После установки на ПИД-регуляторе рекомендованных выше
значений 7'[1 и 7^ следует уточнить настройку коэффициента усиле-
ния Кр таким образом, чтобы декремент затухания по-прежнему рав-
нялся 0,25.
4.3.9.3. Определение настроек регулятора
по переходной характеристике
разомкнутой системы регулирования
Второй метод, предложенный Циглером и Никольсом, основан
на анализе формы кривой переходного процесса — реакции разом-
кнутой системы регулирования на единичное ступенчатое воздей-
ствие на входе. Контур регулирования может быть разомкнут при
этом в любой точке. Как правило, система размыкается между регу-
лятором и исполнительным устройством. Систему переводят на руч-
ное управление, устанавливают статический режим и затем создают
ступенчатое изменение управляющего воздействия. Выходной сиг-
нал разомкнутой системы (переходная характеристика), регистри-
руемый измерительным прибором, обычно имеет S-образную фор-
му. При этом разомкнутая система регулирования может быть при-
ближенно описана передаточной функцией
И/ =
1 Ts + 1
Параметры передаточной функции разомкнутой системы опре-
деляются по переходной характеристике, как это показано было ра-
4.3. Основные законы регулирования
285
нее, и используются для расчета оптимальной настройки регулятора
в соответствии с табл. 4.3.
Таблица 4.3. Рекомендации Циглера и Никольса
по настройке промышленных регуляторов
с использованием переходной характеристики
разомкнутой системы регулирования
Закон регулирования Параметры настройки ретулэтора
т„
П 1 Т
к гип
ПИ 0,9 Т К злч„
ПИД 1,2 Т _ К ' тяп 2т«
Замечания
1. Значения параметров настройки, определенные методом переход-
ных характеристик и методом незатухающих колебаний, совпадают с точ-
ностью от 10 % до 50 %.
2. Максимальный коэффициент усиления регулятора и критический
период, позволяющие выбирать оптимальные значения параметров настрой-
ки регулятора, можно рассчитать по частотным характеристикам разомк-
нутой системы регулирования (см. разд. 3.4).
4.3.9.4. Настройка регуляторов
для получения типовых оптимальных
процессов регулирования
Для ориентировочной оценки параметров настройки регулято-
ров можно воспользоваться приближенными формулами, если ди-
намические свойства объекта заданы его переходной характеристи-
кой по каналу регулирующего воздействия.
Из переходной характеристики статического объекта определя-
ют время запаздывания объекта постоянную времени объекта
То и коэффициент усиления объекта Ко.
Из переходной характеристики астатического объекта опреде-
ляют время запаздывания объекта т.^ и постоянную времени интег-
рирования объекта ТЙ.
Приближенные параметры настройки непрерывных П-, ПИ-
и ПИД-регуляторов для статических и астатических объектов,
позволяющие получить один из трех типовых процессов регули-
рования (см. разд. 2.7.7), приведены в табл. 4.4 и табл. 4.5 соот-
ветственно.
286
Глава 4. Системы автоматического управления
Таблица 4.4. Формулы для определения настроек регуляторов
на статических объектах
Регулятор Типовой оптимальный процесс регулирования
Апериодический, 20 %-ное перереолирйванме
П КаК„ = 0,3-^- ° р г u МП КоКр = 0,7-^- ТЭМ1 А-Лр =0,9^- Тзм.........
ПИ г *ЛР = 0,6-^; К =0,67-о KgKv =0,7i-; 33 П тн =0,7Го *<Л=—; тззл Т =Т и о
ПИД ,о| 5 Чн J J Ох ’ЧГ o' CN О II II II °- г = г С Ь-< Е-ч т К0К^1.2^ Ги =2,0твп; 7>0,4гя, т ^Лр =>>4 — тк = =0,5тИ1
Таблица 4.5. Формулы для определения настроек регуляторов
на астатических объектах
Регулятор Типовой оптимальный процесс регулирования
Апериодический, 20%-иое перерегул hjhj ван ие (ffKO)ni.
П Т К = 0,4-5- р т ‘зал г» А =0,7^-
ПИ т„ Кр = 0,4-5-; т зап Ги = 6тзап т - (V—; т зап. г ч= — L зап ги = 4тап
ПИД Г = 0,6—5—; т« = 5т мп; Л. = г К„ = U-J-; р т ‘ зап та = 2т ип; Л, = 0,4тяп к Кр =1,4^-; зап т;. = 1,6тмп; Тп =0,5тап
4.3.9.5. Самодиагностика и автоматическая настройка
регулятора
Настройка регулятора на инерционном объекте с большими по-
стоянными времени требует длительного экспериментирования ме-
тодом проб и ошибок и не всегда может закончиться удачей. В кон-
турах управления, где используются. ПИД-регуляторы, при измене-
4.3. Основные законы регулирования
287
нии нагрузки в объекте управления операторы-технологи должны
соблюдать ограничения, наблюдая за переменными процесса и по-
очередно выдавая небольшие приращения заданиям ПИД-регулято-
ров. Такие предосторожности увеличивают время переходного про-
цесса, Нелинейные характеристики объекта ограничивают возмож-
ности ПИД-регулятора, Переключение управляемых параметров и
управляющих воздействий по событиям (выход каких-либо пере-
менных объекта на ограничения) в системах управления с использо-
ванием классических законов управления представляется практи-
чески трудноразрешимой задачей.
Типовые промышленные регуляторы, настроенные вышепере-
численными методами, дают удовлетворительное качество регули-
рования при условии, что величина возмущающих воздействий не
превышает 20 % максимально возможной величины. Естественно,
что в случае внепланового отключения и включения подачи тепло-
носителей или перерабатываемого сырья и в прочих подобных ситу-
ациях, когда оператор-технолог не успевает вмешаться в процесс
компенсации возмущающего воздействия, такие системы управле-
ния не в состоянии обеспечить оптимальную траекторию измене-
ния управляемых параметров объекта управления. В результате ка-
чество управления ХТП резко ухудшается, вплоть до появления ава-
рийных ситуаций.
Кроме того, промышленные регуляторы нуждаются в корректи-
ровке параметров настройки в процессе работы. Это связано с впол-
не естественными изменениями параметров объекта управления,
состава и свойств перерабатываемого сырья, расходов технологи-
ческих потоков, технологического режима и т. д.
Преодолеть указанные трудности и улучшить качество регули-
рования можно с помошью системы диагностики объектов управле-
ния и автоматической настройки регуляторов, реализуемой на ос-
нове промышленных программируемых логических контроллеров..
На рис. 4.71 представлена функциональная схема системы регу-
лирования с автоматической настройкой параметров регулятора.
Система диагностики и автоматической настройки регулятора
(Р) состоит из блока формирования (БФ) пробного сигнала, вычис-
лительного блока (ВБ) и блок пересчета (БП).
Блок формирования пробных сигналов генерирует пробное воз-
действие Дип(т), выявляющее основные статические и динамичес-
кие параметры элементов системы управления.
На основе отклика системы управления на сформированный
пробный сигнал и(т)л в ВБ решается система алгебраических урав-
нений, аргументами которых являются определенные параметры
выходных сигналов регулятора и объекта, а решением — параметры
модели, аппроксимирующей цепь последовательно соединенных
288
Глава 4. Системы автоматического управления
Задающее
устройство
ИУ -► ОУ
У(Д
Рис. 4.71. Функциональная блок-схема
системы регулирования с автоматичес-
кой настройкой параметров регулятора.
Пояснения см. в тексте
Вектор
параметров
модели
БФ
исполнительного устройства (ИУ), объекта управления (ОУ) и дат-
чика (Д). Входящую в ВБ модель, аппроксимирующую ИУ, ОУ и Д,
представляют в виде последовательно соединенных п статических
звеньев первого порядка с одинаковыми постоянными времени Д и
одного дополнительного статического звена первого порядка с по-
стоянной времени с передаточной функцией:
(Дл + 1)" ('A.s + 1)’
(4.127)
где — общий статический коэффициент усиления модели.
Найденные значения и, Гь Т2, в (4.127) используются для
пересчета в БП в оптимальные настройки регуляторов. В качестве
критерия оптимальности используется критерий максимальной сте-
пени устойчивости замкнутой системы управления, сочетающий
хорошее качество управления со свойствами робастности. Это озна-
чает, что в оптимальных по степени устойчивости системах управ-
ления можно достичь максимально возможных запасов устойчивос-
ти по фазе и амплитуде по сравнению с любыми другими парамет-
рами настройки типовых ПИ-регуляторов и ПИД-регуляторов.
Замечание
Чтобы повысить качество работы системы регулирования, переходят
на аппроксимацию объекта управления моделью (4.127) и автоматическую
оптимизацию настроек ПИ-регуляторов и ПИД-регуляторов по четырем
параметрам модели п, Th Т3, Км. Такой подход отличается от традицион-
ной аппроксимации объектов управления (см. разд. 4.1), приводящей в итоге
к комбинации последовательно соединенных статического звена первого
порядка, и звена запаздывания. Для пересчета в БП найденных значений и,
7), Т2, в оптимальные параметры настройки регуляторов используют
аналитические зависимости между л. Г,, Г-.. К,, v настраиваемыми пара-
метрами ПИ-регуляторов и ПИД-регуляторов.
Контрольные вопросы
289
Время самодиагностики (по существу, это время вычисления
параметров п, Гь Т2, Км модели) и время автоматической оптималь-
ной настройки регулятора составляют примерно треть времени пе-
реходного процесса в цепи последовательно соединенных исполни-
тельного устройства, объекта управления и датчика. Причем апри-
орная информация о динамических и статических характеристиках
этой цепи не нужна. Это свойство данного подхода можно отнести к
его достоинству, так как довольно часто динамические и статичес-
кие характеристики объекта управления неизвестны, к тому же в
процессе эксплуатации они могут изменяться в широких пределах.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Какие признаки лежат в основе классификации объектов управления?
2. Дайте определения объектов управления одномерных и многомер-
ных, односвязных и многосвязных, линейных и нелинейных, с сосредото-
ченными и распределенными параметрами.
3. Что понимают под емкостью объекта?
4. Что служит мерой емкости объекта?
5. Как влияет емкость объекта на качество регулирования?
6. Что такое самовыравнивание объекта н как оно влияет на переход-
ный процесс?
7. Охарактеризуйте объекты нейтральные, устойчивые, неустойчивые.
8. Что такое транспортное запаздывание, переходное запаздывание?
9. Как влияет запаздывание на качество регулирования?
10, Как определяют свойства объектов?
11. Как экспериментально определяют переходные характеристики
объекта?
12. Как определяют параметры передаточной функции по переходной
характеристике?
13. Как экспериментально определяют частотные характеристики объекта?
14. Что входит в задачу синтеза регуляторов и каковы основные этапы
решения задачи синтеза регуляторов?
15. Назовите основные законы действия регуляторов.
16. Охарактеризуйте свойства пропорционального, интегрального, про-
порционально-интегрального, пропорционально-дифференциальнога, про-
порционально- интегрально-дифференпильного законов регулирования.
17. Каковы особенности позиционных регуляторов?
18. Что представляют из себя регуляторы с прогнозирующей моделью
и на основе искусственных нейронных сетей?
19. Что лежит в основе выбора закона регулирования?
20. Как определяют оптимальные параметры настройки промышлен-
ных регуляторов с запасом устойчивости?
21. Охарактеризуйте систему регулирования с автоматической настрой-
кой параметров регулятора.
H) А. Й„ Xupniosi»» Н. U
ГЛАВА_______________________
ИЗМЕРЕНИЕ
ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
Наука начинается с тех пор, как на-
чинают измерять, точная наука немысли-
ма без меры.
Д.И. Менделеев — основатель и
управляющий Главной палаты
мер и весов в России
5.1. ГОСУДАРСТВЕННАЯ СИСТЕМА
ПРОМЫШЛЕННЫХ ПРИБОРОВ
И СРЕДСТВ АВТОМАТИЗАЦИИ
Технической базой построения АСУ ТП и АСУП в различных
отраслях промышленности является Государственная система про-
мышленных приборов и средств автоматизации (ГСП). В основу пост-
роения и развития ГСП положены следующие принципы:
• выделение типовых функций автоматического контроля, регу-
лирования и управления;
• минимизация номенклатуры технических средств;
• построение технических устройств на основе типовых унифи-
цированных блоков и модулей;
• агрегатное построение сложных систем управления на основе
унифицированных приборов и устройств;
• совместимость приборов и устройств ГСП на основе:
а) унификации сигналов связи, используемых для обмена ин-
формацией между изделиями ГСП в системах управления (инфор-
мационная совместимость);
б) унификации конструкций (конструктивная совместимость);
в) унификации эксплуатационных требований (эксплуатацион-
ная совместимость);
г) унификации метрологических характеристик средств измере-
ний (обеспечение единства измерений или метрологическая совме-
стимость).
5.1. I осударственная система промышленных приборов 291
По функциональному признаку технические средства ГСП разде-
ляются на средства:
• получения информации о состоянии ХТП (к ним относят пер-
вичные измерительные преобразователи, нормирующие преобразо-
ватели, формирующие унифицированный сигнал, измерительные
приборы, устройства алфавитно-цифровой информации). Устрой-
ства этой группы предназначены для преобразования измеряемой
физической величины в удобный для восприятия, передачи и обра-
ботки сигнал измерительной информации;
• приема, преобразования и передачи информации по каналам связи
(к ним относят различные преобразователи сигналов и кодов, комму-
таторы измерительных цепей, шифраторы и дешифраторы, согласую-
щие устройства, устройства для дистанционной передачи и т. д.).
Эти средства используют для приема, преобразования и передачи
сигналов, содержащих измерительную информацию и несущих ко-
манды управления;
• преобразования, обработки, хранения информации и форми-
рования управляющих воздействий, представления информации
операторам (к ним относят функциональные и операционные пре-
образователи), а также логические устройства, анализаторы сигна-
лов, запоминающие устройства, регуляторы (контроллеры), задат-
чики, управляющие вычислительные устройства. Эти средства пред-
ставляют центральную часть ГСП;
• использования командной информации для воздействия на тех-
нологический процесс (к ним относят исполнительные устройства,
состоящие из исполнительных механизмов и регулирующих орга-
нов, усилители мощности и вспомогательные устройства к ним).
По роду энергии, используемой в качестве носителя информации
при передаче сигналов, устройства ГСП делятся на:
• электрические (обладают быстродействием, высокой точнос-
тью, способностью передачи информации на большие расстояния, а
также большой «емкостью» каналов передачи информации);
• пневматические (способны работать во взрыво- и пожароопас-
ных производствах);
• гидравлические (обеспечивают точные перемещения исполни-
тельных устройств и большие перестановочные усилия).
Для обеспечения информационного сопряжения в ГСП приме-
няют унифицированные сигналы. Унифицированный сигнал ГСП —
сигнал дистанционной передачи информации с унифицированны-
ми параметрами. Вид носителя информации и параметры унифици-
рованного сигнала не зависят от вида измеряемой величины, метода
измерения и диапазона изменения измеряемой величины. Обычно
унифицированные сигналы получаются в результате преобразова-
ю*
292
Глава 5. Измерение технологических параметров
ния и нормирования сигналов первичных измерительных преобра-
зователей при помощи встроенных в датчики или внешних нормиру-
ющих преобразователей. В зависимости от вида унифицированных
параметров в ГСП применяют унифицированные сигналы четырех
групп:
• сигналы тока и напряжения электрические непрерывные;
• сигналы частотные электрические непрерывные;
• сигналы электрические кодированные;
• пневматические сигналы.
Основные виды унифицированных сигналов ГСП приведены в
табл. 5.1.
Таблица 5.1. Основные виды унифицированных сигналов ГСП
Электрические сигналы Пневмати- ческий сигнал
Постоянный ток Напряжение постоянного тока Напряжение переменного тока Частота
мА мВ В в кГц кПа
0...5 0...10 0...10 0...2 4...8 20...100
0...20 0...20 0...1
4...20 -10... 0...+ 10 -1...0...+1 -1...0...+1 2...4
-5...0...+5
5.2. ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
МЕТРОЛОГИИ
Наука об измерениях, методах и средствах обеспечения их един-
ства и способах достижения требуемой точности называется метро-
логией.
Примечание
Термин «метрология» происходит от греческих слов петров — мера и
Хоуо^ — учение, слово.
К основным направлениям метрологии относятся: общая теория
измерений, единицы физических величин и их системы, методы и
средства измерений, методы определения точности измерений, ос-
новы обеспечения единства измерений и единообразия средств из-
5.2. Основные термины и определения метрологии
293
мерений, методы передачи размеров единиц от эталонов и образцо-
вых средств измерений рабочим средствам измерений. Законода-
тельный характер метрологии обусловливает стандартизацию ее тер-
минов и определений.
Термины метрологии и их определения установлены ГОСТ и
стандартами ИСО (Международная организация по стандартиза-
ции, ISO — International Organization for Standardization), МЭК
(Международная электротехническая комиссия, IEC — International
Electrotechnical Commission) и другими международными организа-
циями по стандартизации.
Качество управления технологическим процессом в значитель-
ной мере определяется погрешностью измерений технологических
параметров. Важно поддерживать метрологические характеристики
измерительных систем (ИС) на определенном уровне, определяемом
требованиями к качеству управления. На погрешность измерений
оказывают влияние:
• свойства объекта измерений, отражаемые характеристиками
сигналов, параметры которых подлежат измерению;
• условия эксплуатации, отражаемые характеристиками влияю-
щих величин;
• методы измерений и измерительных преобразований внутри
системы, порождающие методические погрешности измерений;
• свойства ИС, отражаемые метрологическими характеристика-
ми ее компонентов;
• алгоритм обработки результатов прямых измерений с помо-
щью встроенного процессора и его программная реализация.
Учитывая вышеперечисленные факторы, метрологическое обес-
печение ИС предусматривает наличие:
• способов описания погрешностей измерений;
• способов описания входных сигналов ИС и других характери-
стик объекта измерений, влияющих на погрешность измерений;
• способов описания условий эксплуатации ИС (выбора способа
описания влияющих величин);
• способов определения характеристик методической погрешно-
сти измерений, учитывающих методы измерений и преобразований
сигналов в ИС, включая алгоритм обработки измерений;
• описания в технической документации свойств ИС, влияющих
на погрешность измерений, включая методы расчета метрологичес-
ких характеристик ИС;
• методов испытаний (контроля) метрологических характерис-
тик ИС, гарантирующих ее свойства.
Измерительные системы используются не только как элементы
систем управления, но применяются и самостоятельно для текуще-
го контроля технологических параметров.
294
Глава 5. Измерение технологических параметров
5.2.1. Физические величины
Физическая величина — одно из свойств физического объекта
(физической системы, явления или процесса), общее в качествен-
ном отношении для многих физических объектов, но индивидуаль-
ное для каждого из них в количественном отношении.
Измеряемая физическая величина — физическая величина, подле-
жащая измерению, измеряемая или измеренная в соответствии с
основной целью измерительной задачи.
Размер физической величины — количественная определенность
физической величины, присущая конкретному материальному объек-
ту, системе, явлению или процессу. Значение физической величины —
выражение размера физической величины в виде некоторого числа
принятых для нее единиц. Числовое значение физической величины -
отвлеченное число, входящее в значение величины.
Истинное значение физической величины — значение физической
величины, которое идеальным образом характеризует в качествен-
ном и количественном отношении соответствующую физическую
величину.
Действительное значение физической величины — значение физи-
ческой величины, полученное экспериментальным путем и настолько
близкое к истинному значению, что в поставленной измерительной
задаче может быть использовано вместо него.
Влияющая физическая величина — физическая величина, оказы-
вающая влияние на размер измеряемой величины и (или) результат
измерений.
Система физических величин — совокупность физических вели-
чин вместе с набором непротиворечивых уравнений, связывающих
эти величины.
Основная физическая величина — физическая величина, входящая
в систему величин и условно принятая в качестве независимой от
других величин этой системы.
Производная физическая величина — физическая величина, входя-
щая в систему величин и определяемая через основные величины
этой системы.
Размерность физической величины — выражение в форме сте-
пенного одночлена, составленного из произведений символов ос-
новных физических величин в различных степенях, и отражающее
взаимосвязь данной физической величины с физическими вели-
чинами, принятыми в данной системе величин за основные с коэф-
фициентом пропорциональности, равным 1.
Показатель размерности физической величины — показатель
степени, в которую возведена размерность основной физичес-
5.2. Основные термины и определения метрологии
295
кой величины, входящая в размерность производной физичес-
кой величины
Размерная физическая величина — физическая величина, в раз-
мерности которой хотя бы одна из основных физических величин
возведена в степень, не равную нулю.
Безразмерная физическая величина — физическая величина, в раз-
мерность которой основные физические величины входят в степе-
ни, равной нулю
Шкала физической величины — упорядоченная совокупность зна-
чений физической величины, служащая исходной основой для из-
мерений данной величины.
Международная температурная шкала, состоящая из ряда реперных
точек, значения которых приняты по соглашению между странами Метри-
ческой конвенции и установлены на основании точных измерений, явля-
ется исходной основой для измерений температуры
Условная шкала физической величины — шкала физической ве-
личины, исходные значения которой выражены в условных еди-
ницах.
Например, шкала твердости металлов Бринелля, шкала твердости ми-
нералов Мооса
Уравнение связи между величинами — уравнение, отражающее
взаимосвязь между величинами, обусловленную законами приро-
ды, в котором под буквенными символами понимают физические
величины.
5.2.2. Единицы физических величин
Единица измерения физической величины — физическая величина
фиксированного размера, которой условно присвоено числовое зна-
чение, равное 1, и применяемая для количественного выражения
однородных с ней физических величин.
Система единиц физических величин — выбранная по соглашению
совокупность основных и производных единиц физических вели-
чин, а также кратных и дольных единиц физических величин, вмес-
те с набором правил их использования.
Основная единица системы единиц физических величин — единица
основной физической величины в данной системе единиц.
Основные единицы Международной системы единиц (СИ): метр (м), ки-
лограмм (кг), секунда (с), ампер (А), кельвин (К), моль (моль) и кандела (кд)
296
Глава 5 Измерение технологических параметров
Производная единица системы единиц физических величин — еди-
ница производной физической величины системы единиц, образо-
ванная в соответствии с уравнением, связывающим ее с основными
единицами или с основными и уже определенными производными
единицами.
1 м/с — единица скорости, образованная из основных единиц СИ -
метра и секунды.
Системная единица физической величины — единица физической
величины, входящая в принятую систему единиц.
Внесистемная единица физической величины — единица физичес-
кой величины, не входящая в принятую систему единиц
Кратная единица физической величины — единица физической
величины, в целое число раз большая системной или внесистемной
единицы.
Единица длины 1 км = 103 м, т. е. кратная метру; единица частоты
1 МГц (мегагерц) = 106 Гц, кратная герцу; единица активности радионук-
лидов 1 МБк (мегабеккерель) = 106 Бк, кратная беккерелю.
Дольная единица физической величины — единица физической ве-
личины, в целое число раз меньшая системной или внесистемной
единицы
Единица длины 1 нм (нанометр) = 10-9 м и единица времени 1 мкс
(микросекунда) = 10-6 с являются дольными соответственно от метра и
секунды.
5.2.3. Измерения физических величин
Измерение физической величины — совокупность операций по при-
менению технического средства, хранящего единицу физической
величины, обеспечивающих нахождение соотношения (в явном или
в неявном виде) измеряемой величины с ее единицей и получение
значения этой величины.
Измерения можно классифицировать по разным признакам.
По характеру зависимости измеряемой величины от времени
измерения делятся на статические и динамические. Статическое
измерение — измерение физической величины, принимаемое в соот-
ветствии с конкретной измерительной задачей за неизменную на
протяжении времени измерения. Динамическое измерение — измере-
ние изменяющейся по размеру физической величины.
5.2. Основные термины и определения метрологии
297
Примечание
Все физические величины подвержены тем или иным изменениям во
времени. Разработанные в последнее время высокочувствительные сред-
ства измерений позволяют обнаруживать изменения физических величин,
ранее считавшихся постоянными. Поэтому разделение измерений на ста-
тические и динамические измерения является условным
По способу получения результатов выделяют прямые, косвен-
ные, cobokj пные и совместные измерения.
Прямое измерение — измерение, при котором искомое значение
физической величины получают непосредственно.
Например, измерение напряжения вольтметром, температуры термо-
метром, давления манометром.
Косвенное измерение — определение искомого значения физи-
ческой величины на основании прямых измерений других физи-
ческих величин, функционально связанных с искомой величиной.
Косвенные измерения широко применяются в тех случаях, когда
искомую физическую величину невозможно или сложно измерить
непосредственно или когда прямое измерение дает менее точный
результат.
Примеры косвенных уравнений: определение плотности р тела цилин-
дрической формы по результатам прямых измерений массы т, высоты Л и
диаметра цилиндра d, связанных с плотностью уравнением:
р = щ/(о.25п^2й);
расчет давления р в грузопоршневом манометре, исходя из площади порш-
ня А, массы груза т и ускорения свободного падения g.
p=mg/A.
При совокупных измерениях одновременно измеряют несколько
одноименных величин и искомые значения величин находят, решая
систему уравнений, получаемых при прямых измерениях различных
сочетаний этих величин.
Совместные измерения - производимые одновременно измере-
ния разноименных величин для определения зависимости между
ними.
Измерительный сигнал — сигнал, содержащий количественную
информацию об измеряемой величине
Измерительная информация — информация о значениях физи-
ческих величин.
298
Глава 5. Измерение технологических параметров
Объект измерений — тело (физическая система, процесс, явле-
ние), характеризуемое одной или несколькими измеряемыми физи-
ческими величинами.
Примечание
Измерение всегда рассматривается как сравнение величины с ее еди-
ниией. Однако не всегда такое сравнение производится непосредствен-
но. В большинстве случаев измеряется не сама интересующая нас вели-
чина, а другие величины, связанные с нею теми или иными соотноше-
ниями и закономернсстями. Обычно к прямым измерениям относят
такие, при которых значение измеряемой величины получается в ре-
зультате одного наблюдения или отсчета. Однако, по существу, в боль-
шинстве таких случаез в скрытом виде также имеет место не прямое
измерение, а косвенное. Действительно, аналоговые измерительные при-
боры, например, дают показания в делениях шкалы, так что мы непос-
редственно измеряем лишь линейные или угловые отклонения стрелки,
связанные с измеряемой величиной посредством ряда промежуточных
преобразований.
5.2.4. Средства измерительной техники
Средства измерительной техники — обобщающее понятие, охва-
тывающее технические средства, специально предназначенные для
измерений К средствам измерительной техники относят средства
измерений и их совокупности (например, измерительные системы,
измерительные установки), измерительные принадлежности (напри-
мер, термостат), измерительные устройства
Средство измерений (СИ) — техническое средство, предназна-
ченное для измерений, имеющее нормированные метрологические
характеристики, воспроизводящее и (или) хранящее единицу физи-
ческой величины, размер которой принимают неизменным (в пре-
делах установленной погрешности) в течение известного интервала
времени. «Умение» хранить (или воспроизводить) единицу физи-
ческой величины неизменного размера, необходимое для выполне-
ния измерений (т. е. для сопоставления с единицей) и превращает
техническое средство в средство измерений.
Основное средство измерений — средство измерении той физи-
ческой величины, значение которой необходимо получить в соот-
ветствии с измерительной задачей.
Вспомогательное средство измерений — средство измерений той
физической величины, влияние которой на основное средство из-
мерений или объект измерений необходимо учитывать для получе-
ния результатов измерений требуемой точности.
5.2. Основные термины и определения метрологии
299
Например, термометр для измерения температуры газа в процессе из-
мерений объемного расхода этого газа.
Мера физической величины — средство измерений, предназначенное
для воспроизведения и (или) хранения физической величины одного
или нескольких заданных размеров, значения которых выражены в
установленных единицах и известны с необходимой точностью.
Замечание
Различают следующие разновидности мер:
• однозначная мера — мера, воспроизводящая физическую величину
одного размера (например, гиря 1 кг);
• многозначная мера — мера, воспроизводящая физическую величину
разных размеров (например, штриховая мера длины);
• набор мер — комплект мер разного размера одной и той же физичес-
кой величины (например, набор концевых мер длины);
• магазин мер — набор мер, конструктивно объединенных в единое
устройство, в котором имеется приспособление для их соединения в раз-
личных комбинациях (например, магазин электрических сопротивлений).
Измерительный прибор — средство измерений, предназначенное
для получения значений измеряемой физической величины в уста-
новленном диапазоне.
Примечание
По способу индикации значений измеряемой величины измеритель-
ные приборы принято разделять на показывающие и регистрирующие.
Измерительный преобразователь — техническое средство с нор-
мативными метрологическими характеристиками, служащее для
преобразования измеряемой величины в другую величину или изме-
рительный сигнал, удобный для обработки, хранения, дальнейших
преобразований, индикации или передачи.
Замечание
Измерительный преобразователь или входит в состав какого-либо из-
мерительного прибора (или измерительной установки, или измерительной
системы и др.), или применяется совместно с каким-либо средством изме-
рений.
По характеру преобразования различают аналоговые, цифро-аналого-
вые, аналого-цифровые преобразователи.
По расположению в измерительной цепи различают первичные и про-
межуточные преобразователи.
Выделяют также передающие и масштабные преобразователи. Переда-
ющим измерительным преобразователем называют элемент измерительного
устройства, предназначенный для дистанционной передачи сигнала изме-
рительной информации. Примером передающего измерительного преоб-
300 Глава 5. Измерение технологических параметров
разователя может служить токовый преобразователь, встраиваемый в мем-
бранный дифманометр. С его помощью деформация мембраны преобразу-
ется в унифицированный сигнал постоянного тока 0...5 мА. Масштабным
измерительным преобразователем называют измерительный преобразователь,
предназначенный для изменения величины в заданное число раз, напри-
мер, измерительный трансформатор тока, делитель напряжения и т. п.
Первичный измерительный преобразователь (ПИП) — измеритель-
ный преобразователь, на который непосредственно воздействует
измеряемая физическая величина, т. е. это первый преобразователь
в измерительной цепи измерительного прибора (или измерительной
установки, или измерительной системы и др.).
Например, термопара, pH-электрод, трубка Бурдона, биметаллическая
пластинка, поплавок ротаметра, терморезистор.
Активный измерительный преобразователь (генераторный преоб-
разователь) непосредственно преобразует одну форму энергии в дру-
гую, не нуждаясь во внешнем источнике энергии.
Например, термопара преобразующая тепловую энергию в электри-
ческую.
Пассивный измерительный преобразователь (параметрический пре-
образователь) не может непосредственно преобразовывать энер-
гию, но он управляет энергией, поступающей от внешнего источ-
ника.
Терморезистор не может непосредственно преобразовать тепловую
энергию в электрическую. Но изменение его сопротивления влияет на про-
текающий в цепи электрический ток, создаваемый внешним источником.
Датчик — конструктивно обособленный первичный преобразо-
ватель, от которого поступают измерительные сигналы (он «дает»
информацию). Датчик может быть вынесен на значительное рассто-
яние от средства измерений, принимающего его сигналы.
При внешней простоте, малых габаритных размерах и массе дат-
чик представляет собой сложную конструкцию, чувствительный эле-
мент которой может работать в тяжелых эксплуатационных услови-
ях, в диапазоне температур от —253 °C до +3000 °C, давлений от
0,001 МПа до 300 МПа, при вибрациях до 105g и акустических шу-
мах до 194 дБ. Датчики являются важными элементами информаци-
онно-измерительных систем и систем автоматического управления
технологическими процессами.
5.2. Основные термины и определения метрологии
301
Средство сравнения (компаратор) — техническое средство, пред-
назначенное для сравнения друг с другом мер однородных величин
или показаний измерительных приборов.
Рычажные весы могут служить средством сравнения эталонной гири,
установленной на одну чашку весов, и поверяемой гири, установленной на
другую чашку.
Измерительная цепь — совокупность элементов средств измере-
ний, образующих непрерывный путь прохождения измерительного
сигнала одной физической величины от входа до выхода.
Примечание
Измерительную цепь измерительной системы называют измеритель-
ным каналом (см. ниже).
Измерительное устройство — часть измерительного прибора (ус-
тановки или системы), связанная с измерительным сигналом и име-
ющая обособленную конструкцию и назначение. Измерительным
устройством может быть названо регистрирующее устройство изме-
рительного прибора, включающее ленту для записи, лентопротяж-
ный механизм и пишущий элемент.
Чувствительный элемент средства измерений — часть измеритель-
ного преобразователя в измерительной цепи, воспринимающая вход-
ной измерительный сигнал.
Показывающее устройство средства измерений — совокупность
элементов средства измерений, обеспечивающая визуальное воспри-
ятие значений измеряемой величины или связанных с ней величин.
Регистрирующее устройство средства измерений — совокупность
элементов средства измерений, регистрирующая значение измеряе-
мой величины или связанной с ней величины.
Шкала средства измерений — часть показывающего устройства
средства измерений, представляющая собой упорядоченный ряд
отметок (черточка, точка и др.) вместе со связанной с ними нуме-
рацией.
Начальное значение шкалы — наименьшее значение измеряемой
величины, которое может быть отсчитано по шкале средства изме-
рений.
Конечное значение шкалы — наибольшее значение измеряемой
величины, которое может быть отсчитано по шкале средства изме-
рений.
Табло цифрового измерительного прибора — показывающее уст-
ройство цифрового измерительного прибора
302
Глава 5. Измерение технологических параметров
По виду измеряемой величины или сигнала измерительной ин-
формации, а также по способу обработки сигнала средства измери-
тельной техники делятся на аналоговые и цифровые.
В аналоговых средствах измерительной техники выходная вели-
чина является непрерывной функцией размера измеряемой величи-
ны, т. е. может принимать, как и измеряемая величина, бесконеч-
ное множество значений.
Высота столбика ртути в ртутном термометре расширения или ТЭДС
термопары являются непрерывными функциями измеряемой темпера-
туры.
В цифровых средствах измерительной техники выходная величи-
на является дискретной (прерывистой) во времени и квантованной
по размеру, т. е. может принимать лишь конечное число значений.
В цифровом средстве измерительной техники непрерывная по раз-
меру и во времени измеряемая величина преобразуется в дискрет-
ный сигнал, квантуется и кодируется. Полученный цифровой код
может передаваться по каналам связи и отображаться на табло циф-
рового измерительного прибора. Структурная схема цифрового из-
мерительного прибора приведена на рис. 5.1, о. Аналоговый первич-
ный измерительный преобразователь преобразует измеряемую ве-
личину х(т) в величину, обеспечивающую нормальный режим работы
аналого-цифрового преобразователя (АЦП), входящего составной
.. d,(T)
б
Рис. 5.1. Структурные схемы:
а — цифрового измерительного устройства; б— информационного изме-
рительного канала ИИС
5.2. Основные термины и определения метрологии
303
частью в цифровой измерительный прибор. Это могут быть масш-
табные преобразования (усиление или ослабление) или преобразо-
вания рода физической величины (например, преобразование со-
противления в напряжение). С выхода АЦП цифровой код поступа-
ет на табло и цифровой выход измерительного прибора, позволяющий
подключать устройства цифровой регистрации показаний или циф-
ровые каналы связи. Использование измерительного сигнала в циф-
ровой форме позволяет свести к минимуму потерю содержащейся в
нем информации.
Измерительная система (ИС) — совокупность функционально
объединенных мер, измерительных приборов, измерительных пре-
образователей, ЭВМ и других технических средств, размещенных в
разных точках контролируемого объекта с целью измерений одной
или нескольких физических величин, свойственных этому объекту,
и выработки измерительных сигналов. В зависимости от назначения
измерительные системы разделяют на измерительные информацион-
ные (ИИС), измерительные контролирующие, измерительные управля-
ющие системы и др.
ИИС производства азотной кислоты содержит сотни измерительных
каналов и позволяет получить измерительную информацию о ряде физи-
ческих величин в различных технологических аппаратах.
Измерительный канал измерительной системы — конструктивно
или функционально выделяемая часть ИС, выполняющая закончен-
ную функцию от восприятия измеряемой величины до получения
результата ее измерения, выражаемого числом или соответствую-
щим ему кодом, или до получения аналогового сигнала, один из
параметров которого — функция измеряемой величины.
Типовой измерительный канал (ИК) включает в себя первичный
измерительный преобразователь, линии связи, промежуточный из-
мерительный преобразователь (нормирующий, либо выполняющий
иные функции), аналого-цифровой преобразователь (АЦП), процес-
сор, цифроаналоговый преобразователь (ЦАП).
Примечание
В АСУ ТП имеется много ИК. Их обслуживание разделено во време-
ни. Каждый канал периодически (с периодом т0) подключается коммутато-
ром к входу микропроцессора, осуществляющего аналого-цифровое пре-
образование (рис. 5.1, б). В результате непрерывная функция ^т) подверга-
ется дискретизации по времени, т. е. преобразуется в последовательность
импульсов g(zi0), модулированных по амплитуде функцией #(т). Следую-
щий вид преобразования — квантование по уровню — выполняет аналого-
цифровой преобразователь (АЦП). При этом амплитуды импульсов g(h0)
304
Глава 5. Измерение технологических параметров
преобразуются в числа g*(rt0), представляющие текущее значение измеряе-
мой величины х(т).
Основными задачами первичной обработки информации в ИК, вы-
полняемой процессором, являются:
• фильтрация сигнала измерительной информации от случайной поме-
хи л(т);
• восстановление значения измеряемой величины х(т) по сигналу из-
мерительной информации у(т) (например, определение температуры по
ТЭДС гермопары).
Измерительно-вычислительный комплекс — функционально объе-
диненная совокупность средств измерения, ЭВМ и вспомогатель-
ных устройств, предназначенная для выполнения в составе измери-
тельной системы конкретной измерительной задачи.
Средства измерений прямого действия — средства измерений, в
которых измеряемая величина подвергается ряду последовательных
преобразований в одном направлении, т. е. без возвращения к ис-
ходной измеряемой величине. В структурной схеме (рис. 5.2, о) П[ и
П2 — преобразователи с коэффициентами преобразования К\ и К2.
Средства измерений прямого действия состоят из ряда блоков, пре-
образующих измеряемую величину в мощный сигнал, под влиянием
которого перемещаются подвижные органы отсчетных устройств,
предварительно прямо или косвенно проградуированных с помо-
щью мер. Энергия или мощность, необходимая для измерения СИ
прямого действия, часто отбирается от объекта измерения, что при-
водит к искажению измеряемой величины. К средствам измерений
прямого действия относят большинство манометров, термометров,
амперметров, вольтметров и т. д. (рис. 5.3).
Метрологическая характеристика средства измерений — характе-
ристика одного из свойств средства измерений, влияющая на ре-
зультат измерений и на его погрешность. Метрологические характе-
ристики, устанавливаемые нормативно-техническими документами,
б
Рис. 5.2. Структурные схе-
мы измерительного уст-
ройства:
а — прямого действия (пре-
образования); П[, П2 — пре-
образователи с коэффициен-
тами усиления К, и Ку, б — с
уравновешивающим преобра-
зованием (компенсацион-
ным); П — преобразователь
5.2. Основные термины и определения метрологии
305
Рис. 5.3. Примеры измерительных устройств прямого действия:
а — весы; б — милливольтметр; в — мембранный манометр
называют нормируемыми метрологическими характеристиками, а оп-
ределяемые экспериментально — действительными метрологически-
ми характеристиками
Показание средства измерений — значение величины или число
на показывающем устройстве средства измерений.
Диапазон показаний средства измерений — область значений
шкалы прибора, ограниченная начальным и конечным значения-
ми шкалы.
Диапазон измерений средства измерений — область значений ве-
личины, в пределах которой нормированы допускаемые погрешно-
сти средства измерений. Значения величины, ограничивающие диа-
пазон измерений снизу и сверху, называют соответственно нижним
пределом измерений и верхним пределом измерений.
Номинальное значение меры — значение величины, приписанное
мере (или партии мер) при изготовлении. Например, резистор с
номинальным значением 1 Ом.
Действительное значение меры — значение величины, приписан-
ное мере на основании ее калибровки или поверки.
Статическая характеристика преобразования средства измерений
(функция преобразования) — зависимость информативного пара-
метра у выходного сигнала средства измерений от информативного
параметра х входного сигнала в статическом режиме:
* = /(*)• (5 1)
Номинальная статическая характеристика (НСХ) преобразования —
номинально приписываемая данному средству измерения статичес-
кая характеристика при номинальных значениях неинформативных
параметров входного сигнала, которая может быть задана в форме
уравнения, графика или таблицы.
306 Глава 5. Измерение технологических параметров
Для средств измерений с линейной статической характеристи-
кой, используемых для измерения не изменяющихся во времени
величин, передаточная функция является величиной постоянной. В
средствах измерений с нелинейной статической характеристикой
зависимость между выходной и входной величинами описывается
алгебраическим или трансцендентным уравнением.
Для средств измерений в большинстве случаев предпочтительна
линейная статическая характеристика (рис. 5.4, а) или близкая к
линейной на заданном интервале изменения входной величины х,
что обеспечивает постоянство чувствительности средства измерений.
При нелинейной зависимости у от х чувствительность зависит от
значения входного сигнала. Если нелинейность статической харак-
теристики невелика или диапазон изменения х ограничен, то можно
нелинейную статическую характеристику линеаризовать (рис. 5.4, б),
например, так, как описано в разд. 3.1.4.
Градуировочная характеристика средства измерений — зависимость
между значениями величин на входе и выходе средства измерений,
полученная экспериментально
^ = Л'(Я (5 2)
Градуировочная характеристика ротаметра выражает зависимость рас-
хода от показаний ротаметра (положения поплавка) и может быть пред-
ставлена в виде таблицы, графика или формулы.
Рис. 5.4. Статические характеристики измерительных преобразователей
(х — измеряемая величина; у — выходная величина):
о — линейный преобразователь; б — нелинейный преобразователь (1 —
реальная нелинейная характеристика; 2 — линейная характеристика,
аппроксимирующая нелинейную характеристику в ограниченном диапа-
зоне 3 изменения входного сигнала)
5.2. Основные термины и определения метрологии
307
Чувствительность средства измерений S — отношение измене-
ния сигнала на выходе средства измерений &у к вызвавшему его
изменению измеряемой величины &х:
5 = Д^/Дх. (5.3)
Пример
► ТЭДС термоэлектрического преобразователя типа L (хро-
мель/копель) изменяется от 40,299 мВ при температуре рабочего
спая 500 °C до 49,108 мВ, при температуре 600 °C. Чувствитель-
ность термоэлектрического преобразователя в указанном диапазо-
не температур равна:
5 = ^ = 49,299 - 40,108^ ^ mB „c4 .
Д/ 600 - 500
Порог чувствительности средства измерений — наименьшее зна-
чение изменения физической величины, начиная с которого может
осуществляться ее измерение данным средством.
Разрешающая способность (разрешение) средства измерений —
характеристика средства измерений, выражаемая или наимень-
шим интервалом времени между событиями, или наименьшим рас-
стоянием между объектами, которые фиксируются прибором раз-
дельно.
Примечание
В соответствии с данным определением различают временное разреше-
ние и пространственное разрешение. Под разрешающей способностью циф-
ровых показывающих приборов понимается обычно значение младшего
цифрового разряда.
Порог чувствительности и разрешающая способность СИ обычно оп-
ределяются уровнем его внутренних шумов и нестабильностью его эле-
ментов.
Дрейф показаний средства измерении — изменение показаний сред-
ства измерений во времени, обусловленное изменением влияющих
величин или других факторов.
Зона нечувствительности средства измерений — диапазон значе-
ний измеряемой величины, в пределах которого ее изменения не
вызывают выходного сигнала средства измерений.
308
Глава 5. Измерение технологических параметров
5.2.5. Принципы, методы и методики измерений
Процесс измерения, способы проведения его и средства измере-
ний, при помощи которых происходит измерение, зависят от изме-
ряемой физической величины, существующих методов и условий
измерений. При выполнение измерений технологических парамет-
ров применяются различные'методы.
Принцип измерений — фйзическое явление или эффект, поло-
женное в основу измерений.
Примеры: использование эффекта Доплера для измерения скорости,
использование эффекта Джозефсона для измерения электрического напря-
жения, использование термоэлектрических явлений для измерения темпе-
ратуры.
Термоэлектрические явления — совокупность физических явлений,
обусловленных взаимосвязью между тепловыми и электрическими процес-
сами в твердых проводниках. К термоэлектрическим явлениям относятся
эффекты Зеебека, Пельтье, Томсона.
Метод измерений — прием или совокупность приемов сравнения
измеряемой физической величины с ее единицей в соответствии с
реализованным принципом измерений.
Классификация методов измерения технологических парамет-
ров разнообразна, поэтому выделим лишь некоторые отличитель-
ные признаки методов.
При контактном методе измерений чувствительный элемент сред-
ства измерений приводится в контакт с объектом измерений.
Например, измерение температуры тела термометром расширения.
Для бесконтактного метода измерении характерно отсутствие
контакта чувствительного элемента средства измерений с объектом
измерений.
Например, измерение температуры в стекловаренной печи пирометром.
Метод непосредственной оценки — метод измерений, в котором
значение измеряемой величины определяют непосредственно по
показывающему средству измерений, отградуированному в едини-
цах измеряемой величины
Например измерение температуры термометром, отградуированным в
градусах Цельсия; измерение давления манометром, отградуированным в
паскалях.
5.2. Основные термины и определения метрологии
309
Метод сравнения с мерой — метод измерений, в котором из-
меряемую величину сравнивают с величиной, воспроизводимой
мерой.
Например, измерение массы на рычажных весах с уравновешиванием
гирями (мерами массы с известным значением) или измерение ТЭДС тер-
мопары на компенсаторе сравнением с известной ЭДС нормального эле-
мента.
Нулевой метод измерений — метод сравнения с мерой, в котором
результирующий эффект воздействия измеряемой величины и меры
на прибор сравнения доводят до нуля
Примеры: измерения электрического сопротивления мостом с пол-
ным его уравновешиванием, измерение массы на равноплечих и нерав-
ноплечих весах (сравнение на рычаге силовых эффектов действия масс),
измерение давления грузопоршневыми манометрами (сравнение на пор-
шне силовых эффектов измеряемого давления и мер массы), измерение
напряжения постоянного тока электрическим компенсатором (сравнение
на сопротивлении падений напряжения от измеряемой ЭДС и ЭДС нор-
мального элемента или другого образцового источника), измерение тем-
пературы радиационным пирометром (сравнение наблюдателем яркостей
свечения объекта измерения и нити накаливания пирометрической лам-
пы током образцового элемента).
Сравнение осуществляется с помощью компенсационных или
мостовых схем (цепей). Компенсационные цепи применяются для
сравнения активных величин, т. е. несущих в себе некоторый запас
энергии (сил, давлений и моментов сил, электрических напряжений
и токов, яркости источников излучения).
При сравнении (компенсации) воспроизводимая мера исполь-
зуется для компенсации измеряемой величины во всем диапазоне
изменений, а также для показания значения. Поэтому для осуще-
ствления этого метода необходима изменяющаяся мера высокого
качества.
Структурная схема средства измерений сравнения представлена
на рис. 5.2, б. Сравнение осуществляется в устройстве сравнения, в
котором обычно одна величина вычитается из другой. Используя
выходной сигнал устройства сравнения, с помощью преобразовате-
ля П можно управлять мерой. Поскольку в средствах измерений,
основанных на методе сравнения, измеряемая величина уравнове-
шивается (компенсируется) величиной, воспроизводимой мерой, их
также называют средствами измерений с уравновешивающим (ком-
пенсационным) преобразованием
310
Глава 5. Измерение технологических параметров
Для сравнения пассивных величин (электрических, гидравличес-
ких, пневматических и других сопротивлений) применяются мосто-
вые цепи типа электрических уравновешенных или неуравновешен-
ных мостов.
Примечание
Пассивные величины могут быть вначале преобразованы в активные
или наоборот и сравниваться соответственно в компенсационных или мос-
товых цепях.
Примеры средств измерений сравнения приведены на рис. 5.5.
Особенности сравнения лучше всего показать, разобрав схему по-
тенциометра (рис. 5.5, б). Измеряемое напряжение Ux компенсиру-
ется (уравнивается) падением напряжения, создаваемым на извест-
ном сопротивлении /?аЬ рабочим током / от стабилизированного
источника питания (ИПС). Нуль-гальванометр (НГ) включается в
цепь сравниваемых напряжений. Когда напряжения скомпенсиро-
ваны, ток в гальванометре, а следовательно, в цепи измеряемого
напряжения, отсутствует. На результаты измерений компенсацион-
ным методом не влияет ни сопротивление соединительных прово-
дов, ни гальванометра.
В соответствии с компенсационным методом измерений изме-
ряемая величина х компенсируется величиной, воспроизводимой
мерой. Разность этих величин поддерживается малой независимо от
размера измеряемой величины. Точность измерения определяется
точностью меры и порогом чувствительности средства сравнения
(нуль-прибора, НП). Статическая характеристика НП может быть
нелинейной: при большой разности между мерой и измеряемой ве-
личиной чувствительность НП мала, а в области нуля — чувстви-
Рис. 5.5. Примеры измерительных устройств, основанных на методе срав-
нения с мерой:
a — рычажные весы; б — потенциометр
5.2. Основные термины и определения метрологии
311
тельность очень высока, а порог чувствительности мал. Благодаря
этому, достигается высокая точность измерения. В уравновешенном
состоянии НП не нагружен, благодаря чему исключается обратное
воздействие на процесс.
Метод измерений замещением — метод сравнения с мерой, в ко-
тором измеряемую величину замещают мерой с известным значени-
ем величины.
Например, взвешивание с поочередным помещением измеряемой массы
и гирь на одну и ту же чашку весов (метод Борда).
Метод измерений дополнением — метод сравнения с мерой, в ко-
тором значение измеряемой величины дополняется мерой этой ве-
личины с таким расчетом, чтобы на прибор сравнения воздейство-
вала их сумма, равная заранее заданному значению.
Дифференциальный метод измерений — метод измерений, при ко-
тором измеряемая величина сравнивается с однородной величиной,
имеющей известное значение, незначительно отличающееся от зна-
чения измеряемой величины, и при котором измеряется разность
между двумя этими величинами.
Методика выполнения измерений — установленная совокупность
операций и правил при измерении, выполнение которых обеспечи-
вает получение результатов с гарантированной точностью в соответ-
ствии с принятым методом.
5.2.6. Условия измерений
Нормальные условия измерений — условия измерения, характери-
зуемые совокупностью значений или областей значений влияющих
величин, при которых изменением результата измерений пренебре-
гают вследствие малости.
Примечание
Нормальные условия измерений устанавливаются в нормативных до-
кументах на средства измерений конкретного типа или по их поверке (ка-
либровке).
Нормальное значение влияющей величины — значение влияющей
величины, установленное в качестве номинального.
Примечание
При измерении многих величин нормируется нормальное значение
температуры 20 °C или 293 К. На нормальное значение, к которому приво-
дятся результаты многих измерений, выполненные в разных условиях, обыч-
но рассчитана основная погрешность средств измерений.
312
Глава 5. Измерение технологических параметров
Нормальная область значений влияющей величины — область зна-
чений влияющей величину, в пределах которой изменением резуль-
тата измерений под ее воздействием можно пренебречь в соответ-
ствии с установленными нормами точности.
Нормальная область значений температуры при поверке нормальных
элементов класса точности 0,005 в термостате не должна изменяться более
чем на ±0,05 °C от установленной температуры 20 "С, т. е. быть в диапазоне
от 19,95 °C до 20,05 °C. В качестве нормальных значений или нормальной
области значений влияющих величин принимают, например, температуру
окружающего воздуха (20 ± 5) °C или (20 ± 2) °C; барометрическое давле-
ние (760 ± 25) мм рт. ст. или (101,325 ± 3,3) кПа; напряжение питания 220 В
с частотой 50 Гц и т. д
Рабочая область значений влияющей величины — область значе-
ний влияющей величины, в пределах которой нормируют допол-
нительную погрешность или изменение показаний средства изме-
рений.
Рабочие условия измерений — условия измерений, при кото-
рых значения влияющих величин находятся в пределах рабочих
областей.
Для амперметра нормируют изменение показаний, вызванное откло-
нением частоты переменного тока от 50 Гц (принимают за нормальное
значение частоты).
Предельные условия измерений — условия измерения, характери-
зуемые экстремальными значениями измеряемой и влияющей вели-
чин, которые средство измерений может выдержать без разрушений
и ухудшения его метрологических характеристик
5.2.7. Результаты измерений физических величин
Результат измерения физической величины — значение величины,
полученное путем ее измерения.
Точность результата измерений — одна из характеристик каче-
ства измерения, отражающая близость к нулю погрешности резуль-
тата измерения.
Примечание
Считают, чем меньше погрешность измерения тем больше его точность.
Сходимость результатов измерений — близость друг к другу ре-
зультатов измерений одной и той же величины, выполненных по-
5.2. Основные термины и определения метрологии
313
вгорно одними и теми же средствами, одним и тем же методом в
одинаковых условиях и с одинаковой тщательностью.
Примечание
Сходимость измерений двух групп многократных измерений может
характеризоваться размахом, средней квадратической или средней ариф-
метической погрешностью
Воспроизводимость результатов измерений — близость результа-
тов измерений одной и той же величины, полученных в разных ме-
стах, разными методами, разными средствами, разными оператора-
ми, в разное время, но приведенных к одним и тем же условиям
измерений (температуре, давлению, влажности и др.).
Примечание
Воспроизводимость измерений может характеризоваться средними квад-
ратическими погрешностями сравниваемых рядов измерений.
5.2.8. Погрешности измерений
Погрешность результата измерения — отклонение результата из-
мерения от истинного (действительного) значения измеряемой ве-
личины.
Абсолютная погрешность измерения — погрешность измерения,
выраженная в единицах измеряемой величины.
Замечание
Необходимо различать термины «абсолютная погрешность» и «абсо-
лютное значение погрешности». Абсолютное значение погрешности — зна-
чение погрешности без учета ее знака (модуль погрешности).
Абсолютная погрешность средства измерений — разность между
показаниями средства измерений А и истинным значением измеря-
емой физической величины АИ:
Ь = А-АИ (5.4)
Если истинное значение измеряемой величины неизвестно, вме-
сто него используют действительное значение измеряемой величи-
ны Лд:
А = Л-ЯД. (5 5)
Абсолютная погрешность СИ (5 4) и (5.5) выражается в едини-
цах измеряемой физической величины и имеет знак.
314
Глава 5. Измерение технологических параметров
Рис. 5.6. Статические характе-
ристики измерительного пре-
образователя: действительная
уд(х) и номинальная ун(х)
Абсолютная погрешность измеритель-
ного преобразователя может быть выра-
жена в единицах входной и выходной
величины и характеризует отличие дей-
ствительной характеристики преобразо-
вания уд(х) от номинальной ун(х).
Абсолютная погрешность измери-
тельного преобразователя в единицах
входной величины (по входу) определяет-
ся как разность между значением вход-
ной величины хн, найденным по действи-
тельному значению выходной величины
уд и номинальной статической характе-
ристике, и действительным значением
входной величины хЛ (рис. 5.6):
^ВХ -\д •
(5.6)
Абсолютная погрешность измерительного преобразователя в еди-
ницах выходной величины (по выходу) представляет собой разность
между значением выходной величины ун, определяемой по действи-
тельному значению входной величины хд при помощи номинальной
характеристики, и действительным значением величины на выходе
преобразователя уП (см. рис. 5.6):
А вых Ун У а •
(5-7)
Относительная погрешность измерения выражается отношением
абсолютной погрешности к результату измерений или к действи-
тельному значению измеренной физической величины;
б = - • 100 % или 8 = — 100 %.
Л Лд
(5.8)
Аналогично выражается относительная погрешность средств из-
мерений и измерительных преобразователей.
Приведенная погрешность средства измерений — относительная
погрешность, выраженная отношением абсолютной погрешности СИ
к условно принятому значению величины, постоянному во всем
диапазоне измерений или в части диапазона:
8Прив = -7^- 100 %,
'’норм
(5.9)
5.2. Основные термины и определения метрологии
315
Примечание
Условно принятое значение величины называют нормирующим значе-
нием Лнорм. В качестве нормирующего значения принимается значение, ха-
рактерное для данного вида средств измерений. Для средства измерений,
нижний предел диапазона измерения которых Лтп выше нуля, нормирую-
щее значение часто принимается равным верхнему пределу измерения Лпих,
если же нижний предел диапазона измерения равен нулю или ниже нуля,
то нормирующее значение может приниматься равным диапазону измере-
ния (Лпих - ^min)- Правила выбора нормирующего значения устанавлива-
ются стандартами.
Приведенную погрешность (5.9) обычно выражают в процентах.
Класс точности средств измерений — обобщенная характеристи-
ка СИ, определяемая пределами допускаемых основной и дополни-
тельных погрешностей, а также другими свойствами СИ, влияющи-
ми на их точность
Правила обозначения классов точности устанавливаются стан-
дартами. Одним из распространенных вариантов является обозначе-
ние класса точности числом, совпадающим со значением допускае-
мой основной приведенной погрешности:
кт = Алах.100%> (5 10)
'Чюр.м
где КТ — число, обозначающее класс точности; Дтах — допускаемая
основная абсолютная погрешность.
Замечание
Класс точности позволяет судить о том, в каких пределах находится
погрешность СИ одного типа, но не является непосредственным показате-
лем точности измерений, выполняемых с помощью каждого из этих средств.
Это очень важно при выборе СИ в зависимости от заданной точности из-
мерений. Класс точности СИ конкретного типа устанавливают в стандар-
тах или других нормативных документах.
Классификация погрешностей измерений может быть осуществ-
лена по разным признакам.
Причинами возникновения погрешностей являются несовершен-
ство методов измерения, средств измерения и органов чувств на-
блюдателя (оператора).
Инструментальная погрешность измерения — составляющая по-
грешности измерения, обусловленная погрешностью применяемого
средства измерений.
Замечание
Появление погрешностей СИ объясняется рядом причин: отличием
параметров элементов и узлов от требуемых расчетных значений, старени-
316
Глава 5. Измерение технологических параметров
ем элементов и узлов, внутренними шумами, изменениями влияющих ве-
личин и неинформативных параметров входного сигнала (например, при
измерении амплитуды напряжения переменного электрического тока ин-
формативным параметром является амплитуда сигнала, неинформативным —
его частота) и др.
Шумы. Любой сигнал, не несущий полезной информации, называется
шумом и является источником ошибок. Шумы могут быть механическими,
электрическими, магнитными. Их уменьшают, защищая СИ от вибрации,
электростатических, магнитных полей. Внутренние шумы — шумы, возни-
кающие в самом СИ. Уровень внутренних шумов уменьшают, тщательно
конструируя СИ
Погрешность метода измерения — составляющая систематичес-
кой погрешности измерений, обусловленная несовершенством при-
нятого метода измерений
Замечание
Примеры погрешностей контактного метода измерения температуры
приведены в разд. 5.7.2.
Субъективная погрешность измерения — составляющая система-
тической погрешности измерений, обусловленная индивидуальны-
ми особенностями оператора.
По статистическим характеристикам погрешности подразделя-
ются на случайные, систематические и грубые.
Систематическая погрешность измерения — составляющая погреш-
ности результата измерения, остающаяся постоянной или законо-
мерно изменяющаяся при повторных измерениях одной и той же
физической величины.
Случайная погрешность измерения — составляющая погрешности
результата измерения, изменяющаяся случайным образом (по знаку
и значению) при повторных измерениях одной и той же величины,
проведенных с одинаковой тщательностью.
Одной из составляющих случайной погрешности измерения яв-
ляется погрешность средства измерительной техники от гистерези-
са, приводящая к вариации.
Вариация выходного сигнала измерительного преобразователя, ва-
риация показаний измерительного прибора — модуль разности между
выходными сигналами у, и у, измерительного преобразователя или
показаниями измерительного прибора в одной и той же точке х;-
диапазона измерений при плавном подходе к этой точке со стороны
меньших и больших значений измеряемой величины:
* = (5.U)
5.2. Основные термины и определения метрологии
317
Вариация возникает из-за люфта,
сухого трения, явлений гистерезиса, про-
являющихся в неоднозначности хода
статической характеристики измеритель-
ного прибора (или измерительного пре-
образователя) при увеличении и умень-
шении измеряемой (входной) величины
(рис. 5.7). Так же как и погрешность
средства измерения, вариацию часто вы-
ражают в процентах нормирующего зна-
чения Лчорм и определяют по формуле
Рис. 5.7. Неоднозначность ста-
тической характеристики сред-
ства измерения
^3=7^-100%.
'’норм
(5.11а)
Замечание
В высокочувствительных (особенно в электронных) измерительных
приборах вариация может выражаться в том, что показание измеритель-
ного прибора колеблется около какого-то среднего значения (показание
«дышит»).
Промах — погрешность результата отдельного измерения, входя-
щего в ряд измерений, которая для данных условий резко отличает-
ся от остальных результатов этого ряда.
Примечание
Иногда вместо термина «промах» применяют термин «грубая погреш-
ность измерений».
В зависимости от характера изменения измеряемой величины
во времени погрешности подразделяются на статические и дина-
мические.
Статическая погрешность измерений — погрешность результата
измерений физической величины, принимаемой за неизменную на
протяжении времени измерения. При этом предполагается, что все
переходные процессы в СИ завершены.
Динамическая погрешность измерений — погрешность, возникаю-
щая при измерении изменяющейся физической величины.
В зависимости от условий измерения погрешности подразделя-
ются на основные и дополнительные.
Основная погрешность средства измерений — погрешность сред-
ства измерений, применяемого в нормальных условиях.
Дополнительная погрешность средства измерений — погрешность
средства измерений, возникающая дополнительно к основной по-
грешности вследствие отклонения какой-либо из влияющих вели-
318 Глава 5. Измерение технологических параметров
чин от нормального ее значения или из-за ее выхода за пределы
нормальной области значений.
Замечание
На первый взгляд кажется (см. рис. 5.1, б), что если возмущающие
воздействия </(т), вызванные изменением влияющих величин, равны нулю,
то это гарантирует точное преобразование входной величины х(т) в выход-
ную величину у(т). Однако преобразование текущего значения измеряемой
величины первичным измерительным преобразователем в сигнал измери-
тельной информации не выполняется строго в соответствии с номиналь-
ной статической характеристикой. Например, преобразование реальной тер-
мопарой температуры рабочего спая (входной величины) в ТЭДС (выход-
ную величину) отличается от номинальной статической характеристики
преобразования, даже если температура свободных концов термопары рав-
на О °C. То есть даже при выполнении условия </(т) = 0 любой реальный
первичный измерительный преобразователь вносит некоторую погрешность.
На рис. 5.1, б она представлена в виде случайной функции времени и(т),
которая накладывается на полезный сигнал у(т) измерительной информа-
ции. Случайная функция времени и(т) — помеха, и она моделирует не только
случайную погрешность первичного измерительного преобразователя, но
и электрические наводки в соединительных проводах, вызванные магнит-
ными полями электросилового оборудования.
5.2.9. Государственная система обеспечения
единства измерений
Единство измерений — состояние измерении, характеризующее-
ся тем, что их результаты выражаются в узаконенных единицах, раз-
меры которых в установленных пределах равны размерам единиц,
воспроизводимых первичными эталонами, а погрешности результа-
тов измерений известны и с заданной вероятностью не выходят за
установленные пределы.
Обеспечение единства измерений — деятельность метрологичес-
ких служб, направленная на достижение и поддержание единства
измерений в соответствии с законодательными актами, а также пра-
вилами и нормами, установленными государственными стандарта-
ми и другими нормативными документами по обеспечению един-
ства измерений.
Государственная система обеспечения единства измерений (ГСИ) —
комплекс нормативных документов межрегиональных и межотрас-
левых уровней, устанавливающих правила, нормы, требования, на-
правленные на достижения единства измерений в стране (при тре-
буемой точности), утверждаемых Госстандартом страны.
Поверка СИ — установление органом государственной метроло-
гической службы пригодности СИ к применению на основании эк-
спериментально определяемых метрологических характеристик и
подтверждения их соответствия обязательным требованиям.
5.3. Динамические свойства средств измерительной техники
319
5.3. ДИНАМИЧЕСКИЕ СВОЙСТВА
СРЕДСТВ ИЗМЕРИТЕЛЬНОЙ ТЕХНИКИ
5.3.1. Динамические характеристики
Динамические характеристики определяют свойства средств из-
мерений при измерении изменяющейся во времени величины.
Динамическую характеристику, полностью описывающую при-
нятую математическую модель динамических свойств средства из-
мерений и позволяющую определить реакцию средства измерений
на любое изменение входного сигнала, называют полной динамичес-
кой характеристикой.
К полным динамическим характеристикам линейных средств
измерений относят:
• дифференциальное уравнение;
• передаточную функцию W\s);
• частотную передаточную функцию WX/id);
• переходную характеристику Л(т);
• импульсную переходную характеристику w(t);
• совокупность амплитудной А(ы) и фазовой <р(ю) частотных ха-
рактеристик;
• амплитудную частотную характеристику Л(ю) (только для ми-
нимально-фазовых средств измерений).
Примечание
Минимально-фазовое средство измерений — средство измерений, ФЧХ
и АЧХ которого однозначно функционально взаимосвязаны (см. разд. 3.2.3).
Способы определения динамических характеристик линейных
систем описаны в гл. 4.
К частным динамическим характеристикам аналоговых средств
измерений, рассматриваемых как линейные, относят любые функ-
ционалы или параметры полных динамических характеристик.
Примечание
Понятие «функционал» возникло в вариационном исчислении и озна-
чает переменную величину, зависящую от одной или нескольких функций
(откуда и название).
Примерами частных динамических характеристик являются:
• время переходного процесса (время реакции) тпп;
• коэффициент демпфирования С;
• постоянная времени Т',
• значение резонансной частоты юр;
320
Глава 5. Измерение технологических параметров
• значение АЧХ на резонансной частоте Л(шр);
• полоса пропускания (см. разд. 3.2.3);
• максимальная частота измерений (для АПП и ПИП).
Примечание
Время переходного процесса тпп (называемое также временем реакции сред-
ства измерений) — время, прошедшее с момента скачкообразного изменения
входного сигнала до момента, начиная с которого выходной сигнал отличает-
ся от установившегося значения не более чем на заданную величину.
Большинство средств измерении (включая измерительные преоб-
разователи) приближенно соответствуют по своим динамическим свой-
ствам статическим звеньями нулевого, первого и второго порядка или
системе из последовательно соединенных звена запаздывания и ста-
тического звена. Например, потенциометрические преобразователи
со стеклянным измерительным электродом, термопары, термоэлект-
рические преобразователи сопротивления обладают заметной инер-
ционностью, и их динамические свойства определяются динамичес-
ким уравнением статического (инерционного) звена первого поряд-
ка. Динамические свойства поплавкового уровнемера, плотномера
определяются колебательным звеном второго порядка.
Динамические характеристики типовых динамических звеньев
подробно обсуждались в разд. 3.3. Отметим еще раз лишь некоторые
особенности поведения средств измерений в динамическом режиме.
Преобразователи с линейной характеристикой первого порядка
могут быть охарактеризованы одной величиной — постоянной вре-
мени Т, а преобразователи с линейной характеристикой второго
порядка — двумя величинами: коэффициентом демпфирования £ и
постоянной времени Т (или собственной угловой частотой ш0 = 1/7Э-
Какой из этих типов преобразователей использовать, зависит в боль-
шей степени от характера измеряемой величины.
В качестве примера полных динамических характеристик средств
измерений можно привести переходные характеристики измеритель-
ных преобразователей первого (рис. 5.8) и второго порядка (рис. 5.9).
Рис. 5.8. Переходная харак-
теристика (2) линейного пре-
образователя первого поряд-
ка на входное единичное сту-
пенчатое воздействие (/)
5.3. Динамические свойства средств измерительной техники
321
Рис. 5.9. Влияние демпфи-
рования (/ — слабое; 2 —
критическое; 3 — сильное)
на переходную характерис-
тику линейного преобразо-
вателя второго порядка
Замечание
Измерительные преобразователи должны иметь реакцию (и не очень
быструю, и не очень медленную), обеспечивающую наибольшую точность
измерений в условиях конкретного применения
Переходная характеристика на рис. 5.8 является экспонентой,
что означает: теоретически выходной сигнал преобразователя ни-
когда не достигнет своего конечного значения. Но по прошествии
времени, равного 4Г, текущее значение сигнала отличается от ко-
нечного менее чем на два процента. Поэтому практически можно
считать, после 4 Г выходной сигнал измерительного преобразовате-
ля достиг конечного значения, т. е. время переходного процесса (вре-
мя реакции) тпп = 4Т.
Промежуток времени, прошедший между моментами достиже-
ния выходным сигналом преобразователя, соответственно 10 % и 90 %
его конечного значения, называют временем нарастания.
На рис. 5.9 показано влияние демпфирования на переходную
характеристику линейного измерительного преобразователя второго
порядка. Можно выделить три типа демпфирования: слабое 1, кри-
тическое 2 и сильное 3. Для слабо демпфированных средств измере-
ний характерна колебательная переходная характеристика. При кри-
тическом демпфировании конечное значение выходного сигнала
достигается гораздо быстрее, чем при сильном демпфировании. Ес-
тественно, что переходная характеристика с критическим демпфи-
рованием 2 представляется идеальной переходной характеристикой
линейного измерительного преобразователя второго порядка. Вре-
мя реакции в этом случае наименьшее.
5.3.2. Динамические погрешности
При измерении в динамических условиях возникают динами-
ческие погрешности, обусловленные инерционностью первичных из-
мерительных преобразователей
11 Беспалов А. В . Харитонов Н. И
322
Глава 5. Измерение технологических параметров
Результаты измерения (или преобразования) величины, меняю-
щейся во времени, могут оказаться искаженными, помимо стати-
ческих погрешностей и погрешностей метода, погрешностью еще
одного вида, возникающей только в динамическом режиме, — дина-
мической погрешностью. Под динамической погрешностью понима-
ют разность между погрешностью СИ в динамическом режиме и его
статической погрешностью, соответствующей значению величины в
данный момент времени.
Наиболее значительные динамические погрешности измерения —
динамические погрешности восприятия измеряемого параметра пер-
вичным измерительным преобразователем. Они определяются не
только конструкцией измерительного преобразователя, но также и
особенностями его установки, подключения и условиями измере-
ния. Например, при измерении температуры на величину динами-
ческой погрешности влияют условия теплообмена между первич-
ным измерительным преобразователем и измеряемой средой, кото-
рые, в свою очередь, зависят от рода измеряемой среды (газ, жидкость,
пар), ее параметров (температуры, давления, скорости движения),
расположения первичного измерительного преобразователя по от-
ношению к потоку и т. д.
Рассмотрим несколько вариантов измерения температуры в ре-
акторе, полагая, что в некоторый момент времени произошло ее
ступенчатое изменение.
Первый случай. На рис. 5.10, а показаны измерение темпе-
ратуры среды в реакторе стеклянным термометром расширения и
динамическая погрешность («недоход») термометра к моменту вре-
мени тР По своим динамическим свойствам рассматриваемое СИ
является статическим звеном первого порядка. Его динамическая
погрешность обусловлена инерционностью, характеризуемой посто-
янной времени. Для того чтобы изменилось показание термометра
при изменении измеряемой температуры, термометр должен при-
нять от измеряемой среды некоторое количество теплоты, а на это
требуется время.
Второй случай. По технологическим соображениям измере-
ние температуры выполняется не в самом реакторе, а в технологичес-
ком трубопроводе (рис. 5.10, б), по которому выводится продукт из
реактора. При таком варианте измерения температуры в измеритель-
ной системе возникает транспортное запаздывание, и рассматри-
ваемое СИ по своим динамическим свойствам представляет собой
последовательное соединение звена запаздывания (характеризуемо-
го временем запаздывания r^) и статического звена первого поряд-
ка Транспортное запаздывание связано с прохождением контроли-
руемой средой пути от точки отбора до приемника измерительного
прибора (рис. 5.10, б). Транспортное запаздывание пропорциональ-
5.3. Динамические свойства средств измерительной техники
323
II
Рис. 5.10. Переходные характеристики средства измерения (измеритель-
ного прибора):
а — средство измерения представлено статическим звеном первого по-
рядка; б — в средстве измерения присутствует транспортное запаздыва-
ние; в — средство измерения представлено апериодическим статичес-
ким звеном второго порядка; / — гильза; 2 — резервуар с термометри-
ческой жидкостью
324
Глава 5. Измерение технологических параметров
но длине пути «ав» и обратно пропорционально скорости потока в
трубопроводе. При отсутствии перемешивания в трубопроводе пе-
реходная характеристика рассматриваемого СИ будет иметь вид, по-
казанный на рис. 5.10, б. Динамическая погрешность, обусловлен-
ная транспортным запаздыванием, к моменту времени т( будет мак-
симальной. При т > динамическая погрешность обусловлена
инерционностью, характеризуемой постоянной времени. Итак, динами-
ческую погрешность в этом примере можно охарактеризовать с по-
мощью двух показателей: времени транспортного запаздывания ТзаП и
постоянной времени Т.
Третий случай. Измерение температуры среды в реакторе
предусматривает защиту термометра, для чего термометр помещают в
толстостенную гильзу. Это означает, что СИ, воспринимающее теп-
лоту измеряемой среды, состоит из двух тепловых емкостей (гильзы 1
и резервуара с термометрической жидкостью 2) и сопротивления для
перехода теплоты из одной емкости в другую (воздух, отделяющий
резервуар с термометрической жидкостью от гильзы) (рис. 5.10, в)
На динамическую погрешность СИ влияют как величины этих ем-
костей, так и сопротивление передачи теплоты в гильзе и переход
теплоты от гильзы к ртути. При таком варианте измерения темпера-
туры рассматриваемое СИ по своим динамическим свойствам пред-
ставляет собой апериодическое звено второго порядка с коэффици-
ентом демпфирования £> 1. Переходная характеристика такого СИ
имеет вид S-образной кривой. Динамическая погрешность в момент
времени ть обусловленная инерционностью, показана на рис. 5.10, в.
Переходную характеристику (рис. 5.10, в) можно заменить ха-
рактеристикой более простой формы, как это выполнялось при рас-
смотрении свойств объектов (см. рис. 4.32, а). Для этого к S-образ-
ной кривой разгона в точке перегиба i проводят касательную. Это
позволяет количественно охарактеризовать динамическую погреш-
ность СИ с динамическими свойствами апериодического звена вто-
рого порядка двумя вышеназванными показателями: временем за-
паздывания и постоянной времени Т.
Из сравнения рис. 5.10, а, б и в можно заключить, что наиболь-
шая динамическая погрешность при измерении температуры в ре-
акторе характерна для СИ, в котором присутствует транспортное
запаздывание (рис. 5.10, б).
5.4. ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
Измерительное преобразование играет крайне важную роль в
процессах измерения и может осуществляться многочисленными
способами. Хотя входные сигналы измерительных преобразователей
5.4. Измерительные преобразователи
325
весьма разнообразны, число физических величин, применимых в
качестве выходных сигналов, ограничено.
Преобразование основано на физических и физико-химических
явлениях, определяющих зависимость между входными и выходны-
ми сигналами измерительных преобразователей. В настоящее время
применяется большое число измерительных преобразователей раз-
личных принципов действия: емкостный, пьезоэлектрический, тен-
зорезистивный, потенциометрический, термисторный, эффекты
Холла. Кориолиса и др.
Замечание
Наиболее широко используется около тридцати традиционных физи-
ческих явлений и эффектов, на основе которых сконструированы датчики.
В результате разработки новых методов усиления сигналов расширяется
выбор физических эффектов. Расширение номенклатуры материалов от-
крывает новые возможности преобразования физических величин. Извест-
но более 400 физических явлений, которые можно положить в основу со-
здания новых средств измерений. Быстрое развитие полупроводниковой
электроники часто изменяет подход к построению измерительных преоб-
разователей.
Измерительные преобразователи разделяются также по виду
энергии (механическая 1, электрическая 2, магнитная 3, тепловая 4,
энергия излучения 5, химическая 6). На рис. 5.11 представлены
возможные комбинации входного (или измеряемого) сигнала, вы-
ходного сигнала и сигнала возбуждения для различных типов пре-
образователей.
Классификация преобразователей может быть выполнена также
и по их практическому применению (рис. 5.12). Измерительные пре-
образователи, используемые в каждой конкретной области, напри-
мер для измерения давления, температуры, расхода и т. д., рассмат-
риваются в соответствующих разделах этой главы.
Измерительные преобразователи — основные элементы, опре-
деляющие качество и стоимость информационно-измерительных и,
1
2
3
4
5
6
Вход Выход
Возбуждение
1
2
3
4
5
6
1 2 3 4 5 6
Рис. 5.11. Схема к классификации измерительных преобразователей по
виду преобразованной энергии
326
Глава 5. Измерение технологических параметров
Рис. 5.12. Классификация первичных измерительных преобразователей
(датчиков) по виду измеряемой величины
следовательно, управляющих систем. Можно привести следующие
ориентировочные данные:
измерительные преобразователи (датчики) — 40 % общей стоимости;
устройства обработки данных — 20 % общей стоимости;
устройства регистрации, отображения — 40 % общей стоимости.
Современный этап развития этой области техники характеризу-
ется разработкой многофункциональных интеллектуальных датчи-
ков, обеспечивающих высокую точность, надежность, длительный
срок службы.
Под интеллектуальным датчиком следует понимать датчик со
встроенным микроконтроллером (своего рода — «интеллектом»).
Интеллектуальный датчик имеет связь с системой управления, по-
сылает ей не только измерительную информацию, но и результаты
самодиагностики, информацию о сбоях, меняет свое метрологичес-
кое состояние по указанию «центра» и выполняет другие внешние и
внутренние функции.
Интеллектуальный датчик содержит следующие основные ком-
поненты: прецизионный усилитель с регулируемым коэффициен-
том усиления, высокоточный АЦП и микроконтроллер. Естествен-
но, что для подключения интеллектуального датчика к сети сбора
информации, в датчике должно быть предусмотрено средство, под-
держивающее протокол обмена данными согласно какому-либо се-
тевому стандарту. Для обеспечения малого энергопотребления, низ-
кой стоимости, высокой надежности интеллектуального датчика все
его компоненты должны быть интегрированы на одном кристалле.
5.4. Измерительные преобразователи
327
5.4.1. Структура измерительного преобразователя
Структурная схема измерительного преобразователя, включаю-
щая в себя элементы, общие для всех типов преобразователей, пред-
ставлена на рис. 5.13, а. Элементы рисунка, обозначенные пунктир-
ными линиями (входное сопротивление Явх, необходимое для опре-
деления мощности внешнего источника питания в пассивных
измерительных преобразователях), в активных (или автогенерирую-
щих) измерительных преобразователях отсутствуют.
В таком представлении измерительный преобразователь можно
рассматривать как совокупность чувствительного элемента (ЧЭ) и
преобразующего элемента (ПЭ).
Чувствительный элемент воспринимает измеряемую величину и
преобразует ее в другую физическую величину. Далее промежуточ-
ный измерительный преобразователь (преобразующий элемент) пре-
образует физическую величину в электрический сигнал, который
отражает значение измеряемой величины.
Замечание
Не всегда можно разделить чувствительный и преобразующий элемен-
ты измерительного преобразователя, как это сделано на рис. 5.13, а. Неко-
торые элементы преобразователей могут выполнять одновременно несколько
функций. Например, в интегральных датчиках, построенных на базе техно-
логий микроэлектроники и микромеханики, чувствительный элемент ин-
тегрирован с промежуточными устройствами преобразования и нормали-
зации сигналов, обеспечивая тем самым малые габаритные размеры и вы-
сокую надежность.
а
б
Рис. 5.13. Схема первичного измерительного преобразователя (а):
ЧЭ — чувствительный элемент, ПЭ — преобразующий элемент, —
входное сопротивление, Явых — выходное сопротивление, — сопро-
тивление источника питания, Ян — сопротивление нагрузки;
упрошенная схема измерительной системы (б):
1 — первичный измерительный преобразователь; 2— согласующее уст-
ройство; 3 — выходное устройство (индикатор)
328
Глава 5. Измерение технологических параметров
Другими возможными элементами измерительного преобразо-
вателя являются устройства формирования выходного сигнала и
питания (см. рис. 5.13, а). Преобразователь подключается к источни-
ку питания (может быть внутренним или отсутствовать) и нагрузке.
За исключением активных преобразователей, питание (или источник
напряжения, или источник тока) требуется преобразователю, чтобы
обеспечить его точную работу. Сопротивление преобразователя /?вх
по отношению к источнику питания с сопротивлением Лп выступает
в качестве входного сопротивления. Сопротивление проводов, со-
единяющих источник питания с преобразователем, всегда рассмат-
ривается как часть сопротивления источника питания Выходное
сопротивление преобразователя ЛВЬ1Х — это сопротивление на вы-
ходных клеммах преобразователя. Общее сопротивление цепи, под-
ключаемой к выходным клеммам преобразователя, является сопро-
тивлением нагрузки преобразователя RH. Сопротивление проводов,
соединяющих преобразователь с нагрузкой, рассматривается как часть
сопротивления нагрузки. Согласование преобразователя с измери-
тельной системой осуществляется с учетом рассмотренных сопро-
тивлений.
На рис. 5.13, б приведена упрощенная схема измерительной си-
стемы с использованием первичного преобразователя 1. Согласую-
щее устройство 2 изменяет сигнал преобразователя, например, уси-
ливает или формирует его в соответствии с требованиями выходно-
го устройства 3 (индикатора или устройства памяти).
5.4.2. Надежность измерительных преобразователей
Точность измерений физической величины, выполняемых из-
мерительной системой, определяет, в первую очередь, качество уп-
равления. Как правило, измерительные преобразователи использу-
ются в химической технологии в условиях, далеких от идеальных.
При выборе измерительных преобразователей необходимо учиты-
вать их надежность и условия эксплуатации (изменение температу-
ры окружающей среды, ускорения, удары, вибрация, коррозия из-
меряемой среды и т. д.). Под надежностью понимают способность
измерительного преобразователя правильно работать в условиях эк-
сплуатации в течение определенного времени.
Внешние условия влияют как на измерительные преобразовате-
ли, так и на линии связи между измерительными преобразователя-
ми в ИИС
Измерительные преобразователи должны точно выполнять свои
функции не только в момент ввода их в эксплуатацию, но и в тече-
ние всего срока службы ИИС. Долговечность работы преобразова-
телей определяют временем до отказа.
5.4. Измерительные преобразователи
329
Рис. 5.14. Изменение частоты от-
казов компонентов измерительных
преобразователей во времени:
/ — период ранних отказов; II — пе-
риод полезной работы; III — период
износа
Причины отказов компонентов измерительных преобразовате-
лей могут быть самыми разнообразными: неспособность работать в
определенных условиях; внутренние недостатки измерительных пре-
образователей, приводящие к отказам в установленных условиях
жсплуатации.
Со временем все компоненты измерительного преобразователя
(как и любого другого средства измерений) отказывают, но точно
определить, когда и какой компонент измерительного преобразова-
теля откажет, невозможно. Поэтому разработчики и изготовители
пытаются установить вероятность отказов, вводя вероятностные по-
казатели надежности измерительных преобразователей.
Долговечность компонентов измерительного преобразователя
представляют иногда в виде «ваннообразной» кривой (рис. 5.14).
Можно выделить три периода изменения частоты отказов во време-
ни. Первый период — период выжигания, или приработки, характе-
ризуемый тем, что отказы в течение этого периода являются систе-
матическими отказами (конструктивными ошибками, «пороками»
материалов). Для их исключения на практике при изготовлении уже-
сточают контроль качества. Второй период — период полезной рабо-
ты, в течение которого частота отказов минимальна и постоянна:
отказы вследствие приработки устранены, явления износа еще от-
сутствуют, возникают только случайные отказы. Третий период ха-
рактерен для систематических отказов вследствие износа. Это озна-
чает, что нагрузка элементов в течение эксплуатации вызвала такой
износ, что интенсивность отказов вновь возросла. Период износа
является заключительным. В этот период заканчивается полезная
работа компонентов и частота отказов возрастает.
5.4.3. Промежуточные преобразователи
Промежуточным измерительным преобразователем (или сокращен-
но промежуточным преобразователем) называют элемент, занимаю-
щий в измерительной цепи место после первичного измерительного
преобразователя. Основное назначение промежуточного преобразо-
вателя — преобразование выходного сигнала первичного измери-
330
Глава 5. Измерение технологических параметров
тельного преобразователя в форму, удобную для последующего пре-
образования в сигнал измерительной информации для дистанцион-
ной передачи. Наряду с преобразованием измерительной информа-
ции часто возникает необходимость усиления сигнала, например,
его мощности, преобразования выходного сопротивления и пр.
Примером промежуточного измерительного преобразователя мо-
жет служить мембранный блок дифманометра-расходомера. В изме-
рительной цепи измерения расхода он занимает место непосред-
ственно после сужающего устройства и преобразует перепад давле-
ния, образующийся на сужающем устройстве, в соответствующее
перемещение мембраны мембранного блока и связанной с ним си-
стемы (например, механической) измерительного прибора.
На рис. 5.15 приведена классификация промежуточных преоб-
разователей.
При измерении неэлектрических технологических параметров,
таких как расход, давление, перепад давления, уровень, многие пер-
вичные измерительные преобразователи преобразуют измеряемую
Рис. 5.15. Классификация промежуточных преобразователей (преобразу-
ющих устройств)
5.4 Измерительные преобразователи
331
величину в смещение Последующее преобразование смещения в
электрический параметр осуществляется с помощью промежуточ-
ных преобразователей смещения: тензометрических, емкостных,
пьезоэлектрических, индуктивных.
5.4.3.1. Тензометрические преобразователи
Воздействуя на соответственно выполненный упругий элемент,
возможно измерить такие физические величины, как силу, давле-
ние, перемещение и т. д., и, таким образом, при построении преоб-
разователей различных величин использовать все преимущества,
присущие методу тензометрии, основанному на измерении дефор-
маций. Среди тензометров самое широкое применение нашли тен-
зорезисторы (тензодатчики).
Изменения формы какого-либо элемента, обусловленные воз-
действием внешних или внутренних сил, сопровождаются деформа-
цией его поверхности. Закрепленный на этой поверхности тензоре-
зистор воспринимает деформации объекта измерения и изменяет
при этом свое электрическое сопротивление. Изменение сопротив-
ления является мерой возникшей деформации и она может быть
измерена средством измерений, подключенным к тензорезистору.
Тензорезистор является пассивным преобразователем, поэтому на него
необходимо подавать питание от электрического источника напря-
жения (постоянного или переменного).
Чувствительный элемент тензорезистора представляет собой ре-
шетку, выполненную из тонкого электрического проводника. В обыч-
ном исполнении решетка заделана в тонкопленочную полимерную
основу, электрически изолирующую ее от объекта измерения, пре-
дающую ей деформацию и защищающую от повреждений.
Тензорезисторы имеют малые размеры, малую массу (около
10...500 мг) и малую жесткость. Поэтому динамическая и статичес-
кая характеристики даже небольших объектов измерения практи-
чески стабильны, что является особым преимуществом тензорезис-
тора по сравнению с другими тензометрами.
Различают металлические и полупроводниковые тензорезисторы.
Тензорезисторы с металлической решеткой. Если такой тензорезис-
тор подвергнуть растяжению (или сжатию) вдоль решетки, то его элек-
трическое сопротивление изменяется в соответствии с зависимостью
ДЛ/Ло = kM/L0 = кг, (5 12)
где ДА = L — Lq — разница между длиной элемента L после приложе-
ния к нему силы, действующей в продольном направлении, и между
его начальной длиной Ьо. Положительное или отрицательное значение
относительной деформации е соответствует растяжению или сжатию.
332
Глава 5. Измерение технологических параметров
Относительное изменение сопротивления терморезистора про-
порционально относительной деформации, причем коэффициент
пропорциональности к характеризует чувствительность тензорезис-
тора, определяемую экспериментально изготовителем.
Из (5.12) следует:
Д£/£о ‘
(5.13)
Примечание
Коэффициент тензочувствительности к связан с выражением Пуас-
сона:
к = 1 + 2 ц,
где ц — модуль упругости Юнга.
Для большинства металлов значение ц лежит в диапазоне
0,25...0,35, при этом к изменяется в пределах от 1,5 до 1,7. Сплавы,
используемые для приготовления тензорезисторов, имеют к в пре-
делах от 2 до 5.
Решетки тензорезисторов изготовляют либо методом фототрав-
ления из тонкой фольги (толщиной 3...5 мкм), либо из проволоки и,
соответственно, выделяют металлические тензорезисторы — прово-
лочные и фольговые.
Проволочные тензорезисторы могут быть наклеиваемыми и не-
наклеиваемыми. Ненаклеиваемый проволочный тензорезистор состо-
ит из четырех проволочных секций, намотанных на рамки, ориен-
тируемых так, что давление, нормальное к их плоскости, вызывает
их деформацию, увеличивая напряжение в двух секциях, а в двух
других, наоборот, уменьшает (проволочные секции соединены, об-
разуя плечи моста). Ненаклеиваемые проволочные тензорезисторы менее
чувствительны и имеют большие габариты, чем наклеиваемые.
Наклеиваемые тензорезисторы изготовляют из проволоки диа-
метром 0,0025 см (или менее) и располагают на держателе (рамке)
зигзагообразно (рис 5.16). Такие тензорезисторы реагируют в ос-
новном на деформацию в одном направлении, а именно вдоль их
длины, однако концы петель чувствительны и к поперечной дефор-
мации. Деформацию в нескольких направлениях измеряют тензоре-
зистором в виде многослойной розетки (рис. 5.17). Наклеиваемые
тензорезисторы имеют небольшую площадь поверхности и сопро-
тивления, равные 120 Ом, 350 Ом и 600 Ом, что обеспечивает их
согласование со стандартными мостами, источниками питания и
измерительными системами.
Фольговые тензорезисторы. Тензорезисторы из металлической
фольги наклеиваются на держатель (рамку), или тензорезистор фор-
5.4. Измерительные преобразователи
333
Рис. 5.16. Проволочный тензодатчик
(вид сверху):
/ — проволока; 2 — рамка
Рис. 5.17. Многокомпонентный на-
клеиваемый проволочный тензодат-
чик, изготовленный в виде розетки
(угол 90”)
мируется нанесением слоя металла и фототравлением непосредствен-
но на держатель. Концы петель имеют увеличенное поперечное се-
чение, чтобы уменьшить их сопротивление и снизить нежелатель-
ный эффект поперечной деформации. Пример такого тензорезисто-
ра изображен на рис. 5.18. Фольговый тензорезистор обладает
линейной статической характеристикой, малым гистерезисом, хо-
рошо противостоит ударам, вибрациям, но имеет меньшую чувстви-
тельность, чем полупроводниковые тензорезисторы. Для уменьше-
ния влияния температуры на измерения обычно используют два оди-
наковых тензорезистора в соседних плечах измерительного моста,
причем оба тензорезистора находятся при одной температуре, но
только один из них подвергается растяжению или сжатию.
Полупроводниковые тензорезисторы расширяют возможности при-
менения металлических тензорезисторов: они приблизительно в 50 раз
более чувствительны. Принцип действия полупроводниковых тен-
зорезисторов основан на деформации кристаллической решетки (пье-
зоэлектрический эффект), при этом наблюдается значительно боль-
шее изменение сопротивления, чем в металлических преобразовате-
лях. Значение коэффициента тензочувствительности находится в
пределах 50...200.
Рис. 5.18. Тензодатчик однокомпо-
нентный, изготовленный из фольги
Рис. 5.19. Наклеиваемый кремниевый
тензодатчик:
1 — монокристалл кремния; 2 — контакт
334
Глава 5. Измерение технологических параметров
Устройство. Полупроводниковые тензодатчики изготавливаются
из кремниевых кристаллов, нарезанных в виде волокон. Применя-
ются и наклеиваемая, и диффузионная конструкции. Наклеивае-
мый полупроводниковый датчик по конструкции подобен наклеи-
ваемому металлическому тензорезистору. Диффузионный полупро-
водниковый тензорезистор изготовляется методом диффузионного
легирования. Диффузионный полупроводниковый тензорезистор име-
ет более высокую линейность и меньший гистерезис, чем наклеива-
емый кремниевый тензорезистор (рис. 5.19), но более низкий вы-
ходной сигнал.
5.4.3.2. Емкостные преобразователи
Известно, что емкость конденсатора, образованного параллель-
ными пластинами, равна
еоел (п - 1)Л
h
(5 14)
где и — число пластин; А — площадь одной стороны пластины; h —
толщина диэлектрика; ег — относительная диэлектрическая про-
ницаемость; е0 — диэлектрическая проницаемость вакуума, равная
8,85- IO"11 Ф/м.
Рис 5.20. Емкостные преобразователи:
о — параллельные пластины с переменным расстоянием; б — парал-
лельные пластины с изменяемым перекрытием; в — параллельные пла-
стины с перемещаемым диэлектриком; г — концентрические трубки;
д — емкостный микрофон: 1 — положение недеформированной диа-
фрагмы; 2 — диафрагма деформированная; 3 — неподвижная пластина;
4 — диэлектрик; 5 — ограничивающая полость
5.4. Измерительные преобразователи
335
а — от расстояния между пластинами; б — от эффективной площади
перекрытия пластин; в — от диэлектрической постоянной
Действие емкостных преобразователей основано на зависимости
емкости конденсатора от расстояния между пластинами, или от эф-
фективной площади пластин, или от диэлектрической проницаемо-
сти, которые могут изменяться под действием измеряемой величи-
ны (рис. 5.20). На рис. 5.20, а входной величиной является расстоя-
ние между пластинами. Максимальная чувствительность емкостного
преобразователя соответствует минимальному расстоянию между
пластинами, поэтому предпочтительны большие пластины с малым
расстоянием между ними (рис. 5.21, а).
На рис. 5.20, б представлен преобразователь, в котором эффек-
тивная площадь пластин изменяется путем изменения их частично-
го перекрытия, а рис. 5.21, б показывает, что в этом случае емкость
зависит линейно от изменения эффективной площади пластин, т. е.
линейно зависит от перемещения пластин относительно друг друга.
Линейную зависимость емкости можно получить (рис. 5.21, в), ме-
няя диэлектрическую проницаемость перемещением диэлектрика
между пластинами (рис. 5.20, в). Емкость концентрических тру-
бок, изображенных на рис. 5.20, г, линейно зависит от перекрытия
(рис. 5.21, б). При измерениях переменного давления газа можно
использовать простой емкостный микрофон (рис. 5.20, д).
Емкостные преобразователи имеют отличную частотную характе-
ристику, т. е. их полоса пропускания очень широка. Они могут при-
меняться как для статических, так и для динамических измерений.
Замечание
Емкостные преобразователи чувствительны к температурным колеба-
ниям и могут выдать неправильный сигнал, когда соединительные провода
длинны и обладают заметной емкостью.
5.4.3.3. Пьезоэлектрические преобразователи
Пьезоэффект (открыт в 1880 г. братьями Ж. и П. Кюри) связы-
вает механическую деформацию в кристалле с возникающим в нем
электрическим сигналом. Электрическое напряжение, приложенное
336
Глава 5. Измерение технологических параметров
к пьезоэлектрическому кристаллу, вызывает его механические де-
формации (обратный пьезоэффект) и, наоборот, механическое воз-
действие на кристалл порождает в нем электрическое напряжение
(прямой пьезоэффект). Пьезоэлектрические датчики, действие ко-
торых основано на прямом пьезоэффекте, преобразуют, например,
давление в пропорциональный электрический сигнал.
Пьезоэлектричество наблюдается как в монокристаллических
материалах, например кварце, так и в поликристаллических матери-
алах, например керамике. Монокристаллический кварц имеет более
высокую температурную стабильность, химическую стойкость и
прочность, чем пьезоэлектрическая керамика (пьезокерамика).
В отличие от естественных кристаллов, таких как кварц (или турма-
лин), пьезокерамика не обладает пьезоэлектрическими свойствами
сразу после их изготовления из-за хаотической ориентации элект-
рических диполей. Подвергая пьезокерамику воздействию электри-
ческого поля напряженностью 10...30 кВ/см при температуре ниже
температуры Кюри, можно ориентировать материал так, что он бу-
дет действовать, как монокристалл. Преимущество пьезокерамики:
из нее можно изготовить образцы сложной конфигурации, она хи-
мически стойка и может изготовляться по стандартным технологи-
ям для керамических материалов.
Примечание
Точка Кюри (температура Кюри) — температура фазового перехода,
характеризующегося непрерывным изменением состояния вещества с при-
ближением к точке фазового перехода и приобретением качественно ново-
го свойства в этой точке. Названа по имени П. Кюри, детально изучившего
этот переход у ферромагнетиков. Пьезокерамика по физическим свойствам
представляет собой поликристаллический сегнетоэлектрик. По химическо-
му составу — это сложный оксид, включающий ионы двухвалентного свинца
или бария, а также ионы четырехвалентного титана или циркония. Наибо-
лее распространена группа пьезокерамических материалов типа титаната-
цирконата свинца ЦТС (PZT), на основе титаната бария ТВ-1, титаната
бария кальция ТБК-3, титаната свинца и т. д.
Одним из основных типов пьезокерамических датчиков явля-
ется осевой (механическая сила действует вдоль оси поляризации).
В осевых датчиках пьезоэлемент может представлять собой диск,
кольцо, цилиндр или пластину.
5.4,3.4. Индуктивные преобразователи
Действие индуктивных преобразователей основано на измене-
нии собственной или взаимной индуктивности катушек. Индуктив-
ный преобразователь, широко используемый, в особенности, для
измерения смещений (и тем самым давления или других техноло-
5.4. Измерительные преобразователи
337
Рис. 5.22. Индуктивный преобразователь:
а — электрическая схема; б — конструкция передающего дифференци-
ально-трансформаторного преобразователя (1 — односекционная пер-
вичная обмотка; 2 — секции вторичной (выходной) обмотки; 3 — под-
вижный сердечник; 4 — катушка преобразователя); в — статическая ха-
рактеристика (зависимость напряжения Uот положения сердечника Л);
&h<ral, — рабочий диапазон перемещения сердечника
гических параметров), — линейный дифференциальный трансфор-
матор (ЛДТ) — рис. 5.22.
В основе работы ЛДТ лежит принцип изменения взаимной ин-
дукции между магнитосвязанными катушками, причем именно это
изменение, а не изменение собственной индуктивности подлежит
измерению.
Конструкция (рис. 5.22, а, б). На катушке 4 из немагнитного ма-
териала (например, пластмассы) равномерно размещена первичная
обмотка 1. Вторичная обмотка, намотанная поверх первичной, вы-
полнена в виде двух секций 2 с одинаковым числом витков, причем
эти секции электрически включены навстречу друг другу, т. е. вы-
ходное напряжение есть разность ЭДС, индуцируемых в этих секци-
ях. Внутри катушки находится сердечник 3 из мягкого железа. Шток
сердечника связан с подвижным элементом измерительного преоб-
разователя или осью указателя прибора. Дифференциально-транс-
форматорный преобразователь размещается в цилиндрическом ме-
таллическом кожухе для защиты от внешних магнитных полей (на
рис. не показан).
На рис. 5.22, в изображена зависимость выходного напряжения
от положения сердечника. При малых смещениях напряжение на
выходе ЛДТ изменяется линейно с перемещением сердечника и пре-
терпевает изменение фазы на 180°, когда сердечник проходит через
центральное положение, указывая на направление смещения сер-
дечника.
Примечание
Начало координат — центральное положение сердечника
338
Глава 5. Измерение технологических параметров
Индуктивный преобразователь имеет преимущество, например,
перед потенциометрическим преобразователем, поскольку в нем
отсутствует трение и износ движущихся частей. Индуктивный пре-
образователь применяется для статических и динамических изме-
рений.
Преимущество дифференциального выхода в системах типа ЛДТ
состоит в том, что такие системы характеризуются большим выход-
ным сигналом при равных смещениях, а также и уменьшенными
вариациями выходного сигнала при изменениях температуры, маг-
нитного поля, напряжения и частоты питания.
ЛДТ конструируются для работы при перемещениях сердечника
от ±0,01 см до ±30 см.
5.4.3.5. Преобразователи электрических сигналов
Преобразователи электрических сигналов — вспомогательные
устройства АСУ, осуществляющие эквивалентное преобразование
сигнала: модуляцию, демодуляцию, а также аналого-цифровое и
цифроаналоговое преобразования.
Преобразователи электрических сигналов как типовые элементы
САУ выполняют функции согласующих устройств без изменения ко-
личества информации, содержащегося в преобразуемом сигнале.
Основные технические требования, предъявляемые к преобразовате-
лям электрических сигналов: точность и стабильность преобразова-
ния, а также высокое быстродействие.
Модуляция — изменение по заданному закону во времени пара-
метров, характеризующих какой-либо стационарный физический
процесс, например, изменение по определенному закону амплиту-
ды, частоты или фазы гармонического колебания для внесения в
колебательный процесс требуемой информации.
На рис. 5.23 приведена блок-схема гармонических преобразова-
телей. Гармонический модулятор (рис. 5.23) выполняет следующее
Ц.(т) = t/mcos(<oor) LL(t) = Umcos(<o0T)
Рис. 5.23. Схема передачи сигнала с использованием гармонических пре-
образователей: СЦт) — напряжение несущей, или опорной, ча-
стоты (0о
5.4. Измерительные преобразователи
339
нелинейное преобразование. Входной сигнал Цт) модулирует несу-
щую (или опорную) частоту 0)о, в результате выходное модулирован-
ное напряжение
имОД (*) = U (т) = и (т)ит cos(w0t), (5.15)
где Um — амплитуда модулирующего сигнала; tZ.(x) — модулирую-
щее напряжение.
Демодуляция — преобразование электрических колебаний, в ре-
зультате которого получаются колебания более низкой частоты. Ус-
тройство, выполняющее обратное преобразование модулированного
сигнала в инфранизкочастотный сигнал, называют демодулятором
(рис. 5.23).
Примечание
Подробнее о работе и характеристиках модуляторов и демодуляторов
можно узнать из [59].
5.4.4. Нормирующие преобразователи
Для преобразования выходных сигналов первичных измеритель-
ных преобразователей в унифицированные сигналы для взаимного
согласования входящих в АСУ элементов, дистанционной передачи
сигналов по каналам связи служат промежуточные {нормирующие)
преобразователи с унифицированным выходным сигналом, представ-
ляющие собой конструктивно законченные изделия. Принципиаль-
ные схемы основных преобразователей, применяемых в СУ ХТП,
разбираются ниже.
5.4.4.1. Токовые нормирующие преобразователи
для термопар и датчиков ЭДС
Действие токового нормирующего преобразователя для термо-
пар основано на статической автокомпенсации.
Рис. 5.24 иллюстрирует принцип работы токового измеритель-
ного (нормирующего) преобразователя, предназначенного для ли-
нейного преобразования ТЭДС в сигнал постоянного тока, напри-
мер, 0...5 мА.
Примечание
Термопара 1 в состав нормирующего преобразователя не входит.
Токовый нормирующий преобразователь состоит из усилителя 2
с большим коэффициентом усиления {К > 1) с токовым выходом /вых,
устройства обратной связи, состоящего из усилителя обратной свя-
340
Глава 5. Измерение технологических параметров
Рис. 5.24. Упрощенная схема токового измерительного (нормирующего)
преобразователя для термопары. Пояснения см. в тексте
зи 4 и постоянного сопротивления обратной связи /?оС. Резисторы
Я], Я2, Я3 корректирующего моста 5 изготовлены из манганина —
материала с очень низким температурным коэффициентом сопро-
тивления, a Ru — из меди. Выходной сигнал термопары 1 E(t, t0)
корректируется напряжением, снимаемым с диагонали ab моста 5, и
сравнивается с напряжением обратной связи Еос:
Е(г, 0) = Е(г, /0) + ЕаЬ. (5.16)
Нескомпенсированный сигнал
ДЕ = Е(г, 0)-ЕОС (5.17)
усиливается усилителем 2. Выходной ток /вых поступает во внешнюю
цепь с сопротивлением 3 внешней нагрузки Ян и также поступает в
усилитель 4 устройства обратной связи. Токи на выходе и входе уси-
лителя 4 строго пропорциональны между собой. Выходной ток /ос
усилителя обратной связи 4 создает на резисторе сигнал обрат-
ной связи:
Еос = 'осЛк = *ос*оЛых, (5-18)
где Koz — коэффициент передачи усилителя обратной связи
Для усилителя 2 напряжение на выходе ДЕ^ определяется вы-
ражением:
ДЕВЫХ = ЯДЕ (5.19)
Подставим в выражение (5.19) ДЕ из (5.17) и, учитывая (5.18),
получим:
ДЕВЫХ = ЯДЕ = Я[Е(Г, 0)- Я^/J (5.20)
5.4. Измерительные преобразователи
341
Разделив обе части уравнения (5 20) на коэффициент усиления К
и затем пренебрегая значением &иъых/К, поскольку АГ» 1, получим
итоговое выражение:
0),
(5.21)
где к — коэффициент передачи нормирующего преобразователя
Из (5.21) следует, что унифицированный токовый сигнал на выхо-
де нормирующего преобразователя практически пропорционален ТЭДС.
5.4.4.2. Токовые нормирующие преобразователи
для термопреобразователей сопротивления
Действие токового нормирующего преобразователя для термо-
преобразователей сопротивления основано, как и в предыдущем
случае, на статической автокомпенсации.
Рис. 5.25 иллюстрирует принцип работы нормирующего преоб-
разователя, предназначенного для линейного преобразования изме-
ряемого сопротивления R, в сигнал постоянного тока, например,
0...5 мА.
Примечание
Термопреобразователь сопротивления 1 в состав нормирующего пре-
образователя не входит. Отличие рис. 5.25 от рис. 5.24 заключается только
лишь в том, что измеряемое сопротивление включено в неуравновешен-
ный мост, напряжение разбаланса которого подается на вход усилителя 2.
Нормирующий преобразователь для термопреобразователя со-
противления состоит из измерительного неуравновешенного моста
Рис. 5.25 Упрощенная схема токового измерительного (нормирующего)
преобразователя для термометра сопротивления. Пояснения см.
в тексте (ИПС — источник питания стабилизированный)
342 Глава 5. Измерение технологических параметров
с резисторами R2, R2, изготовленными из манганина, усилителя 2
с большим коэффициентом усиления (Л"» 1) с токовым выходом /вых,
усилителя обратной связи 4 и постоянного сопротивления обратной
связи R^. Термопреобразователь сопротивления подключен к изме-
рительному неуравновешенному мосту по трехпроводной схеме, что-
бы устранить влияние сопротивления соединительных линий Rn (под-
робнее об этом см. ниже). Напряжение разбаланса t/ab измеритель-
ного неуравновешенного моста пропорционально изменению
сопротивления терморезистора R, относительно некоторого мини-
мального значения, при котором мост находится в равновесии, т. е
1/аЬ=АГм(/?,-Л,гшп), (5.22)
где Кы — коэффициент пропорциональности.
Перед входом в усилитель 2 напряжение разбаланса t/ab сравни-
вается с падением напряжения на резисторе R^. Выходной унифи-
цированный токовый сигнал fBblx практически пропорционален на-
пряжению разбаланса измерительного неуравновешенного моста ab
и, следовательно, измеряемому сопротивлению Л„ т. е.
. _ (-fy ~ min) (с
1 ВЫХ — П • t /
Таким образом, если R, = R, min, то значение выходного унифи-
цированного токового сигнала равно нулю, а при
Rt ^rmin = Д^тах
значение тока на выходе усилителя 2 за счет подбора соответствую-
щего значения R^ достигает значения 5 мА, причем значения полу-
ченного унифицированного токового сигнала не зависят от измене-
ния сопротивления нагрузки Rn.
5.4.4.3. Электропневматический преобразователь
Электропневматический преобразователь (ЭПП) (рис. 5.26) пре-
образует непрерывный унифицированный сигнал постоянного тока
в унифицированный пневматический сигнал. Входной токовый сиг-
нал преобразователя, например, /вх = 0...5 мА, а выходной пневмати-
ческий сигнал преобразователя рвых = 0,02...0,1 МПа (0,2...! кгс/см2).
Принцип действия электропневматического преобра ювателя ос-
нован на преобразовании тока в пропорциональное усилие с помо-
щью магнитоэлектрического устройства 2—3. Это усилие компен-
сируется со стороны пневматической системы: переменного дрос-
селя типа сопло—заслонка 1, снабженного сильфонной жесткой
обратной связью 4.
5.4. Измерительные преобразователи
343
Рис. 5.26. Упрощенная схема электропневмопреобразователя:
/ — преобразователь типа сопло—заслонка (переменный дроссель),
2 — постоянный магнит; 3 — рычаг с рамкой; 4 — сильфон отрицатель-
ной обратной связи
5.4.4.4. Токовый унифицированный преобразователь
Токовый преобразователь (рис. 5.27) непрерывно преобразует
давление (разрежение), перепад давления, расход, уровень и другие
параметры в унифицированный сигнал постоянного тока. В токо-
вом преобразователе использован принцип электрической силовой
компенсации. Токовый унифицированный измерительный преоб-
разователь состоит из измерительного преобразователя / (например,
дифманометра) и унифицированного токового электросилового пре-
образователя II, представляющих единую конструкцию. В измери-
тельной части I измеряемая величина преобразуется в пропорцио-
нальное усилие, компенсируемое усилием со стороны унифициро-
ванного токового электросилового преобразователя II.
Измеряемый параметр, например, перепад давления Др = рг — рх,
воздействуя на чувствительный элемент (вялую мембрану 1) изме-
рительного преобразователя, преобразуется в усилие /ь создающее
момент М\. Момент М{ через рычажную систему 3 приводит к пере-
мещению сердечника 4 индикатора рассогласования 5 дифференци-
ально-трансформаторного типа (выполняет функцию высокочувстви-
тельного нуль-прибора). Индикатор рассогласования 5 преобразует
перемещение сердечника 4 в напряжение переменного тока, посту-
пающее сначала на вход электронного усилителя 6, а затем на вып-
рямитель 7. Постоянный ток поступает в магнитоэлектрическое си-
ловое устройство 8, 9, где вырабатывается уравновешивающее уси-
344
Глава 5. Измерение технологических параметров
О .5 мА
(4 20 мА)
Рис. 5.27. Схема токового унифицированного измерительного преобразо-
вателя с силовой компенсацией:
/ — мембранный дифманометр; II — унифицированный токовый электро-
силовой преобразователь; / — вялая мембрана дифманометра; 2 — уплот-
няющий сильфон; 3 — основной рычаг; 4 — флажок индикатора; 5 —
( индикатор рассогласования дифференциально-трансформаторного типа;
6— усилитель; 7 — выпрямитель; 8 — постоянный магнит; 9 — катуш-
ка; 10 — вспомогательный рычаг; //— подвижная опора; 12 — пружина
для установки начального значения выходного сигнала; R* — сопротив-
ление внешней нагрузки
лие /2, и в последовательно соединенную с ним линию дистанцион-
ной передачи. Уравновешивающее усилие/2 создает момент М2, ком-
пенсирующий Поскольку М\ пропорционален измеряемой ве-
личине Др, а М2 — току, то
(5 24)
1 = К&р
Рис. 5.28. Структурная схема токового унифицированного измерительно-
го преобразователя с силовой компенсацией;
I— преобразователь измеряемого параметра Ар в усилие II — унифи-
цированный токовый электросиловой преобразователь; 1, 2, 6— рычаг;
3 — дифференциальный трансформатор; 4 — усилитель и выпрямитель;
5 — устройство обратной связи, преобразующее выходной токовый сиг-
нал в усилие обратной связи
5.4. Измерительные преобразователи
345
Выходной токовый сигнал преобразователя /пых — 0 ..5 мА; 0...20 мА
или 4...20 мА.
Структурная схема токовых измерительных преобразователей
приведена на рис. 5.28.
5.4.4.5. Пневматический унифицированный
преобразователь
Пневматические унифицированные измерительные преобразовате-
ли с силовой компенсацией (рис. 5.29) непрерывно преобразуют дав-
ление (разрежение), перепад давления, расход, уровень и другие
параметры в унифицированный пневматический сигнал дистанци-
онной передачи. В пневматическом преобразователе использован
принцип пневматической силовой компенсации. Пневматический
унифицированный измерительный преобразователь состоит из изме-
рительного преобразователя I (например, дифманометра) и унифи-
цированного пневматического силового преобразователя II, представ-
ляющих единую конструкцию. В измерительной части / измеряемая
величина преобразуется в пропорциональное усилие, компенсируе-
мое усилием со стороны унифицированного пневматического сило-
вого преобразователя //.
Измеряемый параметр, например, перепад давления Др = р2 — Р\,
воздействуя на чувствительный элемент (вялую мембрану 1) изме-
Рис. 5.29. Схема пневматического унифицированного измерительного
преобразователя с силовой компенсацией:
I — мембранный дифманометр; И — унифицированный пневмосило-
вой электросиловой преобразователь; / — вялая мембрана дифмано-
метра; 2— уплотняющий сильфон; 3 — основной рычаг; 4, 5— высо-
кочувствительный индикатор рассогласования типа сопло—заслонка,
6 — постоянный дроссель; 7 — усилитель мощности; 8 — сильфон
отрицательной обратной связи; 9 — пружина для установки начально-
го значения выходного сигнала
346
Глава 5. Измерение технологических параметров
рительного преобразователя, преобразуется в усилие /j, создающее
момент М\. Этот момент определяется как М\ = К^р Давление
воздуха рвых в сильфоне отрицательной обратной связи 8 создает
усилие и соответственно момент М2 = К2 рвых. Так как момент М\
пропорционален измеряемому параметру, в данном случае Др, а
— Рвых’ то
Рвых = К^р. (5.25)
Из (5.25) следует, что давление на выходе преобразователя про-
порционально измеряемому параметру.
Настройка преобразователя на заданный предел измерений осу-
ществляется перемещением сильфона 8 вдоль рычага 3. Перестрой-
ка преобразователя с одного предела измерений на другой осуще-
ствляется заменой сильфона отрицательной обратной связи
Структурная схема пневматических преобразователей похожа
на схему на рис. 5.28. Отметим отличие: вместо индикатора рас-
согласования дифференциально-трансформаторного типа, элект-
рического усилителя напряжения и выпрямителя, создающих уни-
фицированный токовый сигнал, применяется пневматический
преобразователь типа сопло—заслонка, выполняющий функцию вы-
сокочувствительного индикатора рассогласования, с пневматичес-
ким усилителем мощности. Для создания уравновешивающего мо-
мента вместо магнитоэлектрического устройства используется
сильфон отрицательной обратной связи. Выходной пневматичес-
кий сигнал пневматического преобразователя находится в диапа-
зоне 0,02 МПа < />вых < 0,1 МПа.
5.4.5. Аналоговые и цифровые преобразователи
Все первичные измерительные преобразователи по своей сути
являются аналоговыми устройствами. Однако в последнее время
наблюдается доминирование цифровых информационных измери-
тельных систем, в связи с чем аналоговый выходной сигнал первич-
ного измерительного преобразователя должен иметь форму, при-
годную для его использования в цифровых ИИС.
Существует три вида сигналов:
1) аналоговый сигнал, являющийся электрическим представле-
нием или аналогом (это ток или напряжение) исходного измеряемо-
го сигнала (технологического параметра);
2) цифровой сигнал, в котором функция (например, частота)
используется для представления исходного измеряемого сигнала;
3) кодированный цифровой сигнал, в котором параллельный
цифровой сигнал, например, разрядностью в 8 бит, представляет
5.4. Измерительные преобразователи
347
значение исходного измеряемого сигнала (технологического па-
раметра).
Примечание
Бит (англ, bit, от binary — двоичный и digit — знак) — двоичная едини-
ца, в теории информации — единица количества информации. Бит в вы-
числительной технике — двоичная цифра, двоичный разряд.
Собственно, эти виды сигналов обычно определяют типы пер-
вичных измерительных преобразователей. Известны измерительные
преобразователи, выход которых является чисто электронным ана-
логом измеряемого сигнала (технологического параметра). Другие
измерительные преобразователи представляют измеряемую величи-
ну в цифровой форме, а третьи — в виде цифрового кода.
Устройства, преобразующие электрический или другой аналого-
вый сигнал в эквивалентный цифровой, называют аналого-цифровы-
ми преобразователями (АЦП). АЦП обычно является частью цифро-
вого измерительного прибора.
Устройства, предназначенные для обратного преобразования (пре-
образование цифрового сигнала в аналоговый), называют цифроана-
логовыми преобразователями (ЦАП).
В системах управления и регулирования с цифровыми ЭВМ при-
меняются самые разнообразные АЦП и ЦАП.
5.4.5.1. Цифроаналоговые преобразователи
Цифроаналоговые преобразователи применяются для формирова-
ния аналогового сигнала, пропорционального входному цифровому
сигналу. ЦАП могут входить составной частью в схемы АЦП.
Цифроаналоговые преобразователи часто применяются в АСУ с
ЭВМ в контуре управления (в частности, с персональными компью-
терами). Кроме того, ЦАП применяются в устройствах АЦП с об-
ратной связью (рис. 5.30), в которых их используют для формирова-
ния аналогового сигнала £41ап(т)’ пропорционального входному циф-
ровому сигналу. Этот сигнал сравнивается с преобразуемым
аналоговым напряжением (/вх(т). Выходной сигнал компаратора ис-
пользуют для управления процессом формирования выходного кода
После достижения равенства напряжений (/цАП(т) = Ц«(т) компара-
Рис. 530. Аналогово-цифровой
преобразователь с цифро-анало-
говым преобразователем (ЦАП)
в цепи обратной связи:
К — компаратор, ЦГ — цифровой ге-
нератор
348
Глава 5 Измерение технологических параметров
Рис. 5.31. Взаимосвязь входного и
выходного сигналов ЦАП:
1 — положительный цифровой входной сиг-
нал; 2 — отрицательный аналоговый выход-
ной сигнал; 3 — отрицательный цифровой
входной сигнал; 4 — положительный ана-
логовый выходной сигнал
тор обеспечивает фиксацию цифрового кода, значение которого пред-
ставляет цифровой эквивалент б(/Ткв) входного напряжения в соот-
ветствующий момент времени (Гкв — такт квантования).
Поскольку цифровой входной сигнал может изменяться только
дискретными шагами, аналоговый выходной сигнал также будет сту-
пенчатым (рис. 5.31). Величина каждой отдельной ступени является
функцией числа разрядов цифровой информации. Входной сигнал может
быть обеих полярностей, поэтому ЦАП должен быть биполярным.
Рассмотрим три варианта цифроаналогового преобразования
сигналов (рис. 5.32).
ЦАП со взвешенным суммированием токов
В этой схеме (рис. 5.32, а) цифровой сигнал в каждом двоичном
разряде вызывает переключение соответствующего ключа, при этом
на резистор подается опорное напряжение Uo. В результате в сум-
мирующем соединении возникает ток, который усиливается и дает
выходное напряжение, пропорциональное этому току, т. е. обратно
пропорциональное сопротивлению в подключенной ветви.
Недостаток такой схемы: ее точность зависит от абсолютной точ-
ности опорного напряжения Uo и резисторов. Поскольку значения
резисторов в соседних ветвях различаются в два раза (слева направо
47?, 2R, R соответственно), их сопротивление может достигать очень
высокого уровня, что затруднит их согласование в широком диапа-
зоне температур.
ЦАП с матрицей R-2R
В ЦАП с матрицей R—2R (рис. 5.32, б) ток в каждом узле делит-
ся пополам, следовательно, ток в суммирующем соединении 4 взве-
шен по закону двоичного кода в соответствии с числом пройденных
5.4. Измерительные преобразователи
349
Рис. 5.32. Схемы ЦАП со взвешенным суммированием токов (а); с мат-
рицей R-2R (б); с токовым выходом (в):
D|, D2, D3 — диоды; TRHTR2,TR3 — транзисторы; S(, S2, S3 — переклю-
чатели; Uo — опорное напряжение; 1 — младший двоичный разряд; 2 —
старший двоичный разряд; 3 — цифровой вход; 4 — суммирующее соеди-
нение; 5 — операционный усилитель; б — аналоговый выход
в
350 Глава 5. Измерение технологических параметров
ветвей. В ЦАП по схеме с матрицей R—2R используется в два раза
больше резисторов, чем в предыдущей схеме, и его точность зависит
от относительных значений сопротивлений, а не от их абсолютных
значений. В таком ЦАП используется два номинала резисторов, что
позволяет выбирать резисторы с необходимыми характеристиками
и согласовывать их температурные вариации
Примечание
У данной схемы имеется еще одно преимущество: ее полное сопротив-
ление по отношению к операционному усилителю не меняется с измене-
нием цифрового входного сигнала (поэтому можно избежать проблемы,
связанные с вариациями характеристик усилителей). И первый, и второй
варианты ЦАП имеют аналоговый выход по напряжению
ЦАП с токовым выходом
Для ЦАП с токовым выходом (рис. 5.32, в) характерно высокое
быстродействие, так как все его транзисторы TRb TR2, TR3 работа-
ют в ненасыщенном режиме. Диоды Db D2, D3 заземлены через
цифровые переключатели, поэтому при отсутствии цифрового сиг-
нала на входе выходное напряжение пренебрежимо мало. Цифровой
сигнал в любом двоичном разряде переводит катод соответствующе-
го диода в логическое состояние 1 подачей на него обратного сме-
щения. Теперь ток может течь через резистор и соответствующий
транзистор к выходному резистору /?ь на котором возникает анало-
говое выходное напряжение. Амплитуда этого напряжения зависит
от входного цифрового сигнала. Сопротивление резисторов меняется
по двоичному закону, следовательно, ЦАП работает в двоичном коде.
В таком ЦАП вырабатывается низковольтный выходной сигнал, для
получения более высоких напряжений необходим усилитель.
Примечание
Обычный ЦАП для работы в биполярном режиме или режиме умно-
жения модифицируют. Полярность выходного сигнала ЦАП зависит от
полярности опорного напряжения Uo и от того, на какой вход операцион-
ного усилителя подан сигнал, поэтому для работы в биполярном режиме
полярность опорного напряжения Uo должна меняться при детектировании
отрицательного входного сигнала Амплитуда выходного напряжения про-
порциональна произведению опорного напряжения Uo и входного цифро-
вого сигнала. Обычно опорное напряжение поддерживается на фиксиро-
ванном уровне, но если оно будет меняться пропорционально второму вход-
ному сигналу, то ЦАП будет выполнять операцию умножения.
Характеристики ЦАП
Разрешение ЦАП — это число ступеней, которое укладывается в
его максимальном выходном сигнале и прямо связано с его числом
разрядов. Например, 10-разрядный ЦАП имеет 1024 ступени и его
разрешение менее 0,1 %.
5.4. Измерительные преобразователи
351
Линейность ЦАП определяется двумя способами. Интегральная
линейность измеряется максимальным отклонением точек, соответ-
ствующих выходному сигналу, от прямой линии, проведенной через
эти точки «наилучшим образом». При хорошей линейности это от-
клонение должно быть меньше или равно половине амплитуды сиг-
нала в младшем двоичном разряде. Дифференциальная линейность
измеряется максимальным отклонением истинных значений от сред-
него значения, определяемого делением максимального аналогово-
го выходного сигнала на 2й, где и — число разрядов в ЦАП
Замечание
Погрешности, обусловленные нарушением линейности, возникают из-
за неточности номиналов сопротивлений, а также падения напряжения на
переключателях. Кроме того, эти параметры изменяются от температуры,
следовательно, линейность зависит также от температуры.
Монотонность. ЦАП может быть монотонным или немонотон-
ным. В монотонном ЦАП аналоговый выходной сигнал с ростом
цифрового входного сигнала всегда возрастает. В немонотонном ЦАП
аналоговый выходной сигнал может уменьшаться в некоторых точ-
ках, несмотря на увеличение цифрового входного сигнала. Это весь-
ма нежелательно, поскольку два различных цифровых входных сиг-
нала могут дать один и тот же аналоговый выходной сигнал.
Точность ЦАП определяется сдвигом аналогового выходного
напряжения от его идеального значения при любом цифровом сиг-
нале на входе. Точность зависит от ряда факторов, в частности от
точности опорного напряжения.
Время установления ЦАП можно определить, как в операцион-
ном усилителе: как время, необходимое для того, чтобы окончатель-
ное значение выходного напряжения оказалось в заданных преде-
лах. Это время зависит от типа используемых переключателей, ха-
рактеристик резисторов и выходного усилителя. Быстродействие ЦАП
ограничивается временем установления.
Глитчи. Аналоговый выходной сигнал ЦАП, конечно, не облада-
ет таким регулярным характером, как это наблюдается на графике
взаимосвязи входного и выходного сигналов цифроаналогового пре-
образователя ЦАП (см. рис. 5.31). Аналоговый выходной сигнал под-
вержен шумовым выбросам, глубоким провалам (или глитчам)
Примечание
Глитч от англ, glitch — пичок; выброс; шумовой всплеск.
На рис. 5.33 показаны примеры глитчей, возникающих в ЦАП.
Они вызваны тем, что переключатели имеют неодинаковые времена
замыкания и размыкания. Это означает, например, что при пере-
352
Глава 5. Измерение технологических параметров
Рис. 5.33. Глитчи, возникающие в ЦАП
ключении от цифрового сигнала 011 к 100 возможно что выходной
сигнал в течение короткого промежутка времени будет равен ООО,
если переключатели переходят от 1 до 0 быстрее, чем от 0 к 1. Дли-
тельность глитча можно уменьшить, применяя более быстродейству-
ющие переключатели. Влияние глитча можно также сгладить, сни-
жая максимальную скорость нарастания выходного напряжения уси-
лителя или фильтрацией. Однако это уменьшает время срабатывания.
Замечание
Для борьбы с глитчами можно также применять схему выборки и хра-
нения, которая может хранить напряжение на время глитча. Применение
такой схемы уменьшает быстродействие ЦАП в целом
Температурный коэффициент ЦАП зависит от стабильности
опорного напряжения, резисторов, переключателей и усилителя.
Изготовляют ЦАП с внутренними источниками питания и внешними.
В последнем случае стабильность ЦАП определяют в предположе-
нии, что температурные уходы опорного напряжения (или напряже-
ния смещения) усилителя пренебрежимо малы.
5.4.5.2. Различные способы
аналого-цифрового преобразования
В операциях цифрового преобразования есть чрезвычайно от-
ветственный момент: любой цифровой сигнал содержит дискретные
значения (или фиксированный шаг в некотором диапазоне значе-
ний или шагов). Аналоговый сигнал принимает любое значение в
этом же диапазоне. Отсюда следует, что для обеспечения точного
преобразования аналогового сигнала в цифровой, необходимо диа-
пазон изменений физической величины разбить на достаточно боль-
шое число интервалов
Дискретные значения в диапазоне изменения цифровой величи-
ны называются уровнями квантования и полностью зависят от числа
5.4. Измерительные преобразователи
353
двоичных разрядов в цифровом слове, используемом для представ-
ления некоторой величины. Например, имеется 24 — 1 = 15 уров-
ней квантования для цифрового представления 4-разрядного сло-
ва. В общем случае «-разрядное слово дает всего 2я уровней в про-
цессе аналого-цифрового преобразования (АЦ-преобразования).
Получается, что разрешающая способность цифровой системы ог-
раничивается в основном уровнями квантования, поскольку отдель-
ное цифровое слово может представить одно отдельное аналоговое
значение.
Большинство АЦ-преобразований основано на принципе гру-
бого превращения аналогового сигнала в цифровой с последую-
щим его преобразованием вновь в аналоговый и сравнением полу-
ченного значения с первоначальным. Если первоначальное значе-
ние аналогового сигнала больше, чем полученное в результате
двойного преобразования, то цифровое значение увеличивается,
если меньше — то уменьшается до тех пор, пока оба значения не
будут одинаковыми.
Параллельный АЦП
Наиболее распространенный и быстродействующий способ —
способ преобразования аналогового сигнала в цифровой, осуществ-
ляемый подачей аналогового сигнала на набор параллельных ком-
параторов 1 (рис. 5.34) с различными порогами срабатывания. В па-
раллельном преобразователе аналоговых сигналов в цифровые ис-
пользуются несколько отдельных элементарных компараторов,
сопоставляющих аналоговый сигнал с некоторым числом опорных
напряжений Uo. Каждое опорное напряжение
UQ соответствует уровню квантования, поэто-
му для 3-разрядного цифрового выхода, пока-
занного на рисунке, должно применяться семь
опорных напряжений (23 — 1 = 7), т. е. семь
компараторов. Опорные напряжения образу-
Цифровой
выход
Аналоговый
вход
12 Беспалов Л В.. ХдрнюновП II
Рис. 5.34. Схема параллельного
преобразователя аналоговых
сигналов в цифровые:
I — компараторы; 2 — шифратор;
— аналоговое входное напряже-
ние, Uo — опорное напряжение
354
Глава 5. Измерение технологических параметров
ются цепочкой резисторов, подключенных к источнику общего опор-
ного напряжения Uo. Точность преобразования зависит исключи-
тельно от точности опорных напряжений. Затем выходной сигнал
поступает в логическую схему (шифратор 2), где превращается не-
посредственно в цифровой двоичный выходной сигнал. Такой про-
цесс преобразования называется импульсным преобразованием.
Следящий АЦП
На рис. 5.35, а показана блок-схема АЦП, в цепи обратной свя-
зи которого применяется ЦАП. Генератор синхроимпульсов 5 пере-
ключает счетчик 3, и когда показание счетчика, поданное через ЦАП
4 по линии обратной связи в компаратор 7, становится равным ана-
логовому входному сигналу, генератор синхроимпульсов блокирует-
ся до следующего цикла и происходит считывание цифрового сиг-
нала на выходе (рис. 5.35, б). Поскольку такая схема начинает от-
счет от нуля, при каждом сбросе импульса ее быстродействие
увеличивают, применяя реверсивный счетчик, следящий за входным
напряжением (счетчик считает в том или ином направлении в зави-
симости от направления изменения аналогового сигнала на входе).
б
сигнала
Рис. 5.35. Схема следящего АЦП с использованием ЦАП для генерации
пилообразного напряжения:
а — блок-схема (1 — компаратор; 2 — вентиль электрический; 3 — N-раз-
рядный счетчик; 4 — ЦАП; 5 — блок синхронизации); б — форма выход-
ного сигнала (1\ — аналоговое входное напряжение)
5.4. Измерительные преобразователи
355
Интегрирующий двухтактный АЦП
Другой способ АЦ-преобразования, называемый интегрирующим
двухтактным, представлен в виде блок-схемы на рис. 5.36, а. Внача-
ле логический переключатель 4 замыкает переключатель S,, так что
неизвестное аналоговое входное напряжение U{ подается в интегра-
тор 6 с постоянной времени интегрирования Та, а импульсы син-
хронизации обеспечиваются вентилем 2(управляющая логика) После
фиксированного числа синхроимпульсов общей продолжительнос-
тью т1 (фиксированное время) логический переключатель 4 замыка-
ет S2 и размыкает S,. В этот момент времени максимальное значе-
ние выходного сигнала интегратора равно
S2 разомкнут S2 замкнут
Рис. 5.36 Схема интегрирующего двухтактного АЦП:
а — блок-схема ( / — компаратор, 2 — вентиль электрический, 3 — N-раз-
рядный счетчик, 4 — логический переключатель, 5 — блок синхрониза-
ции; U{ аналоговое входное напряжение, U„ — опорное напряжение;
б — интегратор); б — форма выходного сигнала (U— выходной сигнал
интегратора)
7*
356
Глава 5. Измерение технологических параметров
Опорный входной сигнал (опорное входное напряжение Uo) имеет
обратную полярность по отношению к аналоговому входному на-
пряжению, так что выходной сигнал интегратора 6 уменьшается от
t/max Д° нуля, и в этот момент вентиль 2 блокируется до начала
следующего цикла сброса. Напряжение на выходе интегратора те-
перь равно нулю, поэтому запишем:
0 = ^-^ (5.27)
Из выражений (5.26) и (5.27) получим:
Ц=Ц>т2Л1- (5.28)
Поскольку Uo и постоянны, показание счетчика 3 (т2) дает
значение неизвестного аналогового входного сигнала. Форма вы-
ходного сигнала интегрирующего двухтактного АЦП представлена
на рис. 5.36, б.
Интегрирующие двухтактные преобразователи (АЦП) обладают
высокой точностью. Они исключают ошибки при распространении
сигналов в схеме и компенсируют изменения частоты синхроим-
пульсов и постоянной времени интегратора, поскольку эти измене-
ния воздействуют в равной степени на оба фронта пилообразного
импульса. Такой преобразователь также компенсирует токи и на-
пряжения смещения компаратора: для этого предусмотрены два пе-
рехода через нуль, обеспечивающие это.
АЦП последовательного приближения
Довольно часто применяют способ последовательных прибли-
жений для быстрого АЦ-преобразования (рис. 5.37). На младший
двоичный разряд регистра вначале ло1ический контроллер подает
логическую I, и если выходной сигнал ЦАП меньше неизвестного
аналогового входного сигнала, выбирается ветвь (1) древовидной
схемы (рис. 5.37, а), в противном случае выбирается ветвь (2). Та-
ким образом, в методе последовательных приближений диапазон
возможных значений входного сигнала сокращается каждый раз на-
половину. Полное число сравнений, необходимое для преобразова-
ния, равно числу разрядов, поэтому этот преобразователь обладает
высоким быстродействием, но зато требует сложных логических схем
для своей конструктивной реализации.
Действие данного АЦП основано на принципе последователь-
ного приближения. Структурная блок-схема показана на рис. 5.37, б.
Сигнал от компаратора 1 прикладывается к регистру (счетчика) 4 с
управляющей логикой (логический контроллер) 2. В выключенном
состоянии регистр устанавливается в 0 и поэтому на выходе ЦАП 4,
находящегося в цепи обратной связи, отсутствует напряжение. В этом
5.4. Измерительные преобразователи
357
(2) 010
^•001
0 1 2 3 4 5 Т
Синхронизирующие циклы
Рис. 5.37. АЦП последовательного приближения:
а — древовидная схема; б — блок-схема (1 — компаратор; 2 — логичес-
кий контроллер; 3 — блок синхронизации; 4 — N-разрядный регистр);
ЦАП — цифро-аналоговый преобразователь — напряжение обрат-
ной связи); в — временная диаграмма для четырехразрядного преобра-
зователя последовательного приближения ({/вх — аналоговое входное
напряжение)
случае любое аналоговое напряжение на входе компаратора вызыва-
ет на его выходе логическую единицу. Вначале тактовые импульсы
воздействуют на логический контроллер и вызывают изменение млад-
шего разряда регистра на 1, из-за чего сигнал на выходе ЦАП увели-
чивается. Если аналоговое входное напряжение все еще выше на-
пряжения на выходе устройства, то выход компаратора остается в
состоянии логической 1. Тогда очередной тактовый импульс логи-
ческого контроллера изменяет на 1 следующий разряд регистра и
таким образом происходит изменение каждого его разряда. Когда
аналоговое входное напряжение после какого-либо шага аппрокси-
мации станет меньше, чем выходное напряжение ЦАП, логический
контроллер устанавливает последний разряд в 0 прежде, чем про-
изойдет изменение следующего разряда на 1. Выходное напряжение
устройства в виде временной диаграммы показано на рис. 5.37, в для
четырехразрядного преобразователя последовательного приближе-
ния (рис. 5.37, б). Продолжительность преобразования любого вход-
ного аналогового сигнала в «-разрядном преобразователе равна дли-
тельности «-периодов тактовых импульсов.
358
Глава 5. Измерение технологических параметров
Примечание
Преобразование напряжения в частоту можно рассматривать как раз-
новидность АЦ-преобразования В этом случае цифровой выходной сигнал
состоит из последовательности импульсов строго определенной длитель-
ности, частота повторения которых определяется значением аналогового
напряжения на входе преобразователя.
Характеристики АЦП
Аналого-цифровой преобразователь — устройство, осуществля-
ющее квантование по времени и уровню аналогового входного сиг-
нала при выбранных такте квантования Гкв и числе двоичных разря-
дов разрядной сетки п. На АЦ-преобразование затрачивается конеч-
ный интервал времени. Как правило, цифровой сигнал на выходе
АЦП запаздывает по отношению к соответствующему мгновенному
значению аналогового сигнала. Сигналы с выходов различных АЦП,
входящих в состав АСУ, обрабатываются ЭВМ (персональными ком-
пьютерами). Работа АЦП характеризуется линейностью, тактом кван-
тования, апертурным временем и точностью преобразования.
Апертурное время - временной интервал, характеризующий нео-
пределенность момента преобразования выборочного значения сиг-
нала и вызывающий появление дополнительной динамической по-
грешности:
ЛТА =1/(2я/2л), (5.28)
где f — частота сигнала (в Гц), который при прохождении через
нулевой уровень изменяется за апертурное время на единицу млад-
шего разряда; п — число разрядов двоичного числа.
Максимальная точность АЦ-преобразования ограничена погреш-
ностью (ошибкой) квантования, зависящей от разрядной сетки (числа
разрядов) и максимальной скорости изменения преобразуемого сиг-
нала. Погрешность преобразования
Де = ±0,5(1 + ЛД7'А)/2иЧ, (5.29)
где к — скорость изменения входного сигнала, выраженная через
число единиц младшего по весу разряда за 1 с.
Примечание
Иногда дают такое определение: ошибка квантования — это наимень-
ший аналоговый входной сигнал, при котором появляется выходной циф-
ровой сигнал
Ошибка дискретизации определяется как разность между анало-
говым напряжением, соответствующим цифровому выходному сиг-
налу, и реальным аналоговым входным напряжением. Наиболее
5 4. Измерительные преобразователи
359
значительна ошибка дискретизации в АЦП с большим временем пре-
образования
В зависимости от вида промежуточного сигнала преобразования
различные АЦП делятся на следующие типы:
• аналог — временной интервал — код;
• аналог — частота — код.
АЦП могут входить в состав дистанционных подсистем много-
объектных АСУ.
В настоящее время разработаны прецизионные интеллектуаль-
ные АЦП, получившие название микроконверторы, сочетающие в
себе возможности высокоточного аналогового ввода/вывода, пред-
варительной обработки данных и организации сетей сбора инфор-
мации датчиков.
Более подробно работа АЦП и ЦАП разобрана в книге (29].
5.4.6. Линии связи
Линии связи — это линии между первичным измерительным преоб-
разователем и другой частью информационно-измерительной системы
(ИИС). Если первичный измерительный преобразователь располагает-
ся на каком-то расстоянии от системы, то необходимо предпринимать
шаги к тому, чтобы линии связи не влияли на эффективность систе-
мы. Для этого в систему встраивается один или более каскадов со-
пряжения сигналов, усиливающий, преобразующий и т. п. малый
выходной сигнал первичного измерительного преобразователя в ана-
лого-цифровой сигнал. Важно, чтобы информация, выдаваемая пер-
вичным измерительным преобразователем, не потерялась при пере-
даче ее к другим частям ИИС. При этом нужно учитывать взаимное
влияние преобразователей и других блоков системы друг на друга.
Примечание
В более широком понимании: линия связи — это среда распространения,
например, электромагнитных волн от источника сигнала к приемнику сигна-
ла. Среда распространения сигнала может быть воздушной, кабельной и т. д.
Источник сигнала, линия связи и приемник сигнала образуют канал связи.
По виду используемой энергии линии связи можно разделить на
пневматические, электрические, волоконно-оптические.
5.4.6.1. Пневматические линии связи
Пневматические линии связи (пневмопроводы), изготавливае-
мые из пластмассовых или металлических трубок, обладают ограни-
ченным быстродействием, оказывая тем самым отрицательное влия-
360
Глава 5. Измерение технологических параметров
ние на качество регулирования. Инерционность пневматической
линии связи зависит от внутреннего диаметра и длины пневмопро-
вода, влияющих на его емкость и сопротивление (т. е. на постоян-
ную времени пневмопровода). Увеличение внутреннего диаметра
пневмопровода, с одной стороны, уменьшает его сопротивление и,
как следствие этого, инерционность линии связи, но, с другой сто-
роны, увеличивает его емкость, тем самым увеличивая инерцион-
ность линии связи. Экспериментально установлено, что оптималь-
ный по динамическим свойствам пневмопровод для пневматичес-
ких линий связи длиной до 300 метров имеет внутренний диаметр
4,8...5,0 мм. Для линий связи длиной до 150...200 метров использу-
ется пневмопровод внутренним диаметром 4,0 мм или 6,0 мм.
Динамику пневмопровода длиной £ можно приближенно пред-
ставить передаточной функцией вида
р“тзапЛ
= |----Г' <5-30)
Гп5 + 1
В выражении (5.30) время запаздывания оценивается как
Ьап=(2-ЗЖ, (5.31)
где v0 — скорость звука в воздухе: постоянная времени пневмопро-
вода Тп = (1 .15) с.
Для устранения запаздывания показаний пневматического из-
мерительного прибора к пневмодатчику добавляют усилитель мощ-
ности.
Оценку влияния параметров пневматических линий связи на
качество работы автоматических систем регулирования при про-
ектировании и наладке производят по величине соотношения по-
стоянных времени линий связи пневмопровода Тп и объекта уп-
равления То:
Тп/Т0 <0,05...0,1.
5.4.6.2. Электрические линии связи
Характеристики параметров электрических линий связи, приме-
няемых довольно часто в химической технологии, например, при
измерении температуры, приведены в табл. 5.2.
Примечание
Для трехпроводной связи используются провода равной длины и сече-
ния. ТСП — термопреобразователь сопротивления платиновый; ТСМ —
термопреобразователь сопротивления медный; ТЭП — термоэлектричес-
кий преобразователь.
5.4. Измерительные преобразователи
361
Таблица 5.2. Параметры линии для соединения измерительного
прибора с датчиком температуры
Тип датчика Длина линии Сопротивление линии Исполнение линии
тсп, тем Не более 100 м Не более 10,0 Ом Трехпроводная
ТЭП (термопара) Не более 20 м Не более 100 Ом Термоэлеюрод- ный кабель
Унифицирован- ный ток Не более 100 м Не более 100 Ом Двухпроводная
Унифицирован- ное напряжение Не более 100 м Не более 5,0 Ом Двухпроводная
При использовании измерительных преобразователей существу-
ет важная проблема: воздействие шумов на измерение и преобразо-
вание сигналов. В любой системе с чувствительными элементами на
вход ИИС поступает слабый измерительный сигнал, который потом
усиливается системой. Поэтому даже незначительный шум может
усиливаться до такой степени, что невозможно будет выполнить точ-
ные измерения. Уровень шумов можно уменьшить до приемлемого
уровня, применяя фильтрацию (см. ниже). Для гарантии хороших
характеристик ИИС необходимо учитывать всевозможные шумы и
проектировать ИИС так, чтобы уменьшить их до уровня, при кото-
ром с ними можно не считаться. Известны различные типы шумов,
действующих в ИИС. Шумы, наводимые первоначально, при под-
соединении проводов между преобразователем и схемой сопряже-
ния, называются взаимными помехами. Они обусловлены емкостной
связью, магнитной или индуктивной связью. Способы подавления
или устранения взаимных помех состоят в соединении измеритель-
ного преобразователя и схемы сопряжения экранированным или
коаксиальным кабелем и его заземлением. Еще один способ соеди-
нения источника сигнала и приемника состоит в применении скру-
ченной пары проводов. Взаимные помехи действуют на каждый про-
водник скрученной пары, но поскольку при скручивании проводов
они в каждой точке направлены навстречу друг другу, то общий
эффект от взаимных шумов равен нулю. Случайные шумы возникают
в самой измерительной системе и обусловлены основными физи-
ческими свойствами ее компонентов. Если взаимные помехи всегда
имеют особые формы или виды, то случайные шумы непредсказуе-
мы и поэтому трудно устранимы.
Все шумы в системе принято характеризовать отношением полез-
ного сигнала и нежелательных шумов, т. е. отношением сигнал/шум:
Мощность сигнала
Мощность шума
362
Глава 5. Измерение технологических параметров
Если система состоит из множества отдельных элементов (пре-
образователя, соединительного кабеля, схемы сопряжения и т. д.) и
каждый элемент имеет свое собственное отношение сигнал/шум
(5.32), то возникает проблема о способе вычисления общего для
системы в целом отношения сигнал/шум. Это возможно выполнить,
если охарактеризовать каждый элемент системы коэффициентом
шума (или показателем шума). Этот коэффициент в общем случае
определяется как
(Мощность сигнала/Мошность шума)вх
(Мощность сигнала/Мощность шума)вых
Когда известны коэффициенты шума каждого элемента системы
в отдельности, можно вычислить общее для системы отношение
сигнал/шум, вычисляя общий коэффициент шума. Примеры расче-
та приведены в )8].
5.4.6.3. Волоконно-оптические линии связи
В современных сложных технологических процессах требуется
контролировать и управлять огромным числом параметров. При этом
для передачи информации и сигналов управления традиционными
методами требуется большое количество кабельно-проводниковой
продукции. Электрические трассы превращаются в технически слож-
ные дорогостоящие сооружения и являются источником неисправ-
ностей и помех.
В конце прошлого века для передачи информации в САУ стала
использоваться волоконная оптика. Поскольку этот вид связи сравни-
тельно новый, а в химической технологии только начинается активно
появляться (примеры: соединение АСУП и АСУ ТП с помощью воло-
конно-оптических кабелей; измерение температуры с помощью мик-
ропроцессорного двухцветного инфракрасного термометра, снабжен-
ного волоконно-оптическим соединительным кабелем, выдержива-
ющим температуру до 200 °C, и интерфейсом), остановимся на нем
несколько подробнее.
Примечание
Термин «волоконная оптика» появился в 50-х годах прошлого столе-
тия, когда в Англии и Голландии был создан гибкий эндоскоп — волокон-
но-оптическое устройство, позволяющее рассматривать внутренние орга-
ны человека.
Достоинства волоконно-оптических кабелей по сравнению с
обычными электрическими кабелями, изготовленными из медной и
алюминиевой проволоки:
5.4. Измерительные преобразователи
363
• значительно меньшие размеры и вес;
• нечувствительность к помехам от
электрических и магнитных полей, со-
здаваемых грозовыми разрядами, элект-
рическими машинами и т. д.;
• неподверженность перекрестным
помехам (даже если свет выходит из по-
врежденного кабеля, он не попадает в
соседний кабель);
• более значительная полоса пропус-
кания и меньшее поглощение по сравне-
нию с обычными кабелями (рис. 5.38),
что позволяет использовать в линиях свя-
зи большой протяженности меньшее ко-
Частота, МГц
Рис. 5.38. Зависимость погло-
щения сигнала от частоты ко-
аксиальным (1) и волоконно-
оптическим (2) кабелями
личество ретрансляторов.
К достоинствам волоконно-оптических кабелей по сравнению с
электрическими коаксиальными кабелями можно отнести и то, что
от первых трудно сделать ответвление, поэтому постороннее вмеша-
тельство легко выявляется.
Волоконно-оптические кабели применяются в системах связи
повышенной надежности. Волоконно-оптические линии связи
(ВОЛС) позволяют в одном волоконном световоде теоретически
организовать несколько тысяч каналов связи (передачи сигналов
информации, управления и т. д.). На ВОЛС можно реализовать как
аналоговые, так и цифровые системы передачи информации и сиг-
налов управления.
Схема волоконно-оптической системы технологического конт-
роля и управления представлена на рис. 5.39. В каналах передачи
информации сигнал (например, электрический) от традиционного
первичного измерительного преобразователя 1 поступает на элект-
ронно-оптический преобразователь 2, состоящий из модулятора 3 и
источника света 4, например, светодиода. Излучение светодиода через
устройство излучения 5 (например, типа «линзы») поступает в све-
товод 6. Аппаратура преобразователя 2 и устройства ввода излуче-
ния в световод 6 выполняют функцию электрооптического преобра-
зователя. Его называют также передающим оптическим модулем, кон-
структивно состоящим из оптической головки и электронной схемы,
Рис. 5.39. Схема волоконно-оптической системы передачи информации.
Пояснения см. в тексте
364
Глава 5. Измерение технологических параметров
основным назначением которой является модуляция излучаемого света.
В оптической головке со светоизлучающим диодом размещаются диод
и модулятор. Излучение выводится из оптической головки наружу
через отрезок оптического волокна, к которому, в свою очередь, при-
соединяется внешнее оптическое волокно. Модулятор смонтирован в
общем корпусе с оптической головкой и представляет собой микро-
электронную схему (преобразователь «напряжение—код»), управля-
ющую током в цепи питания светодиода В оптической головке с
лазерным диодом размещаются лазер, модулятор, фотодиод обратной
связи и электронная схема для стабилизации рабочего режима лазера.
По световоду 6 оптический сигнал, эквивалентный электричес-
кому сигналу первичного измерительного преобразователя 1, через
устройство вывода излучения 7 передается к приемнику информа-
ции (приемному оптическому модулю) 8, который состоит из уси-
лителя 9 и фотодетектора 10. В фотодетекторе оптический сигнал
преобразуется в эквивалентный электрический сигнал, который после
усиления поступает на устройство отображения информации 11 (дис-
плей, измерительный прибор и т. д.). Приемник 8 выполняет функ-
цию оптико-электронного преобразователя.
Аналогично работает канал передачи сигналов управления. В этом
случае устройство 1 является источником сигналов управления, а
устройство 11 является исполнительным устройством, воздействую-
щим на объект управления.
В качестве электрооптического преобразователя используются,
например, светодиоды. Пример конструкции светодиода-излучате-
ля для ВОЛС представлен на рис. 5.40, а.
Свет
\\\
I р । 1 I n ।
Свет
\\\
I n I Р I n I
э б к
Рис. 5.40. Схема светодиода-излучателя для волоконно-оптической связи (с)
1 — металлическая поверхность; 2— изолирующий слой из оксида крем-
ния; 3 — излучающая область (50 мкм); 4 — область рекомбинации элек-
тронов и дырок;
схемы приемников оптического излучения (6) и (в):
б — база; э — эмиттер; к — коллектор
5.4. Измерительные преобразователи
365
Источниками оптического излучения в настоящее время служат
планарные полупроводниковые источники — светоизлучающие и
лазерные диоды. Они формируют направленный световой луч в ди-
апазоне длин волн 0,8... 1,6 мкм, характеризуемом минимальными
потерями в оптическом волокне, и позволяют вводить в оптическое
волокно сигнал достаточно большой мощности (0,05...2 мВт).
В качестве оптико-электронного преобразователя применяются
фотодиоды (рис. 5.40, б) или фототранзисторы (рис. 5.40, в), кото-
рые преобразуют оптический сигнал в электрический и усиливают
его. Фотодетектор должен точно воспроизвести форму оптического
сигнала, не внося дополнительного шума. Фотодиоды, выполнен-
ные из германия, работают при длине волны до 1,8 мкм, из кремния —
до 1,2 мкм, из арсенида галлия — до 0,87 мкм. К основным характе-
ристикам фотодиодов относят: квантовую эффективность (выход),
постоянную времени и чувствительность. Квантовая эффективность
(выход) характеризует эффективность преобразования фотонов в
электрический ток. Постоянная времени фотодиода (фотоприемни-
ка) характеризует его быстродействие. Зная постоянную времени
фотоприемника Тпр, определяют ширину полосы пропускания фо-
топриемника по эмпирической зависимости:
Д/пр = 0,4/Тпр . (5.34)
Из (5.34) следует, что, чем меньше Гпр, тем больше полоса про-
пускания. Чувствительность фотоприемника определяется как от-
ношение изменения фототока к изменению световой (оптической)
мощности:
S = I*/N, А/Вт. (5.35)
В качестве световодов в ВОЛС используются волоконно-опти-
ческие кабели. Волоконно-оптический кабель состоит из оптичес-
кого волокна, силиконового покрытия, внутренней (буферной) обо-
лочки, упрочняющего элемента (например, упрочняющих нитей) и
внешней оболочки из полимера.
Типовая конструкция волоконно-оптического кабеля представ-
лена на рис. 5.41, а. Рабочей частью оптического кабеля является
сердцевина из кварцевой нити 6 диаметром 200 мкм, образующая с
оболочкой 5 оптическое волокно. Кварцевая нить 6 и оболочка 5
обладают различными коэффициентами преломления света. Опти-
ческое волокно покрывают пластиковой оболочкой с внешним за-
щитным покрытием. Наружный диаметр такого волоконно-оптичес-
кого кабеля 500 мкм. На рис. 5.41, б дан пример распространения
света в оптическом волокне, а рис. 5.42 демонстрирует простой со-
единитель оптических волокон.
366
Глава 5. Измерение технологических параметров
Рис. 5.41. Пример конструкции волоконно-оптического кабеля (с) и схе-
ма распространения света в оптических волокнах (б):
1 — внешняя оболочка кабеля из полимера; 2 — упрочняющий элемент;
3 — внутренняя (буферная) оболочка; 4 — силиконовое покрытие; 5 —
оболочка из пластика; 6 — кварцевая сердцевина
Рис. 5.42. Соединитель оптических волокон:
I — концентрическая муфта; 2 — соединитель; 3 — световод в оболочке;
4 — световод без оболочки
ВОЛС применяются в системах с большим объемом передачи и
переработки информации и управляющих воздействий, в которых
используются ПЭВМ и управляющие комплексы.
5.5. ИЗМЕРЕНИЕ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН -
НОСИТЕЛЕЙ ИНФОРМАЦИИ О СОСТОЯНИИ
ХИМИКО-ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
Измерение напряжения, тока и сопротивления как носителей
информации о состоянии ХТП основано на известном соотноше-
нии между силой тока I в проводнике и разностью потенциалов
5.5. Измерение электрических величин
367
(напряжением) U между двумя фиксированными точками (сечения-
ми) этого проводника, установленном Омом:
U = RI. (5.36)
Измерение одного из параметров (5.36) позволяет определить
два других.
Простейшим типом измерительного прибора является магнитоэлек-
трический измерительный прибор с подвижной рамкой (см рис. 5.3, б),
пригодный для измерений постоянного или переменного тока.
5.5.1. Уравновешенные и неуравновешенные мосты
Многие технологические параметры (температура, давление, уро-
вень, расход, состав газовых смесей, концентрация растворов) могут
быть преобразованы соответствующими преобразователями в элект-
рическое сопротивление.
Электрическое сопротивление измеряют с помощью уравнове-
шенных и неуравновешенных мостов.
Принципиальная схема простейшего уравновешенного моста
приведена на рис. 5.43, а. Термопреобразователь сопротивления
величина которого должна быть измерена, и расположенные после-
довательно с ним два сопротивления соединительных линий Rn
Рис. 5.43. Схемы измерительных мостов для измерения сопротивления:
а — уравновешенный мост (двухпроводное подключение термопреоб-
разователя сопротивления Л,); б — уравновешенный мост (трехпровод-
ное подключение Л,): в — неуравновешенный мост (трехпроводное под-
ключение Я,)
368
Глава 5. Измерение технологических параметров
включены в плечо cd уравновешенного моста. Другие плечи моста
состоят из постоянных резисторов R\ и /?3 и переменного калибро-
ванного резистора — реохорда Л2. Все три сопротивления изготов-
лены из манганина. В диагональ ас моста подают напряжение от
источника питания, а к другой диагонали bd моста подключают чув-
ствительный гальванометр, применяемый в качестве нулевого ин-
дикатора для определения нулевой разности потенциалов между точ-
ками bd. Изменяя величину сопротивления реохорда У?2, можно до-
биться равенства напряжения в точках bud, что определяется по
отсутствию тока в диагонали bd нуль-гальванометром (НГ). Такое
положение соответствует равному отношению падения напряжения
в плечах обеих ветвей моста.
Положим, что соединительные провода имеют одинаковое со-
противление Rn Тогда обшее сопротивление соединительных линий
будет 2Rn.
При равновесии моста удовлетворяется равенство:
Л, (/?, + 27?л) =/?2/?3, (5.37)
откуда следует
Rt =(R3/Rl)R2-2R„ (5.38)
В этом случае разность потенциалов Ubd становится равной нулю,
ток не протекает через нуль-гальванометр, стрелка которого уста-
навливается на нулевой отметке. При изменении температуры ме-
няется сопротивление Rt, что приводит к разбалансу моста. Для
восстановления равновесия необходимо (при постоянных сопротивле-
ниях резисторов /?| и /?3 и сопротивлении соединительной линии Ял)
изменить величину сопротивления реохорда Я2, перемешал его под-
вижный контакт. Достаточно отградуировать реохорд R2 и по поло-
жению его подвижного контакта при равновесии моста можно су-
дить о величине сопротивления Rt и. следовательно, об измеряемой
температуре.
Мост, схема которого изображена на рис. 5.43, а, отличается
высокой точностью измерения. Его показания практически не за-
висят от напряжения источника питания. При нулевом отсчете по
нуль-гальванометру погрешности, обусловленные температурой ок-
ружающей среды и посторонними магнитными воздействиями,
практически ничтожны. Но некоторую неопределенность в измере-
ние вносит сопротивление подвижного контакта реохорда А2, а так-
же возможное изменение сопротивления соединительных прово-
дов /?л, поскольку изменяется их температура. Но это означает, что
будут внесены искажения в результаты измерения сопротивления R,
[см. равенство (5.37) и его следствие (5.38)].
5.5. Измерение электрических величин
369
Для устранения погрешности, обусловленной колебаниями со-
противления соединительной линии, термопреобразователь сопротив-
ления подключают к мосту по трехпроводной схеме (рис. 5.43, б).
При такой схеме подключения источник питания подключается к
термопреобразователю сопротивления таким образом, чтобы сопро-
тивления двух соединительных линий Rn оказались включенными в
соседние плечи моста. Условие равновесия моста при трехпровод-
ной схеме включения термометра сопротивления запишется как ра-
венство произведений сопротивлений противолежащих плеч моста:
(R, + RA)Rl = (Л2+Лл)Л3. (5.39)
Но даже и при таком включении термопреобразователя сопро-
тивления в схему моста изменение сопротивления каждой из соеди-
нительных линий приводит к изменению сопротивления обоих про-
тивоположных плеч, что может привести к некоторой ошибке при
измерении температуры. Полностью влияние сопротивления каж-
дой из соединительных линий на показания моста при трехпровод-
ной схеме включения термопреобразователя сопротивления возможно
устранить только в том случае, если каждое сопротивление двух со-
единительных линий R]} будет одинаковым, а мост симметричным,
г. е. будет выполнено условие Л, = /?3.
На рис. 5.43, в показана схема неуравновешенного моста для
измерения сопротивления /?„ включенного по трехпроводной схеме.
В этом случае в диагональ моста вместо НГ включают милливольт-
метр. Напряжение питания моста в диагонали ас должно поддержи-
ваться постоянным (применяется источник стабилизированного
питания — И ПС). Для установочного (номинального) значения на-
пряжения при постоянных сопротивлениях плеч Я,, R2, Ry, RK сила
гока в диагонали моста bd будет иметь определенное значение, что
контролируется милливольтметром. После установки напряжения
Uoc в вершинах моста о и с переключатель переставляют в положе-
ние 1 и измеряют сопротивление R, по силе тока 1М в диагонали
моста bd.
5.5.2. Логометры
Логометры являются приборами магнитоэлектрической системы
и применяются для измерения и записи температуры в комплекте с
термопреобразователями сопротивления по схеме неуравновешен-
ного моста (рис. 5.44). В межполюсном пространстве постоянного
магнита на общей оси укреплены две скрещенные и жестко связан-
ные между собой рамки (рис. 5.45), изготовленные из тонкой мед-
ной проволоки. Эти рамки могут свободно поворачиваться в зазоре,
370
Глава 5. Измерение технологических параметров
Рис. 5.44. Схема измерения сопротивле-
ния логометром
Рис. 5.45. Пример упрощен-
ной конструкции логометра
образованном полюсными наконечниками постоянного магнита и
стальным сердечником цилиндрической формы.
Выточка полюсных наконечников сделана так, что воздушный
зазор увеличивается от центра полюсных наконечников к их краям,
а магнитная индукция уменьшается от центра к краям полюсных
наконечников.
Рамки логометра включены в цепь таким образом, что их враща-
ющие моменты, образующиеся при протекании по ним тока, направ-
лены навстречу друг другу. Подвод тока к рамке производится с по-
мощью маломоментных спиральных волосков (пружины не обозна-
чены на рис. 5.45), которые одновременно служат и для возвращения
стрелки в исходное положение при выключенном напряжении.
Вращающий момент, действующий на рамку, пропорционален
силе тока через нее и магнитной индукции в зоне ее расположения.
Л/| = М2 = к212В2, (5.40)
где к\ и к2 — постоянные коэффициенты, определяемые геометри-
ческими размерами рамок и числом витков проводов в них; В{ и —
магнитные индукции в местах расположения рамок.
Подвижная система прибора стремится к положению равнове-
сия, при котором
= М2; к{1 \ВХ = к212В2,
или
12 в,
(5-41)
5.5. Измерение электрических величин
371
При изменении сопротивления Л, (см. рис. 5.44) изменяется 7(
и, следовательно, отношение ЦЦг в (5.41). Равновесие моментов
нарушается, подвижная система начинает вращаться. Благодаря не-
равномерности магнитного поля одна рамка будет перемещаться в
направлении увеличивающейся, другая — в направлении уменьша-
ющейся напряженности поля. В новом положении подвижной сис-
темы (и стрелки) равновесие моментов наступит, когда выполняет-
ся равенство (5.41).
Очевидно, что угол поворота стрелки прибора определяется от-
ношением токов в обеих подвижных рамках l\Hi, т. е. сопротивле-
нием /?,.
Так как изменение напряжения питания измерительной схемы в
одинаковой степени влияет на 1Х и /2, то показания логометра не
должны зависеть от колебания напряжения источника питания. Но
поскольку спиральные волоски, служащие для подвода тока в рамки
и поворота стрелки, имеют небольшой противодействующий мо-
мент, колебания напряжения источника питания свыше 20 % вызы-
вают заметную погрешность в измерениях.
5.5.3. Милливольтметры
Для измерения напряжения постоянного электрического тока и
электродвижущей силы (например, в качестве вторичных приборов
в термоэлектрических термометрах для измерения ТЭДС термопа-
ры) используются милливольтметры и автоматические электронные
потенциометры.
Милливольтметры — это приборы магнитно-электрической систе-
мы. Принципиальная схема милливольтметра изображена на рис. 5.3, б.
Принцип действия милливольтметра основан на взаимодействии тока,
протекающего по рамке под действием ТЭДС термопары, с магнит-
ным полем постоянного магнита, в которое эта рамка помещена.
Рамка прибора состоит из множества витков тонкой изолированной
медной проволоки и находится между полюсами постоянного маг-
нита. Витки рамки при отсутствии тока параллельны направлению
магнитных силовых линий. При протекании постоянного тока по
рамке, в ней создается магнитное поле. При взаимодействии этого
поля с полем постоянного магнита возникает сила, поворачиваю-
щая рамку в равномерном радиальном кольцевом зазоре между на-
конечниками постоянного магнита и железным сердечником. Это
создает вращающий момент
Ml=klI. (5 42)
Рамка соединена со стрелкой. У опор рамки расположены две
противодействующие спиральные пружины (на рис. 5.3, б не пока-
372
Глава 5. Измерение технологических параметров
заны), каждый конец которых прикреплен к рамке и соединен с ее
обмоткой Через эти пружины поступает ток в рамку милливольт-
метра от термопары, и они создают обратный момент
М2 = к2а. (5.43)
Рамка занимает положение, при котором прямой (5 42) и обрат-
ный моменты (5.43) равны, т. е.
b к
а =-J-/или а = —f/x, (5 44)
л
где Ux — напряжение на входе прибора и R — его внутреннее сопро-
тивление.
Таким образом, угол поворота рамки определяется силой тока,
проходящего через нее, или напряжением (5.44) на клеммах милли-
вольтметра при постоянстве его внутреннего сопротивления.
Выпускаются переносные и щитовые милливольтметры. Класс
точности — 1 и 1,5.
При использовании термопреобразователей следует иметь в виду
погрешность, обусловленную сопротивлением внешней цепи элект-
роизмерительного прибора (милливольтметра).
Измеряемое напряжение фактически меньше ТЭДС термопре-
образователя на величину падения напряжения во внешней цепи,
состоящей из термопреобразователя и соединительных проводов.
Принцип действия потенциометра описан в разд. 5.2.5. В от-
личие от милливольтметра (см. рис. 5.3, б) для потенциометра
(см. рис. 5.5, б) показания не зависят от сопротивления внешней
цепи, так как в момент компенсации напряжений ток во внешней
цепи отсутствует, и в ней нет падения напряжения.
5.5.4. Цифровые измерительные приборы
В цифровом измерительном приборе (ЦИП) показания пред-
ставляются в виде дискретных чисел на отсчетном устройстве. Пре-
имущества такого представления заключаются в уменьшении субъек-
тивных ошибок, отсутствии ошибок из-за параллакса, ускорении
считывания. ЦИП содержат встроенные электронные схемы, обыч-
но микропроцессоры, позволяющие подсоединить дополнительные
устройства. Например, некоторые из них снабжены программой,
выполняющей основные вычисления, в частности, линеаризацию
показаний прибора с выводом последних на дисплей. Некоторые
ЦИП включают различные диагностические устройства, что умень-
шает время устранения отказов.
Большинство современных стендовых цифровых измерительных
приборов имеет внутренние приспособления для калибровки. Так-
5.5. Измерение электрических величин
373
же многие из них снабжены шиной интерфейса и благодаря этому
могут работать как части больших измерительных систем
Время выполнения операции обычно определяется используе-
мым аналого-цифровым преобразователем (АЦП), и он же включа-
ет время восстановления ЦИП после перегрузки. Разрешение опре-
деляет минимальное напряжение, которое может быть зарегистри-
ровано (например, разрешение 10-6 означает, что в диапазоне входных
напряжений до 1 В можно зарегистрировать 1 мкВ). Разрешение
зависит от числа цифровых разрядов в ЦИП.
Во всех цифровых измерительных приборах используются ос-
новные схемы преобразователей ЦАП и АЦП.
В ЦИП предусмотрена также установка диапазона измерения при
использовании датчиков с унифицированным выходным сигналом
постоянного тока или напряжения (масштабирование). При работе с
датчиками, формирующими на выходе унифицированный сигнал тока
или напряжения, в ряде конструкций цифровых измерительных уст-
ройств предусмотрено масштабирование шкалы измерения по каж-
дому из каналов. Для этого в соответствующих параметрах програм-
мирования прибора устанавливаются нижняя и верхняя границы ди-
апазона измерения, а также положение десятичной точки.
В ЦИП входит блок обработки данных, который служит для:
• коррекции измерений;
• цифровой фильтрации измеренных значений;
• вычисления дополнительных параметров (например, разности,
отношения и т. п.).
Коррекция измерений (компенсация погрешности датчиков)
Для устранений начальной погрешности преобразования пер-
вичных измерительных преобразователей (датчиков) и погрешнос-
тей, вносимых соединительными проводами, значение параметра
(например, температуры), измеренное прибором, может быть от-
корректировано. В измерительных приборах могут быть два типа
коррекции, позволяющие осуществить сдвиг или изменить наклон
измерительной характеристики на заданную величину.
Первый тип коррекции. На рис. 5.46, а в качестве приме-
ра, иллюстрирующего компенсацию погрешностей, вносимых сопро-
тивлениями соединительных проводов (А/?) при использовании двух-
проводной схемы подключения термопреобразователей сопротивления,
выполнен сдвиг характеристики для первичного измерительного пре-
образователя. К каждому измеренному значению параметра (темпера-
туры) /изм прибавляется заданное значение 5 («сдвиг характеристики»).
Так выглядит измеренное значение температуры с коррекцией:
' = 'изм+5- (5 45)
374
Глава 5. Измерение технологических параметров
Рис. 5.46. Коррекция измерений:
а — первый тип коррекции — сдвиг статической характеристики; б — вто-
рой тип коррекции — изменение наклона статической характеристики.
Данные приведены для термопреобразователя сопротивления
ТСМ50, И^|О0 = 1,426 ( И^оо — отношение сопротивления дат-
чика при 100 °C к его сопротивлению при 0 °C):
1 — без коррекции; 2 - с коррекцией
Кроме первого типа коррекции (5.45) возможен второй гип
коррекции.
На рис. 5.46, б в качестве примера, иллюстрирующего компенса-
цию погрешностей первичных измерительных преобразователей при
отклонении значения от номинального, изменили наклон ха-
рактеристики для первичного измерительного преобразователя а («на-
клон характеристики»), находящийся в диапазоне от 0,900 до 1,100:
г = /изч • а. (5.46)
Цифровая фильтрация измерений
Цифровая фильтрация входного сигнала уменьшает влияние слу-
чайных импульсных помех на показания измерительного прибора.
В современных измерительных приборах может быть предусмотре-
на двухступенчатая фильтрация: «полосовая», устраняющая значи-
тельные единичные помехи, и «сглаживающая», снижающая дей-
ствие небольших высокочастотных помех.
Первая ступень фильтрации характеризуется параметром «поло-
са фильтра» рис. 5.47. Этот параметр позволяет защитить измери-
тельный канал от сильных единичных помех. Полоса фильтра зада-
ется в единицах измеряемой величины. Если текущее значение от-
личается от предыдущего измеренного значения более чем на
5.5. Измерение электрических величин
375
Рис. 5.47. «Полосовая» фильтрация сигнала в измерительном приборе:
I — время опроса первичного измерительного преобразователя; 2 —
полоса фильтра; 3 — фильтрация единичной помехи; 4 — фильтрация
быстроизменяющегося измеряемого параметра
значение этого параметра, то оно не принимается во внимание, и
измерительным прибором производят повторное измерение. На циф-
ровом индикаторе остается значение предыдущего измерения. Ма-
лая ширина полосы фильтра замедляет реакцию измерительного
прибора на быстрое изменение входной величины. Поэтому при
низком уровне помех или при работе с быстроменяющимися про-
цессами рекомендуется увеличить значение параметра. В случае ра-
боты в условиях сильных помех для устранения их влияния на рабо-
ту измерительного прибора необходимо уменьшить значение изме-
ряемого параметра.
Примечание
При этом возможно ухудшение быстродействия измерительного при-
бора из-за повторных измерений
Вторая ступень фильтрации характеризуется порядком фильт-
ра Л' или постоянной времени фильтра. Порядок фильтра позво-
ляет добиться «сглаживания» изменений показаний измеритель-
ного прибора за счет их усреднения. Значение этого параметра
задает количество последних измерений, для которых измеритель-
ный прибор вычисляет среднее арифметическое. Полученная ве-
личина используется измерительным прибором в дальнейшей ра-
боте. Вид переходных характеристик фильтра для различных N
показан на рис. 5.48.
Замечание
Некоторые отечественные производители контрольно-измерительных
приборов и средств автоматизации вместо порядка фильтра используют
понятие глубина фильтра.
376
Глава 5. Измерение технологических параметров
Рис. 5.48. Переходные характеристики цифровых фильтров разного по-
рядка Д' (при разной «глубине фильтра»):
/ — время опроса первичного измерительного преобразователя
Уменьшение значения глубины фильтра приводит к более быст-
рой реакции измерительного прибора на скачкообразные измене-
ния контролируемой (диагностируемой) величины, но снижает по-
мехозащищенность измерительного прибора.
Увеличение значения глубины фильтра улучшает помехозащи-
щенность измерительного прибора, но одновременно с этим повы-
шает инерционность измерительного прибора.
Экспоненциальное сглаживание входного сигнала обеспечивает
фильтр, представляющий собой статическое звено первого порядка
с постоянной времени Т (см. рис. 5.49). На рис. 5.49, б, в показана
реакция фильтра при различных значениях Т на единичное ступен-
чатое изменение входной величины рис. 5.49, а. Малое значение Т
(например, 1 с) позволяет довольно точно отслеживать изменения
входной величины, но уровень помех практически не уменьшается
(рис. 5.49, 6). Большое значение Т (например, 5 с) замедляет реак-
Рис. 5.49. Переходные характеристики фильтров при различных значени-
ях постоянной времени:
б ~ Т= 1 с; в — Г“ 5 с на входное единичное ступенчатое изменение
сигнала (а)
5.6. Измерение давления
377
цию измерительного прибора на единичное ступенчатое изменение
входной величины (температуры, равной 100 °C), но зато помехи в
значительной мере подавлены (рис. 5.49, в).
Дополнительная информация
По существующим правилам рабочие измерения количеств продуктов
выполняются с относительной погрешностью канала измерения примерно
2,5...3,5 %, а нормативные невозвратные потери не должны превышать по-
грешность порядка 0,5...2,0 %. Значительные затруднения возникают при
расчете материального баланса химического производства, поскольку зна-
чения количества продуктов часто вычисляются по значениям приборов
расходов и уровней в резервуарах и т. д. Выйти из создавшегося положения
можно, применяя статистическую и нейросетевую обработку наблюдаемых
данных, что способствует интенсивному развитию и применению матема-
тических моделей для косвенной оценки показателей качества продуктов
(виртуальных или софтовых анализаторов количества).
Для масляных погонов вакуумной колонны установки первичной пе-
реработки нефти разработаны программные анализаторы вязкости. Наблю-
дается почти полное совпадение результатов лабораторных измерений вяз-
кости масляных погонов и вязкости, определяемой виртуальными анализа-
торами вязкости. Три виртуальных (программных) вискозиметра для одной
вакуумной колонны дают 30 % экономии от цены трех реальных самых
дешевых физических вискозиметров. Кроме того, оператор, вместо работы
вслепую, непрерывно получает информацию о качестве продукта в режиме
«оп line» и даже предупреждается о его возможных изменениях.
5.6. ИЗМЕРЕНИЕ ДАВЛЕНИЯ
Давлением р называют физическую величину, характеризующую
интенсивность нормальных (перпендикулярных к поверхности) сил f
с которыми одно тело действует на поверхность другого, например,
жидкость на стенки технологического аппарата, т. е.
р = df/dA. (5.47)
Если распределение сил f вдоль поверхности равномерно, то дав-
ление р на любую часть поверхности равно
P = f/A, (5.48)
где А — площадь этой части поверхности;/— сумма приложенных
перпендикулярно к ней сил.
Под абсолютным давлением ра6с в технологическом аппарате
понимают полное давление газа или жидкости на его стенки. Раз-
ность между абсолютным давлением и атмосферным давлением ратм
ПРИ Рабе > Рты называется избыточным давлением риз6:
Ризб Рабе Ратм •
(5 49)
378
Глава 5. Измерение технологических параметров
Если значение абсолютного давления ниже значения атмосфер-
ного давления (ра6с < ратм), то их разница называется вакуумметри-
ческим давлением (или разрежением) рюк:
Рвак ~ Ратм ~ Рабе (5.50)
За единицу измерения давления в СИ принят паскаль (Па), рав-
ный давлению, которое вызывает сила в один ньютон (1 Н), равномер-
но распределенная по нормальной к ней поверхности площадью 1 м2.
Применяются также внесистемные единицы: кгс/см2; мм вод. ст.;
мм рт. ст. Кроме того, в настоящее время эксплуатируются изме-
рительные приборы, отградуированные в фунтах на квадратный
дюйм (psi) и в фунтах на квадратный фут (psf). Между паскалем и
другими единицами измерения давления существуют следующие
соотношения:
1 кгс/см2 = 98066,5 Па = 0,1 МПа;
1 мм рт. ст. = 133,322 Па;
1 бар = 105 Па;
1 psi = 6894,76 Па;
1 psf = 47,837 Па;
1 атм = 101,325 кПа = 760 мм рт. ст. (атмосфера физическая).
Приборы для измерения давления и разности давлений называ-
ют манометрами.
В зависимости от измеряемой величины различают следующие
средства измерения давления:
• манометры — для измерения избыточных давлений;
• вакуумметры — для измерения вакуума (разрежения);
• мановакуумметры — для измерения избыточных давлений и
разрежений;
• дифференциальные манометры (дифманометры) — для изме-
рения разности (перепада) давлений;
• напоромеры — для измерения малых избыточных давлений
(до 40 кПа);
• тягомеры — для измерения малых разрежений (до 40 кПа);
• тягонапоромеры — для измерения малых избыточных давле-
ний и разрежений.
По принципу действия манометры подразделяют на жидкостные,
деформационные, электрические и т. д.
5.6.1. Жидкостные манометры
В жидкостных манометрах измеряемое давление или разность
давлений уравновешивается давлением столба жидкости. В прибо-
рах используется принцип сообщающихся сосудов, в которых уров-
5.6. Измерение давления
379
ни рабочей жидкости совпадают при равенстве давлений над ними,
а при неравенстве занимают такое положение, когда избыточное
давление в одном из сосудов уравновешивается гидростатическим
давлением столба жидкости в другом
Дифманометры предназначены для измерения расхода неагрес-
сивных жидкостей, паров и газов путем определения величины пе-
репада давления на измерительной диафрагме или ином дроссель-
ном устройстве. Они могут быть использованы также в качестве
манометров и вакуумметров. Другие приборы предназначены для
измерения давлений, разрежений и разности давлений неагрессив-
ных газов.
В жидкостном двухтрубном манометре две вертикальные сооб-
щающиеся стеклянные трубки заполнены рабочей жидкостью до
нулевой отметки и закреплены на основании, к которому прикреп-
лена шкала. В одну трубку подается измеряемое давление, другая
трубка сообщается с атмосферой. При измерении разности давле-
ний к обеим трубкам подводятся измеряемые давления. Разновид-
ностью жидкостного двухтрубного манометра является жидкостный
двухтрубный манометр, стеклянные трубки которого заполнены двумя
несмешивающимися жидкостями, близкими по плотности (благода-
ря чему достигается высокая чувствительность). Для удобства отсче-
та разности уровней используются однотрубные (чашечные) мано-
метры. В таких манометрах одна трубка заменена широким сосу-
дом, в который подается измеряемое давление Уровень жидкости в
этом сосуде практически не меняется. Трубка, прикрепленная к
шкале, является измерительной и сообщается с атмосферой. При
измерении разности давлений к измерительной трубке подводится
меньшее из давлений. Для большей чувствительности измеритель-
ную стеклянную трубку устанавливают наклонно (манометр с на-
клонной трубкой).
5.6.2. Деформационные преобразователи давления
Для измерения давления, разрежения, разности давлений в хи-
мической технологии наибольшее распространение получили дефор-
мационные измерительные преобразователи.
Принцип действия деформационных манометров основан на за-
висимости деформации чувствительного элемента или развиваемой
им силы от измеряемого давления. Деформация или сила, пропор-
циональная измеряемому давлению, преобразуется в показания или
соответствующие изменения выходного сигнала. В соответствии с
используемым чувствительным элементом деформационные мано-
метры подразделяют на трубчато-пружинные, сильфонные и мем-
бранные.
380
Глава 5. Измерение технологических параметров
Рис. 5.50. Деформационные измерительные преобразователи давления:
а — плоская диафрагма; б — гофрированная диафрагма; в — мембрана
(анероидная коробка); г — сильфон; д — одновитковая трубка Бурдона;
е — скрученная или спиральная трубка Бурдона; ж — многовитковая
трубка Бурдона
Принципиальные схемы деформационных измерительных пре-
образователей (силовых элементов) приведены на рис. 5.50.
Примечание
Термин «трубчатые пружины» часто означает то же. что и «трубка Бур-
дона».
Выбор деформационных измерительных преобразователей зави-
сит от величины измеряемого давления (разрежения) и характерис-
тик собственно самих преобразователей. Например, деформацион-
ные измерительные преобразователи (плоская мембрана, гофриро-
ванная мембрана, мембрана) можно использовать, чтобы привести в
действие емкостный или пьезоэлектрический преобразователь.
Примечание
Изготавливаются пьезорезистивные полупроводниковые датчики дав-
ления, в которых полупроводниковые, тензорезисторные мостовые схемы
сформированы непосредственно на кремниевой мембране. Наряду с малы-
ми размерами (диаметр около 1 мм) эти датчики обладают стабильной ха-
рактеристикой в течение длительного времени и малым гистерезисом.
5.6. Измерение давления
381
При необходимости передачи большого усилия или соверше-
ния большого смещения, лучше использовать преобразователи,
изображенные на рис. 5.50, б, в. Мембраны обладают значительной
жесткостью. Частоту резонанса мембраны можно определить по
формуле:
wp=V<7^, (5-51)
где С — коэффициент упругости мембраны; т — масса мембраны.
Из формулы (5.51) следует вывод, что для достижения высокой
резонансной частоты (чтобы преобразователь был устойчив к уда-
рам и вибрациям) необходимо иметь высокое значение С и низкое
значение т. В этом случае рекомендуется деформационный преоб-
разователь типа, изображенного на рис. 5.50, а. Однако плоские
мембраны не применимы в качестве чувствительных элементов ма-
нометров, так как при малой толщине их характеристики нелиней-
ны. Прогиб же равномерно гофрированных мембран линейно воз-
растает с увеличением давления. Анероидная коробка — весьма
эффективный чувствительный преобразователь (рис. 5.50, в) Для
обеспечения достаточно больших усилий в регистрирующих мано-
метрах используют многовитковые трубки Бурдона (рис. 5.50, ж).
5.6.3. Промышленные преобразователи давления
Преобразователи давления серии «Метран»
Принцип действия преобразователей давления серии «Метран»
основан на использовании пьезорезистивного эффекта в тонкой
полупроводниковой пленке кремния, выращенной на поверхности
монокристаллической подложки из искусственного сапфира. Мо-
нокристаллическая структура кремния на сапфировой подложке в
виде плоской миниатюрной мембраны воспринимает измеряемое
давление (или внешнее силовое воздействие) и преобразует его в
пропорциональный электрический сигнал, обеспечивая при этом
высокую стабильность метрологических характеристик и практичес-
кое отсутствие гистерезиса. Благодаря высоким диэлектрическим
свойствам сапфира сравнительно просто и надежно решается задача
создания датчиков в искробезопасном исполнении.
Микропроцессорные датчики серии «Метран» имеют существен-
ные преимущества перед аналоговыми датчиками по метрологичес-
ким, техническим, функциональным и эксплуатационным показа-
телям.
Высокие метрологические характеристики датчиков обеспечи-
ваются в процессе изготовления приборов. Для этого все элементы
сенсорного блока микропроцессорного датчика (рис. 5.51) проходят
382
Глава 5. Измерение технологических параметров
Рис. 5.51. Структурная схема микропроцессорного датчика (р — измеряе-
мое давление или перепад давлений; Т — контролируемая тем-
пература; / — выходной унифицированный сигнал постоянно-
го тока):
I — сенсорный модуль: 1 - преобразователь давления (сенсор); 2 -
преобразователь температуры (сенсор); 3 — АЦП; 4 — память сенсор-
ного блока; II — электронный модуль: 5 — микропроцессор электрон-
ного блока датчика; 6 — память электронного блока датчика; 7 — блок
настройки параметров; 8 — цифровой индикатор с жидкокристалличес
ким дисплеем; 9 — ЦАП; кн.1, кн.2, кн.З — кнопочные переключат'-и
предварительные испытания по специально разработанной программе
для стабилизации их характеристик в рабочих условиях. Затем сен-
сорные блоки подвергают воздействию температуры и давления во
всем рабочем диапазоне с измерением их выходных сигналов. Ре-
зультаты этих измерений используются для расчета коэффициентов
коррекции, которые хранятся в памяти сенсорного блока 4
Цифровой сигнал сенсорного блока вместе с коэффициентами
коррекции поступает на вход электронного преобразователя, мик-
ропроцессор 5 которого корректирует цифровой сигнал по темпера-
туре и линеаризует его. Скорректированный цифровой сигнал пре-
образуется ЦАП 9 электронного блока датчика в стандартный вы-
ходной сигнал постоянного тока 1.
Цифровые значения сигнала в установленных единицах измере-
ния или в % диапазона измерения выводятся на цифровой индика-
тор (ЦИ) 8.
Микропроцессорные датчики серии «Метран» при работе осу-
ществляют непрерывную самодиагностику. В случае возникновения
неисправности датчик формирует предупредительный аналоговый
сигнал постоянного тока.
Контроль установленных ранее параметров и настроек датчика,
выбор и установка новых параметров (настроек), а также калибров-
ка датчика выполняются оператором.
На рис. 5.52 показана структурная схема построения модельного
ряда датчиков.
Состав конкретной модели датчика зависит от вида выходного
сигнала: датчик с частотным неунифицированным выходным сиг-
налом состоит только из чувствительного элемента 2 и модуля ге-
5.6. Измерение давления
383
Рис. 5.52. Схема построения модель-
ного ряда датчиков:
/ — измеряемая физическая величина; 2 —
чувствительный элемент; 3 — модуль ге-
нераторов; 4— модуль преобразования ча-
стоты; 5 — модуль преобразования часто-
та-напряжение; б — модуль преобразова-
ния напряжение—ток; 7 — частотный
неунифицированный сигнал; Я — токовый
унифицированный сигнал; 9 — частотный
унифицированный сигнал
нераторов 3\ датчик с частотным унифицированным выходным сиг-
налом дополнен модулем преобразования 4; в датчик с токовым уни-
фицированным выходным сигналом включены также модули пре-
образования частота—напряжение 5 и напряжение—ток 6, причем
модуль преобразования 4 может отсутствовать. В качестве чувстви-
тельных элементов 2 используются пьезокварцевые резонаторы. От-
личительной особенностью данных элементов является то, что при
их использовании совместно с модулем генераторов 3, независимо
от диапазона и вида измеряемого параметра на выходе модуля генера-
торов, будет присутствовать частотный сигнал в диапазоне 0,3...3 кГц,
т. е. изменение диапазона или вида измеряемого сигнала требует
лишь смены чувствительного элемента. Таким образом, появляется
возможность осуществить унификацию модулей генераторов, пре-
образования и модулей преобразования частота—напряжение и час-
тота—ток и использовать единый подход при разработке датчиков
давления, температуры и влажности с различными выходными сиг-
налами и диапазонами измеряемого параметра (датчики отличаются
только чувствительными и конструктивными элементами). Унифи-
цированные модули выполняются в виде отдельных электронных
блоков, которые могут компоноваться в готовое устройство в раз-
личном сочетании. В простейшем случае датчик с частотным не-
унифицированным выходным сигналом состоит только из чувстви-
тельного элемента 2 и модуля генераторов 3.
Рассмотрим работу датчиков. С чувствительного элемента 2 час-
тотный сигнал поступает на 3, в состав которого входит смеситель
частоты. С выхода модуля генераторов 3 разностный частотный не-
унифицированный сигнал fp может поступать как непосредственно
на выход датчика 7, так и на модуль преобразования частоты 4, в
котором происходит математическая обработка сигнала fp. С выхо-
да модуля преобразования сигнала 4 частотный унифицированный
сигнал fnp может поступать как непосредственно на выход 9 датчи-
ка, так и далее на модули преобразования частота—напряжение 5 и
напряжение—ток 6 для датчиков с унифицированным выходным
сигналом 8.
384
Глава 5. Измерение технологических параметров
5.6.4. Защита манометров от действия агрессивных,
горячих, загрязненных, кристаллизующихся
и вязких сред
Для обеспечения безотказной работы приборов в тяжелых усло -
виях химических производств часто требуется соблюдение особых
мер.
Кислородные манометры во избежание воспламенения и взрыва
масла подвергаются обезжириванию. Ацетиленовые манометры, что-
бы исключить образование весьма взрывоопасной ацетиленистой
меди, изготовляют из материалов с пониженным содержанием меди
Во избежании коррозионного действия аммиака и водорода детали
аммиачных и водородных манометров изготовляют из специальных
марок стали. Манометры снабжаются соответствующей надписью
на циферблате и окрашиваются в следующие цвета: для измерения
давления кислорода — голубой, водорода — темно-зеленый, ацети -
лена — белый, аммиака — желтый и т. д.
При измерении давления агрессивных газов, а также агрессив-
ных, вязких и кристаллизующихся жидкостей манометр заполняет-
ся неагрессивной жидкостью, а передача импульса давления от объек-
та измерения к манометру производится через жидкостные (рис. 5.53),
сильфонные или мембранные (рис. 5.54) разделители.
Разделительные сосуды с разделительными жидкостями
Этот метол защиты манометров, соединительных трубок и диф-
манометров от агрессивных газов, а также от агрессивных и вязких
жидкостей наиболее распространен. Для его применения необходи-
ма разделительная жидкость, которая не должна смешиваться или
взаимодействовать химически с измеряемой средой и должна быть
нейтральной по отношению к материалам манометра, соединитель-
ных трубок, дифманометра и разделительного сосуда, из которых
I, изображенный на рис. 5.53, а,
1
Рис. 5.53. Разделительные
сосуды с разделительными
2 жидкостями:
а — разделительная жидкость
легче измеряемой; б — разде-
лительная жидкость тяжелее
измеряемой (/ — измеряемая
жидкость; 2 — разделительная
ЖИДКОСТЬ!
5.6. Измерение давления
385
Рис. 5.54. Разделительные сосуды с гибкими разделителями:
а — мембранные: (7 — измеряемая жидкость; 2 — нейтральная жид-
кость; 3 — гибкая мембрана); б — сильфонные; в — разделитель-пнев-
моповторитель
применяется в том случае когда разделительная жидкость имеет
меньшую плотность, чем измеряемая. На рис. 5.53, б показан разде-
лительный сосуд, применяемый в том случае, когда разделительная
жидкость имеет ббльшую плотность, чем измеряемая.
Разделительные сосуды с гибкими перегородками
Такие сосуды применяют, когда подбор разделительной жидко-
сти с необходимыми химическими и физическими свойствами зат-
руднен и когда измеряемое вещество образует осадок или содержит
механические примеси (к таким веществам относятся различные
пул ьпы и гидросмеси).
На рис. 5.54, а показан разделитель в виде гибкой мембраны 3.
Измеряемая жидкость 1 передает свое давление через мембрану 3
нейтральной жидкости 2. На рис. 5.54, б изображен разделитель-
сильфон, а на рис. 5.54, в — разделитель-пневмоповторитель с мем-
браной, защищающей от действия агрессивного газа при измерении
его давления.
Непрерывная продувка или промывка соединительных трубок
дифманометра
Способ защиты основан на непрерывной подаче в соединитель-
ные трубки воздуха (при продувке) или воды (при промывке) от
постороннего источника, давление которого выше, чем давление в
трубках.
На рис. 5.55 изображена схема устройства для защиты дифмано-
метра посредством непрерывной продувки трубок воздухом. По ли-
нии 1, на которой установлен манометр 3, воздух через фильтр 2 от
небольшого компрессора или от сети сжатого воздуха проходит че-
рез регулировочные игольчатые вентили 4 и указатели расхода воз-
духа 6, заполняет трубки 5 и 7, а затем выходит в производственный
трубопровод 9 в точках отбора давлений рх и р2 (точки а). Измери-
13 Бала юн А В.. X.ipinoiimi Н II
386
Глава 5. Измерение технологических параметров
Рис. 5.55. Защита дифманометра с использованием непрерывной продув-
ки соединительных трубок воздухом. Пояснения см. в тексте
тельный прибор (дифманометр) 10 следует устанавливать выше су-
жающего устройства (диафрагма) 8, также необходимо иметь на-
клон трубок 7 в сторону последнего для удаления влаги и конденса-
та из воздуха. Чтобы разность давлений в точках б, измеряемая диф-
манометром, равнялась разнице давлений р{ — р2, в обеих трубках на
участках б—а падение давлений должно быть одинаковым, а для
этого требуется равенство скоростей воздуха в них, что достигается
с помощью регулировочных вентилей 4 и указателей расхода 6.
Чем меньше расход воздуха на продувку, тем точнее разность
Рис. 5.56. Защита мано-
метров от действия го-
рячей среды:
а — сифонная кольцеобраз-
ная трубка; 6 — сифонная
U-образная трубка
давлений в точках б соответствует разности
давлений р} — р2, но при этом увеличивается
запаздывание показаний дифманометра с
уменьшением расхода измеряемого вещества.
Для снижения запаздывания желательно
иметь небольшие диаметры и длины как со-
единительных, так и воздушных трубок, но
не нужно уменьшать проходные сечения на
участках б—а.
Непрерывная продувка применяется на
небольших давлениях измеряемого вещества
и при возможности ввода в него воздуха.
Защита манометров
от действия горячей среды
В химической промышленности маномет-
ры часто устанавливают на теплообменниках,
экстракционных и дистилляционных аппара-
5.7. Измерение температуры
387
тах и т. д. Для предотвращения воздействия (например, пара или
газа с высокой температурой) манометр присоединяют к месту из-
мерения либо через сифонную кольцеобразную трубку с гидравли-
ческим затвором, которая и предохраняет манометр от перегрева
(рис. 5.56, а), либо через сифонную U-образную трубку (рис. 5.55, б),
заполненную водой.
5.7. ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
5.7.1. Общие сведения об измерении температуры
Одним из основных технологических параметров в химическом
производстве является температура. Температура — фундаменталь-
ная физическая величина, характеризующая состояние термодина-
мического равновесия макроскопической системы.
Измерение температуры предполагает построение шкалы темпе-
ратур на основе воспроизведения ряда равновесных состояний —
реперных точек, которым приписаны определенные значения тем-
ператур, и создания интерполяционных приборов, реализующих
шкалу между ними.
Чаще всего используются три температурные шкалы: эмпири-
ческие шкалы Цельсия и Фаренгейта и термодинамическая шкала
Кельвина. Наиболее употребляемая температурная шкала была пред-
ложена А. Цельсием (A. Celsius) в 1742 г. Опорными точками этой
шкалы являются температура плавления льда (О °C) и температура
кипения воды (100 °C). Первая температурная шкала была введена
Г. Фаренгейтом (G. Fahrenheit) в 1715 г. Для нижней опорной точки
(0 °F) была использована температура замерзания солевого раство-
ра, а для верхней — температура под мышкой здорового англичани-
на (96 °F). В 1848 г. лорд Кельвин (У. Томсон) предложил термоди-
намическую температурную шкалу, основанную на втором законе
термодинамики. Термодинамическую температуру («абсолютную тем-
пературу») обозначают символом Т. Единицей ее измерения являет-
ся кельвин (К), определенный как 1/273,16 часть термодинамичес-
кой температуры тройной точки воды.
Перевод температуры из одной температурной шкалы в другую
осуществляется с помощью простых соотношений:
/(’C) = |[T(°F)-32];
Т(К) = г(С) +273,16.
388
Глава 5. Измерение технологических параметров
В результате О °C соответствует 32 °F и 273,16 К, а 100 °C соответ-
ствуют 212 °F и 373,15 К. Использование 100 равномерных шагов
температуры между точками кипения и замерзания воды (собствен-
но и сам выбор опорных точек), как и 180 равномерных шагов тем-
пературы по шкале Фаренгейта процедура совершенно произволь-
ная. В настоящее время в качестве стандарта принята международ-
ная практическая шкала МТШ-90 (ITS-90), использующая в качестве
опорных точек температуры изменения агрегатного состояния оп-
ределенных веществ, которые могут быть воспроизведены стандарт-
ными средствами измерения температуры. В интервалах между опор-
ными точками точность измерений сохраняется за счет применения
уравнений интерполяции. В табл. 5.3 приведены основные репер-
ные точки МТШ-90 и стандартные средства измерения температуры
в этих точках.
Таблица 5.3. Основные реперные точки МТШ-90
Название Температура, К Средства измерений
Точка затвердевания меди Точка затвердевания золота 1357,77 1337,33 Оптический пирометр (свыше 1234,93 К)
Точка затвердевания серебра Точка затвердевания алюминия Точка затвердевания цинка Точка затвердевания олова Точка затвердевания индия Точка плавления галлия Тройная точка воды Тройная точка ртути Тройная точка аргона Тройная точка кислорода Тройная точка неона Тройная точка равновесного водорода 1234,93 933,473 692,677 505.078 429,7485 302,9146 273,16 234,3156 83.8058 54,3584 24,5561 13,8033 Платиновый термометр сопротивления (от 13,8033 К до 1234,93 К)
Приборы для измерения температуры называют термометрами
Различают контактный и бесконтактный методы измерения темпе-
ратуры.
5.7. Измерение температуры
389
На рис. 5.57 выполнено ориентировочное сравнение областей
применения термометров наиболее распространенных типов. Есте-
ственно, что границы этих областей у различных изготовителей нео-
динаковы. В ближайшее время предельные температуры примене-
ния термометров, особенно электрических, могут быть смещены как
в сторону более высоких, так и в сторону низких температур. Штри-
ховыми линиями на рис. 5.57 показаны области температур, в кото-
рых термометры используются только кратковременно.
; Дилатометрические
X------------Х-Х Биметаллические
' 1 11 X1— X Стеклянные жидкостные
X .......—— / Манометрические жидкостные
X........ . 'X Манометрические газовые
X X Манометрические конденсационные
X---X Жидкие кристаллы
Термопары
Платиновые термометры сопротивления
Медные термометры сопротивления
NTC-термисторы
РТ С-термисторы
Кварцевые
С исчезающей нитью накала
Фотоэлектрические
Радиационные
Спектрального отношения
О
I
1000 1500 2000
-200 0 500 1000 1500 2000 Г, °C
Рис. 5.57. Сравнение температурных диапазонов контактных и бескон-
тактных термометров
390
Глава 5. Измерение технологических параметров
5.7.2. Измерение температуры контактным методом
Рис. 5.58. Область применения
контактных и бесконтактных
термометров:
I — термисторы; 2 — пьезоэлект-
рические; 3 — термопреобразовате-
ли сопротивления; 4 — термоэлек-
трические преобразователи (термо-
пары)
При использовании контактного
метода измерения температуры опреде-
ляют величину одного из параметров
первичного измерительного преобразо-
вателя (ПИП), зависящего от его тем-
пературы. При этом предполагают, что
температура ПИП равна температуре из-
меряемого объекта, которую хотели бы
измерить. Для выполнения этого усло-
вия необходимо обеспечить хороший
тепловой контакт между ПИП и изме-
ряемым объектом, что и дало название
методу измерения.
К контактному методу относится
измерение температуры термометрами
расширения, манометрическими термо-
метрами, термометрами сопротивления,
термоэлектрическими термометрами.
Температурные диапазоны приме-
нения наиболее распространенных кон-
тактных термометров представлены на
рис 5.58.
5.7.2.1. Термометры расширения
Принцип действия термометров расширения основан на различ-
ном тепловом расширении двух разных веществ. К термометрам
расширения относят стеклянные жидкостные, дилатометрические,
биметаллические, манометрические.
Термометры стеклянные жидкостные
Принцип действия стеклянных жидкостных термометров осно-
ван на различии теплового расширения термометрической жидко-
сти (ртути, амальгамы таллия, спирта, других органических жидко-
стей) и материала оболочки, в которой они находятся (термометри-
ческого стекла или кварца). В небольшом интервале температур
расширение можно рассчитать по формулам:
ДИ = ₽ГДг (5.52)
или
И,=И0(1 + ₽г).
(5.53)
5.7. Измерение температуры
391
В выражениях (5.52) и (5.53) Ио и Vt — объемы термометри-
ческой жидкости (м3) при температуре О °C и при температуре t °C;
Р — температурный коэффициент объемного расширения,°C-1.
Замечание
Коэффициент Р не является постоянной величиной, а зависит от тем-
пературы.
Для изготовления термометров рас-
ширения используют стекла специальных
сортов (термометрические) с малым зна-
чением температурного коэффициента
расширения. Термометры расширения
используются для измерения температу-
ры в пределах от —200 °C до 1200 °C с
высокой точностью (цена деления образ-
цовых стеклянных термометров составляет
0,01 °C). Наибольшее распространение по-
лучили ртутные стеклянные термометры.
Основными элементами конструкции
являются резервуар с припаянным к нему
капилляром, частично заполненные
термометрической жидкостью (ртутью),
и шкала. Конструктивно различают палоч-
ные термометры и термометры со шка-
лой, вложенной внутрь стеклянной оболочки
(рис. 5.59, а). У палочных термометров
шкала наносится непосредственно на по-
верхности толстостенного капилляра. У
термометров с вложенной шкалой капил-
Рис. 5.59. Стеклянные жидко-
стные термометры:
а — обыкновенный с вложенной
шкалой; б — электроконтактный
с подвижным контактом для ус-
тановки задания
ляр и шкальная пластина с нанесенной шкалой заключены в защит-
ную оболочку, припаянную к резервуару. Разновидностью ртутных
стеклянных термометров являются ртутные электроконтактные тер-
мометры (рис. 5.59, 6), предназначенные для сигнализации или ре-
лейного регулирования температуры.
Термометры дилатометрические и биметаллические
Принцип действия дилатометрических и биметаллических тер-
мометров основан на различии линейного расширения твердых тел,
из которых изготовлены чувствительные элементы этих термомет-
ров. Если температурный интервал невелик, то зависимость длины
твердого тела от температуры выражается линейным уравнением вида
= £Q(1 +at),
(5.54)
392 Глава 5. Измерение технологических параметров
где £, — длина твердого тела при температуре / °C, м; £0 — длина того
же тела при температуре О °C; а — температурный коэффициент
линейного расширения твердого тела,°C-1.
Схема дилатометрического термометра представлена на рис. 5.60.
Термометр состоит из трубки 1, изготовленной из металла с боль-
шим коэффициентом линейного расширения (меди, латуни, алю-
миния), и стержня 2 из материала с малым коэффициентом линей-
ного расширения (инвара, фарфора). Один конец трубки крепится
неподвижно к корпусу прибора, а к другому жестко прикреплен стер-
жень. Сама трубка помещается в среду, температуру которой изме-
ряют. Изменение температуры среды приводит к изменению длины
трубки, адлина стержня остается практически постоянной. Это при-
водит к перемещению стержня, который с помощью рычага 3 пере-
мещает стрелку по шкале прибора.
Принцип действия биметаллических термометров основан на раз-
личии температурных коэффициентов линейного расширения ме-
таллических пластин (например, из инвара и латуни, из инвара и
стали), сваренных (спаянных, склепанных) между собой по всей
плоскости соприкосновения. Нагревание приводит к деформации
такой термобиметаллической пластины; последняя изгибается в сто-
рону металла с меньшим коэффициентом линейного расширения
(инвара) (рис. 5.61). Биметаллические термометры используются в
качестве чувствительного элемента в температурных реле, а также
для компенсации влияния температуры окружающей среды в изме-
рительных приборах. Дилатометрические и биметаллические термо-
метры для непосредственных измерений температуры применяются
сравнительно редко.
Рис. 5.60. Схема дилатометрического
термометра. Пояснения см. в тексте
Рис. 5.61. Схема биметаллического
термометра
5.7. Измерение температуры
393
5.7.2.2. Манометрические термометры
Рис. 5.62. Схема
манометрического
термометра. Пояс-
нения см. в тексте
Принцип действия манометрических термометров основан на
взаимосвязи между температурой и давлением рабочего вещества в
замкнутой системе (термосистеме). Основные ча-
сти термосистемы (рис. 5.62): термобаллон 1, ка-
пиллярная трубка 2 и деформационный маномет-
рический преобразователь 3 (например, трубка
Бурдона). Преобразователь связан со стрелкой
прибора (манометра) через передаточный меха-
низм, который на рис. 5.62 не показан. Компен-
сация погрешности, возникающей из-за влияния
температуры окружающей среды на показания
манометра, осуществляется биметаллическим ком-
пенсатором 4.
Первичным измерительным преобразователем
манометрического термометра является термобал-
лон — элемент термосистемы, воспринимающий
температуру измеряемой среды и преобразующий
ее в давление рабочего вещества.
В зависимости от вида рабочего вещества ма-
нометрические термометры подразделяют на газо-
вые, жидкостные и конденсационные (паро-жидко-
стные). Газовые и жидкостные манометрические
термометры имеют линейную шкалу, а конденса-
ционные — нелинейную.
Принцип действия газовых манометрических термометров осно-
ван на зависимости давления газа от температуры при постоянном
объеме:
^=Po(1 + Yz)- (5 55)
Здесь р0 — давление газа при температуре О °C, Па; у — температур-
ный коэффициент расширения газа, °C-1.
В газовых манометрических термометрах термосистема запол-
нена газом под избыточным давлением. В качестве рабочего веще-
ства используется обычно азот, аргон, гелий. Газовые манометри-
ческие термометры позволяют измерять температуру в диапазоне от
-150 °C до +600 °C
Принцип действия жидкостных манометрических термометров
основан на зависимости объема термометрической жидкости (рту-
ти, силиконовых масел, толуола) от ее температуры. Изменение объе-
ма жидкости преобразуется с помощью манометрической пружины
(трубки Бурдона) в перемещение. Жидкостные манометрические
термометры позволяют передавать показания на ограниченное рас-
394
Глава 5. Измерение технологических параметров
стояние (до 60 м), а развиваемое ими усилие настолько велико, что
к ним могут быть подключены не только показывающие приборы,
но и передающие преобразователи или механические регуляторы
прямого действия.
Жидкостные манометрические термометры позволяют измерять
температуру в диапазоне от —150 °C до +300 °C.
В конденсационных манометрических термометрах термобаллон
частично заполнен низкокипящей жидкостью, а остальное его про-
странство — ее парами. Эти термометры имеют преимущество пе-
ред газовыми и жидкостными. Давление насыщенного пара в тер-
мосистеме зависит только от температуры на границе раздела фаз
пар—жидкость, поэтому изменение объема термосистемы и темпе-
ратуры рабочего вещества в капиллярной трубке и манометре не
изменяют показаний термометра. Объем термобаллона конденсаци-
онных манометрических термометров может быть меньше, чем объем
термобаллона газовых и жидкостных манометрических термомет-
ров, что благоприятно сказывается на динамических характеристи-
ках термометра.
В качестве рабочего вещества в конденсационных манометри-
ческих термометрах используют фреон, пропан, хлористый метил,
этиловый эфир, ксилол, ацетон и др. Пределы измерения от —50 °C
до +300 °C.
Динамические свойства манометрических термометров всех ви-
дов могут быть представлены статическим звеном первого порядка.
Постоянная времени газовых манометрических термометров,
называемая также показателем тепловой инерции, равна:
• 500 с, если термобаллон окружает спокойная газовая среда (воз-
дух или газ);
• 15 с, если термобаллон окружает спокойная жидкая среда (вода
или жидкости с близкими к ней коэффициентами теплопередачи);
• 60 с, если термобаллон окружает газовая среда (воздух или
газ), движущаяся со скоростью не более 7 м/с;
• 3 с, если термобаллон окружает жидкая среда (вода или жидко-
сти с близкими к ней коэффициентами теплопередачи), движущая-
ся со скоростью не более 7 м/с.
Показатель тепловой инерции для жидкостных и конденсацион-
ных манометрических термометров:
• в спокойной газовой среде (воздухе или газе), окружающей
термобаллон, равен 800 с;
• в спокойной жидкой среде (воде или жидкости с близкими к
ней коэффициентами теплопередачи), окружающей термобаллон,
равен 30 с;
• в движущейся газовой среде (воздухе или газе) со скоростью не
более 7 м/с, окружающей термобаллон, равен 120 с;
5.7. Измерение температуры
395
• в движущейся жидкой среде (воде или жидкости с близкими к
ней коэффициентами теплопередачи) со скоростью не более 7 м/с,
окружающей термобаллон, равен 6 с.
При измерении температуры агрессивных сред и при измерении
температуры в аппаратах, работающих при высоких давлениях, тер-
мобаллоны манометрических термометров устанавливают в защит-
ную гильзу.
Манометрические термометры могут применяться в пожаро- и
взрывоопасных условиях любых категорий. Большинство маномет-
рических термометров обладает хорошей виброустойчивостью
Для устранения погрешности, которую может вызвать гидроста-
тической напор столба жидкости в жидкостных и конденсационных
манометрических термометрах, термобаллон и манометр устанавли-
вают на одном уровне.
Для снижения температурной погрешности в газовых и жидко-
стных манометрических термометрах применяют термобаллоны с
объемом рабочего вещества, превышающим в несколько раз объем
вещества, находящегося в капиллярной трубке и трубчатой пружине
Бурдона. В результате чувствительные элементы оказываются дос-
таточно большими (длина от 80 мм до 600 мм, диаметр 16 мм и 20 мм)
и инерционными. Используют также компенсационное устройство
в виде биметаллической пластины, встроенной в передаточный ме-
ханизм манометра, которая при изменении температуры манометра
действует в обратном направлении относительно трубчатой пружи-
ны Бурдона.
Чтобы снизить влияние барометрического давления на показа-
ния манометрических термометров, газовые и жидкостные мано-
метрические термометры заполняются рабочим веществом под не-
которым начальным давлением (до 2...3 МПа).
5.7.2.3. Термоэлектрические преобразователи
Термоэлектрический термометр — прибор для измерения темпе-
ратуры, состоящий из термопары в качестве чувствительного эле-
мента и электроизмерительного прибора (милливольтметра, авто-
матического потенциометра и др.).
Термоэлектрическим преобразователем, или термопарой, называ-
ют два разнородных электропроводящих элемента (обычно метал-
лические проводники, реже полупроводниковые), соединенных на
одном конце и образующих часть устройства, использующего тер-
моэлектрический эффект для измерения температуры.
Измерение температуры с помощью термоэлектрического пре-
образователя основано на термоэлектрическом эффекте Зеебека: в
замкнутой термоэлектрической цепи, составленной из двух разно-
396
Глава 5. Измерение технологических параметров
родных проводников, возникает электрический ток, если два спая
(места соединения) проводников имеют разную температуру.
Термоэлектрический эффект объясняется наличием в провод-
нике (металле) свободных электронов, число которых в единице
объема различно для разных проводников (металлов). Допустим, что
в спае с температурой t электроны из проводника А диффундируют
в проводник В в заведомо большем количестве, чем обратно. Про-
водник А заряжается положительно, а проводник В — отрицательно.
Появившийся электрический ток генерирует разность потенциалов
на двух спаях, известную как контактная разность потенциалов. Она
зависит от температуры спаев и ее можно измерить или милливольт-
метром, или потенциометром.
Спай, помещенный в измеряемую среду с температурой г, назы-
вают измерительным (горячим или рабочим) или рабочим концом тер-
мопары. Второй спай, находящийся при постоянной температуре г0
называют соединительным (опорным, холодным, свободным) или сво-
бодным концом термопары. Опорный спай подвержен действию тем-
пературы в месте присоединения к измерительному прибору. Опор-
ная температура должна выдерживаться с определенной точностью.
Если существует зависимость термоэлектродвижущей силы
(ТЭДС) термоэлектрического преобразователя от температуры ра-
бочего конца и при постоянно заданной температуре свободных
концов, то измерение температуры сводится к измерению ТЭДС
термоэлектрического преобразователя (предполагая, что температу-
ра свободных концов термоэлектрического преобразователя посто-
янна: ее стандартное значение г0 = О °C). Чтобы подключить измери-
тельный прибор (милливольтметр, либо потенциометр) в термоэлек-
трическую цепь, ее разрывают (либо в спае с температурой г0, либо
в одном из термоэлектродов, например В, — рис. 5.63, б, в).
Рис. 5.63. Принцип действия термоэлектрического преобразователя:
а — термоэлектрическая цепь из двух проводников (термоэлектродов)
А и В; б - термоэлектрическая цепь с третьим проводником С, вклю-
ченным между термоэлектродами; в — термоэлектрическая цепь с тре-
тьим проводником С, включенным в термоэлектрод В термоэлектри-
ческого преобразователя (I — температура рабочего спая; ta — темпера-
тура опорного спая)
5.7. Измерение температуры
397
ТЭДС термоэлектрического преобразователя не изменяется от
введения в его цепь третьего проводника, если концы этого провод-
ника имеют одинаковые температуры. На этом основании в цепь
термоэлектрического преобразователя подключают соединительные
провода, измерительные устройства (приборы) и подгоночные со-
противления. Желательно в цепи термоэлектрического преобразо-
вателя применять проводники, термоэлектрические свойства кото-
рых незначительно отличаются от свойств термоэлектродов.
Основные типы стандартных промышленных термоэлектричес-
ких преобразователей приведены в табл. 5.4, а технические характе-
ристики некоторых из них — в табл. 5.5.
Таблица 5.4. Стандартные промышленные термоэлектрические
преобразователи
Тип Обозначение промышленного термо п реобра зо - вателя Материалы термоэлектродов
Положительный электрод Отрицательный электрод
R ТПП Платина 87 %, родий 13 % Платина
S ТПП Платина 90%, родий 10% Платина
В ТПР Платина 70 %, родий 30% Платина 94 %, родий 6 %
J тжк Железо Константан (57 % меди, 43 % никеля)
Т тмк Медь Константан
Е ТХКн Никель—хром (хромёль) Константан
К ТХА Никель—хром (хромель) Никель—алюминий (алюмель)
N тнн Никель—хром— кремний (нихросйл) Никель—кремний (нисил)
А ТВР Вольфрам—рений Вольфрам—рений
L тхк Хромель Копель
М тмк Медь Копель
398
Глава 5. Измерение технологических параметров
Таблица 5.5. Технические характеристики термоэлектрических
преобразователей типа К и L
Тип Класс допуска Диапазон измерений. С Погрешность измерения температуры
Температурный диапазон, "С Допускаемое отклонение. °C
К 2 -40... 1300 -40...375 375...1300 ±1,5 ±0,0075/
L 2 -40... 800 -40...300 300... 800 ±2,5 ±(0,7 + 0,005 /)
Примечание, t — температура измеряемой среды, С.
Номинально приписываемая термопаре данного типа зависимость
ТЭДС от температуры рабочего конца при постоянно заданной тем-
пературе свободных концов называется номинальной статической
характеристикой (НСХ) преобразования термопары (рис. 5.64).
Рис. 5.64. Номинальные статические характеристики термоэлектрических
преобразователей
5.7. Измерение температуры
399
НСХ термоэлектрических преобразователей не линейны и могут
быть аппроксимированы полиномами:
п
£(г,О)=£Л/, (5.56)
/-о
где £(/, 0), мВ — ТЭДС термопары при температуре рабочего конца
t °C и температуре свободного конца г0 = 0 °C; А-, — коэффициенты
полинома. В зависимости от природы термоэлектродов и диапазона
температур степень полинома п может изменяться от 3 до 14.
В реальных производственных условиях температура свободных
концов термопары обычно отличается от температуры t0 = 0 °C, для
которой составлены таблицы номинальных статических характерис-
тик, поэтому в показания измерительных приборов необходимо вво-
дить поправку.
Способы устранения погрешности, обусловленной температурой
свободных концов термоэлектрического преобразователя
1. Расчетная поправка. К измеренному значению ТЭДС £(/, t0)
прибавляют величину ТЭДС £(г0, 0), найденную по НСХ преобра-
зования термопары и соответствующую действительной температуре г0
свободного конца термопары при измерении:
£(/, 0)=£(/, Г0) + £(г0, 0). (5 57)
По полученному суммарному значению ТЭДС £(г, 0) с помо-
щью НСХ преобразования термопары находят измеряемую темпе-
ратуру.
Если НСХ преобразования термопары близка к линейной, то к
значению температуры, найденному по значению измеренной
ТЭДС, добавляют действительную температуру свободных концов
термопары
2. Перестановка указателя аналогового измерительного прибора.
Если температура свободных концов термопары постоянна, а НСХ
преобразования термопары близка к линейной, поправку к показа-
ниям вводят предварительной установкой стрелки прибора на деле-
ние шкалы, соответствующей этой температуре.
3. Перенос свободных концов термопары в зону постоянной тем-
пературы с помощью удлиняющих проводов. Термопары из деше-
вых материалов удлиняют с помощью термоэлектродных проводов,
изготовленных из тех же материалов, что и основная термопара. Для
термопар из дорогих материалов в качестве удлиняющих проводов
используют более дешевые термоэлектродные провода, которые в
заданном диапазоне температур (обычно от 0 °C до 100 °C) образуют
термопару с такой же НСХ, что и основная термопара.
400
Глава 5 Измерение технологических параметров
Рис. 5.65. Подключение термоэлектричес-
кого преобразователя к измерительному
прибору:
I — головка термоэлектрического преобразова-
теля; 2 — рабочий (горячий) спай термоэлект-
рического преобразователя; 3 — термоэлектрод-
ный кабель; 4 — датчик температуры свободно-
го (холодного) спая; 5 — экран
4. Термостатирование свободных концов термопары с помощью
термостата. Стрелку аналогового измерительного прибора устанавли-
вают на деление шкалы, соответствующей температуре термостата.
5. Автоматическое введение поправочного напряжения. К ТЭДС
E(t, t0), развиваемой термопарой, добавляют поправочное напряже-
ние E(t0, 0), соответствующее температуре свободных концов термо-
пары, с помощью корректирующего устройства, представляющего
собой мост сопротивлений, в одно из плеч которого включено сопро-
тивление. зависящее от температуры (медный резистор, полупровод-
никовый диод и т. п.). Это сопротивление является датчиком темпе-
ратуры свободных концов термопары и должно иметь с ними одина-
ковую температуру, поэтому располагается рядом с тем местом, где
термопара подключается к измерительному прибору (рис. 5.65).
Примечание
При соединении термоэлектродных проводов с термоэлектрическим
преобразователем и измерительным прибором необходимо соблюдать по-
лярность. Чтобы избежать влияния помех на измерительную часть прибо-
ра, линию связи прибора с термоэлектрическим преобразователем экрани-
руют (см. рис. 5.65). Например, в качестве экрана может быть использова-
на заземленная стальная трубка. Для зашиты от наводок рекомендуются:
применение емкостей, фильтрующих помехи; заземление одного из термо-
электродов термоэлектрического преобразователя (рис. 5.66, а); заземле-
ние измерительной цепи через резисторы (рис. 5.66, б). Схема (рис. 5.66, 6)
используется в том случае, если появляются технические трудности зазем-
ления термоэлектрода термоэлектрического преобразователя
Конструктивное оформление термоэлектрического преобразова-
теля разнообразно и зависит в основном от условий их применения.
Термоэлектроды обычно делают из проволоки, реже из полосок не
очень тонкой фольги. Формы рабочего спая термопар из проволоч-
ных термоэлектродов представлены на рис. 5.67. Рабочий спай поме-
щают в зонд или непосредственно в среду, температуру которой изме-
ряют. Изготавливают открытые или закрытые рабочие спаи (рис. 5.68).
Термоэлектроды, выполненные в виде фольги, наклеивают на под-
ложку, как тензометрические датчики (рис. 5.69).
5.7. Измерение температуры
401
Рис. 5.66. Зашита от помех измерительной цепи с термоэлектрическим
преобразователем: при наличии возможности заземления од-
ного из термоэлектродов термоэлектрического преобразовате-
ля (а); при наличии технических трудностей заземления тер-
моэлектрода термоэлектрического преобразователя (б):
1 — первичный измерительный преобразователь (термоэлектрический
преобразователь); 2 — термоэлектродные провода; 3 — колодка зажимов;
4 — медные провода; ИП — измерительный прибор; Я, = Я2 = 1 кОм —
резисторы цепи заземления; Я3 ~ Л, = 2 кОм, С = 50 пФ — соответствен-
но резисторы и конденсатор фильтра низких частот; — 100 МОм —
резисторы цепи заземления на входе измерительного прибора (усили-
теля преобразования сигнала)
Как правило, рабочий спай промышленных термоэлектричес-
ких преобразователей изготовляют в пламени вольтовой дуги. Тер-
моэлектрические преобразователи из неблагородных металлов свари-
вают под слоем флюса, а преобразователи из платиновой группы —
без флюса. Пайку применяют при изготовлении термоэлектричес-
ких преобразователей из тонкой проволоки.
Рис. 5.67. Типовая форма спаев термоэлектрических преобразователей:
а — сваренные внахлест; б — развальцованные; в — сваренные встык;
г — витые провода
402
Глава 5. Измерение технологических параметров
Рис. 5.68. Типы термопарных зондов:
а — открытый и незазем ленный; б — открытый и заземленный; в — за-
крытый и заземленный; г — закрытый и незаземленный
Рис. 5.69. Конструкция пленочной
термопары:
I — спай; 2 — цветные соединительные
провода; 3 — пластиковая пленка
В настоящее время широкое
распространение получили ка-
бельные термоэлектрические
преобразователи, изготовляемые
из термопарного кабеля. Такой
кабель представляет собой пару
термоэлектродов, помещаемую внутрь металлической трубки и изо-
лированную от нее уплотненным плавленым порошком MgO
Из специальных термопар можно выделить многозонный тер-
моэлектрический преобразователь, применяемый для измерения тем-
пературы в вертикальных аппаратах (колонны синтеза аммиака, ме-
танола и др.). Чехол такого устройства представляет собой трубу, в
которую помещен пучок изолированных один от другого преобразо-
вателей различной длины.
Динамические свойства серийно выпускаемых промышленных
термопар характеризуются постоянными времени (показателями теп-
ловой инерции), величина которых колеблется от нескольких се-
кунд до сотен секунд.
Термоэлектрические преобразователи выпускают со следующи-
ми значениями постоянных времени’
• до 5 с — малоинерционные;
• до 60 с — средней инерционности;
• до 180 с — большой инерционности;
• 10 с — рабочий спай не изолирован от корпуса датчика;
• 20(60) с — рабочий спай изолирован от корпуса датчика.
Для термоэлектрического преобразователя с постоянными вре-
мени более 180 с инерционность не нормируется
5.7. Измерение температуры
403
5.7.2.4. Термопреобразователи сопротивления
Принцип действия термометров сопротивления основан на зави-
. р^мости электрического сопротивления материалов от температуры.
•> Термометр сопротивления представляет собой комплект, в ко-
торый входят:
• первичный измерительный преобразователь, воспринимающий
тепловую энергию и преобразующий изменение температуры в из-
менение электрического сопротивления;
• прибор, измеряющий электрическое сопротивление и отграду-
ированный в единицах измерения температуры.
Первичный измерительный преобразователь термометров сопро-
тивления называют термопреобразователем сопротивления (ТС).
В отличие от термопар, являющихся активными преобразователями
(преобразователями генераторного типа), термопреобразователи сопро-
тивления являются пассивными преобразователями (преобразователя-
ми параметрического типа). Для них необходим вспомогательный ис-
точник энергии, тогда как для термопар он обычно не требуется.
Различают металлические и полупроводниковые термопреобра-
зователи сопротивления Полупроводниковые термопреобразовате-
ли сопротивления называют также термисторами.
Металлические термопреобразователи сопротивления
В качестве материала для металлических ТС используют чаще
всего платину, медь и никель, из которых изготовляются техничес-
кие ТС д ля измерения температуры в интервале от —200 °C до +750 °C
(платиновые) и от -50 °C до +180 °C (медные).
Термопреобразователи сопротивления могут быть охарактеризо-
ваны двумя параметрами: Rq — сопротивлением термопреобразова-
теля при температуре 0 °C и lVi0Q = Rmi/R^ — отношением сопротивле-
ния термопреобразователя при 100 °C к его сопротивлению при 0 °C.
Величина 1¥ю() зависит от чистоты материала.
Зависимость сопротивления металлических проводников от тем-
пературы может быть с весьма высокой точностью описана уравне-
ниями третьей степени.
Зависимость сопротивления платинового ТС с Wl00 = 1,3910 от
температуры выражается интерполяционным уравнением:
R, = «о [1 + At + Bt2 + Ct3 (t - 100)], (5.58)
где R, — электрическое сопротивление металла при температуре /
(°C), Ом; Rq — электрическое сопротивление металла при темпера-
туре 0 °C, Ом; А, В, С — постоянные коэффициенты, значения кото-
рых равны:
404
Глава 5. Измерение технологических параметров
• в интервале от —200 °C до 0 °C
А = 3,9692 10'3 °C-1; В = -5,8290 • I0'7 °C’2; С = -4,3303 • ИГ12 °C-4;
• в интервале от 0 °C до 600 °C
А = 3,9692 10 3 “С-1; В = -5,8290 -10"7 °C’2; С = 0;
• в интервале от 600 °C до 1100 °C
А = 3,9692 10~3 ’С4; В = -5,8621 • 10’7 °C’2; С = 0.
Зависимость сопротивления медного ТС с = 1,4260 от тем-
пературы в интервале от —50 °C до +180 °C выражается уравнением
(5.60), где а — температурный коэффициент сопротивления меди
(а = 4,26 - 10~3 °C1).
Зависимость сопротивления никелевого ТС с = 1,6170 от
температуры в интервале температур от —60 °C до +100 °C выражает-
ся интерполяционным уравнением вида
R, = Яо(1 + Лг + &2), (5.59)
а в интервале температур от +100 °C до +180 °C выражается интер-
поляционным уравнением вида
R, = Ro [1 + At + Bt2 + Ct2 (f - 100)], (5.59a)
где A = 5,4963 • 10’3 °C"1; В = 6,7556 - IO-6 °C 2; C = 9,2004 10"9 °C’3.
Замечание
Достоинствами никелевых ТС являются высокий температурный ко-
эффициент электрического сопротивления (а = 6,6 • 10-3 ’С-1) и большое
удельное сопротивление (12,8 •10'8 Ом • м). Недостатки: нелинейная НСХ;
значительная окисляемость при высоких температурах.
При обычных требованиях к точности зависимость сопротивле-
ния ТС от температуры можно выразить линейной функцией
Л = Ло(1+аг), (5.60)
где Ro — сопротивление датчика при температуре 0 °C, Ом; t —
температура,°C, а — температурный коэффициент сопротивления, °C-’.
Типовые зависимости сопротивления некоторых металлов от тем-
пературы приведены на рис. 5.70. Они свидетельствуют о достаточ-
но высокой линейной взаимосвязи между сопротивлением и темпе-
ратурой (за исключением никеля).
В соответствии с ГОСТ выпускаются термопреобразователи со-
противления следующих номинальных статических характеристик
5.7. Измерение температуры
405
Рис. 5.70. Зависимость отношения Я,//^ для некоторых металлов от тем-
пературы:
Я, — сопротивление термометра при температуре t, Ом; Д, — сопротив-
ление термометра при температуре 0”С (273,15 К). Ом
(НСХ) преобразования: платиновые (ТСП) — 1П, 5П, 10П, 50П.
100П, 500П; медные (ТСМ) — ЮМ, 50М, 100М; никелевые (ТСН) —
100Н. Число в условном обозначении НСХ показывает сопротивле-
ние термопреобразователя (Ом) при температуре 0 °C.
Конструктивно термопреобразователи сопротивления представля-
ют собой тонкую платиновую или медную проволоку, намотанную
бифилярно на специальный слюдяной, фарфоровый или пластмассо-
вый каркас, или свернутую в спираль и вложенную в каналы защит-
ного корпуса. Вариант конструкции термопреобразователя сопротив-
ления изображен на рис. 5.71. Чувствительный элемент на керами-
ческом каркасе состоит из двух последовательно соединенных
платиновых спиралей 1 К двум концам этих спиралей припаяны ко-
роткие платиновые выводы 3, к которым затем привариваются необ-
ходимой длины выводные проводники. Платиновые спирали разме-
щаются в каналах керамического каркаса 2. Крепление платиновых
спиралей и выводов в каркасе осуществляется глазурью 4, изготовля-
емой на основе оксидов алюминия и кремния: коэффициент линей-
ного расширения глазури близок к коэффициентам линейного рас-
ширения материала выводов и каркаса. Подгонка номинального со-
противления чувствительного элемента Rq при 0 °C осуществляется
постепенным уменьшением длины противоположных концов плати-
новых спиралей с последующей пайкой в точке 5. Пространство меж-
Рис. 5.71. Схема платино-
вого термопреобразовате-
ля сопротивления. Пояс -
нения см. в тексте
406
Глава 5. Измерение технологических параметров
Рис. 5.72. Варианты схем подключения термопреобразователей сопротив-
ления к измерительным приборам:
а — двухпроводная; б — трехпроводная; в — четырехпроводная
ду платиновыми спиралями заполняют порошком оксида для улуч-
шения теплового контакта между витками спиралей и каркасом.
Схемы подключения термопреобразователей сопротивления по-
казаны на рис. 5.72. Четырехпроводная схема подключения ТС
(рис. 5.72, в) обеспечивает измерения с максимальной точностью.
Однако дополнительные расходы на соединения такого рода не оп-
равдываются их улучшенными характеристиками. Поэтому наиболь-
шее распространение при подключении термопреобразователей со-
противления к измерительным приборам в реальных условиях полу-
чила трехпроводная схема (рис. 5.72, 6), так как такое подключение
уменьшает погрешность измерения, возникающую при изменении
сопротивления проводов (например, при изменении их температу-
ры). К одному из выводов терморезистора Rt подсоединяют два про-
вода, а третий подключают к другому выводу R, (рис. 5.73). Необходи-
мо соблюдать условие равенства всех характеристик трех проводов.
Термопреобразователи сопротивления можно подключать к изме-
рительному прибору, используя двухпроводную линию (рис. 5.72, а),
Рис. 5.73. Практическая ре-
ализация подключения ТС
по трехпроводной схеме к
измерительному прибору
но тогда отсутствует компенсация сопро-
тивления соединительных проводов, и по-
казания измерительного прибора зависят
от колебаний температуры соединительных
проводов (подробнее см. разд. 5.5).
К числу достоинств термопреобразова-
телей сопротивления следует отнести высо-
кую точность (меньшую, чем у стеклянных
термометров расширения, но большую, чем
у термоэлектрических преобразователей
(термопар) и всех остальных контактных
термопреобразователей и термометров), ста-
бильность характеристики преобразования
и возможность измерения криогенных тем-
ператур (от -260 °C).
5.7. Измерение температуры
407
Термометр сопротивления — наиболее точный датчик, позво-
ляющий измерять температуру с точностью до 10~4 °C (для этого
необходимо измерять электрическое сопротивление с точностью
до 3 10 6 Ом).
Некоторые метрологические характеристики наиболее широко
применяемых термопреобразователей сопротивления приведены в
табл. 5.6.
Таблица 5.6. Метрологические характеристики термопреобразова-
телей сопротивления типа ТСП, ТСМ
Тип нсх Класс допуска Диапазон нзмерений,°С Допускаемые отклонения,°€
50П А -50...250 (500) ±(0,15 + 0,002 Г)
ТСП 100П В -50...250 (500) ±(0,30 + 0,005t)
PtlOO С -5O...25O (500) ±(0,60 + 0,008 /)
50М В -50.-150(180) (0,25 + 0,0035 /)
ТСМ 100М с -50.-150(180) (0,50 + 0,0065t)
Примечание, t — температура измеряемой среды, °C. Значение показателя тепловой
инерции ТС не превышает 30 с. Рабочий ток в измерительной цепи ТС не более 5 мА.
(500), (180) — для единичного производства.
К недостаткам можно отнести большие размеры термопреобра-
зователей сопротивления (диаметр чехла для термопреобразователя
сопротивления 6...20 мм, длина 50 ..180 мм) и. как следствие, их
высокую инерционность (постоянная времени ТС может составлять
несколько секунд при измерении температуры жидкостей и несколько
минут при измерении температуры газов).
Полупроводниковые термопреобразователи сопротивления
Другая основная группа чувствительных к температуре преобра-
зователей температуры известна под названием термисторы.
Зависимость сопротивления термистора от температуры можно
приближенно выразить экспоненциальной функцией:
/?(Т2) = A(7j)exp
TiJ.
(5.61)
{Т2
где RIT^) и /?(Г|) — сопротивление термистора (Ом) при абсолют-
ной температуре 72 (К) и эталонной температуре 7\ (К); В — коэф-
фициент, зависящий от материала.
Термисторы имеют сложную и плохо воспроизводимую от об-
разца к образцу зависимость термометрического параметра от тем-
408 Глава 5. Измерение технологических параметров
пературы, что не позволяет создать для них стандартные градуиро-
вочные характеристики.
Типичные статические характеристики преобразования термис-
торов представлены на рис. 5.74. Сопоставление характеристик пре-
образователей сопротивления с характеристиками термисторов по-
зволяет прийти к следующим выводам: последние существенно не
линейны (это недостаток, сюда же можно отнести низкую стабиль-
ность), но зато они обладают более высоким температурным коэф-
фициентом сопротивления по сравнению с металлами (термисторы
имеют температурный коэффициент сопротивления между 3 % и 6 %
на 1 °C, а платиновые термометры сопротивления 0,4 % на 1 °C);
температурный коэффициент сопротивления у термисторов, как пра-
вило, отрицательный.
Примечание
Разработаны различные способы линеаризации статической темпера-
турной характеристики термистора: шунтирование термистора линейным
резистором; последовательное подключение с термистором линейного ре-
зистора или преобразователя, имеющего зеркальную проходную характе-
ристику по отношению к температурной характеристике термистора; ис-
пользование специального процессора и т. д.
Чувствительный элемент термистора изготовляют из медномар-
ганцевых, кобальтомарганцевых и других соединений. Форма и раз-
меры чувствительного элемента термистора разнообразны: пластин-
ка, стержень или диск, шайба (диаметр менее 0,2 мм), спеченный
шарик (диаметр 0,2...0,5 мм). Вариант конструкции термистора по-
казан на рис. 5.74. Термисторы существенно меньше по размерам,
Рис. 5.74. Схема термистора (полупроводникового термометра сопротив-
ления) и его температурные характеристики:
/ — термистор; 2 — защитный чехол (коррозионностойкая сталь); 3 —
внутренняя изоляция (кварцевый песок); I — термистор с отрицатель-
ным температурным коэффициентом сопротивления; II — высокотем-
пературный термистор; III — термистор с положительным температур-
ным коэффициентом сопротивления
5.7. Измерение температуры
409
чем металлические гермопреобразователи сопротивления, и поэто-
му быстрее реагируют на изменение температуры.
Диапазон измеряемых термисторами температур сравнительно
небольшой: от —60 ’С до +180 °C. Термисторы обладают удовлетво-
рительной точностью, высокой чувствительностью, а также малой
инерционностью — наименьшей постоянной времени (по сравне-
нию с другими типами термометров)
Термисторы изготавливают с большим начальным сопротивле-
нием, что позволяет снизить до незначительных величин погреш-
ности. вызываемые изменением температуры соединительных про-
водов
Замечание
Термисторные преобразователи с отрицательным температурным ко-
эффициентом сопротивления известны больше под термином NTC-терми-
сторы (negative temperature coefficient). Существуют и термисторы с поло-
жительным коэффициентом сопротивления, известные как РТС-термисто-
ры (positive temperature coefficient). Последние чаще применяются не для
измерения температуры, а для предупреждения перегрева.
В табл. 5.7 приведены сравнительные характеристики преобра-
зователей температуры.
Таблица 5 7 Сравнительные характеристики преобразователей
температуры
Параметр Термопреобразователь
Термопара Термометр сопротивления Термистор
Чувствительность 10...50 мкВ/'С 0,1...100м/°С 0,1... 1,0 кОм/°С
Стабильность (дрейф за год) 0,5 °C 0,01 % 1 %
Воспроизводимость 5 °C 0.05 °C 0,5 °C
Диапазон температур -200...+2200 °C —2ОО...+85О°С — 100...+350 °C
Линейность Средняя Высокая Нелинейный
Минимальные габариты Диаметр 0,4 мм Диаметр 5 мм Диаметр 0,4 мм. длина 5 мм
Точность Хорошая Высокая Удовлетвори- тельная
Стоимость Высокая Низкая Средняя
410
Глава 5. Измерение технологических параметров
5.7.2.5. Пьезоэлектрические термопреобразователи
К этой группе можно отнести кварцевые датчики, измеряющие
изменение резонансной частоты кварцевого кристалла, зависящей
от изменения температуры. Кварцевый измерительный преобразова-
тель работает в рабочем диапазоне от —80 °C до +250 °C, имеет линей-
ную характеристику от —50 °C до +250 °C с точностью 0,04 °C и выда-
ет сигналы, удобные для регистрирующих устройств или последую-
щей цифровой обработки.
5.7.2.6. Погрешности измерения температуры
контактным методом
При измерении температуры контактным методом необходим
тепловой контакт чувствительного элемента термопреобразователя
с объектом измерения, в результате чего возникает искажение тем-
пературного поля в месте измерения. Кроме того, на температуру
чувствительного элемента влияет не только его теплообмен с изме-
ряемой средой, но также лучистый теплообмен с окружающими
поверхностями и передача теплоты вдоль конструктивных элемен-
тов теплоприемника за счет теплопроводности. В результате даже в
стационарном режиме возникает разность между температурой чув-
ствительного элемента и температурой измеряемой среды, которую
называют погрешностью контактного метода измерения температу-
ры, приближенно рассчитываемую по выражению:
где t, tj, tc — температуры измеряемой среды, термопреобразователя и
внутренней стенки трубопровода (или части технологического обору-
дования), °C; Гт, 7°с — абсолютные температуры термопреобразователя
и внутренней стенки трубопровода (или части технологического обо-
рудования), К; £, p,s — длина, периметр и площадь сечения термопре-
образователя; — коэффициент конвективной теплоотдачи от изме-
ряемой среды к термопреобразователю, Вт/(м2 К); Л — теплопровод-
ность материала термопреобразователя; ст0 = 5,67 10~8 Вт/(м2 • К4) —
константа изучения абсолютно черного тела (постоянная Стефана-
Больцмана); е|1р — приведенный коэффициент излучения системы
термопреобразователь—стенка, который в случае Ат < Ас можно
приближенно принять равным коэффициенту излучения термопре-
образователя Епр = г,; Лт и - площади поверхностей термопреоб-
разователя и стенки трубопровода (или части технологического обо-
рудования); е7 — коэффициент излучения термопреобразователя;
th — гиперболический тангенс.
5.7. Измерение температуры
411
Полностью избавиться от методических погрешностей невозмож-
но, их можно лишь свести к минимуму К сожалению, общих пра-
вил установки термопреобразователя не существует Можно дать лишь
некоторые советы, следуя которым, можно уменьшить погрешность
контактного метода измерения температуры.
1. Уменьшение лучистого теплообмена с окружающими поверхно-
стями с помощью экранирующих устройств (тепловых экранов). На-
пример, термоэлектрический преобразователь помещают в трубку (она
вставлена в стенку аппарата, где измеряют температуру). Трубка явля-
ется экраном, отделяющим преобразователь от теплового излучения.
2. Уменьшение передачи теплоты вдоль конструктивных эле-
ментов термопреобразователя за счет теплопроводности путем
уменьшения диаметра и длины выступающей наружу части термо-
преобразователя. Выступающую часть и место соединения термо-
преобразователя со стенкой аппарата необходимо покрывать тепло-
вой изоляцией.
3. Увеличение коэффициента теплоотдачи от измеряемой среды
к термопреобразователю. При измерении температуры газов или
паров, движущихся по трубопроводу, термоприемники всех видов
(стеклянные жидкостные термометры, манометрические термомет-
ры, термоэлектрические преобразователи, термометры сопротивле-
ния) следует располагать против направления потока в его центре,
где скорости максимальны В этом случае коэффициент теплоотда-
чи в месте соприкосновения потока с термоприемником возрастает
вследствие разрушения пограничного слоя. При измерении темпе-
ратуры неподвижного газа для увеличения коэффициента теплоот-
дачи термоэлектрический преобразователь помещают в трубку (она
вставлена в стенку аппарата, где измеряют температуру), через ко-
торую водоструйным насосом с большой скоростью просасывается
нагретый газ. Большая скорость газового потока увеличивает тепло-
перенос к спаю преобразователя.
Примечание
Разработаны новые технологии, позволяющие изготовить чувствитель-
ные элементы контактных электрических термометров с чрезвычайно ма-
лыми размерами (оболочечные элементы), что положительно влияет на
уменьшение помех — искажений температурного поля вокруг самого дат-
чика и на динамику процесса измерения.
5.7.3. Измерение температуры бесконтактным методом
Бесконтактный способ измерения температуры основан на вос-
приятии тепловой энергии, передаваемой лучеиспусканием и вос-
принимаемой на расстоянии от исследуемого объекта. Верхний пре-
412
Глава 5 Измерение технологических параметров
дел измерения температуры таким способом теоретически неогра-
ничен. Часто традиционный контактный способ измерения темпе-
ратуры невозможно применить в силу ряда причин: недоступные
для прямого контакта поверхности (промышленное оборудование,
высокая температура в производстве кирпича, керамики, стекла и т. д.,
агрессивные вещества); материалы, плохо проводящие теплоту; не-
большие размеры объектов (при измерении контактным методом
энергия между датчиком и объектом измерения перераспределяет-
ся, в результате чего температура объекта может существенно из-
мениться).
Известно, что любая поверхность, температура которой выше
абсолютного нуля, испускает тепловую энергию в виде электромаг-
нитного излучения. При поглощении электромагнитного излучения
от излучающего тела другими телами электромагнитное излучение
вновь превращается в тепловую энергию. Излучение нагретых тел
называют тепловым. Температуру тела можно измерить на расстоя-
нии по тепловому излучению, при этом температурное поле объекта
измерения не искажается. Следовательно, бесконтактный метод из-
мерений температуры основан на том, что чувствительный элемент
средства измерений не приводится в контакт с объектом измерения.
Измерение температуры тел по их тепловому излучению называют
пирометрией. Средства измерений температуры тел по тепловому излу-
чению называют пирометрами излучения или просто пирометрами.
Бесконтактные методы измерения температуры теоретически не
имеют верхнего температурного предела своего применения. Так,
температура источника со сплошным спектром излучения, близкая
к 6000 °C, измеряется теми же методами, что и температура, напри-
мер, и в 1000 °C, и в 2000 °C.
5.7.3.1. Теоретические основы измерения температуры
по тепловому излучению
Методы измерения температур, использующие различные свой-
ства теплового излучения тел, основаны на физических законах из-
лучения абсолютно черного тела. Под абсолютно черным телом по-
нимают тело, поглощающее всю падающую на него лучистую энер-
гию. Моделью абсолютно черного тела может служить отверстие в
стенке непрозрачной полости, намного меньше самой полости, все
участки поверхности которой имеют одну и ту же температуру. Для
такой модели коэффициент поглощения принимают равным едини-
це, поскольку энергия луча, попадающего в малое отверстие полос-
ти, практически полностью поглощается внутри полости вследствие
многократных отражений от ее внутренней поверхности. При рав-
номерном нагреве такой полости тепловое излучение из отверстия
5.7. Измерение температуры
413
соответствует излучению абсолютно черного тела. Определяя такую
модель как идеальный излучатель, можно отметить, что при данной
температуре абсолютно черное тело излучает (поглощает) макси-
мально возможное количество энергии. Величины, относящиеся к
абсолютно черному телу, отметим ниже индексом «О».
В пирометрии в качестве величин, характеризующих тепловое
излучение тел, используют энергетическую светимость (излучатель-
ность) и энергетическую яркость (лучистость). Следует различать
полную и спектральную излучательность и полную и спектральную
яркость.
Закон Планка устанавливает зависимость спектральной энерге-
тической яркости абсолютно черного тела от длины волны и тем-
пературы:
^охт - 1
А
= —ехр ——
А5 1ат
--1
1
(5.63)
где А — длина волны, м; Т — температура тела, К; С, = 1,191 х
х 1016 Вт • м2/ср; С2 = 1,438 10~2 м К
Для видимого участка спектра и Т< 3000 К вместо закона План-
ка (5.71) используют формулу Вина:
Вохт = С1А-5ехр^-^|.
(5.64)
На рис. 5.75 представлено семейство кривых спектральной све-
тимости черного тела в зависимости от длины волны при различных
температурах. С увеличением температуры черного тела спектраль-
ная яркость быстро возрастает. В видимой области спектра, напри-
мер, при А = 0,65 мкм и Т = 1000 К и 2000 К спектральная яркость
черного тела возрастает соответственно в 20 и 16 раз быстрее, чем
температура. Это позволяет осуществить измерение температуры в
видимой области спектра по изменению яркости тела при данной
длине волны. Условную температуру реального тела, измеренную
этим методом, называют яркостной температурой. Приборы, изме-
ряющие яркостную температуру в видимой области спектра, назы-
ваются оптическими, или фотоэлектрическими, пирометрами.
Из кривых рис. 5.75 видно, что с уменьшением температуры чер-
ного тела максимум распределения энергии его излучения смещает-
ся в сторону длинноволновой области спектра, что явилось основа-
нием использовать для измерения яркостной температуры инфра-
красную область спектра, выделяя из нее сравнительно неширокий
спектральный участок.
По мере повышения температуры черного тела максимум рас-
пределения энергии его излучения смещается в сторону коротких
414
Глава 5. Измерение технологических параметров
Рис. 5.75. Зависимость энергетической светимости абсолютно черного тела
от длины волны и температуры
волн На графике это четко просматривается (см. пунктирную ли-
нию). Эта закономерность была замечена Вином, поэтому она и
носит название закона смещения Вина. Если продифференцировать
уравнение Планка (5.63) и приравнять полученную производную
нулю, то после таких операций и преобразований можно получить
закон смещения Вина:
ЛтахГ = 2896 мкм К,
где Лтах — длина волны, соответствующая максимуму кривой рас-
пределения энергии в спектре излучения черного тела; Т - абсо-
лютная температура.
Зная длину волны, соответствующую максимуму спектральной
энергетической яркости, можно определить температуру излучателя.
В видимой части спектра смещение Лтах и, следовательно, пере-
распределение энергии, вызываемое изменением температуры тела,
приводит к изменению его цвета, что позволило методы измерения
температур тел, основанные на изменении с температурой распре-
деления энергии внутри данного участка спектра излучения, назы-
вать цветовыми методами. Условная температура тела, измеренная
такими методами, называется цветовой температурой. Наибольшее
распространение из цветовых методов получил метод измерения
цветовой температуры в видимой области спектра по отношению
энергетических яркостей в двух спектральных интервалах. Прибо-
ры, измеряющие цветовую температуру по отношению энергетичес-
5.7. Измерение температуры
415
ких спектральных яркостей, называют пирометрами спектрального
отношения, или цветовыми пирометрами.
Интегрирование уравнения Планка приводит к закону Стефана-
Больцмана, определяющему интегральную энергетическую яркость:
50г=стГ4, (5.65)
где ст — постоянная, равная 1,805 I0-8 Вт/(ср м2 • К4).
Закон Стефана—Больцмана положен в основу метода измерения
температур тел по их полному излучению. Условную температуру
реального тела, измеренную таким методом, называют радиационной
температурой, или температурой полного излучения. Пирометры,
предназначенные для измерения радиационной температуры, назы-
вают пирометрами полного излучения, или радиационными.
Энергетическая яркость реальных физических тел меньше ярко-
сти абсолютно черного тела. Спектральная энергетическая яркость
В/Т реального тела связана с энергетической яркостью абсолютно
черного тела Д|)г соотношением:
В).Т ~ ЕХ7^0/.Т’ (5.66)
где ехг— спектральный коэффициент излучения (или интегральный
коэффициент черноты) реального тела при температуре Т.
Отметим, что согласно закону Кирхгофа спектральный коэффи-
циент излучения любого тела равен его спектральному коэффици-
енту поглощения: = а)Г.
Для измерения действительной температуры реальных тел по их
излучению необходимо точно измерить условную температуру (яр-
костную, цветовую, радиационную), а затем к полученной темпера-
туре ввести поправку, величина которой зависит от интегрального
коэффициента черноты реального тела ехг. Для большинства реаль-
ных тел эти коэффициенты известны.
Из кратко изложенных законов излучения можно судить об ос-
новных положениях пирометрии:
• по мере снижения температуры тепловое излучение уменьша-
ется пропорционально четвертой степени абсолютной температуры;
• при низких температурах максимум спектральной энергети-
ческой яркости смещается в область больших длин волн;
• коэффициент излучения нечерных тел зависит от их темпера-
туры и длины волны, а также от материала излучателя и состояния
структуры его поверхности;
• наряду с собственным излучением, происходящим из внутрен-
ней тепловой энерши тела, при некоторых условиях в пирометр
могут попадать также и отраженные лучистые тепловые потоки от
постороннего источника излучения.
416
Глава 5. Измерение технологических параметров
5.7.3.2. Яркостные пирометры
Наиболее известными из них являются пирометры с «исчезаю-
щей» нитью накаливания (рис. 5.76), применяемые для измерения
яркостной температуры в видимой области спектра. Принцип дей-
ствия: сравнение яркости измеряемого излучения и контрольного
излучателя, например, накаленной нити вольфрама.
Сравнить обе яркости можно, например, изменением яркости
контрольного излучателя, изменяя мощность нагревания нити в
широких пределах. Благоприятная для чувствительности глаза дли-
на волны (0,65 мкм) в области видимой части спектра обеспечивает-
ся красным светофильтром. Если в результате уравнивания достига-
ется равенство обеих яркостей, то верхняя часть нити накаливания
исчезнет (перестанет быть видимой) на фоне изображения источни-
ка измеряемого излучения. Мощность нагревания нити накалива-
ния на пути потока излучения является показателем яркостной тем-
пературы измеряемого объекта. Ее считывают по температурной
шкале измерительного прибора.
Диапазон измерений температуры для пирометров с «исчезаю-
щей» нитью накаливания: 400...5000 °C (в особых случаях до 10000 °C).
Погрешность промышленных пирометров составляет ±1 % от верх-
него предела диапазона измерений.
Рис. 5.76. Яркостный пирометр с «исчезающей» нитью накаливания:
/ — объектив; 2,1— диафрагмы; 3, б — фильтры; 4 — пирометрическая
лампа; 5 — окуляр; 8 — реостат; 9 — измерительный прибор
5.7. Измерение температуры
417
5.7.3.3. Пирометры спектрального отношения
Действие цветовых пирометров, или пирометров спектрального
отношения, основано на перераспределении энергетических ярко-
стей внутри данного участка спектра при изменении температуры.
Они определяют яркость излучения измеряемого объекта на двух
различных длинах волн и Х2. Если соответствующие значения спек-
тральных коэффициентов излучения е; л и гКТ2 достаточно близки
между собой (излучатель — серое тело), то определение температу-
ры практически не зависит от абсолютной величины коэффициента
излучения, поскольку искомая температура непосредственно опре-
деляется отношением яркостей. Для этого в пирометрах с помощью
двух светофильтров выделяют два излучения с различными длинами
волн и каждое подают на два отдельных фотоэлектрических чув-
ствительных элемента. Затем по выходным сигналам фотоэлектри-
ческих элементов формируется их отношение.
Примечание
Тело, коэффициент излучения е)Т которого не зависит от температуры Т
и длины волны А., называют серым.
Диапазон измерения температуры (расплавов металлов) для пи-
рометров спектрального отношения составляет 800...3000 °C, погреш-
ность равна 1 .2 % от верхнего предела диапазона измерений.
Замечание
Пирометры спектрального отношения работают более точно, чем ра-
диационные пирометры, поскольку недостоверность определения коэффи-
циента излучения не влияет на результаты измерений.
5.7.3.4. Пирометры полного излучения
Принцип действия основан на зависимости интегральной энер-
гетической яркости тела в широком спектральном интервале от тем-
пературы.
Принято считать пирометр радиационным (полного излучения),
если в нем используется не менее 90 % всего излучения, поступаю-
щего от измеряемого объекта.
Радиационный пирометр (рис. 5.77) — это бесконтактный измери-
тельный первичный преобразователь, реагирующий на излучение на-
гретого тела преимущественно в инфракрасной области спектра с
динами волн от 0,75 до 1000 мкм. Оптические линзы и зеркальная
система, чувствительные в инфракрасной области спектра, использу-
ются, чтобы сфокусировать излучение на миниатюрную термобата-
рею, состоящую из нескольких последовательно соединенных термо-
14 ГкЧЛКЫОН А. В.. Хирн юной II II
418
Глава 5. Измерение технологических параметров
1 2 3 4 5
6
Рис. 5.77. Радиационный пирометр:
Z — объектив; 2, 5 — диафрагмы; 3 — термобатарея; 4 — окуляр; 6 — изме-
рительный прибор
электрических преобразователей, или резистивный преобразователь.
Радиационные пирометры применяются для измерения не только
высоких температур (вплоть до 3500 ”С), но и для низких (до -50 °C).
5.7.3.5. Погрешности измерения температуры
бесконтактным методом
Установка и монтаж пирометров в значительной мере влияют на
успешность измерения. С одной стороны, необходимо добиться,
чтобы измерительное устройство действительно регистрировало ин-
тересующее излучение в неискаженном виде, а с другой стороны,
пирометры должны быть защищены от воздействия окружающей
среды, как правило, неблагоприятного. Измеряемое излучение во
многих случаях содержит не только составляющую, обусловленную
температурой поверхности и коэффициентом излучения, но и со-
ставляющие постороннего излучения, отраженные измеряемым
объектом или пропущенные (если объект прозрачен). Если измеря-
емый объект меньше поля визирования пирометра (например, при
измерении температуры движущейся нити или проволоки), то пи-
рометр воспринимает также излучение фона. Такими дополнитель-
ными составляющими можно пренебречь, если температура объекта
измерения значительно выше температуры посторонних излучате-
лей. Во многих случаях влияние посторонних излучений устраняют
правильной установкой пирометров.
Закрытые топки и печи по характеру излучения близки к черно-
му телу. Результат измерения будет представительным, если в поле
5.8. Измерение расхода 419
визирования не попадут светящееся пламя, пары, пыль и дым. Че-
рез отверстие для визирования в стенке печи можно контролировать
температуру печной атмосферы, элементы конструкции печи, на-
пример свода. Если нет уверенности в том, что воспринимаемое
пирометром излучение является излучением тела, приближающееся
к черному телу, или если температуру поверхности металлического
расплава нельзя измерить из-за того, что поверхность покрыта сло-
ем шлака, то внутрь печи через стенку вводят огнеупорную трубку
(закрытую с одной стороны), изготовленную из специальной стали
или керамики. В этом случае полем визирования становится раска-
ленное дно этой трубки.
5.8. ИЗМЕРЕНИЕ РАСХОДА
Расход — количество вещества (жидкости, пара, газа), проходя-
щее через данное сечение (например, трубопровода) в единицу вре-
мени. Различают объемный расход, измеряемый в единицах объема в
единицу времени (м’/ч, м3/с), и массовый расход, измеряемый в еди-
ницах массы в единицу времени (кг/с, кг/ч, т/ч).
Массовый расход можно измерить косвенно по объемному расхо-
ду, учитывая плотность измеряемой среды и влияние на плотность
температуры и давления. Действительно, для установившегося пото-
ка объемный расход и массовый расход определяются выражениями:
Fo = vA; Fv = pF0,
где A — площадь поперечного сечения потока; р — плотность изме-
ряемой среды; v — средняя скорость в сечении.
Примечание
Дня получения сравнимых результатов измерений объемный расход
газа или пара приводят к стандартным условиям
Приборы, измеряющие расход вещества, называют расходомера-
ми. Приборы, измеряющие количество вещества, протекающее че-
рез данное сечение трубопровода за некоторый промежуток време-
ни, называют счетчиками количества При этом количество веще-
ства определяется как разность двух последовательных показаний
счетчика в начале и конце этого промежутка времени. Показания
счетчика выражаются в единицах объема, реже — в единицах массы.
Прибор, одновременно измеряющий расход и количество вещества,
называют расходомером со счетчиком. Расходомер измеряет теку-
щее значение расхода, а счетчик выполняет интегрирование теку-
щих значений расхода.
420
Глава 5. Измерение технологических параметров
Примечание
В последнее время граница между счетчиками и расходомерами прак-
тически исчезает. Расходомеры оснащают средствами для определения ко-
личества жидкости или газа, а счетчики — средствами для определения
расхода, что позволяет объединить счетчики и расходомеры в одну группу
приборов — расходомеры.
Устройство (диафрагма, сопло, напорная трубка), непосредствен-
но воспринимающее измеряемый расход и преобразующее его в дру-
гую величину, удобную для измерения (например, в перепад давле-
ния), называют преобразователем расхода.
5.8.1. Расходомеры переменного перепада давления
Принцип действия расходомеров этой группы основан на зави-
симости перепада давления, создаваемого неподвижным устройством,
устанавливаемым в трубопроводе, от расхода вещества.
5.8.1.1. Измерение расхода по перепаду давления
на сужающем устройстве
При измерении расхода методом переменного перепада давле-
ния в трубопроводе, по которому протекает среда, устанавливают
сужающее устройство (СУ), создающее местное сужение потока. Из-
за перехода части потенциальной энергии потока в кинетическую
средняя скорость потока в суженном сечении повышается. В ре-
зультате статическое давление в этом сечении становится меньше
статического давления перед СУ. Разность этих давлений тем боль-
ше, чем больше расход протекающей среды, и, следовательно, она
может служить мерой расхода. Перепад давления на СУ (рис. 5.78, а)
равен
ДР = А - Р2» (5.67)
где р{ — давление на входе в сужающее устройство; р2 — давление на
выходе из него
Измерение расхода вещества методом переменного перепада дав-
ления возможно при соблюдении условий:
I) поток вещества заполняет все поперечное сечение трубопро-
вода;
2) поток вещества в трубопроводе является практически устано-
вившимся,
3) фазовое состояние вещества, протекающего через СУ, не из-
меняется (жидкость не испаряется; газы, растворенные в жидкости,
не десорбируются; пар не конденсируется).
5.8. Измерение расхода
421
Рис. 5.78. Расходомеры переменного перепада давления:
а — структура потока проходящего через диафрагму; б — распределение
статического давления р вблизи диафрагмы по длине трубопровода С;
1 — сужающее устройство (диафрагма); 2 — импульсные трубки; 3 —
(J-образный дифманометр; А—А — сечение потока вещества, в котором не
сказывается возмущающее воздействие диафрагмы; В—В — сечение пото-
ка вещества в месте его наибольшего сжатия; в — сопло; г — сопло Вентури
422 Глава 5. Измерение технологических параметров
В качес гве сужающих устройств для измерения расхода жидко-
стей, газов, пара широко применяются стандартные сужающие уст-
ройства. К ним относят стандартную диафрагму, соплб ИСА 1932,
трубу Вентури и сопло Вентури.
Стандартная диафрагма (далее — диафрагма) — диск с круглым
отверстием, имеющий острую прямоугольную входную кромку.
Сопло ИСА 1932 (далее — соплб) — СУ с круглым отверстием,
имеющее на входе плавно сужающийся участок с профилем, обра-
зованным двумя сопрягающимися дугами, переходящий в цилинд-
рический участок на выходе, называемый горловиной (рис. 5.78, в).
Расходомерная труба Вентури (далее — труба Вентури) — СУ с круг-
лым отверстием, имеющее на входе конический сужающийся участок,
переходящий в цилиндрический участок, соединенный на выходе с
расширяющейся конической частью, называемой диффузором.
Сопло Вентури — труба Вентури с сужающимся входным участ-
ком в виде сопла ИСА 1932 (рис. 5.78, г).
Эти наиболее изученные средства измерения расхода и количе-
ства жидкостей, газа и пара могут применяться при любых давлени-
ях и температурах измеряемой среды.
Установим диафрагму в трубопроводе так, чтобы центр ее отвер-
стия находился на оси трубопровода (рис. 5.78, а). Сужение потока
вещества начинается до диафрагмы, на некотором расстоянии ja
диафрагмой поток достигает своего минимального сечения. Затем
поток постепенно расширяется до полного сечения. На рис. 5.78, б
изображено распределение давлений вдоль стенки трубопровода
(сплошная линия), а также распределение давлений по оси трубо-
провода (штрихпунктирная линия). Давление потока около стенок
трубопровода после СУ не достигает своего прежнего значения на
величину рп — безвозвратной потери, обусловленной завихрениями,
ударом и трением (затрачивается значительная часть энергии).
Отбор статических давлений р, и р2 возможен с помощью соеди-
нительных импульсных трубок 2, вставленных в отверстия, распо-
ложенные до и после диафрагмы 1 (рис. 5.78, а), а измерение пере-
пада давления возможно с помощью какого-нибудь измерителя пе-
репада давления (в данном случае U-образного дифманометра 3).
Соплб (рис. 5.78, в) конструктивно изготовляется в виде насадки
с круглым концентрическим отверстием, имеющим плавно сужаю-
щуюся часть на входе и развитую часть на выходе. Профиль сопла
обеспечивает практически полное сжатие потока вещества и поэто-
му площадь цилиндрического отверстия сопла может быть принята
равной минимальному сечению потока, т. е. Aq = А2. Характер рас-
пределения статического давления р в соплб по длине трубопровода £
такой же, как и у диафрагмы. Такой же и отбор давлений р{ и р2 до
и после сопла, как и у диафрагмы.
5.8. Измерение расхода
423
Соплб Вентури (рис. 5.78, г) конструктивно состоит из цилиндри-
ческого входного участка; плавно сужающейся части, переходящей в
короткий цилиндрический участок; из расширяющейся конической
части — диффузора. Соплб Вентури благодаря диффузору обладает
меньшей потерей давления, чем диафрагма и соплб. Характер рас-
пределения статического давления р в сопле Вентури по длине
трубопровода ( такой же, как и у диафрагмы и сопла. Отбор давлений
р} и осуществляется с помощью двух кольцевых камер, каждая из
которых соединяется с внутренней полостью сопла Вентури группой
равномерно расположенных по окружности отверстий.
Отметим, что принцип измерения расхода вещества по перемен-
ному перепаду давления, создаваемому СУ, а также основные урав-
нения расхода одинаковы для всех типов сужающих устройств. На-
блюдается различие только некоторых коэффициентов в уравнени-
ях расхода, определяемых экспериментально.
Для установления зависимости расхода вещества от перепада
давления, появившегося на сужающемся устройстве, воспользуемся
законом сохранения энергии для случая несжимаемой среды — жид-
кости (уравнением Бернулли) и уравнением сплошности (неразрыв-
ности струи). Для сечений А—А и В—В горизонтального потока не-
сжимаемой среды — жидкости с постоянной плотностью р (кг/м3)
при равномерном распределении статических давлений в сечениях
(скорости по всему сечению трубопровода равны средней скорости
и направлены параллельно оси трубопровода), в отсутствие потерь
на трение и обмена с окружающей средой:
^4=-4’ <5-б8>
Р 2 р 2
- ’’гЛ’ (5.69)
где р{ и р2 — абсолютные статические давления в сечениях А—А и
В—В, Па; г;, и v2 — средние скорости потока в сечениях А—А и
В—В, м/с; и А2 — площади сечений А—А и В—В потока, м2.
Введем новые безразмерные величины: р — коэффициент суже-
ния струи и т — относительная площадь сужающего устройства,
или коэффициент сужающего устройства:
И = А2/Ас . (5 70)
где Aq — площадь отверстия СУ, м2; du D — диаметры отверстия СУ
и трубопровода соответственно при рабочей температуре среды, м
424
Глава 5. Измерение технологических параметров
Замечание
Относительный диаметр отверстия (или горловины) трубы Вентури — от-
ношение диаметра горловины к диаметру входного цилиндрического участка в
сечении, проходящем через оси отверстий для отбора давления перед СУ.
Решая совместно уравнения (5.68) и (5.69) и используя введен-
ные безразмерные величины (5.70) и (5.71), определим среднюю
скорость и2 в сечении В—В:
«2 = I , J~(P{ - Р?)- (5 72)
y]l-m2p.2 VP
В полученном уравнении (5.72) абсолютные статические давле-
ния р[ и р2 относятся к сечениям А—А и В—В, но на практике в
большинстве случаев перепад давления измеряют непосредственно
у торцов СУ около стенок трубопровода, а не в сечениях А—А и В—В
или в центре трубопровода. Кроме того, в уравнении (5.72) не учте-
ны: неравномерное распределение скоростей в сечениях А—А и В—В,
вызванное влиянием вязкости; потери энергии на трение о стенки
трубопровода и вихреобразование. Поэтому, чтобы перейти к дей-
ствительным условиям, учитывая замену давлений р{ и р2 давлени-
ями рх и р2, в уравнение (5.72) вводят поправочный коэффициент £
и уравнение для средней скорости v2 в наиболее узком сечении по-
тока принимает такой вид:
₽ Гэ
^=~гЛтГ\п^-^')’ (573)
Vl-w2p YP
где (р| — р2) — перепад давления непосредственно у торцов СУ око-
ло стенок трубопровода, Па.
Объемный расход Fo (м3/с) для несжимаемой жидкости равен
произведению средней скорости потока на площадь его сечения:
Fo = v2A2 = г2рЛд (5.74)
или
Fo = r^-7A>fi(P,-P2)- (5.75)
Поскольку коэффициенты ц, в (5.75) не определяются незави-
симо друг от друга с достаточной точностью, их объединяют в один
общий коэффициент, называемый коэффициентом расхода:
а= / (5-76)
71 -т2ц2
5.8. Измерение расхода
425
Коэффициент расхода а (5.76) учитывает расхождение теорети-
ческого и действительного расходов вещества, протекающего по тру-
бопроводу.
Теперь уравнение объемного расхода для несжимаемой жидко-
сти принимает вид:
/э
fo = <b4(d-(pi - р2). (5.77)
V н
С учетом введения поправочного коэффициента е, учитывающе-
го расширение измеряемой среды, окончательно перепишем урав-
нение (5.77)-
п
Fo =оеЛ0/-(р1 -р2). (5.78)
Для несжимаемой жидкости поправочный коэффициент е равен
единице, при измерении расхода сжимаемых сред (газа, пара) по-
правочный коэффициент е < 1 и определяется по специальным но-
мограммам.
Примечание
Полученные уравнения применяются при значении скорости потока в
СУ меньше критического, т. е. скорость потока должна быть меньше ско-
рости звука в измеряемой среде.
Расход измеряемой среды является однозначной функцией пе-
репада давления в том случае, когда все остальные величины, входя-
щие в уравнение (5.78), будут постоянными.
Площадь отверстия СУ Ао является величиной постоянной. Ко-
эффициент расхода СУ а зависит от физических свойств измеряемой
среды (плотности, вязкости), скорости потока измеряемой среды, от
геометрической формы и размеров СУ, а также от шероховатости
стенок трубопровода. Он связан функциональной зависимостью с
числом Рейнольдса (Re) и коэффициентом сужающего устройства т:
a = /(Re, т). (5.79)
С увеличением числа Рейнольдса зависимость от него а стано-
вится слабее, а достигнув граничного значения числа Рейнольдса
Rerp для различных значений т, он далее практически не изменяет-
ся (рис. 5.79). При Re > Rerp а зависит только от т и типа СУ.
Постоянное значение коэффициента расхода СУ, установленное при
Re > Rerp, называют исходным коэффициентом расхода и обозначают
a„cx (в этом случае трубопровод должен обладать достаточно глад-
кой внутренней поверхностью, а входное отверстие диафрагмы иметь
426
Глава 5. Измерение технологических параметров
Рис. 5.79. Зависимость коэффици-
ента расхода а стандартных диаф-
рагм от числа Рейнольдса при раз-
личных значениях коэффициента
сужающего устройства т
острую кромку). Значения аисх для диафрагм, сопл и сопл Вентури в
зависимости от т приведены на рис. 5.80.
При Re < Rerp а является величиной переменной, что вызывает
дополнительную погрешность при измерении расхода. Кроме того,
на практике внутренняя поверхность трубопровода шероховата, и
нужно учитывать неостроту входной кромки диафрагмы.
При измерении расхода промышленными дифманометрами ко-
эффициент расхода определяют по формулам:
• для диафрагм
® ~ ^ИСХ^Ш^Н’ (5.80)
• для сопл и сопл Вентури
а=аисх^ш> <5-81)
где кш — поправочный множитель на шероховатость трубопровода
для диафрагм, сопл и сопл Вентури, учитываемый при диаметрах
Рис. 5.80. Зависимость исходного коэффициента расхода аисх от т для
стандартной диафрагмы (а); для стандартных сопл и сопл Вен-
тури (6)
5.8. Измерение расхода 427
трубопровода от 50 до 300 мм; к„ — поправочный множитель на
неостроту входной кромки диафрагмы.
Примечание
С увеличением диаметра трубопровода D от 50 мм до 300 мм и умень-
шением т от 0,7 до 0,1 кш для диафрагмы уменьшается от 1,020 до 1,000,
для сопл и сопл Вентури уменьшается от 1,018 до 1,000; с увеличением ди-
аметра трубопровода D от 50 мм до 300 мм и уменьшением т от 0,7 до 0,1
к„ уменьшается от 1,022 до 1,002.
Для удобства практического использования формулы (5.78) плот-
ность вещества выражают в кг/м3, вместо секундного расхода ис-
пользуют часовой, а площадь отверстия СУ выражают через внут-
ренний диаметр трубопровода D (мм) при рабочей температуре ве-
щества t. При соблюдении этих условий основная рабочая формула
для расчета объемного расхода выглядит так:
Fo =0,01252aemD2K^y/Kp/p, (5.82)
где Fo — объемный расход вещества, м3/ч; Ьр — перепад давления на
сужающем устройстве, кгс/м2; К, - поправочный множитель на из-
менение внутреннего диаметра трубопровода D при отклонении
температуры от 20 °C (в интервале температур от —20 °C до +60 °C
равен единице).
Замечание
Расчет расходомеров переменного перепада давления и стандартных
сужающих устройств, а также методика выполнения измерений с помошыо
СУ регламентированы нормативными документами [20, 21].
Если известны свойства вещества, диаметр трубопровода D, ди-
аметр отверстия СУ d, перепад давления Др на СУ, то можно рас-
считать расход протекающего вещества по вышеприведенным ос-
новным формулам с использованием соответствующих графиков и
таблиц.
Если известны свойства вещества, материал и диаметр трубо-
провода D и заданы минимальный и максимальный ожидаемые рас-
ходы этого вещества, то можно найти диаметр отверстия СУ, при-
держиваясь следующей процедуры.
Предварительно выбирают расчетный перепад давления (напри-
мер, целесообразно, чтобы при максимальном перепаде давления
ДДтах значение т было бы приблизительно равным 0,2).
Диаметр отверстия СУ (при температуре 20 °C) рассчитывают по
выражению:
rf20=y-^- (5-83)
428
Глава 5. Измерение технологических параметров
Величину т определяют в зависимости от произведения та.
Для данного диаметра трубопровода D по данным табл. 5.8 строят
график зависимости та = f(m). По уравнению (5.82) вычисляют
значение та и по построенному графику определяют т. Значение
коэффициента расхода а выбирают из табл. 5 8. Далее проверяют
соответствие найденных значений по уравнению (5.82). Получен-
ное значение расхода должно находиться от значения Fo, поло-
женного в основу расчета, в пределах ±0,2 %. Если расхождение
больше, тогда, применяя метод последовательных приближений,
корректируют значения коэффициента т, повторяя вычисления.
И, наконец, рассчитывают диаметр отверстия СУ по выражению
(5.83).
Таблица 5.8. Расчетные значения коэффициента расхода а
для диафрагм
D, MM Коэффициент сужающего устройства m
0,05 0,1 од 0,3 од 0,5 0,6 0,65 0,7
50 0,613 0,616 0,629 0,649 0,676 0,713 0,761 0,791 0,827
100 0,609 0,612 0,624 0,643 0.6695 0,706 0,752 0,7815 0,817
200 0,604 0,607 0,618 0,637 0,663 0,699 0,7445 0,773 0,808
300 0,601 0,604 0,615 0,634 0,660 0,695 0,740 0,768 0,802
г400 0,598 0,602 0,615 0,634 0,660 0,695 0,740 0,768 0,802
Достоинства измерения расхода по методу переменного перепа-
да давления: простота, надежность, большая база эксперименталь-
ных данных.
Недостатки измерения расхода по методу переменного перепада
давления: значительные потери давления; износ входной кромки
диафрагмы; большие длины прямых участков трубопроводов перед СУ
К основным недостаткам расходомеров с сужающими устройствами
относят узкий диапазон измеряемых расходов (1 : 8).
Основные погрешности, %: 1 .3.
Ниже приведены практические рекомендации по применению су-
жающих устройств.
Диафрагмы: диаметр отверстия d не менее 12,5 мм; внутренний
диаметр измерительного трубопровода D — 50... 1000 мм; относи-
тельный диаметр d/D — 0,2...0,75; диапазон чисел Рейнольдса для
диафрагм с различным типом отбора давления — 5000... 108.
Сопла ИСА 1932 50 мм < D < 500 мм; 0,3 < d/D < 0,8; 7 • 104 < Re < 107
(при 0,30 < d/D < 0,44) или 2 104 < Re < 107 (при 0,44 < d/D < 0,80).
5.8. Измерение расхода
429
Трубы Вентури: 100 мм < D < 800 мм; 0,30 < d/D < 0,75.
Сопла Вентури: 65 мм < D < 500 мм; d> 50 мм: 0,316 < d/Л <0,775;
1,5 • 105 < Re < 2 10б.
Примечание
Трубы Вентури рекомендуется применять на магистральных трубопро-
водах (при небольших диапазонах изменения расхода).
Сужающее устройство (или другой преобразователь расходомера
переменного перепада давления) соединяется с дифференциальным
манометром двумя импульсными (соединительными) трубками.
В большинстве случаев диаметр трубок выбирают 10... 12 мм.
Меньшие диаметры нежелательны из-за опасности засорения тру-
бок и образования в них воздушных пузырей или водяных пробок.
С увеличением же диаметров возрастает расход материала и провод-
ка становится громоздкой, а при измерении расхода газа происхо-
дит и запаздывание показаний.
Способ защиты СУ аналогичен защите манометров от агрессив-
ных и вязких измеряемых сред (разд. 5.6.4).
5.8.1.2. Измерение расхода с помощью напорных трубок
Напорными трубками называют устройства для измерения вели-
чины и направления скорости, а также расхода жидкости или газа,
действие которых основано на измерении давления в потоке.
При измерении расхода с помощью напорных трубок, как и при
измерении расхода с помощью сужающих устройств, используется
метод переменного перепада давлений.
Из напорных трубок наибольшее распространение получили крат-
ко рассмотренные ниже трубки Пито, Прандтля, аннубар. Для из-
мерения скорости потока существует большое количество модифика-
ций трубки Прандтля (трубки Брабе, Лосиевского, Престона и др.).
Для исследования полей скоростей в пограничном слое потока вяз-
кой жидкости или газа вблизи твердой стенки применяется трубка
Стэнтона, измеряющая скоростной напор в потоке с большим гра-
диентом скорости.
Трубка Питб
Трубка Питб — Г-образная трубка для измерения динамическо-
го напора текущих жидкости или газа. Трубка датчика вводится че-
рез стенку основного трубопровода и направляется своим отверсти-
ем непосредственно навстречу потоку жидкости или газа (рис. 5.81).
Этот датчик по своей сути играет роль ударного зонда, измеряюще-
го полное давление в лобовой точке напорной трубки рполн, а второй
430
Глава 5 Измерение технологических параметров
Рис. 5.81. Схема трубки Пито
зонд (статический датчик), измеря-
ющий статическое давление (или
гидродинамическое давление в не-
возмущенном потоке) рстат, ра вме-
щается непосредственно в стенке тру-
бопровода. Динамическое давление
Рдин (скоростной напор) определяет-
ся по разности ударного (полного)
и статического давлений и связано
со скоростью соотношением, полу-
ченным из уравнения Бернулли:
Рдии = Рполн - Рстат = (5.84)
где v — скорость движения газа или жидкости в трубопроводе, м/с;
р — плотное гь газа или жидкости в рабочих условиях, кг/м3; рполн и
Рстат’ Па.
Из (5.84) скорость не возмущенно го потока в точке измерения
определяется как
v V^Aihh/P-
(5.85)
Какой бы не была удачной конструкция напорной трубки, дина-
мическое давление измеряется не вполне точно, поэтому в (5.85)
вводится поправочный коэффициент:
^т^Рдин/Р.
(5.86)
где /с, — коэффициент напорной трубки (для правильно изготовлен-
ных трубок близок к единице).
Напорная трубка Прандтля
Напорная трубка Прандтля (называемая также трубкой Питб—
Прандтля, а иногда — трубкой Пито) позволяет одновременно из-
мерять как полное, так и статическое давление в контролируемом
потоке. Она представляет собой цилиндрическую трубку с полусфе-
рическим носиком, ось которой устанавливается вдоль потока. Че-
рез центральное отверстие на полусфере (критическая точка) изме-
ряется полное давление рполн; другое отверстие (или ряд отверстий)
располагается на боковой поверхности трубки на расстоянии не-
скольких диаметров трубки от носика и служит для измерения ста-
тического давления рстат. Геометрическая форма трубки Прандтля,
форма отверстий и расстояние от них до носика трубки выбираются
так, чтобы давление в боковых отверстиях по возможности мало
отличалось от статического давления в исследуемой точке потока.
5.8. Измерение расхода
431
Напорные трубки аннубар (аппиоаг)
Данные напорные трубки вставляются по диаметру трубы в про-
текающий поток. Отверстия расположены на двух сторонах трубки
аннубар, как против течения, так и по нему. Эти отверстия соедине-
ны со сдвоенными усредняющими камерами. Число отверстий про-
порционально диаметру трубы. Давление в камере, соединенной с
отверстиями, направленными против течения, соответствует сред-
нему значению скоростного напора. Давление в камере, соединен-
ной с отверстиями, направленными по течению, соответствует сред-
нему опорному давлению. Их разность дает точный и стабильный
сигнал перепада давления, который пропорционален расходу.
5.8.2. Расходомеры постоянного перепада давления
Расходомеры постоянного перепада давления относят к сред-
ствам измерения, называемым расходомерами обтекания. Принцип
их действия основан на зависимости перемещения тела, восприни-
мающего динамическое давление обтекающего его потока, от рас-
хода вещества. Предназначены для измерения плавно меняющегося
объемного расхода однородных потоков чистых и слабо загрязнен-
ных жидкостей и газов.
Простейшим и наиболее распространенным прибором посто-
янного перепада давления является ротаметр, предназначенный для
измерения плавно меняющегося объем-
ного расхода однородных потоков чис-
тых и слабо загрязненных жидкостей и
газов. Его действие основано на измере-
нии вертикального перемещения чувстви-
тельного элемента (тела), зависящего от
расхода среды и приводящего одновре-
менно к изменению площади проходно-
го сечения отверстия таким образом, что-
бы перепад давления на чувствительном
элементе остался постоянным. Противо-
действующая сила в расходомерах дан-
ного типа — сила тяжести чувствитель-
ного элемента, изготавливаемого в виде
поплавка (или поршня).
Ротаметр (рис. 5.82) состоит из верти-
кальной конусной стеклянной трубки /,
внутри которой находится чувствительный
элемент 2 — поплавок. Верхний его обод
снабжен каналами с крутым наклоном. Под
Рис. 5.82. Схема ротаметра.
Пояснения см. в тексте
432
Глава 5. Измерение технологических параметров
действием потока жидкости или газа поплавок вертикально переме-
щается и одновременно приходит во вращательное движение и цен-
трируется в центре потока. При этом изменяется площадь кольце-
вого зазора между поплавком и внутренними стенками трубки. Пе-
репад давления на поплавке определяется его массой При постоянной
массе поплавка площадь кольцевого зазора между поплавком и внут-
ренними стенками трубки пропорциональна расходу вещества, про-
текающего по трубке. По перемещению поплавка ротаметра вдоль
его шкалы, нанесенной на конусной стеклянной трубке, судят об
объемном расходе в единицу времени (л/ч, м3/ч).
Итак, представим, что поплавок под действием потока вещества
поднялся на некоторую высоту в ротаметре и остановился во взве-
шенном состоянии в измеряемой среде. Рассмотрим силы, действу-
ющие на поплавок ротаметра. В положении равновесия сила, созда-
ваемая измеряемой средой, протекающей через ротаметр и действу-
ющей снизу, уравновешивается силой, создаваемой массой поплавка,
и силой, действующей сверху. Масса поплавка т (в кг) при полном
погружении его в измеряемую среду определяется как
w = Kn(Pn -Рс), (5-87)
где Ип — объем поплавка, м3; рп и рс — плотности материала, из
которого изготовлен поплавок, и среды, протекающей через рота-
метр, соответственно, кг/м3.
Пренебрегая силами трения, запишем равновесие сил:
Кп(Рп -Рс)я = Лп(Р1 ~Р1)> (5.88)
где Ап — наибольшая площадь поперечного сечения поплавка, м2;
pt и р2 — давления измеряемой среды до (снизу) и после (сверху)
поплавка соответственно, Па; g — ускорение свободного паде-
ния. м/с2.
Теперь определим из (5.88) перепад давления на поплавке Ад (Па):
Ал — п л _Кп(РП-Рс)^ {с QQ\
Др = Pt “ Pi =----т-----• (5.89)
Из полученного уравнения (5.89) следует, что независимо от
положения поплавка перепад давления на нем постоянен и не
зависит от расхода измеряемой среды. Это объясняется постоян-
ством скорости измеряемой среды при изменении ее расхода, что
обусловлено изменением площади кольцевого зазора, между по-
плавком и трубкой. Зависимость положения поплавка от величи-
ны измеряемого расхода линейна, поэтому шкала ротаметра рав-
номерна.
5.8. Измерение расхода
433
Объемный расход жидкости и конструктивные параметры рота-
метра связаны уравнением
(5.90)
где Лк — площадь кольцевого зазора между
ротаметра.
Ротаметр, снабженный передающим
преобразователем с электрическим выход-
ным сигналом, показан на рис. 5.83 Ро-
таметр имеет металлический корпус, ко-
нический поплавок /, перемещаемый внут-
ри кольцевой диафрагмы с коническим
отверстием 2 под действием потока жид-
кости, проходящего снизу вверх. При
подъеме поплавка проходное отверстие
между рабочей поверхностью поплавка и
внутренней кромкой диафрагмы увеличи-
вается пропорционально измеряемому рас-
ходу среды. Поплавок ротаметра жестко
связан с сердечником 3 передающего диф-
ференциально-трансформаторного преоб-
разователя 4, надетого на разделительную
трубку 5, изготовленную из немагнитной
стали.
Ротаметр с пневматическим выходным
сигналом 0,02...0,1 МПа (0,2...1,0 кгс/см2)
отличается от ротаметра на рис. 5.84 нали-
чием пневматического преобразователя
поплавком и стенками
Рис. 5.83. Схема ротаметра
с дифференциально-транс-
форматорным датчиком
Пояснения см. в тексте
компенсационного типа.
5.8.3. Объемные расходомеры и счетчики
Принцип действия объемных счетчиков основан на отсчете ко-
личества определенных объемов, вытесняемых из измерительной
камеры прибора под действием разности давлений на счетчике. По
характеру движения измерительных элементов объемные счетчики
подразделяются на счетчики с возвратно-поступательным движени-
ем (поршневые) и счетчики с вращательным движением (счетчики с
овальными шестернями, ротационные и др.).
434
Глава 5. Измерение технологических параметров
5.8.3.1. Счетчики с овальными шестернями
Счетчики с овальными шестернями отсчитывают строго опреде-
ленные объемы жидкости, проходящей через измерительную каме-
ру, в которой вращаются овальные шестерни. Поток измеряемой
жидкости, поступая в счетчик (рис. 5.84) через входной патрубок и
проходя через измерительную камеру 1 теряет часть напора на со-
здание крутящего момента, приводящего овальные шестерни 2 и 3
во вращение. В зависимости от положения шестерен 2 и 3 каждая из
них попеременно является то ведущей, то ведомой. Измерение ко-
личества жидкости происходит за счет периодического отсечения
определенных ее объемов 4, заключенных в полостях между поверх-
ностью корпуса измерительной камеры и овальными шестернями.
За один полный оборот шестерен отсекается четыре таких объема.
По числу оборотов счетчик определяет суммарный объем прошедшей
через прибор жидкости.
Рис. 5.84. Перемеще-
ние овальных шестерен
объемного жидкостно-
го счетчика. Пояснения
см. в тексте
Хотя овальные шестерни вращаются не вполне равномерно, сред-
няя угловая скорость их вращения пропорциональна расходу т. е.
счетчики с овальными шестернями можно использовать также для
измерения объемного расхода.
5.8.3.2. Ротационные счетчики
Действие ротационных счетчиков основано на том, что гладкие
роторы лемнискатной формы под давлением измеряемого газа при-
ходят в движение и при этом отмеривают определенные объемы газа
(рис. 5.85)
Роторные преобразователи в основном устанавливают на газо-
проводах.
Выпускаются счетчики с электронным корректором, позволяющим
получить результат измерений объема газа, приведенный к стандарт-
ным условиям. Ротационные счетчики монтируют как на горизонталь-
ных, так и на вертикальных измерительных трубопроводах. Предпоч-
5.8. Измерение расхода
435
Рис. 5.85. Схема ротационного газового счетчика:
1, 2 — роторы лемнискатной формы: 3 — корпус
тителен монтаж на вертикальных измери-
тельных трубопроводах, особенно, для из-
мерения количества загрязненного газа
Примечание
При наличии в газе взвешенных липких
частиц, например, парафина, необходимо пери-
одически промывать роторы растворителем. Ра-
бота ротационного счетчика при эксплуатации контролируется по показани-
ям дифманометра, измеряющего разность давлений до и после счетчика.
5.8.3.3. Скоростные счетчики
Принцип действия скоростных расходомеров-счетчиков основан
на измерении скорости вращения потоком (газа или жидкости) изме-
рительной турбинки. Для бесперебойной работы счетчиков необхо-
димо отсутствие завихрений в потоке, поступающем на турбинку.
При использовании таких расходомеров-счетчиков число обо-
ротов турбинки п пропорционально объему протекающей жидкости
n = KV.
В скоростных аксиальных расходомерах-счетчиках ось вращения
турбинки совпадает с направлением потока (рис. 5.86).
В скоростных тангенциальных расходомерах-счетчиках поток,
вращающий турбинку, направлен по касательной к окружности,
описываемой средним радиусом турбинки (рис 5 87).
Рис. 5.86. Схема объемного счетчика
с винтовой турбинкой, расположенной
аксиально к потоку:
1 — винтовая турбинка; 2 — корпус; 3 —
счетчик
Рис. 5.87. Счетчик с турбинкой, рас-
положенной тангенциально к потоку:
/ — турбинка; 2 — корпус; 3 — счетчик
436
Глава 5. Измерение технологических параметров
5.8.4. Измерение расхода на основе тепловых явлений
Тепловыми расходомерами называют расходомеры, действие
которых основано на измерении эффекта теплового воздействия
на поток (или на тело, контактирующее с потоком), зависящего
от расхода. Чаще применяются для измерения расхода газа и реже
для измерения расхода жидкости. Тепловые расходомеры отлича-
ются способом нагревания, расположением нагревателя (снаружи
технологического трубопровода или внутри), а также характером
функциональной связи между расходом и измеряемым сигналом.
Основной способ нагревания — электрический омический. По ха-
рактеру теплового взаимодействия тепловые расходомеры подраз-
деляют на калориметрические, термоконвективные, термоанемо-
метрические.
У калориметрических и термоконвективных расходомеров из-
меряется разность температур Д/ газа или жидкости (при постоян-
ной мощности И7нагревания) или же мощность И'Хпри Л/ = const).
У термоанемометров измеряется сопротивление R нагреваемого тела
(при постоянной силе тока /) или же сила тока I (при R = const).
Калориметрические и термоконвективные расходомеры измеряют
массовый расход при условии неизменности теплоемкости измеряе-
мого вещества, что является их достоинством. Другое достоинство
термоконвективных расходомеров — отсутствие контакта с измеря-
емым веществом. Недостаток тех и других — инерционность.
5.8.4.1. Калориметрические расходомеры
Принцип работы калориметрических расходомеров основан на
зависимости среднемассовой разности температур потока от мощ-
ности нагревания. Калориметрический расходомер (рис. 5.88, а) со-
стоит из нагревателя 3, расположенного внутри трубопровода 4, и
двух термопреобразователей 1 и 2 для измерения температур Т\ до
нагревателя и Т2 после нагревателя. Термопреобразователи распола-
гаются обычно на равных расстояниях (fi = f2) от нагревателя. Рас-
пределение температур по обе стороны от источника нагревания
зависит от расхода вещества.
Так как теплоемкость у жидкостей намного больше, чем у газов,
то калориметрические расходомеры находят применение лишь для
измерения очень малых расходов жидкостей. Основное назначение
этих приборов — измерение расхода газа. Из-за малой надежности
работы в эксплуатационных условиях нагревателей и термопреобра-
зователей, располагаемых внутри трубопровода, калориметрические
расходомеры применяют как образцовые приборы для поверки и
градуировки расходомеров других типов.
5.8. Измерение расхода
437
Рис. 5.88. Расходомеры:
а — калориметрический; б — термоконвективный (/, 2 — термопреоб-
разователи; 3 — нагреватель; 4 — трубопровод); в — термоконвектив-
ный с совмещенными нагревателем и термопреобразователями (/ — двух-
секционный нагреватель; 2 — трубопровод; 3 — измерительный при-
бор; Rt, R], Я, и «j — терморезисторы); г — распределение температур
в стенке трубопровода в отсутствие (/) и при наличии расхода (2) среды
Б.8.4.2. Термоконвективные расходомеры
Термоконвективными называются тепловые расходомеры, у кото-
рых и нагреватель, и термопреобразователь (термопара) располагают-
ся снаружи трубопровода (рис. 5.88, б). Это существенно повышает
эксплуатационную надежность расходомеров и делает их удобными
для применения. Передача теплоты от нагревателя к измеряемому
веществу осуществляется через стенку трубы за счет конвекции.
Термоконвективные расходомеры, у которых нагреватель совме-
щен с термопреобразователями, обладают меньшей инерционностью.
В схеме (рис. 5.88, в) нагреватель состоит из двух секций, явля-
ющихся одновременно терморезисторами и /?2, включенными в
мостовую схему с терморезисторами Л3 и R4 Они нагреваются то-
ком от стабилизированного источника напряжения ИПС. При от-
сутствии расхода среды распределение температур в стенке трубо-
провода представляет симметричная кривая 1 (рис. 5.88, г) При этом
А| и R2 равны и мост находится в равновесии. С появлением расхода
среды температура Т{ и сопротивление Rt становятся меньше тем-
пературы Г2 и сопротивления R2, а распределение температур соот-
438
Глава 5 Измерение технологических параметров
ветствует кривой 2. С ростом расхода среды возрастает разность тем-
ператур Т2 — Тх, увеличивается разность потенциалов в точках bad,
измеряемая прибором 5, шкала которого отградуирована в единицах
расхода.
Примечание
В термоконвективных микрорасходомерах обычно применяют термо-
метры сопротивления (медные, никелевые). В остальных типах термокон-
вективных расходомеров применяют термобатареи (последовательно соеди-
ненные медь-константановые или хромель-копелевые термопары) с числом
спаев 8...30. Спаи термобатареи располагают в местах измерения температур
Т\ и Т2, и таким образом получаемая ТЭДС (1...10 мВ) соответствует разно-
сти температур ДГ= Г, — 7\ Спаи должны быть электрически изолированы
от стенки трубы и в то же время их температура должна соответствовать
температурам стенки. Для изоляции служат синтетические смолы и цемент.
Сами же спаи и термоэлектроны должны иметь минимальные размеры.
5.8.4.3. Термоанемометры
Действие термоанемометров (рис. 5.89) основано на зависимос-
ти между потерей теплоты непрерывно нагреваемого тела (элемен-
та), погруженного в поток, и скоростью газа (или жидкости). Поток
газа или жидкости, обтекающий электрически обогреваемый чув-
ствительный элемент, охлаждает его. При постоянной мощности
нагревания температура чувствительного элемента (а при постоян-
ной температуре — потребляемая им мощность) является мерой ско-
рости потока.
Достоинства: большой диапазон скоростей, высокое быстродей-
ствие, позволяющее измерять скорости, изменяющиеся с частотой в
несколько тысяч герц.
Недостатки: хрупкость первичных преобразователей вследствие
динамических нагрузок и высокой температуры нагревания.
Первичные преобразователи термоанемометров делятся на полу-
проводниковые (термисторы) и металлические, которые в свою оче-
редь подразделяются на проволочные и пленочные.
Чувствительный элемент проволочного преобразователя — тонкая
и обычно короткая проволочка (термонить) из платины, вольфра-
ма, никеля. Наибольшую температуру нагревания /„ проволочки
(до 1000 °C) допускает платина, а вольфрамовая проволочка допус-
кает нагревание до 600 °C
Q 1 9 2
Рис. 5.89. Термоанемометр:
7 — проволочный нагревательный
элемент; 2 — трубопровод
5.8. Измерение расхода
439
Тепловая мощность W, теряемая проволочкой диаметром d и
длиною t при обтекании ее перпендикулярным потоком воздуха,
имеющего скорость v, определяется уравнением:
W =('п ~tc)t(a + bvn), (5.91)
где а = X; b = (2лрс</)0,5; п = 0,5. Здесь X, р, с — коэффициент тепло-
проводности, плотность и теплоемкость газа соответственно; /с —
температура среды.
Обычно диаметр термонити равен d— 0,005...0,3 мм, а ее длина —
£ = 0,5... 10 мм и, как правило, проволочные термоанемометры ма-
лоинерционны.
Пленочный преобразователь термоанемометра состоит из кругло-
го стеклянного полого стержня диаметром в несколько миллимет-
ров с клинообразным или конусообразным концом, на который
распылена пленка толщиной 50... 100 А в виде небольшой полоски
(1 х 0,2 мм).
Замечание
Пленочные преобразователи значительно прочнее проволочных и мо-
гут служить для измерения скоростей газа от 1,5 м/с вплоть до 400...500 м/с
при температуре до 500°С и скоростей жидкости до 18 м/с при температуре
до 60 °C.
Чувствительным элементом полупроводникового преобразователя
служит миниатюрный полупроводниковый терморезистор (термис-
тор), обычно в виде шарика или бусинки. Достоинства - простота
конструкции, механическая прочность и высокая чувствительность.
Постоянная времени у термистора несколько больше, чем у метал-
лических проволочных и пленочных термоанемометров, и в зависи-
мости от его размера составляет 0,5...2,5 с.
Подставляя в уравнение (5.91) значение W= RI2, где R — сопро-
тивление термонити, I — сила тока в ней, получим уравнение, свя-
зывающее сопротивление нити с расходом:
RI2 =(tn-tc}£(a + bvn\ (5.92)
Полагая в (5.92) / = const и дифференцируя его по скорости,
найдем, что dR/dv, т. е. чувствительность измерения уменьшается
с ростом v. Точно так же, полагая R = const и дифференцируя
(5.92) по скорости, получим, что df/dv тоже падает с ростом v.
Таким образом, проволочные термоанемометры обладают наиболь-
шей чувствительностью при измерении небольших скоростей.
Увеличение температуры нагревания tn повышает чувствительность
прибора.
440 Глава 5. Измерение технологических параметров
В термокондуктивных анемометрах для измерения R и I обычно
применяют мостовые схемы Термонить или термистор образуют одно
из плеч моста. В другое плечо, если предусмотрена компенсация
температуры потока, включается термонить или термистор, воспри-
нимающий температуру потока, но не реагирующий на его скорость.
Остальные плечи моста образуют постоянные резисторы. Мост урав-
новешен при скорости потока, равной нулю. По схеме I = const
разность потенциалов на вершине моста будет мерой скорости по-
тока. По схеме tn = const (R - const) мост уравновешивается вруч-
ную или автоматически изменением напряжения питания. Скорость
среды измеряется по силе тока нагревания /.
5.8.5. Электромагнитные расходомеры
Среди известных и широко применяемых методов измерения
расхода жидкостей в химической промышленности большое внима-
ние заслуживает электромагнитный метод измерения.
Принцип работы прибора с электромагнитным преобразовате-
лем расхода основан на взаимодействии движущейся электропро-
водной жидкости с магнитным полем. Согласно закону Фарадея, в
движущемся проводнике (например, жидкости) перпендикулярно
силовым линиям магнитного поля наводится электродвижущая сила
(ЭДС), пропорциональная скорости движения проводника:
Е = Btv, (5.93)
где Е — индуцируемая (наводимая) в проводнике ЭДС, В; В — маг-
нитная индукция, Т; £ — длина проводника, м; v — скорость движе-
ния проводника, м/с.
В случае измерения расхода жидкости запишем
Е = BDvcp, (5.94)
где D — внутренний диаметр трубопровода (расстояние между элек-
тродами), м; vcp — средняя скорость протекания жидкости через
поперечное сечение трубопровода в зоне наводимой ЭДС, м/с.
Объемный расход жидкости Fo определяем по формуле:
Fo = Av^, (5 95)
где А — поперечное сечение трубопровода, м2.
Подставив значение иср из (5.95) в уравнение (5.94), получим:
Е = BDFO/A
или
E = kFo, (5.96)
где к = BD/A.
5.8. Измерение расхода
441
Полученное выражение (5.96) пока 1ывает, что значение выход-
ной ЭДС прямо пропорционально значению объемного расхода
жидкости.
Итак, электромагнитный расходомер является по существу гене-
ратором, в котором проводником, перемещающимся в магнитном
поле, служит электропроводная жидкость (коэффициент проводи-
мости жидкости должен быть не менее 1О-5...1О-6 См/м).
Принципиальная схема электромагнитного расходомера с посто-
янным магнитным полем приведена на рис. 5.90. Трубопровод 1 с
перемещающейся в нем жидкостью помещают в магнитное поле.
Трубопровод изготовляют из изоляционного материала (фторопласт,
эбонит и т. п в зависимости от свойств измеряемой жидкости). При
необходимости трубопровод изготавливают из немагнитного метал-
ла (например, из немагнитной нержавеющей стали с большим удель-
ным сопротивлением). В этом случае внутреннюю поверхность ме-
таллической трубы изолируют от жидкости специальным изоляци-
онным материалом.
В стенки трубопровода диаметрально противоположно в одном
поперечном сечении вводят электроды 2, 3 («заподлицо» с внутрен-
ним диаметром трубопровода), изготовленные из нержавеющей ста-
ли. Электроды для съема выходной ЭДС тоже должны быть элект-
рически изолированы от металлической трубы. К электродам под-
ключают высокочувствительный измерительный прибор 6 (например,
потенциометр).
Основным недостатком первичных электромагнитных преобра-
зователей расхода с постоянным магнитным полем является поля-
ризация электродов, характеризуемая появлением двойного слоя
зарядов на 1ранице электрод—жидкость. По мере накопления этих
зарядов возникает ЭДС, направленная против основной измеряе-
мой выходной ЭДС. Появление двойного электрического слоя, а
следовательно, и противоэлектродвижущей силы нарушает стабиль-
ную работу измерительного блока. Чтобы уменьшить вредное воз-
действие поляризации электродов на полезный сигнал преобразова-
теля расхода, постоянное магнитное поле заменяют на переменное.
Рис. 5.90. Схема электромагнит-
ного расходомера с постоянным
магнитным полем
I — трубопровод: 2,3— электроды;
4 — постоянный электромагнит;
5— усилитель, 6 — измерительный
прибор
442
Глава 5. Измерение технологических параметров
Рис. 5.91. Схема электромагнит-
ного расходомера с переменным
магнитным полем:
1 — трубопровод; 2, 3 — электроды;
4 — переменный электромагнит;
5— промежуточный измерительный
усилитель-преобразователь с унифи-
цированным выходным сигналом
постоянного тока 0...5 мА; 6 — из-
мерительный прибор
Принципиальная схема электромагнитного расходомера с пере-
менным магнитным полем приведена на рис. 5.91 Требования,
предъявляемые к материалам для изготовления трубы 1 и электро-
дов 2 и 3 преобразователя расхода с переменным магнитным полем,
аналогичны перечисленным выше требованиям к преобразователям
расхода с постоянным магнитным полем.
Примечание
Переменное магнитное поле должно быть однородным в осевом и по-
перечном направлениях, чтобы избежать появления в жидкости циркуля-
ционных токов, искажающих измерения.
Запишем выражение для магнитной индукции для преобразова-
теля расхода с переменным магнитным полем:
В = #maxsin(,)T- (5-97)
Тогда выражение (5.94) с учетом (5.97) принимает вид:
Е = VcpDB™* sin шт (5.98)
или с учетом уравнения (5 95)
4F
£ =-К *max «п он. (5.99)
71V
Комплект общепромышленного электромагнитного расходоме-
ра состоит из электромагнитного преобразователя расхода (конст-
руктивно преобразователь состоит из трубы и постоянного или пе-
ременного электромагнита) и измерительного блока (например, по-
тенциометра или милливольтметра)
Достоинства электромагнитных преобразователей расхода: они
не имеют движущихся частей, имеют минимальные потери давле-
ния. Практически безынерционны (по динамическим свойствам они
могут быть представлены статическим звеном нулевого порядка),
что очень важно при измерении быстроизменяющихся расходов, а
также при их использовании в АСУ. Показания расходомера не за-
5.8. Измерение расхода
443
висят от свойств измеряемой жидкости (вязкости, плотности) и от
характера потока (ламинарный, турбулентный). Поскольку зависи-
мость наводимой ЭДС от расхода линейна, шкала измерительного
прибора линейна.
Электромагнитные расходомеры обеспечивают измерение рас-
хода в диапазоне от 1 м3/ч до 2500 м3/ч и более в трубопроводах с
внутренним диаметром от 10 мм до 300 мм при средней линейной
скорости движения жидкости иср от 0,6 м/с до 10 м/с и рассчитаны
на максимальное избыточное давление до 1 ..2,5 МПа
В зависимости от типа покрытия внутренней поверхности трубы
преобразователя расхода электромагнитные расходомеры могут при-
меняться для измерения расхода различных электропроводных жид-
костей (абразивных жидкостей, суспензий, кислот, пульп и т д.),
имеющих температуру от —40 °C до +150 °C
Примечание
Пульпа представляет собой двухфазный поток, одна фаза которого яв-
ляется жидкостью, а другая состоит из твердых частиц; содержание послед-
них по массе может составлять 50...90 %.
5.8.6. Вихревые расходомеры
Любое препятствие, помещенное в поток, создает завихрение в
нем вещества, пропорциональное его объемному расходу. В такого
рода преобразователях используются два способа генерирования за-
вихрений: естественные колебания (рис. 5.92), при которых стабиль-
ные структуры (известные как вихревая дорожка Кармана) перио-
дических вращающихся в разные стороны вихрей возникают в пото-
ке за препя гствием, и вынужденные колебания (рис. 5 93), при которых
поток вещества вращается или прецессирует (движение оси враще-
ния потока) вдоль оси трубопровода в виде некоторой спирали.
Вихревые расходомеры с обтекаемым телом
Тело, находящееся на пути потока, изменяет направление дви-
жения обтекающих его струй и увеличивает их скорость за счет со-
ответствующего уменьшения давления. За миделевым сечением тела
начинается обратный процесс уменьшения скорости и увеличения
давления. Одновременно с этим на передней стороне тела создается
повышенное, а на задней стороне — пониженное давление. Погра-
ничный слой, обтекающий тело, пройдя его миделевое сечение, от-
рывается от тела и под влиянием пониженного давления изменяет
направление движения, образуя вихрь. Это происходит как в верх-
них, так и в нижних точках обтекаемого тела. Но так как развитие
вихря с одной стороны препятствует развитию вихря с другой сто-
444
Глава 5 Измерение технологических параметров
Рис. 5.92. Схема вихревого расхо-
домера с генерированием вихревой
дорожки Кармана на цилиндричес-
ком препятствии:
I — трубопровод; 2 — цилиндрическое
препятствие; 3 — измерительный пре-
образователь
роны, то образование вихрей с той и с другой стороны происходит
поочередно (см. рис. 5.92). При этом за обтекаемым телом образует-
ся вихревая дорожка Кармана.
Примечание
Миделевое сечение (мидель) (от голл. middel — средний) — наиболь-
шее по площади сечение тела плоскостью, перпендикулярной направле-
нию движения.
Частота срыва вихрей /, согласно критерию Струхаля Sh, равна
/ = 4Sh> (5.100)
d
т. е. пропорциональна отношению v/d, а следовательно, при посто-
янном характерном размере d тела пропорциональна скорости v а
значит и объемному расходу Fo. Зависимое гь между Fo и f дается
уравнением
Ad
Fo=^f, (5.101)
an
где А — площадь наименьшего поперечного сечения потока вокруг
обтекаемого тела.
Чтобы обеспечить пропорциональность между Fo и/, число Стру-
халя Sh должно оставаться неизменным в возможно большей облас-
ти значений числа Re Для обтекаемого цилиндра число Sh остается
постоянным в области KP.-.IO4 < Re < 2 - 105.
Замечание
Преимущественное применение в вихревых расходомерах нашли при-
зматические тела прямоугольной, треугольной или трапецеидальной (дель-
тообразной) форм. Отсюда идет название вихревого измерителя расхода —
дельтаметр.
Имеется много способов преобразования вихревых колебаний в
выходной сигнал. Они основаны на использовании периодических
колебаний давления или скорости струй с обеих сторон обтекаемого
тела. В качестве чувствительного элемента преобразователя приме-
няются один или два полупроводниковых термоанемометра, тензо-
метрические преобразователи силы или ультразвуковые средства для
5.8. Измерение расхода 445
определения периодических изменений силы, происходящих при
вихревом движении вещества.
Снаружи трубопровода размещен излучатель, а с другой сторо-
ны — приемник ультразвуковых колебаний, реагирующие на вихре-
вые колебания потока. Этот метод имеет свои достоинства, но при-
сутствие в жидкости твердых частиц или газовых пузырьков будет
сказываться на выходном сигнале.
Замечание
Вихревые расходомеры с телом обтекания треугольного трапецеидаль-
ного и квадратного типов предназначены для труб диаметром D от 50 мм
до 300 мм.
Вихревые расходомеры с прецессией воронкообразного вихря
(с закрученным потоком)
В корпусе 1 преобразователя этих расходомеров (см. рис. 5.93)
установлено устройство 2 (направляющие пластинки), закручиваю-
щее поток, направляемый затем через короткую цилиндрическую
насадку или участок трубы в расширенную часть. В последней вра-
щающийся поток принимает воронкообразную форму, а его ось,
вокруг которой вращается ядро вихря, сама вращается вокруг оси
трубопровода. При этом давление на внешней поверхности вихре-
вого потока пульсирует синхронно с угловой скоростью вращения
ядра вихря, пропорциональной линейной скорости потока или объем-
ному расходу. Для преобразования частоты пульсаций давления или
скорости в измерительный сигнал (для определения числа прецес-
сий, проходящих через определенную точку трубопровода) приме-
няются пьезоэлементы, термисторы 3 или полупроводниковые тер-
моанемометры. На выходе расходомера установлен механический
струевыпрямитель 4, устраняющий вращение потока. Таким обра-
зом, этот преобразователь можно условно представить состоящим
из двух ступеней — в первой происходит преобразование объемного
расхода потока в частоту прецессии воронкообразного вихря, а во
второй — преобразование этой частоты в измерительный сигнал.
Погрешности вихревых расходомеров при измерении расхода газа
значительно выше, чем при измерении расхода жидкости. Чтобы
уменьшить эту разницу целесообразно ввести в формулу (для оп-
Рис. 5.93. Схема вихревого расхо-
домера с закрученным потоком.
Пояснения см. в тексте
446
Глава 5 Измерение технологических параметров
ределения расхода или количества) поправочный коэффициент, учи-
тывающий расширение-сжатие газа в зависимости от его свойств и
условий течения. При использовании вихревых расходомеров не ре-
комендуется, чтобы частота пульсаций измеряемого потока была
близка к частоте срыва вихрей, иначе возрастает погрешность изме-
рений.
Достоинства: наличие конденсата, твердых частиц в измеряемой
среде не влияет на условия применения. Широкий диапазон изме-
рения (0,4...40000 м3/ч).
Недостатки: ограничения по числу Рейнольдса (Re > 104).
Основные погрешности, %: 0,5...2,5.
Рекомендуется применять при малой производительности и боль-
шом диапазоне изменения расхода газа.
5.8.7. Ультразвуковые расходомеры
Действие ультразвуковых расходомеров основано на зависимос-
ти от расхода вещества разности времен прохождения ультразвуко-
вых сигналов по потоку вещества и против него. Измеряется время
прохождения ультразвукового сигнала от одного излучателя до при-
емника по направлению течения вещества (например, жидкости),
так и против его течения. Разница во времени прохождения ультра-
звукового сигнала будет прямо пропорциональна скорости потока
вещества, а знак этой разности покажет направление потока.
В трубопроводе на его внешней поверхности устанавливаются
два первичных измерительных преобразователя-излучателя ультра-
звуковых колебаний и два их приемника (частота ультразвуковых
колебаний составляет 1...3 МГц). При скорости ультразвука с дли-
тельность прохождения импульса в неподвижной жидкости, находя-
щейся в трубопроводе, составит
т = £/с, (5.102)
где £ — расстояние между излучателями и приемниками ультразву-
ковых колебаний.
При перемещении жидкости со скоростью v время прохождения
ультразвука по направлению потока т, и навстречу ему т2 равно:
откуда разность времен прохождения импульсов по потоку и против
потока, учитывая, что с » v
Ат = Xi -т2 = -llv/c2. (5 104)
5.8. Измерение расхода
447
Рис. 5.94. Двухканальная схе-
ма ультразвукового преобразо-
вателя:
/ — излучающий пьезоэлемент;
2 — приемные пьезоэлементы
Основными элементами преобразователей являются пьезоэле-
менты, преобразующие переменное электрическое напряжение в
ультразвуковые колебания среды. Часто применяются кольцевые
пьезопреобразователи, создающие не направленное, а сферическое
излучение. Может быть реализована одноканальная схема ультра-
звукового преобразователя, в которой каждый из двух пьезоэлемен-
тов по очереди излучает и принимает акустические колебания. На
рис. 5.94 представлена двухканальная схема ультразвукового преоб-
разователя, на которой средний пьезоэлемент является излучающим,
а два крайних — приемными.
Замечание
Существуют различные способы измерения очень малого значения раз-
ности времен, например фазовый, при котором измеряется разность фазо-
вых сдвигов акустических колебаний, направляемых по потоку и против него
{фазовые расходомеры), или частотный, при котором измеряется разность
частот повторения коротких импульсов (или пакетов) акустических колеба-
ний, направляемых по потоку и против него (частотные расходомеры).
Ультразвуковые расходомеры обычно измеряют среднюю по
диаметру, а не среднюю по сечению трубопровода скорость потока
(в силу чего предъявляются высокие требования к длинам прямых
участков перед расходомерами).
Как правило, ультразвуковые расходомеры измеряют объемный
расход.
Достоинства: ультразвуковые расходомеры не создают препятствий
для потока, и, как следствие этого, падения давления в трубопроводе
малы (минимальные потери давления); не имеют движущихся час-
тей; обладают возможностью достижения высокой точности измере-
ний и высоким быстродействием. Важное преимущество преобразо-
вателей с внешними пьезоэлементами — это отсутствие контакта с
измеряемым веществом и сохранение целостности трубопровода.
Недостатки, методические ограничения (влияние пузырьков,
механических частиц, приводящих к возможности засора излучате-
ля и приемника, находящихся внутри трубопровода). Для преобра-
зователей с внешними пьезоэлементами трубопровод создает повы-
шенный уровень паразитных сигналов и помех, вызванных прохож-
дением акустических колебаний по стенке трубопровода, что снижает
чувствительность преобразователей
448
Глава 5. Измерение технологических параметров
Основные источники погрешностей: неправильный учет влия-
ния профиля скорости; изменение скорости ультразвука в измеряе-
мой среде; паразитные акустические сигналы; асимметрия элект-
ронно-акустических каналов.
Основные погрешности, %: 1...5.
Применение: для больших диапазонов измерения расхода неза-
грязненного газа.
Замечание
В процессе эксплуатации ультразвуковых расходомеров необходимо
систематически проверять электрическое сопротивление изоляции цепи
питания преобразователя и соотношение «сигнал/шум» входного сигнала.
Снижение этого сигнала свидетельствует либо об ухудшении характерис-
тик расходомера, либо о загрязнении отверстий излучателя и приемника.
5.8.8. Кориолисовы расходомеры
Кориолисовыми называются расходомеры, в преобразователях
которых под влиянием силового воздействия возникает кориолисо-
во ускорение, зависящее от расхода. Для образования этого ускоре-
ния непрерывно вращающемуся преобразователю расхода придают
конфигурацию, заставляющую поток перемещаться в радиальном
направлении по отношению к оси вращения, совпадающей с осью
трубопровода.
Кориолисовы массовые расходомеры непосредственно измеряют
массовый расход жидкостей, газов и взвесей без предварительного
определения плотности и объема. Схема первичного преобразовате-
ля изображена на рис. 5.95. Труба, имеющая U-образную форму,
после приведения ее с помощью электромагнитной катушки в коле-
бательное движение, колеблется с собственной частотой (амплитуда
f
Рис. 5.95. Силы, действующие на первичный преобразователь кориоли-
сова расходомера:
/ — силы воздействия; Л — перемешеиие; а — угол закручивания
5.9. Измерение уровня жидкости и сыпучих тел
449
менее 1 мм. частота — десятки герц). При движении трубы вверх
газ, втекающий в трубу, давит на трубу вниз. На выходе из нее тот
же газ дополнительно способствует движению трубы вверх, что, соб-
ственно, приводит к закручиванию U-образной трубы. Во время вто-
рого периода колебаний, когда U-образная труба движется вниз, она
закручивается в противоположную сторону. Это закручивание на-
зывают эффектом Кориолиса. И что очень важно знать: угол закручи-
вания трубы прямо пропорционален расходу газа. Электромагнитные
датчики, расположенные с каждой стороны трубы, измеряют ско-
рость колебания трубы. Массовый расход газа определяют, измеряя
разницу во времени поступления двух сигналов по скорости, эта
разница прямо пропорциональна массовому расходу газа.
Замечание
Трубу первичного преобразователя располагают изгибом вверх, чтобы
предотвратить накопление конденсата в ней. Выпускаются и другие преоб-
разователи, действие которых основано на эффекте Кориолиса, представ-
ляющие собой отрезок прямой трубы, закрепленный с обоих концов и виб-
рирующей с максимальным прогибом в своей средней части.
Достоинства: наличие конденсата, твердых частиц не влияет на
условия применения кориолисова расходомера. Широкий диапазон
измерения, малые потери давления. Высокая точность. Этот прин-
цип измерения позволяет получить информацию не только об объем-
ном, но и о массовом расходе и плотности среды, проходящей через
измерительный преобразователь.
Примечание
Кориолисовы расходомеры относят к «интеллектуальным» изделиям,
так как они могут иметь встроенные микроконтроллеры для вычисления
комплекса показателей.
5.9. ИЗМЕРЕНИЕ УРОВНЯ ЖИДКОСТИ
И СЫПУЧИХ ТЕЛ
Измерение уровня жидкостей и сыпучих тел относится к числу
вспомогательных контрольных операций, позволяющих определить
количества жидкостей и сыпучих тел в резервуарах для учета про-
дукта и сигнализации о переполнении расходных баков и бункеров.
Эти измерения также важны, когда поддержание некоторого
постоянного уровня, например, жидкости в аппаратах, резервуарах,
баках связано как с поддержанием технологического режима, так и
с условиями безопасной работы оборудования. Технические сред-
ства, применяемые для измерения уровня жидкости, называются
450 Глава 5. Измерение технологических параметров
уровнемерами. Приборы, предназначенные для сигнализации пре-
дельных уровней жидкости, называются сигнализаторами уровня.
В химической промышленности применяют различные методы
измерения уровня жидкости: измерение уровня жидкости указатель-
ными стеклами, механические (с помощью поплавка или буйка),
электромеханические (например, уровнемеры с индуктивными дат-
чиками), гидростатические, пневматические, по измерению прово-
димости, емкостные, фотоэлектрические, ультразвуковые, акусти-
ческие, радиоизотопные
При выборе уровнемера необходимо учитывать температуру, аб-
разивные свойства, вязкость, электрическую проводимость, радио-
активность, химическую агрессивность измеряемой среды. Кроме
того, следует принимать во внимание рабочие условия в объекте
измерения или около него: давление, нагревание или охлаждение,
способ заполнения или опорожнения резервуара, наличие мешалки,
огнеопасность и взрывоопасность.
Основными требованиями, предъявляемыми к современным уров-
немерам, являются: высокая степень надежности при эксплуатации
в химически агрессивной среде для широкого температурного ин-
тервала (от —40 °C до +80 °C); малая погрешность измерений (по-
рядка ±1 мм при изменении уровня жидкости до 20 м); относитель-
но невысокая стоимость; простота установки и технического обслу-
живания; пожаро- и взрывобезопасность; возможность интеграции
в АСУ.
5.9.1. Механические уровнемеры
Рис. 5.96. Схема поплавкового
уровнемера. Пояснения см в
тексте
Поплавковые уровнемеры (рис. 5.96)
применяются в основном для непрерыв-
ного измерения уровня жидкости, ког-
да положение поплавка, выступающего
в роли чувствительного элемента и по-
мещенного в жидкость, вызывает изме-
нение какого-либо параметра преобра-
зующего элемента. Принцип действия
поплавкового уровнемера основан на
следящем действии поплавка, находя-
щегося на поверхности жидкости и
перемещающегося вместе с уровнем
жидкости. С поплавком 1 с помощью
троса 2 соединен указатель вместе с про-
тивовесом 4, обеспечивающим натяже-
ние троса. Когда уровень жидкости по-
5.9. Измерение уровня жидкости и сыпучих тел
451
Рис. 5.97. Схема уровнемера с диф-
ференциально-трансформаторным
датчиком
Рис. 5.98. Схема буйкового уровне-
мера:
1 — буек; 2 — преобразователь силы (/) в
токовый (Г) сигнал
вышается, поплавок перемещается вверх, противовес с указателем
движутся вниз вдоль шкалы 3. В большинстве случаев перемещение
поплавка, вызванное изменением уровня жидкости, передается на
плунжер соленоидного дифференциально-трансформаторного (ин-
дуктивного) датчика (рис. 5.97). Уровнемеры с индуктивными дат-
чиками применяются для измерения уровня жидкости в резервуарах
высокого давления.
Буйковые уровнемеры (рис. 5.98' Чувствительным элементом уров-
немера является металлический цилиндрический буек, частично
погруженный в измеряемую среду. На буек действуют сила его веса
и выталкивающая сила. При изменении уровня жидкости меняется
выталкивающая сила и положение буйка, подвешенного на пружи-
не (на рис. 5.98 не показана). За счет разности глубины погружения
буйка меняется выталкивающая сила, действующая на буек, и он
перемещается либо вверх (при повышении уровня) или вниз (при
понижении уровня).
Для дистанционного измерения уровня жидкости, находящейся
под атмосферным, вакуумметрическим или избыточным давлением,
применяются буйковые уровнемеры с унифицированным выходным
сигналом постоянного тока 0...5 мА; 0...20 мА типа «УБ-Э» или
пневматические с давлением 0,02—0,1 МПа (0,2...1,0 кгс/см2) типа
«УБ-П». Действие данных уровнемеров основано на электросиловой
или пневмосиловой, соответственно, компенсации усилия, развива-
емого буйком измерительного блока уровнемера, погруженным в
жидкость, уровень которой измеряется.
452
Глава 5. Измерение технологических параметров
5.9.2. Гидростатические и пьезометрические
уровнемеры
Оба уровнемера пригодны для измерения уровня любых жидко-
стей. При выборе материала трубки, используемой для измерения
давления, необходимо учитывать химические свойства жидкостей.
Гидростатический и пневматический методы индикации уровня от-
личаются друг от друга тем, что при гидростатическом методе ис-
пользуется непосредственно давление, оказываемое жидкостью на
дно резервуара, тогда как при пневматическом методе в резервуар
принудительно подают воздух или защитный газ.
Гидростатические уровнемеры. Измерение уровня основано на
измерении оказываемого жидкостью на дно резервуара гидростати-
ческого давления, которое измеряется в открытых резервуарах при
помощи обычного или дифференциального манометра. В резервуа-
рах, находящихся под давлением и, следовательно, представляющих
собой замкнутую емкость, уровень жидкости можно измерить толь-
ко дифференциальным манометром (рис 5 99).
Величина гидростатического давления на дно резервуара зави-
сит от высоты h столба жидкости над измерительным прибором и от
плотности р жидкости. Таким образом, справедливо уравнение:
P = Pgh
или
Р = Р1А -p2g/»2-
Если манометр установить не на одинаковой с днищем резерву-
ара высоте, то произойдет смещение точки начала измерения, про-
порциональное разности высот. При использовании дифференци-
альных манометров место установки измерительного прибора не
5.9. Измерение уровня жидкости и сыпучих тел
453
Рис. 5.100. Схема пьезометрического
уровнемера
влияет на правильность индикации, если оно находится ниже уров-
ня днища резервуара, а измерение давления осуществляется относи-
тельно давления постоянного уровня жидкости.
Пьезометрические уровнемеры. Высоту уровня жидкости измеряют
по давлению воздуха или газа, барботирующего через слой жидкости.
На рис. 5.100 показана схема подобного устройства для открытых
резервуаров. В жидкость, уровень которой предстоит измерить, по-
гружают трубку и в нее через дроссель непрерывно нагнетается сжа-
тый воздух или защитный газ, например азот Пневматическое дав-
ление, устанавливающееся в погружной трубке за дросселем, сооз -
ветствует гидростатическому давлению над концом трубки и является
тем самым мерой уровня заполнения резервуара. Материал погруж-
ной трубки выбирается в соответствии с химическими и физически-
ми свойствами измеряемой жидкости.
Преимущество гидростатического и пневматического способов
измерения уровня заключается в том, что они обладают весьма вы-
сокой эксплуатационной надежностью. Гидростатический метод
можно использовать в частности, для измерения уровня в резерву-
арах высокого давления Преимущество пневматического метода
состоит в том, что измерительное устройство не находится в кон-
такте с измеряемым веществом, поэтому его очень удобно приме-
нять, измеряя уровень агрессивных, сильно загрязненных, вязких и
склонных к кристаллизации жидкостей, включая пульпы, в откры-
тых резервуарах. Указанные методы применяют в промышленности
для измерения уровня жидкости также в перегонных кубах, реакто-
рах и т. д.
5.9.3. Кондуктометрические уровнемеры
Кондуктометрические уровнемеры применяются для измерения уров-
ня электропроводящих жидкостей в резервуарах, цистернах. Принцип
измерения основан на изменении силы тока от изменения контроли-
руемого уровня жидкости в резервуаре. В пустом резервуаре сопротив-
454
Глава 5. Измерение технологических параметров
ление между двумя электродами бесконечно велико. Если опустить
электроды в электропроводящую жидкость в резервуаре, уровень кото-
рой измеряется, то изменение проводимости отражает ее уровень.
Примечание
Ток, проходящий через жидкость, должен быть мал для исключения
электролиза (или взрыва).
5.9.4. Емкостные уровнемеры
Рис. 5.101. Схема емкост-
ного уровнемера:
1 — трубчатый (наружный)
электрод; 2 — внутренний
электрод; 3 — преобразова-
тель емкости (С) в токовый
(Г) сигнал
Их действие основано на измерении элек-
трической емкости преобразователя, изменя-
ющейся пропорционально изменению конт-
ролируемого уровня жидкости в резервуаре.
Преобразователь, преобразующий изменение
уровня жидкости в пропорциональное изме-
нение емкости, представляет собой цилинд-
рический конденсатор, электроды которого
расположены коаксиально (рис 5.101). Для
каждого значения уровня жидкости в резер-
вуаре емкость первичного преобразователя
определяется как емкость двух параллельно
соединенных конденсаторов, один из которых
образован частью электродов преобразователя
и жидкостью, уровень которой измеряется, а
второй — остальной частью электродов емко-
стного преобразователя и воздухом (или па-
рами жидкости). Измерение емкости осуще-
ствляют уравновешенными мостами пере-
менного тока.
Замечание
Если жидкость находится в металлической емкости, то ее можно ис-
пользовать в качестве одного из электродов емкостного преобразователя.
Емкостный метод применяют для измерения уровня песка, це-
мента, извести, угольной пыли в бункерах и хранилищах, а также
мазута, топлива, воды, кислот, щелочей и вязких материалов.
5.9.5. Фотоэлектрические уровнемеры
Фотоэлектрические уровнемеры применяются только для измере-
ния дискретных уровней жидкости. Первый вариант измерения уровня
жидкости фотоэлектрическими преобразователями (рис. 5.102, о):
5.9. Измерение уровня жидкости и сыпучих тел
455
Рис. 5.102. Схемы фотоэлектрического уровнемера с разделенным (о) и
совмещенным (б) расположением фотоэлектрического источ-
ника света 1 и светодетектора 2
фотоэлектрические источник света 1 и детектор 2 разделены, поэто-
му луч света (а также излучение ультрафиолетовое, инфракрасное)
между ними прерывается, если уровень жидкости превышает высо-
ту установки этих преобразователей. Практически луч света полно-
стью не прерывается, а лишь ослабляется.
Второй вариант измерения уровня жидкости фотоэлектрически-
ми преобразователями: фотоэлектрические источник света, детек -
тор и призма размещаются в одном корпусе (рис. 5.102, б). Свет от
фотоэлектрического источника отражается от внутренней поверх-
ности призмы и попадает на светодетектор в том случае, когда фо-
тоэлектрический преобразователь находится в газовой среде. Если
жидкость покрыла корпус фотоэлектрического преобразователя,
индекс отражения между призмой и окружающей средой изменит-
ся, и луч света не будет отражаться от призмы к светодетектору.
Примечание
Свет представляет собой электромагнитное излучение Видимый свет —
это излучение в диапазоне длин волн, воспринимаемых человеческим гла-
зом (от 380 до 780 нм). Излучение в диапазоне длин волн 10...380 нм назы-
вают ультрафиолетовым излучением (или просто ультрафиолетовым све-
том); излучение в диапазоне длин волн 780...3000 нм инфракрасным
излучением (или просто инфракрасным светом).
5.9.6. Ультразвуковые уровнемеры
Ультразвук можно использовать для измерения уровня как жид-
костей, так и сыпучих материалов. Способ непригоден лишь для
измерения уровня жидкости, содержащей твердые частицы, кото-
рые могут образовать отложения на вибраторах и тем самым приве-
сти к погрешностям измерения Такие химические и физические
свойства жидкости, как агрессивность, плотность и вязкость, игра-
ют при этом второстепенную роль. Ультразвуковой метод измере-
456 Глава 5. Измерение технологических параметров
ния уровня позволяет осуществлять сигнализацию уровня сыпучих
материалов, а также легких хлопьевидных и содержащих воздух ма-
териалов, например, целлюлозы, мелкозернистых или порошкооб-
разных синтетических материалов.
Область применения этого метода распространяется также и на
измерение уровня жидкости в емкостях из дерева и пластика, где
сам по себе точный и надежный емкостный метод измерения не
всегда пригоден.
Для измерения уровня при помощи ультразвука необходимо на-
личие излучателя и приемника. Излучатель посылает ультразвуко-
вые импульсы, представляющие собой механические колебания в
диапазоне частот от 20 кГц до нескольких мегагерц. Чем выше час-
тота, тем прямолинейнее распространяются ультразвуковые колеба-
ния, поведение которых напоминает поведение световых лучей. В свя-
зи с этим к ним применим известный из оптики закон отражения и
преломления.
Замечание
В ультразвуковой измерительной технике все шире применяют пьезо-
электрический эффект, так как он позволяет достичь высоких частот, на-
ходящихся в диапазоне мегагерц.
Время прохождения или поглощения луча ультразвука может
служить мерой уровня. В воздухе и газах скорость распростране-
ния ультразвука минимальна. С ростом частоты звукопроводность
уменьшается.
Различают три режима работы ультразвуковых преобразователей
уровня (рис. 5.103). В первом режиме при измерении уровня мето-
дом поглощения мерой уровня служит ослабление луча ультразвука.
Рис. 5.103. Схемы ультразвуковых уровнемеров, в которых осуществляет-
ся первый (а) второй (б) и третий (в) режимы работы:
1 — излучатель; 2 — приемник
5.9. Измерение уровня жидкости и сыпучих тел
457
Первый режим весьма похож на работу фотоэлектрического преоб-
разователя: ультразвуковой излучатель и приемник (детектор) мон-
тируются внутри резервуара и располагаются строго друг против друга
так, что между ними образуется прямой путь прохождения ультра-
звуковой волны в газе (рис. 5.103, а). При заполнении пространства
между двумя вибраторами жидкостью или сыпучим материалом уль-
тразвуковой излучатель посылает сигнал, и ультразвуковые волны
весьма существенно поглощаются жидкостью или сыпучим материа-
лом. Если сыпучий материал или жидкость освобождает траекторию
луча ультразвука, сигнал гаснет. Этот режим работы ультразвуковых
преобразователей используется только для определения дискретных
уровней жидкости, т. е. для сигнализации предельных величин. Та-
кой способ подачи ультразвуковых сигналов пригоден для измере-
ния уровня сыпучих материалов.
Для измерения уровня жидкостей более удобен второй режим
работы ультразвуковых преобразователей, основанный на измере-
нии времени прохождения сигнала с использованием принципа эхо-
лота (рис. 5.103, б). Электрический импульс пьезоэлектрическим
вибратором преобразуется в ультразвуковой импульс, который из-
лучается в жидкость и отражается пограничным слоем жидкость—
воздух. Эхо поступает на аналогичный пьезоэлектрический вибра-
тор и преобразуется в электрический импульс. Оба импульса, по-
сланный и отраженный, попадают с определенным интервалом на
вход усилителя.
Тогда уровню жидкости соответствует время между излучением
(моментом посылки импульса) и приемом отраженного ультразву-
кового импульса от поверхности жидкость—воздух до ультразвуко-
вого преобразователя:
т = 2£/vc , (5.105)
где С — расстояние от излучателя до поверхностного раздела фаз;
vc — скорость распространения ультразвука в измеряемой среде.
Скорость распространения ультразвука при любой температуре
жидкости (воды) можно рассчитать по эмпирической формуле:
vc = 1557 - 0,0245(74 -if , (5.106)
где t — температура жидкости (воды),°C.
Пауза между двумя последовательно посылаемыми импульсами
определяется выражением
тп > Ют = 20£/г>с (5.107)
Принципиальная схема ультразвукового уровнемера, работаю-
щего во втором режиме ультразвуковых преобразователей приведе-
на на рис. 5.104.
458
Глава 5 Измерение технологических параметров
X
Рис. 5.104. Принципиальная схе-
ма ультразвукового уровнемера.
Пояснения см. в тексте
Уровнемер состоит из пьезоэлектри-
ческого преобразователя (вибратора) 2,
установленного в резервуаре 7, элект-
ронного блока 3 и вторичного изме-
рительного прибора 8 (на рисунке —
автоматический потенциометр). Элек-
тронный блок включает в себя генера-
тор 7, задающий частоту повторения
импульсов; генератор импульсов 4,
посылаемых в жидкость, уровень ко-
торой измеряется; приемного устрой-
ства-усилителя 5; измерителя време-
ни 6. Генератор 7, задающий частоту
повторения импульсов, управляет рабо-
той генератора импульсов 4 и измери-
телем времени 6. Генератор импульсов 4
вырабатывает электрические импульсы
с определенной частотой повторения,
которые преобразуются в ультразвуко-
вые с помощью пьезоэлектрического преобразователя 2, установ-
ленного с внешней стороны дна резервуара. Распространяясь в жид-
кой среде, ультразвуковые импульсы отражаются от поверхности
жидкости (от границы раздела жидкость—газ) и поступают на тот же
пьезометрический преобразователь. Отраженные импульсы после
обратного преобразования в электрические усиливаются и форми-
руются усилителем 5, а затем подаются на измеритель времени.
Выходным сигналом измерительной схемы является постоянное на-
пряжение, поступающее на вход вторичного прибора 8 (например,
автоматического потенциометра)
Замечание
При вычислении уровня жидкости необходимо принимать во внима-
ние скорость звука в среде между преобразователем и поверхностью жид-
кости. Конструктивно ультразвуковой излучатель и детектор могут распо-
лагаться раздельно (см. рис. 5.103, б) или в одном корпусе (см. рис. 5.104).
Третий режим работы ультразвуковых преобразователей показан
на рис. 5.103, в. Внутри резервуара размещают эмиттер, излучаю-
щий ультразвуковые волны в пространстве над поверхностью жид-
кости. В этом случае ультразвуковые колебания оказываются в резо-
нансе с колебаниями полости над поверхностью жидкости или в
резонансе с гармониками собственных колебаний этой полости.
Уровень жидкости определяется измерением частоты новых колеба-
ний, поскольку при разном уровне жидкости резонансная частота
оказывается различной.
5.9. Измерение уровня жидкости и сыпучих тел 459
Примечание
Ультразвуковые волны похожи на звуковые, они создают в воздухе
движущиеся волны давления и отличаются от звука частотой (частота уль-
тразвука выше 20 кГц). Ультразвуковые преобразователи излучают и при-
нимают ультразвуковые волны целого ряда частот. Как правило, ультра-
звуковые преобразователи представляют собой пьезоэлектрические конст-
рукции, имеющие резонансную частоту в диапазоне ультразвука. Подача
на излучающий преобразователь колебаний от генератора на некоторой
частоте вызывает излучение ультразвуковых волн (излучатель и детектор
подбираются для работы на одной и той же резонансной частоте).
Применение ультразвуковых уровнемеров: для измерения уров-
ня только однородных жидкостей, находящихся под высоким избы-
точным давлением
Преимущество измерения уровня с использованием ультразвука
заключается в том, что этот метод удобен для измерения уровня
заполнения даже в труднодоступных резервуарах, где часто по кон-
структивным причинам бывает невозможно воспользоваться другим
способом измерения. Разумеется, метод требует больших затрат, так
как, кроме пьезоэлектрических вибраторов, необходимы частотные
генераторы.
Замечание
Разработан новый датчик-сигнализатор уровня в металлических ре-
зервуарах, работа которого основана на ультразвуковой технологии. Он
позволяет сигнализировать о значениях уровня в металлическом резервуа-
ре не нарушая его целостности, что особенно важно, когда в резервуаре
содержится агрессивная или летучая среда (щелочь, легкие углеводороды и
т. д.) при высоком давлении или температуре.
5.9.7. Измерение уровня
с помощью радиоактивных изотопов
Измерение уровня при помощи радиоактивных изотопов целе-
сообразно прежде всего при наличии специфических условий, а
именно: высокого давления или разреженности, агрессивности сре-
ды, когда нельзя использовать обычные средства измерения. Этот
способ используют для измерения уровня заполнения резервуаров,
силосных башен и бункеров, где нельзя установить измерительные
щупы или необходимо применение дорогостоящей системы изме-
рительных щупов, вызванное конструктивными особенностями. Но
и в тех случаях, когда правила техники безопасности запрещают ус-
тановку уровнемеров в резервуарах или когда установка обычных
средств измерения потребует больших затрат, для измерений часто
460
Глава 5. Измерение технологических параметров
Рис. 5.105. Схема радиоактив-
ного сигнализатора уровня:
I — излучатель; 2 — приемник
выгодно оказывается использовать радио-
активные изотопы. Особенно целесообраз-
но применять радиоактивные изотопы для
измерений уровня агрессивных материа-
лов, веществ с повышенной адгезионной
способностью, в резервуарах с очень вы-
сокими температурами, в резервуарах (ре-
акторах) со встроенными мешалками, в
бункерах с такими крупнокусковыми ма-
териалами, как уголь или руда, в шахтных
печах.
В основе измерения при помощи ис-
кусственных радиоактивных изотопов ле-
жит принцип поглощения радиоактивного излучения соответствую-
щим материалом, содержащимся в резервуаре. Пучок у-лучей, излу-
чаемый радиоактивным источником, проникает через резервуар по
прямой линии (рис. 5.105). На стенке резервуара, лежащей против
излучателя, расположен приемник, преобразующий принятые лучи
в электрические импульсы. Интенсивность принятого излучения
зависит от высоты уровня. Возникающие на выходе приемника им-
пульсы, частота которых пропорциональна интенсивности излуче-
ния, подводятся к переключающему устройству, реле которого сра-
батывает, как только число импульсов в единицу времени достигнет
минимальной величины. Ввиду того, что в большинстве случаев
измеряют толстые слои материала, используют преимущественно
у-лучи. Большое влияние на измерение уровня оказывает толщина
стенок резервуара. Интенсивность излучения, проникающего через
заполненный резервуар, можно рассчитать по формуле
А = 1о ехр[-Х(2рД +рД)]. (5.108)
Интенсивность излучения, проникающего через пустой резерву-
ар, равна
А = 10 ехр(-12рД). (5.109)
Отношение величин интенсивности излучения через заполнен-
ный резервуар (5.108) и пустой резервуар (5.109):
А/А = ехР(“А>,Ч)> (5.110)
где /0 — исходная интенсивность излучения; Ьс — толщина стенки
резервуара; рс и р, — плотности материала стенки и содержимого
в резервуаре соответственно; — внутренний диаметр резервуара;
X — массовый коэффициент поглощения.
5.9. Измерение уровня жидкости и сыпучих тел
461
5.9.8. Акустические уровнемеры
Акустический метод определения уровня жидкости основан на
формировании акустического импульса на границе раздела жид-
кость—воздух в вертикальном звукопроводе, выполненном в виде
тонкого металлического стержня. Уровень жидкости рассчитывает-
ся исходя из времени распространения ультразвукового сигнала от
излучателя, расположенного внутри поплавка на поверхности жид-
кости, до приемника, установленного в верхнем конце стержня.
Для подачи питания и синхронизации формирователя ультра-
звукового импульса используется непосредственно звукопровод, яв
ляющийся одновременно частью витка первичной обмотки транс-
форматора, вторичная обмотка которого расположена в поплавке.
Формирование акустического импульса осуществляется излучателем,
представляющим собой пьезокерамическое кольцо, коаксиально
охватывающее стержень
На рис. 5.106 рассмотрена схема акустического уровнемера. Элек-
трический ток подается на металлический стержень-звукопровод 1
с формирователя импульсов синхронизации 2 и формирователя ча-
стоты питания 3 через смеситель 4. В катушке индуктивности L,
расположенной в корпусе поплавка 5, возникает соответствующий
индукционный ток. Катушка подключена к входу блока формирова-
ния импульсов излучателя 6. Электрический импульс, вырабатывае-
мый этим блоком, подается на пьезокерамическое кольцо 7 излуча-
теля. При этом формируется акустический сигнал, который через
стенки корпуса поплавка и жидкость достигает звукопровода. В ме-
таллическом стержне возбуждается продольная волна. Ультразвуко-
вые импульсы принимаются пьезокерамическим преобразователем
8, закрепленным на верхнем торце стержня. Электрический сигнал
с приемника через усилитель 9 поступает на вход счетчика времени
10, определяющего время распространения ультразвукового импульса
Рис. 5.106. Принципиальная схема акустического уровнемера. Пояснения
см в тексте
462
Глава 5. Измерение технологических параметров
по стержню. При работе системы по металлическому стержню про-
текает переменный электрический ток в несколько миллиампер и
частотой 10 кГц, которого достаточно для индукционного питания
и генерации электрического импульса амплитудой 20...30 В, подава-
емого непосредственно на излучатель. Синхронный запуск излуча-
теля осуществляется высокочастотным импульсом тока. Таким об-
разом, схема синхронизации и формирования ультразвуковых им-
пульсов работает автономно без внутреннего источника питания и
независимо от положения поплавка. Все элементы излучателя рас-
положены внутри герметичного корпуса поплавка, изготовленного
из нержавеющей стали.
Уровнемер представляет собой единый электронный блок, уста-
навливаемый на крышке стандартного технологического отверстия
резервуара, в которое опускается металлический стержень. Сигнал,
поступающий с уровнемера на вход ЭВМ, подвергается обработке с
помощью программного пакета, позволяющего рассчитывать уро-
вень и расход жидкости в нескольких (до 10) резервуарах.
5.10. ИЗМЕРЕНИЕ СОСТАВА
И ФИЗИКО-ХИМИЧЕСКИХ СВОЙСТВ ВЕЩЕСТВ
Физические методы анализа основаны на использовании зави-
симости какого-либо физического эффекта или физического свой-
ства вещества от его состава. Для газового анализа используют плот-
ность, вязкость, теплопроводность, магнитную восприимчивость,
тепловой эффект реакции и т. д По изменению специфических
физических эффектов или физических свойств возможно опреде-
лить концентрацию измеряемого компонента в многокомпонентной
газовой смеси.
5.10.1. Физические газоанализаторы
В физических газоанализаторах для анализа компонента в газо-
вой смеси чаще всего используют такие свойства газовой смеси, как
теплопроводность, магнитная восприимчивость, тепловой эффект
химической реакции и др. Условие выбора физического свойства:
аддитивность свойств выбранной физической величины в данной
газовой смеси.
Газоанализаторы обычно имеют блочно-модульную конструкцию
и состоят из нескольких блоков:
• выносного первичного измерительного преобразователя (датчика);
• блока питания;
5.10. Измерение состава и физико-химических свойств веществ
463
• блока подготовки газа, включающего фильтр, побудитель рас-
хода, индикатор расхода и т. п.;
• измерительного прибора общепромышленного исполнения (рас-
стояние между блоками не более 200 м).
Промышленные автоматические газоанализаторы предназначе-
ны для определения содержания контролируемых компонентов в
газовых смесях технологических процессов, в окружающей воздуш-
ной среде, в производственных помещениях. Термокондуктометри-
ческие, термомагнитные, термохимические, оптические абсорбци-
онные в ИК- и УФ-области спектра газоанализаторы предназначе-
ны в основном для анализа одного компонента в газовой смеси.
Хроматографические газоанализаторы предназначены для анализа
многокомпонентных смесей. Принцип их действия основан на ис-
пользовании для разделения смесей способности в различной сте-
пени адсорбироваться на выбранном адсорбенте при пропускании
газовой смеси через неподвижный слой адсорбента и выделении
соответствующих компонентов газов и жидкостей в хроматографи-
ческой колонке.
5.10.1.1. Термокондуктометрические газоанализаторы
Принцип действия термокондуктометрических газоанализаторов
основан на зависимости теплопроводности газовой смеси от кон-
центрации определяемого компонента. Можно считать, что тепло-
проводность является аддитивным свойством; для бинарной газовой
смеси для данной температуры (в первом приближении)
^см = ХА1 х2^-2> (5 Hl)
где X], х2 — молярные доли компонентов; X, и — теплопроводности
этих компонентов, Вт/(м К).
Измерив теплопроводность бинарной смеси и зная теплопро-
водность чистых компонентов, можно вычислить концентрации ком-
понентов в смеси. Применимость метода теплопроводности ограни-
чивается определенной областью концентраций.
Принципиальная схема термокондуктометрического газоанали-
затора показана на рис. 5.107 В плечи измерительного неуравнове-
шенного моста включены одинаковые сопротивления, например, в
виде платиновых нитей (или полупроводниковых терморезисторов) 1,
нагреваемых током. По сути, эти сопротивления — нагревательные
элементы. Через сопротивления протекает одинаковый постоянный
ток и нагревает их. Два сопротивления, включенные в противопо-
ложные плечи моста, помещаются в камеры, через которые пропус-
кается измеряемый газ, а два других — в камеры 2, наполненные
воздухом (сравнительный газ). До тех пор, пока отвод теплоты от
464
Глава 5 Измерение технологических параметров
Рис. 5.107. Измерительная мосто-
вая схема термокондуктометри-
ческого газоанализатора. Поясне-
ния см в тексте
нагревательных элементов в измерительных и сравнительных каме-
рах одинаков, мост находится в равновесии.
Если теплопроводность измеряемой газовой смеси, подаваемой
в измерительные камеры, отличается от теплопроводности воздуха
(выбран как сравнительный газ), то теплоотдача от нагреваемых нитей
к стенкам камеры изменяется, что приводит к изменению темпера-
туры нитей и, соответственно, к изменению их сопротивления. Рав-
новесие моста нарушится и в диагонали моста cd появляется напря-
жение разбаланса, пропорциональное содержанию определяемого
компонента. Наблюдается такая схема преобразования концентра-
ции анализируемого газа в разбаланс напряжения:
с -» Хсм -» Г -» А -» hUcd
Напряжение разбаланса измеряется, например, потенциометром 3.
Чтобы избежать проявления дополнительных приборных погреш-
ностей за счет влияния температуры окружающей среды на резуль-
тат измерения, блок измерительных камер газоанализатора термо-
статируют, помещая их, например, в один металлический блок.
Недостатки: большая погрешность измерения (основная погреш-
ность составляет 2,5... 10 % в зависимости от интервала измерения),
отсутствие селективности.
Область применения: непрерывный контроль содержания водо-
рода в азотоводородной смеси в производстве синтетического ам-
миака; водорода в газе карбидных печей и в производстве электро-
литического водорода; аммиака в аммиачно-воздушной смеси в про-
изводстве азотной кислоты; диоксида серы в печном газе в
производстве серной кислоты и т. д.
5.10.1.2. Термохимические газоанализаторы
Принцип действия термокаталитических (термохимических) га-
зоанализаторов основан на беспламенном сжигании (окислении) уг-
леводородов на поверхности каталитического активного элемента и
5.10. Измерение состава и физико-химических свойств веществ
465
измерении количества выделившейся при этом теплоты, которое про-
порционально концентрации углеводородов и паров горючих жидко-
стей. Выпускаются две основные модификации термокаталитических
газоанализаторов. В первой (рис. 5.108, а), наиболее распространен-
ной конструкции, реакция сжигания осуществляется на активиро-
ванной поверхности нагретой платиновой нити (измерительный эле-
мент), помещаемой в измерительную проточную камеру и служащей
одновременно чувствительным элементом для измерения температу-
ры. Нить R, нагревается постоянным током и на ней происходит ка-
талитическое окисление пропускаемой горючей смеси. Сравнитель-
ный элемент (точно такая же платиновая нить сопротивлением Л3)
находится в закрытой сравнительной камере, заполненной воздухом.
Оба платиновых сопротивления вместе с двумя другими сопротивле-
ниями образуют неуравновешенный измерительный мост. Выделяю-
щаяся в результате каталитического окисления горючих компонентов
теплота приводит к повышению температуры измерительного эле-
мента. Его сопротивление изменяется, и возникает разбаланс изме-
рительного моста — мера концентрации горючих компонентов
Во второй модификации (рис. 5.108, б) применяется насыпной твер-
дый катализатор /, помещаемый в проточную термостатируемую ка-
меру сжигания. Повышение температуры, вследствие теплового эф-
фекта реакции сгорания, измеряется термометром сопротивления 2.
В результате беспламенного горения появляется следующая схе-
ма преобразования концентрации анализируемого (горючего) газа в
разбаланс напряжения:
С -> <?сг Л -» ^Ued
где Ссг — теплота сгорания.
Рис. 5.108. Измерительные мостовые схемы термохимического газоана-
зизатора:
а — с проволочным платиновым каталитическим чувствительным эле-
ментом Я/ б — с проточной термостатируемой камерой (/ — твердый
насыпной катализатор; 2 — термопреобразователь сопротивления)
466
Глава 5 Измерение технологических параметров
Напряжение разбаланса (рис. 5.108, а, б) можно измерить потен-
циометром.
Недостатки: ограниченный диапазон измерений; отсутствие се-
лективности; низкие быстродействие и чувствительность; отравляе-
мость чувствительного элемента: обязательное присутствие кисло-
рода в контролируемой среде.
Область применения: чаще всего для измерения довзрывных
концентраций углеводородов и паров горючих жидкостей.
5.10.1.3. Термомагнитные газоанализаторы
Принцип действия основан на использовании температурной за-
висимости парамагнитной восприимчивости кислорода, выражен-
ной уравнением Кюри:
X* = с,
(5.112)
Рис. 5.109. Схема термомаг-
нитного газоанализатора с
кольцевой камерой. Поясне-
ния см. в тексте
где х — удельная магнитная восприимчивость; с — постоянная Кюри.
При повышении температуры магнитная восприимчивость сни-
жается.
Принципиальная схема термомагнитного газоанализатора с коль-
цевой камерой показана на рис. 5.109. Поток анализируемого газа
на входе в кольцевую камеру разделяется на два потока, которые
протекают по двум половинам кольцевой металлической камеры 1.
Камера имеет поперечное сечение в виде тонкостенной стеклянной
трубки 5, образующей собственно анализатор. На трубку снаружи
намотаны две одинаковые нагревательные проволочные секции из
металла с высоким температурным коэф-
фициентом сопротивления (Pt; Ni), пред-
ставляющие собой два сопротивления
и R2 измерительного моста. Двумя други-
ми плечами моста служат постоянные
манганиновые сопротивления R3 и R4.
Сопротивления R{ и Я2 нагреваются до
200...300 °C электрическим током от ста-
билизированного источника питания
(ИПС). Половина трубки с сопротивле-
нием Д, находится между полюсами силь-
ного магнита 2. При отсутствии кислоро-
да в анализируемой смеси поток разделя-
ется на две равные части, омывающие
сопротивления R} и R2, не нарушая рав-
новесие моста. Если холодный анализи-
руемый газ содержит кислород, то он
сильнее втягивается в трубку со стороны
магнита. Согласно уравнению (5.112), при
5.10. Измерение состава и физико-химических свойств веществ
467
нагревании газовой смеси, содержащей кислород, магнитная вос-
приимчивость смеси снижается. Более холодные свежие порции
смеси вытесняют нагретые, что приводит к образованию постоян-
ного газового потока («магнитного ветра») через поперечную труб-
ку. Сопротивление /?,, расположенное вблизи магнитных полюсов,
несколько охлаждается, а другое сопротивление Я2 на столько же
нагревается. Возникающая между сопротивлениями разность тем-
ператур и соответственно разность сопротивлений является мерой
содержания кислорода в анализируемом газе. Напряжение разба-
ланса измерительного моста можно измерить потенциометром 4.
5.10.1.4. Оптические абсорбционные
в ИК-области спектра газоанализаторы
Действие оптико-акустических газоанализаторов основано на
способности определяемого газа поглощать инфракрасное излуче-
ние. Этой способностью обладают все газы, за исключением одно-
атомных, а также водорода, кислорода, азота и хлора. Каждый газ
поглощает инфракрасное излучение только в своих, характерных для
него участках спектра. Интенсивность монохроматического излуче-
ния, прошедшего слой поглощающего газа, определяется законом
Бугера—Ламберта— Бера-
Л = A»xexPH^)> (5.113)
где /ОЛ, 4 ~ интенсивность монохроматического излучения до и после
прохождения слоя поглощающего газа; к — коэффициент поглоще-
ния, характерный для данного газа и определенной длины волны Л;
с — объемная концентрация газа, поглощающего излучение; h —
толщина слоя поглощающего газа.
Для измерения интенсивности излучения, прошедшего слои ана-
лизируемого газа, используют оптико-акустический эффект: газ, спо-
собный поглощать ИК-лучи, в замкнутом объеме подвергается пре-
рывистому воздействию инфракрасного излучения, при этом смесь
периодически нагревается (в результате поглощения излучения) и
охлаждается (при прекращении излучения). Колебания температу-
ры вызывают колебания давления газа, воспринимаемые звуковым
приемником.
Принципиальная схема двухканального оптико-акустического га-
зоанализатора показана на рис. 5.110. От двух источников (излуча-
телей) 3 с отражателями 2 потоки инфракрасного излучения, прак-
тически одновременно прерываемые обтюратором 4 (вращается элект-
родвигателем 1) с определенной частотой, проходят две камеры 5 и 6,
затем фильтровые камеры 7 и попадают в лучеприемник 8. Сравни-
тельная непроточная камера 6 заполнена азотом, а в рабочую каме-
468
Глава 5. Измерение технологических параметров
Рис. 5.110- Схема оптико-акус-
тического газоанализатора. По-
яснения см в тексте
ру 5 поступает анализируемый газ.
Окна рабочей, сравнительной и филь-
тровых камер, а также лучеприемника
выполнены из материала, пропускаю-
щего ИК-излучение. Фильтровые ка-
меры заполняются неопределяемыми
мешающими газами, спектры погло-
щения которых могут частично пере-
крывать спектр поглощения определя-
емого компонента. Таким образом
присутствие в анализируемой смеси
мешающих газов не будет приводить к
увеличению погрешности измерения,
так как они будут поглощать ИК-из-
лучение в характерных для них участ-
ках спектра в обоих каналах — как из-
мерительном, так и сравнительном, и
разность интенсивности потоков ИК-
излучения, поступающего в левую и
правую камеры лучеприемника, будет
зависеть от концентрацией в анализи-
руемой смеси только определяемого
компонента. Лучеприемник 8 состоит из двух камер, разделенных
конденсаторным микрофоном 9 и заполненных смесью азота с оп-
ределяемым компонентом. Периодически газ в лучеприемнике 8
нагревается (за счет поглощения энергии) и охлаждается, что при-
водит к возникновению в замкнутом объеме лучеприемника перио-
дических колебаний температуры, вызывающих периодические ко-
лебания давления газа. При равенстве интенсивностей инфракрас-
ного излучения в правой и левой частях лучеприемника 8 мембрана
конденсаторного микрофона неподвижна. Если интенсивность по-
ступающего инфракрасного излучения в левую лучеприемную каме-
ру будет меньше, чем в правую, то и амплитуда периодического ко-
лебания давлений в левой лучеприемной камере будет меньше, чем
в правой. При этом разность давлений, действующая на мембрану
конденсаторного микрофона, будет тем больше, чем больше будет
концентрация определяемого компонента в анализируемой газовой
смеси. Амплитуда колебаний мембраны и связанное с ней измене-
ние выходного сигнала пропорциональны разности давлений в лу-
чеприемных камерах, а следовательно, и концентрации определяе-
мого компонента в газовой смеси. Колебания давления могут быть
преобразованы конденсаторным микрофоном 9 в электрический
выходной сигнал, который можно измерить. Описанное оптико-аку-
стическое явление известно как явление Тиндаля—Рентгена, кото-
5.10. Измерение состава и физико-химических свойств веществ
469
рое наблюдалось этими учеными при звуковых частотах модуляции
излучения Выходной сигнал конденсаторного микрофона после
преобразования в напряжение и прохождения усилителя 10 подает-
ся на реверсивный двигатель 11, перемещающий одновременно стрел-
ку прибора и компенсирующую заслонку 12. Собственно перемеще-
ние компенсирующей заслонки 12 и уравнивает потоки инфракрас-
ного излучения на выходе из камер 5 и 6.
Селективность оптико-акустических анализаторов повышают,
применяя набор светофильтров с узким диапазоном длин волн про-
пускаемых лучей.
Достоинствами оптико-акустических газоанализаторов являют-
ся высокая чувствительность, хорошая избирательность, высокое
быстродействие, широкий диапазон измерений, высокая точность и
долговечность.
Примечание
Для измерения интенсивности ИК-излучения в оптических абсорб-
ционных газоанализаторах применяются также светодиоды. Ослаблен-
ный поток излучения, прошедшего слой поглощающего газа, попадает
на фотоприемник. Отношение сигналов от рабочего и опорного свето-
диодов зависит от концентрации анализируемого газа. Это отношение
устанавливается при калибровке и записывается в память микроконт-
роллера. Полученные сигналы пересчитываются микропроцессором в
объемную концентрацию анализируемого газа с учетом температурной
коррекции.
5.10.1.5. Оптические абсорбционные
в УФ-области спектра газоанализаторы
Принцип действия основан на оптико-абсорбционном методе
измерения ультрафиолетовой энергии излучения анализируемым
компонентом газовой смеси. Газоанализаторы этого типа имеют
большую чувствительность к парам ртути, ацетона, к хлору, озону и
ряду других газов, наличие которых удается обнаружить с точнос-
тью тысячных долей процента.
5.10.2. Измерение концентрации растворов
Автоматический непрерывный контроль жидкостей осуществ-
ляется измерительными устройствами, монтируемыми непосред-
ственно в технологическом аппарате или в трубопроводе, при со-
блюдении следующих условий: измерительное устройство должно
иметь термокомпенсацию или контролируемая среда должна нахо-
диться в изотермических условиях и не менять своего физического
состояния; первичный измерительный преобразователь, погружен-
470 Глава 5. Измерение технологических параметров
ный в измеряемую среду, не должен создавать в ней застойные
зоны. В противном случае датчик анализатора следует установить
вне технологического аппарата, применяя специальные пробоот-
борные устройства.
Широко применяются традиционные автоматические анализа-
торы состава технологических жидкостей, использующие кондукто-
метрический, потенциометрический, денсиметрический и ультра-
звуковой методы.
Примечание
Разработка автоматических систем отбора и подготовки проб с микро-
процессорным управлением получения и обработки информации позволи-
ла значительно развить вискозиметрический, ультразвуковой, титрометри-
ческий и другие методы.
5.10.2.1. Кондуктометрические анализаторы
Принцип действия кондуктометрического анализатора основан
на зависимости удельной электрической проводимости раствора от
количества и природы содержащихся в растворе веществ. Широкое
распространение получили контактные кондуктометрические ана-
лизаторы. Их чувствительный элемент представляет собой электродную
ячейку, погруженную в измеряемый раствор, с помощью которой
измеряется его электрическая проводимость, зависящая от состава
и количества находящихся в нем веществ.
Двухэлектродные ячейки применяют для анализа чистых раз-
бавленных растворов с удельной электрической проводимостью до
10-5 См/м и в сигнализаторах, когда не требуется достижения высо-
кой точности измерения. В трехэлектродной ячейке внешние элек-
троды соединены между собой и вместе с внутренним электродом
образуют две параллельно включенные двухэлектродные ячейки. В та-
кой ячейке незначительны внешние наводки. В четырехэлектрод-
ной ячейке переменное напряжение подводится к двум крайним
электродам, между которыми в растворе протекает ток. Два внут-
ренних электрода служат для измерения падения напряжения, кото-
рое создает ток на участке раствора между ними. Четырехэлектрод-
ные ячейки применяют для анализа чистых растворов с удельной
электрической проводимостью до 10-2..,10 См/м
Этот способ используют при измерения концентрации элект-
ролитов.
Электропроводность гомогенных многокомпонентных жидких
смесей в первом приближении подчиняется правилу аддитивности:
(5.114)
5.10. Измерение состава и физико-химических свойств веществ 471
где ож — удельная электропроводность жидкой смеси, См/м; х, —
молярная доля /-го компонента = — Удельная электро-
проводность /-го компонента в жидкой смеси; п — число компонен-
тов-электролитов в растворе.
Электропроводность дисперсных систем, составленных из элек-
тропроводной сплошной фазы и неэлектропроводной дисперсной
фазы, зависит от концентрации неэлектропроводных диспергиро-
ванных частиц.
Электропроводность неоднородной гетерогенной среды не под-
чиняется правилу аддитивности, и ее определяют экспериментально.
Проводя измерение электропроводности жидких растворов (из-
меняется только концентрация определяемого компонента), изме-
рение электропроводности гетерогенных систем (суспензии, эмуль-
сии и т. д.), у которых изменяется только содержание дисперсной
фазы, возможно непрерывно контролировать изменение концент-
рации определяемого компонента.
Кондуктометрические датчики, как правило, устанавливают в
технологических аппаратах и трубопроводах, при этом специальная
подготовка пробы к измерениям не нужна.
5.10.2.2. Потенциометрические анализаторы
Потенциометрический метод основан на измерении электродных
потенциалов, функционально связанных с концентрацией (актив-
ностью) определяемого вещества в растворе. Электроды представ-
ляют собой окислительно-восстановительные системы. Измеряемый
потенциал отвечает равновесному состоянию, установившемуся на
электроде между окисленной и восстановленной формой определя-
емого вещества, и в общем виде может быть определен по уравне-
нию Нернста:
£=£°+тг|пИ’ <5115)
где Е— электродный потенциал, В; Е° — стандартный электродный
потенциал — потенциал электрода, измеренный в стандартных ус-
ловиях (25 °C, 101,325 кПа, аок = aB = 1 моль/л), В; и — число элект-
ронов, обменивающихся между окисленной и восстановленной фор-
мами вещества; R = 8,314 Дж/(моль К) — универсальная газовая по-
стоянная; Т — абсолютная температура, К; F= 9,648 104 Кл/моль —
постоянная Фарадея; аок, ав — активность окисленной и восстанов-
ленной форм вещества соответственно, моль/л.
472 Глава 5. Измерение технологических параметров
Абсолютное значение электродного потенциала (5.115) непосред-
ственно измерить нельзя, для его измерения применяют гальваничес-
кий элемент, в котором один электрод является индикаторным (из-
мерительным), а другой — электродом сравнения. Индикаторный
электрод помещают в контролируемую жидкую среду. Потенциал
индикаторного электрода Еи определяется концентрацией (актив-
ностью) ионов в растворе. В качестве электрода сравнения исполь-
зуют стандартные электроды (например, металлический электрод,
помещенный в насыщенный водный раствор соли), имеющие по-
стоянный потенциал £с. Потенциал электрода сравнения зависит
от температуры, поэтому его располагают в контролируемой среде в
непосредственной близости от индикаторного электрода (или в спе-
циальном неметаллическом сосуде с раствором электролита). Элек-
трический контакт электрода сравнения с контролируемой средой в
последнем случае реализуется через практически непроточный ключ.
ЭДС гальванической цепи, составленной из индикаторного элек-
трода и электрода сравнения, помещенных в контролируемую жид-
кую среду, составит
Д£ = Ек - Ес.
Потенциометрический метод применяется для измерения кон-
центраций кислот, оснований, солей в водных и неводных средах, а
также для контроля pH водных растворов прямым потенциометри-
ческим измерением. Возможности потенциометрического метода
расширились с появлением ионоселективных электродов (рис. 5.111).
В конструкцию такого электрода входит мембрана, проницаемая
только для определяемого иона, тем самым обеспечивается избира-
тельный анализ одних ионов в присутствии других. В стеклянном
Рис. 5.111. Ионоселективные электроды:
а — стеклянный мембранный электрод; металлические электроды с
напыленным слоем металла (б), проволочный (в), точечный (г); д —
электрод с твердой мембраной
5.10. Измерение состава и физико-химических свойств веществ 473
жит шарик из стекла определенного сорта, припаянного к стеклян-
ной трубке. Трубка заполнена стандартным (внутренним) раствором
с постоянной активностью ионов водорода, и в нее опущен провод-
ник — серебряная проволока. Разность потенциалов между стеклян-
ной ионообменной мембраной и внутренним полуэлементом (сис-
тема проводник—внутренний раствор) составляет потенциал стек-
лянного электрода. В состав стеклянной ионообменной мембраны
входят атомы натрия, способные к активному электрохимическому
обмену с контролируемой средой при pH > 10. При pH > 12, вслед-
ствие интенсивного электрохимического обмена, электрод «выще-
лачивается».
Металлические индикаторные электроды с напыленным слоем
металла на нейтральную поверхность (рис. 5.111, б), проволочный
(рис. 5.111, в) или припаянный одним концом к нейтральной повер-
хности в виде капли — точечный (рис. 5.111, г) в контролируемой
среде вступают в электрохимическое взаимодействие с ионами, при-
сутствующими в этой среде. Электродный потенциал, устанавливаю-
щийся на индикаторном электроде, обусловлен совокупностью про-
цессов, протекающих при этом, в том числе коррозией металла в
контролируемой среде. Поэтому наибольшей селективностью при
потенциометрическом контроле многокомпонентных технологичес-
ких сред обладают индикаторные электроды, изготовленные из бла-
городных металлов (платина, золото, иридий и т. д.). На рис. 5.111, д
представлен индикаторный ионоселективный электрод с раздели-
тельной твердой мембраной (кристалл, пленка, таблетка), выполня-
ющий ту же функцию, что и стеклянный шарик в стеклянном мем-
бранном электроде.
Замечание
В настоящее время большое внимание уделяется разработке химичес-
ких сенсоров на основе ионоселективных полевых транзисторов.
Автоматический потенциометрический контроль технологичес-
ких водных низкоконцентрированных растворов и суспензий ис-
пользуется для управления процессами нейтрализации и для авто-
матического поддержания заданного интервала значений pH и рХ
(X — ион) в технологических средах.
5.10.2.3. Денсиметрические анализаторы
Для непрерывного автоматического контроля плотности прак-
тически любых жидких растворов, суспензий применяются пьезо-
компенсационные плотномеры; для контроля плотности низковяз-
ких технологических растворов — пневматические поплавковые плот-
номеры. Для бесконтактного контроля технологических растворов,
474
Глава 5. Измерение технологических параметров
а б в
Рис. 5.112. Расположение источника (7) и приемника (2) у-излучения
плотномера относительно трубопровода диаметром d < 0,2 м (а),
d = 0,2...0,3 м (б) и d > 0,3 м (в)
суспензий, эмульсий, протекающих по технологическим трубопро-
водам, используются бесконтактные радиоизотопные у-плотноме-
ры.
Принцип действия радиоизотопного плотномера основан на из-
мерении ослабления интенсивности у-излучения, проходящего че-
рез слой вещества толщиной h, которое описывается основным оп-
тическим законом (5.113):
/ = /<<**,
где /0, I — интенсивность у-излучения на входе в слой вещества
толщиной А и на его выходе соответственно; к — коэффициент по-
глощения.
Радиоизотопные у-плотномеры измеряют плотность технологи-
ческих жидких сред в интервале 500...3500 кг/м3. Плотномер уста-
навливают вблизи технологического аппарата или трубопровода,
обычно диаметром 0,1...0,3 м и более (рис. 5.112).
Погрешности денсиметрического контроля связаны с появлени-
ем в контролируемой среде дисперсной фазы (твердой, жидкой, га-
зообразной), способной не только поглощать, но и рассеивать по-
ток у-излучения, а также колебаниями температуры контролируе-
мой среды.
5.10.2.4. Ультразвуковые анализаторы
Ультразвуковой метод анализа жидкостей основан на измерении
скорости распространения и поглощения ультразвуковой волны в
контролируемой среде. Эта скорость определяется химической при-
родой жидкости и при постоянной частоте ультразвуковой волны
зависит от концентрации составляющих компонентов, плотности,
вязкости, сжимаемости и температуры анализируемой среды.
Ультразвуковым методом можно определять состав различных
жидких сред, в том числе суспензий и эмульсий.
5.10. Измерение состава и физико-химических свойств веществ
475
а 4 б
Рис. 5.113. Схемы датчиков ультразвуковых приборов с излучателем и
приемником (а) и с совмещенным излучательно-приемным
элементом и отражателем (б):
1 — пьезоэлектрический резонатор, излучающий и (или) восприни-
мающий энергию ультразвуковых волн; 2 — камера; 3 — разделитель-
ная мембрана; 4 — фиксатор размещения элементов датчика; 5 —
отражатель
Достоинства ультразвукового метода: анализируется весь объем
пространства, заполненный контролируемой средой; измерения
можно проводить при различных частотах, что позволяет осуществ-
лять регулирование чувствительности измерительного прибора к
параметрам контролируемой среды.
Чувствительные элементы ультразвуковых приборов (пьезоэлек-
трические излучатели и приемники) погружаются в контролируе-
мую среду в защитных металлических корпусах во взрывобезопас-
ном исполнении. В качестве излучающего и воспринимающего чув-
ствительных пьезоэлементов применяют кристаллы ниобата лития.
Точка Кюри ниобата лития близка к 500°С. Это позволяет использо-
вать ультразвуковые приборы для контроля состава жидкости в лю-
бых ХТП. На рис. 5.113 приведены схемы двух вариантов датчиков
ультразвуковых приборов. Пьезоэлектрические излучатель и прием-
ник 1 помещают каждый в закрытую камеру 2 и прикрепляют через
звукопроводящий слой к мембране 3. Датчик погружается в жидкую
контролируемую среду таким образом, чтобы на его элементах не
могли оседать твердые частицы. Контакт мембраны 3 или отражате-
ля 5 в датчиках первого и второго вариантов с контролируемой сре-
дой возникает сразу при погружении в нее датчиков.
5.10.3. Химические газовые сенсоры
Химические газовые сенсоры можно рассматривать как сред-
ство диагностики окружающей среды. Именно в охране окружаю-
щей среды в будущем химическим сенсорам будет принадлежать
ведущая роль В СУ ХТП химические газовые сенсоры, подобно
476
Глава 5. Измерение технологических параметров
Рис. 5.114. Принципиальная схе-
ма химического газового сенсо-
ра. Пояснения см. в тексте
компьютерам, представляют собой элементы глобальной информа-
ционной сети.
Под химическим газовым сенсором (ХГС) понимают датчик кон-
центрации компонентов в газе. Он обладает следующими свойства-
ми: работа в реальном масштабе времени, обратимость показаний,
высокая чувствительность, миниатюрность. ХГС является своеоб-
разным хроматографом размером с небольшую монету, «настроен-
ным» на один или несколько компонентов.
Основными функциональными элементами химического газо-
вого сенсора, представленного на рис. 5.114, являются рецептор,
преобразователь, электронное устройство. Рецептор 1 — элемент
(материал), какие-либо свойства которого изменяются под действи-
ем анализируемого газового вещества. Такими свойствами могут быть
масса, размеры, электропроводность, диэлектрическая проницаемость
и др. Конструктивно рецептор представляет или тонкую газосорби-
рующую пленку, или оболочку оптического волокна, или миниатюр-
ную электрохимическую ячейку. Преобразователь 2 преобразует ре-
акцию рецептора в электрический (реже оптический) сигнал. Как
правило, преобразователи представляют собой миниатюрные уст-
ройства, например, полевые транзисторы, оптические волокна, раз-
нообразные акустические электронные устройства и др. Электрон-
ное устройство 3 считывает сигнал, поступающий с преобразовате-
ля, обрабатывает его либо в цифровой сигнал, либо пороговый
«тревожный» сигнал и посылает на регистрирующее устройство 4.
В основу классификации химических газовых сенсоров положен
механизм работы преобразователя, и в соответствии с этим выделя-
ют электрохимические, электрические, оптические, акустические,
магнитные, термические сенсоры.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Что такое физическая величина и что понимают под ее измерением?
2. Что понимают под нормальными и рабочими условиями примене-
ния средств измерения?
3. Назовите статические погрешности средств измерения. Что такое
динамическая погрешность и чем она обусловлена?
Контрольные вопросы
477
4. Охарактеризуйте основные методы измерения технологических па-
раметров.
5. Каково назначение первичного измерительного преобразователя,
каковы его характеристики, какими показателями можно охарактеризовать
его динамические свойства?
6. Каково назначение промежуточных преобразователей, ЦАП, АЦП,
нормирующих преобразователей? Каков принцип их действия?
7. Как происходит сопряжение преобразователей с ИИС? Охаракте-
ризуйте и сравните пневматические, электрические и волоконно-оптичес-
кие линии связи.
8. Как измеряются электрические величины — носители информации
о состоянии ХТП? Сравните действие уравновешенного и неуравновешен-
ного мостов.
9. Как измеряется ТЭДС?
10. Каков принцип действия деформационных, емкостных, пьезомет-
рических, индуктивных преобразователей давления?
11 Как защищают манометры от действия агрессивных, горячих, за-
грязненных, кристаллизующихся и вязких сред?
12. Назовите основные виды манометрических термометров и их ха-
рактерные свойства
13. Объясните принцип действия термоэлектрического преобразовате-
ля. Какие существуют способы устранения погрешности, обусловленной
температурой свободных концов термоэлектрического преобразователя?
14. Перечислите достоинства и недостатки термометров сопротивления.
15. Как уменьшить погрешности измерения температуры контактным
и бесконтактным методами?
16. Каков принцип действия расходомеров переменного и постоянно-
го перепада давления?
17. Как защищают расходомеры переменного перепада давления при
измерении расхода агрессивных и вязких жидкостей?
18. Каков принцип действия электромагнитных преобразователей
расхода9
19. Сравните различные способы измерения уровня
20. Какова структура интеллектуальных преобразователей давления,
температуры, расхода и уровня?
21. Объясните принцип действия физических газоанализаторов и ана-
лизаторов жидкости.
6
Глава___________________________
ОСНОВЫ ПРОЕКТИРОВАНИЯ
СИСТЕМ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
Каждая часть хочет быть в своем це-
лом, в коем лучше себя сохраняет.
Леонардо да Винчи
6.1. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
И ОСОБЕННОСТИ УПРАВЛЕНИЯ
ТИПОВЫМИ ПРОЦЕССАМИ И АППАРАТАМИ
ХИМИЧЕСКОЙ ТЕХНОЛОГИИ
Систему автоматического управления проектируют на основе
анализа объекта управления, т. е. технологического процесса в оп-
ределенном аппаратурном оформлении. И начинают, как правило,
с проектирования одноконтурных САР отдельных технологических па-
раметров, поскольку они являются наиболее простыми и надежны-
ми как в наладке, так и в работе.
Большинство объектов химической технологии характеризуются
большим временем транспортного запаздывания ттап и большой ве-
личиной отношения тзап/7’, что приводит к неблагоприятным дина-
мическим характеристикам каналов управления. Это является причи-
ной того, что даже при оптимальной настройке регуляторов качество
переходных процессов в одноконтурных САР может не соответство-
вать заданному. Чтобы повысить качество управления, применяют
многоконтурные системы управления: каскадные, комбинирован-
ные, взаимосвязанные.
Окончательное решение о применении той или иной схемы уп-
равления ХТП принимают после моделирования различных АСУ и
сравнения качества получаемых процессов управления.
6.1. Динамические характеристики и особенности управления
479
6.1.1. Регулирование
основных технологических параметров
Основные технологические параметры, характеризующие хими-
ко-технологические процессы — это расход, уровень, давление, тем-
пература, pH, а также параметры качества: концентрация готового
продукта и его физико-химические свойства (плотность, вязкость,
влажность и др.).
6.1.1.1. Регулирование расхода
При регулировании расхода нужно учитывать некоторые осо-
бенности, не присущие обычно системам регулирования других тех-
нологических параметров. Первая особенность — небольшая (обыч-
но пренебрежимо малая) инерционность объекта регулирования,
который представляет собой, как правило, участок трубопровода
между первичным измерительным преобразователем для измерения
расхода и регулирующим органом. После перемещения штока регу-
лирующего органа в новое положение новое значение расхода уста-
навливается за доли секунды или, в крайнем случае, за несколько
секунд. Это означает, что динамические характеристики системы
определяются главным образом инерционностью измерительного
устройства, регулятора, исполнительного устройства и линией пере-
дачи сигнала (импульсных линий). Вторая особенность проявляется
в том, что сигнал, соответствующий измеренному значению расхо-
да, всегда содержит помехи, уровень которых высок. Частично шум
представляет собой физические колебания расхода, частота которых
настолько велика, что система не успевает на них реагировать. На-
личие высокочастотных составляющих в сигнале изменения расхода —
результат пульсаций давления в трубопроводе, которые в свою оче-
редь являются следствием работы насосов, компрессоров, случай-
ных колебаний расхода, например, при дросселировании потока через
сужающее устройство. Поэтому при наличии шума, чтобы избежать
усиления в системе случайных возмущений, следует применять ма-
лые значения коэффициента усиления регулятора.
Рассмотрим объект регулирования расхода — участок трубо-
провода 1, расположенный между местом измерения расхода (мес-
том установки первичного измерительного преобразователя, напри-
мер диафрагмы 2) и регулирующим органом 3 (рис. 6.1). Длина
прямого участка трубопровода определяется правилами установки
нормальных сужающих устройств и регулирующих органов и мо-
жет составить несколько метров. Динамику объекта (трубопрово-
да) — канала расход вещества через регулирующий клапан—расход
вещества через расходомер — можно представить статическим зве-
480
Глава 6 Основы проектирования систем управления ХТП
3
Рис. 6.1 Фрагмент системы регу-
лирования расхода. Пояснения см.
в тексте
ном первого порядка с транспортным запаздыванием. Значение по-
стоянной времени Т составляет несколько секунд; время транс-
портного запаздывания т^п для газа — доли секунды, для жидкости —
несколько секунд.
Поскольку инерционность объекта при регулировании расхода
незначительна, к выбору технических средств управления и методов
расчета АСУ предъявляются повышенные требования.
Большинство современных первичных измерительных преобра-
зователей расхода возможно рассматривать как статические звенья
нулевого порядка, а исполнительное устройство (исполнительный
механизм вместе с регулирующим органом) — как статическое зве-
но первого порядка с постоянной времени Т в несколько секунд.
Для повышения быстродействия пневматического исполнительного
устройства применяют позиционеры Пневматические линии связи
представляют статическим звеном первого порядка с транспортным
запаздыванием (постоянная времени Т и время транспортного за-
паздывания т^ определяются длиной линии связи и составляют
несколько секунд).
Если расстояния между функциональными элементами системы
управления велики, то по длине импульсной линии устанавливают
дополнительные усилители мощности, чтобы увеличить быстродей-
ствие системы.
Замечание
Реально существующая нелинейная зависимость между перепадом дав-
ления на стандартном сужающем устройстве (например, диафрагме) и рас-
ходом приводит к тому, что при изменении расхода степень устойчивости
системы регулирования изменяется. Заметим, что увеличение коэффици-
ента усиления объекта с увеличением расхода теоретически может быть
скомпенсировано, если эффективное значение коэффициента усиления
регулирующего клапана будет изменяться обратно пропорционально рас-
ходу. Практически регулирующего клапана с такой характеристикой не
существует. Если требуется обеспечить качественное регулирование расхо-
да при условии, что его значение может изменяться более чем вдвое, то для
получения сигнала, пропорционального расходу, необходимо использовать
преобразователь, осуществляющий операцию извлечения корня. Безуслов-
но, указанная нелинейность отсутствует, если в качестве первичного изме-
рительного преобразователя используется, например, электромагнитный
расходомер или другие средства измерения расхода.
6.1 Динамические характеристики и особенности управления
481
Другой тип нелинейности встречается в случае использования позицио-
нера. Небольшое изменение сигнала на входе в позиционер приводит к тому,
что на регулирующий клапан подается максимальный управляющий сигнал.
При дальнейшем увеличении сигнала на входе в позиционер его выходной
сигнал не изменяется. Таким образом, частотные характеристики системы
зависят от величины сигнала, и настройки регулятора, удовлетворительные
при больших возмущающих воздействиях, не обеспечивают нужного каче-
ства регулирования при малых возмущающих воздействиях.
В системах регулирования расхода применяют различные спосо-
бы изменения расхода:
• дросселирование потока вещества через регулирующий орган
(клапан, заслонка, шибер и др.), установленный на трубопроводе;
• изменение угловой скорости вращения рабочего вала насоса или
вентилятора;
• байпасирование потока (под байпасированием понимается пе-
реброс части вещества из основной магистрали в обводную линию)
6.1.1.2. Регулирование устройств
для перемещения жидкостей и газов
Для транспортировки жидкостей по трубопроводам часто при-
меняют центробежные и поршневые насосы, для транспортиров-
ки газов — вентиляторы, газодувки, центробежные компрессоры
и др. Цель регулирования работы насосов, вентиляторов, ком-
прессоров — поддержать их заданную производительность. Рас-
смотрим для примера схему регулирования расхода, создаваемого
центробежным насосом (рис. 6.2). Датчик расхода 2 устанавлива-
ется после центробежного насоса 1 на линии нагнетания перед
регулирующим клапаном 4. При отклонении расхода жидкости от
заданного значения регулятор 3 формирует командный сигнал, в
соответствии с которым исполнительный механизм перемещает
затвор регулирующего клапана 4. Проходное сечение регулирую-
щего клапана изменяется, что приводит к изменению суммарного
сопротивления гидравлической линии и, следовательно, расхода
жидкости
Замечание
Устанавливать первичный измерительный преобразователь, например
диафрагму, на линии всасывания центробежного насоса не рекомендуется:
дросселирование потока через диафрагму может вызвать кавитацию в на-
сосе, приводящую к его быстрому износу, снижению производительности
и напора насоса.
Предложенный вариант регулирования расхода жидкости не при-
меним, если для перемещения жидкости используют поршневой
16 (мхиа.1ОН А. В.. Хари гонок Н. И.
482
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.2. Схема регулирования расхода,
создаваемого центробежным насосом:
1 — насос; 2 — датчик расхода; 3 — регуля-
тор расхода; 4 — регулирующий клапан
Рис. 6.3. Схема регулирования расхо-
да, создаваемого поршневым насосом.
Обозначения как на рис. 6.2
насос: по команде регулятора регулирующий клапан может полнос-
тью закрыться, что, в конечном итоге, приведет к разрыву трубо-
провода. Если регулирующий клапан установить на линии всасыва-
ния поршневого насоса, то это приводит к помпажу. Тогда для регу-
лирования расхода используют байпасирование потока (рис. 6.3):
часть жидкости перепускают из нагнетательной линии во всасываю-
щую линию. Таким же способом регулируют производительность
шестеренчатых и лопастных насосов.
Примечание
Неустойчивая работа насоса, характеризуемая частой сменой режимов
работы и гидравлическими ударами, носит название помпаж
Производительность центробежных компрессоров стабилизиру-
ют системами регулирования с регулирующим клапаном, установ-
ленным на линии всасывания, и противюпомпажной автоматичес-
кой защитой (рис. 6.4). Для защиты применяется система сброса
части сжатого газа в ресивер, уменьшая при этом расход сжатого
газа в линии потребителя. В случае приближения режима работы
компрессора к области помпажа, регулятор расхода открывает регу-
лирующий клапан, установленный на линии нагнетания к ресиверу.
Это приводит к увеличению производительности компрессора, сни-
жению давления в нагнетательной линии,, повышению давления во
всасывающей линии, что предотвращает шомпаж компрессора.
Регулирование соотношения расходов двух веществ
Существует несколько вариантов регулирования соотношения
расходов двух веществ.
Первый вариант (рис. 6.5). Суммарный расход двух веществ
не задан, при этом расход одного из веществ F\ может меняться
произвольно. Назовем этот расход «ведугщим». Расход второго веще-
ства Г2 назовем «ведомым». Соотношение: между расходами второго
6.1. Динамические характеристики и особенности управления
483
Рис 6 4. Схема регулирования произ-
водительности центробежного комп-
рессора с противопомпажной защитой:
1 — компрессор; 2 — датчики расхода; 3 —
регуляторы; 4 — регулирующие клапаны
Рис 6 5- Схема регулирования со-
отношения расходов при произволь-
ной нагрузке:
1, 2 — датчики расхода; 3 — регулятор
соотношения расходов; 4 — регулирую-
щий клапан
и первого вещества должно быть постоянным и равным п. Следова-
тельно, «ведомый» расход равен
F2 = nF{. (6.1)
Второй вариант (рис. 6.6). Заданы: соотношение расходов
двух веществ и ведущий расход Fr. Помимо регулирования соотно-
шения расходов двух веществ применяют дополнительно еще регу-
лирование «ведущего» расхода. При таком регулировании измене-
ние задания по «ведущему» расходу F, автоматически изменяет и
«ведомый» расход F2 в заданном соотношении с F{.
Третий вариант (рис. 6.7). При заданном «ведущем» расхо-
де регулирование соотношения расходов двух веществ проводится с
коррекцией по третьему технологическому параметру. Регулирова-
ние соотношения расходов двух веществ является внутренним кон-
туром в каскадной системе регулирования третьего технологическо-
Рис. 6.6. Схема регулирования соот-
ношения расходов при заданной на-
грузке:
1,2— датчики расхода; 3 — регулятор соот-
ношения расходов; 4 — регулятор расхода;
5, 6 — регулирующие клапаны
16*
484
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.7. Схема регулирова-
ния соотношения расходов
с коррекцией по третьему
параметру (уровню) при за-
данной нагрузке:
1 — реактор-смеситель; 2, 3 —
датчики расхода; 4 — регулятор
соотношения расходов; 5 — ре-
гулятор расхода; 6 — регулятор
уровня; 7, 8 — регулирующие
клапаны; 9 — датчик уровня
го параметра, например, уровня в реакторе-смесителе 1. Заданный
коэффициент соотношения расходов двух веществ устанавливает-
ся внешним регулятором уровня 6 в зависимости от третьего пара-
метра.
Замечание
Особенность настройки каскадных САУ заключается в том, что на за-
дание внутреннему регулятору (в данном случае регулятору соотношения
расходов двух вешеств) устанавливается ограничение:
ин < я < пв,
где пи, п, - нижнее и верхнее соотношения расходов веществ соответ-
ственно
Если выходной сигнал внешнего регулятора (регулятора уровня) вы-
ходит за пределы [«„, ив], то задание внутреннему регулятору (в данном
случае регулятору соотношения расходов двух веществ) не меняется, а ос-
тается на предельно допустимом значении п (а именно или пи или ив).
О выборе регуляторов расхода
Требуемое (заданное) качество переходных процессов предопре-
деляет выбор законов управления. Для регулирования расхода без
установившейся (статической) погрешности в одноконтурных сис-
темах управления применяют ПИ-регуляторы. Если система управ-
ления расходом является внутренним контуром двухконтурной кас-
кадной системы управления, то в качестве регулятора расхода мо-
жет использовать П-регулятор
Замечание
В промышленных САР расхода не рекомендуется применять ПД- или
ПИД-регуляторы. Если в сигнале изменения расхода присутствуют высо-
кочастотные сигналы (помехи), то использование Д-составляющих в зако-
не регулирования без предварительного сглаживания сигнала расхода мо-
жет вызвать неустойчивую работу системы управления.
6.1. Динамические характеристики и особенности управления
485
6.1.1.3. Регулирование уровня
Постоянство уровня жидкости в технологическом аппарате озна-
чает сохранение материального баланса, т. е. приток жидкости равен
ее стоку, а скорость изменения уровня равна нулю:
dA/dT = 0. (6 2)
Замечание
Понятия «приток» и «сток» рассматриваются как обобщенные понятия.
Уровень жидкости в аппарате можно регулировать, применяя
различные схемы регулирования.
Первый вариант (рис. 6.8) — регулирование «на притоке»,
изменяя расход жидкости на входе в аппарат.
Второй вариант (рис. 6.9) — регулирование «на стоке», из-
меняя расход жидкости на выходе из аппарата.
Третий вариант (рис. 6.10) — регулирование соотношения
расходов жидкости на входе в аппарат и выходе из него с коррекци-
ей по третьему технологическому параметру — уровню (каскадная
система регулирования).
Если в аппарате (испарителе, конденсаторе, ректификационной
колонне и т. п.) имеют место фазовые превращения веществ, тогда
уровень является характеристикой и гидродинамических, и тепло-
массообменных процессов. Приток и сток должны учитывать фазо-
вые превращения веществ. В этом случае уровень регулируют изме-
Рис. 0.8. Схема непрерывного регу-
лирования уровня «на притоке»:
1 — аппарат; 2 — регулятор уровня; 3
регулирующий клапан
Рис. 6.9. Схема непрерывного регу-
лирования уровня «на стоке» Обо-
значения как на рис. 6.8
486
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.10. Схема непрерывного регу-
лирования уровня каскадной САР
1 — аппарат; 2, 3 — датчики расхода; 4
регулятор уровня (ведущий); 5 — регуля
тор соотношения двух расходов (ведомый1
6 — регулирующий клапан
Рис. 6.11. Схема непрерывного регу-
лирования уровня в испарителе:
7 — испаритель; 2 — регулятор уровня;
? — регулирующий клапан
нением расхода теплоносителя, например греющего пара или хлада-
гента (рис. 6.11). В указанных аппаратах уровень связан с другими
технологическими параметрами, например давлением. Естественно,
в каждом конкретном случае система регулирования уровня реали-
зуется с учетом других контуров регулирования.
Изменение уровня жидкости в аппарате с постоянной по высоте
площадью поперечного сечения А в общем случае можно предста-
вить уравнением
^^=^х-^вых, Г6.3)
ат
где FBX, Гвых — приток и сток жидкости соответственно с учетом
фазовых и химических превращений.
Выбор непрерывного или позиционного регулятора определяет-
ся требуемой точностью поддержания уровня в аппарате. Если не-
обходимо уровень жидкости в аппарате поддерживать на заданном
значении, а постоянные колебания уровня недопустимы, то исполь-
зуют непрерывный регулятор. Позиционные регуляторы применяются
обычно для поддержания уровня в сборниках жидкости, промежу-
точных емкостях в заданных (достаточно широких) пределах
LH < L < LB,
где LH, LB — нижнее и верхнее значения уровня жидкости в аппарате
соответственно.
6.1. Динамические характеристики и особенности управления
487
Рис. 6.12. Схема позиционного регулирования уровня:
1 — сборник жидкости; 2 — резервный сборник жидкости; 3 — насос;
4 — датчик уровня; 5 — регулятор уровня; б, 7 — регулирующие клапаны
Схема позиционного регулирования уровня приведена на рис. 6.12.
Если уровень достигает своего предельного значения LB (верхнего),
поток автоматически переключается на резервный сборник жидкости
О выборе регуляторов уровня
П-регуляторы применяются, если не требуется высокое каче-
ство регулирования и возмущающие воздействия не имеют посто-
янной составляющей, приводящей к накоплению статической по-
грешности. Но уровень жидкости может оказать значительное влия-
ние на тепловые процессы, например, в паровых теплообменниках
поверхность теплообмена определяется уровнем конденсата. Для
регулирования уровня в таких объектах без статической погрешнос-
ти применяют ПИ-регуляторы.
6.1.1.4. Регулирование давления
Давление является показателем соотношения расходов газовой
фазы на входе в аппарат и выходе из него. Постоянство давления
свидетельствует о сохранении материального баланса аппарата по
газовой фазе, записываемого в виде:
^^ = /[Лх-^ых], (6.4)
где V — объем аппарата; FBX и Гвых — приток и сток газа соответ-
ственно с учетом химических и фазовых превращений в аппарате,
как и в (6.3).
Обычно давление в технологической установке стабилизируют в
каком-либо одном аппарате, а по всей системе оно устанавливается
в соответствии с гидравлическим сопротивлением технологических
488
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.13. Регулирование вакуума в выпарной установке:
1, 2— выпарные аппараты; 3 — тарельчатый конденсатор; 4 — регуля-
тор вакуума; 5 — регулирующий клапан
линий и аппаратов. Например, в многокорпусной выпарной уста-
новке (рис. 6.13) стабилизируют вакуум в последнем выпарном ап-
парате 2, выбрав в качестве управляющего воздействия изменение
расхода охлаждающей воды, подаваемой в конденсатор 3 (измене-
ние расхода охлаждающей воды влияет на скорость конденсации
вторичного пара, т. е. на Гвых). В остальных аппаратах при отсут-
ствии возмущающих воздействий устанавливается разрежение, оп-
ределяемое из условий материального и теплового балансов с уче-
том гидравлического сопротивления технологической линии.
Если давление значительно влияет на кинетику процесса, то пре-
дусматривается система стабилизации давления в отдельных аппа-
ратах. Таким примером является процесс ректификации, для кото-
рого кривая фазового равновесия зависит от давления. При регули-
Рис. 6.14. Регулирование давления в ректификационной колонне при на-
личии неконденсирующихся примесей:
/ колонна; 2 — дефлегматор; 3 — сборник флегмы; 4 — регулятор
давления; 5 — регулирующий клапан; 6 — гидрозатвор
6.1. Динамические характеристики и особенности управления 489
ровании процесса бинарной ректификации часто в качестве косвен-
ного показателя состава смеси используют ее температуру кипения,
однозначно связанную с составом только при постоянном давле-
нии. Поэтому в продуктовых ректификационных колоннах, как пра-
вило, предусмотрены специальные системы стабилизации давления,
где в качестве управляющего воздействия выбрано изменение рас-
хода не сконденсировавшихся газов, отводимых из верхней части
колонны (рис. 6.14).
Из сравнения уравнений (6.3) и (6.4) следует, что способы регу-
лирования давления аналогичны способам регулирования уровня.
6.1.1.5. Регулирование температуры
Температура — показатель термодинамического состояния систе-
мы — выбирается как выходная координата при регулировании теп-
ловых процессов. Динамические характеристики объектов в системах
регулирования температуры в значительной степени зависят от физи-
ко-химических параметров процесса и конструкции аппарата. Поэто-
му общие рекомендации по выбору систем регулирования температу-
ры сформулировать весьма сложно, и для каждого конкретного тех-
нологического процесса требуется свой детальный анализ.
Но общие особенности системы управления температурой мож-
но выделить. К ним, в первую очередь, необходимо отнести значи-
тельную инерционность тепловых процессов, а также некоторую
инерционность промышленных датчиков температуры. Итак, одной
из основных задач проектирования САР температуры является умень-
шение инерционности промышленных датчиков температуры, и в
этом направлении достигнуты определенные успехи.
Термоэлектрический преобразователь (термопара) широко при-
меняется в ИИС и системах управления. Входной величиной термо-
пары является температура t измеряемой среды, а выходной величи-
ной термоэлектродвижущая сила (ТЭДС). Можно считать (как это
было показано в ряде примеров разд. 3.3.2), что динамические свой-
ства термопары описываются дифференциальным уравнением вида
аА dx
(6.5)
где m — масса рабочего спая термопары; с — удельная теплоемкость
спая; а — коэффициент теплоотдачи конвекцией; А — площадь по-
верхности теплопередачи рабочего спая; К — коэффициент усиления.
Рассмотрим динамические характеристики термопары в защит-
ном чехле. Термопару в защитном чехле можно представить как
последовательное соединение трех тепловых емкостей, разделенных
тепловыми сопротивлениями: защитного чехла, воздушной прослой-
490
Глава 6 Основы проектирования систем управления ХТП
ки, отделяющей термопару от стенок защитного чехла и собственно
термопары. Все элементы можно аппроксимировать статическими
звеньями первого порядка.
Как уменьшить инерционность промышленных датчиков темпе-
ратуры? На основе анализа уравнения (6.5) предлагается ряд общих
рекомендаций:
• увеличение коэффициентов теплоотдачи от измеряемой среды
к защитному чехлу в результате правильного выбора места установ-
ки датчика, при этом скорость движения среды должна быть макси-
мальной; при прочих равных условиях более предпочтительна уста-
новка датчика (термопары в защитном чехле) в жидкой фазе (по
сравнению с газообразной), в конденсирующем паре (по сравнению
с конденсатом) и т. п.;
• уменьшение теплового сопротивления и тепловой емкости за-
щитного чехла подбором соответствующего материала и толщины
при его изготовлении;
• уменьшение постоянной времени воздушной прослойки, на-
пример, припаивая рабочий спай термоэлектрических преобразова-
телей (термопар) к защитному чехлу;
• правильный выбор типа первичного измерительного преоб-
разователя; например, при наборе первичных измерительных пре-
образователей: термометр сопротивления, термопара и маномет-
рический термометр, необходимо учитывать, что наименьшей
инерционностью обладает термопара (в малоинерционном испол-
нении), наибольшая инерционность присуща манометрическому
термометру.
6.1.1.6. Регулирование pH
Различают две основные системы регулирования pH в зависи-
мости от требуемой точности регулирования. К первому типу
систем можно отнести позиционные системы регулирования для под-
держания pH в заданных пределах:
РНн <рН<рНв,
где рНн и рНв — нижний и верхний пределы регулирования pH
соответственно.
Такие системы применяются, когда скорость изменения pH мала,
а допустимые пределы ее колебаний достаточно широки.
Пример: регулирование pH в процессе ферментации, в котором благо-
даря большому времени пребывания раствора и медленному исчезновению
реагента можно сравнительно легко осуществить позиционное регулирова-
ние величины pH.
6.1. Динамические характеристики и особенности управления
491
Второй тип систем регулирования точно поддерживает за-
данное значение pH. В этом случае применяются непрерывные ПИ-
или ПИД-регуляторы.
К одному из основных факторов, затрудняющих точное регули-
рование pH в процессе нейтрализации, относят наличие нелиней-
ной зависимости величины pH от расхода реагентов (нелинейная
статическая характеристика процессов). Небольшое изменение за-
дания регулятору может во много раз изменить коэффициент усиле-
ния объекта и привести к неустойчивым колебаниям в системе. Если
наклон статической характеристики объекта резко изменяется, то
настройки регулятора необходимо устанавливать, принимая во вни-
мание изменения коэффициента усиления объекта. Необходимо от-
метить, что эта особенность возникает не только при регулировании
pH, но и при регулировании всех объектов с нелинейной статичес-
кой характеристикой.
Типичная кривая титрования (рис. 6.15) показывает, сколь труд-
ной является задача поддержания заданного значения pH. На кривой
титрования выделяются три характерных участка: первый (в середи-
не) относится к нейтральным средам и характеризуется большим
коэффициентом усиления; второй и третий участки относятся к
сильнокислым или сильношелочным средам и имеют небольшие
коэффициенты усиления. Если режим работы объекта соответству-
ет первому участку статической характеристики, то допустимый
коэффициент усиления регулятора очень мал и не обеспечивает
нужного качества регулирования при работе в режимах, соответ-
ствующих второму и третьему участкам статической характеристи-
ки. Естественно, при использовании простой системы регулирова-
ния возможны значительные отклонения текущего значения pH от
заданного значения.
Рис. 6.15. Пример кривой титрования
492
Глава 6 Основы проектирования систем управления ХТП
Реакция нейтрализации идет практически мгновенно, поэтому ди-
намические свойства промышленных аппаратов с перемешивающими
устройствами определяются процессом смешения и вполне точно опи-
сываются дифференциальными уравнениями первого порядка с запазды-
ванием. Наблюдается такая тенденция: чем меньше постоянная време-
ни аппарата, тем сложнее обеспечить устойчивое регулирование про-
цесса pH, поскольку проявляются инерционность других элементов
системы регулирования (измерительных и исполнительных устройств,
регулятора) и запаздывание в импульсных линиях.
Необходимо также учитывать, что системы регулирования вели-
чины pH в отработанных средах должны справляться с достаточно
большими возмущениями, вызываемыми изменениями концентра-
ций и расходов. Большие изменения нагрузки влияют на коэффи-
циент усиления объекта и могут даже изменить постоянные време-
ни системы.
Почему при регулировании величины pH возникают проблемы?
Одним из основных источников трудностей является то, что шкала
pH соответствует концентрации ионов водорода от 100 до 10-14 моль/л.
Другого общепромышленного измерения, охватывающего столь ог-
ромный диапазон, не существует. Еще одним источником трудно-
стей, внутренне присущим системам регулирования величины pH,
является то, что измерительные электроды pH-метров могут реаги-
ровать на изменения величины pH даже на 0,001, что делает воз-
можным отслеживание таких маленьких изменений концентрации
ионов водорода, как 5 • Ю-10 моль/л при величине pH 7. Другого
общепромышленного измерения с такой огромной чувствительнос-
тью также нет.
Последствия столь большого диапазона измерения и высокой
чувствительности можно проиллюстрировать, рассмотрев систему
регулирования непрерывной нейтрализации сильной кислоты сильным
основанием. Поток реагента, по существу, должен быть пропорциона-
лен разности между концентрацией иона водорода в технологическом
потоке и заданным значением. Следовательно, регулирующий клапан
на линии подачи реагента должен иметь диапазон изменения расхо-
да больше чем 10 000 000 : 1 для заданного значения рНзл 7, когда
величина pH входящего потока изменяется между 0 и 7. Более того,
неопределенность в ходе штока регулирующего клапана преобразу-
ется напрямую в ошибку регулирования pH, так что гистерезис все-
го лишь в 0,00005 % может вызвать отклонение величины pH на 1
при рНзд 7.
Как же все-таки можно регулировать процесс при таких услови-
ях? Ограничения, связанные с большим диапазоном измерения и
высокой чувствительностью, могут быть преодолены приближением
к заданному значению в несколько стадий, последовательно исполь-
6.1. Динамические характеристики и особенности управления
493
зуя регулирующие клапаны меньшего размера с высококачествен-
ными позиционерами.
Могут быть предложены различные варианты повышения устой-
чивости и качества регулирования pH.
1 Увеличение объема реактора, где происходит нейтрализация,
увеличивает его постоянную времени и уменьшает отношение тзап/Г.
Это повышает устойчивость системы регулирования, позволяет ус-
танавливать более высокие значения коэффициента усиления регу-
лятора, что приводит к уменьшению максимальной ошибки регули-
рования Етах. Кроме того, реактор большого объема сам по себе
лучше сглаживает колебания pH, вызванные флуктуациями расхода
и концентрации исходной смеси, поступающей на нейтрализацию
2 . Использование вместо одного реактора двух (или более), со-
единенных последовательно, при этом поток реагента по реакторам
распределяют так (рис. 6.16): большую часть реагента подают в пер-
вый реактор (форнейтрализатор), где, в основном, и происходит
реакция нейтрализации («грубая»). Во второй реактор подают остав-
шуюся (малую) часть реагента, необходимую для окончательного
завершения реакции нейтрализации («точной»), т. е. до достижения
pH0 (точки нейтрализации на кривой титрования). Такое распреде-
ление потока реагента по реакторам связано с особенностями кри-
вой титрования (см. рис. 6.15), которые были обсуждены выше.
3 Регулирование pH с использованием двух регулирующих кла-
панов разного размера (рис. 6.17) позволяет «компенсировать» не-
линейность статической характеристики объекта в большом диапа-
зоне изменения расхода реагента Fv
Клапаном малого размера (с малым условным проходным диа-
метром) 2 с равнопроцентной расходной характеристикой управля-
ет П-регулятор 4, выходной сигнал которого поступает также на вход
ПИ-регулятора 3, имеющего зону нечувствительности. ПИ-регуля-
тор управляет клапаном большого размера 1 с линейной расходной
характеристикой.
Рис. 6.16. Схема регулирования pH с использованием двух реакторов
494
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.17. Схема регулирования pH с двумя регулирующими клапанами.
Пояснения см. в тексте
При небольших отклонениях pH от величины, соответствующей
точке нейтрализации, когда коэффициент усиления объекта велик,
командный сигнал П-регулятора оказывается в зоне нечувствитель-
ности ПИ-регулятора. Выходной сигнал ПИ-регулятора не изменя-
ется и положение затвора большого клапана 1 остается прежним.
Регулирование процесса нейтрализации осуществляется с помощью
малого клапана 2. Изменение командного сигнала регулятора при-
водит к небольшому изменению расхода реагента F{, т. е. коэффи-
циент усиления исполнительного устройства в этом случае мал.
Если значение pH сильно отклоняется от величины, соответ-
ствующей точке нейтрализации, т. е. объект работает в режиме, где
его коэффициент усиления мал, то командный сигнал П-регулятора
выходит из зоны нечувствительности ПИ-регулятора. При этом зат-
вор малого клапана занимает одно из крайних положений, а регули-
рование осуществляется с помощью большого клапана. Изменение
командного сигнала регулятора приводит к большому изменению
расхода реагента F}, т. е. коэффициент усиления исполнительного
устройства в этом случае велик. Таким образом, изменение коэффи-
циента усиления объекта компенсируется изменением коэффици-
ента усиления исполнительного устройства. Естественно, что пол-
ная компенсация изменения коэффициента усиления контура регу-
лирования может быть осуществлена только при определенном
соотношении между величиной pH и степенью открытия обоих кла-
панов (и большого, и малого размеров).
Замечание
Если размер большого клапана превышает размер малого в 20 раз, то
система регулирования с двумя регулирующими клапанами обеспечивает
изменение расхода реагента F{ почти в 700 раз. Если такого изменения
расхода реагента недостаточно, рекомендуется проводить процесс нейтра-
6.1. Динамические характеристики и особенности управления
495
лизации в две или более стадий При изменении величины pH раствора,
подаваемого на нейтрализацию, в обе стороны от точки нейтрализации
pH0, применяется вторая система регулирования (точно такая же, как и на
рис. 6.17). управляющая подачей другого реагента в тот же самый реактор.
6.1.1.7. Регулирование параметров состава и качества
Качественные параметры (концентрация вещества в потоке, со-
став газовой смеси) должны точно поддерживаться на заданном уров-
не. Сложность регулирования качественных параметров определя-
ется, в первую очередь, сложностью их измерения. В последнее вре-
мя одним из способов регулирования качественных параметров
является регулирование по косвенному показателю с дальнейшим
уточнением алгоритма его расчета по данным прямых анализов,
получаемых анализаторами состава газа и жидкости. В разд. 5.14
рассматривались кратко различные анализаторы состава газа и жид-
кости.
6.1.2. Регулирование типовых тепловых процессов
Теплообменные аппараты классифицируются по виду теплооб-
менной поверхности (с поверхностью из трубок, с плоской поверхно-
стью, с поверхностью непосредственного контакта теплоносителей);
по физическому процессу, происходящему с основным технологи-
ческим веществом (нагреватели, холодильники, испарители, кон-
денсаторы); по характеру работы во времени (рекуперативные,
регенеративные и т. д.) и другим признакам. Поверхностные тепло-
обменники довольно широко используются в химической техноло-
гии, поскольку теплоносители в таких аппаратах разделены тепло-
передающей поверхностью: в трубчатых теплообменниках — стенки
трубок, в пластинчатых теплообменниках — плоские или рифленые
листы Распространенной конструкцией теплообменной аппарату-
ры трубчатого типа является кожухотрубный теплообменник. Кожу-
хотрубные теплообменники делят на теплообменники с неизменяе-
мым агрегатным состоянием веществ, например, теплообменники
типа газ—газ, газ—жидкость, жидкость—жидкость, а также теплооб-
менники с изменяющимся агрегатным состоянием веществ (напри-
мер, паро-газовые, паро-жидкостные теплообменники, испарители,
конденсаторы).
Особенностью теплообменников с изменяющимся агрегатным
состоянием веществ, рассматриваемых как объекты регулирования,
является равенство температур жидкой и паровой фаз при постоян-
ном давлении и отсутствии переохлаждения образующегося конден-
сата (перегрева образующегося пара). Поскольку температура жид-
496
Глава 6. Основы проектирования систем управления ХТП
кой и паровой фаз одинакова, она не может служить показателем
процесса испарения или конденсации. Тогда в качестве основного
показателя процесса теплообмена выбирают уровень жидкой фазы.
В испарителях или конденсаторах, предназначенных для испа-
рения или конденсации жидкости, задача регулирования сводится к
поддержанию материального баланса по технологическому потоку (газу
или жидкости).
В кожухотрубных паро-жидкостных теплообменниках, предназ-
наченных для нагревания жидкости до заданной температуры за счет
теплоты конденсации греющего пара, основной задачей регулирова-
ния является стабилизация температуры жидкости на выходе из теп-
лообменника.
6.1.2.1. Динамические характеристики
паро-жидкостного теплообменника
Рассмотрим динамические характеристики теплообменника с
изменяющимся агрегатным состоянием одного из веществ, исполь-
зуя в качестве примера такого теплообменника аппарат с мешалкой,
снабженный паровой рубашкой (рис. 6.18, а). Жидкость нагревается
насыщенным водяным паром (расход Гп, кг/с) до температуры гвых, °C.
Параметры жидкости: расход F, температура на входе в теплообмен-
ник /вх, °C, удельная теплоемкость сж, Дж/(кг • К).
Входные величины: изменение расхода пара Fn, кг/с; изменение
расхода жидкости F', изменение температуры жидкости на входе в
теплообменник tKX.
Получим уравнение динамики паро-жидкостного теплообмен-
ника, предположив, что теплообменник является стационарным
Рис. 6.18. Схема паро-жидкостного теплообменника (а) и структурная
б
схема его динамических каналов (б)
6.1. Динамические характеристики и особенности управления 497
объектом с сосредоточенными параметрами, и сделав следующие
допущения:
• температура жидкости в теплообменнике гвых одинакова по всему
объему;
• температура теплопередающих стенок гс одинакова во всех точ-
ках, а их термическое сопротивление пренебрежимо мало;
• коэффициент теплоотдачи а [Вт/(м2 К)] между жидкостью и
поверхностью металлических стенок, а также удельные теплоемкос-
ти жидкости сж и материала стенок сс постоянны во времени;
• насыщенный водяной пар при прохождении через паровую ру-
башку теплообменника конденсируется полное гью, отдавая теплоту
фазового перехода, и выводится в виде конденсата при температуре
конденсации;
• теплота, выделяющаяся при конденсации пара, расходуется
на изменение температуры теплопередающих стенок и нагревание
жидкости.
Запишем уравнение теплового баланса для теплопередающих сте-
нок за время dx, принимая во внимание высказанные допущения:
FnrndT = mcccdtc + clA ((с - lBm) dx, (6.6)
где rn — удельная теплота конденсации пара (теплота фазового пе-
рехода), Дж/кг; тс — масса теплопередающих стенок, кг; А — пло-
щадь поверхности теплообмена, м2.
Запишем уравнение теплового баланса для жидкости за малый
промежуток времени dr, принимая во внимание:
• теплоту, поступившую в теплообменник с жидкостью;
• теплоту, полученную жидкостью от пара через металлическую
стенку теплообменника и пошедшую на увеличение температуры
жидкости Гвых, находящейся в теплообменнике;
• теплоту, уходящую с жидкостью из теплообменника за то же
самое время:
^я/вх^Х + аЛ(/с — /ВЬ1Х )dx — /(?Ж/Вых^ ~ ^ж^ж^вых’ (^-7)
где /иж — масса жидкости в теплообменнике, кг.
Приведем уравнения (6.6) и (6.7) к стандартной форме, приня-
той для дифференциальных уравнений:
wccc + aAfc = F„rn + аЛ/„ых; (6.8)
тжсж " + (Л« + аЛ)/вых = Fc tm + aAtc (69)
В уравнениях (6.8) и (6.9) заменим переменные на конечные
приращения, отнесенные к номинальным значениям переменных
498 Глава 6. Основы проектирования систем управления ХТП
(<?, F„, 7^, F°, ). При этом учитываем, что приращение функ-
ции двух аргументов f (х, у) определяется равенством
Эх ду
Введем новые обозначения (см. рис. 6.18, б):
(6.10)
У- Л ’ Л - 0 ’ Х - £0 ’ Х1 - го ’ г - То--
'вых 'с л п ' 'вх
В результате дифференциальные уравнения (6.8) и (6.9) прини-
мают следующий вид:
mccet^ + аЛ/с°ус = Гп°гпх + аЛгв°ыху; (6.11)
ат
тжс-ж^вых ~7~ + сж +а^)^вых =
ат (6.12)
= -F^c* (t° -/вх)х, + + аЛгсус.
Ж < ЦЫл ол ] 1 Ж пл U * С
Обозначив постоянные времени и коэффициенты усиления в
(6.11) и (6.12) соответствующими буквами, получим:
Г^ + ус=Л3х + ^у; (6.13)
ат
+ = -klX[ + k2z + ktyc, (6.14)
где
= £k£c_- у-* _
аЛ ' + аА ’
= сжувых = Г СЖГВХ
1 (Fqc„ +аЛИ„ ’ 2 (Г°сж + аЛ)4’
I Ж / obU К Ж J пл
к к
аЛгс° ’ 4
, _/в°ых
(F^+aA)/^’ 5 /с° ’
Примечание
Все коэффициенты к{, к2, к3, км к5 меньше единицы
6.1. Динамтеские характеристики и особенности управления
499
Чтобы исключить из уравнений (6.13) и (6.14) переменную ус,
продифФеРенЦиРУем уравнение (6.14) по времени и выразим из него
производную dyc/dr и переменную ус. Полученные выражения для ус
и dyc/dr подставим в уравнение (6.13). Разделив все слагаемые полу-
ченного уравнения на коэффициент при у, равный /г°сж/^1Х/(аЛ?®),
и учитывая равенство
(6.15)
получаем итоговое уравнение динамики теплообменника:
где
2 _ /иссс/иж _ _ тссс тссс т*
2 “ aAF<} ’ 1 ’ аЛ Г°Сж ’
уу, Л #0 _
Т — • Ъ — 1 вых 1 вх
1 ’ аА ' •
Моэьно прийти к следующему выводу: при сделанных выше до-
пущениях паро-жидкостный теплообменник, представляющий со-
бой аппарат с мешалкой, снабженный паровой рубашкой, является
устойчивым объектом второго порядка. Из уравнения (6.16) следует,
что температура жидкости у на выходе из теплообменника повыша-
ется пр|И увеличении расхода пара х и температуры жидкости z на
входе в теплообменник и понижается при возрастании расхода жид-
кости JC1'
6. 1,2.2. Динамические характеристики
кожухотрубного паро-жидкостного теплообменника
Однородность температуры в той части кожухотрубного теплооб-
менник;3, гае конденсируется (или испаряется) вещество, позволяет
рассматривать ее как объект (звено) с сосредоточенными параметра-
ми. Но существует еще другая часть теплообменника, в которой на-
гревается (или охлаждается) вещество без изменения агрегатного со-
стояний, и температура вещества изменяется по длине труб тепло-
обменника. Эту часть теплообменника необходимо рассматривать
как объект (звено) с распределенными параметрами.
Ползучим передаточную функцию кожухотрубного паро-жидко-
стного теплообменника в общем виде по каналу регулирования рас-
ход пар3—температура жидкости на выходе теплообменника Гп—7ВЫХ
500
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.19. Схемы кожухотрубного паро-жидкостного теплообменника (а)
и теплообмена в его трубе (б)
(рис. 6.19), рассматривая теплообменник как объект с распределенны-
ми параметрами, при этом принимая следующие допущения: пар —
насыщенный, а конденсат из теплообменника отводится при темпе-
ратуре конденсации.
Нагревание жидкости в кожухотрубном паро-жидкостном теп-
лообменнике идет от /вх до /вых (рис. 6.19, а).
Выявим факторы, влияющие на температуру жидкости. Для это-
го составим уравнение теплового баланса:
(^ВЫХ “ ^ВХ ) = (Pit ) - ?ПОТ ’ (617)
где Гж — расход жидкости на входе теплообменника, кг/с; сж — удель-
ная теплоемкость жидкости, Дж/(кг • К); /вых и /вх — температура
жидкости на выходе и входе в теплообменник, °C; F„ — расход грею-
щего пара, кг/с; рп — давление греющего пара в заводской магист-
рали, Па; гп — удельная теплота конденсации, Дж/кг; <?пот — тепло-
вые потери, зависящие от температуры окружающей среды, Вт.
Запишем уравнение материального баланса для межтрубного
пространства теплообменника:
. dL. _
A-^ = Fn-FK=0, (6.18)
где А — площадь свободного сечения межтрубного пространства,
заполненная конденсатом, м2; LK — уровень конденсата в межтруб-
ном пространстве, м; FK — расход конденсата, кг/с.
Уравнение теплопередачи через стёнку трубы теплообменника:
= (6.19)
где q — тепловой поток через стенку трубы, Вт/м2; К, — коэффици-
ент теплопередачи. Вт/(м • К); А7 — поверхность трубы теплообмен--
6.1. Динамические характеристики и особенности управления
501
ника, м2; tn — температура греющего пара, °C; /ж — температура
жидкости, °C.
По условиям работы теплообменника из всех переменных, вхо-
дящих в уравнения (6.17)...(6.19), основными возмущающими воздей-
ствиями являются изменения расхода и температуры жидкости на
входе в теплообменник ДГЖ и Д?вх; изменения давления греющего
пара Дрп; изменение тепловых потерь Д<7П0Т; изменение коэффици-
ента теплопередачи ДА^ из-за образования отложений на трубах теп-
лообменника.
Возмущающие воздействия Д£ж, Д/Вх и Дрп можно отнести к кон-
тролируемым, а возмущающие воздействия Д<?пот, ДА^ относят к не-
контролируемым.
В качестве регулирующих воздействий можно выбрать расходы
греющего пара Fn и конденсата FK
К регулируемым параметрам можно отнести температуру жидко-
сти на выходе теплообменника /вых и уровень конденсата в межтруб-
ном пространстве £к
Примечание
Отметим, что /вык и £к связаны между собой через поверхность тепло-
обмена. поскольку эффективность теплопередачи в верхней части межтруб-
ного пространства, заполненной паром, гораздо выше, чем эффективность
теплопередачи между конденсатом и нагреваемой жидкостью.
Из уравнения (6.17) выразим температуру жидкости на выходе
теплообменника:
. _ . , 'п _ *7пот
'вых 'вх ' г Г
' Ж еЖ ' Ж“Ж
(6.20)
Из (6.20) следует, что температура жидкости на выходе теплооб-
менника /вых связана линейной зависимостью с температурой жид-
кости на входе в теплообменник гвх, расходом греющего пара F„,
удельной теплотой конденсации гп и тепловыми потерями <?пот и
обратно пропорциональна расходу жидкости Гж.
В результате линеаризации зависимости (6.20) в окрестности
номинального (заданного) режима, подобно тому, как это было про-
делано в разд. 3.1, получим:
у = крхр + кххх + к2х2 + к3х3 + Л4х4,
(6.21)
где
_ . о .
У ~ 'вых 'вых >
0
p = Fn-F°-,kp
д^вых
г°
_п_
F°c
1 жсж
502 Глава 6 Основы проектирования систем управления ХТП
Х1 = Лк Лк ’ Л -
д/щЛ _-Л^п+<7поТ.
ЭЛк J (Лк°)Ч
Г г)/
х, = /вх -&-,к2 = =1;
I «Лх J
х4 Q пот
дЛых
^?пот .
-0° • к -
Чпо11 к4 -
-1
Г°С
‘ жьж
Y - Г - И0-
х3 — 'п ’
Здесь индекс «р» обозначает «по каналу регулирования».
Из (6.21) следует, что коэффициенты усиления линеаризован-
ной модели зависят от входных координат, например, коэффициент
усиления по каналу регулирования кр прямо пропорционален удель-
ной теплоте конденсации пара г° и обратно пропорционален расхо-
ду жидкости F®.
Найдем динамические характеристики кожухотрубного паро-
жидкостного теплообменника. Для определения динамических ха-
рактеристик по каналу регулирования расход пара—температура жид-
кости на выходе теплообменника, т. е. Fn—гвых составим структурную
схему (рис. 6.20).
Вначале разберем динамику первого, второго и четвертого зве-
ньев. Динамика первого звена соответствует изменению давления
пара в межтрубном пространстве рп при изменении расхода пара Fn
и может быть представлена дифференциальным уравнением перво-
го порядка, имеющим, после процедуры линеаризации, следующий
вид (это дифференциальное уравнение статического звена первого
порядка):
+ =Л*Р> (6.22)
Рис. 6.20. Структурная схема кожухотрубного паро-жидкостного тепло-
обменника по каналу управляющего воздействия Fn— /вых
6.1. Динамические характеристики и особенности управления 503
где
У1 = Рп *р = £п -Л?;
Т t
1 л; 1 1 р '
Здесь V — объем межтрубного пространства, м3; р — безразмер-
ный расходный коэффициент регулирующего клапана на линии
конденсата; R = 8.314 Дж/(моль • К) — универсальная газовая по-
стоянная.
Второе звено представим как статическое звено нулевого по-
рядка (усилительное), в котором находит свое отражение зависи-
мость температуры пара /п от его давления рп. Передаточную функ-
цию этого звена
= (6 23)
\°Рп )
можно найти по диаграмме состояния пара при рП = р°.
Итоговая передаточная функция межтрубного пространства выг-
лядит следующим образом:
= = (6.24)
/ | о + 1
Четвертое звено, учитывающее инерционность выходной каме-
ры для нагретой жидкости, аппроксимируется статическим звеном
первого порядка:
и'«« = т^Т-
Теперь рассмотрим третье звено, анализ динамических характе-
ристик которого представляет наибольшие сложности. Это звено
показывает взаимосвязь между температурой пара в межтрубном
пространстве tn и температурой жидкости на выходе из труб (на вхо-
де в верхнюю камеру теплообменника) t(L).
Принимаем следующие допущения:
• температура жидкости распределена по длине труб, в попе-
речном же сечении потока жидкости градиент температуры отсут-
ствует;
• теплопроводность стенки трубы такова, что стенка трубы рас-
сматривается как звено с сосредоточенными координатами1
504
Глава 6. Основы проектирования систем управления ХТП
• тепловой емкостью пленки конденсата и тепловыми потерями
можно пренебречь; теплофизические параметры жидкости и стенки
трубы постоянны.
Запишем уравнение теплового баланса для потока жидкости на
элементарном участке трубы df в виде (рис. 6.19, 5):
/”*C*d£%’+ = 4«В ('с "'жИ-
от at
или
т’ж^-+^ж$£- = ^с-^;
от де ЛваЕ
(6.25)
где /яж — масса жидкости, заполняющая участок трубы длиной 1 м,
кг/м; сж — удельная теплоемкость жидкости, Дж/(кг • К); Ав — пло-
щадь внутренней поверхности теплообмена, м2; ав — коэффициент
теплоотдачи на внутренней поверхности трубы, Вт/(м2 - К); v — ско-
рость жидкости, м/с.
Уравнение теплового баланса для стенки трубы:
m'c'de~b = А"а" (гп ' )^ " 4>«в ('с -
ОТ
или
rc^+'c(i + x) = /n + х'ж; тс =
шссс _ Лвав
Л„ан Лнан ’
(6.26)
где тс — масса трубы, отнесенная к 1 м ее длины, кг/м; сс — удель-
ная теплоемкость стенки трубы, Дж/(кг К); А„ — площадь наруж-
ной поверхности теплообмена, м2; — коэффициент теплоотдачи
на наружной поверхности трубы, Вт/(м2 К).
В уравнениях (6.25) и (6.26) переходим к отклонениям перемен-
ных от их номинальных (заданных) значений и обозначаем:
уз -'°; Уз = 'с -'с°; x = t„-t°n.
Чтобы получить передаточную функцию звена из дифференци-
альных уравнений в частных производных, применяем преобразо-
вание Лапласа по т, обозначая изображения входных и выходных
координат х(т, £), у2(т), Уз(т-> f) через X(s, £), Y2(s), K3(i, () соответ-
ственно.
Примечание
Процедура преобразования дифференциальных уравнений в частных
производных в обыкновенные дифференциальные уравнения опущена,
поскольку она детально описана в специальной литературе.
6.1 Динамические характеристики и особенности управления
505
После преобразования по Лапласу уравнения (6.25) и (6.26) при-
нимают вид;
7>У3 + vT + у = у ; (6.27)
ГС5У2 + У2(1 + Х) = Г3Х+*- (6.28)
Если исключить из уравнений (6.27) и (6.28) У2, получим обык-
новенное дифференциальное уравнение первого порядка с коэффи-
циентами, являющимися функциями комплексной переменной:
ш(5)^. + у3 = b(s)X, (6.29)
где
а ,s \ _ (Tcs +1 + х) ___________Тж_______.
(Гж5 + 1)(Гс5 + 1 + х)-Х + 1______X___’
с 7^ + 1+ Х
Ь^' (Ks + l)(Tcs + l + Х)-Х’
Решение уравнения (6.29) при граничном условии У3(л, I) = 0
для f = 0 и при Х(() = const имеет вид:
1
K3(s, l) = X(s)b{s) 1 -expl •
(6.30)
Для значения температуры жидкости на выходе из трубы ((. = Z)
решение уравнения (6.30) принимает следующий вид:
У3(5, L)~X(s)b(s)
1 - exp
тзап
< а(5),
(6.31)
где T^n ~ L/v — время транспортного запаздывания.
Из (6.31) находим передаточную функцию третьего звена (см.
рис. 6.20):
^3М =
Г3(5, £)
*(*)
= b(s) 1 - exp -Дгт ,
(6.32)
где b(s} может быть представлено как произведение двух простых
сомножителей (двух передаточных функций статических звеньев
первого порядка):
./ 3_1_____1
T2s +1 ' T3s + Г
(6.33)
506 Глава 6. Основы проектирования систем управления ХТП
Выражение 1/а($) аппроксимируем линейным двучленом:
1/а(5) = 5 + о. (6.34)
С учетом (6.34) изменим показатель экспоненты:
ехр
^зап
а (4
eexp[-TMn (s + o)].
(6.35)
Окончательно передаточная функция третьего звена выглядит как
l-expf-Тзап (* + д)]
(T2s + 1)(7> + 1)
(6.36)
Примечание
Постоянные времени Т, и 7) близки по значениям к Тс и 7"ж, а наи-
большая постоянная времени находится в интервале [ Тж, Тж + Тс]
Таким образом, передаточная функция кожухотрубного паро-
жидкостного теплообменника по каналу Fn—/вых равна
^(5) = ^(5).^(5).(Г4(5) =
= kjk2 ! -expf-т^ (s + а)]____1 (6J7)
Г[5 + 1 (Tj5 + 1)(T35 + 1) T4S+1'
Получим передаточную функцию кожухотрубного паро-жидко-
стного теплообменника в общем виде по каналу возмущающего воз-
действия температура жидкости на входе теплообменника—температу-
ра жидкости на выходе теплообменника, т. е. 7ВХ—гвых (рис. 6.21).
Динамические характеристики кожухотрубного паро-жидкостного
теплообменника по каналу Г(0)—t(L) для пятого звена определяются
уравнением (6.29) исходя из следующих условий:
• температура насыщенного пара постоянна и равна тогда Х= 0;
• температура жидкости на входе в трубы теплообменника (при
I = 0) является входной координатой.
В этом случае уравнение (6.29) и граничные условия выгля-
дят так:
ш(5)^- + Г3 =0; У,(0) = '(0). (6 38)
Рис. 6.21. Структурная схема ко-
жухотрубного паро-жидкостного
теплообменника по каналу возму-
шаюшего воздействия /ВУ—
6.1. Динамические характеристики и особенности управления
507
Решение уравнения (6.38) представляет собой:
Г3(£, л) = Г3(0, s)-exp
L
va(s)
Теперь получим передаточную функцию пятого звена:
L
va (5)
(6 39)
Если пренебречь тепловой емкостью стенки трубы теплообмен-
ника и учесть соотношение (6.35), то получим передаточную функ-
цию статического звена нулевого порядка (усилительного) с транс-
портным запаздыванием:
H,5(s) = ft-exp(-T3an5), (6 40)
где b = ехр(—атмп).
Теперь запишем полную передаточную функцию теплообменни-
ка по каналу возмущающего воздействия температура жидкости на входе
теплообменника—температура жидкости на выходе теплообменника,
т. е. zBX—гВЬ1Х, с учетом входной и выходной камер (см. рис. 6.21):
( 1 У
Н*) = ЗД'И/4(*)’ИШ = Ь—т -/»-exp(-TMn5). (6.41)
I / 4 □ + 1 '
Примечание
Анализ динамики изменения температуры жидкости при колебаниях
ее расхода весьма сложен, поскольку между этими координатами суще-
ствует нелинейная зависимость.
Выводы
Для практических расчетов можно воспользоваться приближенны-
ми передаточными функциями, в которых учитывают только наиболь-
шие постоянные времени и время запаздывания. Особенность про-
мышленных кожухотрубных паро-жидкостных теплообменников, как
объектов управления, — небольшие значения постоянных времени и
времени транспортного запаздывания (секунды). Вследствие малой
инерционности этих теплообменников к выбору и расчету системы
контроля и регулирования предъявляются повышенные требования:
• применение по возможности малоинерционных первичных
преобразователей;
• при расчете системы регулирования учитываются инерцион-
ность измерительного и исполнительного устройств, а также кана-
лов связи.
508
Глава 6. Основы проектирования систем управления ХТП
Теперь с учетом выявленных основных возмущающих и управ-
ляющих воздействий можно предложить несколько вариантов сис-
тем регулирования температуры жидкости на выходе из промыш-
ленных кожухотрубных паро-жидкостных теплообменников.
Первый вариант. Для регулирования выходной темпера-
туры жидкости без статической ошибки можно применить одно-
контурную замкнутую САР с использованием ПИ-регулятора или
ПИД-регулятора (рис. 6.22), изменяющего расход греющего пара.
Недостатки такого регулирования: при сильных возмущающих воз-
действиях по каналам расхода или температуры жидкости на входе в
теплообменник качество переходного процесса оказывается неудов-
летворительным.
Второй вариант. Если имеют место возмущающие воздей-
ствия по каналам расхода Гж или температуре жидкости на входе /вх,
то ограничиваются их статической компенсацией. Реализовать такой
подход возможно применением каскадной САР соотношения расхо-
дов пара и жидкости Гп/^ж с коррекцией по третьему параметру -
температуре жидкости на выходе /вых теплообменника (рис. 6.23).
Третий вариант. При сильных возмущающих воздействиях
по каналам изменения давления или температуры греющего пара
возможно применить каскадную систему регулирования температу-
ры (или давления) в межтрубном пространстве теплообменника с
коррекцией задания по /вых (рис. 6.24). Температура (или давление)
Рис. 6.23. Каскадная САР температуры жид
кости в кожухотрубном паро-жидкостном теп
лообменнике (с регулятором соотношения
расходов во внутреннем контуре)
Рис. 6.22. Одноконтурная замкнутая САР темпе-
ратуры жидкости в кожухотрубном паро-жидко-
стном теплообменнике
6.1. Динамические характеристики и особенности управления
509
Рис. 6.24. Каскадная САР температуры жидко-
сти в кожухотрубном паре-жидкостном тепло-
обменнике (с регулятором температуры конден-
сата во внутреннем контуре):
1 — регулятор температуры жидкости на выходе из теп-
лообменника; 2 — регулятор температуры конденсата
в кожухе
7---------------------------------------1
‘BbJX I
Конденсат рис ^ ^5, Регулирование жидкости в схеме кожу-
хотрубного паро-жидкостного теплообменника с
” байпасированием холодного потока:
1 — регулятор температуры жидкости на выходе из теп-
лообменника; 2— регулятор температуры жидкости после
Жидкость
смешения
в межтрубном пространстве теплообменника — промежуточная ко-
ордината, значительно быстрее реагирующая на указанные возму-
щающие воздействия, чем температура жидкости на выходе тепло-
обменника /вых.
Четвертый вариант. Чтобы обеспечить высокое качество
регулирования температуры, желательно иметь дополнительное уп-
равляющее воздействие. Для этого жидкость, поступающую на на-
гревание, перед теплообменником делят на два потока Г, и Г2. Часть
жидкости (поток F\) направляют в теплообменник и нагревают до
температуры несколько выше заданной. Другая часть жидкости (по-
ток Г2) минует теплообменник, оставаясь холодной. За теплообмен-
ником нагретый и холодный потоки смешиваются для получения
жидкости заданной температуры. Таким образом, реализуется схема
с байпасированием (рис. 6.25). В этом случае регулятор температу-
ры 1 стабилизирует температуру после теплообменника (вспомога-
тельная функция). Регулятор температуры 2 регулирует температуру
жидкости после смешения /вых (основная задача). При этом качество
регулирования гвых определяется динамикой основного контура, в
котором объект представляет собой безынерционное звено, поскольку
постоянная времени процесса смешения нагретой и холодной жид-
костей практически равна нулю.
510 Глава 6. Основы проектирования систем управления ХТП
6.1.3. Регулирование массообменных процессов
К массообменным процессам, получившим наибольшее распро-
странение в химической технологии, относят абсорбцию, ректифи-
кацию, экстракцию, кристаллизацию, адсорбцию, сушку. К обшим
особенностям регулирования массообменных процессов можно от-
нести то, что в результате проявления различного рода случайных
возмущающих воздействий нарушаются материальные и тепловые
балансы, изменяются температура и давление, что приводит к нару-
шению состава и качества получаемых продуктов. Поэтому одной
из основных задач регулирования массообменных процессов явля-
ется задача стабилизации режимных параметров, решение которой
позволяет сохранить материальные и тепловые балансы.
Аппараты, в которых осуществляется большинство массообмен-
ных процессов, как правило, — крупногабаритные аппараты колон-
ного типа (диаметр таких аппаратов может достигать несколько мет-
ров, высота равняется нескольким десяткам метрам), поэтому впол-
не естественно, что постоянные времени и запаздывание таких
аппаратов могут составлять десятки минут. Если для регулирования
массообменных процессов использовать одноконтурные системы
регулирования, то они будут характеризоваться большой длительно-
стью переходных процессов и большой максимальной ошибкой.
Чтобы повысить качество переходных процессов, для регулирова-
ния массообменных процессов используют комбинированные САР,
для которых характерно введение коррекции по наиболее сильным
возмущающим воздействиям, а также каскадные САР, характеризу-
емые применением дополнительных сигналов из промежуточных то-
чек массообменных аппаратов.
Рассмотрим особенности регулирования массообменных процес-
сов на примере регулирования ректификационной установки.
6.1.3.1. Управление ректификационной установкой
Ректификационные установки служат для разделения много-
компонентной смеси на составляющие ее компоненты в результате
противоточного взаимодействия смеси паров и жидкой смеси. Обыч-
но целью любой системы регулирования ректификационной уста-
новки является разделение многокомпонентной смеси с соблюде-
нием качества по одному из конечных продуктов при минимальных
потерях конечного продукта на другом конце колонны. Оптимиза-
ция может иметь своей целью увеличение прибыли за счет, напри-
мер, сокращения эксплуатационных затрат или увеличения произ-
водительности.
Разработка любой стратегии управления обычно начинается с
идентификации всех входов и выходов ректификационной колон-
6.1. Динамические характеристики и особенности управления
511
ны, а также типов возможных управляющих воздействий. Выпол-
ним анализ различных стратегий управления ректификационной
колонной (рис. 6.26), предназначенной для разделения бинарной
смеси, содержащей легколетучий компонент wF на дистиллят и ку-
бовую жидкость. Принимаем следующие обозначения Ff, Fr, Fd —
расходы питания, флегмы, дистиллята; £в, LD — уровни в кубе-
испарителе (нижней части) колонны, во флегмовой емкости; 0F,
Qd, Qb — тепловые нагрузки подогревателя питания (разделяемой
исходной смеси), дефлегматора, кипятильника (ребойлера)
Уравнение материального баланса колонны учитывает расходы
сырья, дистиллята и кубового продукта, объемы жидкости в кубе и
флегмовой емкости, запас жидкой фазы на тарелках.
Контрольно-измерительные приборы, установленные на колон-
не, позволяют определять уровни дистиллята во флегмовой емкости
и кубового продукта в кубе-испарителе колонны, температуру и дав-
ление в колонне. Изменение уровня дистиллята во флегмовой емко-
сти и кубового продукта в кубе-испарителе свидетельствует о нару-
шении материального баланса или изменении запаса жидкой фазы
на тарелках колонны Последнее обстоятельство объясняет невоз-
можность быстрой корректировки материального баланса даже при
использовании наиболее совершенных и точных расходомеров.
Управляющими переменными служат; теплота, сообщаемая ис-
ходному сырью в подогревателе питания; тепловая нагрузка кипя-
тильника (ребойлера); теплота, отбираемая в дефлегматоре. Кроме
того, существенную роль играет и температуры исходного и конеч-
ного продуктов. Последние параметры, хотя и редко, но использу-
ются в схемах управления колонной, за исключением тех случаев,
Рис 6.26. Входные и выходные параметры ректификационной колонны
512
Глава 6. Основы проектирования систем управления ХТП
когда кубовый остаток из колонны направляется на подогрев исход-
ного продукта.
При разработке стратегии системы управления рабочее давле-
ние в колонне обычно считается неизменным, а его значение опре-
деляется, например, физическими свойствами углеводородов исход-
ной смеси и конструктивными параметрами самой колонны. Регу-
лирование рабочего давления в колонне входит в функции контура
регулирования теплового баланса.
Регулируя материальный баланс в колонне на основании пока-
заний уровнемеров, а давление — по количеству теплоты, передан-
ной в кипятильнике (ребойлере), можно наметить в общих чертах
схему регулирования температуры в колонне, определяющую тепло-
вой баланс в колонне. Такой процесс является саморегулирующим-
ся, так как количество переданной теплоты является функцией пе-
репада температур в теплообменнике. Так, например, с увеличени-
ем тепловой нагрузки подогревателя питания температура дистиллята
начнет повышаться, но сама разница температур будет снижаться,
вызывая уменьшение теплового потока, т. е. возникнет обратная от-
рицательная связь, что и приводит к так называемому эффекту са-
морегулирования.
Величина перепада температур потоков в теплообменнике зави-
сит от многих факторов. Чем больше эта разность, тем меньшую
площадь поверхности теплообмена можно использовать. Необходи-
мо учитывать, что слишком большая разность температур способна
привести к такому режиму кипения в трубках теплообменника, при
котором значительно снижается коэффициент теплопередачи. Кро-
ме того, слишком высокая температура может испортить продукт и
повредить трубы теплообменника.
Основным параметром обратной связи системы регулирования
является расход флегмы, тогда как тепловая нагрузка кипятильника
позволяет регулировать расход паровой фазы в колонне.
Составим простейшую матрицу входов и выходов ректификацион-
ной колонны, задающую знак взаимодействия между ними (табл. 6.1).
В рассматриваемом случае уровень жидкости в кубе колонны /.в
регулируется изменением расхода кубового продукта Гв, а уровень
дистиллята во флегмовой емкости LD — изменением расхода дис-
тиллята Fd. Соответствующие два столбца и две строки матрицы не
могут быть использованы любыми другими контурами регулирова-
ния (табл. 6.1, б).
Регулирование теплового баланса ведется по двум параметрам:
температуре (изменением тепловой нагрузки кипятильника) и дав-
лению (изменением количества теплоты, отбираемой в дефлегматоре).
Таким образом, вся матрица входов-выходов ректификационной
колонны оказывается заполненной
6.1. Динамические характеристики и особенности управления 513
Габлица. 6.1. Матрица входов-выходов ректификационной колонны
Выход- ные пара- метры Входные параметры
Qf fd QB On
а Взаимодействие между входами и выходами
Lb - + + 0 - - —
Ld + - - - 0 + +
Т + - - 0 0 + 0
Р + — - 0 0 + -
б. Разработка реальной схемы регулирования
Lb - + + 0 - - -
Ld + - - — 0 + +
Т + - - 0 0 0
Р + - - 0 0 + -
В предложенном примере регулирования расход флегмы полага-
ется постоянным. Этот параметр может стать одним из управляющих
при добавлении к схеме регулирования дополнительных рабочих па-
раметров, как, например, состав разделяемой исходной смеси. Дру-
гие два параметра, расход сырья и тепловая нагрузка подогревателя
питания, которые также не включены в предложенную схему регули-
рования, являются входами системы, выполняя роль нагрузки и ис-
точника возмущений выбранной схемы регулирования.
Часто для регулирования температуры сырья используют тепло-
вую нагрузку подогревателя питания, выбираемую в некоторых слу-
чаях с учетом сбалансирования нагрузок в верхней (укрепляющей) и
нижней (исчерпывающей) частях колонны.
Использование описанной выше матрицы дает возможность про-
анализировать возможные схемы регулирования. Плюсы матрицы
означают, что при увеличении входного параметра соответствую-
щий выходной параметр увеличивается, тогда как минусы отражают
обратный эффект, т. е. увеличение входного параметра вызывает
уменьшение выходного. Нули матрицы указывают на отсутствие вза-
имосвязи между параметрами входа и выхода. Следует правда учи-
тывать, что некоторые входы могут использоваться для регулирова-
17 Беспалой Л. В.. Харитонов Н И
514
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.27. Схематическое представление контура регулирования теплового (а)
и материального (б) балансов ректификационной установки
ния произвольного выхода по вспомогательным контурам регулиро-
вания, а не напрямую, что вызывает определенные трудности в реа-
лизации соответствующих схем регулирования. Для выявления по-
добных скрытых взаимодействий рекомендуется построение графи-
ческих диаграмм предлагаемых контуров управления (рис. 6.27).
Из рис. 6.27, а следует, что тепловая нагрузка кипятильника
(ребойлера) QB, используемая для регулирования температуры в
колонне, вносит возмущение и в контур регулирования давления
в колонне, тогда как регулирование давления по варьированию
тепловой нагрузки дефлегматора (конденсатора) QD не оказывает
значительного воздействия на контур регулирования температу-
ры. Расход флегмы, как уже отмечалось выше, считается фикси-
рованным. В контуре же регулирования материального баланса
(рис. 6.27, б) никаких пересекающихся взаимодействий парамет-
ров не наблюдается.
От качественных рассуждений перейдем к количественным
оценкам.
Составим уравнения материального и теплового балансов рек-
тификационной установки, чтобы выявить параметры, влияющие
на качество процесса разделения исходной смеси.
Уравнение материального баланса по ректификационной уста-
новке:
= Fd + FB, (6.42)
где jFf, Fd, Fb — массовые расходы питания, дистиллята и кубового
остатка.
Уравнение материального баланса по легколетучему (низкоки-
пящему) компоненту:
= FDwD + FBwB, (6.43)
где wF, wD, wB — массовые доли легколетучего (низкокипящего) ком-
понента в питании, дистилляте, кубовом остатке.
61 Дин^ические характеристики и особенности управления 515
Уравнение материального баланса для куба-испарителя колонны:
/fB^- = /’L-(JFv + FB) = °, (6.44)
где А ~ площадь поперечного (горизонтального) сечения куба ко-
лонны1’ — уровень жидкости в кубе колонны; FL — расход жидко-
сти в ^ижней части колонны; /у — расход пара в нижней части
колоньны-
Уравнение материального баланса для флегмовой емкости:
4, = ’f’vi - (FR + Fd ) = 0, (6.45)
ат
где Ad ~ лошадь поперечного (горизонтального) сечения флегмо-
вой ем[кости; — Уровень жидкости во флегмовой емкости; fR —
расход' Флегмы; FVi ~ расход пара в верхней (укрепляющей) части
колон Г^Ы'
Уравнение материального баланса по газовой фазе в верхней части
колоньны:
^ = /(^vi-^-Fd-Fr) = 0, (6.46)
где р Давление в колонне; £и — расход инертных газов.
Уравнение теплового баланса для подогревателя питания (исход-
ной см4еси)’
FfCpp (/р - ) = F^c^ (rT1 - tr2) + , (6.47)
где с — Удельная теплоемкость питания; /р — температура пита-
ния (номинальное значение); tF — температура питания (текущее
значен/ие)’ — расход теплоносителя; срт — удельная теплоемкость
теплон,осите 1я; Гт1, /т2 — температуры на входе и выходе подогрева-
теля пкитания5 ~ потери теплоты из подогревателя питания в ок-
ружаю1щУю сРедУ-
Уравнение теплового баланса для кипятильника (низ колонны):
Fnrn = FvrB + q2, (6.48)
где р расход греющего пара; гп — энтальпия греющего пара; гв —
удельн<дая теплота испарения кубовой жидкости; q2 — потери тепло-
ты из ^кипятильника в окружающую среду.
Уравнение теплового баланса для дефлегматора (верх колонны)
-?х1) + 9ъ (6.49)
17*
516
Глава 6. Основы проектирования систем управления ХТП
где Г] — энтальпия парового потока в верхней (укрепляющей) части
колонны; Fx — расход хладагента; срх — удельная теплоемкость хлада-
гента; Гх1, — температуры на входе и выходе в дефлегматоре; q3 —
потери теплоты из дефлегматора в окружающую среду.
Первый вывод
В систему уравнений (6.42)...(6.49) входят переменные, из кото-
рых необходимо выделить возможные возмущающие воздействия,
возможные регулирующие воздействия и регулируемые параметры
(выходные координаты).
Основные возмущающие воздействия: колебания расхода, состава
и температуры питания.
Второстепенные возмущающие воздействия: изменения энтальпии
греющего пара гп (в подогревателе питания), теплоносителя гв (в ки-
пятильнике), хладагента гх (в дефлегматоре); потери теплоты в окру-
жающую среду (q}, q2, q3).
Контролируемые возмущающие воздействия: изменения темпера-
туры питания tF, расхода питания Ff, концентрации легколетучего
компонента wF в питании (исходной смеси).
Неконтролируемые возмущающие воздействия: изменения энталь-
пии греющего пара, теплоносителя, хладагента; потери теплоты в
окружающую среду.
Управляющие воздействия: изменения расходов греющего пара Fn,
теплоносителя FT, хладагента Гх, флегмы FR изменение отбора (рас-
хода) дистиллята FD, кубового продукта Гв.
Примечание
Управляющее воздействие по каналу расхода Ги не рассматриваем.
Регулируемые параметры (выходные координаты): концентрация
легколетучего компонента wD в дистилляте, концентрация легколе-
тучего компонента wB в кубовом продукте, уровень жидкости в кубе
колонны Ав и флегмовой емкости Z,D, давление в колонне рк.
Второй вывод
Из уравнений материального и теплового балансов следует, что
ректификационная колонна с сопутствующими ей элементами пред-
ставляет собой объект с большим числом взаимосвязанных пара-
метров, что находит свое подтверждение при рассмотрении простей-
шей матрицы входов-выходов ректификационной колонны.
На следующем шаге разработки структуры системы регулирования
необходимо определить, как воздействовать на входные параметры.
Регулирование материального баланса можно осуществить за счет
изменения расходов соответствующих потоков с помощью подходя-
6.1. Динамические характеристики и особенности управления
517
Рис. 6.28. Схемы регулирования теплового баланса ректификационной
установки:
а — изменение разности температур путем изменения давления пара в
паровом пространстве теплообменника; б— изменение поверхности теп-
лопередачи за счет изменения уровня конденсата в теплообменнике
щих клапанов. Регулирование теплового баланса возможно двумя
способами, продемонстрированными на рис. 6.28: изменением раз-
ности температур в теплообменнике или изменением поверхности
теплообмена. В данном случае регулировать тепловой баланс ко-
лонны можно, изменяя поверхность теплообмена в дефлегматоре.
На следующем этапе разработки стратегии управления произво-
дится анализ статических и динамических характеристик выбран-
ных схем управления.
Анализ статических характеристик ректификационной колонны
Чтобы определить состояние системы, необходимо иметь четы-
ре независимые переменные. Это могут быть расход питания fF,
состав питания wF, отбор дистиллята FD и расход пара в нижней
части ректификационной колонны Fv.
а б
Рис. 6.29. Влияние ограничений на рабочую область ректификационной
колонны:
а — оптимальные режимы допустимы по условиям ограничений на
Fvmm и fDmln: б — минимальный расход пара недопустим по ограниче-
нию на FVm,„
518
Глава 6. Основы проектирования систем управления ХТП
Рассмотрим статические характеристики колонны на диа1 рамме
Fd - Fv, принимая, что Fp = const, wF = const (рис. 6.29). Для про-
дуктовых ректификационных колонн ставят разные задачи, напри-
мер: минимизировать энергозатраты (Fn) на получение дистиллята
заданной концентрации wD = и>о при ограничении на производи-
тельность по дистилляту: FD > FD min. Из диаграммы FD-FV следует,
что решение задачи находится в точке А (рис. 6.29, а), где составы
продуктов (дистиллята и кубового остатка) равны заданным, т. е.
wD = Wp, wB = а расход пара в нижней части колонны принима-
ет оптимальное значение Fy, или в точке А', если значение Fy ока-
зывается меньше минимально допустимого rVrnin (рис. 6.29, б).
Примечание
Расчеты диаграммы FD—Fy при различных значениях fF и wF показы-
вают, что рабочая область и точки, соответствующие оптимальным режи-
мам колонны, смещаются по диаграмме. Увеличение расхода питания Ff
приводит к сужению рабочей области; существует такое предельное значе-
ние Fp, при котором рабочая область может выродиться в точку. Таким
образом, для поддержания оптимальных режимов работы колонны при раз-
личных возмущающих воздействиях требуется автоматическая коррекция
заданий регуляторам в зависимости от этих возмущающих воздействий
Например, изменения расхода питания можно скомпенсировать пропор-
циональным изменением отбора дистиллята.
Преобразовав уравнение (6.42) с учетом (6.43), получим:
wd =yrwF --7Twb = (6-50)
I'd Fd Fd Fd J
Как следует из уравнения (6.50), при постоянном отношении
Ff/Fd и постоянном составе питания wF составы дистиллята и кубо-
вого продукта также постоянны. Если изменится состав питания wF,
то отношение Fp/FD тоже должно меняться, чтобы сохранить мате-
риальный баланс.
При стационарном (установившемся) режиме в ректификацион-
ной колонне устанавливается определенный профиль концентраций
по высоте колоны. Наибольшей чувствительностью по отношению
к возмущающим и регулирующим воздействиям обладают промежу-
точные тарелки в верхней и нижней частях колонны, называемые
контрольными тарелками. Коэффициенты усиления для них прини-
мают максимальное значение по сравнению с коэффициентами уси-
ления других тарелок в данной секции колонны. По отношению к
возмущающим воздействиям со стороны питания (т. е. к изменени-
ям Fp и wF) составы на контрольных тарелках являются промежу-
точными координатами и обладают меньшей инерционностью, чем
6.1. Динамические характеристики и особенности управления
519
составы продуктов (дистиллята и кубового остатка), поэтому соста-
вы на контрольных тарелках часто используют в качестве регулиру-
емых координат вместо составов продуктов.
Анализ динамических характеристик ректификационной колонны
Изменение состава жидкой фазы на отдельной изолированной
тарелке, если на ней обеспечивается идеальное перемешивание, свя-
зано с изменением состава паровой фазы (или скорости потоков)
дифференциальным уравнением первого порядка. Значения посто-
янных времени тарелок зависят от наклона кривой фазового равно-
весия, времени пребывания на тарелке, скоростей потоков в колон-
не и расхода питания. Для оценки этого влияния на значения посто-
янных времени тарелок приведем два примера колонн: с одной и
двумя ступенями разделения.
Предположим для одной ступени разделения (одна тарелка), что
состав пара в рассматриваемом диапазоне изменения концентраций
является линейной функцией от состава жидкости (рис. 6.30), т. е.
w»v=« + ZwL. (6.51)
Для одной ступени разделения (одной тарелки), изображенной
на рис. 6.31, составим уравнение материального баланса по легколе-
тучему компоненту в виде:
«L ~ ^bwb ~ ^dwd- (6.52)
dr
Или, учитывая, что
Рис. 6.30. Линейная аппроксимация
кривой фазового равновесия
Рис. 6.31. Схема ректификации с од-
ной ступенью разделения
520
Глава 6 Основы проектирования систем управления ХТП
получим
WL ~ ~ + С6.54)
где mL — количество жидкости на тарелке.
Выведем передаточную функцию одной ступени разделения (та-
релки) по каналу состав питания—состав кубового продукта. Для этого
перепишем уравнение (6.54) в отклонениях переменных (координат)
от их номинальных значений, обозначив их следующим образом:
x = wF-wg; у = wB -wg =wL -w£.
Учитывая, что в стационарном режиме на ступени разделения
должно иметь место равенство:
_ 77вИ,о _ = о,
ат
получим уравнение вида:
+ (6.55)
ат
или, иначе говоря, уравнение статического звена первого порядка:
Т^- + у = Кх, (6.56)
от
где
Т = mL • К = Ff
^В +
Здесь Т — постоянная времени ступени разделения, К — коэффици-
ент усиления.
Преобразовав по Лапласу уравнение (6.63), найдем передаточ-
ную функцию ступени разделения:
Проанализируем выражение для постоянной времени в (6.56).
Положим b = 1, что соответствует точке В на рис. 6.30. Тогда постоян-
ная времени одной ступени разделения будет равна среднему времени
пребывания смеси на ней, поскольку Fr = FB + FD и Т= m^Fp = тср.
При низких концентрациях компонента (например, в точке А на
рис. 6 30) постоянная времени меньше среднего времени пребыва-
ния так как b > 1 При высоких концентрациях компонента b < 1
6.1. Динамические характеристики и особенности управления
521
(например, в точке D на рис. 6.30), и
постоянная времени будет больше
среднего времени пребывания.
Для колонны с несколькими сту-
пенями разделения сохраняется такая
же качественная зависимость между
наклоном кривой фазового равновесия
и постоянными времени, как и для
колонны с одной ступенью разделения
(с одной тарелкой), хотя сама зависи-
мость гораздо сложнее.
Рассмотрим колонну с двумя сту-
пенями разделения (двумя тарелками)
(рис. 6.32) Как и в примере с одной
ступенью разделения предположим,
что зависимость между концентраци-
Рис 6.32. Схема ректификации
с двумя ступенями разделения
ями легколетучего компонента в жид-
кой и паровой фазах подчиняется уравнению (6.51). Тогда уравне-
ния материального баланса для двух ступеней разделения (двух та-
релок) запишутся в таком виде:
• для первой ступени
mLl ' = FFWF ~ FBWB + FL2WL2 ~ (6.58)
»для второй ступени
mL2 = ^viW’vi - Л.гИ’ьг “ fdwd- (6-59)
ат
Или, учитывая, что
и’в = wLi; wvl = О] +Z>,wLi, wD = h>v2 = a2 +b2wL2,
уравнения материального баланса примут следующий вид:
"’Ll "ST = FfWf ” FbWl1 + Fl2Wl2 " Fvl + (6‘60)
"*L2 = FVl (al + AwL1)“ ^L2wL2 “ FD (fl2 + ^2VvL2)' (6.61)
Перейдя к отклонениям параметров от их номинальных значений
x = wF-w?; У, =wL1y2=wL2-wlz,
получим систему уравнений:
wli "а" = Ff* - + ЛдРг - Ап*1У1 ;
. ГТ ГТ f
"»L2 “П = FVlMl - ^2У2 ~ ^Ь2У2
от
(6 62)
522
Глава 6. Основы проектирования систем управления ХТП
Преобразуем уравнения (6.62) по Лапласу и запишем их в виде
алгебраических уравнений в изображениях:
- ^(л) + АнМ(я);
(6.63)
«L2^ {У2 ) = ЛлМ (Jl) “ Л.2^ (j>2 ) - (У2 )
Решение системы алгебраических уравнений (6.63) относитель-
но У(У1) и У(у2) приводит к следующим выражениям:
д> (у.) =-----------F ' L----—----2_x2-----------g>(x\• (6.64)
+ + ^vA)(wL25 + Л.2 + ЛА) ~
¥>( v,) =________________^F^vA___________________® (y\ ,Z zr,
(mL1i + FB + FVibx)(mL2s + FL2 + FDb2)~
в которых полиномы преобразуются в произведение простейших
сомножителей с приведенными постоянными времени Тх, Т2, Т3.
При этом передаточные функции получаются в таком виде:
И^) =
*(*) (7’15 + l)(T2J + l)’
(6.66)
»Z2M =
У fa) *2
y(x) (7\s + 1)(7> + 1)’
(6.67)
причем наибольшая постоянная времени в знаменателе передаточ-
ных функций (6.66) и (6.67) (обозначена через Тх) приблизительно
равна среднему времени пребывания тср (при b = 1).
Увеличение наклона линии фазового равновесия, как и для ко-
лонны с одной тарелкой, приводит к уменьшению постоянных вре-
мени и коэффициентов усиления колонны. Если b близко к едини-
це, то наибольшая постоянная времени примерно равна общему
объему жидкости в колонне, деленному на расход питания. Увели-
чение флегмового числа (R - F^/F^) изменяет в основном малые
постоянные времени Т2 и Т3. При очень высокой кратности ороше-
ния постоянные времени Т2 и Т3 стремятся к нулю, и переходные
процессы в колонне при изменении состава питания будут описы-
ваться дифференциальными уравнениями первого порядка с посто-
янной времени Тх.
Выводы о влиянии параметров b, R и /у могут быть применены
к ректификационным колоннам с большим числом тарелок. При
очень больших жачениях флегмового числа реакции веек тарелок
примерно одинаковы, при его малых значениях начальные участки
переходных процессов на различных тарелках будут отличаться зна-
6.1. Динамические характеристики и особенности управления
523
чением транспортного запаздывания Экспериментальное изу-
чение переходных характеристик ректификационных колонн пока-
зывает, что при изменении состава питания, подаваемого на тарелку
питания, состав на тарелках, расположенных вблизи тарелки пита-
ния, изменяется практически сразу, и кривая переходного процесса
хорошо аппроксимируется дифференциальным уравнением первого
порядка (статическим звеном первого порядка). Состав смеси в ниж-
ней и верхней частях колонны изменяется с запаздыванием, превы-
шающим время пребывания на тарелке в кп раз, где п — число таре-
лок между вводом питания и верхом (или низом) колонны; к —
коэффициент, зависящий от числа тарелок (0,5 < к < 1 при п > 10).
Обычно на этапе анализа статических и динамических характе-
ристик каких-либо сложных вопросов не возникает.
При правильном выборе размеров аппарата, оптимальном рас-
положении контрольно-измерительных приборов и корректном вы-
боре регулирующего клапана регулирование уровня жидкости в кубе
ректификационной колонны и во флегмовой емкости сравнительно
легко реализуется и не представляет проблем.
В контуре регулирования давления объект обычно может быть
представлен статическим звеном первого порядка с постоянной вре-
мени, которая на один или несколько порядков меньше постоянной
времени объекта в контуре регулирования температуры. Все это сви-
детельствует об определяющем значении в данном случае именно
контура регулирования давления. Благодаря высокому быстродействию
контура регулирования давления никаких динамических помех регу-
лятору температуры (вследствие наличия перекрестных связей между
этими параметрами, представленных на рис. 6.27) ощущаться не дол-
жно. Следствием такого быстродействия является, кроме того, про-
извольный выбор точки измерения давления в колонне, хотя обыч-
но давление измеряют в верхней части колонны.
Контур регулирования температуры характеризуется значитель-
но меньшим быстродействием и здесь уже требуется тщательный
выбор точки определения температуры. Следует обратить внимание
также на соотношение между расходами тех потоков, изменения
которых используются в качестве регулирующих воздействий До-
пустим, что регулирование температуры верха колонны осуществля-
ется изменением потока флегмы, а уровень во флегмовой емкости
регулируется за счет изменения потока дистиллята, и при этом рас-
ход флегмы много больше расхода дистиллята. Тогда из-за взаимо-
действия между системами регулирования температуры и уровня
расход дистиллята может совершать недопустимо большие скачки.
Потоки с небольшими расходами рекомендуется поддерживать на
постоянном уровне, а необходимую корректировку выполнять как
можно медленнее
524
Глава 6. Основы проектирования систем управления ХТП
Еще одной особенностью, на которую следует обратить внима-
ние при разработке системы управления ректификационной уста-
новкой, является так называемый «обратный ход» температуры, ко-
торый может встретиться при использовании теплообменного обо-
рудования. «Обратный ход» температуры (называемый также реверсом
температуры или инверсией температуры) проявляется в том, что в
ответ на какое-нибудь входное воздействие (например, изменение
одного из потоков теплоносителей) температура вначале изменяется
в сторону, противоположную тому изменению, которое в конечном
счете установится. Такое поведение связано с присущими самой
установке свойствами и часто является результатом противодейству-
ющих процессов, протекающих с разной скоростью и с разной си-
лой влияющих на результат. Окончательное изменение температуры
определяется наиболее сильным, но медленным процессом, тогда
как на начальном этапе скорость и направление изменения темпе-
ратуры определяются наиболее быстрым, хотя и слабым процессом.
На ректификационной установке можно наблюдать «обратный ход»
температуры поступающей на разделение смеси (рис. 6.33), когда
для ее подогрева используется отходящий кубовый продукт и реали-
зована система регулирования температуры с байпасированием час-
ти кубового продукта мимо подогревателя. Инверсную реакцию про-
являет также температура жидкости в кубе колонны в ответ на изме-
нение расхода флегмы. Довольно сложно обеспечить устойчивую
работу таких систем регулирования и поддерживать с их помощью
заданную температуру. Во всех подобных случаях необходимо либо
перейти к другой схеме регулирования, либо внести в используемую
схему регулирования компенсацию реверса температуры.
Рис. 6.33. Инверсная реакция температуры сырья rF на входе в ректифи-
кационную колонну при использовании в качестве теплоноси-
теля отходящего кубового продукта:
/ регулирующее воздействие направлено на повышение температуры;
2 — регулирующее воздействие направлено на понижение температуры
6.1. Динамические характеристики и особенности управления
525
На рис. 6.34 представлена графическая иллюстрация выбора оп-
тимальной схемы регулирования. Возможна реализация двух алго-
ритмов поиска оптимальной схемы регулирования. В первом случае
фиксируется допустимое содержание целевого компонента в кубо-
вом остатке [пунктирная линия в верхней половине рис. 6.34 соот-
ветствует (н>в)м], и задача оптимального регулирования состоит
именно в поддержании этого значения (wB)M, т. е. реализуется так
называемый алгоритм регулирования по ограничению. Обычно он
осуществляется изменением соотношения расходов разделяемой
исходной смеси fF и флегмы fR. Во втором случае потери целевого
компонента и»в в кубовом остатке связываются с определенными
материальными штрафами (следовательно, с прибылью). При уве-
личении расхода флегмы FR содержание целевого компонента в ку-
бовом остатке уменьшается (линии А, В, С), а следовательно, поте-
ри целевого компонента с кубовым остатком уменьшаются, но од-
новременно уменьшается и прибыль, поскольку уменьшается выход
дистиллята. С уменьшением расхода флегмы FR выход дистиллята
увеличивается, но при этом увеличиваются потери целевого компо-
нента с кубовым остатком, а за это накладываются штрафные санк-
ции, которые могут «съесть» всю прибыль. Графики зависимости
прибыли Fr (см. кривые 1, 2, 3 на рис. 6.34) оказываются, как пра-
вило, достаточно плоскими вблизи оптимума. Это означает, что оп-
тимальный расход флегмы, найденный для расхода Ff, соответству-
ющего кривой В, будет достаточно близок к оптимальным расходам
флегмы для других расходов разделяемой исходной смеси.
Рис. 6.34. Графическая иллюстрация выбора оптимальной схемы регули-
рования
524 Глава 6. Основы проектирования систем управления ХТП
Еще одной особенностью, на которую следует обратить внима-
ние при разработке системы управления ректификационной уста-
новкой, является так называемый «обратный ход» температуры, ко-
торый может встретиться при использовании теплообменного обо-
рудования. «Обратный ход» температуры (называемый также реверсом
температуры или инверсией температуры) проявляется в том, что в
ответ на какое-нибудь входное воздействие (например, изменение
одного из потоков теплоносителей) температура вначале изменяется
в сторону, противоположную тому изменению, которое в конечном
счете установится. Такое поведение связано с присущими самой
установке свойствами и часто является результатом противодейству-
ющих процессов, протекающих с разной скоростью и с разной си-
лой влияющих на результат. Окончательное изменение температуры
определяется наиболее сильным, но медленным процессом, тогда
как на начальном этапе скорость и направление изменения темпе-
ратуры определяются наиболее быстрым, хотя и слабым процессом
На ректификационной установке можно наблюдать «обратный ход»
температуры поступающей на разделение смеси (рис. 6.33), когда
для ее подогрева используется отходящий кубовый продукт и реали-
зована система регулирования температуры с байпасированием час-
ти кубового продукта мимо подогревателя. Инверсную реакцию про-
являет также температура жидкости в кубе колонны в ответ на изме-
нение расхода флегмы. Довольно сложно обеспечить устойчивую
работу таких систем регулирования и поддерживать с их помощью
заданную температуру. Во всех подобных случаях необходимо либо
перейти к другой схеме регулирования, либо внести в используемую
схему регулирования компенсацию реверса температуры.
Рис. 6.33. Инверсная реакция температуры сырья tF на входе в ректифи-
кационную колонну при использовании в качестве теплоноси-
теля отходящего кубового продукта:
/ регулирующее воздействие направлено на повышение температуры;
2 регулирующее воздействие направлено на понижение температуры
6. J. Динамические характеристики и особенности управления
525
На рис. 6.34 представлена графическая иллюстрация выбора оп-
тимальной схемы регулирования. Возможна реализация двух алго-
ритмов поиска оптимальной схемы регулирования. В первом случае
фиксируется допустимое содержание целевого компонента в кубо-
вом остатке [пунктирная линия в верхней половине рис. 6.34 соот-
ветствует (wB)J, и задача оптимального регулирования состоит
именно в поддержании этого значения (wB)M, т. е. реализуется так
называемый алгоритм регулирования по ограничению. Обычно он
осуществляется изменением соотношения расходов разделяемой
исходной смеси Ff и флегмы FR. Во втором случае потери целевого
компонента wB в кубовом остатке связываются с определенными
материальными штрафами (следовательно, с прибылью). При уве-
личении расхода флегмы FR содержание целевого компонента в ку-
бовом остатке уменьшается (линии А, В, С), а следовательно, поте-
ри целевого компонента с кубовым остатком уменьшаются, но од-
новременно уменьшается и прибыль, поскольку уменьшается выход
дистиллята. С уменьшением расхода флегмы FR выход дистиллята
увеличивается, но при этом увеличиваются потери целевого компо-
нента с кубовым остатком, а за это накладываются штрафные санк-
ции, которые могут «съесть» всю прибыль. Графики зависимости
прибыли Fr (см. кривые 1, 2, 3 на рис. 6.34) оказываются, как пра-
вило, достаточно плоскими вблизи оптимума. Это означает, что оп-
тимальный расход флегмы, найденный для расхода Ff, соответству-
ющего кривой В, будет достаточно близок к оптимальным расходам
флегмы для других расходов разделяемой исходной смеси.
Рис. 6.34. Графическая иллюстрация выбора оптимальной схемы регули-
рования
526
Глава 6. Основы проектирования систем управления ХГП
Эволюция систем управления
ректификационной установкой
Первый вариант (рис. 6.35). Простейшая система управле-
ния ректификационной установкой включает шесть одноконтурных
САР и обеспечивает стабилизацию состава дистиллята и поддержа-
ние материального и теплового балансов в установке. Основным ре-
гулятором, стабилизирующим состав дистиллята (при разделении би-
нарной смеси при постоянном давлении), является регулятор тем-
пературы верха колонны, воздействующий на отбор (расход)
дистиллята. Регулятор температуры 2 стабилизирует температуру
питания. Регуляторы уровня 3 и 4 поддерживают материальный ба-
ланс в системе по жидкой фазе. Регулятор расхода 6 стабилизирует
подачу греющего пара в кипятильник.
Если задачей регулирования является стабилизация состава ку-
бового продукта, то расход греющего пара задается регулятором тем-
пературы низа колонны 6а, а расход дистиллята стабилизируется
регулятором 1а.
Рис 6.35 Система управления ректификационной установкой, основанная
на одноконтурных САР отдельных технологических параметров:
1 — регулятор температуры верха колонны; 1а — регулятор расхода ди-
стиллята; 2 — регулятор температуры питания; 3 — регулятор уровня в
кубе колонны; 4 — регулятор уровня во флегмовой емкости; 5 — регу-
лятор давления в колонне; 6 — регулятор расхода греющего лара; 6а —
регулятор температуры низа колонны
6.1. Динамические характеристики и особенности управления
527
Примечание
Одновременное регулирование составов (или температур) верха и низа
колонны обычно не применяют, так как эти координаты связаны между
собой, и их одновременное регулирование по обратной связи может при-
вести к снижению запаса устойчивости системы.
Недостатки. Стабилизация расхода греющего пара без учета
реальной обстановки в системе обычно приводит к перерасходу
пара, поскольку регулятору расхода устанавливается завышенное
задание с учетом возможных колебаний энтальпии греющего пара,
переохлаждения флегмы и других возмущающих воздействий в
процессе.
Отсутствие компенсирующих воздействий по возмущениям со
стороны питания приведет к большим динамическим ошибкам ре-
гулирования составов продуктов, так как регулятор состава (или тем-
пературы) на конце колонны получит сигнал об отклонении регули-
руемой координаты от заданного значения лишь после того, как
изменится состав жидкости по всей высоте колонны.
Использование температуры продукта для регулирования его
состава имеет еще один существенный недостаток: колебания тем-
пературы при изменении состава соизмеримы с ее колебаниями при
изменении давления в колонне и часто оказываются соизмеримы с
погрешностью измерительных устройств.
На практике при разделении близкокипящих смесей веществ
сколько-нибудь ощутимые колебания температуры можно наблю-
дать только в средней части каждой секции колонны. Эту особен-
ность следует учитывать при выборе измерительного устройства, а
также места отбора импульса по температуре.
Второй вариант (рис. 6.36). Чтобы обеспечить минимиза-
цию энергозатрат на разделение, применяют регулятор соотноше-
ния расходов греющего пара и питания (или расходов флегмы и
питания) 6. Кроме того, для регулирования температуры продукта
применяют каскадную САР с дополнительным импульсом по произ-
водной от температуры на контрольной тарелке (регуляторы 1 и 1а),
что уменьшает максимальную ошибку регулирования.
Третий вариант (рис. 6.37) реализуется с применением
средств вычислительной техники. Здесь расходы дистиллята и грею-
щего пара регулируются регуляторами 1 и 6, задания которым кор-
ректирует вычислительное устройство 7 в зависимости от расхода и
состава питания и энтальпии греющего пара, учитывая динамичес-
кие характеристики ректификационной колонны. Эта САР должна
обеспечить приближенную инвариантность системы по отношению
к контролируемым возмущающим воздействиям.
530
Глава 6. Основы проектирования систем управления ХТП
тойчивость в «малом», т. е. рассматриваются лишь небольшие от-
клонения от стационарного состояния (режима). Стационарный ре-
жим работы реактора устойчив, если возникшее в некоторый мо-
мент малое отклонение параметра (температуры, давления, концен-
трации и т. д.) химического процесса после устранения причины,
вызвавшей отклонение, исчезает и исходный стационарный режим
восстанавливается; если же отклонения от стационарного состоя-
ния увеличиваются, то рассматриваемое состояние работы реактора
будет неустойчиво.
Пусть на непористом зерне катализатора проходит экзотерми-
ческая химическая реакция первого порядка. Через пограничный
слой у поверхности непористого зерна катализатора происходит не
только массоперенос, но и отвод (подвод) теплоты. Обозначим тем-
пературы на поверхности зерна и в объеме газового потока соответ-
ственно через tn и /г. Скорость тепловыделения определяется проте-
канием химической реакции на поверхности зерна катализатора.
Количество отводимой теплоты от поверхности зерна, представляю-
щее теплоотвод, обозначим через 0Т, а тепловыделение в результате
химической реакции на поверхности зерна — как Qp. Количество
отводимой теплоты зависит от (/п—гг).
Другой пример. Допустим, что в реакторе непрерывного дей-
ствия с мешалкой и рубашкой (для отвода теплоты) проходит экзо-
термическая химическая реакция первого порядка с выделением
теплоты 0р. Теплота, выделяющаяся в результате химической реак-
ции, отводится частично из реактора с продуктом и частично хлада-
гентом в рубашке реактора, что представляет суммарный теплоот-
вод QT. Очевидно, что равновесие как в первом случае, на поверхно-
сти зерна катализатора, так и во втором случае, в реакторе с рубашкой,
достигается, когда количество отводимой теплоты 0Т и выделив-
шейся 0р будут равны между собой. Зависимости (?р(/п) для зерна
катализатора и 0р(/) для реактора нелинейны (f — температура в
реакторе) Они представляют собой S-образные кривые, тогда как
зависимости телоотвода 0т(гп) для зерна катализатора и 0т(г) для
реактора линейны.
Итак, теплоотвод в реакторе с рубашкой (рис. 6.38) линейно за-
висит от температуры. Прямые 7, 2, 3 соответствуют одному и тому
же значению коэффициента теплопередачи, но различным темпера-
турам в рубашке реактора. Точки пересечения прямых линий тепло-
отвода и S-образной кривой тепловыделения <з, 6, с, d, е соответ-
ствуют состояниям равновесия Qp = 0Т в реакторе.
Для первого случая теплоотвода (линия 7) в реакторе воз-
можно одно состояние равновесия — в точке а, которому соответ-
ствует одна стационарная температура ta. Степень превращения в
реакторе низкая, количество выделяемой теплоты незначительно.
6.1. Динамические характеристики и особенности управления
531
Рис. 6.38. Зависимость выделе-
ния и отвода теплоты в химичес-
ком реакторе от температуры:
— выделение теплоты в результа-
те химической реакции; О, — отвод
теплоты
Для второго случая (линия 3 — при высокой температуре в
рубашке) возможно тоже только одно стационарное состояние — в
точке е, и наступает оно при практически полном превращении ре-
агентов и высокой температуре в реакторе. Точке е соответствует
одна стационарная температура te. Два этих случая объединяет то,
что для них характерен один стационарный режим.
Третий случай. Прямая линия теплоотвода 2 пересекает S-
образную кривую тепловыделения в трех точках Ь, с, d. а это означа-
ет, что в реакторе возможно три стационарных состояния, которым
будут соответствовать три стационарные температуры. На рис. 6,39
показаны три возможных стационарных состояния реактора в точке
b — рис. 6.39, а; в точке с — рис. 6.39, б', в точке d — рис. 6.39, в) как
фрагменты рис. 6.38. Точке b (рис. 6.39, а) соответствует устойчивый
стационарный режим работы реактора при температуре th. Если по
каким-либо причинам температура в реакторе становится выше th
(увеличивается до /2), то тепловыделение и теплоотвод также увели-
чиваются, но теплоотвод QT оказывается больше, чем тепловыделе-
Рис. 6.39. Определение устойчивости стационарных состоянии.
а — устойчивое; б — неустойчивое: в — устойчивое
532
Глава 6 Основы проектирования систем управления ХТП
ние 0р. В результате температура в реакторе снижается и возвращает-
ся к значению tb. Если же температура в реакторе опускается ниже tb
(до значения /0, то количество выделяемой теплоты Qp становится
больше, чем теплоотвод 0Т. Это означает, что температура в реакто-
ре будет расти до значения tb, при котором выполняется условие
равновесия Qp = QT. Итак, температурный режим реактора само-
произвольно возвращается в первоначальное состояние с температу-
рой tb. Следовательно, стационарное состояние реактора в точке b
устойчиво
Такой же анализ можно выполнить и для точек с, d и устано-
вить, что точка d соответствует устойчивому состоянию реактора, а
точка с — неустойчивому. Для последнего состояния характерно, что
при незначительном отклонении от состояния равновесия темпера-
тура в реакторе будет или увеличиваться до точки d (рис. 6.38 и
6.39, в), или уменьшаться до точки b (рис. 6.38 и 6.39, а). Если реак-
тор находился в стационарном состоянии, характеризуемом точкой Ь,
и под действием возмущений температура поднялась в реакторе до
значения t > tc, то после устранения причины, вызвавшей возмуща-
ющее воздействие, режим в реакторе не восстановится в точке Ь, а
окажется в точке d — верхнем стационарном состоянии. Возникнове-
ние неустойчивости в реакторе связано с присутствием в нем внут-
ренней положительной обратной связи при проведении экзотермичес-
кой химической реакции. Рост температуры в реакторе экспоненци-
ально увеличивает скорость реакции, что приводит к увеличению
количества теплоты, выделяемой в результате реакции, а это, в свою
очередь, вновь увеличивает температуру в реакторе и т. д.
Из анализа статических характеристик реактора, т. е. зависимо-
стей 0Р(/) и 0Т(/) (см. рис. 6.38), следует критерий устойчивости
стационарного состояния. Стационарное состояние химического ре-
актора будет устойчивым, если теплоотвод зависит от температуры
сильнее, чем тепловыделение:
d/ dr
(6.68)
Другими словами, для устойчивости стационарного режима не-
обходимо, чтобы наклон линии теплоотвода 0Т был больше (круче)
наклона линии тепловыделения Qp в точке стационарного состоя-
ния (точке пересечения линий тепловыделения и теплоотвода)
Итак, исследование статической характеристики реактора с ме-
шалкой позволило определить возможное число его стационарных
состояний (режимов) и, кроме того, установить наличие гистерези-
са в температурном процессе.
Динамические характеристики химических реакторов весьма раз-
нообразны. Так, например, постоянные времени по основным ка-
6.1. Динамические характеристики и особенности управления 533
налам управления в реакторе синтеза аммиака изменяются от не-
скольких секунд до нескольких минут, а в реакторе кислотного раз-
ложения фосфата они могут достигать десятков минут. Особеннос-
тью промышленных химических реакторов является нелинейность
как статических, так и динамических характеристик, в результате
которой и возникает множественность стационарных состояний,
появляются неустойчивые режимы работы реактора.
Рассмотрим, как может решаться задача управления химичес-
ким реактором непрерывного действия с мешалкой. Одна из основ-
ных задач такого управления — стабилизация заданных значений
температуры и концентрации в химическом реакторе. Решается эта
задача так: анализируется несколько вариантов включения в управ-
ление П-регулятора, при этом рассматривается простое однокон-
турное регулирование. Варианты можно разделить на две группы:
регулирование по отклонению температуры и по отклонению кон-
центрации.
Регулирование по отклонению концентрации реакционной сме-
си в реакторе от заданного значения возможно, изменяя входную
температуру реакционной смеси, воздействуя на входную концент-
рацию реакционной смеси, на время пребывания реакционной сме-
си в реакторе, на температуру хладагента в рубашке реактора. В ли-
тературе [1], [71] выполнен анализ стабилизации неустойчивого ста-
ционарного состояния химического реактора непрерывного действия
(с мешалкой) с использованием П-регулятора. Было показано, что
только регулирование входной температуры реакционной смеси,
времени пребывания реакционной смеси или температуры хлада-
гента по температуре в реакторе обеспечивает стабилизацию стаци-
онарного состояния реактора, но при этом должен быть подобран
соответствующий параметр настройки П-регулятора (коэффициент
усиления Кр). В переходном процессе П-регулятор вносит статичес-
кую ошибку
Применение И-регулятора при регулировании отклонения в не-
устойчивом стационарном состоянии реактора не обеспечивает ус-
тойчивости замкнутой системы (реактор + регулятор).
Использование ПД-регулятора повышает быстродействие и обес-
печивает устойчивость системы.
ПИ-регулятор устраняет статическую ошибку, но уменьшает ус-
тойчивость замкнутой системы.
Для улучшения качества переходного процесса в реакторе ис-
пользуют многоконтурное регулирование: каскадные схемы регули-
рования. Задачами управления химического реактора непрерывного
действия с мешалкой являются также регулирование соотношения
расходов реагентов, поступающих в реактор, стабилизация заданно-
го значения pH в реакторе.
534
Глава 6 Основы проектирования систем управления ХТП
6.2. СИНТЕЗ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
В предыдущих главах были изложены методы анализа различ-
ных элементов САР, объектов управления и типовых регуляторов.
В разд. 4.2 был рассмотрен синтез типовых регуляторов. Теперь рас-
смотрим задачу синтеза САР.
Для синтеза любой системы регулировании (одноконтурной или
многоконтурной) в первую очередь нужно знать динамические ха-
рактеристики технологического объекта управления (неизменяемой
части системы), виды и места приложения возмущающих воздействий,
требования, предъявляемые к создаваемой системе регулировании.
Трудности синтеза: рассмотрение при разработке системы регу-
лировании модели со свойствами реального объекта, а не самого
реального объекта; необходимость учета взаимосвязи свойств средств
управления (например, регуляторов) со свойствами модели; отсут-
ствие информации о характеристиках возмущающих воздействий
(в основном) и т. д. Кроме того, статические и динамические свой-
ства автоматической системы определяются структурными связями
между ее элементами, вариантами их включения (например, вклю-
чение регуляторов по схеме комбинированного регулирования, кас-
кадного регулирования, связанного регулирования и т. д.). На прак-
тике задачу синтеза системы управления решают поэтапно.
Первый этап называют структурным синтезом и выполня-
ют его на стадии разработки (проектирования) системы управления.
На этом этапе уточняются статические и динамические свойства
технологического объекта, составляется его математическая модель
в виде дифференциальных уравнений, описывающих статические
и динамические свойства технологического объекта по различным
каналам прохождения возмущающих и управляющих воздействий.
В том случае, если математическое описание технологического объек-
та неизвестно, можно воспользоваться временнымми или частотны-
ми характеристиками, полученными экспериментально на анало-
гичном технологическом объекте.
По дифференциальным уравнениям или графическим характе-
ристикам (временным или частотным) разрабатывается алгоритми-
ческая структурная схема технологического объекта, подлежащая ав-
томатизации. Объект представляют в виде нескольких звеньев с раз-
личными передаточными функциями, соединенных между собой.
При этом важно помнить, что в алгоритмической структурной схе-
ме отдельные звенья могут не иметь физической целостности, но
структурная схема в целом (соединение звеньев) по статическим и
динамическим свойствам, по алгоритму функционирования должна
6.2. Синтез систем автоматического регулирования
535
быть эквивалентна объекту управления. Рассмотрим пример алго-
ритмической структурной схемы технологического объекта, в кото-
ром требуется поддержать на заданном уровне два параметра (на-
пример, у] и у-^). Для этого на объект должны поступать два управля-
ющих воздействия (например, и, и м2). Допустим, что в процессе
работы на объект, а именно на его различные участки, поступают
внешние возмущающие воздействия (например, d} и d2). При со-
ставлении исходной алгоритмической структурной схемы техноло-
гического объекта, во избежание ошибок, отказываются от пред-
ставления объекта как совокупности его конструктивных элемен-
тов. Алгоритмическая структурная схема, изображенная на рис. 6.40,
состоит из звеньев трех видов: звенья с одним входным и одним
выходным сигналом [звенья 1 и 2 с передаточными функциями ^(л)
и И-у.?)]; звенья с двумя или несколькими входными сигналами и
одним выходным сигналом (например, звено 3), при этом один из
сигналов может поступать в промежуточную точку звена, в резуль-
тате чего передаточные функции звена в общем случае будут раз-
личны по отношению к входным сигналам [передаточные функции
Из(л) и И^(л)]; звенья с двумя или несколькими входными сигнала-
ми и двумя или несколькими выходными сигналами (звено 4). При
этом некоторые входные сигналы оказывают влияние на значение
нескольких выходных сигналов. Звенья с несколькими входными и
выходными сигналами имеют несколько каналов прохождения сиг-
налов с различными передаточными функциями. Так, звено 4 имеет
следующие каналы прохождения сигналов: вход «3—выход с пере-
даточной функцией W5(s)-. вход «4—выход Ji с передаточной функ-
цией Hg(5); вход и4—выход у2 с передаточной функцией ^(i); вход
d2—выход у2 с передаточной функцией И^(л).
Рис. 6.40. Пример исходной алгоритмической структурной схемы объекта
регулирования
536
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.41. Алгоритмическая структурная схема объекта регулирования
представленная в виде типовых динамических звеньев
Затем звенья с несколькими каналами заменяют более простыми
с соответствующими передаточными функциями по каждому каналу.
Преобразуем алгоритмическую структурную схему технологического
объекта (см. рис. 6.40) в алгоритмическую структурную схему объек-
та, представленную в виде типовых динамических звеньев, динами-
ческие свойства и передаточные функции которых известны.
По преобразованной алгоритмической структурной схеме (рис. 6.41)
определяют каналы управления объектом. Допустим, что входное
воздействие и, сильнее влияет на выходную величину чем на у2, а
и2 имеет ббльшее влияние на выходную величину у2 В этом случае
объект управления на рис. 6.41 представляют двумя каналами уп-
равления, изображенными на рис. 6.42. Возмущающие воздействия
d2 и ds канала управления, представленного на рис. 6.42, а, опреде-
ляются выражениями.
(т) = SP-'fD, (5) W, (j)]; d, (т) = <е-'[и2 (s) W2 (.)],
где Л,(з) и U2(s) — изображения по Лапласу возмущающего воз-
действия ^|(т) и управляющего воздействия и2(т) соответственно
(см. рис. 6.41).
Возмущающие воздействия di и г/6 канала управления, представ-
ленного на рис 6.42, б, определяются выражениями:
d< (т) = sr'[Z)2 (5). (j)]; d, (т) = (j). Wx (5)],
где Р2(5) и ^1(5) — изображение по Лапласу возмущающего воз-
действия </2(т) и управляющего воздействия И|(т) соответственно
(см. рис. 6.41).
6.2. Синтез систем автоматического регулирования
537
б
Рис. 6.42. Каналы управления объектом регулирования в структурной схеме
рис. 6.41:
а — управляющее воздействие ut — выходной параметр б — управля-
ющее воздействие и2 — выходной параметр у2
Далее выбирается тип автоматического регулятора (контролле-
ра). Законы регулирования, передаточные функции и характеристи-
ки типовых регуляторов приведены в разд. 4.3.
При синтезе САР необходимо выполнять преобразования струк-
турных схем для приведения к виду, упрощающему определение
оптимальных параметров настройки. Эквивалентные преобразова-
ния структурных схем приведены в разд. 3.2 и в Приложении 3 в [8].
После определения по алгоритмической структурной схеме
(см. рис. 6.41) каналов управления объектом, необходимо выбирать
закон регулирования по каждому из них. Предварительно по каждо-
му из каналов выбирают измерительное устройство для измерения
регулируемого параметра, а также регулирующий орган с исполни-
тельным механизмом для реализации управляющих воздействий.
В общем случае структурная схема САР по каждому из каналов
управления объектом имеет вид, изображенный на рис. 6.43, а, где
B^pp(j), И^л), РКоу(5) и B^(5) — передаточные функции реального
регулятора, исполнительного устройства, технологического объекта
управления по данному каналу управления и датчика. Управление
многомерным объектом осуществляется несколькими системами
регулирования со структурными схемами вида, подобного приве-
денному на рис. 6.43, а. Для того чтобы упростить расчет системы
регулирования, ее разбивают на два элемента: управляющее устрой-
ство (регулятор) и объекз управления. На рис. 6.43, б представлена
структурная схема САР с передаточными функциями регулятора PKp(j)
538
Глава 6. Основы проектирования систем управления ХТП
У(«)
%(S)
f(s)
----►
б
Рис. 6.43. Структурная схема САР по каналу задающего воздействия
а — отражающая основные функциональные элементы; б — упрощенная
и объекта IVo(s). Для исключения неопределенностей при расчете
автоматических систем регулирования в качестве регулятора на струк-
турной схеме (рис. 6.43, б) принимается его линейная модель со
стандартным типовым алгоритмом регулирования (разд. 4.3) Пере-
даточная функция W/pp(j) реального регулятора может быть пред-
ставлена как произведение передаточных функций идеального регу-
лятора W'p(s) и балластного звена ^(s). Балластное звено, а также
исполнительное устройство и датчик условно относят к объекту с
передаточной функцией
(*) = ^иу (^оу W (5)^6 (4 (6.69)
Например, при синтезе системы управления объектом, струк-
турная схема которого изображена на рис. 6.41, можно пользоваться
передаточными функциями
(*) = ^иу (*)(5)[^ (5) (5) + (5)] (5)Ж6 (5)
И
И'оз (5) = ^иу (s) (5) WS (s) W, (s) w. (5).
Каждый объект регулирования имеет свою локальную автомати-
ческую систему регулирования. В результате приходим к выводу,
что автоматическая система реального объекта состоит из несколь-
ких САР, причем объекты регулирования этих систем в большин-
стве случаев конструктивно и технологически не выделяются из ре-
ального объекта автоматизации. Естественно, что локальные САР
реального объекта автоматизации определенным образом взаимо-
действуют между собой, обеспечивая требуемый алгоритм функци-
6.2. Синтез систем автоматического регулирования
539
онирования. Тем не менее предложенное теоретическое обоснова-
ние позволяет осуществить проектирование, выбор регуляторов и
расчет оптимальных параметров их настройки исходя из локальных
САР, рассматривая воздействия на данную выбранную локальную
САР других локальных САР как внешние возмушаюшие воздействия,
что значительно упрощает решение задачи.
В структурной схеме локальной САР, приведенной на рис. 6.43, б,
передаточная функция объекта регулирования без учета балластного
звена регулятора известна. Чтобы выполнить дальнейший синтез САР,
определяют оптимальный закон регулирования, а затем и автомати-
ческий регулятор, наиболее близко реализующий этот закон регули-
рования. Разрабатываются способы включения регуляторов, т. е.
разрабатывается структура автоматической системы регулирования.
Второй этап называют параметрическим синтезом. Он вы-
полняется на стадии включения смонтированной автоматической
системы регулирования. Именно на этом этапе определяют опти-
мальные параметры настройки автоматических регуляторов, обес-
печивающие оптимальный ход ХТП.
Синтез инвариантных систем
При проектировании довольно широко используется принцип
инвариантности (независимости) локальных систем по отношению
к наиболее характерным возмущающим воздействиям. В первую
очередь необходимо предусматривать компенсацию возмущающих
воздействий между локальными САР, что обеспечит их работу в
оптимальном устойчивом режиме и повысит надежность работы
объекта.
Замечание
Инвариантность (от лат. invariant) — неизменность, независимость от
некоторых физических условий. Чаще всего инвариантность рассматрива-
ется в математическом смысле: неизменность какой-либо величины по от-
ношению к некоторым преобразованиям.
Для некоторых действующих систем управления известны наибо-
лее характерные возмущающие воздействия, поступающие на объект
управления, и для обеспечения необходимого качества управления
можно, например, выполнить синтез структуры системы, используя
последовательные корректирующие устройства. Сложность синтеза
таких систем состоит в том, что функциональные элементы системы,
включая стандартное управляющее устройство (регулятор или кон-
троллер), реагируют на поступившие возмущающие воздействия не в
момент их поступления на объект управления, а после того, как они
уже прошли через него. Это означает, что имеет место запаздывание,
540
Глава 6. Основы проектирования систем управления ХТП
величина которого определяется инерционностью объекта по каналу
прохождения данного возмущающего воздействия. Следовательно,
выработка управляющего воздействия на объект для предотвращения
нежелательного влияния возмущающего воздействия на управляемую
величину тоже запаздывает, что ухудшает качество управления.
Для большинства промышленных объектов химической техно-
логии характерны значительное запаздывание, большие постоянные
времени (большая инерционность) и значительные возмущающие
воздействия. В таких случаях даже при оптимальных настройках
регуляторов одноконтурные САР не способны обеспечить необхо-
димое качество регулирования (большие динамические ошибки,
длительные переходные процессы и т. д.).
Чтобы повысить качество управления, необходимо перейти от од-
ноконтурных САР к более сложным системам регулирования, исполь-
зующим дополнительные (корректирующие) импульсы по возмущаю-
щим воздействиям или вспомогательным выходным координатам. В
такие системы регулирования, помимо обычного стандартного регуля-
тора, входят вспомогательные управляющие устройства Назовем их
динамическими компенсаторами или дополнительными регуляторами.
Можно синтезировать такую систему регулирования, которая
начнет вырабатывать дополнительное управляющее воздействие на ре-
гулируемую величину в момент поступления на объект возмущаю-
щего воздействия, чтобы полностью нейтрализовать нежелательное
влияние возмущающего воздействия. Для этого, используя компен-
сирующее устройство с передаточной функцией WK(s), формируют
дополнительное управляющее воздействие. Иначе говоря, будет син-
тезирована нечувствительная, или инвариантная, к данному возму-
щающему воздействию система регулирования.
Сущность синтеза инвариантных систем регулирования, таким
образом, состоит в том, чтобы наряду с естественным прохождени-
ем возмущающего воздействия на объект создать искусственное ком-
пенсирующее воздействие с помощью динамического компенсатора (или
дополнительного регулятора), оказывающего на управляемый пара-
метр такой же эффект по величине, как и возмущающее воздей-
ствие, но противоположный по знаку.
В зависимости от характера корректирующего импульса различа-
ют следующие многоконтурные САР: комбинированные, сочетающие
обычный замкнутый контур регулирования с дополнительным кана-
лом воздействия, по которому через динамический компенсатор вво-
дится импульс по возмущению; каскадные — двухконтурные замкну-
тые САР, построенные на базе двух стандартных регуляторов и ис-
пользующие для регулирования кроме основной выходной координаты
дополнительный промежуточный выход; с дополнительным импульсом
по производной от промежуточной выходной координаты.
6.2. Синтез систем автоматического регулирования
541
6.2.1. Комбинированные САР
Рассмотрим синтез комбинированной системы регулирования
Сформулируем принцип инвариантности: отклонение выходной ко-
ординаты у(т) системы регулирования от заданного значения под
действием возмущающего воздействия <У(т) должно быть тождественно
равно нулю при любых возмущающих воздействиях:
е(т) = 0. (6.70)
От сигналов возмущающего воздействия </(т) и выходной вели-
чины у(т) перейдем к их изображениям по Лапласу D(s) и У(5). Тогда
условие инвариантности (6.70) перепишем:
У($) = у[у(т)]в0 VZ>(s)=y[</(t)]*0. (6.71)
Для заданных характеристик объекта по каналам возмущающего
воздействия ^(s) и управляющего воздействия ^^(5) применим
тождество (6.71), чтобы получить передаточную функцию динами-
ческого компенсатора H^fs). Рассмотрим два случая.
Первый случай. Сигнал от динамического компенсатора по-
дадим на вход объекта управления (рис. 6.44, а), а структурную схему
комбинированной САР преобразуем к последовательному соедине-
нию системы с передаточной функцией H^s) и системы регулирова-
ния с обратной связью с передаточной функцией W^s) (рис. 6.44, 6).
Передаточная функция системы регулирования без обратной
связи по возмущающему воздействию:
^(5) = ^) + ^)^) (6.72)
Передаточная функция системы регулирования с обратной связью:
(5) = i+ад^ои w (6-73)
Согласно структурной схеме комбинированной САР ее переда-
точная функция
>Fd(s)= ^(s)JF2(s). (6.74)
С другой стороны, изображение выходной величины комбини-
рованной САР
Y(s) = Wd(s)D(s). (6.75)
Подставим (6.74) в (6.75), а (6.75) подставим в условие инвари-
антности (6.71) и получим:
D(s)Wi(s W2(s = 0. (6 76)
542
Глава 6. Основы проектирования систем управления ХТП
[ Объект регулирования
б
Рис. 6.44. Структурные схемы комбинированном системы регулирования
(выход динамического компенсатора суммируется с командным
сигналом регулятора):
а исходная схема; б — преобразованная схема
При наличии возмущающего воздействия
D(s)*0, (6.77)
а также для замкнутого контура (с обратной связью), имея
ИЛ СО * о,
(6.78)
условие инвариантности задается уравнением:
^О)<ЖиСМ (6.79)
Из (6.79) получаем передаточную функцию динамического ком-
пенсатора.
Инвариантность системы регулирования по отношению к возму-
щающему воздействию обеспечит динамический компенсатор с переда-
точной функцией'.
W М = _ °d '
(6.80)
6.2. Синтез систем автоматического регулирования
543
Второй случай. Сигнал от динамического компенсатора по-
дадим на регулятор (рис. 6.45, а), а структурную схему комбиниро-
ванной САР преобразуем к последовательному соединению систе-
мы без обратной связи W'j(s) и системы с обратной связью ^(s)
(рис. 6.45, б).
Аналогично выводу условия инвариантности для первого слу-
чая, имеем для второго случая выражения (6.75) и (6.76) и переда-
точную функцию системы W^s):
(*) = W/Od (s) + W. (з)^р (j)^ou (5). (6.81)
Условие инвариантности для второго случая запишется так же,
как и для первого, а именно, как выражение (6.77).
Для второго случая при наличии возмущающего воздействия (6.77)
D(j)*0,
а также для системы 2, имея (6.78)
(s) * О,
Рис. 6.45. Структурные схемы комбинированной системы регулирования
(выход динамического компенсатора подключен к входу регу-
лятора):
а — исходная схема' б — преобразованная схема
544
Глава 6 Основы проектирования систем управления ХТП
условие инвариантности задается уравнением:
(*) = (s) + И'к (s)>T0U (s) = О,
откуда получим выражение, подобное (6.80):
^к(5) = -
(6.82)
(6.83)
МШ)
При расчете инвариантных разомкнутых и комбинированных САР
обязательно необходимо учитывать их физическую реализуемость,
иначе говоря, физическую реализуемость динамического компенса-
тора, отвечающего условиям (6 80) и (6.83).
Условия физической реализуемости динамического компенсатора
1. Время транспортного запаздывания по каналу управляющего
воздействия должно быть меньше, чем по каналу возмущающего
воздействия:
тк = - тои > 0. (6.84)
2. В динамическом компенсаторе отсутствуют идеальные диф-
ференцирующие звенья, т. е. в передаточной функции динамичес-
кого компенсатора степень полинома в числителе (wiK) должна быть
не выше степени полинома (лк) в знаменателе. К такому результату
можно прийти при определенном соотношении порядков диффе-
ренциальных уравнений, описывающих динамику каналов возму-
щающего и управляющего воздействий.
Пример
► Рассмотрим систему управления температурой в химическом
реакторе с мешалкой. В реакторе осуществляется экзотермическая
реакция. Основной канал возмущающего воздействия расход реакци-
онной смеси—температура в реакторе аппроксимируем двумя стати-
ческими звеньями первого порядка, соединенными последовательно:
^od (*) = -----Г,
0dV' (7]s + l)(T2s + l)’
где ^od — коэффициент усиления по каналу возмущающего воздей-
ствия; Т|, Ту — постоянные времени реактора и термометра, изме-
ряющего температуру в реакторе.
Канал управляющего воздействия расход хладагента—температу-
ра в реакторе аппроксимируем тремя статическими звеньями перво-
го порядка, соединенными последовательно:
W (s) =_________—___________
ou(' (7jS +1)(Г2д +1)(Г3 +1)’
6.2. Синтез систем автоматического регулирования
545
где А"ои — коэффициент усиления по каналу управляющего воздей-
ствия; Ту — постоянная времени охлаждающей рубашки.
Находим передаточную функцию динамического компенсатора
по выражению (6.80), чтобы построить инвариантную систему уп-
равления:
Лои
Такой динамический компенсатор физически нереализуем, по-
скольку
/ик > ик,
г. е. степень полинома в числителе оказалась выше степени полино-
ма в знаменателе.
При практической реализации разомкнутых и комбинирован-
ных САР необходимо добиться приближенной инвариантности сис-
темы регулирования по отношению к рассматриваемому возмущаю-
щему воздействию в определенном диапазоне частот (юн — нижняя
граница диапазона частот, юв — верхняя граница диапазона частот).
При этом реальный компенсатор выбирают из числа наиболее легко
реализуемых типовых динамических звеньев, параметры которых
можно рассчитать исходя из условия близости частотных характери-
стик идеального [ И/к(Хо)]и и реального I И^.(дл))]р динамических ком-
пенсаторов в этом диапазоне частот:
(»]и = № (»]р, юн < ю < юв. (6.85)
Диапазон частот [<он, юв] определяется частотным спектром воз-
мущающего воздействия и частотными характеристиками системы
В ХТП сигналы обычно являются низкочастотными, и их мощ-
ность, в основном, сосредоточена в диапазоне частот |0, юв], т. е.
нижняя граница диапазона частот юн = 0.
Комбинированную САР рассматривают как своеобразный двух-
ступенчатый фильтр определенных частот для сигнала возмущаю-
щего воздействия, состоящий из разомкнутой CAP и замкнутой
одноконтурной САР ИЛ. Характерной особенностью замкнутой си-
стемы регулирования является наличие пика на АЧХ на частоте ре-
зонанса Юр, в окрестности которой система обладает наихудшими
фильтрующими свойствами.
Поэтому чаще всего условие приближенной инвариантности
(6 85) для комбинированных САР записывают для двух частот: ю = 0
и ю = юр. Компенсация возмущающего воздействия на нулевой час-
тоте (ю = 0) обеспечивает инвариантность системы в установивших-
18 Беспалов А. В.. Хартопон И И
546
Глава 6. Основы проектирования систем управления ХТП
ся режимах, если АЧХ замкнутой системы не равна нулю при ш = О
(например, при использовании П-регулятора в замкнутом контуре).
Структуру передаточной функции реального динамического ком-
пенсатора выбирают на основе совпадения его характеристики с ха-
рактеристикой идеального динамического компенсатора на нулевой
частоте (со = 0).
Выбор параметров передаточной функции должен обеспечить
совпадение характеристик реального и идеального динамических
компенсаторов на частоте резонанса ш = <ор замкнутой АСУ. Обыч-
но компенсаторы выбирают как комбинацию из легко реализуемых
типовых динамических линейных звеньев: статического первого по-
рядка и реального дифференцирующего.
Основные этапы расчета комбинированной САР
1) расчет настроек регулятора и определение частоты резонанса
в замкнутой одноконтурной системе регулирования;
2) вывод передаточной функции идеального компенсатора на
основе принципа инвариантности и анализ его физической реали-
зуемости;
3) выбор структуры реального компенсатора и определение его
параметров на основе принципа инвариантности для нулевой часто-
ты и частоты резонанса.
Область применения-, химико-технологические объекты, подвер-
женные действию значительных контролируемых возмущающих воз-
действий.
Совместное использование в комбинированных САР регулирова-
ния по отклонению и по возмущающему воздействию позволяет по-
лучить высококачественные и быстродействующие системы регули-
рования. На рис. 6.46 приведена схема комбинированной системы
регулирования температуры в химическом реакторе Влияние основ-
ного возмущающего воздействия (например, изменения расхода ком-
Рис. 6.46. Комбинированная схе-
ма регулирования температуры в
химическом реакторе с мешалкой:
1 — преобразователь расхода, 2 — ди-
намический компенсатор; 3 — сумма-
тор; 4 — исполнительное устройство;
5 — датчик температуры, 6 — регуля-
тор температуры
5.2. Синтез систем автоматического регулирования
547
Рис 6 47. Комбинированная система регулирования состава дистиллята в
ректификационной колонне:
1 — ректификационная колонна; 2 — подогреватель исходной разделя-
емой смеси; 3 — дефлегматор; 4 — сборник флегмы; 5 — гидрозатвор
для флегмы; 6 — первичный преобразователь расхода; 7 — регулятор
состава дистиллята; 8 — динамический компенсатор; 9, 10 — регулиру-
ющие клапаны
понента А) нейтрализуется динамическим компенсатором 2, работа-
ющим по принципу компенсации основного возмущающего воздей-
ствия Влияние других возмущающих воздействий (например, изме-
нение расхода компонента В, изменение температуры окружающей
среды и др.) нейтрализуется регулятором 6, реагирующим на откло-
нение текущего значения температуры (управляемой величины), за-
меряемой датчиком 5, от заданного значения температуры (t3n).
На рис. 6.47 приведен пример комбинированной системы регу-
лирования состава дистиллята в ректификационной колонне. Регуля-
тор 7, изменяя расход флегмы, подаваемой на орошение ректифика-
ционной колонны 1, стабилизирует состав дистиллята. Для повыше-
ния качества регулирования в системе предусмотрена автоматическая
коррекция задания регулятору 7 в зависимости от одного из основ-
ных возмущающих воздействий в процессе ректификации — коле-
баний расхода разделяемой исходной смеси, подаваемой в колонну
через подогреватель 2. Динамический компенсатор 8 подает коррек-
тирующий импульс в качестве задания регулятору 7.
6.2.2. Каскадные САР
В каскадных системах регулирования при регулировании основ-
ной технологической величины в объекте с большим запаздыванием
используют также вспомогательные промежуточные величины, реа-
IX*
548
Глава 6 Основы проектирования систем управления ХТП
гирующие на изменение основных возмущающих воздействий объекта
и управляющего воздействия с меньшим запаздыванием. В таких
случаях стабилизация вспомогательных промежуточных величин
способствует более качественному регулированию основной техно-
логической выходной величины. Каскадная система регулирования
химико-технологических объектов состоит из нескольких (чаше всего
двух) контуров, каждый из которых регулирует свою величину.
В двухконтурную каскадную систему регулирования входят два
регулятора: основной (во внешнем контуре) с передаточной функци-
ей ^[(5), предназначенный для стабилизации основной технологи-
ческой выходной величины у, и вспомогательный (во внутреннем
контуре) с передаточной функцией B^s), предназначенный для
стабилизация вспомогательной промежуточной величины Выход-
ной сигнал основного регулятора является заданием для вспомога-
тельного регулятора.
Применение каскадных схем управления эффективно только в
том случае, когда запаздывание в контуре регулирования основной
технологической выходной величины у значительно больше, чем в
контуре регулирования вспомогательной промежуточной величи-
ны ур Поэтому назначение регуляторов определяет выбор законов
регулирования.
Закон регулирования основного регулятора должен содержать ин-
тегральную составляющую, чтобы поддерживать основную техноло-
гическую выходную величину у на заданном значении.
Вспомогательный контур должен обладать быстродействием. В нем
целесообразно использовать пропорциональный закон регулирования.
Пример структурной схемы двухконтурной каскадной системы
регулирования показан на рис. 6.48. В объекте регулирования (часть
схемы, заключенная в пунктирную рамку) на основную технологи-
ческую выходную величину у и вспомогательную промежуточную
величину У| воздействуют управляющая величина и и основное (наи-
более сильное и быстро изменяющееся) возмущение d{. На основ-
ную технологическую выходную величину у может также действо-
Рис. 6.48. Структурная схема двухконтурной каскадной системы регули-
рования
6.2. Синтез систем автоматического регулирования 549
вать небольшое и редкое проявляемое возмущающее воздействие d2.
Двухконтурная каскадная система регулирования имеет внутренний
(стабилизирующий) контур регулирования и внешний (корректиру-
ющий) контур Во внутренний контур входит объект регулирования
с передаточной функцией H^fs) (канал регулирования и -> у^ и
стабилизирующий регулятор (называемый также вспомогательным
или внутренним) с передаточной функцией B^Cs), вырабатываю-
щий управляющее воздействие и Внешний контур регулирования
состоит из объекта регулирования с передаточной функцией И^2(5)
(канал регулирования у1ш -> у) и корректирующего основного (внеш-
него) регулятора с передаточной функцией B^s) и с независимым
заданием ум. На вход основного (внешнего) регулятора поступает
основная управляемая величина у, а на вход вспомогательного
(внутреннего) регулятора — вспомогательная промежуточная величи-
на у,. Выходная величина у)м основного (внешнего) регулятора на-
правляется на вход вспомогательного (внутреннего) регулятора для
изменения его задания. Итак, внутренний контур предназначен для
регулирования вспомогательной промежуточной величины уь а внеш-
ний — для регулирования основной технологической выходной ве-
личины у.
Применяют различные типы двухконтурных каскадных САР,
отличая их по законам управления: П—ПИ, ПИ—ПИ, ПИ—ПИД
(первый регулятор — вспомогательный во внутреннем контуре, а
второй — основной во внешнем контуре).
Возмущающее воздействие d\ изменяет сначала вспомогатель-
ную промежуточную величину уь а затем — основную технологи-
ческую выходную величину у, поэтому внутренний контур регули-
рования быстрее, чем корректирующий, вступает в работу и выраба-
тывает управляющее воздействие, частично компенсирующее
отклонение основной технологической выходной величины у от за-
данного значения ум. Нескомпенсированное отклонение основной
технологической выходной величины у от заданного значения уш
приводит в действие внешний контур регулирования, который по-
степенно сводит это отклонение к нулю. Влияние возмущающего
воздействия d2 на основную технологическую выходную величину у
подавляется внешним контуром регулирования. Внутренний контур
регулирования обладает быстродействием, а внешний контур регу-
лирования является инерционным.
При реализации каскадных систем регулирования следует учи-
тывать, что для многих технологических объектов на вспомогатель-
ную промежуточную величину у, накладывается ограничение (на-
пример, температура не должна превышать предельно допустимого
значения). Это означает, что на выходной сигнал у1м основного ре-
гулятора. являющийся заданием для вспомогательного регулятора,
550 Глава 6. Основы проектирования систем управления ХТП
тоже накладывается ограничение и поэтому в систему регулирова-
ния необходимо вводить устройства для ограничения величины за-
дания вспомогательному (внутреннему) регулятору.
Примером может служить двухконтурная каскадная система ста-
билизации температуры жидкости на выходе кожухотрубного теп-
лообменника (рис. 6.49, а), представляющего собой инерционный
объект с большим запаздыванием. В данном случае применение
одноконтурной системы регулирования температуры обычно не
обеспечивает высокого качества регулирования, поэтому в схему
вводят вспомогательный стабилизирующий контур с регулятором
расхода греющего пара. Обладая большим быстродействием, этот
контур регулирования компенсирует изменения как расхода, так и
давления греющего пара. Другие возмущающие воздействия (на-
пример, изменения температуры нагреваемой жидкости на входе в
теплообменник и др.) компенсируются основным регулятором тем-
пературы 5.
Конденсат ▼
Рис. 6.49. Каскадная система регулирования температуры жидкости на
выходе кожухотрубного теплообменника. Вспомогательные про-
межуточные параметры расход греющего лара (а); давление
пара в межтрубном пространстве (б):
/ — датчик промежуточного параметра; 2 — вспомогательный (ведо-
мый) регулятор; 3 — исполнительное устройство; 4 — нормирующий
преобразователь температуры; 5 — основной (ведущий) ре(улятор
6.2. Синтез систем автоматического регулирования
551
На рис. 6.49, б изображена двухконтурная каскадная система ста-
билизации температуры жидкости на выходе кожухотрубного тепло-
обменника, в которую введен вспомогательный стабилизирующий
контур с регулятором давления пара 2 в межтрубном пространстве.
На рис. 6.50 приведена двухконтурная каскадная система регу-
лирования температуры в химическом реакторе, в котором прохо-
дит экзотермическая реакция. Управляющее воздействие — расход
хладагента, подаваемого в рубашку реактора. В канал управления
входят трубопровод для подачи хладагента, рубашка реактора, соб-
ственно сам реактор, и поэтому канал управления является сложной
динамической системой, обладающей большой инерционностью.
Возмущающими воздействиями являются изменения температуры и
расхода хладагента, изменения температуры и расхода реакционной
смеси и др. Для обеспечения более высокой точности регулирова-
ния, а также повышения быстродействия применяют двухконтур-
ную каскадную систему регулирования. Основной управляемой ве-
личиной в системе является температура реакционной смеси в реак-
торе, измеряемая датчиком 4 и стабилизируемая регулятором 5.
Вспомогательная промежуточная величина — температура хладагента
в рубашке реактора — измеряется датчиком 1 и стабилизируется
регулятором 2, который изменяет с помощью исполнительного уст-
ройства 3 расход хладагента. Значение этой температуры задается
основным (внешним) регулятором 5.
В приведенном примере основная и вспомогательная промежу-
точная величины имеют одинаковую физическую природу и харак-
теризуют значения одного и того же технологического параметра
(температуры) в разных точках системы.
Рис. 6.50. Каскадная система регулирования температуры в химическом
реакторе. Пояснения см. в тексте
552
Глава 6. Основы проектирования систем управления ХТП
В расчет двухконтурных каскадных систем регулирования вхо-
дит определение настроек основного (внешнего) и вспомогательно-
го (внутреннего) регуляторов.
Выбор типов основного и вспомогательного регуляторов двух-
контурных каскадных САР, а также определение оптимальных зна-
чений их настроечных параметров представляет собой более слож-
ную задачу, чем в случае одноконтурных САР. Естественно, что на-
стройки параметров основного и вспомогательного регуляторов
взаимозависимы. Но если инерционность стабилизирующего кон-
тура значительно ниже инерционности корректирующего контура,
т. е. переходный процесс в стабилизирующем контуре заканчивает-
ся гораздо раньше, чем в корректирующем контуре, то выбор регу-
ляторов и расчет параметров их настройки можно проводить неза-
висимо, как для двух одноконтурных САР.
В основе расчета параметров настройки регуляторов лежит ме-
тод итераций.
Примечание
Итерация — повторное применение какой-либо математической опе-
рации.
На каждом шаге итерации рассчитывают приведенную однокон-
турную САР, в которой один из регуляторов условно относят к эк-
вивалентному объекту Эквивалентный объект для основного регу-
лятора с передаточной функцией WC^s), как следует из структурных
схем (рис. 6.51), представляет собой последовательное соединение
замкнутого вспомогательного контура и основного канала регули-
Рис 6.51. Структурная схема
каскадной САР для расчета ос-
новного регулятора:
a — схема внешнего контура (пунк-
тирной линией выделена часть схе-
мы, эквивалентная объекту для ос-
новного регулятора): б — упрошен-
ная схема внешнего контура
6.2. Синтез систем автоматического регулирования
553
рования с передаточной функцией ^(s). Передаточная функция
эквивалентного объекта для основного регулятора равна
(б-вд
Эквивалентный объект для вспомогательного регулятора с переда-
точной функцией JKp2(s), как следует из структурной схемы (рис. 6.52),
можно представить передаточной функцией
И'э! (*) = И'о! (*)[Ч2 (*) •(-!)• И'р! СО - !]• (6.87)
На каждой итерации рассчитывают параметры настройки одно-
го из регуляторов по передаточной функции соответствующего эк-
вивалентного объекта, учитывающей найденные на предыдущей ите-
рации параметры другого регулятора.
Замечание
Если выполняются приближенные расчеты параметров настройки ре-
гуляторов, то можно ограничиться первыми двумя шагами. При выполне-
нии точных расчетов их продолжают до тех пор, пока параметры настрой-
ки регуляторов, определенные в двух последовательных итерациях, не со-
впадут с заданной точностью.
Для одновременного определения параметров настройки регу-
ляторов каскадных САР используют графические зависимости, при-
веденные в литературе [49].
Рис. 6.52. Структурная схема каскад-
ной САР для расчета вспомогатель- 1
ного регулятора:
а — схема внутреннего контура (пунктир-
ной линией выделена часть схемы, экви
валентная объекту для вспомогательного
регулятора); б — упрощенная схема внут-
реннего контура
Е2(3)
554
Глава 6 Основы проектирования систем управления ХТП
Значения настроечных параметров регуляторов в каскадных САР
могут быть найдены путем моделирования систем регулирования на
ПЭВМ.
Замечание
Значения настроечных параметров регуляторов в двухконтурных кас-
кадных системах регулирования рассчитывают на ПЭВМ с помощью спе-
циальных математических программ, например, MathCAD, Matlab и др.
Применение вспомогательного контура регулирования приводит
к значительному повышению качества регулирования основной тех-
нологической величины.
Для иллюстрации этого положения на рис. 6.53 приведены пере-
ходные характеристики каскадной системы с П—ПИ-регуляторами
(кривая 1) и одноконтурной системы с ПИ-регулятором (кривая 2),
полученные при одинаковом возмущающем воздействии dx на один
и тот же объект. И в том, и в другом случае отсутствует статическая
ошибка регулирования, а переходные процессы носят колебатель-
ный характер. В то же время при использовании каскадной системы
регулирования максимальная ошибка снижается в несколько раз, и
время переходного процесса тпп имеет меньшее значение по сравне-
нию с одноконтурной системой регулирования. Уменьшается в не-
сколько раз и интеграл от квадрата ошибки ИКО (2.11) (почти на
порядок).
Отметим, что качество регулирования существенно улучшается
с уменьшением соотношения времени запаздывания во внутрен-
нем и во внешнем контурах. Поэтому если есть возможность выбо-
ра вспомогательной промежуточной величины, то предпочтение от-
дают той, для которой запаздывание во внутреннем контуре будет
минимальным.
Рис. 6.53. Переходные процессы в САР:
I — каскадной (П—ПИ система); 2 — одноконтурной (ПИ-регулятор)
6.2. Синтез систем автоматического регулирования 555
6.2.3. САР с дополнительным импульсом
по производной из промежуточной точки
В объектах с распределенными параметрами (колонные или труб-
чатые аппараты) как основная управляемая величина (температура или
состав), так и возмущающие воздействия распределены по простран-
ственной координате, а управляющее воздействие подается на вход
объекта. Для такого типа объектов характерна большая инерционность
по каналу управления и одноконтурные замкнутые системы регулиро-
вания не обеспечивают необходимого качества переходных процессов.
Для управления объектами с распределенными параметрами
применяют САР с дополнительным импульсом по производной из
промежуточной точки объекта (аппарата), подавая его на вход ре-
гулятора, что дает для регулятора опережающий сигнал и регуля-
тор начинает действовать раньше, чем основная управляемая вели-
чина (температура или состав) на выходе объекта успеет откло-
ниться от заданного значения.
6.2.4. Регулирование многосвязных объектов
Под многосвязными объектами понимают объекты с нескольки-
ми входами и выходами, взаимно связанными между собой.
Химико-технологические объекты управления являются слож-
ными динамическими системами. Реальные химико-технологичес-
кие объекты многомерны. Между регулируемыми (управляемыми)
величинами существуют взаимные связи, обусловленные наличием
общих входных воздействий, изменение каждого из которых приво-
дит к изменению не одной, а нескольких выходных величин. Ана-
лиз взаимных связей регулируемых величин имеет большое значе-
ние для решения задач синтеза системы управления. Необходимо
различать взаимные связи, вызванные наличием общих возмуща-
ющих воздействий и общих управляющих воздействий (рис. 6.54).
В первом случае (рис. 6.54, а) регулировать отдельные параметры
можно с помощью одноконтурных САР. Связь же регулируемых ве-
личин через общие регулирующие воздействия (рис. 6.54. б) требует
изменения структуры системы управления
Замечание
Динамику многосвязных объектов можно описать системой диффе-
ренциальных уравнений. Если дифференциальные уравнения преобразо-
вать по Лапласу, то передаточная функция системы представляет собой
матрицу, элементами которой являются передаточные функции по каждо-
му из каналов вход-выход. Матрица передаточных функций односвязного
объекта является диагональной.
556
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.55. Пример регулиро-
вания объекта с взаимосвя-
занными параметрами
Рис. 6.54. Структурные схемы многомерных объектов:
а — с общими возмущающими воздействиями; 6 — с общими управля-
ющими воздействиями
Для управления многосвязными объектами используют много-
контурные системы регулирования, представляющие совокупность
большого числа простых контуров регулирования, объединенных
перекрестными связями объекта. Контуры регулирования могут либо
взаимодействовать между собой, либо просто один контур регули-
рования может воздействовать на другой. В случае взаимодействия
контуров регулирования, управляющее воздействие одного контура
является возмущающим воздействием для других, связанных с ним
контуров регулирования. Чтобы компенсировать это возмущающее
воздействие, каждый из связанных контуров в свою очередь изме-
няет управляющее воздействие, создавая тем самым возмущающее
воздействие для первого и всех остальных связанных контуров регу-
лирования. Возникает процесс, называемый «раскачкой», который
может привести к появлению в многоконтурной системе регулиро-
вания незатухающих колебаний.
Пример многоконтурной (двухконтурной) системы регулирования
с двумя выходными величинами (давление в аппарате и расход газа на
выходе аппарата) показан на рис. 6.55.
Расход газа на выходе аппарата, давление
в котором поддерживается постоянным с
помощью регулятора давления, регулиру-
ется регулятором расхода. Возмущающие
воздействия в системе регулирования рас-
хода газа, приводящие к его увеличению
или уменьшению, оказывают влияние на
давление. Аналогично возмущающие воз-
действия в контуре давления могут влиять
на работу контура регулирования расхода
газа: при уменьшении давления расход газа
будет стремиться уменьшиться, а при уве-
личении — увеличиться.
6.2. Синтез систем автоматического регулирования
557
В качестве другого примера рассмотрим регулирование уровня
жидкости в резервуаре, в которую под давлением подается газ. Па-
раметры объекта (уровень жидкости, давление и расход газа) между
собой связаны и управляются отдельными контурами регулирова-
ния (уровня жидкости в резервуаре, давления в резервуаре и расхода
газа, подаваемого в резервуар). Между ними тоже возникает взаи-
модействие, когда один регулятор регулирует давление в резервуаре,
а два других регулятора оказывают регулирующее воздействие на
уровень жидкости и расход газа. Уровень жидкости увеличивается,
газ в резервуаре сжимается (таким образом, изменение уровня жид-
кости в резервуаре является возмущающим воздействием для систе-
мы регулирования давления). Возрастание давления увеличивает сток
жидкости из резервуара (изменение давления является возмущаю-
щим воздействием для системы регулирования уровня). Кроме того,
в рассматриваемой системе может наблюдаться и некоторое само-
выравнивание, проявляющееся в том, что более высокое давление,
возникающее как результат внезапного увеличения уровня жидко-
сти, стремится увеличить расход и жидкости, и газа.
В разобранных выше примерах рассматривалась взаимосвязь вход-
ных и выходных величин объекта. Помимо этого, при регулирова-
нии многосвязных объектов необходимо учитывать дополнительные
каналы передачи воздействий (перекрестные) по каждому отдельно-
му контуру регулирования. Параметры настройки регуляторов, выб-
ранные без учета этих связей, могут привести к «раскачке» при од-
новременной работе нескольких контуров регулирования, причем
эффект взаимодействия будет особенно велик, когда контуры регу-
лирования имеют почти одинаковые критические частоты (сокр).
Существует два различных подхода к регулированию многосвяз-
ных объектов.
Первый подход: несвязанное регулирование отдельных вели-
чин одноконтурными САР. При несвязанном регулировании, учи-
тывая только основные каналы управления, расчет регуляторов вы-
полняют как для одноконтурных систем регулирования. Так можно
поступать, если пренебречь влиянием перекрестных связей на вы-
ходные величины объекта (влияние перекрестных связей намного
слабее, чем основных). Структурная схема несвязанного регулиро-
вания объекта с двумя взаимосвязанными величинами (и1 -э ylf ut -» у2
и и2 -» У|, м2 У1) приведена на рис. 6.56. В систему несвязанного
регулирования входят объект с двумя перекрестными каналами и
два независимых контура регулирования с двумя регуляторами, пе-
редаточные функции которых lCpl(s) и H^s) соответственно.
Второй подход: связанное регулирование с применением мно-
гоконтурного регулирования, в котором внутренние перекрестные
558
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.56. Структурная схема несвязанного регулирования многомерного
объекта
связи объекта компенсируются внешними динамическими связями
между отдельными контурами регулирования. Кроме основных ре-
гуляторов с передаточными функциями Жр1(л) и Wp2(s), в систему
связанного регулирования вводят дополнительные динамические
компенсаторы с передаточными функциями И^С?) и И/к3(^). По-
строение систем связанного регулирования основано на принципе
автономности. Если применить его к объекту с двумя входами и вы-
ходами (рис. 6.57), то это означает, что выходные величины у] и у2
взаимно независимы при работе двух замкнутых систем регулирова-
ния. Принцип автономности включает два условия инвариантности;
инвариантность первого выхода уг объекта по отношению к сигналу
Рис. 6.57. Структурная схема связанного регулирования многомерного
объекта
0.2. Синтез систем автоматического регулирования
559
на выходе второго pei улятора и инвариантность второго выхода у2
по отношению к сигналу на выходе первого регулятора ин, записы-
ваемые следующим образом:
У1 (т, и22) = 0; у2 (т, ип) = 0 Ух, ип, и22.
Сигнал ии на выходе регулятора с передаточной функцией
рассматривают как возмущающее воздействие для выходной вели-
чины объекта у2, а сигнал и22 на выходе регулятора с передаточной
функцией W'pjCs') — как возмущающее воздействие для выходной
величины объекта В этом случае перекрестные каналы объекта
регулирования являются каналами возмущающих воздействий. И тогда
для компенсации возмущающих воздействий в систему связанного
регулирования вводят дополнительные динамические компенсато-
ры с передаточными функциями WKi(s) и Wk2(s), сигналы от кото-
рых поступают на объект по соответствующим каналам управляю-
щих воздействий.
Одним из примеров сложного многосвязного объекта регулиро-
вания в химической технологии является ректификационная уста-
новка. Управление процессом в исчерпывающей (нижней) части
ректификационной колонны 1 (рис. 6.58) требует, как минимум,
стабилизации двух технологических параметров, ответственных за
материальный баланс по жидкой фазе и по одному из компонентов,
определяющих состав кубового продукта. Для этого могут подойти
два параметра: температура под первой тарелкой 2 колонны и уро-
вень жидкости в кубе-испарителе 3. В качестве управляющих сигна-
лов (входных величин) выбирают расход греющего пара, подаваемо-
го в кипятильник 4, и отбор кубового продукта. Можно заметить,
что изменение расхода греющего пара оказывает влияние на интен-
сивность испарения кубового продукта, изменяя как уровень кубо-
вого продукта в кубе-испарителе, так и состав пара, т. е. обе выход-
ные величины. Изменение отбора кубового продукта влияет и на
уровень жидкости в кубе-испарителе, и на состав пара в нижней
части колонны
Рис. 6.58. Пример регулирования
исчерпывающей части ректифи-
кационной колонны (многомер-
ного объекта) несвязанными си-
стемами регулирования. Поясне-
ния см. в тексте
560
Глава 6 Основы проектирования систем управления ХТП
Аналогично и для регулирования процессом в укрепляющей ча-
сти ректификационной колоны выбирают две выходные величины
(давление и температуру пара в колонне). В качестве управляющих
сигналов (входных величин) выбирают изменение расхода хладаген-
та, поступающего в дефлегматор, и изменения расхода флегмы, по-
даваемой на орошение колонны.
Замечание
В системах регулирования могут возникнуть и более сложные и разно-
образные взаимные влияния, если пытаться одновременно регулировать
большое количество технологических параметров. Например, вполне оче-
видно, что нельзя управлять величинами расходов всех потоков, поступаю-
щих на вход технологического объекта и выходящих из него: незначитель-
ная ошибка в задании приведет либо к накоплению веществ в объекте с
последующим переполнением его, либо к опорожнению объекта. Естествен-
но, что такие ситуации желательно предвидеть и их избегать.
6.2.5. Регулирование объектов с запаздыванием
Для большинства объектов химической технологии характерно за-
паздывание Объекты могут обладать запаздыванием по каналам воз-
мущающего и управляющего воздействий. Выразим передаточную фун-
кцию системы регулирования по каналу возмущающего воздействия
через передаточные функции объекта и регулятора (см. рис. 4.6):
^(5) =
^(5)
D(s) 1 + И/р(5Х(5)’
(6.88)
где передаточные функции (5) и (s) соответствуют объекту
без запаздывания.
Рассмотрим, как изменится передаточная функция (6.88) системы
регулирования в случае, когда объект обладает запаздыванием. Если
запаздывание существует только в канале возмущающего воздействия:
^odW = ^o‘d(s)-e—\
то передаточная функция системы регулирования имеет вид:
U D(s) l + l¥p(s)^u(sy
(6.89)
Присутствие звена запаздывания в передаточной функции систе-
мы регулирования (6.89) сдвигает переходный процесс на время тмп.
Однако ни вид переходного процесса, ни устойчивость системы ре-
гулирования при этом не изменяются.
6.2. Синтез систем автоматического регулирования
561
Запаздывание осложнит регулирование объекта, если оно появ-
ляется в канале управляющего воздействия:
И'ои (5) = и;‘и(5).е-т-\
В этом случае передаточная функция системы (6.88) изменится так:
У И
D (*) l + PKp(5)ir0’u(5)e"t-"J'
(6.90)
Устойчивость и быстродействие САР с передаточной функцией
(6.90) уменьшатся, ухудшится и точность регулирования.
Если объект обладает запаздыванием, то с помощью обычных
регуляторов трудно добиться высокого качества регулирования.
Максимальное допустимое значение коэффициента усиления ока-
зывается недостаточным, так как запаздывание вносит большое от-
ставание по фазе еще до того, как в достаточной степени начинает
проявляться демпфирующее воздействие инерционных элементов.
Чтобы обеспечить высокое качество переходного процесса в си-
стеме регулирования, используют специальные регуляторы (напри-
мер, регулятор Смита, регуляторы с прогнозирующей моделью),
специальные алгоритмы, способные обеспечить компенсацию за-
паздывания в объекте. Предложено много методов, предусматрива-
ющих использование информации о величине запаздывания тмп, что
позволяет регулятору вводить более точное корректирующее воз-
действие по сравнению с регулятором, который воспринимает толь-
ко сигнал ошибки.
Принципиальная структурная схема САР с регулятором Смита
приведена на рис. 6.59. Корректирующее звено ^(s) подбирается
так, чтобы передаточная функция по каналу управления для объекта
Рис. 6.59. Структурная схема САР с регулятором Смита
562
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.60. Переходные характеристики в САР:
1 — с ПИ-регулятором; 2 — с регулятором Смита
с запаздыванием 1FO*U (5)-ехр(-тзап5) была такой же, как у объекта
без запаздывания IV*U (s):
(5) - (s)e^ = <, (5). (6.91)
Из равенства (6.91) получают выражение передаточной функции
корректирующего звена:
И'м (5) = < (л)(1 + е“ТяшЛ)• (6.92)
Сравнивая переходные характеристики в САР с ПИ-регулято-
ром и с регулятором Смита (рис. 6.60), легко увидеть преимущество
САР с регулятором Смита. К недостаткам регулятора Смита относят
сложность настройки корректирующего звена, вызванную, в первую
очередь, отсутствием точных динамических и статических характе-
ристик объекта.
Применение регуляторов с компенсацией- запаздывания целесо-
образно при отношении тзап/7’> 0,5...0,7.
6.3. ТЕХНИЧЕСКИЕ СРЕДСТВА
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Технические средства САУ обычно разделяют на четыре группы
в зависимости от выполняемых ими функций:
• устройства получения информации о состоянии объекта управле-
ния (датчики, нормирующие преобразователи, устройства формиро-
вания алфавитно-цифровой информации);
• устройства приема, преобразования и передачи информации (ком-
мутаторы, преобразователи сигналов и кодов, шифраторы и дешиф-
раторы, согласующие устройства);
6.3. Технические средства систем автоматического управления
563
• устройства обработки информации, формирования команд уп-
равления и представления информации операторам (анализаторы сиг-
налов, логические устройства, устройства памяти, регуляторы, за-
датчики, управляющие вычислительные устройства);
• устройства использования командной информации для воздействия
на объект управления (регулирующие органы, исполнительные меха-
низмы, усилители мощности и вспомогательные устройства к ним).
В основе построения технических средств автоматизации лежат
принципы агрегатизации и унификации, предусматривающие вы-
полнение различных устройств по единым информационным, кон-
структивным и эксплуатационным требованиям Реализация этих
принципов привела к разработке и организации серийного произ-
водства агрегатных комплексов средств автоматизации. Конкретные
технические решения на основе принципов агрегатизации и унифи-
кации зависят от уровня развития средств автоматизации. Эволю-
ция средств, в частности элементной базы, влечет за собой измене-
ние этих решений.
6.3.1. Основные разновидности управляющих устройств,
применяемых в системах управления ХТП
Классификацию управляющих устройств (регуляторов) выпол-
няют по различным признакам.
1. По виду регулируемой величины: регуляторы температуры, рас-
хода. давления, уровня, концентрации, pH и т. д.
Замечание
Созданы регуляторы универсального типа, предназначенные для регу-
лирования различных технологических параметров. В этих устройствах спе-
цифические особенности имеют первичный измерительный преобразова-
тель, измеряющий значение регулируемого параметра, и нормирующий
преобразователь, преобразующий измеренное значение регулируемого па-
раметра в эквивалентное значение унифицированного электрического или
пневматического сигнала.
2. По характеру перемещения регулирующего органа (РО) регулято-
ры делят на регуляторы непрерывного и дискретного действия. В ре-
гуляторах непрерывного действия РО при непрерывном изменении ре-
гулируемой величины перемещается непрерывно. РО регуляторов
дискретного действия перемещается только при достижении изменя-
ющейся регулируемой величиной определенных заданных значений.
3. По источнику энергии для перестановки регулирующего органа
различают регуляторы прямого и непрямого действия. Регуляторы
прямого действия работают без использования постороннего источ-
564
Глава 6. Основы проектирования систем управления ХТП
ника энергии, отбирая энергию, необходимую для функционирова-
ния системы регулирования, у объекта регулирования. В автомати-
ческих регуляторах непрямого действия необходимая для работы сис-
темы регулирования энергия подводится извне. В зависимости от
вида используемой энергии регуляторы непрямого действия подразде-
ляются на электрические, пневматические, гидравлические и комби-
нированные (электропневматические, электрогидравлические и т. д.).
Выбор регулятора по виду используемой энергии определяется
характером объекта регулирования и особенностями автоматичес-
кой системы.
4. По закону регулирования (по виду математической зависимос-
ти между выходной и входной величинами регулятора) регуляторы
делятся на линейные и нелинейные. Регуляторы с линейными закона-
ми регулирования в свою очередь подразделяются на:
• интегральные (И-регуляторы);
• пропорциональные (П-регуляторы);
• пропорционально-интегральные (ПИ-регуляторы);
• пропорционально-дифференциальные (ПД-регуляторы);
• пропорционально-интегрально-дифференциальные (ПИД-ре-
гуляторы).
Типовые линейные законы регулирования подробно разобраны
ранее в разд. 4.3.
Примером регуляторов с нелинейным законом регулирования
могут служить позиционные регуляторы и. в частности, двух- и трех-
позиционные регуляторы.
5. По конструктивным признакам управляющие устройства разде-
ляют на приборные и блочно-модульные.
Приборные управляющие устройства (приборные регуляторы)
предназначены для щитового монтажа. Надежны и просты в эксп-
луатации, служат для построения сравнительно несложных систем
контроля и регулирования.
В большинстве случаев идея агрегатирования пронизывает пост-
роение управляющих устройств — от элементной базы до сложных
многофункциональных устройств регулирования. Различают три уров-
ня агрегатирования: элементный, модульный и блочный. Элемент-
ный принцип предполагает использование формализованных мето-
дов построения схем, реализующих заданный алгоритм, что намно-
го упрощает проектирование новых технических средств. Элементы
унифицированы, возможно многократное применение одного и того
же элемента в одной схеме управляющего устройства и использова-
ние его в схемах самых различных управляющих устройств. Каждый
элемент выполняет вполне определенную функцию, имеет задан-
ные технические характеристики и при включении в схемы управ-
ляющих устройств не требует дополнительной отладки. Модульный
6.3. Технические средства систем автоматического управления
565
принцип предполагает построение устройств из ряда элементов для
выполнения самостоятельных функций. Блочный принцип предпо-
лагает построение устройств из ряда однотипных модулей. На осно-
ве блочно-модульного принципа конструируют управляющие уст-
ройства, предназначенные для построения сложных аналогово-дис-
кретных систем контроля и регулирования с числом параметров до
нескольких сотен.
6.3.2. Автоматические регуляторы
прямого и непрямого действия
6.3.2.1. Регуляторы прямого действия
В регуляторах прямого действия воздействие регулируемой ве-
личины на первичный измерительный преобразователь регулятора
служит своеобразным источником энергии как для формирования
закона регулирования, так и для перемещения затвора регулирую-
щего органа. К таким регуляторам энергия извне не подводится.
Автоматические регуляторы прямого действия широко применяют-
ся в системах стабилизации таких технологических параметров, как
давление, расход, уровень, температура и т. д.
Регуляторы прямого действия имеют определенные преимуще-
ства по сравнению с регуляторами непрямого действия. Первые авто-
номны (не потребляют энергию от
посторонних источников), не име-
ют искрообразующих элементов
(что важно для химической техно-
логии, изобилующей пожароопасны-
ми и взрывоопасными производства-
ми), надежны (имеют небольшое ко-
личество элементов), просты в
изготовлении, монтаже и ремонте.
На рис. 6.61 показан автомати-
ческий регулятор давления прямого
действия, поддерживающий задан-
ное значение давления среды в тру-
бопроводе после регулирующего
клапана, т. е. «после себя». Конст-
руктивно регулятор выполнен в виде
клапана с мембранным приводом.
На мембрану 7 оказывают воздей-
ствие давление измеряемой среды
в трубопроводе и противодейству-
ющая пружина 2.
Рис. 6.61. Регулятор давления пря-
мого действия:
1 — мембрана; 2 — пружина; 3 — шток;
4 — затвор; 5 — седло; 6 — импульсная
трубка
566
Глава 6 Основы проектирования систем управления ХТП
При заданном значении давления условие равновесия сил, воз-
действующих на мембрану, имеет вид:
РздАч = сЛ> (6.93)
где — заданное значение давления в трубопроводе, Па; Ам —
эффективная площадь мембраны, м2; с — жесткость пружины, Н/м;
h — перемещение регулирующего органа, жестко соединенного што-
ком с мембраной, м
Если давление р в трубопроводе увеличилось на значение Др по
отношению к заданному значению давления рм, тогда мембрана 1
прогибается вниз, перемещая регулирующий орган (клапан) на ДА,
при котором сила сжатия пружины уравновешивает возросшее дав-
ление среды на мембрану. Запишем новое условие равновесия сил
на мембране:
(Рм + А/»)Л = c(h + Ah) (6.94)
или с учетом (6.93)
ДрЛм = сДА, (6.95)
откуда окончательно получим:
Д/г = ^5-Др. (6 96)
С
Таким образом, в приращениях от заданного равновесного со-
стояния регулятор давления прямого действия формирует пропор-
циональный закон регулирования:
Ди = АГрДу,
где Ди = ДА — выходная величина регулятора прямого действия, рав-
ная приращению перемещения клапана; Кр = Лм/с — коэффициент
передачи регулятора (параметр настройки регулятора); Ду = Ьр —
входная величина регулятора, равная отклонению давления от за-
данного значения.
Заданное значение давления (регулируемой величины) устанав-
ливается изменением натяжения пружины 2.
Регулятор расхода прямого действия аналогичен регулятору дав-
ления. Отличие состоит лишь в том, что в трубопровод устанавлива-
ют сужающее устройство, перепад давлений на котором, зависящий
от расхода, и воздействует на мембрану 1. Примером регулятора уровня
прямого действия может служить поплавковое контактное регулиру-
ющее устройство.
В регуляторах температуры прямого действия используется, как
правило, термометрическая система, состоящая из термобаллона.
6.3. Технические средства систем автоматического управления
567
частично заполненного низкокипящей жидкостью, капилляра и силь-
фона. При изменении температуры среды, в которую помещается
гермобаллон, в термометрической системе изменяется давление па-
ров жидкости, в результате чего сильфон или сжимается, или раз-
жимается, перемещая, аналогично мембране на рис. 6.61, затвор ре-
гулирующего клапана.
Замечание
Заданное значение температуры устанавливается изменением натяже-
ния пружины, воздействующей на сильфон
Все регуляторы прямого действия, как правило, реализуют наи-
более простой закон регулирования — пропорциональный.
6.3.2.2. Регуляторы непрямого действия
Электрические автоматические регуляторы применяются для ре-
гулирования невзрывоопасных объектов при больших расстояниях
от пультов управления до объекта регулирования.
Достоинства: относительная простота реализации сложных схем
автоматического управления; наличие на объектах управления элек-
трической энергии; возможность при необходимости разработки
систем регулирования без подвижных частей; большое быстродей-
ствие при передаче, переработке и отображении информации, вы-
работке и передаче управляющих сигналов.
Недостатки: повышенная стоимость обеспечения безопасности
(при работе во взрывоопасных зонах); повышенная опасность (по-
ражение обслуживающего персонала электрическим током); слож-
ность устройства (особенно электронных, микропроцессорных); не-
обходимость в обслуживающем персонале высокой квалификации.
Пневматические автоматические регуляторы применяются во
взрывоопасных и пожароопасных зонах и помещениях при неболь-
ших расстояниях (до 400 м) от пультов управления до объекта ре-
гулирования.
Достоинства: относительная простота конструкции всех элемен-
тов регулятора; простота в обслуживании и наладке; пожаро- и
взрывобезопасность.
Недостатки: необходимость в специальном источнике питания
систем пневмоавтоматики сжатым воздухом; высокие требования к
очистке воздуха от пыли, влаги и масла; большая инерционность
элементов пневмоавтоматики, линий связи и ограниченность в свя-
зи с этим их протяженности.
Гидравлические регуляторы применяются в пожаро- и взрывобе-
зопасных помещениях, как правило, при непосредственном разме-
щении элементов регулятора в зоне объекта регулирования.
568
Глава 6. Основы проектирования систем управления ХТП
Достоинства', гидравлические регуляторы надежны в работе, их
исполнительные механизмы при небольших размерах развивают
большие перестановочные усилия
Недостатки', необходимость в специальном источнике питания
регулятора рабочей жидкостью (в большинстве случаев — маслом);
ограниченность радиуса действия; требование полной герметизации
всех элементов регулятора и линий связи; трудность реализации слож-
ных законов регулирования.
Комбинированные регуляторы применяются в тех случаях, когда
необходимо использовать отдельные преимущества электро-, пнев-
мо- или гидрорегуляторов. Например, если требуется разработать
автоматическую систему регулирования взрывоопасным объектом
при большом удалении пульта управления от объекта, то можно
применить электропневматические регуляторы. Первичный изме-
рительный преобразователь (датчик), исполнительный механизм и
линии связи в пределах взрывоопасных зон выполняют с использо-
ванием энергии сжатого воздуха, а элементы регулятора на пульте
управления и линии связи до объекта управления — с использова-
нием электрической энергии.
Сопряжение линий электрической связи с пневматическими
линиями связи осуществляют на границах взрывоопасных зон с по-
мощью специальной преобразующей пневмоэлектрической и элек-
тропневматической аппаратуры. Так, пневматический сигнал отдат-
чика с помощью пневмоэлектропреобразователя преобразуется в
эквивалентный электрический сигнал (см. разд. 5.7), который пере-
дается по электрическим линиям связи на электрические элементы
регулятора в пульт управления, а электрический сигнал от пульта
управления с помощью электропневмопреобразователя преобразу-
ется в эквивалентный пневматический сигнал, который по пневма-
тическим линиям связи поступает на пневматический исполнитель-
ный механизм.
6.3.3. Построение управляющих устройств
с использованием пневматических средств
автоматизации
Наглядно и сравнительно просто можно рассмотреть принципы
построения управляющих устройств и реализацию законов регули-
рования на примере использования пневматических средств авто-
матизации (ПСА).
Поскольку на многих действующих химических производствах
применяются ПСА, остановимся на них несколько подробнее.
6.3. Технические средства систем автоматического управления
569
Пневматические средства автоматизации — технические устрой-
ства, использующие энергию сжатого воздуха.
Достоинства', пожаро- и взрывобезопасны; обладают высокой на-
дежностью (при работе в условиях агрессивных сред, электромагнит-
ных и температурных помех); сравнительно просты в эксплуатации.
Недостатки: низкое быстродействие (по сравнению с электри-
ческими средствами автоматизации), связанное с небольшой скоро-
стью передачи пневматических сигналов по каналам связи; неболь-
шое расстояние от ТОУ (максимальная длина пневматических ком-
муникаций не превышает нескольких сотен метров); сложность
построения высокоточных вычислительных устройств.
Область применения: пожаро- и взрывоопасные производства (на-
пример, в технологии неорганических веществ — производство ам-
миака, в технологии органических веществ — нефтехимический син-
тез, производство полимеров и т. д.).
Примечание
Пневматические средства используются для автоматизации производств,
которые характеризуются сравнительно небольшими скоростями протекания
процессов с предельными частотами изменения параметров около 0,1 рад/с.
Принципы конструирования
Пневматические средства автоматизации ГСП конструируются
на основе компенсации усилий и содержат преобразователи давле-
ний в усилия и мембранные сравнивающие устройства (мембран-
ные компараторы). Эти устройства характеризуются малыми пере-
мещениями чувствительных элементов и большими коэффициента-
ми усиления, т. е. по сути своей являются усилительными звеньями.
6.3.3.1. Первый уровень агрегатизации
Первый уровень агрегатизации — элементный. Основа пневма-
тических средств автоматизации — универсальная система элемен-
тов промышленной пневмоавтоматики (УСЭППА), комплекс ми-
ниатюрных элементов и модулей пневмоавтоматики (КЭМП), сис-
тема элементов струйной техники (частично).
Элемент промышленной пневмоавтоматики — законченная конст-
рукция, предназначенная для выполнения одной какой-либо простой
операции (например, преобразования, усиления, сложения и т. д.). Эле-
менты могут быть простыми (неделимыми) и сложными (составны-
ми). Простые элементы: дроссели, емкости, мембраны, сильфоны,
пружины и т. д. Из них конструируют сложные, например, пневмо-
камеры, усилители, реле и т. д.
По характеру изменения сигналов во времени элементы делятся
на аналоговые и дискретные. Аналоговые сигналы изменяются в
570
Глава 6. Основы проектирования систем управления ХТП
диапазоне от 20 кПа до 100 кПа, дискретные сигналы принимают
условное значение «0» (не более 10 кПа) и «1» (не менее НО кПа).
Питание элементов УСЭППА и КЭМП осуществляется сжатым воз-
духом под давлением (140 ± 14) кПа. Элементы УСЭППА имеют
небольшие габаритные размеры (в среднем 40 х 40 х 50 мм); линей-
ные размеры элементов КЭМП примерно в 2 раза меньше.
Простые элементы
Дроссели (пневмосопротивления) предназначены для изменения
расхода потока воздуха за счет создания местного сопротивления в
пневматических линиях (рис. 6.62).
Постоянный дроссель (нерегулируемое пневмосопротивление с
постоянной площадью проходного сечения) представляет собой ка-
пилляр (рис. 6.62, а) с отношением его длины (мм) к диаметру (мм),
равным 20/0,18; 20/0,3 и т. д. Большое отношение обеспечивает ла
минарное течение воздуха. Статическая характеристика постоянно-
го дросселя определяется равенством вида
F = а\р = a(pt -/>,), (6.97)
где F — массовый расход воздуха; а — коэффициент проводимости по-
стоянного дросселя; кр — перепад давления на постоянном дросселе.
Примечание
Статические характеристики дросселей (пневмосопротивлении) обыч-
но не линейны, но при небольших перепадах давления их можно линеари-
зовать в виде уравнения (6.97). Такая линеаризация допустима для дроссе-
лей с ламинарным течением при перепаде давления на постоянном дроссе-
ле Д/> < 30 кПа.
Регулируемый дроссель. Например, типа конус—конус (рис. 6.62, б).
Перемещение внутреннего конуса изменяет площадь кольцевого
а б в
Рис. 6.62. Пневматические сопротивления и их условные обозначения:
а — капилляр; б конус—конус; к — сопло—заслонка
6.3 Технические средства систем автоматического управления
571
«вора регулируемого дросселя и его гидравлическое сопротивление,
при этом проводимость дросселя изменяется примерно в 103 раз.
Регулируемый дроссель настраивается поворотом винта, связанного
с внутренним конусом.
Статическая характеристика регулируемого дросселя определя-
ется равенством вида
F = ₽Др = р(д, -р2), (6.98)
где р — коэффициент проводимости регулируемого дросселя.
Переменный дроссель. Например, типа сопло—заслонка (рис. 6.62, в).
Его гидравлическое сопротивление изменяется при перемещении
заслонки относительно сопла. Режим истечения воздуха в дросселе
типа сопло—заслонка — турбулентный.
Примечание
Статическая характеристика дросселя типа сопло—заслонка динеина
при перемещениях заслонки h < 0,08 мм.
Пневмоемкости. Их назначение — на-
копить сжатый воздух. Основная харак-
теристика пневмоемкости — постоянный
или переменный объем V (рис. 6.63).
В КЭМП применяется емкость с по-
стоянным объемом И= 25 см3.
Мембраны применяют для преобра-
зования давления р или перепада дав-
ления Др в перемещение И или силу F.
Часто применяют «вялые» плоские или
гофрированные мембраны из тонкой
прорезиненной ткани с малой собствен-
ной упругостью. Такие мембраны име-
ют жесткие центры. При малых пере-
мещениях мембраны рассматривают
как статические звенья нулевого поряд-
ка (усилительные) с передаточной фун-
кцией
Рис. 6.63. Пневматическая ем-
кость постоянного объема (а) и
ее условное обозначение (б)
иф) = лгГТП = А' (6,99)
у[Др(т)]
где А — эффективная площадь мембраны.
Сильфоны преобразуют перепад давления Др в перемещение h
или силу F. Тонкостенные гофрированные сильфоны со значитель-
ным коэффициентом жесткости с при Др < 200 кПа в области низ-
572
Глава 6. Основы проектирования систем управления ХТП
ких частот рассматривают как статические звенья нулевого порядка
(усилительные) с передаточной функцией:
^[АЛ(т)] _ а
Г /М
#[Дд(т)
(6.100)
с
где А — эффективная площадь сильфона.
Примечание
Эффективную площадь сильфона можно рассчитать по приближенной
формуле А = it(dH + rfB)3 /16, где d„, d„ — наружный и внутренний диамет-
ры сильфона
Пружины преобразуют силу F в перемещение h. В области низ-
ких частот цилиндрические пружины с коэффициентом жесткости с
рассматривают как статические звенья нулевого порядка (усилитель-
ные) с передаточной функцией:
1Г(5) =
ФСО] = 1
с'
(6 101)
Механические рычаги суммируют перемещения и силы.
Сложные элементы
К сложным элементам относят пневматические камеры, дрос-
сельные делители, усилители давления и мощности, сумматоры, реле,
преобразователи перемещений и сил в давление. Рассмотрим неко-
торые из них.
Пневматические камеры. В зависимости от схемы подвода и от-
вода воздуха пневматические камеры могут быть глухими или про-
точными (рис. 6.64). Пневматические камеры в сочетании с дроссе-
лями используют в качестве инерционных элементов.
Пример
» Вывести уравнение динамики глухой пневматической камеры
(рис. 6.64, а) при ламинарном изотермическом истечении воздуха
через постоянный дроссель с коэффициентом проводимости а.
Решение. Запишем уравнение материального баланса для пнев-
матической камеры с учетом (6.97):
F = a(/>l -p) = dm/dt, (6.102)
где F— массовый расход воздуха через постоянный дроссель; dm —
приращение массы воздуха в пневматической камере.
6.3. Технические средства систем автоматического управления
573
Рис. 6.64. Пневматические камеры:
а — глухая; о — проточная и их условные обозначения (в, г)
Из уравнения состояния идеального газа выразим массу воздуха
в пневматической камере т\
т = рУ/(ЯО), (6.103)
где р — давление воздуха в пневматической камере; V— объем пнев-
матической камеры; R — газовая постоянная воздуха; 0 — темпера-
тура воздуха в пневматической камере. Продифференцируем (6.103)
по времени’
dm = 21 dp (6.104)
dr RQ dr
Подставив dm/dr из уравнения (6.104) в (6.102), получим:
где pi — давление воздуха до постоянного дросселя.
Таким образом, по динамическим свойствам глухая пневмати-
ческая камера соответствует статическому звену первого порядка с
коэффициентом усиления К= 1, В установившемся состоянии р = р\.
Передаточная функция глухой пневматической камеры имеет вид:
<61“>
где Т = V/aRQ — постоянная времени камеры.
Уравнение динамики проточной камеры (рис. 6.64, 6), воздух в
которую поступает через постоянный дроссель с коэффициентом
проводимости а и вытекает через регулируемый дроссель с коэффи-
циентом проводимости (3, записывают в таком виде:
Т~ + Р = К[Р' +К2Р2' (6Л07)
574 Глава 6. Основы проектирования систем управления ХТП
где Т= V/[(a + Р)/Йз>] — постоянная времени проточной пневмати-
ческой камеры; К7 — коэффициенты усиления по давлениям
и р2 соответственно:
Дроссельные делители (или сумматоры) предназначены для сум-
мирования нескольких пневматических сигналовр{, р2, .... рп с весо-
выми коэффициентами к2, к„. Наиболее часто применяется
дроссельный сумматор на два пневматических сигнала (рис. 6.65),
состоящий из постоянного дросселя и регулируемого дросселя с
коэффициентами проводимости аир соответственно. Входные ве-
личины сумматора — давления pj и р2, выходная величина — давле-
ние р. Уравнение динамики дроссельного сумматора аналогично
уравнению (6.107). В статических условиях уравнение (6 107) при-
нимает вид:
Р = —+—^/’2 = +(6.108)
а + р а + р
Величины коэффициентов и К2 можно изменять в пределах
от нуля до единицы (изменяя проводимость регулируемого дроссе-
ля), поэтому сумматор на дросселях называют также делителем.
В пневматических регуляторах выход дроссельного сумматора
обычно подключается к одной из камер элементов сравнения —
мембранных сумматоров. Объем этих камер небольшой, и их посто-
янную времени можно принимать равной нулю. В таком случае ди-
намика дроссельных делителей (сумматоров) может быть представ-
лена статическими звеньями нулевого порядка.
Элементы сравнения предназначены для сравнения двух или че-
тырех пневматических сигналов и получения выходных дискретных
сигналов «0» или «1» в зависимости от знака алгебраической суммы
сравниваемых давлений. Основу конструкции элементов сравнения
составляют два последовательно включенных переменных пневмо-
сопротивления типа сопло—заслонка и мембранный сумматор сил,
формируемых давлениями р{, р2 или р]...р4 (рис. 6.66).
Рис. 6.65. Схема дроссельного делителя (а) и его условное обозначение (б)
6.3. Технические средства систем автоматического управления
575
Рис. 6.66. Усилители давления (элементы сравнения):
а — двухвходовой; б — четырехвходовой и их структурные схемы (в, г)
Выходное давление рвых двухвходового трехмембранного элемента
сравнения (рис. 6.66, а) определяется разностью давлений
&Р - Р\~ Pit
а четырехвходового пятимембранного элемента сравнения (рис. 6.66, б)
можно выразить разностью давлений
Др = Р\ - Рг + Рз ~ Pi •
Теоретически элементы сравнения представляют собой пневма-
тические реле.
Рвых
1. если Др > 0;
0, если Др < 0.
(6.109)
Фактически при небольшом значении
Др положение мембранного блока и, сле-
довательно, выходное давление рвых од-
нозначно зависят от разности входных
сигналов Др (рис. 6.67):
Рвых КЬр = К (р, -р2) (/(»!), (6.110)
Рис. 6.67. Статическая харак-
теристика мембранного уси-
лителя давления
т. е. элементы сравнения могут рассмат-
риваться как статические звенья нулево-
576
Глава 6 Основы проектирования систем управления ХТП
го порядка с большим коэффициентом усиления. Поэтому их назы-
вают также усилителями давления.
Передаточная функция элементов сравнения при малых значе-
ниях Др:
fF(j) = К »1.
(6.111)
Элементы сравнения используют
для построения мембранных суммато-
ров, предназначенных для алгебраичес-
кого суммирования непрерывных пнев-
матических сигналов. Например, на
четырехвходовом усилителе суммиро-
вание пневматических сигналов осу-
ществляется введением отрицательной
обратной связи (рис. 6.68).
С точки зрения динамики мемб-
ранные сумматоры имеют свойства
статического звена нулевого порядка
(усилительного).
Пневмоповторители—усилители
предназначены для увеличения расхо-
да воздуха без существенного измене-
ния его давления. Пневмоповторитель
— усилитель мощности используется как конечный элемент пневма-
тических устройств (например, регуляторов) и позволяет передавать
пневматические сигналы на расстояние до 300 м. Он имеет невысо-
кую точность повторения давления, фактически
Рвых = Рвх (1 + 5),
(6.112)
где 8 — относительная погрешность повторения.
Задатчики служат для формирования пневматических сигналов
определенной величины
Реле применяют для коммутации пневматических сигналов и
выполнения простейших логических операций
6.3.3.2. Второй уровень агрегатизации
Второй уровень агрегатизации — модульный. Модуль — устрой-
ство, состоящее из ряда элементов, закрепленных на унифицирован-
ной плате и соединенных внутренними коммуникационными кана-
лами, предназначенное для выполнения самостоятельных функций
(например, интегрирования, дифференцирования, запоминания).
Точные повторители—усилители мощности могут быть сконстру-
ированы на основе двухвходового усилителя давления и повторите-
6.3. Технические средства систем автоматического управления
577
Рис. 6.69. Структурная
схема точного мощно-
го повторителя
(6.113)
ля — усилителя мощности, соединенных последовательно и охва-
ченных стопроцентной отрицательной обратной связью (рис. 6.69)
Его передаточная функция равна
И7 (d = ^_(£+_8)— _------1 + 8--_ j
1 ’ 1 + /Г(1 + 5)-1 (1/AQ+(1 + 8) ~
Поскольку К » 1, величиной {/К в (6.113) можно пренебречь.
Полученная передаточная функция показывает, что такой повтори-
тель реализует операцию повторения с высокой точностью.
Интегратор построен на основе пневматической ЛС-цепи, охва-
ченной стопроцентной положительной обратной связью (рис. 6.70).
ЛС-цепь состоит из глухой камеры объемом Vи регулируемого пнев-
мосопротивления с коэффициентом проводимости р. Входной сиг-
нал Др = рм — рвх и сигнал обратной связи суммируются с помощью
пятимембранного сумматора. Динамику модуля интегрирования ха-
рактеризуют передаточной функцией:
I
W (5) = 1— =
(6.114)
И'
где Ти = И/(РЯ0).
Дифференциатор строится на основе трехмембранного усилите-
ля, в цепь обратной отрицательной связи которого включена пнев-
матическая /?С-цепочка, состоящая из глухой камеры и регулируе-
мого пневмосопротивления (рис. 6.71).
а
б
Рох
19 Беспалой А. В.. Харп гонов 11. И
578
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.71. Пневматический модуль дифферен-
цирования (а) и его структурная схема (6)
Если коэффициент усиления трехмембранного усилителя Л"» 1,
а «паразитные» емкости малы, динамику такого дифференциатора
можно представить передаточной функцией:
Ж ------------------Ц— = T-s + ’’ (6-115)
9 ' 1 + к _ 1 ,
Тп5 + 1
где Тп = ИДрЛО).
6.3.3.3. Третий уровень агрегатизации
Третий уровень агрегатизации — блочный. Блок — функциональ-
но законченная конструктивная единица, состоящая из ряда элемен-
тов и модулей. Блочный принцип широко используется для построе-
ния пневматических и пневмоэлектрических комплексов управления
сложными технологическими объектами. На рис. 6.72 приведена
структурная схема пневматической САР, в которую входят датчик Д,
вторичный измерительный прибор ВП, регулирующий блок Р и ис-
полнительное устройство, состоящее из исполнительного механизма
ИМ и регулирующего органа РО. Измеренное с помощью датчика
Рис. 6.72. Структурная схема пневматической САР. Пояснения см в тексте
6.3. Технические средства систем автоматического управления
579
текущее значение регулируемого параметра должно быть преобразо-
вано в унифицированный пневматический сигнал. Преобразование
осуществляется с помощью встроенного в датчик нормирующего
пневматического преобразователя или, если выходной сигнал дат-
чика электрический, с помощью комплекта из нормирующего токо-
вого преобразователя НП и электропневмопреобразователя. Пнев-
матический сигнал от датчика поступает в регулятор и одновремен-
но во вторичный прибор, снабженный станцией управления СУ. В
станцию управления входят переключатель для выбора режима ра-
боты системы регулирования (автоматического, программного или
ручного дистанционного), задатчик ЗД для формирования задающе-
го воздействия в автоматическом режиме и командного сигнала в
режиме ручного дистанционного управления, а также выключатель,
формирующий команду рк отключения регулятора. Регулятор в со-
ответствии с законом регулирования (позиционный, П, ПИ, ПД,
ПИД) вырабатывает командный сигнал и посылает его по каналу
связи на пневматический исполнительный механизм. В целях полу-
чения наибольшей стабильности регулирования и минимального
времени переходного процесса расстояния от измерительного блока
до регулятора и от регулятора до исполнительного механизма долж-
ны быть минимальными (5... 10 м). Вторичные приборы с встроен-
ными в них задатчиками могут устанавливаться на расстоянии до
300 м от регулятора. В случае регулирования процессов, для кото-
рых запаздывание в линиях связи не имеет значения по сравнению с
большим запаздыванием в самих процессах, регуляторы могут уста-
навливаться на значительном расстоянии от исполнительных меха-
низмов и датчиков (до 300 м).
Пневматические регуляторы имеют одинаковую функциональ-
ную структуру (см. рис. 6.72): мембранный сумматор для сравнения
сигналов 1, поступающих от датчика Д и задатчика ЗД, модуль фор-
мирования закона регулирования 2, точный повторитель — усили-
тель мощности 3.
Рассмотрим вариант реализации наиболее распространенного
промышленного регулятора, пропорционально-интегрально-диффе-
ренциального, упрошенная структурная схема которого показана на
рис. 6.73.
Блок ПИД-регулятора можно представить состоящим из рас-
смотренных выше элементов и модулей. Интегральная составляю-
щая закона регулирования формируется с помощью интегратора И
(см. рис. 6.70), дифференциальная составляющая — с помощью диф-
ференциатора Д (см. рис. 6.71). Суммирование рд, ри и рзд осуществ-
ляется на пятимембранном сумматоре (см. рис. 6.68). Полученный
пневматический сигнал умножается на коэффициент усиления Кр в
дроссельном сумматоре П (см. рис. 6.65) и поступает на вход точно-
19*
580
Глава 6 Основы проектирования систем управления ХТП
Р*
Рис. 6.73. Структурная схема ПИД-регулятора
го повторителя — усилителя мощности У для увеличения расхода
сжатого воздуха. В результате ПИД-регулятор формирует пневмати-
ческий сигнал в соответствии с уравнением;
Рвых
<6.u6>
'иО u .
где Кр — коэффициент усиления; Ти — время изодрома; Тп — время
предварения; рвх — давление, соответствующее текущему значению
регулируемого параметра; — давление, соответствующее задан-
ному значению параметра.
Следует отметить, что построенный по рассмотренной схеме
регулятор формирует ПИД-закон регулирования только по каналу
текущего значения регулируемого параметра. По каналу задающего
воздействия формируется ПИ-закон регулирования.
Примечание
Работоспособность пневматических регуляторов и измерительных уст-
ройств зависит от качества воздуха, применяемого в системах пневмоавто-
матики, поэтому подготовке воздуха уделяется особое внимание. На про-
мышленных химических предприятиях, где используются пневматические
средства управления, имеются специальные компрессорные станции с ма-
гистральными и распределительными пневмопроводами для питания пнев-
матических регуляторов и измерительных устройств сжатым воздухом оп-
ределенного давления (0,4... 1 МПа), осушенного и очищенного от пыли,
механических примесей, компрессорного масла.
6.3.4. Исполнительные устройства
Устройство автоматической системы управления, воздействую-
щее на технологический процесс в соответствии с полученным от
управляющего устройства командным сигналом, называется испол-
нительным устройством. Выходным параметром исполнительного
устройства (ИУ) является расход вещества или энергии, поступаю-
6.3 Технические средства систем автоматического управления
581
тих в объект управления или выходящих из него, а входным —
командный сигнал управляющего устройства.
Исполнительное устройство содержит, как правило, несколько
функциональных блоков: усилитель мощности; исполнительный
механизм; регулирующий орган; датчик положения; блок обратной
связи; блок сигнализации крайних положений; блок ручного управ-
ления.
В зависимости от конкретных условий структура и конструкция
ИУ могут существенно различаться. Например, если управляющим
воздействием является изменение потока электроэнергии (в аппара-
тах с электрообогревом, в электролитических ваннах, в электроли-
зерах), то необходимость в исполнительном механизме и регулиру-
ющем органе отпадает, а роль исполнительного устройства играет
усилитель. В ряде устройств регулирующий орган является частью
технологического оборудования Например, при формовании поли-
мерных пленок, асбестоцементных плит, металлического проката
толщина изделия регулируется за счет изменения расстояния между
прокатными валками, которые и являются в данном случае регули-
рующим органом.
Замечание
Структура исполнительного устройства может быть разнообразной.
Например, микропроцессорная техника позволяет регуляторы встраивать в
исполнительные устройства, тем самым превращая ИУ в комбинированные
устройства для управления различными технологическими параметрами.
По виду действия ИУ делятся на нормально открытые (НО) и
нормально закрытые (НЗ). При прекращении подвода энергии, со-
здающей перестановочные усилия, проходное сечение нормально
открытого ИУ полностью открывается (рис. 6.74, а), нормально зак-
рытого ИУ — полностью перекрывается (рис. 6.74, б).
Исполнительные устройства типа НО целесообразно применять,
когда при аварийном прекращении подачи воздуха в исполнитель-
ный механизм безопасно иметь открытую технологическую линию
(трубопровод). В противном случае применяют исполнительные ус-
тройства типа НЗ. Например, в ректификационной колонне на тех-
нологических линиях подачи исходного сырья и теплоносителя для
его подогрева, а также на линиях отбора высококипяшего и низко-
кипящего компонентов ставят исполнительные устройства типа НЗ;
на линиях же подачи пара в куб ректификационной колонны и оро-
шения в верхнюю часть (укрепляющую) ректификационной колон-
ны устанавливают исполнительные устройства типа НО. В случае
аварийной ситуации ректификационная колонна работает «сама на
себя». Из такого состояния ректификационную колонну легче выве-
сти на заданный режим, чем из состояния полного ее останова.
582
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.74. Схемы клапанов с мембранными исполнительными механиз-
мами:
а — нормально открытый (НО); б — нормально закрытый (НЗ); 1 — шток;
2 — пружина; 3 — мембрана: 4 — затвор: 5 — седло
Исполнительное устройство является «рабочей лошадкой» про-
цессов управления. Одно из главных требований к ИУ — высокая
надежность работы. В большинстве современных контуров управле-
ния используются датчики и регуляторы без движущихся частей.
Единственным элементом контура, содержащим движущиеся части,
остается исполнительное устройство. Следовательно, оно наиболее
подвержено износу и коррозии и требует повышенного внимания
для того, чтобы находиться в рабочем состоянии. К сожалению, ис-
полнительное устройство является также и наиболее затратным эле-
ментом контура регулирования. На его долю приходится от 50 % до
75 % капитальных затрат на контур регулирования и до 90 % затрат
на ремонт и текущие расходы.
Правильный выбор и расчет исполнительных устройств имеет
первостепенное значение, поскольку погрешности в их работе не-
посредственно влияют на качество управления.
Основными функциональными блоками ИУ являются исполни-
тельный механизм и регулирующий орган.
6.3.4.1. Регулирующие органы
Регулирующий орган (РО) — техническое средство изменения
материального или энергетического потока, влияющего на регули-
руемую величину в ОУ. Это устройство, непосредственно воздей-
ствующее на ОУ для поддержания заданного значения регулируе-
мой величины или изменения ее по заданному закону. Регулирую-
6.3. Технические средства систем автоматического управления
583
щие органы различаются по непрерывности воздействия на расход
рабочей среды, по конструкции, по пропускным характеристикам,
по типоразмерам, по материалам, применяемым для их изготовле-
ния, области применения.
Для непрерывного регулирования расхода жидкостей и газов в
химической промышленности широко применяются дроссельные РО,
представляющие собой переменное гидравлическое сопротивление
для протекающей рабочей среды. Изменение расхода рабочей среды
осуществляется за счет изменения проходного сечения РО
Распространены также устройства для регулирования расхода
рабочей среды изменением располагаемого напора. К этому классу
РО можно отнести приводы с регулируемой угловой скоростью вра-
щения, устройства для ее изменения.
Для регулирования расхода сыпучих материалов применяются
питатели: ленточные, шнековые, скребковые, дисковые, лопаст-
ные и т. д.
Дроссельные регулирующие органы
К дроссельным РО можно отнести регулирующие клапаны раз-
личных конструкций (односедельные, двухседельные, клеточные,
шаровые, трехходовые, шланговые, диафрагмовые и др.), поворот-
ные заслонки, шиберы, краны и т. д.
Среди регулирующих клапанов дроссельного типа различают
клапаны прямого и обратного действия. У клапанов прямого дей-
ствия (см. рис. 6.74, а) затвор при движении вниз уменьшает про-
ходное сечение РО, а у клапана обратного действия (см. рис. 6.74. б) —
увеличивает.
Иногда, в зависимости от характера движения и формы затвора,
различные конструкции РО объединяют в конструктивные группы:
с плунжерным затвором (односедельные, двухседельные, клеточные,
трехходовые); бесплунжерные (шланговые, диафрагмовые), с пово-
ротным затвором (шаровые, поворотные заслонки).
По числу затворов дроссельные устройства делятся на односе-
дельные и двухседельные.
В односедельном РО (рис. 6.75, а) проходное сечение образовано
одним цилиндрическим или профилированным затвором 2, кото-
рый перемещается вдоль оси неподвижного седла 3. При перемеще-
нии затвора изменяется проходное сечение и соответственно расход
среды, проходящей через РО. Односедельные РО применяют в ИУ
малых размеров при низких давлениях среды. Для регулирования
расхода особо агрессивных сред применяют футерованные односе-
дельные РО. Материалом футеровки служат пластические материа-
лы, такие как фторопласт, пентапласт и т. д. Основным недостатком
односедельных РО является неразгруженный затвор, поскольку ре-
584
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.75. Схемы регулирующих органов:
а — сщноседельный; б — двухседельный (1 — шток; 2 — затвор; 3 — седло)
гулируемая рабочая среда действует на плунжер сверху и снизу с
разной силой, так как находится под разным давлением. Это приво-
дит к необходимости применять сравнительно мощные исполни-
тельные механизмы.
В двухседельном РО (рис. 6.75, б; 6.76, б) проходное сечение об-
разовано двумя цилиндрическими или профилированными затвора-
ми, перемещающимися вдоль оси двух неподвижных седел. При
перемещении затворов изменяется проходное сечение и соответствен-
но расход среды, проходящей через РО. Двухседельные РО отлича-
ются высокой надежностью и применяются для изменения расходов
жидкостей, паров и газов, параметры которых могут изменяться в
широких пределах. Пропускная способность двухседельного РО при-
мерно в 1,6 раза выше пропускной способности односедельного РО
при одинаковом диаметре условного прохода. Затвор двухседельно-
го РО разгружен, так как усилия, создаваемые регулируемой средой,
действуют на плунжеры в противоположных направлениях. Разгруз-
а б
Рис. 6.76. Конструкция регулирующих органов:
а — клеточного (7 — корпус; 2 — направляющая; 3 — затвор); б
двухседельного (7 — седло; 2 — шток; 3 — сальник; 4 — затвор)
6.3. Технические средства систем автоматического управления
585
ка затвора в двухседельных РО по сравнению с односедельными улуч-
шает качество регулирования и снижает необходимое перестановоч-
ное усилие ИМ, а следовательно, габариты и массу ИМ.
Замечание
Односедельные и двухседельные РО не применяются для изменения
расхода суспензии или пульпы, а также расхода жидкостей, способных к
кристаллизации. В противном случае твердые частицы оседают в нижней
части регулирующего органа, что препятствует нормальному перемеще-
нию его затвора. Кроме того, наличие твердых частиц в движущейся среде
приводит к износу корпуса и поверхностей затвора, а также седел.
В клеточном РО (рис. 6.76, о) проходное сечение образовано
профилированными отверстиями в клетке 2 и затвором 3, перекры-
вающим эти отверстия. Затвор 3 представляет собой полый цилиндр
с отверстиями в верхнем торце для уравновешивания давлений над
затвором и под ним. Затвор перемещается в клетке-направляющей 2,
которая одновременно служит седлом затвора. В данной конструк-
ции затворная пара имеет не одну, а две посадочные поверхности,
что позволяет значительно повысить герметичность регулирующего
органа. В клеточном регулирующем органе устранены недостатки
односедельного РО (неразгруженность затвора) и двухседельного РО
(негерметичность затвора).
В шланговом регулирующем органе (рис. 6.77) регулируемая среда
проходит через эластичный патрубок 3 (шланг), который, деформиру-
ясь под действием усилия, развиваемого исполнительным механизмом,
изменяет площадь проходного сечения и, следовательно, пропускную
способность. В зависимости от среды шланги мшуг быть изготовлены
из бензостойких, маслостойких, химически стойких, эрозионно-стой-
ких материалов. Шланговые регулирующие органы применяются для
изменения расхода сред, содержащих твердые и абразивные частицы,
шламообразующих, а также агрессивных сред, например, кислот, в
которых стойки резиновые шланги соответствующих марок. Основны-
ми преимуществами шланговых РО являются малое гидравлическое
сопротивление, отсутствие застойных зон, отсутствие уплотнения штока
в связи с герметичностью проточной части, надежное перекрытие по-
тока в закрытом положении. К недостаткам шланговых РО относятся
невысокая допустимая температура (до 80 °C), небольшое рабочее дав-
ление (до 1 МПа), значительная неуравновешенность РО, небольшой
срок службы эластичного патрубка.
В диафрагмовом регулирующем органе (рис. 6.78) изменение про-
ходного сечения осуществляется за счет деформации эластичной
диафрагмы 2 относительно неподвижного седла под действием уси-
лия, развиваемого исполнительным механизмом. Эластичная диаф-
рагма может быть изготовлена из резины, фторопласта и т. п. Диаф-
586
Глава 6. Основы проектирования систем управления ХТП
Рис. 6.77. Шланговый регулирующий
орган:
1 — шток; 2— валики-траверсы, 3 — эла-
стичный патрубок
Рис. 6.78. Диафрагмовый регулиру-
ющий орган:
1 — шток; 2 — мембрана
рагмовый РО применяется для изменения расхода агрессивных сред
(например, кислот) при невысоких давлениях и температурах. Внут-
ренняя поверхность корпуса РО футерована химически стойким
материалом, например, полиэтиленом, резиной, фторопластом, или
покрыта эмалью. Основным преимуществом диафрагмовых РО яв-
ляется применение дешевых антикоррозионных материалов вместо
дорогостоящих нержавеющих сталей, а также бессальниковая кон-
струкция. К недостаткам диафрагмовых РО относится их неразгру-
женность и ограниченные давления и температуры регулируемых
сред (до 150 °C).
Шаровой регулирующий орган (рис. 6.79) снабжен поворотным зат-
вором 2 в виде сферы с цилиндрическим отверстием и седлами 3,
уплотнительные поверхности которых имеют форму сферы. Шток 7,
связанный с исполнительным механизмом, осуществляет поворот
шарового затвора, изменяя тем самым площадь проходного сече-
ния. В закрытом положении затвор упирается в пару седел, изготов-
ленных из упругих материалов (например, фторопласта), обеспечи-
вая герметичность перекрытия прохода. Чрезвычайно простая фор-
ма проточной части шарового РО позволяет его применять для
регулирования потоков вязких и кристаллизующихся сред, шламов,
пульп, а также сред, содержащих абразивные частицы. Пропускная
характеристика шарового РО близка к равнопроцентной. При от-
крытом положении затвора сопротивление потоку очень мало. Ша-
ровые РО могут работать, выдерживая перепады давления до 8 МПа
в интервале температур от —60 °C до +230 °C.
Затвор заслоночного регулирующего органа (рис. 6.80) представля-
ет собой заслонку 2 (например, металлический диск), при повороте
б.З. Технические средства систем автоматического управления
587
Нис. 6.79. Шаровой регулирую-
щий орган:
1 — шток; 2 — шаровой затвор; 3 -
седло
Рис. 6.80. Заслоночный регулирующий
орган:
1 — корпус; 2 — затвор (заслонка)
которой изменяется проходное сечение и, следовательно, пропуск-
ная способность РО. Когда заслонка полностью открыта (располо-
жена параллельно оси трубопровода), пропускная способность РО
максимальна. При закрытой заслонке (расположенной перпендику-
лярно оси трубопровода) пропускная способность РО минимальна
(так как затвор не обеспечивает полного перекрытия трубопровода;
всегда остается небольшой кольцевой зазор). Для поворота заслонки
нужен ИМ относительно небольшой мощности. При одинаковых
размерах условного прохода поворотные заслонки обладают ббль-
шей пропускной способностью, чем двухседельные регулирующие
клапаны (примерно на 50 %). Заслоночные РО применяются для
изменения больших расходов газа и пара при невысоких перепадах
давления (до 2,5 МПа) и температурах до 400 °C.
В шиберах затвор, изготовленный в виде полотна, перемещается
перпендикулярно направлению потока (рис. 6.81). Шиберы приме-
няются для регулирования расходов воздуха и газов при небольших
статических давлениях (до 0,01 МПа), а также для дозирования сы-
пучих материалов. Шиберы изготовляют из различных материалов,
А-А
Рис. 6.81. Схема шибера
588
Глава 6. Основы проектирования систем управления ХТП
что определяется условиями эксплуатации. Для работы с инертны-
ми газами (температура до 300 °C) шиберы изготовляют из листовой
стали; при температуре выше 300 °C — из чугуна. Для работы с аг-
рессивными газами шиберы изготовляют из легированных сталей
(или из листовой стали со специальным покрытием). Шиберы уста-
навливают на трубопроводах, коробах и каналах любой геометри-
ческой формы сечения
Основные характеристики регулирующих органов
Для характеристики регулирующих органов используют несколько
групп параметров.
К первой группе относятся параметры, которые определяют ра-
ботоспособность РО в конкретных условиях эксплуатации.
Условным давлением ру называют наибольшее допустимое давле-
ние среды на РО при нормальной температуре. На условное давле-
ние рассчитывается РО, а затем оно выбирается из нормального ряда
значений, принятых по ГОСТу. По значению условного давления,
например, односедельные и двухседельные клапаны подразделяют-
ся на клапаны для низкого давления (до 1,6 МПа), клапаны для
среднего давления (от 2,5 МПа до 16 МПа), клапаны для высокого
давления (от 20 МПа до 150 МПа).
Диаметром условного прохода Dy (мм) называют внутренний диа-
метр сечения в месте присоединения корпуса РО к трубопроводу.
Величина Dy стандартизирована. Условные проходы регулирующих
органов, как правило, выбирают из стандартного ряда чисел. Наи-
большее распространение получили РО диаметром условного про-
хода Dy от 25 мм до 250 мм.
Допустимая температура среды, проходящей через РО, °C:
низкая................до —225
нормальная ...........от -40 до +225
высокая..............от +225 до +450
Примечание
Приведенное выше деление по допустимой температуре рабочей сре-
ды подходит не для всех РО Например, шланговые и дифрагмовые РО
рассчитаны только на нормальную температуру.
Перепад давления на РО определяет усилия, на которые рассчи-
тываются все подвижные детали исполнительного механизма, а так-
же износ дроссельных поверхностей. Предельно допустимый пере-
пад давления для многих видов исполнительных устройств устанав-
ливается в зависимости от мощности исполнительного механизма
Ко второй группе относятся параметры, необходимые для расче-
та статической характеристики РО.
6.3. Технические средства систем автоматического управления
589
Пропускной способностью регулирующего органа Ку называют ве-
личину, численно равную расходу в м3/ч среды плотностью 1000 кг/м3
и кинематической вязкостью 10~6 м2/с, протекающей через РО, при
перепаде давления на нем. равном 0,1 МПа
Условной пропускной способностью Ку§ называют номинальную
пропускную способность полностью открытого РО.
Замечание
Условную пропускную способность обозначают также Куу.
По величине условной пропускной способности Ays регулирую-
щие органы условно делятся на четыре группы:
для больших расходов............от 40 до 25 000
для средних расходов............от 2 до 5000
для малых расходов..............от 0,1 до 4
для микрорасходов..............0,1 и менее
Условная пропускная способность зависит от типа РО, характе-
ризуемого коэффициентом а, и его диаметра условного прохода Dy.
Ниже приведены значения коэффициента а для различных РО:
односедельные и диафрагмовые клапаны...0,012
двухседельные клапаны.................0,016
поворотные заслонки....................0,02
шланговые клапаны.....................0,05.
Относительная протечка в затворе — отношение величины, чис-
ленно равной расходу (м3/ч) среды с плотностью 1000 кг/м3 и кине-
матической вязкостью 10-6 м2/с, протекающей через закрытый но-
минальным усилием затвор клапана при перепаде давления на нем
0,1 МПа, к условной пропускной способности. Относительная про-
течка в затворе выражается в процентах.
Конструктивная характеристика показывает зависимость пло-
щади проходного сечения регулирующего органа Ау от перемеще-
ния затвора Л:
Л =/(*)•
Обычно Ау выражают в процентах от площади проходного сечения
полностью открытого регулирующего органа Xvs.
Пропускная характеристика показывает зависимость пропускной
способности регулирующего органа Ку от перемещения затвора h:
Ky=f(h). (6.117)
Пропускные характеристики используются для сравнения раз-
личных регулирующих органов. Дроссельные устройства серийно
590
Глава 6 Основы проектирования систем управления ХТП
выпускаемых РО профилируются так, чтобы получить одну из стан-
дартных пропускных характеристик, среди которых наиболее рас-
пространенными являются линейная и равнопроцентная. При ли-
нейной пропускной характеристике приращение пропускной способ-
ности пропорционально перемещению затвора, т. е.
dKy=Cdh, (6.118)
где С — постоянная величина; h — перемещение затвора.
При равнопроцентной пропускной характеристике приращение
пропускной способности пропорционально ходу затвора и текуще-
му значению пропускной способности:
dKv=CKvdh. (6.119)
Расходная характеристика РО является одной из основных ста-
тических характеристик РО Различают теоретическую и рабочую
расходные характеристики.
Теоретическая расходная характеристика — зависимость между
расходом среды через РО и положением затвора при постоянном
перепаде давления Ьрт на РО.
Рабочая расходная характеристика — зависимость между расхо-
дом среды через РО и положением затвора при действительном ра-
бочем перепаде давления Дрю на РО. Изменение расхода вещества
через РО в рабочих условиях происходит в соответствии с рабочей
расходной характеристикой.
Расходные характеристики регулирующих органов в рабочих ус-
ловиях отличаются от теоретических, поскольку перепад давления Дрю1
изменяется при увеличении или уменьшении площади проходного
сечения клапана. Регулирующий орган является звеном гидравли-
ческой системы, в которую входит также трубопровод с местными
сопротивлениями, соединяющий два технологических аппарата.
Общий перепад давления на гидравлической системе Др равен:
\р = Лр^ + Дрт, (6.120)
где \р^ — перепад давления на РО Дрт — потери давления в трубо-
проводе, зависящие от расхода.
Давление в аппаратах, как правило, поддерживается постоян-
ным, а значит постоянным остается и разность давлений Др на кон-
цах гидравлической системы, независимо от расхода протекающего
через нее вещества. При полностью закрытом регулирующем органе
весь перепад давления сосредоточен на нем, т. е. Ьр^ = Др. При
открытии РО увеличивается расход вещества в трубопроводе, что
приводит к росту Дрт и, следовательно, к уменьшению Дркл.
Отклонение рабочей расходной характеристики от теоретичес-
кой при прочих равных условиях зависит от отношения сопротивле-
6.3. Технические средства систем автоматического управления
591
Рис. 6.82. Статические характеристики регулирующих органов:
а — затвор с прямоугольным вырезом; б — затвор с треугольным
вырезом; в — затвор с параболическим вырезом: / — конструктивные;
2— теоретические расходные; 3 — рабочие расходные; h — относитель-
ное перемещение штока; Av — относительная площадь проходного
сечения, %; a, k, п, kt, яь и2 — коэффициенты пропорциональности;
с — постоянная, равная относительной площади проходного сечения
при начальном положении штока; с. — постоянная, равная расходу при
начальном положении штока
ния РО к сопротивлению всей гидравлической системы, звеном ко-
торой он является:
с = Д/’кл/Д/’- (6.121)
Чем больше перепад давления на РО по сравнению с перепадом
давления на остальной части гидравлической системы, тем ближе
рабочая расходная характеристика к теоретической. При о = 1 рабо-
чая и теоретическая расходные характеристики совпадают, а с умень-
шением о — различаются все больше.
Примеры конструктивных и расходных характеристик для двух-
седельного регулирующего клапана приведены на рис. 6.82.
Расчет регулирующих органов
Для расчета регулирующего органа прежде всего необходимо
рассчитать перепад давления на нем Др^, необходимый для созда-
ния расхода F в трубопроводе и регулирующем органе:
ДРкл = ДР ~ ДРт ’
(6.122)
592
Глава 6. Основы проектирования систем управления ХТП
где Дркд — перепад давления на регулирующем органе, МПа; Др —
располагаемый напор источника давления, МПа; Дрт — потери дав-
ления в трубопроводе и технологических аппаратах (без учета пере-
пада давления на регулирующем органе), МПа
Величину Дри нельзя принимать произвольно, поскольку пере-
пад давления на РО для данного значения расхода зависит от распо-
лагаемого напора источника давления и параметров технологичес-
ких аппаратов и трубопровода (6.122). Эту величину необходимо
определять, выполняя гидравлические расчеты технологических тру-
бопроводов и выбирая разнообразные источники давления (насосы,
вентиляторы, воздуходувки и пр.). При расчете исполнительных ус-
тройств определяют их основные параметры: максимальную про-
пускную способность, гипоразмер и условный проход (внутренний
диаметр присоединительного патрубка).
Расчет регулирующего органа для потока жидкости
1. Определяют пропускную способность регулирующего орга-
на Kv max, необходимую для обеспечения максимального расхода
жидкости по уравнению:
*V max = 032Лпахл/р/ДРкл > (6.123)
где — максимальный объемный расход жидкости, м3/ч; —
перепад давления на РО при максимальном расходе, МПа; р — плот-
ность жидкости, кг/м3.
2. По каталогам или справочникам из перечня типоразмеров
дроссельных РО выбирают устройство нужного типа с таким диа-
метром условного прохода £>у, чтобы условная пропускная способ-
ность Kvs была примерно на 20 % больше расчетного значения Avmax:
*vs >l,2tfVmax. (6.124)
Выражение (6.123) справедливо для маловязких жидкостей, при
протекании которых через РО не происходит кавитации.
Расчет регулирующего органа для потока водяного пара
Пропускная способность РО для потока водяного пара зависит
от режима течения водяного пара. Если режим течения водяного
пара докритический, т. е.
ДРкл<Р1/2, (6.125)
то пропускную способность регулирующего органа max, необхо-
димую для обеспечения максимального расхода пара, определяют
по уравнению
_ Лпах I 1
103 ^РгДРкл’
max
(6.126)
6.3. Технические средства систем автоматического управления
593
|де Кутях — пропускная способность РО по ГОСТ 12893—93, не-
обходимая для обеспечения максимального расхода пара; -
перепад давления на РО при максимальном расходе пара, МПа;
Pi — абсолютное давление пара перед РО, МПа; Fmax — макси-
мальный массовый расход пара, кг/ч; р! — плотность пара при
давлении р{ и рабочей температуре Г, перед РО, кг/м3; р2 — плот-
ность пара при давлении р2 после РО и рабочей температуре t\
перед РО, кг/м3.
Для критического режима течения водяного пара, когда
дРкл Р1/2,
используют уравнение:
*V max
_ ^max I 1
73,5 ^P! Pt'
(6.127)
(6 128)
Расчет регулирующего органа для потока газа
При расчете пропускной способности РО для потока газа следу-
ет учитывать режима течения газа. Если режим течения газа докри-
тический, т. е.
^</>1/2, (6.129)
то пропускную способность регулирующего органа Ку max, необхо-
димую для обеспечения максимального расхода газа, определяют по
уравнению:
max
Vm” 5280
(6.130)
где Fn max — максимальный объемный расход газа, приведенный к
нормальным условиям (pN = 0,1 МПа, rN = 0°С), м3/ч; pN — плот-
ность газа, приведенная к нормальным условиям, кг/м3; к — коэф-
фициент, учитывающий отклонение реального газа от законов иде-
ального газа (величина безразмерная); — абсолютная температу-
ра газа перед регулирующим органом, К; р2 — абсолютное давление
газа после регулирующего органа, МПа.
Для критического режима течения газа, когда
^>^1/2, (6.131)
следует пользоваться уравнением:
<6132)
Ру
594 Глава Ь. Основы проектирования систем управления ХТП
Общие требования к установке регулирующих органов
Регулирующие клапаны устанавливают на прямолинейных уча-
стках трубопровода (до и после клапана длиной не менее 10Лу), пре-
дусматривая при их монтаже байпасную (обводную) линию (рис. 6.83).
В случае неисправности РО его отключают (закрывают запорные
клапаны 2) и, регулируя расход среды клапаном 3, пропускают по-
ток мимо него, тем самым не останавливая работу технологического
оборудования.
Рис. 6.83. Схема установки ре-
гулирующего клапана на трубо-
проводе:
1 — основной трубопровод; II — бай-
пасная линия; 1 — регулирующий
клапан с исполнительным механиз-
мом; 2, 3 — запорные клапаны
6.3.4.2. Исполнительные механизмы
Исполнительный механизм (ИМ) предназначен для усиления мощ-
ности командного сигнала, получаемого от регулятора, и воздей-
ствия на регулирующий орган.
По виду используемой энергии ИМ делят на электрические,
пневматические, гидравлические.
При выборе исполнительного механизма учитывают следующие
требования:
• ИМ должен развивать перестановочное усилие, достаточное
для преодоления реакции рабочих частей регулирующих органов;
• ИМ должен обладать детектирующим действием, т. е. переда-
вать воздействие только от исполнительного устройства к объекту
регулирования;
• значения основных величин, характеризующих статические и
динамические свойства ИМ (порог чувствительности, гистерезис,
люфт и т. д.), должны быть соизмеримы со значениями аналогич-
ных величин других элементов системы управления (регулирования);
• в конструкции ИМ желательно иметь дополнительные устрой-
ства, такие как ручной привод местного управления регулирующим
органом и т. д.
Важным параметром регулирующего органа, оказывающим вли-
яние на выбор типа и размера ИМ, является реакция, возникающая
при перемещении рабочих частей. При этом учитывается как вели-
чина реакции, гак и ее постоянство во времени при различных на-
грузках. По этому параметру РО подразделяются на разгруженные,
частично разгруженные и перегруженные.
6.3. Технические средства систем автоматического управления
595
Пневматические исполнительные механизмы
Пневматические исполнительные механизмы просты, надежны
и удобны в эксплуатации. Они взрыво- и пожаробезопасны, поэто-
му широко применяются в химической промышленности. Пневма-
тические ИМ обладают высоким быстродействием и точностью по-
зиционирования при умеренном перестановочном усилии и неболь-
ших габаритах.
Входным сигналом пневматических исполнительных механиз-
мов является давление сжатого воздуха (0,02...0,1 МПа), соответ-
ствующее командному сигналу регулятора.
Замечание
Пневматические ИМ можно использовать в комплекте не только с
пневматическими регуляторами, но и с регуляторами, формирующими элек-
трический командный сигнал. В последнем случае для преобразования элек-
трического сигнала в пневматический используется электропневмолреоб-
разователь.
В зависимости от вида чувствительного элемента, воспринима-
ющего энергию сжатого воздуха и преобразующего ее в перестано-
вочное усилие выходного элемента, пневматические ИМ делятся на
мембранные, поршневые, сильфонные и лопастные.
Наибольшее распространение получили мембранные исполнитель-
ные механизмы (МИМ) (рис. 6.84, а). Прорезиненная мембрана 3 с
жестким металлическим центром зажата между двумя фланцами,
разделяя пространство МИМ на две полости. Жесткий центр мем-
браны связан со штоком 7. Под мембраной расположена противодей-
ствующая пружина 2. Командный сигнал в виде давления сжатого
воздуха подается в рабочую полость нал мембраной, создавая усилие
Л = Арк,
пропорциональное командному сигналу (А — эффективная площадь
мембраны).
Под действием усилия F{ мембрана вместе со штоком перемеша-
ется вниз. Пружина сжимается, создавая уравновешивающее усилие
Л = ch,
пропорциональное перемещению штока ИМ (с — коэффициент
жесткости пружины). При равновесии F{ F2. т. е.
h = (A/c)pK,
откуда следует, что в статическом режиме перемещение штока ИМ
пропорционально командному сигналу. Это позволяет использовать
величину командного давления pY в качестве сигнала, определяю-
596
Глава 6 Основы проектирования систем управления ХТП
Рис. 6.84. Исполнительные механизмы:
а — мембранный (1 — шток, 2 — пружина, 3 — мембрана); б — порш-
невой (7 — поршень, 2 — пружина); в — двухфазный асинхронный дви-
гатель; г — электромагнитный (7 — индукционная катушка, 2 — сер-
дечник, 3 — пружина)
шего положение регулирующего органа. Статическая характеристи-
ка, связывающая величину командного давления с положением штока
во всем диапазоне его перемещения, называется ходовой характери-
стикой ИМ.
Шток исполнительного механизма соединен со штоком регу-
лирующего органа (см., например, рис. 6.74, а на стр. 582). С уве-
личением давления воздуха в полости над мембраной 3 шток 1
вместе с затвором 4 движется вниз и уменьшает проходное сечение
клапана, что снижает расход рабочей среды. При уменьшении дав-
ления воздуха затвор за счет упругих сил пружины 2 приподнима-
ется, и клапан открывается.
В зависимости от направления движения штока различают мем-
бранные исполнительные механизмы прямого действия (при повы-
шении давления в рабочей полости шток удаляется от плоскости
заделки мембраны) и обратного действия (шток приближается).
6.3. Технические средства систем автоматического управления
597
Для повышения точности и быстродействия пневматических ИУ
при работе в тяжелых условиях (большое давление и повышенная
вязкость регулируемой среды, большая длина пневматической со-
единительной линии и др.) их снабжают позиционерами.
Позиционеры служат для усиления мощности пневматического
сигнала и обеспечения строгой пропорциональности между переме-
щением штока ИМ и давлением pY, соответствующем командному
сигналу регулятора. Это своеобразные усилители с обратной связью
по положению штока. Обязательными конструктивными элемента-
ми позиционера (рис. 6.85) являются чувствительный элемент (на-
пример, сильфон 1), пружина обратной связи 7, одним концом
связанная со штоком ИМ, и золотниковое устройство 3, 4, в кото-
рое подается сжатый воздух от внешнего источника питания (на-
пример, компрессора). Командный сигнал рк поступает в сильфон 1,
который преобразует этот сигнал в параметр, удобный для сравне-
ния, — перемещение или усилие. Вид параметра сравнения предоп-
ределяет принцип действия позиционера — компенсация переме-
щений или компенсация сил. Большее распространение получил
принцип компенсации сил, который легко реализуется конструк-
тивно и обеспечивает высокую точность. Сравниваются усилие,
создаваемое командным сигналом, и усилие, зависящее от текуще-
го положения штока ИМ, создаваемое пружиной обратной связи 7.
При рассогласовании этих сил чувствительный элемент управляет
работой золотникового устройства, которое изменяет расход сжа-
того воздуха, направляемого из внешнего источника питания в вер-
хнюю полость МИМ.
Рис. 6.85. Схема позиционера:
1 — сильфон; 2 — рычаг; 3 — золотник; 4 — золотниковая камера; 5 -
МИМ; 6 — тяга; 7— пружина обратной связи; Я — РО; />„ — давление
питания, рк — командный сигнал
598 Глава 6. Основы проектирования систем управления ХТП
Замечание
В динамическом отношении МИМ в области частот 0..ДЗ рад/с рас-
сматривают как последовательное соединение статического звена перво-
го порядка с небольшой постоянной времени (порядка нескольких се-
кунд) и усилительного звена (с зоной гистерезиса 2... 10 %). При длине
пневмопровода более 100...150 м МИМ снабжают усилителями мощности и
охватывают жесткой отрицательной обратной связью по перемещению РО.
При использовании таких позиционеров МИМ рассматривают как стати-
ческое звено нулевого порядка (усилительное), не влияющее на динами-
ческие характеристики пневматического регулятора и системы управле-
ния в целом
Поршневые ИМ отличаются большим конструктивным разнооб-
разием и применяются в тех случаях, когда требуются большой ход
штока и большие перестановочные усилия. В поршневой исполни-
тельный механизм (см. рис. 6.84, б) управляющий сигнал в виде
давления сжатого воздуха подается в цилиндр и перемещает пор-
шень 7, шток которого соединен с РО.
Гидравлические исполнительные механизмы
Предназначены для преобразования сигнала (разности давления
масла), поступающего от регулятора, в перемещение РО. Выпуска-
ются два типа гидравлических исполнительных механизмов: пря-
мого хода (с поступательным движением штока) и кривошипные
(с поворотным устройством).
Поршневые исполнительные механизмы прямого хода состоят
из цилиндра с поршнем. Масло под высоким давлением подается в
цилиндр и перемещает поршень, шток которого соединен со што-
ком РО. Входным сигналом поршневого ИМ, соответствующим ко-
мандному сигналу регулятора, является объемный расход масла £, а
выходным — перемещение штока Л. Взаимосвязь между ними выра-
жается уравнением:
где А — площадь поперечного сечения цилиндра.
Таким образом, поршневой гидравлический ИМ является ин-
тегрирующим звеном.
При соединении штока с кривошипом получается кривошип-
ный ИМ, управляющий поворотными (заслоночными) регулирую-
щими органами.
Пневматические и гидравлические ИМ обладают рядом преиму-
ществ перед электрическими ИМ: высокой надежностью, большим
ресурсом работы, возможностью плавного изменения выходных пара-
6.3. Технические средства систем автоматического управления 599
метров в широком диапазоне, простотой преобразования энергии
потока жидкости или газа в механическую мощность на выходе ИМ,
устойчивостью к вибрации.
Электрические исполнительные механизмы
Устройства данного типа создают большие перестановочные уси-
лия, монтируются на большом расстоянии от пульта управления,
обеспечивают практически любой ход плунжера. К недостаткам мож-
но отнести энергоемкость, сложность обслуживания, высокую сто-
имость для ИМ во взрывозащищенном исполнении. Работают в ком-
плекте с электрическими регуляторами. Различают следующие виды
электрических ИМ: электродвигательные и электромагнитные.
Электродвигательные ИМ состоят из электродвигателя (посто-
янной скорости, переменной скорости или шагового), редуктора с
ручным дублером, контрольно-пусковой аппаратуры (указателя по-
ложения, датчика положения), приставки, формирующей переме-
щение выходного вала. В зависимости от типа ИМ те или иные
блоки могут отсутствовать.
Наибольшее распространение получили электрические ИМ по-
стоянной скорости, что обусловлено использованием простых и на-
дежных электродвигателей, для управления которыми применяются
простые и экономичные усилители мощности. В качестве электро-
привода в ИМ применяют асинхронные трехфазные двигатели, а
также асинхронные однофазные двигатели с полым ротором и рото-
ром типа «беличье колесо» (см. рис. 6.84, в). В таких ИМ ротор
электродвигателя имеет постоянную мгновенную скорость враще-
ния, а требуемый закон перемещения затвора регулирующего орга-
на обеспечивается за счет повторно-кратковременного включения
электродвигателя и соответствующего соотношения между длитель-
ностями включенного и выключенного состояний.
В электромагнитных ИМ усилие, необходимое для перестанов-
ки затвора РО, создается электромагнитом (см. рис. 6.84, г). Когда
по катушке электромагнита 1 протекает ток, сердечник 2, соединен-
ный с затвором РО, втягивается в электромагнит (индукционную
катушку), открывая проход для рабочей среды. Если ток в катушке
электромагнита отсутствует, пружина 3 выталкивает сердечник из
электромагнита, и затвор РО перекрывает проход для рабочей сре-
ды. Электромагнитные ИМ применяются в основном в системах
двухпозиционного регулирования и в системах защиты и блокиров-
ки, так как затвор регулирующего органа может занимать только два
крайних положения (открыто-закрыто).
При установке электромагнитных ИМ на трубопроводах для
жидкостей следует иметь в виду, что их практически мгновенное
действие приводит к гидравлическим ударам.
600 Глава 6, Основы проектирования систем управления ХТП
Замечание
Пневматические и гидравлические ИУ имеют более высокую удель-
ную мощность (мощность на единицу массы) по сравнению с электричес-
кими ИУ с электронными, магнитными усилителями. Так, например, для
пневматических и гидравлических ИУ она в среднем равна 10 кВт/кг, а для
электромеханических — 1 кВт/кг. Как следствие этого, динамические ха-
рактеристики пневматических и гидравлических ИУ превосходят соответ-
ствующие характеристики электромеханических систем.
6.3.4.3. Пьезокерамические исполнительные устройства
Хотя пьезоэффект был открыт в XIX веке, потом во второй поло-
вине XX века развиты теория и технология пьезокерамических мате-
риалов, полагают, что пьезокерамика станет одним из перспективных
материалов XXI века. Действие пьезокерамических ИУ основано на
принципе обратного пьезоэффекта: электрическая величина (напря-
жения или заряда) преобразуется в механическое перемещение (сдвиг)
рабочего тела (преобразование электрической энергии в механичес-
кую). Пьезокерамические ИУ подразделяются на три основные груп-
пы: осевые, поперечные и гибкие. Осевые и поперечные пьезокерами-
ческие ИУ объединены общим названием многослойные пакетные,
поскольку представляют собой несколько пьезоэлементов (дисков,
стержней, пластин или брусков), собранных в пакет. Для многослой-
ных пакетных ИМ характерно то, что они могут развивать значитель-
ное усилие (до 10 кН), при управляющем напряжении 1 кВ и очень
малых отклонениях рабочей части (от единиц нанометров до сотен
микрон). Многослойные пакетные ИУ относят к мощным.
Гибкие пьезокерамические ИУ {биморфы) развивают, как прави-
ло, незначительное усилие при малых (сотни микрон) отклонениях
рабочей части, хотя известны пластинчатые биморфы (ленточные
ИУ), обеспечивающие усилие до 0,25 кН при отклонении рабочей
части до 3 мм. Гибкие ИУ относят к группе маломощных.
Перспективным направлением использования пакетных ИУ яв-
ляется управление гидравлическим клапанами.
Ленточные ИУ благодаря высокой чувствительности, относитель-
но большому усилию и величине отклонения используются в каче-
стве сенсорных выключателей и контакторов, закрывающих и от-
крывающих клапанов различного назначения, в том числе для про-
граммируемой дозированной подачи (например, лекарств).
Дополнительная информация
К техническим средствам систем управления относят также разнооб-
разные выходные устройства (устройства контактной коммутации) и уси-
лительные устройства (усилители и распределители).
Выходные устройства предназначены для передачи командного сиг-
нала на исполнительные механизмы (или на регистрирующие устрой-
ства).
6.4. Стадии проектирования систем управления 601
К ним относятся:
• релейные устройства (электромагнитное реле);
• транзисторная оптопара;
• симисторная оптопара.
Выходные устройства ключевого типа используются для управления
нагрузкой либо непосредственно, либо через мошные управляющие эле-
менты: пускатели, твердотельное реле, тиристоры (или симисторы).
Назначение усилительных устройств (усилителей и распределителей)
САУ — усиление по мощности командного сигнала, поступающего с выхо-
да регулятора, для управления исполнительным механизмом.
В зависимости от способа усиления командного сигнала, недостаточ-
ного для управлением двигателем механизма, электрические исполнитель-
ные механизмы подразделяются на механизмы с контактным и бесконтак-
тным управлением. В первом случае управление производится с помощью
реверсивного магнитного пускателя, а во втором — с помощью специаль-
ного тиристорного или магнитного усилителя.
К группе электрических усилителей относят электромагнитные, элек-
тронные (транзисторные, тиристорные), магнитные и другие усилитель-
ные устройства.
В зависимости от типа распределительного элемента пневматические
и гидравлические усилители классифицируются на распределители расхо-
да и давления золотникового типа, распределители типа сопло—заслонка,
распределители струйного типа.
6.4. СТАДИИ ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ
Системы управления разрабатывают как для реконструируемых,
так и для вновь строящихся химических производств. Создание си-
стем управления различными химическими предприятиями вклю-
чает пять стадий: разработку технического задания, эскизную разра-
ботку, разработку технического проекта, разработку рабочего про-
екта, внедрение АСУ ТП и анализ ее функционирования.
6.4.1. Разработка технического задания
Стадия технического задания включает следующие этапы:
• определение цели и критериев качества функционирования ХТП
как объекта управления;
• исследование технико-экономических показателей объекта-про-
тотипа (если таковой имеется) и их взаимосвязи с технологически-
ми параметрами;
• определение структуры технологического объекта управления
(ТОУ), входных воздействий (возмущающих и управляющих), вы-
ходных координат, взаимосвязей между ними и построение матема-
тической модели ТОУ;
• исследование статистических характеристик возмущающих воз-
действий.
602 Глава 6. Основы проектирования систем управления ХТП
Наиболее сложная задача на этой стадии — построение матема-
тических моделей ТОУ, в дальнейшем используемых при синтезе
АСУ ТП. При синтезе локальных САР, как правило, используют
линеаризованные модели динамики в виде дифференциальных урав-
нений первого и второго порядка с запаздыванием, которые получа-
ют в результате обработки экспериментальных переходных характе-
ристик по разным каналам воздействия. При решении задач опти-
мального управления статическими режимами используют конечные
соотношения, получаемые из уравнений материального и энергети-
ческого баланса ТОУ (или уравнения регрессии). В задачах опти-
мального управления динамическими режимами используют нели-
нейные дифференциальные уравнения, получаемые из уравнений
материального и энергетического баланса ТОУ, записанных в диф-
ференциальной форме.
Основная задача при разработке системы управления состоит в
подборе технологических параметров, необходимых для контроля
(диагностирования), управления (регулирования) и анализа пред
аварийного состояния ТОУ. Желательно по минимально возможно-
му числу выбранных параметров получить полное представление о
состоянии и свойствах ТОУ.
Выбор контролируемых параметров
Контролю подлежат технологические параметры, по значениям
которых осуществляется управление технологическим процессом, а
также его пуск и останов. К таким параметрам относятся управляе-
мые параметры, а также входные параметры, при изменении кото-
рых в объект управления могут поступить возмущающие воздействия.
Особое внимание должно уделяться контролю технологических
параметров взрывоопасных ТОУ. Для каждого такого объекта уп-
равления определяют совокупность значений критических физико-
химических величин технологического процесса, а также допусти-
мый диапазон их изменений. Для контроля загазованности (по ПДК)
в производственных помещениях, рабочей зоне открытых наружных
технологических установок должны предусматриваться в обязатель-
ном порядке технические средства газового анализа. Параметры,
характеризующие состояние взрывоопасных ТОУ, должны не толь-
ко контролироваться, но и регистрироваться.
Выбор управляемых (регулируемых)
технологических параметров и управляющих воздействий
На этом ответственном этапе выбирают параметры, подлежащие
управлению (регулированию), и параметры, изменяя которые мож-
но вносить управляющие (регулирующие) воздействия в ТОУ При
этом принимается во внимание целевое назначение технологичес-
6.4. Стадии проектирования систем управления 603
кого процесса и его взаимосвязи с другими технологическими про-
цессами. Выбирают критерий управления, его заданное значение и
параметры, изменением которых целесообразно на него воздейство-
вать. Основой выбора являются статические и динамические харак-
теристики процесса.
Статические характеристики позволяют оценить степень влия-
ния входных параметров на выходные, а динамические характерис-
тики помогают уточнить правильность выбора управляющих воз-
действий. Пусть, например, выход С целевого продукта зависит от
температуры Ти давления р в реакторе, а анализ статических харак-
теристик С = /(Г, р) показывает, что изменение давления в реакторе
в меньшей степени влияет на выход целевого продукта, чем измене-
ние температуры. В таком случае выход целевого продукта следует
поддерживать, изменяя температуру в реакторе. Динамические ха-
рактеристики (полученные, например, экспериментально) помога-
ют уточнить правильность выбора управляющего воздействия. Если
они показывают, что канал воздействия на выход целевого продук-
та, связанный с изменением температуры, обладает гораздо боль-
шим запаздыванием, чем канал, связанный с изменением давления,
то целесообразно в качестве управляющего воздействия использо-
вать именно изменение давления, несмотря на более слабое влия-
ние этого параметра на выход продукта.
Канал управления выбирают так, чтобы управляющее воздей-
ствие (например, изменение расхода, температуры) сопровождалось
максимальным и быстрым изменением управляемой величины (на-
пример, выхода целевого продукта), иначе говоря, чтобы коэффи-
циент усиления ТОУ по каналу управления был максимален.
Анализ возмущающих воздействий
После выбора критерия управления и управляющих воздействий
начинается анализ ТОУ с точки зрения выявления возмущающих
воздействий и способов их устранения до поступления в ТОУ. При
этом особое внимание обращается на стабилизацию входных пара-
метров, поскольку их изменения являются наиболее сильными воз-
мущающими воздействиями.
На практике все внешние возмущающие воздействия не удается
устранить до их поступления в ТОУ, невозможно предусмотреть и
устранить внутренние возмущающие воздействия. Необходимо так-
же учитывать, что многие входные и управляемые параметры дан-
ного технологического процесса определяются технологическим ре-
жимом предыдущего и последующего процессов. Например, в про-
изводстве контактной серной кислоты, концентрация кислорода в
обжиговом газе, поступающем в контактный аппарат, зависит от
технологического режима процесса обжига серы.
604 Глава 6. Основы проектирования систем управления ХТП
Не устраненные возмущающие воздействия приводят к измене-
нию технологических параметров, характеризующих технологичес-
кий режим и влияющих на величину критериев управления. Следо-
вательно, появляется необходимость регулирования технологичес-
ких параметров и нового обращения к статическим и динамическим
характеристикам.
В итоге приходят к созданию комбинированной системы управ-
ления, способной осуществить как регулирование критерия управ-
ления, так и номинальных технологических (режимных) и входных
параметров ТОУ.
Замечание
Технологические параметры, как правило, взаимосвязаны между со-
бой, поэтому управляющие воздействия, направленные на регулирование
одного технологического параметра, оказывают влияние и на другие. На-
пример, изменение количества пара, подаваемого в кипятильник ректифи-
кационной колонны, осуществляемое регулятором температуры, влияет не
только на температуру в кубе колонны, но и на уровень жидкости в нем.
Для ослабления внутренних связей между отдельными параметрами в цепь
управления вводят компенсирующие внешние связи между регуляторами
или выбирают в качестве управляемых (регулируемых) величин парамет-
ры, не связанные (или слабо связанные) между собой
Выбор сигнализируемых технологических параметров
Состояние и свойства ТОУ анализируют на предмет его пожаро-
и взрывоопасности, токсичности, агрессивности перерабатываемых
веществ, возможности аварий и затем приступают к выбору пара-
метров сигнализации. Предаварийной (а при необходимости и пре-
дупредительной) сигнализации подлежат параметры, предельные
значения которых могут привести:
• к взрыву и пожару (например, превышение допустимой кон-
центрации взрывоопасных веществ в технологических аппаратах,
производственных помещениях, рабочей зоне открытых технологи-
ческих наружных установок);
• к несчастным случаям (например, превышение допустимой
концентрации токсичных веществ в помещении);
• к выходу из строя технологического оборудования (например,
при нарушении температурного режима может произойти «загипсо-
вание» реактора сернокислотного разложения фосфатов в производ-
стве экстракционной фосфорной кислоты);
• к нарушению технологического режима (например, превыше-
ние допустимого уровня кислоты в емкости-сборнике, с последую-
щим переливом кислоты);
• к выпуску некондиционной продукции и браку (например, на-
рушение наиболее важных номинальных технологических (режим-
ных) параметров).
6.4. Стадии проектирования систем управления 605
Замечание
Сигнализация о выходе наиболее ответственных технологических пара-
метров за допустимые пределы должна осуществляться от двух параллельно
установленных первичных измерительных преобразователей, например, от двух
первичных измерительных преобразователей уровня легковоспламеняющей-
ся жидкости, и срабатывание устройств сигнализации должно фиксироваться.
6.4.2. Эскизная разработка
На стадии эскизной разработки АСУ ТП выполняются следую-
щие виды работ
• выбор критерия оптимального управления ТОУ, математичес-
кая постановка задачи (центральное место), ее декомпозиция (в случае
необходимости) и выбор методов решения основной и локальных
задач оптимального управления, на основе которых строится алго-
ритм оптимального управления;
• разработка функциональной и алгоритмической структуры АСУ
ТП; определение объема информации о состоянии ТОУ и ресурсов
вычислительного комплекса (быстродействие, объем запоминающих
устройств), необходимых для реализации всех функций АСУ ТП;
• предварительный выбор управляющего вычислительного ком-
плекса и комплекса технических средств;
• предварительный расчет технико-экономической эффективно-
сти АСУ ТП (этот завершающий этап эскизной разработки АСУ ТП
выполняют экономисты).
Основным показателем технико-экономической эффективности
АСУ ТП является срок окупаемости системы Ток. Его можно опре-
делить по формуле:
Ток = {К2 - К\)/\(Ц2 - С2) - - С,)Ь (6.133)
где и К2 — капитальные затраты на автоматизированный техно-
логический комплекс до и после ввода в действие АСУ ТП; и Ц2 —
годовые объемы реализации готовой продукции в оптовых ценах до
и после внедрения АСУ ТП; С( и С2 — себестоимость готовой про-
дукции до и после внедрения АСУ ТП.
6.4.3. Разработка технического проекта
Разработка технического проекта (если создается нетиповая АСУ
ТП) предполагает принятие основных технических решений на ос-
нове технического задания. На этом этапе развиваются и углубля-
ются предпроектные научно-исследовательские работы: уточняются
математические модели и постановки задач оптимального управле-
606 Глава 6. Основы проектирования систем управления ХТП
ния, проверяются с помощью имитационного моделирования на
компьютере работоспособность и эффективность алгоритмов, выб-
ранных для реализации информационных и управляющих функций
АСУ ТП. Уточняются функциональная и алгоритмическая структу-
ры системы, прорабатываются информационные связи между функ-
циями и алгоритмами, наконец, разрабатывается организационная
структура АСУ ТП. Наиболее важный и трудоемкий этап на стадии
технического проекта — разработка специального программного
обеспечения системы.
На стадии разработки технического проекта происходит оконча-
тельный выбор комплекса технических средств, и выполняют рас-
четы по оценке надежности как реализации важнейших функций
АСУ ТП, так и системы в целом.
Комплекс реализуемых способов защиты разрабатывают исходя
из особенностей ТОУ, анализа аварийных ситуаций, а также катего-
рии взрывоопасности ТОУ. По заданной программе системы проти-
воаварийной зашиты (ПАЗ) автоматически перераспределяют мате-
риальные и энергетические потоки, включают и отключают аппара-
ты, чтобы предотвратить взрыв, аварию, несчастный случай, выпуск
некондиционной продукции и брак. При этом ТОУ переводится в
безопасное состояние, вплоть до его останова.
Автоматические способы защиты должны полностью устранить
возникшую критическую ситуацию, при этом последствия от вме-
шательства устройств зашиты должны быть минимальны. Так, на-
пример, при прекращении подачи одного из веществ в реактор дол-
жна быть отключена магистраль подачи другого вещества в этот же
реактор; при превышении предельного значения давления в реакто-
ре должен сработать предохранительный клапан; при достижении
опасного значения концентрации какого-либо вещества перекрыва-
ется магистраль подачи данного вещества и приводится в действие
аварийная система вентиляции и т. д.
Одна из основных задач систем ПАЗ — уменьшение уровня взры-
воопасности ТОУ, в том числе: предотвращение взрывов и пожаров
внутри технологического оборудования; исключение возможных
взрывов и пожаров в производственных зданиях, сооружениях, на-
ружных технологических установках; защита технологического обо-
рудования от разрушения; максимальное ограничение выбросов из
технологического оборудования горючих и токсических веществ в
атмосферу при аварийной разгерметизации.
Заданные значения и время срабатывания систем ПАЗ устанав-
ливают исходя из категории пожаро- и взрывоопасности ТОУ, воз-
можной скорости изменения параметров технологического процес-
са, класса точности первичных измерительных преобразователей и
нормирующих преобразователей, быстродействия системы ПАЗ и т. д.
6 4. Стадии проектирования систем управления
607
Технологические объекты управления, в которых при отклоне-
ниях от номинального режима возможно образование пожаро- и
взрывоопасных смесей, обеспечиваются системами подачи в них
инертных газов, предотвращающих образование взрывоопасных кон-
центраций. Для производств, в которых имеются блоки первой (I)
категории взрывоопасности, предусматривают автоматическое уп-
равление подачей инертного газа, второй (II) и третьей (ПО катего-
рии — дистанционное.
При отключении питания система ПАЗ должна перевести ТОУ в
безопасное состояние, исключая возможность производственных
переключений в системах ПАЗ при восстановлении питания.
Автоматические устройства и средства вычислительной техники,
реализующие функции управления, должны выбираться в рамках ГСИ
с учетом сложности объекта управления и его пожаро- и взрывоопас-
ности, агрессивности и токсичности для окружающей среды, вида
измеряемого технологического параметра и физико-химических
свойств среды, дальности передачи сигналов от первичных измери-
тельных преобразователей и исполнительных устройств до пунктов
управления, требуемой точности и быстродействия, допустимой по-
грешности измерительных систем, места установки устройств, требо-
ваний и правил установки электрооборудования и т. д.
Выбор средств автоматизации для пожаро- и взрывоопасных ТОУ
чрезвычайно ответственен. Производства, в состав которых входят
блоки I категории взрывоопасности, должны оснащаться системами,
базирующимися на резервируемых электронных средствах (включая
ПЭВМ и микропроцессорную технику) с самодиагностикой и свето-
вой индикацией исправного состояния. Такие системы должны рабо-
тать по специальным программам, задающим последовательность и
время выполнения операций отключения при аварийных выбросах.
Для максимального снижения выбросов в окружающую среду при
аварийной разгерметизации блоков I категории предусматривается
установка автоматических быстродействующих запорных и (или) от-
секающих устройств с временем срабатывания не более 12 с.
Технологические блоки II и III категорий взрывоопасности ос-
нащаются эффективными быстродействующими системами приве-
дения технологических параметров к регламентным значениям или
к остановке блоков. Для этих блоков предусматривается установка
устройств с дистанционным управлением и временем срабатывания
не более 120 с.
Примечание
Исполнительные механизмы систем ПАЗ, кроме указателей крайних
положений непосредственно на ИМ, должны иметь обязательно устройства
сигнализации крайних положений в операторских (пунктах управления).
608 Глава 6. Основы проектирования систем управления ХТП
Пример
Производство аммофоса характеризуется наличием агрессивных
сред, запыленности, загазованности, вибрации. В производстве аммо-
фоса имеются также взрывопожароопасные зоны III категории. По-
этому при реконструкции АСУ ТП должны применяться ПЭВМ в про-
мышленном исполнении, а не в офисном. Источники бесперебойного
питания контроллеров и ПЭВМ должны обеспечивать сохранение не-
обходимой мощности в течение 20 минут после исчезновения сетевого
напряжения. Для достижения заданной высокой точности управления
химической реакцией с малым временем пребывания реагентов в труб-
чатых реакторах должны применяться высокоточные измерительные и
исполнительные устройства. В производстве аммофоса не должно быть
невосстанавливаемых в течение 120 с отказов АСУ ТП, если же они
возникнут, то это приведет к аварийной ситуации
6.4.4. Разработка рабочего проекта
В состав рабочего проекта входит рабочая документация. Разра-
ботка рабочей документации является одной из стадий создания АСУ
ТП и включает в себя:
• разработку рабочей документации по информационному, орга-
низационному, методическому, лингвистическому и программному
обеспечению;
• разработку технической документации на технические сред-
ства разового изготовления;
• разработку проектно-сметной строительной документации;
• составление локальной сметы на оборудование и монтаж;
• разработку задания генеральному проектировщику (смежным
организациям или заказчику) на работы, связанные с автоматизаци-
ей объекта управления.
Для простых схем и систем, разрабатываемых с использованием
типовых проектных решений, стадии разработок технического про-
екта и рабочей документации объединяются в одну.
6.4.5. Ввод в действие АСУ ТП,
внедрение и анализ ее функционирования
Цель работ на этой стадии — физическая реализация системы и
передача ее в промышленную эксплуатацию.
Основанием для начала работ по вводу в действие АСУ ТП слу-
жит готовность рабочей документации и несерийных компонентов
средств автоматизации.
Контрольные вопросы 609
Работа по вводу в действие АСУ ТП состоит из следующих этапов:
• подготовка организации к вводу АСУ ТП в действие, обучение
персонала пользователя;
• строительно-монтажные работы;
• комплектация АСУ ТП подготовляемыми комплексами средств
автоматизации, техническими средствами, программными средствами
и т. д.;
• пуско-наладочные работы;
• проведение опытной эксплуатации АСУ ТП;
• проведение приемочных испытаний;
• устранение замечаний, выявленных при испытаниях АСУ ТП;
• приемка АСУ ТП в промышленную эксплуатацию (внедрение
АСУ ТП).
АСУ или отдельно сдаваемая функция АСУ при вводе ее в дей-
ствие должна пройти предварительные и приемочные испытания, а
также испытания, предусмотренные нормативно-техническими до-
кументами заказчика АСУ. Приемочным испытаниям должна пред-
шествовать опытная эксплуатация на объекте управления.
Предварительные испытания АСУ проводят на действующем ТОУ
для определения ее работоспособности и решения вопроса о воз-
можности приемки АСУ в опытную эксплуатацию.
По результатам приемочных испытаний составляется протокол
испытаний и акт о вводе АСУ в действие (или заключение о непри-
емке АСУ с перечнем необходимых доработок и рекомендуемыми
сроками их выполнения).
На стадии анализа функционирования системы проверяют эффек-
тивность решений, принятых при ее создании, определяют факти-
ческую технико-экономическую эффективность АСУ ТП.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Каковы особенности регулирования расхода, уровня, давления, тем-
пературы, pH?
2. Назовите особенности регулирования паро-жидкостного теплооб-
менника.
3. Каким звеном можно представить динамику паро-жидкостного теп-
лообменника?
4. Предложите, учитывая основные возмущаюшие и управляющие воз-
действия, варианты систем регулирования температуры жидкости на выхо-
де промышленного кожухотрубного паро-жидкостного теплообменника.
5. Назовите особенности регулирования массообменных процессов.
6. Предложите варианты регулирования параметров ректификацион-
ной установки.
7. Каковы особенности регулирования химических реакторов?
8. Как выполняется синтез автоматических систем регулирования?
Назовите и поясните этапы синтеза САР.
9. Для чего необходим синтез инвариантных САР?
20 БеаЛловЛ. В.. X фитопоп Н И.
Глава 6. Основы проектирования систем управления ХТП
10. Каковы особенности комбинированного регулирования?
11. Сформулируйте условия физической реализуемости динамическо-
го компенсатора
12. Назовите отличия каскадного регулирования от комбинированного.
13. Приведите примеры двухконтурных каскадных систем регулирования.
14. Объясните понятие «многосвязные системы регулирования». Како-
вы особенности многосвязных систем регулирования?
15. Что характерно для регулирования объектов с запаздыванием?
16. По каким признакам классифицируются регуляторы?
17. Охарактеризуйте регуляторы прямого и непрямого действия.
18. Каковы принципы построения управляющих устройств и как фор-
мируются законы регулирования?
19. Каково назначение исполнительного устройства?
20. Объясните принцип действия регулирующих органов.
21. Перечислите характеристики регулирующих органов.
22. Объясните принцип действия исполнительных механизмов
23. Как происходит выбор исполнительного устройства?
24. Как составляется техническое задание на проектирование систем
управления?
25. Что лежит в основе выбора параметров контроля, сигнализации и
управления?
ГЛАВА_______________________
ОСНОВНЫЕ СВЕДЕНИЯ ОБ АСУ ТП
В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
Это такая штука, которую вы спокой-
но можете объяснить два раза, не опаса-
ясь, что кто-нибудь поймет, о чем вы го-
ворите.
А.А. Милн. Винни-Пух и все-все-все
7.1. НАЗНАЧЕНИЕ АСУ ТП
Автоматизированная система управления технологическим про-
цессом — это человеко-машинная система управления, предназна-
ченная для выработки и реализации управляющих воздействий на
технологический объект управления в соответствии с принятым кри-
терием управления при помощи современных средств сбора и пере-
работки информации и вычислительной техники. Под технологи-
ческим объектом управления (ТОУ) в этом случае понимают сово-
купность технологического оборудования и технологического
процесса, реализованного на нем по соответствующим технологи-
ческим инструкциям и регламентам.
Совокупность совместно действующих АСУ ТП и ТОУ называ-
ют автоматизированным технологическим комплексом (АТК).
Создание и функционирование АСУ ТП направлено на получе-
ние определенных технико-экономических результатов (снижение
себестоимости продукции, уменьшение потерь, повышение качества
целевых продуктов, повышение производительности труда и т. п.).
При функционировании ТОУ на границе критических режимов их
эксплуатация без современной АСУ ТП практически невозможна.
Назначение АСУ ТП — обеспечить безопасность и устойчивость тех-
нологического процесса, проводя его в высокоинтенсивных и эко-
номичных режимах. Немного о целях функционирования АСУ ТП
говорилось ранее (см. разд. 2.2). Естественно, что эти цели разнооб-
разны и могут заключаться в обеспечении безопасности функцио-
нирования ТОУ, стабилизации параметров материальных и энерге-
20*
610
Глава 6. Основы проектирования систем управления ХТП
10. Каковы особенности комбинированного регулирования?
11. Сформулируйте условия физической реализуемости динамическо-
го компенсатора.
12. Назовите отличия каскадного регулирования от комбинированного.
13. Приведите примеры двухконтурных каскадных систем регулирования.
14. Объясните понятие «многосвязные системы регулирования». Како-
вы особенности многосвязных систем регулирования?
15. Что характерно для регулирования объектов с запаздыванием?
16. По каким признакам классифицируются регуляторы?
17. Охарактеризуйте регуляторы прямого и непрямого действия.
18. Каковы принципы построения управляющих устройств и как фор-
мируются законы регулирования?
19. Каково назначение исполнительного устройства?
20. Объясните принцип действия регулирующих органов
21. Перечислите характеристики регулирующих органов.
22. Объясните принцип действия исполнительных механизмов.
23. Как происходит выбор исполнительного устройства?
24. Как составляется техническое задание на проектирование систем
управления?
25. Что лежит в основе выбора параметров контроля, сигнализации и
управления?
ГЛАВА
ОСНОВНЫЕ СВЕДЕНИЯ ОБ АСУ ТП
В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
Это такая штука, которую вы спокой-
но можете объяснить два раза, не опаса-
ясь, что кто-нибудь поймет, о чем вы го-
ворите.
А А Милн. Винни-Пух и все-все-все
7.1. НАЗНАЧЕНИЕ АСУ ТП
Автоматизированная система управления технологическим про-
цессом — это человеко-машинная система управления, предназна-
ченная для выработки и реализации управляющих воздействий на
технологический объект управления в соответствии с принятым кри-
терием управления при помощи современных средств сбора и пере-
работки информации и вычислительной техники. Под технологи-
ческим объектом управления (ТОУ) в этом случае понимают сово-
купность технологического оборудования и технологического
процесса, реализованного на нем по соответствующим технологи-
ческим инструкциям и регламентам.
Совокупность совместно действующих АСУ ТП и ТОУ называ-
ют автоматизированным технологическим комплексом (АТК).
Создание и функционирование АСУ ТП направлено на получе-
ние определенных технико-экономических результатов (снижение
себестоимости продукции, уменьшение потерь, повышение качества
целевых продуктов, повышение производительности труда и т. п.).
При функционировании ТОУ на границе критических режимов их
эксплуатация без современной АСУ ТП практически невозможна.
Назначение АСУ ТП — обеспечить безопасность и устойчивость тех-
нологического процесса, проводя его в высокоинтенсивных и эко-
номичных режимах. Немного о целях функционирования АСУ ТП
говорилось ранее (см. разд. 2.2). Естественно, что эти цели разнооб-
разны и могут заключаться в обеспечении безопасности функцио-
нирования ТОУ, стабилизации параметров материальных и энерге-
20*
612
Глава 7. Основные сведения об АСУ ТП
гических потоков, обеспечении заданных параметров целевых про-
дуктов, оптимизации и согласовании режимов работы технологи-
ческого оборудования и т. п.
Степень достижения цели управления характеризуют с помощью
критерия управления — соотношения, принимающего различные
числовые значения в зависимости от используемых управляющих
воздействий, возмущающих воздействий и параметров состояния
ТОУ. В наиболее общей и часто встречающейся постановке цель
управления ТОУ заключается в обеспечении максимального эконо-
мического эффекта. Например, для установки первичной перера-
ботки нефти критерием управления может служить себестоимость С
целевой продукции:
3-±nniUni
г -____i=l_____
где 3 — затраты на выпуск продукции; 77п, — производительность
установки по побочным продуктам; Пи — производительность уста-
новки по целевому продукту; ЦП1 — цена побочных продуктов
Для сложных и крупных ТОУ (например, производство поли-
этилена, каучука, сложных минеральных удобрений) критерием уп-
равления может служить прибыль:
Прибыль =
/=1 1=1
где 77,- — производительность по целевым продуктам; Ц, — цена про-
изведенной продукции; 3, — суммарные затраты на производство и
автоматизацию.
Для упрощения задачи используют технико-экономические час-
тные критерии управления, учитывающие особенности ТОУ. Такими
частными критериями могут быть: производительность ТОУ при
определенных требованиях к качеству продукции и условиям эксп-
луатации оборудования, расход некоторых компонентов (присадок,
катализаторов) в технологическом процессе, время протекания тех-
нологического процесса от исходного до заданного состояния.
Замечание
В соответствии с особенностями частного критерия ставится задача
его максимизации или минимизации.
Кроме критерия управления необходимо задать в форме равен-
ства и (или) неравенства ограничения, устанавливающие верхние и
(или) нижние пределы для управляющих воздействий и управляемых
переменных. Ограничения бывают двух видов: физические (жесткие)
7.2. Основные функции АСУ ТП
613
и условные. Нарушать физические ограничения нельзя. Условные
ограничения могут нарушаться, но их нарушения приводят к сниже-
нию качественных показателей ведения технологического процесса.
7.2. ОСНОВНЫЕ ФУНКЦИИ АСУ ТП
Функция АСУ ТП — это совокупность действий системы, на-
правленных на достижение определенной цели. В качестве действий
рассматривается последовательность операций и процедур, выпол-
няемых частями системы управления.
Функции АСУ ТП в целом как системы человек—машина вы-
полняются комплексом технических средств системы (техническим
обеспечением АСУ) и человеком — оператором (диспетчером), за
которым, как правило, сохраняется определяющая роль в выполне-
нии наиболее сложных, не поддающихся формализации задач.
Система управления ХТП выполняет ряд функций, объединен-
ных по назначению в подсистемы: информационную, управляющую,
вспомогательную.
7.2.1. Информационная подсистема
Назначение этой системы — предоставление технологическому
персоналу (операторам-технологам, начальникам смен и т. д.) опе-
ративной, достоверной и своевременной, подробной и соответству-
ющим образом обработанной информации о настоящем, будущем и
прошлом химико-технологического процесса. В функции информа-
ционной подсистемы входят: сбор и первичная обработка информа-
ции, расчет показателей качества продукции, расчет технико-эко-
номических показателей, контроль и техническая диагностика объек-
та управления (ХТП).
7.2.1.1. Сбор и первичная обработка информации
Первая операция — периодический опрос первичных измери-
тельных преобразователей (датчиков). Период опроса определяется
особенностями ХТП (инерционностью, запаздыванием, взрыво- и
пожароопасностью) и ресурсами вычислительной техники, поэтому
он может колебаться от нескольких миллисекунд до часа. Техноло-
гическому параметру присваивается измеренное значение до следу-
ющего обращения к первичному измерительному преобразователю.
Вторая операция — фильтрация и прогнозирование техноло-
гических параметров. По полученным результатам измерений необ-
ходимо определить наиболее правдоподобные текущие (в данный
614
Глава 7. Основные сведения об АСУ ТП
момент времени) и прогнозируемые (будущие) значения технологи-
ческих параметров. При фильтрации отбрасываются явно искажен-
ные значения технологических параметров (например, возникшие
вследствие неисправностей информационно-измерительной систе-
мы), и до следующего опроса технологическим параметрам присва-
иваются их расчетные значения.
Примечание
Для реализации этого необходимы расчетные уравнения параметров,
основанные на математической модели технологического процесса. По
имеющимся уравнениям рассчитывают прогнозируемые значения техно-
логических параметров. Необходимость в получении такого рода инфор-
мации появляется в аварийных ситуациях.
Третья операция — усреднение технологических параметров
за заданный промежуток времени (час, смена, сутки). Например, опре-
деление средней температуры в первом слое катализатора контактно-
го аппарата окисления диоксида серы за сутки.
Четвертая операция — расчет действительных значений
технологических параметров по информации, полученной от первичных
измерительных преобразователей с учетом их характеристик и введе-
нием поправок на состояние контролируемых сред. Например, при оп-
ределении расхода F по перепаду давления Ад на сужающем устрой-
стве по упрощенной формуле
F = аАу[Хр/р
с помощью вычислительной техники можно внести поправки в рас-
чет коэффициента расхода а, учесть изменение плотности среды р и
рассчитать (по температуре среды) ее действительное значение и, в
конечном итоге, с большей точностью определить расход среды F.
Пятая операция — интегрирование параметров (например,
интегрирование расхода для вычисления суммарного количества веще-
ства, израсходованного сырья: апатитового концентрата для полу-
чения фосфорных минеральных удобрений, серы для получения кон-
тактной серной кислоты; природного газа; выработанной продук-
ции за некоторый промежуток времени). В этой операции довольно
часто применяют метод дискретного интегрирования, который ос-
нован на вычислении интеграла по формуле прямоугольников:
У = Ху-Лт<’
»-!
где у — интегральное значение параметра из п измерений; Ат,- —
длительность /-го интервала времени; у, — мгновенное значение из-
меряемого параметра.
7.2. Основные функции АСУ ТП 615
Шестая операция — расчет количества продуктов в сборни-
ках и резервуарах по значениям измеренного уровня с учетом текущих
значений физико-химических параметров продуктов.
7.2.1.2. Расчет показателей качества продуктов
Вычислительная техника с ее большими возможностями позволя-
ет рассчитывать показатели качества по текущим значениям парамет-
ров, измеряемых точно и оперативно (температуры, давления, расхо-
ды, уровни). Но для реализации такого подхода необходимо уравне-
ние, связывающее показатели качества и измеряемые технологические
параметры. Чаще всего используют уравнения регрессии, представ-
ляющие собой полином первой степени от технологических парамет-
ров, число которых, как правило, не превышает четырех, например.
Г = tz0 + atyt + о2у2 + a3y3 + a4y4,
где Y— показатель качества продукции, — параметры процес-
са; av..a4 — коэффициенты регрессии.
Результаты лабораторных анализов полученной продукции по-
стоянно вводятся в память вычислительной техники, что позволяет
корректировать уравнения регрессии в одном темпе с получением
достоверных данных путем изменения коэффициентов а. Эти коэф-
фициенты меняются так, чтобы погрешность рассчитанного значе-
ния Убыла минимальной.
Примечание
Автоматические анализаторы в химической промышленности характе-
ризуются большим запаздыванием (связанным, например, с отбором проб),
сложной конструкцией и высокой ценой. Во многих случаях анализ каче-
ства продукта выполняется периодически. В настоящее время интенсивно
ведутся разработки программных анализаторов виртуальных вискози-
метров, газоанализаторов и т. п. Виртуальные измерительные приборы ис-
пользуют математические модели, связывающие показатель качества про-
дукта с другими физическими величинами, для измерения которых приме-
няются более быстродействующие, точные и дешевые средства измерения.
Таким образом, виртуальные измерительные приборы позволяют косвенно
оценить текущее значение измеряемой величины, что равносильно приме-
нению непрерывно действующих анализаторов. Они позволяют также про-
гнозировать изменение измеряемой величины, что можно использовать для
улучшения качества управления объектами с большим запаздыванием или
для технической диагностики.
7.2.1.3. Расчет технико-экономических показателей
К технико-экономическим показателям технологического про-
цесса можно отнести количество производимых основных и побоч-
ных продуктов, а также удельные расходы (расходы на единицу вы-
616
Глава 7. Основные сведения об АСУ ТП
рабатываемой продукции, например, на 1 тонну) всех видов сырья,
топлива, электроэнергии, пара, воздуха, воды, вспомогательных ма-
териалов.
7.2.1.4. Контроль и техническая диагностика ХТП
Основные задачи: обнаружение отклонений значений технологи-
ческих параметров от заданных (номинальных) значений, гарантиру-
ющих нормальное протекание технологического процесса и выпуск
продукции, соответствующей ГОСТу; техническая диагностика обо-
рудования, учет его пробега, определение срока ремонта и т. д.
7.2.2. Управляющая подсистема
Управляющая подсистема предназначена для выработки и реа-
лизации управляющих воздействий на ТОУ. Выработка управляю-
щих воздействий происходит на основании имеющейся информа-
ции. Управляющими функциями являются: одноконтурное, каскад-
ное или многосвязное автоматическое регулирование; оптимизация
статических и динамических режимов; координация подсистем и
оптимальное распределение ресурсов; адаптивное управление с са-
мообучением и изменением алгоритмов и параметров системы уп-
равления.
Основной тенденцией развития АСУ ТП является расширение
использования электронных вычислительных машин и объема функ-
ций, передаваемых им. Применение компьютеров повышает эффек-
тивность работы ТОУ за счет улучшения представления информа-
ции операторам-технологам о состоянии ТОУ, оптимизации стати-
ческих и динамических режимов, сокращения времени пуска и
останова оборудования, предотвращения и локализации аварийных
ситуаций, облегчения анализа и прогноза протекания нормальных и
аварийных режимов работы ТОУ.
7.2.2.1. Регулирование отдельных технологических
параметров
Регулирование отдельных технологических параметров обычно
выполняется с помощью традиционных алгоритмов регулирования
(П-, И-, ПИ-, ПД-, ПИД-регуляторами). Для этих целей можно
использовать, например, микропроцессорные контроллеры. Приме-
нение вычислительной техники позволяет реализовать любой слож-
ный закон регулирования и создавать адаптивные системы управле-
ния, способные самостоятельно подбирать подходящий для данного
ТОУ закон регулирования и рассчитывать параметры его настройки.
7.3. Разновидности АСУ ТП
617
7.2.2.2. Программно-логическое управление
По командам вычислительной техники происходит открытие и
закрытие РО, установленных на трубопроводах, включение и от-
ключение технологических аппаратов, насосов, вентиляторов, ком-
прессоров. Такое управление может быть реализовано по двум вари-
антам:
I) при пуске и останове ТОУ по жесткой временной программе;
II) при переходе ТОУ с одного режима на другой (или возникно-
вение какого-то нежелательного технологического события) при
достижении характерным технологическим параметром заданного
критического значения.
Для этих целей можно использовать программируемый логичес-
кий контроллер. Такая функция может быть возложена на вычисли-
тельную технику, например, на персональную ЭВМ.
7.2.2.3. Оптимальное управление
Поиск и выдача оптимальных управляющих воздействий, спо-
собных обеспечить наилучшее достижение цели управления, проис-
ходят на основе математической модели ХТП, отражающей физи-
ческие и прочие явления, происходящие в ТОУ. Алгоритм, постро-
енный на основе математического описания ТОУ, позволяет
прогнозировать поведение ТОУ при поступлении в него возмущаю-
щих и управляющих воздействий
7.2.3. Вспомогательная подсистема
Вспомогательная подсистема предназначена выполнять функ-
ции, обеспечивающие нормальную эксплуатацию АСУ ТП. Вспо-
могательные функции АСУ ТП заключаются в сборе и обработке
данных о состоянии технического и программного обеспечения АСУ
ТП и представлении этой информации персоналу или осуществле-
нии управляющих воздействий на соответствующие технические
средства АСУ.
7.3. РАЗНОВИДНОСТИ АСУ ТП
В зависимости от распределения функций между техническими
средствами автоматизации, степени централизации управления тех-
нологическими процессами и структуры вычислительной информа-
ционно-управляюшей системы (вычислительного комплекса) раз-
личают несколько разновидностей АСУ ТП.
618
Глава 7. Основные сведения об АСУ ТП
7.3.1. АСУ ТП, в которых все информационные
и управляющие функции выполняются
без применения вычислительного комплекса
Основные функции таких систем управления: измерение и кон-
троль параметров технологического процесса; стабилизация тех-
нологических режимов процесса на уровне, определяемом регла-
ментом производства; программное управление (включая пуск и
останов технологического процесса); защита технологического обо-
рудования от аварий; оперативная связь с другими ступенями уп-
равления.
7.3.2. АСУ ТП с вычислительным комплексом,
выполняющим информационно-вычислительные
функции
Системы этого вида содержат все функциональные элементы,
характерные для предыдущей разновидности АСУ ТП, и дополне-
ны вычислительным комплексом (ВК). Вычислительный комплекс
получает информацию о состоянии ТОУ и выполняет функции цен-
трализованного контроля и вычисления комплексных технических
и технико-экономических показателей На оператора-технолога воз-
лагают анализ информации, выработку решений и реализаций уп-
равляющих воздействий. Полученные данные выводятся на сред-
ства отображения информации, а также передаются в вышестоя-
щую АСУ для дальнейшей обработки и анализа, построения и (или)
уточнения математической модели управляемого технологическо-
го процесса.
7.3.3. АСУ ТП с вычислительным комплексом,
выполняющим функции «советчика» оператора
Кроме функций, возложенных на ВК в предыдущей разновид-
ности АСУ ТП, вычислительный комплекс решает задачу анализа и
принятия решений с выдачей рекомендаций по управлению («сове-
тов») оператору-технологу. Воздействия, необходимые для прибли-
жения технологического процесса к оптимуму, определяются вычис-
лениями по модели, и результаты представляются оператору-техно-
логу, который управляет процессом, изменяя задания автоматическим
регуляторам или выполняя другие действия, следуя рекомендациям,
вырабатываемым ВК.
7.3. Разновидности АСУ ТП
619
7.3.4. АСУ ТП с вычислительным комплексом,
выполняющим функции центрального
управляющего устройства
(супервизорное управление)
Особенность данного вида управления заключается в том, что
ВК включен в замкнутый контур управления и вырабатывает управ-
ляющие воздействия по изменению заданий системам автоматическо-
го регулирования (рис. 7.1, а). Задача супервизорного управления —
поддержание процесса вблизи оптимальной рабочей точки, опера-
тивно воздействуя на нее. Работа информационной части системы
супервизорного управления такая же, как и работа системы «совет-
чика» оператора. Процедуры вычислений по определению управля-
ющих воздействий одинаковы. После того как расчеты по матема-
тической модели выполнены, значения управляющих воздействий
преобразуются в сигналы, используемые для изменения заданий и
настроек регуляторов. Контур управления в АСУ ТП замкнут через
ВК, а функции оператора-технолога сводятся к наблюдению. Опе-
ратор-технолог выполняет управляющие функции только в том случае,
если произошло нарушение нормального режима работы системы.
7.3.5. АСУ ТП с вычислительным комплексом,
выполняющим функции непосредственного
(прямого) цифрового управления
В режиме непосредственного цифрового управления (НЦУ) сиг-
налы, используемые для приведения в действие исполнительных
устройств, вырабатываются непосредственно ВК, а автоматические
регуляторы исключены из системы (рис. 7.1, б) или используются
как резерв. ВК рассчитывает требуемые значения управляющих воз-
действий и передает соответствующие сигналы на исполнительные
механизмы регулирующих органов (ИУ), причем это выполняется
для каждого контура регулирования. В зависимости от типа техно-
логического процесса и мощности ВК число контуров регулирова-
ния может достигать несколько сотен. Одно из главных преиму-
ществ данного вида управления — возможность изменения алгорит-
мов регулирования и управления для контуров простым внесением
изменений в программу. Естественно, что такие изменения должны
быть тщательно подготовлены, а новая программа полностью про-
верена перед ее использованием в системе.
Применение ВК делает удобным построение программным пу-
тем сложных систем каскадного и многосвязного регулирования,
620
Глава 7. Основные сведения об АСУ ТП
►i Технологический
объект
управления
Рис. 7.1. Режимы работы АСУ:
а — супервизорное управление, б — непосредственное цифровое управление
7.3. Разновидности АСУ ТП
621
учитывающих взаимосвязи между отдельными частями ТОУ. Пря-
мое управление от ВК позволяет реализовать как оптимизирую-
щие функции, так и операции по управлению основным техноло-
гическим и вспомогательным оборудованием в режимах пуска и
останова.
Замечание
Некоторые внедряемые системы управления являются комбинацией
систем НЦУ и супервизорного управления. НЦУ предъявляет повышен-
ные требования к надежности ВК, поскольку отказ ВК приводит к отказу
своей системы управления.
7.3.6. Распределенные АСУ ТП
В АСУ ТП данного вида различные функции могут быть выпол-
нены несколькими взаимосвязанными процессорами, объединенны-
ми в вычислительную сеть. Широкое применение в распределенных
АСУ ТП микроЭВМ позволяет приблизить средства обработки дан-
ных к ТОУ, сократить потоки информации к центральному ВК и
осуществить комплекс мер по повышению надежности АСУ ТП —
самодиагностику технических средств, автоматическое резервиро-
вание, обнаружение и исправление неисправностей.
Распределенная система управления (РСУ) сочетает преимуще-
ства систем управления, основанных на вычислительной технике, с
достоинствами децентрализованных систем, основанных на локаль-
ных средствах автоматики, которым присуща «живучесть».
Различают функциональное и территориальное разделение РСУ.
Функциональная децентрализация предполагает упрощение про-
цесса управления, распределяя отдельные функции управления и их
реализацию на отдельные ПЭВМ. Например, на ПЭВМ №1 возлага-
ются все информационные функции (рис. 7.2, а), на ПЭВМ № 2 -
вспомогательные, на ПЭВМ № 3 — управляющие.
Естественно, такой подход повышает надежность и эффектив-
ность системы управления в целом (можно сравнить с централизо-
ванной системой управления, изображенной на рис. 7.2, б). Более
того, жизнеспособность РСУ можно повысить за счет частичного
перекрытия функций, выполняемых отдельными микроЭВМ.
Замечание
Первой и еще кое-где действующей в настоящее время в химической
промышленности из технических структур АСУ ТП была централизован-
ная. В системах с централизованной структурой вся информация, необхо-
димая для управления автоматизированными технологическими комплек-
сами (АТК), поступает в единый центр — операторский пункт, где установ-
лены все технические средства АСУ ТП (исключая источники информации
622
Глава 7. Основные сведения об АСУ ТП
Рис. 7.2. Структурные схемы АСУ ТП:
а функционально децентрализованная; б— централизованная; в—терри-
ториально-децентрализованная
и исполнительные устройства) и где находится оперативный персонал. Та-
кая техническая структура проста и характеризуется рядом очевидных экс-
плуатационных достоинств. К недостаткам же относится: избыточное чис-
ло элементов для обеспечения высокой надежности функционирования АСУ
ТП, большие затраты дефицитного кабеля для связи. Централизованную
АСУ ТП целесообразно применять для сравнительно небольших по мощ-
ности и компактных АТК с невысокими требованиями к надежности.
7.4. Режимы работы АСУ ТП
623
Территориальная децентрализация предполагает территориаль-
ное распределение микроЭВМ (рис. 7.2, в) по технологическим уча-
сткам объекта управления, т. е. приближая средства обработки ин-
формации к ее источникам и потребителям (к установкам ТОУ).
Как правило, РСУ сочетает оба вида распределения.
При создании РСУ соблюдается иерархический принцип уп-
равления: на нижнем уровне — управление отдельными установка-
ми ТОУ (или выполнение отдельных функций) осуществляется мик-
роЭВМ (ПЭВМ); на верхнем уровне - управление всей системой
осуществляется управляющим вычислительным комплексом (УВК).
На этот компьютер возлагается: согласование работы всех частей
АСУ ТП, оптимальное управление ТОУ в целом, управление в
предаварийных и аварийных ситуациях; контроль за локальными
микроЭВМ; подготовка, хранение и подпитка программ микро-
ЭВМ. При отказе микроЭВМ центральная ЭВМ может взять на
себя часть ее функций. Поскольку предполагается достаточно вы-
сокая автономность микроЭВМ, даже выход из строя управляю-
щей ЭВМ не способен привести к катастрофическим последстви-
ям. Иначе говоря, такой подход в создании РСУ повышает «живу-
честь» системы в целом.
7.4. РЕЖИМЫ РАБОТЫ АСУ ТП
Для АСУ ТП характерно наличие двух режимов работы: автома-
тизированного и автоматического.
7.4.1. Автоматизированный режим
В зависимости от участия человека (технологического персонала)
в управлении возможны следующие варианты данного режима: руч-
ное управление, режим «советчика», диалоговый режим.
7.4.1.1. Ручное управление
На основе получаемой по различным каналам информации о
состоянии ТОУ оперативный персонал принимает решения об из-
менении технологического режима и воздействует на технологичес-
кий процесс. Операторы могут либо непосредственно изменять уп-
равляющие воздействия (дистанционно из пункта управления, зак-
рывая или открывая регулирующие органы), либо менять задания
автоматическим регуляторам.
624
Глава 7. Основные сведения об АСУ ТП в ХП
7.4.1.2. Режим «советчика»
Действенность этого режима определяется правильностью реко-
мендаций, выработанных ЭВМ. В этом режиме ЭВМ рекомендует
операторам-технологам через монитор оптимальные значения ос-
новных режимных технологических параметров (например, темпе-
ратуры в реакторе, расхода исходного сырья в реакторе, pH среды).
Оператор-технолог, проанализировав полученные рекомендации,
поступившую информацию о технологическом процессе, а также
учитывая собственный опыт и интуицию, принимает решение о це-
лесообразности изменения технологического режима. Принимая
«совет», оператор-технолог вмешивается в технологический режим
ТОУ, либо меняя задания автоматическим регуляторам, либо не-
посредственно (как в режиме ручного управления).
7.4.1.3. Диалоговый режим
Оператор запрашивает через ЭВМ дополнительную информа-
цию о наличии сырья, о прогнозируемых показателях качества це-
левой продукции, анализирует ее и затем принимает решение о це-
лесообразности изменения технологического режима.
7.4.2. Автоматический режим
В отличие от автоматизированного режима, этот режим работы
АСУ ТП предусматривает формирование и реализацию управляю-
щих воздействий без какого-либо участия человека (оператора-тех-
нолога). Возможны следующие варианты этого режима: супервизор-
ное управление (см. рис. 7.1, а), непосредственное цифровое управ-
ление (см. рис. 7.1, б).
7.4.2.1. Супервизорное управление
ЭВМ автоматически изменяет задания автоматическим регуля-
торам и параметры их настройки. Одновременно на программном
уровне решаются вопросы защиты ТОУ от опасных и ненужных из-
менений технологических параметров.
7.4.2.2. Непосредственное цифровое управление
В этом режиме ЭВМ реализует результаты расчетов по поиску
оптимальных режимов путем воздействия на исполнительные уст-
ройства. Требования к надежности управляющей подсистемы в та-
ком режиме управления неизмеримо возрастают, гем более что уп-
7.5. Обеспечение АСУ ТП
625
равляющая подсистема должна учитывать все возможные техноло-
гические режимы работы ТОУ и не допускать ухода его в неустой-
чивое состояние, где возможны различные аварийные ситуации.
7.5. ОБЕСПЕЧЕНИЕ АСУ ТП
Для выполнения функций, рассмотренных в разд. 7.2, необходи-
мы техническое, программное, математическое, информационное, мет-
рологическое, лингвистическое и организационное обеспечение АСУ ТП
и оперативный персонал.
Термином «техническое обеспечение АСУ ТП» принято опреде-
лять комплекс технических средств (КТС), обеспечивающих функ-
ционирование АСУ ТП. Совокупность технических средств и про-
грамм, используемых для создания АСУ ТП, называют программно-
техническим комплексом (ПТК).
7.5.1. Техническое обеспечение
В состав технического обеспечения входят:
• средства получения, преобразования, передачи и отображения
информации (первичные измерительные преобразователи, норми-
рующие преобразователи, средства измерения);
• средства вычислительной техники, управляющие устройства
(регуляторы, промышленные контроллеры);
• исполнительные устройства (исполнительные механизмы, ре-
гулирующие органы).
Примечание
Термином «промышленный контроллер» обозначают специализирован-
ное микропроцессорное устройство со встроенным аппаратным и программ-
ным обеспечением, которое используется для выполнения функций управ-
ления технологическим оборудованием.
Состав и структура КТС определяются особенностями ТОУ, фун-
кциями и режимами АСУ ТП.
Непосредственно на объекте управления устанавливаются:
• первичные измерительные преобразователи, воспринимаю-
щие параметры технологического процесса (давление, расход га-
зов или жидкостей, температуру, уровень жидкости, электричес-
кую мощность);
• сигнальные двухпозиционные устройства, передающие инфор-
мацию о состоянии (включении или выключении) того или иного
технологического оборудования;
626
Глава 7. Основные сведения об АСУ ТП
• исполнительные устройства, реализующие управляющие воз-
действия открытием клапанов и заслонок, изменением частот вра-
щения двигателей, режима работы насосов.
Основа ПТК современных АСУ ТП — микропроцессорные сред-
ства, микроЭВМ. Условно их делят на аппаратные, программно-
аппаратные и программируемые. Приведенная классификация но-
сит приближенный характер. Четких границ между классами ПТК
не существует, а в последние годы они тем более размываются, так
как открытость и стандартность отдельных компонентов таких ком-
плексов позволяет компоновать их из разных средств, соединять
различными типовыми сетями и создавать систему управления из
отдельных компонентов, выпускаемых разными фирмами и относя-
щихся к разным классам
Замечание
При переходе от традиционных аналоговых средств автоматизации к
микропроцессорным средствам расширяются функциональные возможно-
сти и увеличивается гибкость систем управления, повышается точность.
Микропроцессорные измерительные приборы могут не только регистри-
ровать текущее значение нескольких технологических параметров, но и
определять их отклонение от номинальных значений, рассчитывать сред-
нее значение технологического параметра за заданный промежуток време-
ни и т. д.
Аппаратные средства — микропроцессорные устройства с жест-
кой логикой, реализуемой программами, записанными в постоян-
ном запоминающем устройстве. Их применяют для выполнения сле-
дующих функций: сбор данных, одноконтурное цифровое регулиро-
вание, представление данных, индикация, сигнализация, первичная
обработка информации, программное логическое управление и т. д.
Число обслуживаемых входов и выходов может быть сравнительно
невелико. В состав аппаратных средств входят микропроцессор (или
интегральные микросхемы), память, таймер, коммутатор, устрой-
ства для перехода от автоматического режима управления к ручному
и обратно, интерфейс. На их основе создаются отдельные преобра-
зователи, регуляторы.
Программно-аппаратные средства построены на основе микро-
процессорных комплексов и микроЭВМ. Они предназначены для
реализации функций средней сложности АСУ ТП: многоконтурного
цифрового регулирования, многосвязного программно-логического
управления, многоканального сбора информации, обработки и конт-
роля технологических параметров со средним быстродействием и с
большим числом обслуживаемых входов и выходов. В состав про-
граммно-аппаратных средств входят комплекты микропроцессоров,
память, автономный источник питания, модули сопряжения с уст-
ройствами ввода-вывода и с ЭВМ верхнего уровня.
7.5. Обеспечение АСУ ТП 627
Примечание
Реализованные на базе микропроцессорной техники устройства, пред-
назначенные для сбора, преобразования, обработки, хранения информа-
ции и выработки команд управления, называют программируемыми логичес-
кими контроллерами (ПЛК). Первоначально они предназначались для за-
мены релейно-контактных схем, собранных на дискретных компонентах —
реле, счетчиках, таймерах, элементах жесткой логики. Принципиальное
отличие ПЛК от релейных схем заключается в том, что все его функции
реализованы программно. На одном контроллере можно реализовать схе-
му, эквивалентную тысячам элементов жесткой логики. При этом надеж-
ность работы схемы не зависит от ее сложности. ПЛК работают в локаль-
ных и распределенных системах управления в режиме реального времени в
соответствии с заданной программой.
Промышленные контроллеры, относящиеся, как правило, к про-
граммно-аппаратным средствам, строятся по модульному принципу
и являются многофункциональными.
В общем случае промышленный контроллер содержит следую-
щие модули: микропроцессор, интегральные схемы памяти, жидко-
кристаллический дисплей, усилители, АЦП, ЦАП и др. Особеннос-
тью применяемых в АСУ ТП промышленных контроллеров является
возможность хранения в памяти измеренных значений технологи-
ческих параметров. Это позволяет отображать на дисплее историю
изменения параметра в течение длительного времени.
Для обработки сигналов в большинстве промышленных контрол-
леров предусмотрен набор типовых программ: извлечение квадрат-
ного корня, кусочно-линейная аппроксимация, интегрирование,
дифференцирование, фильтрация, масштабирование сигнала зада-
ния при внешнем каскадном соединении, вычисление сигнала ком-
пенсации основного возмущающего воздействия, ограничение вы-
ходного сигнала и др. Чтобы улучшить качество регулирования не-
стационарных процессов, предусматривается самонастройка каждого
регулятора. Промышленные контроллеры могут быть подключены к
ПЭВМ либо через интерфейс, либо через сеть. Наличие сети позво-
ляет соединять контроллеры между собой для обмена данными.
Программируемые средства применяются для выполнения слож-
ных функций, а также для управления ТОУ большой информацион-
ной мощности (это характерно для многих химических производств).
Они реализуются на многомашинных комплексах микро- и мини-
ЭВМ, входящих в локальные управляющие вычислительные сети.
ЭВМ в АСУ ТП. Функциональное назначение ЭВМ, их место и
роль в системах управления обусловливают ряд специфических тре-
бований: обеспечение обмена информацией между объектом управ-
ления и управляющим устройством; решение задач управления, сбора
и переработки информации в реальном масштабе времени; обеспе-
чение большой продолжительности непрерывной работы; обеспече-
628
Глава 7. Основные сведения об АСУ ТП
ние высокой надежности и программной устойчивости к сбоям и
отказам аппаратуры; возможность реализации широкого круга задач
управления в течение всего периода эксплуатации системы.
Отличительной особенностью управляющих ЭВМ является при
сутствие в них устройства связи с объектом.
Устройства связи с объектом (УСО) предназначены для сбора,
передачи и ввода в управляющий вычислительный комплекс (УВК)
в режиме реального времени информации, поступающей от первич-
ных измерительных преобразователей, а также для вывода из УВК
управляющих сигналов на исполнительные устройства (см. рис. 7.1).
УСО представляют собой совокупность модулей, позволяющих
принимать, обрабатывать, выдавать сигналы различного типа в ши-
роком диапазоне значений напряжения, тока, мощности, длитель-
ности импульсов, обеспечивая сопряжение вычислительного комп-
лекса с разнообразными техническими средствами (датчиками, ис-
полнительными механизмами и другими устройствами).
Устройства связи с объектом могут быть пассивными и выпол-
нять операции по сбору информации и выдаче управляющих ко-
манд под управлением центрального микропроцессора-контролле-
ра. В этих модулях как минимум должны выполняться фильтрация
и аналого-цифровое преобразование сигналов и при необходимости
гальваническое разделение.
УСО могут быть «интеллектуальными», т. е. имеющими собствен-
ные встроенные микропроцессоры, которые обеспечивают выпол-
нение функций первичной обработки., контроля достоверности, кор-
рекции значений, присвоения меток времени событиям и т. п.
В состав ПТК могут входить специализированные интеллектуаль-
ные модули УСО, предназначенные для реализации функций цифро-
вого регулирования (управления). Эти модули, позволяющие реализо-
вать требуемые алгоритмы автоматического управления, должны обес-
печивать прием определенного количества аналоговых, дискретных
сигналов, а также формирование и выдачу управляющих сигналов.
Примечание
УСО в виде специализированных модулей могут входить в состав кон-
троллеров, либо представлять собой отдельные конструктивно закончен-
ные изделия двух модификаций: для размещения в щитовой и выносных
для размещения на объекте вблизи источников информации.
Устройства ввода аналоговых сигналов (рис. 7.3) обеспечивают
прием, нормализацию и фильтрацию (все три операции осуществ-
ляют модули нормализации) и коммутацию (коммутатор) электри-
ческих аналоговых сигналов от первичных измерительных преобра-
зователей (датчиков), а также преобразование их с помощью анало-
го-цифрового преобразователя в цифровой кодовый сигнал.
7.5. Обеспечение АСУ ТП
629
Рис. 7.3. Структурная схема ввода аналоговых сигналов в УВК.
МН — модули нормализации; АЦП — аналого-цифровые преобразователи
Сигналы от термопреобразователей сопротивления должны по-
ступать в УСО по четырех- или трехпроводной линии связи.
УСО для ввода сигналов от термоэлектрических преобразовате-
лей (термопар) должны допускать их заземление в местах установки
на объекте.
Устройства ввода дискретной информации используются для при-
ема дискретных сигналов от двухпозиционных, кодовых и число-
импульсных сенсоров, преобразования их в цифровой кодовый сиг-
нал и проведения над ними простейших арифметических (типа сло-
жения) и логических операций.
Устройства вывода аналоговой информации служат для линейного
преобразования цифровых кодовых сигналов в токовый аналоговый
унифицированный сигнал стандартного диапазона 0...5 мА. Возможна
установка цифроаналогового преобразователя (ЦАП) на каждом
выходном канале или же одного ЦАП, работающего в режиме раз-
деления времени и с выходным запоминающим усилителем в каж-
дом выходном канале. ЦАП выпускают в двух модификациях: для
вывода информации из УВК на аналоговые показывающие и регис-
трирующие приборы и для управления исполнительными устрой-
ствами.
Устройства вывода дискретной информации вырабатывают цифро-
вые управляющие сигналы. Выходами этих устройств могут быть сиг-
налы тока или напряжения, срабатывание полупроводникового клю-
ча или замыкание электромеханического реле. Эти устройства могут
быть использованы для непосредственного (прямого) управления или
630
Глава 7. Основные сведения об АСУ ТП
для изменения задания регуляторам. По мощности дискретные вы-
ходные сигналы делятся на маломощные (меньше 10 ВА), средней
мощности (от 10 ВА до 50 ВА) и большой мощности (выше 50 ВА)
7.5.2. Программное обеспечение
Программное обеспечение (ПО) представляет собой совокупность
программ, необходимых для реализации всех функций АСУ ТП
Программное обеспечение должно отвечать следующим прин-
ципам:
• блочно-модульное построение всех составляющих ПО;
• иерархическая структура ПО и данных;
• эффективность (минимальная затрата вычислительных ре-
сурсов);
• открытость (возможность расширения и модификации);
• гибкость (возможность внесения изменений и перенастройки);
• надежность (соответствие заданному алгоритму, отсутствие лож-
ных действий, защита от разрушения и несанкционированного дос-
тупа как программ, так и данных);
• живучесть (выполнение возложенных функций в полном или
частичном объемах при сбоях и отказах, восстановление после
сбоев);
• унификация решений.
Программное обеспечение реализуется на двух уровнях управле-
ния: на верхнем уровне в среде рабочих станций (операторских, ин-
женерных, архивных), построенных на базе персональных компью-
теров, и на нижнем уровне в среде программируемых контроллеров.
Программное обеспечение разделяется на базовое (общее, фир-
менное) и прикладное (специальное, пользовательское).
7.5.2.1. Базовое программное обеспечение
Базовое ПО поставляется разработчиком ПТК и включает в себя
системное ПО и ПО инструментальных средств разработки, отладки
и документирования.
В системное ПО входят:
• стандартные операционные системы;
программы поддержки обмена данными;
• системы управления базами данных.
Используемые в ПТК операционные системы должны обеспе-
чивать: высокую производительность; поддержку многозадачного
режима; модульность, гибкую конфигурируемость; высокую устой-
чивость и надежность; многоуровневую, основанную на приорите-
тах, обработку прерываний; поддержку стандартных сетей, а также
7.5. Обеспечение АСУ ТП
631
различных промышленных интерфейсов ввода-вывода; удобный и
понятный пользователю графический интерфейс.
Инструментальные средства предназначены для максимального
упрощения и облегчения процесса разработки, проектирования, до-
кументирования и отладки АСУ ТП. Они должны, как правило, со-
вмещать в себе функции разработки и тестирования. Программное
обеспечение инструментальных средств базируется на действующих
стандартах и используется для решения наиболее сложных вопро-
сов, связанных с автоматизацией процессов создания прикладных
программ АСУ ТП: прием и обработка сигналов, организация авто-
матического управления исполнительными устройствами, визуали-
зация измеренных величин (в том числе в виде графиков, гисто-
грамм и т. п.), ведение архивов и генерации отчетов.
Программное обеспечение инструментальных средств разработ-
ки, отладки и документирования включает в себя:
• средства настройки базового ПО;
• средства диагностики и самодиагностики ПТК;
• средства создания и отладки прикладного ПО
7.Б.2.2. Прикладное программное обеспечение
Прикладное ПО представляет собой совокупность программ,
реализующих информационные, управляющие и вспомогательные
функции (обеспечение заданного функционирования технических
средств системы, проверка правильности ввода информации и т. п.)
конкретной АСУ ТП. Оно может разрабатываться как поставщиком
ПТК, так и разработчиком АСУ ТП.
Прикладное программное обеспечение содержит следующие ос-
новные программы:
• линеаризации характеристик первичных преобразователей (дат-
чиков);
• контроля достоверности сигналов,
• сглаживания (фильтрации) сигналов первичных измеритель-
ных преобразователей (датчиков);
• обнаружения выхода параметров за допустимые пределы;
• архивации данных;
• отображения информации (операторам, технологам и т. д.);
• технологической сигнализации;
• составления отчетов;
• автоматического регулирования;
• технологических защит и блокировок;
• вычисления технико-экономических показателей работы тех-
нологического оборудования; вычисления управляющих воздействий;
• оптимизации технологического процесса.
632
Глава 7. Основные сведения об АСУ ТП
7.5.3. Математическое обеспечение
Математическое обеспечение представляет собой комплекс мате-
матических методов, моделей и алгоритмов,' используемых при раз-
работке и функционировании системы управления. Математичес-
кая формулировка задачи управления включает математическую
модель объекта, критерий управления и ограничения. Для представ-
ления модели в аналитической форме необходимо знание физичес-
кой природы ТОУ, его структуры и конструктивных особенностей.
Если характеристики ТОУ подвержены изменениям, то соответствие
модели объекту должно непрерывно проверяться и уточняться на
основе информации о состоянии объекта. Вычислительная техника,
входящая в АСУ, накапливает информацию об управляемом техно-
логическом процессе в виде совокупности значений измеряемых
параметров, сведений о состоянии оборудования и других данных,
затем перерабатывает эту информацию с целью выработки управля-
ющих воздействий. Переработку информации вычислительная тех-
ника осуществляет по алгоритму, который определяет, каким обра-
зом, располагая информацией о технологическом процессе, полу-
ченной на основе измерений, и зная ограничения, накладываемые
на технологический процесс, выбрать целесообразные управляющие
воздействия в различных производственных ситуациях.
Замечание
Алгоритм, выполняемый вычислительной техникой, примерно соот-
ветствует рассуждениям и вычислениям, которые должен был бы сделать
сам оператор-технолог в отсутствие вычислительной техники. Такой алго
ритм-инструкция, выраженный на формальном языке математических фор
мул и логических условий, определяет последовательность действий, каж-
дое из которых соответствует выполнению вычислительной техникой оп-
ределенной операции.
На основе математического обеспечения разрабатывается про-
граммное обеспечение.
Структурой и характеристиками программного и математичес-
кого обеспечения определяется другой вид обеспечения АСУ ТП —
информационное.
7.5.4. Информационное обеспечение
Информационное обеспечение представляет собой совокупность
сведений о потоках и массивах информации, характеризующих со-
стояние автоматизированного технологического комплекса.
Информационное обеспечение включает:
7.5. Обеспечение АСУ ТП
633
• перечень и характеристики сигналов, с помощью которых пе-
редается информация о ТОУ и системе управления;
• описание систем классификации и кодирования технической
и технико-экономической информации;
• описание массивов информации, форм документов и видео-
кадров, используемых в системе;
• описание нормативно-справочной информации, используемой
в системе.
7.5.5. Метрологическое обеспечение
Метрологическое обеспечение — совокупность работ, проектных
решений, технических и программных средств, а также различного
рода организационных мероприятий, обеспечивающих заданную
точность измерений. Метрологическое обеспечение выполняется для
информационно-измерительной системы (ИИС) на всех стадиях
создания и функционирования АСУ ТП. На стадии разработки АСУ
ТП необходимо обеспечивать единство измерений и их точность для
заданных условий эксплуатации, выбирая определенные техничес-
кие средства. Фильтрация измеряемых значений технологических
параметров и выбор достоверных значений обеспечиваются про-
граммными решениями. Разработчиками определяются виды и по-
рядок метрологической аттестации ИИС. На стадии эксплуатации
АСУ ТП метрологические службы предприятий анализируют состо-
яние метрологического обеспечения ИИС, осуществляют метроло-
гическую аттестацию заданных средств измерений, организуют по-
верку средств автоматизации.
7.5.6. Лингвистическое обеспечение
Описание языковых средств общения оперативного технологи-
ческого персонала с управляющим вычислительным комплексом
называют лингвистическим обеспечением. Оно рассчитано на пользо-
вателя, который является специалистом в своей предметной облас-
ти, но не владеет универсальными языками программирования или
описания алгоритмов. Лингвистическое обеспечение оператора сво-
дится к системе видеокадров и текстовых сообщений, снабженных
необходимыми «меню», «подсказками» и «помощью», при органи-
зации диалога с техническими средствами.
Лингвистическое обеспечение строится на основе следующих
принципов:
• образное представление информации и выполняемых функций;
• иерархическая структура поиска;
634
Глава 7. Основные сведения об АСУ ТП
• минимальное число нажатий клавиш для вызова информации;
• интуитивно понятное кодирование информации, выводимой
оператору (например, при нормальной работе оборудования вся ин-
формация отображается зеленым цветом, при возникновении аварий-
ных ситуаций информация выдается красным мигающим цветом);
• применение небольшого числа простых и наглядных правил,
каждое из которых имеет выраженный «технологический» смысл.
7.5.7. Организационное обеспечение
Организационное обеспечение представляет собой совокупность
документов, регламентирующих деятельность персонала АСУ ТП и
его взаимодействие с оперативным персоналом в условиях функци-
онирования системы управления. Организационное обеспечение
предусматривает подготовку персонала АСУ ТП, его квалификацию,
знание должностных обязанностей и навыков взаимодействия с си-
стемой в процессе ее функционирования.
7.5.8. Оперативный персонал
Оперативный персонал АСУ ТП состоит из операторов-техноло-
гов (диспетчеров), осуществляющих контроль и управление ТОУ
на основании информации и рекомендаций по управлению, выра-
ботанных в АСУ, и эксплуатационного персонала, обеспечивающего
правильность функционирования комплекса технических средств
АСУ ТП.
7.6. надежность функционирования асу тп
Надежность АСУ ТП, т. е. ее способность выполнять заданные
функции с сохранением во времени установленных значений эксп-
луатационных параметров оценивают с помощью таких показателей
надежности, как безотказность, ремонтопригодность и долговечность.
Безотказность — способность системы сохранять работоспособ-
ность в условиях эксплуатации в течение заданного времени (на-
пример, в течение года). Характеризуется наработкой на отказ от-
дельных функций, подсистем и системы в целом.
Ремонтопригодность характеризует приспособленность системы
управления к предупреждению, обнаружению и устранению отказов.
Долговечность — свойство системы управления сохранять работос-
пособность до предельного состояния; определяется факторами физи-
ческого и морального старения и задается сроком службы системы.
7.6. Надежность функционирования АСУ ТП 635
Последствиями низкого уровня надежности системы управле-
ния являются нарушения технологического режима, аварии, взры-
вы. Установление и обеспечение надлежащего уровня надежности
систем управления ТОУ химической технологии представляет собой
сложную задачу, так как в состав АСУ ТП входят многочисленные
технические (измерительные, исполнительные, вычислительные)
устройства и оперативный персонал. Избыточность системы (аппа-
ратная, информационная, временная, функциональная) позволяет
поддерживать надежность системы управления в целом выше на-
дежности отдельных подсистем и устройств.
Расчет показателей безотказности
Отказ — это событие, после которого система полностью или
частично перестает выполнять свои функции. Причины отказа: ес-
тественные процессы изнашивания и старения; дефекты, возникаю-
щие при изготовлении, монтаже, ремонте системы; нарушения пра-
вил и норм эксплуатации.
Время безотказной работы системы т должно быть выше заданно-
го значения тзд, иначе говоря, должно выполняться условие т > тзд.
Так как время безотказной работы является случайной величиной,
необходимо использовать вероятностные характеристики: р(т) — веро-
ятность безотказной работы системы (реального устройства) за
заданное время, как правило, I06 часов (функция надежности),
q(x) — вероятность отказа системы за время тзд (функция ненадеж-
ности). Очевидно, что
</(т)=1 р(т).
Характер изменения этих функций представлен на рис. 7.4. Пока-
затель надежности системы с течением времени уменьшается от 1 до 0.
Вероятность р(т) безотказной работы системы за заданное время
рассчитывают по экспоненциальной зависимости:
р (т) = е-Тзд/Тср,
Рис. 7.4. Характер изме-
нения временных функ-
ций надежности p(t) и не-
надежности системы
управления
636
Глава 7. Основные сведения об АСУ ТП
где тср — среднее время безотказной работы системы, определяе-
мое, как
т = 1/(ХА3).
Здесь Л — интенсивность отказов системы: К3 — коэффициент за-
грузки системы.
Примечание
Интенсивность отказов определяется изготовителем, как отношение
числа отказавших систем к числу систем, исправно работающих в задан-
ном интервале времени
Для выполнения даже элементарных функций управления тре-
буется несколько последовательно установленных устройств с на-
дежными характеристиками. Например, для аналоговой регистра-
ции требуются датчик, блок питания и регистрирующий прибор.
Интенсивность отказов цепочки последовательно установленных
устройств рассчитывают по формуле:
(ХА3) = £(ЛА3)., / = 1, и,
1=1
где (ЛА3), — интенсивность отказов /-го устройства с учетом коэффи-
циента загрузки этого устройства; п — число устройств в цепочке.
Для группы параллельно установленных устройств (например,
одно находится в рабочем состоянии, другое — в резервном) интен-
сивность отказов вычисляют по формуле:
(АА3) = 0,5(Х/ф
Повышение надежности систем управления
Основные методы повышения надежности систем управления:
резервирование (избыточность), предусмотренное еше на стадии раз-
работки, качественное обслуживание и ремонт на стадии эксплуата-
ции. Резервирование может быть функциональным и структурным.
Функциональное резервирование предполагает введение в систему
родственных взаимодополняющих функций, например, аналоговой
и цифровой регистрации, ручного и дистанционного управления,
контроля с помощью мониторов и показывающих приборов и т. п.
Структурное резервирование предусматривает параллельную ус-
тановку устройств для выполнения наиболее важных функций уп-
равления. Различают следующие виды структурного резервирования:
автоматическое включение резервных устройств при отказе рабочих
(«горячее» резервирование); включение заранее смонтированного
7.7. Взаимодействие оператора с техническими средствами АСУ ТП 637
резервного устройства за счет изменения коммутационных связей
(«холодное» резервирование); демонтаж неисправного устройства и
замена его резервным.
Техническое обслуживание систем управления — основной спо-
соб поддержания показателей надежности на заданном уровне в меж-
ремонтный период. Предполагает проверку по тестовым сигналам
работоспособности и метрологических характеристик отдельных уст-
ройств и каналов связи; чистку устройств, наладку и замену отдель-
ных элементов; проверку работоспособности разъемных соединений,
контактов и креплений электрических и трубных проводок.
Ремонтные работы выполняются для обеспечения или восста-
новления работоспособности средств автоматизации и состоящих в
замене и (или) восстановлении отдельных частей системы. Для пол-
ного восстановления показателей надежности необходим капиталь-
ный ремонт всех частей системы с последующей проверкой.
7.7. ВЗАИМОДЕЙСТВИЕ ОПЕРАТОРА
С ТЕХНИЧЕСКИМИ СРЕДСТВАМИ АСУ ТП
В АСУ ТП на автоматические устройства возлагаются прежде
всего повторяющиеся, «рутинные» действия, связанные с достиже-
нием таких целей управления, как поддержание технологических
параметров на заданном уровне или их изменение по заданной про-
грамме, автоматическая защита по формализованным алгоритмам и
т. п., а также более сложные действия, связанные с оптимизацией
технологического процесса на различных стадиях его протекания.
На человека (оператора-технолога, диспетчера этих систем) воз-
лагаются функции, которые пока нельзя возложить на автоматичес-
кие устройства, либо автоматическое выполнение которых не оп-
равдано экономически. Кроме того, человек всегда выполняет фун-
кцию резерва на случай отказа автоматических устройств АСУ.
Комплекс помещений для работы оператора-технолога или дис-
петчера, в котором также размещается оборудование для управле-
ния технологическим процессом, называют пунктом управления.
Взаимодействие человека с техническими средствами АСУ осу-
ществляется с помощью пультов операторов-технологов, диспетче-
ров, начальников смен и т. д. Рабочие места операторов, диспетче-
ров, технологов и др., оснащенные средствами вычислительной тех-
ники для автоматизации процессов переработки и отображения
информации, необходимой для выполнения производственного за-
дания, называют автоматизированными рабочими местами (АРМ).
Пульты операторов-технологов обеспечивают выполнение сле-
дующих функций'.
638
Глава 7. Основные сведения об АСУ ТП
• контроль технологического процесса с помощью мониторов
компьютеров, лицевых панелей ПЛК или показывающих и регист-
рирующих приборов;
• контроль состояния технологического оборудования (клапанов
исполнительных механизмов, пускателей электродвигателей, парал-
лельно включенных агрегатов и т. д.) с помощью средств сигнализа-
ции (светодиодов на мнемосхеме, световых табло, сирен и т. д.);
• ручное (дистанционное) или аварийное управление исполни-
тельными механизмами с помощью переключателей, тумблеров,
кнопок, блоков и станций управления;
• регистрация технологических параметров и управленческих
действий обслуживающего персонала с помощью принтеров;
• оперативная связь с технологическим и диспетчерским персо-
налом всех уровней с помощью компьютерных средств и телефон-
ных селекторов.
Программное обеспечение взаимодействия оператора с техни-
ческими средствами АСУ можно разделить на две группы по уров-
ню искусственного интеллекта.
В первую группу входят системы, реализующие традицион-
ные функции наблюдения и управления технологическими процессами.
1. База данных реального времени, включающая средства приема
информации, ее обработки, архивации и отображения, представляет
собой иерархию распределенных баз данных, легко настраиваемых
на приложения. База данных может быть адаптирована для решения
практически любой задачи путем присоединения к источникам ин-
формации произвольного вида.
2. Открытый интерфейс с внешними устройствами и програм-
мами обеспечивает связь с любыми объектами управления и мо-
ниторинга. С его помощью система подключена к базе данных,
расчетным программам, распределенным системам управления,
статистическим пакетам, картографическим системам, данным дис-
танционного зондирования, системам обработки спутниковой ин-
формации и др.
3. Мнемосхемы создаются на основе векторной графики с эле-
ментами компьютерной графики. Мнемосхемы могут перемещаться
по экрану, причем элементы мнемосхемы могут менять цвет, фор-
му, фон, вращаться, плавно менять свое состояние и т. д., что
позволяет создавать высокоэффективные способы представления
информации. Все элементы мнемосхем являются чувствительными
зонами, воздействуя на которые оператор способен быстро и эффек-
тивно управлять работой системы и получать доступ к необходимой
информации.
4. Предупредительная сигнализация. Система имеет развитый ап-
парат работы с предупредительной сигнализацией, отображаемой
7.7. Взаимодействие оператора с техническими средствами АСУ ТП 639
различными способами, включая генерируемые меню, цветные пик-
тограммы, элементы анимации.
5. Графики. В системе хранится история поведения параметров
во времени, которая выводится на экран дисплея в виде графиков.
На графиках выдаются пределы, соответствующие предупредитель-
ной сигнализации, что позволяет оператору более эффективно кон-
тролировать процесс и принимать управляющие решения до момен-
та возникновения предупредительной сигнализации.
6. Панели управления предназначены для ввода управляющих воз-
действий. Панели настраиваются на конкретный вид объектов; на
них размещены кнопки, поля ввода с клавиатуры, линейки ввода и
другие элементы, при помощи которых оператор может быстро и
эффективно управлять сложными объектами.
Вторую группу составляют экспертные системы (ЭС). В их
функции входит интеллектуальная поддержка человека-оператора при
управлении процессами. В частности, ЭС применяются для диагно-
стики, логического анализа событий, прогноза поведения техноло-
гического процесса во времени и др. ЭС основаны на качественной
модели физических процессов, описываемых в символах, схожих с
понятиями, применяемыми человеком. Качественная модель, рабо-
тая синхронно с реальным технологическим процессом, анализиру-
ет его поведение, определяя, какие причинно-следственные связи
между явлениями проявляют себя в каждый момент времени. Вос-
становленные связи запоминаются в базе данных. В режиме кон-
сультации с ЭС оператор может получить информацию о причинах
отклонений параметров процесса от нормы, срабатывании автома-
тики и т. п. Вместе с тем качественная модель позволяет решать
задачу прогноза. В этом случае оператор может запросить ЭС о ве-
роятных последствиях событий: управляющих воздействий, неисп-
равностей, аварий и др.
Одной из функций ЭС является режимная диагностика, пред-
назначенная для помощи оператору в решении основных задач ана-
лиза технологического процесса:
• первая задача — оценка в реальном масштабе времени правиль-
ности протекания технологического процесса и определение техно-
логических параметров, отклонившихся от номинальных значений;
• вторая задача — оперативное выявление мест и причин откло-
нений технологических параметров от их номинальных значений
(собственно диагностика);
• третья задача — идентификация источника неисправностей
путем отнесения его к следующим трем видам: неисправность от-
дельных элементов технологической системы, неправильное функ-
ционирование системы управления, ошибочные действия оператора.
640
Глава 7. Основные сведения об АСУ ТП
Дополнительная информация
Искусственный интеллект — это одно из направлений информатики,
целью которого является разработка аппаратно-программных средств, по-
зволяющих пользователю ставить и решать интеллектуальные задачи пред-
метной области, общаясь с ЭВМ на ограниченном естественном языке.
Термин «искусственный интеллект» {artificial intelligence) был предложен в
США в 1956 году. Слово intelligence означает «умение рассуждать разумно»,
а вовсе не «интеллект» (intellect). Методы искусственного интеллекта пред-
полагают не численное решение задач, а символьное. В связи с чем возни-
кают такие задачи? Например, требуется выяснить причины останова агре-
гата на нефтеперерабатывающем заводе или спланировать проведение орга-
нического синтеза. Ни один специалист в такой ситуации не примется сразу
решать систему дифференциальных уравнений или делать запрос для базы
данных, поскольку вначале идет анализ обстановки, и мы «рассуждаем», а
не вычисляем. Появляется необходимость в составлении программ, помо-
гающих рассуждать. В основе составления таких программ лежат методы
науки, называемой искусственным интеллектом. Одним из разделов ее яв-
ляются экспертные системы. Экспертные системы или системы, использу-
ющие знания, созданы для получения рекомендаций, информации или для
решения проблем. Они могут работать на том же уровне, что и эксперты,
или даже лучше, потому что в них вложен коллективный опыт их создате-
лей. Экспертная система состоит из трех главных компонентов:
• базы знаний о фактах и эвристиках (правилах);
• машины решения и вывода;
• подходящей системы контакта человека с машиной.
База знаний (БЗ) содержит знания в символьной форме. Основное со-
держание базы знаний: факты и эвристики (правила). Например, для сис-
темы управления технологическим процессом в состав фактических зна-
ний входят описание предприятия, технологических процессов, характери-
стики оборудования, измерения значения технологических параметров,
получаемые отдатчиков, химический состав и количество сырья, запасов и
т. д. Эвристики (правила) пути вынесения суждений на основании фак-
тов для решения конкретной проблемы. Для системы управления техноло-
гическим процессом знания содержат, например, такой набор правил: ког-
да требуется профилактический или капитальный ремонт производства,
оборудования; каким должен быть объем запасов (сырья, реагентов, метал-
ла и т. д.) исходя из текущих цен; правила диагностики неисправностей и
рекомендации по их устранению и т. д.
Машина решения и вывода — формально-логическая система, реализо-
ванная в виде программы и позволяющая логически выводить необходи-
мую для пользователя информацию исходя из сведений, размещенных в
БЗ, и информации, поступающей от пользователя в БЗ.
Подходящая система контакта человека с машиной', интерактивные си-
стемы строятся с помощью «меню» и операций, управляемых специальны-
ми клавишами, указателя «мыши» и пиктограмм, изображающих техноло-
гические схемы, резервуары, насосы, вентили и т. д.
Пример применения ЭС: биологический реактор для выращивания
клеток в суспензии. Графический интерфейс включает изображение реак-
тора, нескольких питателей и соответствующих регулирующих клапанов,
индикаторов включения и выключения нагревателей и холодильников.
Экспоненциальный рост клеток в суспензии может быть подавлен в ре-
зультате воздействия одного из нескольких факторов: понижения или по-
7.8. Примеры систем управления в химической промышленности 641
вышения температуры, снижения концентрации питательных компонен-
тов, изменения pH раствора или появления загрязнений. Экспертная ин-
формация, зафиксированная в эвристиках (правилах) БЗ, обеспечивает воз-
можность диагностики нескольких вариантов неудовлетворительной рабо-
ты системы (включая вышеназванные) и выполнения корректирующих
операций. ЭС позволяет устанавливать причины отклонений параметров
от их номинальных значений и предпринимать корректирующие действия:
регулировать температуру или pH в реакторе, добавлять или уменьшать
питание для клеток, заменять загрязненную суспензию и т. д.
7.8. ПРИМЕРЫ СИСТЕМ УПРАВЛЕНИЯ
В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
7.8.1. АСУ ТП подготовки нефти
В нефтедобывающей и нефтеперерабатывающей промышленно-
сти на установках первичной подготовки нефти, стабилизации газо-
вого конденсата, термохимических установках используется один и
тот же принцип построения АСУ — двухуровневая АСУ ТП.
На нижнем уровне АСУ ТП происходит сбор, обработка инфор-
мации и индикация технологических параметров, таких как темпе-
ратура, давление, уровень, расход. Сбор информации осуществляет-
ся датчиками. В виде аналоговых сигналов информация поступает
на входы микропроцессорного многофункционального контроллера
с развитыми средствами самодиагностики, сигнализации и иденти-
фикации неисправностей.
Для измерения температуры применяются датчики температу-
ры: термометры сопротивления медные ТСМ (градуировка 50М) и
термометры сопротивления платиновые ТСП (градуировка 100П).
Сигналы с выхода датчиков температуры подаются на промежуточ-
ные преобразователи и дальше в виде токового унифицированного
сигнала 0...5 мА на входы контроллера.
Для измерения давления и расхода применяются датчики типа
«Сапфир ДД», а для измерения уровня — датчики типа «Сапфир ДУ».
Сигналы с выхода датчиков подаются на промежуточные преобра-
зователи (блок преобразования сигнализации и питания) и дальше в
виде токового сигнала 4...20 мА на входы контроллера.
Информация с объектов управления поступает также в виде дис-
кретных сигналов (сигнализация о предельных значениях уровней и
давлений, информация о работе или останове двигателей и т. д.).
Информация, поступающая на входы контроллера, преобразует-
ся в цифровой код и обрабатывается, включая’
• считывание информации с аналоговых и дискретных входов
контроллера;
21 Беспалой А. В.. Харп iohob Н. II.
642
Глава 7. Основные сведения об АСУ ТП
• сравнение поступивших сигналов с заданными и с предельно
допустимыми значениями технологических параметров;
• формирование управляющих сигналов и сигналов аварийной
сигнализации, защиты и блокировки.
На объектах в основном применяется аналоговое регулирова-
ние. Электрические управляющие сигналы контроллера 4...20 мА,
преобразуются с помощью электропневмопреобразователей в пнев-
матические сигналы 20... 100 кПа, которые подаются на пневмати-
ческие исполнительные механизмы.
Контроллеры объединены в локальную вычислительную сеть
(ЛВС), что позволяет им обмениваться информацией между собой,
а также с устройствами верхнего уровня АСУ ТП, в данном случае с
ПЭВМ. Программирование контроллеров может осуществляться либо
с помощью пульта настройки, либо с помощью ПЭВМ.
На верхнем уровне АСУ ТП основную работу выполняют ПЭВМ
со специально разработанными для этого программами. Широкое
применение на объектах нефтедобывающей и нефтеперерабатываю-
щей промышленности нашли пакеты программ «АРМ оператора-
технолога».
Пример структурного решения АСУ ТП установки для подго-
товки нефти приведен на рис. 7.5.
Объектами управления установки комплексной подготовки не-
фти (УКПН) являются следующие технологические блоки: резерву-
ары, насосы, теплообменники, отстойники, нефтегазосепараторы,
подогреватели, печи, электродегидраторы, конденсаторы-холодиль-
ники и ректификационные колонны.
Каждый из этих технологических блоков имеет различные мо-
дификации: по размерам, исполнению (горизонтальное, вертикаль-
ное), типу подогрева (огневой или паровой), режимным показате-
лям (температура, давление) и т. д. Как объект управления каждый
технологический блок имеет свою типовую группу параметров кон-
троля и управления и, соответственно, свой типовой набор датчи-
ков, исполнительных механизмов, преобразователей, блоков пита-
ния и т. д.
Сигналы с датчиков каждого технологического блока группиру-
ются и распределяются на уровне контроллеров по типу, назначе-
нию, связи с определенными событиями, оборудованием или стади-
ями технологического процесса и т. д.
АСУ ТП подготовки нефти является сложной системой. УКНП
производительностью 2...4 млн тонн нефти в год, кроме перечис-
ленных основных типовых технологических блоков, имеет в своем
составе также очистные сооружения, факельное хозяйство, узел прес-
ной воды, насосную производственно-дождевых стоков, блочную
котельную и т. д. С каждого такого объекта сигналы поступают или
7.8. Примеры систем управления в химической промышленности
643
Рис. 7.5. Пример АСУ ТП подготовки нефти:
1 — диспетчерская; 2 — операторская; 3 — АРМ-1; 4 — АРМ-2; 5 —
модемы; б — двухпроцессорная система; 7 — контроллеры; 8 — блок
питания; 9 — компьютер системы измерения уровней; 10 — АРМ узла
учета нефти; / печи, отстойники, теплообменники и сепараторы, кон-
денсатосборники с насосом, очистные сооружения, первая ступень се-
парации, система измерения уровней, блоки насосных; II — дренажная
емкость, насосная откачки очищенных стоков, площадка блока дозиро-
вания деэмульгатора, факел, установка коммерческого учета нефти, на-
сосная нал артезианской скважиной, насосная производственно-дожде-
вых стоков: III — сооружения пожаротушения, котельная
на отдельно стоящий контроллер, или на контроллер, находящийся
в операторской.
Кроме режима сбора и контроля параметров по технологичес-
ким заданиям в современных АСУ ТП подготовки нефти важную
роль играют режимы дистанционного и автоматического управле-
ния и регулирования. Дистанционное управление осуществляется
исполнительным механизмом по команде оператора с компьютера.
Автоматический режим управления технологическим процессом ре-
ализуется с помощью двух групп алгоритмов. Группа алгоритмов
21*
644
Глава 7. Основные сведения об АСУ ТП
логического или импульсного управления применяется при автомати-
ческом пуске и останове насосов, вытяжных вентиляторов, откры-
тии и закрытии шаровых регулирующих органов. Группа алгорит-
мов автоматического регулирования используется для формирования
управляющих воздействий в контурах регулирования таких парамет-
ров, как уровни продуктов, межфазные уровни, давление и расход
нефти.
При разработке алгоритмов автоматического регулирования не-
обходимо решить следующие вопросы:
• взаимосвязи контуров регулирования для ситуаций, когда изме-
нение одного технологического параметра влечет изменение другого;
• учета нелинейного характера ТОУ;
• выбора шага дискретизации.
Для решения этих вопросов применяются методы математичес-
кого и физического моделирования.
Ужесточение требований к качеству подготовки нефти, а также
к организации экологического мониторинга увеличивает количество
технологических блоков в современных УКПН. Это приводят к уве-
личению числа параметров контроля и управления, что усложняет
АСУТП. Например, общее количество сигналов ввода-вывода сред-
ней АСУ ТП комплексной подготовки нефти сейчас достигает
400...700, включая 30...50 контуров регулирования и дистанционно-
го управления Из-за сложности и взрывоопасности УКПН созда-
ние современных АСУ ТП разрешается только организациям, име-
ющим соответствующие лицензии Госгортехнадзора РФ.
Разработка сложного проекта АСУ ТП требует много времени,
если отсутствуют готовые и проверенные структурные и аппаратно-
программные проектные решения для каждого уровня АСУ ТП.
Аппаратные проектные решения для основных технологических бло-
ков УКПН разрабатываются в виде схем автоматизации:
• нижнего уровня АСУ ТП (рис. 7.6) (датчики, средства индика-
ции, исполнительные устройства, контроллеры);
• уровня контроллеров (микроЭВМ, устройства ввода-вывода, се-
тевые контроллеры, модули памяти, модули интерфейса и др.);
• уровня АРМ оператора (ПЭВМ, мониторы, клавиатуры, прин-
теры, модемы, мыши, сетевые контроллеры и концентраторы).
Прикладное программное обеспечение обоих верхних уровней
создается с помощью единой системы SCADA.
Для контроллеров разрабатываются типовые прикладные про-
граммные решения в виде алгоритмов автоматического регулирова-
ния для отдельных технологических блоков УКПН. Для АРМ опе-
ратора формируется типовое представление многих технологичес-
ких блоков как на экране монитора в виде мнемосхем, так и в базе
каналов.
7.8. Примеры систем управления в химической промышленности 645
Рис. 7.6. Регулирование уровня в отстойнике
Пуск и наладка АСУ ТП подготовки нефти осуществляется в два
этапа:
• испытания АСУ ТП в режиме сбора и контроля параметров со
всех технологических блоков УКПН;
• испытания АСУ ТП в режиме дистанционного и автоматичес-
кого управления и регулирования.
Обучение специалистов начинается уже при монтаже и испыта-
ниях АСУ Т.П и продолжается на работающей системе по мере ее
ввода в действие.
Для обучения операторов-технологов навыкам оперативного ком-
пьютерного управления качеством получаемой на выходе УКПН не-
фти разработан аппаратно-программный тренажер. Он представляет
собой двухмашинный комплекс, где на одном компьютере установ-
лено программное обеспечение АРМ оператора, а на втором модели-
руются различные аварийные ситуации или рассчитываются на моде-
лях зависимости параметров качества нефти от изменений темпера-
туры и давления в технологических блоках автоматизированной УКПН.
7.8.2. АСУ ТП в производстве минеральных удобрений
Рассмотрим производство фосфатов аммония. Эти соединения
являются продуктами нейтрализации ортофосфорной кислоты ам-
миаком:
Н3РО4 + «NH3 —> (NH3)„H3PO4.
646
Глава 7. Основные сведения об АСУ ТП
Для производства минеральных удобрений используют только
моноаммонийфосфат NH4H2PO4 и диаммонийфосфат (NH4)2HPO4;
присутствие других солей в продукте нежелательно вследствие их
высокой кислотности или нестабильности при повышенных темпе-
ратурах.
Последовательность технологических стадий производства ор-
тофосфатов аммония (аммофос, диаммофос) приведена на рис. 7.7.
Конечное значение мольного отношения NH3 : Н3РО4 составляет
-1,0 в производстве аммофоса и -1,75 в производстве диаммофоса.
Упаривание пульпы и сушка готового продукта не являются обяза-
тельными стадиями процесса.
Схема регулирования нейтрализации и донейтрализации фос-
форной кислоты аммиаком в двух последовательно соединенных
реакторах представлена на рис. 7.8. В первом реакторе происходит
нейтрализация фосфорной кислоты до pH -2,5, во втором реакторе —
до pH -4,5 при температуре 100... 105 °C. Температуру в реакторах
поддерживают с помощью регуляторов 5 и 6, воздействуя на испол-
нительные устройства /5 и 16 полачи пара, подаваемого на обогрев
реакторов.
Расход фосфорной кислоты, подаваемой в реактор 1, измеряю!
расходомером 12 и стабилизируют регулятором 13, воздействующим
на исполнительное устройство 17. Концентрацию фосфорной кис-
лоты определяют по плотности раствора плотномером /7, а расход
фосфорной кислоты (с учетом ее концентрации) — блоком умноже-
Готовый продукт
Рис. 7.7. Технологические стадии производства фосфатов аммония
7.8. Примеры систем управления в химической промышленности 647
Рис. 7.8. Схема регулирования стадий нейтрализации и донейтрализации
фосфорной кислоты аммиаком. Пояснения см. в тексте
ния 14. Системой автоматического регулирования предусмотрено ре-
гулирование соотношения расходов фосфорной кислоты и аммиака
в каждый из реакторов 1 и 2 с помощью регуляторов соотношения
расходов 7 и 8 путем воздействия на исполнительные устройства 18 и 19
с коррекцией соответственно от регуляторов pH пульпы (.? и 4) на
выходе первого и второго реактора. Давление в реакторах 1 и 2 из-
меряют измерительными устройствами 9 и 10.
В подавляющем большинстве производств аммофоса использу-
ется барабан грануляционный, сушильный (БГС).
Процесс осуществляется по схеме, представленной на рис. 7.9.
Возможна одноступенчатая нейтрализация фосфорной кислоты ам-
миаком, когда пульпа после аммонизации в скоростном аммониза-
торе-испарителе (САИ) при температуре 90... 100 °C поступает в БГС.
При двухступенчатой нейтрализации пульпу после аммонизации в
САИ до мольного отношения NH3 : Н3РО4 ~1,3 нейтрализуют фос-
форной кислотой (например, в трубчатом реакторе) при температу-
ре ПО...120 °C. В БГС аммофосную пульпу с помощью форсунок
распыляют сжатым воздухом под давлением 0,2...0,4 МПа на завесу
из падающего гранулированного материала. Теплоносителем явля-
ются продукты сгорания топлива, которые поступают в БГС при
температуре 500...600 °C. Гранулы аммофоса из БГС при температу-
ре 105... НО °C подают на классификацию и охлаждение, а отходя-
щие газы, содержащие пыль аммофоса, аммиак и фтор, при темпе-
ратуре 110... 115 °C направляют в систему очистки.
648
Глава 7. Основные сведения об АСУ ТП
В атмосферу
Рис. 7.9. Технологическая схема производства гранулированного аммо-
фоса с аппаратом БГС:
1 — сборник кислоты; 2 — САИ; 3 — сборник пульпы; 4 — БГС; 5 —
грохот; 6 — холодильник; 7 — абсорберы; 8 — циклоны; 9 — дробилки;
10 — транспортер; 11 — элеваторы; 12 — сборники
Производство аммофоса с аппаратом БГС можно охарактеризо-
вать как сложное, непрерывное, многостадийное, малоретурное. Для
производства аммофоса характерно наличие агрессивных сред, за-
пыленности, загазованности, вибрации (например, из-за вращения
БГС) и т. д.
Примечание
Ретур (от франц, retour возврат, рециркуляция) — возврат части про-
дукта обратно в процесс.
На рис. 7.10 приведена принципиальная структурная схема АСУ
ТП производства аммофоса, построенная на базе современной мик-
ропроцессорной техники: предусмотрено резервирование оператор-
ских станций и адаптивное интеллектуальное управление.
Резервирование операторских станций повышает надежность АСУ,
обеспечивает спокойную рабочую обстановку, позволяющую выпол-
нять производственные программы. В производстве аммофоса не
должно быть невосстанавливаемых в течение 120 с отказов АСУ ТП.
Если таковые возникают, они проводят к аварийным ситуациям.
Именно с учетом специфики производства аммофоса реализовано
резервирование операторских станций, включающих АРМ скорост-
ным аммонизатором-испарителем (САИ), АРМ трубчатым реакто-
Т.8. Примеры систем управления в химической промышленности
649
Рис. 7.10. Структурная схема АСУ ТП производства гранулированного
аммофоса
ром (ТР) и барабаном грануляционным сушильным (БГС), АРМ
системами абсорбции и охлаждения (АБС). При отказе одного АРМ
оператор-технолог, используя модуль резервирования, может пере-
вести управление на любое другое АРМ. «Живучесть» управления
производством аммофоса сохраняется даже при одновременном от-
казе двух АРМ, если третье АРМ работоспособно. Резервирование
распространяется также на системы противоаварийной защиты, све-
товой и звуковой сигнализации.
Подсистема адаптивного интеллектуального управления. Современ-
ные АСУ ТП представляют собой сложные дорогостоящие системы,
эффективность которых зависит от качества реализации непосред-
ственного цифрового управления (НЦУ), удобства работы, опера-
тивности реакции в системе человек—операторская станция, защи-
ты ХТП от некорректных действий оператора-технолога. АСУ ТП
должна достаточно точно моделировать объект и быстро устранять
ошибки регулирования.
Адаптивное интеллектуальное управление производством аммо-
фоса является современным применением НЦУ, которое стало воз-
можным благодаря появившимся высокопроизводительным контрол-
650
Глава 7. Основные сведения об АСУ ТП
лерам и ПЭВМ. Гибкое и эффективное программное обеспечение
SCADA-систем создает условия зарождения технологии искусствен-
ного интеллекта и основы для развития и тиражирования современ-
ных методов управления.
Для реализации регулирования в программном обеспечении име-
ются как неадаптивные, так и адаптивные модули. На практике хи-
мики-технологи все время сталкиваются с ситуациями изменения
нагрузок на технологическое оборудование, проявления нелинейно-
сти зависимостей между входными и выходными параметрами. Тех-
нологические параметры не могут быть измерены точно из-за нали-
чия систематических и случайных погрешностей средств измере-
ния. Кроме того, оказывают свое влияние контролируемые и
неконтролируемые возмущающие воздействия, происходит старение
первоначальной априорной информации. Использование же даже
простейших адаптивных модулей в АСУ ТП позволяет добиться ка-
чества управления, близкого к оптимальному
На рис. 7.11 приведена блок-схема беспоисковой адаптивной интел-
лектуальной системы управления в производстве аммофоса. Важное до-
стоинство беспоисковых самоорганизующихся систем — отсутствие
поисковых движений (принудительного изменения технологических
параметров с целью определения оптимального технологического
Рис. 7.11. Блок-схема беспоисковой адаптивной интеллектуальной систе-
мы управления
7.8. Примеры систем управления в химической промышленности 651
режима), являющихся источником помех и приводящих к колеба-
ниям технологических параметров. Использование адаптивных ал-
горитмов дает возможность быстро выводить технологический про-
цесс на требуемый режим и изменять управляющие воздействия
одновременно для всех связанных контуров регулирования.
Рассмотрим назначение некоторых блоков данной системы уп-
равления.
Блок логико-математической модели выполняет:
• идентификацию по определенным алгоритмам переменных со-
стояния ТОУ;
• сравнение при помощи наблюдателя состояния результатов иден-
тификации с хранящимися в базе знаний технологическими образа-
ми (эталонами, априорной информацией);
• выдачу кода распознанного состояния в оптимизатор-модифи-
катор для принятия управляющих решений.
Примечание
Метод распознавания образов — раздел теории адаптивных систем уп-
равления в теории автоматического регулирования. Рассмотрение этого
метода выходит за рамки данной книги.
Результатом идентификации ТОУ является формализация мате-
матических и логических связей между входными и выходными пе-
ременными При этом используются уравнения химических реак-
ций, материальные и тепловые балансы, логические связи между
дискретными состояниями технологического оборудования.
Предварительная проверка адекватности математических моделей
ТОУ проводится блоком логико-математической модели, своеобраз-
ном «отладчике», структурно включающем в себя блок наблюдателя
состояния объекта, оптимизатор-модификатор, блок подстройки стан-
дартного ПИД-регулятора, а окончательная — в ходе эксплуатации.
Оптимизатор-модификатор определяет необходимость подстройки
коэффициентов связи в математической модели при изменении ал-
горитмов в стандартном ПИД-регуляторе. Автоматическая подстройка
математической модели необходима в тех случаях, когда нарушает-
ся линейность математических зависимостей, включаются или вык-
лючаются из работы отдельные параллельно работающие техноло-
гические линии Ручная подстройка математических моделей вы-
полняется высококвалифицированным персоналом КИПиА при
старении исходной априорной информации: изменении свойств
сырья, требований к качеству продукции.
Адаптивный интеллектуальный переключатель режимов цифрового
управления обеспечивает:
• управление ТОУ в ручном дистанционном или автоматичес-
ком режимах;
652
Глава 7. Основные сведения об АСУ ТП
• безударное переключение режимов с ручного управления на
автоматическое управление, и наоборот;
• ПИД-регулирование в нормальных и экстремальных условиях
работы;
• организацию простых одноконтурных и сложных схем комби-
нированного управления с использованием логико-математических
моделей.
Назначение блока подстройки стандартного ПИД-регулятора —
модифицировать алгоритм стандартного ПИД-регулятора и изме-
нять параметры его настройки Кр, Т„, ТП.
Превращение стандартного линейного ПИД-регулятора в моди-
фицированный нелинейный с использованием разных вариантов
нелинейной модификации позволяет плавно изменять регулируе-
мый параметр при изменении задания, исключает перерегулирова-
ние и обеспечивает повышенное быстродействие в тех случаях, ког-
да стандартный регулятор плохо справляется с устранением ошибки
регулирования.
Необходимость изменения параметров настроек стандартного
ПИД-регулятора распознается наблюдателем состояния, передается
как признак в оптимизатор-модификатор, а далее в блок подстрой-
ки стандартного ПИД-регулятора.
Иногда целесообразно использовать схему с двумя исполнитель-
ными устройствами для грубого и точного регулирования. В некото-
рых случаях такая схема способна обеспечить более точное управ-
ление, чем регуляторы с нечеткой логикой или адаптивные само-
настраивающиеся регуляторы.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Назовите основные функции промышленных АСУ ТП.
2. Какие существуют разновидности АСУ ТП?
3. Каковы режимы действия распределенных систем управления?
4. Что входит в обеспечение АСУ ТП?
5. Как определяется надежность АСУ ТП?
6. Как осуществляется взаимодействие человека-оператора с техни-
ческими средствами АСУ ТП?
7. Приведите примеры промышленных АСУ ТП.
ЗАКЛЮЧЕНИЕ
В начале всякой философии лежит
удивление, ее развитием является иссле-
дование, ее концом — незнание.
Мишель Монтень
Наука о системах управления играет ключевую роль во всех об-
ластях деятельности человека и общества, в том числе и в развитии
химической промышленности. Мы вкратце рассмотрели основы
систем управления ХТП. Огромное многообразие химико-технологи-
ческих процессов, их многостадийность, быстродействие, взаимосвязь
с окружающей средой и уникальность как объектов управления пре-
допределяет многообразие решений при построении систем управле-
ния, как в области технических средств управления, диагностики
объектов управления, прогнозирования возможных технологических
ситуаций, так и в самой стратегии управления. Совершенно очевид-
но, что современные СУ ХТП немыслимы без информационных
технологий.
На вопрос о том, как будет выглядеть техническое, программ-
ное, математическое обеспечение СУ ХТП в будущем, ответить весьма
непросто.
Динамично развивающиеся технологии микросистем и наноси-
стем могут привести к революционным преобразованиям в прибо-
ростроении.
Прогресс микросистемной техники начался с разработки про-
мышленной технологии объемного жидкостного травления кремния
для формирования мембран, струн, балок для чувствительных эле-
ментов датчиков давления, вибрации и ускорения. Кремний исполь-
зуется уже не только как полупроводниковый, но и как конструкци-
онный механический материал
Затем была создана технология формирования объемных струк-
тур с использованием синхронного излучения, гальванического осаж-
дения и прецизионного литья полимерами, получившая название
LIGA-технология (L1GA — аббревиатура немецких слов: litographie —
литография, galvanoformung — гальванообработка, abformung — прес-
сование).
Интеграция на кристалле кремния достижений в области элект-
роники, механики, информатики и измерительной техники привела
к объединению этих технологий и созданию «микросистемной тех-
ники».
ПРИЛОЖЕНИЯ
Приложение 1
СВОЙСТВА ПРЕОБРАЗОВАНИЯ ЛАПЛАСА
№ Оригинал Изображение
1 /(т) F(5) = 9 Г/(т)] - f /(т)е ггс1т ° 1
2 + C2f2(T) 1 C\Fx(s) + с2 F2(s) 1
3 /'(т) 1 sF(s)—f(0)
4 snF(s) - sn~ ’/(0) - -/<" -0(0)
5 0
6 /(т — с), с > 0 F(s)e~is
7 /(т)е“ F(.s - <?)
8 /(ст), с 0 >51 c — 1 4
9 /1*/2 Fx(s)F2(s)
10 lim / (т)
11 lim / (т) т >0 .1 lim i s/- (vj|
Приложения
657
Приложение 2
ПРЕОБРАЗОВАНИЕ ЛАПЛАСА НЕКОТОРЫХ ФУНКЦИЙ
N= Оригинал Изображение
1 5(т) 1
2 Кт) 1 «о 1 —
3 С i s2
4 т” п\ sn+^
5 е~ст _1 5 + С
6 - । л> 1 5(75 + 1)
7 е + ст -1 с2 1 (5 + с)52
8 COS((DT) 5 52 +(1)2
9 sin(wr) 0) 52 +<Й
10 е~от -е"** b - а __1__ (5 + а)(5 + й)
11 тя-‘е " (л-1)! 1 Ь+с)”
12 (с-Л)е * +(а-с)е'*т (а b)(b <)(< а) 1_ -a)(s + b)(s^
i»t I н.> и и X II \ ||*н ।» ti->n II II
658
Приложения
Приложение 3
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ПРИБОРОВ
И СРЕДСТВ АВТОМАТИЗАЦИИ В СХЕМАХ
ПО ГОСТ 21.404-85
ГОСТ 21.404—85 устанавливает условные обозначения прибо-
ров, средств автоматизации и линий связи, применяемых при вы-
полнении схем автоматизации технологических процессов. Система
графических и буквенных условных обозначений основана на функ-
циональных признаках (табл. П3.1)
В стандарте установлены два способа построения условных обо-
значений: упрощенный и развернутый.
Для упрощенного способа построения достаточно основных ус-
ловных обозначений, приведенных в табл. П3.1 и буквенных обо-
значений, данных в табл. П3.2.
Развернутый способ построения условных графических обозна-
чений может быть выполнен в результате комбинированного при-
менения основных (табл. П3.1, П3.2) и дополнительных обозначе-
ний, приведенных в табл. П3.4 и П3.5.
1. Условные обозначения
1.1. Графические обозначения
1.1.1. Графические обозначения приборов, средств автома-
тизации и линий связи должны соответствовать приведенным в
табл. П3.1.
1.1.2. Отборное устройство для всех постоянно подключенных
приборов изображают сплошной тонкой линией, соединяющей тех-
нологический трубопровод или аппарате прибором (рис. П3.1). При
необходимости указания конкретного места расположения отбор-
ного устройства (внутри контура технологического аппарата) его
обозначают кружком диаметром 2 мм (рис. П3.2).
Рис. п 3.1
Рис. JB.2
Приложения
659
Таблица П3.1. Графическое изображение приборов,
средств автоматизации и линий связи
Наименование ). Прибор, устанавливаемый вне щита (по месту) а) основное обозначение б) допускаемое обозначение Обозначение
2. Прибор, устанавливаемый на щите, пульте а) основное обозначение б) допускаемое обозначение
3. Исполнительный механизм. Общее обозначение 3
4. Исполнительный механизм, который при прекраще- нии подачи энергии или управляющего сигнала. а) открывает регулирующий орган б) закрывает регулирующий орган в) оставляет регулирующий орган в неизменном положении ? ? ¥
5 Исполнительный механизм с дополнительным ручным приводом Примечание Обозначение может применяться с любым из дополнительных знаков, характеризующих положение регу лирующего органа при прекращении подачи энергии или управляющего сигнала
6 Линия связи Общее обозначение 7. Пересечение линии связи без соединения друг с другом 8 Пересечение линии свя »и с соединением между собой -
Таблица П3.2 Буквенные обозначения измеряемых величин и функциональных признаков приборов
Обозна- чение Измеряемая величина Функциональный признак прибора
Основное обозначение Дополнительное обозначение Отображение информации Формирование выходного сигнала Донолпигельное значение
А + - Сигнализация
В + - —
с . - Автоматическое управление, регулирование
D Плотность Разность, перепад —
Е Электрическая величина - +
F Расход Соотношение, доля, дробь —
G Размер, положение, перемещение - +
Н Ручное воздействие — — Верхний предел измеряемой величины
1 + — Показание
J + Автоматическое переключение, обегание -
К Время, временная программа - -
L Уровень - Нижний предел измеряемой величины
М Влажность — -
N 4- - -
Обозна- чение Измеряемая величина Функциональный признак нрибора
Основное обозначение Дополнительное обозначение Отображение информации Формирование выходного сигнала Дополнительное значение
о + — -
р Давление, вакуум — -
Q Величина, характеризу- ющая качество: состав концентрация и т. п. Интегрирование, суммирование по времени
R Радиоактивность - Регистрация
Скорость, частота Включение, отключе- ние, переключение, блокировка
Т Температура - -
L Несколько разнородных измеряемых величин - -
V Вязкость — +
W Масса — -
X Не рекомендуемая резервная буква - -
Y + — -
Z + — -
Примечание. Буквенные обозначения, отмеченные знаком «+», являются резервными, а отмеченные знаком «—», не используются
Приложения Приложения
662
Приложения
1.2. Буквенные обозначения
1,2.1. Основные буквенные обозначения измеряемых величин и
функциональных признаков приборов должны соответствовать при-
веденным в табл. П3.2.
1.2.2. Дополнительные буквенные обозначения, применяемые для
указания дополнительных функциональных признаков приборов,
преобразователей сигналов и вычислительных устройств, приведе-
ны в табл П3.4 и П3.5.
1.3. Размеры условных обозначений
1.3.1. Размеры условных графических обозначений приборов и
средств автоматизации в схемах приведены в табл. ПЗ.З.
1.3.2. Условные графические обозначения на схемах выполняют
сплошной толстой основной линией, а горизонтальную разделитель-
ную черту внутри графического обозначения и линии связи — сплош-
ной тонкой линией по ГОСТ 2.303—68.
1.3.3. Шрифт буквенных обозначений принимают по ГОСТ
2.304—81 равным 2,5 мм.
2. Правила построения условных обозначений
2.1. Настоящий стандарт устанавливает два метода построения
условных обозначений:
а) упрощенный;
б) развернутый
2.2. При упрошенном методе построения приборы и средства
автоматизации, осуществляющие сложные функции, например, кон-
троль, регулирование, сигнализацию, и выполненные в виде отдель-
ных блоков, изображают одним условным обозначением При этом
первичные измерительные преобразователи и всю вспомогательную
аппаратуру не изображают.
2.3. При развернутом методе построения каждый прибор или
блок, входящий в единый измерительный, регулирующий или уп-
равляющий комплект средств автоматизации, указывают отдельным
условным обозначением.
2.4 Условные обозначения приборов и средств автоматизации,
применяемые в схемах, включают графические, буквенные и циф-
ровые обозначения.
В верхней части графического обозначения наносят буквенные
обозначения измеряемой величины и функционального признака
прибора, определяющего его назначение.
В нижней части графического обозначения наносят цифровое
(позиционное) обозначение прибора или комплекта средств автома-
ти >аиии.
Приложения
663
Таблица ПЗ.З. Размеры условных графических изображений
приборов и средств автоматизации в схемах
Таблица П3.4. Дополнительные буквенные обозначения,
отражающие функциональные признвки приборов
Наименование Обозна- чение Назначение
Чувствительный элемент Е Устройства, выполняющие первичное преоб- разование: преобразователи термоэлектричес- кие, термопреобразователи сопротивления, датчики пирометров, сужающие устройства расходомеров и т. п
Дистанционная передача Т Приборы бесшкальные с дистанционной пе- редачей: манометры, дифманометры, мано- метрические термометры
Станция управления К Приборы, имеющие переключатель для выбо- ра вида управления и устройство для дистан- ционного управления
Преобразование, вычислительные функции Y Для построения обозначений преобразовате- лей сигналов и вычислительных устройств
2.5 Порядок расположения букв в буквенном обозначении при-
нимают следующим:
• основное обозначение измеряемой величины,
• дополнительное обозначение измеряемой величины (при не-
обходимости);
• обозначение функционального признака прибора
664
Приложения
Таблица П3.5. Дополнительные буквенные обозначения,
применяемые для построения преобразователей
сигналов, вычислительных устройств
Наименование Обозначение
1. Род энергии сигнала:
электрический L
пневматический Р
гидравлический G
2 Виды форм сигнала:
аналоговый А
дискретный D
3. Операции, выполняемые вычислительным устройством.
суммирование X
умножение сигнала на постоянный коэффициент А К
перемножение двух и более сигналов друг на друга X
деление сигналов друг на друга возведение величины сигнала f в степень и f
извлечение из величины сигнала f корня степени и n[f
логарифмирование 1g
дифференцирование da/dz
интегрирование I
изменение знака сигнала x(-l)
ограничение верхнего значения сигнала max
ограничение нижнего значения сигнала nun
4 Связь с вычислительным комплексом:
передача сигнала на ЭВМ Д
вывод информации с ЭВМ Bo
2.6. При построении обозначений комплектов средств автомати-
зации первая буква в обозначении каждого входящего в комплект
прибора или устройства (кроме устройств ручного управления) яв-
ляется наименованием измеряемой комплектом величины.
2.7. Буквенные обозначения устройств, выполненные в виде от-
дельных блоков и предназначенных для ручных операций, незави-
симо от того, в состав какого комплекта они входят, должны начи-
наться с буквы Н
2.8. Порядок расположения буквенных обозначении функцио-
нальных признаков прибора принимают с соблюдением последова-
тельности обозначении' I, R. С S, А
Приложения
665
2.9. При построении буквенных обозначений указывают не все
функциональные признаки прибора, а лишь те, которые использу-
ются в данной схеме.
2.10. Букву А применяют для обозначения функции «сигнализа
ция» независимо от того, вынесена ли сигнальная аппаратура на
какой-либо щит или для сигнализации используются лампы, встро-
енные в сам прибор
2.11. Букву S применяют для обозначения контактного устрой-
ства прибора, используемого только для включения, отключения,
переключения, блокировки
При применении контактного устройства прибора для включе-
ния, отключения и одновременно для сигнализации в обозначении
прибора используют обе буквы: S и А.
2.12. Предельные значения измеряемых величин, по которым
осуществляется, например, включение, отключение, блокировка,
сигнализация, допускается конкретизировать добавлением букв Н и L
Эти буквы наносят справа от графического обозначения.
2.13. При необходимости конкретизации измеряемой величины
справа от графического обозначения прибора допускается указы-
вать наименование или символ этой величины.
2.14. Для обозначения величин, не предусмотренных данным
стандартом, допускается использовать резервные буквы. Примене-
ние резервных букв должно быть расшифровано на схеме.
Рис. ПЗ.З. Принцип построения условного обозначения прибора
и и
666
Приложения
2 15. Подвод линий связи к прибору изображают в любой точке
графического обозначения (сверху, снизу, сбоку) При необходимо-
сти указания направления передачи сигнала на линиях связи нано-
сят стрелки.
2 16. Принцип построения условного обозначения прибора при-
веден на рис ПЗ.З.
2.17. Примеры построения условных обозначений приборов и
средств автоматизации приведены в табл. П3.6.
Таблица П3.6. Примеры построения условных обозначений
приборов и средств автоматизации
№ п/п Обозначение Наименование
1 Первичный измерительный преобразователь для из- мерения температуры, установленный по месту Примеры. Термопара, термопреобразователь сопротиале- ния, термобаллон манометрического термометра, датчик пирометра
2 CEj Прибор для измерения температуры показывающий, установленный по месту Примеры Термометр ртутный, термометр манометрический
3 Прибор для измерения температуры показывающий, установленный на щите Примеры. Милливольтметр, логометр, потенциометр, мост автоматический
4 Прибор для измерения температуры бесшкальный с дистанционной передачей показаний, установлен- ный по месту Пример. Термометр манометрический (или любой другой датчик температуры) бесшкальный с пневмо- или электро- передачей
5 Прибор для измерения температуры одноточечный, регистрирующий, установленный на щите Примеры. Самопишущие милливольтметр, логометр, по- тенциометр, мост автоматический
6 Прибор для измерения температуры с автоматичес- ким обегающим устройством, регистрирующий, уста- новленный на щите Примеры. Многоточечные самопишущие потенциометр мост автоматический
7 ^TRC^ Прибор для измерения температуры регистрирую- щий, регулирующий, установленный на щите Пример Самопишущий потенциометртермоэлектриче».' го термометра с встроенным регулирующим устройств'»-
Приложения
667
Продолжение табл. П3.6
№ п/п Обозначение Наименование
8 Регулятор температуры бесшкальный, установленный по месту Пример. Дилатометрический регулятор температуры
9 Комплект для измерения температуры регистрирую- щим, регулирующий, снабженный станцией управле- ния, установленный на щите Пример. Вторичный прибор и регулирующий блок системы «Старт»
10 Прибор для измерения температуры бесшкальный с контактным устройством, установленный по месту Пример. Реле температурное
И Байпасная панель дистанционного управления, уста- новленная на щите
12 Q Переключатель электрических цепей измерения (уп- равления) или переключатель для газовых (воздуш- ных) линий, установленный на щите
В СП) Прибор для измерения давления (разрежения) пока- зывающий, установленный по месту Примеры. Показывающие манометр, дифманометр, тяго- мер, напоромер, вакуумметр
14 Прибор для измерения перепада давления показы- вающий, установленный по месту Пример. Дифманометр показывающий
15 Pl Прибор для измерения давления (разрежения) бес- шкальный с дистанционной передачей показаний, установленный по месту Пример. Манометр (дифманометр) бесшкальный с пневмо- или электропередачей
16 ^PR^ Прибор для измерения давления (разрежения) ре- гистрирующий, установленный на щите Пример. Самопишущий манометр или любой вторичный прибор для регистрации давления
17 psj Прибор для измерения давления с контактным уст- ройством, установленный по месту Пример. Реле давления
18 A Прибор для измерения давления (разрежения) пока зывающий с контактным устройством установлен- ный по месту Примеры. Электроконтактные манометр вакуумметр
668
Приложения
Продолжение табл. П3.6
№ п/п Обозначение Наименование
19 - -С i— Регулятор давления, работающий без использования постороннего источника энергии (регулятор давле- ния прямого действия) «до себя»
20 ' FE ) Первичный измерительный преобразователь для из- мерения расхода, установленный по месту Примеры. Диафрагма, сопло, труба Вентури, датчик индук- ционного расходомера
21 ' FT ) Прибор для измерения расхода бесшкальный с ди- станционной передачей показаний, установленный по месту Примеры. Бесшкальные дифманометр или ротаметр с пнев- мо- или электропередачей
22 <FFR\ Прибор для измерения соотношения расходов ре- гистрирующий, установленный на щите Пример. Любой вторичный прибор для регистрации соот- ношения расходов
23 < Fl Прибор для измерения расхода показывающий, уста- новленный по месту Примеры. Показывающие дифманометр, ротаметр
24 ' FQI ) Прибор для измерения количества вещества путем интегрирования расхода, установленный по месту Пример. Любой бесшкальный расходомер со встроенным показывающим интегратором (так называемый счетчик расходомер)
25 Комплект из двух показывающих установленных по месту приборов для измерения расхода вещества и количества вещества путем интегрирования расхода Примеры. Показывающие дифманометр и интегратор
26 FQISJ Прибор для измерения расхода интегрирующий, с устройством для выдачи сигнала после прохождения заданного количества вещества, установленный по месту Пример. Счетчик-дозатор
77 к LF ) Первичный измерительный преобразователь для из- мерения уровня, установленный по месту Пример. Датчик электрического или емкостного уровнемера
>х Прибор для измерения уровня показывающий, уста- новленный по месту Пример. Показывающий дифманометр используемый для измерения уровня
Приложения
669
Продолжение табл. П3.6
Nt П/п Обозначение Н именование
29 Н LSA Прибор для измерения уровня с контактным устрой- ством, установленный по месту Пример. Реле уровня, используемое для блокировки и сиг- нализации при достижении уровнем верхнего предела (буква Я)
30 Прибор для измерения уровня бесшкальный, с дистан- ционной передачей показаний, установленный по месту Пример. Уровнемер бесшкальный с пневмо- или электро- передачей
31 .Я (LCSJ Прибор для измерения уровня бесшкальный, регули- рующий, с контактным устройством, установленный по месту Пример. Регулятор уровня, используемый также для блоки- ровки при достижении уровнем верхнего предела
32 н / LIA\ Прибор для измерения уровня показывающий, с контактным устройством, установленный на щите Пример. Вторичный показывающий прибор с сигнальным устройством (буквы Яи L означают сигнализацию при до- стижении уровнем верхнего и нижнего пределов)
- L
33 D1 Прибор для и змерения плотности раствора бесшкаль- ный, с дистанционной передачей показаний, установленный по месту Пример. Датчик плотномера с пневмо- или электропередачей
34 Прибор для измерения положений, перемещений или размеров показывающий, установленный по месту Пример. Показывающий прибор для измерения положения затвора регулирующего клапана
35 СЕ' Прибор для измерения любой электрической вели- чины показывающий установленный по месту Пример. Показывающий прибор для измерения напряже- ния, силы тока, мощности
36 СЕ^ Прибор для управления процессом по временной программе, установленный на щите Пример. Командный электропневматический прибор
XI MR Прибор для измерения влажности регистрирующий, установленный на щите Пример. Вторичный прибор влагомера
38 ярн Первичный измерительный преобразователь для из- мерения pH продукта установленный по месту Пример. pH электрод
670
Приложения
Продолжение табл. Л3.6
№ п/п Обозначение Наименование
39 /—хО, QI ) Прибор для измерения качества продукта показыва- ющий, установленный по месту Пример. Газоанализатор показывающий для контроля со- держания кислорода в дымовых газах
40 _H?SO4 QRC\ Прибор для измерения качества продукта регистри- рующий, регулирующий, установленный на щите Пример. Вторичный самопишущий регулирующий прибор для регулирования концентрации серной кислоты в растворе
41 Р ( R1A Прибор для измерения радиоактивности показываю- щий и сигнализирующий о достижении предельно допустимой активности источников а- и (3-излуче- ния, установленный по месту
42 Прибор для измерения скорости вращения регистри рующий, установленный на щите Пример. Вторичный прибор тахогенератора
43 ^U=f(F, Р) ( UR ) Прибор для измерения нескольких разнородных ве- личин регистрирующий, установленный по месту Пример. Самопишуший дифманометр-расходомер с допол- нительной записью давления (надпись, расшифровываю- щая измеряемые величины, наносится справа от прибора)
44 СЕу* Прибор для измерения вязкости раствора показыва- ющий, установленный по месту Пример. Вискозиметр показывающий
45 Прибор для измерения массы продукта показываю- щий, с контактным устройством, установленный по месту Пример. Устройство электронно-тензометрическое, сигна- лизирующее
46 CEE Прибор для контроля погасания факела в печи бес- шкальный, с контактным устройством, установлен- ный на щите Пример Вторичный прибор запально-защитного устройст- ва (применение резервной буквы В должно быть оговорено на поле схемы)
47 z^\£/£ в Преобразователь сигнала в цепи измерения темпера- туры, установленный на щите Входной сигнал элек- трический, выходной сигнал тоже электрический Пример. Нормирующий преобразователь для преобразова- ния ТЭДС термопары в сигнал постоянного тока
48 Преобразователь сигнала в цепи измерения давле- ния, установленный по месту. Входной сшнал пнев- матический, выходной >лектрическии
Приложения
671
Окончание табл. П3.6
№ п/п Обозначение Наименование
49 < fy\ Вычислительное устройство, установленное на щите, выполняющее функцию умножения на постоянный коэффициент К
50 Пусковая аппаратура для управления электродвигате- лем (для включения, выключения насоса; для откры- тия, закрытия задвижки и т. д.), установленная по месту Примеры. Магнитный пускатель, контактор (применение резервной буквы N должно быть оговорено на поле схемы)
51 Аппаратура, предназначенная для ручного дистанци- онного управления (включение, выключение двига- теля; открытие, закрытие запорного органа, измене- ние задания регулятору), установленная на щите Примеры. Кнопка, ключ управления, задатчик
52 Аппаратура, предназначенная для ручного дистанци- онного управления, снабженная устройством для сигнализации, установленная на щите Примеры. Кнопка со встроенной лампочкой, ключ управ- ления с подсветкой
Примечание. Надписи, расшифровывающие конкретную измеряемую физическую величину, располагаются либо рядом с условным обозначением прибора, либо в виде таблицы на поле чертежа.
2.18. Порядок построения условных обозначении с применени-
ем дополнительных букв принимают следующим:
основное обозначение измеряемой величины;
• одна из дополнительных букв: Е, Т, К или Y.
2.19. При построении дополнительных условных обозначений
преобразователей сигналов, вычислительных устройств надписи,
определяющие вид преобразования или операции, осуществляемые
вычислительным устройством, наносят справа от графического обо-
значения прибора.
672
Приложения
Приложение 4
ОСНОВНЫЕ СВОЙСТВА КОМПЛЕКСНЫХ ЧИСЕЛ
Понятие комплексного числа представляет собой расширение по-
нятия действительных чисел. Многие правила арифметики действи-
тельных чисел могут быть перенесены на комплексные числа.
Комплексными числами называют выражения вида
Z~-m + jn, (П4.1)
где т и п — действительные числа; j — мнимая единица (/2 = -1)
Действительное число т называют действительной частью ком-
плексного числа z, а действительное число п называют мнимой час-
тью комплексного числа z и записывают’
Re(z) = w; 1т(г) = л.
(П4.2)
Комплексное число z = т- jn на-
зывают сопряженным с комплексным
числом z = т + Jn, то есть сопряжен-
ные комплексные числа г и и г отли-
чаются только знаком мнимой части.
Комплексное число z изображают
на комплексной плоскости (плоскости
Гаусса) или в виде точки z = (т, п), или
в виде соответствующего радиуса-век-
тора (рис. П4).
Модулем |?| комплексного числа
является неотрицательное действительное число, равное расстоянию
от начала координат до точки (z) (то есть длине радиуса-вектора):
|?| = \1т2 + п2.
(П4.3)
Модули сопряженных комплексных чисел равны, то есть |?| = |z|
Аргументом (фазой) <р комплексного числа называют угол, обра
зованный радиусом-вектором точки (z) с положительным направле
нием действительной оси:
Ф arg (г) arctg
п
т
(П4 4)
Приложения
673
Аргумент комплексного числа z определяется с точностью до
слагаемого 2кп, где к — любое целое число. В качестве главного зна-
чения аргумента комплексного числа обычно выбирают значение,
определяемое неравенствами:
-n<arg(z)<n (П4.5)
Главные значения аргументов сопряженных комплексных чи-
сел равны по абсолютной величине, но противоположны по знаку,
то есть arg (г) = - arg (г).
Комплексное число можно представить в тригонометрической и
показательной (экспоненциальной) форме’.
Z = |?|(cosq> + /sincp) = |г|е-'ф. (П4.6)
Если заданы модуль и аргумент комплексного числа z, то легко
найти его действительную и мнимую части, используя соотношения:
jRe(z) = т = |г| cos (<р);
[Im(z) = л = |^|sin (<р).
Сложение и вычитание комплексных чисел
Пусть заданы два комплексных числа:
Zi =т{ + jnx =|zi|eJ<pi;
Z =т2 + jn2 = |г2|еУф2.
При их сложении (вычитании) необходимо складывать (вычи-
тать) отдельно действительные и мнимые части:
Zi ±z2 =(«! + m2) + j(nl ±л2). (П4 10)
Умножение и деление комплексных чисел
При перемножении комплексных чисел модуль произведения ра-
вен произведению модулей сомножителей, а аргумент произведения
равен сумме аргументов сомножителей’
Zi?2 =^|e^|^|e^ (П4 11)
При делении двух комплексных чисел модуль частного равен от-
ношению модулей делимого и делителя, а аргумент частного равен
разности аргументов делимого и делителя:
|^1|еу<° Zt
‘ |Z2|e'*' \2
(П4.7)
(П4.8)
(П4.9)
(П4 12)
674
Приложения
Замечание
Чтобы освободиться от мнимой единицы в знаменателе, числитель и
знаменатель дроби умножают на комплексное число, сопряженное со зна-
менателем, например:
J _ 1 m-jn т jn п
m+jn m+jn m-jn J = т2 + и2 ~ т2 + п2 J' (П4'3)
Возведение комплексных чисел в степень и извлечение корня
Чтобы возвести комплексное число z в целую степень л, нужно
возвести в эту степень его модуль, а аргумент умножить на показа-
тель степени:
г" =(|г|еУф)л =|z|"ew (П4.14)
Если п — натуральное число, то при извлечении корня л-й сте-
пени из комплексного числа z получается л различных значений,
определяемых формулой:
ч/z =Zn = ffie" "
(П4.15)
где $z\ — арифметический корень из положительного числа |z|;
ф = arg(z) и к = 0, 1,2, ..., л - 1.
Приложения
675
Приложение 5
ПРЕОБРАЗОВАНИЕ ФУРЬЕ
Если функция уСО
а) кусочно-монотонна в интервале -«.<?<+« и имеет в нем
конечное число точек разрыва непрерывности,
б) абсолютно интегрируема, то есть
f |у(т)|с!т<+оо, (П5.П
то существует ее преобразование Фурье Y(Jeo), определяемое следую-
щей формулой:
+ со
Y (» = ,/[у(т)] = J у(т) (П5.2)
Функция Y(jti>) называется также изображением по Фурье или спект-
ральной характеристикой функции у(т)- Следует заметить, что пре-
образованием Фурье называют не только функцию К(/ш), но и сам
переход от функции Хт) к функции У(/о)).
Обратное преобразование Фурье позволяет по известной спект-
ральной характеристике У(у'щ) определить функцию Хт)‘
j (т) = у4 [У J rG'wje^do). (П5 3)
./и У1 - символы прямого и обратного преобразования Фурье.
Свойства преобразования Фурье:
• линейность
если функции х(т) и у(г) имеют преобразования Фурье Д/ш) и
У(Л°) соответственно и если а и b не зависят от т и со, то справедли-
вы следующие равенства:
* Г<гх(т) + Мт)] aX(ja) + hY(j(n). (П5.4)
|аЛ'(./<о) + />У(/о)) | ах(т!+/>у(т); (П5.5)
676
Приложения
• теорема о дифференцировании
если функция j(t) и ее производная /(т) преобразуемы по Фурье
и если преобразование Фурье функции y(t) равно У(у'ш), то спект-
ральная характеристика производной определяется равенством:
= (П5.6)
то есть при преобразовании Фурье операция дифференцирования
преобразуется в умножение на yoj;
• теорема об интегрировании
если функция j(t) преобразуема по Фурье и ее спектральная ха-
рактеристика равна УС/'ш) и если
/ y(r)dT = О,
то спектральная характеристика интеграла определяется равенством:
(П5 7)
L— J
то есть при преобразовании Фурье операция интегрирования преоб-
разуется в деление на ум,
• теорема о смещении (о сдвиге)
если функция j(t) преобразуема по Фурье и ее спектральная ха-
рактеристика равна Y(j(o) и если а — любое неотрицательное дей-
ствительное число, то справедливы следующие равенства1
^[у(т-0)] = е-^Г(/а)), (П5.8)
4е-'отИт)] = /[;(<*) + *)]; (П5.9)
• теорема подобия
если функция j(t) преобразуема по Фурье и ее спектральная ха-
рактеристика равна Y(Ja>) и если а — любое вещественное положи-
тельное число, то справедливо равенство:
= (П5.10)
• теорема о свертке
если функции х(т) и у(т) имеют преобразования Фурье X(jw) и
У(у'<о) соответственно, то спектральная характеристика свертки фун-
кции равна произведению их спектральных характеристик:
у[х(т)*у(т)] / Jx(t I X(j(o) Y(j(o), (П5.11)
Приложения
677
а спектральная характеристика произведения функций равна сверт-
ке их спектральных характеристик:
^[х(т)-у(т)]= J X(j(ii)-n))y(/n)dn = (П5.12)
• формула Парсеваля
если функция у(т) преобразуема по Фурье и ее спектральная ха-
рактеристика равна то1
f |y(T)|2dT = ^/|r(>)|2do),
(П5 13)
где |У(/ш)|2 — энергетическая спектральная характеристика функ-
ции у(т).
678
Приложения
Приложение 6
ПРЕОБРАЗОВАНИЕ ФУРЬЕ
НЕКОТОРЫХ ФУНКЦИЙ
№ Функция y(t) Преобразование Фурье У(у<о)
1 5(т) 1
2 1(т) с/ 1 1 л8(о) +— jm
3 т- 1(т) jn8'(o))--V
4 е-”- 1(т) 1 С + JO)
5 т е-‘г- 1(т) J (с + JO)f
6 cos(w0t) л[8(0) - О)0) + 8(0) + О)0)]
7 sin(wnT) — [8(о) - о)0) - 8(о) + о)о)
8 COS(O)0T) • 1 (т) [8 (о) - о)0) + 8 (о) + 0)0)] + /Ц 2 0)q — 0)
9 cos(m0T) • 1 (т) ^-[8(о)-о)0)-8(о) + о)0Д + -^—- 2jL 0)q -о)'
10 <tcos(u)qt) 1(т) (с + » о>6 + (с + juf _
11 f’<Tsin(w0T) l(r) Wo «Г, • !•' + jo>)
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Автоматическое управление в химической промышленности: Учеб, для
вузов / Под ред. Е.Г. Дудникова. М.: Химия, 1987. 368 с
2. Агафонов С.А., Герман А.Д.. Муратова Т.В. Дифференциальные уравне-
ния: Учеб, для вузов / Под ред. В.С. Зарубина, А.П. Крищенко. М • Изд-во
МГТУ им. Н.Э. Баумана, 2000. 348 с.
3. Анзимиров Л.В. Трейс Моуд. Современное состояние и перспективы раз-
вития И Промышленные АСУ и контроллеры, 2001. № 5. С. 39—42.
4. Анисимов И.В. Основы автоматического управления технологическими
процессами нефтехимической и нефтеперерабатывающей промышленности. М.:
Химия, 1967. 408 с.
5. Анисимов И.В., Бодров В.И., Покровский В.Б. Математическое моделирова-
ние и оптимизация ректификационных установок. М/ Химия, 1975. 216 с.
6. Арнольд В.И. Теория катастроф. М.: Наука. Главная редакция физико-
математической литературы, 1990. 128 с.
7. Бесков В.С. Общая химическая технология: Учеб, для вузов. М ИКЦ
«Академкнига», 2005. 452 с.
8. Беспалов А.В., Харитонов Н.И. Задачник по системам управления химико-
технологическими процессами: Учеб пособие для вузов. М.: ИКЦ «Академкни-
га», 2005. 307 с.
9. Бриндли К. Измерительные преобразователи: Справочное пособие. М.:
Энергоатомиздат, 1991. 144 с.
10. Востриков Ф.С., Французова ГА. Теория автоматического регулирования:
Учеб, пособие для вузов. М.: Высшая школа, 2004. 365 с.
11. Гартман Т.Н., Клушин Д.В. Основы компьютерного моделирования хи-
мико-технологических процессов: Учеб, пособие для вузов. М.: ИКЦ «Академ-
книга», 2006. 416 с.
12. Герасимов Б.И., Кулаков М.В. Динамические характеристики анализато-
ров состава и свойств жидкостей. М.: МИХМ, 1981 80 с.
13. Гибшман Е.А.. Кузьмина ГА. Опыт разработки высоконадежной АСУ ТП в
производстве минеральных удобрений // Промышленные АСУ и контроллеры,
2001. №2. С 15-20.
14. Горбунов П.В., Курцев А.С. АСУ ГП в нефтедобывающей и нефтепере-
рабатывающей промышленности // Промышленные АСУ и контроллеры, 2000.
№ 10. С. 8-10.
15. Горин И.Г., Столяров В.В., Левшин В.М., Семиволос С.П., Конур Ю.П.
Автоматизированная система управления нефтеперерабатывающим мини-за-
водом // Приборы и системы. Управление, контроль, диагностика. 2001. № 11.
С 13-16.
16. ГОСТ 8.009—84. Нормируемые метрологические характеристики средств
измерений. М.: ИПК Издательство стандартов. 2001. 38 с.
17. ГОСТ 21 404 85. Автоматизация технологических процессов Обозначе-
ния условных приборов и средств автоматизации в схемах. М.: Издательство стан-
дартов, 1985. 18 с.
18 ГОСТ 16920—93. Термометры и преобразователи температуры маномет-
рические М Издательство стандартов, 1995. 17 с.
19 ГОСТ 665) 94. Термопреобразователи сопротивления. Минск. ИПК Из-
дательство стандартов, 2000 26 с.
682 Рекоменуемая литература
65 Тронова ИМ., Средина И.Г. О метрологическом обеспечении измери-
тельных систем АСУТП // Промышленные АСУ и контроллеры, 2000. № 10.
С. 27-30.
66. Туманов Н.А., Шинарев А.Л., Титов С.А. АСУ ТП производства серной
кислоты на установках СК-41 и СК-48 // Промышленные АСУ и контроллеры,
2001. №2. С. 21 23
67. Филлипс Ч., Харбор Р. Системы управления с обратной связью. М.. Лабо-
ратория Базовых Знаний, 2001. 616 с.
68. Фролов Ю.Г., Белик В.В. Физическая химия. М.: Химия, 1993. 464 с.
69. Чистяков В.С. Краткий справочник по теплотехническим измерениям.
М.: Энергоатомиздат, 1990. 320 с.
70. Шенброт ИМ., Антропов М.В., Давиденко К.Я. Распределенные АСУ тех-
нологическими процессами. М.: Энергоатомиздат, 1985. 240 с.
71. Шински Ф. Системы автоматического регулирования химико-технологи-
ческих процессов. М.: Химия, 1974. 330 с.
72. Шувалов В.В., Огаджанов Г.А., Голубятников В.А. Автоматизация произ-
водственных процессов в химической промышленности. М Химия, 1991. 480 с.
73. Эрриот П. Регулирование производственных процессов М.: Энергия,
1967. 480 с.
74. Юровский А.Я., Ушаков Л.В. Датчики давления серии «Метран» // Датчи-
ки и системы, 2000. № 11-12. С. 10-14.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоколебания 276
Автоколебательный процесс 278
Автоматизированная система управле-
ния технологическим процессом (АСУ
ТП) 35
— информационное обеспечение 632
лингвистическое обеспечение 633
математическое обеспечение 632
метрологическое обеспечение 633
минеральных удобрений 645
организационное обеспечение 634
— подготовки нефти 643
— программное обеспечение 630
— производства гранулированного
аммофоса 649
— техническое обеспечение 625
Автоматическая настройка регулятора 287
Автоматическая система (см. Система
автоматического управления)
Адаптируемость 84
Алгоритм управления 277
Амплитудно-фазовая частотная харак-
теристика 106
Амплитудно-частотная характеристи-
ка 107
Анализ качества процесса управления 65
устойчивости линейных систем 181
- по корням характеристическо-
го уравнения 178
Анализатор жидкостей
денсиметрический 473
кондуктометрический 470
потенциометрический 471
ультразвуковой 474
Аналого-цифровой преобразователь
(АЦП) 353
Аппроксимация 230
кусочно-линейная 109
Астатическая система 58
Бел 107
Бернулли уравнение 423
Блок управления 277
Бурдона трубка 380
Быстродействие 70 205
Вариация показаний 316
Вектор
- состояния 32
Михайлова 182
Величина влияющая 294
входная 36
выходная 35
управляемая 32
- физическая 294
Вентури сопло 423
Временные характеристики 96
Воздействие
- возмущающее 33
— внешнее 33
внутреннее 33
контролируемое 33
— неконтролируемое 33
входное 100
задающее 35, 43
- единичное импульсное 97
- единичное рамповое 98
- единичное ступенчатое 97
— управляющее 32
Время
— апертурное 358
- изодрома (удвоения) 262
- нарастания 321
- переходного процесса 70
- предварения 265
- реакции 321
- регулирования 70
- самодиагностики 289
- транспортного запаздывания 134,217
- установления 351
Входной сигнал 31, 32
Выходной сигнал 32
Газоанализаторы физические
- оптико-акустические 467
- термокондуктометрические 463
- термомагнитные 466
- термохимические 464
- ультрафиолетового поглошения 469
Гистерезис 272
Годограф 106
Государственная система
промышленных приборов (ГСП) 290
- обеспечения единства измерении
(ГС И)318
I ран и на устойчивости 69, 174
684
Предметный указатель
Давление
— единицы измерения 378
- измерение 377
Датчик 300
— интегральный 327
интеллектуальный 326
— классификация 326
Движение системы
— вынужденное 66
- свободное 66
Декада 108
Декомпозиция системы 84
Дельта-функция Дирака 97
Демпфирование колебаний 143
Демодулятор 339
Децибел 107. 108
Диаграмма
- Боде 108
— Найквиста 106
Диапазон пропорциональности 252
Диафрагма 422
Динамическая погрешность 322
Дифференциальные уравнения
(см. также Уравнение динамики)
— линейные (с сосредоточенными
параметрами) 82
- нелинейные (с распределенными
параметрами) 82
Дрейф показаний средства измерений 307
Дросселирование потока 481
Емкость объекта 201
- гидравлическая 203
- тепловая 203
- электрическая 125
Задача
— анализа систем 76
- синтеза регуляторов 247
- синтеза систем 76
Закон
— Планка 413
смещения Вина 414
Стефана—Больцмана 415
Фарадея 440
Законы регулирования 251
интегральный 259
пропорциональный 252
пропорционально-дифференци
альныи 264
пропорционально-интегрально
дифференциальный 267
— пропорционально-интегральный 261
Запаздывание 216
— транспортное 216
— переходное 221
Запас устойчивости 189
— по АФЧХ разомкнутой системы 191
по ЛЧХ разомкнутой системы 193
— по модулю 192
— по распределению корней 190
— по усилению 190
— по фазе 192
Звено типовое динамическое 87, 120
— дифференцирующее (форсирую-
щее) 162
---идеальное 162
— реальное 165
— запаздывания 134
— интегрирующее 156
— идеальное 156
— реальное 161
— неустойчивое первого порядка 170
— статическое второго порядка 138
— апериодическое 138
- колебательное 138
- консервативное 138
— статическое нулевого порядка 121
— статическое первого порядка 124
Зеебека эффект 395
Зона неоднозначности 272
Зона нечувствительности
— средства измерений 307
Идентификация 278
Идентифицируемость 84
Иерархия управления 40
Измерение
— давления 377
— динамическое 296
— косвенное 297
прямое 297
— расхода 419
— состава и физико-химических
свойств веществ 462, 469
статическое 296
температуры 387
— - бесконтактное 411
- - контактное 390
— уровня 449
Измерительный канал 303
Измерительный прибор 299
цифровой 372
Измерительная система 293, 303
Предметный указатель 685
- метрологическое обеспечение 293
Измерительное устройство 301
— цифровое 302, 373
Изображение функции по Лапласу 93
Инвариантные САР 539
Интеграл от взвешенного квадрата
ошибки (ИВКО) 72
Интеграл от взвешенного модуля
ошибки (ИВМО) 72
Интеграл от квадрата ошибки (ИКО) 72
Интеграл от модуля ошибки (ИМО) 72
Исполнительный механизм (серводви-
гатель) 62, 594
— гидравлический 598
классификация 595
- пневматический 595
---мембранный 595
---поршневой 598
- пьезокерамический 600
— электрический 599
Исполнительное устройство 62
Клапан регулирующий 480,492, 565, 583
Класс точности 315
Классификация
— датчиков 326
- типовых динамических звень-
ев 120, 12)
- измерительных преобразовате-
лей 325, 326
- исполнительных устройств 581
- методов измерения 308
- объектов управления 195
- погрешностей измерений 315
- промежуточных преобразовате-
лей 329
- регулирующих органов 583
— систем управления 53
Колебания
— вынужденные гармоничес-
кие 101, 240
- входные 245
— выходные 244
Колебательность системы 191
Компаратор 301
Компенсатор 540
Компенсация возмушаюших воздей-
ствий 44, 539
Контроллер
- логический программируемый
(ПЛК)627
промышленный 625
Контур
— замкнутый 47, 116
— разомкнутый 45
Корни характеристического уравне-
ния 175, 178
Коэффициент
— демпфирования 138
— расхода 424
— статический усиления 121, 231
— сужающего устройства 425
— тензочувствительности 332
Критерий устойчивости 178
— алгебраический 179
- Вышнеградского 181
- Льенара— Шипара 181
— Рауса—Гурвица 179
частотный 181
- Михайлова 181
- Найквиста 183
Лапласа преобразование 93
Линеаризация 88
— уравнении 89
Линии связи 359
— волоконно-оптические 362
— пневматические 359
— электрические 360
Логарифмическая амплитудно-частот-
ная характеристика (ЛАЧХ) 107
Логарифмическая фазово-частотная
характеристика (ЛФЧХ) 108
Логарифмические частотные характе-
ристики (ЛЧХ) 108
— метод построения 108
Л ого метр 369
Манометр 378
— грузопоршневой 297
— дифференциальный 378
— жидкостный 378
— - двухтрубный 379
— - однотрубный (чашечный) 379
- с наклонной трубкой 379
— деформационный 379
Математическая модель системы 78
Мера
многозначная 299
— однозначная 299
физической величины 299
Метод определения оптимальных па-
раметров настройки промышленных
регуляторов
Предметный указатель
6М ______________________________
- затухающих колебаний 282
- незатухающих колебаний 283
Метод измерения 308
- бесконтактный 308
- дифференциальный 311
- дополнением 311
- замещением 311
- контактный 308
- непосредственной оценки 308
- нулевой 309
— сравнения с мерой 309
Метрология 292
Милливольтметр 371
Многоемкостный объект 200
Моделирование 77
— аналоговое 78
- имитационное 72
- математическое 78
— физическое 77
Модель 77
— абстрактная 78
- динамическая 82
- математическая 79
— с распределенными параметра-
ми 82
с сосредоточенными парамет-
рами 82
- статическая 82
- физическая 77
Модулятор 338
Мост измерительный
— неуравновешенный 369
- уравновешенный 367
Наблюдаемость 83
Надежность
- АСУ ТП 634
- измерительного преобразовате-
ля 328
— программного обеспечения 630
Начальные условия 94
— нулевые 95
- ненулевые 95
Номинальная статическая характерис-
тика (НСХ) 305
Обратная связь 47
- главная 56
дополнительная 6’
- единичная 117
жесткая 117
местная 64
— отрицательная 49
— положительная 49
Объект управления 195
многоемкостный 198
многомерный 196
— - многосвязный 197
- односвязный 196
— линейный 198
— нелинейный 198
— одноемкостный 198
одномерный 195
— с распределенными параметра-
ми 199
— с сосредоточенными параметра-
ми 198, 199
Оригинал 93
Отклонение параметра 89
Ошибка регулирования 48, 49
Параметры
— системы
---качественные (интенсивные) 37
— количественные (экстенсив-
ные) 37
— настройки 252
---И-регулятора 259
П-регулятора 252
— ПД-регулятора 264
ПИ-регулятора 261
— ПИД-регулятора 267
Передаточная функция 95
— параллельного соединения звень-
ев 115
— последовательного соединения
звеньев 114
соединения с обратной связью 116
Переходная функция 98
Переходная характеристика 98
Переходный процесс 66
Период предельных колебаний 283
Пирометр излучения 412
— оптический (фотоэлектрический) 413
радиационный (полного излуче-
ния) 415
- спектрального отношения 415
Погрешность
измерений 313
— абсолютная 313
---динамическая 317
относительная 314
приведенная 314
статическая 317
Предметный указатель
687
- метода измерений 316
- средства измерений 313
---динамическая 322
дополнительная 317
— основная 317
Позиционер 480, 492, 597
Показатели качества процесса управ-
ления
— время переходного процесса 70
- интегральные 71
- максимальная ошибка 69
- перерегулирование 71
- статическая ошибка 70
- степень затухания 71
— устойчивость 68
Показатель колебательности 109
Полоса пропускания ПО
Полюс передаточной функции 96
Порог чувствительности 307
Постоянная времени 124
— дифференцирования 162
— интегрирования 156, 259
Преобразование Ламаса 93
— определение 93
- свойства 94, 656
— таблицы 656, 657
— теоремы 94
Преобразование Фурье 105
— определение 105
- таблицы 678
— свойства 111, 675
Преобразование структурных схем 113
— эквивалентное 118
Преобразователь измерительный 299
- активный 300
- аналоговый 346
- аналого-цифровой 35.3
- деформационный 379
- емкостный 334
- индуктивный 336
- масштабный 300
- нормирующий 61, 339
- оптико-электронный 364
- пассивный 300
- первичный 61, 300
- передающий 299
- пневматический унифицирован-
ный 345
- промежуточный 329
- пьезоэлектрический 335
- расхода 420
- тензометрический 331
— термоэлектрический (термопара) 395
— токовый нормирующий
— для термопар 339
— для термопреобразователеи со-
противления 341
— токовый унифицированный 343
— цифроаналоговый 347
— цифровой 346
— электропневматический 342
электрооптический 363
Принцип
измерений 308
— инвариантности 541
— суперпозиции 84, 198
— управления 42
— по возмущающему воздейст-
вию 44
— по задающему воздействию 43
- по отклонению 47
Промах 317
Процесс технологический
— детерминированный 81
— непрерывный 55
— периодический 55
— стохастический 81
Пьезоэлектрический эффект 335
Расходомеры
— вихревые 443
---с обтекаемым телом 443
— с закрученным потоком 445
— Кориолисовы 448
— объемные 433
переменного перепада давления 420
постоянного перепада давления 431
— тепловые 436
— калориметрические 436
— термоконвективные 437
— термоанемометрические 438
— ультразвуковые 446
электромагнитные 440
Расходная характеристика 493, 590
Регулирование
давления 486
каскадное 546
— комбинированное 540
несвязанное 557
программное 54
расхода 478
ректификационной установки 510
связанное 557
соотношения расходов 482 647
688
Пред “’тныи указатель
температуры 488
теплообменника 508
химического реактора 533
— уровня 484
Регулирующий орган 62, 582
— дроссельный 583
---диафрагмовый 585
- двухседельный 584
- заслоночный 586
- клеточный 585
- односедельный 583
- шаровой 586
- шланговый 585
— основные характеристики 588
Регулятор 27, 61
— непрямого действия 566
— позиционный 271
— двухпозиционный 271
— трехпозиционный 276
— прямого действия 58 564
— Смита 561
— с прогнозирующей моделью 276
Режим
— номинальный статический 89
— переходный 91
- работы АСУ ТП 623
— установившийся 91
Рейнольдса число 425
Робастность 65, 100
Ротаметр (см. Расходомер постоянно-
го перепада давления)
Самодиагностика 286
Самовыравнивание 205
Сенсор химический газовый 476
Сигнал 37
— аналоговый 37
— гармонический 101
— дискретный 37
— измерительный 37
— командный 61
— унифицированный 292
Система автоматического
— регулирования 3^
управления 35
- дискретная 57
замкнутая 47
- линейная 59, 82
- многоконтурная 56
- многомерная 56
- одномерная 56
- разомкнутая 43 4* 188
— с отрицательной обратной свя-
зью 49
Соединение
— параллельное 115
последовательное 114
с отрицательной обратной свя-
зью 116
с положительной обратной свя-
зью 116
Сопло ИСА 1932, 422
Средство измерений 298
— вспомогательное 298
- основное 298
- прямого действия 304
Средство измерительной техники 298
— аналоговое 302
— цифровое 302
Средство сравнения (компаратор) 301
Статическая характеристика
— измерительных преобразователей
(датчиков) 306
- исполнительных устройств 596
- П-регулятора 253
— средства измерений 317
Степень
- затухания 71, 147
колебательности 148 191
- самовыравнивания 213
- устойчивости 190
Структура САУ
— алгоритмическая 59
- конструктивная 60
функциональная 59, 60
Структурная схема 59, 113
— первичных измерительных преоб
разователей (датчиков) 327
- САР 62, 63
- средства измерении сравнения 309
- токовых измерительных преобра-
зователей 345
цифровых измерительных уст-
ройств 302
Струхаля число 444
Счетчики объемные 433
ротационные 434
скоростные 435
аксиальные 435
тангенциальные 435
с овальными шестернями 434
Тахогенератор 162
Тейлора ряд 90
Ппрдметный указатель 6xg
Температура
— измерение 387
— радиационная 415
цветовая 414
яркостная 413
Температурные шкалы 387, 388
Термоанемометр 438
Термометр
— биметаллический 391
— дилатометрический 391
манометрический 393
— - газовый 393
---жидкостный 393
- конденсационный 394
контактный 390
сопротивления 403
— металлический 403
— полупроводниковый (термистор) 407
пьезоэлектрический 410
— стеклянный жидкостный 390
Термопара (термоэлектрический пре-
образователь) 395
Теория автоматического
— регулирования 23
— управления 23
Трубка напорная 429
— аннубар 431
— Пито 430
Прандтля 429
Управление 31
— комбинированное 53
— по возмушаюшему воздействию 44
по задающему воздействию 43
по отклонению 47
— процессами в химических реакто-
рах 529
— ректификационной установкой 510
Управляемость 84
Уравнение
— динамики 83
- Нернста 471
- статики 83
- характеристическое 96
Уровень, методы измерения 449
Уровнемеры 450
- буйковые 451
- гидростатические 452
емкостные 454
пневматические (пьезометричес
кие) 453
поплавковые 450
- радиоактивные 459
- ультразвуковые 455
- фотоэлектрические 454
Условия измерений 311
— нормальные 311
- предельные 312
- рабочие 312
Устойчивость 68, 173
— в большом 173
- в малом 173
- линейной системы 173
— по Ляпунову 177
Устройство
— задающее 61, 64
- измерительное 301
- исполнительное 62
корректирующее 62
- управляющее 34
Фазово-частотная характеристика 107
Фильтр 277
Фильтрация измерений 374
Формула Эйлера 105
Функциональная структурная схема
САР 60
Функция
- веса 98
- единичная импульсная 97
- единичная рамповая 97
- единичная ступенчатая 97
- надежности 635
- ненадежности 635
- обобщенная 98
- переходная 98
— импульсная 98
---рамповая 99
Фурье ряд 242
Характеристика
- временная 97
---импульсная переходная (весо-
вая) 98
переходная 98
рамповая переходная 99
- статическая 121
• — измерительного преобразовате-
ля 306
объекта 224
средства измерении 317
устройств исполнительных 596
частотная 100
амплитудно-фазовая 106
690
амплитудно-частотная 102, 106
действительная частотная 106
мнимая частотная 106
фазовая частотная 102
Химико-технологический процесс 25
Цель управления 31
Цифровая фильтрация 374
Частота колебаний
- критическая 185, 187
-резонансная ПО, 152, 188
- собственная 138
- сопряжения 132, 149
- среза 110
Предметный указатель
Частотная передаточная функция 102,105
Чувствительность 306, 307, 310, 332, 335
Чувствительный элемент 61, 300, 308
Шибер 134, 217, 481, 583, 587
Шумы 316, 361
Электрод ионоселективный 472
Электронная вычислительная маши-
на 23, 554, 608, 621, 627
управляющая 41, 621, 623
цифровая 347, 655
Электромагнитное реле 273, 601
Явление Тиндаля—Рентгена 468
Учебное издание
Беспалое Александр Валентинович
Харитонов Николай Иванович
СИСТЕМЫ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
Редактор Д.К. Новикова
Художник И.А. Слюсарев
Компьютерная верстка Н.А. Попова
Корректор Р.В. Молоканова
ИД № 04284 от 15.03.2001.
Подписано в печать 30.09.06. Формат 60x88 '/ lt>
Гарнитура NewtonC. Печать офсетная.
Объем 43_5 усл. печ. л. Тираж 2000 экз. Зак. № 2803
Издательско-книготорговый центр «Академкнига»
117997, Москва, Профсоюзная ул., д. 90
E-mail: bookman@maik.ru. web-site: http://www.akadenikniga.com
По вопросам поставок обращаться в Книготорговое объединение «АкадемикА»
Россия 117997. г. Москва Профсоюзная ул. 90
Тел.: (495)334-73-18; 334-89-98 Факс: 8-499-724-39-76
E-mail: akademika@maik.ru; svmash@maik.ru
Отпечатано с готовых диапозитивов в
ОАО «Марийский полиграфическо-издательский комбинат»
424002, г Йошкар-Ола ул. Комсомольская 1I2