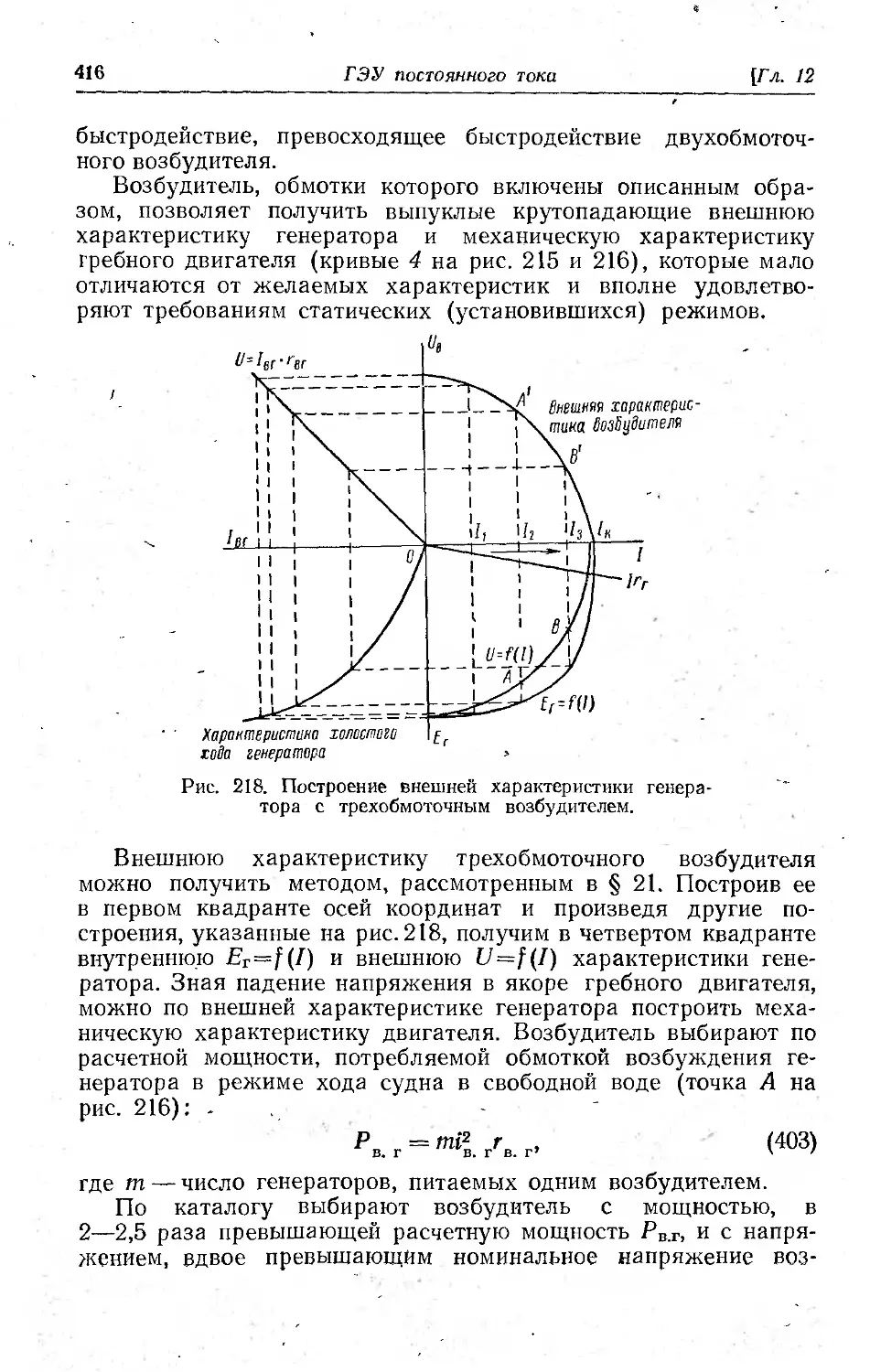
/





























































































































































































































































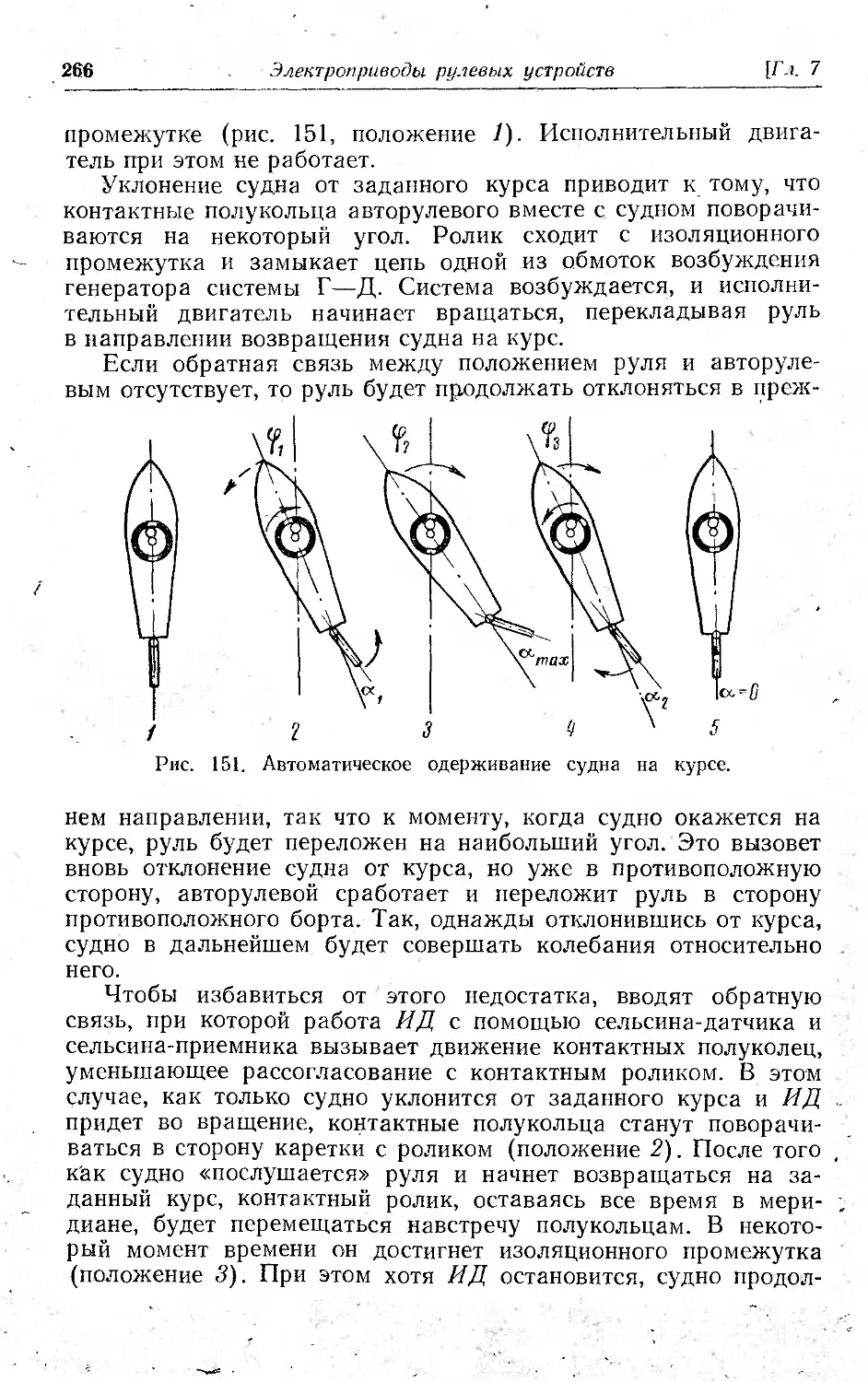




























































































































































































Text
к. А. ЧЕКУНОВ
СУДОВЫЕ
ЭЛЕКТРОПРИВОДЫ
И ЭЛЕКТРОДВИЖЕНИЕ
СУДОВ
Издание второе, переработанное и дополненное
Допущено Управлением кадров и учебных, заведений Министерства
судостроительной промышленности СССР в качестве учебника для
судостроительных техникумов
ИЗДАТЕЛЬСТВО „СУДОСТРОЕНИЕ"
Ленинград 1969
Чекунов К. А.
4 37
Судовые электроприводы и электродвижение су-
дов. Л., «Судостроение», 1969.
464 с.
В книге изложены общие вопросы теории судовых электроприво-
дов, описаны электроприводы палубных механизмов и гребных элек-
трических установок.
Книга является учебником для судостроительных техникумов, но
может быть полезной также студентам кораблестроительных институ-
тов, работникам судостроительных предприятий, судовым электроме-
ханикам.
3-18-5
18-69
УДК 629.12-83(075)
ПРЕДИСЛОВИЕ
Предлагаемый учебник «Судовые электроприводы и элек-
тродвижение судов» является вторым изданием" книги «Судо-
вые электроприводы» (Изд-во «Судостроение», Л., 1965 г.), ко-
торая в соответствии с новыми учебными планами для техни-
кумов дополнена разделом «Электродвижение судов».
Содержание глав, имевшихся в первом издании книги, пере-
работано с тем, чтобы больше внимания уделить автоматизации
управления и внедрению новых систем привода. Более подробно
рассмотрены актуальные вопросы теории современного электро-
привода (частотное регулирование асинхронных двигателей
и др.).
В связи с пожеланиями читателей, приславших свои отзывы
на первое издание книги, дополнительно описаны буксирные
лебедки, рассмотрены тиристорные электроприводы, приведены
числовые примеры, а в конце каждой главы даны контрольные
вопросы и задания по некоторым узловым разделам изложен-
ного материала. В конце книги помещен список условных обо-
значений.
Автор выражает глубокую признательность всем читателям,
высказавшим свои замечания по первому изданию учебника,
и просит направлять отзывы на настоящее издание книги по
адресу: г. Ленинград, Д-65, ул. Гоголя, 8, издательство «Судо-
строение». - • .
й - ' Автор
1*
ВВЕДЕНИЕ
Определение электропривода. «Всякое развитое машинное
устройство,— указывал К- Маркс,— состоит из трех существенно
различных частей: машины-двигателя, передаточного механизма,
наконец машины-орудия, или рабочей машины».*
Первая и вторая части агрегата служат для сообщения дви-
жения рабочей машине (исполнительному механизму) и носят
название привода. Третья часть — исполнительный меха-
низм— выполняет ту или иную производственную операцию,
участвуя в общем технологическом процессе.
В зависимости от рода двигателя привод может быть пнев- >
матическим, гидравлическим, паровым, тепловым, электриче-
ским. С развитием техники и ростом производства менее произ-
водительные и экономичные двигатели заменялись другими,
более совершенными. Паровая машина, например, была вытес-
нена электрическим двигателем, который, получив широкое при-
менение во второй половине прошлого столетия, в настоящее
время является наиболее распространенным видом привода.
Электрическим приводом называется устройство,
состоящее из электродвигателя, электрических аппаратов управ-
ления им и механической передачи движения от двигателя
к исполнительному механизму (рис. 1).
Электропривод имеет следующие преимущества перед дру-
гими видами приводов:
а) длительный срок службы и высокий к. п. д. электродви-
гателя;
б) сравнительно небольшой вес и небольшие габариты элек-
трооборудования;
* К. М а р кс, Капитал, т. 1, М., Политиздат, 1967, стр. 384.
Введение
5
в) высокая перегрузочная способность электродвигателя;
г) возможность регулировать скорость в широких пределах;
д) экономичность торможения, быстрый пуск и возможность
реверса исполнительного механизма;
е) сравнительная простота автоматического и дистанцион-
ного управления;
ж) большое разнообразие типов электродвигателей, позво-
ляющее выбрать двигатель, соответствующий условиям работы
механизма;
з) простота генерирования и распределения электроэнергии.
ЭлектропрсЛВ^ (ЗП)
________________________________________________________________________________________________________________________________________________________________I
Рис. 1. Скелетная схема электрического привода.
Развитие электроприводов шло от групповых (в начале их
применения) к одиночным и многодвигательным (в настоящее
время).
Групповым называют такой электропривод, в котором
движение от одного электродвигателя передается через транс-
миссионные передачи нескольким рабочим машинам. Групповой^
электропривод широко применялся в береговых установках, где
благодаря нему удавалось заменять паровую машину электро-
двигателем большой мощности, не прибегая к значительным
конструктивным изменениям передаточных механизмов. Ввиду
существенных недостатков групповой электропривод теперь уже
почти не используется.
Одиночным считается такой электропривод, который
позволяет каждую рабочую машину приводить в движение от-
дельным электродвигателем. Таковы приводы целого ряда про-
стых металлообрабатывающих станков, а также привод якорно-
швартовного шпиля. Во многих случаях электродвигатель кон-
структивно сливается с исполнительным механизмом в одно
целое и тогда механическая передача отсутствует (например,
вентиляторы небольших мощностей).
Наиболее совершенен многодвигательный электро-
привод, характеризующийся тем/ что различные рабочие органы
6
Введение
сложного производственного агрегата приводятся в движение
отдельными электродвигателями. Так, в электроприводе грузо-
подъемного крана механизмы поворота платформы, изменения '
вылета стрелы и подъема груза приводятся в движение спе- -;
циально предназначенными для каждой из этих целей электро-
двигателями. Применение многодвигательных электроприводов
упрощает кинематическую схему и конструкцию производствен-
ного агрегата и делает осуществимым автоматическое управле-
ние производственным процессом.
Сложный агрегат, состоящий из объединенных общим про-
изводственным процессом рабочих органов, имеющих свои
электроприводы, называется электрифицированным
агрегатом.
По способу управления электроприводы делятся на неавто-
матизированные, полуавтоматизированные и автоматизиро-
ванные.
Неавтоматизированным считается такой привод,
в котором управление двигателем осуществляется вручную,
непосредственным воздействием обслуживающего персонала на
аппараты управления.
Автоматизированный привод представляет собой
комплекс электрических машин и аппаратов, работающих без
непосредственного участия обслуживающего персонала.
Полу автола тиз ир ов ан н ы й привод является устрой-
ством, в котором применяются элементы как ручного, так и
автоматического управления (например, оператором задается
начало автоматического процесса управления электроприводом).
Электропривод, предназначенный для приведения в движе-
ние судовых механизмов, называется судовым электро-
приводом.
Судовые электроприводы приводят в движение рулевые и
якорно-швартовные устройства, промысловые, грузовые, шлю-
почные лебедки, грузоподъемные краны, механизмы машинно- ‘
котельного отделения и другие судовые механизмы. Основная
часть электроэнергии, вырабатываемой электростанциями на
современных судах, потребляется электроприводами. Требова-
ния, предъявляемые к ним, определяют род тока на судне, а на- ,
дежная их работа обеспечивает управляемость, живучесть и
другие мореходные качества судна.
Краткий очерк развития отечественных судовых электропри-
водов. Впервые судовой электропривод применил русский акаде
мик Б. С. Якоби, который сконструировал электродвигатель для
вращения гребных колес и 13 сентября 1838 г. установил его
на лодке, которая благодаря этому смогла передвигаться по
Неве навстречу течению со скоростью около 4 км]ч. Эта дата
ознаменовала не только начало применения судового электро-
Введение
7
привода, но и первое практическое использование электриче-
ской энергии вообще.
Важно также отметить, что, несмотря на экономическую
отсталость тогдашней России, приоритет в этом весьма важном
вопросе принадлежит русским ученым. Опыт Б. С. Якоби по-
лучил широкую мировую известность; в большом количестве
последующих работ русские и зарубежные электротехники лишь
пытались усовершенствовать это изобретение. Принцип движе-
ния от электродвигателя, питаемого химическим источником
электроэнергии, предложенный Б. С. Якоби, был принят (и при-
меняется до сих пор) во всех подводных флотах мира. Однако
из-за несовершенства и неэкономичности имевшихся в то время
источников электроэнергии первое применение судового элек-
тропривода быстрого распространения не получило.
Работы по внедрению электропривода на судах возобнови-
лись лишь спустя несколько десятилетий, в 1886 г., когда на
крейсерах «Адмирал Нахимов», «Адмирал .Корнилов» и «Лей-
тенант Ильин» были установлены первые электровентиляторы,
получившие благодаря своей надежности широкое признание.
В 1892 г. на броненосном крейсере «Двенадцать апостолов»
был установлен электропривод рулевого устройства, который
также успешно прошел испытания. Через пять лет, в 1897 г., на
транспорте «Европа» начала работать электролебедка.
На протяжении последующих пяти лет, с 1898 г. по 1903 г.,
были электрифицированы рулевые и якорные устройства крей-
серов «Громобой» и «Паллада». В рулевых электроприводах
уже тогда применялась система генератор—двигатель, разрабо-
танная в 1894—1896 гг. электриком Николаевского порта
А. В. Шубиным. Несколько позднее, в 1907 г., эта система была
усовершенствована инженером Балтийского завода Н. А. Федо-
рицким, который применил компаундирование приводного дви-
гателя. Системы генератор—двигатель, использующие принцип
компаундирования, широко применяются в современных судо-
вых электроприводах.
В 1903—1904 гг. на Сормовском заводе были построены пер-
вые дизель-электроходы «Вандал» и «Сармат».
Все судовые электрические установки того времени работали
на постоянном токе при напряжении, как правило, не превы-
шавшем НО в. Начиная с 1908 г., на судах отечественного
флота началось внедрение двигателей переменного тока как
наиболее простых и надежных, что в судовых условиях, как
известно, имеет особое значение. Так, на заградителе «Амур»
были установлены трехфазные двигатели для вентиляторов и
водоотливных турбин.
1909—1911 гг. были отмечены внедрением переменного тока
на линейные корабли типа «Севастополь». Следует заметить,
8
Введение
что в США первая судовая электрическая установка на пере-
менном токе появилась только в 1932 г.
Успехи, достигнутые отечественными судостроителями доре-
волюционного периода в практическом внедрении и совершен-
ствовании конструкций электроприводов, во многом объясняются
высоким уровнем русской электротехнической науки, достигну-
тым уже в XIX в. Ученым нашей страны принадлежит приори-
тет в создании теории электропривода как специальной отрасли
прикладных знаний. .Основы теории электропривода изложил
Д. А. Лачинов в своем труде «Электромеханическая работа»,
опубликованном в первых номерах журнала «Электричество»,
начавшем выходить в 1880 г.
Дальнейшее развитие теории электропривода осуществили
советские ученые. Первый систематизированный труд по теории
электропривода — «Электрическое распределение механической
энергии» — опубликовал в 1925 г. профессор Ленинградского
электротехнического института С. А. Ринкевич. В последующие
годы появились фундаментальные работы В. К. Попова,
Р. Л. Аронова, А. Т. Голована и др. по общей теории электро-
привода и В. И. Полонского, Н. М. Хомякова, В. В. Тихонова,
И. Р. Фрейдзона и др. по судовым электроприводам.
В настоящее время перед судостроителями стоят большие
задачи по дальнейшему усовершенствованию и техническому
оснащению флота. Создаются транспортные суда, развивающие
эксплуатационные скорости до 23—25 узлов и обеспечивающие
скоростную доставку груза в любой район земного шара.
Строятся танкеры грузоподъемностью 70 000—80 000 т. Со-
здается высокопроизводительный совершенный рыбопромысло-
вый комплекс, включающий в себя базу «Восток» и четырна-
дцать ловецких судов типа «Надежда», доставляемых в район
лова на борту базы. Экономическая целесообразность смешан-
ных (речных и морских) перевозок без перевалки грузов в про-
межуточных портах требует создания судов смешанного пла-
вания.
Решается задача комплексной автоматизации судов, преду-
сматривающая переход от отдельных автоматизированных су-
довых агрегатов к сложным управляющим комплексам, объеди-
няющим разрозненные автоматизированные системы в единое
целое. Успешная реализация этой большой программы невоз-
можна без существенного продвижения вперед теории и прак-
тики судового электропривода.
ЧАСТЬ ПЕРВАЯ
ОСНОВЫ ЭЛЕКТРОПРИВОДА
ГЛАВА 1
МЕХАНИКА ЭЛЕКТРОПРИВОДА
§ 1. Силы и моменты, действующие в системе электропривода
К валу электродвигателя, работающего в системе привода,
приложены электромагнитный момент самого двига-
теля и так называемый статический момент, создавае-
мый рабочей машиной. Эти моменты действуют по-разному
в различных условиях работы привода.
Так, если электрическая машина работает в режиме двига-
теля, обеспечивая движение системы, то создаваемый ею элек-
тромагнитный момент совпадает по направлению с вектором
скорости, называется вращающим и считается положитель-
ным. Такой момент развивает, например, двигатель грузоподъ-
емного механизма при подъеме груза.
Если же электрическая машина работает в режиме тормоза,
то создаваемый ею электромагнитный момент действует в на-
правлении, противоположном направлению скорости. Такой
момент, препятствующий движению, называется тормозным
и считается отрицательным. В тормозном режиме работает,, на-
пример, двигатель грузоподъемного механизма при опускании
тяжелых грузов.
Статические моменты, приложенные к валу электродвига-
теля, также могут либо способствовать движению, либо проти-
водействовать ему (тормозить движение). В последнем случае
они обычно называются нагрузочными или статиче-
скими моментами сопротивления.
По характеру действия статические моменты делятся на
реактивные и активные (или потенциальные).
Реактивный момент всегда препятствует движению
(рис. 2,о). При изменении направления движения реактивный
момент изменяет свое направление. Такой момент создают, на-
пример, силы трения.
Активный (потенциальный) момент всегда действует
в одну сторону, независимо от направления движения (рис. 2,6).
10
Механика электропривода
[Гл. 1
Примерами могут служить моменты при растяжении, сжатии и
скручивании упругих тел, момент силы тяжести и др.
Действующий на валу двигателя статический момент пред-
ставляет собой алгебраическую сумму различных моментов,
создаваемых рабочим органом
и
Рис. 2. Графики реактивного (а)
активного (б) моментов.
fl — скорость вращения; Мст — статический
момент.
машины, силами трения в кине-
матической схеме и другими
силами. Рис. 3 дает представ-
ление о взаимодействии мо-
ментов в различных режимах
работы.
Двигатель, работающий на
/^подъем груза (рис. 3, а), со-
здает положительный движу-
щий момент М. Моменты же
груза Л4гр и сил трения Л4тр
являются тормозными и в сум-
ме создают нагрузку на дви-
гатель.
Если силы трения создают
момент, превышающий момент
груза (Л4тр>Л4гр), то «для опускания последнего необходимо,
чтобы двигатель создавал направленный в сторону спуска дви-
жущий момент, который вместе с моментом груза преодолевал
G
Рис. 3. Взаимодействие моментов в системе привода: а —
подъем груза; б — силовой спуск; в — тормозной спуск.
бы момент сил трения (рис. 3, б). Такой спуск называется си-
ловым и наблюдается в грузоподъемных механизмах при
опускании холостого гака.
На рис. 3, в изображен случай опускания тяжелого груза
(Л4Гр>2ИТр). Момент груза 7Игр является движущим моментом.
Двигатель же, включенный на подъем, вместе с силами трения
создает тормозной момент и ограничивает скорость спуска.
£ Л
Силы и моменты в системе электропривода
И
Как видно из рисунка, момент сил трения (реактивный)
всегда направлен против движения. Потенциальный момент,
создаваемый грузом, во всех случаях имеет одно и то же на-
правление и в зависимости от направления движения может
быть как движущим, так и тормозным.
Рассмотрением указанных движущих и тормозных моментов,
действующих в системе привода, можно ограничиться только
в том случае, если они взаимно уравновешены, т. е. если си-
стема находится в состоянии покоя или равномерного движе-
ния. Достаточно, однако, в приведенном на рис. 3 примере изме-
нить величину момента, создаваемого двигателем, чтобы равно-
весие между движущими и тормозными моментами оказалось
нарушенным, в результате чего система будет либо разгоняться,
либо затормаживаться. В этом случае, кроме рассмотренных
моментов, появится еще так называемый динамический
момент, характеризующий изменение кинетической энергии
системы. Динамические моменты расходуются на разгон или
затормаживание движущихся масс привода.
При пуске двигателя в ход, торможении, изменении на-
грузки и целом ряде других режимов изменяется скорость дви-
жения привода, что влечет за собой изменение запаса кинети-
ческой энергии системы. Это обстоятельство оказывает значи-
тельное влияние на работу электродвигателя и оценивается
значениями момента инерции J или махового момента GD2.
Если тело с массой m движется прямолинейно со скоростью V,
то запас его кинетической энергии А определится по известной
формуле:
Работающий электропривод чаще всего осуществляет враща-
тельное движение, при котором запас кинетической энергии дви-
жущегося тела определяется из выражения:
А = (2)
где со — угловая скорость, padfceK-,
~ J — момент инерции, кГ • м- сек2.
Момент инерции J характеризует инерционность вра-
щающихся масс и выражается формулой:
J = то2, (3)
где т — действительная масса вращающегося тела;
р —приведенный радиус инерции, т. е. расстояние от оси
вращения до точки, в которой мысленно сосредоточена
вся масса твердого тела при условии, что действитель-
ный момент инерции при этом не изменяется.
12
Механика электропривода
[Гл. t
В практических расчетах вместо момента инерции часто
используют маховой момент GD2 (кГ м2), значение кото-
рого получаем путем следующих преобразований:
т 2 G / D\2 GD2
J = mp2 = — — =-------, (4)
S \ 2 ) 4g '
откуда
GD2 = 4gJ, (5>
где G — действительный вес тела, кГ;
D — приведенный диаметр инерции, м;
g — ускорение силы тяжести; g=9,81 м/сек2.
Таким образом, маховый момент GD2 характеризует также
инерционность вращающегося тела.
§ 2. Уравнение движения. Понятие о переходных режимах
Двигатель работает с постоянной скоростью только в том:
случае, если его вращающий момент М равен статическому
моменту сопротивления MCT:
М = Л4СТ,
или
Л1 —Мст = 0. (6)
Режим работы двигателя с постоянной скоростью носит на-
звание установившегося режима.
Установившийся режим работы электропривода, наступаю-
щий при соблюдении условия (6), продолжается до тех пор,
пока остаются неизменными как параметры двигателя и сети,
так и нагрузка на валу двигателя.
Механизмы, длительно работающие с неизменной нагрузкой '
и скоростью, в практике встречаются редко (некоторые венти-
ляторы и насосы). В большинстве же случаев исполнительные
механизмы, а следовательно, и электроприводы работают с на-
грузкой, меняющейся по ходу технологического процесса, под-
вергаются регулированию скорости, периодическим пускам и
остановкам. Переход от одного установившегося режима к дру-
гому обычно сопровождается изменением не только скорости, но
и подводимого напряжения, потребляемого двигателем тока,
вращающего момента и других величин, являющихся функцией
скорости.
Режим двигателя при переходе от одного установившегося
состояния к другому называется переходным.
Причинами возникновения переходных режимов могут быть: •
а) изменение нагрузки, вызванное производственной необхо-
димостью;
§ 2]
Уравнение движения. Понятие о переходных режимах
13
б) изменение схемы включения, осуществляемое в процессе
управления двигателем (пуск, торможение, реверс и др.) или
изменение параметров управления (например, сопротивления
цепи якоря или обмотки возбуждения);
в) случайное изменение параметров питающей сети (напря-
жения, частоты).
Работа в переходном режиме далеко не безразлична для
большинства электрических приводов. Поэтому весьма жела-
тельно всемерно сокращать время протекания переходных ре-
жимов, поскольку это позволяет повышать как точность'работы
приводов, так и производительность исполнительных механизмов.
Длительность и характер переходных режимов опреде-
ляются:
а) механической инерцией вращающихся и поступательно
движущихся масс привода и рабочей машины;
б) электромагнитной инерцией обмоток электрических ма-
шин и аппаратов электропривода;
в) тепловой инерцией элементов привода, подверженных
нагреву.
Тепловая инерция на длительность переходных режимов
влияет настолько незначительно, что учитывается лишь при
расчетах, требующих высокой точности.
Электромагнитная инерция, обусловленная индуктивностью
обмотки якоря (у машин постоянного тока) и индуктивностью
обмоток статора и ротора (у асинхронных двигателей), в боль-
шинстве практических расчетов также обычно не учитывается.
Это позволяет значительно упростить расчет переходных режи-
мов, обеспечивая достаточную для практики точность конечных
результатов.
Механическая инерция, оказывающая наибольшее влияние
на длительность переходных режимов, определяется величиной
момента инерции или махового момента.
Если развиваемый двигателем момент М не равен статиче-
скому моменту сопротивления Л4СТ, то скорость электропривода
изменяется, обусловливая изменение запаса кинетической энер-
гии системы. При этом в правой части уравнения (6) появляется
динамический или избыточный момент Л4ДИН, представляющий
собой алгебраическую разность моментов двигателя и рабочей
машины и вызывающий наличие переходного режима:
М-МСТ = МДИН. • (7)
Чтобы определить характер переходного режима, выясним
физический смысл динамического момента, для чего произведем
ряд преобразований.
Мощность Рдин, отдаваемую или получаемую инерцион-
ными массами, представим в виде первой производной запаса
14
Механика электропривода
[Г.7. I
кинетической энергии по времени. Тогда получим (при Z=const):
р ____
дин- dt
Л I Т “2
a I J ---
\ 2 ,
dt
г dm
dt
(8),
Известно, что момент связан с мощностью следующей за-
висимостью:
Л4ЛШ, = = J ~ . (9)
ш dt
Подставив это значение М™, в выражение (7), получим:
М —MCT=J—. (10)
dt
Иногда в расчетах переходных процессов удобнее пользо-
ваться маховым моментом и скоростью вращения (об!мин).
Имея в виду, что
2кп dw 2к dn. j d'" GD2 2г dn GD2 dn ....
<o =---; --- =------ — ; J--- =------- --=----- • --, (11)
60 dt 60 dt dt 4g 60 dt 375 dt v
получим уравнение движения в следующем виде:
, М-Мст = — -~, ч (12)
V ст 375 dt
где число 375 имеет размерность ускорения (.м/сек2)'.
Из выражений (10) и (12) уравнения движения (7) видно,
что динамический или избыточный момент расходуется на пре-
одоление инерции и сообщение ускорения движущимся массам
привода.
Из этих выражений вытекает также, что в зависимости от
величины динамического момента возможны следующие три
различные состояния электропривода.
1. При Л1>Л1ст динамический момент положителен. Это
означает, что dn/dt>0 (или d(£>/dt>G), т. е. имеет место уско-
рение (разгон) привода.
2. При Л4<Л1СТ динамический момент отрицателен. Это озна-
чает, что dn]dt<S), т. е. движение замедляется (имеет место
торможение).
3. При М—Мст динамический момент и ускорение равны
нулю, что соответствует установившемуся режиму или движе-
нию с постоянной скоростью.
На основе уравнения движения можно произвести исследова-
ние и расчет протекания переходных режимов электропривода.
Приведение движения элементов привода
15
§ 3. Приведение движения элементов электропривода
к валу электродвигателя
Известно, что из двух электродвигателей равной мощности
меньше весит и имеет меньшие габариты тот, который рассчи-
тан на большую скорость вращения. Поэтому замена тихо-
ходных двигателей быстроходными обусловливает экономию
материалов, снижение их стоимости, а также лучшие эксплуа-
тационные показатели — более высокий к. и. д., а для асинхрон-
ных двигателей и больший cos <р.
Сказанное объясняет, почему электромашиностроительная
промышленность выпускает двигатели, как правило, со скоро-
Рпс. 4. Кинематическая схема передачи движения от
электродвигателя к исполнительному механизму.
с'тями вращения от 750 до 3000 об/мин, причем с уменьшением
мощности двигателей увеличиваются их номинальные скорости.
Между тем очень многие судовые механизмы работают с ма-
лыми скоростями рабочего органа. Это приводит к необходи-
мости соединять электродвигатели с исполнительными механиз-
мами через передачи, изменяющие в определенном соотношении
их скорости вращения (рис. 4).
Чтобы определить вращающий момент двигателя и время
протекания переходных процессов в системе, состоящей из не-
скольких валов, вращающихся с различными скоростями, необ-
ходимо, строго говоря, произвести расчет отдельно для каждого
промежуточного вала и учесть влияние на него остальных эле-
ментов системы. Но такое решение получается громоздким и
нерациональным. Поэтому реальную систему элементов, движу-
щихся с различными скоростями, ' заменяют эквивалентной
системой, вращающейся с какой-то одной определенной ско-
ростью. Для этой скорости составляют и .решают соответствую-
щие уравнения движения. Такая замена носит название при-
ведения движения электропривода к одной оси
16
Механика электропривода
[Гл. I
вращения. В практике обычно все вращающиеся и поступа-
тельно движущиеся массы приводят к валу двигателя на основе
энергетического баланса системы или постоянства запаса кине-
тической энергии до и после приведения.
Приведение статических моментов к валу двигателя. Момент
на валу и мощность двигателя связаны соотношением:
" = (13)
где М — вращающий момент на валу двигателя, н~м;
Р — мощность двигателя, вт.
Выразим угловую скорость ю через п (об/мин):
Тогда будем иметь:
М = ~ = 9,55 — нм. (14)
Г.И п
' ’зо’
Если мощность выразить в киловаттах (кет), а момент
в килограммометрах (кГ -м), то получим:
.. 9,55 Р-103 Р г .
Л4=—— • -------=975—- кГ-м, (15)
откуда
р — M/L кет. . (16)
975 ' 7
В установках со сложной кинематической схемой на вра-
щающихся с различными скоростями валах имеют место раз-
личные по величине моменты. Так, чтобы в электромеханиче-
ском рулевом приводе преодолеть момент в несколько тонномет-
ров на баллере руля, достаточен момент в несколько десятков
килограммометров, развиваемый двигателем. Кроме того, дви-
гатель преодолевает еще и момент сил трения в передаче.
Таким образом, для определения момента сопротивления на
валу электродвигателя необходимо учесть трение в передаче и
соотношение скоростей двигателя и исполнительного механизма,
т. е. привести статический момент сопротивления исполнитель-
ного механизма к валу двигателя.
Выполним такое приведение для работы электропривода
в двигательном и тормозном режимах.
Приведение движения элементов привода
В обоих режимах статический момент, создаваемый исполни-
тельным механизмом, может быть образован как при враща-
тельном, так и при поступательном движении.
При двигательном режиме мощность Р, развиваемая двига-
телем, должна быть равна сумме мощности исполнительного
механизма РСт и мощности потерь в кинематической схеме, учи-
тываемой через к. п. д. передачи тр
Следовательно:
(17)
Если двигатель имеет момент на валу М и скорость враще-
ния п, а исполнительный механизм — соответственно Л4СТ и пСт,
то на основании выражения (16) получим:
Мп = М^Пс1-, (18)
откуда
д! _ Мс1яст __ Л4СТ (19)
где 1=п/пСт — передаточное число.
Если статический момент Л4СТ создается поднимаемым гру-
зом, то его значение определится из формулы:
Мст = , (20)
где Ест — сила (вес груза), кГ;
Dq — диаметр грузового барабана, м.
Подставив значение Л4СТ в уравнение (19), получим фор-
мулу приведения статического момента для двигательного ре-
жима:
2г/
(21)
В тормозном режиме электропривода движущий момент
создается, например, опускаемым грузом, а двигатель и силы
трения создают моменты, противодействующие движению. Если,
как в предыдущем случае, мы учтем трение через к. п. д. пере-
дачи, то момент при спуске на валу двигателя определится по
формуле:
м ~ ст- г
2У1СП . «СП»
где т]сп — к. п. д. механизма при спуске.
2
К. А. Чекунов
" ТЕХНЙЧЁСКЛЯ |
Б И Б Л ИЭТЕ К А ?
Омский С Р 3
18
Механика электропривода
[Гл. 1
Как видно из графика, приведенного на рис. 5, при значи-
тельных загрузках исполнительного механизма к. п. д. передачи
практически постоянен. Однако анализ работы электропривода
показывает, что при спуске механизм обычно загружен значи-
тельно меньше, так как моменты сил трения и груза направ-
лены ПРОТИВОПОЛОЖНО. ПОЭТОМУ 1]сп< т;
Приведенный статический момент на валу двигателя при
спуске, как правило, выражают через к. п. д. передачи при
Рис. 5. График зависимости
к. п. д. механизма т] от его за-
грузки.
и G и — соответственно текущие и
номинальные значения нагрузки. Ци-
фры у кривых — значения
подъеме, принимая моменты сил
трения при подъемен спуске одно*
го и того же груза одинаковыми.
Приведенный статический мо-
мент при подъеме груза с .учетом
потерь в передаче выражается
уравнением (21), а без учета по-
терь — уравнением:
л л/ -TCTDg
М' = - .
2г
Значение момента на валу дви-
гателя, необходимое для преодо-
ления момента сил трения, оче-
видно, определится как разность
указанных моментов:
кМ = М — М' = —
2цг’
__Гст^б Гст£>б / 1 । \
2г ~ 2г \ 1 Г
При тормозном спуске момент сил трения имеет одинаковое
направление с моментом двигателя (см. рис. 3,в), т. е. способ-
ствует уменьшению момента двигателя, необходимого для под-
держания постоянной скорости тормозного спуска тяжелых
грузов.
Для данного условия получим следующее значение приве-
денного к валу двигателя статического момента при спуске:
Мсп = M’—kM = — == (2---(22)
сп 2г 2г \ / 2г \ ’I /
Из уравнения (22) видно, что режим тормозного спуска воз-
можен только в том случае, когда tj>0,5. Такой режим приме-
няется в грузоподъемных механизмах и якорно-швартовных
устройствах.
При т)<0,5 будет иметь место силовой спуск. Момент двига-
теля из тормозного превратится в движущий; направления мо-
ментов, создаваемых двигателем и грузом, совпадут. Значения
§3]
Приведение движения элементов привода
19
к. п. д. т]<0,5 присущи самотормозящимся передачам, исклю-
чающим возможность работы двигателя в тормозном (генера-
торном) режиме. Аналогичный режим свойствен электромеха-
ническим рулевым приводам с секторной или винтовой пере-
дачей.
Приведение моментов инерции и маховых моментов. Запас
кинетической энергии А всех вращающихся масс электропри-
вода, кинематическая схема которого приведена на рис. 6, оп-
ределится из уравнения:
9 9 2 9
А = J дв-^ + А— + Л —+ /мех"2^, (23)
дв 2 1 А 2 1 2 1 2 ’ \ /
Рис. 6. Приведение моментов
инерции к валу двигателя.
где /дв; юдв— соответственно момент инерции и угловая ско-
рость якоря (ротора) двигателя;
Л; <»] — момент инерции и угловая скорость масс, вра-
щающихся на первом от двигателя валу пе-
редачи;
/2; о>2 — момент инерции и угловая скорость масс, вра-
щающихся на втором от двигателя валу пере-
дачи;
/мех! <»мех — момент инерции и угловая скорость масс, вра-
щающихся на валу исполнительного меха-
низма.
Заменив вращающиеся на различных валах массы одной
приведенной (эквивалентной) массой, вращающейся со ско-
ростью двигателя и имеющей запас кинетической энергии,
получим:
о,2
Лпр=/пр^-, (24)
где /пр — приведенный к валу двигателя момент инерции си-
стемы.
При этом считаем, что запас кинетической энергии установки
до и после приведения постоянен, т. е.
А =Апр,
2
20
Механика электропривода
[Гл. 1
ИЛИ
.2
2
'мех
пр
Разделив
запишем:
9 2 2 2
“дв __ г “дв . т “1 , т “2
-Г--<'дв-Г + *'1 — + ^2— . „еА 2 -
все члены полученного уравнения (25) на
мех
(25)
С02дв/2,
ПР
лв
дв
|2 + Л
(26)
Подставив в это уравнение значение ю=лп/30, получим:
Jnp = J.B+ J j (27)
\ “ДВ j \“ДВ J \ “ДВ j
Отношения -^2- = if, = i2; = i представляют собой
Щ Я 2 пмех
передаточные числа от вала двигателя к первому, второму и
третьему валам установки.
Произведя указанные замены в уравнении (27), получим:
^пр==Лв+Л —+ Л~ + ^мех—• (28)
пр дв • а 2 «2 ' мел .g \ /
*1 12 1
С учетом соотношения
GD2 = 4gJ,
уравнение (28) можно переписать и для приведенного махового
момента GZ)2np:
GD2np = GD2B + GDI + GD224 + GE>2ex -1- . (29)
Z1 z2 1
Количество слагаемых в правых частях полученных уравне-
ний зависит от количества промежуточных передач кинематиче-
ской схемы установки.
Приведение поступательно движущихся масс. Во многих
судовых установках имеются, помимо вращающихся частей,
еще и поступательно движущиеся массы, которые оказывают
значительное влияние на инерцию системы.
Чтобы рассчитать электроприводы таких установок, необхо-
димо заменить поступательно движущиеся массы эквивалент-
ным моментом инерции, отнесенным к скорости вращения вала
двигателя. Условием такой замены является равенство запасов
кинетической энергии реальной поступательно движущейся
массы Д = 7иг?2/2 и приведенного момента инерции Лпр=/Пр0)2ДЕ/2.
На основании принятого условия можно записать:
2
mxfl _ j “дв " »
2 пр 2 ’
§5]
Приведение движения элементов привода
21
откуда
j __ mv2
•'пр “ ”
“д
Здесь m — масса, поступательно движущаяся со скоростью v
(рис. 7).
Значение приведенного махового момента имеет вид:
GO2P = 4gJnp = 4^m 4 = 4G ™
“ДВ “да
где G=gm — вес поступательно движущихся частей установки.
Подставив значение ю=лп/30 в фор-
мулу (31), получим:
GDnP = 4G v2
(30)
(31)
приведения. Уста-
из вращающихся
= 365G — . (32)
«ДВ
Рис. 7. Приведение по-
ступательно-движущихся
масс к валу двигателя.
2п2
302
Общая формула
новку, состоящую
с разными скоростями и поступательно
движущихся масс (см. рис. 4), можно
привести к валу двигателя с помощью
так называемой общей формулы приве-
дения:
9 9 GD? GDI GdL^
GD2p= GD2b + -4+—2 1
*2
(33) для определения приведенного
связано
приведенный к валу двигателя ма-
,-2
Z2
+ 365G ~ .
(33)
Использование формулы
махового момента системы
вычислениями. Между тем,
ховый момент элементов установки, вращающихся с неболь-
шими скоростями, как правило, оказывает лишь незначительное
влияние на величину общего приведенного момента. Поэтому
в большинстве практических расчетов маховые моменты эле-
ментов установки, вращающихся не на валу двигателя, не вы-
числяют, а учитывают коэффициентом k = 1,1 1,3, на который
увеличивают значение махового момента двигателя.
Тогда формула (33) принимает более простой вид:
GD2P = £GD2B + 365G — .
«да
Но если в установке имеется механизм со значительным ма-
ховым моментом, то последний обычно вводят в формулу при-
ведения (33) отдельным слагаемым.
с довольно кропотливыми
(34)
22
Механика электропривода
[Гл. 1
Динамические моменты, определяемые величиной GD2, как
и статические моменты, создают при передаче потери, которые
также можно выразить через К; п. д. передачи. Однако то об-
стоятельство, что этот к. п. д. необходимо брать из графика на
рис. 5 для суммарного момента Л/СТ+Л/ДИГ1, который еще не из-
вестен, сильно усложняет расчет, не приводя к большому уточ-
нению результата.
Поэтому потерь при передаче динамических моментов обычно
не учитывают, а к. п. д. передачи, соответствующий Л1СТ, вводят
только в расчет приведенного статического момента. Погреш-
ность уменьшается также благодаря тому, что к. п. д., выбран-
ный только для Мст, несколько меньше к. п. д. при передаче
суммарного момента.
Пример 1. Определить момент на валу и мощность, развиваемую двига-
телем грузовой трехтонной лебедки (см. рис. 4) при подъеме и опускании
номинального груза со скоростью о = 50 м/мин, если диаметр грузового бара-
бана D6 = 400 мм; передаточное число г = 23,3; к. п. д. механизма т] = 0,8; вес
холостого гака Go=60 кг.
Решение. 1. Статический момент при подъеме номинального груза GH,
приведенный к валу двигателя,
М = (G,,+GC)D6 (3000.+ 60)Щ,4 = кГ м
21т; 2-23,3-0,8
2. Приведенный статический момент при спуске номинального груза из
уравнения (22)
л. 3050 - 0,4/q 1\ юс г
Л4СП = -------- 2------1 = 19,6 кГ-м.
2-23,3 \ 0,8/
3. Скорость вращения двигателя
vi 50-23,3 п .
п =-----=--------— = 928 об!мин.
~D6 3,14-0,4
4. Мощность, развиваемая двигателем при подъеме номинального груза,
по уравнению (16)
D 32,8-928
Р = —---------= 31,3 кет.
975
5. В соответствии с расчетными значениями мощности и скорости вра-
щения выбираем двигатель постоянного тока со смешанным возбуждением
типа ДПМ-52 водозащищенного исполнения с ПВ = 40% и со следующими
номинальными данными: Рн=32 кет; пн = 1000 об/мин; 17=220 в; GD2RB =
=7,5 кГ-м>.
6. Мощность, развиваемая двигателем при спуске груза,
Р СП
М№п
’'97‘Г
19,6-928 ._ _
---------= 17,6
975
кет.
Эту мощность двигатель будет возвращать в сеть, работая в тормозном
рекуперативном режиме с расчетной скоростью вращения 928 об/мин.
§ 4]
Время пуска и торможения электропривода
23
§ 4. Время пуска и торможения электропривода
Многие судовые механизмы подвергаются частым пускам и
остановкам, влияющим на режим их работы. Поэтому при рас-
чете электроприводов таких механизмов необходимо учитывать
время разгона и торможения электродвигателя, исходя из урав-
нения движения.
Пуск электропривода. Процесс пуска двигателя под нагруз-
кой можно рассчитать по формуле (12), учтя инерционность ,
системы:
dn
~dT'
М — Мст =
ст 375
где GjD2np — приведенное значение махового момента привода.
Это выражение представляет собой дифференциальное урав-
нение первого порядка. Для его решения разделим переменные
и проинтегрируем отдельно правую и левую части. Тогда полу-
чим время пуска
пст
tn J 375 (Af — Л4СТ) ’
о
(35)
где ria — установившаяся скорость, соответствующая статиче?
скому моменту сопротивления на валу двигателя Л1ст.
Чтобы проинтегрировать выражение (35), надо знать зави-_
симость моментов от скорости. Если вращающий момент двига-
теля и момент статического сопротивления в процессе пуска
не изменяются, то решение весьма упрощается.
При достаточно большом количестве пусковых ступеней мо-,
мент двигателя при пуске (пусковой момент) можно принять
постоянным и равным некоторому среднему значению Ма=const.
Если при этом двигатель работает на нагрузку, момент которой
не зависит от скорости вращения, т. е. 7UCT = const, то и Л1дИН=
=МП — Мст = const.
Проинтегрировав выражение (35) для принятых условий
пуска, получим:
<^пр Ист
- 375 714 п М Ст
где/п — время пуска, сек.
Если двигатель пускается вхолостую и Л1ст~0, то уравнение
движения для этого случая примет вид:
М = (37)
375 dt
24
Механика электропривода
1Гл. 1
Решив это уравнение относительно t, получим время разгона
двигателя при пуске вхолостую:
GD2 п
J. ____ Дд А
” “ 375 ' Мп ’
(38У
где пх. х — скорость холостого хода двигателя, об!мин.
Из уравнений (36) и (38) видно, что время разгона электро-
привода до заданной скорости зависит от значений динамиче-
ского момента М11ИЯ=Л1ТТ— Л1СТ и махового момента.
Часто бывает желательным сократить время пуска. Рассмот-
рим возможные способы такого сокращения.
Скорость пст и момент Л1ст, развиваемые исполнительным
механизмом, определяются технологическим процессом и про-
извольно менять их нельзя. Что касается увеличения пускового
момента МП путем выбора двигателя большей мощности, то оно
не всегда приводит к желаемому результату, так как одновре-
менно увеличивается маховой момент двигателя (особенно
у машин постоянного тока). Поэтому обычно сокращения вре-
мени пуска добиваются тем, что снижают маховой момент
6£>2ДВ, уменьшая радиальные размеры якоря (ротора) двига-
теля. Чтобы при этом не снизился электромагнитный момент
машины, уменьшение радиальных размеров компенсируют уве-
личением соответствующих размеров в осевом направлении. Ха-
рактерным примером такого решения вопроса служат крановые
двигатели и двигатели, предназначенные для кратковременной
работы. Иногда с целью уменьшения махового момента уста-
новки один двигатель заменяют двумя двигателями половинной
мощности.
Для того чтобы определить время разгона двигателя от не-
которой скорости щ до скорости п2, необходимо уравнение (35)
проинтегрировать в указанных пределах:
«2
Р GD)'r,dn GD2(n„— nA
t = I -------SP----=-------------1L (39)
p J 375 (M — Л7СТ) 375Л4ДИН
где tp — время разгона, сек;
Мдин — среднее значение динамического момента двигателя
при разгоне от щ до п2.
Торможение электропривода. Если двигатель отключить от
сети, то он начнет затормаживаться и остановится. Это объяс-
няется тем, что вращающий момент двигателя после отключе-
ния становится равным нулю (Л1=0), а статический момент со-
противления вызывает отрицательный динамический момент.
§ 4]
Время пуска и торможения электропривода
25
Рассматриваемый процесс выражается следующим уравнением
движения:
_ GPnp dn
~ 375 ’ dt
(40)
Пользуясь уравнением (40), можно определить время тор-
можения системы tt от начальной скорости торможения щ до
любого интересующего нас значения скорости «2-
Для этого решим уравнение (40) относительно времени t,
причем будем считать Л4СТ = const:
«2
t = - GP"P f dn GPnp(n2-Wl) = GDnP(ni-»2) . f41)
т 375Л1СТ J 375Л-[СТ 375MCT ' ’
Чтобы определить время торможения до полной остановки
(время выбега tB)подставим в уравнение (41) значение конеч-
ной скорости «2 = 0. Тогда
GPnpnl
3752ИСТ
(42)
Из уравнения (42) видно, что время выбега электропривода
тем больше, чем больше маховые массы системы и рабочая
скорость привода. Время выбега уменьшается с увеличением на-
грузки на валу двигателя.
Аварийные, фиксированные и другие экстренные остановки
электропривода осуществляют различными способами электри-
ческого или механического торможения. Создаваемый при этом
тормозной момент Л1т будет, очевидно, совпадать по направле-
нию со статическим моментом сопротивления Л1ст и способство-
вать более быстрой остановке привода. Время принудительной
остановки в указанном случае может быть определено по фор-
муле:
__ GPnpnl
т“ 375(Л4Т + Л4СТ)
(43)
Пример 2. Определить время пуска и выбега двигателя при подъеме но-
минального груза лебедкой, данные которой приведены в примере 1. Мо-
мент двигателя при пуске изменяется в пределах от 2,0 до 1,2 МЕ. Статиче-
ский момент исполнительного механизма не зависит от скорости.
Решение 1. Номинальный момент двигателя из уравнения (15)
32
М„ =975—= 31,2 кГм.
1000
26
Электромеханические свойства двигателей постоянного тока [Гл. 2
2. Средний пусковой момент двигателя
9 о । 1 9
МП = ’ ’ М„ = 1,6-31,2 = 49,9 кГ-м.
3. Маховой момент передачи и грузового барабана учтем введением
коэффициента й=1,2
4. Маховой момент, приведенный к валу двигателя, согласно уравне-
нию (34)'
GD* = 1,2-7,5+ 365-3050 (——Y = $.9кГ-м?.
пр \60-928/
5. Время разгона двигателя до рабочей скорости из уравнения (36)
9,9-928
tn ='-------------=1,43 сек.
375(49,9—32,8)
6. Время свободного выбега двигателя из уравнения
(42)
9,9-928
375-32,8
сек.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Укажите направления действия активного и реактивного моментов
при работе двигателя в тормозном режиме (стр. 9—10).
2. Что является нагрузкой двигателя в режиме силового спуска
(стр. 10)?
3. Приведите значения моментов, скорости и ускорения в переходных
режимах (стр. 13—14).
4. Когда и почему в уравнении (22) момент А4СП получается отрицатель-
ным? Объясните его физическую сущность (стр. 18).
5. Какой пуск двигателя завершится в наименьшее время: а) на подъем
с полным грузом или без него; б) на спуск с полным грузом или без него
(стр. 17—18 и 23—24)?
6. Что произойдет при отключении двигателя грузовой лебедки, подни-
мавшей номинальный груз без применения механического тормоза (стр. 25)?
7. Напишите уравнение движения для тормозного спуска груза (стр. 10 и
14).
8. Начертите графики моментов для рис. 3 (стр. 10).
ГЛАВА 2
ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА
ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
§ 5. Понятие о механических и скоростных характеристиках*
Механической характеристикой электродвига-
теля называется зависимость между .скор остью вращения и созда-
ваемым двигателем моментом, т. е. зависимость n=f (2И). Ме-
* Материал, изложенный в § 5 и 6, относится также и к двигателям пере-
менного тока.
§ 5]
Понятие о механических и скоростных характеристиках
27
ханические характеристики дают наглядное представление об
электромеханических свойствах двигателей, позволяют опреде-
лить скорость их вращения в установившемся режиме и совме-
стно с уравнением движения могут использоваться для расчета
переходных режимов.
Различают естественные и искусственные механические ха-
рактеристики.
Естественная механическая характеристика соответ-
ствует нормальным условиям работы двигателя, которые имеют
место при отсутствии добавочных сопротивлений в цепях глав-
ного тока и возбуждения дви-
гателя, а также при номиналь-
ных параметрах питающей
сети (напряжении и частоте).
Каждому двигателю (кроме
полюсопереключаемых) соот-
ветствует только одна естест-
венная механическая характе-
ристика.
Скорость большинства элек-
тродвигателей уменьшается
с увеличением нагрузочного
момента на валу. Однако это
уменьшение скорости различно
у различных двигателей. В за-
висимости от характера изме-
Рис. 8. Механические характеристики
электродвигателей.
нения скорости при изменении
момента на валу механические
характеристики подразделяются на жесткие и мягкие.
Критерием жесткости механической характеристики служит
либо так называемая степень жесткости а, т. е. отноше-
ние приращения момента к соответствующему приращению
скорости
ДЛ4
а —----,
Дп
(44)
либо обратная величина — степень крутизны характе-
ристики р, т. е. отношение приращения скорости к соответ-
ствующему приращению момента
Дп
ДМ
(45)
Разграничим механические характеристики электродвигате-
лей, исходя из установленного выше понятия степени крутизны
характеристики р (рис. 8).
1. Абсолютно жесткая механическая характеристика
(кривая 1) соответствует работе двигателя с постоянной
28
Электромеханические свойства двигателей постоянного тока [Гл. 2
скоростью при изменяющемся моменте. Такую характеристику
имеют синхронные двигатели, для которых 0 = 0, а а= со.
2. Жесткая механическая характеристика соответствует
незначительному изменению скорости при значительных изме-
нениях момента. Такую характеристику имеют двигатели по-
стоянного тока с параллельным возбуждением (кривая 2) и
асинхронные двигатели в пределах допустимых нагрузок (кри-
вая 3), для которых 0 <10%.
3. Мягкая механическая характеристика соответствует
резкому изменению скорости двигателя при изменении момента
на валу. Такие характеристики имеют двигатели постоянного
Рис. 9. Механические характери-
стики производственных механиз-
мов.
Рис. 10. Режимы устойчи-
вой и неустойчивой работы
электропривода.
тока со смешанным (кривая 4) и последовательным (кривая 5)
возбуждением, для которых 0> 10%.
С изменением скорости вращения изменяются также и ста-
тические моменты сопротивления, создаваемые некоторыми
исполнительными механизмами. Эта зависимость 7HCT=f (п)
носит название механической характеристики про-
изводственного механизма.
По характеру влияния скорости различают статические мо-
менты сопротивления (рис. 9):
а) не зависящие от скорости, например моменты сил трения
или веса (прямая /);
б) пропорциональные скорости, например момент, который
создает генератор с параллельным возбуждением, работающий
на постоянное сопротивление (прямая 2);
в) пропорциональные квадрату скорости, например моменты
вентилятора, центробежного насоса, гребного винта (кривая 3).
Механические характеристики электродвигателей и произ-
водственных механизмов обычно изображаются в одних и тех
же осях координат (n, М) и для удобства пользования совме-
щаются в одном квадранте, несмотря на противоположные на-
§ 5]
Понятие о механических и скоростных характеристиках
29
правления действия моментов. Точка пересечения характеристик
соответствует равенству моментов и определяет величину ско-
рости установившегося режима работы электропривода.
Вид механических характеристик при совместной работе
электродвигателя и исполнительного механизма определяет сте-
пень устойчивости работы электропривода. Точки на механи-
ческой характеристике асинхронного двигателя (рис. 10) соот-
ветствуют: А—устойчивой и Б — неустойчивой работе двига-
теля.
Рис. 11. Система координат для
изображения механических харак-
теристик
Квад- рант п м ст
I >0 >0 движ. .0 торм.
II >0 <0 торм. >0 движ.
III <0 <0 движ. >0 торм.
IV 1 <0 >0 торм. <0 движ.
Несмотря на огромное разнообразие выпускаемых электро-
двигателей, их естественные механические характеристики не
могут удовлетворить всем требованиям работы производствен-
ных механизмов. Поэтому прибегают к созданию искус-
ственных механических характеристик двигателей. Для этого
либо изменяют нормальные условия работы двигателя, включая
в цепь главного тока или возбуждения дополнительные сопро-
тивления, либо принимают значения напряжения и частоты, от-
личные от номинальных. Таких искусственных характеристик
можно получить для каждого двигателя бесчисленное множе-
ство. С их помощью удается обеспечить требуемые режимы ра-
- боты исполнительных механизмов.
Для изображения механических характеристик двигателя
используют четыре квадранта I—IV осей координат п,.М
(рис. 11). Вверх по оси ординат откладывают скорость п,
условно принятую за положительную (например, при подъеме
груза). При изменении направления вращения скорость откла-
дывают вниз по оси ординат. По оси абсцисс в обе стороны
откладывают противоположно направленные моменты М двига-
теля и производственного механизма. В зависимости от направ-
ления вращения эти моменты могут быть движущими или
30
Электромеханические свойства двигателей постоянного тока [Гл. 2
тормозными. Как видно из рисунка, механические характеристики
двигателя, изображенные в I и III квадрантах, соответствуют
двигательному режиму, во II и IV квадрантах — тормозному.
В теории электропривода, наряду с механическими, приме-
няют часто скоростные характеристики электродви-
гателей, которые выражают зависимость между скоростью
двигателя и током, проходящим по обмотке якоря (статора)
двигателя, т. е. зависимость n=f (I). Подобно механическим,
скоростные характеристики бывают естественными и искусствен-
ными, жесткими и мягкими. Скоростные характеристики обычно
используются при расчетах пусковых, тормозных и регулировоч-
ных сопротивлений.
§ 6. Регулирование скорости электроприводов
и показатели регулирования .
Под регулированием скорости понимают принуди-
тельное, осуществляемое с помощью специальных устройств, из-
менение скорости электродвигателя (или поддержание этой ско-
рости неизменной), происходящее независимо от величины и ха-
рактера статического момента. Регулирование осуществляют,
изменяя либо схему включения двигателя, либо параметры пи-
тающей сети.
Изменение скорости двигателя из-за изменения нагрузки на
его валу, протекающее по механической характеристике, соот-
ветствующей схеме включения, не является регулированием ско-
рости. Обязательным условием регулирования скорости, каким
бы методом оно ни осуществлялось, является переход с одной
механической характеристики на другую. Поэтому изучение раз-
личных методов регулирования скорости сводится, в основном,
к анализу соответствующих этим методам регулировочных ха-
рактеристик.
По характеру изменения скорости во время работы судовые
электроприводы делятся на нерегулируемые и регулируемые.
Нерегулируемые электроприводы работают всегда на
естественной механической характеристике; скорость их изме-
няется только при изменении нагрузки. Схемы включения таких
электроприводов отличаются простотой.
Но для обеспечения высокой производительности и эконо-
мичности работы большинства судовых механизмов требуются
регулируемые электроприводы. Применение таких приво-
дов позволяет исключить громоздкие механические передачи.
Скорости электродвигателей, применяемых в судовых установ-
ках, регулируются различными способами. Чтобы выбрать наи-
более рациональный из этих способов, их сравнивают по сле-
дующим основным показателям:
Регулирование скорости электроприводов
31
а) пределы (диапазон) регулирования;
б) плавность регулирования;
в) стабильность работы с заданной скоростью;
г) экономичность регулирования;
д) направление изменения скорости от основной.
Диапазон регулирования Д представляет собой от-
ношение скоростей: максимальной nmax к минимальной пт1п, ко-
торые при данном способе регулирования может развивать
Рис. 12. К объяснению способов регулирования ско-
рости электроприводов.
двигатель без изменения режима работы исполнительного ме-
ханизма (рис. 12):
Д = ^. (46)
nmin
Величина диапазона Д выражается отношением чисел, на-
пример 2:1 или 10:1, означающим, что при выбранном спо-
собе регулирования изменение скорости возможно, соответ-
ственно, в 2 или в 10 раз.
Различные исполнительные механизмы требуют различных
диапазонов регулирования. Так, если скорость выбирания сво-
бодно висящей якорной цепи должна составлять 16 лД/лин,
а скорость втягивания якоря в клюз не должна превышать
4 м]мин, то, следовательно, для электродвигателя якорно-швар-
товного устройства требуется максимальная скорость, вчетверо
больше минимальной, т. е. Д = 4: 1.
Плавность регулирования определяется так называемым
коэффициентом плавности П, который представляет
32
Электромеханические свойства двигателей постоянного тока [Гл. 2
собой отношение скоростей, соответствующих двум смежным
механическим характеристикам:
Л = (47)
где пи — скорость двигателя на некоторой k-й характери-
стике;
tik-i — скорость двигателя на следующей, ниже располо-
женной характеристике.
Таким образом, чем больше искусственных механических
характеристик располагается между характеристиками, опре-
деляющими максимальную и минимальную скорости, тем выше
плавность регулирования (см. рис. 12). Практически это озна-
чает, что при высоком значении П в диапазоне, соответствую-
щем данному методу регулирования, можно получить много
промежуточных скоростей и что при переходе с одной ступени
регулирования на другую скачки скорости будут незначитель-
ными.
Стабильность работы с заданной скоростью опре-
деляется степенью жесткости регулировочной механической ха-
рактеристики.
Из рис. 12 видно, что одна и та же скорость (например,
nmin) может быть получена различными способами, на раз-
личных механических характеристиках. При этом, если с ко-
лебаниями момента статического сопротивления 2ИСТ в преде-
лах |±ДЛ4СТ скорость nroin на характеристике а почти не изме-
няется, то на характеристике б она будет колебаться от Ди.
до 0. Такая неустойчивая работа на заданной механической
характеристике нежелательна для большинства и совершенно
недопустима для некоторых исполнительных механизмов. Это
заставляет в ряде случаев ограничивать диапазон регулирова-
ния скорости данным методом.
Экономичность регулирования оценивается раз-
мерами первоначальных затрат на создание данной системы
электропривода и величиной потерь ДР электроэнергии при
осуществлении выбранного метода регулирования.
Величина потерь ДР определяется через к. п. д. т]
привода по формуле:
электро-
(48)
из сети;
Р± Р2 + ДР ’
где Pi — мощность, потребляемая электродвигателем
Р2 — мощность на валу электродвигателя.
Для учета времени работы на регулировочных характери-
стиках иногда определяют средний к. п. д. за цикл.
§ 7] Характеристики двигателя с параллельным возбуждением 33
Направление изменения скорости по отно-
шению к основной определяется принятым способом ре-
гулирования. Основной скоростью является скорость, соответ-
ствующая нагрузке двигателя при его работе на естественной
механической характеристике. Одни способы регулирования
обеспечивают изменение скорости вниз от основной, другие —
вверх. Поэтому для исполнительных механизмов, требующих
регулирования скорости в широких пределах (и вниз и вверх),
иногда применяют электроприводы с несколькими способами
регулирования.
При выборе способа регулирования необходимо, помимо
рассмотренных показателей, учитывать также надежность ра-
боты схемы, взаимное соответствие механических характери-
стик привода и механизма, простоту управления, вес и габа-
риты оборудования.
§ 7. Естественные скоростная и механическая характеристики
двигателя с параллельным возбуждением
Подводимое к зажимам двигателя постоянного тока напря-
жение U при установившемся режиме работы уравновеши-
вается противоэлектродвижущей силой (противо-э. д. с.) Е об-
Рис. 13. Схема включения (а) и естественная механическая харак-
теристика (б) двигателя с параллельным возбуждением.
мотки якоря и падением напряжения 1ага в сопротивлении якор-
ной цепи га. Уравнение равновесия э. д. с. цепи якоря (рис. 13, а)
в этом случае можно представить в виде:
и = Е + 1цга.
(49)
34
Электромеханические свойства двигателей постоянного тока [Гл. 2
Известно, что индуктированная в якоре машин постоянного
тока э. д. с. равна
Е = ссФщ (50)
где Ф — магнитный поток полюсов машины, вб;
п— скорость вращения якоря, об1мин\
се — коэффициент э. д. с., отражающий конструктивные
особенности машины; ce=pN/60 а;
р — число пар полюсов машины;
а — число пар параллельных ветвей обмотки якоря;
N— количество активных проводников обмотки якоря.
Подставив значение э. д. с. Е в уравнение (49), найдем ско-
рость вращения двигателя
сеФ
Обеспечение высокого качества выдаваемой в сеть электро-
энергии требует, чтобы напряжение U было стабильным.
При постоянстве напряжения и отсутствии регулировочных
сопротивлений в цепи возбуждения магнитный поток Ф также
является величиной постоянной. Во время достижения маши-
ной установившегося теплового состояния сопротивление якор-
ной обмотки га незначительно изменяется, после чего стано-
вится неизменным. Таким образом, уравнение (51), представ-
ленное в виде
П = У Ijfa
СеФ СеФ
(52)
выражает зависимость между двумя изменяющимися при пере-
. менной нагрузке величинами п и 1а и является аналитическим
выражением скоростной характеристики двигателя.
Из уравнения электромагнитного момента двигателя по-
стоянного тока
М = смФ/а (53)
определим ток якоря
ia=-4’ (54)
' - сыФ
где cM=p7V/2na-9,81 — коэффициент момента, отражающий кон-
структивные особенности двигателя.
§ 7] Характеристики двигателя с параллельным возбуждением 35
Подставив в уравнение (52) значение тока 1а из выраже-
ния (54), получим уравнение механической характеристики дви-
гателя:
и п = Мга (55)
СсФ СсСМФ2
Если учесть принятое условие, согласно которому Ф=const,
то уравнение механической характеристики можно записать
так: .
Re RgRw
где к. = сеФ — коэффициент э. д. с.; )
, ,г. . , ? (57)
км = смф — коэффициент момента. J '
Введем понятие идеального холостого хода, под
которым будем понимать режим работы двигателя с моментом
М=Ь и потребляемым током /а=0.
Скорость идеального холостого хода двигателя п0 опреде-
лится из выражения:
<S8>
Тогда скорость двигателя п, которую он развивает при мо-
менте М, можно представить как разность скорости идеального
холостого хода п0 и некоторого перепада скорости Дп, соответ-
ствующего моменту М:
п — п0 — Ап, (59)
где перепад скорости Ап=Мга/сесыФ2 характеризует крутизну
механической характеристики.
Из уравнений (52) и (55) видно, что скоростная и механи-
ческая характеристики выражают пропорциональные зависи-
мости между скоростью п, с одной стороны, и током 1а или мо-
ментом двигателя М — с другой. Следовательно, на графике эти
характеристики изобразятся прямой линией с незначительным
наклоном к оси М или I (рис. 13,6). При G>=const и выборе
соответствующего масштаба момента и тока механическая и
скоростная характеристики совпадут и будут изображаться
одной прямой.
Поэтому механическую и скоростную характеристики дви-
гателя с параллельным возбуждением определяют любые две
точки в осях координат М(1а),п. Однако для построения есте-
ственной механической характеристики по пастортным или
36
Электромеханические свойства двигателей постоянного тока [Гл. 2
каталожным данным следует использовать наиболее характерные
точки с координатами (Л4=0; п = п0) и (М—Мн; п=пн).
Чтобы найти первую точку, необходимо знать коэффициент
1ге=сеф; его определяют из уравнения скоростной характери-
стики (52), соответствующего работе двигателя при номиналь-
ной нагрузке:
сеФ = и~~^иГа (60)
где Ian — номинальный ток, потребляемый якорем.
Малость тока возбуждения /в позволяет при практических
расчетах считать ток якоря равным номинальному току, по-
требляемому двигателем из сети и указываемому в паспорте.
В этом случае
Если в паспорте или каталоге двигателя нет значения га,
то его можно найти (приняв равными постоянные и перемен-
ные потери в двигателе) из выражения:
га = 0,5-^-(1—tjJ. ~ (62)
Чтобы найти вторую точку, номинальную скорость надо
взять из паспорта, а электромагнитный момент определить из
уравнения момента двигателя постоянного тока (53).
Вычислить коэффициент ^м=смф можно лишь, зная соот-
ношение между се и см. Находим его, пользуясь приведенными
ранее значениями этих величин:
pN
Се _ 60с . ।
1 см pN
2ла-9,81
Аналогично, по двум точкам, можно построить и искусствен-
ные механические характеристики двигателя.
Пример 3. Построить естественную механическую характеристику дви-
гателя с параллельным возбуждением типа П-91М по паспортным (каталож-
ным) данным: Рв=21,5 кет; 17= 220 в; /н=125 а; пв=1000 об!мин.
Решение. 1. Принимаем /О=/Н = 125а.
2 . К. п. д. двигателя при номинальной нагрузке
Tln = -f"-. £1^_8 = 0,782.
UIH 220-125
(63)
Характеристики двигателя с параллельным возбуждением
37
3. Сопротивление якоря двигателя из уравнения (62)
5. Коэффициент момента
k
км
-’—6 = 0,19.
1,03 1,03
6. Номинальный электромагнитный момент двигателя
Ma=kl = 0,19-125 = 23,75 кГм.
а. Н МН
7. Номинальный момент на ралу двигателя из уравнения (15)
М = 975— = 20,96 кГм.
1000
8. Момент холостого хода двигателя
Л4Х v =-= Л-1Ч —Л4---23,75 — 20,96 - 2,79 кК-ж.
л. л су - 11 jj
9. Скорость идеального холостого хода
U 220
п0 = — = --------= 1122 об мин.
ke 0,196
10. По полученным данным строим две характеристики (рис. 14):
1) n=fi(M3) —по точкам Л 1(0, п0) и В1(Л4э.в; пв);
2) n=f2(M) —по точкам Л2(0; пх.х) и B2(zWH; пв).
11. Скорость, соответствующая моменту холостого хода Л4Х.Х на кривой/
/И„ «С 2 79-0 19
nv v = пп-----= 1122-----------’ = 1108 об/мин.
0 kekM 0,196 0,19
X. X
38
Электромеханические свойства двигателей постоянного тока [Гл. 2
Двигатель начнет вращаться, когда его электромагнитный момент пре-
одолеет момент холостого хода, создаваемый трением в подшипниках, тре-
нием щеток о коллектор и трением якоря о воздух, а также потерями в стали
двигателя; при этом полезный момент М на валу двигателя будет равен
нулю, а начальная скорость пх.х определится ординатой точки А2.
В практических расчетах механическую характеристику иногда строят по
точкам 41(0; п0) и £2(Л'1Н, пв), хотя такая характеристика, строго говоря, не
является механической, поскольку не отражает истинного положения, увели-
чивая ее крутизну примерно на 10%.
§ 8. Влияние параметров двигателя и сети
на механические характеристики
Уравнение механической характеристики двигателя в общем
случае можно записать так:
U А1ГВбщ
сеФ сесмФ2
(64)
где 7?общ — полное (общее) сопротивление якорной цепи;
Яобщ = г а + гд;
гд — внешнее добавочное сопротивление, включаемое
в цепь якоря.
Из уравнения (64) видно, что с изменением напряжения
питающей сети U, магнитного потока двигателя Ф и сопротив-
ления цепи якоря /?общ скорость двигателя п будет изменяться.
Проследим влияние каждого из этих параметров на вид
механической характеристики двигателя, для чего восполь-
зуемся выражениями:
nh =----- и Ди =
сеФ
44 7? общ
сесыФ2
Изменение напряжения U, подводимого к якорю двигателя,
изменяет скорость идеального холостого хода п0, но не оказы-
вает влияния на перепад скорости Ли. Следовательно, при раз-
личных значениях напряжения можно получить ряд механиче-
ских характеристик, представляющих собой параллельные пря-
мые линии, одинаково наклоненные к оси М (рис. 15).
В этом случае естественная и искусственные механические
характеристики будут иметь одну и ту же жесткость, что обес-
печивает стабильность работы на заданной характеристике и
получение «ползучих» скоростей (работа с малыми скоростями
на жесткой механической характеристике).
Добавочное сопротивление гд в цепи якоря, наоборот, не из-
меняя скорости идеального холостого хода, увеличивает пере-
пад скорости Д/г, а следовательно, и крутизну механической
характеристики. Таким образом, изменяя сопротивление цепи
якоря, можно получить семейство искусственных механических
§ 8]
Влияние параметров на механические характеристики
39
Рис. 15. Схема включения (а) и механические характери-
стики (б) двигателя с независимым возбуждением при
различных напряжениях на якоре.
Рис. 16.. Механические характеристики двигателя
с параллельным возбуждением: а — при различ-
ных сопротивлениях в цепи якоря; б — при из-
менении магнитного потока.
40
Электромеханические свойства двигателей постоянного тока [Гл. 2
(реостатных) характеристик с различной степенью жесткости,
веером расходящихся из точки, соответствующей скорости иде-
ального холостого хода двигателя п0 (рис. 16, а). Добавочные
сопротивления в цепи якоря гД1, Гд2, гл3 «смягчают» механиче-
скую характеристику двигателя и при больших значениях
делают ее настолько крутой, что стабильная работа электро-
привода на этой характеристике уже становится невоз-
можной.
Если изменять магнитный поток полюсов Ф,то одновременно
будут изменяться как скорость идеального холостого хода п0,
так и перепад скорости Ди. Заметим, что при отсутствии запаса
по возбуждению магнитный поток можно изменять только в сто-
рону уменьшения его номинального значения, что будет соот-
ветствовать увеличению скорости идеального холостого хода и
крутизны механической характеристики. Этим объясняется то,
что каждая искусственная характеристика при некотором кри-
тическом значении момента AfKP пересекается с естественной
механической характеристикой двигателя (рис. 16,6).
При значениях момента Л4<Л4кр ослабление потока вызывает
увеличение скорости вращения; при 2W>MKp с ослаблением по-
тока скорость двигателя уменьшается, что в практике получило
название опрокидывания регулирования.
Искусственную механическую характеристику строят анало-
гично естественной — по точкам, координаты которых опреде-
ляют при заданных значениях напряжения, сопротивления цепи
якоря и потока.
§ 9. Пуск в ход двигателя с параллельным возбуждением
Если подключенный к сети двигатель разовьет пусковой мо-
мент, превышающий момент нагрузки на валу, то система будет
разгоняться до тех пор, пока не наступит равновесие моментов
2И=Л1ст.
Во время работы двигатель потребляет из сети ток, который
можно определить из уравнения равновесия э. д. с. (49):
U — Е _ U — сеФп
Га ~ Га
(65)
Из полученного выражения видно, что величина потребляе-
мого тока 1а зависит от нагрузки на валу, которая определяет
скорость вращения, а следовательно, и величину э. д. с. обмотки
якоря.
В момент пуска двигатель неподвижен (н=0), следовательно,
э. д. с. якоря равна нулю, и пусковой ток определится по закону
§ 9] Пуск в ход двигателя с параллельным возбуждением 41
Ома как отношение напряжения на зажимах двигателя к со-
противлению якорной цепи:
I
П Га
(66)
Если мощность двигателя невелика, то его якорь обладает
значительным сопротивлением, в связи с чем броски пускового
тока не вызывают аварийных режимов. Правила Регистра СССР
допускают пуск двигателей мощностью до 1,3 кет непосред-
ственным подключением их к сети
(прямой пуск).
При пуске более мощных двига-
телей, сопротивление якорной об-
мотки которых мало, величина пус-
кового тока может в 10—15 раз
превысить номинальное значение:
/п = (10-15)/н.
Такой бросок тока при пуске не-
допустим, так как вызовет:
а) ухудшение условий коммута-
ции, что явится причиной кругового
огня на коллекторе и короткого за-
Рис. 17. График допустимых
значений токов якоря двига-
теля постоянного тока.
мыкания в щеточном механизме;
б) провал напряжения сети, что может нарушить нормаль-
ную работу остальных потребителей электроэнергии;
в) недопустимое увеличение динамических моментов на
валу двигателя, что может привести к механическим поломкам
в передаче;
г) динамические усилия в обмотках.
Ограничить бросок пускового тока важно прежде всего для
того, чтобы улучшить коммутацию. Последняя, как известно,
зависит от величины коммутируемого тока и скорости вращения
якоря двигателя, причем с увеличением скорости вращения
уменьшается предельное значение допустимого тока. Из рис. 17
видно, что при пуске он должен быть ограничен 2,5-кратным
значением.
Для выполнения этого условия, очевидно, необходимо либо
понизить во время пуска двигателя подводимое к нему напря-
жение, либо последовательно с якорем включить пусковое со-
противление соответствующей величины. Пуск при пониженном
напряжении возможен лишь в системе генератор—двигатель и
в схемах тиристорного управления. Во всех остальных случаях
приходится применять реостатный пуск, схема которого пока-
зана на .рис 18,а. Последовательно с якорем включают пуско-
вое сопротивление, которое по мере разгона двигателя и роста
42
Электромеханические свойства двигателей постоянного тока [Гл. 2
его э. д. с. постепенно выводится из цепи якоря замыканием
контактов ускорения 1У, 2У и ЗУ. Это сопротивление делят на
несколько ступеней, число которых определяют построением пу-
сковой диаграммы (рис. 18,6). В зависимости от мощности дви-
гателя и тяжести условий пуска выбирают от одной до четырех
ступеней пусковых сопротивлений.
Для построения пусковой диаграммы необходимо иметь есте-
ственную скоростную характеристику двигателя и за-
- а) 6)
Рис. 18. Схема реостатного пуска (а) и пусковая диаграмма (6) двига-
теля с параллельным возбуждением.
даться максимальным пусковым током, который
обычно выбирают в пределах:
/птах = (1,8 ч-2,5)/н.
Пользуясь уравнением (66), находят полное сопротивление
якорной цепи двигателя при пуске
^общ = т^-, (67)
' п max
определяющее крутизну и положение первой пусковой характе-
ристики. Как видно на рис. 18,6, эту характеристику можно по-
строить по точкам А (0; п0) и а (/п тах; 0).
По этой характеристике двигатель разгоняется до скорости
П\ (точка 6), причем с увеличением скорости растет э. д. с. об-
мотки якоря и уменьшается потребляемый ток. Величина тока,
при которой из цепи якоря выводится ступень сопротивления,
называется током переключения, или минималь-
ным пусковым током. Его принимают в пределах:
4m.n = (1,1 нн 1,2)/н > /ст.
§ 9] Пуск в ход двигателя с параллельным возбуждением 43
При выключении из цепи якоря ступени сопротивления на-
блюдается бросок тока, причем шунтируемое сопротивление г\
должно быть таким, чтобы ток вновь достиг значения /п тах
(точка в). Оставшееся в цепи якоря сопротивление 7?1 = /?Общ —
— Г1 определяет вторую пусковую характеристику, которая
строится по точкам А (0; По) и в (/nina; ni)- От точки в дви-
гатель разгоняется по этой характеристике до скорости /г2
(точка г), в которой из цепи якоря выводится вторая ступень
сопротивления. Вновь происходит бросок тока до /Птах (точ-
ка д), и двигатель переходит на третью пусковую характери-
стику, по которой разгоняется от точки д до скорости п3 (точка
е). В это время шунтируется следующая (третья) ступень со-
противления, и двигатель выходит на естественную скоростную
характеристику (точка к). По этой характеристике двигатель
разгоняется до скорости, при которой его момент будет уравно-
вешен моментом статического сопротивления исполнительного
механизма.
Если же при выходе на естественную характеристику бро-
сок тока окажется больше или меньше /п тах, то необходимо
изменить принятые значения токов /п min и /п max н построить
пусковую диаграмму при новых условиях пуска. Обычно изме-
няют величину тока переключения /п mm
С помощью пусковой диаграммы определяют значения от-
дельных ступеней пускового сопротивления, применяя для этого
либо графо-аналитический, либо графический метод.
Графо-аналитический метод. Для каждой промежуточной
скорости, с которой начинается разгон двигателя на новой ско-
ростной характеристике, записывают уравнение э.д. с. двига-
теля, из которого и определяют величину соответствующей сту-
пени пускового сопротивления.
В начале пуска п=0, и напряжение сети идет на преодоле-
ние полного сопротивления якорной цепи:
U___ т р
'п max''общ»
откуда
р -----
''общ ,
'птах
Зная величину 7?Общ и внутреннее сопротивление якоря га,
можно определить значение пускового сопротивления гп:
гп = /?общ —G- (68)
Если гп состоит из нескольких ступеней, то значение каждой
из них определяют следующим образом.
При шунтировании первой ступени гх двигатель имеет ско-
рость щ, для которой уравнение равновесия э. д. с. будет:
U ~ Се -|- Iп тах (^?общ ^1)>
44
Электромеханические свойства двигателей постоянного тока [Гл. 2
откуда
г ______________________ ТЗ И се^п1 1РХЛ
ri~ К>бщ--------------• (оУ)
• п max
При шунтировании второй ступени для скорости двигателя
и2 будем иметь:
U = сеФп^ + /п тах (/?общ — Г1 — г2),
откуда
Г2 = Яобщ - П ~ . (70)
i п шах
Аналогично определится величина сопротивления третьей
ступени гз:
• (71)
' п max
Значения промежуточных скоростей пь п2 и и3 берут из пу-
сковой диаграммы.
Графический метод. Воспользовавшись пусковыми характе-
ристиками (см. рис. 18,6), можно установить, что при заданных
условиях пуска прямая аБ в некотором масштабе представляет
собой общее сопротивление якорной цепи Бобщ, а ее отрезки
между характеристиками являются ступенями пусковых сопро-
тивлений Г1, Г2, /'3.
Таким образом, найдя масштаб сопротивлений (рм/мм)
m
R аБ
определим значения сопротивлений пусковых ступеней по фор-
мулам:
Г1 = ав^й; =
аБ аБ
r2 = ed^S; га = кБ^^.
аБ аБ
Разумеется, полученные результаты должны в сумме состав-
ВИТЬ Бобщ-
Пример 4. Для двигателя, паспортные данные которого приведены в при-
мере 3, рассчитать пусковые сопротивления при условии, что статический мо-
мент сопротивления исполнительного механизма при пуске равен номиналь-
ному моменту двигателя. Расчет произвести графо-аналитическим и графиче-
ским методами.
Решение. 1. Задаемся максимальным и минимальным значениями пус-
кового тока:
In max = 2,0/н = 2,0-125 = 250 а;
/и min = 1.2/н = 1.2-125 = 150 а.
§ Р]
Пуск в ход двигателя с параллельным возбуждением
45
2. Находим полное сопротивление якорной цепи в момент пуска
/?о6щ = —~ = — = 0,88 ом.
Iп max 250
3. Подсчитываем величину пусковых сопротивлении
гП = Побщ — г о = 0,88 — 0,19 = 0,69 ом.
4. По паспортным и расчетным данным строим естественную и пусковые
скоростные характеристики (рис. 18).
5. Из пусковой диаграммы находим промежуточные скорости при шун-
тировании соответствующих ступеней пусковых сопротивлений:
пх = 450 об/мин-, п2 = 720 об/мин-, п2 = ЯЯО'об/мин.
Далее определяем величины сопротивления пусковых ступеней.
Графо-аналитический метод
6. Сопротивление первой ступени
,, U—keni лоо 220 — 0,196-450
г, = R06m -------— = 0,88-----------—-------= 0,353 ом.
в
'птах
7. Сопротивление второй ступени
п U — ken2 поо ' ___ 220 - 0,196-720 п
1 = #общ — И--------— = 0,88 — 0,353-------------------= 0,212 ом.
1 п max 250
8. Сопротивление третьей ступени
г3 = Яобщ - н - '2 - -~-е-я -= 0,88 - 0,353 -
In max
— 0,212
220 - 0,196-880 n
---------------= 0,125 ом.
250
9. Проверка:
Добщ = ri + гг + гз + га = 0,353 4- 0,212 + 0,125 + 0,19 = 0,88 ом.
Графический метод
10. Из пусковой диаграммы определяем масштаб сопротивлений
m = /-общ = 21?? = 0,0269 ом/мм.
к аБ 32,7
11. Сопротивления отдельных пусковых ступеней и якоря
= ae-mR = 13,1 -0,0269 = 0,353 ом;
' - r2 = ed-mR = 7,9-0,0269 = 0,212 ом;
rs = dK-mR — 4,6-0,0269 = 0,125 ом;
г = кБ-Шт, = 7,1 -0,0269 = 0,19 ом.
а к
Таким образом, графо-аналитический и графический методы расчета
дают один и тот же результат.
46
Электромеханические свойства двигателей постоянного тока [Гл. 2
§10. Регулирование скорости двигателя
с параллельным возбуждением
Из уравнения механической характеристики (64) видно, что
скорость двигателей постоянного тока с параллельным возбуж-
дением можно регулировать изменением:
а) сопротивления якорной цепи;
б) магнитного потока полюсов;
в) подводимого к двигателю напряжения.
Рис. 19. Схема включения (а) и механические характеристики (б) двигателя
с параллельным возбуждением при регулировании скорости изменением со-
противления якорной цепи.
Введение в цепь якоря добавочных сопротивлений. Как из-
вестно, скорость двигателя определяется его нагрузкой и видом
механической характеристики, соответствующей данной схеме
включения.
Пусть двигатель с параллельным возбуждением работает на
естественной характеристике с номинальной скоростью, разви-
вая номинальный вращающий момент (рис. 19). Если при этом
разомкнуть контакты ускорения 1У и ввести в цепь якоря доба-
вочное сопротивление гД1, то после переходного процесса ско-
рость двигателя уменьшится до значения «ь Процесс изменения
скорости происходит следующим образом.
Механическая инерция движущихся частей электропривода
значительно больше электромагнитной инерции обмоток двига-
теля. Поэтому в момент переключения сопротивлений скорость
практически остается неизменной, а ток якоря, равный
U — сеФпн
а
Га
§ 10} Регулирование скорости двигателя с параллельным возбуждением 47
уменьшается до некоторого значения
т __ U СеФпя
1а1~ : •
га + Гд1
Также скачком уменьшается электромагнитный момент дви-
гателя до значения
= смФ/а1.
Статический момент исполнительного механизма примем не
зависящим от скорости, т. е. Л4СТ=7Ии = const.
Перейдя на новую механическую характеристику, соответ-
ствующую включенному сопротивлению гД1, двигатель в резуль-
тате действия отрицательного динамического момента 7Идин=
=Л4! — Л1СТ начнет затормаживаться. С уменьшением скорости
будут увеличиваться ток якоря и вращающий момент двига-
теля. Когда скорость достигнет значения момент двигателя
возрастет до статического момента 7И=7ИСТ, и торможение пре-
кратится.
Аналогично можно рассмотреть и процесс перехода электро-
привода с меньшей скорости п2 на большую nt, но при этом
следует иметь в виду, что одновременное выведение из цепи
якоря больших добавочных сопротивлений может увеличить ток
и момент двигателя до недопустимых величин.
Величину добавочных сопротивлений гя, включаемых в цепь
якоря с целью регулирования скорости вращения двигателя,
можно определить, подставив в уравнение механической харак-
теристики значения заданной скорости пх и соответствующего
ей момента Мх.
Решив полученное уравнение относительно rR, получим:
Значения Мх и пх определяют положение точки, через кото-
рую можно провести соответствующую сопротивлению гд искус-
ственную механическую характеристику.
Добавочные сопротивления, включенные в цепь якоря
с целью регулирования скорости, не должны перегреваться при
длительном протекании по ним тока нагрузки. Поэтому у дви-
гателей большой мощности регулировочные сопротивления ста-
новятся громоздкими и тяжелыми.
Рассматриваемый способ регулирования позволяет изменять
скорость по направлению вниз от основной, причем с увеличе-
нием добавочных сопротивлений скорость двигателя умень-
шается. Это объясняется падением напряжения в добавочных
сопротивлениях и уменьшением напряжения, подаваемого на
зажимы якоря.
48 Электромеханические свойства двигателей постоянного тока [Гл. 2
Простота описываемого способа регулирования скорости и
небольшое количество необходимой для его осуществления ап-
паратуры обеспечили ему широкое распространение, несмотря
на многие его недостатки. Основные из этих недостатков:
а) мал диапазон регулирования при работе двигателя с не-
большими нагрузками на валу (например, Мх. х);
б) плавность регулирования скорости уменьшается с увели-
-чением нагрузки (недостаточная плавность регулирования ско-
рости крупных двигателей определяется, в частности, необходи-
мостью применять громоздкие регулировочные сопротивления);
в) регулирование неэкономично ввиду значительных потерь
электроэнергии в добавочных сопротивлениях;
г) стабильная работа электропривода невозможна при боль-
ших сопротивлениях в цепи якоря.
Пример 5. Определить величину добавочного сопротивления, которое не-
обходимо включить в цепь якоря двигателя типа П-91М, чтобы при номи-
нальном моменте он развивал скорость «1=500 об/мин. Параметры двигателя
взять из примера 3.
Решение:
U — ketii. 220—-0,196-500 ПО1_
г = -----k — гГ1----------5-----0,19.— 0,19 = 0,916 ом.
Д 7ИН 20,96
Шунтирование якоря при наличии последовательного сопро-
тивления. Этот способ регулирования применяют, чтобы увели-
чить жесткость механических характеристик при малых скоро-
стях. С увеличением последовательно включенных в цепь якоря
сопротивлений гп уменьшаются рабочие скорости двигателя, а
уменьшение шунтирующих сопротивлений гш уменьшает ско-
рость идеального холостого хода и увеличивает жесткость меха-
нической характеристики.
Работу схемы (рис. 20, а) в установившемся режиме можно
охарактеризовать следующими уравнениями:
U = ken + Iara + Inrn-, (72)
^ = /шгш + /пгп; (73)
/п = /а + /ш; (74)
M = kuIa. (75)
Исключая в этих уравнениях последовательно 1а, Ап, In и ре-
шая их относительно п, получаем уравнение механической ха-
рактеристики для данного случая:
п __ Ч . rm__________41ra J । ЩГщ________1 (76)
Гш -|- гп _ Га (гш -1- Гп) J
U Мга
где — = п0 и —s
Ке
= Ди — соответственно скорость холостого
i
§ 10} Регулирование скорости двигателя с параллельным возбуждением 49
хода и перепад скорости двигателя при обычной схеме включе-
ния (на естественной характеристике).
Подставив эти значения и обозначив k = —Гш —, получим-
гш + Гп
окончательно:
, п — kn0 — An f 1 + k — 'J. (77)
\ Га 1
Так как /г<1, то скорость идеального холостого хода двига-
теля при шунтировании якоря п0ш=^п0<п0- Это объясняется
Рис. 20. Схема включения (а) и механические характеристики (б) двигателя
с параллельным возбуждением при регулировании скорости шунтированием
якоря.
тем, что при отсутствии тока нагрузки 1а напряжение, прило-
женное к якорю, будет меньше напряжения сети на величину
падения напряжения в сопротивлении га, по которому протекает
ток 7Ш.
Перепад скорости двигателя при шунтировании якоря Апш=
= &n(\+kralra), очевидно, будет больше, чем на естественной
характеристике, но меньше, чем при включении лишь одних
последовательных сопротивлений гП (рис. 20, б).
Таким образом, рассмотренный способ регулирования отли-
чается от предыдущего (с введением в цепь якоря добавочных
сопротивлений) тем, что 'позволяет получать низкие скорости
при более жестких механических характеристиках. Однако не-
обходимость вводить в схему не только последовательные, но и
шунтирующие сопротивления, делает его еще менее экономич-
ным. Поэтому эксплуатировать электропривод по схеме рис. 20
целесообразно лишь непродолжительное время.
Изменение магнитного потока. Этот способ регулирования,
осуществляемый включением сопротивлений в цепь обмотки
возбуждения, применяют для увеличения скорости по отношению
3 К. А. Чекунов
50
Электромеханические свойства двигателей постоянного тока [Гл 2
к основной. Изменение скорости вниз от основной требует
наличия запаса по возбуждению. Процесс перехода от одной
скорости к другой иллюстрируется рис. 21. t
При работе двигателя на естественной характеристике со
скоростью П\ через обмотку якоря двигателя протекает ток
Г ____ U ------
al r
ra
Пусть в регулируемом электроприводе двигатель с парал-
лельным возбуждением имеет данные: 17=220 в; £'=сеФнп1 =
Рис. 21. Схема включения (а) и механические характеристики (б) двига-
теля с параллельным возбуждением при регулировании скорости измене-
нием магнитного потока полюсов.
= 200 в; га — \ ом. Подставив эти значения в написанную выше
формулу, получим:
г 220 — 200 ОЛ „
Ioi =----j---= 20 а.
Если теперь разомкнуть контакты реле поля 1РП, то в зави-
симости от величины введенного в цепь возбуждения сопротив-
ления магнитный поток уменьшится, допустим, до значения Ф1 =
= 0,8 Фи. В первый момент времени скорость останется неизмен-
ной, и ток в якоре скачком увеличится до
.• U — с^П! 220-0,8-200 „
1а\=-----------—--------:--------ои а,
Га 1
т. е. в три раза по сравнению с начальным током la\ (I'ai = 3Iai).
В связи с этим момент двигателя ЛТ^СмФн/ai изменится до зна-
чения Л41,=сыФ1/,а1==сы0,8ФнЗ/О1=2,4М1. Если Afi=AfCT, то дей-
§ //] Торможение и реверс двигателя с параллельным возбуждением
51
ствие момента М/ вызовет появление ускоряющего динамиче-
ского момента
Л1Дин = М'1 — Мст = 1,4^.
Система начнет разгоняться, что обусловит плавное уменьшение
тока якоря и момента на валу двигателя. Разгон закончится,
когда скорость достигнет нового значения п%, а момент двига- .
теля уменьшится до величины статического момента (Л12=Л1СТ).
При этом ток, потребляемый двигателем,
. Лй = -~~~ = 1>25/о1.
’ см0,8Фн
Если двигатель до регулирования работал с номинальным
моментом, потребляя номинальный ток, то. с увеличением ско-
рости потребляемый ток станет больше номинального, что, оче-
видно, вызовет перегрев двигателя. Это объясняет, почему при
увеличении скорости двигателя необходимо либо уменьшить на-
грузочный момент двигателя, либо ограничить диапазон регу-
лирования. Верхний предел скорости ограничивается также ус-
ловиями коммутации и механической прочностью конструкции
двигателя. Поэтому диапазон регулирования, как правило, не
бывает больше 3:1.
Практически бросок тока переключения оказывается меньше
расчетного (/'ai<3/ai)- Это объясняется тем, что обмотка воз-
буждения обладает большой индуктивностью и ее магнитный
поток спадает медленно. Скорость двигателя начинает увеличи-
ваться еще до достижения потоком конечного значения Ф1 и
переходный процесс протекает по некоторой кривой а (рис. 21,6).
Достоинство такого регулирования — его плавность, обеспе-
чиваемая малой величиной тока возбуждения по сравнению
с током в главной цепи и использованием реостатов с большим
числом регулировочных ступеней. Другое преимущество описы-
ваемого способа состоит в незначительности потерь при регу-
лировании.
Изменение подводимого напряжения. Такое регулирование
скорости, применяемое по отношению к двигателям, питаемым
от специального генератора (система генератор—двигатель),
к многодвигательным электроприводам при последовательно-
параллельном включении двигателей, а также к схемам тири-
сторного управления, будет рассмотрено подробно в § 19 и 44.
§ 11. Торможение и реверс двигателя
с параллельным возбуждением
Многие производственные механизмы на судах работают по
довольно сложному графику нагрузки и при выполнении ряда
операций требуют искусственного ограничения скорости или
3*
32 Электромеханические свойства двигателей постоянного тока [Гл. 2
быстрой остановки двигателя в заданный момент времени. Для
этой цели в судовых электроприводах используют механическое
и электрическое торможение двигателя.
Механическое торможение производится дисковыми, ко-
лодочными, а также иногда еще применяемыми ленточными
тормозами; оно дополняет электрическое торможение и служит
только для обеспечения фиксированных остановок.
Электрическое торможение выполняет более широкий
крут функций, а именно:
а) переход с большей скорости работы электропривода на
меньшую;
б) ограничение скорости вращения при работе двигателя
в тормозном режиме;
в) экстренные остановки.
Существуют следующие методы электрического торможениу
двигателей постоянного тока, с параллельным возбуждением:
а) генераторное рекуперативное торможение;.
б) электродинамическое торможение;
в) торможение противовключением (противотоком).
Генераторное рекуперативное торможение (с отдачей энергии
в сеть). Этот метод торможения электродвигателя (рис. 22) наи-
более экономичен, так как обеспечивает возврат в сеть (реку-
перацию) электроэнергии, вырабатываемой им при тормо-
жении.
При включении двигателя на спуск тяжелого груза или при
наличии каких-либо других внешних сил, действующих в на-
правлении движения, двигатель постепенно увеличивает ско-
рость, потребляя все меньший и меньший ток и развивая все
уменьшающийся момент (рис. 22,6 и квадранты III и IV на
рис. 22,в). При скорости вращения п=п0 ток, потребляемый
двигателем, равен нулю, так как напряжение сети и=ссФп0
уравновесится противо-э. д. с. обмотки якоря Е = сеФп.
При дальнейшем разгоне скорость п превысит п0 и двига-
тель перейдет в режим генераторной работы, для чего, как из-
вестно, необходимо выполнение неравенства:
Е = сеФп > U = сеФп0- (78)
Следовательно, двигатель может перейти в генераторный ре- .
куперативный режим лишь в том случае, если скорость п ока-
жется больше скорости идеального холостого хода п0 на тормоз-
ной характеристике (п!>п0 и пт>По).
Ток в цепи якоря определяется из уравнения (65), которое
при E>U можно переписать так:
, __ U — E_____E — U
а га га
£ //] Торможение и реверс двигателя с параллельным возбуждением
53
В новом режиме ток изменил свое направление, и двигатель
уже не потребляет, а отдает энергию в сеть.
В результате изменения направления тока изменяет свое на-
правление и момент двигателя, который теперь будет тормоз-
ным:
М=СнФ/а = -СнФ^^- = -СнФ^=^. (80)
'а 'а
а) '
Рис. 22. Схемы включения (о и б) и механические характери-
стики (в) двигателя с параллельным возбуждением при генера-
торном рекуперативном торможении.
С увеличением скорости электромагнитный тормозной мо-
мент двигателя Л1Т возрастает. Когда он станет равным движу-
щему моменту исполнительного механизма, разгон прекратится.
Уравнение механической характеристики для этого режима
имеет вид:
п = и [ Мгта
т СеФ Сесмф2
(81)
где Мт — абсолютное значение тормозного момента двигателя.
54
Электромеханические свойства двигателей постоянного тока [Гл. 2
Из уравнения (81) видно, что скорость идеального холостого
хода является общей для двигательного и генераторного режи-
мов, а при неизменном сопротивлении цепи якоря механическая
характеристика имеет один и тот же наклон (одну и ту же
жесткость). Таким образом, для генераторного тормозного ре-
жима механическая характеристика является продолжением во
второй или четвертый квадрант характеристики двигательного
режима.
Для грузоподъемных механизмов подъем считают положи-
тельным направлением движения, а спуск — отрицательным (об-
Рис. 23. Схема включения (о) и механические характеристики (б) дви-
гателя с параллельным возбуждением при электродинамическом тор-
можении.
ратным) движением. Ввиду этого механические характеристики
рассмотренного режима изображены на рисунке в третьем и
четвертом квадрантах координатной системы.
Описанный метод генераторного рекуперативного торможе-
ния обычно применяют для ограничения скорости опускания
тяжелых грузов и скорости движения катящихся под уклон те-
лежек, а также при переходе двигателя с большей скорости на
меньшую в результате резкого увеличения магнитного потока
полюсов или уменьшения подводимого к двигателю напряжения
(рис. 22, а и в).
Недостатком этого способа торможения являются большие
тормозные скорости. Для их ограничения уменьшают скорости
идеального холостого хода двигателя на тормозной характери-
стике (например, путем шунтирования якоря).
Электродинамическое торможение. Этот метод можно осуще-
ствить, если якорь двигателя отключить от сети и замкнуть на
так называемое тормозное сопротивление гт. Обмотка воз-
буждения при этом должна оставаться подключенной к сети
(рис. 23).
§ 11} Торможение и реверс двигателя с параллельным возбуждением 55
После отключения от сети якорь двигателя некоторое время
продолжает по инерции вращаться в магнитном поле полюсов,
в результате чего в обмотке якоря индуктируется э. д. с. Е, ко-
торая в контуре динамического торможения, состоящем из якоря
и сопротивления гт, создает ток
(82)
где 7?общ=/’а+гт — общее сопротивление контура динамического
торможения.
В тормозном режиме ток в якоре двигателя изменяет свое
направление, так как теперь он создается не приложенным на-
пряжением, а э. д. с. якоря, направленной навстречу напряже-
нию сети.
Момент двигателя также изменит свое направление и по от-
ношению к прежнему направлению движения будет уже тор-
мозным:
ЛЕ = смФ/т = смФ = смФ .
г м i м «-j м «Р
*\общ ^общ
Если обмотка возбуждения остается подключенной к сети и
ток возбуждения не изменяется, то, обозначив смФсеФ через k,
получим:
(83)
Л4Т = Л ——
Кобщ
Из полученного уравнения следуют два вывода:
1. Электродинамическое торможение наиболее эффективно
при больших скоростях. По мере уменьшения скорости «двига-
теля» уменьшается и его тормозной момент.
2. Тормозной момент максимален при замыкании обмотки
якоря накороТко или на незначительное сопротивление. Однако
следует помнить, что уменьшение сопротивления цепи динами-
ческого торможения может вызвать большой бросок тока, не-
допустимый по тем же причинам, что и при пуске двигателя.
Поэтому, чтобы ограничить бросок тормозного тока и мо-
мента, необходимо якорь двигателя замыкать на тормозное со-
противление, величину которого можно определить из уравне-
ния (82):
= ----Га, ' (84)
\ п wax
где
Е = сеФпст = и ~ /нГ°. пст;
«Н I
Sfl Электромеханические свойства двигателей постоянного тока [Гл. 2
Ист — рабочая скорость, с которой начинается тормо-
жение;
/т max — максимально допустимый бросок тормозного тока,
который можно определить по рис. 17.
Поскольку в этом режиме якорь отключен от сети, то при-
ложенное к двигателю напряжение t/=0, а следовательно,
Тогда уравнение механической характеристики выразится так:
Д М7?общ Мт^общ /85)
Т Сесмф2 Сесмф2
Графически на рис. 23 механическая характеристика изобра-
зится прямой, проходящей через начало координат (н=0). Тор-
мозной (отрицательный) момент и неизменное направление
вращения указывают на расположение механической характе-
ристики во втором квадранте, а величина тормозного сопротив-
ления определяет ее крутизну. При переводе двигателя в тор-
мозной режим инерционность вращающихся масс электропри-
вода сохраняет скорость неизменной, что объясняет переход
с рабочей механической характеристики на тормозную по гори-
зонтальной прямой.
Режим динамического торможения применяют для быстрой
остановки двигателя, а также для получения посадочных скоро-
стей (щ ~0,1 пн) при опускании тяжелых грузов. В этом случае
опускающийся груз приводит в движение якорь отключенного
от сети двигателя. Скорость опускания груза и жесткость меха-
нической характеристики определяются величиной тормозного
сопротивления. Механическая характеристика для этого случая
изображается в четвертом квадранте.
В энергетическом отношении этот режим хуже предыдущего,
так как двигатель, перейдя в режим генератора, уже не возвра-
щает энергию в сеть, а работает на тормозное сопротивление,'
в котором электрическая энергия превращается в тепловую.
Кроме того, на питание обмотки возбуждения потребляется
энергия из сети.
Пример 6. Определить величину добавочного сопротивления для ограни-
чения броска тока при динамическом торможении двигателя типа П-91М, ра-
ботавшего до этого с номинальными моментом и скоростью. Подсчитать, до
какой скорости разгонится двигатель под действием активного статического
момента, равного Л1н, если при п=0 зашунтировать тормозное сопротивление
(рис. 23).
Решение. 1. В соответствии с рис. 17 принимаем:
/ттах= 2/н= 2-125 = 250а.
§ //] Торможение и реверс двигателя с параллельным возбуждением 57
2. Э. д. с. обмотки якоря в начальный момент торможения
Е = kenCT = 0,196-1000 = 196 в.
3. Добавочное сопротивление контура динамического торможения из
уравнения (84)
196
гт = ——-----0,19 = 0,594 <ш.
250
4. Скорость двигателя в тормозном режиме под
статического момента
действием активного
Мэ. нга
23,75-0,19
0,196-0,19
= — 121 об]мин.
> kekM
Торможение противовключением. При таком торможении
двигатель, включенный на вращение в одном направлении, под
действием внешних сил или по инерции вращается в противо-
положную сторону.
Режим противовключения может быть осуществлен: а) при
активном статическом моменте и б) при реактивном статиче-
ском моменте на валу двигателя. В первом случае ограничи-
вается скорость опускания тяжелых грузов, во втором — уско-
ряется остановка реверсируемых электроприводов.
Режим противовключения при активном статическом мо-
менте наступает, если в цепь якоря двигателя, включенного на
подъем груза, ввести значительное сопротивление, уменьшаю-
щее пусковой момент двигателя до величины, меньшей момента
нагрузки.
Пусть двигатель с параллельным возбуждением работает на
естественной характеристике со скоростью /гст (точка Л), прео-
долевая момент поднимаемого груза Л1СТ (рис. 24).
Если в цепь якоря включить сопротивление rTi, то в началь-
ный период времени момент двигателя будет меньше момента,
создаваемого грузом (точка Б). Подъем груза будет замед-
ляться, пока не наступит равновесие моментов. Из механиче-
ских характеристик видно, что при выбранном значении сопро- 4
тивления гТ1 равновесие наступит тогда, когда подъем прекра-
тится и скорость вращения двигателя будет равна нулю
(точка В). Эта точка соответствует режиму короткого
з а мыкайи я или стоянки двигателя под током, т. е. включе-
нию заторможенного двигателя на напряжение сети.
Если при этом в цепь якоря включить добавочное сопротив-
ление гт2, то двигатель вновь перейдет на другую механическую
характеристику, на которой его пусковой момент будет меньше
статического момента рабочей машины (точка Г). Груз под дей-
ствием собственного веса начнет опускаться. Двигатель, по-
прежнему включенный на подъем, также изменит направление .
вращения, но будет оказывать тормозящее действие. Как видно -
58 Электромеханические свойства двигателей постоянного тока [Гл. 2
из рисунка, в системе привода будет действовать динамический
момент (вначале пропорциональный отрезку ВГ), под действием
которого груз будет разгоняться. При скорости пт тормозной
момент двигателя сравняется с движущим моментом груза, в ре-
Рнс. 24. Схема включения (а) и механические характеристики (б)
двигателя с параллельным возбуждением в режиме противовклю-
чения при активном статическом моменте.
зультате чего наступит установившийся режим работы электро-
привода с постоянной скоростью нт (точка Д),
Режим противовключения создается также, если при мо-
менте груза Мст включить двигатель на подъем из состояния
покоя при введенных в цепь якоря добавочных сопротивлениях
бТ1+бТ2 (точка Г).
Таким образом, непременным условием перехода двигателя
в режим противовключения является выполнение неравенства:
Afn^-^CT*
Поскольку двигатель переходит в тормозной режим лишь
под действием момента нагрузки, без переключений цепей
якоря и возбуждения, то его ток и момент сохраняют при этом
$> 11] Торможение и реверс двигателя с параллельным возбуждением 5д
первоначальное направление. Момент двигателя по отношению
к изменившемуся направлению вращения становится тормозным.
Если направление потока возбуждения сохранить неизмен-
ным, но изменить направление вращения двигателя, то э. д. с.
обмотки якоря также изменит свой знак и теперь будет действо-
вать в направлении напряжения сети. Тогда, согласно уравне-..
нию (65), ток якоря
(86>
где /?общ = га+лт — общее сопротивление якорной цепи.
Механическая характеристика для режима противовключе-
ния является продолжением в четвертый квадрант механиче-
сксгй характеристики двигательного режима и выражается тем
же уравнением:
г д__ V М7?общ
' сесмФ2
но при Дп = —> п0 = получим: п<0.
Абсолютное значение скорости вращения в этом режиме оп-
ределяется величиной тормозных сопротивлений, включенных
в цепь якоря.
Недостатком рассмотренного метода торможения противо-
включением является то, что:
а) слишком мягкие механические характеристики не обес-
печивают стабильной работы привода;
б) потребляя энергию опускаемого груза, двигатель продол-
жает расходовать и энергию из питающей сети, что неэконо-
мично и к тому же увеличивает собственный нагрев его.
Режим противовключения при реактивном статическом мо-
менте наступает, если якорь двигателя, работающего со скоро-
стью «ст, переключить контактами В и Я на обратное вращение
(рис. 25, а). При этом двигатель, располагая запасенной кинети-
ческой энергией, будет продолжать вращаться в прежнем на-
правлении, а в момент переключения — даже с прежней скоро-
стью. В результате э. д. с. обмотки якоря сохранит свой знак,
а в начальный момент времени — и величину. Напряжение же
после переключений изменит направление и будет действовать
согласно с э. д. с. якоря. Тогда* ток в якоре определится выра-
жением:
/ = _ -У + -Е . (87)
° га Га
Из уравнения (87) следует, что ток, во-первых, меняет свое
направление на обратное и, во-вторых, достигает недопустимо
больших величин.
60
Электромеханические свойства двигателей постоянного тока [Гл. 2
Чтобы ограничить бросок тока во время переключения дви-
гателя на обратное вращение, в цепь якоря включают добавоч-
ное сопротивление гт. Теперь величину тока можно определить
из выражения:
откуда
где /П)ах — максимально допустимый ток переключения, вели-
чину которого можно определить из рис. 17.
Рис. 25. Схема включения
(а) и механические харак-
теристики (б) двигателя
с параллельным возбужде-
нием в режиме противовклю-
чения при реактивном ста-
тическом моменте.
А. Двигательный лежим U r у в Jra Га
б -в Режим противовключения n U ? £ lT(ra + rr^ га','гт
В. Режим короткого замыкания _ и £-0 /„ (го*гг^ г'а+г'г
В-Д. Двигательный реверсивный режим U б ra + тт
Если в полученное выражение подставить значение э. д. с.
E = U-I^ra,
то добавочное сопротивление гт можно определить по тформуле:
гт = U + U-Ictra(90)
Тпах /щах
где /Ст — ток нагрузки (статический) перед переключением об-
мотки якоря.
§ 11} Торможение и реверс двигателя с параллельным возбуждением 61
= —По
СеСмФ2
„ । 1,03Л4т (га + гт)
— “О I—--------------------
(СеФ)2
(91)
Поскольку, как было установлено, ток при переключении
изменяет свое направление, то, очевидно, и момент двигателя
также будет действовать в противоположную сторону, стано-
вясь тормозным по отношению к неизменному направлению
движения.
Таким образом, к валу двигателя окажутся приложенными
два тормозящих момента: реактивный статический момент про-
изводственного механизма и момент двигателя. Под действием
их двигатель будет быстро затормаживаться по механической
характеристике БД, крутизну которой определяет величина тор-
мозного сопротивления г-т.
Уравнение механической характеристики можно записать
так:
и
или для участка БВ
пт =
где Л4Т — абсолютное значение тормозного момента двигателя.
Работа на участке БВ тормозной характеристики соответ-
ствует режиму противовключения. Если двигатель требуется
остановить, то в режиме, характеризуемом точкой В, где ско-
рость равна нулю, двигатель нужно отключить от сети. В про-
тивном случае при пусковом моменте двигателя в точке В, пре-
вышающем момент статического сопротивления Л4СТ, произойдет
реверс. Тогда двигатель, перейдя в обычный двигательный ре-
жим, разгонится до скорости, соответствующей точке Г механи-
ческой характеристики. В этой точке при выполнении реверса
контактом Т шунтируют сопротивление гт, после чего двигатель
выходит на естественную механическую характеристику и про-
должает работать со скоростью — ист. Таким образом, этот ре-
жим противовключения возникает при каждом реверсе электро-
привода:
Положительной особенностью торможения противовключе-
нием является быстрая остановка электропривода при мало из-
меняющемся тормозном моменте.
К недостаткам описываемого способа следует отнести, во-
первых, значительное потребление из сети электроэнергии, рас-
ходуемой на нагрев обмоток двигателя и сопротивлений в якор-
ной цепи, и, во-вторых, возможность произвольного реверса.
Последнее обстоятельство делает йецелесообразным примене-
ние этого способа торможения для электроприводов, в которых
обратное вращение может вызвать аварию механизма или на-
рушение технологического процесса.
62
Электромеханические свойства двигателей постоянного тока [Гл. 2
Пример 7. Определить величину тормозного сопротивления, которое не-
обходимо включить в цепь якоря двигателя типа П-91М, чтобы в режиме
противовключения получить посадочную скорость опускания груза пт =
= —0,1 пв. Приведенный статический момент равен номинальному моменту
двигателя.
Решение. 1. Из уравнения механической характеристики находим
полное сопротивление цепи якоря
/?общ = -^-^ + 0,1пн) =
Мэ. в 'А /
220 \
+ 0,1 • 10001 = 1,92 ом.
0,196 )
0,196-0,19 /
23,75 V
2. Тормозное сопротивление противовключения
гт = /?общ ~га = 1,92— 0,19 = 1,73 ом.
Пример 8. Определить величину добавочного сопротивления, ограничи-
вающего бросок тормозного тока при противовключении с /гСт = Пн двигателя
типа П-91М, а также величину тормозного момента в начале (точка Б) и
» конце (точка В) торможения (рис. 25). До переключения двигатель потреб-
лял номинальный ток.
Решение. 1. В соответствии с рис. 17 принимаем максимальный ток
переключения
/max = 2ZH = 2-125 = 250 а.
2. Тормозное сопротивление противовключения
2U — lKra 2-220— 125-0,19 ... ,
гт =-------—-----га =--------------------0,19= 1,47 ом.
1 max 250
3. Тормозной момент
характеристики)
в начале торможения (из уравнения механической
1.03(,fl + rT)('lo + ”T- нач)
0,1962
1,03(0,19+ 1,47)
(1122+ 1000) = 47,5 кГ-м,
или, поскольку Ф = const,
Мт. вач = Vmax = °-19 ‘250 = 47’5 кГ'М'
4. Тормозной момент в конце торможения (пт .КОН — 0)
1.03(га + гт)(”о + "т-кон)
0,196»
1,03(0,19+ 1,47)
1122= 25,2 кГ-м.
Реверс двигателя. Реверсировать двигатель с параллельным
возбуждением, т. е. изменить направление его вращения, можно,
изменив направление тока либо в якорной обмотке, либо в об-
мотке возбуждения.
§ 12] Характеристики двигателя с последовательным возбуждением
63
Во втором случае для переключений нужна менее мощная
коммутационная аппаратура, чем в первом. Несмотря на это,
двигатели постоянного тока обычно реверсируют, изменяя на-
правление тока в якоре, так как переключения в цепи парал-
лельной обмотки возбуждения связаны со следующими тремя
отрицательными особенностями работы электропривода.
1. Разрыв цепи обмотки возбуждения, обладающей значи-
тельной индуктивностью, приводит к тому, что на зажимах этой
обмотки появляется э. д. с. самоиндукции, в несколько раз пре-
вышающая величину рабочего напряжения. А это может явиться
причиной пробоя изоляции обмотки возбуждения.
2. Большая электромагнитная инерция обмотки возбужде-
ния приводит к тому, что спадание и нарастание магнитного по-
тока в полюсах машины происходит очень медленно, что увели-
чивает время переходных процессов (время реверса).
3. Не исключено, что во время спадания магнитного потока
полюсов в главной цепи двигателя ток увеличится до недопу-
стимо больших значений. Поэтому на время переключений в об-
мотке возбуждения приходилось бы включать в цепь якоря до-
полнительные сопротивления, что усложнило бы схему управ-
ления электропривода.
Реверс двигателя изменением направления тока в якорной
обмотке заключается в том, что двигатель переводят в режим
противовключения и разгоняют в противоположном направлении
до достижения скорости, соответствующей' нагрузке на валу
(см. §11-— торможение противовключением).
§ 12. Естественные скоростная и механическая характеристики
двигателя с последовательным возбуждением
Схема включения двигателя постоянного тока с последова-
тельным возбуждением приведена на рис. 26, а. Из схемы видно,
что через обмотки якоря и возбуждения двигателя протекает
один и тот же ток, потребляемый из сети:
/ = 4 = Л,
Ток в якоре /„ определяется нагрузкой на валу двигателя.
Следовательно, ток возбуждения /в и магнитный поток Ф также
изменяются при изменении нагрузки. Зависимость между током
возбуждения и магнитным потоком определяется кривой намаг-
ничивания, изображенной на рис. 26, б. Криволинейный харак-
тер зависимости объясняется постепенным насыщением, магнит-
ной системы машины. В целях экономии активных матери-
алов и для повышения стабильности электрических машин
отечественная промышленность обычно изготовляет *их с таким
64 Электромеханические свойства двигателей постоянного тока [Гл. 2
расчетом, чтобы номинальные параметры обеспечивались при
насыщенной магнитной системе.
Таким образом, электромагнитный момент двигателя опреде-
ляется выражением:
М = см/Ф=см//(/), (92)
Рис. 26. Схема включения (а), кривая намагничивания (6)
и механическая характеристика (в) двигателя с последова-
тельным возбуждением.
т. е. является функцией тока и потока. Последний, в свою оче-
редь, также является сложной функцией тока нагрузки. Это
чрезвычайно затрудняет аналитическое выражение механиче-
ской характеристики двигателя.
Поэтому для целей общего теоретического исследования вы-
ведем уравнение механической характеристики двигателя, при-
дав зависимости между потоком и током возбуждения прямоли-
нейный характер (штриховая линия на рис. 26,6). Коэффициент
пропорциональности между потоком полюсов и током возбуж-
дения обозначим через а. Тогда
_Ф_ = а = const,
/
§ 12} Характеристики двигателя с последовательным возбуждением
65
ИЛИ
Ф = а/. (93)
Воспользовавшись общим выражением п •= -—^55- для
сеФ
скорости двигателей постоянного тока, после несложных преоб-
разований получим уравнение скоростной характеристики дви-
гателя:
п =---------------= — — па,
Ceal Сеа j а
(94)
где rRB = ra + rB— внутреннее сопротивление двигателя, состоя-
щее из сопротивлений якоря с обмоткой дополнительных полю- -
сов га и последовательной обмотки возбуждения гв;
л U I
А —-----= const;
Сеа
па = — const.
° Сеа
Таким образом, при отсутствии насыщения магнитной си-
стемы уравнение скоростной характеристики выражает гипер-
болическую зависимость между скоростью вращения и током
нагрузки двигателя.
Для принятого условия пропорциональной зависимости ме-
жду потоком и током электромагнитный момент двигателя опре-
делится следующим образом:
М = с Jal = ска.Р, (95)
откуда __
j _ Ум
Усыа
Подставив значение тока в уравнение (94) скоростной ха-
рактеристики, получим аналитическое выражение, механической
характеристики двигателя:
п==
Ум ° Ум
(96)
где В = АУс^а = const.
Таким образом, механическая характеристика также выра-
жается гиперболой с асимптотами п и —па (рис. 26,в).
Проведя анализ уравнения и графика механической харак- -
теристики двигателя, можно прийти к следующим выводам.
66
Электромеханические свойства двигателей постоянного тока [Гл. 2
1. Двигатель с последовательным возбуждением имеет мяг-
кую механическую характеристику, что весьма ценно для элек-
троприводов, работающих с резко изменяющейся нагрузкой.
При внезапном увеличении нагрузки двигатель быстро затор-
маживается, в результате чего инерционные массы привода от-
' дают на вал запас кинетической энергии и тем самым помо-
гают двигателю. Это ограничивает броски тока и мощности,
потребляемой двигателем из сети. При малых нагрузках дви-
гатель автоматически увеличивает скорость, обеспечивая высо-
кую производительность исполнительного механизма.
2. С уменьшением нагрузки на валу скорость двигателя воз-
растает и при очень малых значениях момента может достичь
недопустимо больших величин (двигатель идет «вразнос»).
Чтобы предотвратить опасность произвольного сброса нагрузки
и работы вхолостую, двигатели с последовательным возбужде-
нием не следует соединять с рабочей машиной ременными или
канатными передачами.
3. Механическая характеристика асимптотически прибли-
жается к оси ординат. Следовательно, двигатель с последова-
тельным возбуждением нельзя при обычной схеме включения
переводить в генераторный режим путем повышения скорости.
Это объясняется тем, что по мере снижения нагрузки умень-
шаются ток двигателя и магнитный поток полюсов. При потоке,
ослабленном до Фост, э. д. с. достигает значения напряжения
только в случае недопустимо большой скорости. Кроме того,
изменение направления тока в цепи якоря при переходе двига-
теля в генераторный режим размагничивает машину.
4. При скорости двигателя п=0 противо-э. д. с. обмотки
якоря Е~сеФп=0, и поэтому ток короткого замыкания опре-
деляется из выражения: 1к~и1г№, т. е. может достичь недо-
пустимо больших величин. Поэтому запуск двигателей с после-
довательным возбуждением также производится с помощью со-
противления в цепи якоря.
5. При скорости п<0 двигатель переходит в режим проти-
вовключения, а механическая характеристика пересекает ось
абсцисс и уходит в четвертый квадрант.
6. Ввиду того, что двигатель с последовательным возбужде-
нием работает с насыщенной магнитной системой, при токе
в якоре 1=21н момент на валу увеличивается не в 4, а всего
лишь в 2,5 раза. Но и такое увеличение больше, чем у двига-
теля с параллельным возбуждением, у которого в тех же усло-
виях момент на валу увеличивается только в 2 раза (так как
Ф = const). Стало быть, двигатель с последовательным возбу-
ждением способен при меньшем токе развить больший вра-
щающий момент — свойство, весьма ценное для электроприво-
дов подъемно-транспортных механизмов.
# /5]
Построение характеристик
67
§ 13. Построение искусственных скоростных и механических
характеристик двигателя с последовательным возбуждением.
Универсальные характеристики
Уравнение (96) механической характеристики выведено из
идеализированного условия прямой пропорциональности между
током и магнитным потоком и поэтому неприменимо при рас-
чете и проектировании электроприводов. В связи с этим для
построения искусственных характеристик, для определения пу-
сковых и тормозных сопротивлений, а также для расчета
требуемых скоростей двигателей с последовательным возбужде-
нием приходится пользоваться графическими или графо-анали-
тическими методами, оперируя экспериментальными скорост-
ными характеристиками n=f (/) и зависимостями M — f (/),
получаемыми в лабораториях заводов-изготовителей и обычно
приводимыми в каталогах в виде кривых или таблиц.
Электромашиностроительные заводы изготовляют в настоя-
щее время множество типоразмеров электродвигателей с раз-
личными номинальными значениями скорости и мощности. Если
строить указанные кривые для каждого типоразмера двига-
теля, то при проектировании электроприводов пришлось бы
пользоваться настолько обширным материалом, что это вы-
звало бы серьезные затруднения. К тому же характеристики
данной серии двигателей обнаруживают, как правило, один и
тот же характер изменения основных параметров. Это позво-
ляет для всей серии двигателей применять только одну харак-
теристику, но по осям ее откладывать величины, выраженные
в относительных единицах или в процентах от номинального
значения. Такие характеристики называются универсаль-
ными (рис. 27).
Пользуясь универсальными характеристиками, составлен-
ными для соответствующей серии двигателей, можно построить
кривые, выраженные в абсолютных значениях величин уже для
конкретного двигателя. Для этого относительные величины из
универсальной характеристики умножают на номинальные
значения скорости, момента и тока выбранного двига-
теля.
Естественную механическую характеристику двигателя в от-
носительных единицах строят, используя экспериментальные
кривые n=f(I) и предоставленные заводом-изготови-
телем. Для этого задаются значениями токов /, по которым из
кривых определяют соответствующие значения скорости п и
момента М. Каждая пара значений п и М представляет со-
бой координаты одной точки механической характеристики.
Построив несколько таких точек и соединив их между собой,
получают механическую характеристику двигателя n=f (Л1)
68 Электромеханические свойства двигателей постоянного тока [Гл. 2
в относительных единицах. Механическую характеристику в аб-
солютных единицах строят указанным выше способом.
На основе естественной характеристики n=f(I) и извест-
ного значения внутреннего сопротивления двигателя гдв можно
' построить также искусственные скоростные характеристики, со-
ответствующие работе двигателя с введенными в цепь якоря
добавочными (внешними) сопротивлениями гд.
Во время работы двигателя на естественной характеристике
э. д. с. двигателя
Г Рис. 27. Универсальные характеристики двигателей с последовательным
g возбуждением (серия МП).
При включении в цепь якоря сопротивления гд это уравне-
ние, соответствующее работе двигателя на искусственной ха-
рактеристике, примет вид:
= (7 —/ (гдв-j-гд). (98
Известно, что ток электродвигателя определяется нагруз-
кой на валу и не зависит от величины сопротивления цепи
якоря. Также не зависит от этого сопротивления и магнитный
поток двигателя с последовательным возбуждением. Таким об-
разом, э. д. с. якоря как в отсутствие, так и при наличии со-
противления гд пропорциональна соответствующим скоростям
вращения двигателя:
Те
Еп
Пе
пк
(99)
откуда
пи =
П.
° Те
(100)
$ /3]
Построение1 характеристик
69
Подставив в уравнение (100) значения э. д. с. из уравне- 1
ний (97) и (98), получим:
п =п U (Гдв + Гд) = п f 1
11 и-1глъ Ч
,гд
V — 1Гдв
(101)
Задавшись различными значениями тока / и определив из
естественной характеристики
каждому заданному току,
находим скорость па. Соеди-
нив точки с ординатами пиь
«и2, «ИЗ и Т. Д., получим ИС-
кусственную скоростную ха-
рактеристику двигателя при
включенном в цепь якоря
добавочном сопротивлении
Гд (рис. 28).
Как видно из рисунка,
при некотором значении /4
скорость пи4 = 0. Этот ток
соответствует режиму ко-
роткого замыкания двига-
Рис. 28. Построение искусственной ско-
ростной характеристики двигателя с по-
следовательным возбуждением.
теля при данном сопротив-
лении гд в цепи якоря и может быть определен по общему пра-
Рис. 29. Построение искусственной механической характеристики двига-
теля с последовательным возбуждением.
70
Электромеханические свойства двигателей постоянного Тока (Гл. 2
При токах />/к скорость п приобретает отрицательные зна-
чения, что соответствует работе двигателя в режиме противо-
включения.
Зная величину тока нагрузки двигателя при заданной ско-
рости пи, можно по уравнению (101) определить добавочное
сопротивление гд, включаемое в цепь якоря.
С помощью полученной реостатной скоростной характери-
стики (рис. 29, а) и зависимости строим искусствен-
ную механическую характеристику показанную на
рис. 29,6. Метод построения этой характеристики — тот же, что
и естественной механической характеристики.
§14. Пуск в ход двигателя с последовательным возбуждением
раллельным возбуждением — при
Рнс. 30. Определение пусковых сопро-
тивлений двигателя с последовательным
возбуждением методом лучевой диа-
граммы: а — схема включения; б — пу-
сковая диаграмма.
Двигатели постоянного тока с последовательным возбужде-
нием пускаются в ход, как правило, подобно двигателям с па-
помощи пусковых сопротив-
лений, включаемых в цепь
якоря. Но имеются и отли-
чия, которые заключаются
в том, что при одинаковых
условиях пуска двигатели с
последовательным возбуж-
дением:
а) имеют меньше пу-,
сковых ступеней ввиду боль-
шей крутизны скоростных и
механических характери-
стик;
б) быстрее разгоняются
до установившейся скорости
ввиду того, что с увеличе-
нием пускового тока увели-
чивается и магнитный поток
полюсов, обусловливая воз-
никновение большего пуско-
вого момента, чем при по-
стоянном магнитном потоке у двигателей с параллельным воз-
буждением.
Для определения числа пусковых ступеней и величины их
сопротивления чаще всего применяют метод лучевой диа-
граммы (рис. 30).
Чтобы воспользоваться этим методом, необходимо распола-
гать естественной скоростной характеристикой двигателя n = f(/)
и знать внутреннее сопротивление цепи якоря двигателя гдв.
Кроме того, нужно задаться значениями максимального и ми-
§ 14] Пуск в ход двигателя с последовательным возбуждением
71
нимального пускового тока, выбрав их в таких же пределах,
что и для двигателя с параллельным возбуждением, а именно:
/п тах = (1.8 - 2,5) 7Н;' 7П min = (1,1 ч- 1,2) 7Н > 7С1.
Задавшись токами 7П тах и 7П т1-п, находим на естественной
скоростной характеристике точки д и е, через которые прово-
дим прямую дк.
Из уравнения (101) для тока 7П ITlin и по значению вклю-
ченного в цепь якоря пускового сопротивления гп определяем
скорость пи, до которой двигатель разгоняется на первой ха-
рактеристике (точка б):
. пи = пе(1-------/п;п1пГп -(102)
, \ и — in mjn ГдВ /
где пе —скорость двигателя на естественной характеристике
при токе 7П min.
Через точки а и б проводим прямую до пересечения с про-
должением прямой де (точка к). Из точки к проводим лучи
и строим пусковую характеристику так же, как и для двига-
теля с параллельным возбуждением. Отрезки аб и вг при этом
представляют собой спрямленные участки пусковых характе-
ристик двигателя с последовательным возбуждением.
Проведенные построения позволяют определить и число пу-
сковых ступеней.
Как и в графическом методе, рассмотренном для двигателей
с-параллельным возбуждением, прямая ад определит пусковое
сопротивление гп, а ее отрезки ав и вд— соответственно сту-
пени ri и Г2- Значения сопротивлений этих ступеней можно
определить из следующих рассуждений.
В начальный момент пуска цепь якоря двигателя имеет со-
противление
'иищ . .
'п ma.fr
Но поскольку 7?общ=^дв+/'п, то пусковое сопротивление
i"n К общ Тдв = ад.
Тогда, найдя масштаб сопротивлений (ом/мм)
получим:
г, = ав ом и~г2 = вд ом.
1 ад “ 2 ад
72
Электромеханические свойства двигателей постоянного тока [Гл. 2
§ 15. Регулирование скорости двигателя
с последовательным возбуждением
Больше всего распространены следующие способы регули-
рования скорости двигателя с последовательным возбуждением:
а) изменение сопротивления цепи якоря;
б) шунтирование обмотки якоря;
в) шунтирование обмотки возбуждения; ~ •
г) изменение подводимого к двигателю напряжения.
Рис. 31. Схема включения (а) и механические характеристики (б) дви-
гателя с последовательным возбуждением при регулировании скорости
добавочными сопротивлениями в цепи якоря. , ,
Изменение сопротивления якорной цепи. Этот способ позво-
ляет осуществлять регулирование скорости вращения двигателя
вниз от основной. Предположим, что двигатель работает на
естественной характеристике со скоростью пст, соответствую-
щей моменту Л1СТ, и в цепь якоря включается добавочное со-
противление Гд1 (рис. 31).
Если двигатель работает с ненасыщенной магнитной систе-
мой и Ф = а/, то
U = Е +1 (rRB + гр1) = сеч1п + I (глв + гл1),
откуда
1 =______"______.
сеап + ГдВ + гд1
Значительная инерционность вращающихся масс служит
причиной того, что включение в цепь якоря сопротивления гд1
первоначально не изменяет скорости двигателя. Поэтому ток
скачком уменьшается до некоторого значения I. Это вызывает
§ /5] Регулирование скорости двигателя с последовательным возбуждением 73
уменьшение вращающего момента Л1 = сма/2, пропорциональное
квадрату тока, и переход двигателя на новую механическую
характеристику. Неизменный в рассматриваемом случае стати-
ческий момент теперь оказывается больше момента двигателя,
что вызывает уменьшение скорости до величины п±, при кото-
рой ток, а следовательно, магнитный поток и момент двигателя
настолько увеличиваются, что наступает равновесие: М=МС1:.
Таким образом, установившийся режим восстанавливается при
новой скорости П1.
Рис. 32. Схема включения (а) и механические характеристики
(б) двигателя с последовательным возбуждением при регу-
лировании скорости шунтированием якоря.
К этой скорости можно прийти также со скорости пг, зашун-
тировав в цепи якоря сопротивление гп2. Переходный процесс
будет протекать аналогично рассмотренному выше.
В остальном регулирование по этому способу происходит
так же, как и у двигателей с параллельным возбуждением.
Шунтирование обмотки якоря. Зашунтировав якорь сопро-
тивлением гш и последовательно включив в цепь двигателя со-
противление гп (рис. 32), можно заставить двигатель работать
с малыми скоростями на жесткой механической характери-
стике при незначительном моменте на валу, а также полу-
чить конечное значение скорости идеального холостого хода
и осуществить переход двигателя в генераторный режим.
Получение низких скоростей на пологих характеристиках
обеспечивается одновременным уменьшением напряжения на
зажимах якоря и усилением магнитного потока полюсов, кото-
рый создается током возбуждения
/в = /п = /с + /ш. ' (ЮЗ)
Если нагрузка на валу двигателя отсутствует, то ток якоря
равен нулю (/а —0) и магнитный поток создается током шун-
74
Электромеханические свойства двигателей постоянного тока [Гл. %
тирующей ветви /в=Лп- Это обстоятельство и обусловливает
возможность идеального холостого хода и тормозного генера-
торного режима двигателя. В самом деле, при некоторой ско-
рости «о э. д. с. обмотки якоря Е=сеФпо достигает величины
напряжения на зажимах П=/шгш, что соответствует режиму
идеального холостого хода двигателя.
Таким образом
сеФп0 = /шгш,
откуда
п0 = . (Ю4)
СеФ
Из уравнения (104) следует, что если не учитывать после-
довательного сопротивления гп, то уменьшение скорости иде-
ального холостого хода можно получить, уменьшив шунтирую-
щее сопротивление гш.
Дальнейшее увеличение скорости (п>п0) переводит двига-
тель в тормозной генераторный режим, при котором двигатель
совместно с сетью питает сопротивление гш. Отдача энергии
в сеть при работе по приведенной на рис. 32, а схеме невоз-
можна, так как изменение направления тока в обмотке воз-
буждения вызывает размагничивание машины.
Увеличение тока в шунтирующем сопротивлении гш увели-
чивает падение напряжения на этом сопротивлении и, следова-
тельно, уменьшает ток в обмотке возбуждения. Связанное
с этим уменьшение потока двигателя увеличивает крутизну ме-
ханических характеристик в режиме генераторного торможе-
ния и делает его мало пригодным для практических целей.
Введение сопротивления га вызывает падение напряжения
на данном участке и соответственное уменьшение напряжения
на зажимах якоря. Это является причиной уменьшения рабочих
скоростей в двигательном режиме.
Диапазон регулирования скорости рассматриваемым спосо-
бом может быть доведен до значения Д=5: 1.
Искусственные скоростные и механические характеристики
рассчитывают и строят на основании принципов, изложенных
в § 13. При расчете используют уравнение скоростной харак-
теристики применительно к данной схеме включения. Для
схемы, приведенной на рис. 32, о,
П __ U t Гш________1дГа |
Се® Гш+Гп С«ф [
где г'п=/,п+/‘в-
Недостатком описанного способа
большие потери в шунтирующих и последовательно включенных
р цепь якоря сопротивлениях.
(105)
г
а
являются
§ 15] Регулирование скорости двигателя с последовательным возбуждением 75
Шунтирование обмотки возбуждения. Для увеличения ско-
рости электропривода и отработки заданного пути в более ко-
роткое время применяют регулирование скорости путем ослаб-
ления магнитного потока полюсов. В двигателях с последова-
тельным возбуждением этого добиваются шунтированием об-
мотки возбуждения. Как видно из схемы включения на рис. 33, а,
в этом случае /а=/в+/ш-
Рис. 33. Схема включения (а) и механические характеристики (б) дви-
гателя с последовательным возбуждением при регулировании скорости
шунтированием обмотки возбуждения.
Подставим в полученное уравнение значение тока /ш, най-
денное из выражения /вгв=/шбш- Тогда получим:
' 1а = /в (1 + ДЦ,
\ гш
откуда
= (106)
Таким образом, при неизменном токе якоря (/a=const) ток
в обмотке возбуждения /в и магнитный поток полюсов умень-
шаются с уменьшением шунтирующего сопротивления гш.
Из уравнения механической характеристики двигателя для
приведенной схемы включения
— ——— го + гв-_
СеФ СеСмФ \ Гв -р гш
(Ю7)
следует, что ослабление магнитного потока (как и у двигателя
с параллельным возбуждением) ведет к увеличению скорости
двигателя и крутизны искусственных характеристик.
Сопротивление гш соизмеримо с сопротивлением обмотки
возбуждения и также незначительно. Поэтому потери мощности
76
Электромеханические свойства двигателей постоянного тока [Гл. 2
в шунтирующем сопротивлении ДР = /£/ш при регулировании
скорости будут невелики. Следовательно, этот способ регули-
рования является экономичным.
Диапазон регулирования, однако, невелик и не превышает
значения Д=2: 1.
Изменение подводимого к двигателю напряжения. Этот спо-
соб осуществим как при последовательно-параллельном вклю-
чении двигателей, так и при питании каждого двигателя от соб-
ственного генератора с последовательным возбуждением (си-
стема генератор—двигатель).
al
Рис. 34. Схемы включения (а
двигателей с последовательным возбуждением при параллельно-последо-
* вательном соединении.
и б) и механические характеристики (в)
Иногда применяют электроприводы с двумя двигателями,
каждый из которых рассчитан на половину мощности, требуемой
для приведения в движение одного производственного меха-
низма. Это может быть вызвано стремлением:
а) уменьшить маховой момент привода, который у двух
менее мощных двигателей меньше, нежели у одного более мош-
ного двигателя;
б) облегчить задачу проектировщика, так как разместить
два малых двигателя легче, нежели один большой;
в) увеличить надежность привода, обеспечив возможность
работать некоторое время одним двигателем в случае выхода
из строя другого,.
К числу положительных свойств такого двухдвигательного
электропривода относится и то, что он позволяет регулировать
скорость. Последнее осуществляется следующим образом.
Если два двигателя соединены параллельно (рис. 34,а), то
каждый из них находится под напряжением сети и работает
§ /6] Торможение двигателя с последовательным возбуждением
77
с номинальной скоростью
(108>
При включении этих двигателей последовательно (рис. 34, б)
напряжение сети между ними распределяется поровну:
{7 = 2сеФп + 2/гдв,
откуда
<109’
Таким образом, перевод двигателей с параллельного соеди-
нения на последовательное уменьшает скорость вращения при-
мерно в два раза (рис. 34', в).
Чтобы расширить диапазон и обеспечить большую плав-
ность регулирования, описанный способ часто сочетают с пер-
вым, т. е. с изменением сопротивления якорной цепи. Для этого
в цепь якоря двигателя включают добавочные регулировочные
сопротивления. ’
§ 16. Торможение двигателя с последовательным возбуждением
Известны два способа электрического торможения двигате-
лей с последовательным возбуждением:
а) электродинамический;
б) противотоком (режим противовключения).
Как уже отмечалось в § 12, генераторный рекуперативный
режим для этих двигателей практически неосуществим.
Электродинамическое торможение. Этот способ применяют
для быстрой остановки двигателей, отключаемых от сети, для
подтормаживания опускаемых тяжелых грузов в грузовых элек-
троприводах, а также для подтормаживания спускающихся под
уклон трамваев и электропоездов. Применять этот способ
к двигателям с последовательным возбуждением можно как
при самовозбуждении, так и при независимом возбуждении.
В случае динамического торможения с самовозбуждением
двигатель отключают от сети и замыкают на тормозное сопро-
тивление. Под действием запасенной во время работы двига-
теля кинетической энергии якорь продолжает вращаться в поле
остаточного магнетизма полюсов, что при соответствующих
условиях вызывает процесс самовозбуждения. Двигатель пере-
ходит в режим генератора, и ток в якоре меняет направление
на обратное.
Для самовозбуждения генератора необходимо:
а) сохранить направление тока рабочего режима в обмотке
возбуждения;
78
Электромеханические свойства двигателей постоянного тока [Гл. 2
б) соблюсти соотношение:
Е = сеФп > I (га + гв + гт).
Последнее выражение показывает, что самовозбуждение воз-
можно только начиная с некоторой предельной скорости вра-
щения (п2 на рис. 35).
Первое условие самовозбуждения продиктовано необходи-
мостью избежать размагничивания машины, для чего приме-
няют схему включения, изображенную на рис. 36, о. При тор-
можении контакты Л линейного контактора разомкнуты, кон-
Рис. 35. Характеристики само-
возбуждения двигателя с по-
следовательным возбуждением
при динамическом торможе-
нии.
замкнуты.
Величину сопротивления гт, ог-
раничивающего бросок тормозного
тока, можно определить из следую-
щих уравнений скоростной или ме-
ханической характеристики для дан-
ного режима:
„ = /(ГДВ+ГТ); (Н0)
СеФ
п=_1,03Л7 (гдв -|- гт) (ЦП
(сеФ)2
где сеФ = ~/ст Гдв ориентировочно
ЛСт
тока по естественной скоростной ха-
определяют для заданного
рактеристике двигателя.
Из уравнений скоростной (110) и механической (111) ха-
рактеристик следует, что обе они исходят из начала координат,
а крутизна их определяется величиной тормозного сопротивле-
ния гт.
То обстоятельство, что в данном случае током возбуждения
является ток якоря, зависящий от скорости вращения двига-
теля, порождает следующие недостатки режима динамического
торможения с самовозбуждением:
а) самовозбуждение возможно лишь начиная с некоторой
минимальной скорости вращения;
б) в процессе торможения двигателя его тормозной момент
быстро уменьшается, а при скоростях, меньших некоторого кри-
тического значения пкр, самовозбуждение прекращается и даль-
нейшее затормаживание двигателя производится только стати-
ческим моментом (штриховой участок механической характе-
ристики, рис. 36, б);
в) в начальный период торможения тормозной момент бли-
зок к нулю и по мере самовозбуждения быстро нарастает, со-
§ 16] Торможение двигателя с последовательным возбуждением
79
здавая динамический удар, который может вызвать поломку
производственного механизма.
От этих недостатков свободно динамическое торможение
с независимым возбуждением. Режим осуществляют так: якорь
Рис. 36. Схема включения (а) и механические характеристики (б) двига-
теля с последовательным возбуждением при динамическом торможении
с самовозбуждением.
отключают от сети и замыкают на тормозное сопротивление гт,
обмотку же возбуждения оставляют подключенной к сети через
сопротивление гд, которое ограничивает ток возбуждения до
значения номинального тока двигательного режима (рис. 37).
Рис. 37. Схема включения (с) и механические, характеристики (б) дви-
гателя с последовательным возбуждением при динамическом тормо-
жении с независимым возбуждением.
Возникает параллельное возбуждение, и становится спра-
ведливым все ранее сказанное о подобном же режиме двигателя
с параллельным возбуждением.
Добавочное сопротивление в цепи обмотки возбуждения гд
определится из выражения:
U
-------гв
I
(112)
80
Электромеханические свойства двигателей постоянного Тока [Гл. 2
Однако и этот способ не лишен недостатков. Во-первых, он
неэкономичен, так как цепь обмотки возбуждения потребляет
номинальный ток двигателя, разогревающий добавочное сопро-
Рис. 38. Схема включения (а) и механические характеристики (б)
двигателя с последовательным возбуждением при торможении
противовключением с активным статическим моментом на валу.
Рис. 39. Схема включения (а) и механические характеристики (б) дви-
гателя с последовательным возбуждением при торможении противовклю-
чением с реактивным статическим моментом на валу.
тивление гд и саму обмотку возбуждения. Во-вторых, такой тор-
мозной режим неосуществим в случае исчезновения напряже-
ния питающей сети. Поэтому для аварийной остановки приме-
няют динамическое торможение с самовозбуждением.
Торможение противовключением. Этот способ был подробно
рассмотрен в § 11 применительно к двигателям с параллель-
§ 77] Характеристики двигателя со смешанным возбуждением 81
ным возбуждением. Как и в том случае, торможение противо-
включением для двигателей с последовательным возбуждением
возможно и при активном, и при реактивном статическом мо-
менте на валу.
Торможение противовключением при активном статическом
моменте (рис. 38) требует включения в цепь двигателя тормоз-
ных сопротивлений гт, при которых пусковой момент двигателя
был бы меньше статического момента на валу (Л1п<Л1ст). Та-
кой способ торможения применяют для обеспечения посадочной
скорости при опускании тяжелых грузов.
В случае торможения противовключением при реактивном
статическом моменте (рис. 39) изменяют направление тока
в обмотке якоря с одновременным включением в цепь якоря
тормозного сопротивления гт, необходимого для ограничения
броска тормозного тока. Направление тока возбуждения сохра-
няют прежним.
Этот способ торможения применяют для быстрой остановки
реверсируемых электроприводов. Он пригоден также для ре-
верса электродвигателей с последовательным возбуждением пу-
тем изменения направления тока в обмотке якоря, включенной
по мостовой схеме, приведенной на рис. 39, а.
§17. Механические характеристики двигателя
со смешанным возбуждением
Двигатель постоянного тока со смешанным возбуждением
(рис. 40), как известно, имеет две обмотки возбуждения: па-
раллельную (шунтовую) ОВщ и последовательную (сериесную)
ОВС. Общий магнитный поток
машины Ф создается намагничи-
вающими силами обеих обмоток
возбуждения:
Ф = с (/вщш + Iawc) = Фш + Фс-
(НЗ)
Из уравнения (113) следует,
что в зависимости от того, как
соединены обмотки возбуждения,
Рис. 40. Схема включения двига-
теля со смешанным возбуждением.
их м. д. с. могут иметь одинако-
вое или противоположное направление, и общий магнитный по-
ток машины будет представлять собой, соответственно, либо
сумму, либо разность потоков отдельных обмоток возбуждения.
Во втором случае, т. е. при встречном включении обмоток
возбуждения, пусковой ток, проходя по последовательной
обмотке, может размагнитить машину, в результате чего
4
К. А. Чекунов
82 Электромеханические свойства двигателей постоянного тока [Гл. 2
двигатель нельзя будет запустить. Резкие толчки нагрузки при
работе двигателя вызовут также ослабление потока и броски
тока в якоре. Из-за этих недостатков двигатели со смешанным
возбуждением и встречным включением обмоток возбуждения
практического применения не получили.
Поэтому в настоящее время двигатели со смешанным воз-
буждением используются только при однонаправленном (со-
гласном) включении парал-
лельной и последовательной ,е„
обмоток возбуждения. Маг-
нитный поток, создаваемый к0
намагничивающей силой па-
раллельной обмотки возбуж- t20
дения при холостом ходе дви-
гателя со смешанным возбуж- m
Рис. 41. Механические характери-
стики двигателей с параллельным
(/), последовательным (2) и сме-
шанным (3) возбуждением.
Рис. 42. Универсальные характеристики
двигателей со смешанным возбуждением
единой серии ДПМ.
дением, достаточен, чтобы исключить возможность «разноса»
двигателя, который таким образом (как и двигатель с парал-
лельным возбуждением) имеет конечное значение скорости
идеального холостого хода и может быть переведен в режим
генераторной работы. Через последовательную обмотку возбуж-
дения ток при этом не протекает, и скорость идеального холо-
стого хода определяется выражением:
Намагничивающая сила последовательной обмотки возбуж-
дения создается током нагрузки. Поэтому магнитный поток
усиливается с увеличением нагрузки на валу двигателя; ско-
рость его сначала резко уменьшается, а затем, по мере насы-
§ 18] Режимы работы двигателя со смешанным возбуждением
83
щения магнитной системы, становится все более постоянной.
Иными словами, он, как и двигатель с последовательным воз-
буждением, имеет мягкую механическую характеристику.
Из сказанного вытекает, что двигатель со смешанным воз-
буждением соединяет в себе свойства двигателей с парал-
лельным и последовательным возбуждением и обладает проме-
жуточной механической характеристикой (рис. 41).
Аналитически выразить уравнение механической характери-
стики двигателя со смешанным возбуждением так же трудно,
как и двигателя с последовательным возбуждением. Поэтому
при расчетах и проектировании электроприводов с двигате-
лями со смешанным возбуждением также пользуются экспери-
ментальными данными завода-изготовителя — универсальными
характеристиками n=f(I) и Такие характеристики для
двигателей серии ДПМ приведены на рис. 42.
§ 18. Пуск, регулирование скорости
и тормозные режимы двигателя со смешанным возбуждением
Пуск и реверс. Большинство двигателей со смешанным
возбуждением имеют реостатный пуск. Пусковые сопротивле-
ния для них рассчитываются теми же методами, что и для
двигателей с последовательным возбуждением.
Рис. 43. Мостовая схема включения (а) и регулировочные характеристики
(б) двигателя со смешанным возбуждением.
1 — естественная; 2 и 3— реостатные; 1', 2' н 3' — соответствующие шунтированию
якоря; 4 — полученная ослаблением магнитного потока.
Чтобы сохранить согласное действие м. д. с. обмоток-воз-
буждения, реверс двигателя производят, изменяя направление
тока в якорной обмотке. Для этого пользуются контакторами
направления в мостовой схеме включения якоря (рис. 43, а).
4*
84
Электромеханические свойства двигателей постоянного тока [Гл. 2
Регулирование скорости. Изменение скорости двигателя со
смешанным возбуждением, как и двигателя с параллельным
возбуждением, можно осуществить:
а) включением добавочных сопротивлений в цепь якоря;
б) шунтированием якоря;
в) ослаблением магнитного потока полюсов.
Отличительной особенностью регулировочных процессов
двигателей со смешанным возбуждением является кривизна
механических характеристик, получаемых в результате регули-
рования (рис. 43, б). Это объясняется зависимостью магнитного
потока, создаваемого последовательной обмоткой возбуждения,
от величины нагрузки на валу двигателя.
Режимы электрического торможения. Двигатель со смешан-
ным возбуждением, как и двигатель с параллельным возбуж-
дением, можно подвергнуть:
а) генераторному рекуперативному торможению;
б) динамическому торможению;
в) противовключению.
Основная особенность тормозных режимов двигателя со
смешанным возбуждением заключается в том, что при пере-
ходе в генераторный режим ток якоря, изменив свое направ-
ление, протекает по последовательной обмотке возбуждения,
размагничивает машину и ослабляет тормозной момент. По-
этому в генераторном тормозном режиме последовательную
обмотку возбуждения замыкают накоротко или выключают из
цепи двигателя. Иногда в целях более эффективного торможе-
ния последовательную обмотку подключают через добавочное
сопротивление в параллель с параллельной обмоткой возбуж-
дения. Тогда они совместно создают сильный магнитный поток
и большой тормозной момент.
Динамическое торможение можно получить, если в схеме,
приведенной на рис. 43, а, контактами направления В (вперед)
и И (назад) якорь двигателя отключить от сети, а контактом Т
замкнуть его на тормозное сопротивление Р4 — Р5. При этом
последовательная обмотка возбуждения оказывается отключен-
ной и двигатель становится машиной параллельного (независи-
мого) возбуждения с прямолинейной механической характери-
стикой (рис. 44, а). Для увеличения эффективности торможе-
ния РП (см. рис. 43) должен быть замкнут.
Пользуясь схемой на рис. 43, а, можно также осуществить
режим противовключения при активном п реактивном стати-
ческом моментах на валу двигателя. Этот режим уже доста-
точно подробно рассмотрен применительно к двигателям
с параллельным и последовательным возбуждением. Поэтому
ограничимся здесь изображением соответствующих механиче-
ских характеристик (рис. 44, б).
§ fS] Режимы работы двигателя со смешанным возбуждением
85
Как отмечалось в § 11, генераторное рекуперативное
торможение получается, если якорь двигателя разогнать
под действием внешних сил до скорости, превышающей ско-
рость идеального холостого хода. При этом ток якоря меняет
Рис. 44. Тормозные механические характеристики двигателя со смешанным
возбуждением: а — при динамическом торможении; б — при торможении
противовключением и реверсе.
свое направление и, протекая по последовательной обмотке
возбуждения, создает м. д. с., направленную навстречу м. д. с.
параллельной обмотки. Таким образом, получается противо-
Рис. 45. Схема включения (а) и механические, характеристики (б) дви-
гателя со смешанным возбуждением в режиме генераторного рекупера-
тивного торможения.
компаундный (дифференциальный) генератор с очень мягкой -
механической характеристикой (штриховая линия на рис. 45).
Это означает, что установившийся режим работы электро-
привода наступает только при очень высокой скорости. По-
этому при достижении двигателем скорости идеального холо-
стого хода последовательную обмотку надо закоротить или
отключить. Двигатель и в этом тормозном режиме превра-
щается в обычную машину с параллельным возбуждением и
86
Система генератор—двигатель
[Гл. 3
с прямолинейной механической характеристикой, жесткость ко-
торой определяется величиной магнитного потока параллельной
обмотки возбуждения. Чтобы увеличить жесткость тормозной
характеристики, а следовательно, уменьшить скорость двига-
теля в тормозном режиме, иногда обе обмотки возбуждения
включают параллельно так, чтобы их м. д. с. совпадали.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
I. В чем разница между механическими характеристиками двигателя и
исполнительного механизма, изображенными в первом квадранте осей коор-
динат (стр. 28—30)?
2. Когда диапазон регулирования равен коэффициенту плавности (стр.
31—32)?
3. При каком условии механическая характеристика двигателя постоян-
ного тока не может совпасть со скоростной (стр. 35)?
4. Чем объяснить, что скорость идеального холостого хода не зависит от
величины добавочного сопротивления, включенного в цепь якоря (стр. 35)?
5. Почему в нормальном режиме работы двигателя нет необходимости
ограничивать ток пусковыми сопротивлениями (стр. 40—41)?
6. Каким образом поддерживать постоянной скорость двигателя при уве-
личении нагрузки на его валу (стр. 49—51)?
7. В чем разница между механическим и электрическим торможением
электродвигателя (стр. 52)?
8. Механические характеристики каких тормозных режимов изобра-
жаются во втором и четвертом квадрантах (стр. 52—61)?
9. Почему уравнение (96) механической характеристики двигателя с по-
следовательным возбуждением нельзя применять для практических расчетов
(стр. 63—66)?
10. Как построить искусственные механическую и скоростную характе-
ристики двигателя с последовательным возбуждением, которые были бы при-
годны для практических расчетов (стр. 67—70)?
11. Почему невозможен рекуперативный режим двигателя, работающего
по схеме рис. 32?
12. В чем особенность тормозных режимов двигателя с последователь-
ным и смешанным возбуждением (стр. 77—81 и 84—85)?
13. Назовите пять режимов, в которых двигатель может работать на ха-
рактеристике 3' (рис. 43, б).
14. Почему реверс всех двигателей постоянного тока обычно производят
переключениями в цепи якоря (стр. 63 и 83)?
ГЛАВА 3
СИСТЕМА ГЕНЕРАТОР—ДВИГАТЕЛЬ
§ 19. Пуск, торможение и регулирование скорости
в системе генератор — двигатель
Ответственные судовые механизмы часто оснащают электро-
приводами с управлением по системе генератор — двигатель
(система Г-Д), обеспечивающей плавный пуск, экономичное
торможение, а также плавное регулирование скорости в широ-
ких пределах.
Пуск и торможение в системе Г — Д
87
Эта система обычно включает в себя:
а) исполнительный двигатель — двигатель постоянного тока
с независимым возбуждением, который служит для непосред-
ственного приведения в движение производственного меха-
низма;
б) трехмашинный преобразовательный агрегат, состоящий
из генератора, приводного двигателя и возбудителя, валы кото-
рых соединены между собой; генератором, питающим
электроэнергией исполнительный двигатель, обычно служит
машина постоянного тока с независимым возбуждением;
приводной двигатель вращает генератор и возбудитель;
000
Рис. 46. Система генератор—двигатель.
если судовая сеть работает на переменном токе, то для этой
цели обычно применяют асинхронный двигатель с коротко-
замкнутым ротором, а если на постоянном токе, то-—двига-'
тель постоянного тока с параллельным или смешанным воз-
буждением; в первом случае, т. е. когда основным родом тока
на судне является переменный ток, для питания цепей возбуж-
дения генератора и исполнительного двигателя используют от-
дельный генератор постоянного тока, называемый возбуди-
телем; ‘во втором случае, т. е. при работе судовой сети на)
постоянном токе, надобности в специальном возбудителе нет, i
и он может отсутствовать;
в) аппаратуру управления, выполненную в виде малогаба-
ритных и легких аппаратов, так как управление в основном
осуществляется переключениями в цепи независимой обмотки
возбуждения генератора; в цепи главного тока исполнитель- ,
ного двигателя обычно нет никаких коммутационных и других
аппаратов.
Пуск и реверс- Перед пуском системы Г — Д (рис. 46) необ-
ходимо ввести сопротивления и Дг в цепи возбуждения
возбудителя и генератора, вывести сопротивление Rn из цепи -
88
Система генератор—двигатель
[Гл. 3
возбуждения двигателя, а переключатель И включить в верх-
нее или нижнее положение — в зависимости от требуемого на-
правления вращения исполнительного двигателя.
Пуск системы Г—Д производится в такой последователь-
ности:
а) контактором Л включают приводной двигатель ПД\
б) реостатом Дв устанавливают необходимое напряжение
на зажимах якоря возбудителя Вив сети возбуждения;
в) реостатом RT в цепи обмотки возбуждения генератора
плавно повышают напряжение U, подводимое к якорю испол-
нительного двигателя ИД, который благодаря этому плавно
разгоняется до нужной скорости.
На протяжении всего времени работы агрегата приводной
двигатель, а следовательно, генератор Г и возбудитель В вра-
щаются в одном и том же направлении со скоростью, незначи-
тельно изменяющейся только при изменении нагрузки на валу
приводного двигателя.
Исполнительный двигатель ИД в процессе работы часто
приходится реверсировать, для чего реостатом R? уменьшают
ток возбуждения генератора до нуля и переключатель И пере-
водят в другое рабочее положение (например, сверху вниз).
Затем, вновь увеличивая ток возбуждения генератора и под-
водимое к якорю исполнительного двигателя напряжение, про-
изводят пуск двигателя для вращения его в обратном направ-
лении. При этом изменяются полярность генератора и на-
правление тока в якоре исполнительного двигателя, что и
обусловливает его реверс. Переключатель И и реостат часто
бывают конструктивно совмещены в одном аппарате.
Торможение и остановка. Каждая остановка исполнитель-
ного двигателя и всей системы Г—Д происходит в режиме
электрического торможения.
Чтобы остановить исполнительный двигатель при работаю-
щем преобразователе, надо быстро уменьшить ток возбуждения
генератора, в результате чего э. д. с. двигателя, продолжаю-
щего вращаться по инерции, оказывается больше э. д. с. гене-
ратора. Двигатель переходит в генераторный режим, переводя
генератор в двигательный режим. Если при этом исполнитель-
ный двигатель отдаст энергию, достаточную для покрытия по-
терь в машинах преобразователя, то приводной двигатель,
перейдя в режим генератора, будет возвращать избыток энер-
гии в сеть.
.Аналогичный тормозной режим всегда будет иметь место
при резком уменьшении э. д. с. генератора, а также при увели-
чении тока возбуждения исполнительного двигателя реостатом
Rn (если двигатель работал до этого при ослабленном магнит-
ном потоке). - / .
§ /9] Пуск и торможение в системе Г — Д 89
Для остановки всей системы Г—Д, очевидно, необходимо1
отключить от сети приводной двигатель. При этом якорь испол-
нительного двигателя, вращаясь по инерции и будучи замкнут
на сопротивление якорной цепи генератора, переходит в режим
динамического торможения. Это ускоряет остановку всей си-
стемы.
Механическая характеристика. На основании второго за-
кона Кирхгофа для цепи главного тока можно записать урав-
нение:
Ег ^дв г Н- дв I (га г Н- Д дв)> 0 1^)
где Ег — э. д. с., индуктированная в генераторе;
Ддв — э. д. с. двигателя;
I—ток якорей генератора и двигателя;
Гаг — сопротивление якоря генератора;
га дг. — сопротивление якоря двигателя.
Подставив в уравнение (115) значение э. д. с. двигателя
£'дв = СеФЦ, получим:
Ег сеФп I (го г Га рр),
откуда _________________________
__ _____I (га г га дв) fl 16)
есФ есФ '
Это выражение представляет собой уравнение скоростной
характеристики двигателя, питающегося от отдельного гене-
ратора.
Если в уравнёнии (116) ток I заменить соответствующим
значением момента, то получим уравнение механической харак-
теристики исполнительного двигателя системы Г—Д:
ЕГ_______М (Га г | Гд дв)
сеФ О,с„Ф2
Из уравнений (116) и (117) следует, что скоростная и
механическая характеристики двигателя, питающегося от от-
дельного генератора, не так жестки, как соответствующие ха-
рактеристики двигателя, питающегося от общей сети. Это объ-
ясняется, во-первых, тем, что в системе Г—Д, наряду с паде-
нием напряжения в двигателе 1га№, происходит и падение
напряжения в генераторе 1гаг и, во-вторых, тем, что с увели-
чением нагрузки скорость приводного двигателя не остается
постоянной, а уменьшается в соответствии с его механической
характеристикой. В результате э. д. с. генератора £г также
уменьшается.
90
Система генератор—двигатель
[Гл. 3
с собственной скоростью
Рис. 47. Механические характеристики
регулирования скорости исполнительного
двигателя в системе Г—Д.
уменьшится. Это, в свою очередь,
Регулирование скорости. В системе Г —Д скорость враще-
ния исполнительного двигателя можно регулировать, изменяя:
а) напряжение, подводимое к зажимам якорной обмотки;
б) магнитный поток полюсов двигателя.
В первом случае реостатом или потенциометром в цепи об-
мотки возбуждения генератора плавно и в нужных пределах
изменяют э. д. с. генератора Ег и, следовательно, напряжение,
подводимое к исполнительному двигателю. Каждому значению
напряжения соответствует своя механическая характеристика
го холостого хода п0 и об-
щей для всех степенью
жесткости, определяемой
Ли (рис. 47).
Пусть исполнительный
двигатель работает при но-
минальном напряжении на
зажимах якоря со скоро-
стью пн и моментом Л1п. С
уменьшением подводимого
напряжения до Ui скорость
двигателя в первый момент
времени благодаря инерции
вращающихся масс останет-
ся постоянной. Очевидно,
постоянной останется и
э. д. с. якоря двигателя. Тог-
да ток в цепи якоря в соот-
ветствии с уравнением (65)
ызовет уменьшение вращаю-
щего момента М двигателя. Если нагрузочный момент Л1СТ не
зависит от скорости вращения, то окажется, что Л4<Л4СТ, и дви-
гатель затормаживается. С уменьшением скорости и противо-
э. д. с. якоря ток и момент двигателя начнут возрастать.
При некоторой скорости Hi равновесие моментов восстано-
вится и переходный процесс прекратится.
Если напряжение сразу уменьшить на значительную вели-
чину, то при переходе с одной механической характеристики на
другую двигатель перейдет в генераторный режим и некоторое
время будет работать с рекуперацией энергии в сеть.
Аналогично можно рассмотреть переход с низкой скорости
на более высокую. В этом случае резкое изменение напряжения
может вызвать настолько большой бросок тока в цепи якорей ге-
нератора и двигателя, что нарушатся нормальные условия ком-
мутации машин и возникнет сильное искрение на коллекторе.
Изменением напряжения скорость двигателя можно регу-
лировать только вниз от основной, причем нижний предел
§ 19]
Пуск и торможение в системе Г — Д
91
скорости ограничивается э. д. с. остаточного магнетизма гене-
ратора, а также тем, что при низких напряжениях в главной
цепи стабильность работы двигателя нарушается. Это обуслов-
ливается влиянием реакции якоря и колебаниями падения на-
пряжения в сопротивлениях якорных цепей и особенно в ще-
точном контакте. Поэтому минимальная скорость двигателя при
номинальной нагрузке обычно не бывает ниже 10% от вели-
чины «н и, следовательно, рассмотренный способ обеспечивает
плавное регулирование скорости при постоянной жесткости
механических характеристик в диапазоне значений 10: 1.
Второй способ регулирования скорости исполнительного
двигателя — изменением магнитного потока полюсов —в си-
стеме генератор—двигатель ничем не отличается от рассмотрен-
ного в § 10 аналогичного способа регулирования при питании
двигателя от общей сети постоянного тока. Изменение скоро-
сти осуществляется вверх от основной, причем с уменьшением
магнитного потока увеличиваются скорость идеального холо-
стого хода и крутизна механической характеристики двига-
теля. Диапазон регулирования, ограничиваемый условиями ком-
мутации и механической прочностью конструкции двигателя,
обычно не бывает больше 3:1.
При выборе способа регулирования следует стремиться
к тому, чтобы двигатель был загружен полностью на всем диа-
пазоне регулирования, а это осуществимо лишь при условии
совпадения механических характеристик двигателя и приводи-
мого механизма.
Итак, в системе генератор—двигатель регулирование ско-
рости вращения исполнительного двигателя может осуществ-
ляться изменением напряжения — в диапазоне от 0,1пн до пн
и ослаблением магнитного потока полюсов — в диапазоне от
«и ДО 3/1ц-
Общий диапазон регулирования составляет:
1 д _____ гатах Зпн ___др . ।
ЯППП OjIKh
Если эти значения не удовлетворяют необходимым режи-
мам работы электропривода, то в системе Г—Д применяют
электромашинные усилители, которые позволяют увеличить диа-
пазон регулирования до 100 : 1 и более.
Преимущества и недостатки системы генератор — двигатель.
Применение системы генератор—двигатель дает следующие
преимущества:
а) управление электроприводом осуществляется в маломощ-
ных цепях возбуждения, что позволяет применять облегченную
аппаратуру и располагать посты управления в наиболее удоб-
ном месте и в любом отдалении от исполнительного механизма;
(118)
92
Система генератор—двигатель
[Гл. 3
б) количество применяемой аппаратуры управления не-
велико, что обусловливает высокую надежность работы;
в) отсутствие громоздких пуско-регулировочных и тормоз-
ных сопротивлений в цепи главного тока позволяет избегать
больших потерь энергии при пуске, торможении и регулирова-
нии скорости двигателя;
г) обеспечивается простое и плавное регулирование скоро-
сти в широких пределах.
Этим достоинствам системы генератор — двигатель противо-
стоят следующие ее основные недостатки:
а) высокая установленная мощность, более чем в три раза
превышающая мощность исполнительного двигателя;
б) высокие первоначальные затраты;
в) низкий к. п. д. системы (не более 80%), обусловленный
трехкратным преобразованием энергии; впрочем, потери, свя-
занные с преобразованием энергии, часто полностью компен-
сируются уменьшением потерь при регулировании;
г) возможность «ползучих» скоростей, обусловливаемых
остаточным магнетизмом генератора.
§ 20. Применение генератора с противокомпаундной обмоткой
Работа некоторых судовых механизмов сопровождается зна-
чительными перегрузками, приводящими к резкому затормажи-
ванию, а иногда и к полной остановке двигателя. Такие режимы
свойственны, например, рулевым электроприводам при закли-
нивании пера руля, а также электроприводам якорно-швартов-
ных устройств при отрыве якоря от грунта. Другой особенно-
стью указанных электроприводов является то, что в момент
перегрузок, вызывающих режим короткого замыкания, двига-
тель не должен отключаться от сети. Все это диктует примене-
ние электроприводов, позволяющих ограничивать момент и ток
короткого замыкания двигателя до нужных значений.
Этим требованиям отвечает часто применяемая в судовых
электроустановках система генератор—двигатель с двухобмо-
точным противокомпаундированным генератором. Такой гене-
ратор (рис. 48, а) имеет две обмотки возбуждения: независи-
мую и последовательную, причем последняя создает м. д. с.,
направленную навстречу намагничивающей силе независимой
обмотки, и обычно называется противокомпаундной (ПКО).
Намагничивающая сила (н. с.) противокомпаундной обмотки
Fmto пропорциональна величине тока цепи якорей генератора и
исполнительного двигателя:
PnKO = k1I, . (119)
где ki — коэффициент пропорциональности.
< .
£ 20]
Применение генератора с ПКО
83
Поэтому при работе генератора вхолостую м. д. с. этой об-
мотки равна нулю и магнитный поток машины создается на-
магничивающей силой Fo одной независимой обмотки возбуж-
дения.
При работе с нагрузками, не превышающими номинальных
значений, э. д. с. генератора и скорость исполнительного двига-
теля почти не изменяются под воздействием намагничивающей
силы противокомпаундной обмотки, что объясняется насыще-
нием магнитной системы двигателя. По мере дальнейшего уве-
личения тока нагрузки размагничивающее действие ПКО ска-
зывается все более значительно, и с выходом на участок кривой
Рис. 48. Схема включения (а), кривая намагничивания (б) и механические
характеристики (в) системы генератор — двигатель с двухобмоточным гене-
ратором.
намагничивания (см. рис. 48, б), выражающий пропорциональ-
ную зависимость между потоком и намагничивающей силой,
магнитный поток и э. д. с. генератора резко уменьшаются.
В результате этого скорость двигателя снижается до нуля, и
двигатель переходит в режим стоянки под током.
Насыщение, при котором работает магнитная система гене-
ратора, позволяет зависимость между магнитным потоком гене-
ратора Фг и результирующей намагничивающей силой F счи-
тать квадратичной:
Ф? = Л2А, - (120)
где k2 — коэффициент пропорциональности.
Аналогично для режима холостого хода генератора
' Ф^Л2К0. (121)
В общем случае результирующую намагничивающую силу
машины можно выразить уравнением:
F = F0 — kJ. (122)
94
Система генератор—двигатель
[Гл. 3
Тогда
Ф? = k2 (Fo - V) = Фо - W, (123)
где kikzI—Фтю — магнитный поток противокомпаундной об-
мотки.
Если принять скорость генератора постоянной, то э. д. с.
обмотки якоря ЕГ будет пропорциональна его магнитному по-
току:
£г = сепгФг = сФг. (124)
Э. д. с. генератора, в свою очередь, определяет скорость
исполнительного двигателя и пропорциональна ей:
ЕГ = п. _ (125)
Следовательно, скорость вращения исполнительного .двига-
теля пропорциональна магнитному потоку генератора:
. п-Фг. ”• (126)
Ток якоря исполнительного двигателя I при постоянном
магнитном потоке полюсов связан следующей зависимостью
с моментом двигателя:
М = kuI, или I = .
km
Таким образом, на основании приведенных соотношений
уравнение (123) можно переписать в виде:
n2 = nz0 — kM, (127)
где п0 — скорость идеального холостого хода двигателя.
Значение коэффициента k определяется из режима корот-
кого замыкания двигателя, когда п—0, а М=МК (момент
короткого замыкания — стоянки двигателя под током). Урав-
нение (127) для этого случая перепишется так:
0 = ц2 — kMK,
откуда
k = ^-.
Л4К
Тогда уравнение механической характеристики двигателя,
работающего по системе Г—Д с двухобмоточным генератором,
примет окончательный вид:
л! = /й—= —V (128)
0 Мк °\ Мк) ’ ' '
или __________________
M = MK(l-4-V (129)
\ П0
Применение генератора с ПКО
95
Если возникает перегрузка, то противокомпаундная об-
мотка размагничивает генератор, ограничивает ток и момент
короткого замыкания исполнительного двигателя, обеспечивая
тем самым необходимую защиту машин системы Г—Д. При
снятии перегрузки ток в якорях и противокомпаундной обмотке
уменьшается, и двигатель автоматически разгоняется до рабо-
чей скорости.
Величина тока и момента при коротком замыкании двига-
теля зависят от соотношения намагничивающих сил последо-
вательной и независимой обмоток возбуждения генератора. Та-
ким образом, изменяя число витков противокомпаундной об-
мотки, можно обеспечить необходимую величину тока и нужный
момент в режиме короткого замыкания двигателя. Этот момент
обычно принимается равным
Л4К = (1,5 ч-2,2) Л4Н.
Механическая характеристика двигателя, определяемая
уравнением (128), графически изображается кривой n=f (М),
представленной на рис. 48, в.
Подставляя текущие значения момента и скорости из кри-
вой n=f (М) в известную формулу мощности Р=Мп/975, по-
лучаем кривую зависимости P=f (Л-1), также приведенную на
рис. 48, в.
Максимальное значение мощности по этой кривой примем
, за номинальную мощность двигателя Рн, которой будут соответ-
ствовать определяемые из того же графика номинальные зна-
чения момента Л4Н и скорости пн.
Они также могут быть выражены аналитически, для чего
воспользуемся уравнением:
л М.п Л4К / п3
Р =----- =-----//г-----
975 975 I rag
продифференцировав которое, получим:
д АР _ _ Зи3 \
Ап 975 I по /
Приравняв значение производной dP/dn нулю, получим:
"="--/т=ут- <131>
Подставив это значение п„ в уравнение (129), найдем:
/ 2 \
/ \ 9 Л4
Mh = mJ1--^- = (132)
96
Система генератор—двигатель
[Гл. 3
Тогда номинальная мощность двигателя определится из
выражения:
р .__р ____ МнЯи ___ 2Л4ктгр _ О,384Л1кпо (133)
н“ max- 975 - 3у^- 975 - 975 • / 7
§ 21. Система генератор — двигатель
с трехобмоточным генератором
Исполнительный двигатель, работающий от противоком-
паундированного генератора, имеет мягкую механическую ха-
рактеристику. Для повышения производительности рабочего
механизма необходимо, чтобы двигатель в пределах допустимых
нагрузок работал с примерно постоянной скоростью (на жест-
ком участке механической характеристики), а при достижении
предельного момента (МБ на рис. 49) резко снижал скорость
до нуля. Механическая характеристика, полученная в таком
режиме, является “крутопадающей и иногда называется
экскаваторной. Ее имеет двигатель, питаемый генерато-
ром с тремя обмотками возбуждения: независимой ОВК, парал-
лельной ОВШ и последовательной ОВС (рис. 50).
Для сравнения крутопадающих характеристик служит коэф-
фициент эффективности &Эф— отношение площади, ограничен-
ной осями координат и характеристикой, к площади прямо-
угольника со сторонами п0 и Л4К. У двигателя, питающегося от
противокомпаундированного генератора, /г;,ф колеблется в пре-
делах от 0,5 до 0,66, а у двигателя системы Г—Д с трехобмо-
точным генератором /г;,ф=Д,8.
В обычном режиме намагничивающая сила (н. с.) парал-
лельной обмотки трехобмоточного генератора направлена
согласно, а н. с. последовательной обмотки — встречно с н. с.
задающей обмотки независимого возбуждения. Таким образом,
результирующая н. с. в рабочем режиме будет:
- ЕР = ЕН + ЕШ-ЕС, (134)
где Д=/цй'п—п. с. обмотки независимого возбуждения
ОД,;
— н. с. параллельной обмотки возбуждения
ОВШ;
Fc=Icwc — н. с. последовательной обмотки возбуждения
ОВС.
В режиме идеального холостого хода /с=0. Тогда уравне-
ние (134) примет вид:
Ео = Д, + Ешо,
и магнитный поток генератора будет наибольшим.
£ 21] Система Г — Д с трехобмоточным генератором 97
С возрастанием тока нагрузки будет увеличиваться н. с.
противокомпаундной обмотки ОВС. Это вызовет уменьшение
результирующей н. с. генератора, а следовательно, уменьшение
его потока и э. д. с., что явится причиной снижения напряжения
на параллельной обмотке возбуждения. В результате ток и н. с.
этой обмотки уменьшатся и тем самым ускорится процесс раз-
магничивания генератора и снижения его э. д. с. Однако раз-
магничивание будет протекать быстро только начиная с неко-
торых значений предельного тока нагрузки и результирующей
н. с., так как трехобмоточные генераторы в обычном режиме
Рис. 49. Крутопадающие ме-
ханические характеристики
двигателя, питающегося от
двухобмоточного (/) и трех-
обмоточного (2) генератора.
Рис. 50. Система Г—Д с трехобмоточным
генератором.
работают с большим насыщением. Поскольку э. д. с. генера-
тора определяет величину скорости исполнительного двигателя
системы Г—Д, то рассмотренный режим обусловит получение
крутопадающей механической характеристики исполнительного
двигателя.
Механическую характеристику двигателя можно получить
на основании внутренней или внешней характеристики трех-
обмоточного генератора. Построение этих характеристик выпол-
няется в последовательности,' прослеживаемой по рис. 51.
В первом квадранте изображается характеристика холо-
стого хода выбранного генератора E0=f (F). На горизонталь-
ной оси откладывается н. с. Ен=Оа; из точки а под углом а
(tga=rm) проводится прямая ав — вольт-амперная характери-
стика параллельной обмотки самовозбуждения ОВШ. Точка в
определяет значение э. д. с. холостого хода трехобмоточного
генератора Ео, а отрезок аб — н. с. обмотки ОВШ. Двухобмоточ-
ный генератор при холостом ходе имел бы э. д. с. Е'о.
Когда в главной цепи появится ток нагрузки, э. д. с. гене-
ратора начнет уменьшаться из-за размагничивающего действия
98
Система генератор—двигатель
[Гл. 3
противокомпаундной обмотки ОВС и уменьшения н. с. ОВщ,
обусловленного снижением напряжения на зажимах гене-
ратора. Эти факторы учитываются с помощью треугольника
напряжений а^в^г, в котором катет ахг— падение напряжения
в цепи якоря генератора Д (гогН-----ГсГ? ) = Дгг; катет вщ—
\ гс + г3 )
н. с. последовательной обмотки Fci=IciWc. Полученный тре-
угольник будем перемещать вершиной щ по прямой ав, пока
вершина в4 не коснется характеристики холостого хода; тогда
Рис. 51. Построение внутренней характеристики трехобмоточ-
ного генератора.
точка 61 укажет значение э. д. с. генератора £ь а точка а\ —
напряжение в главной цепи £i при токе Л.
Если по горизонтальной оси влево отложить величину этого
тока, то на высоте £t получим точку в\ внутренней характери-
стики генератора. Из точки а до пересечения с вертикальной
осью под углом р (tgp = rr/tOc) проведем прямую ак, парал-
лельную «161. Для некоторого значения тока /2 влево от точки
а отложим н. с. £с2 (точка д), восстановим перпендикуляр ddt
до пересечения с прямой ак и проведем сйв2 параллельно ав
до пересечения с характеристикой холостого хода генератора_
в точке в2, ордината которой соответствует э. д. с. £2. По току
Z2 и э. д. с. £г во втором квадранте получим точку в'г внутрен-
ней характеристики генератора. Так, задаваясь несколькими
значениями тока /, можно построить внутреннюю характери-
стику генератора £r=f (7).
Во втором квадранте проведем прямую падения напряже-
ния в сопротивлениях цепи якорей генератора и двигателя
§ 22]
Характеристика асинхронного двигателя
99
I Ог + гДЕ) =1га. Расстояния по вертикали между этой прямой
и внутренней характеристикой генератора дадут значения э. д. с.
якоря двигателя Едв для соответствующих величин тока глав-
ной цепи. Пользуясь этими значениями э. д. с. и тока, можно
определить
пдв=—- и М = смФ/
сеФ
и построить механическую характеристику двигателя, питаю-
щегося от трехобмоточного генератора.
Аналогичные построения и расчеты выполняют и в том слу-
чае, если противокомпаундные обмотки расположены не в гене-
раторе, а на полюсах возбудителя, т. е. для системы Г—Д
с обычным генератором и трехобмоточным возбудителем гене-
ратора.
Чтобы двигатель мог обеспечить заданные режимы работы
механизма, работая на полученной механической характери-
стике, надо с помощью сопротивлений и, г2 и г3 изменить со-
отношения намагничивающих сил обмоток возбуждения гене-
ратора. При этом, изменяя сопротивление г2, получают различ-
ные скорости идеального холостого хода при A4K=const;
изменяя сопротивление г3, варьируют Л4К при п0=const, а изме-
няя задающее сопротивление rlt получают механические харак-
теристики с новыми значениями как по, так и Л4К.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Объясните физический процесс реверса исполнительного двигателя си-
стемы Г—Д (стр. 88).
2. Как влияет на механическую характеристику исполнительного двига-
теля изменение скорости вращения приводного двигателя, вызванное измене-
нием нагрузки (стр. 89)?
3. До какого значения надо уменьшить момент нагрузки исполнительного
двигателя при двойной скорости, полученной ослаблением его потока (стр. 16
и 91)?
4. Опишите назначение и работу ПКО генераторов системы Г — Д
(стр. 92 и 93).
5. Каковы особенности работы исполнительного двигателя на экскава-
торной характеристике (стр. 96 и 97) ?
ГЛАВА 4
ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА
ЭЛЕКТРОДВИГАТЕЛЕЙ переменного тока
§ 22. Естественная механическая характеристика
асинхронного двигателя
Асинхронные двигатели подразделяются в ’зависимости от
конструктивного исполнения ротора на двигатели: а) с фаз-
ным ротором (контактными кольцами, рис. 52, а) и б) с корот-
козамкнутым ротором (рис. 52, б).
100
Электромеханические свойства двигателей переменного тока [Гл. 4
Наибольшее распространение в судовых электроприводах
получили асинхронные двигатели с короткозамкнутым ротором.
Это объясняется их простотой и надежностью в работе, деше-
визной, малыми размерами и небольшим весом.
Механическая характеристика выражает, как известно,
зависимость между скоростью вращения и моментом двигателя.
В асинхронных двигателях скорость однозначно связана со
скольжением. Поэтому механические характеристики асинхрон-
ных двигателей часто представляют в виде зависимости между
Рис. 52. Принципиальная схема вклю-
чения асинхронных двигателей с фаз-
ным (а) и короткозамкнутым (б) ро-
тором.
моментом и скольжением:
(s).
Необходимым условием ра-
боты асинхронного двигателя
является отставание ротора от
вращающегося поля статора
(скольжение). Если поле ста-
тора вращается с некоторой,
так называемой синхронной
скоростью
«с =
60А
Р ’
(135)
а ротор — со скоростью п, то
поле статора относительно ро-
тора вращается со скоростью
п2 =/гс— п. (136)
С этой скоростью поле статора пересекает обмотку ротора
и индуктирует в ней э. д. с. Е2 с частотой скольжения fz-
Е = Р(пс-п) = . (137)
60 60 «с 71
Таким образом, частоты э. д. с. и тока ротора изменяются
в зависимости от скольжения. Поскольку скольжение асинхрон-
ного двигателя изменяется от единицы (при пуске) до величины,
близкой к нулю (при холостом ходе), то частота будет изме-
няться от f2=fi=50 гц до /2—1 2 гц и менее.
С изменением частоты ротора, в свою очередь, изменяются
э. д. с., индуктивное сопротивление и ток ротора.
Обозначим через Е2 и E2s— э. д. с., соответственно, непод-
вижного и вращающегося роторов, а через х2 и %2s — индуктив-
ное сопротивление фазы, соответственно, неподвижного и вра-
щающегося роторов.
§ 22]
Характеристика асинхронного двигателя
101
'max = 4,44s/1^o62 Фтах = s£2;
2"/is т __
p ^2 — йЛ2-
Тогда на основании соотношений, известных из
электрических машин, можно написать:
£25 = 4,44/2^62®,
х —WL~ Г —
A2s — ^2-^2 — р ^2 —
По закону Ома ток в роторе
J _ ^ 2S .
курса
(138)
(139)
ГУ +
S / z
Последнее выражение соответствует неподвижному ротору
с сопротивлениями: активным r^s и индуктивным х2. В цепи
Рис. 54. Схема замещения асинхрон-
ного двигателя.
Рис. 53. Схема замещения
ротора асинхронного дви-
гателя.
этого ротора действует э. д. с. £2, создающая ток /2- Такой
ротор можно изобразить эквивалентной схемой, представлен-
ной на рис. 53.
Чтобы сделать возможным совместное рассмотрение ротора
со статором, заменим величины, характеризующие работу ро-
тора, соответствующими приведенными значениями:
I' — * f' — ' х —
12 ~ ’ Г2 ~ К Г2’ Л2 —К 2 ’
где —коэффициент трансформации двигателя.
^Об 2 ^2
Стремясь упростить расчеты, пренебрегаем значениями тока
намагничивания двигателя и активным сопротивлением статор-
ной обмотки. Однако при этом необходимо учесть возмож-
ность включения в цепь ротора добавочных активных сопротив-
лений (для двигателя с фазным ротором). Тогда схема заме-
щения одной фазы двигателя примет вид, изображенный на
рис. 54.
Для этой схемы и при дальнейших рассуждениях действи-
тельны следующие обозначения: лч— индуктивное сопротивле-
ние фазы статора; — индуктивное сопротивление фазы ротора
(приведенное значение); xK=xi+x/2— индуктивное сопротивле-
ние короткого замыкания; £2=г2+гд— активное сопротивление
102
Электромеханические свойства двигателей переменного тока [Гл. 4
фазы роторной цепи (при снятии естественной характеристики
Гд = 0).
На основании приведенной схемы замещения мощность, по-
требляемая двигателем, определится из выражения:
Рг = rtijUI cos ср, ' (140)
где /щ— число фаз статора двигателя;
I — ток, потребляемый из сети; /=Д=г/'2.
Пренебрегая потерями в статоре (так как ач~О), можно по-
требляемую двигателем мощность Pi приравнять к электромаг-
нитной мощности Р0М (передаваемой от статора к ротору), ко-
торую найдем из выражения:
Рэм - Мас, (141)
где М — момент, н - м;
2л/1
<ос — —----синхронная угловая скорость двигателя.
Из равенства мощностей, определяемых уравнениями (140)
и (141), следует:
М = 7 cos ср, х (142)
а из схемы замещения имеем:
Подставив полученные значения в формулу момента
получим:
m..UzsR'2 sR'2
М =------Ц--------= А —s—--------,
% (r'2 + sVK) R'2 + sVK
(142),
(143)
где A = - *...— постоянная величина.
Уравнение (143) представляет собой аналитическое выра-
жение механической характеристики асинхронного двигателя
M=f(s). График этой зависимости представлен на рис. 55.
Как видно из рисунка, с увеличением скольжения момент
двигателя быстро увеличивается до максимального значения
Л4тах, затем медленно спадает до его значения при пуске МП.
Максимальный момент имеет место при некотором критическом
§ 22]
Характеристика асинхронного двигателя
103
скольжении sKp, пусковой момент соответствует скольжению
s=l.
Для определения величины Л1тах продифференцируем урав-
нение (143), а полученную производную dM/ds приравняем
нулю; в результате расчета получаем:
, _ (144)
SkP ~ дг •
Этому критическому скольжению отвечает максимальный момент
М =~
гаах 2%к
2и)сХк /?
(145)
где с = ---коэффициент пропорциональности.
2’4л2£к 775£к
Из уравнения (145) сле-
дует, что максимальный мо-
мент асинхронного двигате-
ля пропорционален квадра-
ту напряжения на зажимах
статора и обратно пропор-
ционален квадрату частоты
питающего тока. От величи-
ны активного сопротивле-
ния роторной цепи макси-
мальный момент не зависит.
Значения сопротивлений
обмоток приводятся далеко
не во всех каталогах асин-
хронных двигателей. Это за-
трудняет пользование урав-
нением механической харак-
теристики (143). Более
удобную для практических
расчетов формулу выведем,
если разделим уравнение (143) на уравнение (145):
Л —________
М' _ ^2 +
^шах &
2хк
Рис. 55. Естественная механическая ха-
рактеристика асинхронного двигателя
M-f(s). .
откуда после несложных преобразований получим:
(146)
=___Жпах---
s | ^кр
5кр 5
104
Электромеханические свойства двигателей переменного тока [Гл. 4
С помощью этой формулы можно сравнительно просто рас-
считать и построить механическую характеристику двигателя.
Неизвестное значение sKp в уравнении (146) определяется под-
становкой в него номинальных значений момента AfH и сколь-
жения sH. Тогда решение будет иметь вид:
®кр ± 1)>
(147)
где 7.м=Л4гаах/Л4н —перегрузочная способность двигателя по
моменту.
Знак «—» отбрасывается, как не имеющий практического
смысла.
Уравнение (146) позволяет с достаточной для практических
расчетов точностью построить механическую характеристику
асинхронного двигателя в пределах скольжений от 0 до sKp.
При скольжениях от sKp до s = l это уравнение (называемое
иногда формулой Клосса) дает недопустимые погрешности, ко-
торые, однако, можно устранить, введя поправочный коэффи-
циент, предложенный автором этой книги.
Исправленная формула Клосса примет вид:
5 ^кр
5Кр 5
(148)
где k — поправочный коэффициент, который может быть опре-
делен из выражения:
а Мкр^ — 2 Ч
\Skp /
а == —= —--------коэффициент, выражающий соотношение
Л4 niax
между пусковым и максимальным моментами двигателя.
Если, пользуясь известной зависимостью и = ис(1—s), пе-
рейти от скольжения s к скорости двигателя п, то получится
механическая характеристика график которой приве-
ден на рис. 56.
Вид механической характеристики определяется из анализа
уравнения (146). Так, для скоростей, близких к синхронной ско-
рости пс (когда s<sItp), первым слагаемым знаменателя,
§ 22]
Характеристика асинхронного двигателя
105
а именно s/sKp, можно пренебречь. Тогда получим уравнение:
М = ,2Mmaxs , эд
SKp
которое позволяет считать участок характеристики от Л1=0 до
М1,5 Л4Н прямой линией.
При скоростях двигателя от икр до нуля и при s>sKp в урав-
нении (146) можно пренебречь вторым слагаемым знаменателя,
а именно sKp/s. В результате этого для соответствующего уча-
стка характеристики бу-
дет действительно урав-
нение:
(151)
Рис. 56. Характеристики асинхронного дви-
гателя типа АМ-62-4.
1 — механическая характеристика, рассчитанная
по формуле Клосса; 2 — то же, с введением по-
правочного коэффициента автора; 3 — скоростная
характеристика.
характеристи-
справедливо
выражающее гиперболи-
ческую зависимость меж-
ду моментом и ско-
ростью.
На первом участке ме-
ханической
ки, когда
уравнение (150), двига-
тель работает в устано-
вившемся режиме; вто-
рой участок, соответст-
вующий уравнению (151),
двигатель обычно прохо-
дит только во время пуска. Поэтому в первом случае говорят об
участке устойчивой pa-боты, во втором—-об участке не-
устойчивой работы двигателя.
Осуществляя проверку асинхронного короткозамкнутого дви-
гателя на нагрев, правильнее от моментов перейти к соответ-
ствующим значениям тока, для чего можно воспользоваться вы-
ражением:
где
/0 = Л, (sin ср„--------— cos ср„
V 11 I 111 с in
\
(152)
(153)
— ток холостого хода.
Если в одних осях координат вместе с механической харак-
теристикой построить и скоростную то можно заметить.
106
Электромеханические свойства двигателей переменного тока [Гл. 4
что с уменьшением скорости ток непрерывно увеличивается до
значения тока короткого замыкания /к=/п (см. рис. 56), что
наблюдается при заторможенном роторе и при пуске двигателя.
Из графика видно также, что, несмотря на непрерывное воз-
растание тока, момент, начиная с некоторой критической ско-
рости икр, уменьшается до Л4П. Это происходит потому, что
в создании момента двигателя участвует лишь активная состав-
ляющая тока, которая при низких скоростях мала.
Пример 9. Построить естественные механическую и скоростную характе-
ристики асинхронного короткозамкнутого двигателя типа АМ-62-4 по сле-
дующим паспортным (каталожным) данным: Рн = 11,0 квт\ «=1415 об[мин\
при 77=220 в ток /в=41,5а; ХМ=7И тах/Ми=2,2; &М=Л4П/Л1И=1,7; cos ф=0,83.
Решение. 1. Номинальный момент на валу двигателя из уравнения (15)
Л4 = 975 П’- = 7,58 кГ-м.
1415
2. Максимальный момент
Л4111ах --= ЛМЛ4Н = 2,2-7,58 = 16,67 кГ-м.
3. Синхронная скорость двигателя типа АМ-62-4 (четырехполюсного)
60/ 60-50 ,,
пс = —— =---------= 1500 об[мин.
Р 2 ) -
4. Номинальное скольжение ,
= = J500— 1415 = 0>057.
«с 1500
5. Критическое скольжение из уравнения (147)
«кр=0,057 (2,2 + ]/Л2,2а— 1) = 0,237.
6. Коэффициент а, согласно определению, будет:
а = = -LL = о,77.
Хм 2,2
7. Расчетный коэффициент k по формуле (149)
1 — 0,2372
Задаваясь значениями скольжения s от 0 до 1, определяем соответст-
вующие им значения моментов:
из уравнения (146) f
„ 2-16,67
М 1 = --------!——— ;
s 0,237
' 0,237 + 5
§ 23] Влияние параметров на характеристики асинхронного двигателя 107
из уравнения (148)
м 2 +(S*-0,237*) 1,53
Л4» = 16,67--------------------.
s 0,237
--- . .... ---- I
0,237 s
8. Выражая механическую характеристику как для принятых
значений s определяем скорости двигателя
п = пс (1 — s) = 1500 (1 — s).
9. Ток холостого хода двигателя находим по уравнению (153)
/0 = 41,5 fo,557---о,83^ = 14,8 а.
V 0,237 )
10. Для принятых значений s определяем из уравнения (152) потребляе-
мый двигателем ток
/1= 1/ (41,5*— 14,8*)------—--------Н 14,82.
к 0,057-7,58
11. Результаты расчетов сводим в табл. 1, по данным которой на рис. 56
построены механические и скоростная характеристики.
Таблица 1
S Л4Х Л42 /1, а п, об/мин S All Л42 /г, а п, об/мин
кГ •м кГ •м
0 0 14,8 1500 0,23>1 16,67 16,67 118,0 1144
0,01 1,40 16,3 1485 0,3 16,25 16,65 132,7 1050
0,03 4,15 — 25,5 1455 0,5 12,9 14,9 161,7 750
0,057 7,58 .— 41,5 1414 0,7 10,1 13,5 182,3 500
0,1 11,9 — 66,0 1350 0,9 8,2 12,9 201,5 150
0,2 16,4 — 107,9 1200 1,0 7,5 12,9 212,5 0
Из таблицы и графика видно, что найденный по формуле (146) пусковой
момент Л4И1 значительно меньше Л4П2, найденного по формуле (148) и совпа-
дающего с каталожным. Поэтому формулу Клосса без введения поправочного
коэффициента можно рекомендовать для расчетов только рабочей части ме-
ханической характеристики (0<s<sKP), где полученные с ее помощью ре-
зультаты обладают достаточной для практики точностью.
§ 23. Влияние параметров питающей сети
на механические характеристики асинхронного двигателя
- Искусственные механические характеристики асинхронных
двигателей можно получить, изменяя:
а) величину включенных в цепь ротора активных или индук-
тивных сопротивлений (это относится только к двигателям
с фазным ротором);
б) напряжение на зажимах обмотки статора;
в) частоту тока питающей сети;
г) включенные в цепь статора индуктивные сопротивления.
108
Электромеханические свойства двигателей переменного тока [Гл. 4
Каждая механическая характеристика асинхронного двига-
теля в основном определяется положением трех точек: 1) М = 0;
п—пс; 2) ЛТ=Л4тах; п=пкр; 3) М=Мп; п=0.
Зная координаты и, следовательно, положение этих точек,
можно получить соответствующий вид искусственной механи-
ческой характеристики в результате изменения одного из пе-
речисленных выше параметров.
Введение активных сопротивлений в цепь ротора. Активные
сопротивления включают в цепь
Рис. 57. Механические характеристики
асинхронного двигателя при введении
активных сопротивлений в цепь ротора.
ротора двигателя с контакт-
ными кольцами, чтобы ог-
раничить ток при пуске и
для регулирования скоро-
сти. При этом получим се-
мейство механических ха-
рактеристик (рис. 57). По-
ложение искусственных ха-
рактеристик определяется
координатами трех указан-
ных выше точек.
1. Точка (0; пс) для всех
характеристик остается по-
стоянной, так как величина
ис=60 f\/p от активного со-
противления цепи ротора не
зависит.
2. Максимальный мо-
мент, как это следует из
уравнения (145), также остается неизменным. С увеличением,
включаемых в цепь ротора активных сопротивлений лишь
уменьшается критическая скорость
/ \
^кр (1 ®кр) = I 1 I • (154)
у Ак /
При некотором сопротивлении /?'2=ЛТ критическая скорость
нкр становится равной нулю, затем принимает отрицательные
значения, что соответствует работе двигателя в режиме проти-
вовключения. С увеличением добавочных сопротивлений увели-
чивается и мягкость (крутизна) механических характеристик.
3. Уменьшение критической скорости двигателя влечет за
собой также изменение пускового момента, причем с уменьше-
нием пкр до нуля пусковой момент увеличивается. При /гкр = 0
(8кр=1) пусковой момент равен максимальному: МП—М тах.
С дальнейшим увеличением активный сопротивлений пкр ста-
новится меньше нуля (sI(p> 1), и пусковой момент уменьшается.
При 7?2=о° момент двигателя достигает своего максималь-
ного значения также в бесконечности; при пуске же момент
$ 23] Влияние параметров на характеристики асинхронного двигателя 109
практически будет равен нулю. Иначе говоря, при обрыве цепи
ротора двигатель пустить в ход невозможно.
Для более плавного пуска при малом количестве пусковых
сопротивлений иногда в цепь ротора совместно с активными со-
противлениями включают индуктивные. Однако они уменьшают
значение максимального момента, усложняют схему и расчет
пусковых сопротивлений и в судовых электроприводах широ-
кого распространения не получили.
Изменение напряжения на зажимах статора. Асинхронные
двигатели отличаются высокой
напряжения сети. Это выте-
кает из квадратичной зависи-
мости между вращающим мо-
ментом двигателя и напряже-
нием на зажимах статорной
обмотки. При прочих постоян-
ных условиях
М = U2
Механические характери-
стики, построенные примени-
тельно к случаю изменения на-
пряжения, подводимого к дви-
гателю, приведены на рис. 58.
Основные особенности их та-
чувствительностью к колебаниям
Рис. 58. Механические характеристи-
ки асинхронного двигателя при раз-
личных значениях напряжения на за-
жимах статора.
ковы:
1. Как и в предыдущем случае, уменьшение напряжения
не вызывает изменения положения первой точки (0; ис), являю-
щейся началом всех искусственных характеристик, полученных
при различных напряжениях сети.
2. Для всех характеристик критическая скорость пкр не за-
висит от напряжения и остается постоянной. Зато с уменьше-
нием напряжения резко снижается находящийся в квадратич-
ной зависимости от него максимальный момент. Так, падение
напряжения сети на 30% снижает значение максимального мо-
мента до A4maxl = 0,72 Л4гпах =0,49 Мтах. Например, двигатель,
имеющий перегрузочную способность Хм=Л4тах/Л!н=2 и рабо-
тавший при полной загрузке (Л4СТ=МН), в указанном случае
сможет развить момент только до величины 7Й тах1 = 0,49 • 2Л!Н=
=0,98А'1н<Л1ст и, следовательно, будет опрокинут.
3. Падение напряжения' также резко уменьшает и пус-
ковой момент, ввиду чего пуск двигателя при пониженных
напряжениях осуществим лишь при небольших нагрузках на
валу.
К изменению частоты питающего тока и к включению индук-
тивных сопротивлений в цепь статора прибегают, чтобы иметь
110
Электромеханические свойства двигателей переменного тока [Гл. 4
возможность регулировать скорость двигателя. Поэтому влия-
ние этих параметров на искусственные механические характери-
стики будет рассмотрено ниже, в § 25 и 43.
§ 24. Пуск асинхронного двигателя в ход
Пуск в ход асинхронных двигателей характеризуется тремя
основными показателями:
а) кратностью пускового тока ki=IEIIE,
б) кратностью пускового момента kv=МП/МЕ;
в) пусковым отношением (добротностью пуска) k„=kM/ki. *
Добротность пуска асинхронных двигателей обычного испол-
нения очень невелика и колеблется в пределах: &п=0,15-^ 0,35.
Таким образом, асинхронные двигатели отличаются боль-
шими бросками пускового тока при сравнительно небольших
пусковых моментах. При частых пусках эти токи могут вызвать
перегрев двигателя, а при одиночных пусках они, хотя и не
оказывают на двигатель заметного отрицательного воздействия,
но могут привести к глубоким провалам напряжения в судовой
сети и к опрокидыванию работающих с наибольшей загрузкой
двигателей.
Стремление уменьшить пусковые токи, одновременно сохра-
нив или даже увеличив пусковой момент (т. е. повысить доб-
ротность пуска) привело к применению специальных способов
пуска.
Пуск двигателя с, короткозамкнутым ротором. Различают
прямой пуск и пуск при пониженном напряжении.
Чтобы осуществить прямой пуск, надо подключить статор-
ную обмотку двигателя непосредственно к сети трехфазного -
тока (см. рис. 52, б). Стремление обеспечить более чувстви- •
тельную защиту двигателя заставляет иногда прибегать к шун-
тированию предохранителей на время пуска.
Регистр СССР разрешает прямой пуск только таких асин-
хронных двигателей, которые вызывают снижение напряжения
сети не более, чем на 20% Нп. Поэтому максимальная мощ- «
ность двигателей', допускающих прямой пуск, определяется
мощностью судовой электростанции и способом регулирования
напряжения судовых генераторов.
Пуск при пониженном напряжении. Напряжение, подводимое
к обмотке статора более крупных двигателей, понижают на
время пуска посредством:
а) включения активных сопротивлений в цепь статора
(рис. 59, й);
б) включения через автотрансформатор (рис. 59, б):
в) переключения обмотки статора со звезды на треугольник
(рис. 59, в);
г) включения дросселей в цепь статора (рис. 59, г).
§ 24]
Пуск асинхронного двигателя в ход
111
Все схемы пуска асинхронных двигателей при пониженном
напряжении обладают одним общим и к тому же весьма су-
щественным недостатком: пусковой момент двигателя умень-
шается до величины, пропорциональной квадрату приложенного
к статору напряжения. Поэтому указанные схемы можно при-
Рис. 59. Схемы .пуска асинхронных двигателей с короткозамкнутым ротором
при пониженном напряжении.
менять лишь для двигателей, которые предназначены для лег-
ких условий пуска (вентиляторы, мотор-генераторы и др.).
В электроприводах же с тяжелыми условиями пуска для
увеличения пускового момента следует
двигатели с повышенным скольже-
нием, двигатели с двойной беличьей
клеткой (двухклеточные двигатели)
или с глубоким пазом на роторе.
Пуск двигателя с повышенным
скольжением. Такой двигатель имеет
несколько меньшую номинальную ско-
рость, чем обычные, но при пуске раз-
вивает больший момент, потребляя
меньший ток (рис. 60).
Скольжение повышается благодаря
увеличению активных сопротивлений
цепи ротора, что видно из следующих
соображений.
Электромагнитная мощность двига-
применять асинхронные
Рис. 60. Механические ха-
рактеристики асинхронных
двигателей обычного испол-
нения (/) и с повышенным
скольжением (2).
теля, передаваемая от статора к ротору, определяется уравне-
нием (141).
Полная механическая мощность, развиваемая в роторе дви-
гателя, представляет собой сумму полезной мощности на валу,
механических и добавочных потерь. По общему правилу, пол-
ную механическую мощность можно выразить формулой:
Р2 = Мш.
112 Электромеханические свойства двигателей переменного тока [Гл. 4
Разность между электромагнитной и механической мощно-
стями будет:
ДР = Рэи — Р2 = = Abcsc. (155)
Эта разность представляет собой электрические потерн
в меди ротора:
ДР=т2/2?'2- (156)
Приравняв правые части полученных уравнений, получим:
Mwcse = m2/ir2) (157)
откуда скольжение на естественной характеристике
е ЛЬ,.С
Если изменить сопротивление роторной обмотки или вклю-
чить в цепь ротора добавочное сопротивление ra(Rz=г2+гД), то
для того же момента М аналогичными рассуждениями получим
скольжение на искусственной характеристике:
и ЛД,С
Разделив почленно уравнение (158) на уравнение (159), по-
лучим: , (
(160)
sc _ г2
Sh R2 ‘
Таким образом, скольжение асинхронного двигателя про-
порционально величине активного сопротивления роторной
цепи.
Пуск двухклеточного двигателя. На роторе такого двига-
теля имеются две обмотки. Одна из них располагается ближе
к поверхности, называется пусковой и выполняется из ла-
тунных или бронзовых стержней небольшого сечения. Другую
обмотку — рабочую, выполняемую из красной меди и имею-
щую большее сечение, укладывают в те же фасонные пазы,
но утепляют в железо ротора значительно глубже первой
(рис. 61, а).
В момент пуска ток ротора имеет частоту При этом
полное сопротивление обмоток состоит главным образом из
индуктивных составляющих. Рабочая обмотка ввиду ее распо-
ложения будет обладать большим индуктивным сопротивле-
нием, и, следовательно, обтекаться незначительным током. По-
этому почти весь ток ротора /2 будет протекать по пусковой
§ 24}
Пуск асинхронного двигателя в хоО
113
обмотке. Ее большое активное сопротивление и обусловливает
ограничение броска пускового тока двигателя: /п= (3,3-ь3,7)/н
против 4—6-кратного значения у обычных двигателей.
По мере разгона двигателя частота тока ротора и индук-
тивное сопротивление обмоток уменьшаются до незначительных
величин, и основную роль начинает играть уже активная со-
став пяющая полного сопротивления. Уподобив обе обмотки ро-
тора двум параллельным ветвям одной цепи, можно предста-
вить себе, почему ток ротора будет протекать теперь по стержням
рабочей обмотки с меньшим
активным сопротивлением.
Каждая обмотка ротора
создает свой вращающий мо-
мент, который будет изменять-
ся с изменением скорости вра-
щения. Ток пусковой обмотки,
ввиду преобладающего значе-
ния ее активного сопротивле-
ния, практически будет совпа-
aj S)
п
О Мпг Мгп Мп
Рис. 61. Двухклеточная обмотка ро-
тора асинхронного двигателя (а) и
его механические характеристики (б).
1 — пусковая обмотка: 2 — рабочая обмот-
ка; 3—результирующая характеристика.
>-
Ток рабочей обмотки при пуске
дать по фазе с индуктирован-
ной в этой обмотке э. д. с.
Поэтому почти весь ток будет
обусловливать создание и из-
менение момента пусковой об-
мотки (кривая 1 на рис. 61, б)
создает малый пусковой момент, поскольку ее индуктивность
будет преобладать над активным сопротивлением. С увеличе-
нием скорости двигателя увеличиваются также ток и cos <р ра-
бочей обмотки, что вызывает быстрое нарастание ее вращаю-
щего момента (кривая 2 на том же рисунке).
Общий момент двигателя можно рассматривать как сумму
моментов, создаваемых обеими обмотками, ввиду чего пуско-
вой момент двигателя увеличивается до Мп= (1,5 -г- 2,0) Л4П,
вместо (1,0 -+- 1,2)7Ин у двигателей обычного исполнения.
Таким образом, преимущества двигателя с двойной бели-
чьей клеткой на роторе сводятся к следующему:
а) повышенный пусковой момент;
б) меньший пусковой ток;
в) отсутствие надобности в специальной аппаратуре для
переключений пусковых сопротивлений.
К недостаткам этого двигателя нужно отнести:
а) более низкие к. п. д. и cosep, чем у обычных двигателей;
б) более высокая стоимость ввиду наличия двух обмоток
на роторе.
Пуск двигателя с глубоким пазом. Этот двигатель отли-
чается простотой конструкции и меньшей стоимостью. Как и
5 К. А. Чекунов
114
Электромеханические свойства двигателей переменного тока [Гл. 4
всякий другой асинхронный короткозамкнутый двигатель, он
имеет на роторе одну обмотку, но расположенную в глубоких
пазах и выполненную в виде стержней прямоугольного профиля
с высотой h, превосходящей ширину b в 15—20 раз (рис. 62, а).
Как видно из рисунка, все сечение стержня охватывается
неодинаковым количеством магнитных силовых линий потока
ротора. Нижняя часть сечения имеет гораздо большее индуктив-
ное сопротивление, в связи с чем незаштрихованная часть се-
чения в начале пуска в токопроведении почти не участвует.
Благодаря этому активное сопротивление ротора увеличива-
ется, вызывая уменьшение пусково-
го тока и увеличение пускового мо-
мента (поскольку в создании мо-
мента участвует только активная
составляющая тока ротора).
Повышенное индуктивное сопро-
тивление обмотки ротора служит
причиной того, что cos <р и перегру-
зочная способность у глубокопаз-
ных двигателей ниже, чем у обыч-
ных короткозамкнутых двигате-
лей.
Преимуществами глубокопазно-
Рис. 62. Глубокопазная обмотка г0 Двигателя являются:
ротора (а) и кривая ее токо- а) большая кратность пускового
распределения (б). момента: kM—1,5 (вместо 1,2 у
обычных двигателей);
б) меньшая кратность пускового тока: &г=4,8 (вместо 6
у обычных двигателей).
Разновидностью глубокопазных двигателей являются дви-
гатели с обмоткой ротора из стержней бутылочного, клинообраз-
ного и других профилей.
Пуск двигателя с фазным ротором. Асинхронный двигатель
с фазным ротором пускают в ход с помощью активных сопро-
тивлений, включенных в цепь ротора. Наличие таких сопротив-
лений уменьшает бросок тока и увеличивает пусковой момент
двигателя вплоть до значения его максимального момента.
Величину пусковых сопротивлений можно определить гра-
фическим методом, который поясняется рис. 63.
Выбирают значения максимального и минимального пуско-
вых моментов:
Лептах < О,8Е2Итах; Mnmin = (1,1 + 1,2) Ма > МСТ.
На естественной механической характеристике двигателя
отмечают точки а и б, соответствующие выбранным значениям
моментов Л1П тах и A4nmin. Через полученные точки проводят,
§ 24]
Пуск асинхронного двигателя в ход
115
прямую до пересечения в некоторой точке С с горизонтальной
линией, соответствующей синхронной скорости пс (s = 0).
Путем математических преобразований нетрудно доказать,
что все спрямленные на участках от Мп raiu до М п шах реостат-
ные характеристики пересекутся в точке С, а это позволяет
произвести следующее построение пусковой диаграммы двига-
теля.
Из точки С проводят прямую в точку в. Отрезок вг этой
прямой является спрямленным участком первой пусковой ха-
рактеристики, по которой двигатель разгоняется до некоторой
Рис. 63. Схема пуска (а) и пусковая диаграмма (б) асинхронного
двигателя с фазным ротором.
скорости Hi (точка г). По достижении двигателем этой скорости
шунтируют первую ступень пускового сопротивления rH,. Вели-
чина его должна быть такой, чтобы при замыкании контакта
/У пусковой момент увеличился до значения Л4ПП1ах (точка д).
От точки д по второй пусковой характеристике двигатель раз-
гоняется до скорости п2 (точка е). В это время замыкается
контакт 2У и шунтируется вторая ступень пускового сопротив-
ления гД2, что вызывает новый бросок тока и момента.
Так шунтируется ступень за ступенью, пока двигатель не
выходит на естественную характеристику; если окажется, что
при этом момент не равен выбранной величине М „ тах (точка а),
то задаются другими значениями A4nmin и Л1птах, и построения
производят вновь. По пусковой диаграмме определяют число
пусковых ступеней (в рассмотренном примере оно равно двум).
Из уравнения (160) следует, что скольжение асинхронного
двигателя при пуске пропорционально величине активного со-
противления цепи ротора, т. е.
г2 _ , (161)
_ ^общ
5*
116
Электромеханические свойства двигателей переменного тока [Гл. 4
где г2 — сопротивление фазы роторной обмотки;
— общее сопротивление роторной цепи в момент пу-
ска; /?общ=Г2 + Гд1 + Гд2;
sc и sn — скольжения при максимальном пусковом момен-
те на естественной и пусковой характеристиках,
соответствующие отрезкам ак и вк пусковой диа-
граммы.
Тогда выражение (161) можно представить в виде:
г2 ак
- общ вк
откуда 7?о6щ=-“''2. ' (162)
Из пропорциональной зависимости между скольжением и ак-
тивными сопротивлениями роторной цепи определяют и величи-
ны отдельных ступеней пусковых сопротивлений.
После замыкания первой пусковой ступени
г2 __ ак
^общ бдх дк
г, дк вк вк — вд ед ,1М\
откуда Гд1 = /?общ---=—г2------------—г2=—г2- (163)
ак ак ак ак
Аналогично сопротивление второй ступени
ГД2=-^^> (164)
или для нашего случая, поскольку пусковых ступеней только две
и сопротивление первой уже известно,
Гдг = /?общ —Г2“ГДГ (165)
Сопротивление роторной обмотки двигателя г2 определяют,
пользуясь формул: либо уравнением (158), либо одной из следующих > (166) , 4/2н (‘ ®и)
r2 = -^s-. (167) 1/з-/2и
§ 25. Регулирование скорости асинхронного двигателя
Скорость асинхронного двигателя определяется формулой:
n = ^L(l_s) (168)
и формулой (143), из которых следует, что скорость двигателя
можно регулировать изменением:
а) активного сопротивления в цепи ротора;
Регулирование скорости асинхронного двигателя
117
б) числа пар полюсов двигателя;
в) частоты тока питающей сети.
Изменение активного сопротивления в цепи ротора. Этот спо-
соб регулирования скорости (см. рис. 57) применим только
к двигателям с фазным ротором и притом лишь для изменения
скорости вниз от основной. К тому же с увеличением значения
включаемых сопротивлений механические характеристики полу-
чаются более мягкими, а работа двигателя на них — менее ста-
бильной.
Реостатные механические характеристики можно построить
как по уравнениям (146) и (148), так и более простым мето-
дом— с помощью уравнения (160) и естественной механической
характеристики двигателя.
Пусть в цепь ротора двигателя, работающего на естествен-
ной характеристике (Ui = const), включено добавочное сопротив-
ление Гд. Ввиду значительной инерции ротор в первый момент
времени после этой операции будет продолжать вращаться
с прежней скоростью, что обусловит постоянство э. д. с. ротора
Ezs=E2s и уменьшение его тока:
г
/2 — ......- . —.
V (г2 + Гд)2 + (sxa)2
В результате вращающий момент двигателя уменьшится и
появится отрицательный динамический момент. Скорость двига-
теля также начнет уменьшаться (а скольжение s увеличивать-
ся). Это повлечет за собой уже возрастание э. д. с. E?s и, следо-
вательно, тока /2.
Когда будет достигнуто прежнее значение тока ротора по ве-
личине и по фазе, восстановится равенство движущего и тормоз-
ного моментов, переходный процесс прекратится и двигатель бу-
дет продолжать работать уже с меньшей скоростью.
Описанный способ сходен с приемами регулирования скоро-
сти двигателя постоянного тока при включении сопротивлений
в цепь якоря. Однако при определении диапазона регулирова-
ния скорости данным способом следует иметь в виду, что в на-
стоящее время асинхронные двигатели выполняются, как пра-
вило, с самовентиляцией. А поскольку с уменьшением скорости
вращения ухудшаются условия охлаждения двигателя, то при
низких скоростях последний уже не сможет развивать номиналь-
ный момент.
Изменение числа пар полюсов. Стремление перевести су-
довые электроустановки на переменный ток долгое время огра-
ничивалось отсутствием надежных способов регулирования ско-
рости двигателей переменного тока в широких пределах. Вы-
пуск полюсопереключаемых асинхронных двигателей позво-
лил во многих случаях отказаться от применения двигателей
118
Электромеханические свойства двигателей переменного тока [Гл. 4
постоянного тока. Большое количество якорно-швартовных уст-
ройств, грузовых электроприводов и других судовых механиз-
мов теперь работает с двигателями типа МАП, скорость которых
можно регулировать, изменяя число пар полюсов обмотки ста-
тора.
Отечественная электромашиностроительная промышленность
выпускает двух-, трех- и четырехскоростные асинхронные ко-
роткозамкнутые двигатели. Регулирование их скорости осущест-
вляется либо применением двух самостоятельных обмоток на
Рис. 64. Схема переключения секционных групп обмотки ста-
тора с последовательного (а) на параллельное (б) соединение.
Н и К — начало и конец секционных групп.
статоре, либо переключением секционных групп одной обмотки
на различные числа полюсов (рис. 64). Второй способ позволяет
осуществить регулирование скорости с соотношением 2 : 1. Та-
кое регулирование применимо только к двигателям с коротко-
замкнутым ротором, так как в двигателях с фазным ротором
потребуются одновременные переключения и в обмотке ротора,
что усложнит конструкцию и уменьшит надежность работы.
Регулировать скорость переключением секционных групп об-
мотки статора можно как при постоянном моменте (рис. 65, а),
так и при (примерно) постоянной мощности (рис. 65, б).
В первом случае, когда скорость двигателя регулируется при
постоянном моменте (и переменной мощности), обмотку, статора
переключают со звезды на двойную звезду.
Как отмечалось ранее, на любой ступени регулирования дви-
гатель должен потреблять ток, на который рассчитана его об-
мотка, т. е. не выше /н (фазное значение). Если к тому же при-
§ 25]
Регулирование скорости асинхронного двигателя
119
нять coscp для различных скоростей двигателя неизменным, то
. будем иметь:
при соединении фаз обмотки в звезду
Рис. 65. Схемы переключения обмоток и механические характеристики
двухскоростных асинхронных двигателей при переключении: а — со звезды
на двойную звезду; б — с треугольника на двойную звезду.
при соединении фаз обмотки в двойную звезду
PYY = 36^2/Hcos<p-T) = 2 j/S tZ/jjCoscp-v; = 2Ру ; (172)
«YY s)=2nY; . (173)
M--=975^“W6^7=^. <174)
120
Электромеханические свойства двигателей переменного тока [Гл. 4
Таким образом, переключение обмотки статора' со звезды на
двойную звезду вдвое увеличивает скорость и мощность, разви-
ваемые двигателем; момент же двигателя остается неизменным
(рис. 65, а). Этот способ регулирования скорости применяется
в электроприводах грузоподъемных механизмов.
Во втором случае — при постоянной мощности — скорость
двигателя регулируют переключением обмотки статора с тре-
угольника на двойную звезду.
Величины, характеризующие при этом электромеханические
свойства двигателя, можно выразить уравнениями^
при соединении обмотки статора в треугольник
— 3{7ф/нсоз<р-т; = 3{7ZHcos<p-v;; (175)
n-=-V(1-s); (176)
М —975 — ; \ (177)
после переключения на двойную звезду
PYY =2/3-Шнсоз<р.7)=-2р-Рд = 1,15Рд; (178)
«YY (l-s) = 2пд; (179)
= 975 — = 9751,1= 0,58Л4 . (180)
YY «YY 2пд л
Следовательно, при переключении обмотки статора с тре-
угольника на двойную звезду мощность двигателя остается при-
мерно постоянной, но скорость и момент изменяются вдвое
(рис. 65„ б). Этим способом целесообразно регулировать ско-
рость электроприводов металлообрабатывающих станков.
Изменение частоты питающего тока. Частотное регулирова-
ние— наиболее плавный и экономичный способ регулирования
скорости асинхронных короткозамкнутых двигателей. Он обеспе-
чивает широкий диапазон регулирования (до 12 : 1 и выше) при
достаточно жестких механических характеристиках. Однако осу-
ществление данного способа регулирования требует наличия
специальных преобразователей частоты, тип которых определяет
схему частотного управления асинхронным двигателем.
Наиболее приемлемы в судовых установках преобразователи:
а) с синхронным генератором, вращающимся от регулируе-
мого двигателя;
б) на полупроводниковых устройствах.
$ 25]
Регулирование скорости асинхронного двигателя
121
При частотном регулировании скорости электропривода не-
обходимо:
а) обеспечить постоянную перегрузочную способность элек-
тродвигателя, чтобы добиться устойчивой работы;
б) выбрать наиболее экономичный режим работы электро-
привода.
Из уравнений (143) и (168) следует, что с изменением час-
тоты изменяются момент и скорость вращения асинхронного дви-
гателя. Однако при этом изменяются также и другие величины
(U; хк), характеризующие работу двигателя. Момент, развивае-
мый двигателем, определяется нагрузкой на валу. Изменяя ча-
стоту, получают заданные технологическим процессом скорости.
Таким образом, для выполнения предъявляемых к частотному
регулированию требований необходимо по определенному за-
кону изменять подводимое к двигателю напряжение.
Рассмотрим соображения, положенные в основу этого за-
кона. Согласно уравнению (145)
, МтаХ = с —.
’ Ш <1Л z-o
Для обеспечения постоянной перегрузочной способности дви-
гателя отношение его максимальных моментов во всех режимах
должно быть равно отношению соответствующих статических
моментов нагрузки:
Мст1 = Mmaxl = X = /(Л у . Г/н \2
Мст. н '1'йпах и f\ Wh/ \ fl /
откуда
где MCTi и Мст.н — статические моменты при скоростях, соответ-
ствующих частотам fi и fH;
U\ и — напряжения при тех же частотах.
Таким образом, оптимальный закон регулирования напря-
жения, подводимого к двигателю, определяется характером за-
висимости статического момента от скорости: МСт = сп .
Установим соотношения между моментами двигателя и ско-
ростью при частотном регулировании. Введем значение относи-
тельной частоты питающего тока: cp—f/fu.
Напряжение, подводимое к двигателю, зависит от частоты
и характера изменения статического момента, и в общем случае
может быть выражено через С7=С7н<ра .
122
Электромеханические свойства двигателей переменного тока [Гл. 4
Индуктивное сопротивление короткого замыкания двигателя
при переменной частоте будет: хк/=Хкф.
Если пренебречь активным сопротивлением статора (г~0),
то для принятых условий выражение момента двигателя можно
записать так:
М == 1-sr2 = А 5'2у2И 1
' 2~Al (г2 + ^к?2) Г2 +
(182)
Исследовав полученное уравнение на максимум, найдем:
(183)
г /2, 2«—2
= р-^--------= -А- ф2и-2 = Мтахф2“~2. (184)
roaxf 4к/„хк 2хк т
На основе полученных уравнений можно построить механи-
ческие характеристики для любых заданных величин напряже-
ния и частоты. Но если значения сопротивления обмоток неизвег
стны, то при построении механических характеристик удобней
пользоваться формулой Клосса, которая получается делением
уравнения (182) на уравнение (184) и для принятых условий
имеет вид:
» 9 ЛЛ ‘ — %
М = . (185)
-р Skp
5кр scp
Выясним закон оптимального регулирования напряжения для
некоторых типичных случаев нагрузки.
1. Мст = const (т. е. а=0). Для этого случая уравнение (181)
примет вид:
тг=4- <186)
«Ат /я
Следовательно, подводимое к двигателю напряжение должно
изменяться пропорционально изменению частоты: C7/f=const.
В преобразователях с синхронным генератором для этой
• цели ток возбуждения генератора поддерживают постоянным.
Максимальный момент двигателя в этом случае также будет
оставаться постоянным, так как
и2 U2
Мтах = 4 = 4 = const. (187)
J1 Jr
Необходимость упомянутого изменения напряжения обуслов-
лена следующим. Если пренебречь падением напряжения в об-
§ 25]
Регулирование скорости асинхронного двигателя,
123
мотке статора двигателя, то можно считать, что С7~£ = с/:Ф, от-
куда [7/^=Ф.
Следовательно, при постоянном напряжении с уменьшением
частоты f должен увеличиваться магнитный поток двигателя Ф,
что при насыщенной магнитной системе двигателя вызовет рез-
кое увеличение намагничивающего тока. С увеличением часто-
ты, наоборот, магнитный поток будет уменьшаться, вызывая при
постоянном статическом моменте увеличение тока нагрузки.
В обоих случаях режим работы двигателя будет неэкономичным.
Механические характеристики, пост-
роенные для рассмотренного закона ре-
гулирования напряжения при 7HCT=const,
представлены на рис. 66.
Из уравнения (183) следует, что с
уменьшением частоты питающего тока
увеличивается критическое скольжение,
т. е. возрастает крутизна механических
характеристик. Вопреки уравнениям
(181) и (184), полученным без учета ак-
тивного сопротивления статора и насы-
щения магнитной системы, при малых
частотах максимальный момент двига-
теля уменьшается. Рассмотрим причины
Рис. 66. Механические
характеристики асин-
хронного двигателя при
регулируемой частоте пи-
тающего тока и U/f =
= const.
этого явления.
При частотах, близких к номиналь-
ной, когда хк значительно больше и, из-
менение частоты вызывает лишь незна-
чительные изменения максимального мо-
мента. При резком снижении частоты,
когда влияние величины вследствие уменьшения хк стано-
вится значительным, максимальный момент уменьшается более
заметно. Это объясняется возрастанием влияния падения напря-
жения в сопротивлении /у на э. д. с. и поток двигателя. Если сни-
жение максимального момента нежелательно, то при малых ча-
стотах напряжение снижается медленней, чем частота; тогда от-
ношение U/f будет возрастать.
2. Момент нагрузки изменяется по вентиляторному закону
(а = 2) и 7Ист = сп2=С1/2. Тогда
МСТ1 _ _£_1_
Л'ст. н /н ’
Следовательно:
МСТ1 Л -1 /~/1
Un fn V AIct.h /к V f2n f2n ’
(188)
124
Электромеханические свойства двигателей переменного тока [Гл. 4
т. е. подводимое напряжение следует изменять пропорционально
квадрату частоты.
Для сохранения постоянной перегрузочной способности не-
обходимо, чтобы максимальный момент двигателя также изме-
Рис. 67. Механические характери-
стики асинхронного двигателя при
частотном регулировании для
МСт = сп2.
Эксплуатация многих судовых
электроприводов требует работы
асинхронных двигателей не толь-
ко в двигательном, но и в тор-
следующие методы торможения
мозных режимах. Возможны
асинхронных двигателей:
а) генераторно-рекуперативное торможение;
б) электродинамическое торможение;
в) торможение противовключением.
Генераторный рекуперативный режим. Этот режим насту-
пает, когда под воздействием внешних сил скорость двигателя п
начинает превышать синхронную скорость пс. Он во многом на-
поминает аналогичный режим.двигателей постоянного тока.
При реактивном моменте на валу генераторное рекуператив-
ное торможение применяют в асинхронных двигателях типа
МАП, когда надо переключить их с большей скорости на мень-
шую. При активном статическом моменте это торможение при-
меняют, кроме того, в грузовых электроприводах при опускании
тяжелых грузов. Механические характеристики, соответствую-
щие этому режиму, приведены на рис. 68.
Так как в данном режиме скорость вращения двигателя
п>«с, то скольжения будут иметь отрицательные значения:
s — пе~п _п — пс
Электродинамическое торможение. Этот режим (рис. 69) ча-
сто используют для быстрой остановки асинхронных двигателей
в нереверсивных электроприводах.
$ 26]
Торможение асинхронного двигателя
125
При размыкании контактов Л обмотка статора двигателя от-
ключается от сети й контактами Т включается на питание по-
стоянным током (рис. 69, а), который создает в статоре непо-
Рис. 68. Механические характеристики асинхронного двигателя
в генераторном рекуперативном режиме: а — при переключении.
скоростей двигателя; б — при опускании тяжелого груза.
движное магнитное поле. В обмотке ротора, продолжающего
вращаться по инерции в этом поле, индуктируется э. д. с. и воз-
никает ток, взаимодействующий
с полем статора. В результате
Рис. 69. Схемы включения (а и
б) и механические характери-
стики (в) асинхронного двига-
теля при электродинамическом
торможении.
взаимодействия создается требуемый тормозной момент. Для
питания обмотки статора постоянным током в установках не-
большой мощности часто используют полупроводниковые выпря-
мители В (рис. 69, б).
Неравномерно загружающий фазы статора постоянный ток
/п для удобства расчетов заменяют переменным током Л,
126
'.Электромеханические свойства двигателей переменного тока [Гл. 4
одинаковым во всех трех фазах и создающим такую же и. с., как
и ток /п, т. е. Fn=F~. Так, тормозной режим двигателя, в кото-
ром он работает как синхронный генератор с переменной часто-
той на сопротивление цепи ротора, заменяется двигательным
режимом асинхронной машины.
Аналогично уравнению (157) электромагнитный момент дви-
гателя в этом случае будет:
т^2 * ___ mifyy2
’ “С “с [''2* + Ор. + 4)2"2]
(190)
где v — относительная скорость вращения; v= ®/®с=н/пс;
х — реактивное сопротивление намагничивания; х —EJl^
I —намагничивающий ток (реактивная составляющая
тока холостого хода двигателя Л>).
Исследовав уравнение (190) на максимум, найдем:
значение критической относительной скорости
максимальный тормозной момент
Л4тах=----. (192)
2“с + Х2)
Поскольку х больше х2 и, тем паче, больше активного
сопротивления г2, то vKp, как это следует из уравнения (191),
имеет очень малое значение. Поэтому .тормозная характеристика
обычного асинхронного двигателя с короткозамкнутым ротором
является неблагоприятной (рис. 69, в). Улучшить характери-
стику (т. е. увеличить vkp) двигателя с фазным ротором можно,
если в цепь ротора включить добавочное сопротивление. Из
уравнения (192) видно, что максимальный тормозной момент
определяется величиной тока а следовательно, и эквивалент-
ной величиной постоянного тока 7П, й не зависит от активного
сопротивления роторной цепи г2'.
Тормозные характеристики обычно рассчитывают, пользуясь
формулой Клосса для данного режима:
2/14 тах
VKp V
(193)
а значениями Л1тах и ткр задаются в соответствии с требова-
ниями, предъявляемыми к приводу.
/
§ 26]
Торможение асинхронного двигателя
127
Следует иметь в виду, что при протекании постоянного тока
через обмотку статора ее индуктивное сопротивление практи-
чески равно нулю. Поэтому для получения нужной величины
тормозного тока напряжение источника постоянного тока
должно быть невысоким (например Ua=Ia-2ri).
Торможение противовключением. Этот режим был доста-
точно подробно рассмотрен в § 11, где речь шла о двигателях
постоянного тока. Поэтому здесь достаточно отметить только
особенности такого торможения асинхронных двигателей.
Чтобы ввести короткозамкнутый асинхронный двигатель
поменять местами две фазы
в режим противовключения,
Рис. 70. Схема включения (а) и механические характе-
ристики (6) асинхронного короткозамкнутого двигателя
при торможении противовключением и реверсе.
статорной обмотки. Это повлечет за собой изменение направле-
ния вращения поля статора и электромагнитного момента дви-
гателя.
Процесс торможения противовключением наглядно виден из
рис. 70. Чтобы ограничить бросок тока при переключении кон-
тактов направления В (вперед) и Н (назад), в цепь статора
иногда включают добавочные сопротивления, что уменьшает
не только ток, но и тормозные моменты.
Из рис. 70 следует также, что если при достижении скорости
п=0 двигатель не отключить от сети, то он будет разгоняться
в обратном направлении до скорости —иСт, которая опреде-
ляется нагрузкой на валу. Так осуществляется реверс асин-
хронных двигателей.
Для двигателей с фазным ротором этот режим торможения
можно использовать также с целью получения посадочных ско-
ростей при опускании тяжелых грузов — требуется лишь вклю-
чить, как и у двигателей постоянного тока, большие сопротив-
ления Гд в цепь ротора (рис. 71, а). В этом случае пусковой
момент двигателя становится меньше статического момента Л4СТ,
128
Электромеханические свойства двигателей переменного тока [Гл. 4
Рис. 71. Схема включения (а) и
механические характеристики (б)
асинхронного двигателя с фазным
ротором при торможении проти-
вовключением.
создаваемого грузом G (рис. 71, б). Этот груз преодолевает
электромагнитный момент двигателя М и под действием соб-
ственного веса начинает опускаться. По отношению к первона-
чальному направлению движения скорость и момент двигателя
становятся отрицательными. Скольжение, соответствующее дан-
ному режиму, можно определить
из выражения:
s = «с — (— п) = пс + « > ।
Способ построения тормозных
механических характеристик —
тот же, что и для двигательного
режима.
Из рассмотрения режимов
работы асинхронных двигателей
видно, что им соответствуют
скольжения:
при генераторном режиме
— со <s<0;
при двигательном режиме
0<s<l;
при тормозном режиме (противовключении) l<s<Coo. 1
Практически скорость генераторного и тормозного режимов
ограничивается механической прочностью двигателя.
§ 27. Механическая и угловая характеристики
синхронного двигателя
Важным достоинством синхронных двигателей является то,
что они могут работать с более высоким cos ср, чем двигатели
асинхронные. Но использование синхронных двигателей требует
наличия, помимо сети трехфазного переменного тока, еще и
источника постоянного тока (для питания обмотки ротора дви-
гателя). Поэтому синхронные двигатели применяют преимуще-
ственно в установках большой мощности (до нескольких тысяч
киловатт). В судовых электроприводах их целесообразно ис-
пользовать для приведения в движение гребных винтов, мощных ,
насосов и компрессоров.
На рис. 72, а показана схема включения синхронного двига-
теля; его скорость п определяется числом пар полюсов р и ча-
стотой тока питающей сети f:
§ 27]
Характеристики синхронного двигателя
129
она не зависит от момента на валу двигателя. Поэтому меха-
ническая характеристика синхронных двигателей изображается
прямой, параллельной оси моментов (рис. 72, б). Однако это
не значит, что как бы ни увеличивался момент на валу, ско-
рость вращения останется неизменной. Синхронные двигатели,
как и все остальные, имеют свою перегрузочную способность,
для определения которой
важно знать так называе-
мую угловую характери-
стику.
Угловая характе-
ристика выражает за-
висимость момента двига-
теля от угла 6 простран-
ственного смещения меж-
Рис. 72. Схема включения (а) и механиче-
ская характеристика (б) синхронного дви-
гателя.
ду полем статора и рото-
ром. На векторных диаг-
раммах направление оси
вращающегося магнитно-
го поля статора определяется вектором напряжения питающей
сети U, а направление оси полюсов ротора — вектором э. д. с.
холостого хода Ео. Если пренебречь активным сопротивлением
Рис. 73. Упрощенная векторная диаграмма (а) н угловая харак-
теристика (б) синхронного двигателя.
статорной обмотки, приняв п — О, то упрощенная векторная ди-
аграмма синхронного двигателя будет иметь вид, изображенный
на рис. 73, а.
Мощность, потребляемая двигателем из сети переменного
трехфазного тока, определяется формулой, известной из общего
курса электротехники:
Р = 3IU cos ф,
(194)
где 1 и V — фазные значения тока и напряжения.
130
Электромеханические свойства двигателей переменного тока [Гл. 4
Из векторной диаграммы находим:
Так как
0D = U cos ф = Ео cos (ф — 0).
COS (ф — 0)
АС _ U sin 6
АВ 1хс ’
где хс — синхронное индуктивное сопротивление двигателя, то
г? U sin 6
OD = Ео-------.
1хс
Подставив значение U cos ср в уравнение (194), получим:
Р = 37Ео t7sin6 = sin 0. (195)
1хс Хс
Согласно принятому условию, п=0, а это значит, что и по-
тери мощности в статоре ДР = Pri также равны нулю. При этом
мощность, потребляемую двигателем из сети, можно считать
равной его электромагнитной мощности. Тогда (если пренебречь
значением реактивного момента) электромагнитный момент
определится из формулы:
М = 975 — = 2925^^ sin 0.
п пхс
(196)
При '6=90°э электромагнитный момент двигателя будет
иметь максимальное значение
Мтах = 2925^ (197)
и искомое уравнение угловой характеристики примет вид:
М — A4maxsin 0. (198)
С увеличением нагрузки на валу двигателя угол 6 возра-
стает. Из угловой характеристики (рис. 73, б) видно, что с уве-
личением угла 6 до 90°э также возрастает и электромагнитный
момент. Это соответствует условию устойчивой работы двига-
теля. Если же нагрузка на валу будет продолжать расти, то
с дальнейшим увеличением угла 0 (0>9О°Э) электромагнитный
момент начнет уменьшаться и двигатель выйдет из синхронизма
(остановится).
Номинальный момент Л1П синхронный двигатель обычно раз-
вивает при 9н=25^-30°э, что соответствует перегрузочной спо-
собности
Д^тах _ 1 _____1___ _ 2 , 2
Хм = Мя sin 6Н 0,4- : 0,5 ’
Однако некоторые специальные типы синхронных двигателей
имеют перегрузочную способность /.w=3 и более.
§ 28] Пуск, регулирование скорости и торможение синхронного двигателя 131
§ 28. Пуск, регулирование скорости и торможение
синхронного двигателя
Чтобы пустить в ход синхронный двигатель, на его роторе,
помимо обмотки возбуждения, располагают еще и специальную
пусковую обмотку, состоящую из медных или латунных стерж-
ней, заложенных в пазы полюсных башмаков и соединенных
между собой замыкающими кольцами. Эта обмотка аналогична
беличьей клетке ротора короткозамкнутого асинхронного дви-
гателя.
Пуск синхронных двигателей, осуществляемый с помощью
пусковой обмотки (рис. 74, а), называется асинхронным,
так как имеет все особенности, присущие асинхронным двига-
телям с короткозамкнутым ротором. Ограничения пусковых то-
ков в обмотке статора можно добиться одним из описанных
выше способов пуска при пониженном напряжении для асин-
хронных двигателей. Разгон также осуществляется по механи-
ческой характеристике, как у асинхронного двигателя
(рис. 74, б).
Для оценки процесса пуска важное значение имеет, наряду
с пусковым моментом Л4П, также входной момент МЕХ
двигателя.
Входной момент двигатель развивает при так называемой
подсинхронной скорости Ппс~0,95 пс. Это — мини-
мальная скорость, при которой возможен вход двигателя в син-
хронизм (если вращающий момент двигателя превышает мо-
мент нагрузки).
132
Электромеханические свойства двигателей переменного тока [Гл. 4
Из пусковых механических характеристик видно, что пуско-
вые и входные моменты зависят от сопротивления пусковой об-
мотки двигателя гп(гп2>Гп1).
Во избежание пробоя изоляции и для улучшения пусковых
характеристик обмотку возбуждения синхронного двигателя на
время пуска замыкают на разрядное сопротивление гр, равное
10-кратному сопротивлению этой обмотки.
Как только достигается подсинхронная скорость, переклю-
чателем П отключают разрядное сопротивление и в обмотку
ротора двигателя подают постоянный ток от возбудителя В.
Синхронные двигатели, как правило, работают при постоян-
ной скорости вращения. Однако в некоторых случаях возможно
регулирование скорости, что осуществляется изменением:
а) числа пар полюсов;
б) частоты тока питающей сети.
В синхронных двигателях, в отличие от асинхронных, изме-
нение числа пар полюсов осуществляется одновременными пере-
ключениями в статорной и роторной обмотках. Механические
характеристики, получаемые при регулировании скорости дви-
гателя, представляют собой параллельные прямые, отстоящие
на величину пс от оси моментов. Регулирование скорости изме-
нением частоты питающего тока, рассмотренное для асинхрон-
ных двигателей в § 25, во многом применимо и к синхронным
двигателям.
Из известных способов торможения синхронных двигателей
практическое применение имеет лишь динамическое торможе-
ние, которое осуществляют следующим образом. Обмотку ста-
тора отключают от сети и замыкают на тормозные сопротивле-
ния гт (см. рис. 74, а). Поле вращающегося по инерции ротора
индуктирует в обмотке статора ток, который во взаимодействии
с полем ротора создает тормозной момент. Величина его, таким
образом, определяется значениями сопротивлений статорной
цепи и тока в роторе.
Генераторный рекуперативный режим нельзя использовать
для торможения синхронных двигателей ввиду невозможности
снизить скорость вращения и тем уменьшить частоту тока ста-
тора.
Торможение противовключением в асинхронном режиме со-
провождается большими толчками тока; кроме того, для отклю-
чения двигателя от сети при снижении скорости до нуля потре-
бовалось бы чрезмерно усложнить схему управления.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Чем объяснить броски пускового тока асинхронного двигателя (стр. 101 ,
и 102)?
2. Почему при большой величине пускового тока асинхронный коротко-
§ 29]
Порядок проектирования электроприводов
133
замкнутый двигатель развивает незначительный пусковой момент (стр. 105 и
106)? .
3. При каком условии в двигателях с фазным ротором Л1п=Л1г1)ах
(стр. 108)?
4. Максимальный момент асинхронного двигателя не зависит от актив-
ного сопротивления цепи ротора, но при обрыве роторной цепи (г2=оо) Дви-
гатель не идет в ход (стр. 108 и 109). Почему?
5. Чем ограничивается мощность асинхронных двигателей, для которых
возможен прямой пуск (стр. ПО)?
6. Почему при регулировании скорости асинхронного двигателя измене-
нием частоты питающего тока необходимо также изменять и напряжение
(стр. 122 и 123)?
7. Какие режимы работы проходит асинхронный двигатель с момента
переключения на обратное вращение до установившегося состояния: а) при
реактивном и б) при активном статическом моменте на валу (стр. 125 и 127)?
8. Увеличение времени пуска синхронного двигателя может вызвать пе-
регрев пусковой обмотки ротора. Почему она не перегревается в нормальном
режиме работы двигателя (стр. 131)?
9. В чем разница между динамическим торможением асинхронного и
синхронного двигателей (стр. 124—127 и 132)?
ГЛАВА 5
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ
§ 29. Порядок проектирования электроприводов
Производственный механизм сможет работать с максималь-
ной производительностью и обеспечивать получение высокока-
чественной и дешевой продукции только в том случае, если элек-
тропривод будет наиболее полно соответствовать условиям его
работы. Это обстоятельство требует, чтобы лица, проектирую-
щие электропривод, знали:
а) устройство и особенности работы производственного ме-
ханизма — с тем, чтобы можно было возможно полнее учесть
требования, предъявляемые им к электроприводу;
б) электромеханические свойства двигателей — с тем, чтобы
можно было выбрать двигатель, наилучшим образом удовлет-
воряющий предъявляемым требованиям.
С точки зрения технико-экономической целесообразности
каждый судовой электропривод должен иметь небольшой вес,
малые габариты и низкую стоимость; сверх того, он должен
быть надежным в работе, простым по устройству и управлению.
Чтобы обеспечить указанные требования, необходимо при
проектировании электропривода последовательно проделать сле-
дующее:
а) изучить назначение и технологический процесс производ-
ственного механизма, построить нагрузочные диаграммы, учесть
частоту пусков и влияние переходных процессов на работу ме-
ханизма;
б) выбрать тип привода (регулируемый или нерегулируе-
мый) ;
134
Выбор электродвигателей
[Гл. 5
в) выбрать род тока и тип электродвигателя;
г) выбрать напряжение и частоту питающего тока;
д) произвести расчет мощности и выбрать двигатель;
е) разработать схему управления и выбрать ее элементы;
ж) составить технико-экономическое обоснование проекта;
з) выполнить конструктивную разработку узлов и опреде-
лить размещение электрооборудования на судне.
В судовых установках, не требующих регулирования ско-
рости, применяют, как правило, асинхронные двигатели с ко-
роткозамкнутым ротором, ибо они проще, дешевле и.надежнее
в работе и, сверх того, обладают довольно высокими к. п. д. и
cos ф.
Единственной причиной, ограничивающей применение асин-
хронных короткозамкнутых двигателей в нерегулируемых при-
водах, является потребность в большом вращающем моменте
при пуске некоторых механизмов и недопустимость провалов
напряжения при пуске, которые могут возникнуть в сети из-за
малой мощности судовой электростанции. В этих случаях прибе-
гают к применению короткозамкнутых двигателей специального
исполнения или двигателей с фазным ротором.
В регулируемых судовых электроприводах в настоящее вре-
мя широкое распространение получили асинхронные полюсопе-
реключаемые двигатели.
По мере усовершенствования тиристорных схем управления
и схем с дросселями насыщения асинхронные короткозамкнутые
двигатели получат еще большее применение. Они особенно пер-
спективны в связи с ожидаемым увеличением частоты перемен-
ного тока судовых систем.
Однако необходимость обеспечить плавную регулировку ско-
рости привода в широких пределах приводит к тому, что в со-
временных установках часто отдают предпочтение двигателям
постоянного тока.
Таким образом, проектировщики останавливают свой вы-
бор на постоянном токе, подчиняясь требованиям, касающимся
регулирования скорости. В остальных же случаях, как правило,
выбирают переменный ток, который позволяет применять более
надежные и экономичные асинхронные двигатели.
Завершив выбор того или иного типа двигателя, приступают
к предварительному решению вопроса о схеме управления;
при этом отдают предпочтение той схеме, которая позволяет
наилучшим образом использовать полезные для привода свой-
ства выбранного двигателя.
Величина напряжения проектируемого электропривода в ос-
новном определяется напряжением, принятым для судовой элек-
трической сети. В установках постоянного тока наибольшее рас-
пространение получило напряжение 220 в, в установках пере-
29] Порядок, проектирования электроприводов 135
менного тока — напряжение 380 и 220 в. Напряжение 380 в
предпочтительно на крупных судах с протяженными питаю-
щими фидерами и крупными электродвигателями, где оно дает
ощутимую экономию в сечении и стоимости судовой кабельной
сети.
В судовых электроэнергетических системах применяют, как
правило, общепромышленную частоту 50 гц.
Увеличение мощности электрических установок затрудняет
размещение электрооборудования на судах и делает весьма же-
лательным уменьшение его габаритов и веса.
В связи с этим становится целесообразным увеличение ча-
стоты, применяемой в судовых электроэнергетических системах,
с общепромышленной (50 гц) до 200 и 400 гц, что позволило
бы решить указанную задачу и, кроме того, обеспечило бы:
а) улучшение условий пуска асинхронных короткозамкнутых
двигателей от генераторов соизмеримой мощности (благодаря
увеличению быстродействия системы);
б ) повышение cos ср при недогрузке двигателей;
в) ограничение токов короткого замыкания и улучшение ус-
ловий безопасной работы установки.
Однако решение этого вопроса задерживается из-за отсут-
ствия электрических машин и аппаратов, рассчитанных на по-
вышенные частоты. Кроме того, работа судовых механизмов на
низких скоростях потребовала бы применения редукторов
с большими передаточными числами, а такие редукторы недо-
статочно разработаны и в настоящее время еще слишком гро-
моздки.
Определение мощности и выбор исполнительного двига-
теля — наиболее трудоемкий этап проектирования электропри-
вода. В большинстве случаев двигатель предварительно выби-
рают по статическому моменту с учетом заданной или выбран-
ной оптимальной скорости вращения. При выборе учитывают
также соответствие конструктивного исполнения двигателя ха-
рактеру среды, в которой ему предстоит работать. Затем строят
график заданного режима работы привода и проверяют соот-
ветствие выбранного двигателя этому режиму (по условиям на-
грева и другим показателям).
После того, как двигатель выбран, можно перейти к окон-
чательной разработке схемы управления и укомплектованию
ее необходимой аппаратурой управления, защиты и сигна-
лизации.
Чтобы выбрать наиболее целесообразную схему электропри-
вода, иногда бывает необходимым провести технико-экономи-
ческое сопоставление нескольких вариантов. Главное внимание
при таком сопоставлении уделяют надежности электропривода,
поскольку:
136
Выбор электродвигателей
[Гл. 5
а) электроприводы обеспечивают работу основных судовых
механизмов, от которых зависят не только нормальные условия
эксплуатации, но и само существование судна;
б) стоимость электроприводов ничтожно мала по сравнению
с общей стоимостью судна.
Конструкция элементов электропривода и их размещение на
судне должны обеспечивать простоту монтажа и удобство об-
служивания и управления механизмами.
§ 30. Особенности конструктивного исполнения
судовых электродвигателей
Обеспечить необходимую надежность работы установки это
означает в первую очередь привести конструкцию исполнитель-
ного двигателя в соответствие с условиями работы электрифи-
цированного механизма.
Конструктивное исполнение двигателей в основном опреде-
ляется:
а) способом защиты двигателя от воздействий окружающей
среды;
б) способом его охлаждения;
в) расположением вала и способом монтажа;
г) типом примененных подшипников.
По способу защиты от воздействий окружающей среды дви-
гатели (и аппараты управления ими) делятся на открытые, за-
щищенные, брызгонепроницаемые, водозащищенные, герметиче-
ские и взрывозащищенные.
Во внутренних помещениях судна обычно устанавливают
' брызгонепроницаемые двигатели, защитные устрой-
ства которых предотвращают попадание внутрь двигателей
капель, падающих сверху под углом не более 45° к вер-
тикали.
Двигатели водозащищенного исполнения устанавли-
вают на открытых палубах и в тех закрытых помещениях, где
на двигатель неизбежно попадает вода. Водозащищенные дви-
гатели снабжены защитой, предотвращающей проникновение
внутрь них влаги при обливании водяной струей под давле-
нием в 2 ст с расстояния 5 м при любом направлении в тече-
ние 5 мин.
В электроприводах, которым длительное время приходится
работать в затапливаемых помещениях, применяют гермети-
ческие двигатели. Их плотно закрытый корпус не пропускает
влаги внутрь двигателя, погруженного на 30 мин в воду при
наружном давлении в 1 ат. На судах гражданского флота эти
двигатели ввиду их больших габаритов и высокой стоимости
обычно не устанавливаются.
§ 30}
Особенности конструктивного исполнения
137
Для работы во взрывоопасных помещениях применяют спе-
циальные взрывозащищенные двигатели, корпус кото-
рых способен противостоять взрыву внутри двигателя и распро-
странению пламени в окружающую среду.
По способу охлаждения различают двигатели с естествен-
ным охлаждением, с самовентиляцией и с принудительным
охлаждением.
Двигатели с естественным охлаждением, т. е. не
имеющие специальных устройств для усиления обдува, приме-
няются редко (в основном при закрытом исполнении).
Двигатели с самовентиляцией охлаждаются вентиля-
тором, смонтированным на валу ротора (якоря) и подразде-
ляются на двигатели с внутренней и с наружной самовентиля-
цией (обдуваемые).
У двигателей с внутренней самовентиляцией крылатка распо-
ложена возле заднего подшипника (со стороны привода), бла-
годаря чему в двигателях защищенного и брызгонепроницае-
мого исполнения холодный воздух поступает в окна переднего
подшипникового щита, затем с нарастающей скоростью омывает
внутренние детали конструкции двигателя и, нагревшись, выхо-
дит через отверстия в заднем щите. Такая система охлаждения
позволяет избежать попадания внутрь двигателя влаги и масла
от приводимых в движение механизмов, а также оседания пыли
на обмотках и сердечниках машины. В закрытых двигателях
осуществляется лишь циркуляция нагретого воздуха внутри них,
что значительно снижает эффективность охлаждения. В резуль-
тате этого закрытые (например, водозащищенные) двигатели
имеют значительно большие габариты и вес, чем брызгонепро-
ницаемые той же мощности и скорости.
В целях улучшения системы охлаждения двигатели водо- и
взрывозащищенного исполнения часто выполняют обдуваемыми.
На валу такого двигателя снаружи (под колпаком) распола-
гают крылатку, обдувающую его наружную поверхность. Но
устанавливать обдуваемые двигатели на открытых палубах не
рекомендуется ввиду возможного обледенения вентиляторов и
загрязнения вентиляционных каналов.
Уменьшение скорости вращения двигателей с самовентиля-
цией резко ухудшает их охлаждение, в связи с чем на по-
ниженных скоростях уже не обеспечивается получение номи-
нальных значений момента и мощности.
Поэтому тихоходные или длительно работающие на пони-
женных скоростях двигатели обеспечиваются принудитель-
ным охлаждением, осуществляемым специальными вентиля-
торами.
По способу монтажа различают электродвигатели, устанав-
ливаемые на лапах, и фланцевые; _по расположению вала —
138
Выбор электродвигателей
[Гл. 5
горизонтальные и вертикальные. Некоторые судовые механизмы
(например, насосы) в последнее время все чаще снабжаются
фланцевыми двигателями с вертикальным расположением вала,
что позволяет экономить палубную площадь, а также более вы-
годно располагать насосы и трубопроводы.
Перейдем к последнему классификационному признаку —
типу подшипников. В судовых электроприводах чаще применяют
двигатели с подшипниками качения (шариковыми и ролико-
выми), которые во многих отношениях выгоднее двигателей
с подшипниками скольжения. Так, двигатели с подшипниками
качения имеют меньшие- осевые размеры, могут устанавли-
ваться вертикально, обладают меньшими потерями на трение и,
следовательно, большим к. п. д. К тому же подшипники качения
не нуждаются в особом уходе и могут работать при более высо-
ких температурах; их коэффициент трения не изменяется при
вращении и трогании двигателя с места. У двигателей же с под-
шипниками скольжения при трогании коэффициент трения
возрастает, что вызывает необходимость в большем электромаг-
нитном моменте двигателя при пуске.
§ 31. Номинальная мощность и перегрузочная способность
электродвигателей
При проектировании электропривода выбирают двигатель
необходимой мощности из определенной серии, выпускаемой за-
водами, в соответствии с предполагаемой нагрузкой и ожидае-
мым режимом работы.
Выбор двигателя с завышенной мощностью ведет к недоис-
пользованию активных материалов, затраченных на его из-
готовление, и обусловливает работу с низким к. п. д,. а в асин-
хронных двигателях — и с низким cos ср. Все это удорожает
установку и ухудшает ее эксплуатационные показатели.
Занижение установленной мощности двигателя также недо-
пустимо, ибо вызывает перегрузку и перегрев обмоток двига-
теля, что приводит к резкому сокращению срока его службы.
Так, при номинальной нагрузке и без перегрева двигатель ра-
ботает 15—20 лет, 25-процентная же перегрузка по току сокра-
щает срок службы до 1,5 месяцев, а при нагрузке, равной 1,5/в,
двигатель может выйти из строя уже после нескольких часов
работы.
Таким образом, нормальные условия работы двигателя опре-
деляются его номинальной мощностью.
Номинальной мощностью — называется мощность,
развивая которую двигатель, работающий в указанном для него
режиме, не перегревается свыше допустимой температуры. Вме-
§ 31} Номинальная мощность и перегрузочная способности 139
сте с другими номинальными данными номинальная мощность
указывается на заводском щитке двигателя.
Различные узлы двигателя допускают различные максималь-
ные температуры, при которых еще возможна нормальная ра-
бота. Наиболее чувствительна к повышению температуры изоля-
ция обмоток, класс которой практически определяет допусти-
мый нагрев двигателя, а следовательно, его номинальную
мощность. Все электроизоляционные материалы, применяемые
в электрических машинах и аппаратах, делятся на семь классов,
которым соответствует диапазон предельно допустимых темпе-
ратур от 90 до 180° С.
В настоящее время все более широкое применение находят
кремнийорганические изоляционные материалы класса Н, вы-
держивающие температуру нагрева до 180° С, что позволяет
значительно увеличить номинальную мощность двигателя без
увеличения его габаритов и веса.
Номинальная мощность дригателя зависит также от условий
охлаждения. Поэтому закрытые двигатели при одних и тех же
размерах имеют меньшую номинальную мощность, чем от-
крытые.’
Часто двигателю приходится преодолевать кратковременные
пики нагрузки, которые ввиду малой продолжительности, как
правило, не вызывают его перегрева, но могут явиться причиной
возникновения ненормальных, а иногда и аварийных режимов
работы электропривода.
Поэтому двигатели необходимо выбирать не только из усло-
вий их нагрева, но и по перегрузочной способности, под кото-
рой, как известно, понимают отношение:
' \ ^тах
, Ам Л. >
где Afmax и Мн — соответственно максимальный момент, разви-
ваемый двигателем, и номинальный момент, определяемый его
нагревом.
Так как максимальный момент электродвигателя опреде-
ляется его электромеханическими свойствами, то перегрузочная
способность различных двигателей при одинаковых условиях
теплового режима может быть различной.
У двигателей постоянного тока, исходя из условий коммута-
ции,
Хм = 2,5 4- 3,0.
У большинства асинхронных двигателей, в зависимости от
величины максимального (опрокидывающего) момента,
Хм = 1,7 ч-2,5.
140
Выбор электродвигателей
[Гл. 5
У синхронных двигателей, в зависимости от синхронизирую-
щей силы или максимального момента, при котором двигатель I
все еще способен работать в синхронном режиме,
= 2,0-s-2,5.
Следует также иметь в виду, что у закрытых двигателей пе-
регрузочная способность выше, чем у аналогичных двигателей
открытого исполнения. Это объясняется заниженной номиналь-
ной мощностью закрытых двигателей ввиду их худшего охлаж-
дения.
§ 32. Нагрев и охлаждение электродвигателей
Нагрев двигателя. При работе с некоторой постоянной мощ-
ностью на валу Р2 двигатель потребляет из сети мощность
Pi, которая больше мощности Р2 на величину ДР. Эта вели-
чина определяется потерями в активном сопротивлении обмоток
и в стали, а также механическими потерями и выражается
обычно через к. п. д. двигателя т; следующим уравнением:
ДР = Р, - Р2 = - Р2 = Р21=^-
(199)
Для определения потерь при различных нагрузках необхо-
димо знать соответствующие им к. п. д. двигателя. Если значе-
ния этих к. п. д. заводом не даны, то их можно ориентировочно
определить по формуле:
(200)
где т]н •— номинальное значение к. п. д. двигателя,
1 + а ’
х — степень загрузки двигателя; x=Px/Ps;
а — отношение постоянных потерь к переменным при номи-
нальной нагрузке (табл. 2); а=ДРПОст/ДРнпер-
Потери мощности в двигателе превращаются в тепло, что
вызывает нагрев двигателя до некоторой температуры, опреде-
ляемой его нагрузкой,
§ 32]
Нагрев и охлаждение электродвигателей
141
Если обозначить количество тепла, выделяющегося в двига-
теле за 1 сек через Q, то можно записать:
Q = 0,24ДР = 0,24Р2 -Цр-, (201)
где Q, кал,
или
Q = (202)
где Q, дж.
' Таблица 2
Род электродвигателя (по механической характеристике) Значение коэффициента а для электродвигателей
тихоходных быстроходных
Постоянного тока с параллельным воз- буждением или асинхронный трехфаз- ного тока Постоянного тока с последовательным возбуждением Постоянного тока со смешанным возбуж- дением 1,0 0,5 0,5—1,0 2,0 1,0 1,0—2,0
Различные части двигателя нагреваются в различной сте-
пени, в зависимости от условий его работы и охлаждения. На-
грев и теплоотдача обмоток отличаются от нагрева сердеч-
ников. При работе вхолостую больше нагревается магнитная си-
стема машины, в связи с чем поток тепловой энергии направлен
от сердечников к обмоткам; при работе же под нагрузкой по-
ток изменяет свое направление. Учет этих особенностей сделал
бы тепловой расчет чрезвычайно сложным. Поэтому для упро-
щения анализа тепловых процессов, происходящих в электро-
двигателе, принимаются следующие допущения:
а) двигатель представляется в виде однородного твердого
тела, равномерно нагревающегося по всему объему;
б) считается, что двигатель охлаждается только благодаря
теплопроводности и конвекции.
При этих условиях количество тепла, выделяемое двигате-
лем в окружающую среду, пропорционально превышению т его
температуры 0ДВ над температурой 0о окружающей среды:
т = 0ДБ-0о. (203)
Введем также обозначения: С — теплоемкость двигателя —
количество тепла, необходимое для повышения темпера-
туры двигателя на ГС, дж/град-, А — теплоотдача двигателя —
142
Выбор электродвигателей
[Гл. 5
количество тепла, которое отдается с поверхности двигателя
в окружающую среду за 1 сек при разности температур двига-
теля и среды в 1°С, дж] (град сек).
Выделившееся в двигателе в течение каждого элементарного
отрезка времени dt количество тепла Qdt расходуется на по-
вышение его температуры нагрева dr и на отдачу в окружаю-
щую среду.
В соответствии с этим уравнение теплового баланса двига-
теля запишется так:
Qdt = Cdx + Axdt, (204)
где С dx— тепло, идущее на нагрев двигателя;
Ах dt — тепло, излучаемое с поверхности двигателя в ок-
ружающую среду.
' Решим полученное дифференциальное уравнение, для чего
произведем разделение переменных
и, проинтегрировав
получим:
/==_£_ln(Q_XT)4-^
где С/А — постоянная величина для каждого двигателя в при-
нятых нами условиях. Назовем ее постоянной
времени нагрева и обозначим через Т:
Т = -£; (205)
t0 — постоянная интегрирования, определяемая из начальных
условий, т. е. при / = 0 и т=тНач:
/0 = 74n(Q —Лтнач).
Подставив значение t0 в выражение, полученное после ин-
тегрирования, запишем:
t = ТIn(Q -Лтнач)_Tin(Q -Лт).
После преобразований будем иметь:
/ = У InЛтнач или А In Q-Т ЛтнЗЧ .
Q — At Т Q — At
Потенцирование последнего выражения дает:
gf/r = 9-~, или = 9~Лт
Q — Ат
Q Л'Гдач
• £32]
Нагрев и охлаждение электродвигателей
143
Решив последнее уравнение относительно т, получим об-
щий вид уравнения нагрева, с помощью которого можно опре-
делить превышение температуры двигателя над температурой
окружающей среды в произвольный момент времени t:
(206)
со превышение температуры достигнет некото-
За время t=
рого постоянного (устано-
вившегося) значения туСт,
которое определится выра-
жением:
туст=4- (207)
Если в момент пуска
температура двигателя рав-
нялась температуре окру-
жающей Среды (0дв.нач=
= 0о), то
т =0 —0„ = О.
нач дв. нач 0
Тогда уравнение нагрева
стой вид:
т =
Рис. 75. Кривая нагрева двигателя при
длительно неизменной нагрузке.
двигателя будет иметь более про-
туст(1-е~^). (208)
/1
Графически эту зависимость (кривую нагрева) можно изо-
бразить в виде экспоненциальной кривой (рис. 75).
Из уравнения (208) и кривой нагрева следует:
1. В начальный период работы двигателя температура его
незначительно отличается от температуры окружающей среды,
в силу чего почти все выделяющееся тепло идет на нагрев, и
температура двигателя быстро возрастает.
2. По мере увеличения разницы температур двигателя и
среды нагрев двигателя постепенно замедляется, так как все
большая часть выделившегося тепла излучается в окружающее
пространство.
3. При некоторой температуре двигателя наступает тепло-
вое равновесие, когда количество выделяющегося в нем тепла
равно количеству тепла, излучаемого в окружающую среду.
При этом нагрев двигателя прекращается, и температура при-
обретает некоторое постоянное (установившееся) значение 0уст.
Однако, как видно из экспоненциального характера кривой на-
грева, это состояние наступит через бесконечно долгое время
работы двигателя.
144 Выбор электродвигателей [Гл. 5
Поэтому практически установившейся темпе-
ратурой принято считать такую температуру, которая в тече-
ние 1 ч изменяется не более, чем на 1°С. Такой температуры
двигатель достигает уже по истечении времени (= (4 5) Т.
Следовательно, время достижения практически установив-
шейся температуры двигателя зависит от постоянной времени
его нагрева Т, физический смысл которой заключается в сле-
дующем.
Если бы, нагреваясь, двигатель не отдавал тепла в окру-
жающую среду, то нагрев его происходил бы по прямой, каса-
тельной к экспоненте в точке А (см. рис. 75). В этом случае
двигатель нагрелся бы до установившейся температуры в те-
чение времени Т.
Таким образом, величина Т представляет собой время, в те-
чение которого двигатель достиг бы установившегося превыше-
ния температуры, если бы не происходило отдачи тепла в ок-
ружающую среду.
Размерность постоянной времени нагрева Т выражается
в единицах времени:
Г С 1 дж дж
[г] = — =-------:--------= сек.
L A j град град-сек
Исходя из реальных условий нагрева двигателя, величину Т
можно определить как время, в течение которого двигатель на-
гревается до 0,632 тУст.
В самом деле, если принять t—T, то
т = туст(1— e~tlT) =туст(1--j-j - 0,632туст. (209)
Постоянная времени нагрева зависит от конструкции и раз-
меров двигателя. У двигателей небольшой мощности открытого
исполнения с самовентиляцией значение Т обычно находится
в пределах 10—22 мин. С увеличением мощности и габаритов
двигателей, а также с переходом от открытого к закрытому ис-
полнению их значение Т возрастает и измеряется уже часами.
Как видно из кривых нагрева, приведенных на рис. 76, ве-
личину Т для данного двигателя при постоянной скорости вра-
щения можно считать постоянной. С изменением нагрузки дви-
гателя изменяется лишь значение установившейся температуры
Туст, до которой будет нагреваться двигатель при длительной
работе, причем каждому значению нагрузки соответствуют свои
потери и, следовательно, свое значение туст.
Возьмем двигатель с допустимой температурой перегрева
обмоток Тдо1ь указанной на графике. Если этот двигатель на-
гружать различными значениями мощности Pi, Р2 и Рз, то он
может работать без перегрева:
Нагрев и охлаждение электродвигателей
145
а) развивая мощность Pi и Р% бесконечно длительное время,
причем при мощности Pi двигатель будет недогружен;
б) развивая мощность Рв лишь в течение времени /рабз-
Охлаждение двигателя. Если двигатель отключить от сети,
то выделение тепла в нем прекратится: Q = 0; iyc^ = Q/A~0, т. е.
он будет охлаждаться до температуры окружающей среды. По-
сле отключения от сети двигатель останавливается, и теплоот-
дача А', соответствующая режиму остановки, обычно ухуд-
Рис. 76. Кривые нагрева двигателя
прн различных длительных нагрузках.
Рис. 77. Кривые нагрева и охлажде-
ния двигателя при Г'>1.
шается (Д/<Д). При этом новое значение постоянной времени
охлаждения
у, _ С
“ А' ’
(2Ю)
как правило, будет больше значения постоянной времени на-
грева Т=С/А.
Для самовентилируемых двигателей 7''=(2^3)7', для дви-
гателей с принудительным охлаждением можно принять Т'^Т.
Применив общее уравнение нагрева (206) для данного кон-
кретного случая, получим уравнение охлаждения двигателя:
—tpr
Т Тнач£!
(2Н)
где Тнач — перегрев двигателя в момент отключения его от сети.
Если двигатель во время работы достиг перегрева тУсТ, то
после отключения от сети он будет охлаждаться по изображен-
ной на рис. 77 экспоненте, асимптотой которой является прямая,
характеризующая температуру окружающей среды.
При Т'—Т кривая охлаждения двигателя является зеркаль-
ным отражением экспоненциальной кривой нагрева.
При Т'>Т кривая охлаждения будет положе кривой нагрева.
6 К. А. Чекунов
146
Выбор электродвигателей
[Гл. 5
За время t—T' двигатель охлаждается до температуры пе-
регрева:
* = ^наче~г/г' = = 0,368~нач. (212)
Из уравнения (211) следует, что охлаждение двигателя до
температуры окружающей среды будет продолжаться беско-
нечно долгое время, однако практически считают, что двигатель
достигнет температуры окружающей среды по истечении вре-
мени /= (4-^-5) Т'.
Самовентилируемые двигатели, обладая худшей теплоотда-
чей (Т'—2Т), после отключения от сети охлаждаются вдвое
дольше, нежели они нагревались во время работы.
§ 33. Классификация режимов работы двигателей.
Нагрузочные диаграммы
Электрифицированные агрегаты на судах выполняют теперь
самые разнообразные производственные операции. Поэтому су-
довые электроприводы имеют различные режимы работы: одни
без остановки работают по нескольку часов и даже суток,
у других же кратковременные периоды работы сменяются пау-
зами различной, подчас весьма большой длительности. Все это
оказывает определенное влияние на характер происходящих
в двигателе тепловых процессов.
Выбрать двигатель, соответствующий заданному режиму ра-
боты, можно только при условии построения его нагрузочной
диаграммы.
Под нагрузочной диаграммой понимают графически
выраженную зависимость мощности Р, момента 714 или тока I
двигателя от времени t:
; Р=/1(0; /=А(0-
Различают нагрузочные диаграммы исполнительного меха-
низма (мощности и момента) и двигателя, причем последние
отличаются на величину потерь в кинематических звеньях пе-
редачи и благодаря инерции движущихся масс привода явля-
ются более сглаженными.
Проектирование электропривода должно сопровождаться
построением нагрузочных диаграмм, причем исходными яв-
ляются диаграммы исполнительных механизмов; для некоторых
из них предварительно строят зависимости в функции пути,
угла поворота и других величин, характеризующих производ-
ственный процесс. Так, нагрузочные диаграммы рулевого
устройства сначала строят в виде зависимости момента на бал-
лере руля от угла перекладки, а затем от этих диаграмм обя-
§ 33] Классификация режимов работы двигателей
147
зательно переходят к зависимости в функции времени. С по-
мощью нагрузочных диаграмм можно проанализировать тепло-
вые процессы в двигателе и осуществить классификацию режи-
мов его работы.
В соответствии с условиями нагрева двигателя различают
три основных рабочих режима: длительный, кратковременный
и повторно-кратковременный.
Длительный режим работы. Это — режим, в котором двига-
тель работает под нагрузкой в течение времени, достаточного
для его нагрева до установившейся температуры (рис. 78, а).
Рис. 78. Нагрузочные диаграммы и кривые нагрева двигателя при длительном
(а), кратковременном (б) и повторно-кратковременном (в) режимах работы.
В таком режиме работают судовые электроприводы насосов,
вентиляторов и некоторых других механизмов.
Кратковременный режим работы. В этом режиме двигатель,
работая под нагрузкой, не успевает нагреться до установив-
шейся температуры, а в следующий затем период остановки
остывает до температуры окружающей среды (рис. 78, б). В та-
ком режиме работают электроприводы якорно-швартовных
устройств. Работать двигатель всегда начинает в холодном со-
стоянии (тИач=0). Согласно ГОСТ 183-55, стандартные длитель-
ности рабочих периодов кратковременного режима, для кото-
рых заводом указываются мощности двигателя, составляют 15,
30, 60 и 90 мин.
Повторно-кратковременный режим работы. Этот режим со-
стоит из чередующихся кратковременных рабочих периодов и
пауз, причем за время работы двигатель не успевает нагреться
до установившейся температуры, а за время паузы не успевает
остыть до температуры окружающей среды (рис. 78, в). Сум-
марная продолжительность рабочего периода /Г)аб и паузы t0,
называемая продолжительностью цикла /ц, не дол-
жна превышать 10 мин. Повторно-кратковременный режим ра-
боты характеризуется величиной относительной про-
должительности включения, т. е. отношением
6*
148
Выбор электродвигателей
[Гл. 5
продолжительности рабочего периода к продолжительности
цикла, выражаемой в относительных единицах (е) или в про-
центах (ПВ%):
е = _Л2б_ = ^Р?б_> или ПВ% =-^.100%. (213)
^раб +
Следовательно, ПВ % = е • 100% •
Стандартные значения относительной продолжительности
включения ПВ% составляют 15, 25, 40 и 60%.
Как видно из рис. 78, в, за время работы /раб температура
двигателя нарастает, а в периоды пауз t0 — снижается. Как и
при длительном режиме работы, с течением времени наступает
равновесие между теплом, выделенным в двигателе за время/раб,
и теплом, рассеянным в окружающую среду за время £раб-Но-
В ходе дальнейшей работы температура двигателя будет коле-
баться в пределах от 01 до 02- Этот режим характерен для
электроприводов грузовых устройств и электромеханической
рулевой машины.
Из нагрузочных диаграмм и кривых нагрева, представлен--
ных на рис. 78, видно, что в кратковременном и повторно-крат-
ковременном режимах с той же нагрузкой, что и в длительном
режиме, двигатель не достигает установившейся (предельно до-
пустимой) температуры и будет работать с недогрузкой. По-
этому при этих режимах можно либо допустить большую на-
грузку двигателя, либо для некоторой определенной нагрузки
выбрать двигатель меньшей мощности.
В практике встречается большое количество электроприво-
дов с более сложными нагрузочными диаграммами, чем приве-
денные на рис. 78. Ниже дается методика расчета мощности
двигателей при их работе в различных режимах.
§ 34. Выбор мощности двигателя при длительном режиме
работы
Двигатели, работающие в длительном режиме, могут иметь
либо неизменную, либо циклически меняющуюся нагрузку. Как
было установлено в § 32, количество выделяющегося в двига-
теле тепла и значение предельной температуры нагрева пропор-
циональны нагрузке двигателя. Поэтому тепловые процессы
в двигателе зависят от характера нагрузки. Очевидно, что это
определяет также методику выбора мощности двигателя.
При неизменной нагрузке выбор двигателя довольно прост ,
и заключается в определении мощности на валу двигателя,
удовлетворяющей требуемому режиму работы исполнительного
механизма. Потребляемая им мощность Р№е& либо задается,
§ 34]
Выбор мощности при длительном режиме
149
либо определяется расчетным или экспериментальным путем.
Мощность двигателя на валу Р№ находят из выражения:
р ____ Рмех
ДВ' Чпер
(214)
где т]пер — к. п. д. передачи от двигателя к механизму.
Далее по каталогу выбирают двигатель нужных параметров
и конструктивного исполнения с номинальной мощностью
РН>Р№.
Указанный метод расчета применим к двигателям электро-
приводов судовых насосов и вен-
тиляторов.
Большинство же судовых ме-
ханизмов работает по цикличе-
скому графику нагрузки.
При циклической нагрузке
мощность на валу двигателя рас-
считывают методом последова-
тельных приближений, в два эта-
па. На первом этапе осуще-
ствляют предварительный выбор
двигателя, на втором — проверку
его на соответствие заданному
графику нагрузки.
Произведем такой расчет
Рис. 79. Нагрузочная диаграмма
исполнительного механизма при ци-
клически изменяющейся нагрузке.
мощности двигателя для исполнительного механизма, нагрузоч-
ная диаграмма которого приведена на рис. 79. Ни по одной из
промежуточных мощностей Pi, Р2, ..., Рт этого графика вы-
брать двигатель нельзя, так как если задаться наибольшей
мощностью, то двигатель будет недоиспользован, а если — мень-
шими мощностями, то он будет перегреваться.
В зависимости от конкретных условий циклически меняю-
щейся нагрузки предварительный выбор двигателя можно осу-
ществить либо по номинальной статической нагрузке механизма,
либо по аналогии с подобными уже работающими механизмами,
либо по средней мощности, найдя ее из заданного графика
исполнительного механизма.
В последнем случае расчетную мощность двигателя опреде-
ляют по формуле:
РДБ-ЛРср, (215)
где РСр — значение средней мощности из графика нагрузки;
р . Plh. 4* Р^2 + - • • + Pmtm ,
СР ~ ,
Гц
k — коэффициент, учитывающий необходимость преодо-
ления динамических моментов; k= 1,1ч-1,3.
150
Выбор электродвигателей
[Г л. 5
Выбрав двигатель по мощности PRB из каталога и опреде-
лив общий приведенный маховой момент системы привода, про-
изводят расчет переходных процессов. Затем на основании по-
лученной нагрузочной диаграммы проверяют выбранный двига-
тель на нагрев, пользуясь для этого одним из описываемых
ниже методов.
Метод средних потерь. Количество тепла, выделяющееся при
циклической нагрузке в единицу времени, пропорционально
развиваемой двигателем мощности. Величина же тепловых по-
терь, в свою очередь, определяет температуру нагрева двига-
теля, которая, таким образом, должна изменяться вслед 'за из-
менениями нагрузки. Но, принимая во внимание большую теп-
ловую инерцию и незначительное время цикла по сравнению
с постоянной времени нагрева, достаточно учитывать 'некоторую
среднюю температуру нагрев двигателя за цикл, которая по
истечении определенного времени достигает установившегося
значения.
Среднее значение тепловых потерь, определяющее темпера-
туру нагрева двигателя, находят по формуле:
г\ __ Ql^l + + . . + Q.m^m
' Vcp — .
Гц
где Qb 0,2, ..., Qm — потери, соответствующие значениям мощ-
ности на валу на отдельных «ступенях» нагрузочной диаграммы
двигателя и определяемые с помощью уравнений (202) и (200).
Если средние потери QCp за цикл не превышают номиналь-
ных потерь QH выбранного двигателя, то, работая по заданному
графику, он, очевидно, не перегреется свыше допустимой тем-
пературы.
Таким образом, при QH>Qcp можно считать, что двигатель
выбран правильно. Если же QH и QCp разнятся значительно, то
выбор неудачен, и необходимо повторить его, после чего заново
произвести расчет среднего значения тепловых потерь.
Это — весьма точный метод, пригодный для всех типов дви-
гателей, однако кропотливость расчетов ограничивает его при-
менение. Поэтому на практике чаще пользуются методами
среднеквадратичных или эквивалентных величин тока, момента
и мощности.
Метод эквивалентного тока. Этот метод основан на замене
действительно протекающего в двигателе тока I током 1ЭКВ —
эквивалентным ему по тепловому эффекту. Выведем формулу
такой замены.
На основании зависимости (201) уравнение (216) можно
переписать в следующем виде:
: ДР __ + Wt +.. • + bPmtm . (217)
Р
£ 34]
Выбор мощности при длительном режиме
1
Из теории электрических машин известно, что потери в дви-
гателе можно разделить на постоянные (не зависящие от на-
грузки) и переменные:
= АРПОСТ + ДРпер,
где ДРпост — постоянные потери, состоящие из потерь в стали,
механических и дополнительных потерь;
ДРпер — переменные потери, обусловленные тепловым дей-
ствием тока; ЬР^^сРг.
Подставив значения потерь в уравнение (217)
ДР + сГ г =
пост 1 экв
(ДРПОСТ + cljr) + (ЛРГ1ОСТ + c/jr) + ... + (ДРПОСТ +cl2mr) tm
после несложных преобразований получим:
„,2 „ ^1+^2+
С* экв' — ~ •
'д
Сократив на сг левую и правую части последнего уравнения,
для двигателей, сопротивление которых не изменяется при из-
менении нагрузки и скорости, можем записать:
j2 _ fyl + ^2*2 + • • • +
•ЭКВ-------------- >
‘Ц
откуда
экв
+ ^2 + • • • + 12т(т
(218)
где /ь I2, , 1т — токи на соответствующих ступенях прямо-
угольного графика.
Найденный таким образом эквивалентный ток сравниваем
с номинальным током предварительно выбранного двигателя,
следя за тем, чтобы соблюдалось условие: /„ >/м;в.
Что касается двигателей, работающих по трапецеидальному
графику нагрузки, то для них формула эквивалентного тока
примет несколько иной вид.
Пусть в течение времени t\ (рис. 80) ток двигателя изме-
няется по линейному закону:
7 = 7, + bt,
(219)
где Ь — ———— приращение тока за единицу времени.
t-i
152
Выбор электродвигателей
[Гл. 5
Среднеквадратичное (эквивалентное) значение тока за
время ti, отнесенное ко времени работы, определится из выра-
жения:
1ЭКВ
1 о
Произведем интегрирование уравнения (220) по
величине тока /, для чего, продифференцировав
(219)
(220) .
переменной
выражение
Рис. 80. Нагрузочная трапе-
цеидальная диаграмма дви-
гателя.
di = b dt,
найдем:
• dt = — di = —
b 12-1г
Подставив полученные
Лэкв, напишем:
а также определим новые пределы
интегрирования:
нижний /ниж = Л 4- Ь0 =
верхний /верх = Д + Ыг = Л +
I ~ Л f _ J
п---q — i2.
ч
значения в исходное выражение для .
di,
1экв
3
2
1 . (/2 - Л)3
/г— /1
+ Мг + ^2
3
(221)
, Эквивалентный ток за весь цикл определится уравнением:
1 + hh +
(222)
/ц -
Если же ток начинает возрастать с нуля (например, при
пуске), то график тока на участке времени ti примет вид тре-
угольника, и уравнение эквивалентного тока для этого случая
может быть записано так:
экв
2 h .2.
2~Г~ + 72Г2
О
/ц
(223) .
£ 35]
Выбор мощности при кратковременном режиме
153
Методы эквивалентного момента и эквивалентной мощности.
Иногда при проектировании электропривода нагрузочную диа-
грамму двигателя легче построить в значениях момента или
мощности, после чего произвести по ним проверку выбранного
двигателя. Однако это возможно далеко не во всех случаях.
Электромагнитный момент двигателей постоянного тока
с параллельным возбуждением (за исключением двигателей
с регулированием скорости потоком) пропорционален току
якоря: M=kMI.
Момент асинхронных двигателей на участке устойчивой ра-
боты механической характеристики можно считать равным:
M=k'№I.
Умножая с учетом этих условий обе части уравнения (218)
на Ам, можно от формулы эквивалентного тока перейти к фор-
муле эквивалентного момента:
й + .. + M2mtm . (224)
________________________
Для двигателей с жесткой механической характеристикой
(со— const) действительна пропорциональная зависимость между
моментом и мощностью: Р=Ма, что позволяет перейти к урав-
нению эквивалентной мощности:
(225)
Если переходные процессы составляют значительную часть
времени цикла, то в формулы среднеквадратичных величин сле-
дует ввести коэффициенты аир, учитывающие ухудшение
условий охлаждения двигателя при пониженных скоростях и
в неподвижном состоянии. Для двигателей постоянного тока
а=0,75 и р = 0,5; для асинхронных двигателей а=0,5 и р = 0,25
(см. § 36).
§ 35. Выбор мощности двигателя при кратковременном режиме
работы
Если двигатель, предназначенный для длительного режима,
будет работать кратковременно в течение периода Л<рат с но-
минальной мощностью, то к концу работы его температура не
достигнет максимально допустимого значения (рис. 81, кри-
вая 1). Иначе говоря, двигатель будет недогружен.
Если же двигатель к концу рабочего периода нагревается
до установившейся температуры режима длительной работы
(рис. 81, кривая 2), то это означает, что он используется
154
Выбор электродвигателей
[Гл. 5
полностью. Допустимое значение перегрузки определяется так
называемым коэффициентом тепловой перегрузки
Гт, представляющим собой отношение потерь при кратковремен-
ном режиме к номинальным потерям двигателя при условии
одинакового нагрева:
Рт = , (226)
где Сократ — допустимые потери при
QH — потери при длительной
кратковременной нагрузке;
номинальной нагрузке.
Рис. 81. Кривые нагрева двигателя
при кратковременном режиме работы.
Рис. 82. Зависимость коэф-
фициента тепловой нагрузки
Рт от времени работы.
Как видно из рис. 81, допустимый перегрев двигателя можно
определить для длительного режима уравнением:
гдоп=^(1'-1ГМГ)=^, (227)
а для кратковременного режима
т = Скрат. (1 — е~'кратП) (228)
Приравняв правые части равенств (227) и (228), получим:
QH=QKpaT(l-^K₽aT/r), (229)
откуда
= = —=г~тт-' (230)
Vn J_____е *крат?
Эта зависимость графически выражена кривой pT = f (^рат/Т1)
на рис. 82.
£ 35]
Выбор мощности при кратковременном режиме
155
(232)
Преобразовав уравнение (230), можно выразить зависимость
времени кратковременной работы от коэффициента тепловой
перегрузки двигателя:
1 _ = 1/р е-%ат/Г = Рт-У или е*к^1Т = _Рт_ .
1 Рт рт— 1
Прологарифмировав последнее выражение, получим:
или t Tjn_J!T (231)
т Рт — 1 Рт — 1
Уравнение (231) позволяет определить время работы дви-
гателя /крат при заданной перегрузке, если известна его посто-
янная времени нагрева Т.
Если в каталоге приведены данные кратковременной работы
и номинальные данные двигателя, то, пользуясь изложенными
выше рассуждениями, можно определить величину Т по фор-
муле:
У = ^крат
Рт — 1
Далее, пользуясь кривой на рис. 82, можно по длительности
рабочего периода определить, до каких значений допустима
перегрузка двигателя длительного режима, чтобы за время ра-
боты он не перегревался выше установленной температуры.
Однако следует отметить, что использование двигателей обыч-
ных конструкций в кратковременных режимах нежелательно,
потому что, во-первых, их ограниченные перегрузочные способ-
ности ведут к недоиспользованию по нагреву (см. рис. 82) и,
во-вторых, различные части двигателя характеризуются различ-
ными значениями постоянной времени нагрева Т. В двигателях
постоянного тока, например, коллектор и обмотка возбуждения
нагреваются быстрее, чем якорь, что вызывает недоиспользо-
вание якоря при малых и перегрев коллектора и обмотки воз-
буждения при больших нагрузках.
Этим продиктовано создание специальных серий двигателей
кратковременного режима.'Если такие двигатели отсутствуют,
то используют двигатели повторно-кратковременного режима,
исходя из следующих соотношений:
Продолжительность ПВи
работы, мин
30 15
60 25
90 40
При выборе двигателей, специально предназначенных для
кратковременного или повторно-кратковременного режима,
основным определяющим фактором, как уже отмечалось,
156
Выбор электродвигателей
[/'л. 5
.является их перегрузочная способность. Поэтому предваритель-
ный выбор двигателя обычно производят по максимальной ста-
тической нагрузке исполнительного механизма с учетом пере-
грузочной способности выбираемого двигателя. Последующая
же проверка его на нагрев выполняется одним из рассмотрен-
ных в § 34 методов эквивалентных величин.
Если номинальная продолжительность работы выбранного
двигателя отличается от действительной, то для окончатель-
ного суждения о правильности выбора двигателя нужно пере-
считать его на нагрев в заданный период работы.
§ 36. Выбор мощности двигателя
при повторно-кратковременном режиме работы
Из графика на рис. 78 видно, что при одинаковых нагрузках
двигатели, работающие в повторно-кратковременном режиме
(как и в кратковременном), нагреваются до меньших темпера-
Рис. 83. Нагрузочная диаграмма двига-
теля при повторно-кратковременном ре-
жиме.
тур, нежели двигатели, ис-
пользуемые в длительном
режиме. Поэтому для ра-
боты в повторно-кратковре-
менном режиме следует при-
менять двигатели меньшей
мощности и габаритов, но
с большей перегрузочной
способностью и прочностью
в отношении динамических
усилий. Кроме того, следует
учесть, что в отличие от
длительного режима здесь
нагрев двигателя происхо-
дит неравномерно из-за бо-
лее интенсивного выделе-
ния тепла в течение кратко-
временных периодов работы. Все это обусловливает необхо-
мость применять двигатели специальной серии, рассчитанные
на одно из следующих стандартных значений ПВ% : 15, 25 или
40%. Номинальной считается ПВ%=25%, для которой и ука-
зывается в каталогах перегрузочная способность двигателя.
Расчет мощности двигателя при повторно-кратковременном
режиме сводится к следующему. На основании статической
нагрузки (например, по номинальной грузоподъемности) ори-
ентировочно выбирают двигатель, для которого рассчитывают
переходные процессы и строят нагрузочную диаграмму в зна-
чениях мощности, момента или тока. Затем выбранный двига-
,. тель проверяют на нагрев. -
§ 36] Выбор мощности при повторно-кратковременном режиме
157
Особенности работы двигателя в данном режиме делают
наиболее рациональным для него метод расчета по среднеквад-
ратичному току с учетом пусковых и тормозных значений. В со-
ответствии с этим строят и нагрузочную диаграмму двига-
теля (рис. 83).
Значение среднеквадратичного тока, исходя из приведенной
диаграммы, будет:
^экв
1/^п + ^у+^т t
* tn + ty + t-T + to
(233)
где индексы «п», «у» и «т» означают соответственно пуск, уста-
новившийся режим и торможение.
При выборе двигателя обычной конструкции проверку за-
канчивают сравнением полученной величины с номинальным
значением тока выбранного двигателя. Но, как уже отмеча-
лось в § 35, для повторно-кратковременного режима работы
выпускаются специальные двигатели, продолжительность пауз
которых уже учтена при определении НВ %. Если выбран такой
двигатель, то необходимо определить повторно-кратковремен-
ный ток, соответствующий одному лишь рабочему периоду (без
пауз). Для этого подкоренное выражение в уравнении (233)
надо умножить и разделить на время работы в течение цикла:
где
(234)
(235)
— эквивалентный повторно-кратковременный ток;
?п-Ну-Ь
tn + ty + tT + <0
— расчетная продолжительность включения, соответствующая
нагрузочной диаграмме.
Частые пуски и остановки при повторно-кратковременном
режиме приводят к тому, что двигатель работает с резко изме-
няющейся скоростью. Это оказывает существенное влияние на
условия охлаждения двигателей с самовентиляцией и должно
быть учтено введением соответствующих коэффициентов аир
158
Выбор электродвигателей
[Гл. 5
(см. § 34). Тогда значения среднеквадратичного и повторно
кратковременного токов определятся из выражений:
экв
1п*п + ffiy + 4*т
1 (^п + ^т) + iy Т ₽<0
а (<п "4 ^т) Т ty
(237)
Полученное значение тока сравнивают с номинальным то-
ком выбранного двигателя. Если расчетная продолжительность
включения е не совпадает с номинальной еи для выбранного
двигателя, то производят пересчет на ток, соответствующий но-
минальной продолжительности включения ен-
При пересчете исходят из того, что эквивалентный ток дви-
гателя при любом режиме должен быть постоянным, т. е.
/ -I 1/Г = / 1/Г,' . (238)
ЭКВ S ’ ЕН F н’ \ /
откуда повторно-кратковременный ток для номинальной про-
- должительности включения будет:
(239)
Выбранный двигатель, работая по заданному графику, не
будет перегреваться при условии, что /и >/еи.
Если в процессе работы двигателя сохраняется постоянная
пропорциональная зависимость между током и моментом или
мощностью, то приведенный расчет можно выполнить, построив
нагрузочные диаграммы соответственно в значениях момента
или мощности.
Иногда возникает необходимость перейти от моментов, в зна-
чениях которых выполнена нагрузочная диаграмма, к соответ-
ствующим токам. В этом случае надо воспользоваться графи-
ческой зависимостью между моментом и током для выбранного
двигателя (см., например, график на рис. 42).
Рассмотренный метод называют расчетом по продолжитель-
ности включения. Он применим при ПВ%<60%. В остальных
случаях расчет ведут обычными методами среднеквадратичных
величин, выбирая двигатели, предназначенные для продолжи-
тельного режима работы.
§ 37] Построение электрических схем 159
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Какие условия определяют номинальный, а какие—максимальный мо-
менты двигателя (стр. 138 и 139)?
2. Сравните номинальные и максимальные моменты двигателей одного
габарита открытого и закрытого исполнения (стр. 140 и 141).
3. Чем определяется установившаяся температура нагрева двигателя
(стр. 140—145)?
4. Почему двигатели длительного режима нецелесообразно использовать
для работы в кратковременном и повторно-кратковременном режимах
(стр. 147, 148 и 153—155)?
5. В каких случаях и почему при выборе двигателя не требуется про-
верка на нагрев (стр. 148 и 149)?
6. Перечислите условия, ограничивающие применение каждого из мето-
дов эквивалентных величин (стр. 150—153).
7. Будет ли перегружен или недогружен двигатель, выбранный по ве-
личине расчетной мощности и ев>ерасч (стр. 158)?
ГЛАВА 6
ПРИНЦИПЫ И СХЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДАМИ
§ 37. Классификация, построение и правила чтения
электрических схем
Схема электрических соединений — это чертеж, на котором
изображена электрическая связь между электрическими маши-
нами и аппаратами, а также между отдельными элементами
внутри одного аппарата. Схемы, с которыми приходится иметь
дело в проектно-монтажной практике, подразделяются на
принципиальные, элементные, монтажные, внешние, внутренние
и др-
На рис. 84 показано, как один и тот же процесс — включе-
ние асинхронного короткозамкнутого двигателя при помощи
магнитного пускателя — отображается на схемах разного рода.
Принципиальной называют схему, на которой ука-
заны только соединения, необходимые для понимания прин-
ципа работы конкретной электрической установки. На принци-
пиальной схеме обычно изображают лишь цепи главного тока,
но исполнение ее может быть как однолинейным, так и много-
линейным (рис. 84, а).
Элементной (развернутой) называют схему, на ко-
торой указаны соединения между всеми элементами электриче-
ской установки, причем сами элементы расположены в порядке,
облегчающем чтение схемы, без учета действительного разме-
щения их в установке или аппарате. Элементная схема полнее
принципиальной, так как охватывает все электрооборудование
160
Принципы и схемы автоматического управление
[Гл. б
Рис. 84. Схемы пуска асинхронного короткозамкнутого двигателя
при помощи магнитного пускателя: а — принципиальная; б — эле-
ментная; в — монтажная; г внешняя.
§ 37]
Построение электрических схем
161
установки и дает наглядное представление об управлении при-
водом (рис. 84, б).
Но производить электромонтажные работы удобнее не по
элементной, а по монтажной схеме, на которой все элементы
установки и соединения между ними указаны в соответствии
с их действительным расположением, а также обозначены се-
чения, марки и способы прокладки проводов и кабелей
(рис. 84, в)..
схемы.
Если в монтажной схеме указаны не элементы, находящиеся
в аппарате, а лишь соединения аппарата с электрической ма-
шиной и другими аппаратами, то она является внешней схе-
мой или, точнее, схемой внешних соединений. В такой схеме
электрические машины и аппараты изображены в .виде конту-
ров, снабженных сборкой зажимов (рис. 84, е).
Внутренней называется схема, на которой показаны
элементы и соединения между ними, находящиеся внутри од-
ного аппарата.
Таким образом, внешняя и внутренняя схемы, вместе взя-
тые, составляют монтажную схему.
Все схемы состоят из параллельных друг другу электриче-
ских цепей, которые делятся на главную цепь (цепь главного,
или рабочего тока) и на вспомогательные цепи. Последние,
в свою очередь, подразделяются на цепи возбуждения, управ-
ления, сигнализации и блокировки (рис. 85).
Цепью главного тока называют электрическую цепь,
предназначенную для подачи электрической энергии к машине
162
Принципы и схемы автоматического управления
[Гл. 6
или к другой части установки с целью преобразования энергии
из одного вида в другой или же для изменения ее параметров.
Под цепью возбуждения понимают электрическую
цепь параллельной или независимой обмотки возбуждения.
Цепью управления считают электрическую цепь, со-
стоящую из последовательно включенных катушек, контактов
реле и контакторов, а также других аппаратов, управляющих
работой главной цепи.
Цепь сигнализации — электрическая цепь, в которую
включены сигнальные реле или другие аппараты звуковой или
световой сигнализации (звонки, сигнальные лампы и т. д.).
Цепь блокировки — электрическая цепь, включающая
в себя контакты и аппараты, служащие для выполнения необ-
ходимых блокировок в цепях управления.
Все элементы электрических схем надлежит изображать оп-
ределенными графическими символами, указанными в ГОСТ
7624-62. Возле каждого графического символа схемы ставят,,
буквенное обозначение, в котором первая буква характеризует
название элемента, вторая и последующие — его назначение,
принцип действия, конструктивное исполнение и т. д. Цифры
впереди буквенных обозначений указывают порядковый номер
однотипных аппаратов схемы, иногда этот номер определяет
очередность срабатывания аппарата. Все элементы одного ап-,
парата должны иметь одно и то же буквенное обозначение
(например, катушка, главные и блокировочные контакты пер-
вого контактора ускорения обозначаются: 1У; это указывает на
то, что в схеме применено несколько одинаковых контакторов
ускорения, из которых данный контактор срабатывает первым).
В интересах большей наглядности схем следует придержи-
ваться определенных правил их начертания.
Главные цепи, по которым протекает ток якоря, статора
или ротора двигателя изображаются на схемах жирными ли-
ниями, вспомогательные цепи — тонкими линиями.
В элементных схемах постоянного тока главные цепи изоб-
ражаются в верхней части чертежа, впомогательные — ниже
главной цепи. В элементных схемах переменного тока вспомо-
гательные цепи изображаются справа от главной цепи. Вспо-
могательные цепи представляют собой параллельные развер-
нутые (обычно горизонтальные) линии с различными полю-
сами на концах при постоянном и с различными фазами на кон-
цах при переменном токе.
Подобное расположение цепей и послужило причиной того,
что элементные схемы получили название развернутых. Все эле-
менты одного аппарата на них располагаются в разных местах
схемы. Принадлежность элементов к одному и тому же аппа-
рату выражается одинаковым их обозначением.
§ 37]
Построение электрических схем
163
Контакты электромагнитных контакторов и реле в схемах
изображаются в положении, соответствующем обесточенному
состоянию втягивающей катушки. Контакты контроллеров и ко-
мандо-аппаратов указываются в схемах в их нулевом положе-
нии и без механического воздействия на них, рубильники и
автоматы — в отключенном состоянии.
Элементная схема электропривода должна строго соответст-
вовать его монтажной схеме. Чтобы облегчить переход от эле-
ментной схемы к монтажной, обе схемы должны иметь строго
одинаковую маркировку, причем в монтажных схемах марки-
руют зажимы, а в элементных — обычно провода, соединяю-
щие их, так как зажимы в схемах часто не указываются. Для
цепей главного тока обычно применяют буквенно-цифровую
маркировку, а для вспомогательных цепей — цифровую.
При маркировке зажимов главной цепи цифру ставят не
перед буквенным обозначением, как это делается в отношении
аппаратов (см. выше), а после буквенного обозначения (на-
пример: Л1, Л2, ЛЗ или Cl, С2, СЗ и т. д.). Зажимы и провода
положительного потенциала вспомогательных цепей маркируют
нечетными цифрами, а зажимы и провода отрицательного по-
тенциала — четными. Аналогично маркируют зажимы и про-
вода, принадлежащие двум различным фазам в цепях управле-
ния переменного тока. Таким образом, соединение зажимов
с четной и нечетной маркировкой возможно лишь через эле-
мент, рассчитанный на полное напряжение цепи управления.
Зажимы нулевого или промежуточного потенциала маркируют
числами, оканчивающимися на 0.
Указанные буквенные обозначения и способы маркировки
не регламентированы ГОСТ; тем не менее их необходимо при-
держиваться, так как они значительно упрощают пользование
схемами при монтаже, ремонте и эксплуатации судовых элект-
рических установок.
Следует придерживаться и определенного порядка чтения
схем, так как это облегчает анализ работы электропривода.
Порядок этот таков:
1. Дается краткая характеристика всех используемых
в электроприводе электрических машин и аппаратов.
2. Рассматриваются главные цепи и цепи возбуждения, уп-
равления, сигнализации и блокировки. По назначению вклю-
ченных в каждую цепь элементов определяются способы пуска,
регулирования скорости и торможения, а также виды защиты
элементов привода от аварийных режимов работы.
3. С помощью таблицы замыкания контактов выявляются
обтекаемые током цепи, а стало быть, и режимы работы элект-
ропривода при различных положениях штурвала или руко-
ятки поста управления.
164
Принципы и схемы автоматического управления
[Гл. 6
Если в качестве поста управления используются такие мно-
гоступенчатые переключатели, как контроллер или командо-
аппарат, то схему снабжают таблицей последовательности за-
мыкания контактов, из которой видно коммутационное состоя-
ние аппарата 'при всех положениях штурвала или рукоятки
управления (рис. 86).
Контроллерные схемы снабжают.таблицами замыкания кон-
тактов контроллеров, подобными изображенной на рис. 86, а,
где в горизонтальных строчках указывают номера контактов,
а в вертикальных графах — положения аппарата. Косой крест
Рис. 86. Таблицы замыкания контактов поста управления: а —
контроллера; б — командо-аппарата.
О
Подъем
1 ? 3
В) С писк.
3 ? J
в ажточке означает, что данный контакт в указанном положе-
нЦ.лаппарата замкнут.
'Релейно-контакторные схемы обычно имеют развертку
с обозначением контактов и положений командо-аппарата
(рис. 86, б). Замыкание того или иного контакта в рассматри-
ваемом положении командо-контроллера указывает жирная
точка на вертикали данного положения несколько ниже цепи,
коммутируемой этим контактом. Однако, если в сложной ре-
лейно-контакторной схеме не удается разместить все контакты
командо-аппарата один под другим в одной развертке, то схему
снабжают выносной таблицей замыкания контактов поста уп-
равления.
§ 38. Способы управления электроприводами
Управление электроприводом заключается в пуске, регули-
ровании скорости, торможении, реверсе, остановке и выполне-
нии других операций для поддержания или изменения задан-
ного режима работы двигателя.
Способы управления электроприводами
165
Различают ручное и автоматическое управление.
Ручное управление состоит в том, что оператор непосред-
ственно воздействует на аппараты управления: рубильники,
пакетные выключатели, реостаты и контроллеры. То обстоя-
тельство, что эти аппараты обычно бывают включены в цепь
главного тока, препятствует использованию их при дистанцион-
ном управлении.
Качество операций, выполняемых вручную, целиком зависит
от подготовленности, внимательности и умения операторов.
А так как не на каждого оператора можно положиться, то это
вносит в управление электроприводами элемент случайности.
Недостатком ручного управления является и то, что оно
требует от оператора значительных усилий, особенно при по-
вторно-кратковременном режиме работы. А быстрое утомление
оператора, ослабляя его внимание, нередко является причиной
снижения производительности и аварий. Поэтому в настоящее
время ручное управление сохранено лишь в электроприводах
небольшой мощности и в основном при продолжительном ре-
жиме работы.
Автоматическое управление осуществляется без участия опе-
ратора, по заранее заданным программам, с помощью системы
взаимосвязанных автоматических устройств. Обслуживающий
персонал при этом лишь производит первичную наладку и пе-
риодический контроль работы системы управления.
Автоматизация процессов управления, сводя к минимуму
участие обслуживающего персонала в работе механизмов, уст-
раняет возможность ошибок, уменьшает вероятность аварий и
повышает производительность оборудования.
Полезность автоматического управления особенно велика
в современных установках, многие операции которых настолько
быстротечны, что человек часто не бывает в состоянии просле-
дить за ходом производственного процесса и вовремя откор-
ректировать его в нужном направлении.
Рассмотрим принципы возможной автоматизации пуска*
двигателей, применяемых в судовых электроустановках.
Маломощные двигатели постоянного тока и асинхронные
короткозамкнутые двигатели подвергаются прямому безреостат-
ному пуску, при котором обмотки двигателя непосредственно
подключаются к питающей сети, после чего двигатель автома-
тически разгоняется до рабочей скорости.
Большинство двигателей постоянного тока и асинхрон-
ных двигателей с фазным ротором пускаются с помощью спе-
циальных пусковых сопротивлений, которые после включения
* Следует иметь в виду, что процесс пуска двигателя включает также
и разгон его до установившейся скорости, соответствующей нагрузке на валу.
166
Принципы и схемы автоматического управления
[Гл. 6
двигателя в сеть необходимо вывести — вручную или автомати-
чески. Как следует из пусковой диаграммы, приведенной на
рис. 87, при таком реостатном пуске с течением времени t изме-
няется скорость п и потребляемый двигателем ток I.
Также вручную и автоматически пускаются при понижен-
ном напряжении и крупные асинхронные двигатели с коротко-
замкнутым ротором.
Таким образом, используя закономерности изменения ука-
занных величин, можно осуществить автоматический пуск дви-
гателей постоянного тока и асинхронных двигателей в функции:
Рис. 87. Пусковая диаграмма двухсту-
пенчатого реостатного пуска.
а) его скорости; б) пуско-
вого тока или в) времени.
В первом случае обычно
применяют аппараты, реа-
гирующие на некоторые
электрические величины, од-
нозначно связанные со ско-
ростью двигателя.
Как известно, при посто-
янном потоке возбуждения
э. д. с. Е якоря двигателя
постоянного тока равна ken.
Поэтому пуск этих двигателей в функции скорости можно за-
менить пуском в функции э. д. с. их якоря.
У асинхронных двигателей, согласно соотношению (137),
f — рп* — р (Пс ~
' 72 60 60
и, следовательно, пуск этих двигателей в функции скорости
можно заменить пуском в функции частоты тока их ротора.
Аналогичные зависимости между этими величинами легли
и в основу схемы автоматического управления электрическим
торможением судовых электродвигателей.
Ниже рассмотрены принципы пуска и торможения, нашед-
шие наибольшее распространение в судовых электроприводах.
§ 39. Принципы пуска и торможения двигателей
постоянного тока
Применяются следующие способы пуска двигателей постоян-
ного тока:
а) непосредственный (прямой);
б) в функции э. д. с. якоря;
ч в) в функции тока якоря;
г) в функции времени.
§ ЗР]
Пуск и торможение двигателей постоянного тока 167
Прямой пуск осуществляют по схеме, приведенной на рис. 88.
В ней использованы двигатель постоянного тока со смешанным
возбуждением, линейный контактор постоянного тока Л и
кнопки управления КП и КС. Защита питающей сети от корот-
ких замыканий в цепи управления обеспечивается предохрани-
телями Пр.
Для предупреждения перенапряжений в параллельной (шун-
товой) обмотке возбуждения при разрыве ее цепи на зажимы
Ш} и Ш2 включено разрядное сопротивление СР. При нажатии
кнопки КП катушка контактора Л получает питание, его глав-
ные и блокировочные контакты Л замыкаются, в результате
чего на обмотки возбужде-
ния и якорь двигателя по-
дается напряжение и по-
следний разгоняется до ра-
бочей скорости. Останавли-
вают двигатель нажатием
кнопки КС, разрывающей
цепь ' катушки линейного
контактора. Линейный кон-
тактор осуществляет, кроме
того, минимальную и нуле-
Рис. 88. Схема прямого пуска двигателя
постоянного тока.
вую защиту двигателя.
При рассмотрении остальных способов пуска
мы не будем
повторять описания цепи катушки линейного контактора, а огра-
ничимся указанием специфических узлов.
Пуск в функции э. д. с. якоря осуществим по разным схемам.
Та, которая представлена на рис. 89, а позволяет выбрать одно-
типные контакторы ускорения 1У и 2У.
В момент включения двигателя почти все напряжение сети
падает на пусковых сопротивлениях и и г2. По мере разгона
двигателя в его якоре наводится возрастающая с увеличением
скорости противо-э. д. с. (E = kcri), на преодоление которой рас-
ходуется все большая часть напряжения сети. При достижении
двигателем определенной скорости срабатывают включенные
параллельно якорю контакторы ускорения. Напряжения их сра-
батывания определяются выражениями:
и1У = Vi + min ('« + г2) ; (240)
+ • (241)
Поскольку эти напряжения одинаковы (благодаря однотип-
ности обоих контакторов), то контактор 1У срабатывает при
меньшей скорости пь т. е. раньше контактора 2У. Это объяс-
няется тем, что при одном и том же значении скорости двига-
теля напряжение U iy на зажимах катушки контактора 1У
168
Принципы и схемы автоматического управления
[Гл. Ь
больше напряжения Uzy на зажимах контактора 2У на вели-
чину падения напряжения в сопротивлении /^(Липы гг)- При раз-
гоне двигателя до скорости и2 напряжение на зажимах второго
контактора достигает величины, требуемой для его срабаты-
вания.
Рассмотренная схема проста и компактна. Но она не лишена
и рушественных недостатков:
а) колебания напряжения сети и температуры катушек кон-
такторов ускорения резко искажают пусковую диаграмму дви-
гателя;
Рис. 89 Схема пуска (а) и механические характеристики (б) двигателя по-
стоянного тока в функции э. д. с. якоря.
/
б) незначительная разница скоростей переключения при мно-
гоступенчатом пуске может вызвать одновременное срабатыва-
ние нескольких контакторов ускорения, в связи с чем этот пуск
осуществим лишь в установках'небольшой мощности, где можно
обойтись двумя ступенями пусковых сопротивлений;
в) при пуске с нагрузочным моментом, которому на
рис. 89, б соответствует ток ZCT1 >Zn п11п. двигатель не достигнет
скорости переключения гц и будет работать с полностью вве-
денными пусковыми сопротивлениями, что вызовет их перего-
рание.
Пуск в функции тока якоря осуществляется с помощью кон-
тактора ускорения У и токового реле ускорения РУ, включенных
по схеме, приведенной на рис. 90, а. Собственное время сраба-
тывания реле РУ выбирается меньшим, чем время срабатыва-
ния контактора У. Механические характеристики пуска двига-
теля приведены на рис. 90, б.
Преимущества этого способа пуска таковы:
а) колебания напряжения сети и температуры катушек кон-
такторов ускорения не влияют на работу схемы; переключения
Пуск и торможение двигателей постоянного тока
169
производятся только при определенных (заданных) значениях
тока;
б) продолжительность пускового процесса пропорциональна
величине инерции электропривода и нагрузке на валу; при не-
больших нагрузках двигатель разгоняется быстрее.
Рис. 90. Схема пуска (а) и механические характеристики (б) дви-
гателя постоянного тока в функции тока якоря.
Недостаток способа состоит в том, что при пуске двигателя
с моментом, превышающим расчетный, ток в главной цепи мо-
жет не уменьшиться до значения, требуемого для переключения,
РУ не отпустит свой якорь и
в конечном счете пусковые со-
противления не будут выклю-
чены.
Рис. 92. Схема пуска и торможе-
ния двигателя постоянного тока
в функции э. д. с. якоря.
Рис. 91. Схема пуска двигателя
' постоянного тока в функции вре-
мени.
Пуск в функции времени наиболее распространен в практике
судовых электроприводов и осуществляется по схеме, показан-
ной на рис. 91.
Преимущества этого способа пуска таковы:
170
Принципы и схемы автоматического управления
[Гл 6
а) схема работает надежно и четко по заранее определен-
ному графику;
б) при многоступенчатом пуске можно применять однотип-
ные контакторы и реле;
в) по истечении заданного времени пусковые сопротивления
обязательно шунтируются.
К недостаткам способа относится то, что:
а) броски пускового тока зависят от нагрузки, от напряже-
ния сети и от инерционности электропривода;
б) выдержка времени и, следовательно, длительность пуска
не зависят от нагрузки; пуск при малых нагрузках осущест-
вляется поэтому с замедлением.
Управление работой электродвигателей может осущест-
вляться также в функции пути, скорости вращения и других
параметров, на изменение которых реагируют реле и другие ап-
параты управления. Автоматическое управление в функции
пути требует ввода путевых и конечных выключателей в схемы
электродвигателей.
Управление процессом электрического торможения двигате-
лей постоянного тока обычно выполняется в функции э. д. с.
или времени. Контроль динамического торможения в функции
э. д. с. представлен на рис. 92. Пуск двигателя производится
нажатием кнопки пуска КП, причем вывод пусковых сопротив-
лений из цепи якоря происходит в функции э. д. с.
Остановка с динамическим торможением двигателя произ-
водится нажатием кнопки КС, в результате чего прерывается
питание катушки линейного контактора Л, который при этом
размыкает цепь главного тока и замыкает цепь катушки реле
динамического торможения РДТ. Через закрывшийся контакт
РДТ получает питание катушка тормозного контактора Т, кото-
рый включает якорь на тормозное сопротивление гт. Двигатель
затормаживается до некоторой минимальной скорости, при кото-
рой э. д. с. якоря уменьшается до напряжения отпадения РДТ.
При этом реле отпускает свой якорь, и окончательное торможе-
ние происходит уже под действием статического момента на-
грузки.
Подробнее процессы управления работой и торможением
электродвигателей будут освещены при рассмотрении конкрет-
ных схем электроприводов палубных механизмов.
§ 40. Принципы пуска и торможения асинхронных двигателей
Для наиболее распространенных на судах асинхронных ко-
роткозамкнутых двигателей применяют: а) прямой пуск и
б) пуск при пониженном напряжении. Двигатели с фазным рото-
ром приводятся в действие путем постепенного выведения
§ 40]
Пуск и торможение асинхронных двигателей
171
пусковых сопротивлений из цепи ротора. Каждый из этих спосо-
бов пуска может выполняться как вручную, так и автоматически.
Автоматический пуск асинхронного короткозамкнутого двига-
теля при пониженном напряжении наиболее часто выполняется
в функции времени, когда подведенное к двигателю при пуске
пониженное напряжение автоматически (при срабатывании реле
времени) повышается по мере разгона двигателя. Автоматиче-
ский пуск асинхронного двигателя с фазным ротором может вы-
полняться в функции: а) частоты тока в роторе, б) тока ротор-
ной цепи и в) времени.
Рис. 93. Схема пуска
асинхронного коротко-
замкнутого двигателя в
функции времени.
На рис. 93 приведена схема пуска асинхронного короткозамк-
нутого двигателя с автоматическим выведением активных сопро-
тивлений из цепи статора в функции времени. В схеме приме-
нено реле времени маятникового типа.
Но при напряженном режиме работы с частыми пусками дви-
гателя эти реле ненадежны, что и вызвало необходимость при-
менять реле времени электромагнитного типа, катушки которых
получают питание через выпрямители от общей сети перемен-
ного тока. Схема пуска асинхронного двигателя с фазным рото-
ром, в которой использовано такое реле, изображена на рис. 94.
Порядок пуска асинхронного двигателя с фазным ротором
в функции тока ясен из схемы, показанной на рис. 95.
Одним из наиболее часто применяемых электрических спосо-
бов торможения асинхронных двигателей является динамическое
торможение, управление которым осуществляется с помощью
электромагнитных реле времени по схеме, изображенной на
рис. 96.
Торможение противовключением происходит всякий раз при
реверсе двигателя, хотя может быть применено и в нереверси-
руемых приводах. Целям автоматического отключения двигателя
172
Принципы и схемы автоматического управления
[Гл. 6
Рис. 96. Схема автоматического управления динамиче-
ским торможением асинхронного короткозамкнутого
двигателя.
$ 41]
Понятие о САР
173
от сети после того, как его скорость в результате торможения
противовключением достигает нулевого значения, служит реле
направления движения.
Рекуперативное генераторное торможение обычно осуществ-
ляется без специальных переключений в схеме.
§ 41. Понятие о системах автоматического регулирования
Всякое воздействие, направленное на то, чтобы осуществить
желательное изменение состояния системы, называют ее уп-
равлением. Частным случаем управления является автома-
тическое регулирование. Объект регулирования и регулятор,
взятые вместе, образуют систему автоматического регулирова-
ния (САР). Такие системы классифицируются:
а) по числу регулируемых параметров — на системы с одним
или несколькими регулируемыми величинами;
б) по наличию усилителя — на системы прямого и непрямого
действия; в системах прямого действия для изменения положе-
ния регулирующего органа используется непосредственно мощ-
ность измерительного элемента, в системах же непрямого дей-
ствия сигналы проходят через усилитель мощности, питаемый
внешним источником энергии;
в) по характеру воздействия на регулирующий орган — на
системы прерывистого (дискретного) и непрерывного действия;
в системах непрерывного действия непрерывному изменению
регулируемой величины соответствует непрерывное изменение
физических величин во всех элементах системы, в системах же
дискретного действия цепь воздействия через определенные про-
межутки времени размыкается; последние из названных систем
в свою очередь подразделяются на релейные и импульсные;
г) по принципу работы — на замкнутые п разомкнутые; пер-
вые действуют по принципу измерения отклонения регулируемой
величины от заданного значения, а вторые — либо по принципу
измерения возмущения, действующего на объект регулирования,
либо по заранее рассчитанной программе управления.
Все системы автоматического управления состоят из отдель-
ных связанных между собой элементов, задачей каждого из ко-
торых является прием воздействия от предыдущего элемента
системы, преобразование этого воздействия и его передача по-
следующему элементу системы.
На вход каждого элемента подается некоторая величина х,
а с выхода снимается величина у. При этом в одних элементах
величина у получается, преобразуясь из х (рис. 97,а), в других
же величина х лишь управляет поступлением от более мощного
источника энергии z для преобразования ее в выходную вели-
чину у (рис. 97,6).
174
Принципы и схемы автоматического управления
[Гл. 6
В том и в другом случае элемент действует направленно.
Таким образом, элементы САР обладают детектирующим свой-
ством, т. е. каждый последующий элемент системы не оказы-
вает обратной реакции на предыдущий.
В функциональном отношении система автоматического
управления состоит из объекта регулирования и регулятора.
Под объектом регулирования понимают элемент
системы, у которого автоматически регулируется один или не-
сколько параметров. Регулятор представляет собой устрой-
ство, состоящее из задающего, чувствительного, усилительного,
исполнительного (регулирующего) и корректирующего элемен-
тов.
Задающие элементы предназначены для задания требуемых
значений регулируемых величин.
Рис. 97 Детектирующее звено системы автомати-
ческого управления.
Чувствительные элементы (датчики) служат для измерения
отклонений регулируемой величины от заданного значения
и преобразования этих отклонений в управляющий сигнал. Они
различаются по характеру входной и выходной величин. В ка-
честве датчиков применяют нелинейные мосты, реостаты, терми-
сторы, термопары, тахогенераторы, сельсины, центробежные
маятники, гироскопы и др.
В некоторых САР высокой точности и чувствительности бы-
вает так, что управляющего сигнала, вырабатываемого датчи-
ком, оказывается недостаточно для приведения в действие регу-
лирующего органа системы. Это вынуждает включать между
ними элемент, предназначенный для усиления управляющего
сигнала В судовых системах автоматического управления наи-
большее распространение получили электромашинные, магнит-
ные и полупроводниковые усилители.
Исполнительным устройством (или серводвигателем САР)
называют привод, который перемещает регулирующий орган
в соответствии с сигналом управления.
Корректирующие элементы (стабилизирующие устройства)
служат для повышения устойчивости и качества процессов ав-
томатического управления путем изменения динамических
свойств системы. Стабилизирующие устройства разделяются на
последовательные и параллельные. Первые включаются в пря-
мой канал прохождения сигнала управления, вторые представ-
§ 41]
Понятие о САР
П5
ляют собой обратные связи. Корректирующие элементы бывают
как непрерывного, так и дискретного действия.
Во время работы система автоматического управления испы-
тывает:
а) управляющее (или задающее) воздействие, определяющее
собой заданное значение регулируемой величины;
б) возмущающие воздействия, представляющие собой сумму
всевозможных факторов, отклоняющих процесс от заданного
его течения.
В системах замкнутого цикла регулятор реагирует на ошибку
рассогласования, а в более сложных случаях также на произ-
водные и интегралы по времени величины ошибки. В процессе
регулирования все время осуществляется обратная связь: регу-
лируемая величина сравнивается с управляющим воздействием
и определяется ошибка, в соответствии с которой автоматически
устанавливается значение регулирующего воздействия, посту-
пающего на вход объекта регулирования. Таким образом, выра-
батывая регулирующее воздействие и подавляя возмущающее
воздействие, система все время стремится к устранению возни-
кающей ошибки.
По своему назначению системы автоматического регулирова-
ния делятся на три группы:
а) стабилизирующие;
б) программного регулирования;
в) следящие.
В стабилизирующих САР заданные значения регулируемых
величин постоянны.
В системах программного регулирования заданные значения
регулируемых величин изменяются во времени по определен-
ному закону.
В следящих системах регулируемая величина является неиз-
вестной функцией времени.
Работу разомкнутых и замкнутых САР рассмотрим на при-
мере регулирования скорости двигателя постоянного тока в си-
стеме Г—Д (рис. 98), причем для удобства построения и анализа
работы САР воспользуемся так называемой функциональной
схемой (блок-схемой), в которой каждая машина, каждый аппа-
рат или механизм, входящий в систему, изображается в виде
прямоугольника со стрелками, указывающими взаимодействие
между частями схемы.
Блок-схема системы Г—Д для регулирования скорости дви
гателя имеет вид, изображенный на рис. 99. Из схемы видно,
что в силу свойства односторонней передачи сигнала управ-
ления последний проходит только в прямом направлении от
задающего элемента к объекту регулирования. Регулируемая
величина системой не контролируется. Поэтому для поддер-
176
Принципы и схемы автоматического управления
[Г.7. 6
жания ее заданного значения оператор все время должен на-
блюдать за показанием контрольного прибора (на схеме
рис. 98 прибор п, отградуированный в делениях скорости) и
Рис. 98. Разомкнутая система регулирования скорости двигателя.
соответствующим образом воздействовать на задающий элемент
системы.
Такая система носит название разомкнутой. В зависи-
мости от изменения возмущающего воздействия (нагрузки),
Управляющее задающие
воздействие элемент
Усилитель-
ные
элемент
Корректи-
рующие,
элемент
Регулиру-
ющие
элемент
возмущающее
I воздействие
| (нагрузка)
Объект —
регулиро- —
6а ни я
Регулируемая
величина
(скорость)
Чубстбите-
Льный
Элемент
Рис. 99. Функциональная схема разомкнутого цикла.
при одном и том же положении ползунка потенциометра, ско-
рость исполнительного двигателя, управляемого этой системой,
может быть различной. Подобная неоднозначность связи между
входной и выходной величинами является существенным недо-
статком разомкнутых систем управления.
§41]
Понятие о САР
177
Если в схеме, представленной на рис. 98, выходную величину
датчика подать не на зажимы прибора п, а в цепь задающей
обмотки или в одну из самостоятельных обмоток управления
усилителя, то получится замкнутый цикл прохождения сигналов
(рис. 100), и выходная величина САР (скорость), преобразован-
ная в требуемый управляющий сигнал (напряжение), будет по-
даваться на вход системы
элемент
Рис. 100. Замкнутая система автоматического управления.
Такие системы автоматического управления называются
замкнутыми. В них устранено влияние возмущающих воз-
действий, которые приводят к неоднозначной зависимости между
входной и выходной величинами САР. Применение этих систем
освобождает оператора от постоянного наблюдения и воздей-
ствия на задающий элемент системы.
Таким образом, система автоматического управления превра-
щается из разомкнутой в замкнутую благодаря введению
обратных связей, под которыми понимаются связи после-
дующих звеньев системы с предыдущими. В зависимости от
рода выходной величины, на изменение. которой реагирует
обратная связь, различают обратные связи по скорости, по току,
по напряжению и т. д. Обратные связи бывают положительными
и отрицательными. Положительной называют обратную
связь, если повышение регулируемой величины на выходе вызы-
вает увеличение общего управляющего сигнала, подаваемого
7 КА Чекунов
178
Принципы и схемы автоматического управления
[Гл 6
на вход системы, а отрицательной, если увеличение регули-
руемой величины приводит к уменьшению подаваемого на вход
сигнала. Далее, различают жесткие и гибкие обратные связи.
Те из них, которые действуют постоянно, называются жест-
кими, а осуществляемые только в переходных режимах —
гибкими. Гибкую связь обеспечивает, например, стабилизи-
рующая обмотка, включаемая через стабилизирующий транс-
форматор или конденсатор.
Обратная связь между выходом и входом какого-либо одного
элемента САР называется местной, или внутренней,
Рис. 101. Функциональная схема многоконтурной САР.
обратной связью. Связь же, соединяющая выход и вход всей
системы, называется главной обратной связью. По количе-
ству обратных связей различают одноконтурные и многоконтур-
ные САР. На рис. 101 изображена функциональная схема мно-
гоконтурной САР.
САР могут работать в двух различных режимах: статическом
и Динамическом. Статическим (установившимся) ре-
жимом называется работа системы с постоянными параметрами,
характеризующими данный режим работы. Переход от одного
установившегося состояния системы к другому носит название
динамического (переходного) режима.
§ 42. Электромашинный усилитель в системе
генератор — двигатель
Как уже отмечалось в предыдущем параграфе, управляю-
щий сигнал, вырабатываемый чувствительным элементом (дат-
чиком), обычно бывает недостаточно сильным, чтобы привести
в действие исполнительный орган (двигатель). Поэтому в систе-
му вводят различного рода усилители.
Усилителем называют устройство, позволяющее с помо-
щью малого сигнала управлять поступлением энергии от внеш-
него источника мощности. Входные и выходные величины усили-
$ 42] Электромашинный усилитель в системе Г—Д 179
теля должны быть одинаковой физической природы. В каждом
усилителе различают вход — место приложения управляющего
сигнала и выход — зажимы, с которых снимается регулируе-
мая величина. Отношение регулируемой величины на выходе
к величине управляющего сигнала в установившемся режиме
называется коэффициентом усиления усилителя.
Различают коэффициенты усиления: ,
по мощности
Рвых .
Рвх ’
К
по напряжению
t, ___ б/ВЫХ
RyU~~ и
и вх
по току
7вых
k
По принципу действия усилители делятся на электромехани-
ческие (в частности, электромашинные), электрические (маг-
нитные, электронные, полупроводниковые) и механические (гид-
равлические, пневматические).
Электромашинные усилители (ЭМУ) получили особенно ши-
рокое распространение в тех схемах автоматического управле-
ния, в которых необходимы:
а) большие мощности на выходе усилителя;
б) высокий коэффициент усиления;
в) малая инерционность;
г) управление усилителем в функции нескольких пара-
метров.
Электромашинным усилителем может служить любая ма-
шина постоянного тока, если только регулированием возбуж-
дения удается изменять на зажимах ее якоря мощность, кото-
рую она получает от приводного двигателя. Если у генератора
постоянного тока мощность цепи возбуждения составляет 5%
от мощности якорной обмотки, то такой генератор можно рас-
сматривать как усилитель с коэффициентом усиления.
Для получения более высоких коэффициентов усиления не-
обходимо в качестве электромашинных усилителей применять
машины специального исполнения. Примером таких машин, по-
лучивших наибольшее распространение в судовых электропри-
водах, может служить ЭМУ с поперечным полем.
Это — генератор постоянного тока с двумя комплектами ще-
ток на коллекторе и несколькими обмотками возбуждения
7*
180
Принципы и схемы автоматическоео управления
[Гл 6
(управления) на полюсах. Чтобы обеспечить наибольшую чув-
ствительность ЭМУ, его магнитную систему делают ненасыщен-
ной и набирают из отдельных листов высококачественной стали.
Обмотки управления ЭМУ, взятые вместе, а именно задающая,
стабилизирующая, обратной связи по напряжению, току, ско-
рости и др., а также компенсационная обмотка, предназначен-
ная для устранения вредного
h
—0 +
о,
п
аг
5г
Фо
(W
Фг
-if-
Uo
+ Ь-
-o' -
То
Рис. 102. Схема ЭМУ с попереч
ным полем.
влияния реакции якоря, создают
результирующий магнитный по- ‘
ток полюсов.
Нарис. 102 для упрощения из-
ображена только одна задающая
обмотка с магнитным потоком Фо.
Вращение якоря в этом магнит-
ном поле индуктирует в витках
якорной обмотки э. д. с. Ei, на-
правление которой указано вну-
три окружности якоря. Эту э. д. с.
можно снять, если в плоскости,
перпендикулярной к магнитному
потоку Фо, расположить щетки
«1—аг. Чтобы под действием
э. д. с. Ei протекал наибольший
ток /ь щетки G] —аг закорачива-
ют. Это уменьшает размеры об-
мотки управления и снижает по-
требляемую ею мощность. Ток Ц, протекая по виткам обмотки
якоря, создает магнитный поток Фь направленный по оси щеток
а\ — а2. Этот поперечный магнитный поток пересекает витки
якоря и наводит в них э. д. с. Е2, которая (ее направление ука-
зано вне окружности якоря) снимается со щеток б\ — б2, соеди-
ненных с нагрузкой Если в цепи имеется ток нагрузки 12, то
в машине будет наблюдаться еще и поток реакции якоря Ф2,
который будет искажать задающий сигнал и режим работы
усилителя. Чтобы компенсировать этот поток, в пазах полюсов
машины укладывают компенсационную обмотку КО, включен-
ную в цепь тока нагрузки 12. Ее магнитный поток Фко имеет на-
правление, противоположное магнитному потоку Ф2, и обычно
равен ему по величине.
Таким образом, ЭМУ с поперечным полем обеспечивает двух-
ступенчатое усиление мощности: на первой ступени мощность
усиливается до на второй — мощность Р} =
=EiIl усиливается до Рвых=О212. Коэффициент усиления ЭМУ
определится из выражения:
Р ВЫХ __
kyp р ~ р
ГВХ вх
Р1 “ Ку1 КУ2
§ 42]
Электромашинный усилитель в системе Г—Д
181
Обычно у ЭМУ с поперечным полем &yi=200 и /гУ2=50.
В этом случае общий коэффициент усиления по мощности
k „ = 200-50= 10000.
Электромашинные усилители весьма часто применяются в си-
стеме генератор — двигатель, где служат либо генератором, либо
возбудителем. ЭМУ обеспечивают:
а) увеличение жесткости механических характеристик и, сле-
довательно, расширение диапазона регулирования скорости ис-
полнительного двигателя системы Г—Д при полной нагрузке;
б) непрерывное (бессту-
пенчатое) управление элек-
троприводом;
в) ускорение переход-
ных процессов (пуска, тор-
можения и др).
г) получение экскава-
торной механической харак-
теристики исполнительного
двигателя.
Системы Г—Д с ЭМУ
обычно работают по замк-
нутому циклу. Выбор той
или иной схемы включения,
а также того или иного чис-
Рис 103 Схема Г—Д с ЭМУ в качестве
генератора со стабилизирующей обмот-
кой управления и отрицательной обрат-
ной связью по скорости
ла используемых обмоток
управления ЭМУ зависит, главным образом, от того, какие тре-
бования в отношении регулирования скорости предъявляются
к электроприводу. Так, для поддержания постоянной скорости
двигателя при изменении нагрузки на его валу целесообразно
осуществить схемы, представленные на рис. 103 и 104.
На первом из этих рисунков изображена схема системы ге-
нератор— двигатель для установки небольшой мощности.
Электромашинный усилитель в этом случае используется в ка-
честве генератора, питающего исполнительный двигатель, и
имеет три обмотки управления, из которых ОУ1— задающая
обмотка, ОУ2— стабилизирующая обмотка и ОУЗ— обмотка
отрицательной обратной связи по скорости Необходимая по
технологическому процессу скорость задается изменением регу-
лировочного сопротивления гр в цепи задающей обмотки управ-
ления. Поддержание этой скорости на заданном уровне выпол-
няется обмотками ОУ2 и ОУЗ.
Допустим, что во время работы двигателя нагрузка на его
валу увеличивается, в результате чего скорость двигателя и
тахогенератора уменьшается. Уменьшаются также э. д. с. тахо-
генератора и ток в обмотке обратной связи ОУЗ. В связи с этим
182
Принципы и схемы автоматического управления
[Гл. 6
уменьшается размагничивающее действие этой обмотки, и э. д. с.
ЭМУ возрастает, увеличивая скорость исполнительного двига-
теля примерно до прежнего значения. При увеличении скорости
исполнительного двигателя обмотка ОУЗ оказывает обратное
действие. В том случае, если э. д. с. тахогенератора недоста-
точна для питания обмотки управления, его якорь включают
в цепь задающей обмотки с таким расчетом, чтобы индуктиро-
ванная в нем э. д. с. была направлена встречно задающему на-
пряжению. В этом случае действие обратной связи аналогично
рассмотренному.
Рис. 104. Схема Г—Д с ЭМУ в качестве возбудителя
и с обратной связью по току и напряжению.
При больших коэффициентах усиления, которыми обладают
ЭМУ, всякие изменения тока в обмотках управления могут вы-
звать колебания напряжения на выходе усилителя. В зависи-
мости от параметров системы эти колебания могут быть зату-
хающими или незатухающими. Если первые только нарушают
нормальный режим работы установки, то вторые делают ра-
боту ее совершенно невозможной. Для устранения этих колеба-
ний и нужна гибкая обратная связь по напряжению, которая
осуществляется стабилизирующей обмоткой ОУ2. Стабилизи-
рующая обмотка включается на выходное напряжение усили-
теля через стабилизирующий трансформатор (или конденсатор)
и работает лишь при колебаниях этого напряжения, препятствуя
его изменениям.
Установка, схема которой изображена на рис. 104, обладает
более значительной мощностью. Здесь ЭМУ применяется в каче-
стве возбудителя генератора. На схеме указаны три обмотки
управления ЭМУ: ОУ1 — задающая, ОУ2— обмотка отрица-
тельной обратной связи по напряжению, ОУЗ — обмотка поло-
жительной обратной связи по току. В целях упрощения схемы
на ней не указана стабилизирующая обмотка, работа которой
рассмотрена выше.
§42]
Электромашинный усилитель в системе Г—Д
183
В случае увеличения напряжения в цепи главного тока об-
мотка ОУ2 уменьшает задающий поток управления, а в случае
уменьшения напряжения — ослабляет свое размагничивающее
действие. Кроме того, обмотка ОУ2 способствует быстродейст-
вию системы. В момент пуска напряжение главной цепи и ток
в обмотке ОУ2 отсутствуют. Поэтому при подаче напряжения
в задающую обмотку ток ее резко возрастает, увеличивая маг-
нитный поток до насыщения магнитной системы усилителя. Это
вызывает быстрое нарастание тока возбуждения генератора,
а следовательно, и напряжения на зажимах исполнительного
двигателя, в результате чего последний быстро разгоняется.
Насыщение магнитной системы усилителя не позволяет обмотке
обратной связи сразу же после появления на генераторе сни-
мать форсировку возбуждения (под которой понимают увели-
чение тока возбуждения при пуске).
Обмотка ОУЗ обеспечивает положительную обратную связь
по току, т. е. компенсирует изменение падения напряжения
в якоре двигателя прн увеличении тока нагрузки. Эта обмотка
также способствует более быстрому протеканию переходных
процессов, резко усиливая под влиянием пускового тока магнит-
ный поток возбуждения ЭМУ.
Электромашинные усилители, применяемые в системе Г—Д,
позволяют также получить экскаваторные механические харак-
теристики, что обеспечивается вводом в схему отрицательной
обратной связи с отсечкой по току или по напряжению.
На рис. 105, а изображена схема управления при отрицатель-
ной обратной связи с отсечкой по току. Большинство элементов
схемы работает аналогично одноименным узлам ранее приведен-
ных схем. Поэтому рассмотрим лишь действие узла отсечки по
току, который состоит из потенциометра /7, выпрямителя В и об-
мотки управления ОУ4, включенной на падение напряжения
в сопротивлении гщ (или в обмотке дополнительных полюсов дви-
гателя). Таким образом, в цепи обмотки ОУ4 имеются два про-
тивоположно направленных напряжения: снимаемое с потенцио-
метра напряжение сравнения Г7ср и падение напряжения в сопро-
тивлении Гпь Напряжение Г7ср задается при настройке схемы и
во время работы является постоянным, падение напряжения
иш~1гш изменяется пропорционально току нагрузки и моменту
на валу исполнительного двигателя.
Выпрямитель В включен таким образом, что ток в цепи
обмотки ОУ4 возможен лишь под действием напряжения 17т.
Если токи I меньше некоторого заданного значения тока на-
грузки, то £Ад<£7Ср н обратная связь по току не действует. Дви-
гатель работает на участке АБ характеристики (рис. 105, б).
Когда рабочий ток и момент двигателя достигают предель-
ных значений (точка Б), то падение напряжения в сопротивле-
184
Принципы и схемы автоматического управления
[Гл. 6
нии гш становится равным напряжению сравнения, а затем пре-
вышает его (£/ш>^ср)- Тогда в цепи обмотки ОУ4 начинает
течь ток, который быстро размагничивает усилитель и вызывает
уменьшение э. д. с. генератора и скорости исполнительного дви-
гателя до нуля (участок БВ механической характеристики).
Двигатель переходит в режим короткого замыкания с моментом
Л1К на валу. С уменьшением нагрузки отрицательная обратная
+
Рис. 105. Схема управления при отрицательной обратной связи с отсеч-
кой по току (а) и экскаваторная механическая характеристика (б) си-
стемы Г—Д.
связь по току прекращается и двигатель разгоняется до прежней
скорости.
§ 43. Схемы управления асинхронными двигателями
с применением магнитных усилителей
В последнее время стали все чаще отказываться от исполь-
зования в судовых электроприводах двигателей постоянного
тока, заменяя их более простыми и надежными асинхронными
двигателями. Во многих случаях это приводит к применению
в схемах управления магнитных усилителей (МУ), позволяющих
осуществить плавный пуск и регулирование скорости асинхрон-
ных двигателей. Заметим, что МУ в этих схемах можно исполь-
зовать в качестве как силовых, так и промежуточных усили-
телей.
Одна из конструкций магнитных усилителей (рис. 106, а)
представляет собой трехстержневой (Ш-образный) сердечник,
на крайних стержнях которого расположена разделенная по-
£ 43]
Схемы управления асинхронными двигателями
185
полам рабочая обмотка переменного тока, а на среднем —
обмотка управления, питающаяся постоянным током от специ-
альных источников или от общей сети переменного тока через
полупроводниковые выпрямители. Рабочая обмотка включена
последовательно с потребителем энергии zHarp. Части рабочей
обмотки соединены между собой так, что протекающий по ним
ток нагрузки /раб создает магнитные потоки, имеющие в сред-
нем стержне противоположные направления. В этом случае ре-
зультирующий переменный поток в стержне равен нулю, ибо
Рис. 106. Схема включения (а) и нагрузочная характеристика (б) магнит-
ного усилителя.
иначе он наводил бы в обмотке управления вторичную э. д. с.,
искажающую ток управления и, следовательно, режим ра-
боты МУ.
Исходной основой для анализа работы магнитного усили-
теля служит нагрузочная характеристика, выражающая зави-
симость тока нагрузки /раб от тока управления 1У (рис. 106,6).
Из нагрузочной характеристики видно, что наибольший ко-
эффициент усиления по току
£ А/раб
у/ ллГ
может быть получен на самом крутом участке характеристики
(участок аб).
Чтобы увеличить коэффициент усиления МУ при малых то-
ках управления, применяют постоянное подмагничивание маг-
нитной цепи усилителя (аналогично сдвигу характеристики
влево), для чего используют специальные обмотки смещения,
включаемые на постоянное напряжение. Коэффициент усиления
МУ можно увеличить также, введя положительные обратные
связи. Отрицательные обратные связи улучшают стабильность
работы системы. ,
186
Принципы и схемы автоматического управления
[Гл. 6
Рис. 107. Схема автоматичес-
кого пуска асинхронного двига-
теля с помощью трехфазного
дросселя насыщения.
Силовые магнитные усилители без обратных связей иногда
называют дросселями насыщения. Они бывают как
однофазными, так и трехфазными.
Для автоматического пуска асинхронного короткозамкнутого
двигателя при помощи дросселей насыщения необходимо осу-
ществить схему, показанную на рис. 107. При включении двига-
теля в сеть напряжение на зажимах статорной обмотки будет
небольшим ввиду значительного падения напряжения в дрос-
селе насыщения. Это ограничивает бросок пускового тока. По
мере разгона двигателя и уменьшения рабочего тока снижается
падение напряжения в рабочих об-
мотках дросселя, из-за чего увели-
чиваются напряжение на зажимах
статора и ток в обмотке управления
ОУ дросселя. В результате увели-,
чивается насыщение магнито-
провода дросселя, уменьшается его
индуктивное сопротивление и, на-
конец, еще больше возрастает на-
пряжение на зажимах статора
двигателя. Так автоматически «вы-
водится» индуктивное сопротивле-
ние из цепи статора, и двигатель
постепенно развивает рабочую
скорость.
Получение низких скоростей асинхронного двигателя на
жестких механических характеристиках обеспечивается замкну-
той схемой управления с отрицательной обратной связью по
скорости (рис. 108, а), в которой, кроме силовых магнитных
усилителей (дросселей насыщения Др), использован также
промежуточный усилитель У. В этой схеме в каждую фазу
асинхронного двигателя АД включена рабочая обмотка
дросселя насыщения Др. Обмотка управления ОУ дросселя
включена через промежуточный усилитель У на разность между
задающим напряжением 1/3 и напряжением тахогенератора Птг.
Задающее напряжение устанавливается потенциометрическим
делителем напряжения ДН, а напряжение тахогенератора за-
висит от скорости вращения асинхронного двигателя. В каче-
стве промежуточного усилителя может быть использован элек-
тромашинный или магнитный усилитель. Вентиль В предотвра-
щает возможность подмагничивания током управления от тахо-
генератора при увеличении скорости вращения двигателя, когда
(7ТГ становится больше U3. В противном случае стабильная ра-
бота привода была бы невозможной.
На рис. 108, б изображены механические характеристики
асинхронного двигателя при различных значениях тока управ-
§
Схемы управления асинхронными двигателями
187
ления. Кривая 1 является естественной характеристикой при
работе двигателя без дросселей насыщения. Для получения
больших моментов при низких скоростях следует выбирать дви-
гатели со значительным активным сопротивлением цепи ротора.
Кривая 2 соответствует максимальному току управления. Кри-
вая 5 — току управления /у = 0.
а)
Рис. 108. Схема включе-
ния (а) и механические
характеристики (б) асин-
хронного двигателя с
дросселем насыщения и
обратной связью по ско-
рости.
Пусть двигатель работает со скоростью tii, преодолевая мо-
мент статического сопротивления MCTi, что соответствует
точке А на кривой 5. Так как в этом случае Zy=0, то
Пу = f/3 — Птг = 0, т. е. U3 = UTT.
Увеличение момента нагрузки до некоторого значения МСт2
приведет к тому, что скорость двигателя начнет уменьшаться,
вызывая уменьшение напряжения Птг, и, стало быть, появление
напряжения Uy и тока 1У в цепи обмотки управления дрос-
селя ОУ. В конечном счете увеличится напряжение на зажимах
статора двигателя, что вызовет переход его на другую характе-
ристику, соответствующую новому значению напряжения
188
Принципы и схемы автоматического управления
[Гл. 6
(кривые 4, 3 и 2). Переход закончится по достижении двигате-
лем скорости П2, при которой он будет развивать момент, рав-
ный Л1Ст2-
Автоматическое изменение тока управления дросселя с из-
менением скорости двигателя (при U3=const) обусловливает
работу на кривой 6, которая является механической характери-
стикой управляемого двигателя при работе его в замкнутой
Рис. 109. Схема управления асинхрон-
ным двигателем при помощи дросселя
насыщения с обратной связью по току
и напряжению.
реход из двигательного режима
схеме регулирования скоро-
сти.
С изменением величины
задающего напряжения дви-
гатель будет работать на
механических характеристи-
ках 7, 8, 9 и т. д. при мо-
менте Мст2, развивая ско-
рость п3, пъ и т. д. Кри-
вая 8 получена при Us=0.
Точка Б на кривой 5
соответствует £73=0 и ра-
боте двигателя в режиме
короткого замыкания. При
всех значениях Z7;i<'0 дви-
гатель переходит в тормоз-
ной режим противовключе-
ния. Следовательно, без спе-
циальных переключений в
схеме, простым уменьшени-
ем задающего напряжения
U3, можно осуществить пе-
в тормозной. Этим способом
получены скорости п4 и п5.
Недостатком рассмотренной схемы является наличие нерегу-
лируемой зоны между кривой 5 и осью ординат, а также невоз-
можность перехода двигателя в генераторный рекуперативный
режим при низких скоростях.
На рис. 109 приведена еще одна схема регулирования ско-
рости асинхронного короткозамкнутого двигателя — при по-
мощи магнитного усилителя с тремя обмотками управления:
задающей обмоткой ОУ1, обмоткой отрицательной обратной
связи по напряжению ОУ2 и обмоткой положительной обрат-
ной связи по току ОУЗ. Эта схема гарантирует постоянство
скорости при изменении нагрузки в определенных пределах
и широкий диапазон регулирования (Д = 10:1), обеспечивае-
мый изменением сопротивлений гп, гд и гш.
Рассмотренные схемы управления показывают, что к до-
стоинствам магнитных усилителей относится:
§ 44]
Тиристорные электроприводы
189
а) высокая надежность работы благодаря отсутствию под-
вижных частей;
б) практически неограниченный срок службы и нечувстви-
тельность к тряске и вибрации;
в) простота и плавность регулирования скорости асинхрон-
ных двигателей в широких пределах;
г) отсутствие искрообразования при регулировании под
нагрузкой (благодаря отсутствию подвижных контактов);
д) малый расход мощности в цепях управления при регули-
ровании.
Вместе с тем магнитные усилители имеют ряд недостатков,
которые ограничивают их применение в судовых установках.
Это:
а) большой вес и габариты при работе в электрических це-
пях с частотой 50 гц;
б) значительная инерционность (в основном из-за обмоток
управления);
в) изменяющиеся пропорционально скольжению потери
мощности в роторе короткозамкнутого асинхронного двигателя,
могущие вызвать перегрев ротора при работе двигателя на'
низких скоростях.
Последний недостаток ограничивает применение схем дрос-
сельного управления только следующими случаями:
а) при незначительной продолжительности работы на низ-
ких скоростях;
б) при изменении нагрузки на валу двигателя по так назы-
ваемому вентиляторному закону;
в) во взрывоопасных помещениях, где недопустимо исполь-
зование двигателей постоянного тока.
§ 44. Тиристорные электроприводы
Описанные выше системы генератор — двигатель и схемы
дроссельного управления, применяемые в судовых регулируе-
мых приводах, обладают, наряду со значительными достоин-
ствами, и существенными недостатками. От многих из этих не-
достатков свободны так называемые тиристорные электропри-
воды.
Их преимущества по сравнению с другими видами приводов:
а) гибкость управления, позволяющая с помощью маломощ-
ных сигналов бесконтактных аппаратов получить любые задан-
ные режимы работы двигателя (коэффициент усиления тиристо-
ров kyP —104 -г-105);
б) безынерционность тиристоров, обеспечивающая быстро-
действие электропривода и минимальное время протекания пе-
реходных процессов;
190
Принципы и схемы автоматического управления
{Гл. 6
в) высокая надежность и экономичность в работе;
г) постоянная готовность к действию и длительный срок
службы;
д) сохранение работоспособности при вибрации, ударах
и колебании температуры от —60 до +130° С;
е) малый вес и незначительные габариты;
ж) простота обслуживания;
з) бесшумность работы и др.
Тиристорное управление применяют для двигателей как по-
стоянного, так и переменного тока. Тиристоры и кремниевые
диоды используются на судах не только в электроприводах, но
и в схемах зарядки аккумуляторных батарей, в системах воз-
буждения синхронных генераторов и двигателей, в установках
для питания дуговых прожекторов, в устройствах катодной за-
' щиты корпуса судна, при электросварке на постоянном токе.
Преимущества тиристорного управления, а также прогрессив-
ность различных установок на тиристорах позволяют сделать
вывод о том, что в ближайшее время они получат весьма ши-
рокое применение на судах.
Тиристор — это кремниевый управляемый вентиль, пред-
ставляющий собой четырехслойный элемент типа р—п—р—п,
имеющий выводы от двух крайних областей р и п и от одной
внутренней базовой области р (рис. 110).
Подача положительного потенциала на анод (область р)
и отрицательного на катод (область п) соответствует прямому
включению первого и третьего переходов р—п и обратному
включению второго перехода п—р, являющегося общим пере-
ходом триодов (транзисторов) р—п—р и п—р—п.
При таком включении переход п—р обладает большим со-
противлением, и тиристор начинает пропускать через себя ток
только после того, как анодное напряжение достигает значения
так называемого напряжения открывания или переключения (7П.
Для различных типов тиристоров оно колеблется в пределах от
50 до 1000 в. После появления тока сопротивление тиристора
резко снижается до значения, которое он имеет в открытом
состоянии, и ток в цепи теперь определяется уже сопротивле-
нием нагрузки.
Чтобы ликвидировать указанный «порог открывания» и сни-
зить Дп ДО значения прямого напряжения, к управляющему
электроду (средняя область р) требуется приложить положи-
тельный импульс (Uy—20 в). При этом тиристор открывается
и подобно тиратрону, независимо от наличия управляющего
импульса, остается открытым до тех пор, пока не прекращается
ток в анодной цепи (в цепи нагрузки).
В цепях переменного тока закрытие тиристора происходит
в момент прохождения тока нагрузки через нулевое значение
§ 44]
Тиристорные электроприводы
191
при отсутствии положительного потенциала на управляющем
электроде (естественная коммутация тиристоров). Поэтому для
поддержания питания нагрузки необходимо во время каждой
полуволны напряжения, соответствующей прямому включению
тиристора, вновь подать на управляющий электрод открываю-
щий сигнал.
Рис. 110 Тиристор: а — структура; б — обозначение на
схеме; в — графики выпрямленного (вверху) и управ-
ляющего (внизу) напряжений.
Эта особенность работы тиристора позволяет изменять вели-
чину выпрямленного напряжения и тока. Управление заклю-
чается в том, что момент подачи управляющего импульса сме-
щают относительно фазы анодного напряжения на угол а, на-
зываемый углом отпирания или углом регулирова-
ния тиристора. Это смещение задерживает вступление
в работу управляемого вентиля. Таким образом, изменяя угол
регулирования а, можно получать различные величины среднего
значения выпрямленного напряжения и тока.
Выпрямители средней и большой мощности, используемые
в схемах электропривода, обычно питаются от сети трехфазного
тока. В этом случае их включают в трехфазную однополупе-
192
Принципы и схемы автоматического управления
[Гл. 6
риодную схему с нулевой точкой или в трехфазную мостовую
схему. Вторая предпочтительнее, поскольку:
а) дает вдвое большее напряжение выпрямленного тока
(благодаря использованию обеих полуволн напряжения пере-
менного тока);
б) позволяет применять тиристоры на более низкое напря-
- жение при одинаковом значении выпрямленного напряжения на
нагрузке;
в) уменьшает зону прерывистых токов;
г) обеспечивает более полное использование силового транс-
д) улучшает работу двигателя (благодаря меньшей пульса-
ции выпрямленного напряжения).
В трехфазных схемах включения каждый вентиль пропу-
скает ток в течение одной трети периода. При использовании
неуправляемых вентилей переход тока с одной фазы на другую
происходит в момент, соответствующий точке m пересечения
кривых напряжения коммутирующихся фаз, так как за этой
точкой потенциал анода вентиля следующей фазы становится
выше потенциала анода вентиля предыдущей фазы (рис. 111,а).
Если же применить тиристоры и задержать относительно
точки пг момент подачи отпирающего импульса к управляю-
щему электроду на угол регулирования а, то среднее значение
выпрямленного напряжения Ь'в ср будет изменяться, причем
и = С/-COSа, (242)
где UBo — выпрямленное напряжение неуправляемого вентиля.
Из выражения (242) следует, что с помощью тиристоров
можно не только выпрямлять переменный ток в постоянный, но
и изменять величину подводимого к двигателю напряжения,
причем с увеличением угла регулирования а выпрямленное на-
пряжение будет уменьшаться и при а=90°3 среднее значение
выпрямленного напряжения окажется равным нулю (Пвср = 0).
§ 44}
Тиристорные электроприводы
193
В случае дальнейшего увеличения угла регулирования
(а>90°э) среднее значение выпрямленного напряжения стано-
вится отрицательным, и тиристорный преобразователь из вы-
прямительного режима переходит в инверторный. Теперь при
сохранении прежнего направления тока и изменении знака вы-
ходного напряжения мощность начинает передаваться от источ-
ника постоянного тока (двигателя) через преобразователь в сеть
переменного тока.
Иногда в целях экономии тиристоров в анодное плечо пре-
образователей с трехфазной мостовой схемой включают неуп-
Рис. 112. Симметричная схема включения (а) и механические
характеристики (б) двигателя постоянного тока при тиристор-
ном управлении.
равляемые вентили. Однако такая несимметричная схема дает
большие пульсации в кривой выпрямленного напряжения и ис-
ключает использование преобразователя в инверторном режиме.
Поэтому в реверсируемых приводах и там, где предусматри-
вается рекуперативный генераторный режим, применяют так
называемые симметричные схемы преобразовате-
лей с шестью управляемыми вентилями (тиристорами).
Как уже отмечалось, через тиристорный преобразователь
можно включать в сеть трехфазного переменного тока двига-
тели и постоянного, и переменного тока.
Симметричная схема включения и механические характери-
стики двигателя постоянного тока с независимым возбуждением
приведены на рис. 112. Из рисунка явствует, что механические
характеристики при различных значениях угла регулирова-
ния а аналогичны характеристикам исполнительного двигателя
системы Г—Д. Отличительной особенностью их является не-
сколько большая крутизна и искривление характеристик при
194
Принципы и схемы автоматического управления
[Гл. 6
малых нагрузках на валу, что связано с прерывистостью вы-
прямленного тока.
Для цепи тока якоря, в котором действует выпрямленное
напряжение L7B и противо-э. д. с. якоря Еа, можно записать сле-
дующее уравнение равновесия э. д. с.:
UB-Ea = Ira+L^-, (243)
at
где га и L — активное сопротивление и индуктивность вторичной
обмотки трансформатора (синхронного генератора), якоря, ка-
тодного реактора и других элементов якорной цепи.
Рис. 113. Тиристорное управление асинхронным двигателем: а —
схема включения; б — кривая напряжения на зажимах статора.
Так как выпрямленное напряжение UE пульсирует, а э. д. с. Еа
в силу инерционности якоря в течение полупериода остается
практически постоянной, то левая часть уравнения (243) в неко-
торые моменты может принимать отрицательное значение. Если
нагрузка велика, то энергии, запасенной в обмотке, достаточно
для поддержания тока прежнего направления. Если же нагрузка
мала, то ток, снижаясь до нуля быстрее, нежели успевает от-
крыться следующий вентиль, становится прерывистым.
По мере того, как длительность импульсов тока умень-
шается, среднее выпрямленное напряжение за время работы
тиристоров возрастает. Из уравнения (243) следует, что э. д. с.
якоря должна уравновешивать среднее выпрямленное напря-
жение за время работы тиристора. Поэтому с увеличением на-
пряжения растет э. д. с., а следовательно, и скорость двигателя.
§ 45}
Защита судовых электроприводов
195
Наиболее перспективным способом регулирования скорости
асинхронных короткозамкнутых двигателей в настоящее время
надо считать частотное регулирование, но лишь при условии
замены громоздких машинных преобразователей частоты в элек-
троприводах тиристорными. Схема, позволяющая осуществить
регулирование скорости, реверс и торможение асинхронного
двигателя с рекуперацией энергии в сеть, представлена на
рис. 113. При помощи диодов Дх трехфазный ток сети выпрям-
ляется в постоянный; пульсации его сглаживаются дросселем Др
и конденсатором С. Открывание и закрывание тиристоров 1\
при соблюдении определенной частоты, скважности и очеред-
ности формируют три сдвинутых на угол 120° синусоидальных
напряжения, предназначенных для питания асинхронного дви-
гателя. Изменение скважности тиристоров Т\ позволяет регули-
ровать частоту и напряжение, а изменение последовательности
открывания тиристоров в двух фазах делает возможным реверс
двигателя.
Рекуперация электроэнергии осуществляется путем выпрям-
ления трехфазного тока асинхронного двигателя в постоянный
диодами Д2 и обратное преобразование его в трехфазный ток
тиристорами Т2 с передачей энергии в сеть через трансформа-
тор. Конденсатор С, назначение которого состоит (см. выше)
в сглаживании пульсаций тока, является к тому же источни-
ком реактивной энергии, используемой для создания магнитного
потока двигателя в генераторном режиме.
§ 45. Защита судовых электроприводов
Чтобы сделать работу электропривода надежной, необхо-
димо правильно выбрать защиту. Назначение защиты — обеспе-
чить такие режимы, при которых исключалась бы возмож-
ность повреждения электрической изолинии машин и аппара-
тов, а также механических поломок электрооборудования и
исполнительных механизмов. Применяемые для этой цели аппа-
раты защиты в случае возникновения ненормальных режимов
работы автоматически подают сигнал или отключают защищае-
мую электрическую цепь. В судовых установках используют
большое количество аппаратов, обеспечивающих различные
виды защиты.
Мощные и ответственные установки, электроприводы кото-
рых должны обладать высокой надежностью, оборудуются наи-
более сложными и дорогостоящими защитными устройствами,
тогда как менее ответственные электроприводы зачастую снаб-
жаются лишь плавкими предохранителями.
При выборе защиты следует учитывать также последствия
отключения двигателей и связанных с ним остановок исполни-
196^ Принципы и схемы автоматического управления [Гл. 6
тельных механизмов. Иногда отключение двигателя, осуществ-
ленное защитой для предотвращения какой-либо поломки, мо-
жет стать причиной повреждений и даже гибели всего судна.
При наличии подобной опасности предусматривают отключаю-
щую защиту только от коротких замыканий (пример: рулевые
электроприводы).
К основным требованиям, которым должны отвечать защит-
ные устройства, относятся:
а) простота обслуживания и надежность работы;
б) высокая чувствительность к неполадкам и способность
предупреждать их переход в аварийный режим;
в) избирательность при отключении поврежденных участков
сети;
г) быстродействие при отключении поврежденного участка;
д) достаточная разрывная способность.
Рассмотрим ниже виды защиты, которые могут быть преду-
смотрены в схемах электроприводов применительно к конкрет-
ным условиям их эксплуатации.
Защита от коротких замыканий. Наиболее простыми и ши-
роко распространенными аппаратами защиты от коротких за-
мыканий являются плавкие предохранители. В нормальном ре-
жиме рабочий ток протекает по вставке предохранителя, как
и по любому другому участку цепи, не вызывая ее перегрева.
При перегрузке же или при коротком замыкании ток расплав-
ляет вставку, причем с увеличением тока уменьшается время
плавления.
При коротких замыканиях вставка плавится практически
мгновенно, не позволяя току короткого замыкания достичь
своего установившегося значения. При токах перегрузки время
перегорания вставки обратно пропорционально величине тока.
Это позволяет использовать плавкие предохранители для за-
щиты от чрезмерных перегрузок и вместе с тем обеспечить не-
которую избирательность действия защиты.
Таким образом, следует различать:
а) номинальный ток вставки /вст — ток, при протекании ко-
торого вставка не перегревается свыше допустимой темпе-
ратуры;
б) номинальный ток предохранителя 1щ> — ток, на который
рассчитано контактное устройство предохранителя (/Пр^- /вст,
иначе перегорание вставки вызовет разрушение предохранителя);
в) номинальный плавящий ток (предельный ток вставки)
— наибольший ток, при котором плавкая вставка еще не
перегорает в течение длительного времени.
Пользуясь введенными понятиями, можно произвести ка-
либровку плавких вставок. По максимальному предельному
току I „ , под действием которого вставка будет медленно рас-
§ 45]
Защита судовых электроприводов
197
плавляться в течение 1—2 ч, определяется номинальный ток
вставки по формуле:
/вст=4г- (244)
Выбор плавких вставок для различных потребителей произ-
водят следующим образом.
Для асинхронных короткозамкнутых двигателей ток плавкой
вставки 7ВСТ можно определить, исходя из условий:
7ВСТ>Л/Н и7вст>А, (245)
где 7Н — номинальный ток двигателя;
7П — пусковой ток двигателя;
k — коэффициент загрузки двигателя;
а — коэффициент, учитывающий условия пуска двигателя
(для тяжелых условий пуска cz= 1,6 - 2; для легких
а = 2,5).
Для фидера, питающего несколько асинхронных двигателей,
1 — П—1 г
J = V k J I 'Пп1ах
1 вст 7\ гЦ1 н/ Т а 1
4-1
где п — число двигателей, питающихся с данного фидера;
7П тах — пусковой ток наибольшего двигателя.
Для электрических цепей, не имеющих резких толчков тока,
7ВСТ 7раб,
где 7раб — рабочий ток электрической цепи.
В более мощных и ответственных установках в качестве
аппаратов защиты от коротких замыканий применяют устано-
вочные автоматы с максимальным расцепителем электромагнит-
ного типа. Обладая более высокой разрывной способностью,
чем плавкие предохранители, они уменьшают простои и увели-
чивают производительность механизма, ибо позволяют быстро
осуществлять повторное включение отключенной цепи, предот-
вращают работу трехфазных двигателей на двух фазах, обеспе-
чивают более совершенную защиту при перегрузках.
Чтобы автомат работал надежно, ток уставки его электро-
магнитного расцепителя надо выбрать по возможности мини-
мальным, но, во избежание ложных срабатываний, все же пре-
восходящим на 20—30% пусковой ток двигателя.
Максимально-токовая защита. Этот вид защиты осуществ-
ляется максимально-токовыми реле электромагнитного типа,
работающими на отключение двигателя при токах уставки,
равных (2 4- 4) 7Н. Назначение такой защиты — предотвра-
щать кратковременные чрезмерные перегрузки, опасные для
двигателей постоянного тока по условиям коммутации, а для
198
Принципы и схемы автоматического управления
[Гл. 6
Рис. 114. Ампер-секундная ха-
рактеристика теплового реле.
асинхронных двигателей с фазным ротором — по причине воз-
можных механических повреждений частей электропривода и
исполнительного механизма. Заметим, что в тепловом отношении
кратковременные перегрузки совершенно неопасны.
Максимально-токовые реле иногда используют для защиты
от коротких замыканий, что нерационально, так как такие реле
при срабатывании вызывают отключение цепи главного тока
линейным контактором, разрывная способность которого, как
правило, не соответствует величине
тока короткого замыкания.
Защита от длительных перегру-
зок (тепловая защита). Работа
двигателя переменного тока на
двух фазах или при пониженном
напряжении сети, неисправность
или заедание передаточного меха-
низма, нарушение технологического
процесса и другие причины вызы-
вают длительные перегрузки и не-
допустимый перегрев двигателя.
Для защиты от указанных ненор-
мальных режимов работы приме-
няют тепловые реле, которые рабо- ,
тают на отключение двигателя или
на сигнал о ненормальном режиме.
Они имеют ампер-секундную харак-
обратно-пропорциональную зависи-
теристику, выражающую
мость между током перегрузки и временем срабатывания
(рис. 114).
Тепловое реле выбирают по номинальному току защищае-
мого двигателя. Этот ток должен быть немного меньше погра-
ничного тока реле. Под пограничным током понимают
такой максимальный ток, длительное протекание которого по
нагревательному элементу при данной температуре окружаю-
щей среды не вызывает срабатывания реле. Пограничный ток,
отнесенный к температуре среды, равной +40°С, называют то-
ком уставки. Для маркировки реле с регулируемым током
уставки берут минимальный ток, соответствующий нижнему
пределу регулирования. Верхнему пределу регулирования соот-
ветствует максимальный ток уставки, превышающий минималь-
ный ток на 15—20%. Реле срабатывает при так называемом
токе срабатывания, который при температуре среды
+40° С превышает установленный регулятором ток уставки не
более чем на 15%. При токах, превышающих ток срабатывания,
реле срабатывает быстрее, как это вытекает из его ампер-се-
кундной характеристики.
§ 45]
Защита судовых электроприводов
199
Минимальная и нулевая защита. Назначение минимальной
защиты — обеспечить отключение электродвигателей при сни-
жении напряжения более чем на 50% Пн. Такое снижение воз-
можно, например, при коротком замыкании в сети. Но так как
на этот случай, как правило, предусматривается быстродей-
ствующая защита, локализирующая поврежденный участок, то
специальная минимальная защита и не потребуется, тем более,
что каждый коммутационный аппарат электромагнитного типа
по своему принципу работы обеспечивает минимальную защиту
электродвигателя.
Важнее обеспечить нулевую защиту и блокировку, особенно
при реостатном пуске двигателя, а также для предупреждения
аварий и несчастных слу-
чаев от произвольного ВКЛЮ"
чения механизма. Этим це-
лям отвечают нулевые реле
напряжения или линейные
контакторы, которые пре-
дотвращают самозапуск
двигателя при восстановле-
нии напряжения в сети по- Рис 115’ Включение нулевого реле PH.
еле его исчезновения или
глубокого падения (провала). Принцип выполнения нулевой
блокировки заключается в том, что катушка нулевого реле или
контактора во всех рабочих положениях поста управления пи-
тается через собственный замыкающий контакт, который только
в нулевом положении шунтируется пусковой кнопкой или со-
ответствующим контактом контроллера.
Узел релейно-контакторной схемы управления, осуществляю-
щий минимальную, нулевую защиту и нулевую блокировку, по-
казан на рис. 115. Чтобы предупредить обгорание контактов
нулевого реле, через которые питаются все цепи управления,
иногда последовательно включают два контакта PH.
Защита от произвольных отключений. Уставки реле и дру-
гих аппаратов, отключающих ток короткого замыкания в уста-
новках постоянного тока, меньше времени, проходящего от на-
чала провала напряжения до момента размыкания контактов
электромагнитных аппаратов постоянного тока в схемах рабо-
тающих электроприводов. Это предотвращает произвольное от-
ключение электродвигателей.
В установках переменного тока, особенно при селективной
защите, в ряде случаев (например, при внезапном глубоком
провале напряжения во время короткого замыкания в неболь-
шом удалении от шин ГРЩ, при пуске асинхронных коротко-
замкнутых двигателей большой мощности или при синхрони-
зации генераторов) возможны произвольные отключения
200
Принципы и схемы автоматического управления
[Гл. 6
работающих электродвигателей. Наиболее распространенным
средством предотвращения таких отключений в настоящее время
является применение установочных автоматов и плавких предо-
хранителей, практически мгновенно отключающих поврежден-
ный участок, а также использование автоматического повтор-
ного включения (АПВ) после восстановления напряжения сети.
На рис. 116 изображена схема АПВ для случая, когда время
провала напряжения сети меньше уставки реле времени РВ.
Защита от превышения допустимых скоростей. Такая защита
особенно распространена в грузовых электроприводах. Она мо-
жет работать как на ограничение скорости, так и на отключение
двигателя от сети с последующим механическим торможением.
Скорость двигателей постоянного тока ограничивается элек-
тромагнитными или центробежными реле, контакты которых при
срабатывании шунтируют часть сопротивлений в цепи парал-
лельной обмотки возбуждения, что ведет к увеличению потока
и к уменьшению скорости вращения двигателя.
Электромагнитные реле скорости имеют параллельную и
последовательную обмотки. В рекуперативном режиме двига-
теля намагничивающая сила последовательной обмотки реле
совпадает с намагничивающей силой параллельной обмотки
(рис. 117). Величина тока рекуперации зависит от скорости
электродвигателя. Когда скорость двигателя достигает заранее
определенной величины, реле срабатывает и перемыкает своими
контактами добавочное сопротивление в цепи обмотки возбуж-
дения. Аналогичное действие оказывает при срабатывании и
центробежное реле.
Отключить двигатель от сети при достижении им недопус-
тимо большой скорости вращения может реле максимального
напряжения с размыкающими контактами и катушкой, вклю-
ченными последовательно в цепь нулевого реле.
Ограничение хода электроприводов. Эта защита обеспечи-
вается срабатыванием конечных выключателей, размыкающих
цепи управления электродвигателем как только движущиеся
части механизма достигают заранее установленных конечных
положений. Обычно контакты конечных выключателей бывают
расположены во вспомогательных цепях (рис. 118). Однако
наиболее ответственные приводы дополнительно снабжены вы-
ключателями цепей главного тока, срабатывающими лишь
в аварийных случаях.
Грузовая защита. Электроприводы, могущие подвергаться
значительным технологическим перегрузкам (например, элек-
тропривод шпиля при отрыве якоря от грунта), нуждаются в
защите, которая, не отключая двигателя от сети, лишь умень-
шала бы его скорость и переводила в режим короткого замы-
кания с моментом стоянки под током 2Л1Н. Для этой цели
§ 45]
Защита судовых электроприводов
201
Рис
НИЯ
117. Схема включе-
электромагнитного
реле скорости.
Рис 118. Схема включения конечных выключателей.
202
Принципы и схемы автоматического управления
[Гл. 6
применяют: при постоянном токе — электромагнитные реле, при
переменном — реле теплового типа. В системе Г—Д для огра-
ничения момента заторможенного двигателя используют проти-
вокомпаундную обмотку генератора.
Защита от обрыва цепи возбуждения. В результате такого
обрыва двигатели с параллельным возбуждением при отсут-
ствии нагрузки на валу могут пойти вразнос, а при значитель-
ной нагрузке — перейти в режим короткого замыкания. Чтобы
избежать этого, в схемах электроприводов с регулированием
скорости изменением потока предусматривается установка реле
обрыва поля. В нерегулируемых электроприводах при исчезно-
вении магнитного потока срабатывает максимально-токовая за-
щита.
В схемах управления судовых электроприводов применяют
и другие виды защиты более узкого назначения. Они будут рас-
смотрены применительно к конкретным схемам управления.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Изобразите контакты контактора и реле:
а) замыкающиеся с выдержкой времени при срабатывании аппарата;
б) замыкающиеся с выдержкой времени при отпускании якоря аппарата;
в) размыкающиеся с выдержкой времени при срабатывании аппарата;
г) размыкающиеся с выдержкой времени при отпускании якоря аппарата.
2. Сравните между собой различные принципы автоматизации пуска дви-
гателей постоянного тока (стр. 166—170).
3. Дайте классификацию и опишите назначение обратных связей в замк-
нутых САР (стр. 177 и 178).
4. Каковы отличительные особенности работы ЭМУ и МУ (стр 178—189)?
5. Рассмотрите работу схемы рис. 108 при отсутствии вентиля В
(стр. 187).
6. Объясните разницу между механическими характеристиками двига-
теля в системе Г —Д и при тиристорном управлении (стр. 192—194).
7. В чем заключается разница между максимально-токовой и грузовой
защитой (стр. 197 и 200)?
8. Изобразите монтажную схему по элементной схеме, изображенной на
рис. 88.
9. Составьте элементную и монтажную схемы пуска двигателя постоян-
ного тока с помощью пускового реостата.
10. Пользуясь элементной схемой на рис. 167, составьте монтажную
схему управления асинхронным двигателем с помощью контроллера.
ЧАСТЬ ВТОРАЯ
СУДОВЫЕ ЭЛЕКТРОПРИВОДЫ
ГЛАВА 7
ЭЛЕКТРОПРИВОДЫ РУЛЕВЫХ УСТРОЙСТВ
§ 46. Назначение и классификация рулевых электроприводов
Рулевое устройство предназначается для удержания судна
на заданном курсе, а также для его поворота при изменении
направления движения. На современных судах рулевые устрой-
ства состоят из следующих основных элементов: а) руля; б) пе-
редаточного механизма; в) исполнительного электродвигателя;
г) системы управления и д) системы контроля.
Типы рулей. Руль представляет собой погруженную в воду
пластину, расположенную обычно за кормой, в диаметральной
плоскости судна. Для обеспечения управляемости судна перо
руля должно иметь определенную площадь S, которую вычис-
ляют по эмпирической формуле:
S = у1Т, (246)
где L — длина судна между перпендикулярами, м:
Т — осадка судна, м;
ц — коэффициент, значение которого берут на основе прак-
тических данных в зависимости от типа судов:
Суда р.
Трансатлантические быстроходные ... . . 0,0142—0,02
Грузовые дальнего плавания.................. . . 0,0166—0,025
Каботажного плавания ....... 0,02 —0,025
Морские буксиры ... . . . 0,025 —0,0335
В зависимости от профиля пера различают рули пластинча-
тые (плоские) и обтекаемые. В современных судах применяют,
в основном, обтекаемые рули (рис. 119), поскольку они умень-
шают сопротивление воды движению судна.
Профиль пера руля характеризуется относительной толщи-
ной а:
а = . (247)
где 6 — наибольшая толщина профиля сечения пера, м\
b — ширина (хорда) пера, м.
204
Электроприводы рулевых устройств
[Гл. 7
f Величина а составляет 0,02—0,05 у плоских и 0,08—0,20
у обтекаемых рулей. Это весьма важный параметр, ибо, как
установлено многочисленными экспериментами, при одном и
том же угле перекладки руля давление на него потока воды,
а следовательно, и момент, поворачивающий судно, зависят от
относительной толщины пера.
Другой важной характеристикой руля является его относи-
тельный размах X:
X = — = —. (248)
b S '
где h — высота (размах) пера руля, м. Обычно Х~2.
Высоту руля морских судов выбирают в со-
ответствии с теоретическим чертежом судна,
причем для судов среднего водоизмещения ча-
сто бывает справедливым соотношение:
h = T — (0,5-: 1,0) м.
По расположению плоскости пера относи-
тельно оси вращения (баллера) рули делятся
на обыкновенные, балансирные и полубалан-
сирные (рис. 120).
Рис. 119. Перо ру- У обыкновенного руля ось вращения сов-
ля обтекаемого падает с передней кромкой руля.
профиля. Обыкновенный пластинчатый руль (рис.
120, а) состоит из пера 3, изготовленного из
стального листа и прикрепленного при помощи ребер к ру-
дерпису 4. Рудерпис имеет петли с коническими отверстиями,
в которые вставляют штыри. С их помощью руль навешивают
на рудерпост 5 (кормовая часть ахтерштевня); при этом вес
руля полностью передается через нижний штырь на подпятник,
являющийся нижней петлей рудерпоста.
В верхней части рудерпис замком соединен с баллером 2,
ось которого должна совпадать с осью штырей. Через отвер-
стие 1 в ахтерштевне, называемое гельмпортом, баллер
руля проходит внутрь судна. Чтобы предотвратить попадание
воды в междупалубное пространство, гельмпортовую трубу уп-
лотняют сальником. Верхний конец (головка) баллера служит
для соединения руля с передаточным механизмом. Баллер вы-
веден на одну из палуб судна, где расположен рулевой привод
(румпельное помещение).
Обыкновенный обтекаемый руль отличается от плоского
только конструкцией пера и тем, что его навешивают лишь на
два штыря. Это максимально приближает перо руля к рудер-
посту и тем уменьшает вихреобразование, а следовательно,
и сопротивление воды движению судна.
£46]
Назначение рулевых электроприводов
205
Балансирный руль (рис. 120. б) применяют, чтобы умень-
шить момент на баллере, требуемый для перекладки руля. Ось
вращения его делит плоскость пера на две части: носовую (ба-
лансирную) и кормовую.
Степень балансировки (компенсации) определяется отно-
шением:
с = ф , (249)
где Si — площадь балансирной части, л2;
S — вся площадь пера, м2.
У прямоугольных рулей
bjh bt
bh b ’
где b[ — ширина балансирной части руля, м.
Балансирный руль может быть подвесным или навесным.
Первый не опирается на подпятник, а поддерживается только
баллером, установленным на подшипники внутри корпуса судна.
Второй навешивается на ахтерштевень, не имеющий рудерпоста.
Полубалансирный руль (рис. 120, в) отличается тем, что его
балансирная часть занимает не всю высоту пера.
В последнее время большое распространение получил так
называемый активный руль. На его пере установлен вспомога-
тельный гребной винт, приводимый в движение электродвигате-
лем, встроенным в перо. При отклонении руля от ДП (диамет-
ральной плоскости) этот вспомогательный винт создает упор,
поворачивающий судно. С увеличением угла перекладки руля
206
Электроприводы рулевых устройств
[Гл. 7
момент, создаваемый упором, увеличивается, поэтому угол от-
клонения от ДП у активного руля больше, чем у обычного. При
расположении активного руля в ДП вспомогательный винт соз-
дает упор, обеспечивающий ход судна при выходе гребной уста-
новки из строя.
Передаточные механизмы. Передача вращающего момента
исполнительного двигателя на головку баллера руля может
быть как электромеханической, так и электрогидравлической.
Электромеханические передачи, в свою очередь, подразде-
ляются на секторные, винтовые и штуртросовые; электрогид-
равлические — на передачи, снабженные насосами переменной
или постоянной производительности.
Электромеханические передачи. Секторная передача
приведена на рис. 121. На баллер руля насажены: жестко —
продольный одноплечий румпель 7 и свободно — сектор 6. Сво-
бодный конец румпеля соединен с сектором буферными пружи-
нами 5. Вращающий момент от двигателя 1 через зубчатый ре-
дуктор 2 и самотормозящийся червячный редуктор 4 передается
на прямозубую цилиндрическую шестерню 15, входящую в за-
цепление с зубчатым сектором 6. Далее момент через буферные
пружины и румпель передается на головку баллера 9. Буфер-
ные пружины служат для смягчения ударов волн о перо руля,
которые, не будь этих пружин, могли бы вызвать поломку
зубьев передачи.
Для выполнения аварийных ремонтов рулевого устройства
в море рулевой электропривод снабжен ручным механическим
тормозом 12, состоящим обычно из тормозного диска, зажимае-
мого клиновидными колодками, и винтового ручного привода 8.
Секторный рулевой привод снабжен, кроме того, конечным вы-
ключателем 3 (обычно шпиндельного типа) и датчиком руле-
вого указателя 10. На случай выхода из строя электропривода
имеется ручной привод 11 с секторным румпелем 13 и переда-
точным механизмом 14 для передачи момента от штурвала
ручного привода на баллер руля.
Секторные передачи получили наибольшее распространение
на судах среднего и малого водоизмещения. Преимуществом
их является простота конструкции и надежность работы,
а также относительно высокий к. и. д. (порядка 0,4—0,5).
К недостаткам этих передач можно отнести большой вес
(500—1000 кг на 1 т-м момента на баллере) и большие раз-
меры по ширине. Из-за последнего обстоятельства установка
секторных передач возможна только на судах с широкой
кормой.
Винтовая дифференциальная передача пред-
ставлена на рис. 122. Момент, создаваемый рулевыми двигате-
лями 1, через дифференциал 2 и пару зубчатых колес 3
§ 46]
Назначение рулевых электроприводов
207
Рис. 121. Рулевой привод с секторной передачей.
208
Электроприводы рулевых устройств
[Гл. 7
передается на винт 4 с правой и левой резьбами. Благодаря этому
гайки 5 на винте при его вращении будут сходиться или расхо-
диться, перемещаясь по направляющим 6. Движение гаек через
тяги 7 передается на поперечный (двухплечий) румпель 8, на-
Рис. 122. Рулевой привод с винтовой передачей.
детый на головку баллера 9. Таким образом, от направления
вращения двигателей зависит, будет ли руль переложен на
правый или на левый борт. Винтовой привод, как и при сектор-
Рис. 123. Дифференциальная
передача Федорицкого.
ложена крестовина Кр, на
конических колеса, причем
ными колесами ЧК1 и ЧК2-
ной передаче, снабжен механиче-
ским тормозом 11, датчиком руле-
вого указателя 10 и конечным вы-
ключателем.
Дифференциальная передача,
впервые предложенная инженером
Балтийского завода Н. А. Федо-
рицким, позволяет плавно регули-
ровать скорость рулевого привода,
а также без его остановки перехо-
дить с работы двумя двигателями
на работу одним из них. Она пред-
ставляет собой систему конических
передач (рис. 123). На валу ци-
линдрической шестерни ЦШ распо-
которой свободно насажены четыре
колеса К.2 жестко связаны с червяч-
Червяки 4i и Ч2, находящиеся в за-
цеплении с этими червячными колесами, связаны с валами
своих электродвигателей.
Рассмотрим несколько режимов работы дифференциальной
передачи.
£ 46] Назначение рулевых электроприводов 209
к Оба двигателя вращаются в одном направлении с одина-
ковой скоростью. При этом конические колеса Ki неподвижны
на своих осях, а крестовина и, следовательно, шестерня ЦШ
вращаются со скоростью двигателей.
2. Работает один двигатель. Через свою червячную пару
он приводит в движение малые конические колеса Кь которые
катятся по неподвижному колесу Кг и сообщают половинную
скорость шестерне ЦШ.
3. Двигатели вращаются с одинаковой скоростью в проти-
воположные стороны. Конические колеса К\ в этом случае вра-
щаются с двойной скоростью, однако крестовина н шестерня
ЦШ остаются неподвижны.
Так, изменяя направления вращения н скорость двигателей,
можно заставить крестовину дифференциала вращаться со ско-
ростями, плавно меняющимися от нуля до величины скорости
червячных колес, а именно: • 4
„ «1 ± «2 ‘
«кр- 2,- ’
где щ и «2 — скорости вращения двигателей;
i — передаточное число червячной пары.
Особенностью механизмов с винтовой передачей является
то, что их длина в 2,75—2,95 раза больше ширины. Поэтому
такие передачи применяются на судах с узкой кормой. Суще-
ственным недостатком их является низкий к. п. д. (0,2—0,4).
Вес механизма, отнесенный к моменту на баллере, составляет
200—400 кг на 1 т-м.
Штуртросовые передачи применяются на судах реч-
ного флота. На морских судах они распространения не полу-
чили и поэтому здесь не рассматриваются.
Электрогидравлические передачи. Все возрастающее водо-
измещение строящихся судов и увеличивающаяся скорость их
хода вызывают увеличение момента на баллере руля. Это де-
лает электромеханические рулевые машины громоздкими и ма-
лонадежными. Поэтому на крупных судах обычно используют
электрогидравлические передаточные механизмы, отличитель-
ными особенностями которых являются: передача значительно
больших моментов и более высокий к. п. д. Кроме того, такие
передачи компактны и надежно работают при затоплении.
Наиболее широкое распространение получили электрогид-
равлнческис передачи с насосами переменной производитель-
ности. Такая передача состоит из двух насосов с электродвига-
телями, гидравлической машины, трубопроводов и системы
управления.
В настоящее время применяют насосы переменной произво-
дительности с горизонтальным и радиальным расположением
8 К. А. Чекунов
210
Электроприводы рулевых устройств
[Гл 7
поршней. Изображенный на рис. 124, а насос с радиальным
расположением поршней состоит из корпуса 5, внутри которого
находится так называемый скользящий блок или направляющее
кольцо 2. Скользящий блок при помощи тяг 1 и 6 перемещается
по специальным салазкам в горизонтальной плоскости. Тяги
получают движение от кулачкового редуктора системы управ-
ления рулевой машины. Внутри направляющего кольца на валу
Рис 124. Поперечный разрез (а) и принципиальная схема работы (б—г)
насоса переменной производительности
электродвигателя вращается ротор 3 с девятью радиальными
отверстиями — цилиндрами 4, внутри которых перемещаются
плунжеры 8. Внешние концы плунжеров снабжены роликами 7,
перемещающимися по внутренней поверхности направляющего
кольца.
Когда скользящий блок находится в центре корпуса на-
соса (рис. 124, в), его ось совпадает с осью ротора, и плунжеры
совершают лишь вращательное движение, не перемещаясь
внутри цилиндров ротора. В этом случае производительность
насоса равна нулю. При смещении блока на расстояние е влево
(рис. 124, б) или вправо (рис. 124, г) плунжеры вместе с вра-
щательным движением совершают также и поступательное
движение внутри цилиндров. Благодаря этому они всасывают
или нагнетают масло, которое через отверстия в цапфе по-
дается по трубопроводам в цилиндры гидравлической машины.
§ 46]
Назначение рулевых электроприводов
211
Двигатель, а следовательно, и ротор насоса все время вра-
щаются в одном направлении и примерно с одинаковой ско-
ростью. Направление подачи масла и производительность на-
соса изменяются в зависимости от направления смещения
кольца и величины эксцентриситета. Из двух насосных агрега-
тов обычно работает один, обеспечивая нормальную перекладку
руля в заданное время. Второй насос является резервным. При
Рис. 125 Четырехцилиндровая гидравлическая рулевая машина.
I
/
плавании судна в узкостях используют оба насоса одновре-
менно. На случай выхода из строя электропривода или неис-
правности насосов переменной производительности имеется ава-
рийный масляный насос, позволяющий производить перекладку
руля вручную.
Чаще всего на судах отечественного флота применяют че-
тырехцилиндровые гидравлические рулевые машины, одна из
которых изображена на рис. 125. Внутри четырех гидравличе-
ских цилиндров 2 перемещаются поршни-скалки 5, которые
с помощью пространственных шарниров 6 соединены с попереч-
ным румпелем 8, закрепленным тремя шпонками на головке
баллера 7. Поперечные усилия при перемещении скалок через
ползуны воспринимаются направляющими балками.
Гидравлическая машина осуществляет перекладку руля на-
гнетанием масла в два расположенных по диагонали гидравли-
ческих цилиндра при одновременном отсосе масла из двух
8*
212
Электроприводы рулевых устройств
[Гл 7
других цилиндров. В случае необходимости, путем перекрытия
соответствующих клапанов, гидравлическая машина может ра-
ботать при включении только любых двух цилиндров.
Система управления служит для управления насосами пе-
ременной производительности 1 путем изменения эксцентриси-
тета. Нужная команда задается штурвалом стойки ручного уп-
равления 14 или дистанционно, с постов электрического управ-
ления через двигатели управления (телемоторы) 15. Движе-
ние от них или от штурвала передается на вал дифферен-
циала 13 и далее валикопроводом 10 через конические пере-
дачи 12 на кулачковый редуктор 4, который и воздействует на
переднюю тягу насоса, изменяя положение направляющего
кольца. Для автоматического возврата последнего в нейтраль-
ное положение при отработке заданного угла перекладки слу-
жит реечная передача 5, через которую на кулачковый редук-
тор передается вращение баллера руля.
Электрогидравлическая рулевая машина обычно бывает
снабжена датчиками заданного 11 и отработанного 17 угла
перекладки, а также путевыми выключателями для световой
сигнализации о положении руля 9 и для отключения электро-
привода 16 при повороте руля на максимальный угол (для
морских судов этот угол атах = 35°).
Система управления и контроля рулевых электроприводов.
Перекладка руля производится исполнительным двигателем,
приводящим в движение насос переменной производительности,
сектор или винт рулевой машины. Для обеспечения заданных
значений угла перекладки, направления и скорости движения
руля служит система управления, куда входят различные элек-
трические машины, командо-контроллеры, кнопочные посты уп-
равления, переключатели постов, магнитные станции, конеч-
ные выключатели, устройства обратной связи между рулем
и постом управления и другие аппараты управления и сигна-
лизации.
Управление рулевым электроприводом обычно осуществ-
ляется с нескольких постов, расположенных в рулевой рубке,
на ходовом мостике, в румпельном отделении и других поме-)
щениях судна.
По характеру действия системы управления курсом судна
делятся на дистанционные, следящие и автоматические.
Система дистанционного управления. При переводе руко-
ятки поста управления из нейтрального положения в сторону
одного или другого борта начинает работать рулевой электро-
привод. Он перекладывает руль в указанном направлении до
тех пор, пока рукоятка не будет возвращена в исходное поло-
жение или пока не сработает конечный выключатель (при до-
стижении рулем максимального угла перекладки). Чтобы воз-
§ 47]
Моменты на баллере рулч
213
вратить перо руля в ДП, необходимо рукоятку поста управле-
ния отклонить в сторону противоположного борта. Система
является разомкнутой и не учитывает влияния внешних воздей-
ствий, нарушающих соотношение между управляющим воздей-
ствием и объектом управления (судном). Поэтому, чтобы су-
дить о положении руля, надо все время наблюдать за рулевым
указателем.
Следящая система управления. Положение штурвала поста
управления связано с положением пера руля (система является
замкнутой). В этом случае электропривод приходит в действие
и работает до тех пор, пока перо руля не переместится в поло-
жение, указанное штурвалом поста управления. Эта система
управления вдвое сокращает число манипуляций рулевого.
Система автоматического управления также работает по
замкнутому циклу. Рулевое устройство автоматически приво-
дится в действие при отклонении судна от заданного курса.
При этом электропривод работает до тех пор, пока судно не
возвратится на заданный курс. Роль рулевого в этом случае
сводится лишь к предварительной настройке схемы управления
Системы автоматического управления делятся на непрерывные
(АБР, АТР) и дискретные («Аншютц», «Сперри»).
Система контроля рулевого устройства позволяет с поста
управления определить как угол перекладки руля, так и дей-
ствие этой перекладки на судно. Для целей контроля исполь-
зуют указатели положения руля (аксиометры) и репитеры гиро-
компаса (иногда магнитные компасы).
§ 47. Моменты на баллере руля и нагрузочные диаграммы
рулевых электродвигателей
Чтобы изменить направление движения судна в сторону
того или другого борта, необходимо в эту же сторону перело-
жить руль. Рассмотрим действие сил и моментов в начальный
период циркуляции, т. е. во время перекладки руля, когда
скорость судна и направление его курса еще не успели изме-
ниться.
Моменты на баллере руля. Отклонение пера руля от диа-
метральной плоскости приводит к тому, что струи воды, встре-
чаясь с плоскостью руля, создают давление, определенным об-
разом распределяющееся по его поверхности (рис. 126). Равно-
действующую сил давления воды на руль Ръ, приложенную
в точке А, разложим на две составляющие: силу Н, действую-
щую в плоскости пера руля и вызывающую оттекание встреч-
ных сТруй воды, и силу Р, направленную перпендикулярно
плоскости пера. Составляющая Н имеет незначительную вели-
чину и в дальнейшем приниматься во внимание не будет.
214
Электроприводы рулевых устройств
[Гл 7
Две противоположно направленные силы п Р2, парал-
лельные и равные по величине силе Р, будучи приложены
к центру тяжести судна G, образуют пару сил Р—Pi, которая
создает поворачивающий судно момент
Мпов = P-BG^P^-coso, (250)
где
BG = (— + o') cos а — cos а;
( 2 } 2
Рис. 126. Силы, действующие на судно при перекладке руля.
Разложив теперь силу Р2, найдем, что ее составляющая F?
тормозит ход судна, а составляющая F№ вызывает дрейф и
крен судна в сторону противоположного борта.
Продифференцировав выражение (250) и приравняв нулю
производную dMno^da, можно определить угол перекладки
руля ctmax> при котором на судно воздействует наибольший
поворачивающий момент. Путем такого расчета найдено, что
атах~36°. Поэтому рулевые устройства на морских судах
обычно допускают перекладку руля на угол агяах=35°.
Для расчета рулевого электропривода необходимо знать мо-
мент .Mg, который сила Р создает на баллере руля:
Мб = Р8,
(251)
где б — расстояние от оси вращения руля до центра давления.
Вместо угла перекладки а в расчеты следует вводить угол
атаки ао, лежащий между направлением скорости движения
и плоскостью пера руля и определяемый выражением:
к0 == а ± р,
$47]
Моменты на баллере руля
215
Рис. 127. Силы давления воды на руль
обтекаемого профиля.
где р — угол дрейфа, образуемый между ДП и направлением
движения судна.
Знак минуса берут при перекладке руля во время прямо-
линейного движения судна (в этом случае угол р незначителен
и можно принять, что а0~а), знак плюса — при перекладке
руля во время так называемой S-образной циркуляции судна
(см. приведенное ниже изложение понятия об опорном мо-
менте) .
В настоящее время при проектировании рулевых устройств
используют гидродинамические коэффициенты, получаемые при
аэродинамических продув-
ках соответствующих про-
филей.*
Представим себе, напри-
мер, руль обтекаемого про-
филя, отклоненный от ДП
в сторону правого борта на
угол а (рис. 127). Силу нор-
мального давления воды на
руль Р, приложенную к точ-
ке А, разложим на две си-
лы, направление одной из
которых Рх противополож-
но направлению движения
руля и судна, а направле-
ние другой Ру перпендику-
лярно к нему. Составляю-
щая Рх называется лобо-
вым сопротивлением,
а нормальная к ней Ру — подъемной (поперечной) силой.
Из построений на рисунке следует, что
Р = Ру cos а Рх sin а, (252)
где подъемная сила
(253)
а сила лобового сопротивления
n Sv2
Ру ~ Clfi
Здесь q — плотность воды (для морской воды Q=
= 104,8 кГ • сек2/мА);
* Теоретическое обоснование применения этих коэффициентов дано
Н. Е. Жуковским в разработанной им аэродинамической теории крыла, при-
меняемой также при расчетах рулей обтекаемого профиля.
216
Электроприводы рулевых устройств
[Гл 7
сх и су — соответственно коэффициенты лобового сопро-
тивления и подъемной силы,
v — скорость хода судна, м]сек
Подставив в уравнение (252) значения Ру и РЛ, получим:
Р = (с,, cos а ф- cr Sin а) о-.
Тогда момент на баллере обыкновенного руля
Мб — РЬ — р8 (су cos а ф sin а). (255)
В гидродинамике эта же величина Мб определяется по
формуле
= (256)
где ст — коэффициент момента, учитывающий изменение мо-
мента на баллере с изменением угла перекладки.
Приравняв друг к другу правые части уравнений (255) и
(256) и учтя, что для обыкновенного руля плечо силы давления
воды б равно расстоянию от точки приложения равнодействую-
щей до передней кромки пера z, запишем:
' рг — (с^ cos а ф sin а) ==с,прб— ,
откуда
• z ==-------CJ±.----. (257)
Су cos a -j- сл sin а
Величина б обычно определяется расстоянием от точки при-
ложения силы давления воды до передней кромки пера руля,
причем при переднем и заднем ходах положение кромок пера
меняется (рис. 128). Написав выражения для моментов, соот-
ветствующие рассматриваемым случаям, и подставив в них зна-
чение z, получим следующие расчетные формулы для опреде-
ления момента на баллере руля:
а) при переднем ходе
момент на баллере обыкновенного руля
Мб = Рг = стрб^; (258)
момент на баллере балансирного руля
Мб = Р {z ~ Ьф = pb (ст — ck)- (259)
2
§ 47]
Моменты на баллере руля
217
i
б) при заднем ходе
момент на баллере обыкновенного руля
Мб^ Р (b- z) = pb ^-(k- cmy, (260)
момент на баллере балансирного руля
M6 = P(b-z-b1)=Pb^-[k(l-c)-cm], (261)
где
k = Су cos а С, sin а;
с — степень компенсации руля.
Рис 128 Плечо силы давления воды на руль при переднем и
заднем ходе судна.
I — обыкновенный руль, II — балансирный руль.
Для пера руля непрямоугольной формы принимают сред-
ние значения b и Ь\. Расчет полубалансирного руля выполняют
раздельно для балансирной и небалансирной частей руля. При
более точных расчетах рулей произвольного очертания пло-
скость пера делят по высоте на 2п частей, каждую из которых
рассчитывают указанными методами как прямоугольник.
Таким образом, для применения формул гидродинамики не-
обходимо знать величины Су и Эти коэффициенты опре-
деляют из таблиц (см. Приложение 1), составленных на осно-
вании продувок крыла данного профиля в аэродинамической
трубе. В таблицах приведены коэффициенты для крыла с отно-
сительным размахом Aj = 6. Рули для морских судов, как уже
отмечалось, выбираются с Л2~2. Поэтому табличные коэффи-
циенты необходимо пересчитать применительно к параметрам
выбранного руля по формулам:
= + (262)
' а2=а1+^£2, (263)
218
Электроприводы рулевых устройств
[Гл. 7
где Лд.1 и сЖ2 — коэффициенты лобового сопротивления, соот-
ветственно, при Ai = 6 (табличный) и Л2;
си и а2— углы атаки, соответственно, при Ti =6 и Z,2;
Су — коэффициент подъемной силы при Л1 = 6;
1 I 1 1 \ г- о
---— ; е2 — 57,3 ех.
’ \ '2 Л1 /
Коэффициент ст практически не зависит от относительного
размаха руля и выбирается по значению щ.
Рис 129 Кривые зависимости Afg=f(a) для обыкновенного (а) и ба
лансирного (б) рулей.
/ — при переднем ходе судна; 2 — при заднем ходе судна.
Приведенные формулы моментов на баллере руля выра-
жают зависимость момента от угла перекладки (атаки). По-
этому при расчетах определяют значения моментов при различ-
ных углах перекладки а и результаты выражают графически
в виде кривых Л1б=/(а), для чего принимают следующие ус-
ловия.
1. Ход руля от диаметральной плоскости к борту называется
прямым ходом; углы перекладки руля при этом считаются
положительными.
2. Ход руля от борта к ДП называется обратным хо-
дом; углы перекладки руля при этом считаются отрица-
тельными.
3. Моменты на баллере, противодействующие перекладке
руля, считаются положительными, а способствующие пере-
кладке руля — отрицательными.
Кривые зависимости момента на баллере руля от угла его
перекладки при переднем и заднем ходе судна представлены на
рис. 129. Из этих кривых видно, что момент на баллере при
О* 47]
Моменты на баллере руля
219
заднем ходе судна Л1б3тах больше момента при переднем
ходе Мбтах. Это объясняется увеличением плеча силы давле-
ния воды на перо руля (см. рис. 128). Однако при расчете ру-
левых электроприводов часто рассматривается лишь передний
ход судна, так как, согласно Регистру СССР, электроприводы
должны обеспечивать перекладку руля при заднем ходе судна
только со средней скоростью, которая обычно принимается
в пределах 50—70% от скорости переднего хода. При этом, как
правило, Л1б зшах < Мб max •
Если степень компенсации балансирного руля велика
(c>cm/k), то при переднем ходе судна в пределах угла пере-
кладки си центр давления воды располагается к носу от оси
вращения, и руль становится неустойчивым. Для уменьшения
мощности рулевых электроприводов желательно увеличить сте-
пень балансировки руля. Однако в случае аварии электропри-
вода бывает необходимо перевести руль в ДП вручную, что на
судах большого водоизмещения при значительной степени ком-
пенсации становится невозможным. Поэтому на крупных судах
степень компенсации выбирают с таким расчетом, чтобы
ах 7 =- 10°. На судах небольшого водоизмещения угол щ мо-
жет доходить до 20° и более.
Рассмотренный гидродинамический метод расчета не учи-
тывает влияния кормы и гребного винта, так как сделать это
можно лишь при продувке полной модели судна.
S-образная циркуляция судна может создать на баллере
руля значительно больший момент, чем односторонняя цирку-
ляция. Экспериментально установлено, Что при отклонении пера
руля от ДП на угол 25—30° момент достигает предельного зна-
чения и получает название опорного момента. Его воз-
никновение объясняется заносом кормы во время предшествую-
щей циркуляции и наличием дрейфа, возникшего в результате
перекладки руля в противоположную сторону.
Полученный проф. В. И. Полонским опытным путем график
изменения момента на баллере руля одного из судов при S-об-
разной циркуляции приведен на рис. 130. Ордината точки А
соответствует опорному моменту 7И0П-
Величину угла дрейфа можно определить из выражения:
где Do — диаметр циркуляции в длинах судна.
Для В0 = 4н-5 угол атаки
а0 = а %- р = 30 4- (15 ч- 20) = 45 н- 50°.
Так как ао = 5О°>атах =35°, то и Л10п>Л1бтах-
220
Электроприводы рулевых устройств
[Гл 7
Однако опорный момент подлежит учету обычно лишь
в проектах рулевых устройств военных кораблей. Двусторон-
няя циркуляция судов гражданского флота маловероятна, по-
чему при выборе для них рулевых электроприводов опорный
момент можно не принимать во внимание.
Нагрузочные диаграммы. Зная коэффициент полезного дей-
ствия рулевой машины и передаточное число механизма, можно
на основании зависимости Мб=/(а) построить графики M=f (а).
Так как все применяемые в настоящее время, методы определе-
Рис. 130. График изменения момента при S-образнсш цирку-
ляции.
ния моментов на баллере руля довольно приближенны, то кри-
вые моментов рулевых электродвигателей без заметных даль-
нейших погрешностей «спрямляют», что значительно упрощает
расчет рулевых электроприводов.
Исходя из этого, рассмотрим приведенные на рис. 131 гра-
фики зависимости M—f(a) для обыкновенного и балансирного
рулей при переднем и заднем ходе судна.
Максимальный момент на валу двигателя в любом случае
определяется по формуле:
Мтах=-^«-, . (264)
и
где i — передаточное число механизма;
г] — к. п. д. рулевой машины с учетом потерь в опорах
баллера.
Когда руль находится в ДП, момент Мб равен нулю, и элек-
тродвигатель должен создавать некоторый вращающий мо-
§ 47]
Моменты на баллере руля
221
мент /Ио для преодоления сил трения в передаточном механизме
и опорах баллера руля. Обычно принимают такие моменты Мо:
Рули Л1о
Обыкновенные . . ......... ... (O.l-^O.SJAlmax
Балансирные . . (0,2-:-0,3)Л1п1ах
Если на баллере руля действует 'отрицательный момент
то двигатель' все равно должен развивать вращающий мо
м
M3m0J, pi Рис. 131. Нагрузочные диаграммы
।— электродвигателей: а — обыкно-
' \ венного руля при переднем ходе
' \ судна; б — балансирного руля при
j \ переднем ходе судна; в — обыкно-
\ -венного и балансирного рулей при
\ Мо заднем ходе судна.
! I
“ mam ® + таи,
мент УИ0, что объясняется применением в передаточном меха-
низме самотормозящихся червяков и винтов.
Таким образом, для перекладки обыкновенного руля с борта
к ДП (от —атах до 0) при переднем ходе судна двигатель дол-
жен развивать момент,’ примерно равный ЛГ0. Во время пере-
кладки руля от ДП на борт (от 0 до атах) момент нагрузки на
валу двигателя плавно возрастет до Л1тах;:
М = М0 + Л1тах~ Л4° а- (265)
атах
Это иллюстрируется рис. 131, а. Изменение момента на валу
рулевого электродвигателя при переднем ходе судна с балан-
сирным рулем показано на рис. 131, б. У рулей с незначитель-
ной степенью компенсации момент при углах перекладки от
—«max ДО + «1 МОЖНО ПрИНЯТЬ рЭВНЫМ Л40. ПрИ уГЛЭХ ОТ +К1
до + а тах момент плавно увеличивается до Л1тах.
Примерно таков же характер нагрузочных диаграмм элек-
тродвигателя руля при заднем ходе судна. Отличие их от на-
грузочных диаграмм при переднем ходе судна заключается
лишь в том, что криволинейный график моментов заменяется
222
Электроприводы рулевых устройств
[Гл. 7
равновеликой по описываемой площади трапецией, причем
максимальное значение момента на валу двигателя сохраняется
(рис. 131, в).
Пример 10. Определить моменты на баллере руля сухогрузного судна,
имеющего следующие главные размерения: длина между перпендикулярами
Г=140 осадка 7=7,65 скорость хода с=17 узлов.
Решение. 1. Подставив в формулу (246) значение ц=0,0177 (см.
стр. 203), найдем площадь пера руля
S = 0,0177-140-7,65 = 19 ж2.
2. Выбираем прямоугольный балансирный руль обтекаемого профиля со
степенью компенсации с—0,16 и относительной толщиной а= 18% (см. прило-
жение т'
3.
I).
Определяем высоту h и ширину b пера руля:
h=T — (0,5 -s-1,0) -- 7,65 — 1 = 6,65 м;
Ь = А = — = 2,86 м.
h 6,65
По формуле (248) находим относительный размах руля
Л^ = 2,32.
2,86
4.
5. Подсчитываем площадь и ширину bt балансирной части пера руля:
«х = cS = 0,16-19 = 3,0 Л12.
Таблица 3
“1 . cv G-i. 1 СЛ2 СД£2 «2 ctn
—8 —0,6 0,032 0,36 0,0302 0,0622 —2,90 —10° 54' —0,137
—4 —0,3 0,018 0,09 0,0075 0,0255 —1,45 —5° 27' —0,070
—2 —0,14 0,012 0,0196 0,0016 0,0136 —0,68 —2°4Г —0,033
0 0 0,009 0 0 0,0088 0 0 0
2 0,14 0,012 0,0196 0,0016 0,0136 0,68 2° 41' 0,033
4 0,30 0,018 0,09 0,0075 0,0255 1,45 5° 27' 0,070
6 0,43 0,022 0,185 0,0155 0,0375 2,08 8° 5' 0,100
8 0,60 0,032 0,36 0,0302 0,0622 2,90 10° 54' 0,137
10 0,72 0,044 0,518 0,0435 0,0875 3,48 13° 29' 0,168
12 0,88 0,054 0,775 0,0651 0.Н91 4,26 16° 16' 0,205
14 1,01 0,078 1,02 0,0856 0,1636 4,89 18° 53' 0,235
16 1,15 0,097 1,33 0,1118 0,2088 5,56 21° 34' 0,268
18 1,28 0,118 1,64 0,1378 0,2558 6,19 24° 11' 0,298
20 1,39 0,140 1,93 0,1621 0,3021 6,73 26° 44' 0,324
22 1,42 0,160 2,02 0,1696 0,3296 6,87 28° 52' 0,331
24 1,31 0,188 1,715 0,1440 0,3320 6,34 30° 20' 0,341
26 1,24 0,360 1,54 0,1293 0,4893 6,00 32° 0' 0,339
28 1,08 0,357 1,16 0,0975 0,4545 5,23 33° 14' 0,342
30 0,96 0,396 0,92 0,0774 0,4734 4,64 34° 28' 0,344
Таблица 4
“2 cos а2 sin а2 Су COS «2 Сх2 а2 k ck cm — ck Mq, кГ-m
—10° 54' 0,9820 —0,1891 —0,5892 —0,0118 —0,6010 —0,0962 —0,0408 —8894,6
—5° 27' 0,9955 —0,0950 —0,2986 —0,0024 —0,3011 —0,0482 —0,0218 —4752,5
—2° 41' 0,9989 —0,0468 —0,1398 —0,0006 —0,1405 —0,0225 —0,0105 —2289,0
— 1,0 0 0 0 0 0 0 0
2° 41' 0,9989 0,0468 0,1398 0,0006 0,1405 0,0225 0,0105 2289,0
5° 27' 0,9955 0,0950 0,2986 0,0024 0,3011 0,0482 0,0218 4752,5
8° 05' 0,9901 0,1406 0,4257 0,0053 0,4310 0,0690 0,0310 6758,1
10° 54' 0,9820 0,1891 0,5892 0,0118 0,6010 0,0962 0,0408 8894,6
13° 29' 0,9725 0,2331 0,7002 0,0204 0,7206 0,1153 0,0527 11488,8
16°’ 16' 0,9600 0,2801 0,8448 0,0334 0,8782 0,1405 0,0645 14061,3
18° 53' 0,9462 0,3236 0,9557 0,0529 1,0086 0,1614 0,0736 16045,2
21° 34' 0,9300 0,3676 1,0695 0,0767 1,1463 0,1834 0,0846 18443,2
24° 11' 0,9122 0,4096 1,1676 0,1048 1,2724 0,2036 0,0944 20579,7
26° 44' 0,8931 0,4498 1,2414 0,1359 1,3773 0,2204 0,1036 22585,3
28° 52' 0,8758 0,4828 1,2436 0,1592 1,4027 0,2244 0,1066 23238,6
30° 20' 0,8631 0,5050 1,1307 0,1677 1,2983 0,2077 0,1333 29060,1
32° 00' 0,8480 0,5299 1,0515 0,2593 1,3108 0,2097 0,1293 28187,2
33° 14' 0,8365 0,5481 0,9034 0,2491 1,1525 0,1844 0,1576 34357,6
34° 28' 0,8244 0,5659 0,7914 0,2679 1,0593 0,1695 0,1745 38041,2
§ 47\ Моменты на баллере руля 223
224 Электроприводы рулевых устройств [Гл. 7
6. Для принятой величины а=18%, соответствующей профилю № 5, оп-
ределяем гидродинамические коэффициенты и пересчитываем их на расчет-
ное аначение Z2=2,32, для чего подставляем в формулы (262) и (263) зна-
чения 61 и е2:
е2 = 57, Зел = 57,3-0,084 = 4,84.
Полученные данные сводим в табл. 3.
7. Момент на баллере руля для переднего хода судна находим из уравне-
ния (259), приняв g=104,8 кГ • сек2/м'\ а 0=0,515-17=8,75 м/сек.
Полученные результаты сводим в табл. 4.
8. По наибольшему моменту на баллере руля Л4бтах=38 т-м выбираем
из'каталога электрогндравлическую рулевую машину типа РЭГ-2-4 с макси-
мальным моментом 45 т • лг.
§ 48. Требования к рулевым электроприводам
Рулевое устройство — одно из важнейших на судне. Выход
этого устройства из строя ведет к потере управляемости,
а иногда и к гибели судна.
Безаварийная работа рулевого устройства во многом зави-
сит от надежности рулевого электропривода. Поэтому к по-
следнему предъявляют жесткие требования.
Согласно Правилам Морского Регистра СССР, рулевой элек-
тропривод должен обеспечивать:
а) перекладку руля с борта на борт на полном переднем
ходу судна за время, не превышающее 28 сек;
б) непрерывную перекладку руля с борта на борт в течение
0,5 ч;
в) длительную работу при ходе судна по курсу в режиме
не менее 350 перекладок в 1 ч;
г) изменение вращающего момента электродвигателя в пре-
делах от 0 до 2 Мн;
д) режим стоянки двигателя под током в течение 1 мин
с нагретого состояния.
Рулевые электродвигатели работают либо в повторно-крат-
ковременном, либо в длительном режиме, что зависит от вида
передаточного механизма.
Так, механической передаче свойствен повторно-кратковре-
менный режим с включением электродвигателя для каждой
перекладки руля. Двигатели насосов переменной производитель-
ности электрогидравлических рулевых машин работают в дли-
тельном режиме с примерно постоянной скоростью, без реверса
и без остановки в течение всего времени плавания судна.
Электродвигатели рулевых приводов с механической пере-
дачей должны иметь мягкие механические характеристики, так
как это обеспечивает: ,
§ 48]
Требования к рулевым электроприводам
225
а) при заклинивании пера руля или заедании в механизме
передачи переход двигателя в режим короткого замыкания
с таким моментом на валу, который не вызовет поломки обо-
рудования;
б) смягчение динамических усилий в электроприводе при
ударах волн о перо руля;
в) замедление скорости двигателя с увеличением нагрузки,
вызванным различными причинами, а стало быть, и ограниче-
ние потребляемой мощности.
Удовлетворению перечисленных требований способствует то,
что в рулевых электроприводах с механической передачей на-
чали все шире применять двигатели постоянного тока с незави-
симым возбуждением, работающие в системе генератор — дви-
гатель. Получение мягкой механической характеристики двига-
теля при этом обеспечивается противокомпаундной обмоткой
генератора. Номинальные значения мощности, момента и ско-
рости этих электродвигателей можно определить по соответ-
ствующим формулам, приведенным в § 20.
Если требуемая мощность составляет около.5 кет, то можно
использовать электродвигатели как постоянного, так и перемен-
ного тока с непосредственным питанием от общесудовой сети
и с релейно-контакторной схемой управления. Так, при питании
постоянным током пригодны двигатели с параллельным воз-
буждением и с включенными в цепь якоря добавочными сопро-
тивлениями, а также двигатели с последовательным и смешан-
ным возбуждением. Последние могут работать непосредственно
на достаточно мягкой естественной характеристике.
В установках переменного тока, нуждающихся в ограниче-
нии пусковых токов и в получении значительных пусковых мо-
ментов, можно применять асинхронные короткозамкнутые дви-
гатели с повышенным скольжением, с глубоким пазом или
двойной клеткой на роторе, а также полюсопереключаемые
двигатели типа МАП.
При гидравлической передаче также можно использовать
электродвигатели на постоянном и на переменном токе, но уже
без ограничений в отношении степени жесткости механических
характеристик, поскольку гидравлическое рулевое устройство
само обеспечивает необходимую амортизацию ударных нагру-
зок и ограничение давления в системе в пределах допустимых
значений. Наибольшее распространение для электропривода
насоса переменной производительности получили при перемен-
ном токе — асинхронные двигатели с короткозамкнутым рото-
ром типа AM, при постоянном токе — двигатели типа П со
смешанным возбуждением.
Режим работы рулевого электропривода зависит от хода
судна- Во время выполнения судном маневренных операций
226
Электроприводы рулевых устройств
[Гл. 7 '
рулевой перекладывает руль с борта на борт на максимальный
угол. На этот режим работы и рассчитывают мощность двига-
теля, которая обусловливается значениями момента статиче-
ского сопротивления и заданного времени перекладки руля
(скорости двигателя).
При ходе судна по курсу роль рулевого электропривода сво-
дится к удержанию судна на заданном курсе, для чего произ-
водится частая перекладка руля (до 350 в 1 ч) на небольшой
угол (обычно 4,—6°). Такой режим работы, хотя и не вызывает
больших моментов на валу, но может вызвать нагрев двига-
теля из-за многократных пусков и остановок.
Таким образом, двигатель рулевого электропривода рассчи-
тывают с учетом обеспечения максимального момента и задан-
ного времени перекладки руля с борта на борт при выполнении
судном маневренных операций на полном переднем ходу. Вы-
бранный двигатель проверяют на нагрев при работе в таком ре-
жиме в течение 30 мин. Иногда двигатель проверяют на нагрев
при длительном удержании судна на заданном курсе, но обычно
такая проверка, как и проверка на обеспечение заднего хода
со средней скоростью, показывает значительный запас мощно-
сти двигателя, выбранного по результатам предыдущих расче-
тов. Поэтому от дополнительных проверок часто отказываются.
§ 49. Расчет мощности двигателя рулевого электропривода
с механической передачей
Для выполнения такого расчета необходимо знать:
а) зависимость (а);
б) передаточное число и к.» п. д. рулевого механизма;
в) заданное время перекладки руля с борта на борт (со-
гласно Правилам Регистра СССР, Т :'28 сек)-,
г) максимальный угол перекладки руля (как уже отмеча-
лось В § 47, ДЛЯ МОРСКИХ СУДОВ Обычно Ctniax=35°).
Рассмотрим способ расчета мощности исполнительного дви-
гателя и других машин системы Г—Д, наиболее распро-
страненной в рулевых электроприводах с механической пере-
дачей.
При переднем ходе судна во время перекладки обыкновен-
ного руля с борта на борт момент на баллере изменяется по
графику, приведенному на рис. 131, а. Если исходить из этого
графика и не учитывать переходных процессов, то можно ска-
зать, что рулевой двигатель работает в течение времени ti (при
перекладке руля от —аП1ах до а = 0) с постоянным моментом на
валу Л40 и в течение времени (при перекладке руля от 0 до
+ аП1ЭХ) с моментом, изменяющимся по прямой от Л40 до Л1тах.
Расчет механического рулевого электропривода
227
Полное время перекладки руля с борта на борт (опять-таки без
учета времени переходных процессов) будет:
Т' = Т — ^з=^1 + ^2> (266)
где t3 — время запаздывания.
Обозначив угловую скорость перекладки руля (баллера)
через соб, получим:
w6^1 = яп;ах>
откуда
“б гм0 (
где йб=л/го/ЗОц
п0 — скорость двигателя при моменте Мо, которую, согласно
уравнению (128), можно определить по формуле:
0 х-х|/ Жк >
где /гх.х — скорость идеального холостого хода;
Мк — момент заторможенного двигателя.
Обычно принимают Мк= (1,5-^-2,0) Л4тах; тогда время Л для
обыкновенного руля определится из выражения:
__ 30гатах (267)
Ул1к —Af0 ’
Для балансирного руля, если пренебречь увеличением мо-
мента в пределах угла 0-г- щ:
j ____ 30г («щах + ai) УМк /осо\
Д — уд ' г "' — • (2Ь8)
”* X \/ Мк — Мо
Период времени Д можно определить из следующих сооб-
ражений. Момент нагрузки на валу двигателя в течение этого
времени выражается уравнением (265). С другой стороны, дви-
гатель, т аботающий в системе Г—Д, развивает вращающий
момент согласно уравнению (129). Приравняв значения момен-
тов, запишем:
Мк (1-----—= Мо + а> (269)-
I *7 2 / ainax
V "х. х /
где п — текущее значение скорости двигателя, которое можно
выразить через угловую скорость перекладки:
\ -
228
Электроприводы рулевых устройств
[Гл. 1
Подставив это значение п в уравнение (269) и проинтегриро-
вав последнее в пределах от а = 0 до атах, получим:
для обыкновенного руля
__ 60г'ап1ах Р Мк Р Мк Mg Р Мк Мтвх . (270)
2’ ГПх.х ’’ Мтах-М0 ’ '
для балансирного руля
__60/ (^tnax а1) У Мк V к Л4р V Мк М щах (271)
2 ' ™Х.Х ' Л4тах- Мд ‘ V 7
Полное время Т', согласно уравнению (266), будет:
для обыкновенного руля
yv __ t_______30 <amax Р -Д^к ( __J_____[_
1 2 ЯПХ.Х \ УМк — Мд
P7 M к — Mg — V MK—M^~X
Д^шах Д^о
для балансирного руля
tv_____ / । 7 __30t р М
1 — И "Г *2 —
(272)
™x.x
amax 4- «1 । 9 i
- - _ -j- z. v^rnax
P Л1К—Mo—p^ MK — M max
М max
(273)
Для заданного времени перекладки руля Т' определяем ско-
рость идеального холостого хода двигателя:
для обыкновенного руля — из уравнения (272)
_____ Зонтах Д4к /_______1______।
х.х- r.(T-t3)
। 2 Д^к — Д^о — Мк Мщах j .
Д^тах — Д^о /
(274)
для балансирного руля — из уравнения (273)
30г У М
П. ~~
- । Р^'тах
о
71 (т — М [У мк — м.
ч, Умк—мв—Умк-м
max
ДЛпах Д40
(275)
+ 2
где /-( = 2-:-3 сек; а1пах=0,611 рад.
§ 49]
Расчет механического рулевого электропривода
229
Определив моменты Мтах, Мо, Мк и Мн, а также соответ-
ствующие им скорости nrain, п0, и пн, строим механическую
характеристику (рис. 132). Далее вычисляем номинальную
мощность
р __ МцПН
' н~ 975
По найденным значениям РИ и пн выбираем рулевой испол-
нительный двигатель. Так как для этих целей обычно исполь-
зуются двигатели серии П,
предназначенные для дли-
тельного режима работы, а
рулевой электродвигатель
рассчитывается на 30- или
60-минутный режим рабо-
ты.. то бывает необходимо
учесть соотношения:
Rn<(l,0-r- 1,2) Р ;
Р6П<(1,0-1,05)Рто>
где Ре — мощность при
длителоном режиме рабо-
ты.
Нижние пределы отно-
сятся к двигателям меньше-
го габарита. Выбранный
двигатель проверяем на вре-
мя перекладки руля и на
нагрев в режиме маневри-
рования судна, для чего
строим нагрузочную диа-
грамму и кривую
зависимости n = f(t). Для
упрощения расчетов прини-
маем, что эти зависимости
имеют в течение всего вре-
мени перекладки руля с бор-
та на борт прямолинейный
характер (рис. 133). Как
видно из нагрузочной диа-
Рис. 132. Механическая характеристика
исполнительного электродвигателя руле-
вого привода, работающего по системе
Г-д.
Рис. 133. Нагрузочная диаграмма руле
вого электропривода при выполнении ма
невренных операций.
граммы, все это время состоит из следующих периодов.
Первый период — разгон двигателя. Время разгона tv =
= Дг + ^р2- За время tvi возбуждение генератора увеличивается
и двигатель выводится на естественную характеристику. Мо-
мент на его валу при этом колеблется около среднего значения
230
Электроприводы рулевых устройств
[Гл. 7
пускового момента 7ИП, которое можно определить из пус-
ковой диаграммы двигателя. Значение fpi определится из выра-
жения:
f = ^0Ддв”П
р1 375 (Л1П — Мо)
(276)
где k — коэффициент, учитывающий инерционность передаточ-
ного механизма; k= 1,3;
пП— пусковая скорость в конце периода, значение которой
можно определить из уравнения механической харак-
теристики по формуле:
(277)
При изменении скорости от /гп до /г0 двигатель разгоняется
по естественной характеристике в течение времени /рг.'
t _ 2^Ддв(»о-»п)
р2 375(Л1П —Л10) ’
и момент двигателя прямолинейно изменяется от Ма
Его эквивалентное значение находим по формуле:
(278)
до Мо.
м
2X2 экв р2
(279)
За время /р руль будет переложен на угол ар, который
можно ориентировочно определить по формуле:
<хр 4>g^p
36()и0 , ___3/г07р
2-607 р
Второй период — установившийся режим. Двигатель рабо-
тает, перекладывая руль до ДП при обыкновенном профиле и
до угла 4-си при балансирном профиле (с незначительной сте-
пенью компенсации). Момент.на валу двигателя считается по-
стоянным и равным Мо.
Время работы двигателя:
при обыкновенном руле
__ 307 (°тах ар) .
1 ~
при балансирном руле ;
/ __ 307 (аП1ах -|- «с — ар)
fcl — -------------—-—~
I
(280)
(281)
§ 49]
Расчет механического рулевого электропривода
231
Третий период — работа двигателя с моментом, изменяю-
щимся от Л40 до Afmax и скоростью —от п0 до nmin. Угол пере-
кладки обыкновенного руля составляет ашах, балансирного
“шах—«1- Время работы двигателя t2 определяем из уравнения
(270) для обыкновенного и из уравнения (271) для балансир-
ного руля. Эквивалентный момент
Мэкв 2 = ~|Z^1±^оЛ4зтах-±^ ., . (282)
Четвертый период — динамическое торможение двигателя от
скорости nm,n до полной его остановки. Тормозной момент при-
нимаем изменяющимся по пря-
мой от Л4Т=Л4П до нуля. Время
торможения определяем из фор-
мулы:
, _ 2АСОдв»т|П
т “ 3757ИТ
(283)
а эквивалентное значение момен-
та — из формулы:
Мэквт
(284)
Угол перекладки руля за вре-
мя ti принимаем: ат~0.
Соответствие выбранного дви-
гателя требованиям Регистра
СССР в отношении скорости пе-
рекладки руля с борта на борт
выявляем из соотношения между
допускаемым ТД0П:
Рис. 134. Нагрузочная диаграмма
электропривода балансирного руля
при удержании судна на заданном
курсе.
расчетным временем Трасч и
^расч — И 4>2 4~ ti 4“ 4 4“ ti Тдоп — 28 сек. (285)
Выбранный двигатель при этом не будет перегреваться, если
М _кр
Л/?Х1 + р2^р2 ' ^1 + ^кп2Л+ ^квт-/т м
tpl 4' tpz + tl ~i~ 4 + ti н’дв
Г ' t (286)
где 7ИН.ДВ — номинальный момент выбранного двигателя.
Для проверки двигателя на нагрев при удержании судна на
заданном курсе строим нагрузочную диаграмму (рис. 134) и
выполняем следующий расчет.
232
Электроприводы рулевых устройств
[Гл. 7
Работа электропривода во время хода судна по курсу ха-
рактеризуется частыми включениями и отключениями испол-
нительного двигателя. Согласно правилам Регистра СССР,
электропривод должен обеспечивать 350 перекладок руля за
1 ч. Средний угол отклонения пера руля от ДП можно принять
равным а = 5° = 0,088 рад.
Время одного цикла
, _ 3600 "
?ц — г •
Отдельные периоды перекладки и соответствующие им мо-
менты определяем так же, как при работе привода в режиме
маневренных операций. Время паузы находим как разность вре-
мени цикла и суммарного времени работы 2/раб:
^0 = С; /раб- (287)
В рассматриваемом режиме значительную часть цикла со-
ставляют время пуска, время торможения и паузы. Поэтому
при определении эквивалентного момента следует ввести коэф-
фициенты аир, учитывающие ухудшение условий охлаждения
с уменьшением скорости вращения двигателя:
лд — 1 /Г^1|/р| ' Мэквр2‘^р2 + W. + Мэквт /т /Ойоч
**^ЭКВ I f. . . 1 / \ | / 1 * (/CO)
’ а (Гр1 Ч Гр2 + О + tl .'Л>
При 7И0КВ<Л1н.Дв двигатель будет длительно работать, не
перегреваясь свыше допустимой температуры.
Пример 11. Произвести расчет электропривода для рулевой машины типа
РЭР-7,5 рыбоморозильного траулера водоизмещением 3712 т. Передаточное
число и к. и. д. рулевой машины соответственно равны: i—1860; г] = 0,4.
Максимальный момент на баллере руля Me max =7,1 т м. Руль — балансир-
ный; угол перекладки, соответствующий 7Иб=0, ai = 10°=0,174 рад. Нагру-
зочным моментом в пределах угла <ч можно пренебречь. Максимальный угол
перекладки руля amax =35°. Время перекладки руля с борта на борт Т=28 сек.
Управление рулевым электроприводом осуществляется в системе Г — Д.
Судовая электросеть работает на переменном токе напряжением 220 в.
Решение. Выбор исполнительного двигателя.
1. Максимальный момент на валу двигателя
Л1тах = =, 9,86 кГ-м.
1800-0,4
2. Момент на валу двигателя при отсутствии нагрузочного момента на
баллере руля - , . .
MQ = 0,2Мтах = 0,2-9,86 = 1,97 кГ-м.
3. Момент на валу заторможенного двигателя
Мк = 1,57Иг;ах = 1,5-9,86 = 14,8 кГ-м.
§ 49] Расчет механического рулевого электропривода 233
4. Для обеспечения заданного времени перекладки рулевой двигатель
согласно уравнению (275) должен иметь скорость идеального холостого хода
-3°-1т1 И'8 f °'6И+°.'74 х 2(0,6„-0,174) X
3,14(28 — 3) 1'14,08—1,97
У14,8 — 1,97 —У 14,8 —9,86
9,86—1,97
= 980 об/мин.
5, Находим номинальную расчетную мощность двигателя
0,384714 пх 0,384.14,8-980 _ „
Р,, пягч =---------------=-------------------= 5,72 кет.
н' расч 975 975
6. Выбираем двигатель типа П-62М с данными: Рн=7,5 квт\ пИ=
= 750 об/мин-, 17=220 в; 7 = 41,7 о; т]н = 81,6°/о; С7)дВ=1,6 кГ • м2.
7; Для построения механической характеристики выбранного двигателя
и дальнейших расчетов определяем:
а) номинальный момент выбранного двигателя
б) скорость идеального холостого хода двигателя
п = У3-и = 1,73-750 = 1295 об/мин‘,
в) скорость, соответствующую моменту Мо,
/714к —Л4о Юнк! /~ 14,8-—-1,97 1ОПП
Мк у 14,8
г) скорость, соответствующую моменту Л1111ах,
4 'п . = пх х 1ЛМк--.тах = 1295 1 f 14,8~9'86 = 745 об/мин.
тт х.х |/ р/ 14>8
Проверка выбранного двигателя на время перекладки руля в режиме
маневрирования (см. рис. 133)
8. Скорость двигателя при пуске в момент выхода на естественную ха-
рактеристику (принимая 7ИП=7ИН)
-. Л714к —714п 1ОО, , Л 14,8-9,75 ,,
и = nv „ I / —--------- = 1295 I / ---------= 750 об/мин.
п х-х|/ 7ИК V 14,8
9. Время разгона двигателя до выхода на естественную характеристику
из уравнения (276)
t 1,3-1,6-750
=-----------------= 0,53 сек,
р 375(9,75— 1,97)
10. Время разгона двигателя на естественной характеристике по фор-
муле (278)
= 2-1.3-1,6 (1200- 750) = 0>64 сек
375(9,75— 1,97)
234
Электроприводы рулевых устройств
[Гл. 7
11. Угол перекладки руля за время разгона двигателя
= J4 bdJ+L = 3-1200(0,53+ 0_£4) = 2 =
р i 1800
12. Время работы двигателя с моментом Мо из уравнения (281)
30-1800 (0,611 +0,174 — 0,04) 1П „.
3,14-1200
13. Время работы двигателя с моментом, изменяющимся от Мо до Almax
согласно уравнению (271)
, 60-1800(0,611—0,174) У 1+8- У 14,8—1,97 —У’14,8 — 9,86 _
3,14-1295 9,86— 1,97
14. Время торможения двигателя (принимая МТ=Л1П) из уравнения (283)
15. Полное время перекладки руля
Т = tpl + /р2 + + t2 + tT = 0,53 + 0,64 + 10,34 + 7,7 + 0,85 = 20,06 сек.
Таким образом, полученное время перекладки руля меньше допустимого:
Т = 20,06 сек < Тд0П = 28 сек.
Проверка выбранного двигателя на нагрев
16. Среднеквадратичный момент двигателя при перекладке руля с борта
на борт
/ M2n/pl + (M2n+MnM0 + M20)-^+ S
1/ + + (^0 + J^o^max + J^max)
мэкв1 = У -------------------------------------2--------5- =
/ 9,752-0,53 + (9,752+9,75-1,97 + 1,972)-^^- +
1 / + 1,972-10,34 + (1,972 + 1,97-9,86+9,862) Ь-^ +9,75» 2^1
* 20,06
- = 4,75 кГ-м.
17. Время работы двигателя с момента Мо при следовании судна по кур-
су (асР=5°=0,088 рад): у
. 30t(acp —ар) 30-1800(0;088 — 0,04) п \
.. L =-------—— 42— =------------------------— = 0,69 сек. \
• - т-по 3,14-1200 ’
18. Суммарное время работы двигателя за цикл
X /раб = /рг + * *рг + <1 + /т = 0,53 + 0,64 + 0,69 + 0,85 = 2,71 сек.
§ 49]
Расчет механического рулевого электропривода
235
19. Время цикла
. 3600 3600 „
Гп —-----—-------— 10,3 сек.
350
20. Время паузы
/0 = /ц — S /ряб = 10,3 — 2,71 = 7,59 сек.
21. Среднеквадратичный момент двигателя при следовании судна по
курсу
| / Лфр1 + « + Л1пЛ40 7И2) < А
Мэкв2= I/ -----------------------------------5------------------- =
F СС (Zpj -|- Zp2 -г- ZT) + /1 4" * * * * * * * * * * 22 23
\ 9,752-0,53 + (9,752 | 9,75-1,97+ 1,972)^ +
1/ + 1,972-0,69 9,752 ()285
' = I--------------------------------------1----------- = 4,18 кГ-лк
F 0,75 (0,53 + 0,64 + 0,85) + 0,69 + 0,5-7,59
Таким образом, выбранный двигатель удовлетворяет условиям нагрева
как в режиме маневрирования, так и в режиме удержания судна на задан-
ном курсе:
7ИЭКП1 = 4,75 кГ-м < Мн = 9,75 кГ-м;
Л4экв2 = 4,18 кГ-м < 7ИН = 9,75 кГ-м.
Расчет и выбор преобразователя
22. По мощности генератора
р V\b -о,76-7,5 _п
Т)пв ----------------- = 7>° Кв,П'
1Д = 0,816
где
, ^н. расч — 5,72
/г-, =----------------—• 0,76 —
Рн 7,5
коэффициент загрузки двигателя т|дв=0,816.
Выбираем генератор типа П-61М с данными: Рн=8,0 кет; 17=220 в; 7 =
= 36,3 а; п=1450 об/мин; т] = 81,0%; исполнение — брызгонепроницаемое;
23. По мощности возбуждения
Рв = 0,05 (Рдв + Рг) = 0,05 (7,5 + 10,0) = 0,875 кет
выбираем возбудитель типа П-31М с данными: />н = 1,05 лет; 17=220 в;
I=6,0 а; п=1500 об/мин; т] = 77,5°/о; исполнение — брызгонепроницаемое;
3. в
= £в. = 0,875 = 0,83.
- Ри] 1.05
236
Электроприводы рулевых устройств
[Гл. 7
24. По мощности приводного двигателя
_ *3. ГРГ р *3. 0,87-8,0 , 0,83-1,05
д ’г тв 0,81 0,775
выбираем приводной двигатель типа АМ-62-4 мощностью Р=11,0 квг,
п=1415 об[мин-, 17 = 220 в; 7 = 41,5 о; cos<p = 0,83; т] = 84%; Ам = 2,2; исполне-
ние — тоже брызгонепропицаемое.
§ 50. Расчет мощности исполнительного двигателя
электрогидравлического рулевого привода
Особенностью работы электрогидравлического рулевого при-
вода с насосами переменной производительности является дли-
тельный режим работы исполнительного двигателя. Направле-
ние и скорость перекладки руля определяются направлением
подачи масла и производительностью насоса, которые зависят
от эксцентриситета его скользящего блока.
Существует несколько методов расчета рулевых электропри-
водов с гидравлической передачей. Последовательность метода
расчета, рекомендованного в работе [8], такова:
1. Определяют силы давления в цилиндрах прессов гидрав-
лической машины.
2. Находят основные параметры установки, по которым вы-
бирают насос переменной производительности.
3. Рассчитывают мощность и выбирают исполнительный дви-
гатель.
4. Выбранный двигатель проверяют на заданное время пе- >
рекладки руля и на нагрев.
Определение силы давления в цилиндрах прессов гидрав-
лической машины. Когда руль отклоняется от ДП при пере-
кладках, на его перо действует сила давления воды, которая
через баллер и румпель передается на цапфы шарнирного уст-
ройства. Эта сила изображена на рис. 135 вектором F, направ-
ленным перпендикулярно к оси румпеля. Ее составляющие Fx
п Fv направлены: первая перпендикулярно, вторая параллельно
оси цилиндров рулевой машины, причем Fx воспринимается на-
правляющими балками, a Fy— давлением в цилиндрах. При
работе рулевой машины возникают силы трения в опорах бал-
лера, в шарнирах и упорных ползунах гидравлической машины,
в сальниках гидравлических прессов. Все они направлены про-
тив движения и вместе с силой Fy создают общую силу'сопро-
тивления Есопр-
Для преодоления силы Есопр и обеспечения перекладки руля
в цилиндрах гидравлической машины создается сила давления
Ецил, выражаемая уравнением:
Лшл = Fconp = F (cos а + 2/msin а) NfCK + Етр. (289)
§ 50]
Расчет электрогидравлического рулевого привода
237
Если выразить силу гидравлического сопротивления через
момент на баллере руля (с учетом сопротивления в его опорах)
Р= —= —Мб—cosa> (290)
^ЦИЛ^^б ^цил^о^б
то получим:
Ти,л=-^^(со82“+/ш8ш2а)+^/скЧ-Етр. (291)
^ЦИЛ^О^б
Рис. 135. Силы, действующие в системе электрогидравличе-
ского рулевого привода.
Здесь тцил — число пар цилиндров прессов гидравлической
машины;
Ro=(2^ 3)D — расстояние от оси баллера до оси
скалок, м, где D — диаметр скалки, м;
т]б—к. п. д., учитывающий потери на трение в опорах
баллера; т]б—0,8 -0,87;
fni — коэффициент трения в шарнирах и упорных пол-
зунах по направляющему брусу; fm=0,08 -0,1;
N — реакция опор относительно сил веса скалок (плун-
- ’ жеров) гидравлической машины, определяемая
конструкцией и типом машины (так, вес плунжера
; с вилкой составляет 369 кг у РЭГ-3 и 464 кг
у РЭГ-2);
/ск — коэффициент трения в сальниковом уплотнении
- скалок (у обыкновенных набивок /Ск=0,2, у ко-
жаных — от 0,7 до 0,13);
238
Электроприводы рулевых устройств
[Гл. 1
Nfск — сила трения скалок в сальниках цилиндров гид-
равлической машины, определяемая весом скалок
и не зависящая от давления в цилиндрах;
Ftp — сила трения в сальниках нагруженных цилиндров
гидравлической машины, зависящая от характера
набивки и величины давления в цилиндре; эту
силу можно определить по экспериментальной
формуле В. А. Михеева:
Ftp = 0,15kD/z/;/ck, (292)
где D — диаметр скалки пресса, см;
р — давление в цилиндре пресса, кГ/см2;
h — высота сальниковой набивки; она зависит от диаметра
скалки D и выбирается по табл. 5;
0,15 — эмпирический коэффициент, указывающий, что при вы-
числении силы трения в сальнике в расчет вводится
только 15% высоты набивки h.
Таблица 5
Уплотнение Диаметр скалки D Высота набивки h
СМ
Мягкая (обыкновенная) набивка До 9,0 9,1—14,0 14,1—40,6 Свыше 40,6 7,7 12,8 20,0 25,0
Обыкновенная кожаная манжета До 8,9 9,0—25,4 25,5—45,7 45,8—71,1 Свыше 71,1 1,0 1,8 2,4 3,4 4,0
Угловая кожаная манжета (угол 3 = 90°) До 8,9 9,0—25,4 25,5—45,7 45,8—71,1 Свыше 71,1 1,5 2,3 2,9 3,9 4,8
Определение основных параметров и выбор насоса перемен-
ной производительности. Если диаметр скалок не определен
при выборе рулевой машины, то его можно найти, выразив силу
давления в цилиндре Ецил через диаметр скалки D:
F = ^р (293)
гцил . 4
- . ' \
Расчет электрогидравлического рулевого привода
239
Приравняв друг к другу правые части уравнений (291) и
(293), можно определить диаметр скалки D (см) гидравличе-
ской машины из условий максимальной нагрузки:
D = 1/(COS2 ашах 4 у sin 2ашах) + NfcJ. (294)
У ^Pmax | /Пцил7?от1б J
где pmax = 70-^-210 кГ/см2 (для большинства судов среднего во-
доизмещения принимается Pniax = 140 кГ/см2); Af6max измеряется
в килограммометрах, a Ro— в метрах.
Силой трения в сальниках fTp пренебрегаем ввиду ее не-
значительного влияния на результат расчета.
Насос четырехцилиндровой рулевой машины должен за
время перекладки руля с борта на борт два цилиндра опорож-
нить и два заполнить маслом.
Объем перекачиваемого масла V (л) в общем случае опре-
делится из выражения:
V=m4H^2/?0tg«raax-l(r3, ' (295)
где лП2/4 — площадь сечения скалки, см2;
2/?otgamax—полный ход скалки в пределах угла 2птах, см.
Тогда средняя секундная производительность насоса будет:
Qep=^> (296)
где Т'—Т—to — время работы насоса;
/о=2-< 3 сек — время изготовки системы к действию.
С учетом неравномерности подачи номинальная расчетная
производительность насоса
У = (297)
kQ
где kQ = 0,7 -г- 0,8 — коэффициент неравномерности подачи на-
соса, учитывающий постепенное нарастание и снижение произ-
водительности в начале и конце его работы, а также уменьше-
ние скорости двигателя и объемного к. п. д. при увеличении
давления.
По значению выбранного максимального давления ршах и
номинальной производительности Qa выбирают насос перемен-
ной производительности для проектируемого рулевого привода.
Расчет мощности и выбор электродвигателя насоса. Мощ-
ность двигателя насоса определяется производительностью и
давлением, которые насос должен обеспечить при перекладке
руля. Так как эти величины не остаются постоянными при
работе рулевого электропривода, то для расчета мощности
240
Электроприводы рулевых устройств
[Гл. 7
исполнительного двигателя берут их средние значения за цикл
перекладки руля с борта на борт.
Среднюю производительность насоса определяют по выра-
жению (296), а среднее значение давления находят графиче-
ским путем из кривой p=f(a) на рис. 136, для построения ко-
торой используют следующее уравнение, полученное при со-
Рпс. 136. Графическое определение среднего рабочего давления на-
соса: а — обыкновенного руля; б — балансирного руля.
вместном решении уравнений (291) и (293) относительно дав-
лений р:
--—-----(COS2 а ф /ш sin 2а) 4- NfCK
/ Р m^Ro------------------------------• ' (298)
«р 0,5t.D(0,5D~ 0,3/г/ск)
7) /„х При прохождении рулем ДП (а = 0) момент на баллере
’Мб=0 и электроприводу остается преодолеть лишь силы тре-
ния в передаче, для чего в цилиндрах прессов должно быть
•' создано давление
р =---------ЛДек--------. (299)
0,(0.5D — 0,3/г/ск)
Экстраполяция кривой в область отрицательных значений
момента на баллере руля указывает на то, что при некотором
угле перекладки а0 (обычно он незначителен) сила трения в пе-
редаче полностью преодолевается отжимным действием набе-
гающих на руль потоков воды. Поэтому в диапазоне углов пе-
рекладки от —«max До —«о насос не создает давления, и элект-
родвигатель работает в режиме холостого хода.
Среднее давление за время положительной перекладки обык-
новенного руля (рис. 136, а) определяют по формуле:
о (300)
гср 1 <
атах
§ 50] Расчет электрогид равлического рулевого привода 241
где Sp — площадь, ограниченная кривой давления, кГ • град/см2;
Sp находится из выражения:
sp = (P1 + Po+
Здесь pt, ро,-.., pmax—давления, кГ1см2, соответствующие про-
межуточным углам перекладки;
ар — величина каждой из п одинаковых ча-
стей угла ao+ctmax, град.
Среднее давление за время положительной перекладки ба-
лансирного руля (рис. 136, б) определяют аналогично.
Зная средние значения производительности и давления, со-
здаваемого насосом, можно определить номинальную мощность
двигателя Рн (кет) по формуле:
р __ IQQcp (Pep ’ Ртр)
н 102т
iu^r-нас
где рТр=3,5-7 4 кГ/см2—потери давления на трение мас-
ла в трубопроводах системы;-
'>1иас = т]г7]г7]мех = 0,4 : 0,8 — к. п. д. насоса;
, г]г = 0,7 : 0,98 — гидравлический к. п. д., связан-
ный с трением жидкости в ра-
бочих полостях насоса; для ро-
тационных насосов, применяемых
в гидравлических рулевых пере-
дачах, можно принять т)г~1;
»]v = 0,7-;- 0,95 — объемный к. п. д. (диапазон но-
минальных значений), учиты-
вающий обратный перепуск пе-
рекачиваемой жидкости и уве-
личивающийся с уменьшением
вязкости жидкости и скорости
насоса;
т)мех=0,85-ъ-0,96 —механический к. п. д„ учитываю-
щий потери на трение в подшип-
никах, сальниках и других тру-
щихся частях насоса.
По номинальным значениям мощности и скорости насоса
выбирают исполнительный двигатель рулевого привода.
Проверка электропривода на продолжительность пере-
кладки руля. Так как исполнительный двигатель рулевого элек-
тропривода выбирают со многими допущениями и по прибли-
женным эмпирическим коэффициентам, то его необходимо про-
верить на соответствие действительным условиям работы.
Продолжительность перекладки руля зависит от фактической
производительности иасоса, поэтому указанную проверку элект-
9 К. А. Чекунов
242
Электроприводы рулевых устройств
[Гл. 7
ропривода сводят к построению диаграммы действительной
производительности, соответствующей углу перекладки a: Qa =
=f(a).
При этом вводят дополнительно следующие величины:
Сует — установленная производительность насоса, которую обес-
печивает насос при номинальной скорости пн, заданном экс-
центриситете и без учета потерь на обратный перепуск перера-
батываемой жидкости; QT — теоретическая производительность, .
полученная при прежних условиях, но с учетом действительной
скорости вращения; .
Рис. 138. Диаграмма установленной
Сует и действительной произво-
дительности насоса переменной про-
изводительности.
Рис. 137. Зависимость механиче-
ского (кривая 7) и объемного
(кривая 2) к. п. д. насоса типа
МНП-0,14 от давления р.
Таким образом, действительную производительность насоса
можно выразить через эти величины следующим уравнением:
Qa-Q^v=Qyc^vv, (зоз)
где t]v — объемный к. п. д., который берут из графика, приве-
денного на рис. 137.
На рис. 138 изображен график изменения установленной
производительности насоса при перекладке руля с борта нах
борт при отсутствии ограничителя мощности. За начало отсчета
принято положение руля, повернутого на угол aniax в сторону
одного из бортов. Отклонение рукоятки (штурвала) поста уп-
равления в направлении противоположного борта приводит
к тому, что по мере увеличения эксцентриситета насоса произ-
водительность прямолинейно возрастает до QyCt- За это время
руль успевает пройти угол « = 2-: 5°. С возвращением руля
в ДП и с дальнейшим поворотом на угол + (30 >33)° приходит
в действие система следящего управления и начинается умень-
шение эксцентриситета, что вызывает быстрое уменьшение про- -
изводительности насоса до нуля.
§ 50] Расчет электрогидравлического рулевого привода 243
Чтобы узнать действительную производительность насоса
по формуле (303), нужно знать величину скорости п; ее опреде-
ление начинают с определения значения мощности насоса для
различных углов перекладки руля а. Для этого пользуются
формулой:
р WQa + ртр) = 10^уст (Ра ^Ртр)» , (304)
102т]нас Ю2т;гт]мехПн
где <2аИ ра—действительная производительность (л/сек) и ра-
- бочее давление (кГ/сж2), соответствующие углу
перекладки руля а;
Г) мех механический коэффициент, который берут из
графика, приведенного на рис. 137.
По известным соотношениям между мощностью и моментом
для каждого из принятых углов перекладки а можно найти со-
ответствующее значение моментов (кГ-м)-.
М = 975 ? = ^5 ЮФуст (Pg Ртр) п
п п 102т;г1]Мехпи
или
М = 95,5 , (305)
к ^н^г^мех
где пн— номинальная скорость вращения насоса, для которой
построена зависимость QyCT=f(a).
По механической характеристике выбранного электродвига-
теля, которую можно построить по формулам (146) и (148),
находят скорости вращения п для полученных значений момен-
тов. Затем определяют действительную производительность на-
соса при выбранных углах а и строят кривую Qa=f(u). Полу-
ченную диаграмму (см. рис. 138) разбивают на зоны, в которых
производительность неизменна или изменяется прямолинейно.
Расчет сводят в табл. 6, в которой приняты следующие обо-
значения: . ' - >
Таблица 6
Зона Граничные углы зон СМ Vi, Л Qcpi, л/сек It, сек
I “0 —“1 Нт V1 лср1 ч
II “1 — “2 - V2 Vcp2 ^2
m «т-1— 'нт vm Qcp т
9*
244
Электроприводы рулевых устройств
[Гл. 7
Hi — путь, проходимый скалками прессов в пределах
зоны (рис. 139); =/?о (tg а0—tgcii);
Vi-—объем масла, перекачиваемого в пределах зоны;
Qcpi — средняя производительность в пределах зоны;
ti — продолжительность перекладки руля в пределах
зоны; ti = VilQCVi.
Выбранный электропривод удовлетворяет требованиям про-
должительности перекладки руля, если суммарное время ра-
Рис. 139. Пути, проходимые скалками гидравлической машины
при перекладке руля.
боты привода во всех зонах и изготовки системы к действию не
превышает допустимого Регистром СССР времени перекладки
. 2^ + ^о<Гдоп = 28 сек. (306)
1
Проверка электродвигателя насоса на нагрев. Во время сле-
дования судна по курсу руль перекладывают на небольшие
углы (средний угол перекладки аср~5°). При этом электродви-
гатель насоса переменной производительности работает в ре-
жиме, близком к холостому ходу. Если принять во внимание
также отсутствие частых пусков и остановок двигателя элект-
рогидравлического рулевого привода, то можно, по-видимому,
утверждать, что выбранный двигатель в данном режиме пере-
греваться выше допустимой температуры не будет.
Поэтому двигатель насоса проверяют на нагрев только в ре-
жиме непрерывных перекладок руля с борта на борт в течение
0,5 ч при полном .переднем ходе судна (Регистр СССР,§ 7.2.13).
Для проверки выбирают самый тяжелый из возможных режи-
мов, когда «ср—атях.
Наиболее простым и достаточно точным является метод про-
верки, предложенный проф. В. И- Полонским и заключающийся
Расчет электрогидравлического рулевого привода
245
в сопоставлении часовых потерь исполнительного двигателя
(ИД) рулевого электропривода. Согласно этому методу
Часовые потери энергии
ИД при номинальном
длительном режиме
Часовые потери ИД
при действительном
режиме
или для конкретного случая
3600ЛРн > m [“ АРрабЛ + (3600 - mta ср) АРх х, (307)
о
где АРп — номинальные потери мощности, вт;
1_-г *
др — 2____!!ир •
Н у 1
'iH
пг— число перекладок руля за 1 ч;
Tlx.x — потери энергии ИД за ”1 ч холостого хода, дж;
71х.Х= (3600-------tnt а ср) АРх.х!
Дер—-продолжительность прямой перекладки руля на
угол аср, сек (по табл. 6);
АРх.х — потери мощности в двигателе при обратной пере-
кл’адке руля (потери холостого хода), вт;
Рхх — мощность холостого хода ИД, вт; Рх.х= (0,2 -г-
-0,3)Рн;
т]х.х — к. п. д., соответствующий мощности Рх.х;
йраб — потери энергии, сопровождающие полезную работу
за период прямой перекладки руля (при обратной
перекладке ИД работает в режиме холостого хо-
да), дж;
^раб J Д-^раб^Д
* 0
Потери Лраб можно определить проще — графическим путем,
для чего достаточно построить кривую APpa6=f(0 с помощью
ряда промежуточных графиков.
Используя уже известные из графиков рис. 136 и 138 зави-
симости p=f(a) и Qo=f(a), находим для углов от 0 до +агаах
значения полезной мощности Р из уравнения (304). Графики
зависимости установленной СДст и действительной Qo произво-
дительности насоса, давления в прессах р и мощности электро-
двигателя Р от угла перекладки руля а приведены на рис. 140.
246
Электроприводы рулевых устройств
[Гл. 7
Угол ai соответствует времени увеличения эксцентриситета на-
соса. На этом же рисунке изображена кривая APpa6=f(a)> по-
строенная на основании зависимости:
др _1~> р,
рао г ’
Чдв
где т]дВ •—текущее значение к. п. д. двигателя, определяемое из
кривой rj=f(P) для выбранного двигателя насоса или по урав-
нению (200).
При построении кривой потерь, сопровождающих полезную
работу, следует иметь в виду, что при Р = 0 потери мощности
будут соответствовать мощ-
ности холостого хода Рх.х-
С помощью расчетной
табл. 6 для найденных уг-
лов от 0 до атах определяем
зависимость t=f(a) и по
Рис. 140. Расчетные кривые для опреде- Рис. 141. Определение рабочих
ления рабочих потерь мощности элек- потерь энергии графическим ме-
тродвигателя насоса. тодом.
ней строим на рис. 141 искомую кривую зависимости потерь
двигателя от времени прямой перекладки руля на максималь-
ный угол ДРраб=/(/).
Из этого графика получаем:
А Раб = (ДРх. х- + + АР2 + • • • + АР„) ta дж, (308)
где ta — каждый из п отрезков времени,
на которые разбито время пря-
мой перекладки руля, сек;
АРх.х, APi, АРг, • • •, АРП — потери мощности двигателя, со-
ответствующие промежуточным
отрезкам времени ta, вт.
Двигатель по нагреву выбран правильно, если соотношение
(307) удовлетворяется.
Расчет электрогидравлического рулевого привода
247
Пример 12. Произвести расчет мощности и выбор исполнительного двига-
теля насоса переменной производительности электрогидравлического рулевого
привода сухогрузного судна водоизмещением 16 000 т.
На судне установлена электрогидравлическая рулевая машина типа
РЭГ-2-4 с двумя насосами переменной производительности. Данные машины:
максимальный момент А1гпах=45 г-я; число пар цилиндров тЦИл=2; диа-
метр плунжера (скалки) £1=220 мм; вес плунжера с вилкой 464 кг; расчет-
ное рабочее давление в системе цилиндров р= 135 кГ/см2; максимальный угол
перекладки руля от ДП на борт an-iax=35o; время перекладки руля с борта
на борт при работе одного насоса 7 = 28 сек. Судовая сеть работает на пере-
менном токе напряжением 380 в. Конструктивные данные рулевого устрой-
ства — по условиям примера 10, оттуда же и значение моментов на баллере
руля.
Решение. Определение основных параметров рулевой машины и вы-
бор насосов переменной производительности.
1. По диаметру плунжера D=220 мм определяем расстояние между
осями баллера и скалок
До = 2Д = 2-220 = 440 мм.
2. Находим объем перекачиваемого масла в цилиндрах при перекладке
руля с борта на борт на угол 2атах =2X35°:
V = щцил — 2Potg35°-10 3= 2 3,14 22^ 2 44-0,7-10~~3 = 46,7 л.
4 4
3. Принимая время изготовки системы к действию £о=2 сек, получаем
время работы насоса
Т' = Т — t0 = 28 — 2 = 26 сек.
4. Подсчитываем среднюю секундную производительность насоса
n v 46,7 , Q ,
(£<-„ = — =----= 1,8 л/сек.
₽ Т' 26
5. С учетом коэффициента неравномерности подачи £<2=0,8 рассчиты-
ваем номинальную производительность насоса
Расч=%-=44=2-25 л'сек=135 л>мин-
kQ
6. Выбираем насосы переменной производительности типа МНП-0,14 со
следующими параметрами: расчетное число оборотов и = 980 об/мин; количе-
ство плунжеров z=9; диаметр плунжера <£=24 мм; рабочий эксцентриситет
е= 17 мм— 1,7 см.
7. Исходя лз этих данных находим, что установленная производитель-
ности иасоса
QyCT = 2-^-zenlO-3 = 2 3,14=2,42 9-1,7-980-10~3 = 137 л/мин,
ИЛИ
QycT = 137 л1мин >.<2н. расч^ 135 л1м“н-
Расчет мощности и выбор электродвигателя насоса.
8. Строим кривую зависимости- давления р, создаваемого насосом, от
угла перекладки руля а, для чего пользуемся уравнением (298), подставляя
248
Электроприводы рулевых устройств
[Гл. 7
в него следующие данные: й=20 см (из табл. 5); т]б=0,85; /ш=0,1; /Ск=0,2.
Момент Л1б берем из кривой, которую строим по табл. 4.
Данные расчета записываем в табл. 7. '
___ ' - , Таблица 7
О,.7. * (7.3 '
а, ° ЛТб, tn-м р, кГ/см2 ^мех Й Ма, кГ м
0 0 0,275 0,45 2,0
5 4 16 0,67 6,5
10 8,5 34 0,83 10,1
15 13 50,6 0,89 13,5
20 17 63,7 0,92 16,2
25 21 74 0,925 18,6
30 28 93 0,93 23,1
35 40 120 0,94 29,3
9. По полученным значениям строим кривую p=f (а), показанную на
рис. 142, а, и определяем площадь Sj>, ограниченную кривой
= (р<, т Pi “I" р2 т Рз + Pt + Ръ “I" Рв + j ар =
(120Х
0,275 -г 16 + 34 + 50,6 + 63,7 + 74 + 93 + = !987 кГ-град/см2. .
10. Находим среднее давление за время положительной перекладки руля
Sp 1987 ,
pCD = —— =-------= 56,7 кГ 1см2.
“max 35
11. Определяем потребляемую насосом мощность
„ lOQcp (РеР + Ртр) _ 10-1,8(56,7 + 3,5)
/ II —-.... - . .....— ~~ ~~ —— — 1 , .Д. 1X0 III .
102i|Hac 102-0,5
12. По скорости и потребляемой насосом мощности выбираем из ВТУ
620-3627-60 электродвигатель типа АМ-82-6 с данными: Рн=27 кет;
и=965 об1мш\ 17 = 380 в; /=56,5 о; rj—87,5%; cos<p = 0,83; Хм = 2,2; испол-
нение — брызгонепроницаемое.
Проверка электродвигателя насоса на продолжительность перекладки
руля.
13. Определяем моменты, развиваемые на валу электродвигателя при
различных углах перекладки руля, для чего подставляем в формулу (305)
следующие значения: QycT = 2,28. л/сек; т)г~1; т)мех~ по графику на рис. 137
для давлении ра +ртр.
Данные расчета вносим в табл. 7.
14. По механической характеристике выбранного электродвигателя для
полученных значений моментов находим скорости вращения п и вносим их
в табл. 8.
15. Определяем действительную производительность насоса при получен-
ных скоростях двигателя, подставляя в формулу (303) значение объемного
к. п. д. T]v по графику на рис. 137 для тех же давлений.
Данные расчета записываем в табл. 8 и строим график Qa=f(a)
(рис. 142, б).
16. Полученный график разбиваем на четыре зоны и определяем время
• работы электропривода в каждой из них. Расчет сводим в табл. 9. ‘
§ 50} Расчет электрогидравлического рулевого привода 249
Рис. 142. Расчетные кривые к примеру 12.
250 Электроприводы рулевых устройств [Гл. 7
Таблица 8
а, ° п, об/мин Q , а’ л/сек а, ° п, об/мин ‘4' О , а» л/сек
0 996 0,94 2,18 20 980 0,83 1,90
3 994 0,92 2,14 25 977 0,82 1,87
5 992 0,91 2,10 30 972 0,79 1,78
10 987 0,89 2,03 32 969 0,77 1,74
15 983 0,86 1,97
Таблица 9
Зона Г раничные углы зон а, ° Hl, см Vi, л <2ср ь л/сек ti, сек
I 35 * 32 3 3 2 5 1 09 2 29
II —32—(Г 27,5 20,9 2,18 9^58
III 0—32 27,5 20,9 1,96 10,66
IV 32—35 3,3 2,5 0,87 2,87
17. Сравнивая искомое время работы с допустимым его значением, по-
лучаем:
4
% t, + t0 = 2,29 + 9,58 4- 10,66 + 2,87 -|- 2,0 = 27,4 сек < Т = 28 сек.
1
Проверка двигателя насоса на нагрев при выполнении судном маневрен-
ных операций (аср = 35°).
18. Находим номинальные потери мощности электродвигателя:
ДР = Р = 1 ~~ °’87-Ё. 27-103 = 3860 вш.
т1н 0,875
19. Определяем число перекладок руля в час: ' ‘
3600 3600
m -------------=-------= 131.
Yti -I- t0 27,4
20. Используя данные табл. 8, строим график Qa = f(u) для прямой пере-
кладки руля (рис. 142, в).
21. Полученный график разбиваем на три зоны и определяем время ра-
боты электропривода в каждой из них. Расчет сводим в табл. 10.
22. Подсчитываем время прямой перекладки на угол аср = а,11ах=35°:
3
^аср = 2 Л- + /о = 1,63 4- 9,87 + 2,87 4- 2,0= 16,37 сек.
23. Мощность холостого хода исполнительного электродвигателя (во
время обратной перекладки руля) оказывается равной:
Рх х = 0,2Р = 0,2-27 = 5,4 кет.
.X. X > н > >
§ 50]
Расчет электрогидравлического рулевого привода
251
Таблица 10
Зрна Граничные углы зон а, ° Hlt см Vt, л Qcp /> л/сек ti, сек
I 0—3 2,3 1,75 1,07 1,63
II 3—32 25,2 19,15 1,94 9,87
III 32—35 3,3 2,5 0,87 2,87
24. Потери мощности в ИД в заданном режиме составят:
X
—--------I'jp.
,^Х. X !
X. X
5,4-103 = 1800 вт.
25. Находим потери энергии ИД в течение часа в режиме холостого
хода:
Лх. X = (3600 — /nZ«p) ДРх. X = (3600 — 131 • 16,37) 1800 = 2 620 000 дж. '
26. Полезная мощность Р электродвигателя насоса при перекладке руля
от 0 до amax=35° определится по формуле (304). Расчетные данные сводим
в табл. 11 и строим график P=f(a) (рис. 142, г).
Таблица 11
Я, ° Ра» кГ/см2 ^мех ^а» кГ -м п, об/мин р, кет
3 10 0,53 5,8 993 5,8
9 30 0,77 9,7 988 9,8
15 51 0,89 13,5 983 13,7
21 65 0,92 16,6 980 16,7
27 82 0,93 20,5 975 20,5
32 101 0,94 24,1 970 24,8
27. По кривой t]=f(P) для выбранного двигателя типа АМ-82-6 по полу-
ченным значениям мощности Р находим к. п. д. двигателя г]дв. Затем опре-
деляем потери мощности двигателя при различных нагрузках по формуле:
ЧДВ
Расчетные данные сводим в табл. 12 и строим график APpa6=f(a)
(рис. 142, г).
28. По графику /==f(a), построенному на основе данных табл. 10
(рис. 142, д), и по данным табл. 12 находим зависимость APpao=f(O
(рис. 142, е).
252
Электроприводы рулевых устройств
[Гл. 7
Таблица 12
*ДВ АР раб» вгп сек р, кет я, ° Т1ДВ АР раб» вт t, сек р, кет
0 0,75 1800 0 5,4 21 0,88 2280 7,7 16,7
3 0,76 1830 1,6 5,8 27 0,88 2800 9,7 20,5
9 0,84 1870 3,6 9,8 32 0,87 3550 11,5 24,8
15 0,87 2050 5,6 13,7 35 0,74 1800 14,4 5,4
29. Потери энергии, сопровождающие полезную работу во время прямой -
перекладки руля, определяем из графика на рис. 142, е:
^раб — I / APV -f-AP \ АР _ + АРх „ х- х рабЗ = др । др I рабЗ х- х / Г 2 Лграб1+ ' раб2 1 1 2 “2 -
= ( _1800-}- З550 1900 + 235(Л 3550 + 1800 = 34 250
\ 2 J 2
30. Сравнивая часовые потери энергии в ИД при номинальном и дей-
ствительном режимах работы рулевого электропривода, получаем: 3600ЛРц>
>тЛраб+Лх. х, т. е. 3600-3860 131-34 250 +2 620 000, или 13 890 000
>6 НО ООО дж.
'Таким образом, в расчетном режиме работы рулевого электропривода
двигатель перегреваться не будет.
§ 51. Системы дистанционного управления электроприводом
рулевого устройства
Рулевые электроприводы с механической передачей. В та-
ких электроприводах чаще всего применяются электромашин-
ные схемы управления (система Г—Д) и схемы управления ре-
лейно-контакторного типа. По характеру воздействия на объект
управления они представляют собой разомкнутые системы.
Электромашинные схемы. Эти схемы осуществимы при пита-
нии приводного двигателя как от судовой сети переменного
тока, так и от сети постоянного тока.
В систему Г—Д при питании от сети переменного тока
(рис. 143) входит следующее оборудование: а) исполнительный
двигатель постоянного тока ИД; б) трехмашинный преобразо-
вательный агрегат, состоящий из приводного асинхронного дви-
гателя ПД, генератора Г и возбудителя В; в) аппаратура уп-
равления, защиты и сигнализации.
В рулевых электроприводах с системой простого действия
в качестве постов управления часто применяют рулевые ко-
лонки типа КН-2200 (рис. 144). Они состоят из основания 1,
в котором смонтированы регулировочные сопротивления и па-
нель с контактными зажимами, корпуса 2, в котором размещен
командо-контроллер кулачкового типа, и головки 3 с рукоят-
§ 51]
Системы дистанционного управления
253
Рис. 143. Схема управления рулевым электроприводом по системе Г—Д
с питанием приводного двигателя от сети переменного тока.
254
Электроприводы рулевых устройств
[Гл. 7
кой 4, снабженной пружинным самовозвратом. На верхней по-
верхности головки расположены три глазка сигнальных ламп.
Для перевода управления с одного поста на другой служат
переключатели постов, представляющие собой многоконтактные
переключатели (обычно типа УП-5200), одновременно пересо-
единяющие все оперативные цепи рулевого электропривода.
Чтобы избежать поломок рулевых механизмов при крайних
рабочих положениях руля, исполнительный двигатель отклю-
чается конечным
шпиндельные
Рис. 144. Руле-
вая колонка ти-
па КН-2200.
выключателем. Наиболее распространены
конечные (путевые) выключатели типа КР-6200
на пять цепей, из которых две служат для раз-
рыва цепи возбуждения генератора и три —
для включения сигнальных ламп постов управ-
ления.
Обеспечению необходимой надежности рабо-'
ты схемы способствует то, что рулевые электро-
приводы питаются двумя разнесенными возмож-
но дальше друг от друга фидерами. При подаче
напряжения на щит питания привода загорается
желтая сигнальная лампа ЛС)К (см. рис. 143).
Нажатием кнопки КП на одном из кнопочных
постов (в румпельном помещении или в рулевой
рубке) пускается в ход приводной двигатель ПД,
который приводит в движение генератор Г и
возбудитель В. Напряжение в цепях возбужде-
ния и сигнальных ламп устанавливается регуля-
тором возбуждения РВ возбудителя, причем обмотка возбуж-
дения ИД в нерабочем состоянии получает питание
через добавочное сопротивление СД. Перекладка руля на-
чинается с возбуждением генератора, который подает напряже-
ние на зажимы ИД. При переводе рукоятки (или штурвала) по-
ста управления в одно из четырех рабочих положений левого или
правого борта устанавливаются скорость и направление пере-
кладки руля (см. таблицу замыкания контактов).
Положение пера руля сигнализируют три лампы, встроен-
ные в пост управления: зеленая ЛЗ — руль право, белая ЛБ—
руль в ДП, красная ЛК — руль лево. Лампы включаются и
отключаются контактами путевого (конечного) выключателя
ВИЗ, ВП4 и ВП5. Контакты конечного выключателя ВП1 и
ВП2 в крайних положениях пера руля разрывают цепь неза-
висимой обмотки возбуждения генератора, обеспечивая тем са-
мым остановку ИД. Двигатель может быть также остановлен
переводом рукоятки (штурвала) поста управления в нулевое
положение.
Согласно Правилам Регистра СССР, в рулевых электропри-
водах на отключение должна срабатывать только защита от
§ 51]
Системы дистанционного управления
255
коротких замыканий. В рассматриваемой схеме цепи главного
тока приводного двигателя и все вспомогательные цепи защи-
щены от коротких замыканий предохранителями с плавкими
вставками. Цепь главного тока генератора и исполнительного
двигателя защищена, кроме того, от перегрузок. Эта защита
осуществлена с помощью противокомпаундной обмотки гене-
ратора, увеличение тока в которой размагничивает генератор
и ограничивает ток и момент короткого замыкания двигателя
заранее предусмотренным значением (обычно 2/н).
Защита приводного двигателя от перегрузок с помощью
тепловых реле воздействует на звуковой и световой сигналы.
При длительной пррегрузке, вызванной, например, работой дви-
гателя на двух фазах, заеданием в передаче или плаванием судна
в неблагоприятных условиях (шторм, битый лед), размыкаю-
щие контакты тепловых реле 1РТ или 2РТ размыкаются, обес-
точивая катушку промежуточного реле 1РП. При потере пита-
ния размыкающие контакты 1РП закрываются, в результате
чего в рулевой рубке загорается красная лампа Л СК. и звонит
звонок СЗ. После того, как меры, необходимые для устранения
ненормального режима работы, приняты, нажатием кнопки К
оживляется током промежуточное реле 2РП и действие зву-
кового сигнала прекращается.
Регистр СССР не рекомендует применять нулевую защиту
при прямом пуске двигателей. Поэтому в схеме управления
приводным двигателем параллельно кнопкам управления вклю-
чен пакетный выключатель ВП.
Если на судне в качестве основного выбран постоянный род
тока, то схема управления рулевого электропривода по системе
Г—Д, в отличие от предыдущей, имеет приводной двигатель
постоянного тока, управляемый при помощи пускового реостата
или магнитной станции, а вспомогательные цепи получают пи-
тание от общесудовой сети постоянного тока (возбудитель от-
сутствует) .
Схема управления рулевого электропривода с дросселями
насыщения. На судах небольшого водоизмещения с сетью пере-
менного тока целесообразно применять схему управления руле-
вым электродвигателем с дросселями насыщения (рис. 145, а).
Ее укомплектовывают асинхронным короткозамкнутым двигате-
лем ИД типа АОС-51-4, номинальной мощностью 4,5 кет,
дросселем насыщения ДИ, магнитным усилителем МУ, тахоге-
нератором ТГ, путевым (конечным) выключателем ВК, кулач-
ковым контроллером К на 17 цепей, системой температурного
контроля ТК и другой коммутационной и регулировочной аппа-
ратурой.
Трехфазный дроссель насыщения с одной общей обмоткой
управления собран на Ш-образном сердечнике и служит для
Замыкание контактов
конечного выключателя
/
Рис. 145. Схема управле-
ния (а) и механические
характеристики (б) ру-
левого электропривода с
дросселями насыщения.
256 Электроприводы рулевых устройств
§ 5Л
Системы дистанционного управления
257
изменения напряжения, подводимого к обмотке статора дви-
гателя.
Магнитный усилитель позволяет уменьшить величину токов
управления и ввести обратные связи, определяющие форму ме-
ханических характеристик. У него имеются следующие четыре
об-мотки, расположенные на Ш-образном сердечнике: Wp — ра-
бочая обмотка, индуктивное сопротивление которой изменяется
с изменением насыщения сердечника; IF0.c— обмотка положи-
тельной обратной связи по току, повышающая коэффициент
усиления; Wc— обмотка смещения, компенсирующая намагни-
чивающую силу обратной связи при отсутствии тока в четвер-
той обмотке Wy, служащей для управления исполнительным
двигателем ИД. Скорость вращения последнего в конечном
счете определяется током в этой обмотке. Величина тока уста-
навливается разностью задающего напряжения Ц3, снимаемого
с потенциометра Pi—Pi, и э. д. с. тахогенератора Етг.
Работа схемы осуществляется следующим образом. Контакты
контактора Л, катушка которого получает питание при подаче
напряжения через размыкающие контакты ВК1 и К14 или ВК2
и К15, замыкаются (действие контактов контроллера К.14 и
К15 указано в таблице на рис. 145). Далее, при переводе конт-
роллера в первое рабочее положение (например, в направле-
нии левого борта) замыкаются контакты К1, КЗ и К5, через ко-
торые подается напряжение на зажимы статора ИД. Контакт
КЮ остается открытым, и обмотка управления дросселя ОУ не
получает питания. Пуск двигателя поэтому происходит при по-
ниженном напряжении.
Во втором рабочем положении контроллера замыкаются
контакты КЗ, КЮ, КН и К16, причем с замыканием последнего
получает питание обмотка ОУ, ток в которой определяется
сопротивлением обмотки 1СР магнитного усилителя МУ. Сопро-
тивление этой обмотки зависит от насыщения магнитной си-
стемы МУ, определяемого током в обмотке управления IFy, по-
лучающей питание при замыкании контакта К8. Цепь возбуж-
дения тахогенератора замыкается через контакты КЮ и КП.
Для сохранения полярности э. д. с. £тг при реверсе ИД служат
контакты К12 и К13. Селеновый вентиль обеспечивает необ-
ходимую отсечку по току, благодаря которой обмотка IFy вклю-
чается только при условии, что ETr<U3.
С переводом контроллера в третье и четвертое положения
замыкаются контакты К9 и К17, в результате чего увеличива-
ются задающее напряжение, ток в обмотке IFy и насыщение
магнитной системы МУ, уменьшается сопротивление обмотки
IFP, увеличивается ток в ОУ дросселя ДИ и напряжение на
зажимах статора. Двигатель переходит с механической харак-
теристики 1 на характеристики-2 и <3 (рис. 145, б).
258
Электроприводы рулевых устройств
[Гл. 7
Когда перо руля достигает крайнего рабочего положения,
то контакт ВК1 или ВК2 размыкается и двигатель отключается
от сети контактами контактора Л, который применен для уси-
ления контактов путевого выключателя.
Остановка двигателя, отключенного от сети, ускоряется ди-
намическим торможением, т. е. подачей в обмотку статора по-
стоянного тока через контакты Кб и К7 или через размыкающие
контакты Л, с помощью которых тормозной ток питает обмотку
статора в рабочих положениях рукоятки поста управления.
Перегрев обмоток статора тормозным током предупреждается
тем, что цепь последнего прерывается по истечении заданной
выдержки времени размыканием контактов реле РТ.
Контроль за нагревом ИД осуществляется с помощью тер-
мосопротивлений ТС, заложенных в обмотку статора. В случае
нагрева двигателя до определенной температуры, которая ус-
танавливается переключателем ПТУ феррорезонансного стаби-
лизатора напряжения ФСН, величина сопротивления ТС резко
снижается и сигнальное реле PC срабатывает, включая сиг-
нальную лампу ЛС и ревун Рв.
Для контроля исправности звуковой сигнализации служат
размыкающий контакт PC и переключатель ПР. Система сиг-
нализации приводится в исходное положение кнопкой К.
Электрогидравлические рулевые приводы. Электрогидравли-
ческие рулевые машины имеют два насоса переменной произ-
водительности, которые обычно приводятся в движение асин-
хронными короткозамкнутыми двигателями. Схема питания та-
кого рулевого электропривода представлена на рис. 146.
На щит питания, расположенный в румпельном помещении,
напряжение подается двумя фидерами, разведенными по бор-
там. Если выходит из строя работающий фидер, то автомати-
чески включается фидер резервный. Эту операцию выполняет
автоматический переключатель питания — реверсивный контак-
тор с электрической блокировкой.
Питание со щита подается к двум двигателям насосов пе-
ременной производительности и к другим элементам, применен-
ным в схеме управления.
Пуск двигателей насоса можно осуществить из румпель-
ного помещения переводом переключателя IBM (2ВМ) в поло-
жение М или с поста управления — выключателем дистанцион-
ного управления 1ВД (2ВД). Переключатель IBM (2ВМ) при
этом должен находиться в положении Д.
Защита от коротких замыканий в главной цепи осуществ-
ляется установочными автоматами на щите питания, а от корот-
ких замыканий во вспомогательных цепях—предохранителями.
•От длительных небольших по величине перегрузок в схеме
предусмотрена тепловая защита, работающая на световой и
Рис. 146. Схема питания электрогидравлического .рулевого привода.
§ о/] Системы дистанционного управления
re
СЛ’
260
Электроприводы рулевых устройств
[Гл. 7
звуковой сигналы. При срабатывании любого из тепловых реле
и размыкании одного из контактов РТ теряет питание реле 1Р
(ЗР), которое замыкает цепи реле времени РВ и ревуна Рв.
Электромагнитное реле времени, получив питание, мгновенно
размыкает контакты РВ в цепи собственной катушки и сигналь-
ной лампы ЗЛС (4ЛС). Потеряв питание, реле РВ с выдержкой
времени замыкает свои контакты и обеспечивает работу сиг-
нальной лампы в режиме мигающего света. Действие ревуна
прекращается нажатием кнопки снятия сигнала КСС. Горение
сигнальной лампы ЗЛС (4ЛС) мигающим светом продолжа-
ется, пока не замыкается разомкнувшийся контакт РТ, и тогда
вся схема возвращается в исходное состояние нормальной
работы.
Сигнализация о подаче напряжения на схему осуществ-
ляется сигнальными лампами 1ЛС — в румпельном помещении
и 2ЛС — на посту управления; сигнализация о нормальной ра-
боте двигателей насосов переменной производительности — ров-
ным светом ламп ЗЛС и 4ЛС.
§ 52. Следящие системы управления
рулевыми электроприводами
Следящие системы управления применяются в рулевых
электроприводах как с электромеханическими, так и с электро-
гидравлическими передачами.
Рассмотренные в предыдущем параграфе схемы управления
рулевыми электроприводами (система Г—Д, контакторная
и др.) могут служить основой для создания схем следящего
действия. Однако надо иметь в виду, что длительная работа ру-
левых электроприводов с частыми переключениями не может
быть достаточно надежной при использовании контактных схем
управления. Это явилось причиной внедрения бесконтактных
схем, одна из которых представлена на рис. 147.
Наиболее распространенный в настоящее время принцип по-
строения систем следящего управления состоит в том, что угол
поворота задающего устройства становится равным углу пово-
рота пера руля лишь после отработки электроприводом задан-
ного углового перемещения руля. В процессе же перекладки
руль на некоторый угол отстает от задающего устройства.
С целью более полного использования машин электропривода
в таких системах предусматривается запаздывание обратной
связи, обеспечиваемое устройством накапливания угла рассо-
гласования 6 (рис. 148).
В схеме на рис. 147, как и в большинстве схем рулевых
электроприводов, применяемых в настоящее время, согласова-
ние положения поста управления и пера руля осуществляется
§ 52]
Следящие системы управления
261
сельсинами, которые, требуя лишь незначительного ухода, обес-
печивают надежную работу установки.
Сельсины — это малогабаритные индукционные машины,
с помощью которых передаются на расстояние угловые пере-
мещения валов, механически не связанных между собой.
Рис. 147 Схема рулевого электропривода следящего действия.
В схеме можно применить как контактные, так и бесконтакт-
ные сельсины. Контактные сельсины типа СС, применяемые
в настоящее время, обычно имеют на статоре трехфазную об-
мотку, соединенную в звезду,
а на роторе — однофазную об-
мотку, которая питается от об-
щей сети переменного тока. Если
роторы соединенных между со-
бой сельсинов (сельсина-датчи-
ка СД и сельсина-приемника СП)
находятся в одинаковых положе-
ниях, то в статорных обмотках
индуктируются равные по вели-
чине и противоположно направ-
ленные э. д. с. Если же ротор
сельсина-датчика повернуть на
некоторый угол, то равновесие
Рис. 148. Изменение скорости ис-
полнительного двигателя в зави-
симости от угла 6.
1 — линейная; 2 — нелинейная обратная
связь.
э. д. с. статоров нарушится и в их обмотках потечет ток, кото-
рый, взаимодействуя с полем ротора сельсина-приемника, вызо-
вет его поворот на угол, равный углу поворота ротора датчика.
262
Электроприводы рулевых устройств
[Гл. 7
Если теперь ротор сельсина-приемника затормозить, а его
обмотку отключить от питающей сети, то при повороте ротора
датчика поле тока статора приемника создаст в однофазной
обмотке ротора индуктированную э. д. с., пропорциональную
синусу угла рассогласования. Такой сельсин-приемник носит
название сельсина-трансформатора.
У бесконтактных сельсинов типов БС и БД, в отличие от
контактных, обе обмотки расположены на статоре, а ротор
представляет собой подвижный магнитопровод специальной
конструкции. Поворот такого ротора смещает ось магнитного
потока, создаваемого током однофазной обмотки. В осталь-
ном принцип работы не отличается от рассмотренного выше.
Сельсины используются в трансформаторном режиме.
Рассматриваемый электропривод рулевого устройства пред-
ставляет систему ЭМУ-Д с двухкаскадным магнитным усилите-
лем, собранным по дифференциальной схеме. Первый каскад
состоит из фазочувствительных выпрямителей Bi и В2 й проме-
жуточных магнитных усилителей 1МУ и 2МУ. Второй каскад
состоит из усилителей мощности ЗМУ и 4МУ. Рабочие обмотки
усилителей включены в цепи вторичных обмоток трансформа-
тора питания ТП. Задание команды на перекладку руля про-
изводится поворотом ротора сельсина-датчика СД в посту уп-
равления ПУ.
Когда отсутствует рассогласование между сельсином-датчи-
ком СД поста управления и сельсином-приемником СП,
связанным с баллером руля, напряжение на выходе сельсина-
приемника равно нулю. Обмотки управления ОУ4 и ОУ2 элект-
ромашинного усилителя, питаясь лишь от трансформатора пита-
ния ТП, обтекаются небольшими токами, равными по величине,
но противоположно направленными. В результате напряжение
на якоре ЭМУ равно нулю и исполнительный двигатель Д не
работает.
При повороте штурвала поста управления ПУ на выходе
сельсина-приемника появляется напряжение. Его величина за-
висит от угла поворота сельсина-датчика, а фаза — от направ-
ления вращения в сторону того или другого борта. В одном
случае это напряжение совпадает по фазе с напряжением вто-
ричной обмотки трансформатора питания, включенной в цепь
управления промежуточного магнитного усилителя 1МУ, и на-
ходится в противофазе с напряжением аналогичной обмотки
в цепи усилителя 2МУ. В конечном счете это вызывает увели-
чение тока в ОУ1 и уменьшение тока в ОУ2. ЭМУ возбуждается
при определенной полярности на щетках. Двигатель приходит
во вращение и перекладывает руль в указанном направлении.
Процесс возбуждения ЭМУ можно проследить по сплошным
стрелкам. При перекладке руля в сторону другого борта ЭМУ
§ 52]
Следящие системы управления
263
получает возбуждение с обратной полярностью (штриховые
стрелки).
Придя во вращение, баллер руля поворачивает сельсин-при-
емник в положение сельсина-датчика. При этом рассогласова-
ние между постом управления и рулем устраняется и электро-
двигатель Д останавливается.
Для устранения колебаний в системе применена гибкая об-
ратная связь по напряжению, которое снимается с моста, обра-
зованного сопротивлениями Д2, Дз и га.
Электропривод, отрабатывая заданную команду, поворачи-
вает ротор СП в положение, занимаемое ротором СД. Как
Рис. 149. Кулачковый редуктор.
только руль оказывается переложенным на заданный угол, ро-
торы сельсинов занимают одинаковое положение, напряжение
на зажимах СП становится равным нулю и электродвигатель
останавливается. Для возвращения руля в исходное или любое
другое положение необходимо вновь штурвалом ПУ повернуть
ротор СД. Работа электропривода в этом случае будет анало-
гична рассмотренной.
Следящее действие электрогидравлического рулевого при-
вода АР осуществляется реечной передачей, воздействующей
через кулачковый редуктор на переднюю тягу насоса перемен-
ной производйтельности. Через кулачковый редуктор передается
и задающий сигнал от поста управления.
Кулачковый редуктор (рис. 149) представляет собой диффе-
ренциал, на крестовине которого вместо четвертой шестерни
расположено кулачковое устройство, передающее движение
260
Электроприводы рулевых устройств
[Гл. 7
через верхний валик и систему рычагов скользящему блоку
насоса.
Перекладку на заданный угол производят следующим обра-
зом. Вращение штурвала поста управления в сторону одного
или другого борта через задающий валик 12 и задающую ше-
стерню 13 передается шестерне-сателлиту 11, которая, перека-
тываясь по неподвижной отрабатывающей шестерне 10, пово-
рачивает в заданном направлении и на заданный угол сектор
8 с диском 7 и нижним кулачком 6. Последний своим высту-
пом поворачивает верхний кулачок 4, а через него — верхний
валик 1 с приводным рычагом 3, который смещает направляю-
щее кольцо насоса, приводя в действие гидравлическую ма-
шину.
Дальнейшее вращение задающей шестерни приводит к тому,
что кулачки выходят из зацепления, верхний валик 1 повора-
чивается до упоров 2 и диск 7 воздействует кромкой впадины
на ролик 5. Затем ролик выходит из впадины и, перекатываясь
по поверхности диска, удерживает верхний валик с приводным
рычагом в крайнем положении. Насос при этом работает с наи-
большей и постоянной производительностью.
С началом перекладки руля движение от баллера через ре-
ечную передачу и вал 9 сообщается отрабатывающей шестерне
10, которая начинает вращаться в направлении, противополож-
ном вращению шестерни 13. Диск 7 при этом поворачивается
со скоростью, соответствующей разности скоростей шестерен 10
и 13. Задав нужный угол перекладки, штурвал поста управле-
ния и задающая шестерня останавливаются, а отрабатывающая
шестерня 10 начинает возвращать сектор 8 с диском и нижним
кулачком в нулевое положение. Ролик попадает во впадину
диска, кулачки приходят в зацепление, а верхний валик с при-
водным рычагом постепенно возвращается в нулевое положе-
ние. Последние 2—5° руль перекладывается с постепенно умень-
шающимися эксцентриситетом и производительностью насоса.
С возвращением кулачкового редуктора в исходное положение
производительность насоса становится равной нулю, а руль
оказывается в положении, заданном ему постом управления.
Вопрос о том, как задают нужный угол перекладки и как он
отрабатывается двигателем управления, рассмотрим в следую-
щем параграфе, посвященном описанию работы авторулевого,
который обеспечивает также и следящее управление.
§ 53. Системы автоматического управления курсом судна
(авторулевые)
Удерживать судно на заданном курсе посредством периоди-
ческих перекладок руля на небольшой угол в сторону одного
или другого борта можно как вручную, так и автоматически.
§ 53]
Системы автоматического управления курсом судна
265
Автоматическое управление обеспечивает более точное сдер-
живание судна на курсе при меньшем числе перекладок и
меньших углах отклонения руля от ДП. Благодаря этому на
2,5—3% сокращается расстояние, проходимое между портами,
увеличивается скорость хода судна, уменьшаются продолжи-
тельность рейса, расход горючего и, наконец, износ механизмов
рулевого устройства.
Системы автоматического управления, как и системы ди-
станционного и следящего управления, могут быть дискретными
и непрерывными.
Рис. 150. Принципиальная схема авторулевого кон-
тактного типа.
Дискретные системы. Эти системы основаны на законе уп-
равления по углу отклонения судна от заданного курса и вклю-
чают обратную связь, пропорциональную углу перекладки руля.
Авторулевой контактного типа. На примере этого авторуле-
вого (рис. 150) рассмотрим принцип действия дискретной си-
стемы автоматического управления. Следящее устройство ее
состоит из двух полуколец, к которым присоединены концы
дифференциальной обмотки возбуждения. Если мощность руле-
вой установки значительна, в цепь включают контакторы управ-
ления. По полукольцам скользит каретка с контактным роли-
ком, постоянно удерживаемым в меридиане репитером гироком-
паса РГК. Курс судну задается поворотом на нужный угол
контактных полуколец с изоляционными промежутками, на
один из которых накатывается каретка с контактным роликом.
Поскольку она вместе с тем постоянно находится в меридиане,
курс судна при этом будет вполне определенным.
Когда судно следует по заданному курсу и перо руля нахо-
дится в ДП, контактный ролик располагается на изоляционном
266
Электроприводы рулевых устройств
[Г.1. 7
промежутке (рис. 151, положение 1). Исполнительный двига-
тель при этом не работает.
Уклонение судна от заданного курса приводит к тому, что
контактные полукольца авторулевого вместе с судном поворачи-
ваются на некоторый угол. Ролик сходит с изоляционного
промежутка и замыкает цепь одной из обмоток возбуждения
генератора системы Г—Д. Система возбуждается, и исполни-
тельный двигатель начинает вращаться, перекладывая руль
в направлении возвращения судна на курс.
Если обратная связь между положением руля и авторуле-
вым отсутствует, то руль будет п[юдолжать отклоняться в преж-
Рис. 151. Автоматическое сдерживание судна на курсе.
нем направлении, так что к моменту, когда судно окажется на
курсе, руль будет переложен на наибольший угол. Это вызовет
вновь отклонение судна от курса, но уже в противоположную
сторону, авторулевой сработает и переложит руль в сторону
противоположного борта. Так, однажды отклонившись от курса,
судно в дальнейшем будет совершать колебания относительно
него.
Чтобы избавиться от этого недостатка, вводят обратную
связь, при которой работа ИД с помощью сельсина-датчика и
сельсина-приемника вызывает движение контактных полуколец,
уменьшающее рассогласование с контактным роликом. В этом
случае, как только судно уклонится от заданного курса и ИД ..
придет во вращение, контактные полукольца станут поворачи-
ваться в сторону каретки с роликом (положение 2). После того
как судно «послушается» руля и начнет возвращаться на за-
данный курс, контактный ролик, оставаясь все время в мери-
диане, будет перемещаться навстречу полукольцам. В некото-
рый момент времени он достигнет изоляционного промежутка
(положение 3). При этом хотя ИД остановится, судно продол-
§ 53]
Системы автоматического управления курсом судна
267
жит движение в сторону заданного курса, поскольку руль ос-
танется положенным на борт. Вместе с судном будут поворачи-
ваться контактные полукольца, благодаря чему ролик, пройдя
изоляционный промежуток, замкнет цепь второй обмотки воз-
буждения (положение 4). Это вызовет перекладку руля в на-
правлении ДП и движение изоляционного промежутка в на-
правлении каретки с роликом. К моменту возвращения судна на
курс ролик расположится на изоляционном промежутке, и элек-
тропривод будет выключен (положение 5).
Важно, чтобы в случае уклонения судна от курса ИД ус-
певал вовремя переложить руль на угол, достаточный для воз-
вращения судна на курс. Это обеспечивается тем, что обратную
связь между рулем и контактными полукольцами выполняют
с запаздыванием (с мертвыми ходами). Нужную величину за-
паздывания обратной связи устанавливают регуляторами обрат-
ного действия руля.
Не менее важно обеспечить надежную работу авторулевого
в штормовую погоду. Для этого судну надо дать возможность
некоторого рыскания на заданном курсе. Осуществляют это тем,
что при помощи регулятора «Погода» изменяют ширину изоля-
ционного промежутка между контактными полукольцами.
Аналогично авторулевому контактного типа работают авто-
рулевые иностранных фирм «Аншютц», «Сперри» и др.
Системы непрерывного действия. Более совершенны системы
непрерывного действия — авторулевые отечественного производ-
ства типов «Самшит», АР, АТР и др.
Бесконтактные авторулевые АР и АТР работают от гиро-
компаса «Курс» и осуществляют стабилизацию судна на задан-
ном курсе в зависимости от угла отклонения суднй' от курса
(его называют углом рассогласования ф), от скорости
этого отклонения, а также от несимметричности рыскания, вы-
званной односторонним действием ветра, креном, неравенством
упоров гребных винтов и др.
Авторулевые АР. Рассмотрим схему авторулевого типа АР-1,
предназначенного для установки на судах с электрогидравличе-
скими рулевыми машинами типа РЭГ, питающимися от сети
трехфазного переменного тока (рис. 152). Схема включает пульт
управления, два электромашинных усилителя типа ЭМУ-12А,
два электродвигателя управления, датчики заданного и истин-
ного положения руля, станцию выпрямителей для питания обмо-
ток возбуждения двигателей управления и токовой отсечки ЭМУ
и другую вспомогательную аппаратуру. Пульт управления рас-
положен в рулевой рубке, остальное оборудование — в румпель-
ном отделении.
Авторулевой способен осуществлять автоматическое, следя-
щее и дистанционное (простое) управление. Выбор того или
Рис. 152. Функциональная схема авторулевого АР-1.
$ 53]
Системы автоматического управления курсом судна
269
иного из них обеспечивается положением переключателя видов
управления на пульте.
Автоматическое управление. При уходе судна
с заданного курса датчик гирокомпаса повертывается на со-
ответствующий угол и на этот же угол повертывается ротор
сельсина-приемника БС-404Аь который передает полученный
сигнал по трем параллельным каналам.
Первый канал состоит из самого сельсина-приемника, не-
обратимой червячной передачи ПЧ. механического дифферен-
циала ДМ и линейного вращающегося трансформатора курса
ЛВТ-Д, при повороте которого на выходе появляется напряже-
ние, пропорциональное углу изменения курса U\ = kx ср.
Второй канал состоит из того же сельсина-приемника и тахо-
генератора АДП-123Б, который создает напряжение, пропор-
циональное скорости изменения курса dqjdt. Выработан-
ный этим каналом сигнал усиливается и регулируется од-
нокаскадным усилительным блоком и потенциометрическим
регулятором (на схеме не указаны).
Третий канал создает напряжение [73 = fe3Jc?(p, необходимое
для автоматического смещения руля от ДП при продолжитель-
ном одностороннем воздействии ветра и других внешних сил,
стремящихся отклонить судно от заданного курса. В этот канал,
кроме сельсина-приемника, входят червячная передача ПЧ,
дифференциал ДМ, сельсин-трансформатор .БД-404Б, так назы-
ваемый интегрирующий асинхронный двигатель ЗАСМ-100 и
линейный вращающийся трансформатор интегратора ЛВТ-И.
Работа третьего канала заключается в следующем. При от-
клонении судна от курса вместе сЛВТ-К вращается и сельсин-
трансформатор БД-404Б. На выходе его появляется напряже-
ние, приводящее во вращение двигатель ЗАСМ-100, который че-
рез редуктор с большим передаточным числом поворачивает
ЛВТ-И. Последний поворачивается при этом на очень неболь-
шой угол и на его выходе возникает незначительное напряже-
ние. Если рыскание носит симметричный характер, то в следую-
щий момент судно отклоняется в противоположную сторону, что
вызывает обратное вращение двигателя ЗАСМ-100 и обратный
знак напряжения на выходе ЛВТ-И. Поскольку суммарный
сигнал равен нулю, то интегрирующее устройство на симметрич-
ные отклонения судна от курса реагировать не будет. А так как
гирокомпас не реагирует на параллельные перемещения, то не
устраняется и дрейф судна.
При асимметричных рысканиях судна ЛВТ-И будет все время
поворачиваться в одном направлении, накапливая сигнал —
напряжение на его выходе. Этот сигнал будет алгебраически
складываться с сигналами двух первых каналов и подаваться
на вход промежуточного усилителя У, представляющего собой
270
Электроприводы рулевых, устройств
[Гл. 7
трехкаскадный усилитель на полупроводниковых триодах типов
П-13А и П-4Д.
Усиленный задающий сигнал трех каналов подается в об-
мотку управления электромашинного усилителя типа ЭМУ-12А
и с выхода последнего—к зажимам исполнительного двигателя
(сервомотора) типа МИ-32, который через валикопровод руле-
вой машины воздействует на кулачковый редуктор, изменяя
эксцентриситет насоса переменной производительности. Так из-
меняются производительность насоса и направление подачи ма-
сла в цилиндры гидравлической рулевой машины РМ, опреде-
ляющие направление и скорость перекладки руля.
Начав .вращаться, двигатель типа МИ-32 приводит в дей-
ствие механически связанный с ним линейный вращающийся
трансформатор руля ЛВТ-Р, который вырабатывает сигнал
Ui—kia, пропорциональный углу перекладки руля и направлен-
ный противоположно задающему. При равенстве этих сигналов
электропривод выводится из работы. Далее, как только судно,
«послушавшись» руля, начинает возвращаться на курс, сельсин-
датчик гирокомпаса поворачивается в обратную сторону, умень-
шая сигнал первого канала и создавая сигнал противополож-
ного знака на выходе второго канала U2- Благодаря этому
результирующий сигнал, подаваемый на вход усилителя У, изме-
няет свой знак на обратный, что вызывает вращение двигателя
типа МИ-32 в противоположную сторону и возвращение руля
в ДП, которой он достигает при выходе судна на курс.
Для демпфирования исполнительного двигателя на вход уси-
лителя У с зажимов двигателя типа МИ-32 через демпфирую-
щее устройство (преобразующее постоянный ток в переменный)
подаются сигналы отрицательной обратной связи, пропорцио-
нальные скорости вращения исполнительного двигателя k5U и
его ускорению ke dU/dt.
Таким образом, на вход промежуточного усилителя У посту-
пает результирующий сигнал:
Uy = k^+k2^
± k3\dq — k& — kbU — k^,
(309)
где ki<p — напряжение сигнала, пропорциональное углу
отклонения судна от курса;
k2 dcp/dt — напряжение сигнала, пропорциональное скоро- •
сти изменения угла отклонения от курса;
— напряжение сигнала, пропорциональное интег-
ралу от изменения курса;
k4a—напряжение сигнала обратной связи, пропорцио-
; нальное углу перекладки руля;
§ 53]
Системы автоматического управления курсом судна
271
k5U — напряжение сигнала обратной связи, пропор-
циональное скорости вращения исполнительного
двигателя;
ke dU/dt— напряжение сигнала обратной связи, пропорцио-
нальное ускорению исполнительного двигателя.
Суммирование сигналов, поступающих по различным кана-
лам, осуществляется линейными вращающимися трансформато-
рами, которые создают напряжения, пропорциональные углу
поворота ротора. В системах автоматического управления эти
трансформаторы обычно используются в качестве измеритель-
Рис. 153. Схема включения (о) и характеристика (6) линейного вра-
щающегося трансформатора.
пых элементов. В конструктивном отношении они аналогичны
сельсинам-трансформаторам контактного типа, но с тем отли-
чием, что их статор и ротор имеют по две одинаковые сдвину-
тые на 90° обмотки (рис. 153): на статоре — обмотки Ct — С2
(основная) и С3—Ci (компенсационная); 'на роторе — обмотки
Pi — Р2 (синусная) и Ря — Рц (косинусная). Если возникает не-
обходимость повернуть ротор в каждую сторону не более, чем
на один оборот, то концы его обмоток гибкими связями соеди-
няют непосредственно с зажимами клеммной сборки. Благодаря
указанному на схеме способу соединения обмотки, линейный
вращающийся трансформатор в пределах угла 90° обеспечивает
линейную зависимость выходного напряжения ДВых от угла
поворота р.
Выходные напряжения трансформаторов ЛВТ-К, ЛВТ-И,
ЛВТ-Р и тахогенератора АДП-123Б алгебраически суммируются
и подаются на вход усилителя У (см. рис. 152). Схема суммиро-
вания сигналов приведена на рис. 154.
При нахождении судна на курсе, а руля — в ДП ро-
торы ЛВТ-К и ЛВТ-Р расположены в нулевом положении и
272
Электроприводы рулевых устройств
[Гл. 7
напряжения на их выходе (на зажимах обмоток Pt—Р2) равны
нулю. На усилитель У не подается никакого сигнала. С измене-
нием исходных условий на этих же зажимах последовательно
соединенных выходных обмоток появляются напряжения, ал-
гебраическая сумма которых и подается на вход усилителя.
Рис. 154. Схема суммирования сигналов.
Чем больше водоизмещение судна и его загрузка, а- также
величина возмущающих факторов (ветра, волн), тем на боль-
ший угол необходимо переложить руль, чтобы вернуть судно на
заданный курс при одном и том же угле отклонения от него.
Следовательно, в различных условиях плавания должно изме-
няться соотношение выходных напряжений ЛВТ-К и ЛВТ-Р.
Это соотношение, являющееся основным регулировочным пара-
Системы автоматического управления курсом судна
273
метром, называется коэффициентом обратной связи
и выражается уравнением:
°, с a Ut *
Для изменения коэффициента обратной связи в схеме при-
менен масштабный вращающийся трансформатор MBT-KJP, от
обмоток которого питаются ЛВТ-К и ЛВТ-Р. Поворачивая ро-
тор МВТ-К[Р специальной рукояткой в ту или иную сторону,
можно изменять коэффициент обратной связи в пределах от
0,25 до 1,5. Благодаря этому авторулевой АР-1 может быть при-
менен для судов различных типов.
Выше уже была отмечена необходимость изменять чувстви-
тельность авторулевого к рысканию судна на курсе в зависи-
мости от условий плавания. При плохой погоде, когда судну
надо дать большую свободу рыскания, в схеме управления при-
водят в действие регулятор тахогенератора и отключают два.
первых каскада промежуточного усилителя У.
Истинное и заданное положения руля на пульте управления
указываются бесконтактными сельсинами ДВС-500, которые
принимают соответствующие сигналы от двух сельсинов-дат-
чиков ДН-500, причем первый (истинного положения) механи-
чески связан с баллером руля, а второй (заданного положе-
ния) — с механизмом задания рулевой машины. Во втором
датчике имеются электроограничители, контакты которых замы-
кают накоротко обмотки управления работающего ЭМУ и оста-
навливают двигатель управления при подходе руля к крайнему
рабочему положению.
Чтобы применить автоматическое управление ходом судна,
необходимо переключатель видов управления на пульте управ-
ления установить в положение «Автомат». При этом загорается
сигнальная лампа «Автомат», сельсин БС-404А] подключается
к датчику гирокомпаса, включается интегрирующая линия и по-
лучает питание один из усилителей. Чтобы повысить живучесть
судна, линию, состоящую из промежуточного усилителя У, эле-
ктромашинкою усилителя ЭМУ-12А и двигателя управления
МИ-32, дублируют.
Автоматическое управление делает возможным, помимо рас-
смотренной выше стабилизации заданного курса, также его из-
менение. Для этого поворотом штурвала управления 1 вводят
нужную поправку, т. е. индекс градусных поправок 3 откло-
няется от нулевого положения и устанавливается против со-
ответствующего деления картушки 2 грубого отсчета репитера
БС-404Аг. С поворотом штурвала заводится линейный транс-
форматор ЛВТ-К, который создает сигнал, приводящий в
Ю К. А. Чекунов '
274
Электроприводы рулевых устройств
[Гл. 7
действие сервопривод. Судно меняет курс, и индекс под дейст-
вием сельсина-приемника BC-404Aj начинает возвращаться в ну-
левое положение, что соответствует выходу судна на вновь за-
данный курс.
Если курс изменяется более чем на 10°, то интегрирующая
линия авторулевого отключается, так как ее действие в этом
случае будет мешать быстрому выполнению поправок (выход
на курс будет осуществляться с перекатом через него).
В системе предусмотрен автоматический возврат ЛВТ-И на
нуль при переключении с автоматического управления на следя-
щее или дистанционное (простое), что необходимо, так как
в случае обратного перехода на автоматическое управление
трансформатор ЛВТ-И должен находиться в нулевом положе-
нии. Возврат ЛВТ-И на нуль производится при помощи следя-
щей системы, которая состоит из электродвигателя интегрирую-
щей линии типа ЗАСМ-100 и специального контактного приспо-
собления.
Принципиальная схема автоматического управления курсом
с применением автоматического бесконтактного рулевого при-
ведена на рис. 155.
Следящее управление. С поворотом переключателя
видов управления в положение «Следящий» загорается соот-
ветствующая сигнальная лампа, один из промежуточных усили-
телей У получает питание и отключаются сельсин-приемник
гирокомпаса типа БС-404А] и интегратор ЛВТ-И. Таким обра-
зом, гирокомпас не влияет на работу следящей системы, а уп-
равление рулем осуществляется поворотом штурвала управ-
ления.
Поворот штурвала в сторону того или другого борта воздей-
ствует через червячную передачу ПЧ и дифференциал ДМ на
трансформатор ЛВТ-К, который, поворачиваясь, вырабатывает
сигнал, пропорциональный углу поворота. Этот сигнал поступает
на вход включенного в работу усилителя У и заставляет руле-
вую машину переложить руль в сторону соответствующего
борта. Одновременно приходит во вращение и трансформатор
ЛВТ-Р, подающий на вход усилителя сигнал противоположного
знака.
Перекладка руля будет происходит до тех пор, пока напря-
жение на ЛВТ-Р не сравняется с напряжением на ЛВТ-К и
суммарный сигнал, создаваемый ими на входе усилителя У,
не снизится до нуля. Это будет соответствовать заданной пере-
кладке руля.
Следящая система управления обеспечивает перекладку руля
на угол, пропорциональный углу поворота штурвала управле-
ния (с учетом коэффициента обратной связи ko,c). При &о.с=1
один оборот штурвала соответствует перекладке руля на 6°.
От ГК
0 0 0 0 0
Рис. 155. Принципиальная схема автоматического управления курсом судна с применением системы АР-1.
§ S3] Системы автоматического управления курсом судна 275
276
Электроприводы рулевых устройств
[Гл. 7
Произвольные повороты штурвала передаются на фрикционную
муфту, которая, проскальзывая, вызывает движение штурвала
вхолостую. Вращение трансформатора ЛВТ-К при этом ограни-
чивается стопором. При обратном повороте штурвала сразу на-
чинается перекладка руля в обратную сторону.
При свободном выбеге или каких-либо неисправностях ис-
полнительный двигатель управления должен останавливаться,
не доходя до механического стопора механизма задания руле-
вой машины. Это обеспечивается электрическими ограничите-
лями, имеющимися в датчике заданного положения руля РДЗ
и замыкающими накоротко управляющую обмотку ЭМУ. Чтобы
снять исполнительный двигатель с электрического ограничи-
теля, нужно повернуть штурвал в обратную сторону.
Простое (дистанционное) управление. Чтобы
применить это управление рулем, надо установить имеющийся
на пульте переключатель видов управления в положение «Про-
стой». При этом загорится соответствующая сигнальная лампа,
система автоматического управления отключится и штурвал
механически свяжется с бесконтактными сельсинами типа
БД-501 Б.
С поворотом штурвала в сторону того или другого борта по-
ворачивается и соответствующий сельсин БД-501Б, который
через диод типа ДГ-Ц24 подает выпрямленное напряжение
в обмотку управления одного из ЭМУ. Включение ЭМУ правого
или левого борта осуществляется .(как и при других видах уп-
равления) переключением агрегатов на пульте управления. ЭМУ
подает питание на двигатель управления МИ-32, который при-
водит во вращение и работает до тех пор, пока штурвал не
возвращается в нулевое положение или не срабатывает электри-
ческий ограничитель в датчике заданного положения руля.
Авторулевые АТР. В настоящее время электрогндравличе-
ские рулевые машины с насосами постоянной и переменной про-
изводительности все шире переводятся на систему управления
АТР, являющуюся частью комплекса управления курсом судна
и состоящую из гирокомпаса, авторулевого, гидравлической ру-
левой машины типа Р и руля. Эта система позволяет автомати-
чески удерживать судно на заданном курсе при любой погоде
и скорости хода свыше 5 узлов, а также выполнять маневрен-
ные операции. Она обеспечивает автоматическое, следящее, про-
стое (дистанционное) и ручное (местное) управление, причем
простое управление осуществляется нажатием клавиши на
пульте управления, а ручное — смещением рукоятки исполни-
тельного механизма в румпельном помещении.
Система АТР включает в себя следующие основные эле-
1 менты (рис. 156):
а) пульт управления ПУ, с которого можно осуществлять
Рис. 156. Функциональная схема системы АТР-2-10.
Положения переключателя видов управления: / — «Простой»; 2 — «Следящий»; 3—«Автомат».
________Системы автоматического управления курсом судна
278
Электроприводы рулевых устройств
[Гл. 1
все виды дистанционного управления (располагается в ходовой
рубке);
б) пульт следящего управления ПСУ, с которого возможно
следящее и простое управление (располагается в резервном
посту управления);
в) переключатель пультов, необходимый при наличии не-
скольких постов управления (устанавливается поблизости от
одного из них) ;
г) исполнительные механизмы ИМ-1, устанавливаемые на
насосах регулируемой производительности типа ПД и служа-
щие для управления их работой (для управления насосами по-
стоянной производительности применяются исполнительные ме-
ханизмы ИМ-2);
д) рулевой датчик РД, связанный тягой с баллером руля
и служащий для выработки сигналов обратной связи и указа-
ния истинного положения руля.
Системы АТР имеют несколько модификаций. Одна из них —
АТР-2-10. В этом обозначении буквами АТР зашифрованы
слова «система автоматического дистанционного управления ти-
пизированного ряда», цифра 2 после буквенного обозначения
указывает на насос переменной производительности, цифра 1
после второго дефиса показывает наличие одного ПУ, нуль
в конце обозначения свидетельствует об отсутствии ПСУ.
В ПУ системы АТР-2-10 размещены: в нижней части — уси-
лцтели, трансформаторы и конденсаторы, в верхней — сигналь-
ные лампы и шкалы, переключатели и другие аппараты управ-
ления, а также блок механизмов, в который входят:
а) репитерный сельсин типа БС-404А, служащий для пере-
дачи показаний гирокомпаса на шкалы курса грубого и точного
отсчета;
б) сельсин 1 типа БС-404А для приема курса и механический
дифференциал 9 для сложения углов поворота ротора сельсина
л штурвала <8;
в) задающие сельсины 10 и 11 типа БД-404А для выработки
напряжения, соответствующего задаваемому углу перекладки
руля;
г) сельсин-приемник типа БС-500 и шкала руля; стрелки на
сплошном валике ротора сельсина показывают истинное, а на
полом валике — заданное положение руля;
д) интегрирующее устройство, реагирующее на несиммет-
ричное рыскание судна и состоящее из сельсина-датчика нерав-
номерного рыскания 18 типа БД-404А, электродвигателя 19
типа АДП-262, сельсина 20 типа БД-404А;
е) накопитель 17, состоящий из кулачка и сектора с роликом
и служащий для ограничения угла поворота ротора сельсина 18
в пределах ±90°;
§ 55] Системы автоматического управления курсом судна 279
ж) двигатель 5 типа АДП-123Б, работающий в режиме тахо-
генератора и вырабатывающий сигнал, пропорциональный ско-
рости изменения курса и подаваемый в систему управления че-
рез усилитель 6;
з) двигатель 16 типа АДП-262, возвращающий штурвал в ну-
левое положение при следящем управлении;
и) сельсин 2 типа БД-404А, служащий для изменения k0,c.
Исполнительные механизмы ИМ-1, устанавливаемые на на-
сосах переменной производительности, служат для поворота вы-
ходного управляющего валика на угол ±30°, в результате чего
изменяется направление подачи и производительность насоса 14,
поворачивающего румпель рулевой машины 15. В приборе
ИМ-1 установлены:
а) исполнительный двигатель 13 типа АДП-262 для дистан-'
ционного управления насосом;
б) сельсин 7 типа БД-404А, предназначенный для выработки
напряжения сигнала промежуточной обратной связи, пропор-
ционального смещению управляющего органа насоса;
в) нулевой установитель, служащий для установки в нуле-
вое положение управляющего органа насоса при обесточивании
исполнительного двигателя, при отпускании рукоятки ручного
управления и при срабатывании электромагнитной муфты МЭП,
которая предназначена для разрыва кинематической цепи от
двигателя к выходному валику прибора.
В рулевом датчике РД установлены:
а) сельсины-датчики 3 и 4 типа БД-404А следящей системы,
вырабатывающие сигнал отрицательной обратной связи, про-
порциональный положению руля;
б) сельсин-датчик типа ДН-500, вырабатывающий сигнал
истинного положения руля для рулевых указателей;
в) электрические ограничители.
Для перевода схемы на автоматическое, следящее или про-
стое управление имеется переключатель видов^управления.
Управление «Автомат» позволяет автоматически удер-
живать судно на прямом курсе и изменять курс судна путем
ввода градусных поправок. Принципиальная схема автоматиче-
ского управления курсом судна приведена на рис. 157, позиции
которого совпадают с позициями рис. 156.
Изменение &0.с (см. выше) в рассматриваемой системе осу-
ществляется следующим образом. Соотношение сигналов, выра-
батываемых сельсином курса и сельсином руля, меняется путем
изменения питающего напряжения, подаваемого от сельсина 2
типа БД-404А на обмотку возбуждения сельсина 3 (4) руля. Если
напряжения, питающие оба сельсина, равны, то при одинаковых
углах поворота их выходные напряжения также одинаковы и
ko.C— 1.
Рис. 157. Принципиальная схема автоматического управления курсом судна с применением системы АТР.
280 Электроприводы рулевых устройств
§ 53}
Системы автоматического управления курсом судна
281
Когда напряжение, питающее сельсин руля, снижается, то
напряжение, снимаемое с него, становится меньше напряжения,
снимаемого с сельсина курса (при равных углах поворота). Для
уравнивания снимаемых напряжений сельсин руля (а, следова-
тельно, и руль) поворачивается на больший угол (&0.с=ф/а< 1) •
При повышении напряжения, питающего сельсин руля, получим
&0.с>1. Необходимая величина koc устанавливается по соответ-
ствующей шкале рукояткой установки ko.c-
Автоматическое удержание судна на заданном курсе осуще-
ствляется под действием суммарного сигнала, усиленного уси-
лителем 12 (см. рис. 156) и подаваемого в схему управления ру-
левым приводом.
Для сдерживания судна на курсе без перекатов на вход сле-
дящей системы авторулевого подается сигнал, пропорциональ-
ный скорости ухода судна с курса Аг dcp/dt. Этот сигнал выра-
батывается асинхронным тахогенератором 5 типа АДП-123Б.
Непараллельный снос судна длительно действующими од-
носторонними силами предупреждается интегрирующим устрой-
ством, действующим следующим образом. При несимметричном
рыскании сельсин 18 типа БД-404А разворачивается несиммет-
рично относительно нулевого положения и на двигатель 19 типа
АДП-262 начинают поступать напряжения, различные по знаку
и величине. Электродвигатель разворачивает сельсин 20 в одну
сторону больше, чем в другую. Это вызывает накопление на-
пряжения, пропорционального одностороннему уходу судна
с курса, и смещение среднего положения руля относительно ДП.
Ввиду большого передаточного числа между двигателем 19 и
сельсином 20 единичное рыскание не оказывает на систему за-
метного влияния. Поэтому интегрирующее устройство вырабаты-
вает сигнал, пропорциональный интегралу от изменения курса
по времени
Таким образом, величина перекладки руля, задаваемая авто-
рулевым, определяется формулой:
а = Т~ V + Л2 + Лз f ф dt.
Ro. с dt
При следящем виде управления поворотом штур-
вала задают направление и величину угла перекладки руля. Од-
новременно со штурвалом повертывается ротор задающего сель-
сина 10 (11) типа БД-404А в ПУ и на его вторичной обмотке
появляется задающее напряжение U3, пропорциональное углу
поворота штурвала. Усиленное усилителем 12 напряжение по-
ступает на управляющую обмотку исполнительного двигателя 13
типа АДП-262 в ИМ, который в определенном направлении
поворачивает управляющий орган насоса и ротор сельсина <3 (4)
282
Электроприводы рулевых устройств
[Гл. Г
насоса (на угол, который на 0°,3 меньше угла поворота ротора
задающего сельсина). Сельсин насоса выдает в схему суммиро-
вания напряжение t/Hac, близкое по величине и противополож-
ное по знаку (фазе) задающему напряжению U3. Усиленная
разность Ll3—6/пас создает на двигателе момент, уравновеши-
вающий пружины нулевого установителя ИМ. Управляющий ор-
ган насоса останавливается в данном смещенном положении, и
начинается перекладка руля. С ротора сельсина 3 (4) руля (в
РД) в схему суммирования начинает поступать напряжение £7Р,
по знаку противоположное U3. Исполнительный двигатель ИМ,
получив сигнал противоположного знака, возвращает управляю-
щий орган насоса в нулевое положение. Руль, оказавшись пере-
ложенным на заданный угол а3, останавливается, £7Р компенси-
рует U3, а Пнас практически становится равным нулю. Следящее
управление предусматривает возврат штурвала в нулевое по-
ложение (с помощью двигателя 16). При возврате штурвала
в нулевое положение руль также возвращается в ДП.
Простое (дистанционное) управление, осуще-
ствляемое с помощью клавишного устройства, охватывает все
операции по маневрированию судна: выход из порта, прохож-'
дение в узкостях, удержание на курсе, повороты и швартовку.
Нажатием одной из клавиш «Лево руля» или «Право руля» на '
обмотку управления двигателя 13 типа АДП-262 в ИМ от си-'
левого трансформатора подается напряжение, фаза которого
(а, следовательно, и направление вращения выходного валика
ИМ) определяется нажатой клавишей. Это вызывает пере-
кладку руля в сторону указанного борта. При опускании кла-
виши микропереключатель в ПУ разрывает цепь управле-
ния двигателя, и пружина нулевого установителя возвращает
управляющий орган насоса в нулевое положение. Перекладка
руля прекращается. Электромагнитная муфта МЭП разрывает
кинематическую связь двигателя с управляющим органом на-
соса, ускоряя тем самым возврат управляющего органа насоса
в нулевое положение.
Ручное (местное) управление применяется как ава-
рийное; оно осуществляется поворотами рукоятки на ИМ рабо-
тающего насоса. Направление поворота рукоятки ИМ опреде-
ляет направление перекладки руля.
В последнее время авторулевые получили весьма большое
применение, что объясняется их эксплуатационными достоин-
ствами: высокой стабилизацией курса и увеличением эксплуата-
ционной скорости судна. Так, при скорости хода в 10—15 узлов
точность удержания судна на курсе составляет: при волнении
на море в 4 балла — от 0°3 до 0"8, а при волнении на море
в 6—8 баллов — от 1°0 до 2°5. Эксплуатационная скорость
при этом повышается соответственно на 2 и на 3%.
§ 54]
Назначение и основные элементы
283
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Как влияет выбор руля на маневренные качества судна (стр. 203—
205)?
2. Каково назначение балансирных рулен и как влияет на их работу
величина компенсации (стр. 205, 216, 240)?
3. Охарактеризуйте работу систем управления рулевым электроприво-
дом (стр. 212 и 213).
4. Какое действие на судно оказывают силы давления воды при пере-
кладке руля (стр. 213—215)?
5. Что представляют собой кривые моментов на баллере руля и нагру-
зочные диаграммы рулевого электродвигателя (стр. 218—221)?
6. Почему двигатель электромеханической рулевой машины должен
обладать мягкой характеристикой (стр. 224 и 225)?
7- В чем заключается расчет и как производится выбор электродвига-
теля рулевого электропривода с механической и гидравлической передачей
(стр. 226—232 и 236—246)?
8. Как ограничивается угол перекладки руля в электроприводах с меха-
нической и гидравлической передачей (стр. 252—254 и 262—264)?
9. Опишите работу авторулевого при удержании судна на курсе и при
изменении курса (стр. 265—282).
10. Что такое коэффициент обратной связи /г0. с в авторулевых и для чего
он служит (стр. 272 и 281)?
ГЛАВА 8
ЭЛЕКТРОПРИВОДЫ
ЯКОРНО-ШВАРТОВНЫХ УСТРОЙСТВ
I
§ 54. Назначение и основные элементы
якорно-швартовных устройств
Якорно-швартовные устройства служат для постановки судов
на якорь и для съемки их с якоря, а также для выполнения
швартовных операций. При стоянке на рейде сбрасывают один
или два якоря, которые, зарываясь в грунт, противодействуют
течению, ветру и другим силам, стремящимся привести судно
в движение. Стоянка на якоре всего характернее для военных
судов. Для гражданских судов более типична стоянка у при-
чала, для чего судно с помощью специальных канатов, называе-
мых швартовами, подтягивается к причалу и удержи-
вается у него. Однако и судам гражданского флота нередко
приходится стоять на якоре то ли в ожидании освобождения
причальной линии в порту, то ли при необходимости произво-
дить грузовые операции на рейде.
В якорно-швартовное устройство входят якоря, якорные
цепи, якорно-швартовная лебедка, исполнительный двигатель
и система управления.
Якоря. В настоящее время чаще всего применяют якоря с
поворотными лапами (якоря Холла), которые обладают большой
284
Электроприводы якорно-швартовных устройств
[Гл. 8
держащей силой, легко укладываются по-походному и состоят
из небольшого числа грубо обработанных деталей, что устраняет
опасность заедания или заклинивания от ржавления (рис. 158).
Каждое судно бывает снабжено двумя или тремя так на-
зываемыми становыми якорями, расположенными в носо-
вой части судна. Третий якорь считается запасным и носит на-
звание штормового. Для постановки судна лагом к ветру,
помимо становых якорей, с кормы отдают еще и более легкие
якоря: стоп-анкеры, каждый из которых весит в 2—3 раза
Рис. 158. Якорь Холла.
1 — скоба; 2 — веретено;
3 — лапа.
меньше станового якоря, и в е р п ы, которые
вдвое легче стоп-анкеров. Стоп-анкеры и
верпы подвешиваются на легком цепном
или тросовом канате и к месту сброса
обычно завозятся на шлюпках. Верпы при-
меняются также для стаскивания судна
с мели.
Количество и вес становых якорей и це-
пей к ним определяются по таблицам (см.
приложение II) —в зависимости от так на-
зываемой характеристики якорного
снабжения судна NH, которая выра-
жается формулой:
N„ = L(B + H) + S, (310)
где L — длина судна между перпендикуля-
рами, я;
В — наибольшая ширина судна, ж;
Н — высота борта, м;
S — поправка на надстройки и рубки.
Поправку S определяют по следующим формулам:
при надстройках (бак, ют, средняя надстройка), доходящих
до бортов: /'
S = 0,75£Z/z;„
(ЗП)
при надстройках, не доходящих до бортов, но превышающих
половину ширины судна на миделе (рубки):
5 = 0,5 2 lh, (312)
где I — длина, ж; h — высота надстройки, ж.
Якорные цепи. Роль гибкой связи, соединяющей якорь с кор-
пусом судна, выполняют якорные цепи (цепные канаты). Якор-
ная цепь состоит из отдельных частей — смычек длиной от 20
до 25 ж. Звенья якорной цепи имеют распорки (контрафорсы),
что увеличивает их прочность примерно на 20%
$ 54]
Назначение и основные элементы
285
Якорные цепи проходят от якоря через бортовой клюз, сто-
пор и кулачковый барабан якорной лебедки в палубный клюз и
цепной ящик, где и укладывается излишек цепи. К стенке цеп-
ного ящика конец цепи надежно крепится с помощью жвака-
галса — концевой смычки. Жвака-галсовая смычка заканчи-
вается откидным гаком (глаголь-гак), который служит для бы-
строй отдачи якорной цепи.
Общую длину и калибр якорной цепи определяют по указан-
ной выше характеристике якорного снабжения Под к а -
л и б р о м d принято понимать диаметр цепного железа, который
колеблется в пределах от 30 до 100 мм. Калибр цепи находят
по таблицам или легко определяют из соотношения:
1 i d = (313)
где бя — вес якоря, кг.
Зная калибр якорной цепи, можно по эмпирическим форму-
лам определить вес ее погонного метра р; с распорками р —
=0,0218 dz; без распорок р=0,023 d2.
Вес 1 пог. м погруженной в воду якорной цепи Pi (с учетом
потери веса в воде) будет:
- ‘ (314)
где у = 7,8 — удельный вес якорной стали, t)ms',
б = 1,025 — удельный вес морской воды, т/лг3.
Применение цепей в качестве якорного каната обусловли-
вается следующими обстоятельствами. Погонный метр цепи
весит в 5—6 раз больше погонного метра равнопрочного ей
стального троса той же длины. Благодаря этому якорные цепи
обеспечивают получение значительно большей держащей силы,
которая, как известно, пропорциональна весу якорного каната.
Ярко выраженные буферные свойства якорной цепи уменьшают
к тому же размах килевой качки и смягчают рывки и толчки
судна от действия волн в свежую погоду. Наконец, якорные
цепи меньше стальных тросов подвержены коррозии в морской
воде.
Чтобы обеспечить "надежную стоянку судна на якоре, якор-
ную цепь вытравливают с таким расчетом, чтобы часть ее улег-
лась на грунт: В этом случае приложенная к якорю сила на-
тяжения якорной цепи бывает направлена горизонтально по
дну, а вертикальная составляющая, действующая на отрыв
якоря от грунта, отсутствует. Известна эмпирически установ-
ленная зависимость между оптимальной длиной вытравленной
Y
286 Электроприводы якорно-швартовных устройств [Гл. 8
цепи Lo и глубиной стоянки судна h0 (за которую в расчетах
обычно принимают расстояние от клюза до грунта):
h0, м Lq
20 4 /г0
21—50 3 Л„
> 50 (2ч-2.5) Ло
Якорно-швартовные лебедки. Для отдачи и подъема якоря,
а также для швартовных операций служат якорно-швартовные
лебедки: шпили и брашпили. Их отличие друг от друга состоит
в том, что у первых ось кулачкового барабана расположена вер-
тикально, у вторых — горизонтально.
И те, и другие располагаются в носовой части судна, но
брашпили вместе с основной частью электрооборудования
устанавливаются на палубе и почти не занимают внутренних
помещений. Эта особенность обеспечила им широкое распро-
странение на судах торгового флота.
У шпилей на палубе размещаются лишь якорно-швартов-
ный барабан (головка шпиля) и тумба управления. Все осталь- .
ное оборудование шпилей находится в подпалубных помеще-
ниях судна. Ввиду этого шпили целесообразно применять: а) на
танкерах, где электродвигатель и аппаратура управления дол-
жны быть изолированы от взрывоопасной среды; б) на ледоко-
лах и судах ледового плавания, где такое размещение основных -
механизмов обеспечивает их защиту от обледенения и облегчает
обслуживание; в) на военных судах, где ответственное якорно-
швартовное устройство подлежит защите от возможных повреж-
дений.
Брашпиль (рис. 159) устроен и работает следующим образом.
Движение от двух исполнительных двигателей 6 через цилинд-
рический редуктор 5 и промежуточную передачу И передается
на промежуточный- вал 12, на концах которого расположены ба-
рабаны (турачки) 4, служащие для выполнения швартовных
операций. Далее через передачу 3 движение сообщается грузо-
вому валу 14, на который свободно посажены две цепные звез-
дочки 1. Одна из них служит для подъема якоря правого, а дру-
гая— левого борта. Каждая из звездочек соединена через ку-
лачковую муфту 2 с валом привода 7. Ленточные тормоза 13,
имеющие маховичковые приводы 8 подтормаживают звездочки,
если нужно ограничить скорость вытравливания якорной цепи.
В качестве исполнительных двигателей обычно используют
два двигателя постоянного тока типа П или ДПМ, работающие
на один вал. В редукторе брашпиля имеется переключатель ско-
ростей 10, установка которого на положение «Аварийная ра-
бота» позволяет увеличить передаточное число от двигателя /
к грузовому валу. Такой режим допускается только в двух слу-
чаях: если надо поднять двумя двигателями якорь, висящий на
§ Щ
Назначение и основные элементы
287
полностью вытравленной цепи, или же поднять якорь с нор-
мальной глубины одним двигателем, при выходе из строя
другого.
Брашпиль может приводиться в действие также и одним
двигателем — постоянного тока типа ДПМ или переменного
тока типа МАП.
Выключенные двигатели затормаживаются колодочными тор-
мозами 9, которые предназначены для быстрой остановки дви-
гателя и удержания грузового вала от обратного разворота.
В последнее время стали широко применять также дисковые
тормоза, конструктивно выполняемые за одно целое с двига-
телем.
Общий вид якорно-швартовного шпиля приведен на рис. 160.
Он состоит из швартовного барабана 2, звездочки 3, баллера 5,
соединенного зубчатой муфтой с грузовым колесом 6, редук-
тора 7, получающего вращение через эластично-фрикционную
муфту 9 от электродвигателя 10 с тормозом. Грузовое колесо,
288
§ 55\
Режимы работы электропривода
289
редуктор и двигатель расположены на общей фундаментной
раме 8.
Цепная звездочка насажена на баллер свободно, что позво-
ляет выполнять швартовные операции и стравливать якорную
цепь, пользуясь одной лишь силой тяжести якоря. Когда же воз-
никает необходимость в движении от баллера, звездочку сое-
диняют кулачковой муфтой со швартовным барабаном. Этот ба-
рабан посредством маховичка, имеющегося на крышке, можно
поднимать и опускать по направляющей шпонке баллера.
Для ограничения скорости стравливания якорной цепи слу-,
жит ленточный тормоз 4 с приводом 11. На случай выхода из
строя электропривода предусмотрено вращение головки шпиля
вручную — с помощью вымбовок 1, вставляемых в гнезда на
крышке швартовного барабана. Нормальная работа шпиля'
в случае деформации палубы обеспечивается тем, что в месте
прохода баллера в палубу вмонтирован сферический подшипник.
В настоящее время шпили и брашпили выполняются с не-
самотормозящимися червячными редукторами, что объясняется
желанием повысить к. п. д. установки.
На крупных судах устанавливают два якорно-швартовных
шпиля — по числу якорей. На мелких же судах обходятся одним
шпилем, используя его для поочередного подъема обоих якорей.'
Многие суда имеют, помимо якорно-швартовных шпилей
в носовой части, еще и по два швартовных шпиля в кормовой
части. В отличие от носовых, они лишены цепных звездочек.
§ 55. Режимы работы электропривода
якорно-швартовных устройств
Электропривод якорно-швартовного устройства служит для
подъема и опускания якорей, а также для подтягивания судна
к берегу при выполнении швартовных операций. В зависимости
от условий стоянки судна отдают один или два якоря, причем
на стоянках глубиной менее 50 м якорь опускают под действием
силы его тяжести, а скорость вытравливания якорной цепи огра-
ничивают ленточным тормозом. На стоянках же глубиной свыше
50 м скорость опускания якоря регулируют электродвигателем,
который, разгоняясь, переходит в режим рекуперативного ге-
нераторного торможения.
Когда судно стоит на якоре, на него действуют силы
ветра FB и течения FT. Их равнодействующая F относит судно
от места заложения якоря и вызывает натяжение якорной цепи.
Так как сила F равна горизонтальной составляющей натяже-
ния цепи N, то
. ' е = (315)
2/to
290
Электроприводы якорно-швартовных устройств
[Гл. 8
где LCb — длина свободно провисающей цепи от клюза до
грунта [10].
Если направления сил ветра и течения совпадают, то равно-
действующую F определяют по формуле:
F = FT + Ев- I (316)
Силу течения находят из формулы Фруда:
^=Ар5сЛ83^- (317)
Здесь fTp — коэффициент трения судна о воду; fTp = 0,14;
v0-—скорость движения воды относительно судна; о0 =
= 0,1-0,3 м[сек\
SCM — смоченная поверхность корпуса судна, ж2; для оп-
ределения SCM служит формула В. А. Семеки:
SCM = [2Т+1,37 (Зп-0,274) В] L, (318)
где L, В, Т — соответственно длина между перпендикулярами,
ширина и осадка судна, м\
бп — коэффициент полноты водоизмещения; бп=
= VILBT-
V — водоизмещение судна, ж3.
Сила ветра
' F = k So2 кГ. (319)
Здесь /?в— коэффициент удельного давления ветра; Лв =
= 0,02 кГ!м2\
ов — скорость ветра; ив==5---12 м!сек\
Snap — парусящая поверхность судна, которая может быть
определена из выражения:
Snap = 0,27B(/7 — T) + bh, ' (320)
где 0,27 — поправка, учитывающая, что у корпуса судна
воздушное сопротивление меньше, чем у над-
строек;
В, Н, Т — главные размерения судна, лл;
b, h — ширина и высота надстроек, ж.
При съемке судна с якоря электропривод должен преодолеть
силу сопротивления воды и ветра, причем на различных стадиях
съемки с якоря усилия у клюза бывают различными.
Рассмотрим подъем одного якоря с нормальной глубины
стоящей (основной режим), для чего весь процесс разобьем на
отдельные стадии (рис. 161):
1-я стадия — выбирание лежащей на грунте цепи с подтяги-
ванием судна к якорю или приведение судна на канат при по-
стоянном тяговом усилии;
§ 55]
Режимы работы электропривода
291
2-я стадия—выбирание висящей в воде цепи до спрямления
цепной линии и подъема веретена якоря или приведение судна
на канат при переменном тяговом усилии;
Рис. 161. Стадии съемки судна с якоря.
3-я стадия — отрыв якоря от грунта;
4-я стадия — подъем цепи и свободно висящего якоря после
отрыва его от грунта;
5-я стадия — втягивание якоря в клюз.
Рис. 162. Нагрузочные диаграммы двигателя прн подъеме од-
ного якоря с нормальной глубины стоянки.
По правилам Регистра СССР съемка судна с якоря должна
длиться не более 30 мин. Следовательно, исполнительный дви-
гатель якорно-швартовного устройства всегда работает в крат-
ковременном режиме.
При съемке судна с якоря момент сопротивления Л4 на валу
исполнительного двигателя колеблется в широких пределах,
(рис. 162).
Некоторое значение момента условно примем за номиналь-
ное, тогда в первую стадию (см. рис. 161) будем иметь
== (0,9-4-1,0) Ми. При этом производится лишь подъем лежащей
292
Электроприводы якорно-швартовных устройств
[Гл. 8
на грунте цепи, но натяжение ее и конфигурация цепной линии
в начале и конце остаются постоянными. Следовательно, мо-
мент, мощность и скорость двигателя также не изменяются.
Вторая стадия начинается с натяжения якорной цепи и за-
канчивается подъемом веретена якоря в положение, при кото-
ром якорь будет оторван от грунта. Момент на валу возрастает
до ЛТ2= (1,5-5-1,7) MR. Мощность двигателя также увеличи-
вается, а скорость его резко уменьшается.
В течение этих двух стадий судно подтягивается к месту
залегания якоря, в результате чего развивается определенная
скорость его хода.
В третьей стадии момент двигателя достигает М3=(2,0-<-
^-2,2) Мн. Двигатель затормаживается и переходит в режим
короткого замыкания (стоянки под током) на одной из искус-
ственных характеристик. Судно, продолжая по инерции движе-
ние, проходит над местом залегания якоря и благодаря избы-
точной плавучести совместно с электродвигателем отрывает
якорь от грунта.
После этого — в начале четвертой стадии — момент на валу
двигателя резко уменьшается до М4Нач= (l,0-s-l,5) Мн, а ско-
рость и мощность двигателя быстро увеличиваются до значения,
соответствующего этому моменту.
По мере выбирания якорной цепи вес ее части, оставшейся
за клюзом, уменьшается. В результате момент двигателя умень-
шается до значения Л14кон= (0,3-ъ0,5) Мк, а скорость двигателя
соответственно возрастает.
Во время последней (пятой) стадии происходит втягивание
якоря в клюз. Двигатель в это время работает на искусствен-
ной характеристике со скоростью, которая значительно меньше
номинальной. Момент к концу периода возрастает до М5=
= (l,2-s-l,5) Мц. При расчете электропривода этим увеличением
момента можно пренебречь ввиду кратковременности его дей-
ствия, а время втягивания якоря в клюз включить в четвертую
стадию. '
Режим работы электропривода якорно-швартовного устрой-
ства, предусматривающий разбивку процесса съемки судна
с якоря на пять указанных выше стадий, является идеализи-
рованным и'принят лишь для упрощения расчетов. В реальных
условиях нагрузка на первых трех стадиях значительно отли-
чается от представленной на рис. 162. Строго говоря, судно и
якорную цепь следовало бы рассматривать как единую колеба-
тельную систему, на которую и работает двигатель якорно-
швартовного устройства. В первое время после его включения
мощность, развиваемая двигателем, идет на сообщение ускоре-
ния неподвижно стоящему судну. Момент на валу резко возра-
стает, а скорость уменьшается. Запасенная судном энергия от-
§ 55]
Режимы работы электропривода
293
дается затем двигателю, в связи с чем развиваемый им момент
уменьшается, а скррость увеличивается. Судно, погасив инер-
цию, вновь запасается энергией с вала двигателя. Такое колеба-
ние нагрузки двигателя происходит вплоть до отрыва якоря
от грунта (см. штриховую кривую на рис. 164, а).
Если глубина стоянки судна превышает длину якорной цепи,
то якорь не ляжет на грунт. Поэтому двигатель якорного шпиля
(как и брашпиля) должен быть рассчитан на подъем якоря,
висящего на полностью вытравленной цепи. При этом в началь-
ный период выбирания момент на валу двигателя будет
•Мав.нач= (1,5-^-2,5) Ми. Затем он начнет плавно уменьшаться до
Л4ав.кон= (0,З ь0,5) Мя к моменту втягивания якоря в клюз.
Электропривод якорно-швартовного устройства должен обес-
печивать также одновременный подъем двух якорей с половины
номинальной глубины якорной стоянки при неодновременном
отрыве их от грунта.
Расчетная глубина якорной стоянки h0 обычно ставится
в следующую зависимость от веса якоря Оя [8]:
6я, т h0, я
1,0 s 80
1,5—3,0 90
3,0—6,0 ' 100-
Правилами Регистра СССР установлено, что средняя ско-
рость подъема одного якоря должна быть не менее 10 м/мин.
После отрыва якоря от грунта скорость доходит до 18 м/мин
и более. Скорость выбирания лежащей на грунте цепи колеб-
лется в пределах от 6 до 18 м[мин. Скорость втягивания якоря
в клюз на основании натурных испытаний не должна превы-
шать 5—10 м/мин. Выбор более высоких скоростей электро-
привода связан с завышением мощности двигателя и не оправ-
дывает себя, так как сколько-нибудь существенное сокраще-
ние времени съемки судна с якоря достигается при этом лишь
на больших глубинах стоянки.
Якорный электропривод — одно из наиболее ответственных
судовых устройств, определяющих безопасность мореплавания.
Поэтому предъявляемые к нему требования должны неукосни-
тельно выполняться. Согласно этим требованиям, якорный элек-
тропривод должен обеспечивать:
а) съемку судна с якоря при любом состоянии погоды и моря;
б) стоянку двигателя под- током в течение 0,5 мин-,
в) широкий диапазон и достаточную плавность регулирова-
ния скорости исполнительного двигателя, обеспечивающие нор-
мальную скорость подъема одного якоря и минимальную ско-
рость подхода якоря к клюзу;
г) удержание якоря на весу при снятом напряжении.
294
Электроприводы якорно-швартовных устройств
[Гл. 8
§ 56. Расчет электропривода якорно-швартовных устройств
Расчет электроприводов выполняют для того, чтобы по его
результатам осуществить выбор исполнительных двигателей
и других машин и аппаратов управления. Расчет производят
на основании данных якорного снабжения судна, по которым
выбирают якорно-швартовную лебедку, глубину стоянки и дру-
гие исходные данные.
Основным режимом работы электропривода якорно-швар-
товного устройства принято считать подъем одного якоря с нор-
мальной глубины. Расчет электропривода для этого случая вы-
полняют по стадиям съемки судна с якоря (см. § 55). Порядок
расчета таков:
1. Определяют моменты статического сопротивления для
каждой стадии и каждого возможного режима работы электро-
привода. Находят расчетное значение момента на валу дви-
гателя.
2. Выбирают нужный тип двигателя и по каталогу находят
его основные данные.
3. Выбранный двигатель проверяют на продолжительность
съемки судна с якоря и на нагрев в процессе работы.
4. Иногда двигатель проверяют на соответствие условиям
швартовки судна и на максимально допустимую скорость раз-
гона при сбросе якоря на большой глубине.
Усилия натяжения у клюза на различных стадиях съемки
судна с якоря. Введем следующие обозначения участков цепи,
выбираемой при съемке судна с якоря: £ц— общая длина цепи
одного якоря; £нс— несмачиваемый участок цепи от 'жвака-
галса до клюза; £о— длина вытравленной цепи (длина цепи
на клюзе); £св — длина свободно провисающей цепи от клюза
до грунта; £b L2, L3, Ltl— участки цепи, выбираемые на соот-
ветствующих стадиях съемки судна с якоря. Воспользовавшись
этими обозначениями, напишем:
£о = £ц ^-нс> ~ Lo £св; L^~ £св £0.
Длину свободно провисающей цепи £св находим из уравне-
ния (315):
£ев=1/ ^-+£0- (321>
Как видно из приведенного выше рис. 161, на. первой стадии
съемки судна с якоря усилие у клюза Fj является постоянным.
Оно состоит из горизонтальной составляющей N, идущей на
преодоление силы сопротивления ветра и течения F, и верти-
S 56]
Расчет электропривода.
295
калькой составляющей, образованной весом провисающей части
цепи G4=p1LCB:
F, - VWcJ = 1/ + (₽,£„)".
’ 2йо 1
или после преобразования: 4
' <322>
На второй стадии съемки судна с якоря натяжение у клюза
изменяется от Ft до F3 (под и Fs мы понимаем значения
натяжений у клюза на первой и третьей стадиях). Для упро-
щения расчета примем, что это изменение происходит по ли-
нейному закону.
На третьей стадии полагаем F3=const и считаем, что дви-
гатель находится в режиме короткого замыкания. Следова-
тельно, L3=0. Усилие в момент отрыва якоря от грунта, сильно
зависящее от характера грунта и других трудно учитываемых
условий, поддается лишь ориентировочному определению и
принимается равным
• ^ = ^=±(ОяН-рй0) + 2Оя. (323)
После отрыва якоря от грунта усилие у клюза резко умень-
шается. В начале четвертой стадии оно определяется весом
якоря и свободно висящего участка цепи:
/=’tea4=2^1(Ga + pAo). ’ (324)
По мере уменьшения этого участка цепи усилие на клюзе
линейно уменьшается до'его значения в конце периода:
Лион = (325)
На протяжении рассмотренных стадий съемки судна с якоря
аналогично усилиям' у клюза изменяются и моменты на валу
исполнительного двигателя, которые можно найти по формуле:
Мх = FxDaB ,
клипер
(326)
где Пзв — диаметр цепной звездочки, м\ определяется по кон-
структивным данным выбранной лебедки или ори-
ентировочно по формуле:
D3B = 13,6d; (327)
296
Электроприводы якорно-швартовных устройств
[Гл. 8
i — передаточное число, равное для' брашпилей 105—
250, а для шпилей 100—200;
т]кл — к. и. д. клюза, обычно равный 0,77; <
т[пер — к. п. д. передаточного механизма лебедки, равный
0,4—0,82 (нижний предел — для самотормозящихся
червячных передач).
Полученные значения моментов позволяют построить гра-
фик зависимости M=f(L), представленный на рис. 163, а.
Рис. 163. Зависимость
момента на валу дви-
гателя от длины вы-
бираемой цепи при
подъеме якоря с нор-
мальной (а) и с боль-
шой (б) глубины.
Как уже отмечалось, кроме рассмотренного режима съемки
судна с одного якоря на нормальной глубине стоянки, электро-
привод должен обеспечивать подъем якоря, висящего на пол-
ностью вытравленной цепи, а также одновременный подъем
j двух якорей с глубины, составляющей половину нормальной
величины. Так как двигатель следует выбирать по наибольшему
значению момента на его валу, то необходимо дополнительно
рассмотреть ряд возможных режимов.
Одновременный подъем двух якорей с половины номиналь-
ной глубины якорной стоянки. Усилие у клюза в начале
подъема
~ ^нач2 = ^~^Ga + Ph0Y ' (328)
Усилие в конце подъема
Ккон2 = 2Ся. / (329)
, Моменты на валу двигателя определяются из уравнения (326).
§ 56]
Расчет электропривода
297
Аварийный подъем якоря с большой глубины. Усилие
у клюза в начале подъема создается весом якоря и вытравлен-
ной' цепи
^нач = —~(Ся + рЦ). (330)
В конце подъема усилие у клюза
Е* _ ГГ
1 ав. кон 1 4кон ' 'я
Соответствующие моменты определяются из уравнения
(326), но с учетом того, что передаточное число i должно быть
заменено на /ап, соответствующее положению переключателя
«Аварийная работа» (4в>0- График изменения момента для
этого случая изображен на рис. 163,6.
На основании полученных расчетных значений моментов вы-
бирают исполнительный двигатель и систему электропривода.
Если требуется двигатель постоянного тока, то расчетное
значение номинального момента на его валу определяется по
формуле:
М __ Мщах
н’Расч Ыы ’
(331)
где 7Итах—максимальный момент, соответствующий наиболее
тяжелому режиму работы двигателя;
k — коэффициент, учитывающий количество исполни-
тельных двигателей в системе привода (например,
для однодвигательных приводов k=\, для двух-
двигательных k=2);
Z.M — перегрузочная способность, обычно выбираемая
для двигателей постоянного тока в пределах
1,8—2,2.
Двигатели переменного тока целесообразно выбирать по пу-
сковому моменту с учетом возможного 10%-го падения на-
пряжения питающей сети, т. е.
Крас, = 1.25Мтах.
Данные по каталогу должны соответствовать условию:
Л4Н. кат > А1н.расч — для двигателей постоянного тока;
Мп. кат^"А1п. расч — Для двигателей переменного тока.
Электропривод сможет обеспечить предусмотренную Ре-
гистром СССР среднюю скорость снятия судна с якоря
298
Электроприводы якорно-швартовных устройств
[Гл. 8
(иср^>10 mImuh), если средняя скорость вращения исполни-
тельного двигателя будет не менее
пср = ^р± = ^£. (332)
Проверка выбранного двигателя на продолжительность
съемки судна с якоря, на нагрев и на выполнение швартовных
операций. Выбранный по максимальному моменту двигатель
проверяют на заданное время съемки судна с якоря и на на-
грев в рассмотренных режимах работы, для чего берут из ката-
лога или строят механическую характеристику выбранного дви-
гателя:
а) для двигателей типа ДПМ со смешанным возбужде-
нием— по универсальной характеристике, приведенной на
рис. 42;
б) для двигателей, работающих в системе Г—Д — методом,
изложенным в § 21;
в) для двигателей переменного тока — по формулам (146)
и (148).
Из полученных расчетных значений момента на валу по ме-
ханической характеристике определяют скорость вращения дви-
гателя, а по ней — скорость и время выбирания якорной цепи
на каждой стадии съемки судна с якоря.
При этом скорость выбирания якорной цепи находят по
формуле:
а время выбирания якорной цепи определяют из отношения
длины участка цепи, выбранной на данной стадии, к соответ-
ствующей скорости выбирания:
= - (334)
Заметим, что для определения продолжительности второй
стадии берут конечную скорость, а четвертой стадии — сред-
нюю скорость выбирания якорной цепи:
Одер = г,4нач-^4-ко^-. (335)
Продолжительность третьей стадии принимают равной
0,5 мин.
Выбранный двигатель будет удовлетворять требованиям
в отношении продолжительности съемки с якоря, если
+ (336).
§ 56']
Расчет электропривода
299
где Тт. у — время, задаваемое техническими условиями и рав-
ное 20—30 мин.
Аналогично проверяют двигатель на работу в других воз-
можных режимах.
По расчетным данным строят нагрузочные диаграммы элек-
тропривода якорно-швартовного устройства показан-
ные на рис. 164.
Рис. 164. Нагрузочные диаграммы электропривода якор-
но-швартовного устройства при нормальной (а) и при
аварийной (б) съемке судна с якоря.
i \
Соответствие выбранного двигателя условиям нагрева про
веряют, сравнивая среднеквадратичный ток или момент с соот-
ветствующими номинальными значениями.
Чтобы проверить двигатель постоянного тока со смешанным
возбуждением на нагрев, по универсальной кривой (см. рис. 42).
строят график зависимости из которого по расчетным
значениям момента находят соответствующие токи и затем оп-
ределяют их среднеквадратичное (эквивалентное) значение:
для подъема якоря- с нормальной глубины стоянки
+ —'з—
r2 > г г j г2 \
. 74нач 74нач74кон ' *4кон ; (337)
300
Электроприводы якорно-швартовных устройств
[Гл. 8
для подъема якоря, висящего на полностью вытравленной
цепи
экв
/2 _L J I
ав. нач ~ л ав. нач* ав кон * ав. кон
-
Двигатели переменного тока или исполнительные двигатели
с независимым возбуждением системы Г—Д проверяют на на-
грев по следующим формулам среднеквадратичного момента:
для нормального режима (рис. 164, а)
(338)
М
ЭКВ
1
Т
м,м„ + м2
.- ;з з—3t2+м%3+
3
. ^4нач + M4Ha4M 4кон 4“ ^4кон >
_________ 4
для аварийного режима (рис. 164, б)
(339)
Л4экв
допу-
М2 + М М -1-Л42
*глав. нач 1 2ГЛав. нач хглав. кон > хт*ав. кон
3
Выбранный двигатель не будет перегреваться свыше
стимой температуры, если
Лкв или Л4,кв •< М„. -
Осуществив выбор исполнительного двигателя для электро-
привода, работающего по системе Г—Д, определяют потребную
мощность и в соответствии с ней производят выбор генератора,
возбудителя и приводного двигателя преобразовательного
агрегата.
Мощность генератора
(340)
р
Рг = ^
^и.д
Если приводной двигатель вращает генератор и возбуди-
тель, то его мощность
Р = I в
П-Д~ Т)Г "Т" 7]В ’
(341)
(342)
где Рв=0,05 (РИ. д+^г).
Выбранный из условий якорных операций электропривод
иногда проверяют на выполнение швартовных операций, но
установленной методики такого расчета до настоящего времени
не имеется. Поэтому целесообразно пользоваться предложен-
ным И. Р. ФрейдзОном методом определения тягового усилия
§ 56]
Расчет электропривода
301
на барабане шпиля Рш, если судно, находящееся на некотором
расстоянии от причала, швартуется при помощи двух тросов:
где F — усилие, необходимое для подтягивания судна (обыч-
но F выбирают из условия шестикратного запаса
прочности швартовных тросов);
Яш — к. п. д. швартовного клюза, равный 0,7—0,8;
<р — угол, образованный направлениями троса и движения
судна.
Проверка двигателя на максимальную скорость при отдаче
якоря. Как уже отмечалось, постановку судна на якорь при
значительных глубинах стоянки производят с помощью электро-
привода. При этом двигатель, включенный на спуск, вначале
работает в режиме силового спуска («Травить»), Это продол-
жается до тех пор, пока момент, создаваемый якорем и вы-
травленной цепью, не оказывается больше момента сил трения
во всех звеньях якорно-швартовного устройства. После этого
двигатель переходит в генеральный тормозной режим и по
мере увеличения длины вытравленного участка цепи разго-
няется до все более высоких скоростей.
Максимальное тяговое усилие у клюза, вызывающее уско-
рение двигателя, определится из уравнения (324). Этому уси-
лию при спуске будет соответствовать момент на валу дви-
гателя
М = , (344)
сп ‘пер ’ v 7
где ц'кл — к. п. д. клюза при спуске якоря (от величины на-
грузки не зависит); ц'Кл=2—l/i^Kn;
ц'пер — к. п. д. передаточного механизма лебедки при
спуске якоря; т] лер=2—1/т]Пер, где т]ПСр находят по
графику, приведенному на рис. 5;
Цкл и цпер — к. п. д. клюза и передачи при подъеме якоря.
Значению момента Л4СП соответствует скорость, определяе-
мая из тормозной характеристики двигателя.
Пример 13. Произвести расчет и выбор электродвигателя брашпиля су-
хогрузного судна водоизмещением 16 000 т по следующим исходным данным:
длина судна между перпендикулярами L=140 м; ширина по миделю В =
=20,6 м; высота борта //=12,3 м; осадка 7=7,65 м; длина средней над-
стройки 1=20 м; высота средней надстройки 6= 13,5 м; ширина средней над-
стройки 6=20,6 м; диаметр цепной звездочки брашпиля £>зв=855 мм; к. п. д.
передаточного механизма брашпиля т]пер=0,74; к. п. д. клюза т]1:л=0,77; пе-
редаточное число механизма для режима «нормальная работа» i=208; оно же
для режима «аварийная работа» /ав=368; напряжение судовой сети U=
=380 в.
302
Электроприводы якорно-швартовных устройств
[Гл. 8
Решение. Выбор якорей и якорных цепей.
1. Характеристика якорного снабжения судна
N„ = L (В + Н) + 0,75 th = 140 (20,6 + 12,3) + 0,75-20-13,5 = 4810.
2. Якорное оборудование (по приложению II):
число становых якорей......................................3 шт.;
общий вес................................................ 13 500 кг;
общая длина двух цепей.................................. 550 л;
л калибр якорной цепи.......................................66 мм.
Таким образом, вес одного якоря бя=4500 кг, длина цепи одного якоря
£ц=275 м.
3. Вес I пог. м якорной цепи с распорками
р = 0,0218+ = 0.0218-662 = 95 кГ.
4. Вес 1 пог. м цепи, погруженной в воду,
^1 = 95 7,8- 1,025 *g
1 7,8
5. Длина несмачиваемого участка цепи в соответствии с высотой
и расстоянием от якорной лебедки до клюза £нс = 18 м.
6. Длина вытравленной цепи
Lo = £ц — £нс = 275 — 18 257 м.
Расчетная глубина стоянки, выбранная по весу якоря, h0= 100 м.
8. Коэффициент полноты водоизмещения судна
D 16 000
борта
8П = —-— =----------------------- -0,708.
8£ВГ 1,025-140-20,6-7,65
9. Смоченная поверхность корпуса судна из уравнения (318)
SCM = [2-7,65+ 1,37 (0,708 —0,274) 20,6]-140 = 4240 м?.
10. Площадь парусящей поверхности судна из уравнения (320)
«пар = 0,27-20,6(12,3 — 7,65) 4 20,6-13,5 = 304 м2.
11. Сила сопротивления течения воды при подтягивании судна к месту
заложения якоря по формуле (317) | £
0,14-4240-0,21,83= 31,2 кГ. $ % ' S $ $ ’
12. Сила сопротивления ветра по формуле (319)
F„ = 0,02-304- Ю2 = 608 кГ.
13. Равнодействующая внешних сил при совпадении их направления
F = FT + £в = 31,2 4 608 = 639,2 кГ.
14. Длина свободно провисающей части цепи согласно уравнению (321)
Ксп-]/^639’2-100^^2-^..
V 82,5
15. Длина лежащей на грунте цепи
£х = £0 — £св = 257 — 107 = 150 м.
16. Длина части цепи, выбираемой во второй стадии съемки судна
С якоря (при переменном тяговом усилии)
£g — Ксв — йр = 107 — 100 = 7 м ' -
§ 56]
Расчет электропривода
303
Определение тяговых усилий и моментов при подъеме одного якоря
с нормальной глубины стоянки.
17. Тяговое усилие у клюза на первой стадии съемки судна с якоря из
уравнения (322)
Ft = 82,5
1072 + 1002
- = 8880 кГ.
2-100
18. Тяговое
нения (323)
усилие у клюза при отрыве якоря от грунта из урав-
-’8—-1--25 (4500 + 95-100) + 2-4500 = 21 170 кГ.
19. Усилие у клюза при подъеме якоря после отрыва его от грунта из
уравнения (324)
7 Я____ 1 (19К
Лнач =.....-’-v - (4500 + 95-100) = 12 170 кГ.
7,8
20. Усилие у клюза перед втягиванием якоря в клюз (в конце четвертой
стадии)
F4кон — G я -— 4500 кГ.
По расчетным данным выбирается брашпиль БЭ-11 с двумя электро-
двигателями (см. рис. 159).
21. Момент сопротивления на валу двух электродвигателей при подтя-
гивании судна к якорю
8880-0,855
З^кл^пер
22. Момент на валу двух
ЛАв
М3 =
27’]кл11пер
= 32,0 кГ-м.
2-208-0,77-0,74
электродвигателей при отрыве якоря от грунта
21 170-0,855
= 75,2 кГ-м.
2-208-0,77-0,74
23. Момент на
его от грунта
валу двух двигателей при подъеме якоря после отрыва
F4начТ^зв
12 170-0,855
43,9 кГ-м.
подходе якоря к клюзу
Т^4нач —
2цкл^пер 2.203-0,77-0,74
24. Момент на валу двух электродвигателей при
л4 ЛконТЗзв 4500-0,855
/И4К0Н — ~
16,2 кГ-м.
2«пер 2-208-0,77-0,74
Определение тяговых усилий и моментов при подъеме двух якорей
с половины номинальной глубины якорной стоянки (50 м).
25. Усилие у клюза в начале периода по уравнению (328)
Лача = -7,8~ 1,025 (2-4500 + 95-100) = 16 100 кГ.
7,8
26. Усилие у клюза в конце периода
Лона = 2GH = 2-4500 = 9000 кГ. ,
304
Электроприводы якорно-швартовных устройств
[Гл. 8
27. Момент на валу двух электродвигателей в начале периода
«4 _ ^начгОзв
'инач2 —
клипер
16 100-0,855 со , „
---------------= 58,1 к! -м.
2-208-0,77-0,74
28. Момент на валу двух электродвигателей в конце периода
,. F конаОзв 9000 • 0,855
'ИКОН2 —
= 32,4 кГ-м.
^^кл'^пер 2-208-0,77-0,74
Аварийный подъем якоря с большой глубины (передаточное число меха-
низма 1&ъ=368).
29. Усилие у клюза при подъеме одного якоря, висящего на полностью
вытравленной цепи из уравнения (330)
Ряк ияц = 7,8~~ 1,025 (4500 + 95-257) = 25 100 кГ.
dti. НаЧ 7 8 ' ' '
30. Момент на валу двух электродвигателей при подъеме якоря, вися-
щего на полностью вытравленной цепи
Мав нач = Гав-нач,Рзв = - 25 100'0’855 = 51,2 кГ-м.
27аВМПер 2-368-0,77-0,74
' 31. Усилие при подходе якоря к клюзу
^ав. кон = ^4кон = •
Момент на валу двух электродвигателей при подходе одного якоря
к клюзу
^ав.кончав 4500-0,855 о г '
М„„ кон = ----------— =------------------- = 9,16 кГм.
S/aB’lK^nep 2-368-0,77-0,74
Предварительный выбор электродвигателя.
32. Максимальный нагрузочный момент имеет место при отрыве от грунта
одного якоря двумя электродвигателями
Мтах = М3 = 75,2 кГ-м.
Отсюда расчетное значение номинального момента двигателя по фор-
муле (331)
.. 75,2
М пасч =-------= 19 кГ-М,
н. расч 2’2
где перегрузочная способность двигателей ?.м=2.
33. Расчетное значение номинальной скорости исполнительного двига-
теля принимается равным средней скорости
3,27 3,2-208
пСр =------=--------= 780 об!мин.
D3B 0,855
34. Расчетное значение номинальной мощности электродвигателя
п ^н.расчпср 19-780 1Г-О
Рн пасч =-----------— =-----------= 15>2 Квт.
р 975 975
35. В качестве исполнительных электродвигателей выбираются два элект-
родвигателя постоянного тока типа ДПМ-32 с независимым возбуждением,
водозащищенные; их параметры: <7=220 в; 30-минутная мощность Р=22 квт;
I
§ 56] Расчет электропривода 305
n=1080 об/мин-, /=120 а. Оба электродвигателя работают на один вал,
соединены последовательно и питаются от одного генератора системы Г—Д.
Определение скорости выбирания якорной цепи и времени работы элект-
родвигателей.
36. По механической характеристике (см. рис. 172) находится скорость
вращения электродвигателей на различных стадиях съемки с якоря:
Момент на валу, кГ-м Скорость п, об!мин
= 16,0 пг = 1120
2 -
-^+=38,1 п3 = 610
2
= 21,95 ^4нач — Ю20
Макон _ g । 2 ~ ' ^4кон — 1275
= 29,05 2 ^нач2 = 840-
^она = 16 2 ЛКОН2 ~ 1145
2 -
м
——”ач = 25,6 2 . — «ав нач = 930 ав.
~-ав'кон = 4,58 пав кон = 1315
do. KUH
37. Скорость выбирания якорной цепи по стадиям:
лОзвП, 3,14-0,855-1120 ,. _ ,
V, = ----55-1- = —-------------= 14,5 м[мин\
i 208
7tO3Bn3 3,14-0,855-610 _n ,
v, =-----55-5- = —----!--------= 7,9 м!мин\
i 208
^4нач — гс^зв^нач „ i 3,14-0,855-1020 208 = 13,2 м1мин\
^4кон — 7С^ЗВ^4КОН __ А 3,14-0,855-1275 208 = 16,4 mJmuh-,
Vi — ^<нач т Р4К0И 2 _ 13,2+ 16,4 2 -- 14,8 м1мин\
;ВзвПнач2 = 3,14-0,855-840 = g
i. 208
7tD3BnKOH2 3,14-0,855-1145 ,
v „= ------3B KO"2 = ----------= 14,8 м/мин-,
i 208
ц2я = + ^ко,-,2 = Ю.8+ 14,8 = 12.8 m1muh.
2 . 2
11 К. А. Чекунов
306
Электроприводы якорно-швартовных устройств
[Гл. 8
^ав. нач
T.D п
зв ав, нач
гав
3,14-0,855-930
368
= 6,8 mJmuh-,
_ ‘'•^>звГ!ав. кон
иав. кон . ncQ
£ав обо
^ав. нач ~т~ ^ав. кон __ 6,8 -|- 9,6
2 2
3,14-0,855-1315
= 9,6 м!мин;
Уав =
8,2 м/мин.
38. Продолжительность каждой стадии
, Lj 150 . n п
ti = —— — ------= 10,3 мин\
vi 14,5
/2 = —- = —— = 0,89 мин\
V» 7,9
Л
h принимаем равной 0,5 мин-,
h0 100 Р __
t4 = —— = ------ = 6,77 мин.
14,8
39. Расчетное значение полного времени съемки судна с якоря
Грасч = <1 + <2 + <3 + <4 = 10,3 + 0,89 4- 0,5 + 6,77 = 18,46 мин.
40. Средняя скорость съемки судна с якоря
257 ,
-----= 13,9 ммин.
18,46
V = L°
LP Трасч
41. Время подъема якоря, висящего на полностью вытравленной цепи,
Lo 257 „
tan — --- '— --- — 31,3 МИН.
»ав 8,2
Таким образом, двигатель удовлетворяет требованиям Регистра СССР
в отношении скорости и времени съемки судна с одного якоря при
ной глубине стоянки:
t>cp = 13,9 mImuh > vPer = 10 mImuh",
^расч = мин < Грег= 30 мин.
Подъем якоря, висящего на полностью вытравленной цепи,
аварийным режимом и встречается редко. К тому же
время такого подъема якоря (31,3 мин) незначительно
мое Регистром СССР.
Проверка выбранных электродвигателей на нагрев.
42. Среднеквадратичный момент электродвигателя
с одного якоря двумя двигателями
норма ль-
является
расчетом
полученное
превышает допускав-
при съемке судна
^ЭКВ —
м\ м\ + м^м3 + м2 м2
-— ti —-------------^2 ——
4 4-3 4
расч
^4нач + ^4нач^-
4-3
' -I- А4?
4кон 4кои ,
----------------
4-3
§ 56]
Расчет электропривода
307
1/_J_ f 16г. 10,3 + -162+16-ggJ + 38^
У 18,96 \ 3
0,89 -t- 38,12-0,5 +
21,95®+21,95-8,1 + 8,12 \
]-----—!----------—!----6,77 = 18,5 кГ-м.
з /
43. Среднеквадратичный момент электродвигателя при подъеме якоря
с большой глубины
M.„„ oo
oKrj. oB
М2 ММ М2
ав.нач , ав. нач' ав. кон , 'ав. кон
". г' ; I----;
4 4 4
62 + 25,6-4,58 + 4,582) = 16,3 кГ-м.
44. Номинальный момент двигателя
Мн = 975 = 975—= 19,9 кГ-м.
«н 1080
Таким образом, Л4Н>МЭКВ и Mh>M8Kb. ав-
Проверка возможности спуска одного якоря на глубину полностью вы-
травленной цепи двумя двигателями.
45. Момент на валу двух электродвигателей в конце спуска якоря
F D / 1 \
Мсп = Гав'.?1<зв /2----------1---\ =
' ' 2/ав \ 1|кл11пер /
25 100-0,855 1 \ , 1С „
=------------- 2-------------= 7,15 кГ-м.
2-368 \ 0,77-0,74 /
46. Моменту Л1Сп/2=3,6 кГ • м соответствует скорость тормозного режима
двигателя п=1420 об/мин, что меньше максимально допустимой скорости
для выбранного двигателя nmax=2300 об/мин.
Выбор преобразовательного агрегата.
47. По мощности генератора *
Рг = 2 = 2.Рдв^1- = 21// = 2-220-120 = 52,8 кет;
^ДВ Рдв
выбираем генератор П-101, брызгонепроницаемый, с параметрами: Рн=60 кет;
U=375 в; п=1445 об/мин; ks.Y^PT/P1,=Zi2.fi/Hi^--6fiVl; т)г=0,9.
48. По мощности возбудителя
Рв = 0,05 (2РДВ + Рг) = 0,05 (2-22 + 60) = 5,2 кет;
выбираем возбудитель типа П-51 с параметрами: Рв=6 кет; <7=230 в;
п=1440 об/мин; k3. Е = Рв/Рн=5,2/6,0=0,87; т)„=0,8.
49. По мощности приводного двигателя
Р fes.rpr , k3. врв 0,88-60 , 0,87-6 _. _
Рп „ = ----------------=-------------h —-----= 64,5 кет;
д Чг Чв 0,9 0,8
* Из рассмотренных режимов следует, что коэффициент загрузки А3
исполнительных двигателей близок к единице,
11*
308
Электроприводы якорно-швартовных устройств
[Гл. 8
выбираем приводной двигатель переменного тока типа- АМ-101-4, брызго-
непроницаемый с параметрами: Рн=75 кет; п=1445 об!мин; /7=380 в;
/=153 а; Лм—2.
§ 57. Схемы управления электроприводами
якорно-швартовных устройств
Системы управления электроприводами якорно-швартовных
устройств обычно бывают разомкнутыми и только в некоторых
случаях для получения необходимых механических характери-
стик применяют местные обратные связи.
По условиям работы якорно-швартовного устройства его
электропривод должен работать в кратковременном режиме<
обеспечивая подъем и спуск якоря с различными скоростями,
плавный пуск под полной нагрузкой и торможение, а также
стоянку исполнительного двигателя под током в течение 0,5 мин.
Выбор для электропривода якорно-швартовного устройства
той или иной схемы управления (контроллерной, релейно-кон-
такторной, электромашинной, бустерной или др.) зависит от
мощности исполнительного двигателя. Весьма перспективными
в настоящее время считаются схемы тиристорного управления.
Контроллерные схемы управления. Эти схемы используются
при мощности исполнительного двигателя до 10 кет (реже — до
25 кет). Контроллерные схемы, предназначенные для электро-
приводов небольшой мощности, отличаются простотой и на-
дежностью работы, малым весом и небольшими габаритами,
а также сравнительной дешевизной. С увеличением мощности
привода схемы становятся все менее надежными и более гро-
моздкими. К числу недостатков этих схем относится и то, что
они не обеспечивают:
а) автоматического ограничения момента двигателя при от-
рыве якоря от грунта, что в установках большой мощности мо-
жет вызвать поломки в механизме или обрыв якорной цепи
(увеличение мощности всегда сопровождается уменьшением
запаса прочности механизмов);
б) ограничения бросков пусковых и тормозных токов, что
может явиться причиной кругового огня на коллекторе и ко-
роткого замыкания в щеточном механизме двигателя.
Сказанное объясняет, почему контроллерные схемы управ-
ления требуют для своего обслуживания квалифицированного
персонала.
В систему управления входят: двигатель с электромагнит-
ным тормозом, контроллер кулачкового или барабанного типа
и ящики сопротивлений (в установках постоянного тока). Кон-
троллеры кулачкового типа обеспечивают более надежную ра-
боту привода, в связи с чем они получили наибольшее распро-
странение. К тому же их стали снабжать панелями защиты,
£57]
Схемы управления электроприводами
309
что освободило контроллерные схемы от части перечисленных
выше недостатков.
Контроллерная схема на постоянном токе приведена на
рис. 165. Она укомплектована двигателем типа ДПМ-32, 30-ми-
нутная мощность которого составляет 22 кет, пристроенным
дисковым тормозом типа ТДП-3, сопротивлениями типов
СКФ-2 и СКФ-3, а также кулачковым контроллером типа
КВ-2500 с одним нулевым и шестью рабочими положениями
в каждую сторону.
После подачи напряжения на зажимы +Л{ и —Л2 контрол-
лер устанавливают в нулевое положение и поворотом съемной
рукоятки «От себя до отказа» включают линейные кулачковые
элементы, которые в этом' положении удерживаются получив-
шей питание катушкой контактора Л. В то же время получает
питание катушка контактора грузовой защиты Г и его за-
мыкающие контакты замыкаются. Одновременно с пода-
чей напряжения на схему включается параллельная обмотка
возбуждения —Ш2 через сопротивление СДЬ падение
310
Электроприводы якорно-швартовных устройств
[Гл. 8
Рис. 166. Механические характеристики
электропривода якорно-швартовного
шпиля на постоянном токе при контрол-
лерном управлении.
механической характеристики на
напряжения в котором увеличивается в виду наличия параллель-
ной ветви, образуемой сопротивлениями Шх—Ш3 и Pi—Р$.
Для подъема якоря маховичок контроллера постепенно пе-
реводят в рабочее положение направления «Выбирать». На пер-
вом положении остаются замкнутыми контакты I и IV, размы-
кается контакт II и замыкаются контакты III, VI и VII. Благо-
даря этому двигатель растормаживается и подключается к сети.
Размыкание контакта II
усиливает поле полюсов,
а замкнутый контакт IV
обеспечивает шунтирование
якоря параллельно вклю-
ченными сопротивлениями
Р7—Рв и Р7—Ps- Двигатель
начинает работать с не-
большой скоростью на пер-
вой механической характе-
ристике (рис. 166).
С переводом маховичка
контроллера во второе по-
ложение цепь шунтирующей
якорь ветви разрывается
контактом IV, и двигатель
выходит на вторую (рео-
статную) характеристику.
Маховичок контроллера
продолжает вращаться в
направлении «Выбирать», и
двигатель все больше разго-
няется, переходя с одной
ругую благодаря последова-
тельному выведению из цепи якоря сопротивлений Pt—Ps. В по-
следнем (шестом) положении, соответствующем работе двига-
теля на шестой характеристике, сопротивления в цепи якоря
будут полностью зашунтированы. Кроме того, включением кон-
такта II магнитный поток ослабляется из-за шунтирования об-
мотки возбуждения —Ш2 сопротивлением Ш\—Ш3.
Работа схемы при положении контроллера «Травить» ана-
логична рассмотренной с той лишь разницей, что:
а) вместо контактов направления VI и VII замыкаются кон-
такты V и VIII, что обеспечивает изменение направления тока
в якоре и реверс двигателя;
б) контакт II не замыкается ни в одном из положений
«Травить», и магнитный поток полюсов не ослабляется;
в) во всех положениях «Травить» якорь остается зашунти-
рованным, что уменьшает скорость двигателя, а механиче-
§ 57]
Схемы управления электроприводами
311
ские характеристики перемещаются параллельно самим себе
вправо — в квадрант генераторного торможения.
Чтобы остановить двигатель, надо перевести маховичок кон-
троллера в нулевое положение; при этом якорь оказывается
замкнутым на сопротивление динамического торможения Рв—Рт-
Разомкнувшийся контакт III обесточивает тормозной электро-
магнит и вызывает механическое торможение двигателя.
Рассмотренная схема обеспечивает следующие виды за-
щиты:
а) минимальную и нулевую, которые осуществляются кон-
тактором Л, освобождающим защелку, удерживающую кон-
такты Л в замкнутом состоянии;
б) максимальную, обеспечиваемую максимально-токовым
реле РМ, разрывающим цепь катушки контактора Л;
в) грузовую, реализуемую грузовым реле РГ и контакто-
ром Г.
В случае увеличения тока нагрузки свыше допустимого пре-
дела срабатывает реле РГ, разрывающее цепь катушки грузо-
вого контактора Г. В результате этого в цепь якоря вводится
сопротивление Р2—Р$ (третья механическая характеристика).
При исчезновении перегрузки возврат двигателя на шестую ха-
рактеристику возможен лишь после перевода контроллера
в третье положение и замыкания контакта /. Разгон двигателя
вновь производится обычным порядком.
Контроллерная схема на переменном токе, приведенная на
рис. 167, укомплектована двухскоростным асинхронным двига-
телем с двумя раздельными обмотками на статоре. Контроллер
кулачкового типа на два рабочих положения в направлении
«Выбирать» и «Травить» производит реверс двигателя контак-
тами направления Кб—К9. Для переключения скоростей слу-
жат контакты скорости К4, Кб, КЮ, КН и К12, которые
подают напряжение на зажимы обмоток большой и малой ско-
рости. Во время переключений контроллера обеспечивается не-
продолжительное одновременное питание обеих обмоток, что
предотвращает исчезновение электромагнитного момента дви-
гателя и вытравливание якорной цепи под действием силы тя-
жести якоря при нахождении контроллера между первым и вто-
рым положениями.
Защита двигателя от перегрузки обеспечена тем, что в две
фазы каждой обмотки включены тепловые реле. Правда, эти реле
могут сработать на отключение двигателя от сети даже при впол-
не исправном механизме, отреагировав на одни лишь тяжелые
условия съемки судна с якоря. Чтобы избежать этого, надо вруч-
ную зашунтировать тепловые реле контактом ВУ2 выключателя
цепей управления. Шунтирующий контакт ВУ2 остается
замкнутым только при удержании рукоятки выключателя'
312
Электроприводы, якорно-швартовных устройств
[Гл. 8
в положении «А», что исключает возможность отключения
тепловой защиты на длительное время.
Нулевую и минимальную защиты осуществляет линейный
контактор Л. Нулевая блокировка выполняется контактором
совместно с размыкающим контактом контроллера К7-
Релейно-контакторные схемы управления. Эти схемы полу-
чили широкое распространение в электроприводах мощностью
от 11 до 60 кет. Электропривод с такой схемой управления со-
Рис. 167. Контроллёрная схема электропривода якорно-швартовного уст-
ройства на переменном токе.
стоит из двигателя с дисковым или колодочным тормозом, маг-
нитной станции, командо-контроллера и ящиков сопротивлений.
Схемы релейно-контакторного типа являются схемами полу-
автоматического управления. Они обеспечивают плавный пуск
и быстрое торможение, ограничение пусковых и тормозных то-
ков заранее установленными величинами, широкую регулировку
скорости при подъеме якоря и ограничение скорости при отдаче
его на больших глубинах. В указанном диапазоне мощностей
схемы надежны в работе, имеют небольшие габариты и ма-
лый вес.
Применение релейно-контакторных схем для электроприво-
дов большой мощности вызывает увеличение числа пусковых
и регулировочных ступеней, в связи с чем возрастает количе-
ство аппаратов управления и соответственно снижается, надеж-
ность работы установки в целом. Это усложняет также уход
за оборудованием. Кроме того, значительно возрастают вес и
§ 57]
Схемы управления электроприводами
313
габариты оборудования, в первую очередь сопротивлений.
Схема становится соизмеримой по весу с системой Г—Д.
Релейно-контакторная схема на постоянном токе. В этой
схеме (рис. 168) управление двигателем со смешанным возбу- '
ждением производится командо-контроллером, имеющим одно
Рис. 168. Релейно-контакторная схема электропривода
якорно-швартовного устройства на постоянном токе.
нулевое, пять рабочих положений для прямого и столько же
для обратного вращения. Схема включения — симметричная.
После подачи напряжения на зажимы +Лу и —Л2 через
полностью включенное сопротивление Ш2—Л22 получает пита-
ние параллельная обмотка возбуждения двигателя Шу—Ш2 и
срабатывает реле поля РП, замыкающий контакт которого
в цепи нулевого реле напряжения PH замыкается.
Когда замыкается контакт выключателя цепей управления
ВУ, то загорается сигнальная лампа, освещающая шкалу ам-
перметра в тумбе поста управления, и срабатывают реле уско-
рения 1РУ, 2РУ и ЗРУ, размыкающие контакты которых в цепи
314
Электроприводы якорно-швартовных устройств
[Гл. 8
катушек контакторов ускорения 2У—4У размыкаются. Если ру-
коятка (маховичок) командо-контроллера находится в нулевом
положении, то срабатывает также PH, шунтируя К1 своими
контактами, через которые теперь подается напряжение в цепи
управления. Питанием катушки PH через контакт К1, замкну-
тый только в нулевом положении, осуществляется нулевая бло-
кировка схемы. В нулевом положении командо-контроллера
якорь отключен от сети и замкнут на сопротивление динамиче-
ского торможения.
Для подъема или опускания якоря командо-контроллер пе-
реводят в одно из рабочих положений, причем существует по-
рядок, согласно которому в якорно-швартовных устройствах и
грузоподъемных механизмах подъем осуществляют поворотом
рукоятки или маховичка по часовой стрелке (в горизонтальной
плоскости) или же взятием «На себя» (в вертикальной плоско-
сти), а спуск — наоборот, т. е. поворотом рукоятки или махо-
вичка против часовой стрелки (в горизонтальной плоскости)
или же отводом «От себя» (в вертикальной плоскости).
При переводе рукоятки командо-контроллера в первое ра-
бочее положение того или иного направления размыкается кон-
такт К1 и замыкаются контакты КЗ (или К4) и К2, благодаря
чему получают питание контакторы направления В (или Н),
линейный контактор Л и контактор механического торможе-
ния КТ. Двигатель растормаживается,' и якорь подключается
к сети через все пуско-регулировочное сопротивление Р\—Рц;
при этом двигатель шунтируется сопротивлением Р6—Р7 и
Рт—Ps- Магнитный поток двигателя усиливается благодаря
шунтированию добавочных сопротивлений Ш2—Шз или Д/2—^4.
Двигатель работает на механической характеристике 1
(рис. 169).
Перевод командо-контроллера во второе положение приво-
дит к замыканию контакта К5, что обеспечивает питание ка-
тушки контактора Т, который разрывает цепь шунтирующего
якорь сопротивления Рв—Рт- Двигатель переходит на механи-
ческую характеристику 2. Уменьшению нагрева катушки кон-
тактора Т во время работы способствует то, что она получает
питание через экономическое сопротивление СЭ, вводимое
в цепь катушки с размыканием размыкающего контакта Т. За-
мыкание замыкающего блок-контакта Т подготавливает работу
контакторов ускорения.
С переводом командо-контроллера в третье положение за-
мыкается контакт Кб. Контактор 1У срабатывает, выводя из
цепи якоря сопротивление Pi—Рг и разрывая цепь реле 1РУ.
Якорь реле с выдержкой времени отпадает, его контакт в цепи
катушки контактора 2У замыкается, подготавливая срабаты-
вание последнего. Двигатель переходит на характеристику 3.
§ 57]
Схемы управления электроприводами
315
Как только командо-контроллер переводится в четвертое
положение, замыкается контакт Р7 и срабатывает контак-
тор 2У. Из цепи якоря выводится сопротивление Рг—Рз, и дви-
гатель переходит на характеристику 4. Реле 2РУ теряет пита-
ние и с выдержкой времени замыкает свой контакт в цепи -
катушки контактора ЗУ. Блок-контакт 2У закрывается, подго-
тавливая работу контакторов последних ступеней ускорения.
Рис. 169. Механические
характеристики электро-
привода якорно-швартов-
ного устройства на по-
стоянном токе при ре-
лейно-контакторном уп-
равлении.
Будучи переведен в пятое (последнее) положение, командо-
контроллер замыкает контакт К8, в результате чего срабаты-
вает контактор ЗУ, выводя из цепи якоря сопротивление Рз—Pt-
Одновременно размыкается цепь катушки реле ЗРУ. В течение
уставки времени реле ЗРУ двигатель работает на характери-
стике 4а, после же срабатывания этого реле замыкается цепь
контйктора 4У, из цепи якоря выводится последняя ступень со-
противления Р4—Pg, и двигатель выводится на естественную
механическую характеристику.5.
Схема предусматривает воз.можность механического, а также
электродинамического и генераторного рекуперативного тормо-
жения. Динамическое торможение происходит всякий раз при
переводе командо-контроллера в нулевое положение, когда
якорь отключается от сети, а контакт Т замыкается. Рекупера-
тивное торможение возможно при спуске якоря, причем для
ограничения тормозных скоростей во всех положениях
316 Электроприводы якорно-швартовных устройств [Гл. 8
«Травить» параллельно якорю включают сопротивление Р6—Ps
и усиливают магнитное поле параллельной обмотки возбуждения
посредством шунтирования сопротивления Ш2—Ш&.
Схема обеспечивает защиты: от обрыва поля, нулевую, ма-
ксимальную и минимальную. Эти защиты срабатывают на от-
ключение двигателя от сети при нарушении нормальных режи-
мов работы.
Ограничение тока и момента в режиме стоянки двигателя
под током осуществляется грузовой защитой — с помощью двух-
катушечного грузового реле РГ. Когда ток двигателя начинает
превышать свое двухкратное номинальное значение, это реле
срабатывает, размыкая свой размыкающий контакт в цепи ка-
тушки контактора ускорения 2У, что вызывает последователь-
ное срабатывание контакторов 2У, 'ЗУ и 4У. Благодаря этому
в цепь якоря двигателя вводится сопротивление Р2—Р5, и
двигатель переводится на механическую характеристику 3 с мо-
ментом короткого замыкания Л1К~2Л1П. Такой режим соответ-
ствует отрыву якоря от грунта. После отрыва якоря ток в
двигателе резко уменьшается, что вызывает уменьшение намаг-
ничивающей силы токовой катушки реле РГ и возврат его
в исходное положение. Контактор 2У получает питание; и двига-
тель разгоняется до выхода на естественную характеристику
описанным выше путем. Срабатывание грузового реле от пуско-
вых токов, которые могут достигать 2,5-кратного значения но-
минального тока, становится невозможным, поскольку парал-
лельная катушка РГ включается только после срабатывания
последнего контактора ускорения 4У. Чтобы бросок пускового
тока не вызвал срабатывания реле, при тяжелом пуске приме-
няют кнопку К-
Релейно-контакторная схема на переменном токе, приведен-
ная на рис. 170. укомплектована двигателем типа МАП с при-
строенным дисковым тормозом типа ТМТ, магнитной станцией
и командо-контроллером с одним нулевым и тремя рабочими
положениями для вращения в каждую сторону. Схема преду-
сматривает пуск, трехступенчатое регулирование скорости, из-
менение направления вращения и остановку электродвигателя
с механическим торможением.
Подготовка схемы к действию сводится к включению пи-
тающего фидера и замыканию контакта ВУ1 выключателя це-
пей управления. Если маховичок командно-контроллера при
этом находится в нулевом положении, то через контакт КЗ пи-
тание подается на нулевое реле PH, которое, сработав, шунти-
рует контакт КЗ, обеспечивая таким образом питание как своей
катушки, так и остальных цепей управления при рабочих поло-
жениях командо-контроллера. Одновременно через закрытый
контакт К13 питание получает катушка промежуточного реле
§57]
Схемы управления электроприводами
317
1РП, которое своими замыкающими контактами замыкает цепь
сигнальной лампы Л С, шунтирует контакт К13 и подготавли-
вает к работе контактор ЗС. Закрытый контакт 1РП в цепи ка-
тушек контакторов 2С и 21С размыкается. Будучи симметрич-
ной, эта схема работает при положениях командо-контроллера
Рис. 170. Релейно-контакторная схема управления электроприводом якор-
но-швартовного шпиля на переменном токе.
в направлении «Травить» так же, как и в направлении «Выби-
рать». Поэтому рассмотрим лишь ее работу при подъеме якоря.
С переводом маховичка командо-контроллера в первое ра-
бочее положение «Выбирать» замыкаются контакты К5, К7
и К4, остается замкнутым контакт К13 и размыкается кон-
такт КЗ, который к этому времени уже оказывается зашунти-
рованным контактом PH. Через контакты К5 и К7 получают
питание катушки контактора направления В и контактора ма-
лой скорости 1С, которые, срабатывая, подключают тихоход-
ную обмотку статора двигателя к питающей сети. При сраба-
тывании контактора 1С его замыкающий контакт замыкает
цепь катушки промежуточного реле ЗРП.
Через контакт К4 и замкнувшийся контакт ЗРП подается
напряжение на катушку контактора Т, который, срабатывая,
318 Электроприводы якорно-швартовных устройств [Гл. 8
растормаживает двигатель. Двигатель приходит во вращение
с малой скоростью на обмотке 2р=16, включенной в треуголь-
ник. Скорость выбирания якорной цепи при этом составляет
около 5 м/мин. Срабатывая, контактор В своим блок-контак-
том разрывает цепь катушки контактора Н, что и обеспечивает
электрическую блокировку между контакторами направления.
Закрытые контакты 1С при срабатывании контактора размы-
кают цепи катушек контакторов 2С, 21С и ЗС, исключая воз-
можность включения контакторов средней и большой скорости
при работе двигателя с включенной тихоходной обмоткой.
При переводе маховичка командо-контроллера во второе
положение замыкаются контакты К8 и 1(9, остаются замкну-
тыми контакты К5, К13 и 1(4, размыкается контакт 1(7. При
размыкании контакта 1(7 прекращается питание катушки кон-
тактора 1С, размыкающий контакт которого подготавливает
к работе контакторы средней скорости 2С и 21С. При замыка-
нии контакта 1(8 последовательно один за другим срабатывают
контакторы 21С и 2С, в результате чего обмотка статора дви-
гателя оказывается соединенной в двойную звезду с числом по-
люсов 2р~8 и подключенной к питающей сети. Замыкание кон-
такта 2С в цепи катушки промежуточного реле ЗРП сохраняет
расторможенное состояние двигателя. Закрытые контакты 21С
и 2С в цепи катушек контакторов 1С и ЗС исключают возмож-
ность получения питания контакторами малой 1С и большой
ЗС скорости при включенных контакторах средней скорости
21С и 2С. Командо-контроллер устроен так, что при переводе
маховичка из первого положения во второе сначала замыкается
контакт К8 и только после этого размыкается контакт 1(7. Бла-
годаря этому обмотки двигателя практически не остаются обес-
точенными, а двигатель — заторможенным.
При переводе командо-контроллера в третье положение за-
мыкается контакт 1(11, остаются замкнутыми контакты 1(5, 1(9
К4 и размыкаются контакты К8 и К13. Через замкнувшийся
контакт 1(11 получает питание контактор ЗС, после срабатыва-
ния которого напряжение сети подается на зажимы быстро-
ходной обмотки статора, соединенной в звезду с числом полю-
сов 2р = 4. При этом двигатель обеспечивает выбирание якор-
ной цепи со скоростью около 20 м]мин. При срабатывании
контактора ЗС его размыкающий контакт размыкается, делая
невозможной работу контакторов малой и средней скорости
с включенным контактором большой скорости ЗС. Замыкаю-
щий блок-контакт ЗС в цепи ЗРП, замыкаясь, оставляет дви-
гатель расторможенным. Замкнутые во всех рабочих положе-
ниях контакты К.5 и К4 обеспечивают постоянное питание кон-
тактора направления В и контактора механического тормоза Т.
Контакт К9 подает питание контакторам средней скорости 21С
§ 57]
Схемы управления электроприводами
319
и 2С на третьем положении командно-контроллера при пере-
грузке электродвигателя и обесточивании катушки 1РП в ре-
зультате срабатывания грузового реле РГ. Перекрывающиеся
контакты Кв и КН способствуют мгновенному переключению
обмоток статора с сохранением расторможенного состояния
двигателя при переводе командо-контроллера из второго поло-
жения в третье.
С переводом маховичка командо-контроллера в нулевое по-
ложение двигатель отключается от сети и затормаживается ме-
ханическим тормозом.
Схемой предусмотрена защита от коротких замыканий и от
перегрузок; имеется также минимальная, нулевая и грузовая
защиты электропривода.
Цепи главного тока защищены от короткого замыкания
автоматом на щите питания, а вспомогательные цепи — предо-
хранителями 1П и 2П.
Защита от перегрузок выполняется тепловыми реле 1РТ—
5Р1\ контакты которых при срабатывании разрывают цепь ну-
левого реле PH и вызывают отключение двигателя. Повторный
пуск производится из нулевого положения командо-контрол-
лера после самовозврата тепловых реле в исходное положение.
В экстренных случаях двигатель можно пустить, не дожидаясь
остывания нагревательного элемента тепловых реле. Для этого
надо замкнуть контакт ВУ2, переводя рукоятку выключателя
цепей управления в нефиксированное положение «А». Тогда по-
лучает питание и срабатывает промежуточное реле 2РП, шун-
тируя контакты тепловых реле 1РТ—5РТ в цепи PH и контакт
реле РГ в цепи 1РП.
Минимальную и нулевую защиту осуществляет нулевое
реле PH, которое, срабатывая, обесточивает все цепи управле-
ния, вызывая тем самым остановку двигателя.
Грузовую защиту обеспечивает, как было указано, реле РГ,
которое защищает двигатель от перегрузок при его работе на
быстроходной обмотке. Срабатывая, реле РГ размыкает цепь
катушки промежуточного реле 1РП, которое выключает кон-
тактор большой скорости ЗС и включает контакторы средней
скорости 21С и 2С. Таким образом, двигатель не отключается
от сети, а лишь начинает работать с меньшей скоростью.
О срабатывании реле РГ сигнализирует погасание лампы ЛС,
цепь которой размыкает контакт 1РП. После спадания нагрузки
перевод двигателя на скорость ЗС возможен только вслед за
возвращением маховичка командо-контроллера во второе по-
ложение, так как в третьем положении контакт К13 разомкнут.
Электромашинные схемы управления (системы Г — Д). При-
менение релейно-контакторных схем в электроприводах боль-
шой мощности заставляет увеличивать число пусковых и
320
Электроприводы якорно-швартовных устройств
[Гл. 8
регулировочных ступеней, в связи с чем возрастает количество
аппаратов управления и соответственно снижается надежность
работы установки. К тому же усложняется уход за ней. С уве-
личением мощности привода значительно возрастают вес и га-
бариты оборудования и, в первую очередь, сопротивлений.
Схема становится соизмеримой по весу с системой Г—Д.
Система Г—Д удовлетворяет всем требованиям электро-
привода якорно-швартовного устройства в отношении плав-
ности пуска, торможения и регулирования скорости в нужных
пределах. Наличие лишь малого количества аппаратов управ-
ления и применение двухдвигательных брашпилей делает элек-
тромашинные схемы высоко надежными в работе.
Недостатком системы Г—Д является ее высокая стоимость,
а при небольших мощностях — значительно больший вес и
большие габариты по сравнению с другими схемами. Поэтому
систему генератор—двигатель можно рекомендовать лишь для
якорно-швартовных устройств, мощность электропривода кото-
рых превышает 50 кет.
В состав электропривода брашпиля (рис. 171) входят:
а) два исполнительных электродвигателя постоянного тока
с пристроенным дисковым тормозом;
б) преобразовательный агрегат, состоящий из приводного
двигателя (асинхронного с короткозамкнутым ротором), гене-
ратора постоянного тока с независимой, параллельной и проти-
вокомпаундной обмотками возбуждения и возбудителя (гене-
ратора постоянного тока со смешанным возбуждением);
в) станция управления переменного тока;
г) пост управления, представляющий собой кулачковый ре-
версивный командо-контроллер с одним нулевым и шестью ра-
бочими положениями в каждую сторону;
д) регулятор возбуждения, включенный в цепь параллель-
ной обмотки возбуждения;
е) два ящика с сопротивлениями (установочными, регулиро-
вочными и разрядными к обмоткам возбуждения генератора,
к обмоткам возбуждения исполнительных двигателей и к диско-
вым тормозам);
ж) щит питания брашпиля.
Исполнительные двигатели и тумба управления водозащи-
щенного исполнения расположены на верхней палубе. Все
остальное оборудование — брызгонепроницаемого исполнения;
оно находится в помещении брашпиля.
Схема предусматривает одновременное использование двух
последовательно включенных двигателей во всех режимах ра-
боты брашпиля, причем в случае выхода из строя одного из
них работа привода обеспечивается вторым. Характер нагрузки
и скорость двигателей определяются положениями переключи-
Рис. 171. Электромашинная схема управления электроприводом брашпиля.
§ 57] - Схемы управления электроприводами
го
322
Электроприводы якорно-швартовных устройств
[Гл. 8
телей Ш и 77//; в шестом положении «Травить» работа одним
двигателем не допускается.
Перед запуском преобразовательного агрегата включают вы-
ключатель цепей управления ВУ, а пост управления устанав-
ливают в нулевое положение. Нажатием кнопки КП на стан-
ции управления пускают в ход приводной двигатель ПД, вме-
сте с которым начинают вращаться генератор и возбудитель.
О самовозбуждении последнего сигнализирует лампа ЛС
в тумбе управления брашпиля. С зажимов возбудителя напря-
Рис. 172. Механические характеристики исполнительных двига-
телей в системе Г—Д.
жение через дополнительные сопротивления ЗСД и 4СД по-
дается на обмотки возбуждения исполнительных двигателей
и катушки реле обрыва поля РП.
Для пуска исполнительных электродвигателей маховичок
тумбы управления, валик которой кинематически связан с по-
стом управления, переводят в первое рабочее положение в сто-
рону «Травить» или «Выбирать» — в зависимости от произво-
димой операции. При этом замыкаются контакты поста управ-
ления КК КЗ, К5, а также Д7, КН («Травить») или К9, К13
(«Выбирать»).
Контакт КК замыкаясь, подготавливает работу тормозных
электромагнитов. Через контакты КЗ и К5 подводится полное
напряжение к обмоткам независимого возбуждения исполни-
тельных двигателей Н0Д1 и Н0Д2 и к катушкам реле обрыва
поля РП1 и РП2. Получив питание, эти реле срабатывают и
замыкают своими контактами цепь контактора обрыва поля К,
который, в свою очередь, замыкает контакт К в цепи тормоз-
§ 57]
Схемы управления электроприводами
323
ных электромагнитов ТМ1 и ТМ2 и независимой обмотки воз-
буждения генератора НОГ.
Получив питание, тормозные электромагниты растормажи-
вают исполнительные электродвигатели. Одновременно возбу-
ждается генератор, подающий напряжение на зажимы испол-
нительных двигателей, которые начинают вращаться со ско-
ростью, соответствующей первому положению поста управления
(рис. 172, кривая 1).
Скорость двигателя регулируют, переводя маховичок тумбы
управления из одного рабочего положения в другое — в сторону
«Травить» или «Выбирать». При этом замыкаются контакты,
шунтирующие сопротивления в цепи независимой и парал-
лельной обмоток генератора, благодаря чему увеличивается ток
возбуждения, а следовательно, и напряжение на зажимах гене-
ратора и двигателей; в результате увеличивается и скорость
вращения двигателей.
Механические характеристики, приведенные на рис. 172, от-
носятся к различным положениям штурвала поста управления,
причем характеристики 1—6 соответствуют работе двух испол-
нительных двигателей, а характеристика 6' — одного двигателя.
Реверс исполнительного двигателя осуществляют, изменяя
направление тока в независимой обмотке возбуждения генера-
тора, для чего маховичок тумбы управления переводят из поло-
жения «Выбирать» в положение «Травить» или наоборот.
Чтобы остановить исполнительные двигатели, надо возвра-
тить маховичок тумбы управления в нулевое положение, что
вызовет размыкание цепей независимых обмоток возбуждения
генератора и двигателей, а также цепей тормозных электро-
магнитов. В результате этого напряжение на зажимах двига-
телей и магнитный поток полюсов спадут до незначительных
величин, двигатели потеряют скорость и затормозятся меха-
ническими тормозами.
Преобразовательный агрегат останавливают нажатием
кнопки КС в тумбе или в станции управления.
Схема обеспечивает все необходимые виды защиты (см.
рис. 171).
Нулевую и минимальную защиту обеспечивает линейный
контактор Л, отключающий приводной двигатель от сети в слу-
чае резкого снижения или исчезновения напряжения. Повтор-
ный пуск агрегата возможен только из нулевого положения
поста управления, что обеспечивается нулевой блокировкой,
принцип которой заключается в питании линейного реле ЛР
через контакт К22, закрытый только в нулевом положении по-
ста управления.
Тепловая защита выполняется тепловыми реле 1РТ и 2РТ,
работающими на отключение приводного двигателя. Повторный
324
Электроприводы якорно-швартовных устройств
[Гл. 8
пуск его также возможен лишь из нулевого положения поста
управления.
Защита от перегрузок осуществляется противокомпаундной
обмоткой генератора, которая, размагничивая генератор и пере-
водя исполнительные двигатели в режим стоянки под током,
ограничивает момент короткого замыкания до заранее установ-
ленного значения.
Для защиты исполнительных двигателей от обрыва поля
предусмотрены реле РП1 и РП2, которые, срабатывая, разры-
вают цепь контактора К, снимая в конечном счете возбуждение
с генератора и затормаживая двигатели.
Защита от токов короткого замыкания в цепях управления
выполняется предохранителями 1Пр— 4Пр.
Схемы тиристорного управления. Современный уровень раз-
вития полупроводниковой техники избавляет регулируемый
электропривод от громоздких преобразовательных агрегатов
системы генератор—двигатель, о недостатках которой говори-
лось выше. Все большее признание завоевывают новые, в осо-
бенности тиристорные системы привода.
Интерес представляет, например, схема тиристорного управ-
ления электроприводом швартовного шпиля, представленная на
рис. 173. Двигатель постоянного тока со смешанным возбуж-
дением питается от сети трехфазного переменного тока через
силовой выпрямитель. Для регулирования величины подводи- •
мого к двигателю напряжения и для управления его работой
в схеме применены пост управления двигателем и блок управ-
ления тиристорами силового выпрямителя, выполненный в виде
импульсно-фазовой схемы с жесткой обратной связью, имею-
щей отсечку по току якоря двигателя.
Силовой выпрямитель собран по несимметричной трехфаз-
ной мостовой схеме с тиристорами Т% в катодном и вентилями
Bi в анодном плече схемы. Для обеспечения обратной связи
в выпрямителе предусмотрен катодный реактор Рк; целям при-
нудительного охлаждения служит вентилятор ДВ, приводимый
асинхронным двигателем.
Пост управления ПУ имеет переключатель для коммутации
цепей контакторов управления работой двигателя и бесконтакт-
ный сельсин БС, работающий в режиме поворотного трансфор-
матора, который через кремниевый выпрямительный мост В3.
трехфазный тороидальный магнитный усилитель ТУМ и транс-
форматор питания ТП управляет работой релаксационных.
генераторов * ГР. Релаксационные генераторы собраны на
* Релаксационный генератор — генератор периодического напряжения не-
синосуидальной формы, в котором происходит периодически повторяющееся
накопление энергии в емкостных или индуктивных сопротивлениях с после-
дующим расходованием ее в активных сопротивлениях.
§ 57] Схемы управления электроприводами 325
326
Электроприводы якорно-швартовных устройств
[Гл. 8
сопротивлениях ri, конденсаторах Сь кремниевых диодах Д\ и
маломощных тиристорах Тх. Кремниевый диод Дг защищает ти-
ристор от пробоя в обратном направлении. Нагрузкой релакса-
ционных генераторов служат первичные обмотки импульсных
трансформаторов ИТ. Напряжение переключения тиристоров Л
выравнивается корректирующим смещением в цепи управляю-
щего перехода, осуществляемым с помощью сопротивлений г2-
Диоды Д2 «обрезают» отрицательную полуволну импульсных
трансформаторов, уменьшая тем самым нагрев тиристоров си-
лового выпрямителя.
Фазы магнитного усилителя ТУМ, подобно дросселям на-
сыщения, включаются в цепь первичных обмоток ТП, причем
каждый дроссель ДН имеет три обмотки: ОР — рабочую, ОУ3 —
задающую и ОУТ — обратной связи по току. Обмотки управле-
ния включены встречно друг другу и их результирующая намаг-
ничивающая сила равна разности намагничивающих сил от-
дельных обмоток.
Увеличение тока в ОУ3 вызывает сдвиг фазы напряжения,,
прикладываемого к первичным обмоткам трансформатора пита-
ния ТП, а следовательно, и сдвиг фазы вторичного напряжения,
питающего релаксационные генераторы. Вместе с этим изме-
няется и амплитуда приложенного к ГР напряжения, что резко
изменяет также время зарядки конденсаторов Ci. Таким обра-
зом, управляющие импульсы, создаваемые импульсными транс-
форматорами ИТ, перемещаются (сдвигаются по фазе) справа
налево относительно положительной полуволны напряжения,
периодически (с частотой 50 гц) прикладываемого к анодам
тиристоров Т2-
Это обеспечивает уменьшение угла регулирования а и плав-
ное изменение (от нуля до некоторого максимума) среднего
значения выпрямленного напряжения на выходе выпрямителя.
В соответствии с напряжением увеличивается скорость испол-
нительного двигателя.
Если ток нагрузки в главной цепи окажется выше (1,3-ь 1,5)
/вн, то падение напряжения, снимаемое с катодного реак-
тора Рк, превысит критическое напряжение стабилитрона СК;
последний будет пробит, и по ОУТ потечет ток, размагничиваю-
щий дроссели насыщения. Это вызовет обратный сдвиг по фазе
напряжения на ТП и приведет к увеличению угла регулирова-
ния а и к соответствующему уменьшению напряжения в цепи
нагрузки.
При этом скорость двигателя резко замедлится.
С уменьшением тока нагрузки (а, значит, и падения на-
пряжения на Рк) кремниевый стабилитрон возвратится в за-
крытое состояние, обратная связь прекратит свое действие, и
двигатель вернется в нормальный режим работы. Механическая
§ 57]
Схемы управления электроприводами
327
характеристика двигателя является крутопадающей, причем
крутизну падающего участка характеристики можно регули-
ровать, изменяя величину сопротивления г3.
Чтобы привести схему в действие, включают установочные
автоматы и ЛУ2, в результате чего пускается в ход венти-
лятор ДВ и подается напряжение на независимую обмотку воз-
буждения двигателя ОВШ. Затем пост управления ПУ перево-
дится из нулевого положения в первое, соответствующее нуж-
ному направлению вращения двигателя. При этом получает
питание контактор Т, который замыкает цепь электромагнита
механического тормоза. Теперь двигатель получает возможность
работать в режиме динамического торможения с якорем, за-
мкнутым на тормозное сопротивление гт. Контакт 77У1 замы-
кает цепь возбуждения сельсина, подготавливая к работе
импульсно-фазовую схему управления.
При переводе рукоятки переключателя ПУ во второе поло-
жение замыкается контакт ПУ4 или ПУ$, обеспечивая питание
контакторов направления В или Н. Двигатель приходит во вра-
щение в заданном направлении с минимальной скоростью. По-
ворот рукоятки поста управления в следующие положения (до
десятого) не изменяет состояния контактов, но ротор БС пово-
рачивается, увеличивая ток в задающих обмотках ДН, благо-
даря чему (как уже было указано) увеличивается среднее
значение выпрямленного напряжения и возрастает скорость
исполнительного двигателя.
Защита элементов схемы от коротких замыканий осуще-
ствляется комбинированными расцепителями установочных
автоматов и предохранителями. Цепочка г4С2, включенная на
вход вспомогательного выпрямителя В2, защищает его от пере-
напряжений.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Проследите путь якорной цепи от якоря до крепления к корпусу
судна (стр. 285).
2. В чем заключается разница в устройстве и работе шпилей и бра-
шпилей (стр. 286—289) ?
3. Перечислите и охарактеризуйте возможные режимы работы элект-
роприводов якорно-швартовных устройств (стр. 289—293).
4. Назовите типовые схемы управления электроприводом якорно'-швар-
товиых устройств и сравните их друг с другом (стр. 308—327).
5. Как осуществляются пуск и реверс исполнительного электродвигателя
в схеме тиристорного электропривода якорно-швартовного устройства
(стр. 324—327)?
328
Электроприводы судовых лебедок и кранов
[Гл. 9
ГЛАВА 9
ЭЛЕКТРОПРИВОДЫ СУДОВЫХ ЛЕБЕДОК
И КРАНОВ
§ 58. Назначение и классификация грузоподъемных механизмов
Для переработки большого количества различных грузов
современные суда оснащаются разнообразными подъемными
механизмами, которые подразделяются следующим образом:
а; по назначению — на
грузовые, шлюпочные, лиф-
товые, буксирные, провизи-
онные, мусорные и др;
б) по режиму работы —
на механизмы с повторно-
кратковременным (грузо-
вые и буксирные лебедки) и
с кратковременным (шлю-
почные и траповые лебед-
ки) режимом работы;
в) по роду тока — на
механизмы с двигателями
постоянного и переменного
тока;
г) по способу управле-
ния — на механизмы с кон-
троллерными, релейно-кон-
Рис. 174. Грузоподъемное устройство такторными и электрома-
судна с грузовой лебедкой. шинными схемами управле-
ния (последние применяют-
ся в основном лишь для буксирных, траловых и других
специальных лебедок); все схемы работают, как правило, по
разомкнутому циклу прохождения управляющего сигнала; для
получения необходимых механических характеристик некото-
рые элементы привода охватываются обратными связями;
д) по типу механической передачи — на механизмы с ци-
линдрической и с червячной передачей.
Наибольшее значение имеют грузовые лебедки и краны.
Грузоподъемное устройство с применением лебедок включает
в себя следующие основные элементы (рис. 174):
а) грузовые стрелы 7, представляющие собой металличе-
ские укосины, монтируемые на мачтах 10 (либо на высоких
вентиляционных трубах или на специальных колоннах);
б) такелаж грузовых стрел, состоящий из топенантов, оття-
жек, блоков, роликов и подъемного шкентеля;
§ 58]
Назначение и классификация
329
в) грузовые лебедки 6 с электрическим приводом, располо-
женные вблизи мачты или колонны со стрелами..
Нижним концом (шпором) грузовая стрела опирается на
башмак 9, укрепленный на мачте на некоторой высоте от па-
лубы. Крепление выполняют так, чтобы стрела могла поворачи-
ваться в горизонтальной и вертикальной плоскостях. Для
подъема и опускания стрелы служит топенант 1, а для пово-
рота — оттяжки 5. Во время хода судна грузовые стрелы
должны быть уложены горизонтально (по-походному) на палубе
судна. На верхнем конце стрелы, называемом но ком, укреп-
лен блок 2, через который проходит шкентель 3, начинающийся
гаком 4 для подъема груза. Другой конец шкентеля проходит
через направляющий блок 8 у мачты и навивается на грузовой
барабан лебедки 6.
Наибольшее распространение в настоящее время получили
грузовые лебедки с цилиндрическим редуктором, который, в от-
личие от червячного, обеспечивает более высокий к. п. д. меха-
низма. Уменьшению габаритов лебедки способствуют планетар-
ные передачи, помещаемые в грузовом барабане.
Грузовые лебедки, применяемые на судах, обладают грузо-
подъемностью 1,5; 3; 5 и 10 т. Для подъема тяжеловесов на
сухогрузных судах устанавливают лебедки и стрелы с грузо-
подъемностью до 60 т.
Грузовая лебедка типа ЛЭ-45-4 грузоподъемностью 3 т изо-
бражена на рис. 175. Механизм лебедки и двигатель постоян-
ного тока 6 расположены на общей раме 2. Лебедке может
быть придан приставной барабан грузоподъемностью 10 т, уста-
навливаемый на стойках и присоединяемый к ней открытой
зубчатой передачей.
Двигатель через косозубый цилиндрический редуктор 3 вра-
щает главный вал, на котором расположены грузовой 5 и швар-
товный 8 барабаны. Грузовой барабан соединен с главным ва-
лом кулачковой муфтой. Лебедка имеет топенантный барабан 1,
приводимый в движение цепной передачей, расположенной
в редукторе. Для включения и выключения топенантного бара-
бана служит кулачковая муфта, управляемая рычагом 4 на
корпусе редуктора.
Электродвигатель снабжен электромагнитным дисковым тор-
мозом. Для стопорения грузового барабана при его отключении
от главного вала, а также для регулирования скорости спуска
служит ленточный тормоз с ручным управлением 7.
Грузовые устройства, состоящие из лебедок и грузовых
стрел, занимают немного места на палубе, но обслуживают зна-
чительную площадь, так как стрелы можно довольно далеко вы-
нести ноком за борт. Грузовые лебедки и стрелы дешевле кра-
нов, но обладают меньшей производительностью. К тому же
330
Электроприводы судовых лебедок и кранов
[Гл. 9
приведение стрел в рабочее положение отнимает очень много
времени, что особенно плохо для судов, часто заходящих
в порты.
Что же касается грузовых устройств с кранами, то они по-
стоянно готовы к действию и обеспечивают более высокую про-
Рис. 175. Грузовая лебедка типа ЛЭ-45-4.
изводительность и экономичность погрузочных работ. Меньший
вылет стрелы компенсируется тем, что краны устанавливаются
вдоль обоих бортов судна, а грузовые люки -делаются больших
размеров. Заметим, что последнее обстоятельство облегчает раз-
мещение грузов внутри трюма.
Эти преимущества кранов и обусловили то, что подавляю-
щее большинство отечественных сухогрузных судов выполняется
теперь в крановом варианте. На этих судах устанавливают по-
воротные краны типа КЭ-26 (рис. 176) грузоподъемностью
2,5/5 т, которую можно изменять, переключая скорость подъема
груза с 55 до 26 м/мин. Краны работают с многодвигательным
§ 58]
Назначение и классификация
331
электроприводом на переменном токе напряжением 380 в. На
поворотной платформе крана смонтированы механизмы подъема
груза, изменения вылета стрелы и поворота крана, а также
аппараты управления этими механизмами. Для крепления кра-
на к палубе судна служит опорно-поворотное устройство 6, со-
стоящее из опорно-поворотного круга с шариковыми обоймами,
прикрепленными болтами к поворотной платформе. Корпус
устройства имеет наружное зубчатое зацепление, вокруг кото-
рого обкатывается шестерня редуктора поворота.
332
Электроприводы судовых лебедок и кранов
[Гл. 9
Механизм подъема груза 5 состоит из грузоподъемной ле-
бедки с двухскоростной планетарной передачей, электродвига-
теля, тормоза 7 с гидротолкателем и конечного выключателя,
ограничивающего спуск груза. Для изменения вылета стрелы
служит установленный на поворотной платформе механизм 4,
состоящий из планетарной лебедки, электродвигателя с диско-
вым тормозом и блочной системы. Подъем и опускание стрелы
ограничивается конечным выключателем рычажного типа, ук-
репленным возле ее оси вращения. Поворотный механизм 8
крана представляет собой планетарную передачу с вертикально
расположенным валом. Приводной электродвигатель установлен
на верхнем фланце корпуса планетарного редуктора. Угол по-
ворота крана составляет 360°. В конце пути поворота двигатель
отключается рычажным конечным выключателем, укрепленным
на поворотной платформе.
На верхнем конце портала 9, установленного на платформе,
расположены амортизаторы. Их назначение — обеспечивать как
горизонтальность хода груза при изменении вылета стрелы и
неработающем механизме подъема, так и плавность опускания
стрелы при раскачке груза во время работы крана. Здесь же
расположен ограничитель грузоподъемности крана.
Конструкция грузовой стрелы 2 крана — облегченная, рам-
ная, из закрытых профилей (труб). Подъем и опускание стрелы
производится посредством трехкратного полиспаста. На ноке 1
стрелы установлен конечный выключатель, ограничивающий вы-
соту подъема гака 3. Электродвигателем подъема груза управ-
ляют с помощью командо-контроллера 12, а электродвигате-
лями изменения вылета стрелы и поворота крана — с помощью
контроллеров 10 и 11.
§ 59. Режимы работы и нагрузочные диаграммы электропривода
грузовых лебедок и кранов
Грузоподъемные механизмы оказывают решающее влияние
на технико-экономические показатели эксплуатации судна. По-
этому к электроприводам этих механизмов предъявляются стро-
гие требования, основными из которых являются:
а) обеспечение высокой производительности;
б) большая надежность в работе;
в) удобство управления и ухода;
г) максимальная экономичность. ' •
Для обеспечения высокой производительности грузового ме-
ханизма электродвигатель должен иметь от трех до шести
устойчивых скоростей, что обеспечивается переключениями схе-
мы питания двигателя. Необходимость в таком количестве
устойчивых скоростей объясняется тем, что при спуске полного
§ 59]
Режимы работы и нагрузочные диаграммы
333
подъема и опускания
Рис. 177. Сравнение ме-
ханических характери-
стик двигателей постоян-
ного (/) и переменного
(2) тока.
груза скорость доводится до двухкратного номинального значе-
ния, соответствующего подъему, а при подъеме холостого гака
она может достигать даже трехкратной величины. Для уста-
новки же груза на палубу и для плавного пуска двигатель' дол-
жен иметь низкие скорости при достаточно жестких механиче-
ских характеристиках.
Надо сказать, что выбор более высоких рабочих скоростей,
конечно, повышает производительность механизмов, но неизбеж-
ное при этом завышение мощности двигателя не окупается до-
стигаемым эффектом, поскольку высота
груза у' судовых лебедок невелика и
к тому же уменьшается по мере запол-
нения трюмов.
Электроприводы грузовых устройств
бывают выполнены как на постоянном,
так и- на переменном токе. Для грузовых
устройств на постоянном токе наиболее
подходящими являются двигатели со
смешанным возбуждением типа ДПМ,
обладающие мягкой механической ха-
рактеристикой, так как они позволяют
с уменьшением нагрузки автоматически
увеличивать скорости, и наоборот.
То обстоятельство, что двигатель гру-
зового устройства работает, как правило,
с нагрузкой, не превышающей номинального значения, делает
лебедку с электроприводом на постоянном токе производитель-
нее лебедкй-'с асинхронным двигателем (рис. 177).Однако этого
недостаточно, чтобы первую предпочесть второй. Дело в том,
что схемы управления электроприводов на постоянном токе
сложнее, требуют применения значительно большего количе-
ства аппаратов управления и поэтому менее надежны в работе,
нежели схемы на переменном токе. Упрощает уход за асинхрон-
ными двигателями и увеличивает их надежность также то, что
они не имеют коллекторов. Наконец, более высокий к. п. д.
асинхронных двигателей по сравнению с машинами постоянно! о
тока, обусловливает большую экономичность установок с элек-
троприводами на переменном токе. Это объясняет, почему наши
заводы оборудуют в последнее время сухогрузные суда преи-
мущественно грузоподъемными устройствами с электроприво-
дами на переменном токе,.
Широкое применение переменного тока для этих целей стало
возможным благодаря внедрению многоскоростных асинхрон-
ных электродвигателей типа МАП, которые обеспечивают доста-
точный для работы грузовых механизмов диапазон регулирова-
ния скорости.
334
Электроприводы судовых лебедок и кранов
[Гл. 9
Условия эксплуатации обусловливают работу электроприво-
дов лебедок и кранов в повторно-кратковременном режиме. Но
в отличие от кранов, лебедки производят лишь подъем и спуск
груза. Чтобы сделать возможным горизонтальное перемещение
груза лебедками, нужно организовать их совместную работу
или поворачивать стрелу вручную оттяжками. Эта особенность
грузовых лебедок делает необходимым более подробное описа-
ние способов их использования.
Работа одной лебедки. За начало цикла (рис. 178) примем
подъем груза, взятого с причала. Двигатель лебедки, поднимая
Рис. 178. Нагрузочная диаграмма грузового электропривода
при работе одной лебедки.
груз в течение времени Ч, развивает момент АД Груз, подня-
тый над причалом, вместе со стрелой переводится оттяжками
на просвет люка (время t2). Затем двигатель, включенный на
спуск груза, работает в генераторном режиме с моментом М2
в течение времени tz. В следующий промежуток времени про-
изводится расстроповка опущенного в трюм груза. Далее сле-
дуют: подъем холостого гака (время t5), перевод стрелы неком
за борт (время £6), опускание гака за новой партией груза (вре-
мя /?) и застроповка нового груза в течение времени t&. Этим за-
канчивается один цикл работы электропривода лебедки. Про-
должительность включения исполнительного двигателя зависит
от характера груза, высоты его подъема и опускания, организа-
ции работ и других условий выполнения грузовых операций.
Обычно она находится в пределах 25—40%•
Работа двух лебедок на один гак. Одну стрелу устанавли-
вают неком над причалом, другую выводят на просвет люка.
Режимы работы и нагрузочные диаграммы
335
И ту, и другую стрелу оттяжками раскрепляют в этих поло-
жениях. Обе стрелы в течение всего времени работы остаются
неподвижными. Шкентели
обеих лебедок соединяют с
одним гаком. При погрузке
лебедки выполняют сле-
дующие операции (рис.
179):
а) одна из лебедок (так
называемая бортовая)
поднимает груз, вторая
(трюмная) выбирает сла-
бину своего шкентеля;
б) бортовая лебедка ра-
ботает на спуск, а трюм-
ная— на подъем груза, что
обеспечивает перемещение
груза в горизонтальном на-
Рис. 179. Работа двух лебедок на один
гак.
правлении;
в) трюмная лебедка опу-
скает груз в трюм, бортовая
вытравливает свой шкен-
тель, обеспечивая вертикальное опускание груза;
г) после расстроповки груза трюмная лебедка поднимает
холостой гак, а бортовая выбирает слабину шкентеля;
Рнс. 180.
Нагрузочная
диаграмма
' электропривода
при работе
двух лебедок
на одни гак.
д) бортовая лебедка выполняет горизонтальное перемеще-
ние гака за борт, а трюмная вытравливает шкентель, создавая
необходимую его слабину;
336
Электроприводы судовых лебедок и кранов
[Гл. 9
е) бортовая лебедка опускает холостой гак, а трюмная про-
должает стравливать свой шкентель.
Цикл заканчивается застроповкой новой партии груза. На-
грузочная диаграмма электропривода при работе двух лебе-
док на один гак приведена на рис. 180. При разгрузке судна ле-
бедки меняются ролями. /
Рис. 181. Нагрузочная диаграмма электропривода грузового по-
воротного крана: а — механизм подъема груза; б — механизм из-
менения вылета стрелы; в — механизм поворота крана.
Последовательная работа двух лебедок. Одна из лебедок .пе-
ремещает груз с причала на палубу, другая опускает его
в трюм. Нагрузочные диаграммы каждой лебедки будут анало-
гичны изображенной на рис. 178, но сдвинуты по горизонталь-
ной оси на некоторый промежуток времени одна относительно
другой.
Нагрузочная диаграмма электропривода крана. Электропри-
вод грузового крана имеет три двигателя: подъема груза, пово-
рота платформы и изменения вылета стрелы. Все двигатели
§ 60] Расчет электропривода 337
работают в повторно-кратковременных режимах, отличающихся
друг от друга лишь относительной длительностью включения.
Наглядное представление о работе электропривода дает уп-
рощенная нагрузочная диаграмма работы всех трех указанных
двигателей (рис. 181). Как и прежде, цикл работы электропри-
вода начинается и заканчивается подъемом груза, взятого
с причала.
После застроповки груза включают двигатель механизма
подъема, который и работает с моментом на валу Л1гр1 в те-
чение времени Ч, поднимая груз на необходимую высоту выше
борта. В течение времени /2 работает двигатель механизма изме-
нения вылета стрелы, поднимая стрелу с грузом так, чтобы нок
стрелы после ее поворота оказался над люком трюма. По мере
уменьшения вылета уменьшается также плечо сил веса груза и
веса стрелы, что объясняется уменьшением момента на валу дви-
гателя с Л1СТр1 до Л1Стр2- В период времени ts работает двигатель
поворота крана, который развивает момент Л1ПОв1- В конце этого
периода груз оказывается над люком трюма, куда и опускается
в течение времени /4 при работе двигателя механизма подъема
груза в генераторном рекуперативном режиме с моментом Л4гр2.
После расстроповки груза в трюме (время t5) холостой гак
в течение времени поднимается двигателем механизма подъ-
ема. Момент на валу двигателя Л4гр3 создается силами трения
в передаче. Далее следует поворот крана с выводом нока стре-
лы за борт (время t7, момент Мповг), опускание стрелы (время
/в, момент Л4стр3-^МстрД и спуск холостого гака (время tg, мо-
мент Мгр4) за новой партией груза. Застроповко?! этого груза
в течение времени ti0 заканчивается цикл работы электропри-
вода крана.
Реальный график работы механизмов крана отличается от
построенного на рис. 181 значительно большим числом включе-
ний двигателей за цикл, а также одновременной работой не-
скольких механизмов. Это соответствующим образом уплотняет
график работы, увеличивает ПВ двигателей, вызывает дополни-
тельный. нагрев их пусковыми токами и должно быть учтено
при расчете электропривода крана.
§ 60. Расчет электропривода грузоподъемных механизмов
Чтобы рассчитать мощность и выбрать электродвигатель
грузоподъемного механизма, необходимо располагать его техни-
ческими данными и сведениями об условиях предстоящей ему
работы.
Ниже описан порядок расчета электропривода.
1. На основании заданных величин определяют статиче-
скую мощность подъема номинального груза, по которой про-
12 к. А. Чекунов
338
Электроприводы судовых лебедок и кранов
[Гл. 9
изводят предварительный подбор исполнительного двигателя.
При этом для грузовых лебедок, работающих в напряженном
режиме, обычно выбирают двигатели с ПВ = 4О°/о, для менее на-
пряженного режима — с ПВ = 25%.
2. Для выбранного двигателя берут из каталога (или строят
известными способами) механическую характеристику.
3. Рассчитывают и строят нагрузочную диаграмму двигателя,
учитывая при этом переходные процессы во всех операциях,
составляющих полный цикл работы электропривода. Расчет-
ные данные удобно свести в таблицу.
4. Выбранный двигатель проверяют на нагрев в режиме, со-
ответствующем расчетному значению ПВ.
5. Выбранный двигатель проверяют на обеспечение заданной
производительности лебедки.
При расчете используют формулы, выведенные в гл. 1 и уже
применявшиеся для определения мощности электродвигателя
других цалубных механизмов. Ниже приведен пример расчета
мощности и выбора двигателя электропривода грузовой лебедки.
Пример 14. Исходные данные: номинальная грузоподъемность GH=3z;
вес холостого гака Go=6O кг- расчетный диаметр грузового барабана De =0,5 м-,
передаточное число 1=44; общий к. и. д. лебедки при работе с номинальным
грузом ц=0,8; скорость подъема номинального груза о=50 м/мин; посадоч-
ная скорость Опое < 8 м/мин-, высота подъема груза //=15 м; число циклов
в час (заданное) Z3 = 15; род тока судовой сети — переменный; напряжение
U=380 в.
Решение. Предварительный выбор мощности двигателя.
1. Момент на валу электродвигателя при подъеме номинального груза
w + о.) о„ ц <зооо + «» о,5 _
2-44-0,8
2. Момент на валу электродвигателя при опускании номинального груза
_ (GK+G0)De /„ 1 \ (3000 + 60) 0,5 / 1 \
2СТ — ~ ~ ~ ---— I " “ ' I — ~~ — ~—— I ~ ~“—— I — Io.U Kl ' М.
2/ \ Ч ) 2-44 \ 0,8/
3. Скорость вращения электродвигателя на быстроходной обмотке, необ-
ходимая для обеспечения заданной скорости подъема номинального груза,
vi 50-44
п =-------=--------= 1400 об/мин.
v.Df, 3,14-0,5
4. Скорость вращения электродвигателя на тихоходной обмотке, необхо-
димая для обеспечения посадочной скорости груза,
нпос = = 225 об/мин.
* t.Dg 3,14-0,5
5. Мощность электродвигателя при подъеме номинального груза на бы-
строходной обмотке из уравнения (16)
р 21,8-1400 _
Pict =------------- 31,3 кет.
§ 60]
Расчет электропривода
339
- 6. Мощность электродвигателя при посадке груза на тихоходной обмотке
из уравнения (16)
, _ 13,0-225 ,п
пос — —-—------— — 0,0 КвПТ,,
975
7. Выбираем электродвигатель типа МАП-611-4/12/24 со данными: следующими
Число полюсов ... 4 12 24
Мощность Ра, кет ... 32 13 5
Скорость вращения пн, об/мин . . . . . 1435 430 195
Номинальный ток /н, а ... 59 38,5 51
Пусковой ток /п, а ... 470 115 70
Максимальный момент Л4тах, кГм . . 83 60 53
Пусковой момент МП, кГ-м . . . . ... 63 58 53
Коэффициент мощности cos <р . . . . . . 0,95 0,75 0,45
Режим работы, ПВ% . . 40 25 15
Маховой момент GD2Y:, кГ-м? . . . 5,65
Напряжение U, в 380
Исполнение
Определяем номинальный момент .
Р 49 . Мн = 975^^ 975 — = 21,74 кГ-м.
«Н 1435
Скоростная и механическая характеристики выбранного двигателя при
Рис. 182. Механическая (/) и скоростная (2) характеристики
асинхронного двигателя типа МАП-611-4/12/24 при 2р = 4.
Построение нагрузочной диаграммы. Подъем номинального
груза.
8. Приведенный к валу двигателя маховый момент электропривода при
подъеме груза из уравнения (34)
GD2 = 1,2-5,65 + 365-3060——---= 7,16 кГ-м?.
₽ 602-14302
12*
340 Электроприводы судовых лебедок и кранов [Гл, 9
9. Динамический момент при разгоне
М1дин = МП — М1СТ = 63 — 21,8 = 41,2 кГ м.
10. Время разгона
Ни —
СРпР”1 7,16- 1430
3757И1дин ~ 375-41,2
= 0,66 сек.
где «1 = 1430 об/мин определяется из кривой n=f(M) для момента MiCI =
=21,8 кГ-м.
11. Тормозной момент механического тормоза, примененного в электро-
приводе лебедки, должен быть не меньше двухкратного момента, развивае-
мого висящим грузом:
Mt > 2Л42ст = 2-13 = 26 кГ-м.
Выбранный двигатель типа МАП-611 снабжен дисковым тормозом типа
ТМТ-6 с 7ИТ=45 кГ Л1>26 кГ • м.
12. К. п. д. двигателя при номинальной нагрузке
/3-6//Hcos<p 1,73-380-59.0,95
13. Постоянные потери в электродвигателе (АРПОСт=А7’н. пер)
ЛЛюсг = —{—-------Й = —f—----------Й = 2,4 кет.
2 \*1н J 2 0,87 /
14. Тормозной момент, обусловленный постоянными потерями в электро-
двигателе,
Л4 пв = 975 -ДРпост = 975 ~ = 1,64’кГ -м.
Т-Дв пг 14зо
15. Суммарный тормозной момент
^IT = Л41ст + мт + ^т.дв = 21-8 + 45 + 1.64 = 68,44 кГ-м.
16. Время остановки поднимаемого груза при отключении двигателя
. 0£)пр«1 7,16-1430
Нт -------s— =------------ = 0,4 сек.
375ЛД,- 375-68,44
17. Установившаяся скорость при подъеме номинального груза
я£>бП! 3,14-0,5-1430 е, ,
Щ ---------------= 51 м мин.
i 44
/t
18. Путь, пройденный грузом при разгоне и торможении,
И1 = ~ (Пп + Нт) = -51— (0,66 + 0,4) = 0,45 м.
£ 2 • 60
19. Время подъема груза при установившемся режиме
Расчет электропривода
341
20. Ток, потребляемый двигателем, в пределах допустимых нагрузок про-
порционален моменту на валу и может быть определен по формуле:
ц = / = 59. = 59 j
Л4Н 21,74
То же значение получим и из кривых n=f(M) и n=f(l).
Тормозной спуск груза.
21. Поскольку в пределах допустимых нагрузок механическую характе-
ристику генераторного и двигательного режимов можно представить одной
прямой линией, скорость рекуперативного торможения определяется по фор-
муле:
п2 = 2пс — п2 ст = 2-1500 — 1460 = 1540 об/мин,
где п2Ст = 1460 об/мин — скорость двигательного режима, соответствующая
значению Л12ст из кривой п=/(М).
22. Ток тормозного режима /2 можно принять равным току двигателя,
работающего с движущим моментом Л12гт. Тогда
Л42Ст _ ко 13 =353 й>
21,74
груза с включенным двигателем
/2 — 1н
= 59
23. Время разгона при
(3&
МИ
опускании
24.
25.
26.
пр«2
7,16-1540 п„п
—----------= 0,39 сек.
375 (Л4П + М2 ст) 375 (63 + 13)
Тормозной момент при отключении двигателя от сети
М ’= М Л1- М„ = 45-1 1,64 - 13 = 33,64 кГ-м.
** X । 1 *• VI
Время остановки опускаемого груза
, , GDnpn2 7,16-1540 nQ_
f t„T =-------------с—— = —!--------- = 0,87 сек.
375Л42т 375-33,64
Скорость опускания груза
~_Dgn2 3,14-0,5-1540 с,
v2 = —= — ------------------= 54,9 м/мин.
^2 п—
44
27. Путь, пройденный грузом при разгоне и торможении,
Н2 = -^-(/2П + /2Т)=-^“ (О-39 + 0,87) = 0,58 ж.
28. Время опускания груза при установившемся режиме
Н — Н2 _ 15 — 0,58
2У v2 ~ 54,9
Подъем холостого гака.
29. Момент на валу электродвигателя при подъеме холостого гака
60 = 15,8 сек.
= 2,3 кГм,
2-44-0,15
где 11о=О,15 —к. п. д. при Go/GB=6O/3OOO=2°/o (см. рис. 5).
30. Моменту Л1ЗСТ=2,3 кГ • м соответствуют скорость двигателя и ток
. п3 — 1485 об/мин-, 13 =’12 а.
342
Электроприводы судовых лебедок и кранов
[Гл. 9
31. Приведенный к валу двигателя маховый момент электропривода (без
груза)
GZ>? = AGO® = 1,2-5,56 = 6,78 кГ-м*.
V пр дв
32. Время разгона при подъеме холостого хода
GD^ прп3
‘.'111 — -
6,78-1485
—-----------= 0,44 сек.
375 (М„ — Ms ст) 375 (63 — 2,3)
33. Тормозной момент при отключении двигателя в конце подъема гака
Л43т = Л43ст + Мт + Мт_ дв = 2,3 + 45 + 1,64 = 48,94 кГ-м.
34. Время остановки поднимаемого гака
, GD0npn3 6,78-1485 к_
/з т =------—— = ----------- = 0,55 сек.
375Л1ЗТ 375-48,94
35. Скорость подъема холостого гака
~Di-.n:l 3,14-0,5-1485 ,
и8 = —у— =-----------------— 53 м/мин,
i 44
36. Путь, пройденный гаком при разгоне и торможении,
#3 = -у (t3 п+ ta т) = (0,44 + 0,55) = 0,44 м.'
37.
Время установившегося движения при подъеме холостого гака
Н — Н3 15-0,44
--------------------60 = 16,5 сек.
53
у —
«з
Силовой
38. Момент
ст —
спуск
на валу
2i V
холостого гака.
электродвигателя при опускании холостого гака
2-----
60-0,5
2-44
2------—
0,15
- — 1,6 кГ • м.
39. Моменту М4СТ=1,6 кГ • м соответствуют скорость двигателя п4=
= 1490 об/мин и ток /4=8 а.
40. Время разгона при опускании холостого гака
. _ GGo прп4
г4 П — -------------
6,78-1490
-------------= 0,44 сек.
375 (Мп — «) 375 (63 — 1,6)
41. Тормозной момент при отключении двигателя
М.= М^+М +М? и= 1,6 + 45+ 1,64 = 48,24 кГ-м.
42. Время остановки опускаемого гака
__6.Т8-1490 =
375Ж4т 375-48,24
43. Скорость опускания холостого гака ?
3,14-0,5-1490 CQO, ,
v. =----^-=- = —-------------- 53,2 м/мин.
i 44
§ 60]
Расчет электропривода
343
44. Путь, пройденный гаком при разгоне и торможении,
(*4 п + /4т) = (0,44 + 0,56) = 0,44 м.
45. Время установившегося движения при опускании холостого гака Н — Hi 15 — 0,44 с. . Л v = — = -60 = 16,4 сек. у Ч 53,2
46. Расчетные данные работы двигателя сводим в табл. 13, пользуясь
которой можно построить нагрузочную диаграмму.
Таблица 13
Режим работы Ток I, а Время f, сек
Подъем номинального груза: разгон установившийся режим торможение /п = 470 /j = 59,1 iln = 0,66 НУ= 17,1 = 0,4
Горизонтальное перемещение груза — #oi = 20
Тормозной спуск груза: разгон 4 установившийся режим торможение /п = 470 /2 =35,3 “ Ч Я II II о — о - СП- оо- -ч 00 со
Расстроповка груза — ^02 “ ^0
Подъем холостого гака: разгон установившийся режим торможение /п = 470 /3= 12 1зп = 0,44 i8y = 16,5 iaT = 0,55
Горизонтальное перемещение гака — (оз = 20
Силовой спуск холостого гака: разгон установившийся режим торможение ць"4 Я I II 11 00 Ф» о Н •< Я 11 II II о — о • СП- СП- Ф» О Ф» Ф»
Застроповка груза — (04 = 60
Проверка выбранного двигателя на обеспечение заданной производи-
тельности лебедки.
47. Полная продолжительность цикла (из табл. 13)
Т = £ /раб + 2 /0 = 67,73 + 162,38 = 230,11 сек.
344
Электроприводы судовых лебедок и кранов
[Гл. 9
48. Число циклов в час
3600
2расч -
3600
230,11
= 15,6 > Z3 = 15.
Проверка выбранного двигателя на нагрев.
49. Расчетная продолжительность включения
/ ПВ% = .100=^ -100 = 29,4%.
W 230,11
50. Эквивалентный ток при повторно-кратковременном режиме, соответ-
ствующий расчетной ПВ°/о (плавное изменение тока от пускового до рабочего
во всех случаях пуска позволяет брать его среднее значение)
т ^2 у + у + ^4 у
Л 0,66 + 59,1=. 17,1 + ( . 0,39 +
Т 0,5(0,66 + 0,39 + 0,44 + 0,44) + 17,1 +
/ 470 -112,2 /470 ' « \ 2
+ 35,32-15,8 + ( -- ~ -0,44 -1- 122-16,5 + I—~—1-0,44 4 82-16,4
. ч+15,8+16,5+ 164
= 55,3 а.
51. Эквивалентный ток при повторно-кратковременном режиме, пересчи-
танный на стандартную ПВ°/о выбранного двигателя по уравнению (239),
, « , 1 / °-294 47 С
. /— 55,3 I / --------— 47,5 а.
\ 0,4
' Таким образом, /ен = 47,5а</н = 59а, т. е. в заданном режиме работы
выбранный двигатель перегреваться не будет.
§ 61. Схемы управления электроприводами грузовых лебедок
и кранов
Схемы управления электроприводами грузоподъемных меха-
низмов должны обеспечивать:
а) возможность частых пусков при высокой их плавности;
б) реверс;
в) регулирование скорости в широких пределах;
§ 61]
Схемы управления электроприводами
345
г) тормозные режимы двигателя при спуске тяжелых грузов;
д) электрическое и механическое торможение при остановке
двигателя;
е) защиту от перегрузок.
Для управления электроприводами грузовых лебедок и кра-
нов чаще всего применяют контроллерные и релейно-контак-
торные схемы как на постоянном, так и на переменном токе.
По принципу действия они являются разомкнутыми системами
управления.
Контроллерные схемы управления на постоянном токе. Эти
схемы применяются лишь для малопроизводительных грузовых
лебедок и для механизмов кранов с менее напряженным режи-
мом работы.
Кроме отмеченных выше (см. § 57), контроллерные схемы
управления имеют и другие недостатки, характерные для ра-.
боты грузовых устройств:
а) необходимость располагать квалифицированным персо-
налом для их обслуживания;
б) сильная утомляемость оператора при повторно-кратковре-
менном режиме работы механизма, что может быть причиной
аварий или несчастных случаев;
в) быстрый износ контактных частей контроллера, что сни-
жает надежность работы и требует частых ремонтов.
Контроллерные и релейно-контакторные схемы на перемен-
ном токе. Эти схемы получили в настоящее время наибольшее
применение в грузовых электроприводах, в частности в электро-
приводах поворотного крана (рис. 183). При этом электродви-
гатель механизма подъема имеет релейно-контакторную схему
управления, а двигатели механизмов изменения вылета стрелы
и поворота крана — контроллерные схемы управления. Все дви-
гатели— серии МАП: двигатель подъема—трехскоростной,
остальные — двухскоростные.
Рассматриваемая схема электропривода крана имеет следую-
щие характерные особенности:
а) расположенные на подвижной платформе двигатели по-
лучают электроэнергию по гибкому кабелю, имеющему сла-
бину, необходимую для скручивания на один оборот, что позво-
ляет обойтись без кольцевых токоприемников;
б) электродвигатель подъема, частота включений которого
велика, и электродвигатель поворота, предназначенный преодо-
левать значительную инерцию массы привода, могут быть обо-
рудованы электрогидравлическими толкателями (ЭГТ), которые
в указанных условиях работают надежнее тормозных электро-
магнитов;
в) включение пакетного выключателя ВП обеспечивает по-
дачу напряжения одновременно на схемы управления двигате-
/
3PJ
?Р1
137
Спреи Подъем
3 2 1 0 1 2 Зг 2рТ зрг WJ
Ki КЙС n
У
сл
ЛРЗ
Механизм подъема
Механизм изменении Выпета стрелы
Рис. 183.
Схема управления электроприводом грузового поворотного крана типа КЭ-26.
346 Электроприводы судовых лебедок и кранов
!РП
1П
вз
ррГ
ж ог 1 ' 1Л.1 । ;
i j ; 1 L// Lg +*
I I I Г- .. Г
. ЗС 21C !C
1МГ
7?г
Механизм
подорота.
Гайлиця затмим ттттоЪ
контроллеров механизме!!
поворота и Вылета стропы
зс
4--—f—\_Г
30016
JeSo
Где-
&
1РЗ
?РИ
?с
ТГ
~г
JT.
41 пт
§ €1]
Схемы управления электроприводами
347
лей механизмов подъема груза, поворота крана и изменения
вылета стрелы; однако двигатели приходят в действие только
после перевода рукоятки соответствующего поста управления
в одно из рабочих положений.
Механизм подъема. При включении выключателя цепей уп-
равления ВУ напряжение через выпрямители В и добавочное
сопротивление СД подается на реле ускорения 1РУ и 2РУ, кото-
рые, сработав, обеспечивают питание тормозного реле 2РП. Кон-
такты этого реле в цепи тормозного контактора Т и нулевого
реле PH замыкаются. При установке рукоятки командо-конт-
роллера в нулевое положение реле PH срабатывает и своим
замыкающим контактом PH шунтирует контакт КЗ, обеспечивая
подачу напряжения на цепи управления в рабочих положениях
командо-контроллера.
Командо-контроллер имеет по три рабочих положения в на-
правлениях «Подъем» и «Спуск» груза. Как следует из таблицы
замыкания контактов, перевод рукоятки командо-контроллера
вызывает последовательное включение контакторов малой 1С,
средней 2С и 21С и большой ЗС скорости и постепенный разгон
двигателя.
Остановка и реверс двигателя производятся переводом ру-
коятки командо-контроллера соответственно в нулевое или
в одно из рабочих положений противоположного направления.
Характерной особенностью схемы является осуществление
некоторых видов защиты.
Защита от неправильного пуска. Если электродвигатель
включить сразу на большую (третью) скорость, то вследствие
значительных ускорений появятся динамические нагрузки, ко-
торые могут вызвать обрыв шкентеля или поломку механизма.
Поэтому в схеме предусмотрена защита, обеспечивающая пред-
варительный разгон двигателя на второй скорости. Она осуще-
ствляется с помощью реле ускорения 1РУ и 2РУ, которые по-
лучают питание при нулевом положении командо-контроллера.
В случае резкого перевода рукоятки командо-контроллера
в третье положение (например, в направление «Подъем») за-
мыкаются контакты Кб, К4 и КН, в результате чего сраба-
тывают контакторы: направления В, тормозной Т и средней
скорости 2С и 21С. Одновременно размыкающий блок-контакт
В прекращает подачу питания реле 1РУ, которое с выдержкой
времени отпускает свой якорь, размыкая цепь катушек контак-
торов средней скорости и замыкая цепь катушки контактора ,
ЗС. Таким образом, электродвигатель в течение всей выдержки
времени реле 1РУ разгоняется лишь на второй скорости.
Защита от неправильного реверса. Если электродвигатель,
еще не успевший полностью остановиться, включить на враще-
ние в обратном направлении, то это также может привести
348
Электроприводы судовых лебедок и кранов
[Гл. 9
к возникновению динамических нагрузок, способных вызвать
обрыв шкентеля или другие поломки. Во избежание такого
преждевременного реверса (например, при резком переводе ру-
коятки командо-контроллера из третьего положения «Спуск»
сразу в третье положение «Подъем») в схеме предусмотрены
реле 1РУ, 2РУ и 1РП. В указанном случае контакты командо-
контроллера К5 и К9 размыкаются, а контакты К4, Кб и КН
замыкаются, но несмотря на отключение контакта К5 контактор
Н продолжает получать питание через замыкающий контакт
реле 1РП в течение всего времени уставки реле. Благодаря от-
ключению контакта К9 и включению контакта КН лишается
питания контактор ЗС и включаются контакторы средней ско-
рости 2С и 21 С. Таким образом, двигатель продолжает рабо-
тать на «Спуск» до тех пор, пока не размыкается контакт 1РП.
Как только это происходит, двигатель отключается и механиче-
ски затормаживается. Вслед за этим получает питание контак-
тор В, и двигатель начинает разгоняться указанным выше
способом.
При быстром реверсе командо-контроллером с третьего по-
ложения «Подъем» на третье положение «Спуск» схема рабо-
тает следующим образом. После размыкания контактов Кб и
КН и замыкания контактов Кб, К4 и К9 двигатель в течение
выдержки времени реле 1РП не подключается к сети, так как
контактор Н получает питание и срабатывает лишь после замы-
кания размыкающего- контакта 1РП в цепи его катушки.
За время отключения от сети электродвигатель успевает
под действием веса груза и электромагнитного тормоза остано-
виться, а затем, с получением питания, разгоняется в направле-
нии «Спуск» в обычном порядке.
Защита от неправильного торможения. При резком пере-
воде рукоятки командо-контроллера из третьего положения в ну-
левое или в первое положение действие схемы аналогично рас-
смотренному выше торможению при реверсе.
Защита от неисправности схемы. Если почему-либо не сра-
батывает один из контакторов скорости, то он своим замыкаю-
щим контактом обесточивает катушку реле 2РП, которое с вы-
держкой времени разрывает цепь нулевого реле PH, что вызы-
вает отключение двигателя от сети.
Схема имеет также нулевую защиту, тепловую защиту от пе-
регрузок и защиту от коротких замыканий.
Схема снабжена конечными выключателями КВГ и КНР,
ограничивающими подъем и опускание гака, а также выключа-
телем ОГ, который отключает двигатель, если поднимаемый
груз превышает номинальное значение.
Механизмы поворота крана и изменения вылета стрелы.
Эти механизмы приводятся в движение двухскоростными асин-
S 62]
Электроприводы буксирных лебедок
349
хронными двигателями, особенностью которых является после-
довательное включение фаз обмоток большой и малой скорости.
Такое включение обмоток делает невозможным как провал
электромагнитного вращающего момента, так и одновременное
длительное подключение обеих обмоток к сети при переключе-
нии скоростей двигателя. Оно позволяет также подключать тор-
мозной электромагнит непосредственно к зажимам двигателя,
но требует применения дополнительных линейных контакторов
для обеспечения двойного разрыва главной цепи.
Управление электродвигателями обоих механизмов произ-
водится одинаковыми контроллерами, имеющими нулевое и по
два рабочих положения в обоих направлениях. Если контрол-
лер поставлен в нулевое положение, то при включении пакет-
ного выключателя ВП линейный контактор К срабатывает, и на-
пряжение подается на зажимы контроллера. При повороте его
рукоятки в одно из рабочих положений включается тихоходная
ТО или быстроходная ВО обмотка двигателя, который и разго-
няется до скорости, соответствующей числу пар полюсов об-
мотки и нагрузке на валу.
Чтобы кран, приведенный во вращение, не делал больше од-
ного оборота, предусмотрен конечный выключатель, контакты
которого КНП и КВП включены в цепь катушки линейного
контактора К1. Ограничение подъема и опускания стрелы обес-
печивается конечным выключателем с контактами КВС и КИС.
Для укладки стрелы по-походному контакт КИС конечного вы-
ключателя шунтируют кнопкой КШ. Для ограничения опуска-
ния стрелы при недостаточной длине вытравленного шкентеля
катушку линейного контактора К2 включают через контакт
КВГ конечного выключателя, находящегося на ноке стрелы.
Схема управления электродвигателем механизма поворота на
рис. 183 не показана, так как она аналогична схеме управле-
ния двигателем механизма вылета стрелы.
Схемы электроприводов механизмов поворота и изменения
вылета стрелы предусматривают нулевую и минимальную за-
щиты, выполняемые линейными контакторами, тепловую за-
щиту от перегрузок, а также защиту плавкими предохраните-
лями цепей управления от коротких замыканий.
Электродвигатели грузовых лебедок управляются по схемам,
аналогичным только что рассмотренным.
§ 62. Электроприводы буксирных лебедок
Назначение. Буксирные лебедки, устанавливаемые на букси-
рах, судах-спасателях и ледоколах, служат для буксировки
плавсредств (доков, кранов и земснарядов), несамоходных
(барж и мастерских) и самоходных судов. Буксируемое судно
350
Электроприводы судовых лебедок и кранов
[Гл. 9
или какое-либо другое сооружение в общем случае носит на-
звание воза.
При ходе буксира с возом в буксирном тросе возникают уси-
лия, которые можно разделить на постоянные, ударные и гар-
монические. Постоянные усилия обусловливаются сопротив-
лением воды и ветра движению воза. При расчете электропри-
вода их обычно задают. Ударные силы (рывки в буксирном
тросе) возникают в результате неодновременного восхождения
на волну буксира и воза, порывов шквального ветра, рыскания
буксира или воза, изменения курса или скорости буксира и дру-
гих причин. Г ар ионические силы вызываются волнением
моря.
Важным условием успешной буксировки воза в открытом
море является постоянство натяжения троса. Поддержание этого
постоянства обеспечивается автоматическими буксирными ле-
бедками,'"которые в случае увеличения усилия в тросе сверх
установленного вытравливают его на некоторую длину, а после
уменьшения усилия выбирают вытравленный участок. На реч-
ных судах устанавливаются буксирные лебедки с ручным управ-
лением.
Режимы работы. Буксир, идущий продольно бегу волны, во-
влекается в кругообразное (орбитальное) движение частиц
воды, что приводит к периодическому изменению натяжения
троса. Воз, длина которого обычно превышает длину волны, об-
ладает большой инерцией. Поэтому влияние волны на него не
учитывается.
Если профиль волны принять синусоидальным, то периоди-
ческое горизонтальное смещение х буксира относительно букси- •
руемого судна при кругообразном движении его центра тяжести
х = г0 (1 — cos at), (345)
где Го — радиус кругообразного движения центра тяжести бук-
сира на волне;
о —угловая частота ветрового волнения; о=2л/Т.
Периодические горизонтальные смещения буксира относи-
тельно воза на величину х вызывают соответствующие измене-
ния усилий в тросе, для снятия которых необходимо периоди-
чески стравливать и выбирать буксирный трос.
Скорость такого протягивания треста v определится фор-
мулой:
v = = roa sin at, (346)
dt
а ускорение соответственно будет: ' '*
а — = r0a2 CO?>at. - (347)
§ 62]
Электроприводы буксирных лебедок
351
Если бы не было протягивания, то в тросе возникала бы
гармоническая сила
Fx = -у а = -у г0а2 cos at, (348)
где D — водоизмещение буксира, т;
g = 9,81 м/сек2 — ускорение силы тяжести.
Максимальное усилие, испытываемое при этом тросом и ле-
бедкой, будет:
F — Р г о2
J max g '
Необходимая скорость вращения исполнительного двигателя
лебедки при выбирании и травлении троса в такт качаниям
буксира на волне определится из соотношения пип:
60w 60('rnc . ,
И =----------- =-------5----SinaZ, - (349)
~ (£*б + 2md) л (Dg + 2md)
где ti—скорость вращения исполнительного двигателя ле-
бедки, об/мин;
— диаметр буксирного барабана, м;
d — диаметр буксирного троса, м;
m — число слоев буксирного троса на барабане.
Выражение (349) можно переписать в другом виде:
П = nmax sinctf, - (350)
где
_ 60t’rO3
ЩпаХ zr-> , n J.
л (Dg + 2m d)
Воспользовавшись уравнением движения, можем выразить
момент на валу исполнительного двигателя формулой:
М = Л4СТ + ,
ст 375 dt
где dn/dt=nra3Yxscoscst — необходимое ускорение исполнительного
двигателя.
Статический момент на валу исполнительного двигателя Л!ст
в основном создается заданной постоянной силой тяги Fa
в буксирном тросе:
ст 9/т
чпер
Динамический момент
Л4ЯИН = GPn^"iaxg° COS at = Л4ДНН max• cos at. (352)
Old
352
Электроприводы судовых лебедок и кранов
[Гл. 9
Тогда
М = Мст + А4ДИН тах • cos at.
(353)
Преобразовав последнее выражение, получим:
/ Л4 — Л4СТ
^дин max
2 я2
I = COS2 at = 1 — sin2 at = 1------------
п2
'чпах
откуда уравнение требуемой механической характеристики
исполнительного двигателя лебедки
будет:
ле-
рактеристика буксирной
бедки.
ft — ± ^тах
М — М„
4^ дин max
2
(354)
Выражение (354) представляет со-
бой уравнение эллипса со сдвигом од-
ной из его полуосей относительно
координатной оси п (рис. 184).
Статический момент, создаваемый
буксирной лебедкой, по своему харак-
теру является активным (потенциаль-
. ным). Если сравнить буксирную ле-
бедку с грузовым электроприводом,
гребным винтом буксира, будет анало-
то упор, создаваемый
гичен висящему на гаке грузу. Статический момент на валу
исполнительного двигателя Мб, соответствующий постоянному
усилию в буксирном тросе, на рис. 184 изображается штрих-
пунктирной линией. При выбирании троса этот момент увели- -
чпвается на величину потерь в лебедке АЛ4:
Мв = Мб + AM.
При травлении движение буксира вызывает момент усилия
в тросе, который на величину потерь в лебедке будет больше
тормозного момента двигателя:
Л4тр = Л4б —AM.
На рисунке указаны создаваемые гармоническими силами
динамические моменты, которые при работе лебедки также
должны преодолеваться исполнительным двигателем.
Точка 1 нагрузочной диаграммы соответствует нахождению
буксира на середине склона набегающей волны. Горизонталь-
§ 62]
Электроприводы буксирных лебедок
353
ная составляющая скорости кругообразного движения центра
тяжести судна и скорость исполнительного двигателя лебедки
в это время равны нулю, момент на валу двигателя — макси-
мален.
Точка 2 — буксир находится на вершине волны, его центр
тяжести с максимальной скоростью перемещается к возу. Элек-
тродвигатель лебедки для поддержания постоянного усилия
в тросе вращается с наибольшей скоростью, выбирая слабину/
По мере прохождения волны горизонтальная составляющая
кругообразного движения центра тяжести судна уменьшается и
в точке 3, соответствующей нахождению судна на середине
склона проходящей волны, становится равной нулю. Затем, под
действием движущегося судна, двигатель лебедки переходит
в режим противовключения, вытравливая трос (точка 4).
Точка 5 соответствует нахождению судна на подошве волны,
после чего скорость стравливания троса постепенно умень-
шается до нуля (точка 6). С набеганием новой волны цикл
работы исполнительного двигателя автоматической буксирной
лебедки повторяется.
Как вытекает из анализа нагрузочной характеристики, для
поддержания постоянного усилия в тросе необходимо, чтобы сле-
дящая система управления обеспечивала работу исполнитель-
ного двигателя по графику, максимально приближающемуся
к нагрузочной характеристике лебедки. В настоящее время при-
нята автоматическая система регулирования натяжения троса
с встроенным в корпус лебедки взвешивающим устройством
в качестве датчика усилий в буксирном тросе.
Расчет мощности двигателя. Мощность электродвигателя
буксирной лебедки зависит от принятого режима работы и на-
стройки датчика натяжения троса. Расчет мощности двигателя
можно выполнить по общему положению методом среднеквад-
ратичного момента.
Эквивалентный момент двигателя получим, если в общее
уравнение момента
подставим значений М из выражения (353) и учтем отдельно
момент МЕ, действующий в полупериод выбирания, и Л1тр, дей-
ствующий в полупериод травления. Тогда окончательно по-
лучим:
Мэкв = ]/ (Мв + Л4?р + Мдин tnax ) .
(355)
354
Электроприводы судовых лебедок и кранов
[Гл. 9
На основании синусоидального изменения скорости [см. урав-
нение (350)] ее среднее значение за полупериод можно выра-
зить так:
2
^ср ^тах-
(356)
По полученным значениям Мэкв и ftcp номинальная мощ-
ность исполнительного двигателя буксирной лебедки опреде-
лится из выражения:
Р — ^экв^ср
н ~ 975
(357)
Схема управления. В последнее время многие морские суда
оснащаются автоматическими буксирными лебедками с тяговым
усилием 18 т. Схема их управления построена по системе гене-
ратор—двигатель (рис. 185).
Приводным двигателем ПД в схеме является двигатель по-
стоянного тока со смешанным возбуждением, управляемый по
релейно-контакторной схеме, обеспечивающей трехступенчатый
пуск в функции времени и динамическое торможение. Для за-
щиты двигателя применено максимально-токовое реле РМ, для
защиты цепей управления — предохранители Пр. О подаче на-
пряжения на схему сигнализирует белая лампа ЛБ, о закон-
ченном процессе пуска — желтая лампа ЛЖ.
Управление исполнительным двигателем ИД осуществляется
командо-контроллером с одним нулевым и четырьмя рабочими
положениями в направлении «Травить» и «Выбирать» и двумя
командо-аппаратами: усилий КУ и путевым КП. Схема пре-
дусматривает как ручное, так и автоматическое управление,
причем последнее вступает в действие после установки командо-
контроллера в положение А («Автомат»):
Ручное управление. Подача напряжения в цепи управления
приводит к тому, что на табло в рулевой рубке загорается крас-
ная сигнальная лампа ЛК и через экономическое сопротивле-
ние C5i питание подается независимой обмотке возбуждения
исполнительного двигателя НОД. При этом срабатывает реле
обрыва поля РП, замыкая свой контакт в цепи реле PH.
После включения выключателя цепей управления ВУ и уста-
новки командо-контроллера в нулевое положение срабатывают
нулевое реле PH (если включены линейные контакторы Л при-"
водного двигателя), реле форсировки тормоза РЭ, шунтирую-
щая часть экономического сопротивления СЭ2 в цепи тормоз-
£ 62]
Электроприводы буксирных лебедок
355
него электромагнита ТМ и загораются лампы ЛБ (в сигналь-
ном табло) и ЛС (командо-контроллере).
Режим работы исполнительного двигателя определяется
положением командо-контроллера, а также величиной усилия
в тросе н длиной вытравленного участка, на что реагируют ко-
мандо-аппараты /СУ и /<77 (см. таблицы замыкания контактов).
При переводе командо-контроллера в первое положение «Вы-
бирать» замыкаются контакты /(5 и К7, через которые получают
питание контакторы направления В, линейный ЗЛ и тормозной
КТ. В результате этого замыкается цепь тормозного магнита ТМ
и после его срабатывания включается сопротивление СЭ2. Об-
мотка независимого возбуждения генератора НОГ контактами
В через сопротивление Pi—Ps включается на напряжение цепи
управления. В цепи главного тока сопротивление Ру—Р2 шунти-
руется последовательной обмоткой возбуждения генератора
СОГ. В цепи обмотки возбуждения двигателя НОД шунтирует-
ся большая часть сопротивления СЭ1. Двигатель работает на
характеристике Д.
Во втором положении командо-контроллера дополнительно
замыкается контакт К9, через который получает питание линей-'
ный контактор 1Л. Своим главным контактом последний шунти-
рует сопротивление Р2—Р3 в главной цепи, а блокировочным
замыкает цепь контактора ускорения /У, что вызывает усиление :
магнитного потока генератора (шунтируется сопротивление
Р2—Рз в цепи НОГ) и подготавливает срабатывание контак-
тора 2У. Двигатель работает на характеристике В2.
В третьем положении командо-контроллера, помимо остаю-
щихся замкнутыми контактов К5, К7 и К9, замыкается еще и
контакт /<72, через который получает питание контактор ускоре-
ния 2У. При срабатывании контактора 2У в цепь обмотки воз-
буждения двигателя НОД вводится все сопротивление СЭЬ
а в цепи обмотки возбуждения генератора НОГ сопротивление
уменьшается до значения /Д—Рз. Двигатель переходит на ха-
рактеристику Вз-
При переводе командо-контроллера в первое положение
«Травить» замыкается контакт К4, но при небольшом усилии
в тросе контакт КУ2 остается разомкнутым и двигатель не вра-
щается, удерживаясь механическим тормозом. Если же усилие
в тросе превышает значение уставки, то контакт КУ2 замы-
кается, контактор КТ получает питание и вызывает растормажи-
вание двигателя, который под действием усилия со стороны
воза вытравливает трос, работая на характеристике Л—Т2. Как
только большой участок троса оказывается вытравленным, раз-
мыкается контакт КП2 и двигатель вновь затормаживается.
Во втором положении командо-контроллера размыкается
контакт К4, замыкается контакт К7 и контактор КТ получает
356
Электроприводы судовых лебедок и кранов
[Гл. 9
Шлица замыкания нонтктб команде-шарит
трабления спроса
Ом 35м 50м
кпз
КПЗ
КМ
Побпица замыкания контакте^ кттЛ-аппарата
усилий
УсепиОна УстоВкаяМзь
Усилие
КУ1
JW
ж Замыкание Разминание
(Зона замыкания заштрихована)
Рис. 185. Схема управления (а) и механические характеристики (б) элект-
ропривода буксирной лебедки.
§ 62]
Электроприводы буксирных лебедок
357
<&+
к cydobou сети
358
Электроприводы судовых лебедок и кранов
[Гл 9
питание независимо от усилия в тросе. Двигатель по-прежнему
работает на характеристике Т\—Т2-
В третьем положении командо-контроллера дополнительно
замыкается контакт К8, в результате чего срабатывают линей-
ный контактор 2Л, а затем и контакторы направления Н и ли-
нейный ЗЛ. При этом шунтируются: в главной цепи — сопро-
тивления Р\—Рз, в цепи обмотки возбуждения двигателя
НОД — часть сопротивления СЭр, обмотка возбуждения гене-
ратора НОГ включается через полностью введенное сопротивле-
ние Р{—Р5. Двигатель работает на характеристике Ts и при
усилии в тросе, превышающем потери в передаче, переходит
в генераторный режим.
В четвертом положении командо-контроллера остаются зам-
кнутыми контакты К7, К8 и замыкаются контакты КП и К12,'
через которые получают питание контакторы 1У и 2У, шунти-
рующие сопротивление Pi—Pi в цепи возбуждения генератора.
Это вызывает увеличение напряжения главной цепи и переход
двигателя на характеристику Т4.
Автоматическое управление. При установке командо-конт-
роллера в положение А замыкаются контакты К4, Кб, К9, КЮ
и К12 и загорается сигнальная зеленая лампа ЛЗ. Цепь кон-
тактора 1Л размыкается контактом РВ. Если усилия в тросе
при этом невелики, то контакт КУ2 остается разомкнутым и
двигатель тормозом ТМ удерживается в неподвижном состоя-
нии.
С возникновением в тросе усилий, превышающих уставку
командо-аппарата КУ, контакт КУ1 размыкается, а КУ2, КУЗ
и КУ4 в последовательности, определяемой таблицей замыка-
ния контактов, замыкаются.
Контакт КУ4 включает лампу Л Ж, сигнализирующую о ра-
боте с превышением номинального усилия в тросе, а контакт
КУЗ включает реле времени РА, которое шунтирует контакт
КУ2. Через контакты КП2, КУ2 и К4 получает питание контак-
тор тормоза КТ, растормаживающий двигатель, который, страв-
ливая трос, переходит в режим динамического торможения
(кривая А!). После стравливания 3—6 м троса замыкается кон-
такт КП1.
В случае уменьшения усилия в тросе размыкаются контакты .
КУ2, КУЗ и КУ4 и замыкается контакт КУ1, через который по-
лучают питание контакторы В и ЗЛ. Контакт ЗЛ выводит из
силовой цепи сопротивление Pi—Р2. Контакты В подают напря-
жение на НОГ, а также шунтируют КП2 и КУ2, обеспечивая
питание КТ и расторможенное состояние двигателя. Электро-
двигатель переходит в режим «Выбирать» (кривая А2). При
размыкании контакта КУЗ теряет питание реле РА, однако его
контакт РА в течение 1 сек продолжает шунтировать КУ2. Это
§ 62]
Электроприводы буксирных лебедок
359
необходимо, чтобы дать возможность замкнуться шунтирую-
щему контакту В и не допустить затормаживания двигателя.
После срабатывания контактора ЗЛ теряет питание релеРВ,
которое с выдержкой времени (1 сек) замыкает цепь контак-
тора 1Л, выводящего из главной цепи оставшееся сопротивле-
ние Р2—Рз- Двигатель переходит на характеристику Л3.
При срабатывании контактора 1Л замыкается цепь контак-,
тора поля генератора (ускорения) 1У, который своим контак-
том 1У шунтирует сопротивление Р2—Рз в цепи НОГ, усиливая
тем самым поле генератора и увеличивая напряжение главной
цепи. Двигатель переходит на характеристику Л4.
Контактор 1У вызывает срабатывание контактора 2У, ко-
торый еще более уменьшает сопротивление цепи обмотки воз-
буждения генератора НОГ, увеличивая напряжение глав-
ной цепи и обеспечивая переход двигателя на характери-
стику As.
Лебедка выбирает вытравленный участок троса со скоростью,
определяемой усилием в нем. Если при этом усилие вновь ока-
зывается выше уставки датчика усилий, то контакт AW7 размы-
кается и катушки контакторов В, ЗЛ, 1Л, 1У и 2У теряют пита-
ние, переводя двигатель в режим динамического торможения
(кривая Л]). Если это усилие сохраняется, то после стравлива-
ния 35 м троса замыкаются контакты КПЗ и КП4 путевого ко-
мандо-аппарата. При этом загорается лампа ЛЖ и получает
питание реле РК предельного травления, которое шунтирует
контакт КУ1. Благодаря этому получают питание контакторы
В и ЗЛ и обесточиваются контактор 1Л и реле РВ.
Обмотка возбуждения генератора НОГ включается через со-
противление Pi—Рз- В главной цепи шунтируется сопротивление
Pi—P-г,- Двигатель переходит в режим противовключения (кри-
вая А2).
После стравливания 50 м троса размыкается контакт КПЗ,
в результате чего теряют питание реле РК и контакторы В, ЗЛ
и КТ (контакт КП2 по-прежнему разомкнут). Двигатель затор-
маживается.
Когда усилия в тросе снижаются, то контакт КУ1 замыка-
ется и получают питание контакторы В, ЗЛ, КТ (кривая А2), за-
тем 1Л (кривая Л3), 1У (кривая А4) и 2У (кривая Л5). Лебедка
выбирает вытравленный участок троса до размыкания контак-
тов КП1, после чего двигатель затормаживается до появления
в тросе усилий, превышающих уставку КУ- •
Защита схемы. Помимо работающих обычным порядком ну-
левой (реле PH) и максимально-токовой (реле РМ) защит и
защиты от обрыва поля двигателя (реле РП), в схеме преду-
смотрены и две другие защиты: скоростная и ограничивающая
величину рекуперируемой в сеть энергии.
360
Электроприводы судовых лебедок и кранов
[Гл. 9
Скоростную защиту в схеме обеспечивает электромагнитное
реле PC, которое при достижении определенного значения
' скорости и э. д. с. в якоре двигателя срабатывает и размыкает
цепь нулевого реле PH.
Предупредить разнос преобразовательного агрегата в случае
отключения приводного двигателя ПД и сохранения напряже-
ния в цепях управления ИД удается благодаря нулевому реле
PH, в цепь которого включается контакт Л линейного контак-
тора приводного двигателя ПД.
Защита от чрезмерной рекуперации нужна при травлении
буксирного троса на третьем и четвертом положениях командо-
контроллера при ручном управлении. В случае недопустимого
увеличения скорости травления и рекуперации энергии двига-
телем срабатывает двухкатушечное реле РР, размыкающее цепи
контакторов Н, 2Л и ЗЛ. При этом размыкается цепь независи-
мой обмотки возбуждения генератора НОГ, отключается после-
• довательная обмотка СОГ и двигатель замыкается на сопротив-
ление Pi—Р3. Э. д. с. генератора, потерявшего возбуждение, па-
дает до нуля, и двигатель переходит в режим динамического
торможения.
После срабатывания реле РР его параллельная катушка от-
ключается. С уменьшением тока двигателя якорь реле возвра-
щается в исходное положение, контакторы Н, 2Л и ЗЛ получают
питание и двигатель продолжает работать в режиме, соответ-
ствующем положению элементов схемы.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Сравните грузоподъемные устройства судна с грузовыми лебедками
и грузовыми кранами (стр. 328—331).
2. Из каких режимов состоит цикл работы двух лебедок на один гак
(стр. 335 и 336)?
3. Изложите порядок расчета грузовых электроприводов (стр. 337 и 338).
4. Перечислите требования, предъявляемые к схеме управления грузовым,
электроприводом и обоснуйте их целесообразность (стр. 344 и 345).
5. Сравните работу контроллерных и релейно-коитакторных схем управ-
ления грузовыми электроприводами (стр. 345—349).
6. Как работает электропривод буксирной лебедки при ходе буксира .
с возом на волне (стр. 349—353) ?
7. Опишите назначение и работу взвешивающего устройства буксирной ,
лебедки (стр. 352 и 353).
8. Каково назначение датчиков усилий и путевого в схеме управления
электроприводом буксирной лебедки (стр. 358—359)?
§ S3] Основные параметры вспомогательных механизмов 361
ГЛАВА 10
ЭЛЕКТРОПРИВОДЫ
ВСПОМОГАТЕЛЬНЫХ МЕХАНИЗМОВ
СИЛОВЫХ УСТАНОВОК
И СУДОВЫХ СИСТЕМ
§ 63. Основные параметры вспомогательных механизмов
К вспомогательным механизмам относятся насосы, вентиля-
горы, воздуходувки и компрессоры. Они предназначены д^я:
а) обслуживания силовых установок;
б) обеспечения остойчивости, плавучести, пожаробезопасно-
сти и маневренности судна;
в) создания нормальных бытовых условий экипажу судна;
г) поддержания установленной температуры и влажности
в грузовых трюмах;
д) выполнения производственных функций на танкерах, ледо-
колах, доках, землесосах и других специальных судах.
В настоящее время почти все вспомогательные механизмы
электрифицированы; вместе взятые, они потребляют более по-
ловины всей энергии, вырабатываемой судовой электростанцией.
Работа вспомогательных механизмов характеризуется такими
основными параметрами, как производительность, напор и по-
требляемая мощность.
Производительность вспомогательного механизма
определяется количеством жидкости или газа, подаваемого им
в единицу времени, и обычно измеряется в кубических метрах
за час (м3/ч), в кубических метрах за секунду (м3/сек) или
в литрах за минуту (л! мин).
Иногда возникает необходимость регулировать производи-
тельность вспомогательных механизмов. Это осуществляется:
а) дросселированием нагнетания или всасывания, т. е. ча-
стичным перекрытием вентилем (заслонкой) напорного или вса-
сывающего трубопровода;
б) изменением скорости вращения приводного электродвига-
теля;
в) обратным перепуском части перекачиваемой жидкости
(например, в зубчатых и винтовых насосах).
Наиболее экономичен второй из этих способов (регулирова-
ние изменением скорости вращения двигателя), но он усложняет
и удорожает схему управления. Поэтому на судах наибольшее
распространение получил метод дросселирования как наиболее
простой и доступный во всех случаях.
Напор означает сопротивление, которое преодолевается
данным механизмом. Различают напор нагнетания — давление
362
Электроприводы вспомогательных механизмов
[Гл. 10
в нагнетательном патрубке, и напор всасывания — разрежение,
которое достигается во всасывающем патрубке механизма. Та-
ким образом, напор представляет собой количество энергии, со-
общаемое механизмом единице веса перекачиваемой жидкости
или газа и измеряется в кГ • м!кГ (т. е. в метрах). Как правило,
он определяется высотой водяного столба, выраженной в метрах
или миллиметрах.
Иногда применяют соответствующие этим единицам кГ!см2,
н!м?.
Потребляемая мощность — это мощность, расходуе-
мая на питание электродвигателя при работе механизма с задан-
ными производительностью и напором. Значение ее определяется
для каждого механизма особо.
§ 64. Электроприводы судовых насосов
Классификация и назначение насосов. Насосом называется
аппарат, предназначенный для перемещения жидкости путем со-
общения ей необходимой скорости. По принципу действия
Рис. 186. Поршневой
насос прямого дейст-
вия.
насосы делятся на поршневые, лопастные,
ротационные, электромагнитные и другие.
Поршневые насосы работают по принци-
пу всасывания перекачиваемой жидкости.
Они делятся на насосы прямого действия,
вытесняющие жидкость при ходе поршня
только в одном направлении, и насосы двой-
ного действия, которые подают жидкость
в систему при обоих направлениях хода
поршня.
Насос прямого действия показан на рис.
186. Когда поршень 1 идет вверх, под ним
образуется разреженное пространство, кото-
рое заполняется перекачиваемой жидкостью,
поднимающейся в цилиндр 2 через клапан
3 по всасывающему патрубку 4. При обрат-
ном ходе поршня жидкость в цилиндре
сдавливается, в результате чего закры-
вается всасывающий клапан 3 и открывается нагнетательный
клапан 5. Так, с каждым ходом поршня вниз через нагнетатель-
ный патрубок 6 в систему подается определенное количество
жидкости.
Производительность насоса Q (мй[сек) определится из фор-
мулы:
~ Sin
(358)
§ 64]
Электроприводы, судовых насосов
363
•где S — поверхность поршня; '
I — путь, проходимый поршнем в одном направлении;
п — число двойных ходов поршня В 1 MUH-,
т]об — объемный к. п. д„ учитывающий утечку жидкости че-
рез неплотности в цилиндре и клапанах и изменяю-
щийся в пределах от 0,85 до 0,9 у небольших и от
0,95 до 0,99 у больших насосов.
В рулевых гидравлических установках (см. § 46) применяют
поршневые насосы переменной производительности. Их исполь-
зуют в установках, где требуется небольшая производительность
при большой высоте всасывания или
высоком напоре.
Положительными особенностями
этих насосов являются:
а) относительная простота кон-
струкции;
б) высокий напор;
в) относительно высокий к. п. д.
(^нас — 0,5 -f- 0,8, причем нижний
предел относится к малым, а верх-
ний— к большим насосам);
г) способность к самовсасыва-
нию и постоянная готовность к ра-
боте.
Но этим насосам присущи и определенные недостатки, та-
кие как:
а) неудобство сочленения с электродвигателем, поскольку ра-
бота происходит при возвратно-поступательном движении
поршня;
б) быстрый износ трущихся частей, особенно при работе с за-
грязненной жидкостью;
в) опасность возникновения недопустимых давлений при пе-
рекрытии вентилей.
Лопастные насосы делятся на центробежные и пропеллерные.
Последние применяются, когда большую производительность
необходимо сочетать с незначительным напором (балластные
насосы). Наибольшее распространение на судах получили
центробежные насосы.
Центробежный насос (рис. 187) состоит из рабочего колеса
(крылатки) 1, расположенного в улиткообразном (спиральном)
корпусе 2. Чтобы пустить насос, необходимо залить его корпус
жидкостью. Эту жидкость вращающиеся лопасти рабочего ко-
леса с большой скоростью отбрасывают к периферии корпуса.
На место вытесненной жидкости в центр корпуса по всасываю-
щему патрубку поступают новые порции. Скорость жидкости,
отброшенной к периферии корпуса, уменьшается, вследствие
364
Электроприводы вспомогательных механизмов
[Гл. 10
чего увеличивается напор, с которым жидкость подается в наг-
нетательный патрубок 4. Для получения высокого напора (сверх
25 кГ1см2') служат многоступенчатые насосы — из нескольких
рабочих колес, расположенных на одном валу.
К преимуществам центробежных насосов относятся:
а) простота конструкции;
б) минимальное число изнашиваемых частей и пригодность
к работе с загрязненной жидкостью;
в) равномерность подачи жидкости, что позволяет увеличить
скорость течения ее в трубопроводах и уменьшить диаметр и
вес последних;
г) возможность непосредственного сочленения насоса с элек-
тродвигателем.
Основными недостатками центробежных насосов являются:
а) необходимость заливать жидкость во всасывающий трубо-
провод перед началом работы;
б) уменьшение к. и. д. с увеличением вязкости перекачивае-
мой жидкости.
Ротационные насосы подразделяются на зубчатые (шестерен-
чатые) и винтовые и служат для перекачивания вязких жидко-
стей: топлива, смазочных
масел и др.
Зубчатый насос (рис.
188) состоит из ведущего 4
и ведомого 2 зубчатых ко-
лес, заключенных в общий
корпус 1. При вращении ко-
лес жидкость, заполняющая
впадины, переносится вдоль
стенок корпуса из камеры
всасывания 5 в камеру на-
гнетания 3, где выдавли-
Рис. 188. Зубчатый насос.
вается зубцами соседнего
колеса, образуя напор. Обратное движение жидкости предотвра-
щается малыми зазорами между внутренней поверхностью кор-
пуса и зубьями вращающихся колес.
Достоинствами ротационных насосов являются:
а) малые габариты и небольшой вес;
б) равномерность и непрерывность подачи жидкости;
в) способность создавать высокие напоры ('—100 кГ/см2);
г) возможность непосредственного сочленения насоса с элек-
тродвигателем.
К недостаткам ротационных насосов следует отнести:
а) малую всасывающую способность; . . ,
б) необходимость тщательной пригонки взаимодействующих
частей.
§ 64] Электроприводы судовых насосов 365
По роду перекачиваемой жидкости насосы под-
разделяются на водяные, топливные, масляные и насосы рассола
(хладагента).
В зависимости от назначения различаются следующие
группы судовых насосов:
а) вспомогательные, обслуживающие работу силовых уста-
новок; это — котельно-питательные, конденсатные, циркуляцион-
ные, охлаждающие, топливные и масляные насосы;
б) общесудового назначения (насосы систем); это — балласт-
ные, трюмные или водоотливные, осушительные, пожарные и
санитарные насосы;
в) специального назначения; это — насосы электрогидравли-
ческих рулевых устройств, водоотливные насосы спасательных
судов, перекачивающие и зачистные насосы танкеров и др.
Климатические установки (кондиционеры воздуха) и хо-
лодильные установки, получившие за последние годы широкое
распространение, значительно увеличили количество применяе-
мых на судах насосов, в первую очередь циркуляционных и
охлаждающих, а также предназначенных для перекачки хлад-
агента.
Выбор электродвигателя для привода насоса. Насос (или
другой вспомогательный механизм) либо работает от вала об-
служиваемого им теплового двигателя, либо имеет электриче-
ский привод. В зависимости от рода тока судовой электрической
сети электроприводы насосов могут работать как от постоян-
ного, так и от переменного тока. При постоянном токе обычно '
используют электродвигатели со смешанным возбуждением и
с легкой последовательной обмоткой, которая служит для под-
держания требуемой скорости при колебаниях напряжения сети.
При переменном токе наибольшее распространение получили
обычные короткозамкнутые асинхронные двигатели.
Центробежные насосы, чаще других встречающиеся на судах,
имеют квадратичную зависимость момента сопротивления от
скорости: М-^п2. При этом потребляемая мощность пропорцио-
нальна кубу скорости: Р= п3. Отсюда следует, что центробеж- /
ные насосы характеризуются легкими условиями пуска. Поэтому'
асинхронные двигатели с короткозамкнутым ротором, развиваю-
щие сравнительно небольшой пусковой момент и имеющие жест-
кую механическую характеристику, вполне удовлетворяют тре-
бованиям, предъявляемым к электроприводам центробежных
насосов.
Более тяжелыми условиями пуска отличаются поршневые на-
сосы. Их пусковой момент может достигать 2МН. Это объяс-
няется, во-первых, необходимостью вытеснять жидкость из тру-
бопровода, во-вторых, повышенным трением в поршнях и уплот-
няющих сальниках при трогании с места, в-третьих, наличием
366 Электроприводы вспомогательных механизмов [Гл., 10
большого динамического момента, вызываемого маховиком.
Поэтому поршневые насосы целесообразно сочетать с асинхрон-
ными двигателями, обладающими глубоким пазом или двойной
обмоткой на роторе.
Исходя из условий работы насоса, конструктивное исполне-
ние его двигателя может быть брызгонепроницаемым, водоза-
щищенным или герметическим.
Двигатели насосов обычно работают в длительном режиме
с постоянной нагрузкой на валу. Потребляемая ими мощность
Р (кет) определяется по формуле:
Р = Q-i (ЯСт + ЛЯ)
где Q — производительность насоса, м^сек-,
у — удельный вес перекачиваемой Жидкости, кг!м\
НСч. — статический, напор, ж;
А// — потери напора в трубопроводе и местных сопротивле-
ниях, м;
Т]нае — к- п. д. насоса (у поршневых насосов он составляет от
0,5 до 0,8, у центробежных — от 0,4 до 0,75).
Определив по этой формуле мощность, выбирают двигатель
для насоса, имея в виду, что скорость двигателя в каталогах
указывается с точностью ±5%. Если действительная скорость
выбранного двигателя окажется на 5% больше указанной в ка-
талоге, то из-за особенностей работы насосов мощность на валу
двигателя возрастет и превысит номинальное значение. Поэтому
при выборе двигателя по каталогу указанную там расчетную
мощность двигателя следует увеличить: для поршневых насосов
на 10%; для центробежных насосов на 16%.
В случае применения насосов с большими инерционными
массами надо, помимо выбора двигателя по мощности, произ-
вести еще и проверку его на нагрев пусковыми токами.
§ 65. Электромагнитные насосы
К числу вопросов, решаемых при использовании на судах
ядерной энергии, относится выбор теплоносителя, предназна-
ченного для переноса тепловой энергии от реактора к паротур-
бинной установке. Для этой цели в настоящее время применяют
газовые, водяные и жидкометаллические теплоносители. При-
чины, по которым последним отдают предпочтение, таковы:
а) более высокие, чем у воды, рабочие температуры;
б) высокие теплопроводность и теплоемкость;
в) низкая температура плавления и высокая температура ки-
пения (парообразования), позволяющие применить в системе
§ 65]
Электромагнитные насосы
367
теплообмена низкое давление, уменьшить вес и габариты обо-
рудования.
Указанные особенности жидкометаллических теплоносителей
обусловливают также более высокий к. п. д. ядерной установки.
В качестве жидкометаллических теплоносителей чаще всего
применяют натрий, калий, свинец, висмут и их сплавы, нагре-
тые до 250—500° С.
Наиболее полно отвечает условиям работы в ядерных уста-
новках жидкий натрий, температура плавления которого состав-
ляет 98° С, а температура кипения равна 833° С. Однако этот
теплоноситель обладает и рядом отрицательных свойств, прежде
всего сильной и продолжительной радиоактивностью в резуль-
тате нейтронного облучения в
реакторе, а также способ-
ностью бурно реагировать
(воспламеняться) при сопри-
косновении с водой и воздухом.
Кроме того, натрий, как и
другие металлы, будучи на-
грет до рабочих температур,
вызывает сильную коррозию
материалов подшипников и
разъедание сальниковых уп-
лотнений насосов, в результа-
те чего может возникнуть
утечка теплоносителя,
герметизацию системы,
механических насосах.
Рис. 189. Принцип действия кондук-
ционного электромагнитного насоса.
Это делает необходимой
надежную
весьма затруднительную в обычных
Учет этих недостатков привел к созданию принципиально
новых так называемых электромагнитных насосов.
Эти насосы просты в конструктивном отношении, легко под-
даются герметизации, не имеют ни вращающихся и перемещаю-
щихся частей, ни сальников и других уплотнений. Правда,
в некоторых отношениях они уступают механическим насосам
(меньший к. п. д., больший вес, более крупные габариты).
Электромагнитные насосы подразделяются на кондук-
ц и о н н ы е, в которых ток через жидкий металл создается по-
сторонним источником э. д. с., и индукционные, в которых
ток в жидком металле индуктируется магнитным полем.
Наиболее распространены кондукционные насосы постоян-
ного тока (рис. 189). Между полюсами электромагнита располо-
жен расплющенный участок трубопровода — горловина, вы-
полненная из немагнитной нержавеющей стали, Нихрома пли
другого сплава, обладающего высоким сопротивлением.
К горловине медно-цинковым или серебряным припоем при-
паяны шины, подводящие к жидкому металлу электрический
368
Электроприводы вспомогательных механизмов
[Гл. 10
ток. Для того чтобы возможно меньшая часть его ответвлялась
в стенки горловины, их делают тонкими (от 0,5 до 3 мм) и из
материала с большим сопротивлением. Обмотка электромагнита
и горловина с жидким металлом обычно являются участками
одной последовательной цепи, ток в которой доходит до несколь-
ких десятков килоампер. Напряжение цепи выбирают в преде-
лах от 0,5 до 2,5 в. Обмотка изолирована слюдяными про-
кладками.
Жидкий металл, находящийся в магнитном поле, испытывает
при прохождении тока воздействие сил F, направление которых
определяется правилом левой руки. Под действием этих сил
жидкий металл выталкивается из магнитного поля по трубопро-
воду. На его' место поступают новые порции металла, в ре-
зультате чего образуется непрерывный поток.
Напор р, создаваемый электромагнитным насосом постоян-
ного тока, в первом приближении можно определить по фор-
муле:
р = JL = = сВ1, х (360)
у S S
где В — магнитная индукция полюсов;
I — ток, протекающий через жидкий металл;
I — длина пути тока в жидком металле;
S — внутреннее сечение горловины;
k, с — коэффициенты пропорциональности.
Производительность электромагнитных насосов постоянного
тока может достигать 3000 м3/ч при напоре до 3—5 кГ!см2.
к. п. д. мощных электромагнитных насосов составляет
около 50%.
Недостатком насосов постоянного тока является то, что по-
падание воздуха в систему циркуляции нарушает режим их ра-
боты. К тому же эти насосы нуждаются в источниках энергии
на большие токи и малые напряжения.
Последний недостаток послужил причиной создания одно-
фазных насосов переменного тока, которые, однако, не получили
распространения, так как у них коэффициент мощности не пре-
вышает 0,3—0,5, а к. п. д. насоса составляет лишь 10—15%.
Индукционные насосы подразделяются на плоские линейные,
цилиндрические линейные и спиральные. Их обмотки питаются
трехфазным переменным током.
Плоский линейный индукционный насос (рис. 190) со-
стоит из верхнего 1 и нижнего 5 индукторов и из плоской горло-
вины 3, расположенной между индукторами и оканчивающейся
диффузорами 4. Индукторы имеют набранные из отдельных ли-
стов стали сердечники, в пазы которых уложены трехфазные
обмотки 2.
§ 65]
Электромагнитные насосы
369
Трехфазный ток, протекающий в обмотках индукторов, соз-
дает бегущее поле, которое индуктирует вторичные токи в жид-
ком металле, заполняющем горловину. Взаимодействие этого
тока с магнитным потоком обмоток вызывает движение металла
по горловине, обеспечивая напор в системе циркуляции до не-
скольких килограммов на квадратный сантиметр.
Высокая производительность, доходящая до нескольких ты-
сяч кубометров жидкого металла в час, сравнительно высокие
А-Л
Рис. 190. Плоский линейный индукционный насос.
к. и. д. (30—40%) и cos <р (0,4—0,6), а также возможность пи-
тания от общей судовой сети — таковы достоинства этих насо-
сов. Их недостатком является сложность обмоток и связанные
с ней трудности изоляции и охлаждения.
Рис. 191. Цилиндрический линейный индукционный насос.
1 — индуктор с обмоткой; 2 — кольцевидный канал для жидкого метал-
ла; 3 — ферромагнитный сердечник.
Цилиндрический линейный индукционный насос
(рис. 191) по принципу действия аналогичен плоскому, но в от-
личие от него имеет трехфазную обмотку, расположенную в коль-
цевых пазах и лишенную лобовых частей, что исключает попе-
речный краевой эффект и уменьшает пульсацию поля. Поэтому
к. п. д. у цилиндрических насосов выше, чем у плоских, да и
производительность при напорах до 5—7 кГ1см2 больше.
Недостатками цилиндрических насосов являются сложность
изготовления и крепления внутреннего сердечника и невозмож-
ность съема индуктора для его ремонта без отсоединения на-
соса от трубопровода.
13 к. А. Чекуиов
370
Электроприводы вспомогательных, механизмов
[Гл. 10
Спиральный индукционный насос имеет индуктор,’ ана-
логичный статору асинхронного двигателя. В индуктор встав-
лена круглая труба со спиральным направляющим аппаратом
внутри. Работает этот насос также аналогично асинхронному
двигателю: жидкий металл, вращающийся по спирали внутри
трубы подобно ротору двигателя, выталкивается из сферы дей-
ствия вращающегося поля индуктора и тем создает необходи-
мый напор.
Рассмотрев принципы работы электромагнитных насосов, мы
смогли убедиться в том, что хотя они и являются разновид-
, ностыо электрических машин, но им присущ ряд специфических
особенностей, до конца еще не изученных. В настоящее время
принимаются меры по усовершенствованию электромагнитных
насосов и их внедрению как в установки с ядерными реакторами,
так и в другие области техники.
§ 66. Электроприводы вентиляторов, воздуходувок
и компрессоров
торы, рассчитанные на напор
Рис. 192. Центробежный вентиля-
тор-
Для перемещения на судах воздуха и газов применяются ме-
ханизмы, обеспечивающие весьма различные напоры: вентиля-
до 0,15 ат, воздуходувки с напо-
ром от 0,15 до 2—3 ат и ком-
прессоры с напором свыше 2—
3 ат.
Вентиляторы образуют наибо-
лее многочисленную группу судо-
вых механизмов с электрически-
ми приводами. В зависимости от
назначения различают:
а) вентиляторы, обслуживаю-
щие силовые установки судна и
предназначенные для поддержа- '
ния необходимой температуры и
состава воздуха в МКО, для обеспечения работы котлов и
для охлаждения работающих механизмов;
б) вентиляторы обслуживающие общесудовые нужды и обес-
печивающие работу системы кондиционирования на судне, об-
мен воздуха в помещениях и удаление вредных и взрывоопас-
ных газов из грузовых трюмов.
В судовых установках нашли себе наиболее широкое приме-
нение центробежные вентиляторы (рис. 192), выполненные
в виде улиткообразного корпуса 1, внутри которого помещено
лопастное колесо 2. У-небольших вентиляторов лопастное колесо
насажено непосредственно на вал приводного электродвигателя
3, а корпус вентилятора конструктивно выполнен за одно целое
§ «П
Электроприводы вентиляторов и компрессоров
371
с корпусом двигателя. По принципу действия вентилятор анало-
гичен центробежному насосу. Воздух засасывается, как указано
стрелками, в центр лопастного колеса и, попадая между лопа-
стей, под влиянием центробежных сил отбрасывается к перифе-
рии корпуса вентилятора. Здесь скорость преобразуется в на-
пор, с которым воздух подается в систему через патрубок.
Мощность Р (кет), потребляемая вентилятором, опреде-
ляется формулой:
102/; ’ ’ 7
где Q — производительность вентилятора, м21сек\
Н — давление или разрежение воздуха, мм вод ст. (или
кГ1м2);
ц — к. п. д. вентилятора, обычно равный 0,5—0,75.
Соображения по выбору приводного двигателя к вентилятору
аналогичны тем, которые были высказаны применительно
к центробежным насосам.
Воздуходувка — особый тип центробежного вентилятора, об-
ладающий более прочной конструкцией, что позволяет развивать
большие окружные скорости и создавать достаточно высокий
напор. Судовые воздуходувки обслуживают двигатели внутрен-
него сгорания и котельные установки.
Судовые компрессоры обеспечивают сжатым воздухом пуск
двигателей внутреннего сгорания, распыление топлива в них во
время работы. Используются воздуходувки в холодильных и
климатических установках, а также для снабжения сжатым
воздухом других судовых потребителей.
По принципу действия компрессоры делятся на поршневые и
турбокомпрессоры (центробежные). Наибольшее распростране-
ние в судовых установках получили поршневые компрессоры,
аналогичные по характеру работы поршневым насосам. Им
также свойственны тяжелые условия пуска, что необходимо учи-
тывать при выборе двигателя.
На судах с сетями постоянного тока для компрессоров выби-
рают двигатель со смешанным возбуждением, последовательная
обмотка которого способствует увеличению пускового момента
и сглаживанию пульсаций тока при нагнетании и всасывании
воздуха.
Если же судовая сеть работает на переменном токе, то для
получения больших пусковых моментов применяют асинхронные
двигатели с повышенным скольжением или с двойной клеткой
на роторе. В мощных установках на переменном токе можно уве-
личить пусковой момент и обеспечить плавность пуска, применив
асинхронные двигатели с фазным ротором.
13* <
372
Электроприводы вспомогательных механизмов
[Гл. 10
К изменению скорости вращения двигателя как к средству
регулировки производительности компрессора прибегают редко.
Чтобы поддерживать давление в заданных пределах, доста-
точно периодически включать и выключать компрессоры.
Теоретически мощность компрессора Р {кет) определяется
уравнением:
— Р = 0,0816<2Я, (362)
где Q — производительность компрессора, м?!мин-,
Н — давление, см вод. ст.
При выборе приводного двигателя к компрессору необходимо
также учитывать его механический к. п. д.
§ 67. Управление электроприводами вспомогательных
механизмов
В зависимости от задачи, поставленной перед электрифици-
руемой системой, управление электроприводом может быть не-
прерывным или дискретным.
Особенности схем управления электроприводами вспомога-
тельных механизмов определяются режимом их работы. Судо-
вые насосы, вентиляторы и компрессоры сравнительно редко
включаются, не требуют специальных способов торможения и
обычно работают без регулировки скорости. Важным отличием
приводов этих механизмов является отсутствие реверса электро-
двигателей, что упрощает схемы управления, сводя их назначе-
ние лишь к пуску, остановке и только в редких случаях — к не-
, значительному изменению скорости.
Двигатели насосов и вентиляторов мощностью до 1 кет
обычно пускаются в ход пакетными выключателями, более мощ-
ные двигатели — как вручную, так и автоматически. Ручной
пуск двигателей постоянного тока производится пусковыми
реостатами, асинхронных двигателей — магнитными пускате-
лями.
Регистр СССР требует дистанционного управления электро-
приводами вентиляторов, топливных и масляных насосов МКО,
а также общесудовой вентиляции и других вспомогательных
механизмов. Осуществляться дистанционное управление должно
из мест, легко доступных и находящихся вдали от помещений,
обслуживаемых вентиляторами и насосами. Особенно важно та-
,кое управление для пожарных, грузовых (на танкерах), бал-
ластных (на ледоколах) и других насосов. Осуществляется
дистанционное управление по схемам релейно-контакторного
типа, позволяющим производить автоматический пуск, остановку
и регулирование скорости в функции давления, уровня, темпера-
туры и других параметров.
§ 67]
Управление электроприводами
373
Автоматизация управления электроприводами вспомогатель-
ных механизмов повышает надежность их работы, облегчает
эксплуатацию, сокращает численность обслуживающего персо-
нала и, кроме того, позволяет уменьшить размеры и вес уста-
новки благодаря сокращению объема расходных цистерн. При-
нимая во внимание многочисленность насосов, вентиляторов и
компрессоров на судах, можно сделать вывод о важности ско-
рейшей автоматизации управления всеми электроприводами этих
механизмов.
Рис. 193. Схема автоматического и дистанционного управ-
ления электроприводом санитарного насоса на постоянном
токе.
Рассмотрим несколько типовых схем управления.
На рис. 193 приведена схема, позволяющая осуществить
дискретное автоматическое и дистанционное управление электро-
приводом санитарного насоса на постоянном токе. Электропри-
вод состоит из электродвигателя со смешанным возбуждением,
пускового СП и установочного СУ сопротивлений, кнопок управ-
ления, магнитной станции с линейным контактором Л, таймтак-
тором У, максимально-токовым реле РМ и другой аппаратуры.
Переход с дистанционного управления на автоматическое осу-
ществляется переключателем П. Чувствительным элементом
установки является манометрическое реле РД, смонтированное
в. верхней части герметически закрытой расходной цистерны.
При подаче напряжения на схему загорается белая лампа
ЛБ и получает питание удерживающая катушка таймтак-
тора У, предупреждающая его преждевременное срабатывание.
374
Электроприводы вспомогательных механизмов
[Гл. 10
Кнопочное дистационное управление наглядно видно из приве-
денной схемы. Поэтому рассмотрим лишь автоматическое управ-
ление, при котором П ставится в нижнее положение А.
По мере расхода воды уровень ее в цистерне понижается и
давление воздуха в верхней части цистерны становится ниже
заранее установленного предела (0,75 ат). В это время замы-
кается контакт РДт\ъ, и катушка линейного контактора полу-
чает питание. Контактор подключает к сети двигатель, который
разгоняется с включенным в цепь якоря сопротивлением СП.
По истечении выдержки времени таймтактора У сопротивление
СП шунтируется, и двигатель выходит на естественную харак-
й теристику. Окончание пуска
Рис. 194. Схема автоматического управ-
ления электроприводом санитарного на-
соса на переменном токе.
вызывает загорание зеленой
лампы ЛЗ и погасание бе-
лой лампы ЛБ.
Двигатель работает, по-
давая воду в цистерну до
тех пор, пока давление воз-
душной подушки над жид-
костью не достигает верх-
него предела (2,5—5 ат).
При этом размыкается кон-
такт РДтгх, и двигатель
останавливается. По мере
заполнения цистерны водой давление воздуха в ней увеличи-
вается. Чтобы предупредить отключение двигателя при непол-
ной цистерне контакт РДт;п шунтируется блок-контактом Л.
Схема предусматривает максимально-токовую и минималь-
ную защиту, а также защиту от коротких замыканий в цепях
управления и сигнализации.
На рис. 194 изображена схема электропривода санитарного
насоса на переменном токе. Насос приводится в движение асин-
хронным двигателем с короткозамкнутым ротором.
Управление — кнопочное дистанционное и дискретное автома-
тическое, осуществляемое с помощью манометрического реле.
Схема работает аналогично рассмотренной выше схеме электро-
привода на постоянном токе.
В установках большой мощности необходимо применять
схемы, способные ограничивать пусковые токи асинхронных дви-
гателей. Одна из таких схем показана на рис. 195. Основными
элементами схемы являются асинхронный двигатель с коротко-
замкнутым ротором, пусковые сопротивления, включенные в цепь
статора, магнитная станция и два кнопочных поста управления,
один из которых вместе с выключателем цепей управления ВУ
находится на магнитной станции. Система работает по разом-
кнутому принципу прохождения управляющего сигнала.
§ 67]
Управление электроприводами
375
Кроме того, в магнитной станции смонтированы: У— кон-
татор ускорения, включающий двигатель через пусковое
сопротивление; Л — линейный контактор, шунтирующий это со-
противление; РУ—реле ускорения, обеспечивающее необходи-
мую выдержку времени для .работы двигателя на пусковых со-
противлениях; РЛ — стопорное реле линейного контактора;
РБ — блокировочное реле, предназначенное для выключения
контактора У в случае отказа в работе линейного контактора Л.
Рис. 195. Схема
управления электроприводом насоса с огра-
ничением пусковых токов асинхронного двигателя.
Подача напряжения на магнитную станцию приводит к тому,
что загорается сигнальная лампа ЛЖ и получает питание реле
ускорения РУ, подготовляющее схему к действию.
При нажатии пусковой кнопки КП срабатывает контактор
ускорения У, включающий двигатель с введенными в обмотку
статора пусковыми сопротивлениями. Срабатывая, контактор У
обеспечивает шунтирование кнопки КП и разрывает цепь реле
РУ, которое своими размыкающими контактами с выдержкой
времени замыкает цепь стопорного реле РЛ. Реле срабатывает
и замыкает цепь катушки линейного контактора Л, который
шунтирует пусковое сопротивление и выводит двигатель на
естественную характеристику. О завершении пуска сигнализи-
рует лампа ЛБ.
Двигатель останавливают нажатием кнопки КС на одном
из постов управления.
376
Электроприводы вспомогательных механизмов
[Гл. 10
В электроприводах вспомогательных механизмов на судах
применяют и другие схемы управления, не отличающиеся боль-
шой сложностью.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Дайте определения основных параметров, характеризующих работу
вспомогательных механизмов (стр. 361 и 362).
2. Как классифицируются применяемые на судах насосы и вентиляторы
(стр. 362—365 и 370)?
3. Охарактеризуйте особенности выбора электродвигателей для судовых
насосов и вентиляторов (стр. 365, 366 и 371).
4. В чем состоит принципиальное отличие устройства и работы электро-
магнитных насосов от насосов обычного типа (стр. 366—370)?
5. Назовите типы электромагнитных насосов и охарактеризуйте особен-
ности их работы (стр. 366—370).
6. Каковы особенности схем управления электроприводами вспомогатель-
ных механизмов (стр. 372 и 373) ?
ЧАСТЬ ТРЕТЬЯ
ЭЛЕКТРОДВИЖЕНИЕ СУДОВ
ГЛАВА 11
ОБЩИЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ
ГРЕБНЫХ ЭЛЕКТРИЧЕСКИХ УСТАНОВОК (ГЭУ)
§ 68. Назначение и типы ГЭУ
Под электродвижением судов следует понимать их
движение, обусловленное использованием электрической энергии
гребными электрическими установками.
В состав гребных электрических установок входят:
а) первичный двигатель (дизель или турбина), приводящий
в движение главный генератор;
б) главньщ генератор, питающий электроэнергией гребной
электродвигатель;
в) гребной электродвигатель, непосредственно соединенный
с движителем;
г) движитель, сообщающий судну движение.
Гребные электрические установки классифицируются по роду
тока, типу первичного двигателя, назначению и другим при-
знакам.
По роду тока ГЭУ подразделяются на установки постоянного
и переменного тока. ГЭУ постоянного тока применяются на су-
дах, где требуется высокая маневренность и частые реверсы
гребного двигателя (ледоколы, китобойные суда и др.). ГЭУ
переменного тока применяются на судах, для которых наиболь-
шее значение имеет экономичность установки.
По типу первичного двигателя ГЭУ подразделяются на ди-
зель-электрические (ДЭГУ) и турбоэлектрические (ТЭГУ),при-
чем применяемый тип первичного двигателя во многом опреде-
ляет свойства ГЭУ.
На судах малого и среднего водоизмещения, как правило,
применяют двигатели внутреннего сгорания, к. п. д. которых
(т]дпз=0,34) выше к. п. д. других тепловых двигателей. Мощ-
ность дизеля и скорость, развиваемую им, регулируют, изменяя
количество подаваемого в цилиндры топлива. Осуществляют это
либо вручную, либо автоматическим регулятором вращения.
Зависимости эффективной мощности Ne и эффективного
момента вращения Ме двигателя от скорости вращения п при
378
Общие вопросы проектирования ГЭУ
[Гл. 1!
предельной подаче топлива называются внешними харак-
теристиками двигателя (рис. 196).
Аналогичные зависимости, полученные при меньшей подаче
топлива, называются частичными характеристи-
ками. Как на внешних, так и на частичных характеристиках,
момент почти не изменяется при изменении скорости вращения
дизеля. Допустимые перегрузки обычно не превышают 10—15%.
Номинальную скорость дизель развивает при предельной подаче
топлива. Дальнейшее увеличение скорости недопустимо как
из-за того, что приводит к повышенному износу и механическим
поломкам, так и из-за ограниченной скорости сгорания топлива
в цилиндрах. Поэтому при
скорости п— (1,1 -г- 1,15) пИ сра-
батывает предельный регуля-
тор, прекращающий подачу
топлива топливным насосом.
Крупные дизели снабжены,
кроме того, всережимными ре-
гуляторами, которые с помо-
щью специальной пружины
могут быть установлены на
Рис. 196. Внешние характеристики ди- любое значение скорости от
зеля. минимально-устойчивой до но-
минальной. При этом следует
иметь в виду, что уменьшение скорости вращения дизеля ведет
к повышению удельного расхода топлива и к снижению к. п. д.
всей установки.
ДЭГУ применяются как на постоянном, так и на перемен-
ном токе.
Тихоходные дизели большой мощности весьма громоздки,
быстроходные же обладают малым моторесурсом и ограничен-
ной мощностью. Поэтому крупные суда, да еще нуждающиеся
в паре для технологических нужд (например, для обработки
рыбы, промывки емкостей и пр.), обычно оборудуются неДЭГУ,
а ТЭГУ, чаще всего с паровой турбиной в качестве первичного
двигателя. В настоящее время начинают применять и газотур-
бинные установки, но широкого распространения они еще не
получили.
Скорость вращения судовых паровых турбин доходит до
10 000 об/мин-, с валом генератора они соединены зубчатым ре-
дуктором. ТЭГУ обычно работают на переменном токе, так как
это позволяет использовать особенно ценное свойство турбины,
заключающееся в способности изменять скорость в широких
пределах (от 100 до 25% пн) путем простого изменения количе-
ства (или качества) подаваемого пара. К-п. д. паровых турбин
обычно составляет 0,25. В отличие от дизелей, турбины допус-
§ 68]
Назначение и типы ГЭУ
379
кают перегрузку на 25—40% Рн, так как нормальный режим
работы турбины обеспечивается уже при неполном открытии
клапанов регулятора.
По назначению ГЭУ делятся на главные (или автономные),
вспомогательные и комбинированные.
В главных ГЭУ винт приводится в движение только от
гребных электродвигателей, питание которых электроэнергией
является единственным назначением главных генераторов.
Во вспомогательных ГЭУ, устанавливаемых на плав-
кранах, земснарядах и других судах технического флота, глав-'
ные генераторы питают: в процессе работы — двигатели основ-
ных производственных механизмов, а во время переходов — греб-
ные электродвигатели.
В комбинированных ГЭУ винт приводится во враще-
ние как главным первичным двигателем, так и электродвигате-
лем, потребляющим свободную мощность вспомогательных гене-
раторов. Дополнительный гребной электродвигатель в этом
случае используется либо в помощь основному двигателю (для
увеличения мощности на гребном валу и повышения скорости
хода судна), либо для самостоятельной работы на гребной винт
на малых ходах судна, невозможных при работе главного дви-
гателя.
От паровых и тепловых гребных установок ГЭУ отличаются,
как многими преимуществами, так и некоторыми недостатками.
Учет тех и других позволяет выбрать для каждого конкретного
случая оптимальный вид установки и определить наиболее эко-
номичный режим ее работы.
К преимуществам ГЭУ, обусловленным в основном от-
сутствием у них жесткой механической связи между первичным
тепловым двигателем и движителем, относятся:
а) свобода выбора на судне места для первичных агрегатов
и гребных электродвигателей, что облегчает рациональное раз-
мещение этого оборудования;
б) возможность использовать быстроходные нереверсивные
первичные двигатели;
в) сравнительно хорошие маневренные качества, обеспечи-
ваемые дистанционным управлением, а также автоматизацией
управления, защиты и контроля ГЭУ;
г) пригодность к работе на неполном числе первичных агре-
гатов при пониженных скоростях судна;
д) сравнительно высокая живучесть;
е) успешная работа силовых установок в тяжелых условиях
плавания судна, обеспечиваемая большой перегрузочной спо-
собностью электрических машин;
ж) возможность использовать главные генераторы для пита-
ния других электропотребителей судна.
380
Общие вопросы проектирования ГЭУ
[Гл. 11
К недостаткам ГЭУ, выявляющимся при сопоставлении
их с дизельными и паровыми установками, следует отнести:
а) сравнительно низкий к. п. д., что объясняется двойным
превращением энергии;
б) сравнительно высокие удельные вес и начальная стои-
мость (на единицу мощности);
в) сравнительная многочисленность обслуживающего пер-
сонала.
§ 69. Сопротивление воды и воздуха движению судов
На судно, неподвижно стоящее в воде, действуют силы дав-
ления, равнодействующая которых равна и противоположно на-
правлена весу судна. При движении судна равнодействующая
Рис. 197. Силы, дейст-
вующие на движущееся
судно.
сил давления Р отклоняется от вертикального направления,
а точка ее приложения смещается по ДП в направлении носо-
вой оконечности корпуса судна (рис. 197).
Равновесие системы не нарушится, если к центру тяжести
судна О приложить две противоположно направленные силы Pi
и Р2. равные по величине и параллельные силе Р. Полученная
таким образом пара сил Р—Pi создаст момент, вызывающий
дифферент на корму. Разложенная по взаимно перпендикуляр-
ным направлениям сила Р2 образует составляющие Q и R.
Вертикальная составляющая Q называется гидродина-
мической силой поддержания, а горизонтальная со-
ставляющая R, противоположная направлению движения судна,
называется сопротивлением воды.
Сопротивление воды движению судна R преодолевается:
у несамоходных судов — силой тяги, передаваемой через буксир-
ный трос, у самоходных судов — силой упора, развиваемой су-
довым движителем. Физическая сущность этого сопротивления
заключается в следующем. Корпус судна приводит в движение
окружающую его массу воды и, преодолевая силы инерции, со-
общает ей ускорение. Реакции сил инерции воспринимаются кор-
пусом как силы давления, а сумма их представляет собой со-
§ 69]
Сопротивление воды и воздуха движению судов
381
противление давления 7?д. Силы вязкости воды на границе с кор-
пусом создают касательные силы, сумма которых составляет
сопротивление трения 7?тр.
Таким образом, сопротивление воды движению судна сла-
гается из сопротивления трения и сопротивления давления, ко-
торое в свою очередь подразделяется на сопротивление формы
7?Ф и волновое сопротивление RB:
7? 7?тр += 7?тр + 7?Ф + 7?в. | (363)
Сопротивление трения 7?тр. Это сопротивление составляет
большую часть общего сопротивления воды движению судна.
Оно обусловлено тем, что прилегающая к корпусу судна масса
воды вследствие своей вязкости «прилипает» к корпусу и дви-
жется со скоростью движения судна. По мере удаления от кор-
пуса скорость воды уменьшается. Так, между различными
слоями жидкости возникает деформация сдвига, которая свиде-
тельствует о наличии сил трения.
Сопротивление трения 7?тр (кГ) можно определить по фор-
муле:
7? = (£ k +С )-^S , (364)
чтр \ тр. пл кр 1 'шер,/ g см ' 7
где £Тр.пл — коэффициент сопротивления трения для гладкой
пластины; £Тр.пл=0,0315 Re-0-145;
Re — число Рейнольдса; Re=nL/v;
и — скорость движения судна, м/сек;
L — длина судна по ГВЛ, м;
v — кинематический коэффициент вязкости воды; при
7=4° С коэффициент 1,57 • 10-6 м2/сек;
ЛКр — коэффициент кривизны, зависящий от отношения
длины L к ширине В судна;
LIB. . . 6 8 10 12
*кр. . . 1,04 1,03 1,02 1,01
£шер — коэффициент шероховатости корпуса судна; у свар-
ных судов £inep= (0,3-s-0,7) . 10 3;
q — плотность морской воды; q=104,8 кГ • сек2/м\
SCM— смоченная поверхность судна; определяется из урав-
нения (318).
При наличии выступающих из корпуса судна частей в фор-
мулу (364) вводят £в.ч= (0,2-н0,5) • 10-3.
Сопротивление формы 7?$. Оно возникает вследствие пере-
распределения давления, вызванного влиянием вязкости на по-
ток жидкости, обтекающей судно. Поэтому сопротивление фор-
мы является промежуточным между сопротивлением трения, за-
висящим исключительно от вязкости жидкости, и волновым
382
Общие вопросы проектирования ГЭУ
[Гл. 11
сопротивлением, зависящим только от разности давлений в раз-
личных зонах корпуса судна.
При движении судна скорость обтекающего его потока воз-
растает от носа к миделю, где становится максимальной, затем
убывает до ахтерштевня. Уменьшение скорости потока от ми-
деля к корме сопровождается постепенным увеличением давле-
ния в потоке. Вследствие этого частицы воды в пограничном
слое судна по мере удаления от миделя постепенно затормажи-
ваются, пока в некоторой зоне не изменяют направления дви-
жения.
Так у поверхности кормовой части судна образуются вихри
с отрывом жидкости от смоченной поверхности (рис. 198). На
Рис. 198. Схема вихреобразования у
кормовой поверхности судна.
Рис. 199. Волны, возникающие при
движении судна.
1 — носовые расходящиеся; 2 — носовые
поперечные; 3 кормовые расходящие-
ся; 4 — кормовые поперечные.
рисунке стрелками показаны направление и скорость частиц
жидкости относительно корпуса в пограничном слое судна; А—
точка отрыва, а кривая АБВ—линия нулевой скорости частиц
воды, или линия отрыва.
Энергия, затрачиваемая на вихреобразование, восприни-
мается как вихревое сопротивление, или сопротйвление формы.
Волновое сопротивление RB. Этот вид сопротивления возни-
кает под воздействием волн, которые образуются при движении
судна на свободной поверхности. Судно, перемещаясь, непре-
рывно вытесняет своим корпусом некий объем жидкости у но-
совой оконечности и освобождает такой же объем ее у кормы.
В результате образуются давления, которые в носовой части
больше, а в кормовой — меньше атмосферного. Это приводит
к изменению уровня свободной поверхности и дает начало вол-
нообразованию, которое поддерживается тем, что частицы воды
не успевают плавно обтекать корпус судна и под действием сил
тяжести совершают колебательные движения. Так образуются
волны, вызывающие дополнительные скорости обтекающего по-
тока. Это обусловливает перераспределение давления воды
вдоль смоченной поверхности судна и воспринимается как вол-
новое сопротивление.
§69]
Сопротивление воды и воздуха движению судов
383
Волны, образуемые движущимся судном, можно разделить
на две группы: носовую и кормовую. Волны первой группы за-
рождаются у форштевня, второй — у ахтерштевня. Каждая
группа состоит из системы расходящихся и системы поперечных
волн (рис. 199). Фронт расходящихся волн образует с ДП угол
а=2 р = 36-г-40°, поперечные волны располагаются под прямым
углом к ДП судна.
Определение сопротивления воды. Существует несколько ме-
тодов определения сопротивления воды движению судна. Наи-
более точен из них метод механического подобия Фруда, позво-
ляющий пересчитывать результаты испытаний модели на натуру
(судно). К сожалению, масштаб, принятый между моделью и
судном, нельзя сохранить для сопоставления вязкости двух сред
(жидкости опытового бассейна и морской воды). Поэтому спо-
собом моделирования пользуются ограничительно — лишь для
определения сопротивления давления. Сопротивление же трения
Ртр, зависящее от вязкости жидкости, определяют аналитиче-
ским путем.
Расчет начинают с того, что путем буксировки модели в опы-
товом бассейне определяют величину полного сопротивления
воды ее движению [6]. Затем находят гТр — сопротивление тре-
ния движению модели, для чего пользуются формулой:
Рим
г
' тр чтр 2
где £тр — коэффициент сопротивления трения для модели, а ин-
дексы «м» указывают на принадлежность параметра к модели.
Сопротивление давления в этом расчете обычно называют
остаточным и для модели определяют из выражения:
/'ост = '' —Пр- " (366)
Тогда остаточное сопротивление движению судна Рост будет:
W3> (367)
•%
где }. = Lll — модуль длины или масштабный коэффициент мо-
дели.
После этого, определив сопротивление трения для судна Ртр
из уравнения (364), находят R — полное сопротивление движе-
нию судна на тихой воде:
(363а)
Р РтР Т~ Рост*
Если почему-либо сопротивление движению судна не пред-
ставляется возможным определить при помощи модельных
испытаний, то приближенно, по методу Г. Н. Кабачинского,
384
Общие вопросы проектирования ГЭУ
[Гл. И
определяют 7?Ост (кГ) — остаточное сопротивление. Для этого
пользуются экспериментальной формулой:
Кост = срК2/3п-10“3, (368)
где с — коэффициент остаточного сопротивления, определяе-
мый по экспериментальным графикам Г. Н. Кабачин-
ского (для многих судов с=2-^4);
q — плотность жидкости, кГ • секР/м*;
V — объемное водоизмещение, м3;
v — скорость судна, м!сек.
Сопротивление трения Мр и полное сопротивление R опре-
деляются вышеизложенным методом.
Мощность Nr, необходимая для преодоления сопротивле-
ния R и сообщения судну скорости и, называется буксиро-
вочной и определяется в лошадиных силах:
(369)
/ о
Сопротивление воздуха движению судна RB3. Кроме сопро-
тивления, которое оказывает движению судна вода, при рас-
четах необходимо учитывать и сопротивление воздуха. Оно за-
висит от парусящей поверхности судна, скорости его движения,
скорости и направления ветра по отношению к направлению
хода судна.
Величину воздушного сопротивления RB3 (кГ) можно опре-
делить из выражения:
RB3 = свз с (370)
где сВз—безразмерный коэффициент, ориентировочно равный
для воздуха 0,8;
Qbs — плотность воздуха; рвз=0,122 кГ • сек2]mN,
^пар — парусящая поверхность судна, равная проекции его
надводной части на плоскость миделя, м2; может
быть определена из выражения (320);
V — скорость судна, м/сек;
ов — проекция скорости ветра на ДП, м/сек; знак плюса
берется при встречном, а знак минуса — при попут-
ном ветре.
Следует также иметь в виду, что при сильном ветре увели-
чивается волнение и соответственно возрастает площадь смо-
ченной поверхности корпуса судна. Это вызывает повышение
сопротивления воды движению судна, что учитывается введе-
нием в уравнение (364) коэффициента сопротивления на вол-
нении £„>= (0,1 -4-0,6) • Ю-3.
Судовые движители
38
§ 70. Судовые движители
Чтобы судно могло двигаться с определенной скоростью,
к нему надо приложить движущую силу (или силу тяги), рав-
ную и противоположно направленную сопротивлению воды и
воздуха. У самоходных судов эта сила называется упором и
создается движителем, который преобразует механическую
энергию первичного двигателя в энергию поступательного дви-
жения судна.
Судовые движители бывают двух типов: активные и реактив-
ные. Активные движители работают на принципе использова-
1 — выходящая кромка; 2 — засасывающая стенка; 3 — входя-
щая кромка; 4 — нагнетающая стенка.
ния активного действия воздуха. К ним относятся роторы и па-
руса. Действие реактивных движителей основано на отбра-
сывании проходящих через движитель масс воды в направле-
нии,' противоположном движению судна. Отбрасываемые назад
массы воды получают ускорение и создают силы реакции, кото-
рые воспринимаются судном как силы упора. К реактивным
движителям относятся весло, гребное колесо, гребной винт,
крыльчатый движитель, водометный движитель п др.
На подавляющем большинстве современных судов движи-
телями служат гребные винты. Они имеют более высокий к. и. д.
(до 0,75), меньшие размеры и легче подчиняются конструктив-
ным требованиям, нежели другие движители. Изготовляют
гребные винты из различных сортов латуни, а иногда из стали
или чугуна.
Гребной винт состоит из 2—6 крылообразных лопастей, ра-
диально укрепленных на ступице на равных угловых расстоя-
ниях друг от друга (рис. 200). В конструктивном отношении
винты бывают трех типов:
J86 Общие вопросы проектирования ГЭУ [Гл, И
а) с неотъемными лопастями;
б) с отъемными лопастями;
в) с регулируемым шагом (ВРШ)
Элементы и характеристики гребного винта. Размер греб-
ного винта характеризуется его диаметром D, под которым по-
нимают диаметр окружности, описываемой наиболее удален-
ными точками лопастей.
Площадь круга, образованного радиусом винта R при его
вращении, называется площадью диска винта. Важной
. геометрической характеристикой гребного винта является диско-
вое отношение &, под которым понимают отношение суммарной
площади всех лопастей А к площади диска винта:
& = t (371)
Часть лопасти, которая непосредственно соединена со сту-
. пицей, называется корнем лопасти.
Поверхность лопасти, обращенная при переднем ходе судна
в направлении движения, называется засасывающей (носо-
вой) стенкой (поверхностью), или с п и н кой лопасти.
Поверхность лопасти, обращенная к корме, называется н а -
гнетающей (кормовой) стенкой (поверхностью).
Линия пересечения засасывающей и нагнетающей поверх-
ностей (стенок) называется кромкой лопасти. Кромка ло-
пасти, обращенная в сторону вращения гребного винта, назы-
- вается входящей, противоположная — выходящей.
Если коаксиальными (соосными) цилиндрами с радиусами
г и r-1-dr вырезать из лопастей гребного винта, показанного на
рис. 200, элемент АВ высотой dr, а затем винтовую линию, со-
ответствующую одному обороту радиуса г, развернуть в пря-
мую, то мы получим прямоугольный шаговый треугольник с ка-
тетом в основании 2 л г и вторым катетом, равным геометриче-
скому (кромочному) шагу Н (рис. 201). При правом вращении
винта в твердой среде элемент лопасти ЛВ за один оборот пере-
местился бы в осевом направлении на величину геометрического
шага винта Н (в положение А'В'). Осевая скорость винта
в твердой среде выразится через скорость вращения п (об/сек)
произведением Нп.
При вращении в воде, допускающей перемещение отдельных
её частиц, винт за один оборот пройдет в осевом направлении
путь, меньший Н. Этот путь называется поступью винта hp.
Скорость осевого перемещения изолированного винта ир будет:
откуда hp = Vp/n.
vP = hpti,
(372)
§ 70]
Судовые движители
387
Разность между шагом винта Я и поступью hp называется
абсолютным скольжением гребного винта S:
S = H — hp. (373)
Отношение абсолютного скольжения S к шагу винта Н назы-
вается относ и тельным скольжением s:
Рис. 201. Геометрический шаг и поступь винта.
1 — нагнетающая стенка; 2 — засасывающая стенка.
Отношение поступи hp к диаметру гребного винта D назы-
вается относительной поступью гребного винта Кр:
. (375)
р D nD • v
Отношение шага Н к диаметру винта D носит название ша-
гового отношения.
Кривые действия гребного винта. Явления, происходящие
при взаимодействии лопастей винта с. набегающими струями
воды, легче понять, если рассмотреть лишь один элемент ло-
пасти и на основании этого сделать заключение о работе всей
лопасти и даже всего винта -в целом. Если представить рабо-
тающий винт неподвижным, то набегающие струи воды будут
направлены к элементу лопасти под некоторым углом а, назы-
ваемым углом атаки. При этом на элемент лопасти будут
действовать силы, показанные на рис. 202: dY — реакция воды,
представляющая собой подъемную или поперечную силу, на-
правленную перпендикулярно набегающей струе или движению
элемента лопасти; dX — лобовое сопротивление, направленное
против этого движения.
388
Общие вопросы проектирования ГЭУ
[Гл. 11
Возникновение подъемной силы dY объясняется тем, что ско-
рость потока воды на нагнетающей стенке лопасти умень-
шается, а на засасывающей увеличивается. На основании этого
в соответствии с законом Бернулли давление на нагнетающую
стенку будет больше, чем на засасывающую. Результирующая
давлений и представляет собой подъемную силу, направленную
в сторону меньшего давления.
Рис. 202. Режимы работы гребного винта.
/ — область работы гидравлическим двигателем (турбиной); II— об*
ласть парализованного состояния; III — область работы движителем.
Лобовое сопротивление dX обусловливается вязкостью жид-
кости. Силы dY и dX, изображенные на рис. 202, получены при
угле атаки «о- Если эти силы разложить по направлению дви-
жения судна и по перпендикулярному ему направлению, проти-
воположному вращению винта, то получим:
а) упор
dP = dPy — dPx; (376)
б) силу, препятствующую вращению винта,
dQ = dQy+dQx. (377)
Из полученных выражений следует, что упор создается подъ-
емной силой и уменьшается лобовым сопротивлением.
Как уже отмечалось, расстояние от рассматриваемого эле-
мента лопасти до оси винта равно г. Поэтому сила dQ создает
относительно оси винта момент, противодействующий враще-
нию элемента,
dM = dQ-r.
§ 70]
Судовые движители
389
Этот момент преодолевается вращающим моментом гребного
двигателя судна. Следовательно, для вращения винта с угловой
скоростью со гребной двигатель должен развивать мощность,
выражаемую в лошадиных силах по формуле:
N = . (378)
р 75 75 '
Если каждый элемент лопасти создает упор dP, то упор,
создаваемый всем винтом, будет Р. Под действием его винт ра-
зовьет поступательную скорость vp, и полезная мощность винта
определится в лошадиных силах как
= '• (379)
Упор Р и момент М при прочих равных условиях зависят от
угла атаки а. Если за счет действия внешних сил изменять ско-
рость осевого перемещения винта (на буксировочной тележке),
то при постоянной скорости вращения п будут изменяться на-
правление шаговой линии п величина поступи. Направление
шаговой линии определяется углом атаки а и соответствует
либо направлению встречных струй воды относительно приня-
того неподвижным винта, либо направлению движения элемента
лопасти в омывающем винт потоке. При этом будет изменяться
положение стенок лопастей винта относительно встречных струй
воды, а следовательно, будут изменяться скорость и давление
потока около этих стенок. Полученные давления вызовут соот-
ветствующее изменение велйчины и направления подъемной
силы dY.
Предположим, что поступь hp (см. рис. 202) соответствует
нормальному ходовому режиму работы винта, движуще-
гося со скоростью vp при числе оборотов п. В этом режиме
силы dY и dX будут иметь величину и направление, указанные
на рисунке.
С уменьшением поступательной скорости vp до нуля также
до нуля уменьшится поступь hp. Этот режим работы винта но-
сит название режима на швартовах и характеризуется
максимальными значениями упора и момента, противодейст-
вующего вращению.
При увеличении скорости vp угол атаки, подъемная сила dY,
лобовое сопротивление dX и, следовательно, упор dP и мо-
мент dM элемента будут непрерывно уменьшаться. При vp = Hn
и hp = H угол атаки а станет равным нулю, но iB виду несим-
метричности профиля лопасти подъемная сила еще не достигнет
нулевого значения. Дальнейшее увеличенйе скорости vp приве-
дет к тому, что угол атаки станет отрицательным и hp окажется
больше И.
390
Общие вопросы, проектирования ГЭУ
[Гл. II
При некотором отрицательном угле атаки и поступи Hi бу-
дем иметь dPy=dPx и тогда
dP — dPu — dPx — 0.
У Л
Полученный режим называется режимом нулевого
упора (Р=0), а поступь, соответствующая этому режиму,—
шагом нулевого упора Яь В этом режиме винт для своего
вращения требует приложения определенного вращающего
момента, но упора не соз-
дает, т. е. с этого времени
он перестает быть движи-
телем.
Дальнейшее увеличение
скорости vp и, следователь-
но, поступи Н приводит
к тому, что упор становится
отрицательным, так как
сила dPx будет больше силы
dPy, непрерывно уменьшаю-
щейся с уменьшением dY.
При некотором отрицатель-
ном угле атаки и поступи Но
подъемная сила dY стано-
вится равной нулю, а затем
изменяет свое направление
> на противоположное (от
' носовой стенки к кормовой). Отрицательный упор при этом все
время возрастает.
Теперь dQ—dQx—dQy и при некоторой поступи Н2 про-
екции сил dY и dX на горизонтальную ось становятся равными
друг другу. Тогда dQ = 0 и dM=dQ-r=0. Это значит, что
винт создает отрицательный упор, не требуя для своего враще-
ния затраты мощности. Этот режим называется режимом
нулевого момента, а поступь, соответствующая этому ре-
жиму,— шагом нулевого момента Н2.
Если продолжать увеличивать поступь свыше Н2, то dQy
превысит dQx и момент окажется направленным уже в сторону
вращения винта. Теперь винт при отрицательном упоре будет
создавать вращающий момент, работая в режиме гидравличе-
ской турбины (двигателя).
При изменении поступи винта от Я] (когда Р = 0) до Я2
(когда Л4 = 0) винт не может работать ни как движитель, ни
как двигатель.
Эту зону режимов проф. А. Ф. Брике предложил называть
паралем — областью парализованного состояния.
§ 70]
Судовые движители
391
Из рассмотренных режимов видно, что между упором, мо-
ментом и поступью существует определенная функциональная
связь. Это позволило для характеристики работы гребного
винта в различных режимах воспользоваться кривыми, выра-
жающими зависимость упора Р и момента М от поступи hp. Но
так как зависимость этих величин от геометрических размеров
винта делает неудобным пользование кривыми в абсолютных
единицах, то для расчета гребного винта вводятся понятия, ис-
пользованные на рис. 203:
циента упора винта k\
поступи Лр, коэффи-
(380)
и коэффициента момента винта k2
. м
=------
pn2D5
На этом же графике приведена кривая к. п. д. винта
*П. в _ Pvp ___________ krftl4)lVp __ lp
Np M 2-я /iaprt2/j52-n k2 2л ’
(381)
(382)
где p — плотность воды, кГ -сек2/м4-,
п — скорость вращения винта, об)!сек\ '
D — диаметр винта, м.
Зависимости k\, k2 и т)р от относительной поступи 7.т,
(рис. 203) называются кривыми действия гребного
винта.
Кавитация гребных винтов. Скорость вращения гребных
винтов быстроходных судов бывает настолько большой, что
потоки воды, обтекающей лопасти винта, достигают так назы-
ваемой критической скорости. При этом на засасывающей стенке
у входящей кромки лопасти давление снижается до значения,
которое при температуре окружающей среды имеют насыщенные
пары. В результате вода здесь вскипает, и образуется простран-
ство, заполненное парами вскипевшей воды и частицами воз-
духа и газов, растворенных в воде.
Явление вскипания воды на лопастях винта, сопровождаю-
щееся разрывом омывающего лопасти потока и образованием
полостей, заполненных парами и газами, называется кавита-
цией *. Различают две стадии кавитации, показанные на
рис. 204. На первой стадии кавитационной полостью охвачена
только часть спинки лопасти. В этой стадии кавитация не из-
меняет значений упора, момента и к. п. д. винта, но может
* От латинского слова cavitas — полость, пустота.
392
Общие вопросы проектирования ГЭУ
[Гл. 11
Рис. 204. Кавитация гребного вин-
та: а — первая стадия; б — вторая
стадия.
вызвать его быстрое разрушение в результате эрозии. Явление
эрозии наблюдается в месте замыкания кавитационной по-
лости и заключается в следующем. Пузырьки воздуха, попадая
в зону повышающихся давлений с, разрушаются и образуют
пустоту, в которую мгновенно устремляется вода. В результате
возникают гидравлические удары, вызывающие изъявление по-
верхности лопасти. Кроме того, при кавитации из воды выде-
ляется кислород, ускоряющий износ лопастей гребного винта.
Вторая стадия кавитации характеризуется тем, что полость
охватывает всю засасывающую поверхность лопасти и замы-
кается за ее пределами. Конден-
сация паров в полости происхо-
дит за пределами лопасти и по-
этому эрозии в этом случае не
происходит. Но в результате пе-
рераспределения давлений на
стенках лопасти во второй стадии
кавитации значительно уменьша-
ются упор, момент и к. п.д. греб-
ного винта.
Таким образом, кавитация —
явление вредное, для предупреж-
дения которого:
а) уменьшают удельное дав-
ление на лопастях винта путем
увеличения дискового отношения;
б) увеличивают глубину по-
гружения гребного винта;
в) выбирают оптимальный профиль сечения лопастей (умень-
шают их толщину);
г) придают судну плавные кормовые обводы.
§ 71. Взаимодействие винта и корпуса судна.
Пропульсивный к. п. д.
Полученные в предыдущем параграфе характеристики отно-
сятся к изолированному гребному винту. Установленный же на
судне винт работает в непосредственной близости к корпусу
судна и взаимодействует с ним. Это взаимодействие состоит,
во-первых, в возникновении попутного потока, уменьшающего
скорость подтекания воды к винту, во-вторых, в появлении силы
засасывания, увеличивающей сопротивление воды движению
судна.
При движении судна в воде часть жидкости, как уже упоми-
налось в § 70, «прилипает» к его поверхности и увлекается
вместе с судном в направлении его курса. Кроме того, в про-
странство, освобождаемое кормой, устремляется вода, образуя
§ 71\
Взаимодействие винта и корпуса судна
393
поток, направленный также в сторону движения судна. Такое
движение жидкости в сторону перемещения судна называется
попутным потоком.
Скорость попутного потока Ду выражается в долях скорости
судна v так называемым коэфффициентом попутного
потока w:
w = (383)
Величина w зависит от формы корпуса судна, размеров
винта и обычно принимается равной 0—0,2.
Винт относительно окружающей его массы воды движется
со скоростью vp, которую можно представить как разность ско-
ростей хода судна v и попутного потока До:
vp = v — До = v (1 — w), (384)
откуда абсолютная скорость судна, представленная через коэф-
фициент попутного потока, выразится формулой:
у=^£-
1 —W
(385)
Экспериментально установлено, что скорость попутного по-
тока на вертикальной линии диска винта больше, чем в точках
горизонтального диаметра диска. Поэтому каждая лопасть в те-
чение одного оборота будет попадать в зоны с различной ско-
ростью попутного потока и, стало быть, подвергаться различ-
ным давлениям. В этом — дополнительная причина вибрации
корпуса судна.
Гребной винт, работающий вблизи корпуса судна, засасы-
вает воду из-под кормы судна и отбрасывает ее назад, в резуль-
тате чего уменьшается давление воды на кормовую часть судна.
А так как давление в носовой части при этом остается неиз-
менным, то появляется дополнительная сила, действующая на
корпус судна в направлении, противоположном его движению.
Эта сила называется силой засасывания (обозначим ее
через Л/?).
Таким образом, сила упора Р гребного винта затрачивается
как на преодоление буксировочного сопротивления судна без
винта R, так и на преодоление силы засасывания Д/?:
Р = Я + ДЯ. (386)
Часть упора, идущая на преодоление буксировочного сопро-
тивления R, называется полезной тягой Ре- Часть же упо-
ра, идущую на преодоление силы засасывания AR, обозначим
394 Общие вопросы проектирования ГЭУ [Гл. И
через ДР. Тогда упор Р, создаваемый винтом, можно пред-
ставить как сумму:
Р = Рел-\Р. (387)
Силу засасывания обычно выражают в долях упора в виде
отношения:
t = . (388)
Это соотношение называют коэффициентом засасыва-
ния. Величина его, зависящая от формы кормовой оконечно-
сти судна, расстояния винта от корпуса судна и режима ра-
боты, колеблется в пределах от 0,02 до 0,3.
Через коэффициент засасывания полная сила упора выра-
зится как:
(389)
Степень эффективности работы гребного винта за кормой
судна определяется пропульсивным * к. п. д., который, таким
образом, является мерой совершенства движительного (про-
пульсивного) комплекса судна, состоящего из гребного двига-
теля, движителя и корпуса судна. Пропульсивный к. п. д. вы-
ражается отношением мощности буксировки (тяги) NR к мощ-
ности, подведенной к винту (затраченной мощности) Np
(390)
Поскольку
^ = ^1-, . (391)
a Np определяется выражением (378), пропульсивный к.
будет:
РеС'
7) = ---- .
2тчгА1
П. Д.
(392)
Подставив в уравнение (392) значение v из выражения
(385) и : Pe = P(\-t), (393)
получим: tj = • -1—£., ' (394) 2л/гЛ4 1 — w
От английского слова propulsion — продвижение, движение вперед.
§ 72]
Механические характеристики винта
395
Pv„
где —с— — т]„ — к. п. д. изолированного винта, определяемый
2~пМ
по выражению (382);
-—— = ек — коэффициент влияния корпуса судна, равный
0,95^1,1.
Следовательно, пропульсивный к. п. д. можно выразить как:
= МР- (395)
Неравномерность потока воды при различных положениях
лопастей гребного винта но отношению к обводам корпуса
судна учитывают по предложению Фруда, вводя в формулу
пропульсивного к. п. д. множитель i=0,97-r-1,0.
Тогда окончательное выражение для пропульсивного к. п. д.
примет вид: -
г ч = - (396)
§ 72. Механические характеристики винта
Как уже отмечалось в § 5, механические характеристики
исполнительных механизмов имеют, наряду с характеристиками
электродвигателей, важное значение для рассмотрения различ-
ных режимов работы электропривода. При проектировании
ГЭУ наибольший интерес представляют рабочие и реверсивные
характеристики винта. Они, как и все механические характери-
стики, являются статическими, т. е. в них каждая точка кривой
соответствует «своей», вполне установившейся скорости движе-
ния судна и определяющей ее скорости вращения винта.
Рабочие характеристики винта. Рабочей характеристикой
винта называют зависимость момента сопротивления винта М
от скорости его вращения п при неизменном направлении дви-
жения и определенных условиях плавания судна. Из уравне-
ния (381) следует, что зависимость М от п при постоянстве
остальных величин представляет собой квадратичную параболу:
М = сп2. (397)
Однако правильной эту квадратичную зависимость можно
считать только на небольшом участке рабочей характеристики
(лишь при незначительном изменении скорости п). Если же
скорость вращения винта п изменять в значительных пределах,
то будут заметно меняться как скорость хода судна, так и
поступь винта, что в соответствии с кривой действия гребного
винта (рис. 203) вызовет изменение коэффициента момента
k%. Таким образом, в уравнении (397) коэффициент с не будет
396
Общие вопросы проектирования ГЭУ
[Гл. И
величиной постоянной, а это означает, что строго параболиче-
ская зависимость не выдерживается.
Расчет ГЭУ основывается на использовании следующих ха-
рактеристик:
а) основной, снимаемой при номинальной осадке и свобод-
ном движении судна в спокойной воде (кривая 1 на рис. 205);
б) швартовной, снимаемой при неподвижном судне (кри-
вая 2 на рис. 205).
Как уже отмечалось, в режиме на швартовах момент сопро-
тивления гребного винта будет максимальным. Если гребной
двигатель в этом режиме разо-
вьет номинальную скорость, то
момент на его валу значительно
превысит номинальное значение.
Кроме того, при расчете ГЭУ
важны:
для ледоколов — ледовая ха-
рактеристика, получаемая при
ходе судна во льдах (кривая 3
на рис. 205);
для буксиров — буксировоч-
ная характеристика, получаемая
при ходе судна с возом (кривая 4
на рис. 205).
По характеру работы винтов
в этих режимах две последние
характеристики являются проме-
жуточными между основной и
швартовной характеристиками.
Рис. 205. Рабочие характеристики
винта.
Танкеры, лесовозы и некоторые другие суда, в обратный
рейс обычно идут порожняком. При этом уменьшается осадка
судна и сопротивление воды его движению. Такому режиму со-
ответствует на рис. 205 кривая 5. При тех же скоростях мо-
менты сопротивления на винте, работающем по этой кривой,
будут сравнительно невелики. А это означает, что рабочая ха-
рактеристика винта при ходе судна порожняком в спокойной
воде окажется ниже основной и других рабочих характеристик.
Реверсивная характеристика винта. Реверсивной характери-
стикой винта называют зависимость момента сопротивления
винта М от скорости его вращения п при реверсе гребного дви-
гателя, вызывающем изменение направления вращения винта
при неизменном поступательном движении судна. Не следует
смешивать реверс гребного двигателя с реверсом судна, т. е.
с маневром, при котором направление движения судна вперед
изменяется на противоположное благодаря изменению направ-
ления упора гребного винта. Реверс гребного двигателя
§ 72]
Механические характеристики винта
397
осуществляется за несколько секунд, тогда как реверс крупных
судов длится несколько минут. Поэтому для целей общего ис-
следования будем считать, что каждая /реверсивная характе-
ристика соответствует некоторой
судна вперед (рис. 206).
При работе в режиме на
швартовах, т. е. когда ско-
рость движения судна равна
нулю (v — 0), тормозной мо-
мент гребного винта изме-
няется в зависимости от
числа оборотов и от направ-
ления вращения винта по
симметричной кривой, яв-
ляющейся швартовной ха-
рактеристикой 2 на рис. 205.
Кривая 3 на рис. 206 со-
ответствует реверсу греб-
ного винта при постоянной
полной (он) скорости хода
судна вперед. Реверсивная
характеристика для этого
случая располагается в трех
квадрантах, причем участок
АБ соответствует работе
винта в режиме движителя,
участок БГ — в режиме гид-
равлического двигателя
(турбины), участок ГД —
в режиме гидравлического
тормоза. Эта характери-
стика показывает, что после
неизменной скорости хода
Рис. 206. Реверсивные характеристики
винта.
выключения гребного двигателя (Л1==0) винт будет замед-
ляться до скорости пБ =73% от номинальной (точка Б). Чтобы
затормозить винт до полной остановки, необходимо приложить
момент, достигающий 96% от номинального при скорости
пв=35% (точка В). Чтобы удерживать винт в неподвижном
состоянии, нужно приложить момент, равный 40% от номиналь-
ного (точка Г). При разгоне винта в обратную сторону (ре-
версе) до скорости 35% пн потребовался бы момент, равный
номинальному; при разгоне до скорости 60% ин—момент, рав-
ный двойному значению номинального.
Для скорости хода судна'v<vn реверсивные характеристики
на графике располагаются аналогично кривой 3, но начинаются
они в точках «ь а2 и as, лежащих на основной рабочей харак-
теристике 1.
398
Общие вопросы проектирования ГЭУ
[Гл. 11
Несмотря на то, что длительности процессов реверса винта
и судна различны в реальных условиях скорость движения
судна при реверсе не остается постоянной, к тому же скорость
реверса гребного двигателя поддается регулировке по желанию
оператора. В случае значительного снижения скорости хода
судна винт будет работать с постоянным переходом с кривой
3 на кривые, соответствующие меньшим скоростям судна. Этот
процесс на графике изображен кривой 4.
§ 73. Выбор основных параметров ГЭУ
' Проектирование ГЭУ требует последовательного выбора:
а) типа ГЭУ;
б) рода тока, величины напряжения и частоты;
в) числа и мощности гребных электродвигателей;
г) оптимальной скорости вращения; <
д) главных генераторов;
' е) схемы и основных аппаратов главного распределитель-
ного устройства;
ж) вспомогательных механизмов собственных нужд ГЭУ.
Выбор типа ГЭУ. Тип ГЭУ вибирают, сравнивая статические
данные или приближенные расчеты основных параметров греб-
ных установок.
ДЭГУ предпочтительны при небольших мощностях, так как
имеют в этом случае меньший вес и меньшую стоимость, боль-
шую компактность, более высокий к. п. д., большую живучесть
и, наконец, отличаются более быстрой готовностью к пуску,
нежели ТЭГУ. Последние же, напротив, предпочтительнее при
больших мощностях, так как в этом случае они меньше весят,
дешевле стоят, более компактны и долговечны.
Выбор рода тока, величины напряжения и частоты. Посто-
янный ток предпочтительнее тем, что создает удобства в управ-
лении и повышает маневренные качества ГЭУ. Переменный же
ток способствует улучшению таких показателей ГЭУ, как вес
и стоимость установки, к. п. д., расход топлива, компактность,
надежность действия и простота обслуживания.
Напряжение определено для ГЭУ Правилами Морского Ре-
гистра СССР: номинальное напряжение главных цепей ГЭУ
постоянного тока — не более 1200 в; номинальное линейное на-
пряжение главных цепей ГЭУ переменного тока — не более
6300 в; номинальное напряжение возбудителей ГЭУ — не более
.230 в; напряжение цепей управления, сигнализации, защиты и
т. п. — не более 220 в постоянного тока и не более 380 в пере-
менного тока.
Применять в ГЭУ постоянного тока более высокие напря-
жения нельзя из-за наличия у машин постоянного тока коллек-
Выбор основных параметров ГЭУ
399
торов. При низких же напряжениях в установках большой мощ-
ности сечения проводов электрических машин и кабелей полу-
чаются слишком большими, что ограничивает мощность уста-
новки.
При выборе напряжения для ГЭУ переменного тока исходят
из максимально допустимых значений тока в фазах гребного
электродвигателя, которые не должны превышать 1500 а в ГЭУ
малой мощности и 2500 а в ГЭУ большой мощности.
Правила Регистра СССР рекомендуют для основного ре-
жима работы ГЭУ выбирать стандартную частоту 50 гц.
Выбор числа и мощности гребных электродвигателей. Рас-
чет и выбор гребного электродвигателя основываются на опре-
делении буксировочной мощности. Если определить сопротив-
ление воды и буксировочную мощность способами, рассмот-
ренными в § 69, почему-либо невозможно, то пользуются одним
из приближенных методов (Папмеля, адмиралтейских коэффи-
циентов или Эйра). Все эти методы основаны на использовании
диаграмм и графиков, полученных при обработке результатов
большого количества экспериментов по определению сопротив-
ления воды движению судов.
Э. Э. Папмель предложил следующую формулу для опреде-
ления буксировочной мощности Nr (в лошадиных силах) судов
нормальных обводов при заданной скорости хода щ (в узлах) :
V с3 х -—
N„~ —----s- • — • у 6. (398)
Я L с \ ‘ ’
где У — объемное водоизмещение, лг!;
с — эмпирический расчетный коэффициент, находимый по
диаграмме, показанной на рис. 207;
х — множитель, зависящий от числа валов;
Число валов 12 3 4
г Значение х 1 1,05 1,075 1,1
X — поправочный множитель на длину судна; Х=0,7 +
+ 0,31/17100; при Г^ЮО м принимается Х=1,0;
ф — характеристика остроты корпуса судна; ф=106пВ/£;
6п — коэффициент общей полноты судна; bv,==V!LBT.
По полученному значению буксировочной мощности NR оп-
ределяют мощность на валу гребного двигателя Рдв, причем
порядок расчета может быть следующим.
1. Буксировочное сопротивление R или равная ему полезная
тяга Ре (кГ)
75АШ .
Ре-------,
е v
где о = 0,515 vs (м/сек) *. \
* 1 узел = 1 ми.чя/ч = 1852 л/3600 сек = 0,515 м/сек.
у \
Рис. 207. Диаграмма Папмеля для расчета буксировочной мощности судов.
Общие вопросы проектирования ГЭУ [Гл. 11
§ 73]
Выбор основных параметров ГЭУ
401
2. Коэффициент попутного потока w по эмпирическим фор-
мулам Тейлора:
tt?i=0,5 6п — 0,10 (для одновинтовых судов);
ш2=0,5 6п — 0,16 (для двухвинтовых судов).
3. Коэффициент засасывания t по формулам Шенхерра: для
одновинтовых судов
/х = kWlf i
где £=0,5-i-0,7 (для судов с обтекаемыми рулями);
k=0,Э-s- 1,05 (для судов с пластинчатыми рулями).
для двухвинтовых судов
/2=0,25 ш2 + 0,14 (для судов с валовыми рукавами);
4=0,7 + 0,06 (для судов с кронштейнами гребных валов).
4. Полная сила упора Р (кГ), создаваемая гребным винтом,
1 — t *
5. Оевая скорость винта ир (м/сек) относительно обтекаю-
щих струй воды
цр = ц(1— ш).
6. Диаметры гребных винтов из условий размещения в кор-
мовом подзоре
= (0,6 -5- 0,75) Тк (для одновинтовых судов);
£>2= (0,6 -ь0,7) Тк (для двухвинтовых судов),
где Тк — осадка судна кормой, м.
7. Выбрав скорость вращения винта п (см. ниже) и опреде-
лив по уравнению (375) и £i по уравнению (380), находят
с помощью вспомогательной диаграммы Э. Папмеля [6] к. п. д.
изолированного винта t]p—f (£Р, ki).
8. Пропульсивный к. п. д.
1 — t .
Ч^Чр-.-----l-
1 — ЙУ
9. Мощность, подводимая к гребному винту,
ХР = -^-. . (399)
10. Знание к. п. д. валопровода г]в = 0,95 -5-0,98 позволяет
определить мощность на валу гребного электродвигателя
' <400>
чв
14 К. А. Чеку нов
402
Общие вопросы проектирования ГЭУ
[Гл. И
По полученному значению мощности Рдв выбирают число,
тип и мощность гребных двигателей.
Выбор типа гребных электродвигателей в ГЭУ постоянного
тока состоит в основном из определения типа корпуса двига-
теля, числа якорей, характера возбуждения и средств улучше-
ния коммутации.
Тип корпуса определяется принятой системой вентиляции и
числом якорей электродвигателя. Для принудительной венти-
ляции по замкнутому циклу выбираются закрытые двигатели,
а при разомкнутом цикле охлаждения — двигатели открытого
исполнения.
Одноякорные двигатели предпочтительнее двухякорных тем,
что обладают меньшими весом, объемом и длиной, а также
позволяют упростить распределительное устройство.
Выбор же двухякорного двигателя оправдывается в тех слу-
чаях, если одноякорный двигатель не удается по конструктив-
ным соображениям разместить в корме судна или если необ-
ходимо обеспечить повышенную живучесть судна, пониженное
напряжение на коллекторе или экономичные хода при мощ-
ности на гребных валах, не превышающей 25% мощности пол-
ного хода.
Возбуждение двигателей обычно независимое.
Чтобы улучшить условия коммутации, выбирают двига-
тели с дополнительными полюсами и компенсационной обмот-
кой. Число гребных двигателей обычно равно числу гребных
валов.
Определение оптимальной скорости вращения гребного дви-
гателя. Одновременно с расчетом мощности на валу гребного
двигателя определяют и его скорость вращения п, причем ее
оптимальное значение выбирают в зависимости от конкретных
обстоятельств из условий;
а) максимального к. п. д. установки или минимального рас-
хода топлива;
б) минимального веса установки;
в) минимальных первоначальных затрат на оборудование
ГЭУ;
г) минимальных годовых эксплуатационных расходов.
На судах гражданского флота наиболее важным показа-
телем работы ГЭУ часто бывает экономия топлива при
полном ходе судна. Поэтому оптимальную скорость гребного дви-
гателя рационально определять из условий получения макси-
мального к. п. д. гребной установки. Методика такого определе-
ния, предложенная В. И. Полонским, заключается в сле-
дующем.
Вращаясь со скоростью п, соответствующей максимальному
к. п. д., винт сможет обеспечивать постоянную скорость, хода
§ 73]
Выбор основных параметров ГЭУ
403
судна, если потребляемая им мощность Np (как функция скоро-
сти вращения) будет равна
N
КР = ------------------21---, (401)
1 1 / nri
cos2 --arc cos 0,039л 1/ —5-(-120°
L3 x " vp J
где NRl — буксировочная мощность на одном гребном валу.
С другой стороны, мощность гребного двигателя, габариты
которого выбраны в соответствии с размерами машинного по-
мещения и всегда должны оставаться постоянными, изменяется
пропорционально скорости вращения винта:
Р = . (402)
Дв ас v 7
Здесь Da — диаметр ротора (якоря) электродвигателя, ориенти-
ровочно определяемый для машин постоянного тока из соотно-
шения:
Da = (0,63 :-0,68)0,
где D = 2y^ ga-p, см;
g — относительный вес гребного двигателя, равный 7—
12 кг/л. с.;
р — число пар полюсов;
а — отношение диаметра ротора (якоря) к длине его ак-
тивного железа (Dalla); для двигателей постоянного
тока а—1,25-т-2,0; для двигателей переменного тока
а=2,0-*- 2,2;
с — машинная постоянная гребного электродвигателя, зна-
чение которой берется из табл. 14.
К. п. д. комплекса винт — гребной двигатель т]в. дв=т]вТ]дв
получается максимальным, если максимален к. п. д. винта
т]в, поскольку к. п. д. гребного двигателя т]дв в диапазоне ра-
бочих скоростей можно считать постоянным. К. п. д. винта уве-
личивается с уменьшением скорости вращения, но уменьшать
последнюю можно лишь до тех пор, пока мощность, развивае-
мая гребным двигателем, не снизится до значения мощности,
потребляемой винтом.
Если в одних осях координат построить зависимости Np =
—fi(n) и PKB=f2(n), то точка их пересечения А, очевидно, оп-
ределит установившийся режим работы с оптимальной ско-
ростью вращения /г(,пт гребного двигателя (рис. 208).
Выбор главных генераторов. Конструктивное исполнение
корпуса главных генераторов должно быть брызгонепроницае-
мым или водозащищенным с вентиляцией по замкнутому или
по разомкнутому циклу.
14*
404
Общие вопросы проектирования ГЭУ
[Гл. 11
Таблица 14
Мощность гребного двигателя, л. с. D2alan . Машинная постоянная с = 10 ’ Гдв
для двигателей
синхронных асинхронных постоянного тока
1 000 2 000 3 000 5 000 7 500 10 000 28,0 24,2 21,6 18,6 17,2 16,0 36,6 29,4 25,8 21,0 19,0 18,3 40,0 32,4 28,4 23,0
Число главных генераторов будет выбрано правильно, если
удастся обеспечить высокий к. п. д. установки и ее небольшую
стоимость, простоту обслуживания и надежность работы.
р N В ГЭУ постоянного тока мощностью
’ более 2000 л. с. обычно устанавливают
/ два генератора и более, а в ГЭУ пере-
———Ир менного тока мощностью до 4000—
.Л] 5000 л. с.— один генератор.
/ J Мощность главных генераторов оп-
/ J ределяют по мощности гребных элек-
/ । тродвигателей и числу генераторов.
Р / \ Скорость вращения генераторов выби-
пст п рают в соответствии со скоростью
Рис. 208. К определению оп- первичных двигателей.
тимальной скорости враще- Схемы главных и вспомогательных
ния гребного двигателя. цепей ГЭУ будут рассмотрены в сле-
дующих главах.
Электрические аппараты главных распределительных уст-
ройств ГЭУ подразделяются на две группы: а) аппараты без
подвижных контактов и б) .коммутационные аппараты. Первые
надо выбирать по рабочему напряжению и току, а затем про-
верять на термическую и динамическую устойчивость при сквоз-
ных токах короткого замыкания, вторые — так же, но сверх
того еще и по их коммутационной способности.
Работу основных агрегатов ГЭУ обслуживают вспомогатель-
ные электромеханизмы собственных нужд, к которым относятся
насосы и вентиляторы. Выбор их заключается в определении
числа и мощности механизмов каждого типа.
§ 74]
Структура ГЭУ и схемы главного тока
405
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Сравните показатели работы главных, вспомогательных и комбиниро-
ванных ГЭУ (стр. 379).
2. Объясните характер составляющих сопротивления воды движению
судна (стр. 380—382).
3. Укажите на рис. 202, чему равны углы атаки при различных режимах
работы винта.
4. С помощью векторных диаграмм изобразите силы, действующие на
винт в режимах нулевого упора и нулевого момента (стр. 387—390).
5. Иногда на лопастях винта сверлят отверстия, предназначенные для
борьбы с кавитацией. Объясните положительное и отрицательное действие
этих отверстий (стр. 391 и 392).
6. Дайте ваши рекомендации по улучшению взаимодействия винта
с корпусом судна (стр. 392—395).
7. Пользуясь рабочей характеристикой винта, определите оптимальный
режим работы ГЭУ (стр. 395 и 396).
8. На основании реверсивных характеристик винта предложите наибо-
лее эффективный режим реверса ГЭУ (стр. 396—398).
9. Выберите основные параметры ГЭУ сухогруза и ледокола (стр. 398—
404).
ГЛАВА 12 ' ,
ГРЕБНЫЕ ЭЛЕКТРИЧЕСКИЕ УСТАНОВКИ
ПОСТОЯННОГО ТОКА
§ 74. Структура ГЭУ и схемы главного тока
ГЭУ постоянного тока применяются главным образом на
судах, которые должны обладать высокой маневренностью.
Такие ГЭУ обеспечивают:
а) простоту дистанционного управления;
б) полное использование машин при работе ГЭУ в различ-
ных условиях плавания судна;
в) легкость и плавность регулирования скорости в широких
пределах.
В качестве первичных двигателей в ГЭУ постоянного тока
обычно применяют дизели. Порядок выбора мощности основных
элементов ДЭГУ наглядно виден из рис. 209.
Если определенная расчетом мощность Ne окажется слиш-
ком большой, то выбирают несколько первичных двигателей
(дизелей). В этом случае число дизель-генераторов тд_г одно-
вальной гребной установки составит:
где Nei — мощность одного выбранного по каталогу первичного
двигателя.
Таким образом, на один гребной двигатель может работать
несколько - дизель-генераторов, что позволяет использовать
406
ГЭУ постоянного тока
[Гл. 12
быстроходные дизели, имеющие малый вес и габариты, но об-
ладающие ограниченной мощностью. Соединять генераторы
в этом случае можно как параллельно, таки последовательно. По
соображениям, изложенным в § 73, иногда устанавливают ко
два гребных двигателя на один винт.
Различные варианты схем включения главных генераторов
и гребных электродвигателей (их называют схемами глав-
ного тока) приведены на рис. 210.
Рис. 209. Структура ДЭГУ постоянного тока.
1 — двигатель внутреннего сгорания; 2— главный генератор; 3 — гребной
двигатель; 4 — вал движителя.
—индикаторная мощность, определяемая работой газов в цилиндрах
двигателя внутреннего сгорания; Np — эффективная мощность, т. е. мощ-
ность на фланце коленчатого вала двигателя; Рг—мощность главного
генератора; Рдв—мощность гребного двигателя; N р~ мощность на валу
движителя (в непосредственной близости к винту); буксировочная
мощность, идущая на создание полезной тяги; Ne^.—механиче-
ский к. п. д, двигателя внутреннего сгорания; *»]г—к. п. д. генератора;
с*~К п' д‘* Учитывающий потери в электрической сети от главного
генератора до гребного двигателя; Чдв—к. п. д. гребного двигателя:
— к. п. д. валопровода; tq — пропульсивный к. п. д.
При последовательном соединении генераторов в любом
режиме работы ГЭУ каждый из работающих дизель-генера-
торов развивает мощность, равную номинальной (полностью
используются генератор и его первичный двигатель), а гребной
электродвигатель получает мощность, равную сумме номиналь-
ных мощностей работающих генераторов.
В процессе эксплуатации нередко возникает необходимость
отключить один или несколько агрегатов. В случае параллель-
ного соединения главных генераторов это заставляет снизить
напряжение оставленных в работе машин, ибо в противном слу-
чае, т. е. при неизменном номинальном напряжении, гребной
двигатель и винт будут вращаться с прежней скоростью и тем
вызовут перегрузку включенных генераторов и их первичных
двигателей. Таким образом, в рассмотренном случае работаю-
щие агрегаты (генераторы и первичные двигатели) будут ис-
§ 75]
Режимы экономичного хода и аварийный
407
пользоваться не полностью, а мощность, подводимая к электро-
двигателю, окажется меньше мощности, которую он потребляет
в аналогичных условиях при последовательном соединении ге-
нераторов. Кроме того, при параллельном соединении токи
между генераторами распределяются неравномерно из-за раз-
личия их внешних характеристик и неодинаковых скоростей
вращения первичных двигателей. Поэтому параллельное соеди-
нение генераторов широкого распространения не имеет.
Параллельное соединение гребных электродвигателей, нахо-
дящихся на одном валу, не применяется вовсе, так как расхож-
Рис. 210. Схемы главного тока одновальных ГЭУ постоянного
тока: а — установка с одним генератором; б — последовательное
соединение генераторов; в — параллельное соединение генерато-
ров; г — попеременно-последовательное соединение генераторов
и гребных электродвигателей.
дение Их характеристик холостого хода исключает возможность
равномерного распределения токов нагрузки. Этот недостаток
устраняется при последовательном соединении электродвигате-
лей. А для того чтобы напряжение между двумя любыми точ-
ками схемы не превышало напряжения одного генератора, при-
меняют так называемое попеременно-последовательное соедине-
ние генераторов и электродвигателей (рис. 210, г).
§ 75. Режимы экономичного хода и аварийные
Режимом экономичного хода называют режим ра-
боты ГЭУ при ходе судна с пониженной скоростью. Для пере-
хода на этот режим отключают один или несколько дизель-ге-
нераторных агрегатов ГЭУ. При уменьшении скорости хода
судна мощность, необходимая для его движения, резко сни-
жается (РвЕп3); соответственно уменьшается и расход топлива.
Аварийный режим возникает при вынужденной оста-
новке первичного двигателя. Таким образом, от режима эконо-
мичного хода он отличается только причиной, которая вызвала
отключение дизель-генераторйых агрегатов.
408
ГЭУ постоянного тока
[Гл. 12
В ДЭГУ постоянного тока широкое распространение имеет
схема, изображенная на рис. 211. Специальными кулачковыми
контроллерами, называемыми селекторными (избира-
тельными) переключателями, производят набор схемы
для различных режимов работы ГЭУ. В приведенной схеме
с помощью двух одинаковых переключателей 1ПГ и 2ПГ, уста-
навливаемых в различные положения (см. таблицу замыкания
контактов), можно набрать шесть режимов с 33 вариантами
схемы включения;
1) работа четырех генераторов на оба якоря гребного дви-
гателя (1 вариант);
2) работа любых трех генёраторов на оба якоря гребного
двигателя (4 варианта);
3) работа любых двух генераторов на оба якоря гребного
двигателя (6 вариантов);
4) работа любого одного генератора на оба якоря гребного
двигателя (4 варианта);
5) работа двух генераторов на один якорь гребного двига-
теля (10 вариантов);
6) работа одного генератора на один якорь гребного двига-
теля (8 вариантов).
Селекторные переключатели обладают также вспомогатель-
ными контактами, предназначенными для одновременного вклю-
§ 75] Режимы экономичного хода и аварийный 409
чения цепей возбуждения, управления, блокировки и сигнали-
зации.
Следует иметь в виду, что главные контакты селекторных
переключателей не рассчитаны на размыкание цепей рабочего
тока под нагрузкой. Поэтому предусмотрена блокировка элек-
тромагнитными замками; которые стопорят вал переключателя,
не позволяя переключать главные цепи при наличии напряже-
ния в цепях возбуждения.
Иногда в цепь главного тока включают, помимо селектор-
ных переключателей, еще и разъединители, служащие для соз-
дания видимого разрыва цепи до переключения контактов пере-
ключателей, что также обеспечивается соответствующей элек-
тромагнитной блокировкой.
Из полученных в рассматриваемой схеме шести режимов
первый является основным, остальные пять — режимами эконо-
мичного хода или аварийными. Опишем способы ориентировоч-
ного определения основных параметров этих режимов, причем
для упрощения расчетов воспользуемся системой относитель-
ных единиц.*
При работе трех генераторов на два якоря гребного элек-
тродвигателя подводимая к винту мощность Рв будет:
" Рв# = -^ = 0,75. -
Скорость вращения винта при этом
п* = = l/oj5 = 0,908.
Момент на гребном валу
М = п2 = 0.9082 = 0,825.
* *
При последовательном соединении якорей гребного двига-
теля нагрузка между ними распределяется поровну. Тогда мо-
мент, создаваемый каждым двигателем (якорем), будет:
Ма* = 0,825.
Использование принудительной вентиляции и последова-
тельное включение генераторов и электродвигателей позволяет
ток главной цепи во всех режимах сделать равным номиналь-
ному значению:
/„ = 1.
* Величины, измеряемые в относительных единицах, помечаются звез-
дочкой.
410
ГЭУ постоянного тока
[Гл. 12
Поток полюсов гребного двигателя должен равняться
Ф* = — = —— : = — =М* = 0,825.
Фн см/„ сы1я Мн
генераторы при полном их
Рис. 212. Определение скорости
вращения винта в аварийных ре-
жимах ДЭГУ.
Напряжение на зажимах якоря электродвигателя
= СеФп = Ф.п* = 0,825-0,908 = 0,75.
а иап Еая сеФипи
К этому же результату придем, если учтем, что работающие
использовании должны иметь
ПГ=ПГ.Н или Пг* = 1; тогда три
работающих генератора в сумме
Дадут:
Ц, = 0,75^н.
Мощность каждого якоря
гребного электродвигателя опре-
делится из выражения:
Ра* = UaJ* = 0,75-1 = 0,75,
ИЛИ
= 0,825-0,908 = 0,75.
Аналогично выполняют расчет
других аварийных режимов. Из
расчетов следует, что при неполном числе работающих гене-
раторов суммарное напряжение, подводимое к якорям греб-
ного двигателя, уменьшается, а следовательно, уменьшается
и скорость гребного вала. Это понижает потребляемую
мощность. Чтобы сохранить номинальную нагрузку работающих
генераторов и первичных двигателей, ток генераторов (и всей
главной цепи) сохраняют номинальным, для чего ослабляют
магнитный поток полюсов гребного двигателя. Регулировать по-
ток можно, вводя сопротивления в цепь обмотки возбуждения
возбудителей двигателя или же (если возбудители питают и
другую нагрузку) вводя сопротивления непосредственно в цепь
обмотки возбуждения гребного двигателя. Но при этом резко
увеличиваются потери и снижается к. п. д. установки, причем
к. п. д. становится тем меньше, чем меньше остается в работе
генераторов. Поэтому режим работы одного генератора на два
якоря гребного двигателя практически не применяют, заменяя
его режимом: один генератор — один якорь гребного двигателя.
Напоминаем, что используемые в приведенном расчете
формулы являются лишь ориентировочными, так как действи-
тельная характеристика винта отличается от квадратичной па-
раболы. Поэтому желательнее применять графические методы
§ 76]
Системы возбуждения ГЭУ
411
расчета с использованием действительной характеристики винта
РВЧ(П).
В рассматриваемой схеме мощность на гребном валу де-
лится между четырьмя генераторами. Ордината полной мощ-
ности характеристики PB=f(«) разбивается на число генерато-
ров (рис. 212).
При последовательном соединении генераторов и их полном
использовании скорость вращения гребного винта определится
абсциссами точек пересечения горизонтальных прямых мощ-
ности работающих генераторов с характеристиками винта: «н,
п3, п2 и nt.
§ 76. Системы возбуждения ГЭУ
Главные генераторы и гребные электродвигатели получают
возбуждение обычно от специальных машин постоянного тока,
так называемых возбудителей. /
Магнитный поток возбуждения главных генераторов регули-
руют, изменяя ток возбуждения генератора или возбудителя
при помощи специальных регулировочных сопротивлений. Если
ток возбуждения не превышает 15—20 а, то регулировочное со-
противление включают в цепь обмотки возбуждения генератора
(прямое регулирование возбуждения). При больших токах
возбуждения генератора регулировочное сопротивление вклю-
чают в цепь обмотки возбуждения возбудителя (косвенное
регулирование возбуждения).
Возбудители генераторов можно приводить в движение как
непосредственно от вала главных генераторов, так и от отдель-
ных электродвигателей. В первом случае возбудитель соеди-
няют с валом генератора посредством муфты или тексропной
передачи. Во втором — возбудители образуют двух-, трех-,
а иногда и четырехмашинный агрегат, в который, кроме при-
водного двигателя и возбудителя главных генераторов, может
быть включен также возбудитель гребного двигателя (в неко-
торых случаях еше и подвозбудитель). Приводной двигатель
должен иметь местный и дистанционный пуск.
В качестве возбудителей главных генераторов ГЭУ постоян-
ного тока применяются двух- и трехобмоточные возбудители,
ЭМУ с поперечным и продольным полем.
В последнее время главные генераторы и гребные электро-
двигатели возбуждают не вращающимися возбудителями,
а магнитными усилителями (МУ), что увеличивает надежность
работы гребных установок. Принципиальная схема возбуждения
главного генератора с применением МУ дана на рис. 213. Об-
мотка возбуждения генератора разделена на две равные части
и вместе с балластным сопротивлением /'6=0,5 гв включена по
мостовой схеме на питание от сети трехфазного переменного
412
ГЭУ постоянного тока
[Гл. 12
тока через МУ и полупроводниковые выпрямители В. Питание
обмотки возбуждения генератора ОВГ через МУ1 и В1 обеспе-
чивает вращение гребного электродвигателя в одном направле-
нии, питание цепей возбуждения через МУ2 и В2 обеспечивает
обратное вращение двигателя.
В соответствии с характером использования возбудителей
и их приводов различают следующие три системы возбуждения
главных генераторов в ГЭУ постоянного тока: индивидуальную,
централизованную и смешанную.
В системах индивидуального возбуждения каждый возбуди-
тель механически связан со своим генератором и питает цепи
_________________________ возбуждения только этого генера-
I тора. Такие системы хороши тем,
гй//\ОвГ ' что:
а) обходятся без приводных
двигателей возбудителей;
б) не нуждаются в подборе
внешних характеристик возбуди-
телей, поскольку их параллельная
работа не предусматривается;
в) исключают возможность не-
произвольного реверса дизелей.
К недостаткам описываемых си-
стем относится:
а) малая живучесть установки
из-за отсутствия резерва возбуж-
дения;
б) сложность схемы при значительном числе генераторов;
в) большая длина дизель-генераторных агрегатов и машин-
ных помещений;
г) колебания напряжения возбудителя, вызываемые изме-
нениями скорости при колебаниях нагрузки первичных дви-
гателей.
В системах централизованного возбуждения возбудители ме-
ханически не связаны с главными генераторами и приводятся *-
во вращение отдельными приводными двигателями. Каждый
возбудитель питает цепи возбуждения нескольких генераторов,
иногда работая в параллель с другими возбудителями. Эта си-
стема получила весьма широкое распространение, что объяс-
няется такими ее достоинствами, как:
а) высокая живучесть и возможность ремонтировать возбу-
дители на ходу судна благодаря наличию резерва;
б) малая длина дизель-генераторных агрегатов и машин-
ных помещений;
/ в) спокойная работа возбудителей, не испытывающих коле-
баний нагрузки первичных двигателей.
ш
<12 i
Рис. 213. Принципиальная
схема возбуждения главного
генератора при помощи МУ.
§ 77\
Система Г—Д с трехобмоточным возбудителем
413
Достоинствам системы противостоят ее недостатки:
а) наличие приводных двигателей;
б) необходимость защищать дизели от непроизвольного ре-
верса;
в) обязательность согласования внешних характеристик воз-
будителей на случай параллельной работы.
Система смешанного возбуждения характеризуется нали-
чием у каждого возбудителя механической связи с приводящим
его в движение валом главного генератора и возможностью одно-
временного питания обмоток возбуждения нескольких главных
генераторов от каждого возбудителя. Эта система возбуждения
занимает промежуточное положение между двумя предыду-
щими системами и имеет следующие особенности.
Достоинства:
а) отсутствие в схеме отдельных приводных двигателей '
к возбудителям;
б) высокая живучесть установки благодаря наличию ре-
зерва возбуждения.
Недостатки:
а) необходимость защищать дизели от непроизвольного ре-
верса;
б) обязательность согласования внешних характеристик
возбудителей на случай параллельной работы;
в) сложность схемы при значительном числе дизель-гене-
раторов;
г) большая длина дизель-генераторных агрегатов и машин-
ных помещений;
д) непостоянство напряжения возбудителей, вызываемое из-
менениями скорости при колебаниях нагрузки первичных дви-
гателей.
§ 77. Система генератор — двигатель с трехобмоточным
возбудителем
Исполнительный двигатель обычной системы Г—Д имеет
жесткую механическую характеристику (кривая 3 на рис. 214).
Если в тех же осях координат (Л1; п) изобразить основную
(кривая 1) и швартовную (кривая 2) характеристики винта, то
точка А будет соответствовать номинальному режиму работы
ГЭУ при полном ходе судна в свободной воде, а точка В —
мало изменившейся скорости вращения винта «н и недопустимо
большому значению момента на валу гребного двигателя Л4Б,
который возникает при режиме работы «на швартовах».
Для грузовых и пассажирских судов обычным режимом ра-
боты ГЭУ является режим точки А. В швартовном режиме винт
работает кратковременно — только при разгоне судна, когда
414
ГЭУ постоянного тока
[Гл. 12
Рис. 214. Жесткая механиче-
ская характеристика гребного
двигателя (3) и рабочие ха-
рактеристики винта (/ и 2).
момент может быть ограничен, например, уменьшением тока
возбуждения генератора.
Нагрузка ГЭУ ледоколов, буксиров, китобоев и некоторых
других судов часто изменяется в диапазоне режимов А—В.
Поэтому для обеспечения нормаль-
ной работы основных машин греб-
ной установки этих судов (прежде
всего первичных двигателей) жела-
тельно, чтобы при изменении мо-
мента нагрузки мощность гребного
электродвигателя оставалась по-
стоянной, т. е. механическая харак-
теристика его на участке АВ выра-
жалась уравнением:
Р„в н = МнПн = Мп = const,
ДИ- ИНН
откуда
М = Мн .
н п
Таким образом, участок АВ
является частью гиперболической
кривой (рис. 215), на которой гребной двигатель и остальные
машины ГЭУ работают с постоянной номинальной мощностью.
Для завершения построения желаемой механической харак-
теристики 5 точки А и В следует соединить с осями координат,
Рис. 215. Желаемый вид механиче- Рис. 216. Желаемая и действи-
ской характеристики гребного двига- тельная внешние характеристи-
теля. , ки генератора в системе Г—Д.
причем отрезок OD должен определить величину максимально
допустимой скорости двигателя при отсутствии момента на
валу, а отрезок ОС — момент стоянки гребного двигателя при
заклинивании винта.
Если гребной двигатель работает с постоянным магнитным
потоком, то его вращающий момент может изменяться только
§ 77]
Система Г—Д с трехобмоточным возбудителем
415
в результате изменения тока главной цепи. Тогда для сохране-
ния неизменной мощности первичного двигателя номинальная
мощность генератора также должна оставаться постоянной и
подчиняться выражению:
= = = = const,
т. е. на участке АВ внешняя характеристика генератора U=f(I)
также представляет собой гиперболу (рис. 216). Продолжение
характеристики в области меньших и больших нагрузок осу-
ществляется отрезками AD и ВС, причем точка D соответствует
Рис. 217. Система Г—Д с трехобмоточным возбудителем гене-
ратора.
напряжению, обеспечивающему максимальную скорость греб-
ного двигателя, а точка С — току короткого замыкания двига-
теля, который обычно принимается 1К~ (1,5 : 2)/и.
Подобный режим работы ГЭУ можно получить, осуществив
обратные связи по току и напряжению в системе Г—Д с трех-
обмоточным возбудителем генератора (рис. 217). На полюсах
такого возбудителя располагаются три обмотки возбуждения:
ОНВВГ — обмотка независимого возбуждения возбудителя ге-
нератора, которая связана с постом управления и служит для
задания необходимого режима работы ГЭУ; ОТВВГ — обмотка
отрицательной обратной связи по току, которая включена на
падение напряжения в компенсационной обмотке и в обмотке
дополнительных полюсов гребного электродвигателя; ОШВВГ —
обмотка параллельного возбуждения возбудителя, которая уве-
личивает зависимость напряжения возбудителя и потока гене-
ратора от тока главной цепи, делает более крутыми внешние
характеристики возбудителя и генератора и обеспечивает
416
ГЭУ постоянного тока
[Гл. 12
быстродействие, превосходящее быстродействие двухобмоточ-
ного возбудителя.
Возбудитель, обмотки которого включены описанным обра-
зом, позволяет получить выпуклые крутопадающие внешнюю
характеристику генератора и механическую характеристику
гребного двигателя (кривые 4 на рис. 215 и 216), которые мало
отличаются от желаемых характеристик и вполне удовлетво-
ряют требованиям статических (установившихся) режимов.
Рис. 218. Построение внешней характеристики генера-
тора с трехобмоточным возбудителем.
Внешнюю характеристику трехобмоточного возбудителя
можно получить методом, рассмотренным в § 21. Построив ее
в первом квадранте осей координат и произведя другие по-
строения, указанные на рис. 218, получим в четвертом квадранте
внутреннюю Er=f(I) и внешнюю U=f(I) характеристики гене-
ратора. Зная падение напряжения в якоре гребного двигателя,
можно по внешней характеристике генератора построить меха-
ническую характеристику двигателя. Возбудитель выбирают по
расчетной мощности, потребляемой обмоткой возбуждения ге-
нератора в режиме хода судна в свободной воде (точка А на
рис. 216): -
Р =mi2 г , (403)
где m — число генераторов, питаемых одним возбудителем.
По каталогу выбирают возбудитель с мощностью, в
2—2,5 раза превышающей расчетную мощность Рв.г, и с напря-
жением, вдвое превышающим номинальное напряжение воз-
§ 77} Система Г—Д с трехобмоточным возбудителем 417
буждения генератора. Это необходимо, чтобы возбудитель рабо-
тал на прямолинейном участке кривой намагничивания и
обладал достаточной отзывчивостью на изменения положения
поста управления (тока в ОНВВГ). Намагничивающие силы
(н. с.) обмоток возбуждения возбудителя выбирают такими,
чтобы механическая характеристика гребного двигателя пере-
секала характеристики винта в точках А и В (рис. 215). Однако
бывает трудно найти такое соотношение намагничивающих сил
обмоток возбуждения возбудителя, которое обеспечивало бы
получение внешней характеристики генератора и механической
характеристики гребного двигателя, проходящих через все
точки заданных режимов. Поэтому при наладке схемы ГЭУ
установочные сопротивления Ri, R2 и R3 регулируют и тем
самым обеспечивают некоторое перемещение механической
характеристики в осях М; п в желаемом направлении.
При изменении сопротивления Ri задающая н. с. возбуди-
теля остается прежней, но в виду изменения общего сопротив-
ления цепи ОВГ изменяются как напряжение холостого хода
генератора, так и п0 двигателя (рис. 219, а). Размагничивание
генератора, очевидно, происходит при прежнем значении тока
главной цепи /к. Поэтому и момент короткого замыкания дви-
гателя Мк при всех значениях Ri остается постоянным. С уве-
личением сопротивления Ri скорость холостого хода умень-
шается до некоторого значения /г02, а с уменьшением Ri она
увеличивается до п03.
Изменение сопротивления R2 не изменяет скорости идеаль-
ного холостого хода п0 (так как при холостом ходе обмотка
ОТВВГ током не обтекается), но изменяет н. с. обмотки обрат-
ной связи при одном и том же токе в главной цепи и таким
образом изменяет размагничивающее действие этой обмотки.
При уменьшении сопротивления R2 обмотка ОТВВГ в большей
степени размагничивает возбудитель. Напряжение генератора
при этом уменьшается, и механическая характеристика двига-
теля опускается. Возбудитель размагничивается при меньшем
токе главной цепи, и момент стоянки также уменьшается до не-
которого значения Л1к2 (рис. 219, б). При увеличении сопротив-
ления R2 размагничивающее действие обмотки ОТВВГ при
одном и том же токе главной цепи уменьшается, что приводит
К повышению напряжения генератора, повышению механиче-
ской характеристики двигателя и увеличению момента стоянки
до значения Л11!3.
При различных значениях сопротивления R3 получаются
различные значения магнитного потока гребного двигателя, что
влияет как на скорость холостого хода, так и на величину мо-
мента короткого замыкания (рис. 219, в). При уменьшении со-
противления R3 увеличиваются как ток возбуждения в обмотке
418
ГЭУ постоянного тока
[Гл. 12
ОВД, так и магнитный поток гребного двигателя. С увеличе-
нием же тока, как известно, скорость холостого хода умень-
шается, а момент стоянки возрастает (кривая 2). При умень-
шении потока, вызванного увеличением /?3, наоборот, скорость
Рис. 219. Механические характеристики гребного двигателя при — var (а);
Ri = var (б); R-j, = var (в); и различных положениях потенциометра П (г).
На схемах показано включение сопротивлений (см. рис. 217). Штриховые линки—основ-
ные характеристики винта.
холостого хода повышается, а момент стоянки становится
меньше (кривая 3).
Изменять положение механической характеристики гребного
двигателя можно не только описанными выше способами, но
и перемещением ползунков потенциометра П, связанного с по-
стом управления. Поворот рукоятки поста управления позволяет
изменять величину тока в задающей обмотке возбудителя
ОНВВГ. При этом увеличение напряжения и тока в обмотке
ОНВВГ приводит к увеличению напряжения генератора и ско-
§ 78] Системы Г-Д с автоматическим регулированием мощности 419
роста вращения гребного двигателя для всех значений тока
нагрузки от нуля до тока, при котором размагничивается воз-
будитель. Механическая характеристика двигателя изменяется
подобно внешней характеристике генератора, поскольку поток
электродвигателя при этом остается постоянным. Механические
характеристики электродвигателя при изменении подводимого
напряжения перемещаются, как известно, параллельно самим
себе (рис. 219, г).
§ 78. Системы Г—Д с автоматическим регулированием
мощности
Для более полного использования ГЭУ и для максимально
возможного повышения к. п. д. установки необходимо, чтобы
первичные двигатели во всех режимах работали с номинальной
мощностью. Сами по себе они не обладают способностью под-
держивать мощность на заданном уровне. Поэтому приходится
прибегать к автоматическому поддержанию постоянства мощ-
ности первичных двигателей путем регулирования возбуждения
генератора или электродвигателя.
Система Г—Д с трехобмоточным возбудителем поддержи-
вает в установившихся статических режимах работы ГЭУ мощ-
ность, близкую к постоянной. В динамических же режимах
(например, при ходе судна на волне) ввиду значительной
инерционности системы могут возникать недопустимые пере-
грузки, способные вызвать аварию первичных двигателей (осо-
бенно дизелей). Отсюда — необходимость настолько понижать
рабочую мощность первичных двигателей, чтобы пики нагрузки
не выходили за пределы допустимых. Это ведет к уменьшению
скорости хода судна, увеличивает удельный расход топлива
и снижает другие показатели работы ГЭУ.
Поэтому в последнее время получили применение системы
автоматического регулирования мощности с использованием
ЭМУ и других малоинерционных элементов. Такие системы
различаются по роду регулируемой величины и по роду регу-
лирующего воздействия. Регулируемой величиной может быть
ток главной цепи или скорость вращения первичного двигателя,
а регулирующим воздействием — ток возбуждения генератора
или гребного электродвигателя. Системы регулирования мощ-
ности первичного двигателя ГЭУ применяются главным образом
на ледоколах, буксирах, судах ледового плавания. Принципи-
альная схема ГЭУ постоянного тока с ЭМУ в качестве возбу-
дителей генератора й электродвигателя приведена на рис. 220.
Регулирование мощности изменением напряжения генера-
тора. В рассматриваемой системе возбудителем генератора слу-
жит ЭМУ с поперечным полем ЭМУ-ВГ. У него имеются три
420
ГЭУ постоянного тока
[Гл. 12
обмотки управления: ОУ1Г — задающая обмотка независимого
возбуждения; ОУ2Г — обмотка отрицательной обратной связи
по току; ОУЗГ — стабилизирующая обмотка. Последняя яв-
ляется и обмоткой обратной связи по скорости первичного дви-
гателя.
Намагничивающие силы обмоток ОУ1Г и ОУ2Г должны
быть выбраны такими, чтобы при номинальном токе главной
Рис. 220. Схема ГЭУ постоянного тока с ЭМУ в качестве возбудителей
генератора и электродвигателя.
цепи результирующая намагничивающая сила ЭМУ-ВГ обеспе-
чивала номинальное напряжение генератора.
При возрастании тока нагрузки размагничивающее действие
обмотки ОУ2Г усиливается, в результате чего уменьшается на-
пряжение ЭМУ-ВГ, а затем и самого генератора. Таким обра-
зом, мощности генератора и первичного двигателя ГЭУ
остаются примерно постоянными и равными номинальному зна-
чению.
Как только ток нагрузки увеличивается до тока стоянки
гребного двигателя, намагничивающая сила ОУ2Г размагничи-
вает ЭМУ, и напряжение генератора уменьшается до величины
падения напряжения в якоре электродвигателя и сети, благо-
даря чему гребной электродвигатель останавливается при токе
главной цепи /Е= (1,5-г-1,8)/и-
Постоянство мощности генераторных агрегатов можно под-
держивать также, регулируя возбуждение генераторов в соот-
ветствии с изменением скдрости вращения первичного двига-
§ 78] Системы Г—Д с автоматическим регулированием мощности 421
теля, т. е. посредством введения обратной связи по скорости,
осуществляемой тахогенераторами ТГГ\ и ТГГ2. Для этого об-
мотку управления ОУЗГ возбудителя генератора ЭМУ-ВГ вклю-
чают на разность напряжений: тахогенераторов С'тг и задаю-
щего напряжения сравнения Ucp.
При номинальной скорости вращения первичного двигателя
{/тг=С,ср> и ток в ОУЗГ отсутствует. При перегрузке скорость
первичного двигателя (и тахогенератора) снижается и UTr ста-
новится меньше Ucp. Под действием возникшей разности напря-
жений в обмотке ОУЗГ появляется ток, который создает н. с.,
направленную против н. с. обмотки ОУ1Г. Напряжения ЭМУ
и генератора уменьшаются, что вызывает уменьшение скорости
вращения гребного электродвигателя, а следовательно, и сни-
жение мощности генератора и нагрузки первичного двигателя.
Перегрузка снимается, и первичный двигатель восстанавливает
номинальную скорость. Эта система допускает отклонения мощ-
ности* и скорости вращения первичного двигателя не более, чем
на 1,5—2,5%, от их номинальных значений.
Системы с обратной связью по скорости должны приме-
няться в ГЭУ, первичными двигателями которых являются ди-
зели, не допускающие перегрузок. Как известно, мощность,
развиваемая дизелем, зависит от многих причин, в том числе
от степени изношенности и исправности цилиндров, от качества
топлива, от температуры окружающего воздуха й охлаждаю-
щей воды. Всякий раз, как только момент сопротивления на
валу двигателя становится больше момента, который тот может
развить по своему техническому состоянию, скорость вращения
снижается. И всякий раз при этом обратная связь по скорости
вступает в действие, ограничивая мощность генератора и на-
грузку первичного двигателя.
В рассматриваемой схеме (рис. 220) один ЭМУ питает об-
мотки возбуждения двух генераторов. Поэтому в цепь ОУЗГ
включены два тахогенератора; при перегрузке одного из дизе-
лей его тахогенератор снижает мощность обоих генерато-
ров. При большем числе генераторов система становится не-
удобной.
Регулирование мощности изменением магнитного потока
электродвигателя. Регулируя поток электродвигателя, можно
при изменении нагрузки на винте поддерживать постоянство
тока в главной цепи, а следовательно, напряжение и мощность
генератора и мощность первичного двигателя. Если в предыду-
щих системах регулируемой величиной была скорость первич-
ного двигателя, а регулирующим воздействием — ток возбужде-
ния генератора, то в этой системе регулируемой величиной
является ток главной цепи, а регулирующим воздействием —
ток возбуждения электродвигателя.'
422
ГЭУ постоянного тока
[Гл. 12
Электродвигатель получает возбуждение от ЭМУ с попереч-
ным полем ЭМУ-ВД, у которого имеются четыре обмотки уп-
равления (см. рис. 220): ОУ1Д — обмотка независимого воз-
буждения (задающая); ОУ2Д— обмотка отрицательной обрат-
ной связи по напряжению возбудителя генератора ЭМУ-ВГ
или косвенной обратной связи по току главной цепи; ОУЗД —
стабилизирующая обмотка; ОУ4Д — обмотка отрицательной об-
ратной связи по напряжению самого ЭМУ.
Постоянство тока главной цепи поддерживается изменением
магнитного потока электродвигателя с помощью обмотки ОУ2Д,
включенной на разность напряжений: возбудителя генератора
ЭМУ-ВГ и сравнения Ucv. В швартовном режиме В эти напря-
жения, равны, и размагничивающий ток в обмотке ОУ2Д отсут-
ствует. Электродвигатель при этом имеет наибольший магнит-
ный поток.
Уменьшение момента сопротивления винта приводит к тому,
что ток в главной цепи и в обмотке ОУ2Г уменьшается. Напря-
жение возбудителя генератора ЭМУ-ВГ увеличивается и стано-
вится больше {/Ср. Под воздействием полученной разности на-
пряжений в обмотке ОУ2Д появляется размагничивающий ток,
и напряжение ЭМУ-ВД снижается, обусловливая уменьшение
тока возбуждения и магнитного потока гребного двигателя. Это
вызывает увеличение скорости вращения электродвигателя и
тока главной цепи, который восстанавливается почти до номи-
нального значения /в, отличаясь от него лишь на незначитель-
ную величину А/. Тогда
Л1ЕЛТ —
В %
т. е. мощность гребного двигателя Р№=Мп^Мвпв~ const.
Рассмотрение работы данной системы показывает, что
уменьшение тока главной цепи вызывает соответствующее уве-
личение напряжения генератора, вследствие чего при крутопа-
дающей внешней характеристике его мощность практически
остается постоянной, не изменяя режима работы дизеля.
Увеличение нагрузки гребного двигателя от режима В до
режима короткого замыкания не вызывает изменения магнит-
ного потока двигателя; он остается постоянным (<D=<DB=const),
и момент на валу возрастает только в результате увеличения
тока главной цепи от 1Б до /к.
Обмотка ОУ2Д включена, кроме того, на разность напряже-
ний, осуществляя сравнение L7cp с С'тг — напряжением так на-
зываемого контрольного тахогенератора гребного двигателя
ТГД. Схема должна быть настроена так, чтобы в режиме А эти
напряжения были равны между собой (ПСр=Птг).
1В-М Фв
----- и п = nR-
в ф
I
§ 79]
Защита ГЭУ постоянного тока
423
В случае резкого уменьшения момента сопротивления на
валу электродвигателя (оголение или потеря винта) скорость
двигателя возрастает и UTr становится больше L7cp. В резуль-
тате по обмотке ОУ2Д начинает протекать ток, резко увеличи-
вающий намагничивающую силу, направленную против намаг-
ничивающей силы задающей обмотки ОУ1Д. Напряжение ЭМУ
и магнитный поток электродвигателя уменьшаются в несколько
раз. Это вызывает увеличение тока главной цепи до значения,
близкого к току стоянки, при котором благодаря обмотке ОУ2 Г
напряжение генератора мало и скорость электродвигателя
лишь незначительно превышает скорость режима А, несмотря
на то, что поток электродвигателя ослаблен.
§ 79. Защита ГЭУ постоянного тока
Ниже описаны основные виды защит, которыми, согласно
требованиям Регистра СССР, должны быть оснащены ГЭУ по-
стоянного тока во избежание возможных аварий.
Защита от коротких замыканий и сверхтоков. Эта защита
осуществляется при помощи:
а) автоматических выключателей, разрывающих цепь глав-
ного тока;
б) максимально-токовых реле, снимающих возбуждение воз-
будителей генераторов и гребного двигателя; катушки реле при
этом должны быть включены либо через шунты, либо непосред-
ственно в рассечку цепи главного тока; повторный запуск
ГЭУ может производиться с нулевого положения поста уп-
равления;
в) противокомпаундных (дифференциальных) обмоток,
обычно располагаемых на полюсах возбудителя генератора
(см. рис. 217).
В ГЭУ с ЭМУ, используемыми в качестве возбудителей ге-
нераторов и гребных электродвигателей, защиту от перегрузок
осуществляют обратной связью по току главной цепи, а также
всей системой поддержания постоянной мощности ГЭУ, рас-
смотренной в предыдущем параграфе.
Защита главных дизель-генераторов от разноса. При оста-
новке или реверсе гребного электродвигателя, когда снижается
возбуждение генератора, э. д. с. электродвигателя, продол-
жающего вращаться под воздействием винта, может превысить
напряжение главной цепи. При этом генератор, перейдя в ре-
жим двигателя, создает вращающий момент, способный начать
разгон дизеля. Чтобы предотвратить разнос дизеля, иногда
применяют центробежное реле, связанное с валом дизеля.
При разгоне дизеля это реле размыкает цепь промежуточ-
ного контактора, который, срабатывая, обесточивает обмотки
424
ГЭУ постоянного тока
[Гл. 12
возбуждения генератора и электродвигателя. Иной путь для ре-
шения той же задачи предлагает схема, изображенная на
рис. 221. В ней срабатывание центробежного реле Р/Л приводит
к включению добавочного сопротивления СД\ в цепь возбужде-
ния гребного электродвигателя, что уменьшает его э. д. с. Эта
схема целесообразнее предыдущей, так как не вызывает пере-
рыва в работе ГЭУ.
Защита гребных электродвигателей от разноса. Недопусти-
мое увеличение скорости вращения гребного электродвигателя
может произойти при внезапной разгрузке установки (напри-
мер, в случае среза лопастей винта). Возможный разнос двига-
Рис. 221. Схема защиты дизель-генератора
и гребного двигателя от разноса.
теля предупреждается либо центробежным реле, механически
связанным с гребным электродвигателем, либо реле максималь-
ного напряжения, включенным на зажимы якоря гребного дви-
гателя.
Центробежное реле может работать как на отключение воз-
буждения главных генераторов и гребных электродвигателей,
так и на включение в цепь потенциометра генератора Пт
(см. рис. 221) добавочного сопротивления СДъ с целью ослаб-
ления возбуждения генератора.
В случае применения реле максимального напряжения раз-
гон двигателя при сбросе нагрузки сопровождается увеличением
напряжения в главной цепи до величины уставки реле. Сраба-
тывая, реле непосредственно или через промежуточный кон-
тактор включает добавочное сопротивление в цепь потенцио-
метра генератора, что уменьшает напряжение генератора и
скорость гребного двигателя.
Защита главных дизелей от непроизвольного реверса. Пре-
кращение или резкое уменьшение подачи топлива дизелю гене-
ратора системы Г — Д нарушает существовавшее до того вре-
мени динамическое равновесие между вращающим моментом
дизеля и моментом сопротивления главного генератора. Если
0 SO]
Пуск и реверс гребного двигателя
Рис. 222. Схема защиты главных дизель-
генераторов от непроизвольного реверса.
при этом в ГЭУ с централизованным или смешанным возбуж-
дением на гребной двигатель работает несколько последова-
тельно включенных генераторов, то генератор неисправного
агрегата уменьшает скорость вращения, а затем, питаясь от
других генераторов, переходит в двигательный режим и изме-
няет направление вращения. При этом происходит реверс ди-
зеля, вызывающий его поломку.
Предотвратить этот аварийный режим можно с помощью
реле давления масла, реле давления охлаждающей воды или
реле скорости вращения дизеля, которые при снижении ско-
рости дизеля, а следовательно, и давления в системах его
смазки и охлаждения раз-
мыкают свои контакты в
цепи контактора, отключаю-
щего возбуждение генера-
тора неисправного агрегата
или всех работающих ма-
шин (рис. 222).
В некоторых ГЭУ посто-
янного тока иногда преду-
сматривают и другие за-
щиты, например тепловую и
минимальную.
Защиту от коротких за-
мыканий в цепях управле-
ния и сигнализации осуще-
ствляют плавкими предохранителями. В главных цепях и в це-
пях возбуждения ГЭУ установка плавких предохранителей
Регистром СССР не допускается.
В случае срабатывания всех видов защиты вступает в дей-
ствие аварийно-предупредительная световая и звуковая сигна-
лизация, предусматриваемая в схемах ГЭУ.
В системах автоматического регулирования ГЭУ эле-
менты автоматики выполняют не только операции управле-
ния, но и функции защиты, что позволяет существенно упро-
стить схемы, создаваемые специально для защиты ГЭУ от ава-
рий и ненормальных режимов работы.
§ 80. Пуск и реверс гребного двигателя в ГЭУ
постоянного тока
Пуску гребного электродвигателя должна предшествовать
изготовка ГЭУ к действию. В процессе этой изготовки пускают
первичные двигатели главных генераторов, вспомогательные
механизмы, обслуживающие работу основных машин, и агре-
гаты возбуждения, после чего селекторными переключателями
426
ГЭУ постоянного тока
[Гл. 12
набирают схему для заданного режима работы ГЭУ и вклю-
чают цепи возбуждения, управления и защиты.
Пускают гребной двигатель поворотом рукоятки поста уп-
равления в положение, которому на швартовной характери-
стике винта соответствуют скорость вращения гребного элек-
тродвигателя пП и номинальный момент Мн (рис. 223). Элек-
тродвигатель разгоняется в течение нескольких секунд, для
разгона же судна требуется несколько минут. Поэтому во время
пуска двигателя судно практически остается неподвижным, и
винт работает в швартовном ' ”
М
Ин
О
2 —
4—6 —
п.р £ пП Чц п
Рис. 223. Работа гребного двига-
теля при пуске и реверсе.
Характеристики: 1 — основная;
швартовная; 3 — реверсивная;
промежуточные.
режиме (точка В). По мере раз-
гона судна электродвигатель пе-
реходит со швартовной характе-
ристики на промежуточные: из
точки В в точку Е (скорость
вращения пп=const; МЕ<МН).
Поворотом рукоятки поста уп-
равления теперь можно переве-
сти двигатель в точку К с мо-
ментом Л4ни несколько увеличен-
ной скоростью вращения. Если
рукоятку поста управления пере-
водить плавно, то винт в точку Л
на основной характеристике пе-
рейдет по прямой ВКА.
Пуск электродвигателя мо-
жет сопровождаться бросками
тока /п= (1,5-1,8) /н. Это объ-
ясняется большой электромаг-
нитной инерцией обмоток воз-
буждения возбудителя и генератора, из-за которой обратная
связь по току не успевает ограничивать его и поддерживать
на постоянном заданном уровне.
Реверс гребного электродвигателя осуществляют поворотом
рукоятки поста управления из положения «Ход вперед» в поло-
жение «Ход назад», или наоборот. На рис. 223 реверсивная ха-
рактеристика АБГД для наглядности вся изображена в первом
квадранте, причем участок АБ соответствует режиму работы
винта движителем, участок БГ — режиму гидравлической тур-
бины, а участок ГД — тормозному режиму винта (см. рис. 206).
Из реверсивной характеристики следует, что если быстрым пе-
реводом рукоятки поста управления скорость электродвигателя
довести до номинальной, то его момент превысит номинальное
значение в несколько раз. Поэтому скорость обратного враще-
ния двигателя ограничивается величиной пр (точка Д).
В ГЭУ с трехобмоточным возбудителем реверс осуществ-
ляют, изменяя направление магнитного потока генератора. Из-
§ 80}
Пуск и реверс гребного двигателя
427
менение при этом основных параметров, характеризующих ра-
боту ГЭУ, показано на рис. 224.
За время э. д. с. генератора ег хотя и спадает, но все еще
остается больше э. д. с. гребного двигателя едв. Поэтому режим
работы ГЭУ не отличается от режима, предшествовавшего на-
чалу реверса.
В течение времени /2 электродвигатель в силу инерцион-
Рис. 224. Изменение основных параметров системы Г—Д при ре-
р верее ГЭУ постоянного тока.
жиме гидротурбины, переводит электродвигатели в генератор-
ный режим, едв становится больше ег, ток главной цепи меняет
направление и достигает максимума. В этот период может воз-
никнуть опасность разгона первичного двигателя генератором,
который, перейдя в режим двигателя, выдает на вал мощ-
ность Рт.
В точке б э. д. с. генератора ег меняет знак, и электродвига-
тель, вращаясь по инерции в прежнем направлении, оказы-
вается в режиме противовключения, в котором и работает в те-
чение времени h.
В точке в скорость вращения гребного двигателя становится
равной нулю, а в течение времени он разгоняется в противо-
положном направлении до скорости, соответствующей положе-
нию поста управления (значению э. д. с. ег) и нагрузке на греб-
ном валу.
428 ГЭУ постоянного тока [Гл. 12
В ГЭУ, где роль возбудителей генераторов и гребного элек-
тродвигателя выполняют электромашинные усилители, реверс
может быть осуществлен изменением направления магнитного
потока:
а) главных генераторов (т. е. подобно тому, как это
делается в системе с трехобмоточным возбудителем);
б) гребного электродвигателя.
В обоих случаях затормаживание винта происходит в режи-
мах генераторного торможения и противовключения гребного
двигателя.
В режиме генераторного торможения мощность, передавае-
мая винтом на вал генераторного агрегата, не должна превы-
шать величины механических потерь агрегата, так как иначе
возможен разгон первичного двигателя. Для дизелей эта мощ-
ность составляет 20—25% номинальной, для турбин — незначи-
тельную величину. Поэтому в ГЭУ, оснащенных турбоагрега-
тами, использовать метод генераторного торможения винта
недопустимо; лучше прибегать к режиму противовключения,
при котором энергия винта расходуется на нагрев цепи глав-
ного тока.
Режим генераторного торможения эффективнее потому, что
при нем энергия винта идет не только на нагрев цепи главного
тока, но и на покрытие механических потерь генераторных
агрегатов. Зато режим противовключения безопаснее для пер-
вичных двигателей.
КОНТРОЛЬНЫЕ ВОПРОСЫ II ЗАДАНИЯ
1. Почему в ГЭУ постоянного тока: а) чаще применяют дизели, а ие
турбины; б) используют более низкое напряжение, чем в ГЭУ переменного
тока; в) мощность меньше, чем в ГЭУ переменного тока (стр. 398, 405—407)?
2. Наберите по одному варианту включения для каждого из шести
режимов ГЭУ, изображенной на рис. 211.
3. Определите основные параметры ГЭУ при работе двух генераторов
на один якорь двухякорного гребного двигателя (стр. 408—410).
4. Сравните способы прямого и косвенного регулирования главных гене-
раторов (стр. 411—417).
5. Объясните необходимость экскаваторной механической характеристики
гребного электродвигателя ГЭУ постоянного тока (стр. 413—415).
6. При малой нагрузке скорость гребного двигателя слишком велика,
а при перегрузке она резко уменьшается. Как устранить этот недостаток
(стр. 417 и 418)?
7. В дизеле первого генератора вышел из строя один цилиндр. Как
изменится режим работы схемы автоматического регулирования (стр. 420—
и 421)?
8. Объясните, как в схеме автоматического регулирования (рис. 220)
происходит процесс реверсирования гребного электродвигателя, осуществ-
ляемый:
а) изменением возбуждения генератора;
б) изменением возбуждения гребного двигателя.
§ 81] Особенности работы и схемы главного тока 429
9. Охарактеризуйте условия непроизвольного реверса дизель-генератора
и назовите меры, направленные иа предотвращение такого реверса
(стр. 424 и 425).
10. Объясните процесс выхода на основную рабочую характеристику винта
при пуске гребного электродвигателя (рис. 223).
11. Охарактеризуйте режимы противовключения н рекуперативного тор-
можения гребного электродвигателя при реверсе (рис. 224).
ГЛАВА 13
ГРЕБНЫЕ ЭЛЕКТРИЧЕСКИЕ УСТАНОВКИ
ПЕРЕМЕННОГО ТОКА
§ 81. Особенности работы и схемы главного тока ГЭУ
Гребные электрические установки переменного тока харак-
теризуются высокой экономичностью, так как у входящих в их
состав машин к. п. д. выше, чем у машин постоянного тока. Но
регулирование скорости гребных двигателей переменного тока
обычно требует соответствующего изменения скорости генера-
тора и первичного двигателя, а реверс — переключения фаз
цепи главного тока, что осуществимо лишь после снятия воз-
буждения. Поэтому ГЭУ переменного тока применяют лишь на
тех судах, которые не испытывают необходимости в частых
пусках, реверсах и изменениях скорости вращения гребного
двигателя.
ГЭУ переменного тока обычно выполняются на большие мощ-
ности и высокое напряжение. Применение высокого напряже-
ния позволяет уменьшить потери, а также вес и габариты от-
дельных элементов установки (в основном, цепи главного тока).
Отсутствие коллекторов у генераторов переменного тока позво-
ляет повысить их скорость (например, в ТЭГУ), что также спо-
собствует уменьшению веса и габаритов ГЭУ.
По типу применяемых первичных двигателей ГЭУ перемен-
ного тока делятся на ТЭГУ и ДЭГУ.
Турбоэлектрические гребные установки (ТЭГУ). По мощ-
ности эти установки больше дизельных. Скорость вращения
турбин обычно составляет 3000 об(мин, что обусловливает при-
менение неявнополюсных синхронных генераторов. Паровые
турбины позволяют регулировать частоту генераторов и ско-
рость гребных электродвигателей в пределах от 100 до 25%.
Турбины и генераторы большой мощности имеют более высо-
кий к, п. д. и относительно малый вес. Потому в ТЭГУ обычно
применяют мощные турбогенераторы, а число их выбирают
равным числу гребных винтов. Чтобы упростить управление и
обслуживание ГЭУ, параллельную работу генераторов обычно не
предусматривают. А чтобы регулирование скорости синхронных
430
ГЭУ переменного тока
[Гл. 13
генераторов и гребных электродвигателей не искажало ре-
жима работы индивидуальных возбудителей, их цепи возбуж-
дения питают от отдельных
а-)
Рнс. 225.
Схемы главной цепи
одновальной (а) н двухвальной
(6) ТЭГУ переменного тока.
возбудителей, вращаемых специ-
альными электродвигателями.
Схемы главного тока ТЭГУ
различаются по числу турбогене- •
раторов и гребных электродви-
гателей (рис. 225). В схемах од-
новальных гребных установок
в цепи генератор—двигатель
устанавливают лишь одйн ревер-
сивный переключатель П; пере-
ключения производят им лишь
при снятом возбуждении генера-
тора и электродвигателя.
В схемах двухвальных гребных
установок применяют электро-
магнитную блокировку, преду-
преждающую возможность вклю-
чения генераторов на параллель-
ную работу. Из схемы блокировки, приведенной на рис. 226,
видно, что при отключенных выключателях цепи катушек элек-
тромагнитных защелок замкнуты, и кулачковые диски допу-
Рнс. 226. Схема электромагнитной блокировки двухвальной
ТЭГУ.
скают включение каждого из трех выключателей. При включе-
нии выключателя 1 или 2 размыкается цепь электромагнита
защелки выключателя 3, что делает возможной работу каждого
§ 81]
Особенности работы и схемы главного тока
431
генератора только на «свои» электродвигатель. Чтобы подклю-
чить оба электродвигателя к одному генератору, необходимо
отключить выключатели 1 и 2 и включить выключатель 3. После
этого становится возможным включение одного из генераторов.
Таким образом, блокировка позволяет включить два любых
выключателя из трех.
Дизель-электрические гребные установки (ДЭГУ). Широкое
распространение этих установок на современных судах объяс-
няется стремлением к экономичности. Дизели, служащие
Рис. 227. Схемы главной цепи одновальной (а и б) и двухваль-
ной (в) ДЭГУ переменного тока.
в таких ГЭУ первичными двигателями, обладают более высо-
ким к. п. д., нежели другие тепловые двигатели.
Желание уменьшить вес и размеры гребной установки при-
водит к использованию быстроходных дизелей, которые обычно
имеют ограниченные мощности. Поэтому в ДЭГУ переменного
тока обычно устанавливают по несколько дизель-генераторов,
работающих параллельно на один гребной двигатель. Таким
образом, число дизель-генераторов превышает в несколько раз
число гребных винтов, что является основным отличием ДЭГУ
(рис. 227).
Скорость вращения дизелей обычно не превышает
1000 об/мин, и это обусловливает применение синхронных гене-
раторов с явновыраженными полюсами. Генераторы, питающие
один гребной электродвигатель, обычно имеют общий возбуди-
тель. Электродвигатель имеет отдельный возбудитель, не свя-
занный с его валом.
ДЭГУ обычно строят на меньшие мощности, чем ТЭГУ,
и число валов в этих установках, как правило, не превышает
двух. Каждый винт обычно приводится в движение одним
432
ГЭУ переменного тока
[Гл. 13
гребным электродвигателем. Число генераторов может дохо-
дить до восьми.
Генераторы, работающие на один гребной вал, должны быть
включены параллельно. Иногда на параллельную работу вклю-
чают генераторы установок правого и левого бортов, для чего
применяют метод грубой синхронизации через реактор Рк
(рис. 227, в).
На современных судах часто практикуют отбор мощности
ГЭУ для питания других судовых потребителей. В ДЭГУ пере-
менного тока это возможно лишь при полных ходах, когда
гребная установка работает с номинальными частотой и напря-
жением. Поэтому некоторые схемы ГЭУ предусматривают воз-
можность отключения одного из генераторов для работы на
общесудовую сеть.
§ 82. Параллельная работа генераторов
Способы синхронизации. В ГЭУ переменного тока для вклю-
чения на параллельную работу синхронных генераторов при-
меняют точную синхронизацию, самосинхронизацию и грубую
синхронизацию. Каждый из этих методов синхронизации может
осуществляться как вручную, так и автоматически.
Точная синхронизация трехфазных синхронных генераторов
предусматривает:
а) равенство э. д. с. подключаемого генератора и напряже-
ния'главной цепи (сетевого напряжения), т. е. Е0—Ес-,
б) равенство частот подключаемого и работающих генера-
торов, т. е. fr=fc',
в) нахождение в противофазе э. д. с. генератора Ео и напря-
жения главной цепи Сс;
г) одинаковый порядок следования фаз генератора и глав-
ной цепи.
Выполнение первого требования обеспечивается регулирова-
нием тока возбуждения генератора и проверяется вольтметром.
Выполнение двух следующих требований осуществляется регу-
лированием скорости вращения первичного двигателя подклю-
чаемого генератора и проверяется синхроноскопом. В судовых
установках обычно используют стрелочный синхроноскоп, пред-
ставляющий собой прибор, аналогичный сельсину. Однофазную
обмотку синхроноскопа подключают к главной цепи ГЭУ, трех-
фазную — к подключаемому генератору. Поворот стрелки на
нулевую отметку делает возможным включение синхронизируе-
мого генератора. Соблюдение последнего требования проверяют
только после монтажа установки.
Включение синхронизируемого генератора при несоблюде-
нии указанных требований вызывает появление больших токов
§ 82] Параллельная работа генераторов 433
в подключаемой цепи, что может явиться причиной аварии ге-
нераторов и первичных двигателей. Выполнение точной син-
хронизации занимает много времени и требует от обслуживаю-
щего персонала определенных навыков.
От этих недостатков свободен способ самосинхронизации,
при котором совключение производится в момент, когда невоз-
бужденный синхронный генератор разгоняется до скорости на
±(3-4-4)%, отличающейся от синхронной, и ускорение подклю-
чаемого генератора не превышает 1 гц/сек. Обмотка возбужде-
ния при этом во избежание перенапряжений замыкается на
разрядное сопротивление, а после включения статора генера-
тора сразу же переключается на питание от источника постоян-
ного тока (возбудителя).
Преимущества метода самосинхронизации таковы:
а) простота выполнения, исключающая возможность оши-
бок;
б) быстрота синхронизации;
в) возможность синхронизации при изменяющихся частоте
и напряжении.
Включенный в сеть невозбужденный синхронный генератор
представляет собой асинхронную машину со скольжением,
уменьшающимся под действием асинхронного момента. Если
скорость вращения у синхронизируемого генератора больше,
чем у работающих генераторов, то он оказывается в режиме
асинхронного генератора и развивает момент, затормаживаю-
щий дизель до синхронной скорости генератора. Если скорость
вращения у синхронизируемого генератора меньше, чем у ра-
ботающих генераторов, то он работает в режиме синхронного
двигателя и развивает вращающий момент, ускоряющий дизель
до синхронной скорости.
Способом самосинхронизации можно подключать только не-
возбужденные (не несущие нагрузки) генераторы. Работаю-
щие же под нагрузкой синхронные генераторы можно включать
на параллельную работу методом грубой синхронизации, кото-
рая производится лишь при приближенном соблюдении условий
точной синхронизации. Следовательно, такое совключение
всегда сопровождается толчком тока.' Для смягчения этого
толчка совключение производят через реактор, который затем
шунтируется (см. рис. 227, в). Этот процесс занимает меньше
времени, чем точная синхронизация, и не требует'высокой ква-
лификации обслуживающего персонала. Недостатком грубой
синхронизации является необходимость применять громоздкие
реакторы.
Распределение нагрузки. При параллельной работе синхрон-
ных генераторов активная и реактивная нагрузки должны рас-
пределяться пропорционально их мощностям, а при одинаковых
15 к. А. Чекунов
434
ГЭУ переменного тока
{Гл. 13
мощностях генераторов — поровну. Следовательно, генераторы
должны работать с одинаковыми коэффициентами мощности
(costp), в противном случае между ними потекут уравнитель-
ные реактивные токи, бесполезно разогревающие обмотки
машин. Распределение активных нагрузок по указанному прин-
ципу обеспечивается регуляторами скорости вращения первич-
ных двигателей (дизелей), а распределение реактивных нагру-
зок — автоматическими регуляторами напряжения генераторов.
Если во время перевода нагрузки с одного генератора на
другой напряжение на шинах и частоту тока сети сохранять
постоянными, то следует увеличить подачу топлива (момент)
и величину тока возбуждения (напряжение) нагружаемого ди-
зель-генератора, соответственно уменьшив эти величины у раз-
гружаемого дизель-генератора.
Весьма важно, чтобы при увеличении нагрузки на винте ра-
ботающие генераторы оставались загруженными поровну. Для
этого необходимо, чтобы регуляторы скорости дизелей имели
одинаковые характеристики. Однако обеспечить синхронное
вращение первичных двигателей довольно трудно, значительно
легче поддержать синхронизацию вращения самими генерато-
рами. Момент сопротивления, создаваемый генератором на валу
первичного двигателя, определяется электромагнитной мощ-
ностью, передаваемой через воздушный зазор от ротора к ста-
тору. Электромагнитная мощность явнополюсного генератора
выражается формулой:
р, mU Ео * । / 1 1 \ • о/ / л о л\
Р, ~-----2- sin 0 -------------1 sin 20, (404)
Ф xd 2 \xq xd) v ’
где ха и xq — синхронные индуктивные сопротивления явнопо-
люсного генератора по продольной и поперечной осям.
Из выражения (404) электромагнитный момент сопротивле-
ния генератора определится так:
М, = Sin 0 + М---------------Ц sin 20. (405)
Ф 2сос \Х‘! XdJ
Вторые слагаемые в уравнениях (404) и (405) называются
реактивными мощностью и моментом; у неявнополюсных
машин, где xd=xq, они равны нулю. Из уравнений мощности
и момента следует, что РфИ являются синусоидальными
функциями угла 0. Если пренебречь реактивными составляю-
щими, имеющими незначительную величину, то так называемые
угловые характеристики Рф =f(0) и А1ф =f(0) примут вид кри-
вой, приведенной на рис. 228.
При случайном замедлении или ускорении ротора любого
из параллельно работающих генераторов на его валу, помимо
электромагнитных мощности Рф и момента Мф возникают
§ S3]
Типы гребных электродвигателей
435
дополнительные мощность и момент, которые носят название
синхронизирующих и определяют избыток или недоста-
ток мощности и момента генератора по сравнению с соответ-
ствующими величинами первичного двигателя.
Синхронизирующий момент в пределах угла Д6 будет:
ДМ, = М де,
ф с ’
откуда
ДМ,,
Мс=-------i
с до
(406)
(407)
где Мс выражает скорость изменения вращающего момента
с изменением угла 0 и называется
зирующим моментом.
Аналогично выразится
удельная синхронизирующая
мощность
ДР,,,
Рс = -^- = Мссос (408)
и полная синхронизирующая
мощность в пределах угла ДО
ДРФ = РСДО. (409)
Синхронизирующая мощ-
удельным синхрони-
Рис. 228. Угловые характеристики
неявнопоУпосного синхронного генера-
ность ДРф при замедлении ро-
тора генератора вызывает его
ускорение, а при ускорении
ротора, наоборот, вызывает
тора.
1 — электромагнитные мощность и момент;
2 — удельные синхронизирующие мощность
и момент.
замедление его вращения и таким образом поддерживает ус-
тойчивую синхронную скорость машин при изменении угла 6
в пределах ±Д0.
Из рис. 228 видно, что удельный синхронизирующий момент
Мс имеет наибольшее значение при 6 = 0 и равен нудю при
6=90°. Таким образом, синхронные генераторы наиболее устой-
чивы при малых углах 0, соответствующих малым нагрузкам
генераторов и первичных двигателей.
§ 83. Типы гребных электродвигателей
В ГЭУ переменного тока в качестве гребных двигателей
применяют асинхронные двигатели, синхронные двигатели и
асинхронные синхронизированные двигатели. Все они бывают
15*
436
ГЭУ переменного тока
[Гл. 13
как тихоходными, непосредственно соединяющимися с винтом,
так и быстроходными, соединяющимися с винтом через ре-
дуктор.
Из асинхронных электродвигателей в ГЭУ переменного тока
чаще всего применяют двигатели с фазным ротором и двух-
клеточные. Первые (их начали применять раньше других
двигателей переменного тока) устанавливают теперь лишь
на судах, которые должны обладать повышенной маневрен-
ностью.
«Маневренные способности» асинхронных двигателей с фаз-
ным ротором объясняются, во-первых, применимостью к ним
большого количества методов регулирования скорости и, во-
вторых, возможностью с помощью реостата в цепи ротора воз-
действовать на переходные процессы в двигателе, сокращая тем
самым время его торможения и реверса. Однако управлять
двигателем, манипулируя реостатом в цепи ротора,— дело
довольно сложное, требующее высокой квалификации. Приме-
нение асинхронных двигателей с двойной обмоткой на роторе
избавляет от этих недостатков.
Скорость асинхронных двигателей в ГЭУ можно регули-
ровать:
а) изменением частоты питающего тока;
б) переключением числа пар полюсов электродвигателя;
в) введением сопротивления в цепь ротора (относится
только к двигателям с фазным ротором).
Особенности перечисленных методов регулирования были
рассмотрены в § 25. Полюсопереключаемые асинхронные двига-
тели с фазным ротором снабжаются специальными роторными
обмотками, позволяющими автоматически изменять число полю-
сов ротора вслед за переключением статорных обмоток.
В пользу применения в ГЭУ асинхронных двигателей гово-
рят следующие их преимущества по сравнению с синхронными
двигателями:
а) простота конструкции и надежность работы (особенно
короткозамкнутых двигателей);
б) хорошие пусковые характеристики;
в) отсутствие необходимости возбуждения постоянным
током;
г) возможность регулировать скорость вращения без изме->
нения частоты питающего тока и скорости первичных двига-
телей.
Но асинхронные двигатели обладают также и существен-
ными недостатками, которые сдерживают их применение в ГЭУ.
Эти недостатки таковы:
а) несколько меньший к. п. д. (по сравнению с синхрон-
ными двигателями);
§ 83]
Типы гребных электродвигателей
437
б) квадратичная зависимость между максимальным момен-
том и напряжением на зажимах двигателя, что делает его
весьма чувствительным к колебаниям напряжения главной
цепи;
в) низкий коэффициент мощности асинхронных двигателей,,
к тому же не поддающийся регулировке, возможной у синхрон-
ных двигателей.
Последнее обстоятельство требует увеличения размеров
и веса гребных двигателей и главных генераторов (размеры
машин переменного тока определяются не активной, а кажу-.
щейся мощностью). Вообще говоря, быстроходные асинхрон-
ные двигатели работают с cos<p=0,83-<- 0,86. Но при непосред-
ственном соединении электродвигателя с гребным валом ско-
рость вращения обычно не превышает 200 об!мин-, costp при
этом уменьшается до 0,7. Опасность износа подшипников и
опускания вала диктует к тому же необходимость увеличения
воздушного зазора между ротором и статором, что является
причиной дальнейшего снижения costp — уже до 0,67.
На судах, для которых экономичность и минимальная пер-
воначальная стоимость ГЭУ важнее маневренных свойств,
в качестве гребных двигателей применяют синхронные и асин-
хронные синхронизированные двигатели.
Регулирование скорости вращения синхронных двигателей
осуществимо как переключением числа пар полюсов, так и
изменением частоты питающего тока. Но изменение числа полю-
сов статора двигателя вызывает необходимость одновременных
переключений в обмотке ротора, что усложняет схему, затруд-
няет обслуживание, увеличивает поток рассеяния в явно-
полюсных машинах и т. д. Поэтому большее распространение
получило регулирование скорости гребного двигателя измене-
нием частоты тока, особенно часто применяемое в режимах
экономичного хода.
Синхронные двигатели применяются в современных ГЭУ
переменного тока чаще других видов двигателей. Это объяс-
няется тем, что синхронным двигателям присущи следующие
достоинства:
а) высокий коэффициент мощности, который изменением
возбуждения двигателя может быть доведен до cos<p=l, что
позволяет уменьшить размеры гребных двигателей и главных
генераторов, сохраняя постоянной их активную мощность;
б) более высокий к. п. д., чем у асинхронных двигателей;
в) наличие большого воздушного зазора, что облегчает
сборку машин и допускает увеличенную просадку вала в под-
шипниках; кроме того, наличие большого воздушного зазора
уменьшает индуктивное синхронное сопротивление двигателя
хс и увеличивает максимальный электромагнитный момент
438
ГЭУ переменного тока
[Гл. /.
ным выше выражением
Рис. 229. Схема включения
асинхронного синхронизиро-
ванного двигателя.
A<Umax =т£7£о/сосХв и перегрузочную способность двигателя;
правда, увеличение воздушного зазора диктует усиление на-
магничивающей силы обмотки возбуждения, но это может
быть осуществлено добавлением витков обмотки;
г) меньшая чувствительность к колебаниям напряжения,
чем у асинхронных двигателей, что подтверждается приведен-
для Мфгаах.
К недостаткам синхронных элек-
тродвигателей следует отнести:
а) худшие пусковые свойства по
сравнению с асинхронными двигате-
лями ввиду снижения коэффициента
мощности при пуске до cos ф=0,4
— 0,5;
б) потребность в наличии источ-
ника постоянного тока для питания
обмоток возбуждения.
Стремление получить хорошие пу-
сковые характеристики и довести
costp в рабочих режимах до желаемой
величины привело к применению в ка-
честве гребных двигателей ГЭУ асин-
хронных синхронизированных двигате-
лей (рис. 229). Их пускают подобно асинхронным двигателям
с фазным ротором, т. е. при помощи пусковых сопротивлений
Гп с установленным в положение 1 переключателем П. После
разгона до полной (асинхронной) скорости переключатель П
переводят в положение 2, в результате чего обмотка ротора
получает питание постоянным током от возбудителя В. Под дей-
ствием возникающего при этом синхронизирующего момента
асинхронный двигатель переходит в синхронный режим. По ус-
ловиям нагрева постоянный ток возбуждения синхронизирован-
ного двигателя /п может превышать ток фазы ротора асинхрон-
ного двигателя / примерно на 25% (/п=1,25 /).
§ 84. Режимы работы ГЭУ переменного тока
В ГЭУ переменного тока, в отличие от ГЭУ постоянного
тока, скорость вращения генераторов и первичных двигателей
не остается постоянной в случае изменения скорости хода
судна. В зависимости от условий плавания судна ГЭУ мо-
жет работать в различных режимах. Рассмотрим некоторые
из них.
Работа одновальной ТЭГУ. Эта установка состоит из турбо- <•
генератора и синхронного гребного двигателя и представляет
собой систему электрического вала, который выгодно отлича-
§ 84]
Режимы работы ГЭУ переменного тока
439
ется от механического вала тем, что допускает значительно
большие углы скручивания. В случае недопустимо большой на-
грузки электродвигатель выходит из синхронизма. Полисе ис-
пользование первичного двигателя здесь возможно только при
полном ходе судна.
Электромагнитная мощность генератора по условиям на-
грева определяется током главной цепи, который в случае при-
нудительного охлаждения во всех режимах может быть вели-
чиной постоянной, равной номинальному значению, т. е. /=/н=
= const. Если во всех режимах поддерживать примерно посто-
янным и ток возбуждения генератора, то его электромагнитный
момент будет неизменным, а электромагнитная мощность ста-
нет изменяться пропорционально частоте: Ali — const; P<^f.
С изменением частоты генератора изменяется скорость вра-
щения гребного электродвигателя, а при изменении его скорости
мощность на валу изменяется пропорционально кубу частоты
питающего тока: Р= п\ a n = f. При этом, если возбуждение
генератора и электродвигателя останется практически постоян-
ным и costp будет равен единице, то напряжение главной цепи
окажется связанным с частотой пропорциональной зависимостью,
а ток станет пропорционален квадрату частоты. В этом случае
при резком уменьшении скорости вращения винта и, следова-
тельно, полезной мощности ГЭУ потери на возбуждение гене-
ратора и электродвигателя будут иметь прежнее значение,
потери в стали уменьшатся незначительно (так как поток и маг-
нитная индукция в зазоре неизменны). Суммарные потери со-
ставят, таким образом, значительную часть полной мощности
ГЭУ, в результате чего к. п. д. установки резко снизится.
Следовательно, для того чтобы с понижением скорости винта
и нагрузки на валу гребного двигателя к. п. д. одновальной
ТЭГУ оставался на достаточно высоком уровне, необходимо
пропорционально частоте изменять ток возбуждения и напря-
жение в главной цепи. Регулирование возбуждения главного
генератора и гребного электродвигателя пропорционально из-
менению тока нагрузки полезно еще и тем, что повышает ус-
тойчивость системы.
Такое регулирование может осуществляться автоматиче-
ски— по схеме, представленной на рис. 230. Обмотки возбуж-
дения главного генератора и гребного электродвигателя полу-
чают питание от возбудителя В, для возбуждения которого ис-
пользуется электромашинный усилитель с поперечным полем.
ЭМУ имеет три обмотки управления: задающую 0У3, токовую
ОУТ и напряжения ОУН. Обмотки управления включены так,
чтобы намагничивающие силы задающей и токовой обмоток
совпадали друг с другом по направлению, а намагничивающая
сила обмотки напряжения была направлена им встречно.
440
ГЭУ переменного тока
[Гл. 13
С помощью задающей обмотки ОУВ устанавливается необхо-
димый ток возбуждения генератора и электродвигателя при
номинальном моменте сопротивления и cos<p=l (см. векторную
Рис. 230. Схема автоматического регулирования тока возбуж-
дения генератора и электродвигателя ТЭГУ.
диаграмму на рис. 231). По мере увеличения нагрузки на винте
возрастает ток главной цепи и уменьшается напряжение. В ре-
зультате н. с. обмотки ОУТ возрастает, а н. с. обмотки ОУВ
уменьшается. Это приводит к уси-
лению результирующей н. с. ЭМУ и,
наконец, к увеличению тока воз-
буждения главных машин ТЭГУ.
В виду одновременного и равного
изменения возбуждения генератора
и электродвигателя, cos <р сохраняет
свое значение при всех нагрузках
(обычно cos<р = 1).
Чтобы схема реагировала на из-
менение частоты тока главной цепи,
последовательно с ОУН включен
дроссель Др, сопротивление кото-
рого изменяется с изменением ча-
стоты тока. Соответствующим под-
бором намагничивающих сил об-
моток управления и величины дрос-
селя возможно найти оптимальное соотношение между напря-
жением и частотой главной цепи.
Однако определение такого соотношения целесообразно
лишь для одновальных ТЭГУ. При длительных малых ходах
§ 84]
Режимы работы ГЭУ переменного тока
441
судов с ДЭГУ или с двухвальной ТЭГУ часть генераторов от-
ключают с тем, чтобы оставшиеся в работе генераторы имели
примерно полную загрузку.
Режимы экономичного хода и аварийные режимы. В ДЭГУ
переменного тока на один гребной двигатель обычно работает
несколько параллельно включенных генераторов. Когда ско-
рость хода судна снижается, то один или несколько генераторов
отключают, а скорость вращения работающих генераторов сни-
жают, чтобы соответствующим образом уменьшить частоту.
Не делать этого нельзя, ибо при номинальной частоте гребной
двигатель будет развивать номинальную скорость и потреблять
полную мощность генераторов. Если при этом в работе будут
не все генераторы, то они окажутся перегруженными.
При неизменном номинальном токе генераторов мощности
дизель-генераторных - агрегатов уменьшаются пропорционально
частоте, а момент, создаваемый на валу дизель-генератора, ос-
тается постоянным. Момент на гребном валу при этом умень-
шается пропорционально числу работающих агрегатов. Мощ-
ность ДЭГУ в режимах экономичного хода и в аварийных ре-
жимах уменьшается, таким образом, по двум причинам: а) из-за
уменьшения числа работающих генераторов и б) из-за уменьше-
ния мощности каждого из них.
Определим, до какой величины необходимо уменьшить ча-
стоту тока главной цепи и чему будет равна скорость гребного
электродвигателя в случае отключения одного, двух и трех ге-
нераторов в ДЭГУ, располагающей четырьмя дизель-генератор-
ными агрегатами. Чтобы упростить пример, воспользуемся от-
носительными единицами моментов, частоты и скорости.
При работе 4 агрегатов М4=МН; следовательно, Л;1;;4= 1;
» » 3 » М3=0,75Мн; » 24*3 = 0,75;
» » 2 » М2=0,5Мн; » М*2 = 0,5;
» » 1 агрегата М1=0,25Мн; » Л4*! = 0,25.
Исходя из пропорциональной зависимости между скоростью
гребного электродвигателя и частотой тока главной цепи, учи-
тывая рабочую характеристику винта М = сп2 и зная, что греб-
ной двигатель должен развивать, не перегружаясь, предельно
возможный в данных условиях момент, мы получим:
= f *1 ~ — ]/ 1 = 1;
ns = Лз = ]/Л4^ = ]/0Д5 = 0,866;
nt = /*2 = 1/л^Г = У0,5= 0,707;
Иг =Л! = J/mZT =/(W= 0,5.
442
ГЭУ переменного тока
[Гл. 13
Примерно такие же результаты дает графическое решение
данного примера (рис. 232). На характеристике винта PB=f(n)
ординату номинальных мощностей при номинальной скорости
пн разделим на число агрегатов ДЭГУ, а из точек, соответст-
вующих мощностям работающих генераторов, проведем в на-
чало координат прямые — характеристики 73r=f(n), соответст- ~
вующие постоянным моментам на валу гребного электродви-
гателя.
Точки пересечения характеристик Ръ=1{п) и Pr=f(n) опре-
деляют скорости вращения гребного электродвигателя в соот-
ветствующих режимах экономич-
ного хода.
В двухвальных ТЭГУ каждый
турбогенератор обычно работает
на «свой» гребной двигатель. Ре-
жимы экономичного хода и ава-
рийный получаются при отключе-
нии одного турбогенератора
с тем, чтобы другой агрегат ра-
ботал на оба гребных электро-
двигателя. Чтобы предупредить
перегрузку работающего генера-
тора, необходимо настолько
уменьшить его частоту и скорость
вращения гребного электродвига-
теля, чтобы мощность генератора
Рис. 232. Определение скорости
вращения гребного вала в ДЭГУ
переменного тока.
= (410)
была равна мощности двух гребных электродвигателей:
2Р — 2Р /з (411)
дв дв. Н-/ * \ Ч
Тогда
Р f = 2Р fs,
Г. Н-' » дв.
откуда
Л = 1/ = /о1 = 0,707, (412)
’ Д»- и
где Рг.н—Рдв.н (если пренебречь потерями в гребном электро-
двигателе) .
С изменением скорости вращения турбогенератора пропор-
ционально частоте уменьшается напряжение главной цепи
U = 0,707t/H.
Ток генератора при этом остается номинальным, а в греб-
ных электродвигателях он составляет половину номинального
значения.
§ 85]
Защита ГЭУ переменного тока
443
§ 85. Защита ГЭУ переменного тока
В ГЭУ переменного тока основными объектами защиты яв-
ляются главные генераторы и гребные электродвигатели, все
повреждения которых можно разделить на внешние и внутрен-
ние. К внешним относятся все повреждения, происходящие
в распределительных устройствах и кабелях, соединяющих
электрические машины и аппараты ГЭУ, а именно: одно-, двух-
и трехфазные короткие замыкания, обрыв одной фазы, замыка-
ние цепи возбуждения на корпус в двух точках. К внутренним
повреждениям генератора и электродвигателя следует отнести
помимо того замыкания витков одной фазы и различные пере-
напряжения. Защищать ГЭУ надо не только от повреждений, но
и от таких ненормальных режимов работы, как перегрузки, вы-
падение двигателя из синхронизма и др.
Регистром СССР предусматриваются следующие виды за-
щиты, направленные на отключение места аварии или на опо-
вещение о ненормальном режиме работы:
для генераторов
а) максимально-токовая защита, работающая на отключе-
ние цепей возбуждения;
б) дифференциальная защита с действием на отключение
цепей возбуждения (для генераторов мощностью 1000 кет и
более) ;
в) реле заземления с автоматическим действием на звуко-
вую и световую сигнализацию;
для гребных электродвигателей
а) максимально-токовая защита, работающая на отключе-
ние цепей возбуждения;
б) дифференциальная защита, работающая на отключение
цепей возбуждения.
Следовательно, релейная защита, как правило, работает на
отключение обмоток возбуждения без разрыва главной цепи,
причем действие защиты должно сопровождаться включением
звуковой и световой сигнализации. Отключение цепей возбуж-
дения производится автоматом гашения поля АГП, который,
кроме того, замыкает обмотку возбуждения на разрядное со-
противление гр=(4-ч-5) гв. При этом запасенная в роторе
магнитная энергия в течение 6—8 сек гасится в сопротивлениях
обмотки возбуждения гв и разрядном гр.
Отключать главную цепь поврежденного генератора нецеле-
сообразно, так как остающиеся в работе дизель-генераторы мо-
гут внезапно перегрузиться и выйти из синхронизма из-за не-
одинакового снижения скорости вращения дизелей. Поэтому
при коротком замыкании в одном из генераторов ГЭУ за-
щита действует на АГП всех главных машин установки. После
444
ГЭУ переменного тока
[Гл. 13
отключения поврежденного генератора приступают к пуску ис-
правных машин в обычном порядке.
Наряду с указанными видами защиты обычно предусматри-
вают температурную сигнализацию на случай перегрева обмо-
ток и подшипников, возникновения пожара в железе магнит-
ной системы и т. д.
Рассмотрим основные виды защиты главных генераторов.
Максимально-токовая защита. Эта защита предусматри-
вается на случай коротких замыканий и перегрузок генерато-
Рис. 233. Схема максимально-токовой защиты ГЭУ переменного тока.
ров. Будучи самой простой, надежной и дешевой, она осуществ-
ляется при помощи электромагнитных реле, включаемых через
трансформаторы тока. Чтобы обеспечить защиту не только от
внешних, но и от внутренних коротких замыканий генераторов,
трансформаторы надлежит включать со стороны нулевой точки
обмотки статора.
В представленной на рис. 233 схеме применены два комп-
лекта токовых реле Т: первый рассчитан на короткие замыка-
ния и срабатывает мгновенно, второй — на перегрузки и сраба-
тывает с выдержкой времени, обеспечиваемой механическим
реле времени В. Оба комплекта реле воздействуют на промежу-
точное реле, замыкающее цепь АГП. Сработавший комплект
защиты указывается сигнальным реле У.
Во избежание ложных отклонений при пусках и реверсах
гребного электродвигателя ток срабатывания защиты выбирают
таким, чтобы он был больше пусковых токов, а время выдержки
реле перегрузки — таким, чтобы оно было больше времени
пуска и реверса.
Продольная дифференциальная защита. Этот вид защиты,
выполняемый по схеме с циркулирующими токами или по схеме
с уравновешенными напряжениями, предназначен для зашиты
генераторов от внутренних коротких замыканий. Дифференты
§ 85]
Защита ГЭУ переменного тока
445
альная защита с циркулирующими токами (рис. 234) действует
от разности токов в начале и в конце защищаемого участка
цепи и является наиболее точной и чувствительной. На гра-
ницах защищаемого участка ставят трансформаторы тока 1
и.2, вторичные обмотки которых вклю-
чают так, чтобы в них все время цир-
кулировали токи. Реле подключают
к соединительным проводам.
Для эквивалентной схемы замеще-
ния вторичной цепи дифференциаль-
ной защиты (рис. 235) можно напи-
сать следующие уравнения равновесия
падений напряжений и токов:
+ (413)
E2 = /2Z2-/pZp; (414)
4 = 4 + /р, (415)
где Zi, Z2, Zp — комплексные сопро-
тивления вторичных обмоток транс-
Рис. 234. Принципиальная
схема дифференциальной
защиты с циркулирующими
токами.
форматоров и реле.
Решив приведенную систему урав-
нения относительно тока реле /р по-
лучим:
/ —- (416)
р ад, + zp (zr + z2) ‘
Рис. 235. Эквивалентная схе-
ма замещения вторичной це-
пи дифференциальной за-
щиты.
Обычно Z!=Z2=Z; тогда:
j __ Ё1-Ё 2
р ~ Z + 2Zp ‘
(417)
При нормальном режиме или коротком замыкании вне за-
щищаемой зоны (точка Ki на рис. 234) первичные токи обоих
трансформаторов должны быть равны и Ei=E2, а /р=0.
При коротком замыкании внутри зоны защиты (точка Кг)
первичный ток трансформатора 2 равен 0 и £2 = 0. Тогда:
I = —А
Р 7 , о
(418)
р
В случае подпитки точки короткого замыкания Кг со сто-
роны нагрузки ток трансформатора 2 и э. д. с. £2 меняют знаки,
и ток в реле /р окажется равным: 4
/ + ! (419)
р Z + 2Z„
446
ГЭУ переменного тока
[Гл. 13
Защита будет надежной в том случае, если сопротивление
реле взято настолько малым, чтобы даже незначительная
э. д. с. могла создать ток /р, достаточный для срабатывания
реле.
Защита обмотки возбуждения от замыкания на корпус.
Наиболее вероятным повреждением обмоток возбуждения гене-
ратора является замыкание на корпус, хотя само по себе со-
единение с корпусом в одной точке опасности не представляет.
Но достаточно возникнуть замыканию во второй точке, чтобы
произошло шунтирование части обмотки корпусом машины,
Рис. 236. Схема защиты обмотки воз-
буждения генератора от двойного за-
мыкания на корпус.
а это может быть причиной по-
нижения магнитного потока
генератора и появления боль-
ших реактивных токов при па-
раллельной работе. Еще боль-
шую опасность представляет
собой ток, который, проходя
между точками замыкания по
шунтирующей перемычке, мо-
жет выжечь соседние витки об-
мотки и оплавить железо сер-
дечника.
Для защиты от замыканий
обмотки возбуждения гене-
ратора или синхронного двига-
теля на корпус в двух точках
применяют токовое реле, воз-
действующее на АГП (рис. 236).
На зажимы обмотки возбуждения генератора ОВГ выклю-
чателем Вг включают потенциометр П, между ползунком ко-
торого и корпусом судна параллельно включены милливольт-
метр /Д' периодически замыкаемый кнопкой К, и токовое реле
Т, цепь которого замыкается рубильником В2.
При нормальном состоянии изоляции обмотки возбуждения
прибор и реле отключены. Обслуживающий персонал периоди-
чески проверяет состояние изоляции обмотки, для чего нажи-
мает на кнопку Л- Если обмотка возбуждения замкнута на
корпус (например, в точке а), то милливольтметр покажет на-
пряжение между точкой а и ползунком потенциометра П. После
перемещения ползунка в равнопотенциальное с точкой а по-
ложение милливольтметр окажется включенным в диагональ
уравновешенного моста (С' = 0). Затем включают рубильник В2,
подготавливая тем самым схему защиты на случай, если замы-
кание на корпус произойдет еще в одной точке. Когда это слу-
чится (например, в точке б), то равновесие плеч моста нару-
шится и через реле Т потечет ток, вызвав срабатывание защиты.
§ 86]
Пуск и реверс гребного двигателя
447
Защита гребных электродвигателей. В ГЭУ переменного
тока электродвигатель следует считать не менее, а иногда (на-
пример, в ДЭГУ) даже более ответственным элементом уста-
новки, нежели генератор. Для синхронных электродвигателей
характерны те же повреждения, что и для генераторов, для
асинхронных — они же, за исключением замыканий на корпус
обмотки возбуждения. Поэтому электродвигатели имеют все
виды защиты, предусмотренные для генераторов, и кроме то-
го— защиту от выпадания синхронного двигателя из синхро-
низма, работающую на сигнал.
В одновальных ТЭГУ иногда применяют один комплект
дифференциальной защиты, охватывающий генератор и элект-
родвигатель. Часто двигатель защищают токовой защитой ге-
нератора, имеющей достаточно высокую чувствительность.
Стремление повысить надежность, быстродействие, чувстви-
тельность и избирательность защиты, а также уменьшить вес,
габариты и потребляемую мощность отдельных ее элементов
привело к разработке в последнее время бесконтактных схем
защиты генераторов и гребных электродвигателей с примене-
нием МУ, усилителей на полупроводниках, датчиков Холла и
логических элементов.
§ 86. Пуск и реверс гребного двигателя в ГЭУ
переменного тока
Пуск и реверс синхронного двигателя осуществляется
в асинхронном режиме, в виду чего работа синхронных и асин-
хронных гребных электродвигателей при пуске и реверсе ана-
логична. Основное различие заключается в том, что если дан-
ные процессы для асинхронного двигателя заканчиваются выве-
дением его на естественную (асинхронную) характеристику, то
синхронный двигатель из асинхронного режима еще должен
перейти в синхронный, что производится при подаче возбужде-
ния в обмотку ротора двигателя. Поэтому пуск и реверс рас-
смотрим для ГЭУ с синхронными гребными электродвигателями.
Пуск гребного электродвигателя. При пуске гребного элект-
родвигателя, мощность которого примерно равна мощности
питающих генераторов, напряжение главной цепи в результате
реакции статора генераторов резко снижается. При этом асин-
хронный момент двигателя, пропорциональный квадрату на-
пряжения, может настолько уменьшиться, что не окажется
в состоянии преодолеть момент сопротивления винта и разо-
гнать двигатель до асинхронной скорости. Для увеличения пус-
кового и максимального моментов двигателя применяют пере-
возбуждение (форсировку возбуждения) генератора. В ГЭУ до-
пускают увеличение тока возбуждения генераторов в 3—6 раз.
448
ГЭУ переменного тока
[Гл. 13
Пусковые характеристики синхронного двигателя без фор-
сировки возбуждения генератора (кривая 1) и с форсировкой
(кривая 2) приведены на рис. 237.
Двигатель под действием асинхронного момента разгоняется
до подсинхронной скорости (0,95 пс), при которой включается
возбуждение, и возникший при этом синхронизирующий момент
втягивает двигатель в синхронизм. Асинхронный момент, раз-
виваемый двигателем при подсинхронной скорости, называется
входным, или подсинхронным. Для надежного вхож-
дения двигателя в синхронизм необходимо, чтобы его подсин-
хронный момент на 25% превышал момент сопротивления. Из
Рис. 237. Пусковые характеристики Рис. 238. Пуск гребного электродви-
синхронного двигателя с форсировкой гателя в ГЭУ переменного тока,
возбуждения и без нее.
рис. 237 видно, что это возможно лишь при форсировке воз-
буждения.
Чтобы уменьшить момент сопротивления винта, гребной
электродвигатель пускают при пониженной частоте цепи глав-
ного тока fn, которая определяется наименьшей устойчивой
скоростью первичных двигателей генераторов (рис. 238). Пуск
гребного электродвигателя состоит из следующих операций:
а) гребной двигатель подключают к генератору или к сбор-
ным шинам группы синхронизированных генераторов, работаю-
щих при пониженной частоте /д;
б) производят форсировку возбуждения генераторов;
в) после того, как гребной электродвигатель достигнет под-
синхронной скорости, включают его возбуждение, в результате
чего двигатель втягивается в синхронизм;
г) уменьшают ток возбуждения генераторов до номинальной
величины; При этом гребной электродвигатель вращается с син-
хронной скоростью пП, соответствующей частоте пуска fa (точ-
ка С).
$
Пуск и реверс гребного двигателя
449
Дальнейший разгон двигателя производится повышением
частоты генераторов. В ДЭГУ при этом должно быть обеспе-
чено равномерное распределение нагрузки между параллельно
работающими генераторами.
Переход гребного электродвигателя из режима точки С
в режим точки В происходит благодаря быстрому повышению
скорости вращения первичных двигателей и увеличению ча-
стоты тока главной цепи от fn ДО при которой гребной дви-
гатель развивает скорость пш
Мн. Затем, по мере посте-
пенного разгона судна и со-
ответствующего увеличения
частоты генераторов, винт,
работая, переходит со швар-
товной характеристики на
промежуточные и, наконец,
на основную характеристику_
в точку А, определяемую
номинальными значениями '
скорости пн и момента AfH-
При этом во избежание пе-
регрузок гребного и первич-
ных двигателей необходимо
частоту увеличивать плавно,
с тем чтобы винт разгонял-
ся без резких колебаний мо-
мента нагрузки — по лома-
ной BDEHFKA.
и номинальный момент на валу
Рис. 239. Реверсивные характеристики
винта (/ и 2) и гребного влектродви-
гателя (3 и 4).
Реверс гребного электро-
двигателя. При реверсе, как и
при пуске, гребной электродвига-
тель работает в асинхронном режиме при пониженном напряже-
нии, а следовательно, при резко уменьшенном моменте на валу
(рис. 239). Чтобы снизить момент сопротивления винта Л1В, при
котором двигатель должен входить в синхронизм, а также чтобы
преодолеть максимальный вращающий момент винта А1вП1ах Для
его затормаживания, реверс производят при минимальной ча-
стоте fp, получаемой путем уменьшения скорости первичных дви-
гателей до минимальной устойчивой. Однако этого часто бывает
недостаточно (кривая 3). Поэтому, как и при пуске, прибегают
к форсировке возбуждения главных генераторов (кривая 4).
Так как продолжительность реверса гребного электродвигателя
мала по сравнению с продолжительностью реверса судна, будем
считать, что пока двигатель затормаживается и разгоняется
в противоположную сторону, судно по инерции движется в преж-
нем направлении со скоростью, которая предшествовала
реверсу.
16
К. А. Чекунов
450
ГЭУ переменного тока
[Гл. 13
Реверс гребных электродвигателей возможен двумя спосо-
бами:
а) электродвигатель включают в обычный для асинхронных
двигателей режим противовключения;
б) электродвигатель сначала включают в режим динамиче-
ского торможения, затем останавливают механическим тормо-
зом и, наконец, пускают в противоположном направлении.
Первый способ предпочтительнее, поскольку он проще и не
требует сложного распределительного устройства системы
электродвижения. Ниже приведена последовательность такого
реверса для ДЭГУ.
I. Снимают возбуждение генераторов и электродвигателя и
выключают реверсивный переключатель. Скорость первичных
двигателей снижают до минимальной устойчивой. При этом
винт затормаживается от пн До пб (участок АБ).
2. Реверсивным переключателем включают гребной элект-
родвигатель в положение «Ход назад» (режим противовключе-
ния). Винт, затормаживаясь от точки Б по реверсивной харак-
теристике 1, увеличивает вращающий момент до Л1Бтах (режим
гидротурбины). Если включенный гребной двигатель развивает
момент в соответствии с механической характеристикой 3, то
в точке В моменты уравновешивают друг друга и наступает
установившийся режим работы ГЭУ. Он продолжается до тех
пор, пока не уменьшается скорость движения судна и винт не
переходит на реверсивную характеристику 2. Это недопустимо
затягивает реверс и вызывает перегрев машин ГЭУ. Чтобы пре-
дотвратить такой режим, возбуждение генератора включают
с необходимой форсировкой, в результате которой гребной дви-
гатель, работая по характеристике 4, сначала затормаживается
до полной остановки (участок ГД), а затем, изменив направле-
ние вращения, разгоняется до подсинхронной скорости (уча-
сток ДЕ).
3. При достижении электродвигателем подсинхронной ско-
рости включается возбуждение (точка Е). Поскольку подсин-
хронный момент двигателя МЕ больше момента сопротивления
винта 7ИВ, двигатель входит в синхронизм (точка К).
4. После вхождения двигателя в синхронизм ток возбужде-
ния генераторов снижается до номинальной величины.
5. Дальнейший разгон гребного двигателя, как и при пуске,
осуществляется постепенным увеличением частоты тока глав-
ной цепи, т. е. увеличением скорости дизелей. При этом следует
контролировать равномерность распределения нагрузки между
параллельно работающими генераторами и дизелями.
В ТЭГУ процесс реверса отличается от описанного тем, что
отпадает надобность в синхронизации генераторов и в контроле
за распределением нагрузки между ними.
§ 87] Регулирование синхронных генераторов по углу 451
§ 87. Регулирование синхронных генераторов по углу
В § 82 и 86 отмечались трудности синхронизации и распре-
деления нагрузки между параллельно работающими синхрон-
ными генераторами. Эти трудности особенно значительны при
реверсе гребного двигателя, когда для увеличения его скорости
вращения необходимо плавно повышать частоту дизель-генера-
торов, сохраняя равномерное распределение нагрузки между
ними. Причина этого заключается в несовершенстве применяе-
мых в настоящее время регуляторов первичных двигателей, ко-
торые контролируют скорость вращения генераторного агре-
Рис. 240. Система управления работой синхронного генератора по
углу.
гата, но нечувствительны к изменениям угла поворота вала ге-
нератора.
Разработанная в Николаевском кораблестроительном ин-
ституте при участии автора система регулирования синхрон-
ными генераторами по углу позволяет устранить указанные
недостатки. Принцип ее работы заключается в следующем.
Режим работы синхронного генератора, как известно, харак-
теризуется значениями частоты и напряжения вырабатываемого
тока. Следовательно, управление работой генератора можно
свести к воздействию на вектор напряжения, модуль которого
определяет величину напряжения, а скорость его вращения —
частоту сети. При этом изменение модуля вектора возлагается
на систему регулирования возбуждения синхронного генера-
тора, а положение (угол) вектора относительно некоторого син-
хронного вращающегося вектора задающего напряжения в каж-
дый отдельный момент времени контролируется регулятором
первичного двигателя, изменяющего подачу топлива или пара.
Блок-схема системы управления работой синхронного гене-
ратора по углу представлена на рис. 240. Вал генераторного
16*
452
ГЭУ переменного тока
[Гл. 13
агрегата ПД—СГ через измеритель момента ИМ связан с ва-
лом задающего двигателя ЗД. Задающим двигателем может
быть маломощный (около 0,4 кет) реактивный двигатель, пи-
тающийся от генератора постоянной частоты ГПЧ или от дру-
гого источника, частоту которого должен воспроизводить управ-
ляемый синхронный генератор.
Измеритель момента может быть как электрический, так и
гидравлический. Электрический измеритель момента представ-
ляет собой вращающиеся на валу СГ два контакта, связанные
с переменными активными сопротивлениями. Между контактами
расположена пластинка, вращающаяся на валу ЗД. При син-
хронном вращении валов контакты не замкнуты, и задающий
двигатель, играющий роль чувствительного элемента системы,
не создает никакого управляющего сигнала. Если же скорость
синхронного генератора по какой-либо причине отклонится от
скорости вращения поля задающего двигателя и синхронное по-
ложение валов (векторов задающего напряжения и напряжения
генератора) * будет нарушено, то задающий двигатель разовьет
момент М, представляющий собой алгебраическую сумму трех
моментов, пропорциональных:
а) углу отклонения вала агрегата а от синхронного положе-
ния (синхронный реактивный момент) Mi = 6ct;
б) скорости изменения угла рассогласования (асинхронный
момент)
Л4 2 = с-;
•2 dt ’
в) ускорению ухода вала агрегата из синхронного положе-
ния
М — 8<х + с — + J—— . (420)
dt dt* 4 ’
При этом пластинка измерителя момента замкнет цепь од-
»' ного из переменных сопротивлений, значение которого опреде-
лится в соответствии с созданным задающим двигателем мо-
ментом М. Электрический сигнал, определенный величиной со-
противления, поступит в регулятор первичного двигателя Р, где
он будет преобразован в механическое воздействие на аппарат
подачи топлива (или пара).
Изменение подачи топлива (или пара) соответствующим об-
разом изменит момент приводного двигателя, и вал агрегата
вернется в синхронное положение с валом задающего двига-
i: Углом нагрузки генератора 6 для простоты рассуждений пренебрегаем.
§ 87]
Регулирование синхронных генераторов по углу
453
теля. Таким образом, система обеспечивает синхронное и син-
фазное вращение валов синхронных генераторов даже при от-
сутствии электрической связи между генераторами.
Проведенные в лабораториях института испытания электро-
механической модели рассмотренной установки дали положи-
тельные результаты. Предлагаемая система автоматического уп-
равления синхронными генераторами позволяет обеспечить:
а) поддержание частоты автономно работающего синхрон-
ного генератора на заданном уровне;
б) простое включение синхронных генераторов на парал-
лельную работу;
в) распределение нагрузок между параллельно работаю-
щими генераторами по любому заданному закону.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. В чем заключается принципиальное различие между ТЭГУ и ДЭГУ
переменного тока (стр. 429—432) ?
2. Опишите способы синхронизации генераторов в ДЭГУ (стр. 432
н 433).
3. Объясните физическую сущность синхронизирующих мощностей и мо-
мента у синхронных генераторов (стр. 434 и 435).
4. Сравните синхронные и асинхронные гребные электродвигатели
(стр. 436—438).
5. Сопоставьте свойства механического и электрического вала гребных
установок (стр. 438 и 439).
6. Каково соотношение между частотой и напряжением при частотном
регулировании гребного электродвигателя в одновальной ТЭГУ (стр. 438—
440)?
7. Сформулируйте закон изменения частоты в экономичных ходах ДЭГУ
и ТЭГУ (стр. 441 и 442).
8. Сравните максимально-токовую и продольную дифференциальную
защиты ГЭУ переменного тока (стр. 444—446).
9. Каково назначение форсировки возбуждения и снижения частоты гене-
раторов при пуске и реверсе гребных электродвигателей (стр. 447—450)?
ПРИЛОЖЕНИЯ
I. Значения аэродинамических коэффициентов для рулей различных профилей
Угол перекладки руля, ° СУ сх С!П СУ сх спг Су сх спг Су с % сгп
Профиль № 3 (а = 12%) Профиль № 4 (а — 15%) Профиль № 5 (а = 18%) Профиль № 6 (а = 21%)
—8 —0,60 0,033 —0,146 —0,60 0,031 —0,143 —0,60 0,032 —0,137 — — —
—4 —0,30 0,015 —0,0733 —0,30 0,014 —0,0715 —0,30 0,018 —0,070 — — —
—2 —0,15 0,009 —0,0368 —0,15 0,009 —0,036 —0,14 0,012 —0,033 —0,15 0,012 —0,033
0 0,00 0,007 0,000 0,00 0,0077 0,000 0,00 0,0088 0,000 0,00 0,010 0,000
2 0,15 0,009 0,0368 0,15 0,009 0,036 0,14 0,012 0,033 0,15 0,012 0,033
4 0,30 0,0155 0,0733 0,30 0,014 0,0715 0,30 0,018 0,070 0,30 0,010 0,066
6 0,445 0,0205 0,109 0,45 0,020 0,107 0,43 0,022 0,100 0,42 0,024 0,092
8 0,60 0,033 0,146 0,60 0,031 0,143 0,60 0,032 0,137 0,58 0,032 0,128
10 0.745 0,041 0,182 0,74 0,042 0,176 0,72 0,044 0,168 0,70 0,042 0,154
12 0,90 0,059 0,220 0,89 0.060 0,212 0,88 0,059 0,205 0,86 0,058 0,189
14 1,045 0,075 0,255 1,02 0,075 0,243 1,01 0,078 0,235 0,96 0,072 0,241
16 • 1,20 0,096 0,293 1,17 0,095 0,279 1,15 0,097 0,268 1,12 0,092 0,246
18 1,32 0,119 0,322 1,30 0,119 0,310 1,28 0,118 0,298 1,24 0,110 0,273
20 1,46 0,142 0,356 1,42 0,140 0,338 1,39 0,140 0,324 1,37 0,140 0,301
22 1,55 0,173 0,378 1,55 0,178 0,369 1,42 0,160 0,331 1,38 0,192 0,303
24 1,20 0,262 0,362 1,29 0,210 0,367 1,31 0,188 0,341 1,29 0,240 0,334
26 1,09 0,322 0,365 1,21 0,269 0,363 1,24 0,360 0,339 1,22 0,290 0,328
28 0,92 0,410 0,369 1,00 — — 1,08 0,357 0,342 1,12 0,330 0,326
30 0,89 0,430 0,368 0,90 — — 0,96 0,396 0,344 1,02 0,372 0,312
Приложения
455
II. Нормы якорного снабжения пароходов и теплоходов
(пассажирских и грузовых) неограниченного района плавания
(за исключением судов постоянного плавания
в Северном Ледовитом океане)
Характеристика Мя Становые якоря Цепи для становых якорей Характеристика Становые якоря Цепи для становых якорей
Количество Общий вес, кг Общая длина двух цепей, м Калибр d, якорной цепи, j мм Количество Общий вес, кг Общая длина двух цепей, м Калибр d якорной цепи, мм
750 3 2100 375 30 3000 3 8 250 500 54
800 3 2300 375 31 3300 3 9 000 500 56
850 3 2500 375 32 3600 3 9 750 525 57
900 3 2700 375 33 3900 3 10 500 550 59
950 3 2900 400 35 4200 3 11 000 550 61
1000 3 3200 400 36 4500 3 11 500 550 63
1100 3 3500 400 37 [4800 3 12 900 550 65
1200 3 3750 425 38 5100 3 13 500 550 66
1300 3 4100 450 40 5400 3 14 500 575 68
1400 3 4250 450 41 5800 3 15000 600 70
1500 3 4500 450 42 6200 3 15 800 600 72
1600 3 4750 450 43 6600 3 16 300 600 74
1700 3 5250 450 45 7000 3 17 600 600 76
1850 3 5500 450 46 7400 3 18 400 600 78
2000 3 5750 450 46 7800 3 19 500 600 80
2150 3 6100 475 48 8200 3 20 300 600 82
2300 3 6500 500 49 8600 3 21 000 600 83
2500 3 7000 500 50 9000 3 22 000 600 85
2700 3 7500 500 52 9500 3 23 000 600 87
П р и м еч а н и я: . Судам плавай лцим в Цаспи Иском МО[ )е и им еющим
сии, достаточно иметь два становых якоря общим весом не менее 2/3 таблич-
ног о веса.
2. У судов , постоянно плавающих в водах Дальнего Востока, калибю цепей
рекомендуется увеличить на 2—3 табличных данных. мм, а их общую длину- -на 2— 4 смычки против
I
ЛИТЕРАТУРА
1. Андреев В. П. и Сабинин Ю. А. Основы электропривода. Гос-
"энергоиздат, М., 1963.
2. Васильев Д. В., Михайлов В. А. и Норневский Б. И. Авто-
• матизация судовых установок. Изд-во «Судостроение», Л., 1965.
3. В е ш е н е в с к и й С. Н. Характеристики двигателей в электроприводе.
Изд-во «Энергия», М., 1967.
4. М е з и н Е. К- Судовые электрические машины. Изд-во «Транспорт»,
М„ 1964.
5. Михайлов В. А., Рукавишников С. Б. и Фрейдзон И. Р.
Электродвижение судов и электропривод судовых механизмов. Изд-во «Су-
достроение», Л., 1965.
6. Полонский В. И. Электрооборудование и электродвижение судов.
Изд-во «Транспорт», М., 1965.
7. Регистр Союза ССР, Правила классификации и постройки морских
судов, ч. III, Электрооборудование. Изд-во «Морской транспорт», 1960.
8. С и в е р с П. Л. Курс судовых электроприводов. Изд-во «Морской
транспорт», Л., 1962.
9. Фрейдзон И. Р. Судовые автоматизированные электроприводы и
системы. Изд-во «Судостроением, Л., 1967.
10. Хомяков Н. М. Выбор электродвигателей палубных электроприво-
дов. Изд-во «Морской транспорт», Л., 1955.
11. Чекунов К. А. Судовые электроприводы. Изд-во «Судостроение»,
Л., 1965.
12. Чекунов К. А. Управление судовыми электродвигателями. Изд-во
«Судостроение», Л., 1966.
13. Чиликин М. Г. Общий курс электропривода. Изд-во «Энергия»,
М., 1965.
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
Латинский алфавит
А — кинетическая энергия; теп-
лоотдача двигателя; сум-
марная площадь лопастей
винта
а — число пар параллельных
ветвей обмотки якоря;, от-
носительная толщина про-
. филя пера руля
В — ширина судна на миделе
b — ширина пера руля
С — теплоемкость двигателя
с — степень компенсации руля
се — коэффициент э. д. с.
см — коэффициент момента
сх, су — коэффициенты лобового со-
противления и подъемной
силы иа баллере руля
D — диаметр грузового бара-
бана, скалки рулевой ма-
шины, звездочки брашпиля,
гребного винта
d — калибр якорной цепи; диа-
метр плунжера насоса пере-
менной производительности
Е — э.д.с.
р — намагничивающая сила
f — частота переменного тока
/тр — коэффициент трения
G — вес тела
g — ускорение силы тяжести
GD2 — маховый момент
Н — высота борта судна, шаг
винта
h — высота пера руля
йо — глубина стоянки судна
ftp — поступь винта
/а — ток цепи якоря
/в — ток возбуждения
/п — пусковой ток
/к — ток короткого замыкания
i — передаточное число
J — момент инерции -
L — длина судна; длина якор-
ной цепи
LK — индуктивность короткого за-
мыкания асинхронного дви-
гателя
М — момент
m — масса тела
т1; т2 — число фаз статора и ротора
двигателя
тп — масштаб сопротивлений
тц — число пар цилиндров руле-
вой машины
N — количество активных про-
водников обмотки якоря
Np — мощность гребного винта
п — скорость вращения
Р — электрическая мощность;
сила давления воды на руль;
упор гребного винта
р — число пар полюсов; давле-
ние в цилиндрах рулевой
машины
рт — коэффициент тепловой пе-
регрузки
Q — количество тепла, выде-
ляющееся в двигателе за
1 сек- производительность
насосов; сила сопротивления
винта
458
Условные обозначения
R — полное сопротивление элек-
трической цепи; сопротивле-
ние воды движению судна
/?о — расстояние между осями
баллера и скалок рулевой
машины
г — сопротивление отдельных
элементов электрической
цепи
S — площадь пера руля
s — скольжение
Т — постоянная времени нагрева;
полное время перекладки
руля; время съемки судна
с якоря; продолжительность
цикла работы грузового при-
вода; осадка судна
t — время; коэффициент заса-
сывания
U — напряжение
V — объемное водоизмещение
судна
v — линейная скорость
w — число витков обмотки; ко-
эффициент попутного по-
тока
х— индуктивное сопротивление
г-— расстояние от точки прило-
жения равнодействующей
до передней кромки пера
руля
гк — полное сопротивление ко-
роткого замыкания асин-
хронного двигателя
Греческий алфавит
а — степень жесткости меха-
нической характеристики;
угол перекладки руля;
коэффициент ухудшения
охлаждения при пони-
женных скоростях дви-
гателя
р — степень крутизны меха-
нической характеристики;
угол дрейфа; коэффици-
ент ухудшения охлажде-
ния неподвижного двига-
теля
у •— удельный вес якорной
стали
ДР — потери мощности
6 — наибольшая толщина
профиля сечения пера
руля; расстояние от оси
вращения руля до центра
давления; удельный вес
морской воды
бп — коэффициент полноты
водоизмещения судна
е — относительная продолжи-
тельность включения
t — коэффициент сопротивле-
ния движению судна
1] — к. п. д.
6 •— угол пространственного
смещения между осями
поля статора и ротора;
дисковое отношение
винта
Одв, ©о—-температура двигателя
и окружающей среды
X — относительный размах
руля
Км — перегрузочная способ-
ность двигателя по мо-
менту
Кр —- относительная поступь
винта
р — коэффициент, определяю-
щий маневренность судна
v — кинематический коэффи-
циент вязкости воды
q — приведенный радиус
инерции; плотность
т—превышение температуры
двигателя над темпера-
турой окружающей среды
Ф — магнитный поток
(р — угол сдвига по фазе
между током и напряже-
нием; угол отклонения
судна от курса
ф — характеристика остроты
корпуса судиа
w— угловая скорость
I б И 5 Л
ОГЛАВЛЕНИЕ
Предисловие.....................................................................................................3
Введение.................................................................................................. ... 4
Часть первая
ОСНОВЫ ЭЛЕКТРОПРИВОДА
Глава 1. Механика электропривода......................................................................... .... 9-
§ 1. Силы и моменты, действующие в системе электропривода . . —
§ 2. Уравнение движения. Понятие о переходных режимах .... 12
§ 3. Приведение движения элементов электропривода к валу
электродвигателя............................................. 15
§ 4. Время пуска и торможения электропривода..............................................................23
Контрольные вопросы и задания ...................................................................... 26
Глава 2. Электромеханические свойства электродвигателей постоянного
тока............................................................—
§ 5. Понятие о механических и скоростных характеристиках ... —
§ 6. Регулирование скорости электроприводов и показатели регу-
лирования .....................................................30
§ 7. Естественные скоростная и механическая характеристики дви-
гателя с .параллельным возбуждением........................33
§ 8. Влияние параметров двигателя и сети на механические харак-
теристики .....................................................38
§ 9. Пуск в ход двигателя с параллельным возбуждением .... 40
§ 10. Регулирование скорости двигателя с параллельным.возбуж-
дением ....................................................... 46
§ 11. Торможение и реверс двигателя с параллельным возбуждением 51
§ 12. Естественные скоростная и механическая характеристики дви-
гателя с последовательным возбуждением.....................63
§ 13. Построение искусственных скоростных и механических харак-
теристик двигателя с последовательным возбуждением. Уни-
версальные характеристики......................................67
§ 14. Пуск в ход двигателя с последовательным возбуждением ... 70
§ 15. Регулирование скорости двигателя с последовательным воз-
буждением .....................................................72
§ 16. Торможение двигателя с последовательным возбуждением . . 77
§ 17. Механические характеристики двигателя со смешанным воз-
буждением . , , . ............................. ... , .... 81
460
Оглавление
§ 18. Пуск, регулирование скорости и тормозные режимы двигателя
со смешанным возбуждением ......................83
Контрольные вопросы и задания..........................86
Глава 3. Система генератор—двигатель...............................—
§ 19. Пуск, торможение и регулирование скорости в системе генера-
тор — двигатель..............................................—
§ 20. Применение генератора с противокомпаундной обмоткой ... 92
§ 21. Система генератор—двигатель с трехобмоточным генератором 96
Контрольные вопросы и задания..............................99
Глава 4. Электромеханические свойства электродвигателей перемен-
ного тока.......................................................—
§ 22. Естественная механическая характеристика асинхронного дви-
гателя ..........................................................—
§ 23. Влияние параметров питающей сети на механические характе-
ристики асинхронного двигателя.................................107
§ 24. Пуск асинхронного двигателя в ход.........................ПО
§ 25. Регулирование скорости асиихрониого двигателя............116
§ 26. Торможение асинхронного двигателя................... .... 124
§ 27. Механическая и угловая характеристики синхронного двигателя 128
§ 28. Пуск, регулирование скорости и торможение синхронного дви-
гателя . ......................................................131
Контрольные вопросы и задания.............................132
Глава 5. Выбор электродвигателей...................................133
§ 29. Порядок проектирования электроприводов.....................—
§ 30. Особенности конструктивного исполнения судовых электро-
двигателей ....................................................136
§ 31. Номинальная мощность и перегрузочная способность электро-
двигателей .................................................. 138
§ 32. Нагрев и охлаждение электродвигателей....................140
§ 33. Классификация режимов работы двигателей. Нагрузочные
диаграммы......................................................146
§ 34. Выбор мощности двигателя при длительном режиме работы . .148
§ 35. Выбор мощности двигателя при кратковременном режиме
работы.........................................................153
§ 36. Выбор мощности двигателя при повторно-кратковременном ре-
жиме работы....................................................156
Контрольные вопросы и задания ... . .... 159
Глава 6. Принципы и схемы автоматического управления электроприводами —
§ 37. Классификация, построение и правила чтения электрических
схем.................................................................—
§ 38. Способы управления электроприводами......................164
§ 39. Принципы пуска и торможения двигателей постоянного тока 166
§ 40. Принципы пуска и торможения асинхронных двигателей . . . 170
§ 41. Понятие о системах автоматического регулирования .... 173
§ 42. Электромашинный усилитель в системе генератор—двигатель 178
§ 43. Схемы управления асинхронными двигателями с применением
магнитных усилителей...........................................184
§ 44. Тиристорные электроприводы...............................189
§ 45. Защита судовых электроприводов...........................195
Контрольные вопросы и задания.............................202
Часть вторая
СУДОВЫЕ ЭЛЕКТРОПРИВОДЫ
Глава 7. Электроприводы рулевых устройств....................... . 203
§ 46. Назначение и классификация рулевых электроприводов ... —
Оглавление 461
§ 47. Моменты на баллере руля и нагрузочные диаграммы рулевых 213
электродвигателей .............................................
§ 48. Требования к рулевым электроприводам......................224
§ 49. Расчет мощности двигателя рулевого электропривода с меха-
нической передачей.............................................226
§ 50. Расчет мощности исполнительного двигателя электрогидравли-
ческого рулевого привода.......................................236
’ § 51. Системы дистанционного управления электроприводом руле-
вого устройства....................................................252
§ 52. Следящие системы управления рулевыми электроприводами . . 260
§ 53. Системы автоматического управления курсом судна (авто-
рулевые) ......................................................264
Контрольные вопросы и задания ... 283
Глава 8. Электроприводы якорно-швартовных устройств...................—
§ 54. Назначение и основные элементы якорно-швартовных устройств —
§ 55. Режимы работы электропривода якорно-швартовных устройств 289
§ 56. Расчет электропривода якорно-швартовных устройств .... 294
§ 57. Схемы управления электроприводами якорно-швартовных уст-
ройств ........................................................308
Контрольные вопросы и задания ... .................327
Г лава 9. .Электроприводы судовых лебедок и кранов..................328
§ 58. Назначение и классификация грузоподъемных механизмов . . —
§ 59. Режимы работы и нагрузочные диаграммы электропривода гру-
зовых лебедок и кранов.........................................332
§ 60. Расчет электропривода грузоподъемных механизмов .... 337
§ 61. Схемы управления электроприводами грузовых лебедок и кранов 344
§ 62. Электроприводы буксирных лебедок..........................349
Контрольные вопросы и задания..............................360
Глава 10. Электроприводы вспомогательных механизмов силовых уста-
новок и судовых систем.........................................361
§ 63. Основные параметры вспомогательных механизмов...............—
§ 64. Электроприводы судовых насосов.......................... 362
§ 65. Электромагнитные насосы...................................366
§ 66. Электроприводы вентиляторов, воздуходувок и компрессоров 370
§ 67. Управление электроприводами вспомогательных механизмов 372
Контрольные вопросы и задания..................................376
Часть третья
ЭЛЕКТРОДВИЖЕНИЕ СУДОВ
Глава 11. Общие вопросы проектирования гребных электрических
установок (ГЭУ)...............................................377
§ 68. Назначение и типы ГЭУ....................................—
§ 69. Сопротивление воды и воздуха движению судов............380
§ 70. Судовые движители . .... .... ... . 385
§ 71. Взаимодействие винта и корпуса судна. Пропульсивный к. п. д. 392
§ 72. Механические характеристики винта......................395
§ 73. Выбор основных параметров ГЭУ..........................398
Контрольные вопросы и задания . ......... .... 405
Глава 12. Гребные электрические установки постоянного тока . . . . —
§ 74. Структура ГЭУ и схемы главного тока......................—
§ 75. Режимы экономичного хода и аварийные ...... • 407
§ 76. Системы возбуждения ГЭУ , .............................411
462
Оглавление
§ 77. Система генератор—двигатель с трехобмоточным возбудителем 413
§ 78. Системы Г-Д с автоматическим регулированием мощности . . 419
§ 79. Защита ГЭУ постоянного тока................................423
§ 80. Пуск и реверс гребного двигателя в ГЭУ постоянного тока . . 425
Контрольные вопросы и задания . . . ...... 428
Глава 13. Гребные электрические установки переменного тока . . . 429
§ 81. Особенности работы и схемы главного тока ГЭУ ..... —
§ 82. Параллельная работа генераторов.......................432
§ 83. Типы гребных электродвигателей........................... 435
§ 84. Режимы работы ГЭУ переменного тока ... ..........438
§ 85. Защита ГЭУ переменного тока . . . . '..............443
§ 86. Пуск и реверс гребного двигателя в ГЭУ переменного тока. . 447
§ 87. Регулирование синхронных генераторов по углу...............451
Контрольные вопросы п задания . ........ 453
Приложения......................................................... 454
Литература .’........................................................456
Условные обозначения.................................................457
ЧЕКУНОВ КОНСТАНТИН АРТЕМЬЕВИЧ
СУДОВЫЕ ЭЛЕКТРОПРИВОДЫ
И ЭЛЕКТРОДВИЖЕНИЕ СУДОВ
(изд. 2-е)
''Рецензенты В. Т. Бланин,
Ю. К. Сахаров
Научный редактор
И. Р. Фрейдзон
Редактор В. М. В а й ц
Технический редактор
А. П. Ширяева
Корректоры: О. И. С к ры лева,
Л. Н. Степнова
Оформление переплета художника
Л. А. Яценко
Сдано в набор 21/111 1969 г. М-28226. Подпи-
сано к печати 16/VII 1969 г. Формат издания
60X90Vic- Печ. л. 29,0. Уч.-изд. л. 27.8.
Изд. № 2159—67. Тираж 12 000 экз.
Цена 1 р. 07 коп. Заказ № 674.
Бумага типографская № 3.
Издательство «Судостроение», Ленинград,
Д-65, ул. Гоголя, 8.
Ленинградская типография № 4 Главполи-
графпрома Комитета по печати при Совете
Министров СССР, Социалистическая, 14
УЧЕБНИКИ ДЛЯ ТЕХНИКУМОВ «
ВЫЙДУТ В 1970 Г. “•
Богомольный Л. Е. СУДОВЫЕ ВСПОМОГАТЕЛЬНЫЕ и
РЫБОПРОМЫСЛОВЫЕ МЕХАНИЗМЫ. 18 л„ ц. 70 к.
В учебнике изложен материал по устройству, конструкции,
эксплуатации, основам теории и расчета судовых вспомога-
тельных и рыбопромысловых механизмов.
Дано описание современных судовых насосов, рулевых,
якорных, швартовных грузовых и буксирных механизмов, ме-
ханизмов и автоматов тралового, кошелькового и дрифтерного
лова, водоопреснительных установок промысловых судов.
Предназначен для учащихся мореходных училищ и техни-
кумов рыбной промышленности (судомеханических специаль-
ностей) .
Мовнин М. С. и др. ОСНОВЫ ТЕХНИЧЕСКОЙ МЕХАНИКИ.
30 л., ц. 1 р. 30 к.
Учебник для немашиностроительных техникумов. Построен
по новой структуре, основанной на использовании взаимосвязи
разделов предмета. Это позволило при небольшом объеме до-
статочно подробно и доходчиво осветить законы механики, ос--
новы расчетов на прочность, устройство и принцип действия
типовых элементов машин и измерительных приборов.
Миклос А. Г., Чернявская Н. Г. СУДОВЫЕ ДВИГАТЕЛИ
ВНУТРЕННЕГО СГОРАНИЯ. 30 л., ц. 1 р. 30 к.
Учебник для средних специальных учебных заведений МРХ
СССР. В книге описаны конструкции, изложены вопросы экс-
плуатации и теории судовых двигателей внутреннего сгорания.
Приведены сведения о судовом валопроводе, судовых системах,
обслуживающих энергетическую установку, вспомогательных
механизмах и устройствах, обеспечивающих нормальную работу
судовых двигателей.
Книга является учебником для мореходных училищ и техни-
кумов рыбной промышленности (по судомеханическим специ-
альностям). Может быть использована как учебное пособие
для курсантов речных, морских училищ и школ, учащихся тех-
никумов судостроительной промышленности, а также для инди-
видуальной и групповой подготовки плавсостава на курсах.
Предварительные заказы (без задатка) принимают все ма-
газины технической литературы.
Издательство «Судостроение»