/
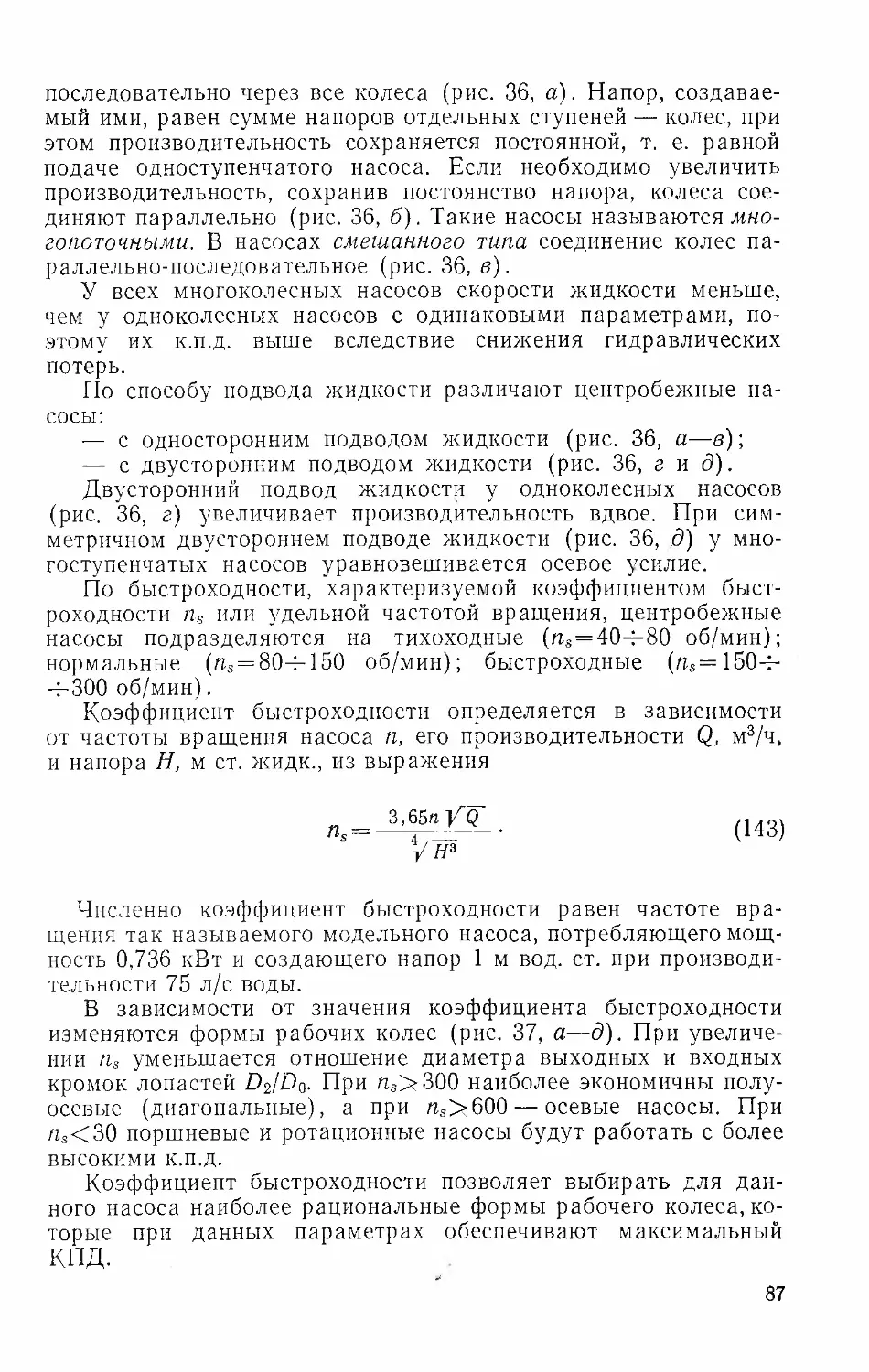
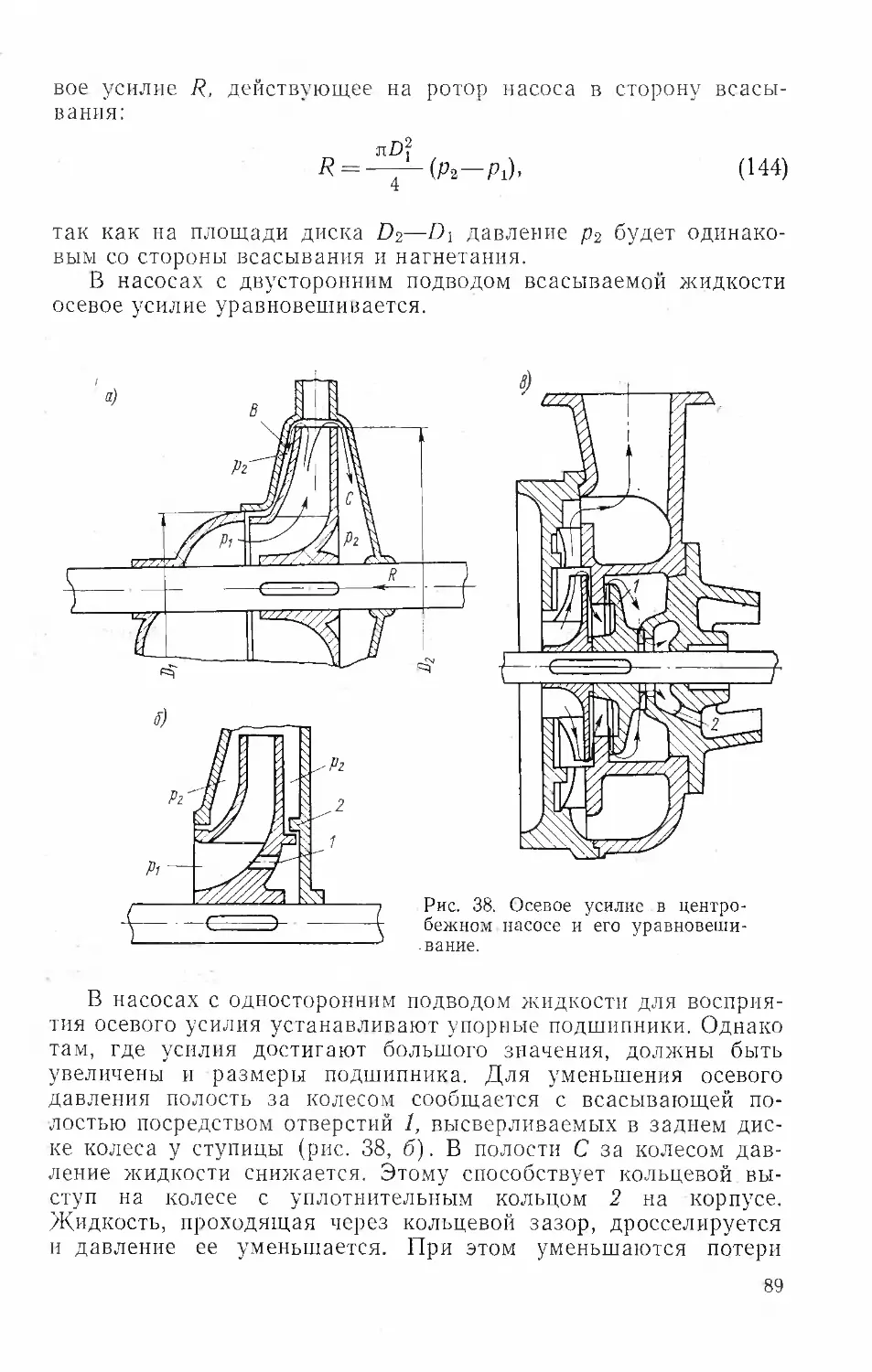
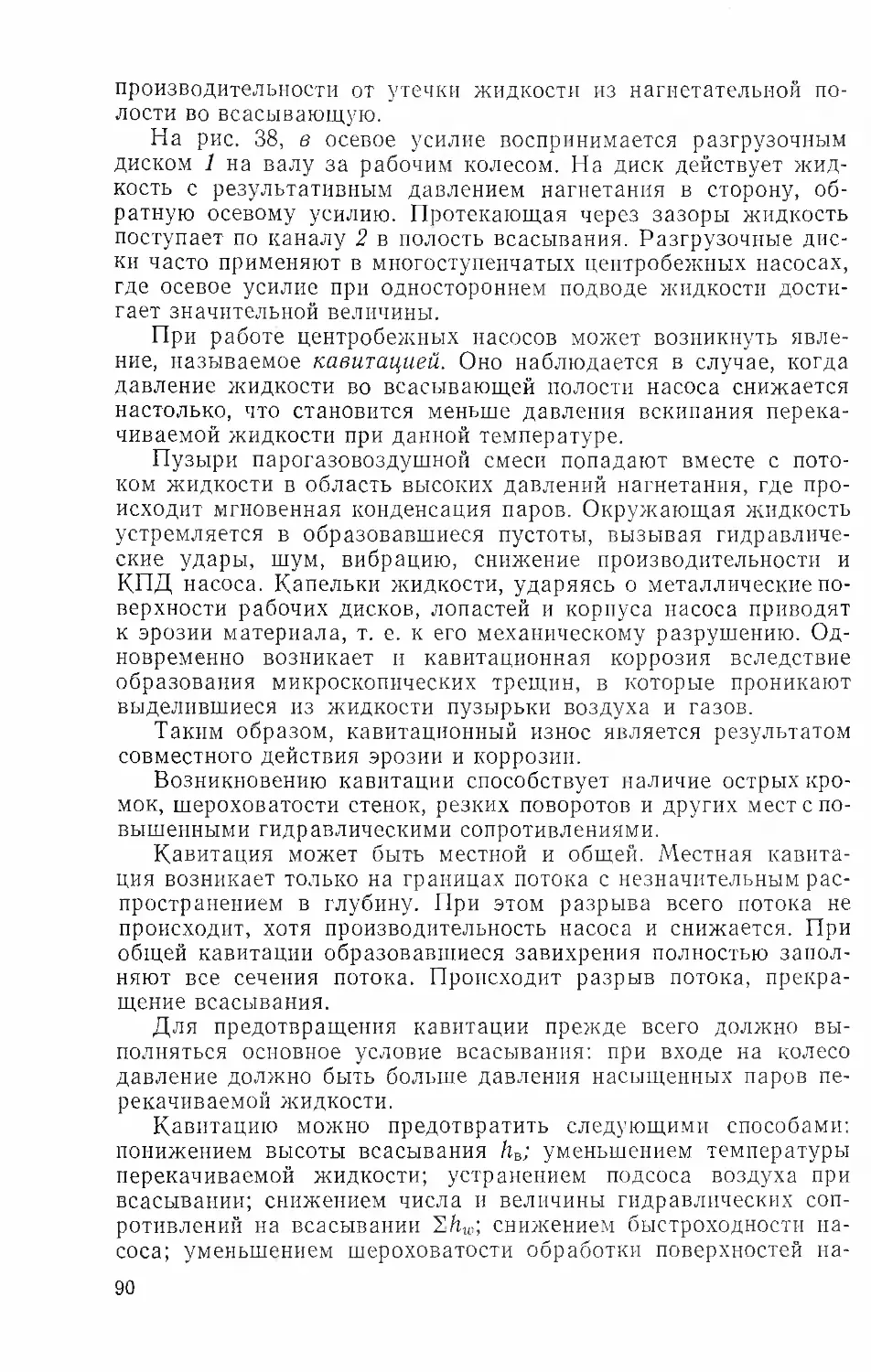

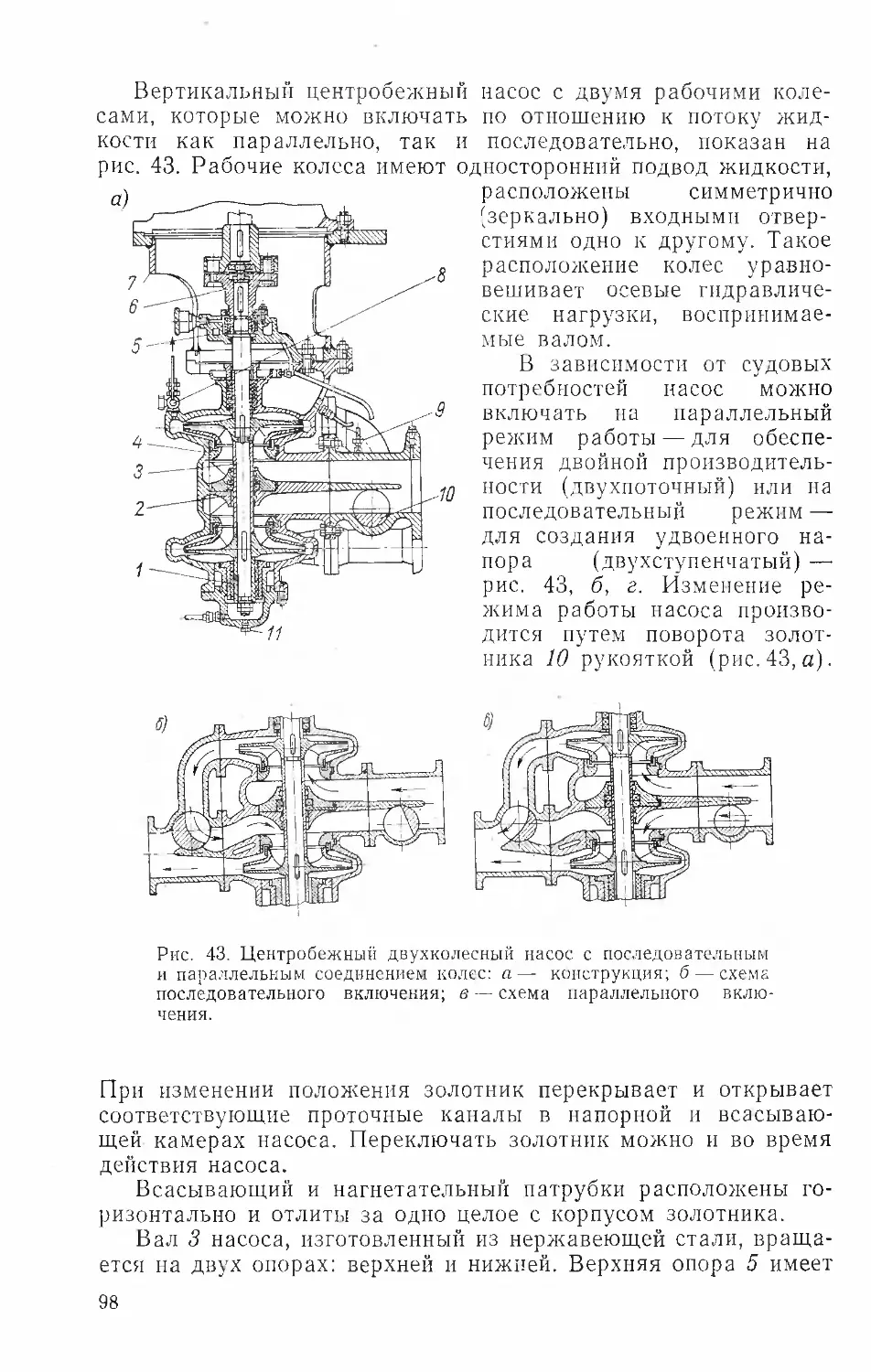


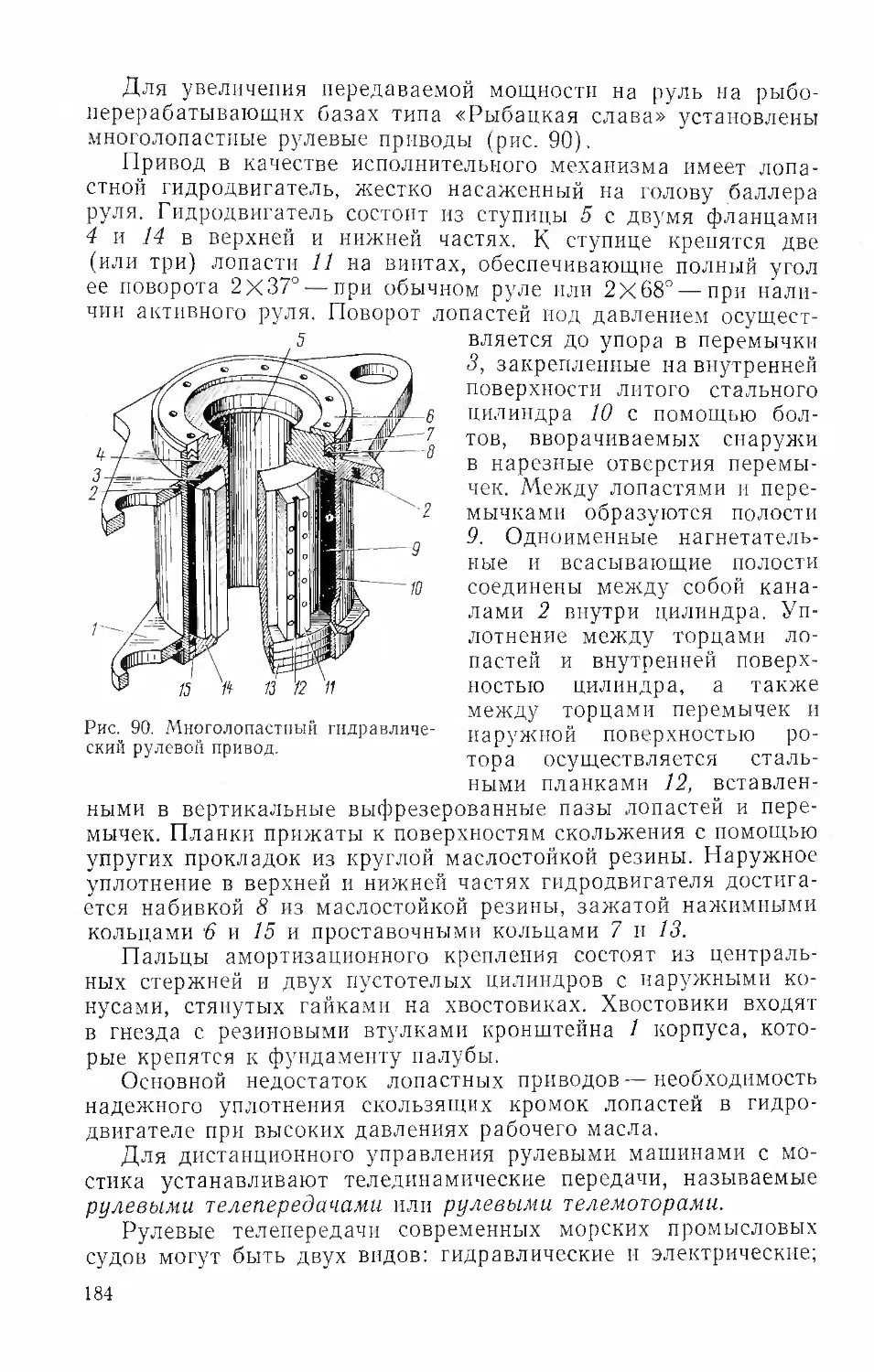
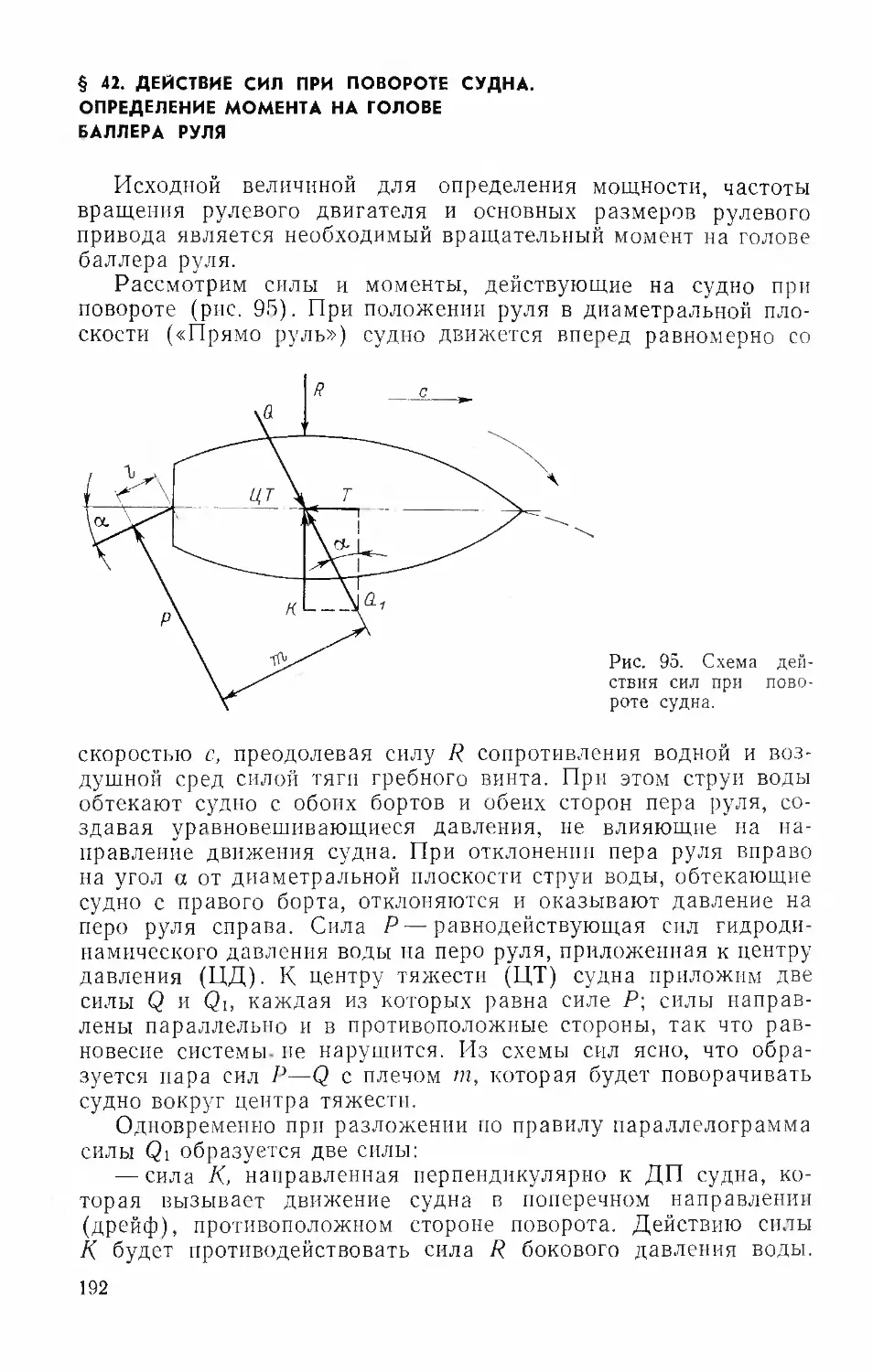
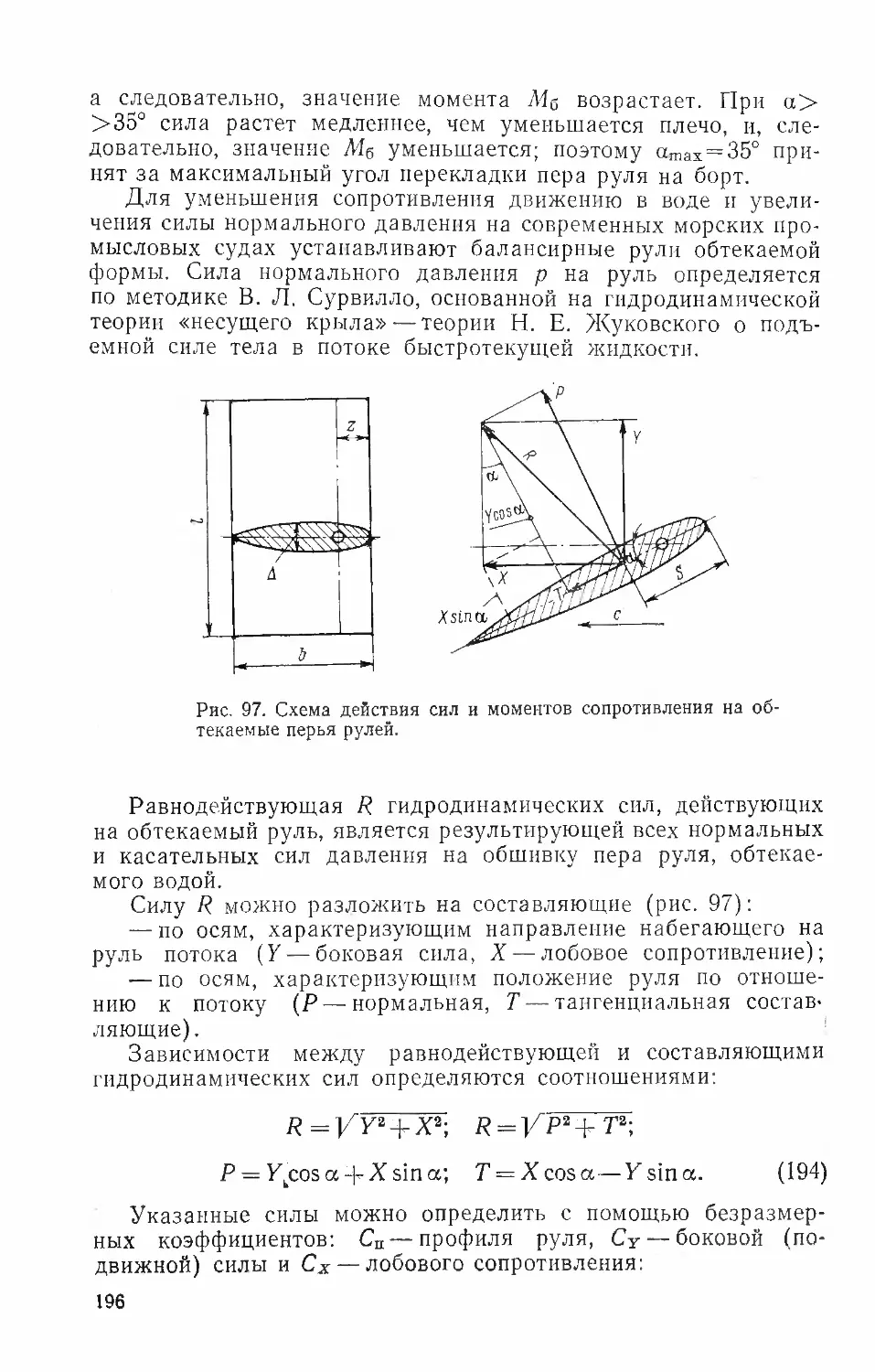
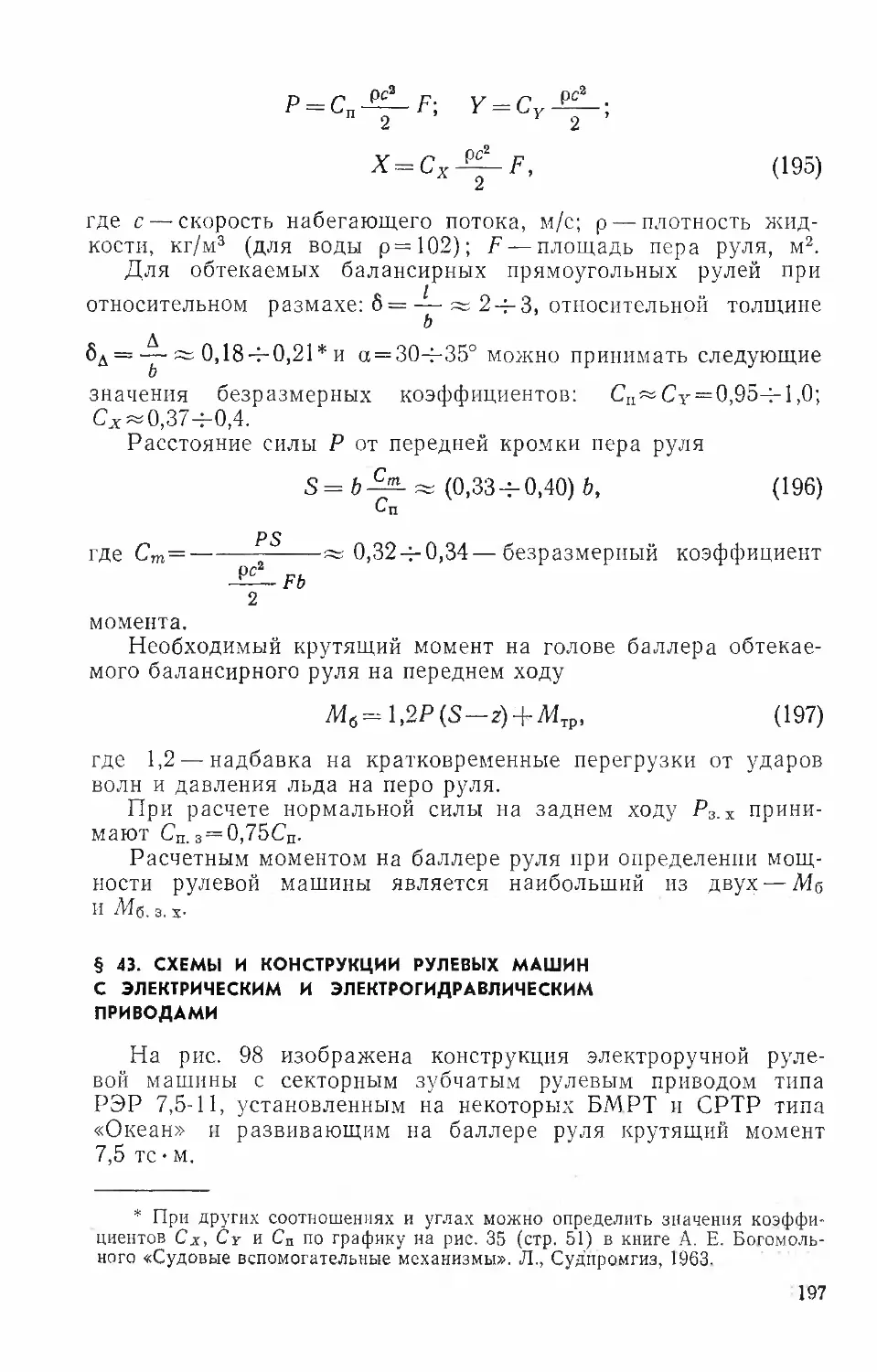
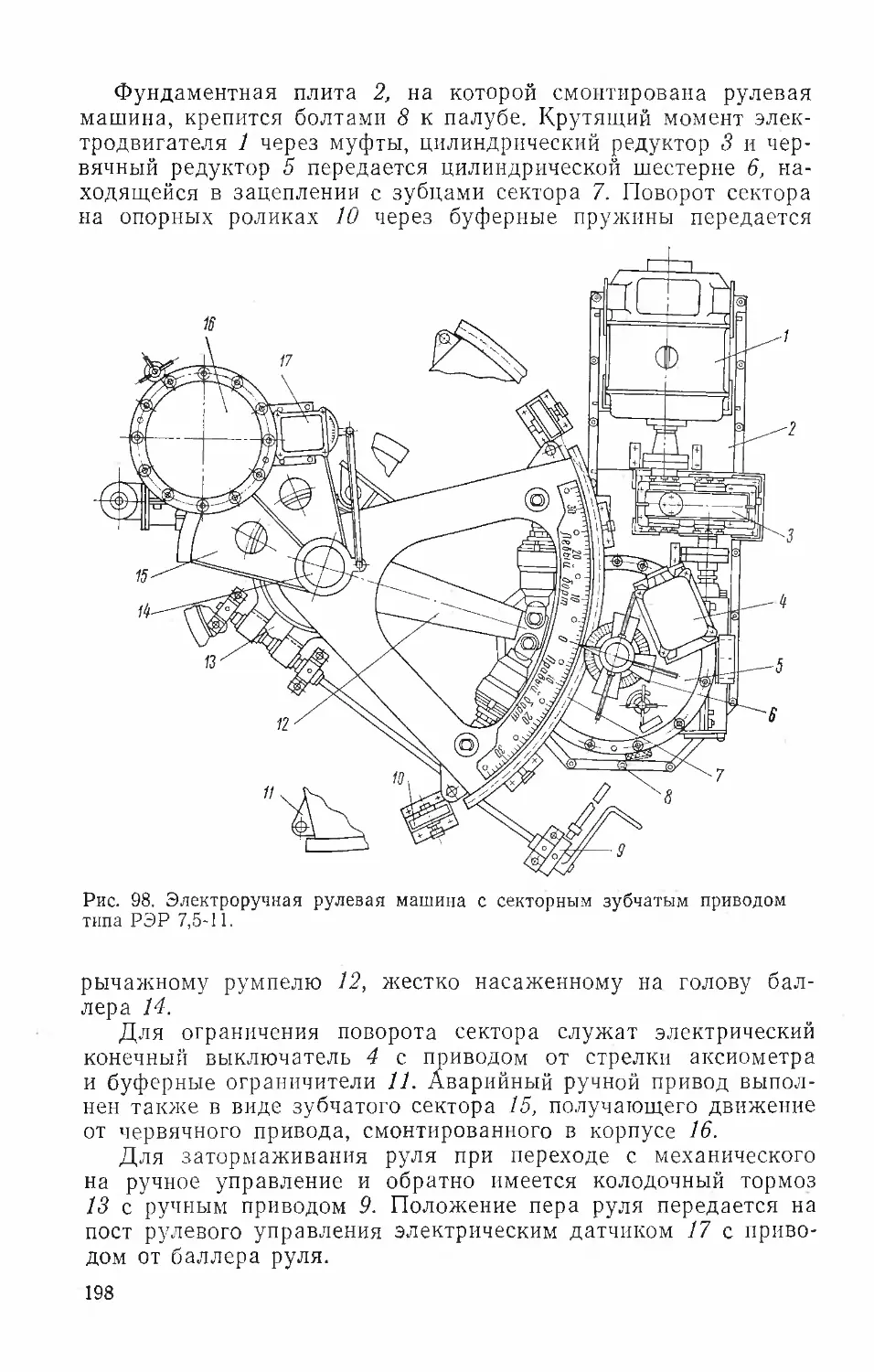
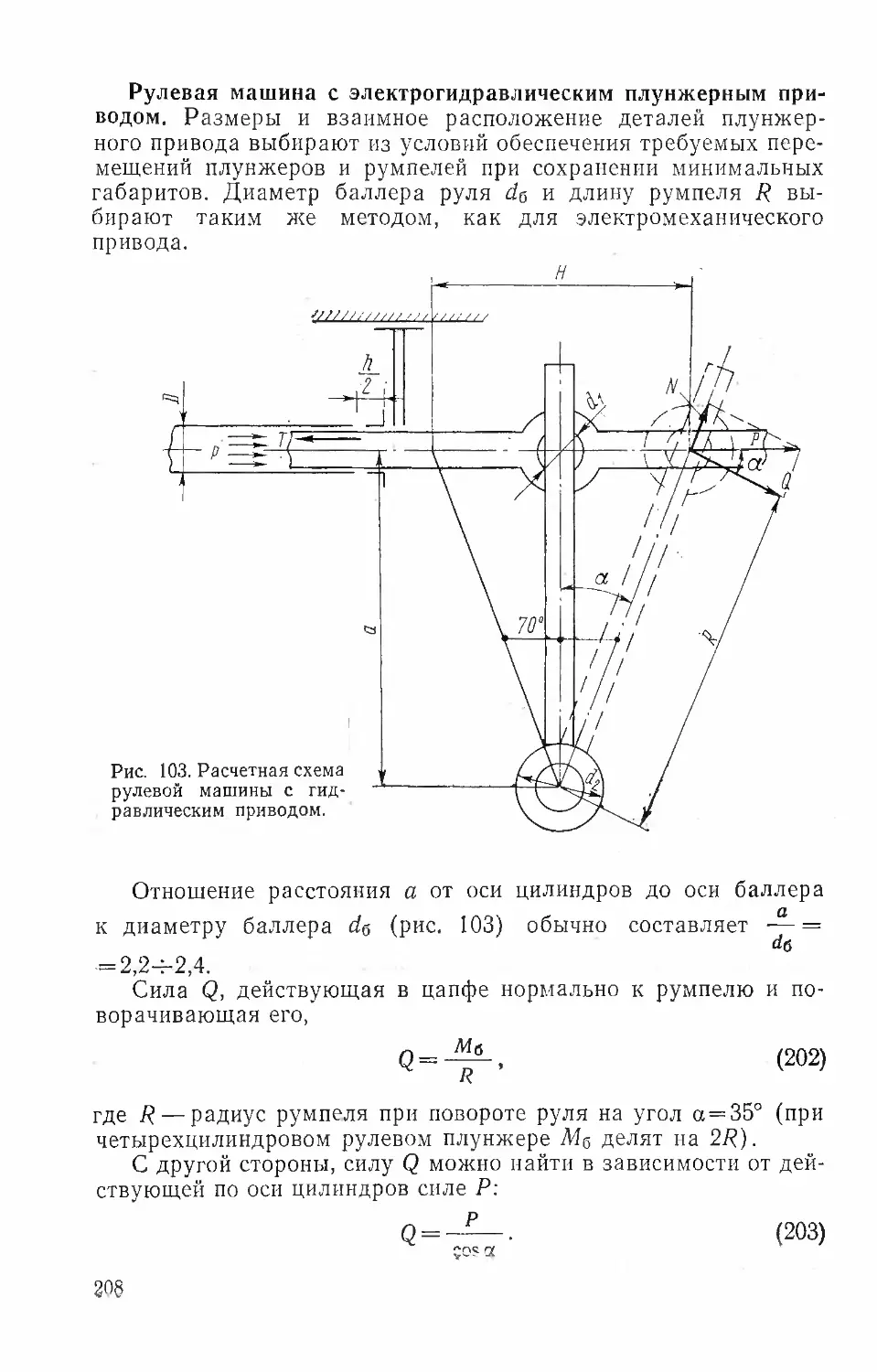
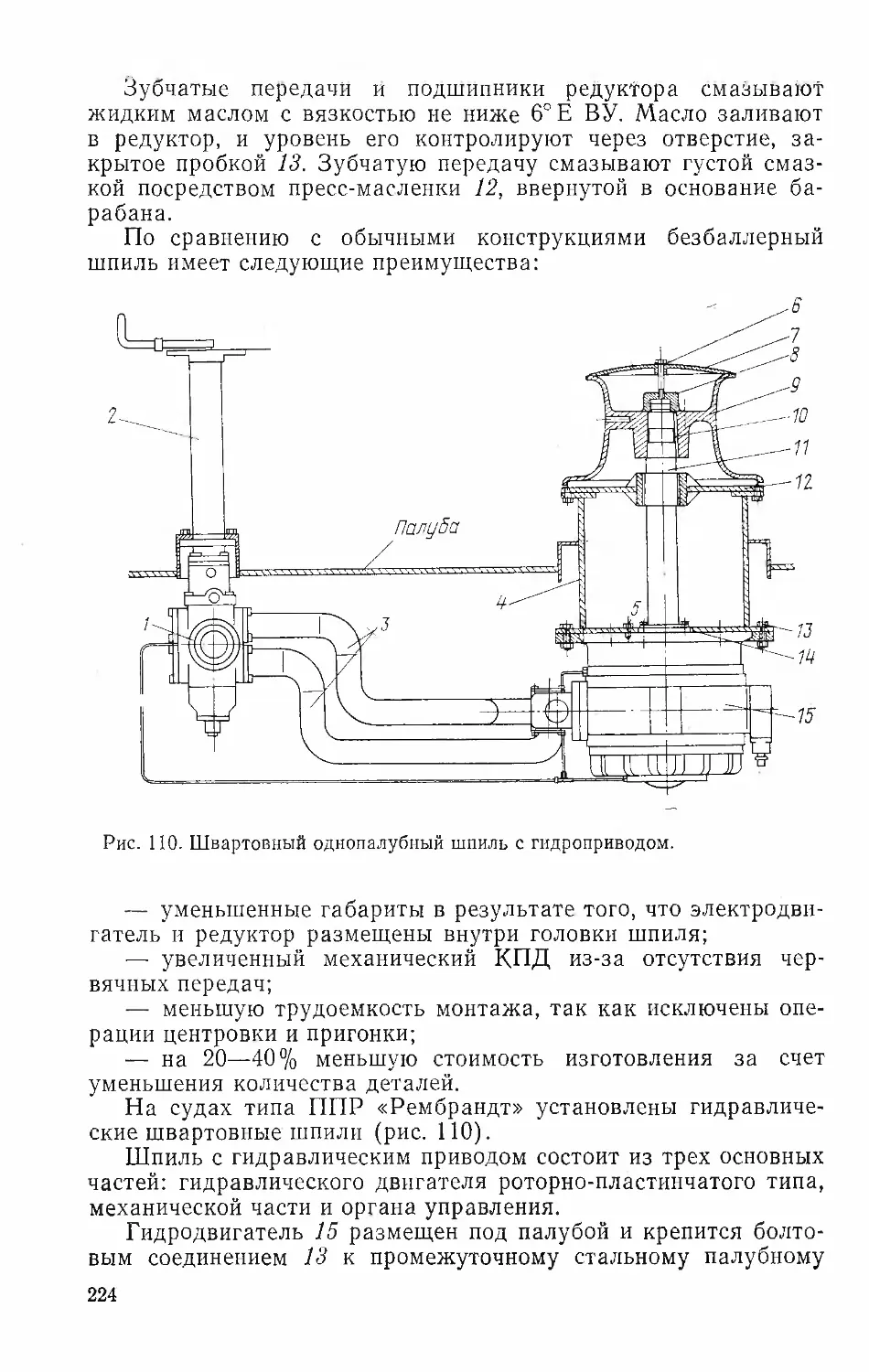
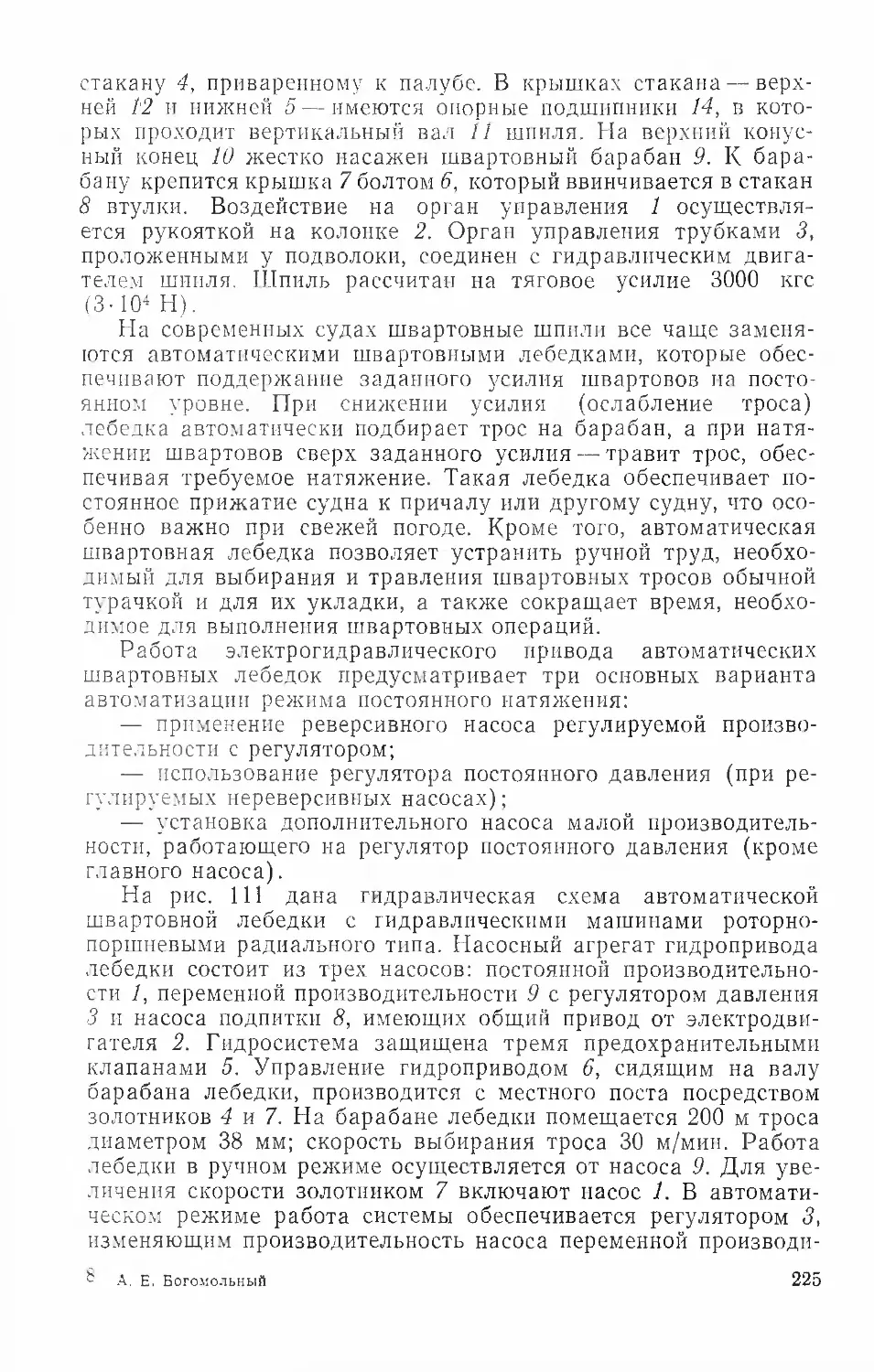
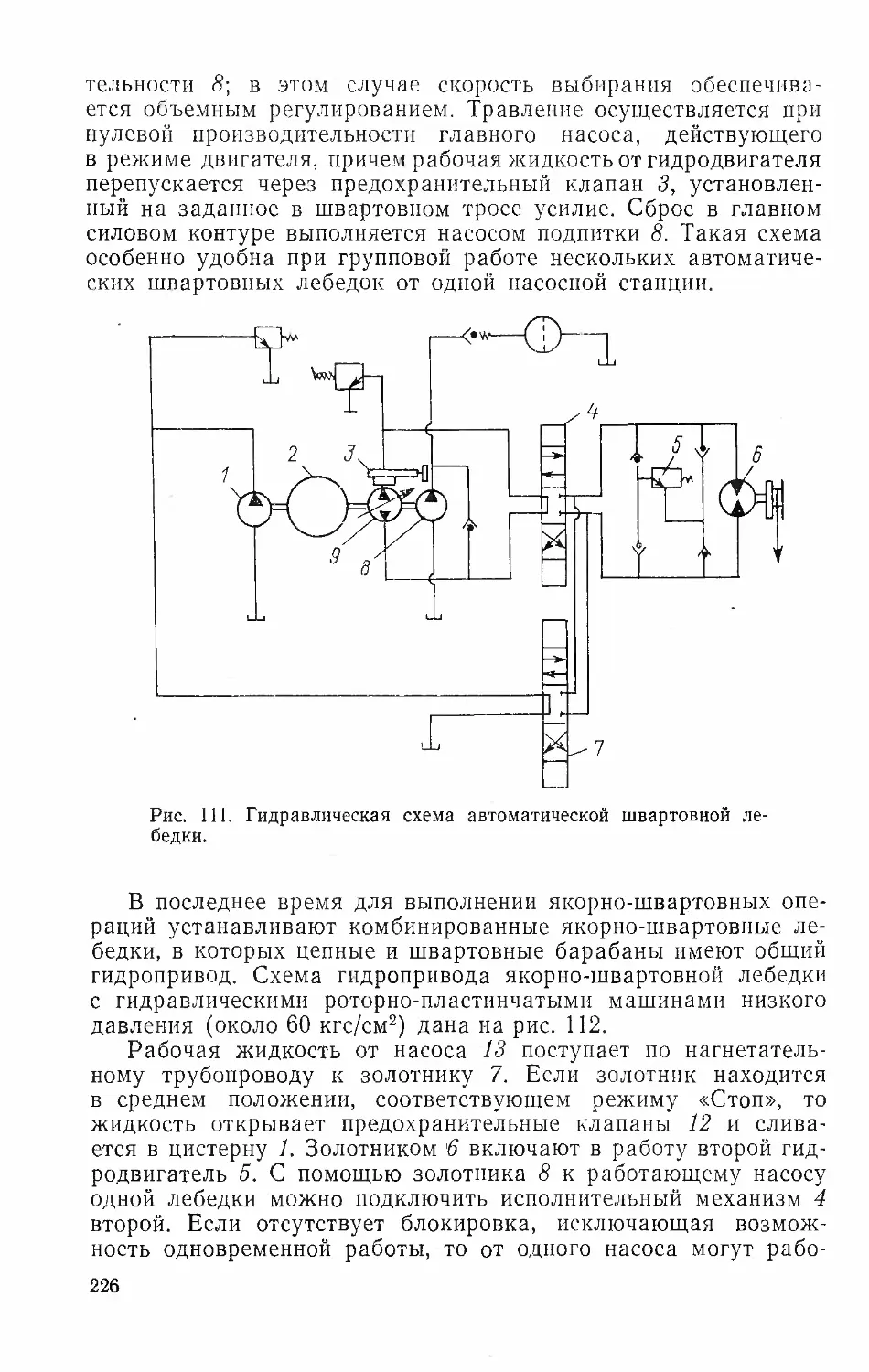


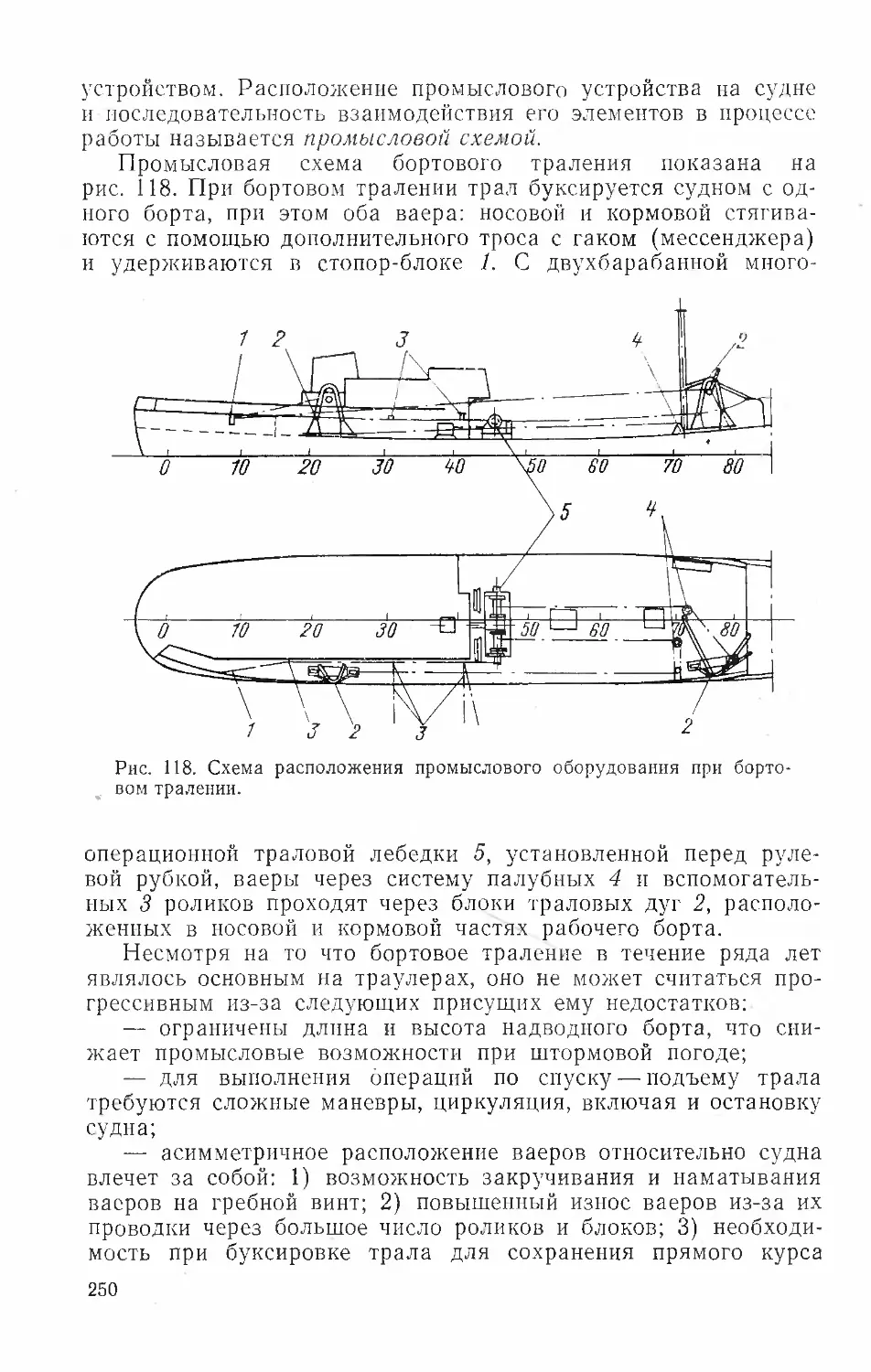
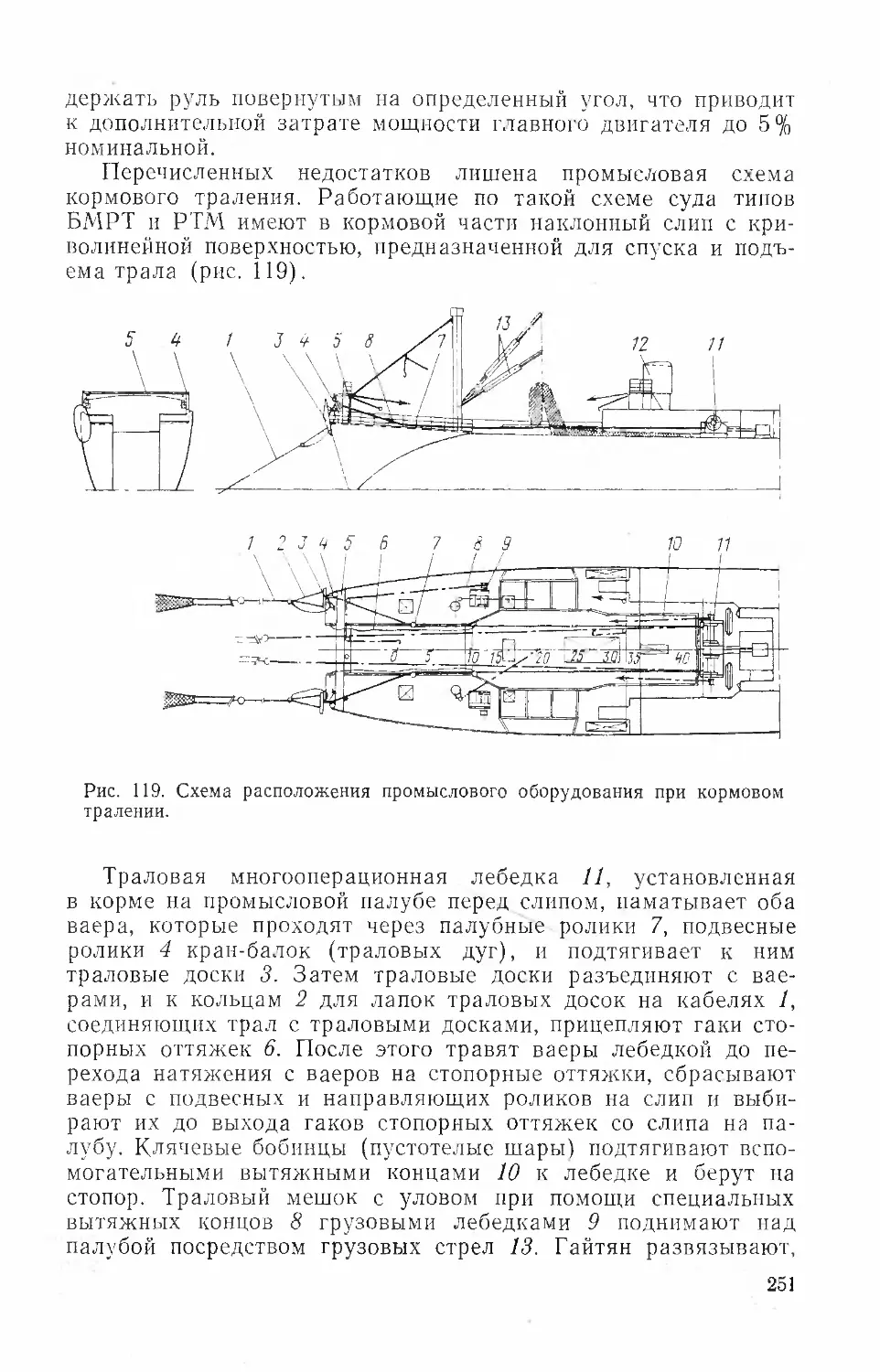
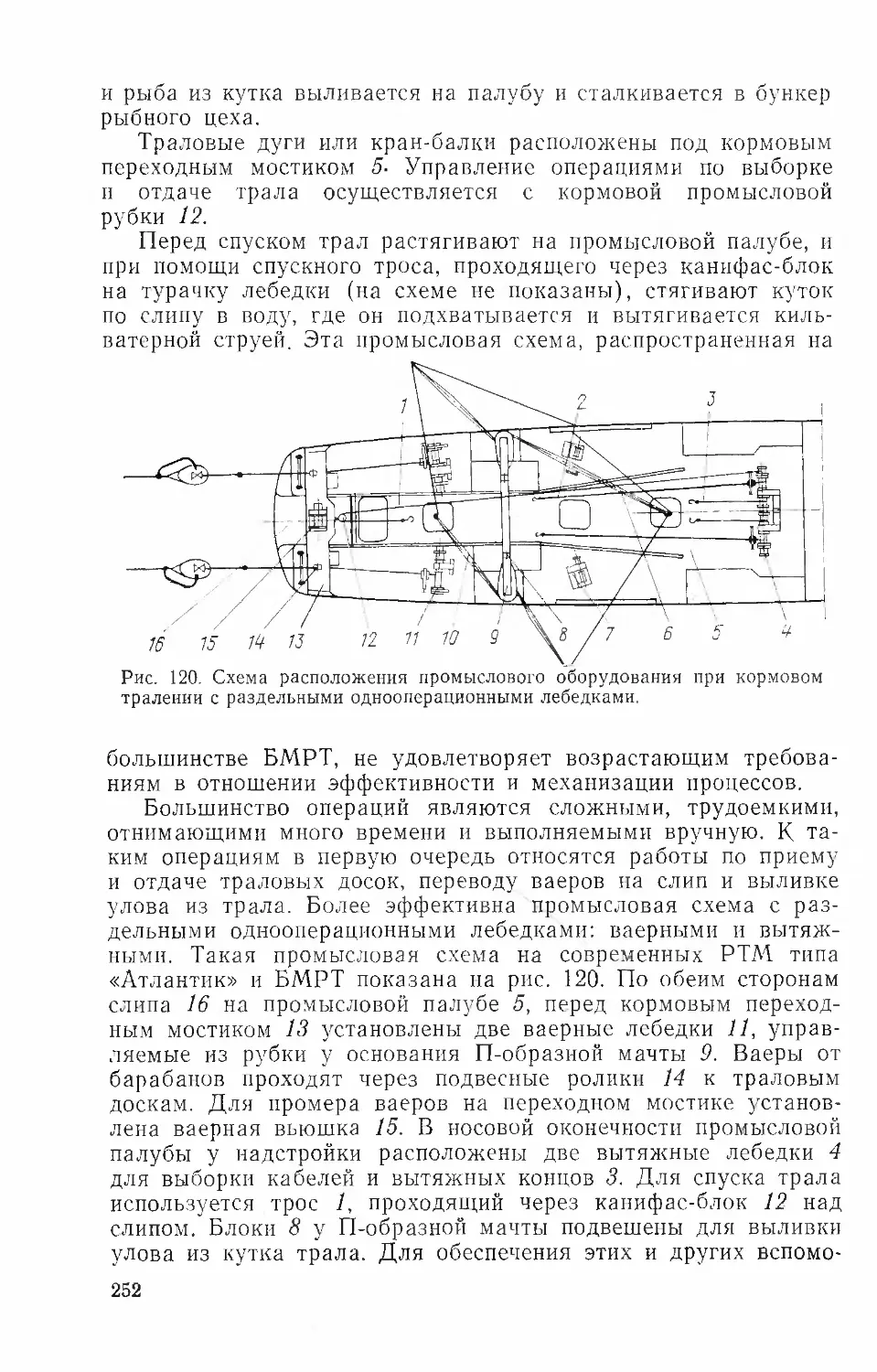
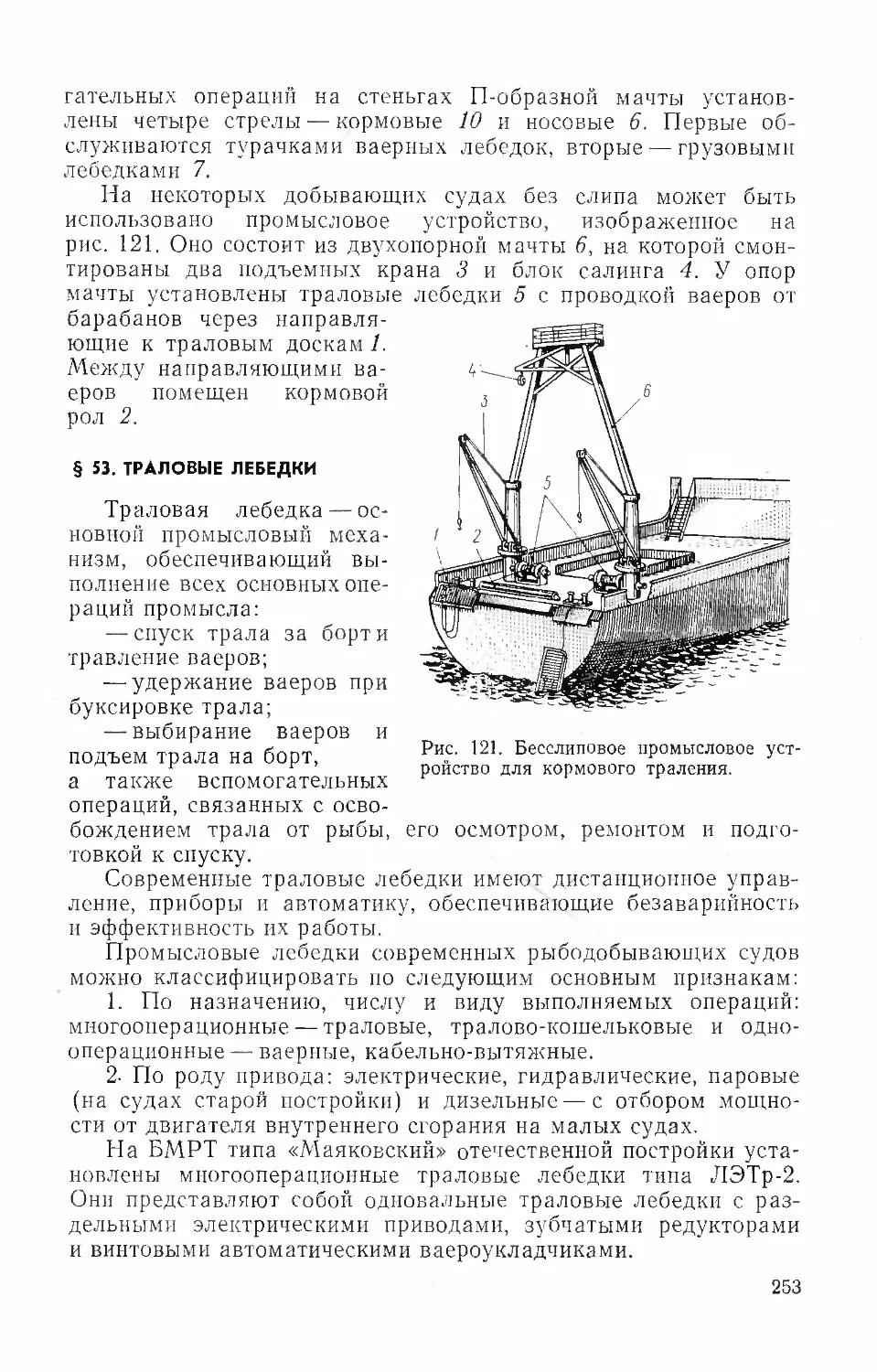

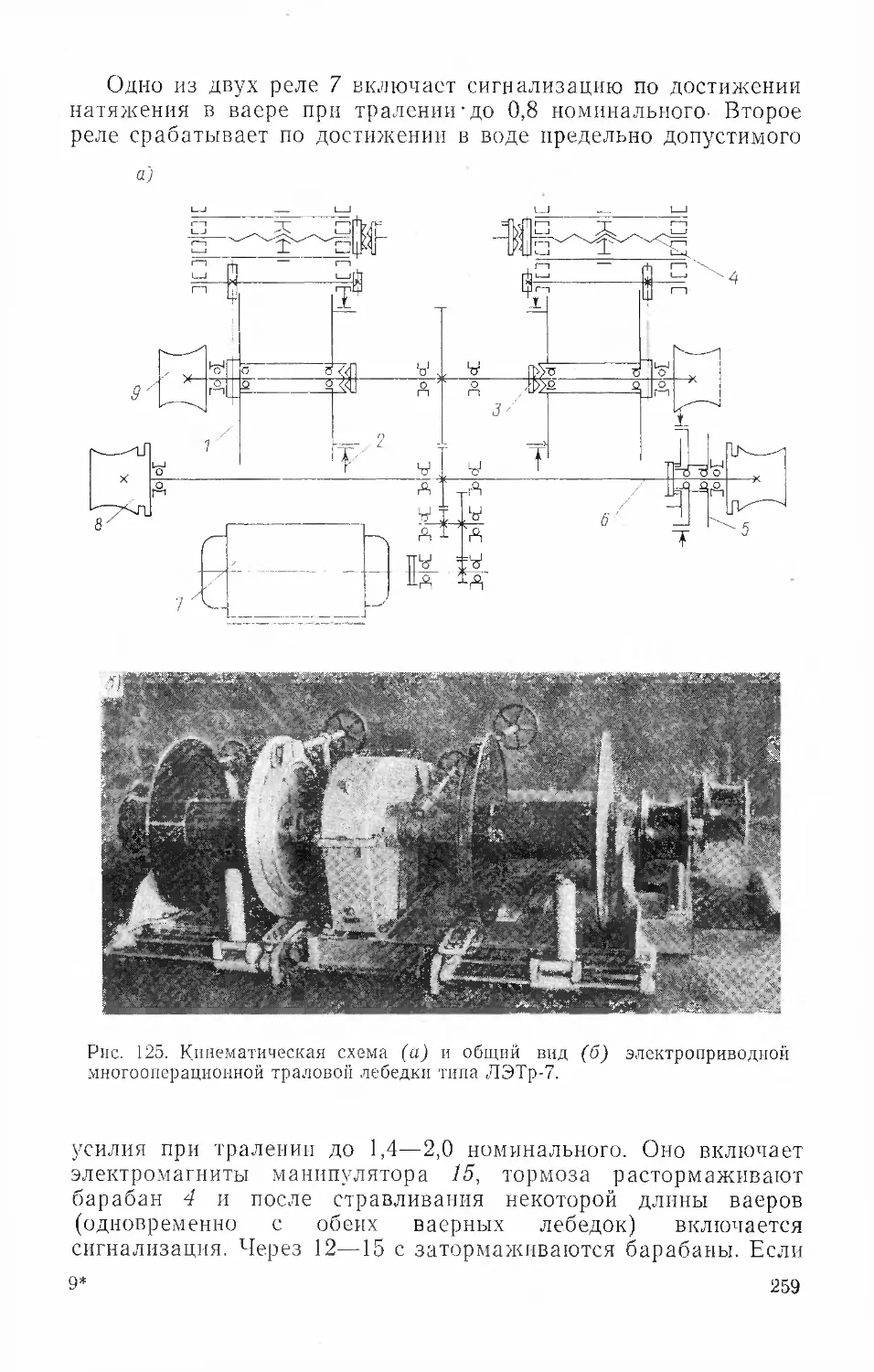
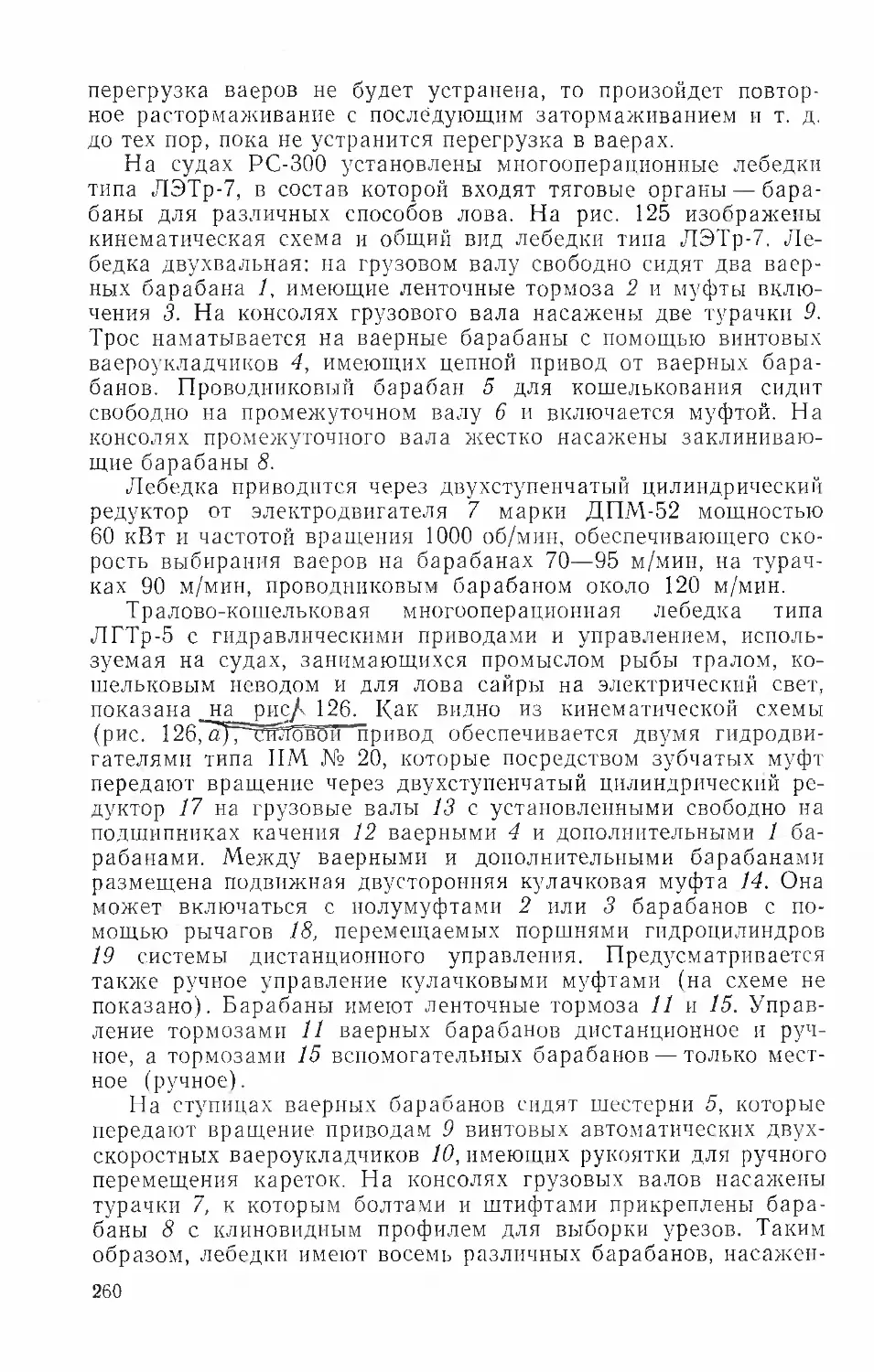
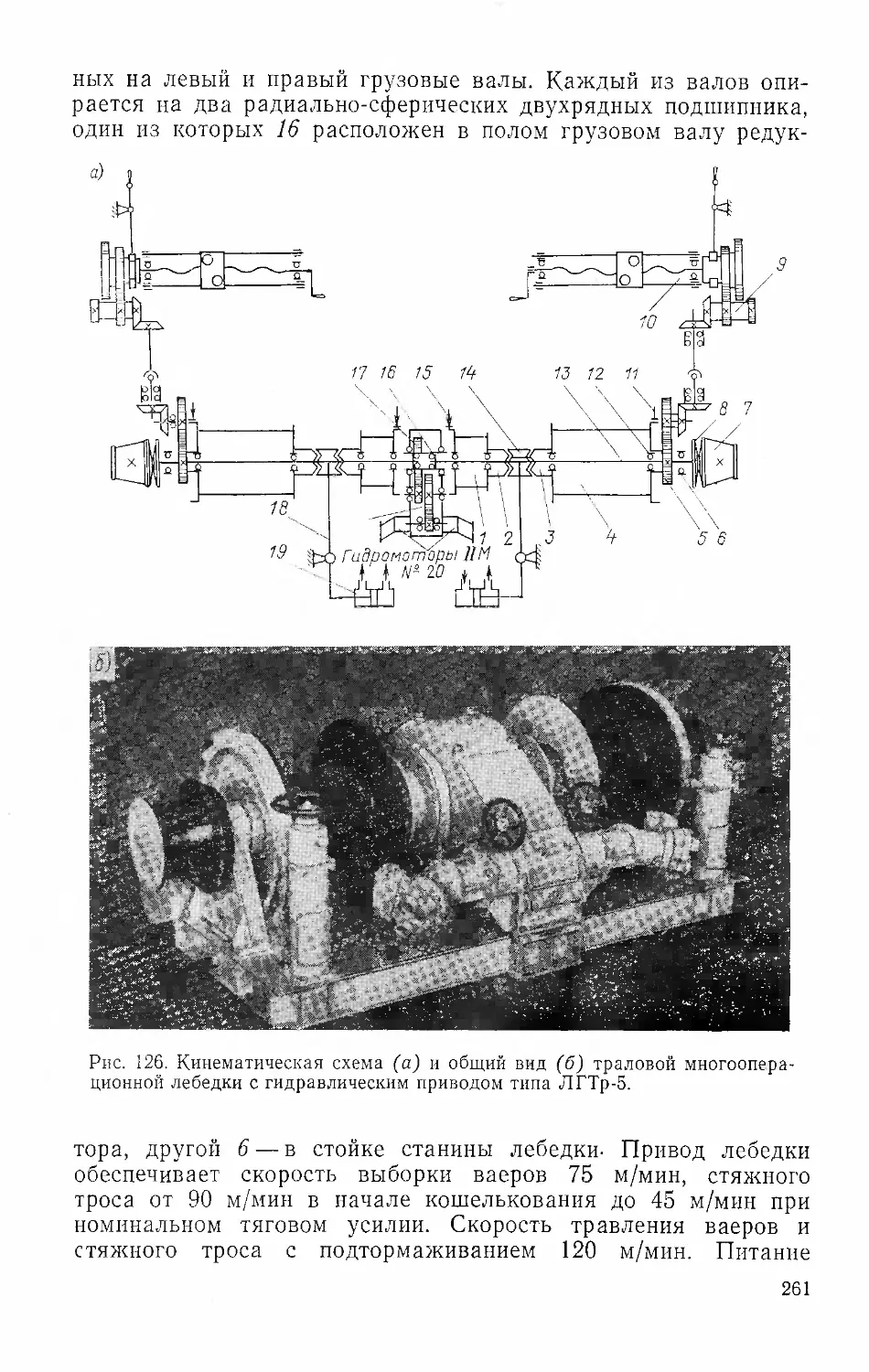
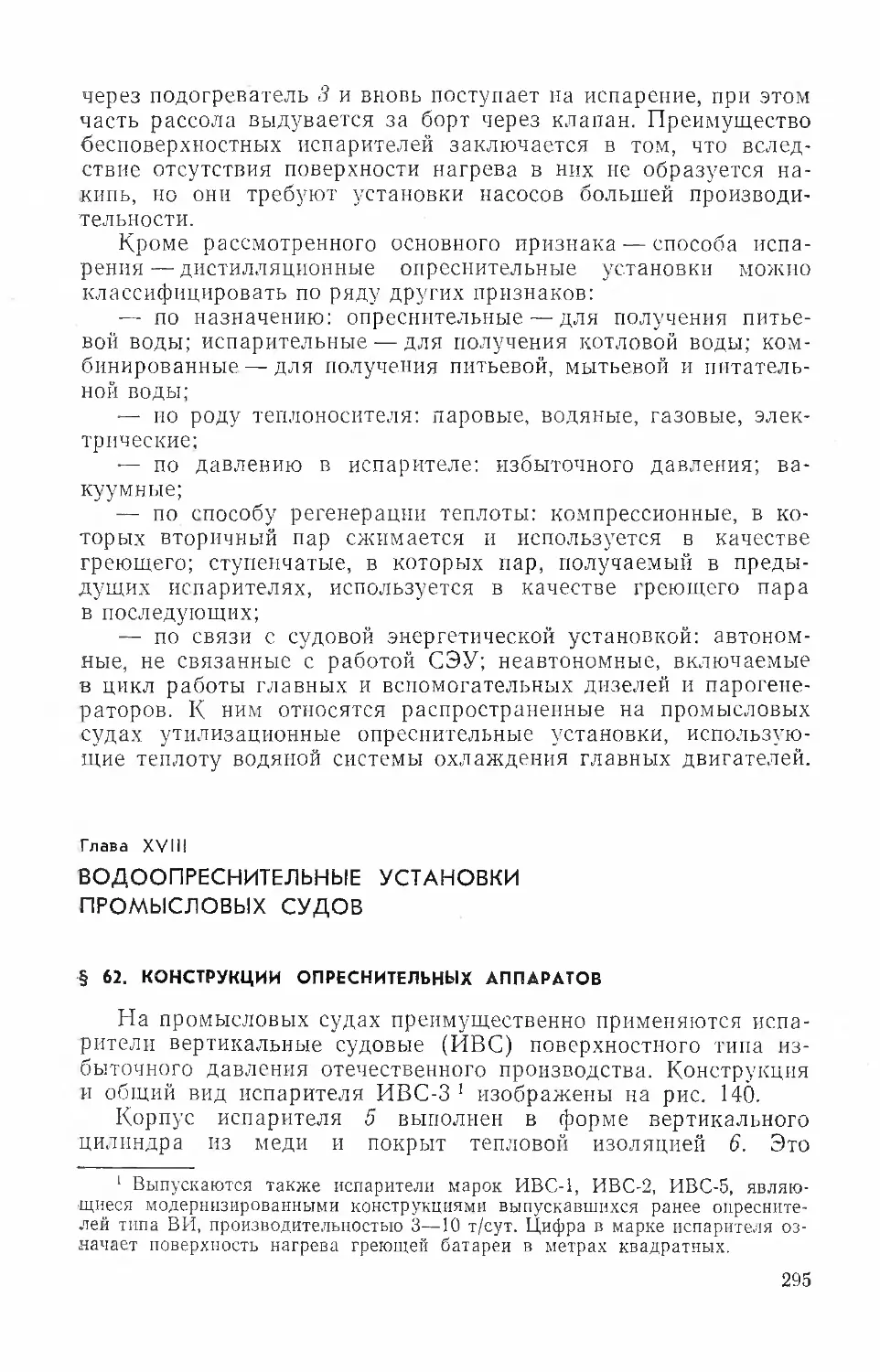
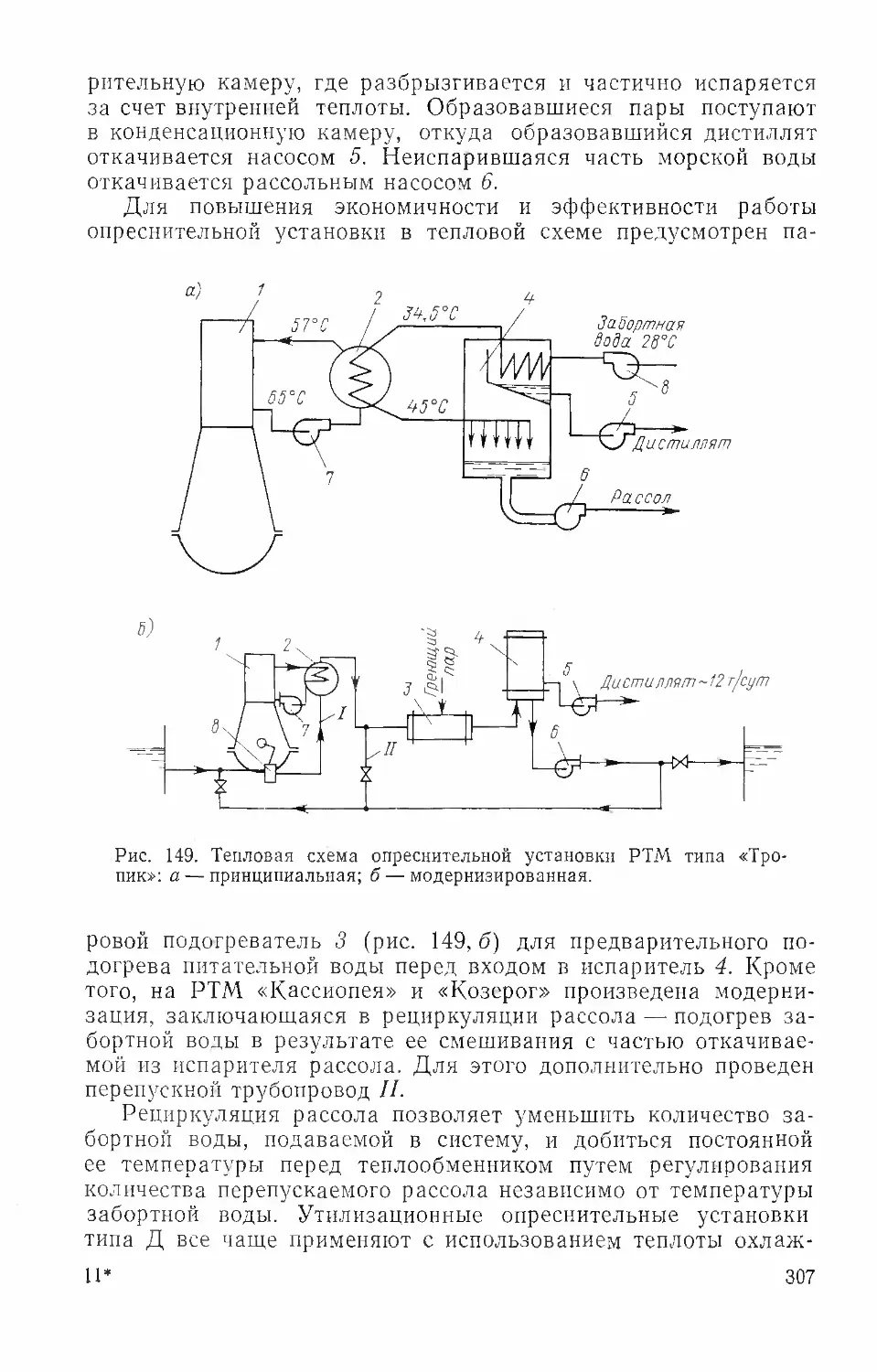
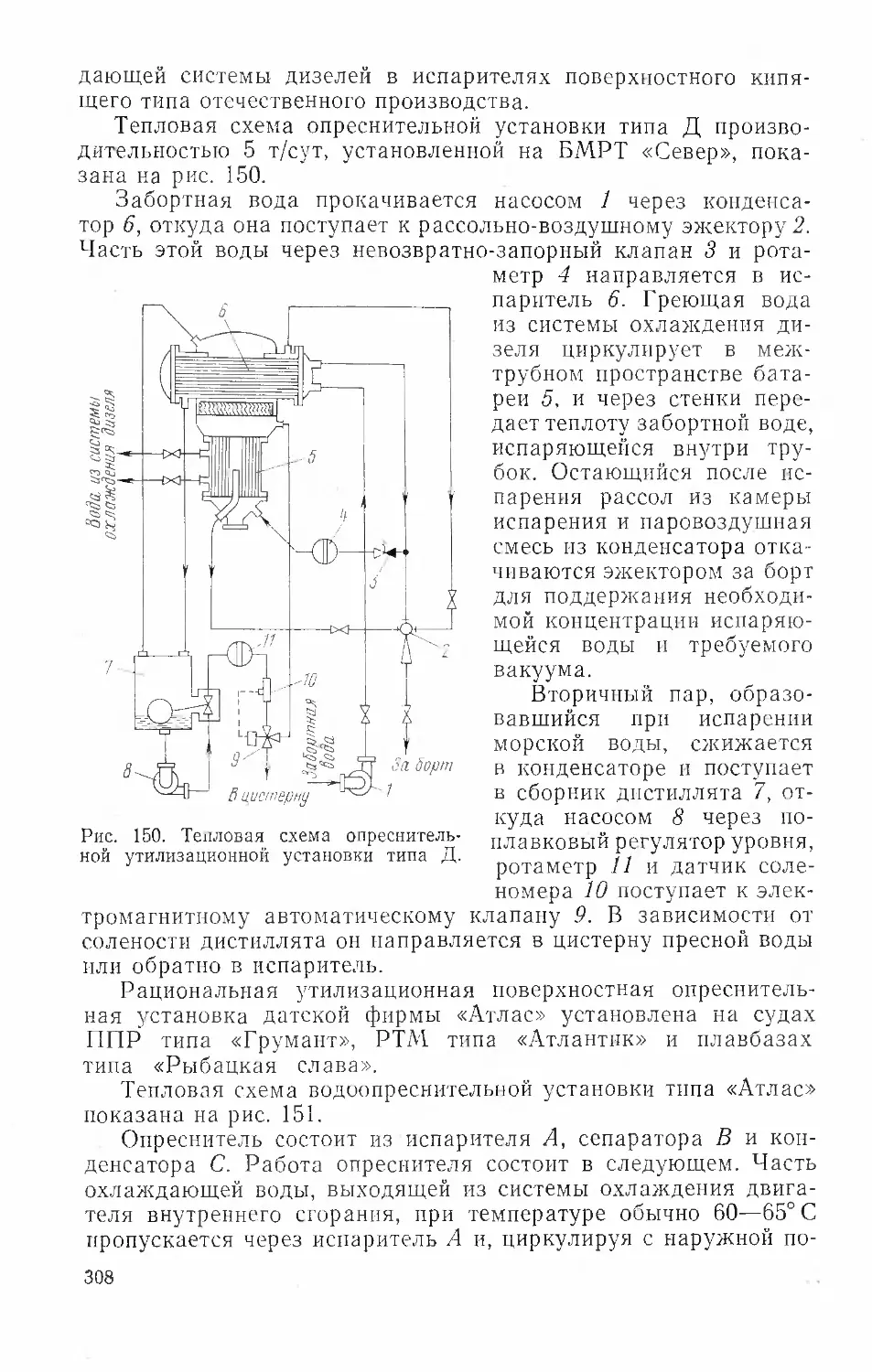
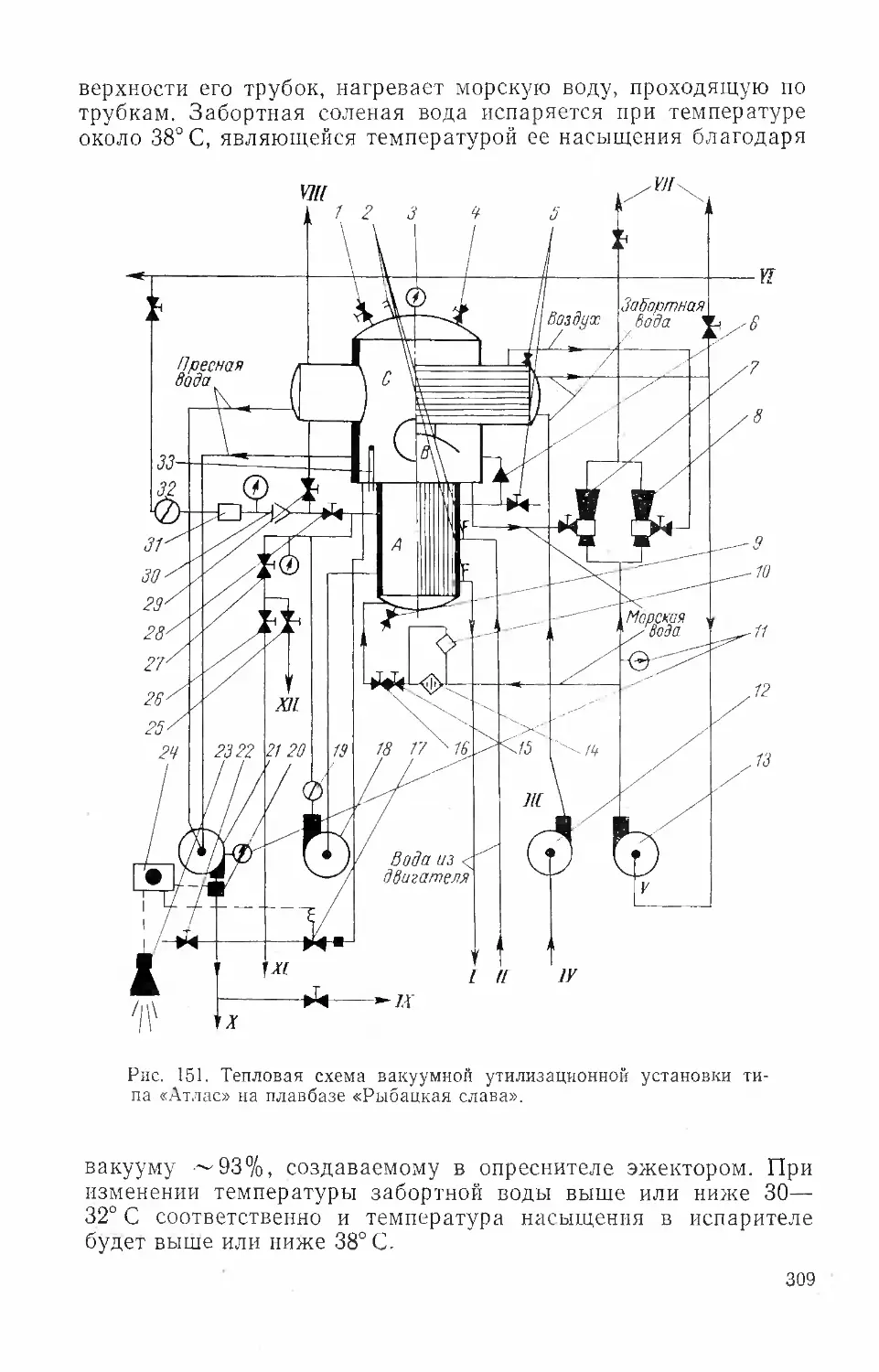




Text
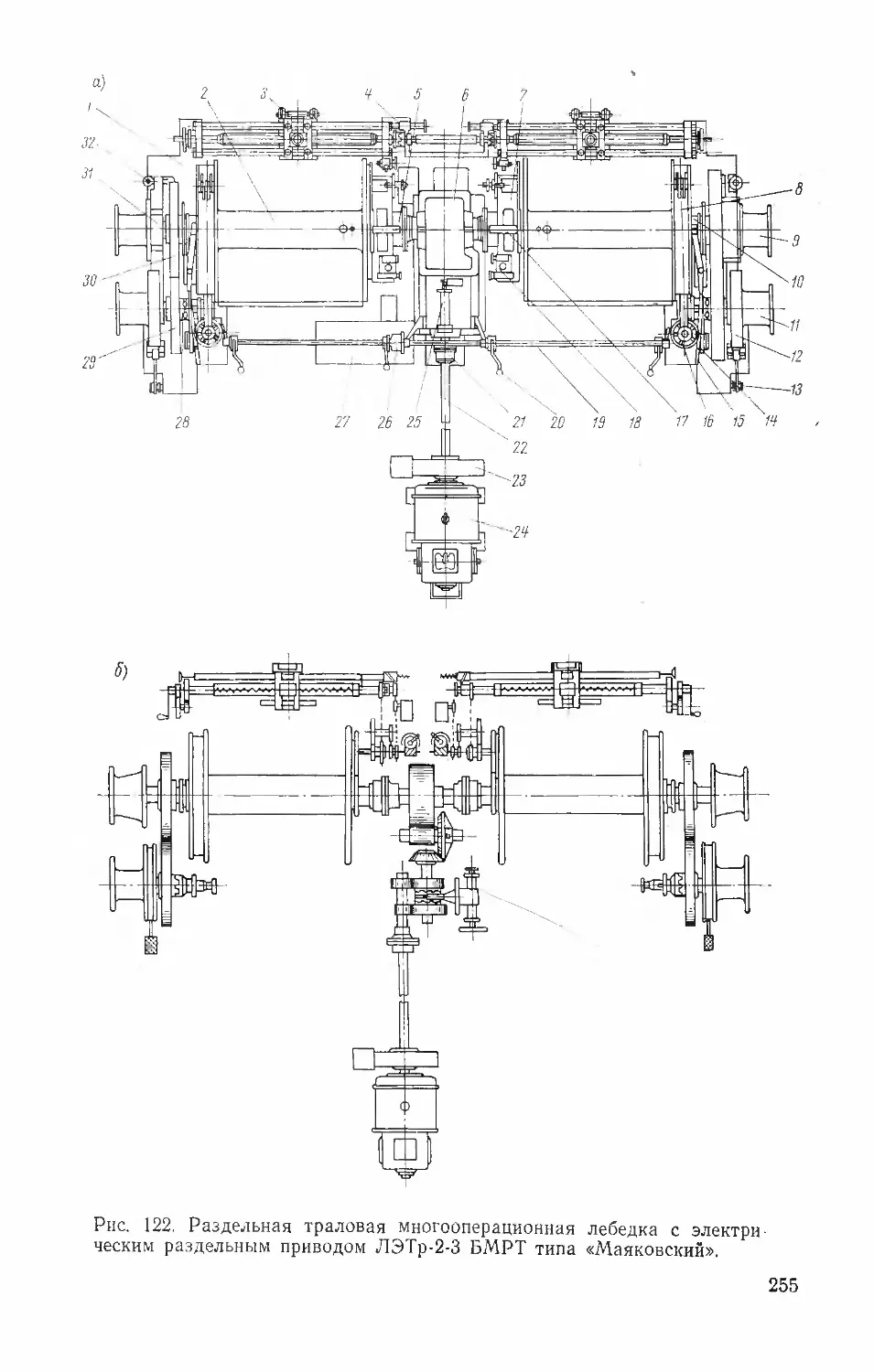
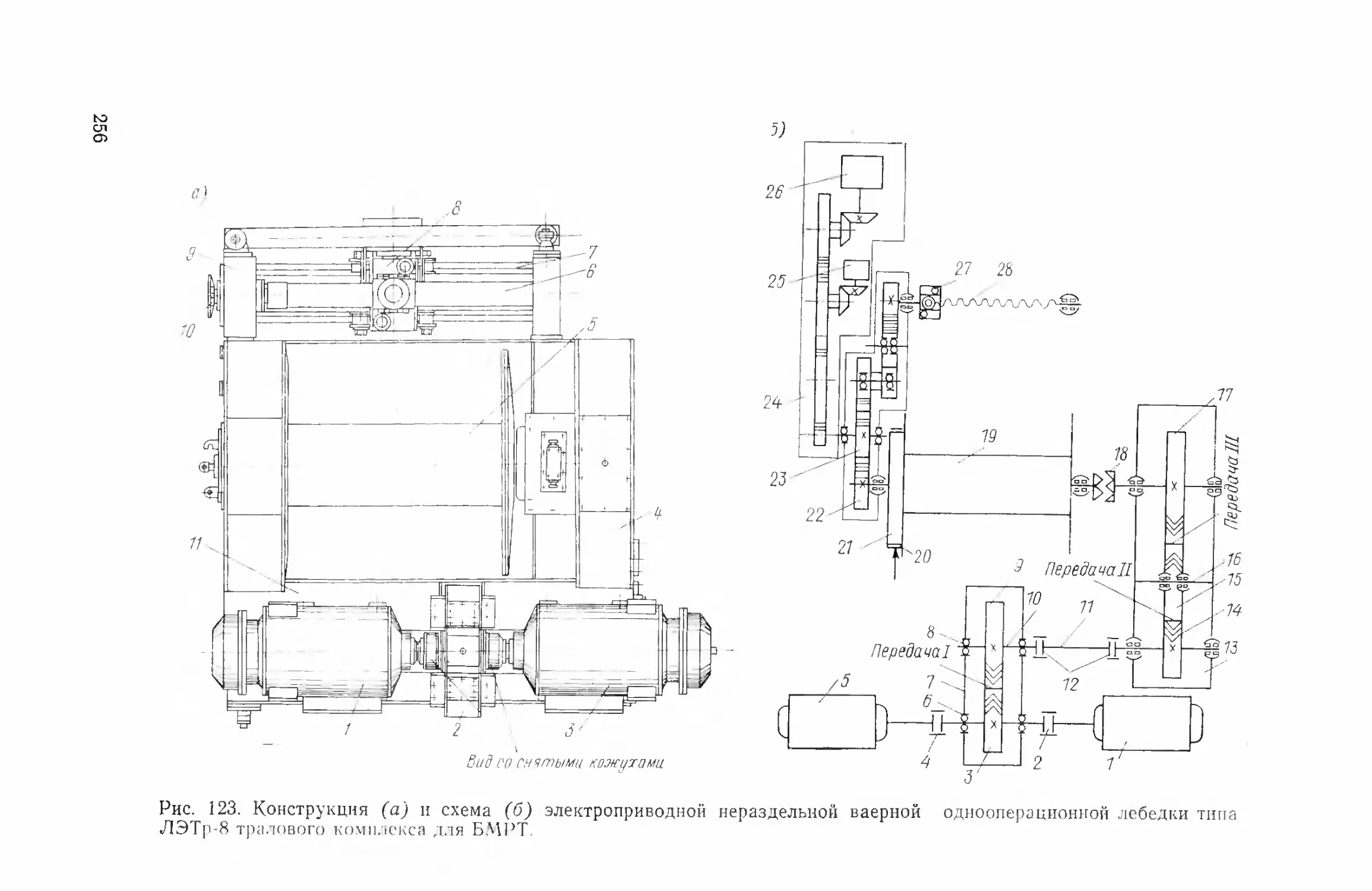
А.Е.БОГОМОЛЬНЫЙ
СУДОВЫЕ
ВСПОМОГАТЕЛЬНЫЕ
И РЫБОПРОМЫСЛОВЫЕ
МЕХАНИЗМЫ
Допущено Управлением руководящих кад¬
ров и учебных заведений Минрыбхоза
СССР в качестве учебника для курсантов
мореходных училищ Минрыбхоза СССР,
обучающихся по специальности 1620 «Экс¬
плуатация судовых силовых установок».
! -'л
к : сч
с ; "т*
т
т
ЛЕНИНГРАД
«СУДОСТРОЕНИЕ»
1980
ББК 39.459
Б73
УДК 629.12.03.002.5 + 639.22.081 (075.3)
Рецензенты:
Цикловая комиссия
судомеханических дисциплин
Херсонского мореходного училища МРХ,
инж. Н. В. ТРЕГУБ
Научный редактор
инж. А. Ф. МАЛОЛЕТКО
Богомольный А. Е.
Б73 Судовые вспомогательные и рыбопромысловые ме¬
ханизмы: Учебник.— 2-е изд., перераб. и доп.— JL: Су¬
достроение, 1980.— 336 с., ил.
Учебник написан в соответствии с программой одноименного курса по
специальности «Эксплуатация судовых силовых установок». В нем рассмот¬
рены принцип действия, устройство, конструкция, основы теории, расчета и
эксплуатации судовых вспомогательных и рыбопромысловых механизмов.
Настоящее издание (1-е издание было в 1971 г.) дополнено сведениями о
средствах по очистке сточных вод и др.
Книга предназначена для учащихся мореходных училищ, а также мо¬
жет быть использована для повышения квалификации специалистов рыбопро¬
мыслового флота. Она будет полезна судомеханикам плавсостава.
31805—005
Б 22—80
048(01)—80
3605030000
39.459
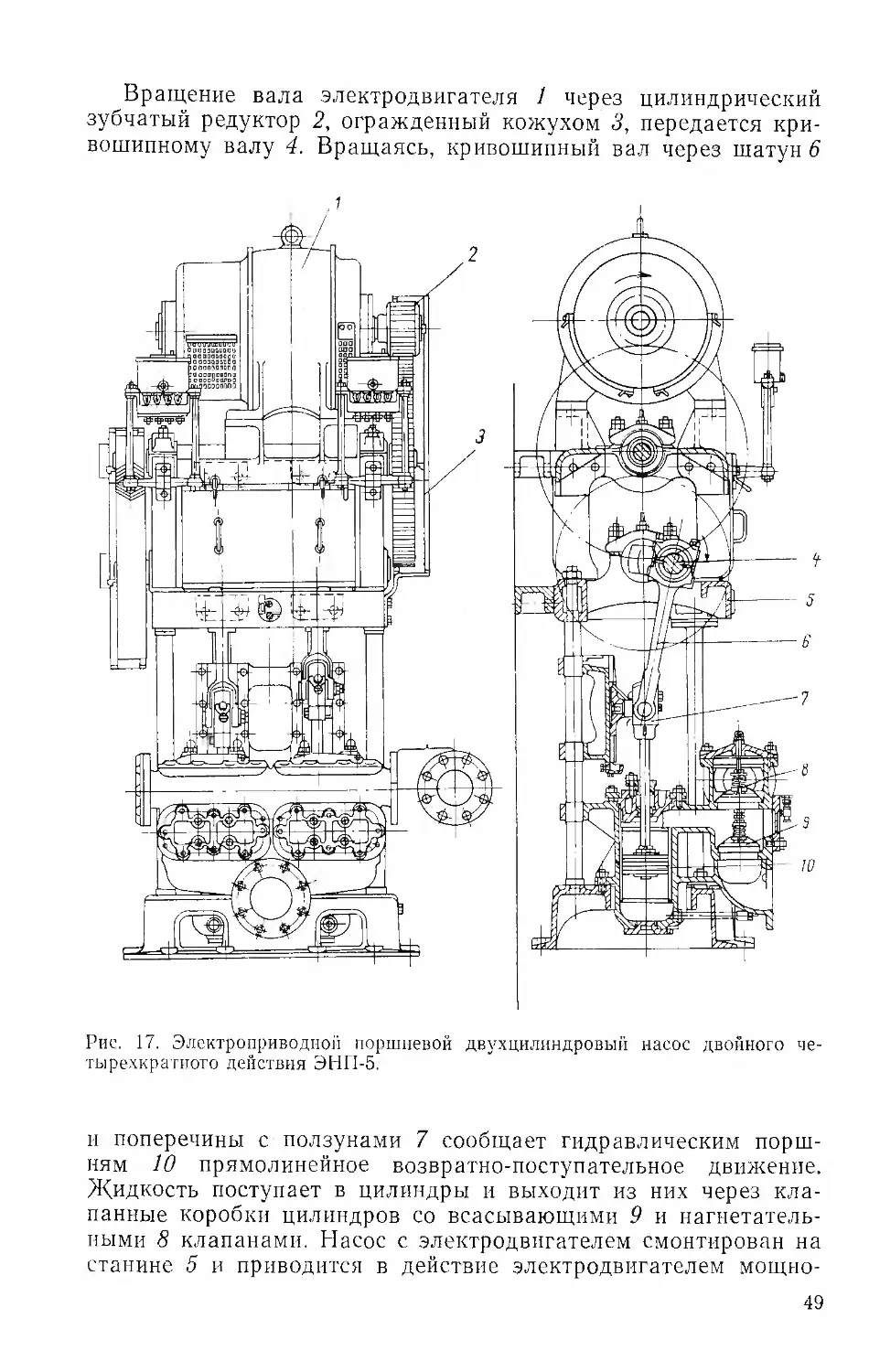
© Издательство «Судостроение», 1980 г.
ПРЕДИСЛОВИЕ
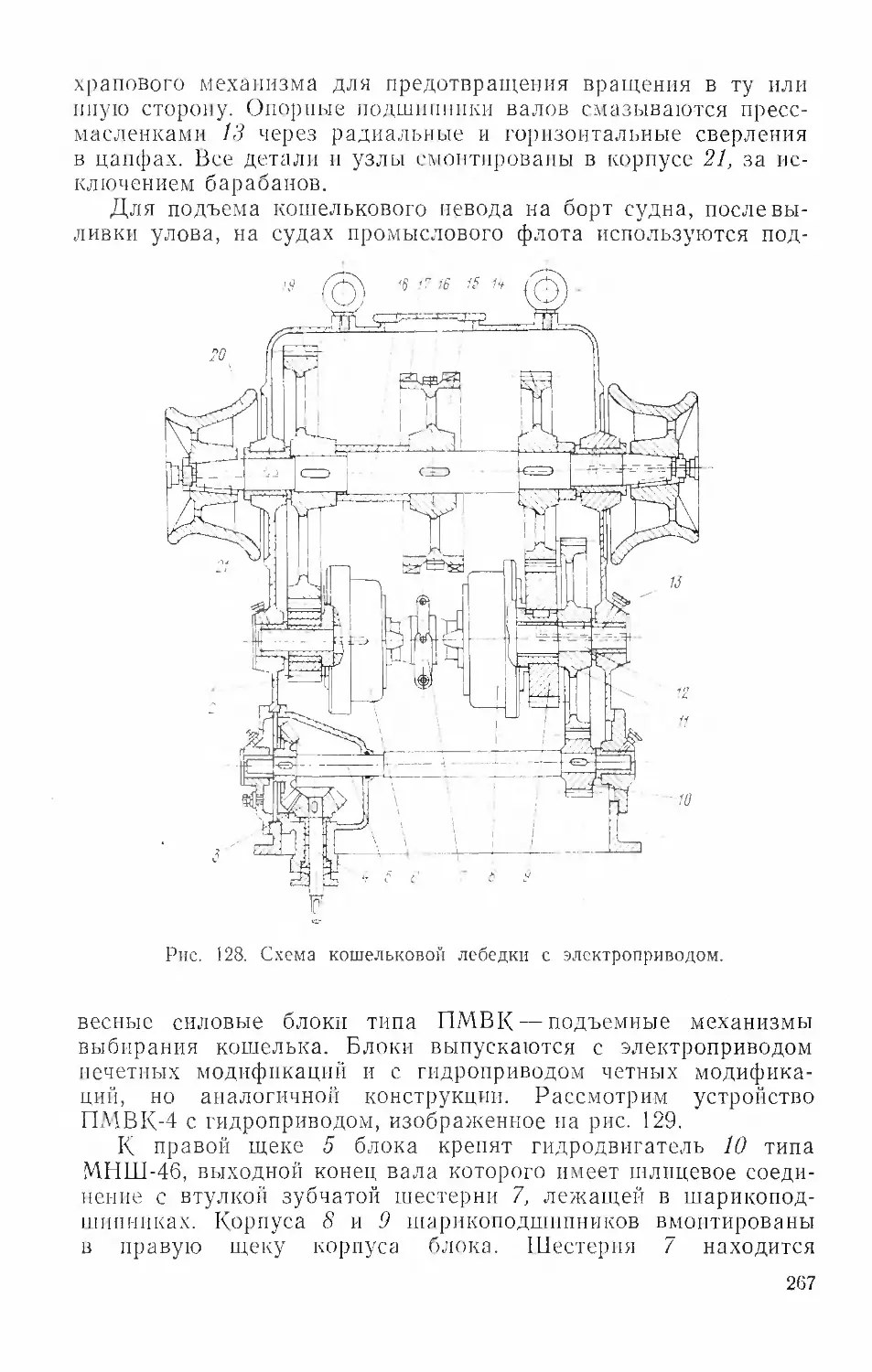
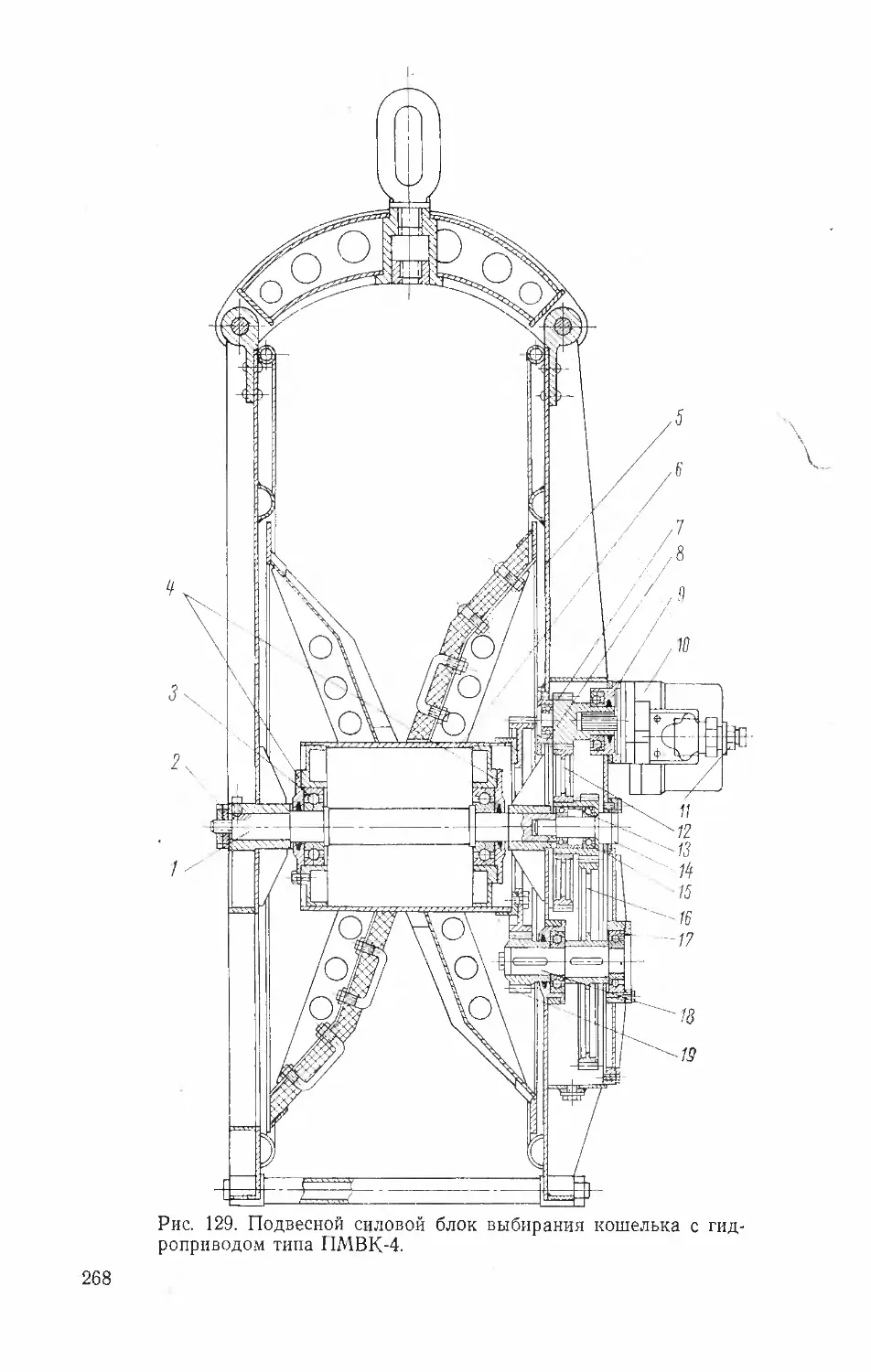
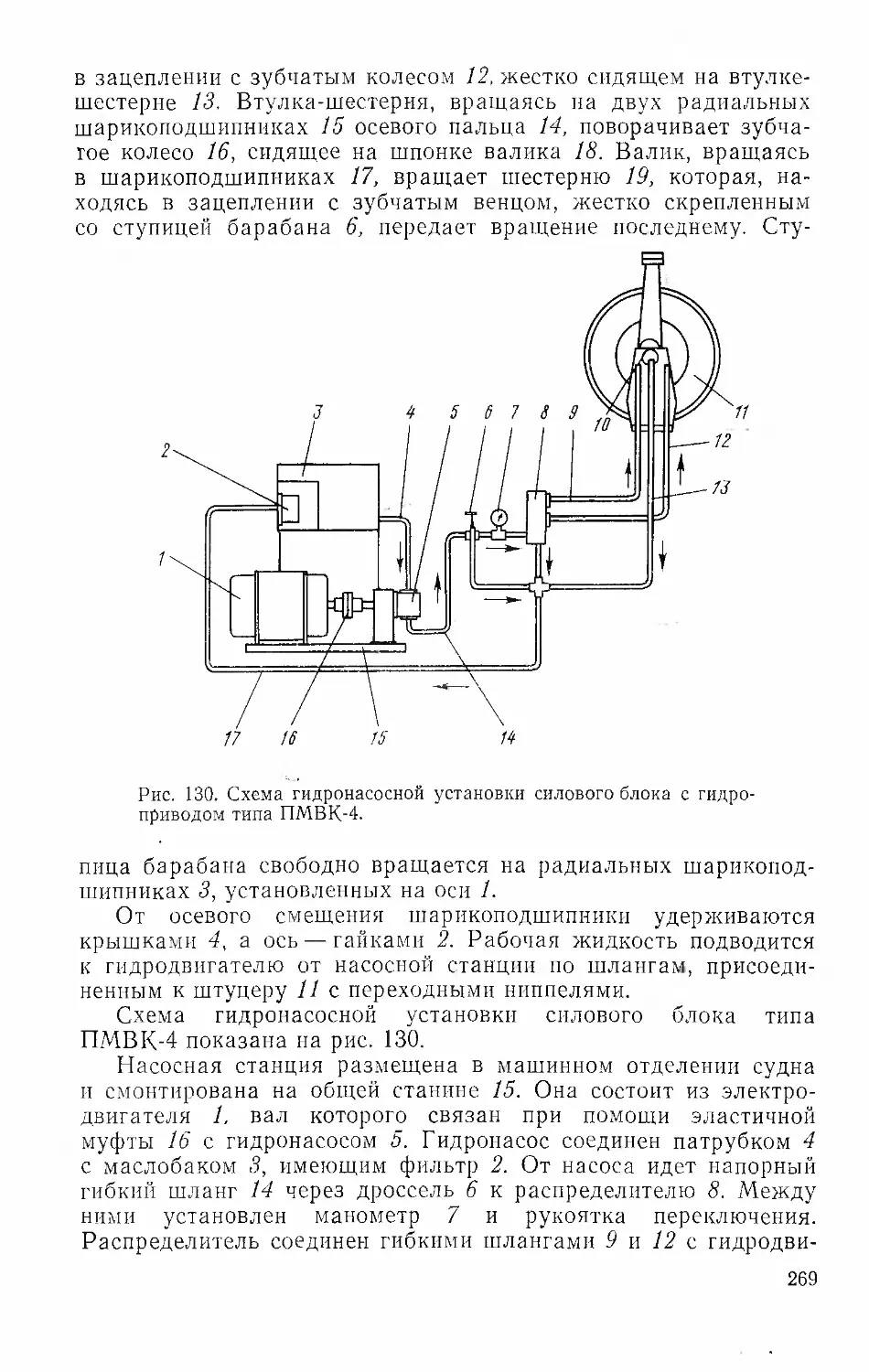
Вспомогательные и рыбопромысловые механизмы, устанав¬
ливаемые на рыбопромысловых судах, обслуживают судовые
устройства и системы.
Вспомогательный механизм любого назначения состоит из
двух основных частей: исполнительной, обеспечивающей выпол¬
нение функций данного механизма, и двигателя, приводящего
исполнительный механизм в движение.
Вспомогательные механизмы морских судов различаются по
следующим основным признакам: по приводу — автономные
(приводимые от независимого двигателя) и навешенные (с при¬
водом от главного или вспомогательного двигателя); по распо¬
ложению на судне — палубные и внутрикорпусные; по виду ис¬
пользуемой энергии — паровые, электрические, гидравлические,
пневматические, дизельные и др.; по назначению — рулевые,
якорные, швартовные, грузовые, шлюпочные, буксирные, про¬
мысловые механизмы и насосы. Отдельные группы составляют
механизмы судовых водоопреснительных установок, движите¬
лей — гребных винтов регулируемого шага (ВРШ) и устройств
по очистке льяльных вод.
Современные вспомогательные и промысловые механизмы
должны отвечать следующим требованиям: иметь минимальные
массы и габариты; безотказно работать в морских условиях —
при крене, дифференте, качке; быть надежными в эксплуатации
(выход из строя того или иного механизма может повлечь за
собой необходимость прекращения промысла, а иногда создать
опасность для жизни экипажа); быть экономичными; иметь про¬
стое и удобное управление, включающее частичную или полную
автоматизацию и аварийную защиту; быть износоустойчивыми.
3
Выполнение указанных требований в большой степени зави¬
сит от вида используемой энергии и от типа привода механиз¬
мов. Это особенно важно для рыбопромыслового флота, где
энергия, расходуемая на вспомогательные механизмы, состав¬
ляет 40—60% мощности главной энергетической установки.
Основными видами автономных приводов, применяемых для
вспомогательных и промысловых механизмов на судах, явля¬
ются паровые, электрические и гидравлические. Паровые меха¬
низмы наиболее надежны, допускают практически неограничен¬
ные перегрузки. Однако они громоздки, требуют предваритель¬
ной подготовки к действию, подвержены «размораживанию»,
а главное, имеют низкий КПД. В настоящее время для вспомо¬
гательных механизмов в основном применяют электро- и гидро¬
приводы. На современных эксплуатируемых и вновь строящихся
рыбопромысловых судах гидравлический привод получает все
большее распространение. В нем удачно сочетаются преимуще¬
ства электрического и парового приводов: возможность плав¬
ного регулирования скорости, простая и надежная защита от
перегрузок. Поэтому на некоторых отечественных рыбопромыс¬
ловых судах осуществлена комплексная гидрофикация палуб¬
ных и промысловых механизмов.
Настоящая книга является вторым изданием учебника «Су¬
довые вспомогательные и рыбопромысловые механизмы», вы¬
пущенного издательством «Судостроение» в 1971 г. Учебник со¬
ответствует программе курса, читаемого в средних специальных
учебных заведениях по специальности 1620 «Эксплуатация
судовых силовых установок». Программа разработана Цент¬
ральным учебно-методическим кабинетом и утверждена Управ¬
лением кадров и учебных заведений Министерства рыбного хо¬
зяйства СССР в 1973 г. В соответствии с программой объем
курса «Судовые вспомогательные и рыбопромысловые меха¬
низмы» значительно расширился. Введены новые разделы, в ча¬
стности «Конструктивные элементы судовых систем», «Системы
гидравлических приводов», «Винты регулируемого шага»,
«Средства очистки и удаления сточных вод промысловых су¬
дов». Компрессоры, сепараторы, фильтры, холодильники не рас¬
сматриваются в настоящем учебнике. Они входят в курс судо¬
вых двигателей.
Изучению курса «Судовые вспомогательные и рыбопромыс¬
ловые механизмы» предшествуют курсы «Техническая -меха-.
4
ника», «Техническая термодинамика и теплопередача», «Основы
теории и устройства судна», «Судовые энергетические уста¬
новки». Значительную часть современных вспомогательных и
промысловых механизмов составляют гидравлические ма¬
шины — насосы и гидродвигатели. Основные сведения по гид¬
равлике приведены в начале первого раздела учебника, чтобы
облегчить учащимся усвоение материала.
В работе над вторым изданием учебника автор использовал
новейшие материалы, касающиеся судовых вспомогательных и
рыбопромысловых механизмов и опубликованные в технической
литературе. Использованы также данные эксплуатации совре¬
менных судов рыбопромыслового флота, техническая докумен¬
тация института Гипрорыбфлот, проспекты советских и ино¬
странных выставок.
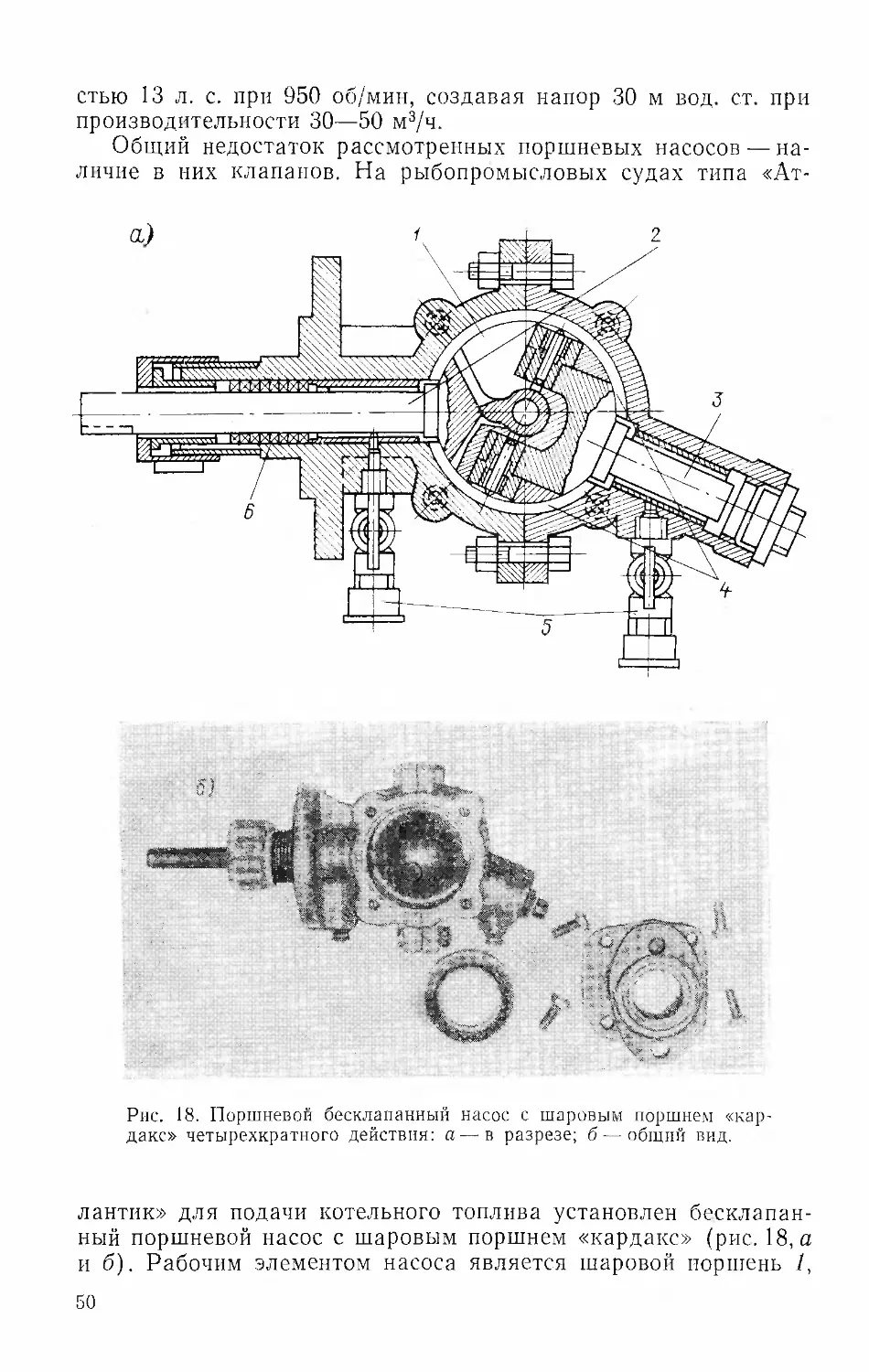
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
■ ширина, м
• диаметр, мм
- скорость, м/с
■ эксцентриситет, мм
- модуль упругости, кгс/см2
градусы Энглера
- площадь, м2
■ коэффициент трения
- масса, кг
■ ускорение свободного па¬
дения, м/с2
высота, напор, м
передаточное отношение,
энтальпия, ккал/кг
коэффициент
расстояние, путь, м
масса, кг; момент, кгс-м
мощность, кВт, л. с.
частота вращения,
об/мин, рад/с
давление, кгс/см2, Па
производительность, рас¬
ход, л/мин, т/ч
сила, Н, кгс
критерий Рейнольдса
радиус, мм
сила, кгс; осадка, м
температура, °С; время,
с; шаг, мм
- объем, м3
■ производительность, кг/ч
- толщина, мм
- сила, кгс
- число, высота напора, м
■ угол, ... °; коэффициент
■ угол, ... °; коэффициент
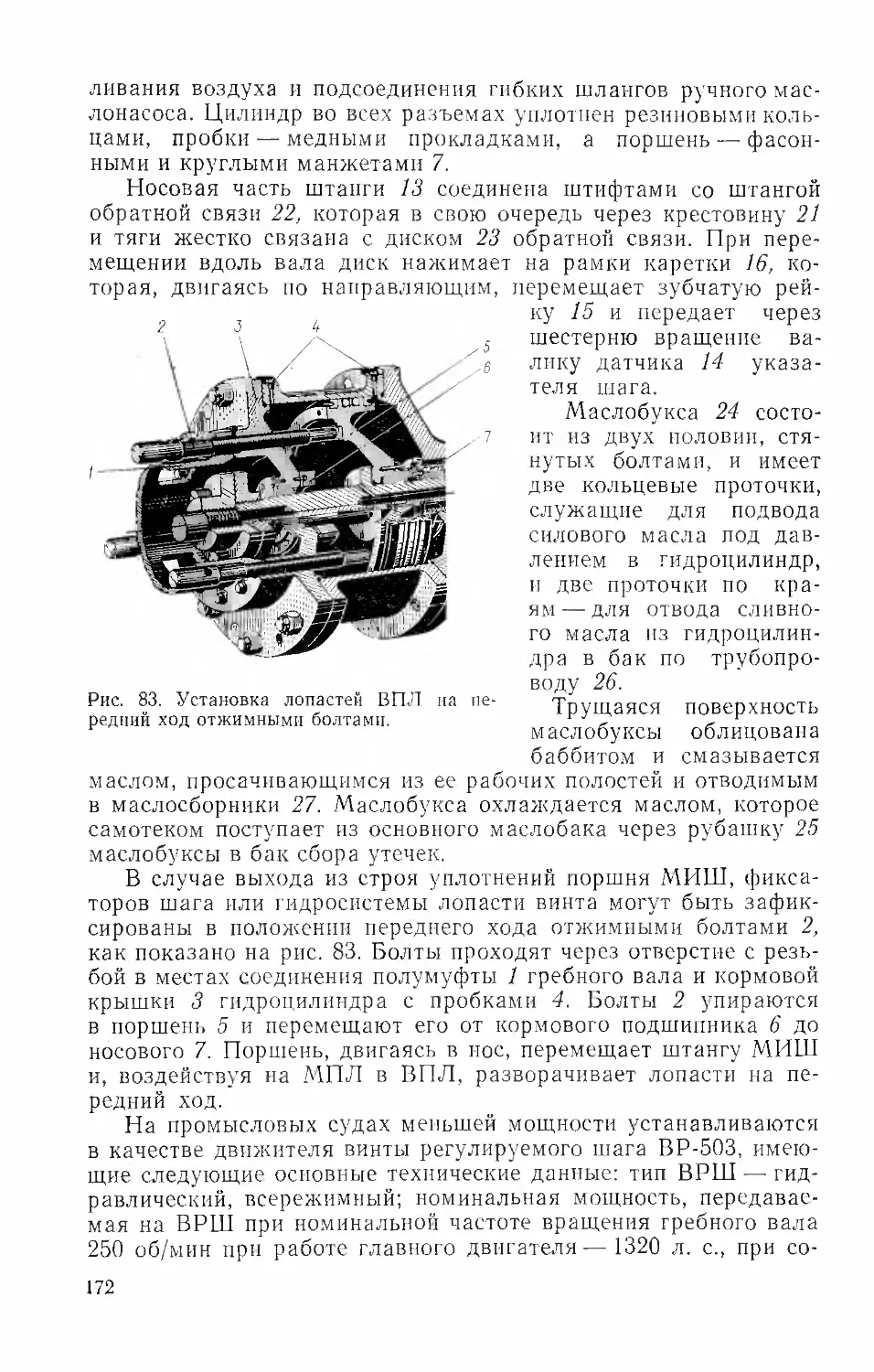
- толщина, мм
- коэффициент мощности
■ коэффициент местного
гидравлического сопро¬
тивления
коэффициент полезного
действия (КПД)
■ относительный шаг винта
динамическая вязкость,
Па-с
кинематическая вязкость,
м2/с
плотность жидкости,
кг/м3
номинальное напряжение,
Па
удельная сила трения,
Па
смоченный периметр
коэффициент отношения
угловая скорость, рад/с
Раздел первый
СУДОВЫЕ НАСОСЫ
Гидравлические механизмы, которые предназначены для пере¬
мещения капельных жидкостей и сообщения им энергии (на¬
пора), называются насосами. Свойствами капельных жидкостей,
изучением законов их равновесия и движения занимается наука
гидравлика.
Глава I
ОСНОВЫ ГИДРАВЛИКИ
Гидравлика делится на две основные части: 1) гидроста¬
тику, которая изучает законы равновесия покоящейся жидко¬
сти; 2) гидродинамику, которая изучает законы движущейся
жидкости.
§ 1. ФИЗИЧЕСКИЕ СВОЙСТВА И ПАРАМЕТРЫ
КАПЕЛЬНЫХ ЖИДКОСТЕЙ
Из курса физики известно, что жидкое агрегатное состояние
вещества характеризуется большой подвижностью его частиц
и отсутствием определенной формы. Такое состояние харак¬
терно как для жидкостей, так и для газов. Капельная жидкость
в отличие от газообразного вещества обладает малой сжимае¬
мостью, т. е. значительной объемной упругостью, и незначитель¬
ной температурной расширяемостью. Иначе говоря, жидкость,
изучаемая в гидравлике, имеет объем, который мало изменя¬
ется от воздействия давления и температуры. Упругость жидко¬
сти измеряется коэффициентом сжимаемости S, показывающим,
на какую долю своего первоначального объема сжимается жид¬
кость при увеличении давления:
или обратной ему величиной — модулем объемного сжатия
К"=~У^7, (2)
av
где dp= 105 Па (1 кгс/см2); Паскаль — давление, вызываемое
силой 1 Н, равномерно распределенной по поверхности пло¬
щадью 1 м2.
Модуль объемного сжатия измеряется в Паскаль-модулях.
Малую сжимаемость капельных жидкостей можно подтвердить следую¬
щим опытом.
Пластмассовый или картонный сосуд до половины наполняют водой и
производят выстрел из малокалиберной винтовки. Если пуля пройдет выше
уровня жидкости, то останется отверстие, но сосуд будет цел; при прохожде¬
нии пули ниже уровня жидкости сосуд разобьется. Это объясняется тем, что
пуля при проникновении в воду должна сжать ее на величину своего объема
либо вытеснить вверх. Времени для вытеснения мало. Происходит мгновенное
сжатие, при котором в жидкости развиваются большие давления, разрываю¬
щие стенки сосуда. На малой сжимаемости воды основано, в частности, дей¬
ствие глубинных бомб: при взрыве в воде развиваются громадные давления,
разрушающие подводный корпус судна.
На малой сжимаемости основано понятие идеальной жидко¬
сти. Идеальная жидкость (по сравнению с реальной) имеет сле¬
дующие особенности: 1) она абсолютна несжимаема, т. е. ко¬
эффициент сжимаемости 5 = 0; 2) не расширяется при повыше¬
нии температуры, т. е. коэффициент температурного расшире¬
ния 1 cif = 0; 3) не имеет вязкости, т. е. в ней отсутствуют силы
внутреннего трения2; характеризуется абсолютной подвижно¬
стью, или текучестью, так как касательные напряжения внутри
ее т=0.
Состояние любой реальной капельной жидкости определя¬
ется тремя основными параметрами: плотностью, вязкостью и
температурой.
Плотностью называется количество вещества (массы), содер¬
жащегося в единице объема:
Значения плотности и относительной удельной массы жид¬
костей приведены в табл. 1.
Вязкость — свойство жидкости, определяемое сопротивле¬
нием ее частиц относительному движению (сдвигу). Вязкость
влияет на текучесть жидкости и зависит от сил внутреннего
трения между частицами, струйками и слоями жидкости при пе¬
ремещении.
1 С увеличением давления коэффициент температурного расширения а*
у большинства реальных жидкостей уменьшается, а у воды, наоборот, уве¬
личивается.
2 Более подробно см. ниже.
8
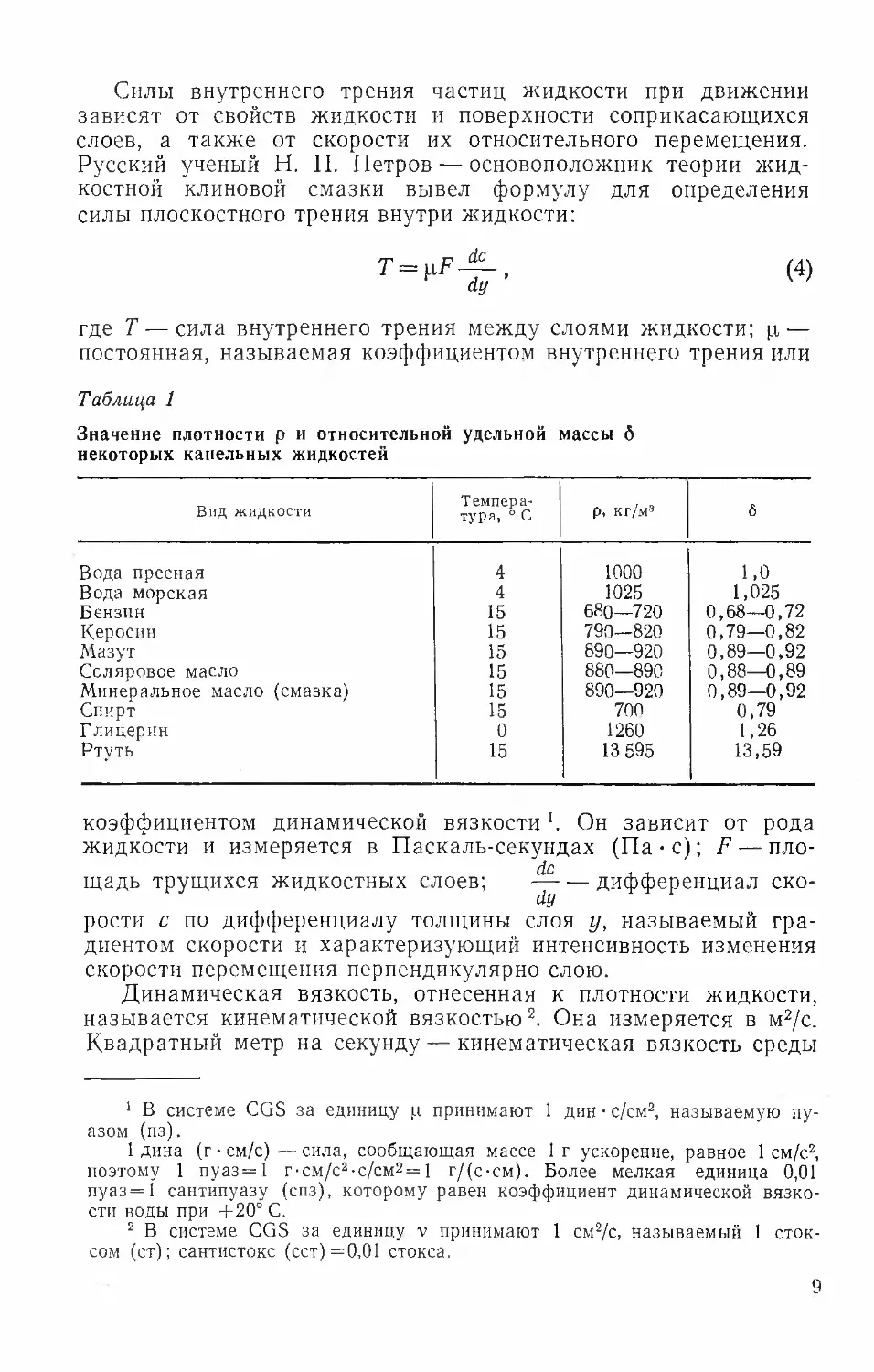
Силы внутреннего трения частиц жидкости при движении
зависят от свойств жидкости и поверхности соприкасающихся
слоев, а также от скорости их относительного перемещения.
Русский ученый Н. П. Петров — основоположник теории жид¬
костной клиновой смазки вывел формулу для определения
силы плоскостного трения внутри жидкости:
Т (4)
где Т — сила внутреннего трения между слоями жидкости; j.i —
постоянная, называемая коэффициентом внутреннего трения или
Таблица 1
Значение плотности р и относительной удельной массы б
некоторых капельных жидкостей
Вид жидкости
Темпера¬
тура, 0 с
р, кг/ма
6
Вода пресная
4
1000
1,0
Вода морская
4
1025
1,025
Бензин
15
680—720
0,68—0,72
Керосин
15
790—820
0,79—0,82
Мазут
15
890—920
0,89—0,92
Соляровое масло
15
880—890
0,88—0,89
Минеральное масло (смазка)
15
890—920
0,89—0,92
Спирт
15
700
0,79
Глицерин
0
1260
1,26
Ртуть
15
13 595
13,59
коэффициентом динамической вязкости1. Он зависит от рода
жидкости и измеряется в Паскаль-секундах (Па* с); F — пло¬
щадь трущихся жидкостных слоев; ——- дифференциал ско-
dy
рости с по дифференциалу толщины слоя у, называемый гра¬
диентом скорости и характеризующий интенсивность изменения
скорости перемещения перпендикулярно слою.
Динамическая вязкость, отнесенная к плотности жидкости,
называется кинематической вязкостью2. Она измеряется в м2/с.
Квадратный метр на секунду — кинематическая вязкость среды
1 В системе CGS за единицу |л принимают 1 дин • с/см2, называемую пу¬
азом (пз).
1 дина (г • см/с) — сила, сообщающая массе 1 г ускорение, равное 1 см/с2,
поэтому 1 пуаз=1 г-см/с2-с/см2 = 1 г/(с-см). Более мелкая единица 0,01
пуаз = 1 сантипуазу (спз), которому равен коэффициент динамической вязко¬
сти воды при +20° С.
2 В системе CGS за единицу v принимают 1 см2/с, называемый 1 сток-
сом (ст); сантистокс (сст) = 0,01 стокса.
9
плотностью 1 кг/м3, динамическая вязкость которой равна од¬
ной Паскаль-секунде (1 Па-с).
С увеличением температуры вязкость капельных жидкостей
уменьшается в отличие от газообразных, вязкость которых воз¬
растает. В пределах от 0 до 100° С зависимость кинематической
вязкости v, м2/с, от температуры выражается эмпирической фор¬
мулой
где i — температура, °С.
На практике обычно вязкость жидкостей измеряют не в аб¬
солютных величинах, а в условных единицах путем сравнения
текучести данной жидкости с текучестью воды. Так, в СССР,
ГДР и ФРГ вязкость условная (ВУ) измеряется в градусах Энг-
лера (°Е). Градус Энглера представляет собой отношение вре¬
мени истечения 200 мл (200 см3) испытуемой жидкости, нагре¬
той до определенной температуры, к времени истечения такого
же количества дистиллированной воды при температуре +20° С
через калиброванное отверстие 2,8 мм в приборе, называемом
вискозиметром Энглера, т. е.
1°Е== J*.( (6)
где tm и tB — соответственно время истечения жидкости и
воды, с.
Как правило, температуру испытуемой жидкости принимают
равной 50 или 100° С, но иногда определяют вязкость и при
другой температуре. Вязкость котельного мазута определяют,
например, при 80° С.
Вязкость жидкости характеризуется следующим признаком:
чем медленнее всплывают в жидкости пузыри воздуха, тем
больше ее вязкость. Наиболее простые вискозиметры состоят из
нескольких трубок; в них находятся жидкости, вязкость которых
известна, и пузырьки воздуха. Рядом помещают трубку с испы¬
туемой жидкостью, заполненную не доверху и закрытую проб¬
кой. Все трубки прикрепляют к дощечке, которую переворачи¬
вают на 180°. Пузырьки воздуха в трубках всплывают с раз¬
личными скоростями, причем скорость всплытия пузырьков
в контрольной трубке будет такая же, как в одной из тариро¬
ванных. Следовательно, жидкость в ней будет иметь такую же
вязкость.
В США и Англии условная вязкость выражается в секундах
Сейболта (универсальных) SV и в единицах Редвуда Rj.
Переход от условной вязкости, выраженной в градусах Энг¬
лера, к кинематической вязкости осуществляется по формуле
10
§ 2. ГИДРОСТАТИЧЕСКОЕ ДАВЛЕНИЕ
И ЕГО ОСНОВНЫЕ СВОЙСТВА
На всякую площадь, находящуюся внутри покоящейся жид¬
кости и соприкасающуюся с ней (т. е. так называемую смочен¬
ную поверхность), действует давление со стороны жидкости.
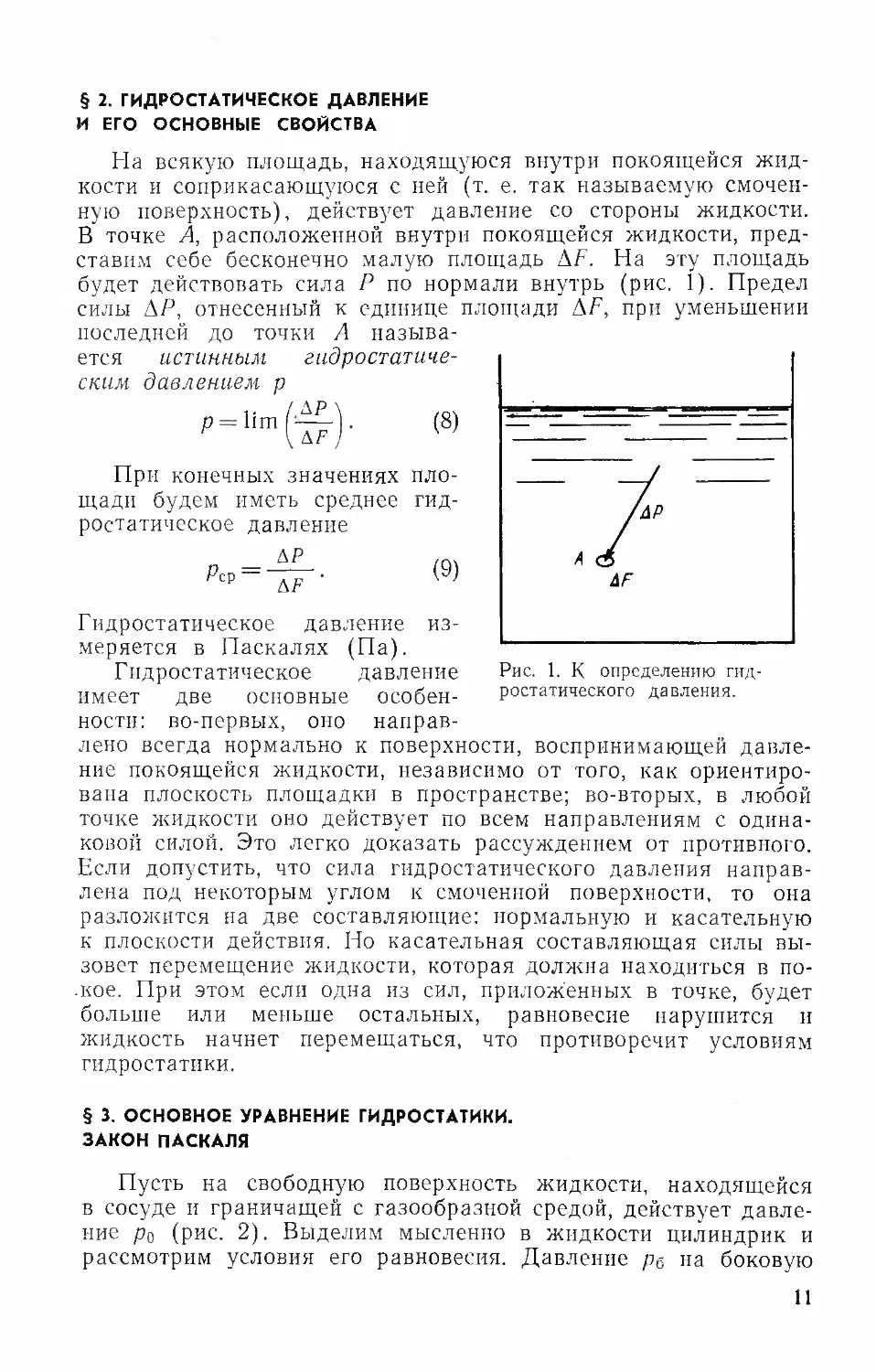
В точке А, расположенной внутри покоящейся жидкости, пред¬
ставим себе бесконечно малую площадь AF. На эту площадь
будет действовать сила Р по нормали внутрь (рис. 1). Предел
силы АР, отнесенный к единице площади ДF, при уменьшении
последней до точки А называ¬
ется истинным гидростатиче¬
ским давлением р
Гидростатическое давление из¬
меряется в Паскалях (Па).
Гидростатическое давление
имеет две основные особен¬
ности: во-первых, оно направ¬
лено всегда нормально к поверхности, воспринимающей давле¬
ние покоящейся жидкости, независимо от того, как ориентиро¬
вана плоскость площадки в пространстве; во-вторых, в любой
точке жидкости оно действует по всем направлениям с одина¬
ковой силой. Это легко доказать рассуждением от противного.
Если допустить, что сила гидростатического давления направ¬
лена под некоторым углом к смоченной поверхности, то она
разложится на две составляющие: нормальную и касательную
к плоскости действия. Но касательная составляющая силы вы¬
зовет перемещение жидкости, которая должна находиться в по-
.кое. При этом если одна из сил, приложенных в точке, будет
больше или меньше остальных, равновесие нарушится и
жидкость начнет перемещаться, что противоречит условиям
гидростатики.
§ 3. ОСНОВНОЕ УРАВНЕНИЕ ГИДРОСТАТИКИ.
ЗАКОН ПАСКАЛЯ
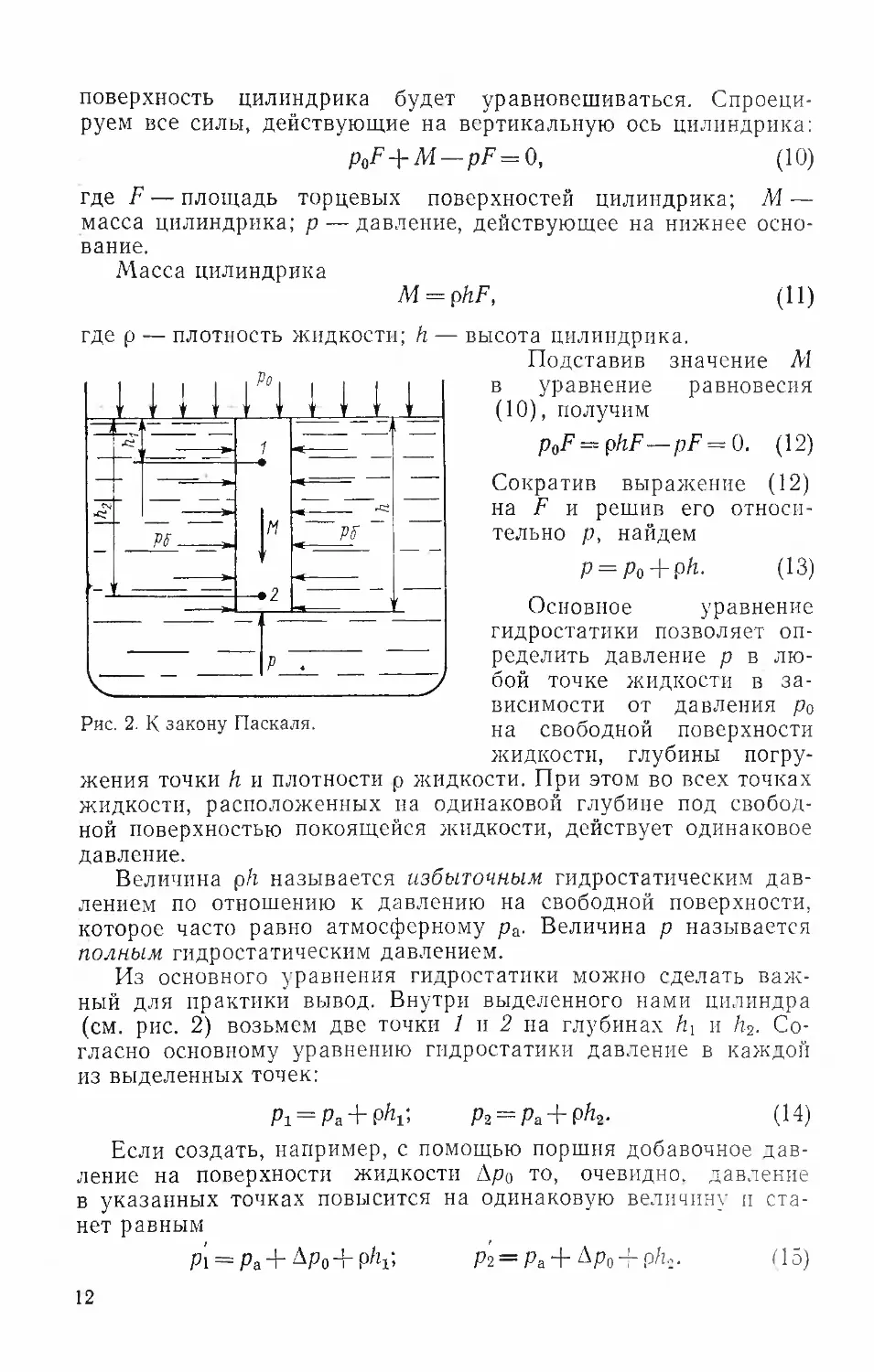
Пусть на свободную поверхность жидкости, находящейся
в сосуде и граничащей с газообразной средой, действует давле¬
ние ро (рис. 2). Выделим мысленно в жидкости цилиндрик и
рассмотрим условия его равновесия. Давление р^ на боковую
При конечных значениях пло¬
щади будем иметь среднее гид¬
ростатическое давление
(9)
11
Рис. 1. К определению гид¬
ростатического давления.
поверхность цилиндрика будет уравновешиваться. Спроеци¬
руем все силы, действующие на вертикальную ось цилиндрика:
p0F+M — pF = 0, (10)
где F — площадь торцевых поверхностей цилиндрика; М —
масса цилиндрика; р — давление, действующее на нижнее осно¬
вание.
Масса цилиндрика
М = phF, (11)
где р — плотность жидкости; h — высота цилиндрика.
Подставив значение М
в уравнение равновесия
(10), получим
p0F — phF—pF = 0. (12)
Сократив выражение (12)
на F и решив его относи¬
тельно р, найдем
P = Po + P^. (13)
Основное уравнение
гидростатики позволяет оп¬
ределить давление р в лю¬
бой точке жидкости в за¬
висимости от давления ро
на свободной поверхности
жидкости, глубины погру¬
жения точки h и плотности р жидкости. При этом во всех точках
жидкости, расположенных на одинаковой глубине под свобод¬
ной поверхностью покоящейся жидкости, действует одинаковое
давление.
Величина рh называется избыточным гидростатическим дав¬
лением по отношению к давлению на свободной поверхности,
которое часто равно атмосферному ра. Величина р называется
полным гидростатическим давлением.
Из основного уравнения гидростатики можно сделать важ¬
ный для практики вывод. Внутри выделенного нами цилиндра
(см. рис. 2) возьмем две точки 1 и 2 на глубинах hx и h2. Со¬
гласно основному уравнению гидростатики давление в каждой
из выделенных точек:
Pl = Pa+pV> р2 = Ра + рЛ2- (И)
Если создать, например, с помощью поршня добавочное дав¬
ление на поверхности жидкости Ар0 то, очевидно, давление
в указанных точках повысится на одинаковую величину и ста¬
нет равным
Pi = Pa + Лро + р/ч; Р2 = Ра + Аро + р/г-2- (15)
12
Рис. 2. К закону Паскаля.
В соответствии с полученными уравнениями закон Паскаля
можно сформулировать так: давление, производимое на жид¬
кость, находящуюся в покое в замкнутом сосуде, передается
внутри жидкости во все стороны с одинаковой силой.
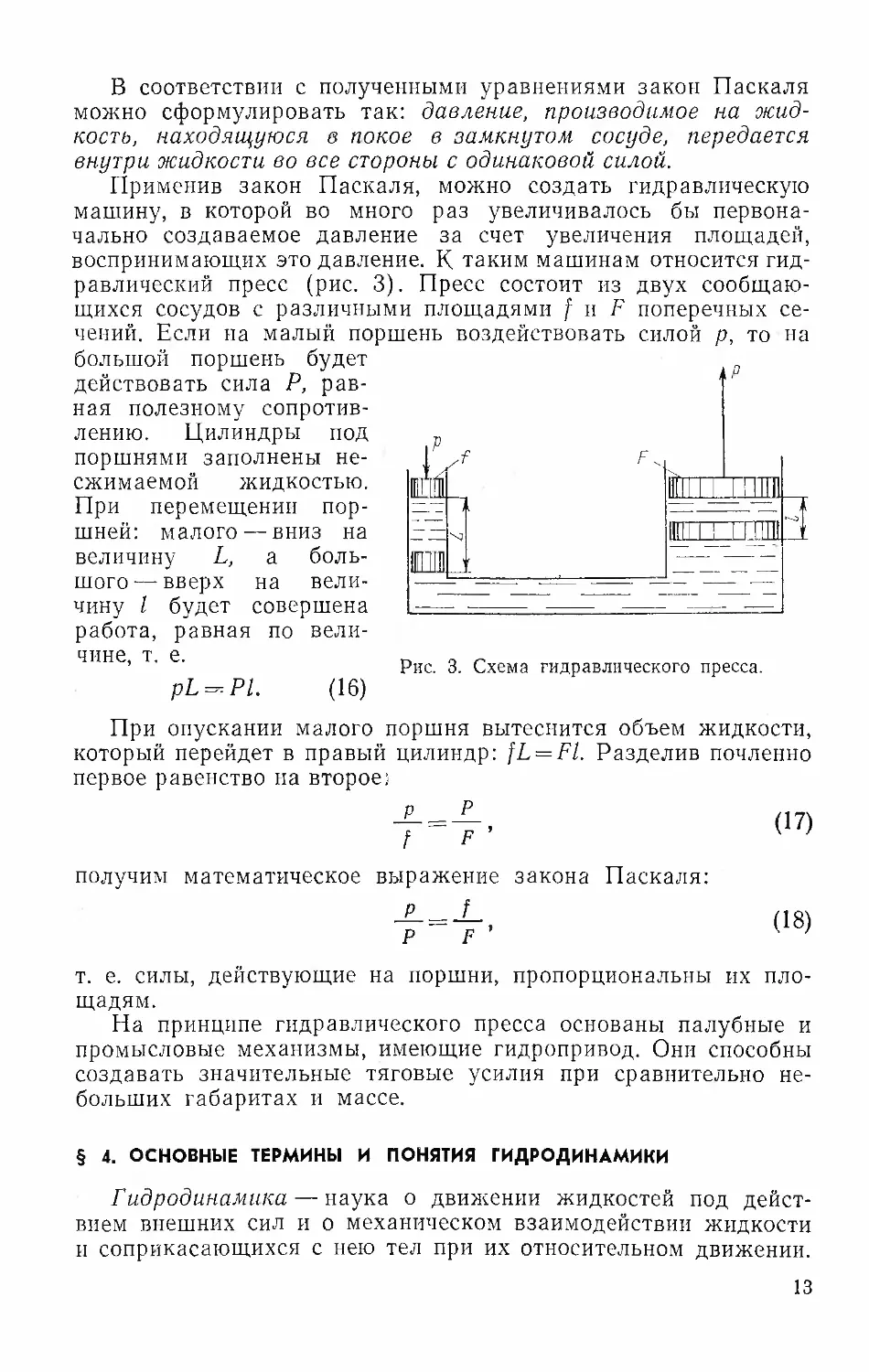
Применив закон Паскаля, можно создать гидравлическую
машину, в которой во много раз увеличивалось бы первона¬
чально создаваемое давление за счет увеличения площадей,
воспринимающих это давление. К таким машинам относится гид¬
равлический пресс (рис. 3). Пресс состоит из двух сообщаю¬
щихся сосудов с различными площадями / и F поперечных се¬
чений. Если на малый поршень воздействовать силой р, то на
большой поршень будет
действовать сила Р, рав¬
ная полезному сопротив¬
лению. Цилиндры под
поршнями заполнены не¬
сжимаемой жидкостью.
При перемещении пор¬
шней: малого — вниз на
величину L, а боль¬
шого— вверх на вели¬
чину I будет совершена
работа, равная по вели¬
чине, т. е.
pL^-Pl. (16)
При опускании малого поршня вытеснится объем жидкости,
который перейдет в правый цилиндр: fL = Fl. Разделив почленно
первое равенство на второе)
f F ’
получим математическое выражение закона Паскаля:
Р F ’
Рис. 3. Схема гидравлического пресса.
(17)
(18)
т. е. силы, действующие на поршни, пропорциональны их пло¬
щадям.
На принципе гидравлического пресса основаны палубные и
промысловые механизмы, имеющие гидропривод. Они способны
создавать значительные тяговые усилия при сравнительно не¬
больших габаритах и массе.
§ 4. ОСНОВНЫЕ ТЕРМИНЫ И ПОНЯТИЯ ГИДРОДИНАМИКИ
Гидродинамика — наука о движении жидкостей под дейст¬
вием внешних сил и о механическом взаимодействии жидкости
и соприкасающихся с нею тел при их относительном движении.
13
Чтобы установить необходимые зависимости между внешними
силами, вызывающими движение потока жидкости, скоростью
течения и сопротивлением движению жидкости, необходимо
знать основные понятия и определения гидродинамики.
Прежде всего установим, что под потоком жидкости подра¬
зумевается ряд элементарных струек, движущихся в одном на¬
правлении в общем русле или трубе. Поперечное сечение по¬
тока, перпендикулярное к основному направлению его движе¬
ния, называется живым сечением потока. Периметр поперечного
сечения русла или трубы, с которым соприкасается поток жид¬
кости, носит наименование смоченного периметра.
Если обозначить /ж площадь живого сечения потока, ах —
его смоченный периметр, то их отношение будет представлять
собой гидравлический радиус:
(19)
Для трубы круглого сечения диаметром d, заполненной жидко¬
стью,
Г = = А. (20)
4nd 4 '
Количество жидкости, протекающей через живое сечение по¬
тока в единицу времени, называется расходом жидкости. Чис¬
ленно расход жидкости Q равен произведению площади его жи¬
вого сечения /щ на среднюю скорость потока сср в данном се¬
чении:
Q = />Ap- (21)
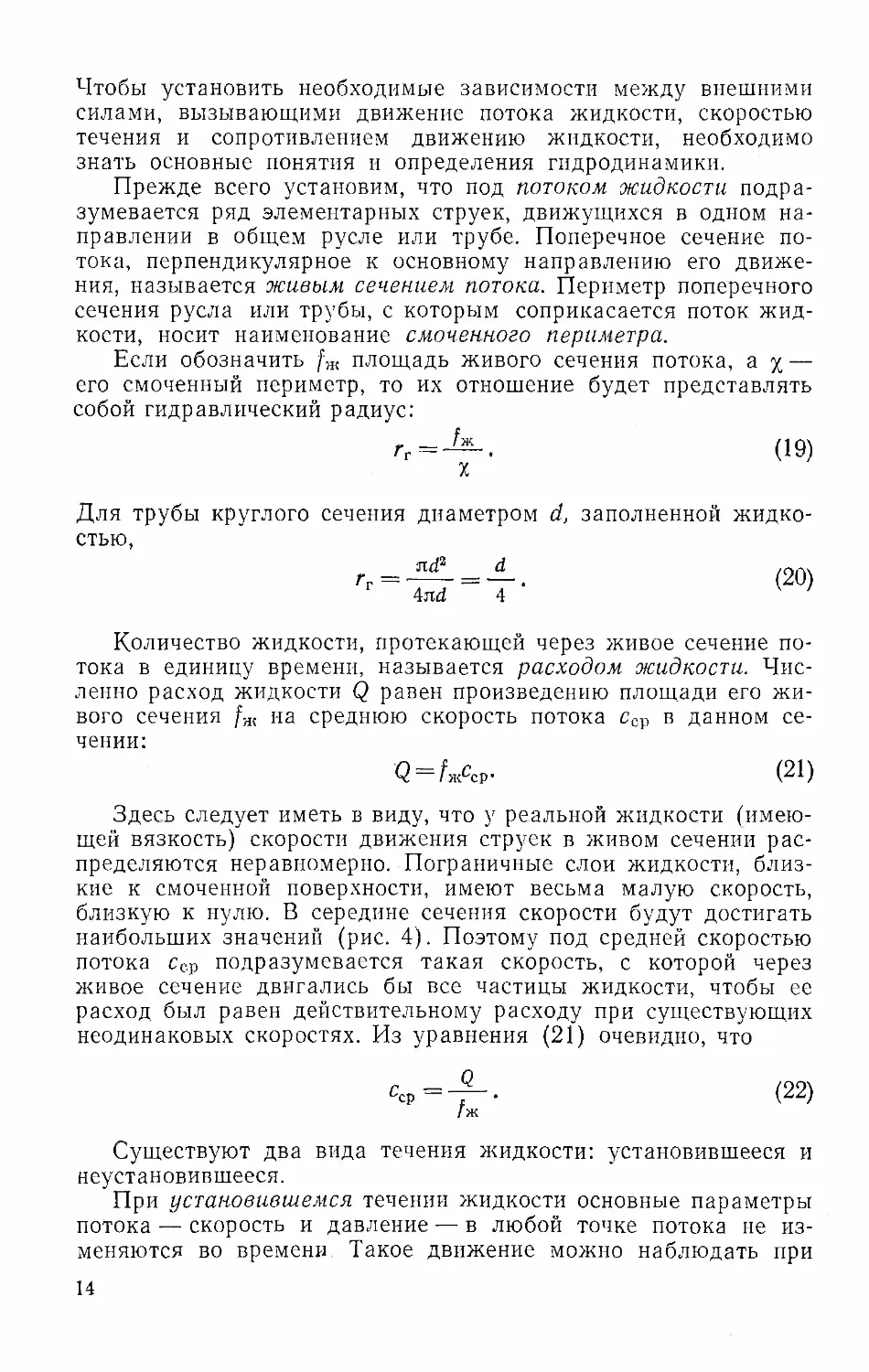
Здесь следует иметь в виду, что у реальной жидкости (имею¬
щей вязкость) скорости движения струек в живом сечении рас¬
пределяются неравномерно. Пограничные слои жидкости, близ¬
кие к смоченной поверхности, имеют весьма малую скорость,
близкую к нулю. В середине сечения скорости будут достигать
наибольших значений (рис. 4). Поэтому под средней скоростью
потока сСр подразумевается такая скорость, с которой через
живое сечение двигались бы все частицы жидкости, чтобы ее
расход был равен действительному расходу при существующих
неодинаковых скоростях. Из уравнения (21) очевидно, что
(22)
/Ж
Существуют два вида течения жидкости: установившееся и
неустановившееся.
При установившемся течении жидкости основные параметры
потока — скорость и давление — в любой точке потока не из¬
меняются во времени Такое движение можно наблюдать при
14
истечении жидкости из какого-либо отверстия резервуара
струей, имеющей постоянную толщину (поперечное сечение).
Течение жидкости с установившимся движением наблюдается
при работе центробежных и осевых насосов.
Если скорость и давление в определенных точках потока не¬
постоянные, т. е. меняются во времени, то течение жидкости на¬
зывается неустановившимся. При этом движении струя может
менять свою толщину, пульсировать. Неустановившееся течение
жидкости создается при работе поршневых насосов.
Установившееся течение жидкости может быть равномерным
и неравномерным.
Равномерное течение может осуществляться в потоке, имею¬
щем по длине одинаковые живые сечения, т. е. в соответствую¬
щих точках этих сечений ско¬
рости и давления одинаковы,
и, значит, средние скорости се¬
чений равны между собой. Та¬
кое движение, например, про¬
исходит в цилиндрических
трубах одинакового диаметра.
Если живое сечение по
длине потока меняется или
скорости и давления в живых
сечениях распределяются не¬
одинаково, то течение счи¬
тается неравномерным. Такое
течение имеет место в трубах переменного диаметра. Если по¬
ток проходит внутри жестких стенок контура (в трубе) под
давлением, создаваемым разностью уровней (напором) или ме¬
ханическим путем — насосом, то такое движение можно назвать
напорным. Свободное или безнапорное течение наблюдается
у потока, имеющего свободную поверхность, на которую дейст¬
вует атмосферное давление. В этом случае жидкость течет под
влиянием сил притяжения, как, например, в руслах рек.
§ 5. РЕЖИМЫ ТЕЧЕНИЯ ЖИДКОСТЕЙ.
ЧИСЛО РЕЙНОЛЬДСА
Английский ученый О. Рейнольдс в 1883 г. произвел опыты,
которые показали, что существуют два режима течения реаль¬
ной капельной жидкости: 1) ламинарный, или струйный; 2) тур¬
булентный, или вихревой.
При ламинарном режиме жидкость течет струйками, причем
частицы жидкости бегут как бы по некоторым «элементарным
трубкам» без взаимного перемешивания, т. е. параллельно одна
другой. При турбулентном режиме, наоборот, происходит пере¬
мешивание жидких частиц, которые помимо главного продоль¬
ного движения имеют также ряд дополнительных, весьма слож-
Рис. 4. Эпюра скоростей в живом
сечении.
15
ных и разнообразных движений в поперечном направлении
(рис. 5).
Опыты Рейнольдса показали, что характер течения зависит
от соотношения между диаметром трубы, скоростью потока и
вязкостью жидкости. В результате им был установлен пара¬
метр, называемый числом, или критерием, Рейнольдса, который
определяется из выражения:
Re = —, (23)
V
где с — средняя скорость потока, м/с; d — внутренний диаметр
трубы, м; v — коэффициент кинематической вязкости, м2/с,
Щ
Рис. 5. Турбулентное движение в потоке.
Нетрудно убедиться, что число Рейнольдса является пара¬
метром безразмерным:
| Re 1 = — = -м/с'м- = = 1. (24)
1 1 v м2/с м2-с v '
Каждый режим течения капельной жидкости характеризу¬
ется определенным числом Рейнольдса. При этом переход из
ламинарного режима в турбулентный и наоборот происходит
при определенном критическом числе Рейнольдса, которое для
всех капельных жидкостей одинаково и равно ReKp = 2300 Если
Re>ReKp, то режим движения жидкости турбулентный, если
Re<ReKp, то режим ламинарный.
1 Следует, однако, иметь в виду, что между устойчивым ламинарным и
устойчивым турбулентным режимами может лежать зона неустойчивых режи¬
мов течения жидкости, характеризуемая значениями числа Рейнольдса в пре¬
делах 2000—3000.
16
Средняя скорость потока в данной трубе, при которой дости¬
гается критическое число Рейнольдса, называется критической
скоростью скр. Она может быть определена из соотношения
§ 6. ГИДРАВЛИЧЕСКОЕ УРАВНЕНИЕ НЕРАЗРЫВНОСТИ
(СПЛОШНОСТИ) ПОТОКА
Рассмотрим сплошной поток однородной несжимаемой жид¬
кости в установившемся напорном движении (рис. 6). В попе¬
речных сечениях / и II, расположенных перпендикулярно к по¬
току, обозначим площади жи¬
вых сечений и средние скоро¬
сти в них соответственно Fь
F2, Ci и с2. Расходы жидкости
в живых сечениях будут
Qi — FIеQ-2 = F‘zc2- (26)
Допустим, что Qi>Q2.
Тогда через некоторый проме¬
жуток времени в объеме меж¬
ду сечениями I я II должно
произойти некоторое накопле¬
ние жидкости, так как коли¬
чество поступающей жидкости Qi больше количества вытекаю¬
щей жидкости Q2. Однако это невозможно вследствие несжи¬
маемости жидкости, ограниченной твердыми стенками.
Допустим, что Qi<Q2. В этом случае через некоторое время
в промежутке между сечениями I и II должны образоваться
разрывы и пустоты. Однако и это невозможно, так как по ус¬
ловию задачи поток сплошной.
Остается третье предположение, которое и является истин¬
ным:
Рис. 6. К выводу уравнения сплош¬
ности.
Qi — Qti
(27)
т. е. поток несжимаемой жидкости с установившимся движе¬
нием течет без разрывов сплошности по всей длине и с постоян¬
ным расходом. Сечения I и II были выбраны произвольно, зна¬
чит, это положение распространяется на любые сечения потока
по длине
Уравнение неразрывности, или сплошности, можно записать
так:
Q = Fc = const. (29)
Следствием полученной закономерности является равенство
для двух любых сечений потока:
(30)
откуда
~ = — > (31)
г 2 Cl
т. е. скорости потока обратно пропорциональны площадям жи¬
вых сечений.
При массовом расходе жидкости
М = р Q, (32)
где р — плотность жидкости.
Тогда, подставив из выражения (29) значение Q в уравне¬
ние (32), получим
М = Fcp = const. (33)
§ 7. УРАВНЕНИЯ БЕРНУЛЛИ
В установившемся сплошном потоке несжимаемой идеальной
жидкости, протекающей в жестком контуре, выделим элемен¬
тарный объем струйки и рассмотрим изменение его энергети¬
ческого состояния в различных живых сечениях потока. При
этом будем считать, что отсутствует теплообмен выделенного
объема с окружающей его средой. Тогда к рассматриваемому
течению применим закон сохранения энергии, открытый
М. В. Ломоносовым, который можно сформулировать следую¬
щим образом: энергия любой частицы струйки потока в любом
живом его сечении есть величина постоянная-.
Еу = const, (34)
где Еу — энергия, которой обладает единица массы (1 кг) те¬
кущей жидкости, называемая удельной энергией (Дж). Удель¬
ная энергия в общем случае состоит из двух составляющих:
потенциальной Еп и кинетической Ек энергий, т. е.
Еу=--ЕП + Ек. (35)
Потенциальная энергия любого вещества, в свою очередь, есть
сумма энергий положения и давления:
£n = z+ —, (36)
Р
18
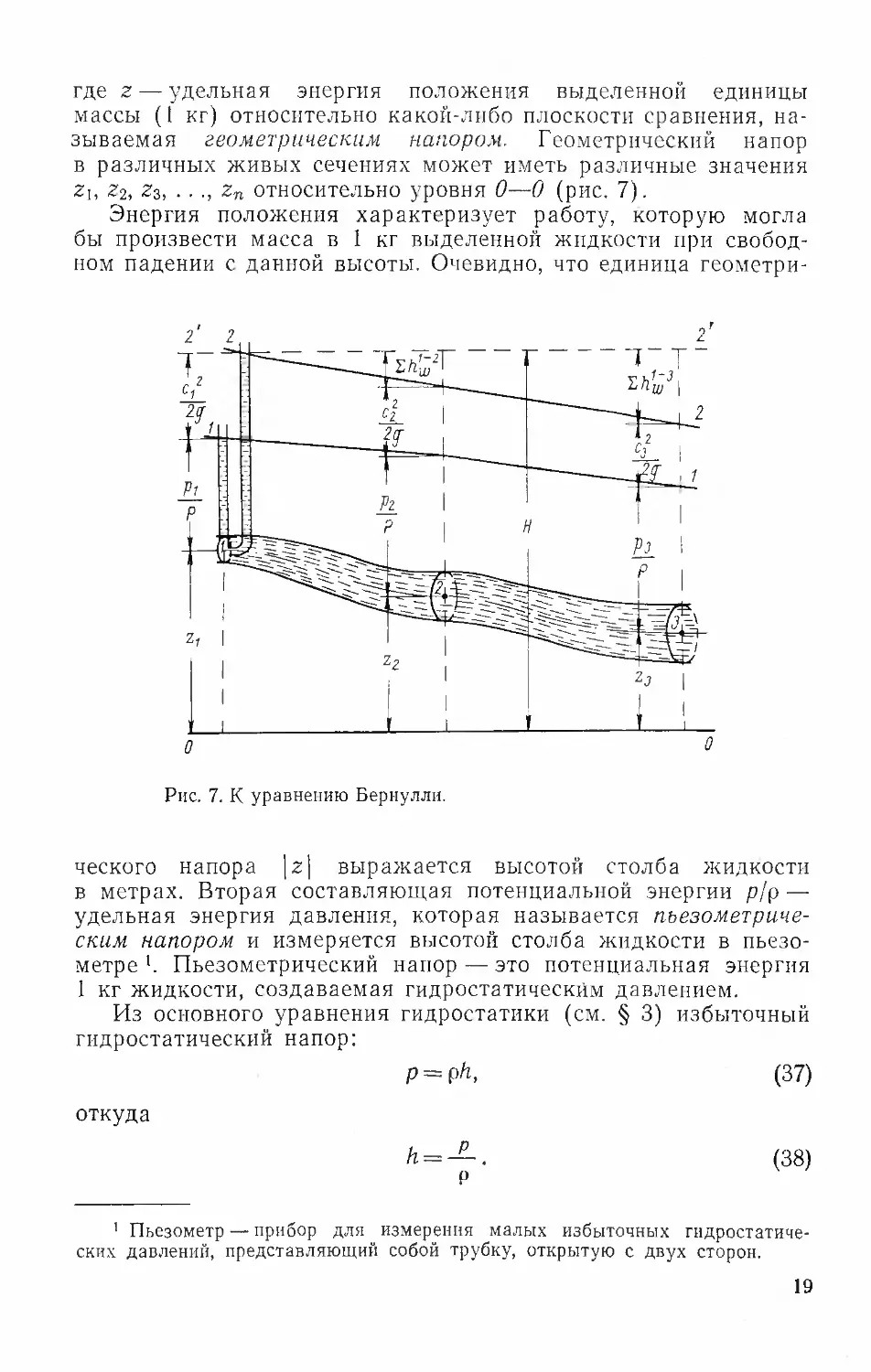
где z — удельная энергия положения выделенной единицы
массы (1 кг) относительно какой-либо плоскости сравнения, на¬
зываемая геометрическим напором. Геометрический напор
в различных живых сечениях может иметь различные значения
Z\, z2, z3, . . ., zn относительно уровня 0—0 (рис. 7).
Энергия положения характеризует работу, которую могла
бы произвести масса в 1 кг выделенной жидкости при свобод¬
ном падении с данной высоты. Очевидно, что единица геометри¬
ческого напора 121 выражается высотой столба жидкости
в метрах. Вторая составляющая потенциальной энергии р/р —
удельная энергия давления, которая называется пьезометриче¬
ским напором и измеряется высотой столба жидкости в пьезо¬
метре '. Пьезометрический напор — это потенциальная энергия
1 кг жидкости, создаваемая гидростатическим давлением.
Из основного уравнения гидростатики (см. § 3) избыточный
гидростатический напор:
Р = Ф, (37)
откуда
Л = -£-. (38)
Р
1 Пьезометр — прибор для измерения малых избыточных гидростатиче¬
ских давлений, представляющий собой трубку, открытую с двух сторон.
19
Рис. 7. К уравнению Бернулли.
В рассматриваемых живых сечениях величина пьезометри¬
ческих напоров соответственно равна
/*!= — ; йа = —; а,=(39)
р р р
Кинетическая энергия жидкости:
(40)
но так как она отнесена к 1 кг, то т= 1 fg, или
Е«=^~ (41)
2 g
и называется скоростным напором. Его также можно измерять
высотой столба жидкости. Из курса физики известно, что ско¬
рость свободно падающего тела от действия гравитационных сил
земли определяется по формуле
с = УЩ, (42)
откуда
h = ^~, (43)
т. е. h — высота, падая с которой в среде, не имеющей сопро¬
тивления, 1 кг жидкости приобретает скорость с. Скоростной
напор в живых сечениях рассматриваемого потока можно опре¬
делить, если к пьезометру приставить прибор, называемый
трубкой Пито. Так как нижний конец трубки Пито изогнут па¬
раллельно движению струй, то высота столба жидкости в трубке
будет зависеть от действия двух видов энергии: избыточного
гидростатического давления жидкости и избыточного динамиче¬
ского давления, сумма которых называется иногда полным дав¬
лением
йПито=~ м ст- жидк. (44)
Р 2 g
Отсюда скоростной напор будет определен как разность столбов
жидкости в трубке Пито и пьезометре.
В рассматриваемых живых сечениях потока скоростные на¬
поры будут соответственно равны:
2 2 2
С1 . С2 . С3 _ _ _ M СТ. ЖИДК.
2g ' 2 g ’ 2 g
Подставляя значения удельных энергий в уравнение (35), по¬
лучим
о 2 2
Р\ с\ Р2 С2 РЗ С\
Еу = Zi + — + — = Z2 + — + — — z3 + —— + — • ■ • м ст. жидк.,
р 2 g Р 2 g р 4g
(45)
20
т. е.
= const
(46)
или
(47)
Полученные уравнения (46) и (47) называются уравнениями
Бернулли. Они представляют собой математическое выражение
закона сохранения энергии в приложении к установившемуся
сплошному потоку несжимаемой идеальной жидкости. В соот¬
ветствии с уравнениями закон Бернулли можно сформулировать
так: сумма удельных энергий, соответствующих геометриче¬
скому, пьезометрическому и скоростному напорам, по всей
длине потока идеальной жидкости постоянна.
На рис. 7 линия 1—1 соответствует высоте уровней жидко¬
сти в пьезометрических трубках по длине рассматриваемого по¬
тока, возвышающихся над геометрическими напорами. Эта ли¬
ния характеризует запас и изменение потенциальной энергии
в живых сечениях потока и называется пьезометрической (ли¬
ния гидростатического давления).
Линия 2'—2' соответствует высоте уровней в трубках Пито
и характеризует суммарный запас удельной энергии жидкости
по длине потока. Так как для идеальной жидкости эта удель¬
ная энергия постоянна, то и линия 2'—2', называемая напорной,
будет проходить параллельно линии 0—0 или в данном слу¬
чае — горизонтально.
Напорная линия 2—2 для потока реальной жидкости будет
проходить наклонно. Это объясняется тем, что реальная жид¬
кость обладает вязкостью, и, следовательно, часть ее энергии
2/1ш затрачивается на преодоление сил гидравлического сопро¬
тивления, возникающих вследствие трения.
В этом случае исходное уравнение (34) закона сохранения
энергии имеет вид
т. е. в установившемся потоке реальной жидкости удельная
энергия в соединении с энергией, теряемой на преодоление гид¬
равлических сопротивлений, постоянна.
Уравнение Бернулли для потока реальной жидкости можно
написать в следующем виде:
£у + 2hw = const,
(48)
(49)
21
или для рассматриваемых сечений (см. рис. 7):
(50)
где 2h‘w 2 и 2^4 3 соответствуют напорам, потерянным на пре
одоление гидравлических сопротивлений на участках соответ¬
ственно между живыми сечениями 1—2 и 1—3.
Уравнение Бернулли имеет важное теоретическое и практи¬
ческое применение, позволяющее объяснить целый ряд природ¬
ных явлений, используется для гидравлических расчетов насо¬
сов, систем и приборов. В частности, на законе Бернулли осно¬
вано применение и действие расходомера (водомера) — прибора
для измерения расхода жидкости через пеперечное сечение тру¬
бопровода.
§ 8. ГИДРАВЛИЧЕСКИЕ СОПРОТИВЛЕНИЯ И ОПРЕДЕЛЕНИЕ
ТЕРЯЕМОГО НАПОРА
Из предыдущего параграфа следует, что теряемый напор оп¬
ределяется как разность уравнений Бернулли для двух сечений
потока реальной жидкости:
Величина теряемого напора характеризует энергию, затрачи¬
ваемую на преодоление так называемых гидравлических сопро¬
тивлений.
Гидравлические сопротивления подразделяются на две
группы: путевые и местные. Путевые сопротивления возникают
на прямых участках трубопровода в результате трения между
слоями жидкости и трения жидкости о стенки труб. Местные
сопротивления появляются вследствие деформации поля скоро¬
стей потока в результате его расширения, сужения или измене¬
ния направления в тройниках, коленах, клапанах, фильтрах,
переходных патрубках и т. д.
Таким образом, теряемый напор образуется двумя состав¬
ляющими:
где hn — потеря напора на путевые сопротивления; hM — потеря
напора на местные сопротивления.
th
Р
(51)
2 hw hn -)- hM,
(52)
22
Напор, теряемый в путевых сопротивлениях, определяется
по формуле
/гп = Х ———= 0,0827М-0— м ст. жидк., (53)
d 2 g d°
где X — безразмерный коэффициент сопротивления трения, ха¬
рактеризующий потери энергии на единицу длины трубопро¬
вода; I — длина прямых участков трубопровода, м; d — диаметр
трубы, м; с — средняя скорость жидкости, м/с; g — ускорение
свободного падения, м/с2; Q — расход жидкости, м3/с.
Опытами установлено, что у стенок трубы при движении
жидкости образуется весьма тонкий ламинарный слой, так как
частицы жидкости, близкие к стенке, могут двигаться только
в осевом направлении потока. Если толщина ламинарного слоя
больше величины выступов стенки А, т. е. слой покрывает эту
шероховатость, то труба считается гидравлически «гладкой».
Если, наоборот, выступы стенки больше толщины ламинарного
слоя, то труба будет шероховатой. В этом случае частицы жид¬
кости, наталкиваясь на выступы шероховатости, получают вра¬
щательное движение с образованием вихрей при срыве с высту¬
пов и вызывают поперечную циркуляцию и беспорядочное тур¬
булентное движение.
Величина X в области гидравлических гладких труб зависит
от режима потока и определяется в зависимости от числа Рей¬
нольдса Ре; в переходной области X зависит от значения Re и
шероховатости стенок; в области шероховатых стенок X опре¬
деляется только шероховатостью стенок и не зависит от Re.
Для гидравлически гладких труб в ламинарном движении,
т. е. при Re<2300,
Л = —. (54)
Re v '
При значениях Re от 4-103 до 105 (турбулентное движение)
_01316_ (55)
ReT
При Re в пределах от 105 до 3 • 106
X = . (56)
(1,8 lg Re — 1,5)2 V ’
При Re от 2,3- 105 до 8- 105 можно применять формулу Всесо¬
юзного теплотехнического института (ВТИ):
» 1,01
~ (lg Re)2,5 ' ^ ^
Для оценки шероховатости труб принимают относительную
шероховатость A/d, т. е. отношение абсолютной шероховатости
23
А к диаметру трубы d. Значение А зависит от материала и спо¬
соба изготовления трубы, продолжительности ее эксплуатации
и способности жидкости корродировать трубу и выделять
осадки. Коэффициент сопротивления трения для шероховатых
труб можно считать по формуле Шифринзона:
А, = 0,п(А)т (58)
или же по формуле Никурадзе:
. (59)
(21gA+ uuj
В переходной области, когда толщина пограничного лами¬
нарного слоя жидкости только частично прикрывает неровно¬
сти стенок, как уже отмечалось, коэффициент трения зависит
и от относительной шероховатости A/d, и от числа Рейнольдса
и рассчитывается по формуле Альтшуля:
Я, = 0,1 l,46-y + -j^-. (60)
Средние значения абсолютной шероховатости Д для труб
Трубы Д, мм
Цельнотянутые латунные и медные 0,01
Алюминиевые 0,06
Стальные 0,1—1,5
Чугунные 0,25—1,5
Корродированные с наличием отложений и накипи . . 1,5—4,5
Потери напора на преодоление местных гидравлических со¬
противлений определяются по формуле
(61)
2 £ = + г£з + • • • + nZn’ (62)
£i, £2, £з • • • ?n — безразмерные коэффициенты местных гид¬
равлических сопротивлений различного вида;
т, п, т, П — количество однородных местных сопротив¬
лений.
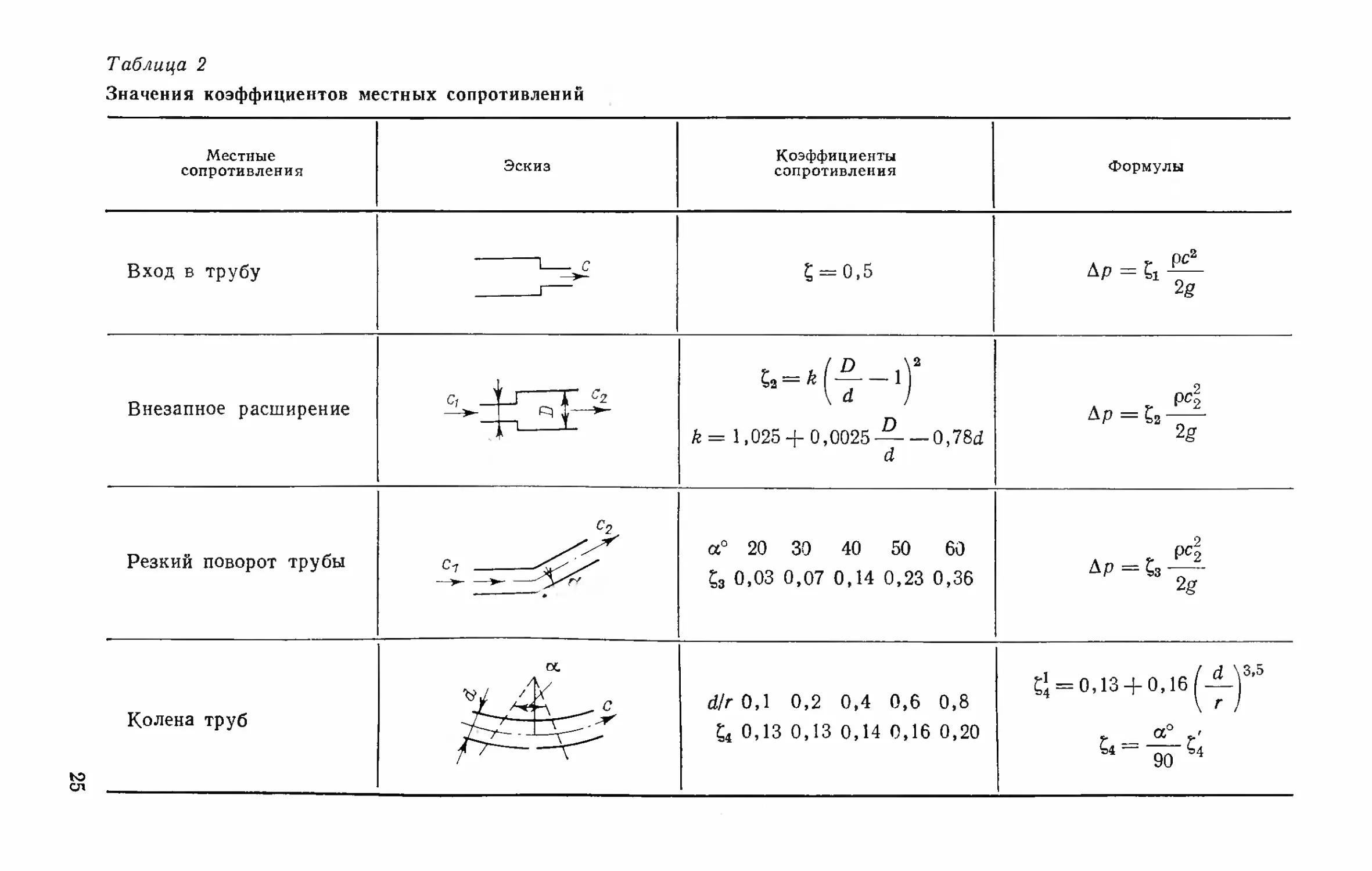
Значения коэффициентов £ некоторых видов местных гид¬
равлических сопротивлений приводятся в табл. 2.
24
Таблица 2
Значения коэффициентов местных сопротивлений
Местные
сопротивления
Эскиз
Коэффициенты
сопротивления
Формулы
Вход в трубу
Внезапное расширение
Резкий поворот трубы
Колена труб
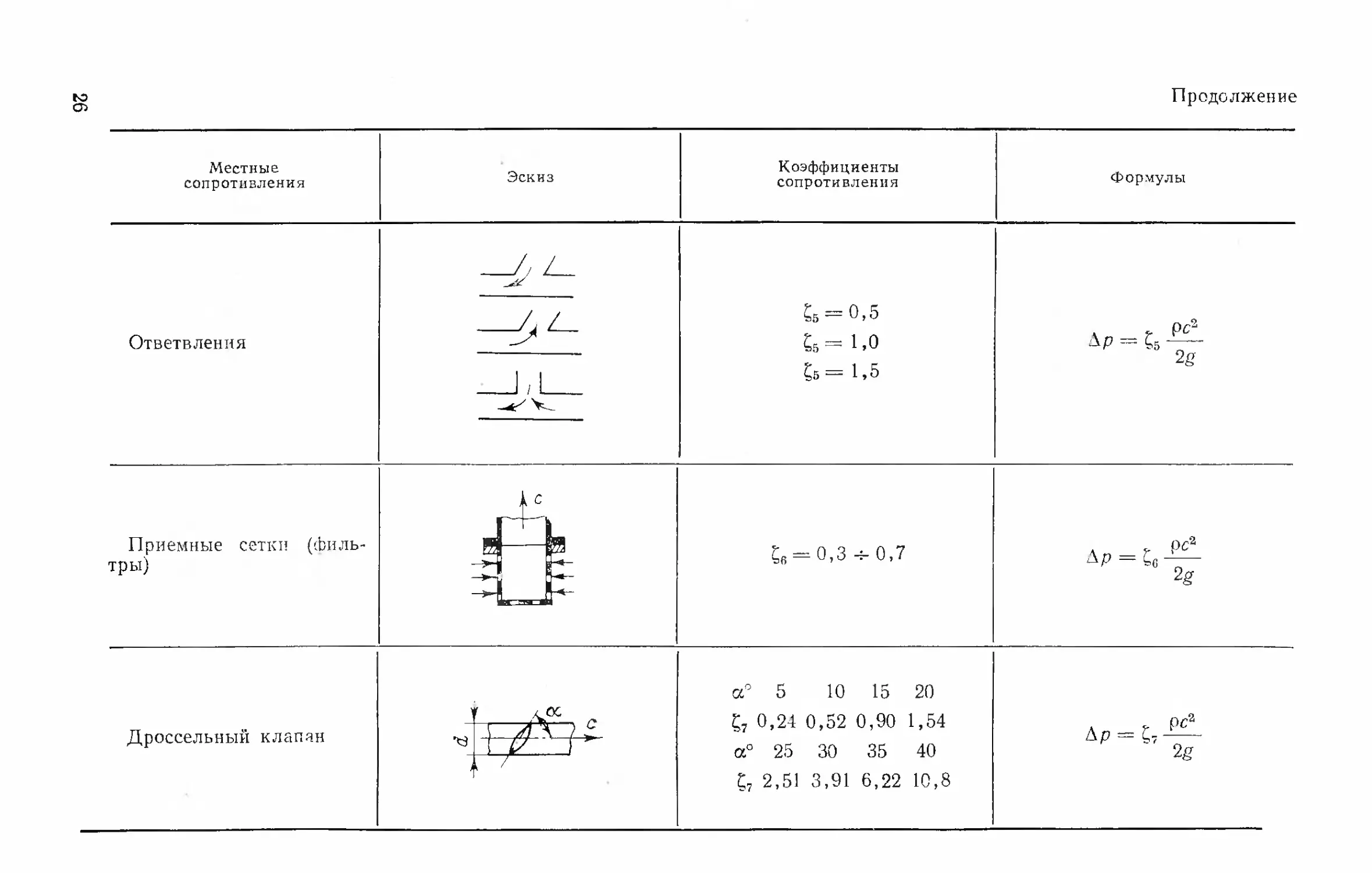
Продолжение
Местные
сопротивления
Эскиз
Коэффициенты
сопротивления
Формулы
Ответвления
Приемные сетки (филь¬
тры)
Дроссельный клапан
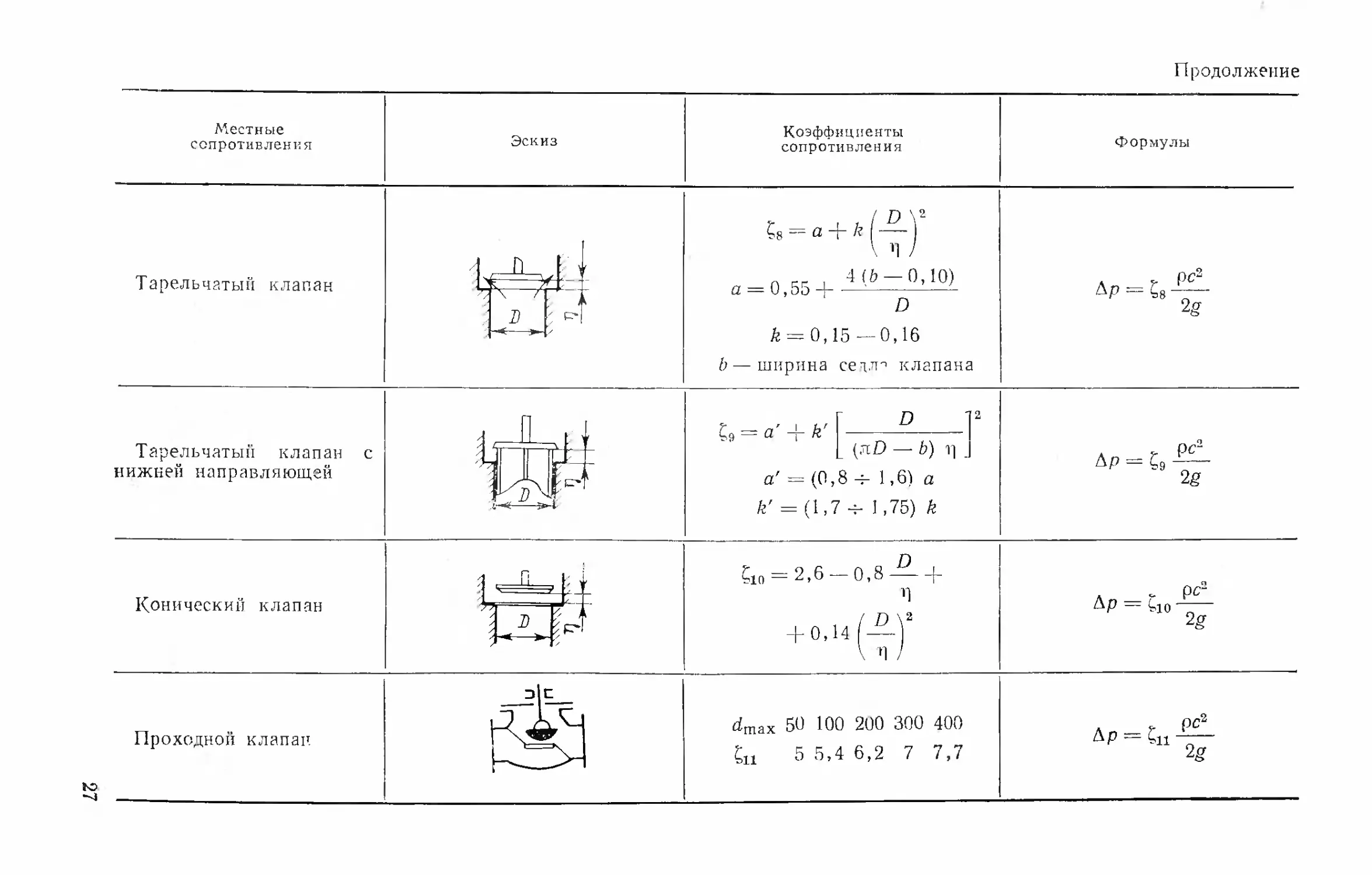
Продолжение
Местные
сопротивления
Эскиз
Коэффициенты
сопротивления
Формулы
Тарельчатый клапан
Тарельчатый клапан с
нижней направляющей
Конический клапан
Проходной клапан
Подставив значения теряемых напоров hn и hM в выраже¬
ние (52), получим общую формулу для определения напора,
теряемого на гидравлические сопротивления в трубопроводе:
. . . + nln) м ст. жидк. (63)
§ 9. ОСНОВЫ ГИДРАВЛИЧЕСКОГО РАСЧЕТА
СУДОВОГО ТРУБОПРОВОДА НА СОПРОТИВЛЕНИЕ
Для подбора насоса, создающего соответствующий напор,
необходимо суммировать: 1) напор, потребляемый в трубопро¬
воде на преодоление гидравлических сопротивлений; 2) напор,
необходимый для обеспечения судовых надобностей.
Напор, потребляемый в трубопроводе, определяется расче¬
том на преодоление в нем гидравлических сопротивлений и свя¬
занной с этим потерей давления.
Различаются два типа трубопроводов: простые и сложные.
Простой трубопровод'—постоянного диаметра и без разветвле¬
ний. Сложный трубопровод может включать трубы различных
диаметров с последовательным или параллельным соедине¬
нием.
Для проведения расчета требуется предварительно опреде¬
лить длину трубопровода I по чертежу или с натуры и внутрен¬
ний диаметр трубопровода d.
Составим уравнения Бернулли для начального (/■—1) и ко¬
нечного (2—2) сечений трубопровода:
31+A-+A=z>+^+_|+2X-2. (64)
Так как при постоянном диаметре трубы имеем равномерное
движение потока, то средняя скорость потока в любом его се¬
чении постоянна, т. е.
Ci = с2 = с. (65)
Сокращаем скоростные напоры в обоих сечениях и перено¬
сим 2j:
= z% — Zi~|———|- 2 hw i (66)
P P
где pi/p = H — потребляемый напор в начале трубопровода, ко¬
торый будет искомым или же, если он известен, располагаемым.
Этот напор в первую очередь определяют как приращение
геометрического напора — высоты подъема жидкости:
A z~z2—zv (67)
28
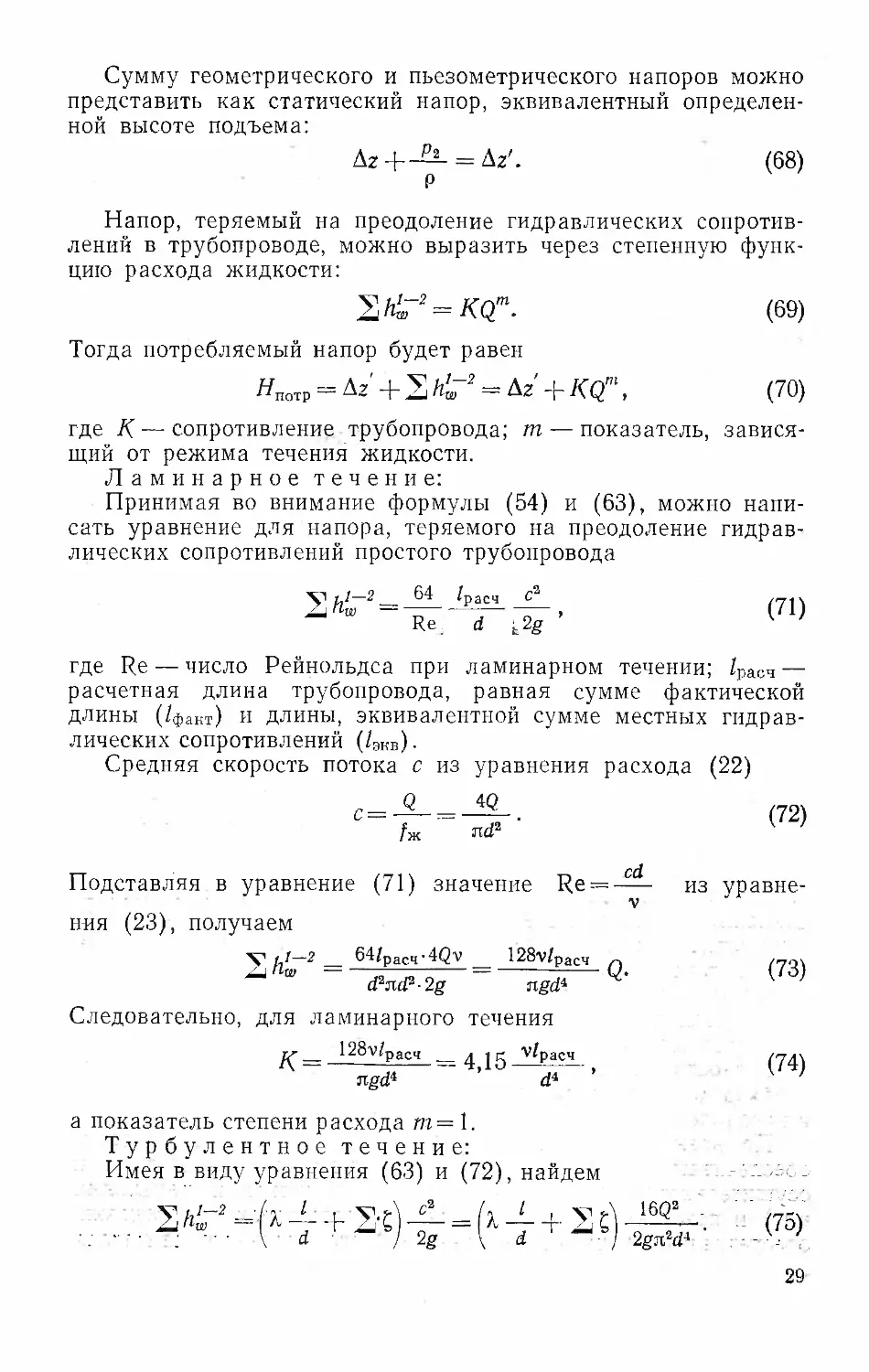
Сумму геометрического и пьезометрического напоров можно
представить как статический напор, эквивалентный определен¬
ной высоте подъема:
Az+-^- = Az'. (68)
Напор, теряемый на преодоление гидравлических сопротив¬
лений в трубопроводе, можно выразить через степенную функ¬
цию расхода жидкости:
2^_2=KQm. (69)
Тогда потребляемый напор будет равен
^потр= == А 2 +KQm, (70)
где К — сопротивление трубопровода; т — показатель, завися¬
щий от режима течения жидкости.
Ламинарное течение:
Принимая во внимание формулы (54) и (63), можно напи¬
сать уравнение для напора, теряемого на преодоление гидрав¬
лических сопротивлений простого трубопровода
2С2= — Jwl*- , (71)
Re, d ‘t2g ’ K ’
где Re — число Рейнольдса при ламинарном течении; /расч —
расчетная длина трубопровода, равная сумме фактической
ДЛИНЫ (1ф
акт) и длины, эквивалентной сумме местных гидрав-
лических сопротивлений (/ЭКв).
Средняя скорость потока с из уравнения расхода (22)
- Q 4Q (72)
/ж nd2
cd
Подставляя в уравнение (71) значение Re = -— из уравне-
v
н-ия (23), получаем
yih'aT2 = ~41расч'~^-= 128v/pac4 Q. (73)
d2ad2 ■ 2g ngdi
Следовательно, для ламинарного течения
„ _ 128у/расч ^ | g v/расч
ngd1 ’ d‘ ’ - ’
а показатель степени расхода т= 1.
Турбулентное течение:
Имея в виду уравнения (63) и (72), найдем
. + + (75,
29
Сопротивление трубопровода для турбулентного течения жид¬
кости
а показатель степени расхода т=2.
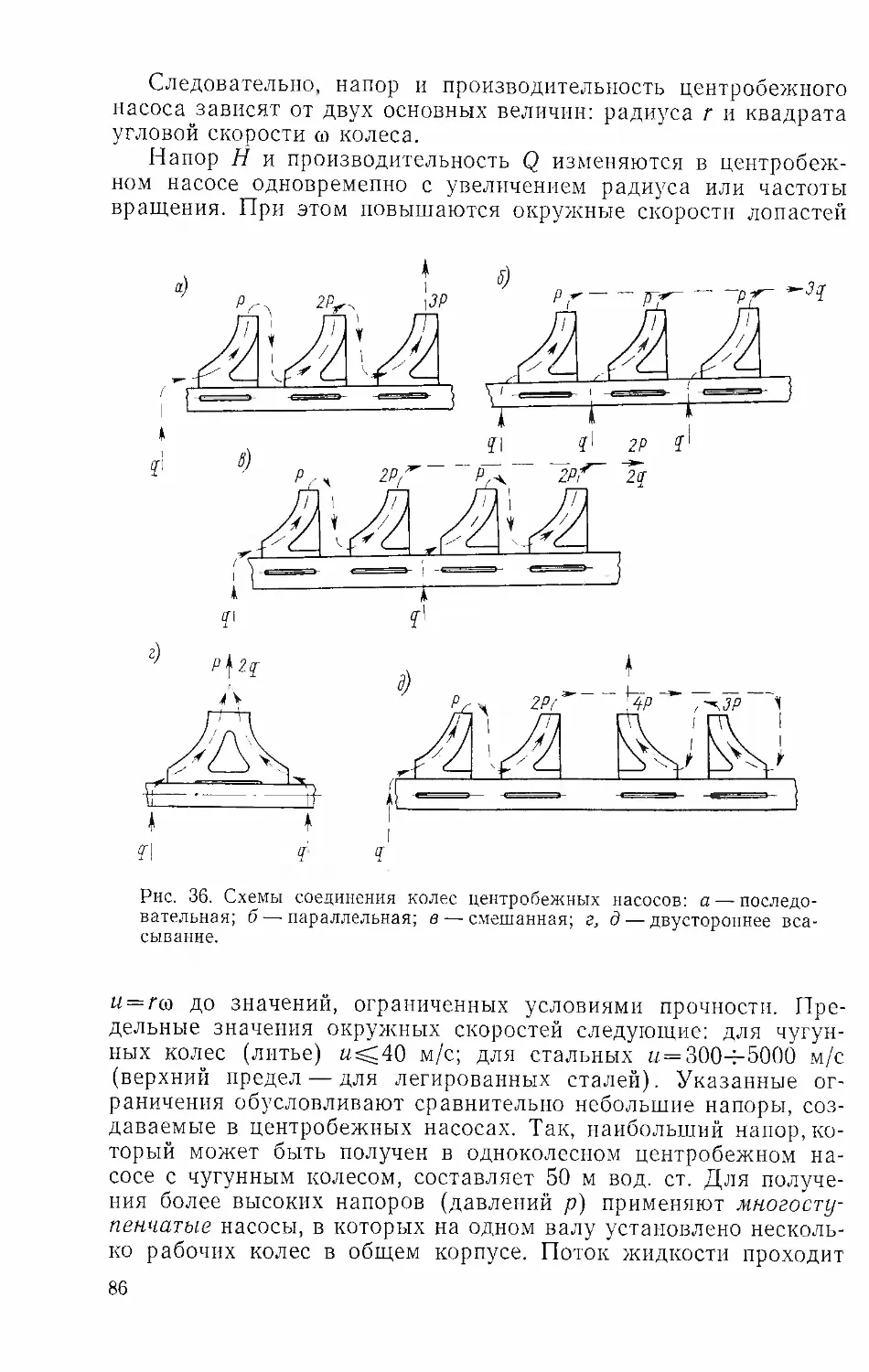
Глава II
ОСНОВНЫЕ СВЕДЕНИЯ О НАСОСАХ
§ 10. СУЩНОСТЬ ДЕЙСТВИЯ И КЛАССИФИКАЦИЯ
СУДОВЫХ НАСОСОВ
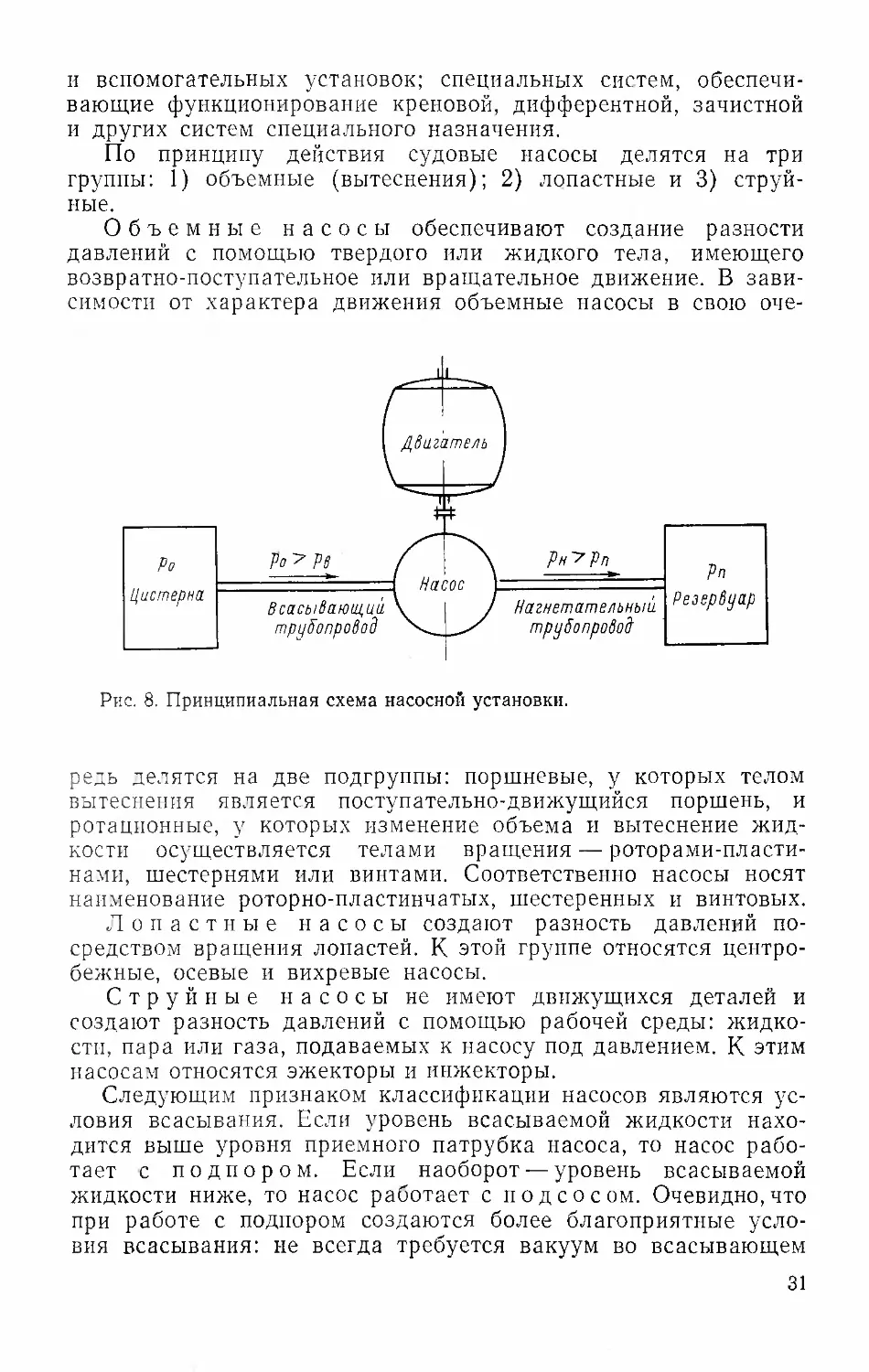
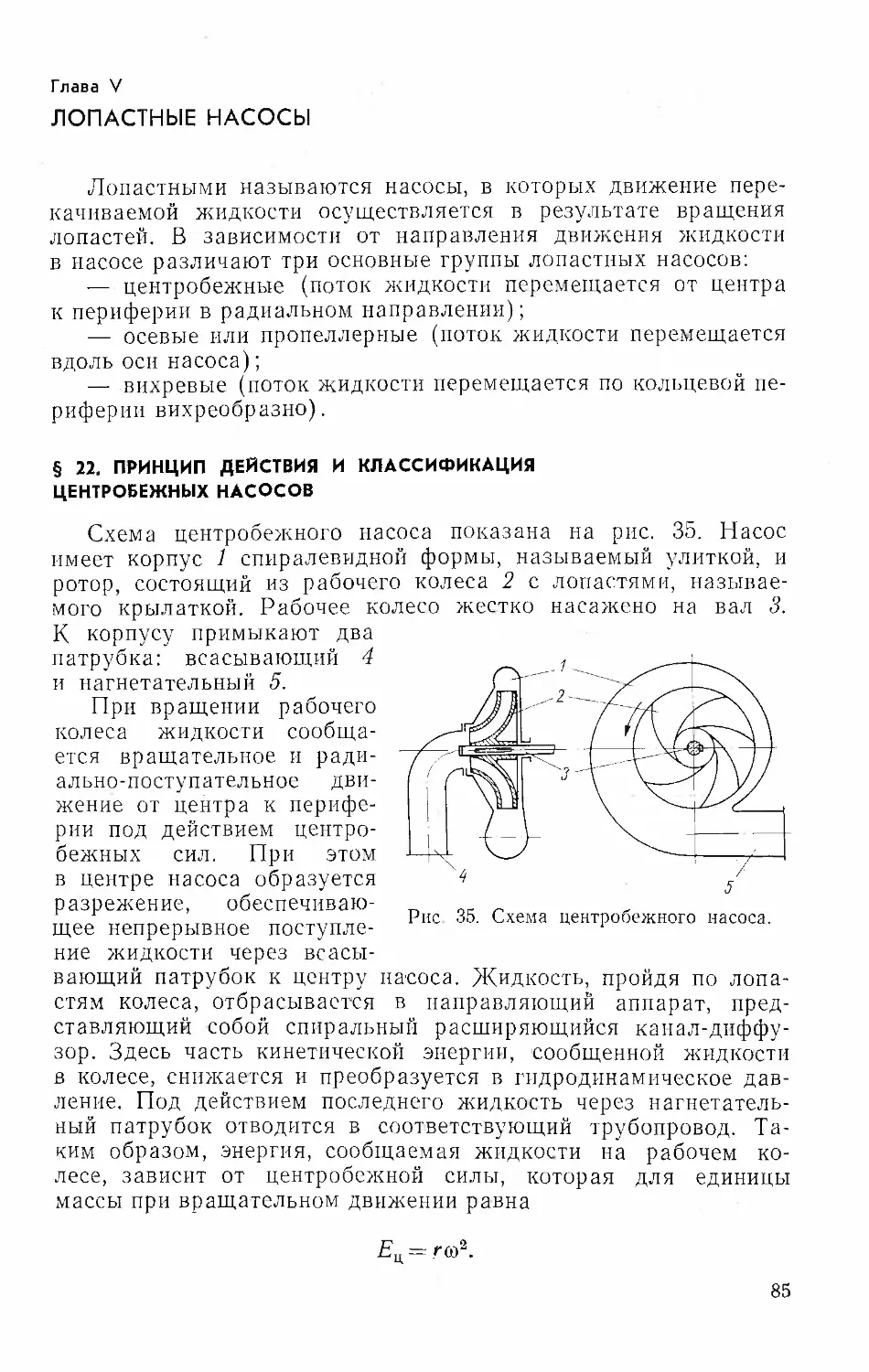
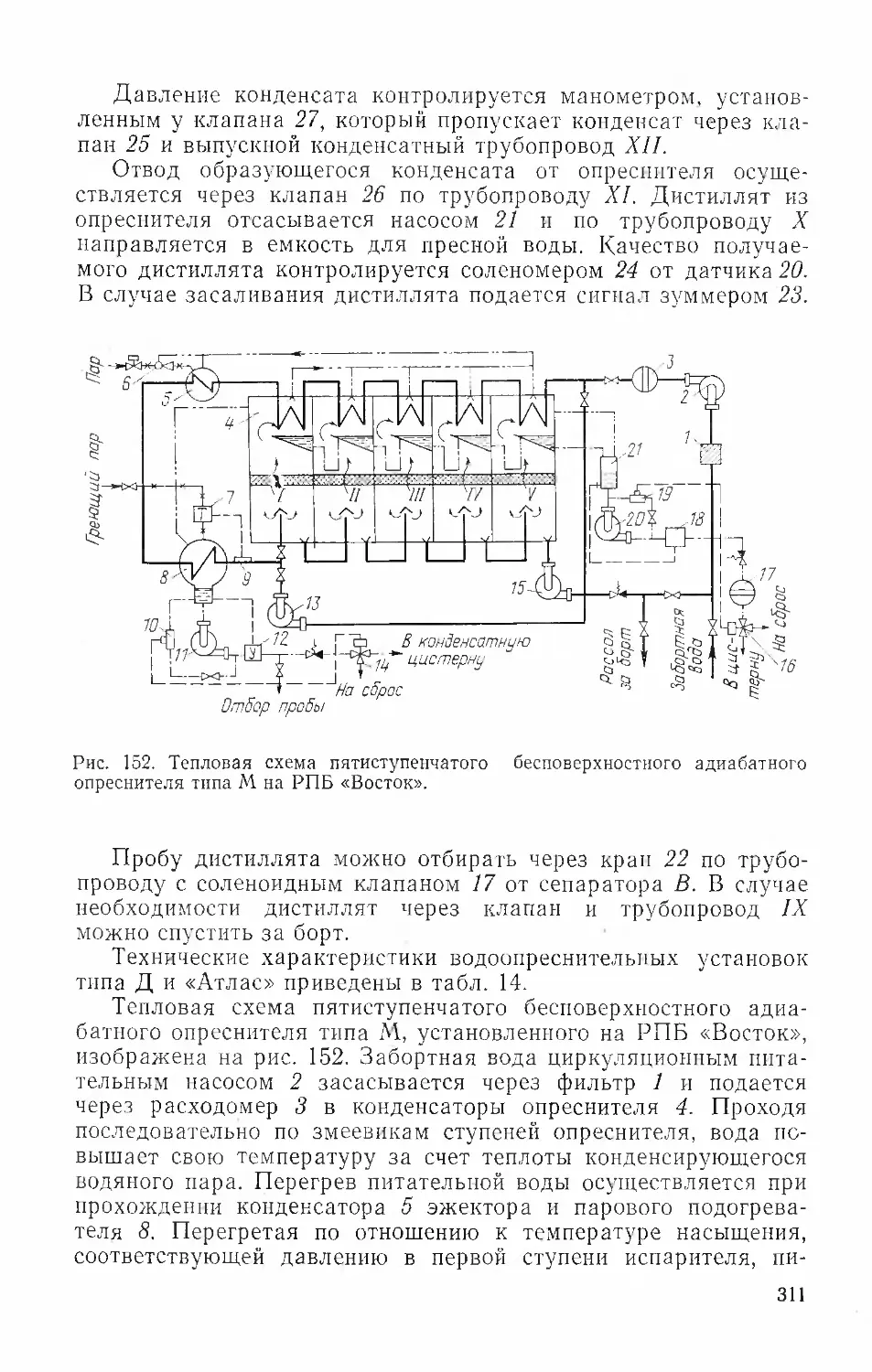
Принципиальная схема судовой насосной установки изобра¬
жена на рис. 8. Установка состоит из следующих основных ча¬
стей: насоса, двигателя (привода), емкостей (цистерна, резер¬
вуар) и трубопроводов.
Насос— это исполнительный механизм, преобразующий ме¬
ханическую энергию двигателя (привода) в гидравлическую
энергию потока жидкости. Насос, приводимый в действие дви¬
гателем, сообщается с емкостями двумя трубопроводами: вса¬
сывающим (приемным) и нагнетательным (отливным). По вса¬
сывающему трубопроводу перекачиваемая жидкость направля¬
ется из цистерны (емкости) к насосу. Это действие называется
всасыванием.
По нагнетательному трубопроводу жидкость от насоса по¬
ступает в резервуар. Это действие называется нагнетанием. На¬
порное движение по трубопроводам осуществляется вследствие
разности давлений на всасывающем (рв) и нагнетательном
(рв) патрубках. Давление всасывания рв должно быть меньше
давления р0, действующего на свободную поверхность жидкости
в цистерне. Обычно это давление равно атмосферному, т. е. р0 =
= Ра, и тогда давление рв будет меньше атмосферного ра, т. е.
во всасывающем патрубке создается вакуум. Давление нагнета¬
ния ри должно превышать противодавление рп в резервуаре, т. е.
оно будет избыточным — больше атмосферного.
Разности давлений ра — Рв и рн — рп должны обеспечивать
необходимую скорость протекания жидкости по трубопроводам
и преодолевать гидравлические сопротивления в них.
По назначению судовые насосы делятся на общесудовые,
обеспечивающие функционирование трюмных (балластной и
осушительной), санитарных (пресной, забортной и фекальных
вод) и пожарных систем; судовой энергетической установки,
обеспечивающие функционирование систем главного двигателя
0,083
(76)
30
и вспомогательных установок; специальных систем, обеспечи¬
вающие функционирование креповой, дифферентной, зачистной
и других систем специального назначения.
По принципу действия судовые насосы делятся на три
группы: 1) объемные (вытеснения); 2) лопастные и 3) струй¬
ные.
Объемные насосы обеспечивают создание разности
давлений с помощью твердого или жидкого тела, имеющего
возвратно-поступательное или вращательное движение. В зави¬
симости от характера движения объемные насосы в свою оче-
Рис. 8. Принципиальная схема насосной установки.
редь делятся на две подгруппы: поршневые, у которых телом
вытеснения является поступательно-движущийся поршень, и
ротационные, у которых изменение объема и вытеснение жид¬
кости осуществляется телами вращения — роторами-пласти¬
нами, шестернями или винтами. Соответственно насосы носят
наименование роторно-пластинчатых, шестеренных и винтовых.
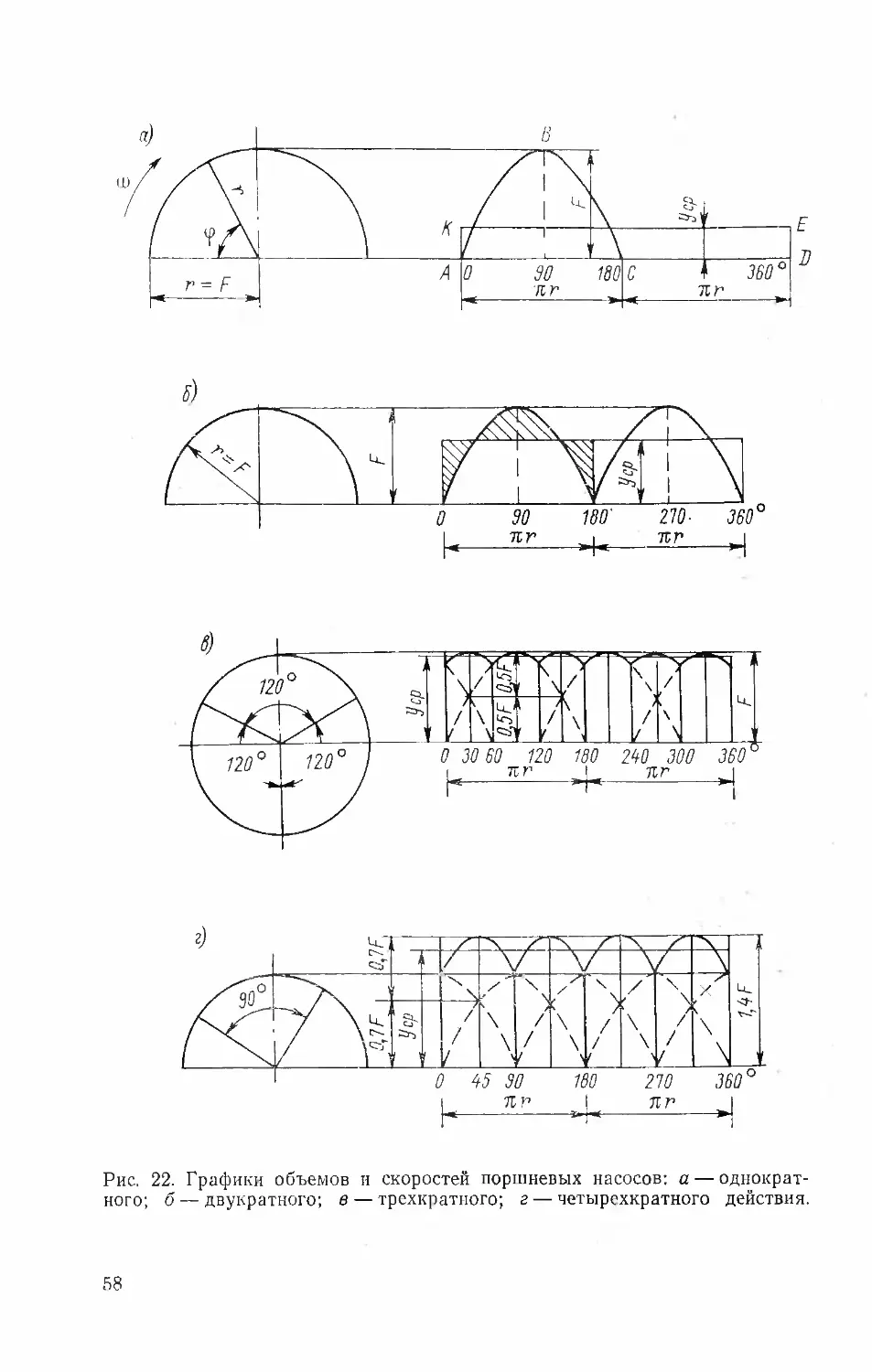
Лопастные насосы создают разность давлений по¬
средством вращения лопастей. К этой группе относятся центро¬
бежные, осевые и вихревые насосы.
Струйные насосы не имеют движущихся деталей и
создают разность давлений с помощью рабочей среды: жидко¬
сти, пара или газа, подаваемых к насосу под давлением. К этим
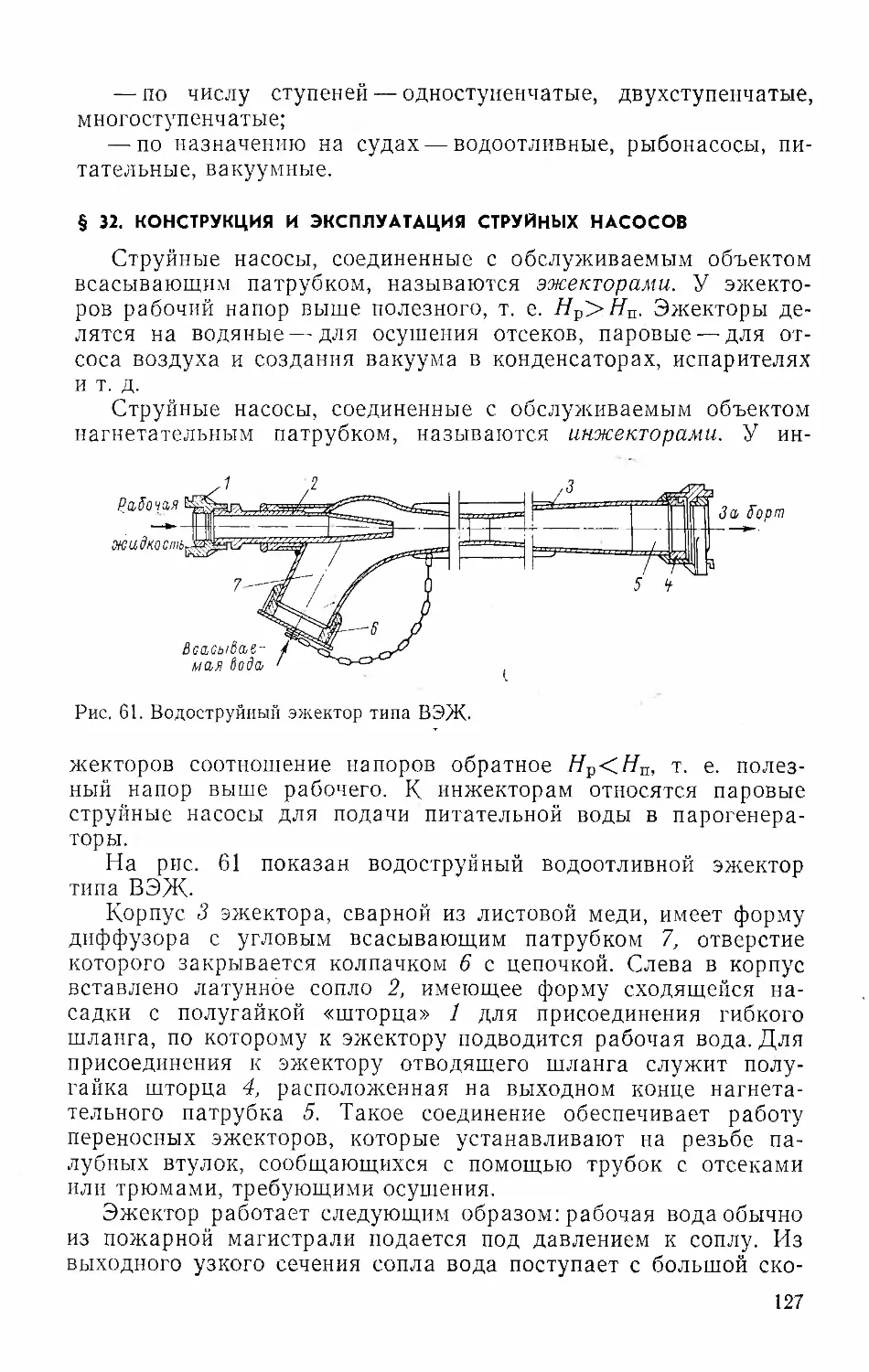
насосам относятся эжекторы и инжекторы.
Следующим признаком классификации насосов являются ус¬
ловия всасывания. Если уровень всасываемой жидкости нахо¬
дится выше уровня приемного патрубка насоса, то насос рабо¬
тает с подпором. Если наоборот — уровень всасываемой
жидкости ниже, то насос работает с подсосом. Очевидно,что
при работе с подпором создаются более благоприятные усло¬
вия всасывания: не всегда требуется вакуум во всасывающем
31
патрубке — существующая разность уровней создает геометри¬
ческий напор, необходимый для поступления жидкости к на¬
сосу.
§ 11. ОСНОВНЫЕ ПАРАМЕТРЫ НАСОСА
Независимо от типа и назначения насосы характеризуются
следующими основными параметрами: производительностью,
напором, мощностью и коэффициентами полезного действия.
Производительностью насоса называется количество жидко¬
сти, подаваемой насосом в единицу времени. Производитель¬
ность может измеряться в объемных единицах (м3/ч, л/мин) и
тогда называется объемной Q, и в массовых единицах (т/ч,
кг/с)—массовой G. Зависимость менаду объемной и массовой
производительностями выражается уравнением
G = pQ. (77)
Производительность может быть теоретической и действи¬
тельной.
Теоретическая производительность QT определяется без учета
потерь жидкости в самом насосе. Действительная производи¬
тельность меньше теоретической на величину потерь, т. е.
Q = Qt-2<7, (78)
где —'Потери жидкости в насосе, равные разности расходов
жидкости во всасывающем и нагнетательном трубопроводах.
Напором насоса называется приращение энергии, получае¬
мое массой 1 кг перекачиваемой жидкости при прохождении
через насос. Иначе говоря, напор насоса Я есть разность удель¬
ных энергий 1 кг жидкости при выходе из насоса Еш У нагнета¬
тельного патрубка и при входе в насос Ев у всасывающего пат¬
рубка, выраженная в метрах столба перекачиваемой жидкости:
Я = £н-£в. (79)
Согласно уравнению Бернулли можно записать
£н = —+ —• Ю4 + гн; (80)
2g Р
Еъ=4-±—л°1±г в>
2g Р
где сИ, рп> zH — соответственно скорость потока, давление и гео¬
метрическая высота места замера давления на выходе из на¬
соса; св, ±рв, ±2В —то же у входа в насос (знак «минус» —
при работе насоса с подпором, знак «плюс» — при работе с под¬
сосом).
32
Подставив значения (80) в уравнение (79), получим
tf=.^^ + ^^-10* + zH±zB. (81)
Р
Теоретический напор Ят, развиваемый насосом, больше дейст¬
вительного (манометрического) Н на величину потерь напора
в самом насосе:
Ят = # + hw, (82)
где Лщ, —напор, теряемый в самом насосе, м.
Мощность, передаваемая двигателем валу насоса, называ¬
ется потребляемой, или мощностью на валу насоса (эффектив¬
ная мощность). Энергия, передаваемая гидравлическому потоку
в насосе и отнесенная к единице времени — секунде, называ¬
ется полезной, или гидравлической, мощностью.
Таким образом, полезной или гидравлической, мощностью
называется работа, совершаемая гидравлическим потоком жид¬
кости при напоре Я и производительности Q:
N = -Q£*L л с_ = _0рН_ кВт_ (83)
75 102 '
Потребляемая, или эффективная, мощность складывается из
теоретической, или индикаторной Ni, и мощности, затрачивае¬
мой на механическое трение в насосе, NM.
Индикаторная мощность определяется по формуле
Ni~ QTpHT. (84)
Имея в виду уравнения (78) и (82), получаем
N (Q + Sg)p(tf + fta,) кВт< (g5^
102
Следовательно, потребляемая мощность
Ne = Nt + NM = 4Q+^mH + hw)(> + kBt_ (g6)
Если между двигателем и насосом имеется механическая
передача, то требуемая мощность двигателя (привода)
АГД = —, (87)
Лр
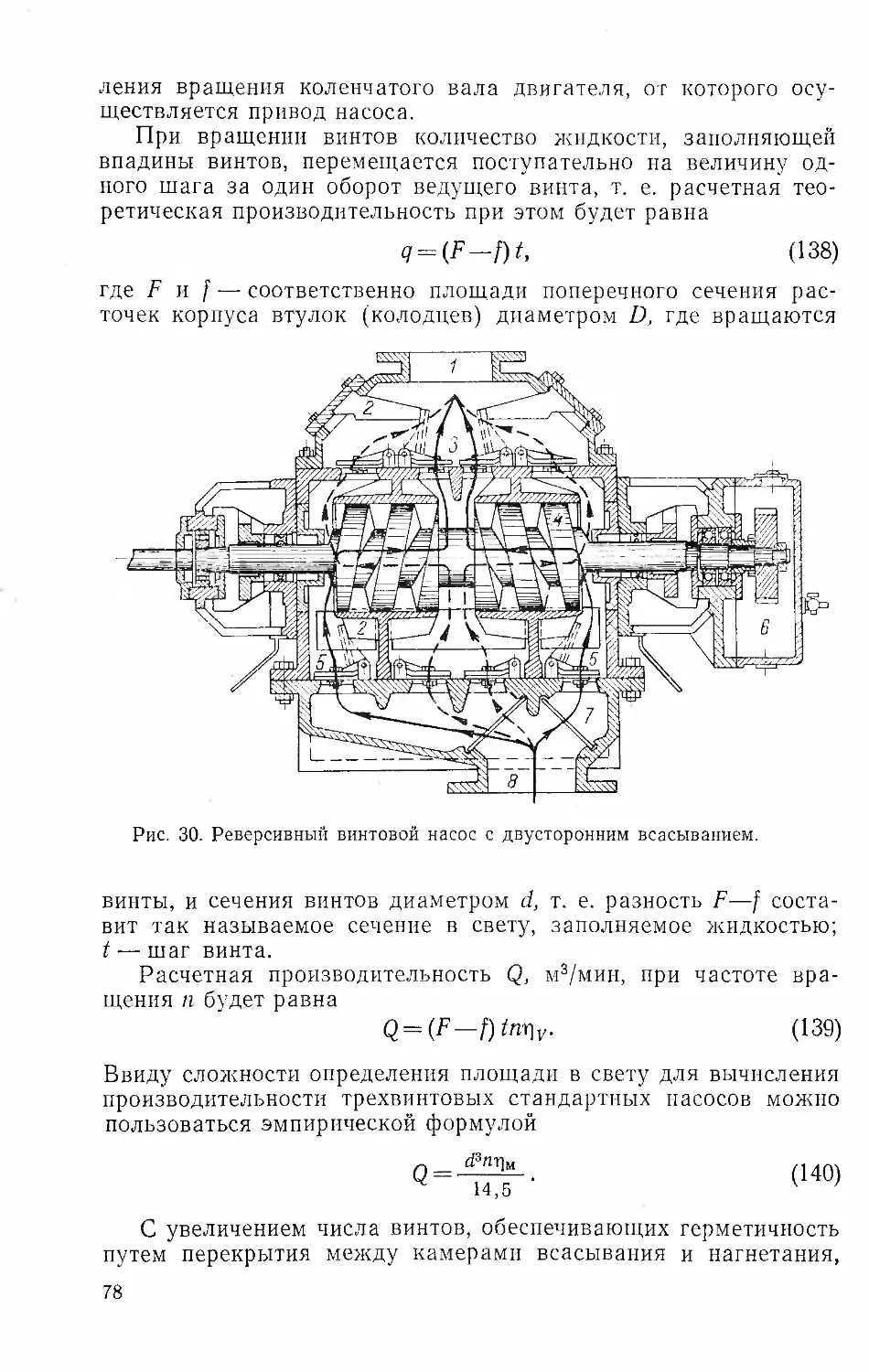
где т)р— КПД передачи (редуктора).
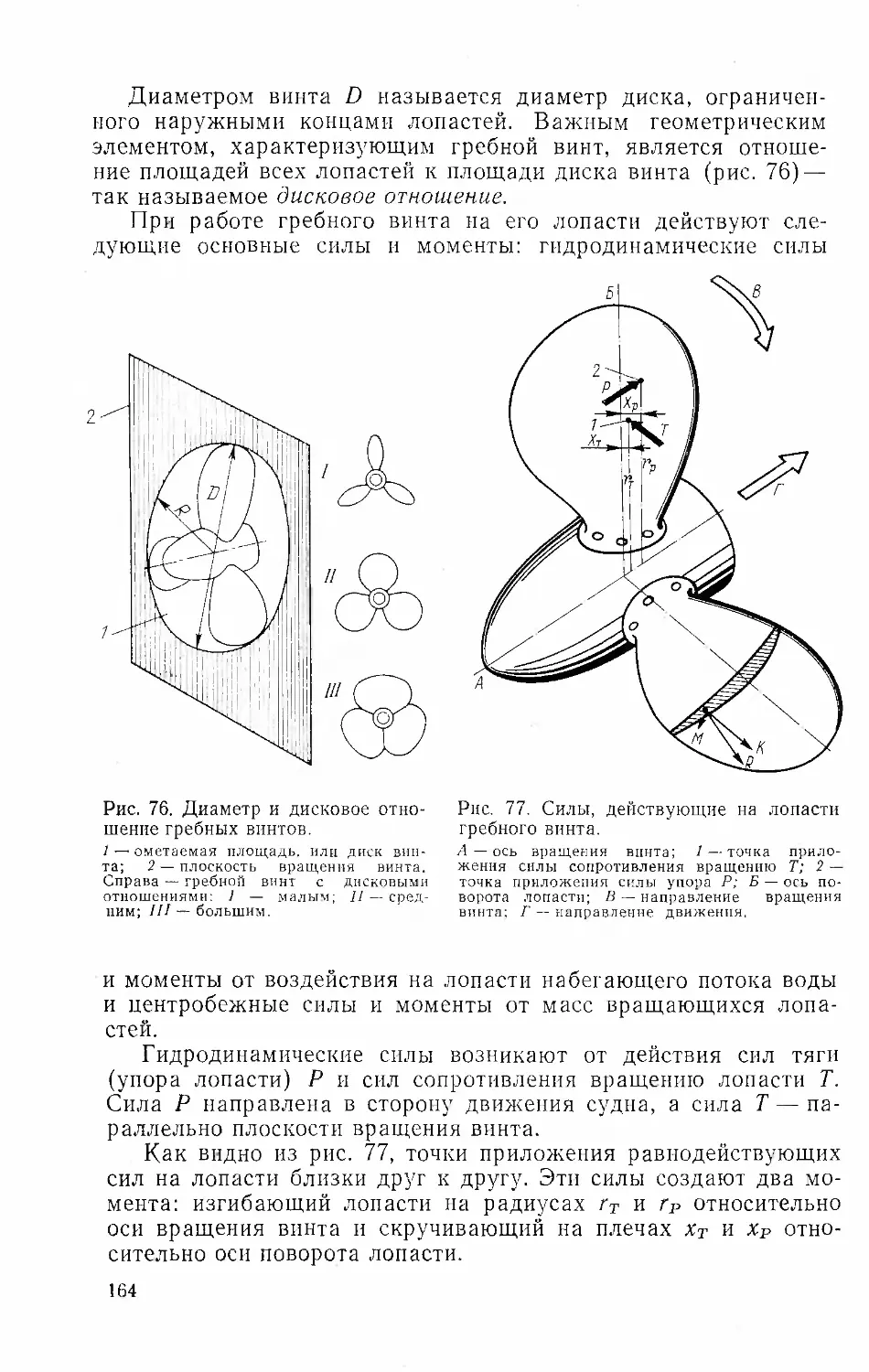
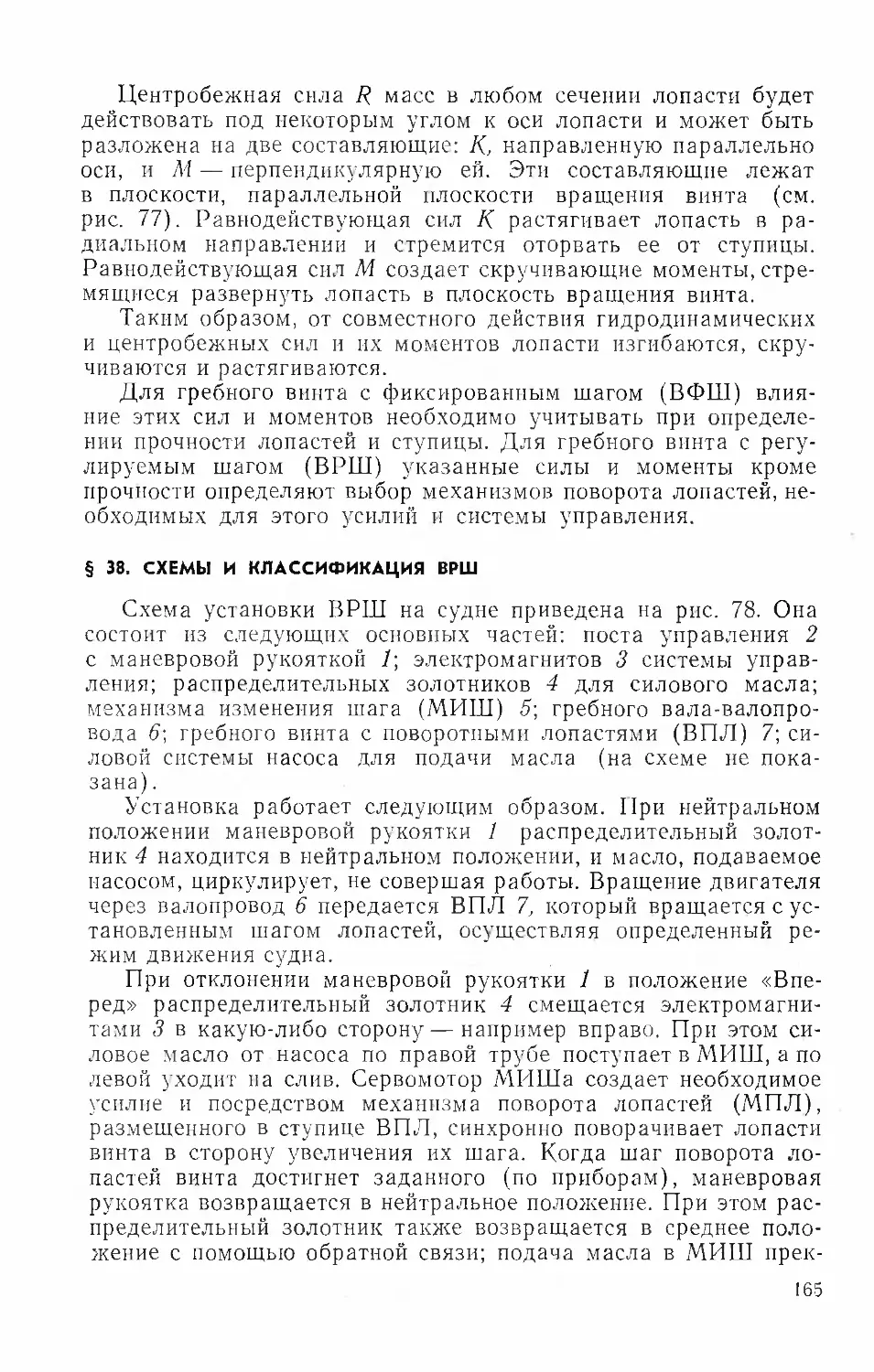
Коэффициент полезного действия насоса % характеризует
и учитывает все потери при передаче мощности потребляемой
(эффективной) к мощности полезной (гидравлической) и пока-
2 А. Е. Богомольный 33
зывает, насколько совершенна конструкция насоса. Численно
он равен отношению этих мощностей:
Этот КПД учитывает три вида потерь: объемные, гидравли¬
ческие и механические.
Объемные потери (производительности) учитываются объем¬
ным КПД (коэффициентом подачи) цу, который равен отно¬
шению действительной производительности Q к теоретической
Qt-
Г = -7ГГ¥7- (89)
Ут Q ~т ^ Q
Гидравлические потери или потери напора в насосе учитыва¬
ются гидравлическим КПД, который равен отношению действи¬
тельного напора Н к напору теоретическому Ят:
Н Н /QA4
Лг = —= „ , . (90)
п 1 Н j~ Нцу
Индикаторный КПД равен отношению гидравлической .мощ¬
ности к индикаторной Nf.
i\i = Mr. = -№*—■ (91)
Ni QTpHT
с учетом уравнений (78) и (82)
i]i -= ^ ; (92)
Q + 2 q Н + hw
с учетом уравнений (89) и (90)
т. е. г)г учитывает объемные и гидравлические потери.
Механические потери в насосе, т. е. трение в подшипниках
и сальниках, учитывает механический КПД т|м, равный отно¬
шению индикаторной мощности Ni к эффективной Ne:
N,
(88)
i'll = "Hi/Hr,
(93)
(94)
отсюда
(95)
34
Подставив выражение (95) в уравнение (88), найдем
(96)
11м
или с учетом уравнений (91) и (93)
‘Пн = 'П(т1м = ,Пут1гЛм-
(97)
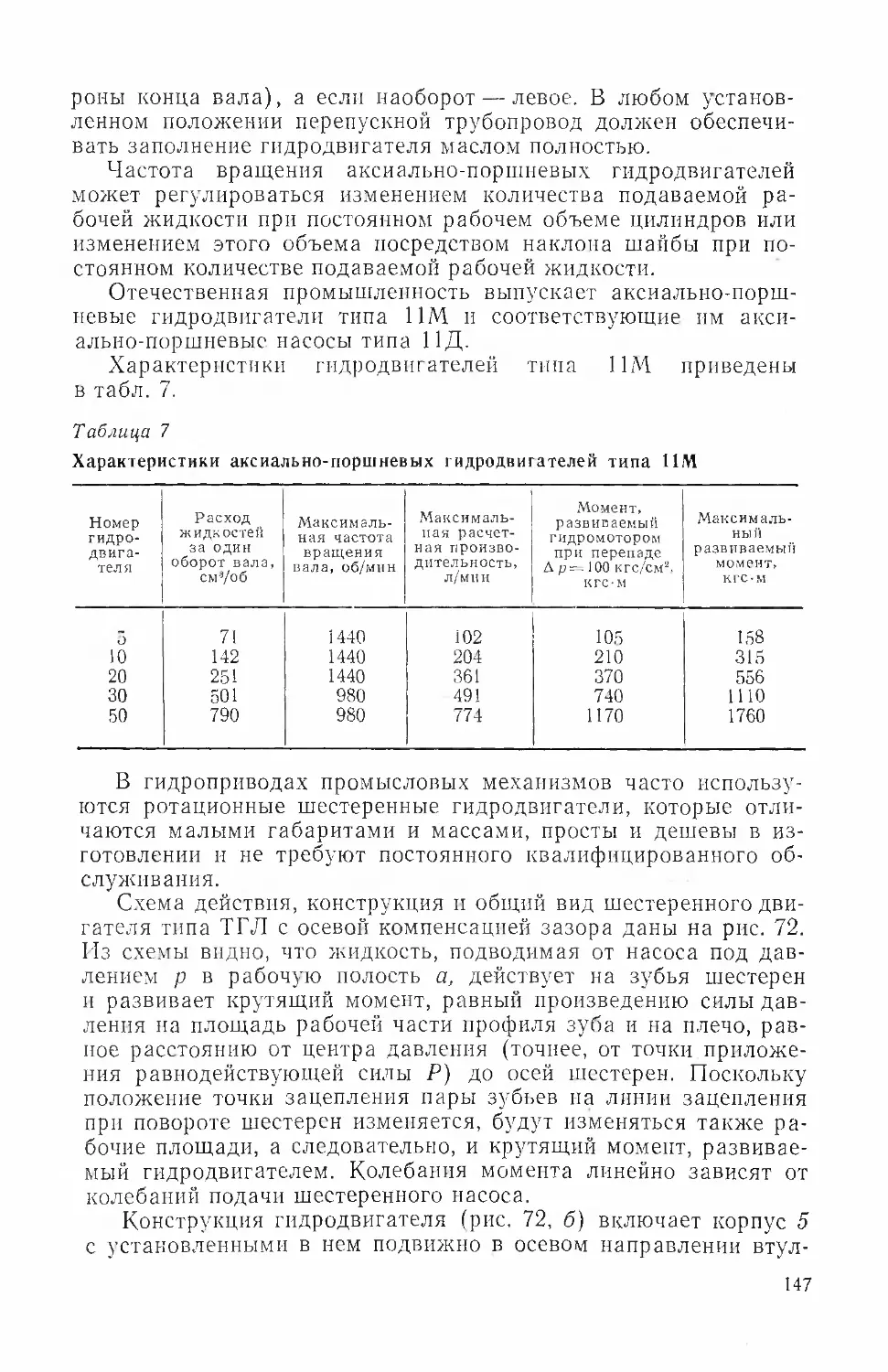
§ 12. ТРЕБОВАНИЯ РЕГИСТРА СССР
К СУДОВЫМ НАСОСАМ
И ТЕХНИКА БЕЗОПАСНОСТИ ПРИ ИХ ОБСЛУЖИВАНИИ
В соответствии с «Правилами классификации и постройки
морских судов», действующими с 1 июля 1971 г., Регистр СССР
требует, чтобы судовые насосы и их приводы, входящие в со¬
став механической установки, надежно работали при всех воз¬
можных условиях эксплуатации судна, а также при длительном
крене судна до 15° и дифференте до 5°. Согласно общим тре¬
бованиям Регистра к судовым насосам перекачиваемая жид¬
кость не должна попадать в подшипники. Это не относится
к насосам, у которых жидкость используется для смазки под¬
шипника. Сальники насосов, расположенные на стороне всасы¬
вания, рекомендуется оборудовать гидравлическими затворами.
В насосе, где возможно повышение давления выше расчетного,
устанавливают предохранительный клапан. У насосов, предназ¬
наченных для перекачки горючих жидкостей, перепуск жидко¬
сти от предохранительных клапанов должен осуществляться во
всасывающую полость насоса. Насосы следует конструировать
так, чтобы в них не возникали гидравлические удары.
Критическая частота вращения ротора насоса должна со¬
ставлять не менее 1,3 расчетной частоты вращения. В насосах,
работающих в условиях сухого всасывания, т. е. осуществляю¬
щих отсос воздуха и называемых самовсасывающими, преду¬
сматривают места для подключения мановакуумметров. Само¬
всасывающим насосам, снабженным для этой цели специаль¬
ными устройствами, запрещается работать на загрязненной
воде.
Согласно правилам, на промысловом судне следует иметь
не менее двух осушительных насосов с механическими приво¬
дами, Если в качестве таких насосов применяют центробежные,
то они должны быть самовсасывающими (один насос рекомен¬
дуется устанавливать поршневого типа).
Ручные насосы необходимо располагать в легкодоступных
местах на высоте, обеспечивающей их нормальную работу.
Балластная система должна обслуживаться, по крайней
мере, одним насосом, в качестве которого можно использовать
2*
35
насосы общесудового назначения достаточной производитель¬
ности, в том числе осушительный, пожарный или резервный
насосы охлаждающей воды.
Регистр определяет также нормы запасных частей к насо¬
сам.
При обслуживании судовых насосов надо соблюдать пра¬
вила по технике безопасности, приведенные для вспомогатель¬
ных механизмов в «Правилах технической эксплуатации флота
Р. П. СССР», «Правилах техники безопасности на судах флота
Р. П. СССР» и «Правилах обслуживания судовых вспомогатель¬
ных механизмов и ухода за ними».
В соответствии с Правилами перед пуском насоса необхо¬
димо произвести его тщательный осмотр и убедиться в нали¬
чии и надежном креплении ограждений, защитных кожухов и
щитов; в отсутствии на движущихся частях и корпусах посто¬
ронних предметов, в наличии на штатных местах и исправно¬
сти предусмотренных предохранительных устройств и контроль¬
но-измерительных приборов.
Во избежание гидравлических ударов перед включением
в работу поршневых и других насосов вытеснения (ротацион¬
ных) полагается проверить открытие отливных и приемных кла¬
панов. Не разрешается производить на ходу какие-либо исправ¬
ления и ремонт, закрепление и подтягивание гаек и болтов на
движущихся деталях, обжим сальниковых втулок и замеры за¬
зоров в сальниках. Правилами также запрещается допускать
к эксплуатации насос при наличии неисправностей и предельных
износах деталей; применять для смазки механизмов нерекомен-
дованные техническими инструкциями изготовителя марки ма¬
сел; использовать насосы не по назначению, если этого не тре¬
бует аварийная ситуация; допускать к обслуживанию лиц, не
прошедших соответствующую подготовку.
Глава III
ПОРШНЕВЫЕ НАСОСЫ
§ 13. ПРИНЦИП ДЕЙСТВИЯ И КЛАССИФИКАЦИЯ
ПОРШНЕВЫХ НАСОСОВ
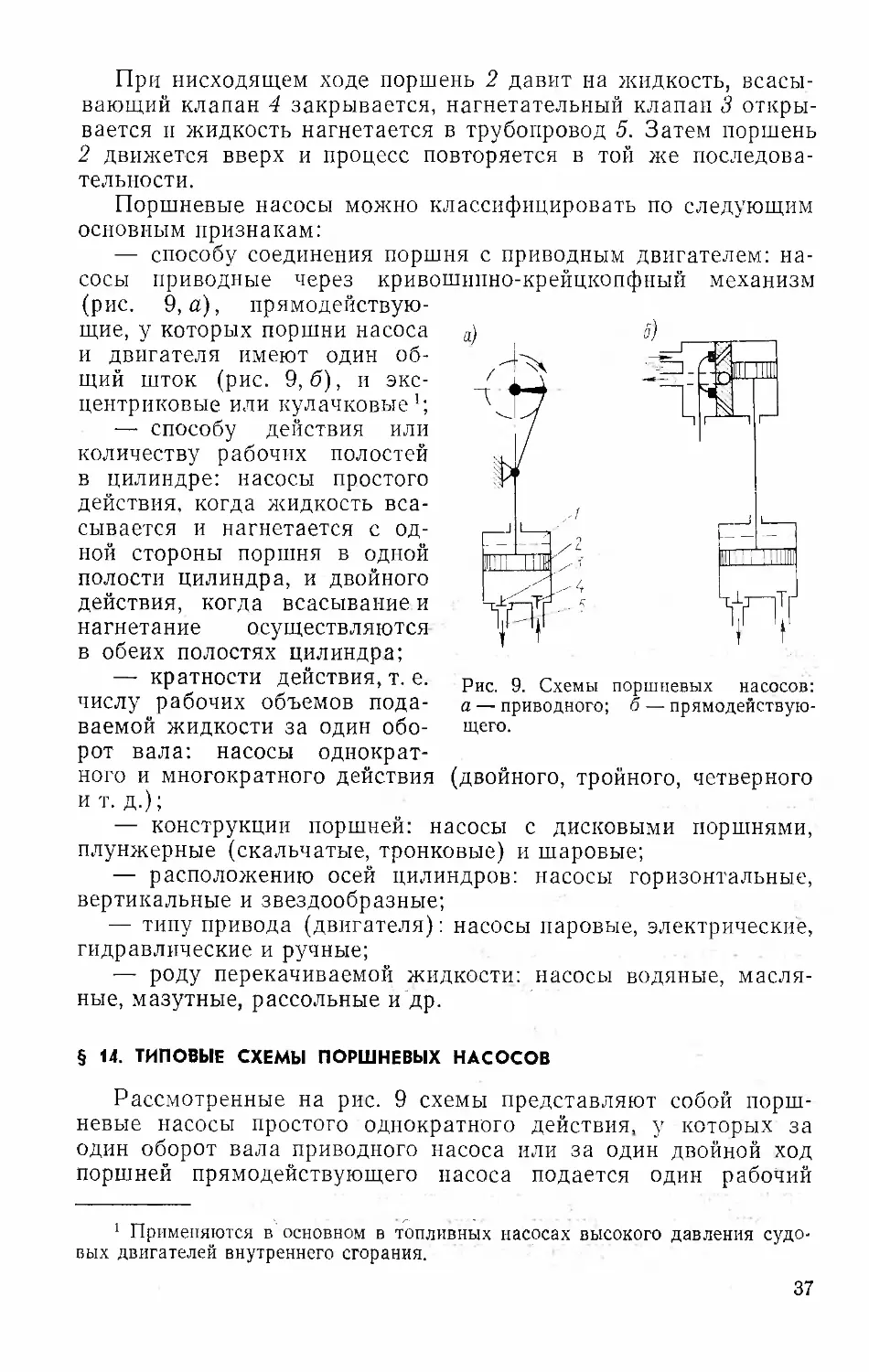
Поршневые насосы относятся к группе объемных. Поршневой
насос (рис. 9) состоит из цилиндра 1 и поршня 2, совершаю¬
щего прямолинейное возвратно-поступательное движение. При
восходящем ходе поршня создается разрежение в нижней ра¬
бочей полости цилиндра. Всасывающий клапан 4 открывается
от воздействия давления во всасывающем трубопроводе и жид¬
кость всасывается в цилиндр.
36
При нисходящем ходе поршень 2 давит на жидкость, всасы¬
вающий клапан 4 закрывается, нагнетательный клапан 3 откры¬
вается н жидкость нагнетается в трубопровод 5. Затем поршень
2 движется вверх и процесс повторяется в той же последова¬
тельности.
Поршневые насосы можно классифицировать по следующим
основным признакам:
— способу соединения поршня с приводным двигателем: на¬
сосы приводные через кривошипно-крейцкопфный механизм
(рис. 9, а), прямодействую¬
щие, у которых поршни насоса
и двигателя имеют один об¬
щий шток (рис. 9,6), и экс¬
центриковые или кулачковые1;
—• способу действия или
количеству рабочих полостей
в цилиндре: насосы простого
действия, когда жидкость вса¬
сывается и нагнетается с од¬
ной стороны поршня в одной
полости цилиндра, и двойного
действия, когда всасывание и
нагнетание осуществляются
в обеих полостях цилиндра;
— кратности действия, т. е.
числу рабочих объемов пода¬
ваемой жидкости за один обо¬
рот вала: насосы однократ¬
ного и многократного действия (двойного, тройного, четверного
и т. д.);
— конструкции поршней: насосы с дисковыми поршнями,
плунжерные (скальчатые, тронковые) и шаровые;
— расположению осей цилиндров: насосы горизонтальные,
вертикальные и звездообразные;
— типу привода (двигателя): насосы паровые, электрические,
гидравлические и ручные; .. . . .
— роду перекачиваемой жидкости: насосы водяные, масля¬
ные, мазутные, рассольные и др.
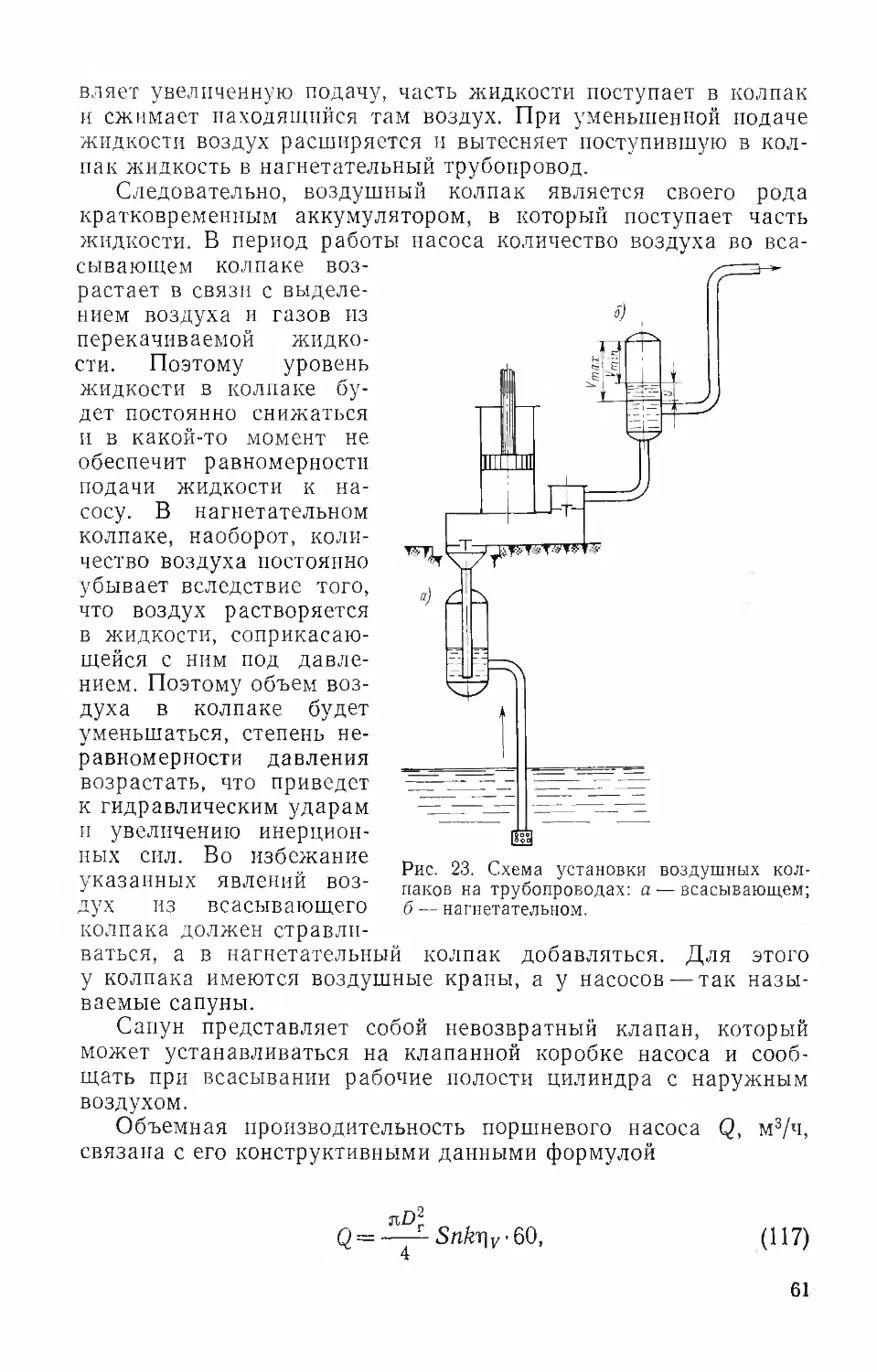
§ 14. ТИПОВЫЕ СХЕМЫ ПОРШНЕВЫХ НАСОСОВ
Рассмотренные на рис. 9 схемы представляют собой порш¬
невые насосы простого однократного действия, у которых за
один оборот вала приводного насоса или за один двойной ход
поршней прямодействующего насоса подается один рабочий
1 Применяются в основном в топливных насосах высокого давления судо¬
вых двигателей внутреннего сгорания.
37
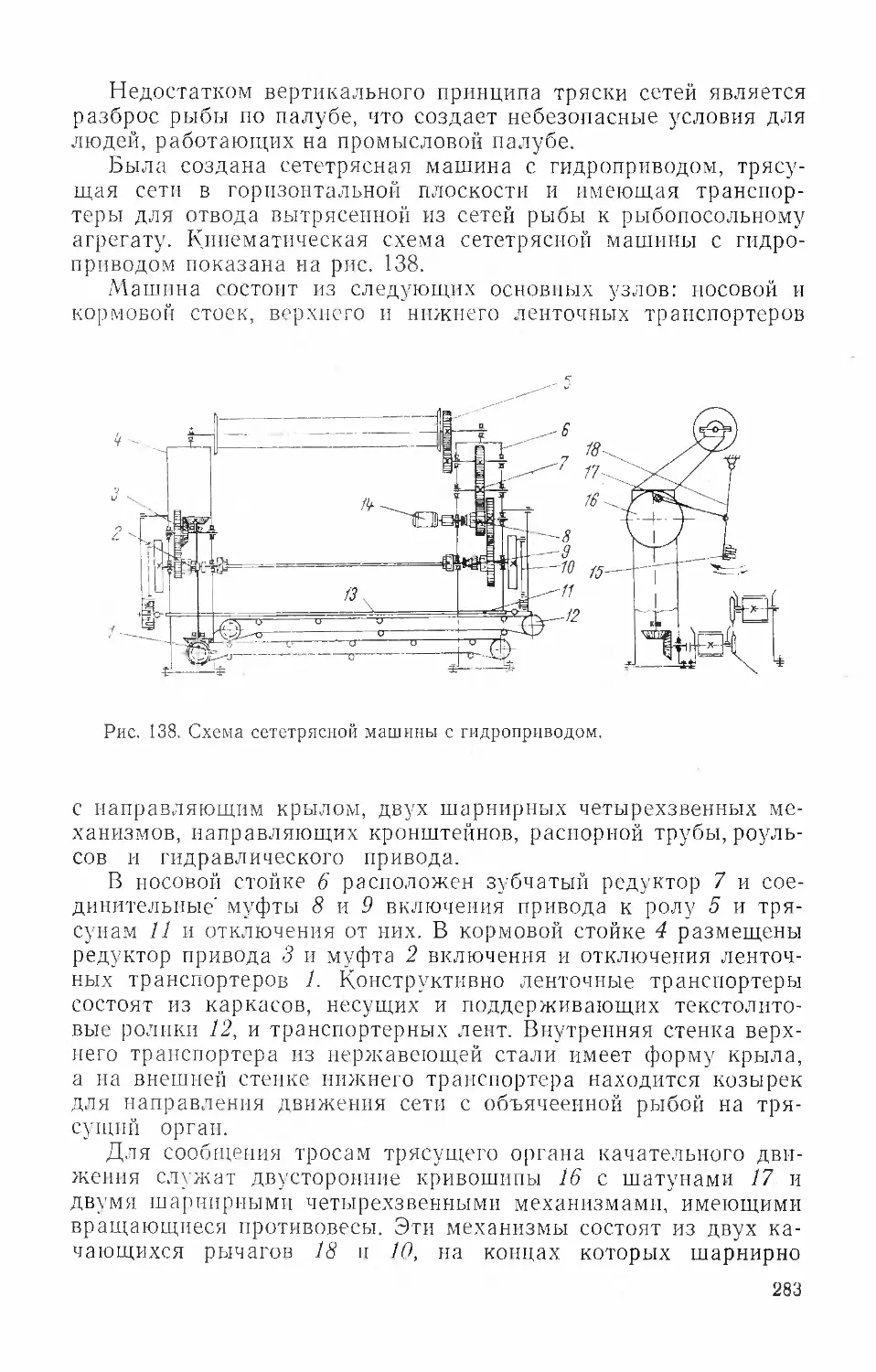
Рис. 9. Схемы поршневых насосов:
а — приводного; б — прямодействую¬
щего.
объем жидкости, теоретически равный FS, где F — площадь
поперечного сечения цилиндра, a S — ход поршня.
Для создания поршневого насоса двукратного действия
можно соединить (сдвоить) два насоса простого действия с уг¬
лом между кривошипами приводного вала 180°. Очевидно, за
один оборот вала или за один двойной ход поршней в обоих
цилиндрах будет подана жидкость объемом, теоретически рав¬
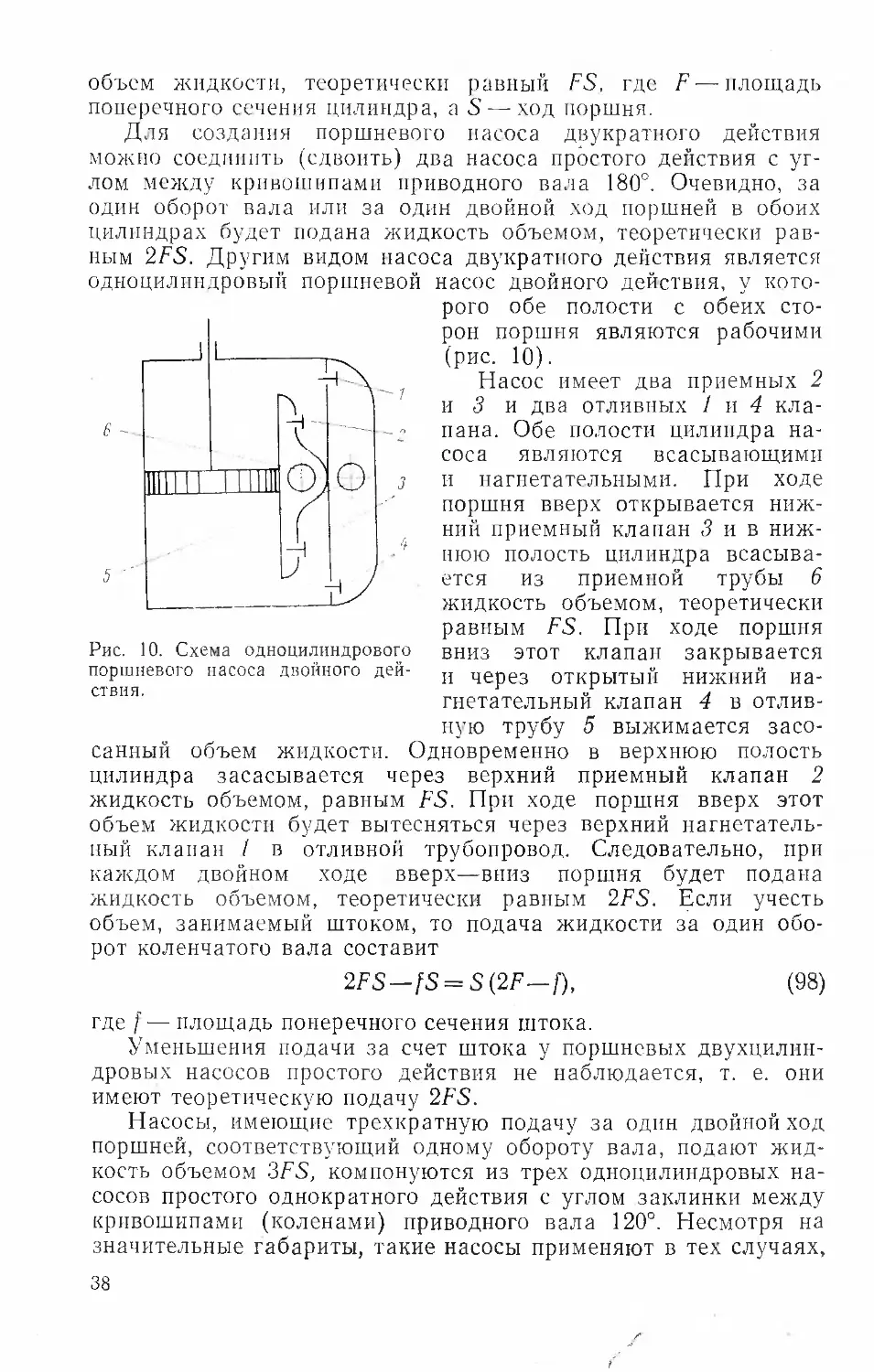
ным 2FS. Другим видом насоса двукратного действия является
одноцилиндровый поршневой насос двойного действия, у кото¬
рого обе полости с обеих сто¬
рон поршня являются рабочими
(рис. 10).
Насос имеет два приемных 2
и 5 и два отливных 1 я 4 кла¬
пана. Обе полости цилиндра на¬
соса являются всасывающими
и нагнетательными. При ходе
поршня вверх открывается ниж¬
ний приемный клапан 3 и в ниж¬
нюю полость цилиндра всасыва¬
ется из приемной трубы 6
жидкость объемом, теоретически
равным FS. При ходе поршня
вниз этот клапан закрывается
и через открытый нижний на¬
гнетательный клапан 4 в отлив¬
ную трубу 5 выжимается засо¬
санный объем жидкости. Одновременно в верхнюю полость
цилиндра засасывается через верхний приемный клапан 2
жидкость объемом, равным FS. При ходе поршня вверх этот
объем жидкости будет вытесняться через верхний нагнетатель¬
ный клапан 1 в отливной трубопровод. Следовательно, при
каждом двойном ходе вверх—вниз поршня будет подана
жидкость объемом, теоретически равным 2FS. Если учесть
объем, занимаемый штоком, то подача жидкости за один обо¬
рот коленчатого вала составит
2FS—fS = S (2F—f), (98)
где f — площадь поперечного сечения штока.
Уменьшения подачи за счет штока у поршневых двухцилин¬
дровых насосов простого действия не наблюдается, т. е. они
имеют теоретическую подачу 2FS.
Насосы, имеющие трехкратную подачу за один двойной ход
поршней, соответствующий одному обороту вала, подают жид¬
кость объемом 3FS, компонуются из трех одноцилиндровых на¬
сосов простого однократного действия с углом заклинки между
кривошипами (коленами) приводного вала 120°. Несмотря на
значительные габариты, такие насосы применяют в тех случаях,
Рис. 10. Схема одноцилиндрового
поршневого насоса двойного дей¬
ствия.
38
когда от поршневых насосов требуется наибольшая равномер¬
ность подачи, например в качестве грузовых на танкерах.
Если соединить два одноцилиндровых насоса двукратного
действия, то получим поршневой насос четырехкратного дейст¬
вия. Он подает за один ход поршней объем жидкости, равный
четырем рабочим объемам цилиндров. Если учесть объем порш¬
невых штоков, то подача жидкости будет равна
4FS—2/S = 2S (2F—f), (99)
где f — площадь поперечного сечения поршневого штока.
Угол между кривошипами (мотылями) на приводном валу
будет равен 90°.
Насосы многократного действия выполняются в виде ротор-
но-поршневых, у которых поршни совершают не только посту¬
пательное, но и вращательное движение вместе с цилиндрами.
В зависимости от расположения осей цилиндров роторно-порш¬
невые насосы подразделяются на радиальные и аксиальные.
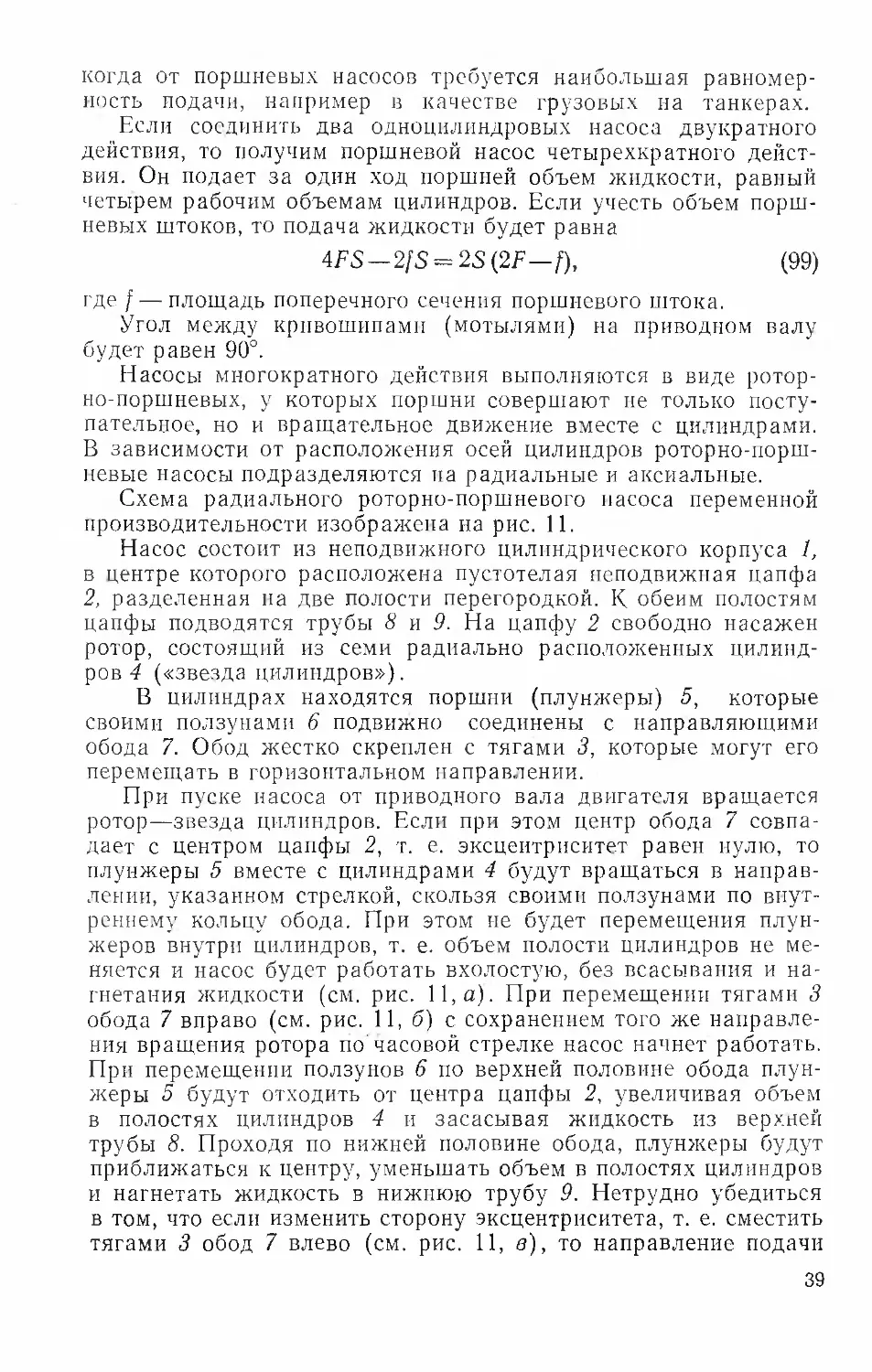
Схема радиального роторно-поршневого насоса переменной
производительности изображена на рис. 11.
Насос состоит из неподвижного цилиндрического корпуса 1,
в центре которого расположена пустотелая неподвижная цапфа
2, разделенная на две полости перегородкой. К обеим полостям
цапфы подводятся трубы 8 и 9. На цапфу 2 свободно насажен
ротор, состоящий из семи радиально расположенных цилинд¬
ров 4 («звезда цилиндров»).
В цилиндрах находятся поршни (плунжеры) 5, которые
своими ползунами 6 подвижно соединены с направляющими
обода 7. Обод жестко скреплен с тягами 3, которые могут его
перемещать в горизонтальном направлении.
При пуске насоса от приводного вала двигателя вращается
ротор—звезда цилиндров. Если при этом центр обода 7 совпа¬
дает с центром цапфы 2, т. е. эксцентриситет равен нулю, то
плунжеры 5 вместе с цилиндрами 4 будут вращаться в направ¬
лении, указанном стрелкой, скользя своими ползунами по внут¬
реннему кольцу обода. При этом не будет перемещения плун¬
жеров внутри цилиндров, т. е. объем полости цилиндров не ме¬
няется и насос будет работать вхолостую, без всасывания и на¬
гнетания жидкости (см. рис. 11, а). При перемещении тягами 3
обода 7 вправо (см. рис. 11, б) с сохранением того же направле¬
ния вращения ротора по часовой стрелке насос начнет работать.
При перемещении ползунов 6 по верхней половине обода плун¬
жеры 5 будут отходить от центра цапфы 2, увеличивая объем
в полостях цилиндров 4 и засасывая жидкость из верхней
трубы 8. Проходя по нижней половине обода, плунжеры будут
приближаться к центру, уменьшать объем в полостях цилиндров
и нагнетать жидкость в нижнюю трубу 9. Нетрудно убедиться
в том, что если изменить сторону эксцентриситета, т. е. сместить
тягами 3 обод 7 влево (см. рис. 11, в), то направление подачи
39
Направление
Вращения ротора.-
„звезды цилиндров”
Направление с,неимения
кольца - овода
Направление сиеице-
ния кольца-одода
Рис. 11. Схема радиального роторно-поршневого насоса.
40
жидкости изменится. В этом случае всасывание жидкости будет
осуществляться из нижней трубы 9 — при скольжении плунже¬
ров по нижней половине обода, а нагнетание жидкости будет
происходить в верхнюю трубу 8 — при прохождении плунжеров
по верхней половине обода.
Рассмотренный роторно-поршневой насос — простого дей¬
ствия, так как всасывание и нагнетание жидкости осуществля¬
ются с одной стороны поршня-плунжера, а кратность его дей¬
ствия равна числу цилиндров. В данном случае за один полный
оборот ротора будет подан объем жидкости, равный 7FS, т. е.
насос будет семикратного действия. Кратность радиальных ро-
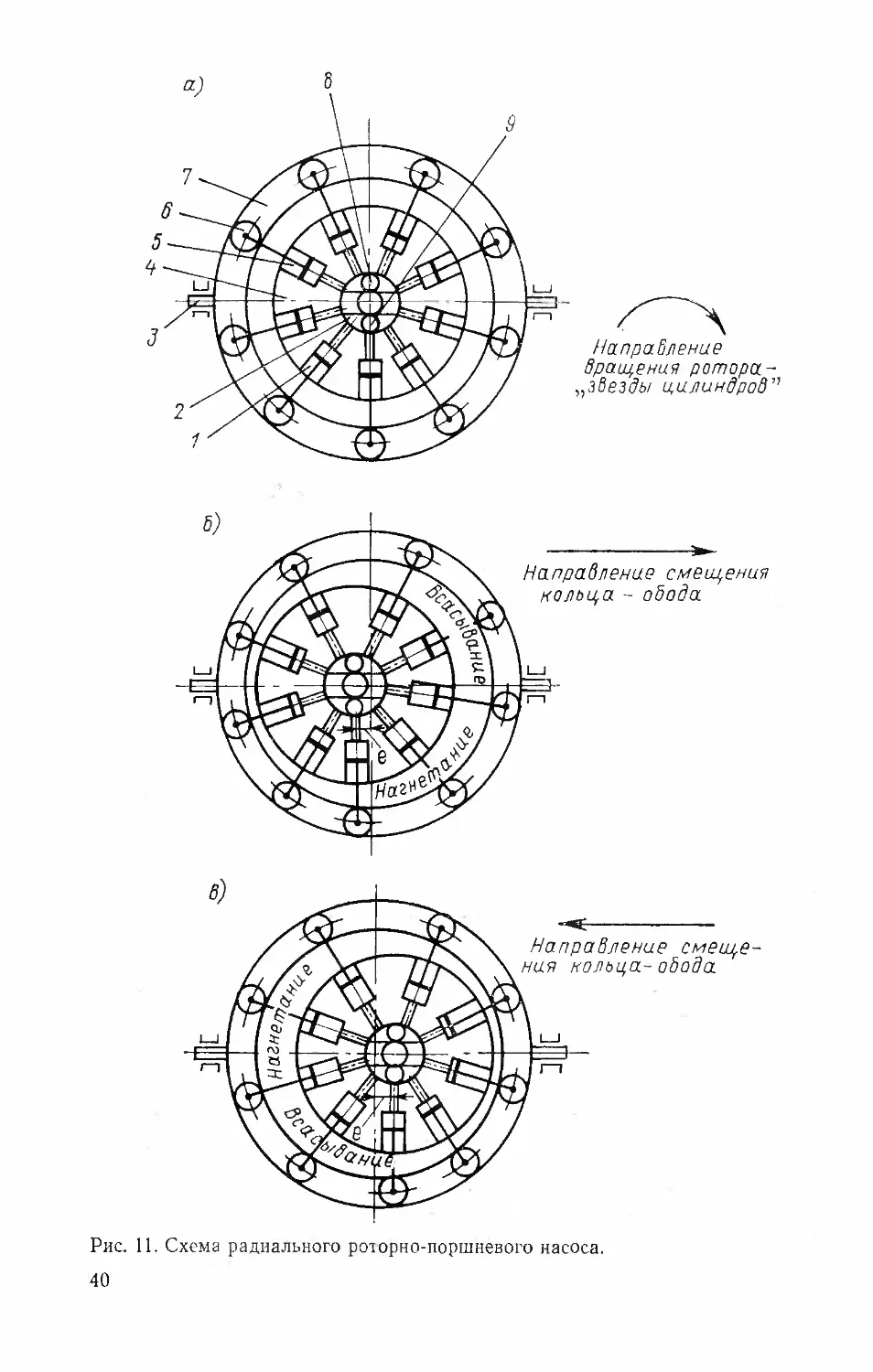
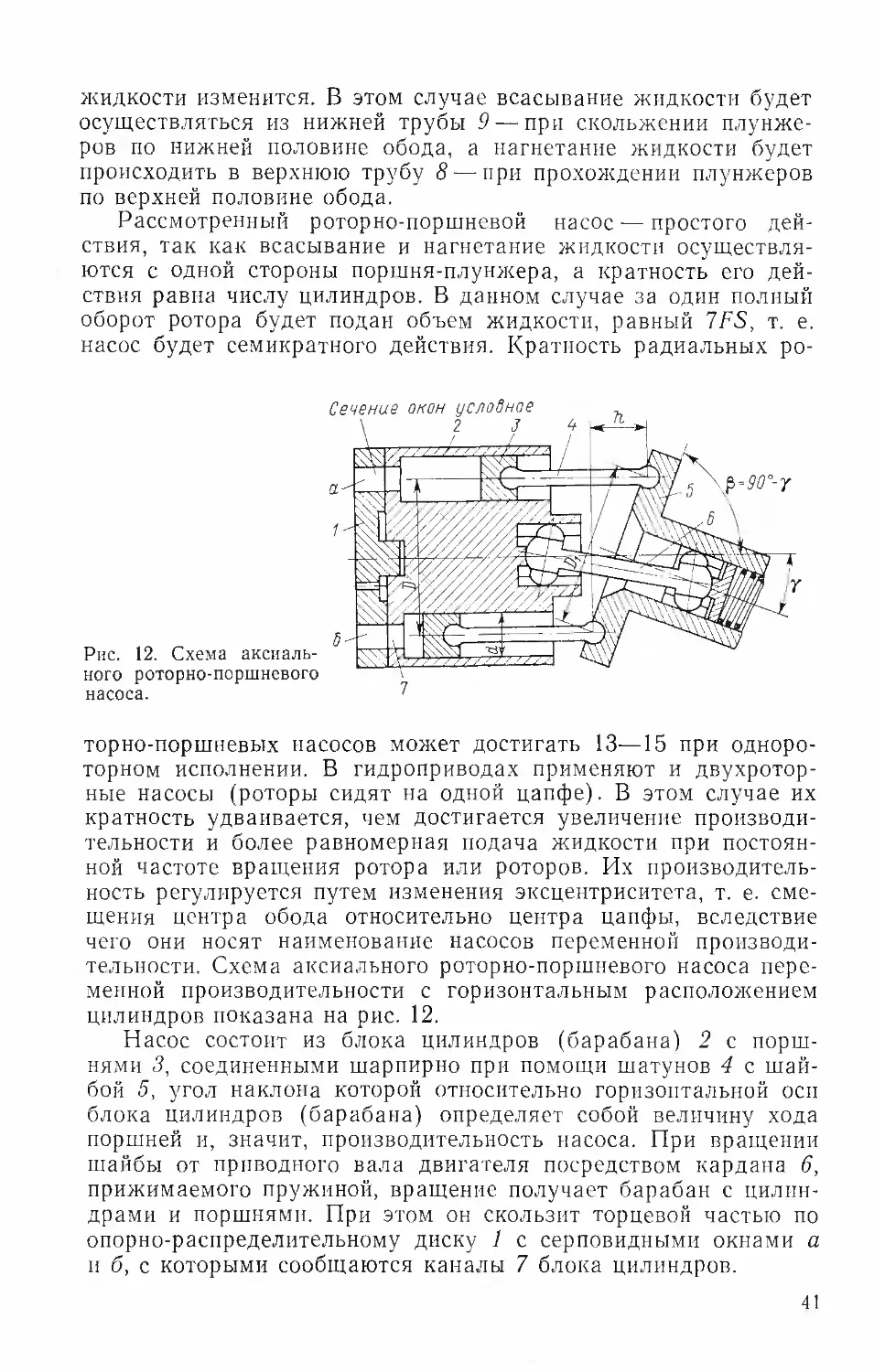
Рис. 12. Схема аксиаль¬
ного роторно-поршневого
насоса.
торно-поршневых насосов может достигать 13—15 при одноро¬
торном исполнении. В гидроприводах применяют и двухротор¬
ные насосы (роторы сидят на одной цапфе). В этом случае их
кратность удваивается, чем достигается увеличение производи¬
тельности и более равномерная подача жидкости при постоян¬
ной частоте вращения ротора или роторов. Их производитель¬
ность регулируется путем изменения эксцентриситета, т. е. сме¬
щения центра обода относительно центра цапфы, вследствие
чего они носят наименование насосов переменной производи¬
тельности. Схема аксиального роторно-поршневого насоса пере¬
менной производительности с горизонтальным расположением
цилиндров показана на рис. 12.
Насос состоит из блока цилиндров (барабана) 2 с порш¬
нями 3, соединенными шарнирно при помощи шатунов 4 с шай¬
бой 5, угол наклона которой относительно горизонтальной оси
блока цилиндров (барабана) определяет собой величину хода
поршней и, значит, производительность насоса. При вращении
шайбы от приводного вала двигателя посредством кардана 6,
прижимаемого пружиной, вращение получает барабан с цилин¬
драми и поршнями. При этом он скользит торцевой частью по
опорно-распределительному диску 1 с серповидными окнами а
и б, с которыми сообщаются каналы 7 блока цилиндров.
41
Если угол 7 = 0 (торцевые плоскости барабана и шайбы па¬
раллельны), насос вращается вхолостую, так как не будет
перемещения поршней по оси и объем в цилиндрах сохранится
постоянным.
При повороте шайбы на угол (3 = 90—у поршни при враще¬
нии перемещаются в осевом направлении. При этом в верхнем
положении поршни 3 перемещаются вправо, объем полости ци¬
линдра увеличивается и всасывание жидкости происходит из
окна а.
В нижнем положении поршень перемещается влево, объем
полости цилиндра уменьшается и жидкость нагнетается через
окно б. Если изменить угол поворота шайбы в противополож¬
ную сторону от вертикали на угол |3 = 90 + у, то направление
движения перекачиваемой жидкости изменится на противопо¬
ложное: в нижних положениях поршни отходят вправо и заса¬
сывают в цилиндры жидкость из окон б, в верхних положениях
поршни, двигаясь влево, нагнетают жидкость через окна а.
В случае постоянной частоты вращения подача насоса зави¬
сит от хода поршней /г, определяемого углом наклона шайбы.
Поэтому насос, как и радиальный, является насосом перемен¬
ной производительности простого действия с кратностью, рав¬
ной числу цилиндров в барабане, обычно 7—9.
Аксиальные роторно-поршневые насосы выполняются с по¬
воротными блоками цилиндров (барабанов), а также с бес-
карданной связью блока цилиндров с шайбой и плунжерами
без шатунов.
Роторно-поршневые насосы обратимы, т. е. их можно исполь¬
зовать в качестве гидродвигателей.
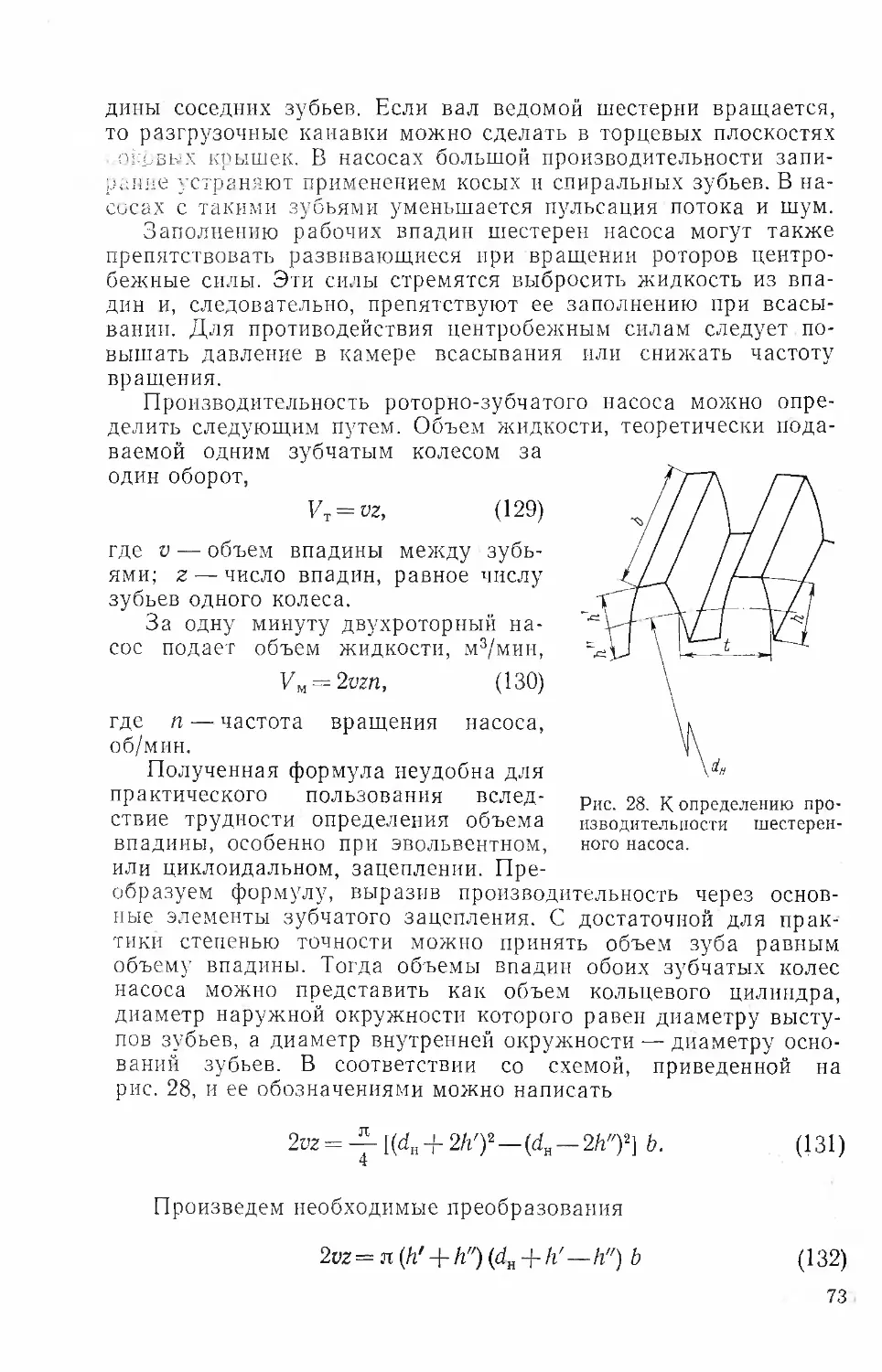
§ 15. ОСНОВНЫЕ ДЕТАЛИ ПОРШНЕВЫХ НАСОСОВ
Поршневой насос конструктивно состоит из двух групп де¬
талей: неподвижных и движущихся. Неподвижные детали, объе¬
диняемые под общим названием «корпус насоса», включают
в себя: рабочие цилиндры с крышками и днищами, патрубки
приемный (всасывающий) и отливной (нагнетательный), кла¬
панную коробку и уплотнения (сальники). К движущимся де¬
талям относятся поршни с уплотнительными кольцами, поршне¬
вые штоки и клапаны.
Корпус насоса в большинстве случаев отливают из чугуна
марки СЧ12-28 или стали с содержанием 0,3—0,4% углерода.
В некоторых случаях для повышения износоустойчивости внутрь
цилиндра вставляют бронзовые втулки. Внутреннюю форму кор¬
пуса выбирают такой, чтобы жидкость проходила в цилиндр
без лишних поворотов. На внешней стороне корпуса для при¬
соединения различной арматуры, кранов и клапанов, а также
для соединительных фланцев предусматривают приливы. Тол¬
щину стенок цилиндра можно определить по формулам: 5,,=
42
= 0,00238 piD + 9 мм — для чугуна и Sc = 0,0017 piD + 9 мм — для
стали, где pi — внутреннее избыточное среднее давление (ин¬
дикаторное), кгс/см2; D — внутренний диаметр цилиндра, мм.
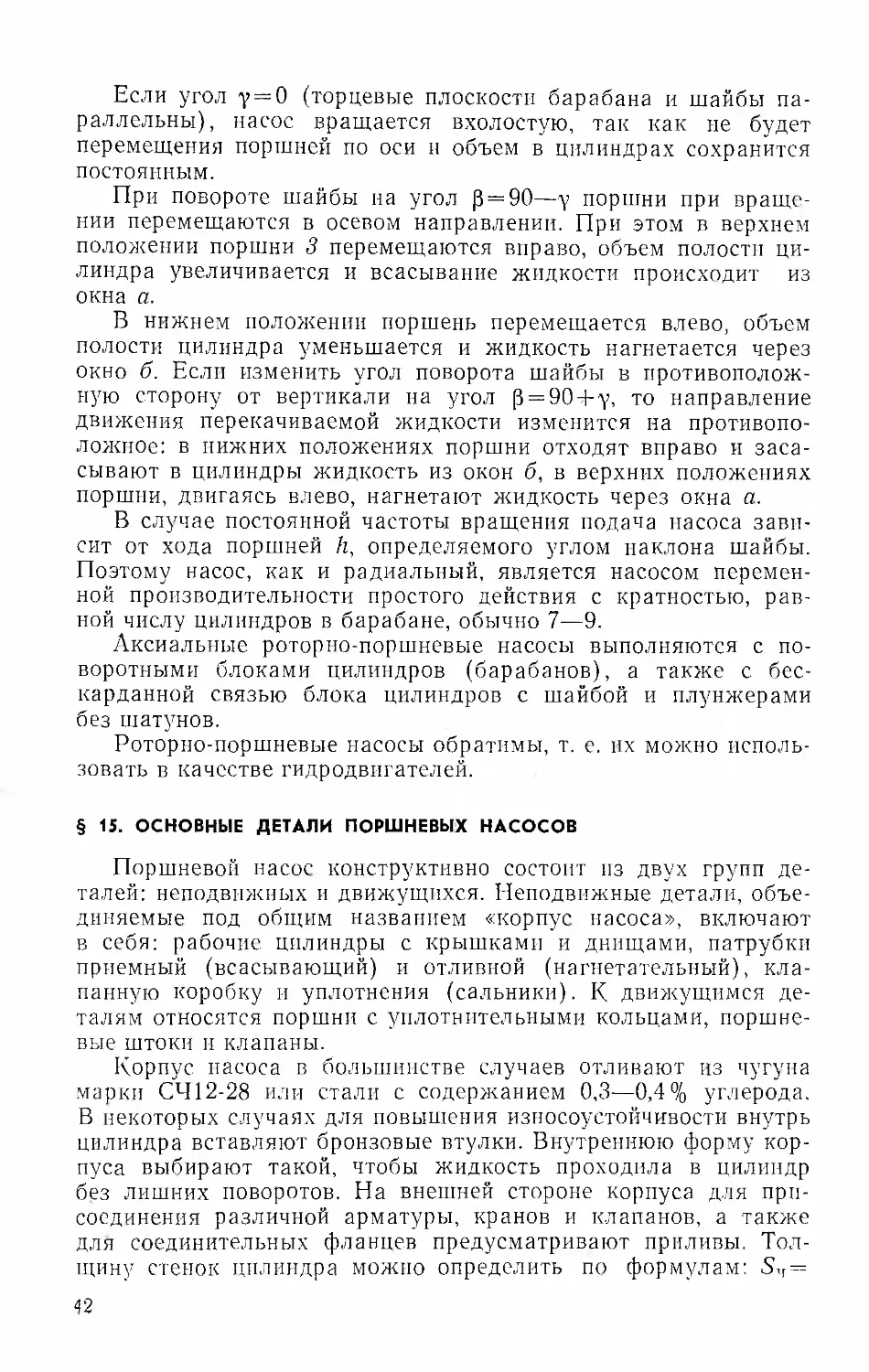
Гидравлические поршни выполняются дисковыми и
цилиндрическими (плунжерные или скальчатые). Дисковые
поршни могут быть цельными или составными и изготовляются
из чугуна, бронзы или стали (рис. 13).
Уплотнение поршней в цилиндре осуществляется самопру-
жинящими металлическими кольцами из чугуна, бронзы, стали
Рис. 13. Дисковые поршни насосов: а — цельный; б — составной; в — с на¬
бивкой; г — с кольцами из эбонита; д — с кожаными манжетами.
или пластмассы; неразрезными кольцами из эбонита (поз. 1,
рис. 13, г), фибры или текстолита; манжетами из кожи, резины
или прорезиненной ткани; мягкой набивкой из пеньки. Кожа¬
ные манжеты (поз. 1, рис. 13, д) являются самоуплотняющи¬
мися кольцами, они создают хорошую герметичность, способ¬
ствуют малому износу стенок рабочих цилиндров и обеспечи¬
вают надежную работу насоса при давлениях до 500 кгс/см2 и
диаметре поршней до 100 мм, при температуре перекачиваемой
жидкости до 50° С. В некоторых случаях уплотнение достигается
при помощи белого металла (баббита Б83), которым покры¬
вается боковая поверхность поршня с пробивкой на ней кольце¬
вых канавок, создающих лабиринтовое уплотнение.
Цельные поршни обладают повышенной прочностью, но сни¬
мать с них и устанавливать на них поршневые кольца значи¬
тельно сложнее, чем у составных поршней с проставочным
43
телом (поз. 2, рис. 13, г и д). В качестве уплотнителя составных
поршней можно применять набивку из пеньково-асбестового
шнура, который перед установкой на поршень прографичива-
ется и промасливается, а также прорезиненную ткань, резину
или пластмассу. Набивка из любого материала зажимается
в поршне перед заведением его в цилиндр. Поршни с неметал¬
лическими уплотнениями меньше изнашивают рабочие ци¬
линдры насосов.
В насосах со скоростью поршня ^1 м/с и давлением 5—
30 кгс/см2 допускаются уплотнения любого типа, в насосах
с высоким давлением применяют
только металлические уплотнения.
Металлическое уплотнение пригод¬
но как для холодной, так и для го¬
рячей жидкости; кожаные манжеты
и мягкая набивка из пеньки при¬
годны для работы с жидкостью
при температуре до 35° С.
Внутренняя поверхность цилин¬
дра дисковых поршней более под¬
вержена износу, и поэтому цилин¬
дры имеют вставные рабочие
втулки.
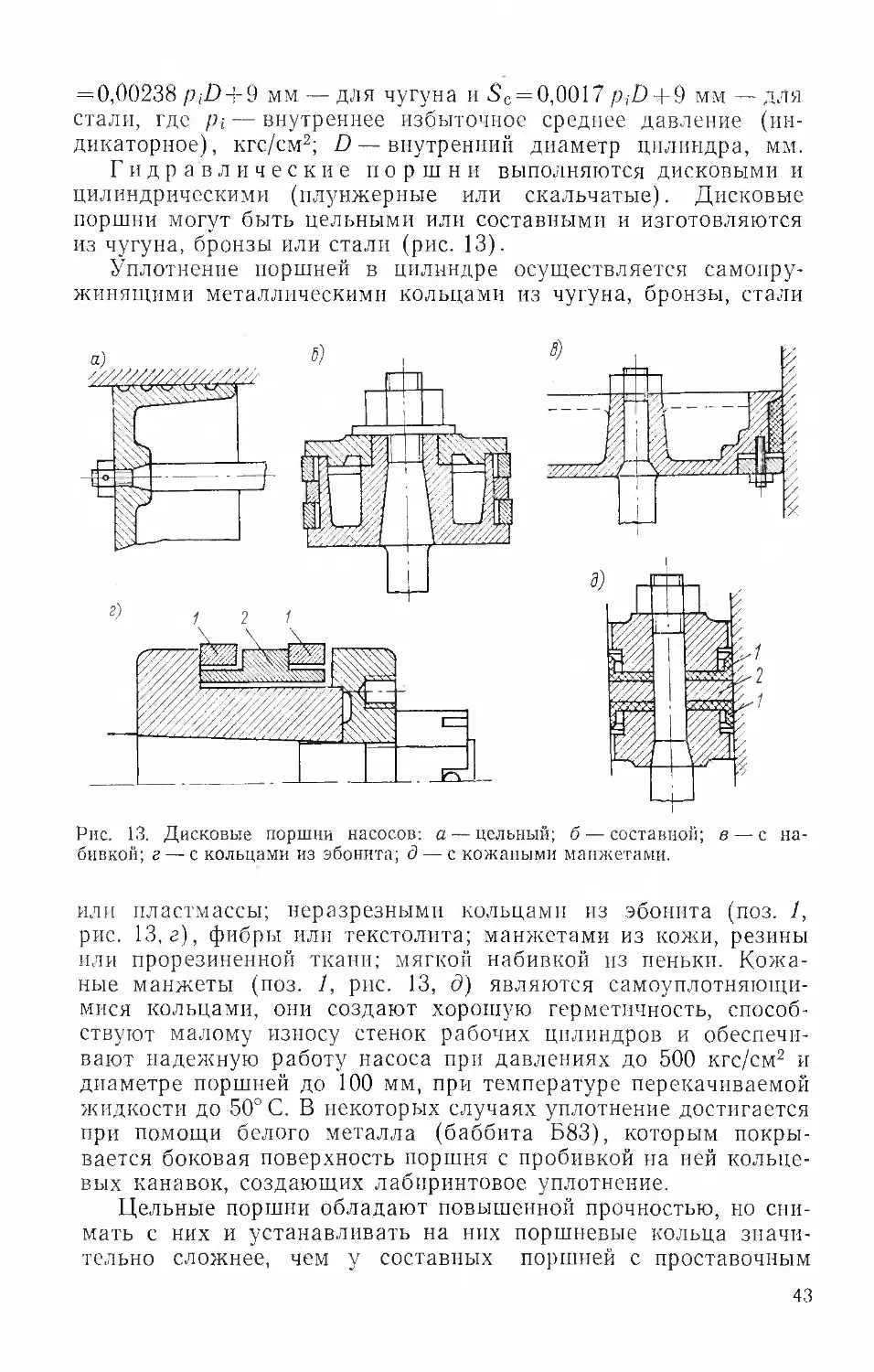
Плунжерные (скальчатые) пор¬
шни бывают открытыми (рис. 14, а)
или закрытыми (рис. 14, б). Они
обычно изготовляются из чугуна и
стали, но могут быть также по¬
крыты бронзовой рубашкой либо
изготовляются целиком из бронзы.
Материал для изготовления — бронза марки Бр. ОФЮ-1. Ци¬
линдры насосов с плунжерными поршнями можно выполнять
без вставных рабочих втулок. Плунжерные (скальчатые) пор¬
шни увеличивают габариты насоса вследствие удлинения ци¬
линдра. Однако в процессе эксплуатации можно контролировать
состояние уплотнения плунжеров (скалок), в связи с чем их ус¬
тановка на судах более предпочтительна, чем насосов с диско¬
выми поршнями, у которых состояние уплотнений трудно про¬
верять без разборки насоса.
Поршневые штоки, на которые насаживаются дисковые
поршни, обычно изготовляют стальными цилиндрическими.
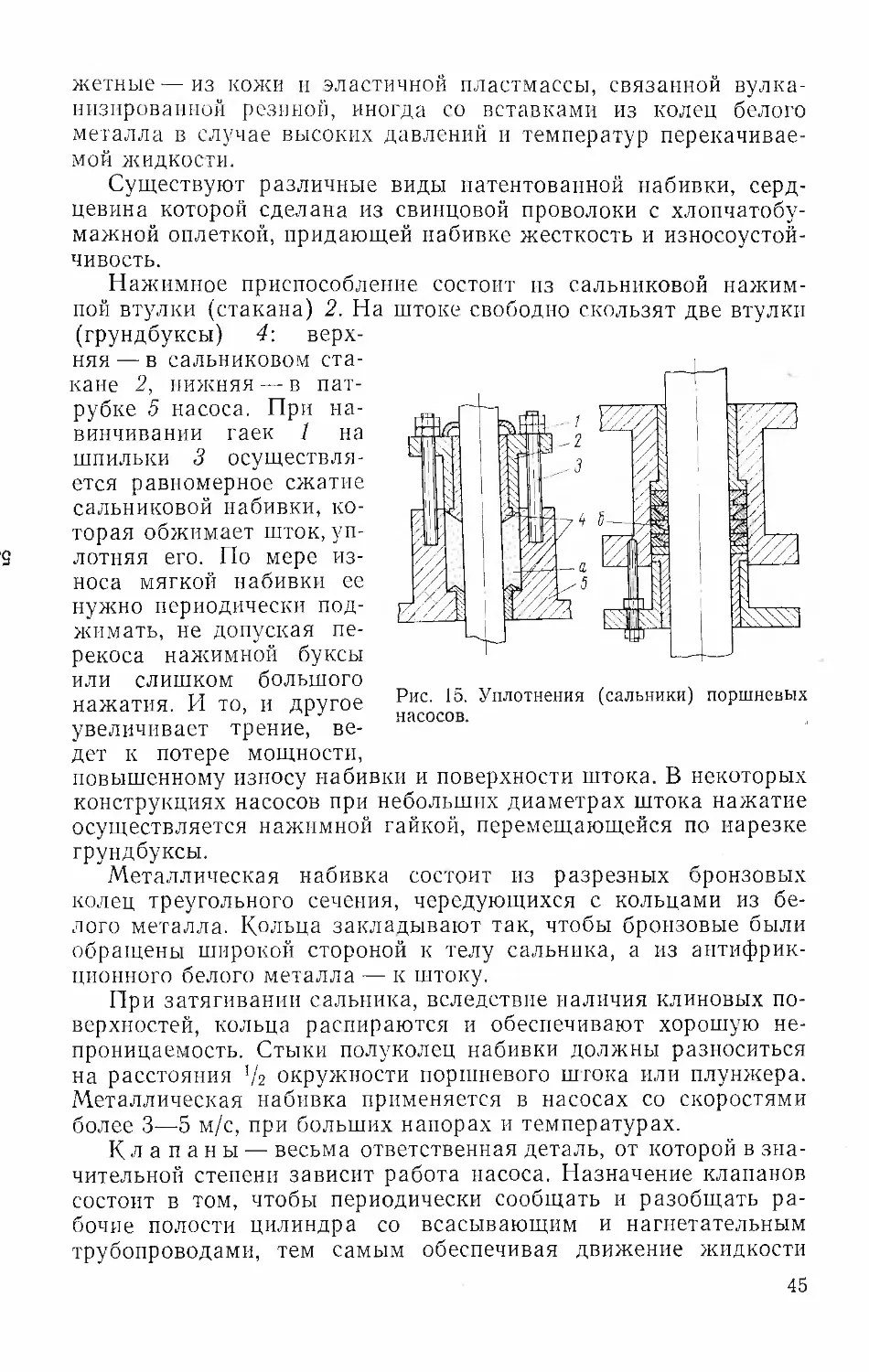
Сальники представляют собой уплотнения отверстий
в днищах цилиндров в местах выхода скалок и штоков. Саль¬
ник состоит из нажимного приспособления и набивки. Набивка
может быть мягкая а или металлическая б (рис. 15). Мягкие
набивки изготовляют из хлопчатобумажных тканей, пропитан¬
ных маслом с тальком; пеньковые и асбестовые — из плетеных
шнуров и колец, пропитанных графито-жировой смазкой; ман¬
Рис. 14. Плунжерные (скальча¬
тые) поршни: а — открытые;
б — закрытые.
44
жетные—из кожи и эластичной пластмассы, связанной вулка¬
низированной резиной, иногда со вставками из колец белого
металла в случае высоких давлений и температур перекачивае¬
мой жидкости.
Существуют различные виды патентованной набивки, серд¬
цевина которой сделана из свинцовой проволоки с хлопчатобу¬
мажной оплеткой, придающей набивке жесткость и износоустой¬
чивость.
Нажимное приспособление состоит из сальниковой нажим¬
ной втулки (стакана) 2. На штоке свободно скользят две втулки
(грундбуксы) 4\ верх¬
няя— в сальниковом ста¬
кане 2, нижняя — в пат¬
рубке 5 насоса. При на¬
винчивании гаек 1 на
шпильки 3 осуществля¬
ется равномерное сжатие
сальниковой набивки, ко¬
торая обжимает шток, уп¬
лотняя его. По мере из¬
носа мягкой набивки ее
нужно периодически под¬
жимать, не допуская пе¬
рекоса нажимной буксы
или слишком большого
нажатия. И то, и другое
увеличивает трение, ве¬
дет к потере мощности,
повышенному износу набивки и поверхности штока. В некоторых
конструкциях насосов при небольших диаметрах штока нажатие
осуществляется нажимной гайкой, перемещающейся по нарезке
грундбуксы.
Металлическая набивка состоит из разрезных бронзовых
колец треугольного сечения, чередующихся с кольцами из бе¬
лого металла. Кольца закладывают так, чтобы бронзовые были
обращены широкой стороной к телу сальника, а из антифрик¬
ционного белого металла — к штоку.
При затягивании сальника, вследствие наличия клиновых по¬
верхностей, кольца распираются и обеспечивают хорошую не¬
проницаемость. Стыки полуколец набивки должны разноситься
на расстояния ’/г окружности поршневого штока или плунжера.
Металлическая набивка применяется в насосах со скоростями
более 3—5 м/с, при больших напорах и температурах.
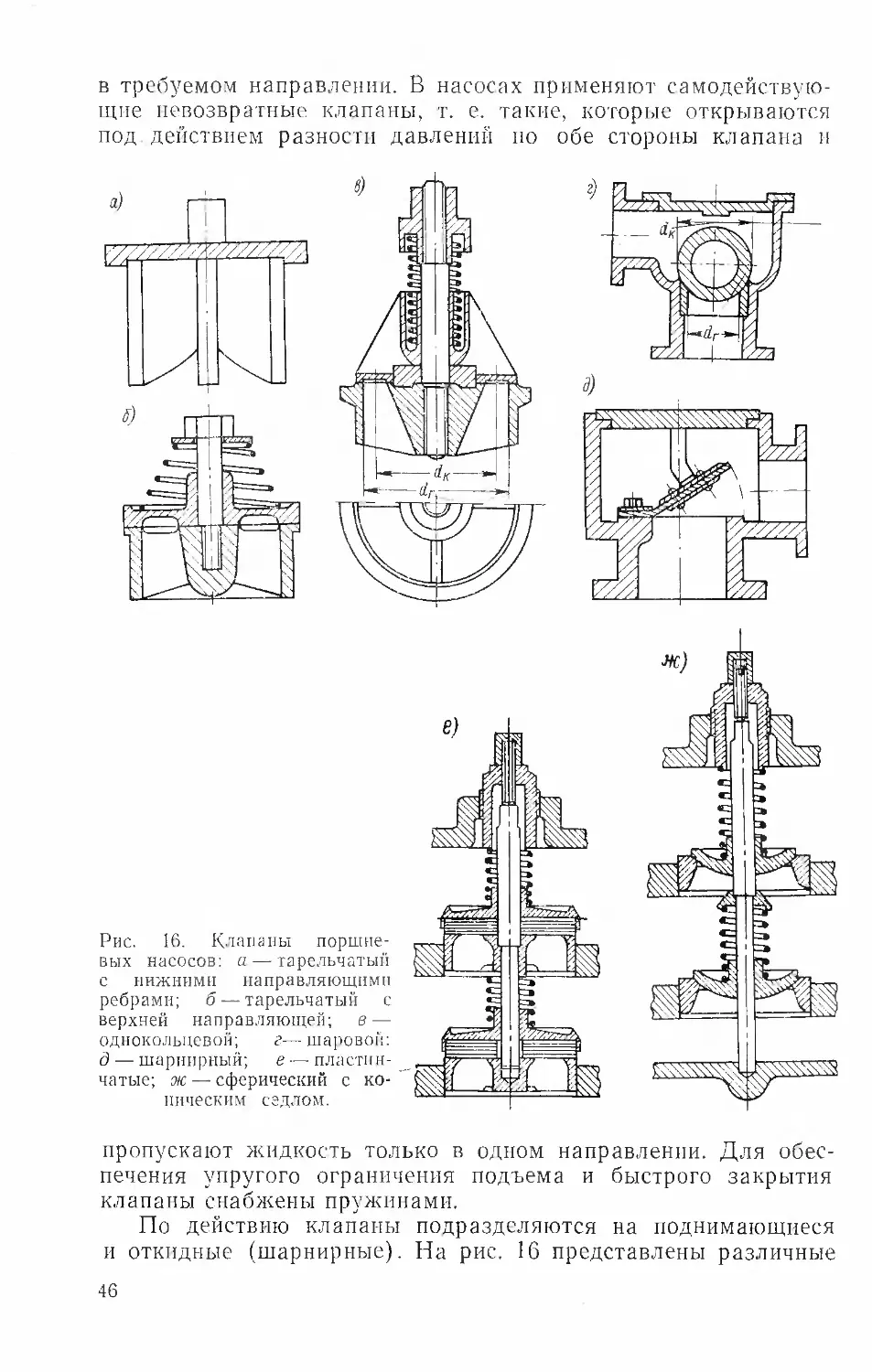
Клапаны — весьма ответственная деталь, от которой в зна¬
чительной степени зависит работа насоса. Назначение клапанов
состоит в том, чтобы периодически сообщать и разобщать ра¬
бочие полости цилиндра со всасывающим и нагнетательным
трубопроводами, тем самым обеспечивая движение жидкости
Рис. 15. Уплотнения (сальники) поршневых
насосов.
45
в требуемом направлении. В насосах применяют самодействую¬
щие невозвратные клапаны, т. е. такие, которые открываются
под. действием разности давлений но обе стороны клапана и
Рис. 16. Клапаны поршне¬
вых насосов: а — тарельчатый
с нижними направляющими
ребрами; б — тарельчатый с
верхней направляющей; в —
однокольцевой; г—шаровой:
д — шарнирный; е — пластин¬
чатые; ж —■ сферический с ко¬
ническим седлом.
пропускают жидкость только в одном направлении. Для обес¬
печения упругого ограничения подъема и быстрого закрытия
клапаны снабжены пружинами.
По действию клапаны подразделяются на поднимающиеся
и откидные (шарнирные). На рис. 16 представлены различные
46
конструкции клапанов. Пластинчатые клапаны представляют
собой одну или несколько пластин, волнистых или плоских,
толщиной 2—5 мм, при этом нижние пластины имеют отверстия
диаметром около 4 мм и сдвинуты одна относительно другой.
Клапаны бывают металлические: латунные, бронзовые или
стальные; неметаллические: кожаные, резиновые и пластмассо¬
вые, а также композитные, т. е. металлические с облицовкой из
кожи, пластмассы, бакаута и других уплотняющих материалов.
Шаровые клапаны отливают из чугуна или бронзы и в неко¬
торых случаях покрывают снаружи слоем резины. Их делают
обычно пустотелыми диаметром, равным 1,5 диаметра седла.
Клапан любой конструкции и из любого материала должен
обеспечивать герметичность закрытия, бесшумную работу и
быстрое открытие клапанного отверстия; создавать меньше гид¬
равлических сопротивлений проходу жидкости; быть прочным
и износоустойчивым, иметь небольшую стоимость изготов¬
ления.
Обеспечение указанных требований прежде всего зависит от
тщательности пригонки тарелки клапана к седлу и конструктив¬
ных соотношений отдельных частей клапана. Толщина тарелки
клапана определяется из соотношения
бк = (0,1^0,2 )dr, (100)
где dr — диаметр проходного отверстия клапанного гнезда.
Высота направляющих штоков или перьев
1П = (0,7 -=-0,8) dT. (101)
Число перьев обычно составляет г = 3-М.
Ширина притертой поверхности, см:
для металлических клапанов
Ь'к = (0,2 ч-0,25) ]/<£, (102)
для неметаллических клапанов.
&; = (0,3^0,4)УХ
При работе клапанов их посадка на гнездо должна происхо¬
дить без стука; в противном случае клапан изнашивается и
от этого ухудшаются показатели работы насоса: КПД, произ¬
водительность и напор. Бесшумная работа клапана зависит
в первую очередь от высоты подъема клапана, его массы и бы¬
строходности насоса.
Максимальный подъем клапана, см,
К max = (0,1 4-0,25)dr. (103)
Обычно hK колеблется от 4 до 10 мм, а у прямодействующих
насосов — до 30 мм. Подъем клапанов регулируется при по¬
мощи отбойников, траверс, нарезного штифта и гайки. Диаметр
пластмассовых гнезд может колебаться от 20 до 60 мм.
47
Проверку клапанов на стук в приводных водяных насосах
производят по формуле И. И. Кукалевского:
пК max <600-Г-650, (104)
где п — частота вращения вала или двойных ходов поршня
в минуту.
Величина гидравлических потерь в клапане определяется
скоростью прохождения жидкости через клапанную щель и бы¬
стротой действия клапана. Гидравлическое сопротивление от¬
крытого клапана определяется из уравнения гидравлики
2
(105)
где сг — скорость жидкости в проходном сечении клапана; для
нагнетательных клапанов с/= 24-4 м/с, для всасывающих кла¬
панов cr"=0,75-f-2 м/с; £ — коэффициент гидравлического сопро¬
тивления клапана, зависящий от его конструкции; для пло¬
ского тарельчатого клапана 1 с нижней направляющей
£ = 1,35ч- 0;25—. (106)
; -т- hK max
В тех случаях, когда один клапан не обеспечивает основных
требований, устанавливают несколько клапанов с суммарным
проходным сечением, равным площади проходного сечения од¬
ного клапана.
Диаметр одного клапана можно определить из условия
сплошности потока по формуле
4 = ]/—9-с—, (107)
где Qc — секундный расход жидкости через отверстие клапана,
м3/с; 2К — число клапанов, обычно от 1 до 8; jx — коэффициент
расхода клапанного отверстия.
§ 16. КОНСТРУКЦИИ ПОРШНЕВЫХ НАСОСОВ
На рис. 17 изображена конструкция вертикального двухци¬
линдрового электроприводного редукторного поршневого насоса
марки ЭНП-52 двойного четырехкратного действия, часто ис¬
пользуемого в качестве осушительного на современных добы¬
вающих, транспортных и перерабатывающих судах рыбной про¬
мышленности: плавбазах типа «Рыбацкая Слава» и БМРТ типа
«Маяковский».
1 Для других клапанов см. табл. 4.
2 Марка насоса расшифровывается так: Э — электроприводной, Н — на¬
сос, П — поршневой, 5 — номер модели.
48
Вращение вала электродвигателя 1 через цилиндрический
зубчатый редуктор 2, огражденный кожухом 3, передается кри¬
вошипному валу 4. Вращаясь, кривошипный вал через шатун 6
Рис. 17. Электроприводной поршневой двухцилиндровый насос двойного че¬
тырехкратного действия ЭНГ1-5.
и поперечины с ползунами 7 сообщает гидравлическим порш¬
ням 10 прямолинейное возвратно-поступательное движение.
Жидкость поступает в цилиндры и выходит из них через кла¬
панные коробки цилиндров со всасывающими 9 и нагнетатель¬
ными 8 клапанами. Насос с электродвигателем смонтирован на
станине 5 и приводится в действие электродвигателем мощно¬
49
стью 13 л. с. при 950 об/мин, создавая напор 30 м вод. ст. при
производительности 30—50 м3/ч.
Общий недостаток рассмотренных поршневых насосов — на¬
личие в них клапанов. На рыбопромысловых судах типа «Ат-
Рис. 18. Поршневой бесклапанный насос с шаровым поршнем «кар-
дакс» четырехкратного действия: а — в разрезе; б— общий вид.
лантик» для подачи котельного топлива установлен бесклапан¬
ный поршневой насос с шаровым поршнем «кардакс» (рис. 18, а
и б). Рабочим элементом насоса является шаровой поршень 1,
50
образующий тремя своими карданно-связанными частями по¬
лый шар с четырьмя камерами.
Несущими шара являются: с одной стороны — приводной
вал с уплотнением 6; с другой стороны — промежуточный вал 3,
отклоненный под определенным углом к приводному. К обоим
валам подводится смазка через штуцерные масленки 5. Для
перекрытия с нагнетательной и всасывающей сторон шаровой
поршень охватывается двумя полукруглыми шаровыми чаш¬
ками 4.
При каждом обороте шарового поршня каждая камера
в шаре один раз открывается, всасывая жидкость из всасы¬
вающего патрубка и один раз закрывается, нагнетая жидкость
через нагнетательный патрубок. Этим достигается четырехкрат¬
ное самовсасывающее действие насоса. При частоте вращения
965 об/мин камеры насоса быстро опорожняются одна за дру¬
гой, обеспечивая равномерную подачу жидкости в количестве
4 м3/ч и напоре нагнетания 3- 105 Па.
Для предохранения насоса с шаровым поршнем от чрезмер¬
ного превышения напора нагнетания, опасного для каждого
объемного насоса, необходимо на нагнетательном патрубке
предусматривать предохранительно-перепускной клапан. Шаро¬
вой поршень чрезвычайно подвержен повреждению и износу
от мельчайших твердых взвешенных частиц, поэтому перед
всасывающим патрубком необходимо установить сетчатый
фильтр.
На морских судах наряду с приводными применяют поршне¬
вые насосы прямодействующие (ПНП), имеющие более про¬
стую конструкцию и обеспечивающие более равномерную по¬
дачу жидкости. Такие насосы устанавливают на промысловых
судах для обслуживания паровых котлов и на танкерах, где за¬
прещается применять электрический привод в целях пожарной
безопасности судна.
Как уже указывалось, у прямодействующих насосов приво¬
дом служит паровая поршневая машина, поршни которой имеют
один общий шток с гидравлическими поршнями насоса. ПНП
делятся на два типа: симплекс (состоит из одного парового и
одного гидравлического цилиндров), и дуплекс (состоит из двух
паровых и двух гидравлических цилиндров). Кроме вертикаль¬
ных насосов, на судах устанавливают и горизонтальные на¬
сосы.
Гидравлическая часть прямодействующих насосов не имеет
существенных отличий от рассмотренных ранее и обычно пред¬
ставляет собой поршневые насосы двукратного действия (сим¬
плекс) и четырехкратного действия (дуплекс). Паровая часть
прямодействующих насосов представляет собой поршневые ма¬
шины с различными конструкциями парораспределительных
органов и в зависимости от них может быть отнесена к одной
из следующих групп насосов:
51
— с механическим принудительным парораспределением
(типа «Вортингтон»1);
— с полуавтоматическим парораспределением (типов
«Вира», «Блекса»);
— с автоматическим парораспределением («Камерон»).
Конструкция прямодействующего горизонтального насоса
типа «Вортингтон» изображена на рис. 19.
Насос горизонтальный типа дуплекс. Гидравлический ци¬
линдр 5 имеет восемь клапанов 7, размещенных в клапанной
коробке. Из них два приемных и два отливных для каждой по¬
лости. Сборный гидравлический поршень 6 расположен на од¬
ном штоке с паровым поршнем 2. Пар по полостям парового
цилиндра 3 распределяется цилиндрическим золотником 1
(в других конструкциях применяются коробчатые золотники),
перемещающимся от системы рычагов золотникового движения
4, Золотники нормальные, и, следовательно, паровая машина
привода насоса работает без расширения пара.
При поочередном впуске пара золотниками через соедини¬
тельные каналы в правую и левую рабочие полости цилиндров
паровые поршни получяют возвратно-поступательное движе¬
ние, 'которое прц jiocp/дстве штоков сообщается гидравличе¬
ским поршням. Насое/осуществляет всасывание и нагнетание
в каждой из четырех рабочих полостей гидравлических ци-
линдров. При этом поршни спаренных цилиндров движутся с ин¬
тервалом в половину рабочего хода, что обеспечивает наиболь¬
шую равномерность подачи2.
Конструкция вертикального прямодействующего парового
насоса симплекс типа «Вира» показана на рис. 20.
Гидравлическая часть насоса представляет собой одноци¬
линдровый поршнево^- насос двойного двукратного действия.
Цилиндр 12„л-асосй'отлит за одно целое с клапанной короб¬
кой 21. Д-аждая полость цилиндра имеет свои клапаны. На ри¬
сунке в разрезе показаны всасывающие В и нагнетательные Я
плоские клапаны нижней полости цилиндра. Клапаны прижи¬
маются к клапанным решеткам 18 пружинами, опирающимися
на тарелки 20 и закрепленными в верхних частях шпинделей 19.
Гидравлический поршень 14 — сборный из двух половин
с четырьмя уплотнительными кольцами 15\ обычно он изго¬
товляется из текстолита или эбонита.
Место выхода поршневого штока 13 из гидравлического ци¬
линдра уплотняется сальником 11, который набивается пень¬
ковым просаленным шнуром и поджимается втулкой. В ниж¬
ней части гидравлического цилиндра имеются отверстия, закры¬
ваемые резьбовыми спускными пробками 17.
1 Наименование фирм, специализирующихся на выпуске насосов.
2 См. далее: исследование равномерности подачи поршневых насосов.
52
Рис. 19. Прямодействующий горизонтальный двухцилиндровый насос ПНП (типа «Вортингтон»)
СЛ
Рис. 20. Прямодействующий верти¬
кальный одноцилиндровый насос
ПНП (типа «Вира»).
54
Приводная часть насоса представляет собой одноцилиндро¬
вую вертикальную паровую поршневую машину, состоящую из
парового цилиндра 2, который закрывается крышкой 1 и тепло¬
вой изоляцией 3. Внутри цилиндра перемещается паровой пор¬
шень 5 с уплотнительными кольцами 6, закрепленный гайкой 4
на поршневом штоке 9. Штоки парового и гидравлического
поршней соединены резьбовой муфтой 10 и представляют одну
кинематическую связь. Место выхода штока из парового ци¬
линдра уплотнено сальниковой набивкой 7 с поджимной
крышкой 8.
К корпусу парового цилиндра крепится золотниковая ко¬
робка 24, в которой размещаются два золотника:
главный — цилиндрический, который распределяет пар по
рабочим полостям парового цилиндра и перемещается паром
в направлении, поперечном движению поршней;
вспомогательный -— плоский, который движется по плоскому
срезу цилиндрического золотника золотниковой тягой 23 от по¬
воротного рычага 22, шарнирно соединенного с муфтой штоков.
Плоский золотник движется параллельно движению порш¬
ней и распределяет пар по сторонам золотниковой коробки
с целью передвижения цилиндрического золотника и отсекает
55
Рис. 21. Ручной поршневой насос двукратного действия типа HP.
поступление свежего пара в рабочие полости парового ци¬
линдра. Насос установлен на раме 16.
В отличие от прямодействующего насоса типа «Вортингтон»,
который работает без расширения пара, в насосе типа «Вира»
используется расширение пара, и поэтому он является более
экономичным.
Для подкачивания небольших количеств воды, топлива и
масла на судах часто устанавливают ручные поршневые насосы.
Конструкция ручного поршневого одноцилиндрового насоса дву¬
кратного действия типа HP показана на рис. 21.
Таблица 3
Основные данные насосов типа HP по ГОСТ 4683—65
Типо¬
раз¬
мер
насоса
Диаметр
цилиндра
Ход
пор¬
шня
Число двойных
ходов в минуту
Подача,
л/мин
Манометрический
напор нагнетания,
м вод. ст.
Вакуумметрическая
высота всасывания,
м вод. ст.
Теоретическая мас¬
са, кг
при работе
с напором
при работе
на слив
при работе
с напором
при работе
на слив
мм
НР-20
65
50
48
80
12
20
16
НР-25
78
64
40
70
20
35
30
5
26
НР-40
100
86
28
52
35
65
38
Чугунный корпус 1 отлит совместно с патрубками 8 и 15.
К корпусу на фланцах присоединены две клапанные коробки
со всасывающими 12 и нагнетательными 13 клапанами.
В горизонтально расположенном цилиндре 10 перемещается
фигурный шток 9, к которому по сторонам прикреплены два
стальных поршня 7 с уплотнительными кольцами или кожаными
манжетами. Поршни начинают перемещаться при повороте де¬
ревянной рукоятки 2, соединенной со стержнем 3. Стержень
сидит на правом конце приводного вала 4, левый конец кото¬
рого имеет приливы; между приливами размещается ролик 14,
входящий в прорезь штока 9. Выход приводного валика уплот¬
нен сальником 5. Жидкость всасывается из полостей И и нагне¬
тается при каждом перемещении поршней поочередно. В ци¬
линдре имеются спускные пробки 6.
В соответствии с ГОСТ 4683—65 насосы типа HP предназ¬
начаются для перекачивания пресной и морской воды с темпе¬
ратурой до 100° С, а также светлых и темных нефтепродуктов
условной вязкости до 110° Е и температурой не выше 65° С.
Насосы изготовляют трех типоразмеров: HP-20, НР-25 и НР-40.
Их данные приведены в табл. 3.
Производительность и вакуумметрическая высота всасывания
указаны при работе насоса на воде с температурой 30° С и тем¬
56
ных нефтепродуктов условной вязкостью 30° Е. При перекачи¬
вании воды, имеющей температуру выше 70° С, и горячих неф¬
тепродуктов насосы HP могут работать с подпором.
Число двойных ходов и производительности насосов в таб¬
лице указаны для 5—10-минутного режима работы. При уси¬
лии на рукоятке 12 кгс создаваемый напор не превышает
10 м вод. ст. для насоса НР-40 и 20 м вод. ст. для насосов НР-20
и НР-25.
§ 17. ОСНОВЫ ТЕОРИИ И РАСЧЕТА ПОРШНЕВЫХ НАСОСОВ.
ГРАФИКИ ПОДАЧ И СКОРОСТЕЙ
Производительность насоса или количество подаваемой им
жидкости в каждый данный момент определяется по формуле
Qx = Fc, (108)
где F — площадь поршня, м2; с — скорость поршня, м/с.
Так как F для данного насоса величина постоянная, то,
очевидно, что количество подаваемой жидкости будет зависеть
от скорости поршня с. Из курса технической механики известно,
что мгновенная скорость поршня в кривошипно-шатунном ме¬
ханизме при бесконечно длинном шатуне
с = rco sin ф. (109)
Полученное выражение показывает, что при постоянной
угловой скорости со, т. е. при постоянной частоте вращения ко¬
ленчатого вала, скорость поршня зависит от тригонометриче¬
ской функции угла поворота мотыля ср. Иначе говоря, с будет
изменяться по закону синуса и, следовательно, производитель¬
ность также будет изменяться по тому же закону:
QT = .Fc = .F/-cosin<p. (НО)
Графически зависимость изобразится на рис. 22 в виде си¬
нусоиды. Кривые в одном масштабе будут показывать измене¬
ние скорости жидкости, а в другом масштабе — изменение
подаваемого объема жидкости. Поэтому такие синусоиды на¬
зываются графиками объемов и скоростей.
Рассмотрим график объемов и скоростей для поршневого
насоса однократного действия. На рис. 22, а изображена сину¬
соида ABC, построенная на развернутой окружности, описывае¬
мой мотылем коленчатого вала. Радиус мотыля г в произволь¬
ном масштабе принят равным площади поршня F. Площадь,
ограниченная кривой ABC, в определенном масштабе показы¬
вает теоретический объем жидкости, подаваемой насосом за
один оборот коленчатого вала. Этот объем соответствует пере¬
мещению поршня вправо на величину 2r = S при повороте криво¬
шипа от нуля до 180° и, следовательно, равен 2Fr = FS.
57
Рис. 22. Графики объемов и скоростей поршневых насосов: а — однократ¬
ного; б — двукратного; в — трехкратного; г — четырехкратного действия.
58
При повороте мотыля на угол <р от 180 до 360° поршень бу¬
дет двигаться влево и осуществлять всасывание, т. е. подачи
жидкости не будет.
Возьмем идеальный поршневой насос, т. е. такой, у кото¬
рого жидкость подается равномерно с постоянной скоростью
на всем протяжении хода поршня. График объемов и скоростей
такого насоса за один оборот коленчатого вала будет иметь
форму прямоугольника ADEK (рис. 22, а). Высота уср этого
прямоугольника в определенном масштабе выражает среднюю
скорость подаваемой жидкости, а его площадь F в другом мас¬
штабе — производительность идеального насоса за один оборот
вала. При этом производительность у реального и идеального
насосов одинакова, т. е. пл. АВСА = пл. AKEDA.
Отношение максимальной скорости сШах жидкости, подавае¬
мой реальным насосом, и соответствующей его максимальной
подаче Qmax, к средней скорости жидкости сср, соответствующей
средней подаче Qcp, которую имел бы идеальный насос равной
производительности, называется степенью неравномерности по¬
дачи поршневого насоса:
g __ cmax Qmax (111)
Ccp Qcp
Из графика следует, что cmax=F (наибольшая высота сину¬
соиды). Для нахождения сср = г/ср приравниваем площади, огра¬
ниченные синусоидой и прямоугольником: пл. ABCA = 2Fr\
пл. AKEDA=2nrycp.
По условию 2Fr = 2nrycp, поэтому
2 Fr' F /110N
Уср~ 2nr ~ л Сср- ( }
Степень неравномерности подачи поршневого насоса однократ¬
ного действия
61 = -^- = -^- = я=3,14, (113)
‘'Ср
п
т. е. наибольшая скорость, а значит, и максимальная подача
насоса в 3,14 больше его средних скорости и подачи.
Таким образом, всасывание в клапанную коробку насоса
и подача из нее протекают неравномерно. Это вызывает возник¬
новение инерционных сил, появляющихся в моменты наиболь¬
ших ускорений поршня, которые определяются как производные
от скорости:
dc driо sin® dsin®' ,,,
а = i- = rco — = гсо cos ср, (Н4)
dt dt dt
так как d<p/dt = a.
59
При ф = 0 с = 0, а = гсо2; при ф = 90° с = гсо, а = 0, при ф=180° с = О,
а = Г(о2, т. е. ускорение достигает максимума при крайних поло¬
жениях поршня. Сила инерции жидкости у поршня пропорцио¬
нальна квадрату угловой скорости коленчатого вала. С увели¬
чением частоты вращения инерционные силы могут нарушить
сплошность потока, вызвать гидравлические удары, приводящие
к разрушению насоса и трубопроводов. Наиболее эффективным
способом уменьшения степени неравномерности подачи является
увеличение кратности действия насоса.
Рассмотрим график поршневого насоса двукратного действия
на рис. 22, б и определим его 6ц. В соответствии с доказанным
площади двух синусоид равны 4Fr. Приравняем площади сину¬
соид и прямоугольника:
AFr = 2лп/ср, (115)
откуда
4 Fr 2 F
Уср г, ^ср'
2я г п
Степень неравномерности подачи поршневого насоса дву¬
кратного действия будет равна
g Cma^ = _F_ = JL=i 57 (116)
1 Сср 2 F 2
п
т. е. наибольшая подача этого насоса больше его средней по¬
дачи на 57%. Следовательно, насос двукратного действия ра¬
ботает значительно равномернее насоса однократного действия.
Аналогичными рассуждениями можно показать, что у на¬
сосов трехкратного и четырехкратного действия степени нерав¬
номерности подач 6ш= 1,045; Siv=l,l. Значит, насос четырех¬
кратного действия осуществляет менее равномерную подачу,
чем насос трехкратного действия. При этом следует иметь
в виду, что насосы с нечетной кратностью действия выше еди¬
ницы имеют более равномерную подачу, чем насосы с четной
кратностью.
Следовательно, дальнейшее увеличение кратности действия
поршневого насоса не всегда приводит к выравниванию подачи
жидкости. Увеличение кратности насоса усложняет насосную
установку и приводит к увеличению ее габаритов. Для вырав¬
нивания подачи применяют практически более действенное
средство — установку воздушных колпаков.
На рис. 23 показана схема установки насоса с воздушными
колпаками на нагнетательном и всасывающем трубопроводах.
Сущность действия воздушного колпака на нагнетательной ли¬
нии заключается в том, что в тот период, когда насос осущест¬
вляет увеличенную подачу, часть жидкости поступает в колпак
и сжимает находящийся там воздух. При уменьшенной подаче
жидкости воздух расширяется и вытесняет поступившую в кол¬
пак жидкость в нагнетательный трубопровод.
Следовательно, воздушный колпак является своего рода
кратковременным аккумулятором, в который поступает часть
жидкости. В период работы насоса количество воздуха во вса¬
сывающем колпаке воз¬
растает в связи с выделе¬
нием воздуха и газов из
перекачиваемой жидко¬
сти. Поэтому уровень
жидкости в колпаке бу¬
дет постоянно снижаться
и в какой-то момент не
обеспечит равномерности
подачи жидкости к на¬
сосу. В нагнетательном
колпаке, наоборот, коли¬
чество воздуха постоянно
убывает вследствие того,
что воздух растворяется
в жидкости, соприкасаю¬
щейся с ним под давле¬
нием. Поэтому объем воз¬
духа в колпаке будет
уменьшаться, степень не¬
равномерности давления
возрастать, что приведет
к гидравлическим ударам
и увеличению инерцион¬
ных сил. Во избежание
указанных явлений воз¬
дух из всасывающего
колпака должен стравли¬
ваться, а в нагнетательный колпак добавляться. Для этого
у колпака имеются воздушные краны, а у насосов — так назы¬
ваемые сапуны.
Сапун представляет собой невозвратный клапан, который
может устанавливаться на клапанной коробке насоса и сооб¬
щать при всасывании рабочие полости цилиндра с наружным
воздухом.
Объемная производительность поршневого насоса Q, м3/ч,
связана с его конструктивными данными формулой
Q = —Snkj]v- 60, (117)
Рис. 23. Схема установки воздушных кол¬
паков на трубопроводах: а — всасывающем;
б — нагнетательном.
61
откуда диаметр гидравлического цилиндра насоса Д-, м,
г
60jiSnkr\y ’
(118)
где 5 — ход поршня, м; п — частота вращения вала или двой¬
ных ходов поршня в минуту; k — коэффициент, учитывающий
кратность действия насоса; т}у — объемный КПД, или коэф¬
фициент подачи; г]У зависит от величины утечки жидкости через
неплотности и зазоры, наличия воздуха в цилиндре, потери
жидкости в результате запаздывания закрытия клапанов; y\v сни¬
жается с увеличением вязкости, частоты вращения и напора.
Для приводных насосов r\v = 0,804-0,95 (нижние пределы —
для насосов малой производительности ^20 м3/ч, а верхние
пределы — для насосов большой производительности ^60м3/ч).
Для прямодействующих насосов г|у = 0,924-0,95 (при любых
производительностях), ручных поршневых насосов т]у = 0,854-
4-0,90, новых поршневых насосов, находящихся в хорошем тех¬
ническом состоянии, т]у = 0,974-0,99, сильно изношенных насо¬
сов г)у = 0,44-0,5. При перекачивании вязких жидкостей значе¬
ние г|у понижается на 5—10% номинального.
При определении хода поршня S задаются отношениями:
Значения г|) в приводных насосах выбирают в зависимости от
его быстроходности. Увеличение хода 5 связано с увеличением
радиуса кривошипа г и возрастанием инерционных сил. По¬
этому, чем быстроходнее насос, тем меньше ход поршня:
для тихоходных насосов (при « = 404-80 об/мин) г[/ = 2,54-
4-2,0, нормальных насосов (при « = 804-150 об/мин) г|/' = 2,04-
4-1,2, быстроходных насосов (при п—1504-350 об/мин) г|/" =
= 1,24-0,5, прямодействующих насосов1 (при « = 254-130 дв.
ход/мин) ^ = 17,54-1,0.
Быстроходность насоса является важным фактором, который
влияет не только на КПД насоса, но и на его всасывание и
нагнетание, и определяется средней скоростью поршня:
с =JS± = Jl. (120)
т 60 30
Средняя скорость поршня приводных насосов: малых (при
Q^20 м3/ч) ст = 0,24-0,5 м/с; средних (при Q = 204-60 м3/ч)
ст = 0,54-0,9 м/с; больших (при 60 м3/ч) ст=14-2 м/с.
Средняя скорость прямодействующих насосов ст = 0,24-
4-0,7 м/с.
JL- = г|з; S = г|Юг.
и г
(119)
1 См. Справочник судового механика. Л., Транспорт, 1965.
62
Число двойных ходов поршня в минуту
П = J30p^ (121)
У прямодействующих насосов диаметр парового цилиндра
Dп при известном диаметре гидравлического цилиндра опреде¬
ляется с учетом условия, что при установившемся движении
сила, действующая на паровой поршень, равна силе, действую¬
щей на гидравлический поршень, суммированной с силами тре-
пня в сальниках штоков, уплотнениях поршней, золотниках, ры¬
чагах, шарнирах и др. и учитываемой механическим КПД г]м.
Указанное условие выразится уравнением
ЧмРп = Рг- (122)
Сила Р„, действующая на паровой поршень (средняя за
ход):
-(ар!~ Pt), (123)
где а — коэффициент, зависящий от степени впуска пара; р\,
Рг— давление соответственно свежего и отработавшего пара.
Для насосов типа «Вортингтон», работающих без расшире¬
ния пара, а=1. Сила, действующая на гидравлический поршень,
nDz
Pr = --LPH, (124)
где р-—плотность перекачиваемой жидкости; Я■—манометри¬
ческий напор, развиваемый в цилиндре насоса и равный алге¬
браической сумме напоров всасывания и нагнетания.
Подставим значения Р„ и Рг в уравнение (122):
лО^ лВ1
—(Pi—Р2)'Пм = —— pH, (125)
где т)м — механический КПД насоса, обычно г|м = 0,75-^0,85.
Диаметр парового цилиндра насоса
Dn = Dr]/~ — gP, (126)
V (Pi — Рг) Лм
Диаметр d всасывающих и нагнетательных патрубков насоса
находим из уравнения
(127)
3600 4 4 '
откуда
d= 1/ - 4Q м, (127а)
V ЗбООяс v '
где с — средняя скорость жидкости в трубе, м/с.
63
Выбирая скорость, следует иметь в виду, что в случае уве¬
личения с уменьшаются диаметры труб, но повышаются потерн
напора на гидравлические сопротивления в трубопроводах, сни¬
жаются геометрические высоты всасывания и нагнетания, па¬
дает КПД насоса и возрастает мощность, затрачиваемая на при¬
вод. С другой стороны, уменьшение с приводит к увеличению
диаметров трубопроводов, массы, габаритов и стоимости насос¬
ной установки. Наивыгоднейшая скорость жидкости находится
в следующих пределах:
во всасывающих трубах с\с = 0,75ч-2,0 м/с — для воды и
с"вс = 0,6-^-0,7 м/с — для вязких жидкостей;
в нагнетательных трубах — с'н= 1,5-^2,5 м/с —для воды и
с"вс= l.O-f-1,5 м/с — для вязких жидкостей.
Внутренняя или индикаторная мощность N{, кВт, потребляе¬
мая поршневым насосом однократного действия,
N{= mm? ’ (128)
60 • 102Г);
pi — среднее давление в цилиндре, кгс/см2.
§ 18. ПРАВИЛА ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
ПОРШНЕВЫХ НАСОСОВ
При эксплуатации поршневых насосов следует руководство¬
ваться «Правилами обслуживания вспомогательных механизмов
и ухода за ними» 1 и фирменными или заводскими инструк¬
циями.
Перед пуском производят осмотр механизма и, если
насос приводится в действие паровой машиной, у прямодей¬
ствующих насосов нужно прогреть паровую машину. У привод¬
ного механизма полагается проверить наличие масла в коробках
передач и подшипниках и в случае необходимости долить масло
до отметки на маслоуказателе. Большое количество масла вы¬
зывает перегрев передач.
Следует убедиться в том, что емкости, для которых должен
работать насос, подготовлены к приему перекачиваемой жид¬
кости, и жидкость может беспрепятственно двигаться к прием¬
ному отростку всасывающего трубопровода. После этого откры¬
вают клапаны на всасывающем и нагнетательном патрубках на¬
соса и на трубопроводах. У насоса проверяют плотность набивки
сальников на поршневых штоках и не слишком ли туго они за¬
тянуты. Перед пуском необходимо провернуть вручную меха¬
низм не менее чем на один рабочий оборот или ход и убедиться
в том, что вращению ничто не препятствует, проверить правиль¬
ность открытия отливных клапанов. Пуск при закрытых клапа¬
1 Составлены институтом «Гипрорыбфлот» и утверждены МРХ СССР 27
декабря 1973 г. (Л., Транспорт, 1975).
нах может вызвать разрыв корпуса клапанной коробки, цилин¬
дров н трубопроводов в результате гидравлического удара.
При каждом пуске насоса следует проверить отсут¬
ствие заедания перепускного или предохранительного клапана
насоса нагнетательной полости. Пуск механизма надо произ¬
водить плавно, без рывков, переходя от малых ходов к номи¬
нальным. После того как насос начнет работать, устанавливают
заданный режим, руководствуясь показаниями контрольно-из-
мерительных приборов. Регулирование производительности и на¬
пора у приводных насосов осуществляется изменением частоты
вращения двигателя, а у прямодействующих насосов — измене¬
нием числа его двойных ходов. В случаях, когда скорость при¬
водного двигателя насоса не регулируется, производительность
меняют путем изменения величины открытия клапана для пере¬
пуска части жидкости из нагнетательной полости насоса во вса¬
сывающую.
При обслуживании насоса вовремя действия
необходимо следить за работой насоса и привода и своевре¬
менно устанавливать такой режим работы, какой требуют усло¬
вия эксплуатации энергетической установки и общесудовых
систем. Уход за приводным механизмом заключается в наблю¬
дении за уровнем масла в передачах и подшипниках и его
температурой. Уровень масла в коробках передач можно кон¬
тролировать только при остановке насоса. Масло можно нагре¬
вать в пределах температур 60—80° С, допускается повышение
температуры масла до 90° С. У поршневых насосов для смазки
подшипников используют масло машинное или индустриальное.
Смена масла в передачах производится в сроки, предусмотрен¬
ные заводской инструкцией. При этом масло должно быть чи¬
стым от механических примесей. Если в отработавшем масле
будут обнаружены металлические мелкие частицы, то перед за¬
правкой маслом следует промыть коробку передач бензином,
керосином или жидким маслом.
При кольцевой смазке подшипников приводного вала надо
периодически наблюдать за уровнем масла. После 8—10 ч ра¬
боты в масленки добавляют масло.
Если при пуске или во время работы возникают неисправно¬
сти, причины которых сразу определить нельзя, то вначале сле¬
дует выявить причины неисправностей вне насоса (в емкостях,
трубопроводах и арматуре) и лишь после этого обследовать
насос.
Рассмотрим некоторые, наиболее часто встречающиеся неис¬
правности 1 при работе поршневых насосов.
Насос не перекачивает жидкость. Это можно объ¬
яснить следующим:
1 Здесь и далее в скобках указываются способы устранения выявленных
дефектов.
3 А. Е. Богомольный 65
— не открыты клапаны на всасывающем или нагнетатель¬
ном трубопроводе (проверить открытие клапанов);
— сильно загрязнены кингстоны, фильтры или сетки на вса¬
сывающем трубопроводе (продуть кингстоны, очистить фильтры
и сетки);
— на приемной распределительной клапанной коробке не
прикрыт другой клапан из пустой емкости (проверить положе¬
ние клапанов на распределительной коробке);
— уровень всасываемой жидкости понизился ниже уровня
приемного отростка всасывающего трубопровода (остановить
насос или перевести его на другую емкость);
— всасывающие клапаны не садятся на место из-за попав¬
ших под них посторонних тел (прочистить клапаны и устранить
зависание).
Насос при работе не дает полной производи¬
тельности или не создает полного напора. Воз¬
можные причины таких неисправностей следующие:
— клапаны на всасывающем и нагнетательном трубопрово¬
дах открыты не полностью (проверить величину открытия кла¬
панов) ;
— на всасывающей линии трубопровода загрязнены филь¬
тры, приемные сетки, приемные кингстоны или клапаны (очи¬
стить фильтры и сетки, продуть кингстоны и клапаны);
— неплотности в соединениях всасывающего трубопро¬
вода, через которые подсасывается воздух (устранить неплот¬
ности, поставив новый прокладочный материал и обжав соеди¬
нения) ;
— утечка перекачиваемой жидкости через сальники или не¬
плотности в соединениях нагнетательного трубопровода (сме¬
нить набивку сальников, устранить неплотности в нагнетатель¬
ном трубопроводе, сменив прокладки и обжав соединения);
— значительный перепуск перекачиваемой жидкости через
предохранительный клапан из нагнетательной полости во вса¬
сывающую (проверить предохранительный клапан, восстановить
герметичность, сменить или подтянуть пружину клапана);
— повышенная вязкость перекачиваемой жидкости: масла,
мазута, рыбьего жира и др. (включить подогрев перекачивае¬
мой жидкости и повысить ее температуру);
— невозвратный клапан в приемном отростке всасывающего
трубопровода неплотно садится или не полностью закрывается
(устранить заедание или притереть клапан).
Поршневые насосы по сравнению с насосами других типов
имеют следующие основные достоинства:
— способны создавать высокие постоянные напоры нагнета¬
ния, до тысяч м вод. ст.;
■— способны к «сухому» всасыванию, т. е. насос не требует
предварительного заполнения всасывающего трубопровода пе¬
рекачиваемой жидкостью;
66
— высокий объемный КПД (коэффициентподачи),значение
которого достигает 0,99 (особенно у прямодействующих на¬
сосов) ;
— при регулировании производительности изменением ча¬
стоты вращения или двойных ходов насоса напор, создаваемый
им, практически не меняется. Это позволяет применять поршне¬
вые (плунжерные) насосы в качестве топливных и питательных
насосов высокого давления в двигателях внутреннего сгорания
и паровых судовых котлах.
Основные недостатки поршневых насосов следующие:
— неравномерная, пульсирующая подача жидкости, сопро¬
вождающаяся инерционными усилиями, требующими установки
специальных устройств — воздушных колпаков;
— значительные масса и габариты, особенно возрастающие
при большой производительности из-за тихоходности насосов;
■— наличие клапанов, влияющих на КПД насоса и являю¬
щихся причиной большинства эксплуатационных неполадок во
время работы насоса;
— большая чувствительность насоса к чистоте перекачивае¬
мой жидкости, так как если в ней имеются даже незначительные
механические примеси, то это приводит к задиру стенок гидрав¬
лических цилиндров и нарушению герметичности клапанов.
Поршневые насосы широко применяют на современных су¬
дах в тех случаях, когда требуются высокие постоянные напоры
и хорошая всасываемость при сравнительно небольшой произ¬
водительности.
Прямодействующие насосы имеют повышенный расход пара
[30—50 кг/(л. с.-ч)]. Как указывалось выше, эти насосы ис¬
пользуются на рыбопромысловых судах с дизельными установ¬
ками в качестве питательных и топливных насосов вспомога¬
тельных парогенераторов.
Поршневые приводные насосы применяют на теплоходах
в основном в качестве балластных, осушительных и пожарных.
Поршневые насосы многократного действия используют в си¬
стеме гидрофицированных палубных механизмов.
Ручные поршневые насосы являются резервными для прока¬
чивания топлива и смазки в дизелях и перекачивании неболь¬
ших количеств воды и топлива для бытовых нужд.
Глава IV
РОТАЦИОННЫЕ НАСОСЫ
Ротационные, или роторные, насосы, как и поршневые, вхо¬
дят в группу объемных насосов. В отличие от поршневых у ро¬
тационных насосов изменение объема, обеспечивающее созда¬
67
ние разности давлений при всасывании и нагнетании жидкости,
осуществляется роторами, совершающими вращательное дви¬
жение в корпусе насоса.
В зависимости от конструкции роторов, имеющих различную
форму тел вращения, ротационные насосы можно разделить на
три основных вида:
1) роторно-зубчатые, называемые шестеренными, у которых
изменение объема осуществляется зубьями зубчатых колес —
шестерен;
2) роторно-винтовые, обеспечивающие изменение объема по¬
средством винтовой резьбы (нарезки);
3) роторно-пластинчатые с изменением объема между пла¬
стинами-лопатками (шиберами).
§ 19. ШЕСТЕРЕННЫЕ НАСОСЫ
Шестеренные насосы различаются по следующему ряду при¬
знаков:
— по числу шестерен — роторов: двухшестеренные, трехше¬
стеренные, многошестеренные;
—- по характеру зацепления: внешнего зацепления, внутрен¬
него зацепления;
— по Форме зубьев: прямозубые, косозубые, шевронные, спи¬
ральные;
— по характеру зацепления: эвольвентные, циклоидальные,
трапецеидальные;
— по направлению вращения: нереверсивные — с постоян¬
ным направлением вращения, реверсивные — с двусторонним
вращением при постоянном направлении подачи жидкости;
— по поточности: однопоточные, двухпоточные, многопо¬
точные. '>
Наибольшее распространение на морских рыбопромысло¬
вых судах получил двухроторный нереверсивный шестеренный
насос с внешним зацеплением типа РЗ, изображенный на
рис. 24.
Насос состоит из корпуса 4, двух роторов: ведущего 5 и ве¬
домого 3, которые представляют собой цилиндрические шестер¬
ни, изготовленные за одно целое с валами. Подшипниками ро¬
торов служат бронзовые втулки 2, запрессованные в крышку 1
и стойку 6 и зафиксированные от поворота штифтами. Выходной
конец ведущего вала имеет сальниковое уплотнение. Оно со¬
стоит из резиновых манжет 7, которые обжимают вал с натя¬
гом, упорного кольца 9 и втулки 8. В нижней части стойки 6
находится сборник для жидкости, просачивающейся из саль¬
ника, и отверстие для ее спуска, закрываемое пробкой 10.
В крышке 1 смонтирован предохранительно-перепускной кла¬
пан 11, прижимаемый пружиной 12\ другим концом пружина
упирается в шайбу 14.
68
Рис. 24. Шестеренный насос типа РЗ.
Внутренняя полость клапана закрывается резьбовой втул¬
кой 13, через которую проходит регулировочный клапанный
винт 15. Колпачок 16 предохраняет полость клапана 11 от за¬
сасывания воздуха и вытекания жидкости по резьбе регулиро¬
вочного винта. Для слива жидкости из насоса в нижней части
корпуса имеется отверстие, закрытое пробкой 17.
Действие насоса ясно из поперечного разреза А—Б. При
вращении шестерен в направлениях, указанных стрелками,
Рис. 25. Шестеренный насос высокого давления типа НД-160
с автоматической компенсацией торцевого зазора.
жидкость, находящаяся во всасывающем патрубке, заполняет
объемы впадин между зубьями и переносится по периметру кор¬
пуса насоса к нагнетательному патрубку. Зубья шестерен, вы¬
ходя из зацепления, освобождают объемы впадин, которые
заполняются жидкостью на стороне всасывания. Зубья, снова
входящие в зацепление, выжимают жидкость из объема впа¬
дин на стороне нагнетания. Предотвращение обратного движе¬
ния жидкости из нагнетательной полости во всасывающую обес¬
печивается малыми зазорами между зубьями и внутренней по¬
верхностью корпуса и крышек (~0,02—0,06 мм).
70
В современных шестеренных насосах, работающих при дав¬
лениях нагнетания свыше 100 кгс/см2, особое значение имеют
торцовые уплотнения.
На рис. 25 изображен шестеренный насос типа НД-160 с ак¬
сиальной автоматической компенсацией торцевых зазоров, изго¬
товляемый в ГДР. Он рассчитан на постоянное рабочее давле¬
ние 160 кгс/см2, которое может достигать 200—250 кгс/см2.
Насос работает следующим образом.
Насос состоит из корпуса 1 и крышек 5 и 8, изготовленных
из высококачественного
сплава легких металлов.
В корпусе расположены че¬
тыре аксиально подвижных
втулки 6, которые образуют
подшипники скольжения
для пары шестерен 2 и 4,
изготовленных из высоко¬
качественных сталей. Во
время работы насоса торце¬
вые стороны втулок 6 на¬
гружаются рабочим давле¬
нием, в результате чего
скользящие плоскости вту¬
лок прижимаются к торце¬
вым сторонам шестерен
(показано стрелками 3).
Привод насоса осуще¬
ствляется через ведущий
вал 9 со шлицами. Сливной
невозвратный клапан 7
способствует накоплению
масла в подшипниках, что
обеспечивает необходимую вязкость масла при пуске в усло¬
виях пониженной температуры окружающей среды.
Насосы типа НД-160 изготовляются как однопоточными, так
и с двумя и тремя одинаковыми и различными подачами в диа¬
пазоне частоты вращения 800—2500 об/мин и производитель¬
ности 4—100 л/мин на масле.
Шестеренные насосы, осуществляющие подачу смазочного
масла в систему циркуляционной смазки реверсивных двигате¬
лей внутреннего сгорания и навешенные на двигатель, должны
быть реверсивными, т. е. обеспечивать подачу масла к двига¬
телю независимо от направления вращения его коленчатого
вала. Реверсивный двухроторный шестеренный насос изображен
на рис. 26. Особенностью его устройства является наличие че¬
тырех откидных невозвратных самодействующих клапанов, из
которых клапаны 2 и 10 — всасывающие, а 3 и 9 — нагнета¬
тельные.
Рис. 26. Реверсивный шестеренный насос.
71
Рассмотрим действие насоса при различных направлениях
вращения роторов. В случае вращения ротора 7 по часовой
стрелке ведомая шестерня 13 вращается против часовой стрел¬
ки, и зубья выходят из зацепления слева. Клапан 2 откроется,
и жидкость из канала 1 поступит к роторам насоса. Нагнета¬
ние осуществляется справа через клапан 9 и.канал 8 в нагнета¬
тельный патрубок. Если ведущий ротор вращается против ча¬
совой стрелки, разрежение создается справа, и жидкость всасы¬
вается из канала 11 через приемный клапан 10, а нагнетается
слева через отливной клапан 3 снова в канал 6 и тот же нагне¬
тательный патрубок. При увеличении противодавления масло
перепускается из нагнетательной полости через предохрани-
Рис. 27. Схема запирания жидкости во впадинах шестерен.
тельно-перепускной клапан 5 и кольцевой канал 4 обратно во
всасывающую полость.
Впадины ведомой шестерни имеют радиальные отверстия 14
для разгрузки осей шестерен от давления масла при запирании
жидкости во впадинах. Запиранию жидкости способствует плот¬
ная беззазорная пригонка зубьев при коэффициенте зацепления,
большем единицы.
На рис. 27 показана схема запирания жидкости во впадинах
шестерен.
В положении а зуб нижней шестерни входит в зацепление
н выжимает жидкость из впадины верхней шестерни в нагнета¬
тельную полость. В положении б, при плотном зацеплении, зуб
входит в соприкосновение с неработающим правым профилем.
Объем жидкости, соответствующий заштрихованной части впа¬
дины, оказывается запертым. В положении в зуб давит на ос¬
тавшуюся жидкость, нагрузка на подшипники увеличивается,
а жидкость от давления нагревается. В результате ухудшаются
условия всасывания, так как при выходе зуба из зацепления
давление падает и нагретая жидкость испаряется, увеличиваясь
в объеме.
В показанном на рис. 26 насосе запертая жидкость через от¬
верстия 14 во впадинах и карманы 12 неподвижной оси ведо¬
мой шестерни выжимается в нагнетательную полость через впа¬
Всасы
Нагнетание
72
дины соседних зубьев. Если вал ведомой шестерни вращается,
то разгрузочные канавки можно сделать в торцевых плоскостях
шоковых крышек. В насосах большой производительности запи¬
рание устраняют применением косых и спиральных зубьев. В на¬
сосах с такими зубьями уменьшается пульсация потока и шум.
Заполнению рабочих впадин шестерен насоса могут также
препятствовать развивающиеся при вращении роторов центро¬
бежные силы. Эти силы стремятся выбросить жидкость из впа¬
дин и, следовательно, препятствуют ее заполнению при всасы¬
вании. Для противодействия центробежным силам следует по¬
вышать давление в камере всасывания или снижать частоту
вращения.
Производительность роторно-зубчатого насоса можно опре¬
делить следующим путем. Объем жидкости, теоретически пода¬
ваемой одним зубчатым колесом за
один оборот,
VT = vz, (129)
где v — объем впадины между зубь¬
ями; г — число впадин, равное числу
зубьев одного колеса.
За одну минуту двухроторный на¬
сос подает объем жидкости, м3/мин,
VM = 2 vzti, (130)
где п — частота вращения насоса,
об/мин.
Полученная формула неудобна для
практического пользования вслед¬
ствие трудности определения объема
впадины, особенно при эвольвентном,
или циклоидальном, зацеплении. Пре¬
образуем формулу, выразив производительность через основ¬
ные элементы зубчатого зацепления. С достаточной для прак¬
тики степенью точности можно принять объем зуба равным
объему впадины. Тогда объемы впадин обоих зубчатых колес
насоса можно представить как объем кольцевого цилиндра,
диаметр наружной окружности которого равен диаметру высту¬
пов зубьев, а диаметр внутренней окружности — диаметру осно¬
ваний зубьев. В соответствии со схемой, приведенной на
рис. 28, и ее обозначениями можно написать
2vz = ^-[(dH + 2h'Y-(dH-2hy\b. (131)
Произведем необходимые преобразования
2vz = я (h! + h") (dH + h'~ h") b (132)
Рис. 28. К определению про¬
изводительности шестерен¬
ного насоса.
73
и подставим в уравнение теоретической минутной производи¬
тельности (130):
VM = n (!г' + h.") (da + h'—h") bn. (133)
Принимая h"xh'tth/2 и вводя объемный КПД, получаем фор¬
мулу минутной производительности:
Высота зуба h зависит от модуля зацепления т: 2,2 т.
Тогда объемная часовая производительность насоса, м3/ч,
где рп — давление нагнетания, кгс/см2; г^м — механический КПД
насоса, г)м = 0,80-^0,95; е — коэффициент мощности, зависящий
от вязкости перекачиваемой жидкости,
°Е — вязкость условная при температуре перекачиваемой
жидкости, в градусах Энглера; сш — окружная скорость на на¬
чальной окружности зубьев шестерни, м/с.
Рабочие параметры шестеренных насосов, используемых на
морских судах в основном для перекачивания вязких жидкостей,
находятся в широких пределах: производительность 0,5—
250 м3/ч; напор 20—400 м вод. ст. и частота вращения 400—
5000 об/мин; полная вакуумная высота всасывания 3—6,5 м вод.
ст.; объемный КПД насоса = 0,704-0,85'. Шестеренные на¬
сосы могут быть соединены непосредственно с электродвигате¬
лем, имеют малые массу и габариты, просты в изготовлении
и обслуживании. Из недостатков насосов следует отметить от¬
сутствие сухого всасывания; необходимость соблюдения мини¬
мальных зазоров между зубьями, торцами шестерни и крышкой
корпуса (осевой зазор 0,025—0,03 мм) и между внутренней
стенкой корпуса и головкой зуба (радиальный зазор 0,05—
0,03 мм).
Перед первым пуском насос должен быть заполнен перека¬
чиваемой жидкостью. Не допускается работа насоса всухую.
Жидкость должна быть чистая, так как даже незначительные
V = ndHhbnr\v.
(134)
Q = 601/ = 132ndHbnr\v.
Потребляемая мощность роторно-зубчатого насоса
дг __ Qph-Ю4 Qpa
(135)
е3600-75г)м 27ег)н ’
(136)
(137)
24,2рн
1 У насосов с автоматической компенсацией торцевого зазора т]у =0,92-Ь
4-0,96.
примеси вызывают падение производительности и повреждение
зубьев зацепления.
Если количество всасываемой жидкости уменьшается, необ¬
ходимо проверить все уплотнения и в первую очередь сальник
вала. Болты крышек должны быть надежно затянуты. Ко всем
местам смазки должно подводиться масло. Не допускается экс¬
плуатация насоса при почти закрытом напорном клапане, когда
вся перекачиваемая жидкость переходит из нагнетательной по¬
лости во всасывающую. Предохранительно-перепускной клапан,
снабженный маховичком, при пуске разгружается путем пово¬
рота маховичка вправо. После пуска насоса и окончания регу¬
лирования клапан полностью вводится в действие поворотом
маховичка влево. Если насос не подает жидкость, то причинами
этого могут быть отсутствие жидкости во всасывающем трубо¬
проводе (необходимо корпус насоса и всасывающий трубопро¬
вод заполнить перекачиваемой жидкостью) или сильный износ
зубьев. В последнем случае надо заменить шестерни.
При работе насоса с неполной производительностью и сни¬
жении требуемого напора необходимо проверить:
-— достаточна ли частота вращения;
■— не увеличились ли радиальные и торцевые зазоры;
— не слишком ли высока температура жидкости;
— нет ли подсоса воздуха при всасывании;
— правильно ли отрегулирован предохранительный клапан.
В случае появления сильного шума при работе насоса, виб¬
рации или нагрева подшипников нужно остановить насос и про¬
верить правильность его сборки и центровки.
§ 20. ВИНТОВЫЕ НАСОСЫ
Винтовые насосы можно подразделить по ряду дополнитель¬
ных к основной классификации насосов признаков:
— по числу роторов-винтов: одновинтовые, двухвинтовые,
трехвинтовые и многовинтовые;
— по профилю резьбы винтов: глобоидальные, эвольвент-
ные, циклоидальные и комбинированные (эвольвентно-цикло-
идальные);
— по поточности или стороне всасывания: однопоточные
(с односторонним всасыванием), двухпоточные (с двусторонним
всасыванием);
-— по направлению вращения: реверсивные и нереверсив¬
ные.
Рассмотрим устройство и действие трехвинтового горизон¬
тального однопоточного нереверсивного насоса типа ИМО, изо¬
браженного на рис. 29. Насосы ИМО установлены в качестве
масляных и топливных насосов на промысловых судах РТМ
типа «Атлантик» и перерабатывающих базах типа «Рыбацкая
Слава».
75
Трехроторные винтовые судовые насосы типа ЭМН, выпус¬
каемые отечественной промышленностью, установлены на судах
БМРТ типа «Маяковский» в качестве главных и резервных в си¬
стеме смазки главных двигателей. Конструктивно они сходны
с насосами типа ИМО, устройство которых приведено ниже.
Насос состоит из корпуса 9, в котором вращается ведущий
винт 7, и от него приводятся во вращение два ведомых винта 8.
Рис. 29. Трехвинтовой однопоточный насос типа ИМО.
Винт выполнен за одно целое с валом, выходной конец которого
имеет призматическую шпонку 4 для насадки полумуфты сое¬
динения с приводом насоса. В месте выхода вала установлено
уплотнительное кольцо 5. Корпус с торцов закрыт двумя крыш¬
ками: подшипниковой I и крышкой 3 со стороны выходного
вала. Винты с циклоидальным профилем резьбы вращаются
в радиальных шарикоподшипниках 2 с всасывающей стороны
и на втулках 6 подшипников скольжения со стороны нагне¬
тания.
Винты фиксируются в положении, не допускающем осевого
перемещения. Перекачиваемая жидкость заполняет межрезьбо-
вое пространство и проталкивается в осевом направлении вит¬
ками резьбы, как застопоренная от вращения гайка, от линии
всасывания к линии нагнетания без вихреобразования и пуль¬
сации. Нарезки винтов, находясь в зацеплении, образуют в ме¬
76
стах касания «перегородки», разделяющие рабочую камеру на¬
соса по длине на несколько замкнутых полостей. При вращении
винтов места взаимного касания как бы поступательно переме¬
щаются вдоль оси, не позволяя жидкости завихряться и отделяя
полость нагнетания от полости всасывания для создания напора.
При этом за каждый оборот витки резьбы перемещаются на
один шаг, выполняя одновременно функции вытеснителя и за¬
мыкающего органа объемного насоса. При перемещении жидко¬
сти от ее давления на витки резьбы возникает аксиальное уси¬
лие, направленное в сторону, противоположную направлению
жидкости, и стремящееся сдвинуть винты в сторону всасывания.
Для восприятия и уменьшения аксиального давления преду¬
смотрен осевой канал внутри ведущего винта 7, через который
жидкость из полости нагнетания поступает к дроссельному пор¬
шню 10 с подпятником 11.
Насос снабжен предохранителы-ю-перепускным клапаном (не
попавшим в разрез), который при возрастании давления нагне¬
тания выше допустимого перепускает часть жидкости из полости
нагнетания в полость всасывания.
Технические данные насоса
Номинальное давление, кгс/см2 .... 16 при подаче до 63 м3/ч
10 » » до 12-5 м3/ч
Номинальная чистота вращения, об/мин 750—1450
Температура перекачиваемой жидкос¬
ти, °С До 80
Как следует из рассмотрения принципа действия винтового
насоса, он не может быть выполнен с одним ротором-винтом,
имеющим обычную резьбу, так как в этом случае не будет пере¬
мычек, обеспечивающих отделение стороны нагнетания от вса¬
сывающей и препятствующих вращению жидкости вместе с вин¬
том.
Навешиваемый на главные двигатели реверсивный двухпо¬
точный двухвинтовой насос с двусторонним всасыванием пока¬
зан на рис. 30.
К корпусу крепятся два патрубка: приемный 8 и отливной 1.
Они отделены от рабочей камеры насоса клапанными решет¬
ками с всасывающими 5 и нагнетательными 3 откидными кла¬
панами, имеющими ограничители 2. Ротор насоса представляет
собой винт 4 с двусторонней резьбой, лежащий на двух опор¬
ных шарикоподшипниках и имеющий на правом конце цилин¬
дрическую шестерню 6, приводящую во вращение второй винт
с насаженной на нем другой шестерней (в разрез не попали).
Направление движения жидкости через фильтрующую сетку
7 при определенном направлении вращения ротора показано
сплошными линиями, при изменении вращения — штриховыми.
Следовательно, насос обеспечивает постоянное направление по¬
даваемой жидкости, масла или топлива при изменении направ¬
77
ления вращения коленчатого вала двигателя, от которого осу¬
ществляется привод насоса.
При вращении винтов количество жидкости, заполняющей
впадины винтов, перемещается поступательно на величину од¬
ного шага за один оборот ведущего винта, т. е. расчетная тео¬
ретическая производительность при этом будет равна
q = (F~f)t, (138)
где F и f — соответственно площади поперечного сечения рас-
точек корпуса втулок (колодцев) диаметром D, где вращаются
Рис. 30. Реверсивный винтовой насос с двусторонним всасыванием.
винты, и сечения винтов диаметром d, т. е. разность F—f соста¬
вит так называемое сечение в свету, заполняемое жидкостью;
t ■— шаг винта.
Расчетная производительность Q, м3/мин, при частоте вра¬
щения п будет равна
Q = (F—f)tmv (139)
Ввиду сложности определения площади в свету для вычисления
производительности трехвинтовых стандартных насосов можно
пользоваться эмпирической формулой
Q = ~~(140)
С увеличением числа винтов, обеспечивающих герметичность
путем перекрытия между камерами всасывания и нагнетания,
78
уменьшаются утечки перекачиваемой жидкости и повышается
производительность, ибо значение объемного к.п.д. повышается
от г]у = 0,6Ч-0,7 до т]v = 0,91-^0,96.
Минимальная длина винтов должна быть не менее LB =
= l,25t, при которой обеспечивается перекрытие канала (впа¬
дины) винта. Однако для получения более высоких давлений
нагнетания до 200 кгс/см2 удлинение винтов должно составлять
LB=(6-^8)/. Потребляемая винтовым насосом мощность Na,
кВт, определяется по формуле
ДJ __ Q (Рн Рв) • 104 Q (Рн Рв) (141)
60-102т1мг1У ~ 0,612r]Mr]i/ ’
где рн и рв — соответственно давление нагнетания и всасывания,
кгс/см2; т)м — 0,85-^0,95 — механический к.п.д. насоса.
Перед первым пуском винтовой насос следует заполнить
чистой перекачиваемой жидкостью до нижней кромки всасы¬
вающего патрубка. Несмотря на то что насосы ИМО и эксцен¬
триковые являются самовсасывающими, не следует допускать
длительной работы этих насосов всухую во избежание повы¬
шенного износа и повреждения нарезки винтов. Следует обес¬
печить плотность подсоединения всасывающего трубопровода во
избежание подсоса воздуха. Воздух в насосе приводит к возник¬
новению шума, образованию пены и кавитации.
Перед запуском насоса надо проверить направление враще¬
ния двигателя, которое должно совершаться по стрелке, выби¬
той на корпусе. Клапаны на всасывающей и нагнетательной ли¬
ниях должны быть открыты.
Производительность винтовых насосов изменяется регули¬
рованием частоты вращения двигателя или величины открытия
перепускного клапана на обводной магистрали, соединяющей
нагнетательную линию со всасывающей. Не следует регулиро¬
вать производительность насоса дросселированием жидкости че¬
рез запорный клапан, так как это может привести к поврежде¬
ниям.
При запуске насоса с холодной и вязкой жидкостью может
сработать реле максимального тока вследствие перегрузки элек¬
тродвигателя и он остановится. В этом случае необходимо пол¬
ностью открыть запорные клапаны всасывания, напора и пере¬
пуска и снова запустить двигатель насоса. Когда насос наберет
необходимую частоту вращения, перепускной клапан медленно
прикрывают; по показаниям вакуумметра и манометра регу¬
лируют насос на требуемое давление. Резкое снижение произ¬
водительности может быть вызвано рядом причин:
— неплотностями в соединениях всасывающего трубопро¬
вода и сальниках;
•— износом винтов-роторов;
— неправильной регулировкой пружины перепускного пре¬
дохранительного клапана;
79
— повышенной или пониженной вязкостью перекачиваемой
жидкости;
— высокой температурой перекачиваемой жидкости.
Бинтовые насосы имеют следующие положительные свой¬
ства:
— возможность регулирования производительности насоса
прц постоянном напоре путем изменения частоты вращения ро¬
торов;
— небольшие габариты и массу;
— равномерную подачу жидкости при высоких значениях
объемных КПД;
— сухое всасывание;
— значительное давление нагнетания.
Таким образом, винтовые насосы обладают положительными
качествами объемных насосов без присущих последним недо¬
статков (например, неравномерной подачи жидкости).
Современные винтовые насосы широко применяют на рыбо¬
промысловых судах для перекачивания вязких жидкостей
в энергетических и технологических установках, в качестве мас¬
ляных, топливных, жировых и др., а также для перекачивания
воды и масла в системах охлаждения и гидросистемах палуб¬
ных механизмов.
Винтовые насосы допускают обратимость, т. е. могут быть
использованы в качестве гидродвигателей.
Насосы изготовляются в широком диапазоне технических
параметров: производительность 0,5—250 м3/ч; напор 30—2000 м
вод. ст., частота вращения 750—8000 об/мин.
§ 21. РОТОРНО-ПЛАСТИНЧАТЫЕ НАСОСЫ
Роторно-пластинчатые, или шиберные, насосы, в которых
изменяются объемы, ограниченные двумя соседними пластин¬
ками (шиберами), поверхностями ротора и внутренними стен¬
ками статора (корпуса), явились развитием и усовершенство¬
ванием коловратных насосов, у которых вытеснитель — само
тело вращения («коловорот») был заменен вытеснителем-пла¬
стиной. В. зависимости от числа пластин насосы могут быть,
двухпластинчатыми или многопластинчатыми; по расположению
ротора: эксцентричными или концентричными; по подаче жид¬
кости: постоянной или переменной производительности; по спо¬
собу действия: простого или двойного; по направлению перека¬
чиваемой жидкости: реверсивными или нереверсивными (при
постоянном направлении вращения).
На рис. 31 изображен простейший двухпластинчатый насос
простого действия, нереверсивный, с эксцентричным расположе¬
нием ротора, постоянной производительности.
В корпусе 12 вращается эксцентрично расположенный в ци¬
линдрической камере ротор 13. В пазах ротора свободно сколь¬
80
зят две пластины 14, распираемые пружиной так, что выходя¬
щие из ротора концы пластин прижимаются к стенкам камеры.
При вращении ротора по часовой стрелке пластина повора¬
чивается, поджимаемая пружиной и действием центробежной
силы. За ней в рабочей камере создается разрежение, а перед
ней — давление. В результате из всасывающей трубы 9 через
фильтр 10 воздух и пары жидкости всасываются в разреженную
полость насоса, а затем через
невозвратный клапан 3, меха¬
нический сепаратор 6 и воз¬
душную трубу 7 выходят в ат¬
мосферу.
Насос с патрубками раз¬
мещен в резервуаре 8, кото¬
рый до определенного уровня
заполнен маслом для предот¬
вращения подсасывания воз¬
духа. Уровень масла контро¬
лируют через смотровое сте¬
кло 4. Резервуар осушается
через трубу 2 и верхнее от¬
верстие, закрытое пробкой 5,
или через нижнее отверстие
с пробкой 1. Заполнять резер¬
вуар можно через отверстие
с пробкой 11.
Насос используется на су¬
дах как вакуумный для со¬
здания пониженного давле¬
ния. Его недостаток состоит
в неравномерности подачи
(пульсации). Для выравнива¬
ния подачи применяют на¬
сосы с большим количеством
пластин.
Для обеспечения самовсасывания применяются водокольце¬
вые вакуумные многопластинчатые насосы простого действия,
схема и конструкция которых показана на рис. 32.
В корпусе насоса 3 эксцентрично размещены ротор — вал
и жестко сидящая на валу втулка-ступица 2 с лопатками-пла¬
стинами. При вращении ротора жидкость (вода) отбрасывается
пластинчатыми лопатками к периферии и образует вращаю¬
щийся кольцевой слой 5. Вследствие несжимаемости капельной
жидкости вращающийся кольцевой слой имеет постоянную тол¬
щину и располагается концентрично по отношению к рабочей
цилиндрической камере насоса. Так как ротор установлен экс¬
центрично, пограничный внутренний жидкостный слой вращаю¬
щегося кольца, соприкасаясь с втулкой-ступицей вверху, будет
Рис. 31. Роторный двухпластинчатый
насос.
81
при вращении постепенно отходить от нее с одной стороны
и вновь приближаться с другой. В образующееся при отходе
жидкости разреженное пространство 6 засасывается воздух или
жидкость из окна 1, перегоняется по окружности лопатками-
пластинами и нагнетается в окно 4. Назначение окон будет из¬
меняться при изменении направления вращения ротора: это
видно из сравнения схемы с конструкцией.
а)
Нагнетание
тш
и
ГчЧЧЧЧУЛЧЧ
ш:
Всасывание
Рис. 32. Многопластинчатый водокольцевой насос: а — схема;
б — конструкция.
В рассмотренных роторно-пластинчатых насосах изменение
объема между двумя пластинами-вытеснителями при всасыва¬
нии и нагнетании достигается эксцентричным расположением
ротора. Кроме того, они являются насосами простого (одинар¬
ного) действия, т. е. за один оборот ротора каждая пара пла¬
стин один раз осуществляет прием и подачу жидкости. Недо¬
статок таких насосов — большая нагрузка на ось ротора и пла¬
стины от сил давления жидкости и неравномерность подачи.
Более совершенными можно считать пластинчатые насосы
с концентричным расположением ротора и фасонным профилем
рабочей камеры корпуса. Схема такого насоса двойного дей¬
ствия изображена на рис. 33. В фасонной рабочей камере кор-
82
пуса 6 имеются четыре окна с прорезями: 7 и 3— всасывающие,
4 и 1 — нагнетательные. В роторе 5 имеются пазы, в которых
перемещаются радиально пластины 2. При вращении ротора
пластины прижимаются под действием центробежной силы к
внутренней поверхности рабочей камеры. При вращении ротора
в направлении стрелки со объем между двумя соседними пла¬
стинами при прохождении окон 7 и 3 благодаря фасонному про¬
филю камеры будет увеличиваться, что обеспечит понижение
давления и всасывание жидкости.
Рис. 33. Многопластинчатый насос двойного действия.
У окон 4 и 1 объем будет уменьшаться, давление возрастать
и жидкость будет нагнетаться. Таким образом, за один оборот
ротора каждая пара пластин нагнетает жидкость два раза. По¬
скольку рабочее давление жидкости действует на ротор с диа¬
метрально противоположных сторон (окон 1 и 4), давление жид¬
кости на подшипники ротора будет уравновешиваться. Тео¬
ретическую производительность многопластинчатого насоса
двойного действия без учета объема, занимаемого пластинами,
можно вычислить по следующей формуле:
QT= 120£>nco (r|—rf), (142)
где о — угловая скорость ротора; b — ширина рабочей части
пластины; г2 и гх — соответственно большой и малый радиусы
полуосей статора; г2—п — длина выступающей части пластины;
п — частота вращения.
Мощность насоса определяется по ранее приведенным фор¬
мулам. Общий к.п.д. насоса средней мощности составляет
т]н~0,85.
83
Такой тип насосов применяется в системе гидропривода па¬
лубных механизмов на судах ТПР типа «Грумант» («Эхолот»).
Конструкция многопластинчатого насоса системы «Норвинч»
показана на рис. 34.
Насос состоит из чугунного корпуса 1, закрепленного лапа¬
ми 9 на фундаменте. В корпусе размещена фасонная рабочая
камера двойного действия с правыми 7 и 8 и левыми 11 к 12
рабочими камерами. Ротор 4 имеет десять радиальных пазов,
в которые вставлены стальные пластины 3. При вращении ро¬
тора с пластинами по часовой стрелке через патрубок 5 жид¬
кость всасывается, через патрубок 2•—нагнетается. Правые
Рис. 34. Конструкция многопластинчатого насоса типа «Норвинч».
рабочие камеры могут соединяться поворотом крана-золотника 6
с всасывающим патрубком 5 поочередно или одновременно. Это
позволяет устанавливать работу насоса на режим простого (вы¬
ключив из работы правую камеру 7), или двойного действия
с увеличением производительности вдвое. Насос может обес¬
печить подачу 118 л/мин рабочего масла при давлении
~35-105 Па. Нижние кольцевые каналы 13 и 14 имеют внизу
отверстие, закрытое крышкой 10 для спуска жидкости из
насоса.
Роторно-пластинчатые насосы просты в устройстве, обла¬
дают хорошим всасыванием и малопульсирующей подачей жид¬
кости, компактны, могут выполняться как в одинарном, так и
сдвоенном исполнении (два ротора на одном валу).
Их недостатки — нерегулируемая производительность и срав¬
нительно небольшие давления нагнетания (обычно не более
~64-105 Па (64 кгс/см2). Для нормальной эксплуатации этих
насосов необходимо, чтобы перекачивались чистые минеральные
масла с вязкостью ВУ 2,6-f-3,3°E50 при температуре от -(-10 до
50° С.
84
Глава V
ЛОПАСТНЫЕ НАСОСЫ
Лопастными называются насосы, в которых движение пере¬
качиваемой жидкости осуществляется в результате вращения
лопастей. В зависимости от направления движения жидкости
в насосе различают три основные группы лопастных насосов:
— центробежные (поток жидкости перемещается от центра
к периферии в радиальном направлении);
— осевые или пропеллерные (поток жидкости перемещается
вдоль оси насоса);
— вихревые (поток жидкости перемещается по кольцевой пе¬
риферии вихреобразно).
§ 22. ПРИНЦИП ДЕЙСТВИЯ И КЛАССИФИКАЦИЯ
ЦЕНТРОБЕЖНЫХ НАСОСОВ
Схема центробежного насоса показана на рис. 35. Насос
имеет корпус 1 спиралевидной формы, называемый улиткой, и
ротор, состоящий из рабочего колеса 2 с лопастями, называе¬
мого крылаткой. Рабочее колесо жестко насажено на вал 3.
К корпусу примыкают два
патрубка: всасывающий 4
и нагнетательный 5.
При вращении рабочего
колеса жидкости сообща¬
ется вращательное и ради¬
ально-поступательное дви¬
жение от центра к перифе¬
рии под действием центро¬
бежных сил. При этом
в центре насоса образуется
разрежение, обеспечиваю¬
щее непрерывное поступле¬
ние жидкости через всасы¬
вающий патрубок к центру насоса. Жидкость, пройдя по лопа¬
стям колеса, отбрасывается в направляющий аппарат, пред¬
ставляющий собой спиральный расширяющийся канал-диффу¬
зор. Здесь часть кинетической энергии, сообщенной жидкости
в колесе, снижается и преобразуется в гидродинамическое дав¬
ление. Под действием последнего жидкость через нагнетатель¬
ный патрубок отводится в соответствующий трубопровод. Та¬
ким образом, энергия, сообщаемая жидкости на рабочем ко¬
лесе, зависит от центробежной силы, которая для единицы
массы при вращательном движении равна
85
Рис 35. Схема центробежного насоса.
Следовательно, напор и производительность центробежного
насоса зависят от двух основных величин: радиуса г и квадрата
угловой скорости со колеса.
Напор Н и производительность Q изменяются в центробеж¬
ном насосе одновременно с увеличением радиуса или частоты
вращения. При этом повышаются окружные скорости лопастей
,i \
т-+1
21
Г
Рис. 36. Схемы соединения колес центробежных насосов: а —последо¬
вательная; б — параллельная; в — смешанная; г, д — двустороннее вса¬
сывание.
и = гсо до значений, ограниченных условиями прочности. Пре¬
дельные значения окружных скоростей следующие: для чугун¬
ных колес (литье) и^40 м/с; для стальных « = 3004-5000 м/с
(верхний предел — для легированных сталей). Указанные ог¬
раничения обусловливают сравнительно небольшие напоры, соз¬
даваемые в центробежных насосах. Так, наибольший напор, ко¬
торый может быть получен в одноколесном центробежном на¬
сосе с чугунным колесом, составляет 50 м вод. ст. Для получе¬
ния более высоких напоров (давлений р) применяют многосту¬
пенчатые насосы, в которых на одном валу установлено несколь¬
ко рабочих колес в общем корпусе. Поток жидкости проходит
86
последовательно через все колеса (рис. 36, а). Напор, создавае¬
мый ими, равен сумме напоров отдельных ступеней — колес, при
этом производительность сохраняется постоянной, т. е. равной
подаче одноступенчатого насоса. Если необходимо увеличить
производительность, сохранив постоянство напора, колеса сое¬
диняют параллельно (рис. 36, б). Такие насосы называются мно¬
гопоточными. В насосах смешанного типа соединение колес па¬
раллельно-последовательное (рис. 36, в).
У всех многоколесных насосов скорости жидкости меньше,
чем у одноколесных насосов с одинаковыми параметрами, по¬
этому их к.п.д. выше вследствие снижения гидравлических
потерь.
По способу подвода жидкости различают центробежные на¬
сосы:
— с односторонним подводом жидкости (рис. 36, а—в);
— с двусторонним подводом жидкости (рис. 36, г и д).
Двусторонний подвод жидкости у одноколесных насосов
(рис. 36, г) увеличивает производительность вдвое. При сим¬
метричном двустороннем подводе жидкости (рис. 36, д) у мно¬
гоступенчатых насосов уравновешивается осевое усилие.
По быстроходности, характеризуемой коэффициентом быст¬
роходности /7s или удельной частотой вращения, центробежные
насосы подразделяются на тихоходные (тг8 = 40-ь80 об/мин);
нормальные (ns = 80-ь 150 об/мин); быстроходные (тг8= 150-ь
-т-300 об/мин).
Коэффициент быстроходности определяется в зависимости
от частоты вращения насоса п, его производительности Q, м3/ч,
и напора Н, м ст. жидк., из выражения
ns= Z’fn_XQ .. (143)
3
УН'
Численно коэффициент быстроходности равен частоте вра¬
щения так называемого модельного насоса, потребляющего мощ¬
ность 0,736 кВт и создающего напор 1 м вод. ст. при производи¬
тельности 75 л/с воды.
В зависимости от значения коэффициента быстроходности
изменяются формы рабочих колес (рис. 37, а—д). При увеличе¬
нии tis уменьшается отношение диаметра выходных и входных
кромок лопастей D2/D0. При 7is>300 наиболее экономичны полу-
осевые (диагональные), а при ns>600 — осевые насосы. При
77s<30 поршневые и ротационные насосы будут работать с более
высокими к.п.д.
Коэффициент быстроходности позволяет выбирать для дан¬
ного насоса наиболее рациональные формы рабочего колеса, ко¬
торые при данных параметрах обеспечивают максимальный
КПД.
87
По конструкции направляющего аппарата, в котором кине¬
тическая энергия (скоростной напор) преобразуется в статиче¬
ский напор (давление)-, насосы бывают: улиточные с диффузор-
ным спиральным каналом, турбинные с лопаточными диффузо¬
рами и, комбинированные, в которых установлены лопаточный
и улиточный диффузоры.
По всасывающей способности центробежные насосы подраз¬
деляются на самовсасывающие и несамовсасывающие.
В отличие от поршневых насосов центробежные не имеют су¬
хого всасывания и требуют заполнения всасывающего трубо¬
провода перекачиваемой жидкостью. Насосы, устанавливаемые
(Пs , 05/мин)
Рис. 37. Формы рабочих колес в зависимости от п.
выше уровня всасываемой жидкости, иногда снабжают специ¬
альными устройствами — вакуумными насосами, обеспечиваю¬
щими сухое всасывание.
По конструкции корпуса различают насосы однокорпусные
и секционные, состоящие из ряда секций, соединенных анкер¬
ными связями; по расположению оси ротора: горизонтальные
и вертикальные; по способу соединения с приводом: непосред¬
ственного соединения с валом двигателя и редукторные, соеди¬
няющиеся с валом двигателя посредством редуктора.
§ 23. ОСЕВОЕ УСИЛИЕ И ЯВЛЕНИЕ КАВИТАЦИИ
В ЦЕНТРОБЕЖНЫХ НАСОСАХ
Часть перекачиваемой жидкости из направляющего канала
улитки поступает вследствие зазора между вращающимся ро¬
тором насоса и внутренними стенками корпуса в полости С и В
(рис. 38, а). Так как эта жидкость истекает из направляющего
аппарата насоса, она обладает статическим давлением /?2, более
высоким, чем давление всасывания рВ результате разности
давлений по обе стороны диска рабочего колеса возникает осе¬
вое усилие R, действующее на ротор насоса в сторону всасы¬
вания:
nD?
R = ~{P*-Pi\ (144)
так как на площади диска D2—D1 давление р2 будет одинако¬
вым со стороны всасывания и нагнетания.
В насосах с двусторонним подводом всасываемой жидкости
осевое усилие уравновешивается.
В насосах с односторонним подводом жидкости для восприя¬
тия осевого усилия устанавливают упорные подшипники. Однако
там, где усилия достигают большого значения, должны быть
увеличены и размеры подшипника. Для уменьшения осевого
давления полость за колесом сообщается с всасывающей по¬
лостью посредством отверстий 1, высверливаемых в заднем дис¬
ке колеса у ступицы (рис. 38, б). В полости С за колесом дав¬
ление жидкости снижается. Этому способствует кольцевой вы¬
ступ на колесе с уплотнительным кольцом 2 на корпусе.
Жидкость, проходящая через кольцевой зазор, дросселируется
и давление ее уменьшается. При этом уменьшаются потери
89
Рис. 38. Осевое усилие в центро¬
бежном насосе и его уравновеши¬
вание.
производительности от утечки жидкости из нагнетательной по¬
лости во всасывающую.
На рис. 38, в осевое усилие воспринимается разгрузочным
диском 1 на валу за рабочим колесом. На диск действует жид¬
кость с результативным давлением нагнетания в сторону, об¬
ратную осевому усилию. Протекающая через зазоры жидкость
поступает по каналу 2 в полость всасывания. Разгрузочные дис¬
ки часто применяют в многоступенчатых центробежных насосах,
где осевое усилие при одностороннем подводе жидкости дости¬
гает значительной величины.
При работе центробежных насосов может возникнуть явле¬
ние, называемое кавитацией. Оно наблюдается в случае, когда
давление жидкости во всасывающей полости насоса снижается
настолько, что становится меньше давления вскипания перека¬
чиваемой жидкости при данной температуре.
Пузыри парогазовоздушной смеси попадают вместе с пото¬
ком жидкости в область высоких давлений нагнетания, где про¬
исходит мгновенная конденсация паров. Окружающая жидкость
устремляется в образовавшиеся пустоты, вызывая гидравличе¬
ские удары, шум, вибрацию, снижение производительности и
КПД насоса. Капельки жидкости, ударяясь о металлические по¬
верхности рабочих дисков, лопастей и корпуса насоса приводят
к эрозии материала, т. е. к его механическому разрушению. Од¬
новременно возникает и кавитационная коррозия вследствие
образования микроскопических трещин, в которые проникают
выделившиеся из жидкости пузырьки воздуха и газов.
Таким образом, кавитационный износ является результатом
совместного действия эрозии и коррозии.
Возникновению кавитации способствует наличие острых кро¬
мок, шероховатости стенок, резких поворотов и других мест с по¬
вышенными гидравлическими сопротивлениями.
Кавитация может быть местной и общей. Местная кавита¬
ция возникает только на границах потока с незначительным рас¬
пространением в глубину. При этом разрыва всего потока не
происходит, хотя производительность насоса и снижается. При
общей кавитации образовавшиеся завихрения полностью запол¬
няют все сечения потока. Происходит разрыв потока, прекра¬
щение всасывания.
Для предотвращения кавитации прежде всего должно вы¬
полняться основное условие всасывания: при входе на колесо
давление должно быть больше давления насыщенных паров пе¬
рекачиваемой жидкости.
Кавитацию можно предотвратить следующими способами:
понижением высоты всасывания /гв; уменьшением температуры
перекачиваемой жидкости; устранением подсоса воздуха при
всасывании; снижением числа и величины гидравлических соп¬
ротивлений на всасывании 2/i№; снижением быстроходности на¬
соса; уменьшением шероховатости обработки поверхностей на-
90
coca, соприкасающихся с потоком жидкости, и устранением рез¬
ких переходов и острых углов на пути потока.
Кавитационному разрушению особенно подвержены чугун
и углеродистая сталь. Более стойкими являются оловянистые
бронзы и нержавеющие стали. Повышение кавитационной стой¬
кости достигается облицовкой поверхностей насоса пластмас¬
сами и поверхностным уплотнением металла.
§ 24. УРАВНЕНИЯ ЭЙЛЕРА
При движении жидкости в межлопаточных каналах рабочего
колеса центробежного насоса его частицы совершают три вида
движения: переносное, относительное и абсолютное, подчиняясь
Рис. 39. К выводу уравнений Эйлера: треугольники вход¬
ных и выходных скоростей.
законам теоретической механики. Скорости переносного движе¬
ния и соответствуют окружной скорости рабочего колеса. Отно¬
сительные скорости да участвуют в переносном движении жид¬
кости относительно вращающегося колеса. Абсолютные скоро¬
сти с соответствуют скоростям жидкости относительно непод¬
вижного корпуса и равны геометрической сумме относительной
и переносной скоростей.
Построим треугольники векторов входных и выходных ско¬
ростей потока жидкости при входе на лопасть и выходе с лопа¬
сти колеса. Индексы «1» относятся к входным, индексы «2»—
к выходным векторам скоростей (рис. 39).
Углы а образуются между абсолютными скоростями с и ок¬
ружными и, а углы (3 — между относительными скоростями да
и обратным направлением окружных скоростей и.
91
Абсолютную скорость с можно представить как сумму ок¬
ружной с индексом и и радиальной с индексом г, т. е. с2и и с2г —
соответственно окружные и радиальные составляющие абсолют¬
ной скорости на выходе. Радиусы входных и выходных кромок
лопастей колес обозначаются т\ и г2.
Обозначим m массу жидкости, проходящую за одну секунду
по колесу,
m = А- , (145)
g
где GT — секундная теоретическая массовая производитель¬
ность, кг/с.
На основании закона моментов количеств движения прира¬
щение момента количества движения материальной системы от¬
носительно данной оси за некоторый промежуток времени равно
моменту импульса всех внешних сил, действующих на эту си¬
стему за тот же промежуток времени. Тогда можем написать
M = M2—MV (146)
Здесь М\ — момент количества движения массы жидкости отно¬
сительно оси О при входе на колесо
Му = mc1 cos ajTi= mcXur{;, (147)
C\u — окружная составляющая абсолютной скорости с, при
входе, С\и = С\ cos j
М2 — момент количества движения той же массы жидкости
относительно оси 0 при выходе с колеса
М2 = mc2 cos а2г2 = тс2цг2; (148)
с2и — окружная составляющая абсолютной скорости с2 при
выходе с колеса, с2и = с2 cosa2.
Подставив значения М\ и М% получим
7И = /И 2—М ! = m (с2нг2—с1цг х). (149)
Мощность двигателя, затрачиваемая на изменение момента ко¬
личества движения,
N = Mco, (150)
где (о —угловая скорость рабочего колеса.
Внешний момент из уравнения (150) M = N/u).
Внешний момент равен моменту изменения количества, дви¬
жения, т. е.
— =пг(с2иг2—с1иг1). (151)
со
Принимая, что вся энергия двигателя передается жидкости, т, е.
JV = GTtfT) (152)
92
получаем
= т (с2ыг2—с1иг х).
СО
(153)
Тогда теоретический напор определится зависимостью
LT ^(?2иг2 " C\lJl) mtsi (Couf2
": г =-— _
0Т mg
= — (V!-Vl)= (154)
£ g
Учитывая, что r2co = u2, r1w = «1, уравнение Эйлера можем запи¬
сать в следующем виде:
Ят=——Ц."1 . (155)
g
У большинства центробежных насосов жидкость поступает
на лопасти в радиальном направлении, т. е. ai = 90°. Тогда
cos ai=-0 и CjM = Ci cos ai = 0, т. e. уравнение Эйлера приобре¬
тает вид
Ят=^^_. (156)
g
Полученное первое основное уравнение центробежного на¬
соса устанавливает количественное соотношение между Нт, с2
и и2.
§ 25. ВЛИЯНИЕ НАКЛОНА, ФОРМЫ И ЧИСЛА
РАБОЧИХ ЛОПАСТЕЙ НА ВЕЛИЧИНУ НАПОРА
На создаваемый насосом напор существенное влияние ока¬
зывают наклон лопастей, их геометрическая форма, количество,,
размеры и степень обработки рабочих поверхностей. Неудачное,
выполнение лопастей и рабочих каналов центробежного насоса
приводит к увеличению гидравлических сопротивлений .и может
вызвать кавитацию.
По наклону лопасти центробежного насоса могут быть, трех
видов: отогнутые назад, радиальные и загнутые вперед. На;
рис. 40 построены треугольники выходных скоростей для трех
указанных видов лопастей.
Для сравнения между собой теоретических напоров примем,
что частота вращения, производительность и наружный радиус
колес у всех трех видов лопастей одинаковы. Теоретический на¬
пор, как известно, определяется по формуле Эйлера (156)
Из выходного треугольника скоростей жидкости окружную
составляющую абсолютной скорости можно выразить так:
сги = с2 cos а2 = и2—c2r ctg р2. (157)
где с2г— радиальная составляющая той же скорости, с2г=
= c2sin а2-
Подставим полученное значение с2и в формулу (156); полу¬
чим
Hr = ^-(u2-c,r ctg р„). (158)
8
У лопасти, оканчивающейся радиально, |32 = 90°; ctg |32 = 0, и
второй член в видоизмененной
формуле Эйлера пропадает:
я; = А. (159)
У лопасти, отогнутой назад,
(32<90°; ctg (32>0, и знак минус
в формуле сохраняется. Следо¬
вательно,
Ят
(160)
У лопасти, загнутой вперед,
(32>90°; ctg р2<0, и в формуле
знак меняется на плюс. Значит,
Рис. 40. К влиянию наклона лопа¬
стей на напор Ят.
Ят>-
(161)
Итак, колеса с лопастями, загнутыми вперед, создают наи¬
больший теоретический напор, а с лопастями, отогнутыми на¬
зад, — наименьший. Однако большинство судовых центробеж¬
ных насосов выполнено с лопастями, отогнутыми назад. Для
объяснения этого рассмотрим влияние угла |32 на гидравличе¬
ский КПД насоса.
У лопастей, отогнутых назад, каналы между ними менее ис¬
кривлены и расширяются более плавно, чем у лопастей, загну¬
тых вперед, что обеспечивает меньшие гидравлические потери.
Кроме того, лопасти, загнутые вперед, придают жидкости боль¬
шую скорость, чем лопасти, отогнутые назад. В направляющем
аппарате эту скорость с2 необходимо преобразовать в энергию
давления, снижая ее до требуемых пределов скоростей жидкости
в нагнетательном трубопроводе (примерно до 1,5—5 м/с). Это
преобразование сопровождается и большими потерями гидрав¬
лической энергии, что также снижает гидравлический КПД на¬
соса. Для повышения КПД насоса в целом целесообразно при¬
94
менять лопасти, отогнутые назад, с небольшим углом наклона
выходной кромки р2~15-ь30°, иногда до 50°.
Входной угол Pi определяется условиями безударного входа
жидкости на лопасть, т. е. при cci = 90°
tg Pi= —; Pi« 14^25°. (162)
Ml
Лопасть надо проектировать так, чтобы ее форма плавно
изменялась по длине без большого возрастания сечения межло-
пастного канала. В противном случае на лопастях будет проис¬
ходить преобразование значительной части кинетической энер¬
гии в потенциальную, сопровождаемое большими гидравличе¬
скими потерями. Уменьшение потерь достигается, как указыва¬
лось выше, при условии незначительного увеличения относи¬
тельных скоростей жидкости на лопасти или их равенства, т. е.
а12 ~ W\.
Большое число лопастей также увеличивает гидравлические
потери и, следовательно, снижает напор. Малое число лопастей
не обеспечивает надлежащего направления жидкости, что при¬
водит к увеличению вихреобразований и в конечном итоге к сни¬
жению напора. Число лопастей колеса рекомендуется опреде¬
лять по формуле
г = 6,5 Izdnlk. sin ^+...Ёз_. (163)
г г Г1 2
Длина лопастей, как и их число, влияет на напор. Послед¬
ний снижается при увеличении длины или ее чрезмерном сокра¬
щении. Оптимальная длина лопасти определяется при угле ее
обхвата приблизительно 75—110°, образованного между радиу¬
сами, ограничивающими начало и конец лопасти. При этом каж¬
дая последующая лопасть должна своей выходной кромкой пе¬
рекрывать входную кромку предыдущей лопасти, чтобы не уст¬
ранялось направляющее действие межлопастного канала. Тол¬
щина лопастей должна быть минимальной во избежание загро¬
мождения проходных сечений колеса.
§ 26. КОНСТРУКЦИИ ЦЕНТРОБЕЖНЫХ НАСОСОВ
И РЫБОНАСОСОВ
Конструкция консольного горизонтального центробежного на¬
соса несамовсасывающего с односторонним подводом жидкости,
осуществляющего циркуляцию внутреннего контура охлаждаю¬
щей воды дизеля, изображена на рис. 41. Насос навешен на дви¬
гатель, передающий вращение на вал 10 через сидящую на приз¬
матической шпонке шестерню 9. Вал лежит в радиальных ша-
риковых подшипниках 11, укрепленных в корпусе 8. На консоль¬
ный конец вала, имеющего защитную рубашку 12 с сальнико¬
95
вым уплотнением 13, насажено на шпонке 4 рабочее колесо с ло¬
пастями 5, закрепленное гайкой 3 и вращающееся между двумя
кольцевыми вставками: передней 2 и задней 14. Вода поступает
на лопасти рабочего колеса через всасывающий патрубок 1
и выходит через нагнетательный патрубок 6. Смазка к шарико¬
подшипникам подводится через масленку 7.
Рис. 41. Центробежный консольный насос горизонтальный несамо¬
всасывающий.
Уравновешивание осевых усилий, как ранее было сказано,
может быть достигнуто у центробежных насосов с двусторон¬
ним подводом жидкости, вертикальный тип которого марки ЭЦН
(электрический циркуляционный насос) изображен на рис. 42.
Бронзовый корпус насоса, разъемный по оси, состоит из ос¬
новного корпуса 9 и крышки 6. К основной части корпуса кре¬
пятся всасывающий (не попал в разрез) и нагнетательный 14
патрубки. Рабочее колесо 8 состоит из среднего диска с прили¬
тыми к нему с двух сторон крайними дисками, между которыми
расположены рабочие лопасти, обеспечивающие двусторонний
подвод жидкости. У входных кромок лопастей с обеих сторон
имеются защитные кольца 15.
96
Рабочее колесо с лопастями насажено на вал 16 из нержа¬
веющей стали. Вал имеет две опоры. Верхняя опора 3 состоит
из двух радиально-упорных шарикоподшипников, воспринимаю¬
щих осевые и радиальные нагрузки. Подшипники смазывают
консистентной смазкой с помощью колпачковой масленки. Ниж¬
няя опора представляет собой резиновый подшипник 12, корпус
которого является нижней
крышкой 10 корпуса на¬
соса. Подшипник закрыва¬
ется крышкой 11, внутри
которой образуется полость
для подвода водяной смаз¬
ки по трубе 7 из нагнета¬
тельной полости насоса.
Верхняя крышка 6 одно¬
временно служит корпусом
сальника 17 с нажимной
втулкой 4. Подводимая
к сальнику по трубе 5
жидкость создает гидравли¬
ческий затвор. Облицовку
вала составляют две смен¬
ные защитные втулки: одна
под сальником, другая под
резиновым подшипником.
Верхний конец вала насоса
соединен упругой муфтой 2
с валом электродвигателя.
Основной опорой всего на¬
соса является сварной фо¬
нарь 1, выполненный из
стальной трубы и обеспечи¬
вающий крепление и цен¬
тровку валов.
Спуск жидкости из на¬
соса осуществляется через
отверстия, закрываемые пробками 13. Ротор насоса вращается
по часовой стрелке, если смотреть на насос со стороны элек¬
тродвигателя. При работе на морской воде насос ЭЦН имеет
следующие основные технические данные:
Рис. 42. Центробежный вертикальный
насос с двусторонним подводом жид¬
кости марки ЭЦН.
Производительность, м3/ч 150—170
Напор, м вод. ст 10—18
Частота вращения, об/мин 1450
Мощность на валу насоса, кВт 6,8—7,2
В рассмотренном насосе производительность возрастает в два
раза, так как два потока жидкости движутся по лопастям одно¬
временно с обеих сторон диска колеса, т. е. при одноколесном
исполнении он является двухпоточным.
4 А. Е. Богомольный
97
Вертикальный центробежный насос с двумя рабочими коле¬
сами, которые можно включать по отношению к потоку жид¬
кости как параллельно, так и последовательно, показан на
рис. 43. Рабочие колеса имеют односторонний подвод жидкости,
расположены симметрично
(зеркально) входными отвер¬
стиями одно к другому. Такое
расположение колес уравно¬
вешивает осевые гидравличе¬
ские нагрузки, воспринимае¬
мые валом.
В зависимости от судовых
потребностей насос можно
включать на параллельный
режим работы — для обеспе¬
чения двойной производитель¬
ности (двухпоточный) или на
последовательный режим —
для создания удвоенного на¬
пора (двухступенчатый) —
рис. 43, б, г. Изменение ре¬
жима работы насоса произво¬
дится путем поворота золот¬
ника 10 рукояткой (рис.43, а).
Рис. 43. Центробежный двухколесный насос с последовательным
и параллельным соединением колес: а— конструкция; б — схема
последовательного включения; в — схема параллельного вклю¬
чения.
При изменении положения золотник перекрывает и открывает
соответствующие проточные каналы в напорной и всасываю¬
щей камерах насоса. Переключать золотник можно и во время
действия насоса.
Всасывающий и нагнетательный патрубки расположены го¬
ризонтально и отлиты за одно целое с корпусом золотника.
Вал 3 насоса, изготовленный из нержавеющей стали, враща¬
ется на двух опорах: верхней и нижней. Верхняя опора 5 имеет
98
два радиально-упорных подшипника, воспринимающих осевые
и радиальные нагрузки. Нижней опорой служит резиновый под¬
шипник 1. Между крайними опорами расположена диафрагма 2,
имеющая уплотнение и разделяющая всасывающие полости ра¬
бочих колес.
Шарикоподшипники смазывают солидолом с помощью кол¬
пачковых масленок. Корпус верхней опоры охлаждается водой,
поступающей через трехходовой кран 8 из верхней спирали кор¬
пуса по трубке. К нижней полуспиральной камере привернут
штуцер (на рис. 43 не виден), соединенный с трубкой для под¬
вода воды в корпус нижнего резинового подшипника 1 (вода
и является смазкой). Охлаждающая вода от шарикоподшипни¬
ков отводится в верхнюю всасывающую камеру насоса через
штуцер 9. В нижней части корпуса находится отверстие, закры¬
ваемое пробкой 11, через которое спускается вода из резино¬
вого подшипника и нижней рабочей камеры.
Вал насоса соединен с валом электропривода упругой муф¬
той 6. Опорой насоса служит фонарь 7, который крепится к су¬
довому фундаменту. К нижнему фланцу фонаря прикреплен
узел 4 корпуса, к верхнему фланцу — приводной электродвига¬
тель. Ротор вращается по часовой стрелке, если смотреть на
насос со стороны электродвигателя.
Основной недостаток центробежных насосов рассмотренных
типов состоит в том, что они не обладают сухим всасыванием,
т. е. не могут засосать воздух из всасывающей магистрали. По¬
этому при первоначальном пуске их надо заполнять перекачи¬
ваемой жидкостью. Наличие жидкости в рабочей полости цен¬
тробежного насоса может быть обеспечено путем его установки
ниже уровня всасываемой жидкости, т. е. для работы с подпо¬
ром. В некоторых случаях, например, для балластно-осушитель¬
ных систем, работу с подпором обеспечить нельзя, поэтому на¬
сос должен быть самовсасывающим, т. е. осуществлять сухое
всасывание. С этой целью насос кроме центробежного рабочего
колеса снабжают колесом вакуумного насоса, насаженного на
общий вал и обеспечивающего при запуске насоса отсос воз¬
духа из всасывающей магистрали (рис. 44).
Корпус 3 насоса литой бронзовый, имеет вертикальный
разъем. В корпусе размещены камера, резервуар для воды и
крышка 18 вакуумного насоса. Ротор насоса состоит из сталь¬
ного вала 1 с насаженными на нем центробежным колесом 4
и колесом 19 водокольцевого вакуумного насоса, отлитых из
бронзы. Ротор опирается на два подшипника: верхний шарико¬
подшипник 10 и нижний подшипник скольжения 2, получающих
консистентную смазку из пресс-масленок. На стороне всасыва¬
ния расположен уплотнительный набивочный сальник 13 с коль¬
цами 14 гидравлического затвора и нажимной втулкой 6. У на¬
соса установлено уплотнительное кольцо 5, у шарикоподшип¬
ника — войлочное кольцо 11 и защитный кожух 12.
4*
99
Рис. 44. Вертикальный центробежный насос самовсасывающий
типа НЦВС.
100
Корпус поплавкового устройства 7 соединен трубкой 8 от¬
соса воздуха с сетчатым фильтром 15 и золотниковым устрой¬
ством 17. Камера вакуумного насоса отделена от резервуара
разделительным диском 20 с серповидными окнами. Для залив¬
ки камеры имеется воронка 16.
Верхний конец вала насоса соединен с приводным валом
электродвигателя кольцевой муфтой 9.
На рис. 45 изображена схема работы насоса с самовсасы¬
вающим устройством в трех положениях. Самовсасывающее
устройство состоит из водокольцевого вакуумного насоса 1, зо¬
лотникового устройства 18 и поплавкового устройства 8, уста¬
новленного у всасывающего патрубка 12.
Резервуар 3, заполненный рабочей водой, сообщается с ка¬
мерой 2 вакуумного насоса через серповидные окна раздели¬
тельного диска 21.
Поплавковое устройство соединяется с золотниковым воз¬
душной трубкой 11 и состоит из поплавка 7, скрепленного с за¬
порной иглой 9, которая перекрывает отверстие канала, с другой
стороны закрываемого невозвратным клапаном 10. В теле рас¬
пределительного золотника имеются каналы, которые могут сое¬
диняться со сверлениями 15 и 20 с одной стороны и трубками
13, 17 и 19 — с другой стороны.
Золотник 16 нагружен пружиной и имеет сильфон 14 с уп¬
лотнением. Всасывающая полость вакуумного насоса соединена
с трубкой 19 рециркуляционной линии. Уровень рабочей жид¬
кости в резервуаре вакуумного насоса обеспечивается сливной
трубкой 5.
Действие самовсасывающего устройства состоит в следую¬
щем. При вращении колеса вакуумного насоса 1, сидящего на
валу 4, вода, находящаяся в его камере, отбрасывается к стен¬
кам и образует вращающееся водяное кольцо. В результате соз¬
даваемого разрежения в межлопастном пространстве колеса ва¬
куумного насоса воздух из всасывающего патрубка 12 прохо¬
дит через сетчатый фильтр в поплавковом устройстве 8, через
открытое отверстие иглы 9 и клапан 10 по трубке И и золотник
16 в камеру вакуумного насоса 1 (положение II на рис. 45).
Засосанный воздух, вращаясь в межлопастном пространстве ва¬
куумного насоса, сжимается и выталкивается через серповид¬
ные окна разделительного диска 21 в резервуар 3 с водой.
В резервуаре воздух отделяется от воды и через сверле¬
ние 15, золотник и воздушную трубку 17 отводится в атмосферу.
Отсос воздуха из всасывающей магистрали центробежного на¬
соса будет происходить до тех пор, пока вода не заполнит пат¬
рубок 12, рабочую полость колеса 6 центробежного насоса и по¬
плавковую камеру устройства 8. Центробежный насос начнет
перекачивать жидкость, поплавок 7 всплывет, переместит иголь¬
чатый клапан 9 и перекроет отверстие, соединяющееся с труб¬
кой 11. Это предотвратит попадание загрязненной воды в ва-
т
Рис. 45. Схема работы самовсасывающего центробежного насоса НЦВС: /— агрегат не включен; 11— агрегат
включен, центробежный насос работает вхолостую, вакуумный насос откачивает воздух; III — агрегат включен;
центробежный насос работает на воде, вакуумный насос — вхолостую.
куумный насос. Одновременно вода под давлением из рабочей
камеры центробежного насоса через трубку 13 надавит на силь-
фон 14, переместит вниз распределительный золотник 16, сжи¬
мая пружину. При этом перекроется линия рециркуляции, т. е.
трубка 19 не будет сообщать камеру вакуумного насоса с ре¬
зервуаром, и колесо вакуумного насоса будет работать вхоло¬
стую (положение III
на рис. 45), так как
его рабочая камера со¬
общается с атмосферой
через трубку 17 и он
будет работать на воз¬
духе.
Если при устано¬
вившемся режиме ра¬
боты центробежного
насоса вакуум во вса¬
сывающей магистрали
упадет и насос переста¬
нет качать жидкость,
то самовсасывающее
устройство сработает
автоматически.
Восстанов ление
нормального режима
работы происходит в
результате того, что
давление из трубки 13
на сильфон резко сни¬
зится, пружина пере¬
местит золотник 16
вверх, разобщит ваку¬
умный насос с атмо¬
сферой и сообщит его
с поплавковым устройством. Иными словами, он снова начнет
работать в режиме положения II с последующим переходом
в положение III после создания необходимого вакуума для вса¬
сывания жидкости центробежным насосом. Общий вид насоса
НЦВС дан на рис. 46.
Основные технические данные выпускаемых насосов типа
НЦВС приведены в табл. 4.
В последние годы на рыбопромысловых судах во все боль¬
ших масштабах стали применять специальные центробежные на¬
сосы. Эти насосы используют для выгрузки рыбы из сетей, лова
рыбы, а также подачи рыбы к технологическим агрегатам.
Особенность работы рыбонасосов заключается в том, что они
перекачивают неоднородную массу: смесь рыбы с водой (пуль¬
пу). Пульпа бывает различной концентрации в зависимости от
Рис. 46. Общий вид центробежного насоса
типа НЦВС.
103
Таблица 4
Основные технические данные выпускаемых насосов НЦВС
Марка насоса
Параметры
НЦВС
63/30
НЦВС
40/30
нцвс
63/20
нцвс
40/20
Производительность, м3/ч
63
40
63
40
Напор, м вод. ст.
30
30
20
20
Вакуумметрическая высота всасы¬
6
6
6
6
вания, м вод. ст.
Перекачиваемая жидкость пси
t = 30° С
Трюмная морская пресная
вода
Электродвигатели постоянного
тока:
марка
П41НВ3
П40МВ3
П40МВ3
П32МВ.
мощность, кВт
8
6,1
6,1
4,2
Электродвигатели переменного
тока напряжением 220/380 В:
марка
АМ52-2
АМ51-2
АМ51-2
АОНЧ2-2
мощность, кВт
8
6
6
4,5
размеров рыбы. При перекачивании пульпы с мелкой рыбой
(хамса, килька, сайра) массовое соотношение ее с водой состав¬
ляет от 1 : 1 до 1 : 2, т. е. на 1 кг рыбы приходится 1—2 кг воды.
Для крупной рыбы это соотношение уменьшается от 1:6
до 1 : 10.
К рыбонасосам предъявляют следующие основные требова¬
ния:
104
Рис. 47. Центробежный рыбонасос РБ.
— рыба не должна застревать между лопастями колеса,
ввиду чего межлопастные каналы выполняют достаточно широ¬
кими с минимальным числом лопастей;
— поверхности лопастей колеса должны быть гладкими и
иметь плавные очертания, чтобы рыба не повреждалась;
— на пути движения пульпы в насосе повороты следует вы¬
полнять плавными, а их число — минимальным;
— внутреннее простран¬
ство насоса и рабочее ко¬
лесо должны быть легко
доступными для осмотра и
очистки.
Вышеизложенным тре¬
бованиям в наибольшей
степени удовлетворяют кон¬
сольные одноступенчатые
рыбонасосы (рис. 47).
Всасывающий патрубок
1 отлит за одно целое с пе¬
редней крышкой 3 корпуса
насоса и имеет смотровой
лючок 2. Улитка 4 корпуса
прикреплена к задней
крышке 8, отлитой за одно
целое с подшипниковой
стойкой 15. В стойке уста¬
новлены две опоры: левая,
состоящая из двухрядного
шарикоподшипника 13, и
правая — из однорядного
шарикоподшипника 16\ ша¬
рикоподшипники крепятся
крышками 11 и 17 с уплот¬
нительными кольцами. В подшипниках вращается вал 12, на
левый консольный конец которого надето на шпонке и закреп¬
лено гайкой 7 рабочее колесо 5 с двумя лопастями.
Проходное отверстие вала в корпусе уплотнено сальником 10,
имеющим гидравлический затвор, образуемый водой, подводи¬
мой по трубе 9. Правый конец вала соединен с валом привода
эластичной муфтой 18.
Внутренняя полость подшипниковой стойки заполняется мас¬
лом через отверстие, закрываемое пробкой 14.
Заливка насоса водой перед пуском и его осушение про¬
изводятся через верхнее и нижнее отверстия в улитке с проб¬
ками 6.
Кроме рыбонасосов палубного типа на современных рыбо¬
промысловых судах используются погружные центробежные ры¬
бонасосы. Такой рыбонасос связан с судном с помощью троса,
105
Рис. 48. Погружной центробеленый рыбо¬
насос.
электрического кабеля, по которому подводится питание к при¬
водному гидродвигателю. Спуск рыбонасоса в орудие лова и за
борт или в трюм, его подъем и маневрирование им осуществля¬
ются с помощью грузового троса, стрелы и лебедки. Погружной
рыбонасос состоит из наружного корпуса 1 и внутреннего 2
(рис. 48), в которых размещены рабочее колесо 6, сидящее на
валу 7, и гидродвигатель 4. Масло от насоса поступает к гидро-
Таблица 5
Основные технические характеристики рыбонасосных установок
и рыбонасосов
Рыбонасосные установки
Рыбонасосы
Параметры
РБУ-100
ЭРН-200
РБУ-250
РБ-100
РБ-150
Производительность,
м3/ч:
по воде
85
435
■—
108
200
по рыбе
25
20—25
35—50
—
—
Частота вращения рабо¬
870
487
400
900
750
чего колеса, об/мин
Род привода
Электрический
От главного
двигателя
Характеристика привода:
МАФ-83
82/4
тип двигателя
ДПМ-31
—■
мощность, кВт1
7,8
31
66
5,23
18
частота вращения,
870
1460
—
—
—
об/мин
Габариты, мм:
длина
1650
3100
•—
945
1288
ширина
660
1230
—
600
856
высота
1100
2150
—
550
800
Высота всасывания, м
4,5
6,4
Напор
—
6,2
Масса, кг
113
2300
3055
152
430
Тип судна
АЧС;
РМС
—
СЧС
РС-300;
СЧС;
МЧС
типа
«Друж¬
ба»
СО
двигателю по трубам 9, от гибких шлангов. На корпусе насоса
закреплен амортизационный резиновый пояс 3, предотвращаю¬
щий повреждение корпуса при ударах. Пенопластовый пояс 5
снижает массу насоса в воде.
Металлический каркас 8 крепится к нижней части насоса
и предохраняет от затягивания сети. Основные технические
данные рыбонасосных установок и рыбонасосов приведены
в табл. 5.
106
§ 27. ХАРАКТЕРИСТИКИ ЦЕНТРОБЕЖНЫХ НАСОСОВ
И ТРУБОПРОВОДОВ
В судовых условиях производительность насосов должна из¬
меняться в довольно широких пределах. В отличие от объемных
насосов, у которых изменение производительности почти не
влияет на создаваемый ими напор, у лопастных и, в частности,
у центробежных насосов производительность и напор зависят
друг от друга.
Для эффективной эксплуатации насосов и их оптимального
подбора нужно знать, как меняется напор и другие параметры
при изменении производи¬
тельности. Характер измене¬
ния параметров обычно выра¬
жается графически в виде кри¬
вых, называемых характерис¬
тиками насоса.
Характеристики могут быть
теоретические или действи¬
тельные, простые или универ¬
сальные. В системе прямо¬
угольных координат характе¬
ристики можно построить с
помощью двух основных спо¬
собов регулирования произво¬
дительности центробежных
насосов:
1) количественного — дрос¬
селированием через нагнетательный клапан, при постоянной ча¬
стоте вращения насоса;
2) качественного — изменением частоты вращения привод¬
ного двигателя.1
Качественный способ регулирования мало влияет на КПД
насоса, но не всегда может применяться (например, у насосов,
навешенных на двигатель или имеющих электропривод перемен¬
ного тока).
Количественный способ регулирования режима наиболее
прост и позволяет изменять производительность от нуля до мак¬
симума, но экономически менее выгоден, чем качественный,
в связи с введением добавочного гидравлического сопротивле¬
ния при дросселировании.
В случае количественного регулирования теоретические ха¬
рактеристики центробежных насосов будут изображаться пря-
Рис. 49. Характеристики центробеж¬
ных насосов.
В некоторых случаях количество подаваемой жидкости изменяют путем
байпасирования, т. е. перепуска части жидкости через клапан из напорной
магистрали обратно во всасывающую. Этот способ применяется в основном
для регулирования расхода в трубопроводе и используется в объемных насо¬
сах, где нельзя регулировать производительность дросселированием.
107
мыми: I — при радиальных лопастях; II — при лопастях, отог¬
нутых назад; III — при лопастях, загнутых вперед (рис. 49).
Точка В на линии ординат будет соответствовать нулевой
подаче при полностью закрытом нагнетательном клапане. При
этом в камере насоса будет статический напор Яст, который
можно замерить по манометру.
Для получения действительной характеристики насоса необ¬
ходимо учесть потери напора на преодоление гидравлических
сопротивлений в самом насосе. Пусть кривая О А на рис. 49 вы¬
ражает графическую зависимость напора, теряемого в насосе,
Рис. 50. Рабочая характеристика на- Рис. 51. Характеристики тру-
соса НЦВС 63/30. бопроводов.
hw от его производительности Q. Действительный напор Н, раз¬
виваемый насосом, будет меньше теоретического на величину
потерь в нем:
Я = ЯТ—hw.
Откладывая ординаты кривой ОА вниз от прямой III, полу¬
чим точки, которые при соединении дадут кривую ВС, представ¬
ляющую собой действительную простую характеристику цен¬
тробежного насоса с лопастями, загнутыми вперед.
Очевидно, что подобным способом можно получить простые
действительные характеристики и для насосов с радиальными
лопастями и лопастями, отогнутыми назад.
Рабочая характеристика рассмотренного насоса НЦВС 63/30
(рис. 50), кроме зависимости напора нагнетания Я от произво¬
дительности, включает зависимости от Q вакуумметрической вы¬
соты всасывания Hs, потребляемой мощности N, КПД т], %,при
частоте вращения /2=2890 об/мин. Для использования харак¬
теристики с целью подбора центробежного насоса для работы
на данный трубопровод и определения требуемого режима его
работы необходимо иметь и графическую характеристику тру¬
бопровода или сети.
108
Характеристикой трубопровода называется кривая, показы¬
вающая функциональную зависимость между расходом жидко¬
сти и потребляемым (затрачиваемым) напором на преодоление
гидравлических сопротивлений в трубопроводе.
На рис. 51 показаны кривые 1, 2 и 3 второго порядка (пара¬
болы), представляющие собой характеристики трех различных
трубопроводов.
Кривые начинаются при различных ординатах, которые ха¬
рактеризуют потенциальные напоры Hs, затрачиваемые на соз-
здание геометрического и
пьезометрического напоров
в трубопроводах. Эти на¬
поры, обеспечивающие
подъем жидкости по верти¬
кали и преодоление проти¬
водавления, не зависят от
расхода жидкости и пред¬
ставляют собой так назы¬
ваемые полезные сопротив¬
ления.
Характеристика 1, на¬
чинающаяся от начала ко¬
ординат, имеет потенциаль¬
ный напор Я5 = 0, т. е. от¬
носится к горизонтально
расположенному трубопро¬
воду с одинаковыми давле¬
ниями во всасывающем и
нагнетательном резервуа¬
рах. Характеристики 2 и 3 относятся к трубопроводам с раз¬
личными полезными сопротивлениями, соответствующими по¬
тенциальным напорам Я/ и Я/'. Кривизна парабол будет раз¬
личной, зависящей от значения и числа местных сопротивле¬
ний. Чем больше будет напор ЪНЮ, затрачиваемый на их
преодоление, тем круче будет кривая характеристики. Для одного
и того же расхода теряемые напоры будут равны соответст¬
венно: 2.hw° — для характеристики /; S/г/ — для характери¬
стики 2\ Hhw" — для характеристики 3 (см. рис. 51).
Для подбора насоса к данному трубопроводу и выбора ре¬
жима его работы необходимо совместить их характеристики, как
это показано на рис. 52. Пересечение характеристик называется
рабочей точкой. При режиме, соответствующем рабочей точке,
расход жидкости по трубопроводу Qpa6 равен производительно¬
сти насоса. В этом же режиме напор Ярав, создаваемый насо¬
сом, полностью «потребляется» в трубопроводе, т. е. на выходе
напор жидкости будет равен нулю.
При режимах, расположенных левее рабочей точки, т. е. при
производительности-расходе Q<QPаб, напор, создаваемый насо¬
Рис. 52. К определению режима работы
насоса на трубопровод с помощью ха¬
рактеристик.
109
сом, будет больше напора, расходуемого в сети, и, следователь¬
но, жидкость будет вытекать из трубопровода с каким-то избы¬
точным напором Янзб (рис. 52). Очевидно, что режимы работы
насоса на трубопровод, расположенные правее рабочей точки,
т. е. при производительностях-расходах Q'Xjpaa, не могут быть
осуществлены, так как напор, создаваемый при этих режимах
насосом (в точке S'), меньше напора, необходимого для тру¬
бопровода (в точке Т'). В некоторых случаях на судах исполь¬
зуются насосные установки с двумя параллельно включенными
насосами / и II на один трубопровод, как это схематично изо-
Рис. 53. Параллельная работа двух центробежных насосов на один трубопро¬
вод: А — тождественных; Б — разных.
бражено на рис. 53. При этом могут быть два случая: насосы
I к II тождественны, одинаковой производительности (рис. 53,
А); насосы I и II неодинаковы, разной производительности
(рис. 53, Б).
В первом случае насосы I и II имеют одинаковую характе¬
ристику ab (рис. 53, А). При раздельной работе на трубопро¬
вод, имеющий характеристику де, рабочая точка К при произ¬
водительности Qк и напоре Як будет характеризовать режим
каждого из включаемых насосов. При подключении обоих на¬
сосов параллельно на один трубопровод удваивается подача.
Для получения общей характеристики насосов I и II на кри¬
вой ab выделим произвольное число точек 1, 2, 3 и удвоим их
абсциссы. Получим точки Г, 2', 3'. Соединяя их плавной ли¬
нией, получим кривую ас, которая и будет характеристикой двух
тождественных насосов, работающих параллельно. В месте пе¬
ресечения характеристик ас и de будет рабочая точка Т режима
обоих насосов с производительностью QT при напоре Ят. Как
видно из рисунка, при работе двух центробежных насосов, вклю¬
ченных параллельно на один трубопровод, развиваемая произ¬
110
водительность-расход будет больше производительности-расхода
каждого из насосов, но меньше их суммы при раздельной ра¬
боте, т. е.
2Qk>Qt>Qk.
Аналогично можно исследовать графически работу двух раз¬
ных насосов I и II, включенных параллельно на один трубо¬
провод (рис. 53, Б). Для получения совместной характеристики
необходимо к абсциссам кривой II приложить абсциссы кри-
Н,м
Рис. 54. Универсальная характеристика центробежного на¬
соса.
вой /. Например, к а—1 отложить по горизонтали а—Г и по¬
лучить точки кривой I + II, которая будет являться совместной
характеристикой насосов / + // с рабочей точкой Т в месте пе¬
ресечения с характеристикой трубопровода. Эта точка будет ха¬
рактеризовать режим работы насосов / и II с производитель¬
ностью-расходом QT при напоре Hi = Hu.
Из рисунка также очевидно, что при работе двух различных
центробежных насосов, включенных параллельно на один тру¬
бопровод, развиваемая производительность больше производи¬
тельности каждого из насосов, но меньше их суммы, т. е.
(Qb + Qc)>Qt>(Qb ИЛИ Qc).
В обоих рассмотренных случаях увеличение производитель¬
ности-расхода от включения в параллель второго насоса будет
тем больше, чем положе характеристика трубопровода, т. е. чем
меньше гидравлических сопротивлений он имеет.
111
Недостаток всех рассмотренных графических характеристик
состоит в том, что они являются простыми, т. е. показывают за¬
висимость двух основных параметров Q—Я при постоянной ча¬
стоте вращения.
Для расширения области применения центробежных насосов
предусматривается их работа при различной частоте вращения
с сохранением количественного регулирования подачи при каж¬
дой частоте вращения путем дросселирования через нагнета¬
тельный клапан. При этом строят кривые зависимостей Q—Н,
Q—г] и Q—п. Такие характеристики называются универсаль¬
ными (рис. 54).
Для построения универсальных характеристик центробежных
насосов используются уравнения подобия:
т. е. при изменении частоты вращения производительность, на¬
пор и мощность изменяются пропорционально частоте вращения
соответственно в первой, второй и третьей степенях.
Для центробежных рыбонасосов, работающих на пульпе
(смеси рыбы и воды), эти зависимости имеют другие показа¬
тели степеней:
Пользуясь универсальной характеристикой, можно по двум
заданным параметрам, например Q и п, найти два других, на¬
пример Ниц. При наложении на универсальную характерис¬
тику характеристики трубопровода О—Е (рис. 54) определяется
ряд рабочих точек К% К\, Ко в местах ее пересечения с кривыми
п2, пх, п0 зависимостей при различных частотах вращения
и КПД.
§ 28. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ
ЦЕНТРОБЕЖНЫХ НАСОСОВ
Теоретическая производительность однопоточного центробеж¬
ного насоса, исходя из размеров рабочего колеса и выходной
скорости, определяется по уравнению неразрывности
D2— наружный диаметр рабочего колеса, м; Ь2— ширина вы¬
ходной кромки лопасти, м.
Радиальная составляющая абсолютной скорости при выходе
жидкости из колеса c2r = c2 sin сс2, где а2~20°.
(164)
(165)
QT = Fc = nD2b2c2 sin a2>
где F — выходное сечение рабочего колеса
F = kD262;
(166)
Действительная производительность центробежного насоса
может быть определена по формуле
Q = knD2b2c2r\n\v, (167)
где k — коэффициент поточности насоса (для однопоточного на¬
соса &=1); [х — коэффициент, учитывающий заполнение межло-
пастного сечения активным потоком (с учетом толщины лопа¬
стей в вихревых зонах); обычно ц=0,854-0,95.
Объемный КПД (коэффициент подачи) можно с достаточ¬
ной для практических расчетов точностью найти из уравнения
% = 1 (168)
1 + 0,68ns~ ’
где ns — коэффициент быстроходности.
Обычно ^ = 0,854-0,95.
Производительность центробежного насоса ориентировочно
можно найти по эмпирической формуле
Q = k"d\ (169)
где £"=134-18 для насосов с диаметром патрубка <100 мм;
&"=204-25 для насосов с диаметром патрубка >100 мм; d —
диаметр нагнетательного патрубка, дм.
Теоретический напор центробежного одноступенчатого на¬
соса определяется по формуле Эйлера
Ят
S
1—г / о ЗТ/2 о „
Применяя w2 = raсо — ——, находим действительный напор
30
Н, м вод. ст
__ тс2иг2пщт . j
93,5 ’ 1
где т — число ступеней; с2и — окружная составляющая абсо¬
лютной скорости выхода жидкости с рабочего колеса, с2и —
= c2cosa2; г2— наружный радиус рабочего колеса; п — ча¬
стота вращения рабочего колеса; ф — коэффициент циркуляции,
который можно определить по уравнению
ф= т1—г—; (171)
14-2
Z
1 -
-М
V г2 )
VF= (0,554-0,65)+0,6 sin |32, обычно Чг = 0,84-1,3; z — число ло¬
пастей
z= 13- Г2 + Г1 sin + ;
“ 2 (г о — гх) 2
обычно г = 54-16.
Гидравлический КПД можно определить по формуле Лома¬
кина
О’42 /1-704
г)г = —, (172)
(lg пР — 0,172)2 V
где Дшр — приведенный диаметр
£inP = (4-5).103 (173)
Обычно г|г=0,85^-0,96.
Напор в одной ступени центробежного насоса можно прибли¬
женно определить по эмпирической формуле
H = kn2Dl, (174)
где k' — коэффициент, принимаемый в пределах k' = 0,00010—
—0,00015; п — частота вращения ротора насоса, об/мин; D2 —
наружный диаметр рабочего колеса, м. Значение полного КПД
насоса можно определить, предварительно задавшись значением
механического КПД г)м = 0,90-^0,96:
= 'Пу'Пг'Пм = 0,65 -г- 0,85. (175)
Потребляемая, или эффективная, мощность N, кВт, центробеж¬
ного насоса, соединенного непосредственно с приводным двига¬
телем, определяется зависимостью
N—M- (176)
102%
или в системе СИ
Ne = MgH, (177)
где М— массовая производительность, M = pQ; р — плотность
жидкости, кг/м3.
§ 29. ПРАВИЛА ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
ЦЕНТРОБЕЖНЫХ НАСОСОВ
После монтажа насоса, перед вводом его в действие, необ¬
ходимо произвести проверку:
— прочности крепления насоса к судовому фундаменту;
— соосности валов насоса и приводного двигателя;
— правильности включения трубопроводов;
-—поступления смазки к подшипникам;
— исправности пускорегулирующих устройств и контрольно¬
измерительных приборов.
До пуска насоса требуется:
— проверить направление вращения электродвигателя, пред¬
варительно разобщив соединительную муфту, и пустить его
114
в ход, обратив при этом внимание на стрелку, выбитую на кор¬
пусе насоса и указывающую направление вращения;
— провернуть за муфту насос, чтобы убедиться, что он
легко и равномерно вращается от руки;
— проверить наличие смазки у всех подшипников; если име¬
ется резиновый подшипник, убедиться в отсутствии в нем масла;
— проверить сальники и набивку.
У несамовсасывающих насосов перед пуском необходимо
залить проточную часть насоса и всасывающий трубопровод
перекачиваемой жидкостью, открыв при этом клапан на вса¬
сывающем трубопроводе и воздушную пробку на корпусе на¬
соса. У самовсасывающих насосов до первого пуска и после
каждого ремонта нужно заливать водой камеру вакуумного на¬
соса, отсасывающего воздух. В дальнейшем такое наполнение
может потребоваться только в случае непоступления жидкости
к главному насосу.
Пуск центробежного насоса рекомендуется осу¬
ществлять в следующем порядке:
1. Включить насос. После того как насос разовьет рабочую
частоту вращения, из контрольной трубки или краника начнет
истекать равномерная струя жидкости — показатель того, что
насос начал перекачивать жидкость. Создаваемое на всасыва¬
нии разрежение проверяют по мановакуумметру, напор — по
манометру.
2. Напорный клапан (задвижку) постепенно приоткрывать
до тех пор, пока не будет достигнута требуемая производи¬
тельность или же допускаемая нагрузка электродвигателя.
3. Постепенно подтянуть сальник настолько, чтобы наружу
вытекало некоторое количество жидкости, необходимое для
смазки и охлаждения набивки. Отрегулировать количество
жидкости, поступающее из нагнетательной полости в сальники
для образования гидравлического затвора. Если перекачивае¬
мая жидкость загрязнена или имеет твердые тела, например
у рыбонасосов, то вода для гидравлического затвора должна
подводиться чистой из водяной системы.
При отсутствии всасывания, в случаях колебаний произво¬
дительности или других неполадок насос следует остановить,
найти неисправность и устранить ее. Запрещается пускать на¬
сос, не заполнив его жидкостью. У самовсасывающего насоса
заполняют жидкостью камеры вакуумного насоса.
Уход за насосом во время его работы в основ¬
ном заключается в наблюдении за показаниями контрольно¬
измерительных приборов и устранении неполадок.
Необходимо вести постоянное наблюдение за работой саль¬
ников и подшипников. Через сальники должно выступать не¬
большое количество жидкости, обеспечивающее смазку на¬
бивки и поглощающее теплоту трения. Чрезмерное подтягива¬
ние зажимной втулки, уплотняющей сальник, вредно и опасно,
115
так как вызывает нагрев и изнашивание вала или его защит¬
ной втулки.
Обслуживание бездействующего насоса, находящегося в со¬
стоянии готовности к пуску, заключается в устранении заме¬
ченных во время работы дефектов и сохранении его в чистоте
и исправности. Рекомендуется ежедневно проворачивать ротор
насоса вручную и производить осмотр в соответствии с судовым
графиком профилактики. При длительном бездействии насос
должен находиться в консервации.
Рассмотрим характерные неисправности, встречающиеся
при эксплуатации центробежных насосов, и способы их устра¬
нения.
1. Потребляемая насосом мощность чрезмерна. Возможные
причины следующие:
— пуск при открытом напорном клапане (пустить насос при
закрытом клапане и постепенно открывать его по достижении
нормальной частоты вращения);
— не уравновешено осевое давление (уравновесить давление
путем правильной установки упорных устройств и отрегулиро¬
вать осевые зазоры);
— загрязнение проточной части насоса (прочистить и про¬
мыть проточную часть);
— перекачивание жидкости с повышенной вязкостью или
пульпы с большим содержанием рыбы (уменьшить вязкость
жидкости путем подогрева или снизить частоту вращения, при¬
крыть всасывающий клапан);
— механические повреждения, чрезмерная затяжка сальни¬
ков, отсутствие смазки в подшипниках (устранить механические
дефекты, подать смазку в подшипники, ослабить сальники).
2. Подача жидкости насосом не производится; возможные
причины следующие:
— насос установлен на большой высоте или всасывающий
трубопровод имеет большое гидравлическое сопротивление
(уменьшить геометрическую высоту всасывания, спрямить вса¬
сывающий трубопровод, снять лишние колена, клапаны, сетки);
— всасывающий трубопровод и камеры насоса, а у само¬
всасывающего насоса камера вакуумного насоса недостаточно
залиты, приемные клапаны или клинкеты закрыты или недо¬
статочно открыты (залить трубопровод и камеры жидкостью,
полностью открыть всасывающие клапаны);
— рабочая характеристика насоса не соответствует харак¬
теристике нагнетательного трубопровода (изменить частоту
вращения насоса, уменьшить гидравлические сопротивления
в трубопроводе);
— высокая температура перекачиваемой жидкости и неплот¬
ности во всасывающей линии (снизить температуру перекачи¬
ваемой жидкости и уплотнить сторону всасывания);
— неправильное направление вращения насоса, недостаточ¬
116
ная частота вращения (изменить направление вращения дви¬
гателя, увеличить частоту его вращения).
3. Недостаточная производительность насоса; возможные
причины следующие:
— всасывающая сетка, фильтр или кингстон засорены, при¬
емный клапан неисправен (продуть и прочистить сетку, фильтр
или кингстон, перебрать приемный клапан);
— неплотности во всасывающем' трубопроводе (устранить
подсос воздуха в соединениях и сальниках);
— загрязнение проточной части насоса или трубопровода
(прочистить насос или трубопровод);
— недостаточная частота вращения насоса (повысить час¬
тоту вращения двигателя);
— неправильный подбор диаметров всасывающего и нагне¬
тательного трубопроводов (сменить трубы);
— износ лопастей рабочего колеса и направляющего аппа¬
рата (отремонтировать насос, заменив изношенные детали).
Центробежные насосы имеют следующие основные досто¬
инства: равномерная подача жидкостей; быстроходность, бла¬
годаря чему обеспечивается высокая производительность при
небольших габаритах и массе; возможность их соединения не¬
посредственно с электродвигателями, что облегчает их автома¬
тизацию; отсутствие клапанов, что упрощает их устройство и
повышает гидравлический КПД; способность перекачивать жид¬
кости различной вязкости, в том числе и с механическими
включениями.
К недостаткам центробежных насосов относятся: отсутст¬
вие сухого всасывания; меньший, по сравнению с поршневыми
насосами, объемный КПД; зависимость КПД от режима ра¬
боты и вязкости жидкости; зависимость напора от производи¬
тельности.
Центробежные насосы широко применяются на морских ры¬
бопромысловых судах в качестве насосов охлаждения двига¬
телей внутреннего сгорания и насосов в различных судовых
системах — пожарной, балластной, санитарной и др.; рыбонасо¬
сов в рыбонасосных установках; насосов, обслуживающих вспо¬
могательные парогенераторные, холодильные и водоопресни¬
тельные установки, а также для обеспечения работы технологи¬
ческого оборудования судов.
§ 30. ОСЕВЫЕ И ВИХРЕВЫЕ НАСОСЫ
Осевые насосы относятся к группе лопастных. Осевой на¬
сос, как и центробежный, состоит из двух основных частей:
корпуса и ротора.
Корпус — короткая труба, в которой вращается ротор
(рис. 55). Ротор насоса состоит из втулки с лопастями 2
(обычно 3—6 лопастей), насаженной на конец вала. Лопасти
117
представляют собой ряд поверхностей, имеющих в поперечном
сечении профили подъемных крыльев самолета. Так как кри-
волинейность профилей лопасти различна, то при поперечном
перемещении ее в потоке жидкости вращательным движением
скорости обтекания наружного и внутреннего профилей ло¬
пасти различны. Вследствие этого по обе стороны лопасти соз¬
дается разность давлений, благодаря чему осуществляется по¬
ступательно-вращательное движение жидкости вдоль оси вала,
обеспечивающее всасывание и нагнетание. За рабочими лопас¬
тями 2 устанавливаются неподвижные лопасти-перегородки 1,
образующие осевой направляющий аппарат, с помощью кото-
При увеличении частоты вращения свыше 1000—1500 об/мин
насосы начинают кавитировать. Напоры, создаваемые осевыми
насосами, обычно не превышают 18—30 м вод. ст., что ограни¬
чивает их применение для работы на сеть трубопроводов. Од¬
нако осевые насосы создают установившееся равномерное дви¬
жение потока жидкости с производительностью 10 000 м3/ч.
Расчет осевого насоса основан на теории подъемной силы
крыла, разработанной Н. Е. Жуковским. Так как в осевом на¬
сосе жидкость движется по цилиндрическим поверхностям, со¬
осным насосу, то радиусы, по которым она входит в рабочее
колесо и выходит из него, одинаковы, и, значит, окружные
скорости равны, т. е. u2 = ih = u.
Напор, развиваемый насосом Я, м вод. ст., с точностью, до¬
статочной для практики, можно найти по формуле Г. Ф. Про-
рого вращательное движе¬
ние жидкости выравнива¬
ется и часть скоростной
энергии преобразуется в
давление.
В крупных осевых на¬
сосах лопасти колеса де¬
лают поворотными для из¬
менения угла их наклона
при изменении производи¬
тельности. В обычных насо¬
сах осуществляется дрос¬
сельное регулирование.
Осевые насосы неспо¬
собны к сухому всасыва¬
нию, и их всасывающая
способность настолько ма¬
ла, что при установке этих
насосов всасывание обычно
обеспечивают подпором.
скуры:
(178)
118
Рис. 55. Осевой насос: а — схема общего
вида; б — разрез.
где коэффициент напора Ки2 = 0,0244 и/'’1; ns — коэффициент
быстроходности (600—2000).
Производительность осевого насоса Q, м3/ч,
где г]у— объемный КПД (коэффициент подачи), цу = 0,90-^0,95;
с2 — осевая скорость потока, м/с, с2 = 5-^-7; Dn — наружный диа¬
ступицы (втулки) рабочего колеса, м.
Обычно отношение диаметров находится в пределах DJDв =
= 1,8-^3,0, причем большие значения у колес с большей быст¬
роходностью.
Вихревые насосы также можно отнести к группе лопастных
насосов, устанавливаемых и экономично работающих при зна¬
чениях коэффициентов быстроходности ns<40. Вихревые на¬
сосы подразделяются на два типа:
1. Насосы с закрытым каналом, у которых периферийные
каналы соединяются с всасывающим и нагнетательным отвер¬
стиями посредством окон в торцевых крышках корпуса.
2. Насосы с открытым каналом, у которых боковые каналы
соединены с всасывающим и нагнетательным патрубками.
На рис. 56, а показана схема устройства и действия вихре¬
вого насоса первого типа. Особенность вихревого насоса со¬
стоит в конструкции рабочего колеса 9, которое представляет
собой диск с двусторонними фрезерованными по окружности
пазами 6, разделенными перегородкой 5, образующими сис¬
тему радиально направленных лопаток. Колесо с лопатками-
пазами жестко сидит на валу 8 в подшипниках 7 корпуса 2 и
имеет всасывающий 3 и нагнетательный 1 патрубки. Всасываю¬
щий патрубок через впускное окно 12 сообщается с началом
кольцевого периферийного канала 4, выходящего к напорному
патрубку и отделенного от него перемычкой 10 (рис. 56, б).
При вращении колеса в корпусе частицы жидкости, находя¬
щиеся между лопатками, приобретают вращательное движение
и под действием центробежных сил отбрасываются в кольце¬
вую полость 4, как это показано стрелками на рис. 56, а. В по¬
лости скоростная энергия жидкости преобразуется в энергию
давления — статический напор. Затем частицы жидкости из
кольцевой полости попадают в один из следующих межлопаст-
ных пазов, вращаясь с меньшей окружной скоростью, чем ко¬
лесо. Получив новое приращение скорости, частицы жидкости
снова отбрасываются в кольцевую полость и получают новое
приращение давления (напора). Это движение на рис. 56, б
показано штриховой линией со стрелками А, В, С, D, Е, F, К.
В целом действие колеса вихревого насоса аналогично дей¬
ствию многоступенчатого центробежного насоса, в котором
(179)
метр рабочего колеса, м, DH= (5-^5,5)
DB — диаметр
119
жидкость несколько раз получает приращение напора, пере¬
мещаясь с отставанием от вращающегося колеса.
В целом движение частиц жидкости происходит по спи¬
рали, вихреобразно, как это видно из рис. 56, в. Попавшая на
лопасти в точке А частица жидкости участвует в окружном
движении по направлению вращения о) колеса, относительном
В)
Рис. 56. Схема действия вихревого насоса.
движении вдоль лопастного пространства и абсолютном дви¬
жении, перемещаясь последовательно из точки А в точки Б, В
и т. д. Таким образом, направление абсолютного движения по
спирали определяется направлением абсолютной скорости с,
полученной от сложения скоростей окружной и и относитель¬
ной W.
В некоторых вихревых насосах жидкость подводится от пе¬
риферии к центру через всасывающий патрубок 11 (рис. 56, б).
Такие насосы проще, так как не требуют наличия окон 12, но
могут не обладать сухим всасыванием.
Отечественная промышленность выпускает вихревые на¬
сосы второго типа на параметры, указанные в ГОСТ 10392—68.
Многие из них способны создавать значительные разрежения
120
В соответствии с ГОСТом вихревые насосы маркируют
буквами и цифрами, которые характеризуют модель насоса.
Например, марка ЗВ-2,7 расшифровывается так: цифра 3 —
диаметр всасывающего и нагнетательного патрубков насоса
в миллиметрах, уменьшенный в 25 раз; число 2,7 — округлен¬
ный коэффициент быстроходности, уменьшенный в 10 раз;
буква В — вихревой (если после нее стоит буква О, то насос
обогревательный, если буква С — самовсасывающий).
Рассмотрим конструкцию насоса типа ВО, изображенную на
рис. 57.
Вихревой насос типа ВО (вихревой обогревательный) со¬
стоит из чугунного корпуса 1, в котором всасывающая полость
22 отделена от нагнетательной перемычкой 26, перекрывающей
не менее двух лопаток по ширине. Крышка 2 прикреплена
к корпусу шпильками с гайками 21 и образует совместно
с корпусом кольцевую камеру, в которой вращается рабочее
колесо 4 с лопатками 27.
Внутренняя крышка 3 закреплена гайками 25 и является
задней стенкой корпуса, корпусом сальника и крышкой опор¬
ной стойки. Рабочее колесо крепится на валу 14 шпонкой 8
и специальным болтом 5 с шайбой.
В отличие от вихревых насосов типа В насосы типа ВО
снабжены дополнительной наружной обогревательной крышкой
с литыми внутренними ребрами. Внутренняя крышка 3 имеет
обогревательный канал 12. Отверстия 6, 10 в крышке 7 и 13
в крышке 3 служат для присоединения трубопроводов с па¬
ром или горячей водой. Торцевой зазор между крышкой 3
и колесом 4 обеспечивается набором регулировочных ко¬
лец 9, а между колесом и крынкой 2 — паронитовой проклад¬
кой 11.
Узел приводной части насоса состоит из чугунной опорной
стойки 17, в которую вмонтированы радиальные шарикопод¬
шипники 18 вала. В крышку 19 упирается наружное кольцо
правого шарикоподшипника 18 и вмонтировано уплотнительное
войлочное кольцо 20. Уплотнение внутренней крышки опорной
стойки создается войлочным кольцом 15 и резиновыми коль¬
цами 24, которые предотвращают утечку масла через радиаль¬
ные зазоры. Для заливки масла и контроля его уровня имеется
отверстие, закрытое резьбовой пробкой 16. Для выпуска масла
служит отверстие с пробкой 23. Вал насоса соединен с валом
электродвигателя напрямую с помощью эластичной муфты
(на чертеже не показано).
Вихревые насосы выполняются одно- и многоколесными
производительностью 10—35 м3/ч и напоре от 9,5—20 м вод. ст.
На рис. 58 изображена характеристика вихревого насоса мо¬
дели 1В-09.
Рекомендуемые режимы его работы отмечены границами
в виде волнистых линий. Количество жидкости, перемещаю-
121
Рис. 57. Конструкция вихревого насоса типа ВО.
щееся по кольцевому каналу вихревого насоса и равное его
производительности, определяется по формуле
Qk = Лр. пЧо. кFu ~ 0,5Fu, (180)
где г|Р.пТ1о.к~0,5 — КПД, учитывающие потери от вихреобра-
зования и объемные от утечек; F — площадь поперечного се¬
чения кольцевого канала; и— окружная скорость.
Вихревые насосы отличаются компактной конструкцией, хо¬
рошим всасыванием, простотой, более высокими напорами
нагнетания по сравнению с центробежными насосами. Их не-
Рис. 58. Характеристики вихревого Рис. 59. Центробежно-вихревой насос
насоса модели 1В-09. ЭСН.
достатки —это низкий КПД (т]н~0,3-^0,4) (см. рис. 58) и не¬
большая высота всасывания. Последнее объясняется тормозя¬
щим действием вихревых токов жидкости, создающих кавита¬
цию при входе во всасывающую полость насоса. Для повыше¬
ния КПД насоса и улучшения его кавитационных качеств под¬
ключают центробежную ступень, образующую центробежно¬
вихревой насос типа ЭСН (электроприводной самовсасываю¬
щий насос), конструкция которого показана на рис. 59.
Корпус 14 насоса в верхней части выполнен в виде полого
колпака, к которому присоединяется нагнетательный трубопро¬
вод. В нижней части размещены две секции центробежного и
вихревого насосов и уплотнительные устройства. Корпус слева
прикрыт крышкой 13. Его верхняя часть отлита за одно целое
с вертикальным всасывающим патрубком. Секция насоса, пред¬
123
ставляющая собой первую ступень, состоит из вставки 11
с улиткообразным каналом и размещенным в нем рабочим
шестилопастным колесом 12 открытого типа с односторонним
всасыванием.
Второй ступенью насоса является вихревой насос, секция
которого состоит из двух вставок 15 и 16 и колеса 10. Внут¬
ренние поверхности вставок образуют кольцевую камеру 8.
Она соединяется перепускным окном со спиральным каналом
центробежного насоса. Уплотнение вала обеспечивает сальник,
который состоит из удлинителя 6 вала электродвигателя, рас¬
порной пружины 7, уплотнительного резинового кольца 5 и
пяты 4, вращающихся вместе с валом. На конце вала имеется
канавка для стального кольца 9, которое закрепляет пружину
сальникового уплотнения. Уплотнение обеспечивается за счет
минимального зазора между поверхностями трения закреплен¬
ного шпильками 3 неподвижного стального подпятника 1, вра¬
щающей пяты 4 из свинцовистой бронзы и резиновой прокладки
2 между фланцем подпятника и корпусом насоса.
При вращении вихревого колеса в перекачиваемой жид¬
кости ее частицы под действием центробежной силы выбрасы¬
ваются через нагнетательное окно в колпак корпуса. Образо¬
вавшееся разреженное пространство заполняется воздухом, по¬
ступающим через спиральный канал центробежного колеса из
всасывающего трубопровода. В колпаке будет происходить
выделение воздуха из жидкостно-воздушной смеси, циркули¬
рующей в канале вихревого насоса, до тех пор, пока не засо-
сется перекачиваемая жидкость. После введения в действие
центробежного колеса вихревое колесо, выполнявшее при за¬
пуске роль вакуумного насоса, начнет работать как вторая
ступень, увеличивающая напор насоса.
Такие насосы целесообразно применять в судовых системах
(например, мытьевой и питьевой воды), где требуется само-
всасывание, а также для питания вспомогательных и утилиза¬
ционных парогенераторов и в качестве вакуумных насосов
в опреснительных установках.
При использовании вихревых насосов в качестве самовса¬
сывающих достаточно при первоначальном пуске заполнить
перекачиваемой жидкостью только корпус насоса, после чего
насос начнет засасывать воздух, а затем и жидкость.
КПД центробежно-вихревых насосов можно довести до зна¬
чения т)и^0,55. Подачу вихревых насосов рекомендуется регу¬
лировать перепускным клапаном, устанавливаемым на нагне¬
тательном трубопроводе, так как при уменьшении подачи
у вихревого насоса резко возрастают напор и потребляемая
мощность, что может привести к разрыву трубопровода и пере¬
грузке приводного двигателя. Вследствие этого параллельно
регулирующему клапану устанавливают предохранительно-пе¬
репускной клапан.
124
Глава VI
СТРУЙНЫЕ НАСОСЫ
§ 31. ПРИНЦИП ДЕЙСТВИЯ И КЛАССИФИКАЦИЯ
СТРУЙНЫХ НАСОСОВ
Струйные насосы отличаются от ранее рассмотренных объ¬
емных и лопастных насосов тем, что в них отсутствуют движу¬
щиеся механические части. Разность давлений для всасывания
и нагнетания обеспечивается с помощью рабочей жидкости, газа
или пара, подаваемых от внешнего источника под давлением
и сообщающих перекачиваемой жидкости необходимую энер¬
гию.
Принцип действия струйного насоса основан на преобразо¬
вании статического напора (давления) и скоростного напора
(кинетической энергии) в потоке, проходящем через трубу пе¬
ременного сечения (насос), согласно уравнению Бернулли:
Схема струйного насоса и распределение напоров в его ра¬
бочей полости показаны на рис. 60.
Струйный насос состоит из трех основных частей: приемной
камеры 1 с соплом 2, камеры смешения 5 и диффузора 6.
Рабочая жидкость Qi подводится к соплу, имея значитель¬
ный пьезометрический напор ре/р и маленький скоростной
напор C62/2g. В узком сечении 4 сопла скорость увеличивается
до Ci, что соответствует увеличению скоростного напора до
c2J2g за счет уменьшения пьезометрического напора до рi/p.
В кольцевом сечении 3 создается разрежение, в результате ко¬
торого перекачиваемая жидкость Q0, имеющая в сечении а — а
пьезометрический напор pa/p>pi/p, всасывается и приобретает
скорость с0, смешиваясь с рабочей жидкостью Q\, вытекающей
из сопла со скоростью С\.
В результате в камеру смешения поступает суммарный по¬
ток, равный сумме Q2 = Qi + Qo- Напор этого потока в сечении
2—2 равен сумме pzlp + c\l2g. Он больше напора перекачивае¬
мой жидкости, но меньше напора рабочей жидкости. В диффу¬
зоре напор суммарного потока жидкости возрастает до напора
в сечении с — с, равного рс/р, а скоростной напор уменьшается
до значения c2J2g. Напор потока несколько снижается за счет
потерь на гидравлические сопротивления h в. Такие же потери
напора имеются в приемном патрубке на величину hp. с рабочей
жидкости и hB. х перекачиваемой жидкости (см. заштрихованные
треугольники на рис. 60). В струйном насосе различают два на¬
пора:
125
— рабочий Яр, затрачиваемый в струйном насосе, он равен
разности напоров в сечениях b — b и с — с;
— полезный Яп, создаваемый в насосе, он равен разности
напоров в сечениях с — сна — а.
уу
Отношение Кж = —
называется относительным напо¬
ром, отношение дэж = —— — относительным расходом, или
коэффициентом инл<екции.
Рис. 60. Схема струйного насоса и распределение напоров в рабочей полости.
КПД струйного насоса — отношение гидравлических мощ¬
ностей перекачиваемой и рабочей жидкостей:
Яп(?оРо
HpQiPi
(181)
Если рабочая и перекачиваемая жидкости одна и та же, то
можно написать формулу для КПД:
hs
Лэж
' 9эж‘
(182)
Классификация струйных насосов производится по следую¬
щим основным признакам:
— по соотношениям между полезным и рабочим напорами —
эжекторы, инжекторы, эрлифты;
— по роду рабочей жидкости — водоструйные, пароструйные,
газоструйные;
— по числу ступеней — одноступенчатые, двухступенчатые,
многоступенчатые;
— по назначению на судах — водоотливные, рыбонасосы, пи¬
тательные, вакуумные.
§ 32. КОНСТРУКЦИЯ И ЭКСПЛУАТАЦИЯ СТРУЙНЫХ НАСОСОВ
Струйные насосы, соединенные с обслуживаемым объектом
всасывающим патрубком, называются эжекторами. У эжекто¬
ров рабочий напор выше полезного, т. е. ЯР>ЯП. Эжекторы де¬
лятся на водяные — для осушения отсеков, паровые — для от¬
соса воздуха и создания вакуума в конденсаторах, испарителях
и т. д.
Струйные насосы, соединенные с обслуживаемым объектом
нагнетательным патрубком, называются инжекторами. У ин¬
жекторов соотношение напоров обратное Нр<Нп, т. е. полез¬
ный напор выше рабочего. К инжекторам относятся паровые
струйные насосы для подачи питательной воды в парогенера¬
торы.
На рис. 61 показан водоструйный водоотливной эжектор
типа ВЭЖ.
Корпус 3 эжектора, сварной из листовой меди, имеет форму
диффузора с угловым всасывающим патрубком 7, отверстие
которого закрывается колпачком 6 с цепочкой. Слева в корпус
вставлено латунное сопло 2, имеющее форму сходящейся на¬
садки с полугайкой «шторца» 1 для присоединения гибкого
шланга, по которому к эжектору подводится рабочая вода. Для
присоединения к эжектору отводящего шланга служит полу-
гайка шторца 4, расположенная на выходном конце нагнета¬
тельного патрубка 5. Такое соединение обеспечивает работу
переносных эжекторов, которые устанавливают на резьбе па¬
лубных втулок, сообщающихся с помощью трубок с отсеками
или трюмами, требующими осушения.
Эжектор работает следующим образом: рабочая вода обычно
из пожарной магистрали подается под давлением к соплу. Из
выходного узкого сечения сопла вода поступает с большой ско¬
127
Рис. 61. Водоструйный эжектор типа ВЭЖ.
ростью в так называемую камеру смешения, при этом давление
понижается. Проходя по узкому сечению диффузора («горлу»),
вода увлекает за собой воздух и создает разрежение в камере
смешения, которое обеспечивает поступление жидкости из вса¬
сывающего патрубка 7. Благодаря трению и в результате обмена
импульсами всасываемая вода смешивается, захватывается
и перемещается вместе с рабочей. Смесь поступает в рас¬
ширяющуюся часть диффузора, где кинетическая энергия (ско¬
рость) снижается и за счет этого воз¬
растает статический напор, способст¬
вующий нагнетанию жидкостной смеси
через патрубок 5 в нагнетательный
трубопровод и за борт. Подачу эжек¬
тора можно регулировать путем ввер¬
тывания или вывертывания сопла.
На рис. 62 изображен пароструй¬
ный инжектор, используемый для пи¬
тания паровых котлов.
К патрубку 1 инжектора подво¬
дится рабочий пар из котла. Клапан
2 открывается поворотом рукоятки 10.
Пар, проходя через паровое сопло 9,
приобретает большую скорость за
счет снижения давления. При этом
он увлекает с собой частицы воздуха
и создает разрежение, обеспечиваю¬
щее поступление в насос питательной
воды через патрубок 3. Поступившая
вода, смешиваясь с паром, конденси¬
рует его. Уменьшение объема повы¬
шает вакуум в камере смешения 4,
обеспечивающий непрерывное всасы¬
вание питательной воды в инжектор.
Смесь конденсата и воды поступает
через диффузор 6 к невозвратному клапану 5, прикрывающему
вход в питательный трубопровод котла. В результате перехода
части кинетической энергии смеси в давление клапан открыва¬
ется и горячая вода поступает в паровой котел.
Если давление нагнетания перед клапаном 5 будет меньше
давления в котле, то клапан не откроется. В этом случае во¬
дяная смесь в камере 7 отожмет вестовой клапан и через от¬
верстие 8 будет выливаться наружу.
Когда давление станет достаточным для открытия кла¬
пана 5, давление в камере 7 понизится и вестовой клапан под
действием пружины закроется, предотвращая поступление воды
наружу. Паровые инжекторы имеют простое устройство и обес¬
печивают подачу в паровой котел горячей питательной воды,
но малопроизводительны и неэкономичны.
Рис. 62. Пароструйный
инжектор.
128
Отсутствие в струйном насосе движущихся деталей обеспе¬
чивает перекачивание жидкости с различными механическими
включениями, что используется на судах рыбной промышлен¬
ности для перекачивания пульпы, т. е. смеси рыбы с ©одой
насосами-эрлифтами или гидроэлеваторами. В отличие от цент¬
робежных рыбонасосов эрлифты
при перекачивании пульпы не по¬
вреждают рыбу.
В качестве рабочей среды в эр¬
лифтах используется сжатый воз¬
дух, который, перемешиваясь с во¬
дой, создает ей пониженную плот¬
ность.
На рис. 63 показана схема эр¬
лифта. Эрлифт состоит из всасы¬
вающего шланга 4, напорного тру¬
бопровода 3 и компрессора 5. Сжа¬
тый воздух из компрессора по
воздушному шлангу подается в спе¬
циальную камеру 2, внутренняя
часть которой имеет щель. Проходя
через эту щель, пузырьки воздуха
смешиваются с водой, вследствие
чего образуется водовоздушная
смесь с пониженной плотностью.
Выжимаемая водой снаружи водо¬
воздушная смесь поднимается по
трубе вверх, засасывая через отвер¬
стие шланга 1 рыбу.
Высота подъема определяется
Н Pi
из соотношения — = — , откуда
hi р2
полная высота подъема пульпы
Н —
р2
Увеличение количества подаваемого воздуха уменьшает
плотность р2 смеси и так же, как опускание смесительной ка¬
меры, повышающее глубину погружения hi, увеличивает вы¬
соту подъема Я до 2,5 м над уровнем моря.
Основной недостаток струйных насосов — низкий КПД,
обычно не превышающий т}Эж= 16-Н-20%, у эрлифтов г]эр =
= 204-35%.
Согласно действующим «Правилам обслуживания судовых
вспомогательных механизмов и ухода за ними» на судах флота
рыбной промышленности не реже одного раза в год эжекторы
и инжекторы должны полностью разбираться для очистки и
осмотра состояния деталей. При осмотре особое внимание
3 А Е. Богомольный
129
Рис. 63. Схема эрлифта.
необходимо обращать на состояние сопл, которые больше, чем
другие детали, подвержены износу. Сопло следует прочищать
красномедной проволокой. При замене изношенных сопл новые
сопла полагается устанавливать в точном соответствии с за¬
водскими или фирменными данными или по данным измерений
установки старого сопла. Если установочные данные отсутст¬
вуют, то при постановке сопла расстояние между соплом и диф¬
фузором можно принимать равным 0,35D, где D — диаметр
диффузора на входе.
При сборке эжекторов после ремонта очень важно обеспе¬
чить соосность сопла и диффузора, не допустить повреждений
стенок и кромок сопл и обеспечить воздухонепроницаемость
частей корпуса эжектора в местах их соединения.
Перед пуском эжектора в работу нужно открыть клапаны
на всасывающем и отливном трубопроводах и убедиться по
манометру, что давление рабочей воды или пара перед эжек¬
тором достаточное. Для ввода эжектора в действие следует
быстро открыть клапан подвода к эжектору рабочей воды или
пара. Во время работы эжектора нужно следить за давлением
рабочей жидкости или пара, не допуская его снижения до пре¬
делов, нарушающих нормальную работу эжектора. Необходимо
также создать беспрепятственное всасывание перекачиваемой
жидкости, воздуха или пульпы, а для этого проверять чистоту
фильтрующей сетки на конце приемного трубопровода.
Для вывода эжекторов из действия требуется закрыть кла¬
пан подвода рабочей жидкости или пара и перекрыть клапаны
на всасывающем и нагнетательном трубопроводах; после этого
открыть спускные краники для осушения эжектора и трубо¬
проводов. Во время действия эжекторов могут возникнуть сле¬
дующие основные неисправности.
Эжектор не всасывает или плохо всасывает.
Причинами могут быть:
—неправильный пуск эжектора (закрыть клапаны и пов¬
торить пуск в правильной последовательности);
— засорение приемной сетки всасывающего трубопровода
(очистить сетку или сменить ее);
— засорение клапана на всасывающем трубопроводе или
его неполное открытие или засорение трубопровода (прочис¬
тить клапан и всасывающий трубопровод, проверить открытие
клапанов);
— значительный подсос воздуха через неплотности (устра¬
нить подсос воздуха, обжав соединения всасывающего трубо¬
провода) ;
— засорение проходного канала сопла (прочистить сопло);.
— кавитация во всасывающем трубопроводе (принять меры
по устранению кавитации).
Эжектор не дает полной производительности.
Это объясняется следующим:
130
— уменьшением давления рабочей жидкости (необходимо
восстановить расчетные параметры рабочей среды);
— коррозионным или эрозионным износом сопла (сменить
изношенные сопла);
— засорением сопла (прочистить сопло от накипи, соли,
шлама);
— неправильным установочным размером сопла или отсут¬
ствием его соосности, допущенным при сборке (разобрать и
вновь собрать эжектор по инструкции).
При использовании эжекторов в качестве рыбонасосов
должны соблюдаться положения техники безопасности.
1. Перед началом работы с рыбонасосами необходимо про¬
верить состояние и исправность электрооборудования рыбона¬
сосной установки и устранить замеченные дефекты.
2. Спуск всасывающего шланга рыбонасоса за борт и по¬
дачу его на палубу производить только с помощью грузовой
стрелы и лебедки.
3. Перед подъемом всасывающего шланга рыбонасоса из
воды палубу нужно хорошо вымыть от рыбьей чешуи и слизи.
Прием шланга на немытую палубу запрещается.
4. Особое внимание следует обращать на надежность сое¬
динения шлангов всасывающей линии и отсутствие их перело¬
мов при подъеме, спуске и укладке на палубу.
5. При выпуске воздуха из рыбонасоса воздушный кран сле¬
дует открывать осторожно, стоя в стороне от корпуса рыбо¬
насоса.
Глава VII
КОНСТРУКТИВНЫЕ ЭЛЕМЕНТЫ
СУДОВЫХ СИСТЕМ
§ 33. КЛАССИФИКАЦИЯ СУДОВЫХ СИСТЕМ
И ИХ КОНСТРУКТИВНЫЕ ЭЛЕМЕНТЫ
Судовой системой называется комплекс емкостей, трубопро¬
водов, арматуры, приводов и механизмов, предназначенных для
приема и перемещения жидкости, пара или газа и сообщения
им энергии.
Классификация судовых систем приведена в табл. 6. Не¬
смотря на большое разнообразие судовые системы состоят из
одинаковых частей, называемых конструктивными элемен¬
тами.
К основным конструктивным элементам судовых систем от¬
носятся: трубопроводы, путевые соединения, арматура, при¬
воды управления.
131
Таблица 6
Классификация судовых систем
Группы систем
Состав группы систем
Виды систем
Трюмные
Осушительные
Балластные
Осушительные, водоот¬
ливные спасательные
Балластные, креновые,
дифферентные
Противопожарные
Водяные противопо¬
жарные
Парогазовые объем¬
ного тушения
Пенотушения поверх¬
ностные
Пожарной сигнализа¬
ции
Водотушения, спринклер-
ная, водораспыления, оро¬
шения
Паротушения, углекнс-
лотные, жидкого тушения
Химического пенотуше¬
ния, воздушно-механическо-
го пенотушения
Тепловые, световые, ды¬
мовые
Искусственного
микроклимата
Вентиляции
Отопления
Кондиционирования
Естественной вентиляции,
искусственной вентиляции
Отопление: паровое, водя¬
ное, воздушное, электри¬
ческое
Охлаждения, осушения
и подогрева воздуха
Санитарные
Бытового водоснабже¬
ния
Канализации
Питьевой воды, мытьевой
воды, забортной воды
Сточная, фановая
Специальные для
танкеров и теплохо¬
дов
Погрузочно-разгру¬
зочные
Подогрева и охлаж¬
дения
Перекачивания нефте¬
продуктов
Очистки танков и
цистерн
Грузовые, зачистные
Подогрева топлива, ох¬
лаждения масла
Перекачивания топлива,
масла
Моечные, газоотводные
Трубы изготовляются из различных материалов, чаще всего
металлов и, как правило, имеют цилиндрическую форму.
Основным размером для труб и арматуры, обеспечивающим
их стандартизацию и соответствие присоединительных разме¬
ров, является номинальный внутренний диаметр трубопрово¬
дов, называемый «условным диаметром» или «условным прохо¬
дом», Обозначается индексом Dу, рядом ставится цифра, пока¬
132
зывающая размер внутреннего диаметра трубы в миллиметрах.
Например: Dy15, Dy60.
Кроме Dy трубы характеризуются давлением пробным, ус¬
ловным и рабочим.
Пробным (рпр) называется максимальное давление, которое
должна выдержать труба при гидравлическом испытании.
Условным (ру) называется номинальное давление, которое
является предельно допустимым для данного трубопровода
с учетом определенной температуры перекачиваемой среды.
Рабочее давление (р)—это фактическое давление рабочей
а) 5) /7 2
Рис. 64. Путевые соединения судовых систем.
среды, перемещаемой по трубопроводу при определенной рабо¬
чей температуре, которое не может быть больше ру.
По условному давлению подбирают стандартизованную ар¬
матуру для данного рабочего давления. При сборке и разборке
трубопроводов и судовых систем, при соединении труб между
собой, с арматурой, емкостями, механизмами, переборками и
палубами используют разъемные путевые соединения.
Для соединения труб и арматуры с условным проходом
Dy>32 мм при условном давлении ру^64 105 Па обычно при¬
меняют фланцевые соединения (рис. 64, а). Фланец привари¬
вают к трубе, как показано на рисунке, или надевают на трубу
свободно. Чтобы обеспечить плотность фланцевого соединения,
на фланце делают специальные концентрические канавки.
Между фланцами устанавливают прокладки из различных ма¬
териалов в зависимости от рода жидкости, ее температуры и
давления. Наиболее часто используют прокладки из паро-
нита — для пара, резины — для воды, прессшпана или фибры—
для мазута, соляра, масла; красномедные отожженные —для
горячего воздуха и газон,
133
При Z)y<32 мм чаще устанавливают ниппельно-штуцерное
соединение (рис. 64, в). Оно состоит из ниппеля 2, представ¬
ляющего собой наконечник, привариваемый к одной из сое¬
динительных труб 1. К другой трубе приваривают штуцер 5,
имеющий наружную резьбу. Между ниппелем и штуцером рас^
полагают прокладку 4, которая и обжимается с помощью на¬
кидной гайки 3.
При небольших давлениях и условном проходе DY<80 мм
можно использовать муфтовое соединение, показанное на
рис. 64, б. Оно состоит из резьбовой муфты 2 и контргайки 1,
Рис. 65. Фасонные части трубопроводов (фитинги).
предохраняющей от самоотвинчивания. Плотность в муфтовом
соединении достигается с помощью белил, сурика и льняного
волокна на резьбе.
В случае вибраций и тепловых расширений при ру<106 Па
используют дюритовое соединение (рис. 64, г). Оно состоит из
эластичной муфты 2, которая закрепляется на концах трубы /
с помощью хомутиков 3. Материал дюрита в зависимости от
среды должен быть масло- или нефтебензостойким.
При разветвлении трубопровода, а также в местах прохода
труб через твердые стенки (переборки, палубы, настилы и пр.)
используют фасонные части, так называемые фитинги. К ним
относятся всевозможные колена, тройники и переборочные или
палубные проходники-стаканы.
На рис. 65, а изображен фланцевый прямой сварной трой¬
ник, на рис. 65, б — прямой сварной фланцевый проходник —
переборочный стакан, состоящий из трубных фланцев 1, трубы 2
и переборочного фланца 3, которым стакан крепится к пере¬
борке или палубе.
Для восприятия удлинений при изменении температуры и
уменьшения вызываемых ею напряжений в трубах служат ком¬
J 34
пенсаторы, которые могут быть гнутыми, линзовыми или саль¬
никового типа.
Включение или выключение всей системы и ее отдельных
участков, регулирование расхода и давления в магистрали,
а также различные переключения производятся с помощью ар¬
матуры судовых систем. К ней относятся краны, клапаны, клин-
кеты (задвижки) и захлопки.
Краны устанавливают чаще всего в трубопроводах с £>у<
<80 мм и ру<10еПа. Основной регулирующей деталью явля¬
ется поворотная конусная втулка-пробка с проходными отвер¬
стиями-прорезями, расположенная в корпусе, соединенном ща-
трубками с трубами. В зависимости от расположения и числа
прорезей в пробке краны делятся на проходные, трехходовые и
многоходовые (манипуляторы).
На рис. 66, а показан трехходовой кран, имеющий в теле
пробки 6 Т-образную или Г-образную прорезь и корпус 1
с тремя фланцевыми патрубками. На квадратный конец штока
пробки надета рукоятка 3. Место выхода штока из корпуса
уплотнено сальниковой набивкой 4, которая опирается на
кольцо 5 и поджимается втулкой 2. Поворотом пробки с по¬
мощью рукоятки можно переключать между собой три трубы,
запирать их и регулировать в них подачу.
В трубопроводах с DY 50 и до 800 мм устанавливают за¬
движки, называемые клинкетами. Основным запорным и регу¬
лирующим органом является клиновидный диск-клин 2 (см.
рис. 66, б), перекрывающий проходное отверстие корпуса 1.
В верхней части диска имеется ходовая гайка 3, соединенная
с резьбовой частью шпинделя 4, на верхний квадратный конец
которого надета рукоятка 9.
Место прохода шпинделя через крышку 5 уплотнено саль¬
никовой набивкой 7, размещенной между опорным кольцом 6
и нажимной втулкой 8. Шпиндель опирается буртиками на
кольцо и крышку, поэтому он не имеет осевого перемещения.
При вращении шпинделя рукояткой 9 клин перемещается гай¬
кой 3, открывая или закрывая отверстие для прохода жид¬
кости.
Самой распространенной арматурой, применяемой в судо¬
вых системах в диапазоне Dy=30^350 мм, являются клапаны.
По конструкции клапаны делятся на пять основных типов: за¬
порные, невозвратно-запорные, невозвратно-управляемые, не¬
возвратные и дроссельные. Отличительная особенность каж¬
дого типа — конструктивное выполнение соединения тарелки со
шпинделем клапана.
На рис. 66, в показан запорный проходной клапан. Его ос¬
новная деталь — тарелка 8 перекрывает проходное сечение
корпуса 1. Уплотнительной пришлифованной поверхностью 9
она прижимается к поверхности седла 10 клапана. С другой
стороны тарелка соединяется с нижним буртиком шпинделя 4,
135
который в нижней части крышки 2 уплотняется сальниковой
набивкой 6 с опорным кольцом 7 и нажимной втулкой 5,
а в верхней части крышки соединен резьбой. При вращении
маховика 3, насаженного на верхний конец, шпиндель, вворачи-
Рис. 66. Запорно-регулирующая арматура судовых систем.
ваясь в крышку клапана или выворачиваясь из нее, будет
перемещать вверх или вниз тарелку, изменяя открытие проход¬
ного сечения клапана. Диапазон подъема тарелки показан рис¬
ками О и 3 на крышке, соответствующими полному открытию
или закрытию клапана.
136
Часто для удобства управления несколько клапанов имеют
один общий корпус, называемый клапанной коробкой.
Захлопка, изображенная на рис. 66, г, представляет со¬
бой клапан с шарнирно закрепленной тарелкой 5, поворачи¬
вающейся вокруг оси 4.
Корпус 1 имеет фланцы 2 и 6 и крышку 3. Клапан откры¬
вается под давлением среды (как показано стрелкой) и явля¬
ется невозвратным. На судах имеются и управляемые захлопки,
открываемые с помощью привода.
Рис. 67. Автоматические клапаны: предохранительный и редукционный.
Особое назначение в судовых системах имеют автоматиче¬
ские клапаны: предохранительные и редукционные. Эти кла¬
паны обеспечивают безопасность работы трубопроводов и сис¬
тем гидравлических приводов (см. гл. VIII).
На рис. 67 приведены типовые конструкции автоматических
клапанов. Предохранительный клапан предотвращает повыше¬
ние давления в судовой системе сверх заданного путем пере¬
пуска (стравливания) части рабочей жидкости в область пони¬
женного давления (см. рис. 67, а). Плунжер 1 перекрывает
выходной канал 2, который соединен со сливом. Во внутрен¬
ней расточке плунжера помещена пружина 4, которая может
быть отрегулирована на определенное давление. При превыше¬
нии установленного давления плунжер-клапан поднимается,
137
сжимая пружину, и перепускает жидкость на слив. Для того
чтобы погасить собственные колебания клапана, полость под
плунжером соединяется с трубопроводом сверлениями 3, в ко¬
торых имеется винт для регулирования степени демпфиро¬
вания.
Предохранительные клапаны могут иметь тарельчатые за¬
порные органы, они менее чувствительны и более резко сбрасы¬
вают давление по сравнению с плунжерными.
Редукционный клапан обеспечивает снижение давления до
заданной величины и удержание сниженного давления на по¬
стоянном уровне. В этом его отличие от обычного дросселя.
В показанном на рис. 67, б редукционном клапане жидкость
под давлением pi поступает в отверстие 10, затем в полость 8,
которая дросселем 3 соединена с нижней поверхностью поршня
7, а через полость 1 и дроссель 2 — с полостью 6. По мере по¬
ступления жидкости давление в полости 6 увеличивается.
Когда оно достигает установленного для клапана 5, последний
поднимается и часть жидкости переходит через канал 4 на
слив. В результате плунжер 9 при воздействии повышенного
давления под поршнем 7 поднимается и перекрывает проход
жидкости, понижая ее давление до р2. Если давление пони¬
зится под поршнем, то от возрастания давления в полости 6
плунжер опустится и увеличит открытие для прохода жид¬
кости. Давление вновь повысится до ро, после чего подорвет
клапан 5 и цикл повторится. Процесс редуцирования в клапане
имеет колебательный характер и обеспечивается дросселями
и шариковым перепускным клапаном.
Управление неавтоматической аппаратурой судовых систем
осуществляется приводами, которые могут быть местными и
дистанционными, действующими вручную или приводом от дви¬
гателей. Дистанционные приводы арматуры (ручные и авто¬
матические) делятся на механические, гидравлические, пневма¬
тические и электромагнитные.
§ 34. ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ СУДОВЫХ СИСТЕМ
И ТРЕБОВАНИЯ РЕГИСТРА СССР
В соответствии с «Правилами технической эксплуатации
флота рыбной промышленности СССР» эксплуатация судовых
систем производится в соответствии с заводскими инструкциями
и «Наставлением по уходу за судовыми корпусами, помеще¬
ниями, устройствами и по обслуживанию систем судов флота
рыбной промышленности СССР».
Техническое состояние судовых систем должно соответст¬
вовать требованиям Правил Регистра СССР или Речного Ре¬
гистра РСФСР и обеспечивать постоянную готовность к ис¬
пользованию их по назначению.
138
В соответствии с требованиями Регистра трубопроводы
гидравлических приводов изготовляют из бесшовных труб сталь¬
ных, медных или из медных сплавов *.
Трубопроводы, в которых может возникнуть давление, пре¬
вышающее рабочее, должны быть оборудованы предохрани¬
тельными клапанами, предотвращающими возможность превы¬
шения этого давления более чем на 10%2. Если на трубопро¬
воде устанавливается редукционный клапан, то за ним следует
располагать манометр и предохранительный клапан.
Муфтовые резьбовые соединения допускаются Регистром
для воздушных и измерительных труб водяных цистерн и льял.
Арматура напорных трубопроводов гидравлических приво¬
дов, работающих при давлении 16* 105 Па и выше, должна быть
выполнена из стали, бронзы или высокопрочного чугуна.
Арматура дистанционного управления должна иметь мест¬
ное ручное управление.
Забортные приемные и отливные отверстия систем и тру¬
бопроводов главных и вспомогательных механизмов, располо¬
женных в машинных помещениях, где несется вахта, необхо¬
димо снабжать легкодоступными клапанами или клинкетами
с местным управлением. Приводы управления должны иметь
указатель положения запорного органа.
В автоматизированных механических установках с безвах-
тенным обслуживанием управление указанными клапанами
осуществляется с центральных постов; при этом надо преду¬
сматривать устройства, сигнализирующие о поступлении за¬
бортной воды в помещения этих установок; отливные бортовые
клапаны должны быть, как правило, невозвратно-запорного типа.
Приводы управления приемной и донной арматуры распо¬
лагают в легкодоступных местах и снабжают указателями поло¬
жения запорного органа.
Глава VIII
СИСТЕМЫ ГИДРАВЛИЧЕСКИХ ПРИВОДОВ
§ 35. ПРИНЦИП ДЕЙСТВИЯ, ВИДЫ И НАЗНАЧЕНИЕ.
ГИДРОДВИГАТЕЛИ
Система гидравлического привода, или гидропривод, вклю¬
чает в себя насос и гидродвигатель с соответствующей регули¬
рующей аппаратурой и служит для передачи посредством
1 См. «Правила классификации и постройки морских судов». Регистр
СССР. Л., Транспорт, 1970.
2 Это требование может не распространяться на системы гидравлических
приводов.
139
жидкости механической энергии на расстояние. С энергетической
точки зрения насосом называется гидравлическая машина, пре¬
образующая механическую энергию в гидравлическую, т. е.
в энергию потока жидкости. Гидродвигателем (гидромотором)
называется гидравлическая машина, преобразующая энергию
потока жидкости в механическую энергию.
Гидравлический привод на морских судах все шире приме¬
няется в рулевых, якорных, швартовных и подъемных механиз¬
мах, люковых закрытиях, гребных винтах регулируемого шага
(ВРШ), промысловых механизмах и системах дистанционного
управления, вытесняя электрический привод. Причиной явля¬
ются следующие преимущества гидроприводов:
— малые габариты и масса на единицу передаваемой мощ¬
ности;
— возможность непрерывного бесступенчатого плавного ре¬
гулирования мощности в широком диапазоне выходной ско¬
рости;
— простота управления и эксплуатации;
— длительный срок службы;
— экономичность вследствие высоких КПД;
— хорошая защита от перегрузок;
— способность развивать большие и переменные усилия и
моменты;
— возможность внедрения дистанционного управления и ав¬
томатизации.
Насосы, входящие в системы гидроприводов, как правило,
роторного типа, а гидродвигатели — с вращательным и возврат¬
но-поступательным движением.
В зависимости от конструктивного исполнения различают
гидроприводы роторно-пластинчатые, поршневые (плунжерные),
шестеренные и винтовые. По способу регулирования производи¬
тельности приводы могут быть трех типов: нерегулируемые,
с дроссельным регулированием и с объемным регулированием.
Для палубных механизмов — брашпилей, шпилей, грузовых
лебедок, а также рулевых машин и траловых лебедок харак¬
терны повторно-кратковременные режимы работы с быстрым
изменением скоростей и нагрузок и стояночные режимы под
полной нагрузкой. Эти режимы, а также необходимость плав¬
ного и бесступенчатого регулирования скоростей во время ра¬
боты хорошо обеспечиваются гидроприводом. На современных
добывающих и обрабатывающих траулерах, производственных
рефрижераторах типа «Грумант», «Эхолот» осуществлена си¬
стема комплексной гидрофикации всех палубных и промысло¬
вых механизмов. В этой системе гидропривода используются
роторно-пластинчатые насосы и гидродвигатели типа «Норвинч»
с дроссельным регулированием мощности и скорости.
Механическая схема гидропривода типа «Норвинч» показана
на рис. 68. Гидропривод состоит из роторно-пластинчатого гид¬
140
ронасоса 17, который нагнетает рабочую жидкость — минераль¬
ное масло — по трубе 4 к золотниковой коробке управления 2
гидромотора 1. На нагнетательной линии установлены мано¬
метр 16, запорный кран 14 и спускные воздушные пробки 11.
От золотниковой коробки масло через невозвратный клапан
3 отводится в трубу 5, а через кран 6 поступает в резервуар 7
и далее по трубе, на которой установлены термометр 8 и филь¬
тры — механический 9 и магнитный 10 — к всасывающему пат-
Рис. 68. Схема гидропривода типа «Норвинч» с дроссельным регулирова¬
нием: а — золотники управления гидродвигателем; б— трубопровод си¬
стемы.
рубку насоса. Нагнетательный и всасывающий патрубки соеди¬
нены предохранительным клапаном 15, перепускающим масло
при чрезмерном увеличении давления. Трехходовой кран 18
соединен со всасывающим патрубком насоса, невозвратным кла¬
паном и трубой 12 от напорной цистерны 13, имеющей воздуш¬
ную трубку. К трехходовому крану 18 присоединен также
шланг 19 от ручного насоса 21, заполняющего систему маслом
из бака 20.
Гидродвигатель с двумя камерами управляется двумя золот¬
никами (рис. 68, а): левый золотник регулирует режим работы
путем изменения скорости и момента, правый — направление
и частоту вращения, пуск и остановку гидродвигателя. Режим¬
ный золотник направляет масло в обе камеры гидродвигателя
при больших нагрузках и в одну камеру — при малых нагруз¬
ках. В первом случае скорость снижается, а крутящий момент
возрастает в два раза; во втором случае, наоборот, момент
уменьшается до одинарного, а скорость возрастает. Маневровый
золотник направляет масло к режимному и путем дросселиро¬
вания меняет частоту вращения в пределах одного режима и ре¬
версирует.
На рис. 68 показаны четыре положения золотников:
/ — золотники в верхнем положении. Масло проходит в верх¬
ний кольцевой канал корпуса гидродвигателя и в нижнюю ра-
Рис. 69. Роторно-пластинчатый гидродвигатель двойного действия типа М-540.
бочую камеру. Это положение соответствует наибольшей ско¬
рости при одинарном моменте;
II — правый золотник поднят, левый опущен. Масло прохо¬
дит по двум каналам одновременно в обе камеры. В этом слу¬
чае создается максимальный момент при сниженной скорости;
III — правый золотник в среднем положении, и масло в гид¬
ромотор не поступает; при любом положении левого золотника
гидромотор останавливается — положение «Стоп»;
IV — оба золотника в нижнем положении. Масло будет по¬
ступать в рабочие камеры с противоположной стороны рабочей
полости и направление вращения гидромотора изменится.
Устройство роторно-пластинчатого гидродвигателя типа
М-540 показано на рис. 69.
Чугунный корпус 4 гидродвигателя лапами 25 крепится
к фундаментной раме, а с торцов закрыт чугунными крыш¬
ками 3 и 8. Чугунный ротор 6 соединен шпонкой с валом 11.
Внутри корпуса имеются две рабочие камеры: верхняя 15 и ниж¬
няя 23. Справа в верхней камере сделано окно, соединяющее
142
ее с каналом 19. Слева верхняя камера сообщается с кольце¬
вым каналом, который через окно 22 выходит в канал 20. В ниж¬
ней рабочей камере слева расположено окно 25, соединяющее
ге с каналам 20. Справа нижняя камера через окно 21 сообща¬
ется с кольцевым каналом 18, который отделен перегородкой
(она видна' на продольном разрезе) от кольцевого канала 19,
соединенного с камерой 15. Окна всех трех каналов 18, 19 и 20
выходят на поверхность фланца 17\ к нему прикреплена золот¬
никовая коробка управления гидродвигателем. В горловине
с крышкой 5 высверлено отверстие для выпуска воздуха, закры¬
тое пробкой. Лючок с крышкой 29, расположенный внизу, имеет
пробки спуска из кольцевых каналов. Для предохранения гид¬
родвигателя от перегрузки служит клапан 26, соединяющий оба
кольцевых канала, когда давление превышает допустимое.
В крышках 3 и 8 смонтированы роликоподшипники 2 и 9,
в которых лежит вал 11. Дистанционные кольца 28 и 30, уста¬
новленные между подшипниками и ротором, упираются в бурты
вала и закреплены пружинными кольцами, фиксирующими
также подшипники. Наружные обоймы роликоподшипников 2
и 9 прижимаются крышками 1 и 10. Отверстие для прохода вала
в крышке 10 уплотнено сальником 27. В восемь радиальных па¬
зов на роторе 6 вставлены стальные рабочие лопатки 12. Чугун¬
ные полозья 14, перемещающиеся в четырех дуговых пазах, тор¬
цами упираются в нижние поверхности боковых концов лопаток.
В местах пересечения полозьев сделаны вырезы, позволяющие
полозьям перемещаться независимо друг от друга.
Стальные упоры 13, вставленные в ступенчатые сверления
торцов полозьев, прижимаются к поверхности лопаток спираль¬
ными пружинами, которые компенсируют некоторые погрешно¬
сти обработки рабочей поверхности корпуса. Рабочая поверх¬
ность должна быть обработана с таким расчетом, чтобы сумма
двух высот лопаток, упирающихся в концы полоза под углом
90°, была равна постоянной высоте рабочей камеры. Это обес¬
печивает соприкосновение лопаток с поверхностью корпуса при
выдвижении их из пазов. Через отверстие 16, соединенное с ду¬
гообразными каналами 7, поступает масло под лопатки. В ре¬
зультате разность давлений в камере и пазах не действует на
лопатки при подъеме и опускании и облегчает их передви¬
жение.
Гидродвигатель работает следующим образом. Масло под
давлением от насоса поступает в каналы 18 и 19. В верхнюю ра¬
бочую камеру 15 оно входит по каналу 19 справа и уходит
слева по кольцевому каналу в окно 22 и канал 20. Разность дав¬
лений на верхних лопатках создает вращающий момент, кото¬
рый поворачивает ротор против часовой стрелки. Такой же мо¬
мент создается на лопатках нижней рабочей камеры от масла,
поступающего в канал 18 и окно 24 слева и уходящего справа
через окно 21 и канал 20.
U3
В рассматриваемом случае объем подаваемого масла рас¬
пределяется поровну между обеими рабочими камерами, и уси¬
лие прилагается с обеих сторон камеры, что создает макси¬
мальный момент при медленном вращении ротора и обеспечи¬
вает плавное выбирание тросов. При вращении ротора лопатка,
упираясь во внутреннюю поверхность корпуса с одной стороны
паза, перемещает полоз и выдвигает с другой стороны паза ло¬
патку, расположенную под углом 90° к первой. Выдвинутая ло¬
патка, проходя по поверхности рабочей камеры постоянного
радиуса, остается неподвижной в радиальном направлении, а за¬
тем вдвигается корпусом и выдвигает первую лопатку, которая
в свою очередь начинает работать, т. е. лопатки все время выд¬
вигаются попеременно.
В случае, если все масло от насоса подается только через
канал 18, а каналы 19 и 20 являются выпускными, работают
только те лопатки, которые проходят по нижней рабочей камере,
а верхняя камера обеими сторонами соединяется с выпускным
трубопроводом и потому не работает. Тогда вращающий момент
составляет 40% максимального, так как усилие создается толь¬
ко в одной камере. Частота вращения будет наибольшей: все
масло поступает в нижнюю камеру, а значит, лопатки переме¬
щаются быстро и тем самым обеспечивают максимальную ча¬
стоту вращения вала. Если необходимо изменить направление
вращения ротора с максимальным вращающим моментом,
масло подается от насоса в канал 20, а уходит через каналы 18 и
19. В нижнюю камеру масло поступает справа из канала 20
и окна 21, а в верхнюю — слева через окно 22 и кольцевой ка¬
нал. Ротор будет вращаться по часовой стрелке, что обеспечит,
например, травление тросов с небольшой скоростью без приме¬
нения ленточных тормозов. Если подавать масло в канал 20,
а выпускать его через канал 18, гидродвигатель будет вра¬
щаться также по часовой стрелке, но с большей скоростью, так
как в этом случае работает только нижняя камера.
Для остановки гидродвигателя необходимо прекратить по¬
ступление масла от насоса.
Гидромашины пластинчатого типа просты по устройству, ма¬
лочувствительны к изменению вязкости рабочей жидкости. Од¬
нако их можно использовать при сравнительно невысоких
давлениях (в пределах 25—30 кгс/см2) и частотах вращения
вследствие увеличения утечек и износа рабочих поверхностей
пластин.
Для передачи больших мощностей и значительной частоты
вращения устанавливают гидромашины роторно-поршневого
(плунжерного) типа. Устройство и действие роторно-поршневых
насосов радиального и аксиального типов переменной произво¬
дительности было рассмотрено ранее.
Рассмотрим действие роторно-поршневых гидравлических
двигателей высокого давления (150 кгс/см2).
144
На рис. 70 показана конструкция и схема действия высоко-
моментного роторно-поршневого гидродвигателя радиального
типа с расходящимися поршнями. Он состоит из статорного
кольца 1 с фигурным внутренним профилем-копиром. Роторный
барабан 2 имеет девять радиально расположенных цилиндров,
в которых движутся плунжеры 3 с роликами 4, обкатывающи¬
мися по копиру на игольчатых подшипниках. Ротор свободно
сидит на втулке 8 неподвижного цапфового распределителя 5
с впускными 7 и выпускными 6 клапанами (рис. 70, а). Рабочая
жидкость под давлением р поступает под плунжеры через окна
Рис. 70. Роторно-поршневой гидродвигатель радиального типа: а — конструк¬
ция; б— схема действия.
во втулке 8 и прижимает их к копиру. Поступательное движение
плунжеров вследствие разложения силы р на нормальную N и
тангенциальную Т преобразуется во вращательное (рис. 70, б).
Момент вращения будет обеспечиваться силой Т на радиусе р
каждым поршнем несколько раз за один оборот. С этой целью
число поршней 2 принимается больше числа ходов х, соответ¬
ствующих числу выступов копира. Роторно-поршневые гидро¬
двигатели аксиального типа так же, как и насосы, представляют
собой наиболее распространенную и перспективную группу гид¬
ромашин, так как они надежно зарекомендовали себя в судовых
системах, требуют минимальных затрат на обслуживание и
очень компактны.
Благодаря небольшим объемам циркулирующего масла ак¬
сиально-поршневые машины обладают большой приемистостью
и малой инерционностью, в связи с чем широко используются
для реверсивных приводов. Конструкция аксиального роторно¬
поршневого гидродвигателя изображена на рис. 71. В непод¬
145
вижном корпусе 10 двигателя размещен блок цилиндров 11
с расположенными по окружности осевыми цилиндрическими
отверстиями, в которых свободно скользят плунжеры (пор¬
шни) 6. В крышке 13, примыкающей через промежуточное коль¬
цо 12 к блоку цилиндров, имеются подсоединения 1 и 2 для на¬
порного и сливного трубопроводов через вставку 14 для пе¬
репуска.
Рабочая жидкость насоса под давлением попеременно под¬
водится к полостям цилиндров через распределительный диск 4,
Рис. 71. Роторно-поршневой гидродвигатель аксиального типа.
скользящий по эксцентриковому диску 5, насаженному на вал
двигателя, вращающийся в определенном направлении.
Это давление плунжерами передается на качающийся диск
9, прочно соединенный с ведущим валом, и через шарикопод¬
шипники — на наклонный диск 8. Возникающие при этом тан¬
генциальные силы вращают приводной вал 7, на конце которого
имеется призматическая шпонка. После произведенной работы
качающийся диск отжимает плунжеры, не находящиеся под
давлением, в исходное положение, и рабочее масло свободно
стекает через сливной штуцер.
В начале ведущего вала имеются цапфы 3 квадратного
сечения для проворачивания вручную. Направление вращения
зависит от направления протекания рабочей жидкости. Если
напорный трубопровод подведен к каналу 1, а сливной — к ка¬
налу 2, то направление вращения правое (если смотреть состо-
146
роны конца вала), а если наоборот — левое. В любом установ¬
ленном положении перепускной трубопровод должен обеспечи¬
вать заполнение гидродвигателя маслом полностью.
Частота вращения аксиально-поршневых гидродвигателей
может регулироваться изменением количества подаваемой ра¬
бочей жидкости при постоянном рабочем объеме цилиндров или
изменением этого объема посредством наклона шайбы при по¬
стоянном количестве подаваемой рабочей жидкости.
Отечественная промышленность выпускает аксиально-порш-
невые гидродвигатели типа ИМ и соответствующие им акси¬
ально-поршневые насосы типа 11Д.
Характеристики гидродвигателей типа ИМ приведены
в табл. 7.
Таблица 7
Характеристики аксиально-поршневых гидродвигателей типа ИМ
Номер
гидро-
двига¬
теля
Расход
жидкостей
за один
оборот вала,
см3/об
Максималь¬
ная частота
вращения
вала, об/мин
Максималь¬
ная расчет¬
ная произво¬
дительность,
л/мин
Момент,
развиваемый
гидромотором
при перепаде
А р —100 кгс/см2.
кгс-м
Максималь¬
ный
развиваемый
момент,
кгс-м
5
71
1440
102
105
158
10
142
1440
204
210
315
20
251
1440
361
370
556
30
501
980
491
740
1110
50
790
980
774
1170
1760
В гидроприводах промысловых механизмов часто использу¬
ются ротационные шестеренные гидродвигатели, которые отли¬
чаются малыми габаритами и массами, просты и дешевы в из¬
готовлении и не требуют постоянного квалифицированного об¬
служивания.
Схема действия, конструкция и общий вид шестеренного дви¬
гателя типа ТГЛ с осевой компенсацией зазора даны на рис. 72.
Из схемы видно, что жидкость, подводимая от насоса под дав¬
лением р в рабочую полость а, действует на зубья шестерен
и развивает крутящий момент, равный произведению силы дав¬
ления на площадь рабочей части профиля зуба и на плечо, рав¬
ное расстоянию от центра давления (точнее, от точки приложе¬
ния равнодействующей силы Р) до осей шестерен. Поскольку
положение точки зацепления пары зубьев на линии зацепления
при повороте шестерен изменяется, будут изменяться также ра¬
бочие площади, а следовательно, и крутящий момент, развивае¬
мый гидродвигателем. Колебания момента линейно зависят от
колебаний подачи шестеренного насоса.
Конструкция гидродвигателя (рис. 72, б) включает корпус 5
с установленными в нем подвижно в осевом направлении втул¬
147
Рис. 72. Шестеренный гидродвигатель: а — схема действия; б— конструкция.
перепускных клапана 1 независимо от направления вращения
отводят масло к перепускному трубопроводу двигателя, при¬
соединенному к штуцеру 8. Вращающий момент передается
через шлицевой конец выходного вала 10.
ками 7 подшипников качения, воспринимающих радиальные на¬
грузки валов зубчатых шестерен 6. С торцов корпус закрыт
двумя крышками-плитами: 9, крепящей и центрующей двига¬
тель при монтаже, и 4
с напорными полостями
3 для компенсации осе¬
вого зазора и с компен¬
сацией клапанов 1 и 2.
Рабочая жидкость от на¬
соса под давлением по¬
дается через клапан 2
в напорные полости 3 и
прижимает втулки под¬
шипников к торцевым по¬
верхностям скольжения
зубчатых колес, обеспе¬
чивая минимальные осе¬
вые зазоры. Оба масло-
148
§ 36. СХЕМЫ ГИДРОПРИВОДОВ.
ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ
Система гидравлического привода кроме насоса и гидродви¬
гателя включает в себя распределительно-регулирующую и пре¬
дохранительную аппаратуру, соединенную гидравлической
сетью трубопроводов. В системе гидропривода должно обеспе¬
чиваться управление потоком жидкости, поступающей от на¬
соса к гидродвигателю, и предохранение от аварий и пере¬
грузок.
Для быстрого составления и чтения гидравлических схем
разработаны условные обозначения, утвержденные Государст¬
венным стандартом, Единой системы конструкторской докумен¬
тации (ЕСКД). Условные обозначения основных элементов
гидропривода даны в табл. 8. Гидравлические машины изобра¬
жаются кружками со стрелками, причем у насоса стрелка
направлена острием наружу, у гидродвигателя—острием внутрь.
Две стрелки указывают на реверсивность; насос переменной
производительности имеет дополнительную пересекающую
стрелку. Гидроцилиндры изображаются прямоугольником с рас¬
положенными внутри поршнем, штоком и пружиной.
Аппаратура распределения, управления, регулирования и за¬
щиты изображается прямоугольниками. Линии и знаки, примы¬
кающие к внешнему контуру, показывают тип клапана или зо¬
лотника, а также направление прохода жидкости. Условные обо¬
значения имеют и другие элементы гидросистемы — фильтры,
аккумуляторы, баки, трубопроводы.
Как уже упоминалось, одним из существенных преимуществ
гидропривода является приспособленность к дистанционному
управлению, включая иногда элементы автоматизации.
На рис. 73 изображены три типа схем гидравлических си¬
стем дистанционного управления. В объемной системе прямого
действия (рис. 73, а) исполнительный привод передвигается по¬
воротом рукоятки 1, которая перемещает поршень 3, сообщаю¬
щий импульс поршню 4. Создаваемое при этом давление пере¬
дается через рабочую жидкость, подаваемую из расширитель¬
ного бака 2.
Объемная система применима для приводов малой мощно¬
сти, действующих на небольшом расстоянии.
В закрытой гидравлической системе дистанционного управ¬
ления (рис. 73, б) усилие создается не вручную, а с помощью
насоса 2, и регулируется дросселем 4 и предохранительным кла¬
паном 3 исполнительного привода 1. Эта система проста и не
требует от оператора значительных усилий.
Так же, как объемная, закрытая система весьма чувстви¬
тельна к попаданию воздуха и к изменению вязкости рабочего
масла. Этих недостатков лишена проточная система, в которой
усилие в исполнительном приводе 1 (рис. 73, в) создается
149
Таблица 8
Условные обозначения элементов гидравлического привода
Обозначение
Наименование объекта,
действие
Примечание
I. Насосы и гидродвигатели
Насос постоянной произво¬
дительности
Насос переменной произво¬
дительности
Гидродвигатель нереверсив¬
ный
Гидродвигатель реверсив¬
ный
Гидродвигатель регулируе¬
мый
Гидродвигатель ступенчато¬
го изменяемого объема
То же
Распространенное
обозначение
II. Гидроцилиндры
Цилиндр двустороннего
действия
Цилиндр дифференциальный
Цилиндр одностороннего
действия с пружиной
Продолжение табл. 8
Обозначение
Наименование объекта,
действие
Примечание
III. Аппаратура распределительная, обозначения внешние
Клапан, золотник (основ¬
ной символ)
Клапан, золотник с ручным
управлением
Клапан, [золотник толчко¬
вого типа с пружинным воз¬
вратом
То же
Влево гидравлически или
пружиной, вправо гидравли¬
чески
Гидравлически с дифферен¬
циальным приводом
То же, но с гидропружиной
Переключение электромаг¬
нитами
Переключение— гидравличе¬
ское, среднее положение —
пружинами
То же, переключение —
электромагнитами
Число полей по
количеству положе-
Распространенное
обозначение
Так же с пневмо¬
приводом
151
Продолжение табл. 8
Обозначение
Наименование объекта,
действие
Примечание
IV. Аппаратура распределительная, обозначения внутренние
Закрыто
Открыто
вправо
влево
» прямо
Реверс потоков
V. Средства защиты, блокировок, регулирования,
гидрооборудование систем
Клапан предохранитель¬
ный, переливной
То же
Клапан редукционный, ре¬
гулятор «до себя»
Сброс в магистраль
слива
Распространенное
изображение
152
Продолжение табл. 8
Обозначение
Наименование объекта,
действие
Примечание
Клапан редукционный, ре¬
гулятор «после себя»
Делитель потока
Дроссель
» регулируемый
Обратный (невозвратный)
клапан
Г идрозамок
Клапан «ИЛИ» (команды
проходят справа или слева)
Избирающий клапан «И»
(открывает высокое давление)
Избирающий клапан «И»
(закрывает высокое давление)
Манометр
Расходомер
Аккумулятор давления
Фильтр
Или обе одновре¬
менно
Выбирает сторону
низкого
Закрывает сторону
низкого
Пневматический
или пружинный
153
Продолжение табл. 8
Обозначение
Наименование объекта,
действие
Примечание
Центробежный маслоочи-
ститель
Реле времени
Теплообменник, охладитель
Подогреватель так
же, но стрелки внутрь
Сливной бак, слив в бак,
прием из бака
Расширительная цистерна,
бак
VI. Трубопроводы
Силового контура, высоко¬
го давления
Системы управления
Слива
»
»
Употребляется ча¬
сто, упрощает схемы
Гибкий шланг
Соединение
Пересечение
Просто, но не ис¬
ключает возможно¬
сти ошибки
Продолжение табл. 8
Обозначение
Наименование объекта,
действие
Примечание
Пересечение
Просто, но не ис¬
ключает возможности
ошибки
Удаление воздуха из гидро¬
системы
Заглушка, место присоеди¬
нения прибора
Соединение трубопроводов
шарнирное
Соединение трубопроводов
трехлинейное
Быстроразъемное соедине¬
ние
Быстроразъемное соедине¬
ние с обратными клапанами
насосом 2, напор которого определяется разностью гидравличе¬
ских сопротивлений, создаваемых двумя дросселями — регули¬
руемым 4 и нерегулируемым 5, а также предохранительным кла¬
паном 3 при постоянной циркуляции масла. Такая система
дистанционного управления пригодна в условиях низких тем¬
ператур окружающего воздуха, но требует увеличенного рас¬
хода энергии для непрерывной циркуляции рабочей жидкости
(масла)
Рассмотрим принципиальные схемы гидроприводов судового
грузоподъемного поворотного крана с объемным регулирова¬
нием скорости в механизмах подъема и поворота при закрытой
системе питания. В качестве гидравлических двигателей исполь¬
зуются высокооборотные аксиально-плунжерные, радиально¬
плунжерные и поршневые машины прямого действия (силовые
цилиндры).
Гидравлическая схема механизма подъема крана на
рис. 74, а состоит из гидродвигателя 1 с гидротормозом 2 и
предохранительным клапаном 3.
Клапан 4, имеющий гидроуправление, с помощью клапана 5
поддерживает определенное противодавление в системе слива,
предотвращающее отрыв плунжеров от жидкости и удары в гид¬
родвигателе. Насос 7 переменной производительности управля¬
ется сервомотором 6, получающим с поста управления импульс,
который усиливается насосом 10. Давление в системе управле¬
ния регулируется предохранительными клапанами 9. Насос 11
через невозвратные клапаны 8 пополняет утечки в системе.
В этой магистрали подпитки установлен грязевой фильтр 12.
Для разгрузки механизма от давления в предельных положе¬
ниях имеется блокировочный клапан 13. При падении давления
в системе пружинный тормоз 2 затормаживает двигатель. В на-
а)
Рис. 73. Схемы гидравлических систем дистанционного управ¬
ления.
чале работы двигатель растормаживается путем сжатия пру¬
жины тормоза при достижении требуемого давления в системе.
В гидроприводе механизма изменения вылета стрелы
(рис. 74, б) имеются гидрозамки 2, которые запирают полости
силового цилиндра 1 при пониженном давлении, предотвращая
самопроизвольное опускание стрелы, соединенной со штоком
поршня. От перегрузки полостей гидравлического цилиндра пре¬
дусмотрены предохранительные клапаны 3. Управление меха¬
низмами вылета стрелы производится золотником 9. При по¬
ложении «Стоп» рабочая жидкость от насоса 6 перепускается
золотником через фильтр 8 на слив при наличии редукционного
клапана 7, обеспечивающего постоянное давление при работе
насоса.
При перемещении золотника 9 влево жидкость от насоса пе¬
репускается к напорному золотнику 4, который открывается под
действием создаваемого импульса через дроссель 5 с невозврат¬
ным клапаном и открывает гидроклапан 2. Жидкость поступает
в правую полость гидроцилиндра 1 (со стороны штока). Пор¬
шень, двигаясь влево, поднимает стрелу и уменьшает ее вылет.
Из левой полости жидкость выжимается на слив через редук¬
ционный клапан 10, обеспечивающий противодавление для
156'
равномерного перемещения поршня и стрелы. Клапан 10 вместе
с невозвратными клапанами встроен в золотник 4.
При перемещении золотника 9 вправо рабочая жидкость от
насоса передается на оба силовых контура (без слива); пере¬
ключая золотник 4, она открывает оба гидрозамка 2 и посту¬
пает в обе полости гидроцилиндра 1. Вследствие разности уси¬
лий с обеих сторон поршня, а также под действием масс груза
и стрелы поршень будет перемещаться вправо, опуская стрелу
Рис. 74. Принципиальные схемы гидропривода крана: а — механизма подъ¬
ема; б — механизма изменения вылета стрелы.
и увеличивая ее вылет со скоростью, регулируемой редукцион¬
ным клапаном 10.
Техническая эксплуатация, наблюдение, уход и работы по
профилактике систем гидроприводов осуществляет постоянно
закрепленный персонал, имеющий специальйую подготовку. Под¬
готовка к действию, пуск и обслуживание во время работы,
а также остановка гидравлических машин гидропривода должны
выполняться в полном соответствии с «Правилами обслужива¬
ния судовых вспомогательных механизмов и ухода за ними»,
разработанными Гипрорыбфлотом и утвержденными МРХ
СССР, а также с инструкциями заводов и фирм-изготовителей.
Для обеспечения постоянной готовности гидропривода к дей¬
ствию необходимо:
— периодически проверять и поддерживать уровень масла
в напорном масляном баке;
157
— следить за герметичностью системы, не допуская утечек
через места уплотнений и соединений трубопроводов, аппара¬
туры и механизмов;
— периодически, не реже одного раза в год, проверять ка¬
чество рабочего масла;
— через каждые 2000 ч работы, но не реже одного раза
в 2 года менять масло в гидросистеме, попутно производя
чистку, мытье и окраску масляных баков;
— периодически, через каждые 150—200 ч работы, произво¬
дить чистку и промывку сетчатых и магнитных фильтров гидро¬
системы; через 500 ч работы заменять патрон фильтра погло¬
щающего типа;
— в период бездействия гидропривода один раз в месяц
производить контрольную проверку его основных элементов
в действии;
— не реже раза в год проверять срабатывание защиты гид¬
ропривода, в том числе предохранительных клапанов, по пре¬
дельным значениям параметров;
— постоянно следить за состоянием изоляции и креплением
кабелей и приводов электропривода насосной станции и системы
сигнализации;
— периодически смазывать узлы трения, шарнирные соеди¬
нения, подшипники, блоки механизмов;
— соблюдать особую чистоту при сборке и разборке гидро¬
агрегатов и гидроаппаратуры в периоды ремонтов, ревизий и ос¬
мотров;
— протирать детали только чистым материалом — батистом,
бязью или фланелью, не применять нитяную ветошь и лоскут,
которые могут засорить систему гидропривода;
— маркировать приборы контрольно-регулирующей аппара¬
туры в соответствии с принципиальной гидросхемой для облег¬
чения обслуживания и обнаружения неисправного узла.
При подготовке гидропривода к пуску необходимо:
— произвести наружный осмотр, убедиться в комплектности
гидросистемы и отсутствии в ней посторонних предметов;
— убедиться в исправности барабанов, муфт, тормозов;
— проверить действие рычагов управления и установить их
в нейтральное положение;
— проверить наличие рабочего масла в емкостях и смазоч¬
ного масла в узлах трения;
— в летнее время проверить систему охлаждения;
— в холодное (зимнее) время до начала работы включить
маслоподогреватели и провернуть вхолостую все механизмы
в течение 10 мин.
Обслуживание гидропривода во время эксплуатации преду¬
сматривает следующее:
наружный осмотр гидромеханизмов не менее двух раз
в течение непрерывной четырехчасовой работы;
158
— работу без рывков и внезапных перекладок рычагов уп¬
равления приводами, так как это приводит к повышенному из¬
носу;
— при внезапной остановке механизмов в момент поднятия
груза — тормоз отжимается специальными приспособлениями и
обеспечивает плавное опускание груза;
— стремление исключить во время работы срабатывание ог¬
раничительных и блокировочных устройств.
Остановка гидропривода осуществляется путем перевода ру¬
кояток системы управления в нейтральное положение и про¬
верки фиксации механизма тормозом. После остановки необхо¬
димо осмотреть гидросистему, чтобы убедиться в отсутствии по¬
вреждений и течи масла и в случае необходимости устранить
обнаруженные дефекты.
Рассмотрим характерные неисправности, которые могут
иметь место при работе гидропривода, и вызывающие их при¬
чины.
1. Отсутствие давления в системе гидропривода; возможные
причины:
— насос не подает жидкость в систему (проверить исправ¬
ность насоса);
— чрезмерный износ движущихся частей насоса (проверить
производительность насоса на холостом ходу и под нагрузкой,
в случае необходимости заменить изношенные детали);
— большие внешние утечки через уплотнения и соединения
насоса и трубопроводов (проверить исправность уплотнений,
подтянуть или заменить их, подтянуть соединения трубопрово¬
дов, сменить прокладки);
— большие внутренние утечки в гидроагрегатах либо откры¬
тый слив через предохранительный клапан или золотник (про¬
верить слив масла при подтормаживают механизма и устра¬
нить причину).
2. Шум и вибрации в гидроприводе; возможные причины:
— большое сопротивление во всасывающей магистрали (про¬
верить арматуру во всасывающем трубопроводе и приемный
фильтр);
— подсос воздуха во всасывающей магистрали (герметизи¬
ровать систему);
— пузырьки воздуха во всасываемой рабочей жидкости
(устранить попадание воздуха в жидкость и не допускать пено-
образования);
— засорение воздушного клапана («сапуна») гидробака
(очистить и отрегулировать сапун);
— неисправность насоса (отремонтировать или заменить
насос);
— некачественный монтаж насосной установки (проверить
центровку насоса с приводным электродвигателем, исправность
соединительной муфты, крепление насоса и двигателя);
159
— вибрация предохранительного клапана (снять клапан,ра¬
зобрать, проверить состояние деталей и отрегулировать пру¬
жину) ;
— нежесткое крепление трубопроводов привода (поставить
на трубы дополнительные подвески и опоры).
3. Неравномерное движение гидравлических рабочих орга¬
нов; возможные причины:
— наличие воздуха в масле гидросистемы (выпустить воз¬
дух из системы или сменить масло);
— высокое давление в системе, близкое к предельному дав¬
лению настройки предохранительного клапана (снизить давле¬
ние, создаваемое насосом);
— перекосы в исполнительном механизме или недостаточно
обильная смазка (проверить качество сборки гидромеханизма
и подачу смазки);
— недостаточное противодавление в сливной магистрали
(повысить сопротивление сливной магистрали регулировкой ре¬
дукционного клапана или дросселя на сливе).
Раздел второй
ВИНТЫ РЕГУЛИРУЕМОГО ШАГА
(ВРШ)
Чтобы судно получило поступательное движение, необходим
движитель, преобразующий механическую энергию, развивае¬
мую двигателем, в усилие, преодолевающее сопротивление во¬
дяной и воздушной сред.
Основным видом движителя на современных морских про¬
мысловых судах является гребной винт регулируемого шага
(ВРШ). Он пришел на смену обычному гребному винту фикси¬
рованного шага (ВФШ) и имеет перед ним следующие преиму¬
щества:
— позволяет использовать полную мощность главного дви¬
гателя на любых режимах при различном водоизмещении
судна;
— обеспечивает при постоянной частоте вращения главного
двигателя получение различных скоростей судна от полного
хода вперед до полного назад;
— позволяет осуществлять маневрирование и реверс путем
дистанционного управления с ходового мостика без подачи
команд в ЦПУ машинного отделения;
— позволяет применять нереверсивные двигатели в качестве
главных (дизель, паровую или газовую турбину) без установки
реверсивных муфт;
— увеличивает моторесурс дизеля за счет исключения его
остановок и пусков при маневрах судна;
— облегчает пуск главного двигателя за счет снижения на¬
грузки при установке лопастей в нулевое положение.
Эти преимущества особенно важны для промысловых судов,
так как облегчают работу с сетевыми орудиями лова, увеличи¬
вают срок службы главного двигателя, снижают расход топ¬
лива, повышают маневренность и безопасность плавания в рай¬
оне промысла, облегчают работу судомеханика и судоводителя.
6 А. Е. Богомольный
161
Глава IX
УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ВРШ
§ 37. ОСНОВНЫЕ ГЕОМЕТРИЧЕСКИЕ ЭЛЕМЕНТЫ ВИНТА.
СИЛЫ, МОМЕНТЫ
Для того чтобы судно двигалось в определенном направле¬
нии, необходима толкающая сила, преодолевающая силу сопро¬
тивления водяной и воздушной сред корпусу судна. Для созда¬
ния толкающей силы морские суда имеют движитель — греб¬
ной винт.
Подобно тому, как обычный металлический винт, ввинчи¬
ваясь при вращении в твердое тело, поступательно движется
в нем, гребной винт, вращаясь от главного двигателя, как бы
«ввинчивается» в водяную среду и приобретает поступательное
движение, сообщая его судну. Упорное усилие, необходимое для
этого, создается лопастями, поверхности которых представляют
собой часть винтовой поверхности резьбы. Число лопастей со¬
ответствует числу заходов (ниток) резьбы. Лопасти своим ос¬
162
Рис. 75. Основные геометрические
элементы гребного винта.
У — шаг Бинта; 2 — нагнетающая сторона;
3 — входящая кромка; 4 — засасывающая
сторона; 5 — перо; 6 — выходящая кром¬
ка; 7 — ось вращения винта; 8 — ступица;
9 — комель; 10 — направление вращения
винта; 11 — направление движения судна.
нованием ■— комлевой частью, или комлем — крепятся на сту¬
пице, насаживаемой на конец гребного вала за кормой судна,
(рис. 75). Поверхность лопасти («перо») со стороны, смотрящей
в корму, на переднем ходу судна называется нагнетающей, а со
стороны, смотрящей в нос, — засасывающей. Таким образом,
если заставить гребной винт вращаться в неподвижной трубе
(судно удерживается на швартовах), он будет действовать по¬
добно осевому насосу и перемещать поток воды в осевом на¬
правлении.
Нагнетающая и засасывающая винтовые поверхности при
пересечении образуют линии контура лопасти, называемые
кромками лопасти. При вращении винта поток воды будет на¬
бегать на передние кромки лопастей, называемые входящими,
и сбегать с противоположных, выходящих, кромок.
Как известно, резьба каждого винта характеризуется гео¬
метрическим шагом, представляющим собой осевое расстояние,
на которое перемещается металлический винт при ввинчивании
в твердое тело или гайку за один полный оборот. Геометриче¬
ский шаг винта равен расстоянию t между двумя соседними
витками резьбы, умноженному на число заходов (ниток) m
резьбы, т. е.
И = tm.
Геометрическим шагом гребного винта Н называется вели¬
чина, на которую поднимается нагнетательная поверхность ло¬
пасти на одном радиусе за один полный оборот (см. рис. 75).
Кроме того, различают шаговый угол ср, который связан
с шагом Н и радиусом г сечения лопасти зависимостью
tg<P = ^~- (184)
2 nr
Очевидно, что при постоянном шаге Н каждое сечение имеет
свой радиус, и следовательно, свой шаговый угол. Наибольший
угол ф будет у сечений, близких к ступице (у комля), наимень¬
ший — у концевых сечений лопасти.
Действительный шаг гребного винта меньше геометриче¬
ского вследствие скольжения винта в воде и отбрасывания воды
в сторону, противоположную движению. Действительный шаг
гребного винта — это расстояние, которое судно пройдет за
один оборот винта, называемый поступью винта.
Относительной поступыо винта Я называется отношение по¬
ступи к диаметру винта D:
где с — скорость судна, м/с; «с — частота вращения гребного
винта, об/с.
6*
163
Диаметром винта D называется диаметр диска, ограничен¬
ного наружными концами лопастей. Важным геометрическим
элементом, характеризующим гребной винт, является отноше¬
ние площадей всех лопастей к площади диска винта (рис. 76) —
так называемое дисковое отношение.
При работе гребного винта на его лопасти действуют сле¬
дующие основные силы и моменты: гидродинамические силы
Рис. 76. Диаметр и дисковое отно-
шение гребных винтов.
1 — ометаемая площадь, или диск вин¬
та; 2 — плоскость вращения винта.
Справа — гребной винт с дисковыми
отношениями: / — малым; II — сред¬
ним; III — большим.
Рис. 77. Силы, действующие на лопасти
гребного винта.
А — ось вращения винта; 1 — точка прило¬
жения силы сопротивления вращению Т; 2
точка приложения силы упора Р; Б — ось по¬
ворота лопасти; В — направление вращения
винта; Г — направление движения.
и моменты от воздействия на лопасти набегающего потока воды
и центробежные силы и моменты от масс вращающихся лопа¬
стей.
Гидродинамические силы возникают от действия сил тяги
(упора лопасти) Р и сил сопротивления вращению лопасти Т.
Сила Р направлена в сторону движения судна, а сила Т — па¬
раллельно плоскости вращения винта.
Как видно из рис. 77, точки приложения равнодействующих
сил на лопасти близки друг к другу. Эти силы создают два мо¬
мента: изгибающий лопасти на радиусах гт и гР относительно
оси вращения винта и скручивающий на плечах хт и хР отно¬
сительно оси поворота лопасти.
164
Центробежная сила R масс в любом сечении лопасти будет
действовать под некоторым углом к оси лопасти и может быть
разложена на две составляющие: К, направленную параллельно
оси, и М — перпендикулярную ей. Эти составляющие лежат
в плоскости, параллельной плоскости вращения винта (см.
рис. 77). Равнодействующая сил К растягивает лопасть в ра¬
диальном направлении и стремится оторвать ее от ступицы.
Равнодействующая сил М создает скручивающие моменты, стре¬
мящиеся развернуть лопасть в плоскость вращения винта.
Таким образом, от совместного действия гидродинамических
и центробежных сил и их моментов лопасти изгибаются, скру¬
чиваются и растягиваются.
Для гребного винта с фиксированным шагом (ВФШ) влия¬
ние этих сил и моментов необходимо учитывать при определе¬
нии прочности лопастей и ступицы. Для гребного винта с регу¬
лируемым шагом (ВРШ) указанные силы и моменты кроме
прочности определяют выбор механизмов поворота лопастей, не¬
обходимых для этого усилий и системы управления.
§ 38. СХЕМЫ И КЛАССИФИКАЦИЯ ВРШ
Схема установки ВРШ на судне приведена на рис. 78. Она
состоит из следующих основных частей: поста управления 2
с маневровой рукояткой 1\ электромагнитов 3 системы управ¬
ления; распределительных золотников 4 для силового масла;
механизма изменения шага (МИШ) 5; гребного вала-валопро-
вода 6\ гребного винта с поворотными лопастями (ВПЛ) 7; си¬
ловой системы насоса для подачи масла (на схеме не пока¬
зана) .
Установка работает следующим образом. При нейтральном
положении маневровой рукоятки 1 распределительный золот¬
ник 4 находится в нейтральном положении, и масло, подаваемое
насосом, циркулирует, не совершая работы. Вращение двигателя
через валопровод 6 передается ВПЛ 7, который вращается с ус¬
тановленным шагом лопастей, осуществляя определенный ре¬
жим движения судна.
При отклонении маневровой рукоятки 1 в положение «Впе¬
ред» распределительный золотник 4 смещается электромагни¬
тами 3 в какую-либо сторону — например вправо. При этом си¬
ловое масло от насоса по правой трубе поступает в МИШ, а по
левой уходит на слив. Сервомотор МИШа создает необходимое
усилие и посредством механизма поворота лопастей (МПЛ),
размещенного в ступице ВПЛ, синхронно поворачивает лопасти
винта в сторону увеличения их шага. Когда шаг поворота ло¬
пастей винта достигнет заданного (по приборам), маневровая
рукоятка возвращается в нейтральное положение. При этом рас¬
пределительный золотник также возвращается в среднее поло¬
жение с помощью обратной связи; подача масла в МИШ прек¬
165
ращается и ВПЛ обеспечивает новый режим движения судна
при увеличенном шаге лопастей. Если отклонить рукоятку 1
в положение «Назад», распределительный золотник 4 сместится
в обратную сторону, т. е. влево. При этом положении силовое
масло от насоса будет поступать в МИШ по левой трубе, а ухо¬
дить на слив по правой. Сервомотор через МПЛ развернет ло¬
пасти ВПЛ в обратную сторону и уменьшит шаг до требуемого.
Вследствие этого при по¬
стоянной частоте вращения
двигателя и валопровода
уменьшится скорость судна
па передний ход. Фиксация
нового положения лопастей
осуществляется так же, как
в предыдущем случае —
установкой маневровой ру¬
коятки в нейтральное поло¬
жение.
Если установить лопа¬
сти ВПЛ на нулевой шаг,
судно потеряет ход при ра¬
ботающем двигателе и вра¬
щающемся винте.
Для получения заднего
хода лопасти тем же спосо¬
бом разворачивают от ну¬
левого шага на обратный
(рис. 79). Судно начинает
двигаться задним ходом
при сохранении постоян¬
ного направления враще¬
ния двигателя и валопро¬
вода.
Рассмотренная система управления ВРШ устроена по так
называемому «неследящему» принципу. Неследящая система от¬
личается тем, что изменение шага лопастей ВПЛ продолжается
до тех пор, пока маневровая рукоятка будет отклонена от ней¬
трального положения, и изменение шага лопастей зависит от
продолжительности отклонения маневровой рукоятки. Для фик¬
сации положения лопастей рукоятку возвращают в нейтральное
положение, как только прибор — указатель положения лопастей
покажет, что лопасти развернуты на требуемый шаг. Неследя¬
щая система управления ВРШ по устройству наиболее проста,
но требует постоянного наблюдения за приборами и удержания
маневровой рукоятки судоводителем, пока происходит измене¬
ние режима. В период сложных маневров это не позволяет су¬
доводителю уделять достаточно внимания контролю за положе¬
нием судна и другим важным операциям управления.
Рис. 78. Схема установки ВРШ.
166
При следящей системе управления маневровая рукоятка ус¬
танавливается в определенное положение, соответствующее раз¬
вороту лопастей на требуемый шаг. В остальном операция раз¬
ворота лопастей осуществляется автоматически, без участия
человека. После того как лопасти ВПЛ займут требуемое поло¬
жение, сервомотор МИШ останавливается и удерживает лопа¬
сти на заданном шаге. Таким образом, следящая система управ¬
ления ВРШ более удобна, но устройство ее сложнее.
Кроме разделения по принципу системы управления на сле-
Рис. 79. Положения лопастей ВПЛ для трех режимов судна: а — вперед;
б — стоп; в — назад.
дящие и неследящие, ВРШ можно классифицировать по сле¬
дующим основным признакам:
— по диапазону поворота лопастей;
— по роду энергии, используемой для работы сервомотора
МИШ;
— по характеру связи между режимами работы ВРШ
и главного двигателя.
По диапазону поворота лопастей можно выделить три группы
ВРШ:
— веер ежим ные, обеспечивающие все режимы работы
судна в диапазоне от «Полного вперед» до «Полного назад»,
с фиксацией положения лопастей в любом месте диапазона;
— многопозиционные, или ступенчатые, обеспечиваю¬
щие работу винта на нескольких определенных режимах;
— двухпозиционные, имеющие только два режима,
обеспечиваемые положениями лопастей, например: «Вперед—
Назад», или «Вперед—Стоп» и др.
По роду энергии (привода), используемой для работы МИШ,
различают следующие виды ВРШ: с гидравлическим приводом,
167
с электромеханическим приводом, с механическим приводом от
гребного вала и с ручным приводом.
По характеру связи дистанционного управления ВРШ и дви¬
гателя возможны следующие варианты:
1) управление ВРШ и двигателя независимое, т. е. управ¬
ление с мостика производится только изменением шага ВПЛ,
а постоянная частота вращения двигателя поддерживается ре¬
гулятором однорежимного типа;
2) предусмотрена автоматическая программная связь между
углом (шагом) установки лопастей винта и частотой вращения
главного двигателя, имеющего всережимный регулятор.
Вторая система является более экономичной, но отличается
большей сложностью устройства и управления. В обоих слу¬
чаях необходимы контроль за работой двигателя из ЦПУ ма¬
шинного отделения и корректировка с целью предохранения
двигателя от перегрузки.
Глава X
КОНСТРУКЦИИ ВРШ И ПРАВИЛА
ЭКСПЛУАТАЦИИ
§ 39. КОНСТРУКЦИЯ ВРШ ПРОМЫСЛОВОГО СУДНА
На больших морозильных рыболовных траулерах (БМРТ)
устанавливают ВРШ типа ВР-394С, имеющие следующие основ¬
ные технические данные:
Вид энергии для сервомотора МИШ .... Гидравлическая
Номинальная мощность, передаваемая на ВРШ
при номинальной частоте вращения 250об/мин.,
л. с 2000
Полный диапазон угла поворота лопастей
От носового до кормового упора, ° 50
Время поворота лопастей из одного крайне¬
го положения в другое, с 35
Управление шагом лопастей винта:
а) основное Дистанционное
электрическое
неследящее
б) аварийное Ручным
маслонасосом
при частоте
вращения винта
110 об/мин
Срок службы до капитального ремонта, ч . . 20 000
Общая масса ВРШ (сухая), кг 14 000
На рис. 80 показано общее расположение основных узлов
ВРШ на БМРТ.
168
Винт с поворотными лопастями (ВПЛ) 2 крепится за ахтер-
штевнем 1 к фланцу гребного вала 4, проходящего в дейдвуд-
ной трубе 3. Перед дейдвудом на гребном валу имеется букса
масловвода 5, представляющая собой подшипник скольжения,
удерживаемый от разворота реактивной штангой 10. Через
буксу по внутреннему каналу вращающегося вала смазочное
масло из напорного бака поступает в ступицу ВПЛ.
Валопровод вращается в опорных подшипниках 6 и имеет
полумуфту 7 для соединения с цилиндром МИШ 8.
В цилиндре, который крепится к кормовым концам проме¬
жуточного вала, находится поршень, соединенный штангой, рас¬
положенной внутри пустотелого гребного вала, с механизмом
Рис. 80. Общее расположение ВРШ на БМРТ.
поворота лопастей (МПЛ) в ступице ВПЛ. Силовое масло по¬
дается в одну из полостей гидроцилиндра МИШ через масло-
буксу 9 и перемещает поршень внутри цилиндра в ту или иную
сторону, обеспечивая через штангу и МПЛ разворот лопастей
винта.
Конструкция ВПЛ с механизмом поворота лопастей МПЛ
ВР-394С показана на рис. 81.
Корпус ступицы 3, выполненный из морской латуни или
бронзы, имеет три радиальные расточки под углом 120°, в ко¬
торых монтируются подшипники скольжения лопастей. Узел
подшипника лопасти состоит из шайбы 6 лопасти, кольцевой
шайбы 4 и упорной шайбы 11, которая закреплена в корпусе
ступицы. Шайбы 4 и 6 стянуты вместе шестью длинными бол¬
тами 5 с гайками, утопленными в комле лопасти. Механизм по¬
ворота лопастей (МПЛ) — кулисного типа. Он состоит из пол¬
зуна 8 с тремя пазами. В пазы входят сухари 9, через которые
возвратно-поступательное движение ползуна передается на
пальцы 10; совершая вращательное движение, пальцы повора¬
чивают лопасти.
Ползун перемещается в шлицевой втулке 2 и опорном под¬
шипнике 7, который центрируется в корпусе ступицы; при этом
169
шлицевая втулка не дает ползуну проворачиваться. В кормовой
части ступицы находится компенсатор объема 13, закрытый ко¬
жухом 14. Компенсатор состоит из цилиндра и поршня с уплот¬
нительными манжетами, соединенного шарнирной штангой с го¬
ловкой стягивающего болта. Поршень компенсатора объема вы¬
тесняет или принимает такой же объем, как и выходящая из
ступицы или входящая в нее штанга гребного вала.
Рис. 81. Гребной винт с поворотными лопастями (ВПЛ) и меха¬
низмом поворота лопастей (МПЛ) ВР-394С.
Таким образом, в ступице поддерживается постоянный объем
масла, что необходимо для предотвращения образования там
вакуума или повышенного давления, и, следовательно, исклю¬
чает возможность подсоса воды или вытеснения масла через
уплотнения лопасти. При просачивании масла в полость между
обтекателем 1 и кожухом 14 в случае повышения давления бо¬
лее 4 кгс/см2 срабатывает предохранительный клапан 12, пере¬
пуская масло в полость ступицы. Уплотнение подшипников ло¬
пастей позволяет в аварийных случаях производить смену по¬
врежденной лопасти под водой.
Механизм изменения шага (МИШ) является гидравлическим
силовым агрегатом, обеспечивающим поворот лопастей путем
создания необходимого усилия и момента для механизма пово¬
рота лопастей (МПЛ) и фиксирующим заданный угол лопасти.
Основными узлами и деталями МИШ (рис. 82) являются:
пустотелый вал 12 с соединительной муфтой 19, цилиндром 6,
кормовой крышкой 3, поршнем 8 и штангой 13; маслобуксой 24;
П
12
агрегатом отсчета шага, состоящим из датчика — указателя шага
14 и каретки обратной связи 16\ фиксаторов шага 11.
Гидравлический цилиндр образован фланцем вала, цилин¬
дром 6 и кормовой крышкой 3. Поршень 8 закреплен на штанге
13 гайкой 9, самоотвинчивание которой предотвращается
штифтом. Штанга 13 соединена штифтами со штоком 22 обрат¬
ной связи. На кормовом конце штанги 13 навернут фланец 1,
соединенный с фланцем штанги, проходящей внутри гребного
вала к МПЛ. Под давлением силового масла, поступающего
через маслобуксу 24 в носовую полость цилиндра по сверлениям
вала 12 и по центральному сверлению в штанге 13, поршень пе-
Рис. 82. Механизм изменения шага (МИШ) ВР-394С.
ремещается в цилиндре в ту или другую сторону. На валу 12
имеется два гидравлических фиксатора 11, которые запирают
масло в полостях цилиндра при падении давления в маслопод¬
водящей магистрали, удерживая тем самым в заданном поло¬
жении поршень 8 и, следовательно, стопорят МПЛ, фиксируя
лопасти на заданном угле поворота.
Соединительная муфта 19 удерживается на валу разъемным
упорным кольцом 28, вставленным в проточку вала. К муфте
при помощи конусных болтов крепится промежуточный ци¬
линдр 20. В муфте 19 и цилиндре 20 имеются отверстия для
тяг 17, которые соединены с диском 23 обратной связи. В свер¬
лении вала размещены штанги 13 МИШ и обратной связи 22,
лежащей в резиновых подшипниках 18. В носовой части вала
для этой цели имеется выточка, в которой находится корпус
носового подшипника. Носовая часть вала закрыта уплотне¬
нием 29.
В кормовой крышке 3 установлен кормовой подшипник 2
с уплотнительными манжетами. Подшипники являются опорами
штанги с поршнем. Ограничителями хода поршня в цилиндре 8
служат: с кормовой стороны бурт 5, с носовой — подшипник 10.
В цилиндре 6 имеются четыре резьбовых отверстия, закры¬
ваемых пробками 4 и предназначенных для слива масла, страв¬
171
ливания воздуха и подсоединения гибких шлангов ручного мас-
лонасоса. Цилиндр во всех разъемах уплотнен резиновыми коль¬
цами, пробки — медными прокладками, а поршень — фасон¬
ными и круглыми манжетами 7.
Носовая часть штанги 13 соединена штифтами со штангой
обратной связи 22, которая в свою очередь через крестовину 21
и тяги жестко связана с диском 23 обратной связи. При пере¬
мещении вдоль вала диск нажимает на рамки каретки 16, ко¬
торая, двигаясь по направляющим, перемещает зубчатую рей¬
ку 15 и передает через
шестерню вращение ва¬
лику датчика 14 указа¬
теля шага.
Маслобукса 24 состо¬
ит из двух половин, стя¬
нутых болтами, и имеет
две кольцевые проточки,
служащие для подвода
силового масла под дав¬
лением в гидроцилиндр,
и две проточки по кра¬
ям— для отвода сливно¬
го масла из гидроцилин¬
дра в бак по трубопро¬
воду 26.
Трущаяся поверхность
маслобуксы облицована
баббитом и смазывается
маслом, просачивающимся из ее рабочих полостей и отводимым
в маслосборники 27. Маслобукса охлаждается маслом, которое
самотеком поступает из основного маслобака через рубашку 25
маслобуксы в бак сбора утечек.
В случае выхода из строя уплотнений поршня МИШ, фикса¬
торов шага или гидросистемы лопасти винта могут быть зафик¬
сированы в положении переднего хода отжимными болтами 2,
как показано на рис. 83. Болты проходят через отверстие с резь¬
бой в местах соединения полумуфты 1 гребного вала и кормовой
крышки 3 гидроцилиндра с пробками 4. Болты 2 упираются
в поршень 5 и перемещают его от кормового подшипника 6 до
носового 7. Поршень, двигаясь в нос, перемещает штангу МИШ
и, воздействуя на МПЛ в ВПЛ, разворачивает лопасти на пе¬
редний ход.
На промысловых судах меньшей мощности устанавливаются
в качестве движителя винты регулируемого шага ВР-503, имею¬
щие следующие основные технические данные: тип ВРШ — гид¬
равлический, всережимный; номинальная мощность, передавае¬
мая на ВРШ при номинальной частоте вращения гребного вала
250 об/мин при работе главного двигателя— 1320 л. с., при со¬
2 3 4
Рис. 83. Установка лопастей ВПЛ на пе¬
редний ход отжимными болтами.
172
вместной работе главного двигателя и электродвигателя —
1637 л. с.
Полный диапазон поворота лопастей по упорам ВРШ — не
менее 60°.
Время поворота лопастей от положения «Полный вперед»
до положения «Полный назад» или обратно при 250 об/мин
гребного вала — не более 30 с (при необходимости ускорения
поворота можно включить резервный насос).
Рис. 84. Гребной винт с поворотными лопастями (ВПЛ) ВР-503.
Управление шагом винта: основное — электрическое, дистан¬
ционное, неследящее; аварийное — местное, реверсивное; управ¬
ление золотником — ручное. Ресурс ВРШ до капитального ре¬
монта 20 тыс. ч. Общая масса ВРШ (сухая) — 8700 кг.
Конструкция винта с поворотными лопастями (ВПЛ) ВР-503
показана на рис. 84. Корпус 16 имеет три радиальные расточки,
расположенные под углом 120°, в которые монтируются подшип¬
ники лопастей. В носовую часть ввернуто восемь шпилек 11,
служащих для крепления ступицы к фланцу гребного вала. Кру¬
тящий момент передается четырьмя цилиндрическими штиф¬
тами 14. Стык ступицы и фланца гребного вала уплотнен круг¬
лым резиновым кольцом.
В кормовой части корпус 16 ступицы закрыт обтекателем 1,
стык между ними уплотнен резиновым кольцом. Для стравли¬
173
вания воздуха из полостей ступицы при заливке и сливе масла
установлены две пробки 19.
Узел подшипника лопасти состоит из шайбы лопасти 7 и
пальцевой шайбы 5, которые центруются между собой штиф¬
тами 9. Шайба лопасти 7 и пальцевая шайба 5 смонтированы
на упорном бурте корпуса ступицы и стянуты резьбовой втулкой
18. Узел подшипника лопасти уплотнен резиновыми манжетами,
расположенными в манжетодержателе 6. Манжетодержатель
крепится к шайбе лопасти 7 болтами. Лопасть 10 центруется на
двух штифтах 9 и крепится к подшипнику лопасти шестью бол¬
тами 8.
В ступице расположен кулисный механизм (ползун 15, су¬
харь 17, пальцевая шайба 5), преобразующий при изменении
шага винта возвратно-поступательное движение ползуна в по¬
воротное движение лопастей, установленных на подшипнике
скольжения. Ползун 15 перемещается в шлицевой шайбе 12
и в кормовом подшипнике 3, установленном в кормовой стенке 4,
и удерживается от поворота шлицевой втулкой 13.
Ползун имеет три паза, в которых расположены сухари 17.
Внутри ползуна проходит стяжной болт 2, соединяющий ползун
15 со штангой гребного вала.
Кормовая стенка 4 отделяет полость ступицы со смазочным
маслом от воздушной полости обтекателя 1.
Кормовой конец ползуна 15 (при движении в корму) выхо¬
дит из масляной полости в воздушную полость обтекателя 1.
Поскольку диаметр кормового конца ползуна равен диаметру
носового конца штанги гребного вала, то общий объем поло¬
сти вала ступицы не изменяется.
Таким образом, полость обтекателя является компенсатором
объема. Для предотвращения обрыва обтекателя в случае, если
полость его окажется заполненной постепенно просачивающейся
через уплотнения жидкостью (маслом или водой), в кормовой
стенке 4 установлено два клапана 20, предназначенных для
стравливания просачивающейся жидкости из воздушной поло¬
сти обтекателя во внутреннюю полость ступицы.
Конструкция механизма изменения шага (МИШ) ВР-503
дана на рис. 85. Основными узлами и деталями МИШ явля¬
ются: вал, стейка цилиндра, цилиндр, поршень, маслобукса, фик¬
саторы шага, подшипник обратной связи.
Гидравлический цилиндр образован фланцем вала 14 с от¬
верстиями 4, цилиндром 17 и стенкой цилиндра 18.
Поршень перемещается давлением масла, которое поступает
через маслобуксу 13. Вал 14 имеет сверления для подвода
масла под давлением в носовую полость цилиндра. В кормовую
полость масло подводится по центральному сверлению в штанге
поршня 16.
На валу МИШ крепятся два гидравлических фиксатора ша¬
га 5, запирающих масло в полостях цилиндра при падении дав-
174
Рис. 85. Механизм изменения шага (МИШ) ВР-503.
ления в маслоподводящей магистрали. В средней части вала 14
имеется бурт, удерживающий своими торцами маслобуксу от
продольного смещения на валу. Четыре резьбовых отверстия,
закрытых пробками 2, предназначены для слива масла и страв¬
ливания воздуха, а также для подсоединения штуцеров гибких
шлангов ручного насоса.
В стенке цилиндра 18 и кормовом фланце вала МИШ име¬
ется по три резьбовых отверстия 1, закрытых заглушками. От¬
верстия предназначены для установки винтовых домкратов при
аварийной фиксации лопастей. Поршень 16 уплотнен резино¬
выми кольцами и центруется в корпусах носового 15 и кор¬
мового 3 подшипников, являющихся одновременно опорами но¬
совой и кормовой штанг поршня. Носовая часть поршня
(штанга) соединена болтами со штангой 12 обратной связи.
Через траверсу 11 с направляющей 6 и подшипник 7 обратной
связи штанга соединена с шестерней 8 датчика указателя шага.
Подшипник уплотнен на валу кольцом 9. Носовое отверстие
вала имеет заглушку 10.
§ 40. ТРЕБОВАНИЯ РЕГИСТРА ПО ЭКСПЛУАТАЦИИ ВРШ
Согласно Правилам Морского Регистра системы МИШ дол¬
жны обслуживаться двумя независимыми насосами, один из ко¬
торых является резервным.
На судах с главными механизмами мощностью менее 300 л. с.
в качестве резервного насоса может быть использован ручной
насос или ручной привод для поворота лопастей. МИШ должен
быть выполнен так, чтобы при выходе из строя гидравлической
системы управления можно было установить лопасти в положе¬
ние переднего хода.
Время перекладки лопастей ВРШ с полного переднего хода
на полный задний не должно превышать 20 с для винтов D<
<2 м и 30 с для винтов £>>2 м.
ВРШ после сборки должен быть испытан на плотность из¬
нутри гидравлическим давлением, превышающим не менее чем
на 1 кгс/см2 (105 Па) гидравлическое давление, действующее
на оси ступицы при максимальной осадке судна.
Ступица гребного винта (ВПЛ) должна быть проверена на
герметичность наружным давлением воды, превышающим на
2,5 м максимальную глубину погружения оси винта при невра-
щающемся валопроводе и непрерывных максимальных пере¬
кладках лопастей в течение 1 ч. Проникновение воды в ступицу
ВПЛ не допускается.
Общее наблюдение, уход и планово-предупре¬
дительные осмотры имеют целью поддержание ВРШ
в готовности к действию. ВРШ обслуживается периодически:
ежедневно, раз в неделю, раз в месяц, раз в полгода, раз в год
и раз в два года, а также при каждом доковании судна.
176
Обслуживание агрегатов привода маслонасосов, системы ди¬
станционного управления шагом винта, гидросистемы и приво¬
дов системы указателей шага должно осуществляться в соот¬
ветствии с фирменными или заводскими инструкциями, прило¬
женными к этим агрегатам и приводам. О результатах осмотров
и о проведенных работах необходимо делать записи в машин¬
ном журнале, формуляре и паспортах.
Для поддержания ВРШ в готовности к действию необхо¬
димо:
— содержать в исправном состоянии и чистоте все агрегаты
и системы;
— следить за уплотнениями узлов, агрегатов и за соединени¬
ями трубопроводов, не допуская подтеков масла и подсоса воз¬
духа;
— следить за правильностью регулирования и за состоянием
системы дистанционного управления ВРШ;
— следить за исправным состоянием крепежных и стопоря¬
щих деталей;
— своевременно производить планово-предупредительные ос¬
мотры.
Подготовка ВРШ к действию осуществляется
в следующем порядке:
а) путем внешнего осмотра убеждаются в исправности агре¬
гатов и отсутствии посторонних предметов на них;
б) проверяют уровень масла в маслобаках;
в) открывают краны основного маслобака и кран маслобака
системы смазки ВПЛ;
г) подают питание на приводы маслонасосов, систему ди¬
станционного управления и систему указателей шага лопастей;
д) проворачивают гребной вал на два-три оборота валопо-
воротным устройством;
е) поочередно с каждого поста управления с переключением
насосов (основного и резервного) производят два-три пробных
поворота лопастей в диапазоне от «Полного вперед» до «Пол¬
ного назад» и обратно;
ж) устанавливают лопасти на нулевой шаг, а рукоятку по¬
ста управления— в положение «Стоп»;
з) переключателем включают тот пост управления, с кото¬
рого будет производиться работа.
Пуск в ход, обслуживание во время работы и
остановка ВРШ сводятся к следующему. Пуск
в ход главного двигателя рекомендуется производить при поло¬
жении лопастей «Стоп» после подготовки ВРШ к действию.
Поворот лопастей в заданное положение осуществляется от¬
клонением рукоятки поста управления. По достижении задан¬
ного положения стрелки выносного указателя шага (ВУШ)
нужно отпустить рукоятку поста управления для автоматиче¬
ского возврата в нейтральное положение.
177
Во время работы ВРШ периодическому контролю подверга¬
ются:
—давление масла (по манометру во время поворота лопа¬
стей; оно должно быть не более 28 кгс/см2);
— температура маслобукс МИШ и гребного вала;
— уровень масла в маслобаках;
— герметичность соединений и уплотнений;
— постоянство положения лопастей (по стрелкам БУШ).
Перед остановкой главного двигателя лопасти ВПЛ следует
установить на нулевой шаг — в положение «Стоп».
В период технической эксплуатации ВРШ возможны сле¬
дующие характерные неполадки и повреждения:
1. При отклонении рукоятки поста дистанционного управле¬
ния стрелки указателей шага не передвигаются. Причины не¬
исправности и способы их устранения:
а) неисправны электромагниты распределительного золот¬
ника— обводнение, загрязнение (выяснить причину и устранить
ее, перейти на ручное управление золотником);
б) неисправен маслонасос (перейти на работу резервных
маслонасосов, устранить неисправность);
в) заедание золотника — попадание грязи, коррозия (устра¬
нить причины заедания).
2. При неработающем маслонасосе и вращающемся вало-
проводе лопасти винта самопроизвольно поворачиваются. При¬
чины неисправности и способы их устранения:
а) повреждены уплотнительные манжеты поршня (заменить
манжеты);
б) повреждены прокладки (манжеты), уплотняющие кормо¬
вую и носовую крышки гидроцилиндра или штанги МИШ (за¬
менить прокладки-манжеты);
в) неисправны клапаны фиксаторов шага (устранить неис¬
правности или заменить фиксаторы).
3. Стрелки БУШ на ходу судна колеблются в пределах двух
и более малых делений шкалы прибора. Возможная причина —
образование люфтов или нарушение регулировки кинематиче¬
ской цепи системы обратной связи (устранить люфты, отрегу¬
лировать механизмы кинематической цепп обратной связи, со¬
гласовать положение лопастей с БУШ).
4. Поворот лопастей осуществляется замедленно либо лопа¬
сти не поворачиваются при работающем маслонасосе. Возмож¬
ные причины и способы их устранения:
а) утечка масла из маслобуксы (обнаружить повреждения
в маслопроводах и устранить их);
б) перепуск масла через предохранительный клапан (про¬
верить и отрегулировать пружину предохранительного клапана
и плотность его посадки на седло);
в) повреждение уплотнительных манжет или трещина в пор¬
шне гидроцилиндра (заменить манжеты или поршень).
Раздел третий
ПАЛУБНЫЕ МЕХАНИЗМЫ
Палубными механизмами называются механизмы, располо¬
женные на палубах судов и обеспечивающие работу судовых
устройств, в состав которых они входят.
Группа палубных механизмов включает: рулевые, якорные,
швартовные, грузоподъемные, шлюпочные и буксирные меха¬
низмы.
Глава XI
РУЛЕВЫЕ МЕХАНИЗМЫ
§ 41. ОСНОВНЫЕ СВЕДЕНИЯ О РУЛЕВОМ УСТРОЙСТВЕ.
ДИФФЕРЕНЦИАЛ ©ЕДОРИЦКОГО
Рулевые механизмы входят в состав рулевого устройства,
обеспечивающего маневренность судна и устойчивость его при
движении на определенном курсе. Рулевое устройство включает:
рулп, рулевые приводы, рулевые машины, рулевые телепере¬
дачи (телемоторы) и рулевое управление (рулевой штурвал).
Рули должны обеспечивать маневрирование судна и удер¬
живать его на заданном курсе. На рис. 86 изображены основ¬
ные типы рулей и схемы их действия. Обыкновенный руль
(рис. 86, а) состоит из пера руля 5, соединенного с вертикаль¬
ным валом-баллером 7 фланцевым соединением 6. Баллер про¬
ходит в гельмпортовой трубе 3 через ахтерштевень судна 1 с под¬
шипником 2, уплотненным гельмпортовым сальником. Йетли ру¬
ля 10, закрепленные на рудерписе 8, навешены на штыри рудер¬
поста 9. Как видно из схемы под рисунком, ось вращения обычно
расположена в носовой части руля, поэтому при повороте пера
руля в ту или иную сторону от диаметральной плоскости не¬
обходимо преодолевать силу полного гидродинамического дав¬
ления Р потока воды, обтекающего корпус судна при движении.
179
Для уменьшения силы Р и, следовательно, необходимого
вращающего момента на баллере руля применяют балансирные
и полубалансирные рули, у которых ось вращения баллера про¬
ходит между носовой и кормовой кромками пера, разделяя его
на две части: кормовую F\ и носовую — балансирную F%. Как
видно из схемы под рисунками 86, б, в, при отклонении пера
руля от диаметральной плоскости на угол а сила Р\ препят¬
ствует, а сила Р2 способствует повороту пера руля, уменьшая
момент и требуемую мощность рулевой машины. Отличие по-
лубалансирного руля от балансирного состоит в уменьшенной
высоте балансирной части пера по отношению к высоте кормо¬
вой (рис. 86, б). Балансирные рули могут быть подвесными
(рис. 86, в) и с нижней опорой 4 (рис. 86, г).
180
Рис. 86. Типы судовых рулей и схемы их действия.
Рулям всех рассмотренных типов присущ один общий не¬
достаток: эффективность их действия пропорциональна скоро¬
сти судна. В то же время наибольшая маневренность необхо¬
дима тогда, когда судно движется на малых скоростях. В та¬
ких случаях эту маневренность обеспечивает так называемый
активный руль или руль Фостра 1 (рис. 86, д).
Активный руль состоит из грушевидного кожуха 8, установ¬
ленного вместе с насадкой 2 в обычном пере руля 3. Внутри
кожуха размещен гребной вал 7 с насаженным на кормовом
Рис. 87. Кинематическая и расчетная схемы механического рулевого привода
с зубчатым сектором.
конце вспомогательным винтом 1. Носовой конец вала посред¬
ством конического зубчатого редуктора 6 соединен с вертикаль¬
ным валопроводом 5, размещенным внутри баллера 4. Валопро-
вод через эластичную кулачковую муфту получает вращение
от вертикального электродвигателя, установленного в румпель-
ном отделении, и посредством редуктора вращает гребной вал
и винт руля. Для создания упора от винта при повороте судна
поворачиваются баллер и руль от рулевой машины на требуе¬
мый угол от диаметральной плоскости судна.
Для уменьшения сопротивления воде при движении судна
поперечному сечению перьев рулей придают обтекаемую форму,
которая увеличивает также силу давления воды на перо руля.
Вспомогательный винт активного руля в сочетании с главным
гребным винтом позволяет увеличить ход судна.
1 Установлен па РТМ типа «Атлантик».
181
Передачу вращения и крутящего момента рулевой машины
на баллер руля осуществляют посредством рулевого привода.
На современных морских промысловых судах используются два
типа рулевых приводов: механические с жесткой связью и гид¬
равлические — плунжерные и лопастные.
Кинематическая и расчетная схема механического рулевого
привода с зубчатым сектором дана на рис. 87.
На голове баллера 1 жестко насажен румпель 2, соединен¬
ный буферными пружинами 4 с зубчатым сектором 3, который
свободно сидит на баллере. Вращение от электродвигателя 6
I ь.. _б
Рис. 88. Гидравлический плунжерный рулевой привод.
через червяк 7 и червячное колесо 5 передается по валу 9 ци¬
линдрической шестерне 8, находящейся в зацеплении с зубча¬
тым сектором. Сектор поворачивается и через буферные пру¬
жины поворачивает румпель, вращающий баллер руля. Буфер¬
ные пружины предохраняют зубья передач от поломки при
ударе волн и при давлении льда на перо руля.
Секторный зубчатый привод устанавливают на судах малого
и среднего водоизмещения с широкими кормовыми обводами.
Для передачи больших мощностей на рулевой баллер использу¬
ется гидравлический плунжерный (поршневой) рулевой привод,
изображенный на рис. 88.
Привод состоит из цилиндров 1 и 8, установленных на ста¬
нине 11. В цилиндрах движутся плунжеры (скалки) 2 и 7; ме¬
ста их выхода из цилиндров имеют уплотнительные кольца.
В месте соединения плунжеров образуется опора, зажимающая
бронзовые втулки для цапф муфты 3. В отверстие муфты, сво¬
бодно поворачивающейся вокруг вертикальной оси в точке d,
Входит цилиндрический хвостовик румпеля 4 со скользящей при¬
гонкой.
При нагнетании масла под давлением в один из цилиндров
с одновременным отсасыванием его из другого цилиндра плун¬
жеры получают прямолинейное движение, обеспечиваемое сколь¬
182
жением ползунов 10 по направляющим станины 11. При этом
румпель 4 поворачивается, скользя в муфте 3 и поворачи¬
вая ее.
Кроме двухцилиндровых плунжерных применяются четырех¬
цилиндровые приводы с двусторонним румпелем и второй па¬
рой плунжеров и цилиндров, оси
которых расположены по ли¬
ниям 5 и 6. В этом случае масло
одновременно подается в одну
пару цилиндров, расположенных
по диагонали, и отсасывается из
другой. Полости цилиндров под¬
ключаются к полостям коробки
9 предохранительных клапанов,
которые перепускают жидкость
из одних полостей в другие
с промежуточным дросселирова¬
нием. Этот процесс происходит
в случаях, когда давление в од-
Рис. 89. Однолопастнын гидравлический рулевой привод
«Кинетроль»: а — схема; б — вид со снятой крышкой.
ной из полостей превышает расчетное вследствие увеличения
нагрузки на руль под действием ударов волн, давления льда.
Более простую и компактную конструкцию имеет лопастный
рулевой привод. Однолопастный гидравлический привод «Ки¬
нетроль» (рис. 89, б) показан со снятой крышкой 2. В корпусе
3 имеется лопасть 5, жестко насаженная на голову баллера 4.
К корпусу подводится и отводится от него рабочая жидкость
по трубам 1 и 6. Действие привода ясно из схемы на рис. 89, а.
183
Для увеличения передаваемой мощности на руль на рыбо¬
перерабатывающих базах типа «Рыбацкая слава» установлены
многолопастные рулевые приводы (рис. 90).
Привод в качестве исполнительного механизма имеет лопа¬
стной гидродвигатель, жестко насаженный на голову баллера
руля. Гидродвигатель состоит из ступицы 5 с двумя фланцами
4 и 14 в верхней и нижней частях. К ступице крепятся две
(или три) лопасти 11 на винтах, обеспечивающие полный угол
ее поворота 2x37° —при обычном руле или 2x68° —при нали¬
чии активного руля. Поворот лопастей под давлением осущест¬
вляется до упора в перемычки
3, закрепленные на внутренней
поверхности литого стального
цилиндра 10 с помощью бол¬
тов, вворачиваемых снаружи
в нарезные отверстия перемы¬
чек. Между лопастями и пере¬
мычками образуются полости
9. Одноименные нагнетатель¬
ные и всасывающие полости
соединены между собой кана¬
лами 2 внутри цилиндра. Уп¬
лотнение между торцами ло¬
пастей и внутренней поверх¬
ностью цилиндра, а также
между торцами перемычек и
наружной поверхностью ро¬
тора осуществляется сталь¬
ными планками 12, вставлен¬
ными в вертикальные выфрезерованные пазы лопастей и пере¬
мычек. Планки прижаты к поверхностям скольжения с помощью
упругих прокладок из круглой маслостойкой резины. Наружное
уплотнение в верхней и нижней частях гидродвигателя достига¬
ется набивкой 8 из маслостойкой резины, зажатой нажимными
кольцами '6 и 15 и проставочными кольцами 7 и 13.
Пальцы амортизационного крепления состоят из централь¬
ных стержней и двух пустотелых цилиндров с наружными ко¬
нусами, стянутых гайками на хвостовиках. Хвостовики входят
в гнезда с резиновыми втулками кронштейна 1 корпуса, кото¬
рые крепятся к фундаменту палубы.
Основной недостаток лопастных приводов — необходимость
надежного уплотнения скользящих кромок лопастей в гидро¬
двигателе при высоких давлениях рабочего масла.
Для дистанционного управления рулевыми машинами с мо¬
стика устанавливают телединамические передачи, называемые
рулевыми телепередачами или рулевыми телемоторами.
Рулевые телепередачи современных морских промысловых
судов могут быть двух видов: гидравлические и электрические;
Рис. 90. Многолопастный гидравличе¬
ский рулевой привод.
часто они дублируются или комбинируются в электрогидрав-
лические телепередачи.
Схема гидравлического рулевого телемотора (телепередачи)
показана на рис. 91. Телемотор состоит из двух основных ча¬
стей: датчика I, или манипулятора, расположенного в рулевой
рубке или на мостике и непосредственно связанного с рулевым
штурвалом, и приемника II, или исполнителя, установленного
в румпельном отделении около рулевой машины и соединен¬
ного с ее пускорегулирующим устройством.
Манипулятор-датчик состоит из цилиндра 23, в котором дви¬
жется поршень 22. Шток поршня представляет собой зубчатую
рейку 19, находящуюся в зацеплении с цилиндрической ше¬
стерней 17. Верхняя и нижняя полости цилиндра 23 датчика
с помощью трубопроводов 5 я 14 соединены с пустотелыми не¬
подвижными втулками 9 и 6 приемника. Втулки входят в по¬
лости подвижного цилиндра 7, соединенного тягами 8 с устрой¬
ством пуска рулевой машины.
Вся система от ручного или механического насоса заполня¬
ется жидкостью: турбинным или веретенным маслом через трубу
11 и клапаны 10 и 13 до тех пор, пока масло не появится через
отверстие в цилиндре датчика, закрытое пробкой 24.
При вращении штурвала 21, например, против часовой стрелки
будут вращаться шестерни 20, 18 и 17, а зубчатая рейка 19 бу¬
дет перемещать поршень 22 вверх. При этом жидкость из
верхней полости цилиндра 23 вытесняется по трубе 5 и втулке
9 в правую полость цилиндра 7 приемника. Под давлением жид¬
кости на среднюю перегородку цилиндр смещается влево и
при помощи тяг 8 приводит в действие пусковое устройство
рулевой машины. При этом из левой полости цилиндра 7 жид¬
кость через втулку 6 и трубу 14 вытесняется в нижнюю полость
цилиндра 23.
При вращении штурвала 21 по часовой стрелке жидкость
в трубах, полостях и втулках перемещается в противополож¬
ном направлении, и цилиндр 7 движется вправо, что приводит
в действие рулевую машину и вызывает перекладку руля в об¬
ратном направлении.
Установочные пружины 12, упирающиеся во фланцы цилин¬
дра 7 и неподвижную станину, работают на сжатие. При пере¬
мещении цилиндра датчика нагрузка на пружины становится
неодинаковой; так, при движении вправо возрастает нагрузка на
правую пружину и ослабевает нагрузка на левую. Чтобы вновь
поставить руль в среднее положение, рулевому достаточно
выпустить из рук штурвал 21. Сильно нагруженные пружины
12 разожмутся и переместят цилиндр 7 в исходное поло¬
жение. Цилиндр при перемещении тягами 8 приводит в дей¬
ствие рулевую машину, которая ставит руль в ДП. Одновре¬
менно жидкость вытесняется из приёмника в датчик и переме¬
щает поршень 22 датчика в среднее положение, вращая через
185
Рис. 91. Гидравлическая рулевая телепередача (телемотор).
шестерни штурвал. В этом положении полости телемотора со¬
общаются между собой при помощи свободных кольцевых пат¬
рубков цилиндра 23; давление в полостях уравнивается и обес¬
печивает нормальные исходные положения поршня 22 и ци¬
линдра 7. Для отключения датчика от манипулятора служит
клапан 15 на перепускной трубе 16.
Для автоматического пополнения телемотора жидкостью
в случае утечек или удаления ее излишков при расширении от
повышения температуры предусмотрена коробка 3 с невозврат¬
ными клапанами, сообщающаяся трубами 2 и 4 с расширитель¬
ной цистерной 1 н цилиндром 23.
Рис. 92. Дифференциал Федорицкого: а —схема; б — общий вид.
Для передачи крутящего момента от двух рулевых машин на
один рулевой привод применяют специальную муфту, называе¬
мую дифференциалом Федорицкого. Основное преимущество
дифференциала перед другими типами муфт состоит в том, что
передачу вращения от двух штурвалов или двух приводных
двигателей на один вал можно осуществлять попеременно или
одновременно, с одинаковой или разной скоростью, без каких-
либо переключений. Включение приводного двигателя с поста
рулевого управления через дифференциал может выполняться
на ходу во время действия рулевой машины. Неправильное
включение двигателя (не в ту сторону) не вызывает каких-либо
повреждений или аварий.
На рис. 92 показаны схема и общий вид муфты. Вал 1, имею¬
щий поперечину 2, связан с рулевым приводом непосредственно
или через редуктор. На цапфах поперечины свободно сидят ко¬
нические шестерни 3 и 4. Шестерни находятся одновременно
в зацеплении с шестернями 5 и 6, которые являются также
червячными. Шестерни 5 и 6 свободно сидят на валу 1 и при¬
водятся во вращение червяками I и // от индивидуальных дви¬
гателей.
187
Разберем несколько возможных вариантов работы диффе¬
ренциала.
1-й вариант. Червяк I и шестерня 5 неподвижны. Чер¬
вяк II вращается. Шестерня 6 также вращается и поворачи¬
вает конические шестерни 3 и 4, которые покатятся по непод¬
вижной шестерне 5 и поведут за собой поперечину 2. Вал 1
будет поворачиваться и приводить в движение рулевой привод,
причем угловая скорость вала будет в два раза меньше угло¬
вой скорости шестерни 6.
2-й вариант. Червяки I и II вращаются с одинаковой ско¬
ростью в одну сторону. При этом будут вращаться шестерни
5 и 6 с одинаковой скоростью и также в одну сторону; шестерни
3 и 4 вращаться не будут. Весь дифференциал как одно целое
вращается и поворачивает вал I. На рулевой привод переда¬
ется мощность от обоих двигателей одновременно, и угловая
скорость вала / равна угловой скорости шестерен 5 и 6.
3-й вариант. Червяки / и II вращаются одновременно
с одинаковой скоростью, но в разные стороны. В этом случае
все шестерни вращаются на своих осях, но поперечина 2 стоит
на месте. Вал 1 вращаться не будет и руль останется непод¬
вижным.
Кроме рассмотренных возможны также промежуточные ва¬
рианты работы дифференциала. Дифференциал Федорицкого
широко используют в сервомоторном (следящем) управлении
рулевой машиной, наиболее распространенном на судах. Эта си¬
стема управления должна удовлетворять двум основным усло¬
виям:
1) управление рулевой машиной должно осуществляться
с помощью обычного рулевого штурвала;
2) между скоростью, направлением вращения и положением
штурвала и скоростью, стороной и углом перекладки руля дол¬
жна быть автоматическая согласованность.
Такая согласованность достигается путем включения в си¬
стему рулевого управления следящего устройства, называемого
сервомотором. Сервомотор — механизм, при помощи которого
на пусковое устройство рулевой машины одновременно могут
оказывать воздействие рулевой через телепередачу («прямая
связь») и рулевая машина («обратная связь»),
В электрических рулевых машинах сервомоторное управле¬
ние обеспечивается с помощью задающего и следящего эле¬
ментов. Вращением штурвала как бы задается требуемый угол
перекладки руля. Рулевая машина, приведя руль в заданное
положение, остановится уже при неподвижном штурвале. Пово¬
рот штурвала, как правило, осуществляется со скоростью, ко¬
торая не совпадает со скоростью перекладки руля рулевым дви¬
гателем, но между этими скоростями имеется прямое соответ¬
ствие, т. е. большей скорости штурвала соответствует большая
скорость перекладки руля и, наоборот.
188
Схема принципиального устройства сервомоторного следя¬
щего управления контактного типа рулевой машины с электро¬
приводом дана на рис. 93.
Обмотка возбуждения через скользящие контакты-стрелки
включается в диагональ потенциометрического мостика. Сколь¬
зящий контакт-стрелка 4 связан с осью баллера 12, контакт-
стрелка 3— с рулевым штурвалом 1.
Если угол поворота штурвала по показанию аксиометра ра¬
вен нулю, а перо руля по рулевому указателю находится в ну-
Рис. 93. Схема следящего управления рулевой электроприводной машины
с сервомотором контактного типа.
левом положении, т. е. в положении «Руль прямо», напряжение
в точках А и Б скользящих контактов 3 и 4 отсутствует, так как
плечи потенциометрического мостика равны. Ток в обмотке
возбуждения генератора 11 равен нулю, и исполнительный элек¬
тродвигатель 10 неподвижен. Руль не поворачивается.
Если повернуть штурвал 1, задав некоторый угол поворота
пера руля по аксиометру, то через зубчатые передачи и вал 2
сместится контакт 3 и равновесие моста нарушится. Через об¬
мотку возбуждения пройдет ток, а генератор 11 даст ток в дви¬
гатель 10.
Исполнительный электродвигатель с помощью механических
передач 8 и 9 повернет сектор 7, румпель 6 и баллер 12 на тре¬
буемый угол. Баллер при вращении через зубчатые передачи
и вал 5 перемещает скользящий контакт 4, который будет вы¬
равнивать плечи потенциометрического моста. По достижении
равенства плеч и соответствующем расположении точек А и
Б контактов, когда угол поворота руля (по указателю) от бал¬
лера станет равен заданному углу (по аксиометру) от враще¬
189
ния штурвала, прохождение тока прекратится и двигатель оста¬
новится, зафиксировав положение руля.
Скорость перекладки руля зависит от степени расхождения
скользящих контактов 3 и 4, т. е. угла рассогласования контакт¬
ных стрелок, который в свою очередь зависит от частоты вра¬
щения рулевого штурвала. При увеличении частоты вращения
штурвала через обмотку возбуждения генератора от увеличения
разности потенциалов (вследствие большего угла рассогласо¬
вания между контактными стрелками) начнет протекать ток
большей величины. Это в свою очередь увеличит ток, подавае¬
мый от генератора 11 к исполнительному рулевому электродви¬
гателю 10. Он начнет вращаться быстрее и ускорит поворот
пера руля через рулевой привод.
При уменьшении частоты вращения рулевого штурвала угол
рассогласования между контактными стрелками А и Б умень¬
шится и снизится сила тока, идущего в обмотку генератора,
который понизит силу тока, подаваемого в электродвигатель,
уменьшит частоту его вращения и, следовательно, скорость пе¬
рекладки пера руля.
Если остановить вращение рулевого штурвала, угол рассо¬
гласования между стрелками А и Б станет равным нулю, по¬
дача тока прекратится и перо руля зафиксируется в заданном
положении.
Следящие системы управления рулевыми машинами с серво¬
моторами наиболее удобны, так как обеспечивают традицион¬
ную в морском флоте перекладку пера руля при помощи обыч¬
ного рулевого штурвала и тем же способом, каким рулевой про¬
изводил управление рулем — без помощи машины, т. е. вручную.
Недостаток этой системы — сложность устройства.
На некоторых судах для управления рулевой машиной при¬
меняется более простая, неследящая система телеуправления,
которая может дублироваться со следящей. Недостаток ее за¬
ключается в том, что рулевой должен уделять больше внима¬
ния показаниям задающего аксиометра и исполнительного дат¬
чика и у него остается меньше времени для наблюдения за дви¬
жением судна.
Для удержания судна в течение длительного времени на
заданном курсе без участия рулевого применяют автоматиче¬
скую систему «авторулевой». Действие такой системы основано
на применении гирокомпаса или магнитного компаса. Органы
обычного управления должны быть связаны с автоматическим
рулевым. Когда судно ляжет на заданный курс, руль по акси¬
ометру устанавливается в нулевое положение и включается
авторулевой.
Действие автоматического рулевого можно проследить по
кинематической схеме на рис. 94.
При нулевом положении руля контактная стрелка 5 нахо¬
дится на изоляционном промежутке контактных колец 4. При
190
этом положении питание в обмотку возбуждения генератора 13
не поступает, и электропривод руля не работает. Когда судно
под действием ветра, волн или течения отклонится от задан¬
ного курса на угол, воспринимаемый «чувствительностью» ав¬
торулевого, электродвигатель 1 получит импульс от датчика
гирокомпаса и начнет вращать через муфту 2 валик 3. При
этом через коническую передачу переместится контактная
стрелка 5 с изоляционного промежутка на одно из полуколец
4. Обмотка возбуждения замкнется, и электродвигатель 12 по¬
лучит ток от генератора 13. Через червячную передачу 11 ру-
Рис. 94. Схема автоматического рулевого (авторулевой).
левой привод 9 повернет руль в сторону, необходимую для воз¬
вращения судна на заданный курс. Валики обратной связи 3,
вращаясь от баллера 8 через муфту 7 и редуктор 6, начнут по¬
ворачивать контактные полукольца 4. Благодаря большей ча¬
стоте вращения полуколец нетокопроводящая часть полукольца
совместится через некоторый период времени с контактной
стрелкой 5. Питание обмотки генератора прекратится и руль
остановится. Судно под действием руля, отклоненного на не¬
который угол, начнет поворачиваться, возвращаясь на заданный
курс.
Если судно по инерции будет продолжать разворачиваться,
замкнется другое контактное полукольцо, руль переложится
в сторону, противоположную первоначальной, и судно будет
«одерживаться». Больший или меньший угол первоначальной
перекладки руля авторулевым зависит от регулируемого люфта
в муфтах 2 и 7. Угол перекладки пера руля фиксируется указа¬
телем 10.
При изменении курса или маневрировании авторулевой от¬
ключают и переходят на обычное рулевое управление.
191
§ 42. ДЕЙСТВИЕ СИЛ ПРИ ПОВОРОТЕ СУДНА.
ОПРЕДЕЛЕНИЕ МОМЕНТА НА ГОЛОВЕ
БАЛЛЕРА РУЛЯ
Исходной величиной для определения мощности, частоты
вращения рулевого двигателя и основных размеров рулевого
привода является необходимый вращательный момент на голове
баллера руля.
Рассмотрим силы и моменты, действующие на судно при
повороте (рис. 95). При положении руля в диаметральной пло¬
скости («Прямо руль») судно движется вперед равномерно со
скоростью с, преодолевая силу R сопротивления водной и воз¬
душной сред силой тяги гребного винта. При этом струи воды
обтекают судно с обоих бортов и обеих сторон пера руля, со¬
здавая уравновешивающиеся давления, не влияющие на на¬
правление движения судна. При отклонении пера руля вправо
на угол а от диаметральной плоскости струи воды, обтекающие
судно с правого борта, отклоняются и оказывают давление на
перо руля справа. Сила Р — равнодействующая сил гидроди¬
намического давления воды на перо руля, приложенная к центру
давления (ПД). К центру тяжести (ЦТ) судна приложим две
силы Q и Q1, каждая из которых равна силе Р; силы направ¬
лены параллельно и в противоположные стороны, так что рав¬
новесие системы, не нарушится. Из схемы сил ясно, что обра¬
зуется пара сил Р—Q с плечом т, которая будет поворачивать
судно вокруг центра тяжести.
Одновременно при разложении по правилу параллелограмма
силы Q1 образуется две силы:
— сила К, направленная перпендикулярно к ДП судна, ко¬
торая вызывает движение судна в поперечном направлении
(дрейф), противоположном стороне поворота. Действию силы
К будет противодействовать сила R бокового давления воды.
R
Рис. 95. Схема дей¬
ствия сил при пово¬
роте судна.
В результате действия этих сил и инерций движения судно
будет описывать циркуляцию (как показано стрелкой на
рис. 95);
— сила Т, действующая в ДП судна, направлена в сторону,
противоположную движению судна и замедляет его ход впе¬
ред1.
Необходимый крутящий момент на голове баллера руля Mg
определится как сумма двух моментов:
М0 = Мс + МТр, (186)
где Мс — момент сопротивления гидродинамических сил воды,
действующий на перо руля; Мтр — момент сопротивления сил
трения в подшипниках, направляющих и сальниках баллера.
Момент сопротивления
Мс=--Р1, (187)
где/3 — равнодействующая сил гидродинамического давления
воды на перо руля; I — плечо действия этой равнодействующей
относительно оси баллера руля.
Момент силы трения в первом приближении можно опреде¬
лить по моменту сопротивления:
MTp = fMc = fPl, (188)
где / = 0,14-0,15 — коэффициент, учитывающий трение в опорах
и сальниках баллера руля.
Схемы действия сил и моментов сопротивления на прямо¬
угольные перья балансирных и небалансирных рулей на перед¬
нем и заднем ходу судна изображены на рис. 96.
Ниже приведены формулы для определения моментов на
головах баллеров прямоугольных рулей.
Для обыкновенных небалансирных рулей (рис. 96, а):
— на переднем ходу
M6 = Mc + Mrp = PS+fPS = (l+f)PS; (189)
— на заднем ходу
мб.,х = (1 +f)P,Ab-S3.x).
Для балансирных рулей (рис. 96, б):
— на переднем ходу
Miaj, = (l+/)P(S-2); (190)
— на заднем ходу
Mt3.* = (l+f)P3.x[b-(S3.x + z)].
1 Действие сил и моментов, создающих крен судна при его повороте, не
рассматриваются.
7 А. Е. Богомольный 193
Рис. 96. Схемы действия сил и моментов сопротивления на прямоугольные
перья рулей.
194
В этих формулах: S, S3.x — расстояние от центров давления
ЦД1 и ЦДг соответственно до передней и задней кромок пера
руля
S(S3.x) = Xb, (191)
где X = 0,195 + 0,305sina— эмпирический коэффициент Жосселя;
b — ширина пера руля, обычно (0,25-^0,35) В, где В — ши¬
рина судна по мидель-шпангоуту; г — ширина балансирной ча¬
сти пера руля, z= (0,20-f-0,35)В.
Отношение высоты руля I к его ширине b — так называемый
относительный размах б = —>2; при этом l^T (Т — осадка
Ь
судна).
Отношение площади балансирной части пера руля Fe к пло¬
щади F всего руля — так называемый коэффициент компен¬
сации:
~ 0,2 ч-0,3.
F
Чем больше значение бк, тем меньше необходимый момент
Мб, но при 6К>0,3 руль фиксируется в определенном положе¬
нии неустойчиво.
Минимальное значение площади пера руля, м2, можно оп¬
ределить по формуле
in = (*v—f 0,75 + —— (192)
100 \ L+ 75 у
где (г=1,2 — для рулей, не работающих непосредственно за
гребным винтом; р,= 1,0 — для рулей, работающих за гребным
винтом; v = 1,25—для судов буксирного типа; v == 1,0 — для
остальных судов; L — длина судна, м; Т — средняя осадка
судна, м.
Равнодействующая сил гидродинамического давления воды
Р, кг-с (Па), на прямоугольный руль определяется по формуле
Р = KFd*sina , (193)
%
где К= 5,3 — для двухвинтовых судов; /(=10,0 — для одновин¬
товых судов; с — скорость судна на переднем ходу, уз; для
заднего хода с3. х= (0,54-0,7) с уз.
Наибольшее значение момент на голове баллера руля Мб
приобретает при значении угла поворота пера руля от ДП
судна атах = 35°.
Объясняется это значение ашах тем, что при отклонении пера
руля от ДП судна равнодействующая сила увеличивается,
а расстояние центра давления ЦД от оси баллера уменьша¬
ется. До значений а = 35° сила Р увеличивается быстрее, чем
уменьшается плечо а ее действия относительно оси баллера,
7* 195
а следовательно, значение момента Мб возрастает. При а>
>35° сила растет медленнее, чем уменьшается плечо, и, сле¬
довательно, значение уменьшается; поэтому атах = 35° при¬
нят за максимальный угол перекладки пера руля на борт.
Для уменьшения сопротивления движению в воде и увели¬
чения силы нормального давления на современных морских про¬
мысловых судах устанавливают балансирные рули обтекаемой
формы. Сила нормального давления р на руль определяется
по методике В. Л. Сурвилло, основанной на гидродинамической
теории «несущего крыла» — теории Н. Е. Жуковского о подъ¬
емной силе тела в потоке быстротекущей жидкости.
Равнодействующая R гидродинамических сил, действующих
на обтекаемый руль, является результирующей всех нормальных
и касательных сил давления на обшивку пера руля, обтекае¬
мого водой.
Силу R можно разложить на составляющие (рис. 97):
— по осям, характеризующим направление набегающего на
руль потока (Y — боковая сила, X — лобовое сопротивление);
— по осям, характеризующим положение руля по отноше¬
нию к потоку (Р—-нормальная, Т — тангенциальная состав*
ляющие).
Зависимости между равнодействующей и составляющими
гидродинамических сил определяются соотношениями:
Указанные силы можно определить с помощью безразмер¬
ных коэффициентов: Сп — профиля руля, С у — боковой (по¬
движной) силы и Сх — лобового сопротивления:
р
Рис. 97. Схема действия сил и моментов сопротивления на об¬
текаемые перья рулей.
r=Vy2+x2-, r=Vp2+t2-,
Р = Ftcosa + Xsina; Т = Х cosa—Fsina. (194)
196
P = Cn-^-F; F = Cy-P^;
X = Cx^-F, (195)
где с—-скорость набегающего потока, м/с; р — плотность жид¬
кости, кг/м3 (для воды р = 102); F — площадь пера руля, м2.
Для обтекаемых балансирных прямоугольных рулей при
относительном размахе: 6 = — » 2ч- 3, относительной толщине
Ь
бд = — » 0,18-7-0,21* и a = 30-f-35° можно принимать следующие
ь
значения безразмерных коэффициентов: Сп^Су = 0,95ч-1,0;
Сх~ 0,374-0,4.
Расстояние силы Р от передней кромки пера руля
S=b^~ (0,33-г0,40) 6, (196)
С п
PS
где Ст= ^0,32-1-0,34—безразмерный коэффициент
-^-Fb
2
момента.
Необходимый крутящий момент на голове баллера обтекае¬
мого балансирного руля на переднем ходу
M6=l,2P(S-z) + MTp, (197)
где 1,2 — надбавка на кратковременные перегрузки от ударов
волн и давления льда на перо руля.
При расчете нормальной силы на заднем ходу Р3. х прини¬
мают Сп. 3 = 0,75СП.
Расчетным моментом на баллере руля при определении мощ¬
ности рулевой машины является наибольший из двух — Mg
И Мб.з.х-
§ 43. СХЕМЫ И КОНСТРУКЦИИ РУЛЕВЫХ МАШИН
С ЭЛЕКТРИЧЕСКИМ И ЭЛЕКТРОГИДРАВЛИЧЕСКИМ
ПРИВОДАМИ
На рис. 98 изображена конструкция электроручной руле¬
вой машины с секторным зубчатым рулевым приводом типа
РЭР 7,5-11, установленным на некоторых БМРТ и СРТР типа
«Океан» и развивающим на баллере руля крутящий момент
7,5 тс • м.
* При других соотношениях и углах можно определить значения коэффи¬
циентов Сх, Сy и Сп по графику на рис. 35 (стр. 51) в книге А. Е. Богомоль¬
ного «Судовые вспомогательные механизмы». Л., Судпромгиз, 1963.
197
Фундаментная плита 2, на которой смонтирована рулевая
машина, крепится болтами 8 к палубе. Крутящий момент элек¬
тродвигателя 1 через муфты, цилиндрический редуктор 3 и чер¬
вячный редуктор 5 передается цилиндрической шестерне 6, на¬
ходящейся в зацеплении с зубцами сектора 7. Поворот сектора
на опорных роликах 10 через буферные пружины передается
Рис. 98. Электроручная рулевая машина с секторным зубчатым приводом
типа РЭР 7,5-11.
рычажному румпелю 12, жестко насаженному на голову бал¬
лера 14.
Для ограничения поворота сектора служат электрический
конечный выключатель 4 с приводом от стрелки аксиометра
и буферные ограничители 11. Аварийный ручной привод выпол¬
нен также в виде зубчатого сектора 15, получающего движение
от червячного привода, смонтированного в корпусе 16.
Для затормаживания руля при переходе с механического
на ручное управление и обратно имеется колодочный тормоз
13 с ручным приводом 9. Положение пера руля передается на
пост рулевого управления электрическим датчиком 17 с приво¬
дом от баллера руля.
198
На современных промысловых рыбодобывающих и транс¬
портных судах все большее распространение получают рулевые
машины с гидравлическими приводами. Габариты и массы этих
машин значительно меньше, чем у электрических машин с сек¬
торными зубчатыми приводами, имеющих одинаковый М§. Че¬
тырехцилиндровая рулевая машина с электрогидравлическим
плунжерным приводом типа Р-17, с роторно-поршневыми насо¬
сами переменной производительности изображена на рис. 99.
Рис. 99. Электрогидравлическая рулевая машина с четырехцилиндровым
плунжерным приводом типа Р-17.
Гидропривод рулевой машины состоит из четырех гидрав¬
лических цилиндров (гидропрессов) 1, 15, 22 и 39, в которых
движутся плунжеры 3, 7, 28 и 37. В местах соединения соосных
плунжеров находятся соединительные муфты 4 и <35 с верти¬
кальными крейцкопфами 5 и 33, в отверстиях которых скользят
хвостовики двуплечего румпеля 29, сидящего на шпонках на
голове 30 баллера руля. В гидравлические цилиндры поступает
масло от звездообразных радиально-плунжерных насосов 2 и 14,
вращающихся от индивидуальных электродвигателей 23 и 38.
Управление насосами и рулевым гидроприводом осущест¬
вляется с помощью дистанционной электрической телепередачи
с рулевых постов, расположенных в одном или двух командных
пунктах, путем включения исполнительных электродвигателей
40 и 46. Электродвигатели с помощью червячных шестерен 41
и дифференциала Федорицкого 42 при включенной муфте 43
Г II 7^ \ \ 1
36 35 34 33 32 3130 29 2В 27%
199
приводят во вращение вал 44. Вращение вала дифференциала
через конические шестерни 32, валик 31 и коническую передачу
27 передается валику 21, на котором расположена коническая
шестерня 19 кулачкового дифференциала. Шестерня 19 передает
вращение конической шестерне 18, которая обкатывается (см.
действие дифференциала Федорицкого) вначале по неподвижной
конической шестерне 16 (на узле не показана), сидящей на
валике 10 обратной следящей связи. От этой передачи повора¬
чиваются поперечина 17 с закрепленными на ней кулачком А и
кольцом В. Кулачок А шайбы отклоняет вилочный рычаг 20,
во впадину которого он входит при нулевой подаче насоса. Ви¬
лочный рычаг поворачивает валик 11 с сидящими на нем ры¬
чагами 12 и 13. При определенном угле отклонения рычага 13
его ролик 48 выходит из впадины кольца В на поверхность
и тем самым отклоняет рычаг 12 до максимального угла (см.
узел I).
Это вызывает перемещение тяги 49, которая в свою очередь
смещает скользящий блок насоса 14 и приводит рулевую ма¬
шину в действие.
В результате движения плунжера 7 муфта 6 перемещает
зубчатую рейку 8 следящего механизма (обратная связь). При
этом вращаются соединенные с рейкой шестерня 9, валик 10
и шестерня 16 дифференциала, которая вращает планетарную
шестерню 18 в обратном направлении. В результате поворот
поперечины 17 прекращается.
Чтобы зафиксировать положение руля, необходимо с ко¬
мандного мостика остановить вращение действующих исполни¬
тельных электродвигателей телепередачи. При этом прекра¬
тится вращение валика 21 и шестерни 19. Валик 10 и шестерня
16 приведут поперечину 17 с шайбой А и кольца В в исход¬
ное положение. Пружины насоса 14 оттянут скользящий блок
в среднее положение и установят эксцентриситет насоса на
нуль. Подача насоса прекратится, и плунжеры гидропривода
остановятся, фиксируя заданное положение руля. При этом
впадина рычага 20 совпадет с кулачком шайбы А, а ролик 48
войдет в выемку кольца В.
Рулевой машиной можно управлять и непосредственно из
румпельного отделения. Для этого муфта 43 отключается от
дифференциала 42 и соединяет вал со ступицей звездочки 45
цепной передачи ручного штурвала 47; вращение штурвала пе¬
редается валу 44. Дальнейшее управление машиной не отлича¬
ется от описанного выше.
Для контроля за положением руля имеется датчик дистан¬
ционного указателя заданного угла перекладки руля, который
действует от валика 31 и шестерен 26 и 24, соединенных с зуб¬
чатой рейкой 25. Румпель 29 через рычаг 34 приводит в дей¬
ствие датчик 36 дистанционного указателя угла перекладки
руля. Совмещение показаний обоих датчиков свидетельствует
200
о правильной отработке следящей системы рулевого гидропри¬
вода.
Звездообразный радиально-поршневой (плунжерный) двух¬
рядный насос типа ТГЛ-10869 с двумя независимыми подачами,
изготовленный в ГДР, показан на рис. 100 в продольном а и
поперечном б разрезах.
Рис. 100. Радиально-поршневой
двухрядный двухпоточный насос
переменной производительности.
Насос состоит из чугунного маслонепроницаемого корпуса 7
и фланца 2. Распределительная цапфа 1 запрессована во фланце
с натягом. На цапфе свободно насажены два рядом расположен¬
ных цилиндрических ротора 3 и 8 с радиально (звездообразно)
расположенными цилиндрическими отверстиями, в которых дви¬
жутся поршни (плунжеры) 4. В распределительной цапфе
имеется четыре раздельных канала, подводящих и отводящих
рабочее масло от роторов, приводимых во вращение от электро¬
двигателя посредством муфты 9. При вращении ротора плун¬
жеры центробежной силой прижимаются к внутренним ободам
направляющих колец 5 радиально-опорных подшипников, рас¬
положенных в поворотных рамах 6.
201
При повороте рамы вместе с подшипниками вокруг поворот¬
ного пальца 10 создается эксцентриситет направляющих колец
относительно оси распределительной цапфы. В результате плун¬
жеры радиально перемещаются, осуществляя всасывающее и
нагнетательное действие. Изменение угла и направления на¬
клона рамы изменяет величину и направление подачи масла.
Перестановочные и регулирующие устройства прикреплены
к верхней части корпуса (рис. 100, в), что обеспечивает неза¬
висимое или одновременное изменение подач обоими роторами.
Перестановочное устройство /—II для напорного трубопровода
D1, a III—IV — для D2.
Перестановочные устройства для рам насосов могут быть
механические или гидравлические с сервомеханизмом для сле¬
дящего управления насосами.
Данные выпускаемых насосов типа ТГЛ-10869 приведены
в табл. 9.
Таблица 9
Технические данные радиально-поршневых насосов переменной
производительности типа ТГЛ-10869
Символ
Обозначе¬
ние
Номинальная подача,
л/мин
Номинальное давле¬
ние, равное длитель¬
ному рабочему давле¬
нию, кгс/см2
Максимально допусти¬
мое давление, кгс/см2
Номинальная частота
вращения, об/мин
Номинальная мощ¬
ность, кВт
Масса, кг
2x6,3/160
2x6,3
160
200
1450
4,1
62
2Х40/160
2X40
160
200
1450
26
120
)—\ А 1
/V / /
г 1
2x160/160
2X160
160
200
1450
105
255
2Х160/100
2X160
100
160
950
105
255
На промысловых судах РТМ типа «Атлантик» установлены
рулевые электрогидравлические машины с двухцилиндровыми
поршневыми приводами и радиально-поршневыми насосами
рассмотренного выше типа — однорядными, переменной произ¬
водительности.
На крупнотоннажных судах флота рыбной промышленности
иностранной постройки, рыбообрабатывающих базах типа «Ры¬
бацкая слава» и траулерах-—производственных рефрижерато¬
рах типа «Рембрандт» установлены электрогидравлические ру¬
202
левые машины с приводами лопастного типа. Гидравлическая
рулевая машина фирмы АЕГ состоит из четырех основных ча¬
стей:
— насосного агрегата, в котором находятся два электропри-
водных аксиально-поршневых силовых насоса барабанного типа;
— рулевого привода с поворотными лопастями, который при¬
водит в действие баллер и руль;
— блока управления, который (например, на рыбообрабаты¬
вающих базах типа «Рыбацкая слава») включает в себя си¬
стему дистанционных дублирующих телемоторов и местного уп¬
равления. Пуск, реверс и остановка силовых насосов осущест¬
вляются путем изменения угла наклона их корпуса (качающиеся
детали) через плунжерный регулятор или магнитный шибер,
воздействующий на цилиндр гидроусилителя;
— следящего рычажного сервомотора, взаимодействующего
с контрольными и сигнальными приборами положения руля.
Общий вид и гидравлическая схема рулевой машины с элек-
трогидравлическим лопастным приводом, установленной на
ТПР типа «Рембрандт» и на рыбообрабатывающей базе типа
«Рыбацкая слава», изображен на рис. 101.
Исполнительные электродвигатели 8 рулевой телепередачи
через дифференциал, винт с ходовой гайкой 10 и двуплечий ры¬
чаг 11 воздействуют на силовой аксиально-поршневой насос пе¬
ременной производительности 7 или 1 (или на оба насоса). От
вращения винта приводится в действие электрический датчик 9
203
Рис. 101. Электрогидравлическая руле¬
вая машина с лопастным приводом.
поворота руля. Силовые насосы 1 и 7 приводятся во вращение
электродвигателями 2 и 6 переменного тока, с которыми они не¬
посредственно соединены эластичными муфтами.
Перемещение ходовой (скользящей) гайки от системы те¬
леуправления или ручного штурвала с помощью поперечины,
связанной со средней частью рычага 11, изменяет наклон оси
вращения барабана внутри неподвижного наружного корпуса
насоса. Насос нагнетает по трубопроводу 4 жидкость в рабочие
камеры лопастного гидромотора 3, насаженного на конус бал¬
лера руля, и лопасти поворачивают баллер руля в требуемую
сторону со скоростью, соответствующей количеству подаваемой
жидкости и зависящей от угла наклона оси вращения барабана.
По достижении заданного угла поворота руля пружинная тяга
5 обратной связи рычажного сервомотора, связывающая гидро¬
привод с двуплечим рычагом 11, отклоняется и устанавливает
барабан силового насоса на нулевую подачу. Если перо руля
отклоняется под действием внешних сил (ударов волн, льда
и др.) от заданного телемотором положения, то при неподвиж¬
ной гайке 10 происходит перестановка рычага 11 от баллера об¬
ратной связью. Это вызывает включение в действие силового
насоса и перемещает перо руля обратно в заданное положение
без воздействия рулевого.
Насосный агрегат состоит из электроприводных аксиально¬
поршневых насосов переменной производительности барабан¬
ного типа многократного действия. Конструкция и схема ра¬
боты насоса показаны на рис. 102, а и б.
Ротор 12 насоса представляет собой цилиндрический бара¬
бан, в котором просверлено несколько аксиальных сквозных от¬
верстий по окружности. В этих отверстиях, выполняющих роль
цилиндров 8, движутся поршни 6, штоки 5 которых шарнирно
соединены с фланцем 2 приводного вала 1. Вал получает враще¬
ние от электродвигателя и передает его барабанному ротору
посредством шарнирного вала 3. При этом ротор цилиндров,
вращаясь вместе с поршнями, прижимается к качающейся де¬
тали 11 и скользит по ее притертой внутренней поверхности
вокруг неподвижно укрепленного штыря 9. На притертой
плоскости имеются две серповидные прорези. С ними соеди¬
нены каналы / и II, проходящие внутри качающейся детали
к пустотелым цапфам 14, вокруг которых может повора¬
чиваться деталь на подшипниках 4. К подшипникам прикреп¬
лены головки 7 я 13, к которым подведены и прикреплены тру¬
бопроводы.
Действие насоса осуществляется следующим образом. При
вращении электродвигателя синхронно вращаются вал 1, фла¬
нец 2, вал 3, ротор и поршни 6. Если торцевые плоскости ро¬
тора и фланца параллельны, то поршни в цилиндрах барабана
не перемещаются и насос работает на холостом ходу (рис. 102,6,
правое положение).
204
Если с помощью механизма изменения наклона, соединен¬
ного с пальцами 10, повернуть качающуюся деталь на некото¬
рый угол (см. рис. 102, б, левое положение), то вместе с ней
Рис. 102. Аксиально-поршневой насос переменной производитель¬
ности барабанного типа многократного действия: а — конструк¬
ция в разрезе; б — схема действия.
на этот же угол повернется барабанный ротор 12. В этом по¬
ложении поршни, поворачиваясь, то отходят от торцевой по¬
верхности качающейся детали, то подходят к ней. За один
205
оборот вала каждый цилиндр будет через серповидные щели
соединяться поочередно с каналами I и II, при этом из одной
трубы жидкость высасывается, а в другую нагнетается. Чем
больше угол наклона у насоса переменной производительности,
тем больше ход поршней и производительность. Для изменения
направления подачи жидкости при постоянном направлении
вращения вала достаточно повернуть качающуюся деталь в про¬
тивоположную сторону. У насосов постоянной производительно¬
сти угол наклона качающейся детали фиксируется в одном по¬
ложении. В этом случае направление подаваемой жидкости
изменяется путем реверса электродвигателя.
§ 44. РАСЧЕТ МОЩНОСТИ И ЧАСТОТЫ ВРАЩЕНИЯ
РУЛЕВОЙ МАШИНЫ. ПОДБОР РУЛЕВОГО ДВИГАТЕЛЯ
Рулевая машина с электрическим приводом. Требуемая мощ¬
ность рулевой машины Nv, кВт, определяется в зависимости от
исходной величины — момента на баллере руля:
= (198)
97оГ)р
где tie—условная частота вращения баллера, об/мин, которая
определяется в зависимости от времени tv перекладки руля
с борта на борт:
_2о60_ = _о_ (199)
6 360/р 3/р
(а = 35° — наибольший угол поворота руля от среднего положе¬
ния); ^р=28 с — время перекладки руля с борта на борт; % —
общий КПД рулевой машины, зависящий от количества и типа
передач и от конструкции рулевого привода. Для электрической
рулевой машины с механическим приводом обычно т]р = 0,1-^0,4.
Задавшись в первом приближении значением КПД по вычис¬
ленному значению Nv, можно подобрать подходящий электро¬
двигатель. Зная частоту вращения пэ выбранного электродвига¬
теля, находят общее передаточное число рулевой машины:
L = ■ (200)
«б
По полученному передаточному числу определяют количе¬
ство и тип передач
I р =' 1ц1ц>
где iH — передаточное число цилиндрической передачи (зубча¬
тый сектор — шестерня); гч— передаточное число червячной пе¬
редачи (червячное колесо-—червяк).
Составляется кинематическая схема рулевой машины (см.
рис. 87).
206
Для дальнейшего расчета прежде всего необходимо опреде¬
лить диаметр баллера dg. Его можно вычислить путем расчета
на кручение. Для морских гражданских судов, в том числе ры¬
бопромысловых, он подбирается по характеристике из табл. 10:
Хр =100/7-, (201)
где F — полная площадь пера руля, включая надводную часть,
м2; г — расстояние от центра тяжести (давления) полной пло¬
щади руля до оси вращения, м.
Таблица 10
Диаметры баллера руля
х
d6,
мм, при наибольших
скоростях,
УЗ
Лр
10
12
14
16
18
20
22
50
60
65
70
75
85
95
110
100
80
85
90
95
105
115
130
200
105
110
115
125
135
145
160
300
130
135
145
155
165
180
195
400
146
155
160
170
185
200
215
500
160
170
180
190
205
220
235
750
190
200
210
220
235
250
270
1000
220
230
245
260
275
290
310
1500
255
265
280
295
315
335
355
2000
290
300
315
330
350
375
395
3000
340
350
365
407
434
459
485
3500
360
370
385
428
457
484
510
4000
380
395
414
449
479
507
535
Примечание. Для судов, плавающих в ледовых условиях, диаметр баллера из
кованой стали должен быть на 10% больше.
Размеры румпеля или сектора выбирают из табл. 11 в зави¬
симости от диаметра баллера.
Таблица 11
Размеры секторов
Диаметр
баллера dg,
мм
Радиус сектора
или длина рум¬
пеля,
мм
Ступица
высота йс
сектора
диаметр dQ
50
750
50
95
100
1000
100
185
150
1200
150
275
200
1400
200
365
250
1800
250
455
300
2250
300
545
350
2400
350
635
375
2400
375
680
207
Рулевая машина с электрогидравлическим плунжерным при¬
водом. Размеры и взаимное расположение деталей плунжер¬
ного привода выбирают из условий обеспечения требуемых пере¬
мещений плунжеров и румпелей при сохранении минимальных
габаритов. Диаметр баллера руля dg и длину румпеля R вы¬
бирают таким же методом, как для электромеханического
привода.
Отношение расстояния а от оси цилиндров до оси баллера
к диаметру баллера dд (рис. 103) обычно составляет — =
= 2,24-2,4.
Сила Q, действующая в цапфе нормально к румпелю и по¬
ворачивающая его,
Q = ~-^ (202)
где R— радиус румпеля при повороте руля на угол а = 35° (при
четырехцилиндровом рулевом плунжере Ms делят на 2R).
С другой стороны, силу Q можно найти в зависимости от дей¬
ствующей по оси цилиндров силе Р:
Р /ОАО\
Рис. 103. Расчетная схема
рулевой машины с гид¬
равлическим приводом.
Приравнивая правые части уравнений (202) и (203) и ре¬
шая равенство относительно силы Р, Н,
Р = м б cos а (204)
или принимая во внимание, что R = a/cos а, имеем
р ^ Мб cos2 и ^ ^205^
а
Осевое усилие, Р, кгс, Н, можно определить также в зави¬
симости от давления силового масла на торцевую часть плун¬
жера:
Р=-^-р, (206)
4
где р — давление нагнетания силового масла, которое прини¬
мается р— 100-Ь 135 кгс/см2.
Приравняв правые части уравнений (205) и (206) и введя
коэффициент т]м> для учета сопротивлений от трения, получим
уравнение
яОарг]м==МбС0^а> (207)
А Iм
4 а
откуда рабочий диаметр цилиндра (плунжера) D, см,
D = 1 f 4уибсоза« _ ^208^
V ярг)„а
При максимальных углах поворота руля a = 30-f-35° можно
принимать т]м~0,75ч-0,78; тогда
4 cos2-35° 0,66
3,14т)м 0,785-0,76
1,1.
Формула (208) для определения диаметра рабочего ци¬
линдра (плунжера) привода упростится:
D — л/ 1 ’-J46- ~ 1,05]/(209)
У ра У ра
Рабочий ход плунжеров при перекладке руля с борта на борт
# = 2atga = 2£!sina. (210)
Секундный объем силового масла, нагнетаемый и одновре¬
менно всасываемый из рабочих цилиндров двухцилиндрового
рулевого привода qa, см3/с,
Чп = — = ^, (211)
*р *р
где tp — время перекладки пера руля с борта на борт, с.
§09
Значение qu должно быть равно секундной производительно¬
сти qa главного роторно-поршневого насоса, подающего силовое
масло в цилиндры привода:
= (212)
где пн—'Частота вращения насоса, соединенного непосредст¬
венно с электродвигателем привода, об/мин; 2е — двойной экс¬
центриситет роторного радиально-поршневого насоса перемен¬
ной производительности, равный ходу плунжера
-^- = ^«1,04-1,3;
Он
zH — число рабочих цилиндров роторно-поршневого насоса, при¬
нимаемое нечетным по условиям меньшей неравномерности по¬
дачи (zH = 7-f-13); r\v — объемный КПД насоса (коэффициент
подачи), обычно г]г~0,6-^0,75.
Так как очевидно, что qu=qn, то, приравняв правые части
уравнений (211) и (212):
(213)
получим требуемый диаметр цилиндра (плунжера) насоса
‘,"=К^Ж^-4'25Кч^Жг- (214)
Мощность приводного электродвигателя главного роторно¬
поршневого насоса Nu, кВт,
N quP' Ю4 = qnp (215)
10е-102% 10 200%
где г|н~0,54-0,7 — КПД насоса, учитывающий гидравлические
и механические потери. ,
§ 45. ОСНОВЫ ЭКСПЛУАТАЦИИ РУЛЕВЫХ МАШИН.
ТРЕБОВАНИЯ РЕГИСТРА И ПРАВИЛА
ТЕХНИКИ БЕЗОПАСНОСТИ
Техническая эксплуатация рулевых механизмов осуществля¬
ется в соответствии с утвержденными МРХ СССР «Правилами
технической эксплуатации флота рыбной промышленности
СССР», «Правилами обслуживания судовых вспомогательных
механизмов и ухода за ними» и инструкция фирмы или за-
вода-изготовителя.
Подготовка к действию электромеханической руле¬
вой машины с секторным зубчатым приводом должна осущест¬
вляться в такой последовательности:
— производят наружный осмотр машины, чтобы убедиться
210
в исправном состоянии всех движущихся частей и в отсутствии
вблизи них посторонних предметов;
— проверяют наличие масла в корпусах цилиндрических и
червячных редукторов (уровень масла в редукторах должен
быть не ниже уровня, показанного на стекле маслоуказателя, и
не выше 2/з окна маслоуказателя);
— заполняют солидолом и поджимают все имеющиеся на
машине колпачковые масленки; смазывают густой смазкой
вручную передачи: секторную зубчатую механического привода,
коническую конечного выключателя, цепную и валиковую, пере¬
дачу ручного привода и ходовой винт ручного тормоза;
-— проверяют, зажаты ли ручные тормоза и включена ли
машина при застопоренном штурвале ручного привода;
— согласуют показания механического и электрического
аксиометров.
После длительной остановки рулевой машины кроме выпол¬
нения указанных операций необходимо проверить включение
рулевой машины:
— на электропривод, для чего рукоятка привода кулачковой
муфты червячного редуктора должна быть установлена и за¬
стопорена в соответствующем (верхнем или нижнем) крайнем
положении, а электродвигатель соединен с цилиндрическим ре¬
дуктором путем включения муфты; при несовпадении кулачков
нужно провернуть рукой вал электродвигателя; рычаг меха¬
низма включения стопорится;
— на ручной привод, для чего рукоятку привода кулачковой
муфты червячного редуктора нужно перевести в положение,
противоположное первому крайнему положению, и застопорить.
После выполнения указанных операций отдают ручные тор¬
моза, включают питание от электросети и докладывают на мо¬
стик или старшему механику о готовности рулевой машины
к действию.
Пуск в ход электродвигателей осуществляется вращением
штурвала. При неследящей системе управления пуск произво¬
дится поворотом рукоятки или нажатием кнопки; в случае ра¬
боты на ручном приводе необходимо вращать ручные штурвалы.
Обслуживание рулевой машины с электромеха¬
ническим приводом во время работы заключается в том, что сле¬
дят за плавностью работы машины, отсутствием рывков при
движении сектора и румпеля, отсутствием ненормальных стуков
и скрипов, обильной смазкой трущихся частей машины и уров¬
нем масла в редукторах.
Масло в редукторах необходимо менять не реже двух раз
в течение года. Густую смазку в подшипниках качения пола¬
гается обновлять через 2000 ч работы машины. Сорта и марки
масел устанавливаются заводами-изготовителями и инструк¬
циями по обслуживанию механизмов, а в случае их отсутст¬
вия — механико-судовой службой.
211
Подготовка к действию электрогидравлической ру¬
левой машины заключается в следующих проверках:
— правильности включения запорных клапанов;
— уровня масла в расширительном баке;
— действия главных масляных насосов при положении, со¬
ответствующем нулевой подаче (проверяют вручную);
— действия насосов путем поочередного включения обоих
насосов и перехода с ручного управления (ручной привод) на
механическое (электропривод через телепередачу со всех постов
дистанционного управления).
Во время пробных перекладок руля следует убедиться в от¬
сутствии неисправностей в работе привода к баллеру, насосов,
систем управления; отсутствии пропусков масла; наличии необ¬
ходимого давления масла (по манометрам); согласованности
показателей положения руля в румпельном отделении и внеш¬
них постах.
После окончания проверки рулевой машины необходимо до¬
ложить на мостик о ее готовности к действию.
Для пуска в ход переключают на тот внешний пост, из
которого будет осуществляться управление рулевой машиной,
и производят пуск одного главного насоса регулируемой произ¬
водительности или двух насосов одновременно, в зависимости от
условий плавания.
Вовремя работы рулевой машины необходимо:
— проверять положение клапанов;
— следить за тем, чтобы машина работала плавно, без сту¬
ков и ненормальных шумов;
— периодически проверять температуру трущихся частей ма¬
шины, не допуская их чрезмерного нагрева;
— периодически производить смазку трущихся частей с со¬
блюдением мер предосторожности;
— периодически проверять уровень масла в напорных бач¬
ках и резервной цистерне (он должен находиться в пределах
верхней и нижней отметок маслоуказателей);
— следить за показаниями манометров гидроцилиндров и
маслонасосов;
— при длительной работе рулевой машины включать пооче¬
редно оба главных насоса регулируемой производительности,
чтобы избежать перегрева масла в работающем насосе и обес¬
печить одинаковую выработку моторесурса насосов.
При переходе с одного главного маслонасоса на другой за¬
пускают электродвигатель подключаемого насоса и только после
этого останавливают электродвигатель работающего. При пере¬
ходе на работу одновременно двумя насосами запускают элек¬
тродвигатель подключаемого насоса.
Остановка рулевой машины осуществляется путем
выключения одного или двух работающих насосов. Производят
наружный осмотр всей машины и обтирают ее с целью удале¬
212
ния грязи и масла. Обнаруженные во время работы неполадки
и повреждения устраняют.
В период работы рулевой машины с электрогидравлическим
приводом могут быть различные неполадки. Ниже приведены
возможные причины и способы устранения некоторых из них.
1. Рулевая машина осуществляет неточную перекладку руля
на угол меньше или больше заданного. Возможные причины:
— неправильная наладка датчика угла отработки в следя¬
щей системе или датчика указателя угла перекладки;
— неправильная установка системы рычажного управления
(проверить подачу датчиков и системы рычагов).
2. Румпель поворачивается неравномерно и слышен шум
в гидравлической части машины. Причина—проникновение воз¬
духа в гидравлическую систему (проверить фланцевые соедине¬
ния и уплотнения, уровень жидкости в расходных цистернах;
открыть воздушные пробки, удалить воздух из системы, дозаря¬
дить систему маслом).
3. Насос не создает нужного напора и проворачивается в ну¬
левом положении. Возможные причины:
— в корпусе насоса недостаточно масла, так как в него про¬
ник воздух;
— барабан цилиндров не полностью прилегает к поверхно¬
сти скольжения поворотного корпуса у аксиальных насосов
(спустить воздух из насоса и дополнить его маслом, плотнее
прижать барабан к скользящей поверхности).
4. Насос во время работы производит сильный шум. Воз¬
можная причина — выработка шарикоподшипников (заменить
подшипники).
5. Насос в среднем положении очень тяжело проворачи¬
вается или совсем не проворачивается. Возможные причины:
— разрушен шарикоподшипник;
— барабан или звезда цилиндров имеет задиры на цапфе
(сменить шарикоподшипник или зачистить места задиров на
цапфе).
6. На ведущий вал насоса или на перестановочную штангу
просачивается масло. Возможная причина — уплотнительные
кольца повреждены или имеют продольные риски (закрыть
клапаны, выпустить часть масла из насоса и заменить кольца).
7. Перестановочная штанга рычажной системы ходит тя¬
жело или совсем не передвигается. Возможная причина — по¬
вреждены или загрязнены внутренние сочленения рычажной си¬
стемы (проверить сочленения, в том числе подшипники качения
и втулку поворотной цапфы у аксиального насоса).
8. Имеются утечки масла из цилиндров плунжерного при¬
вода. Возможная причина — сальниковая набивка повреждена
или недостаточно поджата (поджать сальниковую набивку или,
если это не помогает, заменить набивочные кольца уплотнения;
для этого положить руль на борт).
213
В соответствии с требованиями Регистра СССР конструкции
приводов должна обеспечивать переход с основного рулевого
привода на запасной в течение не более 2 мин. Необходимо,
чтобы рулевые приводы обеспечивали работу в наиболее тяже¬
лых условиях эксплуатации. Двигатели рулевых приводов дол¬
жны работать при перегрузке не менее 1,5 расчетного момента
в течение 1 мин. Приводы должны быть защищены от пере¬
грузки деталей и узлов. В качестве защитных устройств от пере¬
грузки гидравлических рулевых приводов допускается использо¬
вание предохранительных клапанов, отрегулированных на дав¬
ление не более 1,5 рабочего.
Конструкция предохранительных устройств рулевых приво¬
дов должна предусматривать возможность их пломбирования.
Насосы гидравлических рулевых машин должны иметь за¬
щитные устройства, предотвращающие вращение отключенного
насоса в обратном направлении, или автоматически срабаты¬
вающее устройство, запирающее поток жидкости через отклю¬
ченный насос.
Каждый рулевой привод с энергетическим приводом должен
иметь устройство, прекращающее его действие прежде чем руль
дойдет до упора, но не позже, чем максимальный момент достиг¬
нет значения, соответствующего перекладке руля на 35° от ДП.
Указатель положения руля с ценой деления не более 1° дол¬
жен иметь шкалу на секторе электромеханической и на парал¬
лелях гидравлической рулевой машины или на других деталях
привода, жестко соединенных с баллером руля. Точность указа¬
теля должна быть не менее Г при положении руля в диамет¬
ральной плоскости; 1,5° — при углах перекладки 0—5°; 2,5° —
при углах перекладки 5—35°.
По требованиям техники безопасности и во избежание не¬
счастных случаев с персоналом, обслуживающим рулевые ма¬
шины, категорически запрещается производить на ходу обжимку
и переборку сальниковых уплотнений и арматуры, находящихся
под давлением, протирку ветошью вращающихся и движущихся
деталей, измерение зазоров и выборку слабины в движущихся
деталях и узлах, а также смазку узлов и деталей в труднодо¬
ступных местах.
Глава XII
ЯКОРНЫЕ И ШВАРТОВНЫЕ МЕХАНИЗМЫ
§ 46. СХЕМЫ И КОНСТРУКЦИИ БРАШПИЛЕЙ,
ШПИЛЕЙ И ЛЕБЕДОК
Обеспечение надежной стоянки судна на якорях или шварто¬
вах в различных условиях, а также выполнение операций, свя¬
занных с постановкой и снятием судна с якоря и швартовками,
214
Рис. 104. Якорно-швартовный брашпиль СРТ с электроручным приводом:
а — конструкция; б — схема.
215
осуществляется с помощью механизмов, входящих в состав
якорного и швартовного судовых устройств.
Конструктивно эти механизмы делятся на три типа: бра¬
шпили, шпили и лебедки. По назначению они бывают якорные,
швартовные и якорно-швартовные, по роду привода — паровые,
пневматические, электрические, гидравлические и ручные.
На рыбопромысловых судах СССР наибольшее распростра¬
нение получили якорно-швартовные брашпили с электрическим
приводом. Кинематическая схема и конструкция электроручного
якорно-швартовного брашпиля, установленного на средних ры¬
боловных траулерах, показаны на рис. 104.
Брашпиль смонтирован на общей фундаментной плите верх¬
ней палубы. Вращение электродвигателя 9 брашпиля через чер¬
вячный редуктор 11, кулачковую муфту 14 и цилиндрическую
зубчатую передачу 10 передается главному валу 12. На валу 12
свободно сидят кулачковые барабаны или звездочки 8, которые
включаются и выключаются конусными фрикционами 15 путем
вращения маховиков 7, перемещающихся по резьбе вдоль вала.
Стопоры 6 предохраняют звездочки от самопроизвольного вклю¬
чения или выключения. На концах вала 12 жестко насажены
швартовные барабаны (турачки).
Звездочки 8 отлиты за одно целое с барабанами ленточных
тормозов, зажимаемых вручную при помощи маховиков. Вал
электродвигателя 9 соединен с червячным валом редуктора 11
муфтой, которая служит шкивом аварийного электромагнитного
тормоза. Аварийный тормоз действует автоматически, зажимая
вал при обесточивании электродвигателя.
В случае выхода механического привода из строя вал 12
можно вращать ручным приводом с помощью рукояток, наса¬
женных на валик 1. При включенной кулачковой муфте 2 вра¬
щение передается главному валу через цилиндрические ше¬
стерни 4, 5, 3 и 13. Муфта 14 в этом случае отключается.
Брашпиль позволяет осуществлять следующие якорные и
швартовные операции:
— выбирание или травление швартовов с правого и левого
бортов. Эти операции выполняют от механического или руч¬
ного привода; при этом звездочки отключаются от вала 12 по¬
средством вращения маховиков 7, отводящих фрикционы 15;
— подъем или травление одной якорной цепи с якорем или
двух якорных цепей с якорями одновременно с помощью элек¬
тропривода;
— отдача одного якоря или обоих якорей без помощи элек¬
тродвигателя, посредством отдачи ленточных тормозов;
— подъем одного якоря и выбирание якорной цепи с одного
борта ручным приводом.
На рис. 105 изображена конструкция брашпиля с гидропри¬
водом, установленного на ТПР типа «Грумант». Брашпиль со¬
стоит из двух основных частей: гидравлического двигателя
Рис. 105. Якорно-швартовный брашпиль с гидроприводом.
1C
-4
ротационно-лопаточного типа М-540 и механической части. Гид¬
родвигатель вращает консольный вал 31, выходной конец кото¬
рого находится между нижней 33 и верхней 34 половинками
подшипника, скрепленными болтами 32. Вращение вала через
цилиндрический зубчатый редуктор 12 в кожухе 13 передается
основному валу 10. Вал лежнт на вкладышах 2 подшипников 3
и 1'4 с крышками 9 и 21, которые крепят на шпильках 22 гай-
Рис. 106. Якорная лебедка «Раума-Репола» с дистанционно уп¬
равляемыми ленточными тормозами.
ками 17 к стойкам 8 и 15, отлитым за одно целое с основа¬
нием 19 брашпиля.
На шпонки 23 концевых конусов 24 насажены швартовные
барабаны-турачки 1, закрепленные гайками 25. По обе стороны
зубчатого редуктора 12, прикрепленного к основанию 11', на валу
свободно на металлических втулках 6 с кольцами 5 сидят ба¬
рабаны-звездочки 7 с кулаками 30\ звездочки отлиты заодно
с барабанами 18 ленточных тормозов. Звездочки включаются
муфтами 4 и 20, в прорези которых входят вилки 26 рычага 27,
проворачивающиеся вокруг пальцев 29 и фиксируемые винтами
в отверстиях 28.
Чтобы якорная цепь не накручивалась на звездочки, имеются
отбойные кронштейны 16. Места смазки показаны буквой S.
Брашпиль рассчитан на якорь массой 2000 кг при калибре якор¬
ной цепи 47 мм.
218
Гидравлический двигатель имеет две ступени скорости и два
рычага: скоростной (слева) и маневровый (справа). Скоростной
рычаг следует передвигать только тогда, когда маневровый ры¬
чаг находится в положении «Стоп». /
На рис. 106 показан общий вид якорной лебедки фирмы
«Раума-Репола» (Финляндия), имеющий устройство для изме¬
рения длины вытравленной якорной цепи и дистанционно уп¬
равляемые ленточные тормоза, работающие с электронным уп¬
равлением при помощи гидравлики.
В дополнение к приведенной в начале главы классификации
шпили можно разделять на следующие категории.: по распо¬
ложению— на двухпалубные и однопалубные; по конструктив¬
ному исполнению — на баллерные и безбаллерные; по назначе¬
нию (в отличие от брашпилей, которые всегда выполняются
якорно-швартовными) —на якорные, швартовные и якорно¬
швартовные.
На рис. 107 показан внешний вид якорно-швартовного элек-
троручного двухпалубного баллерного шпиля типа ШЭР-8. На
нижней палубе расположена на фундаменте 11 приводная часть
шпиля, состоящая из электродвигателя 9, электромагнитного
тормоза 8 и червячного редуктора 10. На верхней палубе рас¬
положена головка шпиля, состоящая из цепной звездочки 4,
швартовного барабана 5 и крышки 6 с гнездами для вымбовок
ручного привода (на рис. 107 показаны штрихпунктиром). Уп¬
равление ленточным тормозом 2 осуществляется маховиком ко¬
лонки 3.
Вертикальный вал от электропривода соединен с баллером 1
шпиля кулачковой муфтой 7, которая отключается при переходе
на ручной аварийный привод шпиля. Аварийный тормоз 8 за¬
жимает вертикальный вал и гасит инерцию вращения при от¬
ключении подачи электроэнергии на электродвигатель.
На крупнотоннажных транспортных, обрабатывающих и до¬
бывающих судах рыбопромыслового флота, в носовой части ко¬
торых находится брашпиль, для удобства проведения швартов¬
ных операций в корме устанавливают швартовные шпили.
На рис.у108 дана в разрезе головка швартовного однопа¬
лубного баллера шпиля типа ШЭР-11 с электроручным при¬
водом.
В вертикальном пустотелом баллере 10, закрепленном непод¬
вижно в корпусе червячного редуктора, проходит вертикальный
вал 9, на нижнем конце которого на шпонке сидит червячное
колесо 12, соединенное с червяком 11. В верхней части на бал¬
лере 10 крепится на шпонке фланец 15, в котором установ¬
лены три вертикальных болта 6, являющихся осями сателлитов
(промежуточных шестерен) 8. Сателлиты вращаются на под¬
шипниках скольжения, которые смазываются консистентной
смазкой, подаваемой через отверстия в пальцах. Верхний конец
вертикального вала 9 имеет кулачки для сцепления с втулкой
219
Рис. 107. Якорно-швартовный электроручной двухпалубный баллерный
шпиль типа ШЭР-8.
220
ведущей шестерни 16, также сидящей на подшипнике скольже¬
ния, к которому смазка подается по центральному сверлению
оси вала сверху, путем завинчивания крышки 3; маховик 4
шпиля не имеет осевого перемещения; поэтому в зависимости
от направления его вращения шестерня 16 навинчивается на
резьбовую втулку 2 или свинчивается с нее, входя или выходя
С
Рис. 108. Швартовный электроручной однопалубный баллерный шпиль
типа ШЭР-11.
из зацепления с вертикальным валом. На шестерне находится
втулка с гнездами 5 для рукояток (вымбовок) 1 аварийного
ручного привода.
Швартовный барабан 14 свободно сидит на баллере 10 на
подшипнике скольжения. К верхней части барабана прикреп¬
лены зубчатый венец 7, находящийся в зацеплении с сателли¬
тами; в нижней части барабана имеется шесть собачек 13 хра¬
пового устройства.
При работе шпиля от электропривода ведущая шестерня пе¬
ремещается вниз до отказа и вводится в зацепление с верти-
221
кальным валом. Вращение от электропривода передается бара¬
бану через червяк, червячную шестерню, вертикальный вал, ве¬
дущую шестерню, сателлиты и зубчатый венец.
При работе шпиля от ручного привода ведущая шестерня
поджимается до отказа вверх и выводится из сцепления с верти¬
кальным валом. Поворотом вымбовок вручную вращается ве¬
дущая шестерня и сателлиты; через зубчатый венец поворачи¬
вается швартовный барабан.
В ряде конструкций шпилей сцепление и расцепление бара¬
банов с баллером осуществляется не кулачковой, а фрикцион¬
ной муфтой с дисками трения. Преимущество фрикционной
муфты заключается в том, что она может быть введена и вы¬
ведена из зацепления при любом положении барабана и пред¬
охраняет электродвигатель от перегрузки путем проскальзыва¬
ния (пробуксовки) как муфта предельного момента; диски при
износе могут быть легко заменены.
Из новейших конструкций шпилей с электрическим приводом
интерес представляет устройство безбаллерного швартовного
шпиля, показанное на рис. 109. Его особенность заключается
в том, что электродвигатель и приводной механизм смонтиро¬
ваны внутри головки шпиля. Электродвигатель 6 болтами кре¬
пится к крышке 2 корпуса редуктора. Приводной механизм со¬
стоит из четырех пар цилиндрических зубчатых колес; три из
них заключены в корпус 1 редуктора, а четвертая расположена
над редуктором внутри швартовного барабана 7.
Стальной литой барабан свободно сидит на стакане 5, соеди¬
ненном шпильками с крышкой редуктора. Барабан шпиля
имеет опоры скользящего трения. Радиальное усилие восприни¬
мает опорный стакан 5, на рабочую поверхность которого на¬
плавлен слой латуни, упрочненный путем накатки. Кольцевое
основание ступицы барабана опирается на бронзовые секторы
11, уложенные в кольцевую выточку стакана. Скольжению сек¬
торов по выточке препятствуют стальные сегменты, прикреплен¬
ные на винтах к стакану.
Швартовный барабан закрыт сварной крышкой 1'0, в которой
имеется отверстие с пробкой 9 для заливки смазочного масла.
Перемещение барабана вверх предотвращается фланцем масло¬
сборника 8, прикрепленным к верхнему торцу стакана 5. В ос¬
новании швартовного барабана запрессован зубчатый венец 3,
застопоренный от проворачивания винтами. Венец входит в за¬
цепление с шестерней 4, откованной за одно целое с валом. Вал
шестерни имеет опоры в виде сферических роликоподшипников,
установленных в гнездах крышки 2 и корпуса 1 редуктора.
Электродвигатель соединен с приводным валом зубчатой муф¬
той, состоящей из двух половин: ведущей 15 и ведомой 16, на¬
саженной на вал 17. В корпусе редуктора для обслуживания
клеммной платы над опорным фланцем 14 предусмотрена ка¬
мера с люком, закрываемым крышкой.
222
Рис. 109. Электроприводной однопалубный безбаллерный
швартовный шпиль.
Зубчатые передачи и подшипники редуктора смазывают
жидким маслом с вязкостью не ниже 6°Е ВУ. Масло заливают
в редуктор, и уровень его контролируют через отверстие, за¬
крытое пробкой 13. Зубчатую передачу смазывают густой смаз¬
кой посредством пресс-масленки 12, ввернутой в основание ба¬
рабана.
По сравнению с обычными конструкциями безбаллерный
шпиль имеет следующие преимущества:
— уменьшенные габариты в результате того, что электродви¬
гатель и редуктор размещены внутри головки шпиля;
— увеличенный механический КПД из-за отсутствия чер¬
вячных передач;
— меньшую трудоемкость монтажа, так как исключены опе¬
рации центровки и пригонки;
— на 20—40% меньшую стоимость изготовления за счет
уменьшения количества деталей.
На судах типа ППР «Рембрандт» установлены гидравличе¬
ские швартовные шпили (рис. 110).
Шпиль с гидравлическим приводом состоит из трех основных
частей: гидравлического двигателя роторно-пластинчатого типа,
механической части и органа управления.
Гидродвигатель 15 размещен под палубой и крепится болто¬
вым соединением 13 к промежуточному стальному палубному
224
Рис. 110. Швартовный однопалубный шпиль с гидроприводом.
стакану 4, приваренному к палубе. В крышках стакана — верх¬
ней 1'2 и нижней 5 — имеются опорные подшипники 14, в кото¬
рых проходит вертикальный вал 11 шпиля. На верхний конус¬
ный конец 10 жестко насажен швартовный барабан 9. К бара¬
бану крепится крышка 7 болтом 6, который ввинчивается в стакан
8 втулки. Воздействие на орган управления 1 осуществля¬
ется рукояткой на колонке 2. Орган управления трубками 3,
проложенными у подволоки, соединен с гидравлическим двига¬
телем шпиля. Шпиль рассчитан на тяговое усилие 3000 кгс
(3-104 Н).
На современных судах швартовные шпили все чаще заменя¬
ются автоматическими швартовными лебедками, которые обес¬
печивают поддержание заданного усилия швартовов на посто¬
янном уровне. При снижении усилия (ослабление троса)
лебедка автоматически подбирает трос на барабан, а при натя¬
жении швартовов сверх заданного усилия — травит трос, обес¬
печивая требуемое натяжение. Такая лебедка обеспечивает по¬
стоянное прижатие судна к причалу или другому судну, что осо¬
бенно важно при свежей погоде. Кроме того, автоматическая
швартовная лебедка позволяет устранить ручной труд, необхо¬
димый для выбирания и травления швартовных тросов обычной
турачкой и для их укладки, а также сокращает время, необхо¬
димое для выполнения швартовных операций.
Работа электрогидравлического привода автоматических
швартовных лебедок предусматривает три основных варианта
автоматизации режима постоянного натяжения:
— применение реверсивного насоса регулируемой произво¬
дительности с регулятором;
— использование регулятора постоянного давления (при ре¬
гулируемых нереверсивных насосах);
— установка дополнительного насоса малой производитель¬
ности, работающего на регулятор постоянного давления (кроме
главного насоса).
На рис. 111 дана гидравлическая схема автоматической
швартовной лебедки с гидравлическими машинами роторно¬
поршневыми радиального типа. Насосный агрегат гидропривода
лебедки состоит из трех насосов: постоянной производительно¬
сти 1, переменной производительности 9 с регулятором давления
3 и насоса подпитки 8, имеющих общий привод от электродви¬
гателя 2. Гидросистема защищена тремя предохранительными
клапанами 5. Управление гидроприводом 6, сидящим на валу
барабана лебедки, производится с местного поста посредством
золотников 4 и 7. На барабане лебедки помещается 200 м троса
диаметром 38 мм; скорость выбирания троса 30 м/мин. Работа
лебедки в ручном режиме осуществляется от насоса 9. Для уве¬
личения скорости золотником 7 включают насос 1. В автомати¬
ческом режиме работа системы обеспечивается регулятором 3,
изменяющим производительность насоса переменной производи¬
® А. Н. Богомольный
225
тельности 8; в этом случае скорость выбирания обеспечива¬
ется объемным регулированием. Травление осуществляется при
нулевой производительности главного насоса, действующего
в режиме двигателя, причем рабочая жидкость от гидродвигателя
перепускается через предохранительный клапан 3, установлен¬
ный на заданное в швартовном тросе усилие. Сброс в главном
силовом контуре выполняется насосом подпитки 8. Такая схема
особенно удобна при групповой работе нескольких автоматиче¬
ских швартовных лебедок от одной насосной станции.
Рис. 111. Гидравлическая схема автоматической швартовной ле¬
бедки.
В последнее время для выполнении якорно-швартовных опе¬
раций устанавливают комбинированные якорно-швартовные ле¬
бедки, в которых цепные и швартовные барабаны имеют общий
гидропривод. Схема гидропривода якорно-швартовной лебедки
с гидравлическими роторно-пластинчатыми машинами низкого
давления (около 60 кгс/см2) дана на рис. 112.
Рабочая жидкость от насоса 13 поступает по нагнетатель¬
ному трубопроводу к золотнику 7. Если золотник находится
в среднем положении, соответствующем режиму «Стоп», то
жидкость открывает предохранительные клапаны 12 и слива¬
ется в цистерну 1. Золотником 6 включают в работу второй гид¬
родвигатель 5. С помощью золотника 8 к работающему насосу
одной лебедки можно подключить исполнительный механизм 4
второй. Если отсутствует блокировка, исключающая возмож¬
ность одновременной работы, то от одного насоса могут рабо¬
226
тать одновременно четыре гидродвигателя. Золотники 6, 7 и 8
при трех работающих насосах позволяют использовать суммар¬
ную производительность насосов для получения максимальной
скорости в одном гидродвигателе.
Рис. 112. Гидросхема якорно-швартовной лебедки с роторно-пластинча-
тыми гидромашинами.
Управление тормозами 3 для дистанционной отдачи якоря
с мостика или выносного поста производится с помощью золот¬
ников 2. Для удержания пришвартованного судна механизмы
швартовного устройства клапаном 10 переводятся в режим авто¬
матического поддержания требуемого натяжения в швартовах,
устанавливаемого с помощью клапана 9. Для предотвращения
обратного потока рабочей жидкости в насосах и клапанах 10
и 9 в схему включены обратные клапаны 11. Защита от пере¬
грузки осуществляется клапанами 12, а при работе в режиме
автоматического поддержания заданного усилия, кроме того,
клапаном 9, регулируемым вручную на определенное давление.
8*
227
Работа гидравлических клапанов с электромагнитным управле¬
нием обеспечивается насосом 14 системы управления.
В автоматическом режиме используется один насос и один
клапан, что обеспечивает одинаковое натяжение всех тросов.
Производительность насоса превышает общий объем утечек
в системе, поэтому излишки жидкости по достижении давления,
установленного в клапане 9, сливаются через него в сливной
бак. При ослаблении какого-либо из тросов клапан 9 закры¬
вается, а гидродвигатель приходит в движение и выбирает сла¬
бину в тросе. После выборки слабины до достижения в тросе
заданного натяжения давление в системе достигает значения,
при котором клапан 9 вновь открывается и рабочая жидкость
через него поступает на слив.
§ 47. ОСНОВЫ РАСЧЕТА ЯКОРНО-ШВАРТОВНЫХ МЕХАНИЗМОВ.
ПОДБОР ПРИВОДНОГО ДВИГАТЕЛЯ
Исходными данными для расчета брашпиля (шпиля) явля¬
ются: масса якоря, калибр и длина якорных цепей, диаметр и
длина швартовных тросов. Эти величины определяют по таб¬
лице Регистра СССР в зависимости от характеристики снабже¬
ния (табл. 12), которая вычисляется по уравнению
ЗСс = Л2/3 + 2М + 0,Ы, (216)
где А — массовое водоизмещение судна при осадке по летнюю
грузовую ватерлинию, т; В — ширина судна, м; h — условная
высота от летней грузовой ватерлинии до верхней кромки на¬
стила палубы у борта самой высокой рубки, имеющей ширину
Ь>0,25 В, м; А— площадь парусности в пределах длины судна
L (считая от летней грузовой ватерлинии), м2.
В соответствии с требованиями Регистра СССР масса каж¬
дого станового якоря должна быть не менее
G„ > К%с, (217)
где коэффициент К принимается: для судов неограниченного
района плавания К=3,0; для судов ограниченного района пла¬
вания /С=2,00-ь2,75.
Суммарная длина обеих цепей становых якорей должна быть
/ц>87 г4/^, (218)
где коэффициент г принимается равным: для судов неограничен¬
ного района плавания г = 1,0; для судов ограниченного района
плавания г = 0,64^-0,88.
Калибр цепей для становых якорей
> si Ухе - (219)
где s — коэффициент (для судов неограниченного района пла¬
вания s=l,0; для судов ограниченного района плавания s==
228
Таблица 12
Дан ные для выбора якорей, якорных цепей, швартовных и буксирных тросов1
Становые
Цепи для становых якорей
Швартовные тросы
Характеристика
снабжения,
Хс
якоря
калибр, мм, цепи
число
масса
одного
якоря,
кг
суммар¬
ная дли¬
на цепей,
м
обыкно¬
венной
прочно¬
сти
повышен¬
ной проч¬
ности
особой
прочно¬
сти
число
длина
одного
троса,
м
разрывное
усилие
троса,
кгс
длина,
м
разрывное
усилие
троса,
кгс
>70^90
2
240
220
16
14
2
100
3 750
180
10 000
>130г=С 150
2
420
275
20,5
17,5
—
2
120
5 000
180
10 000
>205 240
3
660
302,5
26
22
—
2
120
6 550
180
13 200
>320 =5 360
3
1 020
357,5
32
28
—
3
140
8 750
180
21 100
>450 sr 500
3
1 440
412,5
38
34
—
3
140
11 000
180
28 200
>600 s£660
3
1 920
440
44
38
—
4
160
12 500
190
37 800
>780 -:С 840
3
2 460
467,5
50
44
—
4
170
14 000
190
48 900
>980 1060
3
3 060
495
56
50
44
4
180
16 000
200
61 500
>1220:=: 1300
3
3 780
522,5
62
54
48
4
180
19 000
200
75 300
>1480 ^ 1570
3
4 590
550
68
60
52
5
190
22 000
200
90 600
>1790 ^ 1930
3
5610
577,5
76
66
58
5
190
25 000
220
ИЗ 100
>2230^ 2380
3
6 900
605
84
73
64
5
200
28 000
240
138 300
>2700^2870
3
8 300
632,5
92
81
70
6
200
31 000
260
150 000
>3210 ^3400
3
9 900
660
100
87
78
6
200
34 000
280
150 000
>3800 4000
3
11 700
687,5
107
95
84
6
200
37 000
300
150 000
>4400 4600
3
13 500
715
117
102
90
7
200
40 000
300
150 000
>5000 ^ 5200
3
15 400
742,5
124
111
97
8
200
44 000
300
150 000
>5800 6100
3
17 800
742,5
132
117
102
8
200
50 000
300
150 000
>6900 ^7400
3
21 500
770
127
114
11
200
50 000
Суда длиной 180 м
могут не иметь
буксирного троса
1 Приложение I Правил Регистра СССР, 1970 г., стр. 833 (печатается в сокращенном виде).
= 0,82-^0,94); /— коэффициент, принимаемый для обыкновен¬
ных цепей / = 1,75; для цепей повышенной прочности /=1,55;
для цепей особой прочности /==1,35.
По требованию Регистра СССР мощность привода якорного
механизма должна обеспечивать выбирание одной якорной
цепи со скоростью не менее 10 м/мин, при тяговом усилии на
звездочке Гном, Н,
где — масса 1 м якорной цепи; для цепи с распорками его
можно найти по приближенному соотношению qn=0,022Ga\ h —
условная глубина якорной стоянки, принимаемая в зависимости
от калибра якорной цепи: при 6Ц=15-М7 мм 1г = 65 м; при бц=
= 18-^28 мм h = 80 м; при бц>28 мм /г = 100 м.
Привод якорного механизма должен создавать пусковой мо¬
мент, обеспечивающий максимальное тяговое усилие на звез¬
дочке Тшах = 27'ном- Суммарное тяговое усилие привода на звез¬
дочках брашпиля должно обеспечивать одновременное выбира¬
ние двух свободно висящих якорей (положение «панер»)
с половины условной глубины h. Это усилие Гсум, кгс, Н, опре¬
деляется по формуле
где /ц=Л/2 — длина вытравленной якорной цепи с каждого
стали в морской воде, принимаемый при значениях плотности
морской воды А = 1025 кг/м3 и стали у = 7850 кг/м3; /ц= 1,28ч-
-=-1,35 — коэффициент, учитывающий трение якорной цепи
в клюзах, стопорах и на палубе.
По требованию Регистра СССР ручной привод якорного ме¬
ханизма должен обеспечивать скорость выбирания якорной
цепи не менее 2,5 м/мин при действии на звездочке номиналь¬
ного тягового усилия Гном- При этом усилие, создаваемое одним
работающим на рукоятках привода, не должно превышать
16 кгс (160 Н). С учетом изложенного, необходимый крутящий
момент, создаваемый приводом на оси звездочки (цепного или
кулачкового барабана),
где 7V—усилие в якорной цепи на звездочке, принимаемое рав¬
ным последовательно Гною Г щах и Гсум; Du. о — диаметр началь¬
ной окружности цепного барабана — звездочки, который при
пяти кулаках можно определить из соотношения
т ном ^ (Оя + <7Ц К) -1,13.
(220)
Г1 сум — (2Gfl -f- 2дц/ц) kfa,
(221)
борта, м; k= (1——) ~0,87 — коэффициент уменьшения массы
(222)
(223)
230
86ц — шаг якорной цепи при длине звена, равной 6бц; т|з =
= 0,95 — КПД звездочки.
Необходимый крутящий момент на валу электродвигателя
якорной машины
Мл=-¥±-, (224)
гм'Пм
где УИз — номинальный крутящий момент на оси звездочки; tM —
передаточное число механизма, которое можно принимать для
брашпилей iM = 105-4-250 при пь — 720-4-1550 об/мин; для шпилей
iM= 110-4-220 при «э=800ч-1450 об/мин (па — частота вращения
электродвигателя); т]м■—КПД якорного механизма: при исполь¬
зовании зубчатой передачи т]м = 0,7-4-0,85; при использовании
червячной передачи т]м = 0,65-4-0,75.
Номинальный крутящий момент электродвигателя опреде¬
ляется в зависимости от максимального момента сопротивления
•Мд тах и его перегрузочной способности:
Мнсм^-^f^, (225)
А
где Я =1,84-2,2 — коэффициент перегрузки для электродвигате¬
лей постоянного тока; X = 1,0 — коэффициент перегрузки для
электродвигателей переменного тока.
Необходимая частота вращения электродвигателя пд, об/мин,
(226)
гмая
(227)
где п3 — частота вращения якорной звездочки, определяемая
в зависимости от скорости выбирания якорной цепи:
406ц
сц=10 м/мин — скорость выбирания якорной цепи. Номинальная
мощность электродвигателя NH0M, кВт,
^ном = -^-но9^ном , (228)
где пНом = 'фпэ — номинальная частота вращения электродвига¬
теля (цз «0,9-5-0,95).
Пригодность выбранного приводного двигателя якорно-швар-
товного механизма для выполнения швартовных операций про¬
веряется по заданному номинальному тяговому усилию Рш на
швартовном барабане (турачке) и заданной скорости выбира¬
ния швартовов сш. По правилам Регистра СССР Рш не должно
превышать 7з разрывного усилия швартовных тросов, принятых
на снабжение судна.
Скорость выбирания швартовного троса сш должна быть
не менее 4 м/мин и не более 18 м/мин при номинальном тяго¬
вом усилии Рт. Необходимый крутящий момент, развиваемый
231
приводом швартовного механизма в течение не менее 30 мин,
Мш, Н-м,
Мш = ^^, (229)
2г|6
где £>ш — диаметр швартовного барабана (турачки), обычно
принимаемый £>ш= (154-20) 6Т; бт — диаметр швартовного троса,
выбираемый из таблицы Регистра; г)б = 0,95 КПД барабана (ту¬
рачки) .
Необходимый крутящий момент на валу приводного двига¬
теля
м Мш_' (230)
'** ^м'Пм
где iM и т]м — соответственно передаточное отношение и механи-
ческий КПД.
Натяжение швартова при максимальном моменте приводного
двигателя РШах, Н,
= (231)
-Ь'ш
По правилам Регистра, привод швартовного механизма дол¬
жен развивать в тросе натяжение не менее двукратного номи¬
нального усилия в течение 15 с, т. е. Ртах^2Рш.
При выбирании якоря или швартовании ручным приводом
необходимое число вымбовок (рукояток) определится из соот¬
ношения
Мр — Р1ъг, (232)
где Мр — необходимый крутящий момент для создания номи¬
нального усилия в цепи или в швартове, Н-м; Р — усилие, со¬
здаваемое на вымбовке (рукоятке) одним работающим (ргс;
^160 Н); /в — условная длина одной вымбовки (рукоятки)
/в—1,54-3,0 м; z — число вымбовок (рукояток), равное числу ра¬
ботающих; обычно 2 = 4.
Скорость выбирания цепи или швартова с, м/с,
с=с,-£-, (233)
где св^0,44-0,5 м/с — скорость на концах вымбовок (рукояток);
D — диаметр звездочки или турачки.
§ 48. ОСНОВЫ ЭКСПЛУАТАЦИИ
ЯКОРНО-ШВАРТОВНЫХ МЕХАНИЗМОВ.
ТРЕБОВАНИЯ РЕГИСТРА И ПРАВИЛА
ТЕХНИКИ БЕЗОПАСНОСТИ
При подготовке к действию брашпиля и шпиля с механиче¬
ским приводом необходимо:
— убедиться в отключении ручного привода;
232
— проверить действие ленточного тормоза;
— проверить исправность кулачковой (фрикционной) муфты
и отсоединить ее от звездочки;
— проверить чистоту якорной цепи на участке от механизма
до клюза и правильность ее положения на звездочке;
— подготовить к действию привод брашпиля (шпиля);
— убедиться в исправности храпового механизма.
В соответствии с «Правилами технической эксплуатации
флота рыбной промышленности СССР» перед каждым выходом
в рейс необходимо проверять безопасность отдачи жвака-галса
и исправность стопорных и тормозных приспособлений. При
длительном бездействии (во время стоянки, промысла и на
длительных переходах) брашпиль (шпиль) надо проворачивать
без нагрузки.
При обслуживании во время действия нельзя допускать ра¬
боту брашпиля (шпиля) с таким износом звездочек (цепных
барабанов), при котором наблюдается проскальзывание якорной
цепи между кулачками. Нельзя пользоваться стопором для
удержания якорной цепи во время стоянки на якоре, учитывая,
что основное назначение этих стопоров — удержание втянутых
якорей в клюзах по-походному. Нельзя также оставлять на
турачках закрепленные тросы даже на короткое время. Необ¬
ходимо следить за тем, чтобы колодки и ленты тормозов были
достаточно отжаты и не терлись при включенном приводе о тор¬
мозные шкивы.
Работа электропривода контролируется по показаниям ам¬
перметра: увеличение силы потребляемого тока свыше номи¬
нального значения свидетельствует о перегрузке.
Отдачу (бросание) якоря без включенного приводного дви¬
гателя брашпиля (шпиля) производят в такой последователь¬
ности:
— зажимают ленточный тормоз и выключают звездочку;
—• по команде с мостика ослабляют затяжку ленточного
тормоза и производят травление цепи якоря;
—■ для уменьшения скорости травления поджимают ленточ¬
ный тормоз плавно, без рывков;
— после отдачи якоря и вытравливания цепи на требуемую
длину зажимают ленточный тормоз-
Для подъема якоря при работе брашпиля (шпиля) с при¬
водом необходимо:
— включить муфту, соединяющую звездочку с валом;
— ослабить ленточный тормоз, отдать стопор и одновре¬
менно включить приводной двигатель;
— обмыть через носовой клюз цепь и якорь при подъеме;
— при подходе якоря к клюзу снизить скорость подъема;
— после подъема якоря затянуть ленточный тормоз;
— передать нагрузку с ленточного тормоза на цепной стопор;
— отключить звездочку от вала-
233
Подъем якоря ручным приводом осуществляют следующим
образом: разобщают звездочку с двигателем и соединяют ее
с ручным приводом; отжимают ленточный тормоз звездочки;
прилагая усилие к рычагам ручного привода, выбирают цепь.
Для остановки брашпиля (шпиля) после подъема или отдачи
якоря необходимо отключить питание привода.
Рассмотрим характерные неисправности, встречающиеся при
работе брашпиля (шпиля).
1. Ленточный или колодочный тормоз не тормозит. Возмож¬
ные причины: износ облицовки или колодок; неплотное приле¬
гание облицовки ленты или колодки к шкиву; попадание масла
на облицовку; задевание тормоза за реборды шкива.
2. Цепь выбирается медленно или якорь совсем не подни¬
мается. Необходимо взять его на ленточный тормоз, разъединить
звездочку с валом и, включив электродвигатель, установить
причину неисправности.
Правила техники безопасности на судах флота рыбной про¬
мышленности СССР предусматривают следующее:
— при постановке судна на якорь или при снятии с якоря
в районе брашпиля (шпиля) должны находиться только лица,
обслуживающие якорное устройство;
— при проверке брашпиля (шпиля) на холостом ходу за¬
прещается пускать его, не убедившись предварительно в том,
что цепной барабан (звездочка) отсоединен;
— запрещается отдавать цепные стопоры, а также разоб¬
щать звездочки, не удостоверившись предварительно в том, что
они закреплены ленточными тормозами. Матрос, управляющий
брашпилем (шпилем), не должен отходить от поста управления;
— запрещается использовать брашпиль (шпиль) во время
забортных работ по очистке якоря и якорной цепи до тех пор,
пока люди, работающие за бортом, не выйдут на палубу судна.
При проведении швартовных операций иллюминаторы борта,
обращенного к причалу (судну), должны быть задраены. В этот
период запрещается:
— травить или выбирать швартовы без команды лица, ру¬
ководящего швартовными операциями;
— одному человеку управлять одновременно швартовным
механизмом и выбирать с турачки этого механизма трос;
— пускать в действие брашпиль (шпиль) для использования
турачек при швартовке, не убедившись предварительно в том,
что звездочка отсоединена;
— накладывать дополнительно шлаги троса на турачку при
ее вращении;
— задерживать руками или ногами быстро вытравливаю¬
щийся трос;
— находиться в местах выполнения швартовных операций
лицам, не участвующим в них.
К якорно-швартовным механизмам Регистр СССР предъяв¬
234
ляет следующие дополнительные требования. При подводе
якоря к клюзу привод должен обеспечивать скорость выбирания
цепи не более 10 м/мин; рекомендуемая скорость втягивания
якоря в клюз — не более 7 м/мин. Якорные механизмы с элек¬
трическим или дизельным приводом должны иметь автоматиче¬
ские нормально замкнутые тормоза, установленные на валу при¬
вода и затормаживающие механизм при отключении, остановке
или при выходе из строя приводного двигателя. Тормоз должен
обеспечивать тормозной момент, соответствующий усилию в цепи
на звездочке не менее 1,3 ГНом.
Каждая цепная звездочка должна иметь тормоз, причем
усилие на рукоятке привода тормоза не должно превышать
750 Н.
Цепные звездочки должны иметь не менее пяти кулачков.
Необходима проверка прочности деталей механизма при дейст¬
вии на звездочку усилий, соответствующих максимальному мо¬
менту привода, или моменту, соответствующему предельной
уставке защиты, а также при разрывной нагрузке цепи, дей¬
ствующей за клюзом.
Швартовный механизм должен быть оборудован автомати¬
ческим нормально затянутым тормозом, обеспечивающим удер¬
жание действующего на турачку внешнего усилия, равного 1,5
номинального тягового усилия. Детали швартовного механизма,
находящиеся в силовой цепи, должны быть проверены на проч¬
ность при действии на турачке номинального тягового усилия.
Баллер (вал) механизма должен быть проверен на изгиб при дей¬
ствии на барабан усилия, равного разрывному усилию швартов¬
ного троса.
Глава XIII
ГРУЗОПОДЪЕМНЫЕ И БУКСИРНЫЕ
МЕХАНИЗМЫ
§ 49. НАЗНАЧЕНИЕ, КЛАССИФИКАЦИЯ, СХЕМЫ
И КОНСТРУКЦИИ СУДОВЫХ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ
Нормальная эксплуатация современного морского промыс¬
лового судна невозможна без подъемно-транспортных механиз¬
мов, осуществляющих подъем и перемещение различного рода
тяжестей.
Они могут подразделяться на транспортирующие и подъем¬
ные механизмы.
К транспортирующим механизмам относятся различные кон¬
вейеры, транспортеры, элеваторы, подъемники, обеспечивающие
235
транспортировку рыбы и рыбопродуктов к местам их техноло¬
гической обработки и хранения.
К подъемным механизмам относятся лебедки (грузовые,
шлюпочные, буксирные) и поворотные краны, которые в сочета¬
нии с грузовым устройством судна осуществляют подъем и
горизонтальное перемещение различных грузов, судового обору-
Рис. 113. Грузовая двухскоростная лебедка типа ЛЭГр 5/1 с электриче¬
ским приводом.
дования, орудий лова промыслового снаряжения, рыбы, тары и
рыбной продукции.
Грузовые лебедки, установленные на современных судах
флота рыбной промышленности, имеют электрический или гид¬
равлический привод. На БМРТ отечественной постройки уста¬
новлены лебедки типа ЛЭГр, рассчитанные на номинальную
грузоподъемность 3 и 5 т, с приводными электродвигателями
переменного тока напряжением 220 В.
Устройство лебедки ЛЭГр 5/1 показано на рис- 113,
Электродвигатель 38 смонтирован на стальной сварной фун¬
даментной раме лебедки 37. На грузовом валу 8 свободно вра¬
щается на бронзовых втулках 7 и 11 грузовой барабан 9, отли¬
236
тый из стали заодно целое с ребордой 5 и тормозным барабаном.
Грузовой трос прикреплен к крючку 10. Грузовой вал 8 опира¬
ется на сферические роликоподшипники 1 и 15, закрепленные
в гнездах литой стойки 2 и у торца зубчатой муфты 14 выход¬
ного вала 23 редуктора. Ступица 6, в которую запрессована
втулка 7, имеет кулачки на торце и закреплена на барабане 9.
Барабан соединен с грузовым валом 8 при помощи кулачковой
муфты 3, сидящей на шлицах. Для смазки муфты 3 и втулки 7
установлена масленка 4. Вал 23 редуктора соединен с грузовым
валом с помощью зубчатых полумуфт 13 и 14.
Тормозной барабан огражден кожухом 35 и зажимается тор¬
мозной лентой 12 путем вращения маховика 36. Цилиндриче¬
ский зубчатый редуктор лебедки расположен в стальном литом
корпусе 19 с валом 23, лежащим в радиальном 16 и радиально¬
упорном 21 подшипниках качения. На правом конце вала жестко
насажена турачка 22. В средней части вала на шлицах сидит
зубчатое колесо 18, которое фиксируется от осевого перемеще¬
ния втулками 17 и 20. Колесо 18 входит в зацепление с шестер¬
ней 27 второго промежуточного вала редуктора, уложенного
в радиальные шарикоподшипники 26 и 34 и несущего литые
зубчатые колеса 24 и 25. Они находятся в зацеплении с шестер¬
нями 30 и 32, свободно сидящими своими бронзовыми втулками
на первом промежуточном валу 29 редуктора, лежащего в под¬
шипниках 28 и 33. Шестерни включаются двусторонней кулач¬
ковой муфтой 31, перемещающейся на шлицах средней части
вала 29. Этим осуществляется двухскоростной режим работы
лебедки. Электродвигатель имеет дисковый тормоз, закрытый
кожухом 39.
На ППР типа «Грумант» установлены грузовые лебедки ти¬
пов С-30 и С-50 с гидравлическим приводом грузоподъемностью
соответственно 3 и 5 тс, в которых используются уже знакомые
нам гидравлические машины ротационно-пластинчатого типа.
Грузовая лебедка с гидроприводом показана на рис. 114.
Механизмы лебедки с гидродвигателем 19 и стойкой 9
смонтированы на общей фундаментной раме 13. Гидродвига¬
тель управляется двумя рукоятками 2 и 3 золотниковой ко¬
робки 1.
Грузовой барабан 6, отлитый за одно целое с чугунным тор¬
мозным барабаном, насажен на конус вала 5 гидродвигателя
на шпонке и закреплен гайкой. Барабан соединен с ребордами
4 и 8 болтами. Реборда 8 сидит на шпонке левого конца консоль¬
ного вала 7, который лежит в бронзовом подшипнике 11, смазы¬
ваемом по трубе 10. На правый конусный конец вала на шпонке
насажена чугунная турачка 12. Ленточный тормоз грузового
барабана зажимается винтом 14, на конце которого находится
рычаг 15 с педалью 18\ верхнее положение рычага фиксируется
упором 16. Масло подводится к золотниковой коробке 1 насос¬
ного агрегата через невозвратный клапан 17.
237
Шлюпочные лебедки, входящие в состав шлюпочного
устройства, должны обеспечивать быстрый и безопасный спуск
и подъем спасательных и рабочих шлюпок в соответствии с тре¬
бованиями Международной конвенции по охране человеческой
жизни в море. Согласно этим требованиям необходимо осуще¬
ствлять следующие операции:
Рис. 114. Грузовая лебедка типа С-30 с гидроприводом.
—• вываливание за борт и спуск на воду шлюпки с полным
количеством людей и запасом снабжения при крене судна до
15° и дифференте до 10°;
— кратковременный подъем, полный подъем и заваливание
шлюпки с полным снабжением и людьми.
Шлюпочные лебедки должны быть снабжены двумя тормо¬
зами— ручным и автоматическим для регулирования скорости
спуска спасательной шлюпки в пределах 18—30 м/мин.
Кинематическая схема электроручной шлюпочной лебедки
типа ЛЭР 3/1 отечественного производства показана на рис. 115.
Лебедка имеет два грузовых барабана: верхний 6, сидящий
на валу жестко, и нижний 10, сидящий на валу свободно и
включаемый с помощью кулачковой муфты 12.
238
Оси барабана расположены параллельно одна другой. Бара¬
баны получают вращение от электродвигателя 17 переменного
тока через редуктор и имеют ручной привод от рукоятки 1.
В корпусе редуктора установлены косозубые шестерни 19,
23, 24 и 20, пара цилиндрических шестерен 25 и 4 и шестерня 8,
одновременно находящаяся в зацеплении с шестернями 5 и 9.
На шлицах пустотелого вала 24 сидит шестерня 20. Валы ре¬
дуктора лежат в шарикоподшипниках, а ведущий вал имеет
игольчатый подшипник, установленный внутри пустотелого вала
21. На первом промежуточном валу редуктора смонтирован
центробежный скоростной тормоз 22. Когда частота вращения
вала достигнет 1400 об/мин, что соответствует предельной ско¬
рости спуска, колодки под действием центробежной силы пре¬
одолевают сопротивление пружин, прижимаются изнутри к тор¬
мозному барабану и притормаживают вращение вала, ограни¬
чивая скорость спуска шлюпки.
На левом конце пустотелого вала 21 находится так называ¬
емая «безопасная рукоятка», которая предотвращает самопро¬
извольное обратное вращение лебедки при подъеме шлюпки.
239
Рис. 115. Схема шлюпочной электроручной лебедки типа ЛЭР 3/1.
Это устройство состоит из неподвижно насаженного на вал 21
тормозного барабана 28 с тормозной лентой и свободно сидящим
на валу диском 29, имеющим звездочку- Соединение их с торцом
вала осуществляется с помощью собачки 30. На ступице тормоз¬
ного барабана свободно сидит диск 26 с храповиком 27. При
подъеме шлюпки от электропривода собачка 30 выводится из
зацепления с валом 21, и вращение от тормозного барабана 28
через сжатую пружиной тормозную ленту и рычаг передается
на ведущий диск 26 к храповику 27.
Безопасная рукоятка приводится в действие от штурвала 2
через звездочку 3 цепной передачи.
Грузовой барабан 6 и шестерня 7 жестко укреплены на
грузовом валу. Нижний барабан 10 с ленточным тормозом 11
соединяется с валом при включении кулачковой муфты 12 вра¬
щением маховика 16.
При подъеме шлюпки вращающий момент, создаваемый
электродвигателем 17, передается на грузовые барабаны через
центробежную муфту 18, шестерни редуктора и шестерни 8, 5
и 9. При этом кулачковая муфта 12 должна быть включена,
а ленточный тормоз 11 расторможен, что обеспечивается меха¬
низмом блокировки, который соединен с валиком 14 и гайкой
13. На шпонках валика 14 установлены храповое колесо 15 и
маховик 16. При вращении маховика и включении муфты 12
собачка входит в зацепление с зубьямн храпового колеса 15 и сто¬
порит его. Только после этого возможно ослабление тормоза 11.
В случае поворота маховика 16 в противоположную сторону
кулачковая муфта выключается и собачка храпового зацепления
через механизм блокировки выводится из зацепления, что дает
возможность затянуть ленточный тормоз И.
При аварийном ручном подъеме шлюпки вращение рукоятки
1 передается грузовым барабанам через цепную передачу и
шестерни 25, 4, 8 и 5, 9. При этом собачка 30 соединяет торец
вала 21 с приливами звездочки диска 29. Обратному провора¬
чиванию препятствует тот же храповой механизм 27.
Опускание шлюпки осуществляется без привода.
Спуск шлюпки осуществляется поворотом штурвала 2. При
этом от вращения звездочки поворачивается диск 29, выступ
которого нажимает на ролик рычага тормозного барабана 28.
Рычаг поворачивается, сжимает пружину и растормаживает тор¬
моз (на схеме не показан). Шлюпка начинает опускаться под
действием собственной массы (при этом собачка 30 должна быть
выключена).
Для остановки шлюпки при спуске достаточно повернуть
штурвал 2 в обратную сторону-
По требованию Морского Регистра СССР необходимо обес¬
печить возможность буксировки любого судна другими судами.
Для этой цели на каждом судне должен быть буксирный трос.
Суда-буксиры кроме троса и приспособлений имеют специаль¬
240
ное буксирное устройство, в состав которого входит буксирная
лебедка.
Буксирная лебедка современного судна типа буксира-
спасателя должна работать в режимах ручного и автоматиче¬
ского управления, т. е. должно быть предусмотрено устройство,
обеспечивающее постоянное номинальное натяжение буксир¬
ного троса. Когда натяжение буксирного троса станет меньше
номинального, трос автоматически выбирается до своей перво¬
начальной длины, если же натяжение троса станет больше но¬
минального, трос потравливается.
Конструкция буксирной лебедки должна допускать стравли¬
вание буксирного троса ходом судна и стопорение барабана
лебедки с помощью тормоза. Необходимо также устройство,
позволяющее следить за натяжением троса у лебедки и на
мостике. Одновременно предусматривается звуковая сигнализа¬
ция, включающаяся в момент, когда на барабане лебедки оста¬
ется минимальное количество шлагов троса (но не менее трех).
На буксирных лебедках должен быть тросоукладчик. Бук¬
сирная лебедка обеспечивает буксировку при волнении моря
без резких рывков и провисаний буксирного троса, что могло
бы привести к разрыву троса или наматыванию его на гребной
винт, а также к быстрому изменению расстояния между букси¬
ровщиком и буксируемым судном. Указанным требованиям от¬
вечает стандартная электроприводная автоматическая буксир¬
ная лебедка, выбирающая буксирный трос со скоростью
10 м/мин при номинальном тяговом усилии на гаке 12-104 Н;
ее кинематическая схема дана на рис. 116.
Привод лебедки осуществляется от электрического двигателя
3 типа КПДМ-5Ш мощностью 30 кВт при п = 9004-1000 об/мин.
Вращение от электродвигателя через шлицевую муфту 19, смон¬
тированную вместе с тормозом центробежного типа, сраба¬
тывающим при частоте вращения 1400 об/мин, передается через
цилиндрические зубчатые шестерни 18 и 1 на промежуточный вал
с сидящей на нем шестерней 16 редуктора- Шестерня находится
в зацеплении с тремя промежуточными шестернями 15, которые
в свою очередь сцеплены с зубчатым венцом 14 корпуса плане¬
тарной ступени, являющегося одновременно барабаном ленточ¬
ного тормоза 13.
Промежуточные шестерни 15 вращаются на осях дисков, со¬
ставляющих одно целое с шестерней 17, сцепленной с зубчатым
колесом 12, установленным на грузовом валу 4.
Каретка тросоукладчика 10 с поводком 11 на валу 9 с вин¬
товой нарезкой и направляющими 8 имеет привод от двух кони¬
ческих зубчатых передач, расположенных на вертикальном
валике 7, который включается перемещением маховика 5 с муф¬
той 6. Предусмотрен также ручной привод тросоукладчика.
Планетарный редуктор с тормозным приспособлением и бу¬
ферными пружинами составляет автоматическое устройство,
241
которое используется для управления электродвигателем при
работе лебедки (рис. 116,6).
Вытравливание и выбирание троса при изменении нормаль¬
ных усилий обеспечивается под контролем командоаппарата
Рис. 116. Электроприводная автоматическая буксирная лебедка: а — кине¬
матическая схема; б — автоматическое устройство.
усилий (КАУ) 21 и путевого командоаппарата (ПКА). К тор¬
мозным лентам, охватывающим зубчатый венец 14, приварены
ушки, шарнирно связанные со штоками, которые удерживаются
демпферными пружинами 22 и 24. С увеличением усилия в бук¬
сирном тросе венец 14 повернется по часовой стрелке, при этом
242
пружина 22 растянется, а пружина 24 сожмется. Система рыча-.
гов, шарниров и передач повернет вал КАУ. При повороте на
угол 30" срабатывают контакты, соответствующие предельному
усилию. От этого растормозится электромеханический тормоз,
и двигатель, развив незначительный вращающий момент, поз¬
волит буксирному тросу стравливаться с барабана. Разматыва¬
ние будет происходить до тех пор, пока усилие в канате не
станет на 10—15% меньше усилия, на которое настроен автомат.
Тогда под действием пружин 22 и 24 венед 14 вернется в исход¬
ное положение и через систему рычагов разомкнет контакты
КАУ 21; обмотка тормоза обесточится, вал электродвигателя
затормозится и травление троса прекратится. Трос будет раз¬
матываться на заданную максимальную длину, например на
50 м, после чего путевой командоаппарат включит дополни¬
тельные контакты к электродвигателю, который начнет вра¬
щаться, выбирая вытравленный трос. После выбирания установ¬
ленной длины троса ПКА разомкнет контакты, электродвига¬
тель остановится и его вал затормозится.
Установленное усилие фиксируется положением рукоятки 20,
которая через систему шарниров и рычагов определяет натяже¬
ние пружин и соответствующий угол срабатывания КАУ. Обычно
диапазон установки усилия колеблется в пределах 9—14- 104 Н.
Если тяговое усилие на тросе резко возрастет и достигнет
18—20 • 104 Н, зубчатый венец 14 повернется на угол, при ко¬
тором сработают контакты 23 конечного выключателя. Если
усилие будет продолжать расти или если будет вытравлено более
50 м троса, сработает автоматическая сигнализация, а система
автоматического управления лебедкой отключится-
Во время буксировки электродвигатель отключен, а ленточ¬
ный тормоз зажат с заданным усилием. Если усилие в тросе
немного превысит натяжение тормоза, барабан повернется и
вытравит трос, при этом через передачи и редуктор повернется
и зубчатый венСц 14 на небольшой угол (меньше того, при ко¬
тором срабатывают контакты командоаппаратов); нагрузятся
пружины 22 и 24. Когда нагрузка перестанет действовать, пру¬
жины поставят тормоз 13 и венец 14 в исходное положение.
Через зубчатые передачи вернется в первоначальное положение
барабан 2 и выберет вытравленный участок буксирного троса.
Применение на промысловых, обрабатывающих и транспорт¬
ных судах грузовых поворотных кранов с электрическим и гид¬
равлическим приводами ооусловлено их более высокой манев¬
ренностью по сравнению с грузовыми стрелами с лебедками,
уменьшением затрат времени на подготовку к работе, более вы¬
сокой производительностью, большей экономичностью (затраты
энергии на привод крана меньше, чем на привод двух лебедок,
выполняющих те же операции).
Использование в грузовых кранах гидравлического привода
упрощает их работу, обеспечивает возможность дистанционного
243
управления и программирования рабочего цикла. На рис. 117
представлен поворотный грузовой кран с гидроприводами низ¬
кого давления. Кран отличается простотой конструкции и си-
родвигателями 1. Над механизмом подъема и опускания рас¬
положен механизм изменения вылета стрелы: барабан 2, на
который наматывается топенант, приводится во вращение гидро¬
двигателями 4 через червячный редуктор 3. Оба механизма
оборудованы тормозами с автоматическим растормаживанием
от гидроцилиндров.
244
Рис. 117, Грузовой поворотный кран с гидроприводом.
Механизм поворота приводится от гидродвигателей 7, каж¬
дый из которых имеет при вращении в одну сторону три ступени
скорости, а при вращении в другую сторону — одну ступень. При¬
менение двух гидродвигателей обеспечивает равенство скоро¬
стей поворота крана в обе стороны. Колонка 5 крана служит
одновременно баком для рабочей жидкости. Управление краном
осуществляется из кабины 6 по схеме с дроссельным регулиро¬
ванием, рассмотренной ранее.
Схемы гидравлического привода высокого давления при¬
меняются с системами обычного регулирования скорости в меха¬
низмах подъема и поворота от насосов переменной производи¬
тельности.
Отечественная судостроительная промышленность выпускает
краны с электрогидравлическими приводами, в том числе сдво¬
енные на общей поворотной платформе, которые могут работать
синхронно и раздельно.
Дистанционное управление гидроприводами кранов осуще¬
ствляется двумя рукоятками: одна служит для спуска, оста¬
новки и регулирования скорости подъема груза, вторая — для
приведения в действие механизмов поворота и изменения вылета
стрел.
§ 50. ПОДБОР ПРИВОДНОГО ДВИГАТЕЛЯ
Для расчета грузоподъемного механизма необходимы две
исходные величины: грузоподъемность, Н, т. е. номинальное
усилие на гаке, зависящее от массы поднимаемого груза, и ско¬
рость подъема гака с грузом, м/мин, которая для двухскорост¬
ных лебедок обычно составляет: при силовых режимах с =
= 154-30 м/мин, при скоростных режимах с = 30ч-60 м/мин.
Рабочее номинальное тяговое усилие в грузовом шкентеле
(тросе), Т, у грузового барабана будет
Т = P + G-, (234)
^бл
где/5 — грузоподъемность номинального груза, Н; G — масса
грузового гака и скобы гака, которая в первом приближении
равна G= (0,00224-0,0028) Р кг; т]бл — КПД одного блока,
11бл = 0,92^0,98; п — число блоков между грузовым барабаном
и гаком у нока грузовой стрелы.
Для выигрыша в силе или снижения необходимого тягового
усилия в некоторых грузоподъемных механизмах на рыбопро¬
мысловых судах используют полиспасты, у которых грузовой трос
сбегает с неподвижного блока у нока стрелы. В этом случае
усилие на сбегающем конце троса без учета трения Т0, Н:
Г0 = Р + °_' где z — числ0 блоков в полиспасте.
Z
245
Необходимую мощность электродвигателя лебедки можно оп¬
ределить по формуле
Мэ = ——— л. с. = ——— кВт, (235)
45011Л 612%
где т]л — общий КПД лебедки, который определяется как про¬
изведение КПД зубчатых передач т]3, червячного редуктора г)р,
барабана г]б, подшипников валов г)п, тормоза т|т- В выбранной
кинематической схеме механизма: г1л = 'П”гз'Пр'Пб'Пг1п11т (обычно
г)л — 0,35-т-0,75); т и k — соответственно число зубчатых передач
и число пар подшипников.
По каталогам подбирают подходящий электродвигатель со¬
ответствующей мощности с частотой вращения пэ.
Передаточное число механизма лебедки
1л= —, (236)
«б
где «б — частота вращения грузового барабана, об/мин, которая
определяется из соотношения
пб = ~^~, (237)
я£)Ср
Dср — средний диаметр навивки, Dcv=^D5 + dT(2z—1).
Диаметр грузового барабана
D6 = (16,5-ь 18,0) dT, (238)
где df — диаметр грузового троса (шкентеля), который находят
из таблиц по значению разрывного усилия Rpasp = kTmax-, k —
коэффициент запаса прочности. Для стальных тросов /г = 44-
4-5,5; для растительных £ = 74-8;
г — число слоев, укладываемых по длине барабана, зави¬
сящее от его размеров и длины троса. Обычно при длине троса
LTp = 404-75 м 2 = 5.
При отсутствии таблиц ГОСТа диаметр грузового троса dr,
мм, можно определить по следующей эмпирической формуле:
Крутящий момент на валу грузового барабана Мб, Н-м,
с учетом слоев намотанного на него троса
м = [D6 + dr(2z-\)]T ' (240)
2г|б
где пб«0,904-0,95 —КПД барабана.
246
§ 51. ОСНОВЫ ЭКСПЛУАТАЦИИ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ.
ТРЕБОВАНИЯ РЕГИСТРА И ПРАВИЛА
ТЕХНИКИ БЕЗОПАСНОСТИ
В соответствии с Правилами технической эксплуатации
(ПТЭ) флота рыбной промышленности СССР техническое со¬
стояние грузовых устройств должно обеспечивать быстрое и
удобное проведение погрузочно-разгрузочных работ, а также
сохранность конструкций судна, перерабатываемого груза и
тары. Эксплуатация грузовых устройств должна вестись в со¬
ответствии с заводскими или фирменными инструкциями. Ко¬
миссия рыбохозяйственного предприятия не реже раза в год
подвергает испытаниям грузовые устройства с составлением
акта в двух экземплярах. Все такелажные цепи, кольца, гаки
и вертлюги подвергаются освидетельствованию не реже одного
раза в три месяца- Пробная нагрузка, на 25% превышающая
номинальную грузоподъемность, должна быть поднята на
стрелах при угле наклона не более 15° к горизонту. Испытания
тормозов грузовых лебедок и кранов производятся путем быст¬
рого опускания пробного груза приблизительно на 3 м и рез¬
кого торможения. Это испытание должно быть выполнено по
крайней мере при двух положениях стрелы. Необходимо прове¬
рить удержание пробной нагрузки на валу при отключенном
приводе лебедки.
Эксплуатация грузовых устройств запрещается в следующих
случаях:
— при наличии трещин или деформации у гаков, блоков,
вертлюгов, скоб и других ответственных деталей;
— при уменьшении на 10% и более диаметра звеньев таке¬
лажных цепей, скоб, вертлюгов, штырей и болтов, а также
при наличии у тросов лопнувших проволочек в количестве 10%
и более от общего их числа на длине, равной восьми диаметрам;
— при отсутствии на каждой стреле (кране) ясных и четких
надписей о допустимой нагрузке;
— до проведения испытаний после ремонта или после за¬
мены какой-либо из ответственных несъемных частей (мачт,
колонн лебедок и их фундаментов);
— при неисправных тормозных устройствах.
Все грузовые работы производят в присутствии ответствен¬
ного лица. К производству грузовых работ не допускаются
лица в возрасте до 18 лет.
При выполнении грузовых операций, связанных с делением
и выливкой улова, должны быть приняты все меры, исключаю¬
щие перегрузку грузовых устройств. Обслуживание грузовых
лебедок и кранов производится в соответствии с действующим
«Наставлением по уходу за судовыми корпусами, помещениями,
устройствами по обслуживанию систем судов флота рыбной
промышленности СССР».
247
Все лица, непосредственно занятые грузовыми работами,
должны носить защитные каски. Перед подъемом тяжеловесов
грузовые лебедки осматривает старший механик, который от¬
вечает за их исправную работу. Во время работы грузоподъем¬
ных механизмов запрещается: поправлять шкентель руками;
снимать ручки с пускорегулирующих устройств; резко перево¬
дить рычаги при реверсе (за исключением случаев, когда чело¬
веку грозит опасность); опускать груз под действием собствен¬
ной массы; оставлять подъемные краны, стрелы или подъем¬
ники с поднятым грузом.
Согласно требованиям Регистра СССР должна быть обес¬
печена возможность буксировки каждого судна другим судном.
Все суда длиной 180 м и менее должны быть снабжены буксир¬
ным тросом длиной 160 + 0,035^с, где Хс— характеристика
снабжения. В любом случае длина буксирного троса должна
быть в пределах /б = 180-^300 м.
Разрывное усилие составляет /?ра3р = 60Хс, т. е. должно быть
в пределах /?разр = 10 0000-4-150 0000 Н.
Буксирная лебедка должна иметь устройство, следящее за
натяжением буксирного троса, которое не должно превышать
номинальную тягу более чем на 10%. Управление буксирной
лебедкой осуществляется как у самой лебедки, так и с ходового
мостика. Барабаны буксирных лебедок должны иметь тросо-
укладчики. Длина троса на автоматической буксирной лебедке
составляет 500—700 м при мощности главных двигателей на
спасателях-буксирах 1470—2200 кВт.
Раздел четвертый
ПРОМЫСЛОВЫЕ МЕХАНИЗМЫ
Промышленный лов рыбы производится добывающими су¬
дами рыбной промышленности. В зависимости от основного
орудия лова они подразделяются на траулеры, сейнеры, дриф¬
теры. Орудия лова, используемые этими судами, соответственно
называются тралами, кошельками, дрифтерными сетями.
Для безопасной и эффективной работы рыбаков с орудиями
лова добывающие суда оборудуют специализированными про¬
мысловыми устройствами, в состав которых входят оборудо¬
вание и механизмы-
В соответствии со способом лова рыбы промысловые меха¬
низмы подразделяются на три категории:
1. Механизмы тралового лова.
2. Механизмы кошелькового лова.
3. Механизмы дрифтерного лова.
Глава XIV
МЕХАНИЗМЫ ТРАЛОВОГО ЛОВА
§ 52. ОСНОВНЫЕ СВЕДЕНИЯ И СХЕМЫ ТРАЛЕНИЯ
Орудием тралового лова является трал —сетной мешок, от¬
крытый с одного конца и завязываемый с другого. Трал бук¬
сируется при помощи двух стальных тросов — ваеров. В прак¬
тике современного рыболовства на траулерах применяют два
вида тралов: донные, предназначенные для лова рыбы, которая
обитает около дна моря (например, треска, пикша, зубатка,
палтус, ерш), и разноглубинные (пелагические), предназначен¬
ные для лова рыбы, находящейся в толще воды (сельдь, сар¬
дина и др.).
Для выполнения необходимых операций при траловом лове
рыбы добывающее судно — траулер снабжают промысловым
249
устройством. Расположение промыслового устройства на судне
и последовательность взаимодействия его элементов в процессе
работы называется промысловой схемой.
Промысловая схема бортового траления показана на
рис. 118. При бортовом тралении трал буксируется судном с од¬
ного борта, при этом оба ваера: носовой и кормовой стягива¬
ются с помощью дополнительного троса с гаком (мессенджера)
и удерживаются в стопор-блоке 1. С двухбарабанной много-
Рис. 118. Схема расположения промыслового оборудования при борто¬
вом тралении.
операционной траловой лебедки 5, установленной перед руле¬
вой рубкой, ваеры через систему палубных 4 и вспомогатель¬
ных 3 роликов проходят через блоки траловых дуг 2, располо¬
женных в носовой и кормовой частях рабочего борта.
Несмотря на то что бортовое траление в течение ряда лет
являлось основным на траулерах, оно не может считаться про¬
грессивным из-за следующих присущих ему недостатков:
— ограничены длина и высота надводного борта, что сни¬
жает промысловые возможности при штормовой погоде;
— для выполнения операций по спуску — подъему трала
требуются сложные маневры, циркуляция, включая и остановку
судна;
— асимметричное расположение ваеров относительно судна
влечет за собой: 1) возможность закручивания и наматывания
ваеров на гребной винт; 2) повышенный износ ваеров из-за их
проводки через большое число роликов и блоков; 3) необходи¬
мость при буксировке трала для сохранения прямого курса
250
держать руль повернутым на определенный угол, что приводит
к дополнительной затрате мощности главного двигателя до 5%
номинальной.
Перечисленных недостатков лишена промысловая схема
кормового траления. Работающие по такой схеме суда типов
БМРТ и РТМ имеют в кормовой части наклонный слип с кри¬
волинейной поверхностью, предназначенной для спуска и подъ¬
ема трала (рис. 119).
Рис. 119. Схема расположения промыслового оборудования при кормовом
тралении.
Траловая многооперационная лебедка 11, установленная
в корме на промысловой палубе перед слипом, наматывает оба
ваера, которые проходят через палубные ролики 7, подвесные
ролики 4 кран-балок (траловых дуг), и подтягивает к ним
траловые доски 3. Затем траловые доски разъединяют с вае-
рами, и к кольцам 2 для лапок траловых досок на кабелях 1,
соединяющих трал с траловыми досками, прицепляют гаки сто¬
порных оттяжек 6. После этого травят ваеры лебедкой до пе¬
рехода натяжения с ваеров на стопорные оттяжки, сбрасывают
ваеры с подвесных и направляющих роликов на слип и выби¬
рают их до выхода гаков стопорных оттяжек со слипа на па¬
лубу. Клячевые бобинцы (пустотелые шары) подтягивают вспо¬
могательными вытяжными концами 10 к лебедке и берут на
стопор. Траловый мешок с уловом при помощи специальных
вытяжных концов 8 грузовыми лебедками 9 поднимают над
палубой посредством грузовых стрел 13. Гайтян развязывают,
251
и рыба из кутка выливается на палубу и сталкивается в бункер
рыбного цеха.
Траловые дуги или кран-балки расположены под кормовым
переходным мостиком 5• Управление операциями по выборке
и отдаче трала осуществляется с кормовой промысловой
рубки 12.
Перед спуском трал растягивают на промысловой палубе, и
при помощи спускного троса, проходящего через канифас-блок
на турачку лебедки (на схеме не показаны), стягивают куток
по слипу в воду, где он подхватывается и вытягивается киль¬
ватерной струей. Эта промысловая схема, распространенная на
большинстве БМРТ, не удовлетворяет возрастающим требова¬
ниям в отношении эффективности и механизации процессов.
Большинство операций являются сложными, трудоемкими,
отнимающими много времени и выполняемыми вручную. К та¬
ким операциям в первую очередь относятся работы по приему
и отдаче траловых досок, переводу ваеров на слип и выливке
улова из трала. Более эффективна промысловая схема с раз¬
дельными однооперационными лебедками: ваерными и вытяж¬
ными. Такая промысловая схема на современных РТМ типа
«Атлантик» и БМРТ показана на рис. 120. По обеим сторонам
слипа 16 на промысловой палубе 5, перед кормовым переход¬
ным мостиком 13 установлены две ваерные лебедки 11, управ¬
ляемые из рубки у основания П-образной мачты 9. Ваеры от
барабанов проходят через подвесные ролики 14 к траловым
доскам. Для промера ваеров на переходном мостике установ¬
лена ваерная вьюшка 15. В носовой оконечности промысловой
палубы у надстройки расположены две вытяжные лебедки 4
для выборки кабелей и вытяжных концов 3. Для спуска трала
используется трос 1, проходящий через канифас-блок 12 над
слипом. Блоки 8 у П-образной мачты подвешены для выливки
улова из кутка трала. Для обеспечения этих и других вспомо¬
252
Рис. 120. Схема расположения промыслового оборудования при кормовом
тралении с раздельными однооперационными лебедками.
гательных операций на стеньгах П-образной мачты установ¬
лены четыре стрелы — кормовые 10 и носовые 6. Первые об¬
служиваются турачками ваерных лебедок, вторые — грузовыми
лебедками 7.
На некоторых добывающих судах без слипа может быть
использовано промысловое устройство, изображенное на
рис. 121. Оно состоит из двухопорной мачты 6, на которой смон¬
тированы два подъемных крана 3 и блок салинга 4. У опор
мачты установлены траловые лебедки 5 с проводкой ваеров от
барабанов через направля¬
ющие к траловым доскам 1.
Между направляющими ва¬
еров помещен кормовой
рол 2.
§ 53. ТРАЛОВЫЕ ЛЕБЕДКИ
Траловая лебедка — ос¬
новной промысловый меха¬
низм, обеспечивающий вы¬
полнение всех основных опе¬
раций промысла:
— спуск трала за борти
травление ваеров;
— удержание ваеров при
буксировке трала;
— выбирание ваеров и
подъем трала на борт,
а также вспомогательных
операций, связанных с осво¬
бождением трала от рыбы, его осмотром, ремонтом и подго¬
товкой к спуску.
Современные траловые лебедки имеют дистанционное управ¬
ление, приборы и автоматику, обеспечивающие безаварийность
и эффективность их работы.
Промысловые лебедки современных рыбодобывающих судов
можно классифицировать по следующим основным признакам:
1. По назначению, числу и виду выполняемых операций:
многооперационные — траловые, тралово-кошельковые и одно¬
операционные — ваерные, кабельно-вытяжные.
2- По роду привода: электрические, гидравлические, паровые
(на судах старой постройки) и дизельные—-с отбором мощно¬
сти от двигателя внутреннего сгорания на малых судах.
На БМРТ типа «Маяковский» отечественной постройки уста¬
новлены многооперационные траловые лебедки типа ЛЭТр-2.
Они представляют собой одновальные траловые лебедки с раз¬
дельными электрическими приводами, зубчатыми редукторами
и винтовыми автоматическими ваероукладчиками.
Рис. 121. Бесслиповое промысловое уст¬
ройство для кормового траления.
253
Последующие модели траловых лебедок ЛЭТр-2-1; ЛЭТр-2-2
и ЛЭТр-2-3 были дополнены барабанами для вытяжных концов.
У лебедки модели ЛЭТр-2-2 несколько изменена конструкция
редуктора, который изготовлен двухскоростным с передаточ¬
ным числом 42,3 при выбирании ваеров и 23,85 при его трав¬
лении.
Кинематическая схема и конструкция лебедки ЛЭТр-2-3
изображены на рис. 122, а, б.
Основанием для всех узлов лебедки и редуктора 6 служит
стальная сварная фундаментная рама 1 (рис. 122, а). Редуктор
трехступенчатый двухскоростной с коническими и цилиндриче¬
скими зубчатыми колесами, у которого скорости переключаются
вращением маховичка 25\ передаточное число при выбирании
и травлении ваеров соответственно равно 42 и 24. Вал электро¬
двигателя 24 с помощью зубчатой муфты, корпус которой слу¬
жит шкивом аварийного электромагнитного колодочного тор¬
моза 23, соединен с промежуточным валом 22, который в свою
очередь зубчатой муфтой 21 соединяется с ведущим валом ре¬
дуктора. Ваерный вал лежит в роликоподшипниках стальных
литых стоек 7 и 31 и соединен с редуктором зубчатыми муф¬
тами 5- Свободно сидящие на валу ваерные барабаны 2 вклю¬
чаются кулачковыми муфтами 10 с помощью рычагов 15 и
имеют ленточные тормоза 8, управляемые маховичком 16, и
гидравлическое растормаживающее устройство, срабатывающее
при повышении натяжения ваера сверх допустимого- На концах
ваерного вала закреплены турачки 9. На дополнительных валах
установлены вытяжные турачки И, которые снабжены ленточ¬
ными тормозами 12 с ножными педалями 13. Дополнительные
валы вращаются от ваерного вала через зубчатые цилиндриче¬
ские колеса 30 и 29, которые включаются при перемещении
кулачковой муфты 28 посредством рычага 14. Лебедка имеет
автоматические винтовые ваероукладчики с каретками 3, кото¬
рые обеспечивают правильную укладку ваеров на барабаны
траловой лебедки. Вращение от ваерных барабанов передается
винтам ваероукладчика через привод 4, состоящий из зубчатой
и цепной передач. От привода работают счетчики 17, показы¬
вающие длину вытравленных ваеров, и датчик 18 дистанцион¬
ного контроля общей длины ваера, установленные на внутрен¬
ней стойке 7. Ручной привод ваероукладчика позволяет уста¬
навливать каретки в требуемое положение. Четыре рукоятки
управления 20 через валик 19 и коническую передачу 26 вра¬
щают ротор командоконтроллера 27 электродвигателя лебедки.
Движение тросов к турачке направляется вертикальным ролом
32, установленным у крайней стойки 31.
На рис. 123 показаны конструкция и схема однооперацион¬
ной ваерной лебедки ЛЭТр-8 с электроприводом первого совет¬
ского тралового комплекса для БМРТ с раздельными промыс¬
ловыми лебедками. Две лебедки, правого и левого исполнения,
254
Рис. 122. Раздельная траловая многооперационная лебедка с электри
ческим раздельным приводом ЛЭТр-2-3 БМРТ типа «Маяковский».
Рис. 123. Конструкция (а) и схема (б) электроприводной нераздельной ваерной однооперационной лебедки типа
ЛЭТр-8 тралового комплекса для БМРТ.
устанавливаются симметрично относительно рабочей палубы
в корме у слипа и обеспечивают травление, выборку ваеров при
спуске и подъеме трала, удержание ваеров при тралении и
траловых досок у транца судна при вытаскивании трала на
палубу. Тем самым исключаются трудоемкие и небезопасные
операции, связанные с отцепкой и подвешиванием траловых до¬
сок, имеющие место при многооперационных лебедках.
Конструкция ваерной лебедки ЛЭТр-8 (рис. 123, а) состоит
из двух нераздельных электродвигателей 1 и 3, промежуточного
редуктора 2, редуктора 4, ваерного барабана 5 с кулачковой
муфтой включения и ленточным тормозом, ваероукладчика, со¬
стоящего из каретки 8, двухходового винта 6, направляющих 7,
механического привода 9 и штурвала 10 ручного привода. Все
узлы скомпонованы на общей станине 11, закрепленной на су¬
довом фундаменте. Установка двух электродвигателей марки
ДПМ-65 водозащищенного типа мощностью по 95 кВт при час¬
тоте вращения 964 об/мин предопределили кинематическую
схему, изображенную на рис. 123, б.
Электродвигатели 1 и 5 зубчатыми муфтами 2 и 4 соеди¬
нены с шестерней 3 промежуточного редуктора 7. Через ци¬
линдрические шестерни 3 и 9 (передача 1), сидящие жестко
на валах с подшипниками качения 6 и 8, вращение передается
через вал 10 промежуточному валу 11 с зубчатыми муфтами 12
и шестерне 14 редуктора 13 (передача II). Далее вращение
через паразитную шестерню 15, свободно сидящую на подшип¬
никах качения промежуточного вала 16, передается зубчатому
колесу 17 (передача III) и через кулачковую муфту 18 ваер-
ному барабану 19, жестко скрепленному с тормозным шкивом
21 ленточного тормоза 20. От шестерни 22, сидящей на ступице
вала ваерного барабана, вращение через цилиндрические зуб¬
чатые шестерни передается на винт 28 автоматического ваеро¬
укладчика с кареткой 27. От цилиндрической шестерни 23 при¬
вода ваероукладчика работает цилиндрическо-конический ре¬
дуктор 24 привода синхронизатора 25, обеспечивающего равен¬
ство длины ваеров при выбирании и травлении на барабанах
левой и правой ваерных лебедок. От этого же привода дей¬
ствует ограничитель 26 длины ваеров при их разматывании
с барабанов путем выключения электропривода при переходе
на первый слой навивки ваеров на одном из барабанов.
Ваерные лебедки ЛЭТр-8 снабжены гидравлической систе¬
мой управления кулачковыми муфтами и ленточными тормо¬
зами с обеспечением автоматического растормаживающего
устройства, предохраняющего ваеры от обрыва при задеваниях
трала. В состав гидравлической системы управления, схема ко¬
торой изображена на рис. 124, входят гидроцилиндры 1 дву¬
стороннего действия для переключения кулачковых муфт 2 ва¬
ерных барабанов и гидроцилиндр 3 одностороннего действия
для управления ленточными тормозами барабанов 4, гидро-
9 A. R. Богомольный
257
электроманнпуляторы 15, 16, напорная 13 и сливная 14 маги¬
страли рабочего масла.
Когда электромагниты манипуляторов обесточены, то ленты
тормозов барабанов 4 затянуты и кулачковые муфты 2 выклю¬
чены. При подаче питания на электромагниты манипуляторов
15 и 16 масло из напорной магистрали 13 поступает в гидро¬
цилиндры 1 я 3 и перемещает поршни, что приводит к растор-
маживанию ленточных тормозов барабанов 4 и включению ку¬
лачковых муфт 2. При выключении питания пружины гидро¬
цилиндров 3 возвращают поршни в исходные положения н
Рис. 124. Гидравлическая схема управления ваерными лебедками ЛЭТр-8.
затормаживают барабаны. Одновременно манипуляторами 16
масло подается к днищам гидроцилиндров 1, поршни переме¬
щаются в противоположном направлении и отключают муфты 2.
Гидросистема обеспечивает работу автоматического растор¬
маживающего устройства (АРУ), которое заполняется маслом
из системы управления и затем отключается от нее запорными
клапанами 8 и 9. Каждое АРУ состоит из двух гидроцилиндров
5, к штокам поршней которых подвешивается горизонтальная
балка 10 взвешивающего устройства ваероукладчика. По балке
перемещается ролик 12, на который давит огибающий его ваер
11. Это давление передается штокам цилиндров 5, которые со¬
единены гидравлически между собой так, что реакции, на кото¬
рые раскладывается сила, действующая на балку 10, сумми¬
руются на поршне гидроцилиндра с двух рабочих полостей.
При увеличении тягового усилия на ваере пропорционально
увеличивается сила, прикладываемая с обеих сторон к поршню
цилиндра. Кроме того, повышается давление в верхней полости
и трубопроводе, подключенном к двум реле 7 и манометру 6,
показывающему давление, пропорциональное натяжению ваера.
258
Одно из двух реле 7 включает сигнализацию по достижении
натяжения в ваере при тралении-до 0,8 номинального- Второе
реле срабатывает по достижении в воде предельно допустимого
а)
Рис. 125. Кинематическая схема (а) и общий вид (б) электроприводной
многооперационной траловой лебедки типа ЛЭТр-7.
усилия при тралении до 1,4—2,0 номинального. Оно включает
электромагниты манипулятора 15, тормоза растормаживают
барабан 4 и после стравливания некоторой длины ваеров
(одновременно с обеих ваерных лебедок) включается
сигнализация. Через 12—15 с затормаживаются барабаны. Если
9*
259
перегрузка ваеров не будет устранена, то произойдет повтор¬
ное растормаживанне с последующим затормаживанием и т. д.
до тех пор, пока не устранится перегрузка в ваерах.
На судах РС-300 установлены многооперационные лебедки
типа ЛЭТр-7, в состав которой входят тяговые органы — бара¬
баны для различных способов лова. На рис. 125 изображены
кинематическая схема и общий вид лебедки типа ЛЭТр-7. Ле¬
бедка двухвальная: на грузовом валу свободно сидят два ваер-
ных барабана 1, имеющие ленточные тормоза 2 и муфты вклю¬
чения 3. На консолях грузового вала насажены две турачки 9.
Трос наматывается на ваерные барабаны с помощью винтовых
ваероукладчиков 4, имеющих цепной привод от ваерных бара¬
банов. Проводниковый барабан 5 для кошелькования сидит
свободно на промежуточном валу 6 и включается муфтой. На
консолях промежуточного вала жестко насажены заклиниваю¬
щие барабаны 8.
Лебедка приводится через двухступенчатый цилиндрический
редуктор от электродвигателя 7 марки ДПМ-52 мощностью
60 кВт и частотой вращения 1000 об/мин, обеспечивающего ско¬
рость выбирания ваеров на барабанах 70—95 м/мин, на турач-
ках 90 м/мин, проводниковым барабаном около 120 м/мин.
Тралово-кошельковая многооперационная лебедка типа
ЛГТр-5 с гидравлическими приводами и управлением, исполь¬
зуемая на судах, занимающихся промыслом рыбы тралом, ко¬
шельковым неводом и для лова сайры на электрический свет,
показана нарис/ч 126. Как видно из кинематической схемы
(рис. 12бГН7г=Т^^вои-привод обеспечивается двумя гидродви¬
гателями типа ИМ № 20, которые посредством зубчатых муфт
передают вращение через двухступенчатый цилиндрический ре¬
дуктор 17 на грузовые валы 13 с установленными свободно на
подшипниках качения 12 ваерными 4 и дополнительными 1 ба¬
рабанами. Между ваерными и дополнительными барабанами
размещена подвижная двусторонняя кулачковая муфта 14. Она
может включаться с иолумуфтами 2 или 3 барабанов с по¬
мощью рычагов 18, перемещаемых поршнями гидроцилиндров
19 системы дистанционного управления. Предусматривается
также ручное управление кулачковыми муфтами (на схеме не
показано). Барабаны имеют ленточные тормоза 11 и 15. Управ¬
ление тормозами 11 ваерных барабанов дистанционное и руч¬
ное, а тормозами 15 вспомогательных барабанов — только мест¬
ное (ручное).
На ступицах ваерных барабанов сидят шестерни 5, которые
передают вращение приводам 9 винтовых автоматических двух¬
скоростных ваероукладчиков 10, имеющих рукоятки для ручного
перемещения кареток. На консолях грузовых валов насажены
турачки 7, к которым болтами и штифтами прикреплены бара¬
баны 8 с клиновидным профилем для выборки урезов. Таким
образом, лебедки имеют восемь различных барабанов, насажен¬
260
ных на левый и правый грузовые валы. Каждый из валов опи¬
рается на два радиально-сферических двухрядных подшипника,
один из которых 16 расположен в полом грузовом валу редук-
а)
Рис. 126. Кинематическая схема (а) и общий вид (б) траловой многоопера¬
ционной лебедки с гидравлическим приводом типа ЛГТр-5.
тора, другой 6 — в стойке станины лебедки- Привод лебедки
обеспечивает скорость выборки ваеров 75 м/мин, стяжного
троса от 90 м/мин в начале кошелькования до 45 м/мин при
номинальном тяговом усилии. Скорость травления ваеров и
стяжного троса с подтормаживанием 120 м/мин. Питание
261
гидросистемы управления осуществляется шестеренным насосом
Г-П-12 производительностью 18 л/мин, давлением 13 кгс/см2 и
частотой вращения 1450 об/мин. Общий вид тралово-кошелько¬
вой лебедки типа ЛГТр-5 показан на рис. 126,6.
§ 54. ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ ТРАЛОВЫХ ЛЕБЕДОК
И ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ
Механик, на которого возложена ответственность за исправ¬
ность траловой лебедки, должен после каждой вахты, а стар¬
ший механик не реже одного раза в сутки проверять ее техни¬
ческое состояние.
Траловые лебедки обслуживаются старшими мастерами н
мастерами по добыче рыбы, которые получают от старшего
механика инструктаж по технике безопасности при работе с ле¬
бедками. Только после того как получение инструктажа офор¬
млено в судовом журнале по технике безопасности, мастерам
дают допуск к лебедкам.
В соответствии с промысловым расписанием траловую ле¬
бедку должны готовить к работе одновременно два человека:
мастер по добыче рыбы и лебедчик (при отсутствии послед¬
него— матрос 1-го класса, получивший инструктаж и имеющий
допуск). При подготовке лебедки к пуску проверяют:
— внешний вид движущихся частей лебедки: валов, шесте¬
рен, муфт;
— наличие и крепление ограждений и кожухов открытых
шестерен, маховиков, приводных валов и управления;
— степень износа и состояние турачек; обнаруженные вы¬
боины, заусенцы, раковины и другие дефекты, которые могут
привести к заеданию тросов и травме рук, необходимо устра¬
нить;
— степень износа трущихся деталей: подшипников и повод¬
ков ваероукладчиков, а также облицовки тормозных лент; при
необходимости подшипники подшабривают или заменяют их
вкладыши так же, как и изношенные поводкп: проверяют, не
попала ли. смазка на тормозные барабаны, и если попала, то
снимают тормозные ленты и обезжиривают поверхности бара¬
банов и лент;
— состояние и исправность муфт сцепления: кулачковых и
фрикционных и их рычажных приводов;
— легкость и исправность органов управления лебедкой.
У всех лебедок с электрическим приводом необходимо про¬
верить исправность автоматов защиты электропривода, аварий¬
ных выключателей и аварийных электромагнитных тормозов.
Одновременно проверяют защитное заземление электроприво¬
дов лебедок и командоконтроллеров. Места контакта металли¬
ческих частей лебедок с корпусом судна надо зачистить и не
допускать проникновения к ним масла-
262
При проверке механизмов лебедки следует обращать вни¬
мание на смазку всех трущихся деталей.
Скорость выбирания ваеров не должна превышать макси¬
мально допустимой. В зависимости от погодных условий ско¬
рость выбирания ваеров должна уменьшаться.
При работе на вспомогательных барабанах или турачках
ваерные барабаны отключаются и берутся на тормоз.
Во время выбирания ваеров члены команды, управляющие
траловой лебедкой, должны внимательно следить за движением
ваера, слушать команды и наблюдать за работой траловой
лебедки.
Для соблюдения правил техники безопасности необходимо,
чтобы вблизи ваеров, а также около центральных роликов и
роликов траловых дуг не находились люди. Необходимо по¬
мнить, что лебедка должна быть остановлена не только в слу¬
чае обнаружения явной неисправности, но и по команде
«Стоп», от кого бы эта команда ни исходила. У лебедок с элек¬
трическим приводом нажимается выключатель безопасности,
выключающий электропитание и тормозящий двигатель. В слу¬
чае работы турачками ваерные барабаны отключаются и
стопорятся ленточными тормозами. По окончании работы
муфты ваерных барабанов выключают, а ленточные тормоза за¬
жимают. В машинное отделение сообщается: «Лебедка не
нужна».
Правилами техники безопасности во время работы лебедки
запрещается:
— пускать лебедку на предельной скорости без нагрузки;
-—без надобности резко зажимать ленточные тормоза;
— выбирать ваеры рывками;
— выбирать ваеры на турачках;
— поправлять трос во время хода лебедки.
При обслуживании траловых лебедок с гидроприводом важ¬
ную роль играет процесс заполнения установки рабочей
жидкостью — маслом. В соответствии с инструкциями фирмы
«Норвинч» система гидрофицированных механизмов на ППР
«Грумант» заполняется с помощью насоса.
Время от времени в систему может проникать воздух, о чем
будет свидетельствовать ослабление тяги лебедки и возникно¬
вение шума. Тогда производят необходимые операции по удале¬
нию воздуха из установки.
При работе траловых лебедок встречаются следующие ха¬
рактерные неисправности (указаны причины и способы устра¬
нения неисправностей):
i. Лебедка не запускается или не развивает требуемых тя¬
говых усилий и скорости при выбирании:
а) заклинены валы в подшипниках в результате неудов¬
летворительной смазки, задиров шеек валов и попадания
в подшипники морской воды (вскрыть подшипники, зачистить
263
шейки валов, пришабрить вкладыши, заменить смазку, расхо-
дить подшипники качения);
б) перекосы и чрезмерная затяжка подшипников (прове¬
рить зазоры в подшипниках и установить их в соответствии
с заводскими инструкциями);
в) неполное выключение тормозов или неполное включение
фрикционных муфт сцепления (отрегулировать зазоры тормо¬
зов или муфт);
г) попадание посторонних предметов между корпусом ле¬
бедки и барабаном (удалить посторонние предметы).
2. Лебедка работает с повышенным шумом, стуками и виб¬
рацией:
а) значительный износ и большие зазоры в подшипниках
(произвести пришабровку и перетяжку подшипников, прове¬
рить поступление смазки);
б) нарушение центровки или значительный износ в зубча¬
тых зацеплениях и цепных передачах (произвести центровку
валов передач и уменьшить зазоры в сцеплениях, заменив или
отремонтировав детали передач);
в) ослаблена затяжка болтов фундамента или крепление
деталей и узлов (подтянуть крепление).
3. Лебедка останавливается под нагрузкой:
а) перегрузка лебедки (устранить перегрузку);
б) преждевременное выключение фрикционной или пре¬
дельной предохранительной муфты (отрегулировать муфты на
предельно допустимую нагрузку).
В работе траловых лебедок с гидроприводом могут возни¬
кать следующие дополнительные дефекты.
4. Давление силового масла увеличивается при холостом
ходе:
а) помеха циркуляции масла (проверить клапаны и трубо¬
проводы на пути циркуляции масла);
б) стопорные клапаны на трубопроводе закрыты (прове¬
рить и открыть клапаны).
5. Повышенный шум в гидравлической части лебедки:
а) масло содержит воздух (проверить масло; если оно не¬
прозрачное и содержит маленькие воздушные пузырьки, то его
необходимо заменить);
б) повышенная вязкость масла (заменить маслом нормаль¬
ной вязкости по ТУ).
6. Пластинчатые лопатки механизмов (насоса или гидро¬
двигателя) заклиниваются из-за механических примесей в масле
(механизм разобрать и прочистить).
7. Развиваемая тяговая мощность недостаточна:
а) предохранительный клапан находится в открытом поло¬
жении (проверить предохранительный клапан и поджать или
заменить пружину);
б) масло имеет пониженную вязкость (заменить маслом
264
нормальной вязкости, для гидропривода системы «Норвинч»
вязкость масла должна быть не менее 4,5° Е при 50°С);
в) в масло попал воздух (удалить воздух из установки).
Глава XV
МЕХАНИЗМЫ
КОШЕЛЬКОВОГО ЛОВА
§ 55. ОБОРУДОВАНИЕ И МЕХАНИЗМЫ
КОШЕЛЬКОВОГО ЛОВА РЫБЫ
Кошельковый лов рыбы является активным видом промыш¬
ленного рыболовства и имеет большие перспективы развития.
Сущность лова состоит в том, что косяк рыбы окружается (об¬
метывается) прямоугольной сетью — кошельковым неводом.
Верхняя и нижняя части невода крепятся к пеньковым кана¬
там—-подборам. Нижняя подбора имеет грузила и стяжные
металлические кольца на уздечках, через которые пропуска¬
ется стяжной трос. С его помощью низ невода стягивается и за¬
мыкается тросом, образуя кошель, в котором удерживается
рыба. Концы верхней подборы, оснащенной поплавками, кре¬
пят боковыми стяжными тросами-урезами, с помощью которых
невод подтягивается к судну. Рыба из кошелькового невода
вычерпывается каплером (сетным сачком) или подается рыбо¬
насосом на борт судна.
Длина невода бывает обычно не менее 3,5—4,5 диаметра
циркуляции промыслового судна. Минимальная высота невода,
'обеспечивающая правильное кошелькование, должна состав¬
лять 10% длины невода. Скорость выбирания стяжного троса
при работе с кошельковыми неводами колеблется в пределах
10—60 м/мин. При этом должно обеспечиваться тяговое уси¬
лие, величина которого будет зависеть от скорости тяги урезов,
площади стены невода, размеров ячеи и диаметра ниток, <от
которых зависит сопротивление движения невода при подтяги¬
вании его к борту. Оборудование кошелькового лова состоит
из приспособлений и механизмов, облегчающих и ускоряющих
процессы кошелькования, выливки рыбы, выбирания и укладки
невода. Для выборки и замета кошелькового невода на сейне¬
рах устанавливают на рабочей палубе поворотные площадки.
К моменту окончания замета на рабочем борту судна под¬
готавливают выстрел (стрелу) и откидные блоки-мальгогеры.
В блоки заводят тросы-урезы, свободные концы которых нама¬
тываются на барабаны сейнерной (кошельковой) или тралово¬
кошельковой лебедки для подтягивания крыльев невода. После
их закрепления туда же заводят концы, с помощью которых вы¬
265
бирают стяжной трос. Выбирание можно производить за один
или за оба конца стяжного троса (уреза). По окончании про¬
цесса выливки улова выбирают боковые подборы и невод под¬
нимают на борт. Сливную часть невода крепят к носовой части
судна, а конец бежного крыла передают к выборочному меха¬
низму или устройству. На современных судах выбирание не¬
вода осуществляется неводовыборочными машинами или сило¬
выми блоками.
Схема расположения промыслового оборудования для ко¬
шелькового лова на сейнере РС-300 показана на рис. 127. Как
упоминалось, на судах этого типа используются многоопера¬
ционные тралово-кошельковые лебедки типов ЛЭТр-7 с электро-
Рис. 127. Схема расположения промыслового оборудования для кошелько¬
вого лова на сейнере РС-300.
1 — неводовыборочная машина; 2 — поворотная площадка; 3 — тралово-кошельковая
лебедка; 4 — выстрел с блоками; 5 — грузовые стрелы.
приводом и ЛГТр-5 с гидроприводом, устройство которых было
рассмотрено в предыдущей главе. На других промысловых су¬
дах, в частности судах типов СЧС и МРТ, устанавливаются
кошельковые (сейнерные) лебедки. Схема кошельковой ле¬
бедки с независимым электроприводом показана на рис. 128.
От приводного электродвигателя мощностью 11,3 кВт и
частотой вращения 1320 об/мин вращение передается через
приводной вал 4 и конический редуктор с шестернями 3 и 2
первому промежуточному валу 5, а от него через цилиндриче¬
ские шестерни 10 и 11 — второму промежуточному валу 12. На
этом валу свободно сидят цилиндрические шестерни 1 и 9, нахо¬
дящиеся в зацеплении с шестерцями 14 и 19, сидящими на
шпонках тягового вала 18. На консольных концах последнего
закреплены барабаны 20 для выбирания тросов. Лебедка мо¬
жет работать на двух режимах: скоростном и силовом. Для
этой цели на валу 12 имеются фрикционные дисковые муфты 6
и 8, которые с помощью рычага 7 могут включать левую или
правую цилиндрические передачи, имеющие различные переда¬
точные отношения. На тяговом валу насажен тормозной шкив
15 с ленточным тормозом 16, имеющим два зубчатых венца 17
266
храпового механизма для предотвращения вращения в ту или
иную сторону. Опорные подшипники валов смазываются пресс-
масленками 13 через радиальные и горизонтальные сверления
в цапфах. Все детали и узлы смонтированы в корпусе 21, за ис¬
ключением барабанов.
Для подъема кошелькового невода на борт судна, после вы-
ливки улова, на судах промыслового флота используются под-
Р
Рис. 128. Схема кошельковой лебедки с электроприводом.
весные силовые блоки типа ПМВК — подъемные механизмы
выбирания кошелька. Блоки выпускаются с электроприводом
нечетных модификаций и с гидроприводом четных модифика¬
ций, но аналогичной конструкции. Рассмотрим устройство
ПМВК-4 с гидроприводом, изображенное на рис. 129.
К правой щеке 5 блока крепят гидродвигатель 10 типа
МНШ-46, выходной конец вала которого имеет шлицевое соеди¬
нение с втулкой зубчатой шестерни 7, лежащей в шарикопод¬
шипниках. Корпуса 8 и 9 шарикоподшипников вмонтированы
в правую щеку корпуса блока. Шестерня 7 находится
267
Рис. 129. Подвесной силовой блок выбирания кошелька с гид¬
роприводом типа ПМВК-4.
268
в зацеплении с зубчатым колесом 12, жестко сидящем на втулке-
шестерне 13. Втулка-шестерня, вращаясь на двух радиальных
шарикоподшипниках 15 осевого пальца 14, поворачивает зубча¬
тое колесо 16, сидящее на шпонке валика 18. Валик, вращаясь
в шарикоподшипниках 17, вращает шестерню 19, которая, на¬
ходясь в зацеплении с зубчатым венцом, жестко скрепленным
со ступицей барабана 6, передает вращение последнему. Сту-
Рис. 130. Схема гидронасосной установки силового блока с гидро¬
приводом типа ПМВК-4.
пица барабана свободно вращается на радиальных шарикопод¬
шипниках 3, установленных на оси 1.
От осевого смещения шарикоподшипники удерживаются
крышками 4, а ось — гайками 2. Рабочая жидкость подводится
к гидродвигателю от насосной станции по шлангам, присоеди¬
ненным к штуцеру 11 с переходными ниппелями.
Схема гидронасосноп установки силового блока типа
ПМВК-4 показана на рис. 130.
Насосная станция размещена в машинном отделении судна
и смонтирована на общей станине 15. Она состоит из электро¬
двигателя 1, вал которого связан при помощи эластичной
муфты 16 с гидронасосом 5. Гидронасос соединен патрубком 4
с маслобаком 3, имеющим фильтр 2. От насоса идет напорный
гибкий шланг 14 через дроссель 6 к распределителю 8. Между
ними установлен манометр 7 и рукоятка переключения.
Распределитель соединен гибкими шлангами 9 и 12 с гидродви¬
269
гателем 10 подвесной машины 11. От двигателя идет дренажный
шланг 13, который соединяется со шлангом 17 маслобака. Сис¬
тема заполняется веретенным или индустриальным маслом.
Рабочая жидкость под давлением 50—100 кгс/см2 подается
к распределителю, в котором рукоятка отклоняется от нейт¬
рального положения в положение «Вперед» или «Назад». Час¬
тоту вращения гидродвигателя регулируют вращением махо¬
вика дросселя: по часовой стрелке — на увеличение, против
часовой стрелки — на уменьшение; до упора — для развития
полной частоты вращения; до закрытия — для полной остановки
гидродвигателя.
Если давление в гидросистеме поднимается до 90—110 кгс/см2,
рукоятка распределителя автоматически возвратится в нейт¬
ральное положение. Это может случиться при перегрузке ма¬
шины в процессе выбирания невода в свежую погоду. Распреде¬
литель марки Р75-38 золотникового типа имеет три золотника.
К одному из них присоединена рукоятка включения и отклю¬
чения машины. Напротив рукоятки через два штуцера под¬
соединены шланги 9 и 12 прямого и обратного вращения гид¬
родвигателя. Рукоятка распределителя может быть подсоеди¬
нена к любому из трех золотников.
При отказе клапана автоматического возврата рукоятки
в нейтральное положение при 90—110 кгс/см2 срабатывает
предохранительный клапан распределителя (только по дости¬
жении в гидросистеме давления 135 кгс/см2). Для пуска в ход
машины, после автоматического отключения вследствие пере¬
грузки, достаточно рукоятку распределителя переставить из
нейтрального положения в требуемое.
Основные технические характеристики подвесных силовых
блоков выбирания кошельковых неводов приведены в табл. 13.
На судах типа СРТР, СРТМ и РТ, используемых для ко¬
шелькового лова, установлены иеводовыборочные комплексы,
которые состоят из машины, выбирающей невод, и машины,
транспортирующей невод к месту его укладки. Транспортирую¬
щая машина создает, кроме того, дополнительное тяговое уси¬
лие на конце невода, сбегающего с барабана выбирающей ма¬
шины.
Простейший тяговый комплекс состоит из двух неводовыбо¬
рочных машин типа ПМВК одинаковой или различной мощно¬
сти. В неводовыборочном комплексе с машинами системы
«Триплекс» (Норвегия), экспонировавшемся на выставках «Ин-
рыбпром» в Ленинграде, неводовыборочная машина — палубная
трехбарабанная, транспортирующая машина — подвесная одно¬
барабанная. Привод неводовыборочной машины системы «Трип¬
лекс», изображенной на рис. 131, а, осуществляется от гидро¬
двигателей поршневого и роторного типов. Вращение от вала
гидродвигателя 1 передается редуктору с тремя одинаковыми
цилиндрическими шестернями 2, 9, 6, размещенными в раме 7
270
Таблица 13
Основные технические характеристики силовых блоков
X арактеристики
Типы блоков
ПМВК-1
ПМВК-2
пмвк-з
ПМВК-За
ПМВК-4
Г1МВК-5
Тяговое усилие, Н
6000
15 000
10 000
15 000—18 000
13 000—15 000
25 000
Скорость выбирания, м/мин
20
20
20
20
20
20
Род привода
Электрический
Г идравличе-
Электриче¬
ский
ский
Характеристика привода:
П51-М
тип двигателя
—
П-51М
П-42
П-51-М
П61-М;
МНШ-46
мощность, кВт
2,2
4,2
2,6
4,2
12/6,5
7,4
частота вращения, об/мин
—
100
—
1000
1500
1500
тип гидронасоса
—
—
—
—
НШ-46
—
Габариты, мм:
длина
—
1600
930
1490
1445
1490
ширина
—
1030
860
932
940
932
высота
—
1040
1020
960
672
960
Масса, кг:
с приводом-
240
350
220
350
480
-350
без привода
—
—
—
245
150
245
Тип судна, на котором устанавлива¬
счс
CPTP
СЧС; БЧС
СЧС;
СЧС; БЧС;
СРТР
ются блоки
РС-300
РС-300;
СО-300
Примечание. ПМВК-4 может быть в двух вариантах: 1) гидромотор МНШ-46 с насосом НШ-46 давлением 107 Па; 2) гидромотор
МГ-16А с насосом ЛЭФ-100 давлением 6-105 Па.
to
-ч
и имеющими удлиненные валы 8. На хвостовиках валов, вы¬
ступающих из корпуса редуктора, сидят цилиндрические рабо¬
чие барабаны 4, поверхность которых для увеличения коэффи-
Рис. 131. Неводовыборочная машина си¬
стемы «Триплекс» с гидроприводом: а —
схема машины; б — схема движения невода
в барабанах; в — общий вид.
Рис. 132. Силовой блок
с пневмоприводом для вы¬
бирания кошельковых нево¬
дов
циента трения при тяге покрыта рифленой резиной. При вра¬
щении шестерен 2 и 6 по часовой стрелке шестерня 9 враща¬
ется против часовой стрелки, и невод протягивается лентой
между барабанами, как это показано на рис. 131, б.
На корпусе зубчатой передачи закреплены двуплечие крон¬
штейны 12, через которые пропущены оси 10 и 11. Ось 10 сое¬
динена с двумя опорными трубчатыми стойками 3. Ось 11 со¬
единена со штоком гидроцилиндра 13. С помощью последнего
272
можно изменять положение рамы 7 относительно горизонталь¬
ной оси на угол до 110°. Изменение положения барабанов, вы¬
валиваемых на борт при выбирании невода, улучшает условия
тяги и предотвращает его задевание за корпус судна. При швар¬
товке и в походе барабаны ставят вертикально (рис. 131, в).
Они снабжены отбойниками 5, препятствующими соскальзыва¬
нию сети невода с их поверхности.
Управление гидродвигателем сосредоточено на пульте, раз¬
мещенном у самой машины. Неводовыборочный комплекс
«Триплекс» создает высокие тяговые усилия, имеет широкий
диапазон скоростей тяги и удобен в управлении. Его недостат¬
ками являются сложность устройства, высокая стоимость и не¬
обходимость в квалифицированном обслуживании.
Основные технические данные неводовыборочной машины
«Триплекс»
Расчетное усилие, тс (кН) 12(120)
Диапазон скоростей тяги, м/мин 5—30
Наибольшее давление в гидросистеме, кгс/см2
(Па) 140 (14 - 10е)
Мощность, потребляемая гидронасосом, кВт 40
Габариты машины (в вертикальном положе¬
нии), мм 1950x1650x3750
На некоторых зарубежных судах французской постройки для
выбирания кошельковых неводов устанавливают силовые блоки
с пневмоприводом (рис. 132). Пневмопривод состоит из кон¬
сольного рола 3 на поворотной стойке 5, расположенной
у фальшборта судна. На роле находится самоцентрирующийся
барабан, состоящий из двух щек / и 2, облицованных гофри¬
рованной резиной. Пневмопривод мощностью 3 кВт может вы¬
бирать невод со скоростью до 15 м/мин. Сжатый воздух подво¬
дится по гибким шлангам 4. Консольный рол с помощью от¬
тяжки может разворачиваться в любом направлении.
§ 56. ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ МЕХАНИЗМОВ
КОШЕЛЬКОВОГО ЛОВА
И ТЕХНИКА БЕЗОПАСНОСТИ
Подготовка к действию и обслуживанию кошельковых (сей¬
нерных) лебедок производится по тем же правилам, что и экс¬
плуатация траловых и тралово-кошельковых лебедок, рассмот¬
ренных в предыдущей главе.
Силовые блоки для выбирания кошельковых неводов на пе¬
реходах находятся на палубе, в трюме или на неводной пло¬
щадке. На период хранения машины рекомендуется закрыть
брезентом, смазав предварительно резьбовые соединения соли¬
273
долом. Резиновые шланги, идущие от распределителя к под¬
весной машине, должны быть обернуты брезентом или оклетне-
ваны.
Перед пуском подвесной машины (силового блока) необхо¬
димо проверить исправность системы подвески машины путем
подъема груза массой 2 т на 200—300 см над палубой. При
подвеске машины на стрелу дублирующий трос диаметром 10—
12 мм заводят в отверстие траверсы, а свободный конец про¬
пускают через блок и закрепляют на палубе. После окончания
работ по выбиранию невода на переходах и при швартовках
машину опускают на палубу. Поднимать машину на стрелу и
производить работы по выбиранию невода при волнении моря
5—6 баллов и более не разрешается. Правилами техники безо¬
пасности запрещено находиться под машиной, подвешенной
к стреле.
Заправку жгута невода производят после его формирования
в специальном устройстве, которое представляет собой сво¬
бодно вращающийся на оси ролик с разъемным ограждением,
установленный на планшире судна.
При наружном осмотре неводовыборочных машин со съем¬
ными рабочими барабанами последние необходимо установить
и закрепить. Затем проверить крепление облицовки или оклет-
невки барабанов и убедиться в ее исправности.
У машин, установленных на направляющих, нужно прове¬
рить свободу перемещения машины по направляющим и на¬
дежность ее стопорения в требуемых положениях.
Перед пуском неводовыборочной машины следует заложить
жгут невода в желоб барабана или ленту невода между бара¬
банами с учетом наибольшего угла обхвата и удобства укладки
невода.
Перед началом работы машины с электроприводом необхо¬
димо проверить заземление. Подавать напряжение на зажимы
контроллера следует лишь перед началом работы во избежание
излишнего нагрева шунтовой обмотки двигателя. По этой же
причине по окончании работы машины напряжение снимают.
При выбирании сетей невода включают линейный контактор по¬
средством ручки контроллера, постепенно переводя штурвал
контроллера из одного положения в другое, с интервалами — до
упора. При выбирании невода на пониженной скорости можно
работать на промежуточных положениях контроллера, за ис¬
ключением первого и второго положений. В первом положении
рукоятки контроллера непрерывную работу блока можно про¬
должать не более 30 с, во втором положении — не более 8 мин.
Для остановки машины под нагрузкой включают посредством
контроллера линейный контактор, после чего подъем прекра¬
тится и невод начнет медленно опускаться. Для уменьшения
скорости опускания невода ручку контроллера следует перевести
в нулевое положение.
При подготовке к пуску подвесной машины с гидроприво¬
дом необходимо опробовать ее без нагрузки в течение 5—7 мин
для повышения температуры рабочего масла до 30—60°, осо¬
бенно в холодное время года.
Для пуска машины необходимо привести в действие мас¬
ляный насос типа НШ-46 путем включения электродвигателя.
Рукоятку переключения распределителя нужно перевести из ней¬
трального положения в положение «Вперед» или «Назад» в за¬
висимости от нужного направления вращения силового блока.
Затем вращением клапана дросселя по часовой стрелке сле¬
дует отрегулировать частоту вращения гидродвигателя. Для ре¬
верса блока клапан дросселя вращают против часовой стрелки
до тех пор, пока рабочий барабан машины не остановится. Ру¬
коятку распределителя сначала устанавливают в нейтральное
положение, а затем в положение, противоположное первоначаль¬
ному. После этого маховик клапана дросселя вращают по часо¬
вой стрелке до упора, если необходимо получить номинальную
частоту вращения при полной мощности. Для остановки машины
рукоятку распределителя нужно поставить в нейтральное поло¬
жение, маховик клапана дросселя вывернуть до отказа и оста¬
новить электродвигатель.
При обслуживании неводовыборочной машины нельзя допус¬
кать проскальзывания невода на барабанах машины, для чего
нужно увеличивать угол обхвата неводом барабана или прила¬
гать дополнительные усилия на сбегающем конце невода. Не
допускается также наматывание невода на барабаны и попа¬
дание невода между ребордами барабанов и корпусом ма¬
шины или поворотной площадкой. В указанных случаях, а так¬
же при зацеплении невода за выступы корпуса судна или грунт
неводовыборочная машина должна быть немедленно оста¬
новлена.
В соответствии с Правилами по технике безопасности нельзя
использовать машину ПМВК для выполнения грузовых опера¬
ций. Не разрешается также устранять неисправности на рабо¬
тающей машине. Ее надо остановить, спустить на палубу и
после устранения неисправности продолжать работу.
Оператор не должен отлучаться от пульта управления в те¬
чение всего процесса выбирания невода.
Редуктор подвесной машины периодически, раз в три ме¬
сяца, следует заполнять консистентной смазкой (тавотом), пред¬
варительно удалив старую смазку. Смазку подшипников рабо¬
чего барабана производят при профилактическом осмотре ма¬
шины, но не реже чем раз в полгода.
При продолжительной работе силового блока резиноткане¬
вые ребра, укрепленные на рабочей поверхности барабана, бу¬
дут изнашиваться; поэтому за их состоянием надо следить и
в случае необходимости подтянуть болты крепления ребер, а при
значительном износе заменить резину.
275
Глава XVI
МЕХАНИЗМЫ
ДРИФТЕРНОГО ЛОВА
§ 57. ОБОРУДОВАНИЕ
И МЕХАНИЗМЫ
ДРИФТЕРНОГО ЛОВА РЫБЫ
Способ дрифтерного лова рыбы состоит в том, что сети сое¬
диняются между собой в так называемый порядок, который од¬
ним концом присоединяется к промысловому судну и вместе
с ним под влиянием течения находится в дрейфе. В отличие от
тралового и кошелькового этого вид лова имеет пассивный ха¬
рактер и используется в отечественном и зарубежном флоте
в основном для промысла сельди. Промысловая схема оборудо¬
вания дрифтерного лова на среднем рыболовном траулере
(СРТ) показана на рис. 133.
В носовой части судна на палубе установлен дрифтерный
шпиль 3, осуществляющий выбирание стояночного вожака 1.
В период промысла при дрейфе траулера с дрифтерным поряд¬
ком стояночный вожак может сильно натягиваться. Для пред¬
отвращения разрыва вожака и нарушения дрифтерного порядка
устанавливают амортизатор стояночного вожака. При выбира¬
нии стояночный вожак пропускается через специальный двой¬
ной ролик 2— мальгогер, который расположен на планшире
фальшборта. После этого он наматывается на барабан дрифтер¬
ного шпиля 3 и затем отводится на вожакоукладочную машину
10. Дрифтерные сети 5 поднимаются на борт судна сетевыбо¬
рочной машиной 4 через бортовой рол 6, соединенный с меха¬
низмом 7 для выбирания поводцов. За сетевыборочной маши¬
ной 4 находится сететрясная машина 9, в которой рыба
освобождается из сети. После этого рыба поступает в рыбо-
посольный' агрегат 8.
Дрифтерный лов состоит из ряда последовательно выполняе¬
мых работ: подготовки дрифтерных сетей и снаряжения к вы-
метке, выметки дрифтерного порядка, дрейфа с порядком,
выбирания порядка и уборки рыбы и дрифтерных сетей. При
выбирании порядка верхняя и нижняя подборы сетей заправля¬
ются в ручьевые барабаны сетевыборочной машины, которые
вращаются в противоположные стороны. Буйковый поводец вы¬
бирают с помощью поводцевыборочного механизма или турачки
лебедки.
Вытянув 5—6 м первой сети на палубу, ее заправляют в се-
тетрясную машину. Выбранные и освобожденные от рыбы сети
укладывают на палубу левого борта для очередной выметки,
соединив предварительно с поводцами. Выбранный вожак ук¬
ладывают в трюм вожакоукладочной машиной.
276
Рис. 133. Промысловая схема дрифтерного оборудования на СРТ.
Механизмы и автоматы, обеспечивающие наиболее трудоем¬
кие процессы дрифтерного лова и безопасные методы труда,
можно подразделить на три основные группы:
1) для поддержания постоянного натяжения стояночного во¬
жака и для выбирания и укладки вожакового каната;
2) для выбирания сетей и укладки поводцов;
3) для вытряхивания рыбы из сетей.
Для выбирания вожака, а вместе с ним и подтягивания всего
сетного порядка — одного из наиболее трудоемких процессов
дрифтерного лова — используют дрифтерный шпиль. В некото¬
рых случаях, когда стояночный вожак изготовлен из стального
троса типа «Геркулес», его выбирают траловой лебедкой.
На судах типа СРТ устанавливают дрифтерный шпиль с элек¬
троприводом типа ШЭД-2 (рис. 134). Электропривод и червяч¬
ный редуктор размещены под главной палубой, а тумба с бал-
лером шпиля и барабаном — на палубе. Электродвигатель 1
типа ДПМ-32 мощностью 16 кВт частотой вращения 1140 об/мин
упругой муфтой 2 соединен с валом 3 червячного редуктора, раз¬
мещенного в стальном корпусе 4. При помощи фланца 8 редук¬
тор крепится к тумбе 9. Червячное колесо 6, имеющее бронзо¬
278
Рис. 134. Дрифтерный шпиль СРТ типа ШЭД-2.
вый винт на стальной ступице, сидит на двух шпонках на
баллере 7, вращающемся в двух подшипниках качения: ролико¬
вом 5, установленном в корпусе червячного редуктора, и шари¬
ковом 10, размещенном в опоре сварной стальной тумбы. В верх¬
ней части баллера на шпонках 15 сидит стальной литой бара¬
бан 13, нижняя часть которого имеет форму блока 16. От
осевого смещения барабан удерживается гайкой 14. Вверху име¬
ется крышка 12 и масленка 11 для подачи смазки по сверлению
в баллере к радиальному шарикоподшипнику. Номинальная ча¬
стота вращения барабана 19 об/мин, тяговое усилие до 20 ООО Н.
Для выбирания дрифтерных сетей на СРТ устанавливают
двухтумбовую сетевыборочную машину с ручьевыми головками,
изображенную на рис. 135.
Машина состоит из двух выборочных устройств — головок 1,
смонтированных на специальных тумбах 2. Тумбы установлены
на банкетках 3, прикрепленных к металлическому настилу па¬
лубы. Внутри тумбы находится главный вал 6, соединенный
муфтой 5 с валом 4, который проходит через обшивку палубы
и соединяется с выходным валом 9 червячного редуктора 8.
В месте прохождения вала через палубу расположен водоне¬
проницаемый сальник 7.
Червячный вал соединен карданным валом 15 при помощи
шарниров 14 с горизонтально-трансмиссионным промежуточным
валом 12, лежащим в подшипниках двух подвесок 13 и 11. По¬
следние установлены на общей плите, которая жестко прикреп¬
лена к подволоке кронштейнами. На валу 12 сидит шкив 10
клиноременной передачи. Электрический привод передает вра¬
щение через клиноременную передачу, трансмиссионный и кар¬
данный валы к червячным редукторам, которые благодаря раз¬
ному направлению резьб червяков обеспечивают вращение го¬
ловок в противоположные стороны.
Устройство ручьевой головки изображено на рис. 136. На
рабочем диске 3 закрепляют два профильных диска 1, которые
и образуют р"учей. Ширина ручья определяется кольцом 2, ус¬
танавливаемым между дисками. При вращении ручьевых голо¬
вок от вала 4 подборы сетей закладывают в ручьи, заклинивают
и выбирают при вращении дисков от вертикального вала через
фрикционную дисковую муфту 6. Для освобождения подборы
из головки предусмотрены отбойники 5.
Как уже упоминалось, после выборочной машины дрифтер¬
ные сети поступают на сететрясную машину, где они освобож¬
даются от улова.
Конструкция двухтумбовой сететрясной машины типа
СТМ-225КМ с электроприводом показана на рис. 137. На фун¬
даменте 4 установлены стойки: кормовая 6 и носовая 1, в кото¬
рой расположен редуктор привода. Между стойками размещены
два рола: рабочий 5 и верхний 11. Вращение от электродвига¬
теля 13 передается через редуктор рабочему ролу и качающему
279
Рис. 135. Сетевыборочная двухтумбовая машина с электроприводом: а —
конструкция; б — общий вид.
Механизму 14, состоящему из кривошипа 15, шатунов 16 и по¬
водков 17. Поводки приводят в возвратно-вращательное дви¬
жение валики, на которых с внутренних сторон кормовой и но¬
совой стоек установлены рычаги 18 качающего механизма.
Между рычагами 10 натянуты стальные тросы диаметром 11 мм,
на которые насажены пенопластовые втулки, обтянутые брезен¬
товыми шлангами.
Рабочий трясущий орган 3 состоит из двух канатов, а вспомо¬
гательный верхний 9 — из одного каната. Качающие меха¬
низмы обеспечивают разностороннее колебательное движение
обоих трясунов и имеют ограждения 8 и 12. Поступающая из
сетевыборочной машины сеть проходит между направляющими
роульсами 2 и 7 и двумя канатами трясущего органа, огибает
вспомогательный трясущий орган, пропускается под рабочим
ролом и через верхний рол направляется на укладку.
В результате действия качающего механизма дрифтерная
сеть получает от трясущего органа возвратно-поступательное
движение по вертикали, создающее вибрацию сетей.
281
Рис. 136. Ручьевая головка сетевыборочной машины.
Рис. 137. Сететрясная машина типа СТМ-225КМ.
282
Недостатком вертикального принципа тряски сетей является
разброс рыбы по палубе, что создает небезопасные условия для
людей, работающих на промысловой палубе.
Была создана сететрясная машина с гидроприводом, трясу¬
щая сети в горизонтальной плоскости и имеющая транспор¬
теры для отвода вытрясенной из сетей рыбы к рыбопосольному
агрегату. Кинематическая схема сететрясной машины с гидро¬
приводом показана на рис. 138.
Машина состоит из следующих основных узлов: носовой и
кормовой стоек, верхнего и нижнего ленточных транспортеров
Рис. 138. Схема сететрясной машины с гидроприводом.
с направляющим крылом, двух шарнирных четырехзвенных ме¬
ханизмов, направляющих кронштейнов, распорной трубы, роуль¬
сов и гидравлического привода.
В носовой стойке 6 расположен зубчатый редуктор 7 и сое¬
динительные' муфты 8 и 9 включения привода к ролу 5 и тря¬
сунам 11 и отключения от них. В кормовой стойке 4 размещены
редуктор привода 3 и муфта 2 включения и отключения ленточ¬
ных транспортеров 1. Конструктивно ленточные транспортеры
состоят из каркасов, несущих и поддерживающих текстолито¬
вые ролики 12, и транспортерных лент. Внутренняя стенка верх¬
него транспортера из нержавеющей стали имеет форму крыла,
а на внешней стенке нижнего транспортера находится козырек
для направления движения сети с объячеенной рыбой на тря¬
сущий орган.
Для сообщения тросам трясущего органа качательного дви¬
жения служат двусторонние кривошипы 16 с шатунами 17 и
двумя шарнирными четырехзвенными механизмами, имеющими
вращающиеся противовесы. Эти механизмы состоят из двух ка¬
чающихся рычагов 18 и 10, на концах которых шарнирно
283
закреплены каретки 15. С каретками соединены тросы трясущих
органов. Каретки могут катиться на шарикоподшипниках по на¬
правляющим кронштейна, между которыми установлена рас¬
порная труба 13 с осевым регулированием. Отводной рол 5 для
протаскивания сетей на укладку состоит из шести стальных реек
швеллерного профиля, приваренных к восьми отрезкам стальных
труб.
С внешних сторон машины установлены капроновые щитки
из мелкоячеистой дели, которые предотвращают разбрасывание
вытрясенной рыбы по сторонам и направляют ее на транспор¬
теры. Машина получает движение от гидродвигателя 14 акси-
ально-поршневого типа МГ-155а с крутящим моментом 100 Н-м.
Рабочую жидкость — масло «Индустриальное 20» подает под
максимальным давлением 64-105 Па насос пластинчатого типа
Г12-13А производительностью 25 л/мин при 950 об/мин. Элек¬
тродвигатель насоса гидропривода — постоянного тока мощ¬
ностью 4,2 кВт при 1000 об/мин.
Действие сететрясной машины заключается в следующем.
Дрифтерная сеть с объячеенной рыбой с палубы поступает под
верхний транспортер по направляющему козырьку, проходит
между тросами трясущих органов и попадает на рол, который
подает сеть на укладку. Трясущий орган, совершая качатель-
ное движение в горизонтальной плоскости, заставляет сеть ви¬
брировать, в результате чего рыба вытряхивается из дриф¬
терных сетей в пространство между транспортерами и тросами.
Затем рыба попадает на верхний и нижний ленточные транспор¬
теры, ведущие к деревянному наклонному лотку, по которому
направляется к рыбопосольному агрегату.
§ 58. ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ МЕХАНИЗМОВ
ДЛЯ ДРИФТЕРНОГО ЛОВА И ТЕХНИКА БЕЗОПАСНОСТИ
Дрифтерный шпиль перед началом работы необхо¬
димо осмотреть, проверить смазку в редукторе и масленках,
включить аварийный выключатель. Постепенно плавным пере¬
ключением контроллера в течение 10—15 мин следует опробо¬
вать шпиль на холостом ходу на всех скоростях прямого и об¬
ратного хода. Продолжительную работу шпиля следует прове¬
рять на максимальной мощности, соответствующей крайним
положениям контроллера. На промежуточных положениях кон¬
троллера допускается кратковременная работа. По окончании
работы шпиля контроллер устанавливают в нулевое положение
и выключают аварийный выключатель.
В процессе эксплуатации шпиля необходимо периодически
проверять и подтягивать гайку, закрепляющую турачку на вер¬
тикальном валу. Периодически, не менее двух раз в месяц, сле¬
дует проверять, достаточно ли масла в червячном редукторе
шпиля, и заменять отработавшее масло свежим. Для смены
масла в корпусе червячного редуктора нужно отвернуть ниж¬
нюю резьбовую пробку. Спускаемое масло проверяют на ощупь
и, если обнаруживают в нем металлические частицы, редуктор
промывают. Свежее масло заливают через верхнее отверстие на
7з высоты редуктора.
Подшипник вертикального вала заполняют солидолом при
помощи пресс-масленки на верхнем торце вала. В случае дли¬
тельного перерыва в работе или бездействия шпиля тумбу с ма¬
ховиком контроллера накрывают чехлом. Электродвигатель
шпиля должен быть постоянно зачехлен.
Сетевыборочную машину перед началом работы ос¬
матривают, смазывают и проворачивают на холостом ходу. Осо¬
бое внимание обращают на исправность передач и редукторов.
Перед выбиранием сетей нужно проверить и, если требуется, от¬
регулировать тяговое усилие путем поворота в ту или иную
сторону маховичка, изменяющего прижатие фрикционных дис¬
ков сетевыборочных головок.
Чрезмерное зажатие фрикциона не дает пробуксовки при
возрастании тягового усилия, что вызывает увеличение износа
и разрыв подборы сетей. Для предохранения механизмов от
коррозии все обработанные поверхности должны быть тща¬
тельно смазаны густой смазкой, а к трущимся поверхностям
смазка должна подводиться непрерывно.
Главный вал машины смазывают техническим вазелином из
специальных пресс-масленок, размещенных на основании ма¬
шины. Верхние части валов сетевыборочных головок смазывают
жидким маслом, которое заливают в вертикальные сверления
в валах. Червячные пары редукторов работают в масляной
ванне. Смену смазки в червячных редукторах производят один
раз в два месяца. При холостых пусках машины необходимо
проверить смазку во всех масленках, а также поступление
смазки к трущимся поверхностям.
По правилам техники безопасности не разрешается произво¬
дить исправления в сетевыборочных головках и смазывать ма¬
шину на ходу.
Во время работы сетевыборочной машины могут возникнуть
следующие неисправности (в скобках указаны способы устра¬
нения неисправностей):
1. Головки машины не вращаются при включении контрол¬
лера из-за недостаточного прижатия фрикциона; ослабления
ремней клиноременной передачи (увеличить зажим фрикциона
поворотом маховика по часовой стрелке; увеличить натяг рем¬
ней) .
2. Головки машины не обеспечивают требуемого тягового
усилия при зажатом фрикционе и останавливаются при неболь¬
шом возрастании нагрузки. Возможные причины: излишняя
смазка на фрикционных дисках и ослабление ремней клиноре¬
285
менной передачи (разобрать фрикцион и убрать с дисков лиш¬
нюю смазку; то же, что при неисправности, указанной
в п. 1).
3. Нагрев подшипников и оедукторов в результате недоста¬
точной смазки и неправильной сборки (увеличить подачу смазки
или заменить масло; проверить правильность натяга подшипни¬
ков и сборки редуктора).
4. Неравномерное вращение головки с посторонним шумом
из-за ослабления крепления дисков и перекоса вертикальных ва¬
лов (снять кожух, проверить и подтянуть крепления дисков;
демонтировать муфты и редуктор и, подкладывая шайбы под
болты крепления редуктора, восстановить соосность валов).
Перед пуском сететрясной машины проверяют
смазку и степень натяжения тросов трясущего органа; путем
вращения вручную муфты электродвигателя рычаги выводят из
крайних положений и плавным движением включают контрол¬
лер. Натяжение тросов трясущего органа должно быть в преде¬
лах 3000—3500 Н. По окончании работы машины тросы ослаб¬
ляют.
При установке двухтумбовых машин и в процессе их экс¬
плуатации необходимо следить за тем, чтобы носовые и кормо¬
вые стойки были параллельны между собой и перпендикулярны
к фундаменту. Особое внимание должно быть обращено на со¬
осность маховиков и рола. В процессе работы проверяют (не
реже одного раза в месяц) параллельность пластин на носовой
и кормовой опорах рычагов привода трясущего органа путем
замера расстояния между верхними и нижними концами пла¬
стин-дисков. Разность замеров не должна превышать 3 мм,
чтобы не возникало сильной вибрации, сопровождаемой стуком.
Причиной появления стука в районе поводков или их чрезмер¬
ного нагревания при достаточной смазке могут быть ненормаль¬
ные зазоры между поводками и опорными пластинками. В ма¬
шинах СТМ-225 КМ эти зазоры должны быть в пределах 0,5—
1,0 мм.
Восстановление параллельности пластин и нормального за¬
зора производят с помощью прокладок.
Исправность машины проверяют свободным проворачиванием
ее за муфту редуктора от руки. Редуктор машины надо заправ¬
лять свежим машинным маслом не реже одного раза в три ме¬
сяца. Подшипники верхнего рола, звездочек и силового вала
набивают солидолом один раз в месяц. Опорные подшипники си¬
стемы рычагов и игольчатые подшипники смазывают один раз
в сутки солидолом путем шприцевания. Неокрашенные поверх¬
ности машины и трясущий орган в местах сращивания тросов
смазывают солидолом.
В соответствии с Правилами по технике безопасности заправ¬
лять сети в сетевыборочную машину надлежит при работе ма¬
шины на самой малой скорости, при этом удерживать подборы
286
руками следует на расстояний не менее 1 м от движущихся ча¬
стей машины.
Заправлять сети в трясуны и на ролы сететрясной машины,
а также распутывать сети разрешается только при остановлен¬
ной машине. Лица, расправляющие сети перед трясущими ор¬
ганами, должны держать подборы ру ками и находиться от тря¬
сунов машины на расстоянии 1 м. При выборке сетного порядка
запрещается:
— поправлять и распутывать сети на роле, головках сетевы¬
борочной машины, трясущих органах и ролах сететрясной ма¬
шины во время работы этих механизмов;
■— находиться под сетями между сетевыборочной и сететряс¬
ной машинами.
Раздел пятый
СУДОВЫЕ ВОДООПРЕСНИТЕЛЬНЫЕ УСТАНОВКИ
Рыбопромысловые суда, ведущие промысел в отдаленных
районах в течение нескольких месяцев без захода в порты, тре¬
буют значительного количества пресной воды. Вследствие огра¬
ниченного объема судовых емкостей — водяных цистерн и труд¬
ности сохранения качества воды в течение продолжительного
времени запаса пресной воды, взятой с берега, не хватает.
В связи с этим суда оборудуют водоопреснительными установ¬
ками, в которых пресная вода получается из морской заборт¬
ной воды путем опреснения.
Глава XVII
ОСНОВНЫЕ СВЕДЕНИЯ ПО ВОДООПРЕСНЕНИЮ
§ 59. ВИДЫ ПРЕСНОЙ ВОДЫ НА СУДАХ.
САНИТАРНЫЕ И ТЕХНИЧЕСКИЕ НОРМЫ
Вода, в том числе и пресная, не является абсолютно чистой:
она содержит различные примеси. От количества и свойств рас¬
творенных в воде веществ зависит пригодность ее применения
на судне.
Основными показателями, определяющими качество пресной
воды, являются соленость, характеризуемая содержанием раст¬
воренного хлористого натрия, и жесткость, обусловленная нали¬
чием в ней солей кальция и магния
Соленость определяется как остаток количества растворен¬
ных в воде минеральных солей в хлор-ионах — мг/л С1. На мор¬
ских судах соленость чаще выражают в градусах Брандта (°Б).
Один градус Брандта соответствует содержанию солей хлора,
1 Остальные показатели качества воды подробно рассмотрены в разделе
«Вода и водоподготовка» курса «Судовые паровые котлы».
288
эквивалентных 10 мг хлористого натрия NaCl в 1 л воды, или
в хлор-ионах, 6,06 мг/л С1. При больших концентрациях соле¬
ность можно определять в зависимости от плотности воды:
S = 137 (р — 1 ООО)0 Б, (241)
где р — плотность (определяется ареометром), кг/м3.
Средняя концентрация солей в забортной океанской (мор¬
ской) воде составляет около 3000° Б, или 30 г/л. Общее солесо-
держание морской воды иногда выражают в промилле (%о).
Один промилле 1 °/00 — тысячная часть или 0,1% солесодсржа-
ния. Таким образом, содержанию солей 30 г/л соответствует
3°/оо- В зависимости от солесодержания (минерализации) при¬
родная вода может подразделяться на следующие категории:
— ультрапресная — <200 мг/л Ci (<33° Б);
— пресная-—от 200 до 500 мг/л С1 (33—82,5)°Б;
— с повышенной минерализацией — от 500 до 1000 мг/л С1
(82,5—165)° Б;
— солоноватая — от 1000 до 3000 мг/л С1 (165—495)° Б;
— соленая — от 3000 до 10000 мг/л С1 (495—1650)°Б;
— с повышенной соленостью — от 10 000 до 350 000 мг/л С1
(1650—5780)° Б;
-— рассол — >50 000 мг/л С1 (>8750°Б).
Жесткость воды оценивалась до настоящего времени в так
называемых немецких градусах жесткости (°Н). Один градус
жесткости соответствовал содержанию 10 мг СаО и MgO в 1 л
воды, при этом все соли кальция и магния пересчитывались
на эквивалент по массе.
В СССР степень жесткости воды выражается числом милли-
грамм-эквивалентов Ca2 + Mg2, содержащихся в 1 л воды. Учи¬
тывая, что 1 мг эквивалентных ионов Са2 весит 20,04 мг, а 1 мг
эквивалентных ионов Mg2 весит 12,16 мг, общую жесткость Ж
воды можно определить из уравнения
Ж = —+ _М_ мг-ЭКв;л. (242)
20,04 ' 12,16 v ;
Для того чтобы перейти от градусов жесткости к милли¬
грамм-эквивалентам, нужно число градусов жесткости умно¬
жить на 0,357, а чтобы перейти от мг-экв/л к градусам жест¬
кости, надо значение в мг-экв/л увеличить в 2,8 раза.
По величине жесткости пресная вода подразделяется на
очень мягкую с жесткостью 1,5 мг-экв/л; мягкую с жесткостью
1,5—4 мг-экв/л, средней жесткости 4—8 мг-экв/л; жесткую 8—
12 мг-экв/л и очень жесткую >12 мг-экв/л (например, морская
вода в Черном море). В океане средняя жесткость воды состав¬
ляет 22.5 мг-экв/л.
В зависимости от назначения различают следующие виды
пресной воды, применяемые на судне:
— питьевую — для питья и приготовления пищи;
50 А. Е. Богомольный 289
— мытьевую — для умывальников, душевых, прачечных;
— питательную — для питания парогенераторов;
— дистиллированную — для аккумуляторных батарей;
— техническую — для охлаждения судовых двигателей;
— технологическую — для обработки рыбы.
Для каждого из перечисленных видов воды предусматрива¬
ются свои емкости и системы.
Допускается устройство единой системы питьевой и мытье¬
вой воды при условии, что качество и условия ее хранения бу¬
дут удовлетворять требованиям, предъявляемым к питьевой
воде.
Перечисленные виды пресной воды должны удовлетворять
определенным качественным и количественным требованиям и
нормативам.
§ 60. СПОСОБЫ ОПРЕСНЕНИЯ МОРСКОЙ ВОДЫ
Существующие разнообразные способы опреснения заборт¬
ной морской воды можно разделить на две основные группы:
1) опреснение без изменения агрегатного состояния
жидкости (воды);
2) опреснение, связанное с промежуточным переходом
жидкого агрегатного состояния в твердое или газообразное (па¬
ровое) .
Опреснение способами первой группы включает в себя та¬
кие виды, как химическое, электрохимическое, ультрафиль¬
трация.
При химическом способе опреснения в воду вводят ве¬
щества, называемые реагентами, которые, взаимодействуя с на¬
ходящимися в ней ионами солей, образуют нерастворимые, вы¬
падающие в осадок вещества. Вследствие того что морская
вода содержит большое количество растворенных веществ, рас¬
ход реагентов весьма значителен и составляет примерно 3—5%
количества опресненной воды. К веществам, способным образо¬
вывать нерастворимые соединения с натрием и хлором, отно¬
сятся ионы серебра и бария, которые образуют выпадающие
в осадок хлористое серебро и сернокислый барий. Эти реагенты
дорогие, реакция осаждения с солями бария протекает мед¬
ленно, соли ядовиты. Поэтому химическое опреснение исполь¬
зуется редко.
При электрохимическом опреснении (электро¬
диализе) применяют специальные электрохимические активные
диафрагмы, состоящие из пластмассы, резины с наполнителем
и анионитовых или катионитовых смол. Ванна с рассолом огра¬
ничена двумя диафрагмами: положительной и отрицательной.
Под действием постоянного тока напряжением 110—120 В ионы
солей, растворенных в воде, устремляются к электродам. По¬
ложительные катионы через катионопроницаемые диафрагмы.
290
а анионы через анионитовую диафрагму проходят в крайние
камеры, где встречаются с двумя пластинами: анодом и като¬
дом. Встречаясь с одноименно заряженными диафрагмами, они
остаются в этих камерах. В результате в промежуточных ка¬
мерах оказывается обессоленная вода, которая стекает в от¬
дельный сборник. Соли и рассолы из крайних камер отводятся
за борт, а образующиеся газы (хлор и кислород)—в атмо¬
сферу.
Камеры, в которых опресняется вода, отделены от рассоль¬
ных камер полупроницаемыми ионитовыми мембранами.
При достаточном количестве пар мембран между анодом и
катодом расход электроэнергии зависит от солености морской
и опресненной воды: чем меньше разница между ними, тем
процесс протекает экономичнее. Поэтому электродиализ целе¬
сообразно применять для опреснения слабосоленых вод при
допустимом высоком солесодержании опресненной воды (500—
1000 мг/л). На судах, где требования к солесодержанию до¬
статочно высокие, электродиализные опреснители не находят
применения. Опытная электродиализная установка эксплуати¬
ровалась на траулере «Ногинск».
Опреснение ультрафильтрацией или так называемым
способом обратного осмоса состоит в том, что солевой раствор
оказывается под давлением со стороны мембраны, проницаемой
для воды и непроницаемой для соли. Пресная вода проникает
через мембрану в направлении, обратном обычному осмотиче¬
скому (когда пресная вода вследствие осмотического давления
проникает через мембрану в солевой раствор). В сущест¬
вующих установках производительностью около 4 м3/сут соле¬
ная вода под давлением около 150 кгс/см2 (150■ 105 Па) продав¬
ливается через мембраны ацетилцеллюлозного типа, обработан¬
ные перхлоратом магния для увеличения их водопроницаемости.
С противоположной давлению стороны мембран установлены
пористые бронзовые плиты, способные выдержать большое дав¬
ление. При испытаниях установки с 1,5%-ным солевым раство¬
ром была получена вода с солесодержанием 600—1000 мг/л С1.
Применение ультрафильтрации как способа опреснения огра¬
ничивается малым сроком службы пленок-мембран и большими
размерами фильтрующей поверхности. В настоящее время этот
способ применяется в аварийных опреснителях на спасательных
плотах и шлюпках.
К методам опреснения второй группы, относятся вымора¬
живание и дистилляция, или термическое опреснение.
Опреснение вымораживанием основано на том, что
в естественных природных условиях лед, образующийся
в океанах и морях, является пресным'. При искусственном
1 Существует проект использования айсбергов для получения пресной во¬
ды путем их буксировки к континентам для растаивания.
10*
29!
медленном замораживании соленой морской воды вокруг ядер
кристаллизации образуется пресный лед игольчатой структуры
с вертикальным расположением игл льда. При этом в межиголь-
чатых каналах концентрация раствора, а следовательно, и его
плотность, повышаются, и он, как более тяжелый, по мере вы¬
мораживания оседает вниз. При растаивании игольчатого льда
образуется пресная вода с содержанием солей 500—1000 мг/л С1.
При быстром замораживании рассол оказывается включенным
в толщу льда, и сильное и интенсивное охлаждение приводит
к замерзанию всей массы соленого раствора в единое ледяное
тело.
Для лучшего опреснения морского льда иногда применя¬
ется искусственное плавление его части при температуре ~20°С.
Вода, образующаяся при таянии, способствует более полному
вымыванию солей из льда. Способ вымораживания достаточно
прост и экономичен, но требует сложного и громоздкого обо¬
рудования.
Дистилляция, или термическое опреснение,— наиболее
распространенный на морских судах способ получения пресной
воды из забортной морской. Как известно, морская вода пред¬
ставляет собой раствор, состоящий из воды — летучего раство¬
рителя и солей — нелетучего растворенного в воде твердого ве¬
щества. Сущность дистилляции заключается в том, что заборт¬
ную воду нагревают до кипения и выходящий пар собирают и
конденсируют. Образуется пресная вода, называемая дистилля¬
том. Выпаривать воду можно как при кипении, так и без ки¬
пения. В последнем случае морскую воду нагревают при более
высоком давлении, чем давление в камере испарения, куда
направляется вода. Так как при этом температура воды превы¬
шает температуру насыщения, соответствующую давлению
в камере испарения, то часть поступившей воды превращается
в пар, который и конденсируется в дистиллят. Для парообразо¬
вания используется теплота, содержащаяся в самой испаряе¬
мой воде, -которая при этом охлаждается до температуры на¬
сыщения оставшегося рассола. Основное термодинамическое
различие между процессами заключается в следующем: при
кипящем процессе теплота подводится от внешнего источника
и поддерживает температуру насыщения при данном постоян¬
ном давлении в испарителе, т. е. процесс является изотермиче¬
ским-, при некипящем процессе теплота подводится к морской
воде без кипения до температуры выше температуры насыще¬
ния, соответствующей давлению в испарителе, и, следовательно,
процесс испарения идет за счет внутренней теплоты и является
адиабатным. Недостатком термического опреснения избыточ¬
ного давления является его малая экономичность: на получение
1 кг дистиллята расходовалось до 700 ккал, что соответствует
выходу 10—12 т дистиллята на 1 т расходуемого топлива. Этот
недостаток удалось преодолеть применением вакуумных испари¬
292
телей с использованием утилизационной теплоты двигателей
внутреннего сгорания и парогенераторов.
Дистилляция, как уже было отмечено,— основной способ оп¬
реснения морской воды, применяемый на судах промыслового
флота, и поэтому в дальнейшем будут рассмотрены только оп¬
реснительные установки, работающие на термическом опрес¬
нении.
В настоящее время исследуются новые способы водоопресне-
ния, в частности путем образования кристаллогидратов и при
помощи гидрофобного теплоносителя.
Принцип кристаллогидратов заключается в выделении прес¬
ной воды из соленых растворов в форме кристаллов, которые
в специальном расплавителе разлагаются на чистую воду и гид¬
рат-агент. В качестве гидрат-агентов для повторного использо¬
вания в процессе используются такие вещества, как метилбро-
мидгидраты, метилхлоридгидраты, гидраты изо-бутана.
Сущность гидрофобного теплоносителя заключается в том,
что различные смеси углеводородов, парафины, фторированные
масла и другие вещества, инертные по отношению к воде и рас¬
творенным в ней солям, впрыскивают в теплонесущий дистиллят
для нагрева. После этого дистиллят и теплоноситель разделяют
и последний впрыскивают в морскую воду. При нагреве часть
воды испаряется и образующийся пар в конденсаторе превра¬
щается в дистиллят. Гидрофобный теплоноситель отделяют от
оставшегося после выпаривания рассола и возвращают в тепло-
несущий дистиллят для последующего нагрева.
§ 61. КЛАССИФИКАЦИЯ ОПРЕСНИТЕЛЬНЫХ УСТАНОВОК
И ИХ ПРИНЦИПИАЛЬНЫЕ СХЕМЫ
Дистилляционная опреснительная установка состоит из сле¬
дующих основных частей:
1. Теплообменных аппаратов: испарителя, конденсатора,
водоподогревателя.
2. Насосов: питательного, циркуляционного, дистиллятного,
рассольного.
3. Трубопроводов: теплоносителя, забортной воды, пресной
воды, рассола.
4. Контрольно-измерительных, сигнальных и автоматиче¬
ских приборов.
Основным признаком, определяющим тип опреснительной
установки, является способ испарения морской воды. Дистил-
ляционные опреснители делятся на два класса:
1) кипящие, или поверхностного типа;
2) некипящие самоиспаряющиеся, или адиабатные беспо-
верхностного типа.
Схемы опреснительных установок поверхностного и беспо-
верхностного типов изображены на рис. 139. В испарителе 1
293
поверхностного типа (рис. 139, а) находится греющая батарея 2,
через которую проходит теплоноситель — пар или горячая вода.
В результате нагрева и кипячения рассола в испарителе выде¬
ляется из морской воды так называемый вторичный пар, кото¬
рый направляется по трубопроводу в конденсатор 9. Пар
охлаждается забортной водой, прокачиваемой по змеевику цир¬
куляционным насосом 8, конденсируется и дистиллят откачи¬
вается дистиллятным насосом 7. Часть забортной воды, вы¬
ходящей в подогретом состоянии из конденсатора, отводится
через регулятор уровня 6 в испаритель. Для поддержания по-
Рис. 139. Схемы дистилляционных опреснительных установок: а — поверх¬
ностной (кипящей); б — бесповерхностной (адиабатной).
стоянной солености рассола в испарителе производится проду¬
вание рассольным насосом 4.
В установке с бесповерхностным испарителем 1 (рис. 139,6)
отсутствуют греющие элементы с твердой поверхностью для теп¬
лопередачи. Морская вода перед поступлением в испаритель
предварительно нагревается в подогревателе 3 теплоносите¬
лем до температуры, которая превышает температуру насыще¬
ния, соответствующую давлению, поддерживаемому в испари¬
теле. При поступлении воды из подогревателя, где вода не
кипит, так как давление в нем более высокое, в испаритель с бо¬
лее низким давлением происходит еамоиспарение некоторой
части воды за счет внутренней теплоты. Образовавшийся пар,
как и в предыдущей схеме, поступает в конденсатор 9, прока¬
чиваемый забортной водой от насоса 8, конденсируется и отка¬
чивается дистиллятным насосом 7. Часть прокачиваемой ох¬
лаждающей воды отводится для питания испарителя через регу¬
лятор уровня 6. Ненспарившаяся вода из испарителя циркуля¬
ционным рассольным насосом 5 многократно прокачивается
294
через подогреватель 3 и вновь поступает на испарение, при этом
часть рассола выдувается за борт через клапан. Преимущество
бесповерхностных испарителей заключается в том, что вслед¬
ствие отсутствия поверхности нагрева в них не образуется на¬
кипь, но они требуют установки насосов большей производи¬
тельности.
Кроме рассмотренного основного признака — способа испа¬
рения — дистилляционные опреснительные установки можно
классифицировать по ряду других признаков:
— по назначению: опреснительные — для получения питье¬
вой воды; испарительные — для получения котловой воды; ком¬
бинированные — для получения питьевой, мытьевой и питатель¬
ной воды;
— по роду теплоносителя: паровые, водяные, газовые, элек¬
трические;
■— по давлению в испарителе: избыточного давления; ва¬
куумные;
— по способу регенерации теплоты: компрессионные, в ко¬
торых вторичный пар сжимается и используется в качестве
греющего; ступенчатые, в которых пар, получаемый в преды¬
дущих испарителях, используется в качестве греющего пара
в последующих;
— по связи с судовой энергетической установкой: автоном¬
ные, не связанные с работой СЭУ; неавтономные, включаемые
в цикл работы главных и вспомогательных дизелей и парогене¬
раторов. К ним относятся распространенные на промысловых
судах утилизационные опреснительные установки, использую¬
щие теплоту водяной системы охлаждения главных двигателей.
Глава XVIII
ВОДООПРЕСНИТЕЛЬНЫЕ УСТАНОВКИ
ПРОМЫСЛОВЫХ СУДОВ
§ 62. КОНСТРУКЦИИ ОПРЕСНИТЕЛЬНЫХ АППАРАТОВ
На промысловых судах преимущественно применяются испа¬
рители вертикальные судовые (ИВС) поверхностного типа из¬
быточного давления отечественного производства. Конструкция
и общий вид испарителя ИВС-3 1 изображены на рис. 140.
Корпус испарителя 5 выполнен в форме вертикального
цилиндра из меди и покрыт тепловой изоляцией 6. Это
1 Выпускаются также испарители марок ИВС-1, ИВС-2, ИВС-5, являю¬
щиеся модернизированными конструкциями выпускавшихся ранее опресните¬
лей типа ВИ, производительностью 3—10 т/сут. Цифра в марке испарителя оз¬
начает поверхность нагрева греющей батареи в метрах квадратных.
295
обеспечивает значительный объем над зеркалом испарения при
сравнительно небольших габаритах. В нижней части корпус
снабжен фланцем для бронзовой крышки 12, к которой крепятся
трубки батарей для отвода и подвода греющего пара. Змеевики
11 нагревательной батареи выполнены из красномедных трубок,
изогнутых в виде плоской спирали. Они закреплены неподвижно
с помощью опорных крестовин 9 и трубок 10 и прижаты к гнез¬
дам в крышке накладками с
болтами. Поддержание посто¬
янного уровня рассола в испа¬
рителе осуществляется поплав¬
ковым регулятором уровня 7
и контролируется по мерной
трубке 8.
Сепарация пара от влаги
Рис. 140. Испаритель избыточного давления ИВС-3 на БМРТ
типа «Маяковский».
осуществляется последовательно в двух сепараторах: горизон¬
тальном жалюзийном 4 и концентрическом кольцевом 2.
Отвод влаги от сепаратора производится через дренажную
трубку 3. При превышении давления в испарителе пар страв¬
ливается через предохранительный клапан 1.
Недостатком испарителя ИВС, как и других опреснителей
поверхностного типа, является быстрое образование накипи
на поверхности змеевиков, в результате чего снижается произ¬
водительность и требуется большой расход теплоты на проду¬
вание рассола.
Конструкция испарителя поверхностного типа вакуумной
опреснительной установки СРТ с использованием в качестве
теплоносителя отработавших газов от главного дизеля пока¬
зана на рис. 141. Испаритель состоит из цилиндрического верти-
296
*<з>
кального корпуса 4 с размещенными внутри двумя трубными
решетками 5 и 9, к которым приварены трубки 8, расположен¬
ные в шахматном порядке. В межтрубном пространстве имеются
две направляющие перегородки 7. Отработавшие газы главного
двигателя входят через патрубок 14 в межтрубное простран¬
ство, совершают два поворота, через стенки трубок передают*
Рис. 141. Испаритель
вакуумный поверхност¬
ный утилизационный ус¬
тановки СРТ.
теплоту на испарение рассола и уходят через патрубок 6 в ат¬
мосферу.
В нижней крышке 13 расположены входной 12 и выходной 11
патрубки для морской воды и рассола, а также закрытый па¬
трубок 10 с цинковым протектором для предохранения испари¬
теля от коррозии. В верхней крышке имеются сепараторы пара:
конусный 3 и сетчатый 2 с кольцами Рашига 1. Уравнительная
трубка поплавкового регулятора уровня присоединена к пат¬
рубку 15. Производительность испарителя равна 500 кг/ч.
На'"промысловых судах РТМ типа «Тропик» в опреснитель¬
ных установках вакуумного бесповерхностного типа с ис¬
пользованием утилизационной теплоты охлаждающей воды
Рис. 142. Испаритель-конденсатор ваку¬
умный бесповерхностный адиабатный на
РТМ типа «Тропик».
Рис. 143.'Испаритель-конденсатор-сепаратор типа «Атлас» (Д)
б — схематический разрез.
.298
вакуумный поверхностный утилизационный: а — конструкция;
299
Задортная охлаждающая
применяется испаритель-конденсатор адиабатного испарения,
конструкция которого изображена на рис. 142. Он состоит из
вертикального цилиндрического сварного корпуса 9, к которому
крепятся на болтах цилиндрическая вставка 15, нижняя 18 и
верхняя 5 крышки. В трубных досках 6 и 14 запрессованы
концы вертикальных трубок 8 конденсатора, расположенные-
внутри корпуса концентрично. Межтрубное пространство кон¬
денсатора отделено от испарительной камеры цилиндром 11
с двойными стенками. Для сборки дистиллята к нижней трубной
доске прикреплен кольцевой коллектор 17.
Забортная морская вода, предварительно нагретая до 50° С
в теплообменниках от воды систем охлаждения главных и вспо¬
могательных дизелей, через патрубок 22 поступает в кольцевук>
трубку 20 и через небольшие (0 5 мм) отверстия подается
в распыленном состоянии в камеру испарения. Вследствие глу¬
бокого вакуума (~90%) капельки воды испаряются за счет
внутренней теплоты. Образовавшийся пар поднимается вверх иу
изменяя свое направление, проходит через две решетки 7 и от¬
бойную внутреннюю крышку 3, где сепарируется. Отделившиеся
капельки воды стекают в воронку 10 и по трубке 24 отводятся
в нижнюю часть испарителя, где вместе с оставшимся рассо¬
лом отсасываются через патрубок 21. Пар, проходя по труб¬
кам конденсатора вниз, охлаждается и конденсируется за счет
забортной воды, подаваемой через патрубок 13 в межтрубное
пространство. Дистиллят стекает в нижний сборный коллек¬
тор 17, а оттуда через патрубок 16 — в бак. Воздух, скапливаю¬
щийся в пространстве между верхней и отбойной крышками,,
отсасывается через патрубок 2 вакуумным насосом водоколь¬
цевого типа. Патрубки 1 и 19 соединены с уравнительными тру¬
бопроводами бака дистиллята. Для контроля на испарителе-кон¬
денсаторе установлены водомерное стекло 23, термометр 12 и
присоединенный к патрубку 4 вакуумметр. Лапами 25, прива¬
ренными к корпусу, испаритель-конденсатор крепится к на¬
бору судна. Производительность опреснителя по паспорту
15 т/сут.
На промысловых судах РТМ типа «Атлантик», ППР типа
«Грумант» и промысловой базе типа «Рыбацкая слава» уста¬
новлены блочные вакуумные опреснители, использующие ути¬
лизационную теплоту охлаждающей системы дизелей (датской
фирмы «Атлас» и отечественного производства типа Д), рабо¬
тающие по идентичному циклу.
Конструкция опреснителя типа «Атлас» (Д) изображена на!
рис. 143.
Как видно из схематического разреза (рис. 143,6) блок со¬
стоит из трех основных теплообменных аппаратов, объединен¬
ных в одном агрегате: испарителя 1 (А — на схеме), сепара¬
тора 3 (В) и конденсатора 6 (С). Трубные доски и трубы испа¬
рителя и конденсатора изготовлены из бронзы. Крышки кон¬
300
денсатора — чугунные, корпус — из нержавеющей стали; ос¬
тальные части—из высококачественной стали. Сепаратор 3
(рис. 143, а) покрыт изнутри слоем пластмассы. Днище испари¬
теля 1 и торцевые крышки конденсатора 6 покрыты изнутри
антикоррозионным материалом. На корпусе опреснителя уста¬
новлены арматура и контрольно-измерительные приборы: рас¬
ходомер 2 дистиллята, водомерное стекло 4, кран для спуска
воздуха 5, тревожный сигнализатор-зуммер 7, соленомер 8, тер¬
мометры 9, манометры 10, вакууметр 11, расходомер воды 12,
.клапаны: предохранительный 13, вакуум-прерывательный 14,
спускной 15, невозвратные 19 и 20 для водяного и воздушного
эжекторов, регулировочный 23 и невозвратный 24, запорный
ниппель 21 для расходомера забортной воды, клапан 22, нагру¬
женный пружиной, пробный кран 25, соленоидный клапан 26 и
невозвратный клапан 27 для него.
Установка обслуживается следующими насосами: эжекто¬
рами 17 и 18 для воды и воздуха, эжекторным насосом 28, насо¬
сом 29 для пресной воды (дистиллята) и циркуляционным на¬
сосом 16 для конденсата (при работе установки на паре).
Римскими цифрами (I—VIII) обозначены присоединитель¬
ные патрубки трубопроводов, назначение которых указано в опи¬
сании тепловой схемы установки в § 63.
Основные параметры водоопреснительных установок типа Д
и «Атлас» приведены в табл. 14.
Таблица 14
Основные параметры водоопреснительных установок Д и «Аглае»
Индекс йлй но¬
мер
Расход охла¬
ждающей воды
при 25—30° С,
м:,/ч
Температура греющей пресной воды
на входе в испаритель, СС
Примечание
60
80
Расход
греющей
воды,
м;!/ч
Произво¬
дитель¬
ность,
т сут
Расход
греющей
воды,
м3 ч
Произво¬
дитель¬
ность,
т сут
Д1
10
7
1
10
2,5
Соленость дистилля¬
да
20
10
2,5
20
5
та не более 8 мг/л С1
ДЗ
35
20
5
35
8,5
(0,8е Б)
Д4
00
35
10
55
15
0,5
4
3,5
1
Соленость дистилля¬
1
10
8,5
2,5
—
—
та 0,5—4° Б
2
20
17
5
—
—
3
40
35
10
—
—
4
60
50
15
—
—
6
120
100
30
—
.—
7
170
145
42
—
—
8
240
200
60
—
—
301
На современных промысловых судах получили распростра¬
нение многоступенчатые бесповерхностные адиабатные опресни¬
тели, обладающие высокими экономическими показателями.
Они имеют наиболее высокий коэффициент полезного использо¬
вания теплоты и значительную производительность.
На рис. 144 изображена конструкция пятиступенчатого опрес¬
нителя бесповерхностного адиабатного типа М-5.
Основой опреснительного агрегата является пятикамерный
корпус, который с помощью опорных лап 3 крепится к фунда¬
ментной раме. Каждая камера разделена на две части: ниж-
Рис. 144. Конструкция пятиступенчатого опреснителя бесповерхностного адиа¬
батного типа М-5 на РПБ «Восток».
нюю — испарительную и верхнюю — конденсаторную с жалю-
зийным сепаратором 7, очищающим пар от капель рассола.
Нижняя испарительная часть камер изготовлена из листовой
углеродистой стали, а верхняя с встроенным конденсатором 1 —
из нержавеющей стали, трубки — мельхиоровые, трубные до¬
ски — латунные; крышки — сварные из листов медно-никелевого
сплава. Крышки 9 конденсаторов имеют внутри цинковые про¬
текторы для предохранения от коррозионного разъедания. Для
осмотра внутренних поверхностей камер и их чистки на перед¬
нем фронте корпуса предусмотрены лазы, закрываемые крыш¬
ками 2, в которых имеются смотровые окна 11. К днищу камер
приварены трубы 5, по которым забортная питательная вода
подается в камеры испарения. Отбойные колпаки 6 выполняют
роль отражателей, препятствуя уносу крупных капель воды
с паром. Неиспарившийся рассол удаляется из камер через
спускные трубы 4, которые соединяются с питательными тру¬
бами последующих камер испарения.
Дистиллят, собирающийся в сборниках конденсатов, пере¬
текает из одной камеры в другую через перепускные трубы 10,
302
являющиеся гидрозатворами. Воздух из камеры в камеру пере¬
пускается через коленчатые патрубки 8.
Корпус опреснителя покрыт снаружи тепловой изоляцией,
и имеет кронштейны и прива-
рыши для крепления приборов и
оборудования.
На рис. 145 показан верти¬
кальный водоподогреватель типа
ВП-10, устанавливаемый в оп¬
реснительных установках поверх¬
ностного типа избыточного дав¬
ления для предварительного по¬
догрева питательной забортной
воды, поступающей в испари¬
тель.
Подогреватель состоит из
спирального змеевика 5, кото¬
рый заканчивается штуцером 2,
прикрепленным к бронзовой
крышке 3. В этом змеевике цир¬
кулирует смесь конденсата и не-
сконденсировавшегося первич¬
ного пара из испарителя. Змее¬
вик находится во внутреннем
корпусе 6, который прикреплен
к верхней бронзовой коробке 4.
К этой же коробке прикреплена
верхняя часть наружного кор¬
пуса 7. Нижняя часть корпуса 7
соединена с нижней бронзовой
коробкой 8. Бронзовые коробки
отлиты за одно целое с патруб¬
ками 10 и 11. Змеевик 5 и внут¬
ренний корпус 6 выполнены из
красной меди.
Вторичный пар поступает из
испарителя через верхний пат¬
рубок 11, проходит через про¬
странство между внутренним 6
и наружным 7 корпусами подо¬
гревателя и выходит через ниж¬
ний патрубок 10. Забортная вода входит через патрубок 9 и
выходит через штуцер 1. Подогреватель рассчитан на подогрев
воды до 70° С.
Для поддержания постоянного уровня рассола в испарителе
устанавливают автоматический регулятор питания, изображен¬
ный на рис. 146. Он состоит из трех основных узлов: корпуса,
рычажно-поплавкового устройства и клапана.
303
Рис. 145. Водоподогреватель ВП-10
опреснительной установки избы¬
точного давления на БМРТ типа
«Маяковский».
Корпус 1 регулятора уровня представляет собой медный
сварной цилиндр. Сверху к корпусу приварен литой бронзовый
фланец с лапой для крепления регулятора к испарителю. Снизу
к корпусу приварено днище 19. За одно целое с днищем отлит
патрубок с фланцем, соединяющий регулятор с водяным про¬
странством испарителя. К днищу корпуса на шпильках при¬
креплен колпак 18, в котором установлена направляющая
втулка для штока 21 поплавка.
Питательная Вода.
\
Питательная
Вода.
Рис. 146. Автоматический регулятор питания испарителя.
Внутри корпуса на штоке 21 укреплен при помощи двух
•стопоров 22 поплавок 23 регулятора. Поплавок представляет
собой цилиндр, изготовленный из меди. Снизу и сверху к нему
приварены плоские днища. По оси поплавка приварена трубка,
через которую проходит шток 21. Крышка регулятора уровня —
.литая бронзовая. За одно целое с крышкой отлиты патрубок
•с фланцем, соединяющийся с паровым пространством испари¬
теля, и дугообразный отросток. Внутри дугообразного отростка 2
находится рычаг 4, который одним концом соединен через
ушко 24 со штоком 21, а другим —• с валиком 25.
На валик 25 насажен верхний наружный рычаг 5, который
одним концом через тяги 6, 10 и муфту 8 соединен с нижним
.304
наружным рычагом 13, а другим через тягу 7 и поперечину 9 —
с пружинами 3, служащими для уравновешивания поплавка.
Нижний наружный рычаг 13 насажен на валик 11. Этот валик
через рычаг 12 передает движение штоку 15, который вместе
с тарелками 16 движется внутри корпуса 17 клапанной коробки.
Рис. 147. Расходомер (рота- Рис. 148. Автоматический клапан соле-
метр) опреснительной уста- ности.
новки.
За одно целое с клапанной коробкой отлиты два патрубка для
входа и выхода питательной воды и фланец, на котором уста¬
навливают и прижимают крышкой 14 клапана направляющую
втулку.
Снаружи корпус регулятора покрыт изоляцией 20 и обшит
миткалем.
Количественный контроль за режимами питания и проду¬
вания испарителя обычно осуществляется с помощью поплавко¬
вых расходомеров, называемых ротаметрами. Конструкция
ротаметра изображена на рис. 147. Он состоит из корпуса,
11 А. Е. Богомольный 305
внутри которого вставлена конусная втулка 3 с сердечником-
поплавком 1. Посредством внутренней вертикальной трубки
поплавок соединен с указателем 2, перемещающимся внутри
стеклянной трубки вдоль шкалы. При отсутствии расхода воды
поплавок и указатель под действием собственной массы нахо¬
дятся в нижнем положении.
Под действием подводимой жидкости сердечник поднима¬
ется, вода проходит вверх через кольцевое сечение между ним
и конусной втулкой. При этом массы сердечника, трубки и
указателя уравновешиваются за счет перепада давления воды
при ее протекании через кольцевое сечение. Чем больше рас¬
ход воды через ротаметр, тем больше будет площадь кольце¬
вого сечения и, следовательно, тем выше поднимутся поплавок
и указатель. Каждому положению сердечника-поплавка будет
соответствовать определенный расход воды, который отсчиты¬
вается в соответствии с положением указателя по шкале в лит¬
рах или кубических метрах в час.
По ротаметру, установленному на дистиллятном трубопро¬
воде, можно определить производительность опреснительной
установки.
Для контроля за качеством дистиллята и спуска засолен¬
ного в льяла устанавливают автоматический клапан солено¬
сти, срабатывающий от соленомера. В автоматическом клапане,
показанном на рис. 148, при подаче тока на соленоид 1 сердеч¬
ник 2 удерживается в верхнем положении. Если при этом руко¬
ятка рычага 4 находится в верхнем положении, то она удер¬
живается в нем защелкой 3 спускного механизма. При повы¬
шении солености дистиллята реле соленомера обесточивает
соленоид, сердечник опускается и спусковой механизм осво¬
бождает рычаг. Под действием пружины 5 рычаг и соединенный
с ним штоком клапан 6 опускаются в нижнее положение (см.
рис. 146). Дистиллят, проходивший раньше в цистерну, спуска¬
ется в льяла. Одновременно должна срабатывать световая и
звуковая сигнализация.
§ 63. ТЕПЛОВЫЕ СХЕМЫ ИСПАРИТЕЛЬНЫХ
И ОПРЕСНИТЕЛЬНЫХ УСТАНОВОК
Тепловые схемы водоопреснительной установки РТМ типа
«Тропик» с использованием теплоты охлаждающей системы
главного двигателя и с адиабатным бесповерхностным испари¬
телем изображены на рис. 149. В принципиальной схеме
(рис. 149, а) вода из замкнутой системы охлаждения двигателя 1
прокачивается циркуляционным насосом 7 через водо-водяной
теплообменник-подогреватель 2. За счет теплоты охлаждающей
воды нагревается забортная вода, прокачиваемая по змеевику
теплообменника после конденсатора-испарителя 4 питательным
насосом 8. Из теплообменника морская вода поступает в испа¬
306
рительную камеру, где разбрызгивается и частично испаряется
за счет внутренней теплоты. Образовавшиеся пары поступают
в конденсационную камеру, откуда образовавшийся дистиллят
откачивается насосом 5. Неиспарившаяся часть морской воды
откачивается рассольным насосом 6.
Для повышения экономичности и эффективности работы
опреснительной установки в тепловой схеме предусмотрен па-
Рис. 149. Тепловая схема опреснительной установки РТМ типа «Тро¬
пик»: а — принципиальная; б — модернизированная.
ровой подогреватель 3 (рис. 149, б) для предварительного по¬
догрева питательной воды перед входом в испаритель 4. Кроме
того, на РТМ «Кассиопея» и «Козерог» произведена модерни¬
зация, заключающаяся в рециркуляции рассола — подогрев за¬
бортной воды в результате ее смешивания с частью откачивае¬
мой из испарителя рассола. Для этого дополнительно проведен
перепускной трубопровод II.
Рециркуляция рассола позволяет уменьшить количество за¬
бортной воды, подаваемой в систему, и добиться постоянной
ее температуры перед теплообменником путем регулирования
количества перепускаемого рассола независимо от температуры
забортной воды. Утилизационные опреснительные установки
типа Д все чаще применяют с использованием теплоты охлаж¬
11*
307
дающей системы дизелей в испарителях поверхностного кипя¬
щего типа отечественного производства.
Тепловая схема опреснительной установки типа Д произво¬
дительностью 5 т/сут, установленной на БМРТ «Север», пока¬
зана на рис. 150.
Забортная вода прокачивается насосом 1 через конденса¬
тор 6, откуда она поступает к рассольно-воздушному эжектору 2.
Часть этой воды через невозвратно-запорный клапан 3 и рота¬
метр 4 направляется в ис¬
паритель 6. Греющая вода
из системы охлаждения ди¬
зеля циркулирует в меж-
трубном пространстве бата¬
реи 5, и через стенки пере¬
дает теплоту забортной воде,
испаряющейся внутри тру¬
бок. Остающийся после ис¬
парения рассол из камеры
испарения и паровоздушная
смесь из конденсатора отка¬
чиваются эжектором за борт
для поддержания необходи¬
мой концентрации испаряю¬
щейся воды и требуемого
вакуума.
Вторичный пар, образо¬
вавшийся при испарении
морской воды, сжижается
в конденсаторе и поступает
в сборник дистиллята 7, от¬
куда насосом 8 через по¬
плавковый регулятор уровня,
ротаметр 11 и датчик соле-
номера 10 поступает к элек¬
тромагнитному автоматическому клапану 9. В зависимости от
солености дистиллята он направляется в цистерну пресной воды
или обратно в испаритель.
Рациональная утилизационная поверхностная опреснитель¬
ная установка датской фирмы «Атлас» установлена на судах
ППР типа «Грумант», РТМ типа «Атлантик» и плавбазах
типа «Рыбацкая слава».
Тепловая схема водоопреснительной установки типа «Атлас»
показана на рис. 151.
Опреснитель состоит из испарителя А, сепаратора В и кон¬
денсатора С. Работа опреснителя состоит в следующем. Часть
охлаждающей воды, выходящей из системы охлаждения двига¬
теля внутреннего сгорания, при температуре обычно 60—65° С
пропускается через испаритель А и, циркулируя с наружной по¬
Рис. 150. Тепловая схема опреснитель¬
ной утилизационной установки типа Д.
308
верхности его трубок, нагревает морскую воду, проходящую по
трубкам. Забортная соленая вода испаряется при температуре
около 38° С, являющейся температурой ее насыщения благодаря
Рис. 151. Тепловая схема вакуумной утилизационной установки ти¬
па «Атлас» на плавбазе «Рыбацкая слава».
вакууму — 93%, создаваемому в опреснителе эжектором. При
изменении температуры забортной воды выше или ниже 30—
32° С соответственно и температура насыщения в испарителе
будет выше или ниже 38° С.
309
Вследствие низкой температуры испарения и в связи с тем,
что в испаритель подается в три-четыре раза больше грею¬
щей воды, чем питательной забортной, образование накипи на
его трубках будет минимальным.
Водяной пар, образующийся в испарителе А, проходит через
сепаратор В, где осушается благодаря механической сепара¬
ции отбойным щитом, и направляется в конденсатор С. Здесь
от охлаждающего действия забортной воды, прокачиваемой
внутри трубок конденсатора, пар конденсируется и пресная вода
(дистиллят) отводится от опреснителя.
В случае необходимости опреснительные установки могут ра¬
ботать на свежем паре, подводимом от вспомогательных паро¬
генераторов.
Установка обслуживается эжекторами, один из которых сое¬
динен с конденсатором С и обеспечивает отсос воздуха для соз¬
дания вакуума. Другой эжектор отсасывает из сепаратора В
соленую воду, не успевшую испариться и занесенную из испа¬
рителя в сепаратор. Кроме эжекторов в установке имеются два
центробежных одноступенчатых насоса, один из которых обеспе¬
чивает эжекторы рабочей водой, а другой откачивает пресную
воду из конденсатора в цистерны пресной воды.
На корпусе опреснителя установлены: клапан-прерыватель
вакуума 1, термометры 2, вакуумметр 3, предохранительный
клапан 4, воздухоспускные клапаны 5, соленоидный клапан 6,
спускной клапан 9 и водомерное стекло 33.
Горячая вода подается в испаритель из системы охлажде¬
ния двигателей по трубопроводу II, а выпускается — по трубо¬
проводу I. Морская охлаждающая вода по трубопроводам IV
и III прокачивается насосом 12 через конденсационные трубки.
Из конденсатора часть охлаждающей воды уходит за борт по
трубопроводу VII, а остальное количество по трубопроводу V
отсасывается эжекторным насосом 13 и нагнетается по двум
направлениям: часть по трубопроводу с манометром 11 к эжек¬
торам (воздушному 8 и водяному 7), которые обеспечивают ва¬
куум в конденсаторе и сепараторе; другая часть поступает в ис¬
паритель через расходомер 10 или, минуя его, через клапан 14
и регулировочный и пружинный клапаны 15 и 16 в испаритель
для опреснения.
В качестве теплоносителя вместо горячей воды в установке
можно использовать свежий пар, идущий из вспомогательного
парогенератора по магистрали VI через фильтр 32, редукцион¬
ный клапан 31, сопло 30 и запорный клапан 28. Давление и
температура контролируются манометром и термометром; в слу¬
чае превышения нормального давления пар стравливается через
предохранительный клапан 29 и трубопровод VIII в атмосферу.
Конденсат из испарителя отсасывается насосом 18 и через
фильтр 19 может направляться для повторной циркуляции
в испаритель,
310
Давление конденсата контролируется манометром, установ¬
ленным у клапана 27, который пропускает конденсат через кла¬
пан 25 и выпускной конденсатный трубопровод XII.
Отвод образующегося конденсата от опреснителя осуще¬
ствляется через клапан 26 по трубопроводу XI. Дистиллят из
опреснителя отсасывается насосом 21 и по трубопроводу X
направляется в емкость для пресной воды. Качество получае¬
мого дистиллята контролируется соленомером 24 от датчика 20.
В случае засаливания дистиллята подается сигнал зуммером 23.
Рис. 152. Тепловая схема пятиступенчатого бесповерхностного адиабатного
опреснителя типа М на РПБ «Восток».
Пробу дистиллята можно отбирать через кран 22 по трубо¬
проводу с соленоидным клапаном 17 от сепаратора В. В случае
необходимости дистиллят через клапан и трубопровод IX
можно спустить за борт.
Технические характеристики водоопреснительных установок
типа Д и «Атлас» приведены в табл. 14.
Тепловая схема пятиступенчатого бесповерхностного адиа¬
батного опреснителя типа М, установленного на РПБ «Восток»,
изображена на рис. 152. Забортная вода циркуляционным пита¬
тельным насосом 2 засасывается через фильтр 1 и подается
через расходомер 3 в конденсаторы опреснителя 4. Проходя
последовательно по змеевикам ступеней опреснителя, вода по¬
вышает свою температуру за счет теплоты конденсирующегося
водяного пара. Перегрев питательной воды осуществляется при
прохождении конденсатора 5 эжектора и парового подогрева¬
теля 8. Перегретая по отношению к температуре насыщения,
соответствующей давлению в первой ступени испарителя, пи¬
311
тательная вода, проходя последовательно камеры испарения,
испаряется в каждой ступени с 1 по V последовательно, так
как давление в ступенях все время снижается. Поддержание
в ступенях вакуума осуществляется двухступенчатым паро¬
струйным эжектором 6, который отсасывает воздух через си¬
стему дроссельных шайб, обеспечивающих создание необходи¬
мого перепада давлений в камерах.
Для уменьшения накипеобразования расчетная температура
забортной питательной воды за подогревателем равна 77° С.
В каждой ступени вода охлаждается на 7° и отсасывается из
последней ступени V рассольным насосом 15 при температуре
42° С. Поддержание температуры забортной воды за подогрева¬
телем на требуемом уровне осуществляется автоматически ре¬
гулятором 7, получающим импульс от датчика 9.
Вторичный пар, образовавшийся в камерах испарения, сепа¬
рируется и конденсируется. Образовавшийся в конденсаторах
дистиллят под действием разности давлений перетекает по сту¬
пеням в сборник дистиллята 21. Из сборника он отсасывается
дистиллятным насосом 20 и через регулятор уровня/S типа РУК
и ротаметр 17 подается к' автоматическому переключающему
клапану 16, который в соответствии с импульсом от датчика
соленомера 19 направляет дистиллят в цистерну пресной воды
или на сброс. По аналогичной схеме происходит откачивание
конденсата греющего пара из подогревателя насосом 11, регу¬
лятором уровня 12 и переключающим автоматическим клапа¬
ном 14, действующим от датчика 10.
Рециркуляция рассола забортной воды по замкнутому кон¬
туру используется для химической чистки теплообменных по¬
верхностей 5%-ным раствором ингибированной соляной кислоты
и осуществляется специальным насосом 13. Установка выво¬
дится на режим и работает автоматически, что обеспечивается
наличием: J
— регулятора температуры подогрева забортной питатель¬
ной воды для поддержания заданной производительности;
— контрольных приборов, обеспечивающих номинальную
соленость дистиллята и конденсата;
— регулятора РУК, обеспечивающего устойчивую работу
дистиллятного и конденсатного насосов;
—■ системы автоматического регулирования и защиты, осу¬
ществляющей:
а) выключение установки при отклонениях температуры по¬
догрева питательной воды или повышении температуры и уровня
рассола в камерах испарения;
б) сигнализацию о ненормальной работе установки на ре¬
жиме и срабатывание защиты по любому из перечисленных им¬
пульсов.
Как уже упоминалось, дистиллят, получаемый в вакуум¬
ных опреснителях, для использования в качестве питьевой воды
312
должен подвергнуться соответствующей обработке, которая
заключается в минерализации и озонировании.
Для достижения качества питьевой воды, соответствующего
требованиям санитарной инспекции, а также нормам ГОСТ
2874—73, в дистиллят добавляют в соответствующей дозировке
следующие химикалии: NaF (натриумфторид), NaHC03 (на-
триумгидрогенкарбонат), NaHC04 (натриумгидрогенсульфат),
MgS04 (магнезиумсульфат), Na2S04 (натриумсульфат), СаСЬ
(кальциумхлорид).
бак растворения
' химикатов
Циркуляци¬
онный насос
Рис. 153. Схемы ус¬
тановки по минерали¬
зации дистиллята
для питьевой воды
1 (а) и озоногенера-
/ тора (б).
1 — озон; 2 — озониро¬
ванный дистиллят; 3 —
клемма подвода тока;
4 —• трубка с пробковой
изоляцией; 5 — поступле¬
ние дистиллята; 6 — по¬
ступление воздуха.
Установка по минерализации (рис. 153, а) состоит из бака-
растворителя, в котором в нижней части расположено смотро¬
вое окно. Циркуляционный насос всасывает по трубопроводу 1
дистиллят из цистерны А, куда он поступает из опреснитель¬
ной установки, и подает по наружному трубопроводу 2 в бак-
растворитель, в который предварительно засыпаны химикалии.
В результате циркуляции дистиллята происходит процесс мине¬
рализации в течение 20—30 мин. Из бака по переливному тру¬
бопроводу 3 минерализованный дистиллят поступает вновь в ци¬
стерну. В случае необходимости можно перепустить дистиллят
от насоса по обводному трубопроводу 4.
После минерализации вода по трубопроводу В поступает
к генератору озона, схема которого показана на рис. 153, б
(поз. 1—6, на рисунке объяснены в подрисуночной подписи).
Озоногенератор монтируют в шкафу с приборами контроля и
автоматизации процесса. Озоногенератор производит 13 г озона
в часКонцентрация озона составляет 25 мг озона 03 на 1 л
1 Данные по установке на РТМ «Атлантик-2».
313
воды. Для работы установки требуется фильтрованный воздух
в количестве 500 л/ч. Производительность озоногенератора со¬
ставляет 4 м3/ч пресной воды, подаваемой при давлении не бо¬
лее 2 • 105 Па. В результате озонирования питьевая вода сте¬
рилизуется в бактериологическом отношении и улучшает свои
вкусовые качества.
Глава XIX
ЭКСПЛУАТАЦИЯ
ОПРЕСНИТЕЛЬНЫХ УСТАНОВОК
§ 64. ОСНОВЫ ТЕОРИИ ЭКСПЛУАТАЦИИ
ВОДООПРЕСНИТЕЛЬНЫХ УСТАНОВОК
К судовым водоопреснительным установкам помимо обыч¬
ных требований компактности, надежности и долговечности
предъявляют ряд дополнительных требований. Установка дол¬
жна вырабатывать дистиллят, удовлетворяющий существую¬
щим нормативам и в количестве, достаточном для судовых по¬
требителей. Кроме того, установка должна работать с наиболь¬
шей экономичностью, т. е. расходовать как можно меньше
топлива. Это требование особенно важно, так как определяет
стоимость опресненной воды.
Рассмотрим условия выполнения каждого из указанных
требований.
Качество дистиллята зависит главным образом от количе¬
ства находящихся в нем солей. Соли могут попадать в дистил¬
лят вместе с забортной водой вследствие технической неисправ¬
ности теплообменных аппаратов (через неплотности в подогре¬
вателе или конденсаторе), а также с вторичным паром,
эбразующимся в испарителе. Попадание солей с вторичным па¬
ром зависит от характера парообразования, качества образую¬
щегося пара и концентрации рассола в испарителе. При ин¬
тенсивном парообразовании капельки воды выбрасываются
с поверхности испарения в паровое пространство.
Таким образом, качество дистиллята, с одной стороны, опре¬
деляется количеством капелек воды, содержащихся в паре во
взвешенном состоянии, или так называемой первичной влаж¬
ностью вторичного пара (чем меньше эта влажность, тем выше
качество дистиллята), и, с другой стороны, солесодержанием
капелек. Так, при солености рассола sp = 4000°B и первичной
влажности вторичного пара 0,1% соленость дистиллята состав¬
ляет 4° Б (~25 мг/л СГ); при влажности пара 0,01% соленость
дистиллята при той же концентрации рассола будет 0,4°Б
(~ 2,5 мг/л СГ).
Вторичный пар можно осушать различными способами:
— повышением давления вторичного пара р2 в испарителе,
С увеличением рг возрастает плотность пара рп и уменьшается
скорость его истечения, что приводит к увеличению массы капли
воды в паровом пространстве испарителя;
— спокойным парообразованием при отсутствии вскипания,
для чего необходимо уменьшить напряжение зеркала испаре¬
ния до 2000—3000 м3/(ч-м2). С этой целью на поверхности
зеркала испарения устанавливают решетчатые успокоительные
щиты;
— установкой в паровом пространстве тепловых пароосуши¬
тельных приспособлений. Для подвода первичного пара к ба¬
тарее испарителя часто используют паровую трубу, которую
пропускают через паровое пространство. В некоторых случаях
оголяют верхние элементы нагревательной батареи в испари¬
теле, снижая в нем уровень рассола;
— удалением (по вертикали) от зеркала испарения паро¬
сборного патрубка вторичного пара. В связи с этим высоту
парового объема испарителя обычно принимают не менее 0,9—
1,2 м;
— установкой механических сепарирующих приспособле¬
ний — отражательных щитов, решетчатых приемников и других
сепараторов, предназначенных для резкого изменения направ¬
ления движения пара, ударов парового потока об отражатель¬
ные поверхности и расщепления его на мелкие струйки.
Уменьшение солесодержания во вторичном паре достигается
поддержанием концентрации рассола в испарителе на уровне
6000—8000° Б. Повышение концентрации рассола выше указан¬
ной ухудшает качество дистиллята и уменьшает производитель¬
ность опреснительной установки из-за интенсивного образова¬
ния накипи.
Концентрация рассола поддерживается продуванием. Проду¬
вание рассола может быть периодическим и непрерывным. Ко¬
личество рассола, продуваемого в единицу времени, характери¬
зуется коэффициентом продувания:
где Wp — объем продуваемого рассола в час; WH — объем ис¬
паряемой воды в час.
С помощью ротаметров определить коэффициент продувания
можно путем замера массовых расходов питательной забортной
воды Гпит и количества вырабатываемого дистиллята Wn. Так
как Wm„ = Wu + Wv, a Wp = eWa, то
W и
(244)
315
Коэффициент продувания можно также определить по солено¬
сти забортной морской воды и рассола в испарителе. При не¬
прерывном продувании, когда клапан продувания при работе
все время открыт,
где sp — соленость рассола в испарителе, °Б.
При периодическом продувании, когда клапан продувания
открывается по достижении максимально допустимой концен¬
трации рассола,
где s0 — соленость забортной воды, °Б; smax — наибольшая допу¬
стимая соленость рассола, °Б, smax==S9000-f- 10000° Б.
Для обеспечения хорошего качества дистиллята нужно под¬
держивать постоянную соленость рассола sp^6000°B.
Следует иметь в виду, что при непрерывном продувании
расход теплоты с продуваемым рассолом примерно в два раза
больше, чем при периодическом, т. е. sH~2en.
Экономичность водоопреснительной установки определяется
количеством энергии, затрачиваемой на получение единицы
опресненной воды.
Для опреснительных установок, в которых источником теп¬
лоты служит греющий пар, экономичность характеризуется
удельным расходом, кг/кг, т. е. расходом этого пара на 1 кг дис¬
тиллята:
где Wi —расход греющего пара, кг/ч,
Q — теплота, затрачиваемая на подогрев и испарение воды
в испарителе, ккал/ч; г) — коэффициент, учитывающий тепловые
потери испарителя во внешнюю среду (обычно г) = 1,02ч-1,03);
t'i — энтальпия греющего пара, ккал/кг; qi — энтальпия конден¬
сата греющего пара, ккал/кг; W% — производительность уста¬
новки, кг/ч.
Существует несколько способов уменьшения удельного рас¬
хода греющего пара:
1. Использование теплоты вторичного пара и конденсата
греющего пара для подогрева забортной воды в подогревате¬
лях, как показано на схемах опреснительных установок в § 63.
Этот способ наиболее простой и распространенный, однако его
эффективность невелика. В некоторых установках теплоту вто-
s0
(245)
(246)
^ = -9хI-
h — <7i
(248)
316
ричного пара используют в других теплообменных аппаратах,
в частности в подогревателях котельной питательной воды, неф-
теподогревателях и др.
2. Применение регенеративных испарителей. Впервые идея
регенеративного испарителя была предложена в 1904 г. инже¬
нером Бессоновым. Работа регенеративного испарителя осно¬
вана на использовании вторичного пара, сжатого компрессором,
в качестве греющего пара. В результате значительно снижается
расход первичного (котельного) пара и используется на испа¬
рение теплота вторичного пара. В обычном одноступенчатом
испарителе только 2% теп¬
лоты удается употребить на
подогрев питательной воды,
остальные 98% уносятся
с охлаждающей водой кон¬
денсатора.
Схема регенеративного
испарителя с использова¬
нием пароструйного эжек¬
тора в качестве компрессора
показана на рис. 154. При
вводе в действие испарителя
2 по змеевикам пропуска¬
ется рабочий пар от вспомо¬
гательного парогенератора.
Получаемый вторичный пар
частично поступает в эжек¬
тор 1, где он сжимается, и вместе с вторичным паром направ¬
ляется в качестве греющего в змеевики батареи испарителя.
Другая часть вторичного пара идет в конденсатор 3 для полу¬
чения дистиллята. Количество регенерируемой таким способом
теплоты определяется коэффициентом инжекции и, который
представляет собой отношение всасываемого эжектором пара
к количеству рабочего пара. Коэффициент инжекции опреде¬
ляется из соотношения
и = (249)
Ап
где На — теплоперепад рабочего пара; п — степень сжатия, п =
= рг/Р15« 1,3-г-2,2; А — коэффициент расхода, увеличивающийся
при малых расходах, А =60-5-100.
Для указанных на схеме давлений коэффициент инжекции
« = 0,5, т. е. каждый килограмм пара сжимает полкилограмма
вторичного пара, и, значит, расход котельного пара уменьшается
примерно на 30—35%. Удельный расход греющего пара со¬
ставляет ц» 1-0,4 кг/кг, в то время как для обычных односту¬
пенчатых испарителей избыточного давления он достигает
ц = 1,5-М ,8 кг/кг.
Рабочий пар
Рис. 154. Схема регенеративного испари¬
теля с пароструйным компрессором
(эжектором).
317
3. Применение многоступенчатого испарения в нескольких
аппаратах 1, 2, 3, соединенных последовательно с поверхно¬
стными (рис. 155, а) и адиабатными (рис. 155,6) испарителями.
В этом случае пар, получаемый в предыдущей ступени, исполь¬
зуется в качестве греющего в последующей. Таким образом,
выход дистиллята из конденсаторов 4 будет кратен числу испа-
Охлаждаюцая
Вода
£?-*- Воздух
Рассол
ЯЭ— Задсртная
Дистиллят
Рассол
Рис. 155. Схемы многоступенчатых испарительных установок: а —
с поверхностными испарителями; б — с адиабатными испарите¬
лями.
рителей, и следовательно, удельный расход пара, кг/кг, опреде¬
лится из выражения
1-1 = ^(250)
Г ^2 + ^3+^4
где W2, Wз, W4 —• количество дистиллята, получаемого из вто¬
ричного пара соответственно в 1-й, 2-й и 3-й ступенях трехсту¬
пенчатого испарителя.
На современных промысловых судах часто устанавливают
двухступенчатые поверхностные испарители избыточного дав¬
ления, имеющие удельный расход греющего пара ц = 0,6-г-
-=-0,7 кг/кг. В вакуумных четырехступенчатых установках адиа¬
батного испарения на плавбазах типа «Профессор Баранов»
11 = 0,45 кг/кг.
318
Производительностью водоопреснительной установки назы¬
вается количество дистиллята, вырабатываемого установкой
в единицу времени, обычно за час или за сутки. Чтобы выяс¬
нить, от каких факторов зависит производительность, выведем
расчетную формулу. Предварительно введем следующие обо¬
значения:
W2 — производительность испарителя, кг/ч;
ь—энтальпия вторичного пара, ккал/кг;
г'о — энтальпия питательной воды, поступающей в испари¬
тель, ккал/кг;
QH — наружные тепловые потери испарителя, ккал/ч;
k — коэффициент теплопередачи от греющего пара к ки¬
пящей воде в испарителе, ккал/(м2-ч-°С);
t\—температура первичного (греющего) пара, °С;
t2— температура кипящего рассола в испарителе, °С;
F — площадь нагрева батареи испарителя, м2.
Количество теплоты, затрачиваемой на образование вторич¬
ного пара, равно W2[h—to) ккал/ч. Количество теплоты, полу¬
чаемой от первичного пара, равно kF(t\—t2) ккал/ч.
Составим уравнение теплового баланса с учетом тепловых
потерь во внешнюю среду и на продувание:
W2{i2—i0) + QH + EW2 (i'2—i0)=kF (^—t2), (251)
где eW2 — количество рассола, продуваемого за час (е — ко¬
эффициент продувания); i\ — энтальпия рассола в испарителе,
ккал/кг.
Из уравнения баланса (251)
W2 = (*i — *t> ~ &—_ (252)
*2 — г'о + 8 (*2 — г’о)
Из анализа полученного выражения можно установить, что
производительность испарителя W2 будет увеличиваться при
следующих условиях:
1. При уменьшении разности г2—/о, для чего необходимо
уменьшить г2 и увеличить г0. При пониженных давлениях и осо¬
бенно при вакууме в испарителе энтальпия сухого вторичного
пара г2 сильно снижается. С другой стороны, разность умень¬
шается за счет увеличения i0 при предварительном подогреве
питательной воды.
2. При уменьшении потерь теплоты Q„ через корпус испари¬
теля во внешнюю среду. Для уменьшения этих потерь корпус
испарителя покрывают термоизоляцией. Количество теплоты,
теряемой через корпус испарителя во внешнюю среду, QH,
ккал/ч, можно найти по формуле
Qn = kHFK(t2-tB), (253)
где ka — коэффициент теплоотдачи через стенку и термоизоля¬
цию испарителя, ккал/(м2-ч-°С); FH — наружная поверхность
319
корпуса испарителя, м2; t2— температура вторичного пара, °С;
tB — температура наружного воздуха, °С.
3. При возрастании разности температур первичного и вто¬
ричного пара t\—t2. Возрастание разности температур — одно
из наиболее эффективных средств повышения производитель¬
ности, однако увеличивать эту разность можно до известного
предела, называемого критическим температурным напором.
С повышением t\—12 увеличивается и интенсивность парообра¬
зования. По достижении критического температурного напора
выход пара становится настолько интенсивным, что между по¬
верхностью нагрева и кипящей жидкостью образуется паровая
пленка. Пар как бы приподнимает кипящую воду у зеркала
испарения, т. е. происходит вскипание. Это отрицательно ска¬
зывается в первую очередь на качестве дистиллята, так как
способствует увлажнению вторичного пара.
Наиболее благоприятна для работы испарителя разность
температур t\—4 ~ 20-4-25° С. Допустимая разность снижается
с уменьшением давления р2.
4. При увеличении поверхности нагрева батареи испари¬
теля F. Увеличение поверхности нагрева связано с возраста¬
нием массы и габаритов установки. В некоторых конструкциях
площадь батареи можно изменять в период эксплуатации испа¬
рителей, увеличивая или уменьшая число секций нагреватель¬
ных батарей.
5. При увеличении коэффициента теплопередачи k. Значе¬
ние k зависит от ряда факторов, в том числе от материала ба¬
тареи испарителя, физических параметров жидкости и пара
и условий, при которых происходит кипение и парообразование.
В частности, с увеличением давления р{ значение k возрастает.
При конструировании и постройке испарителя значение k
принимают достаточно высоким, используя металлы с большой
теплопроводностью. В процессе эксплуатации k непрерывно
уменьшается вследствие интенсивного образования накипи на
поверхности трубок. В случае образования на поверхности
трубки слоя накипи толщиной 0,5 мм значение коэффициента
теплопередачи снижается для стальных трубок на 31%, для
медных — на 45%.
Если толщина слоя накипи небольшая, снижение k можно
компенсировать увеличением разности температур t\—to.
Для 1 м2 нагревательной поверхности змеевика тепловая
нагрузка Q3, ккал/(м2-ч), составляет
0.3 = k{t1—t2). (254)
В целях сохранения производительности испарителя раз¬
ность температур надо увеличивать во столько раз, во сколько
уменьшилось значение k. На практике повышать производитель¬
ность путем увеличения давления р\ первичного пара можно
320
лишь до тех пор, пока толщина слоя накипи не превысит
0,75—1,0 мм.
В случаях, когда слой накипи превышает 1,0 мм, для сохра¬
нения производительности испарителя необходимо принимать
следующие меры по предотвращению накипеобразования:
— использовать антинакипины, которые вводят в пита¬
тельную морскую воду; они разрыхляют накипь, после чего ее
можно удалять продуванием. Для опреснителей этот способ
неприменим;
— снижать концентрацию рассола путем усиленного проду¬
вания испарителя. Недостаток этого способа состоит в увели¬
чении тепловых потерь, в результате чего снижаются эконо¬
мичность и производительность установки;
— применять так называемый «холодный душ». Из испари¬
теля продувают весь рассол и тем самым оголяют змеевики
батареи. По змеевикам продолжают пропускать греющий агент.
Затем в паровое пространство испарителя по специальным тру¬
бам с многочисленными отверстиями подают холодную воду,
которая орошает поверхность нагревательной батареи. В ре¬
зультате резкого изменения температуры змеевики деформи¬
руются, накипь дает трещины и отваливается от поверхности.
Этот процесс повторяют несколько раз, после чего накипь
удаляют из испарителя продуванием. Способ холодного душа
позволяет очистить от накипи до 60—80 % поверхности ба¬
тареи;
■— использовать специальные химикалии, которые добав¬
ляют к морской питательной воде. Они предотвращают образо¬
вание накипи, вследствие чего установка может работать про¬
должительное время без чистки. Научно-исследовательский ин¬
ститут английского адмиралтейства выпустил новое вещество,
называемое «адмиралтейским препаратом для испарителей»,
которое предотвращает образование накипи, переводя соли
в шлам. Кроме того, препарат препятствует образованию пены.
Применение нового препарата позволяет в течение длительного
времени сохранить номинальную производительность судовых
испарительных установок и увеличить время их эксплуатации.
Действие «адмиралтейского препарата для испарителей» было
проверено в судовых условиях на английском вспомогательном
судне «Готик»;
— снижать давление ниже атмосферного в вакуумных ис¬
парителях, где парообразование и кипение рассола происходят
при более низких температурах; вследствие этого накнпь обра¬
зуется менее интенсивно. В результате производительность ис¬
парителя не снижается, и он может продолжительное время
работать без чистки нагревательных элементов;
— использовать принцип самоиспарения в адиабатных мно¬
гоступенчатых опреснительных установках, в которых вслед¬
ствие вынесения теплообменных поверхностей из зоны кипения
321
и снижения температур кипения уменьшается интенсивность
образования накипи.
Во время эксплуатации опреснительных установок для пол¬
ного удаления накипи периодически производят механическую
или кислотную очистку поверхности нагревательной батареи.
Недостаток этого способа состоит в продолжительном выводе
из строя испарителя.
§ 65. ОСНОВЫ ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
ВОДООПРЕСНИТЕЛЬНЫХ УСТАНОВОК
И ТЕХНИКА БЕЗОПАСНОСТИ
Обслуживание судовых водоопреснительных установок сле¬
дует осуществлять в соответствии с Правилами технической эк¬
сплуатации флота рыбной промышленности СССР, заводскими
или фирменными инструкциями и Правилами обслуживания
судовых вспомогательных механизмов.
Перед пуском установки необходимо убедиться в исправно¬
сти трубопроводов, арматуры, приборов и фланцевых соедине¬
ний. Все клапаны должны быть закрыты. При вводе уста¬
новки в действие необходимо открыть воздушные краны на
испарителе, подогревателях и конденсаторе, на трубках к мано¬
метрам и вакуумметрам, а также на водоуказательных прибо¬
рах. Затем, убедившись в готовности к пуску насосов: питания
и прокачивания забортной воды, откачивания пресной воды и
рассольного, следует открыть все клапаны для свободного про¬
хода забортной воды через конденсатор за борт, на питание
опреснителя (испарителя) и через водоподогреватели. После
этого, запустив питательный насос, заполняют опреснитель (ис¬
паритель) морской водой примерно на 2/з рабочего уровня, ру¬
ководствуясь показаниями водоуказательного прибора. Далее,
постепенно открывая клапаны на паропроводе, подают грею¬
щий агент в змеевики опреснителя (испарителя) и доводят
давление до рабочего. По мере прогревания корпуса опресни¬
теля уровень воды в опреснителе доводят до нормального и
устанавливают необходимый режим подачи морской воды в оп¬
реснитель через автомат питания. Одновременно при режиме
непрерывного продувания открывают клапаны продувания рас¬
сола из опреснителя и пускают рассольный насос.
С появлением в опреснителе вторичного пара закрывают воз¬
душные краны, пускают циркуляционный насос конденсатора и
открывают клапаны на паропроводах вторичного пара и ди¬
стиллята, включают соленомеры.
При эксплуатации водоопреснительных установок следует
добиваться их экономичной работы, которая определяется ми¬
нимальным удельным расходом свежего пара. Это достигается
путем установления оптимальных значений параметров свежего
и вторичного пара; поддержанием в опреснителе надлежащей
322
плотности рассола; минимальным расходом воды на конденса¬
цию и охлаждение дистиллята; рациональным питанием опрес¬
нителя забортной водой; содержанием в чистоте нагреватель¬
ных поверхностей змеевиков опреснителя, водоподогревателей
и конденсатора; содержанием в исправном состоянии изоляции
водоопреснительной установки.
В период действия водоопреснительной установки необхо¬
димо следить за качеством вторичного пара и дистиллята по
показаниям соленомеров и периодически, не реже одного раза
в сутки, брать пробы для определения качества дистиллята
химическим способом. Соленость рассола должна быть в пре¬
делах 5000—7000° Б. Увеличение солености отражается на ка¬
честве дистиллята, а также на производительности установки.
Вследствие интенсивного образования накипи снижается эконо¬
мичность работы установки.
Плотность рассола определяют путем взятия пробы арео¬
метром, не реже одного раза за вахту. В опреснителе должен
поддерживаться постоянный уровень рассола, что достигается
хорошей работой регулятора питания. Для этого необходимо,
чтобы обеспечивались свободное перемещение питательного
клапана, поплавка и штоков в местах прохода через сальники;
хорошая плотность поплавка; чистота патрубков, соединяющих
паровое и водяное пространство опреснителя с регулятором.
Через каждые 2000—3000 ч работы следует вскрывать сек¬
ции испарителя и подогревателя и производить внутренний ос¬
мотр с целью проверки состояния антикоррозионного покрытия
поверхностей и наличия накипи на трубках. При необходимо¬
сти накипь удаляют проволочным ершом с предварительным
размягчением ее 5%-ным раствором соляной кислоты и после¬
дующей тщательной промывкой.
Рассмотрим возможные причины ненормальной работы во¬
доопреснительных установок и способы их устранения.
Установки избыточного давления. Неисправность: испари¬
тель установки вырабатывает дистиллят повышенной солено¬
сти. Возможные причины и способы устранения неисправностей:
— интенсивное испарение, сопровождаемое повышенной
влажностью вторичного пара вследствие высокого давления
греющего пара (снизить давление греющего пара);
— резкое понижение давления вторичного пара из-за повы¬
шенного расхода (снизить расход, прикрыв запорный клапан
вторичного пара);
— высокий уровень рассола в испарителе (проверить работу
регулятора питания и обеспечить плотность питательного кла¬
пана) ;
— повышенная плотность рассола в испарителе (продуть
часть рассола с подпиткой свежей водой);
— нарушена плотность между паровой и водяной полостями
в водоподогревателе или конденсаторе (устранить неплотность);
323
— вскипание рассола в испарителе вследствие резкого из¬
менения давления паров или уровня рассола (выполнить ре¬
комендации, указанные в предыдущих пунктах).
Вакуумные установки типа Д. Первая неисправность: испа¬
ритель вырабатывает дистиллят повышенной солености. Воз¬
можные причины и способы устранения неисправностей:
— эжектор не удаляет достаточного количества воды из се¬
паратора (проверить эжектор и эжекторный насос, добиваясь
того, чтобы давление воды перед эжектором было не менее
30—40 мм вод. ст.);
— слишком интенсивное испарение в результате избыточного
количества теплоты или высокого вакуума (дросселировать ва¬
куумный клапан горячей воды или приоткрыть клапан, сни¬
жающий вакуум).
Вторая неисправность: производительность падает. Возмож¬
ные причины и способы устранения неисправностей:
— в испарителе недостаточно теплоты (увеличить подачу го¬
рячей воды);
— на трубках испарителя образовалась накипь (очистить
трубки от накипи);
— в испаритель попал воздух от горячей воды (удалить воз¬
дух из испарителя);
— в испаритель поступает мало забортной воды (отрегули¬
ровать открытие клапана так, чтобы количество соленой воды
в 3—4 раза превышало производительность).
Установки самоопреснения типа М. Неисправность: чрезмер¬
ное повышение уровня питательной воды в ступенях испари¬
теля. Возможные причины и способы устранения неисправно¬
стей:
— увеличение поступления питательной воды (снизить про¬
изводительность питательного насоса);
— падение производительности рассольного насоса (повы¬
сить производительность рассольного насоса).
К водоопреснительным установкам избыточного давления
следует применять правила техники безопасности при обслужи¬
вании сосудов, работающих под давлением.
Ингибированная соляная кислота и ее 3—4%-ные растворы,
применяемые для очистки греющих элементов испарителей, тре¬
буют строгого соблюдения правил техники безопасности.
Члены экипажа, производящие кислотную очистку, должны
пройти инструктаж, иметь предохранительные очки, резино¬
вые сапоги и перчатки, суконную спецодежду. Вблизи работ по
очистке должна быть медицинская аптечка с средствами против
ожогов. В процессе растворения накипи должна действовать
система вентиляции для удаления выделяющихся при этом уг¬
лекислого газа и водорода. Пользоваться в районе работ от¬
крытым огнем запрещается.
Раздел шестой
СУДОВЫЕ СРЕДСТВА ПО ОЧИСТКЕ
И УДАЛЕНИЮ СТОЧНЫХ ВОД
Одним из основных веществ, загрязняющих морские воды,
является нефть и ее продукты, используемые при эксплуатации
морских судов. В связи с этим появилась необходимость в очи¬
стке судовых канализационных и отработавших вод.
Загрязнение моря нефтью потребовало проведения междуна¬
родно-правового регулирования мер по защите окружающей
среды. К ним в первую очередь относится «Международная
конвенция по предотвращению загрязнения с судов», которая
регулирует порядок слива в море нефтеостатков и нефтеводя¬
ных смесей и обязывает участников Конвенции принимать со¬
ответствующие меры.
В целях обеспечения выполнения требований Конвенции су¬
дами флота рыбной промышленности институтом Гипрорыб-
флот разработано «Наставление по предотвращению загрязне¬
ния моря нефтью», утвержденное Минрыбхозом СССР
1.07.1976 г.
Глава XX
СРЕДСТВА ПО ОЧИСТКЕ И УДАЛЕНИЮ СТОЧНЫХ ВОД
НА ПРОМЫСЛОВЫХ СУДАХ
§ 66. ИСТОЧНИКИ ЗАГРЯЗНЕНИЯ сточных вод
И ПРИНЦИПЫ их очистки
В процессе эксплуатации судна в результате утечек из тру¬
бопроводов и механизмов в льяла машинного и котельного от¬
делений непрерывно поступают вода, топливо и смазочные масла.
В льяла попадают нефтепродукты, используемые для промывки
механизмов и аппаратов при ремонте, случайно переливаемые
при перекачивании, смазке, заполнении картеров двигателей и
325
механизмов. В зависимости от размеров судов ежесуточно в лья¬
лах машинных отделений накапливается несколько десятков
литров различных нефтесодержаний'.
Особенностями льяльных вод, определяющими принципы и
способы их очистки, а также конструкцию устройств сепараци-
онных установок, являются:
1. Четкое расслоение на нижний слой, содержащий 300—
1000 мг/л смеси нефтепродуктов, и верхний слой, в котором
содержится основная масса нефтепродуктов.
2. Значительная обводненность нефтепродуктов, достигаю¬
щая 70—90% воды в литре смеси в результате перемешивания
в льялах при качке и вибрации.
Содержащаяся в льяльных водах нефть представляет собой
обводненную смесь всех видов нефтепродуктов, применяемых
на судне, и поэтому ее плотность колеблется в пределах 0,90—■
0,98 кг/м3 (г/см3).
В льяльных водах содержится некоторое количество поверх¬
ностно-активных веществ, создающих стойкую нефтеводяную
эмульсию, например, в результате применения синтетических
моющих средств для очистки механизмов и аппаратов. Многие
современные морские суда имеют междудонные цистерны, в ко¬
торые попеременно принимается топливо и балласт. Особенно¬
стью балласта, сливаемого из топливных цистерн, является его
сравнительно четкое расслоение на нижний слой, содержащий
10—200 г/л смеси нефтепродуктов, и верхний, содержащий ос¬
новную их массу.
Для отделения нефтепродуктов, эмульгированных в воде,
кроме отстоя применяются коалесцирование (коагуляция), фло¬
тация и фильтрация.
Коалесцирование, или укрупнение, применяют после
отстоя льяльных вод для их дополнительной очистки. Со¬
зданы различные коалесцирующие вещества—коагуленты. Ме¬
ханизм действия коагулентов различен: одни приводят к коалес-
ценции, т. е. слиянию и укрупнению частиц, способствующих их
отделению от воды и всплытию; другие коагуленты вызывают
агрегатирование частиц с последующим всплытием или выпаде¬
нием в осадок.
Способ флотации заключается в насыщении очищаемой
воды пузырьками воздуха, которые при всплытии захватывают
частицы нефтепродуктов и выносят их на поверхность в виде
легко удаляемой нефтевоздушной пены. Эффективность флота¬
ции обусловлена тем, что скорость всплытия частицы нефтепро¬
дукта, прилипшей к воздушному пузырьку, примерно в 900 раз
больше обычной скорости всплытия нефтяной частицы вслед¬
ствие разности объемных масс.
1 Нефтесодержание — смесь воды с нефтью, которая включает как сырую
нефть, так и мазут, дизельное топливо и смазочные масла.
326
Способ фильтрации состоит в пропускании загрязнен¬
ной воды через слой фильтрующих материалов, задерживаю¬
щих нефтепродукты. В качестве фильтрующих материалов при¬
меняют кокс, стекловату, опилки, асбестовые материалы, квар¬
цевый песок. Интенсификация процесса отделения и всплытия
эмульгированных в воде нефтепродуктов может быть достиг¬
нута повышением температуры нефтеводяной смеси, при кото¬
рой объем нефти увеличивается быстрее, чем воды, и исполь¬
зованием центробежных сил при сепарации.
§ 67. СИСТЕМЫ ОЧИСТКИ, СЕПАРАЦИЯ И УДАЛЕНИЕ
ЛЬЯЛЬНЫХ ВОД
В соответствии с Международной конвенцией 1973 г. каж¬
дое судно должно быть оборудовано сепарационной установкой,
обеспечивающей очистку сливаемых за борт нефтесодержащих
вод до содержания в них нефти не более 15 мг/л. Кроме того,
на каждом судне должна быть предусмотрена емкость (вклю¬
чая емкость льяльных колодцев) для накапливания льяльных
вод, если сепарационная установка не обеспечивает очистки
в соответствии с нормами предельного нефтесодержания. Се¬
чение сливного трубопровода должно соответствовать произво¬
дительности осушительного насоса МКО, палубный трубопро¬
вод слива должен заканчиваться фланцем международного об¬
разца для возможности подсоединения шлангов в любом порту
мира.
На промысловых судах СССР используются сепарационные
установки отстойного типа марок СТВ-10, СТВ-50 — на судах
типа ТР «Сибирь», КБ «Советская Украина» и коалесцирую-
щего типа СК-2,5 — на траулерах типа «Баренцево море».
Сепаратор типа СТВ-50 производительностью 50 м3/ч изо¬
бражен на рис. 156. Корпус сепаратора из листовой стали,
сварной, состоит из двух частей: горизонтальной — отстойной
полости и вертикальной — полости для сбора нефтепродуктов.
В сепараторе установлена автоматическая система слива от¬
стоявшихся нефтепродуктов и очищенной воды, которая состоит
из поплавкового датчика 4, электропереключателя 15, щита уп¬
равления и сигнализации 9 и двух электрозадвижек 10.
В отстойной части сепаратора для обеспечения коалесци-
рования и увеличения подъемной силы, действующей на ча¬
стицы нефтепродуктов, имеются центробежные сопла 2 и зме¬
евики подогрева воды 1 и 8 (обычно до температуры 25—30° С,
так как дальнейшее увеличение температуры связано с большим
расходом пара при сравнительно малом эффекте). В любом
случае не рекомендуется подогревать нефтеводяную смесь выше
60° С в связи с появлением факторов, замедляющих процесс
отстоя. В сборнике нефти имеются также змеевики подогрева 5,
327
328
Рис. 156. Сепаратор трюмной воды типа СТВ-50: а — схематиче¬
ский разрез; б ■— внешний вид.
которые, прогревая отстоявшуюся нефть до 40—50° С, обеспечи¬
вают ее свободный слив. В отстойной полости установлены сет¬
чатый щит 3, горизонтальная каскадная перегородка 7 и вер¬
тикальные гидравлические перегородки 6, предотвращающие
завихрения в нефтесборной полости.
На корпусе сепаратора установлены клапан выпуска воздуха
11, термометр 12, пробный кран 13 и манометр 14.
Действует сепаратор следующим образом. Загрязненная
вода от насоса через входной патрубок входит в уплотнитель¬
ную камеру, подогревается и через сопла выбрасывается в от¬
стойную полость, перемещаясь по горизонтали к выходному
патрубку. Частицы нефтепродуктов вследствие уменьшения объ¬
емной массы и скорости всплывают и собираются в нефтесбор-
нике. Система автоматического слива действует следующим об¬
разом. Перемещение поплавка вниз (рис. 156, а) передается
через валиковый привод эксцентрику переключателя. Послед¬
ний, поворачиваясь, замыкает контакты микропереключателей,
которые через реле в щите управления открывают правую элек¬
трозадвижку слива нефтепродуктов и закрывают левую элек¬
трозадвижку слива воды. По мере слива нефти вода заполняет
нефтесборник, поплавок поднимается вверх и через контакты
микропереключателей в реле управления закрывается задвижка
слива нефти и открывается задвижка слива воды. На щите 9
установлены сигнальные лампочки синего и желтого цвета, по¬
казывающие положение электрозадвижек.
При выходе из строя автоматического управления или в слу¬
чае отсутствия электроэнергии предусмотрено ручное дистан¬
ционное и местное управление электрозадвижками.
На рис. 157 изображен сепаратор СК-2,5 коалесцирую-
щего типа. Он представляет собой аппарат напорного типа, ос¬
новными элементами которого являются корпус, коалесци-
рующие элементы, нагреватель, арматура и контрольно-измери¬
тельные приборы, автоматика. Корпус сепаратора 6 сварной,
состоит из цилиндра (обечайки), сферического днища 1, фланца
под крышку 7 и патрубка 3 под подогреватель, закрытого ко¬
жухом 4. В верхней части корпуса установлены нефтесбор-
ники. Внутри корпус разделен поперечной перегородкой на по¬
лости грубой и тонкой очистки. В полости тонкой очистки на
водораспределительных трубах установлены коалесцирующие
элементы 2. Коалесцирующий элемент представляет собой
полый цилиндр из полипропилена, наружная и внутренняя по¬
верхности которого ограничены перфорированными корпусами.
Подвод воды на очистку в коалесцирующий элемент произ¬
водится снизу во внутреннюю полость. Трюмно-балластная
вода, подаваемая перекачивающим насосом, проходит через во¬
доподогреватель воды 5 и каскад отстойной полости по водорас¬
пределительным трубам, поступает на коалесцирующие эле¬
менты 2 и через сливную трубу отводится за борт. Проходя
329
Рис. 157. Сепаратор трюмной воды коалесцирующего типа СК-2,5: а — об¬
щий вид; б — разрез.
полость грубой очистки, основная масса наиболее крупных ча¬
стиц нефтепродуктов вследствие разности плотности воды и
нефти отделяется и всплывает в левый нефтесборник 14. Более
мелкие частицы нефтепродуктов с потоком воды поступают на
коалесцирующие элементы. При прохождении через них мел¬
кие частицы нефтепродуктов укрупняются и всплывают, собира¬
ясь во втором нефтесборнике. Очищенная вода через сливную
трубу сбрасывается за борт. Ввод коалесцирующих элементов
производится по трубкам 8.
По мере наполнения нефтесборников 14 нефтепродукты с по¬
мощью датчиков и электромагнитных клапанов 12 автомати¬
чески сливаются в цистерну грязного топлива.
На сепараторе установлена следующая арматура и приборы:
— предохранительный клапан 9 для аварийного слива воды
из сепаратора при превышении давления сверх допустимого;
— электромагнитные клапаны 12 слива отсепарированных
нефтепродуктов;
— клапаны 13 для автоматического выпуска воздуха из се¬
паратора;
— манометры 10 для контроля за давлением пара в подо¬
гревателе и перепадом давления в коалесцирующих элемен¬
тах;
— термометры 11 для контроля температуры в нефтесбор-
никах.
Основные технические данные сепаратора СК-2,5
Производительность, м3/ч Не более 2,5
Плотность сепарируемых нефтепродуктов .... Не более 0,97
Рабочее давление, Н 4• 105
Температура подогрева воды, °С 35—40
Содержание нефтепродуктов на выходе из сепа¬
ратора, мг/л Не более 20
Все суда флота проходят бункеровку. Нарушение правил
бункеровки судов — одна из основных причин загрязнения
портовых акваторий нефтью. Перед бункеровкой рекоменду¬
ется обеспечить надежную связь судна с бункеровочной базой,
закрыть палубные шпигаты во избежание попадания за борт
топлива или масла при переливе. Заполнять нужно такое коли¬
чество цистерн, за которыми может быть установлено наблю¬
дение. Учитывая, что повреждение шлангов — основная при¬
чина разлива при бункеровках, надо строго соблюдать правила
эксплуатации шлангов.
Для сухогрузных судов рекомендуется по возможности из¬
бегать приема водяного балласта в топливобалластные ци¬
стерны.
Суда, имеющие сепарационные установки, обеспечивающие
очистку загрязненного водяного балласта и льяльных вод МКО
331
до установленной для данной акватории нормы, могут сливать
воды только в пределах этой акватории.
Если по данным сертификата на сепарационную установку,
который предусматривается «Наставлением» для каждого
судна, невозможно очистить загрязненные воды до требуемой
нормы, слив должен производиться вне запретных зон и обя¬
зательно через сепаратор. Если и это невозможно, загрязненные
воды следует накапливать и затем сдавать в плавучие или бе¬
реговые емкости, которые порт должен предоставить по тре¬
бованию судна. Наличие сертификата не снимает ответствен¬
ности с администрации судна, если при сливе вод через сепа¬
ратор произойдет загрязнение моря нефтью.
В соответствии со ст. IX Конвенции на каждом судне, ра¬
ботающем на жидком топливе, а также на каждом танкере
должен быть «Журнал нефтяных операций». На танкерах жур¬
нал следует заполнять при выполнении всех операций, а на су¬
дах, не являющихся танкерами,— при выполнении любой из
следующих операций:
— приеме балласта в топливные цистерны или их зачистке;
•—сливе грязного балласта или промывочной воды из ци¬
стерн;
— удалении нефтеостатков;
■—сливе за борт содержащих нефть льяльных вод, скопив¬
шихся в машинном отделении во время стоянки в порту, и
обычный слив льяльных вод, содержащих нефть во время рейса.
При сливе в специальных случаях, связанных с безопасно¬
стью судна или людей, или утечке нефти в Журнале нефтяных
операций должна быть сделана запись об обстоятельствах и
причине слива или утечки.
Все крупнотоннажные суда рекомендуется по возможности
снабжать комплектом средств, позволяющих отбирать пробы
сливаемых вод для анализа содержания в них нефти.
Мойка топливных и масляных цистерн, как и мойка грузо¬
вых цистерн, должна производиться во время рейса без слива
за борт нефтепродуктов и загрязненных вод с использованием
для отстаивания одной из цистерн. Слив отстоявшейся воды,
как и моющего раствора, за борт рекомендуется производить
через сепаратор или вне запретных зон, а собранные очищен¬
ные нефтепродукты сдавать в порту либо вводить в котельное
топливо. Густые осадки из фильтров и центробежных сепара¬
торов следует собирать в бачки и сдавать на берег. Не допу¬
скается сброс на акватории портов и судоремонтных заводов
загрязненных нефтью вод и твердых отходов в процессе ре¬
монта судов и механизмов. Воды должны сдаваться на очист¬
ные сооружения, а твердые отходы — на берег.
I—
к
СПИСОК ЛИТЕРАТУРЫ
1. Александров А. В. Судовые системы. Л., Судостроение, 1966.
2. А с т р а т о в Н. А. Опреснение и деаэрация воды на судах. Л., Судо¬
строение, 1966.
3. Б а к ш т Ю. В., Л о р е н ф е л ь д Е. Г., Р у с е ц к и й А. А. Гребные
винты регулируемого шага. Л., Судпромгиз, 1961.
4. Валдаев М. М. Гидравлические приводы судовых палубных ме¬
ханизмов. Л., Судостроение, 1973.
5. Гидравлика и гидравлические мехаиизмы/Башта Т. М., Руднев С. С.,
Некрасов Б. Б., Байбаков О. В., Курилловский Ю. Л. М., Машинострое¬
ние, 1970.
6. Дубровский О. Н., Руфин Б. А., Артамонов М. Н. Гид¬
равлические приводы судовых механизмов. Л., Судостроение, 1969.
7. Ермилов В. Г. Эксплуатация испарительных установок теплохо¬
дов. М., Транспорт, 1969.
8. Завиша В. В., Денин Б. Г. Судовые вспомогательные меха¬
низмы. М., Транспорт, 1974.
9. Зайчик К- С., Терентьев Г. В. Морские рыбопромысловые су¬
да, Л., Судостроение, 1965.
10. Калачев В. Р., Карабанов В. С. Промысловые машины и
механизмы рыбопромыслового флота. М., Пищевая промышленность, 1975.
11. Колесников О. Г. Судовые вспомогательные механизмы. М.,
Транспорт, 1971.
12. Луганский И. А. ВРШ на Вашем судне. М., Транспорт, 1970.
13. Лукин Г. Я-. Колесник Н. Н. Опреснительные установки про¬
мыслового флота. М., Пищевая промышленность, 1970.
14. Мальц Л. У. Гидравлика в судовых машинах. Л., Судостроение,
1971.
15. Ну ну паров С. М. Предотвращение загрязнения моря нефтью. М.,
Транспорт, 1971.
16. Попов Р. Н. Судовые вспомогательные механизмы. М., Пищевая
промышленность, 1970.
17. Пыж О. А., Харитонов Е. С., Егорова П. Б. Судовые вин¬
товые насосы. Л., Судостроение, 1969.
18. Торбан С. С. Судовые и береговые промысловые установки и
механизмы. М., Пищевая промышленность, 1972.
19. Тур кин А. А. Вспомогательные механизмы и технологические хо¬
лодильные установки промысловых судов. Л., Судостроение, 1960.
20. Черепанов Б. Е. Судовые промысловые механизмы. М., Пище¬
вая промышленность, 1976.
21. Черкасский В. М., Романова Т. М., Кауль Р. А. Насосы,
компрессоры, вентиляторы. М., Энергия, 1968.
22. Ч и н я е в И. А. Эксплуатация насосов, судовых систем и гидропри¬
водов. М., Транспорт, 1975.
ОГЛАВЛЕНИЕ
Предисловие 3
Условные обозначения 6
Раздел первый. СУДОВЫЕ НАСОСЫ 7
Глава I. Основы гидравлики —
§ 1. Физические свойства и параметры капельных жидкостей . —
§ 2. Гидростатическое давление и его основные свойства . . 11
§ 3. Основное уравнение гидростатики. Закона Паскаля . . —
§ 4. Основные термины и понятия гидродинамики 13
§ 5. Режимы течения жидкостей. Число Рейнольдса .... 15
§ 6. Гидравлическое уравнение неразрывности (сплошности)
потока 17
§ 7. Уравнения Бернулли . : 18
§ 8. Гидравлические сопротивления и определение теряемого
напора 22
§ 9. Основы гидравлического расчета судового трубопровода
на сопротивление : 28
Глава II. Основные сведения о насосах 30
§ 10. Сущность действия и классификация судовых насосов . —
§ 11. Основные параметры насоса 32
§ 12. Требования Регистра СССР к судовым насосам и техника
безопасности при их обслуживании 35
Глава III. Поршневые насосы 36
§ 13. Принцип действия и классификация поршневых насосов . —
§ 14. Типовые схемы поршневых насосов 37
§ 15. Основные детали поршневых насосов 42
§ 16. Конструкции поршневых насосов 48
§ 17. Основы теории и расчета поршневых насосов. Графики
подач и скоростей 57
§ 18. Правила технической эксплуатации поршневых насосов . 64
Глава IV. Ротационные насосы 67
§ 19. Шестеренные насосы 68
§ 20. Винтовые насосы 75
§ 21. Роторно-пластинчатые насосы 80
Глава V. Лопастные насосы 85
§ 22. Принцип действия и классификация центробежных насосов —
§ 23. Осевое усилие и явление кавитации в центробежных насосах 88
§ 24. Уравнения Эйлера 91
§ 25. Влияние наклона, формы и числа рабочих лопастей на
величину напора ...... 93
334
§ 26. Конструкции центробежных насосов и рыбонасосов . . 95
§ 27. Характеристики центробежных насосов и трубопроводов 107
§ 28. Определение параметров центробежных насосов . . . .112
§ 29. Правила технической эксплуатации центробежных насосов 114
§ 30. Осевые и вихревые насосы 117
Глава VI. Струйные насосы : : 125
§ 31. Принцип действия и классификация струйных насосов . —
§ 32. Конструкция и эксплуатация струйных насосов . . . .127
Глава VII. Конструктивные элементы судовых систем 131
§ 33. Классификация судовых систем и их конструктивные эле¬
менты —
§ 34. Техническая эксплуатация судовых систем и требования
Регистра СССР 138
Глава VIII. Системы гидравлических приводов 139
§ 35. Принцип действия, виды и назначение. Гидродвигатели . —
§ 36. Схемы гидроприводов. Особенности эксплуатации . . .149
Раздел второй. ВИНТЫ РЕГУЛИРУЕМОГО ШАГА (ВРШ) . . 161
Глава IX. Устройство и принцип действия ВРШ 162
§ 37. Основные геометрические элементы винта. Силы, моменты —
§ 38. Схемы и классификация ВРШ 165
Глава X. Конструкции ВРШ и правила эксплуатации 168
§ 39. Конструкция ВРШ промыслового судна —
§ 40. Требования Регистра по эксплуатации ВРШ 176
Раздел третий. ПАЛУБНЫЕ МЕХАНИЗМЫ 179
Глава XI. Рулевые механизмы . . . —
§ 41. Основные сведения о рулевом устройстве. Дифференциал
Федорицкого —
§ 42. Действие сил при повороте судна. Определение момента
на голове баллера руля 192
§ 43. Схемы и конструкции рулевых машин с электрическим и
электрогидравлическим приводами 197
§ 44. Расчет мощности и частоты вращения рулевой машины.
Подбор рулевого двигателя 206
§ 45. Основы эксплуатации рулевых машин. Требования Ре¬
гистра и правила техники безопасности 210
Глава XII. Якорные и швартовные механизмы 214
§ 46. Схемы и конструкции брашпилей, шпилей и лебедок . . —
§ 47. Основы расчета якорно-швартовных механизмов. Подбор
приводного двигателя 228
§ 48. Основы эксплуатации якорно-швартовных механизмов. Тре¬
бования Регистра и правила техники безопасности . . . 232
Глава XIII. Грузоподъемные и буксирные механизмы 235
§ 49. Назначение, классификация, схемы и конструкции судо¬
вых грузоподъемных механизмов —
§ 50. Подбор приводного двигателя 245
§ 51. Основы эксплуатации грузоподъемных механизмов. Тре¬
бования Регистра и правила техники безопасности . . . 247
Раздел четвертый. ПРОМЫСЛОВЫЕ МЕХАНИЗМЫ 249
Глава XIV. Механизмы тралового лова . : —
§ 52. Основные сведения и схемы траления —
§ 53. Траловые лебедки 253
§ 54. Техническая эксплуатация траловых лебедок и правила
техники безопасности . : . 262
335
Глава XV. Механизмы кошелькового лова 265
§ 55. Оборудование и механизмы кошелькового лова рыбы . . —
§ 56. Техническая эксплуатация механизмов кошелькового лова
и техника безопасности 273
Глава XVI. Механизмы дрифтерного лова . 276
§ 57. Оборудование и механизмы дрифтерного лова рыбы . . —
§ 58. Техническая эксплуатация механизмов для дрифтерного
лова и техника безопасности 284
Раздел пятый. СУДОВЫЕ ВОДООПРЕСНИТЕЛЬНЫЕ УСТАНОВКИ 288
Глава XVII. Основные сведения по водоопреснению —
§ 59. Виды пресной воды на судах. Санитарные и технические
нормы . : : : : —
§ 60. Способы опреснения морской воды 290
§ 61. Классификация опреснительных установок и их принци¬
пиальные схемы . : : : 293
Глава XVIII Водоопреснительные установки промысловых судов . . 295
§ 62. Конструкции опреснительных аппаратов —
§ 63. Тепловые схемы испарительных и опреснительных установок 306
Глава XIX. Эксплуатация опреснительных установок . : : 314
§ 64. Основы теории эксплуатации водоопреснительных устано¬
вок —
§ 65. Основы технической эксплуатации водоопреснительных
установок и техника безопасности 322
Раздел шестой. СУДОВЫЕ СРЕДСТВА ПО ОЧИСТКЕ И УДА¬
ЛЕНИЮ СТОЧНЫХ ВОД 325
Глава XX. Средства по очистке и удалению сточных вод на промыс¬
ловых судах . : —
§ 66. Источники загрязнения сточных вод и принципы их очи¬
стки —
§ 67. Системы очистки, сепарация и удаление льяльных вод . 327
Список литературы . 333
АБРАМ ЕВСЕЕВИЧ БОГОМОЛЬНЫЙ
СУДОВЫЕ
ВСПОМОГАТЕЛЬНЫЕ
И РЫБОПРОМЫСЛОВЫЕ
МЕХАНИЗМЫ
Редактор Р. Д. Никитина
Художественный редактор О. А. Андреев
Технический редактор А. П. Ширяева
Корректор Е. М. Реутская
Оформление художника Н. И. Абрамова
ИБ № 248
Сдано в набор 31.08.79. Подписано к печати 08.01.80. М-26801. Формат изда¬
ния 60x90Vie. Бумага типогр. № 1. Гарнитура шрифта литературная. Пе¬
чать высокая. Уел. печ. л. 21,0. Уч.-изд. л. 21,1. Тираж 11000 экз. Изд.
№ 3438—78. Заказ № 1880. Цена 80 коп.
Издательство «Судостроение», 191065, Ленинград, ул. Гоголя, 8.
Ленинградская типография № 4 Ленинградского производственного объеди¬
нения «Техническая книга» Союзполиграфпрома при Государственном ко¬
митете СССР по делам издательств, полиграфии и книжной торговли. Ле¬
нинград, Д-126, Социалистическая, 14.