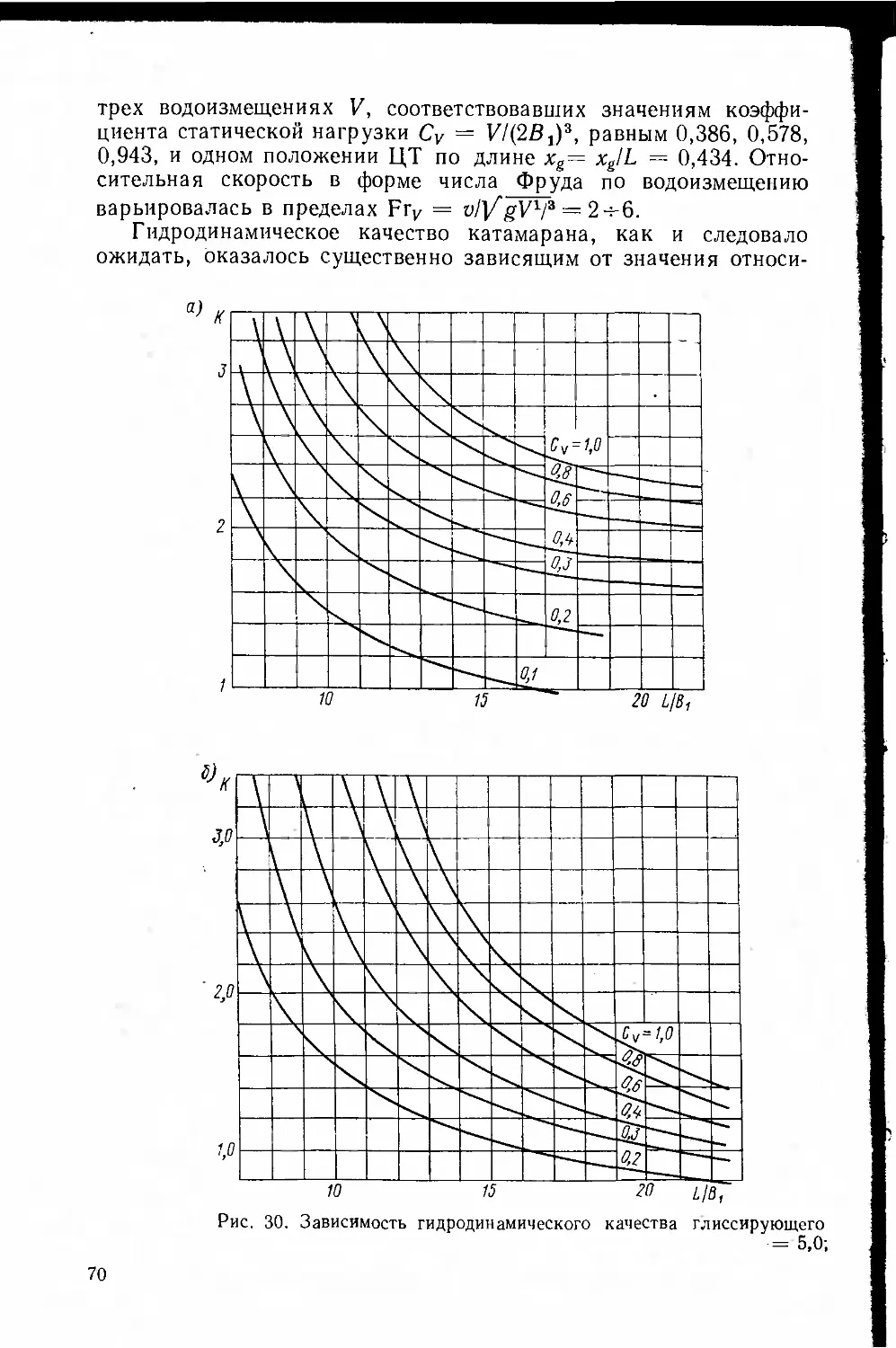
/



























































































































































































































































































Text
г
Авторы
книги:
А. Н.
Алексеев
А. А.
Алисейчик
А. Д.
Батуев
Л. М.
Беленький
Л. Б.
Благовидов
н. д.
Велиносельсний
А. К.
Волкова
И. н.
Г алахов
В. А.
Дубровский
Г. А.
Егоров
В. г.
Железняк
К. 3.
Кац
Л. В.
Каширин
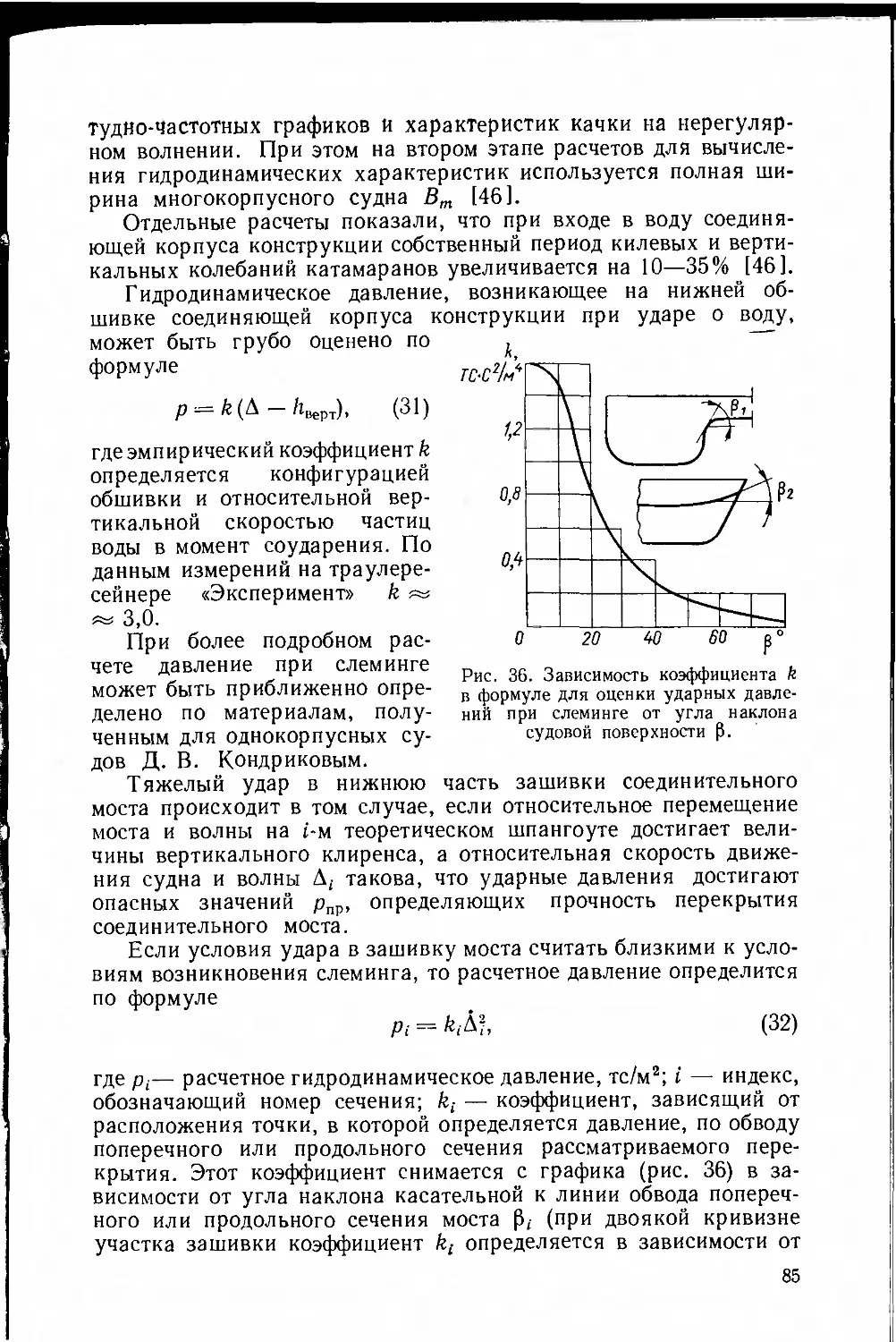
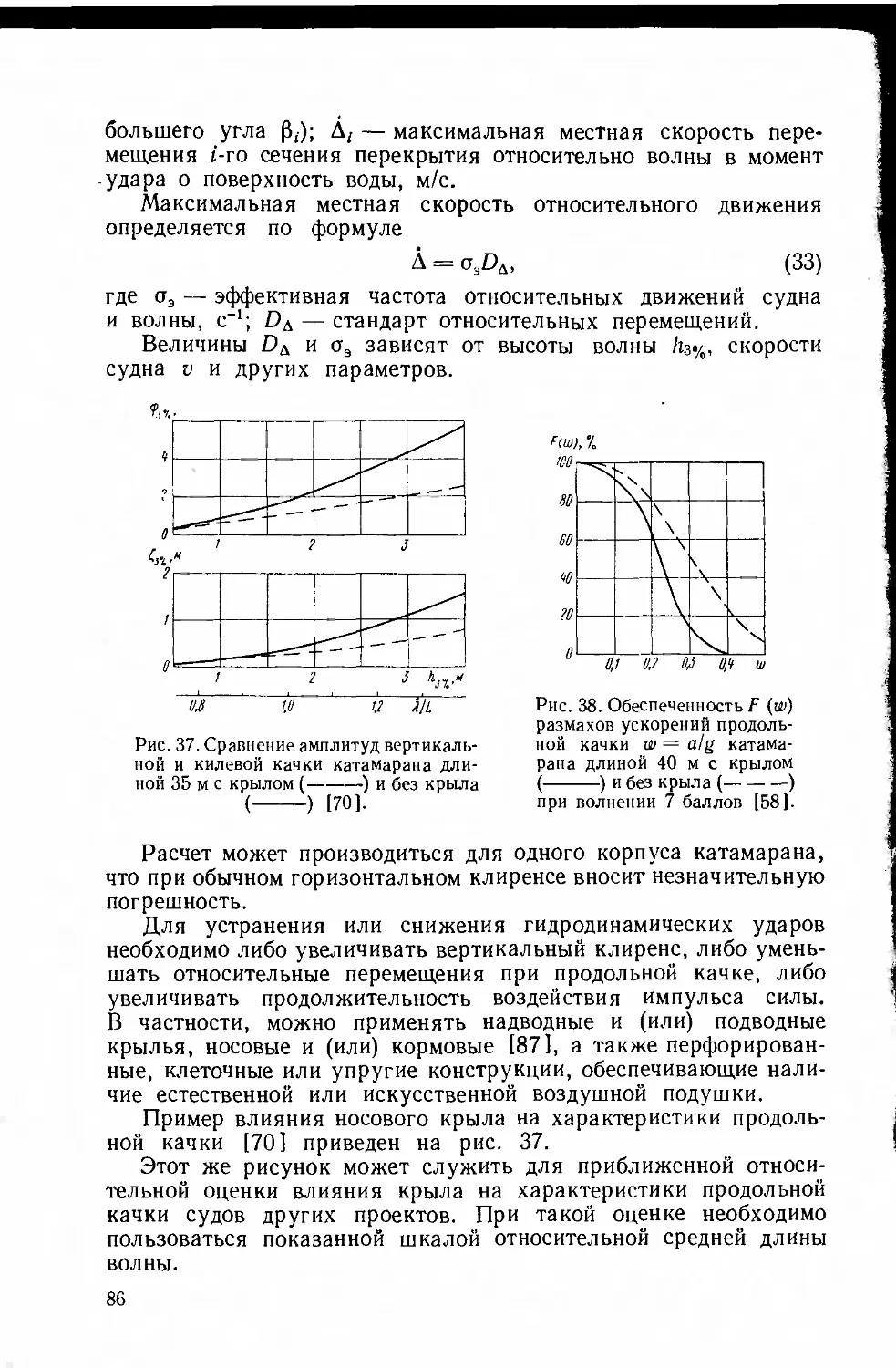
А. Я.
Король
Г. К.
Крупнов
0. Е.
Литонов
А. Г.
Ляховицкий
В. И.
Панков
Ю. Л.
Проскуряков
Ю. К.
Прытков
П. Ф.
Пырялин
Н. Н.
Рахманин
С. Б.
Соловей
С. В.
Сутуло
В. Ю.
Сутыгин
М. С.
Труб
А. Д.
Ферин
А. А.
Форет
Э. Е.
Шаблова
В. М.
Шапошников
Я. М.
Элис
много-
корпусные
суда
Под редакцией В, А. ДубрОВСКОГО
Издательство
«Судостроение»
Ленинград
1978
УДК 629.12,011
М73
Многокорпусные суда/Под ред. В. А. Дубров¬
ского. — Л.: Судостроение, 1978. 304 с.
Впервые собраны материалы об особенностях
плавучести, остойчивости, непотопляемости,
ходкости, качки, управляемости, прочности
многокорпусных судов (катамаранов, три¬
маранов, судов с аутригерами, трисеков,
дуплусов и полупогружных платформ).
Представлен отечественный опыт проектирова¬
ния катамаранов для промыслового и техни¬
ческого флота, приведены оригинальные рас¬
четы технико-эксплуатационных качеств су¬
дов с малой площадью ватерлинии.
Книга ориентирована на вариантный ме¬
тод проектирования и содержит также спра¬
вочные материалы для расчета характеристик
остойчивости, непотопляемости, ходкости,
качки и массы корпуса. Намечены пути даль¬
нейшего рационального развития этого пер¬
спективного класса судов.
Ил. 165. Табл. 44.
Библ. 113 назв.
Рецензенты:
канд. техн, наук
С. Н, климашевский,
инж. С. В. ЧЕЖИН
М
31805—037
048(01)—78
20—78
© Издательство «Судостроение», 1978 г-
Предисловие
В основе книги лежат доклады, прочитанные в 1974—1975 гг.
на семинаре по проектированию многокорпусных судов при сек¬
ции проектирования судов Центрального правления Научно-
технического общества им. академика А. Н. Крылова. Книга
посвящена описанию теоретических и экспериментальных методов
прогнозирования технико-эксплуатационных качеств морских
многокорпусных судов различных типов, а также отечественного
опыта проектирования таких судов.
При написании книги авторы учитывали две категории чита¬
телей: тех, кто впервые заинтересовался многокорпусными су¬
дами и хочет получить общее представление об особенностях и
возможностях таких судов, а также тех, кто практически столк¬
нулся с частными вопросами создания и применения рассматрива¬
емых судов, и которым необходимы сведения о способах расчета
и конкретных судах. В приложениях приведены инженерные ме¬
тодики прогнозирования технико-эксплуатационных характери¬
стик многокорпусных судов различных типов.
В создании книги участвовали: А. А. Алисейчик и Л. Б. Бла¬
говидов, написавшие § 1.2, Ю. Л. Проскуряков и В. Ю. Су-
тыгин — § 2.3, С. В. Сутуло — § 2.5, А. Г. Ляховицкий — § 2.6,
С. Б. Соловей — § 2.7, А. Я- Король — § 3.2, Я. М. Элис — § 3.3
и приложение 7, Н. Н. Рахманин и Ю. К- Прытков — § 3.4
и приложение 8, А. Д. Батуев и А. Н. Алексеев — § 3.5 и прило¬
жение 6, Г. А. Егоров — § 3.6, И. Н. Галахов — § 5.1, В. М. Ша¬
пошников — § 5.2, О. Е. Литонов — § 5.3, Л. М. Беленький и
A. Д. Ферин — § 5.4, Г. К. Крупнов и А. К. Волкова — § 6.2,
Н. Д. Великосельский и В. И. Панков — § 6.3, К. 3. Кац —
§ 6.4, Л. В. Каширин — § 6.5, М. С. Труб и П. Ф. Пыря-
лин — § 6.6, Л. Б. Благовидов и В. Г. Железняк — § 7.2,
М. С. Труб и В. А. Дубровский — § 6.7, А. А. Форет и
B. А. Дубровский — приложение 9. В написании § 3.1 участвовала
Э. Е. Шаблова. Остальные материалы подготовлены В. А. Дѵб-
ровским.
Введение
С каждым годом во всем мире строится, исследуется и проектиру¬
ется все больше морских многокорпусных объектов. Если за 300 лет
(данные на 1960 г.) было построено около 20 парусных и паровых
двухкорпусных судов в двух-трех странах, то за десятилетие
(1960—1970) — около 150 судов в 28 странах.
Распределение судов по назначению и странам показано
в табл. I1.
Таблица 1
Распределение катамаранов по назначению и странам
Назначение
Количе¬
ство
судов
Количе¬
ство
стран
Назначение
Количе¬
ство
судов
Количе¬
ство
стран
Пассажирские
Паромы
Научно-иссле¬
довательские
Промысловые
Буксиры-тол¬
качи
Противопожар¬
ные
22
21
25
17
11
5
8
8
12
5
6
2
Лоцмейстер-
ские и для очист¬
ки акватории
Крановые н
буровые
Для добычи и
перевозки грунта
Транспортные
Носители глу¬
боководных ап¬
паратов
5
6
5
4
5
4
3
4
3
1
1 Здесь и ниже частично использованы данные, приводимые М. С. Трубом,
В. П. Деркач, Т. Я- Лиходаевой.
7
Построенные катамараны имеют водоизмещение до 14 тыс. т,
длину до 122 м, мощность энергетической установки до 6000 л. с.,
скорость до 28 уз. Однако большинство судов имеет длину менее
30 м, мощность энергетической установки до 600 л. с., скорость
до 12 уз.
Попытка обобщения накопленного опыта эксплуатации
катамаранов различного назначения предпринята для выяс¬
нения, какие качества и характеристики обеспечивают поло¬
жительный экономический результат применения судов этого
типа.
Пассажирские катамараны работают на реках, в том
числе на Волге, озерах, в Японском море и фьордах Скандинавии.
Количество пассажиров колеблется в очень широких пределах —
от 6 до 850; суда используются в основном для экскурсий или про¬
гулок (рис. 1). Все пассажирские катамараны показали отличную
остойчивость: крен при скоплении всех пассажиров на одном борту
не превышает 2—3°. При равных с однокорпусным судном пасса¬
жировместимости и скорости у катамарана примерно вдвое мень¬
шее водоизмещение и на 30% меньшая мощность энергетической
установки. Для катамаранов характерны возможность уменьше¬
ния осадки без существенного ухудшения мореходности и отлич¬
ная маневренность.
Паромы-катамараны, эксплуатирующиеся на ре¬
ках, озерах и в прибрежных водах, предназначены для перевозки
пассажиров и автомобилей (рис. 2). Благодаря большой удельной
площади палуб расходы на перевозку одного автомобиля на ката¬
маране примерно на 30% меньше, чем на однокорпусном судне.
Двухкорпусные паромы могут работать в малых гаванях, на из¬
вилистых фарватерах, а также в случае выхода из строя одного
из главных двигателей.
Н а у ч н о-и сследовательские катамараны
предназначены для работы на реках, озерах, в прибрежных зонах
морей, а отдельные суда имеют неограниченный район плавания
(рис. 3). При таком назначении к числу благоприятных особенно¬
стей катамарана относятся такие, как большая удельная площадь
палуб и вместимость, высокая остойчивость, позволяющая рабо¬
тать с грузами массой до 10% водоизмещения. Небольшой дрейф,
бортовая качка с умеренными амплитудами и хорошая управля¬
емость катамаранов на малом ходу при ветре и волнении позво¬
ляют эффективно использовать их для исследовательской работы.
Возможное для катамаранов увеличение расхода топлива не ока¬
зывает существенного влияния на экономику эксплуатации, так
как до 80% рейса судно свободно дрейфует или имеет малую ско¬
рость (до 4—5 уз).
Таким образом, большая удельная площадь палуб и остой¬
чивость катамаранов позволяют эффективно использовать их в
качестве специализированных пассажирских, паромных и научно-
исследовательских судов.
8
Рис. 1. Общее расположение пассажирского катамарана «Отдых».
1 ■ машинное отделение; 2 — пассажирский салон на 183 чел.; 3 — зрительный зал;
4 - пассажирский салон на 69 чел.; 5 - пассажирский салон на 68чел. 6
тельные пояса; 7 — эстрада; 8 — аккумуляторная; 9 — радиорубка, 10 киоск, 11
каюты экипажа; 12 - лифт; 13 - буфет; 14 - камбуз; 15 - продуктовая кладовая.
9
Рис. 2. Автомобильно-пассажирский паром «Рокко-мару»: а — схемати¬
ческий продольный разрез; б — палуба бака; в — главная палуба; г —
платформа.
1 — румпельное отделение; 2 — ахтерпик; 3 — сухой отсек; 4 — машинное
отделение; 5 — трюм; 6 — кладовые; 7 — цепной ящик; 8 — форпик; 9 — пло¬
щадка для легковых автомобилей; 10 — салон на 65 чел.; 11 — санузлы; 12 —
буфет; 13 — салон II класса на 300 чел.; 14 — площадка для отдыха; 15 —
автомобильная палуба; 16 — камбуз; 17 — столовая экипажа; 18 — одноместные
каюты; 19 — каюты экипажа.
10
Рис. 3. Научно-исследовательское судно «Риджели Уорджильд»: а —
ходовой мостик; б — шлюпочная палуба; в — главная палуба; г — плат¬
форма.
I — рулевая рубка; 2 — пост управления; 3 — спасательный плот; 4 — каюты
капитана и старшего помощника; 5— каюта научных сотрудников; 6 — лебедка;
7 — кран-балка; 8 — рабочая шлюпка; 9 — брашпиль; 10 — кран; 11 — шахта
с подкрановыми путями над ней; 12 — лебедка; 13 — кран-балка и рабочая
платформа; 14 — лаборатория; 15 — кладовая; 16 — кают-компания; 17 — гру¬
зовой люк; 18 — переходный мостик; 19 — камбуз; 20 — санузел; 21 — трюм;
22 — машинное отделение; 23 — помещение аккумуляторов; 24 — каюты коман¬
ды; 25— отделение вспомогательных механизмов.
11
Однако практика эксплуатации катамарана США «Хайес»
показала, что при недостаточном вертикальном клиренсе на ин¬
тенсивном волнении повреждается нижняя обшивка соединитель¬
ного моста. Это научно-исследовательское судно попало в шторм
в Северной Атлантике осенью 1972 г., после ремонта снова полу¬
чило повреждение во время шторма, в результате чего ремонти¬
ровалось повторно. После установки носового крыла, снизившего
амплитуды килевой качки на 30%, повреждения из-за слеминга
моста больше не наблюдались.
Для промыслового флота в последние годы характерны совер¬
шенствование перерабатывающего оборудования и орудий лова,
а также повышение требований к условиям труда и отдыха ко¬
манды, что приводит к трудностям, связанным - с обеспечением
остойчивости однокорпусных судов. Несмотря на все увеличи¬
вающуюся ширину таких судов, они довольно часто теряют
остойчивость на попутном волнении, при обледенении. Измене¬
ние сырьевой базы делает целесообразным оснащение промыс¬
ловых судов несколькими комплектами орудий лова, что
вызывает необходимость увеличения площади палуб. Эти обстоя¬
тельства приводят ко все более широкому использованию про¬
мысловых катамаранов.
Промысловые катамараны добывают морепро¬
дукты на озерах, в прибрежных районах морей, а также в открытом
море (рис. 4). В число особенностей этих судов, выявившихся в
процессе эксплуатации, кроме больших площадей для промысло¬
вого и обрабатывающего оборудования, входят быстрота и удоб¬
ство переоборудования для смены орудий лова, повышенные
тяговые качества, возможность переносить шторм практически
без заливания и с малой качкой лагом к волне, улучшение быто¬
вых условий экипажа, существенное (в 1,4—1,6 раза) повышение
производительности труда. Кроме того, промысловые катамараны
не подвержены опрокидыванию на попутном волнении и поз¬
воляют располагать сети и улов на палубе или в трюмах в удобном
для конкретной обстановки промысла сочетании. Испытания про¬
мысловых катамаранов неограниченного района плавания вы¬
явили и недостатки таких судов, например, при сильной килевой
качке возникает слеминг нижней обшивки соединяющей кор¬
пуса конструкции. В качестве способа умерения килевой качки
советского океанского траулера-катамарана «Эксперимент» была
опробована установка носового крыла, в результате чего резко
снизились количество и интенсивность ударов в нижнюю обшивку
моста.
Стремление уменьшить строительную стоимость катамаранов,
упростить переоборудование однокорпусных малых промысло¬
вых судов в двухкорпусные привело к появлению судов с аутри¬
герами. Два советских судна для близнецового лова рыбы в при¬
брежных водах продемонстрировали хорошие мореходные и экс¬
плуатационные качества.
12
Рис. 4. Морозильный траулер-сейнер неограниченного рай¬
она плавания «Эксперимент-2»: а — разрез по ДП судна;
б — разрез по ДП левого корпуса; в—разрез по ДП пра¬
вого корпуса; г — план верхней палубы.
1 — рыбный цех; 2 — машинное отделение; 3 — моторное отде¬
ление траловой лебедки; 4 — рулевая рубка; 5 — салон-столовая,
6 — агрегатная; 7 — румпельное отделение; 8 — бункер предвари¬
тельного охлаждения рыбы; 9 — машинное отделение, 10 от¬
деление вспомогательных механизмов; 11 рефрижераторное от¬
деление; 12 - рыбный трюм; 13 — механическая мастерская;
14 — малярная кладовая; 15 — кладовая скоропортящихся про¬
дуктов* 16 — центральный пост управления; 17 помещение
гидроакустической аппаратуры; 18 — помещение подруливаю¬
щего устройства; 19 — морозильное отделение; 20 — лаборатория
мореходных качеств; 21 — лаборатория прочности; 22 — помеще¬
ние циркуляционного ресивера аммиака; 23 — помещение централь¬
ного кондиционера; 24 — камбуз.
13
Построенные буксиры и толкач и-к аТамарайЫ,
кроме увеличенной остойчивости, имеют увеличенную удельную
тягу, определяемую снижением нагрузки на винты при одина¬
ковых с однокорпусным судном осадке и мощности энергетической
установки. В последние годы построен двухкорпусный толкач
для составного судна грузоподъемностью более 40 тыс. т, предназ¬
наченного для работы в море. Оказалось, что для судна такого
типа катамаран обеспечивает лучшие условия сцепки, а также луч¬
шие пропульсивные и маневренные качества.
Постройка пожарных катамаранов объясняется
тем, что на судах рассматриваемого типа можно установить на
мачтах и специальных площадках мощные водяные и пеногонные
стволы, не опасаясь за остойчивость судна. Кроме того, эффек¬
тивно используется высокая поворотливость при малой скорости
и небольшая осадка.
Для двухкорпусных судов, предназначенных для очистки
гавани, а также землесосных снарядов харак¬
терны большая ширина и хорошая поворотливость.
Суда для перевозки тяжеловесных гру¬
зов, а также кранов о-м онтажные суда должны
иметь большую площадь палуб и высокую остойчивость, т. е. как
раз те качества, которые характерны для катамаранов. Применя¬
емые сейчас крановые суда используют и другое свойство ката¬
марана — малое изменение осадки при приеме большого груза.
В качестве транспортных судов катамараны при¬
меняются для перевозки колесной техники и как суда-площадки.
В последнем случае отсутствие вертикальных перемещений груза
снижает время стоянок. Но поскольку многокорпусные суда ха¬
рактеризуются большой удельной вместимостью, а доля грузов
с очень большой удельной погрузочной кубатурой в общем
грузопотоке пока мала, количество грузовых катамаранов
невелико.
Таким образом, множество данных показывает, что рациональ¬
ное использование особенностей катамарана обеспечивает целе¬
сообразность его применения. Больше того, в отдельных случаях
оказывается дешевле, проще, а главное быстрее построить ката¬
маран из двух имеющихся корпусов, чем строить новое судно.
Таким способом были построены советские траулеры неограничен¬
ного района плавания, голландское судно для перевозки тяжело¬
весных грузов, американские буровые суда и т. д.
Эффективность применения катамаранов в тех случаях, когда
нужны большая площадь палуб, остойчивость, вместимость, пово¬
ротливость, малая бортовая качка, практически подтверждена
неоднократно.
В качестве энергетических установок на катамаранах чаще
всего [47] используются форсированные дизели с редукторами,
часто —• с отбором мощности. Обычно энергетическая установка
размещается симметрично в обоих корпусах.
14
На крановых, буровых, научно-исследовательских судах, где
имеются специальные механизмы большой мощности,
оборудуются дизель-электрические энергетические установки на
постоянном или переменном токе. Разделение энергетической у
новки на две части и повышенная шумность высокооборотных ди¬
зелей заставляют повышать степень автоматизации главны
и вспомогательных двигателей, а также обеспечивающего шх ра
боту оборудования. Центральный пост управления обычно рас
полагается в звукоизолированной выгородке в районе главно
палубы, а в отдельных случаях - в машинном отделении одного
из корпусов. Управление энергетической установкой обычно осу¬
ществляется из рулевой рубки и с ходового мос™^
Особо следует остановиться на вопросе льдопроходим
катамаранавсего количества эксплуатируемых судов этого
типа только два или три имеют ледовые подкрепления (типа под
креплений на класс С Английского Ллойда). Рѵаппитчяются
При движении во льдах между корпусами скаплива^ся
льдины, что резко снижает управляемость, увеличивает сопротив
ление и вероятность повреждения корпусных констРУ^иб ’ Р J
ставляется, что форма обводов с плоскими внутренними бортами,
примененная на многих американских судах, снижа р
забивания межкорпусного пространства льдами (именно суда с
плоскими внутренними бортами имеют ледовые п0Д“Ревле
корпусов) Судя по имеющимся данным, можно считать, что п
падание двухкорпусных судов с обычными обводами в лед нежела-
™ь™Правда’ следует отметить, что случаи повреждения об-
шивки траулера «Эксперимент» во льдах характер ,
попавших вместе с ним во льды нескольких десятков однокорпус¬
ных судов примерно треть также имела повреждения мте0.
Вопрос о ледовых качествах судов с малой площадью ватер
линии в настоящее время остается открытым. мяПпсть
Неоднократно высказывались предположения, чт0 ма
водоизмещающих объемов в районе ватерлинии, т._ . р
контакта со льдом, может обеспечить таким судам преимущество
по сравнению с однокорпусными судами [94]. Деистеительно
если перенести на узкие стойки специальной формы СУД°В^
площадью ватерлинии известные закономерности взаимДде™Я
льда и корпуса обычного ледокола, то, судя по оценкам, сделанвь
С. В. Зельмановым, при одинаковой мощности и в°д°из“ “L
скорость полупогруженных судов во льдах зада в03.
превзойдет скорость обычных судов в 2—3 раза, Д ппохлемы
можность такого перенесения закономерностей а Р
обеспечения поворотливости и поперечной прочно У
при сжатии во льдах ожидают исследования. чксплѵата-
Также следует особо остановиться на результатах эксплу
г. суди с малой площадью ватерлн-
нии — «Дуплус». Большая площадь палуб и уда ПППнании
воды, малая килевая и вертикальная качка на встречном волнении
15
делают его сходным с полупогружными буровыми платформами.
Однако увеличение ширины стоек, выполненное после нескольких
лет эксплуатации, заставляет предположить, что либо возникли
новые задачи, потребовавшие увеличения начальной остойчивости,
либо при проектировании эта характеристика была выбрана не
соответствующей назначению судна.
В 1974 г. для ВМФ США было построено экспериментальное
судно (трисек) «Каймалино» водоизмещением около 200 тс. Оче¬
видно, постройка этих судов, как и многочисленные публикации
о результатах исследований технико-эксплуатационных качеств
судов с малой площадью ватерлинии являются свидетельством
потребности и желания использовать в новых областях положи¬
тельный опыт применения полупогружных (с малой площадью
ватерлинии) платформ. Использование таких платформ связано
с возможностью выполнения с них буровых работ в открытом море
на глубине до 200 м в течение 98—99% эксплуатационного вре¬
мени, при потерях времени на ожидание благоприятной погоды
не более 1—2%.
По данным на конец 1973 г. наибольшее количество полупо¬
гружных платформ работало в Северном море, где перспективные
на нефть и газ структуры находятся на глубинах до 250 м. Осталь¬
ные были примерно равномерно распределены между Мексикан¬
ским и Гвинейским заливами, побережьем Канады и Зондскими
островами. Первая платформа начала работу в 1957 г., с 1963
по 1973 г. было построено 38 платформ, а в проектировании и стро¬
ительстве находилось еще 52 судна такого типа. Судя по зарубеж¬
ным прогнозам, в ближайшие годы возрастет количество плат¬
форм, эксплуатирующихся в Северном море, в Мексиканском за¬
ливе и у Зондских островов.
Сейчас примерно половина платформ работает в районах с от¬
носительно благоприятными гидрометеорологическими условиями.
Однако большинство строящихся платформ предназначено для
работы в гораздо более суровых условиях.
Из 38 работающих и 52 строящихся платформ 75 принадлежат
к И основным типам. Можно предположить, что такое разнообра¬
зие типов отчасти связано с поисками количества и формы корпу¬
сов, обеспечивающих лучшие условия постройки и эксплуатации.
Однако проектируются в основном двухкорпусные установки
с 6—8 цилиндрическими стойками и корпусами прямоугольного
или круглого сечения.
Существенной особенностью платформ рассматриваемого типа
является их «чувствительность» к кренящим моментам и распре¬
делению нагрузки. Производство буровых работ связано с посто¬
янным перемещением значительных грузов в открытом море при
относительно малой площади ватерлинии, обеспечивающей ми¬
нимальную качку. В связи с этим, а также с небольшой удален¬
ностью места работ от берега автономность платформ невелика:
возможность их установки и работы определяется наличием и ха-
16
рактеристиками судов снабжения и технических средств (кранов).
Представляется рациональным обеспечить судам снабжения при¬
мерно такие же мореходные качества, как и платформам. Это су¬
щественно облегчило бы передачу грузов на волнении. Первые
шаги в этом направлении делаются, проектируются суда снабже¬
ния с малой площадью ватерлинии.
Специфическим для платформ является сложное и дорогое якор¬
ное устройство. Обычно оно состоит из 6—8 автоматических лебе¬
док с якорь-цепями или тросами и якорями массой до 15—20 тс.
Отклонение платформы от точки бурения не должно превышать
5—10% глубины. Масса якорного устройства достигает 1000—
1200 тс, а стоимость — 20% стоимости судна.
В дополнение к развитому якорному устройству многие плат¬
формы, даже несамоходные, имеют подруливающие устройства
большой мощности.
Относительно малая площадь ватерлинии и большие над¬
водные поверхности определяют повышенную чувствительность
платформ к обледенению. Слой льда толщиной всего 70—80 мм
снижает начальную поперечную метацентрическую высоту плат¬
формы на 25—30%. Основным средством борьбы с обледенением
является электрообогрев конструкций вышки и надводного кор¬
пуса, а также располагаемых на палубе запасов буровых труб.
Относительно тяжелые условия работы, ошибки при проек¬
тировании и эксплуатации приводили к авариям полупогружйых
установок. Четыре платформы потеряли остойчивость и были
залиты волнами во время шторма; две были повреждены при
буксировке и во время установки; одна имела течь, и на
этой же платформе возник пожар. Следует отметить, что не¬
обычные размерения платформ (большая высота над водой,
большая ширина) затрудняют как эвакуацию экипажа, так и
борьбу с пожаром.
Для эвакуации экипажа предложены различные специальные
устройства, связывающие палубу платформ со спасательными
средствами. К числу таких устройств относятся, например, ци-
линдрические мелкоячеистые сети, служащие направляющими
для спуска людей и подвешиваемые к стойкам платформ. Пред¬
ложены также устройства периодического действия, например
кабины, укрепленные на концах специальных стрел.
Все платформы имеют вертолетные площадки, и одна из важ¬
ных задач проектировщика — обеспечить безопасную посадку
и взлет вертолета с этой площадки.
Вначале все платформы строились невдалеке от места эксплуа¬
тации, предназначались для районов с относительно мягкими
условиями и были несамоходными. Однако впоследствии число
самоходных платформ увеличилось, поскольку наличие собствен¬
ной двигательно-движительного комплекса упрощает процесс
постановки на якоря, а также небольшие переходы от точки
к точке в районе работ.
17
В настоящее время некоторые платформы перебазируются от
места постройки до места работы в течение полутора-двух меся¬
цев. При этом требуются мощные суда-буксировщики или обеспе¬
чивающие суда. Учитывая, что и сами платформы — весьма до¬
рогостоящие сооружения, стоимость эксплуатации которых со¬
ставляет десятки тысяч денежных единиц в сутки, можно согла¬
ситься с тем, что проблема снижения буксировочного сопроти¬
вления платформ на тихой воде и особенно дополнительного со¬
противления на волнении весьма актуальна.
Таким образом, отмечаемое увеличение объема строительства
и исследований характеристик катамаранов и полупогружных
платформ объясняется, прежде всего, все более заметной специа¬
лизацией судов морского флота по назначению и району плавания.
В результате такой специализации выделяются типы судов, для
которых определяющим качеством является удельная площадь па¬
луб и вместимость (автомобильно-пассажирские паромы, научно-
исследовательские суда, суда для перевозки трейлеров и колесной
техники и т. д.) или возможность уменьшения амплитуд качки
(буровые платформы, промысловые и научно-исследовательские
суда).
Однако выявленные недостатки катамаранов — удары в об¬
шивку соединительного моста, увеличенная масса металлического
корпуса, трудность постройки и ремонта — препятствуют расши¬
рению использования судов этого типа. Для смягчения влияния
этих недостатков необходимы дальнейшие исследования, а также
накопление опыта проектирования и эксплуатации таких судов.
Судя по приведенным ниже материалам, определенный выигрыш
может обеспечить также рациональное использование многокор¬
пусных судов других типов.
Так, тримаран, сохраняя преимущества катамарана по сравне¬
нию с однокорпусным судном по удельной площади палуб и остой¬
чивости, имеет лучшие ходовые качества при высокой относитель¬
ной скорости и, вероятно, менее подвержен ударам при движении
на встречном волнении.
Особенно широкие перспективы совершенствования мореход¬
ных качеств открывает применение многокорпусных судов с малой
площадью ватерлинии, аналогичных по параметрам качки полу-
погружным платформам.
Однако прогнозирование эксплуатационно-экономических ха¬
рактеристик и рациональное проектирование многокорпусных
объектов затруднены, по крайней мере, в связи с тремя объектив¬
ными обстоятельствами. Прежде всего, все чаще приходится рас¬
сматривать судно не само по себе, а как часть определенной слож¬
ной системы (транспортной, добывающе-перерабатывающей, на¬
учно-информационной). Усиление системных тенденций, всегда
имевших место при проектировании судов, объясняется объективно
большей эффективностью таких систем по сравнению с набором
разрозненных объектов и усложнением, удорожанием постройки
1§
и эксплуатаций самого судна. Это обстоятельство отражается как
на системе критериев для оценки судов (прогрессирующая замена
технических критериев эксплуатационно-экономическими), так
и на количестве прогнозируемых качеств и характеристик, опре¬
деляющих эти критерии.
Если богатый опыт проектирования и эксплуатации однокор¬
пусных судов позволяет достаточно уверенно прогнозировать
практически все их технико-экономические качества, то для двух¬
корпусных характерна ограниченность и разрозненность имею¬
щейся информации.
С точки зрения гидромеханики многокорпусное судно пред¬
ставляет собой систему хорошо или плохо обтекаемых тел, поко¬
ящихся или движущихся у поверхности жидкости, с точки
зрения строительной механики — систему пространственных пере¬
крытий, соединенных надводными или подводными, жесткими,
гибкими или подвижными связями. Главная особенность много¬
корпусного судна состоит в том, что действующие на него силы
определяются не только геометрическими характеристиками кор¬
пусов, но и их взаимным расположением. Если связь характеристик
одного корпуса с величинами и фазами внешних сил в определен¬
ной степени изучена, то вопросы взаимодействия корпусов изу¬
чены относительно слабо. Кроме того, возможные соотношения
размерений и особенно формы обводов многокорпусных объектов
гораздо более разнообразны, чем однокорпусных, а влияние не¬
обычных геометрических характеристик на технико-экономические
показатели также малоизучено.
Соотношения габаритных размеров многокорпусных объектов
весьма своеобразны и существенно отличаются от тех же соотно¬
шений однокорпусных судов.
Обычно многокорпусные суда и платформы имеют: большую
относительную ширину (Bm*L = 0,3-: 1 против 0,1—0,3 для одно¬
корпусных); большую относительную высоту борта (Н/L = 0,10-е-
н-0,3 против 0,07—0,1 для однокорпусных); меньшую относитель¬
ную ширину одного корпуса (BJT = 0,2н-2,5 против 2—4 для
однокорпусных судов).
Наиболее существенны отличия геометрических характери¬
стик объектов с малой площадью ватерлинии.
Указанные отличия геометрических параметров во многом
определяют отличия технико-эксплуатационных, а через них —
и экономических характеристик.
Еще одним обстоятельством является обычное для многокор¬
пусных объектов отсутствие близких прототипов при проекти¬
ровании. Если, например, удовлетворительные характеристики
продольной качки однокорпусного прототипа практически обес¬
печивают ту же особенность спроектированному по нему судну,
то отсутствие прототипа заставляет вести вариантные расчеты этого
и многих других качеств многокорпусного судна, увеличивает
объем работ при проектировании.
19
Наконец, в общем достаточно изученные для однокорпусных
объектов связи между геометрическими и техническими характе¬
ристиками позволяют сформулировать определенные рекоменда¬
ции для выбора соотношений главных размерений. Для много¬
корпусных объектов такие рекомендации либо отсутствуют, либо
противоречат друг другу, а практика еще не выработала для
них рационального компромисса.
Все эти обстоятельства обычно приводят к необходимости ва¬
риантного проектирования, причем количество вариантов часто
больше, чем для однокорпусного судна. А необходимым этапом
вариантного проектирования является расчет технико-эксплуата¬
ционных качеств вариантов при заданных их геометрических ха¬
рактеристиках, т. е. решение прямых задач ходкости, прочности,
качки и т. д. при условии изменения соотношений размерений
в широких пределах. Последнее условие ограничивает возможно¬
сти использования имеющихся результатов экспериментального
исследования ходовых, мореходных, прочностных качеств и за¬
ставляет совершенствовать расчетные методы. В связи с усилением
системных аспектов, развитием вычислительной техники и уве¬
личением номенклатуры типов, обусловленным специализа¬
цией, сходные процессы имеют место и в проектировании однокор¬
пусных судов, однако для многокорпусных такие тенденции
более заметны.
Глава 1
Статика
Основные обозначения
at — продольный клиренс (расстояние от мидель-шпангоута
г-го корпуса до мидель-шпангоута судна в целом), м;
Вт — габаритная ширина судна, м;
ВРЛ — ширина г-го корпуса на уровне расчетной ватерлинии, м;
Вх — наибольшая ширина г-го корпуса, м;
Внк, ВСТ — ширина надводного корпуса и стойки по ватерлинии;
bi — поперечный клиренс (расстояние от ДП г-го корпуса до
ДП судна в целом), м;
с — наименьшее расстояние между внутренними бортами кор¬
пусов в подводной части, м;
D — водоизмещение судна в целом, тс;
D, —то же для г-го корпуса, тс;
Н — продольная начальная метацентрическая высота, м;
Hit Н(, — высота борта г-го корпуса и судна в целом, м;
Я1ІК — высота борта надводного корпуса, м;
h — поперечная начальная метацентрическая высота, м;
ЛЕерт — вертикальный клиренс (расстояние от расчетной ватер¬
линии до нижней кромки соединяющей корпуса конструк¬
ции на заданной длине от мидель-шпангоута судна в целом), м;
Ллодв — расстояние от верхней кромки подводного корпуса до ва¬
терлинии;
/ім — высота соединяющей корпуса конструкции на миделе судна,
м;
L, Lt, LHK—длина по ватерлинии судна в целом, г-го корпуса и над¬
водного корпуса соответственно, м;
LQT — длина стойки по ватерлинии, м;
Ім — длина соединяющей корпуса конструкции («моста»), м;
JXI, Jуі—моменты инерции площади ватерлинии г-го корпуса отно¬
сительно продольной оси х и поперечной оси у, м;
R — продольный метацентрический радиус, м;
St, S — площадь ватерлинии г-го корпуса и судна в целом, м2;
21
Ti, Т — осадка і-го корпуса и судна в целом, м;
Vi, V — объемное водоизмещение і-го корпуса и судна в целом, м3;
zg — аппликата центра тяжести, м;
а — коэффициент полноты ватерлинии;
р — коэффициент полноты мидель-шпангоута;
6 — коэффициент полноты водоизмещения;
Ф — коэффициент продольной полноты;
р — поперечный метацентрический радиус, м;
% — коэффициент вертикальной полноты.
Индексом 1 отмечены величины, относящиеся к одному из двух или трех
одинаковых корпусов катамарана или тримарана.
Индекс ВЛ указывает на соответствие величины осадке по ГВЛ.
§ 1.1. Главные размерения, типы корпусов,
особенности плавучести, остойчивости,
непотопляемости
Многокорпусные суда (рис. 1) могут состоять из корпусов трех
типов [22], показанных на рис. 2:
тип I — корпус с обычными обводами и наибольшей шириной
на уровне ватерлинии; из таких корпусов может состоять судно
как водоизмещающее, так и глиссирующее;
тип II — корпус с S-образными по всей длине шпангоутами
(типа бульбовых); наибольшая ширина корпуса расположена
ниже расчетной ватерлинии; крайним случаем этого варианта
формы обводов являются корпуса двухкорпусного судна дуплус —
погруженного тела вращения и узкой стойки, пересекающей по¬
верхность. В настоящее время эксплуатируется только одно судно
такого типа, но, судя по количеству публикаций, технико-эксплу¬
атационные качества таких судов интенсивно изучаются; судно
из двух корпусов типа II ниже называется дуплусом;
тип III — погруженный корпус с 2—3 отдельными стойками,
пересекающими поверхность воды (судно из двух корпусов типа III
ниже называется трисеком).
Корпуса двух последних типов, как правило, неостойчивы
и могут применяться только в составе многокорпусного судна.
В то же время именно с применением таких корпусов связаны мно¬
гие надежды, возлагаемые на многокорпусные суда.
По геометрическим и эксплуатационным признакам к много¬
корпусным объектам с малой площадью ватерлинии могут быть
отнесены не только двухкорпусные суда типов дуплус и трисек,
но и полупогружные буровые установки.
Отличительной чертой геометрических характеристик полу¬
погружных объектов является малая удельная площадь ватер¬
линии (Ввл/Т = 0,2-ъ0,5 против 2—4 для однокорпусных судов).
Это отличие определяет технико-эксплуатационные особенности
таких судов.
Запас плавучести многокорпусного судна значительно больше,
чем однокорпусного, и по-иному распределен по высоте (рис. 3, а).
Например, для судна из корпусов типа I запас плавучести
22
а)
Рис. 1. Главные размерения многокорпусного судна; а—с обычными
корпусами; б — с малой площадью ватерлинии.
Ill
II
Рис. 2. Типы корпусов многокорпусных судов.
23
^надв/У = 2,0 4- 2,5, и зависимость водоизмещения от осадки —
без перегибов. При малой осадке водоизмещение судна с кор¬
пусами типа II растет быстро, на уровне стойки изменяется мед¬
ленно, в районе надводной части — снова быстро. Для судна из
корпусов типа III также характерна неравномерная зависимость
водоизмещения от осадки; при малой осадке водоизмещение ра¬
стет быстро, на уровне стоек — еще более медленно, чем для
типа II, а в районе надводной части — так же быстро.
Метацентрические радиусы многокорпусных судов в значитель¬
ной степени зависят от поперечного и продольного клиренсов:
S + L + s Jyl
R=~—
Начальная поперечная остойчивость, например, катамаранов
в 8—10 раз больше, чем сравнимых однокорпусных судов, дуплу-
сов и тримаранов — обычно только в 2—3 раза; остойчивость
трисеков практически одинакова с остойчивостью однокорпусных
судов равного водоизмещения.
Продольная остойчивость катамарана и однокорпусного судна
равного водоизмещения и длины практически одинакова; дуп¬
луса— меньше, а трисека — еще меньше.
Продольная остойчивость трехкорпусных судов, даже соста¬
вленных из корпусов типов II и III, заметно выше, чем однокор¬
пусного судна того же водоизмещения — из-за квадратичной
зависимости остойчивости формы от продольного клиренса.
При изменении расстояния между корпусами водоизмещение
и возвышение центра тяжести остаются практически постоянными,
но изменяются метацентрические радиусы
£ (4о-4/)^
Ар
1=1
V
А/?«-^ . . (2)
Здесь Ар, АТ? — изменение поперечного и продольного радиуса
соответственно; индексом 0 отмечены начальные значения кли¬
ренсов, а индексом / — конечные значения.
Поэтому метацентрические высоты заметно зависят от расстоя¬
ния между корпусами: А/і Ар; А//< АТ? (А/і, АТ/ — измене¬
ние поперечной и продольной метацентрической высоты соответ¬
ственно).
Продольная и поперечная остойчивость, например, двух¬
корпусных судов весьма близка, особенно для полупогружных
платформ и трисеков; если поправки на влияние свободных по¬
верхностей неодинаковы, то возможны случаи h > Н.
Угол между направлением наклонения судна р и направлением
действия пары внешних сил
tg Р = 4"tg ф’
24
где ф — угол между ДП и плоскостью, в которой действуют
внешние силы. Поскольку h ^Н, для катамарана и других двух-
иорпусных судов tg р tg ф, т. е. обычно при действии внешнего
момента имеют место сравнимые по величине крен и дифферент.
Поэтому аварийная посадка и остойчивость многокорпусных
судов всегда определяются с учетом асимметричности затопления.
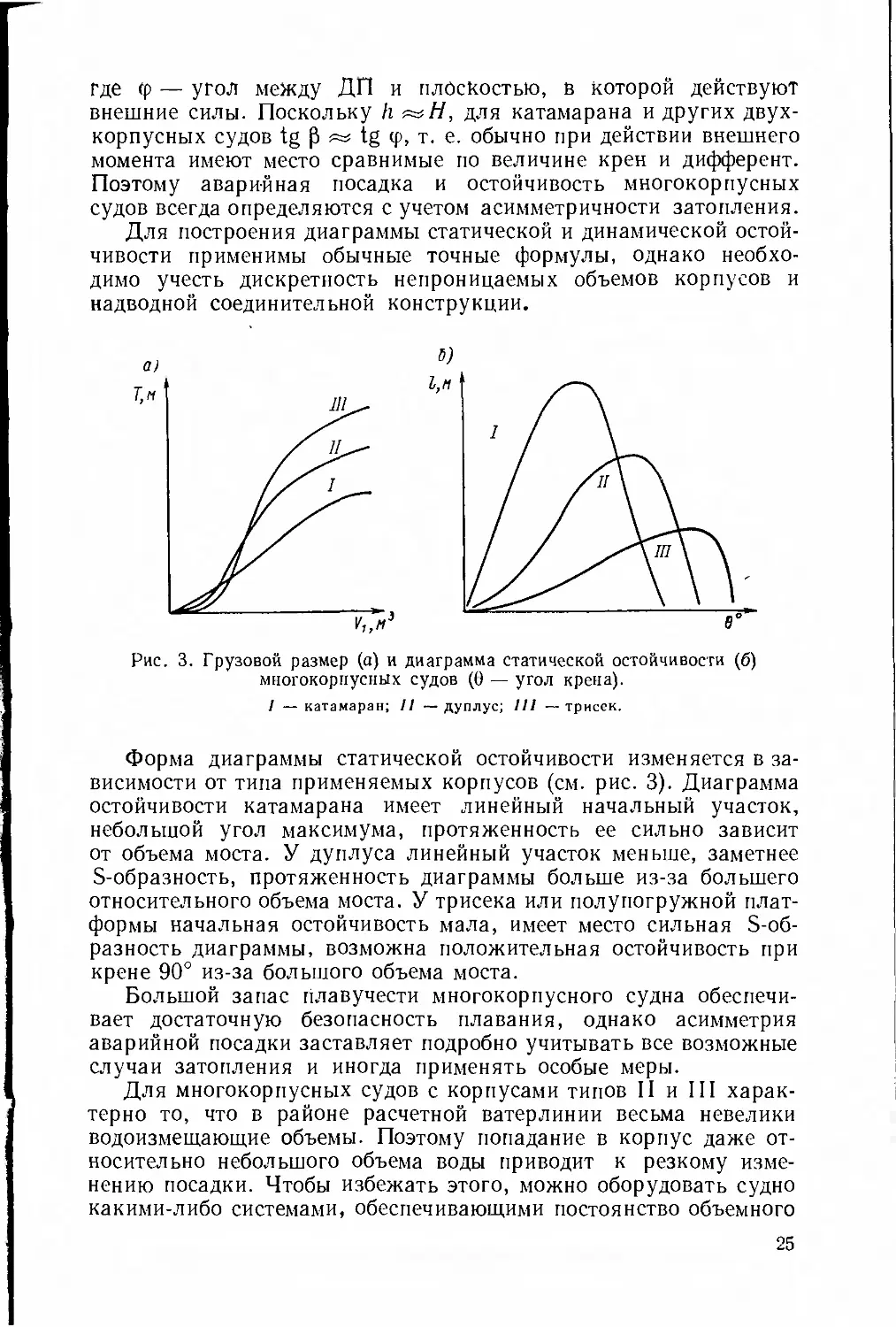
Для построения диаграммы статической и динамической остой¬
чивости применимы обычные точные формулы, однако необхо¬
димо учесть дискретность непроницаемых объемов корпусов и
надводной соединительной конструкции.
Рис. 3. Грузовой размер (а) и диаграмма статической остойчивости (б)
многокорпусных судов (Ѳ — угол крена).
1 — катамаран; 11 — дуплус; 111 ~ трисек.
Форма диаграммы статической остойчивости изменяется в за¬
висимости от типа применяемых корпусов (см. рис. 3). Диаграмма
остойчивости катамарана имеет линейный начальный участок,
небольшой угол максимума, протяженность ее сильно зависит
от объема моста. У дуплуса линейный участок меньше, заметнее
S-образность, протяженность диаграммы больше из-за большего
относительного объема моста. У трисека или полупогружной плат¬
формы начальная остойчивость мала, имеет место сильная S-об¬
разность диаграммы, возможна положительная остойчивость при
крене 90° из-за большого объема моста.
Большой запас плавучести многокорпусного судна обеспечи¬
вает достаточную безопасность плавания, однако асимметрия
аварийной посадки заставляет подробно учитывать все возможные
случаи затопления и иногда применять особые меры.
Для многокорпусных судов с корпусами типов II и III харак¬
терно то, что в районе расчетной ватерлинии весьма невелики
водоизмещающие объемы. Поэтому попадание в корпус даже от¬
носительно небольшого объема воды приводит к резкому изме¬
нению посадки. Чтобы избежать этого, можно оборудовать судно
какими-либо системами, обеспечивающими постоянство объемного
25
водоизмещения. Например, осуществима система, состоящая из
гибких емкостей, хранящихся в сложенном виде в каждом отсеке.
При поступлении воды в отсек в емкости подается агент, имеющий
малую удельную плотность (воздух, вспенивающаяся пластмасса
и т. п.). Подача агента может осуществляться вручную или авто¬
матически из локального или общего источника. При наличии
быстротвердеющих вспенивающихся пластмасс они могут пода¬
ваться извне в отсек или генерироваться прямо в отсеке, а не в гиб¬
кой емкости. Описанная система с надуваемыми воздухом емко¬
стями, предложенная в 30-е годы, способна заметно увеличить
безопасность эксплуатации судов с корпусами типов II и III и
буровых установок.
Корпуса и стойки судов с малой площадью ватерлинии обычно
ограничены аналитическими поверхностями, что позволяет полу¬
чить простые формулы для расчета их плавучести и начальной
остойчивости, особенно удобные для расчетов с помощью ЭЦВМ.
§ 1.2. Некоторые результаты систематических
исследований статики многокорпусных объектов
До настоящего времени наиболее обширные исследования остой¬
чивости и непотопляемости выполнены для промысловых ката¬
маранов. Расчеты производил инженер Ю. Б. Фишкис [24].
Им получены следующие результаты. Остойчивость катамара¬
нов (коэффициент Dh или поперечная метацентрическая высота h)
на порядок выше при равном с однокорпусными судами водоиз¬
мещении. Поэтому в изученном диапазоне соотношений размере¬
ний и форм обводов требования Регистра по основному критерию
заведомо выполняются, поскольку порядок сил, действующих на
однокорпусное или двухкорпусное судно, одинаков. Только при
малых НбІТ (<1,13) и больших zgIH& (< 1,5) углы максимума
и углы заката диаграммы статической остойчивости становятся
меньше, чем требуется по нормам.
Для непотопляемости катамарана характерна асимметрия
затопления (при симметричном затоплении аварийная высота борта
такая же, как у одиночного корпуса). Выяснилось, что угол ава¬
рийного крена увеличивается почти пропорционально BJb и
существенно уменьшается с ростом отношения ВГІТ. Высота ава¬
рийного надводного борта почти не зависит от горизонтального
клиренса.
На аварийную посадку катамарана сильно влияют коэффици¬
енты общей и продольной полноты. Сравнение аварийной посадки
однокорпусного и двухкорпусного судов даже при равных отно¬
сительных характеристиках затапливаемого отсека показывает
заметные преимущества катамаранов. Во всех случаях, когда
угол аварийного крена меньше угла входа палубы в воду, началь¬
ная поперечная метацентрическая высота не менее 0,1 м при крене
25°. Если кромка палубы входит в воду, надо строить диаграмму
26
статической остойчивости и проверять степень удовлетворения
нормам.
Как правило, на катамаране может быть обеспечен на одну
ступень более высокий стандарт числа затопленных отсеков,
чем на сравнимом однокорпусном судне. Так, если на однокорпус¬
ных промысловых судах не всегда выполняется одноотсечный
стандарт, то на промысловых катамаранах, начиная с длины около
15 м, этот стандарт может быть обеспечен, а при длине более 20—
25 м достижим и двухотсечный стандарт.
Угол аварийного крена, дифферента и относительное измене¬
ние осадки катамарана при затоплении отсека с заданной длиной
и коэффициентом проницаемости, расположенного на известном
расстоянии от миделя, можно рассчитать по формулам, приведен¬
ным в приложении 1.
Конструктивные особенности полупогружных платформ за¬
метно влияют на их остойчивость. Правила классификации и по¬
стройки буровых установок требуют, чтобы установка в любом
состоянии нагрузки выдерживала регламентируемый ветровой
кренящий момент, в частности, вычисляемый для неограниченного
района эксплуатации при скорости ветра 100 уз. В связи с этим
особенно опасно снижение остойчивости, в частности из-за за¬
держки воды в цепных ящиках.
Проникновение воды через палубные клюзы в ящики для якор¬
ных цепей обычно происходит при работе бурильной установки
в штормовую погоду, когда постоянным выбиранием и травлением
цепей платформа удерживается в достаточной близости от точки
бурения. В этих условиях загерметизировать клюзы каким-нибудь
способом, например путем заливки пеком, не представляется воз¬
можным.
В то же время опыт показал, что замена якорных цепей тро¬
сами, не требующими для своего размещения ящиков, себя не оправ¬
дывает вследствие неоднократно имевших место случаев перети¬
рания тросов. Таким образом, вопрос о снижении остойчивости
вследствие проникновения воды в ящики для якорных цепей оста¬
ется актуальным.
Якорное устройство буровой платформы обычно состоит из
восьми якорей с цепями калибром по 23/4 или 3 дюйма и длиной
1000 м и более каждая. Объем цепного ящика для такой цепи
составляет около 100 м3. Цепные ящики размещаются попарно
в угловых стабилизирующих колоннах.
Расчетным случаем является заполнение водой свободных от
цепей четырех ящиков одного борта, что приводит к увеличению
водоизмещения платформ примерно на 400 т. Например, для кон¬
кретной двухкорпусной буровой платформы (водоизмещение
20 400 тс, число стабилизирующих колонн 6, диаметр колонн
8,4 м, расстояние между осями колонн 58,0 м, осадка 18 м, возвы¬
шение верхнего края колонн над водой 14 м), угол заливания цеп¬
ных ящиков которой составляет 23°, при затоплении ящиков
27
одного борта крен достигает 12°, что практически недопустимо по
условиям эксплуатации. Средняя осадка изменяется примерно
на 1 м.
Анализ показывает, что попадание воды в цепные ящики
платформ без верхнего водонепроницаемого корпуса снижает
восстанавливающий момент для них на 10% при постоянном
опрокидывающем моменте. Это необходимо учитывать в расчетах
остойчивости, так как при определенных соотношениях размере¬
ний платформы может получиться так, что требуемый запас остой¬
чивости при учете влившейся воды обеспечиваться не будет, в то
время как без учета заливания цепных ящиков величина основ¬
ного критерия будет удовлетворять требованиям Правил.
Для платформы с верхним водонепроницаемым корпусом с уче¬
том значительных запасов остойчивости по основному критерию
при расчете остойчивости можно не принимать во внимание
возможность заливания цепных ящиков. Однако затопление цеп¬
ных ящиков создает постоянный угол крена, который может пре¬
восходить 12°. При качке платформы в эксплуатационных условиях
к нему может добавляться переменный крен с амплитудой до 6°.
Это ставит под угрозу целость и самой платформы, и имеющегося
на ней оборудования.
Представляется целесообразной разработка технических
средств, предотвращающих нахождение значительных масс воды
в цепных ящиках.
Для дуплуса и трисека, имеющих относительно малую началь¬
ную остойчивость, также существенны меры, снижающие стати¬
ческие кренящие и дифферентующие моменты.
Глава 2
Ходкость
Основные обозначения
Fr = ѵ/Ѵ gL—относительная скорость в форме числа Фруда по
длине L;
Frc = v/fgc — относительная скорость в форме числа Фруда по
наименьшему расстоянию между внутренними бор¬
тами корпусов с;
FrCT = v/fgLCT — то же по длине стойки LCT;
g — ускорение свободного падения, равное 9,81 м/с2;
/2, і2к — коэффициенты влияния неравномерности потока на
момент для одиночного корпуса и катамарана соот¬
ветственно;
Kde = vDB : К R/p — обратный коэффициент нагрузки гребного винта
диаметром DB;
Kf, Kw — коэффициенты, отражающие влияние взаимодей¬
ствия корпусов на вязкостное и волновое сопро¬
тивление катамарана. Дополнительные индексы 6,
LIB, В/Т указывают на введение поправок по этим
величинам;
Kv, Kt — коэффициенты, отражающие влияние взаимодействия
корпусов на попутный поток и засасывание ката¬
марана. Дополнительный индекс I указывает на
введение поправки по этой величине;
7?к, Вт —• буксировочное сопротивление катамарана и три¬
марана;
RTp, Rf> Rw — сопротивление трения, формы и волновое для оди¬
ночного корпуса;
7?бр '— брызговое (струйное) сопротивление;
Rwl, Rwi '— волновое сопротивление изолированного централь¬
ного и боковых корпусов тримарана;
LRWK, &Rwt — дополнительное волновое сопротивление из-за влия¬
ния боковых корпусов на центральный и централь-
29
ного на боковые. Те же индексы применены для
соответствующих коэффициентов сопротивления;
t, tK — коэффициенты засасывания одиночного корпуса и
катамарана;
ѵ, vs — скорость, м/с или уз;
w, wK — коэффициенты попутного потока одиночного кор¬
пуса и катамарана;
хст — отстояние наибольшего сечения стойки от ее носо¬
вой кромки, м;
р — массовая плотность жидкости, т-с2/м4;
Лкк — коэффициент влияния корпуса на пропульсивный
коэффициент катамарана;
?тр> Sfi ?ост — коэффициенты соответственно полного сопротивле¬
ния, сопротивления трения, формы, волнового,
остаточного (£г = Т^/ри2!^, где Qj — смоченная
поверхность одного корпуса).
Индексом 1 отмечены водоизмещение и размерения одиночного корпуса
катамарана или центрального корпуса тримарана, индексом 2 — водоизмеще¬
ние и размерения боковых корпусов тримарана.
Обозначения размерений составляющих корпусов и клиренсов см. в гл. 1.
Индекс 1 для составляющих или коэффициентов сопротивления означает
соответствие случаю движения одиночного корпуса.
§ 2.1. Составляющие сопротивления
многокорпусного судна на тихой воде
Особенности сопротивления многокорпусных судов при движении
на тихой воде определяются геометрическими характеристиками
корпусов и их взаимным расположением. Эти факторы по-разному
воздействуют на все составляющие сопротивления. Качественные
аспекты этого воздействия изложены ниже применительно к схеме
разделения буксировочного сопротивления голого корпуса водо-
измещающего судна, рассмотренной на 13-м конгрессе по опы¬
товым бассейнам (рис. 4).
На элементарной площадке поверхности каждого корпуса
при установившемся движении возникают постоянные во времени
касательные и нормальные напряжения. Интегрируя составля¬
ющую касательных напряжений, параллельную направлению
движения, по смоченной поверхности всех корпусов, получаем
сопротивление поверхностного трения. Ана¬
логичный интеграл горизонтальной составляющей нормальных
напряжений дает сопротивлениедавления. Первая соста¬
вляющая может быть разделена на сопротивление экви¬
валентной плоской пластины, длина и смоченная
поверхность которой равны соответствующим характеристикам
рассматриваемого корпуса, исопротивление, связан¬
ное с кривизной поверхности корпуса. Во-
доизмещающие части многокорпусного судна, например стойки
и корпуса, могут отличаться по длине в 5 раз и более, что опреде¬
ляет отличие чисел Рейнольдса, а потому — и режимов обтекания
этих частей. При постоянном водоизмещении смоченная поверх¬
ность судна тем больше, чем больше количество и удлинение
30
составляющих корпусов. Сопротивление эквивалентной пластины
и сопротивление, связанное с кривизной поверхности, несколько
изменяются (в пределах 1—3%) из-за появления дополнительных
скоростей, вызванных взаимовлиянием корпусов.
й ,,
I- Ш zlL
тГУ I 19 \
Рис. 4. Схема разделения буксировочного сопротивления и явлений,
возникающих при обтекании корпуса, аналогичная предложенной
на 13-м конгрессе по опытовым бассейнам.
/ — буксировочное сопротивление корпуса без выступающих частей; 2 —
касательные составляющие (сопротивление поверхностного трения); 3 — нор¬
мальные составляющие (сопротивление давления); 4 — сопротивление экви¬
валентной, т. е. имеющей одинаковую с корпусом длину н смоченную поверх¬
ность, плоской пластины; 5 — составляющая, обусловленная влиянием кри¬
визны поверхности корпуса; 6 — вязкостное сопротивление (касательные
составляющие); 7 — вязкостная составляющая сопротивления давления;
8 — составляющая, связанная с образованием локальных волн («начальное»
волновое сопротивление); 9 — сопротивление формы; 10 — индуктивное со¬
противление скуловых вихрей; 11 — индуктивное сопротивление нз-за скоса
потока на ахтерштевне; 12 — составляющая, обусловленная разрушением
волн у форштевня или «плеча» ватерлинии (сопротивление разрушающихся
волн); 13 — составляющая, связанная с генерированием н поддержанием
волновой системы (сопротивление системы свободных волн или волновое со¬
противление); 14 — сопротивление, связанное с изменением формы кормовых
обводов при безотрывном обтекании; 15 — часть сопротивления формы, обус¬
ловленная отрывом пограничного слоя; 16 — «начальный» вязкостный попут¬
ный поток; 17 — результирующий попутный поток; 18 — вызванные попут¬
ным потоком деформации свободной поверхности; 19 — результирующая
волновая система.
Д — орбитальные скорости в волне изменяют сопротивление трення, а вол¬
новой профиль — смоченную поверхность; В — орбитальные скорости оп¬
ределяют условия отрыва в корме, на скулах н на «плечах»— на переходе
от носового заострения к цилиндрической вставке; С — вихри от разру¬
шенных волн влияют на условия возникновения отрыва; D — те же вихрн
изменяют распределение скоростей в пограничном слое.
Сопротивление давления может быть разделено на обусло¬
вленное вязкостью жидкости и связанное
с образованием локальных волн. Первая из
этих составляющих делится на сопротивление формы
и индуктивное, определяемое образованием скуловых
вихрей. Обе последние составляющие также подвержены влия¬
нию взаимного расположения корпусов: сопротивление формы
тем больше, чем ближе корпуса, чем они короче и полнее, особенно
31
В Кормовой части. Скуловые вихри образуются при малом радиусе
закругления скулы и более интенсивны, если корпуса располо¬
жены близко друг к другу. Любая стесненность потока приводит
к сдвигу точки скрутки вихря на корпусе вверх по потоку.
Взаимодействие корпусов приводит к появлению специфической
для многокорпусного судна составляющей индуктивного сопро¬
тивления, обусловленной скосом потока за ахтерштевнем. Киль¬
ватерный след симметричных корпусов катамарана, например,
явственно отклоняется наружу; при плоских внешних бортах
это отклонение еще более заметно; при плоских внутренних бортах
следы отклоняются внутрь. Вероятно, взаимодействие скуловых
вихрей друг с другом и с поверхностью корпусов также должно
оказывать определенное влияние на индуктивную составляющую
сопротивления давления.
Сопротивление формы делят на часть, связанную
с изменением эффективной формы кормо¬
вых обводов при безотрывном обтекании
(из-за влияния пограничного слоя), ичасть, обусловлен¬
ную его отрывом. Стесненность потока из-за наличия
взаимодействующих корпусов влияет на эти части сопротивления
формы, увеличивая их и сдвигая зону отрыва, если он имеет ме¬
сто, вверх по потоку.
Часть сопротивления давления, связанная с возникновением
локальных волн, разделяется на сопротивление раз¬
рушающихся волн и сопротивление систе¬
мы свободных волн (волновой области). Последняя
составляющая в наибольшей степени подвержена влиянию взаи¬
модействия корпусов, причем может быть как больше, так и меньше
по величине, чем в случае одиночного корпуса. Влияние взаимо¬
действия корпусов на сопротивление волновой системы следует
рассмотреть особо (см. ниже). '~
Взаимовлияние перечисленных составляющих сопротивления
также зависит от расположения корпусов.
Орбитальные скорости судовых волн изменяют сопротивление
трения как самого генерирующего волну корпуса, так и соседних
с ним корпусов. Кроме того, волновой профиль может заметно,
иногда до 8—10%, изменять смоченную поверхность.
Те же орбитальные скорости меняют условия свертки вихря
на скулах и в кормовой части генерирующего волну корпуса и
соседних корпусов. Вихри, появляющиеся в результате разруше¬
ния волн, изменяют устойчивость, условия формирования и от¬
рыва пограничного слоя корпуса, на котором образуются, и со¬
седних корпусов.
Вязкий след, в общем случае состоящий из пяти вихрей за
каждым корпусом, изменяет амплитуды генерируемых этим и со¬
седними корпусами волн, сглаживая их.
Для большинства достаточно быстроходных многокорпусных
объектов характерно повышенное удлинение корпусов. При этом
32
снижаются или исчезают некоторые составляющие сопротивле¬
ния перечисленные выше. При большом удлинении корпусов
резко уменьшаются сопротивление, связанное с кривизной по¬
верхности, сопротивление формы, сопротивление локального вол¬
нообразования. Практически исчезают сопротивление разрушаю¬
щихся волн и сопротивление отрыва пограничного слоя, а также
уменьшается индуктивное сопротивление, связанное с образова¬
нием скуловых вихрей. При обычных расстояниях между корпу¬
сами невелика и часть индуктивного сопротивления, обусловлен¬
ная скосом потока за ахтерштевнем. В результате появляется
возможность упрощенного разделения буксировочного сопроти¬
вления водоизмещающего многокорпусного судна на составляю¬
щие- трения, формы, волновое. При обычном эксперименте сумма
двух последних составляющих фигурирует под названием остаточ¬
ного сопротивления.
Волновая система каждого корпуса состоит из расходящихся
и поперечных волн, наиболее интенсивно генерируемых участками
с наибольшим градиентом.
Зависимость остаточного сопротивления многокорпусных судов
от расстояния между корпусами или взаимного расположения
корпусов и стоек обычно носит ярко выраженный немонотонный
характер Как правило, на графике имеются экстремумы, положе¬
ние которых зависит от сочетания параметров относительная ско¬
рость — относительное расстояние между корпусами, степени
асимметрии корпусов относительно собственной диаметральной
плоскости и, в меньшей степени, от формы обводов. Можно пред¬
положить, что эффекты взаимодействия волновых систем двух¬
корпусных судов, приводящие к появлению экстремумов, есть
в значительной мере результат взаимодействия расходящихся волн
носовых волновых систем и поперечных волн кормовых волновых
систем Поскольку взаимное положение этих систем определя¬
ется соотношением 2b/L, то этот параметр и оказывает определя¬
ющее влияние на сопротивление [20].
В пространстве между корпусами увеличивается высота по¬
перечных волн носовой системы, что приводит к изменению взаимо¬
действия этих волн с поперечными волнами кормовой системы
как по фазе, так и по амплитуде [23].
Движение двухкорпусных объектов может сопровождаться
неустойчивыми кризисными волновыми явлениями, аналогичными
кризисным явлениям при движении в канале и зависящими от
истории движения. При этом определяющим является поперечное
число Фруда Frc = v/V~gc.
При недостаточном разгоне постоянное увеличение скоростей
от Frc = 0,8 до Frc = 1,0 приводит к появлению в точке пересе¬
чен и я носовых расходящихся волн поперечной волны большой
амплитуды, перемещающейся в нос при росте скорости. При Frc
= 1,0 и недостаточном разгоне отсутствуют носовые расходящиеся
волны, а между корпусами существует гидравлический прыжок,
32
2 п/р Дубровского В. А.
бор; объект резко дифферентуется на нос, сопротивление сильно
растет. Нормальная волновая система восстанавливается при
Frt. > 1,2.
В случае избыточного разгона волновая картина в режиме
установившегося движения сильно отличается от описанной выше.
При Frc = 1,0-е 1,2 заметно понижается уровень воды между
корпусами, появляется дифферент на корму, отсутствуют беспо¬
рядочные завихрения и остаточное сопротивление падает.
Если ускорения во время разгона достаточно велики, коэффи¬
циент остаточного сопротивления некоторых двухкорпусных мо¬
делей имеет резкие местные «провалы» в диапазоне Frc = 0,8-е 1,2.
Обтекание объектов из корпусов с плоскими внешними или
внутренними бортами отличается тем, что хотя у плоского борта
возникает обычная волновая система с поперечными и расходя¬
щимися волнами, но амплитуда этих волн весьма мала (в 2 3 раза
меньше, чем у борта симметричного корпуса), а угол, составля¬
емый расходящимися волнами и диаметральной плоскостью кор¬
пусов, приблизительно вдвое меньше угла Кельвина. Поэтому
в случае плоского по всей длине внутреннего борта взаимодействие
волновых систем в межкорпусном пространстве весьма незна¬
чительно, поскольку в основном волновые системы пересекаются
за кормой.
Наибольшее волновое взаимодействие имеет место в том слу¬
чае, когда корпуса расположены уступом, т. е. имеется продоль¬
ный выдвиг (тримаран [90], катамаран со сдвигом корпусов).
При этом взаимодействуют поперечные волны, несущие наиболь¬
шую энергию в широком диапазоне скоростей, что и приводит
к весьма значительному взаимовлиянию корпусов.
Современный уровень развития экспериментальной техники
обеспечивает возможность прямого получения составляющих
сопротивления: измерением вязкого следа — вязкостной соста¬
вляющей, а измерением волнового следа — волновой составляющей.
Метод анализа волновой системы успешно применен при иссле¬
довании сопротивления двухкорпусных судов (катамаранов) в ра¬
боте [81 ]. Хотя в ней отсутствует описание деталей эксперимента,
можно предположить, что наиболее удобен для изучения волно¬
образования катамарана метод поперечных сечений. Измеряются
амплитуды волн одиночного корпуса, после чего производится
наложение амплитуд двух одинаковых корпусов, расположенных
на траверзе друг друга с заданным расстоянием между корпусами.
Затем результирующие амплитуды волн используются в обычной
схеме волнового анализа.
Применение метода волнового анализа [81] позволило выя¬
вить причину снижения волнового сопротивления катамарана по
сравнению с волновым сопротивлением тех же корпусов, движу¬
щихся изолированно.
На рис. 5 видно, что при благоприятной интерференции
(Fr = 0,35, 2b/L = 0,26, где 2Ь — расстояние между диаметраль-
34
Рис. 5. Волновой спектр катамарана при бла- Рис. 6. Волновой спектр катамарана ( ) при не-
гоприятном взаимодействии корпусов ( ) и вол- благоприятном взаимодействии корпусов и волновой
новой спектр одиночного корпуса ( ). спектр одиночного корпуса (———).
2*
35
ними плоскостями корпусов) причиной уменьшения сопротивле¬
ния является снижение интенсивности расходящихся волн. При
неблагоприятной интерференции (Fr = 0,43, 2b/L = 0,26, рис. 6)
такого уменьшения амплитуды расходящихся волн не наблюдается,
а увеличение амплитуды поперечных волн, имеющее место в обоих
случаях, приводит к общему увеличению волнового сопроти¬
вления.
Движение достаточно быстроходных судов с малой площадью
ватерлинии характерно тем, что носовые участки относительно
коротких стоек генерируют струю, поднимающуюся по поверх¬
ности стоек и разрушающуюся в кормовой части с образованием
брызговой пелены. С этим явлением связано наличие особой со¬
ставляющей буксировочного сопротивления — брызговой, кото¬
рая обычно наблюдается не у водоизмещающих, а у глиссирующих
судов или судов на подводных крыльях. Однако по сравнению
с двумя последними, суда с малой площадью ватерлинии движутся
с невысокими скоростями, что отражается и на условиях генери¬
рования брызговой пелены.
Брызговое сопротивление представляется возможным разде¬
лить на сопротивление давления, определяемое объемом жидкости,
выбрасываемой на некоторую высоту, и сопротивление трения,
связанное с омыванием струей дополнительной поверхности, рас¬
положенной выше ватерлинии, соответствующей волновому про¬
филю. Именно вязкостную часть брызгового сопротивления можно
свести к минимум}7 путем применения отсечек типа продольных
реданов.
Брызговое сопротивление тем меньше, чем меньше угол входа
ватерлинии и относительная осадка стойки. Сопротивление стоек
может быть снижено на 5—15% путем применения продольных
реданов. Взаимодействие волновых систем оказывает определя¬
ющее влияние на остаточное сопротивление комплекса из двух
стоек в кильватер одна другой только до FrCT = v/j/gLCT. При
относительной скорости FrCT > 0,9 обычные для волнового взаимо¬
действия горбы и впадины исчезают и остаточное сопротивление
комплекса становится меньше, чем сумма сопротивлений соста¬
вляющих стоек.
§ 2.2. Результаты исследования ходкости
катамаранов с крейсерской кормой
При выборе геометрических параметров моделей систематической
серии катамаранов было решено исследовать ходкость симметрич¬
ных относительно ДП корпусов с умеренно Ѵ-образными обводами,
строительным дифферентом и крейсерской кормой. Соотношения
главных размерений катамаранов нельзя считать установивши¬
мися (табл. 1), поэтому было принято, что они изменяются в ши¬
роких пределах. Ограниченность сроков и объема испытаний вы¬
нудила выбрать способ изменения отношения B-JT путем измене-
36
Таблица 1
Главные размерения и основные характеристики испытанных моделей серии катамаранов с крейсерской кормой
ігаю
0,822
1
1
6І8‘0
1
1
0,820
1
1
0,820
1
1
0,820
1
1
СО
Ш
ш
СО
со
о
СО
со
СО
со
СО
со
со
со
ш
со
со
00
со
о
со
о
со
СП
CQ
00
со
00
00
со
00
00
со
00
00
со
00
00
со
со
o'
о
о
о
о
о
о
о
о
о
о
о
о
о
o'
00
сч
о
Ш
со
Ш
Ш
со
сч
о
00
КО
сч
о
со
Ш
С 5
со
со
ш
со
CQ
ю
ш
ш
О
со
со
ш
со
со
со
г---.
со
со
o'
о
о
О
о
о
о
о
о
о
о
о
о
о
о
сч
о
Ш
85
о
о
со
со
00
ея
00
О
Ш
О
Ш
сч
о
іл
□2
Ш
Ш
Ш
Ш
со
ІЛ
со
СО
со
«О
ог
о”
о
о"
о"
со
о"
сГ
о“
о
о
о"
Q
о
gT
ео
сч —
со
сч
со
ш
сч
ш
со
о?
со
со
со
00
СЧ
со
сч
о
ю
о
f'-—
ХЛ
СП
со
F4
со
хл
ю
ш
<О
ю
ІЛ
Jx.
со
со
со
хл
хл
со
хл
хл
а
сч
со
Ш
Ш
,85
ю
со
о
со
о
со
о
со
ш
сч
сч
со
сч
со
со
сч
со
со
сч
со
со
сч
сч
сч
сч
сч
сч
~■"
сч
€
со
со
о
сч
о
о
Ш
со
о
со
со
со
хп
со
со
о
со
о
ш
со
ІЛ
со
ХЛ
со
CQ
со
со
ш
ш
ш
Jx.
Jx.
сч
S
со
о
со
о
сч
о
со
1(0
ш
со
in
со
со
оо
сч
00
f'-—
ш
оо
СП
со
со
сГ
Tf*
Tf*
ш
со
Tf*
Tf*
сч
со
Tf*
сч
со
Tf*
сч
со
Tf*
со
сч
о
со
о
о
сч
о
00
со
сч
[s»
( 1
[s»
со
(Л)
^4^
со
со
о
сч
СП
••
00
со
о
ш
СО
00
сч
со
ш
сч
со
со
со
о
о
о
о
о
о
о
о
о
о
о
о
о
o'
S
о
ш
о
со
со
Ш
со
1(0
со
со
00
со
о
о
о
СП
о
о
СП
о
о
о
о
о
о
о
о
CQ
со
со*"
со"
со
со
>~4
S
о
ю
со
S
ш
о
ш
о
о
1Л
о
о
іЛ
о
•
Tf
со
сч
со
сч
со
сч
со
о”
о
о
о
о
о
о
о
о
о
о
о
о
о
о"
S
сч
Ш
8
ш
[s»
Ш
СО
СП
о
ш
ІЛ
іЛ
CQ
о
о
-О
О’
Hirafow
d 9J5IOJ-J
сч
со
ш
со
37
ния осадки моделей, что связано с незначительным изменением
и коэффициентов полноты. Серия состояла из двух групп моделей:
с изменяющимся коэффициентом общей полноты и с изменяющимся
удлинением. Для всех моделей использована крейсерская форма
кормы. Были выполнены буксировочные испытания всех моделей
до скорости Fr = 0,45 при значениях относительного клиренса
2Ь = 2Ь/L, равных 0,2, 0,3, 0,4, 0,5, а также самоходные испы¬
тания моделей 2 и 3 при тех же значениях клиренса и Fr 0,40.
Принималось, что сопротивление двухкорпусного судна следую¬
щим образом связано с сопротивлением его одиночного кор¬
пуса [23, 79]:
7?к = 2/?ТР + 2ЗД + 2/<Л. (4)
Такое представление позволило при переходе к безразмерной форме
рассматривать коэффициент сопротивления корпуса в составе
катамарана £к и его связь с коэффициентом Для одиночного кор¬
пуса:
= + + (5)
Коэффициенты взаимодействия двухкорпусного судна следую¬
щим образом были связаны с коэффициентами одиночного корпуса:
WK=KVW, tK=Kft-, ІК2 = І2- (6)
В формуле индексом «к» были отмечены величины, относящиеся
к корпусу в составе двухкорпусного судна. Все коэффициенты,
учитывающие взаимодействие корпусов, представляли собой про¬
изведения, у которых каждый сомножитель должен отражать
влияние одного из геометрических параметров корпуса.
Влияние одновременного изменения коэффициента общей пол¬
ноты (6 = 0,5, 0,6 и 0,7) и клиренса (при постоянных значениях
ЫВ1 и BJT) на вязкостное взаимодействие легко проследить
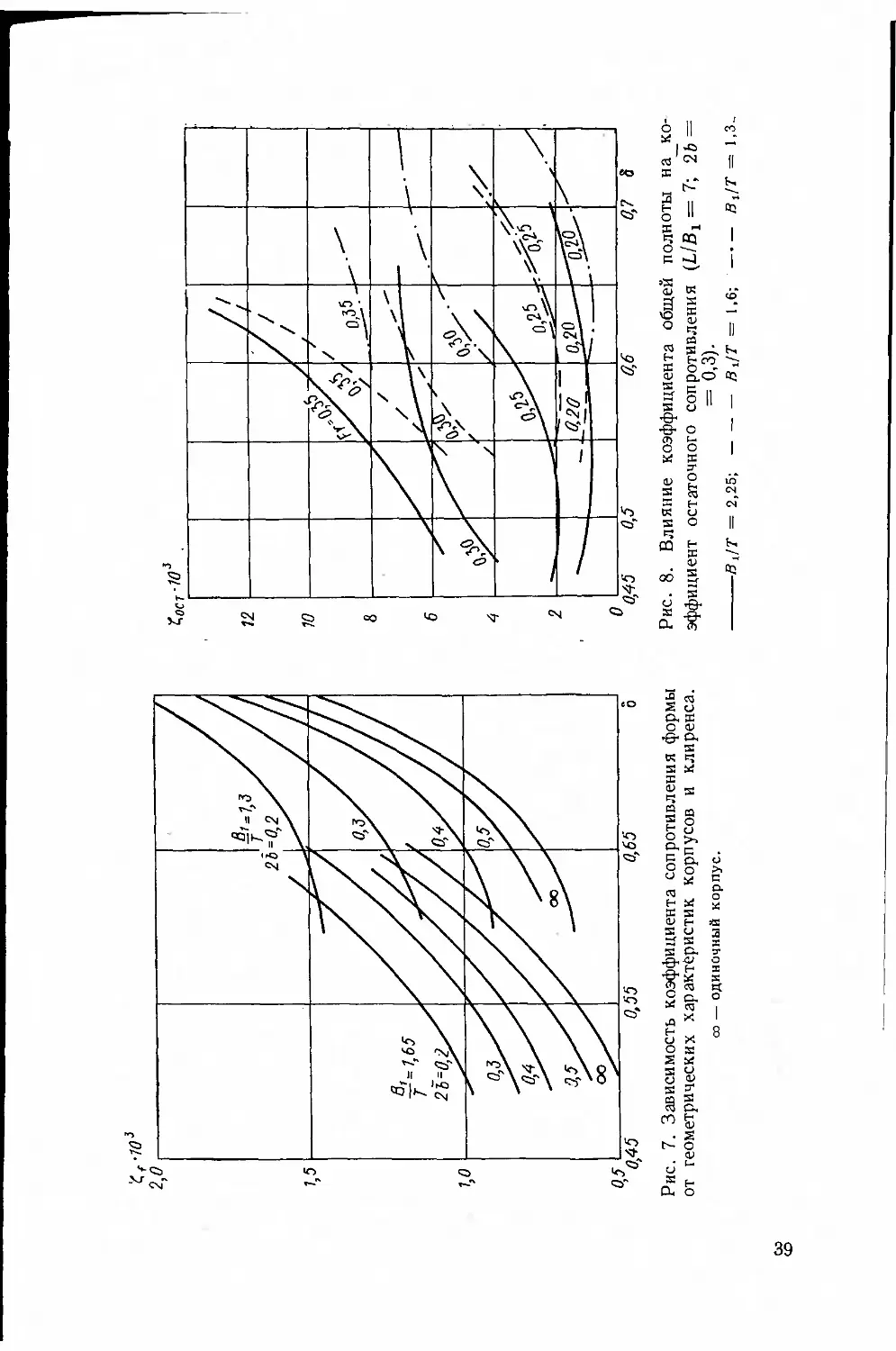
по рис. 7. Обработка результатов испытаний показала, что при
малых значениях клиренса (2Ь 0,2) коэффициент умень¬
шается с увеличением 6. С ростом клиренса это влияние умень¬
шается и при 2Ъ «=< 0,5 не превышает 10%.
Анализ результатов буксировочных испытаний показал, что
изменение геометрических параметров корпусов и клиренса при¬
водит к монотонному изменению относительного коэффициента
вязкостного сопротивления, который при любых условиях остается
больше единицы. Это означает, что взаимодействие корпусов с лю¬
быми соотношениями размерений приводит к увеличению сопро¬
тивления формы катамарана по сравнению с сопротивлением формы
его одиночного корпуса.
На рис. 8 приведены результаты анализа данных о сопроти¬
влении моделей, имеющих одинаковое удлинение L!Bt = 7 при
изменении клиренса и коэффициента общей полноты для трех
значений относительной ширины B-JT.
38
'C.f-IO
39
Анализ результатов буксировочных испытаний моделей с оди¬
наковым удлинением ЫВг = 7,0 показал, что во всем диапазоне
скоростей и клиренсов увеличение коэффициента общей полноты
приводит к более или менее (для Fr 0,30) интенсивному увели-
Рис. 9. Зависимость коэффициента остаточного сопротивления от уд¬
линения корпуса и числа Фруда. BjT = 1,65; 6 = 0,55;
одиночный корпус; — катамаран, 26 = 0,4.
чению абсолютной величины остаточного сопротивления, а умень¬
шение относительной ширины позволяет более или менее за¬
метно, в зависимости от скорости, уменьшить остаточное сопро¬
тивление.
Приведенные данные показывают, что в рассмотренном диа¬
пазоне скоростей увеличение осадки катамарана с крейсерской
кормой и вызванное этим снижение величины B-JT и углубление
волнообразующего объема под свободную поверхность приводит
к уменьшению абсолютного и относительного коэффициентов вол¬
нового сопротивления при ЫВг = const и б = const.
40
Удлинение составляющих корпусов ЫВ1 является основным
параметром, оказывающим влияние на их взаимодействие. Это
объясняется тем, что при постоянном расстоянии между ДП кор- •
пусов изменение удлинения соответствует переменному реальному
клиренсу (среднему расстоянию между корпусами).
Коэффициенты остаточного сопротивления моделей с изменя¬
ющимся удлинением ЫВХ приведены на рис. 9.
С уменьшением удлинения
Рис. 10. Влияние относительной
ширины корпуса BJT на коэф¬
фициент остаточного сопротив¬
ления (при изменении осадки).
корпусов катамарана абсолютное
значение коэффициентов остаточ¬
ного сопротивления растет, а от¬
носительное — уменьшается. На
эту общую тенденцию накладыва¬
ются местные: сдвига экстрему¬
мов и их слияния.
Относительная ширина испы¬
танных моделей В^ІТ изменялась
от 2,25 до 1,3. Такие малые
значения относительной ширины
Рис. 11. Относительный коэффи¬
циент волнового сопротивления
в функции от отношения B^JT
(ЫВ!= 7,0; 26=0,3; 6=0,5).
корпуса могут быть реализованы только для двухкорпусных судов
и, наряду с асимметрией корпусов относительно собственных диа¬
метральных плоскостей, являются одной из особенностей геоме¬
трических характеристик катамаранов.
Характерная для катамаранов возможность реализации кор¬
пусов с весьма малым значением относительной ширины B-JT
целесообразна с точки зрения уменьшения сопротивления, так
как с уменьшением отношения B-JT падает волновое сопротивле¬
ние одиночного корпуса (рис. 10), волновое взаимодействие кор¬
пусов (рис. 11) и, до определенных пределов, удельная смочен¬
ная поверхность корпусов.
При самоходных испытаниях коэффициент нагрузки
изменялся в пределах 0,5—3,0, клиренс был принят равным 0,3
и 0,4 для модели с относительной длиной одного корпуса I = 5,0
и равным 0,2—0,5 для модели с относительной длиной Іг = 6,4.
41
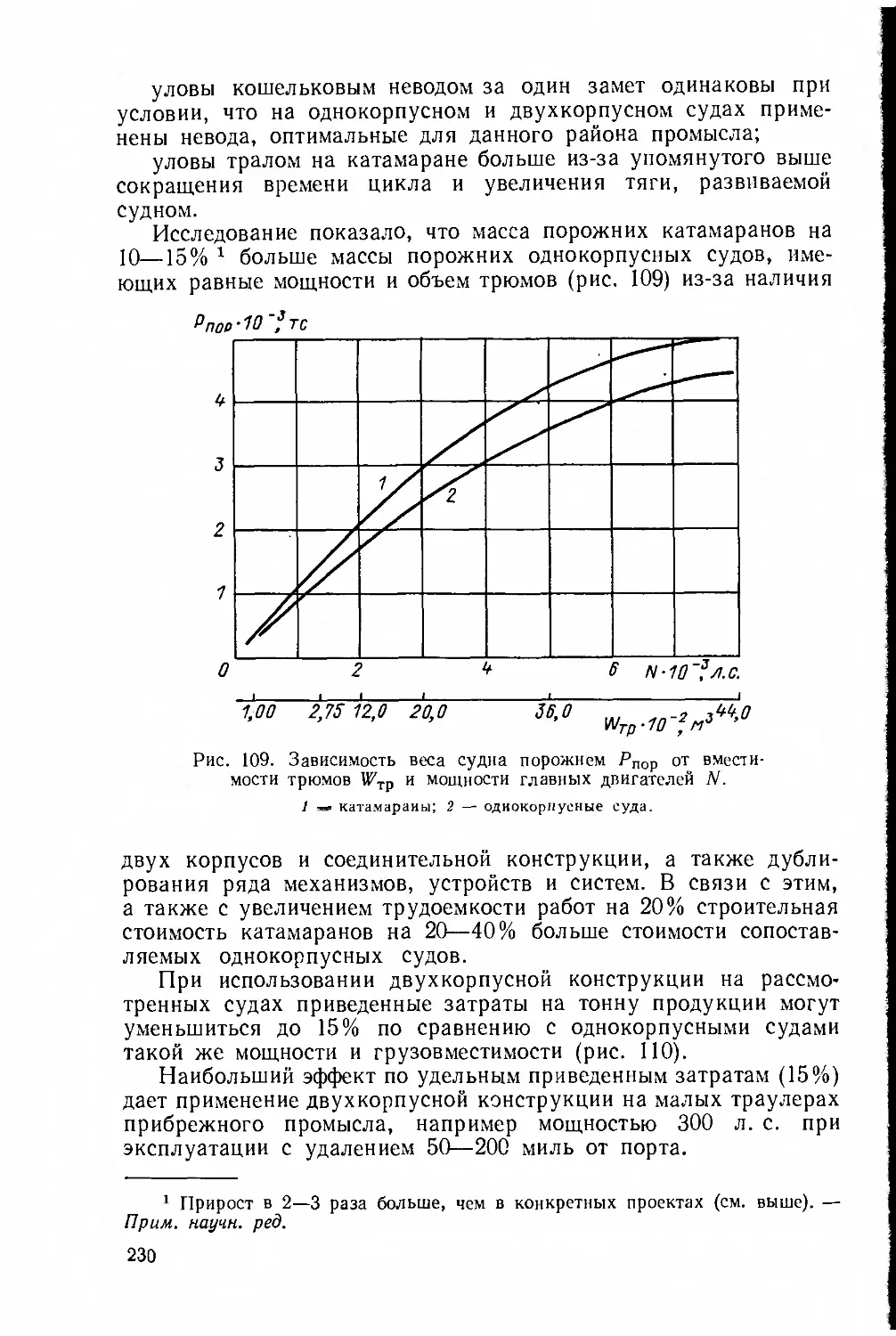
Проведенные самоходные испытания двухкорпусных моделей
с открытыми винтами в ДП каждого корпуса выявили, что режимы
обтекания и измеряемые коэффициенты взаимодействия менее
устойчивы, чем для одиночного корпуса.
На кривых коэффициента попутного потока имеются горбы,
зависящие от относительной скорости. Таким образом, наличие
второго корпуса влияет на взаимодействие движителя и кор¬
пуса немонотонно. Это влияние зависит от числа Фруда и, по-ви-
димому, объясняется взаимодействием волновых систем корпусов;
при Fr = 0,30-4-0,35 выявлено благоприятное влияние на взаимо¬
действие движителей и корпусов (повышение коэффициента по¬
путного потока wK на 20%); вне указанного района относительной
скорости влияние взаимодействия корпусов проявляется в изме¬
нении попутного потока от —20% для 2Ь < 0,3 и 2Ь > 0,4 до
+20% для 2Ь = 0,3-4-0,4 по сравнению с попутным потоком оди¬
ночного корпуса.
Влияние взаимодействия на коэффициент влияния неравно¬
мерности і,, по-видимому, находится в пределах точности опре¬
деления последнего и при обработке результатов испытаний не
выявлено.
При большом удлинении корпусов, малых и средних коэф¬
фициентах нагрузки увеличение клиренса приводит к росту отно¬
сительного коэффициента попутного потока катамарана, который
имеет максимум при Fr 0,35. С ростом коэффициента нагрузки
появляется и усиливается зависимость от относительной скорости,
хотя максимум кривых остается при Fr = 0,35.
В целом взаимодействие корпусов приводит к падению коэффи¬
циента попутного потока катамарана по сравнению с одиночным
корпусом при малых клиренсах (2Ь 0,2) и к увеличению —
при 2Ь > 0,25, особенно интенсивное увеличение наблюдается
при 26^0,35, Fr 0,32-4-0,35 и Kde > 1,5.
Для указанных выше пределов изменения нагрузки, удлине¬
ния и клиренса типичные кривые коэффициентов взаимодействия
в зависимости от обратного коэффициента нагрузки Kde приведены
на рис. 12.
Анализ испытаний показал, что на кривых коэффициентов за¬
сасывания имеются впадины, обусловленные гидродинамическим
взаимодействием корпусов. Влияние второго корпуса не монотонно
и зависит от относительной скорости. В районе Fr = 0,30-4-0,35
имеет место благоприятное влияние волновой интерференции на
засасывание, уменьшающее последнее на 15—20%, причем нисхо¬
дящая ветвь впадины на кривой коэффициента засасывания соот¬
ветствует вершине горба на кривой коэффициента попутного потока.
Вне указанного района значений относительной скорости
взаимодействие корпусов приводит к изменению коэффициента
засасывания в пределах от +10% для 2Ь <0,35 и 2Ь >0,45
до —10% для 2Ь 0,4.
42
При малых коэффициентах нагрузки коэффициент засасывания
катамарана с корпусами большого удлинения слабо зависит от
клиренса. С уменьшением удлинения эта зависимость усиливается,
одиночный корпус; — — — катамаран, 2Ь — 0,3.
но районы впадины и горба на кривей относительного коэффи¬
циента засасывания не изменяют своего положения (2Ь 0,4
и 0,3 соответственно).
При Kde > 1,0 проявляется зависимость коэффициента за¬
сасывания от относительной скорости. С дальнейшим ростом Kde
усиливаются влияние удлинения корпусов, модуляция кривых, но
положение горба и впадины также не меняется.
43
В целом испытания показали, что взаимодействие кор¬
пусов приводит к увеличению коэффициента засасывания
катамарана по сравнению с одиночным корпусом; это уве¬
Рис. 13. Буксировочная мощ¬
ность EPS и мощность энер¬
гетической установки ката¬
маранов водоизмещением
2200 тс:
1 — L/B, = 5, L = 44 м, б =
= 0,58, В, = 8,1 м, Вт =
= 24,0 м, Т — 4,9 м; 2 —
L/B, = 7, L = 56,3 м, 0 =
= 0,54, В, = 7,45 м, Вт =
= 24,0 м, Т = 4,53 м; 3 —
L/B, = 9, L = 55,6 м, 0 =
= 0,71, В, = 5,8 м, Вт =
= 22,0 м, Т = 4,50 м.
личение минимально при 2Ь & 0,4.
В отношении влияния второго кор¬
пуса на пропульсивный коэффици¬
ент т]кк катамарана следует отметить,
что при определенных значениях кли¬
ренса (2Ь 0,3—5—0,4), относительной
скорости (Fr 0,30—0,35) и коэффи¬
циента нагрузки коэффициент т]к ката¬
марана может на 10—15% превышать
коэффициент для одиночного корпуса.
Проведенные систематические букси¬
ровочные и самоходные испытания
моделей промысловых двухкорпусных
судов с крейсерской кормой позволили
выявить качественные и количествен¬
ные зависимости ходкости таких судов
от расстояния между корпусами и
основных соотношений главных разме¬
рений (Л/В15 B-JT, 6).
Кроме того, подтверждена принци¬
пиальная возможность улучшения хо¬
довых качеств за счет воздействия
волновой интерференции на сопротив¬
ление и взаимодействие с движителями
при определенных значениях относи¬
тельной скорости и относительного
клиренса. Приближенная методика рас¬
чета ходкости катамаранов с крейсер¬
ской кормой приведена в приложе¬
нии 3. На рис. 13 показана за¬
висимость мощности энергетической
установки катамаранов одного водо¬
измещения при разном удлинении
корпусов, но близкой длине от
скорости.
§ 2.3. Влияние соотношений главных размерений
катамаранов с транцевой кормой на их
буксировочное сопротивление
При разработке теоретических чертежей моделей серии с симме¬
тричными и несимметричными обводами были приняты следующие
значения и диапазоны изменений отдельных параметров двух¬
корпусного судна^Л/Z?!, равные 3,5, 5,1, 7,0; Вг/Т, составляющие
1,50, 2,00, 2,43, 7 = с/51; равные 0,25, 0,50, 0,75, 1,00, 1,25;
44
Таблица 2
Главные размерения и основные характеристики моделей катамаранов с транцевой кормой
ю
ю
ю
ю
ю
ю
ю
ю
ю
ю
ю
ю
ю
а
00
00
00
00
00
00
00
00
00
00
00
00
00
о
о
о
о
о
о
о
о
о
о
о
о
о
сч
сч
сч
сч
сч
сч
сч
сч
сч
С4
С4
С4
сч
02.
00
00
00
00
00
00
00
00
00
00
00
00
00
о
о
о
о
о
о
о
о
о
о
о
о
о
ю
ю
ю
ю
ю
ю
ю
ю
ю
ю
ю
ю
ю
О
ю
ю
ІО
ю
ю
ю
ю
ю
ІО
ю
ю
ю
ю
о
о
о
о
о’
о
о
о
G>
о
о
о
о’
00
00
00
00
00
00
00
00
00
00
00
708
00
Ѳ-
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
аГ
о
аГ
о
о
о’
о
о
о
о
о
ю
ю
о
о
о
о
о
о
о
ю
ю
ю
ю
сч
о
о
ю
ю
ю
ю
ю
— к
о
о
о
о
о
о
о
•
о
о
о
о
о
Ьч
со
о
о
со
со
со
СО
со
о
о
со
о
о
о
ю
о
ю
о
ю
CQ
сі
сі"
чч
сі"
сі"
сі"
сч
сГ
сІ
•
сі"
сі"
ЧЧ
тН
о
,00
о
о
о
о
о
о
о
о
о
о
о
о
о
Ч“4
Ч“4
Ч“4
7—<
ю
ю
ю
ь-
ь-
ь*
ю’
ю’
ю’
ІО
ІО
ю’
ІО
со
со’
со
S
о
tF
сч
о
о
со
со
ю
g
о
о
гЧ
05
05
сч
сч
о
С4
ІО
00
а
о'
о
о
о
чч
чч
1
чч
чч
ЧЧ
ЧЧ
2
со
сч
05
00
ч-Ч
8
о
о
8
о
о
о
о
8
о
сч
сі
о
о
о’
о
о
о
о
О
о
о
о
о
о
2
сч
00
г-
8
ч-Ч
со
со
С4
сі
С4
сч
о?
Ьч
о
о
о
о
О
о
о
о
О
о
о
о
о
2
со
05
со
05
со
05
8
8
8
8
8
8
со
о
05
05
05
сч
сч
сч
^Ч
^Ч
^Ч
^ч
ю
ю
ю
0]
о
о
о
о
о
о
о
о"
О
о
о
о
о
05
05
05
05
05
05
05
О)
05
05
05
05
05
PQ 2
06
8
8
8
8
8
8
8
8
8
8
СО
О
8
сч
сі"
сч
сі"
СІ"
сІ
оГ
сч
сі"
сі"
сі"
сі"
СІ
о
ю
о
о
о
о
о
о
о
о
^^4
о
ч»
05
ю
со
00
00
00
00
00
ю
ю
[Ч.
ю
ч-Ч
ІО
іо
ІО
tF
tF
tF
TF
tF
tF
со’
со’
со
W
ч
Ч“4
сч
со
tF
1—<
і—<
►—<
►—<
00
05
о
ч—ч
s
ь
(ч
£
д
Я
я
д
я
я
я
я
Оч
Оч
&
Оч
аз
аз
аз
«
ІО
ІО
со
со
.
сч
со
^ч
ю
со
00
05
о
сч
СО
* с
45
Л — равные 0, 0,25, 0,50, 0,75, 1,00, где Л — коэффициент
асимметрии; А = 0,5 соответствует симметричному корпусу; 5ВТ —
расстояние от ДП катамарана до внутреннего борта.
Исследование изменения коэффициентов полноты корпусов
на буксировочное сопротивление не проводилось.
Рис. 14. Влияние клиренса на коэффициент
остаточного сопротивления катамаранов
с транцевой кормой.
Серия состояла из 13
моделей (табл. 2). Модели
№ 5 (варианты I и II) и
№ 6 (варианты I и II) об¬
разуют группу асиммет¬
ричных моделей, осталь¬
ные входят в группу сим¬
метричных. ■
Модель № 4 является
исходной, она изготовлена
по теоретическому чер¬
тежу двухкорпусного трау¬
лера-сейнера «Экспери¬
мент» в масштабе 1 : 15.
Все испытанные модели
имели постоянную длину
по ватерлинии, равную
2,069 м. Варьирование от¬
ношений главных размере¬
ний производилось за
счет изменения ширины и
осадки корпусов (путем
аффинного преобразования
теоретического чертежа мо¬
дели № 4).
Корпуса асимметрич¬
ных моделей № 5, 8 полу¬
чены в результате аффин¬
ного преобразования чер¬
тежа модели № 4 с различ¬
ными коэффициентами пре¬
образования по левому и
правому бортам. Варианты
I и II этих моделей получены из одних и тех же корпусов
путем перестановки их относительно средней линии катамарана.
Так, например, у модели № 6, корпуса которой имели по одному
плоскому борту, в варианте I плоские борта корпусов являлись
внутренними бортами катамарана (Л = 0), в варианте II при пере¬
становке корпусов относительно средней линии плоские борта
становились наружными (Л = 1).
Результаты испытаний представлены в виде зависимостей
коэффициента остаточного сопротивления от числа Фруда и соот¬
ношений размерений. О характере влияния изменения горизон¬
46
тального клиренса на остаточное сопротивление одного корпуса
В “СТа1ГІ *= »Пз приведенных*
влияние изменения горизонтального ^иренсае аа ОСТ^Х°ноше-
противление сильно зависит от скоростного режима и соотноше
НИЙ главных размерений. „ оиі/Р =
. 5ДГв ™ "
““Аналогичная ^картин^а 7а£ается для асимметричных мо¬
делей №5 (варианты I и II) и № 6 (вариант 10. причем для мо¬
дели № 6 (вариант II) относительный клиренс с = 0,25 является
лучшим из испытанных для всего исследуемого диапазона ско-
Р°СПри испытаниях симметричных моделей с УдЛИН^
= 3,5 и асимметричной модели № 6 (вариант I) подобнои картины
'ZS-SCa остаточного -про™=ер =о"й
“ Д)НвеН"ЯсеХ= днапа^еѴнХГисГот
относительной ширины В.ІТ и скоростного Режима.
Модели с относительной шириной В.ІТ, равной , , >
хар^ктерны^езким уменьшением остаточного сопротивления при
изменении LIB. от 3,5 до 5,0. В диапазоне LIB. > 5 коэ^ициент
остаточного Р gg Т™!),20-^0,25 в этом диапазоне
удлинений1" наблюдался незначительный минимум коэффициента
0СТаі^результатеРААытАий Ао^елей‘соотносительной шириной
5/7 = 2,4 выявлен максимум коэффициента оста™чн0 р
тивления при L/B, = 5,0-4-6,0 на больших скоростях движения
(Fr > 0 30). При меньших числах Фруда коэффициент
(но?о сопро’тивл^ння уменьшается при
LIB. Клиренс (в исследованном диапазоне) сравнительно мал
влияет на характер зависимости С0Ст (Fr’ и„1/;ыипрния от От-
Зависимость коэффициента остаточного с°пР°™але й с
носительной ширины В.ІТ приведена на рис. 16. Для
удлинением LIB. = 7 и 5,1 изменение отношения f if ™
влияния на коэффициент остаточного сопротивления н
Уяплктрп коивых L (Fr, В .IT) меняется в зависимости
от удлинения и скоростного режима. Так, для большинствадри-
вых ПРИ LIB. = 7,0 характерен максимум в районе и.и
а при^/Д, = 5,1 в этом районе наблюдается минимум
Для моделей с удлинением L/B. = 3,5 н^/^отивления
заметная зависимость коэффициента °стат0ЧН0Г0н“7°“ния
от относительной ширины В .IT, когда с увеличением отношения
Я 1Э0
Рис. 15. Влияние удлинения корпусов на коэффициент остаточного сопротивления катамаранов с транцевой кормой.
48
L/81 = J,t>
Рис. 16. Зависимость коэффициента остаточного сопротивления катамаранов с транцевой кормой
от относительной ширины BjT (с — 1,0).
49
BJT значение коэффициента остаточного сопротивления умень¬
шается.
Метод линейной интерполяции сопротивления по BJT, часто
применяемый при расчете буксировочного сопротивления одно¬
корпусных судов, для двухкорпусных судов дает большую по¬
грешность.
Асимметрия корпуса в исследуемом диапазоне коэффициентов
асимметрии А (А = 0-4-1,0) в ряде случаев положительно сказы¬
вается на значении остаточного сопротивления (в районе А =
= 0,50 и А = 0,75).
На основании проделанных буксировочных испытаний систе¬
матической серии моделей двухкорпусных судов с транцевой кор¬
мой можно сделать следующие выводы:
буксировочное сопротивление заметно уменьшается с увеличе¬
нием удлинения ЫВГ при любых значениях клиренса;
изменение относительной ширины BJT при удлинении кор¬
пусов ЫВГ, равном 7,0, 5,1, сильного влияния на буксировочное
сопротивление не оказывает; при £/Вх = 3,5 буксировочное со¬
противление уменьшается с увеличением B-JT\
асимметрия корпуса может привести к уменьшению букси¬
ровочного сопротивления при А = 0,25 и А = 0,75.
Следует отметить, что если сопротивление катамаранов с асим¬
метричными по всей длине корпусами изучалось хотя бы при одном
сочетании прочих геометрических параметров, то сопротивление
корпусов с асимметричной носовой и симметричной кормовой
частями почти не изучено. Известно только, что при U-образных
обводах и небольшом коэффициенте общей полноты (6 0,5)
сопротивление катамарана с асимметричными носовыми обводами
(плоские борта внутри) может быть несколько меньше, чем у сим¬
метричных корпусов [111]. В то же время для Ѵ-образных обводов
и повышенного коэффициента общей полноты до сих пор не уда¬
лось добиться аналогичного результата.
При переходе от симметричных обводов к обводам с плоскими
внутренними бортами корпусов резко (вдвое и более) увеличива¬
ется коэффициент сопротивления формы. Можно предположить,
что каждый корпус с асимметричными обводами обтекается как
крыло предельно малого удлинения с ненулевым углом атаки
даже на прямом курсе. В этом случае можно ожидать появления
увеличенного индуктивного сопротивления, которое при суще¬
ствующей системе расчетов сопротивления проявляется как до¬
полнительное сопротивление формы.
Носовая система внутренних волн в случае асимметричных но¬
совых обводов относительно мала, а кормовая — обычна для дан¬
ной полноты и удлинения. Поэтому взаимодействие систем незна¬
чительно и расстояние между корпусами мало влияет на волновое
сопротивление такого катамарана. В то же время при корпусах
с плоскими носовыми внутренними бортами значительно проще
50
решаются многие конструктивные вопросы, например расположе¬
ние носового крыла — успокоителя продольной качки. Поэтому
желательно систематическое исследование ходкости таких кор¬
пусов.
§ 2.4. Особенности ходкости двухкорпусных
судов с малой площадью ватерлинии
Удельная смоченная поверхность Q1/V'12/3 двухкорпусных су¬
дов с малой площадью ватерлинии в зависимости от удлинения
корпусов, стоек, формы шпангоутов и осадки может достигать
10—12. Обычно смоченная поверхность дуплуса и трисека зна¬
чительно больше, чем сравнимого однокорпусного судна. Однако
погружение основного волнообразующего объема под поверхность
приводит к значительному, особенно при Fr JSs 0,4н-0,5, снижению
волнового сопротивления. Поэтому с точки зрения ходкости рас¬
сматриваемые двухкорпусные суда целесообразны лишь в указан¬
ной зоне относительной скорости [91, 92].
Другими особенностями, влияющими на вязкостное сопро¬
тивление, являются наличие поверхностей различной, но сравни¬
мой длины и взаимовлияние этих поверхностей. Если различия
длины и режима обтекания стоек и корпусов сравнительно просто
учитываются существующей схемой пересчета с применением пло¬
ского экстраполятора трения, то влияние турбулентного или вихре¬
вого следа, сходящего с одной части судна, на условия обтекания
последующих частей изучено мало.
Сопротивление, обусловленное возникновением струйной и
брызговой пелены при обтекании вертикальных стоек, в случае
FrCT > 2,0 может быть приближенно оценено по формулам [76]:
о - Рц2 1 R
Лбр 2 ^ст^ст
0,003 + 0,06BCT/LCT при = 0,65;
0,011 4-0,08ВстДст при xCT/LCT = 0,50; (7)
0,009 4~ 0,013BCT/LCT при хстДст = 0,35.
При меньших значениях относительной скорости коэффи¬
циент брызгового сопротивления приближенно можно считать
пропорциональным Frct; при FrCT 0,9 Дбр 0.
Для снижения брызгового сопротивления желательно приме¬
нение профиля сечения стоек с острыми концами, а не крыльевых
профилей. Стойки со смещенным в корму центром тяжести площади
ватерлинии при достаточно высокой скорости имеют заметное
преимущество по сопротивлению.
Волновое сопротивление определяется собственным волновым
сопротивлением корпусов и стоек, а также их взаимодействием.
При реальном расстоянии между корпусами для дуплуса и три¬
сека главную роль играет взаимодействие между корпусами и
стойками, а не между корпусами, как для катамарана.
51
Увеличение удлинения и погружения корпусов, а также удли¬
нения стоек снижает их волновое сопротивление, но вызывает рост
смоченной поверхности судна.
Как показали опыты, выполненные В. В. Васильевой, изме¬
нение положения стоек по длине корпуса влияет на волновое
сопротивление комплекса
Рис. 17. Сравнение мощности
энергетической установки су¬
дов различных типов длиной
40 м и водоизмещением
500 тс.
/ — однокорпусное судно, В»
= 7,35 м, Т = 3,4 м, д = 0,5;
2 — катамаран, Ві = 5,35
Вт — 13,35 м, Т ~ 2,4 м, д =
=0,5; 3 — дуплус, Bt = 2,5
(Вгвл = 1.0 «). Вт = 10,5
Т = 3,5 м, 6 = 0,67.
м
м,
снижает
«корпус со стоиками» по-разному, в за¬
висимости от скоростного режима. При
Fr > 0,4 сдвиг стойки от миделя
к оконечности в 3 раза и более увели¬
чивает сопротивление, а при Fr < 0,4
стойка, расположенная на носовом или
кормовом перпендикуляре,
сопротивление на 10—4Q%.
Взаимовлияние корпуса и стойки
связано с взаимодействием генерируе¬
мых ими поперечных волн длиной X =
= 2л v*/g. Поэтому имеется принци¬
пиальная возможность при заданном
числе Фруда, объеме и погружении
корпусов, а также площади ватерлинии
стоек так выбрать удлинение корпусов
и стоек, чтобы были близки амплитуды
их волн, и так подобрать взаимное
расположение корпусов и стоек, чтобы
вершина поперечной волны стойки
была возможно ближе к подошве
волны корпуса. При выполнении этих
условий достигается минимум суммар¬
ного волнового сопротивления корпуса
со стойкой.
Таким образом, можно отметить,
что удельное буксировочное сопротив¬
ление трисека и дуплуса уменьшается,
если снижается площадь ватерлинии,
увеличивается погружение корпусов,
а взаимное расположение стоек и кор¬
пусов точно соответствует скоростному
методика расчета сопротивления дуп-
режиму. Приближенная
луса и трисека приведена в приложении 4.
Обычно за корпусами дуплуса и трисека можно разместить
винты достаточно большого диаметра, что позволяет снизить [95]
удельную нагрузку и увеличить пропульсивный коэффициент до
0,75—0,80 (при оптимальной частоте вращения).
Представляется очевидным, что обоснованное сравнение ха¬
рактеристик судов одинакового назначения может производиться
только по конечным эксплуатационно-экономическим показателям.
Однако для того чтобы использовать частные технические особенно¬
сти каждого судна, бывают полезны и сравнения отдельных ка-
52
чесТв судов при условно постоянных общепроектных характери¬
стиках. Например, для проверки возможности снижения остаточ¬
ного и полного сопротивления двухкорпусного судна путем уве¬
личения погружения волнообразующего объема была спроекти¬
рована и испытана одна модель с подповерхностными корпусами
(типа дуплус), имеющая ту же длину и водоизмещение, что и
центральная модель серии катамаранов с крейсерской кормой.
Мощность энергетической установки условных судов длиной
40 м и водоизмещением 500 тс, взятых в качестве расчетного при¬
мера, в зависимости от скорости приведена на рис. 17.
Сравнение кривых показывает, что увеличение углубления
водоизмещающего объема под свободную поверхность, во всяком
случае для корпусов достаточно большого удлинения, в принципе
позволяет существенно улучшить ходовые качества двухкорпус¬
ных судов по сравнению с однокорпусными (при достаточно вы¬
сокой скорости).
§ 2.5. Волновое сопротивление катамарана,
снабженного носовым подводным крылом
Для улучшения мореходных качеств катамаранов применяется
продольная стабилизация их с помощью крыла, расположенного
между корпусами в районе носовой оконечности. Это крыло позво¬
ляет значительно снизить качку и дополнительное сопротивление
на встречном волнении. В то же время установка крыла приводит
к росту сопротивления на тихой воде при малых и средних относи¬
тельных скоростях. Экспериментально было показано, что при
достаточно больших числах Фруда установка крыла может,
напротив, привести к снижению полного сопротивления системы
катамаран — крыло по сравнению с сопротивлением катамарана
без крыла, что объясняется уменьшением волнового сопротивле¬
ния вследствие благоприятной интерференции. Эксперименты
показали также, что для каждого значения числа Фруда суще¬
ствует такое значение установочного угла атаки крыла, при ко¬
тором достигается наибольший выигрыш (или наименьший про¬
игрыш) в сопротивлении.
Если принять обычные для теории волнового сопротивления
допущения о том, что жидкость идеальная, несжимаемая, ее
движение безвихревое, а амплитуды возникающих на поверх¬
ности жидкости волн малы по сравнению с их длиной, то можно
поставить краевую задачу для потенциала вызванных скоростей <р.
Дополнительно на задней кромке крыла требуется выполнить
условие Жуковского. Крыло имитируется вихрем с циркуля¬
цией Г (ц); считается, что форма корпусов судна удовлетворяет
условию Мичелла [35].
Интенсивность особенностей (циркуляция несущей линии,
плотность источников на ДП корпусов) для каждого корпуса
и крыла может определяться независимо, т. е. влиянием
53
вызванных скоростей от одного тела на интенсивность особен¬
ностей другого можно пренебречь.
Используя линейность задачи, заменяя тонкое крыло с заглуб¬
лением ha подковообразным вихрем с абсциссой £а, с учетом ре¬
зультатов работы [110], можно получить формулу для опреде¬
ления волнового сопротивления катамарана с крылом Rw. Удобно
представить суммарное сопротивление Rw в виде суммы трех
составляющих
= Rwli Rwa -ф- ARW. (8)
Здесь
п/2
Rwii = — пру2 j (Al + Bl) cos3 Ѳ dd (9)
о
— волновое сопротивление катамарана без крыла;
п/2
Rwa = — rtpv2 j (Al + Bl) cos3 Ѳ dd (10)
0
— волновое сопротивление изолированного крыла;
п/2
&RW = 2лру2 j (AaAb 4- BaBb) cos3 Ѳ de (11)
о
— интерференционное сопротивление (в благоприятном слу¬
чае &RW < 0).
В этих формулах Аа и Ва — амплитудные функции, определяе¬
мые соотношениями
Л = ФА (Ѳ) ѵа (Ѳ), Ва = (Ѳ) Ѵа (Ѳ).
Здесь
(12)
Фл (Ѳ) 1
Фв (Ѳ) J
b'f. f sl° 1 /sec Ѳ g \
Icos J ёа/
sec4 Ѳ exp
ha sec2 Ѳ
Fr2
rrZ>
(13)
b — хорда крыла; X = ЦЬ — удлинение крыла (I — размах
крыла); Ѳ — переменная интегрирования; Frh = vlVgb; и ha
отнесены к хорде крыла:
1/2
J Г(т])ф(т], Ѳ)гіт]; (14)
-1/2
Г (ц) — переменная по размаху крыла циркуляция; ц — пере¬
менная ордината, отнесенная к размаху крыла;
ф (n, Ѳ) = cos I sec2 0 sin 0 \ .
I 7'
(15)
54
— 1 о
sec3 Ѳ cos Sin Ѳ 4) f J l/d X
0 -T/L
J COS 1 , sec2 ѳ \ / see2 0 \ ,1KX
Hsin/rFTi-QM-r^H’ (16>
где I = HL — относительный размах крыла; [fg] = ' fi —
скачок производной от уравнения поверхности каждого корпуса:
координ^ы £ и £ отнесены к L.
Обычно абсцисса линии наибольших толщин крыла £а для
достижения наилучших стабилизирующих свойств принимается
как можно меньшей, т. е. крыло располагается возможно ближе
к линии форштевней, а заглубление ha выбирается возможно
большим. Поэтому проблема поиска наилучших значений и ha
ниже не рассматривается.
Для крыла с постоянной циркуляцией Го [Г (л) Го] в со¬
ответствии с условием минимума суммарного волнового сопро¬
тивления нетрудно получить формулу для оптимальной цирку¬
ляции:
Л/2
J (АьАа + BbBa) cos’ Ѳ гіѲ
Го=- ° я/2-:- > (17)
j (^а + ®а) COS3 Ѳ гіѲ
О
где Аа = Аа/Г0, Ва = Вц/го.
Волновое сопротивление крыла с оптимальной циркуляцией:
RWa = «РУ2
"Л/2 -|2
J (AbAa + BbBa) COS3 Ѳ dQ
_0 _
л/2
j (Л2+Вд) cos30d0
Интерференционное сопротивление при этом будет
&RW = — 2Rwa.
(18)
(19)
Целесообразно при определении Го ограничиваться лишь
учетом волн, генерируемых носовой оконечностью, которую будем
схематизирование представлять в виде пары тонких симметричных
клиньев с углами раствора 2awL, осадкой Т и расчетной длиной LH
(Н — глубина погружения крыла). При этом остальная часть
корпуса может быть имитирована полубесконечным параллелепи¬
55
педом, не влияющим нз волнообразование. Если обозначить коэф¬
фициент волнового сопротивления изолированного крыла
cw = (20)
рѵ Ѵ 1
Т2
2
И
Cwa = tg2^/. = (21)
где Іц = ЦТ, то изменение коэффициента волнового сопротивле¬
ния
= 16nZ" Fr«/G-
l& awL
а оптимальное значение функции G:
С _ 4Fr" 1
°р‘~ Лін J •
Здесь
Я/2
X COS I sec 9Ѳ sin Ѳ
\ Fr„
. j sec2 Ѳ Lh \ .
X Sin jr— I sin
\ FrH 2 /
\ . ( sec2 Ѳ . n,
- Sin — sin 0/H
/ \ FrH
Г sec2 Ѳ / . ч
н
FrH число Фруда по глубине погружения крыла ha; haH =
= halT, laH = Ѣа/Т;
л/2
j f sec Ѳ / 2haH sec2 Ѳ \ , [ sec2 Ѳ . \
J sin20 P ( pr2 I Sin I p 2 Sin Ѳ/Л dQ.
о \ ггн / \ Ьгн у
_Ha рис. 18, 19 представлены графики функций Gopt (FrH)
и Cwa (FrH) (при G = GOpt), вычисленных при ІаИ = 0, haH = 1,
= 6 для различных Ін. Анализ этих графиков позволяет сде¬
лать следующие выводы:
зависимость Gopt (FrH) имеет резко выраженный колебатель¬
ный характер, причем положения максимумов и минимумов слабо
зависят от относительного клиренса Ін. Максимумы наблюдаются
примерно при Fr^ax, равных 0,525, 0,62, 0,82 и 1,7, а минимумы —
при Fr^ln, составляющих 0,57, 0,71 и 1,03. Значение Gopt при
данном Fr// сильно зависит от Ін;
56
кривая Cwa (FrH) имеет примерно тот же характер, что и
кривая Gopt (FrH) (абсциссы относительных экстремумов практи¬
чески те же), но зависимость от Ін выражена слабее, и для значи¬
тельного диапазона FrH почти незаметна. Примечательным
является то, что Cwa Ss 1,0 только при FrHg 1,25; 2,5 (в случае
Рис. 18. Оптимальное значение относительной циркуляции носового крыла
катамарана Gopt в зависимости от числа Фруда по глубине погружения
крыла Fth-
Iff = //Я — относительный клиренс.
Ін = 2). Этим объясняется то, что в экспериментах только при
довольно больших числах Фруда (Fr > 0,3) удавалось добиться
снижения полного сопротивления катамарана за счет благо¬
приятной интерференции.
Приведенные формулы и графики могут быть использованы
для выбора оптимального угла атаки демпфирующего крыла
катамарана.
§ 2.6. Особенности волнового и вязкостного
сопротивления тримарана
У быстроходных водоизмещающих речных судов [51 должны
сочетаться следующие качества, важные для эксплуатации их
в условиях внутренних водных путей: сохранение практически
постоянной сравнительно высокой скорости на фарватере раз¬
личной глубины; способность прохождения малых глубин,
57
Рис. 19. Коэффициент волнового сопротивления изолирован¬
ного крыла cwa (при оптимальной относительной циркуля¬
ции) в зависимости от числа Фруда по глубине Fr//.
58
незначительно превосходящих статическую осадку судна; хоро¬
шие мореходные качества при плавании на озерах и водохра¬
нилищах. Возможность обеспечения таких качеств подтверждена
натурными испытаниями и опытной эксплуатацией однокорпус¬
ного судна такого типа «Экспериментальный-1».
Преимущества пассажирского речного катамарана по сравне¬
нию с однокорпусным судном, заключающиеся в возможности
создания больших по площади комфортабельных пассажирских
салонов, повышении остойчивости, уменьшении амплитуд борто¬
вой качки, реализованы при создании двухкорпусного теплохода
со сверхкритической скоростью «Анатолий Угловский», строи¬
тельство которого было завершено в 1975 г.
Трехкорпусное судно (тримаран), состоящее из выдвинутого
вперед центрального корпуса и двух боковых, объединенных
соединительным мостом, позволяет сочетать преимущества одно¬
корпусного варианта по мореходным качествам на встречном
волнении с преимуществами катамарана по площади палубы,
амплитудам бортовой качки и остойчивости. Основные достоин¬
ства трехкорпусной схемы:
сосредоточение большей части водоизмещения в центральном
корпусе уменьшает удельную смоченную поверхность судна по
сравнению с катамараном, а продольный сдвиг боковых корпусов
благоприятно влияет на волновое сопротивление;
использование корпусов с большей относительной длиной,
чем для однокорпусного судна, целесообразно по соображениям
ходкости 1 и уменьшения волнообразования и допустимо по
условиям остойчивости;
сосредоточение большей части водоизмещения в центральном
корпусе, имеющем в некоторых случаях отрицательную остой¬
чивость, позволяет уменьшать метацентрическую высоту судна,
увеличивать период бортовых колебаний по сравнению с тем же
периодом катамарана и снижать перегрузки, обусловленные
качкой;
1 Легко показать, что для однокорпусных судов, имеющих расчетную отно¬
сительную скорость на глубокой воде FrKp >0,5, ограничение относительной
длины I /1(Р, желательное для получения минимальной мощности энергети¬
ческой установки, приводит к жесткой связи между заданной (абсолютной)
скоростью и водоизмещением. В самом деле, по условию FrKp Ja 0,5 имеем огра¬
ничение длины корпуса снизу: L о2/Ргкр g, а по условию I = L/V1!3 Ja /кр
получаем ограничение длины корпуса сверху: L /крР/3. Одновременное
выполнение этих условий приводит к зависимостям: V = ов/РгКр£3/кр (при
заданной скорости ѵ, м/с) или ѵ =]/"/kpFr2 pgV1/3 (при заданном объемном во¬
доизмещении V, м3).
Превышение указанных значений водоизмещения приводит к резкому росту
мощности энергетической установки. Чтобы избежать это, необходим переход
к двух- или трехкорпусиым судам, у которых каждый из корпусов имеет водо¬
измещение не более указанного выше (которое по аналогии называется кри¬
тическим). — Прим. науч. ред.
59
вследствие разрушения волн центральным корпусом умень¬
шается число ударов в обшивку соединяющей корпуса конструк¬
ции (по сравнению с ударами в мост катамарана);
появляется возможность создания больших по площади палуб
и обеспечения более удобного общего расположения и большей
остойчивости, чем на однокорпусном судне.
трехкорпусного судна с одинаковыми корпусами на глубо¬
кой (а) и мелкой (б) воде в зависимости от Fr.
С использованием линейной теории волн было получено выра¬
жение для волнового сопротивления трехкорпусного судна Rw
в виде
Rw = Rwi + ^Rwi ARwt (22)
Для трехкорпусного судна с равными корпусами выражение
(22) примет вид
Rw = 3Rw2 4- bRWK 4- bRWT. (23)
На значение «тримаранной добавки» Д/?Ют наибольшее влия¬
ние оказывает продольный сдвиг (выдвиг) корпусов а. На рис. 20
60
Рис. 21. Изменение составляющих коэффициента волнового сопротивления трех¬
корпусного судна при hlL = 0,15:
61
показаны кривые коэффициентов волнового сопротивления трех¬
корпусного судна на глубокой и мелкой воде при нескольких
значениях относительного выдвига а = aJL, рассчитанные по
теоретическим формулам, полученным в работе [42]. Результаты
расчета свидетельствуют о благоприятном влиянии продольного
сдвига на значения коэффициентов волнового сопротивления как
на глубокой воде, так и на мелководье при критической и сверх¬
критических скоростях [4]. Результаты теоретического расчета
были подтверждены испытаниями моделей трехкорпусных судов
на глубокой и мелкой воде [2, 43].
На рис. 21 в качестве примера показано изменение состав¬
ляющих коэффициента волнового сопротивления тримарана в усло¬
виях мелководья в зависимости от Fr. Безразмерные’составляющие
коэффициента волнового сопротивления приведены в соответствии
с принципом разделения, представленным выражением (23).
Изменение поперечного клиренса b (расстояния между диа¬
метральными плоскостями центрального и боковых корпусов)
в реально осуществимых пределах не оказывает существенного
влияния на волновое сопротивление тримарана [5].
Проведенные исследования позволили разработать практиче¬
скую методику расчета сопротивления воды движению трех¬
корпусных судов [43].
Коэффициент полного сопротивления t, может быть представ¬
лен в виде
? = £тр + £/ + K,w + (24)
где Д£ — суммарная надбавка на сопротивление выступающих
частей, шероховатости, воздуха.
Коэффициенты формы и волнового сопротивления опреде¬
ляются путем введения поправок к соответствующим коэффи¬
циентам для изолированного корпуса, как и для катамарана
с корпусами большого удлинения [20]:
Zw ^W^Wl' (25)
Поправочный коэффициент kf определяется по формуле
k; = (kf0- 1)Ѵ!/Ѵ2+ 1. (26)
Графики kf {а, b) для тримарана с одинаковыми корпусами
приведены на рис. 22. Здесь а = a/L, b = b/L (L —длина одного
корпуса тримарана). Для схематизированной модели судна с оди¬
наковыми корпусами были рассчитаны поправочные коэффи¬
циенты kw (рис. 23).
Когда трехкорпусное судно имеет основной центральный
корпус и боковые поплавки, поправочный коэффициент kw яв¬
ляется функцией большего числа параметров. Графики kw (Fr,
a, b, L2!Llt BJB-^ были получены в работе [42] на основании
анализа результатов систематических расчетов на ЭВМ по теоре-
62
тическим формулам, полученным с использованием Линейной
теории волнового сопротивления.
Для оценки изменения характера обтекания и сопротивления
трения корпусов многокорпусного судна необходимо знание
распределения скоростей по поверхностям корпусов, движу¬
щихся как в составе системы, так и изолированно. Картина
распределения скоростей может быть получена аналитически
из решения задачи об обтекании тела потоком идеальной несжи¬
маемой жидкости. Известны приближенное [80] и уточненные
Рис. 22. Зависимость kf от выдвига а и клиренса Ь.
[561 решения задачи о распределении скоростей по поверхности
эллипсоида, движущегося в безграничной глубокой жидкости
вдоль вертикальной твердой стенки.
При расположении эллипсоида на относительно близком рас¬
стоянии от экрана оказалось \ что расчет распределения скоро¬
стей по меридиональному сечению, обращенному к экрану, по
приближенной зависимости [80] дает значения скоростей, зани¬
женные для средней части и завышенные для оконечностей.
Распределение скоростей по поверхностям системы тел при¬
ближенно (при достаточно большом отстоянии тел друг от друга)
может быть найдено методом Блоха — Гиневского [101.
Моделирование обтекания системы тел на основе аналогий
ЭГДА (электрогидродинамической аналогии) и ЭМГА (электро¬
магнитогидродинамической аналогии) дает практически совпа¬
дающие результаты, что подтверждает целесообразность приме¬
нения моделирования, особенно при малых расстояниях между
корпусами, тем более если корпуса имеют сложную форму. По¬
этому было решено исследовать характер обтекания тел, движу¬
щихся в составе системы, с использованием аналогии ЭМГА [55].
1 По данным Б. В. Курылева.
63
В качестве объекта исследования была выбрана система из
трех корпусов близких размеров (тримаран). Характерным для
многокорпусных судов является использование в качестве состав¬
ляющих корпусов весьма большого удлинения (LIBl >10). Для
Рис. 23. Зависимость kw от числа Фруда и выдвига а
при b = b/L = 0,100.
упрощения корпуса были заменены эллипсоидами вращения.
Боковые корпуса имели удлинение LIB = 8, средний корпус —
LID — 10. Модели имели диаметр D = 125 мм.
Методом ЭМГА находилось распределение скоростей по по¬
верхностям корпусов тримарана. Результаты представлялись
64
1.02.
3 п/р Дубровского В. А
65
в форме коэффициента эффективной скорости Кэ, представляющего
собой отношение скорости в точке поверхности корпуса при
движении его в составе системы к скорости в этой же точке при
движении изолированного корпуса с теми же размерениями:
Рис. 25. Соотношение коэффициентов
трения корпусов тримарана Лт (а) и
положение точек отрыва на корпусах
тримарана (б).
На рис. 24 приведено зна¬
чение коэффициента Кэ для
случаев b = (Ь — R)/R = 1,5;
а = a'iLy, равных 0,3 и 0,8,
где R — радиус на мидель-
шпангоуте.
Как видно, максимальные
значения коэффициента не пре¬
восходят 1,05 даже для таких
малых отстояний корпусов друг
от друга. При увеличении
параметров b и а значение
Кэ- і,о.
Распределение скоростей по
поверхностям корпусов, полу¬
ченное моделированием,в даль¬
нейшем использовалось при
расчете сопротивления трения
и точек отрыва пограничного
слоя.
Результаты расчетов турбу-
лентного пограничного слоя
представлялись в форме коэф¬
фициента влияния Кт, равного
отношению коэффициентов тре¬
ния WUi-
значения Кт = f (Re) для случая
движения тримарана в безграничной жидкости.
Как показывают оценки влияния близости корпусов, движу¬
щихся в составе системы, сопротивление трения многокорпусного
судна (тримарана) может быть определено приближенно по су¬
ществующим методикам, разработанным для однокорпусного
судна, т. е. без учета взаимного влияния корпусов.
Если использовать критерий отрыва турбулентного погра¬
ничного слоя, свойственный этому методу, можно построить
1 — боковой корпус; 2 — центральный
корпус.
/ — линия отрыва прн движении одиноч¬
ного корпуса; II — лнння отрыва прн
движении того же корпуса в составе три¬
марана.
На рис. 25, а представлены
зоны отрыва пограничного слоя на корпусах, входящих в три¬
маран, например, для случая ~Ь = 1,5; о~=0,3; Re = 10е. На
рис. 25, б показаны зоны отрыва турбулентного пограничного
слоя на боковых и среднем корпусах при движении их как в со-
66
ставе системы, так и поодиночке. Видно, что на боковых корпу¬
сах, движущихся в составе системы, зоны отрыва турбулентного
пограничного слоя несколько сокращаются по сравнению с изо¬
лированным движением, а у среднего — расширяются.
При Re > 10 все корпуса обтекаются практически безотрывно
как в составе системы, так и при движении поодиночке. Таким
образом, применение названного метода позволяет предположить,
что для натурных объектов достаточно большого удлинения можно
не учитывать отличий зон отрыва, вызванных взаимовлиянием
корпусов.
§ 2.7. Особенности сопротивления
глиссирующего катамарана
Однокорпусные глиссирующие суда на высоких скоростях дви¬
жутся с углами дифферента 1—2°, т. е. существенно меньшими
оптимальных (рис. 26). Попытки увеличить дифферент до 4—5°
за счет смещения центра тяжести в корму приводит к потере
продольной устойчивости [11].
Рис. 26. Влияние удлинения плоской пластины на границу
перехода к режиму глиссирования Fry и на оптимальное
значение угла ходового дифферента форГ
При использовании катамаранной схемы масса судна распре¬
деляется между двумя несущими поверхностями, удлинение
каждой из которых существенно больше удлинения смоченной
поверхности однокорпусных глиссеров. Имея на больших ско¬
ростях углы дифферента, близкие к оптимальным, корпуса глис¬
сирующих катамаранов могут обладать гидродинамическим ка¬
чеством, превышающим качество однокорпусных судов с анало¬
гичными характеристиками.
5* 67
Рис. 27. Характерный вид кривых сопротивления катама¬
ранов с различными клиренсами (Су = 0,578).
Рис. 28. Влияние относительного расстояния между корпусами
на скорость, соответствующую горбу сопротивления.
I — Су = 0,386; 2 — Су = 0,578; 3 — Су = 0,943.
68
Обладая этим, а также рядом других эксплуатационных пре¬
имуществ, таких, как хорошая остойчивость, большая площадь
палубы и др., катамаранная схема не свободна и от недостатков.
Например, период выхода катамарана на режим развитого глис-
Рис. 29. Влияние относительного расстоя¬
ния между корпусами на гидродинамиче¬
ское качество глиссирующего катамарана:
(Z./B, = 11,25, xg = 0,434): а — Сѵ =
= 0,386; б — Сѵ = 0,578; в — Сѵ =
= 0,943:
сирования оказывается более продолжительным, чем у одно¬
корпусного судна, что вызвано смещением границы начала глис¬
сирования в зону высоких скоростей движения по мере увеличе¬
ния удлинения несущей поверхности [77].
Влияние клиренса в форме отношения суммарной ширины
корпусов к полной ширине катамарана Вт исследовалось при
69
трех водоизмещениях V, соответствовавших значениям коэффи¬
циента статической нагрузки Сѵ = VI(2B1)S, равным 0,386, 0,578,
0,943, и одном положении ЦТ по длине xg= xJL = 0,434. Отно¬
сительная скорость в форме числа Фруда по водоизмещению
варьировалась в пределах Fry = n/j/gV1/® = 24-6.
Гидродинамическое качество катамарана, как и следовало
ожидать, оказалось существенно зависящим от значения относи-
Рис. 30. Зависимость гидродинамического качества глиссирующего
= 5,0;
70
тельного клиренса 2В1ІВт. С уменьшением расстояния между
корпусами катамаран позже переходит к режиму глиссирования,
и скорость, соответствующая горбу сопротивления, Fryrop6 уве¬
личивается, что особенно четко прослеживается у тяжелонагру-
женных моделей при Су-» 1. Характер кривых буксировочного
сопротивления катамарана оказывается несколько иным, чем
у однокорпусного глиссера (рис. 27): на них имеют место два
горба сопротивления. Скорость, соответствующая первому горбу,
возрастает по мере увеличения расстояния между корпусами
(рис. 28). Второй горб сопротивления наблюдается при одной
и той же скорости Fry ж 5, независимо от взаимного расположе¬
ния корпусов. Гидродинамическое качество глиссирующего ката¬
марана оказывается выше качества изолированной глиссирующей
поверхности лишь при расстояниях между корпусами, соответ¬
ствующих отношениям 2В1ІВт >0,75 (рис. 29). При 2BJBm<
< 0,75 качество катамарана всегда ниже качества изолированной
лодки удвоенной ширины. Наименее выгодной в отношении сопро¬
тивления является компоновка, при которой суммарная ширина
корпусов составляет примерно 0,4 полной ширины катамарана.
Влияние удлинения корпусов катамарана оценивалось по
результатам испытаний пяти моделей, образованных пластинами
различного удлинения ЫВг = 7,5-4-22,5. Полное удлинение всех
пяти моделей было одинаковым (LIBm = 2,25), а клиренс был
переменным (2B-JBm = 0,24-0,6). Испытания проводились при
катамарана от удлинения лодок: а — Fry = 4,0; б — Fry =
в — Fry = 6,0.
71
С ростом удлинения лодок гидродинамическое качество глис¬
сирующего катамарана, как видно из рис. 30, уменьшается,
причем особенно интенсивно в зоне умеренных удлинений. Ана¬
логичное влияние удлинения на качество изолированной глисси¬
рующей поверхности было отмечено еще в опытах Зотторфа и
подтверждено затем расчетами Клемента [77]. На основании
зависимостей Д' (L/BJ, полученных для различных Сѵ, можно
заключить, что уменьшение ширины лодок при постоянном пол¬
ном удлинении катамарана делает последний менее чувствительным
к изменению нагрузки. Скорость не оказывает существенного
влияния на характер зависимости качества катамарана от удли¬
нения составляющих его лодок.
Приведенные графики позволяют не только производить
оценку буксировочного сопротивления глиссирующего катама¬
рана с заданным главными размерениями и водоизмещением,
но и решать в первом приближении обратную задачу — по за¬
данным водоизмещению, скорости и мощности выбирать главные
размерения судна: удлинение лодок и горизонтальный клиренс Ч
1 Заметное влияние на сопротивление оказывает форма корпуса: в част¬
ности, корпуса с плоскими внутренними бортами во всем диапазоне исследо¬
ванных скоростей имеют большее сопротивление, чем симметричные [84]. —
Прим. науч. ред.
Глава 3
Качка
Основные обозначения
а — амплитуда нормального к палубе ускорения у борта, м/с2;
h, Н — начальная поперечная и продольная метацентрическая вы¬
сота, м;
Іх, Іу — моменты инерции площади ватерлинии относительно продоль¬
ной и поперечной осей, м4;
Jx, Jу — моменты инерции массы судна относительно продольной и по¬
перечной осей, т-м-с2;
М' — амплитуда момента на единицу полувысоты набегающей волны,
тс-м/м;
р — давление при ударе, кгс/см2;
R — продольный метацентрический радиус;
г — радиус-вектор текущей точки;
rw — амплитуда волны, м;
Si — площадь ватерлинии і-го корпуса;
2», у" — амплитуды вертикальной и горизонтальной возмущающих сил
на единицу амплитуды набегающей волны (нижний индекс 0 —
для единицы длины одиночного корпуса, индекс «к» — для
единицы длины цилиндрического катамарана; для реальных
обводов — те же обозначения без штриха);
ао — угол волнового склона, рад;
Р — коэффициент полноты мидель-шпангоута или общей полноты
цилиндрического корпуса;
у — удельная плотность воды, т/м3;
6 — фазовый угол качки относительно волны, рад;
Д — относительное перемещение судна и поверхности жидкости;
ф, Ѳ — амплитуда углов килевой и бортовой качки, рад или град;
х — редукционный коэффициент возмущающих сил или моментов;
X, ц — коэффициенты демпфирования и присоединенной массы при
качке (при двух нижних индексах первый указывает главное
направление движения, второй — направление, для которого
определяется соответствующий коэффициент);
73
Лщ — длина волны, м;
р — поперечный метацентрический радиус;
о — частота колебаний, 1/с;
Z — амплитуда перемещений при вертикальной качке, м;
'ф, 'Ф, "Ф — амплитуды, скорости и ускорения при килевой качке (анало¬
гичное обозначение производных использовано для других видов
качки; характеристики цилиндрических объектов отмечены
штрихом).
Верхняя черта над буквенными обозначениями соответствует средним зна¬
чениям величин.
§ 3.1. Качественные особенности качки
многокорпусных судов и установок
Отличия характеристик качки многокорпусных судов и уста¬
новок от тех же характеристик однокорпусных судов обусловлены
особенностями соотношений главных размерений, форм обводов,
распределения нагрузки, а также количеством и взаимным рас¬
положением корпусов. Следуя установившейся схеме расчета,
рассмотрим качку на регулярном волнении в широком диапазоне
частот, что позволяет определять и характеристики качки на
реальном морском волнении [9].
Одним из главных обстоятельств, отличающих качку много¬
корпусных объектов как особого класса плавучих сооружений,
является большой диапазон значений собственных частот, свя¬
занных с соотношением восстанавливающих и инерционных сил.
Это обстоятельство по-разному влияет на передаточную функцию
бортовой, килевой и вертикальной качки [7].
При равном водоизмещении и длине однокорпусного судна,
катамарана и тримарана поперечный метацентрический радиус
последних существенно, в 3—10 раз, больше, чем тот же радиус
однокорпусного судна, из-за увеличенной полной ширины. В то
же время момент инерции относительно продольной оси при уве¬
личении ширины растет медленнее, чем остойчивость. В резуль¬
тате собственная частота бортовых колебаний тримарана выше,
чем однокорпусного судна, а катамарана — еще выше. Чем
меньше полная ширина катамарана и тримарана, тем ниже соб¬
ственная частота бортовой качки.
Поперечная остойчивость многокорпусных судов с малой
площадью ватерлинии одинакова с однокорпусным судном или
несколько выше, чем у него, а момент инерции относительно
продольной оси существенно больше. В результате собственные
частоты бортовой качки таких судов весьма низки и достигают
0,30—0,25 с-1 (период 20—25 с). Малая по отношению к водо¬
измещению площадь ватерлинии у таких судов обусловливает
низкие собственные частоты вертикальных колебаний (около
0,25—0,20 с-1, т. е. периоды до 30—35 с).
При равной длине, водоизмещении и одинаковой форме обво¬
дов однокорпусного судна, катамарана и тримарана продольный
74
метацентрический радиус, момент инерции относительно попереч¬
ной оси и отношение площади ватерлинии к водоизмещению
у катамарана и тримарана незначительно меньше. Поэтому соб¬
ственные частоты килевой и вертикальной качки названных судов
весьма близки, хотя обычно у катамарана и тримарана немного
выше. Продольный метацентрический радиус многокорпусных
судов с малой площадью ватерлинии, как и относительная пло¬
щадь ватерлинии, значительно в (2—12 раз) меньше, чем у сравни¬
мого однокорпусного судна, а момент инерции относительно по¬
перечной оси несколько больше. Поэтому собственные частоты
килевой и вертикальной качки таких судов значительно ниже,
чем те же частоты однокорпусных судов, и достигают 0,25—0,20 с”1
(период до 25—30 с).
Для большинства многокорпусных судов характерна близость
собственных частот колебаний различных видов качки, что обус¬
ловливает большую, чем у однокорпусных судов, взаимосвязь
качки различных направлений.
Заметное отличие в воздействии волнения на многокорпусное
судно связано с тем, что каждая отдельная волна действует на
составляющие судно корпуса в различные моменты времени,
а интенсивность этого воздействия уменьшается в направлении
от наветренного к подветренному корпусу из-за демпфирующего
влияния ряда корпусов (и стоек). Суда с малой площадью ватер¬
линии имеют весьма небольшие водоизмещающие объемы в районе,
подверженном воздействию волн (у ватерлинии), а потому для
них малы и возмущающие силы.
Очевидной особенностью бортовой качки многокорпусных су¬
дов является то, что можно приближенно заменить перемещения
при бортовой качке вертикальными перемещениями каждого
корпуса. Поэтому гидродинамические характеристики бортовой
качки могут быть приближенно определены через те же харак¬
теристики вертикальной качки.
При вертикальной качке одиночного цилиндрического кор¬
пуса с малой площадью ватерлинии в определенном диапазоне
частот наблюдается минимум возмущающей силы, связанный со
взаимной компенсацией инерционной и гидростатической состав¬
ляющих [109 ]. Соответствующая частота может быть приближенно
определена по формуле
<27>
где ATWj — безразмерный коэффициент присоединенной массы
при вертикальной качке; g — ускорение свободного падения.
В том же диапазоне частот для названного корпуса имеется
минимум и на амплитудно-частотном графике вертикальной качки.
Амплитуды и фазы гидродинамических сил и моментов, дей¬
ствующих на многокорпусные суда при качке на тихой воде и
75
■волнении, в значительной мере определяются взаимным влиянием
корпусов.
Сравним сначала качку цилиндрического однокорпусного судна
и такого же двухкорпусного. Если на тихой воде раскачивается
однокорпусное судно (рис. 31), то от него расходятся так называе¬
мые собственные волны 1, на образование и поддержание которых
затрачивается энергия, определяющая величину демпфирования.
Набегающие на закрепленное судно морские волны 2 частично
отражаются (поз. 4), отдают некоторую долю своей энергии
судну, а частично «проходят» за судно и распространяются дальше
(поз. <?), в первоначальном направлении (рис. 31, б).
При качке однокорпусного судна на взволнованной поверх¬
ности волновая система вблизи судна представляет собой резуль¬
тат наложения описанных волновых систем (рис. 31, в).
Когда на тихой воде раскачивается двухкорпусное судно
(рис. 32), то систему волн, отходящих от внешнего борта одного
из корпусов, можно условно разделить на две: обусловленную
колебаниями этого корпуса (поз. 1) и обусловленную наличием
второго корпуса и сложной волновой системы между корпусами
(поз. 4). В пространстве между корпусами каждая волна, гене¬
рируемая одним корпусом (поз. 2), доходит до другого корпуса,
отражается (поз. <?), отдавая часть энергии последнему, и частично
«выходит» на внешнюю сторону, имея уменьшенную высоту.
Одновременно то же происходит с волной, генерируемой вторым
корпусом, только движется она навстречу рассмотренной и при
бортовой качке имеет сдвиг по фазе на 180° (при вертикальной
качке волны имеют одинаковую фазу). Воспринятая корпусом
энергия волны преобразуется в колебания, влияющие на резуль¬
тирующее движение.
Следовательно, при качке катамарана на тихой воде суще¬
ствуют такие непрерывные системы прогрессивных волн:
волны, отходящие от внешних бортов корпусов и соответству¬
ющие качке одиночного корпуса (поз. /);
внутренние волны, генерируемые корпусами и отражающиеся
от внутренних бортов корпусов (поз. 2, <?);
волны, «выходящие» при этом из междукорпусного простран¬
ства (поз. 4).
При воздействии волнения к описанным системам добав¬
ляются:
волны, набегающие на внешний борт наветренного корпуса
(поз. 5) и отражающиеся от него (поз. 9);
волны, «проходящие» в между корпусное пространство (поз. 6)
и неоднократно отражающиеся от внутренних бортов корпусов
(поз. 8);
волны, «выходящие» при каждом отражении из междукорпус¬
ного пространства (поз. 7 и /б).
Все эти волны в случае регулярного волнения имеют одина¬
ковую длину, при взаимодействии с корпусами изменяется только
76
77
их амплитуда, а фазовые сдвиги при данной частоте Волн опре¬
деляются соотношением длины волны, размерений корпуса и
расстояния между корпусами.
Картины волнообразования при качке катамарана и дуплуса
совпадают. У трисека, как и у катамарана, генерируемые при
качке на тихой воде волны распространяются наружу и в про¬
странство между корпусами. Практически систему волн, генери¬
руемых при качке на тихой воде корпусами трисека, можно рас¬
сматривать как результат сложения двух независимых систем
от колебаний подводных корпусов. Набегающие волны также
практически не отражаются стойками малой площади и не отдают
энергии корпусу. Это означает, что системы внутренних волн
исчезают, а результирующая система внешних волн на тихой воде
складывается из двух систем, генерируемых корпусами. В за¬
висимости от того, какова фаза складывающихся волн (она за¬
висит от расстояния между корпусами и длины волны), резуль¬
тирующая волна имеет большую или меньшую высоту, чем и
определяется величина демпфирования.
Если на ширине эффективного междукорпусного пространства
цилиндрического катамарана или дуплуса укладывается целое
нечетное число полуволн (при бортовой качке) или целое четное
число полуволн (при вертикальной качке), то происходит взаимное
усиление волн, сложение амплитуд и возникает резонансная
система стоячих волн, высота которых существенно отличается от
высоты волн со стороны внешних бортов.
Частота стоячих резонансных волн
(28)
где т = 2,2/3, 2/5 для бортовой качки; т = 1, Ч 2, Ч4 для верти¬
кальной качки; с' — эффективное расстояние между корпусами
(с учетом влияния корпусов на поле давлений).
При этом во время регулярной бортовой качки между корпу¬
сами наблюдаются волны с одним узлом в диаметральной пло¬
скости и двумя пучностями у бортов. При регулярной вертикаль¬
ной качке одной из собственных частот междукорпусного про¬
странства соответствует волна с двумя узлами и тремя пучно¬
стями — у бортов и в диаметральной плоскости судна.
Резонансная частота отражается на графике относительной
амплитуды отходящей волны резким всплеском и последующим
уменьшением (рис. 33). Это характерно как для вертикальной, так
и для бортовой качки двух цилиндрических корпусов. Расчеты,
приведенные японскими учеными, показали [100, 102], что при
совместных колебаниях трех и четырех корпусов также имеются
характерные резонансные пики. Положение этих пиков по шкале
частот мало зависит от формы обводов и определяется только
соотношением длины волны и расстояния между корпусами.
78
Рис. 33. Относительные коэффициенты присоеди¬
ненной массы AMj и демпфирования двух кру¬
говых цилиндров при вертикальной качке (рас¬
чет).
79
При определенном соотношении длины волны и расстояния между
корпусами возникает биение. Это дает основания предположить,
что для некоторых многокорпусных судов может иметь место пара¬
метрический резонанс, связанный с периодическим изменением гид¬
родинамических коэффициентов в левой части уравнения качки.
Кроме того, судя по экспериментальным данным, полученным
Г. Г. Шевелевым, гидродинамическое взаимовлияние корпусов
дуплуса может приводить к появлению добавочного пика переда¬
точной функции бортовой качки (в положении лагом к волне,
без хода) в области частот больших, чем резонансные, т. е. в об-
ласти реальных частот мор¬
ского волнения. На рис. 34
дана приближенная связь частот
добавочного пика с соотноше¬
ниями размеров дуплуса.
Поскольку «внутренняя» си¬
стема волн у трисека отсут¬
ствует, гидродинамические ко¬
эффициенты качки на тихой
воде для этого варианта двух¬
корпусного судна существенно
зависят от взаимодействия двух
волновых систем, генерируемых
корпусами. Влияние неодно¬
кратного отражения волн ме¬
жду корпусами практически
Рис. 34. Частота субгармонического
пика амплитудно-частотного графика
бортовой качки дуплуса.
отсутствует.
Особенности процессов генерации и дифракции волн при качке
цилиндрического катамарана и катамарана реальных обводов,
вероятно, различны. Каждая элементарная волна, отходя от
поверхности корпуса по нормали, несколько раз отражается
таким образом, что угол падения примерно равен углу отражения,
и после нескольких отражений уходит в сторону носа или кормы.
На обтекание при качке влияет также нерегулярность волнения,
поскольку цилиндрический катамаран создает резонансную вол¬
новую систему только с волнами одной частоты, т. е. имеет свой¬
ство своеобразного, сравнительно узкополосного резонатора.
Кроме того, по существу, каждое поперечное сечение реального
двухкорпусного судна соответствует плоской задаче при различ¬
ном расстоянии между корпусами, поэтому даже на регулярном
волнении данной частоты резонансные явления могут иметь место
только на ограниченной длине корпусов. Однако, если оставаться
в рамках обычной гипотезы плоских сечений, можно предположить,
что для некоторых форм обводов и соотношений размерений реаль¬
ных судов влияние резонансных явлений междукорпусного про¬
странства окажется заметным.
Картина генерирования, взаимодействия и отражения волн
при качке многокорпусного судна сильно усложняется при на¬
80
личии поступательной скорости судна. В этом случае положение
точки касания каждой элементарной волной соседнего корпуса
и количество этих отражений зависит от соотношения скорости
распространения волны и скорости судна. Поэтому можно ожи¬
дать, что влияние взаимодействия корпусов при заданной ча¬
стоте <т будет зависеть от скорости ѵ. Кроме того, очевидно, это
взаимовлияние будет определяться параметром у0 (у0 = avlg),
описывающим соотношение названных выше скоростей (при у0
0,25 можно ожидать возникновения больших расчетных и
экспериментальных трудностей).
Типичные амплитудно-частотные графики качки однокорпус¬
ного судна, катамарана, тримарана, дуплуса и трисека (при
равном водоизмещении судов) показаны на рис. 35.
При невысокой относительной скорости (Fr с 0,3) графики
килевой качки однокорпусного судна, катамарана и тримарана
весьма близки как по абсциссам, так и по ординатам. Резонанс¬
ный максимум судов с малой площадью ватерлинии сдвинут
к меньшим частотам и имеет большую величину из-за малого
демпфирования (рис. 35, а).
На встречном и попутном волнении катамаран и тримаран
имеют практически одинаковые с однокорпусным судном харак¬
теристики продольной качки на волнении заданной интенсивности.
Систематические экспериментальные исследования продольной
качки промысловых катамаранов, выполненные Г. Г. Шевелевым,
позволили сделать следующие выводы:
а) амплитудно-частотные характеристики судов с удлинением
корпусов ЫВг = 3,54-7,0 имеют максимальные относительные
амплитуды 1,5—1,8 при относительной длине волны ML = 1,8-5-
4-2,0;
б) изменение относительного расстояния между внутренними
бортами корпусов в пределах с/Вг = 0,54-2,0 не оказало суще¬
ственного влияния на продольную качку.
Суда с малой площадью ватерлинии на встречном волнении
не попадают в условия резонансной качки, поскольку собствен¬
ные частоты их колебаний соответствуют длине волн 600—1000 м,
вероятность возникновения которых исчезающе мала. Эти суда
могут попасть в условия, близкие к резонансу, только при дви¬
жении на попутном волнении с невысокой скоростью, когда кажу¬
щаяся частота волн будет близка к собственной. Если не учиты¬
вать влияния соединяющей корпуса конструкции и успокоителей
качки, то можно ожидать, что в условиях резонанса на попутном
волнении (при невысоких скоростях) амплитуда качки таких
судов будет больше, чем однокорпусных.
Амплитудно-частотные графики бортовой качки катамарана
и тримарана (рис. 35, в) характерны повышением резонансных
частот. При достаточно большой ширине одного корпуса (BJT
2,0), которая обеспечивает большое демпфирование, резонанс¬
ные амплитуды существенно (в 2—4 раза) меньше, чем у
81
Рис. 35. Сравнение амплитудно-частотных характеристик качки судов различных типов при равной длине и водоизме¬
щении: а — килевая качка на встречном волнении; б — вертикальная качка в положении лагом к волнам, без хода;
в — бортовая качка в положении лагом к волнам, без хода.
— ®— одиокорпусиого; — дуплуса; —X— катамарана; —•— трисека.
82
однокорпусного судна; при малой полной ширине и ширине одного
корпуса (BJT с 1,5) это отличие исчезает. Кроме того, в зоне
очень высоких частот, превышающей реальные частоты волнения
малой интенсивности, наблюдается минимум, связанный с гидро¬
динамическим взаимодействием корпусов.
Систематическое экспериментальное изучение поперечной качки
моделей промысловых катамаранов, выполненное Г. В. Кобернюк,
позволило сделать следующие основные выводы:
с увеличением расстояния между корпусами максимальные
относительные амплитуды качки уменьшаются (примерно про¬
порционально относительному клиренсу c/BJ;
увеличение скорости приводит в основном к смещению макси¬
мальных амплитуд в сторону более низких значений частоты;
большое влияние на бортовую качку оказывает относительная
ширина корпуса B-JT (максимальная амплитуда обратно пропор¬
циональна величине BJT);
амплитудно-частотная характеристика вертикальной качки
отличается наличием минимума с амплитудами 0,1—0,15 высоты
волны;
в исследованном диапазоне частот поперечно-горизонтальные
колебания весьма малы и не превышают 0,15—0,20 высоты
волны.
Резонансный максимум качки судов с малой площадью ватер¬
линии выше, чем однокорпусных, и сдвинут к малым частотам (име¬
ются также высокочастотные минимумы и максимумы). Катамараны
и тримараны попадают в условия резонансной качки на волне¬
нии меньшей интенсивности, по сравнению с однокорпусным
судном (хотя и имеют обычно меньшие, чем однокорпусное судно,
резонансные амплитуды). Суда с малой площадью ватерлинии
при движении или стоянке лагом к волне практически никогда
не попадают в условия резонанса,кроме субгармонического резо¬
нанса дуплуса (см. рис. 34).
При вертикальной качке (лагом к волне) минимумы, опреде¬
ляемые гидродинамическим взаимодействием, попадают в зону
реальных частот волн, особенно для судов с малой площадью
ватерлинии (рис. 35, б).
Амплитудно-частотные графики вертикальной качки катама¬
рана и тримарана отличаются от графика однокорпусного судна
также высокочастотными максимумами.
Резонансные максимумы вертикальной качки многокорпус¬
ных судов с малой площадью ватерлинии смещены в зону весьма
низких частот; в зоне средних частот имеются минимумы, обуслов¬
ленные гидродинамическим взаимодействием корпусов со стой¬
ками, а также корпусов между собой. Для последних графиков
также характерно наличие высокочастотных максимумов.
Если «сдвинуть» частоту нулевого возмущения к собственной
частоте вертикальной качки, резонансный максимум резко умень¬
шится, но одновременно вырастет высокочастотный максимум,
83
так что площадь, ограниченная графиком и осью абсцисс, будет
примерно постоянна.
В целом можно считать, что при правильном выборе соот¬
ношений размерений катамаран и тримаран в определенном
диапазоне частот могут иметь преимущество в отношении пере¬
мещений при качке (в 2—4 раза) и ускорений (на 10—15%) при
движении лагом к волне, а суда с малой площадью ватерлинии —
преимущество по перемещениям (в 3—6 раз) и ускорениям (на
30—80%) при движении на встречном волнении и лагом к волне.
Существенной особенностью многокорпусных судов, влия¬
ющей на характеристики качки, является наличие надводной
соединяющей корпуса конструкции. Когда относительные пере¬
мещения судна и поверхности воды при качке превышают отстоя¬
ние этой конструкции от расчетной ватерлинии (вертикальный
клиренс), конструкция касается воды или входит в воду. При этом
резко изменяются гидродинамические характеристики погружен¬
ной части судна [44], резонансные частоты; кроме того, могут
появиться интенсивные местные гидродинамические давления
на вошедшей в воду части надводной конструкции. Вероятность
таких контактов J может быть весьма приближенно оценена по
формуле
J^exp [ —(29)
где /іверт — вертикальный клиренс; А — перемещение нижней
обшивки соединяющей корпуса конструкции в рассматриваемой
точке.
С ошибкой в безопасную сторону
DA = Dr + D£ + DA1,; (30)
здесь Од, Dr, D& — дисперсии относительных перемещений,
амплитуды волны, перемещений от вертикальной и килевой
качки соответственно.
Чтобы приближенно оценить влияние соединяющей корпуса
конструкции на качку, следует расчет качки на нерегулярном
волнении заданной интенсивности производить в два этапа. На
первом этапе рассчитывают собственные периоды и амплитуды
продольной качки без учета влияния соединяющей корпуса
конструкции и во всем рассматриваемом диапазоне частот про¬
веряют выполнение условия /іверт А3о/о.
Если вертикальный клиренс /іБерт равен сумме взаимных
перемещений судна и уровня воды или превышает ее, влияние
соединяющей корпуса конструкции учитывать не требуется,
так как в равенстве (30) не учтен сдвиг фаз различных видов качки,
что приводит к ошибке в безопасную сторону. В противном слу¬
чае приближенно определяется изменение периодов, присоеди¬
ненных масс и моментов инерции, вызванное входом в воду до¬
полнительных объемов, и производится повторный расчет ампли-
84
тудйо-Частотных графиков и характеристик качки на нерегуляр¬
ном волнении. При этом на втором этапе расчетов для вычисле¬
ния гидродинамических характеристик используется полная ши¬
рина многокорпусного судна Вт [46].
Отдельные расчеты показали, что при входе в воду соединя¬
ющей корпуса конструкции собственный период килевых и верти¬
кальных колебаний катамаранов увеличивается на 10—35% [46].
Гидродинамическое давление, возникающее на нижней об¬
шивке соединяющей корпуса конструкции при ударе о воду,
может быть грубо оценено по
формуле
р = А(А-М- (31)
где эмпирический коэффициент k
определяется конфигурацией
обшивки и относительной вер¬
тикальной скоростью частиц
воды в момент соударения. По
данным измерений на траулере-
сейнере «Эксперимент» k
3,0.
При более подробном рас¬
чете давление при слеминге
может быть приближенно опре¬
делено по материалам, полу¬
ченным для однокорпусных су¬
дов Д. В. Кондриковым.
Рис. 36. Зависимость коэффициента k
в формуле для оценки ударных давле¬
ний при слеминге от угла наклона
судовой поверхности р.
Тяжелый удар в нижнюю часть зашивки соединительного
моста происходит в том случае, если относительное перемещение
моста и волны на і-м теоретическом шпангоуте достигает вели¬
чины вертикального клиренса, а относительная скорость движе¬
ния судна и волны Д£ такова, что ударные давления достигают
опасных значений рпр, определяющих прочность перекрытия
соединительного моста.
Если условия удара в зашивку моста считать близкими к усло¬
виям возникновения слеминга, то расчетное давление определится
по формуле
Рі. = (32)
где pi— расчетное гидродинамическое давление, тс/м2; і — индекс,
обозначающий номер сечения; fe(- — коэффициент, зависящий от
расположения точки, в которой определяется давление, по обводу
поперечного или продольного сечения рассматриваемого пере¬
крытия. Этот коэффициент снимается с графика (рис. 36) в за¬
висимости от угла наклона касательной к линии обвода попереч¬
ного или продольного сечения моста р, (при двоякой кривизне
участка зашивки коэффициент fe£ определяется в зависимости от
85
большего угла |3(); Az — максимальная местная скорость пере¬
мещения і-го сечения перекрытия относительно волны в момент
удара о поверхность воды, м/с.
Максимальная местная скорость относительного движения
определяется по формуле
А = Оэод> (33)
где оэ — эффективная частота относительных движений судна
и волны, с-1; Од — стандарт относительных перемещений.
Величины Од и оэ зависят от высоты волны /із%, скорости
судна ѵ и других параметров.
Рис. 37. Сравнение амплитуд вертикаль¬
ной и килевой качки катамарана дли¬
ной 35 м с крылом ( ) и без крыла
( ) [70].
Рис. 38. Обеспеченность F (ш)
размахов ускорений продоль¬
ной качки ш = a/g катама¬
рана длиной 40 м с крылом
( ) и без крыла ( )
при волнении 7 баллов [58].
Расчет может производиться для одного корпуса катамарана,
что при обычном горизонтальном клиренсе вносит незначительную
погрешность.
Для устранения или снижения гидродинамических ударов
необходимо либо увеличивать вертикальный клиренс, либо умень¬
шать относительные перемещения при продольной качке, либо
увеличивать продолжительность воздействия импульса силы.
В частности, можно применять надводные и (или) подводные
крылья, носовые и (или) кормовые [87], а также перфорирован¬
ные, клеточные или упругие конструкции, обеспечивающие нали¬
чие естественной или искусственной воздушной подушки.
Пример влияния носового крыла на характеристики продоль¬
ной качки [70] приведен на рис. 37.
Этот же рисунок может служить для приближенной относи¬
тельной оценки влияния крыла на характеристики продольной
качки судов других проектов. При такой оценке необходимо
пользоваться показанной шкалой относительной средней длины
волны.
86
Основанный на данных Ю. М. Мастушкина рис. 38 показы¬
вает, что благодаря воздействию крыла резко снижается обеспе¬
ченность больших ускорений продольной качки.
В настоящее время разработаны методы расчета качки ката¬
марана, которые можно разделить на две группы: а) сравнительно
простые приближенные методы, не учитывающие гидродинамиче¬
ского взаимодействия корпусов [9, 45, 75, 112] (эти методы почти
без оговорок применимы в случае корпусов с плоскими внутрен¬
ними бортами, но для обычных, симметричных относительно
собственной ДП, корпусов обоснованность их применения сомни¬
тельна); б) сложные численные методы, учитывающие изменение
гидродинамических характеристик корпуса в связи с воздей¬
ствием второго [30, 99, 102, 113]. Эти методы неудобны в исполь¬
зовании, их результаты не всегда физически объяснимы, затруд¬
нительно выявление параметров, позволяющих желательным об¬
разом изменять характеристики качки.
Ниже показаны в основном методы, в которых удалось в опре¬
деленной степени совместить достоинства обеих названных „групп:
достаточную простоту и учет гидродинамического взаимодействия.
§ 3.2. Вертикальная и килевая качка дуплуса
и катамарана с аналитическими обводами
на встречном волнении
Примем системы координат: неподвижную в пространстве си¬
стему, O0x0y0z0 и подвижную, жестко связанную с судном систему
Oxyz. Ось 0z направлена вертикально вверх, плоскость Оху совпа¬
дает с плоскостью ватерлинии, плоскость Oxz—с ДП судна,
а плоскость Oyz — с плоскостью мидель-шпангоута. При отсут¬
ствии качки обе системы совпадают [33]. Каждый корпус заменен
эллипсоидом с полуосями а0, Ьо, с0.
Жидкость считаем идеальной, а ее движение — потенциаль¬
ным. Потенциал скоростей возмущенного движения жидкости
Ф (х, у, z, 0 является решением уравнения Лапласа и удовлетво¬
ряет известным граничным условиям линейной теории волн
малой амплитуды.
Линейность задачи позволяет при установившихся колеба¬
ниях судна представить Ф (х, у, z, t) в виде
Ф(х, у, z, /) = Фк(х, у, z, 0 + Ф*(х> У’ z< 0 + фо(*. У, z, *) =
6
-Re
2 фт (х, у, Z) ѵт + ф* (х,
т=1
у, г) + Фо (X, у, z) ela‘ >
(34)
где Фк, Ф*, Фо — потенциалы скоростей движения жидкости,
вызванного вынужденными колебаниями судна на тихой воде,
набегающим прогрессивным волнением и дифрагированным вол¬
новым движением; (рт (х, у, z) — функции излучения; ѵт —
амплитуды скоростей вынужденных колебаний судна; ф* (х, у,
87
z) — амплитудная функция волнения; <р0 (х, у, г) — амплитудная
функция дифрагированных волн.
Функции фт, ср* и ф0, гармонические в области, занятой
жидкостью, удовлетворяют следующим граничным условиям:
lim фг = lim Ѵф(- = 0; r = ]/x2 + у2; (35)
Г->оо
-ф- — Ѵф(- = О при Z = 0;
Зфо . д(рі п дФі г, .
-^- + -^- = 0, = Nk на поверхности судна о(-; к = 3 или
k = 5;
N3 = cos (n, z), N5 = zcos (n, x) — x cos (n, z),
где v = 2л/Хт — волновое чцсло; n — единичный вектор нор¬
мали к поверхности судна.
При использовании таких же уравнений продольной качки,
как и в случае однокорпусного судна [53], такая постановка
задачи позволяет получить расчетные формулы для гидродинами¬
ческих характеристик качки.
Возмущающая сила при вертикальной качке
где CF =2
A fee)
ge
Rl = yrwSsnCF cos at,
e-v'« - C4
■^3/2 (g3)
fes)3'2
t — время, c;
(36)
Jm — функции Бесселя порядка m; t0 — h0 — 2c0 — осадка
стойки; h0 = T — c0 — глубина погружения продольной оси
эллипсоида, заменяющего корпус;
C4=D3%S2 j/^ѵсйе-^-,
g3 = v/a24-c02;
D3 — 1 + Аз3Г33; Xs — !
K33, Г33 — безразмерные коэффициенты, графики которых приве¬
дены в работе [34]; — площадь экваториального сечения
корпуса, м2.
Возмущающий момент R^ при килевой качке
= yvrwlyCiA sin at,
где
г я Г A fee) . r J 3/2 (g,)
C«=8[ (gc)2
(37)
ft Z' Co p-Vhn J3/2(g3)
2 a0 a0
fes)3/2 J'
88
Выше и здесь индексами «с» и «э» отмечены величины, относя¬
щиеся к стойке и заменяющему корпус эллипсоиду соответственно;
С5 = М>Хі2 ѵсое~ѵЛ»; О5= (1 — + (1 +-§-) ^вбГбб-
Х1 = ^; z'^h0‘,
Jy
Г55 — безразмерные коэффициенты [34]; Jy3 — момент инер-
аэ
ции площади экваториального сечения, м4; Jy s=s# 2 (2а0)3 2Ь0;
а3 — коэффициент полноты экваториального сечения;
Коэффициент демпфирования при вертикальной качке
2ро5вл
= ' лЬ~ £з’
(38)
где
Л/2 ,
pF*-’'—с«
Л/2 (&э)
2
cos2 (y2b sin Ѳ) dft;
g; = v[(4-)2c°s20+(^ysin20];
g'3 = V [(а2 - с2) cos2 Ѳ + (b? - с2) 8іп2Ѳ]>/2.
Коэффициент демпфирования при килевой качке
, 8рст/* l
Л’И» ~ лЬ3 51
(39)
где
Л/2 , ...
Г ^2 (Sc)
Ѵ'о С ^3/2 (gZ.) ~|2
g'2 Ч g'3/2_
cos2 Ѳ cos2 (2vb sinO) d&.
о
Коэффициент присоединенной массы при вертикальной качке
V = ££вл м
л3Ь 4’
(40)
здесь
оо . vL
С х + ^
Adj = ѵ.р. (х) dx-,
oJ х-^-
89
F1W = J [Л^1ехр(_х^)_СзСг^И' x
exp (— X jy*-) - с; ^”уУ cos2 (х^-51пѲ)Л;
«-’[(>-4)И+^-0Г
ax = r ( 4(a§ —6jj) Г — eg)
ёэ I L* ! (а%-Ь%)
+ cos20 ^1/2;
СІ-Хх2/і^хехр(^х^)'.
Коэффициент присоединенного момента инерции при килевой
качке
^ = Й'М2: (41)
здесь
л/2
М2 = ViPi I -
J х
о
vL
x2F2 (х) dx;
~2~
Г (*) = J
О
ГШ)С.
(й)2
Г'2 (4) '
T-)“Dsfi74F
^5/2 (£)
о I ПХ
’і) 'W5'
cos20 X
л 2с0
T~L
X
Главные части восстанавливающей силы и момента Rcm, как
и для однокорпусных судов, равны:
^=-D-vSCTC; ^ = -РЯф. (42)
Формулы, полученные для расчета гидродинамических сил,
действующих на катамаран с обычными корпусами, аналогичны
и легко получаются из выражений (36)—(39), если в них полагать
2а = Г; 2Ь0 = Вх; с0 = Т\ t0 = 0;
z' Т/2;
Xs = Хі = 0>5; Г33 = Г55 = 1; Ѵпк = D/y.
90
Характеристиками, необходимыми для расчета качки полу-
погруженных объектов, являются моменты инерции массы Jx и Jy
относительно главных осей
Л = -у(Хі^ + 4Х2ь2);
jy= -у(Х14 + ^к).
Анализ соотношений масс, координат центра тяжести и разме¬
рений позволил установить следующие пределы изменения коэф¬
фициентов Кт (т = 1; 2; 3):
Хі = 0,21 -0,31;
Х2 = 0,73 - 1,01 при Рнк/О = 0,7 -- 0,3; Рст/О = 0,05 0,25;
Х3 = 0,06 — 0,076 при Рнк/О = 0,5 -г- 0,25; PJD = 0,25 ~ 0,05;
Lct = 0,6h- 1,0.
Здесь индексами «нк», «ст» отмечены величины, относящиеся
к надводному корпусу, подводному корпусу и стойкам соответ¬
ственно.
Для катамарана, состоящего из платформы массой Рп и двух
судовых корпусов массой Рк каждый, по аналогии получаем
Лк = Y (^4 + ^ + 4);
Рук ~ ( К lzg -|- )>
где Xi = 0,064-0,38; Къ = 0,724-1,06; Хз = 0,07-^0,10.
Решения дифференциальных уравнений методом комплексных
амплитуд, определяющие вынужденные колебания, имеют вид:
£ = £0cos (о/-6г);
ф = Фо cos (о/ — 6ф).
Здесь
с. ySr
+исОГ+<’МІ,!'
„ __ .
0 {[DH - о* (Jy + Нфф)]3 + (Ам,)2}1/2 ’
— т-р у >
V5 - °2 (ту + p-ss)
. о _ СТЦі1)
- DH-tPiJy + pw) ’
(43)
(44)
(45)
(46)
91
Для иллюстрации на рис. 39 сопоставлены результаты расчета
относительных амплитуд вертикальной L!rw и килевой if>/a0 качки
модели катамарана с расчетами и экспериментальными данными,
заимствованными из работы [98].
Рис. 39. Сравнение расчетных ( ) и экспериментальных (•) переда¬
точных функций вертикальной (а) и килевой (б) качки катамарана на встреч¬
ном волнении.
расчет по полной методике.
Значения гидродинамических характеристик качки во втором
приближении, полученные в результате расчета на ЭЦВМ при О,
могут быть использованы для приближенного определения характе¬
ристик вертикальной и килевой качки при ходе судна на волнении.
92
§ 3.3. Исследование влияния скорости и
поперечного клиренса на продольную качку
катамарана методом плоских сечений
Как обычно, жидкость считается идеальной и несжимаемой,
движение жидкости — безвихревым, колебания контура, набе¬
гающие и вызванные волны в рамках линейной теории прини¬
маются малыми.
Пусть Ф — потенциал ско¬
ростей течения жидкости при
колебаниях катамаранного кон¬
тура (см. рис. 40), тогда функ¬
ция удовлетворяет уравнению
Лапласа при обычных гранич¬
ных условиях на контурах и на
поверхности.
Для решения сформулиро¬
ванной краевой задачи восполь¬
зуемся методом Урселла, рас-
Рис. 40. Система координат, связанная
с плоским сечением катамарана.
положив в точках пересечения
диаметралей корпусов с действующей ватерлинии бесконечное
множество мультиполей. Тогда выражение для потенциала при¬
Ф = £к
ла
мет вид
Г со
2 (Р2тф2т + Р2тф2т) COS Gt ф-
_m=l
+ (<?2тф2т + <?2тф2т) S1H Gt ф- Фв COS Gt ф- Ф5 Sill Gt , (47)
где rw — полувысота волны, генерируемой на бесконечности при
колебаниях контура; р2т, р'іт, Цът, Ц'іт — коэффициенты разло¬
жения; ф2т, Ф2ш — потенциалы мультиполей; Фс, Ф5 — косинус¬
ные и синусные составляющие пульсирующих источника и диполя.
Потенциалы мультиполей q>2m, ф2т удовлетворяют уравне¬
нию (47) и граничному условию на поверхности
= 0 ПРИ у = 0 (k = ѵ)
и определяются по следующим формулам:
' ллЪт ( cos2m6i f cos2mB2\
= + r?m ] +
\ Г1 Г2 /
, kNim cos (2m 4-1) Pi ■ cos (2m — 1) p2
2m— 1 Jim—I I ,2m-1
L rl '2
" _ A^m-H Г sin (2m + 1) Pi sin (2m + 1) p2
Tm — 1
'1 '2
, ^№m+* t sin 2mpx , sin 2mP2 \ .
“I 2m I r~m+l фт+1 ) ’
(48)
93
здесь М, N — масштабные множители, имеющие размерность
длины; r2> Рі. Р2 — полярные координаты.
При этом потенциал Ф удовлетворяет уравнению Лапласа
и условию на поверхности при любых значениях коэффициентов
р2т ■■■ я'іт, которые определяются из удовлетворения граничного
условия на контуре [83].
Расчет продольной качки был произведен для модели катама¬
рана [71, 72], которая была испытана на встречном регулярном
Рис. 41. Передаточные функции вертикальной качки на встречном волнении:
а—с= 1,0; б—с= 2,0.
расчет; эксперимент.
волнении. Исследовалось влияние поперечного клиренса и ско¬
рости движения. Результаты расчетов сравнивались с резуль¬
татами модельных испытаний.
На рис. 41 показаны передаточные функции вертикальной
качки для различных значений клиренса с как на стоянке,
так и при скорости, соответствующей Fr = 0,4.
Если исключить из рассмотрения малое значение относитель¬
ного клиренса (с = 0,5) при больших скоростях движения Fr =
= 0,4, когда для расчетов недостаточно десяти сечений и явно
велик шаг по частотному параметру можно говорить об удов¬
летворительном качественном согласовании данных расчета и
эксперимента, за исключением района резонанса при больших
скоростях движения и малых (близких к практически применяе¬
мым) клиренсах. Возможно, в этом случае необходимо учитывать
демпфирование неволновой природы, в чем нет необходимости при
94
расчетах продольной качки обычных судов. Однако это утвер¬
ждение нуждается в тщательной экспериментальной проверке.
На рис. 42 приведены передаточные функции килевой качки.
Здесь наблюдается та же картина, что и при вертикальной качке,
но расчетные резонансные пики сдвинуты по частоте. Это свя¬
зано с различными значениями радиусов инерции, принятых при
производстве расчетов и в эксперименте, причем в последнем это
значение взято неоправданно высоким — около 0,27 длины судна.
Влияние клиренса на передаточные функции вертикальной
и килевой качки показано на рис. 43. Из рассмотрения этого
рисунка можно'заключить, что в практически применяемом ди¬
апазоне изменения клиренса (0,5 < с < 2,0) влияние его на
амплитудные значения продольной качки невелико. Но следует
отметить, что полученные при расчете амплитуды качки двух¬
корпусного судна в достаточно широком диапазоне частот больше,
чем амплитуды качки одиночного корпуса (если, конечно, можно
обеспечить остойчивость такого судна), а последние существенно
превышают амплитуды качки корпуса удвоенной ширины.
В табл. 3 показано влияние клиренса на амплитуды вертикальной
и'килевой качки 3 %-ной обеспеченности, а также на наибольшие
Таблица 3
Расчетные характеристики продольной качки катамарана
Наименование
характеристик
лз% •
м
Fr =0
Fr = 0,4
с — с]Вх
7 =
0,5
1,0
1,5
2,0
0,5
1,0
1,5
2,0
Относительная ам-
1,5
105
128
136
128
260
142
133
125
плитуда вертикальной
качки (3% -ная обе¬
спеченность)
3,0
93
107
111
ПО
150
131
124
118
Относительная ам-
1,5
114
99
102
103
140
118
130
115
плитуда килевой качки
■ф3% (3%-ная обеспе¬
ченность)
3,0
93
96
98
100
93
108
125
117
Наибольшее относи-
1,5
108
103
108
106
150
127
134
118
тельное перемещение
оконечности (3%-ная
обеспеченность)
3,0
90
97
100
100
98
116
130
120
Наибольшее относи-
1,5
85
115
123
117
175
144
137
113
тельное вертикальное
ускорение форштевня
(3% -ная обеспеченность)
3,0
88
107
112
109
116
130
135
117
95
96
перемещения форштевня и наибольшие вертикальные ускоре¬
ния, возникающие на нерегулярном волнении. Эти значения
отнесены к характеристикам качки одиночного корпуса.
Если исключить малые значения клиренса при больших
скоростях, когда, как указано выше, точность расчетов недоста¬
точна, можно сделать вывод, что расчетные перемещения и ускоре¬
ния, возникающие при продольной качке указанного катамарана
на нерегулярном волнении, примерно на 30% превышают эти же
величины у одиночного корпуса независимо от величины кли¬
ренса 1 (в пределах 1,5 < с < 2,0). При этом следует отметить,
что качка одиночного корпуса достаточно резкая из-за относи¬
тельно малых значений В^Т.
§ 3.4. Качка полупогружйых буровых платформ
Ниже излагается приближенная методика оценки отдельных
видов качки на волнении, разработанная применительно к наи¬
более распространенному типу полупогружйых платформ — плат¬
форм, состоящих из двух (или нескольких) цилиндрических
понтонов и ряда вертикальных колонн (рис. 44). Основное внима¬
ние уделяется рассмотрению вертикальной качки, поскольку
из-за нее возникают основные трудности при бурении скважин и
добыче нефти, что накладывает в ряде случаев ограничения на воз¬
можность использования платформ в условиях морского волнения.
Заметим, что вышеуказанные особенности качки платформ,
в частности, малые ее амплитуды, позволяют использовать основ¬
ные положения линейной теории качки и разделить возмущающие
силы и моменты на ряд независимых составляющих (будем рас¬
сматривать лишь две составляющие возмущающих сил и момен¬
тов: главную часть и инерционную часть, пренебрегая во всех
случаях демпфирующей составляющей). При дальнейшем изло¬
жении будем пользоваться следующими двумя системами коорди¬
нат (рис. 44, б): системой б^л^, неподвижной в пространстве,
и системой Oxyz, жестко связанной с платформой; при этом ось Ох
направлена в нос, ось Оу — на правый борт и ось 0z — вниз;
плоскость Оху совпадает с плоскостью ватерлинии на тихой воде;
плоскость Оух — с плоскостью миделя. В начальный момент
времени неподвижная б^л^ и подвижная Oxyz системы координат
совпадают.
Уравнения вертикальной качки для любого плавающего соору¬
жения, расположенного лагом к волне, может быть записано
(если пренебречь демпфирующей составляющей возмущающей
силы) в виде
(tn + рк) £ + Уг£ + у5Вл£ = х™у5влг™ cos at —
— х“нцко2 * *гш cos at, (49)
1 Экспериментальные амплитудно-частотные графики катамарана отлича¬
ются от тех же графиков одиночного корпуса только на 10—15%. —Прим,
научн. ред.
4
п/р Дубровского В. А.
97
где т — масса платформы; ps — присоединенная’масса воды
при вертикальной качке; — коэффициент сопротивления вер¬
тикальной качке; хГл — редукционный коэффициент к главной
части возмущающей силы; х|н — редукционный коэффициент
к инерционной части возмущающей силы.
Рис. 44. Конструктивные элементы полупогружной буровой платформы (а)
и системы координат, принятые при расчете качки (б).
Разделим все члены уравнения (49) на коэффициент при пер¬
вом члене:
£’ + 2ѵг£ -f- п[^ = x™n|r№ cos at — cos at, (50)
где 9 Nt . 2 Ѵ5вл
Решение уравнения (50), как известно, имеет вид
£ = £0cos(a/ —е£), (51)
где п „9,,ин
2ѵ?а
98
или, после некоторых преобразований,
где
хГл — <м‘х£Н
. у » Ь »
' W , /
у (1 — с2)2 + (2ѵ£)2с2
с = o/n-Q, 2ѵ£ = 2v^/n^.
Очевидно, что решение уравнения (50) в виде (51) может быть
осуществлено, если известны присоединенная масса Afjj, коэф¬
фициент сопротивления и редукционные коэффициенты х™
и х£н.
Присоединенную массу как это показано в работе [96],
целесообразно представить в виде суммы двух слагаемых:
НК = Р-Цп РКпк>
где — присоединенная масса для участков понтона без
колонн (цилиндрические участки); p.SblK — присоединенная масса
для участков понтона с колоннами.
Для цилиндрических участков с круглым поперечным сече¬
нием определение величины р.^п, как это показано в работах
[96] и [86], может быть произведено по формуле
№ = r>nrnL'nkr (-у г,
где г — радиус понтона; п — количество понтонов; L'n — сум¬
марная длина цилиндрического участка понтона; kr — коэффи¬
циент, учитывающий влияние частоты колебаний и свободной
поверхности (рис. 45); a^rlg — частотный параметр; zc — отстоя¬
ние центра величины понтона от ватерлинии.
99
Заметим, что длина цилиндрического участка приближенно
определяется
Лп Ді. ок Ч- Бп] “F ^-п2 Ч- ^-пЗ Ч' -^п4 Ч" Д<. ок»
где LH ок и LK ок — приведенные длины носовой и кормовой
оконечности понтона соответственно (длины участков в оконеч¬
ностях понтона, имеющих переменную по длине площадь попереч¬
ного сечения и преобразованных в эквивалентные им по объему
участки с постоянной площадью поперечного сечения, равной
площади поперечного сечения основного корпуса, но с уменьшен¬
ной длиной); Lni — длина і-го участка между колоннами.
Для цилиндрических участков с прямоугольном поперечным
сечением определение величицы р^п производится по формуле
Rjjn = Р&іЛп,
где pjjn определяется по номограмме 1 приложения 8, построен¬
ной в параметрах o2bn/2g, Tol2zc, bn/T0, bn; bn — ширина пон¬
тона; To — высота понтона.
Для участков понтона с колоннами
Ш£пк = ЦЦкпДо
здесь pjjnK определяется по номограммам приложения 8 в зави¬
симости от параметров a2Tlg, d/T, d'/d vlT\ d — диаметр понтона;
d' — диаметр колонн; LK — суммарная длина участков понтона
с колоннами.
Номограммы 1—5 приложения 8 построены по данным, при¬
веденным в работе [97]. Ключ к пользованию показан на номо¬
граммах 1 и 2. При проведении расчетов качки зависящие от
частоты колебаний величины kr, р^п и р^Пк определяются (сни¬
маются с графиков или номограмм) не менее чем для трех значе¬
ний частоты колебаний о, и для каждого значения о вычисляются
ИК и (частоты собственных вертикальных колебаний) по формуле
п (52)
Вычисляются разности А = о — и строится график А =
= f (о); точка пересечения этого графика с осью абсцисс опре¬
деляет искомое значение частоты о0, отвечающее условию А = 0.
Значение присоединенной массы р^, определенное по формуле
(52) для этого аргумента о0, используется в дальнейших расчетах
качки.
Безразмерный коэффициент сопротивления вертикальной
качке 2vs в соответствии с рекомендациями работы [86] может
быть принят постоянным (не зависящим от частоты колебаний)
и равным 0,06.
При получении зависимостей для редукционных коэффициен¬
тов были использованы основные положения общей теории качки
100
фруда—Крылова и основанные на этой теории практические
схемы, а также отдельные рекомендации, содержащиеся в работе
[891.
Редукционные коэффициенты х[л, х™ определяются по фор¬
мулам
хУ = (е~кТк — 2-~ ke~kz^ cos kb, (53)
х£м = е kZ(: cos kb.
Здесь k — o2/g — волновое число; Тк — высота погруженной
части колонн; Ѵп — суммарный объем понтонов; b — половина
расстояния между диаметральными плоскостями понтонов.
ее расположении лагом к волне: а — для вертикальной качки; б — Для
бортовой качки.
расчет; • — опыт.
Ординаты амплитудно-частотной характеристики вертикаль¬
ной качки платформы (рис. 46, а) можно вычислить, используя
выражение (50):
I ? , Ѵгл а Г2«ин
X = . (55)
I Га> ' V(1 — са)а + (2л>Е)2са
Уравнение бортовой качки при расположении платформы
лагом к волне (в случае пренебрежения влиянием горизонтальных
поперечных колебаний на бортовую качку) записывается в виде
(Jx + Цѳѳ) Ѳ + А^ѳѲ + Dhd = xo"D/iam sin cst — x^pee®2am sin (56)
где рѳѳ — присоединенный момент инерции массы воды при бор¬
товой качке; Л'ѳ — коэффициент сопротивления бортовой качке;
хрл — редукционный коэффициент к главной части возмущаю"
щего момента; x'qh — редукционный коэффициент к инерционной
части возмущающего момента; ат — наибольший угол волнового
склона.
101
Разделим все члены уравнения (56) на коэффициент при пер¬
вом члене:
Ѳ + 2ѵѳѲ -ф- «ѳѲ = кѳлПѳат sin at — x^t/e^am sin at,
где
2ѵй --ѳ • n2 = Dh ■
Ѳ <+нѳѳ’ Пѳ < + иѳѳ’
„ _ і'ѳѳ
9ѳ' <+Нѳ/
Решение уравнения имеет вид
где
Ѳ = Ѳо sin (at — еѳ),
(57)
еѳ = arctg
2vgo
«І-о2
или, после соответствующих преобразований,
,.гл л Хин
п „ ХѲ — 9ѲСѲХѲ
°о — ат г- „ „ ,
]А(1-сѳ) +(2ѵѳ)2сѳ
сѳ =~; 2ѵѳ = .
”ѳ "ѳ
В работе [9] рекомендуется определять присоединенный мо¬
мент инреции цѳѳ по следующей приближенной формуле:
M-ee=/W2>
где k — эмпирический коэффициент, который применительно
к полупогружным буровым платформам можно принимать рав¬
ным 0,85.
_ Безразмерный коэффициент сопротивления бортовой качке
2ѵѳ, в соответствии с рекомендациями работы [109], может быть
принят равным 0,21.
Редукционные коэффициенты хдл и хѳ" рассчитываются по
формулам
— с2cos kb {e~kZce3 + е~k ~с4) ] ’ (58)
_ e~kZc sin kb ,
a ’ o,85W
102
здесь
2LubnTQ . ТчТ' .
Сі — s , c2 — >
„ 2LnbnTQ . T\ . TK .
Сз— STK ’ 4 T' ’ 1 2 P’
T'^T~^--Zp, лп = л; + лк;
zp — отстояние . центра тяжести платформы от ватерлинии.
Ординаты амплитудно-частотной характеристики для бор¬
товой качки (рис. 46, б) можно вычислить по формуле
I Ѳо I = (59)
І»-І '
Уравнение горизонтальных поперечных колебаний (в случае
пренебрежения влиянием на них бортовой качки) можно пред¬
ставить в виде
(т + р^) ті + Улг] = К. (60)
По данным В. А. Мореншильдт, правая часть уравнения (60)
может быть представлена так:
Y = Хт) тт]в Хт) Цт)Г)Лв> (61)
где г]в — горизонтальное ускорение волны.
Если пренебречь влиянием сопротивления горизонтальным
поперечным колебаниям, то
(ttl Д~ Цт)Г)) Г] — (Хт) Щ Н- Хт) Рип) Г]в, (62)
откуда
іл,„ і „ин,,
• • Ху] tn Д- Х^ Ц-qY) ••
Л = т + р-пп 111
(63)
Решение уравнения (63) имеет вид
т] = — Т)о sin at, (64)
где
х^лт + x»Hpnrl f
m + Prw '
Как и выше, представим в виде суммы
Рт)Г) Нт)Г)П Нгрік’
где р, п - присоединенная масса понтона; — присоеди¬
ненная масса колонн.
103
Приближенно
М'тілн 1,5рлтіАп,
Штпк
?Ѵк .
g ’
здесь п — количество понтонов; Ѵк — погруженный в воду объем
колонн;
^-п ~ "Ь ^к>
где L'n — суммарная длина понтона без участков с колоннами.
Рис. 47. Амплитудно-частотные ха¬
рактеристики: а — горизонталь¬
ных поперечных колебаний плат¬
формы, расположенной лагом к вол¬
не; б — вертикальной качки плат¬
формы, расположенной вразрез
волне.
Редукционные коэффициенты х™ и х™ могут быть вычислены
по выражениям
Ь у 1 —— р К I
Dae + -k cos kb
D ’
ин [p-nnn? fe2c d - Р-ппкО — e ferK)]cos£6
Xy] —— J
Нт]Г)П T Mt)T)K *
(65)
а ординаты амплитудно-частотной характеристики для гори¬
зонтальных поперечных колебаний (рис. 47, а) — по формуле
JL| = ичЛт + хпХп
r W I т +
(66)
Вертикальная качка платформы, расположенной вразрез
волне, описывается в основном теми же уравнениями, что и при
ее расположении лагом к волне. При этом для вычисления ре¬
дукционных коэффициентов х£л и х|н могут быть использованы
выражения
2 У -j- (d()2 cos kxte kTK — 2LnbnT0ke kzcx
ѵгл
= i . , (67a)
овл
104
где Xi — абсцисса центра і-й колонны; г. — аппликата центра
величины колонны, м;
sin k -~-
х =J;
k (676)
ин Р-еепХі + цеекХ2
Хг е с
6 KS
где
і-п t
sin k sin k
Для вычисления и ц^к можно использовать получен¬
ные выше три значения р,^п и М-Кк Для тРех значениях о0 ПРИ
определении присоединенной массы цц для положения лагом
к волне.
Найденное по формулам (67) значение р,& следует разделить
в том же процентном отношении р,Кп и р,^к, что и при расчете
вертикальной качки при положении лагом к волне.
§ 3.5. Качка катамарана,
расположенного лагом к волне
Как показано выше, одним из основных технико-эксплуатацион¬
ных преимуществ катамарана является возможность снижения
амплитуд бортовой качки в положении лагом к волне. Однако
такая возможность не является обязательным качеством ката¬
марана, а сопутствует только вполне определенным соотношениям
размерений. Именно этим объясняется настоятельная необходи¬
мость достаточно простых, но учитывающих главные закономер¬
ности процесса методов расчета бортовой и вертикальной качки
катамарана, применимых уже на ранних стадиях проектирования.
Такой метод расчета был разработан в рамках линейной те¬
ории волн с использованием гипотезы плоских сечений и допу¬
щения, что корпуса находятся настолько далеко друг от друга,
что генерируемые или отраженные корпусом волны синусоидальны
в месте расположения второго корпуса [6, 52]. Это допущение
позволяет достаточно просто учесть взаимодействие корпусов,
определяя гидродинамические характеристики по характеристи¬
кам одиночного корпуса.
Рассматривается малая качка катамарана с симметричными
корпусами, расположенного лагом к регулярным волнам, без
хода. Система неподвижных координат: начало — в диаметраль¬
ной плоскости на уровне расчетной ватерлинии, ось Oz — вверх,
ось Оу — по ходу волн, ось Ох — в нос.
105
Горизонтальные колебания точки пересечения ДП и плоско¬
сти расчетной ватерлинии описываются системой уравнений [6]:
“Г ЦдтД У Д ^тцпкУ Д' -j- Pg-qc) Ѳ Д == ^к> (68)
(•/% Д' рѳѳк Д m.Zp) Ѳ Д р,декѲ Д DhO Д (ц^дк Д tnzp) У Д ДдѲкУ = 7ИК;
(/и Д р^к) z Д Л^кг Д ySz = ZK.
Для получения общего решения была формализована физи¬
ческая модель генерирования и отражения волн, аналогичная
рассмотренной выше. Полученные формулы позволяют доста¬
точно просто рассчитать амплитудно-частотную характеристику
бортовой качки катамарана с учетом взаимодействия корпусов.
Амплитудно-частотная характеристика бортовой качки
— = Хд . (69)
]Л0 — °ѳ)2+4^ѲѲкаѲ
здесь
хь = хД2/Ф; х= 1-Х[0,984Д2(1-х)3]
Og = o/ng; лѳ = У k = o2/g;
J JrL_ Ь2 (?2 1 Ff) R I f| О 9 д') I Г2®
4к- g b (г д^дод^^^-г^^^д —jj,
г = У ; 2b = 2&//BJ6;
zs — аппликата центра тяжести, м;
_ ] oph 2.
Леек 1-pa 4ygZ.&2zeC>
£ = sln2/sb при 2/г&<л/2; £=1 при 2kb > л/2.
Приведенная амплитудно-частотная характеристика, учиты¬
вающая трехмерность нерегулярного волнения,
= f = 0,0305 -^- — 0,255-^- ДО, 886. (70)
a ’ >-w 1 ’ v 1
Результат расчета качки на регулярном волнении приведен
на рис. 48.
Для упрощения метода расчета вертикальной качки гидро¬
динамические величины одиночного корпуса можно определять
по приближенным формулам или графикам, а взаимодействие
корпусов можно считать приближенно таким же, как взаимодей¬
ствие соответствующих цилиндров.
1С6
Амплитудно-частотную характеристику вертикальной качкн
найдем по формуле
£g _ Zqk /7 I \
([(« + ° ’ — 2V‘S112 + 4^ко2}1/2‘
Здесь
2ОК^ ; №к «[sin 2 (8, - kb) -ф-Ш +
А,Кк
/4
/4 = 1 -I- £2+ 4- 2L cos (6. - 2kb);
f5 = 1 — L cos (6_ — 2kb) -ф-£+ sin (6_ — 2kb); = cos (8</ — 8г)1
£+= sin^ —ег); 6_ = гу -ф- е/, 6+ = 6_ —л/2.
Сдвиг фаз г'у, e'z представлен на рис. 49.
При расчете коэффициентов демпфирования вертикальной
качки Лц корпус катамарана заменяется цилиндром с приве¬
денной шириной В = Д15 , где индексами 5, 10, 15
обозначены значения ширины по ГВЛ на 5-м, 10-м, 15-м шпан¬
гоуте соответственно, и коэффициентом полноты Р* = X- Тогда
Пример расчетных и опытных амплитудно-частотных харак¬
теристик вертикальной качки дан на рис. 50.
Амплитудно-частотный график вертикальной качки катама¬
рана существенно отличается от графика для однокорпусного
судна. При определенной частоте на первом имеется минимум
z0/£0, теоретически равный нулю, а при высоких частотах на¬
блюдается пик высотой 1,5—2.
Расчеты показали, что вертикальная качка отсутствует, когда
/6 = 0 (возмущающая сила и сопротивление качке отсутствуют).
Это позволяет найти частоту минимума амплитудно-частотной
характеристики о0 с учетом взаимодействия корпусов. Прирав¬
нивая выражение для f6 нулю
/а = 1 — cos (6_ — 2kb) -ф- £+ sin (6_ — 2kb) = 0, (72)
получаем
2 sin2 (&у — kb) = 0 и Ry= kb ± пл; п = 0, 1, 2, ...
Если интересоваться первой со стороны нуля частотой, то
п = 0. Тогда е;/ = 2kb. Это простое соотношение позволяет оп¬
ределить о0.
107
Рис. 48. Приведенная Пере¬
даточная функция бортовой
качки катамарана.
/ — опыт; 2 — расчет по мето¬
дике, учитывающей взаимодей¬
ствие корпусов; 3 — расчет по
методике, не учитывающей взаи¬
модействие корпусов.
Рис. 49. Сдвиг фаз вертикальной и горизонтальной возмущающей
108
6)
109
Найденный таким образом частотный параметр (kb)Q = a^blg
показан на рис. 51 в виде графической зависимости от BJT,
2ЫВ1 и р для цилиндрических катамаранов. Эти же графики можно
использовать для нахождения (/г&)0 и, следовательно, о0 и для
реального объекта, полагая вместо BJT-, 2Ь/Вг и р соответственно
В'/Т; 2ЫВ’ и х = р'.
Рис. 50. Передаточная функция вертикальной качки катамарана.
Расчет: |3'==0,8; р'=^=3г),бб5. Опыт: • — /’=1,2; 4 г=І,0.
Отметим, что гипотеза проницаемости Крылова дает первую
от нуля частоту отсутствия вертикальной качки катамарана
при Х/2& = 2 (X — длина волны) или при (kb)0 = л, заметно от¬
личающуюся от частоты, определяемой из условия, учитываю¬
щего гидродинамическое взаимодействие корпусов.
Положим, что крен и вертикальная качка выражаются урав¬
нениями
Ѳ = Ѳо cos (at + бѳ + емк); 1
z — z0 cos (at 4- 62 4- e2K), J ' '
110
Рис. 51. Относительная частота нулевого возмущения (2/г&)0 ка¬
тамарана в зависимости от относительной ширины BjT и относи¬
тельного клиренса 26/Вр а — р — 0,6; б — ₽ = 0,8; в
— р = 1,0.
Ill
а возмущающий момент и вертикальная возмущающая сила —
уравнениями
= Мок cos (pt емк); j
2K = ZOKcos(o/4-eJ. j (74>
Положительными будем считать крен на подветренный борт и
возмущающий момент, кренящий на тот же борт. Тогда для пе¬
регрузок у наветренного или подветренного борта получим сле¬
дующее выражение в безразмерном виде:
go = Г MV, ( Ѳо ^m\2
L k to / \ а0 2 J *
) C0S ~ бѲ + егк — емк)] • (75)
Здесь знак «+» соответствует наветренному, а знак «—» — под¬
ветренному борту.
Таким образом, кроме Ѳ0/а0 и zo/So необходимо найти фазы
оѳ, о2 и разность е2К — емк. Из уравнения вертикальной качки
найдем
tg6 = W___
2VS1-(m+^K)CT2 ’
причем б2 = 0.
Рассматривая зависимое уравнение бортовой качки вида
(АЛ + Л) Ѳ + NeQ + DhQ = Л4К,
найдем
tg60 = -^§, (76)
где х = о/од, причем 60 = 0, а безразмерный коэффициент за¬
тухания качки Хѳѳ и частоту собственной бортовой качки оѳ
можно определить так, как показано выше.
Что касается разности фаз е2К — емк, то для ее оценки допу¬
стим, что эта разность такая же, как для катамарана, состоящего
из эквивалентных цилиндров. Это позволяет использовать вы¬
ражения, полученные ранее:
(с')2
tg(eZK — eMK)^tg(e;K —е;к) = - (77)
2g_ sin (S_ - 2kb) V ’
причем e2K — емк 0 при о о0.
Для проверки правомочности допущений в отношении фаз
при суммировании перегрузок был произведен расчет перегрузок
для одной модели по приведенным формулам. Поскольку теоре¬
тическое определение связано с дополнительной погрешностью
нахождения Ѳ0/а0 и zo/£o, эти величины были приняты по сгла¬
женным опытным амплитудно-частотным характеристикам. Ре-
П2
зультаты такого расчета, как показывает рис. 52, удовлетвори¬
тельно согласовались с данными опыта. Это позволяет рекомен¬
довать приведенные формулы для оценки суммарных перегрузок.
Экспериментальные суммарные перегрузки были получены
путем обработки синхронной осциллографической записи крена
и вертикальной качки модели. Обработка по трем моделям по¬
казала, что основную роль в суммарных перегрузках играет
Рис. 52. Относительные суммарные ускорения при качке ката¬
марана (В1/Т=1,5; 2ЬВі = 2,07; 7= 1,2).
расчетные данные для наветренного борта; — — — для подве¬
тренного борта; —• — ускорения от крена.
ф — опытные данные для наветренного и подветренного бортов соот¬
ветственно.
бортовая качка. С уменьшением BJT и 2Ь и увеличением радиуса
инерции и аппликаты центра тяжести (т. е. с увеличением пика
Ѳ0/а0) степень влияния бортовой качки увеличивается, а отно¬
сительная разность суммарных перегрузок на наветренном и
подветренном бортах уменьшается.
Общее представление о влиянии соотношений размерений
катамарана на величину ускорений при его качке также дают
расчеты, основанные на материалах испытаний моделей, выпол¬
ненных Г. В. Кобернюк под руководством Ю. А. Нецветаева.
На рис. 53 показаны относительные ускорения бортовой и вер¬
тикальной качки в зависимости от отношения длины волны Хр,
частота которой равна собственной частоте бортовой качки,
113
к полной ширине Вт. При X/Sm 2 (Ѳ)з% Bm!g —> 0, а (£з%№~*
—const.
Как уже отмечалось выше, сравнение отдельных технико¬
эксплуатационных качеств судов различных архитектурно-кон¬
структивных типов, в том числе однокорпусных с двухкорпус¬
ными, не может служить основанием для окончательного сужде-
типа. Однако такие сравнения
ния и выбора предпочтительного
позволяют наметить способы й
улучшения конкретных ка¬
честв судов, оценить преиму¬
щества и недостатки этих
способов, их влияние на дру¬
гие качества судов. Для
примера рассмотрим харак¬
теристики бортовой качки
среднего рыболовного трау-
Рис. 53. Относительные ускорения катамаранов в положении лагом к волне,
без хода (по данным Ю. А. Нецветаева и Г. В. Кобернюк): а — при вер¬
тикальной качке; б — при бортовой качке.
/—”=1,0; BJT = 2,5; 2— ~= 2,0; BJT = 1,35; 3 -~ = 1,0, BJT = 1,35; 4 —
с = 2,0, BJT = 2,50; 5 — с = 0,5; BJT = 1,35.
лера (СРТ), траулера-катамарана «Эксперимент», построенного
из корпусов СРТ, и катамаранов с корпусами, имеющими сни¬
женное отношение ВгІТ. Главные размерения судов приве¬
дены в табл. 4 (здесь и ниже частично использованы данные
А. Д. Батуева).
Размерения катамарана МРТК-2 выбраны таким образом,
что расстояние между внутренними бортами примерно равно
ширине одного корпуса; это обеспечивает минимальную массу
соединяющей корпуса конструкции при приемлемой площади
палуб.
Размерения катамарана МРТК-2Ш определены при условии
равенства полной ширины этого судна и траулера «Эксперимент»;
114
Таблица 4
Характеристики сравниваемых судов
Характеристики
СРТ
«Эксперимент»
МРТК-2
МРТК-2Ш
Водоизмещение D, т
Полная ширина Вт,м
Ширина одного кор¬
пуса Bj, м
Осадка Т, м
Относительная ши¬
рина ВгІТ
Метацентрическая вы¬
сота It, м
446
7,3
7,3
2,1
2,5
0,56
—900
19,0
7,3
2,1
2,5
17,4
892
14,9
4,74
3,8
1,25
5,28
892
19,0
4,74
3,8
1,25
15,0
это обеспечивает одинаковую величину промысловой палубы
и производственных помещений.
Расчеты качки для интенсивности волнения между 6 и 7 бал¬
лами выполнены с применением спектра Неймана. Результаты
расчетов показаны в табл. 5 (суда расположены лагом к волнам,
без хода).
Таблица 5
Характеристики сравниваемых судов
Характеристики
СРТ
«Эксперимент»
МРТК-2
МРТК-2Ш
Средняя амплитуда
крена 0°
Средняя амплитуда
ускорений у борта alg
17,4
0,078
4,3
0,077
14,8
0,12
8,5
0,082
Приведенный пример показывает, что катамаран обладает
преимуществами по характеристкам бортовой качки только в том
случае, когда правильно выбраны его элементы (достаточно велик
поперечный клиренс или относительная ширина корпусов).
§ 3.6. Исследование влияния поперечных размеров
многокорпусных судов на параметры бортовой
и вертикальной качки (методом Жуковского)
Рассматривается плоская задача о взаимодействии волнующейся
жидкости с поперечным сечением двух- и трехкорпусного судна,
расположенного лагом к регулярным двухмерным волнам. Для
решения задачи используется метод Жуковского [25].
Обводы корпусов принимаются упрощенными (прямоугольный
понтон), а вертикальный клиренс для двух- и трехкорпусного
115
Рис. 54. Системы координат при исследовании качки методом Жу¬
ковского; а — однокорпусное судно; б — катамаран; в — тримаран.
T]Oz — неподвижная система координат; хО^ — подвижная система ко¬
ординат; £0, т}0 — координаты точки Ot в неподвижной системе; —
амплитуда волны в характерных точках; индексами 1, 2, 3, 4,... отме¬
чена последовательность амплитуд деформируемой корпусом волны; d —
расстояние между внутренними бортами корпусов тримарана.
116
судна выбирается таким, чтобы исключить «замывание» соедини¬
тельного моста. Система координат и основные обозначения
для каждого рассматриваемого случая приведены на рис. 54 и 55.
Следуя Жуковскому, будем считать, что волновые движения
жидкости у борта судна, обращенного к заданной системе набе¬
гающих регулярных волн, а также волновые движения в меж-
дукорпусном пространстве можно представить в виде системы
двух волн, движущихся навстречу друг другу. Кроме того, го¬
ризонтальная скорость частиц жидкости слева и справа от кор-
Рис. 55. Пределы интегрирования при расчете давлений (для катамарана).
пусов судна передается частицам жидкости за корпусами пла¬
вающего судна. По заданным элементам набегающих волн и
поперечным размерам судна определяются характеристики вол¬
новых движений жидкости у бортов и в междукорпусном простран¬
стве судна.
На основании уравнений гидродинамики с учетом элементов
волнения определяются характеристики силового взаимодей¬
ствия между качающимся судном и волнующейся жидкостью.
Полученные формулы могут быть использованы непосредственно
для анализа влияния поперечных размеров многокорпусных
судов на параметры вертикальной и бортовой качки.
Относительная амплитуда вертикальной качки двухкорпус¬
ного судна:
rw sin (of + 6ОК + 6^к)
5 Г - f ('*/
Кi -! -tg26OK у мкр + [ -^(с* + 1).]2
117
где
tg60K =
kB,
1
tg-^-(cK- 1)
к (ck + •) .
tg6^= 4^ ’
Лк = ?г(1 -2kT)~ Г-ф- +
CK
tg^ (Ck — 1)
2cK 4~
—g относительное расстояние между внутренними
бортами корпусов катамарана.
Относительная амплитуда бортовой качки двухкорпусного
судна:
Ѳт
Bt - Г kBr , , kBr -
рДк — cK ~T~ (Ck “
Sin (о/ 4~ бок 4“ бѳк)
- (79)
1 (6kpxcK — kT) у
64 J
где
tge0K = --tg6+ = - [feB1 + tg^fi- (cK -
tg6gK= —
kBr (cK + l)2 (6/грхск — kT)
8 (2ekTkHK — ko2Ki)
^1 Px
2 o2
/C1 = 2eftr^- +
UK
\z 3 - ,,2 / — 2T2 \ , kB,
(kB^)2 — -s- (cK — I)2 cK + — \ tg (cK
Ві -і ві + 4zg \
4 к + 12 Г
Относительная амплитуда вертикальной качки трехкорпус¬
ного судна, составленного из
•к
трех одинаковых корпусов:
K>tn
Т XS)
sin
(о/ 4" бот + ^£т)
К1 + tg2 бот
kBr (2cT + 1) 12
6 J
(80)
ск =
-i) ;
118
где
tg60T = — -jg^; tg6 =
kBL-
i
tg-ф- (Ст—1)
ГйВх (2cT + 1) 1.
tg6ET=- [
AT = ekT (1 - 2kT) - Rf- + 2 ZJT"‘ 1;
tg-21 (Ст - О
cT = (cT + B^!B} — относительное расстояние между внутрен¬
ними бортами корпусов тримарана.
Относительная амплитуда бортовой качки трехкорпусного
судна, составленного из трех одинаковых корпусов,
Ѳт. KST sin (of -|- 6РТ 4- 6gT) (81)
“о V1 +tg26- /[2,ekTkhx __ /гСу2/<1т]2 + [/ео/С2Т]2
где
/Г - В, \ , fi+ , В, Г kBj — . kB 1Ч"|
Лзт = ~уг J tg Н уТ- 6 Ст tg 2 О'т 1) J X
tg^y-l) [ 1 - tg^fl- (ст— 1)]
tg -ф- (Ст - 1) [1 - tg kBt (е~Т - 1)]
tg 6„т = — , tg 6+ = — [kBt + tg kBt (cT - 1)],
tg9T =
3ekTkhT~ko2K1T ’
TS ГХ kT X
^1T “ 3e 7\
Bj
2T
Ct — 1
tgABj (cT — 1) .
2&px +
- Ig-ф- Й - 1) [-Sf ё. + X (2?r - I)’]).
JTX — момент инерции масс трехкорпусного судна относительно
продольной оси; DT = 3pgLBrTb—водоизмещение судна; hT =
= (1 + 8px4) + zc — Zg — метацентрическая высота; рх — мета¬
центрический радиус одного корпуса.
119
На рис. 56 показано влияние горизонтального клиренса на
параметры бортовой и вертикальной качки, а на рис. 57 — от¬
ношения y.BjT при постоянном клиренсе (х = 6/а — коэффи¬
циент вертикальной полноты).
Рис. 56. Амплитудно-частотные графики катамарана, рассчи¬
танные методом Жуковского, при изменении поперечного кли¬
ренса: а — бортовая качка; б — вертикальная качка (судно
расположено лагом к волне, без хода); В^Т = 2,0.
120
Рис. 57. Амплитудно-частотные графики катамарана при из¬
менении относительной ширины корпуса, рассчитанные мето¬
дом Жуковского: а — бортовая качка; б — вертикальная качка
(судно расположено лагом к волне, без хода); с = 2,0.
Глава *
Управляемость
Основные обозначения
су — коэффициент поперечной силы при движении с дрейфом
и угловой скоростью [ су = \ ;
\ р 4-LT /'
CD — коэффициент сопротивления шпангоута при поперечном
обтекании;
/і> /з— функции влияния клиренса на присоединенную массу
корпуса катамарана при движении вдоль осей х п у,
^і> ^2 — поправки, учитывающие влияние взаимодействия кор¬
пусов на поперечную силу и момент при движении с дрей¬
фом и угловой скоростью;
Mz — момент относительно оси z при движении с дрейфом
и угловой скоростью, кгс-м;
тг — коэффициент момента относительно оси при движении
с дрейфом и угловой скоростью/ mz =— I;
L2T J
R — радиус циркуляции;
_ — площадь руля, м2;
Т (х) = Т (х)/Т — относительная осадка на расстоянии х от носового пер¬
пендикуляра;
ѵ> ѵв> ѵн — скорость на циркуляции и скорость движения внутрен¬
него и наружного корпусов катамарана при устойчивом
вращении, м/с;
_ уветр — скорость ветра, м/с;
хо = Xo/L — относительная координата мгновенного полюса пово¬
рота;
У — поперечная сила при движении с дрейфом и угловой
скоростью, кгс;
122
$ — угол дрейфа, т. е. угол между диаметральной плоскостью
судна и направлением его движения при циркуляции;
— угол отклонения пера руля от ДП, град;
А. = T/L — удлинение корпуса, рассматриваемого как крыло;
— коэффициент присоединенной массы при движении вдоль
оси х;
А22 — коэффициент присоединенной массы при движении лагом;
со — угловая скорость вращения при циркуляции, 1/с;
Q = ілЬіѵ — безразмерная линейная скорость вращения при цир¬
куляции.
§4.1. Общие результаты теоретико-экспериментального
изучения управляемости катамаранов1
Одной из ключевых проблем прогнозирования управляемости
судна является определение его гидродинамических характеристик
при движении с дрейфом и при установившемся вращательном
движении. Эта проблема, достаточно сложная в отношении одно¬
корпусного судна, еще более сложна для многокорпусных судов,
поскольку в этом случае необходимо учитывать взаимовлияние
корпусов при расчете вязкостных и инерционных сил и мо¬
ментов.
Обычно при расчете сил и моментов корпус судна рассматри¬
вают как крыло предельно малого удлинения. Тогда многокор¬
пусное судно будет представлять собой систему таких крыльев.
При обтекании корпуса с углом атаки появляется пелена при¬
соединенных вихрей, а при обтекании системы корпусов пелена
вихрей каждого корпуса зависит от расположения корпусов,
и возможно взаимодействие вихрей с корпусами и между собой.
Кроме того, углы атаки и угловые скорости различных корпусов
(рис. 58) могут быть различны, а при высокой скорости должны
возникать эффекты, связанные с возникновением, разрушением
и взаимодействием волн, образующихся при поперечном обте¬
кании корпусов.
Если при движении с угловой скоростью и дрейфом каждый
корпус судна рассматривать [как крыло малого удлинения,
то катамаран будет представлять собой два крыла малого удли¬
нения [69], расположенных параллельно на определенном рас¬
стоянии одно от другого. При расчете их гидродинамических
характеристик можно использовать • приближенную циркуля¬
ционно-отрывную теорию крыла малого удлинения. Согласно
этой теории, силы, действующие на такое крыло, можно пред¬
ставить как результат сложения двух компонент — линейной и не¬
линейной. Появление линейной компоненты сил зависит от цирку¬
ляции продольного обтекания (вдоль хорды крыла). Эта компо¬
нента рассчитывается по линейной теории крыла малого удли-
1 В параграфе частично использованы материалы Ю. М. Мастуш-
кина.
123
Рис. 58. Система координат, принятая при исследовании
управляемости катамарана.
Рис. 59. Функция влияния клиренса на сопротивле¬
ние (боковую силу) при движении лагом.
1 — крылья, угол атаки 5°; 2 — крылья, угол атаки 15°;
3 — расчет для пластин, угол атаки 90°.
124
нения; появление нелинейной компоненты сил зависит от отрыв¬
ного поперечного обтекания (вдоль торца крыла):
(82)
^z/отр— CdN (*о) 2 ’ ^2 0тр Ѵ^о) 6 •
Величины~cD, f'2, F2 можно рассчитать с помощью формулы, при¬
веденной в монографии [66]; учитывая, что обычно 0,3 < х0 < 0,5,
Fd^-^--o,25-4?-; Мх0)~1.2; f2(x0) 1,0. (83)
Взаимовлияние двух шпангоутных сечений должно иметь
некоторые отличия от взаимовлияния пластин. Однако в первом
приближении можно считать их одинаковыми, поскольку обычно
для катамарана 2ЫТ с 5, а в этой зоне сопротивление при дви¬
жении лагом не зависит от клиренса и формы сечения.
Коэффициенты сул_ т и тг л.т (рис. 59) следует определять
по линейной теории при условии параллельного расположения
двух крыльев малого удлинения, a cD соответствует плоскост¬
ному обтеканию двух шпангоутов. Необходимо обратить внима¬
ние на то, что при совершении катамараном устойчивого враща¬
тельного движения скорость двух корпусов ѵв и ѵн (рис. 58)
будет разной, поэтому будет различной и соответствующая ско¬
рость поперечного движения.
Рисунок 59 выявляет следующие особенности поперечного
обтекания пластин: _
1. При 2ЫТ = 0, т. е. при единичной пластине, cD = 1,06.
Эта величина меньше обычно принимаемой cD = 2,0, так как ис¬
пытанная плоская пластина не имела острых краев.
2. При 2Ь/Т < 4 и при его увеличении cD слегка понижается.
Это говорит о том, что сопротивление расположенных очень близко
друг к другу пластин меньше, чем у единичной пластины.
3. При 2ЫТ > 4 вслед за увеличением 2ЫТ сначала постепенно,
а затем резко начинает повышаться cD. При 2ЫТ > 7,3 сопро¬
тивление обеих пластин превышает сумму сопротивлений двух
отдельных пластин.
Присоединенные массы при поперечном обтекании плоских
пластин измерялись с помощью метода электродинамической
аналогии (ЭГДА); при этом проделаны опыты над четырьмя
моделями, у которых 2Т = 70 мм.
На рис. 60 приведены данные о влиянии клиренса на коэф¬
фициент присоединенной массы при поперечном обтекании. Ри¬
сунок показывает, что при 2ЬІТ = 6 взаимное влияние двух
пластин становится весьма малым, значение относительной при¬
соединенной массы приближается к двум.
125
Экспериментальная кривая І (см. рис. 60) аппроксимирована
следующей формулой:
h £ь,о=^ = 2-ехр(“О’6-т)- <84>
На основании опытов с установкой ЭГДА оказалось возможным
аппроксимировать зависимость коэффициента /2 при плоском
обтекании [74] эллипсов:
/2 = 2 —0,8ехр [— 2-^-], (85)
где Сі (х) — расстояние между внутренними бортами корпусов,
переменное по их длине.
Рис. 60. Функция влияния клиренса на коэффициент присое¬
диненной массы при движении лагом.
1 — плоские пластины; 2 — BJT = 2; 3 — BJT = 3; 4 — BJT = 4.
Используя гипотезу плоских сечений, можно рассчитать коэф¬
фициент присоединенной массы катамарана при движении лагом:
L/2
^22к = 2 j f2 (х) Цо (х) dx", (86)
-L/2
здесь Цо (*) — погонная присоединенная масса одиночного кор¬
пуса катамарана.
При тех же допущениях присоединенный момент инерции от¬
носительно вертикальной оси
L/2
А66к=2 J (^2+^)/2(x)p0(x)dx4-2Mn^2, (87)
-L/2
где находится по рис. 61 (при %11к > 0).
126
Аналогично определяется и статический присоединенный мо¬
мент катамарана
При вычислении Х22 и Хвв можно использовать результаты,
полученные для плоской пластины.
Рис. 61. Функция влияния клиренса на продольную присоеди¬
ненную массу.
BJL = 0,25; В,/Л = 0,15.
В табл. 6 сравниваются выражения для некоторых характеристик
однокорпусного судна и катамарана, (г = r/L — относитель¬
ный радиус инерции). Выражение присоединенной массы соот¬
ветствует прямоугольному корпусу; считается, что %11к >=« 0.
Таблица 6
Сравнение формул для расчета гидродинамических коэффициентов
корпуса при прогнозировании управляемости [69]
Тип суды 1
Х22
Хвв
ГПі
m2
П1
Однокор¬
пусное
рлТ2Ь
T2L3
РЛ 12
к?
Оэ
to
2 6 А -у лХ
2 6 А 72 ! ...А.
L 1 12
Катама¬
ран
pitT2Lf2
Т2/ 3
Р" 12 /2
46 А
46^ + л^2
в1 Г-2 , V
46 L 1/ +Т2" Х
х("г) ] +
Присоединенная масса А-корпусного судна при поперечном
движении может быть оценена по формуле
L/2
Х22ЛГ —М j [/2 (t'+i) (х) f2 а+2) (х)...] p.0(x)dx, (88)
-Д/2
127
где р0 (х) — погонная присоединенная масса, определяемая для
шпангоутов одного корпуса известными методами; коэффициенты
в квадратных скобках учитывают влияние шпангоутов соседних
корпусов.
Каждый коэффициент /2 зависит от расстояния между шпан¬
гоутами различных корпусов в данном сечении. Предполага¬
ется, что изменением коэффициентов, из-за различий размерений
и формы шпангоутов, а также из-за взаимовлияния дальних
от рассматриваемого корпусов, можно пренебречь. Присоединен¬
ный момент инерции 7Ѵ-корпусного судна
L/2 N N
(*"? Ч- hi (-v) poi (x) dx -ф AAii —. (89)
-L/2 ,=1 T7 2
Такая же формула может быть использована для определения
статического момента присоединенной массы Лаем судна, состоящего
из W корпусов.
Коэффициенты поперечной силы и момента многокорпусного
судна могут быть найдены по значениям аналогичных коэффици¬
ентов одиночного корпуса (при Fr < 0,30):
CyN ~ (КцКі (i+i).. . KiN) Су',
tnZN — {K21K2 (i+i)... Л4v) mz. (90)
Здесь i — порядковый номер корпуса.
На рис. 61 приведены результаты систематических расчетов
присоединенной массы катамаранов, составленных из двух эл¬
липсоидов, при продольном обтекании. Показанная зависимость
отношения присоединенной массы катамарана к удвоенной при¬
соединенной массе его изолированного корпуса от клиренса слабо
зависит от соотношений размерений корпусов.
Данные рис. 61. могут быть применены для приближенного
(без учета волновых эффектов) определения коэффициента при¬
соединенной массы катамаранов с удлинением корпусов ЫВ1 =
\пк 2/іХц.
При вращательном движении общий характер зависимости
коэффициентов поперечной силы и момента рыскания угла атаки
одинаков и для одиночных крыльев, и для крыльев в системе
«биплан».
Эксперименты также показывают, что характер гидродина¬
мического взаимодействия корпусов таков же, как и тонких
крыльев предельно малого удлинения.
Предложенный Ю. М. Мастушкиным способ расчета ^попе¬
речной силы и момента рыскания катамарана основан на введении
128
в величины соответствующих коэффициентов поправки, учитыва¬
ющей взаимодействие корпусов:
Сук ' Стк = ^2^z> (91)
где
К^2 - 0,5ехр (-;
z os ■ (92)
/С2«« 2 — 0,65 ехр .
(Fr <0,30)
си, тг — коэффициенты для одиночного корпуса катамарана.
При этом влияние угла’ дрейфа, угловой скорости Q, удли¬
нения X, относительной ширины BJT и коэффициента полноты
диаметрали о катамарана считается пренебрежимо малым.
В настоящее время имеются результаты расчетов по нели¬
нейной теории суммарной поперечной силы YK и момента рыска¬
ния Л4К катамарана при движении его с дрейфом. Эти расчеты
и опыты подтверждают существование показанных выше зави¬
симостей. В частности, они показывают, что при сближении
крыльев суммарная поперечная сила и момент уменьшаются,
причем более интенсивно на внешнем крыле, чем на внутреннем.
При удлинении крыльев X = 0,1 4-0,2 их взаимовлияние прекра¬
щается при расстоянии между их средними линиями 2b > 0,5L.
Опыты с тонкими крыльями в гидролотке со свободной поверх¬
ностью показали, что примерно до чисел Фруда Fr 0,3 вли¬
янием волнообразования на поперечную силу и момент относи¬
тельно оси OZ можно пренебречь.
Расчеты по зависимостям нелинейной теории методом конеч¬
ных элементов и эксперименты показали, что интенсивность
5 п/р Дубровского В. А. 129
зависимости поперечной силы и момента рыскания от клиренса
зависит от угла атаки: с ростом последнего взаимодействие крыльев
больше (рис. 62). Расчетные и опытные данные говорят о том,
что взаимодействие практически не зависит от удлинения крыльев.
§ 4.2. Результаты сравнительных исследований
управляемости катамаранов
Результаты расчетов устойчивости на курсе [69] катамаранов и
отдельных корпусов, представленные на рис. 63, позволяют
сделать такие выводы:
при уменьшении 2ЫТ устойчивость катамарана на курсе
ухудшается;
устойчивость катамарана на курсе лучше, чем у однокорпус¬
ного судна, ширина которого в два раза больше, чем
ширина одного корпуса катамарана;
устойчивость на курсе катамаранов с маленьким межкор¬
пусным расстоянием близка к устойчивости отдельного корпуса.
Результаты вычисления угловой скорости и угла дрейфа [691,
показанные на рис. 64, 65, позволяют отметить следующее:
при расстоянии между пластинами 2Ь/Т = 1,63 н- 5 влияние
межкорпусного расстояния катамарана на диаметр устойчивой
циркуляции очень мало;
если на корпуса катамарана поместить по такому же рулю,
что и у однокорпусного судна, с шириной вдвое большей, чем
ширина одного корпуса катамарана, то его диаметр циркуляции
будет больше, чем такого однокорпусного судна;
поворотливость катамарана несколько лучше, чем одиночного
его корпуса;
чем меньше межкорпусное расстояние катамарана, тем больше
угол дрейфа;
угол дрейфа катамарана намного меньше, чем у однокорпусного
судна с шириной вдвое большей, чем ширина одного корпуса ката¬
марана, однако несколько больше угла дрейфа одиночного корпуса.
Влияние межкорпусного расстояния катамаранов на их уг¬
ловую скорость крайне мало. Поворотливость однокорпусного
судна несколько лучше, чем у катамарана, при прочих равных
условиях. Чем больше межкорпусное расстояние, тем больше
максимальная угловая скорость судна. Эти результаты согла¬
суются с полученными выше.
Можно считать, что снижение скорости катамарана связано
лишь с Q и не зависит от межкорпусного расстояния (рис. 66).
Снижение скорости однокорпусного судна несколько меньше,
чем катамарана.
Расчеты параметров циркуляционного движения катамарана
«Эксперимент-1» показали, что при увеличении поперечного клирен¬
са угол дрейфа уменьшается,а радиус циркуляции увеличивается.
В настоящее время имеются результаты изучения влияния
формы диаметральной плоскости и шпангоутов на управляемость
130
Рис. 63. Характеристика
устойчивости на курсе
катамарана (при замене
корпусов пластинами).
1 — один корпус; 2 — 2Ь/Т
= 5,4; 3 — 2Ь/Т = 1,6.
Рис. 65. Угол дрейфа катама¬
ранов в зависимости от угла пе¬
рекладки рулей. Обозначения
те же, что на рис. 64.
Рис. 64. Угловая скорость ка¬
тамаранов в зависимости от угла
перекладки рулей.
1 — один корпус удвоенной ши¬
рины; 2 — одиночная пластина;
3 — корпуса заменены пластинами,
2Ь/Т = 1,67; 4 — 2Ь/Т = 5,0.
X — опытные данные.
5*
131
Рис. 67. Форма обводов испытанных моделей катама¬
ранов [110]: а, б — диаметраль и корпус модели К;
в — диаметраль моделей А-6 и А-8; г — корпус мо¬
дели А-6; д — корпус модели А-8; е — диаметраль
моделей В-6 и В-8; ж — корпус модели В-6; з — кор¬
пус модели В-8.
132
Таблица 7
Главные размерения моделей катамаранов с различной формой
обводов корпусов [НО]
Обозначения
модели
L, м
Ві, м
, м
б
2D,, кгс
25Л/ТТ, %
к
3,0
0,416
0,25
0,71
444
6,0
А-6
3,0
0,500
0,25
0,60
450
5,25
В-6
3,0
0,500
0,25
0,60
450
5,25
А-8
3,0
0,375
0,335
0,60
450
5,25
В-8
3,0
0,375
0,335
0,60
450
5,25
катамаранов [ПО]. Рис. 67. позволяет судить о форме обводов
испытанных моделей, главные размерения которых приведены
в табл. 7. Модели А-6 и В-6 испытаны при клиренсе IbiL равном
0,28, 0,36, 0,44, остальные — при клиренсе 0,36.
катамаранов.
/ — обводы типа А-8; 2 — А-6;
<3 — В-8; 4 •— В-6; Клиренс 2b/L =
= 0,36.
Рис. 69. Влияние относительной
скорости ветра і>ветр/vs на ус¬
тойчивость катамарана на курсе.
1 — ф = 135°; 2 — ф = 90°; 3 — ф =
= 45°.
Кривые зависимости относительного диаметра циркуляции
D^IL от угла перекладки рулей 6Л моделей показаны на рис. 68.
В этой же работе были выполнены исследования устойчивости
моделей А-6 на курсе под действием ветра (рис. 69). Приведенные
результаты теоретических и экспериментальных исследований
могут быть использованы при оценке управляемости не только
катамаранов, но и многокорпусных судов других типов.
Глава 5н
Прочность
и масса
корпуса
Основные обозначения
Ьр — ширина прочной рубки;
с — коэффициент жесткости на кручение;
ср — ширина ' участка прочной рубки, расположенного на
корпусе;
d = — 0,65Т — условное плечо горизонтальной поперечной силы, вы¬
зывающей поперечный симметричный изгибающий мо¬
мент, м;
F?, F? — вертикальная сила в данном сечении левого и правого
корпусов;
Fy, Fu — горизонтальная сила в данном сечении левого и правого
корпусов;
Лр — высота рубки, м;
Нх — отстояние нейтральной оси продольного сечения соеди¬
няющей корпуса конструкции от основной плоскости, м;
Лм— высота соединительного моста в ДП судна;
hn — высота соединяющей корпуса рубки;
Q — перерезывающая сила, действующая на корпус или
соединительный мост;
Кр — коэффициенты жесткости і-й поперечной связи при
симметричном и кососимметричном изгибе;
/м—длина соединительного моста;
/р—длина прочной, рубки катамарана, входящей в состав
соединительной конструкции;
Мв—продольный изгибающий момент, ТС'М;
Мк — общий крутящий момент, действующий на судно;
Л41с, М2С — симметричная и антисимметричная составляющие по¬
перечного изгибающего момента Мизг! Л^іс =
= Ф 2 КЧ;
134
Мх, Му — симметричные составляющие изгибающих моментов от¬
носительно осей х и у,
se, sx, Sy — эквивалентные напряжения и нормальные напряжения,
направленные вдоль соответствующих осей;
t — толщина балки-стенки;
624, — сдвиг фаз силы или момента по отношению к волне;
индекс указывает направление действия силы или
момента;
т — касательные напряжения;
Ѳ — курсовой угол по отношению к фронту волны;
Ф, ф — углы поворота корпусов вокруг продольной оси при
поперечном изгибе и вокруг продольной оси при кру¬
чении;
ш — площадь поперечного сечения присоединенного пояска;
Эй 2х — местные моменты в сечении левого и правого корпу¬
сов.
§5.1. Проблемы обеспечения
прочности катамаранов
В настоящее время трудно говорить о существовании устойчи¬
вых связей между архитектурно-конструктивным типом двух¬
корпусного судна, условиями эксплуатации и требованиями
к размерам связей, конструкции его узлов и т. п. Причиной
этого является недостаток опыта проектирования и отсутствие
длительной проверки корпусов построенных судов. Вместе с тем
выполненные исследования -и. проектные решения дают возмож¬
ность сделать определенные обобщения, полезные в методиче¬
ском и практическом отношениях.
Эти обобщения касаются особенностей расчетной схемы обос¬
нования прочности, методов расчета внешних сил и напряжений
в конструкции, принципов нормирования.
При рассмотрении прочности катамаран характеризуется зна¬
чениями вертикального и горизонтального клиренсов, конструк¬
тивным типом соединительной конструкции, формой обводов ее
нижней поверхности, высотой расположения нейтральной оси
сечения поперечных связей, соединяющих корпуса, а также со¬
отношениями главных размерений. Эти параметры для катама¬
ранов различного назначения отличаются довольно существенно.
В связи с этим обеспечение прочности различных катамаранов
имеет особенности. Так, например, для катамаранов с малым
вертикальным клиренсом при большой относительной длине
корпуса основную сложность вызвает обеспечение продольной
прочности главным образом в связи с появлением значительных
ударов волн. Вопросы общей поперечной прочности приобретают
определяющее значение для относительно коротких судов.
Специфика методов расчета прочности обусловливается также
различием конструктивных типов соединительных конструкций
катамаранов (рис. 70). Типы I и II могут классифицироваться
как регулярные, и к ним, следовательно, могут быть применены
методы, пригодные для непрерывных систем. Расчетная модель
135
в этом случае такова же, как для складчатой призматической
оболочки с деформируемым контуром. Типы III и IV соедини¬
тельной конструкции отличаются существенной нерегулярностью,
и для определения внутренних усилий или перемещений в такой
конструкции используются те или иные методы расчета стати¬
чески неопределимых дискретных систем. Однако во всех случаях
Рис. 70. Основные типы соединительной конструкции двух¬
корпусных судов.
имеются общие физические особенности, отличающие расчетные
схемы прочности катамаранов. Они состоят в многокомпонент¬
ное™ нагрузок и напряжений.
Катамаран на волнении испытывает общий вертикальный
продольный и поперечный изгиб, скручивание, сдвиг и т. п.,
причем относительный «вес» той или иной формы деформации
или составляющей внешних сил может быть различным и нахо¬
дится в зависимости от геометрических и динамических парамет¬
ров судна. Это исключает возможность априорного сокращения
числа компонентов внешней нагрузки и, более того, приводит
136
к необходимости исследовать не только амплитудные, но и фа¬
зовые характеристики нагрузок.
В отличие от случая однокорпусных судов напряженное со¬
стояние конструкции катамарана нельзя рассматривать как
одноосное, поскольку в наиболее напряженных связях действуют
и нормальные, и касательные напряжения соизмеримой величины.
Это обстоятельство вынуждает при оценке прочности конструк¬
ции рассматривать «эквивалентные напряжения» ■ se, которые
связаны с компонентами плоского напряженного состояния сле¬
дующей зависимостью:
se = "|/~sx “Ь sy — SX$H И- Зт . (93)
Определение наибольших за время эксплуатации судна зна¬
чений se, действующих в каком-либо узле конструкции, пред¬
ставляет собой весьма сложную задачу.
Следует отметить, что достаточно полные и корректные методы
учета названных особенностей в расчетной схеме оценки проч¬
ности конструкции только начинают развиваться. Одним из
таких методов является ■ метод динамического подобия на не¬
регулярном волнении [82], или динамический метод, как он
назван в работе [31]. В нем рассматривается долговременное
распределение эквивалентных напряжений в определенных уз¬
лах конструкции. Однако практическое использование этого
метода связано с очень большим объемом расчетов, что вынуждает
ограничиться небольшим числом анализируемых узлов. Другой
метод [141 основан на интегральном представлении компонентов
внешних сил и последующем анализе долговременного распределе¬
ния их амплитуд. Метод позволяет представить квазистационар-
ные процессы нагрузок на интенсивных волновых режимах как
регулярные и таким образом учесть многокомпонентность напря¬
жений при случайном характере воздействия нагрузки.
Оба эти метода используются при проектировании плавучих
полупогружйых платформ. Однако сходство геометрических
и динамических характеристик платформ и катамаранов дает
возможность с успехом использовать эти методы и в случае ка¬
тамаранов.
Пожалуй, наиболее сложным элементом расчетной схемы
является обоснование расчетных нагрузок.
В зависимости от цели расчета и особенностей конструкции
судна внешняя нагрузка может быть задана распределенной
по длине или в виде интегральных значений в конкретном сече¬
нии (рис. 71).
Когда жесткость корпусов значительно превышает жесткость
соединительной конструкции и ее общая длина невелика по срав¬
нению с длиной корпусов, расчетная модель конструкции ока¬
зывается малочувствительной к форме закона изменения нагрузки
по длине, и знания интегральной величины этой нагрузки
137
достаточно. Если же гибкость корпусов и длина соединительной
конструкции относительно велики, для определения внутренних
усилий с той же точностью необходимо знать зависимость ин¬
тенсивности внешней нагрузки от длины. Приближенная оценка
допустимости интегрального задания внешних сил может быть
сделана с помощью условий, приведенных в работе [12],
Рис. 71. Составляющие внешних сил: а — интенсивность сил; б — их инте¬
гральные значения.
По своим физическим основам и конечным результатам иссле¬
дования, относящиеся к проблеме определения внешних сил
на волнении, можно разделить на две группы.
Первую группу составляют работы, имеющие характер при¬
ближенных решений. Цель работ — получить конкретные ре¬
комендации и зависимости для использования на ранних стадиях
проектирования. Это работы А. М. Фролова [651, Динсенбахера
[78], Ланкфорда [931, Скотта [1081. Как правило, они построены
на предположении о гидростатическом характере волновых сил.
Это приводит к тому, что составляющие внешних сил М2у, ко¬
торые обусловлены в основном вертикальными компонентами
нагрузок, оцениваются с избытком, а составляющие, в которых
превалируют горизонтальные компоненты Л41с, — с недостатком.
138
Для улучшения сходимости расчетных значений этого момента
с экспериментом Динсенбахер ввел горизонтальные силы инер¬
ции масс корпуса с ускорением до 0,4 g. Самые приближенные
оценки внешних сил могут быть сделаны с помощью зависимостей,
приведенных ниже:
по данным [78]
Мнзг = 0,25Z?-2b; Мкр = 0,04DL; (94)
по данным [108]
Л4кр = 0.175DL. (95)
Формула (95), по замыслу ее автора, должна отражать на¬
грузки, действующие на двухкорпусное судно при посадке на
мель и постановке в док.
С большой точностью расчетный крутящий момент Л4кр может
быть получен по данным работы [64 ], а поперечный момент Л41с —
по данным работы [78].
Работы другой группы составляют решения, основанные
на результатах исследований гидродинамики двухкорпусных
судов. Следует отметить работу Норденстрома, Фалтинсена и
Педерсена [104]. В ней представлен метод расчета характеристик
качки и интегральных нагрузок при нулевой скорости и про¬
извольном курсовом угле по отношению к направлению бега
волн. Решение учитывает гидродинамическое взаимодействие
корпусов, которое, как выяснилось, может оказывать заметное
влияние на результаты. Коэффициенты присоединенных масс
и демпфирования корпусов, использованные в расчетах, полу¬
чены в работе [83] для круговых цилиндров, оси которых сов¬
падают с поверхностью воды. Считалось, что с волной взаимодей¬
ствуют только корпуса, но не соединительная конструкция.
Расчетные крутящий момент и вертикальная перерезывающая
сила хорошо согласуются с экспериментальными величинами.
Вертикальный поперечный изгибающий момент в области макси¬
мальных значений по экспериментальным данным примерно
вдвое больше, чем по расчету.
В аналогичной отечественной работе [12] способ определения
волновых нагрузок основан на использовании гидродинамиче¬
ской теории Хаскинда. Главная часть возмущающих сил опре¬
деляется для двухкорпусного судна так же, как для однокор¬
пусного. При определении дифракционной составляющей приняты
следующие допущения: на оба корпуса действует одинаковая
система волн, взаимное влияние корпусов катамарана учитывается
путем отождествления этого взаимодействия с эффектом изме¬
нения присоединенной массы тела, колеблющегося в жидкости
У вертикальной стенки; считается, что корпус прямостенный,
соединительный мост не взаимодействует с водой. Для получения
внешних нагрузок к возмущающим силам добавляются компо¬
139
ненты, учитывающие суммарное проявление инерции масс при
качке, дифракционного демпфирования и других составляющих.
Характерный вид передаточных функций для одного из судов
показан на рис. 72.
При анализе внешних сил, действующих на катамараны,
большое значение имеет учет гидродинамического взаимодействия
корпусов. Теоретическое решение задачи определения коэффи¬
циентов присоединенных масс и демпфирования методом непре¬
рывного распределения источников получено Франком [83].
Результаты этого решения удовлетворительно согласуются с дан¬
ными [97]. Гидродинамические силы, действующие на тела с раз¬
личной формой поперечного сечения, рассматривались также
в работе [99].
Судя по результатам экспериментальных исследований, пред¬
положение о линейной зависимости основных процессов внешних
сил и качки от высоты волны в основном оправдано. Исключение
составляют случаи малого вертикального клиренса при большой
скорости (Лверт IL < 0,02; Fr > 0,2).
Внутренние усилия в конструкции судна имеют в основном
двухчастотный состав: одна составляющая имеет частоту, равную
кажущейся частоте волн, а другая — одну из низших собственных
частот упругих колебаний корпуса. Соответственно различается
«волновая» и «ударная» составляющие внешних сил. Остановимся
на результатах исследования «волновой» составляющей, полу¬
ченных путем испытания моделей на регулярном волнении.
Положение максимума продольного вертикального изгибаю¬
щего момента Мв соответствует условию KIL cos Ѳ 1,0. Разли¬
чие в амплитудах моментов каждого из корпусов на косых курсах
зависит от соотношения жесткости связей, оно может достигать
40%. От вертикального клиренса (при /iBePT/L >0,03) продоль¬
ный изгибающий момент практически не зависит, а с увеличе¬
нием горизонтального клиренса значение момента в каждом
корпусе приближается сверху к значению момента изолирован¬
ного идентичного корпуса. Это обстоятельство позволяет, на¬
чиная с горизонтального клиренса 2Ь 1,5В], представить Мв
как сумму изгибающих моментов в каждом изолированном кор¬
пусе и использовать для количественной оценки волновой со¬
ставляющей продольного момента методы и зависимости, полу¬
ченные для однокорпусных судов. При меньших значениях
горизонтального клиренса 2Ь & (1,5-г-1,1) Вх суммарный верти¬
кальный волновой изгибающий момент на 10—20% больше суммы
моментов в каждом из корпусов, рассматриваемых изолированно.
Поперечные изгибающие моменты Мс и М1К достигают ма¬
ксимума в положении лагом к волне, а крутящий момент М2&
(или Л42х) — на курсовых углах 50—70°. Наибольшие значения
моментов возникают при воздействии относительно коротких
волн (VL = 0,4—0,8). Интегральные значения поперечных со¬
ставляющих внешних сил в различной степени зависят от пара-
140
Рис. 72. Расчетные передаточные функции для симме¬
тричного, кососимметричного и крутящего моментов
катамарана (Bj/T = 2,5; T/L = 0,025; с/В1 = 1,0; z0/B1 =
= 1,0; а = 0,95; 0 = 1,0).
141
метров h^jL, 2ЫВ1 и НІВѴ. Для испытанных моделей характер
этой зависимости показан на рис. 73.
Значительный интерес представляет оценка расчетных зна¬
чений нагрузок, определяющих общую прочность соединитель¬
ной конструкции. Такие данные приведены в табл. 8 для научно-
исследовательского судна АSR, бурового судна «Торнтон» и кра¬
ново-монтажного судна «Гигант». Данные по ASR и «Торнтону»,
8=60°; nMfL= 0,055
1.0
1,25.
7~/L=0,75
90° h„/
—
1=0,055,
1, = 0,56
[/1=0.75
1,25
1,0
0.0 06 0.8 1.0 с/В,
О 0,2 0,0 0,6 0,8 1,0 с/В
0.08
0.06
0,06
002
008
0,06
0,06
0,02
Рис. 73. Зависимость интегральных значений внешних сил от вертикаль¬
ного и горизонтального клиренсов для модели катамарана (L/B, = 6 О'
TIL = 0,028; а = 0,83; ₽ = 0,995).
О — Н,/В, *= 0,34; • — HJBi = 0,54; Д — HJB, = 1,04.
заимствованные из работы [85], получены на основе эксперимен¬
тальных передаточных функций нагрузок при плавании в Се¬
верной Атлантике, а данные по краново-монтажному судну —
с помощью теоретических передаточных функций [12] примени¬
тельно к условиям плавания на Каспии. В обоих случаях исполь¬
зовалась полновероятностная схема расчета. Обеспеченность рас¬
четных значений в долговременном спектре нагрузок прини¬
малась равной ІО"8.
Несмотря на различие в архитектуре и условиях плавания,
нормированные значения расчетных нагрузок рассмотренных
судов отличаются незначительно. Значения этих нагрузок не
соответствуют упрощенным оценкам, принимавшимся ранее. Так,
горизонтальная сила давления волн, способная вызвать полу¬
ченное значение поперечного момента, примерно равна водоиз¬
мещению одного корпуса. Расчет, основанный на представлении
о квазистатическом воздействии волн, дает существенно меньшее
142
Таблица 8
Сравнение расчетных нагрузок катамаранов
Характеристики
Формулы
ASR
«Торн тон»
«Гигант»
Нормированные
значения расчетных
нагрузок
2М1С
1 DT
2Qik 2ТИ1К
2 ~ D Db
с 2Мв
8 DL
1,50
0,125
0,064
0,85
0,090
0,072
0,73
0,094
0,094
Соотношения раз¬
мерений
L/2b
L/T
L/B,
3,4
11,7
8,7
3,7
15,0
6,9
3,4
34,7
7,1
Коэффициент об¬
щей полноты
6
0,54
0,73
0,82
значение силы. Расчетное значение вертикальной перерезыва¬
ющей силы, действующей в продольном сечении соединительной
конструкции, составляет примерно 0,1 водоизмещения одного
корпуса. При грубых оценках эта сила принималась равной ве¬
совому водоизмещению. Значение крутящего момента на волне¬
нии почти в 5 раз меньше момента, соответствующего статиче¬
ской постановке корпусов на опоры, расположенные в разных
оконечностях (в этом случае с3 0,5).
Возможность появления значительных ударов в соединитель¬
ную конструкцию катамаранов является одним из недостатков
таких судов. Так, например, транспортное судно внутреннего
плавания «Братья Игнатовы», имеющее вертикальный клиренс
при плавании с грузом /іверт = 0,91 м при длине корпуса L — 93 м,
испытывало заметные удары даже на волнении высотой Из% =
= 1,3 м. Судя по спектру напряжений в миделевом сечении
(рис. 74), энергия деформации распределяется примерно поровну
между высокочастотной и низкочастотной составляющими.
Для относительно коротких судов (например, рыбопромысло¬
вых) возникновение ударов в соединительную конструкцию
осложняет обеспечение местной прочности и ухудшает обитае¬
мость судна; в случае длинных судов удары, кроме того, вызы¬
вают в корпусе значительные продольные изгибающие моменты.
Воздействие волновой нагрузки выражается в виде кратко¬
временных высоких динамических давлений, действующих в огра¬
ниченной области поверхности и определяющих прочность
143
пластин и ребер, а затем более низких и более продолжительно
действующих давлений, обусловливающих прочность перекрытия
и динамическую составляющую продольного изгибающего мо¬
мента. По данным [85], для катамарана без подводного крыла
на первом этапе давления достигали 5—7 кгс/см2, а втором —
на порядок меньше.
Следует отметить работу [28], основанную на эксперимен¬
тальных данных и использующую для катамаранов подход,
оправданный при расчете ударных изгибающих моментов, дей¬
Рис. 74. Нормированный спектр нор¬
мальных напряжений Ох на миделевом
сечеиии катамарана (ЫВ^ = 15,5,
Ь/Ві = 0,6, TlL = 0,031, hm/L= 0,01,
а = 0,78; Р = 0,86) на волнении
с = 1,3 м, т = 4,0 с.
ствующих на однокорпусные
суда.
При изучении общей проч¬
ности необходимо рассмотреть
два расчетных режима движе¬
ния катамарана. При движении
на встречном волнении макси¬
мума достигают высокочастот¬
ная и низкочастотная состав¬
ляющие вертикального продоль¬
ного изгибающего момента.
Кроме этих составляющих
вследствие трехмерности волне¬
ния в этом случае проявляются
также поперечные составляю¬
щие внешних сил. При следо¬
вании курсовыми углами, близ¬
кими к положению лагом к вол¬
не, снижается продольный
момент, зато поперечные изги¬
бающие и крутящий моменты достигают наибольших значений.
Первое решение задачи определения внутренних усилий в кон¬
струкциях катамаранов было получено П. Ф. Папковичем [49]
при рассмотрении прочности парома, состоящего из двух барж,
соединенных поперечными балками. Задача была сведена к рас¬
чету балки, лежащей на упругом основании, соответственно
учитывались перемещения, вызванные только изгибом корпуса,
но не его скручиванием. Аналогичная модель была использована
М. Я. Фельдманом при проектировании первых отечественных
транспортных двухкорпусных судов внутреннего плавания.
В дальнейшем, когда проектировалось двухкорпусное кра¬
ново-монтажное судно «Кер-оглы», Б. С. Перельманом, а затем
А. М. Фроловым [65] получены приближенные решения, учиты¬
вающие конечную жесткость корпуса на кручение.
Достаточно простая расчетная модель использовалась А. Д. Фе-
риным [63] и Л. М. Беленьким применительно к конструктив¬
ным особенностям рыбопромысловых катамаранов.
В дальнейшем развитии приближенных решений предполо¬
жение о линейности перемещений по длине корпуса может ис-
144
пользоваться наряду с предположением о линейности угла за¬
кручивания корпусов, учет которого необходим. Судя по экспе¬
риментальным данным, такая аппроксимация вполне возможна^
Когда конструкция состоит из одинаковых элементов, распо¬
ложенных на равных расстояниях друг от друга, ее расчетная
Рис. 75. Система внутренних усилий взаимодействия
корпуса и.соединительной конструкции.
модель может быть представлена как призматическая складча¬
тая оболочка с деформируемым контуром. Способ расчета такой
оболочки на основе метода Власова разработан Б. И. Рубинштей¬
ном [54].
Аналогичная регулярная конструкция рассматривалась в ра¬
ботах [15] и [16]. Каждый из корпусов рассматривался как
тонкостенный стержень, воспринимающий изгиб в двух плоско¬
стях, растяжение — сжатие и скручивание; соединительная кон¬
струкция представлена в виде ортотропной пластины (рис. 75).
Условия взаимодействия корпусов и соединительного моста
в такой модели представлены достаточно полно. Рассматриваются
145
не только усилия Z и М, но также и касательные, и нормальные
усилия X и Y, влияние которых в ряде случаев оказывается су¬
щественным. Учет этих силовых компонентов необходим, когда
параметры, характеризующие отношение жесткости соединитель¬
ной конструкции к жесткости основного корпуса, невелики.
Некоторая нерегулярность в конструкции, например надстройка,
при таком подходе может быть учтена путем использования ки¬
нематических граничных условий [68].
В расчетах подобных конструкций применяется метод ко¬
нечных элементов. Для всей конструкции используется в основ¬
ном стержневая идеализация с различной степенью приближения.
При более укрупненной модели корпуса и поперечные связи
соединительной конструкции рассматриваются как элементы,
каждый из которых моделируется одним стержнем с постоянными
геометрическими характеристиками [1]. Из зарубежной прак¬
тики известны примеры, когда корпус и связи соединительной
конструкции аппроксимировались не одним стержнем, а систе¬
мой, обладающей в совокупности определенными свойствами
реального элемента конструкции [93] х. Имитация системой
пластин используется в решении локальных задач, например
в исследованиях эффективности работы палуб соединительной
конструкции при ее изгибе и скручивании [101].
Помимо создания и совершенствования методов расчета внут¬
ренних усилий накоплены некоторые данные по модельным
и натурным испытаниям конструкций двухкорпусных судов.
В совокупности эти исследования уже позволяют сделать неко¬
торые обобщения.
Жесткость корпусов на кручение имеет существенное значе¬
ние, и, соответственно, достаточно надежные данные по напряже¬
ниям и перемещениям дают методы, учитывающие это обстоя¬
тельство. При общем изгибе и скручивании достаточно эффектив¬
ными оказываются только те поперечные связи соединительной
конструкции, которые сопрягаются с поперечными переборками
корпусов. Рамные шпангоуты, расположенные между перебор¬
ками, не могут обеспечить полного участия настилов палуб и
зашивки нижней поверхности соединительной конструкции. Ши¬
рина присоединенного пояска у переборок составляет 0,15—0,30
горизонтального клиренса. Повышению эффективности работы
настилов соединительной конструкции может способствовать пра¬
вильная перевязка этих связей со связями корпусов.
В случае если соединительная конструкция образует в по¬
перечном сечении один или несколько замкнутых контуров,
ограничивающих значительную площадь, поток касательных
усилий в этих контурах должен учитываться в значении момента
внутренних сил. Если соединительная конструкция не имеет
1 Учет трехмерности перекрытий снижает расчетные моменты на 20—30%
[61 ]. — Прим. науч. ред.
146
замкнутых контуров, вполне оправдано использование модели
с дискретным расположением поперечных связей без учета про¬
дольных усилий X. Для многих из рассмотренных конструкций
двухкорпусных судов закон изменения по длине поперечных
перемещений точек сопряжения корпусов с соединительной кон¬
струкцией и углов закручивания корпусов близок к линейному.
Использование этих закономерностей позволяет существенно
упростить расчет.
При разработке конструкции двух¬
корпусного судна наибольшие затруд¬
нения вызывает конструирование узла
соединения корпуса и соединительного
моста.
Можно отметить три варианта кон¬
структивного решения этого узла
(рис. 76). Вариант 1 используется для
судов внутреннего плавания, вариант
2 — на двухкорпусном траулере «Экспе¬
римент-2», а вариант 3 применялся
в проектах зарубежных двухкорпусных
судов больших размерений, например,
аналогичное решение использовано для
научно-исследовательского судна ASR.
Очевидных преимуществ ни один из
этих узлов не имеет. Так, например,
достоинства варианта 3 узла в отно¬
шении предельной прочности сочета¬
ются с недостатком, выраженным в по¬
вышенной концентрации напряжений.
Вариант 2 представляется целесообраз¬
ным с точки зрения равномерности
поля напряжений в плоской переборке,
соединяющей корпуса. Однако обшивка
соединительного моста в этом случае
оказывается практически неспособной
Рис. 76. Варианты узла со¬
пряжения корпуса и соедини¬
тельной конструкции.
воспринимать осевые усилия в попе¬
речном направлении и вся нагрузка при кручении и поперечном
изгибе воспринимается поперечными переборками.
Длительную эксплуатационную проверку пока прошел только
вариант 1. Можно с удовлетворением отметить, что повреждений
узлов такого типа не было.
Значительные сложности связаны с выбором расположения
и размеров вырезов в поперечных переборках соединительной
конструкции, а также с оформлением конструкции в районе вы¬
резов, особенно если последние должны быть расположены в рай¬
онах сопряжения соединительной конструкции с корпусами.
В исследованиях прочности катамаранов, проведенных в по¬
следние годы, получен ряд новых и принципиально важных
147
результатов. Дальнейшие успехи в повышении эффективности ка¬
тамаранов и расширении области их использования тесно свя¬
заны с решением следующих задач:
исследование взаимосвязи архитектурных и конструктивных
параметров двухкорпусных судов с внешними силами и опре¬
деление целесообразных значений этих параметров;
разработка методов оценки экстремальных значений суммар¬
ных напряжений в конструкции судна с учетом нескольких со¬
ставляющих внешних сил и двухчастотного состава внутренних
усилий в конструкции;
уточнение критериев прочности конструкции, учитывающих
особенности напряженного состояния и условий работы;
совершенствование узлов сопряжения корпусов и соедини¬
тельной конструкции на основе изучения их работоспособности
по отношению к статическим и знакопеременным нагрузкам.
§ 5.2. Оценка волновой составляющей внешних
сил, действующих на трисек
Одной из наиболее важных и сложных проблем при проектиро¬
вании трисеков является оценка внешних сил, действующих
на них на волнении.
По сравнению с однокорпусными судами напряженное состо¬
яние судов с малой площадью ватерлинии значительно более
сложно. Их конструкции испытывают общий вертикальный,
продольный и поперечный изгибы, скручивание, сдвиг и т. д.
Относительная роль той или иной формы деформации или состав¬
ляющих внешних сил может быть различной в зависимости от
обших характеристик судна. Эти обстоятельства не позволяют
заранее сократить число компонентов внешних сил и требуют
изучения фазовых соотношений между отдельными компонентами.
Задача оценки внешних сил осложняется также и тем, что
необходимо учитывать гидродинамическое влияние одного кор¬
пуса на другой.
Ниже рассматривается система волновых составляющих внеш¬
них сил, определяющая общую прочность судна с малой площадью
ватерлинии. Под компонентами внешних сил понимаются такие
интегральные значения нагрузок, которые могут быть исполь¬
зованы в уравнениях равновесия упругой системы для опреде¬
ления интегральной величины внутренних усилий.
В направлении продольной оси трисеков наблюдается доста¬
точно равномерное распределение массы, поэтому, учитывая малую
площадь ватерлинии, можно считать, что они подвергаются
действию небольших продольных изгибающих моментов. Эти
моменты воспринимаются конструкциями большой высоты
с высоким моментом сопротивления; следовательно, напряже¬
ния, возникающие в корпусе судна от действия данного ком¬
понента, будут незначительными.
148
Со стороны секций правого и левого бортов на соединительную
конструкцию действуют поперечные изгибающие моменты Л41пр
и Л41лев; для удобства дальнейшего исследования этих нагрузок
их можно разложить на симметричный поперечный изгибающий
момент = О,5(Л41Пр + М1лев) и кососимметричный изгибающий
момент М2 = 0,5 (М1пр — Л41лев), которому по условию равно¬
весия соответствует вертикальная перерезывающая сила Q2 =
= М^Ь. Эти нагрузки воспринимаются соединительной конструк¬
цией с относительно малым моментом сопротивления, что приводит
к появлению больших напряжений. Судя по данным исследований
напряженного состояния соединительной конструкции, напря¬
жения в диаметральной плоскости в поперечном направлении
на порядок больше, чем в продольном. Отсюда следует, что глав¬
ное значение имеет обеспечение поперечной прочности. При рас¬
четах внутренних усилий в корпусе трисеков к уже рассмотрен¬
ным компонентам внешних сил необходимо добавить крутящий
момент относительно продольной оси М3 (или относительно по¬
перечной оси Мз), а также постоянную нагрузку от массы над¬
водного корпуса.
Наибольшие трудности заключаются в получении передаточ¬
ных функций при отыскании расчетных значений компонентов
внешних сил и корреляционных зависимостей между ними.
Отсутствие опыта эксплуатации трисеков и недостаточная
изученность внешних сил, обусловленная сложностью архитек¬
турного типа этих судов, не позволили до настоящего времени
разработать достаточно надежный теоретический метод расчета
амплитудно- и фазово-частотных характеристик для внешних сил.
Поэтому на данном этапе проектирования эксперимент является
наиболее надежным средством оценки внешних сил, действую¬
щих на трисек, позволяющим учесть основные особенности ар¬
хитектурно-конструктивного типа объекта, а также получить
информацию для разработки и совершенствования теоретических
методов.
Ниже приводятся результаты экспериментальной оценки вол¬
новых составляющих внешних сил, действующих на трисек.
Испытания модели длиной 2,1 м проводились в опытовом
бассейне на регулярном волнении без хода при различной ориен¬
тации судна относительно фронта волны. Поскольку такие данные
являются единичными, экспериментально проверена линейность
зависимости внешних сил от высоты волны.
Испытанная модель имела следующие соотношения главных
размерений: ЫВт = 1,8; L/T = 5,9; LIH = 3,65; B-JBm = 0,162;
= L/P/3 = 4,08.
Во время испытаний волновые нагрузки измерялись с по¬
мощью четырех силовых датчиков, представляющих собой труб¬
чатые упругие элементы с наклеенными на них тензометрами.
Датчики устанавливались на каждой из стоек. Соответствующим
включением тензометров в измерительную схему достигалось
149
HilOrw
tn\
1
' 1
1
1
о
3
1
1
1
1
1
А'
11
1
1
1
1
и
U
ѵ
ш
у
V
1
1
1
У
\
\
//
//
//
\
\
\
\
//
//
//
</
3
\
\
\
\
оЗ
3
//
/ /
/ /
!
к
\
\
>
•Оо
//
/1
\
/
/ S/
1,0 7,4 1fi 2,2 І2кЪ
Рис. 77. Амплитудно-частотные характеристики относительного изги¬
бающего симметричного момента.
1 — трисек, Ѳ = 90°; 2 — трисек, Ѳ = 60°; 3 — дуплус, Ѳ= 93е.
150
Мг/Dr,
151
выделение сигналов, пропорциональных компонентам внешних
сил Мі, М.2, М3. Выполнена синхронная запись составляющих
нагрузок вместе с характеристиками волнения. Полученные
амплитудно-частотные характеристики внешних сил представ¬
лены в виде коэффициентов моментов в функции от частотного
параметра У 2kb (k — волновое число, 2Ь — расстояние между
осями подводных корпусов).
На графиках рис. 77, 78, 79 видно, что при положении мо¬
дели лагом к волне (Ѳ = 90°) максимум амплитуд моментов М х
и Л42 соответствует длине волны, составляющей примерно две
ширины судна, что свойственно
и катамаранам. В этом случае
поперечный симметричный из¬
гибающий момент ЛД на поря¬
док больше поперечного косо¬
Рис. 80. Сдвиг фаз изгибающего (612) и крутящего (613) моментов по отношению
к ЛД (обозначения см. на рис. 78).
симметричного изгибающего момента Л42, причем скручивающий
момент М3 относительно продольной оси практически равен
нулю.
При измерении курсового угла Ѳ с 90 до 60° к направлению
бега волн максимум коэффициентов поперечного симметричного
и кососимметричного моментов снижается примерно в 1,5 раза;
появляется еще одна составляющая внешних сил — крутящий
момент Л43.
На рис. 77 для сопоставления приведены экспериментальные
данные, полученные в США при исследовании качки и гидроди¬
намических сил, действующих на модель дуплуса на регулярном
волнении без хода при положении его лагом к волне.
Графики (рис. 80) показывают, что при малых частотах сдвиг
фаз между моментами АД и М2 невелик, но затем быстро возра¬
стает и в районе резонанса достигает 1,5л; при дальнейшем уве¬
личении частоты он довольно быстро стремится к л, т. е. нагрузки
оказываются в противофазе. Сдвиг фазы момента М3 относительно
Мі практически во всем диапазоне близок к л.
Для получения расчетных значений компонентов внешних
сил, действующих на трисек в условиях нерегулярного волнения,
может быть использована полновероятностная схема, нашедшая
152
широкое применение в практике проектирования однокорпус-
ных судов. Можно предположить, что трисеки с достаточной сте¬
пенью точности удовлетворяют условиям применения этой схемы.
Расчет статических характеристик внешних нагрузок для
конкретного судна (при масштабе 1 : 50) дал значения, приве¬
денные на рис. 81 и 82. Эти
данные могут быть использо¬
ваны при оценке внешних на¬
грузок сходных объектов.
Рис. 8Г. Долговременные спектры вол¬
новых нагрузок для района Северной
Атлантики (№, — повторяемость на¬
грузки).
1 — для М2 — для М 2; 3 — для М3.
Рис. 82. Коэффициенты корреляции
для компонентов внешних сил при
Ѳ = 60°.
~~ • “• Д Л Я k j 2» ~~ Д Л Я & 2 3» • дл я
&13-
§ 5.3. Некоторые аспекты нахождения
долговременных распределений напряжений
в конструкциях двухкорпусных судов
Известно, что долговременные распределения напряжений в свя¬
зях конструкций служат основой для установления критериев
как предельной, так и усталостной прочности плавучих соору¬
жений. В настоящее время сложившаяся процедура определения
долговременных распределений подвергается различным уточ¬
нениям и дополнениям.
Ниже развивается один из упрощенных методов получения
долговременных распределений, позволяющий оценивать экстре¬
мальные величины с учетом многокомпонентности действующих
нагрузок и сложности напряженного состояния элементов кон¬
струкций, характерных для многокорпусных судов.
В качестве характеристики, по которой можно судить о проч¬
ности рассматриваемой конструкции в условиях сложного
153
напряженного состояния, предлагается использовать приведен¬
ное напряжение, оцениваемое по условию Мизеса
se — + ЗтХ4(, (96)
где sx, хху — составляющие нормальных и касательных напря¬
жений.
Имея в виду, что функции sx и хху являются случайными про¬
цессами на стационарном режиме, долговременное распределение
se может быть определено только после установления закона
распределения функции se и суммирования ее обеспеченностей
на всех стационарных режимах. Установление долговременного
распределения se с помощью распределений sx, sy, хху не представ¬
ляется возможным без дополнительных допущений, оценка сте¬
пени влияния которых на окончательный результат в настоящее
время затруднительна. В связи с этим весьма перспективным может
быть выявление так называемого «наихудшего» стационарного
режима, суммирование напряжений на котором можно было бы
выполнить вполне строго. В то же время режим должен быть
настолько представительным, чтобы на нем с наибольшей веро¬
ятностью реализовалась экстремальная величина обеспеченности.
Учитывая некоторую условность концепции «наиболее тяжелого
режима», по-видимому, его введение может быть произведено
исходя из разных позиций
В основу предлагаемого подхода положена возможность ис¬
пользования чисто статистических соображений, сущность ко¬
торых заключается в следующем. Известно, что в качестве рас¬
четной величины применяется экстремальное значение х, харак¬
теризуемое тем, что в выборке объема N среднее число превыше¬
ний уровня х равно единице. В теории экстремальных величин
х именуют характеристическим наибольшим значением:
Р(х~)=1-4-, (97)
где Р (х) — интегральное распределение величины х.
По своему смыслу это значение справедливо как для долго¬
временного распределения х, так и для стационарных режимов,
на которые условно разбивается весь период эксплуатации судна.
Можно считать, что зависимость наиболее вероятной экстре¬
мальной величины от объема выборки на стационарном режиме
дает достаточно надежную основу для нахождения искомых
характеристик долговременного распределения.
1 С концепцией «наиболее тяжелого режима» в известной степени перекли¬
кается введенное в [8] понятие о высоте волны трехпроцентной обеспеченно¬
сти h3 щах, отвечающей максимуму подынтегрального выражения в интеграле
полной вероятности.
154
Для каждого стационарного режима это значение будет функ¬
цией параметров распределения и объема выборки і-го режима,
определяемого как
Ni = PlN, (98)
где Рі — вероятность і-го режима; N — объем выборки, соответ¬
ствующий всему сроку эксплуатации сооружения.
Так, для закона Релея
;z = o(V2hnvT, (99)
где ог — стандартное отклонение величины х на і-м режиме.
Существование максимальной величины характеристического
наибольшего значения среди всех xt дает возможность, с одной
стороны, установить наиболее вероятный «тяжелый режим»,
с другой стороны, получить искомые экстремальные величины
заданной обеспеченности. Учет множественности событий в этой
схеме производится обычным порядком, т. е. умножением рас¬
четного значения N на количество объектов, Таким образом,
математически условие для нахождения «наиболее тяжелого ре¬
жима» выразится следующим образом:
Xh3% = 0.
(100)
Покажем теперь порядок использования концепции «наиболее
тяжелого режима» для оценки долговременных характеристик
применительно к приведенным напряжениям.
Закон распределения величины se как радиуса-вектора нор¬
мально распределенных независимых величин sx и ]/ Зтх;/ со
стандартными отклонениями os и ]/ 3ot определяется как [57 ]:
S /
12аХ ) °[ 12а>2
(101)
где Іо — модифицированная функция Бесселя первого рода ну¬
левого порядка.
Представив функцию 10 (г) в виде соответствующего степенного
ряда по степеням аргумента г [37]
= <102>
т=0
и воспользовавшись подстановкой
t2 _ (°s + Зч?)
2 12а2а2 ’
155
интегральное распределение Р (S„ > se) можно записать в сле¬
дующем виде:
Р (Se > Se) = V. —
m=0 ' "
as — За2
2т
(т!)2(о2 + 3а2)[4(°2+3а2)_
оо
X I Z4'"+1exp(-4)dZ-
(104)
/6asaT
Интеграл в (104) известен как произведение функций ф (4т +
+ 2) = 22т Г (2т + 1), где Г — гамма-функция, на функцию %2
распределения Пирсона Р (%2, 4т + 2). Тогда
00
P(Se>se)=2^
tn—О
2 3(т5(тт
Ч)а (а2 + За2)
а2 — За2
22тГ(2/и+ 1)Р (х2, 4т 4-2),
(105)
4 (а2 + Зат)
где
Введем обозначение
(106)
os = р У3(ТХ, если os > УЗот;
(107)
/3(Тт =
= fkrs, если <7S < УЗох.
(108)
В первом случае
оо
Р (Se > = S (₽а 4- О (т!)а Х
т=0
х [^^рГ(2т+1)Р(хМ/и+2).
(109)
Характеристическое наибольшее значение найдем из условия
P(Se>se) = J-, (110)
Графическое решение уравнения (НО) приводит к зависимости
(Ill)
156
Во втором случае
(112)
При 0 = 1, т. е. равенстве стандартных отклонений o s и ]/ Зот,
как и следовало ожидать, возвращаемся к закону Релея
se = <Ts/21n N^. (113)
Зависимость (113) дает принципиальную основу для решения
поставленной задачи.
Наиболее логичным путем реализации предлагаемого подхода
представляется следующий:
а) выбирается наиболее неблагоприятный курсовой угол. В пер¬
вом приближении для двухкорпусных судов значение расчетного
угла можно полагать равным 90°;
б) определяется предполагаемый район «наиболее тяжелого
режима» (в табл. 9 условно обозначен прямоугольником).
Таблица 9
Параметры долговременных распределеивб волнения
h3f м
хі-с
3
4
Хі
Хі^
Т«
1
Ріа
Р14
2
Раз
Pit
^Зі-І
кзі
^3(+1
Ріі
• • 4
кзт
Ph3mxn
Примечание. /ідг- — высота волны 3-%-иой обеспеченности, м; Ту —
средний период волнения, с.
157
Максимум полученных значений является искомой экстре¬
мальной величиной заданной обеспеченности 1/У. Сравнение
результатов полного расчета и предлагаемого подхода показало
их удовлетворительную сходимость. Сопоставление производи¬
лось для одномерных характеристик внешних нагрузок на связи
двухкорпусной буровой установки1 (табл 10), где в числителе
дробей приведены значения параметров k и а по формулам (116),
(117), в знаменателе — по данным полного расчета.
Таблица 10
Параметры долговременных распределений нагрузок
Нагрузка
Экстремальная
величина обеспечен¬
ности ІО”8, тс-м
Экстремальная
величина по фор¬
муле (ИЗ), тс-м
II
III
S
г-®5
О'¬
СО
15,
S
о
со
О
•а»
а, тс-м
г
II
III
IV
V
VI
VII
VIII
IX
Симметричный
изгибающий мо¬
мент 7И1С
6200
5910
0,95
10
2-ІО”4
1325
1,07
1,10
400
445
Кососимметрич¬
ный изгибающий
момент ?Д2С
1850
1735
0,94
11
5,4-10-°
420
0,83
0,97
80
90
Рассмотрим возможность использования параметров «наиболее
тяжелого режима» для определения характеристик долговремен¬
ного распределения, пригодных для оценок усталостной долго¬
вечности. Учитывая возможность аппроксимации долговремен¬
ных распределений волновых нагрузок законом Вейбулла [8,
31, 40], найдем связь его параметров с параметрами распределе¬
ния «наиболее тяжелого режима». Поскольку применяемый обычно
закон Вейбулла имеет два параметра, составим систему из двух
уравнений. Потребуем равенства обеспеченностей искомой эк¬
стремальной величины и равенства углов наклона интегральных
кривых в районе этой величины, т. е.
1 Полный расчет выполнен П. С. Карповым.
158
где р — повторяемость наиболее тяжелого режима; а и k —-со¬
ответственно параметры масштаба и формы закона Вейбулла.
Выполнив дифференцирование и разделив (114) на (115),
получим
aft = fe4~2(T2. (116)
Подставляя (116) в (115), найдем значение параметра k, опре¬
деляющего угол наклона интегральной кривой обеспеченности
в осях вейбулловского графика
6 = Т • (Н7)
л0
Обозначив х0/ст = t, запишем выражение для k в следующем
виде:
‘=тт? ШЗ)
2 /2
Выражение (118) показывает, что значения k падают с умень¬
шением t. Если говорить о вертикальном изгибающем моменте,
то это характерно для длинных судов [39]. Кроме того, параметр k
уменьшается с уменьшением обеспеченности «наиболее тяжелого
режима» волнения. Оба эти фактора подтверждаются видом за¬
висимости k от отношения Llohw, полученного прямым расчетом в
[8, 41 ]. Конкретная оценка k по (118) в настоящее время затруд¬
нительна из-за недостатка данных о параметре t, зависящем не
только от ограниченной продолжительности стационарного ре¬
жима, но и реальной крутизны волн.
В первом приближении для оценки k используем зависимость
(98), которую можно переписать как
/2=2 1пр?Ѵ. (119)
Подставляя (120) в (121), получаем
£ = Ц . (120)
1+-£*
In р
Если записать выражение для р в виде р = 10~" и принять N =
= 108, то приходим к весьма простому выражению для пара¬
метра fe:
k = п<8, (121)
показывающему связь величины k долговременного распределе¬
ния с обеспеченностью «наиболее тяжелого режима». Связь осталь¬
159
ных параметров рассматриваемых распределений, полученная
с использованием соотношений (116), (117), имеет следующий вид.
1п^ = 4 1п 8-П „ 1п4)6 (8 _ п}. (122)
а 8 — п 4 2. (8 — п)
— = 2,14|Л8 —Л. (124)
а
На рис. 83 приведены графические изображения зависимостей
(123) и (124): ха — величина с обеспеченностью N = 10 8. Когда
долговременное распределение состоит из одного режима (р = 1,
п = 0), естественно, возвращаемся к релеевским соотношениям
k = 2, a = о ]/2? х = 6,Обо. Как показывает формула (121),
для волновых нагрузок параметр k всегда меньше двух. Наблю¬
дающуюся на практике тенденцию k приближаться к единице
можно объяснить тем, что вероятность «наиболее тяжелого ре¬
жима» имеет порядок 10-4 (см. рис. 83). Для ориентировочных
подсчетов полученную разницу результатов точного и приближен¬
ного расчета, по-видимому, можно полагать допустимой.
Необходимо подчеркнуть, что точность предложенного спо¬
соба существенным образом зависит от степени достоверности
данных о волнении. Способ может применяться только при нали¬
чии подробной волновой статистики. Дальнейшее совершенство¬
вание предложенной схемы возможно путем упрощения расчета
зависимостей статистических параметров напряжений на стацио¬
нарных режимах от основных характеристик двухкорпусных
судов. Например, такое упрощение выполнено в работах [8, 32]
применительно к вертикальному изгибающему моменту в корпусе
судна. В результате получается замкнутое решение, являющееся
одним из звеньев системного подхода к оценке прочности корпус¬
ных конструкций двухкорпусных судов.
Ниже предлагается способ определения стандартных отклоне¬
ний на основе результатов анализа взаимосвязи статистических
и спектральных зависимостей.
В настоящее время для оценки статистических характеристик
волновых реакций корпуса судна активно используется спек¬
тральный метод, в основе которого (при обычно применяемом
спектре волновых ординат Пирсона—Московица) лежит следу¬
ющее соотношение:
2л-10-"Йх] Ф’(о)-^е (125)
о
где со — дисперсия ординат исследуемого процесса; /із% ■— вы¬
сота волны трехпроцентной обеспеченности; Ф (о) — относитель¬
но
ная амплитудно-частотная характеристика (АЧХ) рассматривае¬
мого процесса; <тср — средняя частота волнения.
На базе соотношения (125), справедливого для линейных
стационарных систем, построены, по сути дела, все основные
критерии прочности корпусов судов. Однако в ряде случаев,
особенно на исследовательской стадии, могут оказаться полез-
Рис. 83. Графики параметров долговременных распределений.
ными и другие методы, позволяющие получить при той же точности
более обозримые результаты. Один из таких методов предложен
Г. С. Чувиковским.
В определенных условиях этот метод приводит к результатам,
идентичным результатам спектрального подхода.
Основой статистического метода служит двухмерное распреде¬
ление высот и длин волн, пригодное для описания морского
волнения в первом приближении,
л г/ ft \2 і (\2i
p(h,X) = -^-e 4 ' '*'-1, (!26)
где h и X — высота и длина волны.
6 п/р Дубровского В. А.
161
Параметр распределения Е волновых реакций, отвечающих
закону Релея, определяется согласно зависимости
со со
£ = 2оо= J \ p(h,K)M2(hA)dhdk. (127)
о о
Здесь М — рассматриваемый процесс, аналитическое выражение
которого для линейной постановки задачи можно записать в сле¬
дующем виде:
М=4®Ш> <128>
где Ф — модуль передаточной функции относительно рассматри¬
ваемого процесса в зависимости от соотношения Х/£о; Lo — ха¬
рактерный линейный размер (например, для вертикального из¬
гибающего момента в корпусе судна L — длина судна).
Подставляя (126) и (128) в (127), получаем
<129)
Интеграл Jh после преобразований обращается в выражение
4 = -£ (130)
или, с учетом релеевского соотношения h3 = 2,117г,
/іч
J = *_. (131)
п 4,45л ' '
Второй интеграл выразим в функции от а. Учитывая, что
Нам понадобятся значения X в функции от оср, получаем соотно¬
шение между ними по известной зависимости
Поскольку должно соблюдаться условие для убывающих функций
р (Х)| dK I = р (о) da, (133)
имеем
л / 2ng \2
= (134)
162
Располагая (134), нетрудно найти оср
как
оо
(тср = j ар (a) da, (135)
о
что дает
оо Л / 2ng \2
СТср— J Л 4 Х°г da- (136)
Используя
0
_ Л / 2л£ \ 2
подстановку и = -у (, получаем
1 \ %а2 J
или окончательно
(137)
(138)
(3 \
-у) 1,222 — гамма-функция.
Решая (138) относительно X, приходим к зависимости
_ л3/2яг2(4)
х = AAZ. (139)
аср
Подставляя (132) и (139) в выражение для JK, находим
л (2”g)2qcp
Гоп4 4 л3ё!Г‘(Ц-) <И
А- ^.(140)
J ”‘г (т)
о
поскольку I dA, I = -n^3da.
После сокращений JK преобразуется к виду
(141)
Перемножив ѴгАА, приходим к выражению
7 4 -0,44
по = 6,28 • 10~2/гз% J Ф2 (о) -^-е ' ° ' da.
о
(142)
6*
163
Выражение (142) полностью совпадает с выражением для
полученным на основании спектрального подхода.
Таким образом, при соответствующих функциях распределе¬
ния видимых элементов волн и спектральных плотностей волне¬
ния результаты должны совпадать. По-видимому, есть основания
утверждать, что определенной спектральной плотности волнения
отвечает некоторая функция распределения видимых элементов
волн. Так, выше показано, что таким соответствием обладает
функция распределения элементов волн и спектральная плотность
Пирсона—Московица. Единственным условием здесь служит не¬
обходимость выдерживания формальных теоретических соотно¬
шений между параметрами волн \ т. е.
_ ^(4) 81 _ g-2
Х = _2> 7 ^4^-; Х = ]<1,2-^-^ 1,71т1 2. (143)
аср - % Я
Модель описания волнения в виде (126) в ряде случаев может
быть предпочтительней, как, например, в случае исследования
заливаемости, учета нелинейностей и т. п. Применительно к ре¬
шению рассматриваемого вопроса статистический метод дает
возможность относительно легко получить зависимость сг0 т).
Необходимое при этом аналитическое выражение для амплитудно-
частотных характеристик предлагается аппроксимировать функ¬
цией, удовлетворяющей достаточно широкому диапазону ва¬
риаций форм:
(X \ 2
, (144)
\ м / \ м /
гдеФ^-^') — нормированное значение фГ-44; у — линейный
\ Ьо / .. \ ьо /
размер, при котором Ф — 1-
Соотношение между параметрами аппроксимации найдем,
используя условие, что при X = Lo функция имеет максимум
и равна единице:
у = 2z, х = ег. (145)
Параметр z можно определить, исходя из разных предпосылок
(метод наименьших квадратов, метод равенства полос пропуска¬
ния системы и т. д.). К достаточно точным результатам приводит
использование равенства площадей истинной 5И и аппроксими¬
руемой Sa передаточных функций
1 Второе соотношение получено в книге: Глуховский Б. X. Иссле¬
дование морского ветрового волнения. Л., Гидрометеоиздат, 1966.
164
Раскрывая (146), находим
*гг(г+^)
5И = (147)
2zZ+^
Параметр z имеет простой физический смысл и характеризует
ширину полосы пропускания системы. В самом деле, поскольку
ширина полосы пропускания системы Л определяется как
оо
Д = |ф2(п)гіп, (148)
О
(149)
то, используя выражение (144), приходим к выражению
А- Ѵу т'
4 (2г) 4
которое для данного вида амплитудно-частотной характеристики
зависит только от параметра г.
Анализ передаточных функций внешних сил, выполненный
с использованием формулы (147), свидетельствует о перспектив¬
ности применения аппроксимационных зависимостей в виде (144).
Нормированное значение сг0 определится по формуле (129)
с учетом выражения
(144):
Пр
hs%
г+~2
.1150)
6
Это выражение соответствует функции и в работе [32 ] и является
ее обобщением на случай вариаций форм амплитудно-частотных
характеристик.
§ 5.4. Особенности напряженного состояния
соединительной конструкции промысловых
катамаранов
Сегодня уже представляется возможным классифицировать соеди¬
нительные конструкции двухкорпусных промысловых судов.
В частности, рассматриваемая конструкция может включать:
соединительный мост — перекрытие с продольными и попереч¬
ными связями (последние опираются на переборки, полупереборки
или рамные шпангоуты корпусов и верхнюю и нижнюю обшивки);
соединительный мост и верхнее строение судна (надстройки,
рубки), имеющее поперечные переборки, лежащие в плоскости
поперечных переборок и полупереборок корпусов;
165
верхнее строение двухкорпусного судна без соединительного
моста.
Характерные соотношения размеров соединительной конструк¬
ции двухкорпусных промысловых судов приведены в табл. 11.
На рис. 84 и 85 показаны типичные поперечные сечения двух¬
корпусного траулера-сейнера (ДТС) «Эксперимент» и двухкор¬
пусного морозильного траулера-сейнера (ДМТС) «Эксперимент-2».
Таблица 11
Размерения и относительные размеры конструкций катамаранов
Наименование судна (проекта)
L, м
D, т
‘PIL
bp/hp
bplBm
cplBtn
Траулер-сейнер «Экспери¬
мент»
34,5
950
0,38
0,90
2,44
0,410
0,305
Морозильный траулер-
сейнер «Эксперимент-2»
37,5
1120
0,80
0,89
2,67
0,421
0,312
Экспериментальное науч¬
нопромысловое судно (про¬
ект)
45,0
2000
0,81
0,87
2,70
0,455
0,280
Траулер-сейнер (проект)
34,8
850
0,31
0,81
4,25
0,649
0,334
Рыболовный бот (проект)
23,5
355
0,75
0,90
1,92
0,435
0,300
Бот для добычи морепро¬
дуктов
12,9
60
—
0,95
5,80
—
0,220
Траулер-сейнер (проект)
54,0
2010
0,85
—
7,00
1,00
0,358
Малое промысловое(проект)
14,0
106
0,25
1,00
3,70
—
0,353
Основными несущими связями соединительной конструкции
во втором и третьем случаях оказываются поперечные переборки
рубки, что заставляет предъявлять особые требования к их расчету
и конструктивному оформлению. Для этих переборок характерны
малые отношения bp/hp (см- табл. 11). Поэтому должна быть по¬
ставлена под сомнение возможность использования для их расчета
теории изгиба балок в ее обычной редакции. Требуют особого
рассмотрения вопросы участия настилов соединительной конструк¬
ции в обеспечении прочности.
Нетрадиционной оказывается роль закрепления поперечных
связей на корпусах. Поскольку нагружение соединительной
конструкции происходит в основном за счет перемещений корпусов
(собственная поперечная нагрузка здесь обычно невелика), по¬
перечная связь, не заделанная на корпусе, практически окажется
ненагруженной. Это определяет конструктивные требования:
существенно, чтобы расположение поперечных переборок прочной
рубки совпадало с расположением поперечных переборок кор¬
пусов.
166
Рис, 84. Поперечное сечение ДТС «Эксперимент» на 34-м
шпангоуте.
167
Анализ показывает, что взаимное перемещение и деформации
корпусов приводят главным образом к взаимному повороту
и вертикальному смещению опорных сечений поперечной связи
соединительной конструкции в ее плоскости. Этот поворот и сме¬
щение вызывают симметричный и кососимметричный изгиб кон¬
струкции соответственно и являются основными расчетными
случаями.
Поперечные переборки соединяющих корпуса рубок являются
плоскими элементами (с присоединенными поясками), имеющими
довольно сложный контур. Эксперименты показывают, однако,
что задачу изучения изгиба такого элемента можно существенно
упростить. На рис. 86 для примера приведены нормальные на¬
пряжения sx в узле соединения поперечной переборки прочной
рубки и переборки корпуса. Видно, что распределение напряже¬
ний близко к линейному. Касательные напряжения оказываются
незначительными. Аналогичные результаты получены и на дру¬
гих моделях. Это позволяет рассматривать изолированную попе¬
речную переборку рубки, прикладывая по ее нижней кромке
(в опорном сечении) нормальную нагрузку, распределенную
по линейному закону, и свести расчет к решению задачи для пря¬
моугольной балки-стенки (рис. 87). Нетрудно здесь учесть и нали¬
чие присоединенных поясков настилов, если считать, что нормаль¬
ные напряжения по толщине пояска не меняются, а его изгибная
жесткость пренебрежимо мала. Тогда по контуру балки-стенки
достаточно приложить касательные усилия:
ds, Ы
Хх« — Т ’
где sx — нормальные напряжения в присоединенном пояске;
со — площадь его поперечного сечения; 6 — толщина балки-
стенки.
Методы расчета балок-стенок разнообразны и хорошо раз¬
работаны. Рассматриваемая задача была решена с использованием
функции напряжений в форме гиперболо-тригонометрического
ряда по схеме, предложенной в работе [26]. На основе решения
составлены вычислительный алгоритм и программа для ЭЦВМ
«Минск-22».
Выполненные расчеты и эксперименты позволили выявить
существенные особенности напряженного состояния рассмотрен¬
ных связей. Эпюры напряжений для двух характерных попереч¬
ных сечений балки-стенки с blh = 2,87 и с/b = 0,174 без при¬
соединенных поясков показаны на рис. 88. Форма эпюр на рис. 88, а
мало отличается от обычных для технической теории изгиба
балок. Распределение напряжений на рис. 88, б существенно
нелинейно, причем максимум эпюры s близок к нижней кромке,
но не совпадает с нею. Максимум эпюры т также смещен к нижней
кромке. Эти результаты характерны при fep//ip < 5. Наличие
присоединенных поясков качественно картину не меняет. При
168
Рис. 86. Распределение напряжений в опорном сечении (сечение 4—4) по¬
перечной связи соединительной конструкции в зависимости от отстояния
точки замера от борта (в долях ср).
симметричный изгиб; — кососимметричный изгиб.
Рис. 87. Расчетная схема балки-стенки: а — симметричный изгиб; б — косо¬
симметричный изгиб.
S)
Рис. 88. Распределение напряжений по высоте балки-стенки:
а — сечение в ДП; б — сечение у внутреннего борта.
эпюра s при симметричном изгибе; эпюра s и т при косо-
симметричном изгибе (линии — расчет, точки — опыт)
169
fep/hp > 5 хорошо оправдывает себя техническая теория изгиба.
Выполненный анализ показал, что площади присоединенных
поясков при малых bp/hp слабо влияют на перемещения (рис. 89),
гораздо существеннее влияние срІЬр.
Обратимся к рассмотрению деформаций соединительной кон¬
струкции в целом. При ее поперечном изгибе (симметричные
деформации связей) в первом приближении корпуса удобно
считать недеформированными. Тогда для определения коэффи¬
циента жесткости /г“ можно
использовать рассмотренный
выше расчет балки-стенки или,
при fep/hp > 5, техническую
теорию изгиба. Определяется
угол ф, а затем опорные изги¬
бающие моменты для каждой
связи Мі = ф/г“ и напряжения
в них. Если влияние конечной
жесткости корпусов на круче¬
ние существенно, можно на¬
грузить корпус моментами Mit
вычислить его углы закручива¬
ния и найти поправки к ф для
каждой связи Дфг. Потом необ¬
ходимо ввести их в расчет, до¬
бавив в правую часть 2 Лф&;,
снова определить ф и т. д. Рас¬
четы показали, что процесс
последовательных приближений
сходится очень быстро.
Рис. 89. Влияние площади присоеди¬
ненного пояска на угол поворота и
перемещение опорного сечения бадки-
стенки:
угол поворота опорного сечения сс.
a = aE6/q', вертикальное смеще¬
ние опорного сечеиия при кососимметрич¬
ном изгибе "ѵ; ѵ — vEb/hq; h, б— высота
и толщина
стеики; q— интенсивность на¬
грузки.
При кручении соединительной конструкции задача решается
так же. Определив угол ф, можно вычислить опорную реакцию
на каждой связи Rt = фх£/г“ и напряжения в ней.
При составлении выражений корпуса считались абсолютно
жесткими. Учесть влияние продольного изгиба корпусов можно
внесением поправки и последовательным их уточнением, как и
в предыдущей задаче. Найти величину с и касательные напряже¬
ния, возникающие при кручении многосвязного контура, доста¬
точно просто.
Конечно, представления о кручении соединительной кон¬
струкции, изложенные выше, весьма приближенны, тем не менее
они дают неплохое соответствие данным эксперимента. Момент Л4Кр
уравновешивается главным образом касательными напряжениями
в настилах соединительной конструкции, чем определяется су¬
щественная роль этих настилов как основных несущих связей.
Изложенная методика расчета соединительной конструкции
проверялась многочисленными экспериментами на моделях из
органического стекла [63]. Было испытано 18 моделей изолиро-
170
ванных поперечных связей и три модели судов. Испытания моде-
лей поперечных связей проводились с целью проверки приме¬
нимости расчета балок-стенок для оценки напряженного со¬
стояния и перемещения этих связей. Во всех моделях поперечная
связь являлась продолжением поперечных переборок корпусов,
к которым, в свою очередь, прикладывалась внешняя нагрузка.
В моделях варьировались размеры связей: fep/hp = 2,0-г-6,5,
с /ьѵ = 0,15-^0,35. Модели были с присоединенными поясками
и без таковых; были испытаны также конструктивно подобные
модели связей судов «Эксперимент» и «Эксперимент-2». Во всех
случаях соответствие данных эксперимента и расчета получалось
хорошим, что свидетельствует о приемлемости предложенной
расчетной схемы.
Целью испытаний моделей судов была экспериментальная
оценка характера распределения напряжений во всей соедини¬
тельной конструкции и проверка применимости изложенного
выше метода расчета. Первая модель имела корпуса в виде прямо¬
угольных понтонов, а ее соединительная конструкция в каждом
варианте испытаний видоизменялась в следующем порядке:
соединительный мост; мост, разное число и расположение пере¬
борок рубки; только рубка; были варианты с настилами и без
настилов (всего 8 вариантов). Такие испытания позволили про¬
контролировать расчет для весьма широкого класса соединитель¬
ных конструкций различного исполнения.
Две другие модели были конструктивно подобными. Во всех
случаях соответствие расчета и эксперимента оказалось вполне
удовлетворительным. На рис. 90 для примера показано распреде¬
ление напряжений по длине соединительной конструкции моде¬
лей, измеренных в сечении у внутреннего борта на нижней за¬
шивке при поперечном изгибе и кручении. Пилообразный харак¬
тер кривых на модели траулера-сейнера вызван различиями
заделок разных поперечных связей на корпусах.
В целом эксперименты на моделях подтвердили приемлемость
изложенных выше подходов к расчету соединительной кон¬
струкции.
Особо следует рассмотреть натурные испытания судов «Экспе¬
римент» и «Эксперимент-2». Первое двухкорпусное промысловое
судно неограниченного района плавания испытывалось трижды:
на стапеле после завершения корпусных работ, на плаву путем
приложения статических нагрузок и в море, в условиях разви¬
того волнения. Одна из причин, определивших целесообразность
испытаний судна на стапеле, состояла в отсутствии в этот период
проверенной методики расчета соединительной конструкции.
Во время испытаний один корпус ДТС находился на сплошной
килевой дорожке, второй опирался лишь на клетку, установлен¬
ную в оконечности. (Испытания проводились в двух вариантах:
первый — клетка была в носу, второй — в корме.) Наливом воды
в отсеки корпусов создавались дополнительные крутящие моменты.
171
Напряжения в 134 точках соединительной конструкции измеря¬
лись с помощью тензорезисторов, а перемещения корпусов —
шланговыми ватерпасами. Испытания дали полезные сведения
а)
ГТ Г~І I
/ н т
1 1
1
■
XU ХШ XIV
iy ѵ ѵі ѵпѵш а хх/
Рис. 90. Распределение напряжений по длине соединительной кон¬
струкции: а— траулер-сейнер «Эксперимент»; б — морозильный
траулер-сейнер «Эксперимент-2» (римскими цифрами обозначены
номера связей).
1 — поперечный изгиб; 2 —* кручение.
об особенностях напряженного состояния соединительной кон¬
струкции, общем уровне напряжений и др.
Статические испытания траулера-сейнера «Эксперимент» и мо¬
розильного траулера-сейнера «Эксперимент-2» на плаву в закрытой
акватории предшествовали морским испытаниям. Нагружение осу-
172
-ООО -200-ЮО 0 100 200
s кгс/смг
Рис. 91. Распределение
напряжений у внутрен¬
него борта кормовой связи
моста при статических ис¬
пытаниях судна «Экспе¬
римент» (линии—расчет,
точки — опыт).
іцествлялось с помоіцыо твердого балласта, размещавшегося
в оконечностях корпусов, что создавало строго фиксированный
момент .Мкр, закручивающий соединительную конструкцию. Для
судна «Эксперимент-2» установкой грузов вдоль внешних бортов
создавался дополнительный поперечный изгибающий момент
•Мкр = 393тс-м. Измерения напряжений в связях соединительной
конструкции и корпусах велись с помощью тензорезисторов,
перемещения фиксировались нивелирами.
Эти испытания предназначались в основном для тарировки
соединительной конструкции перед выходом судна в море. Вместе
с тем они позволили еще tpa3 сопоставить
результаты эксперимента с расчетом по
предложенному методу. Примеры сопо¬
ставления представлены на рис. 91 и 92.
На схеме поперечного сечения, изо¬
браженного на рис. 92, выносными пока¬
зано положение датчиков. Цифры около
датчиков соответствуют номерам кривых.
Некоторое превышение эксперименталь¬
ных данных (точки на эпюрах) над рас¬
четными для кривых 1 и 2 связано
с наличием концентрации напряжений
в районе скругления [631. В сечении по
ДП, как видно, совпадение расчетных
и экспериментальных значений суще¬
ственно лучше. Аналогично — для сечений
по связи на 8-м шпангоуте при кручении
соединительной конструкции.
Испытания на развитом морском вол¬
нении различной балльности проводились
в осенне-зимний период в Северном море и Северной Атлан¬
тике. На обоих судах были оборудованы лаборатории, позволяю¬
щие регистрировать напряжения по 48 измерительным каналам,
давления, ускорения и углы крена и дифферента. Измерения
проводились в дрейфе и при движении судов на различных
курсовых углах по отношению к фронту волнения при состоя¬
нии моря от 3 до 7 баллов.
На первом судне измерения выявили, что максимум средних
напряжений mOmax в соединительной конструкции от волновых
нагрузок соответствует высоте волны 3%-ной обеспеченности
в пределах 3—5 м (рис. 93), при более сильном волнении эти
напряжения уменьшаются. На волнении наибольшие размахи
волновых напряжений соответствуют положению судна лагом
к волне (линия 1 на рисунке), наименьшие — ходу судна носом
на волну (линия 3). Аналогичные результаты были получены
при испытании второго траулера-катамарана. На рис. 94 показана
зависимость максимальных амплитудных значений нормальных
напряжений в сечении по скруглению рубки на 28-м шпангоуте
173
Рис. 92. Распределение напряжений при статических испытаниях ДМТС
«Эксперимент-2» на плаву: а — по связям соединительной конструкции;
б — в сечении у внутреннего борта, 8-й шпангоут; в — в сечении по скруг¬
лению на 8-м шп.
I — расчетные напряжения в плоскости поперечной связи соединительной кон¬
струкции в районе скругления продольной переборки рубки при кручении (Мк =
= 1760 тс-м); 2 — то же при поперечном изгибе соединительной конструкции
(Мк = 393 тс-м); 3 — при поперечном изгибе в ДП соединительной конструкции
в верхнем иастиле.
X — опытные данные.
174
Рис. 93. Зависимость средних волновых напряжений от
высоты волны для ДТС «Эксперимент».
1 — лагом к волне; 2 — курсом 60° к волне; 3 — носом на
волну.
Рис. 94. Максимальные амплитуды напряжений на скруг¬
лении рубки, 28-м шпангоут ДМТС «Эксперимент-2»
(обозначения см. на рис. 93).
Рис. 95. Изгибающие (а) и крутящие (б) моменты ДМТС
«Эксперимент-2» при йз% = 3,8 м.
— опыт; расчет.
175
при разных курсовых углах по отношению к фронту волнения,
при различной балльности (обозначение курсовых углов хода —
как на рис. 93).
Использованная при испытаниях второго судна схема под¬
ключения тензорезисторов обеспечила разделение деформаций
Рис. 96. Действующие внешние изгибающие и кру¬
тящие моменты ДМТС при различном волнении:
а — поперечный изгиб; б ■— кручение.
1 — лагом к волне; 2 — курсом 60° к волне; 3 — носом
на волну.
от поперечного изгиба и кручения соединительной конструкции.
Это позволило по результатам измерений в море и предшество¬
вавшей тарировке легко определить интегральные характеристики
внешних сил. На рис. 95, а, б в зависимости от курсовых углов
(Ѳ) представлены поперечный изгибающий момент Л4ИЗГ и кру¬
тящий момент Л4Кр. (Л4изг80 и УИкр90— соответственно значения Л1ИЗГ
и Л1кр при положении судна лагом к волне, Ѳ = 90°). Сплошной
176
линией показаны экспериментальные значения моментов при ходе
судна на встречных курсах к фронту волны, штриховой — на
попутных курсах относительно фронта волны. Действующие вол¬
новые поперечные изгибающие моменты и крутящие моменты при
различном состоянии моря представлены на рис. 96, а, б. Из со¬
поставления этих данных с результатами расчета при стати¬
ческой постановке судна на трохоидальную волну высотой h =
= 4 м следует, что поперечные изгибающие моменты практически
совпадают, а действующий крутящий момент примерно в четыре
раза меньше расчетного при косой постановке судна на волну.
§ 5.5. Масса корпуса
Одной из наиболее сложных задач, возникающих при проектиро¬
вании многокорпусного судна, является определение массы ме¬
таллического корпуса. Эта задача исключительно важна потому,
что экономическая эффективность таких объектов зависит от их
массовых характеристик относительно больше, чем у однокорпус¬
ных судов. Опыт проектирования и эксплуатации многокорпусных
судов, а также расчеты не позволяют уверенно определить массу
их корпуса в широком диапазоне изменения размерений на ранних
стадиях проектирования. В настоящее время отсутствуют система¬
тические результаты расчетов внешних сил, выбора конструкции,
определения напряжений и массы корпуса многокорпусных
объектов с различными размерениями. Отчасти это объясняется
громадным разнообразием соотношений размерений этих судов.
Отсутствие систематических данных и испытанных способов их
получения затрудняет использование вариантного метода проек¬
тирования, на который ориентирована настоящая книга в целом.
Кроме того, даже при использовании названного метода пред¬
ставляется неизбежной грубая оценка величины массы металли¬
ческого корпуса на самых ранних стадиях, до построения вариант¬
ного ряда. Особенно усложняется расчет вследствие отсутствия
(обычного для многокорпусных объектов) близких прототипов.
Поэтому ниже сделана попытка обобщить и систематизировать
то небольшое количество • сведений о массе корпуса, которое
имеется в настоящее время.
В этом небольшом объеме сведений наиболее велика доля
информации о массе корпуса катамаранов и плавучих буровых
платформ, поскольку уже имеется опыт эксплуатации объектов
этих типов. Однако все это суда разного назначения, разного¬
района плавания, так что дальнейшая систематизация данных
может рассматриваться только как первый шаг в этом направ¬
лении.
Естественно, весьма грубо можно определить массу корпуса
многокорпусного объекта по имеющимся данным для однокорпус¬
ных судов. Однако при этом надо четко представлять себе, как
повлияют на определяемую величину особенности конструкции
177
Рис, 97. Относительная масса металлического корпуса многокорпусных объек¬
тов различного водоизмещения.
1 —двухкорпусиые и с аутригером рыбопромысловые (/ об — корпус с оборудова-
иием); 2 — научно-исследовательское судно США «Риджели Уорджильд» с корпусом
из легких сплавов; 3 — краиово-монтажиое судно «Кёр-оглы»; 3'—то же, без примене¬
ния низколегированной стали; 4 — краново-монтажное судно «50 лет КПСС»; 5 — на¬
учно-исследовательское судно США «Хайес»; 6 — полупогружные буровые установки;
7 — транспортные катамараны (по данным фирмы «Дженерал дайнемикс»; 3—проектные
исследования эсмннцев-катамаранов США; 9 — проектные исследования кораблей США
с малой площадью ватерлинии (сталь); 10 — то же, алюминиевые сплавы; II — «Дуплус».
Рис. 98. Удельная масса металлического корпуса многокорпусных объектов
различной вместимости.
(Основные обозначения те же, что на рис. 97. Индексами «к», «ст», «н» обозначены гра¬
фики, относящиеся к удельному весу подводных корпусов, стоек и надводного корпуса).
UZ — внутренний объем соответствующих частей судиа.
178
и отличия соотношений размерений выбранного однокорпусногО
прототипа и многокорпусного проектируемого судна.
Наиболее просто учитывается отличие площади наружной
обшивки. Знание смоченной поверхности и размеров надводной
части позволяют достаточно точно найти эту площадь.
Однако уже определение толщины обшивки сопряжено с труд¬
ностями. При общем продольном изгибе эквивалентный брус
двухкорпусного судна характерен обычно большим расстоянием
Рис. 99. Кривые для удельной массы металлического корпуса
многокорпусных объектов в зависимости от произведения габа¬
ритных размеров LBmH. (Основные обозначения см. на рис. 97.)
Индексом «р» отмечены точки, отражающие характеристики речных судов.
Штриховой линией отмечены рекомендуемые для грубых оценок массы кор¬
пуса кривые (7 —для катамаранов, 9 —для судов и установок с малой
площадью ватерлинии, имеющих стальной корпус, 10 — для объектов
с малой площадью ватерлинии, построенных из легких сплавов).
между верхними и нижними связями. Кроме того, влияет боль¬
шая ширина и наличие четырех вертикальных связей — обшивки
бортов.
При определении массы днищевых перекрытий следует иметь
в виду, что даже при одинаковом расстоянии между продольными
переборками ширина этого перекрытия у двухкорпусного судна
обычно меньше — из-за меньшей ширины каждого корпуса. По¬
этому связи работают в более благоприятных условиях, а пролет
флоров меньше, чем у однокорпусного судна.
Если принимать толщину поперечных переборок и палуб
при соединяющей корпуса конструкции объемного типа такой же,
как их толщина в пределах корпусов, необходимо выполнять
хотя бы приближенный проверочный расчет поперечной проч¬
ности.
При анализе данных о массе корпуса построенных и спро¬
ектированных многокорпусных объектов возникает вопрос о
179
Приемлемости аргумента для сравнения. Представляется, что аргу¬
мент типа отношения массы корпуса к водоизмещению порожнего
судна пригоден только для объектов одного назначения, района
плавания, относительной скорости и при небольших отличиях
в соотношениях главных размерений (рис. 97). Такой показатель,
как отношение массы корпуса к объему внутренних помещений
корпуса в надводной и подводной частях, также представляется
недостаточно универсальным, поскольку плохо отражает влияние
расстояния между корпусами (рис. 98). Правда, такой показатель
отражает соотношение масс частей корпуса. Надо отметить, что
при прочих равных условиях худшие массовые характеристики
имеют суда с плоскостным соединительным мостом, поэтому,
если назначение и схема общего расположения позволяют, пред¬
почтительна объемная конструкция, соединяющая корпуса.
Наиболее универсальным показателем удельной массы метал¬
лического корпуса представляется отношение этой массы к про¬
изведению габаритных размеров многокорпусного судна. Рис. 99
позволяет сделать вывод о том, что использование в качестве
параметра произведения габаритных размеров позволяет прибли¬
женно обобщить все имеющиеся данные о массе корпуса многокор¬
пусных объектов. В самом деле, вокруг кривой 7 и ее участка,
отмеченного штриховой линией, с разумной точностью группи¬
руются точки, отмечающие характеристики катамаранов, вокруг
кривой 9 — точки, соответствующие судам и плавучим буровым
платформам с малой площадью ватерлинии, имеющим сталь¬
ной корпус.
Таблица 12
Относительное изменение масс судов с малой площадью
ватерлинии при вариации размерений [74]
Вариант или его изменение
Надвод¬
ный
корпус,
%
Стойки,
%
Подвод-
ные
корпуса,
%
Объект
в целом,
%
Горизонтальная расчетная сила
уменьшена вдвое
—6,2
—3,7
—2,7
—5,3
Та же сила увеличена на 50%
0
+5,0
+3,6
+8,0
Высота борта снижена вдвое
—6,2
—10,0
—20,0
—10,5
Введено допущение об отсутствии
слеминга нижней обшивки моста
—6,2
—7,4
—2,7
—5,3
Расстояние между ДП увеличено
в 1,27 раза
+6,2
+2,5
+ 1,8
+5,3
Расстояние между ДП увеличено
в 1,67 раза
+6,2
+3,7
+2,7
+6,6
Все несущие конструкции — из
легкого сплава
—43,0
—37,0
—40,0
—40,8
Надводный корпус из легкого спла¬
ва
—43,0
0
0
— 19,8
180
Поскольку приведенные ДанйЫё должны Служить только
для оценки массы корпуса перед построением вариантного ряда,
использование кривых 7, 9, 10 представляется допустимым.
В настоящее время имеются иностранные материалы о влия¬
нии вариации соотношений главных размерений на корпуса сред¬
нетоннажных быстроходных судов с малой площадью ватер¬
линии [93]. Основные данные по ним представлены в табл. 12.
Расчеты показали, что при прочих равных условиях переход
к легким сплавам оказывает наибольшее влияние на массу над¬
водной конструкции, соединяющей корпуса. При постоянном
водоизмещении и площади ватерлинии варьирование расчетных
величин и размерений в указанных в таблице пределах изменяет
удельный вес стального корпуса на 5—10%. Данные таблицы
могут служить ориентиром для оценки возможных влияний изме¬
нения размерений на массу корпуса объектов близких размерений.
Глава 6
Проектирование
§6.1. Методические проблемы проектирования
многокорпусных объектов
и сравнения их мореходных качеств
Как показано выше, особенности многокорпусных объектов —
увеличенная удельная площадь палуб и вместимость, большая
надежность (как результат дублирования энергетической уста¬
новки и повышенной непотопляемости), возможность улучшения
отдельных характеристик мореходности и обитаемости — наиболее
полно соответствуют требованиям, предъявляемым к промысло¬
вым, пассажирским, трейлерным, научно-исследовательским, бу¬
ровым, контейнерным судам.
Перечисленные особенности технико-эксплуатационных ка¬
честв многокорпусных объектов связаны с влиянием дополнитель¬
ного, по сравнению с однокорпусными, геометрического фактора —
взаимного расположения корпусов. Кроме того, эти особенности
связаны с большей широтой диапазона изменений соотношений
главных размерений и большим разнообразием форм обводов
многокорпусных объектов. Поэтому ограничены возможности при¬
менения имеющейся информации о качествах однокорпусных
судов и алгоритмов выбора главных размерений таких судов.
Оптимальные по эксплуатационно-экономическим показате¬
лям основные исходные характеристики много- и однокорпусных
судов обычно не совпадают, поскольку влияние изменений этих
характеристик на целевые функции указанных типов судов не¬
одинаково.
Объем информации о влиянии соотношений главных размере¬
ний многокорпусных объектов на их технико-эксплуатационные
качества в настоящее время недостаточен, что приводит к затруд-
182
нениям при расчетах этих качеств. Это не позволяет уверенно
выбирать оптимальные соотношения главных размерений, рацио¬
нально используя особенности многокорпусных объектов.
В соответствии с особенностями формы корпусов рассматривае¬
мые объекты можно разделить на суда с обычными обводами,
с малой площадью ватерлинии и плавучие установки. Технико¬
эксплуатационные качества объектов этих групп и методы выбора
размерений заметно различаются. В первую очередь, существенно
различна их начальная остойчивость и распределение вмести¬
мости по высоте.
Увеличенная удельная площадь палуб и вместимость много¬
корпусных судов делает их применение целесообразным тогда,
когда судно строится для получения заданной площади палуб
и вместимости. Поэтому обычно в алгоритме выбора главных
размерений первостепенную роль играет уравнение вместимости.
Особенностью, отражающейся в уравнении масс через массу
металлического корпуса, является наличие соединяющей корпуса
конструкции. Обеспечение прочности этой конструкции при ми¬
нимальной ее массе является сложной проблемой, которая далека
от окончательного решения. Расчет внешних нагрузок, прочности
и массы соединяющей корпуса конструкции в настоящее время
возможен в весьма узких диапазонах размерений, а обусловленные
прочностью ограничения главных размерений весьма приблизи¬
тельны. В то же время многокорпусные суда и установки очень
«чувствительны» к нагрузке.
Особенности качки многокорпусных объектов определяются
отличиями частот собственных колебаний, равномерностью воз¬
действия волнения на корпуса и их гидродинамическим взаимодей¬
ствием. В целом можно считать, что в определенном диапазоне
курсовых углов по отношению к волнению правильно спроектиро¬
ванный многокорпусный объект всегда имеет более благоприятную
качку, чем однокорпусное судно. Однако точность прогнозиро¬
вания качки таких объектов в настоящее время меньше, чем одно¬
корпусных, а ограничения главных размерений, связанные с кач¬
кой, не выбраны'достаточно определенно. Одной из причин этого
является практическое отсутствие критериев и норм для оценки
качки, поскольку необходимость в такой оценке появилась только
вместе с возможностью более или менее заметно изменять харак¬
теристики качки, отличающей многокорпусные объекты от одно¬
корпусных.
Ходкость многокорпусных объектов определяется не только
формой и размерениями корпусов, но и их взаимным расположе¬
нием. Гидродинамическое взаимодействие корпусов в целом
тем меньше, чем они дальше друг от друга, чем более они погру¬
жены и менее удлинены. Удельная мощность энергетической
установки взаимодействующих корпусов обычно больше, но может
быть и меньше, чем изолированных. Особенности геометрии судов
с малой площадью ватерлинии позволяют применять для расчета
183
их сопротивления методы линейной теории волн и достаточно
уверенно решать вариационную задачу полного сопротивления.
Для других соотношений размерений расчеты, основанные на ли¬
нейной теории волн, недостаточно точны, а ограничения главных
размерений, определяемые ходкостью, недостаточно проверены.
Обеспечение необходимой управляемости многокорпусных су¬
дов до сих пор не вызывало трудностей, в целом их устойчивость
на курсе и поворотливость лучше, чем однокорпусных. Однако
для судов с малой площадью ватерлинии могут возникать проблемы
обеспечения устойчивости движения как в горизонтальной, так
и в вертикальной плоскости.
У многокорпусных судов с обычными обводами главные раз¬
мерения определяются с использованием уравнений вместимости
и плавучести, роль уравнения остойчивости второстепенна. Раз¬
мерения корпусов находятся с учетом ограничений, диктуемых
требованиями размещения грузовых и производственных поме¬
щений, энергетической установки, грузовых устройств, ходкости
и качки, а также эксплуатационных.
Расстояние между корпусами ограничивается условием проч¬
ности и массой соединяющей корпуса конструкции, требованиями
ходкости, качки, иногда — габаритами перевозимого груза. Огра¬
ничения высоты соединяющей корпуса конструкции связаны
с качкой и массой металлического корпуса судна.
Главные размерения судов с малой площадью ватерлинии
определяются с использованием уравнений вместимости, пла¬
вучести, остойчивости. Ограничения размерений корпусов свя¬
заны с требованиями размещения энергетической установки,
балластировки, ходкости и качки; расстояния между корпусами
лимитируются сверху по эксплуатационным соображениям,
а также для получения приемлемой массы корпуса. Размерения
надводного корпуса ограничивают с учетом прочности и габаритов
грузов или грузовых устройств. Высота надводного корпуса над
водой зависит от расчетной высоты волны и амплитуд качки.
Главные размерения буровых установок находят по уравне¬
ниям плавучести и остойчивости для заданной площади рабочей
палубы и высоты ее над уровнем моря. Размерения составляющих
установку водонепроницаемых объемов ограничиваются с учетом
прочности, качки, управляемости, внешних сил. Требования,
диктуемые ходкостью, второстепенны, поскольку основной режим
работы таких установок — стационарный, а переходы совершаются
весьма редко и при осадке, заметно отличающейся от рабочей.
Остойчивость и качка установок в режиме перехода и в рабочем
положении отличаются не только из-за размерений и формы
погруженного объема, но и из-за влияния развитого якорного
устройства в рабочем режиме.
Одной из сложных проблем проектирования судов с повышен¬
ной мореходностью является сравнение мореходных качеств:
качки и ходкости на волнении.
184
Следует отметить, что названные типы судов явственно раз¬
деляются на две группы. Первую группу составляют относительно
тихоходные суда (Fr < 0,30), на борту которых во время рейса
выполняются производственные операции (лов и обработка рыбы,
бурение скважин, океанографические наблюдения). Основная
задача таких судов — находиться заданное время в заданном
районе (или даже точке) океана при любых (или почти любых)
гидрометеорологических условиях и выполнять названные опе¬
рации в течение максимально возможного периода. Фактически
единственным средством воздействия на качку и сопровождающие
ее явления для этих судов (кроме буровых платформ) представ¬
ляется изменение курсового угла по отношению к достаточно
интенсивному волнению. Для судов этой группы наиболее важна
возможность обеспечения умеренной качки. Заметим, что одно¬
корпусные суда штормуют или против волны и ветра, или по волне
и ветру. Попадание такого судна в положение лагом к достаточно
интенсивному волнению недопустимо. И даже на волнении мень¬
шей интенсивности однокорпусные суда легче переносят продоль¬
ную качку, чем боковую.
Совершенно отличное от описанного поведение многокорпус¬
ных судов на волнении определяет и иную тактику их штормова-
ния. Имеющийся опыт эксплуатации средних катамаранов с не¬
ограниченным районом плавания показывает, что на встречном
волнении достаточной интенсивности у них может возникнуть
слеминг нижней обшивки соединяющей корпуса конструкции,
а в положении лагом к волне они могут двигаться или дрейфо¬
вать практически на любом волнении.
Для судов с малой площадью ватерлинии зависимость качки
от курсового угла невелика; а такие из них, как плавучие плат¬
формы, совсем не имеют возможности изменять этот угол, так как
стоят на якорях; тем не менее платформы выдерживают волнение
практически любой интенсивности.
Таким образом, уже при рассмотрении проблемы нормирова¬
ния мореходности судов первой группы возникает вопрос об учете
допустимых курсовых углов.
Ко второй группе можно отнести быстроходные суда (Fr >
> 0,30), главной задачей которых является переход через опре¬
деленный район независимо от гидрометеорологических условий,
наблюдающихся в нем. Для этих судов имеется возможность воз¬
действия на качку и сопровождающие ее явления как путем изме¬
нения курсового угла, так и путем изменения (уменьшения)
скорости. Однако для них оба эти пути в общем нежелательны,
так как могут привести, например, к нарушению расписания дви¬
жения (для линейных транспортных судов), поскольку уклонение
от кратчайшего пути равнозначно снижению скорости. Для судов
второй группы наиболее важна возможность обеспечения высокой
скорости на волнении при допустимой качке. И для судов этой
группы весьма существенны отличия мореходности многокорпус¬
185
ных объектов. Можно предположить, что транспортные катама¬
раны будут вынуждены изменять курс таким образом, чтобы не
двигаться на встречном волнении, в отличие от однокорпусных
судов, для которых такой курс обычно предпочтителен. Перспек¬
тивные суда с малой площадью ватерлинии при достаточно боль¬
шом водоизмещении, вероятно, практически не будут менять
курс или снижать скорость.
В связи с тем что мореходность однокорпусных судов обеих
групп является мерилом их технического совершенства, неодно¬
кратно делались попытки найти показатели, в основном опреде¬
ляющие мореходность, и обосновать их предельные значения.
Для судов первой группы рассматривалось два критических
режима: в первом из-за интенсивной бортовой качкй прекращаются
производственные операции на борту судна; во втором из-за ин¬
тенсивной продольной качки возникает возможность повреждения
или даже гибели судна.
В первом критическом режиме работы на однокорпусных
промысловых судах прекращаются при среднем крене 10°. Для
тех же условий М. Э. Моисеева дает близкое значение среднего
угла крена — 8,5°. Очевидно, в этом случае прекращение работ
связано с непроизвольными перемещениями человека, незакреп¬
ленных орудий и обрабатываемых предметов. Таким образом,
сами по себе углы качки на нерегулярном волнении являются
в определенной степени показателем мореходности судна, осо¬
бенно судна первой группы.
Физиологи утверждают, что организм человека, в частности,
его вестибулярный аппарат, реагирует не на скорость, а на уско¬
рение. Минимальное ощущаемое угловое ускорение составляет
2—37с2, линейное — около (0,01—0,02) g.
Следует отметить, что принципиально правильным представ¬
ляется именно такое нормирование качки (и сопутствующих
ей явлений), когда исследуются условия труда экипажа или усло¬
вия работы каких-либо существенных для судов данного типа
устройств или систем (например, как указывалось, вертикальная
качка, при которой выполняется бурение с полупогружйых плат¬
форм, не превышает 3 м). Однако иногда предпочитают фиксиро¬
вать в качестве нормы достигнутый средний — или лучший —
показатель судов некоторой серии. Такая норма представляется
гораздо менее обоснованной и не стимулирующей совершенство¬
вание судов.
На волнении интенсивностью до 6—7 баллов катамараны имеют
меньшие углы, но практически такие же, как однокорпусные
суда, ускорения бортовой качки на планшире наветренного борта.
При большей интенсивности волнения катамараны имеют меньшие
углы и ускорения бортовой качки.
Поскольку все однокорпусные суда на волнении изменяют
курсовой угол, а также, по-видимому, в связи с трудностями рас¬
чета качки на косом нерегулярном волнении, наибольшее коли-
186
чество предложений в настоящее время касается нормирования
характеристик качки и сопровождающих ее явлений при движении
навстречу волнам. В этом случае обычно наблюдается заливание
носовой части судна, слеминг, а также общая вибрация корпуса.
Нормы линейных ускорений при угловых колебаниях, пред¬
ложенные разными авторами, в общем близки: около 0,3g
при 3%-ной обеспеченности. Вероятно, при нормировании бор¬
товой качки многокорпусных судов, а также при сравнении ва¬
риантов судов различных типов, принадлежащих к первой группе,
можно использовать этот критерий, а также предельное значение
углов крена (17° при 3%-ной обеспеченности), в зависимости от
того, какой предел достигается раньше. При этом если предельные
значения углов и ускорений для судов разных типов соответствуют
разной интенсивности волнения, то эти отличия должны быть
учтены при расчете эксплуатационного периода рассматриваемых
судов в данном бассейне, для которого должна быть известна
повторяемость волнения. Вероятно, можно считать, что судно
каждого типа имеет определяемый технологическими соображе¬
ниями курсовой угол по отношению к волнам вплоть до момента
прекращения технологических операций. После прекращения
операций суда первой группы могут выбирать благоприятный
курсовой угол к волне. Очевидно, что если для выполнения
технологических операций не требуется определенный курсо¬
вой угол, то и до прекращения работ суда первой группы могут
выбирать его благоприятные значения.
Отличия качки могут быть учтены, например, по следующей
схеме. После расчета ускорений качки на нерегулярном волнении
по имеющимся формулам и сравнения их величины с предельной
получаем диапазоны допустимых <рдоп курсовых углов при каждой
интенсивности волнения. Зная повторяемость волнения р(- в дан¬
ной части Мирового океана, определяем время работы на волне¬
нии каждой интенсивности:
= (152)
где ^эк — эксплуатационный период.
Тогда время работы со средней заданной производительностью
при каждой интенсивности волнения (если вероятность различных
курсовых углов волны в данной точке океана обозначена рф):
180
о
(153)
Полное время работы с
заданной производительностью
Г180
С = f Pi f РфФдоп^Ф ^dh.
(154а)
о
.0
187
Именно эту величину представляется целесообразным вводить
в экономические расчеты при сравнении судов первой группы.
Предложения, касающиеся норм мореходности при движении
на встречном волнении, весьма разноречивы и представляются
недостаточно подробными и обоснованными. Это не позволяет
в настоящее время предложить конкретные нормы. Однако ясно,
что при проектировании многокорпусных судов следует учиты¬
вать их особенности. Например, представляется очевидным, что
нормы слеминга соединяющей корпуса конструкции не могут быть
более жесткими, чем нормы слеминга днища. В самом деле, соеди¬
няющая корпуса конструкция находится в надводной части и
местные нарушения ее прочности и непроницаемости не могут
привести к таким опасным последствиям, как нарушения непро¬
ницаемости днища.
Однако при расчете общей поперечной прочности, вероятно,
надо учитывать возможное ослабление сечения поперечных
связей.
Если применить одинаковые нормы слеминга днища и соеди¬
няющей корпуса конструкции, то при условии симметричности
перемещений при продольной качке это повлечет за собой требова¬
ние о примерном равенстве вертикального клиренса на носовой
кромке и осадки судна. Это требование, вероятно, трудновыпол¬
нимо для катамаранов малого водоизмещения. С другой стороны,
для них не имеет существенного значения общая продольная вибра¬
ция, вызванная слемингом. Поэтому для таких катамаранов пред¬
ставляются целесообразными нормы, допускающие несколько
более интенсивный слеминг на расчетном волнении, чем для
судов большего водоизмещения. Однако конструкция, соединя¬
ющая корпуса малых катамаранов, должна быть соответственно
защищена и подкреплена.
Нормы, определяющие интенсивность заливания палубы на
встречном волнении, для катамаранов не могут быть более жест¬
кими, чем для однокорпусных судов, поскольку для первых
заливание не связано с угрозой потери остойчивости, как для
вторых.
Такам образом, представляется, что нормы, определяющие
частоту и интенсивность слеминга и заливаемости, должны быть
дифференцированы в зависимости от водоизмещения (или хотя бы
длины) судов и должны быть применимы к катамаранам в той же
степени, как и к судам однокорпусным. В настоящее время пред¬
ставляется возможным считать, что предельные значения ускоре¬
ний при продольной качке могут быть приняты одинаковыми для
однокорпусных судов и катамаранов.
В отношении судов с малой площадью ватерлинии (в том числе
и буровых платформ) следует отметить, что для них слеминг и
заливаемость связаны с труднопредсказуемыми и обычно весьма
неприятными последствиями; во всяком случае, для объектов до¬
статочно большого водоизмещения слеминг и заливаемость пред-
188
ставляются недопустимыми. Для объектов среднего и малого
водоизмещения вопрос о последствиях оголения корпусов или
входа в воду надводного корпуса требует незамедлительного,
тщательного и всестороннего изучения.
Требования о предельных углах качки и ускорениях для су¬
дов с малой площадью ватерлинии, очевидно, будут выполняться
автоматически вплоть до волнения самой большой интенсивности
или до входа в воду верхнего корпуса.
Для судов второй группы определяющим показателем пред¬
ставляется средняя максимальная достижимая скорость на вол-
однокорпусное судно; катамаран с равной высотой борта; —• — три¬
сек или дуплус.
Прежде всего, очевидно, что в этом случае нормы качки, слеминга,
заливаемости могут быть несколько выше, чем для судов первой
группы, поскольку на судах второй группы никаких производ¬
ственных операций во время рейса не производится.
Если построить зависимость скорости на встречном волнении
для данного судна от интенсивности волнения, то при данной
высоте волны (рис. 100)1 можно различить два значения скорости:
определяемого мощностью энергетической установки (участок, /)
и качкой (участок 2). На волнении малой интенсивности-скорость
определяется только пропульсивными качествами, большой интен¬
сивности—заливаемостью (участок3), слемингом днища (участок 4).
Обычно осадка судна выбирается так, чтобы слеминг начи¬
нался позже, чем заливание палубы. Тогда при равной вьісоте
борта в Носовой части кривая допустимой скорости катамарана
по условию отсутствия слеминга соединительной конструкций
всегда будет проходить ниже, чем кривая, соответствующая
1 Рис. 100 может быть использован для приближенной оценки потери ско¬
рости судов отмеченных архитектурно-конструктивных типов.
189
началу интенсивного заливания моста. Поэтому при том же усло¬
вии (одинаковая высота борта до верхней палубы в носовой части)
достижимая скорость катамарана на интенсивном встречном вол¬
нении будет ниже, чем сравнимого однокорпусного судна. Для по¬
вышения этой скорости необходимо увеличивать высоту борта
и вертикальный клиренс в носовой части или применять успокои¬
тели килевой качки.
Средняя достижимая скорость судов второй группы за эксплуа¬
тационный период может быть определена по следующей схеме.
После расчета качки, заливаемости, слеминга судна при различ¬
ной скорости и различных курсовых углах по отношению к вол¬
нению интенсивностью от 0 до 7 баллов определяем допустимые
углы (рдоп и скорости ѵф(Л для волнения указанной интенсив¬
ности, а затем — среднюю скорость
180
[ Фдоп^срт
^■=-Чб • (1546)
J фдоп ^ф
О
Если считать, что изменение курса из-за волнения равнозначно
удлинению пути, т. е. уменьшению скорости, можно определить
условную эксплуатационную скорость на волнении данной интен¬
сивности
180
j (фтреб — Фдоп) Vi d<f
где фтреб — требуемый угол.
С учетом повторяемости волнения средняя достижимая ско¬
рость
в
ѵв= S РА; (156)
1
здесь В — интенсивность волнения.
Сравнения судов рассматриваемых групп может производиться
также с использованием понятия 1 о вероятности выполнения
судном своей основной задачи. Эта вероятность для судов первой
группы может быть оценена по формуле
w = wnwTw6w0, (157)
где пуп — вероятность попадания в районы Мирового океана,
соответствующие технологическим возможностям судна (например,
встреча косяков рыбы на определенной глубине для промыслового
судна; определенные типы грунтов для бурового судна). Эта ве-
1 В соответствии с идеей А. В. Скорохода.
190
роятность тем выше, чем более универсально оборудование судна.
шт — вероятность поддержания заданной средней производитель¬
ности труда экипажа. Может быть оценена по соотношению вре¬
мени, когда на судне выдерживается заданная производительность
труда t'3K, к эксплуатационному периоду t3K\ w6 — вероятность
безаварийной работы судовых конструкций и оборудования.
Повышается при снижении слеминга, заливаемости и качки на
волнении; цу0 — вероятность поддержания заданной средней про¬
изводительности технологического оборудования; увеличивается
при дублировании агрегатов этого оборудования, повышении их
надежности, улучшении условий их эксплуатации и ремонта
в судовых условиях.
Для судов второй группы вероятность выполнения задачи
(перевозки груза в заданные сроки) связана со значением средней
достижимой скорости на волнении
w = ііутііусііуб, (158)
где пус— вероятность поддержания заданной средней скорости
во время перехода (с учетом удлинения пути при вынужденном
уклонении от необходимого курса). Может быть оценена как от¬
ношение средней достижимой скорости за эксплуатационный
период к средней скорости, необходимой для получения данного
грузопотока при данном количестве и грузоподъемности судов.
Представляется, что соотношения вероятностей выполнения
задачи позволят достаточно объективно оценить сравнительную
приспособленность судов разных архитектурно-конструктивных
типов к работе на морском волнении.
Кроме того, можно считать обоснованным распространение
любых норм мореходных качеств на интенсивность волнения до
6—7 баллов включительно, потому что воздействие на качку
и сопровождающие ее явления при большей интенсивности вол¬
нения весьма затруднительно, а повторяемость такого волнения
очень мала.
В отечественном судостроении и судоходстве накоплен неко¬
торый опыт проектирования (в том числе и сравнения мореходных
качеств), строительства и эксплуатации многокорпусных объек¬
тов. Этот опыт в определенной мере обобщен в последующих
параграфах.
§ 6.2. Проблемы проектирования многокорпусных судов
и установок для изучения и
освоения океана
Последнее десятилетие характерно интенсивным развитием работ
по изучению и освоению Мирового океана, в первую очередь —
его шельфа. При этом часто используются двухкорпусные суда
(в основном катамараны) и различного типа плавучие установки
для бурения скважин на нефть и газ. Катамараны применяются
191
при проведении гидрографических и океанографических иссле¬
дований, а также как суда-носители подводных аппаратов. Прак¬
тически все положительные качества катамарана (большая пло¬
щадь верхней палубы, хорошая остойчивость, малые амплитуды
качки и т. д.) используются при выполнении работ по изучению
и освоению Мирового океана.
Отмеченные преимущества катамаранов по сравнению с одно¬
корпусными судами в некоторых случаях оказываются настолько
значительными, что предпочтительность применения многокор¬
пусных судов становится очевидной. Действительно, масса буро¬
вого оборудования достигает 1000 тс, его центр тяжести располо¬
жен на расстоянии 10—15 м от верхней палубы и для размещения
этого оборудования и технологических запасов (труб, цемента,
барита, бентонита и др.) требуется открытая площадь палубы до
2000—3000 м2. На гидрографических судах, функцией которых
является проведение работ по постановке и снятию знаков нави¬
гационного ограждения, обеспечивающих безопасность судоход¬
ства, необходимо располагать значительное количество буев мас¬
сой до 10 тс каждый при длине до 10 м. Научно-исследовательские
суда-катамараны имеют большую (в 1,5—2,5 раза) удельную
площадь палуб, а потому и лабораторий, например, американское
судно T-AGOR-16 имеет удельную площадь палуб, равную —
0,23 м2/т, а однокорпусные суда T-AGOR-15 и T-AGOR-3 — рав¬
ную 0,085—0,18 м2/т.
Кроме того, на катамаране все лаборатории размещаются
на одной палубе, что обеспечивает удобство работы с пробами
воды, кернами при бурении и т. д.
Несомые исследовательскими судами подводные аппараты
и их спуско-подъемные устройства также могут иметь значитель¬
ную массу. На катамаранах удобно спускать аппараты между
корпусами, при этом не требуются противокренные цистерны,
необходимые при спуске аппаратов с борта однокорпусного судна,
обеспечиваются достаточно большие размеры шахт и большая
независимость от степени взволнованности моря при стоянке
лагом к волне. - -
Помимо общих проблем, возникающих при проектировании
многокорпусных судов (обеспечение прочности соединяющей кор¬
пуса конструкции, создание надежных методов расчета ходовых
и мореходных качеств и т. д.), для катамаранов, используемых
при выполнении работ но изучению и освоению Мирового океана,
весьма важной задачей является выбор таких главных размерений,
их соотношений и форм обводов, которые обеспечивали бы мини¬
мальную качку судна без хода. Требование обеспечения мини¬
мальной качки научно-исследовательских катамаранов без хода
вытекает из специфических особенностей их эксплуатации, по¬
скольку максимальная стабилизация судна необходима при бу¬
рении скважин или во время проведения операций подъема буев
или подводных аппаратов. Эти операции осуществляются либо
192
в дрейфе, либо при стоянке судна на якорях. Для гидрографиче¬
ских судов эта проблема усугубляется необходимостью иметь от¬
носительно малую осадку (1,5—2,0 м) для возможности работы
с буями на мелях, рифах и прочих мелководных участках.
В последние годы идет интенсивное изучение и освоение под¬
водных месторождений нефти и газа.
Более 300 плавучих буровых установок различных типов
(в корпусах судов, самоподъемных, полупогружных) ведут
разведочное бурение на шельфе 70 стран, на глубинах моря
до 300 м, а иногда и до 1000 м. Двадцать стран уже добывают
нефть и газ с глубин моря 150—200 м. Добыча нефти со дна моря
достигла в 1960 г. 10% общей добычи, в 1975 г. — около 20%,
а к 1985 г., согласно прогнозам, составит до 35% полной мировой
добычи нефти.
Первые буровые работы в море велись на глубинах до 10 м со
стационарных эстакад; иногда на малых глубинах использовались
старые баржи, которые притапливались и сажались на дно.
Первые буровые установки — погружные. Они передвигаются
в плавучем состоянии, имея малую осадку, а работают, опираясь
нижними корпусами на дно; погружение происходит за счет
приема балласта. Преимуществом этих установок является про¬
стота конструкций, основным недостатком — малая глубина моря
в месте бурения.
Эти установки обычно работают на глубинах, не превосходя¬
щих 20 м. Большинство погружных установок построено в 1954—
1958 гг.
В настоящее время за рубежом самым распространенным ти¬
пом плавучих буровых установок являются самоподъемные (135 ед.
эксплуатируется и 57 находится в постройке)1. Они представляют
собой плавучий понтон, несущий буровое оборудование, и опоры,
поднятые вверх. На месте бурения опоры опускаются на дно,
вдавливаются в него, а затем механизм поднимает понтон по опо¬
рам вверх, на высоту, обеспечивающую свободное (без касания)
прохождение волн под днищем понтона. Самоподъемные установки
используются на глубинах до 100 м. По мере увеличения глубины
моря, на которой необходимо вести разведочные работы, на смену
самоподъемным пришли полупогружные установки, которые,
как и погружные, передвигаются с малой осадкой, а работают,
будучи раскрепленными на якорях или удерживаясь при помощи
системы динамической стабилизации, при этом нижние корпуса
глубоко погружены в воду. В настоящее время в эксплуатации
находятся 75 полупогружных установок и строятся 52 уста¬
новки.
Полупогружные установки весьма разнообразны по конструк¬
ции, они строились с тремя, четырьмя и пятью стабилизирующими
колоннами с опорами (стойками) круглой или эллиптической
1 Данные на сентябрь 1975 г.
7 п/р Дубровского В. А.
193-
формы, причем верхний корпус у них был соответственно трех-,
четырех-, пятиугольной формы.
В настоящее время в основном строятся установки с верхним
корпусом прямоугольной формы, с отношением ширины к длине,
близким к единице. Корпус изготовляется либо в виде водонепро¬
ницаемого понтона, либо в виде палубы-рамы, на которой уста¬
навливаются рубки для жилых и служебных помещений, техноло¬
гического оборудования, энергетической установки и т. д.
Размеры полупогружных установок весьма значительны: длина
наибольшая — 90—100 м, ширина — 60—80 м, высота до верхней
палубы — 30—40 м.
Полупогружные установки эксплуатируются на глубинах
200—300 м, новейшие—на глубинах до 1000 м. При использо¬
вании этих установок на малых глубинах (до 30 м) они работают
как погружные.
Полупогружные установки обычно буксируются на место бу¬
рения несколькими буксирами суммарной мощностью 5000—
10 000 л. с. со скоростью 4—6 уз.
В последнее время проектируются и строятся самоходные
установки.
Полупогружные установки наиболее дороги из всех плавучих
буровых средств (строительная стоимость 30—50 млн. долл.),
однако срок их окупаемости меньше срока окупаемости буровых
судов, так как время, когда возможно бурение на полупогружных
установках (до 99% эксплуатационного периода), значительно
больше, чем у буровых судов (до 80% в Северном море). Это объяс¬
няется меньшими перемещениями этих установок при качке на
взволнованном море.
Разнообразие форм полупогружных установок свидетельствует
о стремлении найти оптимальное решение в создании установки,
достаточно остойчивой и имеющей удовлетворительные параметры
качки. С одной стороны, поскольку на полупогружных установках
технологическое оборудование и запасы для бурения глубоких
разведочных скважин расположены высоко и имеют значительную
массу (2000—2500 т), требуется обеспечить достаточно высокую
остойчивость. С другой стороны, буровые работы в море могут <
вестись только при ограниченных колебаниях установки: обычно
буровое оборудование выходит из строя при амплитудах борто¬
вой качки более 7°, амплитудах вертикальной качки более 3 м,
при горизонтальных перемещениях, превышающих 3% глубины
моря в месте бурения. Эти ограничения фактически и определили
архитектурные и конструктивные типы средств для разведочного
бурения.
Поэтому если для судов основными уравнениями, по которым
определяются главные размерения, являются уравнения пла¬
вучести, вместимости, остойчивости и масс, то для полупогруж¬
ных установок — это уравнения плавучести, масс, остойчивости
и качки.
194
Таким образом, вопросам качки полупогружных установок
должно уделяться большое внимание, особенно на ранних стадиях
проектирования, когда выбираются основные элементы установок.
Следует отметить, что при существующих соотношениях главных
размерений полупогружных установок, их форме и распределении
масс, амплитуды бортовой качки, как правило, не превышают
допустимых, поэтому в первую очередь следует рассматривать
вертикальные перемещения. На величину вертикальных переме¬
щений основное влияние оказывает площадь ватерлинии и осадка
установки в рабочем положении (при бурении), причем чем меньше
площадь ватерлинии и больше осадка, тем меньше амплитуда
вертикальной качки.
Учитывая, что отстояние палубы платформы в рабочем поло¬
жении от ватерлинии определяется высотой расчетной волны,
(например, по американским правилам оно равно 60% расчетной
высоты волны плюс 1,5 м), улучшать остойчивость можно лишь
за счет уменьшения высоты борта, увеличения площади ватерлинии
или расстояния между стабилизирующими колоннами. Улучше¬
ние остойчивости путем уменьшения осадки или увеличения пло¬
щади ватерлинии приводит к ухудшению параметров вертикальной
качки; увеличение расстояния между стабилизирующими колон¬
нами ограничено массовыми характеристиками и возможностями
судостроительных заводов при строительстве сооружений значи¬
тельной ширины.
Уравнение вместимости для полупогружных установок может
не рассматриваться, поскольку, как показывают расчеты, удо¬
влетворение требований к их остойчивости и вертикальным пере¬
мещениям приводит к таким размерениям, что размещение буро¬
вого оборудования, технологических запасов, энергетической
установки и т. д. не вызывает трудностей.
Таким образом, основная проблема при проектировании
полупогружных буровых установок заключается в выборе таких
размерений (прежде всего ширины, осадки и площади ватерлинии
в рабочем положении), при которых обеспечивается минимальная
масса установки и удовлетворяются требования к остойчивости
и вертикальным перемещениям с учетом влияния массы якорного
устройства.
§ 6.3. Опыт проектирования двухкорпусных
краново-монтажных судов
Для строительства нефтепромысловых сооружений на любых глу¬
бинах моря, независимо от применяемого метода установки
опорного блока, требуется наличие плавучего грузоподъемного
средства, плавучего крана или кранового судна.
Границы использования крановых судов при различных
глубинах моря показаны на рис. 101. В отличие от плавучих
кранов общего назначения, крановые суда нефтепромыслового
7* 195
флота являются узкоспециализированными и предназначены для
грузоподъемных и транспортно-монтажных работ, связанных
с разведкой и добычей нефти и газа в море.
Крановые суда заняты в основном строительством морских
нефтепромысловых сооружений — стационарных морских осно¬
ваний и эстакад. Эти суда применяются также для обслуживания
Рис. 101. Границы использования кра¬
ново-монтажных судов различных типов
в зависимости от полной массы основа¬
ния Р и глубины моря Н:
нефтепромыслов и передвиж¬
ных буровых платформ, де¬
монтажа морских оснований.
Введение в эксплуатацию
в 1955 г. кранового судна
«50 лет КПСС» с краном
грузоподъемностью 100 тс
позволило укрупнить блоки
морских оснований до 100 т и
устанавливать их на глуби¬
нах моря до 27 м (табл. 13).
Методы крупноблочного
строительства морских нефте¬
промыслов на глубинах моря
40—60 м были внедрены
благодаря появлению мощ¬
ного транспортно-монтажного
кранового судна «Кёр-оглы»
с краном грузоподъемностью
250 тс. Судно было введено
в эксплуатацию в 1966 г.
Накопленный за предше¬
ствующие 25 лет опыт освое¬
ния морских месторождений
Каспия на глубинах моря
до 60 м с использованием
/ — кран грузоподъемностью 100 тс; 2 —
250 тс; 3 — 600 тс; 4 — 600 тс, с баржей; 5 —
четырехблочиые основания; 6 — двухблочные
основания; 7 — моноблочные основания;
8 — метод подъема блока; 9 — метод спуска
блока с баржи; 10 — метод регулирования
плавучести блока.
крановых средств грузо-
подъемностью 100—250 т дает
возможность дальнейшего
освоения перспективных неф¬
теносных площадей на глу¬
бинах моря 80—120 м с по¬
мощью усовершенствованных четырех- и двухблочных морских
оснований, а также принципиально новых конструкций стацио¬
нарных морских оснований, где полностью изменены конструк¬
тивная схема стационарной буровой платформы, а также методы
ее доставки и установки к месту строительства.
По сравнению с практиковавшейся постройкой морских соору¬
жений из относительно мелких элементов массой 100—220 т
строительство более крупными блоками, кроме прямого экономи¬
ческого эффекта, значительно уменьшает зависимость работ от
состояния моря, ускоряет монтажные работы в море и позволяет
196
Таблица 13
Основные технические характеристики катамаранных крановых судов
Характер стики
ТМС
«Илья
Муромец»
с краном
грузоподъем¬
ностью
6Э0 т,
ок. 1980 г.
тмс
«Кёр-оглы»
с краном
грузоподъем¬
ностью
250 т,
1965 г.
КС
«50 лет КПСС»
с краном
грузоподъем¬
ностью
100 т,
1955 г.
Длина расчетная 7-гвл> м
Ширина расчетная:
125,4
120,0
98,4
общая Вт, м
54,0
50,0
35,12
одного корпуса Вх, м
17,56
18,0
16,55
Высота борта Н, м
Клиренс:
7,0
7,0
5,0
горизонтальный с1} м
18,8
14,0
2,0
вертикальный /іверт, м
3,9
3,9
1,0
Осадка расчетная Т, м
Водоизмещение, т:
3,6
3,5
1,91
порожнего судна Do
10 530
9 040
2 971
с полным грузом D
Коэффициент полноты водоизме-
13 220
11 365
4 457
щения 6:
0,799
0,742
0,836
ЫВ1
7,37
6,68
5,95
LIT
18,5
17,6
19,7
BJT
4,9
5,15
8,6
HIT
1,94
2,0
2,6
^•верт/7"
1,08
ЦП
0,53
Адмиралтейский коэффициент с =
= А/ѵ3О2/3
93
89
—
Наименьший относительный диа¬
метр установившейся циркуляции по
ЦТ судна (на полном переднем ходу)
£>ц/£
3
2,8
—
Коэффициент утилизации водоиз¬
мещения по грузоподъемности Prp/D
0,166
0,157
0,095
Коэффициент утилизации площа¬
ди палубы по площади грузовой пло¬
щадки Srp/anLBn
0,79
0,58
0,55
Площадь грузовой палубы Srp
6600
5000
2000
Коэффициент парусности судна
^*надв/LT
2,9 •
2,6
2,2
Примечание. ап — коэффициент полноты площади палубы.
197
сократить стоимость строительства морского основания на
25—30%.
Эти работы будут осуществляться с помощью мощного транс¬
портно-монтажного кранового судна «Илья Муромец» с краном
грузоподъемностью 600 тс.
Конструктивный тип кранового судна выбирается с учетом тех¬
нико-эксплуатационных требований, предъявляемых к крановым
судам по условиям эксплуатации, а также технико-экономических
особенностей различных технологических схем и технических
средств (плавучий кран с баржей, одно- или двухкорпусное кра¬
новое судно, понтонный метод), обеспечивающих доставку и мон¬
таж блоков морских оснований к месту работ в море.
К условиям эксплуатации крановых судов, влияющим на выбор
типа судна и крана, относятся: погодные условия, удаленность
от баз-убежищ, автономность плавания, способ доставки блоков
оснований, наличие грузовой палубы, возможность взятия блока
с площадки сборки, необходимость работы на мелководье, способ
установки блоков оснований на дно моря (см. рис. 101).
Для расположения блоков оснований на палубе судна
требуется грузовая площадка таких размеров, которые обеспе¬
чивают размещение крупногабаритных блоков оснований как
вдоль, так и поперек судна с минимально допустимыми свесами
блока за борт, регламентируемыми правилами перевозки крупно¬
габаритных грузов на палубе.
Ограничения, накладываемые на осадку судна условиями
эксплуатации, на длину и ширину корпусов по условиям по¬
стройки и проводки по шлюзам внутренних водных путей, вы¬
нуждают принимать высокие значения коэффициентов общей
полноты, учитывая необходимость обеспечения заданной грузо¬
подъемности судна.
Общее расположение крановых судов-катамаранов во многом
определяется размещением крана на одном из корпусов с целью
обеспечения возможности подъема блока основания с причала,
при минимальном вылете стрелы за борт.
Для компенсации большей части массы крана в правом кор¬
пусе размещается главное и вспомогательное машинные отделе¬
ния, трюм, запасы топлива, воды, масла, в оконечностях —
отсеки гребных электродвигателей и подруливающего устрой¬
ства.
В сторону правого борта смещаются и балластные отсеки,
прием балласта в которые регулируется в зависимости от на¬
грузки судна и колеблется от 2 до 15% водоизмещения.
В левом корпусе размещают: крановое отделение, основную
группу жилых, общественных и санитарно-бытовых помещений,
в оконечностях — отсеки гребных электродвигателей и ПУ.
При проектировании катамаранного судна основное внимание
должно быть обращено на выбор наиболее рациональной марки
стали и системы набора, выбор способа обеспечения прочного
198
соединения корпусов между собой, определяющего массу кон¬
струкции корпусов и моста (табл. 14).
Соотношение масс статей нагрузки двухкорпусных краново¬
монтажных судов приведено в табл. 15.
Таблица 14
Сравнительная таблица массовых показателей катамаранных
крановых судов
Показатели
«Илья Муромец*
«Кёр-оглы»
«50 лет
КПСС»
Металлический корпус
(без подкреплений под
кран) Рк, тс:
левый
правый
Подкрепление под кран
Рпк, тс
Соединительный мост
Рем, тс
Масса металлического
корпуса Рк, отнесенная к
кубическому модулю LBJ1,
тс/м3
Масса металлического
корпуса Рк с соединитель¬
ным мостом, отнесенная к
кубическому модулю
LBmH, тс/м3
Масса металлического
корпуса 1 м длины, тс/м
Масса корпуса на 1 тс
водоизмещения
Доля массы металличе¬
ского корпуса в массе по¬
рожнего судна, %
Марки материалов кор¬
пуса
Масса верхнего строения
Рв. с- тс
2182
2063
300
657
0,137
0,129
0,0726
17,4
16,4
0,403
49,5
10ХСНД, 09Г2,
13стЗсп2-4
2550
2154
1973
347
636
0,143
0,131
0,0744
18,0
16,0
0,438
52,2
10Г2СД-40, 09Г2,
ВМстЗсп
2195
683
500
15
41
0,145
0,080
12
0,400
40,0
Ст. 4
1400
Таблица 15
Показатели массы корпусов КМС
Статьи нагрузки
Процентное соотно¬
шение масс
Измеритель массы,
тс/м3
Голый корпус
Металлический корпус
Подкрепления и фундаменты
Изоляция, окраска и покрытия
Оборудование помещений
Судовые устройства
85,7—88,5
87,0—89,9
1,5—4,0
5.4— 10,2
1,3
10.4— 13,0
0,147—0,159
0,131—0,153
0,004
0,006
0,002
0,019—0,021
199
Наиболее приемлемыми для корпусов судна и соединительного
моста являются стали марок 09Г2, 10ХСНД и ВСЗсп2.
Одной из наиболее важных и ответственных конструкций
катамаранных судов является соединительный мост, восприни¬
мающий все многообразие нагрузок, возникающих при эксплуа¬
тации судна. Значения напряжений, возникающих в самых
нагруженных связях моста (в средней части и оконечностях)
при походном и рабочем положениях крана, приведены в табл. 16.
Таблица 16
Сравнение действующих и допускаемых напряжений
Случаи нггрузки
Напряжения, кгс/см2 ‘
Коэффи¬
циент
исполь¬
зования
матери¬
ала
Положение судна
допус¬
каемые
груз
на гакэ
на тихой
воде
без
груза,
на тихой
воде
без
груза,
иа волне
Рабочее положение
крана, О'
Связи в средней час¬
ти, т
1430
450
20
65
—
1500
1000
0,97
0,52
Походное положение
крана, о
Связи в оконечностях,т
—
290
90
1435
440
2000
1000
0,86
0,53
Сравнительные расчеты массы грузовой палубы при различ¬
ном ее конструктивном исполнении (разрезная или неразрезная)
для двухкорпусного и однокорпусного судов показывают, что
весьма важными показателями, характеризующими тип судна
и конструкцию палубы, являются отношение массы корпусной
стали к полезной площади грузовой палубы и стоимость корпус¬
ной стали на 1 м2 площади.
Учитывая специфические условия эксплуатации крановых
судов, обладающих большой парусностью и малой осадкой (коэф¬
фициент парусности 2,6—2,9), а также требование обеспечения
морских переходов при возможно большей балльности моря
(8—9 баллов), важно получить для судна не максимальную ско¬
рость в спецификационных условиях плавания (10—11 уз), а обес¬
печить минимально допустимую скорость в тяжелых погодных
условиях (не менее 5 уз).
В рабочих условиях судно должно обладать повышенной
маневренностью на малых ходах, надежно управляться на заднем
ходу и обладать способностью разворачиваться на месте и удер¬
живаться без значительного сноса. В настоящее время пред¬
ставляется рациональной схема движительно-рулевого комплекса,
200
состоящего из четырех кормовых винтов в направляющих насад¬
ках с рулями и подруливающего устройства в носовой части каж¬
дого корпуса (табл. 17).
Таблица 17
Данные об управляемости краново-монтажных катамаранов
Характеристики
управляемости
«Кёр-оглы»
с рулями в носу
и корме
«Илья Муромец»
ДРК без торце¬
вых шайб с ру¬
лями S =4,9 м2 і
ДРК с торце¬
выми шайбами
и рулями S- =г
= 4,9 м2
ДРК с рулями
Sp = 6,76 м2
ДРК с поворот¬
ными насадками
ДРК с рулями
1 Sp =4.1 м2
і ДРК с дкк -
! — 3200
Максимальный угол пе¬
рекладки рулей или наса¬
док, град
Относительный диаметр
циркуляции
Угловая скорость на ус¬
тановившейся циркуляции,
град/с
35
3,3
1,03
45
2,72
0,91
45
1,65
1,01
45
1,16
1,19
30
2,04
1,09
45
2,83
0,92
1,10
0,9
Как видно из приведенной таблицы, эффективность приня¬
того движительно-рулевого комплекса существенно возрастает,
если перо руля (площадью Sp = 4,9 м2) снабдить торцевыми
шайбами, а угол перекладки рулей увеличить до 45°.
Испытания моделей катамаранных судов и натурные испытания
судна «Кёр-оглы» показывают, что в условиях Каспия вертикаль¬
ный клиренс судна длиной около 120 м должен составлять не менее
3—3,3% длины или 108—110% осадки судна при отстоянии перед¬
ней кромки моста от носового перпендикуляра на 3—9% длины
судна.
Изменение горизонтального клиренса от 0,4В х до 1,1В! слабо
влияет на характер амплитудно-частотных характеристик верти¬
кальной (С0/гау) и килевой (-ф0/сь) качки на встречном волнении и не
оказывает существенного влияния на продольную качку (рис. 102).
Изменение горизонтального клиренса сильно сказывается на
амплитудно-частотных характеристиках бортовой Ѳ0/а и верти¬
кальной t,^rw качки при курсовом угле около 90°, причем с уве¬
личением клиренса амплитуды бортовой качки резко падают,
а амплитуды килевой качки несколько возрастают.
Наибольшее влияние клиренса при бортовой качке прояв¬
ляется в резонансной зоне; влияние клиренса на резонансные
амплитуды килевой качки менее существенно.
На рис. 102, б показаны амплитудно-частотные кривые вер¬
тикальной и бортовой качки при изменении относительного гори¬
зонтального клиренса c/BL от 0,7 до 1,4. Очевидно, существенное
201
SI.'0 S‘O SZ‘O
202
Рис. 102. Амплитудно-частотные графики вертикальной ( ), бортовой (—X—X—) качки кра¬
ново-монтажного судна «Кёр-оглы» (а); килевая ( ) и вертикальная (—X— X—) качка (б).
203
уменьшение амплитуды бортовой качки Ѳ при увеличении кли¬
ренса с; это уменьшение сопровождается некоторым смещением
зоны резонанса в сторону более высоких частот.
Максимумы амплитуд бортовой качки Ѳ наблюдаются в том
случае, если длина волны в 2—4 раза больше расстояния между
ДП корпусов (Вт— BJ.
На рис. 103 приведены амплитуды бортовой, килевой и верти¬
кальной качки катамарана «Гигант»; имеющего относительный
горизонтальный клиренс с = 1,07 Вх при различной балльности
Рис. 103. Характеристики бортовой (Ѳ), вертикальной (С)
и килевой (41) качки на нерегулярном волнении.
катамаран; — — — дуплус.
моря (пунктиром показаны данные о качке дуплуса равного
водоизмещения и длины без учета субгармонического резонанса).
В табл. 18 представлены некоторые данные об остойчивости
и качке краново-монтажных судов, демонстрирующие заметные
преимущества двухкорпусных судов этого назначения.
Для крановых судов с мощной гребной установкой и большим
числом автономных механизмов, обслуживающих главные ди¬
зель-генераторы, мощность, требующаяся при грузовых и монтаж¬
ных работах от судовой электростанции, может быть в 1,5 раза
больше мощности, необходимой в ходовом режиме.
Анализ режимов работы ГЭУ и электростанции крановых
судов показал, что при практически одинаковых маневренных
характеристиках ГЭУ переменно-постоянного тока оказывается
предпочтительной ввиду ее более высокой надежности и лучшего
использования дизель-генераторов. Это позволяет уменьшить
массу энергетической установки в целом по сравнению с ГЭУ
постоянного тока, сократить количество дизель-генераторов и
применить генераторы одного типа, при этом снижаются капи-
204
Таблица 18
Сравнение характеристик мореходности
Характеристики
Тип судна
Однокорпусное
Двухкорпусное
Коэффициент парусности
Относительная метацентрическая
высота
Восстанавливающий момент на
1 град, тс-м
Суммарный угол крена от груза,
ветра и качки при четырехбалльном
волнении моря, град
Амплитуда бортовой качки при ин¬
тенсивности волнения 7 баллов, град
Размах колебаний нока стрелы при
четырехбалльном волнении:
без груза на гаке, м
при обрыве груза, м
4,2—5,7
0,53—0,71
2900—4200
5,1—6,2
13—15
2—3,5
9
2,6—2,9
1,76—1,85
16 600—21 600
1,9—2,0
7,5—8,3
1 — 1,1
1,5
тальные затраты (на 7%) и эксплуатационные расходы на энерге¬
тическую установку (на 13%). При скорости 10—11 уз можно
рекомендовать следующие значения удельных характеристик
энергонасыщенности: по установленной мощности 0,6—0,8 кВт/тс,
по мощности, используемой для движения, — 0,5—0,6 кВт/тс.
При относительно небольшой установке электродвижения,
встречающейся на плавучих кранах, обычно ее используют для
крановых работ и сокращают за счет этого общую установленную
мощность.
Касаясь вопросов технологии постройки, следует отметить,
что большие трудности вызывает соединение корпусов на плаву
балками моста вследствие несовпадения упругих линий корпусов
по длине.
Для выполнения монтажных операций по соединению вырав¬
нивают водоизмещение отдельных корпусов, их крен и диффе¬
рент, а также упругие линии, что обеспечивается соответству¬
ющей балластировкой.
Особую сложность вызывает выравнивание упругих прогибов,
которые достигают 60—125 мм. Это объясняется спецификой
расположения масс отдельных корпусов.
При эксплуатации судна возникают дополнительные напряже¬
ния в соединительном мосту, вызванные изменениями упругих
линий корпусов. Нормальные напряжения достигают 300 кгс/см2,
касательные— 100 кгс/см2.
Опыт проектирования крановых судов показывает, что двух¬
корпусное судно обладает целым рядом эксплуатационных пре¬
имуществ по сравнению с однокорпусным, таких как:
205
большая площадь грузовой палубы и лучшее обслуживание
ее краном при его расположении у борта в средней части;
хорошая остойчивость, обеспечивающая малые углы крена
при работе крана без противокреновых устройств, перегрузку
и перевозку металлоконструкций;
меньшую массу верхнего строения и большой полезный вылет
при расположении крана у борта;
лучшее поведение на волнении, что приводит к малым пере¬
мещениям нока стрелы и меньшим углам раскачивания холостых
подвесок;
лучшие ходовые, мореходные и маневренные качества, учи¬
тывая ограниченную осадку, частые швартовки, заходы в узкости,
работу у морских оснований, возможности плавания при повы¬
шенной балльности моря, потери рабочего времени судна по
условиям погоды.
Высокая экономическая эффективность применения двух¬
корпусных краново-монтажных судов подтверждается данными,
приведенными в табл. 19.
Таблица 19
Экономическая эффективность краново-монтажных катамаранов
Показатели
«50 лет КПСС«
«Кёр-оглы»
«Илья
Муромец»
Годовой объем работ (в единицах
смонтированных оснований) при глу¬
бине моря, м
30
6
27
45
60
—
10
20
100
—
—
18
Годовой экономический эффект,
млн. руб.
0,5
1,7
4,0
§ 6.4. Опыт проектирования и эксплуатации
рыбопромысловых катамаранов,
построенных с использованием корпусов СРТ
В последние годы наблюдается непрерывный рост мощности глав¬
ных двигателей рыбопромысловых судов, сопровождающийся
увеличением тяговых характеристик промысловых механизмов,
ростом их числа, габаритов и массы.
Увеличение габаритов и массы промысловых (и перерабаты¬
вающих) механизмов в сочетании с требованиями о большой про¬
тяженности и площади промысловой палубы создает при проекти¬
ровании промысловых судов, во всяком случае малых и средних,
затруднения, связанные с размещением промыслового и техноло¬
гического оборудования и с обеспечением остойчивости судов.
2С6
Проектирование двухкорпусного траулера-сейнера «Экспери¬
мент» велось в 1965—1966 гг. Целью создания судна являлась
проверка на практике предположений об особых преимуществах
рыбопромысловых катамаранов. К таким преимуществам отно¬
сятся следующие:
повышенная безопасность плавания благодаря высокой остой¬
чивости, а также большой живучести дублированных энергети¬
ческой установки и рулевого устройства, расположенных в раз¬
ных корпусах;
большие рабочие площадки на судах сравнительно неболь¬
шого водоизмещения вследствие значительных удельных площа¬
дей палуб и объемов помещений;
хорошие маневренные качества благодаря большому от¬
стоянию рулей и винтов от вертикальной оси;
увеличенная тяга при постоянной мощности вследствие боль¬
шой удельной площади дисков винтов.
Наряду с этим, постройка и испытания судна должны были
дать ответ на вопросы о значительности предполагаемых недо¬
статков двухкорпусных судов: резкая бортовая качка и наличие
ударов волн в нижнюю часть соединительной конструкции.
Поскольку до постройки и испытания «Эксперимента» у части
специалистов имелись большие сомнения в возможности создания
работоспособного морского промыслового катамарана, то при его
проектировании, с целью снижения стоимости постройки, не были
предусмотрены ни технологическое оборудование, ни специальные
помещения для обработки улова.
Двухкорпусный морозильный траулер-сейнер «Эксперимент-2»,
построенный в 1973 г., предназначался для продолжения экспери¬
ментальной проверки и изучения мореходных, прочностных и про¬
мысловых качеств двухкорпусных судов, а также проверки возмож¬
ности создания на среднетоннажном судне технологического цеха
сравнительно большой производительности (см. рис. 4 введения).
На судне «Эксперимент-2» предусмотрен технологический ком¬
плекс, состоящий из:
бункеров накопления и предварительного охлаждения рыбы;
рыбцеха;
морозильного отделения;
транспортеров готовой продукции.
Производительность комплекса по заморозке составляет до
20 т/сут.
Поскольку «Эксперимент» и «Эксперимент-2» создавались на
базе корпусов средних рыболовных траулеров, главные размере¬
ния и характеристики этих судов в значительной мере определены
размерениями корпусов (табл. 20).
Длина рассматриваемых судов определялась длиной корпусов,
подлежащих переоборудованию, а максимальная ширина — воз¬
можностью постановки судов в плавучие доки судоремонтных
предприятий, ведущих ремонт среднетоннажных судов.
207
Таблица 20
Основные характеристики катамаранов, построенных из корпусов СРТ
Характеристики
«Эксперимент»
«Эксперимент-2»
Длина наибольшая, м
Ширина общая, м
» одного корпуса, м
Высота борта до верхней палубы, м
Осадка по грузовую марку
Водоизмещение при осадке по гру¬
зовую марку, тс
Мощность главных двигателей,
л. с.
Скорость на испытаниях, уз
40
19
7,3
4,08
3,1
980
2X300
9
41,5
19
7,3
4,5
3,6
1200
2X540
10
Высота борта «Эксперимента» определялась, помимо прочих
условий, минимальным вертикальным клиренсом (отстоянием
нижней кромки соединительной конструкции от ватерлинии),
который на основании предварительных исследований был принят
равным 1,1 м.
Предполагалось, что высота борта «Эксперимента-2», несмотря
на некоторую разницу в водоизмещении, будет такой же, как
и у «Эксперимента». Однако в связи с тем, что водоизмещение
порожнего судна превысило проектируемую величину, надводный
борт ДМТС несколько меньше, чем ДТС. Вместе с тем вертикаль¬
ный клиренс ДМТС превышает клиренс ДТС на 500 мм.
Все жилые, служебные и бытовые помещения рассматриваемых
судов расположены выше верхней палубы. Экипаж размещен
в одно- и двухместных каютах.
На обоих судах рулевая рубка совмещена со штурманской
и имеет круговой обзор, а на «Эксперименте-2» в кормовой части
рулевой рубки размещен также пост управления ваерной лебедкой.
Верхняя палуба с каждого борта вдоль рубки свободна и
служит для работы с орудиями лова.
В кормовой части каждого корпуса имеется слип; между
слипами (на ДТС—на верхней палубе, на ДМТС—на палубе
надстройки) размещена площадка для кошелькового невода.
Большая ширина судов позволила расположить параллельно
друг другу траловые палубы и рубку. Это обеспечило длину
каждой из двух траловых палуб около 25 м при максимальной
длине судов 40 и 41,5 м, что превосходит длину траловой палубы
таких крупнотоннажных судов, как БМРТ проекта 394 и РТМ
типа «Тропик».
Как на «Эксперименте», так и на «Эксперименте-2» применены
схемы тралового лова с раздельными лебедками, при которых
отдача и выборка ваеров, постоянно скрепленных с траловыми
досками, производится ваерной лебедкой, а подъем сетной части
208
трала и кутка с рыбой по слипу—кабельно-вытяжными лебедками
на ДТС «Эксперимент» и раздельными кабельными и вытяжными
лебедками на ДМТС «Эксперимент-2». Работой кабельных и вы¬
тяжных лебедок на ДМТС «Эксперимент-2» управляют дистан¬
ционно с постов управления, размещенных на крыльях ходового
мостика.
Промысловые устройства катамаранов «Эксперимент» и «Экспе¬
римент-2» позволяют осуществлять траловый и кошельковый
лов рыбы, причем орудия лова для обоих методов находятся на
борту судна, готовые к использованию, и переход от одного ме¬
тода к другому осуществляется на первом за 1 ч, а на втором —
за 3—4 ч. Увеличение времени перехода на ДМТС связано
с тем, что в качестве сейнерной лебедки используется ваерная
и при большом количестве намотанного ваера его необходимо
смотать с одного из барабанов лебедки. Если на каждом барабане
ваерной лебедки имеется по 900 м ваера, намотка стяжного троса
возможна поверх ваера, что уменьшает время перехода с трало¬
вого на кошельковый лов до 1—1,5 ч.
В качестве ваерных лебедок использованы траловые лебедки
судов типа СРТМ. Кабельно-вытяжные лебедки «Эксперимента»
представляют собой переоборудованные траловые лебедки судов
типа СРТ, а кабельные и вытяжные лебедки «Эксперимента-2» —
гидравлические механизмы, специально спроектированные для
этого судна.
При проектировании промысловой схемы тралового лова
траулера «Эксперимент-2» использован принцип «каждой снасти —
свой механизм», что позволяет сократить время промысловых
операций. Однако это приводит к установке большого количества
лебедок (восемь лебедок на ДМТС против двух на ДТС).
Перемещение траловых досок с одного борта на другой на
обоих катамаранах производится специальным устройством. Под¬
весные ваерные блоки установлены на каретках, которые при
помощи специальных лебедок и системы тросов перемещаются
по направляющим от одного слипа к другому.
Для работы с кошельковым неводом оба судна оборудованы
подвесной неводовыборочной машиной ПМВК-7 и вьюшкой стяж¬
ного троса.
В отличие от большинства среднетоннажных судов, где опера¬
ции по обработке улова частично или полностью выполняются на
открытой палубе, на судне «Эксперимент-2» вся обработка улова
ведется в закрытом помещении. Общая площадь рыбцеха и мо¬
розильного отделения составляет около 100 ма.
С промысловой палубы рыба сливается в бункера для накоп¬
ления и предварительного охлаждения, откуда ковшовыми транс¬
портерами подается в рыбцех на сортировочный транспортер,
затем на мойку и замораживание в два скороморозильных агре¬
гата МАР-8АМ. В соответствии с техническим заданием на проек¬
тирование, разделка рыбы не предусматривается. В случае улова
209
крупных экземпляров, которые нельзя направить на замораживание
целиком, предусмотрена линия ручной разделки на четыре места.
Замороженная рыба укладывается в короба и по транспортерам
готовой продукции (продольному и поперечному) и склизам
направляется в трюмы.
Соединительные конструкции судов несколько отличаются
одна от другой. В том и другом проекте поперечная прочность
судна обеспечивается за счет переборок рубки 1-го яруса, опи¬
рающихся на соответствующие жесткие связи (переборки и полу¬
переборки) в корпусах. На первом судне, кроме того, в обеспече¬
нии общей поперечной прочности участвует объемный «мост»,
простирающийся почти на всю длину судна. Конструкция «моста»
аналогична конструкции двойного дна.
Результаты исследования прочности позволили отказаться от
объемного моста на втором судне. Это дало возможность умень¬
шить массу соединительной конструкции, улучшить ее техноло¬
гичность и увеличить вертикальный клиренс. Кроме того, выпол¬
нение нижней зашивки в виде арки со сравнительно небольшим
радиусом кривизны значительно повысило несущую способность
при восприятии ударов волны.
Рулевое устройство обоих катамаранов включает по две не
связанные между собой1 рулевые машины (электрические на
первом и электрогидравлические на втором) с двумя постами
управления в рулевой рубке. В зависимости от режима маневри¬
рования может осуществляться перекладка одного или обоих
рулей судна.
Для обеспечения операции по постановке на якорь и съемке
с якоря на каждом из корпусов катамаранов установлено по якор¬
ному механизму (на первом—брашпиль, на втором—шпиль).
Из специальных устройств на втором судне установлены:
носовое подруливающее устройство типа «винт в трубе», рас¬
положенное в правом корпусе катамарана;
носовое подводное крыло — успокоитель килевой качки.
Установка одного носового подруливающего устройства обус¬
ловлена спецификой схемы кошелькового лова с выборкой не¬
вода с кормы, при которой работа главного двигателя левого
корпуса создает крутящий момент, для компенсации которого
служит подруливающее устройство.
В качестве главных двигателей на рассматриваемых судах
установлены дизели тех же марок, что и на СРТ, из корпусов
которых они построены. На первом катамаране двигатели
8НФДЗ-6 мощностью 300 л. с., а на втором—6НФД48 мощ¬
ностью 540 л. с.
Энергетическая установка катамарана «Эксперимент-2» авто¬
матизирована на класс А2 Регистра СССР, позволяющий не иметь
1 Это позволяет применять весьма эффективный способ торможения путем
перекладки рулей на равные углы в разные стороны. — Прим, научи, ред.
210
постоянной вахты в машинных отделениях. Управление меха¬
низмами и судовой электростанцией и контроль осуществляются
из центрального поста управления (ЦПУ), который расположен
в правом машинном отделении. Здесь размещены центральный
пульт дистанционного контроля и управления энергетической
установкой и ГРЩ. Главные двигатели оборудованы системой
дистанционного автоматического управления из рулевой рубки
и ЦПУ.
ДМТС «Эксперимент-2» имеет производственную холодильную
установку суммарной холодопроизводительностью 138 000ккал/ч
при температуре испарения —40° С, которая обеспечивает работу
льдогенераторов на бункера предварительного охлаждения рыбы,
заморозку 15—20 т рыбы в сутки и сохранность замороженной
продукции в трюмах при температуре —25° С.
Наличие двух слипов, а также специального устройства для
перемещения подвесных ваерных блоков с одного борта на другой
позволяет вести работу попеременно двумя тралами.
Промысловые катамараны «Эксперимент» и «Эксперимент-2»
после постройки были подвергнуты разносторонним испытаниям,
во время которых исследовались мореходные, прочностные, про¬
мысловые и другие качества этих судов (о прочностных испыта¬
ниях см. выше).
Мореходные и прочностные испытания, а также дальнейшая
эксплуатация выявили, что эти катамараны, в отличие от одно¬
корпусных судов, имеют возможность:
ходить лагом к штормовой волне, испытывая лишь незначи¬
тельную качку, при этом заливание и забрызгивание судна не¬
большие;
следовать на попутном волнении при сильно взволнованном
море практически без качки, без заливания и забрызгивания па¬
лубы, не подвергаясь опасности опрокидывания;
при сильно взволнованном море находиться в свободном дрейфе
при неработающих главных двигателях, испытывая при этом
незначительную качку и небольшое заливание и забрызгивание
палубы;
производить лов рыбы тралом (схема «дубль») на волнении
моря силой до 5 баллов без ограничения курсовых углов и про¬
изводить обработку улова в рыбцехе (для второго судна) на волне¬
нии силой до 7 баллов, также без ограничения курсовых углов;
концентрировать и перемещать, исходя из производственной
необходимости, грузы как на рабочей промысловой палубе, так
и на вышерасположенных палубах;
производить операции по ремонту и подгонке любых орудий
лова, в том числе и кошелькового невода, на промысловой па¬
лубе судна.
Каждое из этих качеств раскрывает новые широкие возмож¬
ности эксплуатации промысловых судов, и все эти преимущества
недоступны для среднетоннажного однокорпусного судна.
211
Большая поперечная остойчивость катамаранов обеспечивает
бортовую качку с малым периодом и очень малой ампли¬
тудой.
На пятибалльном волнении при положении судна лагом
к ветру средний угол крена составил у первого судна 2,7° при
периоде качки около 5 с. При тех же условиях средний угол крена
второго судна составил 4,09° при периоде около 5 с. Некоторое
ухудшение параметров качки по сравнению с первым катамараном
следует отнести за счет некоторого уменьшения начальной по¬
перечной метацентрической высоты.
Предметом особого беспокойства при проектировании первого
катамарана были возможные последствия ударов .волн в нижнюю
зашивку соединительной конструкции. На основании модельных
испытаний в открытом водоеме при расчете прочности нижней
подшивки моста были приняты значения давления от ударов в но¬
совой части — 5,5 кгс/см2 и в остальных районах — 3,0 кгс/см2.
Зафиксированные во время испытаний давления не превышали
2,7 кгс/см2. Однако воздействие ударов значительно меньшей
интенсивности (порядка 0,3 кгс/см2), приходящихся на большие
поверхности соединительной конструкции, вызывало общее со¬
трясение судна и неприятно воспринималось личным сос¬
тавом.
С целью снижения неблагоприятного воздействия ударов волны
в мост в одном из рейсов первый катамаран был оборудован носо¬
вым подводным крылом — успокоителем килевой качки. Испыта¬
ния с крылом показали значительное умерение килевой качки
и уменьшение количества и интенсивности ударов в мост.
Установка такого устройства в сочетании с увеличением
вертикального клиренса и приданием обшивке цилиндрической
формы с небольшим радиусом кривизны позволили уменьшить
количество ударов до трех ударов за 25 мин измерений при пяти¬
балльном волнении против 15 ударов в минуту на первом
судне.
При этом максимальные давления не превышали 1,0 кгс/см2,
а удары, вызывающие общее сотрясение корпуса, которое плохо
воспринимается личным составом, не наблюдались совсем.
Кроме того, на втором катамаране имело место смещение
максимума давления от ударов волны в кормовую часть судна,
в то время как на первом удары наибольшей силы отмечались
в носовой части соединительной конструкции. Это следствие
установки носового крыла.
Прочностные испытания, проведенные на катамаранах, пока¬
зали, что прочность соединительной конструкции судов при дей¬
ствии внешних волновых нагрузок любой балльности обеспечена
и имеет запас. Максимальные напряжения в связях на ДТС «Экспе¬
римент» отмечены на курсовых углах «навстречу волне» и «лагом
к волне», а на ДМТС «Эксперимент-2» — при ходе лагом к волне
и косым курсом к фронту волны.
212
Измерения напряжений в связях носового крыла показали,
что нагрузка на крыло не превышает 50 тс, что хорошо согла¬
суется с данными расчетов.
Катамараны «Эксперимент» и «Эксперимент-2» участвуют в про¬
ведении различного рода экспериментов и исследований с различ¬
ными орудиями лова, промысловыми механизмами, приборами.
Добыча рыбы является для этих судов делом второстепенным.
Вследствие этого судить об эффективности судов катамаранной
архитектуры по результатам работы рассматриваемых траулеров
в сравнении с однокорпусными очень трудно.
Практически первый катамаран работал в промысловом ре¬
жиме только во время экспериментально-промыслового рейса
в мае—сентябре 1969 г.
Сравнение работы ДТС на траловом лове проводилось с суда¬
ми типа СРТ, имеющими двигатели мощностью 300—400 л. с.
и типа СРТМ с двигателями 800 л. с., т. е. с судами, работающими
по бортовой схеме траления.
В среднем за весь период рейса суточный вылов у катамарана
составил 142% среднего вылова у судов типа СРТ, работающих
рядом с ним. При этом необходимо учитывать, что боль¬
шая парусность «Эксперимента» при недостаточной мощности глав¬
ных двигателей позволяла использовать преимущества схемы
«дубль» только при тихой погоде, когда судно могло идти с тралом
против ветра. По этой причине при тихой погоде выловы у катама¬
рана составили 164% от вылова у судов типа СРТ. При этом, имея
вылов за одно траление в среднем выше, чем у СРТ, на 23%, ДТС
«Эксперимент» производил тралений в сутки на 33% больше.
Имея меньшую мощность главных двигателей и худшие тяго¬
вые характеристики, чем СРТМ-800, первый катамаран имел
вылов за одно траление на 4% меньше, чем у СРТМ. Однако за
счет увеличения количества тралений на 50% вылов его за сутки
промысла составил 142% от вылова у СРТМ-800.
Промысловые испытания ДМТС «Экс пер и мент-2» к моменту
написания данной книги еще не были закончены.
Во время проведения мореходных и прочностных испытаний
судно кратковременно работало в промысловом режиме на тра¬
ловом лове. Выловы за одно траление и за один час траления
составили соответственно на 40 и на 30% больше, чем у ДТС
«Эксперимент».
§ 6.5. Опыт проектирования малотоннажных
промысловых катамаранов
и судов с аутригерами
На главные размерения и архитектуру промыслового судна ока¬
зывают решающее влияние вид лова, способы переработки улова
и передачи его на базу. В табл. 21 приведены основные характе-
213
Т аблица '21
Основные характеристики промысловых двухкорпусных
судов малого и среднего водоизмещения
Характеристики
РБК
тдк
КРБ-К
БТБ-К
Длина, м:
наибольшая
25,5
39,0
25,5
14,3
расчетная
23,5
35,0
23,5
13,2
Ширина, м:
общая
11,5
19,0
П,5
6,0
одного корпуса
4,25
6,7
4,25
2,27
Высота борта, м
3,34
3,65
3,34
2,25
Осадка средняя с гру-
2,08
2,65
2,58
1,27
зом, м
Водоизмещение с гру-
308,0
880,0
378
45,0
ЗОМ, тс
Дедвейт, тс
66,6
262,5
с тунобо-
тами
83,3
2X30,
11,6
2X8,
Объем трюмов, м3
2X45,6
(рефриже¬
раторные)
(6 чанов по
9,0, рефри¬
жераторные)
(рефриже¬
раторные)
(изотерми¬
ческие)
Мощность главных
двигателей, л. с.
2X300
2X422
2X300
2Х 145 или
2X90
Скорость, уз
9,3
10,8
9,3
9,5 или 9,0
Автономность, сут
11,5
25
18
3
Дальность плавания,
мили
200
Не ограни¬
чена
200
50
Класс Регистра
КИ Л2 11 А2
(рыбо¬
ловное)
КМ 1 А2
(рыбо¬
ловное)
КМ Л 21 А2
(рыбо¬
ловное)
кмш
(рыбо¬
ловное)
Экипаж, чел.
13
42
16—18
5—6
Орудия лова
Тралы, ко¬
шельковый
невод
Два туно-
бота, ярус
Тралы, уст¬
ройство для
лова креве¬
ток, элек¬
трические
тр алы
Ярус
Промысловые механиз-
ЛГТрС,
Ярусоподъ-
ЛГТрС,
Линия
мы
МПВК-7,
барабаны
емкая
лебедка
барабаны
«Марлин-2»
Рыбопоисковые при-
Гидроло-
Эхолот
Эхолот
Эхолот
боры
катор
«Сарган»
«Судак»
«Судак»
«Судак»
214
Продолжение табл. 21
Характеристики
т-кт
МРБ-К,
вариант 1
МРБ-К,
вариант 2
МРБ-К,
вариант 3
Длина, м:
наибольшая
14,3
—
—
14,3
расчетная
13,2
15,1
15,1
13,2
Ширина, м:
общая
6,0
9,0
9,0
8,0
одного корпуса
2,27
3,0
3,0
2,27
Высота борта, м
2,25
2,3
2,3
2,25
Осадка средняя с гру-
1,40
1,42
1,28
1,71
зом, м
Водоизмещение с гру-
52,1
71,0
64,0
64,0
ЗОМ, тс
Дедвейт, тс
10,0
24,0
18,0
22,0
Объем трюмов, м3
8+6
Рефриже¬
раторные
—
—
2Х 13
Мощность главных
2X145
2Х 145
2X90
2Х 150
двигателей, л. с.
Скорость, уз
—9,3
9,0
8,2
9,2
Автономность, сут
3
6
2
5
Дальность плавания,
50
100
100
100
МИЛИ
Класс Регистра
КМП
(рыбо¬
ловное)
КМ Л2 11 А2
(рыбо¬
ловное)
КМ Л2 11 А2
(рыбо¬
ловное)
КМ ЛЗ 1 А2
(рыбо¬
ловное)
Экипаж, чел.
5—6
5
8
6—8
Орудия лова
Ярус, тра¬
лы
Трал
Трал,
ярус, снюр-
ревод, ко¬
шельковый
невод
Тралы
Промысловые механиз-
Линия
Гидравли-
Гидравли-
Две гидрав-
мы
«Марлин-2»,
2 одноба¬
рабанные
ЛГТР
ческая тра¬
ловая ле¬
бедка и
барабан
ческая тра¬
ловая ле¬
бедка, ба¬
рабан,
пмвк
лические
однобара¬
банные
ЛГТр, ду¬
га, барабан
Рыбопоисковые при-
Эхолот
Эхолот
Эхолот
Эхолот
боры
«Судак»
«Судак»
«Судак»,
гидроло¬
катор
«Омуль»
«Судак»
215
ристики некоторых промысловых двухкорпусных судов, имеющих
одинаковые корпуса.
Величину годового улова определяют условия эксплуатации
судна — организация промысла, район плавания и гидрометео¬
условия. Чем меньше промысловое судно, тем это влияние сильнее.
Главные размерения, архитектура и условия эксплуатации
оказывают решающее влияние на рентабельность работы промыс¬
лового судна через эксплуатационные расходы и величину годо¬
вого улова.
Положительные и отрицательные качества катамаранов свой¬
ственны и судам с аутригерами, но в иной степени. Увеличение
удельной стоимости строительства и удельных эксплуатационных
расходов у них меньше, чем у катамаранов; уменьшение относи¬
тельной грузоподъемности, как правило, невелико; горизонталь¬
ная качка и сколько-нибудь значительные удары в площадку
аутригера при натурных испытаниях не были зафиксированы.
Годовой экономический эффект является определяющим пока¬
зателем при решении вопроса о целесообразности внедрения
промыслового судна того или иного архитектурного типа и назна¬
чения:
Э = [(Сх КаЕн) — (С2 КХЕН)] В2 4- (Ц2Е2 — НА), (159)
где Сх, С2 — себестоимость 1 ц продукции базового и внедряе¬
мого вариантов; Кх, К2 — капиталовложения на 1 ц продукции
базового и внедряемого вариантов; Ен — нормативный коэффи¬
циент экономической эффективности; Вх, В2—годовой выпуск
продукции базового и внедряемого вариантов; Цѵ Ц2 — стои¬
мость 1 ц продукции базового и внедряемого вариантов.
Архитектура и главные размерения внедряемого промыслового
судна должны выбираться с учетом их влияния на величины,
входящие в эту формулу. Анализ формулы показывает, что наи¬
большее влияние на экономический эффект оказывает годовой
выпуск продукции В 2, от которого зависят удельные себестои¬
мость С2 и капиталовложения К2-
Указанные выше положительные качества катамаранов и судов
с аутригерами могут быть использованы для увеличения годового
выпуска продукции, а также для улучшения ассортимента продук¬
ции (Ц2, Ц,), уменьшения капиталовложений (К2) и себестои¬
мости (С2).
В табл. 22 приведены относительные массы укрупненных ста¬
тей нагрузки малых и средних катамаранов.
Из таблицы видно, что водоизмещение судов-катамаранов
в порожнем состоянии на 3—4% больше, чем у промысловых
однокорпусных судов близких водоизмещений [51]. Удельная
масса машинных установок (кроме судна БТБ-К, не имеющего
дизель-генератора) также больше, чем у промысловых одно¬
корпусных судов, близких по назначению.
216
Таблица 22
Измерители статей нагрузки промысловых малых катамаранов
Суда
Корпус и обо¬
рудование
с судовыми
устройствами
Машинная
установка
Промысловое
устройство
и технологи¬
ческое обо¬
рудование
Навига¬
ционное
и электро-
радиообо-
рудованне
Масса
порожнего
судна
Дед-
вейт
А
D
₽м
^м
Рто
D
₽то
р
*эр
₽эР
^пор
впор
Dw
D
2LB1H
D
N
N
D
N
D
КРБ-К
0,461
0,177
0,149
0,094
0,080
0,050
0,03
0,053
0,720
0,280
РБ-К
0,546
0,172
0,145
0,075
0,058
0,030
0,034
0,104
0,783
0,246
0,217
БТБ-К
0,482
0,112
0,160
0,025
0,049
0,008
0,051
0,52
0,742
0,173
0,258
Массовые характеристики двухкорпусных судов в первом
приближении определялись по данным о массе корпуса одно¬
корпусных промысловых судов [17, 27] и уточнялись после рас¬
чета прочности.
Расчеты поперечной прочности выполнялись по методике,
дающей хорошую сходимость теоретически определенных напря¬
жений с полученными при испы¬
таниях. В табл. 23 приведены
напряжения в соединительной
конструкции БТБ-К — расчет¬
ные и определенные при испы¬
таниях модели из органического
стекла.
Рабочий проект рыболовного
бота-катамарана (РБ-К) явился
логическим завершением прора¬
ботки технического задания
на судно катамаранного типа
для рыбной промышленности
в 1966 г. В этой проработке был
рассмотрен ряд траулеров от
малотоннажных до крупнотон¬
нажных включительно и расче¬
тами установлено, что только
Таблица 23
Напряжения в прочных связях
катамарана БТБ-К
Наименование
напряжений
Напряжения,
кгс/см2
рас¬
четные
по данным
опыта
Нормальные
при симмет-
345
309
ричном изгибе
при кососим-
452
367
метричном
изгибе
Касательные при
278
271
кососиммет¬
ричном изгибе
мало- и среднетоннажные двухкорпусные траулеры могут пре¬
взойти однокорпусные суда близких водоизмещений по эксплуа¬
тационно-экономическим показателям [29, 50].
РБ-К предназначен для ведения автономного и экспедицион¬
ного лова рыбы в морях, омывающих Советский Союз, выпуска
презервов и охлажденной рыбопродукции. Хранение рыбопро¬
дукции предусмотрено в рефрижераторных трюмах. Траловое
устройство типа «дубль» обеспечивает ведение непрерывного тра¬
ления. Подъем тралов предусмотрен по слипам с использованием
217
сетных барабанов. РБ-К может быть переоборудован в порту
для ведения кошелькового лова. Сравнительными технико-эко¬
номическими расчетами было установлено, что при работе в Бал¬
тийском, Баренцевом, Охотском и Японском морях РБ-К бу¬
дет иметь высокую рентабельность и малые сроки окупаемости
капиталовложений.
Было установлено, что использование на тунобазе типа «Ле¬
нинский луч» четырех ТДК с указанными в табл. 21 характери-
Рис. 104. Вид сбоку промыслового катамарана БТБ-К-
1 — кладовая; 2 — грузовой трюм 2 X 8 м3; 3 — машинное отделение; 4 — куб¬
рик 2 X 8 м3; 5 — румпельное отделение; 6 — рулевая рубка; 7 — камбуз.
стиками обеспечивает эффективную работу экспедиции в целом,
особенно при хранении улова в охлажденной морской воде.
На базе технического проекта РБ-К в 1971 г. был разработан
технический проект креветочного варианта рыболовного бота-
катамарана (КРБ-К). Бот предназначен для ведения автономного
и экспедиционного тралового электролова креветки в пределах
континентального шельфа СССР по двухбортной схеме траления,
тралового^ лова рыбы, выпуска мороженой продукции и муки.
Траловое устройство принципиально не отличается от устройства
на РБ-К- Сравнительными технико-экономическими расчетами
было установлено, что бот даст условный годовой экономический
эффект в размере 12,5 тыс. руб. при смешанной работе в течение
года.
На основании выполненной проработки была дана рекомен¬
дация о целесообразности внедрения в колхозных рыбодобыва¬
ющих организациях судов с основными характеристиками, при¬
веденными в табл. 24 (МРБ-К, вариант 1 — для Балтийского
моря, МРБ-К, вариант 2 — для морей Дальнего Востока, рис. 104).
218
Таблица 24
Главные размерения и основные характеристики судов с аутригерами
Характеристики
МРБ-К,
вариант 4
МПБ-К
мс-к
СРТ-К
Длина наибольшая,
м:
основного корпуса
12,6
10,7
10,7
39,15
аутригера
11,0
5,39
8,06
25,0
Длина расчетная, м:
основного корпуса
11,6
9,4
9,4
34,80
аутригера
10,0
5,06
—
23,0
Ширина, м:
общая
6,6
5,38
6,20
14,0
основного корпуса
3,5
3,0
3,0
7,3
аутригера
1,0
0,76
1,68
3,5
Высота борта, м:
общая
1,3
1,20
1,35
4,30
основного корпуса
1,3
1,20
1,20
3,48
аутригера
0,9
1,0
1,21
4,30
Осадка с грузом сред¬
няя, м:
основного корпуса
0,87
0,85
0,97
2,73
аутригера
0,47
0,65
0,75
2,73
Водоизмещение, тс:
с грузом
21,0
13,6
19,0
510
аутригера
2,8
2,6
5,2
85
Дедвейт, тс
7,1
2,29
7,9
165
Объем трюмов, м3
—
4,0
6,3
180
Мощность главного
55
55
55
300—400
двигателя, л. с.
Скорость, уз
7,3
6,75
7,0
9,0
Автономность, сут
4
1,5
1,5
24
Район плавания, ми-
20
20
20
Неограни-
ЛИ
Класс Регистра
М
М
М
ченный
КМ Л2
Экипаж, чсл.
3-8
3—6
5—6
(рыболов¬
ное)
23
Орудия лова
Ставные и
Ярус,
Кошелько-
Кошелько-
закидные
невода, се¬
ти, ярус,
ловушки,
трал для
близнецо¬
вого лова
близнецо¬
вый трал
вый невод,
трал для
близнецо¬
вого лова
вый невод,
тралы
219
Продолжение табл. 24
Характеристики
МРБ-К,
вариант 4
МПБ-К
мс-к
CPT-K
Промысловые меха-
ханизмы
Рыбопоисковые при¬
боры
Однобара¬
банная
ЛГТр, сет¬
ной бара¬
бан-рол
Эхолот
«Язь»
Однобара¬
банная
ЛГТр,
ярусоподъ¬
емная гид¬
равлическая
лебедка
Две одно¬
барабанные
ЛГТр,
ПМВК-4
Гидролока¬
тор «Лещ»
ЛЭТр,
шпиль,
ПМВК-7,
ПМВК-5
Эхолот
«Судак»,
гидролока¬
тор «Омуль»
В 1973 г. было выполнено проектное исследование варианта
катамарана для Балтийского моря (табл. 23—МРБ-К, вариант 3).
Была рассмотрена возможность создания ПДС в корпусах БТБ-К
с использованием машинных установок МСТБ-150 и промысло¬
вого устройства СТБК.
Была также установлена возможность унификации корпусов
для Балтийского моря и морей Дальнего Востока. Технико¬
экономические расчеты показали, что МРБ-К для Балтийского
моря будет экономически более эффективен, чем эксплуатиру¬
ющиеся однокорпусные суда типов СЧС, СТБ, РБ, ТБ и МРТ;
МРБ-К для морей Дальнего Востока не будет эффективнее
МРС-80, так как ожидается больший срок окупаемости капитало¬
вложений (из-за удаленности района промысла) и внедрение ката¬
маранов можно считать целесообразным лишь с точки зрения
обеспечения безопасности мореплавания, санитарных норм для
экипажа и выполнения требований по незагрязнению моря. Для
внутренних морей, крупных озер и водохранилищ не представ¬
ляется возможным создать катамаран, обеспечивающий требуемый
срок окупаемости капиталовложений, так как строительная стои¬
мость такого судна превышает 30—35 тыс. руб. Поэтому было
рекомендовано судно с аутригером (табл. 24), которое может
иметь строительную стоимость не более указанной выше.
Первые данные о поведении судна с аутригером на волнении
были получены во время промысловых испытаний МПБ-К в Бал¬
тийском море. Испытания проводились при волнении моря около
3 баллов (высота волны до 1 м). Для МТРБ-55, на базе которого
создано судно с аутригером, пребывание на таком волнении,
особенно лагом к волне, было бы небезопасным. Заливаемости
палубы основного корпуса МПБ-К не наблюдалось при всех
курсовых углах, угол крена не превышал 7,5°. Имела место зали-
ваемость площадки аутригера из-за отсутствия у него полубака
и наличия отверстий в соединительной балке.
220
Управляемость и устойчивость на курсе судов с аутригерами
была впервые изучена при испытаниях МПБ-К в 1973 г. Испы¬
тания показали хорошую устойчивость МПБ-К на курсе. Для
обеспечения прямолинейного движения руль МПБ-К перекла¬
дывается на 2—3° в сторону борта, противоположного располо¬
жению аутригера. Управляемость МПБ-К на переднем ходу
хорошая. Диаметр циркуляции на борт, где укреплен аутригер,
не превышает 2,5 длины корпуса, а на борт, противоположный
аутригеру, не более четырех длин корпуса.
Испытания выявили, что управление МПБ-К на заднем ходу
затруднено; при полной перекладке руля на борт, противополож¬
ный аутригеру, обеспечивалось движение на прямом курсе, но
добиться устойчивой циркуляции не удалось.
Период собственных бортовых колебаний МПБ-К равен 3 с,
т. е. при испытаниях волнение было близко к резонансному.
Испытания подтвердили хорошую мореходность подобных судов
и, по мнению команды, лов на судне с аутригером можно вести
при ветровом волнении 4—5 баллов. Приемная комиссия назна¬
чила МПБ-К район плавания с удалением от берега до 20 миль.
МТРБ-55, на базе которого построено судно с аутригером, имеет
район плавания с удалением от берега до 5 миль и ограничение
по ветру до 3 баллов.
В основном корпусе размещены все судовые помещения, а на
его палубе—промысловые механизмы и устройства. На пло¬
щадке аутригера расположен поворотный стол для укладки
корзин при выметывании и выбирании яруса. Для удобства ра¬
боты с близнецовыми тралами два опытных МПБ-К были спроек¬
тированы с расположением аутригера с левого и правого бортов
основного корпуса.
Технико-экономическими расчетами установлено, что пере-,
оборудование СРТ в сейнер-траулер экономически целесообразно,
особенно в случае использования их на экспедиционном кошель¬
ковом промысле.
В качестве основного корпуса МС-К будет использовано
серийно строящееся судно МРБ-55 (рис. 105).
Судно предназначается для ведения кошелькового и близне¬
цового тралового пелагического лова сига и форели на озере
Севан. В проекте учитываются результаты испытаний опытных
МПБ-К. Для обеспечения транспортировки МС-К по железной
дороге соединительные балки и промысловая площадка крепятся
к основному корпусу с помощью болтов. Верхняя часть рулевой
рубки также имеет съемную конструкцию.
Определение главных размерений судна с аутригером прин¬
ципиально отличается. Уравнение плавучести приобретает сле¬
дующий вид: + (160)
где — водоизмещение основного корпуса, м3; Ѵа—водоизме¬
щение аутригера, м3.
221
222
Рис. 105. Схема общего расположения судна с аутригером (МС-К): а — вид сбоку; б — план палубы.
223
Кроме того, возникает необходимость в составлении дополни¬
тельного уравнения поперечной посадки
Da(b Ур),
(161)
здесь £>і— водоизмещение основного корпуса, тс; уя — ордината
ЦТ судна, м (от ДП основного корпуса); Da— водоизмещение
аутригера, тс; b — расстояние между ЦВ основного корпуса
и аутригера, м. Необходимо также составить уравнение остой-
Рис. 106. Результаты буксировочных испытаний модели суд¬
на с аутригером.
/ сопротивление основного корпуса; 2 — сопротивление аутри¬
гера; з — сопротивление судна в сборе; 4 — коэффициент влияния
аутригера Ка-
чивости на больших углах крена для случая выхода аутригера
из воды, являющегося наихудшим:
М <О(/фі — aesin Ѳ) + £>az/c3cos0, (162)
где — кренящий момент, тс; /ф1 — плечо остойчивости формы
основного корпуса, соответствующее водоизмещению D и углу
крена Ѳ, м; аѳ = гд — zcl — возвышение ЦТ над ЦВ, соответ¬
ствующее водоизмещению D основного корпуса, м; 0 угол
крена, соответствующий полному выходу аутригера из воды или
максимуму диаграммы статической остойчивости при полном
выходе аутригера из воды; ус2— ордината ЦВ аутригера.
Предельные значения Da пока не установлены, но опыт проек¬
тирования показывает, что можно принимать
Da С (0,27 н- 0,28) D. (163)
224
Для судов с аутригерами теория качки пока не разработана;
учесть ее влияние на главные размерения в настоящее время
можно лишь весьма грубо.
Результирующие данные о массе корпуса судов с аутригерами
приведены в табл. 25.
Таблица 25
Измерители статей нагрузки судов с аутригерами
Суда
Корпус с обо¬
рудованием
н судовыми
устройствами
Машинная
установка
Промысловое
оборудование
и технологи¬
ческое обо¬
рудование
Навига¬
ционное
и электро-
радиообо¬
рудование
Масса
порожнего
судна
Дед-
вейт
D
Рк
рм
р
то
рто
рэр
р
эр
^пор
/^пор
2LB,H
Dw
D
2кВгН
D
N
D
N
D
N
D
мс-к
0,424
0,089
0,084
0,029
0,059
0,021
0,038
0,75
0,605
0,128
0,395
МПБ-К
0,611
0,120
0,111
0,027
0,081
0,020
0,029
0,40
0,832
0,158
0,168
Первые буксировочные испытания модели с аутригером
происходили в марте 1975 г. в бассейне КТИРПиХ. Результаты
испытаний модели МС-К приведены на рис. 106. Там же изобра¬
жена кривая коэффициента взаимного влияния корпусов Ла.
Первые модельные испытания управляемости и устойчивости
на курсе проведены КТИРПиХ на модели МС-К. Испыта¬
ниями установлено, что при кормовом расположении аутригера
обеспечивается устойчивое движение по курсу с углом дрейфа
около 6°. Коэффициенты разворачивающего момента при углах
дрейфа 3° на борт аутригера и противоположный борт равны
см = 0,012 и см = 0,004. На прямом курсе см = 0,004.
§ 6.6. Определение областей рационального
использования промысловых катамаранов
Оценка влияния основных, характеристик катамаранов на экс¬
плуатационно-экономические показатели их работы и сравнение
катамаранов с однокорпусными судами были выполнены на базе
проектных исследований 1 * следующих серий двухкорпусных судов
различного промыслово-технологического назначения с система¬
тически изменяющимися параметрами:
посольно-свежьевых траулеров-сейнеров прибрежного плава¬
ния, имеющих главные двигатели мощностью 150—300 л. с.,
с трюмами объемом 30—90 м3;
рефрижераторных траулеров-сейнеров прибрежного плавания
с главными двигателями мощностью 150—300 л. с., с трюмами
объемом 60—180 м3;
1 В работе принимали активное участие А. С. Курдин, С. А. Иванов,
А. П. Тарновскнй, Т. Я- Лиходаева и В. П. Деркач.
8 п/р Дубровского В. А. 225
рефрижераторных траулеров-сейнеров океанского плавания
с главными двигателями мощностью 800—2600 л. с., с трюмами
объемом 180—620 м3;
морозильных траулеров-сейнеров океанского плавания с глав¬
ными двигателями мощностью 1000—2000 л. с., с трюмами объ¬
емом 275—620 м3;
Рис. 107. Структурная схема исследований областей рационального ис¬
пользования промысловых катамаранов.
/ — обобщение сведений о построенных и спроектированных катамаранах, об нс-
следованиях ходкости, прочности, мореходности и других технико-эксплуатацион¬
ных качеств катамаранов; 2 — разработка перечня необходимых теоретических,
расчетных, экспериментальных исследований; 3 — определение основных харак¬
теристик промысловых катамаранов, подлежащих сравнению с^ однокорпусными
судами; 4 — конструкторские проработки промысловых устройств, энергетиче¬
ских установок и архитектуры промысловых катамаранов; 5 — рекомендации по
составу и размещению промысловых устройств, энергетических установок, рубок;
6 — расчетное исследование остойчивости н непотопляемости; 7 — буксировочные
испытания моделей; 8 — самоходные испытания моделей; 9 — расчетное исследова¬
ние волнового сопротивления; 10 — испытания моделей на регулярном волнении;
11 — испытания упругой модели на волнении; 12 — расчетное исследование внеш¬
них сил и напряжений в конструкциях катамаранов;. 13 — графики для прибли¬
женного определения аварийной посадки; 14— методика приближенного расчета
ходкости и тяги; 15 — схема приближенного расчета бортовой и продольной качки;
16 — схема проверки прочности; 17 — расчетные зависимости и измерители для
определения влияния вариаций характеристик и элементов на технико-эксплу¬
атационные качества; 18 — проектные проработки двухкорпусных траулеров-сей¬
неров; 19 — проектные проработки сопоставимых однокорпусных судов; 20 — тех-
нико-экономическое сопоставление двух- и однокорпусных судов, определение об¬
ластей рационального использования промысловых катамаранов.
морозильно-мучных траулеров с главными двигателями мощ¬
ностью 1500—8000 л. с., с трюмами мороженой продукции объ¬
емом 420—4400 м3.
Сравнение технико-экономических показателей двухкорпус¬
ных и однокорпусных судов производилось при равном объеме
трюмов и равной мощности их главных двигателей, поскольку
мощность — основная характеристика рыбодобывающих судов,
от которой главным образом зависит тяга, а следовательно, и
уловы траулера.
В качестве основного экономического критерия при сравнении
был принят показатель приведенных затрат на 1 тс продукции
с учетом удельных затрат по судам обеспечения (рис. 107).
226
Основные параметры двухкорпусных промысловых судов опре¬
делялись в результате расчета дедвейта, совместного решения
уравнений масс, плавучести и вместимости с последующей оцен¬
кой скорости, тяги, характеристик непотопляемости и качки судна.
При проектировании катамаранов было принято, что:
корпуса имеют симметричные относительно собственной диа¬
метральной плоскости умеренно Ѵ-образные шпангоуты;
в качестве энергетической установки используется дизель-
редукторный агрегат с легкими и компактными четырехтактными
форсированными дизелями средней и повышенной оборотности,
утилизацией тепла выхлопных газов и охлаждающей воды;
уровень автоматизации энергетической установки рассматри¬
ваемых судов позволяет исключить постоянную вахту в машинных
отделениях;
в качестве движителя используется ВРШ в поворотной на¬
садке с оптимальной частотой вращения в режиме свободного хода.
Для двухкорпусных промысловых судов были специально
разработаны промысловые схемы и чертежи размещения энерге¬
тического оборудования.
Несмотря на изменение характеристик в широком диапазоне,
в частности, D = 160-4-7000 тс, ѵ3 = 9-4-16 уз, L = 20-н80 м,
соотношения главных размерений и коэффициент общей полноты
катамаранов менялись в относительно узком диапазоне: отношение
длины по ватерлинии к ширине одного корпуса — от 5 до 7;
отношение ширины одного корпуса к осадке было принято по¬
стоянным и равным двум; также постоянным принималось рас¬
стояние между внутренними бортами двух корпусов, равное
ширине одного корпуса; коэффициент общей полноты лежал
в пределах 0,55—0,59.
При определении составляющих нагрузки считалось, что
масса металлического корпуса пропорциональна площади соответ¬
ствующих конструкций, а масса соединительного моста — массе
наружной обшивки. Масса остальных составляющих была найдена
на основании статистических данных и материалов специальных
проработок. Наиболее специфические зависимости, полученные
на основании аппроксимации данных по массовым измерителям
однокорпусных промысловых судов, представлены в табл. 26.
Расчет скорости выполнялся с использованием данных об
остаточном сопротивлении однокорпусных судов и поправочных
коэффициентов, полученных на основе специальных модельных
испытаний и учитывающих влияние горизонтального клиренса.
В результате сопоставления двухкорпусных и однокорпусных
промысловых судов, алгоритм которого показан на рис. 107,
получено следующее.
Двухкорпусные рыбодобывающие суда имеют увеличенную
примерно на 15% тягу в режиме траления (рис. 108) по сравнению
с однокорпусными судами, что позволяет увеличить улов на 7—
15% за траловый цикл. Возрастание тяги катамарана по сравне-
8* 227
Таблица 26
Основные формулы для расчета масс промыслового катамарана
Наименование
Формула
Наружная обшивка с набо¬
ром
Второе дно
Палубы и платформы
Поперечные переборки
Второстепенные выгородки
в корпусе, штевни, поковки,
фундаменты
Надстройки, рубки
Переборки мостовой кон¬
струкции
Мостовая конструкция (дни¬
щевая часть)
Рулевое устройство
Якорное и швартовное
устройства
Системы трюмные и запасы
Валопровод и движители
Рі = (40 + 8В2/3) Qj^2- 10~ '3,
где Й, — площадь наружной обшивки, м2;
kr — коэффициент, учитывающий усиление
обшивки и набора на швартовку в море и
ледовые подкрепления по сравнению с при¬
нятым в практике промыслового судострое¬
ния; k2— коэффициент, учитывающий число
корпусов
Р2 = 40-10~3 бк212ЬгУт,
где 12 — длина второго дна
3
Р3= У Рзі k2,
i=i
где Рзі = ( 11 + — j ■ 10 J — для верхней
палубы; Рз2 = 9-10~3 — для нижней па¬
лубы; рзз = 6,7-ІО'3—для платформ;
й3£-—площади палуб и платформ
Р4 = 38-10- 3nt B,D 2/3 k2,
где — количество поперечных переборок
в одном корпусе
Р5 = p5LB1Z?fe2,
где р5 = 21 • ІО-3 — для однопалубных су¬
дов; Рз= 16-10“3 для двухпалубных судов
Р6 = 46.10-3Л2/3пУ3й2/3,
где пе — количество надстроек, рубок;
Йе — суммарная площадь надстроек и рубок
п fl?b7h7pi
7" k2BiD ’
где л, — количество переборок мостовой
конструкции; Ь7, Л7 — ширина и высота пе¬
реборок мостовой конструкции
п _
где й/, — площадь мостовой конструкции
Р9 = (55—0,35В) - 10”5ВTv2,
где vs — скорость судна, уз
Р10 = 23,5- IO’3L (2В! + D)
Рп = [о,58 (Г■ ІО”1)2 — 0,87В-10”1] k2
Р12 = 1,05й2-10"3 [б,8/12 +
4- о 1
+ Р12 2 J ,
где Z12 — длина валопровода; МгД — мощ¬
ность главных двигателей; р12=3,35 для ВРШ
228
нию с тягой однокорпусного судна обусловлено распределением
мощности энергетической установки на два гребных винта такого
же диаметра, что у одного винта однокорпусного судна, т. е.
уменьшением нагрузки движителей, результатом чего является
повышение их пропульсивного коэффициента в этом режиме.
Большая площадь палуб и повышенная остойчивость дают
возможность разместить на катамаранах два комплекта оборудова¬
ния для тралового лова, иметь готовые к действию донные и раз-
Рис. 108. Зависимость тяги судна от мощности главных дви¬
гателей.
1 — для катамаранов; 2 — для однокорпусных судов.
ноглубинные тралы, а также оптимальный кошельковый невод, что
позволяет быстро переходить с одного вида лова на другой. За
счет попеременного использования двух тралов улов за траловый
цикл увеличивается на 8—10% при одинаковых параметрах про¬
мысловых механизмов. В тех районах, где ограничено число тра¬
лений в сутки и возможен переход с трала на кошельковый невод,
уловы могут быть увеличены еще больше (на 30—40%). Уловы
определялись на основании следующих предположений:
эксплуатационный период у двухкорпусных судов несколько
меньше, чем у однокорпусных, из-за увеличенной на 15% продол¬
жительности ремонтов, вызываемой большим числом механизмов
и большей площадью палуб и бортов;
время переходов на промысел и обратно у катамаранов больше,
чем у однокорпусных судов, из-за меньшей на 5—7% скорости
катамаранов при равной с однокорпусными судами мощности
и близком водоизмещении;
229
уловы кошельковым неводом за один замет одинаковы при
условии, что на однокорпусном и двухкорпусном судах приме¬
нены невода, оптимальные для данного района промысла;
уловы тралом на катамаране больше из-за упомянутого выше
сокращения времени цикла и увеличения тяги, развиваемой
судном.
Исследование показало, что масса порожних катамаранов на
10—15% 1 больше массы порожних однокорпусных судов, име¬
ющих равные мощности и объем трюмов (рис. 109) из-за наличия
Рис. 109. Зависимость веса судна порожнем Рпор от вмести¬
мости трюмов 1Ртр и мощности главных двигателей N.
1 « катамараны; 2 — одиокорпусные суда.
двух корпусов и соединительной конструкции, а также дубли¬
рования ряда механизмов, устройств и систем. В связи с этим,
а также с увеличением трудоемкости работ на 20% строительная
стоимость катамаранов на 20—40% больше стоимости сопостав¬
ляемых однокорпусных судов.
При использовании двухкорпусной конструкции на рассмо¬
тренных судах приведенные затраты на тонну продукции могут
уменьшиться до 15% по сравнению с однокорпусными судами
такой же мощности и грузовместимости (рис. НО).
Наибольший эффект по удельным приведенным затратам (15%)
дает применение двухкорпусной конструкции на малых траулерах
прибрежного промысла, например мощностью 300 л. с. при
эксплуатации с удалением 50—200 миль от порта.
1 Прирост в 2—3 раза больше, чем в конкретных проектах (см. выше). —
Прим, научн. ред.
230
По мере увеличения мощности главных двигателей траулеров
разница в удельных затратах уменьшается, поскольку при длине
однокорпусных судов более 55—60 м и ширине более 12,5 м схему
«дубль» с двумя попеременно используемыми тралами, оказы¬
вающую определяющее влияние на увеличение уловов и улучше¬
ние экономических показателей судов, удается осуществить и на
однокорпусном судне.
Применение двухкорпусных промысловых судов экономически
оправдано в районах промысла, удаленных до 1000 миль при
Рис. 110. Изменение отношения удельных
приведенных затрат катамарана Эк и одно¬
корпусных судов Эо в зависимости от мощно¬
сти главных двигателей и способа лова при
удаленности района промысла до 1000 миль.
1 — лов тралом; 2 — лов тралом и кошельковым
неводом попеременно.
Рис. 111. Область рацио¬
нального использования
рыбодобывающих двух¬
корпусных судов
(R.—удаленность района
промысла).
А — катамараны; Б — одно¬
корпусные суда.
1 — лов тралом; 2 — лов
тралом и кошельковым нево¬
дом попеременно.
мощности главных двигателей до 2500 л. с. на траловом лове и
до 3000 л. с. в тех случаях, когда возможен переход с трала на
кошельковый невод в течение суток.
По мере роста удаленности района промысла сравнительная
экономическая эффективность катамаранов уменьшается на 0,5—
1% на каждые 1000 миль.
На рис. 111 показана область рационального использования
рыбодобывающих двухкорпусных судов. Основой для нанесения
разграничивающих кривых являлось равенство экономической
эффективности однокорпусных и двухкорпусных судов. Создание
и эксплуатация этих судов обеспечит более высокую (от 15 до
5%) эффективность по сравнению с эффективностью однокорпус¬
ных судов такой же мощности.
Исследование области рационального использования промыс¬
ловых катамаранов было выполнено без учета ряда преимуществ
этих судов, не поддающихся экономической оценке. К числу таких
преимуществ следует отнести:
231
улучшение условий труда и отдыха экипажа из-за увеличения
площади помещений и улучшения поведения судов на взволнован¬
ном море (лагом к волне);
повышение степени безопасности и упрощение эксплуатации
при приеме большого количества палубных грузов, полу¬
чении пробоины или выходе из строя одного из главных дви¬
гателей;
возможность изготовления готовой продукции на малых и
средних судах благодаря наличию площадей, позволяющих раз¬
местить производственно-технологическое оборудование и каюты
для дополнительного числа рыбообработчиков.
Учет указанных факторов может внести некоторые коррективы
в полученные результаты в направлении повышения экономической
эффективности катамаранов и расширения области рационального
их использования.
Таким образом, проектно-экономическое исследование позво¬
лило установить, что двухкорпусные малые и средние траулеры
и траулеры-сейнеры имеют технические, эксплуатационные и эко¬
номические преимущества по сравнению с однокорпусными
судами, что делает целесообразным проектирование и строитель¬
ство таких катамаранов.
В табл. 27 приведены характеристики и элементы катамаранов,
рекомендованных для проектирования.
Таблица 27
Основные характеристики и элементы рекомендуемых двухкорпусных
рыбодобывающих судов
Характеристики
Прибрежного плавания
Океанский
рефрижератор¬
ный траулер-
сейнер
Свежьевое
судно
Рефрижератор¬
ный траулер-
се«нер
Длина по ватерлинии, м
Ширина, м:
общая
одного корпуса
Высота борта, м
Осадка, м
Водоизмещение при вы¬
ходе из порта, тс
Объем трюмов, м3
Мощность главных дви¬
гателей, л. с.
Скорость, уз
Экипаж, чел.
Орудия лова
16,7
8,5
3,2
2,65
1,90
112
26
2X150
9
8
Снюрревод,
трал, ярус
26,2
15,0
4,8
3,0
2,35
336
90
2X300
И
14
Трал или ко¬
шельковый
невод
35,0
20,2
6,7
5,2
3,60
930
180
2X400
И
23
Трал или ко¬
шельковый
невод
232
§ 6.7. Исследование целесообразности применения
промысловых двухкорпусных судов
с малой площадью ватерлинии
Ниже изложены основные результаты исследования, посвящен¬
ного выявлению целесообразности применения судна с малой
площадью ватерлинии в качестве рыболовного. Для обеспечения
достаточной остойчивости принята схема «дуплус», т. е. схема
с одной длинной стойкой на каждом корпусе.
Таблица 28
Технические характеристики сопоставляемых судов
Наименование и размерность
Двухкорпусные
Однокорпусные
Дуплус
Катама¬
ран
С мощностью
дуплуса
С уловами
дуплуса
Длина, м:
по ватерлинии Lb л
наибольшая Lmax
Ширина, м:
общая Вт
одного корпуса Вх
Высота борта И, м
Осадка Т, м
Вертикальный клиренс на
миделе, м
Водоизмещение, тс:
порожнего судна
при выходе из порта
Мощность главных двигате¬
лей, л. с.
Объем рыбного трюма, м3
Экипаж, чел.
Автономность по запасам
дизельного топлива, сут
* В числителе ширина кс
линии.
** Мощность в режиме тра»
45,5
48,5
21,2
4,3/1,8 *
14,0
8,6
3,0
1300
1740
2Х 1000
275
35
30
рпуса, в знам
тения.
46,7
49,5
23,4
7,7
6,0
3,8
1,8
1100
1570
2Х 1000
275
33
30
енателе ши
50,0
53,7
10,5
10,5
6,0
4,2
850
1160
2000/(1800) **
275
25
19
>ина стойки п
57,0
60,7
11,8
11,8
6,8
4,7
1150
1690
2600
275
35
30
э ватер-
В табл. 28 сопоставляются технические характеристики про¬
мысловых судов различных конструктивных типов, имеющих
одинаковый объем рыбных трюмов и одинаковую мощность глав¬
ных двигателей. Кроме того, дополнительно рассмотрено одно¬
корпусное судно большей мощности и размеров, что позволяет
сравнивать его с исследуемым двухкорпусным при примерно
одинаковых суточных уловах рыбы.
При выполнении проекта (рис. 112) предполагалось, что на
двухкорпусном судне с малой площадью ватерлинии возможны:
траловый лов рыбы попеременно через два слипа с выборкой
трала по двум независимым траловым линиям (система «дубль»);
233
кошельковый лов при помощи готового к действию кошель¬
кового невода;
сортировка рыбы и пересыпка ее льдом в ящиках в закрытом
помещении рыбцеха;
размещение двух главных четырехтактных двигателей мощ¬
ностью по 1000 л. с. при 1000 об/мин, работающих через редукторы
на гребные винты в поворотных насадках, четырех валогенерато-
ров постоянного тока мощностью по 200 кВт для промысловых
нужд и трех дизель-генераторов переменного тока мощностью
по 200 кВт для общесудовых нужд.
На сопоставимом по мощности однокорпусном судне осуще-
Рис. 112. Общее расположение траулера-сейнера с малой площадью ватерлинии:
луба; г —
А — подводный корпус; Б — соединитель
1 _ промысловая лебедка; 2 — слип; 3 — кладовая промыслового снаряжения; 4 — рыбный
и санитарные помещения; 9 — шахта схода; 10 — машинное отделение; // — электростан
устройство; /5 — балластно-дифферентиая цистерна; 16 — площадка для хранения невода;
234
ствить схему «дубль», а также хранить готовый к действию ко¬
шельковый невод оказалось невозможно.
При переходе к подповерхностным корпусам масса в порож¬
нем состоянии, в случае использования обычной для промысловых
судов стали с пределом текучести 24 кгс/мма, на 50—60% пре¬
вышает массу порожнего однокорпусного судна и на 20% массу
катамарана из-за увеличения осадки (примерно в 2 раза) и пло¬
щади поверхностей.
Большая масса корпуса судна с малой площадью ватерлинии
объясняется, в частности, увеличением поверхности: например,
а — продольный разрез по левому корпусу; б — вид сверху; в — нижняя па-
вид с носа.
^ая конструкция; В — верхнее строение.
Цех; 5 — рыбный трюм; 6 — рефрижераторное отделение; 7 — ЦПУ и ГРЩ; 8 — жилые
Ция; 12 — топливная цистерна; 13 — гидроакустическая станция; 14 — подруливающее
'7~ котельное отделение; /Я —площадка для подсушки невода; 19 — румпельное отделение.
235
коэффициент смоченной поверхности (Й/КDL) у него в 2,8 разй
больше.
Проектные исследования показали, что обеспечить остойчи¬
вость и непотопляемость двухкорпусного промыслового судна
с подповерхностными корпусами (дуплуса) возможно.
Можно полагать, что благодаря уменьшению интенсивности
качки в широком диапазоне эксплуатационных условий на про¬
мысловом дуплусе условия труда и отдыха экипажа будут лучше,
чем на однокорпусном судне или катамаране, а потеря скорости
на волнении существенно меньше, чем у судов названных типов.
Проведенные испытания модели и имеющаяся информация
о буксировочном сопротивлении моделей судов с подповерхност¬
ными корпусами позволили определить скорость и тягу судна
(табл. 29). При расчетной скорости рассмотренный дуплус имеет
значительно меньший коэффициент остаточного сопротивления
Таблица 29
Тягово-скоростные характеристики судов различных конструктивных
типов
Наименование
и размерность
Двухкорпусные
Однокорпусные
Дуплус
Катамаран
С мощностью
дуплуса
С уловами
дуплуса
Смоченная поверх¬
ность, м2
2x950
2X490
580
750
Коэффициент смочен¬
ной поверхности:
2,57
2,42
2,42
одного корпуса
4,77
судна
6,72
3,63
2,42
2,42
Диаметр гребного вин-
2X4,0
2X2,44
2,15
3,0
та, м
250
Частота вращения
гребного винта, об/мин
85
180
250
5,2-ІО-3
Коэффициент оста-
1,00-ІО-3
4,10-ІО-3
5,2-ІО-3
точного сопротивления
7,5-10“3
Коэффициент полно-
3,3-ІО'3
6,4-10“3
7,5-10 3
го сопротивления
Коэффициент полез¬
ного действия винта:
0,622
0,622
на свободном ходу
0,710
0,673
в режиме траления
0,520
0,415
0,320
0,320
Пропульсивный коэф¬
фициент:
0,605
0,584
0,584
в режиме свободно-
0,685
го хода
в режиме траления
0,560
0,424
0,351
0,351
Скорость на тихой во-
13,5
12,7
14,3
14,9
де, уз
Тяга при скорости
5 уз, тс
2X13,0
2X11,7
17,6
28,0
233
ЙО сравнению с катамарайоМ й однокорйусньім судном. Пропуль¬
сивный коэффициент этого судна на полном ходу повысился до
0,685 благодаря увеличению диаметра гребного винта до 4,0 м
(в пределах высоты подводного корпуса) и меньшей частоте вра¬
щения (85 об/мин). Однако в связи с существенным увеличением
смоченной поверхности скорость дуплуса на тихой воде была
примерно на 6% ниже, чем однокорпусного судна, но на 6%
выше, чем у катамарана.
Комплексное сравнение судов различных конструктивных
типов выполнено путем сопоставления строительной стоимости
при условии постройки одновременно на одном заводе и расчета
эксплуатационно-экономических показателей при одинаковых
условиях эксплуатации на траловом лове в районе северо-запад¬
ной Атлантики, удаленном от порта базирования на 3300 миль.
При этом трудоемкость постройки и время ремонта катамарана
и дуплуса приняты на 20% большими по сравнению с однокорпус¬
ным судном такой же массы в порожнем состоянии из-за большой
площади палуб и бортов, а также дублирования ряда механизмов,
устройств, систем.
Рассмотрение результатов расчета, приведенных в табл. 30,
позволяет сделать вывод, что использование двухкорпусных трау¬
леров и траулеров-сейнеров с подповерхностными корпусами
может быть экономически оправдано благодаря повышению их
Таблица 30
Сопоставительные эксплуатационно-экономические показатели
судов различных конструктивных типов, %
Наименование
Двухкорпусные
Однокорпус¬
ные
с суточными
уловами
дуплуса
Дуплус
Катамаран
Строительная стоимость
Улов за сутки лова
Срок окупаемости
Эксплуатационное время за год
Количество продукции за год
Стоимость продукции за год
Эксплуатационные расходы за год
Прибыль за год
Удельные показатели на 1 тс про¬
дукции:
себестоимость
капиталовложения
приведенные затраты
145
139
103
99,5
128
128
125
129
98
104,5
100,0
133
130
104
98
119
119
118
118
99,7
104,0
101,0
130
131
96
106
136
136
134
139
98,5
99,0
98,7
Примечание. Показатели однокорпусного судна с двигателем мощ¬
ностью 2000 л. с. приняты за 10С%.
237
промысловой производительности по сравнению с Однокорпус-*
ными судами и катамаранами.
Учитывая, что при этом существенно улучшаются условия
труда и отдыха членов экипажа вследствие меньших амплитуд
и ускорений качки, можно ожидать, что на практике преиму¬
щества такого судна будут более значительными, чем показал
расчет.
Таким образом, применение промысловых судов с малой
площадью ватерлинии и подповерхностными корпусами может быть
целесообразно в тех случаях, когда по условиям эксплуатации
существенным является требование к значительному умерению
качки и повышению тяговых и скоростных характеристик судов.
Глава
Технология
постройки
и ремонта
Си
§ 7.1. Особенности сборки двухкорпусных
судов и плавучих платформ
Основной проблемой, возникающей при постройке двухкорпусных
судов, и особенно полупогружйых буровых установок, является
проблема стапельной сборки. Полная ширина двухкорпусных
судов обычно намного превышает ширину имеющихся построечных
мест. Для полупогружйых буровых установок размерами, опре¬
деляющими возможность использования существующих доков
и стапелей, является полная ширина и высота борта. Дело ослож¬
няется тем, что пока ни один тип многокорпусных объектов не
строился настолько большой серией, чтобы могло быть экономиче¬
ски оправдано создание специализированных доков, слипов,
стапелей, предназначенных только для постройки и ремонта
таких объектов.
Однако уже накоплен некоторый опыт сборки многокорпусных
судов и установок. Технология сборки определяется водоизме¬
щением и размерениями судна, а также имеющимся судострои¬
тельным оборудованием. При постройке катамаранов малого водо¬
измещения и спусковой массы их сборка производится на гори¬
зонтальной площадке, а спуск на воду выполняется при помощи
плавучего крана соответствующей грузоподъемности. Например,
таким способом были построены в Японии двухкорпусные проти¬
вопожарные суда типа «Хирю» [47].
Суда большего водоизмещения могут быть собраны и спущены
на наклонных слипах. При боковом спуске на слипе или стапеле
заданной длины можно построить двухкорпусное судно примерно
вдвое большего водоизмещения, чем однокорпусное.
239
Суда малого и среднего водоизмещения могут строиться се¬
риями на продольных слипах и даже в доках соответствующей
ширины при условии размещения одного судна за другим —
с поочередным (стапель) или одновременным (док) спуском на
воду. Например, в Японии три автомобильных парома типа
Рис. 113. Варианты постройки двухкорпусного судна: а— по¬
стройка серии судов на продольном стапеле; б — совместная по¬
стройка корпусов с поперечным перемещением одного на плаву;
в — раздельная постройка и спуск корпусов, монтаж блоков соеди¬
няющей конструкции на плаву; г — то же, монтаж с помощью спе¬
циального понтона 1.
«Асаане» были построены на продольном стапеле, предназначен¬
ном для сборки крупных однокорпусных судов (рис. 113).
При постройке на слипе, стапеле или в доке особое значение
имеет постоянный контроль при монтаже корпусов и соединитель¬
ного моста для обеспечения одинаковой длины отсеков, точного
расположения поперечных переборок в корпусах и соединяющей
корпуса конструкции, а также одинаковых размерений корпусов
240
в целом. Например, опыт постройки автомобильно-пассажирского
парома в Испании показал, что одновременный монтаж блоков
на параллельных стапельных дорожках (корпус—мост—корпус)
обеспечивает большую точность сборки, чем монтаж каждого
корпуса в отдельности с последующим соединением их мостовой
конструкцией.
При постройке многокорпусных объектов широкое применение
нашел способ соединения водоизмещающих частей на плаву, при
этом монтажные стыки расположены только в надводной части
судна. Корпуса катамаранов могут быть построены по одному
и раздельно спущены на воду, при этом, естественно, должна
быть обеспечена остойчивость отдельно плавающего корпуса.
Возможна также постройка обоих корпусов борт о борт, одновре¬
менный спуск на воду и установка соединительного моста на
плаву. Таким способом строился, например, японский паром
«Рокко-мару».
Для сборки на плаву крупнейшего в мире советского ката¬
марана «Кёр-оглы» был построен специальный понтон, на который
при монтаже устанавливались блоки соединяющей корпуса кон¬
струкции.
Наибольшие сложности возникают при постройке полупогруж-
ных буровых платформ из-за несоответствия их размерений воз¬
можностям имеющихся судосборочных сооружений. Например,
установки типа «Акег» целиком строятся на двух соседних про¬
дольных стапелях при помощи козловых кранов с большим про¬
летом (рис. 114).
При недостаточном расстоянии между имеющимися стапелями
производится постройка на стапелях всей установки без части
верхнего строения и раскосов. Затем на плаву выполняется про¬
дольный разъем и монтаж недостающих частей верхнего строения
с помощью понтонов или плавкранов. Так была построена уста¬
новка «Sedneth» в Роттердаме.
Корпуса со стойками и надводный корпус могут быть по¬
строены и спущены на воду в отдельности, причем последний
может собираться на плаву из нескольких блоков. Собранный
надводный корпус устанавливается на сваи с гидравлическими
подъемниками и поднимается над водой, а корпуса со стойками
(или частями стоек) подводятся под него. Так была построена
установка «Магк-2» в Гамбурге (рис. 115).
Собранный надводный корпус может быть поднят над водой
с помощью понтонов (рис. 115,6). После постройки корпусов
со стойками может производиться стыковка их на плаву с помощью
раскосов, а затем надводный корпус собирается из отдельных
секций.
Окончательная сборка заранее построенных корпусов может
выполняться в строительном доке (например, установка
«Sedko-135A», построенная в Японии) или мостовыми кранами
со специальной ферменной конструкции,
241
Ь)
1
Рис. 114. Схема постройки буровой установки на стапелях: а —
при достаточном расстоянии между стапелями; б — при малом
расстоянии между стапелями (с монтажом дополнительных сек¬
ций 1 на плаву).
242
Рис. 115. Варианты сборки буровой установки (при раздельной по¬
стройке корпусов): а — с применением опор с гидравлическими
домкратами 1 (2 — забойные части стоек); б — с использованием
специальных понтонов; в — в сухом доке.
243
Строительство полупогружйых установок иногда ведется в спе¬
циально вырытом вблизи от берега котловане с помощью подъем¬
ных кранов на гусеничном ходу, имеющих достаточную грузо¬
подъемность, вылет и высоту подъема. После окончания строи¬
тельства перемычка, отделяющая котлован от моря, разрушается,
и установка выводится в море. Так строятся установки «Condeep»
в Ставангере.
Таким образом, использование разнообразных возможностей
разделения многокорпусных объектов на водоизмещающие со¬
ставные части, соединяемые обычно только выше ватерлинии,
позволяет вести их постройку силами существующих судострои¬
тельных предприятий.
§ 7.2. Особенности докования
многокорпусных объектов
Двухкорпусные буровые или краново-монтажные суда, а также
плавучие морские буровые установки обычно имеют значительную
габаритную ширину, в большинстве случаев превышающую раз¬
меры доков, находящихся в эксплуатации, что серьезно затруд¬
няет процесс ремонта подводной части таких объектов. Поскольку
постройка специального сухого или плавучего дока со значитель¬
ной шириной в свету, допускающей докование объектов шириной
50—75 м, требует значительных затрат, при строительстве пере¬
численных выше сооружений для увеличения сроков эксплуатации
предусматривают большие запасы толщины обшивки на коррозию;
применяют усиленные системы защиты от коррозии; для ремонта
оконечностей используют дифферентование и накренение путем
балластировки или с применением специальных понтонов.
Однако в любом случае после истечения какого-либо срока
службы вопрос о необходимости полного докования объекта
встает с полной серьезностью.
Так, например, эксплуатирующееся с 1968 г. на Каспийском
море краново-монтажное судно-катамаран «Кёр-оглы», исполь¬
зуемое для монтажа стационарных морских буровых оснований,
уже давно требует для восстановления эксплуатационных качеств
серьезного докового ремонта. Однако докование судов шириной
около 50 м весьма затруднительно. С целью повышения экономич¬
ности и сокращения сроков докового ремонта катамаранных
объектов, имеющих значительную габаритную ширину, предла¬
гается их доковать в целом, применяя имеющиеся в эксплуатации
или строящиеся серийно доки.
Относительно просто производят докование многокорпусного
объекта в L-образном доке: поочередно поднимают в док правый
и левый корпуса. Однако в настоящее время таких доков мало.
Докование многокорпусного объекта может производиться
с помощью двух плавучих доков, поставленных рядом и имеющих
суммарную грузоподъемность не менее массы объекта в порожнем
244
1^.6
Рис. І16. Схема докования двухкорпусных крановых судов
в двух плавучих доках: а — «Кёр-оглы» (с краном грузоподъем¬
ностью 250 тс); б — «Илья Муромец» (с краном грузоподъемно¬
стью 600 тс). Размеры указаны в метрах.
Рис. И7. Схема докования полупогружной буровой установки в двух пла¬
вучих доках. Размеры указаны в метрах.
245
состоянии в целом. Доки подбирают по размерам таким образом,
чтобы можно было осуществить постановку в каждый из них
отдельного корпуса.
Конкретная реализация данного способа для судна «Кёр-
оглы» представлена на рис. 116. Доки устанавливают рядом на
расстоянии 1,8 м между ними. Высота киль-блоков выбирается
так, чтобы соединительный мост судна находился выше топ-
палубы. Оборудование, имеющее значительные габариты и нахо¬
дящееся на топ-палубе под соединительным мостом, временно
демонтируется. Длина доков по стапель-палубе 131,5 м достаточна
для размещения судна (габаритная длина 129, 7 м).
Докование осуществляется следующим образом: доки притап-
ливаются, судно вводится в них до совпадения'килевых линий
корпусов с килевыми дорожками, затем производится равномерное
одновременное всплытие доков.
Для нефтяников Каспия в ближайшие годы будет построено
транспортно-монтажное крановое судно-катамаран с краном гру¬
зоподъемностью 600 т. Схема его возможного докования в тех же
доках представлена на рис. 116, б.
Кроме того, рассмотрение проекта полупогружной буровой
установки показывает, что данный способ докования применим
и для нее (рис. 117).
Таким образом, докование плавучих объектов, имеющих зна¬
чительные габаритные размеры, которые превышают размеры
имеющихся доков, можно осуществить путем постановки их
в два дока, расположенных рядом.
Заключение
Приведенные выше материалы позволяют считать, что много¬
корпусные суда тем более рациональны и перспективны, чем
более они специализированы и чем выше требования к мореход¬
ности и безопасности плавания судов конкретного назначения.
Для обоснования целесообразности создания любого судна
нового типа требуются:
методы прогнозирования технико-эксплуатационных качеств;
методика выбора оптимальных по эксплуатационно-экономиче¬
ским характеристикам элементов судна;
данные о результатах эксплуатации аналогичных или близких
по типу судов, отражающие влияние реальных условий работы на
расчетные экономические показатели.
Сейчас в основном завершена разработка методов прогнозиро¬
вания технических и эксплуатационных качеств многокорпусных
судов главных типов (конечно, это не исключает необходимости
дальнейших уточняющих исследований).
Теоретически и экспериментально выявлены основные каче¬
ственные и количественные особенности остойчивости, ходкости,
качки, прочности катамаранов, тримаранов, дуплусов, трисеков,
судов с аутригерами. Поэтому имеется достаточно обширная база
для вариантного проектирования многокорпусных судов указан¬
ных типов, в том числе и с помощью ЭЦВМ. Однако методики
выбора оптимальных элементов многокорпусных судов различных
типов и назначения требуют дальнейшего совершенствования.
Главной задачей представляется накопление и тщательный анализ
247
опыта эксплуатации построенных и строящихся многокорпусных
судов в различных районах и условиях.
Многолетняя успешная работа отечественных речных пасса¬
жирских и грузовых катамаранов позволила перейти к серийному
строительству двухкорпусных судов типа «Анатолий Угловский»
со сверхкритической скоростью. Кроме того, ожидается попол¬
нение речного флота катамаранами других типов. Дальнейшая
эксплуатация катамаранов «Эксперимент» и «Эксперимент-2» поз¬
волит подробно изучить поведение среднетоннажных двухкорпус¬
ных судов в различных районах океана.
Использование имеющихся судов для близнецового лова (два
судна с аутригерами) и построенного головного в серии промыс¬
лового катамарана типа «Приметный» позволит' расширить при¬
менение малых промысловых многокорпусных судов. Постройка
первой отечественной полупогружной буровой платформы и кра¬
нового судна «Илья Муромец» ознаменует новый этап совершен¬
ствования технического флота и освоения шельфа.
Кроме того, представляется необходимым создание ряда судов
других типов для практической проверки имеющихся представле¬
ний о качествах многокорпусных судов. Например, такими судами
могут быть:
толкач-катамаран (возможно, для составного морского судна);
железнодорожный паром для Каспийского моря (катамаран
или тримаран);
морское пассажирское судно с малой площадью ватерлинии
(дуплус или трисек).
Многокорпусные суда должны быть шире использованы для
повышения эффективности отечественного флота.
Приложение 1
Приближенный метод оценки
аварийной посадки катамарана
Исходные данные: размерения одного корпуса катамарана Дгвл,
Blt Т, 6; расстояние от ДП одного корпуса до ДП судна в целом ft; возвыше¬
ние центра тяжести Zg; длина поврежденного отсека / н его коэффициент про¬
ницаемости р, положение по длине х.
Рис. I. Зависимость средней аварийной осадки Т'аъ ( ) и угла
крена Ѳвв -g- ( ) от длины /, положения по длине х и коэффициента
проницаемости р поврежденного отсека.
Аварийная средняя (относительная) осадка (рис. 1, 3, а)
аварийный угол дифферента (рис. 2, а, 3, в)
(т> -т)(т ■в);
аварийный угол крена (рис. 1—3)
- € (т • т) 4 (л- ■») (» (т ■ -г)
249
250
Приложение 2
Приближенный расчет ходкости катамаранов
с крейсерской кормой
Исходные данные: размерения одного корпуса Лвл, Blt Т, 6, <р
и диаметр его винта £>в; отношение расстояния между ДП к длине корпуса
2Ь = 2Ь/Ьвл\ диапазон значений скорости, для которых определяются харак¬
теристики ходкости l>s.Tiin — t'smas-i уз; соответствующий диапазон чисел Фруда
0,51 5-js mln „ с 0,515us
°т Frmin = - до Fr max = ; смоченная поверхность од-
V ёВвл V gi-вл
ного корпуса Qj, определяемая по теоретическому чертежу или по соответ¬
ствующей ему приближенной формуле; соотношения размерений одного кор¬
пуса Лгвл^і, BjT, Zi = Лвл обратный коэффициент нагрузки откры¬
того гребного винта Kje = цОв: V Rilp< где R±— буксировочное сопротив¬
ление, р — удельная плотность воды.
При отсутствии близких материалов могут быть использованы данные
рис. 4, 5, где коэффициент полноты миделя р = 0,98-? 0,95; ф = 6/Рфактич.
При расчете коэффициентов взаимодействия движителей и корпусов жела¬
тельно использование значений этих коэффициентов для одиночного корпуса.
При их отсутствии могут быть использованы данные рис. 6.
Результаты расчетов по табл. 1, 2 далее используются обычным способом.
Таблица 1
Расчет буксировочной мощности корпуса малого удлинения,
движущегося в составе катамарана
Ц/и
Характеристика
Формула
Источник
1
Число Фруда
0,515os
гг= -
V £^ГВЛ
Основная перемен¬
ная
2
Скорость, м/с
Г’= Fry gLrBJ1
0) Ѵ^гвл
3
Коэффициент остаточ¬
ного сопротивления од¬
ного корпуса
Гост (Fr)
Исходный матери¬
ал расчета (допусти¬
мо пользоваться
рис. 4, 5)
4
Коэффициент сопро¬
тивления формы одного
корпуса
= Еост |ff=0,15
По графику tOCT
5
Коэффициент волно¬
вого сопротивления од¬
ного корпуса
fw —- Гост Г|
(3)—(4)
6
Коэффициент влия¬
ния клиренса и отноше¬
ния L/By на вязкостное
сопротивление
KfL/e(L/Sl’ 2*)
Рис. 7
7
Коэффициент влия¬
ния клиренса и коэффи¬
циента общей полноты на
вязкостное сопротивле¬
ние
Kf6 (6, 2b)
Рис. 7
251
Продолжение табл. 1
№
п/п
Характеристика
Формула
Источник
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Коэффициент влия¬
ния отношения ВХ!Т на
вязкостное сопротивле¬
ние
Коэффициент влия¬
ния клиренса на вяз¬
костное сопротивление
Коэффициент сопро¬
тивления формы кор¬
пуса в составе катама¬
рана
Коэффициент влия¬
ния клиренса и отноше¬
ния Д/BY на волновое со¬
противление
Коэффициент влияния
клиренса и коэффициента
общей полноты 6 на
волновое сопротивление
Коэффициент влия¬
ния клиренса и отноше¬
ния BjT на волновое
сопротивление
Коэффициент влия¬
ния клиренса на вол¬
новое сопротивление
Коэффициент волно¬
вого сопротивления кор¬
пуса в составе катамара¬
на
Коэффициент остаточ¬
ного сопротивления кор¬
пуса в составе катама¬
рана
Число Рейнольдса
для судна
Коэффициент трения
эквивалентной’ пласти¬
ны
Коэффициент полно¬
го сопротивления кор¬
пуса в составе катамара¬
на
Буксировочное со¬
противление корпуса в
составе катамарана
Буксировочная мощ¬
ность корпуса в составе
катамарана
KjB/Т 2^)
Kf ~ L/B^f Ь^-fB/T
K-wl/b (^/5p 2^> Fr)
Kwh (6, 2b, Fr)
^wBlT (В1/Т, 2b, Fr)
^wL/B^w6^wB/T
(Ff) — Kai^w
oct — ?KU> 4“ $Kf
r> v^
Re
V
&rp (Re)
?K = ?K OCT 4“ trp + Уі A£
Ri == k Krc
EPS, = л. c.
/0
Рис. 7
(6).(7)-(8)
(9)-(5)
Рис. 8, 9
Рис. 8, 9
Рис. 8, 9
(11)-(12)(13)
(6) (14)
(Ю) 4- (15)
1,61 [ ’
0,455
’ТР “ (IgRe)2’58
(16)4- (18)4-£ д?
-^Qi-(19)-(2)2
(20) ■ (2)
75
252
100
0,15 0.20 0,25. 0,30 0,35 0,00 Fr й« ojo 0.25 ojo 0.35 o.oo Fr
Рис. 4. Приближенные данные о коэффици- Рис. 5. Приближенные данные о коэффициен-
еите остаточного сопротивления одиночного те остаточного сопротивления одиночного
корпуса катамарана. корпуса катамарана.
Іі = 4,0; It =» 4,5; /, = 5,0. = 6,0; — Zi = 7,0; /, = 8,0.
253
08'0 = 5 ‘GZ'Z-lPO
254
ОО+і'и000'0 q/q'q
255
Таблица 2
Расчет коэффициентов взаимодействия корпуса малого удлинения,
движущегося в составе катамарана
Е
Характеристика
Формула
Источник
1
2
3
4
5
6
7
8
9
Коэффициент нагруз¬
ки одного корпуса
Коэффициент попут¬
ного потока для оди¬
ночного корпуса
Коэффициент засасы¬
вания для одиночного
корпуса
Коэффициент влия¬
ния клиренса, числа
Фруда и относительной
длины 1± на попутный
поток при Fr1; Fr2. . .
Коэффициент попут¬
ного потока корпуса в
составе катамарана
Коэффициент влия¬
ния на засасывание кли¬
ренса, числа Фруда и от¬
носительной длины
при Ffj, Fr2. . . на за¬
сасывание
Коэффициент засасы¬
вания корпуса в соста¬
ве катамарана
Коэффициент влия¬
ния неравномерности
корпуса в составе ката-
мар ана
Пропульсивный коэф¬
фициент корпуса в со¬
ставе катамарана
Kde = ѵ DB : К7?і/р
w (Kde)
t (Kde)
Kv (ZP 2b)
WK = KVW
Kt (Z1( 2b)
Zk — kk
l2K = *2
1 ~ZK 1
^KK 1 — WK І2К
Основная пере¬
менная
Основные исход¬
ные данные (допу¬
скается использо¬
вание рис. 6)
' То же
Рис. 10
(2) -(4)
Рис. 10
(3) .(6)
1 ~(7)
И-(5)] (8)
Приложение 3
Приближенный расчет буксировочного сопротивления
катамаранов с тонкими корпусами
Коэффициент остаточного сопротивления катамарана ~Гк с корпусами большого
удлинения может быть получен, если известно значение этого коэффициента
для одного корпуса (например, пересчитанные с рис. 11):
?гк (Fr) = kf (2b) £f + kw (Fr, 2b) Zw (Fr).
Здесь kf (2b) — коэффициент, учитывающий влияние взаимодействия корпусов
на сопротивление формы; — коэффициент сопротивления формы одиночного
корпуса; & = £,/Fr = 0,12 по рис. 11;^ (Fr, 2Ь) — коэффициент, учитывающий
Рис. 11. Удельное остаточное
сопротивление тонкого одиноч¬
ного корпуса в зависимости от
числа Фруда по водоизмеще¬
нию Fry =
Рис. 12. Коэффициенты влия¬
ния взаимодействия корпусов
катамарана на сопротивление
формы kf и волновое сопротив¬
ление kw при Frgj0,24.
Рис. 13. Коэффициенты влияния взаимодействия корпусов катамарана на
волновое сопротивление при Fr = 0,26ч-0,44.
Рис. 14. Коэффициенты влияния взаимодействия корпусов катамарана на
волновое сопротивление при Fr = 0,46ч-0,80.
258
Рис. 15. Коэффициенты пропорциональности между сопротивлением
трения и вязкостным сопротивлением модели одиночного корпуса.
Л о — поправка, связанная с относительной остротой корпуса н коэф¬
фициентом продольной полноты <р; — поправка, зависящая от от¬
носительной ширины одного корпуса; вст — поправка, определяемая
относительной длиной цилиндрической вставки BCT/L.
9*
259
влияние взаимодействия корпусов на волновое сопротивление; (Fr) — коэффи¬
циент волнового сопротивления одиночного корпуса: (Fr) = (Fr) — tj.
Коэффициенты kf и kw для корпусов большого удлинения (LlBY 10)
определяются только клиренсом 2b = 2ЬІL и степенью асимметрии корпусов
относительно собственных ДП.
Для симметричных относительно ДП корпусов значения коэффициентов
приведены на рис. 12—14.
Для проверки коэффициента сопротивления формы одиночного корпуса
служат графики Л. С. Артюшкова и Я. И. Войткунского (рис. 15):
= гтр (ПоИв/Т-Иц. вст — 1)>
где Т]о, ивіт, Иц. вст — поправки, учитывающие влияние приведенных геоме¬
трических параметров на коэффициент сопротивления формы одиночного кор¬
пуса, £тр — коэффициент сопротивления трения эквивалентной плоской пла¬
стины.
Приложение 4
Приближенный расчет ходкости
дуплуса и трисека
Исходные данные: главные размерения корпуса LK, Blt Нв, 6, ср;
осадка судна Т; размеры п стоек: LCTi, Всті, аст £-; отстояние миделей стоек
от миделя корпусов х£; расстояние между ДП корпусов 2b=2b/L; диаметр
винта DB и его отстояние от корпуса а = a!DB.
Вспомогательные величины:
относительная смоченная поверхность корпуса (со стабилизаторами) со
(рис. 16);
Рис. 16. Зависимость относительного коэф¬
фициента сопротивления формы х, удель-
ной^смоченной поверхности со и поправок
к волновому сопротивлению kK, kCT от удли¬
нения корпуса и стойки соответственно.
поправка к смоченной поверхности, учитывающая овальность шпангоу¬
тов бж 1 (рис. 17);
относительный коэффициент сопротивления формы корпуса хк (рис. 16)
и стойки хСт (рис. 16);
поправка к коэффициенту сопротивления стойки на влияние овальности
шпангоутов б/ (рис. 17);
1 Используется при постоянном соотношении ЬіИі\ при переменном ЬіНі
вводится с коэффициентом 2/3.
261
коэффициент, учитывающий влияние расстояния между корпусами на со¬
противление формы Kf (рис. 18);
поправки для учета влияния удлинения корпуса /гк или стойки /гет на
волновое сопротивление (рис. 16);
поправка к волновому сопротивлению на овальность шпангоутов рк
(рис. 17);
Рис. 17. Поправки к удельной смочен¬
ной поверхности
/ Q, \ ' Q, \
I у2/з I I I
\ 'к JB/H \ 'к )В/Н=\
~ / Я, \
ѵ-'/З
\ ѵк )В/Н=1
относительному коэффициенту сопротив¬
ления формы 6f = Уов/^т.в, волновому
сопротивлению корпуса |ік, зависящие
от степени овальности k0B =
Рис. 18. Поправка, учитывающая влияние клиренса и удлинения корпу¬
сов на коэффициент сопротивления формы.
расстояние между носовыми кромками стоек аст = х± + х2 + Lzn!2 —
— LCT2/2 — (трисек, две стойки на одном корпусе);
п
смоченная поверхность корпуса Пк = Ѵ^соцбщ— У*, Аст іВстіаст і\
і—
п п
смоченная поверхность стоек QCT = Е^т — S 2 Act і Act («ст і •
i=l 1
Дальнейший расчет представлен в табл. 3.
262
Рис. 19. Коэффициент волнового сопротивления корпуса при различном
погружении h = /і0СИ/Лк оси и относительной скорости Fr; = 8.
263
Рис. 20. Изменение волнового сопротивления корпуса при уста¬
новке на миделе стойки длиной LCT.
264
Рис. 21. Изменение коэффициента волнового сопротивления корпуса при
сдвиге стойки от миделя к оконечностям.
ст н**ст к
Рис. 22. Зависимость остаточного сопротивления стоек от их взаимного рас¬
положения.
Рис. 23. Зависимость волнового сопротивления корпусов со стойками
от 26 и Fr.
/і = 6,5; lt ■= 4,5.
265
Рис. 24. Зависимость коэффициента брызгового сопротивления стойки от
угла входа ватерлинии а и относительной скорости FrCT = v! \^gLCT.
Рис. 25. Коэффициенты попутного потока w
( ) и засасывания t ( ) корпуса
со стойками при различном удлинении корпуса.
266
Таблица 3
Расчет ходкости дуплуса или трисека
№
п/п
Величины, формулы, источники
Численные
значения
1
Скорость и, м/с
2
3
V2, м2/с2
Число Фруда Fr = —?
V gLK
4
5
Число Рейнольдса для корпуса ReK = —
То же для стойки RerT = Ц^ст‘
с-1 ѵ
6
Коэффициент трения пластины для корпуса
?тр (ReK)
7
То же для стойки £тр. ct(R6ct)
8
Коэффициент вязкостного сопротивлений корпу¬
са £ѵк = (1 Н- ик SfKf) £тр. к ~ 0 Я- fyKf) (6)
9
То же для каждой стойки £ѴСТ1- = (1 +xCTJQ)X
х£тр. отд “ (1 4“ ^сті-^f) (7) ■
10
Вязкостное сопротивление корпуса А\,к =
= ^2 ^к£ѵк = (2) йк (8)’ кгс
11
То же для каждой стойки RVCTi~^~ йстг&ѵст» =
= -у- (2) йст,- (9), кгс
12
Вязкостное сопротивление корпуса со стойками
Rv = (10) + (11), кгс
13
Коэффициент волнового сопротивления корпуса с
удлинением 8 'Qw (Fr, h0/L) — рис. 19
14
Дополнительное волновое сопротивление от стой¬
ки 1, размещенной на миделе корпуса,
А£сті (/-ст/Тк, Кг) рис. 20
15
16
То же для стойки 2 А£Ст2 (Т-ст/Д-к, Fr) — рис. 20
Число Фруда стойки FrCT = Ѵ —
V g^CT
17
Изменение волнового сопротивления, вызванное
сдвигом стойки 1 на расстояние xt от миделя,
kxl, (xlt L„ILk, Fr) — рис. 21
18
To же для стойки 2 kX2 (х2, LCT/LK, Fr) — рис. 21
19
Поправка, учитывающая влияние носовой стойки
на кормовую Ка (аст, FrCT), — рис. 22
267
Продолжение табл. 3
Xs
п/п
Величины, формулы, источники
Численные
значения
20
Коэффициент волнового взаимодействия корпу¬
сов KKw(2b, Fr) — рис. 23
21
Коэффициент волнового сопротивления корпуса
со стойками в составе судна (п стоек)
tn \
'QiiK~'QwkKKKwpK ( і kxi — п + 1) j +
п
•
22
Волновое сопротивление корпуса со стойками в
п ? Рс'2 <->
составе судна Rw = Сюк —“і
23
Брызговое сопротивление стоек 7?бр =
2 п
= ^9 Уі ^ctZ^ctZ^6d. сбр рис. 24
і 1
24
Буксировочное сопротивление корпуса со стой¬
ками в составе судна — Л® + Дбр
25
Буксировочная мощность корпуса со стойками
в составе судна ЕР8г = Rjv/75, л. с.
26
Коэффициент нагрузки движителя ое =
= Sflj/pvW^
27
Коэффициент попутного потока w (ае, LlV~BjHк)—
рис. 25
28
Коэффициент засасывания t (ое, L/VВуН^ —
рис. 25
29
Коэффициент влияния корпуса т)к= (1 — t)l(\ —ш)
Дальнейшие расчеты ведутся по обычной схеме
1
Приложение 5
Графики для приближенной оценки
гидродинамических характеристик дуплуса
и трисека при килевой, вертикальной
и бортовой качке
Весьма приближенная оценка коэффициентов присоединенной массы, демпфи¬
рования, возмущающей силы дуплуса и трисека при килевой, вертикальной
и бортовой качке может быть выполнена методом плоских сечений по данным;
о тех же характеристиках при вертикальных перемещениях этих сечений [104].
Возмущающая сила и моменты при качке:
бортовой
рѳ~ (>gab'LbP'Q (kD') kp (2b/T,kT);
килевой
2iV
P^«« 2pgaD'N (AL)2 £ P& (kD’t) kpi (2b/T, kT);
1=1
вертикальной
P^ 2pgaD'LPz (kD*) kp (2b/T, kT);
AL = L/2N,
где N — количество шпангоутов.
Присоединенные моменты инерции и масса при качке:
бортовой
-у- <kD') k'n №/т> kT)i
килевой
2iV _
(ЛЛ)2£ р?; (kD') kpj (2b/T, kT);
1=1
вертикальной
Pg ~ nLD'2pg (kD') kp (2b/T, kT).
Силы и моменты демпфирования при качке:
бортовой
А.0 ~ 2А| (kD’) Lb (2bIT, kT);
килевой
т 2
(kD') kv (2b/T,kT);
вертикальной
L ~2LA> (kD') ~ kv (2b/T, kT);
» » к
pg, Ag, P^ определяются по рис. 26; kp, kp, kv — по рис. 27, а; коэффи¬
циенты co штрихом — по рис. 27, 6.
269
*
I
I
270
Рис. 27. Поправки на взаимодействие корпусов дуплуса с характеристиками
ТІВ^= 1,7; Вст/О'= 0,25; а!Ь = 1:а — при вертикальных колебаниях;
б — при угловых колебаниях сечения (бортовая качка).
*0’ % — попРавки" вводимые при расчете коэффициентов присоединенной массы,
демпфирования и возмущающей силы соответственно.
271
Приложение 6
Таблицы для оценки коэффициентов
присоединенной массы и демпфирования
шпангоутов катамарана
при вертикальных перемещениях
Таблицы (4—13) разработаны Я- М. Элисом и предназначены для «ручного» расчета
коэффициентов pgg и при варьировании клиренса 2Ь/ВІ в пределах 1,5—
3,0, коэффициента полноты fJ в пределах 0,644—0,926, частотного параметра
от 0,05 до 1,15, В^ЧТ от 0,2 до 1,5.
г яЬі .
(id) = (^) р ь
($</) = (id) Р° ■
Для вертикальной качки
ДЛТе; г» j Рц (х) dx (присоединенная масса);
L
г
N m J (х) dx (сопротивление качке).
L
Для килевой качки
« j х2 (х) dx (присоединенный момент инерции);
L
х2рц (х) dx (момент силы демпфирования).
Коэффициент Ujj при
SI* I
1
0,201
0,115
0,056
0,171
0,100
0,060
!
0,151
0,090
0,059
СО QO &
о о
о о о
1,05
0,193
0,112
0,056
0,164
0,097
0,061
0,145
0,087
0,059
0,129
0,079
0,057
0,95
1
■ 0,187
0,110
0,058
0,159
0,096
0,062
0,141
0,086
0,061
0,126
0,078
0,058
0,85
£90*0
601*0
581*0
0,156
0,096
0,066
0,138
0,086
0,065
0,124
0,078
0,062
0,75
0,179
0,112
0,070
0,153
0,098
0,073
0,136
0,089
0,071
0,124
0,081
0,068
0,65
0,178
0,118
0,082
0,154
0,105
0,085
0,138
0,095
0,082
0,126
0,088
0,078
SS'O
0,185
0,130
0,101
30 ГО
911*0
191*0
0,146
0,106
0,099
0,134
0,099
0,094
0,45
0,198
0,151
0,129
0,176
0,137
0,129
0,161
0,127
0,125
0,150
0,119
0,119
0,35
0,225
0,186
0,173
0,204
0,172
0,172
0,190
0,161
0,167
1
0,179
0,152
0,160
0,25
0,280
0,247
0,244
0,260
0,232
0,243
0,246
0,221
0,237
0,235
0,212
0,230
0,15
0,387
0,360
0,372
0,369
0,347
0,373
0,357
0,337
0,368
0,347
0,328
0,362
0,05
0,671
0,646
0,685
0,659
0,639
0,696
0,650
0,635
0,700
0,644
0,632
0,702
СО.
0,926
0,785
0,644
0,926
0,785
0,644
0,926
0,785
0,644
0,926
0,785
’ 0,644
Кли¬
ренс
Ю
2,0
2,5
3,0
10 п/р Дубровского В. А
273
Таблица 5
Значения коэффициента (B-J2T = 0,667)
Коэффициент при
ю
Ф м <м
—< —< СП
ІО —00 —<
о о о о
1 1 1
Г- СО СП —
(N СО —< СО
ю м о
о о о о
1
0Q ^ч Ю чф
со еч со со
ІО со СЧ (М
о о о о
СП О О —<
чф 00 Ф со
LQ СО СОл чф.
О О О О
1,05
S О О СС
<м
О О -7 о
СО ф М Ф
00 СО О 00
°І
О О о О
1 1
со г- —< о
О 00 00 оо
—1 —1
о о о о
со м s со
(М to —< СО
СП СО СО чф.
о о о о
0,95
LQ СО (М чф
со о F7
о —7 о" о
1 1
СО СТ) со со
(N to СП со
■ф^ О (N чф
О О О О
1 1
S Ю СО S
со со о ю
сч о
о о о о
СО 00 чф СО
СП —< Г- СО
чф О? (N СО
о о о о
0,85
—< —« со о
СП СО ю ср
О 00 —< о
о со" -7 —7
со чф ю о
тн (N СО 00
со —< со ф
о о о о
1 1 1
Гчч си чф СП
—- Ю (N СО
ч^ —о -М
о о о о"
1 1
Г- чф О (N
Ф S Ф
чф^ сч сч сч
о о о о
0,75
Ю О 00 ю
СО чф Ю СП
ф Ф ф
о о? —7 -7
1
О СО СО чф
о чф чф
(N Ю (N СО
о о —7 о
1 1 1
СО СО (N
чф (N Гчч чф
СО О СЧ чф.
о о о о
00 to 00 (N
О О Ф г-
чф^ (N О О
о о о о
1
0,65
со СО чф СП
о г, г, о
чф. СО чф
< —< ■—< «Н
СО чф о ю
Ю 00 г- —<
о> Г- СО
о —7 о о
1 1 1
Ю СП — 00
О СП чф иэ
М (N 00
о о о о
о г- со ю
со со ю о
со о - со
о о о о
1 1
0,55
—• (N (N -<
00 СО 00
СО (N СО чф
со s со со
СП —< —< г-
00
-м" о о о
1
СО 00 СО СП
О г-, ю со
(N СО чф чф
о" —7 U* о
1 1 1 1
СП г-. LQ (М
чф СО СО СП
- СО СО X
о о о о
1 1 1
ю
о
О Ю СО СО
Ф — О ф
О -1 со ю
СО Ф -< (М
—< 00 о г-
00 00 о —<
о о -7 —7
—0,830
—0,471
—0,012
0,377
(М 00 to СП
Ю О чф оо
КО чф' о? со.
о ~ ~ о*
1 1 1 1
0,35
чф О —< О
Ф S М 00
СП о со со
о —7 —7 -7
Ю О О чф
СО О 00 00
00^ 00 о со
0 0—7—7
—< —< со О
—< (М Ю (М
LQ Ю СО СП
О О О О
со со СО Ф
— со — со
—< О (N
о о о о
1 1 1
0,25
чф СП СП ю
СП СО ’Ф О)
СП чф. СП
о" -7 -7 -7
СП 00 Г- 00
Ф Ф м ю
00 О> (N СО
0 0—7—7
— СО СП
со ср со
S S О) со
0 0 0 —7
О ср Гч- со
-W О чф схз
Ю Ю со СП
о о о о
0,15
СО 00 СП со
СП О) СП СО
со г-
—7 —7 —7 сч
о ю со ю
S СО 00 оо
О (N ф.
—7 —7 —7 оГ
(М —< о о
Ю 00 СП чф
О О СО СП
о —7 —7 —7
СО 00 чф СО
чф (М СП СП
°Ч ‘'Ч.
0 0-7-7
0,05
00 —• о о
чф — ф Г-.
СП СО СП СП
”7 оі оі со
Ф (М S (М
(N Ю чф ,ф
°9. —1
—7 оГ о7 со"
00 Ф Ф S
(М CJ 00 чф
Г- О LQ LQ
—7 оГ оі со
СО S S со
СО СТ) чф со
—7 —7 оі со"
СО.
S Ф CO S
Ф СО <М СО
О> СО ’Ф
О О О о"
S Ф СО S
00 (N СО
СП Г- СО ч^
О О О о
Г- LQ СО Г-
чф 00 О! со
о о о о
Г- ю со г-
чф 00 (N СО
СП Гч- СО чф.
о о о о
« X
ІО
2,0
2,5
3,0
274
Таблица 6
Значения коэффициента [j,^(Bj/2T = 1,0)
Коэффициент при
ю
—< СО —' —'
rt LQ Г- СГ)
s см со
о о о 7-
ІЛ ю оо со
S CO CM S
Г- ІО
о о о о
© — 00 ОМ
Ф Ю X
<о со_ 00^
о о о о
Г'- СО СП г^.
СО Ст)
°Ч *4 °ч
о о о
1,05
00 о
іо 00 СГ) —'
СО О —
о 6 О СІ
СГ) г-
ФМ Г-
s « со
о о о о
ю со ом о
со о —< ом
СО_ со 00
о о о о
со см S іл
о о © ом
СО t4** t4**
ООО—*
0,95
со С о со
о ю оо
ю ОМ СО О>
о о — со
1 1 1
см ю о
Г- О ФМ ю
СО ФМ~ —
о о о о
чф 00 СО
см ю ю
Г- ю LO
о о о о
00 со о о
СО СО ’’Ф о
СО ь. о
0 0 0 —7
0,85
со со со іл
0 S ф
СО О 'Ф
о о со ІО
1 1 1
СГ) ФМ СО СГ)
ф ф CO S
ю см о
о о о о
1
со со о г-
S О X см
СО Ю СО
о о о о
О) ОМ СГ) о
ОМ ОМ СГ) СГ)
СО СО СП
о о о о
0,75
СО S ор
— со об о5
о ю оо ю
о см со оі
1 1
СО О '-Ф ю
СГ) —< (М чф
'■Ф — OD 00
о о о о
ю —< со
-Н см со со
со со
о о о о
чф чф СО 00
00 СО СГ)
СО LQ СО 00_
о о о о
99*0
Г- о to 00
Г- ОМ г- г-
О 00 —'ф
—Г о со со
1 1
о со со
—< оо ом —<
СО_ ОМ ОМ~ іо
о о —7 ом
1 1 1
ю о> оо
ОМ О) ом со
іо ом о
о о о о
Г'- IQ LO г-
см о со со
СО LQ LQ Г-^
о о о о*
0,55
оо со о
—< ір ю> г--
со со ю о
см см со
—< о оо ст>
со о> о со
— ІО 00 ОМ
о —Г со
1 1 1 1
Ф S оо см
Ю ОМ об
со о о
о о о ~
1 1 1
00 О СО СО
СО Г- О '■Ф
ІЛ со со со
о о о о
ю
о
1,777
1,828
2,172
2,799
Ю Г- СО Г"-
00 СО
ф со о со
-7 -7 о о
1 1
ОМ О) ом со
СГ) О) 00 —•
xf ІЛ
о U* ом со*
1 1 1 1
со о со со
— ср г^. со
OD о ©
о о о* о
1 1 1
0,35
СО СО 00 —•
со ОМ £1 г-
<ь о г-*
-7 _7 ом ом*
ФМ 5) ОО
Ф О СО 00
о —7 —7 —7
S СО іл
w 3 ?
(М —< оо со
-Г -Г о о*
1 ГІ
00 —• ом —
ІЛ СО X см
CD СО Ф
о —Г ом ом*
1 1 1 1
0,25
со о оо см
—< со об
со о оо
—7 -7 сі ом
СМ ср СО 00
со О Г- 00
со со см
— —7 -7 фм*
СО О О) LO
S СО CD 00
СО г^. СГ) со
© о о —*
СО LQ О
—' ю со t>
— — о о
о о о о
1 1 1
0,15
ОМ чф г^- со
(М —< со со
со ф Л
-4 J см сс
СО — Ф
см о
со — ©
J см см
СО со со LO
00 LQ м* —*
СО N 't
—4 —7 —7 оГ
—< 00 СМ о
см см со S
°ч
о* -7 —7 —7
0,05
о LO
СО ф СО
ФМ со СО* LQ
ФМ ІЛ Ф 00
ом со —1
оо Ф СП
ФМ* ОМ* со
со ю со з;
СО © © 00
ем cd со ю
см СМ 6 't
00 со со
— 00 ’ со 00
—< хф —< ом
Ф$ ом со* м<*
СО.
—< Щ о о
'-ф 00 СО 00
СГ) Г- СО_ 'Ф
о о о о
— ю о о
'-ф 00 со 00
О) со
о о о о
—< ш о о
чф 00 СО 00
СП Г- СО 'Ф
о о о о
— ю о о
00 со 00
СГ) г- со
о о о о
Кли¬
ренс
LQ
2,0
2,5
3,0
10:
275
Таблица 7
Значения коэффициента (В1/27' = 1,25)
Коэффициент при 1
ю
0,938
0,502
0,037
0,977
0,773
0,751
1,019
0,916
1,043
О СО
— сч Е
1,05
0,856
0,360
—0,257
0,930
0,718
0,676
0,979
0,869
0,983
СО О —<
Г- Г- (N
О О СО
0,95
0,748
0,150
—0,753
0,873
0,649
0,578
0,935
0,821
0,921
1,012
0,985
1,205
0,85
0,592
—0,208
—1,772
0,802
0,558
0,437
0,885
0,766
0,850
0,960
0,921
1,120
0,75
0,333
—0,995
—4,690
0,708
0,422
0,204
0,825
0,699
0,757
0,907
0,864
1,046
0,65
—0,250
—3,841
—2,505
0,566
0,177
—0,273
0,748
0,600
0,605
0,850
0,802
0,962
ю
ю
о*
сэ
—2,630
1,868
3,513
0,280
—0,437
—1,628
0,625
0,411
0,274
77
Г^ 00
ООО
2,424
2,520
2,931
—0,718
—2,831
—4,499
0,332
—0,150
—0,788
0,640
0,491
0,439
0,35
1,917
2,105
2,613
—0,630
0,297
0,987
—1,063
—2,382
—3,366
0,101
—0,486
—1,198
0,25
1,747
2,021
2,590
О О —<
—< СГ)
СО СГ>
•-< •-< •-<
0,094
0,187
0,450
—• о ю
•—< Ю О
СО Ш S
7 7 7
0,05 0,15
1,930
2,290
2,961
1,642
1,926
2,499
00 г-7 со
(N СГ)
0,837
0,932
1,245
с£>
О со со
СО со чф
2,805
3,338
4,27о
2,594
3,077
3,944
2,401
2,838
3,640
СО.
0,942
0,785
0,628 (
0,942
0,785
0,628
0,942
0,785
0,628
0,942
0,785
0,628
к ё
Ч <у
* а
ІО
2,0
2,5
3,0
.276
Коэффициент при
1,134
0,738
0,425
1
со со
00 о
О
СО Г- (N
Г- со Ю
0,730
—1,574
10,687
SO' I
1,051
0,610
0,200
1,134
0,969
1,030
Ь* '-Ф
—< оо со
2,050
2,029
2,604
0,95
0,945
0,430
—0,144
1,075
0,901
0,940
(N Ю О
со —<
—< —< со
(N (N
00 СГ) —<
со
оо
о
0,799
0,150
—0,746
1,004
0,816
0,821
1,105
1,049
1,253
со ю
О со
(N оэ Ф
0,75
0,574
—0,368
j —2,076
0,914
0,699
0,643
1,041
0,979
1,160
00 S О)
Ю СГ) —<
—< —« іо
0,65
0,147
— 1,708
—6,346
0,786
0,511
0,327
0,964
0,890
1,036
со Ю 00
00 —* о
о —«
<
0,55
— 1,136
—6,721
0,975
0,565
0,120
—0,415
0,857
0,749
0,815
—< СГ) 00
—< (N оо
О О (N
О
0,246
3,190
3,759
—0,023
—1,175
—3,023
0,652
0,411
0,225
0,904
0,883
1,054
0,35
2,427
2,670
3,260
—2,679
—2,972
—1,809
0,135
—1,054
—2,255
0,593
0,354
0,158
0,25
2,096
2,446
3,114
1,286
1,529
2,025
со о ю
со со со
СО ОО -м
7 7 7
— 1,374
—2,271
—3,102
0,15
2,230
2,673
3,451
1,852
2,193
2,842
Ю СО
О —< СГ)
СО СТ)
0,570
0,619
0,874
ю
со
о
3,443
4,152
5,325
3,150
3,782
4,860
2,887
3,454
4,443
2,638
3,146
4,051
со.
0,947
0,785
0,623
0,947
0,785
0,623
0,947
0,785
0,623
0,947
0,785
0,623
Ч си
ІО
2,0
2,5
3,0
277
Таблица 9
Значения коэффициента Х^(Вг/27'=0,2)
278
Таблица 10
Значения коэффициента Xjj (В/2Т = 0,667)
Коэффициент при
1,15
S S 00
о см о
о о —оо
о о о о
ь- —< о о
О СО 00
О —4. ~ СМ
о о о о
S (N S Ф
чф —< СП —<
О < СО
о о о” о
00 00 О Cl
—< ci CO
О —< CM co.
0 0 0 0
1,05
•—< ''ф ''ф СО
Ю СО СМ СМ
О О СО —
о о о —Г
Ю —< т|4
LO О СТ)
О. —~ СМ
о о о о
СО О СО ю
LO (N СП О
О. г-4. —4. СО.
о” о” о о”
00 О b- CT)
LO CO Cl LO
cq ~ cm co.
0 0 0 0”
0,95
СП о ю о
чф о —< со
О О 4-4.
о о” —Г
о
СО СП —< ь-
о о « м
о о о о
со со со
СО (N 00 00
° П. °1
о о о о
СТ) О b- co
co CM
cq 4—< см co
0” 0 0 0”
0,85
О СО СТ) м
СО СІ М4 со
о —4. оо со.
о —7 —Г —<”
о со lo
СО СО СТ)
о о о со
о о о о
СО Ю О чф
S in со
о ~ —4. (N
о о о о
CT) CO CM CD
b- < 0
cq cm co.
0” 0 0” 0”
0,75
со ю СТ) 00
Ь- СО — СМ
О 00 00 00^
о со” -Г —7
ю 00 со
О СО <
о о со со.
о о о —7
_ d —< ~
S 00 ф СО
о о о со
о о о о
CD О 00 CT)
00 CO CD
-cq ~ —4. ci
0 0 0 0”
0,65
1,999
1,681
1,712
1,967
Г- СТ) Г- СМ
О СТ) —<
О LO о -q.
о* о оГ см”
Г- (М О 00
СО СО ’
О О —4*. оо
о - о” о” о” :
b- CM
b- 00 00
cq 0 cq cm
0” C5 0” 0
0,55
О й СТ) S
« СО СО. ~
—7 —7 —7 сі
00 со со
lo ю со со
« М CD LC
-7 со сі сі
S X о
О Г- СП
О. СО '■Ф О '
о” о” —4” с<Г
00 0 00 b-
S 8 2 g
0 0 cp 0
0,45
~ '•Ф СТ) 00
b СО СО СТ)
о> *4 °і
о” —7 —7 см”
00 N о <м
Ь- СТ) со о
ю О) СО S
—7 —7 сі сі
00 СП о ю
bw —< ю СП ,
IQ ‘ 00
—7 оі сч” оі
СТ) 4-Ф LO
CD О CT) CD
CT) b- co
0” 0” —7 ci
0,35
со оо 4—« со
чф СО СІ
О q О) Ю*
—7 —7 —7 сі
—< СО СТ) СМ
О СО ’’Ф со
СО. Г- (N00*
—7 _? сі сі
(N LQ S -
S CO «
LO. О to.
—7 oi 01” co”
О LO b- CD
—< LO b-
cq —< co —<
—4” СІ СІ co
0,25
lo со си
СО ’’Ф СО 00
СІ СО -q 00
—7 —7 см” см”
X (N S «
LQ О СО СІ
СО 00 со. «
—<” —7 сІ со”
Tt< чф b- co
CO CO (N О
cn to. co.
J J M co"
О b- тГ CT)
Ю Cl co «
чф о CD
ci ci co”
0,15
о о ю о
LO 00 со о
іо СП ІО
—7 —7 см” со”
чф со «—* ю
4—< ' со 00 СО
СО О СО іо
—7 сі сі со”
(N « CD Ю
co co co 00
cq 4-4. ь- cq
—7 oi oi co”
b- CD CD b-
CT) b Cl CD
CD —4. 00. b-
—7 ci ci co”
0,05
ю со ю
СМ О О
• со со со
сІ см” со м7
СТ) —. чф . ■чф
Чф Чф Ю
со СО
ci <N со ^7
b- LO CT) CT)
co co 00 0
co cq io
ci ci co”
4—< CO LO Ю
00 00 —< Ю
со. lo
СІ СІ co” 'Ф
СО.
b LO СО b
чф 00 СІ со
СП Ь- СО
о о о о
Г- LO со Г-”
чф 00 сч СО
о о о” о
b- LO co b-
00 Cl co
CT>. b- CD.
0000”
b- LO co b-
00 Cl CD
CT) b- CD
0” 0 0” 0
е; о;
ю
2,0
2,5
3,0
279
Таблица 11
Значения коэффициента Хгг(В/2Т= 1,0)
Коэффициент Xjj при
1,15
СО S’ СО
eg 22 со —*
о о о о
00 Ю S’
со ю со он
© —* 04 СО
о” о о о
00 СО іо ю
ср со о он
О —« СО '-Ф
о о” о о”
© СО 04 ю
О -М со ю
о о о о
1,05
LQ О СО
fe = 8 8
О О О О
—< S’ СО 04
00 СО СО S’
О -м О4л СО
О о о” о”
04 ОН 00
00 00 —< ОН
О СО
о о” о о
Ю ОН О СО
00 он со со
О -М СО_ ю
о о” О о”
0,95
со ОН чф
СО СО О -н
о о о
О О о о
со s> о
ф S’ 04
© —* О4~ СО
о о О О
ОН •“< СО S’
ОН О 04 00
О 04 СО
о о” о о
СО О S’ —
О 04 S’ ОН
—* 04 СО ю
о о о о”
0,85
00 —< ОН
s W со ІЛ
О О чф 00
О о” о”
S’ 00 со 04
О СО О 04
°1 01
о о о” о
со со о —«
04 ю
•М 04 СО
о о” о” о”
О S’ —<
04 '■Ф 00 00
04 ео ю
о” о” о о
0,75
ІЛ СО S
s со сп
О -Н С0 s
О О СП s'
—< Ю ОН LQ
СО О S’
"1 * *1 Ож
о о о о
04 04 ю СО
СО 00 СО
—04 СЧ СО
О О о о
Ю О 04
ю 00
04 СО ю
о” о о о
0,65
IQ ОН 04
СО —« он '-Ф
О О
о со’ 1Л
ОН ОН СО со
00 О СО
О О О 04
о" о” о” о”
СО 00 04 S’
СО S’ он он
о” о” о” о
04 00 Ю ОН
со со со
04 СО
о о о” о”
0,55
СО О 04 Ю
CO LQ <
со о <м -
’■ф” со” со”
СО СО О чф
-5 со со он
© S’ LQ
О О ’ф”
© СО 04 Ю
© S’ 04 04
—* О О О
О О” О О”
ю о со он
ю он о
-И 04^ 04
о” о о” о”
0,45
00 о о ю
•Ф -Н N О)
оо °І °о *4
оГ О4 со”
СО СО 00 '-Ф
S’ со
со оэ со со
•И ю со
со СО
© СО 04 О
О -М 00
О О О 04”
со —< —< о
S’ со о
о о о о
о” о о о
0,35
00 со ОН 04
О 04 О 04
© 00 00
~ 04 04 со
S’ ОН со
Ю 00 S’ ю
IQ О СО О
04” со” со” IQ
S’ О ю 04
со СО ОН
О 04^ СО S’
04” со” LC
ОН он S’
—< IQ СО ’’Ф
04 00 СО ©
о” о” ~ СО
0,25
Ю ” СО
со —< чф ”
s> оэ о —
04” СО
© © S’ он
о —« со со
S’ IQ S’
04 04” со”
СО —* 04 ю
ОН Ю ю
СО О ОН 04
04” со” со” LC
S’ 04 LQ S’
он он со
со о о со
04” со” ’’ф” LQ
0,15
ОН LQ S’ 00
Ф СО
S’ IQ S’
04” 04” со” чф
00 чф Чф
—* со он со
СО ОН S’ о
04* 04” СО іо
04 S’ он СО
СО S’ S’ о
о он со
04” со” со” ІО
со он со со
о со он ю
LQ —< О
04 СО IQ
S0‘0
СО LO —< со
04 СО СО СО
О СО СО
со” со” т^” со
S’ ю со
S’ ю ю со
О S’ S’ сч
со” со” М4” со
S’ 10 О чф
—< О 04 ю
—00_ 00 СО
со со” со
LQ 04 00 —<
'■Ф СО 04
00 оо_ 'Ф
со” со” со
СО.
—* Ю О о
'Ф 00 СО 00
СП S СО
о о” о” о
—■ ю о о
00 СО 00
ОН S’ со
о о” о о
—< ю о о
00 со 00
ОН S’ СО
о” о” о о”
ю © о
00 со со
ОН S’ СО '■Ф
о” о” о о”
я S
о,
1,5
I
2,0
2,5
3,0
280
Таблица 12
Значения коэффициента Х^(В/27'=1,25)
о со о
СП О —и
О Ю
ООО
ю
00 Ф м
Г- СП
00 О СП
00 'Ф оо
О —• <м
о —< со
О N со
о см
ООО
ООО
ООО
ООО
со со
Ю 00 о
00 оо —
со со
ю
О СО 00
О о ю
СП сч —*
О ю 00
о
О
о <м со
О (N
—< СМ ’З5
ООО
ООО*
ООО
ООО
ю о
О
00 <м СП
ю О СП
ю
о ю
—< СМ '■Ф
—< Ю (N
СМ 00 СП
О)
—< СМ СО
—< (N '■Ф
—* СМ '■Ф
о
ООО
ООО
ООО
о - о" о
о со см
со со О)
(N 00
t4** t4**
ю
О
со со м
Г- СО
ю о —«
оо
—< о
—< СМ со
—* (N '■Ф
—< СО LQ
о
о о о"
ООО
ООО
ООО
ю со s
X Ю 00
Г- О СП
—И со г-
ю
О>
СМ СО
со о см
00 со см
О О ю
-М (М (М
—* см
—« СО ю
о
ООО
ООО
о" о" о"
ООО
4J?
S
СМ СО 00
00 СП (М
Г-. чф со
СП со
ю
СО 00 '■Ф
чф со со
00 оо г-
ІЛ
о
о
о ю со
о" о —Г
о" о о
—см^ со.
о" о о
см со_ IQ
о" о" о"
Я
S
СТ) чф О
Г- СМ <М
СМ —< СП
00 —• со
а
ю
со со со
о со см
00 см см
см со со
S
ю
г- о о
ООО
—< см см
см со
•Ѳ*
•&
сэ
о” іо
ООО*
ООО*
ООО
л
&
_ s со
ю 00 Г-'-
LQ О —<
см со —<
ю
о со о
М Ф со
О) 't о
СП
чф со о
О 00 о
ООО
—< см см
о
со со со
О О '■Ф
о о о
ООО*
со ю о
о ю со
Г- 00 о
ю s о
ю
ю со
(М со —•
СО 00 —•
•—< о см
—< LO
о г- г-
СМ —< СП
о
см см со
со ю
О —: см
ООО
(М СМ СМ
СП LQ О
СМ Ю СП
г- см со
ю
о о
СТ) со со
—< О
о см СП
см
о
—00 со
см of со"
S LC Ф
<м" со" 'Ф
°1 °і
СО to
•—« со
см" со" '■Ф
_
О 00 СО
О 00 со
СО 00 С7>
Ю о о
ю
О Г"-
со s со
о см
—і со о
о
іо <N сч
<м" СО 'Ф
00 ІО со^
оі со ’’ф"
О 00^ о>
со со"
—< СП о
со" со ю"
—< LO о
СО О)
см ю <м
СО СП
ІЯ
со со со
-і со s
f*** t4**
со
о
со со
г-, ю
Г- СО 00
00 СО СП
о*
СО М<" LO
СО
СО ІО
со ю
d Ю 00
СМ Ю 00
СМ Ю 00
СМ Ю 00
чф 00 сч
оо <м
00 см
00 см
сп г- со
СП г- СО
О) s со
СП Г- со
о о о
о о о
ООО
ООО
яё
е; щ
1,5
2,0
2,5
3,0
281
Таблица 13
Значения коэффициента (В/2Т = 1,5)
282
Приложение 7
Графики для экспресс-оценки бортовой
и вертикальной качки катамарана
без хода на нерегулярном волнении
1. Средние амплитуды крена, скорости и относительных ускорений у борта
при бортовой качке могут быть приближенно оценены с использованием схемы
расчета, приведенной ниже [52]:
а) по рис. 28, 29 определяем отношение длины резонансной волны Лр
к полной ширине катамарана:
- - - ЧЬ
— ф (S, «, B-JT, Zg/T1, г, b)\ I = f
Рис. 28. Изменение отношения длины резонансной волны катамарана при бор¬
товой качке к его полной ширине Вт при 6 = 0,56 в зависимости от BlТ.
г = 0,9; г = 1,15.
Рис. 29. Изменение отношения длины резонансной волны катамарана при бор¬
товой качке Лр к его полной ширине Вт при 6 = 0,70 в зависимости от В/Т.
7=0,9; ~ =1,15.
283
б) по рис. 30—34 в зависимости от Интенсивности воЛненйй находим сред¬
ние характеристики качки при заданной величине Q- В^Ъ, м2 и полу¬
ченном значении КрІВт;
в) найденные величины корректируем, умножая на коэффициент о =
Рис. 30. Средние амплитуды крена, линейные скорости и ускорения у наве¬
тренного борта катамарана при расположении его [лагом к волне, без хода; вол¬
нение 4 балла.
Рис. 31. Средние амплитуды крена, линейные скорости и ускорения у наве¬
тренного борта катамарана при расположении его лагом к волне, без хода;
волнение 5 баллов (обозначения см. на рис. 30).
2. Средние перемещения, скорости и ускорения при вертикальной качке
катамарана могут быть приближенно оценены с помощью графиков на рис. 35
по приведенной ниже схеме:
а) определяем отношение средней длины волны Л при заданной интенсив¬
ности волнения к расстоянию между ДП корпусов: Т/2&.
б) _по рис. 35 в зависимости от интенсивности волнения и полученной вели¬
чины Л/26 находим характеристики вертикальной качки 3%-ной обеспеченности;
в) полученные величины умножаем на коэффициент щ определенный
в пункте 1.
284
Рис. 32. Средние амплитуды крена, линейные скорости и ускорения у наве¬
тренного борта катамарана при расположении его лагом к волне, без хода;
волнение 6 баллов (обозначения см. на рис. 30).
Рис. 33. Средние амплитуды крена, линейные скорости и ускорения у наве¬
тренного борта катамарана при расположении его лагом к волне, без хода; вол¬
нение 7 баллов (обозначения см. на рис. 30).
285
рис. 30).
а катамарана при расположении его лагом к волне, без хода; вол¬
нение 8 баллов (обозначения см. на
Рис. 35. Средние амплитуды, скорости, ускорения вертикальной качки ката¬
марана при расположении его лагом к волне; волнение 4—8 баллов.
286
Приложение 8
Номограммы для расчета качки
полупогружных платформ
Способ применения номограмм изложен в § 3.4 (рис. 36—40).
Рис. 36. Номограмма для определения присоединенной массы при
вертикальной качке плоского прямоугольного контура при d/T = 0,1.
Рис. 37. Номограмма для определения присоединенной массы при вер¬
тикальной качке плоского составного контура при d/T = 0,25.
287
Рис. 38. Номограмма для определения присоединенной
массы при вертикальной качке плоского составного кон¬
тура при d/T = 0,50.
Рис. 39. Номограмма для определения присоединенной
массы при вертикальной качке плоского составного
контура при d/T = 0,75.
Рис. 40. Номограмма для определения присоединенной
массы воды при вертикальной качке плоского состав¬
ного контура при d/T = 1,0.
288
Приложение 9
Приближенный метод определения
главных размерений судов
с малой площадью ватерлинии
Приводится принципиальная схема выбора основных элементов двухкорпус¬
ных судов на ранних стадиях проектирования применительно к транспортным,
пассажирским и научно-исследовательским судам. Исходными данными при
проектировании являются грузовместимость судна, скорость и дальность пла¬
вания.
В качестве основных геометрических элементов и характеристик, которые
должны быть определены в процессе проектирования, выбраны: водоизмещение
судна D, габаритные размеры надводного корпуса БНк, ^нк, ННк, размерения
подводных корпусов LK, Blt Нк, размеры стоек LCT, Вст, hCT, коэффициенты
полноты 6, ф, а, высота борта Н, осадка Т, расстояние между ДП корпу¬
сов 2Ь; вертикальный клиренс /іверт.
Для сокращения области поиска рациональных характеристик рассма¬
триваемых судов можно допустить, что габаритные размеры надводного корпуса
в основном зависят от заданной вместимости, а главные размерения подводных
корпусов — от условий плавучести и ходкости; размеры стоек определяются
требованиями остойчивости, мореходности и прочности.
Выбор габарита надводного корпуса производится путем решения урав¬
нения вместимости
ЬнКВикНнк = к^гр + k2 (W
жил + ^СЛ + ^ВСп),
где 1,0 — коэффициент, учитывающий, что часть груза размещается на
палубе; k2 1,0 — коэффициент, учитывающий, какую долю общего объема
жилых, служебных и вспомогательных помещений составит объем таких поме¬
щений в надводном корпусе;
Frp = snhjtn,
здесь s — удельная площадь палубы на грузовую единицу (контейнер, трей¬
лер); п — число грузовых единиц в одном ярусе; h± — высота яруса или между¬
палубного пространства (с учетом размеров набора и зазоров); m — число
ярусов или палуб.
Размеры грузовых помещений, кроме того, должны быть кратны размерам
грузовых единиц с учетом необходимых зазоров и выступающего набора.
В случае проектирования пассажирского судна объем трюмов должен быть
заменен суммарным объемом пассажирских кают и общественных помещений,
располагаемых в надводном корпусе.
Соотношение LHilBHK, учитывая необходимость обеспечения поперечной
остойчивости при минимальной площади ватерлинии стоек, целесообразно
принять равным 1,4—2,0.
С точки зрения конструкции надводный корпус есть объемное
перекрытие, опертое на стойки. Балками главного направления этого пере¬
крытия являются поперечные переборки, доля массы которых в массе конструк¬
ции надводного корпуса весьма велика. Оптимальное в смысле массы при за¬
данном пролете соотношение высоты и длины балки, работающей на изгиб
и срез, колеблется в пределах 7—9, поэтому такими же пределами целесооб¬
разно ограничить соотношение ВикІНак при достаточно большой ширине над¬
водного корпуса.
289
Количество поперечных переборок (не менее 4) определяется с учетом
требований о кратности расстояния между ними и размерами грузовых еди¬
ниц с добавлением величины набора и необходимых зазоров.
Толщина стенки переборки определяется по условию допустимого уровня
касательных напряжений [т], толщина настилов - по уровню нормальных
напряжений [о] при восприятии переборкой (и стойкой) изгибающего момента
Мст = Dilf), тс-м,
где — водоизмещение одного корпуса, т; /0 — отстояние ЦВ одного кор
пуса от нижней обшивки надводного корпуса.
Масса оборудованного надводного кор¬
пуса определяется массой настилов и сте¬
нок переборок:
Р кк — ^з^іРц<
41. Коэффициент утилиза-
водоизмещения транспорт-
судна с малой площадью
где Рн — масса настилов и стенок попереч¬
ных и продольных переборок; k3 ~ 1,4 —
коэффициент, учитывающий массу набора;
£ _ 124-1,5 — коэффициент, учитывающий
массу оборудования [74] (нижний предел —
грузовые суда, верхний — пассажирские и
научно-исследовательские).
Водоизмещение транспортного судна
с горизонтальной погрузкой может быть
определено с использованием даиных о ко¬
эффициенте утилизации водоизмещения по
грузоподъемности (рис. 41):
D = РгрТ).
Рис.
ции
ного
ватерлинии по грузоподъемности.
женно может быть найдено через массу надводного корпуса РНк
Водоизмещение пассажирского или
научно-исследовательского судна D прибли-
п с 0б0.
рудованием:
D — Р нкЛик,
где Пнк — коэффициент утилизации водоизмещения (т]нк ~ 0,3—0,4).
Главные размерения подводных корпусов находятся решением уравнения
плавучести
D = у (26АкВі#к + \ ѴСт),
где 2ѴСТ= (0,204-0,35) V-объемное водоизмещение подводной части стоек
(верхний предел — грузовые суда). „
Длина подводных корпусов в первом приближении выбирается по рис. 42
в зависимости от водоизмещения и скорости. По соображениям улучшения
общего расположения и удифферентовки желательно выполнение условия
НК Расстояние от расчетной ватерлинии до обшивки подводного корпуса по
условиям ходкости
hn 1,25^6 КВі//К,
где kb 0,5, а для обеспечения минимальной качки
/іп 7--
290
здесь ke = 1,5 — коэффициент, учитывающий влияние Качки йа относительные
перемещения корпуса и воды; rw = полувысота расчетной волны (hK =
= hs% для пассажирских, hB = h — для грузовых судов).
Величина /іп принимается наибольшей из получаемых по последним двум
формулам.
Рис. 42. Рекомендуемая начальная длина корпусов судна
с малой площадью ватерлинии.
Рис. 43. Реко¬
мендуемые на¬
чальные значе¬
ния коэффициен¬
та общей пол¬
ноты корпусов.
Для уменьшения габаритной осадки и некоторого снижения волнового
сопротивления может быть желательно ограничение = 1,54-1,8.
Начальные значения 6 могут быть определены по рис. 43.
Длина и ширина стоек определяются площадью ватерлинии, получаемой
из условия обеспечения минимальной начальной остойчивости (А is 0,02ВНк):
о _ 2 (h— zc + zg) V.
■^mln rs ,
для указанных выше относительных объемов стоек гс « (0,8ч-0,95) И; по ре¬
зультатам проектных исследований zg sa 0,65/7 для транспортных судов, zg ~
~ 0,60// — для пассажирских и научно-исследовательских; V —■ объемное во¬
доизмещение судна; 2Ь — расстояние между ДП корпусов.
291
Для обеспечения минимальной качки Желательно выполнение уело*
вия [102]:
ДМ Ѵу
•Jmax^ ~ г
где от — частота максимума спектра расчетного волнения; ДМ ~ 0,5 — коэф¬
фициент присоединенной массы при вертикальной качке.
Для обеспечения минимального волнового и брызгового сопротивления
> 6,0.
С учетом необходимости наличия набора и доступа к нему ширина стоек
должна быть не менее 1,2 м.
Для ограничения аварийного угла крена при затоплении отсеков подвод¬
ного корпуса высота стоек /іст Вик tg 15°; для обеспечения высокой море¬
ходности иа волнении /іст 1,5/ів/2, где /ів — высота расчетной волны. При
выборе размеров стоек следует учитывать, что по условиям удобства размеще¬
ния энергетической установки и удифферентовки при двух стойках на каждом
корпусе площадь ватерлинии кормовой стойки надо принимать равной
0,55—0,65 суммарной площади ватерлинии одного корпуса. Кроме того, стойки
должны иметь такие длину и расположение, чтобы поперечные переборки
в стойке, подводных корпусах и надводном корпусе были в одной плоскости.
Количество и расположение переборок в подводных корпусах определяются
таким образом, чтобы объем каждого отсека был не больше объема надводной
части стоек, что обеспечивает максимальный угол крена в случае затопления
одного любого отсека не более 15° (для пассажирских судов — двух отсеков).
Масса подводных корпусов определяется их размерами, количеством пере¬
борок и толщиной обшивки (с учетом приведенных выше коэффициентов, при¬
нимающих во внимание массу набора). Толщина обшивки выбирается такой,
чтобы была обеспечена местная прочность (зависящая от диаметра корпуса
и погружения) и общая прочность (зависящая, кроме того, от расположения
стоек и количества переборок в стойках).
292
Толщина обшивки стоек при известных их размерах определяется из ус¬
ловия ограничения напряжений при изгибе и срезе стойки как консольной балки
горизонтальными динамическими силами, возникающими на волнении. На
ранних стадиях проектирования такая сила, приложенная в центре величины*
может быть принята равной водоизмещению одного корпуса со стойками, а до¬
пускаемые напряжения с учетом характера нагрузок [а] = 0,8от, [т] =’о,4от.
Таким образом, в результате упрощенных расчетов прочности можно опреде-
лить толщину всех основных связей и уточнить массу металлического корпуса.
Минимальная ширина стоек на ватерлинии дана на рис. 44.
Ходкость судов рассматриваемого типа может быть рассчитана по мето¬
дике, приведенной в приложении 4.
Желательно, при этом выбрать оптимальный диаметр винта и оптималь¬
ную частоту вращения одновременно, что позволяет получить пропульсивный
коэффициент в пределах 0,75—0,80.
Ограниченные габариты подводных корпусов и необходимость всемерного
снижения водоизмещения почти однозначно определяют тип энергетической
установки рассматриваемых судов — газотурбинная (в отдельных случаях —
среднеоборотные дизели).
С учетом результатов расчета ходкости определяется масса энергетической
установки и запасов топлива, затем уточняется нагрузка, проверяются удиф-
ферентовка и остойчивость. Вслед за этим выполняются расчеты экономиче¬
ских показателей с учетом влияния конструктивных особенностей рассматри¬
ваемых судов на ходовое время и время стоянки.
Приложение 10
Словарь терминов
Аутригер (или противовес) — см.
судно с аутригером.
Выдвиг — см. клиренс продоль¬
ный.
Двухкорпусное судно — см. много¬
корпусное судно, а также катамаран,
дуплус, трисек, судно с аутригером,
полупогружная платформа.
Дуплус — судно с двумя одина¬
ковыми корпусами (см. многокорпус¬
ное судно), расположенными рядом
друг с другом, малой площадью ва¬
терлинии и наибольшей шириной кор¬
пусов ниже расчетной ватерлинии.
Может рассматриваться как судно
с малой площадью ватерлинии из
двух глубокопогруженных корпусов
и двух стоек большой длины, пере¬
секающих поверхность воды и соеди¬
няющих подводные корпуса с над¬
водным (см.). Взаимное расположе¬
ние корпусов характеризуется по¬
перечным клиренсом (сл.), высота
надводного корпуса от расчетной ва¬
терлинии — вертикальным клиренсом
(см.). Судно голландской постройки
«Duplus», название которого пред¬
ложено для обозначения данного архи¬
тектурно-конструктивного типа, пред¬
назначено для выполнения буровых
и исследовательских работ в Север¬
ном море.
Катамаран — двухкорпусное судно
(см. многокорпусное судно) с одина¬
ковыми корпусами, расположенными
рядом друг с другом, с V или U-об-
разной формой шпангоутов и наиболь¬
шей шириной каждого корпуса на
уровне расчетной ватерлинии. Взаим¬
ное расположение корпусов характе¬
ризуется расстоянием между внутрен¬
ними бортами или поперечным кли¬
ренсом (ел.). Отстояние соединяющей
корпуса конструкции от расчетной
ватерлинии называется вертикальным
клиренсом (см.). Корпуса катамарана
объединяются в единое судно либо
общей надстройкой, либо общей руб¬
кой, либо соединительным мостом (сл.),
либо балочными или ферменными
связями.
294
Клиренс вертикальный — расстоя¬
ние от расчетной ватерлинии до ниж¬
ней обшивки или нижней кромки
поперечных связей, образующих над¬
водный корпус или соединяющую кор¬
пуса конструкцию (мост) многокор¬
пусного судна (ел.). Может быть
переменным по длине; колеблется
от 2—3% длины корпуса (для реч¬
ных катамаранов) до 8—12% длины
(для судов с малой площадью ватер¬
линии).
Клиренс поперечный — расстояние
между плоскостями, проходящими че¬
рез центры величины корпусов, или
диаметральными плоскостями корпу¬
сов многокорпусного судна (см.).
Клиренс продольный — расстояние
между плоскостями мидель-шпангоу-
тов, составляющих судно корпусов.
Корпус надводный — объемная го¬
ризонтальная конструкция, чаще всего
имеющая форму параллелепипеда, рас¬
положенная в надводной части мно¬
гокорпусного судна (см.) с малой
площадью ватерлинии (см.) и опи¬
рающаяся на подводные корпуса (сл.)
через стойки (сл.). Служит для обес¬
печения поперечной прочности много¬
корпусного судна, а также для раз¬
мещения грузовых, жилых, отдельных
служебных и вспомогательных поме¬
щений.
Корпус подводный — водоизмещаю-
щая горизонтальная конструкция, ча¬
ще всего имеющая форму цилиндра
с носовым и кормовым заострениями,
при расчетной осадке погруженная
под поверхность воды, связанная одной
или несколькими стойками (см.)
с надводным корпусом (см.) судна
с малой площадью ватерлинии (см.).
Служит для размещения машинного
отделения, цистерн для жидкого груза,
топлива, запасов и балласта.
Многокорпусное судно — несамо¬
ходный или самоходный плавучий
объект, состоящий из двух или более
водоизмещающих объемов, при рас¬
четной осадке погруженных под по¬
верхность воды или пересекающих
ее, жестко связанных между собой
в надводной части. Взаимное распо¬
ложение частей многокорпусного судна
определяется поперечным, продольным,
вертикальным клиренсами (ли.). Под¬
водные водоизмещающие объемы могут
иметь одинаковое или разное водоиз¬
мещение, главные размерения и форму
обводов, эти объемы могут быть сим¬
метричны или несимметричны относи¬
тельно собственных диаметральных
плоскостей и плоскостей мидель-шпан-
гоутов. Многокорпусное судно в целом
может быть симметричным относи¬
тельно общей диаметральной плоско¬
сти (см. катамаран, тримаран, дуплус,
трисек, полупогружиая платформа)
или несимметричным [ли. судно с аут¬
ригером; также возможны двухкор¬
пусные суда (с.и.) с продольным сдви¬
гом корпусов].
Мост соединительный — жесткая
корпусная конструкция, состоящая из
одного или двух, верхнего и нижнего
настилов с набором и соединяющая
корпуса катамарана (ли.), тримарана
(см.) и судна с аутригером (ел.).
Может быть непрерывным или преры¬
вистым по длине; может иметь в ка¬
честве набора составные балки оди¬
накового размера, расставленные на
одинаковом расстоянии друг от друга
(регулярная конструкция) или балки
разного размера с разным расположе¬
нием по длине (нерегулярная кон¬
струкция).
Полупогружная платформа (или уста¬
новка) — многокорпусное судно (см.),
состоящее из двух или более подвод¬
ных корпусов (ли.) упрощенной формы
(круглого или прямоугольного сече¬
ния) и надводного корпуса (см.),
связанных между собой круглыми
стойками (см.) и дополнительными
фермами из цилиндрических элемен¬
тов. Расчетная рабочая осадка обычно
находится на середине высоты стоек;
при этой осадке платформа представ¬
ляет собой многокорпусное судно с ма¬
лой площадью ватерлинии (ли.). Пе¬
редвигается при малой осадке (ниже
палубы корпусов), представляя собой
при этом многокорпусное судно с кор¬
пусами упрощенных обводов.
Судно с аутригером (ами) — двух-
или трехкорпусное судно (см. много¬
корпусное судно) с корпусами раз¬
личного водоизмещения, размерений
и формы обводов. Меньший корпус,
аутригер, или противовес, может быть
расположен впереди, позади или ря¬
дом с большим. Взаимное располо¬
жение корпусов характеризуется рас¬
стоянием между внутренними бортами
или поперечным клиренсом (см.),
а также продольным клиренсом (см.).
Судно с малой площадью ватерли¬
нии — см. дуплус, трисек, судно
с аутригером, полупогружная плат¬
форма, а также многокорпусное
судно.
Стойка — водоизмещающая верти¬
кальная или наклонная конструкция,
пересекающая поверхность воды при
расчетной осадке и соединяющая под¬
водный корпус (ли.) и надводный
корпус (см.) судна с малой площадью
ватерлинии (см.).
Трехкорпусное судно — см. много¬
корпусное судно; тримаран, полупо¬
гружная платформа, судно с аутри¬
герами.
Тримаран — трехкорпусное судно
(см. многокорпусное судно) с одина¬
ковыми корпусами, два из которых
расположены рядом друг с другом,
а третий сдвинут в продольном направ¬
ления в корму или, чаще, в нос;
шпангоуты имеют V- или U-образную
форму, а наибольшая ширина каж¬
дого корпуса—на уровне расчетной
ватерлинии. Взаимное расположение
корпусов характеризуется расстоянием
между внутренними бортами или по¬
перечным клиренсом (си.), а также
продольным клиренсом (ли.) или вы-
двигом.
Трисек — двухкорпусное судно (см.
многокорпусное судно) с одинаковыми
корпусами, погруженными под по¬
верхность воды, и четырьмя пересе¬
кающими поверхность стойками обте¬
каемого сечения, соединяющими под¬
водные корпуса с надводным корпусом.
Является судном с малой площадью
ватерлинии. Взаимное расположение
корпусов и стоек характеризуется
поперечным клиренсом (ли.) и про¬
дольным клиренсом (ли.), а высота
надводного корпуса от расчетной ва¬
терлинии — вертикальным клирен¬
сом (ли.).
Указатель литературы
1. Анализ прочности и жесткости конструкций катамаранов по методу
конечных элементов. — IX научно-техническая конференция «Очередные задачи
речного судостроения». «Труды ГПИ», Горький, 1973. Авт.: В. В. Козляков,
Л. С. Журавлев, С. А. Кириченко, Е. А. Шишенин, М. А. Тахватулин.
2. Артюшков Л. С., Ляховицкий А. Г., Юрков Н. Н.
Экспериментальное исследование сопротивления воды движению трехкорпус¬
ных судов. — «Судостроение», 1975, № 12, с. 7—9.
3. Б а с и н А. М. Приближенное исследование действия волнения на
плавающее судно. — «Труды ЦНИИРФ», 1952, вып. XVII, с. 14—32.
4. Басин А. М., Веледницкий И. О., Ляховицкий А. Г.
Гидродинамика судов на мелководье. Л., «Судостроение», 1976.
5. Басин А. М., Ляховицкий А. Г. Перспективы развития бы¬
строходных водоизмещающих судов. — «Речной транспорт», 1972, № 6,
с. 36—37.
6. Б а т у е в А. Д. Коэффициент сопротивления, присоединенный мо¬
мент инерции и возмущающий момент катамарана с большим клиренсом. •
В сб. трудов КТИРПиХ «Мореходные качества судов», 1972, вып. ХХХХІѴ,
с. 50—60.
7. Батуев А. Д„ Дубровский В. А. Особенности качки двух¬
корпусных судов. — «Судостроение», № 8, 1972, с. 12 17.
8. Б о й ц о в Г. В., П а л и й О. М. Комплексный подход к проблемам
обеспечения прочности судов. — В кн.: «Проблемы прочности судов», Л., «Су¬
достроение», 1975, с. 71—150.
9. Бородай И. К-, Нецветаев Ю. А. Качка судов на морском
волнении. Л., «Судостроение», 1969.
10. Блох Э. Л., Г и н е в с к и й А. С. О движении системы тел в идеаль¬
ной жидкости. — «Труды НТО им. акад. А. Н. Крылова», 1963, вып. 47,
с. 71—74.
11. Буньков М. М. Влияние основных параметров корпуса на про¬
дольную устойчивость глиссирующих катеров. — «Труды НТО им. акад.
А. Н. Крылова», 1969, вып. 124, с. 34—38.
296
12. Внешние силы, действующие на двухкорпусное судно на волнении.—
В кн.: «Проблемы прочности судов», Л., «Судостроение», 1975, с. 263—294.
Авт.: Е. Б. Волкова, И. Н. Галахов, Ф. Г. Кандель, Ю. А. Кулаков,
А. 3. Фридлянский.
13. В о р о б ь е в П. С., Р у д и н С. Н. К вопросу о влиянии ограни¬
ченности потока на коэффициент присоединенной массы трехосного эллип¬
соида. — «Труды НИИВТ», 1966, вып. XXI, с. 25—80.
14. Г а л а х о в И. Н. Принципиальные особенности расчета прочности
полупогружных буровых платформ. — В кн.: «Вопросы судостроения. Проек¬
тирование судов», Л., «Судостроение», 1976, вып. 9. с. 20—30.
15. Г а л а х о в И. Н., В о л к о в а Е. Б. К расчету прочности двух¬
корпусного судна с регулярной конструкцией соединительного моста. — В кн.:
«Вопросы судостроения. Проектирование судов». Сер. 1, Л., «Судостроение»,
1973, вып. 2(4), с. 111—123.
16. Г а л а х о в И. Н., К у л а к о в Ю. П., Ч у п р и к о в В. Г. Осо¬
бенности напряженного состояния двухкорпусного судна. — «Материалы XXIV
научно-технической конференции ЛИВТ», 1970, с. 71—78.
17. Гернер Г. иФерховсек Р. Проектирование и оборудова¬
ние судов. Л., Судпромгиз, 1956.
18. Г у б а н о в В. Е. Крановое судно-катамаран «Кёр-Оглы». — «Судо¬
строение», 1968, № 8, с. 3—10.
19. Г у м б е л ь Е. Статистика экстремальных значений. М., «Мир», 1965.
20. Д у б р о в с к и й В. А. Исследование волнового сопротивления ката¬
марана.— «Судостроение», 1968, №7, с. 12—16.
21. Д у б р о в с к и й В. А. Качка многокорпусных судов. — В кн.:
«Мореходность и стабилизация судов на волнении», Л., «Судостроение», 1976,
с. 287—299.
22. Д у б р о в с к и й В. А. Особенности мореходности многокорпусных
судов. Изд-во ЛКИ, 1975.
23. Д у б р о в с к и й В. А. Силы и моменты волновой природы, действую¬
щие на тело при движении вдоль твердой стенки. — «Труды ЛКИ», 1967, вып. 58,
с. 37—46.
24. Д у б р о в с к и й В. А. Расчеты мореходных качеств многокорпус¬
ных судов. Изд-во ЛКИ, 1975.
25. Ж у к о в с к и й Н. Е. Действие волнующейся жидкости малой глу¬
бины на плавающие на ее поверхности тела. —Собр. соч. Т. 2., Гостехтеорет-
издат, 1949.
26. К а л м а н а к А. С. Расчет балок-стенок. М., Госстройиздат, 1956.
27. Каменский Е. В., Терентьев Г. Б. Рыболовные траулеры.
Л., «Судостроение», 1968.
28. К а н д е л ь Ф. Г. Приближенное определение ударного изгибающего
момента для катамарана.—«Судостроение», 1976, №6, с. 7—11.
29. К а ш и р и н Л. В. Перспективы применения судов катамаранного
типа. — «Доклады III научно-технической конференции по развитию флота
рыбной промышленности и промышленного рыболовства социалистических
стран», Л., «Судостроение», 1968, вып. 3, с. 21—41.
30. Коган М. П. К гидродинамической теории качки катамарана в жид¬
кости конечной глубины. — «Труды НКИ», 1970, вып. 35, с. 33—39.
31. Козляков В. В. Об оценке усталостной долговечности конструк¬
ций, долговременный спектр напряжений в которых определяется законом
Вейбулла. — «Труды НТО им. акад. А. Н. Крылова», 1967, вып. 99,
с. 47—54.
32. Козляков В. В. О рациональной структуре формул для опреде¬
ления статистических характеристик волновых нагрузок — «Судостроение»,
1966, № 8, с. 10—16.
33. К о р о л ь А. Я. Вертикальная качка полупогруженного катамарана
на продольном волнении. — В кн.: «Морские порты», изд-во Харьковского уни¬
верситета, 1973, вып. 6, с. 51—60.
34. К о р о л ь А. Я- Продольная качка катамарана, состоящего из обыч¬
297
ных или полупогруженных корпусов. — В кн.: «Морские порты», Харьков,
1976, вып. 4, с. 24—39.
35. Костюков А. А. Теория корабельных волн и волнового сопротив¬
ления. Л., Судпромгиз, 1959.
36. К о ч и н Н. Е. О волновом сопротивлении погруженного в жидкость
тела.—Собр. соч. Т. 2, М., Изд-во АН, 1949.
37. К у з н е ц о в Д. С. Специальные функции. М., «Высшая школа»,
1965.
38. К р и в о н о с о в С. Н. О гидродинамике многокорпусных глисси¬
рующих судов. — «Катера и яхты», 1968, № 14, с. 16—21.
39. Л и т о н о в О. Е. К оценке экстремальных значений изгибающих
моментов в корпусе судна в условиях стационарного режима волнения. — «Труды
НТО им. акад. А. Н. Крылова», 1975, вып. 225, с. 31—39.
40. Л и т о н о в О. Е. Усталостный критерий прочности корпусов транс¬
портных судов (возможный принцип построения). — «Труды Регистра СССР»,
Л., «Транспорт», 1975, вып. 3, с. 227—252.
41. Л и то нов О. Е. Требования к диапазонам квантования напряже¬
ний, регистрируемых с помощью счетчиков напряжений. — «Труды Регистра
СССР», Л., «Транспорт», 1975, вып. 3, с. 324—328.
42. Л я х о в и ц к и й А. Г. Исследование волнового сопротивления трех¬
корпусных судов на глубокой воде. — «Труды ЛИВТ», 1976, вып. 153, с. 14—24.
43. Л я х о и и ц к и й А. Г. Особенности гидродинамики трехкорпусных
судов и их учет при проектировании. — «Судостроение», 1975, № 12, с. 3—6.
44. М а л о в а С. В. О расчете волнового сопротивления катамарана
с соединительным мостом, входящим в воду. — «Труды Горьковского политехи,
ин-та», 1972, вып. 108, с. 58—58.
45. М и л о в а И. И. Возмущающие силы и моменты при вертикальной
и бортовой качке катамарана. — В кн.: «Материалы научно-технич. конферен¬
ции проф.-препод, состава ГИИВТ», Ч. 1, изд. ГИИВТ, 1970, с. 38—44.
46. М и л о в а И. И. К вопросу о вертикальной качке катамарана с уче¬
том моста на тихой воде. — «Труды ГИИВТ», 1970, вып. 107, с. 41 46.
47. Многокорпусные суда. Л., «Судостроение», 1972. Авт.: Г. X. Бара¬
кан и др.
48. И а в л е н к о А. С., С о л о в е й С. Б, Некоторые результаты экс¬
периментального исследования гидродинамических характеристик глиссиру¬
ющих катамаранов. — «Труды НТО им. акад. А. Н. Крылова», 1974, вып. 173,
с. 161—168. „ ,
49. И а п к о в и ч И. Ф. Строительная механика корабля. Ч. 1, т. 1.
Л., Судпромгиз, 1941.
50. И у х ш т а й н К. Перспективы применения судов катамаранного
типа. —«Доклады III научно-технической конференции по развитию флота
рыбной промышленности и промышленного рыболовства социалистических
стран», Л., «Судостроение», 1968, вып. 3, с. 1—20.
51. Раков А. И. Особенности проектирования промысловых судов. Л.,
«Судостроение», 1966.
52. Рекомендуемый способ оценки бортовой качки рыбопромысловых ката¬
маранов. Отчет КТИРПиХ, 1972, № гос. регистрации 71075465, инв. № Б254403.
53. Ремез Ю. В., Некрасов В. А., Шестопал В. П.
Качка судна на нерегулярном волнении. Изд-во НКИ, 1973.
54. Рубинштейн Б. И. Исследование прочности двухкорпусных
судов. Автореф. дис. на соиск. учен, степени канд. техн, наук, Л., 1964 (ЛКИ).
55. Р я з а н о в Г. А. Электротехническое моделирование с применением
вихревых полей. М., «Наука», 1969.
56. С а б а н е е в В. С. О движении эллипсоида вращения в жидкости,
ограниченной плоской стенкой. — «Вест. ЛГУ», 1958, вып. 3, № 13, с.
24—29,
57. С в е ш н и к о в А. А. Сборник задач по теории вероятностей, мате¬
матической статистике и случайным процессам. М., «Наука», 1970.
58. Семенов И. М. Двухкорпусный траулер-сейнер «Эксперимент»,—
«Судостроение», 1970, № 1, с. 3—17.
298
59. Средства активного управления судами. Под ред. А. А. Русецкого,
Л., «Судостроение», 1969.
60. Т р у б М. С., П ы р я л и н П. Ф. Технико-экономическая целесооб¬
разность применения рыбопромысловых катамаранов. «Доклады IV научно-
технической конференции по развитию флота рыбной промышленности и про¬
мышленного рыболовства социалистических стран», Л., «Судостроение» 1968
вып. 3, с. 59—76.
61. Трунов Е. К., Кор мушкин А. В., Четыркин Н. В.
Экспериментальная оценка точности методов расчета двойного дна судов для
навалочных грузов. — «Труды ЦНИИМФ», 1974, вып. 186, с. 60—72.
62. Ф е р и н А. Д. Исследование прочности соединительной конструк¬
ции двухкорпусных рыбопромысловых судов. Автореф. дис. на соиск. учен,
степени канд. техн. наук. Калининград, 1973 (КТИРПиХ).
63. Ф е р и н А. Д. Экспериментальные исследования прочности соеди¬
нительных конструкций промысловых катамаранов средних и малых размере¬
ний. — «Тезисы докладов XX научно-технической конференции, посвященной
памяти академика Ю. А. Шиманского», Л., «Судостроение», 1971, с. 72—84.
64. Ф р о л о в А. М. К определению волновых нагрузок на соединитель¬
ный мост катамаранов. — «Судостроение», 1966, №2, с. 3—11.
65. Ф р о л о в А. М. Практический способ расчета соединительной кон¬
струкции катамарана. — «Труды НТО им. акад. А. Н. Крылова», 1967, вып. 93
с. 24—29.
66. Федяевский К. К., Соболев Г. В. Управляемость корабля.
Л., «Судостроение», 1963.
67. X а с к и н д М. Д. О волновом сопротивлении тела произволь¬
ной .формы на мелкой воде. — «Прикладная математика и механика», 1949,
вып. XXXII, с. 420—431.
68. Ч у п р и к о в В. Г. Уравнения деформаций двухкорпусных судов
и граничные условия к иим с учетом влияния надстроек. — «Сб. научных тру¬
дов молодых специалистов ЛЙВТ», ч. 8, 1973, с. 87—98.
69. Ш э н ь Цзы Инь. Об управляемости катамаранов. — «Чжунго
Цзао Чуань», 1964, вып. 4, Xs 56, с. 7—20.
70. Экспериментальное исследование ходкости и мореходности пассажир¬
ского катамарана. — В кн.: «Судостроение и судоремонт», 1972, вып. 5, с. 43—
53. Авт.: Ю. М. Гулиев и др.
71. Эл и с Я. М. Гидродинамические коэффициенты уравнений качки двух¬
корпусного судна на мелководье. — В сб. «Судостроение и морские сооруже¬
ния», Изд-во Харьковского университета, 1972; вып. 19, с. 104—109.
72. Э л и с Я. М. Присоединенные массы, коэффициенты демпфирова¬
ния и возмущающие силы при качке катамаранных судов и судов у вертикаль¬
ной стенки. — В кн.: «Судостроение и судоремонт», 1970, вып. 4, с. 115—121.
73. А е г t s s е п G. Labouring of ships in rough seas. — «TSNAME», 1968.
vol. 76, p. 420—435.
74. А г о п п e E. L., L e v F. M., N a p p i N. S. Structural weight de¬
termination for SWATH ships. — AIAA Paper», 1974, N 74—326.
75. В о e s e P. Untersuchung des Seegangsverhaltens von Katamaranen —
Shiffen unter Benutzung moderner Methoden der Seegangstheorie. — «Shiff und
Hafen», 1970, N 3, S. 1420—1438.
76. C h a p m a h R B. Spray drag of surface-piercing struts. — «АІАА
Paper», 1972, N 605.
77. С 1 e m e n t E. R. Graphs for predicting the ideal high-speed resistance
of planing catamarans. — «Int. Shipbd. Progr.», 1962, vol. 9, N 99, p. 420—441.
78. Dinsenbacher A. L. A method for estimating loads on catama¬
ran cross structure. —«Mar. Techn.», 1970, vol. 7, N 4, p. 124—132.
79. D u b г о v s k у V. A. Verfahren zur Berehnung des Widerstandes eines
Katamaranen mit dicken Rumpfen. — «Shiffbauforschung», 1970, N 5/6, S. 247—
80. E i s e n b e r g P. An approcsimate solution for incompressible flow
about an ellipsoid near a plane wall. — «J. Applaid Mechanic», 1950, vol. 17. N2
p. 724—740.
299
81. Everest J. T. Some research on the hydrodynamics of catamarans
and multihulled vessels in calm water. — «Trans. N. E. Coast Inst, of Engrs and
Shipbldrs.», 1968, vol. 84, N 5, p. 4—22.
82. Fifth Internal. Ship Structure Congress, Rep. of Commitee 3, September
1973.
83. F г а п к W. Oscillations of cylinders in or below the free surface of
deep fluids. Washington, Naval Ship Research Developm. Center, 1967, Rep. 2375.
84. F г у E. D., Graul T. Design and application of modern high-speed
catamarans. — «Mar. Techn.», July 1972, vol. 9, N 3, p. 345—357.
85. H a d 1 e r J. B., Lamb G. R. The challenges of a big catamarans. —
«Astronautics and Aeronautics», June 1970, p. 63—80.
86. H о о f t J. P. A mathematical method of determining hydrodynami¬
cally induced forces on a semisubmersible. — «TSNAME», 1971, vol. 79, p. 28—70.
87. Hydrofoil stabilizing fins for catamarans. — «Mar. Eng. Nav. Arch.»,
1968, vol. 91, N 1111, p. 420.
88. J о и e к u r a K. On navigation of ship in rough seas. — «Jap. Shipb.
and Mar. Eng.», 1974, vol. 8, N 1.
89. J о и g de B. The hydrodynamic coefficients of two parallel identi¬
cal cylinders, oscillating in the free surface. — «Int. Shipb. Progr.», Dec. 1970,
vol. 13, N 196, p. 82—100.
90. L а с к e и b у H., Slater C. The case of multihulled ships with
particular reference to resistance characteristics. — «TSNAME», 1969, vol. 77,
p. 124—155.
91. Lang T. G. S3-semisubmerged ship concept and experimental hydro¬
dynamic coefficients. — «Nav. Eng. J.», 1972, vol. 84, N 2, p. 33—42.
92. L a и g T. G. Hydrodynamic design of an S3-semisubmerged ship. —
«Proc. of 9th Symp. of Nav. Hydromech.», Paris, 1972.
93. L а и к f о r d В. M. The structural design of the ASR-catamaran cross¬
structure. — «Nav. Eng. J», Aug. 1967, p. 64—92.
94. L e о p о 1 d R., Johnson R. S., Hadler J. B. The lowwa-
terplane multihull shipprinciples, status and plans for naval development. — «АІАА
Paper», 1972, N 603.
95. L i n W e n - C h i n, Day W. G. The still-water resistance and
propulsion characteristics of small-waterplane-area twin-hull ships. — «АІАА
Paper», 1974, N 325.
96. M a e d a H. Hydrodynamical forces on a cross-section of a stational
structure. ■— «Dynamics of Mar. Ven. and Struct, in Waves», Meeh. Eng. Publ.
Lim., London, 1975.
97. Maeda H. Wave excitation forces on two dimensional ships of arbi¬
trary sections. —«J. of Nav. Arch, of Jap.», 1971, N 126, p. 55—83.
98. M а к о t о О. On the heaving motion of two circular cylinders on
the surface of a fluid. — «Rep. of Res. Inst, for Appl. Meeh.», 1969, vol. 17,
N 58, p. 40—64.
99. M а к о t о О. On the motion of multihull ships on waves. — «Rep. of
Res. Inst, for Appl. Meeh.», 1970, vol. 18, N 60; 1971, vol. 19, N 62.
100. Makoto О., Takaki M. On the motions of multihulled ships
in waves. —«Rep. of Res. Inst, for Appl. Meeh.», vol. 19, N. 62, p. 63—81.
101. Mansour A., Fenton P. H. Structural analysis and design of
a catamaran cross-structure by a finite element method. —«Nav. Eng. J.», 1973,
vol. 85, N 1, p. 33—42.
102. Motora S., KoyamaT. Wave-exitationless ship forms. — «ISNA
of Jap.», 1969, vol. 117, p. 56—78.
103. Nishiyama T. Lifting-line theory of the submerged hydrofoil
of finite span.—«ISNA of Jap.», 1959, vol. 71, N 3, p. 75—83.
104. Nordenstrom H., Fait insen O., Pedersen B. Pre¬
diction of waveinduced motoins and loads for catamarans.—«Report of 3rd Annal
Offshore Technology Conference», Houston, Texas, 1971.
105. «Proc, of 13th Internat. Towing Tank Congress», 1974.
106. «Rules for building and classing offshore mobile drilling units» by Amer.
Bureau of Shipping», N.—Y., 1968.
300
107. «Rules for the construction and classification of mobile offshore units
by Det Norske Veritas, Oslo, 1975.
108. Scott R. Catamaran structure: strength and hull weight.—«TSNAME»
1962, vol. 70, p. 324—350.
109. T а к а к i M., A г a к a w a H., T a s a i F. On the oscillations of
a semi-submersible catamaran hull at shallow draft. — «Rep. of Res. Inst for
Appl. Meeh.», 1972, vol. 19, N 64, p. 203—224.
110. T о у о j i T., T о г а к i c h i N. On the steering quality of catama¬
rans. — «Reps, of Ship. Research Inst, of Japan», 1966, N 1, p. 70—74.
111. Turner H., Tuplin A. The resistance of large powered cata¬
marans. — «TSNAME», 1968, vol. 76, p. 180—213.
112. Wahab R. Het slingeren van een Catamaran op Zee.—«Ship en
Werf», 1964, vol. .31, N 6, p. 127—134.
113. Wang S., Wahab R. Heaving oscillations of twin cylinders in
a free surface.—«J. of Ship. Res.», 1971, vol'. 14, p. 71—78.
Принятые сокращения
. «АІАА Paper» — «American Institute of Astronautic and Aeronautic Paper»,
«Dynam. «Mar. Ven. and Str. in w». — «Dynamics of Marine Venicles and
Structures in waves», Mechanical Engineering Publishing,
«Int. Shipbd. Progr». — «International Shipbuilding Progress»,
«Jap. Shipb. and Mar. Eng.» — «Japan Shipbuilding and Marine Enginee¬
ring»,
«J. of Nav. Arch, of Jap.» — «Journal of Naval Architects of Japan»,
«J. of Ship RES.», — «Journal of Ship Research»,
«JSNA of Jap,» — «Journal of Society of Naval Architects of Japan»,
«Mar. Eng. and Nav. Arch.» —• «Marine Engineer and Naval Architect»,
«Mar. Techn.» — «Marine Technology»,
«Nav. Eng. J.» — «Naval Engineers Journal»,
«Proc, of 9th Symp. of Nav. Hydromech.» — «Proceedings of 9th Sympo¬
sium of Naval Hydromechanic»,
«Rep. of RES. Inst, for Appl Meeh.» — «Report of Research Institute for
Applied Mechanic»,
«Trans. N. E. Coast Inst, of Eng. Shipbd.» — «Transactions of North —
East Coast Institute of Engineers and Shipbuilders»,
«TSNAME» — «Transactions of Society of Naval Architects and Marine Engi¬
neers».
Оглавление
Предисловие 5
Введение 7
Глава I. Статика
§ 1.1. Главные размерения, типы корпусов, особенности плавучести,
остойчивости, непотопляемости 22
§ 1.2. Некоторые результаты систематических исследований статики
многокорпусных объектов 26
Глава 2. Ходкость
§ 2.1. Составляющие сопротивления многокорпусного судна на тихой
воде 30
§ 2.2. Результаты исследований ходкости катамаранов с крейсерской
кормой 36
§ 2.3. Влияние соотношений главных размерений катамаранов с тран¬
цевой кормой на их буксировочное сопротивление 44
§ 2.4. Особенности ходкости двухкорпусных судов с малой площадью
ватерлинии 51
§ 2.5. Волновое сопротивление катамарана, снабженного носовым, под¬
водным крылом 53
§ 2.6. Особенности волнового и вязкостного сопротивления тримарана 57
§ 2.7. Особенности сопротивления глиссирующего катамарана .... 67
Глава 3. Качка
§ 3.1. Качественные особенности качки многокорпусных судов и уста¬
новок 74
§ 3.2. Вертикальная и килевая качка дуплуса и катамарана с аналити¬
ческими обводами на встречном волнении 87
§ 3.3. Исследование влияния скорости и поперечного клиренса на про¬
дольную качку катамарана методом плоских сечений 93
§ 3.4. Качка полупогружных буровых платформ 97
§ 3.5. Качка катамарана, расположенного лагом к волне 105
§ 3.6. Исследование влияния поперечных размеров многокорпусных
судов на параметры бортовой и вертикальной качки (методом
Жуковского) 115
Глава 4. Управляемость
§ 4.1. Общие результаты теоретико-экспериментального изучения уп¬
равляемости катамаранов 123
§ 4.2. Результаты сравнительных исследований управляемости ката¬
маранов 130
302
Глава 5. Прочность и масса корпуса
§ 5.1. Проблемы обеспечения прочности катамаранов 135
§ 5.2. Оценка волновой составляющей внешних сил, действующих на
трисек 148
§ 5.3. Некоторые аспекты нахождения долговременных распределений
напряжений в конструкциях двухкорпусных судов 153
§ 5.4. Особенности напряженного состояния соединительной конструк¬
ции промысловых катамаранов 165
§ 5.5 Масса корпуса 177
Глава 6. Проектирование
§ 6.1. Методические проблемы проектирования многокорпусных объек¬
тов и сравнения их мореходных качеств 182
§ 6.2. Проблемы проектирования многокорпусных судов и установок
для изучения и освоения океана 191
§ 6.3. Опыт проектирования двухкорпусных краново-монтажных су¬
дов 195
§ 6.4. Опыт проектирования и эксплуатации рыбопромысловых ката¬
маранов, построенных с использованием корпусов СРТ .... 206
§ 6.5. Опыт проектирования малотоннажных промысловых катамара¬
нов и судов с аутригерами 213
§ 6.6. Определение областей рационального использования промысло¬
вых катамаранов 225
§ 6.7. Исследование целесообразности применения промысловых двух¬
корпусных судов с малой площадью ватерлинии 233
Глава 7« Технология постройки и ремонта
§ 7.1. Особенности сборки двухкорпусных судов и плавучих плат¬
форм 239
§ 7.2. Особенности докования многокорпусных объектов 244
Заключение . . . . • 247
Приложение 1. Приближенный метод оценки аварийной посадки ка¬
тамарана 249
Приложение 2. Приближенный расчет ходкости катамаранов с крей¬
серской кормой 251
Приложение 3. Приближенный расчет буксировочного сопротивления
катамаранов с тонкими корпусами 257
Приложение 4. Приближенный расчет ходкости дуплуса и трисека 261
Приложение 5. Графики для приближенной оценки гидродинамических
характеристик дуплуса и трисека при килевой, вер¬
тикальной и бортовой качке 269
Приложение 6. Таблицы для оценки коэффициентов присоединенной
массы и демпфирования шпангоутов катамарана при
вертикальных перемещениях 272
Приложение 7. Графики для экспресс-оценки бортовой и вертикаль¬
ной качки катамарана без хода на нерегулярном вол¬
нении 283
Приложение 8. Номограммы для расчета качки полупогружных плат¬
форм 287
Приложение 9. Приближенный метод определения главных размерений
судов с малой площадью ватерлинии 289
Приложение 10. Словарь терминов 294
Указатель литературы 296