/




Author: Бадалов В.
Tags: теория и организация труда взаимоотношения между предприятием и персоналом, между работодателями и работающими, между трудом и капиталом эргономика программирование программное обеспечение издательство москва
ISBN: 978-5-907127-40-1
Year: 2012



Text
Владимир Бадалов
ПРОСТО ЭРГОНОМИКА
ПРОСТО
ЭРГОНОМИКА
УДК 331.101.1
ББК 30.17
Б15
Рецензент — доктор технических наук,
профессор СПбПУ В. А. Дьяченко
Б15
Бадалов В. В.
Просто эргономика / Владимир Бадалов. —
СПб.: Страта, 2019. — 110 с., с илл. — (серия
«Просто»)
ISBN 978-5-907127-40-1
Эргономика прочно вошла в нашу жизнь и продолжает развиваться. В работе собраны и обобщены
современные представления в области эргономики.
Рассмотрены психофизиологические особенности
человека, основы проектирования рабочей зоны оператора, математические методы моделирования деятельности человека, вопросы надежности персонала,
применения САПР на примере модуля Human Builder.
Книга предназначена для широкого круга читателей и специалистов.
Все права защищены. Никакая часть настоящей книги не может быть воспроизведена или передана в какой бы то ни было форме
и какими бы то ни было средствами, будь то электронные или механические, включая фотокопирование и запись на магнитный носитель, а также размещение в Интернете, если на то нет письменного
разрешения владельцев.
All rights reserved. No parts of this publication can be reproduced, sold
or transmitted by any means without permission of the publisher.
УДК 331.101.1
ББК 30.17
ISBN 978-5-907127-40-1
© Бадалов В. В., текст, 2012
© ООО «Страта»,
оформление, 2019
ОГЛАВЛЕНИЕ
Введение................................................................................................5
1. История эргономики ..........................................................................6
2. Основные понятия эргономики ..........................................................9
3. Задачи эргономики ...........................................................................11
4. Человек в эргатической системе ......................................................13
4.1. Анализаторы человека и их характеристики ..........................13
4.1.1. Зрительный анализатор...................................................16
4.1.2. Слуховой анализатор .......................................................21
4.1.3. Тактильная чувствительность .........................................24
4.1.4. Температурный анализатор .............................................25
4.1.5. Обоняние. Вкус................................................................26
4.1.6. Вибрационная чувствительность ....................................26
4.1.7. Болевой анализатор .........................................................27
4.2. Моторная сфера оператора .....................................................27
4.2.1. Антропометрические данные человека ..........................31
4.2.2. Рабочая зона оператора ...................................................33
5. Эргономические требования при проектировании рабочего
места оператора ...................................................................................39
5.1. Микроклимат ...........................................................................39
5.2. Рабочее кресло .........................................................................40
5.3. Рычаги ......................................................................................41
5.4. Педали ......................................................................................43
5.5. Органы управления .................................................................45
5.6. Кабина ......................................................................................47
5.7. Сигнальные и световые устройства ........................................50
5.8. Обзорность ...............................................................................51
6. Системы доступа к рабочим местам и местам обслуживания ...........53
6.1. Площадки, проходы, лестницы ..............................................53
6.2. Поручни, перила ......................................................................54
6.3. Двери, проёмы, люки ..............................................................54
6.4. Общие требования безопасности ...........................................55
6.5. Защитные ограждения .............................................................57
3
6.6. Системы защиты от падающих предметов и опрокидывания ...58
7. Методы математического моделирования деятельности
человека в эргатических системах .......................................................59
7.1. Методы теории автоматического регулирования
в исследованиях эргатических систем (ЭС) ..................................59
7.2. Информационная модель деятельности человека в ЭС.........63
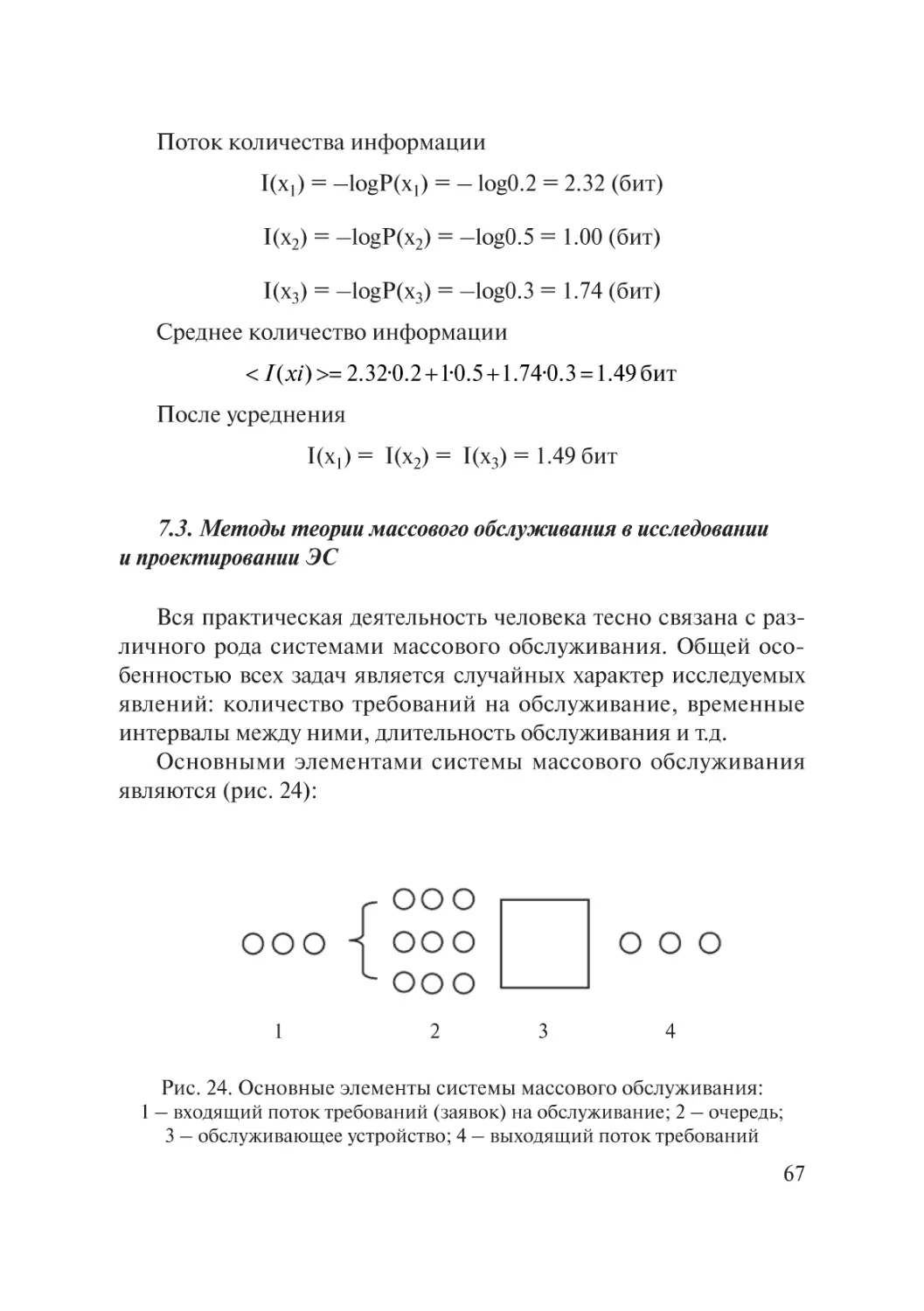
7.3. Методы теории массового обслуживания
в исследовании и проектировании ЭС ..........................................67
7.4. Описание и анализ деятельности человека на уровне
операций .........................................................................................70
7.5. Àëãîðèòìè÷åñêèé ìåòîä.....................................................73
8. Надежность персонала в транспортных системах ............................75
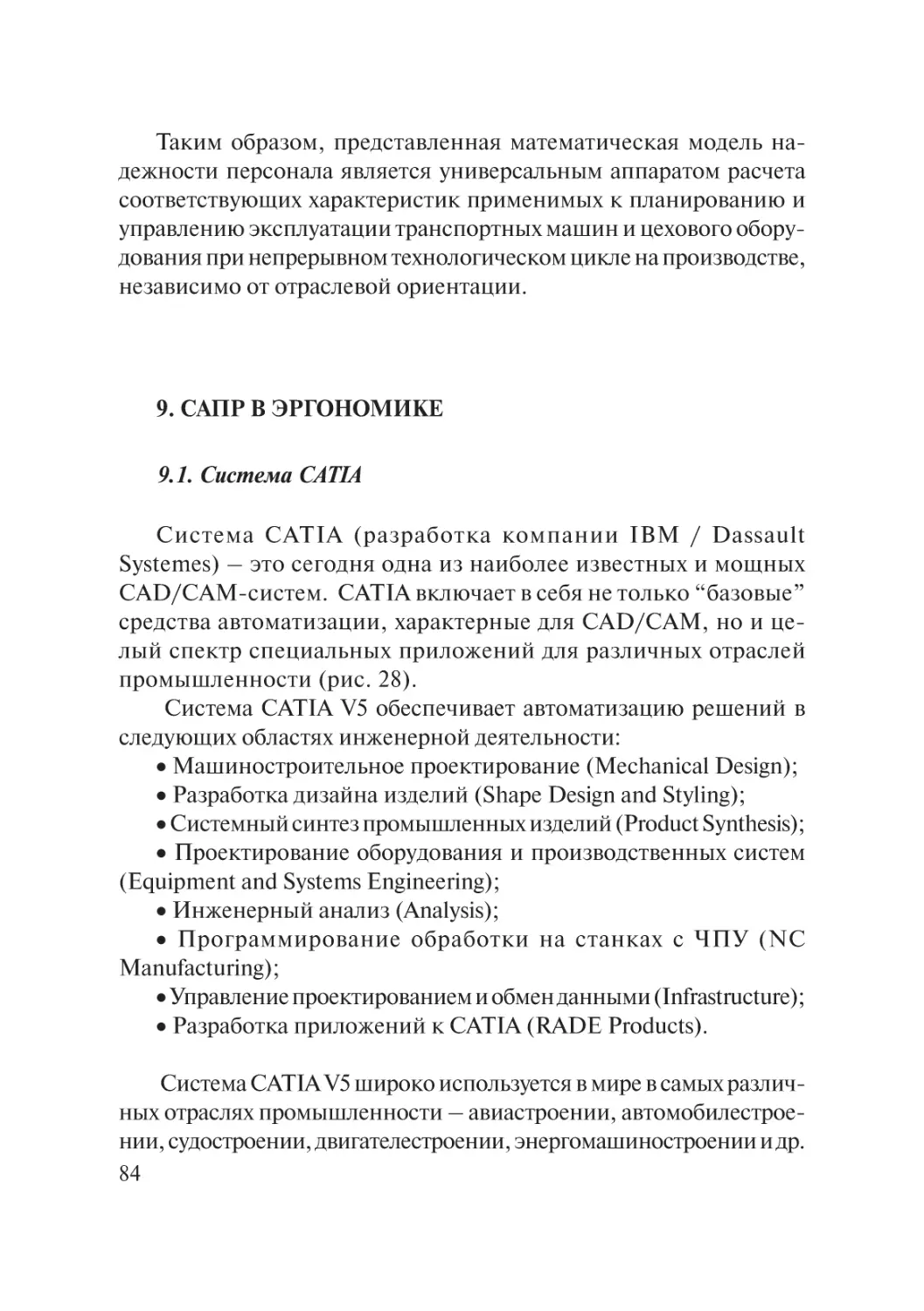
9. САПР в эргономике..........................................................................84
9.1. Система CATIA ........................................................................84
9.2 Модуль Human Builder
javascript:openViewer(‘images/doc/intro1.jpg’) ................................85
10. Основные законы эргономики ........................................................96
ЛИТЕРАТУРА ....................................................................................97
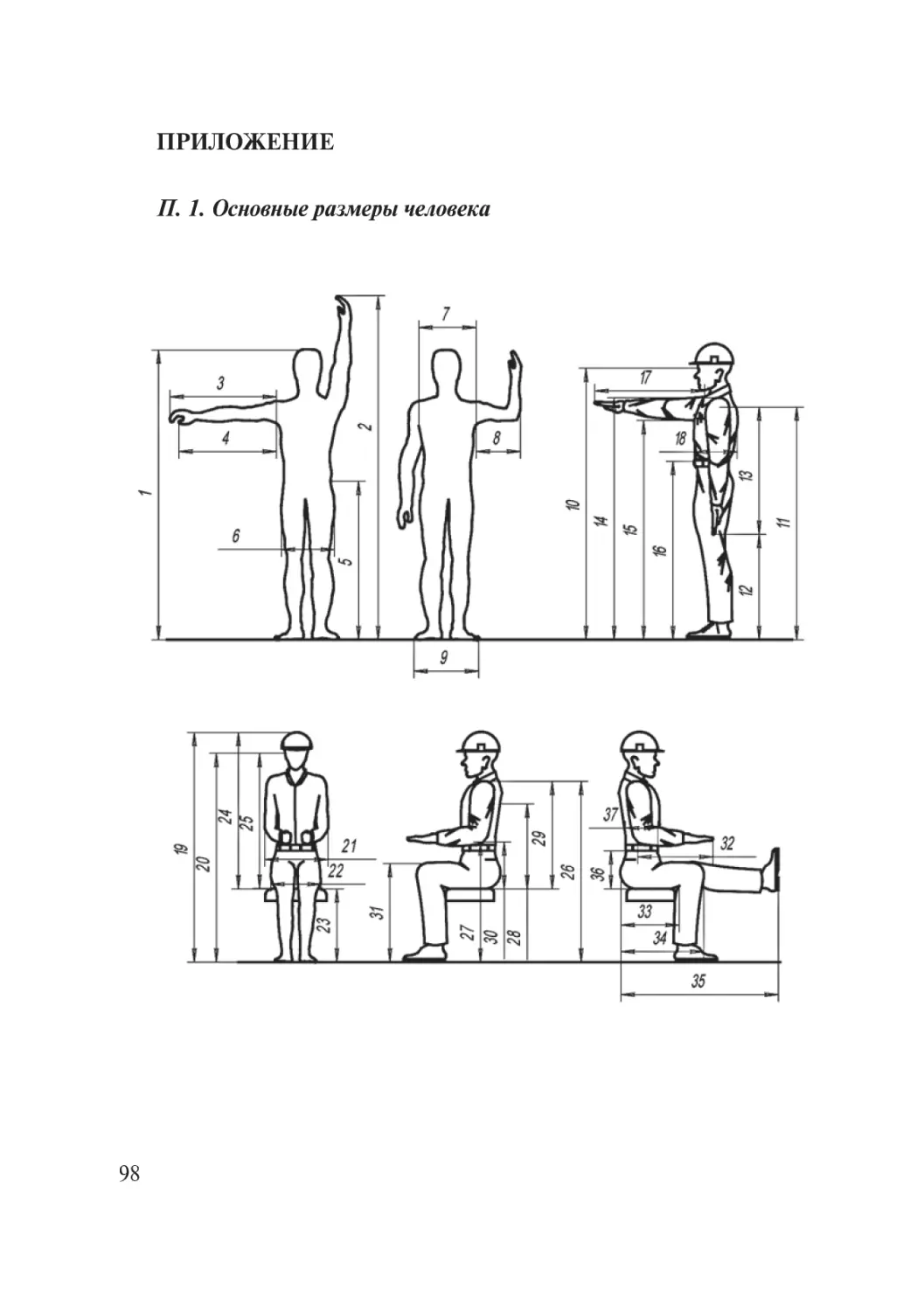
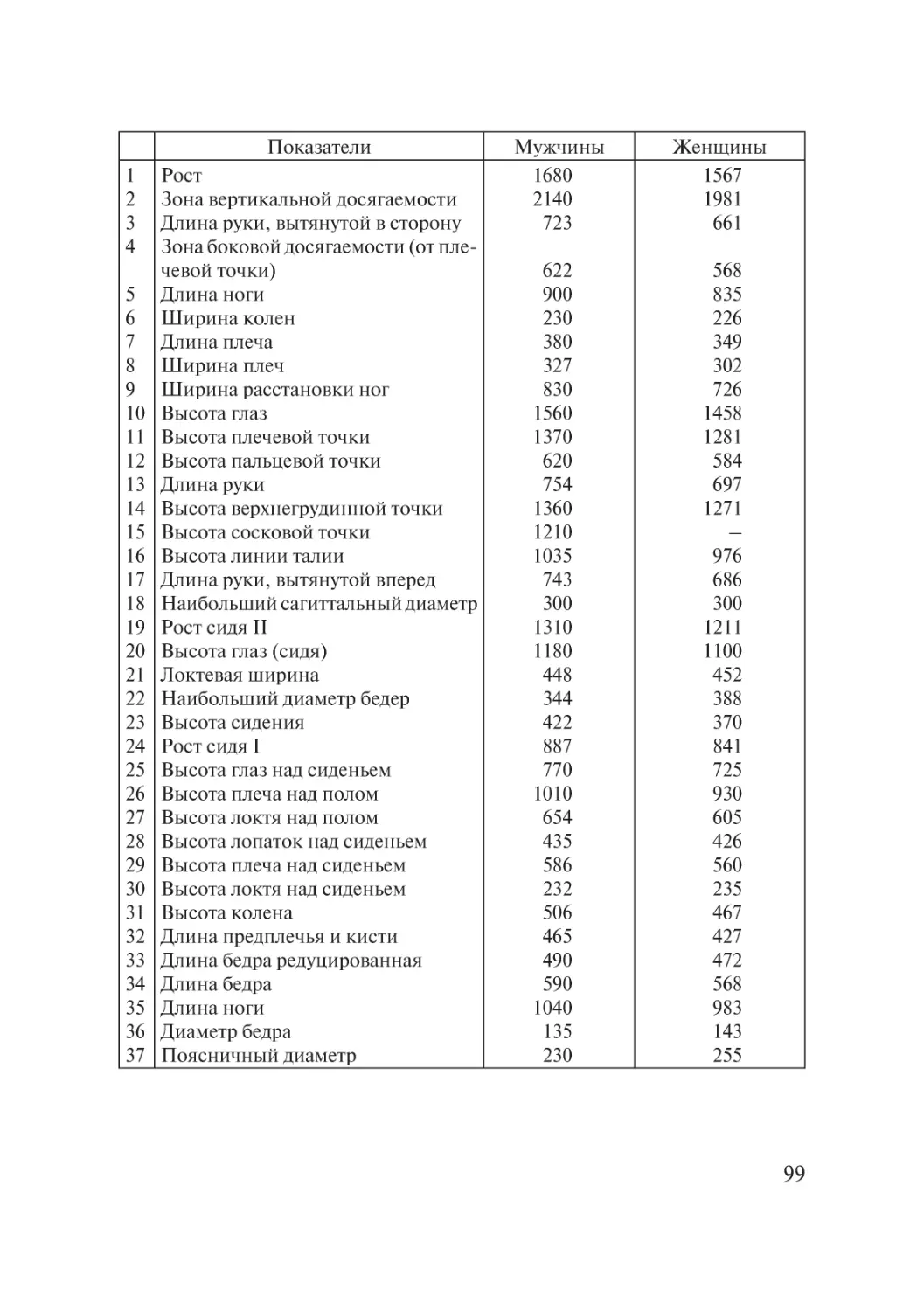
Приложение ........................................................................................98
4
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
О.В. РОНЖИНУ ПОСВЯЩАЕТСЯ
ВВЕДЕНИЕ
В настоящее время постоянно возрастает роль человека как
управляющего звена системы «человек – машина – среда» (ЧМС).
В связи с этим при проектировании новой техники весьма актуальным становится вопрос максимального приспособления машин и
оборудования к возможностям человека. Исследования эргономики показывают, что при комплексном и рациональном подходе к
проектированию системы «человек-машина-среда» одновременно
достигается наивысшая производительность труда, обеспечивается
оптимальное функционирование элементов системы и безопасность системы в целом.
«Одна из великих проблем,
с которой мы неизбежно столкнемся
в будущем, это проблема
взаимодействия человека и машины,
проблема правильного распределения
функций между ними».
Н. Винер
5
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
1. ИСТОРИЯ ЭРГОНОМИКИ
Научное изучение трудовой деятельности человека связывают с именем американского инженера Ф. Тейлора и его учеников. В результате их исследований была создана и внедрена
в производство концепция инженерного проектирования ЧМС
и положено начало эргономике. Дальнейшее развитие производства вызвало необходимость учета психофизиологической
стороны процесса труда. Были исследованы психологические
свойства человека в процессе труда (восприятие, память,
мышление, внимание и др.), разработаны некоторые психодиагностические методы отбора рабочей силы для реализации
определенных трудовых процессов.
В конце XIX и в начале XX веков в промышленно развитых
странах мира (США, Англии, Германии, Японии и др.) организуются специальные лаборатории, кафедры и институты,
изучающие влияние трудовых процессов и производственной
среды на организм человека. В это время бурно развивались
психология, физиология, гигиена труда, дизайн. В1915 г. в Англии создан Комитет по изучению здоровья рабочих, в 1921 г. в
США – Психологическая корпорация. В этом же году Бехтеревым В.М. организована первая Всероссийская конференция по
научной организации труда. В Японии издана книга «Человеческая инженерия».
К 40-м годам прошлого столетия результаты исследований во
многих областях техники, физиологии, биологии, психологии и
других наук были успешно использованные для создания оружия
и сложной военной техники, в которой эффективность человекомашинной системы (ЧМС) была ограничена возможностями
человека, а не машины. В системе человек оказался на грани своих психофизиологических возможностей. К решению проблем
потребовалось привлечение специалистов различного профиля:
инженеров, медиков и психологов.
После Второй мировой войны начались работы по обобщению
достигнутого опыта и применению его к решению широкого круга
6
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
технических проблем. Важным шагом в этом направлении было образование группой английских ученых во главе с К. Мареллом в 1949
г. в Англии Эргономического научно-исследовательского общества.
Так возникло объединение ученых смежных научных дисциплин
для совместной работы по проектированию эффективной трудовой
деятельности человека. Для обозначения новой научной области
был использован термин “эргономика”, впервые предложенный
еще в 1857 г. польским естествоиспытателем Войцехом Ястшембовским, опубликовавшим работу “Очерки по эргономии или науке о
труде, основанной на закономерностях науки о природе”
В 1955 г. бельгийский профессор Ж. Фаворж опубликовал одну
из первых фундаментальных работ по эргономике «Анализ труда».
В 1958 г. вышел первый номер журнала «Человеческие факторы»
(США), 1960 г – в Англии создан факультет эргономики. В 1961г.
создана Международная эргономическая ассоциация.
В нашей стране эргономика как самостоятельная научная
дисциплина начала развиваться в 50-е годы прошлого столетия. В
1959 г. Ленинградском университете создана лаборатория, а в 1966 г.
кафедра инженерной психологии. В 1963 г. вышла книга Ломова
Б.Ф. «Человек и техника». В 1972 году в Москве была проведена
Международная конференция ученых и специалистов стран – членов СЭВ по вопросам эргономики, способствовавшая дальнейшему
развитию и координации научных исследований и практическому
внедрению их результатов в сферу производства. В 1992 году Россия
была принята в Международную эргономическую ассоциацию.
Координацию работ в СССР в области эргономики осуществлял
Всероссийский научно-исследовательский институт технической
эстетики (ВНИИТЭ), созданный в 1962 г.
Причины возникновения и развития эргономики:
– человек все чаще находится на грани своих психофизиологических возможностей,
– человек все больше удаляется от управляемого объекта,
– человек управляет все большим количеством объектов,
– возрастают требования к быстродействию человека,
– нарушаются привычные условия труда (космос, ЧС)
7
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
– возрастает степень ответственности функционирования человека в системе. Примером тому знаменитое Великое затмение
США – 9 января 1965 г. одна из пяти линий электропередач единой
энергосистемы США вышла из строя. Остальные 4 не выдержали
перегрузки и отключились. В результате:
– 17 час 21 мин – погас свет в Бостоне
– 17 час 28 мин – без света остался Нью-Йорк и еще 8 штатов: 600
тыс. пассажиров застряли в метро, тысячи в лифтах, остановились
фабрики, заводы, отключились газ, радио и т.д. Восстановили электроснабжение 10 января в 7 часов утра. «Великое затмение США» обошлось в 1,5 мрд. долларов. В нашей стране – Чернобыльская авария.
– деятельность человека в системе носит все более творческий
характер.
Но как оказалось человек:
– медленно думает (анг. ученый считал число до 707 знака
20 лет),
– часто ошибается,
– плохо и мало запоминает,
– быстро устает.
Однако пока человека в ЧМС не заменить:
– часть функций он выполняет лучше машины (распознавание,
неординарные решения, накопление опыта, обнаружение сигналов
с низким уровнем шума). Тренированный текстильщик различает
до 100 оттенков черного цвета
– надежность системы при наличии человека выше. В США для
проверки надежности автоматизированной космической системы
ее многократно дублировали, а в одном случае управление доверили
человеку. На четвертый день имитированного полета наметились
расхождения. К концу 14 суток надежность систем с 2,3,4 –кратным
дублированием не отвечала требованиям, с 5-кратным дублированием была недостаточно высокой. Надежность системы с космонавтом оказалась значительно выше
– кто-то должен нести экономическую и юридическую ответственность за результаты деятельности
– наличие человека в системе значительно экономичнее.
8
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
На одной из фирм США для автоматизированной системы не
хватало одного «пустякового устройства», обеспечивающего надежную работу системы. На совещании молодой инженер предлагает
требуемое кибернетическое устройство. «Вес конструкции?» –
«Килограммов 80» – «Отлично. Потребляемая мощность» – «Ватт
600» – «Чудесно. Время отладки» – «Месяцев 5-6» – «Что это за
чудо!» – «Человек!»
2. ОСНОВНЫЕ ПОНЯТИЯ ЭРГОНОМИКИ
В ходе своего исторического развития эргономика сформировалась и оформилась как наука и как любая наука характеризуется:
объектом и предметом изучения
принципами, положенными в основу научных исследований
задачами, стоящими перед наукой
методами исследования и решения поставленных задач.
В то же время основная терминология, используемая в эргономике, широко использует термины смежных дисциплин: физиологии, психологии, анатомии, системотехники и др.
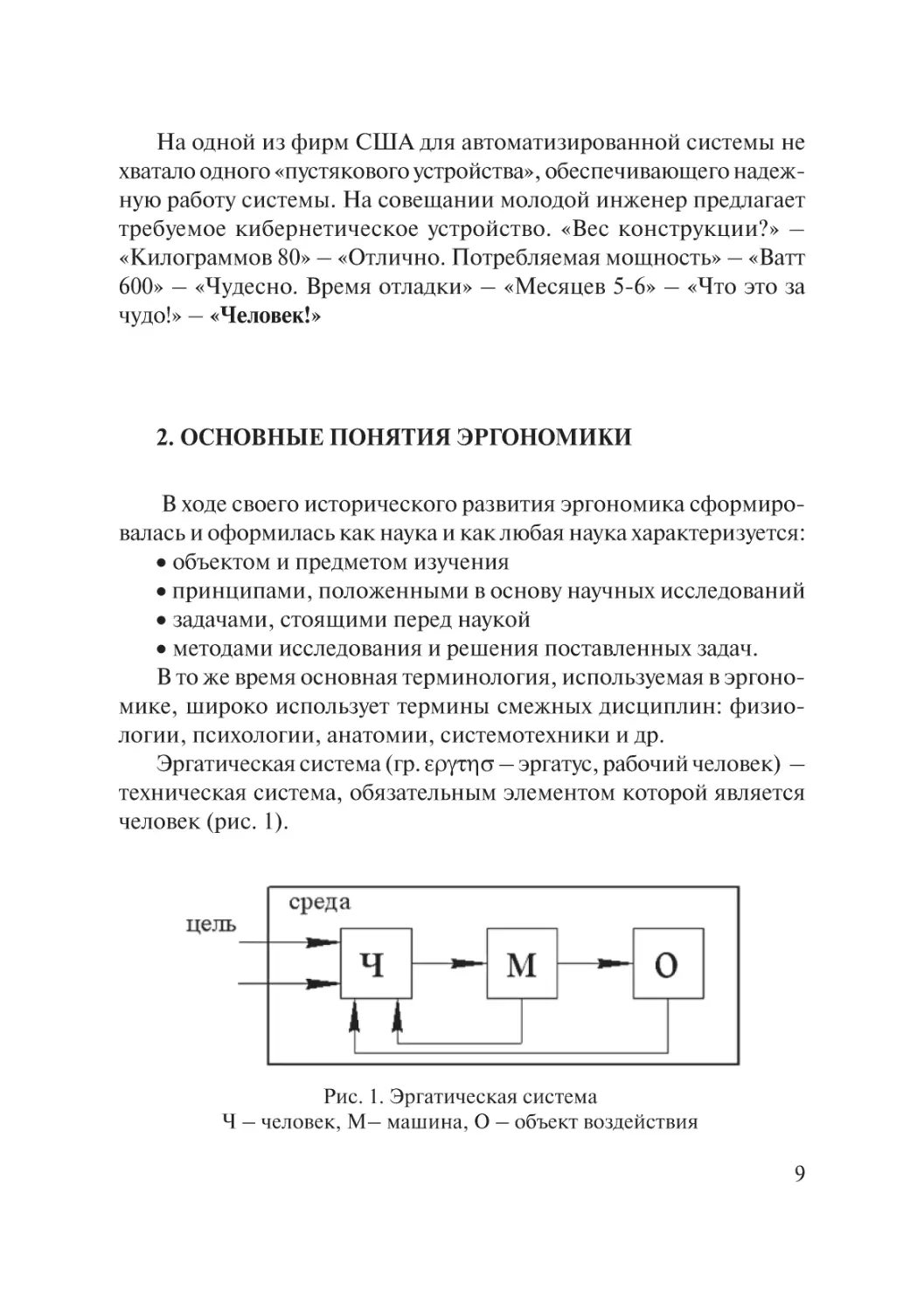
Эргатическая система (гр. – эргатус, рабочий человек) –
техническая система, обязательным элементом которой является
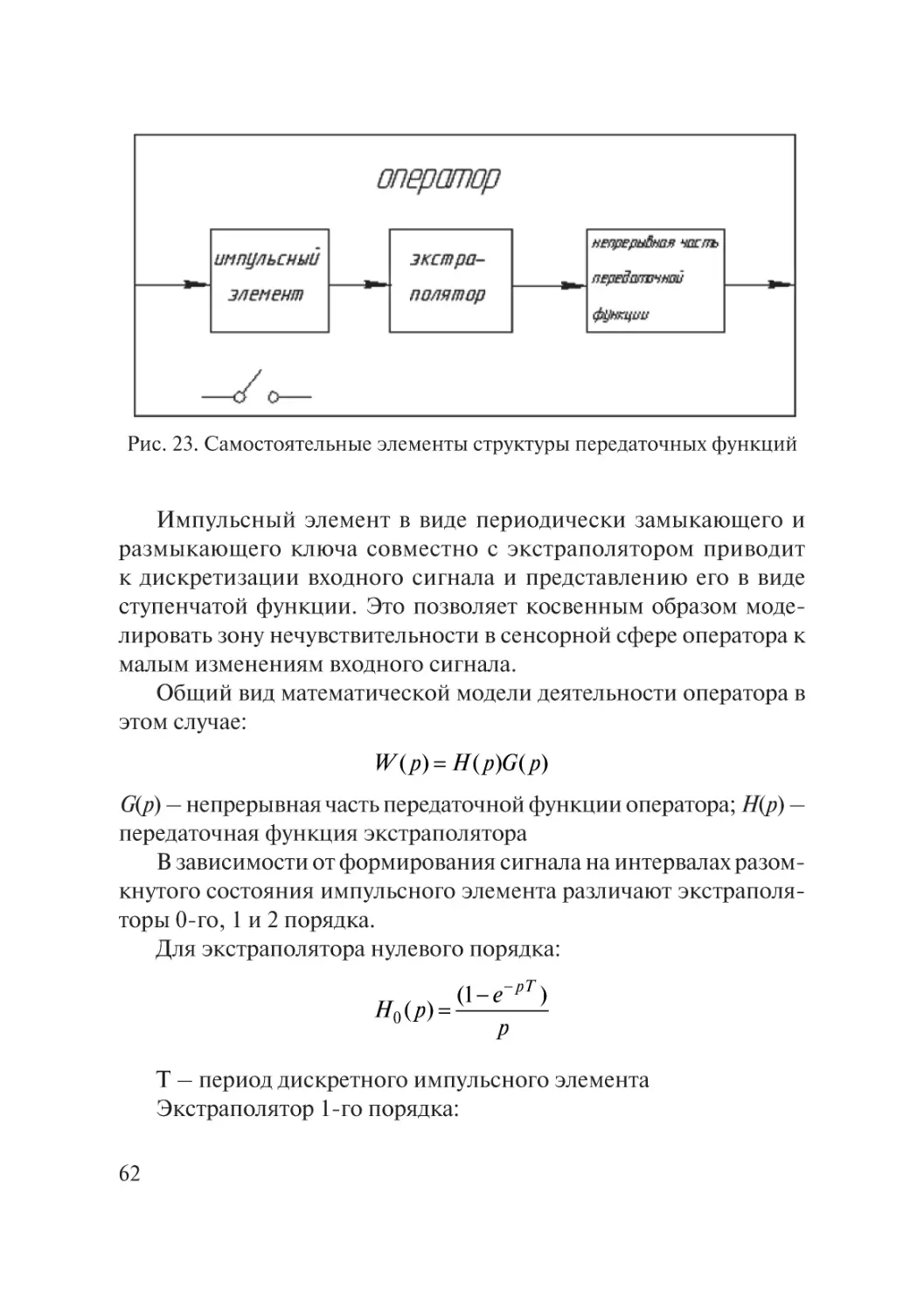
человек (рис. 1).
Рис. 1. Эргатическая система
Ч – человек, М– машина, О – объект воздействия
9
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Классификация эргатических систем (ЭС):
– по целевому назначению – управление, контроль, обслуживание, разработка и проектирование, производство и т. д.
– по функциональному признаку – детерминированные, недетерминированные
– по иерархическому (иерархия – порядок подчинения) признаку – деление на системы первого, второго и более высокого
уровня управления
– по количеству операторов в звеньях – моноэргатические,
полиэргатические
– по виду деятельности – сенсорная (сфера восприятия), моторная (исполнительные действия), принятие решения.
– по характеру переработки информации – дедуктивная деятельность (образование выходного сигнала по известному входному
сигналу и правилам его преобразования), абдуктивная деятельность
(по заданному следствию и известному правилу найти причину,
входное воздействие – по точке на экране опознать объект), индуктивная, эврестическая деятельность (для ряда причин нужно
найти руководящее решение).
Оператор – любой человек, управляющий машиной в механизированных и автоматизированных системах. Различают пять
классов операторской деятельности:
оператор-технолог, оператор-манипулятор, оператор-наблюдатель,
контролер, оператор-исследователь, оператор-руководитель
Машина – любое техническое устройство, предназначенное
для целенаправленного изменения материи, энергии или информации. Римский инженер Марк Витрувий Поллион (вторая
половина первого столетия до нашей эры) определил машину как
«деревянное приспособление, оказывающее величайшие услуги
при подъеме грузов».
По фунциональному назначению различают машины:
– энергетические
– рабочие
– информационные
10
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Среда – внешние факторы, оказывающие влияние на работу
оператора и машины. Под ними понимают не только температуру, влажность, газовый состав воздуха, шум, вибрацию, но и
социально-психологические факторы, команды и пояснения руководителей работ, различные правила, инструкции и т.д.
Система – совокупность элементов, обладающих интерактивными свойствами. В эргономике в качестве элементов системы
рассматриваются человек, машина и среда.
Ошибка оператора – любое действие (или бездействие) человека,
мешающее успешной работе ЧМС. Ошибки вызываются не только
безответственностью, рассеянностью или низкой квалификацией
работника, но и тем, что безошибочные действия в определенных
ситуациях оказываются за пределами физических и психических
возможностей человека.
3. ЗАДАЧИ ЭРГОНОМИКИ
Эргономика (др. греч. – работа, ό – закон, гр. érgon
+ nómos) – наука, изучающая эргатические системы.
Эргономика – это научная дисциплина, комплексно изучающая
человека (группу людей) в конкретных условиях его (их) трудовой
деятельности, связанной с использованием машин или механизмов
с целью повышения эффективности функционирования таких систем путем оптимизации средств, условий и процесса труда.
Более широкое определение эргономики, принятое в 2010 году
Международной Ассоциацией Эргономики (IEA),: «Научная дисциплина, изучающая взаимодействие человека и других элементов
системы, а также сфера деятельности по применению теории, принципов, данных и методов этой науки для обеспечения благополучия
человека и оптимизации общей производительности системы»
Эргономика рассматривает технический и человеческий
аспекты в неразрывной связи. Сочетание способностей человека
и возможностей машины существенно повышает эффективность
11
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
функционирования ЧМС. Поэтому решение прикладных проблем эргономики предполагает движение одновременно в двух
направлениях – от требований человека к машине и условиям
ее функционирования и, наоборот – от требований машины и
условий ее функционирования к человеку. Тем самым эргономика
решает задачи рациональной организации деятельности людей в
ЧМС, целесообразного распределения функций между человеком
и машиной.
Эргономика изучает определенные свойства системы ЧМС,
которые получили название человеческих факторов. Они представляют собой интегральные характеристики связи человека и
машины, проявляющиеся в конкретных условиях их взаимодействия при функционировании системы.
Знание человеческих факторов позволяет формулировать
требования к профессиональному отбору и обучению персонала,
техническим средствам подготовки, согласованию внешних средств
трудовой деятельности и способов ее осуществления.
Человеческие факторы всесторонне проявляются и фиксируются в такой целостной эргономической характеристике ЧМС как
эргономичность.
Одной из важнейших задач эргономики является оптимизация
условий труда, для чего изучаются возможности и особенности
различных категорий индивидов с целью учета полученных результатов при проектировании оборудования рабочих мест. В том
числе эргономика приобретает все большее значение и в решении
комплексной проблемы реабилитации лиц, в той или иной мере
утративших работоспособность.
С этой же целью в эргономике изучаются психофизические
возможности и особенности людей пожилого возраста. Таким
образом, эргономика создает научную базу для решения важной
социальной проблемы по вовлечению в производительный труд
указанной части населения.
Эргономика призвана решать ряд проблем, связанных с оценкой точности, надежности и стабильности работы, влияния психической напряженности, утомления, эмоциональных факторов
12
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
и особенностей нервно-психической организации оператора на
эффективность его деятельности в ЧМС.
Задачи эргономики:
– исследование характеристик человека как элемента эргатической системы (ЭС): восприятие информации, память, принятие
решения, мотивация, движение, стресс, утомляемость и т.д.
– рациональное распределение функций между человеком и
машиной
– проектирование системы с учетом конкретных условий эксплуатации
– проектирование средств взаимодействия человека с машиной
(визуальные и слуховые индикаторы, органы управления, инструменты и приборы)
– профотбор, тренировка человека для работы в ЭС
Эргономика занимается комплексным изучением и проектированием трудовой деятельности. Эргономика включает в себя
результаты исследований многих отраслей знаний (инженерная
психология, физиология труда, гигиена труда, социология, дизайн
и др.), но не является их простой суммой.
Эргономика является самым древним видом систем, созданных
человеком и возраст их равен возрасту человека. При этом теория
ЭС менее развита, чем теория автоматических систем. Объясняется
это трудностью формализации понятий и терминов элементов ЭС
и прежде всего к основному ее элементу – человеку.
4. ЧЕЛОВЕК В ЭРГАТИЧЕСКОЙ СИСТЕМЕ
4.1. Анализаторы человека и их характеристики
В эргономике принято различать две сферы деятельности:
– сенсорная. Все, что позволяет человеку воспринимать информацию об окружающем мире и функционировании объекта
управления или наблюдения.
13
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
– моторная. Все, что позволяет человеку воздействовать на
объект или окружающий мир.
Сенсорную сферу деятельности составляют анализаторы, приборы и устройства, отображающие информацию о функционировании системы.
Различают 4 основных этапа переработки информации:
– поиск и опознание сигнала
– восприятие
– идентификация
– принятие решения
Анализаторы – первичные органы, осуществляющие прием,
анализ раздражений. Любой анализатор (А) состоит из трех основных частей:
– рецептор
– нервные пути
– мозговой центр
Основная функция рецептора (кодирующее устройство) – превращение энергии раздражителя в нервный процесс. Вход рецептора приспособлен к приему только определенных видов воздействий
(свет, звук). На выходе сигналы едины для любого входа нервной
системы. Между рецептором и мозговыми центрами существует не
только прямая, но и обратная связь. Поэтому рецептор осуществляет еще и декодирование сигнала.
Назначение мозговых центров – накопление, хранение, переработка информации.
Особенность мозговых центров – бирецептия (парность). Это
повышает надежность, пропускную способность и пространственное различие сигнала.
Основные характеристики анализатора:
– чувствительность
– избирательность
– адаптивность
Диапазон чувствительности – интервал между min и max
адекватно ощутимой величиной сигнала (верхний и нижний абсо14
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
лютные пороги). С помощью А человек может различать сигналы
по их интенсивности – дифференциальный порог, под которым
понимается минимально различимый сигнал, вызывающий едва
заметное различие ощущений. Таким образом:
– абсолютные пороги – шкала анализатора
– дифференциальные пороги – цена деления шкалы
Существует еще оперативный порог, характеризующий оптимальную различимость сигнала, который в 10–15 раз больше дифференциального.
Кроме энергетических порогов существуют пространственные
и временные пороги. Временной порог – время воздействия сигнала для возникновения ощущений. Пространственный – размер
сигнала, площадь воздействия, а также взаимное расположение
анализаторов и сигнала.
Энергетические, временные и пространственные пороги находятся в тесном взаимодействии и всегда выступают в единстве.
Избирательность анализатора заключается в его способности из множества раздражителей, действующих на человека,
в каждый момент времени в зависимости от условий фиксироваться на определенных раздражителях. Она является условием
формирования адекватных ощущений и обеспечивает высокую
помехоустойчивость анализатора. Избирательность может быть
амплитудной, пространственной, временной.
Анализатор является самонастраивающейся системой. Это
свойство анализатора называется адаптацией, которое проявляется в изменении диапазона чувствительности в соответствии с условиями работы анализатора. В процессе адаптации
изменяются как энергетические, так и временные, пространственные пороги. Адаптация характеризуется величиной изменения чувствительности и времени, в течение которого оно
осуществляется.
По современным представлениям человек воспринимает информацию о внешнем мире по 11 каналам с соответствующими
анализаторами.
15
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
4.1.1. Зрительный анализатор
Около 80 % информации человек воспринимает через зрительный анализатор, 15 % – слуховой, 5 % – остальные каналы
переработки информации.
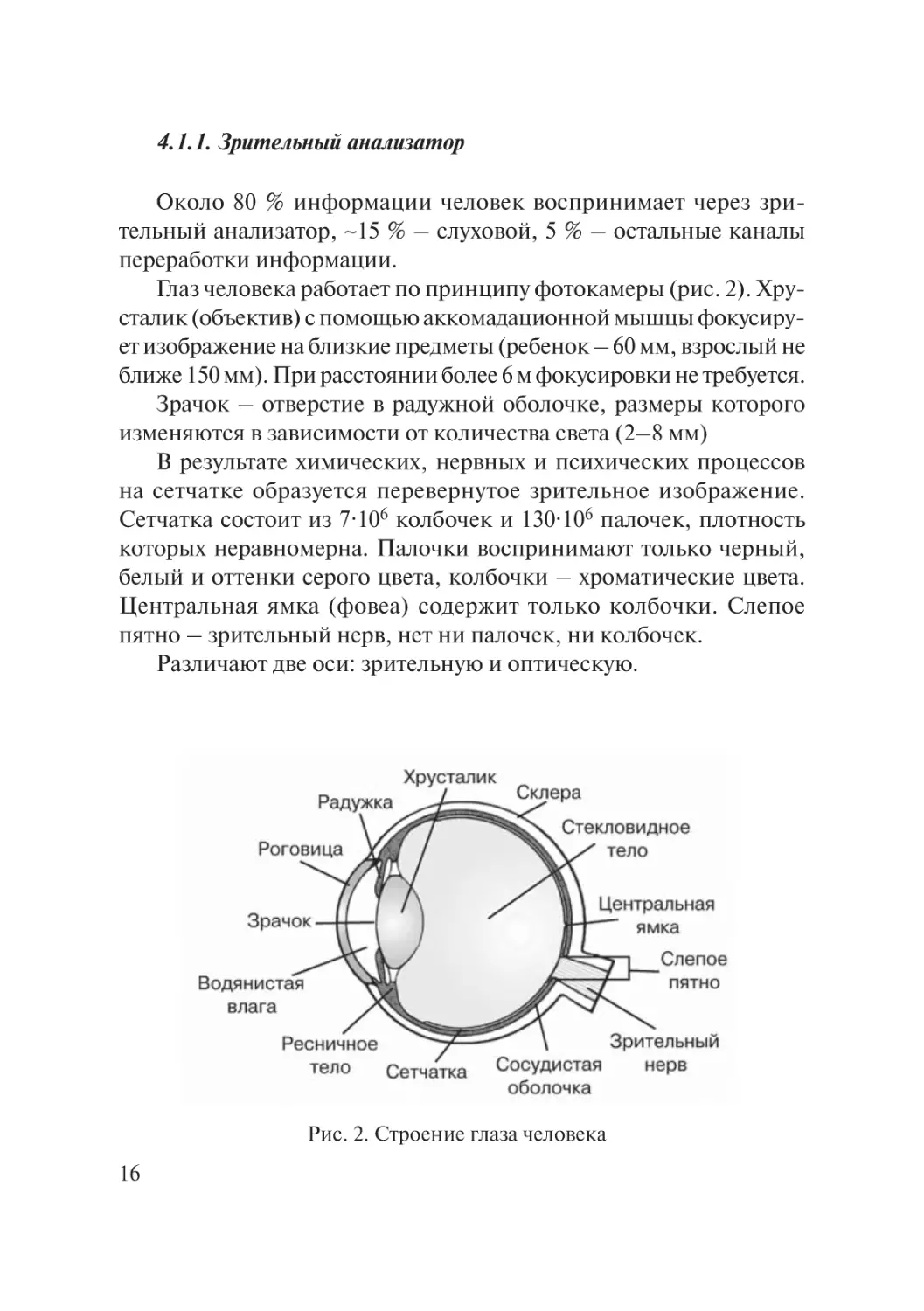
Глаз человека работает по принципу фотокамеры (рис. 2). Хрусталик (объектив) с помощью аккомадационной мышцы фокусирует изображение на близкие предметы (ребенок – 60 мм, взрослый не
ближе 150 мм). При расстоянии более 6 м фокусировки не требуется.
Зрачок – отверстие в радужной оболочке, размеры которого
изменяются в зависимости от количества света (2–8 мм)
В результате химических, нервных и психических процессов
на сетчатке образуется перевернутое зрительное изображение.
Сетчатка состоит из 7·106 колбочек и 130·106 палочек, плотность
которых неравномерна. Палочки воспринимают только черный,
белый и оттенки серого цвета, колбочки – хроматические цвета.
Центральная ямка (фовеа) содержит только колбочки. Слепое
пятно – зрительный нерв, нет ни палочек, ни колбочек.
Различают две оси: зрительную и оптическую.
Рис. 2. Строение глаза человека
16
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Диапазон чувствительности – по яркости от 10–6 кд/м2 для
глаза полностью адаптированного к темноте до 106 кд/м2 для глаза
полностью адаптированного к свету
Дифференциальный порог – 0,01 от исходной интенсивности
стимула
Временные характеристики изучены слабо. Время инерции
глаза – 0,05 – 1 с.
Важной характеристикой является критическая частота мелькания. При частоте более 40 гц мелькание изображения не замечают.
Тепловая адаптация – 40–60 мин, световая – 5–10 мин.
Латентный период – промежуток времени от момента подачи
раздражителя до момента возникновения ощущения (0,16–0,24 с).
Пропускная способность – количество информации в единицу
времени
– на уровне сетчатке – 5,6·109 дв.ед /с
– на корковом уровне – 20-70 дв.ед/с
В целом, с учетом ответной реакции 2–4 дв.ед/с
Порог болевого ощущения – 160 дб, солнечный свет – 140 дб,
экран телевизора – 60 дб, нижний порог – 0–20 дб.
Глаз различает семь основных цветов и более сотни их оттенков:
Длина волны 380–455 ммк – фиолетовый цвет, 455–470 ммк –
синий, 470–500 ммк – голубой, 500–540 ммк – зеленый, 540–
590 ммк – желтый, 590–610 ммк – оранжевый, 610–780 ммк –
красный.
Контрастность по отношению к фону влияет на восприятие
цвета. Лучше различаются такие комбинации знаков: синий на
белом, черный на желтом, зеленый на белом. черный на белом,
зеленый на красном красный на желтом.
Контраст – отношений разности изображения и фона к яркости
фона. Различают прямой (символ темнее фона) и обратной (символ
ярче фона) контраст.
K пр
Bф – B
B – Bф
, K пр
Bф
B
17
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Вф и В – яркость фона и символа соответственно.
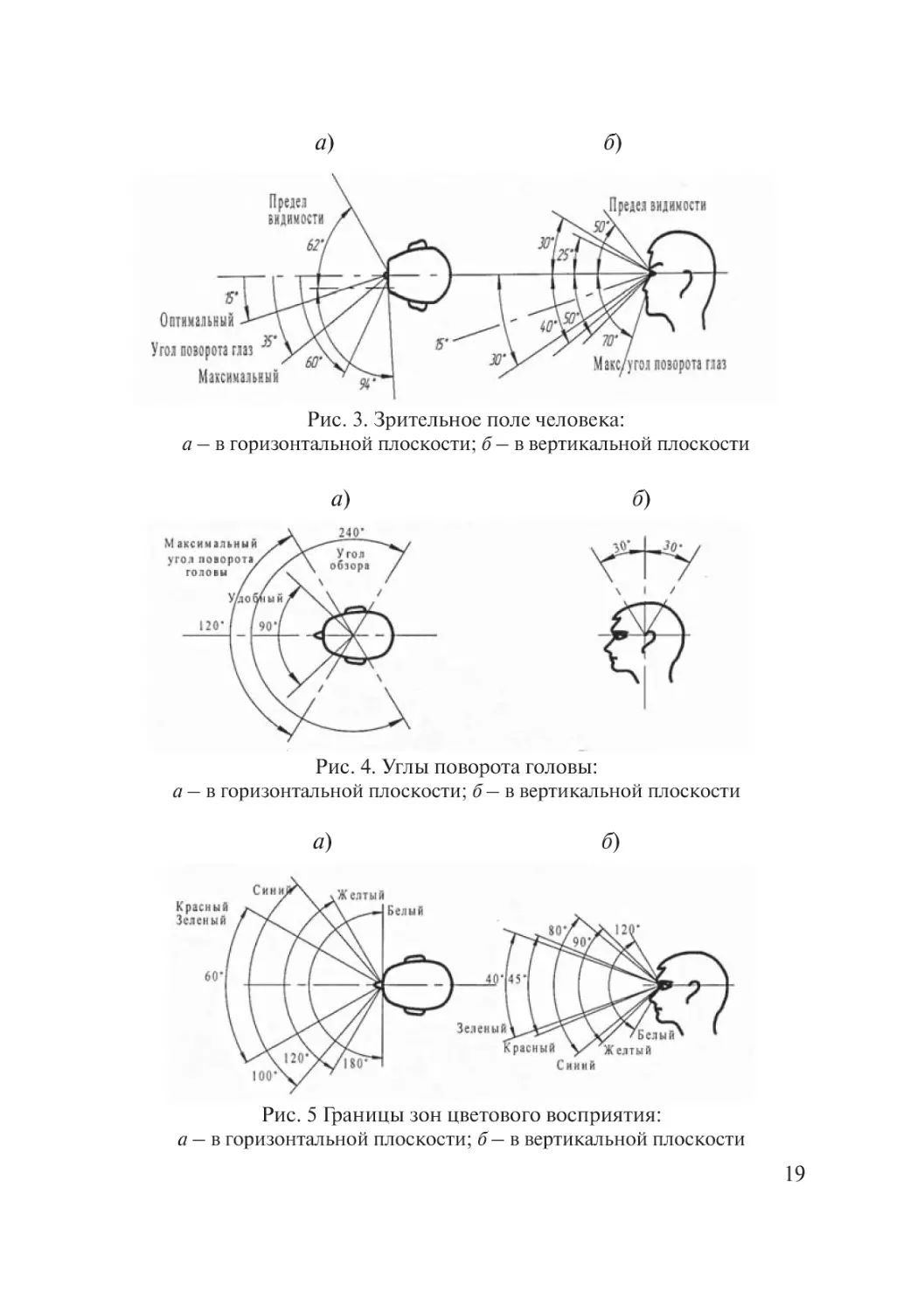
Конструктор должен рассматривать два основных фактора –
величину поля зрения и наименьший размер видимых деталей. В
зависимости от четкости восприятия предметов зрительное поле
человека подразделяется на три основные зоны. Первая – зона
центрального зрения обеспечивает наиболее четкое восприятие
объекта. Размеры этой зоны 1,5–3° обусловлены размером желтого
пятна – наиболее чувствительного участка сетчатки глаза. Чувствительность глаза резко уменьшается от центра к периферии.
Если при угле зрения 5° чувствительность составляет 1/2, то при
угле 65 – 1/18. Вторая – зона мгновенного зрения, соответствует
тому пространству, в пределах которого возможно зрительное
восприятие при ограниченном времени восприятия; размеры этой
зоны 18° определяются максимальной величиной скачка глаза в
процессе движения. Третья – зона эффективной видимости 30°
соответствует пространству, в пределах которого возможно достаточно четкое восприятие при необходимости концентрированного
внимания.
При движении глазного яблока зона обзора значительно расширяется (рис. 3 а,б). При поворотах головы зона обзора расширяется на угол, соответствующий углу поворота головы. Пределы
поворота головы, не вызывающие чрезмерных напряжений, составляют 45° в горизонтальной плоскости и 30° в вертикальной
(рис. 4 а,б).
Кроме границ зрительного поля и его зон, необходимо учитывать особенности цветового зрения, которое осуществляется за
счет центральных областей сетчатки. Области цветового зрения
неодинаковы для разных монохроматических цветов (рис. 5 а,б).
Периферическое зрение является ахроматическим.
Для правильного использования поля зрения важное значение
имеет направление остроты зрения, которое всегда совпадает с
прямым (пристальным) взглядом на наблюдаемый предмет. Та часть
предмета, которая находится в поле зрения, но наиболее удалена
от направления остроты зрения, воспринимается хуже. Это вызывает необходимость делать источники информации, находящиеся
18
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
а)
б)
Рис. 3. Зрительное поле человека:
а – в горизонтальной плоскости; б – в вертикальной плоскости
а)
б)
Рис. 4. Углы поворота головы:
а – в горизонтальной плоскости; б – в вертикальной плоскости
а)
б)
Рис. 5 Границы зон цветового восприятия:
а – в горизонтальной плоскости; б – в вертикальной плоскости
19
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
в стороне от пристально наблюдаемого предмета, более резкими,
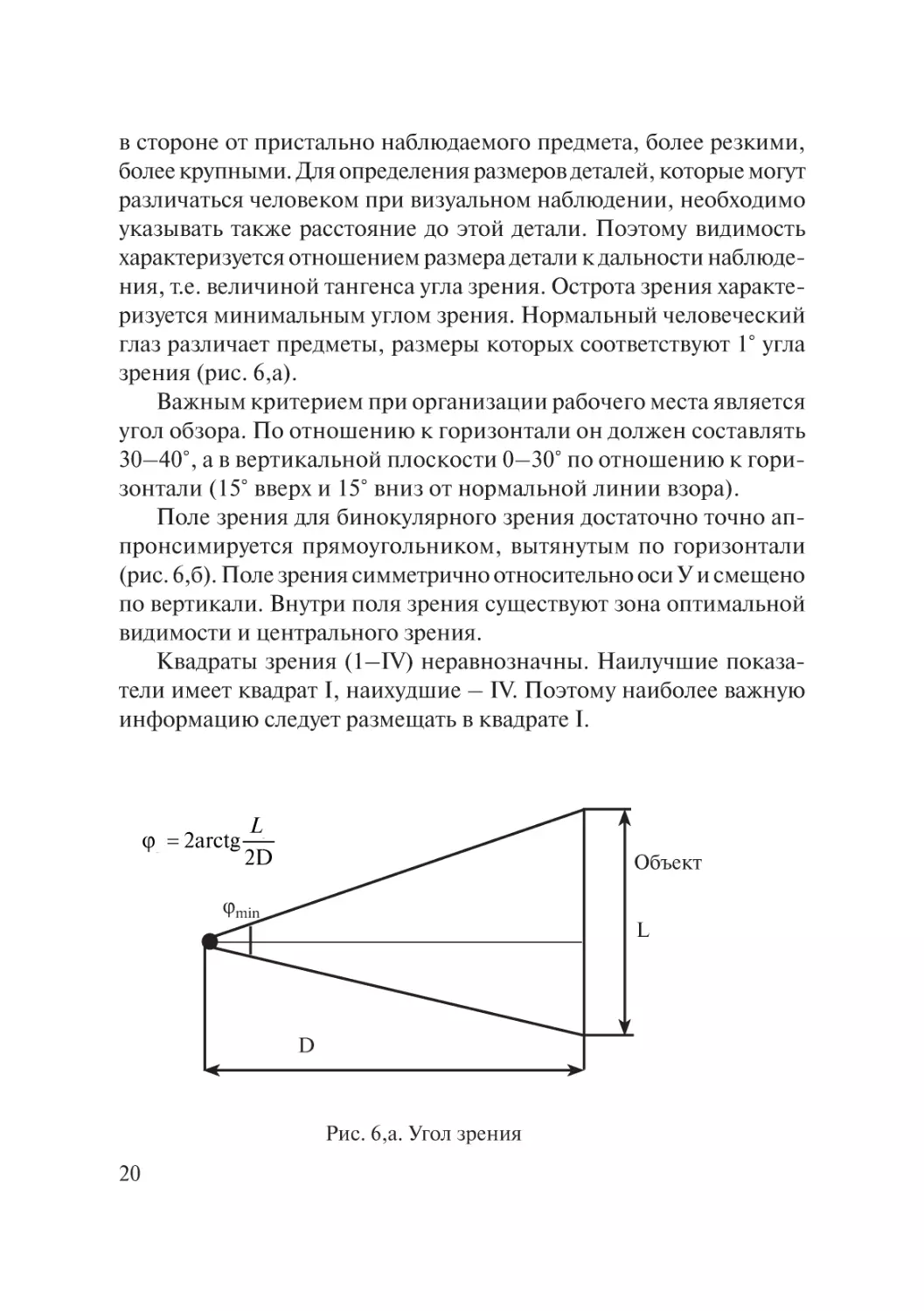
более крупными. Для определения размеров деталей, которые могут
различаться человеком при визуальном наблюдении, необходимо
указывать также расстояние до этой детали. Поэтому видимость
характеризуется отношением размера детали к дальности наблюдения, т.е. величиной тангенса угла зрения. Острота зрения характеризуется минимальным углом зрения. Нормальный человеческий
глаз различает предметы, размеры которых соответствуют 1° угла
зрения (рис. 6,а).
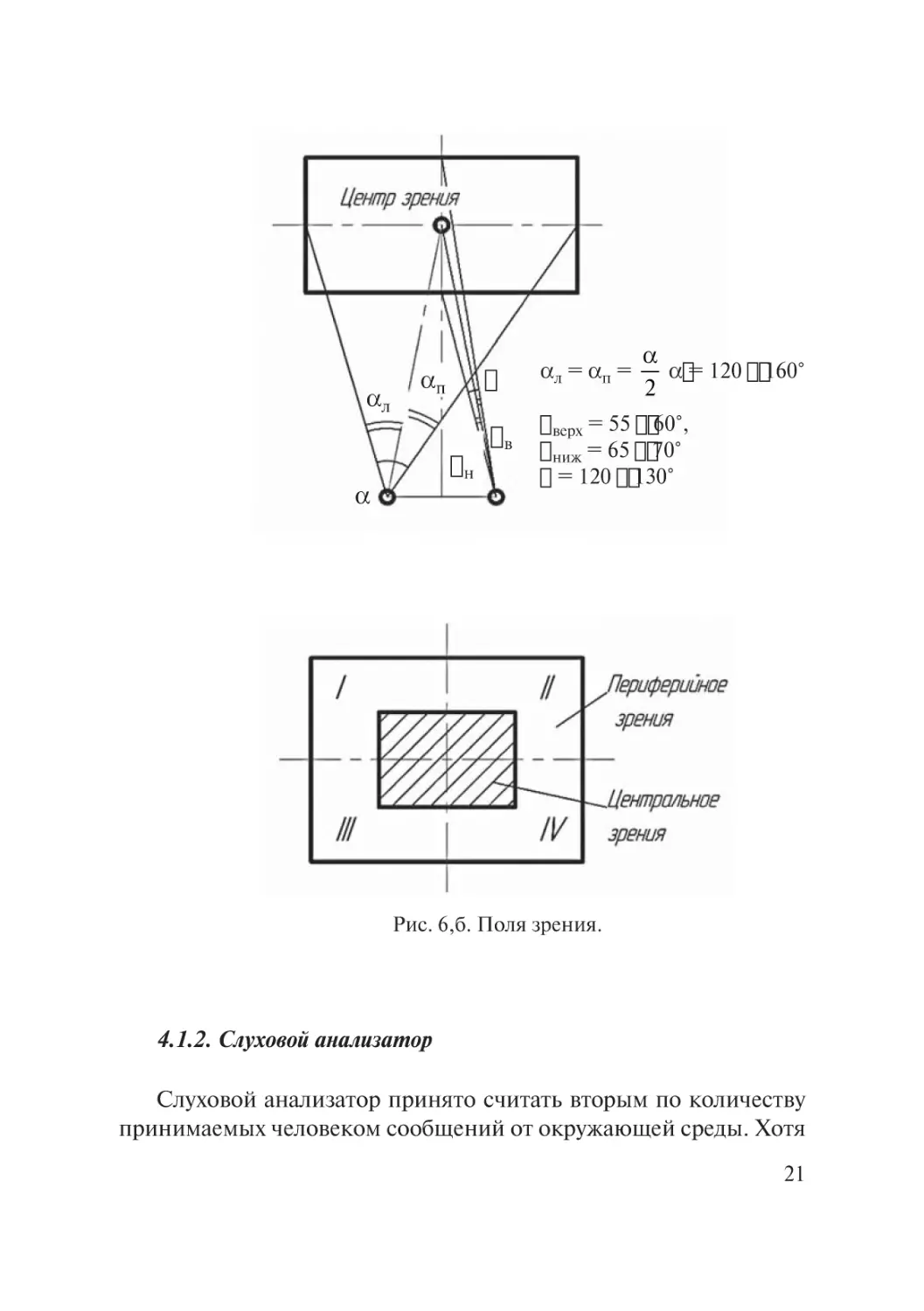
Важным критерием при организации рабочего места является
угол обзора. По отношению к горизонтали он должен составлять
30–40°, а в вертикальной плоскости 0–30° по отношению к горизонтали (15° вверх и 15° вниз от нормальной линии взора).
Поле зрения для бинокулярного зрения достаточно точно аппронсимируется прямоугольником, вытянутым по горизонтали
(рис. 6,б). Поле зрения симметрично относительно оси У и смещено
по вертикали. Внутри поля зрения существуют зона оптимальной
видимости и центрального зрения.
Квадраты зрения (1–IV) неравнозначны. Наилучшие показатели имеет квадрат I, наихудшие – IV. Поэтому наиболее важную
информацию следует размещать в квадрате I.
2arctg
min
L
2D
min
Объект
min
L
D
Рис. 6,а. Угол зрения
20
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
л
л = п =
п
в
н
= 120 160°
2
= 55 60°,
=
65 70°
ниж
= 120 130°
верх
Рис. 6,б. Поля зрения.
4.1.2. Слуховой анализатор
Слуховой анализатор принято считать вторым по количеству
принимаемых человеком сообщений от окружающей среды. Хотя
21
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
в ряде случаев информация, получаемая оператором по слуховому
каналу, может играть решающую роль (пилот, акустик-подводник,
шофер)
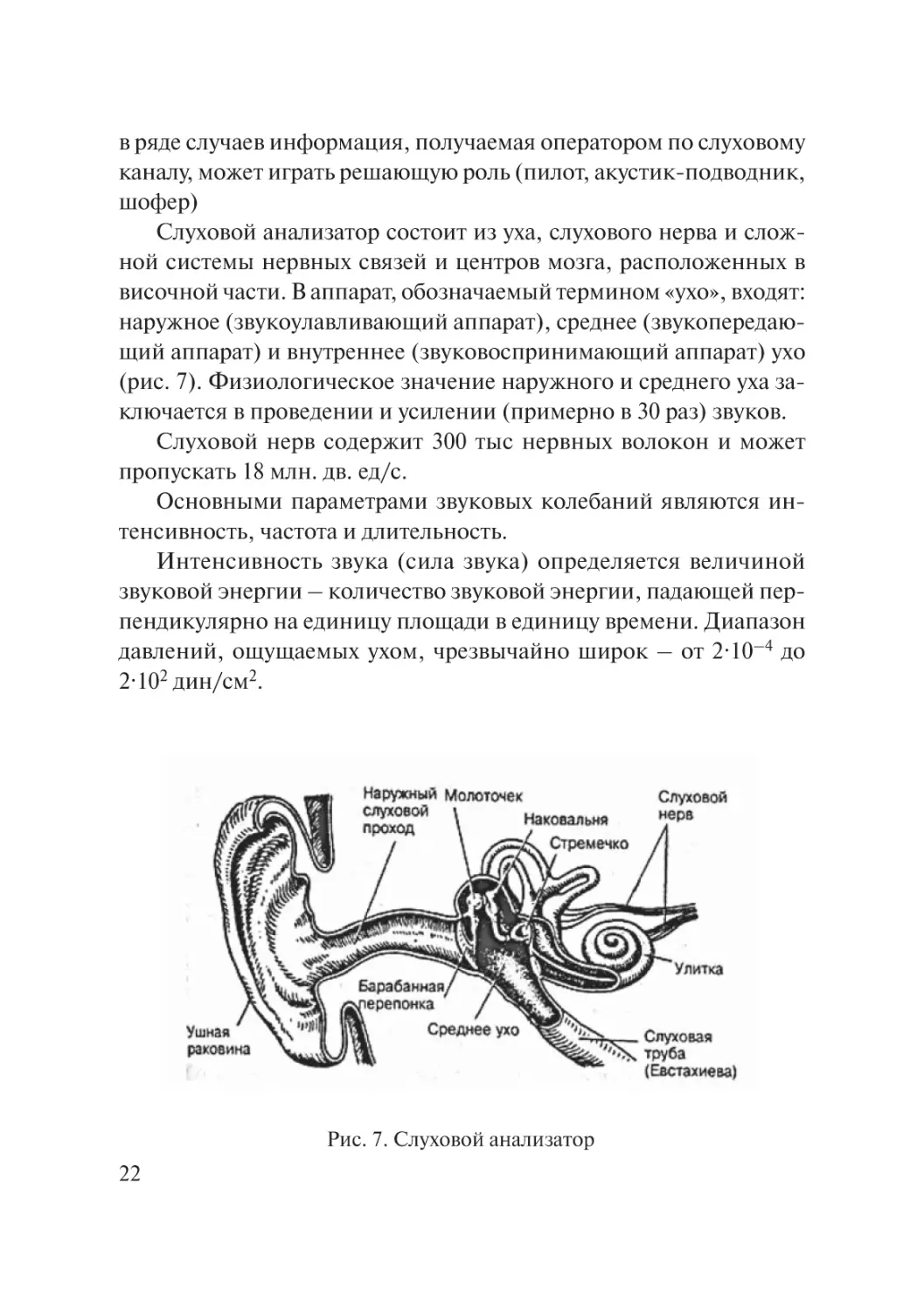
Слуховой анализатор состоит из уха, слухового нерва и сложной системы нервных связей и центров мозга, расположенных в
височной части. В аппарат, обозначаемый термином «ухо», входят:
наружное (звукоулавливающий аппарат), среднее (звукопередающий аппарат) и внутреннее (звуковоспринимающий аппарат) ухо
(рис. 7). Физиологическое значение наружного и среднего уха заключается в проведении и усилении (примерно в 30 раз) звуков.
Слуховой нерв содержит 300 тыс нервных волокон и может
пропускать 18 млн. дв. ед/с.
Основными параметрами звуковых колебаний являются интенсивность, частота и длительность.
Интенсивность звука (сила звука) определяется величиной
звуковой энергии – количество звуковой энергии, падающей перпендикулярно на единицу площади в единицу времени. Диапазон
давлений, ощущаемых ухом, чрезвычайно широк – от 2·10–4 до
2·102 дин/см2.
Рис. 7. Слуховой анализатор
22
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Порогом слышимости называется наименьшее значение
эффективного давления, при котором звук еще воспринимается
органами слуха. Абсолютный порог звукового давления – давление 0,0002 дин/см2 при частоте 2000 Гц соответствует силе звука
109 эрг/см2·с.
Порог болевого ощущения – наибольшее эффективное давление звука, при котором восприятие звука еще не вызывает
болевого ощущения. Если давление звука превосходит эту величину, то нормальное восприятие звука становится невозможным.
Порог болевого ощущения зависит от частоты звука. Однако для
характеристики величин, определяющих восприятие звука, обычно
употребляют не абсолютное значение интенсивности звука, а ее
отношение, например, к пороговому значению. Такой единицей
называется децибел:
N
10 lg
J
P2
P
10 lg 2
20 lg ,
J1
P0
P0
где J – величина измеряемого звукового давления; J0 – уровень
2·10–4 дин/см2
Диапазон частот воспринимаемых ухом лежит в пределах 16–
22 000 Гц. Звуковые колебания с частотой менее 16 Гц называются
инфразвуковыми, а с частотой более 22000 Гц – ультразвуковыми.
Ухо наиболее чувствительно к колебаниям в области средних частот – 1000–4000 Гц.
Дифференциальный порог по интенсивности зависит от частоты и интенсивности сигнала. В звуковом диапазоне он составляет
3–5 Гц при интенсивности 10 дБ. В среднем относительная величина дифференциального порога составляет 0,002 (табл. 1).
Временной порог чувствительности акустического анализатора
не является величиной постоянной. С увеличением интенсивности
и частоты он уменьшается. Диапазон изменения временного порога
лежит в пределах 1–50 мс. В этом диапазоне человек различает как
«щелчки», а оценку громкости и высоты начинает различать при
длительности звука свыше 50 мс.
23
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
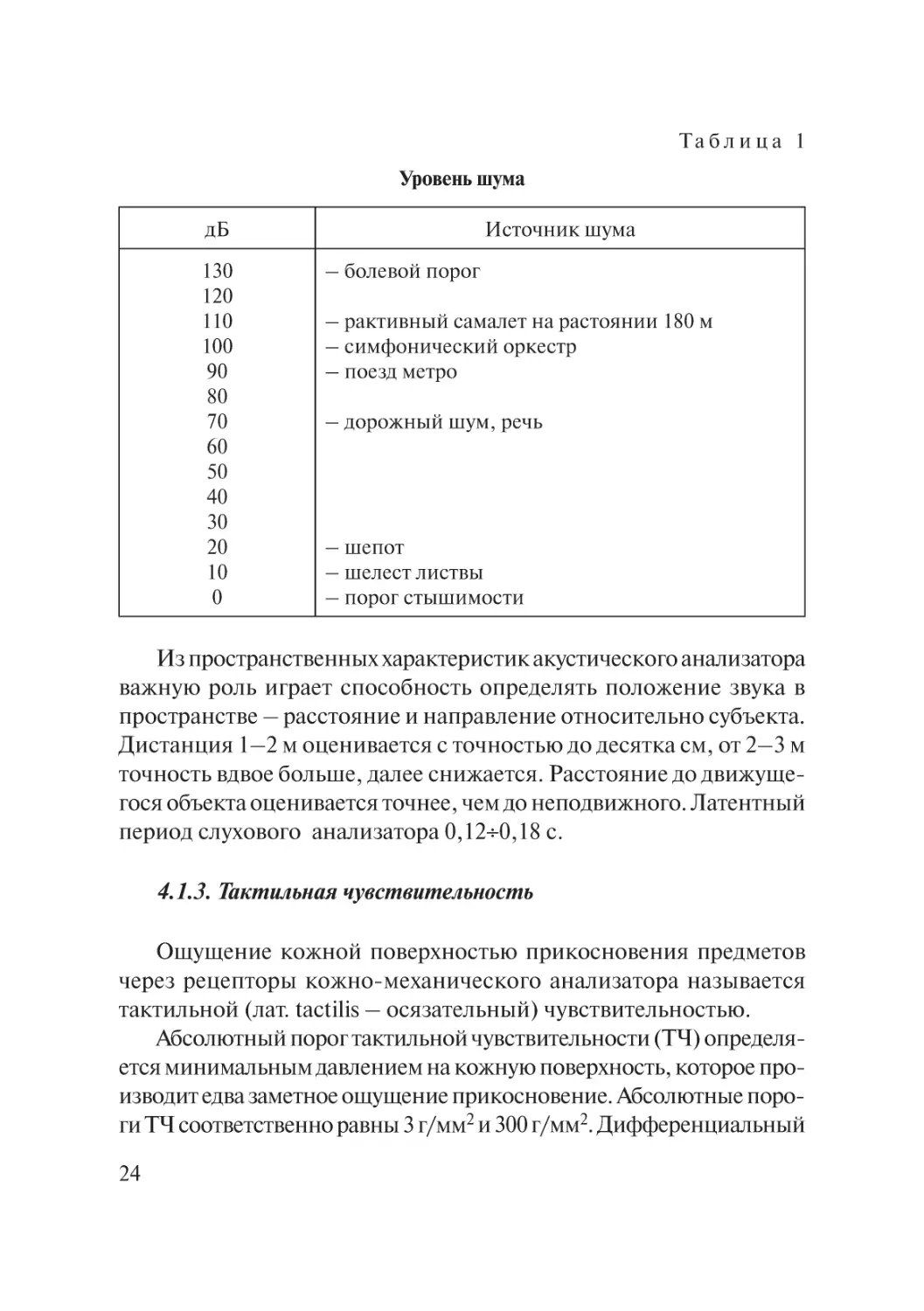
Та б л и ц а 1
Уровень шума
дБ
130
120
110
100
90
80
70
60
50
40
30
20
10
0
Источник шума
– болевой порог
– рактивный самалет на растоянии 180 м
– симфонический оркестр
– поезд метро
– дорожный шум, речь
– шепот
– шелест листвы
– порог стышимости
Из пространственных характеристик акустического анализатора
важную роль играет способность определять положение звука в
пространстве – расстояние и направление относительно субъекта.
Дистанция 1–2 м оценивается с точностью до десятка см, от 2–3 м
точность вдвое больше, далее снижается. Расстояние до движущегося объекта оценивается точнее, чем до неподвижного. Латентный
период слухового анализатора 0,120,18 с.
4.1.3. Тактильная чувствительность
Ощущение кожной поверхностью прикосновения предметов
через рецепторы кожно-механического анализатора называется
тактильной (лат. tactilis – осязательный) чувствительностью.
Абсолютный порог тактильной чувствительности (ТЧ) определяется минимальным давлением на кожную поверхность, которое производит едва заметное ощущение прикосновение. Абсолютные пороги ТЧ соответственно равны 3 г/мм2 и 300 г/мм2. Дифференциальный
24
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
порог в среднем равен 0,07 от исходной величины. Интенсивность
ощущения давления зависит от скорости, с которой осуществляется
деформация кожи: чем больше скорость, тем больше интенсивность
ощущения. Временной порог ТЧ составляет примерно 130 мс. Пространственный порог составляет 2,2 мм на пальцах, 67,7 мм на плече.
В зависимости от величины импульса различают три характерных порога:
– абсолютный порог ощущения, при котором человек начинает
ощущать воздействие импульсов
– болевой порог, при котором у человека возникают неприятные ощущения
– порог нетерпимой боли, при котором человек просит прекратить опыт
Болевая чувствительность кожи 20–300 г/мм2. Латентный период болевого ощущения – 370 мс.
4.1.4. Температурный анализатор
Многочисленные исследования показали, что характеристики
анализаторов не являются неизменными, все анализаторы представляют собой единую сложную систему и тесно взаимосвязаны.
Температурная чувствительность свойственна организмам,
обладающим постоянством температуры тела (изотермия). Температурные ощущения всегда есть ощущения различия температуры
кожи и окружающей среды.
В коже человека обнаружены два рода температурных рецепторов. Одни из них реагируют только на холод, другие – только на
тепло. Средняя температура открытых участков кожи равна 30–32°.
Абсолютный порог температурной чувствительности для тепловых
рецепторов равен 0,2°, для холодных 0,4°. Порог различительной
чувствительности немного менее 1°. Величины абсолютных и
дифференциальных порогов в значительной степени зависят от
скорости и величины температурной адаптации.
Пространственный порог температурной чувствительности
зависят от формы стимуляции. При контактной стимуляции он
25
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
составляет 1 мм2. Очень интенсивное излучение на меньшую площадь может вызвать лишь болевое ощущение, но не температурное.
Латентный период температурного ощущения равен примерно
250 мсек.
4.1.5. Обоняние. Вкус
В обонятельных вкусовых ощущениях отражаются свойства
химических веществ.
Абсолютный порог обоняния у человека весьма мал – мгр и тысячные доли мгр вещества на литр воздуха. Но дифференциальный
порог высок – в среднем 38 %, а при интенсивных раздражителях
даже 10 %.
Абсолютные пороги вкусового анализатора, выраженные в
величинах едва ощущаемых концентрациях раствора, примерно
в10 000 раз выше, чем обонятельного. В отношении различных
вкусовых качеств они значительно варьируются. На первом месте
по величине стоит чувствительность к горькому (нижний порог),
затем к кислому и наконец сладкому (верхний порог).
Различительная чувствительность вкусового анализатора довольна груба. В среднем отношение едва ощутимого прироста
раздражителя к исходному составляет 20 % для всех вкусовых
качеств. Но под влиянием практической деятельности и специальных знаний чувствительность вкусового анализатора может быть
значительно выше (дегустатор).
4.1.6. Вибрационная чувствительность
Оператору нередко приходится работать в условиях вибрации.
При этом продолжительное воздействие вибрации высокой интенсивности приводит к серьезным изменениям в организме, а
иногда и к тяжелым заболеваниям. В тоже время при небольшой
интенсивности и длительности воздействия оно может оказывать
благоприятное влияние: уменьшается утомляемость, повышается
обмен веществ, увеличивается мышечная сила и т.д.
26
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Вибрация часто служит для человека сигналом изменения состояния управляемого объекта (контактный слух). Вибрационная
чувствительность является особым и самостоятельным видом
чувствительности и природа ее пока неизвестна.
Диапазон ощущения вибрации широк: от 1 до 10 000 гц. Наиболее высокая чувствительность к частотам 200–250 гц. Дифференциальный порог по частоте составляет 3–8 %.
4.1.7. Болевой анализатор
Воздействие сверхмощного раздражителя, превышающего
абсолютный порог, вызывает болевое ощущение в любом анализаторе. Считается, что болевыми рецепторами являются свободные
нервные окончания, которые распределяются по телу человека неравномерно. Наименьшая плотность болевых рецепторов на участке
кожи наиболее богатыми тактильными рецепторами, и наоборот.
Многочисленные исследования показали, что характеристики
анализаторов не являются неизменными, все анализаторы представляют собой единую сложную систему и тесно взаимосвязаны.
4.2. Моторная сфера оператора
Наряду с сенсорной сферой деятельности (все, что определяет ощущения, восприятие, т.е. воздействует на анализаторы и
определяет ответные действия) существует моторная (двигательная)
сфера деятельности. Она сформировалась в результате длительного
эволюционного процесса приспособления человека к изменениям
окружающей среды и определяет реактивность человека на эти
изменения.
Совокупность всех имеющихся у человека реактивных систем
определяет его эффекторную сферу. Она включает 3 основные
подсистемы:
– систему эндокринных желез или желез внутренней секреции
– система речевого аппарата
– система моторного или двигательного аппарата
27
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Структура и функции желез внутренней секреции достаточно
сложна, многообразна и изучена еще недостаточно. Применительно
к эргономическим проблемам значимость процессов и самой подсистемы проявляется через параметры внутреннего психофизиологического состояния человека и их влияния на характеристики
работоспособности человека, трансформации этих характеристик
во времени (утомляемость, стресс, ошибочные действия, профессиональные заболевания и т.д.)
По характеру движений в моторной сфере различают:
– вращательные. Основные характеристики:
темп – 4,8 об/с ведущей рукой, 4,0 об /с ведомой рукой,
Максимальный темп при радиусе рукоятки 3 см (R = 3 см).
При усилие на рукоятке P = 50 Н минимальный темп при R= 4 см.
С увеличением R темп падает, при R больше 24 см темп падает вдвое
P – усилие возрастает, темп падает. При P = 5 темп при R = 4 см
– линейные. Максимальные усилия:
– вытягивание на себя – 544 Н
– толкание от себя – 626 Н
– толкание вниз – 186 Н
– отведение от себя – 155 Н
Усилия ведущей руки на 10–15 % больше ведомой
– нажимные. Максимальный темп при величине усилия 250 Н
для ведущей руки – 6–7 нажимов в сек., для неведущей – 5,5. Если
усилие 4000 Н, то различие между ними уменьшается. Усилие нажатия является важной характеристикой кнопочного управления.
– ударные. Максимальный темп ударных движений пальцев
5–14 ударов в секунду. Для большинства людей оптимальный диапазон 1,5–5 ударов в секунду при продолжительной работе. Если
есть возможность менять пальцы, то темп можно увеличить. Например, интервал между ударами одного и того же пальца 0,09 с,
разных пальцев одной руки 0,03 с, а разных рук 0,02 с.
Амплитуда ударных движений влияет на темп незначительно.
Оптимальная амплитуда – 20 мм.
– максимальный темп вращательных движений – 4,0–4,8
об/с, нажимных движений для ведущей руки – 6,6 нажимов в 1 с,
28
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
для неведущей – 5,3 нажима в 1 с. Максимальный темп ударных
движений–от 5 до 14 уд/с, оптимальный для длительной работы
3,5–6,0 уд/с
По назначению органов управления все двигательные задачи
можно разделить на операции включения, выключения и перемещения.
Основная характеристика – время реакции. При этом различают
простые реакции и реакции выбора.
Двигательные задачи заключаются в выполнении последовательного ряда повторяющихся движений. Основная характеристика – темп.
Манипулирование органами управления для настройки аппаратуры и точной установки требует дозирования движений по
силовым, пространственным и временным параметрам. Основной
фактор – точность. Точность движений:
– точные движения лучше выполняются сидя, чем стоя;
– наибольшая точность движений достигается в горизонтальной
плоскости в зоне, расположенной на расстоянии 15–35 см от средней линии тела, при амплитуде движения в локтевом суставе 50–60°;
– точность попадания рукой в заданную точку составляет 15–20
см в средней зоне ниже груди и 30–40 см в крайних зонах;
– при работе вслепую в горизонтальной плоскости короткие
расстояния человеком преувеличиваются, а длинные преуменьшаются, в вертикальной плоскости – преувеличиваются;
– наиболее точно оцениваются движения с амплитудой 8–12 см;
– при движениях в вертикальной плоскости ошибки меньше,
чем в горизонтальной. Наилучшие направления движений в этом
отношении – влево вверх и вправо вниз под углом 40° к горизонтали;
– точность движений обеих рук при оптимальных для каждой
руки амплитудах движений одинаковая, но оптимальные амплитуды для обеих рук различны – для правой руки амплитуда больше,
чем для левой, на 4–5°;
– пространственная точность движений при небольшой нагрузке (до 25 % максимального усилия) наилучшая, при значительных
усилиях снижается.
29
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Зависимость пространственной точности движений от их скорости следующая:
– для вращательных движений наилучшая точность при скорости 140–200 об/мин, для ударных – 60–70 движений в минуту.
Экономия усилий: – сила, развиваемая рукой, зависит от ее
положения: давление и тяга сильнее при движении руки перед
корпусом, чем при движении сбоку;
– если при работе используются обе руки, то следует учесть, что
сила правой руки больше, чем левой, на 10 % для сгибателей пальцев
и на 3–4 % для сгибателей и разгибателей предплечья;
– максимальные усилия в положении стоя развиваются на
уровне плеча, в положении сидя – на уровне локтя;
– наибольшая сила в положении стоя развивается движением
на себя;
– сила давления больше при согнутой руке, чем при вытянутой;
– сила тяги по горизонтали больше при движении перед собой,
чем при движении сбоку;
– в положении сидя давление сильнее, чем тяга;
– сила сгибателей предплечья больше при согнутой, чем при
вытянутой руке;
– величина усилий, развиваемых рукой в положении сидя, при
движении в различных направлениях, располагается примерно в
следующем порядке: давление (горизонтальное), тяга (горизонтальная), движение вверх, движение вниз, движение к себе (сбоку),
движение от себя (сбоку);
– сила вращения руки зависит от ее положения и направления
вращения – при повороте внутрь развивается более значительная
сила, чем при обратном движении;
– сила давления ног сидящего человека больше, когда они вытянуты вперед (с тупым углом в коленном суставе), чем при положении с
прямым углом в коленном суставе. В психологии труда выявлено, что
движения организуются не только пространственно, но и музыкально,
подчиняясь определенному ритму. В свое время обратили внимание
на то, что наиболее квалифицированные наборщики при составлении
полосы набора из отдельных букв выполняют круговые движения,
которые, на первый взгляд, кажутся менее целесообразными, чем
30
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
прямолинейные. Между тем круговая (дуговая) линия в большей
степени обеспечивает непрерывность ритма и подчиненность движения определенной ритмической структуре. Поэтому в определенных
случаях не самое скорое движение – самое рациональное и не самое
короткое движение – самое рациональное. Выявление соответствующих закономерностей организации движения возможно только на
основе глубокого психологического анализа деятельности.
Операции слежения за изменяющимися объектами относятся
к классу перцептивно-моторных задач. Различают две основные
задачи слежения:
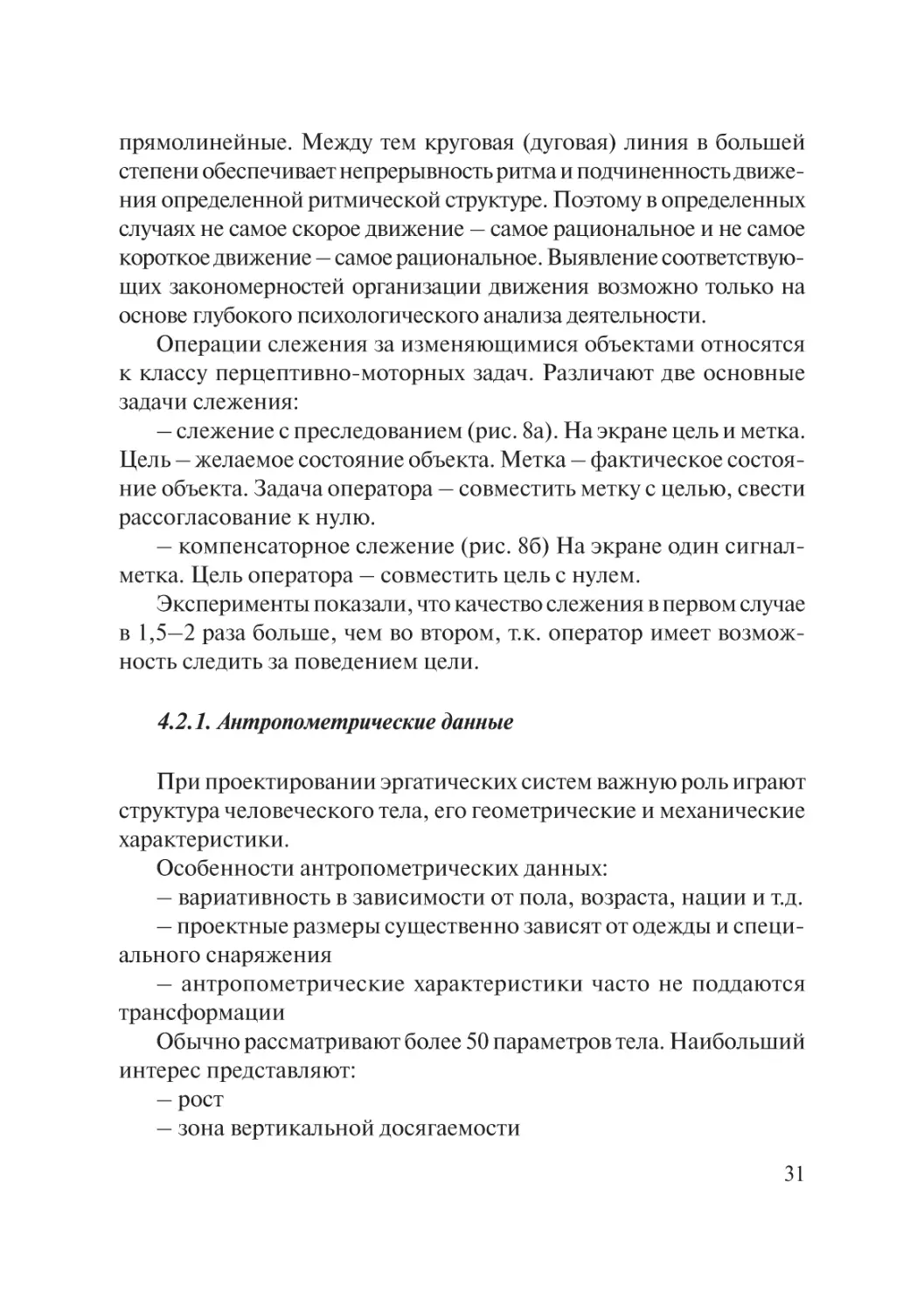
– слежение с преследованием (рис. 8а). На экране цель и метка.
Цель – желаемое состояние объекта. Метка – фактическое состояние объекта. Задача оператора – совместить метку с целью, свести
рассогласование к нулю.
– компенсаторное слежение (рис. 8б) На экране один сигналметка. Цель оператора – совместить цель с нулем.
Эксперименты показали, что качество слежения в первом случае
в 1,5–2 раза больше, чем во втором, т.к. оператор имеет возможность следить за поведением цели.
4.2.1. Антропометрические данные
При проектировании эргатических систем важную роль играют
структура человеческого тела, его геометрические и механические
характеристики.
Особенности антропометрических данных:
– вариативность в зависимости от пола, возраста, нации и т.д.
– проектные размеры существенно зависят от одежды и специального снаряжения
– антропометрические характеристики часто не поддаются
трансформации
Обычно рассматривают более 50 параметров тела. Наибольший
интерес представляют:
– рост
– зона вертикальной досягаемости
31
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
а)
б)
Цель
Метка
Метка
0
Рис. 8. Задачи слежения
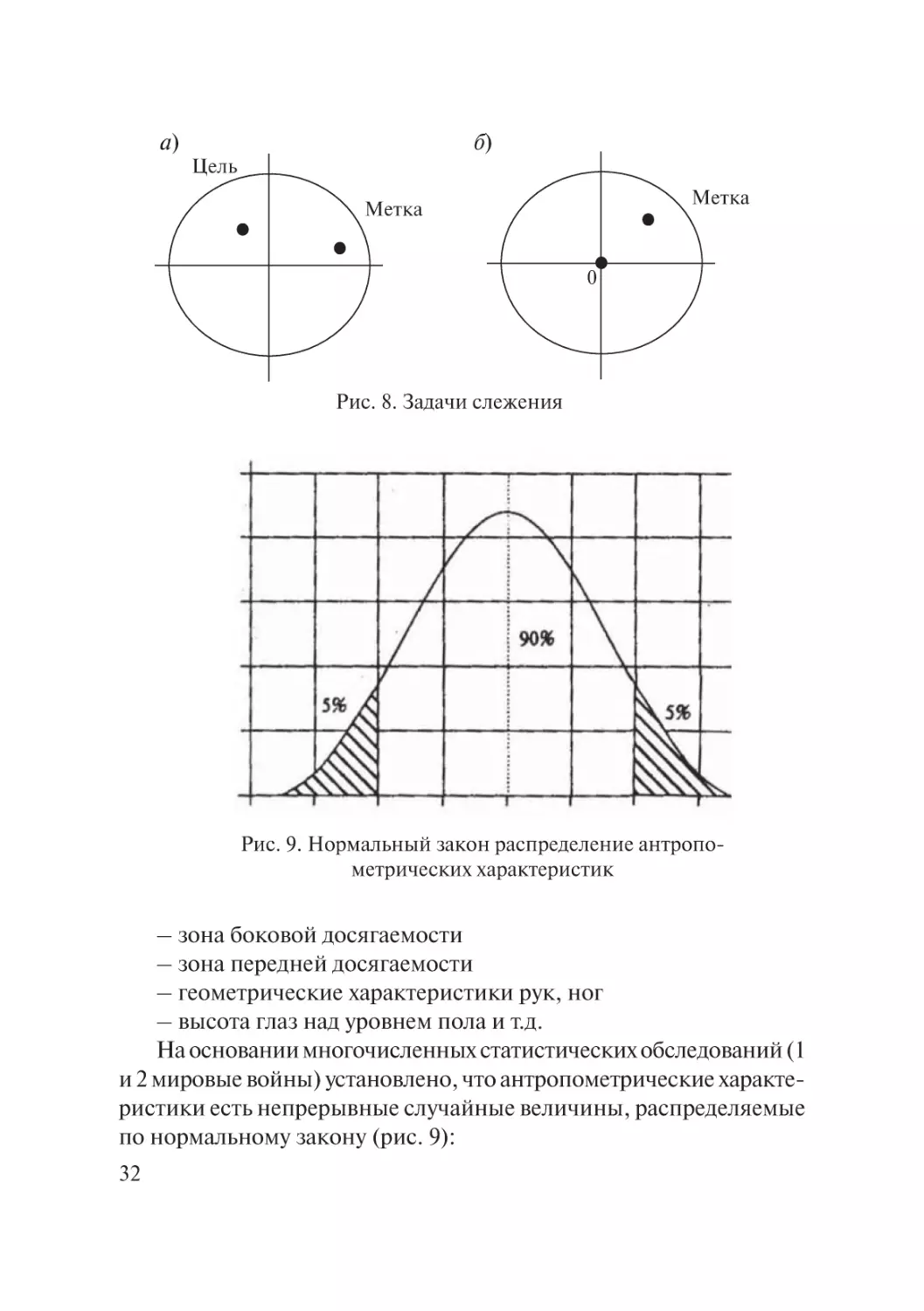
Рис. 9. Нормальный закон распределение антропометрических характеристик
– зона боковой досягаемости
– зона передней досягаемости
– геометрические характеристики рук, ног
– высота глаз над уровнем пола и т.д.
На основании многочисленных статистических обследований (1
и 2 мировые войны) установлено, что антропометрические характеристики есть непрерывные случайные величины, распределяемые
по нормальному закону (рис. 9):
32
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
К сожалению, в практике проектирования широко распространена ошибочная концепция среднего человека.
Стандартного и среднего человека не существует.
Система спроектирована правильно, если в ней чувствует себя
комфортно 90 % обслуживающего персонала.
4.2.2. Рабочая зона оператора
Антропометрия – система измерений человеческого тела, давно
стала необходимой для проектирования рабочего места. Данные
антропометрии необходимы для определения высоты сиденья,
наклона спинки, расстояния до рычагов и педалей. Сами средне-
Рис. 10. Схематическое изображение человеческого тела
33
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
статистические размеры человека мало могут дать проектировщику
т.к. в процессе работы человек меняет свою позу. Поэтому необходимо проводить анализ положения тела при различных наклонах,
поворотах, изгибах рук и ног.
Для анализа положения тела применяют соматографию – метод
схематического изображения человеческого тела в технической или
иной документации (рис. 10). С помощью соматографии можно
простым схематическим способом изобразить человеческую фигуру
в различных рабочих и физиологически удобных положениях на
рабочем месте на стадии проектирования. Соматография исходит
из данных антропометрии и размеров человеческого тела в статике
и динамике для различных рабочих положений. Для исследования
методом соматографии изготавливают макеты человеческой фигуры в масштабе 1:10, 1:5, 1:2.
При проектировании рабочего места определяют зоны основных и вспомогательных движений и соответственно зоны размещения оборудования (ГОСТ 12.2.097-83).
Рекомендуется руководствоваться следующими принципами:
планировать целое, затем детали,
сначала оптимальное, затем практически допустимое.
Рис. 11. Рабочая зона оператора
34
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
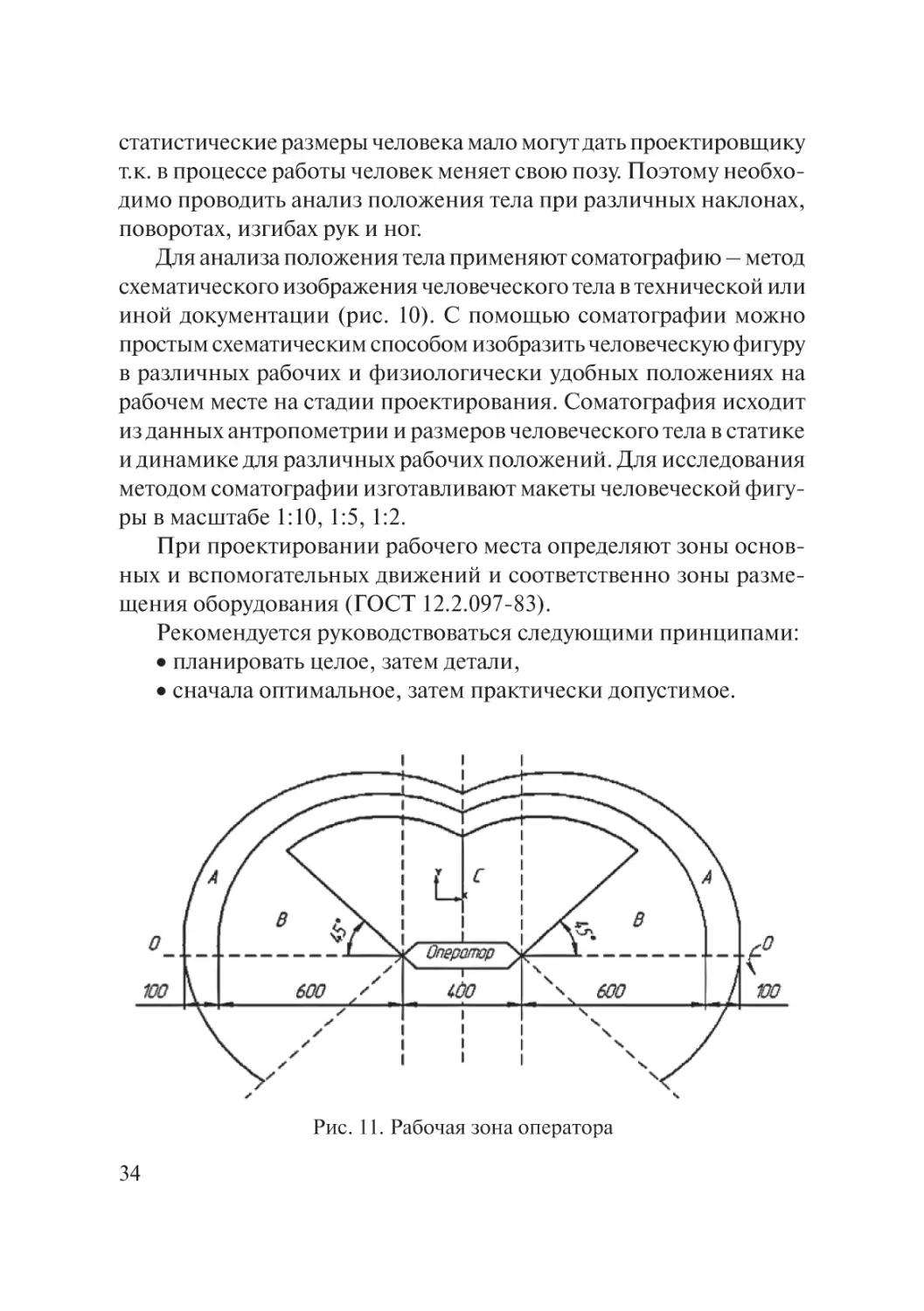
Оптимальным считается рабочее пространство, ограниченное
дугами, которые описываются руками оператора при вращении в
локтевом суставе, максимальным – дугами, описываемыми вытянутыми руками при их повороте в плечевом суставе (рис. 11).
Для определения зоны оптимальной досягаемости широко
используется метод механико-математического моделирования,
широко распространенный для описания различных аспектов
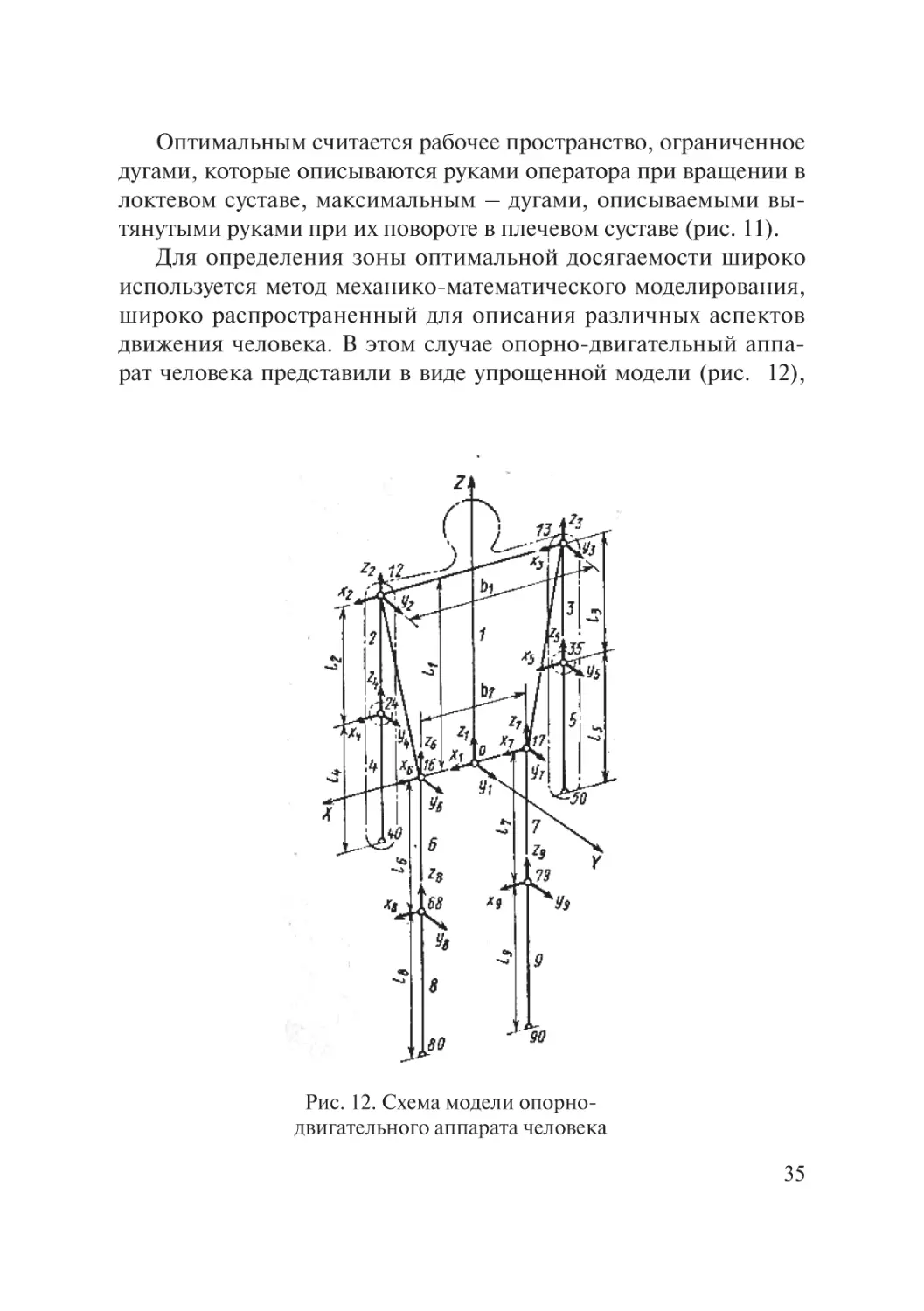
движения человека. В этом случае опорно-двигательный аппарат человека представили в виде упрощенной модели (рис. 12),
Рис. 12. Схема модели опорнодвигательного аппарата человека
35
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
состоящей из пространственной системы, включающей девять
шарнирно соединенных звеньев. Построение модели проводится
с учетом того, что все звенья абсолютно жесткие и соединяются
идеальными шарнирами, связи стационарные и совершенные,
размеры звеньев ii , и bi модели совпадают с аналогичными частями тела человека.
Число звеньев, равно как и число степеней свободы, выбирается
в зависимости от характера описываемых движений, используемых
при управлении строительными и дорожными машинами. Установлено, что таких движений восемь: три движения в «плечевом
суставе (сгибание-разгибание, отведение-приведение, вращение
плеча вокруг собственной оси или ротация); сгибание-разгибание
предплечья; сгибание-разгибание и приведение-отведение бедра;
сгибание-разгибание голени в коленном суставе. Число степеней
свободы шарниров модели соответствует перечисленным движениям.
Исследование моделей проводили в пространственной системе
координат, состоящей из основной неподвижной ОХУ с центром
отсчета в точке О, совпадающей с точкой SIР (для рабочей позы
сидя), и вспомогательных подвижных систем координат Хi , Yi, Zi,
имеющих центрами координат шарниры на проксимальных концах звеньев; индексы вспомогательных координат соответствуют
номеру звена.
Все движения модели образуются за счет поворота звеньев относительно своих координатных осей. Углы относительного поворота
звеньев обозначали qik, где i = 1–9 – номера звеньев, к = 1–3-номера
координатных осей (Х = 1, Y = 2, Z = 3), относительно которых
происходит поворот.
Оптимальная зона досягаемости, с точки зрения физиологии
труда, ограничивается поверхностью, описываемой центром кулака или стопы при условии, что все межзвенные углы остаются
в пределах комфортных значений. С учетом допускаемых физиологией труда значений углов комфорта методами сферической
геометрии, составляли уравнения габаритных точек модели (рис.
точки 40; 50; 80; 90).
36
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
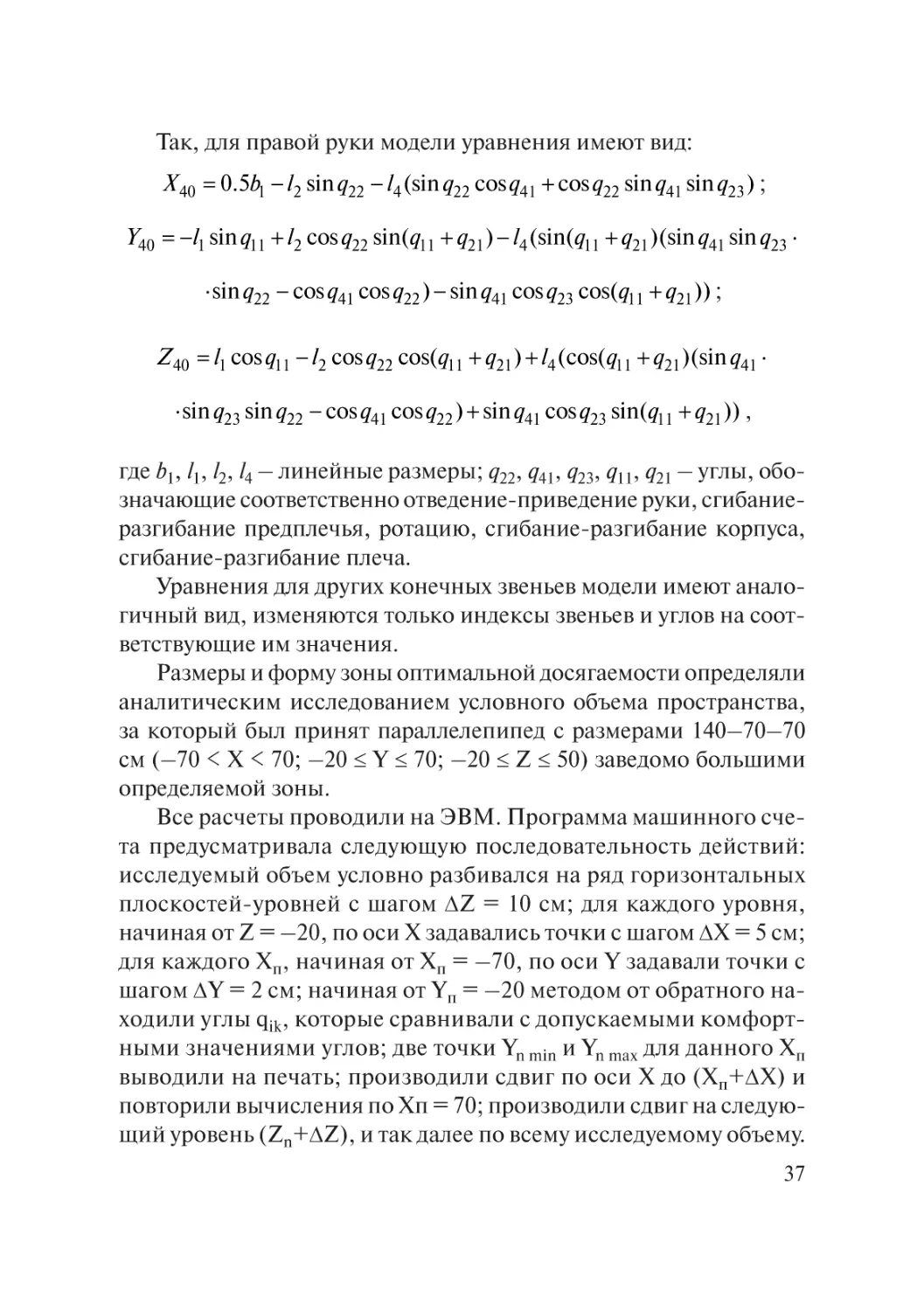
Так, для правой руки модели уравнения имеют вид:
X 40
0.5b1 l 2 sin q22 l 4 (sin q22 cos q41 cos q22 sin q41 sin q23 ) ;
Y40
l1 sin q11 l 2 cos q22 sin(q11 q21 ) l 4 (sin(q11 q21 )(sin q41 sin q23
sin q22 cos q41 cos q22 ) sin q41 cos q23 cos(q11 q21 )) ;
Z
40 l1 cos q11 l 2 cos q22 cos(q11 q21 ) l 4 (cos(q11 q21 )(sin q41
sin q23 sin q22 cos q41 cos q22 ) sin q41 cos q23 sin(q11 q21 )) ,
где b1, l1, l2, l4 – линейные размеры; q22, q41, q23, q11, q21 – углы, обозначающие соответственно отведение-приведение руки, сгибаниеразгибание предплечья, ротацию, сгибание-разгибание корпуса,
сгибание-разгибание плеча.
Уравнения для других конечных звеньев модели имеют аналогичный вид, изменяются только индексы звеньев и углов на соответствующие им значения.
Размеры и форму зоны оптимальной досягаемости определяли
аналитическим исследованием условного объема пространства,
за который был принят параллелепипед с размерами 140–70–70
см (–70 < Х < 70; –20 Y 70; –20 Z 50) заведомо большими
определяемой зоны.
Все расчеты проводили на ЭВМ. Программа машинного счета предусматривала следующую последовательность действий:
исследуемый объем условно разбивался на ряд горизонтальных
плоскостей-уровней с шагом Z = 10 см; для каждого уровня,
начиная от Z = –20, по оси X задавались точки с шагом Х = 5 см;
для каждого Хп, начиная от Хп = –70, по оси Y задавали точки с
шагом Y = 2 см; начиная от Yп = –20 методом от обратного находили углы qik, которые сравнивали с допускаемыми комфортными значениями углов; две точки Yn min и Yn max для данного Хп
выводили на печать; производили сдвиг по оси X до (Хп+Х) и
повторили вычисления по Хп = 70; производили сдвиг на следующий уровень (Zn+Z), и так далее по всему исследуемому объему.
37
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
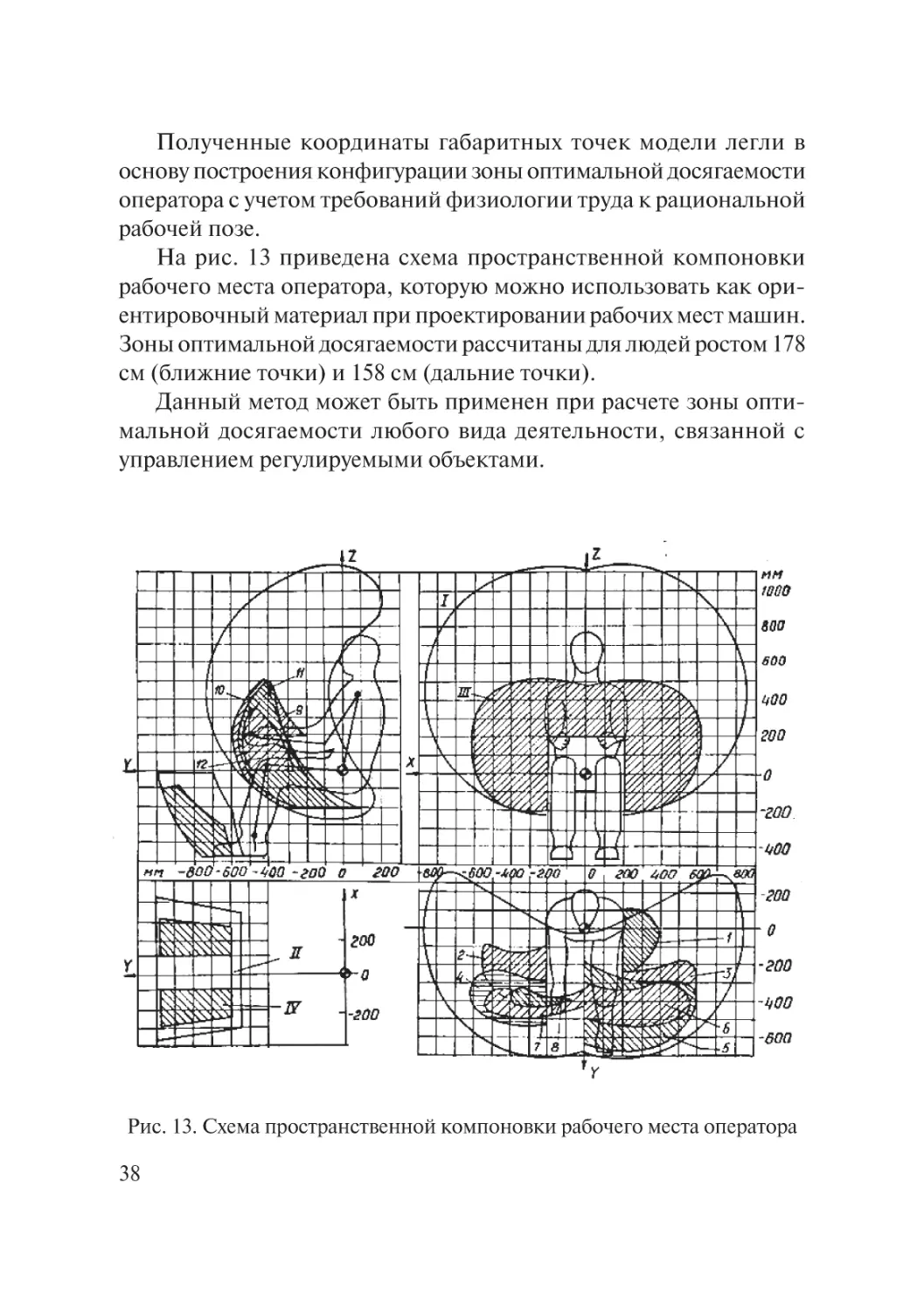
Полученные координаты габаритных точек модели легли в
основу построения конфигурации зоны оптимальной досягаемости
оператора с учетом требований физиологии труда к рациональной
рабочей позе.
На рис. 13 приведена схема пространственной компоновки
рабочего места оператора, которую можно использовать как ориентировочный материал при проектировании рабочих мест машин.
Зоны оптимальной досягаемости рассчитаны для людей ростом 178
см (ближние точки) и 158 см (дальние точки).
Данный метод может быть применен при расчете зоны оптимальной досягаемости любого вида деятельности, связанной с
управлением регулируемыми объектами.
Рис. 13. Схема пространственной компоновки рабочего места оператора
38
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
5. ЭРГОНОМИЧЕСКИЕ ТРЕБОВАНИЯ ПРИ ПРОЕКТИРОВАНИИ РАБОЧЕГО МЕСТА ОПЕРАТОРА
Рабочее место должно отвечать следующим эргономическим
требованиям:
– гигиеническим (освещенность, температура, влажность, запыленность, радиация, вибрация и т.д.)
– антропометрическим (размеры, форма)
– физиологическим (соответствие силовым, скоростным, энергетическим возможностям)
– психологическим (восприятие, переработка информации)
5.1. Микроклимат
1. Помещение для оператора должно быть оснащено регулируемыми средствами нормализации микроклимата (отопления, охлаждения, вентиляции и др.), обеспечивающими санитарные нормы.
Основные факторы микроклимата:
– температура
– влажность
– состав воздуха
Нормальное содержание кислорода 20 %. Ниже 6–9 % опасно для
жизни, избыток кислорода приводит к отеку легких. Для нормальной
жизнедеятельности необходимо содержание азота (78 %), углекислого газа (0,03 %). Более 3 % углекислого газа опасно для жизни.
Наиболее благоприятная влажность воздуха 40–60 %
Для каждой эргатической системы рекомендуется своя оптимальная температура функционирования:
– умственная работа 21–30°
– при больших физических нагрузках – 16–21°
Идеальная скорость движения воздуха – 150 мм/с.
Для большинства людей комфортными являются условия при
температуре окружающей среды примерно на уровне 20–22°С,
влажности в пределах 30–60 % и скорости движения воздуха не
более 0,2 м/с.
39
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
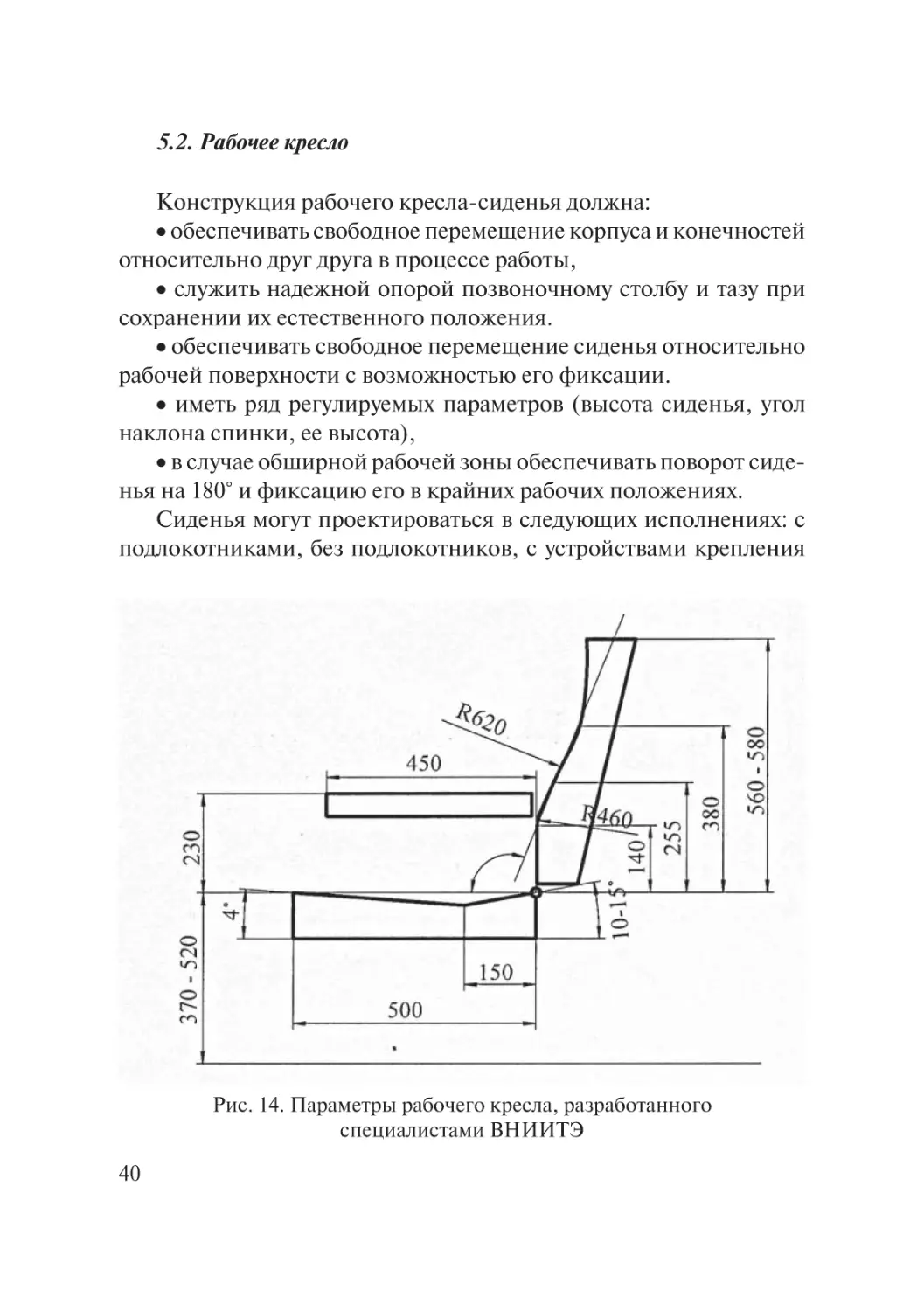
5.2. Рабочее кресло
Конструкция рабочего кресла-сиденья должна:
обеспечивать свободное перемещение корпуса и конечностей
относительно друг друга в процессе работы,
служить надежной опорой позвоночному столбу и тазу при
сохранении их естественного положения.
обеспечивать свободное перемещение сиденья относительно
рабочей поверхности с возможностью его фиксации.
иметь ряд регулируемых параметров (высота сиденья, угол
наклона спинки, ее высота),
в случае обширной рабочей зоны обеспечивать поворот сиденья на 180° и фиксацию его в крайних рабочих положениях.
Сиденья могут проектироваться в следующих исполнениях: с
подлокотниками, без подлокотников, с устройствами крепления
Рис. 14. Параметры рабочего кресла, разработанного
специалистами ВНИИТЭ
40
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
привязного ремня безопасности и без этих устройств. Учитывая
разные антропометрические данные обслуживающего персонала, необходимо иметь регулировки в вертикальном направлении
на величину + 40 мм и в горизонтальной на величину + 75 мм.
Интервал регулировки между фиксированными положениями в
вертикальном положении не более 20 мм и в горизонтальном не
более 25 мм. Регулировки должны быть независимыми друг от
друга и осуществляться без применения инструмента усилием не
более 100 Н.
Конструкция сиденья должна обеспечивать:
– возможность регулировки спинки сиденья в интервале 5°20° по отношению к вертикали и ее фиксацию через интервал не
более 5°.
– возможность регулировки в зависимости от массы оператора
от 60 до 120 кг.
Сиденье должно быть покрыто прочным, легкомоющимся,
воздухопроницаемым материалом (ГОСТ 23367-78).
Рекомендуют следующие параметры рабочего кресла (рис.
12). Высота сиденья от пола – 425 мм; ширина сиденья – 400
мм; глубина сиденья – 390 мм; высота подлокотников – 230 мм;
длина подлокотников относительно фиксированного положения
спинки – 450 мм; ширина нижнего края спинки – 370 мм. По материалам исследований американских специалистов, оптимальные
параметры рабочего кресла должны быть следующие: высота сиденья – 375–400 мм; ширина сиденья 450 мм; глубина сиденья – 425
мм; угол наклона сиденья – 6–7° высота спинки кресла – 450–500
мм; с подголовником – 850 мм; высота подголовников 200–250 мм;
наклон спинки – 103–115°.
5.3. Рычаги
Рычаги используются, когда важна точность установки органа
управления в определенное положение, требуется высокая скорость
установки при больших управляющих усилиях и сравнительно
коротком эффективном пути управления.
41
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рычаги на свободном конце имеют захватную часть, называемую рукояткой или ручкой. Другой конец укреплен на оси, смонтированной на машине. Рычаг может совершать колебательные
движения в одной или нескольких плоскостях в зависимости от
функционального назначения.
Минимальная длина свободной части рычага управления
(вместе с рукояткой) в любом его положении – не менее 50мм для
захвата пальцами и 150 мм для захвата всей кистью руки. Максимальная длина рычага до 700 мм. Такие размеры рычагов обусловлены сопротивлением функциональных частей, допустимой силой
переключения, величиной пути перемещения рукоятки (таблица 2).
Усилия, прилагаемые к рычагам: минимальное 30 Н., максимальное 120 Н., оптимальное 60 Н. При переключении минимальное
расстояние между двумя положениями рычага должно быть 50 мм,
максимально возможное число положений рычага при перемещении должно быть не более 8.
При использовании рычага для тонкого и непрерывного регулирования должна быть обеспечена опора:
– локтю – при управляющем движении кистью с предплечьем,
– предплечью – при движении кистью,
– запястью – при движении пальцами.
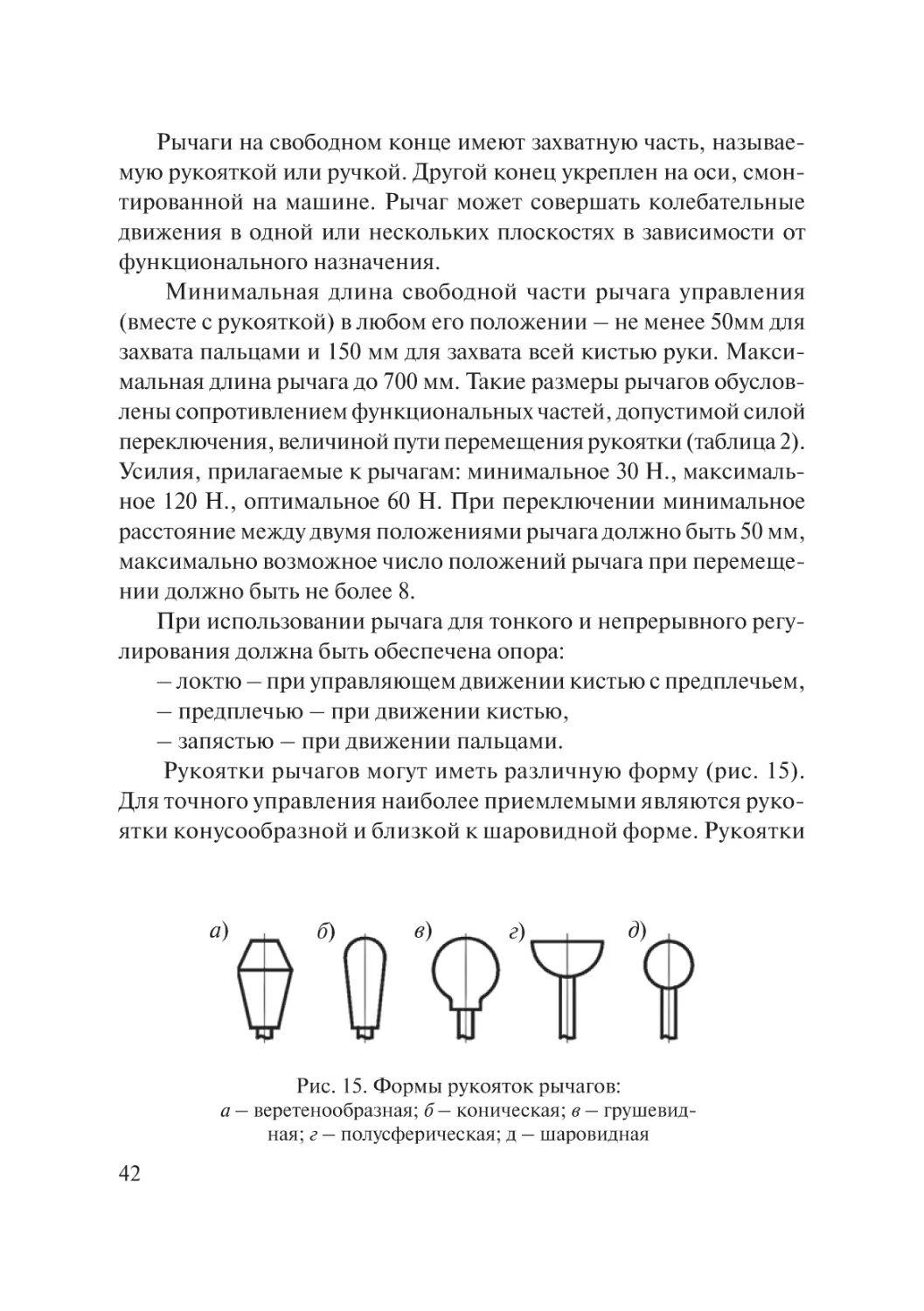
Рукоятки рычагов могут иметь различную форму (рис. 15).
Для точного управления наиболее приемлемыми являются рукоятки конусообразной и близкой к шаровидной форме. Рукоятки
а)
б)
в)
г)
д)
Рис. 15. Формы рукояток рычагов:
а – веретенообразная; б – коническая; в – грушевидная; г – полусферическая; д – шаровидная
42
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
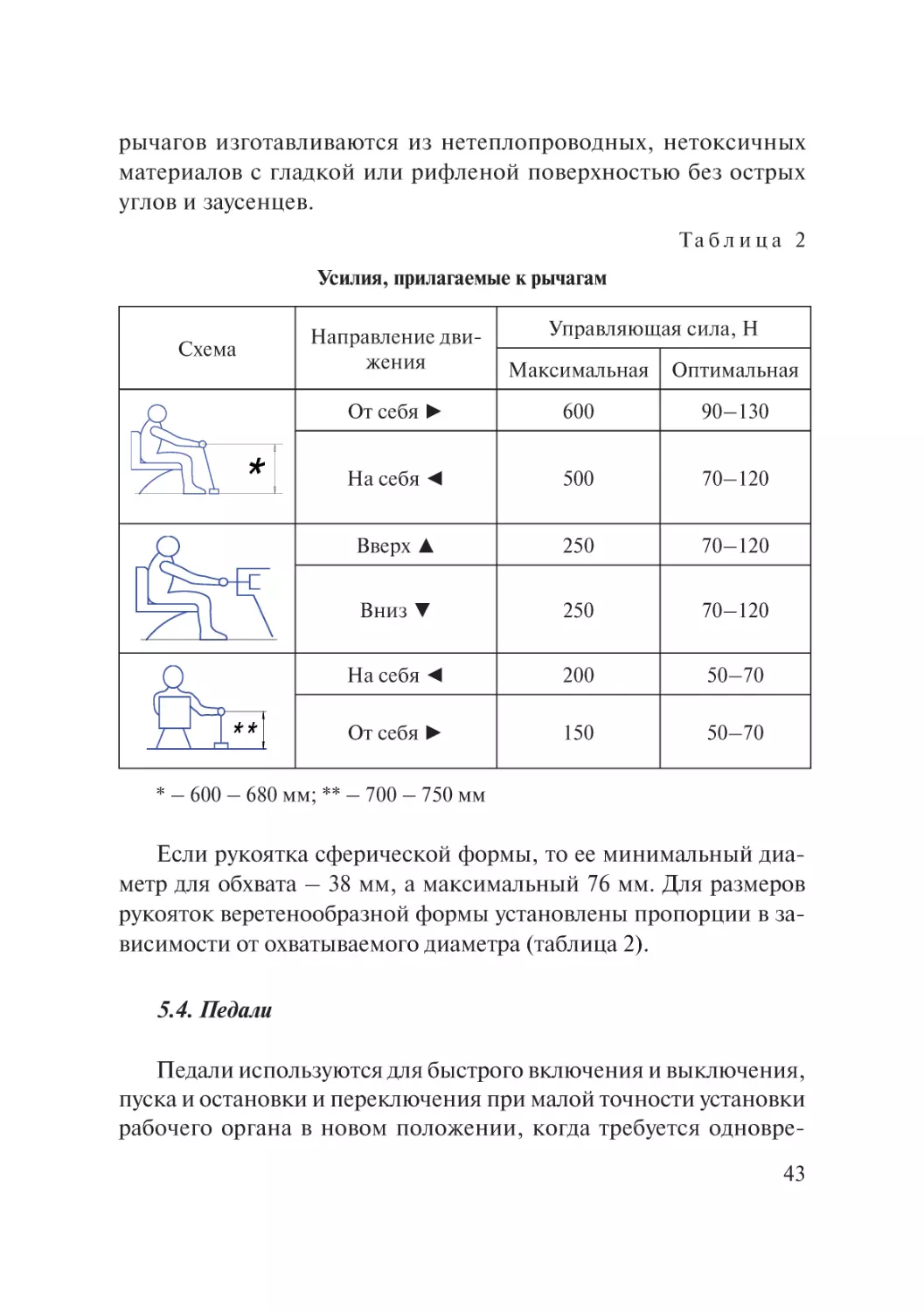
рычагов изготавливаются из нетеплопроводных, нетоксичных
материалов с гладкой или рифленой поверхностью без острых
углов и заусенцев.
Та б л и ц а 2
Усилия, прилагаемые к рычагам
Схема
*
**
Управляющая сила, Н
Направление движения
Максимальная
Оптимальная
От себя ►
600
90–130
На себя ◄
500
70–120
Вверх ▲
250
70–120
Вниз ▼
250
70–120
На себя ◄
200
50–70
От себя ►
150
50–70
* – 600 – 680 мм; ** – 700 – 750 мм
Если рукоятка сферической формы, то ее минимальный диаметр для обхвата – 38 мм, а максимальный 76 мм. Для размеров
рукояток веретенообразной формы установлены пропорции в зависимости от охватываемого диаметра (таблица 2).
5.4. Педали
Педали используются для быстрого включения и выключения,
пуска и остановки и переключения при малой точности установки
рабочего органа в новом положении, когда требуется одновре43
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
менное управление с помощью рук и ног, непрерывное, частое и
быстрое управление определенной операцией, необходимо высвобождение рук для другой более точной работы.
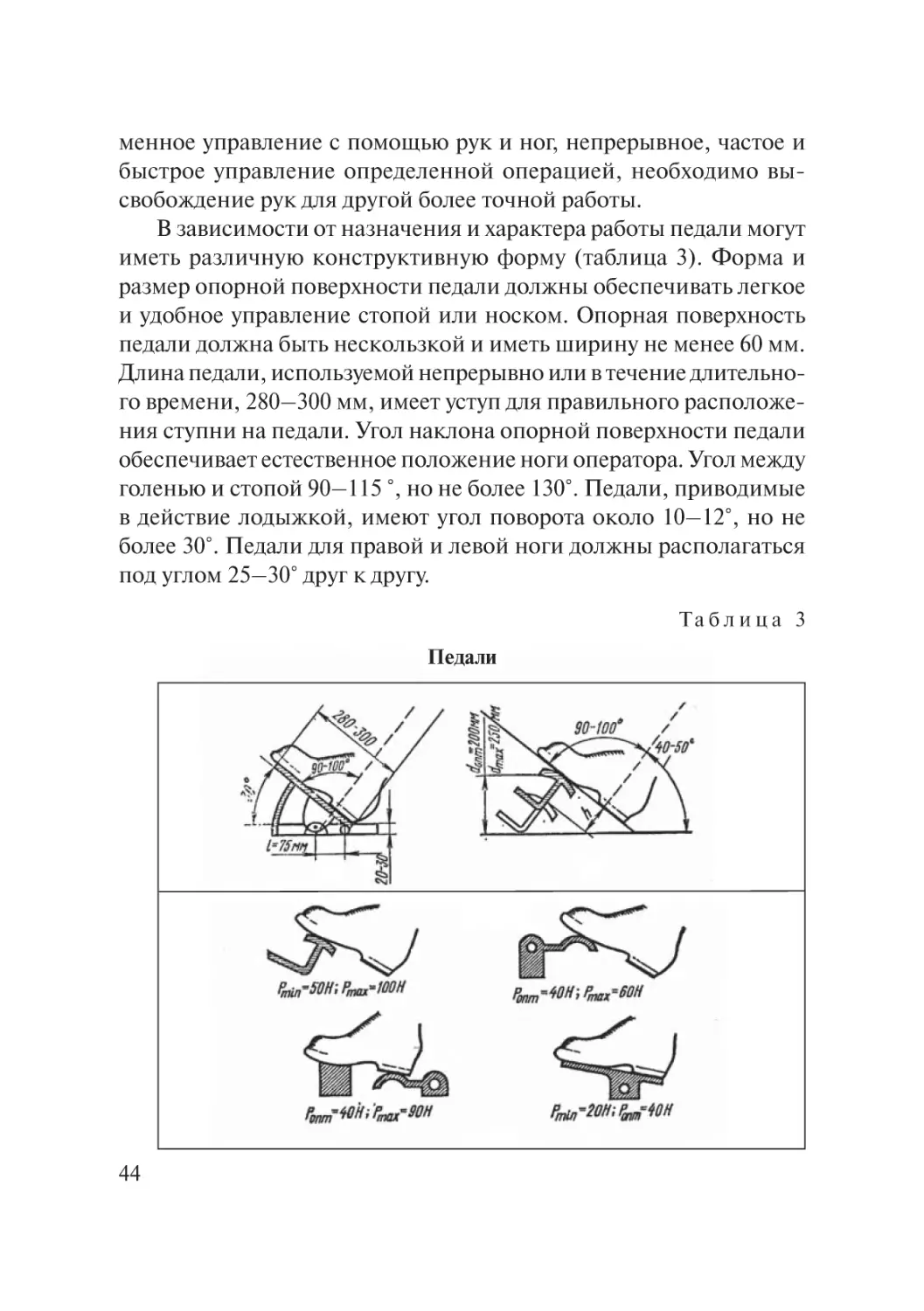
В зависимости от назначения и характера работы педали могут
иметь различную конструктивную форму (таблица 3). Форма и
размер опорной поверхности педали должны обеспечивать легкое
и удобное управление стопой или носком. Опорная поверхность
педали должна быть нескользкой и иметь ширину не менее 60 мм.
Длина педали, используемой непрерывно или в течение длительного времени, 280–300 мм, имеет уступ для правильного расположения ступни на педали. Угол наклона опорной поверхности педали
обеспечивает естественное положение ноги оператора. Угол между
голенью и стопой 90–115 °, но не более 130°. Педали, приводимые
в действие лодыжкой, имеют угол поворота около 10–12°, но не
более 30°. Педали для правой и левой ноги должны располагаться
под углом 25–30° друг к другу.
Та б л и ц а 3
Педали
44
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
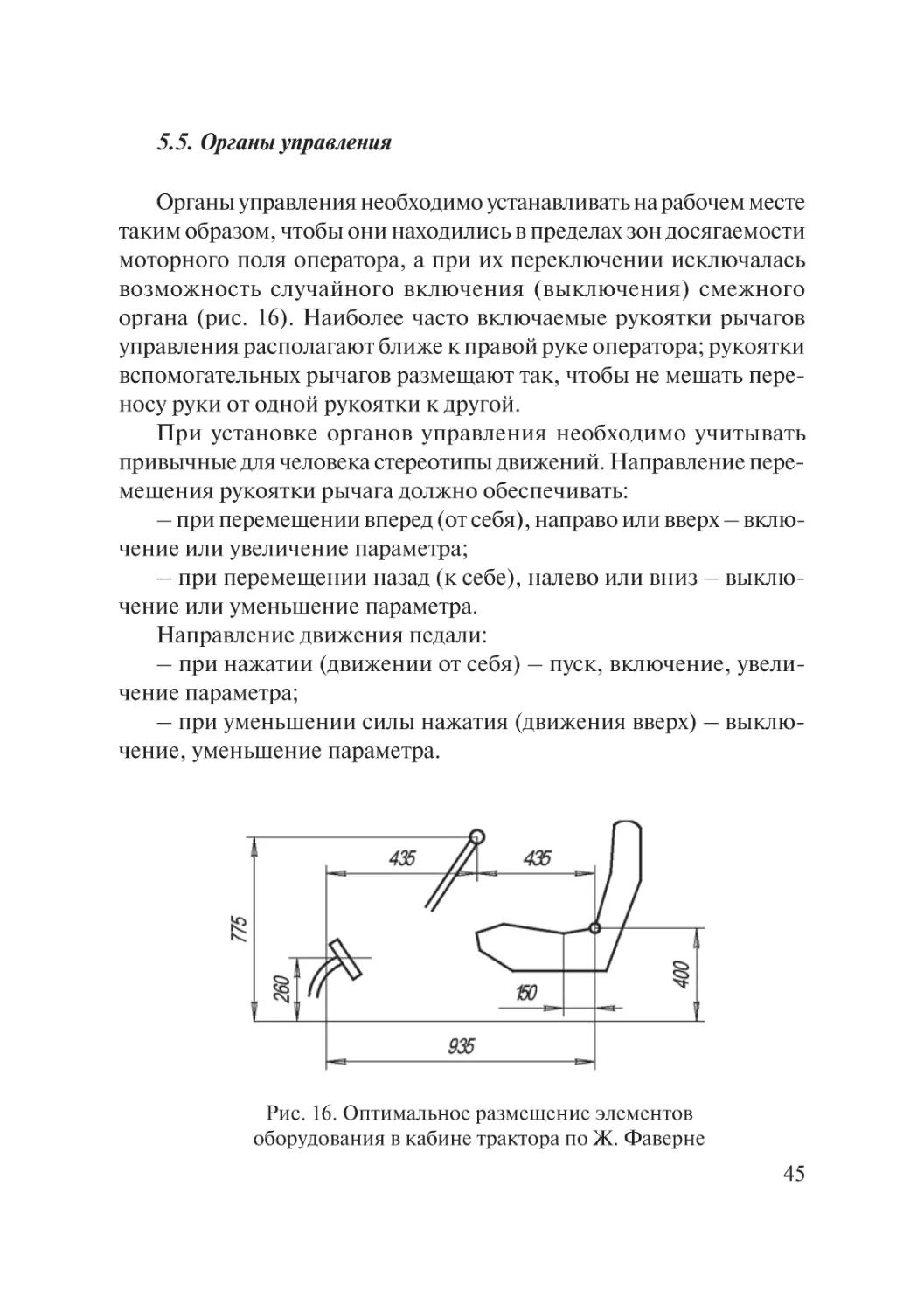
5.5. Органы управления
Органы управления необходимо устанавливать на рабочем месте
таким образом, чтобы они находились в пределах зон досягаемости
моторного поля оператора, а при их переключении исключалась
возможность случайного включения (выключения) смежного
органа (рис. 16). Наиболее часто включаемые рукоятки рычагов
управления располагают ближе к правой руке оператора; рукоятки
вспомогательных рычагов размещают так, чтобы не мешать переносу руки от одной рукоятки к другой.
При установке органов управления необходимо учитывать
привычные для человека стереотипы движений. Направление перемещения рукоятки рычага должно обеспечивать:
– при перемещении вперед (от себя), направо или вверх – включение или увеличение параметра;
– при перемещении назад (к себе), налево или вниз – выключение или уменьшение параметра.
Направление движения педали:
– при нажатии (движении от себя) – пуск, включение, увеличение параметра;
– при уменьшении силы нажатия (движения вверх) – выключение, уменьшение параметра.
Рис. 16. Оптимальное размещение элементов
оборудования в кабине трактора по Ж. Фаверне
45
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
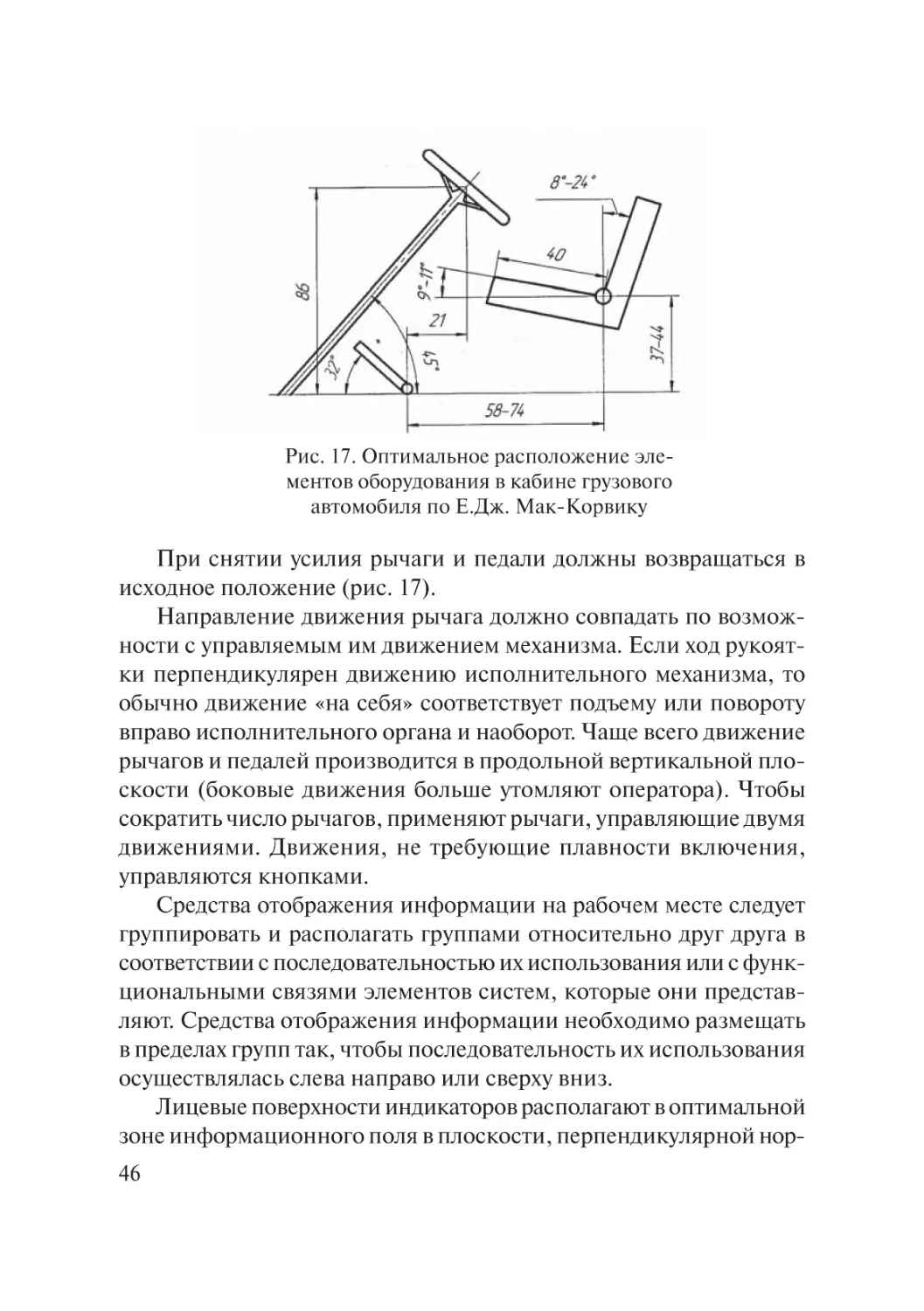
Рис. 17. Оптимальное расположение элементов оборудования в кабине грузового
автомобиля по Е.Дж. Мак-Корвику
При снятии усилия рычаги и педали должны возвращаться в
исходное положение (рис. 17).
Направление движения рычага должно совпадать по возможности с управляемым им движением механизма. Если ход рукоятки перпендикулярен движению исполнительного механизма, то
обычно движение «на себя» соответствует подъему или повороту
вправо исполнительного органа и наоборот. Чаще всего движение
рычагов и педалей производится в продольной вертикальной плоскости (боковые движения больше утомляют оператора). Чтобы
сократить число рычагов, применяют рычаги, управляющие двумя
движениями. Движения, не требующие плавности включения,
управляются кнопками.
Средства отображения информации на рабочем месте следует
группировать и располагать группами относительно друг друга в
соответствии с последовательностью их использования или с функциональными связями элементов систем, которые они представляют. Средства отображения информации необходимо размещать
в пределах групп так, чтобы последовательность их использования
осуществлялась слева направо или сверху вниз.
Лицевые поверхности индикаторов располагают в оптимальной
зоне информационного поля в плоскости, перпендикулярной нор46
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
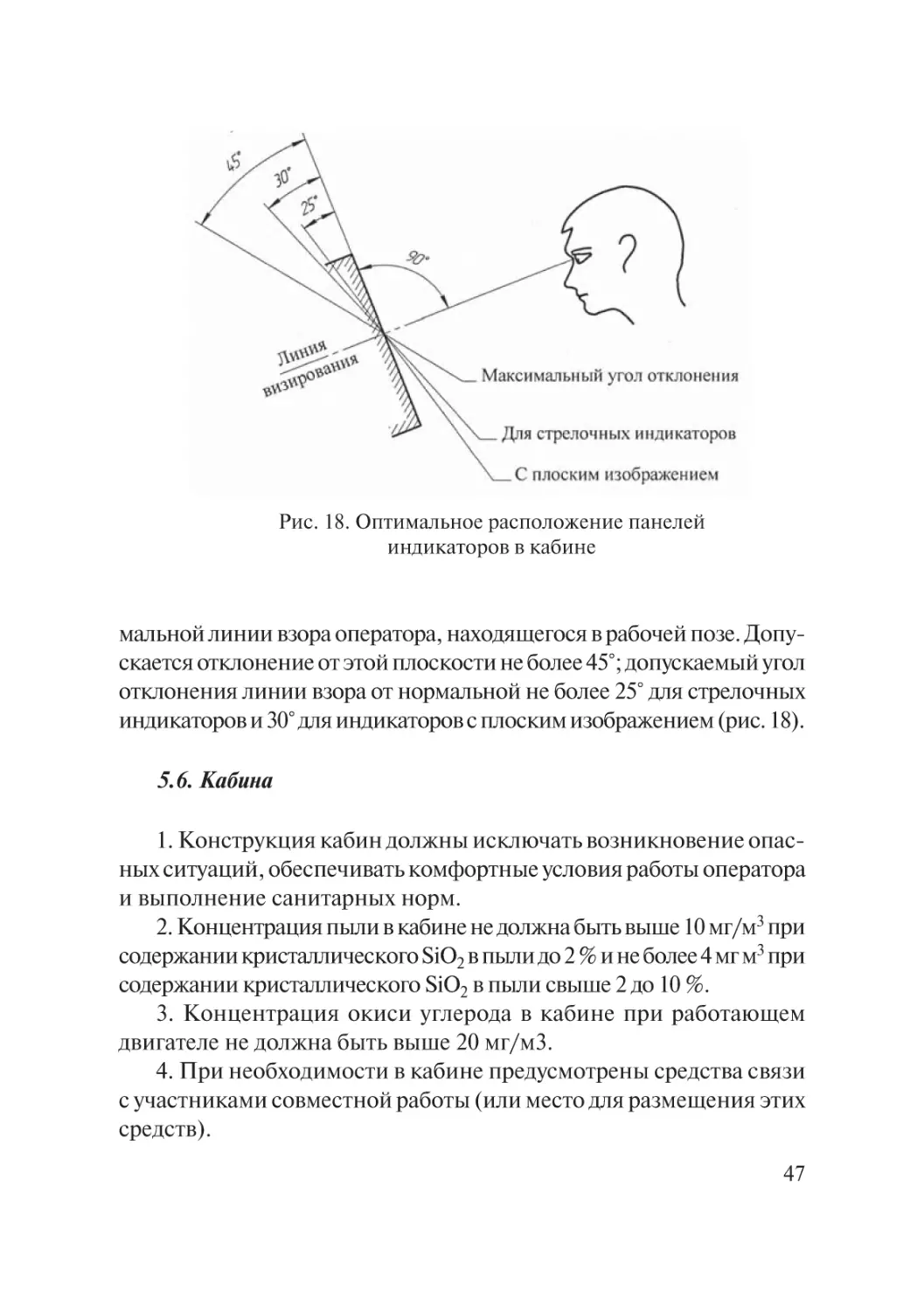
Рис. 18. Оптимальное расположение панелей
индикаторов в кабине
мальной линии взора оператора, находящегося в рабочей позе. Допускается отклонение от этой плоскости не более 45°; допускаемый угол
отклонения линии взора от нормальной не более 25° для стрелочных
индикаторов и 30° для индикаторов с плоским изображением (рис. 18).
5.6. Кабина
1. Конструкция кабин должны исключать возникновение опасных ситуаций, обеспечивать комфортные условия работы оператора
и выполнение санитарных норм.
2. Концентрация пыли в кабине не должна быть выше 10 мг/м3 при
содержании кристаллического SiO2 в пыли до 2 % и не более 4 мг м3 при
содержании кристаллического SiO2 в пыли свыше 2 до 10 %.
3. Концентрация окиси углерода в кабине при работающем
двигателе не должна быть выше 20 мг/м3.
4. При необходимости в кабине предусмотрены средства связи
с участниками совместной работы (или место для размещения этих
средств).
47
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
5. В необходимых случаях кабину снабжают:
устройством защиты от опрокидывания;
устройством защиты от падающих предметов;
средствами аварийного выхода из кабины.
6. Освещенность на уровне пульта управления и панели приборов от внутреннего освещения кабины – не менее 5 лк.
7. Необходимо обеспечить удобство мойки и уборки кабины.
8. Стёкла кабины должны быть устойчивыми к механическому
воздействию, а при повреждении не давать ранящих осколков.
Стёкла по периметру снабжаются вибродемпфирующей прокладкой.
9. При необходимости, помимо передних, задние окна кабины
также снабжаются стеклоочистителями.
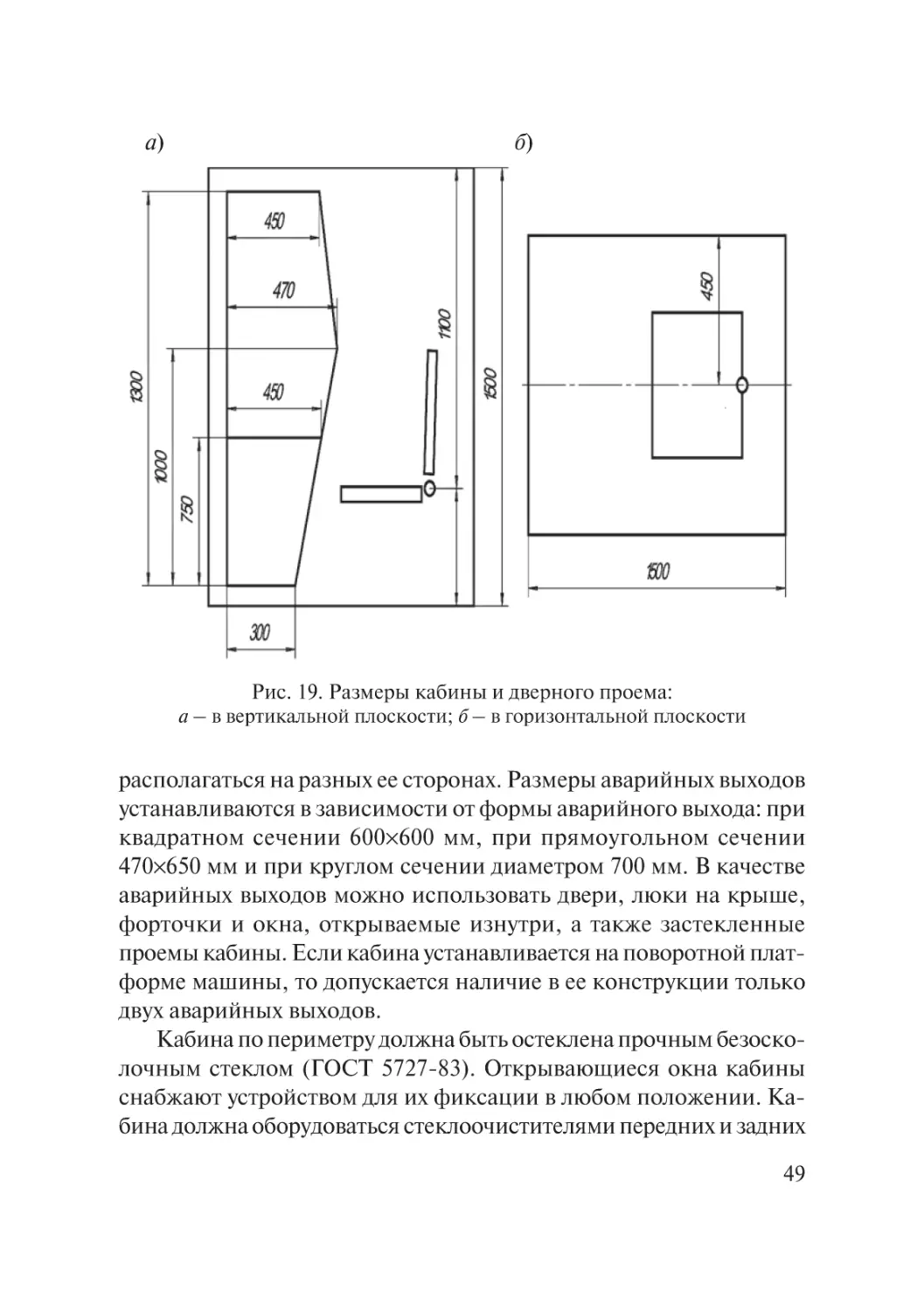
10. Размеры дверного проема и прохода при максимально возможной открытой двери для кабин машин представлены на рис. 19.
По согласованию с потребителем допускается уменьшение высоты
дверного проема до размера не менее 1700 мм.
Внутренние размеры и форма кабины определяются с учетом
габаритных размеров устанавливаемого в ней поворотного сиденья, размещения органов управления и другого оборудования.
Прочностные свойства кабины должны обеспечивать сохранение
необходимого объема ограничения деформации (зоны безопасности). Поэтому необходим прочный каркас кабины.
В соответствии с нормативными требованиями основные размеры кабины относительно точки отсчета сиденья должны быть
не менее приведенных на рис. 19 (для кабин, устанавливаемых
на поворотной платформе и не требующих наличия поворотного
сиденья допускается ширина кабины, измеренная по полу 820 мм).
Параметры дверного проема кабины, обеспечивающие свободный
доступ оператора на рабочее место, должны быть не менее приведенных на рис. 19, а. Боковую дверь кабины следует навешивать на
петлях, расположенных с задней стороны по ходу машины. Двери
должны открываться наружу при повороте ручки на себя или вверх,
оборудоваться замками, запирающимися на ключ и стопориться в
крайних положениях. В случае возникновения аварийной ситуации
кабина имеет не менее трех аварийных выходов, которые должны
48
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
а)
б)
Рис. 19. Размеры кабины и дверного проема:
а – в вертикальной плоскости; б – в горизонтальной плоскости
располагаться на разных ее сторонах. Размеры аварийных выходов
устанавливаются в зависимости от формы аварийного выхода: при
квадратном сечении 600600 мм, при прямоугольном сечении
470650 мм и при круглом сечении диаметром 700 мм. В качестве
аварийных выходов можно использовать двери, люки на крыше,
форточки и окна, открываемые изнутри, а также застекленные
проемы кабины. Если кабина устанавливается на поворотной платформе машины, то допускается наличие в ее конструкции только
двух аварийных выходов.
Кабина по периметру должна быть остеклена прочным безосколочным стеклом (ГОСТ 5727-83). Открывающиеся окна кабины
снабжают устройством для их фиксации в любом положении. Кабина должна оборудоваться стеклоочистителями передних и задних
49
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
стекол с автономным электромеханическим приводом, а также
подвижными прозрачными солнцезащитными устройствами. Расположение и размеры окон кабины позволяют оператору свободное
наблюдение за выполнением всех технологических и транспортных
операций в зависимости от назначения машины при сохранении
естественной позы на сиденье. Кабины должна иметь регулируемые
системы обогрева и вентиляции для обеспечения необходимого
микроклимата на рабочем месте, иметь достаточную герметизацию
и теплоизоляцию. Кабина оборудуется плафоном внутреннего
освещения, крючком для одежды, регулируемым зеркалом заднего
вида, ящиком (карманом) для документов и личных вещей, а также
термоизолированным бачком для питьевой воды вместимостью не
менее 3 л, футляром для аптечки первой помощи, огнетушителем
и приспособлением для его крепления.
5.7. Сигнальные и световые устройства
Для обеспечения работы в темное время суток машины должны
оборудоваться приборами внешнего освещения (фарами), обеспечивающими освещенность рабочих зон в соответствии с нормативными требованиями. Целесообразно в конструкциях машин
предусматривать наличие поворотных фар, управляемых из кабины
оператора. Кабина должна оборудоваться звуковыми сигнальными
устройствами с уровней звука не менее 110 дБА.
Колесные тракторы должны оборудоваться также сигналами
торможения, указателями поворота, габаритными огнями. Количество их, расположение, цвет и видимость должны соответствовать
требованиям ГОСТ 8769-75.
1. Машины должны иметь звуковую сигнализацию, включаемую
с рабочего места оператора. В необходимых случаях предусмотрен
сигнал тревоги для оповещения людей в опасной зоне. В зоне
действия рабочего органа (в опасной зоне) уровень звука сигнала
должен быть на 8 дБ выше уровня внешнего шума машины.
2. При необходимости машины оснащаются проблесковыми
маячками.
50
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
3. При выборе средств отображения информации, требующей
немедленного реагирования (об аварийном состоянии и т.п.),
предпочтение следует отдавать звуковым сигналам. В условиях, где
звуковой сигнал может быть не распознан на фоне производственных
шумов, необходимо использовать его вместе с ярким мигающим
световым сигналом.
4. На машины, работа которых без принятия специальных мер
может привести к аварийной ситуации или вызвать опасность для
работающих, должны быть нанесены необходимые предупредительные надписи («Не стой под стрелой» и т.п.).
5. Для обозначения потенциально опасных зон и элементов
машин применяются стандартные сигнальные цвета и знаки
безопасности.
5.8. Обзорность
Одним из важных эргономических требований, предъявляемых
к конструкции машины и, прежде всего, к кабине, является обеспечение необходимой обзорности рабочих органов и зон наблюдения
при сохранении удобной, естественной позы оператора на сидении.
Углы обзора технологического оборудования с рабочего места
оператора устанавливаются нормативными требованиями. При
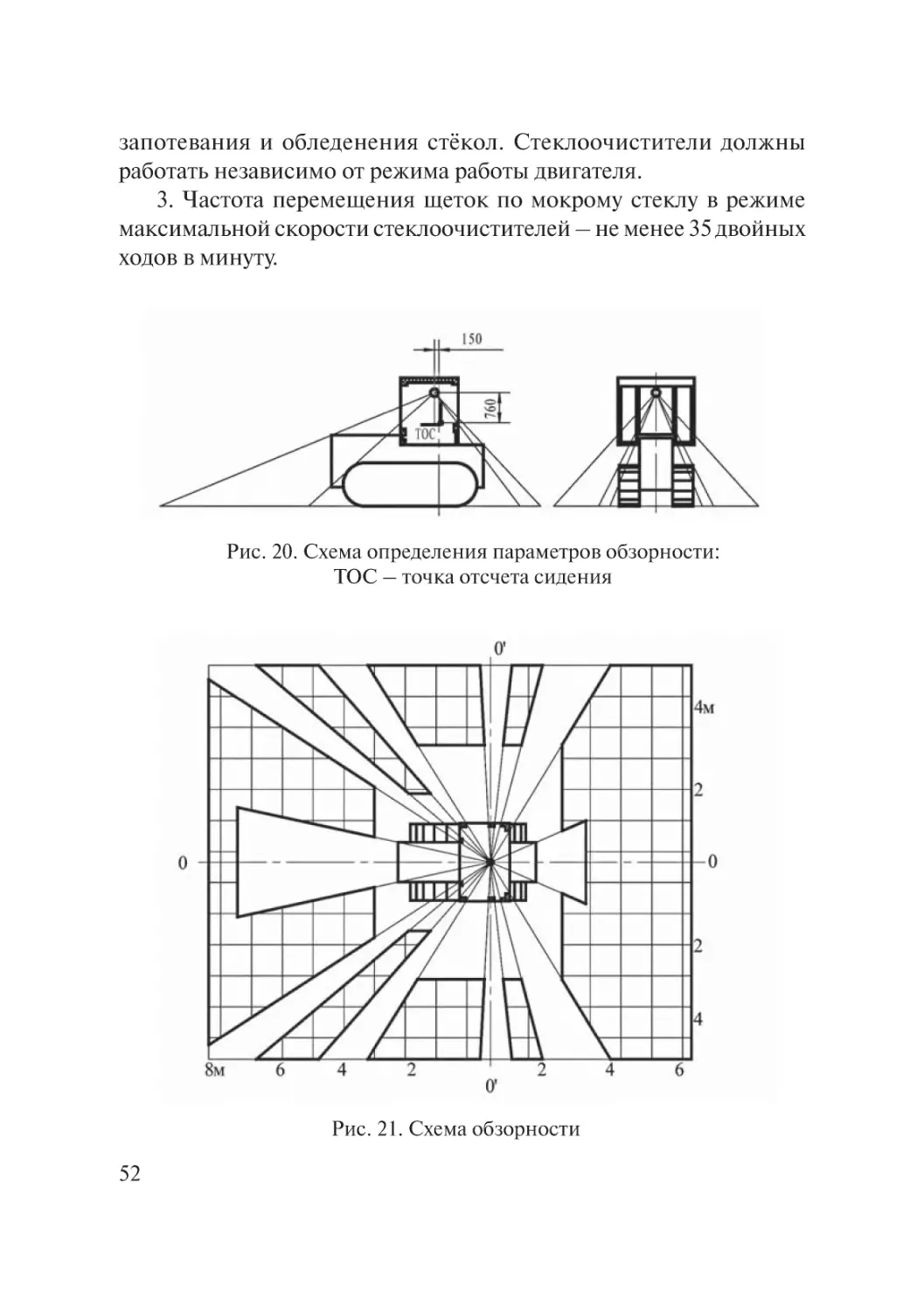
проектировании рациональная организация обзорности достигается применением графоаналитического метода (рис. 20, 21). Для
практического применения этого метода необходимо выделить те
элементы внешней среды, которые необходимо видеть оператору
в процессе управления машиной при выполнении необходимого
комплекса технологических операций.
1. Условия обеспечения видимости с рабочего места должны
обеспечивать обзор рабочей зоны и рабочих органов с рабочего
места машиниста при любых погодных условиях и во всех режимах,
включая движение задним ходом.
2. Лобовые стёкла машин должны быть оборудованы стеклоочистителями, расположение которых обеспечивает обзор рабочей
зоны и рабочих органов, а также устройствами для предотвращения
51
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
запотевания и обледенения стёкол. Стеклоочистители должны
работать независимо от режима работы двигателя.
3. Частота перемещения щеток по мокрому стеклу в режиме
максимальной скорости стеклоочистителей – не менее 35 двойных
ходов в минуту.
Рис. 20. Схема определения параметров обзорности:
ТОС – точка отсчета сидения
Рис. 21. Схема обзорности
52
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
4. Конструкция и расположение навесного оборудования не
должны ограничивать оператору обзор рабочей зоны.
5. Уровень освещенности зон обзора, обеспечиваемый собственными средствами машины (фары, прожектора и др.), должен
быть не менее:
для площадки в передней зоне обзора шириной, равной захвату
рабочего органа, на расстоянии 10 м от него – 15 люкс;
для площадки в передней зоне обзора шириной 16 м на расстоянии 10 м от рабочего органа – 5 люкс;
для зоны выгрузки (загрузки) технологического продукта – 15
люкс;
для рабочих органов в поле зрения оператора – 20 люкс.
6. СИСТЕМЫ ДОСТУПА К РАБОЧИМ МЕСТАМ И МЕСТАМ ОБСЛУЖИВАНИЯ
6.1. Площадки, проходы, лестницы
1. Для доступа водителя на рабочее место машины необходимо
оборудовать подножками и лестницами с поручнями (ручками).
Допускается использовать в качестве поручней и промежуточных
подножек конструктивные элементы машин.
2. Настил площадок и проходов выполняют из металла.
3. Устройство площадок, проходов и лестниц должны обеспечивать безопасное перемещение работающих в начале, в конце и в
ходе работы машины, при ремонте и техобслуживании, а также при
экстренном покидании машины в аварийных ситуациях.
Во всех случаях ширина рабочей площадки оператора должна
быть не менее 400 мм, длина – не менее 600 мм.
Расстояние от поверхности земли до подножки или первой
ступеньки лестницы – не более 550 мм.
Ширина опорной поверхности подножки – не менее 150 мм
для одной ноги и не менее 300 мм для двух ног.
53
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Глубина опорной поверхности подножки не менее 100 мм.
Интервал между подножками или ступеньками не более 450 мм.
Расстояние по вертикали между подножкой или последней
ступенькой и порогом кабины или площадкой не более 350 мм.
При наличии площадки перед кабиной ширина площадки
должна быть не менее 400 мм.
Допускается использовать в качестве промежуточных подножек
конструктивные элементы машин.
4. Шаг ступеней должен быть выдержан по всей длине лестницы.
5. Настил площадок и лестниц должен иметь поверхность,
препятствующую скольжению и не задерживающую атмосферную
влагу (снег).
6.2. Поручни, перила
1. Наклонные лестницы оснащают перилами с обеих сторон. Вертикальные и крутопадающие лестницы должны иметь
ограждения в виде дуг.
2. Рабочие площадки огорожены перилами с промежуточным
ограждением и непрерывным ограждением по низу площадки.
Высота перил относительно рабочей поверхности ступеней должна
быть не менее 800 мм, ширина (диаметр) охватываемой части перил
(поручня) 18-38 мм, длина охватываемой части поручня – не менее
150 мм, расстояние между поручнем (перилами) и любым другим
конструктивным элементом – не менее 60 мм.
3. Конструкция перил, поручней и других элементов доступа,
в том числе должны обеспечивать сохранение равновесия и постоянную опору (в трёх точках) работающих как в процессе работы
машины, так и при ремонте и техобслуживании, а также при экстренном покидании машины в аварийных ситуациях
6.3. Двери, проёмы, люки
1. Расположение и размеры дверей и проемов должны обеспечивать безопасный проход на рабочее место и выход с него.
54
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
2. Минимальные размеры аварийных люков должны быть такими, чтобы в их поперечное сечение вписывался эллипс с главными
осями 640 и 440 мм.
3. Дверь проема должна открываться без нарушения вертикального положения открывающего ее оператора.
4. Запасной и главный проемы располагают на разных поверхностях.
5. Дверь проема кабины, которая может оставаться открытой
при работе машины, должна быть снабжена устройством для закрепления в открытом положении. Конструкция распашных дверей
должна исключать опасные перемещения двери под влиянием силы
инерции, возникающей при работе машины.
6. Распашные двери открываются наружу.
7. Конструкция съемных крышек, закрывающих проем кабины
и удерживаемых на месте силой тяжести, например, крышек люков,
должна исключать возможность их падения через проем.
8. Конструкция и расположение навесного оборудования не
должны затруднять оператору подход к рабочему месту.
6.4. Общие требования безопасности
1. Опасность для людей и окружающей среды должна быть
минимальной как в условиях штатной эксплуатации, так и
при наличии неисправностей машины, ошибок оператора или
небрежного обращения с машиной.
2. Во всех режимах работы машины необходима противопожарная
защита путём устранения источников загорания, применение
рациональных конструкций, негорючих материалов и средств
пожаротушения.
3. В приводах рабочих органов должно быть предусмотрено
устройство, позволяющее отключать рабочие органы от двигателя.
4. Машины, а также сборочные единицы, имеющие массу свыше
20 кг, имеют устройства или места для крепления при транспортировке и перемещении.
55
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
5. Машины должны быть окрашены в контрастный цвет по
сравнению с фоном окружающей среды.
6. Элементы конструкции, которые могут представлять опасность при работе, обслуживании или транспортировании, должны
иметь стандартизованную сигнальную окраску.
7. Машины должны сохранять устойчивость на наклонных
поверхностях в процессе работы, техобслуживания, монтажа
и демонтажа. Самоходные и прицепные машины – сохранять
устойчивость и при транспортировке.
8. Сборочные единицы и детали машин, которые могут
самопроизвольно перемещаться при погрузке, транспортировании
и выгрузке, должны иметь средства фиксации или быть
легкосъёмными.
9. Световые приборы машин обеспечивают достаточную
освещённость органов управления, контрольных приборов и
рабочей зоны собственными источниками света.
10. Конструкция системы питания, смазки и охлаждения
двигателя, пневмо– и гидросистемдолжна исключать подтекание
топлива, масла и охлаждающей жидкости, в том числе при заправке
и техобслуживании.
11. Самопроизвольное включение и выключение рабочих
органов исключено.
12. Грузозахватные устройства спецоборудования должны
обеспечивать захват грузов, исключающий их самопроизвольное
смещение или опрокидывание.
13. При необходимости выделения рабочей зоны машины
указания по размерам рабочей зоны и способам её обозначения,
а также по ограничению доступа людей в зону должны быть
приведены в эксплуатационной документации.
14. При необходимости конструкция машин должна
обеспечивать защиту от проникновения посторонних твердых тел
(обломков строительных конструкций, перемещаемых грузов и др.)
в условиях эксплуатации.
15. Если снижение давления в приводе или напряжения в
электрической сети может создать опасность для работающих
56
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
или вызвать аварию, необходима блокировка, обеспечивающая
автоматическое прекращение работы машины с подачей светового
или звукового сигнала. При этом не должны отключаться устройства,
перерыв в работе которых может привести к травмированию
работающих (зажимные, тормозные устройства и т. п.).
16. Машины снабжают устройствами безопасности и
блокировками, предохраняющими их:
от перегрузок;
от несовместимого одновременного движения механизмов;
от перемещений частей машины с выходом за допустимые
пределы.
17. Если конечные положения перемещаемых частей ограничены
электрическими или пневматическими устройствами (например,
конечными выключателями), при повреждении которых могут
возникать аварии или опасность для работающих, то для ограничения
перемещения должны быть установлены жесткие упоры.
18. Для регулируемых устройств, изменение настройки
которых может привести к аварийному состоянию, должна быть
предусмотрена возможность фиксации их регулирующих элементов
опломбированием, применением замков и других средств.
19. Конструкция машин должна исключать возможность
попадания минерального масла на горячие поверхности, температура
которых превышает 80 % температуры воспламенения масла/
20. Поднимающиеся и опрокидывающиеся части спецоборудования должны быть оснащены упорами для их фиксации
в поднятом положении и (или) устройствами, исключающими их
самопроизвольное опрокидывание и резкое опускание.
22. Эксплуатационная документация должна соответствовать
указаниям Приложения 4.
6.5. Защитные ограждения
1. Движущиеся, а также имеющие температуру выше 70°С
части машины должны быть ограждены таким образом, чтобы
исключалось непреднамеренное прикосновение к ним.
57
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
2. При необходимости частого (более 5 раз в смену) доступа к
ограждаемым частям оборудования могут применяться ограждения,
открываемые вручную без применения инструмента. При этом
усилие открывания должно быть не более 150Н. При отсутствии
потребности в частом доступе к опасным частям машины их
ограждают постоянно закрепленными ограждениями, съем которых
возможен только с помощью инструмента.
3. Все рабочие элементы, включая специальные устройства или
насадки, служащие частью машины, должны ограждаться таким
образом, чтобы при нормальной эксплуатации не создавалось
опасности их вылета (вследствие вибрации, изменения направления
движения, электрического или механического торможения и др.).
4. В машинах, при работе которых возникает опасность выброса
обрабатываемых материалов, рабочие органы или рабочая зона
должны быть закрыты специальными ограждениями (кожухами).
5. Применяемые ограждения не должны создавать
дополнительной опасности (связанной, например, с ограничением
обзора оператора).
6. Должно быть предусмотрено механическое предохранение
от опускания рабочего оборудования или ограждения, если техническое обслуживание проводится при поднятом оборудовании
(ограждении).
6.6. Системы защиты от падающих предметов и опрокидывания
1. Конструкция самоходных машин, при работе которых может
возникнуть опасность опрокидывания (бульдозеры, автогрейдеры
и др.), должна обеспечивать возможность установки устройства
защиты оператора при опрокидывании (ROPS).
Машины с защитными устройствами или защитными кабинами
снабжаются местами крепления ремней безопасности.
2. Конструкция машин, при работе которых может возникнуть
опасность для оператора от падающих предметов, должна обеспечивать возможность установки устройства защиты от падающих
предметов (FOPS).
58
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
7. МЕТОДЫ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
ДЕЯТЕЛЬНОСТИ ЧЕЛОВЕКА В ЭРГАТИЧЕСКИХ СИСТЕМАХ
Человек в эргатической системе представляет собой сложную
систему, не поддающуюся декомпозиции на отдельные подсистемы:
– отсутствует ясность в механизме процессов центральной
нервной системы. Поэтому в основу ряда методик исследования
положена хорошо известная модель «черного ящика»
– деятельность человека носит сознательный, творческий характер. Получаемые объективные оценки некоторой субъективной
деятельности носят вероятностный характер
– способность человека к самообучению и самоорганизации на
базе предыдущего опыта за счет долговременной, кратковременной
и моторной памяти
– запаздывание человека в формировании ответной реакции
на входной сигнал
– деятельность человека носит динамический характер и может
быть описана лишь в функциях, зависящих от времени.
7.1. Методы теории автоматического регулирования
в исследованиях эргатических систем
Первые попытки количественного описания эргатических
систем были связаны с применением теории автоматического
управления (ТАУ). Объясняется тем, что в период становления
эргономики (40-е годы прошлого столетия) ТАУ уже располагала
обширным арсеналом средств и приемов исследования сложных
динамических систем и необходимым опытом их использования.
В соответствии с основными принципами ТАУ все проблемы
сводятся к отысканию передаточной функции между входной
и выходной координатами любого звена управляющей системы
(рис. 22).
W ( p)
y( p)
; x ( p) e pt x (t )dt ; y( p) e pt y(t )dt
x( p)
0
0
59
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 22. Человек в системе управления
Передаточная функция человека зависит от целого ряда факторов:
– динамические свойства объекта управления
– модальность входного сигнала
– тип и конструкция органов управления
– характер и параметры внешних возмущений
– требования к точности контроля
Вскоре от поиска «глобальной» передаточной функции пришлось
отказаться. Как звено системы управления Ч является нелинейной
системой. Он может выполнять функции дифференцирующего, интегрирующего, усилительного звена, а также выполнять функции блока
дискретной выборки данных. Ч является не только нелинейным, но
имеет переменные параметры, т.к. способен к самообучению и приспособляемости. Может менять свои передаточные характеристики
от типа управляемой системы и вида возмущающих воздействий.
Большая часть успешных попыток математического моделирования деятельности человека приходится на задачи одноканального
слежения при простейших по динамическим свойствам объектам .
В качестве обобщенного варианта линейной непрерывной
модели деятельности человека в задачах слежения рассматривают
функцию вида:
W ( p)
kN ( p) p
e ,
M ( p)
k – коэффициент усиления оператора; – латентный период времени запаздывания реакции; e p – позволяет количественно учесть
запаздывание в формировании ответной реакции оператора на
60
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
входной сигнал; N(p), M(p) – полиномы, порядок и коэффициенты
которых зависят от типа и конкретных условий решения задачи и
могут изменяться в широких пределах; N(p) – операторный полином в общем случае может иметь порядок от нулевого до второго
и позволяет при необходимости отразить способность оператора
к учету 1 и 2 производных входного сигнала; M(p)-операторный
полином, может иметь порядок от нулевого до 6. В его структуре
должны быть отражены характеристики нервно-мышечной системы человека, свойства фильтрации высокочастотных составляющих входного сигнала, параметры целевой функции управления,
а так же факторы, характеризующие специфику решаемой задачи.
При решении многих практичных задач достаточно
N (
p) T1 p 1
M ( p)
(T2 p 1)(T3 p 1)
T1 – постоянная времени упреждения на основе предыдущего опыта(0,3–2 с); T2 – постоянная времени, характеризующая динамику
нервно-мышечной системы(5–25 с); T3 – постоянная времени запаздывания вводимая оператором сознательно
k = 15–100, = 0,15–0,25.
– существует зона нечувствительности в сенсорной сфере
оператора
– в выходном сигнале оператора содержатся частоты, которых
нет во входном сигнале (нелинейность преобразования сигнала)
– линейная модель не может объяснить явление интерполяции
и экстраполяции оператора при временном исчезновении входного
сигнала.
Стремление избавиться хотя бы от некоторых из этих недостатков и приблизить математическую модель к реальному поведению
человека в задачах слежения привело к попыткам использования
дискретных импульсных моделей. В структуре соответствующих
передаточных функций выделяют три самостоятельных последовательно включенных элемента: импульсный, экстраполятор,
непрерывная часть передаточной функции (рис. 23).
61
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 23. Самостоятельные элементы структуры передаточных функций
Импульсный элемент в виде периодически замыкающего и
размыкающего ключа совместно с экстраполятором приводит
к дискретизации входного сигнала и представлению его в виде
ступенчатой функции. Это позволяет косвенным образом моделировать зону нечувствительности в сенсорной сфере оператора к
малым изменениям входного сигнала.
Общий вид математической модели деятельности оператора в
этом случае:
W ( p) H ( p)G ( p)
G(p) – непрерывная часть передаточной функции оператора; H(p) –
передаточная функция экстраполятора
В зависимости от формирования сигнала на интервалах разомкнутого состояния импульсного элемента различают экстраполяторы 0-го, 1 и 2 порядка.
Для экстраполятора нулевого порядка:
H 0 ( p)
(1 e pT )
p
T – период дискретного импульсного элемента
Экстраполятор 1-го порядка:
62
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
2
1 e pT 1 pT
H ( p)
p
T
Дискретная модель в большей мере соответствует реальному
повелению оператора, чем линейная непрерывная модель.
7.2. Информационная модель деятельности человека в ЭС
Наиболее общее суждение о работоспособности оператора
может быть получена путем сравнения информации, которую
оператор должен переработать за конкретный отрезок времени для
достижения конечной цели управления, с информацией, которую
он способен переработать в конкретных условиях деятельности.
Первым количественную меру информации ввел Хартли в 1928 г.
Точная мера количества информации была введена и детально разработана американским математиком и инженером Шенноном К.
(1947–1948)
Центральным понятием в ТИ является понятие «информация».
Различают три варианта определения информации:
– в житейской практике под информацией понимают некую
совокупность сведений о предметах, явлениях, процессах
– в теории систем информация выступает как организация,
упорядоченность системы (альтернатива хаосу, дезорганизации)
– наиболее общий и универсальный подход – информация это
отражение разнообразия в ситуациях с неопределенными исходами
Информация – это сведения, являющиеся объектом хранения,
передачи и преобразования (Комитет научно-технической терминологии АН СССР).
Необходимым и достаточным для построения ТИ является понятие количества информации. Искомая мера должна быть нечувствительной к смыслу, ценности, степени правдивости информации
и определяться через нечто общее, присущее всему многообразию
различной информации.
Этим общим являются:
63
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
– наличие опыта. Всякая информация добывается в результате
опыта.
– до опыта должна существовать некоторая неопределенность.
В противном случае нет количества информации
Таким образом, для определения количества необходимо уметь
вычислять неопределенность до и после опыта.
Для определения количества информации (КИ) от опыта с исходами при условии, что после опыта неопределенность отсутствует,
была предложена логарифмическая функция
I c loga n
где с, а произвольные постоянные
В случае равновероятных исходов вероятность любого исхода равна
I – c loga P
Выбор с и а несущественен, т. к. переход от одной степени логарифма к другой сводится к изменению масштаба
Для простоты положим с = 1, а = 2. тогда
I
c loga P
log 2 P
log 2 n
В этом случае единицу количества информации называют бит –
количество информации, получаемой в результате опыта с двумя
равновероятными исходами.
Если опыт Х имеет n исходов xi с соответствующими вероятностями наступления Pi(i = 1,2,3…n)
n
Pi 1
i 1
Тогда КИ, несомое сообщением, что наступит исход равное
I ( xi ) log P ( xi )
является случайной величиной
Чтобы не иметь дела со случайной мерой информации, предложили среднее КИ при условии, как и прежде, после опыта
неопределенность исхода отсутствует.
64
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Если после опыта остается некоторая неопределенность исхода,
то формула.
n
H ( x ) – P ( xi )·log P ( xi )
i 1
уже не выражает среднее КИ, несомое одним исходом опыта Н ()
выражает среднее количество неопределенности до опыта в наступлении того или иного исхода и называется энтропией
Однако на базе информационных методов пока не удалось разработать единой теории, охватывающей более или менее широкий
класс задач человеческой деятельности и позволяющей прогнозировать работоспособность оператора в конкретной ситуации.
Пример.
Имеем: 5 лапочек; 5 индикаторных приборов; 2 переключатель
(3 положения); 2 переключателя (10 положений).
Условия.
Диапазон ИП–0–10 усл.ед.
(Л1Л5) – вероятность загорания лампочек одинакова
65
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
После Л1Л4 обязательно Л5 = > считывает показания соответствующего прибора. Для перевода условных единиц – увеличить
в 3 раза.
Цена деления шкалы-1
В зависимости от найденного значения = >установить одну из
пар П1 П3; П2 П4 в соответствующее положение
Л1 Л3 Л5 = > П1 П3
Л2 Л4 = > П2 П4
Расстояние до панели = 64 см
диаметр переключателя = 4 см, Sмежду ними = 6 см
Общее КИ перерабатываемая. при отработке одного сигнала и
оп = 3 де.ед/с (среднее)
Безусловные вероятности сигналов следующие:
P1 = P2 = P3 = P4 = 0.125 , P5 = 0.5
Энтропия первого порядка (без учета логистической обработки)
5
H1( x ) –
P log2 Pi 2 дв ед
по (1)
i 1
Вероятность появление диаграмм
P15 = P25 = P35 = P45 = P51 = P52 = P53 = P54 = 0.125
Для второго порядка
s
H 2
( x ) – Pij log2 Pij – H1
( x ) 3
– 2 1дв ед
i 1
Опыт Х имеет х1 х2 х3 с вероятностями
Р(х1) = 0.2
Р(х2) = 0.5
Р(х3) = 0.3
66
по (2)
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Поток количества информации
I(х1) = –logР(х1) = – log0.2 = 2.32 (бит)
I(х2) = –logР(х2) = –log0.5 = 1.00 (бит)
I(х3) = –logР(х3) = –log0.3 = 1.74 (бит)
Среднее количество информации
I ( xi ) 2.32·0.2 1·0.5 1.74·0.3
1.49 бит
После усреднения
I(х1) = I(х2) = I(х3) = 1.49 бит
7.3. Методы теории массового обслуживания в исследовании
и проектировании ЭС
Вся практическая деятельность человека тесно связана с различного рода системами массового обслуживания. Общей особенностью всех задач является случайных характер исследуемых
явлений: количество требований на обслуживание, временные
интервалы между ними, длительность обслуживания и т.д.
Основными элементами системы массового обслуживания
являются (рис. 24):
1
2
3
4
Рис. 24. Основные элементы системы массового обслуживания:
1 – входящий поток требований (заявок) на обслуживание; 2 – очередь;
3 – обслуживающее устройство; 4 – выходящий поток требований
67
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Входящий поток может быть одноканальным, многоканальным.
Время поступления заявок – регулярным, случайным.
Когда поток заявок превышает производительность обслуживающего устройства, образуется очередь. Интерес представляет
длина очереди, порядок обслуживания (дисциплина), время ожидания. Различают:
– обслуживание в порядке очереди
– обслуживание с приоритетами
– случайный выбор заявки из очереди
Обслуживающие устройства присутствуют в любой системе массового обслуживания. Они могут располагаться последовательно,
параллельно, быть одного типа и разного, иметь сложную сетевую
структуру. От организации функционирования структуры зависят
время обслуживания, длина очереди, время ожидания.
Основная задача теории массового обслуживания (ТМО) –
определение количественных показателей функционирования
системы, выявление слабых мест, поиск путей повышения эффективности, улучшение структуры и т.д.
Основные характеристики системы массового обслуживания:
– вероятность отказа
– среднее число занятых приборов
– средняя длина очереди
– среднее время ожидания начала обслуживания
– среднее число требований в системе
Поток требований – одно из важнейших понятий ТМО. Он
может быть описан некой функцией X(t) на отрезке времени (0–t).
При этом:
– функция X(t) – случайная величина для каждого значения
времени t
– функция X(t) может принимать только целочисленные положительные значения (0,1,2… n)
– функция с возрастанием времени не убывает
В ТМО различают два основных типа моделей:
– марковскую (Марков – проф. ЛГУ)
– немарковскую
68
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Марковской называют модель, в которой входной поток заявок
описывается законом Пуассона, а распределение времени обслуживания – экспоненциальным законом
Pk (t )
( t )k t
e
k!
0 – плотность потока требований (математическое ожидание
числа заявок, поступающих в систему в единицу времени)
Функция распределения интервалов между появлением двух
последовательных требований:
F (t ) 1 e t
– интенсивность обслуживания
Пример:
В инструментальную кладовую цеха за инструментом приходят
= 1,6 рабочих/мин.
1
Обслуживание 1 рабочего – 1,1 мин
Стоимость минуты рабочего и кладовщика
С1 = 6, С2 = 4.
Сколько должно быть кладовщиков (S), чтобы потерянное
время рабочего и кладовщика было минимальным?
1
0,9 – (один кладовщик)
1,1
1,6
, S = 1, >1 – не рассматриваем.
S 0,9 3
Среднее число рабочих в очереди
69
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
S 1S S
( )
P0
S
(1 )2
S 1S S
( )
P0
S
(1 )2
Среднее число незагруженных кладовщиков
() (1 )S
С = С1 ( ) +С2 () = 6 ( ) +4 ()
Результаты расчетов представлены в таблице 4.
Та б л и ц а 4
Результаты расчетов
S
P0
( )
()
C
2
0,88
0,68
6,66
0,24
40,92
3
0,59
0,178
0,59
1,23
8,46
4
0,44
0,198
0,13
1,68
7,50
5
0,36
0,191
0,03
3,6
12,58
Минимальные потери (7,50) будут при работе 4 кладовщиков.
7.4. Описание и анализ деятельности человека на уровне операций
Основные методы описания и анализа деятельности оператора
на уровне операций:
– метод диаграмм оперативных этапов
– метод органиграмм
70
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
– метод графических схем
– алгоритмический метод
Методы основаны на описаниях последовательности переработки информации и вероятностно-статистических связей
между элементами и показателями деятельности. Главное внимание уделяется не состоянию элементов системы, а переходам и их
закономерностям.
Метод диаграмм – графическое описание последовательности
преобразования информации и действий (рис. 25).
Метод органиграмм – графическое представление логических
условий при решении задач управления (рис. 26).
Метод граф-схем – краткое, схематическое отображение отдельных характеристик деятельности (рис. 27).
Рис. 25. Метод диаграмм
71
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 26. Метод органиграмм
Рис. 27. Метод граф-схем: p – проверка включения; q – проверка соответствия прибора; A – прибор включен; B – прибор выключен; C – действие
включения; D – показания соответствуют; E – показания не соответствуют;
F – управляющее действие
72
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Алгоритмический метод
Алгоритм – формализованная запись деятельности. Может быть
отражена в виде логической схемы или в виде графа.
Обозначения:
А, Т. – типовое действие (ТД); р, q – логические условия (ЛУ)
После ЛУ стоит нумерованная стрелка 3 , конечная стрелка
перед каким-либо другим членом алгоритма 3 .
Среди ТД могут быть афферетные акты: ()
– считавшие показания приборов
– получение команд и т.д.
эфферетные условия: ()
– нажатие кнопок
– отдача команд и т.д.
После ЛУ возможны два варианта:
– ЛУ выполняетсясработает следующий член алгоритма .
– ЛУ не выполняется сработает член, к которому ведет нумерованная стрелка с выходным номером.
Часто в схеме алгоритма есть «всегда ложное» ЛУ () всегда
срабатывает тот член, который указывает стрелка.
Например
2.3 A ()q 1 R () 3 1 T () 2
где A () – ТД считывание показаний прибора; R () – ТД нажатия
кнопки; T () – поворот регулятора (ТД); q – ЛУ показания прибора
находятся в заданном интервале; – в случае ложного ЛУ
Читаем:
– оператор считывает показания прибора
– проверяем ЛУ (q):
q = 1, показания внутри интервала переходим к нажатию кнопки ТД – R () через ЛУ по стрелке 3 обращается к прибору, т.к.
показания вышли за интервал, т.е. q = 0 следует поворот
регулятора и через ЛУпо стрелке 2 обращается к считыванию
показания прибора, т.е.
73
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Число возможных реализаций алгоритма:
k 2N n ,
где Nn – число проверяемых ЛУ.
В нашем случае n = 2
Алгоритмический анализ позволяет количественно оценить
деятельность оператора:
1. Число членов А.
N = Nn + Nm
Nn – число ЛУ
Nm – число ТД
2. Число возможных реализаций.
nmax 2N n
3. Показатель логической сложности деятельности.
Nn
L Pi n X in
i 1
i – число групп ЛУ, не разделенных ТД; X in = > число ЛУ в каждой
группе; Pi n = > частота появления групп ЛУ каждого размера.
4. Показатель стереотипности.
NC
t PjC X Cj
j 1
j = число групп ТД, не разделяемых ЛУ; X Cj = число ТД в каждой группе; PjC = частота появления групп ТД каждого размера.
5. Суммарная динамическая интенсивность процесса управления.
N
Va
где – время выполнения алгоритма.
74
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
6. Энтропия появления i-го ЛУ:
H i Pi * log2 Pi * ,
где Pi * – частота появления данного ЛУ в алгоритме
7. Энтропия появления j-го ТД:
H j Pj* log2 Pj* ,
где Pj* – частота появления данного ТД в
8. Средняя скорость переработки информации:
S
H i H 0j
9. Общая сложность выполнения алгоритма – S0:
S 0 Va S
L
t
необходимо стремление и S 0 min .
8. НАДЕЖНОСТЬ ПЕРСОНАЛА В ТРАНСПОРТНЫХ СИСТЕМАХ
Исследования в области эргономики показали, что на эффективность системы «человек – машина – среда» влияет надежность
персонала и техники.
Результаты социологического обследования персонала Норильского горно-обогатительного комбината (НГК) позволили разработать формализованные методы оценки надежности персонала на
основе показателей, совместимых с техническими устройствами,
и разработать общую математическую модель надежности производственной эргатической системы.
75
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
С этой целью предложены показатели безотказности персонала
совместимые с терминами, понятиями и определениями надежности технических систем (ГОСТ 27.002-83):
1. Надежность – свойство персонала выполнять заданные
функции, сохраняя во времени значения психофизиологических,
социальных и профессиональных показателей, обеспечивающих
работоспособность и выполнение транспортных операций.
2. Безотказность – свойство персонала сохранять работоспособность непрерывно в течение некоторого времени или некоторой
наработки не меньше одной смены работы.
3. Долговечность – свойство персонала сохранять работоспособность до наступления предельного состояния при установленном режиме работы, отдыха и восстановления после более продолжительного перерыва.
4. Восстанавливаемость – свойство субъекта, заключающееся
в приспособленности к предупреждению и обнаружению причин
возникновения отказов по психофизиологическим причинам и
устранению их естественным или медицинским порядком в результате отдыха, лечения, профилактики. Аналог ремонтопригодности
технических устройств.
5. Сохраняемость – свойство персонала непрерывно сохранять
работоспособное состояние после перерывов в работе.
Наблюдения за работой персонала НГК показали, что в их
профессиональных действиях возможен отказ, представляющий
собой событие, заключающееся в нарушении работоспособности
специалиста независимо от причины его вызвавшей. Причины
возникновения отказов персонала могут быть различными:
1. Внезапный – характеризуется скачкообразным изменением
одного или нескольких параметров надежности персонала.
2. Постепенный – определяется постепенным изменением
одного или нескольких заданных параметров надежности персонала.
3. Независимый – отказ, не обусловленный отказами других
специалистов в системе перевозок.
4. Зависимый – отказ, обусловленный отказами других специалистов в системе перевозок.
76
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
5. Сбой – самоустраняющийся отказ, приводящий к кратковременному нарушению работоспособности персонала.
6. Перемежающийся отказ – многократно повторяющийся сбой
одного характера.
7. Систематический – многократно повторяющийся отказ, обусловленный приобретенными хроническими заболеваниями персонала, а также элементами социального и профессионального поведения, определяющие административные отстранения от работы.
Отказы могут быть вызваны психофизиологическими, социальными и профессиональными причинами, а также естественными
процессами деградации и старения. К последствиям отказа относятся явления, процессы, события, возникающие после отказа и в непосредственной причинной связи с ним. Анализ и классификация
отказов могут быть использованы для формирования показателей
надежности персонала, совместимых с аналогичными характеристиками машин и оборудования. К их числу отнесены ресурс, наработка между отказами, вероятность безотказной работы, среднее
время восстановления, интенсивность (параметры) потока отказов
и восстановлений, коэффициент готовности.
В соответствии с рекомендациями ГОСТ 16468-79 и ГОСТ
27.502-83, ГОСТ 27.002-89, а также терминами, понятиями и
определениями надежности специалиста, адаптированными по
результатам обследования, в дальнейшем используются показатели, совместимые с характеристиками безотказности машин и
оборудования. При этом распределения случайных величин описываются дискретными законами, поскольку циклический режим
работы персонала определяется чередованием периодов занятости
и пауз. Как принято в методах теории надежности, показатели в
общем виде рассматриваются по вероятностным оценкам. К числу
основных определений относятся:
1. Изменение вероятности безотказной работы специалиста во
времени до к-го отказа по модели Пуассона:
(t )
Pk (t ) k exp(k (t ) t ) ,
k!
77
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
где k (t ) – интенсивность потока отказов, t – время, k – номер
отказа.
2. Наработка специалиста до к-то отказа:
Tk Pk (t )dt .
0
3. Интенсивность потока отказов:
1
k (t )
Klim
K
1
Tk ,
j 1
k
где К – число фиксированных отказов.
4. Время восстановления:
TB (
t)
t G (t )dt ,
0
где G(t) – распределение времени восстановления.
5. Интенсивность потока восстановления i-го специалиста:
i
(t ) g (t ) / (1 G (t )) ,
где g(t) – плотность распределения времени восстановления ТB.
6. Нестационарный коэффициент готовности специалиста:
_
K (t )
1T
K (t )dt ,
T 0
где К – стационарный коэффициент готовности, определяющий
вероятность работоспособного состояния специалиста в момент
времени t, при известных начальных условиях при t = 0, Т – средняя
наработка между отказами.
Вероятностные формы показателей надежности специалиста
целесообразны при задании требований к безотказности персонала
в целом. Для оценки результатов испытаний принято использовать
78
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
статистическую форму показателей. Увеличивая число испытаний,
можно получить предельные вероятностные показатели надежности персонала предприятия. Приведенные показатели надежности
применимы для расчета безотказности каждого из специалистов
и для групповых характеристик коллектива в целом. Результатами
исследования установлено, что надежность оператора формируют
физическая работоспособность, социальная пригодность к управлению техническими устройствами, профессиональная подготовленность. Эти признаки дееспособности специалиста образуют группы:
1. Безотказность специалиста на основе психофизиологической
оценки состояния его здоровья.
2. Профессиональная подготовленность, которая устанавливает
пригодность специалиста для работ в открытых карьерах на Севере
или иных условиях работы и перевозок в частности.
3. Социальная пригодность к управлению машинами для выполнения производственных заданий на основе административноправовых взаимодействий в коллективе.
Численные характеристики групп определяются значениями
– фактора, – фактора, – фактора. Работоспособность специалиста реализуется, если значения факторов выше минимально
допустимых и проявляются одновременно. Соответственно общая
надежность:
(t ) (t ) (t ) (t ) ,
где (t ) – вероятность безотказной работы специалиста по психофизиологическим показателям, (t ) – социальная вероятность
безотказной работы специалиста в составе производственных
формирований (колонна, бригада, экипаж), (t ) – вероятность
безотказной работы по признакам профессиональной подготовки
специалиста. Перечисленные характеристики нестационарные,
т.е. изменчивы во времени t. Возможны определения вероятностей
отказа, вычисленные по статистическим соотношениям.
Каждый из параметров (t ) , (t ) , (t ) математической модели
надежности имеет интегральный характер. Факторы надежности
и их составляющие оцениваются статистическими методами. Как
79
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
предусмотрено в методике исследования, при определении ВБР
оператора учитывается зависимость ее в целом от трех групп структурных компонентов.
Управляющая функция специалиста реализуется при последовательном соединении и одновременной дееспособности всех
структурных элементов. Тогда выражение для ВБР получает следующий вид:
P (t ) (t ) (t ) (t ) (t ) 1 10 (t ) 1 1(t )
1 2 (t ) 1 3 (t ) 1 10 (t ) 1 1(t ) 1 2 (t )
(1)
1 1(t ) 1 02 (t ) 1 2 (t ) 1 3 (t ),
где 10 (t ) – фоновая составляющая вероятности отказа (ВО) по
гриппу и ОРЗ; 1(t ) – вероятность эпидемических заболеваний;
2 (t ) – вероятность травматических поражений; 3 (t ) – вероятность прочих заболеваний; 1(t ) – вероятность отстранения наркологом; 2 (t ) – вероятность прогула или опоздания; 02 (t ) – фоновая
составляющая вероятности аварии; 2 (t ) – вероятность совершения аварии; 1(t ) – вероятность невыполнения производственного
задания; 3 (t ) – вероятность ошибочности действий специалиста
при управлении машиной. Возможны групповые сочетания и
интерпретация структурных компонент. При этом произведение
(t ) (t ) может рассматриваться как вероятность выхода специалиста на работу (необходимое условие), 1(t ) – фактор эквивалентен
вероятности выполнения рабочего задания (достаточное условие).
Для расчетов компонентов ВБР и других параметров надежности специалистов рекомендуются соотношения:
1. Вероятность безотказной работы (ВБР) специалиста:
P
(t ) exp( t ),
m
i
i 1
– интегральная интенсивность потока отказов, i – част-
ная по одному из признаков, интенсивность i -ого потока отказов,
80
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
т – число показателей безотказности водителя. Вероятность отказа (ВО):
P (t ) 1 P (t ).
2. Средняя наработка водителя до k-ого отказа:
Tk 1
3. Интенсивность (параметр) потока отказов:
N (t t ) N (t )
i i
N (t ) t
где N(t) – число отказов водителя на момент времени t; N (t t ) –
число отказов за время t ; t – интервал времени наблюдения.
4. Среднее время восстановления:
Nb
B
tbi
i 1
/ Nb
где tbi – время восстановления i – ого водителя; Nb – число восстановлений.
5. Интенсивность потока восстановлений:
N (t t ) N b (t )
i (t ) b
N b (t ) t
где Nb(t) – число восстановлений i-ого водителя на момент времени t; N b (t t ) – число восстановлений за время наблюдения t .
81
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Та б л и ц а 5
Факторы и компоненты надёжности водителя
Факторы
Компоненты
Пределы значимости
(t ) фактор
1(t ) 1 1(t )
1 – вероятность
0 1,0
эпидемических заболеваний
2 (t ) 1 2 (t )
2 – вероятность
0 1,0
травматизма
3 (t ) 1 3 (t )
3 – вероятность
0 1,0
общих заболеваний,
включая хронические
(t ) фактор
1(t ) 1 1(t )
1 – вероятность
выполнения плана
перевозок
0 1,0
2 (t ) 1 2 (t )
2 – вероятность
0 1,0
безаварийного движения
3 (t ) 1 3 (t )
3 – вероятность
безошибочных действий водителя
0 1,0
(t ) фактор
1(t ) 1 1(t )
1 – вероятность
0 1,0
прогулов и опозданий
водителя
2 (t ) 1 2 (t )
2 – вероятность
отстранения водителя
наркологом
82
0 1,0
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
6. Нестационарный коэффициент готовности:
1
K (t ) K (1 K ) exp t
b
где K (1 / mi (t ))1 – стационарный коэффициент готовности.
По аналогии с техническими устройствами надежность
персонала определяется единичными и комплексными показателями.
Вероятность отказа персонала по психофизиологическим (t ) и
социальным (t ) признакам является универсальной характеристикой, не связанной с профессиональной деятельностью специалиста.
Оценка безотказности персонала по профессиональному (t ) –
фактору ориентирована на специфику выполняемой работы. Однако и в этой характеристике содержится общий принцип оценки
вероятности эффективного выполнения задания на производство
определенной работы.
При этом считается (t ) 1 , если задание специалисту независимо от его содержания гарантировано выполнением в необходимые сроки и в заданном объеме. По рабочим профессиям
объем и время исполнения задания нормируются в тарифноквалификационных документах. Примером таких работ является организация труда машинистов экскаваторов и водителей
автосамосвалов на открытых горных разработках. В этом случае
качество выполняемых работ может быть оценено допустимо
точно и дифференцируется персонально по должности и уровню
квалификации.
Сложнее определяется персональное значение – фактора водителей пассажирского автотранспорта. Здесь ведущим признаком
квалификации является соблюдение графика движения автобуса
при условии безаварийной работы. Характеристикой квалификации водителя автобуса является классность, корректируемая
организаторами работ, например, по методу экспертных оценок.
Аналогичный подход допустим к оценке – фактора цехового
персонала, в частности металлургических цехов.
83
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Таким образом, представленная математическая модель надежности персонала является универсальным аппаратом расчета
соответствующих характеристик применимых к планированию и
управлению эксплуатации транспортных машин и цехового оборудования при непрерывном технологическом цикле на производстве,
независимо от отраслевой ориентации.
9. САПР В ЭРГОНОМИКЕ
9.1. Система CATIA
Система CATIA (разработка компании IBM / Dassault
Systemes) – это сегодня одна из наиболее известных и мощных
CAD/CAM-систем. CATIA включает в себя не только “базовые”
средства автоматизации, характерные для CAD/CAM, но и целый спектр специальных приложений для различных отраслей
промышленности (рис. 28).
Система CATIA V5 обеспечивает автоматизацию решений в
следующих областях инженерной деятельности:
Машиностроительное проектирование (Mechanical Design);
Разработка дизайна изделий (Shape Design and Styling);
Системный синтез промышленных изделий (Product Synthesis);
Проектирование оборудования и производственных систем
(Equipment and Systems Engineering);
Инженерный анализ (Analysis);
Программирование обработки на станках с ЧПУ (NC
Manufacturing);
Управление проектированием и обмен данными (Infrastructure);
Разработка приложений к CATIA (RADE Products).
Система CATIA V5 широко используется в мире в самых различных отраслях промышленности – авиастроении, автомобилестроении, судостроении, двигателестроении, энергомашиностроении и др.
84
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 28. Возможности САПР CATIA
CATIA занимает около 70 % мирового рынка систем автоматизированного проектирования и технологической подготовки производства в авиакосмической промышленности и более 45 % – в
автомобилестроении (ее используют 14 из 20 крупнейших автомобилестроительных компаний).
9.2 Модуль Human Builder
javascript:openViewer(‘images/doc/intro1.jpg’)
Human Builder основан на лучшей системе моделирования
деятельности человека.
85
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Манекен управляется таким образом, что пользователь может
точно предсказывать его положения в пространстве. Манекен поддерживает различные типы моделирования зрения: бинокулярное,
периферийное. Области зрения показаны как периферийные конусы, центральные конусы и линии вида.
В отдельном окне демонстрируется то, что манекен может видеть в пространстве трехмерного моделирования.
Чтобы гарантировать пользователю соблюдение эргономических требований для соответствующего специфического рынка,
предоставлена возможность выбрать базу данных, соответствующих
европейскому, американскому или азиатскому типа антропометрических параметров.
Манекен позволяет моделировать взаимодействие с механизмами, причем учитываются такие тонкие структуры, как ограничения действий человека при максимальной нагрузке или иной
экстремальной ситуации.
Работа с Human Builder начинается с выбора манекена, имеются
встроенные манекены по Американской, Канадской, Французской,
Японской и Корейской популяции.
Так же можно выбирать в зависимости от целей рассмотрения
все тело манекена или отдельные его части (рис. 29, 30, 31).
Рис. 29. Выбор параметров манекена
86
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 30. Создание манекена
Рис. 31. Рассмотрение только левой
руки
87
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Программа позволяет отслеживать центр тяжести манекена (рис. 32).
Рис. 32. Центр тяжести
В зависимости от поставленных задач, можно производит более
точные манипуляции с манекеном (рис. 33).
Рис. 33. Манипуляции с кистью руки
Для оценки эргономики в той или иной обстановке можно задавать ограничения манекену, выбирать имеющиеся в библиотеке
программы стандартные позы для манекена (рис. 34).
88
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 34. Выбор позы манекена
Манекен поддерживает различные типы моделирования зрения:
бинокулярное, периферийное. Области зрения показаны как периферийные конусы, центральные конусы и линии вида (рис. 35).
89
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 35. Виды зрения и направление взгляда
В отдельном окне моделируется то, что может видеть манекен в
пространстве трехмерного моделирования (даже правым или левым
глазом (рис. 36)).
90
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 36. Взгляд от первого лица
91
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Манекен позволяет моделировать взаимодействие с механизмами, причем учитываются такие тонкие структуры, как ограничения
действий человека при максимальной нагрузке или иной экстремальной ситуации (рис. 37).
Рис. 37. Взаимодействие с объектами
и механизмами
92
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Модуль анализа человеческой активности (Human Activity
Analysis) оценивает все элементы выполнения работы, от статического анализа положения до сложных действий. В этом модуле
представлены инструментарии и методы, которые однозначно
анализируют, как манекен взаимодействует с объектами в виртуальной действительности. В модели человека оцениваются реальные
особенности диапазоны возможностей человека, что позволяет
оптимизировать выполнение задачи. После ввода начального и
заключительного положения, проектировщик может определять
множество переменных для точного предсказания выполнения работы, обеспечение соответствия требований сохранности здоровья,
требований безопасности и комфорта работы (рис. 38).
Рис. 38. Имитация работы
Модуль Анализа Положения (Human Posture Analysis) позволяет
пользователям количественно и качественно анализировать все
аспекты положения манекена. Могут быть исследованы различные
положения тела для определения комфорта работы в соответствии
с заданными базами данных комфорта. В модуле имеется возможность создания пользователями их собственного варианта выбранного критерия комфорта (рис. 39, 40).
93
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 39. Анализ положения манекена
Рис. 40. Соответствие манекена реальному
населению
В дополнение к 6 стандартным манекенам Редактор измерений
(Human Measurements Editor) позволяет пользователям создавать
модель любого человека. Пользователи могут исправлять все 104
94
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
антропологические переменные на манекене или управлять частью
переменных для определения остальных в автоматическом режиме.
Эти переменные могут быть изменены вручную или с помощью
мыши в графическом режиме пользователя. Данный Редактор имеет
способность определять Среднее и Стандартное Отклонение всех
антропометрических переменных. Используя уникальную методологию Редактор гарантирует, что люди, полученные в результате
моделирования, реально существуют.
Имеется возможность определить процент от населения, идеально соответствующий разработанной в проекте конструкции, с
которой придется взаимодействовать человеку в реальной жизни.
Кроме реализации естественного желания посадить манекен
в кресло, в седло, в кабину, за пульт управления, за баранку и
т.д. и т.п., этот инструмент дает возможность реализовать моделирование элементов жизненного цикла изделия. В частности,
открывается широкий спектр его применения для моделирования сборки, эксплуатации, ремонтопригодности и разборки при
утилизации (рис. 41).
Рис. 41. Моделирование эксплуатации
95
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
10. ОСНОВНЫЕ ЗАКОНЫ ЭРГОНОМИКИ
1. Не проектируй систему под себя. Свое рабочее место можно и
нужно обустроить под себя, но оно будет дискомфортно для другого.
2. Не проектируй систему под среднего человека. Согласно
нормального закона распределения случайной величины в системе
комфортно будут себя чувствовать всего лишь 50 % персонала .
Успеха!
96
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
ЛИТЕРАТУРА
1. Бадалов В. В. Надежность эргатических систем . Издательство
СПбГТУ 2001
2. Вудсон Е.У., Коновер Д.В. Справочник по инженерной психологии
для инженеров и художников конструкторов. Пер. с англ. – М.: Мир, 1969
3. Гнеденко Б. В., Беляев Ю. В., Соловьев А. Д. Математические методы
в теории надежности. М.: Наука. – 1965.
4. Душков Б.А., Ломов Б.Ф., Рубахин В.Ф. и др. Основы инженерной
психологии: Учебн. для техн. вузов. / Под ред. Б.Ф. Ломова. – М.: Высшая
школа, 1996.
5. Журнал «Строительные и дорожные машины» №5. 1979
6. Зинченко В.П., Мунипов В.М. Основы эргономики Издательство
московского университета 1979.
7. Инженерная психология в применении к проектированию оборудования. Пер. с англ. – М.: Машиностроение, 1971, Авт. К.Морган,
Т.Клиффорд, А.Чапанис и др.
8. Инструкция по применению Human Builder.
9. Лебедев В.И. Профессия века. – М.: Наука. 1978
10. Ломов Б.Ф. Человек и техника. – М.: Советское радио. 1966.
11. «Основы эргономики и дизайна автомобилей и тракторов» под ред.
Шарипова В.М.. – М.: Академия. 2005.
12. Орловский С. А. Проблемы принятия решений при нечеткой исходной информации. – М.: Наука. 1981. 203с.
13. Раннев А.В. Корелин В.Ф., Жаворонков А.В. и др. Строительные
машины: Справочник, Т.1 / Под ред. Э.Н. Кузина. – М.: Машиностроение, 1991
14. Ронжин О.В. Информационные методы исследования эргатических
систем. – М.: Энергия, 1976.
15. Справочник по инженерной психологии / Под ред. Б.Ф. Ломова. –
М.: Машиностроение, 1982.
16. Справочник по прикладной эргономике. – М.: Машиностроение
1980.
17. Трофимов А. А. Определение эргономических параметров кабины
СДМ. Братск 2006
18. Хилл П. Наука и искусство проектирования. Пер. с англ. – М.:
Мир, 1973
19. Эргономика: Принципы и рекомендации. – М.: ВНИИТЭ, 1983.
97
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
ПРИЛОЖЕНИЕ
П. 1. Основные размеры человека
98
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
Показатели
Рост
Зона вертикальной досягаемости
Длина руки, вытянутой в сторону
Зона боковой досягаемости (от плечевой точки)
Длина ноги
Ширина колен
Длина плеча
Ширина плеч
Ширина расстановки ног
Высота глаз
Высота плечевой точки
Высота пальцевой точки
Длина руки
Высота верхнегрудинной точки
Высота сосковой точки
Высота линии талии
Длина руки, вытянутой вперед
Наибольший сагиттальный диаметр
Рост сидя II
Высота глаз (сидя)
Локтевая ширина
Наибольший диаметр бедер
Высота сидения
Рост сидя I
Высота глаз над сиденьем
Высота плеча над полом
Высота локтя над полом
Высота лопаток над сиденьем
Высота плеча над сиденьем
Высота локтя над сиденьем
Высота колена
Длина предплечья и кисти
Длина бедра редуцированная
Длина бедра
Длина ноги
Диаметр бедра
Поясничный диаметр
Мужчины
1680
2140
723
622
900
230
380
327
830
1560
1370
620
754
1360
1210
1035
743
300
1310
1180
448
344
422
887
770
1010
654
435
586
232
506
465
490
590
1040
135
230
Женщины
1567
1981
661
568
835
226
349
302
726
1458
1281
584
697
1271
–
976
686
300
1211
1100
452
388
370
841
725
930
605
426
560
235
467
427
472
568
983
143
255
99
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
П. 2. ЭРГОНОМИКА. ГОСТы
ГОСТ ЕН 1005-2-2005 Безопасность машин. Физические
возможности человека. Часть 2. Составляющая ручного труда при
работе с машинами и механизмами
ГОСТ Р ИСО 15265-2006 Менеджмент риска. Основы стратегии оценки риска для предупреждения стресса и дискомфорта в
термальных рабочих средах
ГОСТ Р 50948-2001 Средства отображения информации индивидуального пользования. Общие эргономические требования
и требования безопасности
ГОСТ Р 52324-2005 Эргономические требования к работе с
визуальными дисплеями, основанными на плоских панелях. Часть
2. Эргономические требования к дисплеям с плоскими панелями
ГОСТ Р 50923-96 Дисплеи. Рабочее место оператора. Общие
эргономические требования и требования к производственной
среде. Методы измерения
ГОСТ Р ИСО 10007-2007 Менеджмент организации. Руководящие указания по управлению конфигурацией
ГОСТ Р ИСО 9241-3-2003 Эргономические требования при
выполнении офисных работ с использованием видеодисплейных
терминалов (ВДТ). Часть 3. Требования к визуальному отображению информации
ГОСТ ИСО 8995-2002 Принципы зрительной эргономики.
Освещение рабочих систем внутри помещений
ГОСТ Р 50949-2001 Средства отображения информации индивидуального пользования. Методы измерений и оценки эргономических параметров и параметров безопасности
ГОСТ Р 29.05.008-96 Система стандартов эргономических требований и эргономического обеспечения. Рабочее место диспетчера
служб управления воздушным движением. Общие эргономические
требования
ГОСТ 12.2.033-78 Система стандартов безопасности труда.
Рабочее место при выполнении работ стоя. Общие эргономические
требования
100
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
ГОСТ 29.05.006-85 Система стандартов эргономических требований и эргономического обеспечения. Трубки электронно-лучевые
приемные. Общие эргономические требования
ГОСТ 29.05.002-82 Система стандартов эргономических требований и эргономического обеспечения. Индикаторы цифровые
знакосинтезирующие. Общие эргономические требования
ГОСТ 23000-78 Система «Человек-машина». Пульты управления. Общие эргономические требования
ГОСТ 22614-77 Система «Человек-машина». Выключатели и
переключатели клавишные и кнопочные. Общие эргономические
требования
ГОСТ 21829-76 Система «Человек-машина». Кодирование
зрительной информации. Общие эргономические требования
ГОСТ Р 29.08.004-96 Система стандартов эргономических
требований и эргономического обеспечения. Рабочее место диспетчера служб управления воздушным движением. Методы оценки
соответствия общим эргономическим требованиям
ГОСТ 20.39.108-85 Комплексная система общих технических
требований. Требования по эргономике, обитаемости и технической эстетике. Номенклатура и порядок выбора
ГОСТ 30.001-83 Система стандартов эргономики и технической эстетики. Основные положения
ГОСТ 12.2.032-78 Система стандартов безопасности труда.
Рабочее место при выполнении работ сидя. Общие эргономические
требования
ГОСТ 22613-77 Система «Человек-машина». Выключатели и
переключатели поворотные. Общие эргономические требования
ГОСТ 21752-76 Система «Человек-машина». Маховики управления и штурвалы. Общие эргономические требования
ГОСТ 22269-76 Система «Человек-машина». Рабочее место
оператора. Взаимное расположение элементов рабочего места.
Общие эргономические требования
ГОСТ 21753-76 Система «Человек-машина». Рычаги управления. Общие эргономические требования
101
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
ГОСТ 21889-76 Система «Человек-машина». Кресло человекаоператора. Общие эргономические требования
ГОСТ 21480-76 Система «Человек-машина». Мнемосхемы.
Общие эргономические требования
ГОСТ 21786-76 Система «Человек-машина». Сигнализаторы
звуковые неречевых сообщений. Общие эргономические требования
ГОСТ 21958-76 Система «Человек-машина». Зал и кабины
операторов. Взаимное расположение рабочих мест. Общие эргономические требования
ГОСТ Р 51503-99 Приборы для измерения светотехнических
характеристик средств отображения информации. Типы, основные
параметры, общие технические требования
ГОСТ 22902-78 Система «Человек-машина». Отсчетные
устройства индикаторов визуальных. Общие эргономические
требования
ГОСТ 22615-77 Система «Человек-машина». Выключатели и
переключатели типа «Тумблер». Общие эргономические требования
ГОСТ Р ИСО 10551-2007 Эргономика тепловой окружающей
среды. Определение влияния тепловой окружающей среды с использованием шкал субъективной оценки
ГОСТ Р ИСО 11399-2007 Эргономика тепловой окружающей
среды. Принципы и применение признанных международных
стандартов
ГОСТ Р ИСО 7243-2007 Термальная среда. Расчет тепловой
нагрузки на работающего человека, основанный на показателе
WBGT (температура влажного шарика психрометра)
ГОСТ Р ИСО 7250-2007 Базовые измерения человеческого
тела в технологическом проектировании
ГОСТ Р ИСО 15534-3-2007 Эргономическое проектирование
машин для обеспечения безопасности. Часть 3. Антропометрические данные
ГОСТ Р ИСО 14738-2007 Безопасность машин. Антропометрические требования при проектировании рабочих мест машин
102
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
ГОСТ Р ЕН 1005-1-2008 Безопасность машин. Физические
возможности человека. Часть 1. Термины и определения
ГОСТ Р 50948-96 Средства отображения информации индивидуального пользования. Общие эргономические требования и
требования безопасности
ГОСТ Р 50949-96 Средства отображения информации индивидуального пользования. Методы измерения и оценки эргономических параметров и параметров безопасности
ГОСТ Р ИСО 9241-7-2007 Эргономические требования при
выполнении офисных работ с использованием видеодисплейных
терминалов (ВДТ). Часть 7. Требования к дисплеям при наличии
отражений
ГОСТ Р ИСО 13406-1-2007 Эргономические требования к
проведению офисных работ с использованием плоскопанельных
терминалов. Часть 1. Введение
ГОСТ Р ИСО 9241-8-2007 Эргономические требования при
выполнении офисных работ с использованием видеодисплейных
терминалов (ВДТ). Часть 8. Требования к отображаемым цветам
ГОСТ Р 52870-2007 Средства отображения информации коллективного пользования. Требования к визуальному отображению
информации и способы измерения
ГОСТ Р ИСО 6385-2007 Эргономика. Применение эргономических принципов при проектировании производственных систем
ГОСТ Р ИСО 7731-2007 Эргономика. Сигналы опасности
для административных и рабочих помещений. Звуковые сигналы
опасности
ГОСТ Р ИСО 9241-1-2007 Эргономические требования к
проведению офисных работ с использованием видеодисплейных
терминалов (VDTs). Часть 1. Общее введение
ГОСТ Р ИСО/ТУ 13732-2-2008 Эргономика термальной среды.
Методы оценки реакции человека при контакте с поверхностями.
Часть 2. Контакт с поверхностью умеренной температуры
ГОСТ Р ИСО 8996-2008 Эргономика термальной среды.
Определение скорости обмена веществ
103
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
ГОСТ Р ИСО 9886-2008 Эргономика термальной среды. Оценка температурной нагрузки на основе физиологических измерений
ГОСТ Р ЕН 547-1-2008 Безопасность машин. Размеры тела
человека. Часть 1. Принципы определения размеров проемов, обеспечивающих полный доступ человека к машине
104
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
П. 3. МЕЖДУНАРОДНАЯ СИСТЕМА ЕДИНИЦ
105
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Международная система единиц, СИ (SI) – согласованный между
собой набор единиц физических величин (основных, дополнительных, производных) принятый Генеральной конференцией по
мерам и весам в 1960 г.
Метр – единица длины равная расстоянию между осями двух
штрихов, нанесенных на платиноиридиевом бруске, хранящемся в
Международном бюро мер и весов при 0 °С и нормальном давлении.
По определению метр равен 1650763,73 длинам волн излучения
атома криптона-86 при переходе от уровня 2р10 на уровень 5d5 в
вакууме или равен расстоянию, проходимому светом в вакууме за
1/299792458 секунды.
Килограмм – единица массы. Равна массе эталона из платиноиридиевого сплава и на 0,000028 кг больше массы одного кубического
дециметра химически чистой воды при температуре ее наибольшей
плотности ( +3, 98 °С).
Моль – единица количества вещества, в которой содержится
Авогадрово число NA = 6,022 1023 структурных элементов вещества:
атомов, молекул, ионов и др. частиц.
Молярная масса – масса одного моля данного вещества
Кмоль – количество вещества, в котором содержится 6,022·1026
структурных элементов. 1 кмоль = 103 моль.
Секунда – единица времени и равна по атомным часам («атомная секунда») 9192631770 периодам излучения, соответствующего
энергетическому переходу между двумя уровнями сверхтонкой
133
структуры основного состояния атома цезия 55 Cs , а по эфемеридному определению – 1/315569259747 части тропического года
(относительное различие между ними 2· 10–9 ). Секунда, равная
1/86400 части звездных или средних солнечных суток, составляет
0,99726966 атомных секунд.
Атомная секунда – единица времени (секунда), отсчитываемая по
квантовым часам (специальному радиотехническому устройству для
точного измерения времени). В квантовых часах используется стабильность частоты колебательных процессов в атомах («атомные часы»)
или в молекулах («молекулярные часы»). В хороших квантовых часах
отклонение может составлять около одной секунды за тысячелетие.
106
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Герц – единица частоты, равна частоте периодического процесса, при которой за одну секунду происходит один цикл процесса.
Радиан – единица плоского угла, равна углу между двумя радиусами окружности при длине дуги, равной радиусу (отношение
длины дуги окружности к ее радиусу есть угол, выраженный в
радианах); является безразмерной величиной. 1 рад = 57°17.
Стерадиан – единица телесного угла, равна телесному углу с
вершиной в центре сферы, которой вырезает на поверхности сферы площадь, равную площади квадрата со стороной, равной r , где
r – радиус сферы.
Кельвин – единица термодинамической температуры и равна
1/273,16 части термодинамической температуры тройной точки
воды.
Кандела – единица силы света, равна силе света, испускаемого
с площади 1/600000 м2 сечения полного излучателя в перпендикулярном к этому сечению направлении при температуре излучателя,
равной температуре затвердевания платины (2042 °К), и давлении
101325 Па.
Ньютон – единица силы. Равна силе, которая сообщает телу
массой в 1 кг ускорение в 1 м/с2 в направлении действия силы;
1 H = 1 кг м/с2.
Паскаль – единица давления и механического напряжения и
равно давлению, создаваемому силой в 1 ньютон, равномерно распределенной по плоской поверхности в 1м2.
Джоуль – единица работы, энергии и количества теплоты. Равна
работе силы в 1 ньютон при перемещении точки приложения этой
силы в направлении ее действия на 1 м.
Ватт – единица мощности, равная мощности, при которой за
1 секунду совершается работа, равная 1 джоулю.
Ампер – единица силы тока. Равна силе постоянного тока, который
при прохождении по двум параллельным прямолинейным проводникам бесконечной длины и ничтожно малой площади сечения, расположенным в вакууме на расстоянии 1 метр один от другого, вызвал
бы на участке проводника длиной 1 м силу взаимодействия, равную
2 10–7 ньютона. В амперах измеряется также и магнитодвижущая сила.
107
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Кулон – единица количества электричества, равна количеству
электричества, которое проходит через сечение проводника с током
1
·1019 элементарных
в 1 ампер за одну секунду. 1 кулон равен
1,602
электрических зарядов.
Вольт – единица разности потенциалов, равна электрическому
напряжению, которое вызывает в цепи постоянный ток в 1 ампер
при затраченной мощности в 1 ватт, или равен разности потенциалов между двумя точками электрического поля, если работа
переноса точечного заряда в 1 кулон из одной точки в другую равна
1 джоулю.
Ом – единица электрического сопротивления, равна сопротивлению проводника, между концами которого при силе тока в
1ампер существует напряжение в 1 вольт.
Сименс – единица электрической проводимости. Равна проводимости проводника, сопротивление которого равно 1 Ому.
Фарад – единица электрической емкости, равна емкости конденсатора, между обкладками которого при заряде в 1 кулон возникает разность потенциалов в 1 вольт. 1 Ф = 1 Кл/В, микрофарад
(мкФ) = 10–6 Ф, нанофарад = 10–9 Ф, пикофарад = 10–12 Ф.
Вебер – единица магнитного потока. Равна магнитному потоку, создаваемому однородным магнитным полем при индукции
в 1 тесла через нормальную к вектору индукции площадку в 1м2.
Максвелл – единица магнитного потока и равна 10–8 вебер.
Генри – единица индуктивности (L) и взаимной индуктивности
(M). Равна индуктивности электрического контура, возбуждающего
магнитный поток в 1 вебер, при силе постоянного тока в контуре в 1
ампер, или индуктивности проводника, на концах которого возбуждается электродвижущая сила индукции в 1 вольт при равномерном
изменении тока в нем со скоростью 1 ампер в секунду.
Тесла – единица магнитной индукции, равна магнитной индукции однородного магнитного поля, в котором на плоский контур
площадью в 1 м2 при силе тока в 1 ампер действует максимальный
вращающий момент, равный 1 ньютон-метру.
Ампер на вебер – единица магнитного сопротивления и равна
магнитному сопротивлению цепи, в которой магнитодвижущая
108
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
сила в один ампер создает магнитный поток в один вебер.
Ампер на метр – единица напряженности магнитного поля,
равна напряженности магнитного поля внутри длинного соленоида
с витками на единицу длины при силе тока в 1 ампер. Также это
единица намагниченности вещества, при котором на 1 м3 вещества
приходится магнитный поток, равный 1 А м2.
Ампер – квадратный метр – единица магнитного момента
контура с током и равна магнитному моменту плоского контура с
площадью в 1 м2 , по которому течет ток в один ампер.
Люмен – единица светового потока и равна световому потоку,
испускаемому точечным источником в телесный угол, равный
одному стерадиану, при силе света в одну канделу.
Люкс – единица освещенности и равна освещенности поверхности площадью 1м2 при световом потоке падающего на нее излучения, равном одному люмену.
Стильб – единица яркости
109