/













































































































































































































































































































Author: Лурье А.И.
Tags: общая механика механика твердых и жидких тел физика механика теория упругости
Year: 1970




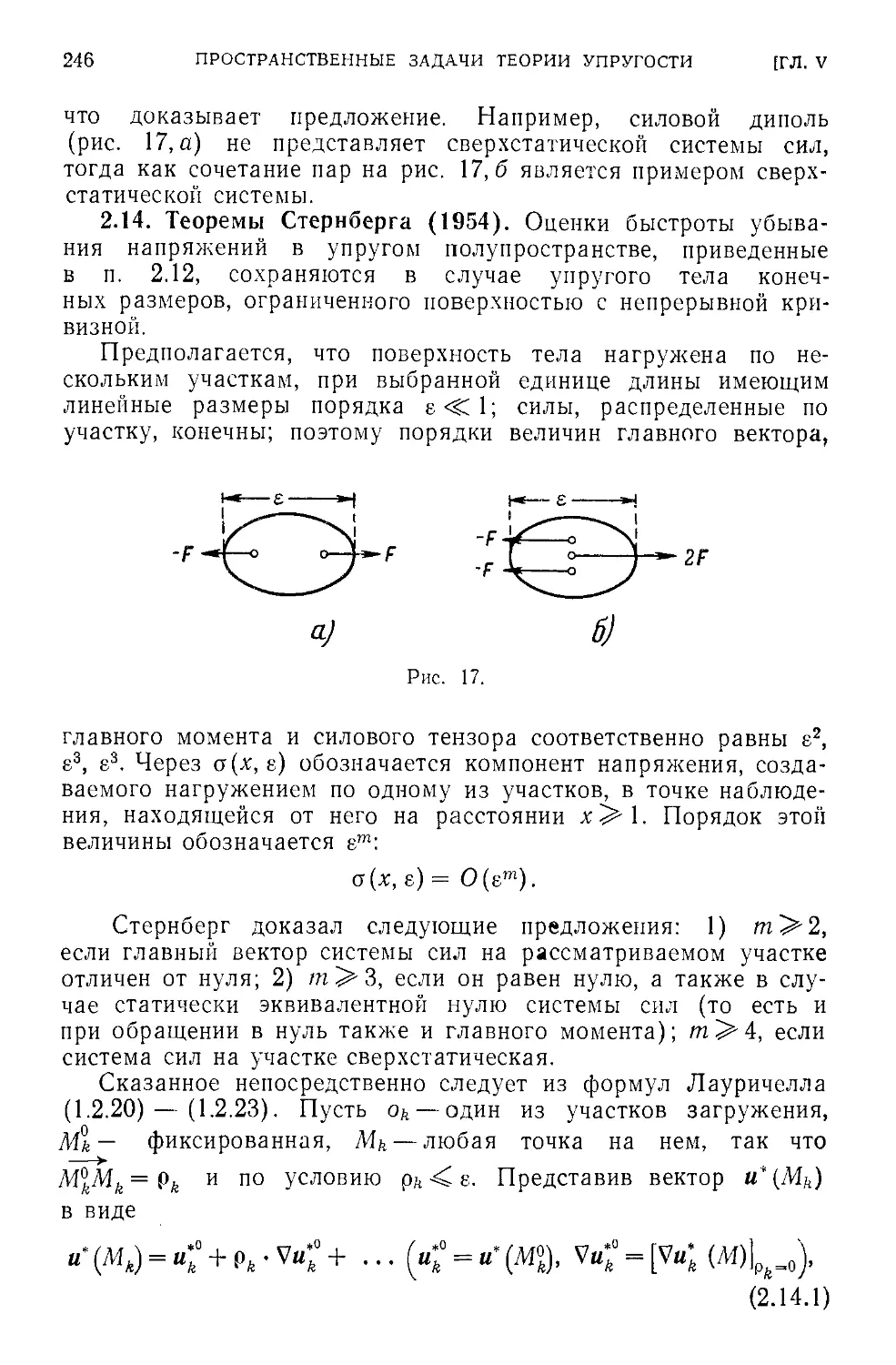
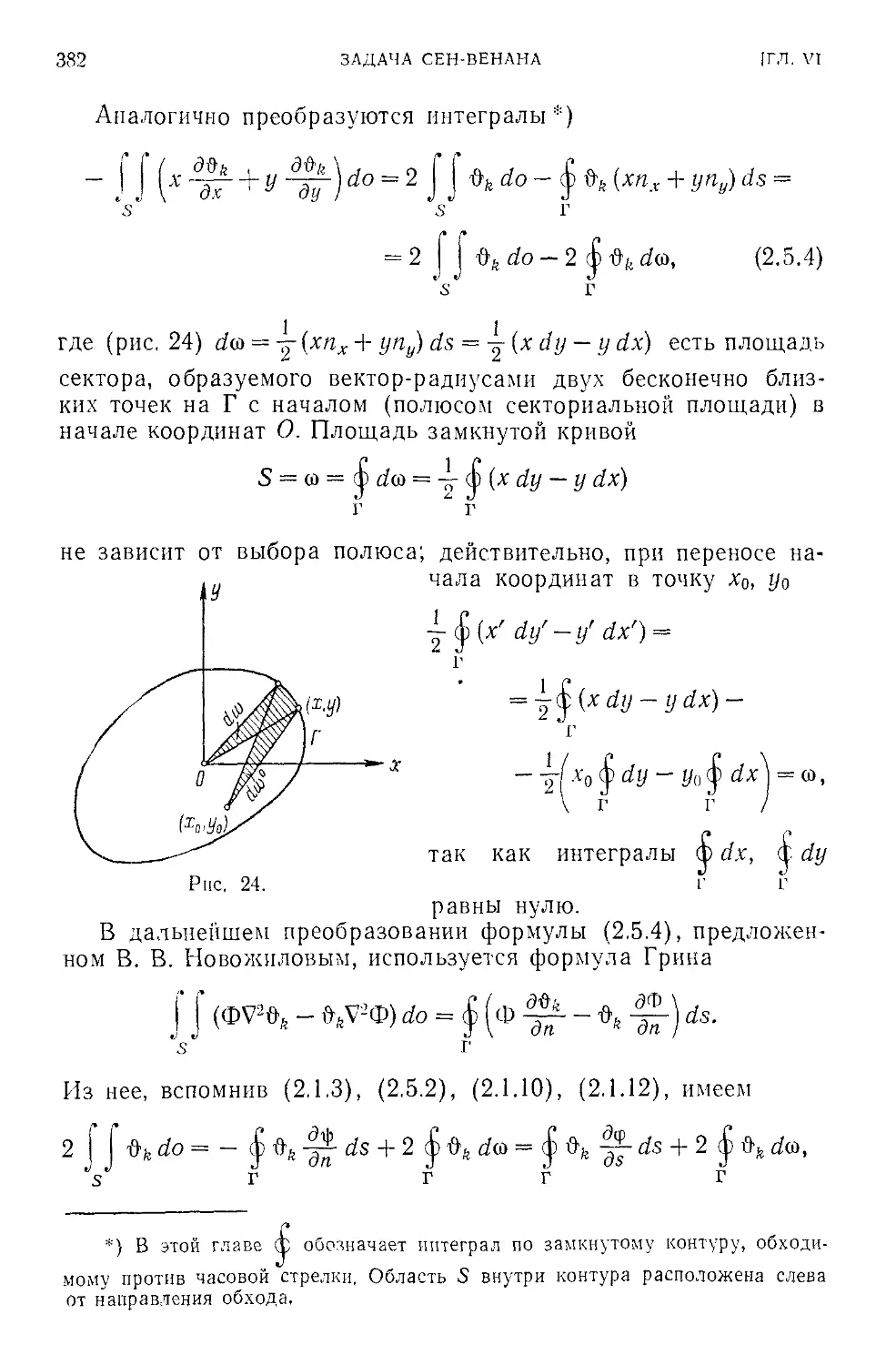
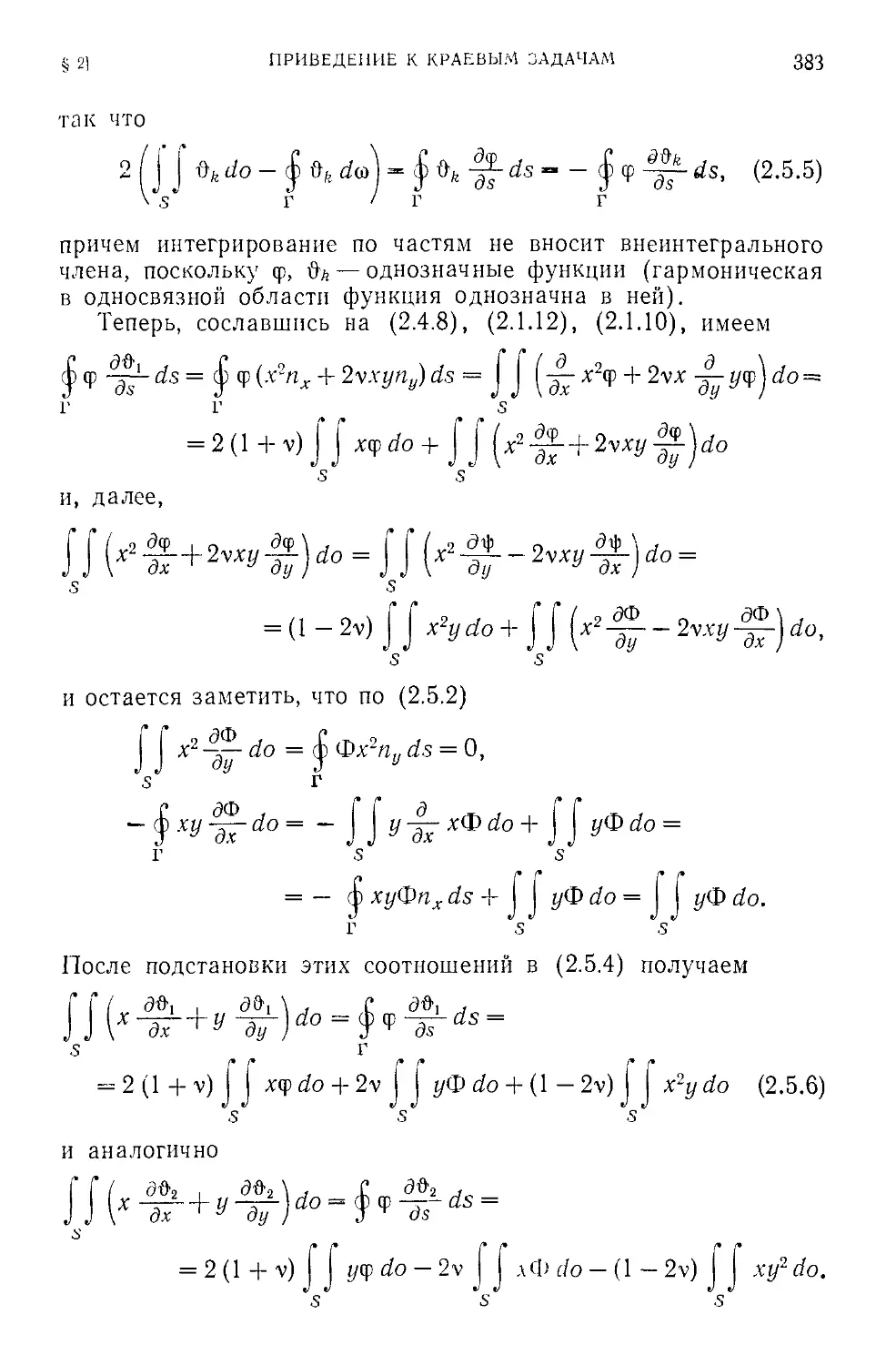
Text
А. И. ЛУРЬЕ
Теория
упругости
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1970
531
Л 86
УДК 531
ОГЛАВЛЕНИЕ
Предисловие 11
ЧАСТЬ Г
ОСНОВНЫЕ ПОНЯТИЯ МЕХАНИКИ СПЛОШНОЙ СРЕДЫ 13
Глава I. Тензор напряжений 13
§ 1. Поле напряжений в сплошной среде 13
1.1. Координатные системы в механике сплошной среды A3). 1.2. Внешние силы A5).
1.3. Внутренние силы в сплошной среде A7). 1.4. Равновесие элементарного тетра-
тетраэдра A9). 1.5. Необходимые условия равновесия сплошной среды B1). 1.6. Тензор
функций напряжений B5).
§ 2. Свойства тензора напряжений 27
2.1. Преобразование компонент. Главные напряжения. Главные инварианты B7).
2.2. Круги Мора C0). 2.3. Разбиение тензора напряжений на шаровой тензор и
девиатор C2). 2.4. Примеры напряженных состояний C3).
§ 3. Материальные координаты 37
3.1. Представление тензора напряжений C7). 3.2. Зависимости Коши C7). 3.3. Необ-
Необходимые условия равновесия C8). 3.4. Другое определение тензора напряжений C9).
3.5. Элементарная работа внешних сил D0). 3.6. Энергетический тензор напряже-
напряжений D3). 3.7. Инварианты тензора напряжений D4).
§ 4. Интегральные оценки напряженного состояния 45
4.1. Моменты функции D5). 4.2. Моменты компонент тензора напряжений D5).
4.3- Случаи п=0, п=1 D6). 4.4: Моменты напряжений первого порядка D6). 4.5. При-
Пример. Сосуд под внешним н внутренним давлением D7). 4.6. Пример. Главный век-
вектор и главный момент напряжений в плоском сеченнн тела D8). 4 7. Оценка сред-
среднего значения квадратичной формы компонент тензора напряжений D9). 4.8. Оцен-
Оценка удельной потенциальной энергии деформированного линейно-упругого тела (.51).
4.9. Оценка удельной интенсивности касательных напряжений E1). 4.10. Моменты
напряжений второго и более высокого порядка E2). 4.11. Оценка снизу максимума
компонент напряжений E2). 4.12. Уточненная оценка E4).
Глава II. Деформация сплошной среды 57
§ 1. Линейный тензор деформации 57
1.1. Обзор содержания главы E7). 1.2. Определение линейного тензора деформа-
деформации E8).
§ 2. Определение вектора перемещения по линейному тензору деформа-
деформации 60
2.1. Совместность деформаций (зависимости Сен-Венана) F0). 2.'. Вектор переме-
перемещения. Формула Чезаро F3J. 2.3. Пример. Температурное поле F4). 2.4. Днсторсни
Вольтерра F6).
4 ОГЛАВЛЕНИЕ
§ 3. Первая мера и первый тензор конечной деформации 68
3.1. Векторные базисы i>- и V-объемов F8). 3.2. Теизоры-градиенты V/J, 7г G1).
3.3. Первая мера деформации (Коши —Грии) G1). 3.4. Геометрическое значение
компонент первой меры деформации G3). 3.5. Изменение ориентированной пло-
площадки G4). 3.6. Первый тензор конечной деформации G5). 3.7. Главные деформа-
деформации, главные оси деформации G7). 3.8. Конечный поворот среды как твердого
тела G8). 3.9. Выражение тензора конечной деформации через лниейный тензор
деформации и линейный вектор поворота G8).
§ 4. Вторая мера и второй тензор конечной деформации 79
4.1. Вторая мера конечной деформации G9). 4.2. Геометрическое значение компо-
компонент второй меры деформации (80). 4.3. Второй тензор конечной деформации
(Альманзи — Гамель) (81).
§ 5. Связь между мерами деформации 82
5.1. Сопоставление мер деформации и обратных им тензоров (82). 5.2. Связь меж-
между инвариантами (82). 5.3. Представление мер деформации в главных осях (83).
5.4. Инварианты тензоров конечной деформации (85). 5.5. Объемное расшире-
расширение (86). 5.6. Преобразование подобия начального состояния (87). 5.7. Определение
вектора перемещения по мерам деформации (87).
§ 6. Примеры деформированных состояний 89
6.1. Аффинное преобразование (89). 6.2. Плоское поле перемещений (90). 6.3. Про-
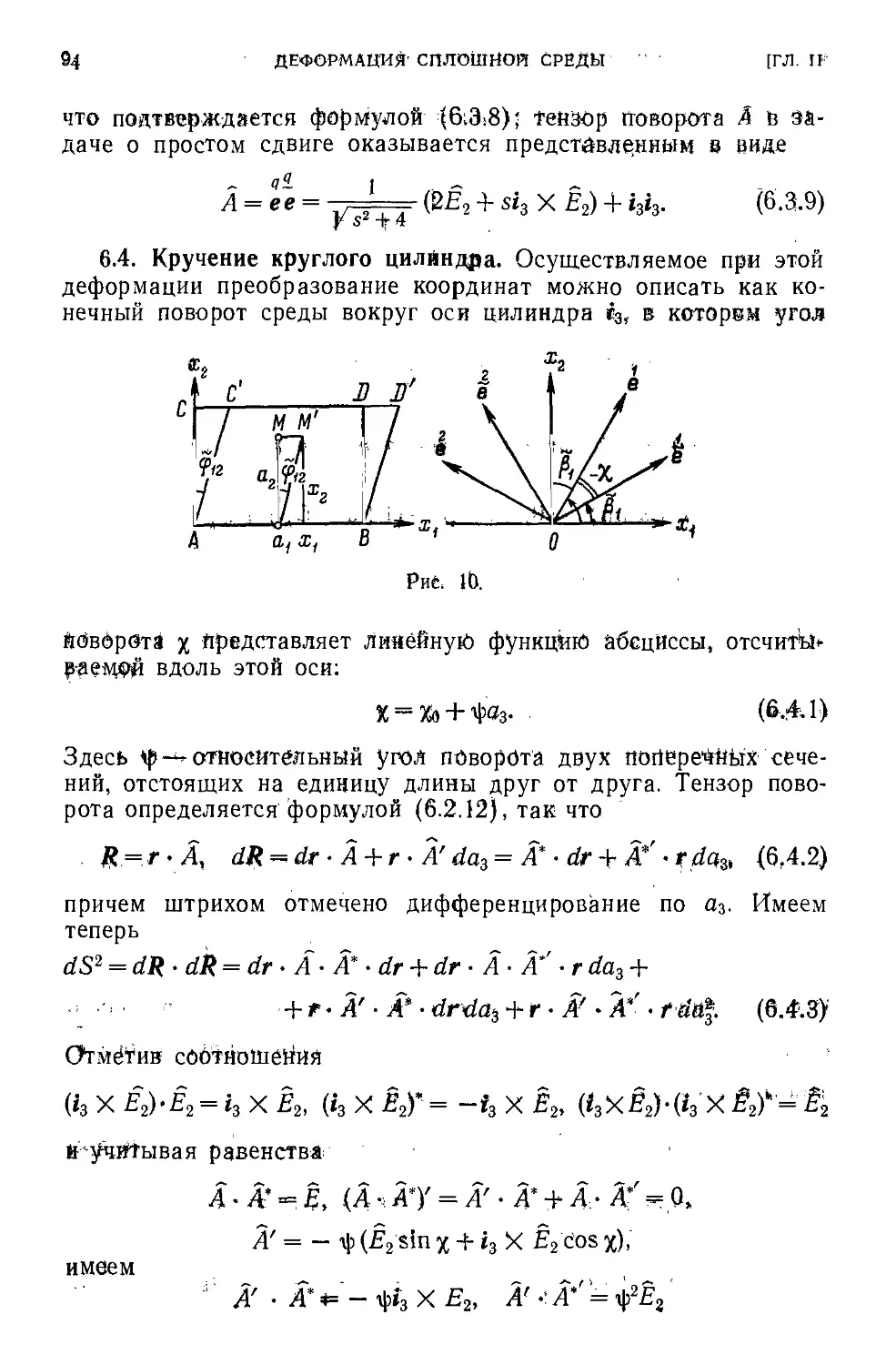
Простой сдвиг (92). 6.4. Кручение круглого цилиндра (94). 6.5. Цилиндрический изгиб
прямоугольной плиты (95). 6.6. Радиальио-снмметричная деформация полой сфе-
сферы (97). 6.7. Осесимметричная деформация полого цилиндра (98).
ЧАСТЬ II
УРАВНЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ 100
Глава III. Закон состояния линейной теории упругости 100
§ 1. Изотропная сплошная среда . . 100
1.1. Постановка задачи лииейиой теории упругости A00). 1.2. Элементарная рабо-
работа A02). 1.3. Изотропная однородная среда Геики A03).
§ 2. Потенциальная энергия деформации 106
2.1. Внутренняя энергия лииейио-деформируемого тела A06). 2.2. Изотермический
процесс деформирования A07). 2.3. Адиабатический процесс A08). 2.4. Удельная
потенциальная энергия деформации. Среды Геики A09).
§ 3. Обобщенный закон Гука • > ; И1
3.1. Модули упругости A11). 3.2. Удельная потенциальная энергия деформации ли-
иейио-упругого тела A14). 3.3. Формула Клапейрона. Область значений модулей
упругости A16). 3.4. Учет температурных слагаемых. Свободная энергия A18).
3.5. Термодинамический потенциал Гиббса A20). 3.6. Уравнение теплопроводно-
теплопроводности A21).
Глава IV. Основные соотношения лииейиой теории упругости .... 124
| 1. Дифференциальные уравнения линейной теории упругости 124
1.1. Перечень исходных соотношений A24). 1.2. Краевые условия A24). 1.3. Диф-
Дифференциальные уравнения теории упругости в перемещениях A26). 1.4. Представ-
Представление решения в форме Папковича - Нейбера A28). 1.5. Решение в напряжениях.
Зависимости Бельтрами A31). 1.6. Преобразование Ю. А. Круткова A33). 1.7. Ре-
Решение Буссииека-ГалеркинаA35). Ь8. Криволинейные кбордИиаты A36). 1.9. Орто-
Ортогональные координаты A38). 1.10. Аксиальио-симметричйые задачи. Решение Ля-
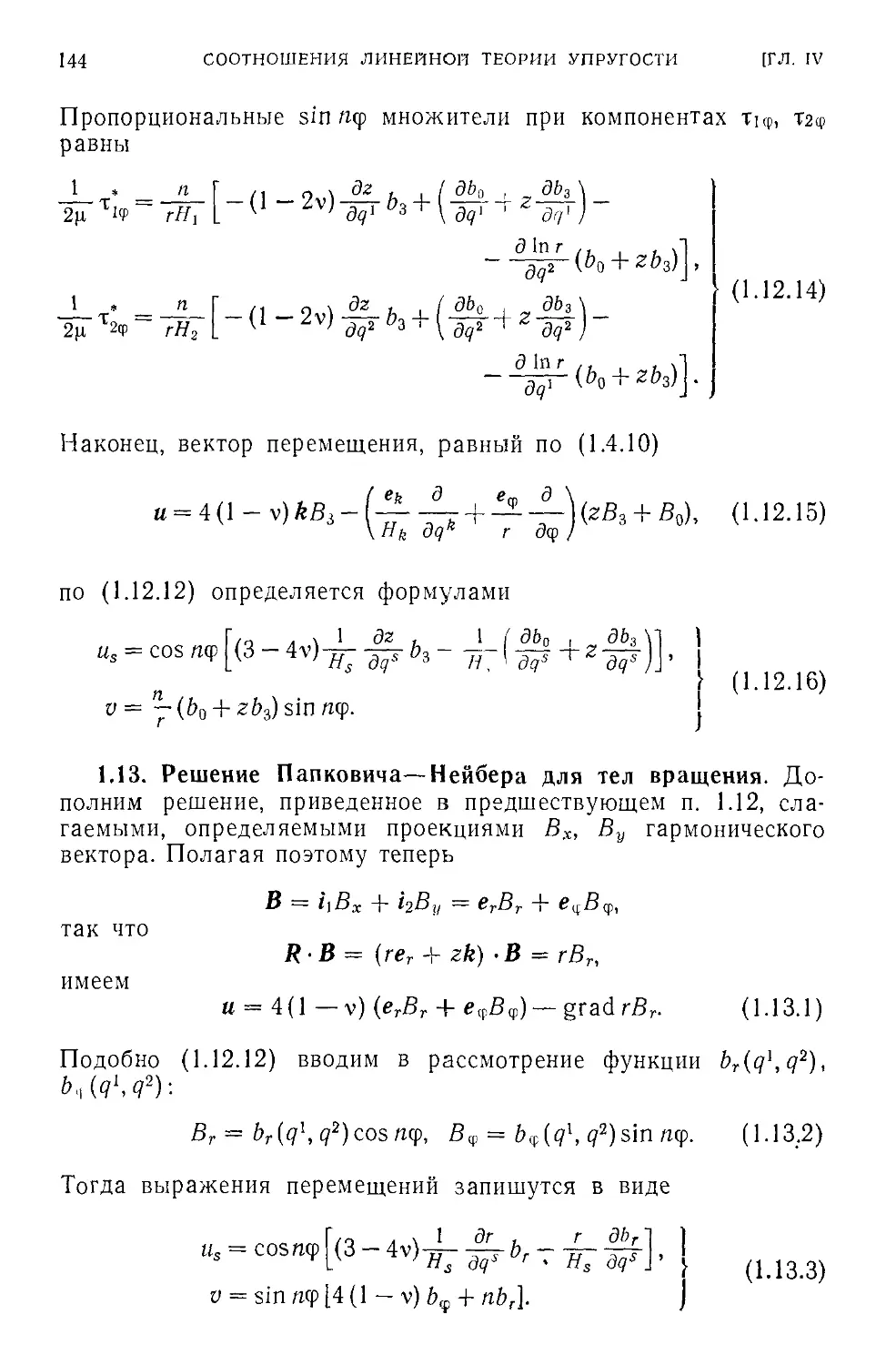
ва A39). 1.11. Кручение тела вращения A41). 1.12. Деформация тела вращения A41).
1.13. Решение Папковича - Нейбера для тела вращения A44). 1.14. Учет темпера-
температурных слагаемых A46).
§ 2. Вариационные принципы статики линейно-упругого тела 148
2.1. Стационарность потенциальной энергии системы A48). 22. Принцип минимума
потенциальной энергии системы A50). 2.3. Метод Ритца A53). 2.4. Способ Галер-
кииа A54). 2.5. Принцип минимума дополнительной рабртн A56). 2.6. Смешанный
ОГЛАВЛЕНИЕ 5
принцип стационарности (Е. Рейсснер, 1961) A59). 2.7. Вариационные принципы
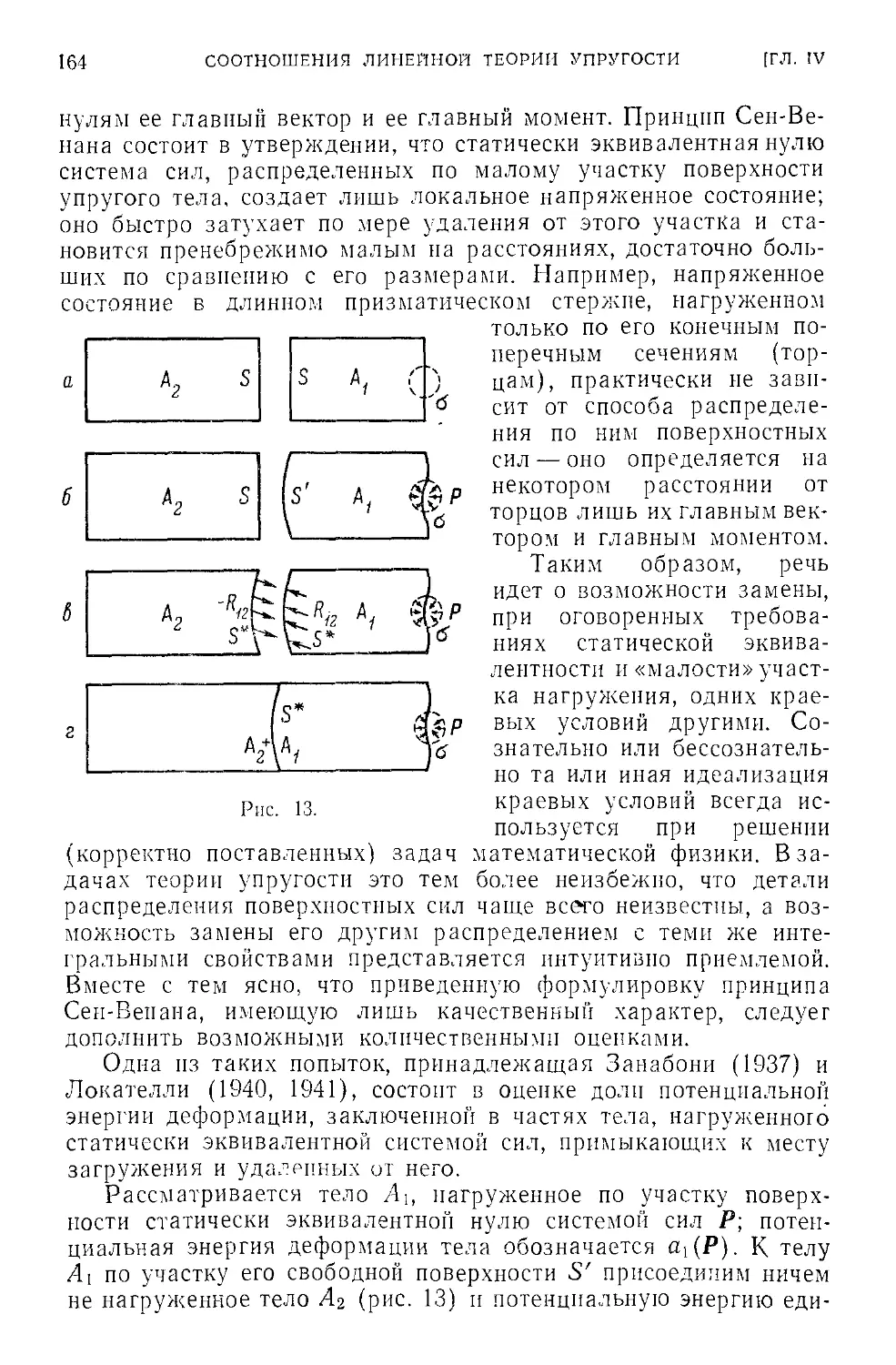
при учете температурных слагаемых A61). 2.8. Принцип Сеи-Венана. Энергетиче-
Энергетическое рассмотрение A63).
§ 3. Теорема взаимности. Потенциалы теории упругости 167
3 1. Формулировка н доказательство теоремы взаимности (Бетти, 1872) A67).
3.2. Тензор влияния. Теорема Максвелла A68). 3.3. Применение теоремы взаимно-
взаимности A69). 3.4. Теорема взаимности при учете температурных слагаемых A72).
3.5. Тензор влияния в неограниченной упругой среде A73). 3.6. Потенциалы теории
упругости A76). 3.7. Определение поля перемещений по заданию внешних сил и
вектора перемещения на поверхности тела A79). 3.8. О поведении потенциалов
теории упругости на бесконечности A81).
§ 4. Теоремы единственности и существования решений 182
4.1. Теорема Кирхгоффа A82). 4.2. Интегральные уравнения первой краевой за-
задачи A85). 4.3. Интегральные уравнения второй краевой задачи A87). 4.4. Сопо-
Сопоставление интегральных уравнений первой и второй краевых задач A90). 4.5. Тео-
Теорема существования решения второй внешней и первой внутренней задачи A91).
4.6. Вторая внутренняя краевая задача IlW A92). 4.7. Эластостатическая задача
Робеиа A93). 4.8. Первая внешняя краевая задача iW A96).
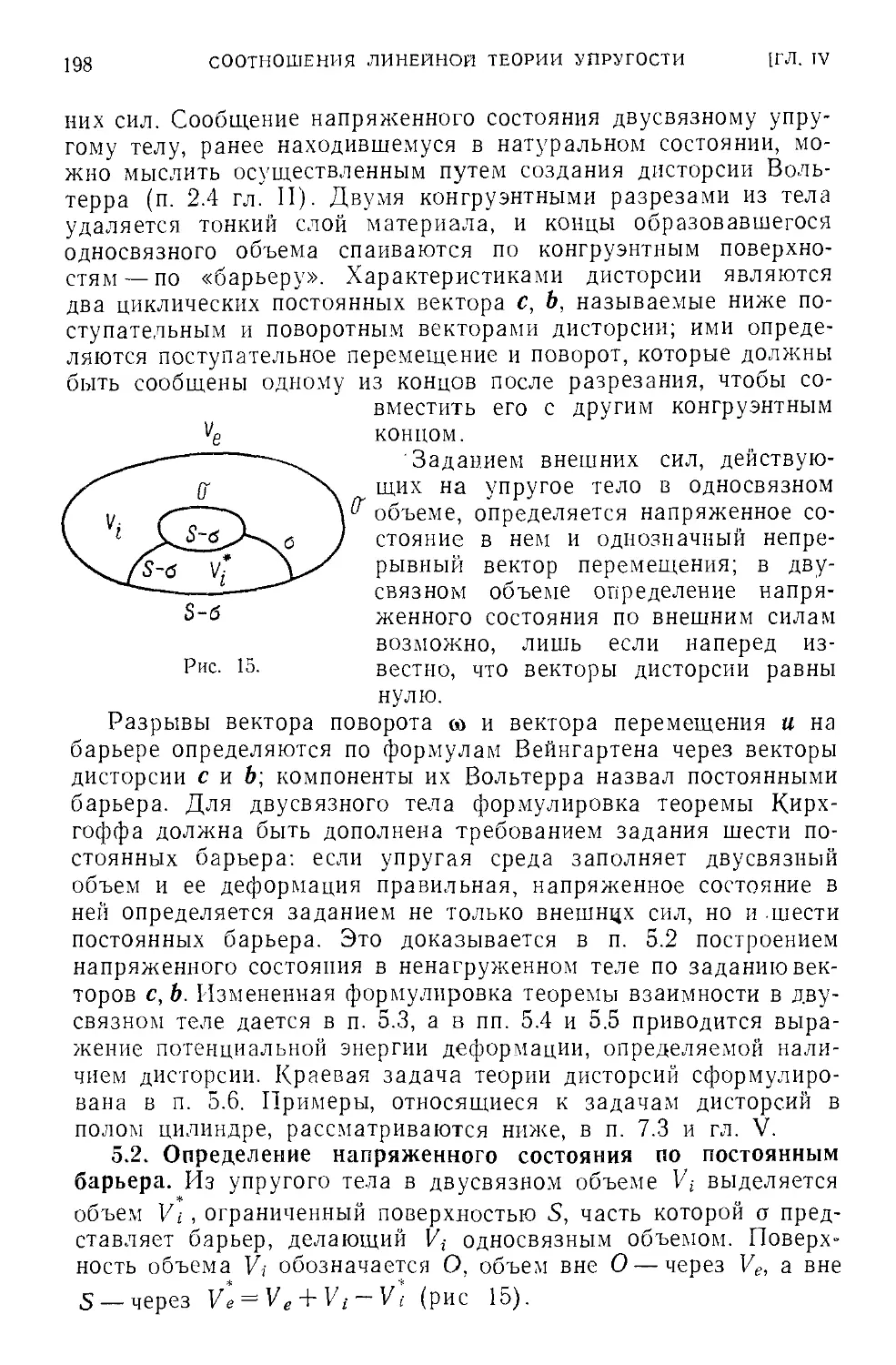
§ 5. Напряженное состояние в двусвязном объеме 197
5.1. Обзор содержания A97). 5.2. Определение напряженного состояния по постоян-
постоянным барьера A98). 5.3. Теорема взаимности B00). 5.4. Потенциальная энергия ди-
сторсии B01). 5.5. Случай тела вращения B02). 5.6. Краевая задача для двусвяз-
иого тела вращения B05).
ЧАСТЬ III
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ ... 207
Глава V. Пространственные задачи 207
§ 1. Неограниченная упругая среда 207
1.1. Силовые точечные особенности B07). 1.2. Система сил, распределенных в ма-
малом объеме. Формулы Лауричелла B09). 1.3. Интерпретация второго потенциала
теории упругости B15). 1.4. Потенциалы Буссииека B15). 1.5. Термоупругие пере-
перемещения B17). 1.6. Напряженное состояние, создаваемое включением B19).
§ 2. Упругое полупространство • 223
2.1. Задачи Буссинека и Черрути B23). 2.2. Частная задача Буссинека B24). 2.3. Рас-
Распределенная нормальная'нагрузка B25). 2.4. Применение функций Папковича — Ней-
бера к решению задачи Буссииека — Чеорути B27). 2.5. Тензор влияния в упругом
полупространстве B30). 2.6. Температурные напряжения в упругом полупростраяг-
стве B32). 2.7. Случай установившейся температуры B34). 2.8. О вычислении по-
потенциала простого слоя по плоской области B36). 2.9. Задача Дирихле для полу-
полупространства B37). 2.10. Первая краевая зацача для щолулрогтранства B40). 2.11.
Смешанные задачи для полупространства B41). 2.12. О принципе Сеи-Веиана.
Формулировка Мизеса B42). 2.13. Сверхстатическая система сил B44). 2.14. Тео-
Теоремы Стериберга A954) B46).
§ 3. Равновесие упругой сферы 247
3.1. Постановка задачи B47). 3.2. Первая краевая задача B48). 3.3. Эластостатн-
ческая задача Робеиа для шара B50). 3.4. Тепловые напряжения в шаре B51).
3.5. Вторая краевая задача для сферы B54). 3.6. Вычисление вектора перемеще-
перемещения B57). 3.7. Напряженное состояние в центре шара B59). 3.8. Тепловые напря-
напряжения B59). 3.9. Напряженное состояние в окрестности сферической полости B61).
3.10. Напряженное состояние в окрестности малой сферической полости в скручен-
скрученном цилиндрическом стержне B63). 3.11. Действие массовых сил B64). 3.12. Гра-
витирующнй шар B66). 3.13. Вращающийся шар B66). 3.14. Действие сосредото-
сосредоточенных сил B68). 3.15. Случай распределенной нагрузки B71).
§ 4. Тела вращения 272
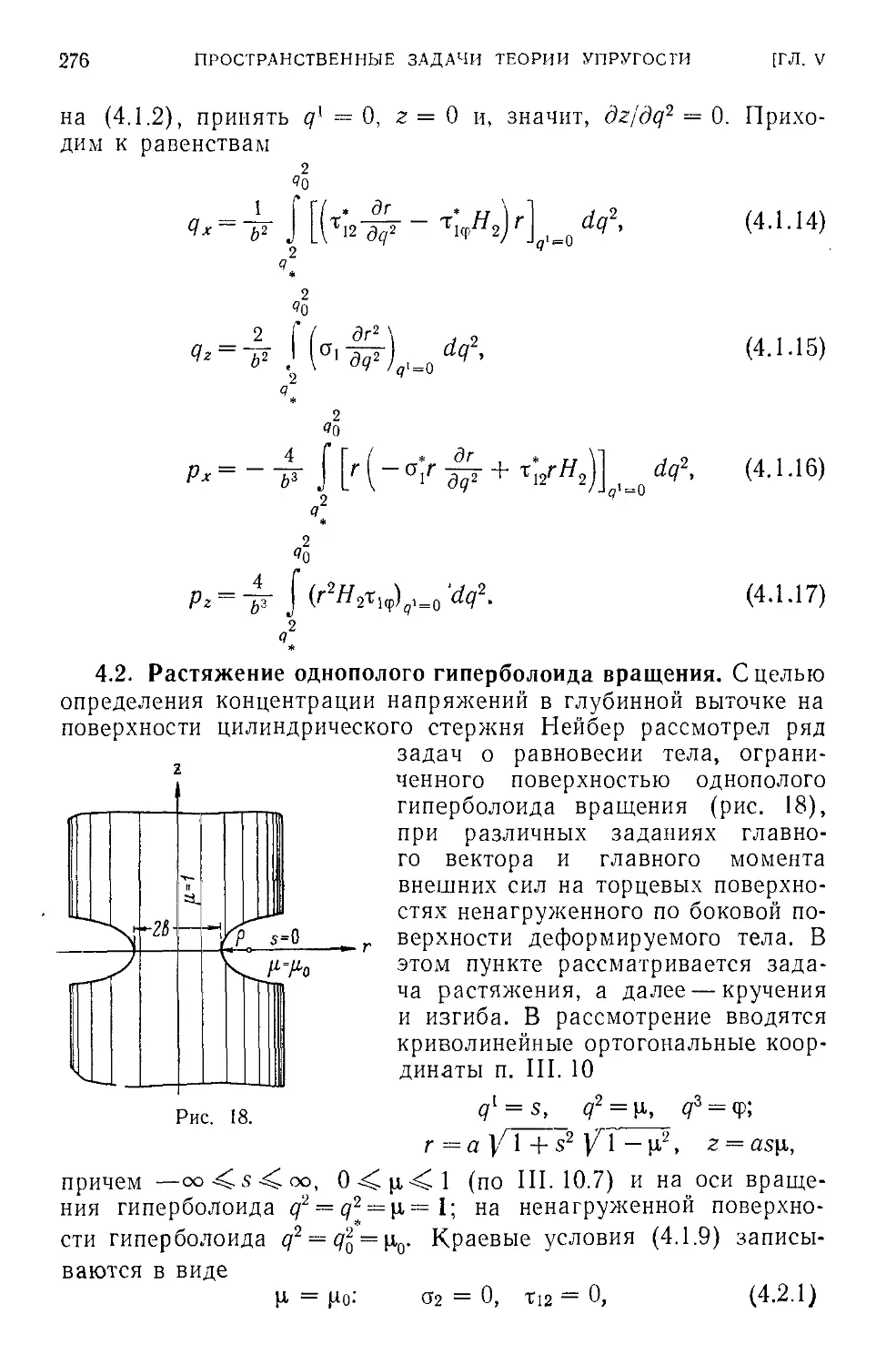
4.1. Интегральное уравнение равновесия B72). 4.2. Растяжение однополого гипер-
гиперболоида вращения B76). 4.3. Кручение гиперболоида B7$). 4.4. Н?гиб гипербр-
ДОида B80). 4,5. Вращающийся эллипсоид вращения <2&\),
6 ОГЛАВЛЕНИЕ
§ 5. Эллипсоид 284
5.1. Эластостатическая задача Робена для трехосного эллипсоида B84). 5.2. Посту-
Поступательное перемещение B85). 5.3. Распределение напряжений по поверхности эл-
эллипсоида B86). 5.4. Перемещение поворота B89). 5.5. Распределение напряжений
по поверхности эллипсоида B90). 5.6. Эллипсоидальная полость в неограниченной
упругой среде B92). 5.7. Краевые условия B95). 5.8. Выражения постоянных через
трн параметра B97). 5.9. Сфероидальная полость в упругой среде B99). 5.10. Кру-
Круговая щель в упругой среде C00). 5.11. Эллнптическаи щель в упругой среде C03).
§ 6. Контактные задачи 306
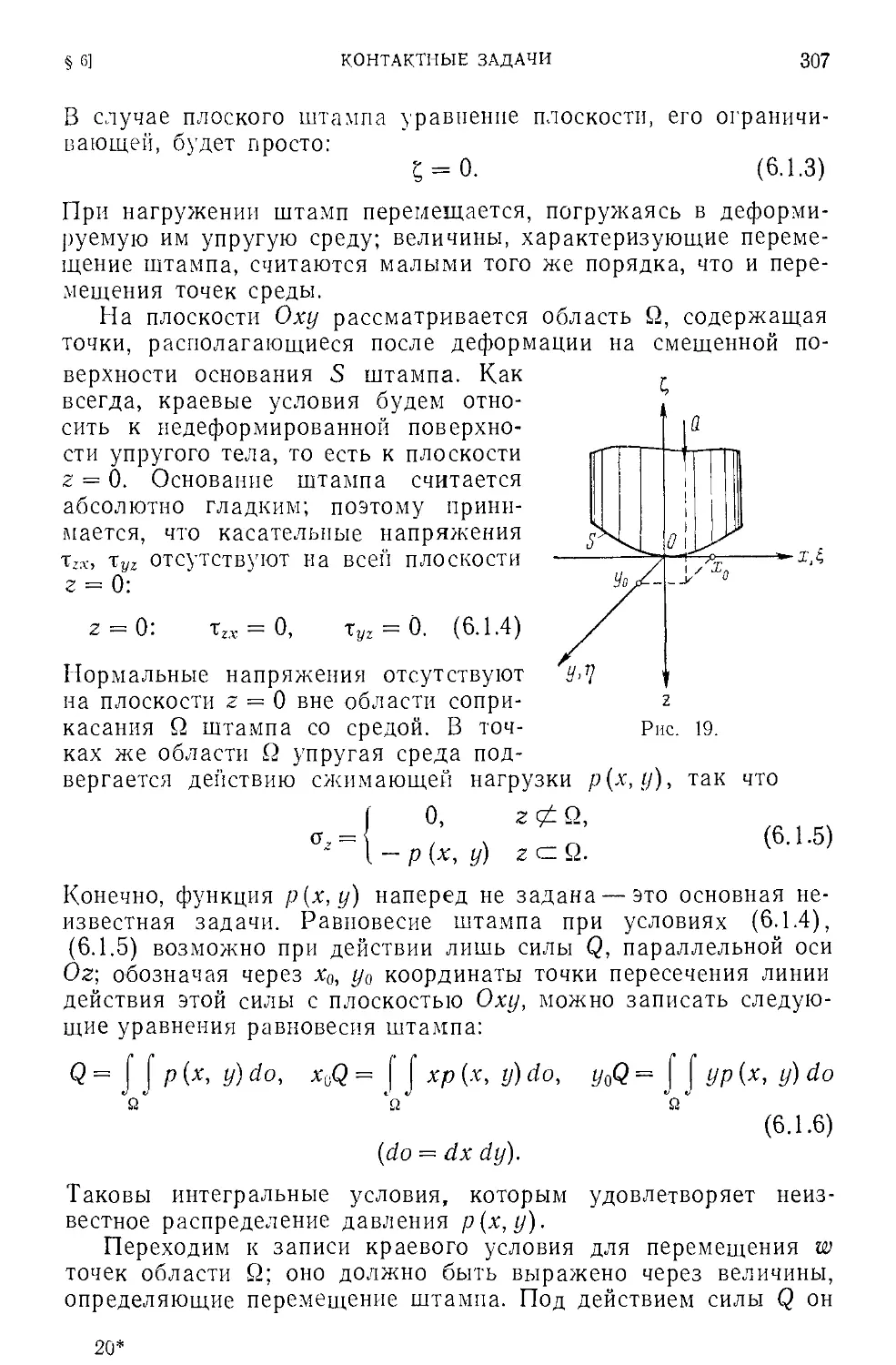
6.1. Задача о жестком штампе. Краевое условие. C06). 6.2. Способ решения за-
задачи о жестком штампе C10). 6.2а. Представление снл и моментов, прилагаемых
к неплоскому штампу C13). 6.3. Плоский, эллиптический в плане штамп C15).
6.4. Перемещения и напряжения C17). 6.5. Неплоский штамп C19). 6.5а. Определе-
Определение сил н моментов, действующих на неплоский, эллиптический в плане штамп C21).
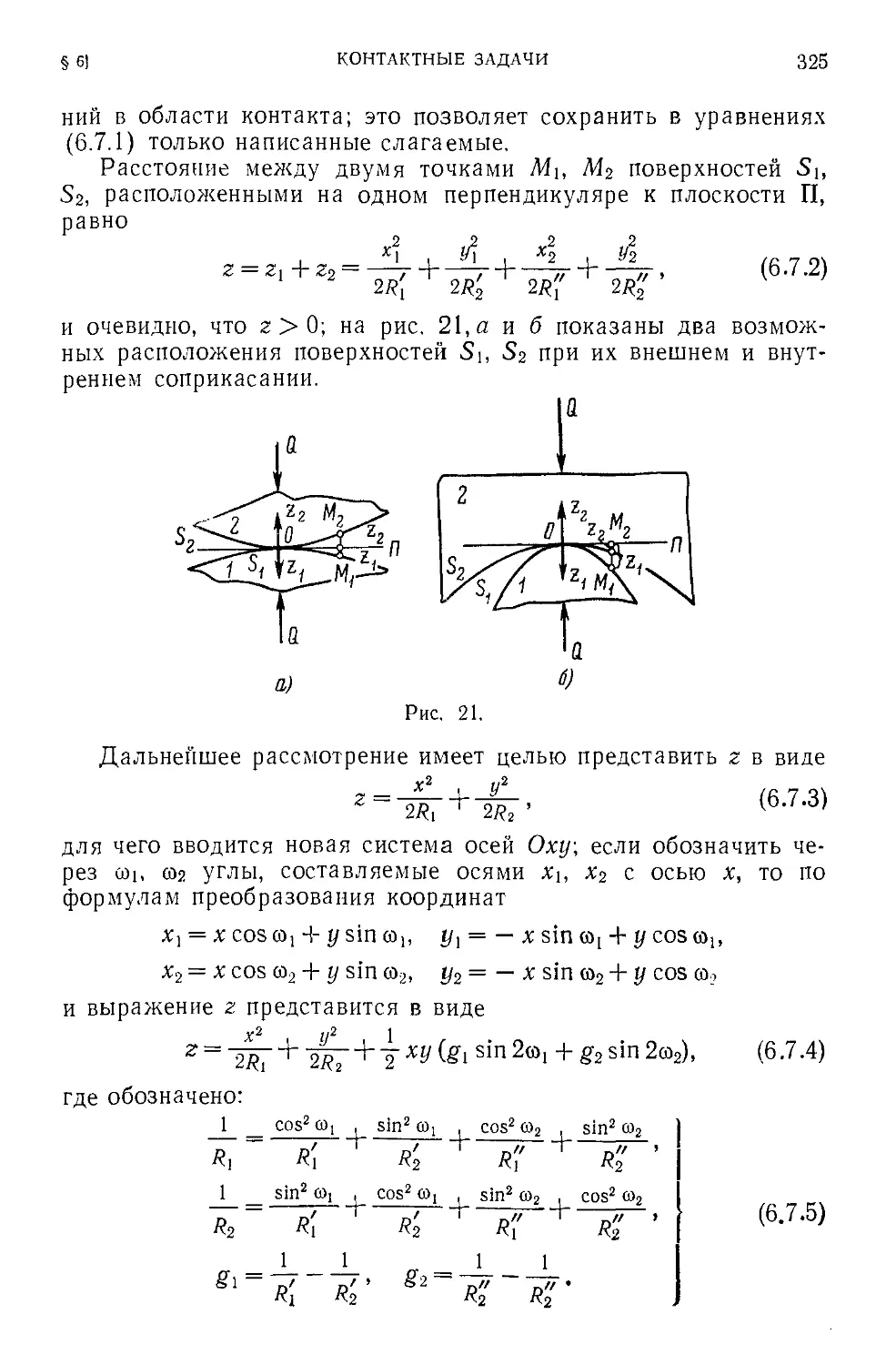
6.6. Перемещения и напряжения C23), 6.7. Соприкасание поверхностей C24).
6.8. Задача Герца о сжатии упругих тел C29).
§ 7. Равновесие упругого кругового цилиндра 331
7.1. Дифференциальные уравнения равновесия кругового цилиндра C31). 7.2. За-
Задача Ляме для полого цилиндра C35). 7.3 Дисторсни в полом цилиндре C37).
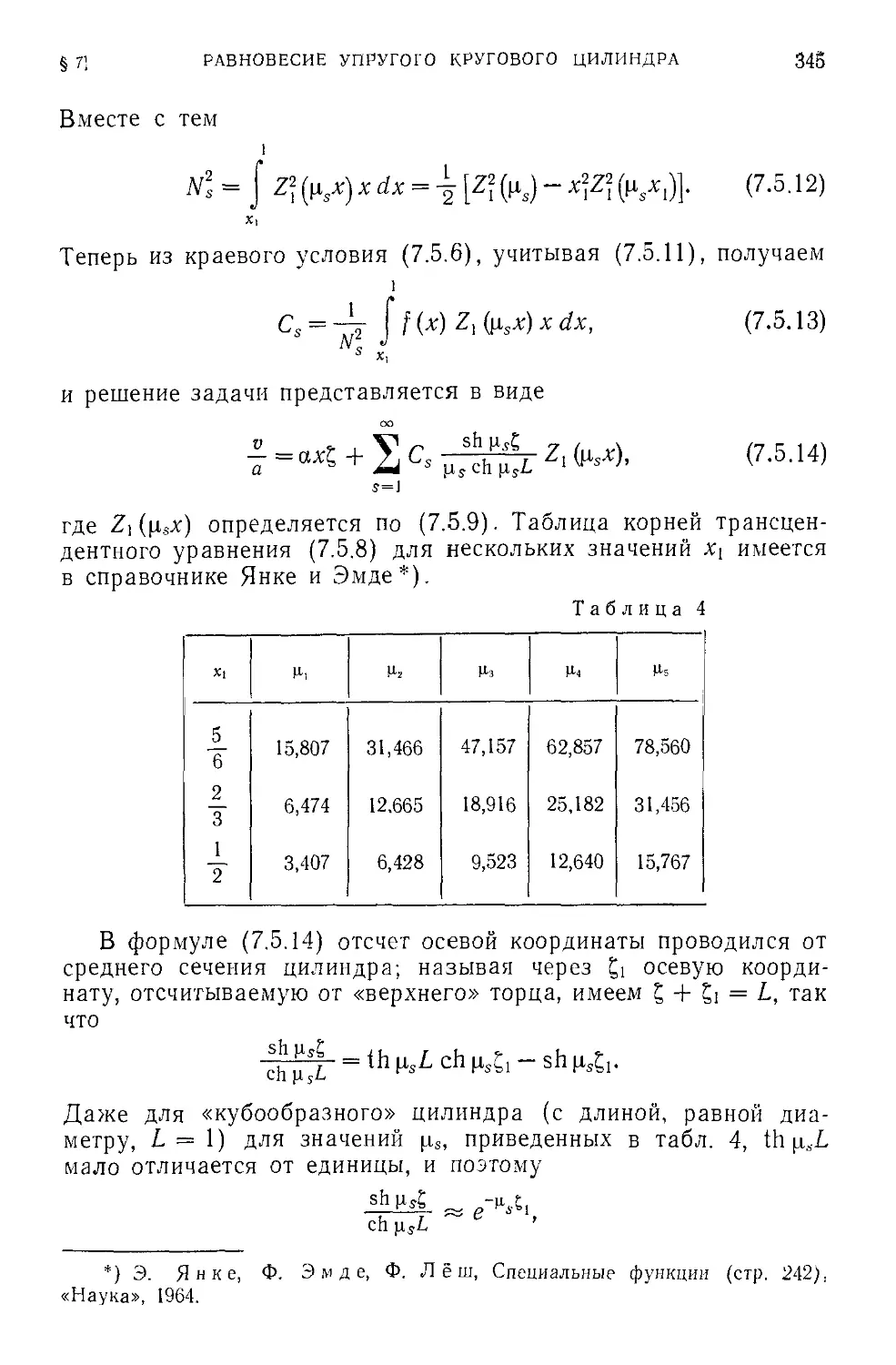
7.4. Полиномиальные решения задачи о равновесии цилиндра C39). 7.5. Кручение
полого цилиндра снламн, распределенными по торцу C43). 7.6. Решения в бессе-
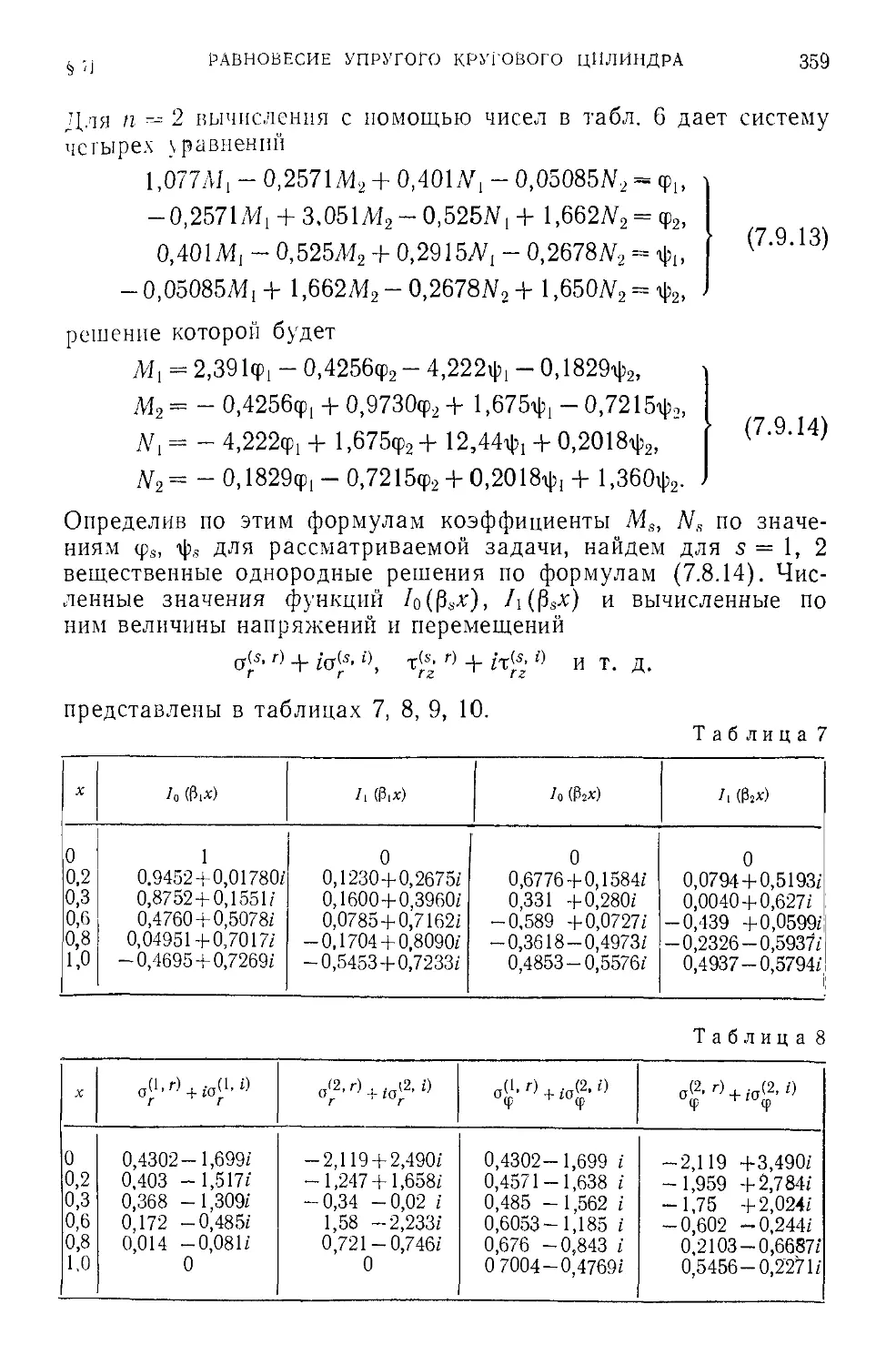
бесселевых функциях C46). 7.7. Задача Файлона C50). 7.8. Однородные решения C53).
7.9. Краевые условия иа торцах C56). 7.10. Обобщенная ортогональность C60).
Глава VI. Задача Сен-Венана 366
§ 1. Напряженное состояние 366
1.1. Постановка задачи Сен-Венана C66). 1.2. Интегральные уравнения равнове-
равновесия C67). 1.3. Основные предположения C68). 1.4. Нормальное напряжение аг в за-
задаче Сен-Венана C69). 1.5. Касательные напряжения xxz> Xyz C70).
§ 2. Приведение к краевым задачам для уравнений Лапласа и Пуассона 372
2.1. Введение функций напряжений C72). 2.2. Перемещения в задаче Сен-Вена-
Сен-Венана C74). 2.3. Упругая линия C77J. 2.4. Классификация задач Сен-Венана C79).
2.5. Определение постоянной а C81). 2.6. Центр жесткости C84). 2.7. Элементарные
решения C85).
§ 3. Задача о кручении 388
3.1. Постановка задачи C88). 3.2. Перемещения C90). 3.3. Теорема о циркуляции
касательных напряжений C92). 3.4. Жесткость при кручений C94). 3.5. Мембранная
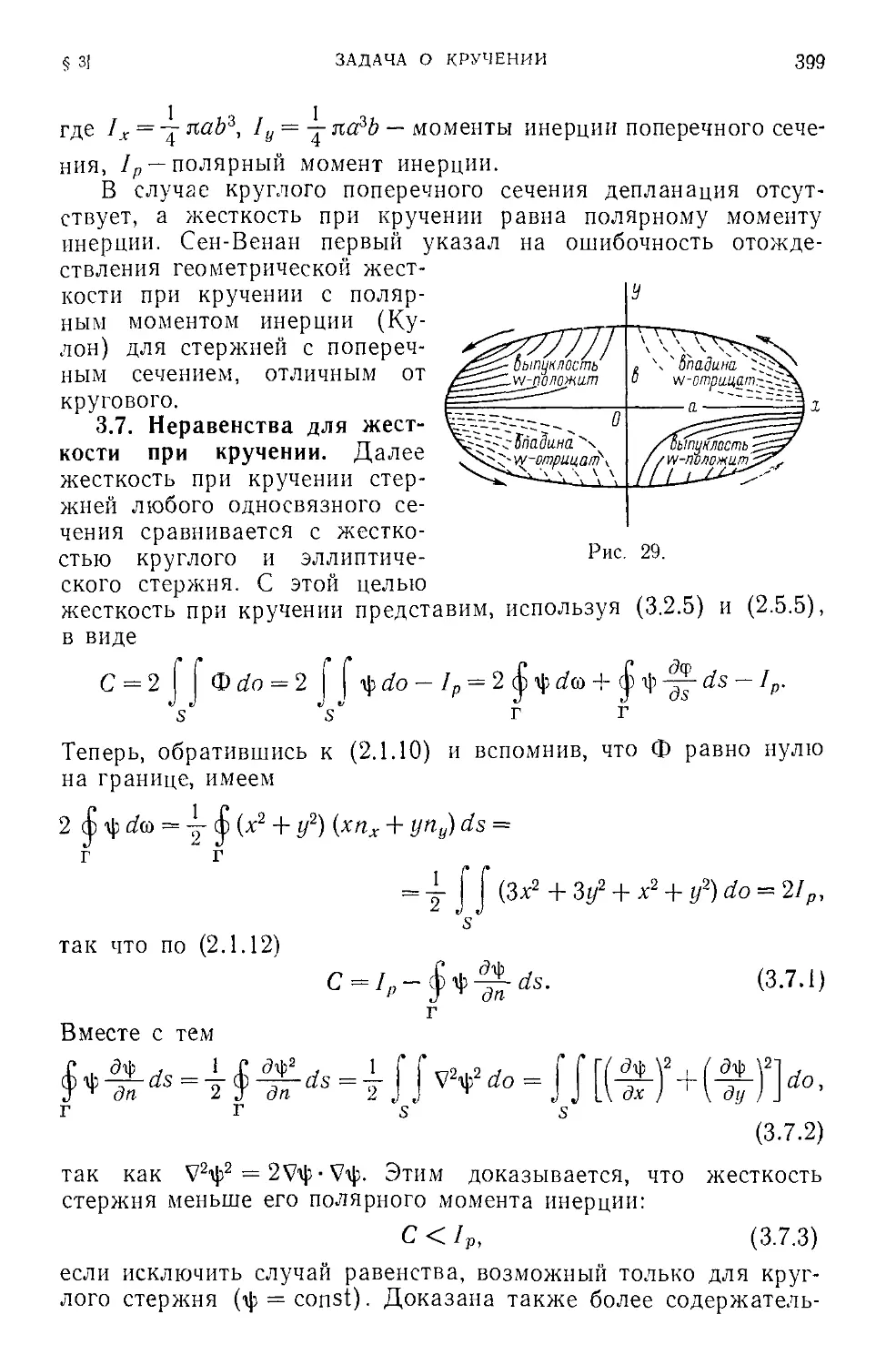
аналогия Прандтля A904) C95). 3.6. Кручение стержня эллиптического сечения C97).
3.7. Неравенства для жесткости при кручений C99). 3.8. Кручение стержня прямо-
прямоугольного сечения D01). 3.9. Решения в конечном виде D03). 3.10. Двусвязная
область Г405). 3.11. Эллиптическое кольцо D07). 3.12. Эксцентрическое кольцо D09).
3.13. Вариационное определение функции напряжений D12). 3.14. Приближенное
решение задачи кручення D16). 3.15. Удлиненные профили D20). 3.16. Кручение
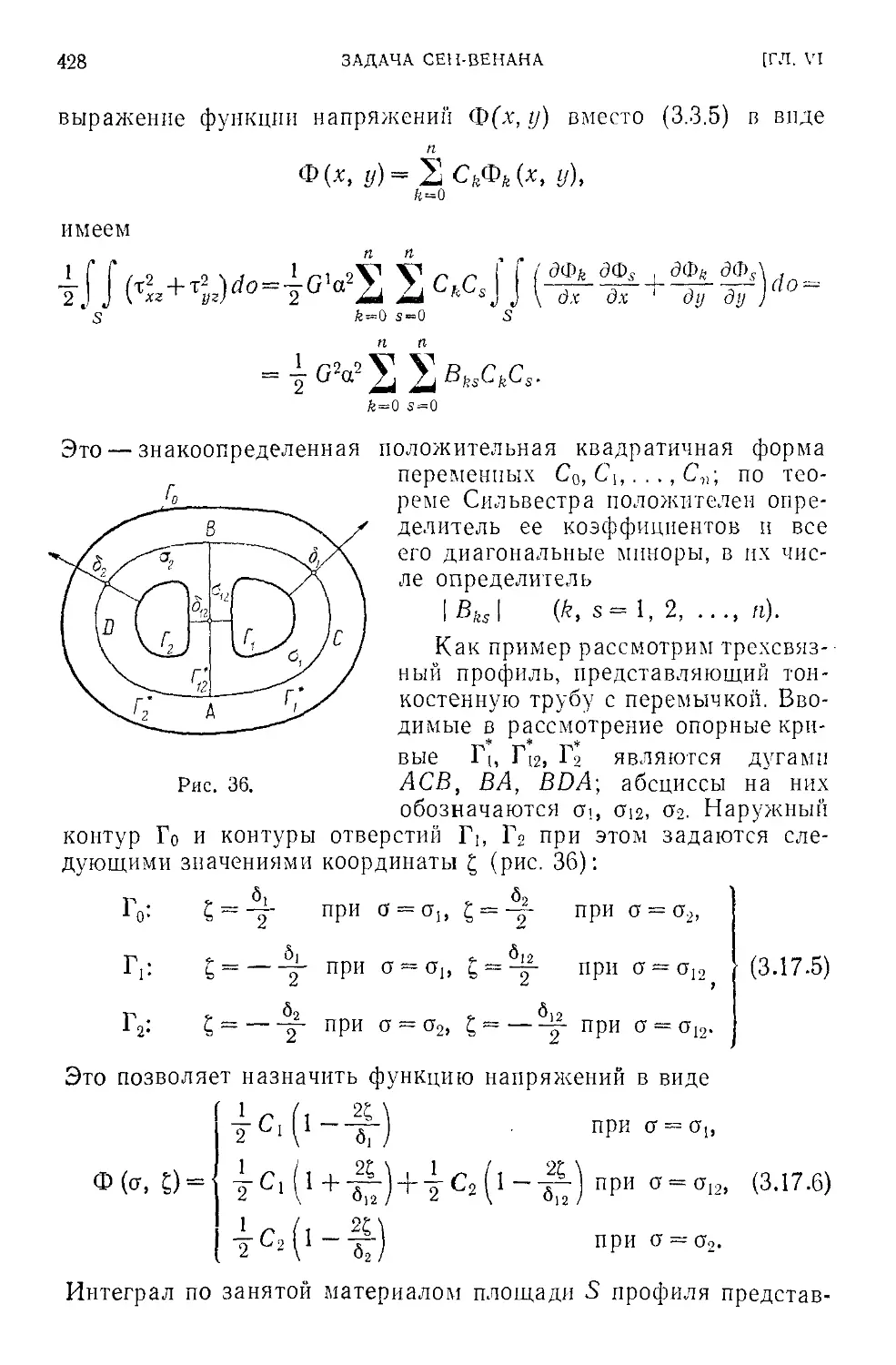
тонкостенной трубы D24). 3.17. Многосвязные области D27).
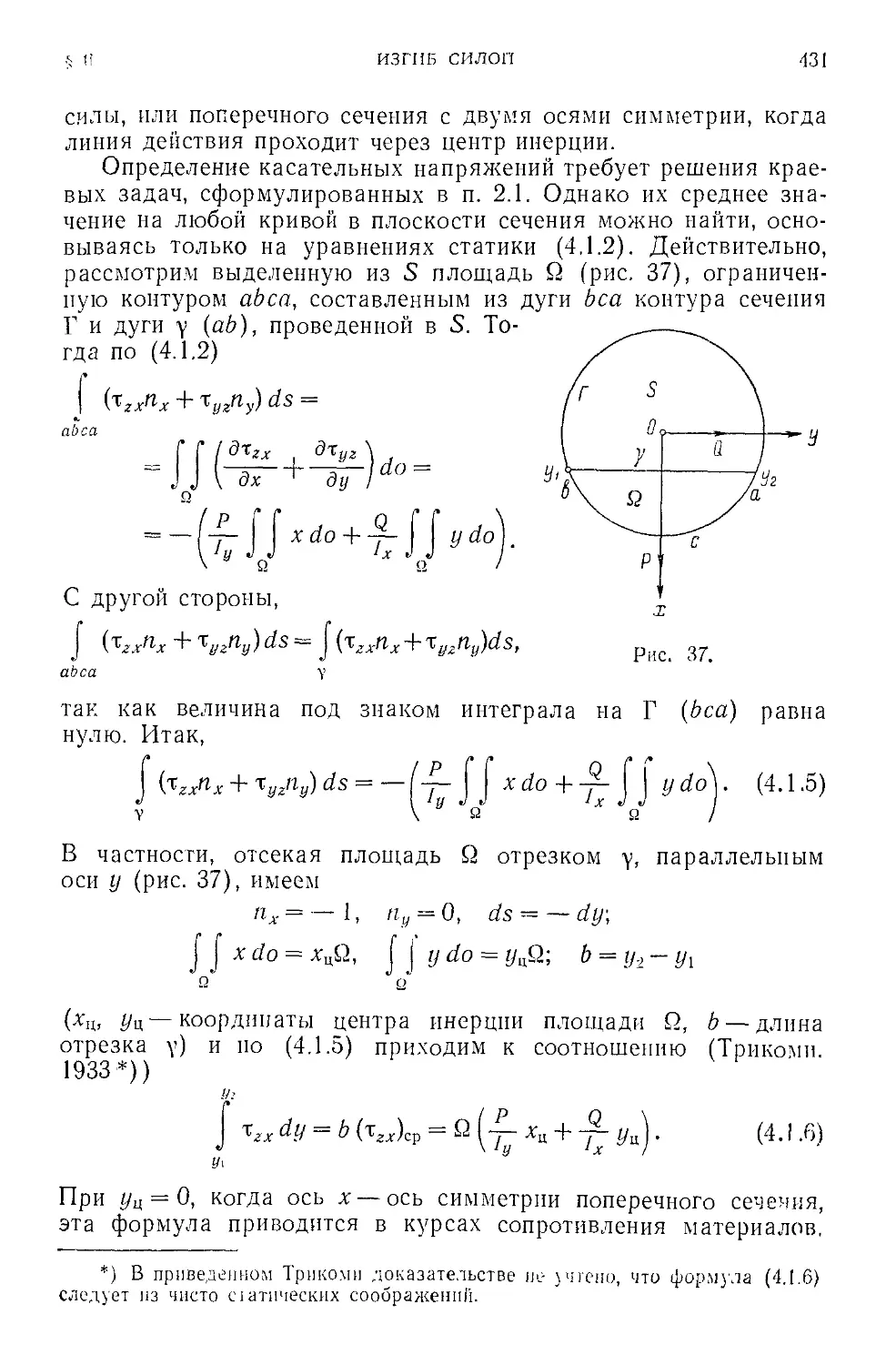
§ 4. Изгиб силой 430
4.1. Напряжения D30). 4.2. Изгнб стержня эллиптического поперечного сече-
ння D32). 4.3. Функция напряжений С. П. Тимошенко D33). 4.4. Прямоугольное
поперечное сечение D34). 4.5. Вариационная формулировка задачи изгиба D37).
4.6. Центр жесткости D39). 4.7. Приближенные решения D41). 4.8. Авиационный
профиль D43).
§ 5. Задача Мичелла 443
5.1. Постановка задачи D45). 5.2. Распределение нормальных напряжений D47).
S.J. Растяжение стержня D49). 5.3а. Растяжение стержня силами постоянной
интенсивности D51). 5.4. Касательные напряжения т^., хХуг D53). 5.5. Напряжения
"*' V хху и54)- 5-6- °пределенне ст° D56). 5.7. Изгиб тяжелого стержня D57).
5.8. Средние значения напряжений D59). 5.9. О задаче Альманэи D61).
ОГЛАВЛЕНИЕ 7
Глава VII. Плоская задача теории упругости 462
§ 1. Постановка плоских задач теории упругости 462
1.1. Плоская деформация D62). 1.2. Функция напряжений Эри D65). 1.3. Дифферен-
Дифференциальное уравнение для функции напряжений D66). 1.4. Плоское напряженное со-
состояние D67). 1.5. Обобщенное плоское напряженное состояние D69). 1.6. Плоская
задача D70). 1.7. Перемещения в плоской задаче D71). 1.8. Главный вектор и
главный моментD73). 1.9. Ортогональные криволинейные координаты D74). 1.10. По-
Полярные координаты иа плоскости D75). 1.11. Представление бигармонической функ-
функции D75). 1.12. Введение комплексного переменного D76). 1.13. Преобразование
формул плоской задачи D77). 1.14. Формула Гурса D79). 1.15. Перенос начала
координат D81).
§ 2. Балка и брус с круговой осью 482
2.1. Постановка плоской задачи о балке и плите D82). 2.2. Плоская задача Сен-
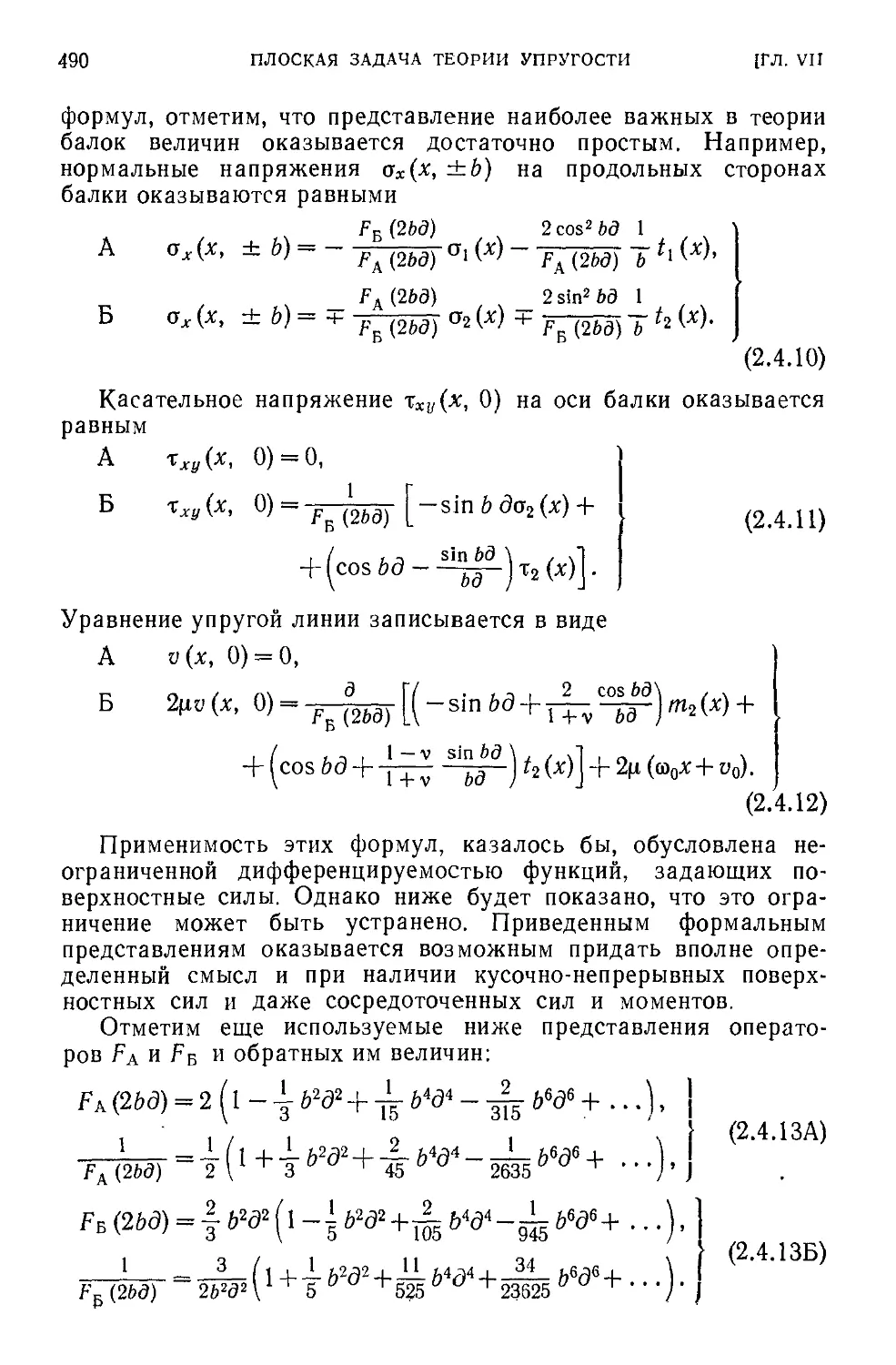
Венана D84). 2.3. Операторное представление решений D86). 2.4. Функция напря-
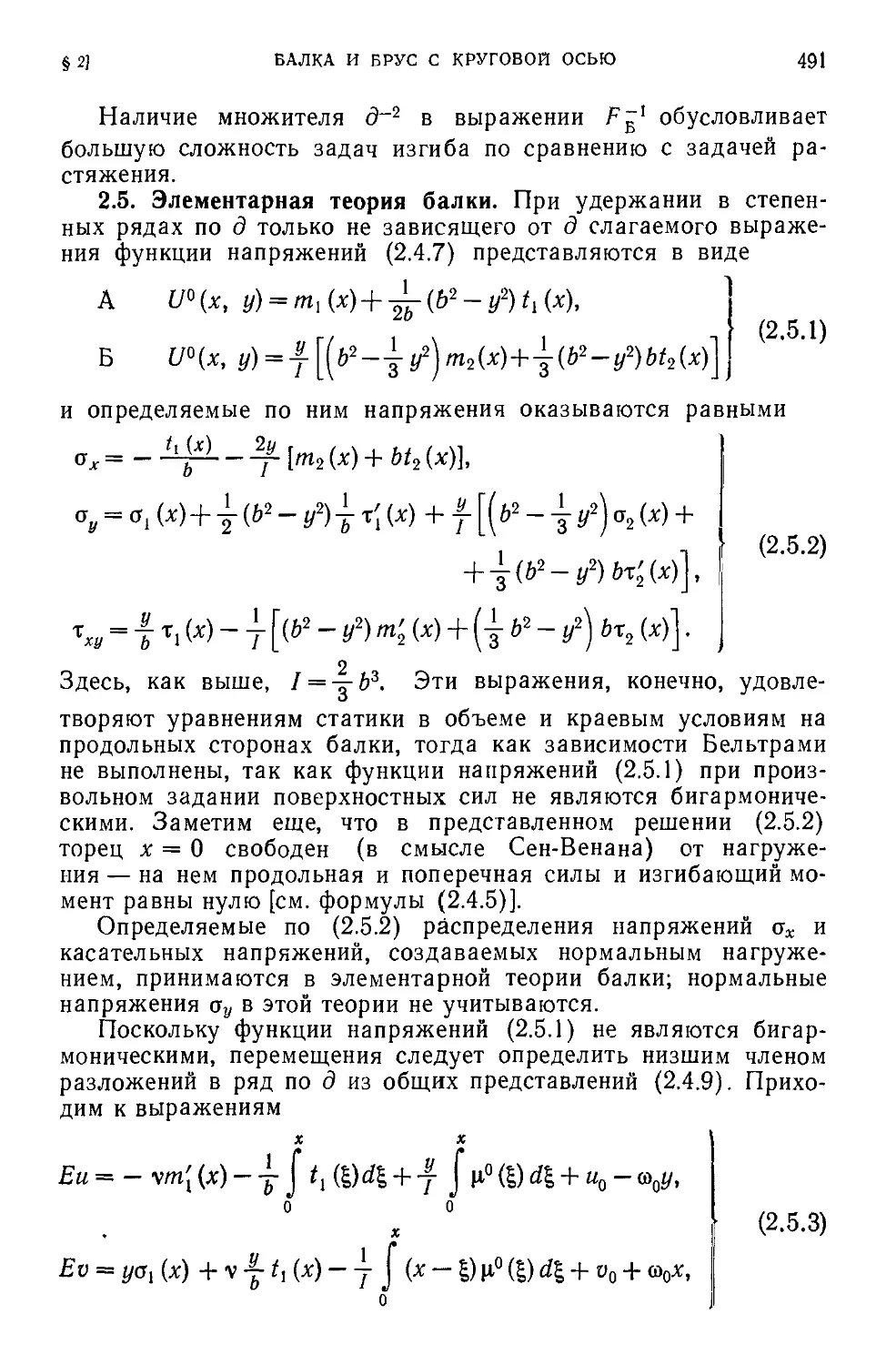
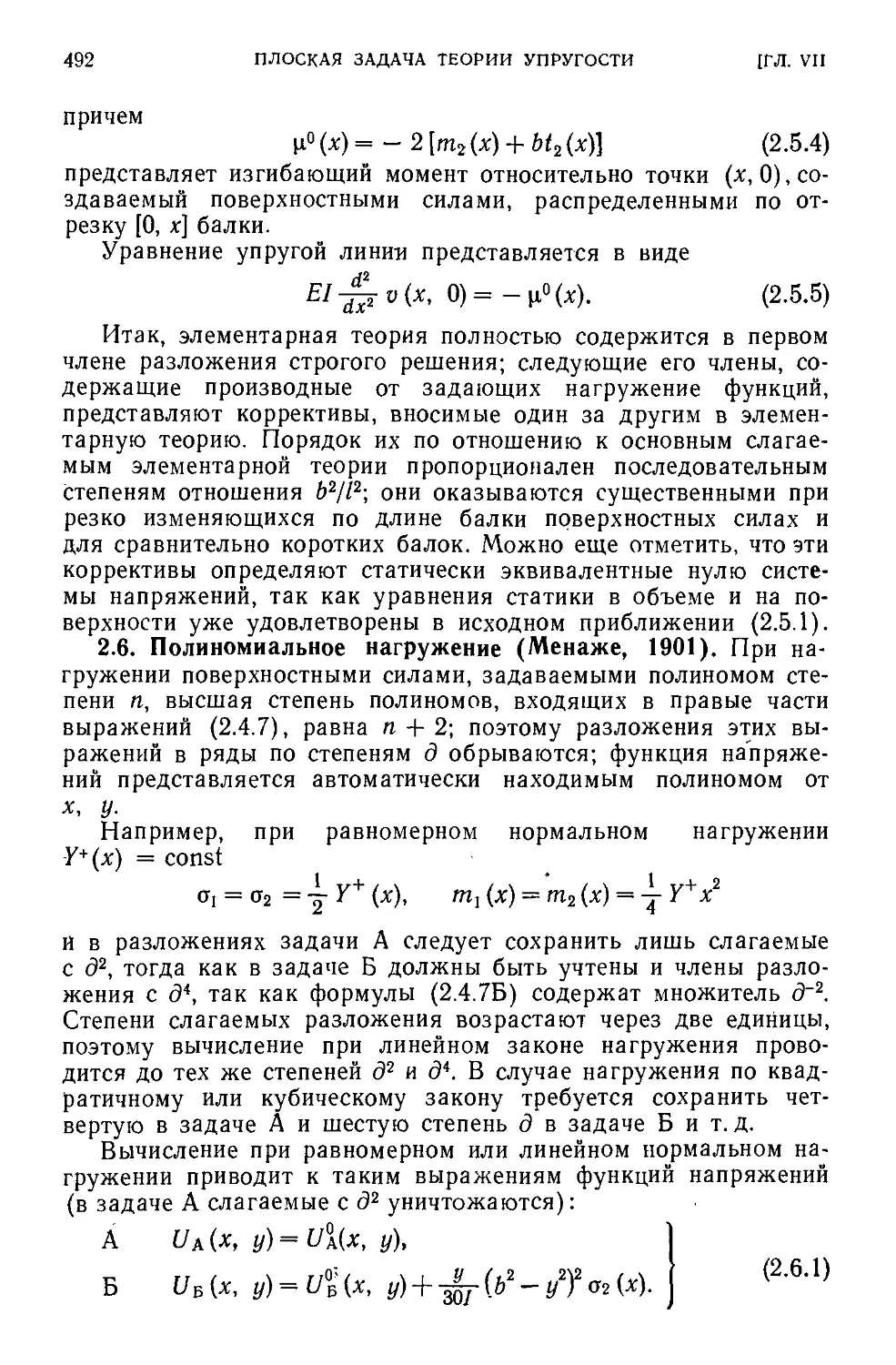
напряжений в задаче о полосе D87). 2.5. Элементарная теория балки D91). 2.6. Полино-
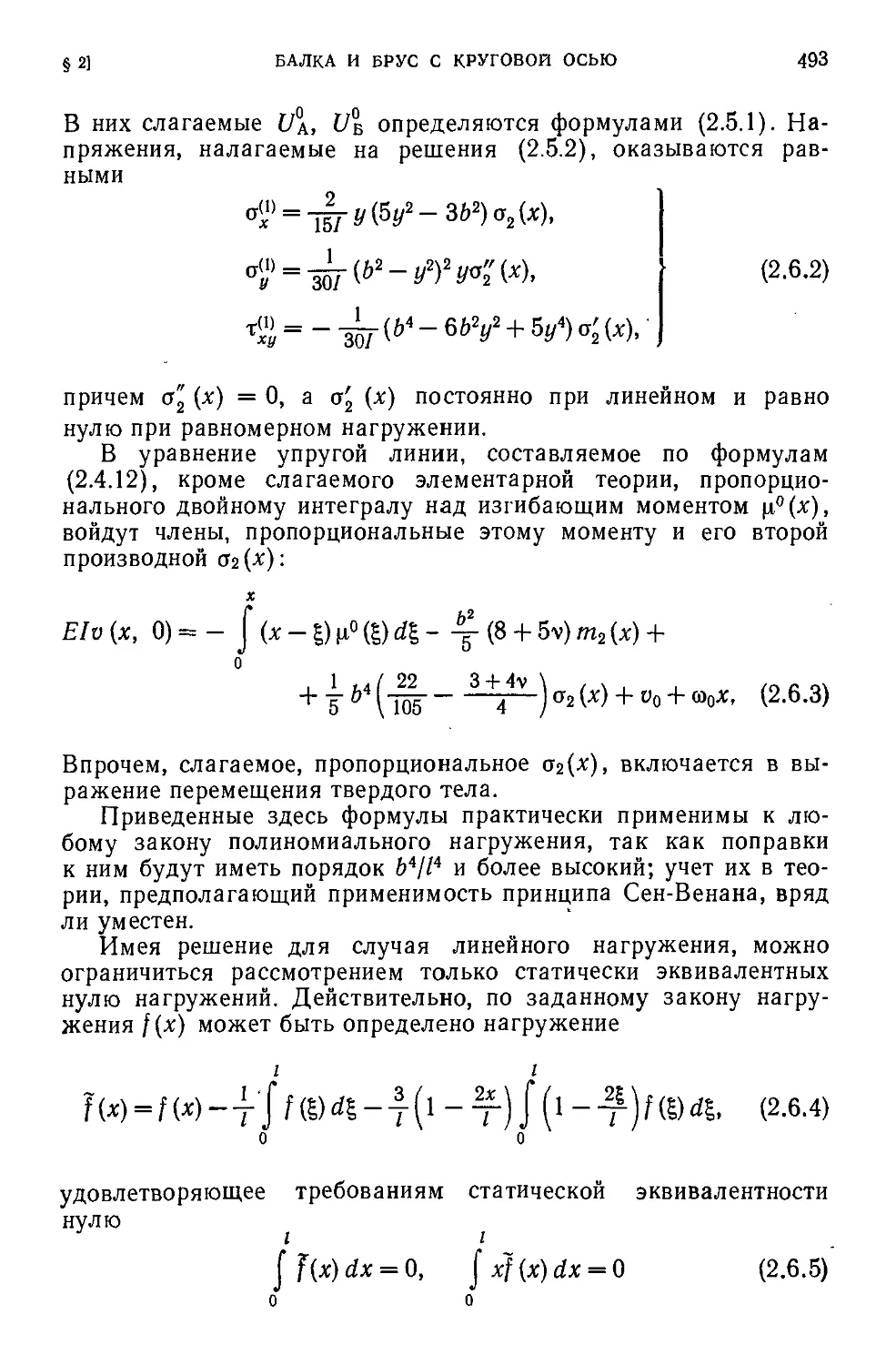
Полиномиальное иагружеиие (Менаже, 1901) D92). 2.7. Синусоидальное нагружение (ре-
(решения Рибьера A898) и Файлона A903)) D94). 2.8. Сосредоточенная сила (Карман н
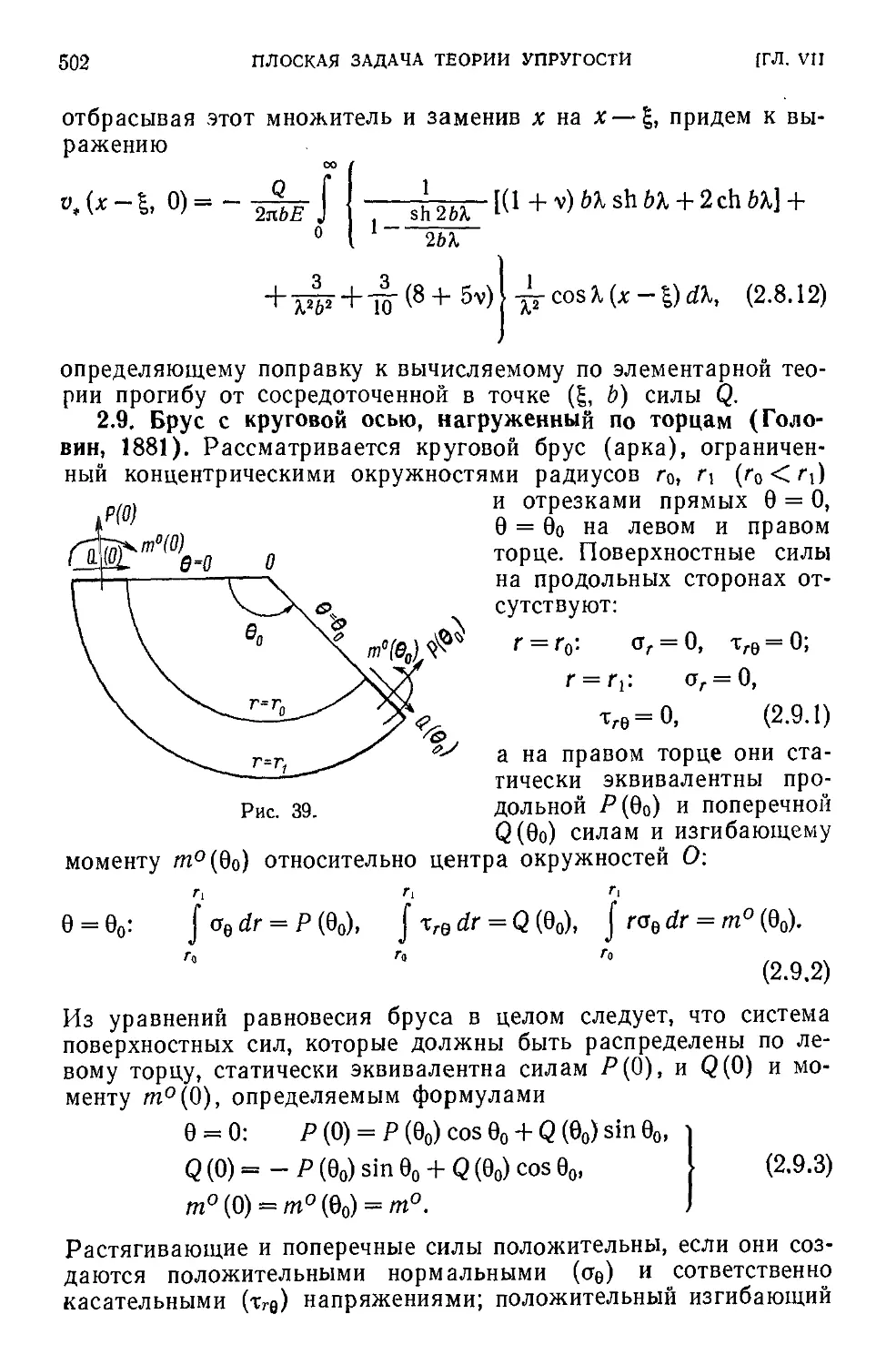
Зеевальд, 1927) D97). 2.9. Брус с круговой осью, нагруженный по торцам (Голо-
(Головни, 1881) E02). 2.10. Нагружение кругового бруса по поверхности E06). 2.11. Ко-
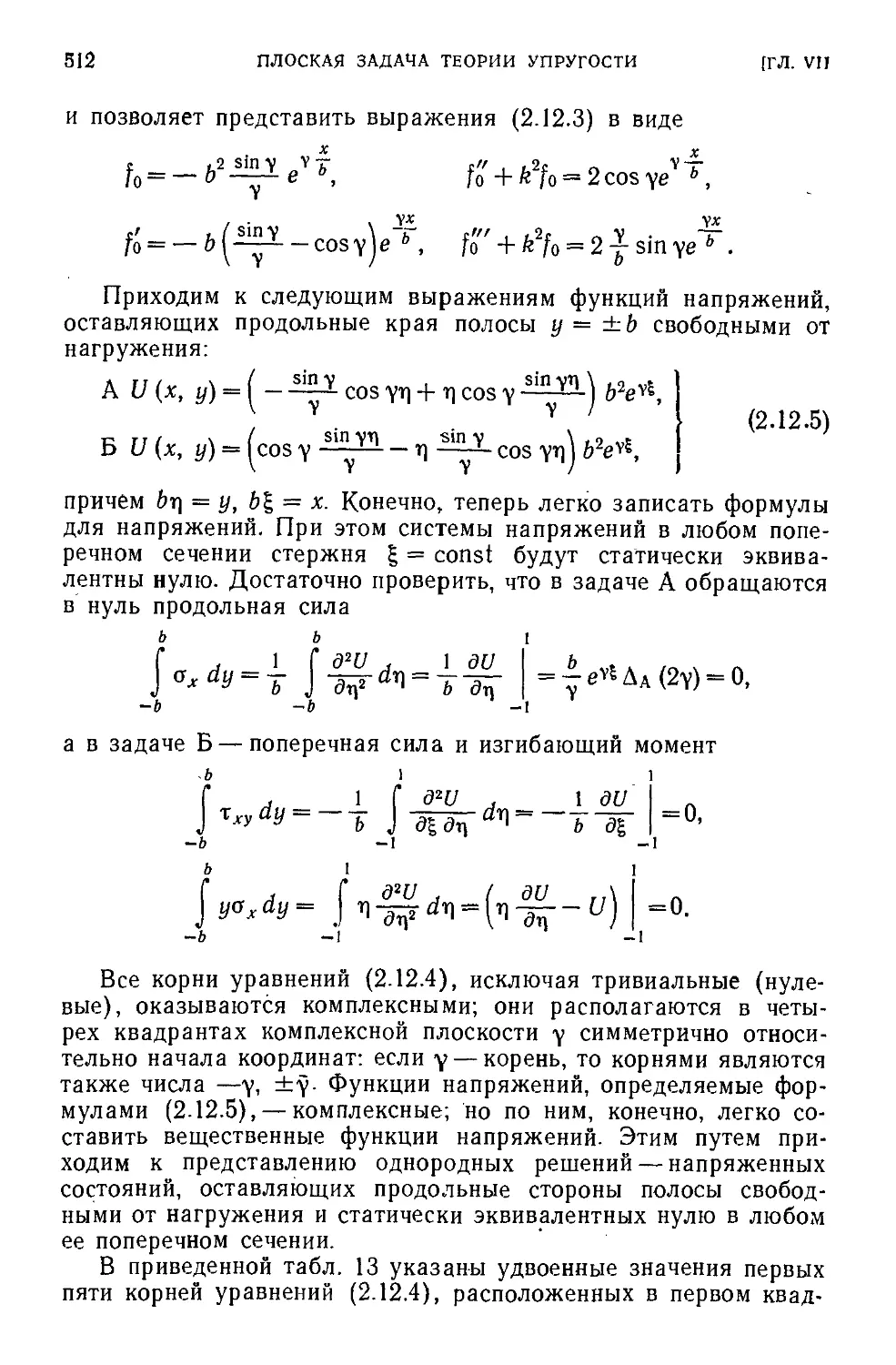
синусондальное нагружение E09). 2.12. Однородные решения E11).
§ 3. Упругая плоскость и полуплоскость 513
3.1. Сосредоточенная сила и сосредоточенный момент в упругой плоскости E13).
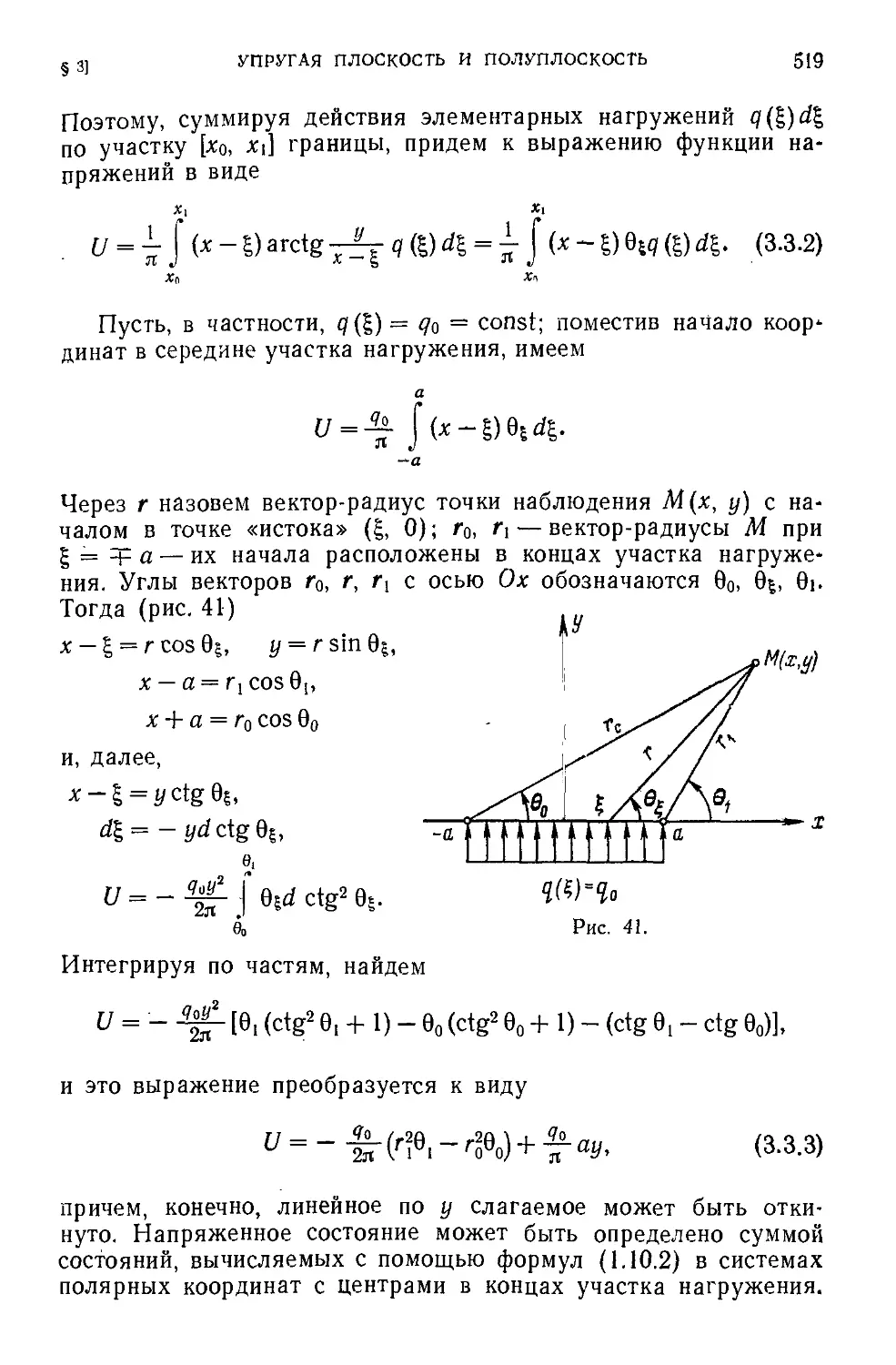
3.2. Задача Фламана A892) E16). 3.3. Общий случай нормального нагружеиия E18).
3.4. Нагружение силой, направленной вдоль границы E20). 3.5. Плоская контакт-
контактная задача E22). 3.6. Построение потенциала со E24). 3.7. Плоский штамп E28).
3.8. Штамп параболического очертания E28). 3.9. Сосредоточенная сила в упругой
полуплоскости E29).
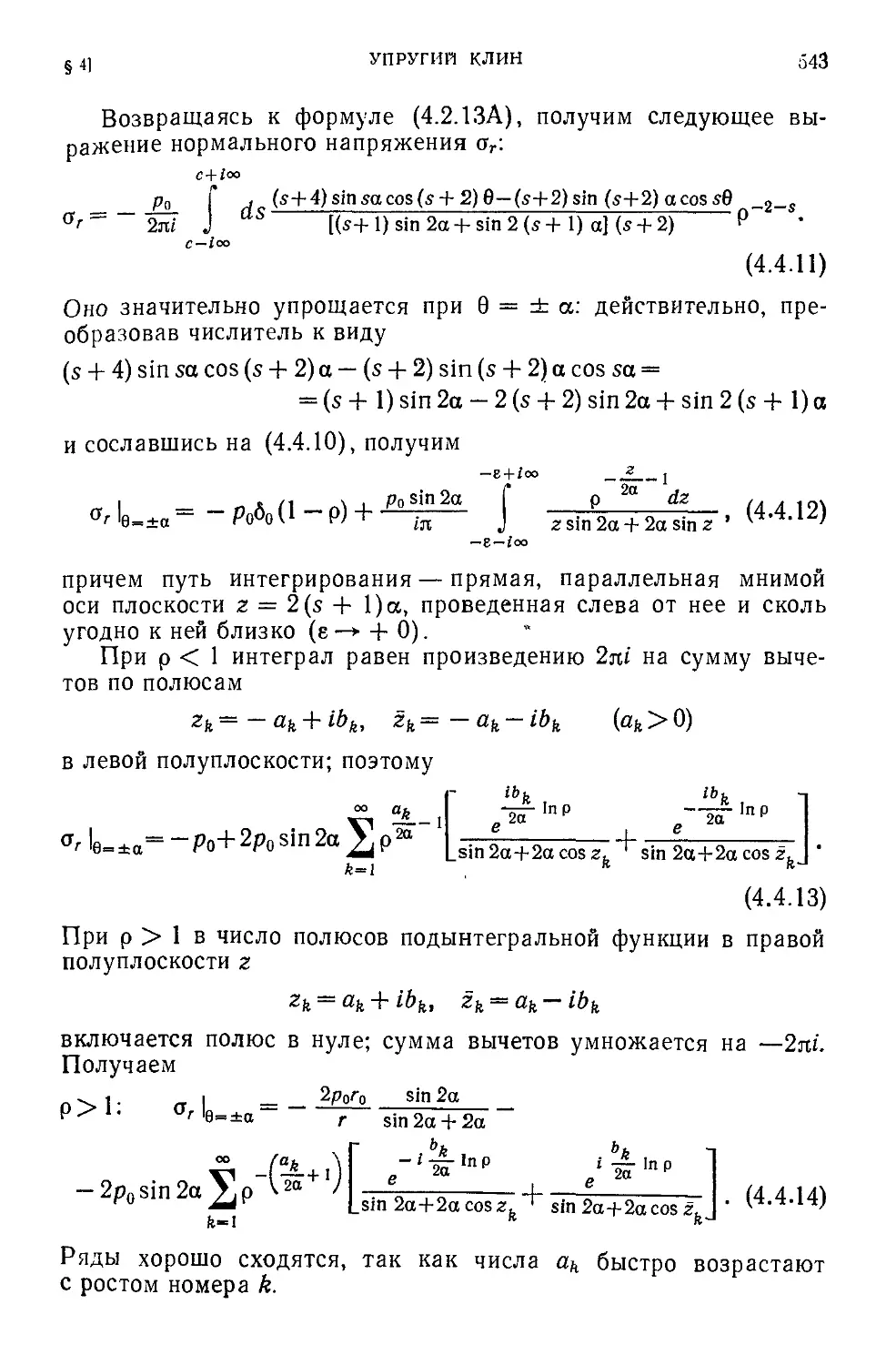
§ 4. Упругий клин 531
4.1. Сосредоточенная сила в вершине клнна E31). 4.2. Интегральное преобразова-
преобразование Меллина в задаче о клане E33). 4.3. Сосредоточенный момент в вершине
клнна E37). 4.4. Нагружение боковых граней E40).
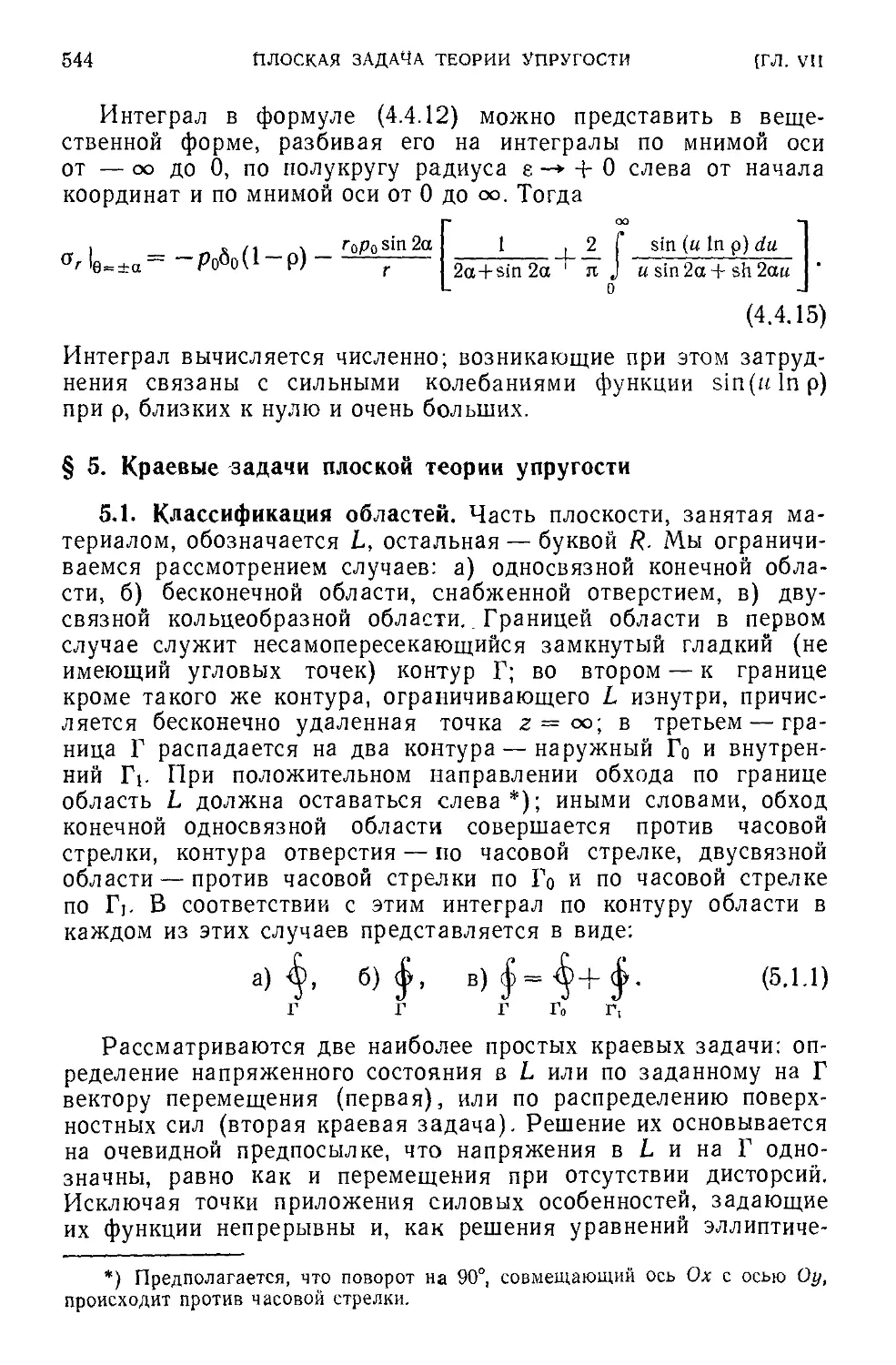
§ 5. Краевые задачи плоской теории улругости 544
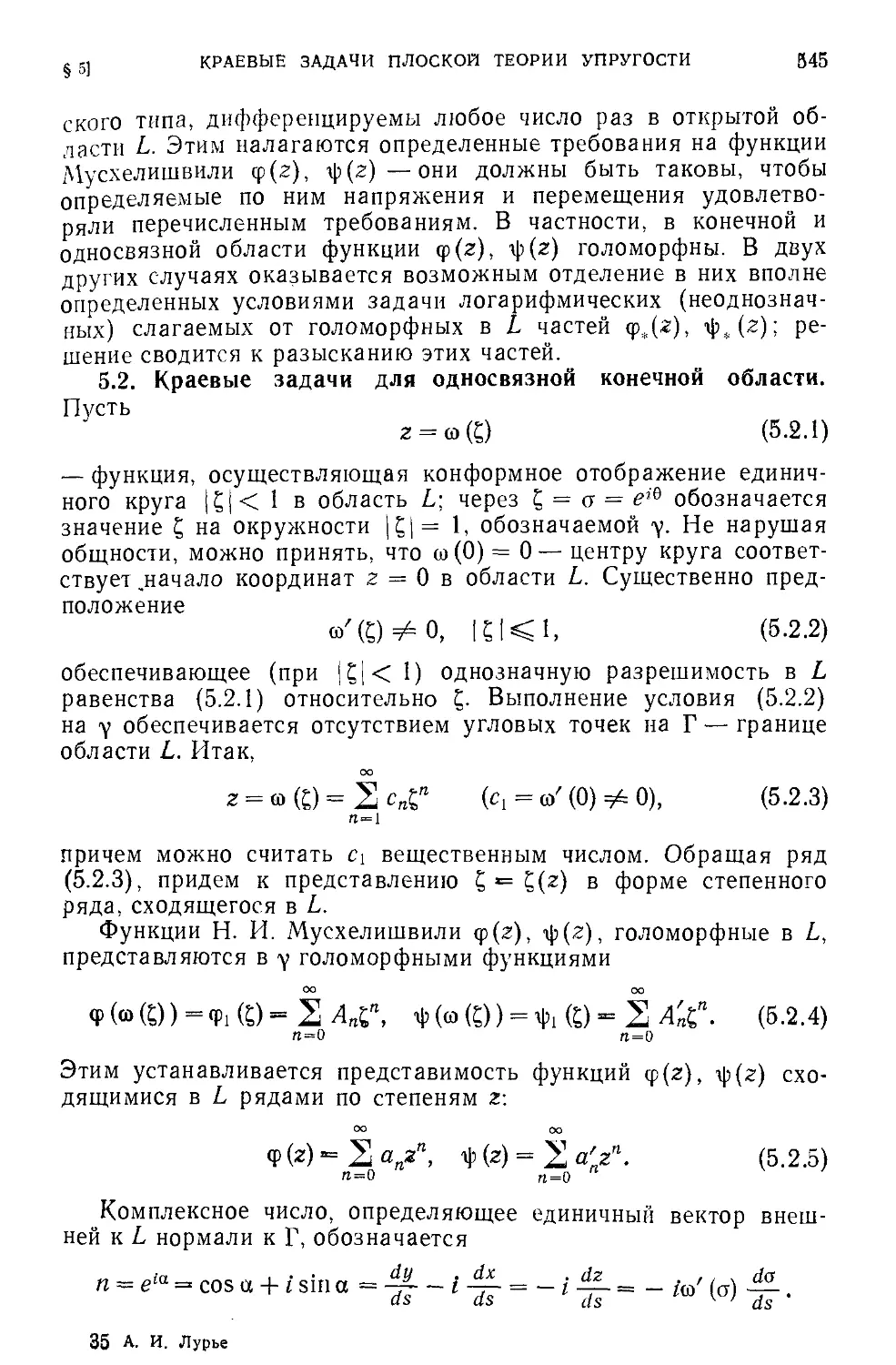
5.1. Классификация областей E44). 5.2. Краевые задачи для односвязной конечной
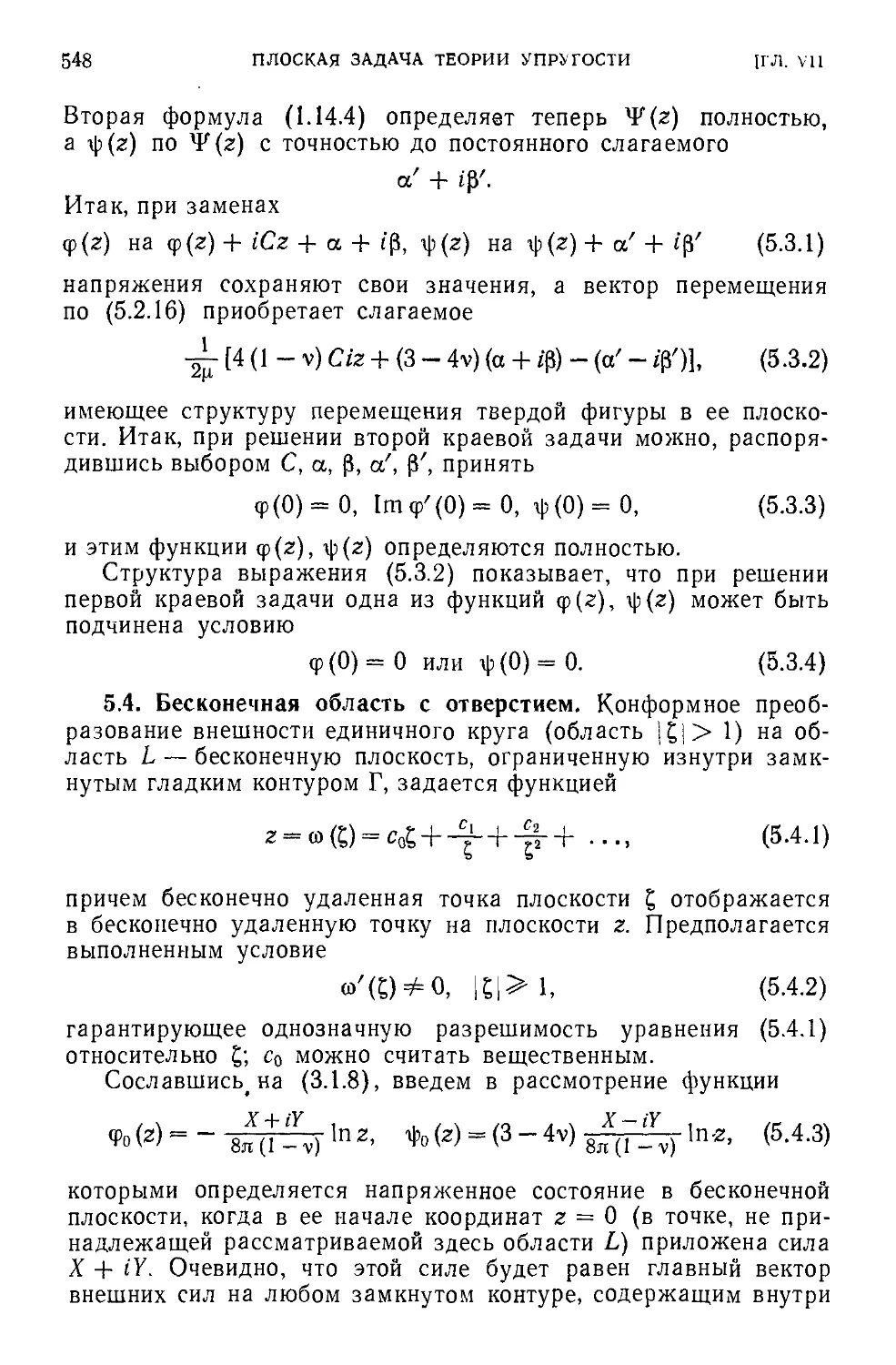
области E45). 5.3. Степень определенности функций Н. И. Мусхелишвили E47).
5.4. Бесконечная область с отверстием E48). 5.5. Двусвязная область. Дистор-
сия E52). 5.6. Представление функции напряжений в двухсвязной области (Ми-
челл) E53). 5.7. Тепловые напряжения. Плоская деформация E55). 5.8. Плоское
напряженное состояние E57). 5.9. Стационарное распределение температуры E59).
5.10. Теорема Коши, интеграл Коши E62). 5.11. Интегралы типа Коши. Формулы
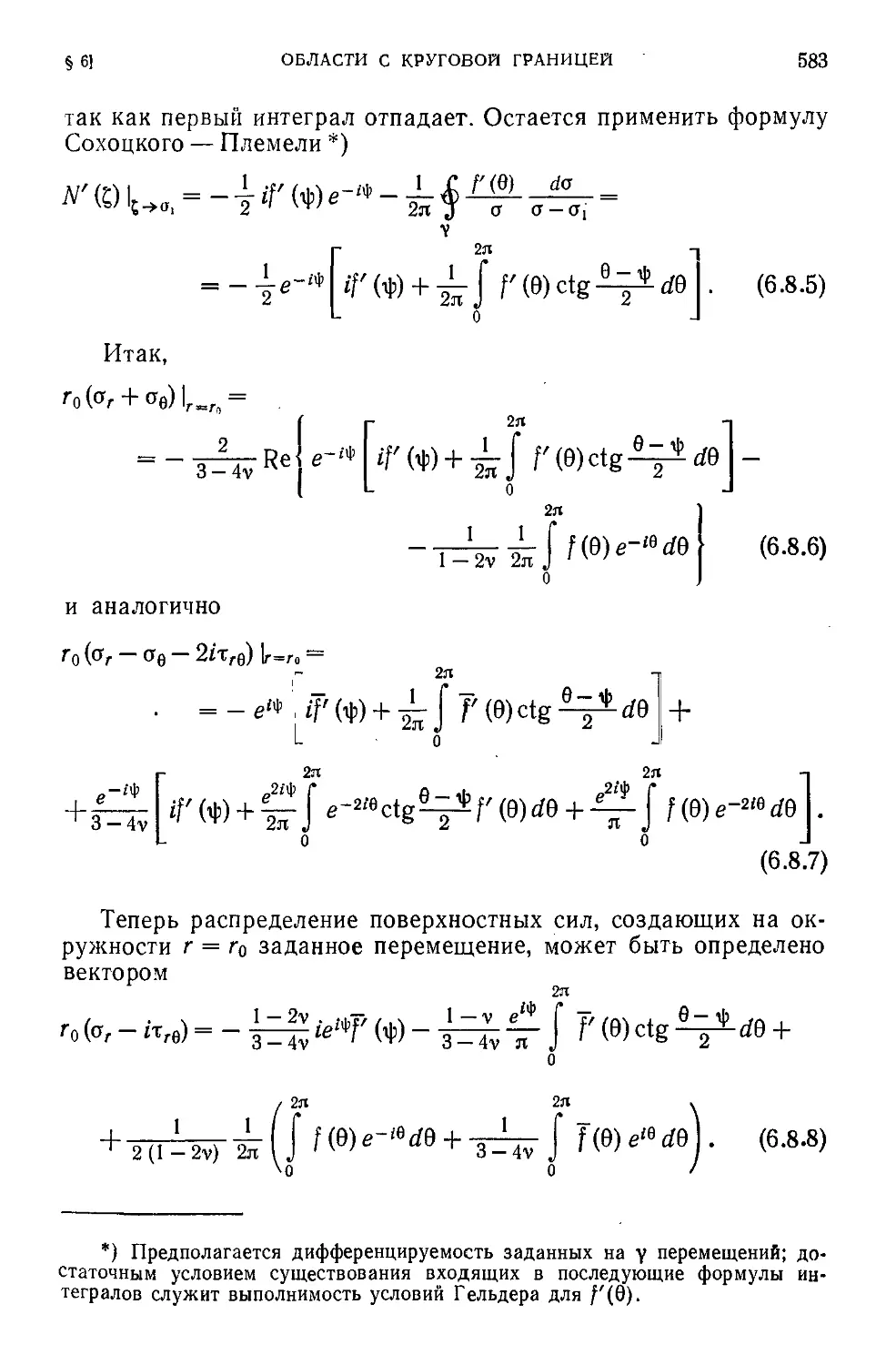
Сохоцкого — Племели E64).
§ 6. Области с круговой границей 566
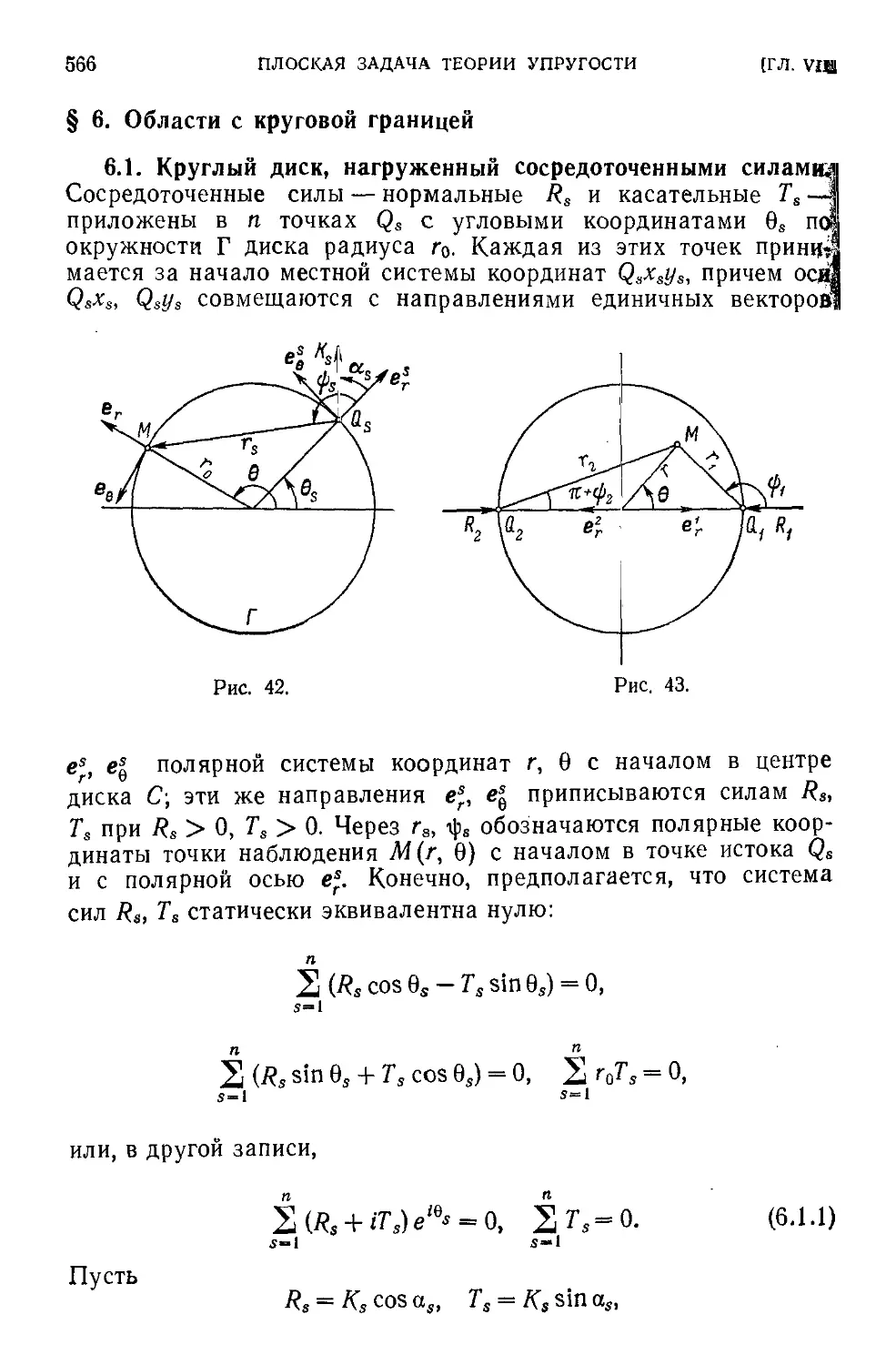
6.1. Круглый диск, нагруженный сосредоточенными силами E66). 6.2. Общий слу
чай нагружения круглого диска E69). 6.3. Способ интегралов Коши E71). 6.4. Нор-
Нормальное напряжение og на окружности E72). 6.5. Напряжения в центре диска E74).
6.6. Статически неуравновешенный вращающийся диск E75). 6.7. Первая краевая
задача для круга E78). 6.8. Напряженное состояние E81). 6.9. Тепловые напряжения
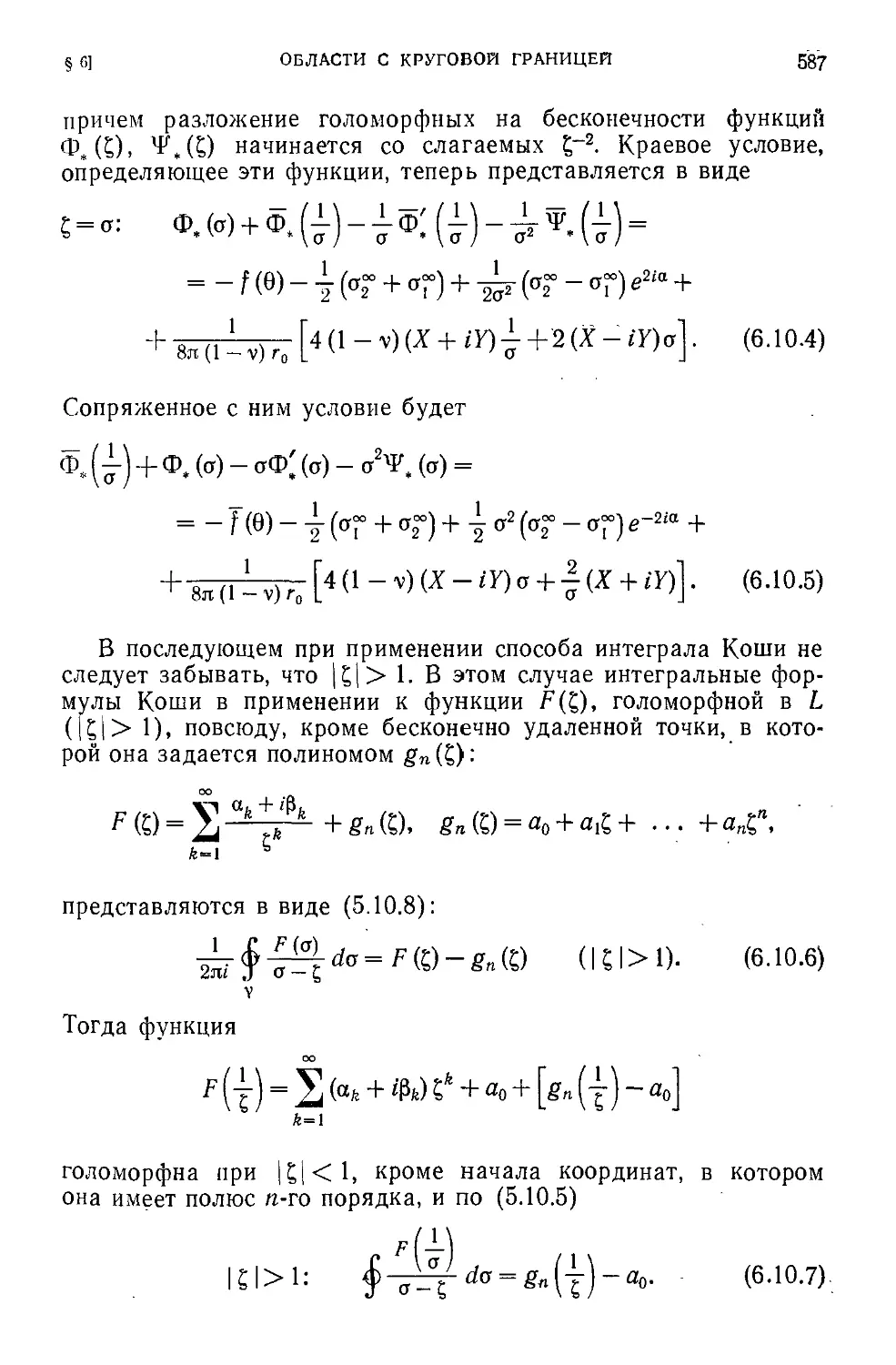
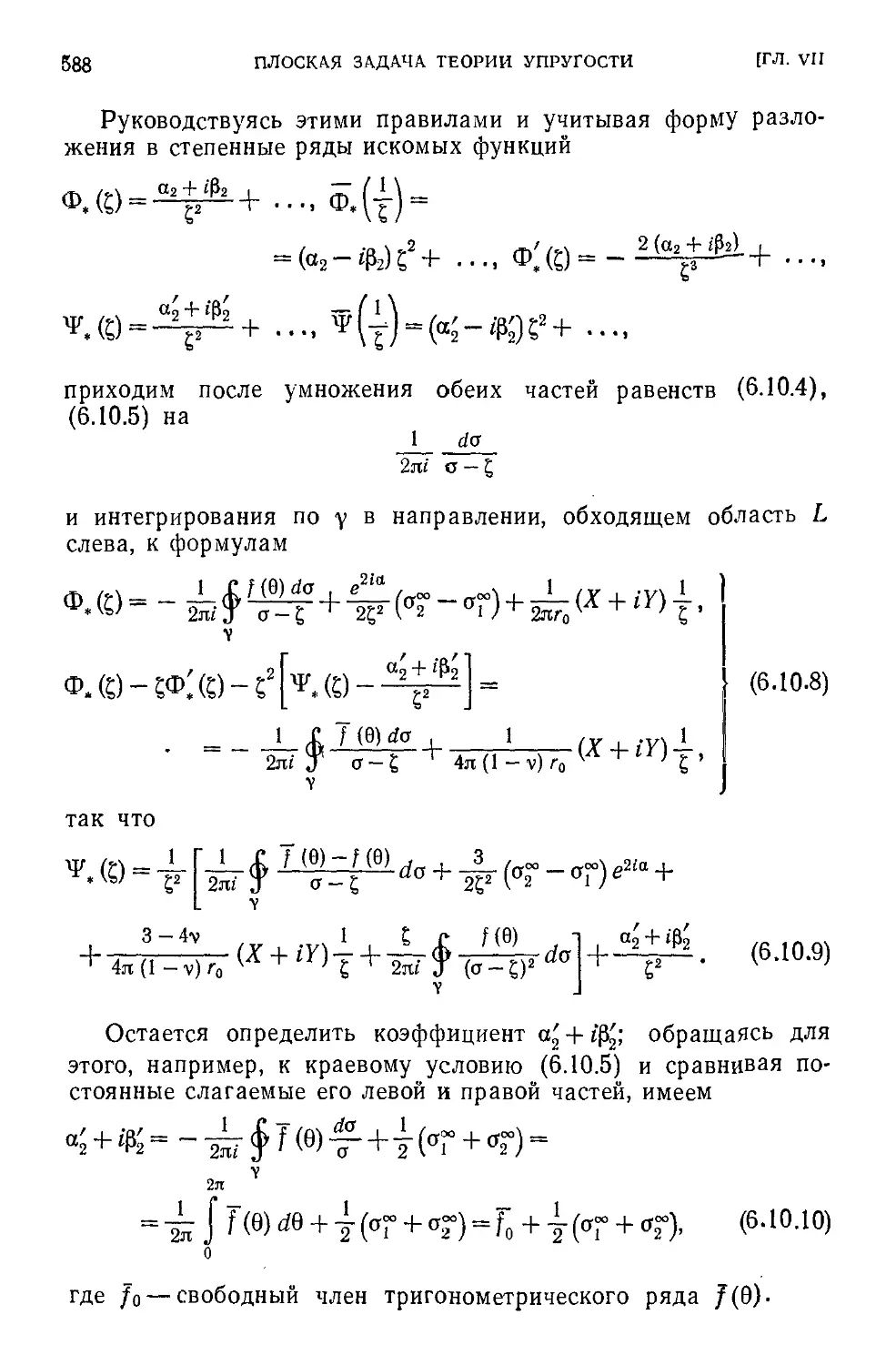
в диске, заключенном в жесткую обойму E84). 6.10. Круговое отверстие в беско-
бесконечной плоскости E86). 6.11. Равномерное нагружение края отверстия E89). 6.12.
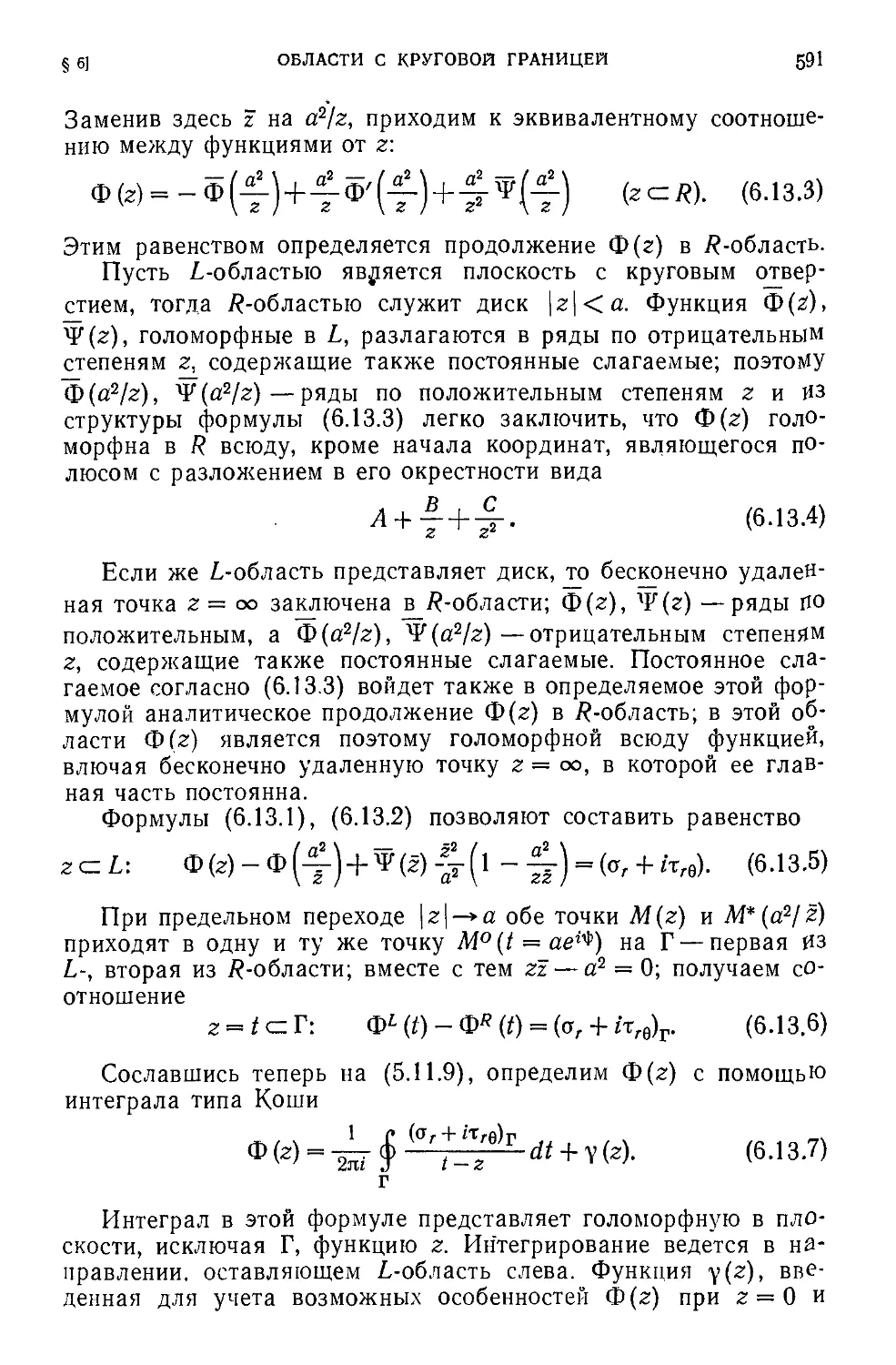
Растяжение плоскости, ослабленной круговым отверстием E89). 6.13. Продолже-
Продолжение Ф (г) E90). 6.14. Решение краевых задач пп. 6.2, 6.10 способом продолжения E92).
§ 7. Круговое кольцо 595
7.1. Напряженное состояние, вызываемое дисторсией E95). 7.2. Вторая краевая за-
задача для кругового кольца E96). 7.3. Определение функций Ф (?), V (?)
J597). 7.4. Труба под равномерным внешним и внутренним давлением (задача Ламе)
E99). 7.5. Температурные напряжения в кольце E99). 7.6. Растяжение кольца сосре-
сосредоточенными силами F01). 7.7. Способ продолжения F02).
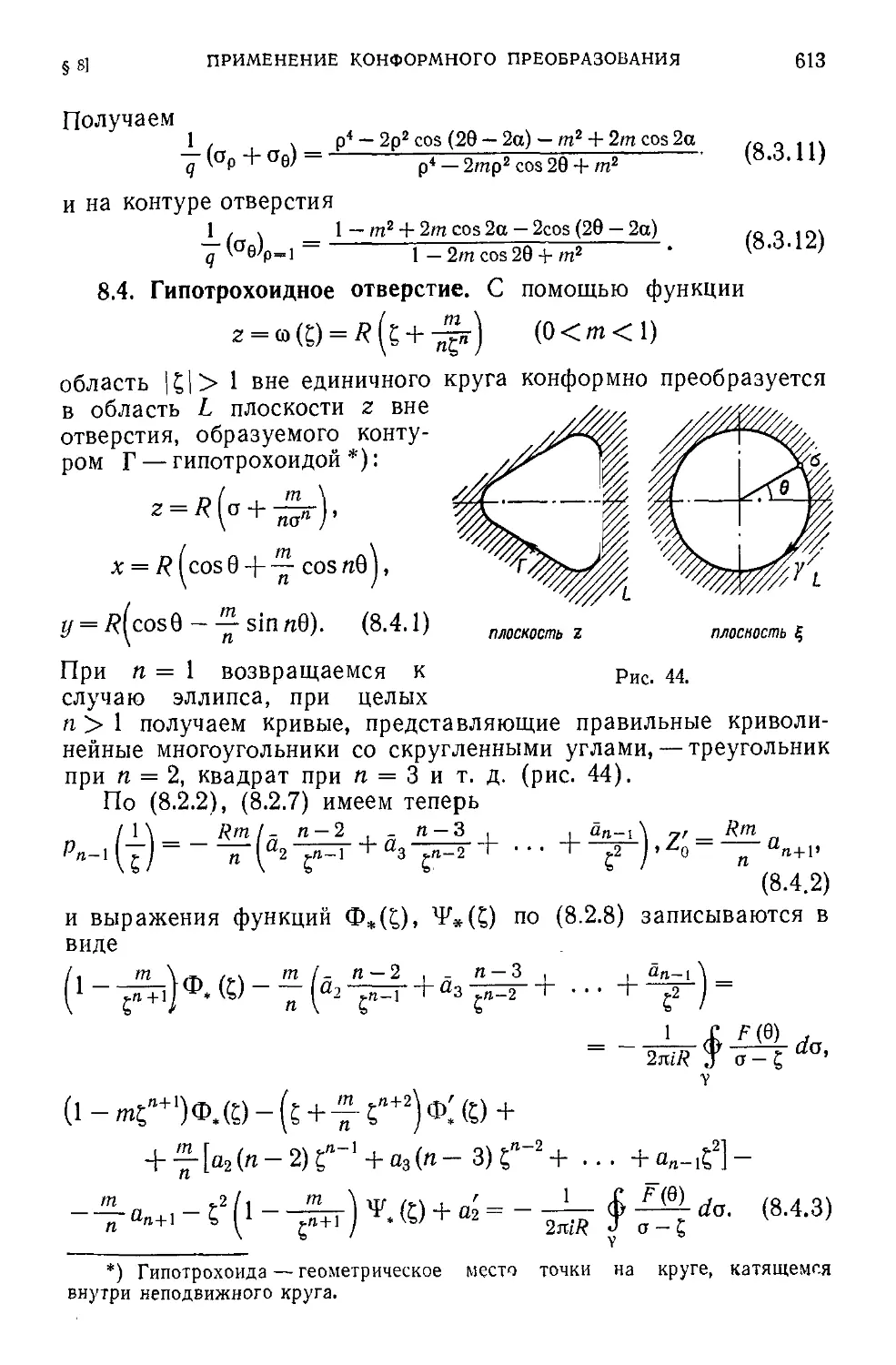
§ 8. Применение конформного преобразования 606
«ли Бесконечная плоскость с отверстием F06). 8.2. Способ интегралов Коши
№и«). 8.3. Эллиптическое отверстие F11). 8.4. Гнпотрохоидное отверстие F13). 8.5. Од-
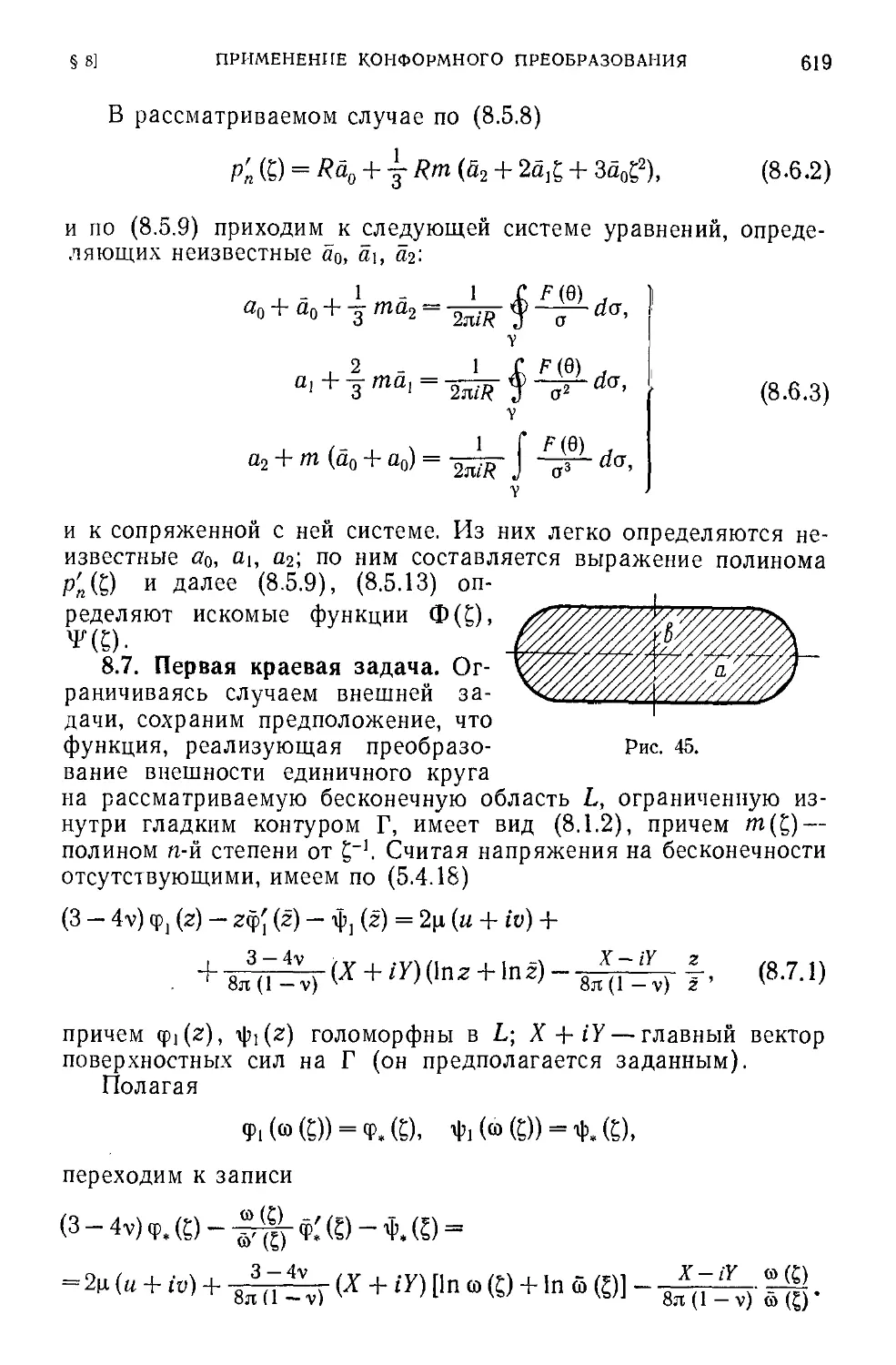
(кт?Я!Наа^ конечная область F15). 8.6. Пример F18). 8.7. Первая краевая задача
'""'• 8-s Эллиптическое отверстие F22). 8.9. Двусвязиая область F23). 8.10. Некон-
Центрнческое кольцо F26).
ОГЛАВЛЕНИЕ
ЧАСТЬ IV
ОСНОВНЫЕ СООТНОШЕНИЯ
НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ 628
Глава VIII. Законы состояния нелинейно-упругого тела 628
§ 1. Потенциальная энергия деформации 628
1.1, Идеальио-упругое телоF28). 1.2. Потенциалы деформации F29). 1.3. Однород-
Однородное изотропное идеально-упругое тело F32).
§ 2. Закон состояния изотропного идеально-упругого тела 633
2,1. Общая форма закона состоиния F33). 2.2. Начальное и натуральное состояния
F35). 2.3. Связь между обобщенными модулями при различных начальных состоя-
состояниях F35). 2.4. Представлеине тензора напряжений F37). 2.5. Выражение закона
состояния через тензоры деформации F38). 2.6. Главные напряжения F40). 2.7. Вы-
Выражение тензора напряжений F42). 2.8. Теизор напряжений Пнола A836) — Кирх-
гоффа A850) F44). 2.9. О задании удельной потенциальной энергии деформа-
деформации F45).
§ 3. Представление закона состояния квадратичным трехчленом 647
3.1. Квадратичная зависимость между двумя соосиымн тензорами F47).
3.2. Представлеине энергетического тензора напряжений F48). 3.3. Представ-
Представление тензора напряжений F49). 3.4. Разбиение тензора напряжений на шаровой
тензор и девиатор F50). 3.5. Применение логарифмической меры деформации F54).
§ 4. Аппроксимации законов состояния 657
4.1. Квадратичный закон состояния Сииьориии F57). 4.2. Зависимость коэффициен-
коэффициентов квадратичного закона от начального состояния F60). 4.3. Знак удельной потен-
потенциальной энергии деформации F62). 4.4. Применение к задачам об одноосном растя-
растяжении F64). 4.5. Простой сдвиг F65). 4.6. Закон состояния Муриагаиа F66): 4.7. По-
Поведение материала при сверхвысоких давлениях F67). 4.8. Одноосное растяжение
F69). 4.9. Несжимаемый материал F70). 4.10. Материалы с углом подобия девна-
торов, равным нулю F72).
§ 5. Вариационные теоремы статики нелинейно-упругого тела 674
5.1. Принцип виртуальных перемещений F74). 5.2. Стационарность потенциальной
энергии системы F75). 5.3 Дополнительная работа деформации F79). 5.4. Стацио-
Стационарность дополнительной работы F80). 5.5. Удельная дополнительная работа дефор-
деформации для полулинейного материала F82).
Глава IX. Задачи и методы нелинейной теории упругости 686
§ 1. Напряженное состояние при аффинном преобразовании 686
1.1. Теизор напряжений при аффиииом преобразовании F86). 1.2. Всестороннее сжа-
сжатие F88). 1.3. Одноосное растяжение F89). 1.4. Простой сдвиг F90).
§ 2. Упругий слой 692
2.1. Цилиндрический изгиб прямоугольной плиты F92). 2.2. Сжатие и растяжение
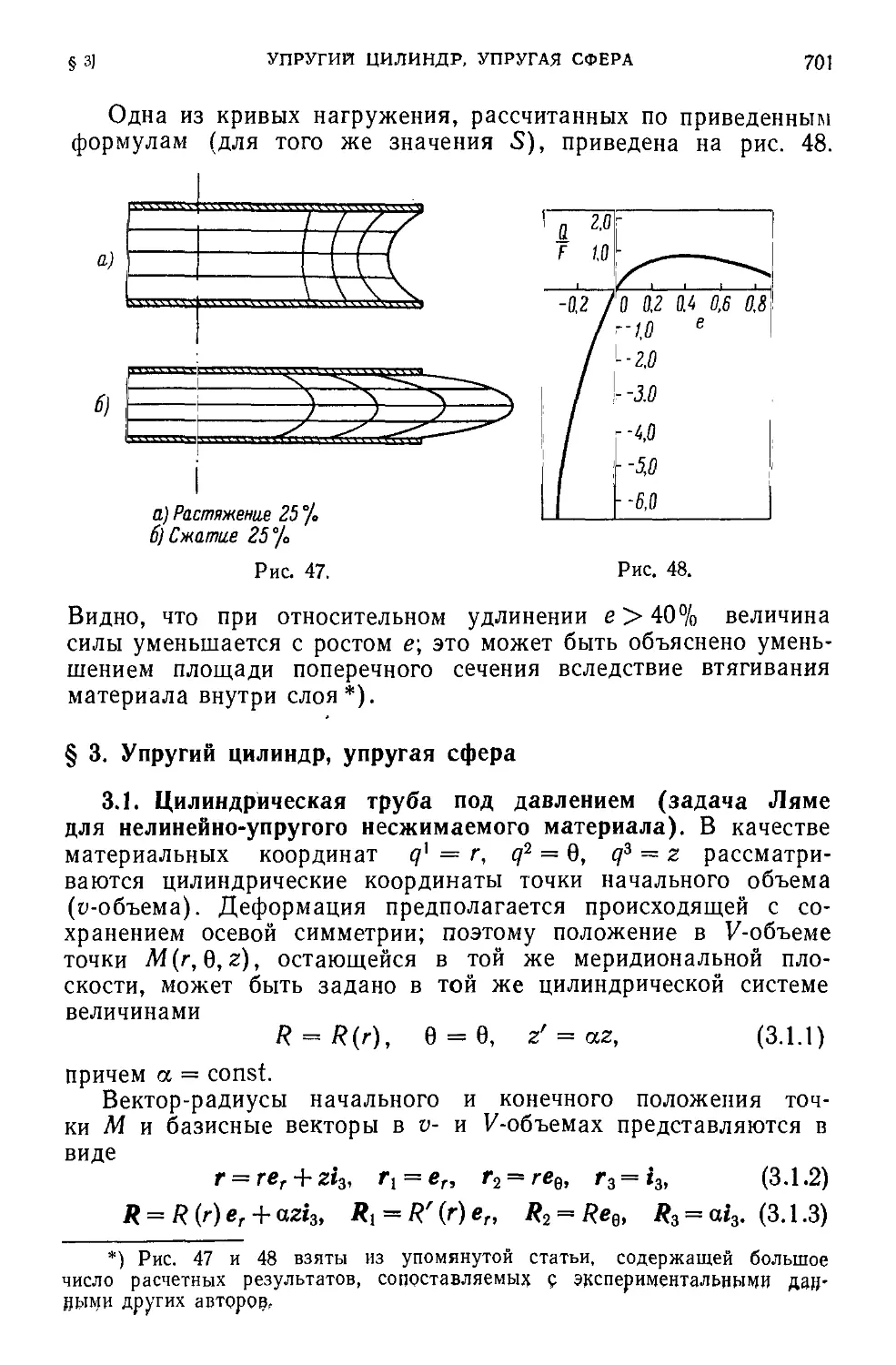
упругой полосы F95). 2.3. Уравнения статики F97). 2.4. Сжатие слоя G00). 2.5. Ра-
Растяжение слоя G00).
§ 3. Упругий цилиндр, упругая сфгра 701
3.1. Цилиндрическая труба под давлением (задача Ляме для иелинейио-упругого
несжимаемого материала) G01). 3.2. Напряжения G03). 3.3 Определение постоянных
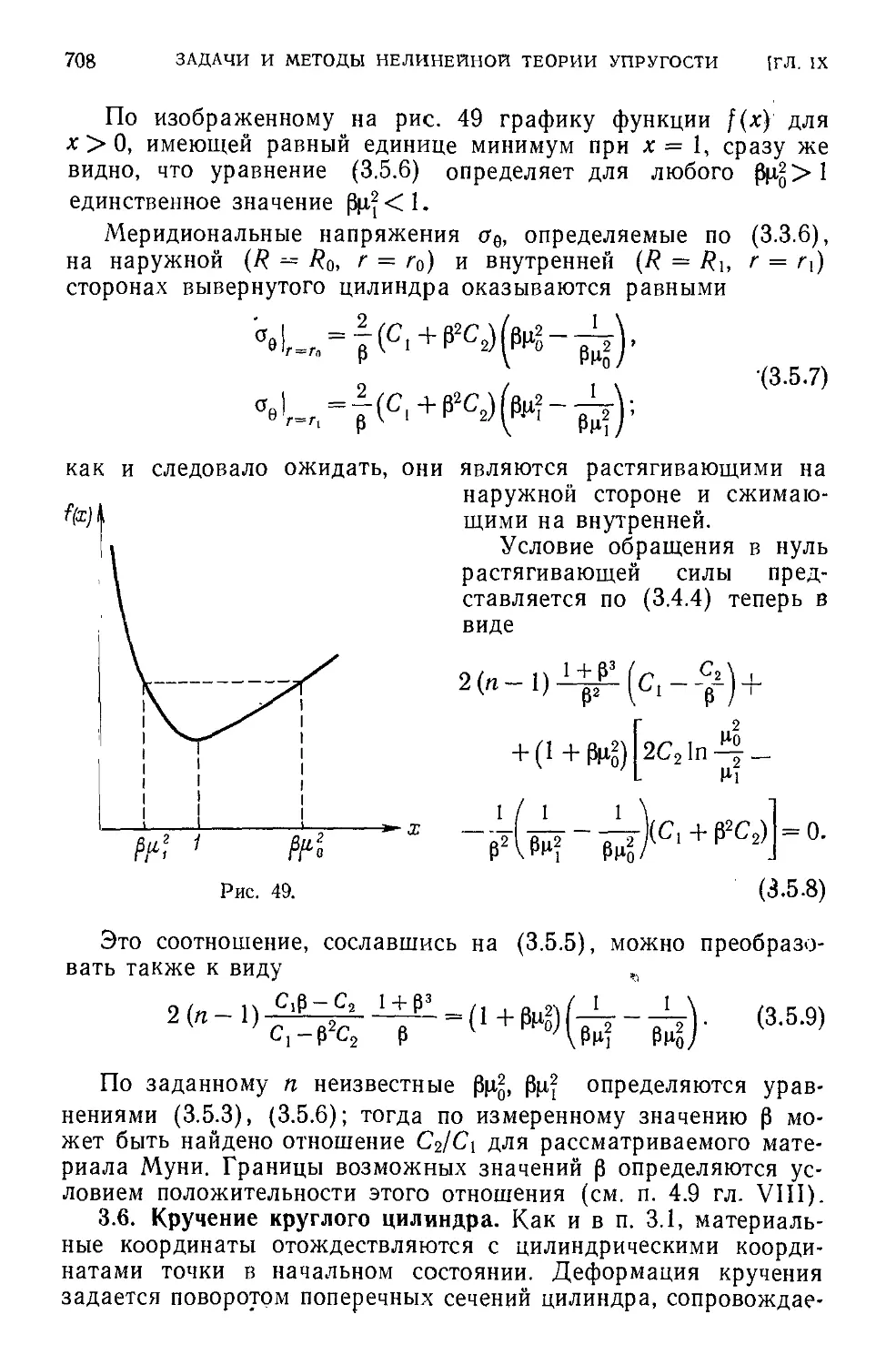
G04). 3.4. Материал Муни G06). 3.5. Цилиндр, «вывернутый наизнанку»
G07). 3.6. Кручение круглого цилиндра G08). 3.7. Напряжения, крутящий момент,
осевая сила G11). 3.8. Симметричная деформация полого шара (задача Ляме для
шара) G14). 3.9. Несжимаемый материал G16). 3.10. Применение принципа стацио-
стационарности потенциальной энергии G17)
ОГЛАВЛЕНИЕ 9
§ 4. Малая деформация при наличии начального нагружения 719
4.1. Малая деформация деформированного объема G19). 4.2. Тензор напряжений
G22). 4.3. Необходимые условия равновесия G23). 4.4. Представление тензора в
G26). 4.5. Трехосное напряженное состояние G28). 4.6. Гидростатическое иапряжениое
состояние G30). 4.7. Одноосное растяжение G32). 4.8. Деформация кручения сжа-
сжатого стержня G34).
§ 5. Эффекты второго порядка 736
5.1. Выделение линейных слагаемых в законе состояния G36). 5.2. Уравнения рав-
равновесия G39). 5.3. Эффекты второго порядка G41). 5.3а. Измеиеяне объема тела,
подвергнутого днсторсин G45). 5.4. Выбор исходного приближения G46). 5.5. Эффек-
Эффекты второго порядка в задаче о кручении стержня G48). 5.6. Несжимаемая среда
G50). 5.7. Уравнения равновесия G51).
§ 6. Плоская задача 753
6.1. Геометрические соотношения G53). 6.2. Уравнение состояния G55;. 6.3. Уравне-
Уравнения статнкн G56). 6.4. Функция напряжений G56). 6.5. Плоское напряженное состоя-
состояние G59). 6.6. Уравнения равновесия G61). 6.7. Уравнение состояния G63). 6.8. Систе-
Система уравнений задачи о плоском напряженном состоянии G64). 6.9. Применение
логарифмической меры деформации в задаче о плоской деформации
G65). 6.10. Плоская деформация несжимаемого материала с равной нулю фазой
подобия девиаторов G67). 6.11. Пример. Радиальио-симметричиая деформация
G69).
§ 7. Полулинейный материал 771
7.1. Уравнения равновесия полулинейного материала G71). 7.2. Сохранение главных
направлений G72). 7.3. Примеры (цилиндр и сфера) G72). 7.4. Плоская деформация
G74). 7.5. Напряженное состояние прн плоском аффиииом преобразова-
преобразовании G78). 7.6. Изгибание полосы в цилиндрическую панель G79). 7.7. Наложение
малой деформации G82). 7.8. Случай сохранения главных направлений G86).
7.9. Уравнения нейтрального равновесия Саусвелла A913) G87). 7.10. Представление
решений уравнений Саусвелла G89). 7.11. Бифуркация равновесия сжатого стержня
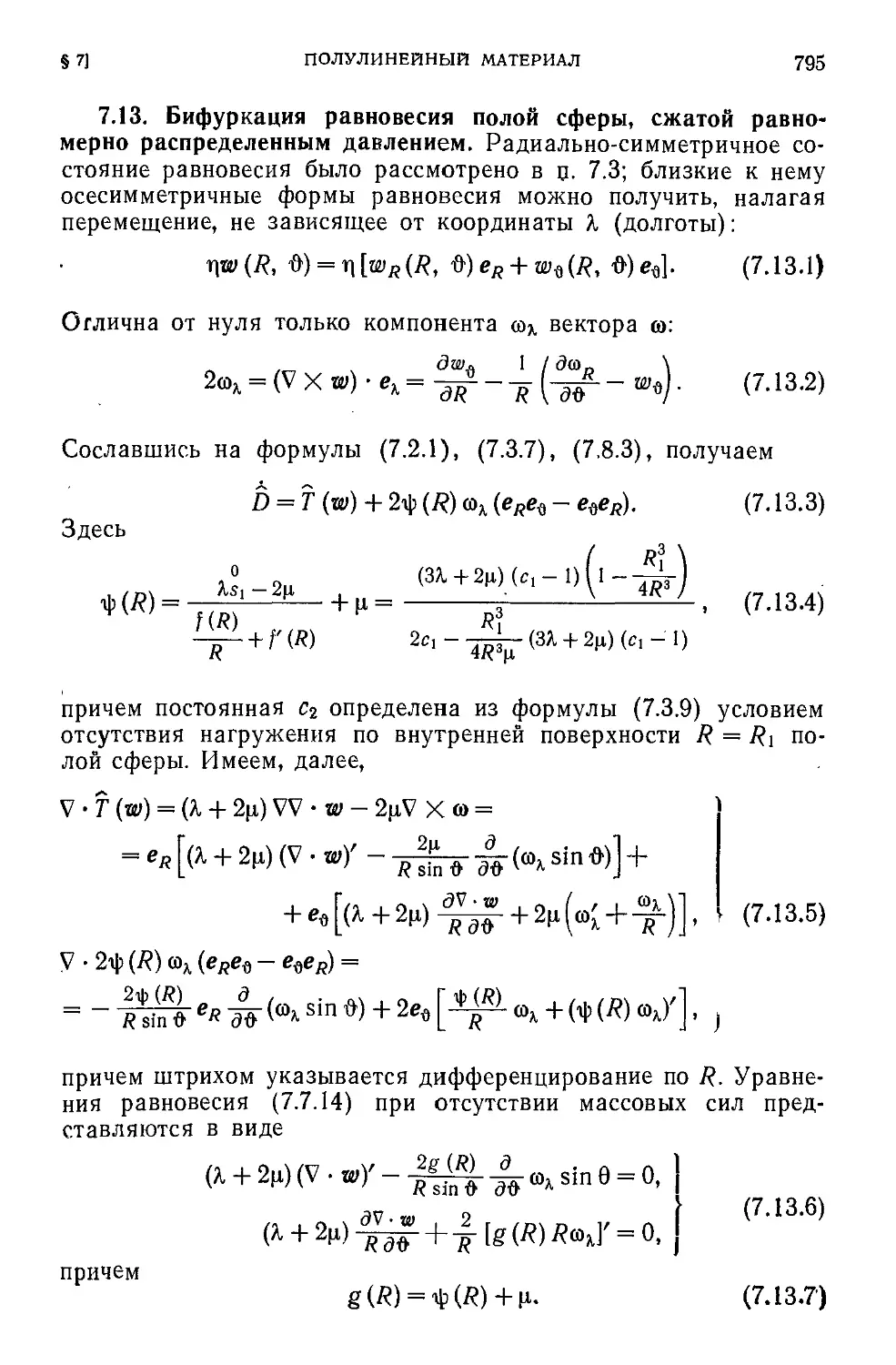
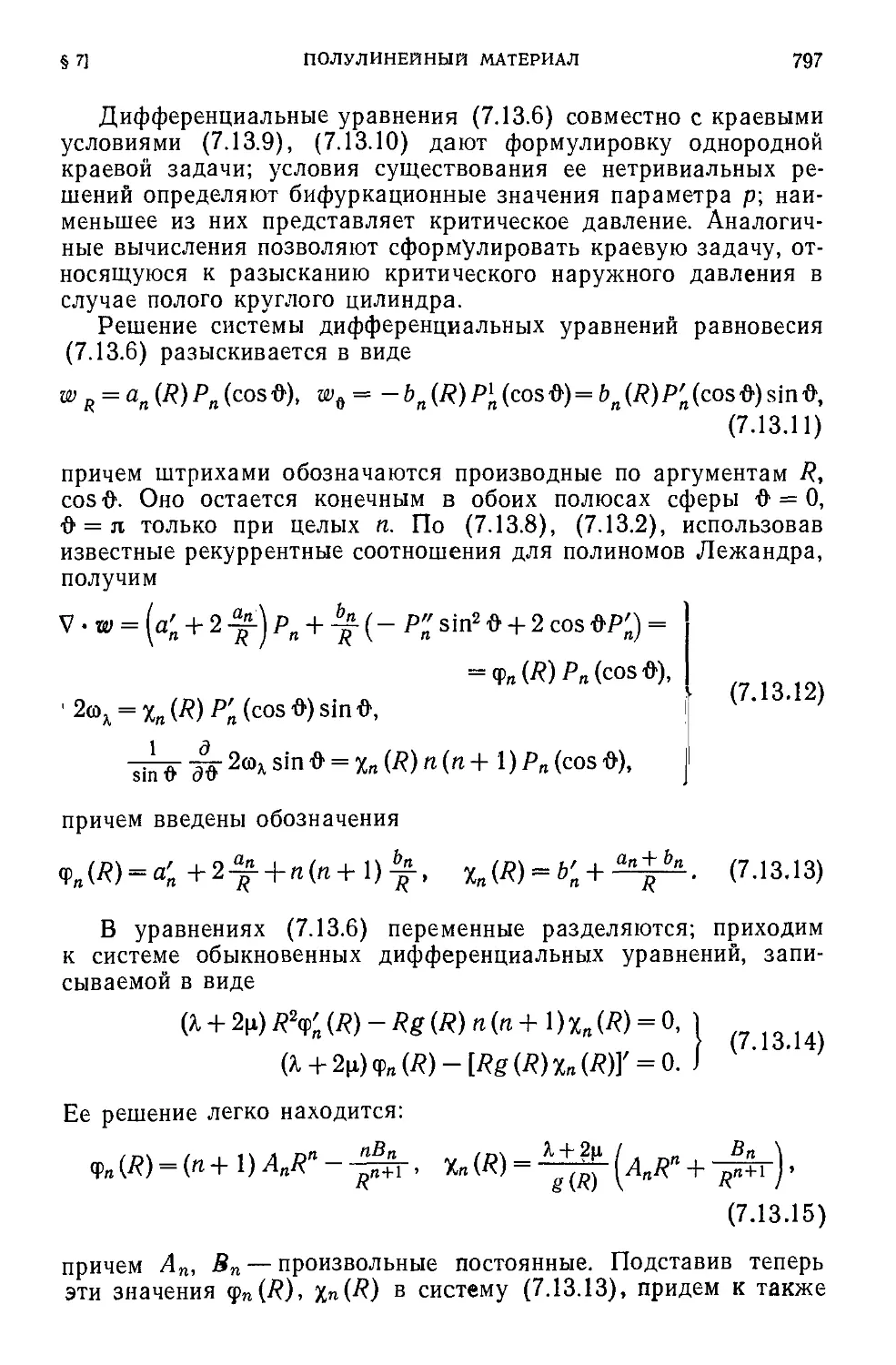
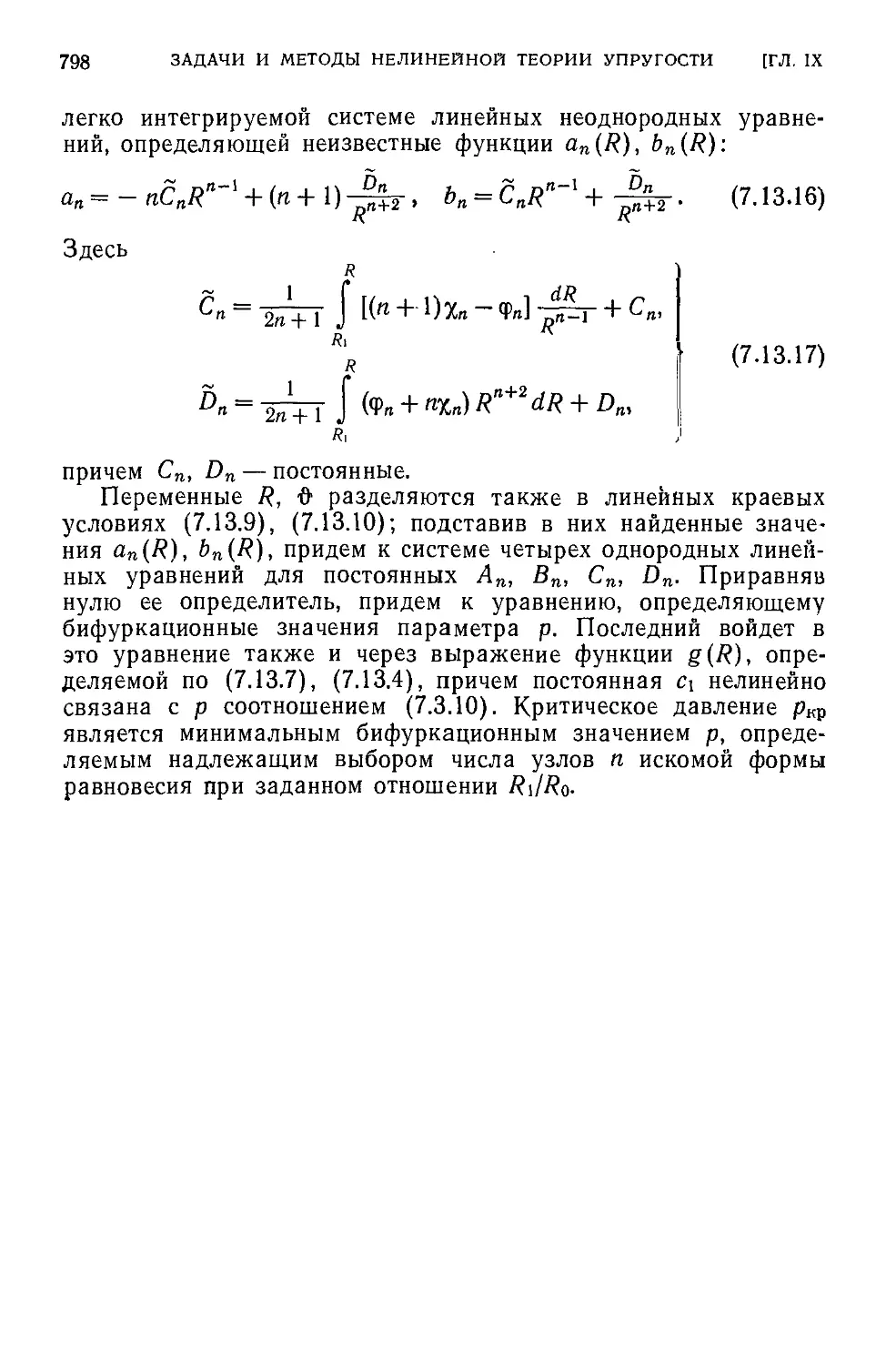
G91). 7.12. Стержень круглого поперечного сечеиня G94). 7.13. Бифуркация равно-
равновесия полой сферы, сжатой равномерно распределенным давлением G95).
Приложение I. Основы тензорной алгебры 799
1.1. Скаляр и вектор G99). 1.2. Символы Леви-Чнвита (801). 1.3. Тензор второго
ранга (802). 1.4. Простейшие операции с тензорами (806). 1.5. Диада векторов, диад-
ное представление тензора второго ранга (809). 1.6. Тензоры высших рангов. Свер-
Свертывание индексов (811). 1.7. Обратный теизор (814). 1.8. Тензор поворота
(815). 1.9. Главные оси и главные значения симметричного тензора (817). 1.10. Выра-
Выражение компонент тензора через главные значения. Инварианты. Теорема Кейли —
Гамильтона (821). 1.10а. Главные оси и главные значения несимметричного тензора
(824). I. II. Разбиение симметричного тензора второго ранга на девиатор и шаро-
шаровой теязор (828). 1.12. Функции тензоров (830). 1.13. Выделение шаровой и девиа-
торной частей (834). 1.14. Лннейиая связь между тензорами (838).
Приложение II. Основные операции тензорного анализа 839
ИЛ. Набла-оператор (839). 11.2. Дифференциальные операции в векторном поле
(840). II.3. Дифференциальные операции над тензорами (842). II.4. Двукратное
дифференцирование (843). 11,5. Преобразование объемного интеграла в поверхно-
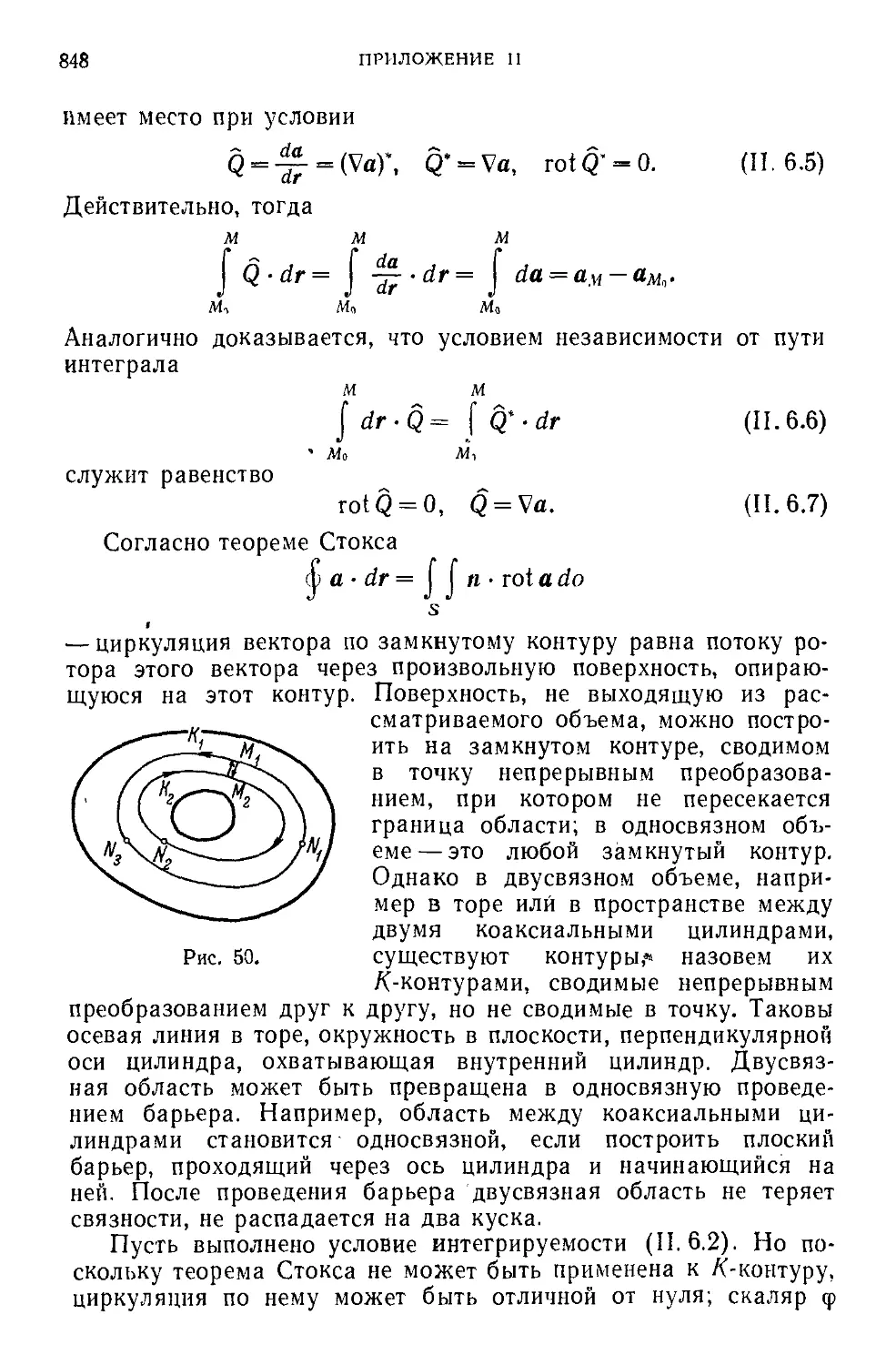
поверхностный (846). II.6. Преобразование Стокса (847).
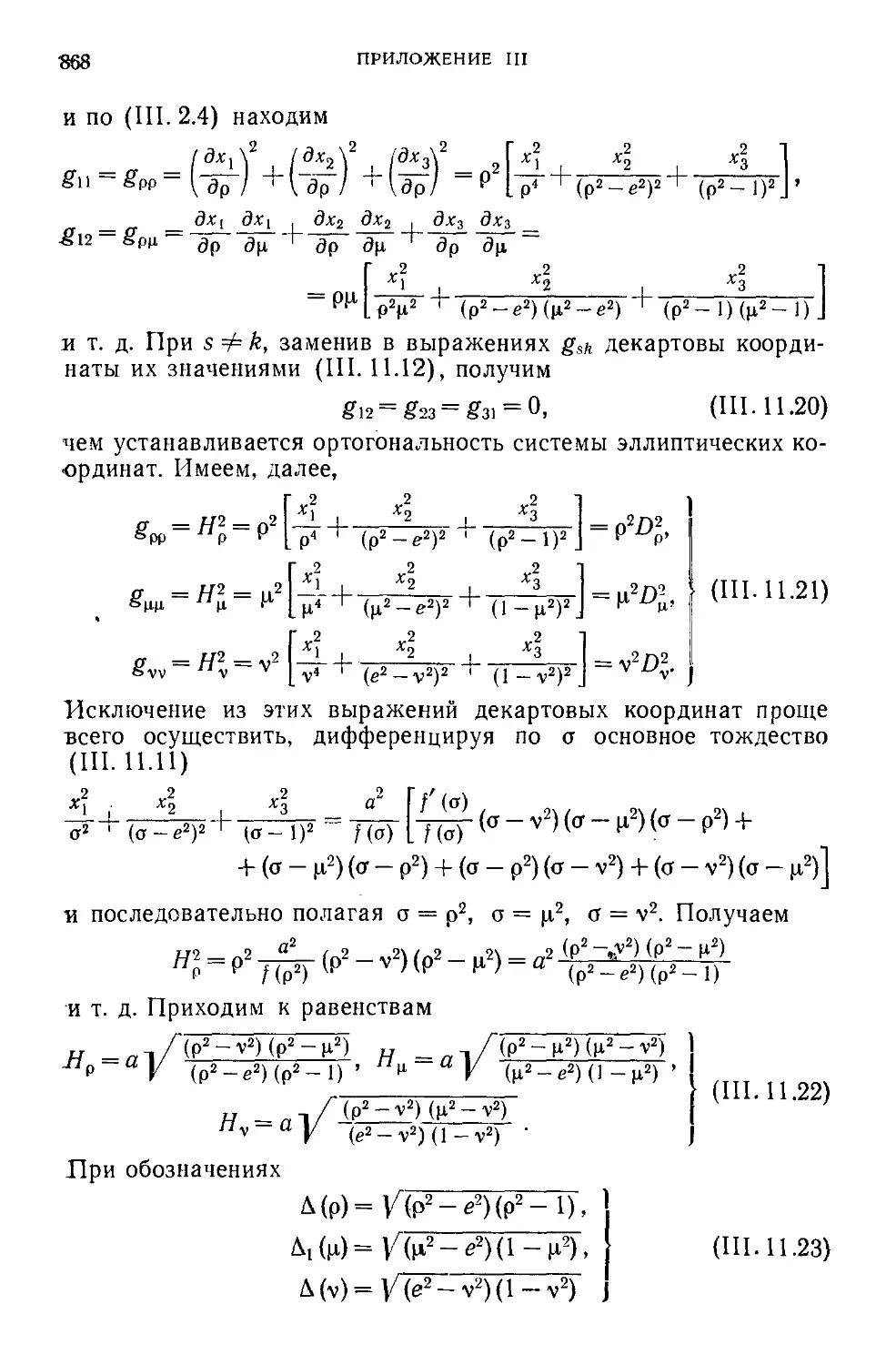
Приложение III. Ортогональные криволинейные координаты . . . .850
III.1. Определения (850). Ш.2. Квадрат линейного элемента (851). Ш.З Ортогональ-
Ортогональная криволинейная система координат. Базисные векторы (852). III.4. Дифферен-
Дифференцирование базисных векторов (854). II 1.5. Дифференциальные операции в ортого-
ортогональных криволинейных координатах (856). Ш.6. Зависимости Ляме
«к?!' "'-7' Цилиндрические координаты (860). Ш.8. Сферические координаты
J°°l)- III.9. Тела вращения (861). ШЛО. Вырожденные эллиптические координаты
(«ЬЗ). III.п. Эллиптические координаты (общий случай) (865).
10 ОГЛАВЛЕНИЕ
Приложение IV. Тензорная алгебра в косоугольном базисе .... 870
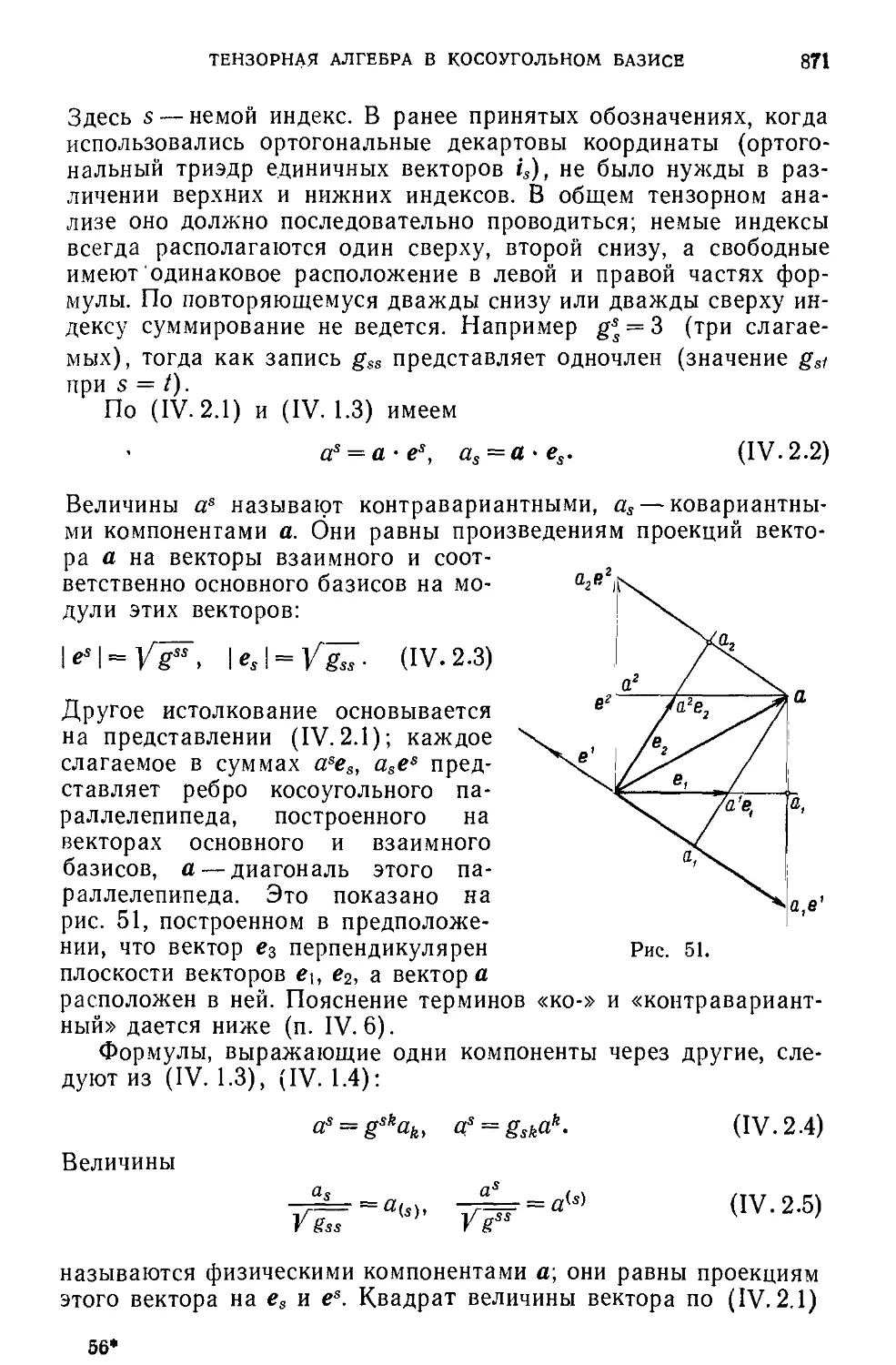
IV.1. Основной и взаимный базисы (870). IV.2. Вектор в косоугольном базисе
(870). IV.3. Метрический тензор (872). IV.4. Тензор Леви-Чивита (873). IV.5. Тен-
Тензоры в косоугольном базнсе(874). 1V.6. Преобразование базиса (875). IV.7. Главные
оси симметричного тензора. Главные инварианты (876).
Приложение V. Операции тензорного анализа в криволинейных
координатах 878
V.I. Введение базисов (878). V.2. Производные базисных векторов (879). V.3. Кова-
риантное дифференцирование (880). V.4. Дифференциальные операции в криволи-
криволинейных координатах (883). V.5. Переход к ортогональным криволинейным коорди-
координатам (885). V.6. Тензор Римана-Кристоффеля (886). V.7. Тензор Ink?
(890). V.8. Преобразование поверхностного интеграла в объемный (891).
Приложение VI. Сведения по теории сферических и эллипсоидаль-
эллипсоидальных функций 892
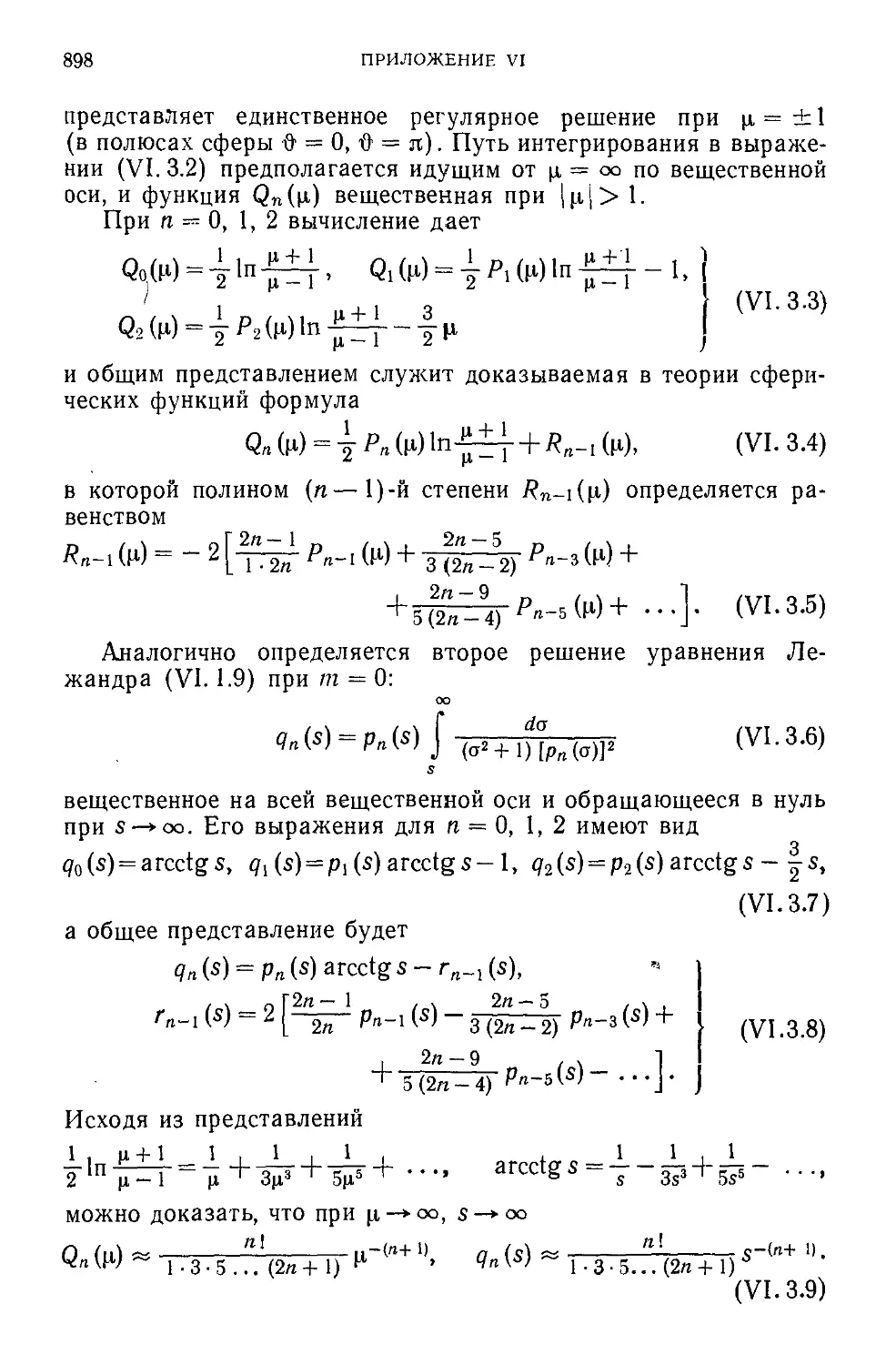
VI.1. Разделение переменных в уравнении Лапласа (892). VI.2. Сферические функ-
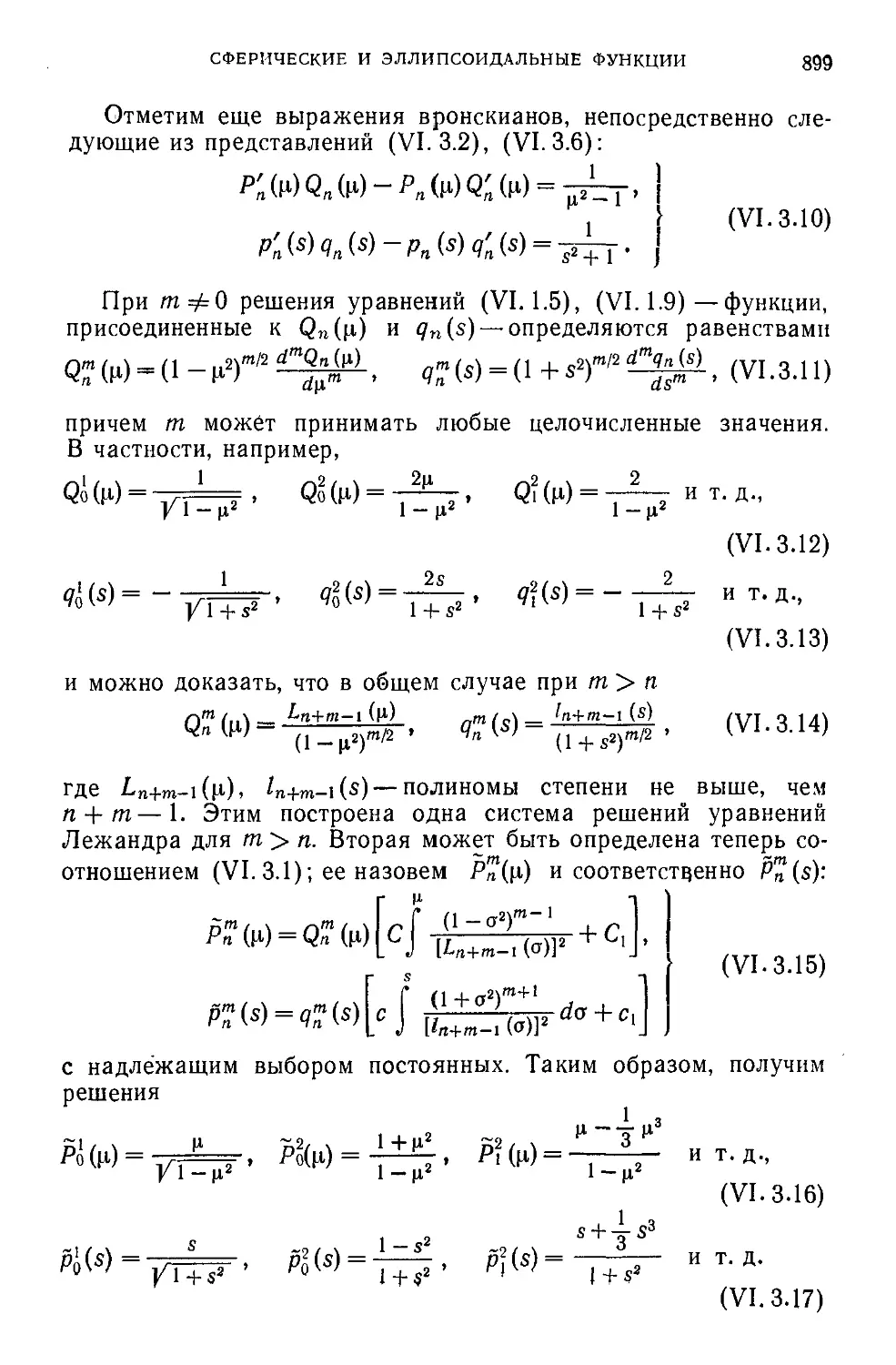
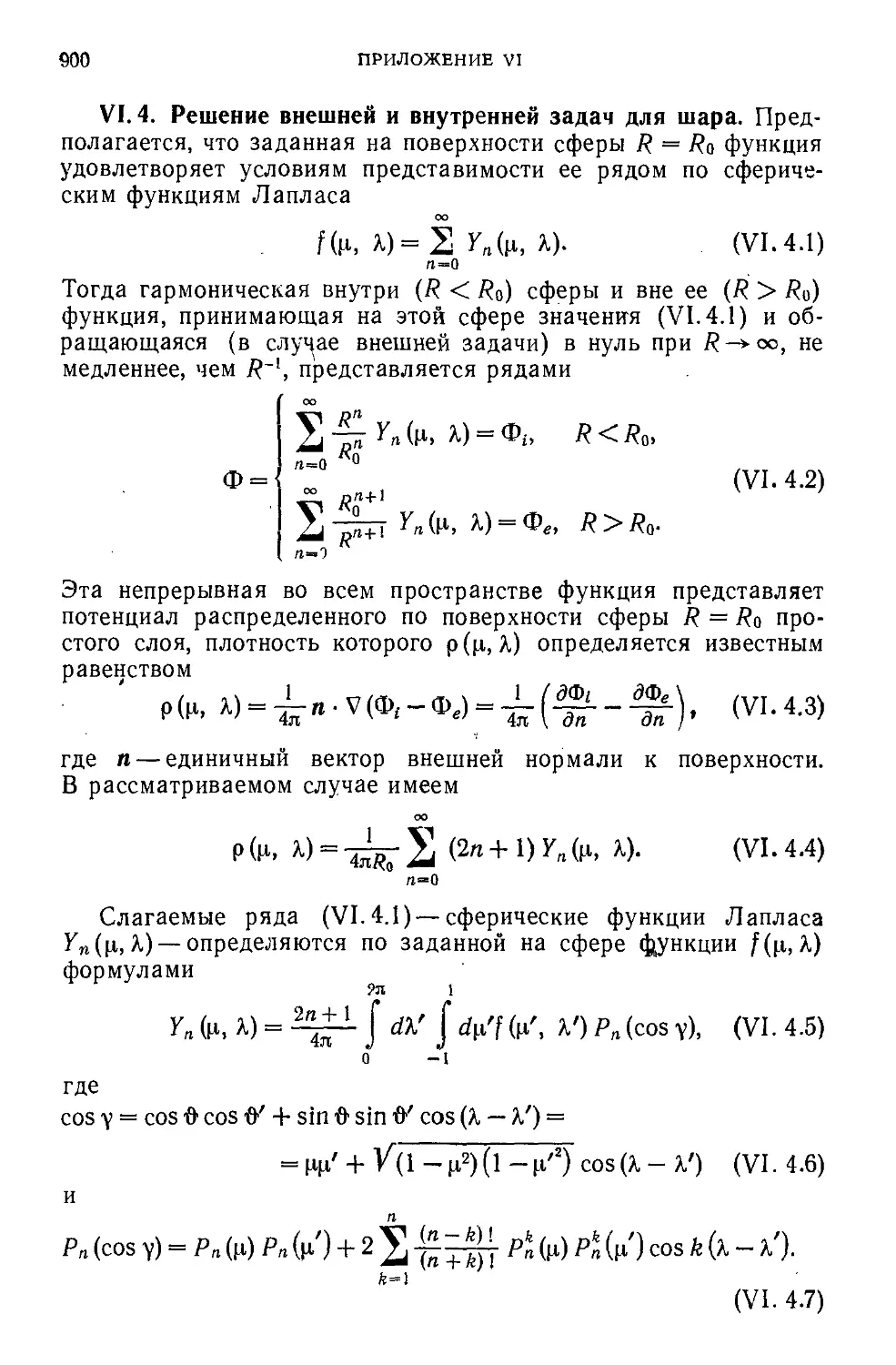
функции Лапласа (894). VI.3. Решения Qn (ц), qn (s) (897). VI.4. Решение внешней и
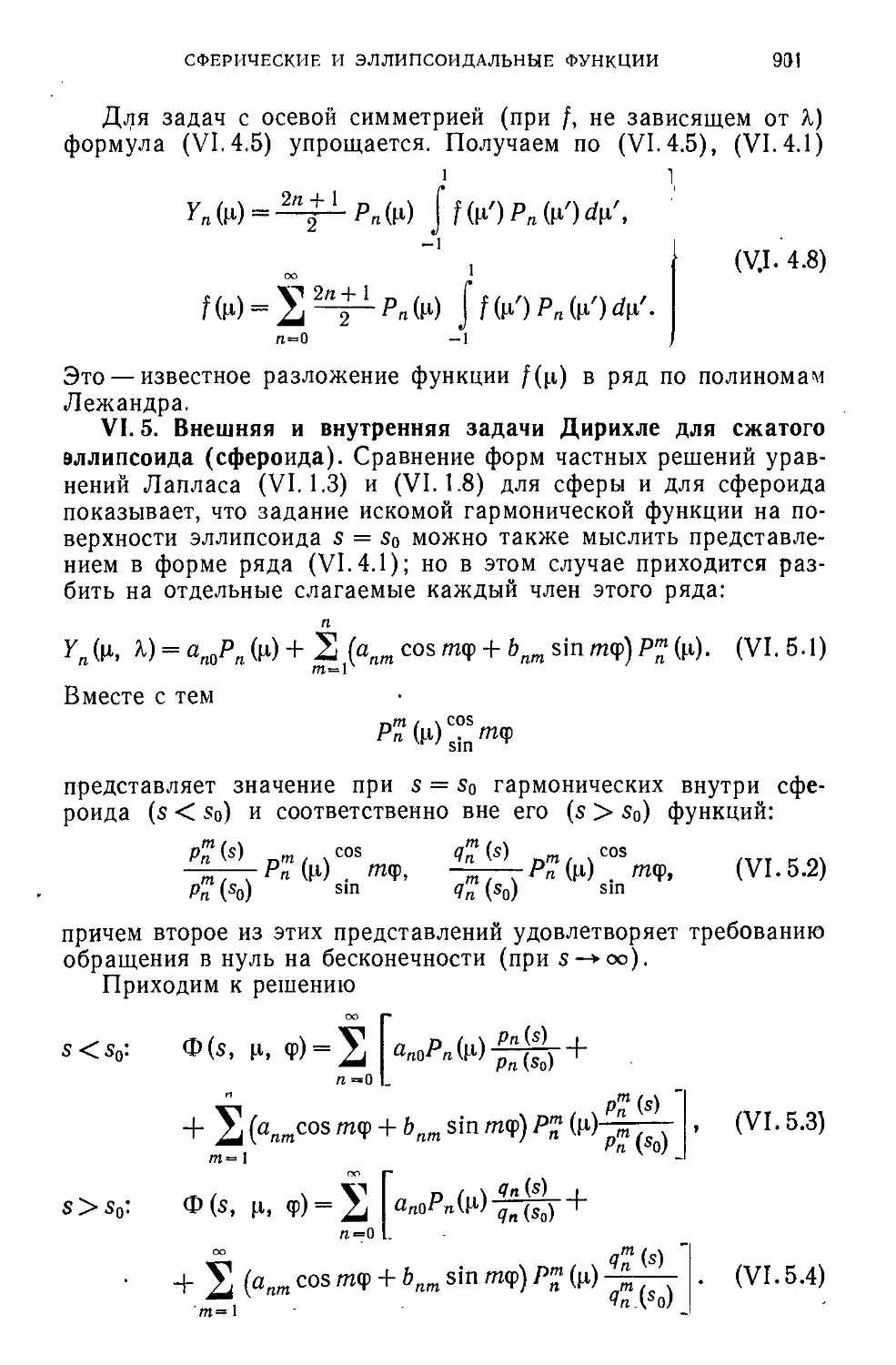
внутренней задач для шара (900). VI.5. Внешняя н внутренняя задача Дирихле для
сжатого эллипсоида (сфероида) (901). VI.6. Представление гармонических поли-
полиномов произведениями Ляме (902). VI.7. Функции S^ (р) (904). VI.8. Потенциалы
простого слоя на эллипсоиде (905).
Литературные указания 9С9
Именной указатель 930
Предметный указатель 933
ПРЕДИСЛОВИЕ
Классическая теория упругости сохраняет свое почетное ме-
место в науке о поведении деформируемого твердого тела. Ее
исходные определения являются общими для всех разделов этой
науки, а методы постановки и решения задач служат для нее
образцами. Успехи и завоевания теорий пластичности, ползу-
ползучести, упруго-вязкой среды, разрушения твердых тел не засло-
заслоняют значения методов теории упругости для обоснования при-
приемов расчета напряженного состояния в строительных сооруже-
сооружениях и машинах, составляющих существенную часть наук о
сопротивлении материалов и строительной механики.
Первые две главы (ч. I) посвящены основным определениям
механики сплошной среды — тензорам напряжений (гл. I) и де-
деформаций (гл. II). Необходимость различения в нелинейной
теории начального и конечного состояний среды не позволяет
довольствоваться рассмотрением одной лишь меры (или тен-
тензора) деформации, а в связи с этим и в описание напряженно-
напряженного состояния оказывается целесообразным ввести отличные друг
от друга тензоры. Эти вопросы рассмотрены в § 3 гл. I, изуче-
изучению которого должно предшествовать изучение §§ 3—5 гл. II.
Усвоение содержания этих параграфов может быть без ущерба
отложено до изучения нелинейной теории (в гл. VIII, IX).
Получение замкнутых систем уравнений линейной теории
упругости и описание приемов решений составляет содержание
ч. II (гл. III — закон состояния, гл. IV — основные соотношения).
Решение специальных задач отнесено к ч. III (гл. V—VII).
Содержание гл. V только по направленности тематики соответ-
соответствует монографии автора «Пространственные задачи теории
упругости» (Гостехиздат, 1955); изложение рассмотренных в ней
задач целиком переработано, и включены отсутствующие в этой
монографии разделы (напряжения, создаваемые инородным
включением; обоснование принципа Сен-Венана; некоторые за-
задачи о концентрации напряжений (Нейбер); эластостатическая
задача Робена и т. д.).
Естественные затруднения возникли при отборе материала
гл. VI (задача Сен-Венана) и VII (плоская задача). В гл. VI
jfj ПРЕДИСЛОВИЕ
сравнительно подробно трактованы постановка задачи Сен-Вена-
на, теорема о циркуляции, вопрос о центре жесткости, вариа-
вариационные способы решения, тогда как рассмотрение решений для
профилей частного вида сведено к минимуму. В гл. VII примене-
применение теории функций комплексного переменного ограничено рас-
рассмотрением простейших краевых задач, уделено место примене-
применениям других средств решения (преобразование Меллина в за-
задаче о клине, операторные решения задач о полосе и брусе с
круговой осью).
Часть IV (гл. VIII, IX) посвящена основам нелинейной тео-
теории упругости: формулировкам закона состояния нелинейно-
упругого тела, рассмотрению простейших задач, постановкам
задач об эффектах второго порядка и бифуркации состояния
равновесия. В содержание Приложений включены используемые
в тексте книги способы тензорного исчисления и некоторые све-
сведения по теории сферических и эллипсоидальных функций.
В книге рассмотрены «строгие» постановки задач — решения,
не только статически допустимые, но и удовлетворяющие усло-
условиям совместности. От первоначального намерения включить в
содержание также «технические» теории тонких стержней, пла-
пластин и оболочек пришлось отказаться, так как это привело бы
к непомерному увеличению объема книги. Существенным про-
пробелом является также ограничение по той же причине лишь
статическими задачами.
Литературные указания, вынесенные из текста книги, не со-
соответствуют необозримой литературе, относящейся к принци-
принципиальным исследованиям и решениям специальных задач теории
упругости. Этот недостаток в некоторой мере компенсируется
указаниями на обзорные статьи и монографии, содержащие ис-
исчерпывающие библиографии по специальным вопросам.
Книга адресована подготовленному читателю, заинтересован-
заинтересованному в углублении знаний по теории упругости и приобретении
навыков решения ее задач. Она предназначается также служить
пособием в преподавании курса теории упругости.
Первыми читателями этой книги были Л. М. Зубов, проверив-
проверивший формулы и вычисления, и В. А. Пальмов, предложивший
внести ряд исправлений и разъяснений. Приятным долгом авто-
автора является выразить им искреннюю благодарность за большой
труд, ценные советы и критические указания.
Автор благодарит также за плодотворную и дружескую кри-
критику профессора И. И. Воровича и руководимый им коллектив
кафедры теории упругости Ростовского государственного уни-
университета, взявших на себя труд рецензирования рукописи.
ЧАСТЬ!
ОСНОВНЫЕ ПОНЯТИЯ МЕХАНИКИ
СПЛОШНОЙ СРЕДЫ
ГЛАВА I
ТЕНЗОР НАПРЯЖЕНИЙ
§ 1. Поле напряжений в сплошной среде
1.1. Координатные системы в механике сплошной среды.
Сплошная среда характеризуется наличием в любом ее элемен-
элементарном объеме dx массы dm = pdr; коэффициент пропорцио-
пропорциональности р, плотность, считается непрерывной функцией коор-
координат точек среды.
Принимается, что под влиянием внешних воздействий ранее
находившаяся в равновесии сплошная среда в объеме v, ограни-
ограниченном поверхностью о, пришла в новое состояние равновесия, в
котором объем станет равным V; ограничивающую этот объем
поверхность назовем О. Первое состояние среды назовем на-
начальным (у-объём), второе — конечным (V-объем). В дальней-
дальнейшем будет иметь значение рассмотрение также натурального
состояния среды. Это — то состояние, в котором среда не напря-
напряжена; оно, пока не оговорено противное, не отождествляется с
начальным состоянием.
Вводится декартова система осей OXiX2X3; положение точки
среды М в начальном состоянии задается в этой системе ее
декартовыми координатами а\, а2, аз или вектор-радиусом *)
г = axi\ + a2i2 + a3i3 = asis, A.1.1)
где is — единичные векторы координатных осей. В конечном со-
состоянии эта точка занимает положение М', определяемое в той
же системе осей координатами хь х2, х3 или вектор-радиусом
R = x\U + x2i2 + x3l3 = xsis. A.1.2)
*) Знак суммирования по немому индексу опускается, как принято в
Приложениях I—III. Ссылки на Приложения отмечаются римской цифрой,
указывающей номер Приложения, номером пункта и формулы. Три числа в
формулах текста обозначают: первое — номер параграфа, второе — пункта,
третье — формулы. Они указываются при ссылке на формулу данной главы
и дополняются указанием номера главы при ссылке на формулу другой главы.
14
ТЕНЗОР НАПРЯЖЕНИИ
[ГЛ. I
Геометрическая разность R — г определяет вектор перемеще-
перемещения точки М, обозначаемый и:
= г + и = ls(as + us), xs = as
A.1.3)
Проекции us вектора перемещения, называемые перемещениями,
рассматриваются как функции координат точек среды аи а2, а3
в ее начальном состоянии, непрерывные вместе с их производ-
производными по этим переменным до требующихся в проводимом иссле-
исследовании порядков. Предполагается также, что уравнения A.1.3)
разрешимы, и единственным образом, относительно перемен-
переменных as:
г — о и п — v п (\ \ 4)
» *\ И-j l*s <rt'S M'S» \ l * * •*/
причем здесь us рассматриваются уже как функции координат
Xh конечного состояния. Условием однозначной разрешимости
системы уравнений A.1.3) является необращение в нуль яко-
якобиана
J(au аъ а3) =
dxs
дак
dus
6sk + да,
1 _|- dUl
"*" dat
диг ,
даг
диъ
да.
дщ
да2
ди%
дй2
диъ .
да.
дщ
даъ
диг
. ди$
да3
в замкнутой области v + о. Принимается, что / > 0, — в про-
противном случае можно было бы изменить нумерацию переменных.
Якобиан представляет, как известно, отношение элементов
объема среды в конечном и начальном состояниях*):
dx=JdxQ. A.1.6)
По закону сохранения массы
= p0 dx0,
так что
р
A.1.7)
A.1.8)
Декартовы координаты as точки среды в ее начальном со-
состоянии можно рассматривать как переменные, сопоставляемые
этой точке и поэтому сохраняемые за нею в конечном состоянии
среды; в этом состоянии им приписывается роль криволинейных
координат; например, точки среды, располагавшиеся в и-объеме
*) См. также п. 5.5 гл. II.
§ 1] ПОЛЕ НАПРЯЖЕНИЙ В СПЛОШНОЙ СРЕДЕ 15
на прямой а2 — а°2, а3 = аз> параллельной оси ОХ\, в V-объеме
расположатся на кривой
По установившейся терминологии as называют лагранжевы-
ми, xs — эйлеровыми координатами. Лучше сказать, что as — ма-
материальные координаты, индивидуализирующие точку и отли-
отличающую ее от других точек, a xs — координаты ее места в
V-объеме.
Квадрат линейного элемента — расстояния между двумя бес-
бесконечно близкими точками М и N, — в и-объеме равный
ds2 = dr • dr = da2 + da2 + da2, A.1.9)
в У-объеме, когда точки займут положения М', N', станет рав-
равным
dS2 = dR-dR = dx\ + dx\ + dx% A.1.10)
В дальнейшем для сокращения речи применяются термины
и-метрика и 1/-метрика в зависимости от того, какое определе-
определение квадрата линейного элемента — A.1.9) или A.1.10)—приня-
A.1.10)—принято в данном рассмотрении. Конечно, обе метрики евклидовы [Ег).
Замечания. 1. Строгое различение начального и конеч-
конечного состояний необходимо при рассмотрении конечных дефор-
деформаций сплошной среды. В линейной теории упругости эта не-
необходимость, как правило, отпадает.
2. Не обязательно за материальные координаты точек среды
принимать их декартовы координаты as в начальном состоянии.
Изложение основ механики сплошной среды приобретает боль-
большую стройность, если в качестве материальных координат точки
принять любые криволинейные координаты ql, q2, qz — тройку
чисел, сопоставляемых этой точке по некоторому закону. Тогда
as = as(q\ q\ <Д r = r(q\ q2, q% A.1.11)
равн® как и
xs= xs{q\ q\ q\ R = R{q\q2,q\ A.1.12)
следует рассматривать как координаты места и вектор-радиус
в у- и соответственно в У-объеме.
1.2. Внешние силы. В этой главе сплошная среда рассмат-
рассматривается в ее конечном состоянии. Действующие на нее силы
подразделяются на внешние и внутренние. Внешние силы пред-
представляют воздействия на точки среды тел, не включенных в рас-
рассматриваемый объем V. Они могут быть массовыми или поверх-
поверхностными.
Массовыми называют силы, действующие на каждую частицу
среды. Вектор массовой силы, отнесенной к единице массы
jg ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. Г
среды, обозначается К; тогда pKdx будет силой, действующей
на элементарную массу pdx в объеме йт, а рК — силой, дей-
действующей на единицу объема, объемной силой. Главный вектор
и главный момент относительно начала координат массовых сил
равны
jjjpKdx, jjJRXpKdx. A.2.1)
V V
Простейшим примером массовой силы служит сила тяжести
K = -kg; A.2.2)
здесь k — единичный вектор восходящей вертикали, g — ускоре-
ускорение силы тяжести. При рассмотрении равновесия сплошной
среды по отношению к движущимся осям в число массовых сил
включается сила инерции переносного движения
K=-wt~-[w0 + mXR + nX{e>XR)], A.2.3)
где we — вектор переносного ускорения, равный геометрической
сумме ускорения w0 начала системы осей, вращательного & X R
и центростремительного со X (со X R) ускорений (со — вектор
угловой скорости, о — углового ускорения). Ускорение Кориолиса
не включено в правую часть A.2.3), так как среда покоится
относительно движущихся осей. В частном случае равномерного
вращения среды вокруг неподвижной оси массовой является
«центробежная сила»
К = _ © х (со X R) = a>2he, A.2.4)
где h — радиус окружности, по которой вращается рассматри-
рассматриваемая частица среды, е — единичный вектор из центра этой
окружности по ее радиусу. Начало вектора R взято на оси вра-
вращения.
В случае потенциальных массовых сил
K=-gradn, A.2.5)
где П — потенциальная энергия поля массовых сил. Например,
для поля силы тяжести и поля центробежной силы
U = gk-R, П = i- [(со - /?J - о2/?2] = - ±|<о х J? Р. A.2.6)
Внешние поверхностные силы — силы, распределенные по по-
поверхности О объема V. Поверхностная сила, отнесенная к еди-
единице площади этой поверхности, обозначается F; главный век-
вектор и главный момент поверхностных сил равны
jJRxFdO. A.2.7)
§ 1] ПОЛЕ НАПРЯЖЕНИЙ В СПЛОШНОЙ СРЕДЕ 17
Через dO обозначается элемент площади поверхности О в от-
отличие от элемента площади do поверхности о, ограничивающей
объем v среды в начальном состоянии. Единичный вектор нор-
нормали к площадке tdO, направленный вовне V-объема, обозна-
обозначается N (в отличие от п — единичного вектора нормали к do
вовне у-объема); N dO называется вектором ориентированной
площадки на О (ndo — на о). Нормальная компонента силы F
и ее составляющая в плоскости, касательной к О, равны
N-F, F — NN-F = (NXF)XN. A.2.8)
Примером поверхностной силы может служить гидростатическое
давление жидкости, в которую погружено тело:
F = —pN. A.2.9)
Другой пример — распределенные по поверхности контакта ре-
реакции основания, на котором покоится тело.
Потенциальными являются поверхностные силы, сохраняю-
сохраняющие неизменную величину и неизменное направление при дефор-
деформировании тела из начального состояния в конечное. Тогда
П = — F-R = — F.(r+u)=n0 — F и. A.2.10)
1.3. Внутренние силы в сплошной среде. Рассмотрение рав-
равновесия сплошной среды основано на двух положениях: 1) при
равновесии среды в равновесии находится любая по произволу
выделенная ее часть (способ сечений), 2) условия равновесия
абсолютно твердого тела являются необходимыми условиями
равновесия рассматриваемой части среды (принцип затверде-
затвердевания).
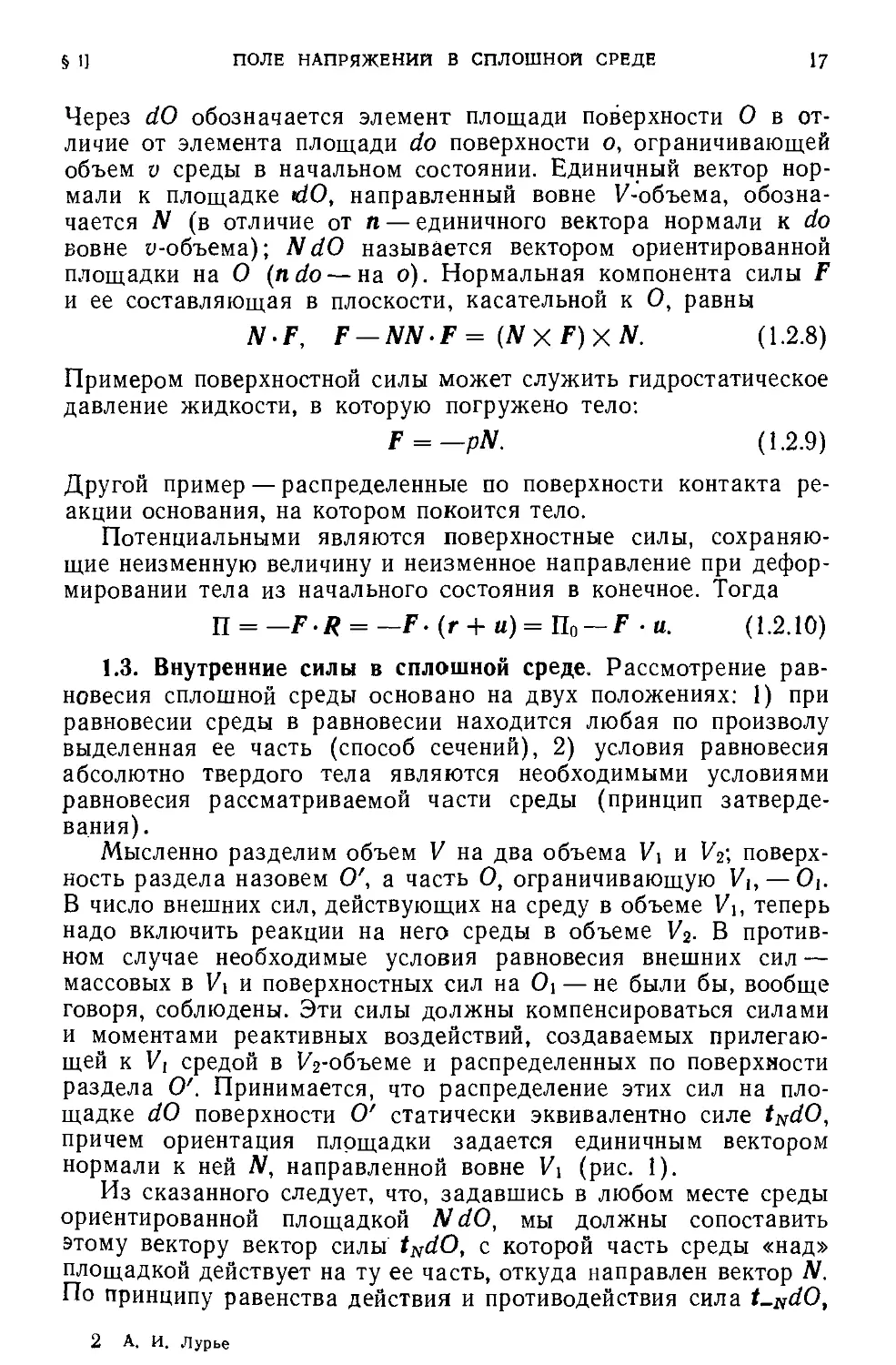
Мысленно разделим объем V на два объема 1Л и VV, поверх-
поверхность раздела назовем О', а часть О, ограничивающую 1Л, — О\.
В число внешних сил, действующих на среду в объеме V\, теперь
надо включить реакции на него среды в объеме V2. В против-
противном случае необходимые условия равновесия внешних сил —
массовых в Vi и поверхностных сил на О\ — не были бы, вообще
говоря, соблюдены. Эти силы должны компенсироваться силами
и моментами реактивных воздействий, создаваемых прилегаю-
прилегающей к Vi средой в Уг-объеме и распределенных по поверхности
раздела О'. Принимается, что распределение этих сил на пло-
площадке dO поверхности О" статически эквивалентно силе tNd0,
причем ориентация площадки задается единичным вектором
нормали к ней N, направленной вовне V\ (рис. 1).
Из сказанного следует, что, задавшись в любом месте среды
ориентированной площадкой NdO, мы должны сопоставить
этому вектору вектор силы tNd0, с которой часть среды «над»
площадкой действует на ту ее часть, откуда направлен вектор N.
По принципу равенства действия и противодействия сила t-Nd0,
2 А. И. Лурье
]g ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. I
равной величины и противоположно направленная, будет дей-
действовать со стороны второй из упомянутых частей среды (рас-
(расположенной «под» площадкой) на первую:
t-Nd0 = —tNd0. A.3.1)
Эти воздействия частей среды друг на друга определяют поле
внутренних сил — поле напряжений в сплошной среде. Его ко-
количественные характеристики изменяются не только от точки к
точке, как в скалярных полях, но и в данной точке ему нельзя
сопоставить определенного направления, как в случае векторных
полей. Величина, задающая поле напряжений, должна определять
вектор tNdO в каждой точке поля и для
каждой ориентированной площадки NdO в
этой точке (или вектор tN по вектору N).
Это значит, что физическое состояние, на-
названное полем напряжений, определяется
величиной, сопоставляющей одному вектору
N другой tN. Если принять, что связь между
этими векторами линейна (этот вопрос рас-
рассмотрен в следующем п. 1.4), то такой ве-
величиной служит тензор второго ранга*),
рис 1 в данном случае тензор напряжения. ®н
обозначается Т, а его компоненты в де-
декартовой системе осей OXiX2X3 — через tih. Вектор tN опреде-
определяется произведением Т на N слева:
tN = N-f. A.3.2)
Запись в форме произведения на N справа изменила бы только
обозначения компонент тензора Т.
Замечания. 1. Было предположено, что распределение сил
на элементарной площадке N dO статически эквивалентно одной
силе tNd0 — его главный момент относительно точки на линии
действия этой силы принят равным нулю. Это предположение
отброшено в разработанной в начале этого века братьями Кос-
сера системе механики сплошной среды. Основанием для такого,
казалось бы, парадоксального представления, что моменту мо-
можно приписать такой же порядок малости (порядок dO), что и
главному вектору, является, по-видимому, условность самого
понятия малости в механике сплошной среды. То, что называет-
называется бесконечно малым объемом, представляет само по себе слож-
сложный объект, содержащий весьма большое число элементарных
частиц, а передаваемое через площадку усилие следует тракто-
трактовать как интегральный эффект взаимодействия этих частиц. Нет
*) См. определение в п. 1.3 (пункт 3 Приложения I).
§ 1]
ПОЛЕ НАПРЯЖЕНИЙ В СПЛОШНОЙ СРЕДЕ
19
ШО
ничего логически недопустимого в том, что по крайней мере в
местах резкой изменяемости напряженного состояния влияние
моментов может оказаться сравнимым с влиянием сил. В по-
последние годы идеи Коссера развиваются в большом числе работ
по «моментной» или «несимметричной» теории упругости.
2. Принятое предположение, что реактивное воздействие
объема Vo на V\ может быть заменено только системой сил, рас-
распределенных по поверхности О', обусловлено физическим пред-
представлением, что взаимодействия частиц являются силами близко-
действия. В нелокальной теории
упругости учитываются массовые
силы взаимодействия отброшенной
части тела с оставшейся.
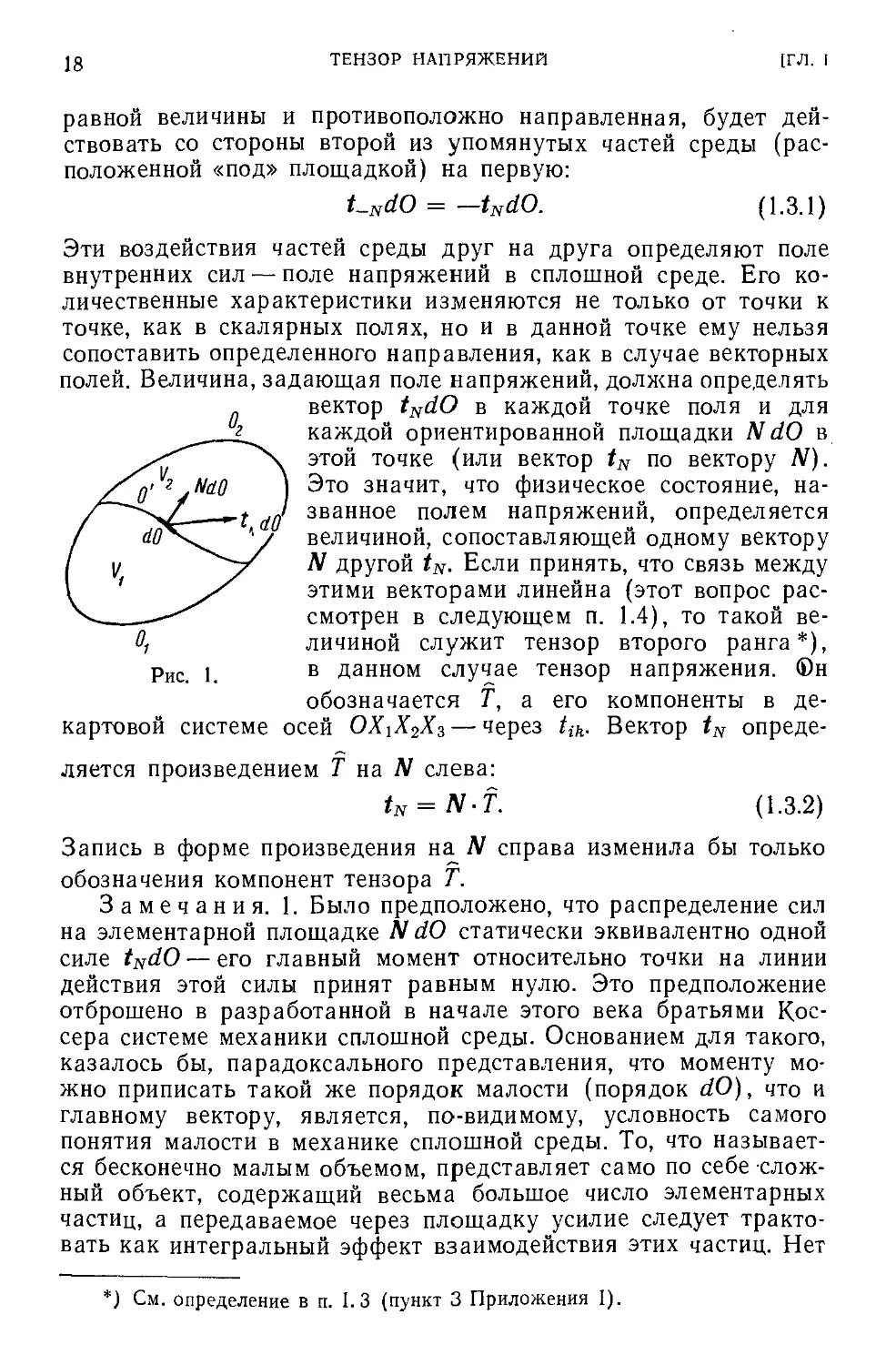
1.4. Равновесие элементарного
тетраэдра. Предположение о линей-
линейной связи векторов силы t^dO и
ориентированной площадки NdO
заменим предположением, что эта
связь задается более общим соот-
соотношением
tNd0=f(Nd0). A.4.1)
Надо доказать, что / — линейная
операция над вектором NdO. С этой
целью рассматривается равновесие
элементарного тетраэдра с вершиной в точке О и ребрами
О А, ОВ, ОС, задаваемыми векторами Хеи ке2, Хе3, где К — мас-
масштабный малый параметр. Направленные вовне тетраэдра век-
векторы ориентированных площадок ОАВ, ОВС и ОСА (рис. 2)
равны
Рис. 2.
выделенного из среды
dO = \ Я2е2 X
= \r к2е3 X е2,
= \ Я2е, X е3.
Правая часть легко проверяемого тождества
<?3 X е2 + ех X <?3 + ег X *i = (*з ~ *i) X (е2 - <?,)
пропорциональна и направлена противоположно вектору NdO
вовне тетраэдра ориентированной площадки ABC:
Итак,
NxdO + N2dO + NsdO = - N dO.
A.4.2)
2*
20 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. 1
Выражая теперь, что главный вектор приложенных к тетраэдру
поверхностных и массовых сил равен нулю, имеем
1 2 3
tNl dO + tN, dO + tN, dO + tNd0 + pKdx = 0.
Последнее слагаемое пропорционально элементарному объему:
cft=g-A3e1-(e2Xe3).
и оно должно быть отброшено, так как при Х-*-0 прочие сла-
слагаемые пропорциональны к2. Итак,
ad0. A.4.3)
Учитывая A.4.2), A.4.3), а также соотношение A.3.1), перепи-
переписываемое в виде
f(-NdO)=-f(NdO), A.4.4)
можно равенству A.4.1) придать теперь вид
/ (JV, d6 + N2d6 + N3 dO) = / (JV, d6) + / (tf2 dO) + f (JV3 dO),
чем и доказывается линейность функциональной зависимости
A.4.1). Пришли к основному для всего построения механики
сплошной среды соотношению A.3.2), дающему определение
тензора напряжений Т.
В координатном представлении согласно A.3.2) и A.4.2) оно
записывается в виде
A.4.5)
Полагая N = iu так что Ni = l, N2 = N3 = 0, получим вектор
силы, действующей на площадку с внешней нормалью ц и от-
отнесенной к единице площади. Назовем его вектором напряже-
напряжения fi; его проекции на оси системы OXiX2X3, равные ^п, fa, ti3,
называются напряжениями: tu—нормальным; ti2, t\3 — каса-
касательными. Аналогично вводятся векторы напряжения t2, t3 на
площадках, нормалями которых служат единичные векторы ко-
координатных осей <2, «з- В матрице компонент тензора Т
hi ^12 ^13
t2l ta t23l A.4.6)
^31 ^32 ^33 I
диагональные элементы представляют нормальные, а недиаго-
недиагональные— касательные напряжения. На рис. 3 изображен вы-
§1]
ПОЛЕ НАПРЯЖЕНИЙ В СПЛОШНОЙ СРЕДЕ
21
деленный из среды элементарный параллелепипед с ребрами,
параллельными координатным осям, и показаны напряжения на
его гранях с нормалями, сонаправленными с этими осями.
Замечания. 1. Соотношения A.4.5), полученные рассмо-
рассмотрением равновесия элементарного тетраэдра (с ребрами, напра-
направленными параллельно координатным осям), впервые сформули-
сформулировал Коши в 1827 г.
2. Можно лишь условно в выбранной координатной системе
называть напряжения tsh проекциями «вектора» ts, так как эти
величины при повороте коор-
координатной системы преобра-
преобразуются как компоненты тен-
тензора, а отнюдь не компоненты
вектора.
Квазивекторы iiS [см.
A.5.12)] могут быть введены в
диадное представление тензо-
тензора напряжений:
Т = Ш,к =
A-4.7)
3. На рис. 3 были показа-
показаны напряжения tsh на гранях с Рис. 3.
внешними нормалями, сона-
сонаправленными с координатными осями, в предположении, что
tsh > 0. Поскольку /_s = —/s, то на грани с нормалью (—/s) поло-
положительные tSh ориентируются по направлениям (—ih). Отсюда
следует, что положительные нормальные напряжения — растя-
растягивающие, а отрицательные — сжимающие; моменты положи-
положительных касательных напряжений tsk на гранях is и (—is) от-
относительно оси ir имеют знак символа Леви-Чивита eSkr (см.
1.1.2).
4. В технической литературе по теории упругости теперь
общеприняты обозначения нормальных и касательных напряже-
напряжений буквами о и т с соответствующими индексами, так что ма-
матрица тензора Т представляется в виде
A.4.8)
Эти обозначения мы будем применять наряду с обозначениями
A.4.6). Существует ряд других систем обозначений, например:
Ох = Хх, Тух = Ху И Т. Д.
1.5. Необходимые условия равновесия сплошной среды. Вы-
Выделим из среды целиком расположенный внутри нее, а в осталь-
остальном произвольный объем У», ограниченный поверхностью О„ не
Ох
ХУХ
хгх
= т21 с
= Т31 Хк
<у ~~ Т12 xxz — Т13
*у == ^2 tyz == ^23
•а = Х32 аг = аЗ
22 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. I
имеющей общих точек с поверхностью О объема V, равновесие
которого рассматривается. Распределенные по О* поверхност-
поверхностные силы, внутренние для V (внешние для V»), обусловлены
существованием в V напряженного состояния, задаваемого тен-
тензором Т. Они определяются основным соотношением A.3.2), в
котором N— единичный вектор внешней нормали к О*.
Имеются две группы необходимых условий равновесия —
уравнения равновесия в объеме V и уравнения равновесия на
его поверхности О.
Уравнения равновесия в объеме выражают условия обра-
обращения в нуль главного вектора и главного момента массовых и
поверхностных сил, действующих на произвольно выделенный
из V объем К*. Сославшись на A.2.1), A.2.7), имеем
J f J pKdx + J J tN dO = 0, J J J R X pKdx + J J R X tN dO = 0
vt o, vt o,
и после замены tN по формуле A.3.2)
J J iV- f dO = 0,
- A.5.1)
RXN-Td0 = 0.
0»
Преобразуя поверхностные интегралы в объемные [см. (II.5.5),
(II. 5.6)], получим
jj N-TdO= jj J div frit,.
, , °* /I , . d.5.2)
J J R X N • T dO = j J J (if X div T - 2a) dx,
o, v, J
где со — сопутствующий тензору Т вектор, определяемый косо-
симметричной частью этого тензора. Приходим к равенствам
J J J (p/C + div f) dx = 0, J J j[RX (p/C + div f) - 2w] dx = 0.
V, Vt
A.5.3)
Из равенства
когда У* — произвольный объем, a f — непрерывная функция
координат, следует, что / = 0, так как, если предположить, что
|^0 в некоторой точке У*-объема, то она сохранит по непре-
непрерывности знак в окрестности этой точки. Такую окрестность мо-
§ 1] ПОЛЕ НАПРЯЖЕНИИ В СПЛОШНОЙ СРЕДЕ 23
жно принять за объем F*, а интеграл от знакопостоянной функ-
функции не может быть нулем.
Отсюда и из формулы A.5.3) i следует, что
div f + р/С = 0. A.5.4)
Это — первое уравнение равновесия сплошной среды; из него и
A.5.3J следует теперь, что и = 0, а этим доказано, что тен-
тензор Т симметричный:
f = r. A.5.5)
Уравнения равновесия сплошной среды A.5.4), A.5.5) записаны
здесь в инвариантной форме. Их запись в декартовых координа-
координатах V-объема имеет вид трех дифференциальных уравнений ста-
статики сплошной среды
A.5.6)
и трех уравнений, выражающих симметричность тензора напря-
напряжений,
4з = ^32, hi = ti3, t\<i = ^2i- A.5.7)
Более общее предложение, выражающее это свойство, можно,
основываясь на A.5.5) и A.4.3), записать в виде (пип2—про-
(пип2—произвольно ориентированные единичные векторы)
nX'fn2 = n2-f-nx A.5.8)
— проекция на направление п2 вектора напряжения на пло-
площадке с нормалью «1 равна проекции на пх вектора напряжения
на площадке с нормалью Лг-
Уравнения равновесия A.5.6), A.5.7) легко получить из на-
наглядных представлений, выражая, что главный вектор и главный
момент действующих на выделенный из среды элементарный
параллелепипед поверхностных и объемных сил равен нулю.
Поверхностные силы на гранях (передней и задней), перпен-
перпендикулярных оси U, равны
+jdxi, x2,
-jdxu x2,
24 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. J
где t\ = ti(xux2,Хз) — значение t\ в центре параллелепипеда.
Вектор-радиусы точек приложения этих сил, взяв начало в вер-
вершине параллелепипеда, можно считать равными
1 1 1 1 1
f, dxx + у {h dx2 +13 dx3) = -j j, dxx + у is dxs; - у i, dxx + j is dxk,
причем
у is dxs = у («, dxx + i2 dx2 + i3 dx3)
— вектор-радиус центра параллелепипеда. Подобным же обра-
образом составляются выражения сил и вектор-радиусов их точек
приложения для правой и левой граней, перпендикулярных i2:
— i2
и для верхней и нижней граней, перпендикулярных ц:
+т -^dx») dx>dx- (*-» - т *к3 dx>) dx>dx»
j i3 dx3 + j is dxs, - ^ i3 dx3 + у is dxs.
Объемная сила pKdx\dx2dx3 считается приложенной в центре
параллелепипеда. Приравнивая теперь нулю главный вектор
всех перечисленных сил и их главный момент относительно точ-
точки О и учитывая A.3.1), после сокращения на dx\dx2dx3 при
дем к двум векторным уравнениям:
Ж7 + Ж7+ЖГ+Р* = ° 0-5.9)
A.5.10)
причем последняя группа слагаемых в A.5.10) отпадает по
A.5.9). Получили соотношения, представляющие иную запись
уравнений A.5.6), A.5.7):
) | 0' (Ь5Л1)
is Xts = is X tstit = еМг = 0. A.5.12)
Три уравнения равновесия A.5.6) содержат шесть компонент
симметричного тензора напряжения. Это, конечно, только необ-
необходимые условия равновесия; получение также и достаточных
условий неизбежно требует рассмотрения физической модели
§ 11 ПОЛЕ НАПРЯЖЕНИЙ В СПЛОШНОЙ СРЕДЕ 25
среды (упругое тело, вязкая жидкость). Задача о равновесии
сплошной среды статически неопределима.
Уравнения равновесия на поверхности О, ограничивающей
объем V, представляют запись основного соотношения A.3.2),
в котором tN заменено распределенной по О поверхностной си-
силой F:
N-f = F. A.5.13)
Другие формы записи этого равенства имеют вид
NJi + Nfc + NJs^F A.5.14)
или же
ЛГ,*„ + ЛГ2*21 +#3*31 = ^1, ]
#1*12+ #2*22 +#3*32=^2, A.5.15)
где Ns — проекции единичного вектора N на координатные оси.
Условимся говорить, что любое частное решение уравнений
равновесия в объеме и на поверхности определяет статически
возможное состояние среды. Многообразие таких состояний —
многообразие удовлетворяющих трем краевым условиям A.5.15)
частных решений системы трех дифференциальных уравнений в
частных производных A.5.6), содержащих шесть неизвестных.
Задача статики сплошной среды состоит в определении в этом
многообразии состояния, реализуемого в принятой физической
модели.
1.6. Тензор функций напряжений. Уравнения равновесия
сплошной среды A.5.4) линейны относительно компонент тензо-
тензора напряжений, и их решение представляется суммой какого-
либо частного решения уравнения
pK = 0 . A.6.1)
и решения однородного уравнения
divf<2> = 0. A.6.2)
Частное решение предполагается известным; оно для практи-
практически встречающихся заданий массовых сил (сила тяжести,
центробежная сила) без труда находится (в линейной теории
упругости при р = const). Поэтому речь будет идти об общем
представлении тензора с равной нулю дивергенцией; чтобы не
усложнять записей, назовем его Т, вместо Л2'. Такой тензор сле-
следует искать в виде (см. (П. 4.16))
f-rotP, A.6.3)
26
ТЕНЗОР НАПРЯЖЕНИЙ
[ГЛ. 1
где Р — тензор второго ранга, который надо в соответствии с
A.5.5) подчинить условию
rot P = (rot P)\ A.6.4)
Сославшись на (II. 4.13), можно удовлетворить этому усло-
условию, принимая
P = (rot6)\ A.6.5)
где Ф — любой симметричный тензор второго ранга. Итак, тензор
f = rot(rot<5)* = Ink6 A.6.6)
удовлетворяет поставленным условиям: он симметричен, а его
дивергенция равна нулю. Симметричный тензор Ф называется
тензором функций напряжений.
Взяв тензор Ф в диагональной форме
Ф = i,ii®ii + У2Ф22 + М3Ф33, A -6.7)
придем по (II. 4.15) к представлению напряжений через три
функции напряжений Максвелла:
i _ з2ф22 , <э2ф33 , , _ а2Ф33
'12— '21
щ
<Э2Фзз
дх\
<Э2Фи
дх\
дх\
{ дх2
дх\
'23 — ^32
'23
дх2
— '13 —
дхъдхх
A.6.8)
Представление тензора напряжений через функции напря-
напряжений Морера получим, полагая нулями диагональные компо-
компоненты
Ф = (|,?2 + i2ix) Ф12 + (i2i3 + цц) Ф23 Щ
Оно имеет вид
дх2 дх3
/22
-2-
дх3 дхх
= ~ 2
х{ дх2
дх_
= д I дФ12
дх2 \ дхц
д (дФ2г
¦ ~ дх3 \ дхх
¦ I
дФу.
дх2
дх2
дх3
A.6.9)
Представление напряжений через функции Максвелла неин-
неинвариантно, так как при преобразовании координат тензор, ра-
ранее диагональный, уже не останется таковым. Неинвариантно и
представление Морера. Инвариантное представление тензора
§ 2] СВОЙСТВА ТЕНЗОРА НАПРЯЖЕНИЙ 27
напряжений A.6.6) было независимо друг от друга дано
Б. Финци (В. Finzi), Ю. А. Прутковым, и В. И. Блохом.
В плоской задаче теории упругости напряжения не зависят
от координаты xs, а компоненты ^гз, hi тензора напряжений от-
отсутствуют. Инвариантное относительно поворота вокруг оси ОХ3
выражение тензора функций напряжений можно взять в виде
Ф = (v?2 + Уз) U(хи х2), Ей = Mi + i2i2 = Е-цц, A.6.10)
где v — постоянная. Тогда по A.6.8)
Функция U(xuX2) представляет функцию напряжений Эри
(Airy); сразу легко видеть, что выражения A.6.11) тождествен-
тождественно удовлетворяют однородным уравнениям равновесия плоской
задачи
дху дх2 ' дху дх2
Из представления A.6.6) видно, что по заданному тензору
напряжения Т тензор функции напряжений определен с точ-
точностью до слагаемого ФA) — симметричного тензора, операция
Ink над которым равна нулю. Таким тензором, как увидим ниже,
в п. 2.1 гл. II, и что легко проверить, является линейный тензор
деформации над любым вектором а:
<DA) = defa, 1пкФA) = Ink def a = 0. A.6.12)
Итак, полагая
Ф = Ф4 + def a, A.6.13)
имеем
f = 1пкФ = 1пкФ.. A.6.14)
Следовательно, в задание Ф входят три произвольно назначае-
назначаемые функции as; это позволяет понять, почему шесть функций tsh,
связанных тремя дифференциальными уравнениями A.5.6), ока-
оказались выраженными через шесть, а не три, функций напряже-
напряжений Фгг.
§ 2. Свойства тензора напряжений
2.1. Преобразование компонент. Главные напряжения. Глав-
Главные инварианты. Можно повторить применительно к тензору
напряжений сказанное в Приложении I о свойствах симметрич-
симметричного тензора.
28 ' ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. I
Закон преобразования компонент тензора напряжений при
повороте декартовой системы осей дается формулами (I. 3.6). Их
можно получить также, исходя из зависимости Коши A.4.5).
Совместим N с единичным вектором i'k; тогда aks = i'k • is = Ns и
проекции на старые оси «квазивектора» fk — напряжения на пло-
площадке с нормалью i'k — по A.4.5) будут
«Узз + 2 («и«1
а на новые оси
Например,
a13a22) t23 + (апЩ\ + ац«2з) ^3i- B.1.3)
Легко также получить эти формулы, записав тождество
f = E-f -Ё
и представив в нем единичный тензор Е в виде
?-ад-ад-
Снова получаем B.1.1):
f = Ws - W * <mAA • W = «*аЛЛК- B.1.4)
Главные значения тензора напряжений, называемые главны-
главными напряжениями, равны корням tu t2, h его характеристиче-
характеристического уравнения
'23
= 0. B.1.5)
Главные направления — главные оси напряжений — образуют
1 2 3
ортогональный триэдр единичных векторов е, е, е; косинусы их
углов с осями координат ek = e • ik определяются системой
уравнений (г = 1, 2, 3; s = 1,2, 3)
). B.1.6)
*) Нр суммирорать цо
СВОЙСТВА ТЕНЗОРА НАПРЯЖЕНИИ
29
Диагональное представление тензора напряжений в главных
осях записывается в виде
11
T = t,ee-
22
33
t2ee + t3ee,
B.1.7)
и главные напряжения ts на площадках с нормалями е являются
нормальными, а касательные напряжения на них отсутствуют.
Выражения компонент тензора в
системе осей iu i2, i3 через глав-
главные напряжения записываются в
виде
+ as3ak3t3. B-1.8)
т
Здесь ocsm = is-e, так как глав-
главные оси играют роль «старых»
осей. Упрощается также запись
зависимостей Коши A.4.5):
*лп — ^l^i» tN2 = t2N2, tN3 = t3N3
(Nk = N-e). B.1.9)
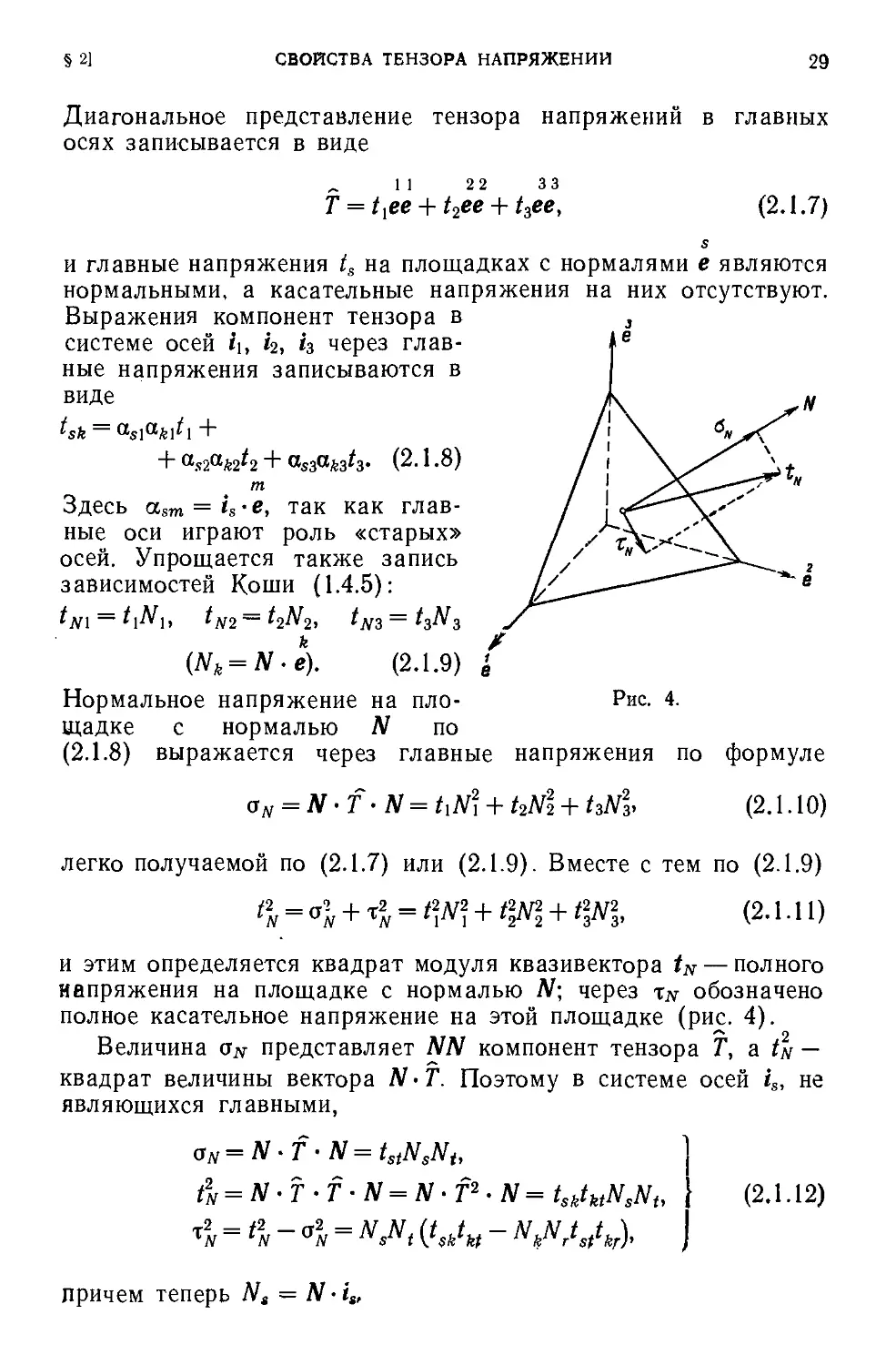
Нормальное напряжение на пло- Рис. 4.
щадке с нормалью N по
B.1.8) выражается через главные напряжения по формуле
аы = N • Т • N= UN*
UNl + hNl
B.1.10)
легко получаемой по B.1.7) или B.1.9). Вместе с тем по B.1.9)
^ = ^ + ^ = W + ^ + ^I, B.1.11)
и этим определяется квадрат модуля квазивектора tN — полного
напряжения на площадке с нормалью W; через tjv обозначено
полное касательное напряжение на этой площадке (рис. 4).
Величина aN представляет NN компонент тензора Т, a /jy —
квадрат величины вектора N-T. Поэтому в системе осей is, не
являющихся главными,
= tsktktNsNu
B.1.12)
причем теперь Ns = N • it.
30 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. I
В плоской задаче теории упругости ось ОХ3 является одной
из главных осей, так как ^з = hi = 0; называя через ф, -=— ф
I 2
угол оси ц с главными осями е, е, имеем по B.1.8)
tn — ti cos2 ф + t2 sin2 ф = у (ti + t2) — у (t<i — t^ cos 2ф,
f22 = ^ Sin2 ф + t2 COS2 ф = -75- (ti + t2) + -5- (t2 — tx) COS 2ф,
hi= (^2 — ^1)cos Ф sin ф = y (ti ~h) sin 2ф.
B.1.13)
Здесь повторены формулы A.3.14). Сославшись на A.6.11),
легко теперь получить исходные соотношения плоской задачи
Формулы для главных инвариантов тензора Т, сославшись на
A.10.4) A.10.10), A.10.11), можно записать в виде
/, (f) = ti + t2 + t3 = tn + t22 + t33 = tss, 1
2 2 ' 1 (z.l.loj
/3 (f) = txt2t3 = \tsk\ = ~\l\ (f) - 3/, (f) /, (f2) + 2/, (f *)]. j
2.2. Круги Мора. Разыскиваются площадки, на которых нор-
нормальное и полное касательное напряжения имеют заданные на-
наперед значения oN и т^. Задача сводится к разысканию трех не-
неизвестных N2i, N2, N2 из уравнений B.1.10), B.1.11), к которым
добавляется уравнение
Искомое решение записывается в виде
«I .)(¦ 8) Bl)(^s) (.l)C*)
B.2.1)
«-де обозначено:
f (а х 1-т2 I (а - /2 +
2J
СВОЙСТВА ТЕНЗОРА НАПРЯЖЕНИЙ
31
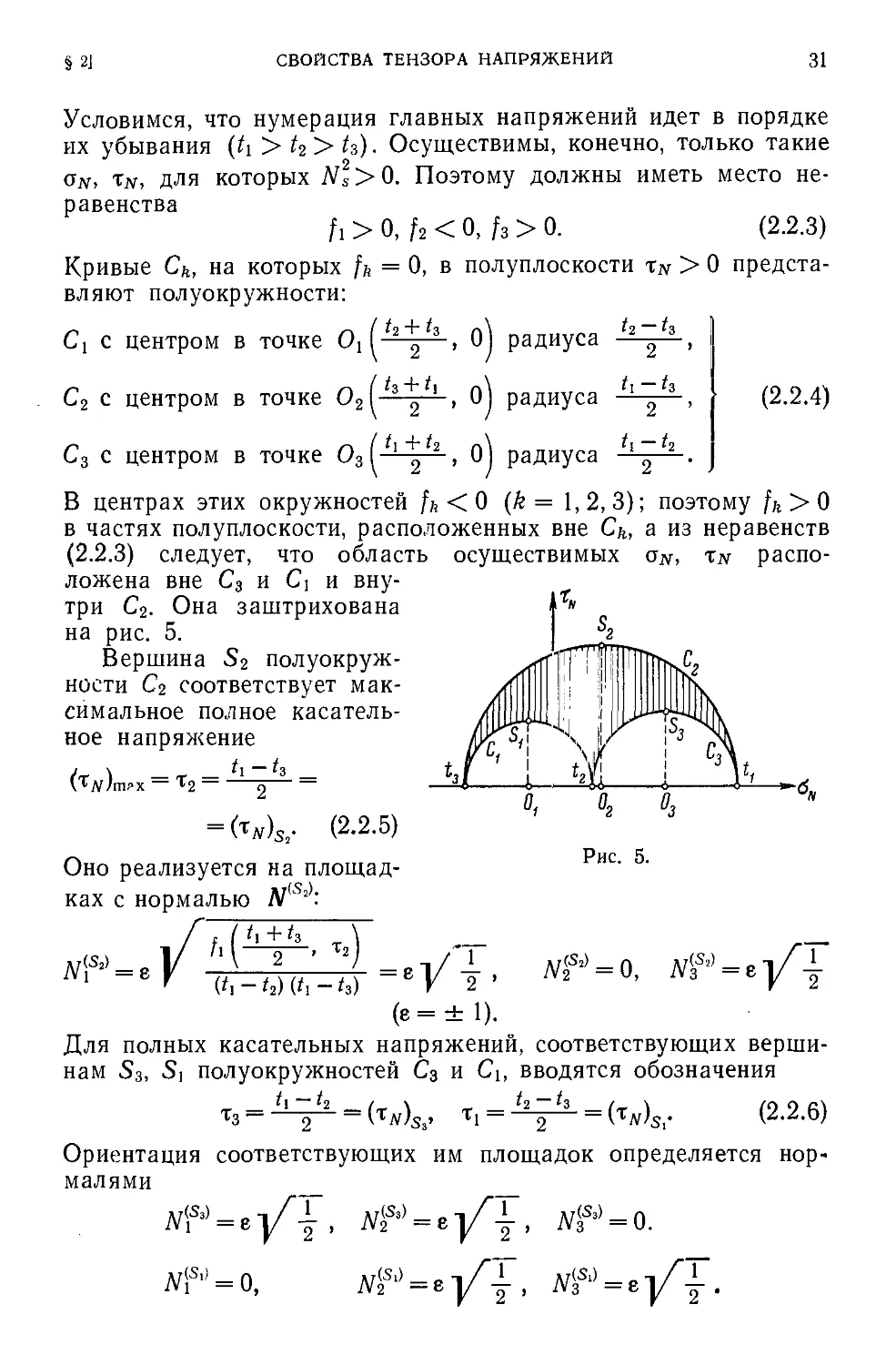
Условимся, что нумерация главных напряжений идет в порядке
их убывания (t\ >t2>t3). Осуществимы, конечно, только такие
on, Xn, для которых N2s>0. Поэтому должны иметь место не-
неравенства
h > 0, h < 0, h > 0. B-2.3)
Кривые Cfc, на которых /й = 0, в полуплоскости tjv > 0 предста-
представляют полуокружности:
С, с центром в точке О!
С2 с центром в точке О2
h
радиуса
радиуса
2
U-к
2
и-и
B.2.4)
С3 с центром в точке О3 ( ' 2 -, 0) радиуса
В центрах этих окружностей fh < 0 (k = 1,2,3); поэтому /fe > 0
в частях полуплоскости, расположенных вне Си, а из неравенств
B.2.3) следует, что область осуществимых aN, %n распо-
расположена вне С3 и С] и вну-
внутри С2. Она заштрихована
на рис. 5.
Вершина S2 полуокруж-
полуокружности С2 соответствует мак-
максимальное полное касатель-
касательное напряжение
B.2.5)
Оно реализуется на площад-
площадках с нормалью Л^ :
Рис 5.
r(S2>
N\^ = i
(г=± 1).
Для полных касательных напряжений, соответствующих верши-
вершинам S3, Si полуокружностей С3 и С\, вводятся обозначения
4 _ 4 4 *
B.2.6)
Т3 —
Т1 ~
2 V'AT/Ss' 1 2
Ориентация соответствующих им площадок определяется нор
малями
32 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. I
Как видно из этих формул, касательные напряжения xh осу-
осуществляются на площадках, проходящих через главное напра-
направление е и делящих пополам прямой угол между главными
координатными плоскостями, пересекающимися по этому на-
направлению; th называются главными касательными напряже-
напряжениями.
При обозначениях B.2.5), B.2.6) из формул B.1.10), B.1.11)
легко находится
х% = 4 (х2ЩИ\ + х2ЩЩ + хЩЩ). B.2.7)
В частности, на октаэдрической площадке — площадке, одина-
одинаково наклоненной к главным осям, когда N\ = N\ = N\ = '/з. имеем
f —** * -° ' V2\
B.2.8)
4 = |(^ + ^ + '
Вместе с тем по A.11.6) и (I. 10.10)
т2 = t2 — а2 = — Г/ <Т2) - /2 ^1 = — I (T)?v f) (I 9 Q^
• < '• I? о Ц & J «
так что
/2 (Dev f) = - -| (t2 + T2 + t2). B.2.10)
Впрочем, зто же следует и из формулы A.11.8). Величина
х = V - /2(Dev f) = У\(?\ + tJ + т23) B.2.11)
называется интенсивностью касательных напряжений. Приве-
Приведенные формулы содержат истолкование механического значе-
значения инвариантов тензора напряжения.
Описанное в этом пункте построение области осуществимых
Одг, tn было дано О. Мором A882). Конечно, оно^применимо ко
всякому симметричному тензору второго ранга Q, причем роль
eN, fit отходит к N-Q-N, N-Q2-N.
2.3. Разбиение тензора напряжений на шаровой тензор и
девиатор. Тензор напряжений представляется в виде (I. 11.1):
B.3.1)
ряже-
О
ний на взаимно перпендикулярных площадках. В идеальной
Здесь 4-сх— среднее значение суммы трех нормальных напряже-
О
§ 2] СВОЙСТВА ТЕНЗОРА НАПРЯЖЕНИЙ 33
жидкости или в покоящейся вязкой жидкости осуществляется
напряженное состояние, в котором одинаковое давление
р= —^а действует на произвольно ориентированных площад-
площадках. Такое «гидростатическое» напряженное состояние соответ-
соответствует шаровой части тензора напряжений; его девиатором ха-
характеризуется уклонение напряженного состояния от гидроста-
гидростатического.
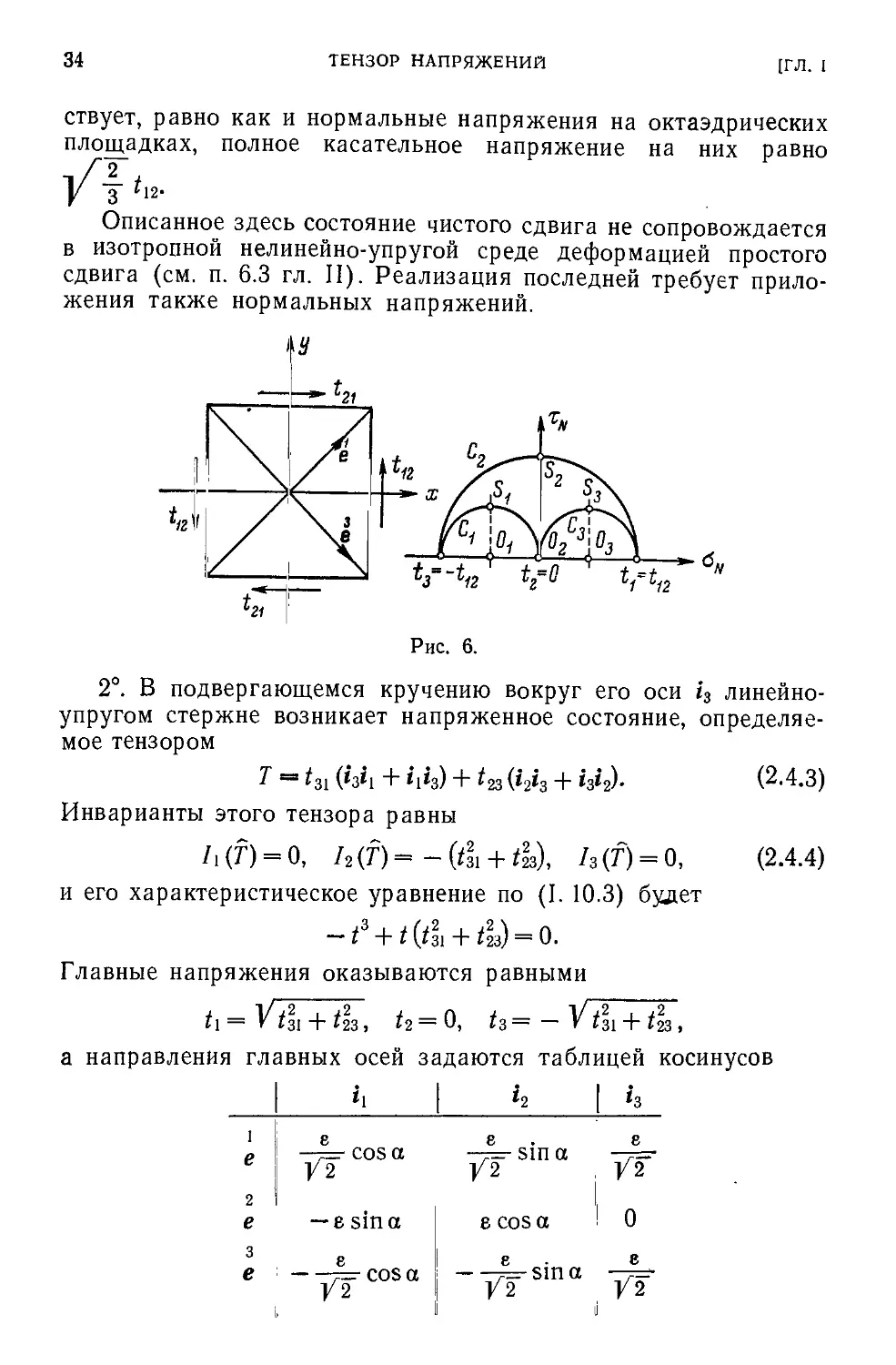
2.4. Примеры напряженных состояний. Г. В напряженном
состоянии чистого сдвига отсутствуют напряжения на площад-
площадках, перпендикулярных *3, а также напряжения tn, t^. Тензор Т
задается равенством
f = (M2 + *2*l)*12, B-4.1)
и его характеристическое уравнение B.1.5) имеет вид
-t tl2 0|
t2l -t 0 =-t{t2-A) = 0.
jo о -t :
Главные напряжения равны
U = tn, t2 = Q, U = —Ui. B.4.2)
Система уравнений B.1.6), определяющих главную ось напря-
1
жения е, будет
11 11 1 ill
*i2e2= °> Vi ~ fi2e2 = 0, -^а^з^0- е\ + е\ + е\=\.
Одно из них должно быть следствием прочих, в данном случае
второе повторяет первое. Получаем
и аналогично найдем
2 2 2 3 3 1 3
1
= е2 = 0, е3=±\, е, = -е2= ±—?=, е3 =
1
?=
1 3
Главные оси е, е имеют показанные на рис. 6 направления диа-
2
гоналей квадрата, а главная ось е направлена по ц, что, впро-
впрочем, следовало из задания тензора.
Расположение кругов Мора показано на том же рис. 6. Глав-
Главные касательные напряжения и интенсивность касательных на-
напряжений равны
1 = Т3 =
Т1 = Т3 = ~2 *12> Т2 = ^12> Т= у "(Т1 + Т2+ Тз) = *12«
Этим объясняется выбор множителя 2/3 в определении B.2.11)
величины т. Шаровая часть Т в случае чистого сдвига отсут-
3 А. И. Лурье
34
ТЕНЗОР НАПРЯЖЕНИЙ
[ГЛ. I
ствует, равно как и нормальные напряжения на октаэдрических
площадках, полное касательное напряжение на них равно
У у 'is-
Описанное здесь состояние чистого сдвига не сопровождается
в изотропной нелинейно-упругой среде деформацией простого
сдвига (см. п. 6.3 гл. II). Реализация последней требует прило-
приложения также нормальных напряжений.
trt12
Рис. 6.
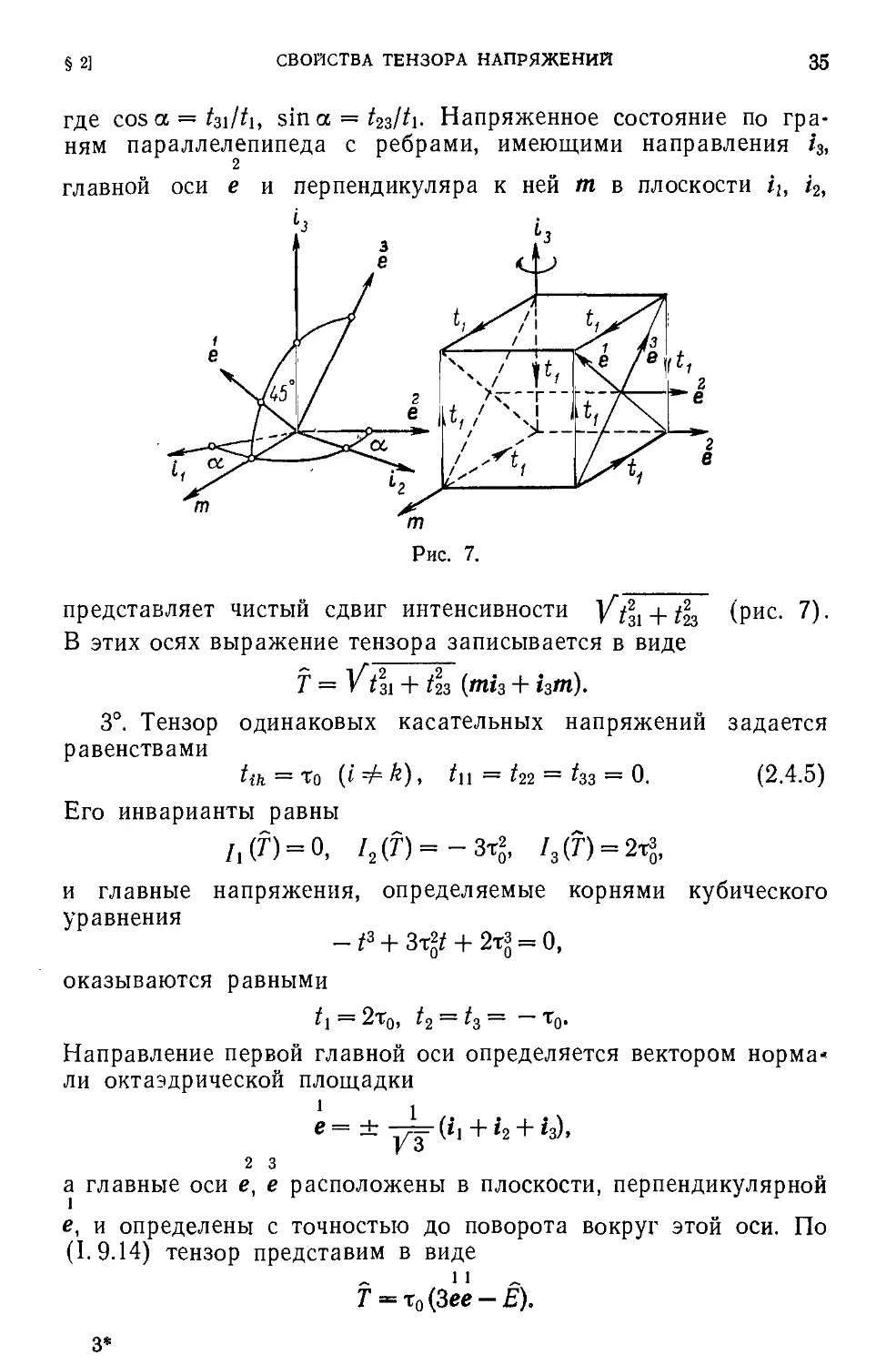
2°. В подвергающемся кручению вокруг его оси i$ линейно-
упругом стержне возникает напряженное состояние, определяе-
определяемое тензором
1 = ^3i (Mi + Мз) + Ub {ЧН + hh)- B.4.3)
Инварианты этого тензора равны
/i (f) = 0, h (f) - - (tl + tl), h (f) = 0, B.4.4)
и его характеристическое уравнение по (I. 10.3) будет
Главные напряжения оказываются равными
а направления главных осей задаются таблицей косинусов
I 'i I ^ I h
е
2
е
3
е
8
— е sin а
8
у= cos а
/2
8
е cos а
8 л.
/2
е
0
е
§2]
СВОЙСТВА ТЕНЗОРА НАПРЯЖЕНИЙ
35
где cosoc = 4i/^i, sin ос =/2з/^ь Напряженное состояние по гра-
граням параллелепипеда с ребрами, имеющими направления i3,
2
главной оси е и перпендикуляра к ней т в плоскости iu i2,
представляет чистый сдвиг интенсивности Yt\\ + ?>з (рис. 7).
В этих осях выражение тензора записывается в виде
Т = Vtli + ti3 {mh + ism).
3°. Тензор одинаковых касательных напряжений задается
равенствами
tih = то (i Ф k), tn = hi = faa = 0. B.4.5)
Его инварианты равны
/,(?) = 0, /2(f)=-3t2, /3(г) = 2т3,
и главные напряжения, определяемые корнями кубического
уравнения
-13 + Зхр + 2тЗ = 0,
оказываются равными
м = 2т0, г2 == 'з== то-
Направление первой главной оси определяется вектором норма*
ли октаэдрической площадки
2 3
а главные оси е, е расположены в плоскости, перпендикулярной
е, и определены с точностью до поворота вокруг этой оси. По
A.9.14) тензор представим в виде
Т = то{3ее-Е).
36 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. I
1
Цилиндрик, ось которого имеет направление е, подвергается рас-
растягивающему напряжению 2то вдоль оси и сжимающему то по
боковой поверхности.
4°. Электростатическая система напряжений Максвелла за-
задается тензором
g( •) B.4.6)
в котором g— плотность свободных зарядов, k — диэлектриче-
диэлектрическая постоянная (предполагается, что она не зависит от g),
8— вектор напряженности электростатического поля. Оно воз-
возникает в поле объемных сил, действующих на диэлектрик:
рК = - div Т = - -^div(ge -1 ?8 • в).
Учитывая соотношения
j.8, 8 = gradV, rotg = 0,
где V — потенциал поля, имеем
pK=--g-8div8. B.4.7)
Главные оси и главные напряжения находим почти без вычис-
вычисления. По определению главных осей A.9.1)
и сразу видно, что можно удовлетворить этому уравнению,
приняв
Остающиеся решения получим, задавая единичному вектору е
произвольные направления в плоскости, перпендикулярной 8:
е.8 = 0, е-8 = 0, *2 = *3= - -^-8 • 8. B.4.9)
По направлению поля действуют растягивающие напряжения, а
в поперечных направлениях равные им по величине сжимающие
напряжения.
5°. Сосуд под равномерным давлением. Напряженное состоя-
состояние, определяемое шаровым тензором
Т=-рЁ, B.4.10)
является статически возможным в сосуде, подверженном извне
и изнутри одинаковому давлению; это следует из того, что при
§ 3] МАТЕРИАЛЬНЫЕ КООРДИНАТЫ 37
таком задании тензора напряжения и при отсутствии объемных
сил удовлетворяется уравнение равновесия в объеме A.5.4), а
на любой поверхности выполняется условие
N-f=-pN,
что и требуется. Это статически возможное состояние действи-
действительно реализуется в линейно-упругом теле.
§ 3. Материальные координаты *)
3.1. Представление тензора напряжений. В §§ 1, 2 этой
Главы тензор напряжений Т задавался в деформированной среде
(в V-объеме) его компонентами, далее обозначаемыми t^, в де-
декартовой системе координат OXiX2X3. Переходу к материальным
координатам qs n к векторному базису Rs соответствуют диадные
представления тензора
T = fkRsRk = nRsRk C.1.1)
через его контравариантные tsh или смешанные компоненты 1\
(ковариантные компоненты тензора напряжений обычно не при-
применяются). Вместе с тем
* =
и из сопоставления этих- выражений, сославшись на C.1.6),
C.1.18) гл. II, получаем формулы связи
p-t дхт дхп гг дхт дд ,0 , „-.
t ~TTTF=tt~rr~*—• (о. 1.2)
dqT dql dqT dxn
7rt _ . dqr dq* rr _ , dqr dxn
3.2. Зависимости Коши. Исходное определение тензора на-
напряжения A.3.2) записывается в виде
t = JV • Г = l9SRsNq, Nq = N • Rq. C.2.1)
Отсюда имеем
t .Rk=tk = ?qkNq, t -Rk=tk = rkNq. C.2.2)
Это — зависимости Коши A.4.5), выражающие контра- и кова-
ковариантные компоненты в базисах V-объема вектора напряжения
*) Изучение этого параграфа предполагает знакомство с содержанием
3-5 гл. И,
38 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. 1
(л?)
t на площадке с нормалью N через компоненты (контравариант-
ные и смешанные) тензора напряжения. Сила, действующая на
эту площадку, по C.5.2) гл. II представляется выражением
ЫО = У~ FsRsrq • п do. C.2.3)
3.3. Необходимые условия равновесия. Инвариантная запись
уравнений статики в объеме была представлена в п. 1.5 двумя
соотношениями:
dhrf + pK = O, f = r. C.3.1)
Знак тильды, как условлено в п. 3.1 гл. II, обозначает, что опе-
операция дивергенции вычисляется в базисе V-объема. В этом
базисе по (V. 4.7) имеем
^ ? Rt + рК = 0. • C.3.2)
По закону сохранения массы и по E.5.1) гл. II
и другой записью уравнения статики в объеме может служить
д
dqs
C.3.3)
Сославшись на правило дифференцирования базисных векторов
(V. 2.2), можно представить вектор в левой части__ этого равен-
равенства через его контравариантные компоненты в виде
+ Ш VG>' + Ро. VIК" = 0. C.3.4)
Условие симметричности тензора f через его контравариант-
контравариантные компонеты и смешанные компоненты записывается в обыч-
обычном виде:
Jgk jkS JS _ fS _ JS /о О ЦЧ
1 l 1 l-k—lk —Ik- yo.o.O)
Это следует из соотношений (IV. 5.5) и, конечно, подтверждает-
подтверждается формулами преобразования C.1.3).
Уравнение равновесия C.3.3) легко получить из наглядных
представлений; рассматривается элементарное тело (параллеле-
(параллелепипед), ограниченное поверхностями gs и qs + dqs (s = 1,2,3).
По C.2.3) и C.5.3) гл. II силы, действующей по этим
§ 3] МАТЕРИАЛЬНЫЕ КООРДИНАТЫ 39
поверхностям, представляется выражениями
- VWPlRt dq2 dq3, VcfP'Rt dq2 dq3 + -^ f G~F" Rtdql dq2 dq3,
dq3dq1, VcffURt dq3dq1 + ~ У7Й2' Rtdq2dq3dq\
t dq' dq2, V~G?3% dq1 dq2 + ~ Vg> Rtdq3 dq1 dq2,
так как на площадке, определяемой, например, векторами
Rd2d
NdO = R2xR3dq2dq3 = V~GRxdq2dq3, NdO ¦ f = YgV*Rtdq2dq\
Массовая сила, действующая на рассматриваемый объем, равна
= Кр0 dx0 = Кр0 V~g dq1 dq2 dq3.
Уравнение C.3.3) выражает равенство нулю главного вектора
перечисленных здесь сил. Уравнение равновесия на поверх-
поверхности О, ограничивающей объем V, выражает равенство векто-
pa t, определяемого по тензору напряжения основным соотноше-
соотношением C.2.1), вектору внешней поверхностной силы F. Сослав-
Сославшись на C.5.5) и C.2.2) гл. II, имеем
F = N.f= , 1 , Rmnm - Г%Ъ,
ИЛИ
F VGsknstik = fmtnmRt. C.3.6)
Запись через контравариантные компоненты поверхностной
силы имеет вид
rHtnm = FtVG*knsnk, C.3.7)
что, можно было бы записать и в форме
Fk^f%, Fk = HNq, C.3.8)
но запись C.3.7) имеет то преимущество, что в ней используется
вектор нормали п к обычно наперед заданной поверхности о,
ограничивающей и-объем, тогда как поверхность V-объема О
разыскивается.
3.4. Другое определение тензора напряжений. Треффтц, Га-
мель. Каппус и другие авторы называют тензором^напряжения йТ
тензор, связанный с ранее введенным тензором Т соотношением
40 ТЕНЗОР НАПРЯЖЕНИЙ 1ГЛ. I
Тогда по C.2.3)
^ t, C.4.2)
(л?)
где о* — вектор напряжений на ориентированной площадке N dO
в У-объеме, но рассчитанный на единицу площади, которую эта
площадка имела в начальном состоянии (в и-объеме).
Уравнения равновесия в объеме и на поверхности приобре-
приобретают вид
^ = О, C.4.3)
\ C.4.4)
Здесь Р — внешняя поверхностная сила, отнесенная к единице
площади поверхности о тела в о-объеме:
Pdo = FdO. C.4.5)
3.5. Элементарная работа внешних сил. Рассматривается
состояние равновесия среды в 1/-объеме, ограниченном поверх-
поверхностью О и подверженном действию массовых К и поверхностных
сил F. Согласно принципу виртуальных перемещений элемен-
элементарная работы всех внешних и внутренних сил на виртуальном
перемещении точек сплошной среды из ее равновесного состоя-
состояния равна нулю:
Ь'а(е) + b'a(i) = 0. C.5.1)
Поле виртуальных перемещений задается вектором
би = б (/? — г) = б/?, C.5.2)
так как в виртуальном перемещении из положения равновесия
в У-объеме вектор г, индивидуализирующий рассматриваемую
частицу в и-объеме, сохраняет неизменное значение Fг = 0).
Выражение элементарной работы внешних сил представляет*
ся в виде
6'aw = J J J р/С • 6и dx + J J F • би dO. C.5.3)
V О
Заменив во втором слагаемом поверхностную силу ее значением
и используя правила преобразования поверхностного интеграла
в объемный (И.5.5) и тождество (II.3.10), имеем по (II.3.11) и
A.5.5)
jJF.budO=jJN-f-6udO=jJlv.T
О О V
-= f f f[(V-f)-a« + f--Vea]dT C.5.4)
j j j
§ 3] МАТЕРИАЛЬНЫЕ КООРДИНАТЫ 41
и возвращаясь к C.5.3), C.5.2), получим
6'а(в) = J J J (р/С + div Г) • 6и rfr -f- J J J f • - V 6J? rfr.
V V
Вместе с тем по определению (V. 4.3) набла-оператора в метри-
метрике У-объема
и, учитывая симметрию тензора Т, имеем
? t- RsbRs = Г" Я, • 6RS =
Теперь, сославшись на C.3.1) и на C.3.3) гл. II, приходим
к соотношению
6'а«> =Т Ш r4Gs<dx = Т Ш "[/ ^*G,,dT0. C.5.5)
V
Но по C.6.3) гл. II
4-
так как тензор ? при варьировании в У-объеме остается неиз-
неизменным. Это позволяет переписать C.5.5), C.5.1) в виде
6'а(е) = - 6'%) = jjj ^Т Г" 6&*4 dro- C.5.6)
0
В рассмотрение еще вводится элементарная работа сил, отне-
отнесенных к единице объема среды в начальном ее состоянии
(в и-объеме), — удельная элементарная работа
Ь'а{е) = J j J в'Л(в) dT0, b'ai = J J J b'AU) dx0. C.5.7)
V V
Тогда по C.5.6) и вследствие произвольности выбора объема V
Ь'А(е) = - й'Л@ = у ]/"-| Г 6Gsq = ]/"| Г* 6ISV C.5.8)
Это выражение можно получить и более наглядным путем, вы-
вычислив элементарную работу перечисленных в п. 3.3 сил, дей-
действующих в У-объеме на элементарное тело, ограниченное
поверхностями qs и qs + 6qs; при этом надо иметь в виду, что
42 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. 1
виртуальные перемещения точек противоположных граней отли-
отличаются вектором
~Wdq ='Wdq =6R^dq.
В частном случае, когда Т — шаровой тензор, описывающий
гидростатическое напряженное состояние (всестороннее равно-
равномерное сжатие) интенсивности — р, имеем
T = -pG, rq=-pGsq C.5.9)
и, далее, сославшись на A.7.9),
или
бМш = -р6]/-|=-р6?>. C.5.10)
Здесь по E.5.1) гл. II через D обозначено относительное изме-
изменение объема. Пришли к результату, который можно было пред-
предвидеть.
Замечания. 1. Виртуальными в объеме V сплошной среды
являются произвольные бесконечно малые перемещения, не на-
нарушающие ее сплошности, а на ограничивающей ее поверх-
поверхности О—такие, которые согласуются с наложенными связями.
Поэтому на части О\ поверхности, на которой перемещения
заданы,
би = 0. C.5.11)
Поверхностные силы F на Oi наперед неизвестны. Это силы
реакций тех приспособлений, которые сообщают точкам О] за-
заданные перемещения и (например, реакции неподвижных опор,
если и = 0). Но это не препятствует записи выражения элемен-
элементарной работы поверхностных сил в форме
J J F • 6и dO = J J N • f • б« dO,
так как на О\ выполнено условие C.5.11).
2. Знак б' в выражениях элементарной работы и удельной
элементарной работы применен для обозначения бесконечно ма-
малых величин, а введением штриха указывается, что эти величины
не являются, вообще говоря, вариациями некоторых функций.
Не существует величины Л(е) (или Л(г)), вариация которой равна
удельной работе внешних (или внутренних) сил.
§ 3] МАТЕРИАЛЬНЫЕ КООРДИНАТЫ 43
3.6. Энергетический тензор напряжений. Мера деформации
определялась в базисе у-объема формулами C.3.2), C.3.3) гл. II:
Gx = Gsqrsr4,
так что
bGx=rsr4Gsq. C.6.1)
Тензор же напряжений Т представляется в базисе У-объема че-
через его контравариантные компоненты выражением C.1.1). По-
Поэтому
±У^ C.6.2)
то есть удельная элементарная работа внешних сил не выражает-
выражается через свертку (первый инвариант произведения) тензоров на-
напряжения Т и вариации первой меры деформации 6GX.
Введем поэтому в рассмотрение тензор
контравариантные компоненты которого в базисе и-объема равны
контравариантным компонентам Ist тензора напряжений в базисе
У-объема. Тогда
q. .6G* = r«rjrq- -rmrn Wmn = Г bGsq
и, далее,
Здесь удельная элементарная работа представлена сверткой тен-
тензора Q, называемого поэтому энергетическим тензором напряжен
ний, с вариацией первой меры деформации.
Связь тензоров Т и Q может быть представлена и в инва-
инвариантном виде. Сославшись на формулы C.2.3) гл. II, имеем
и поэтому
и по C.6.3), а также C.2.6) гл. II
f = (VRY -Q-VR, Q = (VrY • f • Vr. C.6.5)
Заметим, что в уравнения статики в объеме C.3.3) и на поверх-
поверхности C.3.8) входят компоненты isq тензора Т, являющиеся
44 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. I
одновременно и компонентами (в другой метрике) тензора Q.
Но, конечно, было бы ошибкой записывать эти уравнения в виде
dTvQ + p^G~/C = O, F = N.Q.
Представим тензоры Q и ЫЯ их разбиениями на шаровые и де-
виаторные части:
б Dev J\
Тогда по C.6.4) выражение удельной элементарной работы
представится в виде
g/, (Q) + Dev Q) • • (у |б/, (t) + 6 Dev
так что, имея в виду соотношения (g — единичный тензор в
и-метрике)
) = 6/, (Dev i) = О,
Dev Q-•? = (),
получим представление удельной элементарной работы суммой
двух слагаемых:
Q • 6 Dev t)]. C.6.6)
В линейной теории упругости первое называют удельной элемен-
элементарной работой изменения объема, второе — изменения формы..
В нелинейной теории такая интерпретация не имеет места.
3.7. Инварианты тензора напряжений. Сославшись на
(IV. 7.5), (IV. 7.6), в 1/-объеме имеем
Il(f) = GJst, /3(f)=G|P'|. C.7.1)
Далее, переходя в формуле (IV. 7.11) к смешанным, а потом к
контравариантным компонентам Т, получаем
h if) = | (ЧП - ?%) = | GsqGrt (ГГ* - ГГ<) =
\ C.7.2)
§ 4] ИНТЕГРАЛЬНЫЕ ОЦЕНКИ НАПРЯЖЕННОГО СОСТОЯНИЯ 45
Вместе с тем
GsqGrt - GrqGst = (Rs • RqRr - RT ¦ RqRs)Rt = [(*, X Rr) X Rq]Rt =
= (*, X Rr) • (Rq X Rt) = esrmeqtnRm - Rn = GmnGesrmeqtn
и еще одним представлением h{T) служит
/2 (f) = 1 ОО^е^^Г "Г\ C.7.3)
§ 4. Интегральные оценки напряженного состояния *)
4.1. Моменты функции. Условимся называть моменты гс-го
порядка функции f(xi,X2,x3), заданной в У-объеме, интегралы
, % ^3) хГ42Л;з5 rfT> dr = dx1dx2dx3, D.1.1)
где Si,S2, s3 — неотрицательные целые числа, сумма которых
si + s2 + s3 = п. D.1.2)
При Si = 0 имеется /г + 1 чисел (вг, S3) с суммой и, при Si = 1
число чисел ($2, s3) с суммой п — 1 равно /г и т. д. Поэтому об-
общее число N моментов п-ro порядка равно
jV = (n+l) + rc+ ... +1=1(я+1)(я + 2). D.1.3)
4.2. Моменты компонент тензора напряжений. Уравнения
равновесия в объеме A.5.6) позволяют записать 3N соотношений
Первое слагаемое преобразуется по формуле Гаусса — Остро-
Остроградского
l3
Г з т
Ш—— (x**xs>xs»t \ — xsi^s»jks3 T1 — tu. \
, дхь 1.1 2 3 f«J Xl X2 *3 ZJ x lkt
= J J x№x*Ft dO
ft=l
*) Содержание этого параграфа не связано с последующими главами. o:i
может быть опущен без ущерба для понимания дальнейшего текста.
46 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. 1
причем использованы уравнения равновесия на поверхности
A.5.15)
htNk = Ft.
Теперь введя обозначения
С С 1
Xs'1 Xs'х*> о К л/т 4- xs>xs"Xs»F (id
' 2 3 ^ * J J ' 2 3 t uu >
v
_1_
V
v
придем к соотношениям
w
D.2.3)
Их правые части при заданных объемных и поверхностных си-
силах (по всей поверхности О, ограничивающей объем V) изве-
Q
стны. Число уравнений D.2.3) равно -^ (п + 1) (и + 2), а число
неизвестных — числу моментов (п—1) -го порядка для шести
функций tM, то есть Зп(п + 1).
4.3. Случаи п — 0, п = 1. При п = О S\ = s2 = S3 = 0 и три
уравнения
<!o«> = y\lllpKtdr + ll Ftdo]=0 D.3.1)
выражают условия обращения в нуль главного вектора внеш-
внешних сил.
При и = 1 приходим к девяти уравнениям, содержащим
шесть неизвестных; из них находим средние значения шести ком-
компонент тензора напряжений
t t t
(t\t)m = <7юо» (ht)m = <7oio> iht)m = <7ooi. D.3.2)
причем условия симметричности этого тензора
2 1 3 2 13
(t\2)m — (*2i)m = <7юо — <7ою — 0. <7oio — <7ooi = 0. <7ooi ~ <7юо = ° D.3.3)
выражают требования обращения в нуль трех компонент глав-
ного момента внешних сил.
4.4. Моменты напряжений первого порядка. При п = 2 при-
приходим к 18 уравнениям с таким же числом неизвестных
(thtXr)m=(tthXr)m (Г =1,2,3). D.4.1)
§ 4] ИНТЕГРАЛЬНЫЕ ОЦЕНКИ НАПРЯЖЕННОГО СОСТОЯНИЯ 47
Уравнения распадаются на две группы:
t t t
2 (*w*i)m = fcoo, 2(t2tx2)m = q020, 2(t3tx3)m = qm, D.4.2)
D.4.3)
(htxX
Из них находим все моменты первого порядка всех шести ком-
компонент тензора напряжений. Например, моменты первого поряд-
порядка напряжений ^п, i\2 (поделенные на объем) равны
1 I I 1 2 I j 3
(tnxl)m ~ ~2 <7200> (tux2)m = <7ll0 ~ "J <72ОО> (^Пхз)т = ^101 ~ "J <72ОО>
D.4.4)
1 2 j I j 2 1 3
(t\2xi)m — Y <72оо> (^12^г)т ~ ~2 *?О2о> (^12^з)« —"J^101 "^" 9оп ~<7по)- D.4.5)
4.5. Пример. Сосуд под внешним и внутренним 'давлением.
Объем тела обозначается Ve, а внутренней полости 1/,-; ограни-
ограничивающие эти объемы поверхности назовем Ое, О4. Поверхно-
Поверхностные силы создаются равномерно распределенными по Ое и Ог
давлениями — внешним ре, внутренним ри так что
J-РЛ. на О..
\-PiNi на Oit
где Ne, N{ — единичные векторы внешних по отношению к телу
нормалей к поверхностям Ое, Ot (вектор Nt направлен внутрь
полости Vi). Начало системы осей совмещено с центром тя-
тяжести объема тела (материала), так что
Увхаа-У1Х{а = 0, s= 1,2,3, D.5.2)
где **, x's — координаты центров тяжести объемов Ve, Vt.
По D.2.1) при пренебрежении массовыми силами имеем
J J Л1 2 A3JV et UKJ T Pi J J xl X2 X3 ™ itUU
°
где V = Ve—Vi — объем материала. Условия равновесия D.3.1),
D.3.3), конечно, выполняются. По D.3.2), D.4.2), D.4.3),
48 ТЕНЗОР НАПРЯЖЕНИЙ [ГЛ. I
учитывая D.5.2), находим средние значения нормальных напря-
напряжений и их первых моментов
iVV) (%) D.5.3)
Т (PeVeK - РУ^ '-У-(P.' Pi)
Средние значения и первые моменты касательных напряжений
равны нулю:
У«. = 0, (tghXs)m = 0 {q + k). D.5.5)
4.6. Пример. Главный вектор и главный момент напряжений
в плоском сечении тела. Рассматривается часть загруженного
массовыми и поверхностными силами тела V, отсеченная от него
плоскостью хъ = х\. Объем этой части назовем Т; он ограничен
поверхностью О* + Q, где 0^ — часть поверхности О тела V, а
Q — площадь плоского сечения. При этих обозначениях, прини-
принимая Хз^^з в объеме Т, имеем по D.2.1)
4'Fr d0]+
4--L Ys'xs*xs3t N dO = л* -
Т J J 1 2 37Г*"и ''^i2S3 7" J J
о, I
J J 2 3
так как Nk = —бзл на плоскости х3 = х\. В D.6.1) первое сла-
слагаемое определяется заданными внешними силами. Из уравне-
уравнений равновесия D.3.1), D.3.3) находим теперь выражения:
а) перерезывающих сил
Q(t \ =Tq* , Q(t ) — Tq* , D.6.2)
б) растягивающей силы
О(*зз)т =Tq*m, D.6.3)
в) крутящего момента
^ О^гз ~" xih\) = Т (^юо ~ ^ою)' D.6.4)
г) изгибающих моментов относительно осей Охи Ох2
3. 2. 2.
аи I Лп1 и 1 1 1 17л1п "~~ Цппл 1 Л оУллл /)
V *б ооу^**7 \ U1U * Uul о ' UUU/
'. 3. о1, D>6-5)
§ 4] ИНТЕГРАЛЬНЫЕ ОЦЕНКИ НАПРЯЖЕННОГО СОСТОЯНИЯ 49
Индексом mt обозначается среднее значение по площади Q:
1 г г
"О" J J l(Xl< Х2> Хз)С''Х1 2~^1'т,-
4.7. Оценка среднего значения квадратичной формы компо-
компонент тензора напряжений. Для упрощения записей здесь ис-
используются одноиндексные обозначения
Tl = tn, Т2 = ^22, Тз = ^33, Т4 = ^12, Т5 = ^23, Те = ^31 • D.7.1)
В рассмотрение вводится положительная 6X6 матрица \\qrs\\
постоянных*). Через г|) обозначен интеграл по объему тела от
знакоопределенной положительной квадратичной формы:
D.7.2)
(опущены знаки суммирований по г и s). Система осей Ох\х2хз
совмещена с главными центральными осями инерции объема
J J J хк dx = 0, j j ( хкхт dx = 0 {k, m = 1, 2, 3; k ф т.),
v v
D.7.3)
и вводятся обозначения
1Цх\йх = УЦ F= 1,2,3), D.7.4)
v
так что
О2 — <2 л- J2 П2 _ ;2 i ;2 П2 _ /2 i ;2
представляют квадраты радиусов инерции относительно главных
осей Ох\, Ох2, Охг.
Рассматриваемая как функция коэффициентов ag, ask, функ-
функция гр имеет минимум при условиях
*) Напомним, что матрица называется положительной, если образуемая
но ней квадратичная форма qrsXsxr — знакоопределенная положительная
(обращается в нуль только тогда, когда все хг = 0).
4 А. И. Лурье
ТЕНЗОР НАПРЯЖЕНИЙ
[ГЛ. 1
50
Поскольку определитель \qrs\^0, из них следует, что стацио-
стационарное значение if>, являющееся вследствие ее знакоопределен-
ной положительности минимумом, достигается при значениях
параметров ar0, aTk, равных
и вычисляемых с помощью формул D.3.2), D.4.2), D.4.3) по
заданию внешних сил. Этот минимум, если еще раз обратиться
к формулам D.7.3), оказывается равным
X
= J J I j qrs^r
v
Приходим к неравенству
Mm Mm + ]? If (^r
k-i lk
J_
V
J J j flVsVb dx > qrs {xr)m (xs)m + 5] 4" кгХк)т (t,xk)m . D.7.6)
•]¦
D.7-5)
Co знаком ^- оно имеет место и для положительной знакопо-
знакопостоянной формы qrsXrXs*). Пусть, например, все qrs, кроме од-
одного qrr, равны нулю. Тогда
В задаче о сосуде п. 4.5 по D.5.3) и D.5.4) неравенство
JJkv
Ц {Peve
lk J г, s-l
D.7.8)
*) Форма, сохраняющая знак, но обращающаяся в нуль не только в на-
начале координат пространства своих переменных, называется знакопостоянной.
§ 4] ИНТЕГРАЛЬНЫЕ ОЦЕНКИ НАПРЯЖЕННОГО СОСТОЯНИЯ 51
согласно с B.4.10) выполняется при ре = р, со знаком равенства.
Пусть теперь р{ = 0; полагая только одно <7SS Ф 0, имеем не-
неравенство
показывающее, что наличие полости сопровождается повышени-
повышением напряжений; это следует из того, что при отсутствии полости
Ve = V, хек = 0, и по B.4.10) в формуле D.7.9) надо принять
знак равенства.
4.8. Оценка удельной потенциальной энергии деформирован-
деформированного линейно-упругого тела. Эта величина, как будет показано
в п. 3.2 гл. III, выражается через инварианты тензора напряже-
напряжений по формуле
A=±-\l2i(T)-2(l+v)I2(f)l D.8.1)
где Е — модуль Юнга, v — коэффициент Пуассона материала.
Неравенство D.7.6) позволяет дать следующую оценку этой
величины; вычисляемую по заданию внешних сил. Обозначим
Mf) = (*„)«.
и также
(суммирование по индексу г от 1 до 3 с заменой г + 1 = 4 еди»
ницей). Тогда
- D.8.2)
4.9. Оценка удельной интенсивности касательных напряже-
напряжений. Квадрат этой величины, равный абсолютному значению
второго инварианта девиатора тензора напряжения, по B.2.11),
а также со ссылкой на формулы (I. 11.8), (I. 10.5), может быть
записан в виде
Т2 = i [(*! - hf + (t2 - tzf + (*3 - txf] = J \(tn - t22f + {t22 - t33J +
+ (t* - tuf + 6 (/'„ + t>23 + ft)] = 1 [(tn - tr+u r+lf + Ы1 r+1]. D.9.1).
4*
52 ТЕНЗОР НАПРЯЖЕНИЕ [ГЛ'. I
Это — знакопостоянная положительная форма, так как она обра-
обращается в нуль при /,2 = /гэ = tn = 0, /м = 4г =/зз =? 0. По
D.7.6) имеем
Согласно критерию Мизеса неравенство т. < тт во всем объеме
тела (tT — предел текучести материала) гарантирует отсутствие
в нем зон пластической деформации; поскольку (т2)'/г < ттах, то
условие тт>(т2)т2 представляет необходимое, но, конечно, не
достаточное условие недостижимости предела текучести. По-
Поэтому неравенство
тт<т. D.9.3)
является достаточным признаком наличия зон пластичности,
тогда как неравенство противоположного знака
тт > т. D.9.4)
представляет необходимое условие их отсутствия. Как уже го-
говорилось, эти критерии выражены с помощью формул п. 4.3 че-
через внешние объемные и поверхностные внешние силы (послед-
(последние предполагаются заданными по всей поверхности О тела).
4.10. Моменты напряжений второго и более высокого порядка.
Если п^-3, то число уравнений D.2.3) меньше числа неизвест-
неизвестных. Например, при п = 3 имеем 30 уравнений с 36 неизвест-
неизвестными. Однако 15 неизвестных (при любом п>3) оказывается
возможным определить. Это девять величин
и шесть величин вида
(я - 1) (*»-%tn)m = i_h I0 —i- qm, (n - 1) (xr%tn)m =
1 j 3
= <7«-i,oi--^<7/too- D.10.2)
4.11. Оценка снизу максимума компонент напряжений. Вы-
Вывод формулы D.7.6) для оценки снизу среднего значения квадра-
квадратичной формы компонент тензора напряжений основывался
только на свойствах ортонормированности D.7.3), D.7.4) в
объеме V четырех полиномов (нулевой и первой степени)
PP~ <*-1.2,3), ("и)
§ 4] ИНТЕГРАЛЬНЫЕ ОЦЕНКИ НАПРЯЖЕННОГО СОСТОЯНИЯ 53
и его можно применить к более общей системе ортонормирован-
ных полиномов
Ро,РиР2,Рз,...,Рг. D.11.2)
Например, к основной системе D.11.1) можно присоединить
один из полиномов второй степени
[3 -1
Г2 _;2 V .f*. r2 Y Лт (А 1 1 о\
Ч 'Ч V *d ;2 I J J Xq к "т ' ^•11><э/
причем
V к=\
Вычисление становится более громоздким при присоединении к
основной системе не одного, а двух полиномов, например поли-
полинома Р4 и полинома Рь, содержащего х%; тогда придется поза-
позаботиться об ортогональности Рь не только с основными полино-
полиномами, но с Pi.
Пусть построена ортонормированная в V система полиномов
q ' U <7=1. 2, ..., s. D.11.5)
Тогда введя в рассмотрение вместо D.7.2) выражение более
общего вида
S
v
)
t=a I ^ i-o
и повторив вывод в п. 4.7, придем к более общему, чем D.7.6),
неравенству
\\\
t=0
причем знак равенства может иметь место, если qrqXTXq — знако-
знакопостоянная положительная форма.
Пусть все qrq, кроме одного с одинаковыми индексами, равны
нулю. Тогда, учитывая, что
J4dT<N!w DЛ1-6)
V
придем к оценке снизу максимума модуля хд:
\rqU*>[v tiXqPtf^'. D.11.7)
54
ТЕНЗОР НАПРЯЖЕНИЙ
[ГЛ. I
Она представляется весьма грубой, но ее можно уточнить, уве-
увеличивая ее правую часть путем присоединения новых ортонор-
мированных в V полиномов. При выборе их, однако, надо поза-
позаботиться о возможности выразить величины
rPtdx D.11.8)
через вычисляемые по заданным нагрузкам моменты высоких
порядков D.10.1) и D.10.2).
Например, если ограничиться в этих формулах п = 3, то при
разыскании |ti|max, кроме основных полиномов D.11.1), можно
использовать еще построенный выше полином Р4, а для дальней-
дальнейшего уточнения еще один полином, ортонормированный с пред-
предшествующими пятью полиномами, включающий слагаемое Х\Х%
или Х\хг. Дальнейшее уточнение требует уже построения системы
семи ортонормированных полиномов (четырех основных и трех
квадратичных, содержащих х\, ххху ххх^. Этим при п = 3 воз-
возможность дальнейшего уточнения JTi|max будет исчерпана. Ана-
Аналогично строятся оценки максимумов остальных компонент.
Например, наилучшая оценка при п = 3 снизу |т4|тах = Uulmax
с помощью формулы D.11.7) может быть достигнута с помо-
помощью шести полиномов: полиномов Ро, ¦ ¦ ¦, Pi и ортонормиро-
ванного с ними полинома, содержащего х\.
4.12. Уточненная оценка. Исходим из равенства
6 s 6 s
Ш 2 iv* 2 а*р* ^=i/ 2 р* 2
<0
DЛ2Л)
<=0
в котором pg (<7 = 1,...,6) и at (t=\,...,s) — некоторые по-
постоянные. Тогда, поскольку модуль интеграла в левой части не
превосходит интеграла от модуля подынтегральной функции,
имеем
dx
ш
V
6
V д
G = 1
S
6
2рл
9=1
ш
max V
s
и, возвращаясь к D.12.1), приходим к неравенству
в
,7-1
Рл
D.12.2)
Вхождение в знаменатель правой части интеграла от модуля
существенно усложняет вычисление, но преимуществом этой
§ 4]
ИНТЕГРАЛЬНЫЕ ОЦЕНКИ НАПРЯЖЕННОГО СОСТОЯНИЯ
55
формулы по сравнению с D.11.6) является наличие постоянных
at, распоряжаясь которыми можно увеличивать правую часть
неравенства.
Полагая
6 /6
V
2л Цтцхтхц '-
г, q**\
имеем по D.11.6)
>
{"И
I t=o i,
Теперь примем в неравенстве D.12.2)
6
2 W,
D.12.4)
и через у назовем его правую часть:
s Г 6
(rgPt)m
s 6
V~ \t=0 o = l
D.12.5)
Полагая ф = sgn ip в известном неравенстве Буняковского —
Шварца
имеем
В приложении к знаменателю правой части D.12.5) это неравен-
неравенство с учетом D.11.5) дает
Ш
S 6
V
2л
:|МП
2 1 </«
t=u q-\
откуда следует, что
56
ТЕНЗОР НАПРЯЖЕНИЙ
[ГЛ. I
Итак, оценка снизу по неравенству D.12.3) хуже, чем даваемая
неравенством D.12.2), если в последнем выбрать постоянные at
по D.12.4). Например, если только одна из постоянных |3? от-
отлична от нуля, то по D.12.2) и D.12.4)
V
ш
2 (T?P,)W Pt
D.12.6)
и эта оценка точнее, чем D.11.7).
В качестве примера приведем оценку снизу максимума мо-
дуля температуры 6 линейно-упругого тела при адиабатическом
нагружении. По C.5.8) гл. III имеем
где 6 — температура, отсчитываемая от натурального состояния
(при отсутствии нагружения), в0 — абсолютная температура в
этом состоянии, а — коэффициент линейного расширения, ср —
теплоемкость при постоянном давлении; через а обозначен пер-
первый вариант тензора напряжения (а = tl{ + t22 + ^зз)- По
D.12.3), ограничиваясь только основными полиномами D.11.1),
имеем
\ • DЛ2.7)
J
Более точная оценка по формуле D.12.5) дает
\{aPt)mPt\dx
D.12.8)
ГЛАВА II
ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ
§ 1. Линейный тензор деформации
1.1. Обзор содержания главы. Как говорилось в п. 1.1 гл.1,
переход из начального состояния среды (из с-объема) в ее ко-
конечное состояние (V-объем) определяется заданием вектора пе-
перемещения и точек среды. Построение механики сплошной сре-
среды нуждается в математическом средстве, обеспечивающем воз-
возможность определения по этому векторному полю изменения
расстояний между точками среды и углов между отмеченными
направлениями в данной точке.
Задача состоит в том, чтобы проследить за изменением дли-
длины и направления любого бесконечно малого отрезка и-объема,
задаваемого вектором
dr=e\dr\ = eds A.1.1)
и несущего те же частицы вектора У-объема
dR = ~e\dR\ = idS. A.1.2)
Речь здесь идет о сопоставлении вектора dR вектору dr, и есте-
естественно, что решение связывается с введением в рассмотрение
тензора второго ранга. Действительно, рассматривая вектор-
радиус R точки У-объема как функцию материальных координат,
за каковые можно принять, в частности, декартовы координаты
аи а2, а3 этой точки в и-объеме, имеем по (II. 2.11)
dR = dr-VR = (VR)'-dr, A.1.3)
где VR — тензор второго ранга— градиент вектора R. С по-
помощью этого несимметричного тензора строится симметричный
тензор второго ранга, называемый ниже тензором первой меры
деформации (Коши —Грина), позволяющий дать решение по-
поставленного выше вопроса об изменении длин отрезков и углов
в и-объеме.
Этим не исчерпывается вопрос о величинах, характеризую-
характеризующих деформацию, так как имеет значение и обратная задача —
58
ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ
[ГЛ. II
определение в и-объеме вектора dr, заданного в 1/-объеме век-
вектором dR. Ее решение приводит к введению второй меры дефор-
деформации.
Еще одной существенно важной геометрической задачей яв-
ляется определение по заданной материальной ориентированной
площадке ndo в у-объеме соответствующей ей в У-объеме пло-
площадки NdO. Эта задача и ей обратная — нахождение ndo по
NdO — решаются введением еще двух мер деформации, опреде-
определяемых тензорами второго ранга, обрат-
ными первой и второй мерам (см.
п. 1.7).
Из равенства A.1.3) гл. I следует,
что
A.1.4)
м
В линейной теории упругости нет нужды
в использовании перечисленных мер де-
деформации; в ней основываются на впол-
вполне приемлемом при рассмотрении дефор-
деформации массивных и слабо деформируе-
деформируемых тел предположении о существенной малости элементов ма-
матрицы тензора V«:
Рис. 8.
да*
A.1.5)
Этим допускается последовательное пренебрежение квадратами
и произведениями компонент тензора V» по сравнению с их
первыми степенями. При таком допущении для описания дефор-
деформированного состояния достаточно ввести один симметричный
тензор второго ранга, называемый далее линейным тензором
деформации.
1.2. Определение линейного тензора деформации *). В и-объ-
еме рассматриваются две бесконечно близкие точки М и N
(рис.8):
M...r = isas, N.. .r + dr = is(as + das). A-2.1)
В V-объеме их положения М', N' определяются вектор-радиу-
вектор-радиусами
dus).
A.2.2)
*) См. также п. II.2.
§1]
ЛИНЕЙНЫЙ ТЕНЗОР ДЕФОРМАЦИИ
59
Здесь du представляет вектор относительного перемещения двух
бесконечно близких точек среды; по (II. 2.6) и (II. 2.11)
A.2.3)
du=^r-dr = (V«)* -dr^dr- V«.
Тензор du/dr — производную вектора и по направлению г —
представим суммой его симметричной и кососимметричной ча-
частей [см. A.4.8)]:
Первая определяет симметричный тензор второго ранга, назы-
называемый линейным тензором деформации и обозначаемый
A.2.5)
Матрица компонент этого тензора записывается в виде
_ 1 _ 1
6п 6i2~Y^12 8'3 ~ 2 ^
621 = о" Y21
622
_ 1
623 — Т Y23
_ 1 _ 1
е31 — ~2 Y31 632 — Y Y32 6зз
A.2.6)
A-2.7)
Выражения компонент е*ь = ъы через производные вектора пе-
перемещения по (Н.2.5) определяются формулами
_ dtij _ ди2 _ ди3
ди2 \ _ J_ I диг , диъ \ _ 1 / диъ , di
'A.2.8)
Диагональные элементы матрицы A.2.6) в линейной теории
упругости называются относительными удлинениями, а удвоен-
удвоенные недиагональные (\ш) — сдвигами. Происхождение этих наи-
наименований объяснено ниже (п. 3.6).
Второе слагаемое в формуле A.2.4) представляет кососим-
метричный тензор второго ранга
1 r/^..ч. V7..1 ^gg)
с матрицей компонент
О
(U2i = ©з
131 = — @2
@,2 = — С03 @13 = С02
0 С02з = —
A.2.10)
60 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
Здесь величины
1 / ди3 ди2 \ 1 / дщ ди3\ I (ди2 дщ \
A.2.11)
представляют проекции сопутствующего тензору (V«)* векто-
вектора ю, называемого вектором поворота. По (II.2.8) имеем
Переписав формулы A.2.5) и A.2.9) в виде
-g- = e + Q, V« = e-Q A.2.13)
и сославшись на A.2.3), а также на A.4.10), имеем
X dr. A.2.14)
Второе слагаемое в этой формуле представляет перемещение,
обусловленное поворотом бесконечно малой окрестности точкиМ
как твердого тела, а первое определяет перемещение относитель-
относительно точки М точек этой окрестности, создаваемое деформацией е.
Данное здесь в применении к вектору перемещения и опреде-
определение линейного тензора деформации распространимо на лю-
любой вектор (п. II. 2). Например, применение операции def к век-
вектор-радиусу г приводит к единичному тензору
(f) ^ ?, A.2.15)
так что
def# = ? + e. A.2.16)
§ 2. Определение вектора перемещения
по линейному тензору деформации
2.1. Совместность деформаций (зависимости Сен-Венана).
Ставится задача об определении вектора перемещения — его
трех проекций us, называемых кратко перемещениями, по задан-
заданному линейному тензору деформации е. Иначе говоря, речь идет
об интегрировании системы шести дифференциальных уравнений
дщ_ _ ди2 ди3
1 ( диг , дщ \ _ _ \_ ( ди
2\;
да, + да, ) ~ &зи
_
~ 23>
1 (диг duL\_
B.1.1)
§2] ОПРЕДЕЛЕНИЕ ВЕКТОРА ПЕРЕМЕЩЕНИЯ 61
заданные правые части которых непрерывны вместе с их произ-
производными первого и второго порядков. Число уравнений (шесть)
превосходит число неизвестных (три), поэтому задача может
иметь решение только при наложении некоторых условий на
задание компонент тензора ё. Это поясняется таким рассмотре-
рассмотрением: представив себе среду разделенной на элементарные ку-
кубики, сообщим каждому из отдельно взятых кубиков деформа-
деформацию, подвергнув его малым растяжениям и малым скошениям
первоначально прямых углов между ребрами; полученные тела
можно будет снова сложить в сплошную (лишенную разрывов)
среду лишь при надлежащей согласованности деформаций от-
отдельных кубиков. Это обеспечивается при существовании непре-
непрерывного вместе с его производными по крайней мере до третьего
порядка вектора перемещения и, так что заданный тензор ё яв-
является его деформацией (ё = def«). Иначе говоря, речь идет об
условиях интегрируемости системы уравнений B.1.1); сказан-
сказанное объясняет и другие наименования— условия сплошности и
условия совместности деформаций. На их важное значение в ме-
механике сплошной среды указал Сен-Венан, поэтому принят так-
также термин «зависимости Сен-Венана».
Исходим из формулы A.2.14). В ее правую часть входит не-
неизвестный кососимметричный тензор Q, и его надо исключить из
рассмотрения. Но условием интегрируемости соотношения
A.2.14), то есть существования вектора и, служит по (II.6.5) об-
обращение в нуль ротора тензора (е + Q)*:
rot(g + Q)* = rot(e-Q),
так как ё* = ё, Q* = —Q. Приходим к условию
rote = rotQ. B.1.2)
Выражение ротора кососимметричного тензора дается формулой
(II. 3.9):
rotQ = (V<ft)*-?divft> = -^, B.1.3)
поскольку
dive» = (!/, — rot ft) = О,
так как первый инвариант ротора симметричного тензора равен
нулю.
Приходим к соотношению
rotft = ^-, da = rotft-dr B.1.4)
и, снова обратившись к (П. 6.5), записываем условие его инте-
интегрируемости в виде
rot(rote)\=Inke = 0. B.1.5)
62 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
При его выполнении по B.1.4) имеем
м
<» = <»0+ J rote-dr. B.1.6)
Теперь правая часть выражения du в формуле A.2.14) пол-
полностью известна и выполнено условие ее интегрируемости
B.1.3)—из него при соблюдении условия B.1.5) определен век-
вектор с*. Поэтому последнее и представляет условие интегрируе-
интегрируемости соотношения A.2.14). Этим, кстати, объясняется наимено-
наименование Ink — условие InkP=?0 несовместимо с существованием
вектора, для которого симметричный тензор Р был бы дефор-
деформацией (см. п. П. 4).
Запись шести условий обращения в нуль тензора Inke сле-
следует из таблицы компонент (II.4.15) тензора Inke. Эти же
условия можно получить, исключив перемещения щ, и2, щ из
системы уравнений B.1.1). Процесс исключения ведется так.
Рассматривая три уравнения
дщ ди2 _ дщ , дщ _
15Г "' ~д^2~22> ~дщ"]"д^~Ут
замечаем, что их левые части удовлетворяют тождеству
д2 дщ . д2 д»2 _ д2 f д»[ , ди2
да\ дах да] да2 да1 да2 \ да2 да1
Из него получаем одно из трех условий, выражающих требова-
требование обращения в нуль диагональных компонент Ink ё:
d28]j | д2?22 д2\\2 /П « рт\
да2 да^ да.\ да2
Одним из тождеств второй группы является
_2 д3"з | д2 I дщ . дщ \ . д2 I диъ . ди2 \ _
да^ да2 даъ да2 да3 \ дщ ' да3 ) да3 да{ \ да2 ' да3 J
'дщ
^да2 да{
Оно приводит к соотношению
д2 1
dal \
2
Остающиеся условия получаем из B.1.7) и B.1.8) с помощью
круговой перестановки индексов.
Отметим еще, что формула B.1.5), конечно, применима к
линейному тензору деформации defa любого вектора а (не
только вектора перемещения):
Inkdefa = 0. B.1.9)
§ 2] ОПРЕДЕЛЕНИЕ ВЕКТОРА ПЕРЕМЕЩЕНИЯ 63
Симметричный тензор, «несовместность» (Ink) которого равна
нулю, представляет деформацию некоторого вектора. Это пред-
предложение было использовано в п. 1.6 гл. I.
2.2. Вектор перемещения. Формула Чезаро. Использовав вы-
выражение B.1.6) вектора о, перепишем соотношение A.2.14) в
виде
м
du^e-dr + щХ dr-dr X J rote (a) • dr (<т). B.2.1)
Пусть С — путь интегрирования, Мо — его начальная, М — ко-
конечная точка; М!, М" — точки на этом пути. Вектор-радиусы
этих точек обозначаются r0, r(s), r(a), r(а'). Тогда
и (s) = «о + <о0 X [г (s) - г0] +
М ММ'
+ J e(a)-dr (а) - J dr(a)X J rot e (a') • dr {о').
М, Ма АГо
Двойной интеграл известным приемом преобразуется в оди-
одинарный:
ММ' М М
- [dr (а) X J rot e (о') • dr (a') = j rot е (а') ¦ dr{<f) X j dr (a) =
Мо М, М, М"
м
J rot e (</) • dr (о') X [г (s) - г (</)].
Приходим к формуле Е. Чезаро, определяющей вектор переме-
перемещения по линейному тензору деформации:
м
и = ио + (»0 X (r-r0) + J {e(cr) + [г(а) -г(«)] X rotе(сг)} • dr{a) =
Мо
М
= «о + «о X (г - г0) + J П • dr {a). B.2.2)
Здесь введен в рассмотрение тензор второго ранга П (несимме-
(несимметричный) :
П = Г + (/ - г) X rot Г. B.2.3)
В этой записи r — r(s), а штрихами отмечены величины в
ке пути интегрирования. Пользуясь диадным представлением
этого тензора
[($^)k B-2-4)
64 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. И
можно придать формуле Чезаро вид
i>st4a>q-aq)(^-^)]da>t. B.2.5)
Вектор перемещения и, естественно, оказался определенным с
точностью до слагаемого вектора
«о + (»оХ(г —г0), . B.2.6)
представляющего малое перемещение среды как твердого те-
тела — геометрическую сумму перемещения и0 точки Мо и пере-
перемещения поворота йоХ (г — г0) вокруг этой точки.
Интегрируемость выражения B.2.2) проверяется непосред-
непосредственно. Надо убедиться в выполнении условия (II. 6.5):
rot П* = rot [Г + (/ - г) X rot еТ = rot [Г - (rot г')* X (/ - г)] = 0.
B.2.7)
Здесь учтено тождество A.5.11):
[(/ - г) X rot еТ = - (rot е')* X (/ - г).
Полагая теперь Q =(rote')* в тождестве
rot (Q X г) = rotQ Xr + Q*- ESpQ, B.2.8)
имеем
rot [(rot е'Г X (г' - г)] = rot (rot ё')* X {г' - г) +
+ (rot ё'Г - Е Sp (rot %')• = Inke' X {г' -г)Л- rot ё',
поскольку след ротора симметричного тензора (а значит, и
транспонированного тензора) равен нулю. Подстановка в B.2.7)
дает
rotn* = rote'-Inke'X(r/-r)-rote/= - Ink е'X (г'- г) = 0,
B.2.9)
и вследствие произвольности вектора г' —г приходим снова к
условию B.1.5).
2.3. Пример. Температурное поле. Деформация отдельно взя-
взятого изотропного кубика в температурном поле в(аь аг, аз) пред-
представляется известным выражением
(еп = е22 = е33 = а9, Y12 *= Y23 = Y31 = °)> B.3.1)
§ 2] ОПРЕДЕЛЕНИЕ ВЕКТОРА ПЕРЕМЕЩЕНИЯ 65
где а — коэффициент линейного температурного расширения.
В сплошном теле такая деформация возможна при выполнении
условия B.1.5):
Ink а9? = rot (rot а6?)* = is -~ X lit -^ X adiqiqj =
с к/ • \с ч/ • \ д2а8 . . д2а9
= (h X lq) (lt X *,) V^M
s t
0 11
(sfim mt да да
Итак,
Ink а0^ " Ё ^ ~ a^Sr W = (W - W) ав. B.3.2)
Учитывая еще, что
Sp(?V2-VV)a6 = 0,
имеем теперь
Условиями осуществимости деформации в сплошном теле по за-
закону B.3.1) оказались требования равенства нулю всех вторых
производных 6 по координатам, так что 6 представляет линей-
линейную функцию координат. Принимая a = const, имеем
6 = Go + qicti + q2a2 + <73a3 = 60 + q • r, B.3.4)
где q = grad 0 — постоянный вектор.
Вектор перемещения найдем, подставив это выражение в
формулу Чезаро B.2.5). Отбросив перемещение среды как твер-
твердого тела, получим
м
« = «'J Кео + я А) *« + К - «г) DAt ~ Ш\ da't =
м,
м
= a J [(во + q ¦ r')dr' + ±qd\ r' -r ?-q • {г'-г) ¦ dr']
J
м,
и в окончательном виде
a = a6(r-ro)-^-a|r-roPgrade. B.3.5)
При законе распределения температуры по объему тела, от-
отличном от линейного, свободное температурное расширение по
закону B.3.1) не может иметь места. На тензор ?а0 надо нало-
наложить компенсирующий тензор ё* такой, чтобы при деформации
е = ё* + EaQ B.3.6)
5 А. И. Лурье
66 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
удовлетворялось условие совместности
Ink г = - (?V2 - VV) об. B.3.7)
Было бы ошибкой думать, что вектор перемещения и теперь
можно представить геометрической суммой векторов щ, и2, опре-
определяемых условиями
def «[ «= аВЁ, def «2 = ё*,
так как тензоры aQE и ё*,- взятые по отдельности, не удовле-
удовлетворяют условиям совместности и Викторы иь «2 не суще-
существуют.
2.4. Дисторсии Вольтерра. Векторы поворота «* и перемеще-
перемещения и, определяемые интегралами B.1.6) и B.2.2), предста-
представляют в односвязной области однозначные функции координат
пи точки М — верхнего предела интеграла. В случае двусвязной
области в рассмотрение должны быть введены циклические по-
постоянные векторы — см. (II. 6.9):
rote'• <**•' = *, $(e' + r'Xrotr).rff' = c, B.4.1)
где К — несводимый непрерывным преобразованием в точку
контур. Значения о и а в точке М могут быть теперь записаны
в виде
i = ©о + J rot ё' • dr' + nb, B.4.2)
Mo
M
и = и0 + ю0 X (г - r0) + J [ё' + (г' - г) X rot ё'] • dr7 +
м,
+ №(с + 6Хг), B.4.3)
где и — число оборотов по Я-контуру на пути интегрирования
из Mq в М. Однозначность определения векторов и и «о теряется.
Ее можно восстановить проведением барьера, превращаю-
превращающего двусвязную область в односвязную, однако переход через
барьер сопровождается нарушением непрерывности этих век-
векторов.
Пусть о — поверхность барьера, о~ и сг+ — две конгруэнтные
с сг поверхности, расположенные непосредственно «над» и «под»
барьером; М, М~, М+ — близкие друг другу точки на о, а", а+.
§2]
ОПРЕДЕЛЕНИЕ ВЕКТОРА ПЕРЕМЕЩЕНИЯ
67
Тогда,, принимая ДО- за начальную, М+ за конечную точку пути
интегрирования, имеем (рис. 9)
й+ = <»" + J rote'-d/1', B.4.4)
м~
м+
и+ = и- + со" X (г+ - г") + J [ё' + (/ - г+) X rot г'] • dr'. B.4.5)
При наложении поверхностей от, о+ цд барьер, и
г, г* ^ г, г+ — г~ —5>- О
И интегралы B.4.4), B.4,5) равны их значениям по замкнутому
/(-контуру. Приходим к формулам Вейнгартена, определяющим
разрьшы на барьере векторов © и и
/ 1 r\r\ * \
рр
A901):
- = 6,
г( B.4.6)
•"Рис' 9.
Они указывают на то, что материал на
одной стороне барьера испытал относи-
относительно материала на другой его стороне
малое перемещение, возможное в твер-
твердом теле, задаваемое векторами rioBOpd1
та Ь и поступательного перемещения с.
Это можно объяснить так: из двусвяз-
ного те^а (тора, например) после его рассечения по поверхт
ности а удален тонкий слой материала, а затем конгруэнтные
кодвд сг+ и а~~ полученного односвязного тела снова спаяны
(в тор), причем им было Сообщено малое поступательное пере-
перемещение с и малый поворот, определяемый вектором Ь. Эту опе-
операцию образования нового тела из старого Вольтерра назвал
дисторсией; Ляв называет ее дислокацией, но в литературе по-
последнего десятилетия термину «дислокация» придается более
общее значение. В подверженном дисторсии упругом теле воз-
возникает напряженное состояние. Оно может быть теоретически
рассчитано по заданию циклических постоянных векторов ft, с.
Последние могут быть определены экспериментально по изме-
измерению смещений и поворртов концов разрезаемого кольцеобраз-
Його тела.
Возможность дисторсии в односвязном теле исключается,
так как после удаления из него, скажем, тонкого клинообраз-
клинообразного тела и последующего сшивания свободных краев теряется
непрерывность самого тензора деформации § (следовательно, и
напряжения становятся разрывными). Это.следует из того, что,
как указывалось ранее, перемещения в односвязном теле уне
68 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
могут быть многозначными, если тензор ё непрерывен. Этим же
следует объяснить, почему при рассмотрении дисторсии говори-
говорилось об удалении из тела полоски с обязательно конгруэнтными
краями, — дело в том, что разрыв на барьере вектора и, совме-
совместимый с предположением о непрерывности тензора ё, предста-
представляется смещением твердого тела. При всяком же разрыве бо-
более сложной природы этот тензор не останется непрерывным.
§ 3. Первая мера и первый тензор конечной деформации *)
3.1. Векторные базисы v- и V-объемов. Точка сплошной
среды задается материальными координатами qx, q2, q3. Ее по-
положение в и-объёме определяется вектором-радиусом
r = r{q\q\q*) = isas{q\q2,qz). C.1.1)
В 1/-объеме положение этой же материальной точки можно за-
задать вектор-радиусом
R = H(q\ q\ <73) = isxs(q\ q\ q3) = is(a. + us). C.1.2)
В частности, материальными можно считать декартовы коорди-
координаты и-объема
as = qs, C.1.3)
но с таким же основанием за них можно принять и декартовы
координаты У-объема
*S = <7S- C-1.4)
Векторный базис в u-объеме задается тройкой векторов
а в У-объеме — тройкой векторов
dR дхъ
b-w-bw- (ЗЛ-6)
Векторы взаимных базисов строятся по правилам (V. 1.5):
rs = j*sktrkXrt, C.1.7)
nS * ^Sktn w П /Q 1 Q\
Здесь
V g
*) Чтение этого раздела предполагает знание материала Приложений IV
и V.
§ 3] ПЕРВАЯ МЕРА И ПЕРВЫЙ ТЕНЗОР КОНЕЧНОЙ ДЕФОРМАЦИИ 69
причем через g и G обозначаются определители матриц кова-
риантных компонент
gsh = rs-rk, Gsh = Rs-Rh C.1.10)
метрических тензоров v- и У-объемов g и G, так что
g = \gsh\ = [rl-(r2Xr3)Y, G = |GSfcl = [*r(*2X*3)]2. C.1.11)
Сами эти тензоры, играющие роль единичных в у- и соответ-
соответственно в У-объеме, в их диадных представлениях записываются
в виде
U = gsursrk = gskrsrk = rkrk, C.1.12)
G = GskRsRk = GskRsRk = RkRk. C.1.13)
Здесь, как всегда, введены также контравариантные компо-
компоненты метрических тензоров g и G:
gSh = rs.rht Gsh = Rs-Rh. C.1.14)
Заметим, что тензоры g и 8, являясь единичными в базисах v- и
соответственно У-объемов, равны обратным им тензорам:
'-g = u~\ G = G-\ C.1.15)
Следствием определений C.1.7), C.1.8) служат известные соот-
соотношения
1, s = k,
»'«9
Заменив здесь rh, Rh их значениями C.1.5), C.1.6), имеем
Отсюда имеем
За, до* . За, 3afe
г" ¦ it —*т — - rs • ii —'- = rs • i = g»
dqk даг даг г &к даг даг
Итак,
и аналогично
Следствием являются упомянутые выше соотношения
C.1.18)
ДЕФОРМАЦИЯ- СПЛОШНОЙ СРЕДЫ [ГЛ. И
П© C.1.10) и C.1.14) приходим к формулам
daf daf dxf dxf
~^l^' sb=W^' (ЗЛЛ9)
§ dat dat ' " dxt dxt • \6.\.JM)
Набла-оператор в у-объеме определяется символическим векто-
вектором (У. 4.3):
V=r^. C.1.21)
В V-объеме роль векторов г* Обходит к /?s и для набла-оператора
применяется обозначение
^ = Г^. C.1.22)
В последующем требуется тщательное различение операций
в и- и в V-объемах; действия и величины, относящиеся к V-объ-
ему, указываются знаком тильды (~). Например, вектор может
быть задан его компонентами в базисах у- и У-объемов; его
коварйантные и контравариантные компоненты в векторном ба-
базисе у-объем а обозначаются, как обычно, as и аа, но в вектор-
ноМ базисе F-объеМа — через as, as:
e =* asrs = asrs = ufR* = asRs. C.1.23)
Тензор, равный градиенту вектора а, в соответствии со сказан-
сказанным записывается в метрике и-объема в виде
Va = г* .gr = rsrk4sak = rsrkVsak, C.1.24)
а в метрике 1/-объема имеем отличный от него тензор
Щ = И3-щт = RsRkVsak = RsRkVsak. C.1.25)
Это объясняется тем, что транспонированный тензор (Va)* опре-
определен как производная в по направлению г, а (Va)* — по на-
направлению R:
В операциях ковариантного дифференцирования в у- и в
У-объемах требуется, конечно различать символы Кристоффеля;
например,
Т
§ 3] ПЕРВАЯ МЕРА И ПЕРВЫЙ ТЕНЗОР КОНЕЧНОЙ ДЕФОРМАЦИИ 71
Символы, снабженные знаком тильды, вычисляются по компо-
компонентам тензора G, а когда этот знак отсутствует — по компо-
компонентам g:
п 1
О[ЗГг)О№+
L J 2 V V а?* dqr
Отметим также формулы, обратные C.1.7), C.1.8):
г, = у W* X rfe, ^ =Д es«#' X *\ <3.1.29)
причем
«в«* = г, • (г, X rfe) = /g estk, €stk = /?s • (Rt X J?ft) /G = e,tt. C.1.30)
3.2. Тензоры-градиенты SIR и V*. По C.1.21), C.1.22), учиты-
учитывая определения базисных векторов C.1.6), C.1.6), имеем диад«
ные представления этих тензоров :
C.2.2)
Транспонированные тензоры —производная R по направлению
г и г по направлению R —определяются равенствами
= JifL =, J(sr\ (Vr)* = -^~ = rs/f. C.2.3)
Из этих определений следуют основные в последующем формулы
dR = (VI?)* -dr = dr- VR, C.2.4)
dr = (Vr)' -dR = dR- Vr. C.2.5)
Сразу видно также, что тензоры VR и Vr обратные:
VR-Vr = rsRs-Rkrk = rsrs = g, VR = (Vr)~\ )
s к / _ - ~ -i C-2-6)
Заметим еще, что в отличие от C.2.1), C.2.2) тензоры VR, Vr —
единичные тензоры в базисах V- и о-объемов:
= G, Vr = rVs = ^. C.2.7)
3.3. Первая мера деформации (Коши —Грим). Как уже го-
говорилось в начале п. 1.2, вектор MN = dr, определенный в
и-объеме двумя бесконечно близкими точками М и N, в V-объе-
ме становится равным вектору M'N' = dR. Связь между этими
72 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
векторами задается формулами C.2.4). Из них находится соот-
соотношение, определяющее квадрат линейного элемента dS в
У-объеме:
dR-dR = dS2 = dr.VR-(VR)*-dr = dr-Gx-dr. C.3.1)
Здесь в рассмотрение введен тензор Gx, называемый ниже пер-
первой мерой деформации (или мерой деформации Коши). Этот
тензор по C.2.1) равен
Gx = VR{VRy=rsRsRkrk = GsVsrft C.3.2)
и определен, как видно из этого представления, в векторном ба-
базисе у-объема своими ковариантными компонентами 6Д,равны-
6Д,равными ковариантным компонентам единичного тензора 1/-объема G,
имеющего диадное представление C.1.13),
G? = G,ft = *,.**. C.3.3)
Было бы ошибочно на этом основании отождествлять тензоры
6х и G. Контравариантные компопенты GxSk тензора меры де-
деформации определяются по общему правилу перехода от ко- к
контравариантным компонентам (IV. 5.4):
G^-sV'G,,, C.3.4)
и отнюдь не равны контравариантным компонентам Gsh тензо-
тензора G— последние определены формулами C.1.14) и предста-
представляют элементы матрицы, обратной ||Ggft||.
Вернемся к квадрату линейного элемента C.3.1); учитывая
C.3.2), C.3.3), приходим к его известному представлению ква-
квадратичной формой дифференциалов dqs, образуемой с помощью
матрицы ковариантных компонент тензора G:
dS2 = dr • r»Gskrh • dr = dq*rt • rsGshrh • rmdqm = Gshdqsdqk C.3.5)
Для вычисления ковариантных компонент первой меры дефор-
деформации служат формулы C.1.19):
Gsk = Rs.Rk = it^.im^f^^. C.3.6)
dqs dq" dqs dq"
Введем еще в рассмотрение тензор Gx .обратный Gx. Со-
Сославшись на A.7.14), имеем
Gx"' = (VR • VRT1 = (V/?)*-1. (V*)-1 = (V/?)* • (V*)
и по C.2.6), C.2.2), C.2.3), C.1.14)
Gх~' = фг)' • W = rsRs • R* ¦ rk = G''V*- C-3.7)
§ 3] ПЕРВАЯ МЕРА И ПЕРВЫЙ ТЕНЗОР КОНЕЧНОЙ ДЕФОРМАЦИИ 73
Контравариантные компоненты этого тензора, он обозначается
далее еще т, в векторном базисе и-объема равны контрава-
риантным компонентам единичного тензора У-объема G.
Вычисление компонент Gsk связано с обращением матрицы
Gsh- Можно поступить иначе. Примем на минуту декартовы
координаты точек У-объема за материальные координаты. Тогда
и по C.3.7), C.1.5), возвращаясь к материальным координа-
координатам qs, имеем
Ях-1 Л_ дг дг dg* dgm , m
Итак, снова получим формулы C.1.20):
G^^^-Jf-, C.3.9)
dxs dxs v '
и легко проверить, что матрицы ||Gsi||, ||Gs(|| обратные. Действи-
Действительно, по C.3.7)
дхт дхт дд' ддг _ дхт дхт dqT _ dxm dgT _ ддг _ ,г
st
dgs dg' dxt dx{ dgs dX[ dx{ dgs dxm dgs
что и требуется. Вычисление по формулам C.3.9) требует зна-
знания преобразования, обратного C.1.2), то есть выражения мате-
материальных координат через декартовы координаты У-объема.
3.4. Геометрическое значение компонент первой меры дефор-
деформации. Представим в формуле C.3.1) бесконечно малый век-
вектор dr в виде произведения его модуля \dr\ = ds на задающий
его направление единичный вектор е. Придем к равенству
e'Gx-e-ds2, -g-= (e • Gx • е)/г. C.4.1)
В частности, направляя dr по базисному вектору г,, имеем
е = -^ = -р= (±) C.4.2)
IM Yen ^ij
и, сославшись на C.3.2), получим
-¦?г,-
Этим определяется геометрическое значение диагональных ком-
компонент матрицы ||G«fc||. Обозначая 6< относительное удлинение
74 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
элементарного отрезка, направленного в и-объеме по базисному
вектору г и имеем
(зЛ4)
Единичный вектор е, имеющий направление вектора <Ш в
У-объеме, по C.2.4) определяется равенством
dR = ~е dS = е ds ¦ VR = (V/?)* • е ds,
так что по C.4.1)
Рассматривая теперь в точке и-объема М два направления е,
е' под углом р и называя е, е' сопоставляемые им направления
в У-объеме, получаем
\_.\ju к» v \* у , — i
Ve-Gx-e e'-Gx-e'
и, сославшись на C.3.2),
cos p = r C.4.6)
В частности, выбрав е и е' по направлениям базисных векторов
rs, rt, придем к формуле
поясняющей геометрическое значение недиагональных элементов
матрицы [IGstfl.
Определяя угол cpst, называемый углом сдвига, равенством
Ps( = Psi — tyst,
имеем
cos J3S, = cos ps/ cos cpst + sin ps< sin qst =
(cos %t
Это позволяет записать C.4.7) еще в виде
гв«cos ф,< + VsssSn - ё%sin Фй = d + б/
3.5, Изменение ориентированной площадки. Вектор ориенти-
ориентированной площадки ndo в и-объеме может быть представлен в
виде
ndo = je'Xe"ds'ds"
§3] ПЕРВАЯ МЕРА И ПЕРВЫЙ ТЕНЗОР КОНЕЧНОЙ ДЕФОРМАЦИИ 7§
где е', е" — единичные векторы в плоскости площадки.
В 1/-объеме он преобразуется в вектор
je'Xe
и по C.4.5), C.4.1), C.2.1) C.2.3)
N dO = | ds' ds" {(S/RY ¦ e<\ X (e" • VR) = \ dsr ds"Rs X R/Se"\
C.5 Л)
где e's, е"ч — контравариантные компоненты е', е" в базисе
у-объема. Сославшись теперь на C.1.20), C.1.30), имеем
N dO = 1 ds' ds"ZsqiRte'se"q = у is' ds" "|/-| (rs X r,) •rfe'ie/JR< =
= j ]/у ds' ds" (e' X e") • rtR' = ]/-| n • rtP? do C.5.2)r
или по C.2.3)
NdO = V^ n ¦ (Vr)' do = ]/— Vr ¦ n do. \ C,5.3)
Отсюда, имея в виду также C.3.7), приходим к соотношению
поясняющему геометрическое значение тензора G* ; им опреде-
определяется отношение площадей ориентированных площадок У- и
у-объемов вполне подобно тому, как мерой деформации Gx
определяется отношение длин отрезков [см. C.4.1)].
Теперь по C.5.3) имеем
Эта формула аналогична C.4.5).
3.6. Первый тензор конечной деформации. Замена в вйра-
жении первой меры деформации вектор-радиуса R точки V-ойъ-
ема его значением через вектор перемещения и ввбдйт в рас-
рассмотрение симметричный тензор второго ранга, называемый пер-
первым тензором конечной деформации (Коши—Грийа) и о^озна5-
чаемый далее
& =. Def и
(в противопоставление линейному тензору деформации е =
= dei«). Сославшись на A.1.4) и C.3.2) и заменив по C.2.7)
76 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
единичный тензор Е его представлением g в базисе и-объема,
имеем
G х = (ё + Vu) - [g + (Vu)'\ = g + Vu+ (Vu)' + Vu ¦ (Vu)'. C.6.1)
Определив § равенством
i = ^ [V« + (V«)* + V« • (Vu)'} = e + j Vu • (Va)\ C.6.2)
получим
GX = ? + 2J\ g = l{6x-g). C.6.3)
Если материальными координатами точки считать ее декар-
декартовы координаты as в системе осей ОХ\Х2Х3 и через u(s) обозна-
обозначить проекции и на эти оси, то по C.3.6) компоненты тензора
в этих осях представятся в виде
Ш 2 W *M 2\das дак + да$ дак dag дак )'
C.6.5)
где 8(88), 8(Sft) определяются по формулам A.2.7), A.2.8), в записи
которых us заменяются на щ$), чтобы отличить проекции и на оси
декартовой системы (перемещения) от ковариантных компо-
компонент us этого вектора в векторном базисе rs.
Выражения ковариантных компонент <%& тензора конечной
деформации Коши через ковариантные компоненты вектора пе-
перемещения записываются по (V. 4.5), (V.4.6) в виде
причем
1 1 / ди duh \ ( г I
zsk = _ (vs«A + Vkus) = — I—|-H s)~* \иг- (З-6-7)
Формулы, связывающие компоненты тензора конечной де-
деформации с относительными удлинениями элементарных отрез-
отрезков на базисных векторах rs в и-объеме и с углами сдвига ф8(,
непосредственно получаются из C.4.4) и C.4.8) при замене Glt,
Gst соответственно на git + 2e« и gst + 2esj. Они записываются
в виде
__ ^ si /о a q\
если в качестве материальных координат ввести декартовы ко-
координаты as в и-объеме.
§ 3] ПЕРВАЯ МЕРА И ПЕРВЫЙ ТЕНЗОР КОНЕЧНОЙ ДЕФОРМАЦИИ 77
Как указывалось в п. 1.1, в линейной теории упругости при-
принимается предположение о малости компонент тензора Vu, по-
позволяющее пренебречь квадратами этих величин по сравнению
с первыми степенями. При этом условии тензор конечной де-
деформации заменяется линейным тензором деформации
#» j[Va + (V«)*] = e, &st~Sst C.6.9)
и по формулам C.6.8)
б; « в„, sin ф„ « ф,, = yst. C.6.10)
Этим объясняются принятые в линейной теории наименова-
наименования диагональных компонент тензора ё относительными удли-
удлинениями, а недиагональных — сдвигами. Последние здесь пред-
представляют изменения первоначально прямых углов между отрез-
отрезками, параллельными координатным осям.
Относительные удлинения 6д и сдвиги ф„г в большом числе
задач теории упругости оказываются достаточно малыми, что
дает основание к замене формул C.6.8) приближенными равен-
равенствами C.6.10). Однако малость самих относительных удлине-
удлинений и сдвигов еще не может служить основанием для замены
тензора %> на ё—требуется, как говорилось, малость всех ком-
компонент тензора-градиента перемещения V«. Так, в п. 3.8 будет
приведен пример, когда § = 0 (поворот среды как твердого
тела), тогда как ёФО и компоненты этого тензора могут быть
сколь угодно большими. Очевидно, что здесь возможность ото-
отождествления тензоров Ж и ё отпадает. Эти же вопросы рас-
рассматриваются в п. 3.9.
3.7. Главные деформации, главные оси деформации. Конечно,
на тензоры Gx и <S, как на симметричные тензоры второго ран-
ранга, распространяется все сказанное в пп. 2.1 и 2.2 гл. I. Глав-
Главные деформации, обозначаемые Es, определяеются из характери-
характеристического уравнения тензора Ш
|<^)-Еб.И = 0 C.7.1)
или, в другой записи (IV. 7.4),
-Eei\ = 0. C.7.2)
Аналогично главным касательным напряжениям в п. 2.2 гл. I
вводятся главные сдвиги
Ej-Eg^r,, Е,-Е3 = Г2, Е,-Е2 = Г3 (E,>E2>E3). C.7.3)
Через них выражается второй инвариант девиатора тензора
#4(H 1 D = -?. C.7.4)
78 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [I7J- И
Здесь, подобно B.2.И) гл. I, введена величина, называемая ин-
интенсивностью деформации сдвига:
Г =* ]/| (Г? + 1а + Гз) -2 Y-It(Devi). C.7.5)
3.8. Конечный поворот среды как твердого тела. При таком
перемещении вектор-радиус г, не изменяя своей длины и ориен-
ориентации относительно системы осей, повернутых вместе со средой,
станет равным [см. A.8.3)]
RAU'A'
где A — тензор поворота, i's— единичные векторы повернутых
осей. В этом случае rs = is, Rs=i's> так чт0 по C-2.1)
VR^A, (VI?)*-X4, Gx-V#.{V*r = ? = g
и по C.6.3)
<#~0. C.8.1)
Этого следовало ожидать, так как перемещение среды как твер-
твердого тела не сопровождается изменениями длин элементов и
углов между ними. Однако линейный тензор деформации от-
отнюдь не равен нул,ю:
- 2Ё] ~ ^ (i/s + i% - 2isis).
C.8.2)
Например, при повороте на 90° вокруг оси /3
Й, ЗНаЧИТ, 6ц = 822 = —1.
Линейный вектор поворота определяется по A,2.12):
3-9. Выражение тензора конечной деформации через линей-
линейный тензор деформации и линейный вектор поворота. Обратив-
Обратившись к формулам A.2.13) и C.6.2), имеем
$ ±& \ j(e2 + e • Q-Q ¦ e-Q2)
и, сославшись на A.6.12), придем к формуле
[ё2 + ^<й
у + ^<й-<й-о)<й-<й X ё-((» X е)*] C.9.1)
(в базисе и-объема Е= g). Из нее следует, что условия
|e.ft|«l C.9.2)
§4] ВТОРАЯ МЕРА И ВТОРОЙ ТЕНЗОР КОНЕЧНОЙ ДЕФОРМАЦИИ /9
еще не являются достаточными для отождествления тензорой
& и ё даже при малости компонент тензора &; тогда по C.9.2)
будет мал и вектор со, но не исключено, что величины ess имеют
более высокий порядок малости, чем <а^. Тогда в формуле C.9.1),
придется сохранить квадратичные относительно w слагаемые;
а при 18gft | <С | ©ft | не исключена также возможность использо-
использования этой формулы в виде
i = 1 (|cft . с» - coed). C.14)
Она действительно может осуществиться в задачах о деформи-
деформировании тел с резко отличающимися по различным направлен-
ниям размерами (весьма Тонкий стержень, тонкая плита) при
некоторых условиях нагружения.
Из C.9.1) следует вместе с тем, что замена тензора, $ ли-
линейным тензором деформации требует малости одного порядка
не только компонент последнего eSh, йо и компонент вектора со:
I Q I ^ 1 I С\ I <%? 1 С\ Q ^\\
Но эти условия эквивалентны A.1.5):
< 1. C.9.6)
§ 4. Вторая мера и второй тензор конечной деформации
4.1. Вторая мера конечной деформации. Введение первой
меры деформации 6х и обратного ей тензора 6х позволило
указать способы определения геометрических объектов (длин
отрезков, углов мбжДу ними, Ориентированных площадок)
У-объема по их заданию в и-объеме. Здесь будет рассмотрена
обратная задача — определение этих объектов в у-объеме по
их заданию в 1/-объеме. Очевидно, что ее решение сведется к
замене в построениях § 3 векторов г на R, a R на г. Тот и дру-
другой вектор мы будем считать функциями материальных коор-
координат qs.
Исходным соотношением вместо C\2.4) теперь является
C.2.5):
dr = dR-Vr- (Vr)* • dR,
и, полагая dR = е \dR \ = еdS, dr = e\dr\ = eds, получим
dr • dr = ds2 -e -Sr • {Vrf -~e dS2 = ~е • gx -~edS2. D.1.1)
80 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
Введенный здесь симметричный тензор второго ранга
?х = Vr • (Vr)* = Rsrs ¦ rkRk = g5hRsRk D.1.2)
представляет вторую меру деформации. Его компоненты gsh в
векторном базисе V-объема равны ковариантным компонентам
единичного тензора g в у-объеме; но, конечно, нельзя отожде-
отождествлять эти тензоры: контравариантные компоненты меры де-
деформации gx определяются формулами
gxsk = GsrGkq • grq. D.1.3)
Для вычисления ковариантных компонент gx служат формулы
да, дап да, dat
gsh = it—7-tq-TT = — —T- D.1.4)
09 дця dqs dq
Тензор g*~l = М, обратный gx, определяется из соотношения
gx-' = [vr. (Vr)*] = (Vr)* • (Vr) = (V/?)* • V/?. D.1.5)
Здесь использованы равенства C.2.6); по C.2.3) имеем
Компоненты этого тензора представляют элементы матрицы,
обратной gSh. Повторив вычисление, подобное C.3.9), получим
также
„sk oq dq ,. . —ч
S =-ХГ-"яТ~- D.1-7)
4.2. Геометрическое значение компонент второй меры дефор-
деформации. По D.1.1)
^- = (}.йх.~е)-\ D.2.1)
В частности, рассматривая направление, определяемое базисным
вектором Rh в У-объеме, возвращаемся к формулам C.4.3),
Аналогично C.4.5) имеем также соотношения
е = -Й1- = ^=^. D-2.3)
определяющие единичный вектор о-объема, который в У-объеме
имеет направление е. Отсюда имеем
р. . р! = ros ft = — е' 1Х "е' D.2.4)
§ 4] ВТОРАЯ МЕРА И ВТОРОЙ ТЕНЗОР КОНЕЧНОЙ ДЕФОРМАЦИИ 81
и, направляя е и е' по базисным векторам Rs, Rt в ]/-объеме,
придем, как следовало ожидать, к формуле
*) D.2.5)
7 ^
VSssStt \rs\\ft\
Отметим еще аналоги формул C.5.4), C.5.5):
D.2.6)
4.3. Второй тензор конечной деформации (Альманзи — Га-
мель). Вводя в рассмотрение вектор перемещения и сославшись
на C.2.7), имеем
Vr-V(JJ-a) = 6-Va, D.3.1)
так что по D.1.2)
?х = уг . (Vr)* = G - [Va + (Va)*] + V« • (Va)' = G - 2#. D.3.2)
Здесь введен в рассмотрение тензор деформации Альманзи —
Гамеля
# = i.(G-^) = ~_|v«.(V«r> D.3.3)
где ё — вычисляемый в базисе ]/-объема линейный тензор де-
деформации
Принимая декартовы координаты xs в V-объеме за материаль-
материальные, имеем также
ди(к)\ ди«) du(
Через линейный тензор деформации и линейный вектор пово-
поворота тензор деформации Альманзи — Гамеля выражается фор-
формулой, подобной C.9.1):
§ = е - у [е2 + Ой ¦ « - шл - а Х~е - («> X е)*]. D.3.6)
1 (бх - §)=у (Gsk -
Сопоставляя равенства C.6.3) и D.3.2):
*
= \(G
6 А. II. Лурье
D.3.7)
82 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. IJ
приходим к соотношениям
&sh = ish. D.3.8)
Ковариантные компоненты тензоров $ и Ж — первого в ба-
базисе и-объема, второго в базисе У-объем;а — равны друг другу.
Но, конечно, было бы ошибочно отождествлять эти тензоры
(§ Ф.§).
§ 5. Связь между йерами деформации
,5.1. Сопоставление мер деформации и обратных им тензоров.
В .§§ 3 и 4 этой главы были введены четыре меры деформации;
мера Коши Gx и тензор M = gx , обратный мере ?х:
,M, E.1.1)
а также вторая мера gx и тензор, обратный первой мере &я
К
Gx"' = (VRT~l ¦ (VI}) - (Vr)* *Vr = m, E.1.2)
Тензоры Gx и th определены в базисах о-объема:
Gx = Gskrsr\ m = Gx~1 = GsVb E.1.3)
где GSh, Gsh — ко- и контравариантные компоненты единичного
тензора У-объема.
Представления gx и М в базисах У-объема имеют вид
?х-ft*****, M-fRsR,,, E.1.4)
причем gsh, gsk — ко- и контравариантные компоненты единич-
единичного тензора и-объема.
Формулы для компонент введенных тензоров в декартовой
системе осей OXiXvX3 записываются в виде
да. dat да dak
5.2. Связь между инвариантами. Известно [см. A.9.16)], что
главные значения произведений тензоров Q • Q* и Q" • Q равны
друг другу. Поэтому, называя главные значения тензоров
E.1.1), E.1.2) через Gs, Ms, gs, ms, имеем
Gs =M5, gs =m5. E.2.1)
§5) СВЯЗЬ МЕЖДУ МЕРАМИ ДЕФОРМАЦИИ 83
Вместе с тем главные значения тензора Q~l равны обратным
величинам главных значений Q. Поэтому
G, =-L = _L, g JL= i E<2i2)
Отсюда следуют формулы связи главных инвариантов {см.
(L 10.15), A.10.16)]:
G Is(gx)=*Is(m), E,2.3)
и, конечно, обращения этих формул
'ЛйХ)=Ш' '^Х)-1Ш' ''Ы*) = 1Ш- E-2'6)
К приведенным соотношениям следует добавить формулы,
определяющие главные инварианту тензоров мер деформ^дий
Gx и ?х. По E.1.3), E.1.4) имеем
k^Gs!tgtkr E.2,6)
что согласуется с определением (IV. 7.5). Далее, по (IV. 7.6)
Теиер*> по E,2-4), E.2.5) подучаем
/2(GX) = |^G^ /3(gX) = -|/feGsft. E.2.8)
Это соответствует (IV. 7.10).
5.3. Представление мер деформации в главных осях. Через
q
е обозначаются единичные векторы главных осей мер дефор-
деформации 6х и 6Х~1:
3 3 SS
Д E.3.1)
Js
s=\
В формуле C.4.5) npMMfeta e = е; тогда
s
x
=CS) е=^Ж = ^1-, E.3.2)
У G ¦ у G •
84 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
так что
s 3 ss
Л = ее = 2т^- VjR=GX~v'.V1?. E.3.3)
s=\
Этим определяется тензор поворота главных осей тензора Gx
при деформации и-объема. Но триэдры главных осей двух тен-
тензоров Gx и М, имеющих одинаковые главные значения, связа-
связаны преобразованием поворота [см. A.9.17)], а поворот тензо-
тензора Gx осуществляется тензором поворота E.3.3). Поэтому М —
это «повернутый тензор Gx» и по A.9.17)
М = А* • Gx • А = 2 ее • Gx • 2 ее = S G~ee, E.3.4)
S-1 Ч = 1 S=l
откуда следует также, что
з ??
Заметим еще, что соотношение E.3.3), переписываемое в виде
VR=Gx'h-A, V/?* = i*-Gx'/a, E.3.6)
согласуется с представлением (I. 10.17) несимметричного тен-
тензора в форме произведения справа или слева тензора поворота
на симметричный положительный тензор. Из E.3.6) сразу же
следует и соотношение E.3.4):
V/Г-УД = Л1 = Л*-ОХ- А.
Заметим еще, что следствием формул E.3.6) и C.2.6) являются
представления тензоров Vr, Vr* в виде
Vr = Д* • (?х~'\ Vr*=Gx~'/2-i. E.3.7)
Определение тензора поворота, когда известны исходные
преобразования C.1.1), C.1.2) и-объема в ]/-объем, требует
знания тензора Gx ; для этого должны быть известны глав-
главные направления и главные значения тензора Gx. Другой прием
основан на отыскании компонент тензора 5х~'/г. По A.6.9) это
сводится к системе уравнений
GwW\ = G-Slqh E.3.8)
процедура решения которой, по существу, не отличается от
разыскания главных осей и главных направлений тензора G*.
Она значительно облегчается, когда поле вектора перемещения
плоское. См. п. 6.2 этой главы.
§ 5] СВЯЗЬ МЕЖДУ МЕРАМИ ДЕФОРМАЦИИ 85
5.4. Инварианты тензоров конечной деформации. Они вычис-
вычисляются по инвариантам мер деформации Gx и gx с помощью
соотношений
E.4.1)
и формул [см. [1.10.10), A.10.11)]
/2(Q)=4[/2(Q)-/.(Q2)], |
} E.4.2)
Получаем
E.4.3)
SU 1 С 1 ~
E.4.4)
Обратные соотношения имеют вид
Л 7 EР\ I All SP\ [О Т (/~* X \ _
= 1+2/! («f) + 4/2 (t) + 8/3 {?), E.4.5)
= 1-2/, (I) + 4/2 {§) - 8/3 (I). E.4.6)
Более сложны зависимости между главными инвариантами тен-
тензоров деформации %> и S. Их можно получить с помощью фор-
формул E.2.4). Например,
и по E.4.5)
г ,Ш\ /t (i) + 4/2 <g) +12/3 (f)
86 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
5.5. Объемное расширение. Выражение элементов объема
среды в начальном и конечном состояниях представляются в
виде
dxo = rr(r2 X r3) dq1 dq2dq5 = VJгг-г1 dq4q2dq3=V7dql dq2dq3,
«=/(?/?,• R1 dq1 dq2 dq3 =VG dq1 dq2 dq3.
бтсюда находим
dx
dxQ
Величина D — относительное изменение элемента объема при
деформации — называется объемным расширением.
Сославшись на определение (IV. 7,6} третьего инварианта в
косоугольном базисе, имеем
j (Qx) = —\(j I = _ = A д. ?)J E 5 2)
или по E.4.5)
" " -1. E.5.3)
Учитывая также E.2.5) и E.4.6), можно это выражение запи-
записать еще в виде
D = \ 1 - 2/i (I) + 4/2 (I) - 8/3 A)Г'/2 - 1 • E.5.4)
Непосредственный вывдд формулы E.5.3) основан на том,
что объем в о-объеме единичного кубика с ребрами, направлен-
q л
ными по главным осям е тензора <?х, станет в F-объеме равным
A + 60 A + Ъ2) A + ЯЬ) = V A + 2^0 A + 21Г2) A + 2^3) = D + 1,
Где 6S — главные удлинения, Bs — главные значения тензора &;
см. также C.6.8). Остается сослаться на формулы A.10.4) —
(I. 10.6), связывающие главные инварианты с главными значе-
значениями тензора.
В линейном приближении, когда тензор 8 отождествляется
с линейным тензором деформации ё, объемное расширение, обо-
обозначаемое обычно ¦§ (вместо D), по E.5.3) представляется в
виде [см. также (IV. 7.5)]
# = /i(e) = gs4fe E.5.5)
или по (V.4.4), (V.4.6)
k\ ^^^. E.5.6)
§ 5] СВЯЗЬ МЕЖДУ МЕРАМИ ДЕФОРМАЦИИ 87
5.6. Преобразование подобия начального состояния. Рас-
Рассматриваются два начальных состояния среды: у-объем и
и*-объем, получающийся из первого преобразованием подобия
г,-Кг, asii = Kas. E.6.1)
Тогда меры деформации, вычисленные по первому и второму
начальным состояниям, связываются соотношениями
G,X = -^GX, <ix=K2?x, E-6.2)
непосредственно следующими из C.3.6), — достаточно в Каче-
Качестве материальных координат ввести декартовы координаты as
в и-объеме.
Связь между главными инвариантами мер деформации
h и h дается очевидными формулами
E.6.3)
Более сложный вид имеют формулы, связывающие инвариан-
инварианты тензоров конечной деформации. По E.6.3) и E.4.3) получим
If" ЧТ Л I г" л лО
/. [ Г / ^\ I *^ Q 1 7 / SP \ \ Т I SP\ I О Т / 5Р\ I ^
1 (& *) ~ ~FF Ml \^;~Г "о" Р » ^2 1*^*) =s ~^Т И2 1®)тРм 1^/1*4"
E.6.4)
причем
Р=1-Л:2. E.6.5)
Точно такие же формулы, но с заменой К2 на К~2, 8 на К~2 -^ 1,
связывают инварианты тензоров деформации ё\ и &.
В теории конечных деформаций следует предпочесть приме-
применение мер, а не тензоров деформации. «Вводя перемещения вме-
вместо координат, ничего не выигрывают, а, наоборот, теряют в
смысле краткости и обозримости формул» (Кирхгофф).
5.7. Определение вектора перемещения по мерам деформа-
деформации*). По заданной мере деформации Gx (матрице компо-
компонент Gsk) находится тензор Gx~' (обратная матрица). Этим
*) Принятым здесь изложением автор обязан беседам с М. А. Заком.
88 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
определяются символы Кристоффеля второго рода
ff.-^). E.7.,)
dqR dq' )
Конечно, предполагается, что известен метрический тензор
г-объема g и вычисляемые по нему символы Кристоффеля
. I * [. q;] f (| + ff Ц)E.7.2)
kq ) 2 \ dqi dq* cq' }
Теперь, исходя из равенств
Rq = rq-Vn, VR~r°Rs, E.7.3)
имеем
и при обозначении
приходим к системе линейных дифференциальных уравнений от-
относительно тензора VjR:
-^- = f(bl.VR ^ 7 ^
ft —L[k] *Ц. ^O./.Oj
dq
Условия интегрируемости ее следуют из сотоношений
<Э2Я
•fin -v/?=Mf+fw.rwЬv/?=
dqr dqR \ dqT J \ dq" j dq" dqr
и приводятся к виду
1«1 1П Г Г Р V IK Т R\
~Т~т ГТ" ~ W * W ~ * И ' И' ^а"' л>
Выполнив дифференцирования (при этом используются фор-
формулы дифференцирования базисных векторов rs, rq) и заменив
Г[й]. fw их значениями E.7.4), придем к соотношениям, экви-
эквивалентным требованию обращения в нуль компонент тензора
Риччи Апп (V.6. 14).
§ 6] ПРИМЕРЫ ДЕФОРМИРОВАННЫХ СОСТОЯНИЙ 89
Предположив решение системы уравнений E.7.5) извест-
известным*), далее по E.7.3) находим R по его полному дифферен-
дифференциалу
dR = Rm dqm = rm-VR dqm = dr ¦ V/f. E.7.7)
При задании меры деформации gx (значит, и обратного тен-
зора?х = М) искомым является вектор г, определяющий поло-
положение точки в у-объеме, тогда как ее положение в У-объеме и
метрический тензор в этом объеме известны — известны R и G
(например, положение в У-объеме задается декартовыми коор-
координатами xs, 6 = Е = isis).
Теперь из соотношений
Vr = Rsrs, rq = Rq-Vr E.7.8)
имеем
dqk \\ksj [sk
и система дифференциальных уравнений E.7.5) заменяется си*
стемой
$-Vfr. '--({i}-{i})r«r E-7-9)
Определив из нее тензор Vr, находим г по его полному диф-
дифференциалу
dr = dR-4r. E.7.10)
Вектор перемещения и определяется, конечно, равенством
и = R — г.
§ 6. Примеры деформированных состояний
6.1. Аффинное преобразование. Оно определяется соотноше-
соотношением [см. [1.3.15)]
R = Ar, F.1.1)
где Л — постоянный тензор второго ранга. Из соотношения
dR = Л • dr = dr • Л*
по C.2.4), C.3.2), C.3.7) имеем
V/? = A\ (V/?)* = A, 6* = Л'-Л, GX~' = /ft = (A*-Ar\ F.1.2)
а по C.2.5), D.1.2), D.1.5) и A.7.14)
Vr = A*~\ (Vr)' = A~\ ^х = (Л-Л'Г1, М = Л-Л*. F.1.3)
*) Его можно записать в форме матрицанга, строящегося по тензо-
тензорам тт.
90 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
Эти формулы поясняют различие между введенными мерами
деформации. Далее в записях компонент используются декарто-
декартовы координаты; поэтому в нарушение правил общей тензорной
алгебры (Приложение IV) свободные индексы в левой и правой
частях формулы занимают различные положения, а суммирова-
суммирование проводится по индексам, расположенным на одной высоте.
Компоненты первой меры деформации и тензора деформации
= -g- (G х — g) представляются в виде
F.1.4)
и по C.4.4), C.4.8) формулы для относительных удлинений и
сдвигов будут
F.1.5)
Через Xsr обозначается алгебраическое дополнение элемента Krs
матрицы WhsW, разделенное на определитель 2\, = |?w.s| этой ма-
матрицы. Тогда
ffr/ = W, $rt = jFrt-%srKst) F.1.6)
й, далее,
б9)
Отметим, что 6f =И=бг, — в Нервом случае речь идет об относи-
относительном удлинении отрезка единичной длины, который в ч-объ-
еме был параллельным оси it и приобрел длину 1 + 6* в
У-объеме; во втором — об отрезке длины 1 + б; в У-объеме, ко-
который в этом объеме стал параллельным оси it. В формуле
F,1.5) материальными координатами считаются а« (декартовы
координаты о-объема), а в F.1.6) — координаты xs (декартовы
координаты У-объема).
Инварианты меры деформации 6х по A.6.7) и E.2.4) пред-
представляются в виде
/, (G х) = А* • • А = КлКа, /2 <G ^|Йт
JAg )
F.1.8)
6.2. Плоское поле перемещений. Точечное преобразование
и-объема в ]/-объем задается соотношениями
хл = я, {аи аг), х2 = х2{аиа2), хц = а3. F.2.1)
Для упрощения записей вводим обозначения
|г- = А.л (s,k = \,2), X3s = %s3 = Q, Я,за=1. F.2.2)
§6]
ПРИМЕРЫ ДЕФОРМИРОВАННЫХ СОСТОЯНИЙ
Тогда вполне аналогично F.1.2) имеем
dR = Л • dr
и, сославшись на F.1.4), получим
л _,!,.! г _ , , loo /-
"II — Лц-гЛ21. 2—ЛЦЛ12 Т Л21Л22, bZ2 — '»в i /vai. i rp л п\
G =| Gs;| = GiiG22 — Gi2 = (Я11Я22 — Я12Я21) =Я. F.2.4)
Система уравнений E.3.8), определяющих компоненты тензора
"Gx \ записывается в виде
(Vx'/2Y_L (гХУг\2 Г Г**'2 (Г*'12-L Г*''2} Г
\О|1 ) +\2 / =1, Сг 12 41/11 +U12 /=U12,
у'/Л2 / - v'/A2
F.2.5)
Квадрат первого Инварианта этого тензора выражается через
главные значения и, значит, инварианты тензора 0х:
= Gx + G?
Поэтому
12-A21J. F.2.6)
Теперь из второго уравнения F.2.5) находим G& ', а потом и
диагональные элементы G\ G%-
— уг— [Я,
/22 =
F.2.7)
При обозначениях
(Яи+Я22), sinx = -7^(A21-A12) F.2,8)
эти равенства записываются в виде
Gj2 — Я,2 cos х + Я22 sin х = — Яп sin x + Я21 cos x,
G222 =? - ^12,siq X + Я22 CQS 5C«
F.2,9)
92 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ. II
Выбор знака в определении F.2.8) угла % диктуется тем, чтобы
линейное преобразование
могло быть преобразованием поворота вокруг оси i3 на угол х-
Тогда выбор
Кп = %22 = cos х, Я,21= — Я12 = si
удовлетворяет определению F.2.8) и вместе с тем
х, = a, cosх — а2sin%, x2 = als'm% +
ss
F.2.10)
что и требуется.
Представление тензора Gx'/2 теперь записывается в виде
Gх'/2 = Gu'/2t,tfc + Уз - (М* cos х - «з X Wfe sin х) Я,яА + t3t3. F.2.11)
Выражение матрицы поворота А составляется по E.3.6):
А = G х'/г • (Vr)' = (уfc cos x - h X Mfe sin x) -^- • «Л 15Г + гз'з =
ft T
= (yr cos x - h X У, sin x) -^ -^ + »3'3 '
и, далее,
A = ?2cosx-«3X?;2sinx + M3 (?2 = У|+У2). F.2.12)
Структура этого выражения повторяет A.8.8).
6.3. Простой сдвиг*). Этот частный случай плоского аффин-
аффинного преобразования задается формулами
xl = ai + sa2, x2 = a2, х3 = а3) F.3.1)
где s — постоянная сдвига; прямоугольник ABDC превращается
в параллелограмм ABD'C (рис. 10). Матрицы Л, Л* записы-
записываются в виде
A = ? + s«V2, A' = E + si2iu F.3.2)
и по F.1.3), F.L4) имеем следующие отличные от нуля компо-
компоненты тензора &:
GX = ? + s(t1i2 + MI) + S2M2, #12 = ^21 =|. ^22 = ^S2. F.3.3)
Далее, по F.1.5)
A ^, F.3.4)
*) Не смешивать с термином «чистый сдвиг» (п. 2.4 гл. I).
§6]
ПРИМЕРЫ ДЕФОРМИРОВАННЫХ СОСТОЯНИИ
93
что, конечно, легко увидеть на рис. 10. Из характеристического
уравнения тензора 8х
(l-G)[(l-GJ-s*G] =
\ G, =1.
F.3.5)
Система уравнений для определения его главных направлений
будет
= 0 F.3.6)
1-G
s
0
находим
= 1B
его
+ t
s
1 + s2 - G
0
главные
;2 + S]/7
0
0
1-C
значения
+ T), G2
tgpl"
F.3.7)
и при s>0-^-^Pi^-2", — < p2^я.
Главные значения тензора gx no E.2.2) и F.3.6) равны
1 1
а система уравнений, определяющих их главные направления,
отличается от F.3.6) заменой s на —s. Поэтому
=-tgp2, tgp=-tgp,,
я
Т'
Расположение главных осей е, е тензоров 6х и ?х показано
S
на рис. 10. Угол, на который надо повернуть вокруг i3 оси е,
s
чтобы совместить их с осями е, равен
f = -iS. F.3.8)
С другой стороны, в формулах F.2.6) и F.2.8) имеем теперь
Яи = Ляг = 1, ^12 = s, Я21 =0, так что
2 5,1
+ 4, cos x =
ДЕФОРМАЦИЯ' СПЛОШНОЙ СРЕДЫ
[ГЛ. IF
что подтверждается формулой |6i3s8); тенаор поворота А ь за-
задаче о простом сдвиге оказывается представленным в виде
А = ее =
¦ BЁ2 + si3 X Ё2) + i3i3.
F.3.9)
6.4. Кручение круглого цилиндра. Осуществляемое при этой
деформации преобразование координат можно описать как ко-
конечный поворот среды вокруг оси цилиндра щ, в которвм угол
Й; it).
йбвдрота х представляет Лияёйнук) функций абсциссы, отсчитУ*-
р-аеледй вдоль этой оси:
% — 5&j +1|3#3- F.4. 1)
Здесь ^-^относительный угол пзворбта двух попбреадш сече-
сечений, отстоящих на единицу длины друг от друга. Тензор пово-
поворота определяется формулой F.2.12), так что
Д = г-Л, dR^dr-A + r- A'daz= А* • dr ^ А*'- гйцг> F,42)
причем штрихом отмечено дифференцирование по а3. Имеем
теперь
dS2 = dR • dR = dr • A • A" ¦ dr + dr • A ¦ A'' -rda3 +
•¦¦>¦•¦ +f-A' -A*- drda3
Отметив собтношеййя
(i3 X E2) Ё
t-du%.
имеем
= i3X?2) (i3XE2T=-t3xE2, (
равенства
Л • А* = Е, (А ч AJ = А' • А* + Д:- Ж !г О»
Д' = — ^ (?2 sin х + »з X ?2 cos x)>
3 Д' . л* *= - а|)»з X ?2, Я' •* Л*' = $%
§ 6] ПРИМЕРЫ ДЕФОРМИРОВАННЫХ СОСТОЯНИЙ 95
и после подстановки в F.4.3) получим
dS2 -Gst das dat = 6rf das dat +
+ ф [dr • (i3 X E2) - r - r • (i3 X E2) • dr\ da3 + ^2r-E2-r da2.
Итак,
= bst das dat + 2ty(a1 da2 - a2 da{) da3 + $2 {a\ + a2) da2 F.4.4)
и по C.3.5) компоненты меры деформации Gx оказываю^й
равными
F.4.5)
Отличны от нуля компоненты тензора деформации
_j_ =_ 1 . „ 1
Наличие компоиенты й'зз, обусловленное «стремлением ци-
цилиндра» изменить длину, указывает на необходимость прило*
#сения осевой силы для осуществимости предположенного поля
перемещения, в котором сохраняется длина цилиндра (отсут-
(отсутствует Из). Тогда
Это—одно из проявлений эффектов-^ экспериментально уста-
установленных Пойнтингом A909). Его нельзя было бы объяснить,
основываясь на линейной теории деформаций.
Объем цилиндра при рассмотренной деформации кручения
сохраняется; действительно,
10 — -фа2 !
0 1
-¦фа2 ^а1 1
и по E.5.1) объемное расширение D = 0.
6J5. Цилиндрический изгиб прямоугольной плиты. Рассмат-
Рассматривается преобразование
*,*C(a,)cosi^-, *2 = C(a,)sfn-*p-, x3^ea3, F.5.1)
с помощью которого область параллелепипеда
аЧКа^аЧ + h, -&<g2<&, -/<g3</, F.5.2)
представляющая прямоугольную плиту толщины h, ширины 2й
и длины 21 (рис. 11), деформируется в цилиндрическую
96
ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ
[ГЛ. II
панель —в область, ограниченную поверхностями коаксиальных
цилиндров с радиусами
- И), F.5.3)
плоскостями
х2 = ± хх tg a
F.5.4)
и плоскостями Хз = ±el. Предполагается, что эта деформация
происходит с сохранением объема материала.
Компоненты меры деформации Gx определяются по C.3.6),
причем декартовы координаты и-объема принимаются за мате-
„ риальные; отличными от
,х нуля оказываются лишь
В' i диагональные компонен-
&у/\ ! ты тензора Gx
Из условия сохранения
объема имеем
Рис. И.
:>с = ^, F.5.6)
откуда после интегрирования, учитывая F.5.3), находим
так что
-r».
F.5.7)
F-5.8)
Проймем, далее, что в изгибаемой плите имеется плоскость
а, = а* такая, что отрезки прямых — Ь^а2-^Ь на ней, которые
были параллельны в о-объеме оси i2, сохраняют в ]/-объеме
длину. Тогда по F.5.5.) и F.5.8)
¦П--1
F.5.9)
§ 6] ПРИМЕРЫ ДЕФОРМИРОВАННЫХ СОСТОЯНИЙ 97
и выражения компонент меры деформации представляются в
виде
, f A-rl a\-a°
2
Gn=-p- 2"~5 5~> G22 = -i2Q-. G33 = e2. F.5.10)
. Г\~Ч> gi~ai
S
Учитывая F.5.7), можно записать равенство F.5.9) в форме
л2 —г2
квадратного уравнения относительно —§—> положительное ре-
решение которого дается формулой
г2, — rl 2,
F.5.11)
Из нее и из F.5.7) получаем отношение высоты прямоугольной
полосы к длине дуги поперечного сечения внутреннего ци-
цилиндра:
F.5.12)
Из приведенных формул следует, что при е & 1 компоненты
меры деформации отличаются от единицы слагаемыми порядка
h/b, весьма малыми для тонкой плиты. Компоненты тензора
деформации имеют этот же порядок, тогда как перемещения
отнюдь не малы.
6.6. Радиально-симметричная деформация полой сферы. За
материальные координаты принимаются сферические координа-
координаты и-объема
91 = г, q2 = #, q* = Я.
Тогда, сославшись на п. III. 8, имеем
г1 = -^г = ед, r2 = -^-=refl, r3 = -ф- = exr sin #,
и отличными от нуля ковариантными компонентами единичного
тензора и-объема g будут
8п = r,-r, = l, ga = r2 • ^ = г2, g33 = r3-r3 = г2 sin2 ¦&. F.6.1)
Далее, имеем
» sin2 #, F.6.2)
и контравариантными компонентами этого тензора по (V. 5.7)
будут
7 А. И. Лурье
98 ДЕФОРМАЦИЯ СПЛОШНОЙ СРЕДЫ [ГЛ; И
При радиально-симметричной деформации сферы, ограни-
ограниченной в у-объеме поверхностями концентрических сфер г = г0
и г = ги в У-объеме имеем
R = R (г) ея, Я, = R' (г) ея, R2<= R (r) efl, R3 = R (r) ek sin ft, F.6.4)
так что
Gjj =/? , G22 = /? , G33 = /? sin о", G = RR sin^.
Для материала, сохраняющего при деформации объем (несжи-
(несжимаемого), по E.5.1)
f=l, *'2 = ^-> F-6.5)
и, интегрируя это соотношение, имеем, как следовало ожидать,
дя (г) - г3 = const = R* - г\ = RI - г\,
Где Ri, Ro — радиусы сфер в конечном состоянии (в У-объеме).
Отличные от нуля ковариантные и контравариантные компонен-
компоненты единичного тензора G равны
в!' 22 ,' 33 , ' i F.6.6)
GП„Л_ Q22 _ _i_ Q33 _-_^___ I
л4 ' R2 ' R2 sin2 О ' j
Главные инварианты меры деформации Gx вычисляются по
E.2.6), E.2.8):
, (Ох) = -кг + 2-^2-, /2(GX) =-^- + 2 -kj- , /3(GX)=1. F.6.7)
6.7. Осесимметричная деформация полого цилиндра. Вычис-
Вычисление аналогично проведенному в п. 6.6. Материальными коор-
координатами служат цилиндрические координаты и-объема
q} = r, q2 = ф, qz = z.
Сославшись на формулы п. III. 7, имеем
т = гв + zk т = е т = те т = k F 71}
так что в согласии с (III. 7.1) и (V. 5.7)
g'.Li' g'L-^, gsLi' '( <6-7-2)
При осесимметричной деформации вектор-радиус R в У-объеме
определим равенством
R = R (r) er + azk,
§6]
так что
далее,
ПРИМЕРЫ ДЕФОРМИРОВАННЫХ СОСТОЯНИЙ
99
F.7.3)
Для несжимаемого материала
iL = 11 R'2RW = r2, a/?2 - г2 = const = a/?2 - r2 = a/?2 - r\, F.7.4)
где r0, г\ — радиусы концентрических цилиндров в о-объеме,
Ro и /?i — в У-объеме; ко- и контравариантные компоненты тен-
вора G равны
Gn = ^2a2 > G22 = R , G33 = a,
G11
1
П2 »
F.7.5)
и главные инварианты тензора меры деформации Gx будут
F.7.6)
ЧАСТЬ II
УРАВНЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
ГЛАВА III
ЗАКОН СОСТОЯНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
§ 1. Изотропная сплошная среда
1.1. Постановка задачи линейной теории упругости. Как не-
неоднократно указывалось (пп. 3.6, 3.9 гл. II), возможность заме-
замены тензоров конечной деформации линейным тензором деформа-
деформации е обусловлена малостью компонент тензора-градиента век-
вектора перемещения Ун или, что то же самое, компонент тензора ё
и вектора поворота ©
dus
дак
|<о,|«1. A.1.1)
При этих условиях отпадает необходимость различения произ-
производных по координатам начального состояния as и конечного со-
состояния xf. Действительно, для некоторой функции f в той и
другой системе независимых переменных имеем
df . df dus
дЧ dxs dak dxs [°^ + dak ) dxk ^ dx, dah
и в принятом приближении
#-¦?¦ (U-2)
В линейной теории упругости, если не оговорено противное, за
начальное состояние среды принимается ее состояние при отсут-
отсутствии напряжений — натуральное состояние. Декартовы коорди-
координаты точки в напряженном состоянии обозначаются хи х%, xs, a
в начальном —через аи а2, а3 (п. 1.1 гл. I):
xs = as + us, A.1.3)
но их нет нужды явно вводить в рассмотрение. При разыскании
напряженного состояния принимают, что размеры и форма тела
§ 1J ИЗОТРОПНАЯ СПЛОШНАЯ СРЕДА 101
такие же, что и в начальном состоянии, не различая v- и У-объ-
еыов и поверхностей О и о, их ограничивающих.
Тензор напряжения, в отличие от основного соотношения
A.3.2) гл. I, вводится соотношением
tn = n-f. A.1.4)
Здесь tn do — вектор силы, действующей на ориентированную
площадку ndo, причем п — единичный вектор нормали этой пло-
площадки в начальном состоянии тела, do — ее площадь. Уравнения
равновесия в объеме сохраняют вид A.5.4) или A.5.6) гл. I
но, относя массу к начальному объему, принимают в выражении
объемной силы р/С плотность равной ее значению в начальном
состоянии (р = р0). Уравнение равновесия на поверхности в со-
соответствии с A.1.4) записывается в виде
F = n-f, A.1.5)
где F — поверхностная сила, рассчитанная на единицу началь-
начальной площади поверхности о, а п — единичный вектор внешней
нормали к ней.
В линейной теории равновесия сплошной среды отпадает
также необходимость в различении тензоров деформации Ко-
ши — Грина § и Альманзи —Гамеля S. Как следует из C.6.5)
и D.3.5) гл. II, тот и другой тензоры должны быть по A.1.1) и
A.1.2) заменены линейным тензором деформации
§ =|=8=y[VK + (V«)*], A.1.6)
причем безразлично, какими независимыми переменными (х$
или as) пользоваться при вычислении набла-оператора. Далее
принимаются обозначения xs для этих переменных, через V и О
обозначаются объем тела и ограничивающая его поверхность.
При применении криволинейных координат qs принимается обо-
обозначение g для метрического тензора, gsk, gsk, g^ = bks — для его
компонент. Первый инвариант линейного тензора деформации в
соответствии с E.5.5) гл. II (объемное расширение в линейном
приближении) обозначается
ft = /,(?) = diva. A.1.7)
В п. 1.5 гл. I уже говорилось, что задачей статики сплошной
среды является разыскание во множестве статически возможных
напряженных состояний (удовлетворяющих уравнениям статики
в объеме и на поверхности) фактически реализуемого в приня-
принятой физической модели среды состояния. Эта модель опреде-
определяется законом состояния; для большого числа сред он состоит
в задании связи между тензорами напряжения и деформации;
102 ЗАКОН СОСТОЯНИЯ ЛИНЕПНОП ТЕОРИИ УПРУГОСТИ [171 III
в линейной теории сплошной среды это — линейное соотношение
связи тензора напряжения с линейным тензором деформации.
В линейно-упругом теле оно представляет систему линейных
уравнений, связывающих компоненты этих тензоров; они вы-
выражают обобщенный закон Гука для линейно-упругого тела*).
В выражение закона состояния входит также температура
тела.
Задание закона состояния приводит к замкнутой системе диф-
дифференциальных уравнений, по которой определяется реализуе-
реализуемое в теле напряженное состояние и вектор перемещения точек
среды. Из сказанного следует, что в линейной постановке задача
определения формы и размеров упругого тела в конечном со-
состоянии отодвигается на второй план—их находят после того,
как задача решена в предположении неизменности начальной
формы тела. Этот прием позволяет избежать серьезной труд-
трудности нелинейной теории упругости, когда напряженное состоя-
состояние приходится разыскивать в У-объеме — в теле с неизвестной
наперед границей О. Его законность подтверждается тем, что
при решении задач нелинейной теории упругости методом после-
последовательных приближений, например в форме ряда по степеням
параметра малости, характеризующего малость градиента век-
вектора перемещения, исходное приближение, получаемое при пре-
пренебрежении слагаемыми, содержащими этот параметр, пред-
представляет решение задачи для линейно-упругого тела, когда опре-
определяющие уравнения отнесены к начальному объему и начальной
форме его границы.
Дальнейшее изложение ведется преимущественно в декарто-
декартовой системе координат ОХ\Х2Хг; однако все результативные со-
соотношения формулируются в инвариантной форме зависимо-
зависимостей между векторами или тензорами и инвариантами тензоров.
Поэтому переход к криволинейным координатам нигде не соста-
составляет труда.
1.2. Элементарная работа. Выражение удельной элементар-
элементарной работы внешних сил Ь'А{е] или равной ей по величине, но
противоположной по знаку удельной элементарной работы вну-
внутренних сил 67l((), получим, заменив в формулах пп. 3.5, 3.6 гл. I
отношение Gjg единицей, а тензор деформации — линейным
тензором деформации. В линейной теории отпадает необходи-
необходимость различения метрик v- и V-объемов; поэтому энергетиче-
энергетический тензор напряжения тождественен тензору напряжений Т.
Итак, по C.6.4) гл. I имеем
6М{Р) = - b'A{i) = Т¦ -бе = /, (Т ¦ бе) = tsk tesk, A.2.1)
*¦) Ниже станет ясно, что линейность соотношений между тензорами не
равнозначна с линейностью связи их компонент.
§ 1] ИЗОТРОПНАЯ СПЛОШНАЯ СРЕДА ЮЗ
причем tSh, ESk — компоненты тензороз Т и е в декартовой прямо-
прямоугольной системе координат.
Первый инвариант тензора напряжений далее обозначается
а; это —сумма трех главных напряжений или трех нормальных
напряжений на ортогональных площадках:
a = tn + /,2 +/33 = ^1 + t2 + h. A.2.2)
При обозначении A.1.7) представление удельной элементарной
работы C.6.6) гл. I через шаровые и девиаторные части тензо-
тензоров Т и ё записывается в виде
i(Devf ¦ 6Deve). A.2.3)
Переход от удельной элементарной работы к элементарной ра-
работе во всем объеме тела, конечно, осуществляется интегрирова-
интегрированием
6'а(„= J f \b'A{e)dx, b'a(i)= \\\b'A(i)dx. A.2.4)
v v
1.3. Изотропная однородная среда Генки. Мы ограничимся
рассмотрением сред, в которых тензор напряжения определен
заданием тензора деформации и температуры 0, отсчитываемой
от температуры начального состояния. Компоненты этих тензо-
тензоров связываются соотношениями вида
tsh = fSft(en, е22, езз, 612, 823, е3ь хи х2, х3, 0), A.3.1)
на которые накладываются некоторые требования инвариант-
инвариантности— сохранения вида при преобразовании координатной си-
системы. Этим исключаются физические модели сред, в которых
тензору напряжения сопоставляются тензоры деформации и ско-
скоростей деформации, когда он предполагается зависящим от пред-
предшествующей истории деформирования и «возраста» материала,
и т. д. Далее не рассматриваются также неоднородные среды,
когда координаты Х\, х2, х3 явно входят в зависимости A.3.1).
Изотропными упругими средами будем называть среды, в
которых тензоры деформации и напряжений соосны (п. 1.12).
Кубик, выделенный из такой среды, одинаково деформируется
под действием приложенных сил при любой ориентации ребер.
Из теоремы Кейли — Гамильтона следует, что два соосных тен-
тензора связываются друг с другом квадратичной зависимостью
вида (I. 12.4). Одним из затруднений нелинейной теории упру-
упругости является указание той из мер деформации, которой дол-
должен быть сопоставлен тензор напряжения. В линейной поста-
постановке задачи оно отпадает, а квадратичная зависимость заме-
заменяется линейной вида
Т = аЁ + Ье, A.3.2)
104 ЗАКОН СОСТОЯНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. ill
причем a, b — зависят от инвариантов тензора ё и, возможно, от
температуры; через Е обозначается единичный тензор.
Изотропную однородную среду, подчиняющуюся закону со-
состояния A.3.2), называют средой Генки. Запись этого закона
через компоненты тензоров Т и е имеет вид
U = abak + bzsk, A.3.3)
и поскольку а и Ь зависят от инвариантов е, эти соотношения
нелинейны. Среда Генки линейна геометрически, но физически
нелинейна. Частным случаем ее является линейная и геометри-
геометрически и физически упругая среда — среда Гука; описание пове-
поведения ее составляет основное содержание этой книги*).
По A.3.2) имеем
or = /, (f) = За + ЪЪ, A.3.4)
так что
Dev 7 —1 — -~gE = b I e—^-df =6Deve A.3.5)
и зависимость между вторыми (квадратичными) инвариантами
девиаторов Г и е записывается в виде
/2 (Dev f) = й2/2 (Dev ё).
Сославшись на формулы B.2.11) гл. I и C.7.4) гл. II:
т2= -/2(Devf), ~= -/2(Deve), A.3.6)
где т — интенсивность касательных напряжений, Г—интенсив-
Г—интенсивность деформации сдвига, вводим новое обозначение
и 9,1 „ *^т ,, т П Ч 7\
О1— ^(А — ^гГ i Ц —ТТ. ^1.0./)
Еще раз изменяя обозначения, представим коэффициент а сум-
суммой двух слагаемых:
а = М} + а',
причем второе а' зависит от температуры 8 и обращается в нуль
вместе с 0 (при температуре тела, равной температуре натураль-
натурального состояния). Тогда по A.3.4) и A.3.7)
+ а' = кЪ + а'. A.3.8)
*) В этой книге вопросы теории упругости анизотропных сред не рассма-
рассматриваются. Линейной теории упругости анизотропной среды посвящена книга
С. Г, Лехшщкого «Теория упругости анизотропной среды» (Гостехиздат,
1950). Нелинейным задачам поведения анизотропных упругих тел уделено
большое место в книге А. Грина и Дж. Адкинса «Большие упругие деформа-
деформации и нелинейная механика сплошной среды» (изд-во «Мир», 1965).
§ I] ИЗОТРОПНАЯ СПЛОШНАЯ СРЕДА Ю5
Здесь обозначено
й = й, + -|ц. A.3.9)
Величины k и |_i называются соответственно модулем объем-
объемного сжатия и модулем сдвига. В дальнейшем, ссылаясь на
большое число экспериментальных данных о поведении мате-
материалов при гидростатическом давлении (всестороннем равно-
равномерном сжатии), примем, что модуль объемного сжатия не за-
зависит от инвариантов деформации; его зависимость от измене-
изменения объема испытуемого образца была обнаружена в известных
опытах Бриджмена только при сверхвысоких давлениях.
При температуре 0 и при отсутствии внешних сил (тогда
а = 0) тензор деформации ё в испытуемом кубике является ша-
шаровым и определяется равенством
8 = а9?, /, (г) = «• = ЗаВ, A.3.10)
где а — коэффициент линейного расширения. Подстановка в
A.3.8) теперь дает
3/гаО + а' = 0, а' = — 3/га8.
Приходим к равенству
а = %% — 3/гаВ = Яд — (ЗК + 2ц) аб,
и теперь закон состояния Генки A.3.2) записывается в виде
Т = ХЪЁ + 2A8 - (ЗА + 2ц) aQE A.3.11)
или в эквивалентной форме
jo = jIl{T) = k{$-3aQ), Dev f = 2ц Dev ё. A.3.12)
Возвращаясь к выражению A.2.3) удельной элементарной ра-
работы, имеем теперь
Dev Т • 6 Dev е = 2ц Dev ё • б Dev e = цЬ (Dev ёJ
и по A.11.9), A.3.6)
/, [(Dev ёJ] = - 2/2 (Dev ё) = ~, б/, [(Dev ёJ] = Г бГ.
Теперь формула удельной элементарной работы внешних сил
представляется в таком выразительном виде:
Ь'А{е) = k (О - За9) 6fl + \xY 6Г = -| ЬЬ + % бГ. A.3.13)
Первое слагаемое представляет элементарную удельную работу
изменения объема, второе — изменения формы.
106 ЗАКОН СОСТОЯНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. Ill
Напомним еще, что по формулам A.11.6), A.10.4), A.10.5)
Г2 = - 4/2 (Dev ё) = 4 \\ /? (е) - /2 (ёI =
A.3.14)
§ 2. Потенциальная энергия деформации
2.1. Внутренняя энергия линейно-деформируемого тела. За
независимые параметры состояния однородной изотропной сре-
среды Генки принимаются первый инвариант тензора деформа-
деформации*)— объемное расширение О, интенсивность деформации
сдвига Г и температура 8. Термодинамическая величина (потен-
(потенциал), называемая удельной внутренней энергией Е, предста-
представляется функцией этих параметров:
Е = Е(в,Г,в). B.1.1)
В соответствии с первым законом термодинамики ее приращение
(вариация) 6Е определяется суммой удельной элементарной ра-
работы внешних сил 6'Л(е) и подведенного к единице объема коли-
количества тепла d'Q. Последнее задается соотношением
b'Q = сдВ + хдФ. B.1.2)
Здесь с — теплоемкость при постоянном объеме (при 6д = 0),
а %д&— количество тепла, затраченного на изменение этого
объема. В дальнейшем через в обозначается абсолютная темпе-
температура; очевидно, что
0 = 00 + 9, 66 = 66, B.1.3)
где Go — абсолютная температура тела в натуральном со-
состоянии.
Теперь по B.1.2) и A.3.13) имеем
ЬЕ = Ь'А{Р) + b'Q = [k{& — ЗаЭ) + х№ + сб0 + цГбГ. B.1.4)
Условия интегрируемости этого выражения — существования Е
как функции перечисленных выше параметров — записываются
в виде
дс _., д^ I
дТ ~1 дВ '
, . B.1.5)
= U- J
*) На всем протяжении глав, посвященных линейной теории упругости,
линейный тензор деформации для сокращения речи называется тензором де-
деформации.
§ :'] ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ДЕФОРМАЦИИ ДО7
Вторым законом термодинамики утверждается существова-
существование еще одной функции параметров состояния системы — энтро-
энтропии 5; в обратимом равновесном процессе вариация этой величи-
величины определяется равенством
es=-5? = ?ee+-!w = -gee+-§Jw+§er, B.1.6)
и условия интегрируемости этого выражения представляются в
виде
Поскольку k не зависит от инвариантов деформации, из первых
двух равенств B.1.5) и B.1.7) имеем
f = 0, 1 = 0, ,=ф(Г). B.1.8)
Остающиеся равенства дают
|]. B.1.9)
Здесь и далее принимается, что аО — величина того же порядка
малости, что О; это позволяет в соответствии с принимаемыми
в линейной теории пренебрежениями и вследствие слабой зави-
зависимости k от температуры заменить B.1.9) соотношением
B.1.10)
Теперь по B.1.5) и B.1.7) имеем
J^ = 0, -§. = 0, с = С(в) B.1.11)
— теплоемкость при постоянном объеме зависит в принятом при-
приближении только от температуры.
Выражения 6'Q и ЬЕ теперь записываются в виде
6'(Э = ЗАав6# + с(е)бе, B.1.12)
ЬЕ = k {Ь + 3а0о) б* + цГ 6Г + с F) 60, B.1.13)
и при сделанных пренебрежениях следует считать k не завися-
зависящим от температуры.
2.2. Изотермический процесс деформирования. Если темпе-
температура в процессе деформирования поддерживается неизменной,
то е = 0, 6 = во и по A.3.13)
Ь'А{е) = kft6Ф + цТ 6Г = 1 а 6д + т бГ. B.2.1)
Обратившись же к B.1.2), B.1.4), B.1.6), имеем
б? = Ь'Ае + вб-S = 6М(Р) + 6 FS) — S6O. B.2.2)
108 ЗАКОН СОСТОЯНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. Ш
Термодинамическая функция (потенциал)
F = E — 6S B.2.3)
называется свободной энергией системы. Ее вариация по B.2.2)
равна
6F = b'A(e) — S6S, B.2 А)
и, следовательно, в изотермическом процессе удельная элемен-
элементарная работа внешних сил равна вариации свободной энергии:
6F = Ь'А(е) = ШЪ + цГ6Г. B.2.5)
2.3. Адиабатический процесс. В этом процессе b'Q = 0 и по
B.1.12)
с(еN9 = — 3/гавбд. B.3.1)
В соответствии с ранее допущенными пренебрежениями пола-
полагаем
_ с @) , J
t»o ио L Wo J fcH
где Co = c(O)—теплоемкость при температуре начального со-
состояния @ = 0, в = во). Учитывая также, что ¦& = 0 при 6 = 0,
приходим к соотношению
Of /Г\
B.3.2)
с0
определяющему изменение температуры при адиабатическом
процессе деформирования.
Теперь по B.1.4) и B.3.2) имеем
6? = Ь'А(е) = к{Ъ- Заб)ЬЬ + цТбГ =
При обозначении
(9МвЛ BД4)
это равенство записывается в внде
ЬЕ = б'Л(е) = k'ftbti + цГбГ. B.3.5)
Величина к' называется адиабатическим, k — изотермическим
модулем объемного сжатия. Модуль сдвига \х имеет одинаковое
значение в адиабатическом и изотермическом процессах.
При свободном тепловом расширении, когда бд = ЗабЭ, со-
сообщаемое единице объема количество тепла b'Q = ср6в, где
§21
ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ДЕФОРМАЦИИ
109
ср — определяемая в обычных опытах теплоемкость при отсут-
отсутствии напряжений (теплоемкость при постоянном давлении).
Поэтому по B.1.2) и B.1.10)
b'Q = cp 66 = с 69 + ЗЬв • За 66
так что по B.3.4)
en к'
B.3.6)
В приводимой табл. 1 даны значения этого отношения для
некоторых металлов (при 20°С). Из нее следует, что с прием-
приемлемой для технических расчетов точностью можно не делать
различия между адиабатическим и изотермическим модулями.
Таблица 1
Элемент
Алюминии . . .
Молибден . . .
Вольфрам . . .
Серебро ....
Марганец ....
Свинец
ср1°
1,043
1,007
1,006
1,004
1,044
1,067
Элемент
Железо ....
Медь
Кобальт ....
Никель
Платина ....
Золото
1,016
1,028
1,020
1,021
1,020
1,038
2.4. Удельная энергия деформации. Среды Генки. Основы-
Основываясь на равенствах B.2.5) и B.3.5), введем в рассмотрение
функцию инвариантов деформации Л (тЭ1, Г), вариация которой
определяется равенством
ЬА = ШЪ + цГбГ = Шд + тбГ. B.4.1)
В изотермическом процессе А отождествляется со свободной
энергией F, а в адиабатическом — с внутренней энергией Е, и
в этом случае k следует заменить на k'—адиабатический мо-
модуль объемного сжатия. Но в том и другом процессах может
быть определена функция состояния, называемая далее удель-
удельной потенциальной энергией деформации,
г
А = — &А2 -4- т бГ (9 4 9\
Го
с отличием (практически несущественным) в определении ве-
величины k для изотермического или адиабатического процессов
деформирования. В этих процессах удельная потенциальная
энергия деформации равна удельной работе внешних сил на
ПО ЗАКОН СОСТОЯНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. Ill
непрерывной последовательности равновесных состояний, по ко-
которой среда переходит из натурального состояния в рассматри-
рассматриваемое равновесное.
Конкретизация выражения B.4.2) требует знания экспери-
экспериментально устанавливаемой зависимости
т = ц(Г)Г. B.4.3)
Частными случаями изотропных сред Генки являются: а)линей-
а)линейно-упругая гукова среда
ц(Г) = const; B.4.4)
б) среда в состоянии текучести, когда
т = ц(Г)Г = const = тя. B.4.5)
Через ts обозначен предел текучести материала.
Общий случай определяет упрочняющуюся среду. Один и
тот же материал при постоянном росте нагружения может пере-
переходить через все три стадии. Это
показано на диаграмме (Г, т),
схематически иллюстрирующей
поведение, например, литой ста-
стали (рис. 12). Участок О А соот-
соответствует линейно-упругому пове-
поведению, АВ— участок текучести,
на котором деформация растет
при неизменном т = т8; с некото-
•*"j- рого Г = Г* начинается участок
" *~* упрочнения ВС, на котором даль-
дальнейший рост Г требует роста т.
PfiC- '2- Для жестко-пластических мате-
материалов линейный участок практи-
практически отсутствует — материал до нагружения, соответствующего
т = ts, не деформируется, а при т = xs начинается его течение,
которое далее может смениться упрочнением. Для нелинейно-
упругих материалов (например, меди) отсутствуют участки
ОА и АВ.
В одноосном напряженном состоянии, приближенно реали-
реализуемом в опытах на растяжение стержня осевыми силами, от-
отлична от нуля единственная компонента ох тензора напряжений.
По B.2.11) гл. I в этом случае
9 1 о OV
% =7а Т = 7Г
так что, называя as значение ох, при котором достигается пре-
предел текучести, имеем
§ 3] ОБОБЩЕННЫЙ ЗАКОН ГУКА 1 { [
В случае чистого сдвига отлично от нуля только одно каса-
касательное напряжение и т равно этому напряжению. Определив
ts из опыта на чистый сдвиг, реализуемого при кручении тонкой
трубки, можно поэтому предсказать, что предел текучести в
опыте на растяжение стержня из того ж материала наступит
при ах = ]/3 rs. Это подтверждается опытами над мягкими ме-
металлами (Рош и Эйхингер и др.).
В развернутом виде условия B.4.5), его называют условием
текучести Мизеса, записывается в виде *)
т2= -/2(Devf) =
= Т [К - °уТ + К ~ ^J + К - °хJ} + **у + r% + *L = т». B.4.7)
В п. 4.9 гл. I даны оценки внешних сил, позволившие сформу-
сформулировать достаточный критерий наличия зон пластичности в на-
нагруженном теле и необходимый критерий их отсутствия.
Сказанное в этом пункте применимо к гипотетическому мате-
материалу — физической модели, обладающей способностью, накопив
энергию за счет работы внешних сил при нагружении, возвра-
возвращать ее без потерь при восстановлении исходного (натураль-
(натурального) состояния. Одним из предположений при построении этой
модели была обратимость процесса. Поведение множества
реальных материалов необратимо, накопленная энергия при раз-
гружении частично рассеивается; это делает предложенную мо-
модель приемлемой лишь для рассмотрения процессов, в которых
интенсивность касательных напряжений т монотонно растет.
Рассеивание энергии при разгружении линейно-упругого (гуко-
ва) тела незначительно, и необратимостью процесса «нагруже-
ние — разгружение» в нем принебрегают.
§ 3. Обобщенный закон Гука
3.1. Модули упругости. Закон состояния линейно-упругого
тела в изотермическом процессе деформирования (8 = 0) по
A.3.11) записывается в виде
Г = Ш? + 2цё. C.1.1)
Здесь Я, \i — постоянные модули упругости, называемые коэф-
коэффициентами Ляме. Форма закона сохраняется и в адиабатиче-
адиабатическом процессе, но по A.3.9) и B.3.4) следует заменить в нем К
*) Здесь применены и часто ниже будут применяться обозначения ком-
компонент тензора напряжения Т, указанные в матрице A,4.8) гл. I; для компо-
компонент тензора деформации используются аналогичные обозначения ея = е,(,
\'ху = 2е[2 и т. д.
112 ЗАКОН СОСТОЯНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. III
мало отличающимся от него адиабатическим модулем А/:
C.1.2)
Из C.1.1) легко также выразить тензор деформации ё через
тензор напряжений Т. Имеем
Il(f) = o = CK + 2V)b = 3kQ, Ъ^-^^, C.1.3)
так что
Равенства C.1.1), C.1.4) выражают обобщенный закон Гука.
Поведение материала в нем задается двумя постоянными; это
является следствием предположений об изотропности среды и
малости компонент тензора Ун, позволивших в общей квадра-
квадратичной зависимости между соосными тензорами Т, е сохранить
только линейное слагаемое.
Запись законов состояния C.1.1), C.1.4) через компоненты
тензоров Г, е в декартовой системе осей имеет вид
ах = Яд + 2\мх, хх,, = цуху и т. д., C.1.5)
Y^7TT^ и т- д- (зл'6)
Обозначения Ляме применяются преимущественно в теорети-
теоретических работах, в технической литературе их заменяют другими
модулями упругости, чаще всего модулем Юнга Е (модуль
нормальной упругости) и коэффициентом Пуассона v. Чтобы
ввести эти величины, выделим в формуле C.1.6) для ех слагае-
слагаемое Ох из суммы а:
(ог" + в
% + \i Г Я
Г Я / | \1
При обозначениях
' я + ц -?> F(X"TIo-v (ЗЛ-7)
запись обобщенного закона Гука C.1.6) приводится к виду
^ = jK-vK + (Tj], Уху^ — txy,
K( + I
z = — xyz, \ C.1.8)
ег = ?г [аг - v (а, + аД Тгх = у тм. J
§3] ОБОБЩЕННЫЙ ЗАКОН ГУКА ЦЗ
В одноосном напряженном состоянии, когда отлична от нуля
только компонента ох, имеем
e-t=lP еУ = е* = ~ v"if" = ~ V8-" Vw = Yj/г = Y« = 0, C.1.9)
и в этой записи легко узнать элементарный закон деформирова-
деформирования растягиваемого осевой силой стержня — его относительное
удлинение в осевом направлении пропорционально напряжению
с коэффициентом пропорциональности Е~1; это осевое удлинение
сопровождается пропорциональным ему поперечным сокраще-
сокращением размеров стержня, определяемым коэффициентом Пуас-
Пуассона v. Общий случай трехосного растяжения можно истол-
истолковать как результат наложения трех последовательно нала-
налагаемых одноосных напряженных состояний. Это рассуждение,
конечно, предполагает линейность закона деформирования.
Вторая группа формул C.1.8) выражает пропорциональность
сдвига касательному напряжению при чистом сдвиге — при от-
отличном от нуля только хху имеет место только соответствующий
ему сдвиг уху. Учет нелинейности деформации вносит существен-
существенный корректив в это простое представление (п. 6.3 гл. II).
Выражения коэффициентов Ляме через Е и v по C.1.7) за-
записываются в виде
Модуль сдвига \х часто обозначают G, а вместо коэффициента
Пуассона вводят обратную ему величину, обозначаемую т:
H=G, m=*\. C.1.11)
Первая формула C.1.10), дающая выражение модуля сдвига
через Е, v, может быть истолкована с помощью известного гео-
геометрического построения, в котором рассматривается удлинение
диагоналей квадрата, по сторонам которого действуют касатель-
касательные напряжения, сообщающие изменение прямому углу между
этими сторонами.
В записи обобщенного закона Гука может быть, конечно,
использована любая пара из введенных выше модулей
k, К, ц= G, E, v = —.
Часто за такую пару принимают ц, v. Тогда соотношения C.1.1),
C.1.4) принимают вид, в котором они преимущественно исполь-
используются в этой книге:
(^ ) C.1.12)
8 А. И. Лурье
114
ЗАКОН СОСТОЯНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. ИГ
В табл. 2 дается сводка формул, выражающих модули упру-
упругости через основную пару модулей.
Таблица 2
Мо-
Модули
X
ц-G
и
Е
V
Основная пара
К и
X
2
со
ц(ЗЯ+2ц)
Я + ц
Я
2(Я+ц)
к, ц
2
* з"
3k + u
3/г-2ц
6ft + 2ц
2nv
1 -2v
2ц A +v)
3(l-2v)
2ц A 4-v)
V
?, v
vE
A +v)(l -2v)
E
2A +v)
3A -2v)
V
(? - 2ц) (x
Зц-?
И
Ец
3 (Зц - ?)
Е
1 ?
2 Ц 1
3.2. Удельная потенциальная энергия деформации линейно-
упругого тела. Ее выражение по B.4.2) и B.4.4) в изотерми-
изотермическом и с заменой k на k' в адиабатическом процессах записы-
записывается в виде
| C.2.1)
или, если использовать формулы преобразования (I. 10.10),
(I. 11.6) и ввести модули ),, ц, в виде
C.2.2)
Учитывая теперь, что
j (v
приходим к следующему выражению удельной потенциальной
.энергии деформации через компоненты тензора ё, обозначае-
обозначаемому далее А (е):
А (е) = 1
2fx (e
ц
- C.2.3)
В рассматриваемых процессах, напомним, вариация удельной
потенциальной энергии (равная вариации свободной энергии в
§ 3] ОБОБЩЕННЫЙ ЗАКОН ГУКА 115
первом из них и внутренней энергии — во втором) равна элемен-
элементарной работе внешних сил и может быть по A.2.1) записана
в виде
= tn 6еп + t22 бе22 + tm 6833 + tl2 6Y12 + ^23 6Y23 + hi бу.чь C.2.4)
Из этого представления следуют формулы
1 / дА , дА \ I dzss ' '
выполняющиеся не только для изотропного линейно-упругого
тела, но и для всякой среды, когда может быть введено понятие
о потенциальной энергии деформации как функции от компонент
деформации, определяемой работой внешних сил.
В линейно-упругом (гуковом) теле Л—однородная квадра-
квадратичная форма компонент деформации, и по известной теореме
Эйлера
Пришли к билинейному представлению удельной потенциальной
энергии (в этом представлении она будет обозначаться А(е,о))
*xyYxy + TyzVyz + *zxVzx)- C.2.6)
Л(е, а) = уГ--е =
= J (Охех + (ГуВу + <Гг?
Из него, использовав закон Гука в форме C.1.13), получим вы-
выражение удельной потенциальной энергии деформации через
тензор напряжений, обозначаемое Л (о):
?] C.2.7)
или, в развернутой форме,
А И = W \°l + v2y + Gl-2v (ахау + ayoz + агау)] +
Соосные тензоры входят вполне равноправно в билинейное вы-
выражение удельной потенциальной энергии деформации C.2.6);
8*
116 закон состояния линейной теории упругости [гл. ш
поэтому, наряду с C.2.4), может быть записано представление
ее вариации в виде
= ех 6ох + еу Ьау + zz baz + уху &хху + yyz 6xyz + yzX &xzx. C.2.9)
Отсюда получаем соотношения, обратные C.2.5):
дА дА дА дА _ ) |
C.2.10)
дах х' да у у' daz z' дхху
дА дА
¦ = Угх,
дху2 ryz' dxzx
справедливые, однако, как и C.2.6), только для гукова тела.
3.3. Формула Клапейрона. Область значений модулей упру-
упругости. Потенциальная энергия деформации упругого тела опре-
определяется интегралом по объему от удельной потенциальной
энергии
а= j j j Adx. C.3.1)
v
Эта величина равна половине работы внешних сил на последо-
последовательности равновесных состояний линейно-упругого тела из
его натурального состояния. Доказательство основано на ра-
равенстве
J J J и ¦ (div f + pK)dx + J J (F- n ¦ f) • udo = 0. C.3.2)
V О
Действительно, по (П. 3.10) и C.2.6)
J J J « • div f dx= J J Jdiv(f-a)dT- J J J f--edx =
О V
и подстановка в C.3.2) приводит к искомому соотношению
C.3.3)
I
Это — формула Клапейрона. В ней утверждается, что работа
внешних сил затрачена на сообщение рассматриваемому объ-
объему линейно-упругой среды потенциальной энергии, возвращае-
возвращаемой в виде работы при постепенном разгружении тела (или ки-
кинетической энергии при внезапной разгрузке). Из этих энергети-
энергетических представлений следует, что а > 0. Такое утверждение
§3] ОБОБЩЕННЫЙ ЗАКОН ГУКА Ц7
эквивалентно локальному (осуществляемому в любой части
V-объема) свойству
А > 0, C.3.4)
вследствие произвольности объема V.
Утверждение C.3.4) является свойством, приписываемым
упругому телу, — в нем отсутствуют зоны, в которых А < 0.
В линейно-упругом изотропном теле оно должно обеспечиваться
требованиями, накладываемыми на модули упругости:
k>0, (i>0. C.3.5)
Отчетливее всего это видно из формулы C.2.1): при отсутствии
сдвигов (Г = 0) выполнение неравенства C.3.4) требует поло-
положительности модуля объемного сжатия (/г>0), а при неиз-
неизменности объема (•& = 0) — положительности модуля сдвига.
Неравенства C.3.5) соответствуют и привычным статическим
представлениям о поведении упругого тела: в напряженном со-
состоянии чистого сдвига (п. 2.4 гл. I) деформация сдвига имеет
знак касательного напряжения (|д>0), а при гидростатическом
сжатии объем кубика уменьшается (/г>0).
Из выражения k через ц, v:
h_2_ 1 +v
3 ^ 1 - 2v '
следует, что первое неравенство выполняется для значений ко-
коэффициента Пуассона в промежутке
-Kv<{. C.3.6)
Растяжение стержня из материала с отрицательным (но боль-
большим, чем —1) v сопровождалось бы увеличением его поперечных
размеров. Энергетически существование таких упругих материа-
материалов не исключено.
Заметим, что неравенства C.3.5) могут быть записаны еще
в виде
ЗА, + 2ц > 0, ц > 0. C.3.7)
Замечание. Известно, что квадраты скоростей распростра-
распространения волн сдвига и сжатия — расширения в упругой среде рав-
равны соответственно
р р ч г/ р 1 —2v
Поэтому A > 0, v < '/2 — распространение волн сжатия — расши-
расширения представляется возможным в среде с любым v < 0. Огра-
Ограничение v> —1 является следствием независимого требования
C.3.4). В гипотетическом материале с v<— 1 гидростатическое
сжатие кубика сопровождалось бы увеличением ею объема.
118 ЗАКОН СОСТОЯНИЯ ЛИНЕПИОП ТЕОРИИ УПРУГОСТИ [ГЛ. Ill
3.4. Учет температурных слагаемых. Свободная энергия. От-
Отбросим предположение, что процесс деформирования происходит
изотермически или адиабатически. Тогда отпадает возможность
отождествления удельной элементарной работы внешних сил с
вариацией удельной потенциальной энергии деформации; само
это понятие приходится отбросить. Его роль отходит к одному
из термодинамических потенциалов — или к свободной энергии,
или к потенциалу Гиббса (п. 3.5).
Запишем, сославшись на B.1.13) и A.3.13), выражение ва-
вариации удельной внутренней энергии 6Е в виде
ЬЕ = ШФ + цГбГ + Зйавобд + сбб =
= 6ММ + 3/га(в0 + 0Nд + сбО
или, вспомнив также A.2.1), B.1.3),
б? = Ь'А(С) + З&авбд + сбО = tst6est + З&авбд + сбО. C.4.1)
С другой стороны, рассматривая внутреннюю энергии и энтро-
энтропию как функции компонент деформации и температуры, имеем
б? = бМ(г) + 6'Q = tst 6est + О 6S = tst 6ss; + 0
или
б? = (^ + 0^N8^ + 0-1160. C.4.2)
Сравнение с C.4.1) приводит к формулам
0,
s = t
из которых получаем выражение энтропии
в
C.4.4)
Е = 1
где за в0 можно принять абсолютную температуру в натураль-
натуральном состоянии тела.
По B.1.13) в случае линейно-упругого тела имеем
в
+ цГ2) + Зкав0® + J с (О) dS,
во
или
0
Е = А (е) + Ш@0Ъ + j с(в)d&, C.4.5)
во
причем А (г)—квадратичная форма компонент деформации, не
отличающаяся по виду от удельной потенциальной энергии в
изотермическом процессе.
§ 3] ОБОБЩЕННЫЙ ЗАКОН ГУКА Ц9
Теперь по C.4.5), C.4.4) и по определению удельной свобод-
свободной энергии B.2.3) имеем
F = А (е) - ЗЛад8 - f -Ц^- (в - I) d\. C.4.6)
ч S
Производные этой функции по компонентам деформации опре-
определяют компоненты тензора напряжения; действительно, по
C.2.3) и A.3.9) имеем
|^ J?L C.4.7)
|^ -(ЗА, + 2ц)ае, = |iY
ofc.v "Уху
и т. д. Это уже ранее установленное соотношение A.3.11) для
случая гукова тела
f = ХЪЁ + 2ре - (ЗА + 2ju) сс8?. C.4.8)
Дифференцирование выражения Z7 по 8 приводит к ранее полу-
полученному выражению энтропии
U
S. C.4,9)
\ в„ В }
По C.4.8) имеем
C.4.10)
Слагаемое
8/ = а9?; C.4.11)
представляет тензор деформации отделенного от среды элемен-
элементарного кубика, нагретого до температуры 8. Но поскольку окру-
окружающая среда препятствует изменению размеров этого кубика,
создается напряженное состояние, определяемое тензором Т; оно
в свою очередь создает, налагаемую на температурную дефор-
деформацию C.4.11), деформацию, определяемую законом Гука для
изотермического процесса *)
Этим поясняется структура формулы C.4.10). Заметим еще, что
по C.4.10)
^! C-4.13)
*) Именовать тензоры е', I" «деформациями», строго говоря, нельзя, по-
поскольку условия сплошности выполняются для тензора e — e' + t", а не для
каждого слагаемого этой суммы по отдельности.
120 закон состояния линейной теории упругости [гл. in
3.5. Термодинамический потенциал Гиббса. Эта термодина-
термодинамическая функция, обозначаемая через G, в которой за незави-
независимые переменные приняты компоненты тензора напряжения Т
и температура 6, связана со свободной энергией преобразова-
преобразованием Лежандра
G = tskesk-F = f--e-F.
Здесь по C.4.10)
[^] , C.5.1)
где А(а)—квадратичная форма компонент тензора напряжения
C.2.8). Через эти компоненты остается выразить также свобод-
свободную энергию F, в первую очередь входящую в нее форму А (г).
Имеем
/, (е) = /, (ё') + /, (е'О; /? (ё) = /2 (ё") + у^у Забег + 9а?62;
262
-а2е2?;
/, (ё2) = /, (ё) + - аб \~ а + За262,
так что по C.2.2), используя представление X через ц и v,
найдем
А (е) = 1 \xi\ (ё") + 2ц/, (ё//2)] + абст + ц 1Ц^ За262 =
= Л (q) + абст + ц . _ 9V За282 C.5.2)
и далее по C.4.13) и C.4.6)
F = Л (or) + абст + ц уз^- За262 - !
или
/^ = Л(а)-ц^
Подстановка приводит к следующему выражению потенциала
Гиббса:
G = Л (а) + аба + ц 11^ За262 + J ^- (О - |) dg. C.5.4)
On
По свойству преобразования Лежандра приходим к соотноше-
соотношениям, обратным C.4.7):
3G 1 г / , м , г. <5" 1 , _ _,
§ 3| ОБОБЩЕННЫЙ ЗАКОН ГУКА 121
и т. д. Энтропия определяется соотношением
е
^4. C.5.6)
Конечно, это же выражение следует из C.4.4) и C.4.13).
В задачах о тепловых напряжениях к свободной энергии и
к потенциалу Гиббса отходит роль потенциальной энергии де-
деформации, выраженной соответственно через компоненты дефор-
деформации и компоненты напряжения.
Считая теплоемкость с при постоянном объеме не зависящей
от температуры, а изменение последней 6 = 6 — во малым,
имеем
так что, сославшись еще на таблицу п. 3.1 формул, связываю-
связывающих модули, получаем
S = aCT + 9to2e + C7?-. C.5.7)
В натуральном состоянии S = 0, а в адиабатическом процессе
она остается равной нулю. Поэтому изменение температуры
упругого тела в этом процессе оказывается равным [см. также
B.3.2), B.3.4), B.3.6)]
где ср —теплоемкость при постоянном давлении. В п. 4.12 гл. I
даны оценки снизу максимума модуля этой величины.
3.6. Уравнение теплопроводности. В рассмотрение вводится
вектор теплового потока q, пропорциональный градиенту темпе-
температуры и направленный в сторону падения температуры:
q = — Kgrad6, C.6.1)
где К — коэффициент теплопроводности. Этим вектором опреде-
определяется количество тепла, выходящее в единицу времени вслед-
вследствие теплопроводности из произвольного объема V через огра-
ограничивающую его поверхность О;
J J n-qdo = - JJ п-К grad 9 do = - J J J div К grad 6 dx.
0 0 V
C.6.2)
122 злкон состояния линейной теории упругости [гл. in
Вместе с тем сообщаемое единице объема в единицу времени
количество тепла можно представить в виде
M = 0^- = GS. C.6.3)
Поэтому
С [ [ FS - div К grad 9) dx = 0
v
и вследствие произвольности объема V
6S-div/С grad 0 = 0. C.6.4)
Заменив здесь энтропию S ее значением C.4.4), получим
(ЗЯ + 2jx) ав4 + с (в) 8 - div К grad 9 = 0. C.6.5)
Как и выше, величину аб считаем малой того же порядка, что и
¦0-. Считая еще К постоянным, приходим к уравнению теплопро-
теплопроводности
V26 - 1 6 - —- (Зк + 2ц) i4 = 0, C.6.6)
где
;= *
(в0)
— коэффициент температуропроводности. Другой формой записи
уравнения теплопроводности, получаемой при замене S в C.6.4)
значением C.5.7), служит
V29-^re--^a = 0, C.6.7)
где теперь а' — К/ср, что следует из B.3.6), B.3.4).
Использование понятия энтропии в равновесном стационар-
стационарном процессе для вывода уравнения нестационарного распреде-
распределения температуры основывается на предположении о локально-
равновесных и медленно протекающих процессах.
Уравнения C.6.6), C.6.7) отличаются от классического урав-
уравнения теплопроводности Фурье
V26 - ~ 9 = 0 C.6.8)
слагаемыми, обусловленными учетом деформации среды. При
нестационарном температурном режиме задачи теплопровод-
теплопроводности и теории упругости оказываются связанными: распределе-
распределение температуры зависит от деформации, а последняя — от рас-
распределения температуры. Вместе с тем уравнения равновесия
§ 3', ОБОБЩЕННЫЙ ЗАКОН ГУКА 123
упругой среды должны быть заменены уравнениями движения
ее. Этот эффект может стать заметным при весьма резких изме-
изменениях температуры (при «тепловом ударе»), а в обычных усло-
условиях он пренебрежимо мал. Уравнения равновесия сохраняют
в форме Фурье C.6.8), а среду считают остающейся в условиях
равновесия, пренебрегая ускорениями ее точек («квазистатиче-
(«квазистатическое» рассмотрение). Задача теплопроводности решается неза-
независимо от задачи теории упругости.
При стационарном распределении температуры
V26 = 0. C.6.9)
ГЛАВА IV
ОСНОВНЫЕ СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ
УПРУГОСТИ
§ 1. Дифференциальные уравнения линейной теории упругости
1.1. Перечень исходных соотношений. Основные уравнения
теории упругости задаются тремя группами соотношений. Пер-
Первая группа представлена уравнениями статики в объеме
divf + pjK = O, (Ы.1)
связывающими тремя соотношениями шесть компонент симме-
симметричного тензора напряжений Т.
Вторая группа уравнений содержит определение линейного
тензора деформации ё через вектор перемещения и:
e = -i[V« + (V«)*]. A.1.2)
Здесь имеется шесть уравнений, определяющих компоненты
тензора деформации по первым производным трех компонент
вектора перемещения.
В третьей группе шести уравнений формулируется закон со-
состояния линейно-упругого тела. Для изотропного тела и в изо-
изотермическом или адиабатическом процессах этот закон — об-
обобщенный закон Гука — записывается в форме
A.1.3)
или в форме обратного соотношения
Пятнадцать уравнений трех групп содержат такое же число
неизвестных: двенадцать компонент двух симметричных тензо-
тензоров второго ранга Г, ей три компоненты вектора и.
1.2. Краевые условия. К. системе уравнений A.1.1)—A.1.3),
определяющих поведение линейно-упругого тела в точках его
объема, добавляются условия на ограничивающей его поверх-
§ 1] ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 125
ности. Они определяют задание или внешних поверхностных
сил, или перемещений точек поверхности. Здесь различают так-
также внутреннюю задачу для упругого тела, ограниченного извне,
и внешнюю, когда речь идет о бесконечно простирающейся сре-
среде, снабженной полостью (или полостями). Для каждой из них
обычно формулируют три типа задач.
В первой задаче ставится кинематическое краевое условие:
в объеме V разыскивается вектор перемещения, принимающий
на поверхности О, ограничивающей этот объем, заданное значе-
значение
и\0 = и*(хих2,х3). A-2.1)
Конечно, здесь координаты хи х2, х3 связаны уравнением поверх-
поверхности.
Вторая краевая задача — статическая. Задается распределе-
распределение поверхностных сил F, и краевым условием является уравне-
уравнение равновесия на поверхности
n-f\0 = F. A.2.2)
Третья краевая задача — смешанная. На части О\ поверх-
поверхности задается кинематическое, а на другой ее части О2 — ста-
статическое краевое условие:
и\0 =и.(*1> *2> *з)
Этим, конечно, не исчерпывается многообразие постановок
задач теории упругости. Например, на некотором участке грани-
границы могут быть заданы не все три компоненты вектора и или
силы F. Так, краевые условия на площадке, по которой тело
опирается на твердое гладкое основание, записываются в виде
и-п = 0, «X(fXn)-0, A.2.4)
где, как всегда, п — единичный вектор внешней нормали к по-
поверхности тела; первое условие выражает отсутствие нормаль-
нормальной компоненты перемещения, а второе — касательной соста-
составляющей вектора силы, тогда как ее проекция на нормаль
п.р — распределенная реакция гладкого основания — наперед
неизвестна. Задача значительно усложняется в случае неудер-
живающей связи: площадка не препятствует перемещению тела
в направлении — п. Тогда к A.2.4) надо добавить условие
F-n^-О, а на той (наперед неизвестной) части границы, где
оно нарушается, заменить условием F = 0.
Известны два способа решения задач теории упругости.
В первом начинают с разыскания вектора перемещения и, по
которому уже не представляет затруднения вычислить тензор
деформации е, а по последнему — тензор напряжения. Это
126 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
естественный путь, особенно если речь идет о первой краевой
задаче. Но он не всегда является наиболее простым, и ему во
многих случаях следует предпочесть способ решения задачи в
напряжениях. Тогда ставится вопрос о разыскании такого ста-
статически возможного тензора напряжения Т, что определяемый
но нему тензор деформации е удовлетворяет условию сплошно-
сплошности B.1.5) гл. II. Вектор перемещения и находится по формуле
Чезаро B.2.2) гл., II.
Оба описанных способа основываются на дифференциальных
уравнениях теории упругости, но ими не исчерпываются возмож-
возможные подходы к решению задач. Еще одна возможность заключе-
заключена в использовании минимальных энергетических принципов и в
применении основанных на них прямых методов решения вариа-
вариационных задач.
1.3. Дифференциальные уравнения теории упругости в пере-
перемещениях. Основываясь на перечисленных в п. 1.1 исходных
соотношениях, легко получить дифференциальные уравнения
для вектора и. Достаточно для этого в уравнение статики под-
подставить выражение тензора напряжений через этот вектор. При-
Приходим к равенству
^ ] pK = O, A.3.1)
которое после подстановок (см. также II.4)
div ЪЁ = Ё • gradft = grad div и, div V« = V • Vu = V2«,
д да. д2и
div W = V • W -*.-ET- hit ~i-=4 -щ^г " grad div u
приводит к искомому дифференциальному уравнению
1
l-2v
A.3.2)
Проектируя его на оси декартовой системы, приходим к трем
уравнениям, называемым дифференциальными уравнениями тео-
теории упругости в перемещениях:
1 — 2v дх
i-2v a_
- ? Кг = О,
l-2v дг
где
A.3.3)
§ 1] ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 127
Они были впервые даны Навье A827), правда, в «одноконстант-
ной» теории (коэффициент Пуассона v = XU), и одновременно с
ним Коши A827—28).
Следствием уравнений A.3.3) является дифференциальное
уравнение для объемного расширения
Вспомнив преобразование (II. 4.5), можно придать уравнению
A.3.2) другую, иногда применяемую форму:
^^rotrotU + -^/C=0. A.3.6)
Еще одна запись основана на легко проверяемом соотношении
^^ , A.3.7)
где R = isxs — вектор-радиус; заменив теперь grad-& в A.3.2)
его значением из A.3.7), получаем уравнение в перемещениях
в форме, предложенной Тедоне:
При отсутствии объемных сил объемное расширение ¦& по
A.3.5) является гармонической функцией, а и — бигармониче-
ским вектором:
V2O = 0; V4h = 0: V4« = 0, V4i> = О, V% = 0. A.3.9)
Последнее сразу же следует из A.3.3), но надо заметить, что
три бигармонические функции и, v, w не независимы; действи-
действительно, по A.3.8) вектор и представим (при К = 0) через четы-
четыре гармонические функции — гармонический вектор а и гармо-
гармонический скаляр •&:
u = a-JTi^)m' A-ЗЛ0)
связанные условием A.3.4).
Краевое условие A.2.2) на части границы, на которой зада-
заданы поверхностные силы, записывается через вектор перемещения
в виде
F = п ¦ f = 2ц [yzr^ ®n + n-
A-3.11)
Здесь использованы равенства A.2.13) и A.2.12) гл. П. В проек-
проекциях на оси декартовой системы эти краевые условия имеют вид
ду } г\дг дх
A.3.12)
128 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
и т. д. Здесь
ди _ ди , ди . ди
Л '^ Г Л Г till ~~Л Г~ fl-7 —^
дп л дх у ду z дг
— производная и по нормали к поверхности.
1.4. Представление решения в форме Папковича—Нейбера.
Трудность разыскания частных решений системы уравнений тео-
теории упругости в перемещениях обусловлена тем, что каждая из
искомых функций и, v, w входит во все три уравнения A.3.3).
Эта трудность устранена в предложенном П. Ф. Папковичем
A932) и Г. Нейбером A934) представлении перемещений через
гармонические функции; этим достигается возможность исполь-
использования хорошо известного «каталога» частных решений урав-
уравнения Лапласа, а иногда даже удается привести задачу теории
упругости, если не целиком, то частично, к одной из классиче-
классических задач теории гармонических функций (теории потенциала).
Можно предложить большое число представлений вида
A.3.10) для решения однородной (К = 0) системы уравнений
теории упругости через гармонические функции; их недостатком,
устраненным в решении Папковича — Нейбера, является неза-
независимость вводимых гармонических функций.
Пусть В — гармонический вектор, вектор — лапласиан кото-
которого равен нулю:
V2B = 0. A.4.1)
Тогда и проекции этого вектора на оси декартовой системы коор-
координат также удовлетворяют уравнению Лапласа:
V2BX = 0, V2BV = 0, V2BZ = 0. A.4.2)
Было бы, однако, ошибкой распространить это на случай осей
криволинейной системы координат; проекции лапласиана от век-
вектора на оси переменного направления отнюдь не равны лапла-
лапласианам от его проекций на эти оси.
Предполагая, что объемные силы потенциальны:
РК = — gradll, A.4.3)
разыскиваем решение уравнения A.3.2) в виде
и = 4A — х)В + gradx- A.4.4)
Тогда, замечая, что
div « = 4A — v) div В + V2%, grad div и =
= grad [4 A—v) div В + V2yJ,
и учитывая A.4.1), приходим к соотношению
grad [4A-v) div В+ 2A - v) V2% - —^ n] = 0,
§ 1] ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 129
которому можно удовлетворить, подчинив выбор % уравнению
17V П A45^
= -2divB+
2)iG-v)
Общее решение этого уравнения представляется суммой реше-
решения уравнения
V2 = — 2divB A.4.6)
и какого-либо частного решения %0 уравнения Пуассона
Частное решение уравнения A.4.6) может быть взято в виде
+ yBv + zBz), A.4.8)
что легко проверить непосредственным вычислением
sjtRB^R- V2B + BV2R + 2divB = 2divB, A.4.9)
так как V2R = 0. Общее решение этого уравнения получим, до-
добавив к A.4.8) произвольный гармонический скаляр, обозна-
обозначаемый —Во. Итак,
и искомое представление решения уравнений теории упругости
записывается в виде
и = 4A— v)B~grad(R-B + B0) + grad/o A.4.10)
причем последнее слагаемое отбрасывается, если объемные силы
отсутствуют, а при наличии непотенциальных объемных сил
его следует заменить каким-либо частным решением исходных
уравнений A.3.3). Обычно такое частное решение легко найти;
существует также общий прием его построения (п. 3.7 этой
главы).
По (Н.2.12), (II.2.9) имеем
VRB = R- (VB)* + В = R • def В + \ R X rot В + В,
и это позволяет записать решение Папковича — Нейбера
A.4.10) в видах
и = C - 4v) В - R • (VB)* - grad Во + grad &, A.4.11)
a = C-4v)B-J?. defB--Y#XrotB-grad?0 + gradxo. A.4.12)
Тензор деформации, вычисляемый по решению A.4.10), равен
ё = 4 A — v) def В — def grad {R ¦ В + Bo) + def grad &•
9 А. И. Лурье
130 соотношения линейной теории упругости (гл. iv
Замечая, что градиент вектора, являющегося градиентом ска-
скаляра г|), является симметричным тензором, имеем
def grad ф = j [VVijj + (VV^)] = VV-ф.
Поэтому
е = 4 A - v) def В - VV (R ¦ В + Bo) + Wfc, A.4.13)
и, далее,
Ъ = 11(е) =4A— v)divB— WRB + \12%0
или, если сослаться на A.4.9) и A.4.7),
^ = 2(l-2v)divB + -2tx1~!vv)n. A.4.14)
По A.1.3) теперь записывается выражение тензора напряжений:
f = 2ц [2vE div В + 4 A - v) def В - VV (R ¦ В + Bo)] + f°, A.4.15)
где Т° определяется по объемным силам:
f ^E A.4.16)
Воспользовавшись еще соотношением
VVR • В = isit —^ xkBk = 2 def В + xkVVBk,
можно представить тензор Т еще в виде
Т = 2ц [2vE div В + 2 A - 2v) def В - xfeVVBfe - VVS0] + f°. A.4.17)
Замечания. 1. Исходная система однородных уравнений
равновесия в перемещениях содержит три неизвестные функции
и, v, w. Поэтому приемлемо предположение, что достаточно
удержать в решении лишь три из входящих в него гармониче-
гармонических функций Ва, Во. Откинув Во (с целью сохранить симметрию
относительно координат), придем к решению
и=4A— v)B — VRB. A.4.18)
Однако может быть доказано, что в случае односвязной конеч-
конечной области общее решение уравнений равновесия в перемеще-
перемещениях может быть представлено в таком виде лишь при условии
v Ф 0,25.
2. Из уравнений равновесия непосредственно следует, что
решением их может служить градиент гармонического скаляра
(и = VSo, V26o = O), а также ротор гармонического вектора
{и = VXC, V2C = 0). Эти решения малосодержательны, так как
ими описываются только деформированные состояния с сохра-
сохранением объема (¦& = у • и = У2В0 = 0, ft = V-VXC = 0).
§ Ij ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 131
3. Легко проверяется, что задание вектора перемещения в
форме, предложенной И. С. Аржаных и М. Г. Слободянским,
и = 4A— v)B + R\B~ RXB, A.4.19)
где В — гармонический вектор, также является решением урав-
уравнения равновесия в перемещениях.
Представление A.4.19) переписывается в виде
и = 4A -v)B + R- MB-jRX rotB-RS/ В A.4.20)
и будет решением, если разность его и решения Папковича —
Нейбера в форме A.4.12)
A = 2/?defB + B-/?VB
также являются решением уравнений теории упругости в пере-
перемещениях; тогда она представима в форме ротора некоторого
гармонического вектора (А = rot С, \'2А = 0). Итак, надо про-
проверить, что
V • А = 0, V2A = 0.
Это следует из соотношений
V • 2R • dei В = 2/?-V-def В + /, (def В) = RV2B + R-S7W В + 2V • В,
V • (J?V • В) = 3V • В + R ¦ W • В,
V2/? • def В = 2 {V2B + VV • В), V2RS/ ¦ В = 2W • В
и условия V2B = 0.
М. Г. Слободяпским доказано, что A.4.19) представляет
общее решение уравнений теории упругости для односвязной
конечной области при любом у (не исключая v = 0.25); в случае
бесконечной области, внешней по отношению к замкнутой по-
поверхности, общим (не исключая v = 0,25) является решение
A.4.18).
1.5. Решение в напряжениях. Зависимости Бельтрами. Тен-
Тензор напряжений 7', удовлетворяющий уравнениям статики в
объеме, должен быть так выбран, чтобы вычисленный по нему
тензор деформации удовлетворял условиям совместности B.1.5)
гл. II:
^() 0. A.5.1)
Используя уравнение статики, можно преобразовать это соот-
соотношение к легче обозримому и запоминаемому виду. Проделав
это, придем к зависимостям Бельтрами A892).
По B.3.2) гл. II
Ink a? = ?V2a - Wa. A.5.2)
132 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ 1ГЛ, IV
Далее, сославшись на формулы (II. 4.15) и уравнения^ равно-
равновесия A.5.6) гл. I, можно представить компоненты (InkT)ih тен-
тензора Ink T в виде
О '22 | О '33 о " '2 3
дх\ дх\ дх2 дх3
¦ п дк3\ | / дчп ач„ ои2\
й^з Зх| \dx3oxi дх3 дх3 I \дх9дх1 дх2 дх2
дх1 axi \ дх2 дх3 ) \ дх2 дх3
дх\
/1^1 Ф\ и ul23 I "'31 "»12 \ V '33
(Ink У ),? = -=— -т h -з" 5— —^—т1-
v /и дхъ \ дхх дхг дхг I дхх дх2
д ( (Э/12 , Э^2 , „i^ \ д
i д2а -\ р(дК2 1
дд д
\ р( 1
дх{дх2 \дх\ дх%
В единой записи этим равенствам можно придать вид
откуда следует инвариантное (бескоординатное) представление
Ink f = (EV2 - VV) a - V2f + ?p div К - 2p def K. A.5.3)
Вообще для симметричного тензора второго ранга Q
InkQ= - V2Q + 2def div Q + (EV2-VV) /, (Q) - ?V • V • Q. A.5.4)
Теперь, подставив A.5.2), A.5.3) в исходное соотношение A.5.1),
получим
- V2f+?pdivK-2p def K+ у^-(?V2 - VV) a = 0. A.5.5)
Отсюда, образуя первый инвариант тензора в левой части этого
равенства, придем к соотношению
|± A.5:6)
которое, конечно, можно получить из A.3.5), заменив ¦& его
выражением C.1.3) гл. III через о.
§ 1] ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 133
Приходим к обычно принимаемой форме записи зависимо-
зависимостей Бельтрами:
V2f + —^ Wor + 2р def К + Е -^ р div К = 0. A.5.7)
При отсутствии массовых сил они принимают без труда запоми-
запоминаемый вид
^ = 0 A.5.8)
или, в компонентах в декартовой системе координат,
+ 1 + v дх» и' v т'» + 1 + v дх ду и'
V2ct +—[— — = 0 V2t +—!— а% =0
г 1 + v 9г2 ZJ: 1 + v 9г дх
A.5.9)
1.6. Преобразование Ю. А. Круткова. Рассматривая случай
отсутствия массовых сил, представим, следуя A.6.6) гл. I,
тензор напряжений Т через тензор функций напряжений:
Г = 1пкФ. A.6.1)
Этим тождественно удовлетворяются уравнения статики, и
остается подчинить выбор Ф зависимости Бельтрами A.5.8).
Сославшись на A.5.2) и A.5.6), имеем
— InkaE, A.6.2)
и это позволяет записать A.5.8) в виде
0. A.6.3)
Но обращение в нуль операции Ink над симметричным тензором
означает, что этот тензор является деформацией некоторого век-
вектора (п. 2.1 гл. II); итак,
jJv A.6.4)
Вместе с тем
or = /, (Ink Ф) = /, (У2Ф) - div div Ф, A.6.5)
что нетрудно проверить сложением диагональных элементов
тензора 1пкф [см. (II.4.15)]. Поэтому, обозначая для сокраще-
сокращения письма
b A.6.6)
134 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
приходим к иной записи соотношения A.6.4):
^<1\уЬ) = <1е1с. A.6.7)
Вектор с можно исключить, выразив равенство следов тензоров
в левой и правой частях этого соотношения; имеем
/,(У2Ф) = У2Ф, /1(defc) = divc, V2<D= divgradO, /,(?) = 3.
Поэтому
(|^) A.6.8)
и вектор в скобках является ротором некоторого вектора, так
что
с = j-^- (Ь - rot q) - |^ grad Ф.
Считая, что rot q включен в вектор Ь, имеем теперь
c14*TX
l+V 1 +
и подстановка в A.6.7) приводит к дифференциальному уравне-
уравнению, содержащему только операции над тензором Ф:
У2Ф = -pi— Е {\2Ф - div Ь) + -j^~ def b - ^- УУФ. A.6.9)
l+v4 '1+v 1+v ч '
Теперь выражение тензора напряжений Т через тензор функций
напряжений, основываясь на формуле A.5.4), можно записать
в виде
f = InkФ = - У2Ф + 2 def Ь + (EV2- VV)Ф-Е divЬ
или, после исключения У2Ф с помощью A.6.9), в виде
Т = j~ Е (У2Ф - div Ь) - ~~ (def b - VVO). A.6.10)
Отсюда
от = /, (?) = У2Ф - div Ь, A.6.11)
так что выражение тензора деформации получает следующее
представление:
или
2\.ie = ~~-del(VO-b). A.6.12)
Из него с точностью до перемещения среды как твердого тела
находим вектор перемещения и:
\^6) = 1=^[У/,(Ф)-ШУФ]. A.6.13)
§ 1] ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 135
Полученные Ю. А. Крутковым A949) формулы A.6.10),
A.6.13) представляют одну из форм общего решения задачи
линейной теории упругости; ими определяются по тензору функ-
функций напряжений, удовлетворяющему дифференциальному урав-
уравнению A.6.9), тензор напряжения Т и вектор перемещения и.
Они оказались вависящими лишь от первого инварианта Ф и
дивергенции Ь тензора Ф. Поэтому нет нужды в знании всех
компонент этого тензора, а достаточно лишь связать Ь и Ф
соотношением, являющимся следствием A.6.9).
1.7. Решение Буссинека—Галеркина. Искомое выражение
вектора Ь через Ф можно получить, приравнивая дивергенции
обеих частей равенства A.6.9). Имеем
div У2Ф = V26, div Е (У2Ф - div Ь) = grad У2Ф - grad div b,
div SS/Ф = У2УФ = grad У2Ф, div def b = у (V26 + grad div b)
и после подстановки в A.6.9) получим
Vft + yj^graddiv^ 21A_~^) gradV2O. A.7.1)
Можно удовлетворить этому соотношению, введя представление
Ь и Ф через вектор G в виде
Ф = у(Т^^уе. A.7.2)
Вектор G по A.7.1) оказывается бигармоническим:
V4G-0. A.7.3)
Выражения вектора перемещения и тензора напряжений через
вектор G по A.6.13) и A.6.10) записываются в виде
2\хи = grad div G- 2A -v)V2G, A.7.4)
f = WdivG-2(l - v) def V2G - vE div V2G. A.7.5)
Эта форма решения уравнений теории упругости была дана
Б. Г. Галеркиным A930) и ранее была известна Буссинеку
A878).
Основываясь на A.7.1) и A.6.13), можно сразу же получить
и решение в форме Папковича — Нейбера. Достаточно заметить,
что уравнение A.7.1) не отличается от уравнения в перемеще-
перемещениях A,3.2), если отождествить -у~2^М^2ф с потенциалом объ-
объемной силы П. Тогда по A.4.7) хо = Ф, и, записав решение урав-
уравнения A.7.1) в виде A.4.10):
l±^ A.7.6)
136 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
по A.6.13) придем к представлению вектора перемещения в
упомянутой форме (при отсутствии массовых сил).
Нетрудно также установить связь между векторами В и G.
По A.7.6) и A.7.2) имеем
так что по A.7.3), A.4.9)
и можно принять
4(l-v)B=-^V2G. A.7.7)
1.8. Криволинейные координаты. В предшествующих пунк-
пунктах основные соотношения были представлены в инвариантной
форме зависимостей между векторными или тензорными вели-
величинами; поэтому запись формул в криволинейных координатах
требует лишь внимательного соблюдения правил тензорного ис-
исчисления (Приложения III—V).
В линейной теории отпадает потребность различения базисов
начального и конечного состояний. Это позволяет представить
тензор напряжений Т через его контравариантные компоненты в
векторном базисе rs, вместо C.1.1) гл. I, формулой
f = tskrsrk. A.8.1)
Уравнения равновесия в объеме по C.3.4) гл. I записываются в
виде
^ {1} У7Ч = О. A.8.2)
Линейный тензор деформации представляется через его кова-
риантные компоненты
das , dut\ ( r 1 ,
— это формулы C.6.7) гл. II, в них иг — ковариантные компо-
компоненты вектора перемещения. По (IV. 7.5) и (V. 4.4) объемное
расширение может быть выражено в одном из видов
' Щ?* 0.8.4)
dqr
У g dqr
Записывая формулы, связывающие контравариантные компонен-
компоненты тензора напряжений с ковариантными компонентами тензора
деформации, следует иметь в виду, что роль тензора Е в выра-
«, 1] ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 137
жении обобщенного закона Гука A.1.3) отходит к тензору g'
Поэтому, сославшись также на A.8.4), имеем
tsk = 2ц (j^ gs4 + gsmgknzmn) = 2ц (j^ gskgmn + gsmghl1) emn.
A.8.5)
Обратные соотношения записываются в виде
I /т rr J.ttltb ' rr л* 1 1ГГ/Т if rr \ -f-Wlft
^sfe 2\i \^smskn^ i i «j ssfe^ I 9и \№stn&kn i i „ HskSmn I ^ *
A.8.6)
Билинейное представление удельной потенциальной энергии
деформации C.2.6) гл. III записывается в виде
д [р а1) = — fjfte «, П 8 71
так что по A.8.5), A.8.6) ее представления А (г) и А (а) через
тензоры деформаций и напряжений будут
А & = » (т^27 SskSmn + ГЯЫ) %Фтп, d.8.8)
А(ст) = 1]Г [Ssrngkn ~ j^gskgmn) tsktmn. A.8.9)
Запись уравнений равновесия в перемещениях A.3.2) полу-
получаем, сославшись на (V. 4.9), в виде
По (V. 3.5), (V. 3.4) имеем
= V • Vf = rm -?я ¦ r%rtVQtst = ^"rsrtSmSlqtst,
rrrrVJ
dqn dqk dqk
и зависимости Бельтрами A.5.8) при отсутствии массовых сил
представляются в виде
, V' + Y~ *п~ = 0. A.8.11)
138
СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IV
Развернутые выражения операций двукратного ковариант-
ного дифференцирования в уравнениях A.8.10), A.8.11) весьма
громоздки.
1.9. Ортогональные координаты. В этом пункте индексами
(снизу) обозначаются физические (а не ковариантные) компо-
компоненты векторов и тензоров. Выражения используемых далее
дифференциальных операций приведены в п. III. 5.
Обобщенный закон Гука (в физических компонентах) запи-
записывается в виде
A.9.1)
l-2v
"sk ¦
причем выражения ¦&, е,,н даются формулами (III. 5.3), (III. 5.8),
(III. 5.9); в них надо лишь заменить as на us — проекции вектора
перемещения на направления единичных векторов es базисного
триэдра. Уравнение равновесия A.1.1) по (III. 5.10) записы-
записывается в виде
С = 0. A.9.2)
В цилиндрических координатах (пп. III. 1, III. 7) компонен-
компоненты тензора деформации и объемное расширение записываются
в виде
Yrcp
ди
дг '
dv
dr '
Еф
1
г
и
г
dv ,
г (Эф !
du v
(Эф г '
, dv
г <Эф
и
г ' Ег
dw
г дг '
dw
dz
dw
г Эф '
dv
dz ' ^
ди
dz
dw
dr '
A.9.3)
где и, v, w — проекции вектора перемещения на оси ет, еч, k
цилиндрической системы. Уравнения равновесия имеют вид
дг
дх
r<t
да„
dz
дх,„
дг
dxrz
дг
г <Эф ' дг
0,
0,
дх
z<p
A.9.4)
Выражения компонент тензора деформации в сферических
координатах (пп. III. 1, III. 8) более громоздки. Обозначая uR,
щ, их проекции вектора перемещения на базисные векторы
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
139
ев,
), вк
daR
dR
1 /
R \
dR
, имеем
> fci3
' ! '
^ R
1 с
R (
1
sin ft
duR
dX
ui
R
да.
R '
R sin
1 du
\
_^ I
dX ' dR R ' J
A.9.5)
)
1A.9.6)
Уравнения равновесия записываются в виде
daR ¦ 1 Эт^ ¦ } dxRk ¦
dR ~* R dft ' R sin Ф йЯ, '
+ -о" Bстй - ^ - а^ + тм ctg ¦&) +
х) Ctg
Зтл
^ sin & дХ
, ctg Ъ)
= О,
= О,
к = 0.
A.9.7)
1.10. Аксиально-симметричные задачи. Решение Лява.
В задаче о равновесии тел вращения (п. III. 9) при наличии
аксиальной симметрии нагружения (независимости объемных и
поверхностных сил от азимутального угла ф) тензор напряжения
и вектор перемещения не зависят от ф, а являются функциями
координат ql, q2 — напряженное состояние одинаково во всех
меридиональных плоскостях.
Через Mi, Иг, v — u(i, обозначаются проекции вектора переме-
перемещения на направления еь е2, е((, базисного триэдра. Тогда
1 ди1 ! и2 д In #i п 1 ди2 «1 d In Я2
е, =
Yl2 =
Я! а?1 ^
Uj <Э In г
G ==
д In г
dq{
1
Я,
du.
Я2
dq2
Я,
<5 In
dv din r
dq' dq1
dv
dq2
¦ — V ¦
dlnr
A.10.1)
A.10.2)
140 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Компоненты тензора деформации распались на две группы —
группу относительных удлинений и сдвига Yi2 и группу двух
компонент ущ, Y2(f- Распадаются также и уравнения статики —
на два уравнения, в которые входят напряжения аь аг, Т12, otf:
\ . т12 3 In Hx а2 д\пН2
dq1 * dq2
0m д In Г
1 1дНхга2 , дЯ2пг12\ , т12 31пЯ2 (Ti gin Я,
A.10.3)
и уравнение для напряжений тС[ь тчг:
1 / ЗЯгПГф, 5Я,гтф2 \ тф1 Э In r тф2 <Э In r
ITJUx Vdq1 ' dq2 /+ ~Щ ~W ~th "dq2 г РЛф = О.
Нормальные напряжения и касательное напряжение xi2 вы-
выражаются с помощью обобщенного закона Гука через дефор-
деформации A.10.1) первой группы, а касательные напряжения тФь
т(B — через деформации A.10.2) второй группы. Поэтому
аксиально-симметричная задача распадается на две независимые
задачи — во-первых, задачу о деформации в меридиональной
плоскости, в которой отсутствует компонента перемещения v
(но, конечно, имеется нормальное напряжение o,t), во-вторых, на
задачу кручения. Ею определяется перемещение v(q\q2), пер-
перпендикулярное меридиональному сечению, не зависящее от ази-
азимутального угла ф.
Общее решение задачи о меридиональной аксиально-симмет-
аксиально-симметричной деформации может быть выражено через одну бигармо-
ническую функцию — функцию Лява %. Оно представляет част-
частный случай решения Буссинека — Галеркина A.7.4), A.7.5), ко-
когда бигармонический вектор G задается одной лишь компонен-
компонентой, направленной по оси симметрии.
G = kx(r,z). A.10.4)
В цилиндрических координатах при обозначениях п. 1.9 имеем
^ и = 0, 2цш = -0-- 2A -v)V\ A.10.5)
дг2 У )
A.10.6)
§ 1J ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 141
Здесь
V2y — — — г —-+-^ V4y = О П 10 7)
Легко, основываясь на этих формулах, сделать переход к об-
общим координатам тел вращения (п. III. 9). По (III. 9.8) полу-
получаем
- * JL(J- д% дг л- ' дг дг\ 2П vi ' gz У2-/
U
(s=l, 2), A.10.8)
причем теперь по (III. 5.5)
rH2 d
1.11. Кручение тела вращения. В решении Папковича—Ней-
бера A.4.10) достаточно принять, что гармонический вектор
имеет лишь компоненту по направлению еФ:
В = Вчеч. A.11.1)
Тогда
RB =(rer + zk)-B = 0,
и при отсутствии объемных сил перемещение v оказывается про-
пропорциональным Вч, а перемещения щ, щ обращаются в нуль,
что и требуется. Итак, иеф — гармонический вектор и по
(II.4.19), (III.7.5)
Vve4 = ефУ2и + t-V2^ + 2Vv ¦ Уеф = вф (v2y - -^-) = 0,
так как по (III.7.4), (III.7.5)
Итак, и определяется из дифференциального уравнения
v.o-vo r2 о- ^^ [~щг\-щ-dqi)+dqi { Н2 dqi)\ тг-O,
A.11.2)
так что не v, a ue'i' — гармоническая функция [см. (III. 5.5)].
По A.10.2) напряжения определяются из формул
_ г д v _ г д v ,...„>
T'<p~^7TlV~7' Т2(р ~ ц ~я71^-7 • U-n.cSj
1.12. Деформация тела вращения. Величины, характеризую-
характеризующие деформацию тела вращения (предположение об аксиальной
симметрии нагружения отбрасывается), являются периодиче-
периодическими функциями угла <р. Поэтому перемещение можно предста-
представить в форме рядов Фурье по переменной ср; общий член этого
ряда представляется формулами (сначала в цилиндрических
координатах)
и = и*{г, z)cos «ф, v — у*(г, 2)sin mp, w — w*(r, z)cos «ф. A.12.1)
(Конечно, можно было бы да и ы считать пропорциональными
i42 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
sin «ф, а и пропорциональным —соэщр). В решении Буссине-
ка — Галеркина теперь вместо A.10.4) полагаем
G = k%(r, г) cos тр.
Тогда по A.7.4)
2^ = те- 2^.= -g--2(l-v)V!x, 2^.= -f-|-, A.12.2)
причем теперь
то есть бигармонической является функция %ein(f. По A.7.5)
имеем, далее,
A.12.4)
причем эти величины являются множителями при cos Оф в вы-
выражениях соответствующих компонент тензора напряжений
(ar = ar cos rap и т.д.). Остающиеся компоненты пропорциональ-
пропорциональны sin mp:
Здесь в противоположность аксиально-симметричному нагруже-
нию разбиение задачи на деформацию в меридиональной пло-
плоскости и на деформацию кручения не имеет места.
В общих координатах тел вращения формулы для перемеще-
перемещений записываются в виде (s = 1,2)
1 д I \ д% дг , 1 д% dz \ 2A-у) дг у2
dq] dq1 H% dq2 dq2 J'
A.12.6)
причем по (III. 5.5)
_d_(Hjr__d%_\] _ ^_
A.12.7)
По A.7.5) гензор напряжения представляется в виде
Т = VV Jj- cos лф - 2 A - v) def ftV2 (x cos nqj) ~vE ? V2 (x cos mp).
A.12.8)
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
143
Задавая бигармоническую функцию %cosnq> через две гармони-
гармонические хосоэяф и хз cos Пф:
Xcos rap = (хо + 2X3)cos «ф, A.12.9)
и полагая
4?- cos «ф = - 2цВ3, A.12.10)
придем к представлению тензора напряжений Г в форме Папко-
вича — Нейбера A.4.17), в котором сохранены лишь две гар-
гармонические функции В3, Во:
Y~ ? = 2 A - 2v) def ftB3 + 2v? -^ - zWB3 - VVB0. A.12.11)
Приняв теперь
Bo = b0 cos «ф, B3 = 63cosrap, A.12.12)
получим следующие значения множителей при cos Пф в выраже-
выражениях компонент ai, 02, 0сг, Ti2 тензора напряжений:
1 * п/. N 1 <5г ЭЬз i о I дг db3
1 '— \ */ 2~ 1 1 ^ 2 2 2
__L/^o_ ,
j
in я,
Я2 dql
dql
<?6„
+ 2-
dq1
1 / д2Ь0
9
dq2
1 д in //о / dbr, , db-\
Н2 dq \dq dq
1 д In Я2 / <Э&0
2 I I л 1 ' л
A.12.13)
2ц
In г
dq'
In г
dq* \dq
абз
dq2
a in я2 / <эб
dq1 \ dq
144
СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IV
Пропорциональные sin «ф множители при компонентах
равны
дЬ° '
r
d In r
A.12.14)
Наконец, вектор перемещения, равный по A.4.10)
ъ д ет д
,Hk dqk r
по A.12.12) определяется формулами
Г/о л \ 1 32 , 1
us = cos mp C — 4v)-tt- -д-s- O3 - -j,-
), A.12.15)
дЬв
дЬ3
A.12.16)
1.13. Решение Папковича—Нейбера для тел вращения. До-
Дополним решение, приведенное в предшествующем п. 1.12, сла-
слагаемыми, определяемыми проекциями Вх, Ву гармонического
вектора. Полагая поэтому теперь
B = /,BX + i2By = erBr + e{(B<f,
RB= (rer + 2ft) В = rBr,
и = 4A — v) (erSr + е(РВф)— gradrSr. A.13.1)
Подобно A.12.12) вводим в рассмотрение функции br(ql,q2),
так что
имеем
(p, Вф = bv(q\ q2)sm пц>. A.13.2)
Тогда выражения перемещений запишутся в виде
0 = sin пф |4A -v)b<f + nbr].
A.13.3)
§ и
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
145
Система дифференциальных уравнений для функций Ьг и Ь,{ по
(III. 7.4), (III. 7.5) и (II. 4.19) находится из соотношения
= (erV2Br + 2S/Br ¦ Ver + BrS2eT)
В, 2 М,
Получаем
2/1
A.13.4)
Она распадается в аксиально-симметричном случае (п — 0) на
два независимых уравнения, выражающих, что Ьге^, Ь,{е^ —
гармонические функции.
Компоненты тензора напряжений вычисляются по формулам:
множители при cos пер
1 * о/1 \ г дЬт д In г . о г dbr din r
— а. = 2A — v)—5-—г i—H2v—5"—w —9~
2ц
dq
d2br 1 a In Я) dbr
,2 „ , . T~
Н\
, 1 din Ht
а?"
_L T' _ _L
2ц Ti2 я,я2
dbr r dlnr dbr
—+ —^-^
dbT d\nr dbr a In г
dbj_ d\nH2 dbj
dq2
dq1 dq2
A.13.5)
10 А. И. Лурье
146 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
и при sin пф
ьт a in r
[ГЛ. IV
dlnr
dq2
A.13.6)
1.14. Учет температурных слагаемых. В системе исходных
уравнений теории упругости п. 1.1 изменится только форма за-
записи обобщенного закона Гука. Теперь по C.4.8) гл. III, вос-
воспользовавшись таблицей связей между модулями упругости в
п. 3.1 гл. III, имеем
A.14.1)
где, напоминаем, 0 — температура, отсчитываемая от темпера-
температуры натурального состояния. Обратное соотношение записы-
записывается в виде
6
2ц
A.14.2)
Далее принимается, что внешние силы (массовые и поверхно-
поверхностные) отсутствуют. В предположении, что задача теплопровод-
теплопроводности может рассматриваться независимо от задачи теории
упругости (см. п. 3.5 гл. III), это не идет в ущерб общности, так
как линейность задачи для тела, подчиняющегося закону Гука,
допускает наложение напряженных состояний, вызываемых дей-
действием объемных сил, поверхностных сил и изменением темпера-
температуры и определяемых по отдельности для каждого из перечис-
перечисленных факторов.
Повторив вывод уравнений в перемещениях A.3.2) с учетом
температурного члена в A.14.1), получим
j^ grad div и + V2m - 2 j±^ grad аб = 0. A.14.3)
Краевое условие A.3.11) запишется в виде
п div и + п • Vu + — п X rot и —
+v
l-2v
l-2v
= 0. A.14.4)
Сравнение показывает, что влияние температурного слагае-
слагаемого в выражении закона Гука можно формально свести к зада-
§ 1] ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ 147
нию массовых сил с потенциалом, пропорциональным темпера-
температуре:
n = 2M-,Li^-a0, A.14.5)
и нормальных к поверхности тела О поверхностных сил
F = 2A -~^- aQn = nil. A.14.6)
Из сопоставления выражений A.14.5) и A.4.7) следует, что
уравнение A.14.3) допускает частное решение
и, = gradjco, A.14.7)
где %о определяется из уравнения Пуассона
j~-ae. A.14.8)
Перейдем к составлению дифференциальных уравнений в на-
напряжениях. К уравнению статики при отсутствии массовых сил
div Г = 0 A.14.9)
добавляется по A.5.1) и A.14.2) условие
2ц1пкё = 1пк(г--г^а?) + 2ц1пкае?; = 0. A.14.10)
Но по A.5.2)
и условие A.14.10), сославшись на A.5.3), можно записать в
виде
V2f + (VV - ?V2) (-j-^- + 2fxae) = 0. A.14.11)
Из него, образуя первый инвариант, имеем
V20=-4n{i^aV2e, A.14.12)
так что
( j^) A.14.13)
Если температура — линейная функция координат (п. 2.3 гл. II):
6 = 9о + <7-#,
то зависящее от нее слагаемое в A.14.13) отпадает. Поэтому, в
предположении отсутствия поверхностных сил на всей поверх-
поверхности тела:
n-f=0, A.14.14)
10*
148 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
все уравнения A.14.9), A.14.14) и A.14.13), определяющие тен-
тензор Т, однородны; им во всем объеме удовлетворяет решение
f =0,
и оно — единственное (п. 4.1). Итак, при линейном законе рас-
распределения температуры в упругом теле не возникает темпера-
температурных напряжений. Вектор перемещения в этом случае вычис-
вычисляется по формуле B.3.5) гл. II, в которую можно внести еще
слагаемые вида B.2.6) гл. II, определяющие поворот среды как
твердого тела {R— вектор-радиус):
и = схб {R - #„) - j Щ | R - До I2 + «о + «о X (R - До). A.14.15)
Сказанное имеет место лишь в предположении, что условие
A.14.14) выполнено на всей поверхности О. Если же на ее части
и задан вектор перемещения, отличающийся от определяемого
формулой A.14.15), то возникнет напряженное состояние, обу-
обусловливаемое воздействием приспособлений (реакций связей),
обеспечивающих сообщение требующегося перемещения.
Нетрудно также проверить, что вектор перемещения A.14.15)
удовлетворяет при линейном распределении температуры диф-
дифференциальному уравнению A.14.3) и краевому условию
A.14.4).
§ 2. Вариационные принципы статики линейно-упругого тела
2.1. Стационарность потенциальной энергии системы. Эле-
Элементарная работа внешних сил 6'а{е) может быть отождествлена
с вариацией потенциальной энергии деформации 6а, равной ва-
вариации свободной энергии в изотермическом процессе и внутрен-
внутренней энергии в адиабатическом*):
6'а(е) = 6а = 6 J J J Л dt= JJJ р/С-бийт+ JJF-би do. B.1.1)
V V О
Из этого равенства можно получить три отличающихся друг от
друга энергетических принципа в зависимости от того, через
какие переменные выражена удельная потенциальная энергия Л.
Задавая ее квадратичной формой А (г) [см. C.2.3) гл. III] ком-
компонент деформации, придем к принципу минимума потенциаль-
потенциальной энергии системы; исходя же из квадратичной формы А(а)
компонент тензора напряжений [C.2.8) гл. III], получим прин-
принцип минимума дополнительной работы. В первом принципе
варьируются перемещения, во втором — компоненты напряже-
напряжения. Наконец, в смешанном принципе стационарности удельная
*) Только эти процессы рассматриваются в пп. 2.1—2.6
§ 2] ВАРИАЦИОННЫЕ ПРИНЦИПЫ 149
потенциальная энергия задается билинейной формой А(е,о)
и варьированию подлежат переменные той и другой группы.
В формуле B.1.1) содержится утверждение, что работа
внешних массовых и поверхностных сил на виртуальном переме-
перемещении 6« точек упругого тела из положения равновесия, опреде-
определяемого вектором и, равна вариации потенциальной энергии де-
деформации. При этом на той части О) поверхности О, на которой
заданы перемещения, следует принять 6и = 0, так что
J J F ¦ бн do = J J F • 6и do.
о.
Два состояния упругого тела — равновесное и бесконечно близ-
близкое к нему, когда точкам тела сообщено поле виртуальных пере-
перемещений,— рассматриваются при одних и тех же силах рК в
объеме и F на части поверхности О2, нигде не налегающей
на Оь Иными словами, в объеме V
бр/С = 0,
и на О2
Вынося еще знак вариации за знак интегралов, что законно, по-
поскольку объем V и поверхность О2 фиксированы, имеем по
B.1.1)
dx- J j j pK-udx- j j F.udo\ = 0. B.1.2)
v v o, J
Величину
ф= j j j A dx- J J J pK-ud-z- j j F -udo B.1.3)
V V Ог
называют потенциальной энергией системы; она равна разности
потенциальной энергии деформации и работы заданных внешних
сил (на О! они не заданы), вычисляемой в предположении, что
эти силы во всем процессе деформирования из натурального со-
состояния имеют значение, которое они приобрели в рассматри-
рассматриваемом равновесном состоянии.
Потенциальная энергия Ф представляет функционал над и,
численное значение которого меняется вместе с заданием и; в
этом множестве чисел Ф то, которое сопоставлено значению
вектора и в положении равновесия упругого тела, обладает за-
замечательным свойством стационарности:
6Ф = 0. B.1.4)
Это значит, что вычисление Ф один раз для поля перемещений
в положении равновесия, другой раз для поля перемещений
150 СООТНОШЕНИЯ ЛИНЕЙНОЙ 'П-ОРИИ УПРУГОСТИ [ГЛ. IV
и + 6и приводит к одному и тому же значению при условии, что
это вычисление проводилось с учетом лишь величин того же по-
порядка малости 6м. Приращение функционала Ф при сообщении
упругому телу поля виртуальных перемещении 6м из положения
равновесия является величиной более высокого порядка малости,
чем 6м.
2.2. Принцип минимума потенциальной энергии системы.
Теперь будет доказано, что стационарное значение функциона-
функционала Ф в положении равновесия является его минимальным зна-
значением.
Для разъяснения последующего уточним понятие о прира-
приращении функции F(xu х% . . . , хп) от п переменных х\, х2, . . . , хп;
зададим им приращения (вариации) Ьх\, &х2, ¦ ¦ • , Ьхп. Тогда
приращение функции /\F определяется величиной
AF = F (х, + бх„ х2 + 6х2, • • •, хп + 6хп) - F (хи хъ .. ., хп) =
= 6F + 62F+ ..., B.2.1)
где первая вариация bF — линейное относительно 6xs слагаемое,
вторая 62F — квадратичное и т. д.:
Если теперь F — квадратичная форма переменных xs, то
г - 2 askxsxk, gxs dxk - ask, dxk дх^ dxi - u,
и поэтому
&F = jask6xsdxk = FF*1, 6x2 6ж„), 6sF = 0 (s>2)
•—вторая вариация квадратичной формы равна этой форме от
вариаций переменных. Вместо B.2.1) имеем
AF = 6f + FFxu 6x2,.-., bxn), B.2.2)
а если форма F линейна, то, конечно,
А/7 = б/7. B.2.3)
Возвращаясь к функционалу Ф, имеем по B.1.3)
дф = J J J AAdx- J| J ДрК • миг - J J AF • м dt.
V V О,
Но рК и F не зависят от м, поэтому, сославшись на B.2.3),
имеем
ДрК • и = 6рК • ы, AF ¦ и = 6F • м.
Вместе с тем по B.2.2)
ДЛ = Л(е + 6е) — Л(е) = 6Л + Л (бе),
§ 2] ВАРИАЦИОННЫЕ ПРИНЦИПЫ 151
так как А — квадратичная форма компонент тензора деформа-
деформации. Приходим к равенству
| A dx- \\ \ p/C- udx- $ $ $
V V Ъ, I V
так что по B.1.2) или B.1.4)
дф = Г Г Г Л (бе) dx.
v
Но по C.3.4) гл. III удельная потенциальная энергия А являет-
является положительно-определенной функцией, так что Л>0 при
любом отличном от нуля бе. Этим доказано, что
ЛФ >0
— функционал Ф возрастает при сообщении точкам упругого
тела отклонений из равновесного состояния, иными словами, он
имеет минимум в этом состоянии. Пришли к принципу миниму-
минимума потенциальной энергии системы: состояние равновесия линей-
линейно-упругого тела отличается от всех мыслимых его состояний
тем, что в нем функционал Ф, называемый потенциальной энер-
энергией системы, имеет минимальное значение. Словом «мыслимый»
указывается на то, что сравниваемые с вектором перемеще-
перемещения « непрерывные в объеме V перемещения и + Ьи принимают
то же, что и, значение на той части О\ поверхности О, где пере-
перемещение задано.
Из формулы Клапейрона C.3.3) гл. III и из B.1.3) следует,
что в положении равновесия
= Ф
т.п
F ¦ и do + ) \ F ¦ и do
о "о,
B.2.4)
Задача разыскания равновесного состояния линейно-упругого
тела сведена к вариационной задаче об определении вектора и,
сообщающего минимум функционалу Ф над ним и принимаю-
принимающего заданные значения на Оь Известно, что задаче вариацион-
вариационного исчисления сопоставляется эквивалентная ей краевая за-
задача. Дифференциальные уравнения и краевые условия послед-
последней получаются из рассмотрения вариации минимизируемого
функционала — это уравнения Эйлера и натуральные краевые
условия, соответствующие этому функционалу.
Переходим к составлению этой вариации. По C.2.4) гл. III
имеем
* л дА s ЗА ,
152 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
где вх, ..., тгх — линейные формы компонент деформации, опре-
определяемые равенствами C.1-5) гл. III. В другой записи [см.
(П.3.10)]
M = f •¦fie = div (Г • бн) - би • div f. B.2.5)
Тензор Т здесь выражен через тензор деформации, а выражая
последний через вектор перемещения и и сославшись на вывод
уравнений теории упругости в перемещениях в п. 1.3 этой главы,
имеем по A.3.2)
div f = V-[т^ъ grad div u + V2")* L М B>2-6)
и вместе с тем по A.3.12)
п- f = 2\x^j~-n divи + п • V« + yn X rota) = M(a). B.2.7)
Заметим, что здесь только для сокращения записей и чтобы не
повторять ранее проведенных преобразований, введены величи-
величины ах,...,х2х, которым сопоставлен тензор Т, — это лишь обо-
обозначения, которым можно и не приписывать никакого наиме-
наименования.
По B.2.5)-—B.2.7) имеем теперь
6 j j j Adx = f J f div (f ¦ 6u)dr - [ [ J бы • div fdx =
V ' V " V
= [ [ n • f ¦ 6u do - 11 J би • L(u) dx =
V v
= | j M(u) ¦ budo - 111 I (a) • budx. B.2.8)
Ог V
Здесь учтено, что вектор и разыскивается в классе функций,
принимающих на О\ заданное значение
и|о1 = и*, B.2.9)
так что б« = 0 на О\.
Подстановка в B.1.2) приводит к равенству
6Ф=- J J J[L(a) + pK]-flBdT+JJ[iM(a)-F]-flado, B.2.10)
V On
и вследствие произвольности Ьи в объеме и на той части О2 по-
поверхности, где перемещения не заданы, выполнение условия
стационарности B.1.4) требует обращения в нуль подынтеграль-
подынтегральных выражений в объемном и поверхностном интегралах. При-
Приходим к дифференциальным уравнениям равновесия в пере-
перемещениях
L(u)+9K = 0 B.2.11)
и к краевому условию на О2
М(и) =F. B.2.12)
§ 2] ВАРИАЦИОННЫЕ ПРИНЦИПЫ 153
Естественно, что получена именно эта форма уравнений, так
как Ф — функционал над и. Выше уже отмечена несвязанность
определения потенциальной энергии системы и формулировки
принципа минимума ее с представлением о напряженном состоя-
состоянии. О последнем нет речи в чисто энергетическом принципе,
определяющем поведение линейно-упругого тела по заданию
некоторого функционала над вектором перемещения. Подобно
принципу Гамильтона в общей механике, принцип минимума
потенциальной энергии системы синтезирует свойства физиче-
физической модели упругого тела, включая экспериментальные данные
о поведении его под нагрузкой.
2.3. Метод Ритца. Вариационная формулировка задачи
о равновесии, заключающаяся в принципе минимума потенци-
потенциальной энергии системы, подсказывает возможность применения
для решения задач теории упругости прямых методов вариа-
вариационного исчисления.
В методе Ритца A909) дифференциальное уравнение B.2.11)
и статическое краевое условие B.2.12) не рассматриваются, так
как наперед известно, что они автоматически удовлетворяются,
если найдется вектор и, точно минимизирующий функционал Ф.
Прием, позволяющий определить приближенно этот вектор, со-
состоит в задании его проекций аппроксимирующими представле-
представлениями вида
« = 2 ak(pk {х, у, z) + Щ {х, у, z),
п
v = 2 ak+nyk+n (х, у, z) + v0 (х, у, z),
fei
ak+2nq>k+2n(х, у, z) + w0{х, у, z).
B.3.1)
Здесь «о, vo, Wo принимают на Oi заданные значения B.2.9),
тогда как функции ф3 (s= 1, 2, ..., 3ft) выбираются равными
нулю на О\\ этим удовлетворяется краевое условие для вектора
и при любых значениях коэффициентов as. Система аппрокси-
аппроксимирующих («координатных») функций ф8 должна быть взята
в столь общей форме, чтобы при достаточно большом п всякая
удовлетворяющая условию B.2.9) система перемещений могла
быть представлена приближенно в форме B.3.1). Такую систему
представляют, например, произведения целых степеней пере-
переменных вида xqvyqiz4\ умноженные на функцию, обращаю-
обращающуюся на О[ в нуль.
После подстановки так или иначе назначенных представле-
представлений вида B.3.1) для перемещений и, v, w в выражение потен-
потенциальной энергии системы Ф последняя представится суммой
154 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
квадратичной и линейной форм коэффициентов as и постоян*
ного слагаемого
Ф = Ф2(аь . . . , а3„) — <Di (аи . . . , а3п) + Фо, B.3.2)
причем квадратичная форма Ф2 равна как раз потенциальной
энергии деформации а, вычисляемой по вектору и — н0:
. г , Зп Зп
ф2 = J J J А (е _ ео) dx = | ^ ^ ^ад, B.3.3)
К s = l />• = !
и поскольку А—знакоопределенная положительная форма ком-
компонент деформации, то и Ф2 — такая же форма от а.\, а2,. . . , а^п.
Поэтому определитель матрицы ее компонент положителен:
|Cet|>0. B.3.4)
По теореме о минимуме потенциальной энергии системы наилуч-
наилучшее приближение в выбранном классе аппроксимирующих век-
вектор и функпий обеспечивается значениями коэффициентов, со-
сообщающих минимум выражению B.3.2). Это приводит к системе
Зга линейных уравнений
JL((I>2_(Di) = о, f = l, 2, .... Зп, B.3.5)
или
Зга
%Cstas = Bt, t = l, 2, .... Зп, B.3.6)
с таким же числом неизвестных. Существование и единствен-
единственность ее решения следует из неравенства B.3.4).
Таким образом, строится приближенное решение задачи. При-
Приемлемо предположение, что при достаточной общности системы
аппроксимирующих функций вычисленное значение потенциаль-
потенциальной энергии системы будет все более с ростом п приближаться
к ее минимуму. Но из этой «сходимости по энергии» не следует
еще, что и последовательность приближений B.3.1) сходится к
искомому решению. Здесь нет места для этих рассмотрений,
которым посвящена обширная специальная литература*). Вы-
Вычисление дает при разумном выборе вида и числа аппроксими-
аппроксимирующих функций значения вектора и, достаточно близкие к точ-
точному решению; меньшей точности следует ожидать от вычисле-
вычисления по найденным методом Ритца перемещениям их производ-
производных, значит, и напряжений.
2.4. Способ Галеркина A915). Для краевых задач, допу-
допускающих вариационную формулировку, в частности для задач
теории упругости, этот приближенный способ интегрирования
дифференциальных уравнений представляет упрощающее вы-
вычисление видоизменение метода Ритца. Приближение B.3.1)
*) См., например, книгу С. Г. Михлина «Прямые методы в математиче-
математической физике», Гостехиздат, 1950.
§2]
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
155
подставляется в выражение вариации потенциальной энергии
системы B.2.10), а не самой энергии B.1.3); это исключает не-
необходимость возводить в квадрат суммы B.3.1) при вычис-
вычислении А.
Заменив в B.2.10) вариации Ьи, bv, bw их выражениями
п п п
б«=2фйбаь Su= ^qk+nbak+n, bw=^j<pk+2nbak+2n, B.4.1)
ft=i k=\ k=i
в которых вариации искомых коэффициентов bas произвольны,
придем к равенству
- 6Ф = 2 ba
J J J J [L, (в) + р/С,] Tferfx- J" J [Af, (н) - F,] cpft do \ +
\ V 02 J
n { J J J[L2(и) + p/C2]Ф*+nйт - J J[M2(«)-.F2]<pk+ndo|
= 0, B.4.2)
в котором Ls, Ms — проекции векторов L и М, определяемых
формулами B.2.6), B.2.7), на координатные оси. Конечно,
и, v, w в выражениях Ls, M, заменяются их представлениями
B.3.1).
Теперь, приравняв нулю коэффициенты при произвольных
вариациях 6as, получим систему Зи линейных уравнений для
неизвестных as:
J J J L, (и)
///ад
dx — \ М) (u)(fkdo =
02
do,
„ rfx - J J A?2 (и) q>k+n do =
O2
= - I I I pKWk+ndt- [ f
tJ t! tJ J J
v o2
2« dT - J J M'i («) Ф'е + 2« ^О =
п do,
F3q>k+2ndo.
B.4.3)
156 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Конечно, это лишь другая запись уравнений B.3.6). Отли-
Отличается лишь последовательность, в которой проводилось вычис-
вычисление.
Часто под уравнениями способа Галеркина понимают си-
систему уравнений
JJ j
B.4.4)
при составлении которой используются только дифференциаль-
дифференциальные уравнения задачи. Но при этом выбор аппроксимирующих
решение функций tps должен быть подчинен всем не только
кинематическим, но и статическим краевым условиям B.2.12).
Тогда поверхностные интегралы в системе уравнений B.4.3) от-
отпадают и она переходит в систему B.4.4).
2.5. Принцип минимума дополнительной работы. Принцип
минимума потенциальной энергии системы был получен путем
сравнения полей перемещений упругого тела в состоянии равно-
равновесия и в бесконечно близком к нему допускаемом связями со-
состоянии. В принципе минимума дополнительной работы сравне-
сравнению подвергаются два статически возможных напряженных со-
состояния— истинное, задаваемое тензором напряжения Г, и
бесконечно близкое к нему, с тензором напряжения 7 + df. Оба
состояния рассматриваются, конечно, при одном и том же за-
задании внешних сил — объемных рК и поверхностных, распреде-
распределенных на части О2, ограничивающей тело поверхности О. Итак,
в объеме У
div f + р/С = 0, div(f + 67) + рК = 0 B.5.1)
и на О2
я- 7 = /\ n-(f + 6T) = F, B.5.2)
так что
div 6Г = 0, л-б7|Ог = 0. B.5.3)
Рассматривая удельную потенциальную энергию деформа-
деформации А как функцию компонент тензора напряжений, то есть в
форме C.2.8) гл. III, и учитывая C.2.9) гл. III, а также B.5.3),
имеем [см. (II. 3.10)]
ЬА (в) = ё • • 67 = div F7 • и) - и • div 67 = div FГ • и). B.5.4)
§ 2] ВАРИАЦИОННЫЕ ПРИНЦИПЫ 157
Поэтому
ба = | J j 6А dx = | J | div FT ¦ u) dx =
V V
= J /n-df -«do= J JM-6Fdo, B.5.5)
0 O,
где 6F — вариация поверхностной силы на той части Oi поверх-
поверхности, на которой задан вектор перемещения; на ней
б« = 0, u-6F = 6(u-F),
и равенство B.5.5) переписывается в виде
. B.5.6)
I
Выражение
У= $ j j A(o)dx- \ j u.Fdo= \ \ $ A(«)dx- \ j n-f -ado
v o, v o, B57)
называется дополнительной работой, а соотношение B.5.6) вы-
выражает свойство стационарности в положении равновесия этого
функционала- над тензором напряжения Т:
6W = 0 B.5.8)
Стационарное значение дополнительной работы является ее
минимумом. Действительно, по B.2.2), B.2.3)
№ = J J J 6Л (a) dx + J J J A Fa) dx- J J u-bFdo =
V V O,
= 6*+//|ЛFа)Л
и по B.5.8)
A^= JJJ Л(бст)йт>0,
что и доказывает наличие минимума в состоянии равновесия.
Итак, состояние равновесия линейно-упругого тела отличает-
отличается от всех статически возможных при заданных внешних силах
состояний тем, что для него функционал W над тензором напря-
напряжений Т, называемый «дополнительной работой», имеет минимум.
По B.5.7) и формуле Клапейрона C.3.3) гл. III этот мини-
минимум равен
xVmla = U\\\pK-udx-\\ F-udo + \j F-udo). B.5.9)
158
СООТНОШЕНИЯ ЛИНЕЙНОЙ ТКОРИИ УПРУГОСТИ
[ГЛ. IV
В п. 2.2 было установлено, что уравнениями Эйлера и нату-
натуральными краевыми условиями вариационной задачи о мини-
минимуме потенциальной энергии системы служат уравнения равно-
равновесия в перемещениях и статические краевые условия. Есте-
Естественно ожидать, что принципу минимума дополнительной ра-
работы— функционала над статически возможным тензором на-
напряжений Т — должны соответствовать зависимости Бельтрами,
а также кинематические краевые условия, как натуральные
краевые условия вариационной задачи.
Для доказательства представим условие стационарности
B.5.8) в виде
ЬА (a) dx - | J и ¦ 6F do =
за
до г
J
+ ... +
dx — I I и ¦ 6F do =
О,
(в, Ьах + ... + Угх bxzx) - J J и • ЬР do =
v " о,
e--6Tdx- | J u-6Fdo = 0. B.5.10)
"o,
Здесь е.с, . . . , Yzx- — линейные формы компонент тензора напря-
напряжений Т, определяемые по C.2.8) гл. III и выражаемые форму-
формулами C.1.8) гл. Ill; e — тензор, задаваемый этими формами его
компонент и, значит, представимый формулой A.1.4). Вариации
компонент тензора ЬТ под знаком интегралов в B.5.10) не неза-
независимы, а должны удовлетворять зависимостям B.5.3). Пришли
к связанной задаче вариационного исчисления и, следует извест-
известному правилу, вводим в объеме V лагранжев вектор К; это по-
позволяет, представив теперь B.5.10) в виде
= С J J (е
-6Г
div6f)dx- [ Ja-fiFdo = 0, B.5.11)
o.
считать все шесть вариаций Ьох, . . . , 6xzx, связанных тремя усло-
условиями B.5.3), независимыми за счет надлежащего выбора трех
компонент вектора к.
Применив многократно использованное преобразование
(П. 3.10);
§ 2] ВАРИАЦИОННЫЕ ПРИНЦИПЫ 159
перепишем теперь B.5.11) в виде
б?= f f f (e-defX)--fif dr + [ [ [ div(fif -X)<ix- f [ и ¦ bFdo =
J J j J J J K j j
V V 0,
= JJ|(e-defX)..6fdx+|Jn.6f.Xdo +
V 02
+ 11 (n ¦ 6T ¦ X - и ¦ fiF) do,
o,
так что, сославшись на B.5.3), получаем
б"Ф" = f Г f(e-defX)..67;dT+ Г f 6F • (Х- и) do = 0. B.5.12)
J J J J J
v o,
Теперь, выразив условия обращения в нуль множителей в
подынтегральных выражениях перед вариациями 6Т и 6F, при-
придем к соотношениям
Первое показывает, что тензор, обозначенный ё, есть деформа-
деформация лагранжева вектора к; на 0\ последний должен быть равен
заданному здесь вектору перемещения, и ничто не препятствует,
отождествив К с вектором перемещения и в объеме V, вернуться
к определению тензора е как к величине, задаваемой полем
перемещений. В самом принципе минимума дополнительной ра-
работы понятие о тензоре деформации отсутствует, поэтому ото-
отождествление векторов к и и должно быть привнесено нами, «так
как принцип об этом не знает».
По B.1.9) гл. II тензор, являющийся деформацией, должен
удовлетворять условию
Ink def h = 0, B.5.14)
и исключение к из первого соотношения B.5.13) приводит к со-
соотношению
() O, B.5.15)
что вместе с условием A.1.1), выражающим, что Т — статически
возможный тензор, приводит к зависимостям Бельтрами (см.
п. 1.5). Это и требовалось доказать. Вектор X == и, поскольку
условие B.5.14) выполнено, может быть вычислен по формулам
Чезаро B.2.2) гл. II.
2.6. Смешанный принцип стационарности (Е. Рейсснер, 1961).
В формулировке принципа минимума потенциальной энергии
рассматривается функционал над вектором и; от последнего
требуется, чтобы он принимал предписанное значение на той
160 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
части О] поверхности, на которой он задан; тензор напряжений
из рассмотрения исключен. Дифференциальными уравнениями
Эйлера, естественно, оказываются уравнения равновесия в пере-
перемещениях, а натуральными краевыми условиями — выраженные
через вектор перемещения условия равновесия на той части по-
поверхности О2, на которой заданы внешние поверхностные силы.
В противоположность этому в принципе минимума дополнитель-
дополнительной работы речь идет о функционале над тензором напряже-
напряжений Т, причем к сравнению допускаются статически возможные
напряженные состояния, то есть тензоры Т, удовлетворяющие
необходимым условиям статики сплошной среды в. объеме и на
той части Ог поверхности, на которой заданы поверхностные
силы. Получающаяся связанная краевая задача приводит к за-
зависимостям Бельтрами (этим уравнения статики дополняются
до достаточных условий) и краевым условиям на части поверх-
поверхности Оь на которой задан вектор перемещения.
В рассматриваемом в этом пункте смешанном принципе ста-
стационарности вводится функционал над вектором перемещения и
и над тензором напряжения Т, как над независимыми величи-
величинами. Этот функционал записывается в виде
V V
- Jj я-Г-(a-a.)do- jj F-udo. B.6.1)
Ог Oi
Здесь ё — тензор, определяемый по вектору и формулами A.1.2);
F— поверхностная сила, заданная на О2; и» — вектор перемеще-
перемещения, заданный на Оь Через А(а) обозначена удельная потен-
потенциальная энергия деформации, задаваемая квадратичной фор-
формой C.2.8) гл. III. Ее производные по компонентам тензора на-
напряжения будут линейными формами этих компонент, опреде-
определяемыми левыми частями соотношений C.1.8) гл. III. Они пред-
представляют компоненты некоторого тензора, обозначаемого
так что по C.2.9) гл. III
бЛ(ст) = 67--ё\ B.6.3)
Теперь имеем
6/= JJJ [6f--(e-e') + T--de]d%- j j j pK-6ud%-
v v
- j j п-ЬТ -{u-ut)do- j J n-f -budo- j j F-budo, B.6.4)
О О О
j j j J j
О, О, Ог
§ 2] ВАРИАЦИОННЫЕ ПРИНЦИПЫ 161
так как 6F =-- 0 па Ог. Остается применить хорошо известное пре-
преобразование
[ ' [ Т- -бе dx = \ \ [ div (T ¦ бы) dx - \ \ [ би • div f dx =
V V V
= \ I n-f -dudo + f f л • f -budo- f f [ 6м • div f dx,
О, Ог V
чтобы записать условие стационарности функционала / в виде
6/= f [ f [6Г •¦(e-r)-(divf
n • 6f • (и - нЛ'^о + J J (n • f - F) • би do = 0. B.6.5)
О, . Ог
Отсюда, вследствие произвольности 6Г и 6« в объеме, а также
вариаций и- 6Г на О{ и бгг на О2, приходим к уравнениям ста-
статики в объеме
divf + pK = 0, B.6.6)
к обобщенному закону Гука
и к краевым условиям
H|Oi=Ht, n-f\Oi=F. B.6.8)
Уравнениями Эйлера вариационной задачи о стационар-
стационарности функционала / оказываются исходные соотношения линей-
линейной теории упругости, перечисленные в п. 1.1, а натуральными
краевыми условиями — кинематические и статические краевые
условия.
2,7. Вариационные принципы при учете температурных сла-
слагаемых. Уравнение теплопроводности рассматривается в его
классической форме Фурье C.6.8) гл. III, а в задаче теории
упругости сохраняется статическая постановка, то есть пре-
пренебрегают изменениями во времени напряженного состояния,
вызываемыми нееташюнарностыо температурного поля. Это по-
позволяет рассматривать температуру как неварьируемый при
варьировании напряженного состояния внешний фактор и в со-
соответствии со сказанным в п. 1.14 формально трактовать наличие
температурного поля как поля объемных сил с потенциалом
A.14.5) и поверхностных сил A.14.6). Учитывается действие
этих «сил» и реактивных сил на Ои создаваемых связями, обес-
обеспечивающими заданные перемещения на этой части поверхности
тела.
11 А. И. Лурье
162 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Аналогом функционала Ф в принципе минимума потенциаль-
потенциальной энергии в соответствии с B.1.3), A.14.5) и A.14.6) служит
функционал
А {е)dx + 2\x~^(j j^ и • gradaddx- j ^ адп-udo),
V \ V 02 /
B.7.1)
где А (г) — квадратичная форма C.2.3) гл. III компонент тен-
тензора деформации ё Применив легко проверяемое преобразова-
преобразование
J | J и ¦ grad ав d% = J J л • иа8 dx - J J J Ш dx, B.7.2)
V О V
приведем B.7.1) к виду
причем по C.4.6) гл. III (см. также таблицу п. 3.1 гл. III)
величина
с точностью до не имеющего здесь значения слагаемого, зави-
зависящего только от температуры, представляет свободную энергию
системы.
Повторив над функционалом B.7.3) вычисление, которое
привело к формуле B.2.8), придем к соотношению
, = J | J f • • бе dx + 2ц у^ J J n • биаб do =
v о,
= JJ л-Г-6иdo- f JJda.divf rfT + 2|ij
О " V
О,
B.7.4)
Здесь 7 — тензор, определяемый формулами C.4.7), C.4.8)
гл. III:
так что
divf = ?(«)-2ii-~~grELdaQ, n ¦ f = M{u)-2\i-^~пав,
§ •:] ВАРИАЦИОННЫЕ ПРИНЦИПЫ 163
где введены обозначения B.2.6), B.2.7) дифференциальных опе-
операторов L(u), М(и).
После подстановок в B.7.4) получаем
6Ф =-
L (и) - 2ц J357 grad аб] • би dx +
v
+ J J \м{и) - 2ц j=± лаб] • би dx + | J М(и) • би do = 0, B.7.5)
ог о,
причем последнее слагаемое следует отбросить, поскольку
бн = 0 на О\.
Приходим к дифференциальному уравнению равновесия в
перемещениях A.14.3) и к краевому условию A.14.4), что и тре-
требовалось. Полностью повторив сказанное в п.2.2, убедимся, что
функционал Ф* в положении равновесия имеет минимум.
Аналогом функционала W в принципе минимума дополни-
дополнительной работы служит функционал
W, = | f J G dx - J J F • udo = J J J G dx - J J n-f и do, B.7.6)
V O, V O,
где G —потенциал Гиббса C.5.4) гл. Ill, a F — вектор поверх-
поверхностных реактивных сил на О\. Имеем
bG = t--bf, B.7.7)
где ё —тензор, компоненты которого, вычисляемые по C.5.5)
гл. III, представляют линейные формы компонент тензора на-
напряжений и температуры; выражение тензора ё дается также
формулой C.4.10) гл. III.
Доказательство стационарности и минимальности функцио-
функционала в положении равновесия, когда к сравнению допускаются
статически возможные напряженные состояния, не отличается
от приведенного в п. 2.5.
2.8. Принцип Сен-Венана. Энергетическое рассмотрение.
«Принцип упругой эквивалентности статически эквивалентных
систем сил» был впервые сформулирован в применении к задаче
о напряженном состоянии нагруженного по торцам призматиче-
призматического стержня в классическом мемуаре Сен-Венана «О круче-
кручении призм» A855). Более общую формулировку этого прин-
принципа, названного принципом Сен-Венана, дал Буссинек A885);
уточнению рассмотрений Буссинека посвящены работы Мизеса
A945) и Стернберга A954).
Системы сил F и F' называются статически эквивалентными
при равенстве их главных векторов и главных моментов относи-
относительно одного и того же центра приведения. Очевидно, что
система сил F — F' статически эквивалентна нулю — равны
11*
164
СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IV
нулям ее главный вектор и ее главный момент. Принцип Сен-Ве-
нана состоит в утверждении, что статически эквивалентная нулю
система сил, распределенных по малому участку поверхности
упругого тела, создает лишь локальное напряженное состояние;
оно быстро затухает по мере удаления от этого участка и ста-
становится пренебрежимо малым на расстояниях, достаточно боль-
больших по сравнению с его размерами. Например, напряженное
состояние в длинном призматическом стержне, нагруженном
только по его конечным по-
поперечным сечениям (тор-
(торцам), практически не зави-
зависит от способа распределе-
распределения по ним поверхностных
сил — оно определяется на
некотором расстоянии от
торцов лишь их главным век-
вектором и главным моментом.
Таким образом, речь
идет о возможности замены,
при оговоренных требова-
требованиях статической эквива-
эквивалентности и «малости» участ-
участка нагружения, одних крае-
Г
Рис. 13.
вых условий другими. Со-
Сознательно или бессознатель-
бессознательно та или иная идеализация
краевых условий всегда ис-
используется при решении
(корректно поставленных) задач математической физики. В за-
задачах теории упругости это тем более неизбежно, что детали
распределения поверхностных сил чаще всего неизвестны, а воз-
возможность замены его другим распределением с теми же инте-
интегральными свойствами представляется интуитивно приемлемой.
Вместе с тем ясно, что приведенную формулировку принципа
Сен-Веиана, имеющую лишь качественный характер, следует
дополнить возможными количественными оценками.
Одна из таких попыток, принадлежащая Занабони A937) и
Локателли A940, 1941), состоит в оценке доли потенциальной
энергии деформации, заключенной в частях тела, нагруженного
статически эквивалентной системой сил, примыкающих к месту
загружения и удаленных от него.
Рассматривается тело А\, нагруженное по участку поверх-
поверхности статически эквивалентной нулю системой сил Р; потен-
потенциальная энергия деформации тела обозначается cii(P). К телу
А\ по участку его свободной поверхности S' присоединим ничем
не нагруженное тело Л2 (рис. 13) и потенциальную энергию еди-
S о] ВАРИАЦИОННЫЕ ПРИНЦИПЫ 165
ного образовавшегося тела А\ -f А2 назовем а\+2(Р). Докажем,
что
а1(Р)>аш(Р). B.8.1)
Действительно, назовем через R[2 статически эквивалентную
нулю систему сил в сечении S* тела А\ + А2— это та ранее сво-
свободная часть поверхности S тела А\, которую пришлось
подвергнуть деформированию, чтобы слить А\ и А2 в единое тело
А\ + А2. Потенциальная энергия деформации части А2 тела
А[ + А2 равна a2(R\2), тогда как в части А{ этого тела заклю-
заключена потенциальная энергия
где a\(R12) — работа ранее приложенных сил Р, обусловленная
тем, что участок тела А\, загруженный этими силами, деформи-
деформируется вследствие приложения по S* сил R12. Итак,
а1+2 (Р) = а, (Р) + а2 (Rl2) + a, (Rl2) + a\ (Rl2). B.8.2)
Этапы этого рассуждения иллюстрируются рис. 13, а — г.
С истинным состоянием равновесия, когда силами Р соз-
создается напряженное состояние, дающее в сечении S* систему
сил /?i2, сравнивается состояние, в котором эта система (при
тех же Р) заменена пропорционально измененной системой сил
A + е)/?12. Отметим, что система уравнений статики, описываю-
описывающих поведение тела Л2, нагруженного по S* статически эквива-
эквивалентной нулю системой Rt2, линейна; поэтому и система
A + е)/?12 создается статически возможной системой напряже-
напряжений, что делает допустимым применение принципа минимума
дополнительной работы.
При указанном пропорциональном изменении сил R12 потен-
потенциальные энергии a\(Ri2), a2(Rl2) становятся равными
A + eJa\(Ri2), (I + eJa2(R]2), тогда как a\(Rl2) должно быть
заменено на A +е) а\ (/?12), так как в отношении 1 + е измени-
изменились лишь деформации, а силы Р остались неизменными. Итак,
варьированное выражение потенциальной энергии тела А\ + _42
должно быть записано в виде
а[+2 (Р) = fl] (Р) + A + еJ a, (R12) + A + еJ а2 (Rl2) + A + е) а\ (Rl2),
и поэтому
Ьа1+ч{Р) =
= е12а;
«1+2
[(#12
) + 2а
«1+2
о I A j
(Р) =
2) + а
2)] + e2 [a, (RVi) + a2 (Rl2)}. B.8.3)
Здесь ai(Rl2)>0, a2(Rl2)>0, a само выражение разности B.8.3)
по теореме о минимуме дополнительной работы должно оста-
оставаться положительным независимо от знака е. Поэтому
2а, (*12) + 2а2 (R!2) + a\ (R12) = 0, B.8.4)
166 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
и выражение B.8.2) записывается в виде
а,+2 (Р) = fli (Р) — а, (/?,2) — а2 (Rl3) < а{ (Р). B.8.5)
Знак равенства невозможен, так как силы /?]2 всегда возникают
при наличии Р. Предложение B.8.1) доказано. Продолжая про-
процесс мысленного присоединения к телу Ai + Л2 тела Л3 и т. д.,
имеем
а, (Р) > аш(Р) > «i+2+з(Р) > • •. B.8.6)
На втором этапе этого рассуждения сравниваются потенциаль-
потенциальные энергии, создаваемые системами сил Рп,2+з и Ри+2, з; как
видно из этих обозначений и рис. 14, первая система сил разви-
развивается в сечении S* тела Ль соединенного с ненагруженным те-
Рис. 14.
лом Л2 + Л3, а вторая —в более удаленном от места загруже-
ния силами Р сечении S2 между телами А^ + Лг и Л3.
По B.8.5) имеем при втором способе образования тела
fll + 2+3 (Р) = «1 + 2 (Р) ~ й1 + 2 (Р.1 + 2, з) ~ аЗ (Р. 1+2, з) =
= а, (Р) - а, (Р.12) - а2 (Р.12) - а1+2 (Я,+2,3) - а3 (/?1+2,3), B.8.7)
а при первом
fli+2+3(P)= al(P) — a1(Rh2+z)~ a2+3(RU2+3). B.8.8)
Из этих равенств имеем
fli(P-i,2+3) + а2+3(Р.,,2+з) = «1+2(^1+2,з) + «з(Рл+2,з) + «1 (Рчг) + а2 (А?12)
или, как следовало ожидать,
ai(P.i,2+3)+ а2+3(Р.1,2+з)>а1+2(Р.1+2,з) + аз(/?1+2,з). B.8.9)
Определим функционал a(R), равный потенциальной энер-
энергии деформации тела, вычисляемой по напряжениям, создавае-
создаваемым силами Р., развивающимися в сечении S от нагружения
тела статически эквивалентной нулю системой сил Р. Из дока-
доказанного неравенства B.8.9) следует, что a (R) уменьшается при
удалении сечения от места натружения. Поскольку a(R)—по-
a(R)—положительно-определенный функционал, его можно принять за
интегральную меру самих напряжений; найденные оценки ука-
указывают на уменьшение этой меры при удалении от места за-
гружения и служат подтверждением принципа Сен-Венана.
К другим оценкам самих напряжений мы вернемся ниже,
в п. 2.12—2.14 гл. V.
§ 3] ТЕОРЕМА ВЗАИМНОСТИ 167
§ 3. Теорема взаимности. Потенциалы теории упругости
3.1. Формулировка и доказательство теоремы взаимности
(Бетти, 1872). Рассматриваются два состояния равновесия ли-
линейно-упругого тела, называемые далее первым и вторым. По
векторам перемещений и', и", задающих эти состояния, опреде-
определяются тензоры деформации
e' = defa', e" = deftt", C.1.1)
а по ним — тензоры напряжений
(^Ъ"Ё+Ь"). C.1.2)
Теперь находим массовые и поверхностные силы, которые дол-
должны быть приложены к телу, чтобы осуществить эти состояния:
рК' = - div Г, Г = я • Г; рК" = - div f", F" = n- f". C.1.3)
Доказывается, что работа внешних сил первого состояния на
перемещениях, соответствующих второму состоянию, равна ра-
работе сил второго состояния на перемещениях первого состояния:
J J J рК' • и" dx + |J F' • и" do = J J JpK" • и! dx + J J F" ¦ и' do.
V О V 0
C.1.4)
Заменив в левой части этого равенства силы их выражениями
C.1.3) и используя преобразования (II. 3.10) и (II.5.5), имеем
- J J J и" • div f' dx + J J n • Г • u" do =
V О
= ///[-«"• div Г + div {u" ¦ T')\ dx= [[[f'.-ъ" dx,
V V
так что
J J J pK' • u"dx + J J F' • u"dx^ | J J f'--z"d% C.1.5)
V О V
и, конечно,
J J J рК" • н'dx + J| f". „' dx= j j jf"--e' dx. C.1.6)
V О V
Остается убедиться в равенстве правых частей. Это следует из
C.1.2):
Г• • г" = 2A
так как Е • • ё" = /, (ё") = Ь"; вместе с тем
е .-е -/^е е )-
р
168 СООТНОШЕНИЯ ЛИНЕИНОП ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Итак, правая часть C.1.6) одинаковым образом записи г от пе-
личин первого и второго состояний, чго доказывает теорему.
Формулировка теоремы взаимности усложняется в примене-
применении к неодносвязному объему, если не исключается возмож-
возможность неоднозначности перемещений. См. п. 5.3 этой главы.
3.2. Тензор влияния. Теорема Максвелла. Упругое тело на-
нагружено в точке Q сосредоточенной силой е единичной вели-
величины, уравновешенной реакциями связей — опорных устройств.
Связи предполагаются идеальными — сумма работ их реакций
на всяком перемещении точек упругого тела, находящихся в
контакте с опорными устройствами, равна нулю.
Вектор перемещения точки М упругого тела, назовем его
и{М, Q), представляется в виде
u(M,Q) = G(M,Q)-e. C.2.1)
Здесь G(M,Q)—тензор второго ранга, называемый тензором
влияния. Его компонента GSh(M, Q) представляет проекцию на
направление is перемещения точки М, вызываемого единичной
силой, направленной по h-
Условившись называть Q, М точками истока и наблюдения,
рассмотрим два состояния упругого тела — первое: Q — точка
истока, М — наблюдения,
u{M,Q)=G(M,Q)-eQ,
и второе: М — точка истока, Q — наблюдения,
u(Q,M) = G(Q,M)-eM.
По теореме взаимности работа силы вц на перемещении в
точке М, создаваемой силой eQ, равна работе силы eQ на пере-
перемещении в точке Q от силы ем:
eM-u(M,Q) = eQ-u(Q,M) C.2.2)
или, в другой записи,
е™ • (GM, Q).eQ = eQ-G (Q, М) ¦ ем. C.2.3)
Этим выражается свойство тензора влияния, называемое тео-
теоремой Максвелла:
G(M,Q) = G'(Q,M). . C.2.4)
Здесь, как всегда, звездочка обозначает операцию транспониро-
транспонирования тензора, так что
Gah(M,Q)=Gks(Q,M), C.2.5)
чю и требовалось.
§ 3] ТЕОРЕМА ВЗАИМНОСТИ 169
Знание тензора влияния G(M, Q) позволяет представить в
квадратурах вектор перемещения при любом задании массовых
и поверхностных сил:
и Ш) = J J J G (M, Q) ¦ pi( (Q) rftQ + J J G (M, Qo) • F (Qo) doQ().
v о
C.2.6)
Ясно, что степень трудности эффективного построения тензора
влияния такая же, как и решения краевых задач. Оно просто
выполняется для неограниченного упругого пространства, когда
краевые условия отпадают (п. 3.5 этой главы).
3.3. Применение теоремы взаимности. В качестве первого
состояния задается обычно весьма простое напряженное состоя-
состояние. Теорема взаимности позволяет по заданным внешним си-
силам второго состояния (они, конечно, должны представлять ста-
статически аквпвалентпую нулю систему сил) определять некото-
некоторые осредиенные величины, относящиеся к этому состоянию.
Зададим вектор перемещения первого состояния афинным
преобразованием:
u' = A-R, C.3.1)
где А — постоянный тензор второго ранга. Тогда по A.2.3) —
A.2.5) гл. II -
du' = (V«T • dR = dR ¦ V«' =A-dR = dR- A*,
так что, сославшись еще «а A.2.13) гл. II, имеем
е' = J (А + Л*), Л = ё' + Q' C.3.2)
и, далее,
C.3.3)
По теореме взаимности (отбросив штрихи над величинами вто-
второго состояния), получим
о/С • Л • R dx + F ¦ Л • Rdo =
V О
2н ( -~ f)' n-u do •!- j | п ¦ ё' • и do ). C.3.4)
о' "о'
170 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Тензор Л в левой части можно заменить на г', так как
= J J J p/C • («о X R) dx + J J f • (g> X R) do =
где © — сопутствующий тензору Л вектор (п. 1.4), а величина в
скобках — равный нулю главный момент внешних сил (второго
состояния). Вместе с тем
J п • и do = | j J ciiv и dx = J J J § dt,
OF V
n • e' • и do = J | J div (e' • и) dx =
V
= J J J и • div e' dx + e'- • J f | e rfx.
Обозначая индексом т среднее значение величины в объеме,
имеем
V
Приходим к равенству
1-
C.3.5)
преобразуемому с помощью тождества
Q • • аб = /j (Q • ab) = Ix (a • Q'b) = а • Q* • b
к виду
i / Г Г Г Г Г \
I. C.3.6)
Полагая здесь е = С имеем ¦&'= 3, г'--ет~®, e'--pKR =
= pK'R и т. д. Приходим к следующему выражению среднего
объемного расширения:
/ Г Г Г Г Г \
C.3.7)
§ 31 ТЕОРЕМА ВЗАИМНОСТИ 171
Подстановка в C.3.6) приводит теперь к соотношению
L \ v о
Например, при г' — i\i\, Ь' = 1 придем к выражению среднего
относительного удлинения
о
тогда как, полагая ё' = U2 + Mi, ft' = 0, получим среднее зна-
значение сдвига
jj ^y . C.3.10)
Отсюда теперь легко найти средние значения напряжений:
1
-(ст,)т = ^г I
vvt>
pyKxdx+ yFxdo
о
и т. д. Эти же выражения были получены в п. 4.3 гл. I с по-
помощью только уравнений статики и для любой сплошной среды,
а не гукова тела. По ним, основываясь на законе Гука, можно
перейти к приведенным выше формулам для средних значений
компонент тензора деформации в линейно-упругом теле.
Задавшись выражениями вектора перемещения и' в виде
квадратичных форм координат и используя теорему взаимности,
можно получить этим же путем формулы п. 4.4 гл. I для момен-
моментов напряжений первого порядка.
В задание компонент деформации г' в виде квадратичных
форм координат войдет 36 коэффициентов, связанных шестью
условиями совместности деформаций B.1.5) гл. II. Использо-
Использование теоремы взаимности в форме C.1.5)
зкКкdr= j /I * • «' dt + J J F-u'do
172 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
приводит к тридцати уравнениям (по числу независимых коэф-
коэффициентов этих форм). Число же неизвестных моментов напря-
напряжений второго порядка
tikxfxsdx
равно тридцати шести. Этот же результат был получен в п. 4.10
гл. I.
3.4. Теорема взаимности при учете температурных слагае-
слагаемых. В вывод формул C.1.5), C.1.6) не вносится изменений, но
при вычислении их правых частей следует учесть наличие тем-
температурных слагаемых в выражении тензора напряжения
A.14.1):
', * cr/ = 9ii ft it 4- p » • p 9нп ¦ H ту
r V 1 — 2v r 1 — 2v
¦ C.4.1)
r \ 1— 2v
и вместо C.1.4) получаем
pK' -u"dx+ F' ¦ и" do
V О V
pK"-u'dx+ f Jf//-M/rfo + 2l.ia1~; ( J| б"*'oft. C,4.2)
Ъ
Конечно, этот же результат можно получить формальной за-
заменой температурного поля объемными и поверхностными си-
силами A.14.5), A.14.6):
и" ¦ grad 8' dx + J J re • n' dr) =
о
что и требовалось.
В качестве примера примем напряженное состояние, созда-
создаваемое единичной силой eQ, приложенной в точке Q, за первое
состояние; пусть в нем В' = 0; пусть во втором состоянии силы
отсутствуют, рК" = 0, F" = 0, а температура равна 8. Примене-
Применение формулы C.4.2), если учесть C.2.1), приводит к равенству
cQ ¦ и (Q) = 2u.a -^ J j J e (M) divA1 G (M, Q) ¦ eQ dxM,
§ 3] ТЕОРЕМА ВЗАИМНОСТИ
н, поскольку c.q — произвольно направленный вектор,
и (Q) = 2ца ~^~ J J J 6 (М) div^i G (M, Q) dxM. C.4.3)
v
Знание тензора влияния позволяет определить поле перемеще-
перемещений в упругом теле по температурному полю.
3.5. Тензор влияния в неограниченной упругой среде. В не-
неограниченной упругой среде мысленно выделяется конечный
объем V,-, ограниченный поверхностью О; остающийся бесконеч-
бесконечный объем с полостью V, назовем Ve.
В точке Q упругой среды прикладывается единичная сосре-
сосредоточенная сила е, создающая напряженное состояние, опреде-
определяемое тензором Т. Тогда уравнения статики для Vj-объема за-
записываются в виде
Jn-fdo + e = 0, [Jl?X(n-f)do = 0, Q <= Vh C.5.1)
= 0, QczVe. C.5.2)
Через R обозначен вектор-радиус, имеющий начало в точке
Q — точке «истока». Если гл1, fq — вектор-радиусы точки «на-
«наблюдения» М и точки истока Q с началом в начале координат
О, то, очевидно,
R = rM — rQ. C.5.3)
Примем, что поверхностью О в формуле C.5.1) служит сфе-
сфера О радиуса R с центром в точке истока Q; это не ограничи-
ограничивает общности приводимого ниже рассуждения, так как значе-
значение интегралов в C.5.1) по любой поверхности, охватывающей
сферу О, неизменно. Уравнение C.5.1) теперь записывается в
виде
R2 Jj n-7W + e = 0, C.5.4)
о*
где О* — сфера единичного радиуса, do* — элемент ее поверх-
поверхности; отсюда следует, что главный вектор напряжений на лю-
любой поверхности, содержащей точку Q внутри себя, имеет не
зависящее от R значение — е, а это возможно лишь при условии,
что компоненты тензора Г убывают, как R~2. Но тогда вектор
перемещения должен убывать при удалении от точки Q, как R~l.
Этим подсказывается характер решения. Гармонический век-
вектор В в решении Папковича — Нейбера A.4.10) следует принять
равным
В А
174 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
так как R~l — единственная гармоническая функция с таким
характером убывания на бесконечности, а вектор е должен вой-
войти в решение задачи; через А обозначена постоянная, подлежа-
подлежащая определению из условия C.5.1). Введение гармонического
скаляра Во излишне, и вектор перемещения представляется по
A.4.10) в виде
u = A[C-4v)f+-^R], C.5.5)
так как
Тензор напряжения вычисляется по A.4.15). Имеем
divJB=--^-e-*, УЯ=-Л-^, def5=-4~ (Re + eR),
и подстановка дает
Т = Цр- [A - 2v) {Ее ¦ R - eR - Re) - Щ^- RR]. C.5.6)
Для определения А имеем равенство
_ е = -L-. | | (i _ 2V) (ne • R - л • eR - /i • J?e) - -^- n • J?J? j do.
о
Но на поверхности сферы О
так что
и, имея в виду, что
о о" v v
находим
Представляя теперь вектор перемещения в форме C.2.1), при-
приходим к равенству
u(M,Q)^U(M,Q)-e, C.5.8)
§ 3] ТЕОРЕМА ВЗАИМНОСТИ 175
в котором тензор влияния U(M, Q) для неограниченной упру-
упругой среды — тензор Кельвина — Сомильяна — представляется по
C.5.5) формулами
TJ /О Л.Л р I **" _ v v" \ /OCQ\
u — irttt, (\~v\p w 4V;?+ p2 — 4тгм I p л(\ _.л • (о.о.у;
Вектор напряжения на площадке в точке М с нормалью пм ока-
оказывается равным
-Ъ~~пМ'М] C.5.10)
и может быть представлен в виде произведения справа на век-
вектор е
пм-Т =Q>{M,Q)-e C.5.11)
«силового» тензора влияния, определяемого формулами
-2(l-v)EnM-R-R3nM-RVV±]. C.5.12)
Уравнения статики C.5.1) и C.5.2) теперь представляются в
виде
г г ~ \ -Ё, QczVi,
Jj <D{M,Q)doM = { Oj Q(_v^ C.5.13)
и при любом расположении точки Q
Q)rfoni = 0. C.5.14)
о
Развернутая запись первого имеет вид
Я
8n(l-v) JJ \^~2v)lp(nMR-RnM)-nM
о
о.
176 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Вместе с тем согласно известной теореме Гаусса о потенциале
двойного сЛоя постоянной (единичной) плотности, распределен-
распределенного по замкнутой поверхности,
4л, Q а V,,
2л, QdO, C.5.16)
I 0, QcVf,
о
и поэтому
[A - 2v) -~(nMR - RnM) - пм ¦ i?VV -^J doM = 0 C.5.17)
о
при любом расположении точки Q, в том числе и на О. Это по-
позволяет записать C.5.13) в более полном виде:
&{M,Q)doM=-Eb(Q), C.5.18)
где 6(Q)—функция положения точки Q, определяемая равен-
равенствами
6(Q) =
0, QczVe
C.5.19)
Равенство C.5.18), многократно используемое ниже, будем на-
называть обобщенной теоремой Гаусса.
Заметим еще, что соотношения C.5.14) и C.5.17) несложно'
проверить непосредственным вычислением.
3.6. Потенциалы теории упругости. Обобщая классические
определения теории ньютонова потенциала, введем в рассмот-
рассмотрение два потенциала теории упругости. %
Первый потенциал является аналогом потенциала простого
слоя. Он определяется вектором
A (Q) = | | а (Мо) ¦ U (Mo, Q) doMn C.6.1)
о"
где U(M.Q)—тензор Кельвина — Сомильяна C.5.9). Предпо-
Предполагается, что О принадлежит к классу поверхностен Ляпунова;
вектор а(Мо)—заданная на О плотность слоя. Вектор A(Q) —
непрерывная по всем пространстве функция (разрыв непрерыв-
непрерывности при переходе через слой испытывает нормальная произ-
производная п-\'А), удовлетворяющая в V,- и Vc 'однородным уравне-
уравнениям теории упругости в перемещениях
l_ graj (| iv A + V2/l = 0 C.6.2)
1 — .iV
§ 3) ТЕОРЕМА ВЗАИМНОСТИ 177
Предельные значения потенциала A(Q) извне п изнутри, обо-
обозначаемые *)
A,(Qo) = lim A(Q), Ae(Q0) = lim A(Q), C.6.3)
VQQ VQQ
равны его «прямому значению», определяемому несобственным
сходящимся интегралом
A (Qo) = J J a Wo) • 0 Wo, Qo) dom. C.6.4)
о
Итак,
A-(Q ) = A(Qn) = A (Qn) C 6 5^
Второй потенциал теории упругости имеет свойства потен-
потенциала двойного слоя. Он определяется вектором
В (Q) = j J b Wo) • Ф Wo, Q) doK, C.6.6)
о
где Ф(УИ, Q)—силовой тензор влияния C.5.12). В I7,: и в Уе
этот вектор также удовлетворяет однородным уравнениям в пе-
перемещениях. Вектор плотности Ь(М0), равно как и ранее вве-
введенный вектор a Wo), предполагается удовлетворяющим усло-
условию Гельдера II (А, у) с положительным показателем у:
Ь {Мо) - Ь {Мо) I < Л г, - г „ Y. C.6.7)
Тогда интеграл, называемый прямым значением B(Q0) потен-
потенциала B(Q),
В (Qo) = / J b (Mo) • Ф (Мо, Qo) dom C.6.8)
о *
сходится в смысле главного значения**). Предельные значения
Bt(Qo), Be(Q0) потенциала B(Q):
Bt(Qn)= lim B(Q), Be(Qo)= lim B(Q), C.6.9)
VQ Q vq Q
не равны друг другу и не равны его прямому значению — потен-
потенциал B(Q) претерпевает разрыв при переходе через слой. То же
*) Запись Vt zd Q -> Q,,(Vr zd Q -> Qn) означает, что точка Q прибли-
приближается к точке Qo па слое, оставаясь в V; (в VP); предполагается, что при-
приближение происходит (в обоих случаях) по нормали к Q, направленной в
Ve — внешней к V,-.
**) Главное значение интеграла по поверхности определяется как предел
при в->0 интеграла по поверхпоан О — O(Q0,e), где 0(Qo,e)—окрестность
па О точки Qo с диаметром 2в.
12 Л. И. Лурье
178 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
самое имеет место и для ньютонова потенциала двойного слоя
(его плотность обозначается р (А10))
Однако доказывается, что его предельные значения равны пря-
прямому значению, если Qo— та точка на О, в которой плотность
равна нулю: при p(Qo) — О
W (Qo) = f { Р (AQ ^г^ dom = W{ (Qo) = We (Qo)
'о
и это свойство ньютонова потенциала сохраняет и второй по-
потенциал теории упругости: если b(Q0) = 0, то
B(Q0) = Bi(QQ) = Be(Q0). C.6.10)
Сославшись теперь на обобщенную теорему Гаусса C.5.18). за-
запишем равенство
В (Q) = ( f \Ь (Мо) - Ь (Qo)] ¦ Ф <Мп, Q) doM. +
+ Ь (Qo) • f J Ф (Мо, Q) doMn =\\\b (Мо) - Ь (Qo)] • Ф (Мо, Q) йош -
'о о
Г 6 (Qo), Q с vt,
~\ с\ /л ,— лг C.6.11)
Интеграл
представляет потенциал того же вида, что B(Q), но с плот-
плотностью
обращающейся в нуль в точке Qo. Поэтому, сославшись на
C.6.10), C.6.11), C.6.8) и снова на C.5.18), имеем
Bt (Qo) = f J [Ь (Mo) - Ь (Qo)] • Ф (Мо. Qo) doMa - Ь (Qo) =
\Ь (Л/„) - & (Qo)] • Ф (Л/о, Qo) rfo,Uj = P> (Qo) + j b (Qo).
о
§ 3] ТЕОРЕМА ВЗАИМНОСТИ 179
Пришли к формулам Племели для второго потенциала теории
упругости:
—jb(Q0), (З-6-12)
Be{Qo) = B(Q0)+jb{Q0). C.6.13)
3.7. Определение поля перемещений по заданию внешних
сил и вектора перемещения на поверхности тела. В точке Q не-
неограниченной упругой среды приложена единичная сосредото-
сосредоточенная сила е; тогда по поверхности О, ограничивающей мыс-
мысленно выделяемый из среды объем Vt-, будут распределены по-
поверхностные силы, определяемые по C.5.11):
(n-fH = O(MQ,Q)-e. C.7.1)
Вектор перемещения в этом объеме равен
u(M,Q) = 0(M,Q)-e. C.7.2)
Это состояние объема V,- принимается за первое его состояние
в теореме взаимности. Состояние того же тела под действием
внешних сил — объемных рК и поверхностных F — назовем вто-
вторым состоянием; вектор перемещения в этом состоянии обозна-
обозначается и(М).
Работа сил первого состояния на перемещениях второго со-
состояния равна ¦
Г
а' =
и (Q) + J | и (Мо) ¦ Ф (Мо, Q) do Л -е, QczVit
°п J C.7.3)
J J и (Мо) • Ф (Мо, Q) doAh -e, QaVe.
Сославшись на формулы Племели C.6.12), C.6.13), имеем в
обоих случаях
lim а'= lim а'= у«(<Эо)+ и(Лу-Ф(М0, Qo) dom \-e,
так что, вспомнив определение C.5.19) функции 6(Q), имеем
а' =¦ Гб (Q) и (Q) + J J и (Мо) • Ф (Мо, Q) do Л ¦ е, C.7.4)
условившись, что интеграл в правой части, когда Q<^0, пони-
понимается в смысле его главного значения
J Ju{M0)-&{M0,Qo)doMl. C.7.5)
12*
180 СООТНОШЕНИЯ ЛИНЕ1ТНОП ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Работа сил второго состояния па перемещениях первого со-
состояния равна
а" = Г\ / / рК (Af) • 0 (М, Q) dxM + j j F(M0) ¦ U (Mo, Q) doM] • e,
C.7.6)
и по C.G.5) эта формула сохраняет свое значение как при
Q с V{, Q cz Ve, так и при QcO; в последнем случае несоб-
несобственный поверхностный интеграл сходится, так как особенность
тензора 0(M0,Q), рассматриваемого как функция точки М0, в
точке Qo слабая (обращение в бесконечность, как R~l).
Применение теоремы взаимности приводит теперь к соотно-
соотношению (произвольно задаваемый вектор е может быть отбро-
отброшен)
б (Q) и (<Э) = f j F Шо) ¦ О {Мо, Q) dom - \ j и (Л/о) • Ф (Л/о, Q) doAU +
О О
+ j | j 9К (М) ¦ б (М, Q) dxM. C.7.7)
Последнее слагаемое в этой формуле
и. (Q) = f [ f P^C (Af) • t/ (M, Q) йтж C.7.8)
представляет частное решение уравнений равновесия в пере-
перемещениях A.3.2), соответствующее объемным силам. Этим до-
доказано (см. п. 1.4), что оно может быть определено квадрату-
квадратурами при любом законе задания объемных сил.
Соотношение C.7.7) определяет вектор перемещения по за-
заданию на поверхности О и поверхностной силы F и вектора пе-
перемещения и. Поэтому оно, конечно, нех является решением
краевой задачи.
Проверим, что, когда второе состояние является натураль-
натуральным, то есть при рК = 0, F = 0, соотношению C.7.7) удовлетво-
удовлетворяет вектор перемещения тела как твердого:
и (М) = н0 + и X гм = н0 + и X rQ + со X R C.7.9)
Действительно, замечая, что
(и X R) ¦ Ф (.Но, Q) = со • [Я X Ф (Л'/о. Q)],
имеем
u(M0)-Q>(M0,Q)do,,u=-
= - (и0 + о) X rQ) • J J Ф (Ai0, Q) doMa - © . J j" J? X Ф (Mo, Q) do.M,
§ 3] ТЕОРЕМА ВЗАИМНОСТИ Jgl
и, сославшись на C.5.14), C.5.18), получаем
и (Мо) • Ф (Мо> Q) doMa = (щ + о X rQ) б (Q), C.7.10)
что и требовалось.
3.8. О поведении потенциалов теории упругости на бесконеч-
бесконечности. При достаточно большом удалении точки Q zd Ve от по-
поверхности О
R = rM — rQ~ - rQ, R~rQ C.8.1)
и ядро C.5.9) первого потенциала представляется в виде
J Ь^-КЗ - 4v) E + eQeQ], eQ = ^rQ.
По формуле C.6.1), в которой вследствие симметрии тензора (У
сомножители Ома переставимы, получаем
W0)dom. C.8.2)
По C.5.8) эта формула представляет вектор перемещения в
точке от действия силы
\ а (Мо) йом„
приложенной в начале координат; ее можно трактовать как
главный вектор системы сил на поверхности малого объема V,-,
когда последний стремится к нулю. Перемещение от такой си-
системы сил и, следовательно, первый потенциал убывают на бес-
бесконечности, как /-д1-
Для ядра C.5.12) второго потенциала при той же замене
C.8.1)
ф (Mo. Q) =
I
пм • eQE) + SnM • eQeQeQ],
Х eQeQeQ]
I Q
и выражение этого потенциала примет вид
в(Q) = та1^f^1 ~2v) I j ^b -b ¦ пм
L 'o
bnMdoM-eQE\.4-- C.8.3)
182 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Он представляет перемещение точки Qx, создаваемое некоторой
системой сил, распределенных по поверхности малого объема
Vt, когда последний стремится к нулю. Главный вектор этой си-
системы сил равен нулю — в противном случае перемещение на до-
достаточном удалении Q от V,- убывало бы, как г^1, а не как г^2.
Второй потенциал, подобно потенциалу двойного слоя, ведет себя
на бесконечном удалении от О, как г^2. См. также п. 1.3 гл. V.
§ 4. Теоремы единственности и существования решений
4.1. Теорема Кирхгоффа. Исходная система уравнений и
краевых условий теории упругости приведена в п. 1.1. Вводятся
следующие предположения: 1) начальное состояние тела яв-
является натуральным; 2) постоянные ц, v в обобщенном законе
Гука удовлетворяют неравенствам C.3.5), C.3.6) гл. III, обес-
обеспечивающим положительность удельной потенциальной энергии
деформации: поэтому последняя может быть нулем лишь в на-
натуральном состоянии; 3) допускается общепринятое в линейной
теории упругости пренебрежение изменением формы тела при
формулировании краевых условий — ограничивающая упругое
тело поверхность О в состоянии равновесия такая же, как в на-
натуральном состоянии.
При перечисленных условиях решение краевых задач — един-
единственное (теорема Кирхгоффа). Действительно, предполагая на-
наличие двух отличающихся друг от друга решений и', V и и", Т"
при одном и том же задании объемных сил в V, а также по-
поверхностных сил на О2 и вектора перемещения на Оь получили
бы, что разности
и = и"-и', Т = ?'-?" D.1.1)
являются решением однородной краевой задачи*
divf = O, Т = Г,
е = ~ [Уи + (УиI,
и|0, = 0, я • f |Oj = 0. D.1.3)
Из этих уравнений следует [см. (II. 3.10)]
J f Jtt-divf d%= J J jdiv(f-u)dT- J j j T--zdx =
V V V
= jjn-f-«do-
§ 4] ТЕОРЕМЫ ЕДИНСТВЕННОСТИ И СУЩЕСТВОВАНИЯ РЕШЕНИЙ 183
Но поверхностный интеграл по D.1.3) равен нулю; поэтому
dx~0, D.1.4)
и вследствие положительной знакоопределенности удельной по-
потенциальной энергии деформации
Л^О, е = 0, ГзО. D.1.5)
По D.1.1) получаем
и' = и", Т' = Т", D.1.6)
что противоречит предположению о существовании двух отли-
отличающихся друг от друга решений.
В условиях смешанной краевой задачи A.2.3), а также пер-
первой краевой задачи A.2.1), из D.1.5) следует, что и = 0, тогда
как во второй краевой задаче вектор перемещения оказывается
определенным с точностью до перемещения среды как твердого
тела:
и = ио + <» Х(г — г0). D.1.7)
Замечания. 1. В теореме Клрхгоффа устанавливается
свойство уравнений линейной теории упругости. Из нее следует
недостаточность этой теории для предсказания явлений сосу-
сосуществования различных состояний равновесия при одних и тех
же условиях нагружения, например, изгиба сжатого продольной
силой стержня. В доказательстве было существенным пренебре-
пренебрежение изменений формы тела; если его не делать, то для каж-
каждого из предположенных состояний равновесия следовало бы
записать кинематические краевые условия в виде
причем О\ = О\, так как задание перемещения и* определяет
одну и ту же форму этой части поверхности в деформирован-
деформированном состоянии тела. Однако часть границы, на которой задает-
задается распределение поверхностных сил, не сохраняет вида
уО'ч ф О"), так что на ней N' ф N", и статические краевые усло-
условия следует записать в виде
N'-f'\, = F, N".T"\,, = F,
°2 °2
и поэтому краевые условия D.1.3) для разности решений не
имеют места.
2. Доказательство теоремы выражает, что при отсутствии
внешних сил в упругом теле не возникает напряженного состоя-
состояния. Этому не противоречит возможность существования напря-
напряжений - в ненагруженном односвязном упругом объеме, из
184 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
которого удалено клинообразное тело с последующим сшиванием
поверхностей разрезов. В таком теле нельзя создать непрерыв-
непрерывное вместе с его производными поле перемещений, которое
могло бы из этого начального состояния вернуть тело в нату-
натуральное состояние. В этих условиях приведенное доказательство
теоремы Кирхгоффа отпадает, хотя бы вследствие невозможно-
невозможности преобразования объемного интеграла в поверхностный, пред-
предполагающего непрерывность Г, к и их первых производных.
3. В неодносвязном объеме обеспечивается непрерывность
тензоров деформации и напряжений и при наличии неоднознач-
неоднозначности перемещений, создаваемой с помощью дисторсии Воль-
терра, как описано в п. 2.4 гл. II. В приведенной формулировке
теорема Кирхгоффа также здесь не имеет места. Она допол-
дополняется требованием, чтобы решениям и', и" соответствовали оди-
одинаковые циклические постоянные векторы Ь, с (одна и та же
дисторсия). Тогда вектор и = и' — и" — непрерывная и одно-
однозначная функция и приведенное доказательство сохраняется.
Более подробно об этом см. § 5 этой главы.
4. В теореме Кирхгоффа утверждается единственность реше-
решения, если оно существует. Доказательство существования ре-
решения первой и второй краевых задач рассматривается в пп. 4.2—
4.8 этой главы.
5. Теорема Кирхгоффа не исключает существования разрыв-
разрывных решений однородных краевых задач, когда при отсутствии
массовых сил равны нулю перемещения (или поверхностные
силы во второй краевой задаче) на поверхности тела. Непре-
Непрерывное и даже аналитическое в объеме тела решение однород-
однородных краевых задач можно построить для значений постоянной
Пуассона v вне допустимого интервала ее значений (при v>l/2
или v < — 1).
Примером могут служить однородные краевые задачи для
полого шара, ограниченного концентрическими сферами /? = /?0,
R = /?,. Решение может быть построено с помощью бигарыонк-
ческой функции Лява (п. 1.10) вида
+ CRS + ^) Р М ilx Cos
где Ps(n) —решение уравнения Лежандра
Индекс s определяется условием существования нетривиального
решения однородной краевой задачи — должен быть равен нулю
определитель А системы линейных однородных уравнений для
неизвестных коэффициентов Л,„ Д„ Cs, Db, получаемой в записи
§ 4] ТЕОРЕМЫ ЕДИНСТВЕННОСТИ И СУЩЕСТВОВАНИЯ РЕШЕНИЙ 185
краевых условии. Он зависит от s, v, Ro/R\, и корни трансцен-
трансцендентного no s уравнения
( f) 0 D.1.9)
в допустимом интервале значений v оказываются комплексными.
Решения, соответствующие каждому из этих корней, опреде-
определяются вещественной (или мнимой) частью функции /. По свой-
свойству функций Лежандра они разрывны при Ь = 0 или Ф = л —
решение задачи содержит линию особенностей на отрезке
Ro<R<Ru * = 0 (или я).
Задавая s целочисленные значения s = «^>2, получаем не-
непрерывные во всем объеме решения; определяемые по таким s
из уравнения D.1.9) значения параметра v при всех Ro/R\ рас-
расположены вне допустимого интервала.
4.2. Интегральные уравнения первой краевой задачи. Реше-
Решение представляется в форме второго потенциала теории упруго-
упругости C.6.6) с неизвестным вектором плотности Ь(М0):
v{Q) = u (Q) - и4 (О) = ^Ъ (Мо) ¦ Ф (Мо, Q) dom = В (Q). D.2.1)
о
Через «*(Q) обозначено частное решение, соответствующее дей-
действию массовых сил, находимое, например, формулой C.7.8);
поэтому вектор v(Q), определяемый по D.2.1), будет решением
однородных уравнений теории упругости в перемещениях как
при Q a Vi, так и при Q cz Ve. Значение v(Q0) этого вектора на
поверхности О задано.
Сославшись на( 3.6.12), C.6.13), записываем равенства
= v (Qo) = Bt (Qo) = Bo (Qo) ~\b (Qo), D.2.2)
D.2.3)
где Bo(Qo)—прямое значение потенциала B(Q). Приходим к
следующим интегральным уравнениям первой внутренней A!)
и первой внешней AС>) краевых задач:
I(" j Ь (Qo) -\\b (Мо) ¦ Ф (Мо, Qo) doMa =-v (Qo), D.2.4)
о
I(e> jb(Q0) + \j b(M0) ¦ Ф (Mo, Qo) doA1, = v(Q0). D.2.5)
о
186 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Замечания. 1. Заданию в случае 1<*> вектора перемеще-
перемещения v(Q0) в форме перемещения твердого тела
соответствует решение интегрального уравнения D.2.4):
=-{v0 + ®XrM,), D.2.7)
что сразу же следует из C.7.10) при 6(Q) = l/2. Действительно,
представив D.2.7) в виде
имеем
J J Ь(Af0) • Ф (Mv Qo) dom -^(*0 + « х rj, D.2.8)
о
и сказанное следует из подстановки выражений D.2.7), D.2.8)
в D.2.4). Вместе с тем по D.2.1) и при 6(Q)= 1 находим, как
следует ожидать,
v (Q) = - J J (v0 + со X гМо) • Ф {Мй, Q) doMo = vo + (nXrQ D.2.9)
о
— при задании твердого перемещения поверхности О весь объ-
объем V,- перемещается как твердое тело, напряженное состояние
отсутствует. Это решение по теореме Кирхгоффа — единственное.
2. Из приведенного вычисления следует, что вектор
= v0 + e>XrMt, D.2.10)
где гH, (о — произвольные постоянные векторы, является реше-
решением однородного интегрального уравнения
0. D.2.11)
Отсюда следует, что вектор плотности Ь(М0) в задаче ?е> может
быть определен лишь с точностью до слагаемого D.2.10).
3. Вектор перемещения D.2.1) в случае внешней задачи, со-
согласно C.8.3), убывает на бесконечности не медленнее, чем ^~2.
Такое решение может быть получено, если равен нулю главный
вектор сил, которые должны быть распределены по О, чтобы
сообщить точкам этой поверхности, заданное вектором v(QQ).
Поэтому решение первой внешней краевой задачи в форме вто-
второго потенциала C.6.6) не существует при произвольном зада-
задании вектора v(Q0).
Аналогичное явление известно в электростатике. Решение
внешней задачи Дирихле, к которой сводится разыскание поля
§ 4] ТЕОРЕМЫ ЕДИНСТВЕННОСТИ И СУЩЕСТВОВАНИЯ РЕШЕНИИ 187
электрического потенциала v(Q) в Ve, исчезающего на беско-
бесконечности, по заданному его распределению v(M0) на проводя-
проводящей поверхности О, может быть представлено потенциалом
двойного слоя только при условии, что полный заряд на О ра-
равен нулю. Поэтому задачу решают, налагая на потенциал двой-
двойного слоя решение так называемой задачи Робена. В ней по-
потенциал на О постоянен, а его значение в Ve представляется
потенциалом простого слоя. Понятно, что и решение первой
краевой внешней задачи теории упругости приводит к аналогич-
аналогичной «эластостатической задаче Робена».
4.3. Интегральные уравнения второй краевой задачи. Реше-
Решение однородных уравнений теории упругости в перемещениях
разыскивается в форме первого потенциала C.6.1)
v (Q) = uQ - и. (Q) = I а (М„) • U (Ma, Q) doMo = A(Q) D.3.1)
о
с неизвестным вектором плотности а{М0). Вычисляемый, как
указано в п. 3.5, по вектору v(Q), тензор напряжений равен
J
D.3.2)
Здесь, как и ранее,
R = rMl-rQ, D.3.3)
а отличие в знаке от C.5.12) объясняется тем, что при переходе
от D.3.1) к формуле D.3.2) дифференцирования проводились
по координатам точки Q. Законность дифференцирований под
знаком интеграла в D.3.1) не вызывает сомнения, поскольку
точка Q не расположена на О, так что R ф 0.
Вектор напряжения на площадке с нормалью nQ опреде-
определяется равенством
nQ-f(Q)=\J4 (Mo, Q) ¦ a (Mo) doMc, D.3.4)
причем, как следует из D.3.2), несимметричный тензор второго
ранга Ф(Л10, Q) равен
~(RnQ-nQR) + nQ-R
D.3.5)
188 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Этот тензор существенно отличается от Ф(М0, Q) тем, что в его
определение входит нормаль к площадке в точке Q, а не Мо.
Вместе с тем по C.5.12) сумма
Ф (Мо, Q) + Ф (М01 Q) = -щ^у { 2~%^ (nQ - nMt) ¦ RE +
+ -Ц^ [R К - пли) - (nQ - ял1о) R] + (nQ - пм.) • i?VV± } D.3.6)
представляет ядро потенциала со слабой особенностью (ви-
(вида /?-')
С (Q) = J J [Ф (Мо, Q) + Ф (Мо, Q)] • а (Мо) doiWol
предельные значения которого извне и изнутри равны друг дру-
другу и равны его прямому значению (подобно случаю первого по-
потенциала)
lim C(Q) = Ct(Q)= Hm С (Q) = Се (Q) = С0 (Qo).
Поэтому
lim f f Ф(М0, Q)-e(
= J J [* (Mo, Qo) + Ф (Mo, Qo)] • a (Mo) doM, -
о'
- lim f f Ф(М0, Q)-a(M()dohU.
Но, подобно D.2.2).
lim [ [ Ф(М0, Q)-a(M0)a?OjVb =
= f f Ф(Mo, Qo) • a(MQ) doMn -\a(Qo),
Vt=>Q->Q0 ~0
так что
lim
j* J Ф (Mo, Qo) • а (Мо) doMo + у а (Qo) D.3.7)
'о
§ 4] ТЕОРЕМЫ ЕДИНСТВЕННОСТИ И СУЩЕСТВОВАНИЯ РЕШЕНИИ 189
и аналогично
lim
" (Mo, Qo) • a. (Mo)doAh -~a(Qa). D.3.8)
i'e=>«-»«0 о
о
Сравнивая еще D.3.5) с C.5.12) и учитывая, что rQ — rM = —R,
имеем
Ф (Мо, Qo) = Ф (Qo, Mo). D.3.9)
Поэтому, введя в рассмотрение заданные на О распределения
поверхностных сил
lim no-f = (no-f)i = F(Q0), lim (nQ • f)e = f(Q0), D.3.10)
где в обоих случаях «g — единичный вектор нормали, внешней
к Vu и сославшись на D.3.4), D.3.7), D.3.8), D.3.9), приходим
к интегральным уравнениям второй внутренней (IIW) и второй
внешней (№') краевых задач:
II») | a (Qo) + Ф (Qo, Mo) • a (MQ) doMl = F (Qo), D.3.11)
H(e) | a (Qo) - J J Ф (Q.,, Mo) • a (Mo) doM, = - f (Qo). D.3.12)
'o
Заметим, что во второй формуле D.3.10) определение поверх-
поверхностной силы отличается знаком от ее обычного задания как
произведения внешней к Ve нормали на тензор напряжения.
Замечание. Сославшись на C.5.9), можно представле-
представление вектора перемещения D.3.1) в виде первого потенциала за-
записать еще так:
• (« " *5Г [Я Т^ <*"- + TaW Р-« Я
[о о
[
[о
D.3.13)
или, после замены R его значением rMn — rQ,
L О
D.з.14)
190
СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IV
Это решение в форме Папковича — Нейбера A.4.10), когда за
гармонические вектор и скаляр приняты потенциалы
1 Г Г а (Мо) 1
- - -doMr], BQ=
R
16лцA
Г tr{M0)-a(M0) ,
~) J J R й°м"
D.3.15)
4.4. Сопоставление интегральных уравнений первой и второй
краевых задач. Полученные в пп. 4.2 и 4.3 интегральные урав-
уравнения перепишем в такой последовательности:
~b(Q0)-
b{M0)-O(M0,Q0)doM>=-v(Q0),
E)(Qo, M0)-a(M0)doMt=~F(Q0),
I(fi) 16 (Qo) + J J b (Mo) • Ф (Mo, Qo) rfo^ = v (Qo),
о
1 a(Q0) + f Г Ф (Qo, Mo) • a (Mo) с?ож, = F (Qo).
D.4.1)
D.4.2)
Выше указывалось, что поверхностные интегралы понимаются
в смысле их главных значений, поэтому уравнения сингулярны.
Применимость к ним основных теорем и альтернатив Фредгольма
может быть доказана при значениях постоянных ц, v, для ко-
которых удельная потенциальная энергия деформации положи-
положительна [см. C.3.5), C.3.6) гл. III].
Интегральные уравнения, составляющие систему D.4.1),—
союзные уравнения; то же относится к паре уравнений D.4.2).
Соответствующие им системы однородных уравнений можно за-
записать в виде
T(t) T(e)
io , lo
TT(e)
Ho .
о
Ь°(М0)-Ф(М0, QQ)doM. = 0,
a" (Qo) -X \\ Ф(Qo, Мо) • a0(Mo)doM. = 0,
D.4.3)
причем X == 1 для задач W, Пое) и X = — 1 для 1Г, Щ'. Изве-
Известно, что собственные числа союзных однородных интегральных
уравнений одинаковы, так что эти уравнения или одновременно
(при одном и том же л) имеют только тривиальное (нулевое)
решение, или одновременно обладают собственными решениями,
отличными от тривиальных. Согласно альтернативе Фредгольма
известно, что в первом случае соответствующее неоднородное
уравнение имеет единственное решение, тогда как во втором оно
§ 4J ТЕОРЕМЫ ЕДИНСТВЕННОСТИ И СУЩЕСТВОВАНИЯ РЕШЕНИИ J91
не имеет решения при произвольной правой части, а при нало-
наложении на последнюю некоторых условий — решение не единст-
единственное.
Ниже доказывается, что К = 1 не является собственным чис-
числом системы союзных уравнений D.4.3). Поэтому первая внут-
внутренняя 1<г> и вторая внешняя П(е) задачи имеют единственное
решение при произвольных заданиях их правых частей.
Наоборот, при X = —1 однородное уравнение 1о имеет от-
отличное от нуля семейство решений D.2.10), зависящее от двух
произвольных постоянных векторов (от шести постоянных).Зна-
постоянных).Значит, и однородное уравнение По1) имеет также зависящее от ше-
шести постоянных семейство нетривиальных решений; поэтому за-
задачи IIW и ?е\ вообще говоря, решений не имеют. Это легко
понять, поскольку в задаче Ц(*> свободный член F(Q0), опреде-
определяющий распределение поверхностных сил, должен удовлетво-
удовлетворять уравнениям статики и при этом вектор перемещения опре-
определен с точностью до перемещения твердого тела. В задаче же
№ ¦—в самой ее постановке — накладывалось существенное ог-
ограничение на задание вектора v(Q0), на что обращалось внима-
внимание в замечании 3 п. 4.2.
Ниже группы задач D.4.1), D.4.2) более подробно рассмат-
рассматриваются по отдельности.
4.5. Теорема существования решения второй внешней и пер-
первой внутренней задачи. Пусть однородное интегральное урав-
уравнение
\ a (Qo) - J J Ф (Qo, Мо) • а (Мо) doMa = 0 D.5.1)
о
имеет нетривиальное решение a°(Q0). Тогда вектор перемеще-
перемещения v(Q), определяемый по D.3.1) первым потенциалом
° (Мо) • б (Мо, Q) doMo, D.5.2)
удовлетворяет однородным уравнениям теории упругости в пе-
перемещениях и убывает на бесконечности не медленнее, чем R~l,
а вычисляемые по нему поверхностные силы по D.4.1) и D.5.1)
исчезают на О и имеют порядок R~2 на поверхности Q сферы
достаточно большого радиуса R. Удвоенная потенциальная энер-
энергия деформации в таком напряженном состоянии, определяе-
определяемая формулой Клапейрона C.3.3) гл. III, равна
J J J f--edx= j j v -Fdo+ J J v-F do~
ve а о
- R2 J | v • F do* + J | v ¦ F do.
192 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ (ГЛ. IV
Здесь do*— элемент поверхности сферы Q* единичного радиуса,
а подынтегральная функция убывает не медленнее, чем R~3, так
что
' J J Т.. ё dx = J j' v ¦ F do = 0,
и вследствие положительной знакоопределенности удельной по-
потенциальной энергии деформации ё = 0. Поэтому v(Q) может
быть только перемещением среды как твердого тела, но оно
отсутствует на бесконечности, и поэтому
= A(Q,a°) = 0, QczVe. D.5.3)
Остается убедиться, что это равенство противоречит предпо-
предположению а0 Ф 0. Для этого отметим, что вследствие непрерыв-
непрерывности первого потенциала из D.5.3) следует
Ae(Q0) = Ai{Qo) = v{Q0) = 0, D.5.4)
и, еще раз обратившись к формуле Клапейрона, имеем
f--edx=jjv{Q0)-FdoMt = 0,
vt о
так что е = 0 и по D.5.4)
v{Q) = 0, QczVt. D.5.5)
Поверхностные силы, вычисляемые по равному нулю вектору
перемещения, конечно, отсутствуют, и по D.3.10) — D.3.12) те-
теперь получаем
(nQ •T)i — (nQ • Т)е = а°( Qo) = 0, D.5.6)
что и требовалось. Итак, интегральное уравнение Пое), значит
и союзное с ним уравнение ^о\ допускает только тривиальное
решение; X = 1 не является собственным числом этих уравнений.
Этим доказано существование и единственность решения задач
1(г), Ц(е) при произвольных заданиях на О вектора перемеще-
перемещения v(Q0) в первой из этих задач и поверхностных сил F(Q0) —
во второй.
4.6. Вторая внутренняя краевая задача (П(;>). Однородное
интегральное уравнение, соответствующее этой задаче,
lid0 yfl°(Q0) + J/ O(Q0, M0)-a°(Mо) doMn = 0 D.6.1)
о
является союзным с D.2.11):
If)e) | Ь° (Qo) + ' f b° (Mo) • Ф (AfOl Qo) doAU = 0. D.6.2)
§ 4] ТЕОРЕМЫ ЕДИНСТВЕННОСТИ И СУЩЕСТВОВАНИЯ РЕШЕНИЙ 193
Но последнее имеет нетривиальное решение D.2.10), значит, не-
нетривиальным решением обладает и первое. Обратившись теперь
к неоднородному интегральному уравнению D.4.2) задачи П<*>,
имеем
J j Ь° (Qo) • F (Qo) doQa = ~ 11 6° (Qo) • a (Qo) doQo +
о о
+ / f doMa [ / / b°(Qo) • Ф(Qo, M0)do J ¦ a(Af0).
Ho no D.6.2) внутренний интеграл равен — уб0^0), так что
- j\ b°(M0) • o(M0)rfo
О
Здесь доказана одна из теорем Фредгольма, выражающая, что
задача П<*> может иметь решение, если заданное распределение
поверхностных сил F(Q0) ортогонально семейству собственных
решений союзного интегрального уравнения D.6.2):
0 D.6.3)
о
или, если заменить вектор b°(Q0) его значением,
и вследствие произвола в выборе векторов «о, ю приходим к
ожидаемым условиям статики, выражающим требования обра-
обращения в нуль главного вектора и главного момента поверхност-
поверхностных сил в задаче №*>:
V = | J F (Qo) doQa = 0, m° = J" J r (Qo) X F (Qo) doQ} = 0. D.6.4)
о о
При соблюдении этих условий вектор перемещения v(Q) опреде-
определен с точностью до слагаемого перемещения твердого тела,
являющегося, в соответствии с одной из теорем Фредгольма,
собственным решением союзного уравнения D.6.2).
4.7. Эластостатическая задача Робена. Нетривиальное соб-
собственное решение a°(Qo) задачи Но" примем за плотность
первого потенциала, решающего задачу №>. Распределение
13 А. И, Лурье
194 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
поверхностных сил на О, соответствующее так заданной плотно-
плотности, по D.4.1), D.6.1) и D.3.10) будет
Q j)-^ J Ф(<Э„, M0)-u°{M0)doM, =
о
D.7.1)
Этим дается истолкование механического значения собственного
решения второй внутренней задачи.
Первый потенциал теории упругости, образуемый по плот-
плотности а°{М0), обозначим
w (Q) = IJ а0 (Мо) ¦ 0 (Мо, Q) иол,.. D.7.2)
о
Эта непрерывная во всем пространстве функция определяет век-
вектор перемещения
( w, (Q), Q c= Vt,
w(Q)=\ w(Q0), QcO, D.7.3)
1 we (Q), Q с Ve.
Вычисляемые по D.3,11) поверхностные силы на О, соответ-
соответствующие вектору перемещения w{(Q) задачи 1И!'), оказываются
равными нулю:
Ф (Qo, M0)-a0(M0)do,M- = lnQ,-f(a;i)]0 = 0> D.7.4)
что следует из определения D.6.1) плотности a°(Q0). Но пере-
перемещение ii>i(Q) во второй внутренней задаче при отсутствии по-
поверхностных сил может быть только перемещением твердого
тела %
и0 + &Хгд D.7.5)
и по непрерывности потенциала простого слоя D.7.2)
v>i (Qo) = «о + о) X rQa = и;е (Qo). D.7.6)
Представим себе твердое тело, впаянное в полость V, неогра-
неограниченной упругой среды. Сообщим ему перемещение, определяе-
определяемое вектором D.7.5). Это создает в Vr иоле перемещений we(Q),
задаваемое первым потенциалом D.7.2), причем взятое со зна-
знаком минус собственное решение —a°{Q) задачи По0 определяет
распределение по поверхности смещенного твердого тела реак-
реакций среды на него (напомним, что nQ в D.7.1) — единичный век-
вектор нормали, направленной внутрь Ve).
Эта задача о напряженном состоянии упругой среды, возни-
возникающем при сообщении перемещения впаянному в нее твердому
§ 41
ТЕОРЕМЫ ЕДИНСТВЕННОСТИ И СУЩЕСТВОВАНИЯ РЕШЕНИЙ
195
телу, представляет аналог задачи Робена электростатики. По-
Постоянству потенциала на проводящей поверхности и внутри нее
соответствует твердое перемещение объема Vu а отсутствию
поля электрического напряжения — отсутствие напряженного
состояния в Vj-объеме. Задача Робена сводится к разысканию
распределения заряда на проводнике О из однородного инте-
интегрального уравнения для плотности потенциала простого слоя;
этому соответствует сведение эластостатической задачи Робена
к разысканию собственного вектора a°(Q0) задачи По*. Суще-
Существование решения эластостатической задачи Робена гаранти-
гарантируется наличием нетривиального собственного решения инте-
интегрального уравнения По".
Главный вектор и главный момент системы сил, которые
надо приложить к впаянному в среду твердому телу, чтобы со-
сообщить ему перемещение D.7.5), определяются из уравнений
статики
V = J1 a°(Q0) doQn, mc= jjr(QQ)Xa° (Qo) doQn. D.7.7)
Назовем через
к k + 3
a, a (k = l, 2, 3) D.7.8)
распределения поверхностных сил по О, вызываемые приложе-
k
нием к твердому телу единичной силы V == ih с линией действия
по оси Cxk и соответственно единичного момента т = 4 относи-
относительно этой оси. Тогда по D.7.7)
г гk
J J a
Jr — '
3. • ^ = 0,
r(Q0) Xo.
k + 3
¦(Qo)X о (
ir = 0,
D.7.9)
так как линией действия равнодействующей сил а является
k + г
ось Cxh, а распределения сил а статически эквивалентны
парам.
Через
k fe+3
u = ik, u=ikXr(Q0) D.7.10)
назовем систему собственных решений интегрального уравнения
Icf. Очевидно, что любое перемещение впаянного в V; твердого
13*
196 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
тела является линейной комбинацией этих элементарных пере-
перемещений. Формулы D.7.9) теперь переписываются в виде
г=1, 2 6). D.7.11)
Этим определяется система распределений поверхностных сил —
собственных решений интегрального уравнения По", ортонорми-
рованных с системой D.7.10) собственных решений задачи I (ое)
[см. D.2.11)].
4.8. Первая внешняя краевая задача A(е)). Интегральное
уравнение D.4.2) этой задачи по упомянутой в п. 4.6 теореме
Фредгольма имеет решение лишь при условии ортогональности
его свободного члена любому собственному решению a°(Q0)
задачи По':
= 0. D.8.1)
Это условие, как уже говорилось в замечании 3 п. 4.2, вызвано
не существом задачи, а принятым представлением v(Q) в форме
второго потенциала теории упругости. При таком представлении
этот вектор на достаточно большом удалении от О убывает, со-
согласно C.8.3), не медленнее, чем R~2, тогда как следует потре-
потребовать его убывания не более медленного, чем R~l.
Введем вместо заданного распределения v(Q0) на О вспомо-
вспомогательный вектор
6 г
г
где и — элементарная система собственных решений D.7.10) ин-
интегрального уравнения \q .
Условие D.8.1) будет удовлетворено при любом собственном
векторе a°(Qo), если потребовать его выполнения с каждым из
векторов D.7.8). Сославшись на D.7.11), имеем
J v* (Qo) • a (Qo) doQt =\\v (Qo) • a (Qo) doQ, - Dk = 0. D.8.3)
о
Этим определены коэффициенты Dr, и, приняв теперь,
з
«о = ^ h \ | v (Qo) • а (Qo) doQtl,
D.8.4)
з
k=i
Иv
k + 3
а (
§ 5] НАПРЯЖЕННОЕ СОСТОЯНИЕ В ДВУСВЯЗНОМ ОБЪЕМЕ 197
представим D.8.2) в виде
f*(Qo) = »(Qo) — («o + 6)XrQ). D.8.5)
Разыскивая теперь решение v*(Q) в форме D.2.1) второго по-
потенциала теории упругости, придем, вместо D.2.5), к интеграль-
интегральному уравнению
у Ь (Qo) + ^Ь (Л*о) • Ф Шо, Qo) doM, = v (Qo), D.8.6)
о
имеющему решение, поскольку соблюдено условие ортогональ-
ортогональности D.8.3) его свободного члена собственному вектору за-
задачи Но' .
Остается построить в Ve первый потенциал we(Q), решающий
эластостатическую задачу Робена, соответствующую заданию
на О вектора перемещения
w, (Qo) = «о+ «»Х »¦<?,. D.8.7)
Решение первой внешней краевой задачи теперь представляется
в виде
v(Q) = v*(Q) + we(Q). D.8.8)
Действительно, это решение удовлетворяет в Ve однородным
уравнениям теории упругости (им удовлетворяет каждый из
потенциалов)., а на О по D.8.5) и D.8.7)
v (Qo) = v (Qo) - («о + « X rQo) + (и0 + (о X rQo) = v (Qo),
что и требуется. Единственность решения гарантируется теоре-
теоремой Кирхгоффа.
§ 5. Напряженное состояние в двусвязном объеме
5.1. Обзор содержания. В дальнейшем предполагается, что
компоненты тензора деформации е представляют однозначные
непрерывные функции координат, имеющие непрерывные част-
частные производные первого и второго порядка и удовлетворяющие
условию сплошности B.1.5) гл. II. Условимся называть такую
деформацию правильной.
При правильной деформации упругой среды в односвязном
объеме вычисляемые по тензору деформации вектор перемеще-
перемещения и и линейный вектор поворота « также однозначны и не-
непрерывны. Согласно теореме единственности (п. 4.1) Кирхгоффа
состояние этого объема при отсутствии внешних сил является
натуральным. Этого нельзя сказать в случае двусвязного объема
(тор, полый цилиндр); в нем может существовать напряженное
состояние при правильной деформации и при отсутствии рнеш-
]98 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
них сил, Сообщение напряженного состояния двусвязному упру-
упругому телу, ранее находившемуся в натуральном состоянии, мо-
можно мыслить осуществленным путем создания дисторсии Воль-
терра (п. 2.4 гл. II). Двумя конгруэнтными разрезами из тела
удаляется тонкий слой материала, и концы образовавшегося
односвязного объема спаиваются по конгруэнтным поверхно-
поверхностям— по «барьеру». Характеристиками дисторсии являются
два циклических постоянных вектора с, Ь, называемые ниже по-
поступательным и поворотным векторами дисторсии; ими опреде-
определяются поступательное перемещение и поворот, которые должны
быть сообщены одному из концов после разрезания, чтобы со-
совместить его с другим конгруэнтным
концом.
Заданием внешних сил, действую-
действующих на упругое тело в односвязном
объеме, определяется напряженное со-
состояние в нем и однозначный непре-
непрерывный вектор перемещения; в дву-
связном объеме определение напря-
напряженного состояния по внешним силам
возможно, лишь если наперед из-
Рис. 15. вестно, что векторы дисторсии равны
нулю.
Разрывы вектора поворота со и вектора перемещения и на
барьере определяются по формулам Вейнгартена через векторы
дисторсии с и Ь; компоненты их Вольтерра назвал постоянными
барьера. Для двусвязного тела формулировка теоремы Кирх-
гоффа должна быть дополнена требованием задания шести по-
постоянных барьера: если упругая среда заполняет двусвязный
объем и ее деформация правильная, напряженное состояние в
ней определяется заданием не только внешнцх сил, но и шести
постоянных барьера. Это доказывается в п. 5.2 построением
напряженного состояния в ненагруженном теле по заданию век-
векторов с, Ь. Измененная формулировка теоремы взаимности в дву-
связном теле дается в п. 5.3, а в пп. 5.4 и 5.5 приводится выра-
выражение потенциальной энергии деформации, определяемой нали-
наличием дисторсии. Краевая задача теории дисторсии сформулиро-
сформулирована в п. 5.6. Примеры, относящиеся к задачам дисторсии в
полом цилиндре, рассматриваются ниже, в п. 7.3 и гл. V.
5.2. Определение напряженного состояния по постоянным
барьера. Из упругого тела в двусвязном объеме Vt выделяется
объем Vi , ограниченный поверхностью 5, часть которой а пред-
представляет барьер, делающий Vt односвязным объемом. Поверх-
Поверхность объема Vj обозначается О, объем вне О — через Ve, а вне
S —через Vl = Ve + Vi~V] (рис 15).
§ 5] НАПРЯЖЕННОЕ СОСТОЯНИЕ В ДВУСВЯЗНОМ ОБЪЕМЕ 199
Пусть с, Ь — заданные постоянные барьера. Сославшись на
формулы C.7.9) и C.7.10), имеем
6 (Q) (с + Ь X rQ) = - J J (с + Ь X rMs) ¦ Ф (Ms, Q) doMs, E.2.1)
s
причем 6(Q)= 1 при QczV] и 6(Q) = 0 при QaVe, так что
левая сторона этого равенства может быть представлена в фор-
форме разности значений вектора перемещения
v (Q) = т «' v E.2.2)
при переходе через барьер. Тензор деформации e(vQ), вычисляе-
вычисляемый по этому вектору, равен нулю повсюду:
е (v (Q)) = 0 (Q cz V], Q с S, Q с Vl). E.2.3)
Итак,
w (Q) = - J J (с + 6 X rMs) ¦ Ф (М5, Q) doMs. E.2.4)
s
Интеграл справа представим в виде суммы двух интегралов:
и (Q) = - J J (с + Ь X rM(J) ¦ Ф (Ms, Q) doMa, E.2.5)
и' (Q) = - J J (с + 6 X r*s) • Ф (Мв, Q) doMs. E.2.6)
S-a
Вектор и'(Q) сохраняет непрерывность при переходе через а,
a u(Q) — через поверхность S — a; то же можно сказать о вы-
вычисляемых по и' и и тензорах деформации e(«'(Q)), e(«(Q)).
Вместе с тем по E.2.3)
Но тензор e(«'(Q)) остается непрерывным при переходе через а,
значит, на а непрерывен и тензор e(«(Q)), а вследствие непре-
непрерывности на а вектора и'(Q) вектор
= v(Q)-u'(Q)
остается непрерывным повсюду, исключая барьер о, на кото-
котором он испытывает тот же разрыв непрерывности, что и v(Q),
так что по E.2.4)
~H-(Q0) = c + 6XrCa. E.2.7)
Здесь в согласии с B.4.6) гл. II индексами « + » и «—» обозна-
обозначены значения и «под» и «над» барьером (рис. 9).
200 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Вектор u(Q), представимый по E.2.5) в виде
(Ма, Q)doMg-
а
- Ъ ¦ J | гма X Ф (Ма, Q) doMa, E.2.8)
о
является вектором перемещения точек упругой среды, удовле-
удовлетворяющим однородным уравнениям теории упругости в пере-
перемещениях. Вычисляемые по нему тензоры деформации e(u(Q))
и напряжений T(u(Q)) повсюду непрерывны; оставаясь непре-
непрерывным всюду, кроме барьера о, этот вектор на барьере испы-
испытывает разрыв непрерывности требуемого вида E.2.7).
По тензору T(u(Q)) определяется распределение поверхно-
поверхностных сил n-T(u(Q)) на поверхности двусвязного объема О;
эта система сил статически эквивалентна нулю, так как опреде-
определяемое по вектору u(Q) напряженное состояние является равно-
равновесным.
Определим теперь в объеме У, напряженное состояние Т*,
создаваемое поверхностными силами — n-T{u(Q)) при отсут-
отсутствии дисторсии. Такое напряженное состояние по теореме п. 4.6
существует и определяется единственным образом, так как иско-
искомый в нем вектор перемещения «* непрерывен и однозначен, а
система поверхностных сил—n-T(u(Q)) статически эквива-
эквивалентна нулю. Наложение напряженных состояний T(u(Q)) и Г*
представляет напряженное состояние в двусвязном объеме, опре-
определяемое только дисторсией, так как внешние силы в нем отсут-
отсутствуют.
5.3. Теорема взаимности. Применим формулу Клапейрона
C.3.3) гл. III к односвязному упругому 'телу, получающемуся
из двусвязного с помощью барьера
2а= j j j pK-udx+ j j F-udo +
V 0
+ J J n+ • f + • u+ do + | J n- ¦ f~ ¦ u- do, E.3.1)
o+ o-
где n+ = — n~ — единичные векторы нормали к барьеру, напра-
направленные вовне рассеченного барьером тела; на барьере f+ =
= ?-=?. Сославшись на E.2.7) и считая, что внешние силы
отсутствуют, получим
2а = [ j п+ • f •{c + bXr)do = Q-c + m°-b. E.3.2)
§ 5] НАПРЯЖЕННОЕ СОСТОЯНИЕ В ДВУСВЯЗНОМ ОБЪЕМЕ 201
Здесь через Q и т° обозначены главный вектор и главный мо-
момент относительно выбранного начала координат создаваемых
дисторсией напряжений в выбранном барьере:
Q= J J n+ -fdo, m°= J J rX(n+ -f)do. E.3.3)
a a
Рассматривая два состояния упругого двусвязного объема —
первое, создаваемое действием массовых и поверхностных сил
рК', F' и при наличии дисторсий с', Ъ', и второе, в котором эти
величины обозначены рК", F", с", Ъ", по теореме взаимности
имеем
J J J p/C • u"dx+ \\F' - и"do + Q' - с" + тР'- Ь" =
V О
= 111 p/T • «' dt + 11 F" -ufdo + Q" • c' + mP". 6'. E.3.4)
у о
В частности, когда в первом отсутствуют внешние силы, а во
втором — дисторсия, приходим к соотношению (Колонетти, 1912)
J J J pK"-u'dx+j J F" • m' do + Q" ¦ c' + m°" ¦ V = 0. E.3.5)
V 0
При отсутствии внешних сил в обоих состояних
Q' ¦ с" + т0' • Ь" = Q" ¦ с' + т°". 6'. E.3.6)
В частности, считая первым состоянием поступательную дистор-
сию с, а вторым — поворотную Ъ, имеем с'— с, Ъ'= 0, с" = 0,
*" = Ь по E.3.6)
6 • то = с • Q, E.3.7)
где Q, т° — главный вектор и главный момент напряжений,
создаваемых соответственно поворотной F) и поступательной
дисторсией (с).
5.4. Потенциальная энергия дисторсий. В линейно-упругом
теле главный вектор Q и главный момент т° напряжений на
барьере, создаваемых дисторсией, представляют линейные век-
векторные функции определяющих дисторсию векторов с, Ъ:
Q=Cc + М-Ь, m° = N-c + В-Ъ. E.4.1)
Здесь С, М, N, В — тензоры второго ранга; слагаемые М-b и
N-c, очевидно, представляют векторы, обозначенные в E.3.7)
соответственно Q* и /п°; поэтому
с-М-Ь = b-N-c, E.4.2)
так что тензор N транспонирован с М:
N = М*. E.4.3)
202 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
Выражение потенциальной энергии дисторсии E.3.2) теперь за-
записывается в виде
а = 1 (с . с ¦ с + 1с ¦ М ¦ Ь + Ь ¦ В ¦ Ь). E.4.4)
В общем случае оно содержит 21 постоянную, так как тензоры
С , В, входящие в E.4.1) симметричны, что также легко следует
из теоремы взаимности. Действительно, рассматривая два со-
состояния, например, поступательной дисторсии на одном и том
же барьере, имеем
c' = Ci*i. *' = 0, Q=C -с' = схС •*!,
с" = c2h, Ь" - 0, Q" = C ¦ с" = с2С ¦ i2
и по E.3.6)
i{ ¦ С • i2 = i2 • С ¦ г'|.
что и требуется. Заметим, что величина потенциальной энергии
дисторсни зависит, вообще говоря, от выбора барьера — места
осуществления дисторсии.
5.5. Случай тела вращения. За ось вращения принимается
ось Охъ, барьером служит плоская область 0 пересечения тела
меридиональной полуплоскостью; через 0о назовем барьер, обра-
образуемый плоскостью ОхзА'1. В рассмотрение вводится триэдр еди-
единичных векторов цилиндрической системы координат ег, еф, k
(см. п. III. 7). Вследствие симметрии напряженное состояние, со-
создаваемое на барьере со дисторсией с0, 6°, такое же, как созда-
создаваемое на барьере дисторсией с векторами с, Ь, ориентирован-
ориентированными в осях er, efr, k так же, как с0, 6° — в осях e°r, e\y k. По-
Поэтому, введя в рассмотрение тензоры поворота [см. A.8.1)]
А = е\ег + <реф + kk, А* = ere\ +\e» + kk, E.5.1)
имеем
с = Д*. со = с0 • А, Ь = Л* ¦ 6° = 6° • А. E.5.2)
Эти значения с0, Ь° внесем в выражение потенциальной энергии
дисторсии, также, конечно, сохраняющей свою величину в двух
рассматриваемых состояниях дисторсии. По E.4.4) имеем
2а = с°-С0-с°+2с0- М°-60+60-В0-6° = с-С-
= с0 • А ¦ С • А" ¦ с0 + 2с° ¦ А ¦ М • А* • 6° + 6° • А- В ¦ А* • 6°, E.5.3)
так что
С°=А-С-А\ М°=А-М-А\ В° = А-В-А\ E.5.4)
§ 5] НАПРЯЖЕННОЕ СОСТОЯНИЕ В ДВУСВЯЗНОМ ОБЪЕМЕ 20,3
Тензоры С, М, В постоянные (не зависят от положения барьера,
то есть от угла ф), что следует из второго выражения потенци-
потенциальной энергии E.5.3).
По E.5.1) и (III. 7.3) имеем
dA п n dA* n п
pvp р\) р a pU U
и, чтобы не повторять одного и того же вычисления, вычислим
производную по ф от тензора А-Р-А*, где Р — постоянный тен-
тензор второго ранга:
±А.Р.А' = {е% - е%ег) • Р ¦ # + А- Р ¦ (erf - erf) =
= (« - е^У) (Р21 + Р12) + [frf + еуч) (Р22 - Рп) + e\kP,n +
+ *^з2-<*Лз-КРзг
Условия обращения в нуль этого тензора поэтому записываются
в виде
Рц = Pi2, ?*21 = —?*12, РЪ — Р$2 ~ Р\3 = Pi\ — 0,
так что
Р = Pn{eTer + elfe,r,)+ P33kk + Pi2(ereff — e,(er),
а если тензор Р симметричен, Р = P\ то и Р12 = 0. Итак,
С = М„ (erer + вфв,) + С33**, S = В„ (егег + ефеф) + B33kk,
, E.5.5)
= Ми {егег + е^) + M33kk + Ml2 (ere(f - ефег)
и выражение потенциальной энергии дисторсий E.4.4) на этом
этапе представляется в виде
2а = С„ (с\ + cl) + С33с23 + 2МИ (ft,c, + 62с2) + 2М,2 (с,62 - c2b,) +
+ 2МззС3йз + Ян (й? + йг) + Вззйз, E.5.6)
но возможно его дальнейшее упрощение, основанное на сохра-
сохранении симметрии при поворотной дисторсий Ьъ и поступатель-
поступательной с2.
Пусть отличны от нуля только &з, с3. Тогда по E.5.6)
2а = Сззсз + 2Мзз6зС3 + B33bl
и это выражение не должно менять величины при изменении
знака относительного поворота bs спаиваемых концов вокруг
оси симметрии; поэтому М3з = 0. Такое же рассуждение в при-
применении к случаю с2 ф 0, 62 Ф 0 дает Мп =0, так как и измене-
изменение знака поступательной дисторсий с2, перпендикулярной
204 СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IV
барьеру, также не влияет на величину потенциальной энергии
дисторсий. Итак,
Мзз = 0, Ми = 0. E.5.7)
Пусть теперь только с2 ф 0. В напряженном состоянии, со-
создаваемом такой дисторсией, вследствие симметрии отсутствуют
касательные напряжения tx2 = tr(f, t23 = t4z, так что по E.3.3)
t22do = Q2er m° = J J (rer + x3k) X е^22 do =
о о
k П rt22 do — e(j x3t22 do = km\ — eTm\, E.5.8)
и вместе с тем, обращаясь к E.4.1), E.5.5) и E.5.6), имеем
Q = Cnc2ev=Q2e(f, т°=-М{2{е^ег-еге^) • с = — МХ2с2еп а = -^
E.5.9)
откуда следует, что СЬ^О, а момент т° имеет направление ег;
т\ = т\^ 0.
Перенесем центр моментов О в точку О* на оси Ох3; тогда
по E.5.8).
Х3 ~ Х3
=
и можно выбрать h так, чтобы обратить т°* в нуль:
Эту точку О* на оси х3 Вольтерра называет центральной; при
наличии в теле плоскости симметрии, перпендикулярной оси
вращения, центральной будет точка пересечения этой оси с пло-
плоскостью симметрии. Выбрав ее за центр моментов, имеем теперь
по E.5.8)
то, = _ м{2с2еТ = О, М12 = 0, E.5.10)
и по E.5.7) тензор М оказывается нулевым. Выражение E.5.6)
потенциальной энергии дисторсий приводится к виду
а = j [Си {с\ + сг) + Сззс\ + Ви [b] + bf) + B33bl]. E.5.11)
В него входит только четыре постоянных; вместе с тем по E.4.1)
главный вектор и главный момент относительно центральной
точки напряжений в меридиональном сечении тела оказываются
равными
О = С -с=Сп {с{ег + с2еф) + C33c3k,
§ 5] НАПРЯЖЕННОЕ СОСТОЯНИЕ В ДВУСВЯЗНОМ ОБЪЕМЕ 205
— в упругом двусвязном теле, обладающем симметрией враще-
вращения, каждой элементарной дисторсии сопоставляется ей соот-
соответствующее усилие при условии, что за центр моментов при-
принята центральная точка. Напряжения, создаваемые поступатель-
поступательной дисторсией, статически эквивалентны равнодействующей
с линией действия, проходящей через центральную точку, а со-
создаваемые поворотной дисторсией—паре сил.
5.6. Краевая задача для двусвязного тела вращения. Вектор,
задаваемый равенством
»¦ = -р-(е + Ъ X R) фU = arctg -7-, R = err + kx3 = isxs\, E.6.1)
обладает требуемой для вектора перемещения многозначностью,
а вычисляемая по нему деформация однозначна и непрерывна
в области, из которой исключена ось х5. Действительно, градиент
этого вектора и транспонированный с ним тензор равны
E.6.2)
и, далее,
def v, = ~ (ефс + сеф + еф6 X R + Ъ х Rev), E.6.3)
так как
ЬХЁ-ЁХЬ = еш (itis + isit) bk = 0. E.6.4)
Вектор z>« не удовлетворяет однородным уравнениям равнове-
равновесия в перемещениях; поэтому введя корректирующий вектор v,
однозначный и непрерывный в области, из которой исключена
ось Олг3, следует потребовать, чтобы вектор
u = vt + v E.6.5)
представлял частное решение этих уравнений. Непосредствен-
Непосредственным вычислением проверяется, что таким решением может слу-
служить вектор
X R)y + [k X c + (k X b) X R + Y(T^y hr]
E.6.6)
206
СООТНОШЕНИЯ ЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IV
Тензор напряжении, вычисляемый по этому вектору, оказывает-
оказывается равным
ce(f + e((bX R + b X Re,e + erk X с + k X сег +
+ er (k X 6) X R + {k X b) X Rer] +
+ & lee (l + lnr)
+ 7"
'e' (l + lnr) + e/q) In r]}. E.6.7)
Краевая задача теории дисторсий Вольтерра сводится к ра-
разысканию из однородных уравнений равновесия вектора пере-
перемещения U по краевому условию на поверхности О двусвязного
объема
n-T{U) =
(и).
E.6.*
Громоздкость этих формул объясняется их общностью — рас-
рассмотрен общий случай дисторсий. Для поворотной дисторсий
вокруг оси симметрии, когда только 63 Ф 0, имеем
и==
¦2v
2(l-v)-rlnre')'
E.6.9)
причем возникают только нормальные напряжения
~ 23i
2-3v
-v)(l-2v)
3v — 4v2
l-v
2v
lnr),
\nr).
E.6.10)
2я 3\ A - v)(l -2v) ' 1 -v
Простые формулы получаются также для поступательной ди-
дисторсий с2:
и =
(X COS ф
еф cos ф) Ф — (er cos qp — е^ sin ф) In r]<
(х cos ф ц sin ф
E.6.11)
I
Решение этих задач для полого цилиндра приведено в п. 7.3
1л. V.
ЧАСТЬ III
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ЛИНЕЙНОЙ
ТЕОРИИ УПРУГОСТИ
ГЛАВА V
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
§ 1. Неограниченная упругая среда
1.1. Силовые точечные особенности. Перемещение точки «на-
«наблюдения» М в неограниченной упругой среде под действием
сосредоточенной в «точке истока» Q силы Р определяется с по-
помощью тензора Кельвина — Сомильяна формулой C.5.9) гл. IV:
и(М, Q)= U(M, Q) Р. A.1.1)
Здесь
-^)Ё + ^1 R-rM-rQ, R = \rM-rQ\.
A.1.2)
Поместив точку приложения в близкую к Q точку Q':
r'Q=r0 + p, A.1.3)
и проводя вычисление с учетом слагаемых первой степени отно-
относительно р, имеем
При таком смещении точки истока тензор Кельвина — Со-
Сомильяна и вектор перемещения представляются в виде
и(М, Q') = u(M,Q) +
A.1.6)
208 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
В этих выражениях диада рР представляется ее разбиением на
симметричную и кососимметричную части, причем в первой из
них выделяются девиатор и шаровой тензор:
(рР + Рр) Q |(pPPp) A.1.7)
р = Dev р + { ?/,(р) = Devp + у р • Р?. A.1.8)
Теперь, учитывая также соотношения
Я ¦ Q • Я = 0, Я • рР • Я = Я • Dev р • Я + у Я2р ¦ Р,
Я • Q = 4 (J? • рР - R ¦ Рр) = у (р х Р) X Я = ^ mQ (P) X R,
где, как всегда т^(Р)—момент силы Р относительно точки Q,
можно представить формулу A.1.6) в виде
8ЯмГ; * [ + 2 A _32v) ^2 ЯЯ • Dev p • я] ¦ A.1.9)
Полагая р—>0, но Р->св так, что компоненты диады рР
сохраняют конечное значение, назовем величины р, mQ(P),
р • Р, локализуемые в результате предельного перехода в точ-
точке Q, соответственно силовым тензором, сосредоточенным мо-
моментом, интенсивностью центра расширения. Введение этих «си-
«силовых точечных особенностей» позволяет приписать самостоя-
самостоятельное истолкование отдельным слагаемым формулы A.1.9):
а) перемещение, вызванное действием силы Р в точке Q:
Ul(M,Q)=U(M,Q)-P; A.1.10)
б) перемещение от сосредоточенного в точке Q момента:
u2(M,Q) = -~rtn<i(P)xR; A.1.11)
в) перемещение от центра расширения в точке Q:
»з Ш, Q) - 24^-2! v) Р ¦ Р Jr = - J-{{2V_ v) P • Р V± ; A.1.12)
г) перемещение от силового тензора:
A.1.13)
Перемещения, создаваемые сосредоточенной силой, убывают
при удалении от точки истока, как Я, а от прочих точечных
особенностей, как R~2,
§ 1] НЕОГРАНИЧЕННАЯ УПРУГАЯ СРЕДА 209
1.2. Система сил, распределенных в малом объеме. Формулы
Лауричелла. Рассматривается действие на среду системы
сил Рь Р2, ..., Рп, приложенных в окрестности точки Q в точ-
точках Qb Q2, ..., Qn с вектор-радиусами р,, р2,..., р„, имеющими
начало в точке Q. Тогда перемещение точки М будет геометри-
геометрической суммой перемещений A.1.9), создаваемых каждой си-
силой по отдельности. Вводятся в рассмотрение: а) главный век-
вектор Р системы сил
б) ее главный момент относительно точки Q
т«=2/л<ЧР;), A-2.2)
в) тензор системы сил
п
i-^iQiPi + PiVi) A-2.3)
г) и его первый инвариант
п
Цр*-*/. (L2>4)
2=1 1=1
При непрерывном распределении сил по линии, поверхности,
объему эти суммы заменяются соответствующими интегралами.
Теперь вектор перемещения в точке М представляется в виде
и(М, Q)=U(M, Q).P + ^rmQXR + -^-^v) ^з /, (Р)
+ 8я, il'-v) *з [* • PevР + 2 A -I) ^ ^ • Pevр • /?]. A.2.5)
Рассмотрим случай силового диполя —так называется си-
система двух равных, противоположно направленных сил с общей
линией действия; направление этой прямой зададим единичным
вектором е, тогда
Р, = ~еР, Р2 = еР, р, = 0, р2 = ер,
причем произведение рР = о назовем интенсивностью диполя, а
тензор оее — дипольным моментом. В формулах A.2.J) — A-2.4)
теперь
Р = о, тЯ = 0, р = оее, /, (р) = a, Devр = (ее -1 f)а, A.2.6)
}4 А. И. Лурь?
210 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
и перемещение в точке М от диполя в точке Q по A.2.5) пред-
представляется в виде
Силовой тензор, определяемый тремя диполями одинаковой
интенсивности о по трем взаимно перпендикулярным направле-
направлениям, является шаровым:
р= <у{е\ех + е2е2 + е3е3) = оЁ, It(p)= За = q, Dev p = 0.
Такая особенность называется центром расширения, q — его ин-
интенсивность; ей соответствующее перемещение по A.2.5) равно
и{М, Q)= o/'7i2v)?P3 R = ~ o/~n2V x ?v-^- A-2-8)
v ^-' 24яц A - v) R3 24nn(l-v) ч R y '
Без труда находится напряженное состояние, создаваемое цент-
центром расширения; имеем
g = _w
24nn(l-v) R
12n(lv)v /
Компоненты тензора напряжения в сферической системе коор-
координат [см. A.9.4) гл. IV] можно записать в виде
_ 1 -2у q _ _ 1 -2v q _ __
°R~— 6n(l-v) Ж* CT«-^~ 12n(l-v) Ж' т«в~т^-т^-и.
A.2.10)
Такое напряженное состояние реализуется в упругой среде,
снабженной полостью радиуса Ro, по поверхности которой рас-
распределено нормальное давление интенсивности
р-
6n(l-v)
В этом радиально-симметричном напряженном состоянии пере-
перемещения и напряжения равны
^ ыв=«я = 0, 0Д = —р-^, oe = 0?i = p-A. A.2.11)
Перемещение от системы трех ориентированных по взаимно
ортогональным направлениям диполей, с суммой интенсивно-
стей, равной нулю, определяется только четвертым слагаемым
формулы A.2.5), так как в этом предположении силовой тензор
является девиатором.
Перемещение, создаваемое парой, не равно перемещению от
ее момента, так как второе слагаемое формулы A.2.5) пред-
§ I] НЕОГРАНИЧЕННАЯ УПРУГАЯ СРЕДА 211
ставляет перемещение от сочетания пар с равным нулю сило-
силовым тензором. Такая особенность называется центром враще-
вращения; ее можно, например, представить совокупностью четырех
равных по величине сил, расположенных в одной плоскости и
образующих пары одного направления вращения:
Для такой системы сил
р = о, т<?= р2 X Р2 + р4 X Р4 = 2/гРе, X е2 = 2hPe3 = тег, р=0,
причем т — алгебраическая сумма моментов пар. Перемещение,
определяемое центром вращения, по A.2.5) равно
т Rq з ' т
'3 /Ч ~ Rz ° R '
A.2.12)
Это распределение перемещений создается в упругой среде,
если впаянному в нее твердому шару радиуса Ro сообщить по-
поворот, задаваемый вектором 8 . Таково решение наиболее про-
простой из эластостатических задач Робена (п. 4.7 гл. IV). Вектор
напряжения на площадке с нормалью п здесь оказывается рав-
равным
R3
я • f = Зц -^- F х я - 29 X вдЯ • ед + я X елв • ел) A.2.13)
и по поверхности сферы R = Ro с наружной нормалью п = eR
f Q. A.2.14)
Главный вектор этой системы сил равен нулю, а ее главный мо-
момент будет
mQ = Зц J J R X (л X 6) do = Зц J J {пЯ ¦ 0 - QR) do =
о о
= Зц / J J | VR • G dx - 4п/?о6^ = —8яц#о6 = — m«3 A.2.15)
так как V#-8 = 8. К шару должен быть приложен момент про-
противоположного знака (он передается среде через поверхность
полости). Пришли к ожидаемому результату A.2.12).
Приведенными примерами показана возможность построе-
построения силовых систем (сила, центр вращения, центр расширения,
силовые диполи), соответствующих каждой из введенных осо-
особенностей по отдельности. Этим доказано, что каждая из четы-
четырех групп слагаемых формулы A.2.5) представляет некоторое
частное решение уравнений теории упругости, непрерывное
14*
212 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
вместе со своими производными в любой области с исключен-
исключенной точкой, в которой сосредоточена особенность.
Понятие особенностей, определяемых силовым тензором,
было использовано Лауричелла A895) для представления ком-
компонент тензора деформации упругого тела через внешние силы.
Вывод формул Лауричелла основан на применении теоремы
взаимности Бетти к двум состояниям: 1) первое состояние соз-
создается поверхностными силами F (при отсутствии объемных),
причем через и, Т обозначаются вектор перемещения и тензор
напряжения в этом состоянии; 2) второе состояние и*, Т* за-
задается: а) действием в точке Q силового тензора, определяю-
определяющего вектор перемещения м* и тензор напряжения f\, и б) на-
наложением на это действие напряженного состояния и*2, 7V сни-
снимающего нагружение поверхности О тела. Вектор перемещения
в этом состоянии и тензор напряжения равны
«* = «; + «; ? = f\ + f\, A.2.16)
так что по условию
n-f*|o = 0, A.2.17)
чем определяются конечные и непрерывные в объеме тела
функции и*, f*.
Теорема взаимности применяется к объему, ограниченному
извне поверхностью О тела, а изнутри сферой 2 с центром в Q;
через п — R~lR обозначается единичный вектор нормали, внеш-
внешней к сфере (внутренней к рассматриваемому объему). Тогда,
сославшись на A.2.17), имеем
J | F -и* do- J J n-f -и] do- | J n-f • u2do =
0 2 2
= — | J n • f; ¦ udo - J J n • f * • и do ,
2 2
и применение теоремы взаимности приводит к соотношению
J J F-u*do= J| n.(f-«;-f;-a)do. A.2.18)
О 2
Поскольку [см. A.2.5)] перемещения и напряжения, создавае-
создаваемые особенностью типа силового тензора, в точке Q становятся
бесконечными соответственно как R'2 и R'3, достаточно, как
станет ясным из приведенного ниже вычисления, принять, что
в объеме v сферы
= fQ, u = uQ + R-(Vu)Q, A.2.19)
§ 1] НЕОГРАНИЧЕННАЯ УПРУГАЯ СРЕДА 213
так как слагаемые более высокой степени относительно R отпа-
отпадут в предельном переходе R -> 0.
Обратившись к A.2.5) и переходя от поверхностных интегра-
интегралов к объемным, имеем
JJJ V-f-RR-Devp-R dr\,
v J
где Sa = l\(p). Сославшись на (И.3.10) и учитывая, что
V- Т = 0, имеем
V . f • R = f--E,V •? ¦ R- Devp = r--Devp, V-f -RRDevpR =
= f ¦ ¦ (ER • Dev p ¦ R + 2R- Dev pR)
и, далее,
V . f . R dx = | я/?3/! (f),
Нетрудно также видеть, что
и поэтому
JJJ V - f •/?/?• Devp •/?^т = ^ f--Dev/3.
Заменив еще тензор Т и его первый инвариант выражениями
найдем
J J п • f - и\ do - -Гд^гг^)- [5ст A + v) О + (8 - 10v) е • - Dev p].
214 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Переходя ко второму слагаемому в формуле A.2.18), заметим,
что вычисляемый по и* тензор напряжений оказывается равным
и поэтому
Теперь имеем
J J п ¦ ТI • и do = ]5A'_ - [- 10 A - 2v) 0^ + (- 7 + 5v) г¦ • Dev p],
и искомое выражение A.2.18) приводится к виду
F-u*do = aft + e--Devp = e--p. A.2.20)
В частности, для центра расширения Dev p = 0, и, положив
a = 1, получим
¦»= f f F-iTdo. A.2.21)
'о'
Для силового диполя ее о = 1/3, и по A.2.20), A.2.6) относи-
относительное удлинение по оси диполя будет
e-e-e= [ \ F -и* do, A.2.22)
о
Наконец, рассматривая особенность, задаваемую силами —heh,
—/геь в точке Q и heh, hes соответственно в точках h~les, h~leh
(причем si=k), имеем
Р = Des + esek), /, 06) = 0, р = Dev p
и по A.2.20) приходим к выражениям сдвигов
2ek-e,-es = yks= J ^ F • и" do. A.2.23)
о
Фактически вычислить входящие в эти формулы интегралы, ко-
конечно, можно, лишь зная вектор перемещения а*, представляю-
представляющий в сумме с а^ аналог функции Грина, соответствующий дан-
данной особенности.
§ 1) НЕОГРАНИЧЕННАЯ УПРУГАЯ СРЕДА 215
1.3. Интерпретация второго потенциала теории упругости.
Вектор перемещения в первой внешней краевой задаче A(е>)
теории упругости был представлен в форме второго потенциала
теории упругости — аналога потенциала двойного слоя. Для со-
согласования обозначений с обозначениями этого пункта в фор-
формуле D.2.1) гл. IV надо поменять буквы М и Q местами. Тогда,
вспомнив выражение C.5.12) гл IV, имеем
V(M) = я„н-,л ! I \(l-2v)(-Rb-n + nb-R + bn.R) +
|^. A.3.1)
Здесь силовой тензор представляется по A.1.7) диадой nb:
и подынтегральное выражение записывается в виде
^г [A - 2v) (- Я/, (р) + 26 • /?) + 3 ~ R ¦ р • Я] =
Поэтому
Сравнение с A.2.5) обнаруживает, что двойной слой в теории
упругости образуется распределением по поверхности О цент-
центров расширения и силовых диполей; силовые и моментные осо-
особенности в нем отсутствуют. Этой неполнотой силовой системы
объясняется неразрешимость задачи Пе) с помощью только вто-
второго потенциала.
1.4. Потенциалы Буссинека. Распределение особенностей по
линиям, поверхностям и объемам дают частные решения урав-
уравнений теории упругости бесконечной среды, из которой удалены
эти геометрические места. Решение краевых задач для ограни-
ограниченного тела иногда достигается путем комбинирования так
построенных решений.
Далее рассматриваются два примера такого построения
частных решений, определяемых распределениями центров
216 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
расширения и центров вращения на полупрямой. Направление
на ней задается единичным вектором е, а положение точки —
абсциссой X, отсчитываемой от начала О полупрямой. Вектор-ра-
Вектор-радиус R' точки А1 среды, имеющий начало в текущей точке полу-
полупрямой, представляется в виде
R' = R-eX, A.4.1)
где R отсчитывается от ее начала О. Сославшись на A.2.8),
A.2.12), приходим к частным решениям
lVM-^, «(M)=-CxJ dlVM-~r. A.4.2)
о о
Первое соответствует распределению центров расширения, вто-
второе— центров вращения. Постоянные — скаляр А и вектор С —
характеризуют интенсивность этих особенностей. Имеем
±
причем вычисление градиента следует провести до подстановки
верхнего предела, а потом подставить пределы; тогда слагае-
слагаемое, относящееся к верхнему пределу X = оо, исчезнет; полу-
получаем
оо
о
Итак, вводя в рассмотрение первый потенциал Буссинека
d>i = \n{R — R -e), A.4.3)
приходим к двум представлениям вектора перемещения:
в любой области, из которой исключена полупрямая. В этой
области Ф\ — гармоническая функция; можно непосредствен-
непосредственным вычислением проверить, что она удовлетворяет уравнению
Лапласа, но в этом нужды нет: если известно, что вектор пере-
перемещения в задаче теории упругости при отсутствии массовых
сил представлен в форме градиента скаляра, то этот скаляр —
гармонический; его можно отождествить, например, с гармони-
гармоническим скаляром Во в решении Папковича — Нейбера A.4.10)
гд. IV-
§ 1] НЕОГРАНИЧЕННАЯ УПРУГАЯ СРЕДА 217
Потенциал Буссинека A.4.3) возрастает с ростом R, как
inR; соответствующий ему вектор перемещения убывает, как
R'1. Вычисляемый по Ф( тензор напряжений равен
Т =
A.4.5)
и его компонентами, если линией центров расширения служит
отрицательная ось Oz, будут
1 А
2ц Ujr RiR + г) L R2(R + z) J'
1 A
2циу- R(R + z)[L RHR + z) J' .
1 _ Лху BR + z) 1 = _л-?- U-4.0)
Простота выражений компонент напряжения на площадках, пер-
перпендикулярных оси г, делает потенциал Ф1 пригодным сред-
средством решения задачи о напряженном состоянии в упругом по-
полупространстве z > 0.
В сферической системе координат при том же выборе направ-
направления е ( к южному полюсу сферы)
J_ А_ 1 A sin ft __ п )
_L = Л cos ft =n J_ _ A \ (J-4-7)
2(i fffl i?2 A + cos ft) ' T^ ~ U> 2ц °Ь ~~ R2 A + cos ft) • J
Для решения краевых задач применяется также еще один
потенциал Буссинека:
Ф2= | \n{R+z)dz = z\n{R + z)-R, и = УФ2. A.4.8)
Это, конечно, также гармоническая функция в области, из ко-
которой удалена отрицательная ось г.
1.5. Термоупругие перемещения. Сославшись здесь на фор-
формулы C.4.3) и C.5.9) гл. IV, имеем
«(Q) = 2ца -i±?- J J | e (м) diVyM D (M, Q) dxM.
Здесь
A.5.1)
218 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
и выражение вектора перемещения может быть представлено
также в виде
u{Q)=a 4Я(ГЛ) Ше{м)VmО)йхм=~v* °-5-2)
где в рассмотрение введен потенциал
Здесь 0 — превышение температуры над ее постоянным значе-
значением в натуральном состоянии; Vi— объем, в котором задано
распределение температуры; вне этого объема 8 = 0. Такое же
поле вектора перемещения в неограниченной упругой среде
создается, по A.1.12), распределением в объеме V{ центров
расширения с интенсивностью, пропорциональной 0. Функция /
представляет ньютонов потенциал притягивающих масс с плот-
плотностью, пропорциональной температуре. Первые производные
этого потенциала (компоненты силы притяжения, компоненты
вектора перемещения в нашем случае) непрерывны во всем
пространстве (в предположении, что непрерывна плотность);
разрыв вторых производных при переходе через поверхность О
извне (из объема Ve) внутрь объема V, определяется известными
формулами
(VVx), - (VVX); = а |^- Qonn, A.5.4)
где п — единичный вектор внешней нормали к О; 8о — значе-
значение 8 на О. Вне объема V{ потенциал % удовлетворяет уравне-
уравнению Лапласа, а в объеме—уравнению Пуассона
0, Q<=Ve,
Тензор напряжений, определяемый по потенциалу х. п0
A.14.1) гл. IV равен при QaVi
A.5.6)
а при Qcz Ve температурное слагаемое отбрасывается. По
A.5.4) получаем
(f(e) - Т{% = 2ц4^7 aQo Ф ~ пп), A.5.7)
§ 1] НЕОГРАНИЧЕННАЯ УПРУГАЯ СРЕДА 219
откуда следует, что вектор напряжения на поверхности О не-
непрерывен:
[п-(г(й)-7;"'))]о = 0) A.5.8)
тогда как этот вектор на площадках, перпендикулярных границе
(с нормалью га*, где га*-га = 0), в точках этой границы испыты-
испытывает разрыв своих нормальных компонент:
[и\(^)_^)).„*]0 = 2,ц4~-ае0. A.5.9)
Его касательные комппленты непрерывны.
Пусть, в частности, И, — объем нагретой до постоянной тем-
температуры 8° сферы радиуса а; по известным из теории ньюто-
ньютонова потенциала формулам имеем
и по A.5.6)
± |1±з^)-^, A.5.11)
и в согласии со сказанным
Т(П
<#'
R = a R l/? = a -">
4 1
так что Or остается непрерывным во всем пространстве, тогда
как ст^ и О}, испытывают разрыв непрерывности, определяемый
формулой A.5.9).
1.6. Напряженное состояние, создаваемое включением. По-
Повышение температуры элементарного объема, выделенного из
окружающей его среды, не является единственным средством
сообщения этому объему деформации, в которой не возникает
напряженное состояние — так называемой свободной деформа-
деформации. Можно представить себе другие физические процессы, со-
сопровождающиеся свободной деформацией*). Напряженное со-
состояние, однако, возникает в упругой среде, когда в некотором
ее объеме Vt имел место процесс, который вызвал бы свободную
*) Д. Эшелби относи^ к таким процессам двойникование в кристалле,
маргенсигное превращение в стали, выделение фазы с другой элементарной
ячейкой.
223 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
деформацию, задаваемую тензором ё°, если бы этот объем
Vi был свободным. В результате повсюду в среде создается де-
деформированное состояние, и описывающий ее тензор деформа-
деформации связан с тензором напряжения сотношением
'°' 0.6.1)
так как появление напряжений вызвано «деформацией» ё — ё°.
Соотношение A.6.1) является естественным обобщением закона
Гука C.4.10) гл. III с учетом температурного слагаемого ?а0
и может быть пояснено теми же соображениями, что и этот за-
закон (см. конец п. 3.4 гл. III). Из него находим
и, далее,
A.6.3)
Здесь через Г° обозначен «тензор напряжений», формально свя-
связываемый с тензором е° законом Гука:
A.6.4)
Введение этого «тензора напряжений» лишь сокращает запись
формул — свободная деформация не сопровождается, как ука-
указывалось, напряжениями.
Рассмотрим два состояния упругой среды. В первом ее со-
состоянии в точке Q прилагается единичная сосредоточенная си-
сила вр, а во втором — напряженное состояние при отсутствии
внешних сил обязано своим возникновением имевшей место сво-
свободной деформации.
Сославшись на формулу C.1.5) гл. IV и рассматривая объем
V — Vi + Ye, имеем соотношение
e'Q-u"(Q) = J J |Г--е"Л;- \\n-T'-и"do= \ \ Jf'--e"dT =
V S V
= J f J?'-.a"dT+JJ Jf'.-e"dT, A.6.5)
Ve
так как интеграл по поверхности S объема V при неограничен-
неограниченном расширении последнего стремится к нулю.
Во втором состоянии объема V внешние силы отсутствуют;
поэтому
JI Jr'..e'dT= f { f f"-.e'dT+ [J |Г"--ё'Л = 0. A.6.6)
§ 1; НЕОГРАНИЧЕННАЯ УПРУГАЯ СРЕДА 221
Тензор напряжений Т во всем объеме V и тензор f" в объеме Ve
определяются по закону Гука:
'), Т" = 2ц (-
тогда как в У, по A.6.3)
Т" = 2\х (—27 Ь"Ё + е") - f °.
Поэтому
(^^" + Г--е") в V,
или
Возвращаясь к соотношениям A.6.6), A.6.5), имеем
f f f f'..g"rfT-f f {f°-'t'dx = e'-u"(O)- f f f f°-
J J J JJJ <? ^' J J J
так что
Выражая здесь е' через тензор Кельвина—Сомильяна C.5.9)
гл. IV, имеем
(f°--VUf)dx-e'n
и, отбросив произвольно задаваемый вектор е' и ненужные
теперь штрихи, приходим к равенству
°.-VMU(M,Q)dTM. A.6.7)
222 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Здесь интегрирование проводится по объему включения, подверг-
подвергшегося свободной деформации. Далее будем считать, что эта
деформация однородна —тензор ё° и, значит, Т° постоянны. То-
Тогда, вспомнив еще выражение C.5.9) гл. IV тензора Кельвина —
Сомильяна, придем к формуле (Эшелби)
^(H
L Vt Vt J
A.6.8)
Введя в рассмотрение потенциалы
можно ее записать также в виде
L]. A.6.10)
Функция ф — ньютонов потенциал притягивающих масс единич-
единичной плотности, и, поскольку V2/? = 2R~\ имеем
У2г|5 = 2ф A.6.11)
и по A.5.3), A.5.5)
0, QczVe, f 0, QczVe,
Г 0,
а аналогичные A.5.4) соотношения разрыва непрерывности на
поверхности Q объема У, представляются в виде
1
(VVVVa])), - (VVVVil)), = 8ппппп, j ( }
так как компоненты тензора Wo]) представляют ньютоновы по-
потенциалы с плотностью, равной соответствующим компонентам
тензора —Dя)~'У?2ф.
Компоненты тензора деформации, вычисляемые по A.6.8),
равны
о а2ф о а2Ф \ Г о
ч I
s dxq dxf \ '
4A - v)
A.6.14)
В частности, когда тензор Т° шаровой, то
§2] УПРУГОЕ ПОЛЬ ПРОСТРАНСТВО 223
И ПО A.6.11)
_ _ -JL ' + v ар д2д>
Esk ~ 4л УA - у) дх5 дхк '
О, Q<=Ve,
l+v л0 ^^т/ A-6.16)
4я
3A-v)
Например, в температурном процессе Q° = ЗссЭ и при v = 0,25
объемное расширение, стесненное окружающей средой, состав-
составляет только 5/9 свободного, а в окружающей среде оно отсут-
отсутствует.
В общем случае компоненты напряжения вычисляются че-
через компоненты деформации A.6.14) в среде, окружающей
включение, по закону Гука в его обычной форме [A.1.3) гл. III],
а во включении — по формуле A.6.3). Вычисление требует зна-
знания обоих потенциалов <р, я]). Для определения ¦& достаточно
знать только первый. Действительно, по A.6.11) и A.6.14)
имеем
' 2 д2 '2v fn ууш^
qs дх дх
Я s
^1-г)Тг°- Qczl/b A>6Л7)
Отсюда и по A.6.13), A.6.15) находим разрыв ¦& на поверхно-
поверхности включения:
так как Dev f° = 2ц Dev ё°. При Dev ё° = 0 возвращаемся
к A.6.16).
§ 2. Упругое полупространство
2.1. Задачи Буссинека и Черрути. Разыскивается напряжен-
напряженное состояние в упругом полупространстве z > 0 — в упругой
среде, ограниченной плоскостью z = 0, при заданном законе
распределения поверхностных сил по этой плоскости
2 = 0: F = n-f=-i3-f B.1.1)
или
z = 0: F,, = ^ (х, «/) = - ххг, Fu = ^2 (л:, г/) = - туг
= p(x, У) =-<*,. J { '
224 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Принимается, что массовые силы отсутствуют, а главный вектор
поверхностных сил конечен:
V=jJFdo (do = dxdy), B.1.3)
а
где Q — область загружения на плоскости г = 0. При этих усло-
условиях требуется, чтобы искомое решение было при /?->оо убы-
убывающим не медленнее, чем R~l для вектора перемещения и не
медленнее, чем R~2 для напряжений.
Известно несколько приемов решения этой рассмотренной
Буссинеком и Черрути классической задачи. В частной задаче
Буссинека, когда qi = q?. = 0 и рассматривается нагружение со-
сосредоточенной силой Q, нормальной к границе полупростран-
полупространства, решение легко получить наложением напряженного со-
состояния A.4.6), создаваемого особой линией центров сжатия,
на напряженное состояние в неограниченной упругой среде от
сосредоточенной силы (решение Кельвина — Сомильяна, п. 3.5
гл. IV). Переход к общему случаю нормального нагружения
р(х,у) после этого, очевидно, прост. Другой прием состоит
в применении решения Папковича — Нейбера (п. 1.4 гл. IV);
он распространяется и на общую задачу Буссинека — Черрути,
то есть на случай нагружения B.1.2).
2.2. Частная задача Буссинека. В неограниченной упругой
среде приложение силы, имеющей направление оси Oz и при-
приложенной в начале координат, создает напряженное состояние,
определяемое по C.5.6) гл. IV равенством
Т = -^ [A - 2v) (Ez - i3R - Ri3) -§RR] (* = *,* + i2y + hz),
B.2.1)
где С — далее определяемый коэффициент пропорциональности.
Вектор напряжения на плоскости 2 = 0 поэтому равен
^ B.2.2)
Но таким же законом по A.4.6) задается распределение на
плоскости z = 0 напряжений, определяемых с помощью потен-
потенциала A.4.3) Буссинека:
П'Т = 2рА-Щ, B.2.3)
и можно удовлетворить требованию отсутствия напряжений на
этой плоскости, связав постоянные А и С равенством
Л = —C(l—2v).
§ 2' УПРУГОЕ ПОЛУПРОСТРАНСТВО 225
Теперь по C.5.5), C.5.6) гл. IV и по A.4.4), A.4.5) имеем
, B.2.4)
-~[A- 2v) (Ег - М? - **з) ~
Постоянная С определяется из уравнения равновесия выделен-
выделенного из среды полушара произвольного радиуса R с центром
в точке приложения силы isQ:
hQ + R2 JJe^-frfo.-O, B.2.6)
о»
где do, = s'mft dftdk— элемент площади поверхности единичной
полусферы О,, а
е^ = RR~l = ц cos -0 + sin -0 (it cos % + i2 sin К).
Имеем
R4R . f = 2цС [- A - 2v) h ~ &rcos * + -~~ (eR + f3)] =
cos2 ¦& + ....
где многоточием отмечены слагаемые, не вносящие вклада в
интеграл B.2.6). Получаем
2я я/2
Q - 6цС J dX J cos2 Ь sin ф d* = 0, С = -^-,
J J
0 0
и этим завершается решение частной задачи Буссинека. Вы-
Выражения перемещений приводятся к виду
,. ^ Q * ( * 1 - 2v \ Q У
4лц У? U Jи
+ г J' и 4лц
У / г 1 - 2у Ч
Bl2J)
Весьма простыми и не зависящими от коэффициента Пуас-
Пуассона оказываются выражения напряжений на плоскостях, па-
параллельных границе полупространства:
2.3. Распределенная нормальная нагрузка. Решение частной
задачи легко обобщается на произвольное число нормальных
15 А. И. Лурье
226 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
к границе 2 = 0 сил Q;r3 с координатами точек приложения
(хь У и 0):
Rl = il(x- Xi) + i, (у - yt) + i3z.
Переход к случаю распределенной нагрузки р(х,у) сводится
к замене Q,- на p(x',y')do' и к последующему интегрированию
по области загружения Q. В рассмотрение вводятся потенциалы
jj^ B.3.2)
со, (х, у, z)=\\p (*', у1) In (#' + г) do', B.3.3)
а
причем, конечно,
R' = *,(*- х') + i2(y- У') + hz, R' = [(х - х'Т + (у- y'f + г2]'1'.
Через эти потенциалы вектор перемещения представляется
в виде
и =
а напряжения на площадках, перпендикулярных оси z, — в виде
%xz 2л дхдг' ХУ* 2я ду дг ' Ог~2л\дг Z dz2 j' ^-^-^
Функция «>(x,y,z) представляет потенциал простого слоя, рас-
распределенного по площади загружения с плотностью р(х,у). Эта
непрерывная повсюду (включая область Q) функция убывает
на достаточно больших расстояниях от Q (при R =
= (х2 + у2 + 22)'/2->оо), как PR~\ где Р — главный вектор по-
поверхностных сил:
/>= J J р(х, у)do.
Q
Известно, что производная потенциала простого слоя по нор-
нормали к поверхности, на которой распределен слог, претерпе-
претерпевает разрыв непрерывности при переходе точки через эту по-
поверхность. В частности, для слоя, распределенного по области Q
на плоскости г = 0, имеют место соотношения
+2пр (х, у), (х, у) cQ,
0, (х, y)<?Q. (г-д-Ь)
УПРУГОЕ ПОЛУПРОСТРАНСТВО
227
Отсюда еще раз следует, что найденное решение удовлетво-
удовлетворяет краевым условиям B.1.2), когда qx = q2 = 0.
Функция a\(x,y,z), гармоническая в полупространстве z>0,
возрастает вместе с R, как
Pln(R
B.3.7)
но ее первые производные по координатам, которые только и
входят в выражение вектора перемещения, убывают при /?->оо,
как /?-'. Отметим еще равенство
5, B.3.8)
дг ~ш'
определяющее вместе с условием на бесконечности B.3.7) функ-
функцию coi через со с точностью до несущественной аддитивной по-
постоянной.
2.4. Применение функций Папковича—Нейбера к решению за-
задачи Буссинека—Черрути. Выражения компонент тензора напря-
напряжений через эти функции по A.4.17) гл. IV записываются в виде
дгдх
дгдх
<9г2
B.4.1)
В случае только нормального нагружения достаточно принять
B.4.2)
Тогда
= 0, В2 = 0, ^ = (l-2v)B,
2ц %xz Z дх dz ' 2u X'JZ Z ду dz ' 2ц
B.4.3)
Краевые условия для касательных напряжений удовлетворяются
автоматически:
(тжг)г=о = (ту2)г=о = 0, B.4.4)
а остающееся краевое условие
B.4.5)
228
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
1ГЛ. V
подсказывает в соответствии с B.3.6), что 5з представляется
потенциалом простого слоя с плотностью Dл\х)~1р(х, у). Функ-
Функция So определяется вторым равенством B.4.2) и условием об-
обращения в нуль ее производных на бесконечности. Очевидно,
что В3, ^о отличаются от со и соi лишь постоянными множите-
множителями:
-2v) со,
B.4.6)
Переходя к общей краевой задаче B.1.2), представим вы-
выражения xxz, Туг в иной форме:
дг
дВ3
дх
д (х дВ>
дх \Х дг
дВъ
ду
дг
дВ*
дВ* I дВ
дг ^ дг
дВз Л дВ°
B.4.7)
Скаляр Во можно принять равным
оо
Во = - (хВ, + уВ2 + zB3) - 2 A - v) J B3 dz B.4.8)
при условии, что правая часть этого соотношения удовлетворяет
уравнению Лапласа
^(^ ^). B.4.9)
Тогда по B.4.7) приходим к весьма простым краевым условиям
^ v)-^.--<72(;c,0), B.4.10)
позволяющим определить Вь В2 как потенциалы простых слоев:
1 / 1
(х, у, г), В2 = 8n[iA_v) ф2 {х, у, z), B.4.11)
где обозначено
Qi{X:
: У° do' (/=1, 2). B.4.12)
§ 2] УПРУГОЕ ПОЛУПРОСТРАНСТВО
По B.4.9) имеем также
1
229
B.4.13)
Нормальное напряжение ог по B.4.1) и B.4.9) представляется
в виде
Ъ- B-4Л4)
3~ 8nn(l-v) \ дх ' di
h(x,y,z)= f I qi(x', yr)\n{R' + z)do'.
Остается удовлетворить третьему краевому условию B.1.2); это
приводит к рассмотренной уже задаче о напряженном состоя-
состоянии в полупространстве, когда на его границе z = 0 отсутствуют
касательные напряжения, а нормальные равны
дВ,
B.4.15)
Гармонические функции Папковича, решающие эту задачу
(назовем их Б;), по B.4.2) и B.4.6) определяются равенствами
= 0, 53=
дг
B.4.16)
Исходная краевая задача решается наложением этих реше-
решений. Приходим к следующим значениям напряжений:
Li?L
хг 2л dz
_ 1 dq>2 _
Хч*~1~дг
да
2A
1
2л дг 2(l+v) дг '
B.4.17)
где обозначено
1 + v / dg>!
л \ дх
ду
¦ + —).
^ дг)
B.4.18)
Ниже доказывается, что о—сумма трех нормальных напря-
напряжений. Вектор перемещения определяется наложением приве-
приведенных выше решений:
и = 4 A - v) E + 5*) - grad [Ц.(В + В*) + (Во + 5o)J,
230
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
Результат вычисления представляется в виде
2яаи = ф, — тг z -т— -~
^ Т1 2 дх \ дх
дх \ дх г ду
1 да 1 ,, „
¦)~
ду
дх ~ ду
1 ( d<ti | дфг
2 \ <Эк ' dr/
ду '
-___
B.4.19)
причем введены потенциалы
Xi (х, у, z)=\jqi (х', у') [z In (R' + z)~ R'} do' (i = 1, 2). B.4.20)
Вычисляемое по этим выражениям объемное расширение ft ока-
оказывается равным
B.4.21)
дх ду д
откуда следует также B.4.18).
Формулы B.4.19) представляют решение задачи Буссине-
ка — Черрути.
2.5. Тензор влияния в упругом полупространстве. Разыски-
Разыскивается напряженное состояние в упругом полупространстве
2 > 0, создаваемое сосредоточенной в его точке Q@,0, h) си-
силой Р.
В рассмотрение вводятся точка Q*@, 0,—К) и сила Р*:
являющиеся зеркальным отображением точки Q и силы Р в
плоскости 2 = 0. Вектор-радиусы точки наблюдения M(x,y,z),
имеющие начала в Q и Q», обозначаются
П / у _L * v А 1 {'у h\ D - / у _1_ у v А- 1 ('у A- h\ (О ^ О\
ж\ — *1'^1 i *'2**'2 ' 3 \^ '*'/* -*^# — 'l^l ' ^2"^2 i~ *3 V1^ i~ '*¦/• \?>О,?)
Искомое напряженное состояние представляется суммой трех
состояний: двух состояний f° и Г° в неограниченном упругом
пространстве, создаваемых сосредоточенными силами Р в точ-
точке Q и Р* в Q*, и состояния 71', лишенного особенностей в полу-
полупространстве z > 0 и выбираемого так, чтобы граница полупро-
§2]
УПРУГОЕ ПОЛУПРОСТРАНСТВО
231
странства 2 = 0 оставалась свободной от нагружения, создавае-
создаваемого состоянием f° + fl:
i3.f = i3.(T° + f0, + T%=Q = 0. B.5.3)
По C.5.6) и C.6.7) гл. IV тензоры f°, f° равны
8л A
-v)< ['
{l-2v)(EP,-Rt-PtR,-RtP,
Но на плоскости 2 = 0
B.5.4)
так что
B.5.5)
и краевое условие B.5.3) приводит к задаче о напряженном со-
состоянии полупространства при только нормальном нагружении
ограничивающей его плоскости, что, конечно, ожидалось по со-
соображениям симметрии. Краевые условия записываются в виде
1 -2у , ЗЛ2
W "Ж
Рхх + Р2у / 1 -2v _ ЗА2'
~ 4яA-у) [ R30 R50
= 0- a'- fih
4n(l-v)
С = о.
B.5.6)
Далее по отдельности рассматриваются каждая из групп
слагаемых, входящих в условия B.5.6). Пары гармонических
функций со и мь решающих эти задачи (п. 2.3), обозначим
соответственно со', coj и со", со".
По B.3.5) имеем
да'
дг
z-»e
и вместе
P3h
2A -v)
с тем
д 1
дг R
( ' ~
1 ь
Z +
R
2v
,3
h
3 '
ЗЛ2\
^ /?g )
(92 1
дг2 R
Pbh P,h I
R\ 2A-v)\
1 , 3B +/гJ
Я3 ' R5
1 . 3/г2
B.5.7)
232
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
Это позволяет переписать B.5.7) в виде
да'
дг
~\р д — -
а2 1
-v) дг*
B.5.8)
Правая часть представляет значение на границе области
функции, гармонической в области z > 0; да'/дг — также гар-
гармоническая в этой области функция. Итак, равенство B.5.8)
выполняется во всем полупространстве z > 0. Поэтому, сослав-
сославшись еще на B.3.8), имеем
(*2.5.9)
Аналогичное вычисление проводится для второй пары слагае-
слагаемых в краевом условии B.5.6). Имеем
дх
3x(z +
дгдх
д2
1п
R5 дгдх R
* *
и поэтому, сославшись также на A.4.8), имеем
~ЬТ
~dj) x
z + К) -
X {A - 2v) (z + h) [In (R, + z + h) - R.] + Aln I
Решение задачи дается потенциалами
со = со' + и" = 2A1_v) |^ +
А».
B.5.10)
p •v
h) In
¦/\ • V In (/?. + г + А).
B.5.11)
Вектор перемещения вычисляется по формулам C.5.8), C.5.9)
гл. IV и B.3.4). Этим решена задача о построении тензора влия-
влияния для упругого полупространства.
2.6. Температурные напряжения в упругом полупространстве.
Далее применяется соотношение C.4.3) гл. IV в предположе-
§ 2] УПРУГОЕ ПОЛУПРОСТРАНСТВО 233
нии, что G(M, Q)~тензор влияния для упругого полупростран-
полупространства. Достаточно знать дивергенцию этого тензора, равную
сумме дивергенций от перемещений и0, ы°, и'', соответствующих
тензорам напряжений f°, f°t, f', которые были определены
в п. 2.5. Выражение первой дается формулой A.5.1), а вторая
находится заменой R на Rt. Получаем
Дивергенцию вектора перемещения «' находим, пользуясь фор-
формулами B.5.11) и B.3.4):
л ¦ , _ 1 - 2v <Эш _
2Л(х дг
Сложив эти выражения к заменив Р* его значением B.5.1),
найдем
1 2
B.6.1)
Вектор, умножаемый на Р, представляет искомую диверген-
дивергенцию тензора влияния в полупространстве от единичной силы
в точке Q(О, О, К); при переносе этой точки в точку с коорди-
координатами (|, г], ?), далее также называемую Q, надо лишь заме-
заменить h на ?, a R и 7?, на
2 + (z + ?J]/2. I
По C.4.3) гл. IV имеем теперь
B.6.3)
Здесь I7 — нагретый объем, целиком расположенный в полу-
полупространстве z > О, Q(M)—распределение температуры в этом
объеме; градиенты вычисляются в точке M(x,y,z), которая те-
теперь стала точкой истока. Имеем соотношения
1 ,1 д 1 _ д 1
grad R, дг j- - ^
B#6<4)
234 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Учитывая их, можно представить B.6.3) в виде
C - 4v) (VQ - 2i3 -щ) %2 + 2?~ VqX2) B.6.5)
где введены потенциалы
l+v Г f f 6 (
V V
B.6.6)
Слагаемое, определяемое потенциалом хь представляет поле
перемещений, рассмотренное в п. 1.5 для неограниченной упру-
упругой среды. Функция /2 — гармоническая в полупространстве
z > 0; вычисляемые по ней напряжения
: дг
- д.. (gr d%2 i
»г — 41 ZZ Я„ Л,2 Г
ду дг2 ~ дудг)'
)
B.6.7)
аннулируют на плоскости 2 = 0 напряжения, определяемые по-
потенциалом %i-
2.7. Случай установившейся температуры. В установившемся
режиме температура Q(x,y,z)—гармоническая в полупростран-
полупространстве z > 0 функция; предполагается известным ее значение на
границе z — 0:
( %{х, у, 0), {х, y)c:Q,
Поэтому, введя в рассмотрение потенциал простого слоя с плот-
плотностью —8о/2я:
Ф(х,у, z)^-~
можно записать решение задачи теплопроводности для полупро-
полупространства в виде
6(х, 0, z) = -g-. B.7.3)
Действительно, определяемая этим равенством функция — гар-
гармоническая; она удовлетворяет краевому условию B.7.1), что
следует из B.3.6).
Переходя к решению задачи теории упругости, удержим
в решении Папковича — Нейбера A.4.10) гл. IV две гармони-
гармонические функции В3 и Во1-
в = 4 A - v) i3B3 - V {zB3 + Во) + V-ф, B.7.4)
§2] УПРУГОЕ ПОЛУПРОСТРАНСТВО 235
причем последним слагаемым учитывается наличие температур-
температурного поля, а функция, обозначенная здесь г|з, представляет част-
частное решение уравнения A.14.8) гл. IV:
4^a9. B.7.5)
Компоненты напряжения на площадках, перпендикулярных
оси z, вычисляемые по B.4.1) с учетом в B.7.4) слагаемого Уф,
оказываются равными
дМ дМ (. дВ3 о 1+v Q , дМ\ ,о _ с.
где для краткости принято
^ + fio) + 2jf • B.7.7)
Оказывается возможным распорядиться выбором Вг и Во так,
чтобы обратить М в нуль. Для этого примем
2fi3 = i|>, ^- = 2(l-v)fl3. B-7-8)
Из первого равенства и из B.7.5), B.7.3) имеем
V2253 = 2^-=l±^ae, В, = ^^аФ(х,у,г), B.7.9)
и, поскольку Ф — гармоническая функция, такой выбор ?3
возможен. Возвращаясь к формулам B.7.6), приходим к ре-
результату, возможность которого было трудно предвидеть: при
установившемся тепловом режиме полупространства отсутст-
отсутствуют температурные напряжения на плоскостях, параллельных
его границе *):
B.7.10)
Теперь находим по B.7.8) и B.7.2)
So = - ^ A + v) a f Г 80 (х', у', 0) In (#' + z) do', B.7.11)
и, сославшись на B.7.4), можно записать выражения проекций
вектора перемещения:
Через эту же гармоническую функцию Ва определяется
*) Это свойство сохраняется и в задаче о тепловых напряжениях в упру-
упругом слое при установившейся температуре.
236
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
температура:
B.7.13)
Выражения отличных от нуля компонент тензора напряжения,
вычисляемого по A.14.1) гл. IV, записываются в виде
а,, = 2и . ° , т ,„ = — 2и ——^-. B.7.14)
fin У fi~x У fiY ft 1
2.8. О вычислении потенциала простого слоя по плоской об-
области. Как показано выше, решение задач о напряженном со-
состоянии в упругом полупространстве существенно зависит от зна-
знания потенциалов слоя, распределенного по плоской области,—
в первую очередь потенциала простого слоя, через который бо-
более сложные потенциалы определяются интегрированием по г.
а)
6)
Рис. 16.
Пусть М1(х,у,0) обозначает проекцию точки наблюдения
M(x,y,z) на плоскость z = 0; принимая М1 за начало полярной
системы координат (рД), имеем
х1 - х = р cos Я, у' - у = р sin A,, do' = р ф d%, R'2 = р2 + z2. B.8.1)
Выражение потенциала простого слоя B,3.2) теперь записы-
записывается в виде
B.8.2)
Обозначения указаны на рис. 16, а при AJ1 ф Q; при М1 с Q
следует принять pi (А,) = 0, р2 = р(А,), Iq = 0, %х = 2я (рис, 16,6).
§ 2] УПРУГОЕ ПОЛУПРОСТРАНСТВО 237
Вычисление упрощается, когда значение потенциала разыски-
разыскивается в точках плоскости 2 = 0. Тогда
<o(x,y,Q)=*\Q(x,y,k)dK B.8.3)
где
®{х,у,к) = J p(x + pcosX, y + psinX)dp. B.8.4)
При постоянной плотности (р = const)
к
со (х, у, г) = р J (fp2 (I) + г2 - /р? (Я) + z2) ^ B.8.5)
и, в частности, на плоскости г = 0
л.
ш(х, г/, 0) = р f [р2(Я.)-р,(Я,)]Л. B.8.6)
я.
Например, вычисление по этой формуле потенциала круговой
области Q радиуса а дает
B.8.7)
где г — расстояние точки наблюдения М(х, у, 0) от центра диска,
K(k), E(k) — полные эллиптические интегралы первого и вто-
второго рода.
2.9. Задача Дирихле для полупространства. Гармоническая
в полупространстве z>0 функция Wt(x, у, z), представляющая
потенциал двойного слоя плотности ц(х,у), распределенного по
области й плоскости z = 0, определяется равенством
Я/* I*
ft'3 дг J J R' ° дг '
B.9.1)
где, как выше, R'= [(х — \J + {у — г)J + z2]'/», а функция
®(x,y,z)
(о (х, у, г) = J j -^|Д rfE rfti B.9.2)
238 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
представляет потенциал простого слоя той же плотности \i(x, у).
По B.3.6)
Wt{x, у, г)
(9@
±2щ{х, у), (х, у)ей,
z-*±0 I. О, (X,
Поэтому гармоническая функция
W(x, у, z) = ^J j 2^-dtdi) B.9.3)
дает в полупространстве z > О решение задачи Дирихле
*, у), (х, у) crQ,
1/' \;^
B.9.4)
Пусть точка наблюдения M(x,y,z) расположена внутри ци-
цилиндра с основанием Q и образующими, параллельными оси г.
Рассмотрим сначала случай постоянной на Q плотности; тогда
по B.8.5) и B.9.1)
2л
ш(х, у, z)= и I (/ТОУТ?-
zdl
и, далее,
dW
дг
2л
2Я
Г
J
п
[Р2
о2 (Я) dX
(Я) + 22]% '
дг
ц
2=о 2л
2л
Г
J
п
dX
р(Я) •
B.9.5)
Заметим, что правая часть не является постоянной, так как р(Х)
зависит от выбора начала (х, у, 0) системы полярных коорди-
координат р, К. В общем случае задания плотности, записав B.8.2)
в виде
2л р {%)
<л (х, у; z) = J d% J [\i (x + pcosl,y + p sin A,) - ц (х, у)] ^~ri +
0 0 ' P
2Л
§ 2]
имеем
УПРУГОЕ ПОЛУПРОСТРАНСТВО
239
2л р(К)
г
р
W (х, у,г)=^-\ dX [ц {х + р cos Я, у + р sin Я) - ц (х, у)\ X
О О
2л
X
zd%
(Я,)
B.9.6)
и, далее,
2Я р (К)
2л
|i (*, у) Г р2 I
Полагая
^ (х + р cos Я, г/ + р sin Я) — ц (х, г/) =
2л J [Р2 (Я) + г2]3А •
)Я; х,у), B.9.7)
где g(p, Я; х, у) конечно при р = 0, и учитывая, что
Р(И
Г р4 - 2р2г2 , _ р (X) _
J (п2 + г2)ъ!г Vn2 (X) + г2
легко получим
2л
Ш_
дг
2л j \ дх ду I v
2л
2л
. B.9.8)
0 0
Этим доказано, что в предположении о представимости плот
ности в форме B.9.7) нормальная производная потенциала
двойного слоя будет конечной, когда точка наблюдения, остаю-
остающаяся внутри упомянутого цилиндра, переходит в точку
(х, у) cz й.
240
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
Сославшись на B.9.1), B.8.2), имеем также
дг
г-»0
Л, Pj(Л1
= 4~ \ dk I ^(x + pcosA,, y + psink)-^-, B.9.9)
^o Pi (
, г/)
и не может возникнуть сомнения, что нормальная производная
в этом случае также конечна; она равна нулю на бесконечности,
так как при ]/ х2 + у2 -> оо разность ?ч — Я,0->0.
2.10. Первая краевая задача для полупространства. Предпо-
Предполагается, что на плоскости z — 0 даны значения перемещений
2 = 0- и = «о^, «/), У = do(x, г/), ш = kjo(x, у). B.10.1)
Исходим из решения уравнений теории упругости в форме Те-
доне A.3.10) гл. IV:
и = а{ —
2(l-2v)
i V 0,2 r) /j t
где fli, а2, «з, ¦& — гармонические функции. Из третьего уравне-
уравнения B.10.2) имеем, сославшись на B.9.3),
1г_0:
1. B.10.3)
Этим определена функция а3(х, у, z) и ее производные в обла-
области z ~2> 0. Теперь имеем
дг дх ду дг
так что
2A-2у) [да
г=0 3-4V
Отсюда по B.9,3) находим
Теперь имеем
ди0
дх
2A -2v) J R
2A -:
B.10.4)
B.10.5)
B.10.6)
B.10.7)
и остается подставить найденные значения четырех гармониче-
гармонических as, ¦& в исходные уравнения B.10.2).
§21
УПРУГОЕ ПОЛУПРОСТРАНСТВО
241
2.11. Смешанные задачи для полупространства. Предпола-
Предполагается, что на плоскости 2 = 0 заданы перемещения и, v и нор-
нормальное напряжение oz:
2 = 0: и = ио(х,у), v = vo(x,y), oz = ol{x
Имеем
аг v „ , dw 1 — v Л ди dv
~ЩГ~ l-2v
B.11.1)
дг
- 2v
дх
ду
ft 1 -2v / (Тг ,_ Д»
1 - v \ 2|x ^ Эх
B.11.2)
и гармоническая функция #, известная на границе
Ь(х,у,0) =
l-2v
-v \2ц ' дх ' Эг/
определяется решением B.9.3) задачи Дирихле
д (х, у, z) = —
-dc,dr\.
B.11.4)
Теперь по B.10.4) и B.11.3) имеем
3-4v <г° . l-2v м«0 (?»0 _
дг
2-0
2 (l-v)
2 (l-v)
и гармоническая функция сз представляется потенциалом про-
простого слоя
±\\Щ^й1йъ B.11.5)
тогда как аь а2 определяются формулами B.10.7), в которых
¦&(|, т), 0) должно быть заменено по B.11.3).
Перейдем к рассмотрению другой смешанной задачи — на
плоскости 2 = 0 заданы касательные напряжения и перемеще-
перемещение w.
, у),
= wo(x,y). B.11.6)
По B.10.2), решая задачу Дирихле для гармонической функ-
функции а3, имеем
/ \ _ г Г Г а>о A, л) .6 <
B.11.7)
Теперь, сославшись на уравнение в перемещениях A.3.3) гл. IV,
имеем
д ди д dv d2w
j
д& д ди д dv
j i
дг дх дг ' ду дг ' дг2
дг
yz
дх
)-¦
дх2
d2w
' ду*
16 А. И. Лурье
242 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
так что
2 = 0: -^
l-2v Г 1 (dxt . Зт° \ /dV, д\
BЛ1-8)
и гармоническая функция О определяется как потенциал про-
простого слоя
±\\ l^Ldld4. B.Ц.9)
Перемещение w(x, у, z) находим по B.11.7) и B.10.2). Гармо-
Гармонические функции а\, а2 определяются теперь как потенциалы
простых слоев по условиям
_ _ п _
dwa . хр {х, у)
[I *>- дх ^ 2(l-2v) '
да,
~дг
Получаем
1_
а'"~ 2л ,! ,
= ^т" -¦
(х, у)
2-=0 ц У* ду "^ 2A -2v) "
Г f Г_L то cs п\ - ёе± -L iPlliJoLl ЗА
,! J [ i-i ^^ь. Ф др г 2A — 2v) J R'
B.11.10)
В приведенных решениях предполагается дифференцируемость
нагрузок т",(^, у), x°uz(x, у) и двукратная дифференцируемость
перемещения wo(x,y).
2.12. О принципе Сен-Венана. Формулировка Мизеса.
В пп. 1.1 и 1.2 этой главы рассматривалось напряженное состоя-
состояние в неограниченном упругом пространстве, создаваемое си-
силами, распределенными в малом объеме, на достаточном уда-
удалении от него. Было показано, что, ограничиваясь учетом ве-
величин первой степени относительно линейных размеров этого
объема, можно заменить действие такой системы сил ее интег-
интегральными характеристиками — главным вектором, главным мо-
моментом и силовым тензором. Оказалось, что на достаточном
удалении точки наблюдения напряжения, создаваемые главным
моментом, имеют тот же порядок, что и создаваемые силовым
тензором. Здесь будет показано, что это же явление констати-
констатируется и в упругом полупространстве z > 0 при нагружении его
силами, распределенными по малой площадке о его границы
z = 0.
Выберем начало координат в точке О площадки о, через
р = i,| + г2т] обозначатся вектор-радиус какой-либо точки Q
§ 2j УПРУГОЕ ПОЛУПРОСТРАНСТВО 243
этой площадки (точки истока), через R — ОМ — вектор-радиус
точки наблюдения; тогда R'= QM = R— р, причем р ^ е, где
е — радиус круга с центром в О, в который можно заключить
площадку. С точностью до величин порядка e/R, подобно A.1.4),
имеем
ж = т+^р-*- BЛ2Л)
Потенциалы фь ор2, со, введенные в п. 2.4, будем считать компо-
компонентами вектора
^J{ ^{|o, B.12.2)
причем вектор плотности f(\, ц) представляет поверхностную
силу, компоненты которой были обозначены q\, q2, p, а ин-
интегралы в B.12.2) представляют главный вектор F системы сил
и ее силовой тензор; последний разбиваем на симметричную р
и кососимметричную п части:
F, л) do,
о о
= j^(pf + fp)do + ±^((>f-f(>)do = p + Q. B.12.3)
о о
Вместе с тем
B.12.4)
причем
m°= [ Jp Xfdo, B.12.5)
о
где tn° — главный момент системы сил / относительно точки О.
Итак, в приближении B.12.1)
® = ±F + ^m°XR + ~R-p. B.12.6)
По B.4.17) и B.4.18) вектор напряжения на площадках, пер-
перпендикулярных оси z, рассмотрением которого ограничимся,
чтобы не загромождать вычисления, будет
k-f = -^(k- VO-zW-Ф). B.12.7)
Вычисление дает
VO =- -^з-RF- ^3-т° X Е- ^Rm° X R--JrRR ¦ р + ~р,
16*
244 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
где Е — единичный тензор. Поэтому
Далее имеем
и последнее выражение упрощается, если заметить, что, по-
поскольку k- р = О,
k-p-±kXm° = ±k-
После подстановки в B.12.7) получаем
B.12.8)
Естественно, что это выражение обращается в нуль при 2 = 0,
так как точка наблюдения должна оставаться вне площадки
нагруженйя. Как и для случая неограниченного пространства,
вектор напряжения оказался представленным через главный
вектор, главный момент, первый инвариант и девиатор силового
тензора.
Слагаемое, определяемое главным вектором, имеет порядок
FJR2 = а, тогда как все остальные слагаемые имеют порядок
o/Re независимо от того, является ли система статически экви-
эквивалентной нулю или нет (то есть будет ли при F = 0 также
т° = 0 или нет). Это заставляет принять более осторожную
формулировку принципа Сен-Венана (п. 2.8 гл. IV), предложен-
предложенную Мизесом A945): порядок величин напряжений, создавае-
создаваемых в упругом теле силами, распределенными по малым
участкам его границы, на конечном удалении от этих участков
уменьшается, если нагружение каждого из них статически экви-
эквивалентно нулю.
2.13. Сверхстатическая система сил. Статически эквивалент-
эквивалентная нулю система сил называется сверхстатической при обра-
обращении в нуль ее силового тензора:
/7 = 0, т° = 0, р = 0 B.13.1)
$ 2] Упругое полупространство 245
При нагружении малого участка о границы полупространства
сверхстатической системой сил все слагаемые B.12.8) будут ну-
нулями; на достаточном удалении от участка нагружения напря-
„ „ / 8 \2
жения будут иметь по крайней мере порядок слагаемых 1-^-1 а,
неучтенных в принятом приближении B.12.1).
Пример сверхстатической системы сил представляет стати-
статически эквивалентная нулю система сил, нормальных к границе
полупространства (как в частной задаче Буссинека); тогда
h = h = 0 и
га? = |j p2f3do = 0, /n°=- JJPlf3do = 0, m° = 0,
о о
а все остальные компоненты fkps do силового тензора будут
о
нулями, так как р3 = 0.
Более общий пример представляет система сил, остающаяся
статически эквивалентной нулю при любом повороте входящих
в нее сил. Обозначим / повернутый вектор силы /; тогда, со-
сославшись на A.8.1), A.8.2), имеем / = /-Л, где А—тензор по-
поворота. Примем для простоты, что при сообщенном повороте
силы повернулись на 90° вокруг оси is; тогда
i'k = isX ik, A = iki'k = - ikik Xis=-EX is,
и по условию
m'° = / J P X fdo = J J p X (is X f) do =
о о
По B.12.3) при т° = 0 силовой тензор симметричен, так что
jjf9do = p, ilIltf)-p-ia = 0, B.13.2)
о
и из этого соотношения сразу же следует, что
h{p) = Рп + Р22 + рзз = h-p-is = pss (S= 1,2,3),
так что
Pll = P22 = РЗЗ = 0. B.13.3)
Вместе с тем по B.13.2) при s=?k имеем
in • Ui (p) = 0 = ik-p-is = Pks, B.13.4)
246
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
что доказывает предложение. Например, силовой диполь
(рис. 17,а) не представляет сверхстатической системы сил,
тогда как сочетание пар на рис. 17,6 является примером сверх-
сверхстатической системы.
2.14. Теоремы Стернберга A954). Оценки быстроты убыва-
убывания напряжений в упругом полупространстве, приведенные
в п. 2.12, сохраняются в случае упругого тела конеч-
конечных размеров, ограниченного поверхностью с непрерывной кри-
кривизной.
Предполагается, что поверхность тела нагружена по не-
нескольким участкам, при выбранной единице длины имеющим
линейные размеры порядка е< 1; силы, распределенные по
участку, конечны; поэтому порядки величин главного вектора,
Рис. 17.
главного момента и силового тензора соответственно равны г2,
е3, е3. Через а(х, е) обозначается компонент напряжения, созда-
создаваемого нагружением по одному из участков, в точке наблюде-
наблюдения, находящейся от него на расстоянии х^-1. Порядок этой
величины обозначается ет:
о(лг, е) = 0{ет).
Стернберг доказал следующие предложения: 1) т^2,
если главный вектор системы сил на рассматриваемом участке
отличен от нуля; 2) т^-З, если он равен нулю, а также в слу-
случае статически эквивалентной нулю системы сил (то есть и
при обращении в нуль также и главного момента); т ^ 4, если
система сил на участке сверхстатическая.
Сказанное непосредственно следует из формул Лауричелла
A.2.20) — A.2.23). Пусть ok — один из участков загружения,
м\— фиксированная, Ми— любая точка на нем, так что
M\Mk = 9k и по условию ph -^ е. Представив вектор и" (Mh)
в виде
B.14.1)
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 247
имеем
так как второе слагаемое является первым инвариантом произ-
произведения тензора Vk^ на тензор F(ft)pfc. Итак, по A.2.20)
е^--р = и°- j j F{k)do + Vu°--j j F(k)pkdo+ ..., B.14.2)
и остается заметить, что первое слагаемое имеет порядок е2
площади загружения, а второй — порядок е3. Этим дается вы-
вышеприведенная оценка деформаций и значений напряжений в
точках тела, расположенных на расстояниях х\%> e. Напомним,
что тензор р и вектор u*k (M) — вспомогательные средства в вы-
выводе формул Лауричелла; конечно, они никак не связаны с рас-
распределением сил на Oh и с определяемой этим распределением
деформацией ё^.
§ 3. Равновесие упругой сферы
3.1. Постановка задачи. Решение первой и второй краевых
задач для сферы разыскивается в предложенной Е. Треффтцем
форме
u=U + (R2-Ro)Sn?. C.1.1)
Здесь #о — радиус сферы, R = isxs — вектор-радиус, U — Usis —
гармонический вектор, W — гармонический скаляр:
Г72Г/ _ Л У72Ш П 14 1 О\
V U ,5 — VJ, V 1 — \1. 1 0. 1 . ?* I
Представление решения в форме Папковича — Нейбера в слу-
случае сферы не столь быстро ведет к цели, в особенности для
первой краевой задачи.
Соотношения, связывающие гармонические функции Us и W,
следуют из уравнений теории упругости в перемещениях. По-
Последние при отсутствии объемных сил записываются в виде
A — 2v)V2m + VV-ы = 0. C.1.3)
По C.1.1), C.1.2) имеем
V2h = V^VY = 6V41" + 4# • VW = V BXF + 4R • уЧ), C.1.4)
VV • и — V(V • U + 2R • W), C.1.5)
и подстановка в C.1.3) приводит к искомому соотношению
-~V-f/=O. C.1.6)
248 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Тензор деформации и объемное расширение представляются
в виде
е = def U + RVW + (V40 R + (R2 - JXU/ . . -, , /о , ,
3.1./
Теперь легко составляется выражение вектора напряжения на
поверхности сферы R = const:
- Rl) R ¦ VVXV\ C.1.8)
или
-±-RPR = n + (R*-Rl)R.W4, C.1.9)
где в рассмотрение введен вектор
П = Т^г7 RW • v + T=?TRR • VW + /? • def f/+ tfW. C.1.10)
Этот вектор оказывается гармоническим. Действительно, исполь-
используя снова C.1.4), C.1.5), имеем
V2#V • U = 2VV • U; V2RR • VW = 2V {R ¦ V^);
W2R ¦ def U = VV • U; V2tfW = 2VW + 4VR
и подстановка в C.1.10) дает
j V [i V • U + A - 2v) W + C - 4v) R
Но величина в скобках по C.1.6) равна нулю; итак,
V2n = 0. C.1.11)
3.2. Первая краевая задача. Заданный на поверхности О
сферы вектор перемещения и представим в соответствии
с п. VI. 4 его разложением по сферическим векторам Лапласа:
= 2 ап0Рп (ц) + S Km cos ml + Ьпт sin m%) Pn (v) • C.2.1)
n=0 L m-l J
Ho no C.1.1) значения на О гармонического вектора U и век-
вектора перемещения и равны
д=0 п=0
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 249
Поэтому, сославшись на (VI. 4. 2) имеем
' Id ч d ^ а о л\
— (/2+1) \А ^ АО/. ^O.Z.t^
Здесь ?/„, f/_(n+i) — однородные гармонические векторы сте-
степени п и —(п+\). Гармонический скаляр W будем также
разыскивать в виде рядов по однородным гармоническим поли-
полиномам степени п для внутренней и —(п + 1) для внешней за-
задачи:
Ш C-2.5)
п=0 п=0
сох
C.2.6)
п=0 п=й
Здесь и далее при рассмотрении краевых задач для сферы мно-
многократно применяется теорема Эйлера об однородных функциях
(VI. 2.2):
R ¦ VUn = nUn, R'Wn = nVn. C.2.7)
Пользуясь ею и основным соотношением C.1.6), имеем
A - 2v) Чп-i + C - 4v) (я - 1) ЧГЛ_1 + \ V • Un = О,
так что
Ч^ , = - У'У" C 2 8Ъ
п~' 2 3re-2-2vB«-1) w.^.<->/
и, далее,
1 grad div Un /о 9 n\
2 3«-2-2vB«-l) ' \o.z.V)
причем V • Uо = V • а00 = 0. По C.1.1) имеем теперь
где по сказанному Ч*1-! = 0. Итак, решение внутренней задачи
представляется рядом
?%^] W<«o). C.2.10)
250 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Решение внешней задачи получим при замене под знаком
суммы л на —(п + 1):
Здесь по C.2.3), C.2.4)
Уп(ц, Л), ?/-(.+i) = (irf+4(H,A), C.2.12)
а векторы Уп(ц, Я) — сферические векторы Лапласа, задавае-
задаваемые разложением C.2.1).
3.3. Эластостатическая задача Робена для шара. В соответ-
соответствии с п. 4.7 гл. IV речь идет о напряженном состоянии в упру-
упругой среде, когда впаянному в нее твердому шару сообщается
малое перемещение
и* = и0 + (ох#. C.3.1)
Здесь «о и со — постоянные векторы. Точкам ограничивающей
среду полости О, поверхности шара R = Rq, сообщается пере-
перемещение
я I*-*.= "*'*-*» = "о+ fi>x*°' C-3.2)
где Ro — вектор-радиус точки на О. Правая часть C.3.2) уже
представлена суммой сферических векторов Лапласа нулевого
и первого порядка
Уо = ы0, У, = «> X Ro.
Поэтому, сославшись на C.2.4), имеем
^
C.3.3)
В общем выражении C.2.11) имеем теперь
и = н_1 + и_2, C.3.4)
причем
Имеем
divt/_, = -
div C/_2 = 0,
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 251
и решение задачи дается формулами
в \
C.3.5)
пЗ
C.3.6)
Последняя формула определяет перемещение, создаваемое цент-
центром вращения [см. A.2.12)]; там же был определен вектор на-
напряжений на поверхности шара, а также главный момент сил,
который следует приложить к шару, чтобы сообщить ему тре-
требуемый поворот о; главный вектор этих сил равен нулю.
Вычисление распределения напряжений, вызываемых посту-
поступательным смещением и0 шара, более громоздко. Имеем
е = def в-! = 2 E _ 6°v) Ri { - [A - 2v) + -^-J (Ru0 + UoR) +
-2v
и тензор напряжения на поверхности О оказывается равным
3 1
5-6v Rl
C.3.7)
1 f
2ц
Вектор напряжения на этой поверхности определяется теперь
формулой
1 Т „ _ ' Г Rl) 3A -У) ,г. „ „ч
ж " ~ ~ жг ¦ ж = E-6v) я; ""¦ C-3-8)
Поэтому главный вектор сил, сообщающий впаянному шару пе-
перемещение Но, равен
V-^rU C.3.9)
Их главный момент равен нулю.
3.4. Тепловые напряжения в шаре. Предполагается задан-
заданным установившееся распределение температуры 8 на поверх-
поверхности упругого шара, заключенного в абсолютно твердую обо-
оболочку. Иными словами, решение задачи разыскивается по усло-
условиям
г,_я = 2 Zn(n, I), «L „ =0. C.4.
252 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Здесь Zn(\i,%) — сферические функции Лапласа, по которым
разлагается гармоническая при R < Ro функция —температура
Частное решение и, уравнений равновесия в перемещениях, со-
соответствующее наличию в них температурного слагаемого, по
A.14.7) и A.14.8) гл. IV определяется соотношениями
«. = Vx, V2X - a ±tL 0 = а|±? ? вп. C.4.3)
Достаточно найти какое-либо частное решение х этого уравне-
уравнения. Оно разыскивается в виде
n-0
Правая часть представляет однородный гармонический поли-
полином. Полагая
In = AnR2Qn, S/2%n = Ап F6n + AR • VX«) = F ¦
имеем
7-~Ta l-v
так что
я-0
Решение разыскивается в виде суммы
C.4.4)
причем вектор v, представляющий решение однородных уравне-
уравнений равновесия в перемещениях, по C.4.1) должен быть опре-
определен по краевому условию
L д=о л-0
C.4.5)
Вектор V8n, как градиент гармонического скаляра, является
гармоническим вектором; поэтому значение его на поверхности
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 253
сферы представляет сферический вектор Лапласа порядка п—1.
Разбивая теперь искомый вектор v на два слагаемых:
v=a(v
определяемых краевыми условиями
д=0
можно, сославшись на C.2.10) и учитывая, что div V6n
= V28n = 0, сразу же записать выражение г>B) в виде
п-0
Задача сведена к определению вектора flA>. Ограничиваясь
рассмотрением случая симметричного распределения темпера-
температуры по поверхности сферы, имеем Zn = anoPn(\i)', теперь тре-
требуется заменить вектор
е^РпЫ) = tf'i cosX + «2sink)sin ¦& + i3 cos
его разложением по сферическим векторам Лапласа. Восполь-
Воспользуемся для этого известными рекуррентными формулами
Bп+ 1)цР„(ц) = (ft + 1) Рп+Х (ц) + яР„_, (ц),
Bп + 1) Р„(ц) = Pn+iiv) - P»-i О*)-
Тогда, вспомнив определение присоединенных к Р„ (ц) реше-
решений, получим
ецРп (и) = ^гг ft*i cos X + i2 sin X) р\+х (ц) + (п + 1) *3Р„
+1^тг f ~(ii cos х+'2sin ^ р«-'(|л) + "'
Величины в скобках представляют сферические векторы Ла-
Лапласа [см. (VI. 2.10)]. Теперь, введя обозначения
Y'n+l (ц, X) = -^-р \егР{п+х (ц) + ft (я + 1) Р
„+,
приведем краевое условие C.4.6) для вектора irt'> к виду
254 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Через er, k обозначены здесь единичные векторы цилиндриче-
цилиндрической системы координат (er = i\ cos к + h sin X, k = i3). Компо-
Компоненту Zn — an0Pn в краевом условии C.4.6) соответствуют два
гармонических вектора:
причем [7_i = 0. По C.2.10) и C.4.4) — C.4.7) решение задачи
дается равенством
п=0 п=0 п—0
Зя + 1 - 2v Bл +
п=0
Зл - 5 - 2v Bл - 3)
где
, C.4.11)
6„ = <Ц^-) Ра(ц). C.4.12)
Пусть, например, температура поверхности — линейная функ-
функция:
По такому же линейному закону она, очевидно, изменяется
внутри тела:
Вычисление по вышеприведенным формулам дает
и =
4 - 6v 2RQ
¦(R2-Rt)k,
что просто проверить по A.14.3) гл. IV; по A.14.1) гл. IV легко
вычисляются также напряжения.
3.5. Вторая краевая задача для сферы. Через Рп в п. 3.1
был назван вектор напряжений на поверхности любой сферы,
концентрической со сферой О радиуса Ro. На последней век-
вектор Pr задан и может быть представлен рядом по сферическим
векторам Лапласа
оо
пр j V у /,, И /"Ч Е\ 1\
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 255
Этот ряд по C.1.9) и C.1.11) представляет значение на поверх-
поверхности сферы вектора
п=-ш 2 (-?¦)" Yn ь> ^)=2 lln' (з-5-2)
/г=0 я —0
гармонического внутри сферы, и вектора
оо оо
п — _L VfA] v di ji — V тт (ч ъ ч)
2G /т^\ R ) п ^' ' ~ лЛ -(«+О> (,o.j.o;
гармонического вне ее. Буквой G здесь обозначается модуль
сдвига.
Решение внешней задачи, как известно, можно получить, за-
заменив п на —(га + 1) в решении внутренней. Поэтому сначала
рассматривается только последняя. По C.1.9) определение PR
требует знания гармонического скаляра ^F; он может быть най-
найден путем исключения гармонического вектора U из равенств
C.1.6), C.1.10). Из последнего уравнения, учитывая, что
V2l7 = 0 и V2? = 0, имеем
+ -R-VV
Заменив здесь Ч-U его значением C.1.6), получим
У-П = —2[A + v)W + A +2v)R-VW + K-VR- W].
Теперь, представляя гармонический скаляр 4s суммой гармони-
гармонических полиномов
ft-0
имеем
R • VT = ^ ftWft, /? . VJ? |j
ft=i ft=i
оо оо
V • П = 2 V • П„ = - 2 2 [*2 + A + 2v) ft + A + v)] Ч^.
n0 fe0
n=0
Слева стоит сумма гармонических полиномов степени п—1, так
что, полагая k = п— 1, получаек
=
д-i 2 и2-(! -2v)n + (l-v) '
СО
иг = _ ± V v-nn
2 ^J п?-(\-2у)п+\-у
C.5.4)
256
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
и, учитывая, что VH'n-i — гармонический вектор степени п — 2,
имеем по C.1.9)
Вместе с тем по C.1.6), C.1.1) находим
V . П= У C-4v)ra-2(l-v) „ _ п
1л я2 — A — 2v) п + 1 — у ' п'
«=о
n2 - A -
- v
C.5.6)
Из последней формулы определяется сумма нормальных напря-
напряжений
О = I
«2 — A — 2v) « + A —
C.5.7)
Система приложенных к шару внешних сил должна быть стати-
статически эквивалентна нулю — должны обращаться в нуль ее глав-
главный вектор V и главный момент т°:
= J J"
О,
C-5.8)
Известно, что интеграл по поверхности сферы от произведения
двух поверхностных векторов Лапласа различных порядков
равен нулю; поэтому при вычислении интегралов C.5.8) сле-
следует в разложении C.5.1) сохранить лишь слагаемое Уо в пер-
первом и У] во втором. Получаем
V =
= 0,
т
1G 11 J V -X Пч dx = Щ- GRlv ХП1 = О, C.5.9)
так как V X IIi — постоянный вектор. Итак, в разложении век-
вектора поверхностных сил должно отсутствовать постоянное сла-
-и
гаемое Уо> а слагаемое Ro Y\ подчинено условию
2GII, = JL У, = Vtf, R^Y^R
C.5.10)
где Я —некоторая однородная квадратичная форма координат
х, у, z. Суммирование в формулах C.5.5) — C.5.7) следует начи-
§ 3) РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 257
нать с п = 1, а во второй группе слагаемых C.5.5) с п = 3. За-
Заменив «на —(п + 1) в разложениях C.5.5), C.5.7), придем к
решениям внешней задачи
п = 0
" ,2 |2C-32V)B+~3(l'-v) ' C-5Л2)
3.6. Вычисление вектора перемещения. Формулами C.5.5),
C.5.7) определены сумма нормальных напряжений и вектор на-
напряжения на любой концентрической с О поверхности сферы
R < Ro. Более сложно находится вектор перемещения. Исполь-
Используя формулы
V X щ = cpV X а + Vcp X а, V X R ¦ def U = \- R • VV x U,
по C.1.10) и C.1.6) найдем
1
i_2vRXS?R-Vx? + 2RxW =
г-A -4v)RX V(R- V^O + jjR- VV X V, C.6.1)
откуда, учитывая еще, что
R • VV X Un = (п — 1) V X Un,
и вспомнив C.5.4), найдем при п Ф 1
V х U = ' [2V X П пA-4у)-3 + 2у ^ х vv . П 1
C.6.2)
Полагая теперь в C.1.10)
def C/ =
^RX(VX U)
и снова применив C.1.6), получим
П = - 2vR4 + A - 4v) RR • VW + ^2VY + /? . V?/+ ^- /? X (V x V),
так что
17 А. и. Л>рье
258 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Исключив теперь V X V с помощью C.6.2), a vF,>-i— по C.5.4),
придем к равенству
n
+ 7Г(Г-1)[^-0-йя + 1 -v]
и по C.1.1), C.5.4) вектор перемещения оказывается равным
Очевидно, что слагаемое, соответствующее м = 0, входит в вы-
выражение вектора перемещения сферы как твердого тела. Сла-
Слагаемое Mi представляет вектор, линейно зависящий от коорди-
координат; оно может быть представлено произведением
«, = А ¦ R = - (Л + А') ¦ R + \ (А - А*) ¦ R, C.6.5)
где А — постоянный тензор второго ранга, который можно счи-
считать симметричным (А == л"), так как присутствие в нем косо-
симметричной части добавило бы к вектору лишь слагаемое
входящее в произвольно добавляемый вектор перемещения
твердого тела. Вычисляемый по U] тензор напряжения ТО) равен
[t^ ] C.6.6)
так что
Первый инвариант тензора А определяем по C.6.6), C.5.7):
так что
«i=lIi-TT7*v>I1i- C>6-
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 259
В случае внешней задачи, изменив п на —(га + 1) в формуле
C.6.3), имеем
x rot п-
C.6.9)
для всех п = О, 1,2, ...; вектор перемещения определяется фор-
формулой
3.7. Напряженное состояние в центре шара. Вектор напря-
напряжения на произвольно ориентированной площадке в центре шара
(R = 0), определяемый формулой C.5.5), равен
Ro I/1 ' 2G + 5^
— для определения напряжений в центре сферы достаточно
знать только первый и третий члены разложения C.5.1) нагруз-
нагрузки в ряд по сферическим векторам Лапласа.
3.8. Тепловые напряжения. Поверхность О сферы предпола-
предполагается ненагруженной, а температурный режим — стационар-
стационарным. Вектор перемещения, как в п. 3. 4, представляется в виде
u = v + Vx, C.8.1)
где х — частное решение уравнения Пуассона C.4.4), v — век-
вектор, определяемый из однородных уравнений равновесия в пе-
перемещениях. Тензор напряжений по A.14.1) гл. IV равен
Т = Т (и) - 2G ~l^~aQE = T (v) + f (Vx) - 2G -^~
где операция Т над вектором а определяется очевидным равен-
равенством
Т (а) = 2G (-f^b— E div a + rief a),
так что
1?»
260 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Теперь, сославшись на A.14.8) гл. IV и на C.1.8), имеем
f = f (v) + 2G (WX - V25c?) = f (v) + 2G (wx - -i±^-a9?),
RPs=R.f = RPR(v) + 2
Но, как указывалось в п. 3.4,
-S VX.-a-|±J-2
д=0
где Э„ — однородные гармонические полиномы п-й степени, по
которым разложена в ряд гармоническая функция В, а %„ — од-
однородные полиномы (п + 2)-й степени, так что
R ¦ vvXn = (n+ i)vXrt = «4^ ww(w*+у ^2 • v
и, далее,
C.8.2)
Вектор г> определяется краевым условием
и гармонический вектор II (v) оказывается равным
1-v
" д=0
(n + 2)am Г/ ?> \"+i , / d \i-i
tt=O
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 261
где использовано уже известное по п. 3.4 представление век-
вектора (eRQn)R_R(t по сферическим векторам Лапласа C.4.8). Те-
Теперь по C.5.5) получаем
2 а
д=0
2 а 1-v ^ol^o- К ) 2и 2« + 3 L«2 + «(l+ 2v)+1+v +
(«-3)VV-n**_, 1
+ /i*-C-2v)n + 3(l-v)J' C-8>5)
где введены обозначения гармонических векторов
Гп+1, п»-1 = а«о(-^-) П-ь C.8.6)
Нетрудно проверить, что при линейном законе распределения
температуры
4^z; afe0 = 0, 6 = 2, 3, ...,
О
вычисляемый по этим формулам вектор PR действительно ока-
оказывается равным нулю (п. 1.14 гл. IV). Поэтому суммирование
надо начинать с п = 2.
Напряжение в центре (R = 0) определяется заданием лишь
второго слагаемого в разложении C.4.12) температуры в ряд
по гармоническим полиномам; остальные слагаемые, в том чис-
числе содержащие аю, при R = 0 обращаются в нуль. Вычисление,
в котором используются формулы C.8.5), C.8.6), C.4.8) и
(VI. 2.17), дает
±^^er). C.8.7)
3.9. Напряженное состояние в окрестности сферической по-
полости. На большом удалении от полости напряженное состояние
предполагается однородным; оно задается постоянным тензо-
тензором f°°. Тензор напряжений при наличии полости обозначается
Т, он представляется суммой
f = f°°+f*, C.9.1)
где V—тензор, обращающийся в нуль на бесконечности (при
R—>оо); им определяется возмущение напряженного состояния
262
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
вызываемое полостью. Поверхность последней R — Ro предпо-
предполагается свободной от нагружения. Поэтому
(eR • Г)*.*, = 0, (ей ¦ fV* = - («* • f\mR,.
или
RPR \R_Rit = - RoeR • f°° = - RoeR ¦ isikt7k =
= - Roik fsin О {tTk cos A + t?k sin l) + /.% cos fl] = - У, (ц, X). C.9.2)
Гармонический вектор П* должен быть определен равенством
п* = п*_, = - Л. (^J Y[ ^ к) = _ _L (^)ч я. f - (з.9.з)
(^) Y[ ^ к) = _ L
Выражение C.6.10) для вектора перемещения, в котором сохра-
сохраняется лишь одно слагаемое п= 1, записывается в виде
и =
?3 ' 7 - 5v Я3
Пусть, в частности, f°° = г'з&С то есть речь идет о напря-
напряженном состоянии в растягиваемом стержне при наличии в нем
сферической раковины с весьма малым по сравнению с разме-
размерами стержня диаметром. Для напряжений на поверхности ра-
раковины очевидное, хотя и довольно громоздкое вычисление по
формуле C.9.4) приводит к сравнительно простым формулам
оо
ofl = т 15v) B7 - 15v - 30 cos2 fl),
(I5v — 3 - 30v cos2 #)
°>-2/-fry)
и, в частности, при ¦& -- гг/2
а при д = 0
3+15 v по п__оо
0{) = оА = - -2j7~--^-y Ог « - 0,75а,- .
Максимальное растягивающее напряжение создается на эква-
экваторе полости, оно в 2,07 раза больше номинального напряже-
напряжения 0?; сжимающие напряжения 0,75сьГ создаются в полюсах
^ 3| РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 263
полости. Концентрация напряжений имеет местный характер.
Например, в плоскости экватора \1 = л/2
_ - _Л=Г1 4- 45V (
2 G - 5v) \ R ) ' 2 G - 5v) \ R
При R = Ro получаем, конечно, вышеприведенное значение
2,07а~, но уже при R = 2R0 оно падает до 1,03а".
3.10. Напряженное состояние в окрестности малой сфериче-
сферической полости в скрученном цилиндрическом стержне. Аналогич-
Аналогично рассматриваются задачи, в которых задаваемое на бесконеч-
бесконечности напряженное состояние неоднородно. Например, в скру-
скрученном цилиндрическом стержне
^хг ~ ~ ~1 У' %цг = '*''
1 р у 1 р
ИЛИ
т°° __ z \. (ii-i-ii)u-4-(ii-4-ii\r] C 10 1^
h 3 113
где М, — крутящий момент, 1Р — полярный момент инерции
стержня.
Полагая, как выше,
f = Г» + Г,
имеем
(RPr)r=r = — Ro^r • f °° = ^-sin dcos-e1 (— tj sin h + i2cosA) =
= - -~- P\ Ы (- h sin I + i2 cos X) = -Y2 ((x, k).
Поэтому
или
"IM00' «°° = ^(~-i,y-H2xJ> C.10.2)
где м1^ — вектор перемещения на бесконечном удалении от по-
полости, В разложении C.6.10) сохраняется лишь слагаемое п — 2.
Учитывая, что
,. ц°° _
div -j^- = 0,
получаем
В сферических координатах имеем
C.10.4)
264
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
и отличны от нуля только напряжения
dR
На поверхности полости
5 Мг
э5 | sin ¦& cos Ф.
. о
sin
C.10.5)
C.10.6)
Искажение напряженного состояния имеет резко выраженный
местный характер. Максимальное касательное напряжение на
М R
I2
М
25% превосходит номинальное напряжение —I
'р
Простота полученного решения объясняется тем, что задача
о кручении тела вращения сводится к разысканию одного лишь
перемещения их, причем произведение щеа представляет гармо-
гармоническую функцию (см. п. 1.11 гл. IV).
3.11. Действие массовых сил. При действии массовых сил с
потенциалом Ф частное решение уравнений равновесия в пере-
перемещениях определяется из соотношений A.4.7), A.4.10) гл. IV:
7 Ф ОП1)
2. Тогда и % разыскивается как
Далее рассматриваются частные случаи задания Ф.
1°. Ф-Ф(г), г =
функция только г:
_1_ d d% _
г dr dr
l-2v
2G(l-v) V,
l-2v
2G(l-v)
^ J ГФ
/
1
C.11.2)
и, далее, по A.1.3) гл. IV
s 1
— v
Е\Ф (г) +
+ A - 2v) [ егегФ (г) - ~ {егег - ефеф)[ J гФ (г) + С ) J |, C.11.3)
причем er, e!(, k обозначают единичные векторы цилиндрической
системы координат (см. п. III.7).
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 265
Например, при вращении твердого тела вокруг неподвижной
оси Oz с постоянной угловой скоростью (о потенциал центробеж-
центробежных сил равен по A.2.6) гл. I
Ф = --2-^-со2г2=-у71«Х^|2, C.11.4)
и остающееся конечным при г = 0 частное решение для вектора
перемещения будет
и = —
l-2v ум2 ,
Г е
2G(l-v) 8g " v——,
а отличные от нуля компоненты тензора напряжений равны
ум2 3 - 2у 2 уш2 1 + 2у 2 Y«2 v 2
°r— gg j_v > и<р 8j 1-v ' г 2g 1-v
C.11.6)
2°. ф = Ф(#), ^ = )/л:2 + г/2 + 22. Теперь по C.11.1), разы-
разыскивая х как функцию У?, имеем
1 d R2 d% _ 1-2у
/?2 d/? ^ d/? 2G(l-y)
так что
н= ] 2v e 1-^ I R2O(R)dR + C1J, C.11.7)
2G A — v) л1 v /?2 i \ ч' i / \ /
¦(l-2v)
/? + ? ) J } • C.11.8)
3°. Потенциал Ф — гармоническая функция, представимая
рядом однородных гармонических полиномов:
C.11.9)
Как и в п. 3.8, найдем
v - l~2v O2 V ЪЛх, У, г)
266 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
3.12. Гравитирующий шар. Из теории ньютонова потенциа-
потенциала известно, что сила притяжения, действующая на частицу
шара единичной массы, направлена к центру шара и пропорцио-
пропорциональна по величине радиусу этой частицы:
| C.12.1)
Здесь Ro — радиус шара, \ — значение объемной силы на по-
поверхности шара, то есть в случае земного шара вес единицы
объема. Частное решение C.11.7) будет
„•- 1 -2v у/?2 р /о to <?\
" бп^ГГ* ( )
а по C.11.8) и C.1.8) находим
п т* рр* = ~
Y,.
C.12.3)
Поверхность шара не нагружена, и по C.6.8) на решение
C.12.2) следует наложить решение
Получаем
Вектор напряжения в центре шара определяем по C.7.1):
(*Л-о = - lofr^T yR°eR- C-12'5)
Для Земли (у = 5,53 г/см3, /?0 = 6,37 • I08 см) вычисляемое по
этой формуле напряжение оказывается неправдоподобно боль-
большим; это указывает на неприменимость принятых методов линей-
линейной теории упругости в рассматриваемой задаче.
3.13. Вращающийся шар. Тензор напряжений Т и вектор
перемещения и представляются в виде
f = fo + fi u = mo + m\ C.13.1)
где f°, u° —частные решения C.11.6), C.11.5), определяемые
действием центробежных сил. Записывая Т° в виде
^ C~ 2v) + ***A + 2v) + Akkv] R2{[~fx2)l
^ЗЛЗ.21
РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ
267
имеем, сославшись на (VI. 2.12), (VI. 2.16),
R.f°=- -20(iV!v)g R" {I2 <3 ~ 2v) егР>(fx) + C + 2v) *
- [1 C - 2v) erP3 (ц) + C + 2v) kP3 (ц) ]}, C.13.3)
где, как выше в п. 3.4, введен единичный вектор е,, так что
eR = ег sin ¦& + & cos ¦&.
Условие отсутствия иагружения на поверхности шара R = Ro
записывается в виде
или
Здесь Пь Пз — гармонические при R < Ro векторы
R тт / R \3 ¦
C.13.4)
а Уь У3 — сферические векторы Лапласа, определяемые по
C.13.3):
У, = А [2 C - 2v) er Р\ (ц) + C + 2v) kPl (ц)],
у3 = - Л [1 C - 2v) erP3 (ц) + C + 2v) kP3 (j
C-13.5)
причем
Л =
40G(l-v)g
Вектор перемещения определяется по формулам C.6.3),
C.6.4), C.6.8) и C.13.1), C.11.5). В п. 4.5 приведены более об-
общие формулы для случая эллипсоида вращения. В полюсе и на
экваторе шара вектор перемещения оказывается равным
3 I 2A-2у) 2 B + у)
I 2A
L 15
v)
2gG
пЗ[ 2A -2у)
3 G + 5v)
2 + v
k,
'5 A + v) r 3 G + 5v)
C.13.6)
где k, er — единичные векторы цилиндрической системы коорди-
координат. В применении к Земле, задаваясь сжатием у полюсов
ед = 1/300 и принимая v = 1/3, находим G~'2,6-IO5 кг/см'2—¦
это приблизительно значение модуля сдкига стекла.
268
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. \
Вектор напряжения на поверхности шара R < ^о, определяе-
определяемый по C.5.5), оказывается равным
(R2o - R2) [2 C - 2v) erp\ (ц) + C -
V»2
C.13.7)
Вместе с тем
Рн = еп • f = ет • Т sin ¦& + k ¦ f cos ¦&,
и поэтому на экваторе и в полюсе шара
2) [
Т) =
-v)
i-rj|2C-2v) +
2v-
14 +
21-2v
7 + 5v
C.13.8)
Векторы (e, • f) v=n/j, (ft'7")v-o коллинеарны соответственно ег
и fe, поэтому на экваторе и в полюсе касательные напряжения
%rz отсутствуют, а приведенные формулы определяют нормаль-
нормальные напряжения ог и соответственно о2.
Сумма нормальных напряжений в центре шара опреде-
определяется по C.5.7):
^^A5-6v). C.13.9)
Отсюда и из C.13.8) имеем
2 C - 2v)
^v)
21-2v
"I
20g(l~v)
C.13.10)
Равенство нормальных напряжений сг и а?. в центре шара,
впрочем, следует и из соображений симметрии.
3.14. Действие сосредоточенных сил. Рассматривается напря-
напряженное состояние в сфере, нагруженной уравновешенной си-
системой сосредоточенных сил Q{, приложенных в точках RoeW
поверхности. Конечно, эта система сил предполагается уравно-
уравновешенной:
N N
2Qi = 0, 2 е? X Q, = 0. C.14.1)
Плоскость, проведенная через вектор-радиус точки приложения
силы Qi и линию действия ее, пересечет сферу по меридиональ-
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 269
ной плоскости я?; положение меридиональной плоскости .-г*,
проходящей через точку приложения силы Q, и точку наблюде-
наблюдения ReR, определяется углом этой плоскости с плоскостью л°;
через Э, обозначается угол в плоскости щ между векторами
у. = cos 8(. = е^ ¦ eR = cos ft cos ft, + sin ft sin ft\ cos (A — X{), C.14.2)
где (Ro,®i,h) и (R, ft, А)—сферические координаты точек при-
приложения сил и точки наблюдения. Очевидно, что (Е — единич-
единичный тензор)
R ¦ Е /}/? 1
Уу. = Ve^ • eR = We^ ¦ -^- = eRl • ~^~ eRl • -^r = -g (e^ ~ YieR)-
C.14.3)
Разложение по сферическим поверхностным векторам Лап-
Лапласа вектора, представляющего сосредоточенную силу Qu полу-
получим путем предельного перехода в^ —*0 от поверхностной на-
нагрузки:
О, e,<9,<Ji,
-рр, 0<6г<е,,
Сославшись на (VI. 4.8), имеем
Вместе с тем
B«+1) f Рп(у'^с1у^ = Prt_,(cosE(.) — Pn j(coseA
cos z-t
так как Ри(\) = 1. Далее,
lim -\ [Pn-i{coset) - Pn+i(coset)] =
_ .. 1 dcose, rn/ .,. _,, .iSi 2n+l
e, = 0
de,-
и, следовательно, представление сосредоточенной силы (расхо-
(расходящимся) рядом по полиномам Лежандра Рп{Уг) будет
270 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Сославшись теперь на C.5.1), C.5.2), получаем
СО «1 Л'
n = SU-=8cbrSB»+1)(i)"S«^^). (ЗЛ4.4)
fl = 0 н = 0 ( = 1
Заметим, что ряд
сходится и имеет суммой
так что
П = ° У Q (№ + R2- 2RRny.V3k. C.14.5)
Возвращаясь к C.14.4), получим
TV
П - 2я+1 р" V
и, далее, сославшись на C.14.3),
)Qi, C.14.6)
так как
nPn-yiP'^-P'n-i- О-14-7)
Сумма нормальных напряжений по C.5.7) представляется
рядом
C.14.8)
Теперь имеем
* V • «Ч (V,) Qt = ^И~21(я - {
Снова применив C.14.7), молено этот результат записать в виде
%)} ¦ Qh
C.14.9)
§ 3] РАВНОВЕСИЕ УПРУГОЙ СФЕРЫ 271
и распределение напряжений на поверхностях R = const по
C.5.5) записывается в виде
р/? =
V Bга+ 1) (га-2) Г/ R \"-3 I R
2|ra2-(l-2v)ra+l-v| \\R0) \R0
В центре сферы по (VI. 2.12) и C.7.1) находим
е<»е«
t • eRe%]. C.14.1
Например, в случае сферы, сжатой двумя сосредоточенными
в ее полюсах силами, имеем
Q2 = kQ, ef=-k, Y2= -eR'kz= -
и no C.14.11)
так что нормальные напряжения на площадках, параллельных
направлению сил и к ним перпендикулярных, соответственно
будут (v = 1/3)
ох= 22Щ ^-Л" 0.605. а,
3.15. Случай распределенной нагрузки. В формулах C.14.10)
и C.14.8) следует заменить суммы интегралами. Задавай
272 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
распределение нагружения вектором Р^(ц', А/), имеем
п=\ О -1
Г/ р \п~3 / р \ге-П
X
1
"Т
X
1
" 4л;
2л
0
У
'А,'
i
1
J'
-i
Bft
г2-A
fH'PO
+
—
¦ ft
1)
2i
(n
')'
-2)
г + 1 - v]
tf
+ «/Л (Y) + («fo + вл^) Я?-, (V)], (ЗЛ5.1)
причем у = цц' + 1 1 — }л2 У 1 — j/ cos (Л —Я'). Выражение сум-
суммы нормальных напряжений представится в виде
If
R 1
2Я
X
о -i
1
Jdji'P» (jx', Я') • [е^; (v) - eR P;_, (у)]. C.15.2)
Заметим, сославшись на C.14.5), что первую группу слагае-
слагаемых в C.15.1) можно записать в форме известного интеграла
Пуассона
§ 4. Тела вращения
4.1. Интегральное уравнение равновесия. Применяя обозна-
обозначения п. III.9, рассмотрим тело вращения с ненагруженной бо-
боковой поверхностью q2 = q%; ортогональные ей поверхности
qx — ±qlQ будем называть торцевыми; принимается, что поверх-
поверхность q2 = q\ вырождается в ось вращения Oz и на ней
r(ql,q2) = 0 D.1.1)
и что поверхность q1 = 0 представляет на плоскости z = О
область внутри окружности радиуса ft:
z@,</2) = 0, r(O,^)<r@, </2)=й. D.1.2)
§ 4] ТЕЛА ВРАЩЕНИЯ 273
Вектор напряжения на торцевой поверхности равен
е, • f = а,е, Ч- т12е2 + т1феф, D.1.3)
и распределение напряжений на ней статически эквивалентно
главному вектору
2я "О
V = J dtp J (a,e, + т12е2 + т1феф) H2r dq2 D.1.4)
и главному моменту
2л "О
т° =
J (rer + kz) X (a,ei + т12е2 + т1феф) Н2г dq2. D.1.5)
Здесь H2r d(p dq2 — элемент площади поверхности q1 = const.
Полагая
V^iiVx + bVy + kVz, m° = mji + m^2 + mjt, D.1.6)
где в терминологии теории балок Vx, Vy — перерезывающие,
V2 — растягивающая силы, а тх, ту — изгибающие, mz—кру-
mz—крутящий моменты, и используя формулы (III. 9.8), имеем
2
"О
D.1.7)
Вместе с тем
2я «О
18 А. И. Лурье
г)] еф + Я2т1ф(rft -ze,)\,
274
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
так что
2я
г
тх = — dcp
0 "I
дг дг
Sinq>
2я
Щ —
)\ СОЭф - Я2Т1ф2 ЭШф
2л
Ш;
= 1
D.1.8)
Краевые условия на боковой поверхности, очевидно, записы-
записываются в виде
Я =^о: т12 = °> ^ = 0, т =0.
D.1.9)
Поскольку боковая поверхность не нагружена, главный век-
вектор V и главный момент т° напряжений, распределенных по
торцевой поверхности, не зависят от ql. Это следует из про-
простейших соображений статики: силы, приложенные к телу, огра-
ограниченному двумя произвольно взятыми поверхностями qx —
— const и боковой поверхностью q2 = q20, находятся в равно-
равновесии, так что их главный вектор и главный момент один и тот
же на любой поверхности qx. Далее на распределение напряже-
напряжений по этим поверхностям накладывается лишь требование их
статической эквивалентности заданным V и т°.
Так поставленная задача распадается на четыре существенно
различных задачи: 1) растяжение продольной силой Уг; 2) кру-
кручение моментом mz; 3) изгиб парой тх (или tnv); 4) изгиб
силой Vx (или Vу). Напряженное состояние в задачах 1) и 2),
как подсказывают формулы D.1.7), D.1.8), можно считать осе-
симметричным, причем в задаче растяжения отличны от нуля
напряжения а\, стг. сг(р, х\2 и перемещения «ь м2, а в задаче
кручения — напряжения ткг, т.2сГ, и перемещение v — щ (см.
п. 1.10 гл. IV). Более сложны задачи изгиба: в них отличны от
нуля все компоненты тензора напряжения и вектора перемеще-
перемещения; в соответствии с D.1.7), D.1.8) можно принять в задаче
§ 4] ТЕЛА ВРАЩЕНИЯ 275
изгиба силой Vx (Vv) и парой ту (тх) напряжения и переме-
перемещения
ffi) а2> ^ср. Т12> «1> Щ пропорциональными cos ф (sin ф),
Tiq» т2ф, иф пропорциональными sin ф (cos ф).
В рассмотрение удобно ввести «номинальные» напряжения:
они определяются, как вычисляемые по элементарной теории
напряжения при действии рассматриваемой силы или момента
в круглом стержне с радиусом Ь = г @, q§:
Vx V z niyb Am у mzb 2mz
Формулы D.1,7), D.1.8) после интегрирования по ф можно
записать в виде
D.1.10)
D.1.11)
2
*
„2
4
2
2, D.1.12)
D.1.13)
,2
Здесь, как и в пп. 1.11 —1.13 гл. IV, звездочкой отмечены
.множители перед соэф, вшф в выражениях напряжений неосе-
симметричных задач изгиба.
Интегралы в формулах D.1.10) и D.1.12) указывают, что
в задачах растяжения и изгиба силой напряжения убывают при
./? = У г2 + z2-> оо не медленнее, чем R~2, а в задачах кручения
и изгиба парами — не медленнее, чем /?~3.
Поскольку величины qx, . . ., pz постоянные, не зависящие от
q], можно при вычислении по упомянутым формулам, сославшись
276
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
на D.1.2), принять q{ = 0, 2 = 0 и, значит, dz/dq2 = 0. Прихо-
Приходим к равенствам
4
dq\
D.1.14)
D-1.15)
\ D.1.16)
D.1.17)
4.2. Растяжение однополого гиперболоида вращения. С целью
определения концентрации напряжений в глубинной выточке на
поверхности цилиндрического стержня Нейбер рассмотрел ряд
задач о равновесии тела, ограни-
ограниченного поверхностью однополого
гиперболоида вращения (рис. 18),
при различных заданиях главно-
главного вектора и главного момента
внешних сил на торцевых поверхно-
поверхностях ненагруженного по боковой по-
г верхности деформируемого тела. В
этом пункте рассматривается зада-
задача растяжения, а далее — кручения
и изгиба. В рассмотрение вводятся
криволинейные ортогональные коор-
координаты п. III. 10
-26
Рис. 18.
г = a/l+s2 jA-H2. z = as\i,
причем —oo<s-<oo, 0<ц<Л (по III. 10.7) и на оси враще-
вращения гиперболоида q1 = g2 = ix= 1; на ненагруженной поверхно-
поверхности гиперболоида q2 = ql = \i0. Краевые условия D.1.9) записы-
записываются в виде
н = Ио: а2=0, Т12 = 0, D.2.1)
ТЕЛА ВРАЩЕНИЯ
277
тогда как распределение напряжений на части поверхности лю-
любого эллипсоида s — s0, ограниченного поверхностью ц — ц0, удо-
удовлетворяет условию D.1.11) или D.1.15):
И-0 I
так как здесь Ь2 = а2 A — ц2,)- Напряжения с ростом s убывают
-2
не медленнее, чем s
Обращаясь к формулам A.12.13) гл. IV, имеем следующие
выражения напряжений через осесимметричные гармонические
функции Ьо. Ьъ\
2G~
дЬъ 1 + s2
+ u2 \ 3s r ds
363
?T + ^
2G
1-Д2
3ft0 , .. - 363
s(l+s2)
ааф 1 - ц2 Г
G~= s2 + n2 L
2v
1 + s2 363
+ S
s /36,
ds
1+s2
2G
ds
d\i ' ds
\i / 360 , „„ З&3
duds)^ s2 + Ц2 \ 3s
3s
D.2.3)
Из этих выражений следует, что с ростом s функция Ьо долж-
должна возрастать не быстрее ins, a b3 — убывать не медленнее,
чем s~K
278
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
Ц'Л. \
Осесимметричной гармонической функцией, растущей, как
In s, является
In ~ = {in A + s2) + ~ In A - ц2).
D.2.4)
Она не остается ограниченной на оси гиперболоида (при ц =1);
но эту особенность можно исключить, добавляя к D.2.4) реше-
решение Qo(l-i) [см. (VI. 3.3)]. Поэтому одним из используемых ре-
решений, входящих в состав Ьо, будет
Ф (s, v) = In ^л Qo (и) = j In A + s2) + In (I + ц). D.2.5)
Осесимметричными решениями уравнения Лапласа, убывающи-
убывающими, как s~l и s~2, являются по (VI. 3.7) и (VI. 1.8) функции
qo(s)Po(\*)= arcctgs, <?, (s)P, (ц) = (s arcctgs— 1)ц. D.2.6)
Первое принимается за Ь2, второе включается в b0. Итак, по-
полагаем
D.2.7)
После вычисления по формулам D.2.3) краевые условия
D.2.1), которым надо удовлетворять при любом s, записы-
записываются в виде
Но
D.2.8)
Нет ничего неожиданного в том, что в правильно взятом реше-
решении выполнение, скажем, первого краевого условия (для ао = 0)
автоматически влечет выполнение второго. Для такого решения
распределенные но поверхностям двух произвольно взятых
эллипсоидов, ограниченных куском поверхности S]^s^Cs2 ги-
гиперболоида fx = цо. напряжения уравновешиваются. Но на этом
куске по условию <з2 = 0, значит, и напряжения х\2 на нем ста-
статически эквивалентны нулю, и вследствие произвола выбора
sb S2 напряжения Т|о = 0.
Получаем
? \
'i ISM)
\
§ 4J
и отсюда по D.2.2)
ТЕЛА ВРАЩЕНИЯ
279
D.2.10)
Этим полностью определяется напряженное состояние. Ко-
Коэффициенты концентрации напряжений о\, о\г определяются от-
отношением их в наиболее глубокой точке выточки \х = цо, s = 0
(в критической точке) к номинальному напряжению:
V I -
U 2
D.2.11)
Например, при |io = 0,2, принимая v = 0,3, имеем k\ = 5,08,
k,{ = 1,65. Вместо цо в эту формулу вносят кривизну меридиана
в критической точке
а 1 -Но
Напряжения быстро убывают по мере удаления от критиче-
критической точки; это позволяет оценивать коэффициент концентрации
в точке максимальной кривизны наружной выточки на теле вра-
вращения при любой форме меридиана по его значению D.2.11)
для гиперболоида.
4.3. Кручение гиперболоида. Это — наиболее простая задача
в рассматриваемой группе задач, так как, в соответствии с
п. 1.11 гл. IV, решение сводится к разысканию одной лишь гар-
гармонической функции иег'ф такой, что v/r убывает с ростом s не
медленнее ,s~3. Решение дается функцией
v = aCq\ (s) Р\ (ц) = аС {-^^ - arcctg s) V^
q—--arcctgs).
и по A.11,3) гл. IV
0 TUp
^Т+Т5" у ~^ + ^2 >
D.3.1)
D.3.2)
Краевое условие на боковой поверхности D.1.9) удовлетворяет-
удовлетворяется, а постоянная С, определяемая по D.1.17), оказывается
равной
8 о
280 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Коэффициент концентрации напряжения Т1Ф дается формулой
A11] 3 <1 + ^а D34}
И-Ио
4.4. Изгиб гиперболоида. Задачи изгиба тела вращения не
осесимметричны, и гармонические функции Во, Въ следует брать
пропорциональными cos ср; при изгибе силой Vx и парой пгу в
решение включается также гармоническая функция В\, так что
Вг = В\ cos ф, В9 = —В\ sin ф,
и поэтому, приняв
Вг = br (q\ q2) cos ф, Bv = b,( (q\ q2) sin ф,
имеем в формулах A.13.5), A.13.6) гл. IV
п = 1, Ьг = —6Ф = Ви D.4.1)
причем 6Г, 6Ф — осесимметричные гармонические функции (см.
также A.13.4) гл. IV), равно как boei(f, 63ei(p.
Структура формул A.2.13), A.2.14) и A.13.5), A.13.6)
гл. IV с учетом того, что г, z, Я2 возрастают пропорционально s,
#i с ростом s остается конечной величиной, а напряжения в за-
задаче изгиба силой (парой) убывают, как s~2(s~3), накладывает
определенные требования на порядок роста введенных в рас-
рассмотрение функций bo, b%, br = —6Ф.
Изгиб силой. В состав гармонической функции Ьое{ч>
вносится слагаемое, остающееся конечным при s —>¦ оо. Таковы-
Таковыми при п= 1 являются по (VI. 3.12), (VI. 3.16), (IV. 3.17)
разность которых конечна на оси гиперболоида (при ц. = 1):
fii. D.4.3)
+
В состав bo вносится еще одно слагаемое вида D.3.1). Функция
Ьз должна убывать, как s~\ Таким решением, конечным на оси
гиперболоида, является
cp2(s, ц)- ~ 9j(s)lQi(n)-Pi0i)] = -p=r/Y^- ¦ D-4.4)
§4]
ТЕЛА ВРАЩЕНИЯ
281
Наконец, Ъг — осесимметричная гармоническая функция, убы-
убывающая, как S'1; таковой является qo{s) = arcctgs. Итак, реше-
решение задачи строится с помощью функций
+ в
-arcctgs) r,
l/ -j—^ . &r= - &m=-Darcctgs.
F 1 4- II
D.4.5)
Трех постоянных оказывается достаточным, чтобы удовлетво-
удовлетворить трем краевым условиям D.1.9); четвертое уравнение
дается условием D.1.14).
Изгиб парой т,у. Набор функций, решающих эту задачу,
дается функциями
+s2
Bq\ (s)
Ьт = — Ьщ = DPX (ц.) qx (s) = D\i (s arcctg s — 1),
причем no (VI.3.7), (VI. 3.1.1), (VI.2.16)
q\ (s) = 3 V 1 + s2 s arcctg s — 1 —
D.4.6)
3 (.1 + s2)
Опускаем дальнейшее вычисление, которое заняло бы много
места. Аналогично рассматриваются задачи о напряженном со-
состоянии упругого пространства при наличии в нем полости,
ограниченной поверхностью сжатого эллипсоида вращения, при
заданном напряженном состоянии на бесконечности. Способ ре-
решения более общей задачи, когда поверхность полости является
трехосным эллипсоидом, указан в § 5 этой главы.
4.5. Вращающийся эллипсоид вращения. Предполагается,
что эллипсоид вращается вокруг его оси симметрии (оси Ог).
Частное решение, соответствующее действию массовой центро-
центробежной силы, предполагается выбранным по формулам C.11.5),
C.11.6). Решение этой осесимметричной задачи строится с по-
помощью бигармонической функции Лява х (см. п. 1.10 гл. IV).
Применяются цилиндрические координаты г, z, так как исполь-
использование вырожденных эллиптических координат было бы более
сложно.
На напряженное состояние Т°, задаваемое формулами
C.11.6), налагается также осесимметричное напряженное со-
состояние Т*, определяемое по краевому условию
282 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
или, в развернутом виде,
°Х + КгПг = Аг\> Х\гПг + аХ = А1Г\> D.5.1)
. _ ю2у C - 2v) , _ со2уу а с 9ч
а 9
А~ 8ff(l-v) ' Л'~ 2g(l-v) • ^4'5-^
Здесь иг, я2 — проекции на направления ет, k единичного век-
вектора нормали я к поверхности эллипсоида, так что
дг , дг , \ яг fe/C.5 г s2 ± 1 га2 г
nr dr/ds r s2 r c2 ra '
где а = с2/а2 — квадрат отношения полуосей эллипсоида, кото-
который может быть как сплющенным, так и вытянутым (см.
п. III. 10). По A.10.6) гл. IV приходим к краевым условиям
D.5.3)
которые должны быть выполнены на поверхности эллипсоида
z2 = c2 — ar2. D.5.4)
Нетрудно понять, что бигармоническая функция % должна быть
нечетной по г; тогда в правые части D.5.3) войдут (после со-
сокращения на г и г) только слагаемые, четные по z, которые да-
далее исключаются с помощью D.5.4).
Аксиально-симметричные гармонические внутри эллипсоида
функции RnPn(\i) представимы следующими однородными по-
полиномами по г, z (см. п. VI. 2):
R*Pt (и) = г4 - 3zV + 4 r\ R5P, (и) = г5 - 52V2 + -^ r*z
(отброшены несущественные числовые множители). Они обозна-
обозначаются далее фЬ ср2, ..., ф5. Бигармонической функцией яв-
является произведение гармонической на z или на z2 + г'2 = R2.
Поэтому в состав / кроме ф3, ф5 включаются
(Г2 + 22)фЬ гф2, (Г2 + 22)ф3, 2ф4, . . .
Оказывается достаточным принять
% = С3с2ф3 + С5ф5 + D^zr'1 + D2 (zY- - j r*z), D.5.5)
причем третье и четвертое бигармонические слагаемые линейно
представимы через перечисленные функции.
§ 4]
ТЕЛА ВРАЩЕНИЯ
283
Определив постоянные, приходим к следующим выражениям
компонент тензора Г":
D.5.6)
где обозначено
Q= 8g(f-
. D.5.7)
Проекция вектора перемещения и на направления er, k опреде-
определяются по формулам
~ ur = ah \^ [2 C - 2v) - 4v (у + 2a + 2av)] +
+ r(c2~z2){C-2v)[2-v + 4a(l - v)] + 4v (-j-- 2av -
D.5.8)
nr>
+ z (c2 ~ —) {- 2 C - 2v) [1 + Da + 1) v + 4v Ba - 5v)]} +
2\ - C - 2v) [v-4a A - v)] + 4v ( П 10v+2a)|. D.5.9)
284 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
В частности, в полюсах и на экваторе эллипсоида вращения
B0 Ч-, - 8g A - v) Д { TTv t ~ 4 C - 2v) + 4v (v + 4a + 4av)] +
-|a[- 2C-2v)(H-4av + v) + 4vBa~5v)]}, D.5.10)
D.5.11)
При а= 1 возвращаемся к формулам C.13.10) для сферы*).
§ 5. Эллипсоид
5.1. Эластостатическая задача Робена для трехосного эллип-
эллипсоида. Постановка задачи была дана в п. 4.7 гл. IV, а в п. 3.3
приведено ее решение в наиболее простом случае смещения
твердой сферы в неограниченной упругой среде. Здесь эта за-
задача рассматривается в предположении, что смещаемым твер-
твердым телом является трехосный эллипсоид
2 2 2
Xi Хп Хо
~YJ+ 2/ 2_ 2) И 2/ 2_ ) -1=0 E.1.1)
с полуосями ар0, аУр^ —е2, а Ур|—1. При решении исполь-
используются потенциалы простого слоя на эллипсоиде, перечисленные
в (VI. 8.3) и обозначаемые здесь для упрощения записей через
tyi(x,y,z). На поверхности эллипсоида и внутри него эти потен-
потенциалы принимают значения, соответственно равные
фо = 1; i|>s = xs (s = 1, 2, 3), г),^ = x2xs, г]M = x3Xi, if6 = X\X2, E.1.2)
а вне эллипсоида
Функции со., (р) задаются эллиптическими интегралами с по-
помощью формул (VI. 7.5) — (VI. 7.9); обозначения а>\к) в них здесь
заменены на cos для s = 1, 2, 3, а и^ — на cos для s = 4, 5, 6.
*) Случай вращающегося тонкого сплющенного эллипсоида, рассмотренный
Кри (С. Chree, 1895), может быть получен из вышеприведенных формул
при a <C 1.
§ 5]
ЭЛЛИПСОИД
285
Далее рассматривается сначала случай задания впаянному
в упругую среду эллипсоиду поступательного перемещения
р = р0: и = ы°
и затем отдельно — перемещения поворота
р = р0: и = 6 X Ro,
E.1.5)
E.1.6)
где #о — вектор-радиус точки на поверхности E.1.1).
5.2. Поступательное перемещение. Для построения гармони-
гармонических вектора В и скаляра Во в решении Папковича — Ней-
бера A.4.10) гл. IV, записываемом здесь в виде
з
us = C - 4v) Bs - 2j Ч -
dxs
dxs
(s = 1,2,3), E.2.1)
применяются потенциалы \|з0, ipi, 1K2, ^з- Принимаем
Bs = C5ifo, Bo = Mufi + М2Ц2 + Af3if3 (s = 1, 2, 3), E.2.2)
и шести постоянных Cs, Ms оказывается достаточным, чтобы
удовлетворить краевым условиям E.1.5). Действительно, раз-
развернутая запись равенств E.2.1) представляется в виде
1
Д(р) dxs
<»о(Ро)
с,
<Во(Ро
;(Ро)
М,
И, (р0) р2
<-2 | '
МроГ <о2(ро) (р2-
и остается принять
ио (Ро)
С3
= 0,
S S
с,
ио (Ро) йз (Ро) (Ро -
(s=l, 2, 3),
= 0.
¦ = о,
E.2.4)
Отсюда находим постоянные Cs, Мя. Используя также соот-
соотношения (III. 11.26), приходим к выражениям перемещений
1 сг, (р0) 1^
¦(Р) л ,
а2 (р„)
м, =
E.2.5)
286 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
где введены обозначения
а2 (р) = C - 4v) ©0 (р) + (р2 - е2) ш2 (р),
[ГЛ. V
E.2.6)
н -ч
2 Lor, (Po)
сг2(Ро
- +
03(Ро) Р2-1
причем
р4 ^ (р2-е2J ' (р2-!J '
рД (р) D = А (р) Яр = а V(Р2 ~ й2) (Р2 ~ v2).
, E.2.7)
E.2.8)
5.3. Распределение напряжений по поверхности эллипсоида.
Зная вектор перемещения, конечно, можно вычислить тензор
напряжений в любой точке среды. Его выражение очень гро-
громоздко, поэтому ограничимся определением вектора напряжения
tn на поверхности эллипсоида (при р = р0). Учитывая при этом,
что
»//^_.. 40-v)
-1.2, 3),
E.3.1)
имеем (р = ро)
дщ Г 4A -V)
dxs
ди2
Л (Ро) "i (Ро)
4A — v) и\
Л(Ро) <МРо)
4A-v) и%
Ро2
2Ро
оШ
;-е-
Зхс
E.3.2)
2Ро
А(Ро) °з(Ро) Ро-1
Замечая еще, что на поверхности эллипсоида ns = ~- p0DQ, где
Ms — косинус угла единичного вектора нормали к поверхности
эллипсоида р = р0 с осью х,„ имеем
1
2A-2v)
dp
E.3.3)
f-l
§ 5]
ЭЛЛИПСОИД
287
Еще раз сославшись на формулы (III. 11.26), имеем вместе
с тем
V ЦТ дР = 4A-у) I" «1 х, и°2 х2 и\ л-3 1
ai(Po) Ро аг(Ро) Ро-е2 0з(Ро)Ро-и
2 ..2 ..1! \
4 U
так что по E.2.7), E.2.8)
з
E.3.4)
Подстановка в E.3.3) дает теперь
2G 90D
1 1
1g n2~~~^D0 \2
Ро
Ф° =-
2G
p0ZH
Po-1
или, по (III. 11.21) и (III. 11.22),
4G(l-v)
CTi(Po)
стг(Ро)
E.3.5)
af(Po)
0з(Ро)
(s= 1,2,3). E.3.6)
Этот неожиданно простой результат, полученный прямым вы-
вычислением, может быть сразу же найден, если основываться на
представлении вектора Папковича — Нейбера D.3.15) гл. IV,
в котором плотность а(М0) как раз является искомым вектором
напряжения —tn на поверхности полости в упругой среде, что
следует из выражения D.7.1) гл. IV. В нашем случае по E.2.2)
и E.2.5) проекции вектора В при р = р0 равны
Вя =
as (Ро)
«о (р),
E.3.7)
а на поверхности эллипсоида имеют постоянные значения, ко-
которые являются также значениями этих гармонических функ-
функций и внутри эллипсоида. Итак, сославшись на D,3.15) гл. IV,
288
имеем
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
1
16nG(l-v) J
О
°s (po)
°s (Po)
«о (р). Р > Ро.
«о (Ро). Р < Ро.
[ГЛ. V
E.3.8)
и по теореме о разрыве нормальной производной простого слоя
dB(i) gB(e)
дп дп
= — 4я ,g_^
16яОA -v) '
или
4G(l-v)
как и требовалось.
Уравнением
Qs+
определяются проекции силы Q, которую следует приложить к
эллипсоиду, чтобы сообщить ему перемещение и0. Имеем по
(III. 11.22), (III. 11.23)
do = #,,# v d\i dv,
do
Д (p0)
а (ц2-v2)
Д) (|х) Д (v)
du. dv,
так что по E.3.6)
= 32G(l-v)
0
(v)
¦ dv,
где интегрирование ведется по октанту эллипсоида. Вычисление
дает
1 е е 1
о I* .
Д (v) V J Д; (ц) ~
О е
Ми)
е 0
J
-0
= К (ef) E (е) - К И К (е)
§ 5] ЭЛЛИПСОИД 289
так что по известному соотношению Лежандра
1 е
е О
Получаем
l~v)irtb (*= 1.2,3). E.3.9)
5.4. Перемещение поворота. Задаем гармонические функции
Папковича — Нейбсра равенствами
5, = Dfi.x^ (р)-?>;езх2со2Н ]
Д, = DjjO^jCe, (p) - Я^А^з (Р). | E.4.1)
B3 = D3e,x2co2(p)- D&*,©, (р), |
Во = iV191x2x3co4 (р) + ^б^зх^з (р) + Ы3в3х^2а6 (р), E.4.2)
так что
л-, Б, + х2В2 + хД + Во = 9,х2х3 [D3co2 (p) - Z)^ co3 (р) + Л^,ю4 (р)] +
+ e^gX, [Z},(o3 (p) - D>, (p) + iV2co5 (p)| +
+ бз^Л [А>Ю1 (Р) " D>2 (P) + ^«е (Р>1- E-4.3)
Компонент и.\ вектора перемещения представляется формулой
и{ = %х3 [C - 4v) D,©3 (p) + D>, (p) - iV2co5 (p)] -
- 93х2 [C - 4v) D>2 (p) + D2co, (p) + ]Улш6 (p)j +
1 dp i Г D3 D'2 .V,
0 [ +
i
I
Do N,
' P2(P2-D
, E-4.4)
и аналогично записываются выражения ц2, «з- Теперь краевые
условия E.1.6)
р = р0: «1 = бг^з ~ 9з#2, = Эз-Vi — OiX3, u3 = 8]X2 — 02Xi
приводят к системе девяти уравнении для такого же числа неиз-
неизвестных постоянных A, Ds, Л/,. Она распадается на три незави-
независимые системы, соответствующие поворотам вокруг каждой in
19 А. И. Лурье
290
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
осей эллипсоида. Например, система, порождаемая поворотом
0i вокруг оси хи будет
C - 4v) D3«2 (p0) + D>3 (Po) - N^4 (Po) = 1'
C - 4v) D>3 (p0) + D3co2 (Po) + 7V,co4 (p0) = 1,
(р2о-1)(Ро2-е2)
Р2-1
= 0.
E.4.5)
Опуская вычисление, в котором используются также соотноше-
соотношения (VI. 7.7) — (VI. 7.9), приводим окончательные выражения
для перемещений точек упругой среды:
U\ =
1
(р0
I (Po)
P2
-ft 5'(р)
"з - н i*2 fll (ро)
Здесь обозначено:
fi1(p) = 2(l-2v)©2(p)©3(p0)
E.4.6)
б2 (р) = 2 A -2v) со3 (Р) со
, (po
(р0) [(р02- 1) оK
(р)],
E.4.7)
*
а функции 6S (p) отличаются от 6s(p) заменой индексов в пер-
первом слагаемом, например:
E.4.8)
и очевидно, что б* (р0) = 6,, (р0). Функция Q в решениях E.4.6)
определяется равенством
о._ 1 Г 8, (Ог(Ро)-Сйз(ро) ,
Ы ~ рД (р) Д2 L «1 (Ро) (Р2 - е2) (р2 - 1) *2*3 +
"г (Оз(ро)-Ю| (Ро) „ v , 63 СО, (р0) - И2 (ро)
I
:(ро) (р2- 1) р2
Р2(р2-е2)
5.5. Распределение напряжений по поверхности эллипсоида.
Вычисление проводится в предположении, что только Gi Ф 0; со-
соображения симметрии подскажут вслед за этим запись формул
для общего случая.
§5)
ЭЛЛИПСОИД
291
По E.4.1) и E.4.5) имеем
5, = О, В2=- 01D^3oK(p), B3 =
где
1
? -
- 2(l-v)e,(p0)
Подобно E.3.8) имеем теперь
(Р0) + О - 2V) СО3
(p), E.5.1)
E.5.2)
'о)]-
1т.
R
а также
1
16itG(l-v)
'из
1q)=52'), p<p0,
• =в(зв). Р>Ро>
и применение теоремы о нормальной производной потенциала
простого слоя приводит к следующим выражениям компонент
вектора напряжений на поверхности эллипсоида:
2G9,x3
т2(ро) .
J
2ое,х2
бх (Ро) //р
Po-1
: (РО) + Л-^Т ^З (РО) | '
E.5.3)
Моменты tn°s относительно осей xs, которые должны быть
приложены к эллипсоиду, чтобы сообщить ему поворот в, опре-
определяются равенствами
= - JJ (x2tn3 - x3tn2) do = ||^г {A - 2v) [co2'(po) /3 +
С03(Ро) /2] + (О, (р0) [(pg -
d0=то
v) [йз (Ро) 7i
= - J J
0
{A ~ 2V) [CO, (ft,) Jo
E.5.4)
19*
292 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
Здесь
[ГЛ. V
Рол Ы
о
2 do г _ 1
11 о \"о ti )
¦^3 =
1
do
о о
Учитывая равенства
-, п, = -
3~
имеем
Вместе с тем
9 0
Р ~ в
Ро
—1
E.5.5)
E.5.6)
JJ
.v, do = И п,х2 do = rt-j-Xg do =
Г л-
так что
= у nabc = -г зга3р0 v (p2 — 1) (p2 — e2),
4
/) — J% — /3 — -5- Л!.'
и выражения E.5.4) приводятся к виду
8ла3
где введены обозначения:
Yi (Ро) = ftTTTZT U1 ~ 2v) f°>2 (Ро) + «з (РоI +
1, 2, 3),
E.5.7)
Y2 (Ро) = 57(^7
со3 (Ро) Н- (о, (po)j + Bр20 - 1) со5 (р0)},
E.5.8)
5.6. Эллипсоидальная полость в неограниченной упругой
среде. Напряженное состояние на бесконечном удалении от по-
полости задается тензором
f E.6.1)
главные оси которого параллельны осям эллипсоидальной по-
поверхности полости
V2 ,,2 -2
0|4т/т1тт-«г = С E.6.2)
§ 5] ЭЛЛИПСОИД 293
Тензор напряжений Т представляется суммой тензора Т°° и кор-
корректирующего тензора Т*:
? = Г» + Г, E.6.3)
определяемого по краевому условию
р = р0: п ¦ Г = - п • Г° = - {nj{qx + n2i2q2 + n3i3q3) E.6.4)
выражающему, что поверхность полости не нагружена; через
пв обозначены проекции внешней нормали к этой поверхности
на координатные оси.
Вектор перемещения, соответствующий корректирующему
тензору Т*, представляется через гармонические функции Bs, Bo
Папковича — Нейбера по формуле A.4.10) гл. IV:
щ = 4 A - v) Bs - -?- {Blxl + В2х2 + В3х3 + Во).
Сославшись также на формулу A.4.17) гл. IV, можно после не-
несложного преобразования привести краевые условия E.6.4) к
виду*)
^ fc=i
.У «|i.f|i E=1,2,3). E.6.5)
ьл R дп dxs дп dxs v > > / \ i
xs дп dxs
Гармонические функции Bs естественно задать потенциалами
(VI. 8.9), принимающими на поверхности р = р0 значения, про-
пропорциональные координатам:
В, = Л,л:М1(р), В2 = Л2г/оJ(р), В3 = А3г<й3(р), E.6.6)
причем функции cos(p) определены эллиптическими интегра-
интегралами. Гармонический скаляр Во зададим в виде
во = С, (pg - a,J F4co4 (р) + С2 (Ро2 - a2f F5v5 (p) + Л« + Л0а2со0 (р).
E.6.7)
Здесь ^^(р), ^^(р) — потенциалы, обозначенные в п. VI.8
через Ff&f, Ff&f,
F *2 \ У2 | г2 а2 р _ х2 , У2 | *2 Я2
а, + а,-е2 + ет, — 1 а> Г* а2
E.6.8)
*) В укороченных записях, конечно, Х]=х, Х2=у, Xi = z.
294 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
тогда как а — ньютонов потенциал (VI. 8.20):
оо
Г
E.6.9)
В преобразованиях краевых условий E.6.5) существенно ис-
используются равенства (III. 11.19), (III. 11.21), (III. 11.26) и вы-
выражения проекций вектора нормали
п = -*— = х_ и, = ^ = У _ ]
рЯр p«KD/ (р2-е2)Яр (Р*-»8)^'!
М5-6Л0)
zp
Р
Здесь D2 — форма, обозначенная в п. III. 11 через D\\
_е2J + (p*_i)»-- E.6.11)
В рассмотрение вводится также форма
^З" р6 + (Р2-е2K ^ (P2-1K " 2р ар ' 1О.О.U)
причем последнее соотношение легко проверить, обратившись
к указанным только что равенствам. Для укорочения записей
вводятся также обозначения форм
ФЛх,У,г) = А1^ + А2^т+А,-^гт + А,а\ E.6.13)
(х, y,z) = A{^ + A2 j^f + А,-^~т, E.6.14)
Ог = ^ + 715Г72Г+7-2—ТГ7 ГГ (/ = 1, 2). E.6.15)
1 р20. ' (р2-е2)(а. -е2) ' (р2-1)(о.-1) v ' > у '
Выражения производных первого порядка от функций, со-
содержащих р и декартовы координаты, несложны; например, со-
сославшись на (VI.7.5), (III. 11.26), имеем
д , ч , ч d<Bi да
^-хсо1(р) = со1(р) + х^^ =
=й'^-^г1=^(р)-тетр7- {5-6Л6)
Еще проще вычисление производной по нормали
1--—^y). E.6.17)
С помощью формул E.6.10) производятся преобразования вида
.,.„ _ ХУ _ „ ., Р2
§5]
ЭЛЛИПСОИД
295
и т. д., позволяющие в записи первого краевого условия E.6.5)
вынести в правой части за скобку пх, второго — п2, третьего —
«з- Более громоздки выражения вторых производных; это вычис-
вычисление облегчается тем, что вторые производные в краевых усло-
условиях E.6.5) представляют находимые по правилу E.6.17) про-
производные по нормали от первых производных функций Папко-
вича — Нейбера. Особенно просты вычисления, относящиеся к
потенциалу E.6.9); сославшись на соотношение E.6.2), выпол-
выполняющееся согласно (III. 11.9), при любом р имеем
1 -\ E.6.18)
да> _ „ д За
dxs 's s> дп dxs
^^ ~рМр)
Следует еще заметить, что одно из слагаемых, включенных в
состав Во, излишне, так как эти четыре функции связаны линей-
линейным соотношением (VI. 8.16).
5.7. Краевые условия. В каждое из трех уравнений, выражаю-
выражающих краевые условия E.6.5), входят две группы слагаемых.
В первую группу (Is) входят величины, постоянные на поверх-
поверхности полости р = р0; вторая группа (IIS) содержит слагаемые,
зависящие не только от р0, но и от декартовых координат х, у, z
точки на этой поверхности. Приходим к равенству: р = р0
-^ ••= - {A -2v)
+ А (Ив_ _Lj_
(P2-P2J
G2-as
tth
рД
2р2А;
,2Л2
р'-
{[is (P) - -g- P2A2] (Ф, + C,F4 + C2F5) +
-pWiO.-Cfii-C^i)} E.7.1)
9-^2
(s=l, 2, 3),
причем а! = 0, a2 = e2, a3=l и введены обозначения:
2Xs = 3p4-2(l+e2)p2 + e2 + -
A2(p) = (p2-l)(p2-e2),
E.7.2)
Следует потребовать, чтобы квадратичный полином
ф, + CiF4 + C2F5
293 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
делился нацело на ?J; при учете E.6.2) это условие записы-
записывается в виде
Oi + C\Fi + C2F5 = xD2 + kD\ E.7.3)
и приводит к четырем уравнениям
р2 - <xs ox — as 02 — as (p2 - asJ p2 - as
(s=l,2, 3),
I ~~г~ L>2 — Л i -^*q« \О-1 «О
Вторая группа слагаемых в уравнениях E.7.1) теперь при-
приводится к виду
, E.7.6)
и оказывается возможным член в квадратных скобках прирав-
приравнять KD2. Действительно, приняв
+ Ф2 - CjG, - C2G2- XD2 = 2jiD, = О
приходим к системе четырех уравнений
я _| As~X
(р2 - asK ^ (Р2 - a,J
Г ^ I ?* 1 -
L (Р2 - 0,) @, - а,) ^ (р2 - а2) (а2 - а,) ]
причем система уравнений E.7.8) тождественно удовлетво-
удовлетворяется в силу E.7.4), E.7.7). Действительно, по E.7.4) она мо-
может быть записана в виде
С / 1 1 \ i С2
0, - as \ р2 - 0, р2 - as j ~ а2 -
1
¦ as \ р2 - 02 р2 - as
то есть приводится к E.7.7).
Краевые условия E.7.1) теперь дают систему уравнений, пра-
правые части которой, как и надо, постоянны при р = р0:
<Ол + с, — — со,
4 1 о2 — а^
С'_ 1 С2 1 P2-Ct,
Рд •
§ 5]
ЭЛЛИПСОИД
297
5.8. Выражения постоянных через три параметра. Определив
постоянные Си С2 по E.7.5), E.7.7), имеем (здесь и далее
Р = Ро)
С, = -4— [(Я + Ао) (р2 - а,) - ц (р2 - а,) (р2 - а2)], ]
2 , ' | E.8.1)
С2 = ^^ Г- ft + А>) (р2 - *2) + и (р2 - <О (р2 - ъ)] j
п по E.7.4)
Л
Но по определению (VI. 6.8) чисел аи а2
=1,2). E.8.2)
5=1
Отсюда следует, что постоянные As должны быть связаны равен-
равенством
s-I
E.8.3)
которому можно удовлетворить, лишь приняв
Я + Ао = 0.
Но тогда по E.8.1)
С[ = -С2 = С = ^L- (р2 - а,) (р2 - о«), E.8.4)
и параметр ц далее можно заменить на С. По E.7.4) получаем
(от, - *,
as)
E.8.5)
или, подробнее,
E.8.6)
Постоянные Л., выражены через три параметра, но в краевые
условия входит еще четвертый параметр А; его присутствие
298 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
излишне. Действительно, обратившись к исходному представле-
представлению перемещений через гармонические функции Ss, Bq:
з
щ = 4 A - v) Asxs*a (р) - Ц-, V = V Лк*Х + 50,
и сославшись на E.6.7), E.8.3), E.8.6), E.6.9), имеем
з
V = (А - к) со + ^ V— *К + С [(р? - ст,J F4co4-(p2-cr2J F5co5] +
Pn U(
В выражениях трех перемещений по E.6.18) постоянные к, А
войдут в единой комбинации
так что сохранение постоянной А одновременно с к приводит
только к замене обозначений.
Сумма трех эллиптических интегралов coi + сог 4- соз выра*
жается элементарно:
1,1,1
{) г ' I2 - е2 " к2 - 1
Р
dk | 1 i и, ( 1 -г П I _,Л г_ л / 41 —1 /с О О\
р
что легко проверить дифференцированием.
Краевые условия E.7.9) теперь представляются тремя урав-
уравнениями, содержащими такое же число неизвестных к, к, С; при
р = р0 имеем
рА
V %S (Р) \ ¦
-а, 62Д2 1 +
р2 р2-е2 , P2-l \ 1-v Р2-ау
е2 ' е2A-е2) 2 1 - е2 3/ (а, - а^) (а2 - as) рЛ
0,-а, (Я2-0,J
§5]
ЭЛЛИПСОИД
299
Перемещения определяются соотношениями (здесь, конечно,
надо различать р и р0)
(
-2v) Л
с
i-°5 (°i-a,)(ff2-as)
,(P)-
at-as
¦ «5 (p) Xs +
1 dp | | x
K
Д(р) дх.
с? у2
Ро х\
+ С
2 2
Р~е
(Р2-0,J 4
1-е2 р2- 1
^F51|. E.8.10)
Здесь, напомним,
а, = 0, а2 = е2, а3 = 1,
=, .2 „ _ 1 _^Р_ _
_
р (р2 - as) D2 '
(aj - а;) (а2 - а;) = -j-, (al - а2) (сг2 - а2) = - -^ е2 A - е2),
(а, - а3) (а2 - а3) = у A - е2).
5.9. Сфероидальная полость в упругой среде. Пусть поверх-
поверхность полости представляет эллипсоид вращения, а поле тен-
тензора напряжения Т°° симметрично относительно оси вращения
этого эллипсоида.
При е — 0 поверхность полости представляет сплющенный
эллипсоид вращения вокруг оси г; тогда, полагая
Р2 = 1 + 52, fi?p =
s ds
У1 + s2
имеем
А (р) = s /1 + s2 pA(p) = s(l+s2)
и далее, сославшись на (VI. 3.7), (VI. 3.13), (VI. 7.5), находим
dk
i= г
(О, = СО, =
dX
A+Я2J 2
1 / s
— arcctg s
2 I 6
l+s2
E.9.1)
300
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
В предположении qi = Цг задача будет осесимметричной и
второе краевое условие E.8.9) повторяет первое; достаточно со-
сохранить лишь две постоянные К, х. Приходим к краевым усло-
условиям: при s = s0
AG
¦¦ A A — 2v) («! + и3) — к
Ы
iW
2vsg-4sg-l
2so3(l+s2J
Перемещения определяются формулами E.8.10):
4\
- + ¦
E.9.2)
E.9.3)
~2 (s2+lJ ' s4 *
В случае вытянутого эллипсоида вращения р = s, е = 1, Д(р) =
= s2—I и по (VI. 3.3), (VI. 3.11) имеем
©9 E) = I
s-1
\ (s)
E.9.4)
При <72 = ?з приходим также к двум уравнениям для определе*
ния постоянных х, К.
5.10. Круговая щель в упругой среде. Представляя коэффи-
коэффициенты уравнений E.9.2) при малых s0 степенными рядами
j я
So
§ 5] ЭЛЛИПСОИД 301
приходим к системе уравнений
4\sQ 2) 2s03
которой можно удовлетворить, разыскивая неизвестные X, у-
также в форме рядов
А = Ао + Vo + ..., x = x2s02+ ... E.10.1)
в которых
Яо=="~ ISg"^. «2 = iicft и т. Д. E.10.2)
Случаю круговой щели в упругой среде соответствует so-*O,
Я = Я0, и = h2s|. Решение оказывается не зависящим от q\, так
как наличие такой щели не изменяет напряженного состояния,
создаваемого нагружением, параллельным плоскости щели
(корректирующий тензор будет нулем).
При найденных значениях постоянных X, к корректирующий
вектор перемещения E.9.3) определяется его проекциями щ, w
на направления осей er, k цилиндрической системы координат:
Г) -
A+52J
E.10.3)
причем цилиндрические координаты выражаются через сферо-
сфероидальные ц, s (координаты сжатого эллипсоида) по формулам
(III. 10.1):
У /" E.10.4)
Это позволяет записать соотношения E.10.3) также в виде
E.10.5)
Известно, что значениям |.i = 0, s ф 0 соответствует часть пло-
плоскости z = 0 вне круга г — а, а ц =? 0, s = 0 — внутри этого
круга. На самой окружности s = 0, ц, = 0. Поэтому перемещением
302 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
в плоскости щели г = 0 оказывается непрерывной функцией г,
равной
q3 j ац = Ytf^?, r<a (s=0), ,_1ЛСЧ
W'=i-2yr\ E.10.6)
nG У 0, r>a (ц = 0).
Для вычисления напряжений используются формулы дифферен-
дифференцирования
ds |x(l+s2) <Э|х s(l—|x2) ]
~Ж~ a(s* + li2) ' ^7- a{s2 + v2) ' I ,_,.„
os sr d]i \ir j
"dT ~ a2 (s2 + |x2) ' ~b~r a2 (s2 + |x2) ' J
Касательное напряжение хгг оказывается равным нулю на всей
плоскости щели:
J_T J _(du,dw\ _f °. S = °> ^=5^°> /rino^
Далее находим
Gn a: п о..\Г„ ! о„ , s Л i !-^
iiv « = A — 2v) ©з 2©[ ¦
L S
Sz
°Л вю " .2v)(«3-4- + ^rb) +
Ay \ /10 о ' -c* -L и *
Ол аи ,, „ > Г s(l-n2)
-— -=r = (l-2v) со, -
dr Vl "'L ' (l+s2)(s2 + y.
Git и /1 о \ i
— T=-(l-2v)©1+ ....
причем слагаемые, обращающиеся в нуль на плоскости г = О
(при s = 0 или при [i = 0), не выписаны; они остаются непре-
непрерывными при приближении в плоскости z = 0 к фокальному
кругу s = 0, ц = 0.
Получаем на плоскости 2 = 0
f -Яг, s = 0,
,._А E.10.9)
и при приближении к фокальному кругу s = 0 со стороны s > 0
(то есть г > а) нормальное напряжение испытывает разрыв не-
непрерывности
I г 2q3 ^ 2q3 а /г .« . „¦,
Рассмотренное здесь напряженное состояние реализуется в
упругом полупространстве, покрытом снабженной круговым вы-
вырезом (г <^ а) твердой гладкой плитой; по кругу r-%a распре*
§ 5] ЭЛЛИПСОИД 303
делено давление <7з; а плита не допускает нормального переме-
перемещения w, не препятствуя перемещениям иг в ее плоскости.
Из вышеприведенных формул легко получить также распре-
распределения напряжений ог, <тФ на плоскости z = 0.
5.11. Эллиптическая щель в упругой среде. Аналогично рас-
рассматривается задача о напряженном состоянии в упругой среде
с эллиптической щелью—щель представляет эллиптическую
площадку в плоскости z = 0, ограниченную фокальным эллип-
эллипсом Ео [см. (III. 1.16)]. Решение системы уравнений E.8.9) пред-
представляется рядами по степеням параметра ]/р§— 1 =е:
и для решения задачи о щели достаточно ограничиться первыми
членами этих рядов. Учитывая, что по E.8.8), E.7.2)
I I
Щ = Тл" - @1 + С°2)> %\ (О = %2 (Ч = Т V1 ~ в >>
можно записать первые два уравнения E.8.9) в этом прибли-
приближении в виде
Из них следует
п П j -v
Oq VJ, /\/Q q ''
после чего из третьего уравнения E.8.9) легко найти
Н2= гО^+йг) ' Ао== ~ 4G((O,V(O2) • E.11.1)
Здесь
1
E.11.2)
?(е)-A-е2)^(е)
где К, Е — полные эллиптические интегралы первого и второго
рода, так что
«•, + ^=1— E.11.3)
и при е = 0 возвращаемся к формулам E.10.2) для случая круг-
круглой щели.
304
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
Решение задачи — выражение проекций вектора перемеще-
перемещения E.8.10)—записывается в виде, аналогичном E.10.3):
Gu =
Gv =
Gw =
:]¦
¦[(l-2v)z<D3(p) + .
2Ё(е) Lvi ""-mvk/ ' p(ps_l)*A(p)D2
Это решение записывается также в виде
¦]•
E.11.4)
t- = - 2 Л [A - 2v) t/co2 (р) +
(e)
E.11.5)
E.11.6)
и его можно представить через функции Папковича — Нейбера
Bi=—Axai(p), В2 = — Лг/со2(р), B3=Az&$(p), Во = Аа2щ{р).
E.11.7)
Проверим, что оно удовлетворяет всем условиям задачи.
Действительно, сославшись на формулы (III. 11.26) и E.8.8)
и учитывая равенство
имеем
= 2(l-2v)V-B =
1__
¦рд"(р) ?>2 L"p
4A(\-2v)
1-е2
\Е(а> с)
рД(р) + pA(p)(p2-lJD2
и также
<?2<йз
1 =
(Э2Ир1
§ .'I
ЭЛЛИПСОИД
305
Значения входящих сюда величин на плоскости z — 0 в об-
области внутри эллипса Ео (р = 1) и вне его (ц = 1) определяются
из соотношений
= 1 <г
1-е2
О вне ?0,
1 -!?-*{?=?¦)) ВНУТРИ ?о>
а2 а2 A-е2)
рЛ(р)(р2-1JО2
f
V 1 - е2
а2 а2 A-
p2-e
I
вне ?0,
внутри ?0,
вне ?0,
внутри ?0,
вне ?0,
внутри ?0.
Ha всей плоскости г = О
,5л;2 "^ ду2
_ о
(ПРИ г =
откуда следует, что на этой плоскости
дн . dv д^' 1 л
Поэтому нормальное напряжение oz\z..0, вычисляемое с учетом
напряжения на бесконечности
оказывается равным
oU.._n = ¦
tJ_1 | вне Ео
О
1 E.11.8)
внутри Ео.
На эллипсе /:0 это напряжение претерпевает разрыв непрерыв-
непрерывности.
20 А. И. Лурье
306 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Проверим еще, что касательные напряжения %хг, хш отсут-
отсутствуют на всей плоскости 2 = 0:
G %хг
= 2Л A-
дщ
Eл: <Эг
2=0
так как равна нулю по вышесказанному величина в скобках.
Отметим еще легко получаемое из приведенных формул вы-
выражение перемещения w:
( 0 вне Ео,
t W
Оно остается непрерывным на Ео.
§ 6. Контактные задачи
6.1. Задача о жестком штампе. Краевое условие. В контакт-
контактных задачах теории упругости рассматривается напряженное
состояние, возникающее в прижатых друг к другу упругих те-
телах. Одно из тел, в частности, может быть абсолютно твердым
(жесткий штамп), а упругое тело представлено упругим полу-
полупространством. Решение этой простейшей задачи оказывается
при некоторых добавочных предположениях достаточным для
построения решения более общей задачи Герца о контакте двух
упругих тел.
Плоскость, ограничивающую полупространство, примем за
плоскость Оху, направив ось Oz внутрь полупространства. Осно-
Основание, которым штамп прижат к полупространству, может быть
или плоским, или иметь форму выпуклой поверхности 5 (рис. 19).
Со штампом связывается система осей О|г), начало которой
расположено на поверхности S, а ось Ot, направлена по нор-
нормали к этой поверхности внутрь штампа. В начальном состоя-
состоянии, пока штамп не нагружен, начала систем осей Ogr|^, Охуг,
равно как и оси g и х, г| и у, совпадают, тогда как оси z и Z,
имеют прямо противоположные направления; указанные си-
системы осей поэтому разноименны (первая — левая, вторая —
правая).
В системе осей g, ц, ? уравнение поверхности S основания
штампа представляется в форме
S = <p(S,ti), F.1.1)
и при принятом выборе осей
(О, 0) = 0, га =0, Hf =0. F.1.2)
6]
КОНТАКТНЫЕ ЗАДАЧИ
307
В случае плоского штампа уравнение плоскости, его ограничи-
ограничивающей, будет просто:
? = 0. F.1.3)
При нагружении штамп перемещается, погружаясь в деформи-
деформируемую им упругую среду; величины, характеризующие переме-
перемещение штампа, считаются малыми того же порядка, что и пере-
перемещения точек среды.
На плоскости Оху рассматривается область Q, содержащая
точки, располагающиеся после деформации на смещенной по-
поверхности основания 5 штампа. Как
всегда, краевые условия будем отно-
относить к недеформированной поверхно-
поверхности упругого тела, то есть к плоскости
z = 0. Основание штампа считается
абсолютно гладким; поэтому прини-
принимается, что касательные напряжения
т*х, туг отсутствуют на всей плоскости
г = 0:
= 0,
туг = 0.
F.1.4)
Нормальные напряжения отсутствуют
на плоскости 2 = 0 вне области сопри- г
касания Q штампа со средой. В точ- Рис. 19.
ках же области Q упругая среда под-
подвергается действию сжимающей нагрузки р(х,у), так что
I 0, гф Q,
<т,= , ' F.1.5)
~ (-р{х,у) zaQ.
Конечно, функция р(х,у) наперед не задана—-это основная не-
неизвестная задачи. Равновесие штампа при условиях F.1.4),
F.1.5) возможно при действии лишь силы Q, параллельной оси
Oz; обозначая через х0, у0 координаты точки пересечения линии
действия этой силы с плоскостью Оху, можно записать следую-
следующие уравнения равновесия штампа:
Q = | J р(х, у)do, xtiQ= ( J хр{х, у)do, Уо<3 = J J УР(x, у) do
q 'a a
F.1.6)
(do = dx dy).
Таковы интегральные условия, которым удовлетворяет неиз-
неизвестное распределение давления р(х,у).
Переходим к записи краевого условия для перемещения w
точек области Q; оно должно быть выражено через величины,
определяющие перемещение штампа. Под действием силы Q он
20*
308
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
переместится поступательно и совершит поворот. Поступатель-
Поступательное перемещение б параллельно оси г, а поворот произойдет
вокруг некоторой оси в плоскости Оху; через \5Х, ру назовем
проекции вектора малого поворота. Через три величины 6, |3Х, \iy
могут быть выражены перемещения точек поверхности S осно-
основания штампа, и требуется составить выражения координат то-
точек xs, ys, zs этой поверхности в системе осей Oxyz. Таблица
косинусов углов осей этой системы с осями Ogri? будет
X
У
z
1
0
0
1
РЖ
-ру
Р*
-1
Непривычная расстановка знаков в этой таблице обусловлена
разноименностью систем осей. В системе осей Oxyz координаты
начала системы осей ?г|? будут 0, 0, 6; поэтому формулы пре-
преобразования координат точки g, ц, ? = ф(|, ц) на 5 будут
, ц),
F.1.7)
Из равенств F.1.2) следует, что величина <р(е, ц) имеет второй
порядок малости относительно величин, характеризующих про-
протяженность контактной поверхности; это позволяет пренебречь
произведениями (Зд;ф, р,/р в формулах F.1.7). Тогда
xs = b ys = r\, zs = 6 — pyxs + pxys — (f(xs,ys). F.1.8)
Пусть (х,у, 0)—точка области Q, которая при деформации пе-
перейдет в точку (xs, ys, zs) на S:
xs= x+u, </<; = y + v, zs= w, F.1.9)
где, конечно, и, v, w обозначают проекции перемещения точки
(х, у, 0) на Q. По F.1.8), F.1.9) имеем теперь
, y
FЛЛ0)
В последнем из этих равенств пренебрегаем произведениями
[ixv, Cy«, а также полагаем
<f(x + u, y + v)~<p(x,y).
Приходим к искомому краевому условию
2 = 0, (ч)сй: ш = 6-р„* + Р^-ф(*.0)- F.1.11)
§6] КОНТАКТНЫЕ ЗАДАЧИ 309
В случае плоского штампа оно упрощается и принимает вид
2 = 0, (x,y)<=Q: w = Ъ — $уХ + $ху. F.1.12)
Задача о штампе теперь сведена к смешанной краевой за-
задаче теории упругости: во-первых, касательные напряжения хгх,
ту2 обращаются в нуль на всей плоскости z = 0; во-вторых, вне
области Q этой плоскости обращаются в нуль нормальные на-
напряжения; в-третьих, задано нормальное перемещение w точек
области Q. Величины |3Х, fiy, 6 наперед неизвестны; для их опре-
определения используются уравнения равновесия штампа F.1.6).
Сказанное можно пояснить еще так: точкам области Q на
плоскости 2 = 0 сообщаются нормальные перемещения w по
заданному закону F.1.11) или F.1.12), для чего по площади О.
должно быть распределено нормальное давление по наперед
неизвестному закону р(х,у). В образованную «впадину» встав-
вставляется штамп, прижимаемый для сохранения равновесия вер-
вертикальной силой Q.
Если пренебречь искажением, вносимым поворотом, то об-
область й в случае плоского штампа определяется формой его
поперечного сечения, нормального оси ?. На контуре этой об-
области нормальное напряжение az разрывно. Для неплоского
штампа, поверхность которого не имеет угловых линий (дц>/д%,
дц>/дц непрерывны), контур С области й определяется условием,
что на нем
Р(хс,Ус)=0. F.1.13)
Тогда по F.1.5) нормальное напряжение будет непрерывным на
всей плоскости 2 = 0. Постановка этого условия диктуется
тем, что при отсутствии угловой линии на поверхности штампа
среда плавно прилегает к его основанию*).
Величина w(xc,yc) представляет перемещение точек упру-
упругой среды вдоль контура С области Q (на плоскости z = 0). По-
Погружением штампа в среду 6i следует назвать величину, опре-
определяемую равенством [см. F.1.11)]
6; = 6 — w(xc, Ус) = $уХс — $хУс + Ч>(хс,ус), F.1.14)
выражающим, что перемещение штампа б равно сумме его по-
погружения в среду и перемещения ее в точках кривой С.
Штамп должен быть прижат по всей поверхности соприка-
соприкасания, так что искомое распределение давления удовлетворяет
условию
P(x,y)>0 (x,y)<=.Q), F.1.15)
причем равенство выполняется лишь на контуре С области Q.
*) Задача о штампе с неплоским основанием допускает при условиях
F.1.4), F.1.5), F.1.6) и F.1.11) семейство решений, зависящих or одного
параметра, определяемого требованием плавного прилегания среды к поверх-
поверхности штампа F.1.13).
310 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Это условие накладывает ограничение на расположение линии
действия прижимающей штамп силы Q.
6.2. Способ решения задачи о жестком штампе. В п. 2.3 была
рассмотрена задача Буссинека о напряженном состоянии упру-
упругого полупространства, на границе которого 2 = 0 отсутствуют
касательные напряжения xzx, xyz, а нормальное напряжение рас-
распределено по заданному закону. Решение сводилось к разыска-
разысканию гармонической функции со (по ней квадратурами определя-
определялась еще одна гармоническая функция со*)), которая была
определена потенциалом простого слоя, распределенного по пло-
площади загружения Q с плотностью, равной интенсивности нор-
нормального давления р(х,у):
ю=[[-7== Р(Х'''Л = do' {do'¦ = dx' dy'). F.2.1)
Касательные и нормальные напряжения на площадках 2 = const
определялись по формулам B.3.5):
1 д2со 1 d2a
% 2 Х Х а
F.2.2)
а перемещения — формулами B.3.4):
1 Г д<?> , м п \ <Эй ] 1 Г й ,,. р. ч E51
И= — -г"?^ Z-H—+A ~2v)^— , 0 = — -г—рг 2-5—+A — 2v) -г- ,
4nG L дх ч ' dx J 4jiG L 3(/ ч <5у J
F.2.3)
- !~V- ! -4!- F-2.4)
Известно, что нормальная производная потенциала простого
слоя, распределенного по плоской области, определяется ра-
равенством B.3.6):
2 = 0- —
2 и- дг
- 2хф (,v, (/), (х, г/) a Q,
0, (х, #)<?Q.
F.2.5)
Поэтому, сославшись на F.2.2), можно заключить, что решение,
определяемое через потенциал со, удовлетворяет условиям
F.1.4), F.1.5) задачи о жестком штампе, причем требуется под-
подчинить выбор плотности р(х,у) условию F.1.11). Оно по F.2.4)
сводится к интегральному уравнению первого рода для иско-
искомого распределения нормального давления
w(x, у, о) = б~
*) В. п. 2.3 она обозначалась щ.
F.2.6)
§6] КОНТАКТНЫЕ ЗАДАЧИ 311
или, в случае плоского штампа, по F.1.12)
w(xyO) = bfix + ^y = P\:J
F.2.7)
Решение задачи в замкнутом виде можно получить в пред-
предположении, что областью соприкасания Q является эллиптиче-
эллиптическая площадка, ограниченная эллипсом Ео:
Для плоского штампа полуоси а, а |А — е2 задаются фор-
формой его прижатой поверхности. В задаче о неплоском штампе
уравнение поверхности S представляется ее разложением в сте-
степенной ряд, начинающийся, согласно F.1.2), с членов второй
степени относительно ?, ц:
При надлежащем выборе направлений осей |, ri слагаемое, со-
содержащее произведение \ц, может быть сделано равным нулю.
Тогда
|2
F-2-9)
Здесь R] \ R2 — кривизны главных нормальных сечений поверх-
поверхности 5 в точке касания ее с плоскостью, ограничивающей полу-
полупространство. Предполагается, что они положительны и что
через R] обозначен больший из двух радиусов кривизны.
В уравнении F.2.9), удовлетворяясь рассмотрением только
локальных эффектов, ограничимся учетом лишь написанных
членов второй степени; это значит, что поверхность 5 аппрокси-
аппроксимируется в области ее касания с плоскостью г = 0 эллиптиче-
эллиптическим параболоидом. Теперь краевое условие F.2.6) записы-
записывается в виде
ft *. ..f\0 i / .. f\o \ * * /
— мы ограничиваемся в задаче о неплоском штампе только слу-
случаем его поступательного перемещения (рж=ру = О). Область
интегрирования Q, как указывалось выше, считается располо-
расположенной внутри эллипса Ео; его параметры а, е теперь наперед
неизвестны. Они определяются в конечном счете по заданию
прижимающей силы Q и кривизн R~[ , i?^1 прижимаемой по-
312 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
верхности. Принимается, что на Ео давление р(х,у) обращается
в нуль, то есть выполнено условие F.1.13).
Следует отличать границу площадки контакта (эллипс Ео)
от контура поперечного сечения штампа плоскостью ? = const.
Эллиптическая пластинка, имеющая «верх» (z > 0) и «низ»
B<0), ограниченная фокальным эллипсом ?0, представляет
одну из координатных поверхностей р = 1 семейства эллипсои-
эллипсоидов р = const в системе эллиптических координат р, |.i, v [см.
п. III. 11, в частности формулу (III. 11.16)]. Поэтому естественно
ввести в рассмотрение потенциал простого слоя со(х, у, z; р0) на
поверхности эллипсоида й* (р = ро>1), определив эту не-
непрерывную гармоническую функцию ее значением а>{х,у,г; р0)
на Q*. Можно для задачи о плоском штампе по F.2.6) принять
на Q,: <а(х, у, z; р0) = у-37 (б - Pff* + P,y), F-2.11)
а по F.2.10) для неплоского штампа
Теперь, составив решения со,(х, у, z; p0), ae(x,y,z;p0) внутрен-
внутренней и внешней задач Дирихле при этих заданиях на поверх-
поверхности эллипсоида р = р0, придем к функции
f щ (х, у, z\ Ро), р<р0, /СО1ОЧ
©(х, у, z; po) = i , ч . F.2.13)
I ©е (л:, у, z; р0), р > Ро,
непрерывной во всем пространстве и обращающейся на беско-
бесконечности в нуль; она представляет потенциал простого слоя с
плотностью p(x,y,z), определяемой равенством
F.2.14)
дп dn'(x,y.z)c:Q,
Поскольку плоскость 2 = 0 является плоскостью симметрии эл-
эллипсоида р = ро, а заданные на этой поверхности значения
со (х, у, z; ро) функций &и &е не зависят от z, то плотность р бу-
будет четна относительно z.
Для определения потенциала со(х, у, г) простого слоя на
эллиптической пластинке остается провести предельный пе-
переход
со(х, у, z)= lim со (я, у, z; р0) = lim ae(x, у, z\ p0). F.2.15)
И 1
§6] КОНТАКТНЫЕ ЗАДАЧИ 313
Потенциал a(x,y,z) удовлетворяет условиям F.1.11) или
F.1.12) на поверхности пластинки Q. При вычислении плотно-
плотности следует иметь в виду, что на каждый элемент площади пла-
пластинки лягут два симметрично расположенных относительно
плоскости 2 = 0 элемента эллипсоида й* с одинаковой плотно-
плотностью; поэтому плотность распределения слоя на fi, получаемая
в предельном переходе по формуле F.2.14), должна быть
удвоена:
(х, у, г; р.Л да>, (х, и, г; рЛ \
1^МtU^M) F.2.16)
Этим определяется интенсивность давления по поверхности со-
соприкасания штампа с упругой средой.
В предложенном способе решения избегнуто непосредствен-
непосредственное рассмотрение интегральных уравнений первого рода F.2.6),
F.2.7); кроме того, отпадает вычисление интеграла F.2.1) по
найденной плотности — функция м строится по F.2.15), что
предполагает лишь знание решения внешней задачи Дирихле
для эллипсоида (см. п. VI. 8).
6.2а. Представление сил и моментов, прилагаемых к непло-
неплоскому штампу. Предположив известным решение задачи о пло-
плоском штампе, можно получить выражения сил и моментов, ко-
которые следует приложить к штампу, основание которого очер-
очерчено по заданной поверхности <р(|, г|) == ?,, чтобы сообщить ему
поступательное перемещение б и повороты |3Х, [5У. Поперечное
сечение плоского штампа должно быть таким же по размерам
и по форме, как и площадка соприкасания (наперед неизвест-
неизвестная область Q плоскости г — 0) неплоского штампа.
Через qQ(x,y) назовем распределение давления по основа-
основанию плоского штампа, когда последнему сообщается поступа-
поступательное перемещение 6° = 1, но отсутствует его поворот (f$° = 0,
Р° = 0). Для главного вектора и главных моментов этого рас-
распределения принимаются обозначения
Qo = / { Яо О, У) do, j | yq0 (x, у) do = y0Q0,
F.2.1a)
xqo(x, y)do= -Q
Q
Аналогично в рассмотрение вводятся распределения давлений
qx{x,y), q2(x,y), при которых отсутствует поступательное пере-
перемещение штампа (бA) = 0, 6 ' = 0), но возникают повороты, рав-
равные соответственно $W = 1, ft<} = 0 и pw = 0, $w — i. для главных
3i4
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
векторов и главных моментов этих распределений принимаются
аналогичные обозначения (s — 1, 2):
F.2.2a)
Из этих определений и теоремы взаимности следует симмет-
симметричность матрицы
Qo </oQo - *oQ
Qs = \ qs (x, У) do, yqs (x, y) do = ysQs,
a a
¦<7S (x, y)do= — XSQS.
Qi
Вместе с тем, сославшись на F.2.7), имеем
, _ 1 - v Г Г qn (x\ if) do'
F.2.3а)
¦ X =
2ло .П
1-V И
2nG JpJ
1-v Ц
2jtG J J
V(x-
У {x -
X'J
+ (y-y'J
У') do'
+ (y-y'J
У') do'
+ (y-y'Y
F.2.4a)
Рассматривая теперь неплоский штамп и называя Р, ти т%
главный вектор и главные моменты приложенных к нему сил,
имеем
Р = f f Р(х, у) do, тх= [\ ур{х, у) do, т2= - f f xp(x, у) do,
an a
F.2.5a)
причем p(x,y) — распределение давления по контактной поверх-
поверхности штампа с упругим полупространством. Вместе с тем по
F.2.6)
б -
у' - ф (х', ;/') =
1-у
Р (х, У) do
U 1 (х'-хJ + {if-у)
=, F.2.6а)
где б, |3Ж, р„ — поступательное перемещение и углы поворота
штампа при действии этой силы и моментов.
§ 6] КОНТАКТНЫЕ ЗАДАЧИ 315
Обратившись теперь F.2.5а) и первому соотношению
F.2.4а), получим
р —
=^Я^^/ГГ plx'y)i
а
или, по F.2.6а), F.2.1а),
Аналогично этому, использовав второе и третье равенства
F.2.4а), а также F.2.2а), F.2.5а), F.2.6а), придем к соотно-
соотношениям
J J </1 (*', У') Ф (/, У1) do' = Q, E 4- р^, -
Q J F.2.8a)
) I
J j
Й
/) Ф (^'. /) d0' = Q2 (в
Уравнения F.2.7а), F.2.8а) еще не решают поставленной
задачи, поскольку не известна область интегрирования Q—по-
Q—поперечное сечение введенного в рассмотрение плоского штампа.
Очевидно, что как заданные (б, р\Х) §у, <р(х,у)), так и искомые
величины (Р,т\,т2) не должны зависеть от параметров, за-
задающих форму и размеры Q. Эти соображения дают средство
для определения Q.
Изложенный здесь прием разыскания сил и моментов, не
предусматривающий знания распределения давления р(х,у) по
основанию неплоского штампа, эффективно применим, к сожа-
сожалению, только к случаю штампа эллиптического (в частности,
круглого) поперечного сечения, так как требуемые решения в
замкнутом виде интегральных уравнений второго рода F.2.4а)
известны только для плоского эллиптического (круглого)
штампа.
6.3. Плоский, эллиптический в плане штамп. Функции
а>{(х, у, z; ро), ае(х, у, г; ро) определяются формулами (VI. 8.9):
_ 2nG ,. __ „ ,
„ ^ 2яО Г со0(р) сМр) со2(р)
е 1 - v L «о (Ро) у «1 (Р(
так что по F.2.15)
316
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
а для определения распределения давления по площади штампа
служит формула (VI. 8.15); в ней теперь
а величина ^A) для каждого слагаемого, входящего в это выра-
выражение, задается формулами (VI. 6.2), (VI. 6.4). Получаем
G Г
(l-v)ay 1-е2 L
g>oA)
Щ U)
У
X
. F.3.2)
Постоянные б, $х, Ру находятся из уравнений равновесия F.1.6):
_. G б С С I - у1 </2\-'<
a2 b2}
do =
2naG 6
G h [[х,({ *2 у2
(l-v)a/l-e2 co,(l) Jj \ а2 Ъг
G
F.3.3)
— v)a(l —
3A-v) (о,A) '
a2 b2 I
3A -v) ш2A) •
Величины сой A) определяются полными эллиптическими ин-
интегралами К(е), Е(е) с модулем е:
MX)
со,
2 [l-
F.3.4)
§ 6] КОНТАКТНЫЕ ЗАДАЧИ 317
Обозначения D(e), B(e) для представленных комбинаций
полных эллиптических интегралов первого и второго рода
я/2 я/2
E(e)=
приняты в известном справочнике таблиц и формул Янке и
Эмде; там же имеются таблицы этих величин*).
Получаем
Q(l-v) м о Q(l-v) „ В (е) 1
Распределение давления теперь представляется в виде
/ \ 1 fi Зххо i %^о l/i ^2 У2
Р{Х, У)=трт[\ +^^+a2A_e2)J^l --tf--a*(i-e*)J
F.3.6)
причем рт—среднее давление:
рт = ? . F.3.7)
ла2 У 1 - е2
Давление р, равное половине среднего в центре штампа, воз-
возрастает неограниченно при приближении к контуру области за-
гружения, являющемуся угловой линией штампа. Штамп будет
прижат к упругому полупространству по всей поверхности со-
соприкасания, если линия действия силы Q проходит внутри эл-
1 1 /
липтического цилиндра с полуосями -г-а, -^ауХ—е1.
Выражение F.3.1) потенциала ы записывается в виде
Q Г dX (. Злг.Ур Зуу0
р
6.4. Перемещения и напряжения. Для вычисления компо-
компонент и, v вектора перемещения требуется знание производных
да Г да , д& Г да , ,.,.,
= Jdz idz- F>4Л)
*) Э. Янке, Ф. Эмде, Ф. Лёш. Специальные функции. Формулы, гра-
графики, таблицы, «Наука», 1964.
318
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
Здесь по F.3.8) и (III. 11.26)
Зсо _ 3Qx0 ,
дх а3
а\(р)
Q
Зхл:0
¦
F.4.2)
Приходим к вычислению интегралов вида
оо оо оо
J dz j%{l)dl, J f{x, у, р)
г р z
По (III. 11.9) и (III. 11.26) имеем
, у, Я),
F.4.3)
причем второе равенство получено дифференцированием (III. 11.9)
по р при постоянных х, у. Итак,
оо оо
- J dz J х (Я) dk = J [2 - z (Я)] % (Я) dX,
z p
oo
p p
dz
ЯйЯ.
р
Применив эти равенства, получаем по F.4.2)
(Я)
СО
, _Q?_ Г Г1 , Злгхр . Зг/г/р
a2 J [ а2А2 а2 (Я2 - е2) J
Я2 /A,* - e2 y (*. У. Я) '
d&
~dy~
= ЗОКо. Г г _
OO
¦"^"J L1 +^ + "a2(A2-e2)J
(Я2 - e2f"> у (х, у, Я) "
F.4.4)
§ 6)
КОНТАКТНЫК ЗАДАЧИ
319
Выражения перемещений, составляемые по F.2.3), F.2.4), в
случае центрально нагруженного штампа (л'о = г/о = 0) будут
и =
v =
Qx
гД(р)
т — 2
dX
Qy
ap(p2-H2)(p2-v2) m J X2(X2~e2)y{x,y,X)
p
zp A (p)
4яОа2 L а (р2 - е2) (р2 - ц2) (р2 - v2)
т-2
dX
Qz
т -I (X2 - е2I' у (х, у, к)
Q(m-l) Г dX
4nGa3 (p2-l)(p2-n2)(p2-v2) ' 2nOma J A (X)
P
F.4.5)
: = —-, число Пуассона].
Здесь использованы соотношения (III. 11.21), (III. 11.12):
ГJ _ I1L _ „2
р р2 ~а
I I 2W 2 2\
(р -v)(p -ц )
Интересно отметить, что интегралы, входящие в выражения и,
и, вычисляются элементарно.
Объемное расширение вычисляется по формуле
„ __ т-2 да __ Q {т-2) гр А(р)
2nGm дг 2лОто3 (р2 - 1) (р2 - ц2) (р2 -
В точках на оси г имеем
v = 0, ц. = е, z = а Ур'2 — 1,
. F.4.6)
F.4.7)
и вычисление напряжений в точках этой оси приводит к фор-
формулам
1-е2
_ 1 }- 1-е2 Г т — 2 /
¦ ~ „ Рт I — IP '
2 Р L те2
{p2-e2)
1 1
2»рГ р2 - е
Р L 4- р ~ J j_ 1 \
2 _ Р2 \ п2 Г „2 „2 Г i | •
F.4.8)
Касательные напряжения на оси z отсутствуют.
6.5. Неплоский штамп. По F.2.12) краевое условие для по-
потенциала со представляется в виде
= 0, (х,
, Пч 2яО /, х
у2
320 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
причем плотность этого потенциала по F.1.13) должна обра-
обращаться в нуль на эллипсе Ео, ограничивающем область сопри-
соприкасания Q. В п. VI. 8 показано, что последнему условию удовле-
удовлетворяет потенциал (VI. 8.19)
Д(Я) L а2Я2 о2(Я2-е2) а2 (Л2 — 1)
р
с плотностью (VI. 8.18)
Р(*, У) = „ S ? У 1 -~~ 2lf 2, •
2лау1—е2 У а2 а2 A-е2)
Определяя постоянную С по уравнению равновесия F.1.6),
имеем
Q = \\ р (х, у
и
так что
f
-^- f , рт = ——^==г. F.5.2)
а2 о2 A-е2) па2}'1-е2
Максимальное давление в центре площадки равно 1,5 среднего
давления рт; эпюра распределения давления представляет по-
поверхность полуэллипсоида, опирающегося на ограничивающий
площадку соприкасания эллипс Ео.
Потенциал со представляется в виде
со =-
2а J А(Л) \ «2^-2 а2(^2-е2) а2 (Л
5!_
2 (Л2—
причем постоянные а, е должны быть определены из условия
F.5.1), принимающего вид
оо
_2nG f _ х2 _ j/M _ 3Q_ Г dl I. _ _х^ у2 \ =
- v \ ^7 ~ 2R2)~ 2а J Л(Л)\ а2К2 а2(Х2-е2))~
I. F.5.4)
Здесь использованы формулы F.3.4). Приходим к равенствам
, 3Q(l-v) v(n^ I _30(l-v)r>,v 1 3Q(I-v) Д(е)
^ ^'' i?2 2ла36' 1 - e2 '
F.5.5)
§61
КОНТАКТНЫЕ ЗАДАЧИ
321
Ими определяются поступательное перемещение штампа б, боль-
большая полуось а и эксцентриситет е площадки соприкасания. По-
Последний находим из соотношения
R2 A-е2)О(е) A - е2) [К (е) - Е (е)]
R> B(e) Е(е)-A-е*)К(е) '
F.5.6)
после чего определяются а, 6:
L G
где обозначено
с <7\
Г
[
К(е). F.5.8)
В табл. 3 для некоторых значений е2 приведены значения
R2IR1, «а, СС6. ПОЛЬЗУЯСЬ ЭТОЙ ТаблИ-
цей, по заданному отношению кривиз-
кривизны находим е2 и далее аа, ос6.
На рис. 20 приведен график зави-
зависимости R2lR\ от е2. Смещение штампа 0,7
б оказалось пропорциональным Q!/s; jj-jj
этот необычный для линейной теории ц
упругости результат, конечно, объяс- о,л
няется тем, что одновременно с ростом й>2
силы увеличивается площадь площад- '0
ки соприкасания.
6.5а. Определение сил и моментов,
действующих на неплоский, эллипти-
эллиптический в плане штамп. Здесь приме-
применяется прием определения этих величин, изложенный в
п. 6.2а.
По F.3.2) и F.2.4а) имеем
G г. г« /#2 л~'Ь
0,1 0,2 0,3 0,4 0,50,60,7 0,8 0,91
Рис. 20.
<7о (х, У) =
Я\ (*> У) =
<7г (*. У) =
шоA)
а2 а2 A — е2) j
i У2 1
о2 a2(l-e2)J
-С
A -v) a ]/ 1-е2 со,A)
X \ I
a2 A-е2)
F.5.1a)
и отличны от нуля только диагональные элементы матрицы
F.2.3а), по F.3.3), F.2.1а), F.2.2а) равные
1шп
3A-v) о, A) '
X2Q2 = —
2na3G
3A — v)«i A) '
F.5.2а)
21 А. И. Лурье
322
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. v>
Таблица 3
е2
аа
а&
е2
R2IR1
аа
ай
0
1
0,722
0,520
0,50
0,594
0,783
0,565
0.05
0,963
0,726
0,523
0,55
0,549
0,793
0,571
0,10
0,925
0,731
0,526
0,60
0,502
0,803
0,580
0,15
0,885
0,736
0 530
0,65
0,454
0,815
0,589
0,20
0,846
0,741
0,534
0,70
0,405
0,829
0,597
0,25
0,806
0,747
0,538
0,75
0,353
0,844
0,609
0,30
0,765
0,753
0,543
0,80
0,297
0,863
0,623
0,35
0,724
0,760
0,547
0,85
0,238
0,888
0,642
0,40
0,682
0,767
0,553
0,90
0,174
0,921
0,668
0,45
0,637
0,775
0,559
0,95
0,101
0,975
0,713
0,50
0,594
0,783
0,565
1
0
-
-
По F.2.9)
F.5.3а)
Теперь, снова обратившись к F.3.3), по F.2.7а) получим
rcG а3 Л 1-е2
3A-v) ©о A) Ri \ + R2
2naG
A-v)cuoA)
б, F.5.4а)
причем юоA) =К(е), а величины Р, Ru R2,6 не зависят от а,
е2. Учитывая соотношения
В(е)
de2
- е2 '
и дифференцируя F.5.4а) по а и е2, найдем
причем второе равенство повторяет F.5.6), а первое дает
ж-25
Р(е)
F.5.6а)
Отсюда и из F.5.4а) легко получить теперь соотношения F.5.5).
Подынтегральные выражения в формулах F.2.8а) нечетны
по у и соответственно по х (см. F.5.1а), F.5.2а)). Поэтому вы-
выражения моментов приводятся к виду
2лаЮ ,„ _ .
1)Py> F.5.7 a)
3(l-v)a>2(l)
§6)
КОНТАКТНЫЕ ЗАДАЧИ
323
внешне не отличающемуся от F.3.3), —следует иметь в виду,
что теперь а3 не задано, а определено вышеприведенными фор-
формулами.
6.6. Перемещения и напряжения. Имеем (см. также E.6.18))
да
17
ZQx
ду
По F.4.4) находим
дх as
да 3Qy
ду ~ а3
3Qy
dk
А2Д (Я,)
осо
3Q2
%(р). F.6.1)
[Z Z
(А2-е2)Д(А)
да
F.6.2)
и (х, у, z) =
и выражения перемещений по F.2.3), F.2.4) записываются в
виде
и —
w =
3Qx
4nGa3
SQy
inGa3
3Q(l-v
!-е2)Д(
F.6.3)
причем г(Х) определяется по F.4.3), и интегралы
Г z(X)dX
Я2Д (А)
у (х, у. Я.) d%
Я2 /А2 - е2 '
г(Я)
(Я2 - е2) Д (Я,)
= а
у (х, у, Я) d
(Я2-е2)8/'
выражаются через элементарные функции.
Зная перемещения, находим напряжения. Ограничимся при-
приведением резутьтатов, относящихся к центру площадки сопри-
соприкасания и к ее контуру.
21*
324 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
В центре (х, у, z = 0)
3 2va + b 3 2vb + a 3 ,c а л\
Gx = - 7Г Pm a + b > ay = - ~2 Pm a + b > ffz = --JP"» V6'b>4)
где 6 = a yl — е1. Ha контуре
1 -2v з
х у е2 2 "т
х[,-
-e2 X
l-2v 3
-г# е2 2 "т ' а2 \_2ex а — ех еу ь а (I — е
F.6.5)
В частности, на концах большой и малой полуосей эллипса име-
имеем соответственно
(Х = а> y = 0),
F.6.6)
6.7. Соприкасание поверхностей. Рассматриваются два тела,
ограниченные выпуклыми поверхностями Si, S2 и соприкасаю-
соприкасающиеся в точке О. Принимая эту точку за начало систем коорди-
координат, проведем оси z\, z2, перпендикулярные к общей касатель-
касательной плоскости П поверхностей Si, S2 в точке О, внутрь каждого
из тел. Оси {х\,у\), (дг2, г/г) систем Ox\ij\Z\, Ол:2г/222, связанных
с первым и соответственно со вторым телом, направим в пло-
плоскости II по главным нормальным сечениям поверхностей Si, S2.
Уравнения поверхностей Si, S2 в этих системах осей в окрест-
окрестности точки соприкасания О представляются в виде
%\ , У\ . -^2 i ^2 t /r n \\
гу ^^^_^^ 1^ \ /у —^ ~ 1 ) I Ii / II
/С 1 — . j "w j . . . , !&¦) ~Т. j Т. \~ ••*, \yj tl , 1J
где l/R\, l//?2~ главные кривизны поверхности Si в точке О,
положительные, если соответствующий центр кривизны распо-
расположен внутри тела, то есть на положительной оси Z\\ аналогич-
аналогичное значение имеют величины \]R", \1Щ для поверхности S2.
В дальнейшем мы ограничимся рассмотрением локальных явле-
§6!
КОНТАКТНЫЕ ЗАДАЧИ
325
ний в области контакта; это позволяет сохранить в уравнениях
F.7.1) только написанные слагаемые.
Расстояние между двумя точками М\, М2 поверхностей Si,
S2, расположенными на одном перпендикуляре к плоскости П,
равно
Z = Zi + 22 =
2
У\
2R~
А
F.7.2)
и очевидно, что z > 0; на рис. 21, а и б показаны два возмож-
возможных расположения поверхностей Si, S2 при их внешнем и внут-
внутреннем соприкасании.
а
Рис. 21.
Дальнейшее рассмотрение имеет целью представить z в виде
для чего вводится новая система осей Оху; если обозначить че-
через Ш1, «2 углы, составляемые осями хи х2 с осью х, то по
формулам преобразования координат
хх — х cos @) + у sin ©], t/, = — х sin @i + у cos (о(,
л:2 = х cos оз2 + У sin оз2> г/2 = — ^ sin ю2 + г/ cos co?
и выражение z представится в виде
1
~п ХУ (gi sin 2<B; + g2 sin 2оз2),
¦Л „2
2Rt ^ 2R2
где обозначено:
1 _ cos2 сох
sin2 M
, sin^ со, . cos2 (D2 , sin2 co2
Ro
cos^
sin2 co2 . cos2 ю2
n'
Д2
F.7.4)
F.7.5)
326 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Через а назовем угол между осями х\, х% (отсчитываемый от х\
к хг):
а = ш2 —юь F.7.6)
и введем в рассмотрение средние кривизны поверхностей Sit S2
в точке О:
2Я, = ЛН—т. 2Я2 = ~4н—\г, F.7.7)
так что
^- + 4- = 2(Я, + Я2). F.7.8)
Теперь подберем величину
/ I \ I ^ ^ (Pi П П\
Ш == Г~ \Cui ~Т~ ^2/ == ^1 ' "о" == ^2 — ~п" V®•' *^)
так, чтобы обратить в нуль слагаемое в F.7.4), содержащее
произведение ху:
gx sin 2cO[ + g2 sin 2co2 = (gx + g2) sin 2a cos a — (g{ — g2) cos 2co sin a = 0'
F.7.10)
Вместе с тем по F.7.5) и F.7.9) имеем
-$- = Я] + Я2 + -к" Kg'i + 82) cos 2co cos a + (g, — g2) sin 2co sin a],
~p- = Hl + H2 — -y [(g-, + g2) cos 2co cos a + (gL — g2) sin 2« sin a], j
F.7.11)
Из двух уравнений: F.7.10) и первого уравнения F.7.11) нахо-
находим теперь cos 2co, sin2co:
cos 2@ = ~ [~ - Нх - Н2) (gi + g2) cos a,
F.7.12)
sin 2co = -ir I -ir - Hi - H21 (g, - g2) sin a,
где
A = (g2l + g22 + 2glg2cos2ajh. F.7.13)
Теперь '-fr- находится по условию sin22co + cos22co = 1, после
чего -=- определится по F.7.8):
А2
^7 = Я1 + Я2-1л, -^_ = Я1 + Я2 + уЛ1 F.7.14)
через R[ обозначена большая из двух величин Ru R2. По
F.7.12) имеем также
cos 2@=—т- (gi + g2) cos a, sin2co= {g{ — g2)sina- F.7.15)
§6]
КОНТАКТНЫЕ ЗАДАЧИ
327
Таким образом определена система осей Оху, в которых квад-
квадратичная форма F.7.4) приведена к сумме квадратов F.7.3),
и найдены коэффициенты этой формы -^5~> J5~ ¦ Они оба поло-
положительны, так как 2>0 при любых значениях переменных х, у.
:/ ось сращен.
у—.
' поверхности
Рис. 22.
Рис. 23.
В частном случае поверхностей вращения с параллельными
осями при их внешнем (рис. 22, а) и внутреннем (рис. 22, б)
соприкасании имеем а = 0 и по F.7.13), F.7.5)
_1 L_l_J L
г.' г,
Д =
Тогда при
имеем
Если же
R'i
А 2 R\
и = 0, — = -V
F.7.16)
то
R,
-Т77 F.7Л7)
и в обоих случаях Ri >
328 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Случай поверхностей вращения с осями, расположенными
накрест, представлен на рис. 23, а при внешнем соприкасании
и на рис. 23, б при внутреннем. Теперь а = я/2, так что
J 1 L-I--
Т> D D D
К) К2 К\ К
и при
J L_ 1 4- ' SO
A I А О А 1 А О
соответственно имеем
ю=т i=i+i' i=i+i' F-7Л8)
»=т t-v+-^' т=т+^- F-7Л9)
Интересен также случай соприкасания поверхностей вращения
в точке на оси вращения z. Тогда
J j i_ i l l
А] А 2 А А] А2 ^
Угол а произвольный, a g\ = g2 = О, Л = 0. Получаем при внеш-
внешнем соприкасании
-J- = -i-=-l-4--^r, F.7.20)
и эта же формула сохраняется и при внутреннем соприкасании,
но тогда большая по модулю из двух величин R', R" отрица-
отрицательна.
Например, для двух соприкасающихся извне шаров радиу-
радиусов /?', R" по F.7.20)
1 _ J 1 1
Г> Г) ПГ \ ПП )
Al A2 А А
а для шара радиуса R' в сферической полости радиуса R''
_j__ j j l
Ri ~ Ri ~~?~1г'
При соприкасании двух цилиндров радиусов а и b с накрест
расположенными осями
— — — — — — ( ~>h)
В случае шара Si радиуса R в цилиндрическом желобе S2 ра-
радиуса г > R
я7 = Т~Т' ~r7 = ~r'
§ 6] КОНТАКТНЫЕ ЗАДАЧИ 329
причем ось х направлена перпендикулярно образующей цилин-
цилиндра.
6.8. Задача Герца о сжатии упругих тел. Два упругих тела
прижаты друг к другу силами Q, линия действия которых пер-
перпендикулярна общей касательной плоскости П поверхностей S\
и S2 тел в точке О. Под действием сил Q тела деформируются
в области, примыкающей к месту контакта, и сближаются друг
с другом. Назовем через —6Ь —82 проекции поступательного
перемещения первого и второго тел на оси Z\ и z2, которые, на-
напомним, направлены внутрь соответствующих тел. Можно так-
также определить 6i и бг как перемещения достаточно удаленных
от места контакта точек первого и соответственно второго тела,
а величину
б = б,+б2 F.8.1)
называть сближением тел.
Рассмотрим две точки Ми М2 первого и второго тел, рас-
расположенные в области, примыкающей к месту контакта, на об-
общем перпендикуляре к плоскости П. В системах осей Oxyz\,
Oxyz2, введенных в п. 6.7, координаты этих точек до деформации
соответственно будут (z\,x,y) и (z2, х, у). При деформации тел
точкам М[, М2 сообщаются перемещения, проекции которых на
оси 2), z2 обозначаются через w\, w2. Одновременно точки Ми
М2 сместятся вместе со своими телами и займут положения
М.\, M'i\ поэтому после деформации интересующие нас коорди-
координаты z\, z'2 точек М\, М'2 станут равными
z[ = zl + wl-6v z'2 = z2 + w2-b2 F.8.2)
и расстояние М\М2 станет равным
z' = г\ + z'2 = z, + z2 + wl + w2 - Fj + 62) F.8.3)
или, по F.8.1), F.7.3),
Для тех точек Mi, M2 первого и второго тел, которые после
деформации вступят в контакт, это расстояние станет равным
нулю, а для точек вблизи места контакта оно положительно.
Поэтому поверхность О, контакта можно определить как место
точек, для которых
г' = 0, Wl + w2 = 6-~~^-, F.8.5)
тогда как вне контактной площади
-^-~^. F.8.6)
330 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
По поверхности контакта действует нормальное давление
с интенсивностью р(х,у), тогда как касательные напряжения
на ней считаем отсутствующими. Далее предполагается, что при
рассмотрении локальных эффектов в окрестности контакта мож-
можно заменить соприкасающиеся тела двумя упругими полупро-
полупространствами, прижатыми друг другу по площадке Q, располо-
расположенной в разделяющей полупространства плоскости П — каса-
касательной плоскости поверхностей Su S2 в точке О. На этой пло-
плоскости z\ = 0, z2 = 0. Как и в п. 6.5, площадка соприкасания
определяется областью внутри эллипса
оси которого х, у определены в п. 6.7. Давление р(х,у) на Ео
принимается равным нулю.
Напряженное состояние в каждом из полупространств опре-
определяется с помощью функции (Oi(x,y,Zi) (i = 1, 2), являющейся
потенциалом простого слоя, распределенного по площадке й с
интенсивностью р(х,у). По F.2.1) имеем
со, (х, у, z,) = | J P^W ^ ^ F88)
и можно ограничиться рассмотрением одного лишь потенциала
xtu,z)= — ¦ гг» F.O.9)
считая z положительным в каждом из полупространств. При вы-
вычислении же перемещений по формулам F.2.3), F.2.4), конечно,
следует упругим постоянным придавать соответствующие значе-
значения: G\, vi и G2, V2.
По F.2.4) на площадке соприкасания
^a{x, у, 0), w2 = -~-(s>{x, у, 0), F.8.10)
и, следовательно, по F.8.5) на Q
где обозначено
fy = -^p (i=l,2). F.8.12)
Потенциал оз определяется условием F.8.11) и требованием
обращения в нуль плотности р{х,у) на контуре Ео площадки Q.
Эта задача лишь заменой обозначения
V- на Ъ1 + Ъ2 = А^ + 1^ F.8.13)
§ 7] РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА 331
отличается от задачи п. 6.5 о действии неплоского штампа на
упругое полупространство. Поэтому результаты решения задачи
о штампе тотчас же переносятся на задачу о контакте упругих
тел, прижатых друг к другу силами Q. Ход решения этой задачи
такой:
1) По заданным кривизнам (l/Ri, IIR2), (l/Ru IIR2) по-
поверхностей Sb S2 соприкасающихся тел в точке соприкасания О
и по углу а определяются с помощью формул F.7.14) и F.7.15)
величины I//?], \/R2 и направления осей х, у — угол и.
2) По F.5.6) определяется эксцентриситет е площадки со-
соприкасания.
3) Большая полуось эллипса а и сближение тел 6 опреде-
определяются с помощью формул
[|-^1 + ^)Т/за6> F.8.14)
причем функции эксцентриситета аа, а6 задаются формулами
F.5.8).
4) Перемещения определяются по формулам F.6.3) с за-
заменой v, G на V,, Gt (i = 1, 2); конечно, при вычислении напря-
напряжений следует также в формулах п. 6.6 заменить v на v<-
§ 7. Равновесие упругого кругового цилиндра
7.1. Дифференциальные уравнения равновесия кругового ци-
цилиндра. В последующем ограничиваемся рассмотрением слу-
случаев аксиально-симметричной и изгибной деформаций цилиндра.
В первом случае осевое w, радиальное и и кольцевое v (перпен-
(перпендикулярное меридиональным плоскостям) перемещения являют-
являются функциями цилиндрических координат г, г. Для деформации,
названной изгибной, первые две компоненты w и и вектора пе-
перемещения принимаются пропорциональными косинусу, аи —
синусу азимутального угла ср. Общий случай (пропорциональ-
(пропорциональность cos Пф и соответственно sinncp) здесь не рассматривается.
Вместо г, z вводятся безразмерные переменные х, ?:
* = 7Г' С = ?. G.1.1)
где а — наружный радиус цилиндра. Для полого цилиндра
длины 21 с внутренним радиусом Ь
4 = *,<*<1, -L<?<L = 1. G.1.2)
Аксиально-симметричный случай, как говорилось уже в
п. 1.10 гл. IV, распадается на задачу о меридиональной дефор-
деформации и задачу кручения. Решение первой может быть выра-
выражено через три функции Папковича — Нейбера (достаточно,
332 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
впрочем, двух). Сохраняя обозначения пп. 1.12 и 1.13 гл. IV,
две из них назовем Ьо, 63 —это гармонические функции; третья
обозначается br, причем гармонической функцией является про-
произведение brei(f;
V% = 0, V263 = 0, V2ft,--?f = 0. G.1.3)
Л
Здесь в обозначениях G.1.1)
v2 = JL+±J__i_i!l G 14)
V дх*^ х дх + дЪг' {/ЛА)
По A.12.16) и A.13.3) гл. IV перемещения выражаются через
эти функции формулами (п = 0)
а отличные от нуля напряжения по A.12.13), A.13.5) гл. IV
равны
2G r dt, \ дх2 ' ъ дх2 ) l v ' дх
2GX™-V Zv} дх \дхд?^<° dxdi) + (l ZVj dt, X
G.1.6)
В задаче о кручении отлично от нуля только перемещение v,
и по A.11.3) гл. IV отличные от нуля напряжения тгч. и тгф оп-
определяются из формул
— т -jc— - —т =— G 17)
G "Р dJt л: ' С гЧ> а? ' V'.i-';
причем ае1'* — гармоническая функция,.
-^ = 0. G.1.8)
В случае изгибной деформации в рассмотрение вводятся че-
четыре функции bQ, bz, br, b(f. Функции boei<f, b3ei(f гармонические,
тогда как по A.13.4) гл. IV дифференциальные уравнения, оп-
определяющие (при п — 1) функции Ьт, ЬФ, будут
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
333
и следует ввести в рассмотрение их полусумму и полуразность
p = j(br + blf), q^jibr-by), br = p + q, blf = p-q. G.1.9)
Введенные функции определяются поэтому из дифференциаль-
дифференциальных уравнений
V2p--^p = 0, V2q = 0, ^--^ = 0, V263-^r = 0. G.1.10)
Выражения перемещений по A.12.16) и A.13.3) гл. IV при-
ведутся к виду
и —a cos ф —
w = (
v = a sin ф [ j (&0 + lh) + E - 4v) p - C - 4v) <?] .
G.1.11)
Напряжения определяются формулами A.12.13), A.12.14) и
A.13.5), A.13.6) гл. IV:
or __,mr2vi*L- I94" ' - а2&
2G
= COS ф 4
дх2
дх2
-х?1Ш.+ь*\.
дх
2G
= соэф 2A -v)
db3
&1
db3
dba
дЬ
^- = СО5ф
Тгф
~2С~
G.1.12)
334
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
Уравнения статики в цилиндрических координатах в акси-
аксиально-симметричном случае записываются по A.10.3) гл. IV в
виде: для меридиональной деформации
да г
дхГ
дхгг
дх
и для деформации кручения
дхг№ dxzm
2хг
G.1.13)
G.1.14)
Конечно, решения G.1.6) и соответственно G.1.7) удовлетво-
удовлетворяют, при отсутствии массовых сил, этим уравнениям.
В задаче об изгибной деформации уравнения статики A.9.4)
гл. IV представляется в виде (п = 1)
да.
Z
дх
2х,
дх
Zif
дх
дх
-~а'+9аК=0,
G.1.15)
причем штрихом указывается на замену sin cp в выражениях
Тгф, Tztp на cos ф и sin9 на cos cp — в выражении аФ.
В аксиально-симметричном случае распределенные по попе-
поперечному сечению цилиндра напряжения приводятся к осевой
силе и крутящему моменту:
1 !
Z = 2ita2 j azx dx, mz = 2яа3 j тгфх2 dx. G.1.16)
С помощью уравнений равновесия G.1.13) и G.1.14) эти ве-
величины легко выразить через напряжения на внутренней и внеш-
внешней поверхностях полого цилиндра:
= Z0 + 2ла2 J
Ъ
G.1.17)
где ZOt m® —осевая сила и крутящий момент в сечении ? = 0.
§71
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
335
При деформации изгиба напряжения ог, rrz, x2<!. в поперечном
сечении статически эквивалентны поперечной силе X и изгибаю-
изгибающему моменту ту относительно оси у в плоскости г — 0:
1
X = яа2 J (т;г-т^)хdx,
1
-яа? J x4zdx, G.1.18)
причем звездочками обозначены множители при cos cp, sincp в со-
соответствующих выражениях напряжений. Выражая X, ту с по-
помощью уравнений равновесия G.1.15) через напряжения на по-
поверхностях х = Х\, х = 1, придем к формулам
X =
а; - г;,) - « - x^_
,-т° + по? J {j
G.1.19)
Эти вырал<ения легко непосредственно получить, рассматривая
равновесие конечной части цилиндра между сечениями % = 0
и 1 = 1
7.2. Задача Ляме для полого цилиндра. Рассматривается
осесимметричная задача о напряженном состоянии в полом ци-
цилиндре под действием нормального давления, равномерно рас-
распределенного по боковой поверхности
х = \: ог = —
0; х = Х\\
= —р\, хп = 0. G.2.1)
В решении Папковича — Нейбера достаточно удержать толь-
только одну функцию br, считая ее не зависящей от ?; тогда по
G.1.3)
так что
Поэтому
G.2.2)
G.2.3)
336
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
Определив постоянные С\, С2 по краевым условиям G.2.1), по-
получим
1
' (l-X^X2
I
l-xi
> xrz — 0.
G.2.4)
Далее, по G.1.5) найдем перемещения
-p0)—], о; = 0. G.2.5)
* j
Полученное напряженное состояние реализуется в упругом ци-
цилиндре, подверженном равномерному давлению снаружи и из-
изнутри и помещенном между двумя неподвижными жесткими и
гладкими плитами, не допускающими продольного перемещения
точек на торцах цилиндра (w = 0), но не препятствующими их
радиальным смещениям (rrz = 0). Реакции этих стенок создают
равномерно распределенное по торцу нормальное напряже-
напряжение az.
Случай цилиндра, края которого могут свободно смещаться
в осевом направлении (а2 = 0, тФО), можно получить, нало-
наложив на найденное напряженное состояние равномерное осевое
сжатие, противоположное а2 по знаку:
jo= _2v-
~ Ро
1-*?
Оно вызывает перемещение
но не создает добавочных напряжений оГ) Ос(, хгг. Решение за-
задачи Ляме для цилиндра со свободно смещающимися торцами
поэтому представляется в виде
2<3и =
- р0
1 + V 1-Х,
G.2.6)
причем а2 — 0, а прочие напряжения определяются формулами
G.2.4).
§7]
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
337
7.3. Дисторсии в полом цилиндре. Постановка задачи была
дана в п. 5.6 гл. IV. Остановимся на простерших случаях вра-
вращательной дисторсии Ь3 вокруг оси Oz и поступательной с2 (по
направлению ev).
1°. Вращательная дисторсия Ь3. Задача состоит в
разыскании напряженного состояния Т', наложение которого на
напряженное состояние E.6.10) гл. IV освобождает поверхности
х = 1, х = Х\ полого цилиндра от напряжения о/-
= хх
2G
1
2G
о= —
4я 1 - 2v
Ьг ( 1
4л I 1 - 2v
'= _ 1 I
,1тг \ 1 О„ *
In х,
1-v
G.3.1)
Это —задача Ляме, в которой
_ Gb3 1
-°°~ 2я l-2v* Pl
Gb3
2п " I 1 - 2v
In
По G.2.4) и по E.6.10) напряжения получаются равными
/ 1 2 2
2. = а. + а[ = —- In х ¦
2n(I-v)
b3G
2n(l-v)
g 2
1 '— X] X
9 9* 1П AT] I j
-4 г )
-Inл:,
G.3.2)
Это напряженное состояние будет иметь место в подвергнутом
дисторсии /K цилиндре, заключенном между двумя недопускаю-
щими осевого перемещения w, жесткими и гладкими плитами,
создающими по торцам напряжение Sz. Разыскание напряжен-
напряженного состояния при свободных торцах требует наложения еще
одного состояния, ликвидирующего распределение напряжений
Е2 по торцам и не создающего напряжений на цилиндрических
поверхностях x=l, x = Х\. Решение этой задачи в конечном
виде, по-видимому, невозможно.
2°. Поступательная дисторсия с2. Здесь на напря-
напряженное состояние E.6.11) гл. IV следует наложить напряжен-
напряженное состояние изгиба, определяемое краевыми условиями
G.3.3)
22
А.
=
И
1:
*,:
. Лурье
2G
-А с
2ЯД:,
СОЭф,
ТГф
G" ~"
2G
2я
С2
2лл
sin ф
— sin ф.
338 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Используются не зависящие от ? функции ряд, определяемые
дифференциальными уравнениями G.1.10):
Их частные решения имеют вид
и определяемые по G.1.12) напряжения равны
а'г = [ Л,* + -^ + Л3 C - 2v) |] cos Ф>
iX + ~r~ A3(l -2v) 7 I Sin ф.
Постоянные определяются по краевым условиям G.3.3):
Из них находим
2n(l-v) '
и напрян<ения в цилиндре, подвергнутом дисторсии, записы-
записываются в виде
Множители при соэф, э1пф в выражениях Sr, Tr{p оказались
равными, и остается удовлетворить лишь двум краевым усло-
условиям:
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
339
Получаем следующие значения напряжений (см. также фор-
формулы G.1.4) гл. VII):
coscp,
у
2<р =
Т
1 Г((
у
2я
2я
2я
С2Сг
A-v)
CiG
A-v)
c2G
A-v)
e2Gv
2яA -v) *
COS ф,
sinq>,
coscp.
G.3.4)
Это напряженное состояние осуществляется в подверженном в
сечении ср = 0 поступательной дисторсии упругом цилиндре, по-
помещенном между двумя препятствующему осевому перемеще-
перемещению, жесткими гладкими плитами. Как и в предшествующем
случае, строгое решение задачи об освобождении торцов весьма
трудно.
7.4. Полиномиальные решения задачи о равновесии цилинд-
цилиндра. В п. 7.1. представлены формулы, выражающие напряжения
и перемещения в цилиндре, подверженном аксиально-симметрич-
аксиально-симметричной деформации и деформации изгиба, через гармонические
функции двух видов — осесимметричные (зависящие от х, ?) и
произведения функций от х, ? на eilf. В этом пункте дается по-
построение этих решений в форме однородных полиномов от х,
t, для сплошного цилиндра и с членами, содержащими надле-
надлежащие особенности на оси z (при х = 0), в случае полого ци-
цилиндра.
1°. Осесимметричные гармонические функции.
Для сплошного цилиндра речь идет о выраженных в цилиндри-
цилиндрических координатах гармонических полиномах
= /?"/>„ (ц),
^cos# = ^-, G.4.1)
где
(Р') —полиномы Лежандра (VI. 2.11). В частности, имеем
Фо=1. <Pi = ?. <p2 = yB?2-*2), Фз = уB?3-3^2),
ф4
+
Ф5 =
2+ 15л:4) и т. д.
G.4.2)
В случае полого цилиндра добавляются решения вида
1|>„ (х, ?) = ф„ (х, ?) In Jf + Xn (*, S), G.4.3)
92»
340 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
причем слагаемое %п определяется но условию
У2г|>„ = 0, V2x« = —V2 ф„ In х = —2Уф„ • Vln х.
Здесь использовано известное представление лапласиана произ-
произведения и учтено, что У2фп = 0, V2 In x = 0. Возвращаясь к сфе-
сферическим координатам, имеем
Vtprt = Rn~l {nPneR - sin ЪРпеъ), V In л: = — (eR + eectg ¦&),
так что (если использовать известное рекуррентное соотношение
для полинома Лежандра)
V\n = - 2R'l-2(nPn - ixK) = 2Rn~2P'n^ (ц).
Теперь, разыскивая %„ в виде произведения
Xn = /?nSn(n), G.4.4)
приходим к неоднородному уравнению Лежандра
1A - ц2) Srn (n)]f + п (п + 1) Sn (ц) = 2Р;_, Oi).
Его правая часть представляет полином (я — 2)-й степени от ц,
представимый через полиномы Лежандра формулами
Рп-1 (ц) = Bл - 3) Р,г_2 (|i) + Bл - 7) Р„_4 (ji) + ...
... +9Ptdi) + 5P2(p) + P0(n) (n четно),
Р;г_, (ц) = Bл - 3) Р„_2 Ы + Bл - 7) Р„_4 (ц) + ...
... +11Р5(ц) + 7РзЫ + ЗР1М (л нечетно).
G.4.5)
Поэтому, записав уравнение Лежандра для полинома Pv(\x)
в виде
[A - ^2) К (]х)\ + п (л + 1) Pv (ц) = [л (л + 1) - v (v + 1)] Pv Ы
и разыскивая Sn(\i) в виде
«-2
Sra (|х) = 2 av-Pv W.
о
придем для определения av к соотношению
v=0
§ 7] РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА 341
Из него, использовав G.4.5), найдем
я(я+1)-(я-4)(п-3) Рга^ + • ' - + n(n+l)-4-5 P4 ^ +
+ .(.+ 15)-2-3^^ + ^ТТУ («четно),
5 М Р ^ +
^^)+ +
i)(n-3) ' n~iW я(я+1)-5-6
P3 (ц) -\ . ., _ . „ Py (\i) (n нечетно). [
G.4.6)
С помощью этих формул, а также G.4.3), G.4.4) получаем
-Фз = Ф31п х + f S (S2 + ^2). ЧЧ = Ф41п^ + ^(j^ + g2)A9^-6^) и т. д.
G.4.7)
2°. Полиномиальные решения, пропорциональ-
пропорциональные cos ф. Выражение в цилиндрических координатах гармони-
гармонических полиномов, пропорциональных cosф, имеет вид
RnPn (ц) cos Ф = Rn sin Ъ cos цРп (ц) = xRn~lP'n (ц).
При обозначении
Фи*.?) = ^"^Ы. G-4.8)
так что
5
Ф1 = 1
5 15
1 ? №2 З*2) 1 ^
G.4.9)
и т. д., полиномиальные решения для сплошного цилиндра за-
записываются в виде
Ф1п = х^п(х,О- G.4.10)
В случае полого цилиндра добавляются решения, имеющие
особенности на оси z; эти решения разыскиваются в виде
К = Ч>» (х, ?) cos ф, ^ (*, g) = Ф" {Хх' С) + pi (x, g) jf in * + < (*, g)
G.4.11)
342
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
по условию
V2< = О, (V - ~) ^ = (V2 -^-){~ + Рпх In х + О?) = 0.
G.4.12)
Последовательно находим
Фз
105
G.4.13)
3°. В качестве примера рассмотрим цилиндр, нагруженный
нормальными давлениями, линейно распределенными по его
внешней и внутренней поверхностям:
х = 1: а, = - <70?, %TZ = 0,
G.4.14)
Решение представляется через осесимыетричные гармонические
функции bo, b3:
b0^A(f3{x,O + Bxpi(x,Q, b3 = Cy2(x,Q + Dtyo(x,i). G.4.15)
По G.1.6), G.4.2), G.4.5) после определения постоянных по
краевым условиям G.4.14) найдем напряжения
Or =
1 -х2
„2 2
А — л г
-qxx\
х2+:
G.4.16)
Это решение соответствует отсутствию загружения торцов цп-
линдра; продифференцировав его по ?, придем к решению
G.2.4) задачи Ляме (при замене с/о, Ц\ на р0, Pi)-
Задание решения в форме G.4.15) позволяет рассмотреть
также случай нагружения боковых поверхностей касательными
напряжениями постоянной интенсивности
1: Or = 0, %„ = То; х = Х\\ ог = 0, тгг = —т\. G.4.17)
§ 7] РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
Напряжения оказываются равными
343
т —
C0Xl
1-х
G.4.18)
Это напряженное состояние осуществляется приближенно в уда-
удалении от торцов длинного цилиндра, на торце которого ?= О
отсутствуют нормальные напряжения, тогда как по торцу t, = L
приложены сжимающие напряжения с равнодействующей
Z = —2яа/(то + xiti)
[см. также G.1.17)].
7.5. Кручение полого цилиндра силами, распределенными по
торцу. Задача состоит в разыскании перемещения v из диффе-
дифференциального уравнения G.1.8) по краевым условиям на боко-
боковых поверхностях цилиндра
дх х ~~и>
дх х
и на его торцах
- —
G.5.1)
G.5.2)
Предполагается, что распределение касательных напряже-
напряжений на обоих торцах одинаково. Решение разыскивается в виде
sh
s=l
ch ]isL
G.5.3)
где a, (us — надлежащим образом определяемые постоянные. По
G.1.7)
ch
q "^г<р "-^ '
ch
G.5.4)
и краевые условия G.5.1), G.5.2) приводят к требованиям
= 0, (-^У =0, G.5.5)
= f W ~ a*.
G.5.6)
344 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Функции gs(x) определяются по G.1.8) из дифференциального
уравнения Бесселя
общее решение которого представляется цилиндрической функ-
функцией
gs (x) = Z, fax) = cf/, fax) + c'tf, fax),
где /i, /V'i — бесселева и нейманнова функции первого порядка,
причем по G.5.5), используя известную формулу дифференци-
дифференцирования, имеем
Числа ц8 определяются корнями определителя этой системы
J2(iisxl)N2(lis)-J2(lxs)N2(^i) =0, G.5.8)
и выражение gs(x) представляется в виде
gs(x)^Cs[J1(iisx)N2(lxs) -Nl(v.sX)J2(ns)] = CaZi(Visx). G.5.9)
Задача сведена к определению постоянных Cs по условию
G.5.6). Постоянная а определяется по крутящему моменту
mz = 2яа31 тгфх2 их = 1 na3G A - х4-) а, G.5.10)
так как остальные слагаемые, по G.5.4) и G.5.7), не влияют на
выражение крутящего момента
1
f Z, (p,x)
I
= 0. G.5.1
I
Ортогональность системы функций Yx %i ifisX) легко прове-
проверяется; в известной формуле
sx) ZQ (\ikx) - \xsxZt {\xkx) Zo (nsx)
надо заменить Z0(]ix) выражением
Z № Z fox">
и учесть G.5.7). При ц., ?= цл получаем
1
J Zi (ц5*) Z, (nfcx) x dx = 0.
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
345
Вместе с тем
G.5.12)
Теперь из краевого условия G.5.6), учитывая G.5.11), получаем
G.5.13)
и решение задачи представляется в виде
G-5Л4)
где Z\{\isx) определяется по G.5.9). Таблица корней трансцен-
трансцендентного уравнения G.5.8) для нескольких значений хх имеется
в справочнике Янке и Эмде*).
Таблица 4
Х\
5
6
2
3
1
2
15,807
6,474
3,407
31,466
12,665
6,428
Из
47,157
18,916
9,523
62,857
25,182
12,640
78,560
31,456
15,767
В формуле G.5.14) отсчет осевой координаты проводился от
среднего сечения цилиндра; называя через t,\ осевую коорди-
координату, отсчитываемую от «верхнего» торца, имеем Z, + ?i = L, так
что
Даже для «кубообразного» цилиндра (с длиной, равной диа-
диаметру, L = 1) для значений \is, приведенных в табл. 4, th \.isL
мало отличается от единицы, и поэтому
sh \ist, ^ —jjl^c,
ch ucL ~ '
*) Э. Янке, Ф. Эмде, Ф. Лёш, Специальные функции (стр. 242),
«Наука», 1964.
346 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
так что слагаемые ряда G.5.14) экспоненциально убывают при
удалении от торцов. Полученное решение, представляя эффект
любого распределения напряжений xz(f, статически эквивалент-
эквивалентного крутящему моменту tnz, показывает, что влияние закона
распределения этих напряжений экспоненциально убывает с воз*
растанием расстояния от торцов. Принцип Сен-Венана оправ-
оправдывается здесь с большей точностью, чем можно было ожидать
по общим оценкам п. 2.14.
Для сплошного цилиндра
оо
lCs~er^sX), G.5.15)
причем |.is —корни уравнения J2([i) = О, равные
щ = 5,136; ц2 = 8,417; ja3 = 11,620; щ = 14,796
и т. д.; постоянные Cs определяются по формуле
1
Cs = 4f f f (x) J, Ы x dx, N2S = -1 J\ 0is). G.5.16)
Nsi 2
7.6. Решения в бесселевых функциях. В п. 7.1 показано, что
функции Папковича — Нейбера, решающие задачи о равнове-
равновесии упругого цилиндра при радиально-симметричной деформа-
деформации, представляются гармоническими функциями
Ь0(хЛ), h(x,zy, br(x,t)e% b^(x,l)e^. G.6.1)
В случае меридиональной деформации используются две из
трех функций bo, b$, br\ функция bl{, пропорциональная переме-
перемещению v, служит для решения задачи кручения.
Гармонические функции того же типа
q(x,'Q), bo(x,i)ei'f, bz(x,^)e^, p(x,?)e2iv G.6.2)
применяются для решения задач об изгибе, причем использо-
использование всех четырех функций излишне.
В этом пункте даются представления гармонических функций
с помощью произведений вида
gn(x)ert+n<* („ = 0, 1, 2), G.6.3)
обеспечивающего разделение переменных в уравнении Лапласа.
Для определения gn(x) приходим к дифференциальному урав-
уравнению цилиндрических функций
gn (x) + T8n(x) + (v2-i) gn (x) = 0. G.6.4)
§ 7] РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА 347
Необходимость раздельного выполнения краевых условий на
боковых поверхностях (х=1, х = Х\) и на торцах (? = -—?,,
? = L), по-видимому, делает невозможным решение задачи
в «замкнутом» виде, иначе говоря, в форме рядов с коэффици-
коэффициентами, определяемыми конечным числом операций. Задача,
исключая случай осесимметричного кручения, приводится к бес-
бесконечным системам линейных уравнений для этих коэффициен-
коэффициентов; при надлежащем выборе исходных решений такие системы
оказываются вполне регулярными (или регулярными), что до-
допускает применение приемов приближенного определения неиз-
неизвестных.
Этого трудного пути, допускающего в конечном счете полу-
получение численных результатов не из общих формул, а для опре-
определенного задания геометрических параметров и параметров
нагружения, стараются избегнуть ценой тех или иных пренеб-
пренебрежений. В случае, когда длина цилиндра достаточно велика
BЬ~^> 1), можно, используя набор решений вида G.6.3) при |i
чисто мнимом, точно удовлетворить краевым условиям на бо-
боковых поверхностях и довольствоваться приближенным выпол-
выполнением условий на торцах. Система сил, распределенных по
торцам (наперед заданных, а также определяемых решениями
первой группы), заменяется ей статически эквивалентной си-
системой, для которой решение, оставляющее боковые поверхно-
поверхности свободными от нагружения, известно. Обычно эта цель
достигается наложением решения задачи Сен-Венана (гл. VI);
в последней краевые условия на торцах выполняются интеграль-
интегрально— строится решение, в котором главный вектор и главный
момент распределенных по торцам сил имеют заданные значе-
значения, а боковая поверхность оказывается ненагруженной.
Этот способ решения задачи о длинном цилиндре обосновы-
обосновывается «принципом Сен-Венана» (п. 2.8 гл. IV), утверждающим,
что так находимое напряженное состояние может отличаться от
искомого лишь местными возмущениями напряженного состоя-
состояния, убывающими при удалении от торцов*). Можно еще доба-
добавить, как уже говорилось, что практическая ценность «решений
по Сен-Венану» определяется тем, что детали закона распре-
распределения напряжений чаще всего не могут быть учтены в за-
задании.
Второй крайний случай — случай короткого цилиндра
BL<1), то есть круглой (сплошной или кольцевой) плиты.
Сказанное выше о случае длинного цилиндра здесь можно по-
повторить «в обратном порядке»: строится путем использования
*) Это подтверждается, в частности, примером задачи кручения в п. 7.5;
слагаемое ахС, в выражении перемещения G.5.14) представляет решение за-
задачи Сен-Венана, а входящий в него ряд определяет местные возмущения
напряженного состояния в окрестности торцов, См. также пп. 7.8, 7.9.
348 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ | ГЛ. V
набора решений вида G.6.3) при вещественном jj, решение, в ко-
котором строго удовлетворяются условия нагружения торцов ци-
цилиндра; приходится довольствоваться выполнением «в среднем»
краевых условий на боковых поверхностях (они могут быть раз-
разнообразными). Возникающие здесь вопросы в значительной мере
связаны с теорией изгиба плит, не рассматриваемой в этой
книге.
Наиболее труден случай «кубообразного» цилиндра с дли-
длиной, сравнимой с диаметром (L—1). По-видимому, общего
средства решения, отличного от приведения к бесконечным си-
системам линейных уравнений, здесь нельзя предложить.
Далее мы останавливаемся только на задаче о «длинном»
цилиндре, нагруженном по его боковым поверхностям. Торцы
предполагаются ненагруженными.
При |i = ф, где р вещественно, решение дифференциального
уравнения
С (х) + 7 g'n (х) - (р2 + -?) gn (x) = 0 G.6.5)
записывается в виде
ёп М = СТК (N + СЫКп (fix) (п = 0, 1, 2). G.6.6)
Здесь In (fix) =i~nJn (ifix) —бесселева функция от аргумента ifix;
Kn(fix) — функция /Чакдональда; последняя имеет особенность
на оси цилиндра (при х = 0) и поэтому исключается при рас-
рассмотрении задач о сплошном цилиндре.
Ограничиваясь далее случаем аксиально-симметричной де-
деформации, примем
Ьг = gx (x) cos pc b0 = go (x) cos pC- G.6.7)
По G.1.6) напряжения ог, тп, после исключения из их выраже-
выражений вторых производных с помощью уравнений G.6.5), при-
примут вид
G.6.8)
- Гр2 + A - 2v) Д-1 xgi (x) \ cos fit,
-^ тгг = f^ (x) + л:^; (дс) - A - 2v) gi (x)] fi sin K.
При задании нагружения боковых поверхностей по закону
х = 1: аг= — р cos р?, тгг = q sin p^
— p'cos% x = (?'sinK '
полагаем
go(x)^Dllo(^x) + D2Ko(fix))
§ 7] РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА 349
С помощью формул дифференцирования (штрих обозначает
дифференцирование по х)
I'o(fix) = р/, (fix), I\(fix) = р/0(fix) -~h (И.
/Co (N = - P* i (N- tf (P*) = - P/Co (pJc) - j Ki (fix)
для определения четырех постоянных D,-, С,- получаем четыре
уравнения, не выписываемых здесь вследствие их громоздко-
громоздкости. Отметим лишь, что определитель этой системы в частном
случае сплошного цилиндра (х{ = 0) оказывается равным
Д(Р) = РЧ>(Р). 4>(P) = P2['o(P)-/i(P)]-2(l-v)/?(p). G.6.1D
Зная коэффициенты Сг, Du по формулам G.1.5), G.1.6) состав-
составляем выражения радиального и осевого перемещений и всех
компонент тензора напряжений. Это решение обобщается на
случай произвольного нагружения боковой поверхности ци-
цилиндра, симметричного относительно среднего сечения цилиндра
(? = 0). Тогда стг четно, %гг нечетно относительно ? и их крае-
краевые значения представимы тригонометрическими рядами
оо со ^
• knt, I
sin~T' !
x=l: vr=-Po-2jPkC0SL' %TZ = 2a
CXJ OO
* = *,: ar= ~P0- 2jPkC0SL » %rz = 2jIk sin "T
G.6.12)
Решение для постоянных слагаемых —pQ, —p'Q определяется по
формулам задачи Ляме п. 7.2, а каждому члену рядов соответ-
соответствует получаемое описанным выше способом решение, в ко-
kn
тором р принимается равным —г- .
Называя через Z осевое усилие в поперечном сечении ци-
цилиндра, имеем по G.1.17)
и, поскольку CTZ, trz пропорциональны cosp? и sin P?, получаем
Z (I) =
350 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
причем постоянное слагаемое вносится решением задачи Ляме.
Осевые усилия на торцах оказываются равными
Г = 2ла2L ^ГЪГ {Ъ ~ fad + 2паЧ Р01~2Р<> , G-6.13)
я система сил, распределенных по торцам, может быть сделана
статически эквивалентной нулю при нагружении торцов равно-
равномерно распределенными нормальными напряжениями интен-
интенсивности
< G6Л4)
2
ncf
-x\)
Так построенное решение определяет напряженное состояние
в цилиндре длины 2aL с точностью до местного возмущения
его в близости от торцов. Строго говоря, здесь дается решение
задачи о бесконечно длинном цилиндре, по боковой поверхно-
поверхности которого распределена нагрузка, задаваемая периодиче-
периодическими функциями G.6.12). Можно также использовать пред-
представление закона нагружения не рядом, а интегралом Фурье,
продолжая произвольным образом задание этого закона вовне
отрезка —L-C?<1L, например, принимая нагрузку равной
нулю при \t,\> L.
Точное решение требует удаления с торцов оставленных на
них статически эквивалентных нулю систем сил. Выше указы-
указывалось на трудность этой задачи; далее рассматривается прием
частичного выполнения этого требования с помощью «однород-
«однородных решений».
Случай кососимметричного относительно среднего сечения
цилиндра нагружения рассматривается аналогично; требуется
заменить cos |3?, sin pg на sin pg, —cos p^ в формулах G.6.7),
G.6.8). Общий случай нагружения можно рассмотреть наложе-
наложением симметричного и кососимметричного нагружении.
7.7. Задача Файлона. Рассматривается нагружение сплошно-
сплошного цилиндра касательными усилиями постоянной интенсивно-
интенсивности q, равномерно распределенными по двум участкам боковой
поверхности
Можно принять, что эта схема описывает загружение испытуе-
испытуемого на растяжение цилиндрического образца, которому пере-
передается с помощью кольцевых захватов через заплечики (вы-
(высоты Ьа) растягивающее усилие
Р = 2na2qb.
Распределение касательных напряжений по поверхностям, от-
отделяющим заплечики от тела стержня, считается равномерным.
§7]
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
351
Краевые условия G.6.12) теперь записываются в виде
х = \: аг = 0, т„ = т(?), G.7.1)
причем т(?)—нечетная функция, задаваемая при
венствами
0.
q, Zo
О, ^
ра-
раG.7.2)
Коэффициенты ее разложения в ряд по синусам равны
t{Q sin s? dl = ^ [cos sfe?0 ~ cos
Тогда, задавая в соответствии с G.6.6), G.6.7) функции br, bo
тригонометрическими рядами
ОО
Ьт = S Ckh (skx) cos sftS,
cos sft?, G.7.3)
придем, записав краевые условия G.7.1), к уравнениям
Ck {C - 2v) sfe/0 (sfe) - [4 A - v) + s\] h (sh)} +
Ck [sklu(sk) - 2 A - v) A (sk)}
G.7.4)
определяющим неизвестные коэффициенты Ch, Dk. Зная bn b0,
no G.1.5), G.1.6) составляем выражения напряжений и пере-
перемещений. Вместе с тем по G.6.14)
(-I)*
•Як = -
ft=l
ft2
L L L \
G.7.5)
причем суммирование проведено с помощью ряда
(-D
~i cos ka
k-i
352
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
Добавив это равномерно распределяемое по сечению цилиндра
напряжение к напряжению az, вычисляемому по полученному
решению в форме тригонометрического ряда, придем к распре-
распределению напряжений
+ — 2uj fcos ¦
k=i
~ cos sk (So + b)] Sz (x, sk) cos s&, G.7.6)
статически эквивалентному нулю на торцах t, = ±L цилиндра.
Через Sz(x, р) обозначено выражение
5* (х- Р) = да {/° (pJf) [3р/°(Р) ~ 2 B " V) 7l (Р) ~ р2/| т +
+ рхЛ(|Зх)[р/0(р)-/,©]}, G.7.7)
и при подстановке в G.7.6) следует заменить р на sh = kn/L.
В приводимой ниже таблице, вычисленной Файлоном для
значений
/_И h — r— — — —
L~ 2 ' °~^°~3~6'
приведены распределения нормальных напряжений стг в различ-
различных сечениях цилиндра. Через от обозначено среднее значение
Р
-^¦ = 2qb при ?<?о; заметим, что при ? > ?0 + Ъ среднее зна-
значение этого напряжения, конечно, равно нулю.
Таблица 5
Отношение az/am
III
0
0,1
0,2
0,3
0,4
х = 0
0,689
0,673
0,631
0,582
0,539
х = 0,2
0,719
0,700
0,652
0,594
0,545
х = 0,4
0,810
0,786
0,720
0,637
0,565
х = 0,6
0,962
0,937
0,859
0,737
0,617
1,117
1,163
1,334
2,022
1,368
В последней строке дается распределение напряжения az в
сечении, расположенном уже в загруженной части цилиндра.
Из таблицы можно заключить, что распределение нормальных
напряжений az выравнивается при удалении от места загруже-
ния. Но даже в среднем сечении (? = 0) эти напряжения изме-
изменяются в пределах от 69% до 112% от среднего значения. Это
объясняется тем, что в рассмотренном случае цилиндр загру-
загружен по значительной части A/3) его боковой поверхности; при-
применение принципа Сен-Венана недопустимо.
5 Л
PABHOBECHF УПРУГОГО КРУГОВОГО ЦИЛИНДРА
353
7.8. Однородные решения. Ограничиваясь случаем аксиаль-
аксиально-симметричной деформации сплошного цилиндра, рассмотрим
при отсутствии загружения боковой поверхности {х = I) одно-
однородную систему линейных уравнений [см. G.7.4)]
С {C - 2v) р/0 (Р) - [4 A - v) + Р2] /, (Р)} + ]
+ />р[/1(Р)-р/о(р)] = О, G.8.1)
С [р/0 (р) - 2 A - v) /, (Р)] + Dp/, (Р) = 0, >
определяющую коэффициенты С, D решений
Ьг = Ch (И е''К, *о = D/o (pjc) e'W. G.8.2)
Эта система может иметь ненулевые решения для значений |3,
обращающих в нуль ее определитель G.6.11):
ч^ О) = Э2 [/§ (|5) — /? О)] — 2A — v) /? О). G.8.3)
Представление ф(Р) в форме степенного ряда можно получить,
используя формулу для произведения бесселевых функций
ТП-\-П
(т
2s)l
Приходим к равенству
из которого следует, что для v < 1/2 величина в скобках поло-
положительна при всяком целом s; поэтому г|з(|3) не имеет корней
при вещественных р, исключая очевидный двойной нулевой
Таблица 6
S
1
2
3
S
1
2
3
1,367 + 2,698/
1,558 + 6,060/
1,818 + 9,320/
0,9528 - 0,0692/
0,9712 + 0,0102/
0,997 +0,000/
'о (Р*)
-0,4695 + 0,7269/
0,4853 - 0,5576/
-0,567 +0,562/
1,489 + 2,476/
1,451 +5,901/
1,812 + 9,29/
'i (h)
-0,5453 + 0,7233/
0,4937 - 0,5794/
-0,568 +0,563/
*'№*)
2,85-1,48/
8,22 - 0,84/
12,06-1,56/
23 А. И. Лурье
354
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
корень. Она не имеет и чисто мнимых корней, в чем можно убе-
убедиться, положив р = 1ц и группируя слагаемые ряда попарно;
тогда окажется, что г[1(ф)<0.
Таким образом, все корни функции г[;(|3) комплексные; но
эта функция четна, а коэффициенты ее разложения G.8.4) в
ряд вещественны. Поэтому ее корни распадаются на четыре
группы:
P, = YS-H65> p;=-Ys-W6a> fis = ys-it>s, Fs=-ys-it>s GA5)
(Ys>0, 6s>0).
Значения первых трех корней, расположенных в первом квад-
ранге плоскости |3, приведены в таблице 6; в ней же приведены
числовые значения некоторых функций от этих корней. Вы-
Вычисление проведено для значения v = 0,25.
Поскольку уже jp3 1 = 9,496, достаточную точность прия>3
дают асимптотические формулы корней (с точностью до членов
порядка п,'1 In я)
ft, ~ гШ +1Ш inn - i
и функций от них
1 - 2 A - v)] } G.8.6)
h (p«)
2A-у)
Заметим еще, что при принятом обозначении
уравнение G.8.3) записывается в виде
v).
G.8.7)
. G.8.8)
G.8.9)
G.8.10)
Возвращаясь к уравнениям G.8.1), находим зависимость
между постоянными С, D, соответствующими корню ps:
(У) = [p. (Я2, - 1) - U C(s).
Постоянные С("> остаются неопределенными. Далее вводится
обозначение
(s) __ Ls __ Ms + iNs
С —
(Ps) Ml
§7]
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
355
позволяющее записать выражения перемещений для каждого
корня в виде
где
^•Л*. Ps)= - р^7(р^ (PsJc/i (Psa;) + [2A -v)-я.врв1 /0(
В этой же форме записываются напряжения:
причем
20
^ = Lsosz(x,$s)ehsl, -?r = Ls%srz(x,
20
~2G
1
[G.8.12)
G.8.13)
(ps)
2v) /0
¦[2(l-v) + PAl,
G.8.14)
Л (Ps) ct? (x, ps) = B - p^s) /0 (p^) + psx/, (ps.t),
Л (Ps) т*г(*. P.) = -«№^o (P.*) - РЛ/j (P.^)].
и легко непосредственно проверить, сославшись на G.8.9),
G.8.10), что комплексные функции osr{x,$s), 7,srz{x,'f>s) обра-
обращаются в нуль на поверхности цилиндра х — 1. Конечно, равны
нулю и их вещественные и мнимые части (обозначаемые индек-
индексами г, I сверху).
Таким образом, построена система «однородных решений»
уравнений равновесия упругого цилиндра — решений, оставляю-
оставляющих его поверхность х = 1 свободной от нагружения. Система
напряжений, вычисляемых по этим решениям, в любом попе-
поперечном сечении цилиндра статически эквивалентна нулю. Это
сразу же следует из соображений статики и легко подтвер-
подтверждается вычислением
os_ (я, ps) х dx =
23*
B - РЛ) J /о (pVt) x dx -!- p, [ /, fox) x2 dx \ = 0,
I
356
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ
[ГЛ. V
что следует из G.8,9) и из соотношений
*"/„_, (х) dx = х"In (х), /2 (х) = /0 (х) ¦
2/, (х)
Отделив в G.8.11) вещественную часть, получим
urs = {Ms [u(s>r) cos ysC - «(Sl" sin уД -
s'r)
sin
u(s>i] cos
[a>(s-r) cos yst, — w(s'l) sin уД —
{s-r) sin yl + w{s' °
Ns [w{s-r) sin ysl + w{s' ° cos
G.8.15)
Выражения, отличающиеся только перестановкой и знаком
постоянных, получили бы, взяв мнимую часть «s, ws. Таким об-
образом, для каждого корня |3S в первом квадранте плоскости р
имеем два частных однородных решения, соответствующих не-
независимым постоянным Ms, Ns. Наличие в выражениях G.8.15)
множителя е~ s указывает, что эти решения экспоненциально
затухают от края цилиндра 'Q = 0. Быстрота затухания возра-
возрастает с номером решения: 6i = 2,698 и уже бз = 9,320. Решения,
затухающие от края ? = L, получим, заменив в G.8.11) G.8.13)
множитель е'№ на е'к>, %\ = L — ? (и изменив знаки w и %rz).
Использование корней, расположенных в других квадрантах
плоскости C, не приведет к решениям, отличным от указанных;
для каждого |3S получаем, таким образом, четыре независимых
частных решения, из них два затухают при удалении от торца
? = 0 и два — от торца ?i = 0.
7.9. Краевые условия на торцах. Введенные в п. 7.8 одно-
однородные решения могут быть использованы для приближенного
выполнения краевых условий на торцах цилиндра, так как на-
наложение их не вносит никаких изменений в условия нагружения
боковой поверхности цилиндра.
Можно ограничиться рассмотрением полубесконечного ци-
цилиндра, так как следует предположить, что искажение напря-
напряженного состояния, вносимое невыполнением краевых условий
на одном из торцов, будет пренебрежимо малым в области, при-
прилегающей к другому торцу. Допустимость такого предположе-
предположения даже для «кубообразного» цилиндра (L ~ 2) оправды-
оправдывается экспоненциально;1! быстротой затухания однородных ре-
решений.
Выражения s-i\ пары вещественных однородных решений
для нормального и касательного напряжений на торце Z, = 0
будут
s, г) _
, г) _
§7]
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
357
где, как говорилось, о^-г\ т^г) — вещественные, cr<f' l\ т;(.^г) —
мнимые части функций osz(x, s), xsrz(x, s), определяемых по
формулам G.8.14).
Краевые условия на торце ?, = 0 запишем в виде
? = 0: o, = F(x), т„=-Ф(*), G.9.2)
где функции F(x), Ф(х) задаются законом нагружения торца,
причем F(x)>0 при растяжении, а Ф(л:)>0, если касательные
нагрузки направлены в сторону возрастания х. Распределение
нормальных нагрузок на торце предполагается статически экви-
эквивалентным нулю:
1
xF(x)dx = 0, G.9.3)
так как удаление растягивающей силы Z (главного вектора-рас-
вектора-распределения нормальных напряжений) требует лишь наложения
элементарного решения az = Z/na2.
Итак, задача сводится к одновременному представлению
двух заданных функций рядами вида
ф(*)=- 2 [м&г) - адг>].
s = l
G.9.4)
Ограничиваясь приближенным решением, сохраним в пра-
правых частях G.9.4) конечное число п слагаемых и введем в рас-
рассмотрение квадратичное отклонение по площади
W{Mlt M2, ..., Мп\ Nlt N2, ..., Nn) =
F«- S
s=l
¦4-
ф ^ +
-r) -
r) -
x dx. G.9.5)
Коэффициенты Ms, Ns определяются по условию минимума
квадратичного отклонения; это приводит к системе In линей-
линейных уравнений
дМь
= 0,
= 0, k=\, 2, ..., п,
G.9.6)
358 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
или, в развернутом виде,
п _п_
~ Ms + CskNs) = it>k, G-9.7)
S-l
S-1
где обозначено
B
0
1
= - J (a<
XdX=
С* !,
G.9.8)
- «4»* = J [f (*) ^ (JC h) - ф (^) < (*. P*)] *
Коэффициенты ASh, BSk, Csft вычисляются (для фиксирован-
фиксированного коэффициента Пуассона v) один раз навсегда. Они пред-
представляются в виде (v = 1/4)
Ask - iBsk = y f;+ ®s, h) + /- (P«
G.9.10)
и вычисление приводит к следующим значениям величин У+ и /_:
.vPft (РДй -
G.9.11)
и при s =
(Р« Р.) = - 4 РДч + 2,667 - 4,5 ^ -f ^,
° Ps Ps
и/ р2,
G.9.12)
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
359
G.9.13)
Цля п -- 2 вычисления с помощью чисел в табл. 6 дает систему
четырех уравнений
1,077/У, - 0,257\М2 + 0,401^! - 0,05085TV2 - <plf
-0.257Ш, + 3.05 Ш2 - 0,525^! + 1,662/V2 = ср2,
0,40Ш, - 0,525М2 + 0,2915Л/, - 0,2678//2 = ф„
- 0.05085М! + 1,662М2 - 0,2678iV2 + 1,6507V2 = г|J,
решение которой будет
М, = 2,391ф! - 0,4256ф2 - 4,222ф! - 0,1829г|з2,
М2= -0,4256ф1 + 0,9730ф2+ 1,675ч|э, — 0,7215г|з2,
N{ = - 4,222ф, + 1,675ф2 + 12,44^, + 0,2018г|з2,
дг2= — 0,1829ф, — 0,7215ф2 + 0,2018^! + 1,360ф2.
Определив по этим формулам коэффициенты Ms, Ns по значе-
значениям ф8, г|з5 для рассматриваемой задачи, найдем для s= 1, 2
вещественные однородные решения по формулам G.8.14). Чис-
Численные значения функций /0(psx), I\($sx) и вычисленные по
ним величины напряжений и перемещений
G.9.14)
s, r) + i(y(s, i)
s. r)
представлены в таблицах 7, 8, 9, 10.
Таблица 7
X
0
0,2
0,3
0,6
0,8
1,0
/о (Pi*)
1
0.9452 + 0,01780/
0,8752 + 0,1551/
0,4760 + 0,5078/
0,04951+0,7017/
-0,4695 + 0,7269/
0
0,1230 + 0,2675/
0,1600 + 0,3960/
0,0785 + 0,7162/
-0,1704 + 0,8090/
-0,5453+0,7233/
/о Фгх)
0
0,6776 + 0,1584/
0,331 +0,280/
-0,589 +0,0727/
-0,3618-0,4973/
0,4853-0,5576/
/i (M
0
0,0794+0,5193/
0,0040 + 0,627/
-0,439 +0,0599/!
-0,2326-0,5937/
0,4937-0,5794/
Таблица 8
X
0
0,2
0,3
0,6
0,8
1.0
аг г
0,4302-1,699/
0,403 -1,517/
0,368 -1,309/
0,172 -0,485/
0,014 -0,081/
0
г lGr
-2,119 + 2,490/
-1,247+1,658/
-0,34 -0,02 i
1,58 -2,233/
0,721-0,746/
0
A, г) , . B, ()
Ф *" * ф
0,4302-1,699 /
0,4571-1,638 /
0,485 - 1,562 /
0,6053-1,185 /
0,676 -0,843 i
0 7004-0,4769/
„B, г) B, «)
Ф т' ф
-2,119 +3,490/
-1,959 +2,784/
-1,75 +2,024/
-0,602 -0,244/
0,2103-0,6687/
0,5456-0,2271/
360
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Таблица 9
X
0
0,2
0,3
0,6
0,8
1,0
-2,522+1,195/
-2,273+0,952/
-1,966+0,685/
-0,450-0,221/
0,776—0,351/
1,681+0,303/
он,г) + й,е,г)
6,369-4,479/
4,252-2,410!
2,092-0,581/
-2,42 +1,17 1
-0,456-0,551/
2,151+0,335/
0
-0,5007 + 0,6171i
—0,7186 + 0,8357/
-1,030 +0,8790/
-0,7628+0,4486/
0
ТB,о + ,ЧМ)
0
2,669-2,880/
3,17 -3,04 /
0,54 +0,28 /
-1,325 + 0,889/
0
Таблица 10
1
X
,0
0,2
0,3
0,6
0,8
1,0
ц0,г)-н„A,0
0
0,1478-0,2394/
0,2124-0,3376/
0,3240-0,4836/
0,3059-0,4706/
0,2241-0,4422/
u&,r) + iuB,i)
0
-0,4335 + 0,4759/
-0,524 +0,522 /
-0,190 +0,011 /
0,0927-0,2208/
0,0600-0,2322/
w(\,r) + lw{\,i)
0,8906-0,1552/
0,7953-0,1139/
0,6819-0,0707/
-0,358 +0,051 /
-0,1568-0,0441/
-0,3050-0,2799/
wB,r) + iwB,i)
-1,118 +0,5443/
-0,7377 + 0,2753/
0,1756 + 0,0306/
0,388 -0,137 i
0,0794 + 0,0462/
-0,2448-0,1173/
7.10. Обобщенная ортогональность. Трудность выполнения
краевых условий на торцах цилиндра состоит в необходимости
одновременного представления двух независимых функций ря-
рядами вида G.9.4) по неортогональной системе решений, остав-
оставляющих боковую поверхность цилиндра (х = 1) свободной от
нагружения («однородных решений»).
Эти решения обладают, однако, некоторым свойством «обоб-
«обобщенной ортогональности». Его можно использовать для точного
выполнения одного из краевых условий, причем сохраняется
произвол, допускающий возможность приближенного выполне-
выполнения второго условия.
В рассмотрение вводятся функции
= е
и их производные по аргументу (Jsx
К =8'
G.10.1)
G.10.2)
Здесь, как и ранее, ps — корни трансцендентного уравнения
о /1 ,.\ о /1 2 11 1 _. 'о yPs) in г
РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА
361
Однородные решения задачи о цилиндре (оставляющие его
поверхность свободной от нагружения) в этих обозначениях
представляются рядами
- е0 cos
G.10.4)
причем каждому корню s = 1, 2, ... соответствуют четыре сла-
слагаемых для значении G.8.5) корпя |3S. Ряды G.10.4) при над-
надлежащем выборе постоянных Cs дают представления веществен-
вещественных функций.
Вычисляемые по G.10.4) напряжения определяются по фор-
формулам
G.10.5)
Введенные функции е^, р^ обладают свойством обобщенной ор-
ортогональности (П. А. Шифф, 1883):
G.10.6)
Это проверяется непосредственным вычислением. Имеем
1 1
№- \)+кмч~
362 ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Входящие сюда интегралы вычисляются по фэрмулам
1
Ps h G.10.7)
т [П (h) - П (У + -^ Л> (Ps) л (Р.) E = *),
G>108)
и в сказанном можно убедиться подстановкой в G.10.6). Вме-
Вместе с тем
1
2 j p'ke'kx dx = Nk = I\ фк) {%\ - 1) [ 1 + $k%k (%l - 1) - 2Щ. G.10.9)
о
П. А. Шифф и позже П. Ф. Папкович A941) указали на воз-
возможность одновременного представления двух независимо за-
задаваемых функций Ft(x), Рг(х) в форме рядов по функциям,
обладающим свойством обобщенной ортогональности. В приме-
применении к функциям е^, р^ эти представления записываются в виде
l(x) = 2>Dse's, F2 {x) = 2j Dsp's. G.10.10)
s s
Одинаковые коэффициенты Ds этих рядов определяются с по-
помощью свойства обобщенной ортогональности
1 1
[ [p^i W + z'kF2 M]x dx = S D' I" Ke^ + 8*Ps) x dx = DkNk-
о s о G.10.11)
Например, положив F2(j;)»0, имеем
s 7] РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА 363
получили представление нуля в виде ряда по функциям p's
с коэффициентами Ds, вычисляемыми по произвольно заданной
функции F\(x) *).
Функция 2GF\{x) может быть принята равной заданному на
торце ? = L касательному напряжению {xxz)i=l-
{xxz\_L = 2G S CX ^n PSL = 2GFi{x). G.10.12)
Тогда по G.10.11)
l
Произвол в задании функции F2(x) может быть использо-
использован для приближенного выполнения еще одного краевого усло-
условия. Так, если задать F2(x) в виде
п
F2(x)= 2 акщ(х), G.10.14)
то коэффициенты С, окажутся линейными функциями парамет-
параметров ah:
G.10.15)
Эти параметры можно определить, например, по условию мини-
минимума квадратичного отклонения заданного на торце ? = L нор-
нормального напряжения az от его требуемого значения G.10.5):
W(alt a2, ..., ап) =
1
о
Приходим к системе п линейных уравнений (k = 1, 2, ..., /г)
lr(Vv)osP'L]''t-=tl- G-Ю.17)
Например, приняв
F2 (х) = щх + а2х3 + ... + апх
2п~\
*) Изучению свойств сходимости рядов и установлению классов функ-
функций F,(x), F2(x), для которых возможны совокупные представления вида
G.10.10) по обобценно ортогональным функциям, посвящено (применительно
к задаче изгиба плит) исследование Г. А. Гринберга A951).
364
имеем
ПРОСТРАНСТВЕННЫЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ [ГЛ. V
1 1
Nr sin %L -f^ = J ***e; dt =
* о о
Входящие сюда интегралы вычисляются с помощью формул
приведения
jV~7o@ it,
k + ]IQ{t)dt = x2k+[Il{x)-2kx2kIQ{x) + 4k
о о
X
\t2kl{{t)dt =
о
Г 9b 9
• — П Г /, (t) dt
J
x/0 @ dt = x/, (x), J /, (t) dt = /0 (x) - 1.
G.10.18)
Напомним, что только статически эквивалентные нулю си-
системы напряжений oz представимы в виде G.10.5):
1 1
U ] dx = 0.
xoz dx = 0, I x US
0 0
В случае цилиндра, растянутого осевыми сосредоточенными си-
силами Q, надо принять
Поэтому
1
, TaV> Р->О, тгг|?_? = 0.
I 0, х>р, Z
na2 p2
- v
x dx
и система линейных уравнений G.10.17) приведется к виду
(* = 1, 2 я)
Р-5
1-v
I 7] РАВНОВЕСИЕ УПРУГОГО КРУГОВОГО ЦИЛИНДРА 365
причем теперь
к=\ О
1
дСг 1 Г / / ч .
-~ = -тг—• о г I xzT4k \x) dx.
о
Вычисление интегралов проводится по формулам G.10.7) —
G.10.9) и получающимся из них дифференцированием по пара-
параметрам ps, pc Трудности будут связаны с вычислением двойных
рядов, представляющих коэффициенты при неизвестных ah в си-
системе G.10.19) *).
*) Автору неизвестны работы, в которых описанный процесс был бы
доведен до численных результатов
ГЛАВА VI
ЗАДАЧА СЕН-ВЕНАНА
§ 1. Напряженное состояние
1.1. Постановка задачи Сен-Венана. Призматический стер-
стержень— тело, образуемое при поступательном движении плоской
фигуры S по прямой, перпендикулярной плоскости фигуры; фи-
фигура S представляет поперечное сечение стержня. Осью стерж-
стержня Oz называется прямая, являющаяся геометрическим местом
центров инерции поперечных сечений; оси Ох, Оу, расположен-
расположенные в плоскости поперечного сечения, направлены по его глав-
главным осям инерции. Начало О системы осей Оху расположено
в одном из поперечных сечений (в сечении z = const); началь-
начальное (.г = 0) и конечное (z = /) поперечные сечения называются
торцами стержня, их центры инерции обозначаются О~, О+.
Через /т, Iv назовем моменты инерции поперечного сечения от-
относительно расположенных в нем осей, через S — его площадь.
Итак,
\l Г Г = 0, \\ydo = 0 {do = dxdy),
s
, Iy=jjx4o,
s "s s
для всех z cz |0, /].
В задаче Сен-Венана рассматривается напряженное состоя-
состояние в призматическом стержне, нагруженном распределенными
по его торцам поверхностными силами; боковая поверхность 2
стержня свободна.
Краевые условия записываются в виде: на торцах
2 = 0 - XZX = XJ {X, у), - Xyz = Y~z [Х, У), ~O, = Z7 (X, tj), |
Z = / Хгх == XJ {X, tj), Xyz = Yt {Х, у), Ог = ZJ {Х, у), J
A.1.2)
§ 1]
НАПРЯЖЕННОЕ СОСТОЯНИЕ
367
где Xg, Yt, Zt — проекции на координатные оси поверхност-
поверхностных сил на торцах; на боковой поверхности 2 имеем
+ ХХуПу = 0, TXytlx
T.V2«X + Xy-Jly = 0.
A.1.3)
A-1.4)
Здесь п — единичный вектор внешней нормали к боковой по-
поверхности и одновременно к контуру Г поперечного сечения,
так что
„ _ йУ. „ Ах „ _ n
причем
x = x(s), y = y(s), г = const
A.1.5)
A.1.6)
— уравнение контура Г, s — дуга на нем.
1.2. Интегральные уравнения равновесия. Назовем через
Р, Q, R проекции на координатные оси главного вектора по-
поверхностных сил на правом торце (z = /), через пгх, mv, tnz —
проекции на эти оси их главного момента ш^° ) относительно
центра инерции 0+ этого торца. Тогда
Р = J J Xt (х, у) do, Q= \\Yt{x,y)do, R=\\zt{x,y)do,
s s s
A.2.1)
mx = [ \ yZt (x, y) do, my = - П xZt (x, y) do,
S S A.2.2)
m, = J J \xYt (x, y) - yXt (x, y)\ do.
s
Силы P. Q называют поперечными, R — осевой; inx, in,, — изги-
изгибающие моменты, in, — крутяишй момент.
Составим условия равновесия части стержня \z, /]; по его
левому торцу распределены напряжения хх:, т;;г, о., представ-
представляющие систему поверхностных сил с проекциями на коорди-
координатные ОСИ —Т.«, —Тут, —Ог.
Так как боковая поверхность не нагружена, а массовые силы
отсутствуют, то шесть уравнении статики запишутся следующим
образом: три уравнения проекций сил
f f xzx do = P, J \ xu, do = Q, f [ аг do = !< A.2.3)
368 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
и три уравнения моментов относительно осей Ох, Оу, Ог сече-
сечения г
yazdo = tnx — (l — z)Q, — | xezdo = tny + (l — z) Py
s
(xryZ-yx2x)do = tnz.
s
A.2.4)
При z = 0, заменив xxz, x,J2. ог их значениями A.1.2), придем,
конечно, к условиям равновесия внешних поверхностных сил,
которые должны считаться выполненными.
1.3. Основные предположения. Интегральным условиям рав-
равновесия A.2.3), A.2.4) можно удовлетворить, полагая, что xxz, xyz
не зависят от z, a ov—линейная функция от (I— г):
Ххг = Тл.-Л-Г> У)> Ъуг=Хуг(Х'У)' °г = °1(Х> У) + (l ~ Z) Ol(X> У)-
A.3.1)
Эти приемтемые предположения, конечно, не являются след-
следствиями упомянутых уравнений, но, лишь приняв их, можно
продвинуться дальше в решении задачи о равновесии стержня.
Два из трех уравнений статики в объеме теперь запишутся
в виде
_1 + _^ = 0, ~-^!__? = 0. A.3.2)
дх ду дх ду '
Следствием этих уравнений, а также краевых условий A.1.3)
на боковой поверхности стержня является приемлемость второй
группы предположений, допускаемых в постановке задачи Сен-
Венана:
o.v = 0, x.vl, = 0. о„ = 0. A.3.3)
В предположениях A.3.1), A.3.3) заключена идея «полуоб-
«полуобратного метода Сен-Венана»: некоторые напряжения (или пе-
перемещения) назначаются («угадываются»); тогда уравнения,
определяющие остающиеся неизвестные, становятся доступными
рассмотрению. Конечно, эти допущения заставляют отказаться
от точного решения краевой задачи; в задаче Сен-Венана, на-
например, отпадает возможность точного выполнения краевых
условий на торцах A.1.2), они заменяются интегральными со-
соотношениями A.2.3), A.2.4). Приемлемость этой замены обос-
обосновывается принципом Сен-Венана (п. 2.8 гл. IV).
Усилиями основоположников теории упругости Ляме, Кель-
Кельвина, Буссинека, Черрути и др. были получены строгие реше-
решения некоторых краевых задач теории упругости для областей,
ограниченных поверхностями, задаваемыми одним параметром
(шар, полупространство); исследования, имеющие целью полу-
§ I] НАПРЯЖЕННОЕ СОСТОЯНИЕ 369
чение точных решений, продолжаются в наше время, и число их
растет. Но началом теории упругости как прикладной дисцип-
дисциплины следует признать знаменитые мемуары Сен-Венана
«О кручении призм» A855) и «Об изгибе призм» A856), в ко-
которых предложен «полуобратный метод» и высказан «принцип
Сен-Венана».
1.4. Нормальное напряжение а2 в задаче Сен-Венана. Это
напряжение может быть определено в общем виде для стержня
любого поперечного сечения; уравнений статики здесь недоста-
недостаточно, надо (решая задачу в напряжениях) обратиться к зави-
зависимостям Бельтрами — Мичелла A.5.9) гл. IV. В них по A.3.3)
сумма нормальных напряжений о заменяется напряжением az
и по A.3.1) линейно зависит от (/ — г):
о = ог = о1{х, у) + A-г)оЦх, у). A.4.1)
Из A.3.1) следует также, что все вторые производные искомых
функций по z оказываются нулями, так что в оператор Лапласа
войдут только производные по х, у:
Из трех уравнений Бельтрами — Мичелла (для o.v, ay, хху) сле-
следует:
^_ = 0 -^ = 0 -^- = 0 A4 3)
дх2 ду2 дх ду v '
а уравнение для а2 по A.4.1) удовлетворяется тождественно.
Итак, а оказывается линейной функцией х, у:
о = о. = а\х + а2у + ao + (l — z) {b\X + b2y + b0). A.4.4)
Обратившись к геометрическим и статическим соотношениям
A.1.1), A.2.3), A.2.4), теперь легко получим
R т„ т, |
а\ =
~T7' Ix ' 1 A4 5)
и п и Р и Q ' ' '
О0 = U, О, = г— , 02= j— , I
и поэтому
Пришли к закону распределения нормальных напряжений в
упругом стержне, растягиваемом осевой силой R и изгибаемом
приложенными к торцу моментами т,, тч и поперечными си-
силами. Величины
AU = тл- Q{l — z), Mu = mu + P(l — z) A.4.7)
24 Л II. .'Ирье
370 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
представляют изгибающие моменты в сечении z. В элементар-
элементарной теории изгиба балок также принимается, что
R Ми Мх
^ > AА8)
причем этот закон распределения нормальных напряжений о2
распространяется на случай любого нагружения стержня по бо-
боковой поверхности, когда изгибающие моменты Мх, Му произ-
произвольным образом зависят от г.
1.5. Касательные напряжения xXz,xyz. Эти напряжения опре-
определяются из третьего уравнения статики и остающихся двух
уравнений Бельтрами—Мичелла
д^хг . дТуг даг I Р Q \
— —^—= ^—= — \-г- х + -г- и , A.5.1)
дх ду дг \1у 1х I к '
V2t VV= (L52)
Они рассматриваются совместно с краевым условием A.1.4)
на боковой поверхности или, что то же самое, на контуре Г об-
области S:
на Г: xxtnx + хугпу = 0, A.5.3)
и остающимися интегральными условиями A.2.3), A.2.4):
J J т*гdo = P, ^xyzdo = Q, ^ (xxyz-yxzx)do = mz. A.5.4)
s s s
Заметим, что всякое решение уравнений статики в объеме
A.5.1) и на поверхности A.5.3) удовлетворяет двум первым
условиям A.5.4). Действительно, после умножения на х и ин-
интегрирования по площади 5 поперечного сечения имеем, сослав-
сославшись на A.1.1), A.5.1),
/ дххг dTyZ \
л; —-— + -——)do =
V дх ду I
' дК ХХ" + ^у XX^)d° - j J T- d° = - 7^
= -Р.
Но по A.5.3) и формуле преобразования поверхностного интег-
интеграла в контурный
XIXz + -§r xxy)j do = | х (xxzttx + хугпу) ds = 0,
§ 1] НАПРЯЖЕННОЕ СОСТОЯНИЕ 371
чем устанавливается первое соотношение A.5.4); конечно, ана-
аналогично приходим ко второму.
Заметим еще, чго уравнения A.5.1) и A.5.3) непротиворе-
непротиворечивы, что следует из соотношений
Эт„ дху2 \ ?
-&Г -Г -gy-j d0=§ {Xxztlx + хугПу) ds =
Г
l
У
'х
S S
у do = 0.
Ниже доказывается, что дифференциальными уравнениями
A.5.1), A.5.2) при краевых условиях A.5.3) и при задании ве-
величины крутящего момента т2 касательные напряжения xxz, хуг
вполне определяются единственным образом. Как видно, здесь
нет речи о выполнении предписываемых равенствами A.1.2)
условий на торцах. Можно сказать, что решение задачи в по-
постановке Сен-Венана является строгим решением краевой за-
задачи теории упругости лишь при условии, что нормальные на-
напряжения на торцах распределены в точности но закону
A.4.6), а касательные — по закону, найденному из решения
сформулированной выше задачи. Так найденные напряжения об-
образуют, однако, систему поверхностных сил, статически эквива-
эквивалентную (с тем же главным вектором и с тем же главным мо-
моментом) любому предписанному распределению поверхностных
сил Хг, YZ, Zt на торцах. Принцип Сен-Венана отвечает на
вопрос, насколько приемлема такая замена одной задачи дру-
другой. Об этом принципе упоминалось в п. 7.6 гл. V при поста-
постановке задач о равновесии упругого кругового цилиндра. Он
формулировался и обсуждался в п. 2.4 гл. IV и п. 1.14 гл. V.
Его содержание в применении к задаче Сен-Венана сводится
к утверждению, что статически эквивалентные системы сил, рас-
распределенных по торцам, составляющим малую часть всей по-
поверхности достаточно длинного стержня, создают в теле стерж-
стержня напряженные состояния, существенно отличающиеся друг от
друга в областях, примыкающих к торцам, и практически одина-
одинаковые на достаточном удалении от торцов. В подтверждение
можно сослаться на примеры экспоненциального убывания на-
напряжений при удалении от торца, нагруженного статически
эквивалентной нулю системой поверхностных сил, в задачах
о кручении (п. 7.5 гл. V) кругового цилиндра и об однородных
решениях (пп. 7.8, 7.9 гл. V). Но можно привести также пример
противоположного характера; таковым является случай круче-
кручения стержня с тонкостенным открытым профилем (корытным [,,
зетовым Z и т. п.), когда напряженное состояние от статически
эквивалентной нулю системы сил распространяется по длине
24*
372 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
стержня на значительное расстояние. Принцип Сен-Венапа
лишен универсальной применимости, но остается незаменимым
средством подхода к решению подавляющего числа задач тео-
теории упругости.
§ 2. Приведение к краевым задачам
для уравнений Лапласа и Пуассона
2.1. Введение функций напряжений. Введем в рассмотрение
две функции G%(x,y), ОаФ(х,у), где G — модуль сдвига, а —
определяемая ниже постоянная; функция % предполагается
определяемой из уравнения Лапласа
VY = + = o B 1 П
V % дх*^ ду2 и" ^-1-U
Можно тождественно удовлетворить уравнению статики
A.5.1), приняв
Тогда
~ а ду
и подстановка в уравнения Бельтрами — Мичелла A.5.9) гл. IV
приводит к равенствам
д
уФ = 0> |У2Ф = 0, У2Ф = const.
ду дх '
Эта постоянная принимается равной —2, что не нарушает общ-
общности, поскольку в выражение напряжений через Ф уже введена
постоянная а. Итак, Ф определяется из уравнения Пуассона
у2ф = __2 B.1.3)
Краевое условие A.5.3) можно записать, учитывая A.1.5),
в виде
+ [f ^п + 2vxtJn) {ЪхуП + уЬц)\ = 0>
причем ? = 2A +v)G —модуль Юнга и, как всегда,
да дх ds "Г ду ds ' дп дх Пх "*" ду У
§ 2] ПРИВЕДЕНИЕ К КРАЕВЫМ ЗАДАЧАМ 373
Таким образом, функции Ф и х можно подчинить краевым усло-
условиям
на Г: -^- = 0, B.1.4)
на Г: -JJ- = ±- (х2пх + 2vxyny) + -?- Bvxynx + уЧу). B.1.5)
Гармоническая функция }( определяется по заданию на кон-
контуре области S ее нормальной производной-—это классическая
задача Неймана; она имеет решение, так как
ф -j^ds = -jj- (j) (x2nx + 2vxyny) ds + ^j- (j) Bvxynx + y2ny) ds =
г y г г
Гармоническую функцию % удобно представить суммой двух
гармонических функций:
^ = -Щ^ + ЖЪ' У2*> = 0' V2^ = 0. BЛ.6)
определяемых по краевым условиям
^ ^ +y\. B.1.7)
Поскольку хь Х2 — гармонические функции, можно ввести в рас-
рассмотрение две функции комплексного переменного ? = х + iy:
M?) = Xi + tfi. Ы?) = Х2 + «02. B.1.8)
Функции 'Ой связаны с %и известными соотношениями Коши —
Римана
дх ду ' ду дх
ИЛИ
= =
дп ds ' ds дп
(k=\, 2) B.1.9)
и определяются по %h квадратурами с точностью до аддитивной
постоянной.
Вместо функции напряжений Ф, удовлетворяющей уравне-
уравнению Пуассона, в рассмотрение вводится функция
Она по B.1.3) является гармонической в S:
0, B.1.11)
374
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
и рассматривается далее как мнимая часть функции комплекс-
комплексного переменного F{t), вещественная часть которой обозна-
обозначается ф(х, у); поэтому
дх ду ' ду
так что
—^ или -~-
дх да
ds '
= -^S B.1.12)
on N '
B.1.13)
Краевое условие B.1.4) теперь представляется в виде
<?1|) <?ф dx dy ,п л л я\
ds on ds J ds y J v -"
Приведем еще несколько измененную запись выражений каса-
касательных напряжений B.1.2):
_1_
a
J_
7Г
хг = «
дФ
дФ
+6
-!/2
Здесь и далее для упрощения введены обозначения
Р
а =
Ь =
El,
\ B.1.15)
B.1.16)
2.2. Перемещения в задаче Сен-Венана. Основываясь на ис-
исходных соотношениях задачи Сен-Венана A.3.3) и на обоб-
обобщенном законе Гука, запишем равенства
ди
V
F °z'
dv
Ъу~ ду~
V
<?«
ХУ~ ду
, flu
B.
' E "
.2.1)
Заменив ог его значением A.4.6), приходим к равенствам
и = — v
V = — V
W =
ES
2?/y Л
¦л;у
ES
у-
Е1,
-ху
2?/,
г, л;),
El и
¦ л; — ¦
\ B.2.2)
4 з V -
+ &г/) + IF (x, у), j
§-']
ПРИВЕДЕНИЕ К КРАЕВЫМ ЗАДАЧАМ
375
где U, V, W — функции указанных переменных, играющие роль
«постоянных интегрирования» соответственно по х, у, z. По
третьему соотношению B.2.1) имеем теперь
Величины в фигурных скобках зависят только от z — в про-
противном случае это соотношение связывало бы независимые пе-
переменные Л', у, z. Называя эти величины через —Z0{z), Z0(z),
имеем
U=~
[my
-z)]-yZ0(z) + Z,(г),
Из двух еще не использованных соотношений обобщенного за-
закона Гука, записываемых в виде
•ди
dw
дх G %xz дг ' ду
дг '
B.2.4)
теперь, сославшись на B.1.15), находим
дх
B.2.5)
Выражения в квадратных скобках должны быть постоянны,
так как W не зависит от г; эти постоянные обозначаются ю°
У
—а>°. так что
'-¦'у
1 т.
B.2.6)
2 Eh
где «о, ^о — постоянные интегрирования. Из B.2.5) следует
также постоянство Z0(z), а из условия интегрируемости, запи-
записываемого в виДе
д dW д dW Л -2 ' /
376
ЗАДАЧА СЕН-ВЕНЛНА
[ГЛ. VI
сославшись на B.1.3), имеем
Zq B) = a, Z0 =
° = const.
B.2.7)
Сославшись теперь на B.1.10), B.1.12), можно в выражениях
B.2.5) провести замены
— а
ж) = — а
гЭ-ib (Эф
дх ду
;AZo (ж) = а ^
дх к ' \ дх
и интегрирование соотношении B.2.5) дает
W (х, у) = аф (х, у) + a [xt - j B - v) л-3 - у v.tr/2] -f
+ b [г, -jB-v)i/-~ vx2y ] + wQ + a°y - 0«.v. B.2.8)
Остается подставить найденные выражения B.2.3), B.2.6),
B.2.7), B.2.8) в исходные равенства B.2.2). Придем к следую-
следующим выражениям перемещений:
и = - uyz -
ES л ' 2Ely L У
v 1 in,
[mx-Q(l-z)]xy+ r~
~ У2) ~
El
Eh
~ ^S" ^ + "IT Lm" +P"~ z>\ ХУ ¦
-ay = af (x, у)
- g- B - v) .t3 - у va;//2 ]
Elu
m,l + ~PU-z) -
B.2.9)
Шесть постоянных u0, v0, wa, a>°, a°y, а" определяют смеще-
иие стержня как твердого тела.
§ 21 ПРИВЕДЕНИЕ К КРАЕВЫМ ЗАДАЧАМ 377
Запишем еще выражения проекций линейного вектора по-
поворота to. IIлеем
1 / dm dv\ 1 до \yZ dv
ди dw \ 1 ди _ xzx . ди
+ -~[mx-Q{l-z)]x. B.2.11)
Из последнего уравнения находим значение угла поворота, от-
отнесенного к единице длины, вокруг оси стержня:
х'
откуда, интегрируя по площади поперечного сечения и учиты-
учитывая A.1.1), получим
Этим дается кинематическое истолкование постоянной а — это
средний угол закручивания поперечного сечения на единицу
длины оси стержня.
2.3. Упругая линия. Перемещения точек оси стержня — его
упругую линию — найдем, приняв х = у = 0 в B.2.9). Вспомнив
еще, что гармонические функции хь /2, <р согласно B.1.7),
B.1.14) определяются решением задачи Неймана с точностью
до аддитивной постоянной, можем принять
Xi @,0) = О, ЭС2 @, 0) = 0, ср(О,О) = О. B.3.1)
Получаем следующие уравнения упругой линии:
¦"о"
B.3.2)
Это — формулы элементарной теории изгиба и растяжения
стержня. Входящие в них постоянные следует определить по
378
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
краевым условиям на левом торце стержня. Примем, что его
центр инерции не смещается; тогда
и @) = 0:
v @) = 0:
z г
9
/ /2
_ PI3
I, \ I I2)
Ql3
EIX
z ?2 г3
/ ;2 ' /3
B.3.3)
и, далее,
El и
PP
Q'2
ЧЕ1Х
B.3.4)
Будем считать торец стержня z = 0 «заделанным». Решение
Сен-Венана, в котором можно распорядиться тремя постоян-
постоянными со", со* а>°, позволяет в задаче изгиба трактовать термин
«заделка» двумя способами. Первый принят в элементарной
теории: предполагается, что закрепление не допускает поворота
касательной к упругой линии стержня в месте заделки:
AЦГ0, (§)г=о = О. B.3.5)
Этим определяются со", а0, и по B.3.3), B.3.4) получаем из-
известные в элементарной теории изгиба уравнения упругой ли-
линии и выражения прогибов конца оси стержня:
u(z) =
muz<
Plz2
ЖЁГ,
3-т , «(/) =
2EIU
РР
ТЁТи
тхгг
~2Eh
Qlz2
3--
Q/3
[ B.3.6)
Во втором понимании считают, что закрепление не допускает
смещений вдоль оси стержня элементов dx, dy поперечного се-
сечения 2 = 0, примыкающих к центру инерции сечения:
при х = 0, у = 0, 2 = 0: — = 0, -х7 = 0. B.3.7)
э ~' " "• дх "' ду
По B.2.4) эти условия могут быть записаны в виде
у
mul
Ely
2E1U
а
dz
= ^
0 '
B.3.8)
§ 2] ПРИВЕДЕНИЕ К КРАЕВЫМ ЗАДАЧАМ 379
где т°_х, т°—касательные напряжения в центре инерции попе-
поперечного сечения. Уравнения упругой линии теперь должны быть
дополнены слагаемыми
B.3.9)
и величины прогибов с «поправкой на сдвиг» будут
2.4. Классификация задач Сен-Венана. Решение задачи Ссн-
Венана в ее общей постановке определяется заданием шести
величин-—трех проекций Р, Q, R силы и трех моментов пгх,
tnv, mz. Каждая из шести частных задач соответствует действию
только одного из этих силовых факторов. Три случая — дейст-
действия осевой силы R и моментов пгх, tnv — элементарны, так как
эти действия не создают касательных напряжений, вследствие
чего отпадает рассмотрение краевой задачи.
Решение задачи растяжения осевой силой дается форму-
формулами
oz = -g' u==~~esx> v=~Jsy' W = ~ES2' B-4-1)
содержащимися в общих соотношениях A.4.6), B.2.9). Эти же
соотношения и B.3.6) дают решение задачи об изгибе парой пгх
B.4.2)
и парой mu
Шу Vltly Illy (I -
адс; №у2) +
h ' 2EIy 2EIy '
и тгг— Xyч W •— ~pj— л \l Z).
Ely Ely
В задаче о кручении отличен от нуля только крутящий мо-
момент тг. Нормальное напряжение а, отсутствует, а касательные
напряжения по B.1.2) выражаются через функцию напряже-
напряжений Ф, определяемую уравнением Пуассона B.1.3) при краевом
условии B.1.4):
-Г — = - G — • \72Ф 2- Г-— —О
B.4.4)
380
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
причем постоянная а — угол закручивания на единицу длины
оси стержня (а не «средний угол закручивания», Так как Р, Q
в формуле B.2.12) здесь отпадают). Он находится по заданию
крутящего момента из соотношения A.5.4). Перемещения на-
находятся по формулам B.2.9) и оказываются равными (см. так-
также п. 3.2)
и = —ayz, v — azx, w = ац>(х, у). B.4.5)
Из этих соотношений следует, что при кручении поперечное се-
сечение стержня, поворачиваясь вокруг оси стержня, не остается
плоским («депланирует») — его точки смещаются вдоль оси
стержня. Обнаружение этого факта является одним из важ-
важнейших достижений теории Сен-Венана. Определяющая депла-
нацию гармоническая функция ф(х, у) является решением за-
задачи Неймана B.1.14); по B.4.5) функция <р(х,у) однозначна
в S. Заметим, что ее разыскание, равно как и функции напря-
напряжений ф, не связано с задачей об изгибе силами Р или Q.
В задаче об изгибе силой Р нормальное и касательные на-
напряжения определяются по формулам A.4.6), B.1.15), B.1.9):
az=~
дФ_ , Р
Ely \ дх
2\ (ЭФ , Р
ду ' ?/8 I а»
• — х'
дФ . Р
= — а
дФ
(Эх ?/и
п
B,4 6)
а перемещения равны
ы= -aijz + Twr{x 2~y 2)(l-z)+ -7ГБТ-
w=aq>(x, y) + ~\jA-jB-v)x3~j
PPx (г2 z\ Г 1
5/</ I 2/2
B.4.7)
В этих формулах a — «средний угол закручивания»; он также
определяется по крутящему моменту
j J (xxyz - yxzx) do
от касательных напряжений, создаваемых силой Р. Согласно
B.4.6) их следует выражать через две функции напряжений Ф
§ 2] ПРИВЕДЕНИЕ К КРАЕВЫМ ЗАДАЧАМ , 381
и Xi или Ф и ^ь Функция Ф, как только что говорилось, опре-
определяется краевой задачей B.4.4), a xi или fh—-краевыми за-
задачами
V2X, = О, V^, = 0; на Г: Ц*- = ^- = хЧх + 2vxyny B.4.8)
[см. B.1.6), B.1.7), B.1.9)]. Заметим еще, что из последнего
равенства B.4.7) следует требование однозначности суммы
Щ(х,у) + ~Х1. B.4.9)
Г.1у
Конечно, соотношения в задаче об изгибе силой Q аналогич-
аналогичны B.4.6) — B.4.9). Более подробное рассмотрение перечислен-
перечисленных отдельных задач — растяжения, изгиба парой, кручения,
изгиба силой — дается ниже (п. 2.7 и §§ 3, 4 этой главы).
2.5. Определение постоянной а. Задача рассматривается
в предположении об одновременном действии крутящего момен-
момента и поперечных сил. По A.5.4), B.1.15), B.1.9) имеем
+ y
B-5л)
Ограничимся здесь рассмотрением односвязной области S.
Тогда можно принять, что функция напряжений, которая по
B.4.4) на контуре Г постоянна, равна на нем нулю:
на Г: Ф = 0. B.5.2)
Тогда
= - & Ф {хпх + yriy) ds + 2 Ф do = 2 ф do.
Г S S
Величина
||йо B.5.3)
называется геометрической жесткостью при кручении. Ее опре-
определение для многосвязной области дано в п. 3.4 этой главы.
382 ЗАДАЧА СЕН-ВЕНАНА
Аналогично преобразуются интегралы*)
[ГЛ. VI
= 2 fy, do - 2 | flfe deo, B.5.4)
где (рис. 24) dto = у (xnx + i/ny) ds = -^(x dy — y dx) есть площадь
сектора, образуемого вектор-радиусами двух бесконечно близ-
близких точек на Г с началом (полюсом секториальной площади) в
начале координат О. Площадь замкнутой кривой
5 = со = (ю d& = — ж (л: dy — у dx)
г '
не зависит от выбора полюса; действительно, при переносе на-
чала координат в точку х0, у о
y'-y'
- т{хЛ dy - уЛ dx\ = <a,
так как интегралы CD ax, ф at/
Рис 24. г г
равны нулю.
В дальнейшем преобразовании формулы B.5.4), предложен-
предложенном В. В. Новожиловым, используется формула Грина
, = ф ф !р. _ о, ^
Г'
Из нее, вспомнив B.1.3), B.5.2), B.1.10), B.1.12), имеем
ЯГ dib г, Г ? dw n J
f)fe do = — ф ftfe -г3- ds + 2 (Ю "(jj. dco = ф u^ -н— as + 2 ф хтк dco,
s г г г г
*) В этой главе ф обозначает интеграл по замкнутому контуру, обходи-
обходимому против часовой стрелки. Область S внутри контура расположена слева
от направления обхода.
§ 21 ПРИВЕДЕНИЕ К КРАЕВЫМ ЗАДАЧАМ 383
так что
2
/ г
ds, B.5.5)
причем интегрирование по частям не вносит внеинтегрального
члена, поскольку ср, $й — однозначные функции (гармоническая
в односвязной области функция однозначна в ней).
Теперь, сославшись на B.4.8), B.1.12), B.1.10), имеем
ifds = §ф(*2"*+Ъхупу>ds = \\ (~hx2(f + 2vx~km)do^
и, далее,
'-тН do =
s
и остается заметить, что по B.5.2)
л:2 -,— do = ф Фх2п„ ds = О,
S "S
= - ф хуФпх ds+ \ уф do = г/ф do.
г s s
После подстановки этих соотношений в B.5.4) получаем
х
~- + г/ -т^- do = ф го -— ds =
дх ' и ду ) J ^ ds
s г
= 2 A + v) J J xy do + 2v | J уф do + A - 2v)^ x2ydo B.5.6)
s s s
и аналогично
= 2A + v) \ \ yq>do-2v \ \ AfDdo-(l~2v)
s s s
384
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
Теперь, вернувшись к исходному соотношению B.5,1), придем
к уравнению, определяющему постоянную а — средний угол за-
закручивания:
Р
тг = GCa — .
1+V
\ \ уФ do + Г Г X($do
{2-5J)
2.6. Центр жесткости. Обозначим через х*, у* имеющие раз-
размерность длины величины
"-¦h
хФ do — yep do ,
s I
о+ xq do),
B.6.1)
вычисление которых требует решения только краевой задачи
о кручении. Формула B.5.7) при этом переписывается в виде
= mz-{x*Q-y*P).
B.6.2)
Система касательных напряжений т2Х, хгу в любом попереч-
поперечном сечении стержня по условию статически эквивалентна силе
F = ixP + i2Q, проходящей через на-
начало координат (центр инерции О се-
сечения), и паре с моментом tnz (рис.25).
1_ Из элементов статики известно, что та-
такая система (пгг и F в точке О) стати-
статически эквивалентна одной силе F*=F
с линией действия L, определяемой
х уравнением
m, = xQ — уР. B.6.3)
Теперь B.6.2) записывается в виде
Рис.25. GCa = (x-x,)Q-(y-yJP. B.6.4)
Отсюда следует, что а = 0, если прямая L проходит через точку
с координатами (х*, у*):
х = х*,у = у,: а = 0. B.6.5)
Итак, средний угол закручивания а равен нулю — изгиб не со-
сопровождается кручением, если линия действия силы F* прохо-
проходит через точку С(х», (/*), называемую центром жесткости (или
центром изгиба) (рис. 26, й).
§2]
ПРИВЕДЕНИЕ К КРАЕВЫМ ЗАДАЧАМ
385
В случае, когда mz = О, система касательных напряжений
t.xz, Tyz статически эквивалентна одной силе F с линией дей-
действия Lo, проходящей через центр инерции; тогда (рис. 26,6)
GCa = —x.Q + yJ B.6.6)
и, вообще говоря, ос Ф 0 —сила, прилагаемая в центре инерции,
создает деформацию, сопровождающуюся средним закручива-
закручиванием; исключением будет случай, когда Lo одновременно про-
проходит и через центр жесткости.
В случае поперечного сечения, симметричного относительно
прямой, эта прямая будет одной из главных осей инерции, пусть
Рис. 26.
осью Ох. Тогда функция напряжений Ф будет четна относитель-
относительно переменной у, а функция депланации qp — нечетна:
Ф (х, у) = Ф (х, —у), ф (х, у) = —ф (х, —у).
Из B.6.1) легко видеть, что в этом случае г/, = 0 — центр
жесткости сечения, имеющего ось симметрии, расположен на
этой оси. При наличии двух осей симметрии центр жесткости С
сечения совпадает с точкой пересечения этих осей, то есть с
центром инерции О. В этом частном случае рассмотрение задачи
изгиба не требует решения задачи кручения.
2.7. Элементарные решения. Как указывалось в п. 2.4,
к элементарным случаям относятся нагружения осевой силой R
и изгибающими моментами тх, ту; отличным от нуля оказы-
оказывается нормальное напряжение az; поэтому краевые задачи, свя-
связанные с определением касательных напряжений xxz, rVZt не воз-
возникают.
Решение задачи о растяжении дается формулами B.4.1) —
перемещаясь поступательно вдоль оси стержня, поперечное се-
сечение подобно преобразуется в своей плоскости. Зависимости
25 А. И. Лурье
386 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
координат (х\, уи zx) точки стержня в напряженном состоянии
от их начальных значений (х, у, г) даются формулами
При изгибе в плоскости гх (парой ту) эти зависимости при-
приобретают по B.4.3) более сложный вид:
1 --
с
B.7.2)
тУ
Здесь — = -fi кривизна упругой линии; в проводимом далее
С lLi у
С
i у
рассмотрении искажения поперечного сечения сохраняются
лишь первые степени отношений х/с, у/с, z/c. Через я, т обозна-
обозначаются единичные векторы внешней нормали и касательной к
контуру Г поперечного сечения ? = const стержня, причем п, т,
h ориентированы, как единичные векторы i\, h, i3. Записывая
уравнения A.1.6) этого контура в векторной форме r = r(s),
имеем
х~ ds ' ds + p ' ds ~ - р ' ^•'•6)
причем 1/р — кривизна кривой Г и верхний (нижний) знак бе-
берется, если она обращена вогнутой (выпуклой) стороной к на-
началу координат — центру инерции сечения.
Формулы B.7.2) представляют уравнения поверхности изо-
изогнутого стержня; в них s = д\ ?, = q2 играют роль гауссовых
координат. Называя через R = R(q\q2) вектор-радиус точки на
этой поверхности, составляем выражения базисных векторов на
ней:
B.7.4)
+ ''f. ]
так что с указанной точностью
Единичный вектор т нормали к поверхности оказывается рав-
равным
_ 1 р у, р _ , jv^_ _ ^ А _^_ /о 7 5^
У gllg22 С С dS
§ 2] ПРИВЕДЕНИЕ К КРАЕВЫМ ЗАДАЧАМ
Сославшись на B.7.3), имеем
387
v / dx у
± т— +
с
и -
«22 ~
р ; ds2 с 3>
с ds '
B.7.6)
и коэффициенты второй квадратичной формы поверхности ока-
оказываются равными
С принятой степенью точности координатные линии оказы-
оказываются линиями кривизны (bi2 = 0, gi2 = 0). Вектор нормаль-
нормальной кривизны поверхности определяется равенством
и поэтому кривизны линий кривизны — главных нормальных
сечений ? = const и s = const — равны
Центры кривизны расположены на нормали т к поверхности.
Первой формулой определяется кривизна контура Г* деформи-
деформировавшегося поперечного сечения, второй — кривизна волокна
s = const на поверхности стержня.
В случае круглого поперечного сечения (радиуса а) по
B.7.8) имеем
л; = a cos —, г/= а sin —,
а уравнение контура Г* в векторной форме записывается по
B.7.2) в виде
Со степенью точности, принятой в этом вычислении, кривизны
кривых Г* и Г одинаковы, но центр кривизны сместился из цент-
центра круга г0 в точку С\.
а2 I , s t s . \
г = — am = rn v sin — т — -2- cos — и \.
с, о с \ а а а д)
25*
388 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Для волокон s = 0h s — un имеем соответственно m= ±iit — — »3г,
их центр кривизны Сг попадает в центр кривизны С упругой
линии стержня г* = с?, — ?i3; кривизна волокон s = -5-а, -?- а
сохраняется равной нулю.
Рассмотрим еще случай, когда в состав контура входит пря-
прямолинейный отрезок; пусть его уравнения
х = х0 — scosa, w = ssina
Кривизны оказываются равными
kl= since, й2 = —since.
С "С
Они имеют противоположные знаки; говорят, что плоский уча-
участок превратился в антикластическую поверхность. Отношение
кривизн равно коэффициенту Пуассона v; это обстоятельство
было использовано для его экспериментального определения с
помощью интерференционных полос, получающихся при пропу-
пропускании света через пластинку, установленную параллельно пло-
плоской грани изгибаемого бруса.
Как пример рассмотрим случай стержня прямоугольного се-
сечения. Стороны х = ±а, ? = Z,o превращаются (приближенно) в
параболы, обращенные выпуклостью в сторону положительной
оси х. Кривизны равны — v/c, l/c; центры кривизны парабол
расположены на отрицательной оси i\ в точке c/v, тогда как
центр кривизны изогнутого волокна" х = а, у = 0 находится в
точке ci\ — центре кривизны упругой линии.
Грани у = ±Ь в рассматриваемом приближении остаются
плоскими:
§ 3. Задача о кручении
3.1. Постановка задачи. Случай кручения является частным
случаем общей задачи Сен-Венана о напряженном состоянии
призматического стержня, нагруженного по его торцам, поста-
постановка которой была дана в §§ 1, 2 этой главы. Однако боль-
большое значение и детальная разработанность этого случая застав-
заставляют предпочесть независимое от общей задачи его изложение.
В задаче о кручении интегральные условия на торцах г = О,
г = / сводятся к требованию
{ххуг-ухгх)йо = тг, C.1.1)
5*
§ 3] ЗАДАЧА О КРУЧЕНИИ 389
тогда как все остальные условия A.2.3) — A-2.4) однородны,
то есть Р - Q = R = 0, тх = ту = 0. Это позволяет, сохранив
основные предположения A.3.3) полуобратного метода, при-
принять дополнительно
а2 = 0. C.1.2)
Напряжения хХ2, хух, не зависящие от z, определяются [ср.
A.5.1)] по остающимся уравнениям статики в объеме и на бо-
боковой поверхности:
~дГ + ^ = 0> %хгпх + хугпу = 0, C.1.3)
условию C.1.1) на торцах и уравнениям Бельтрами. Последние,
поскольку нормальные напряжения отсутствуют, сводятся к
двум уравнениям:
V2xxz = 0, V2v = 0, C.1.4)
причем здесь и во всей этой главе V2 — плоский оператор Ла-
Лапласа A.4.2).
Уравнению статики в объеме тождественно удовлетворяет
представление касательных напряжений через функцию Ф, на-
называемую функцией напряжений:
txz=Ga-^-, хуг= - Ga-^, C.1.5)
где а — постоянная, G — модуль сдвига. Тогда уравнение ста-
статики на боковой поверхности приводит к условию на контуре
поперечного сечения Г:
г дФ дФ дФ dy , дФ dx дФ п /о 1 с\
на 1: -г— пх—^—пи = -ц—т- + ir~ т~ = ~т~ = 0- C.1.6)
ду х дх У ду ds дх ds ds v '
Уравнения Бельтрами C.1.4) теперь записываются в виде
^У2Ф = 0, -|^2Ф = 0 C.1.7)
и выражают требование постоянства лапласиана У2Ф в обла-
области S; эту постоянную, пользуясь уже наличием постоянной а
в выражении напряжений, можно зафиксировать произвольно.
Принято считать ее равной —2,
_2 C.1.8)
Остается выразить условие C.1.1) через функцию напряжений
S
Введем еще в рассмотрение «вектор касательного напряжения»
Т = Xxztl + Xyzi2-
390 ЗАДАЧА СЕН-ВЕНАНА (ГЛ. VI
Тогда, рассматривая некоторый контур L, имеем по C.1.5)
дФ
т . » = т =т п А- х п — Па С\ 1 1 (Х\
так что т„ = 0, если контур L представляет одну из кривых се-
семейства линий
Ф(х, у)= const = В C.1.11)
и вектор т в любой точке поперечного сечения имеет направ-
направление касательной к кривой Ф = const, проходящей через эту
точку. Проекция вектора т на касательную к L равна
du г, (дФ , дФ \ ^ дФ ,„ , . ~\
п" ' - ** [ -~— пг = — Ga , C 1 12)
ox j ore
и если L принадлежит семейству C.1.11), то абсолютное зна-
значение этой проекции будет модулем вектора т (тогда тп = 0):
х — Ga
Таким образом, в местах поперечного сечения, где кривые
семейства C.1.10) сближаются (расстояние 8п между соседними
кривыми В = const, В + 66 = const уменьшается), имеет место
концентрация касательных напряжений. Можно сказать, что гу-
густота кривых — траекторий касательных напряжений — служит
мерой величины этих напряжений.
Касательное напряжение т достигает максимума на контуре
области. Доказательство основано на положительности лапла-
лапласиана V2t2; имеем [см. C.1.4), (II. 4.20)]
1 1
V79 9 V72 /9 i 9 Л С7 9 i Т7 '? -^. А /о 1 1 л \
|VV = |r(t^ + ty= \ххг г+ \xyzz>0. C.1.14)
Если предположить, что максимум т достигается в точке М
области, то в окрестности а этой точки и на малой окружности у
с центром в М
дп
что противоречит C,1.14).
В большом числе задач максимум касательного напряжения
реализуется в точке границы L, наиболее близкой к центру
инерции сечения. Однако имеются исключения,, на которые ука-
указал Сен-Венан.
3.2. Перемещения. Из шести компонент тензора деформации
четыре равны нулю:
ди г. ди „ dw п . ди , да п ,„ п 1N
§3]
ЗАДАЧА О КРУЧЕНИИ 391
что является следствием отсутствия нормальных напряжений
и касательного напряжения хху. Отличны от нуля сдвиги yxz,
у ; по C.1.5) их можно представить в виде
_ dti_ ,dw_ 1_ _ дФ_ 1
хгх дг дх G гх ду ' \
\ C.2.2)
dv dw 1 дФ j
"»z ~~ дг "*~ ду ~ G уг дх ' )
По C.1.8) и четвертому условию C.2.1) имеем
д I dv ди \ п dv ди о , п( , •,
-г- -^ т~ = 2а; -з т- = 2аг + 2/ (х, у);
дг \ дх ду ) дх ду п ' а"
ди г dv f
-г— = — аг — г; -т- =az + f,
dy дх "
причем по первому и второму условиям C.2.1) легко заклю-
заключить, что f = const = ю°. Итак,
и = — аг/z — со^г/ +' ы0, и = axz + a°zx + v0.
Слагаемые, определяющие поворот и поступательное перемеще-
перемещение стержня как твердого тела, далее отбрасываются. Форму-
Формулами
и — —ayz, v = azx C.2.3)
определяется перемещение поворота поперечного сечения
2 = const на угол az вокруг его оси; постоянная а — угол кру-
кручения — представляет угол относительного поворота двух сече-
сечений, отстоящих друг от друга по оси стержня на единицу дли-
длины. Однако поперечные сечения не остаются плоскими, так как
осевое перемещение w отлично от нуля (исключением является
стержень круглого поперечного сечения) — поперечное сечение,
как отмечалось ранее, «депланирует».
Вернемся к уравнениям C.2.2), заменив в них и, v их зна-
значениями C.2.3). Получаем
dw ( дФ , \ dy dw I дФ , \ ду ,„ п .-,
-з— = а -^—Ь у } = а — , -з— = — а -% Ь х = — а ~-. C.2.4)
дх \ ду 3 j ду ду \ дх } дх у '
Здесь в рассмотрение введена определенная с точностью до
аддитивной постоянной функция у\>(х,у):
¦ф = Ф-т- у(л:2 + г/2), C.2.5)
которая, как следует из C.1.8), является гармонической в S;
условия C.2.4), связывающие функцию aij) с ш, — это условия
Коши —Римана. Поэтому да — также гармоническая функция,
392
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
a w+ (cap — функция комплексного переменного х + iy; вспом-
вспомнив обозначение B.1.13), имеем
V2^ = 0, V2w = 0, w = a<(, ф + пр = F (x + iy). C.2.6)
Функцию F называют комплексной функцией кручения.
По C.1.6) легко получить краевые условия для гармониче-
гармонических функций г|з и ф:
dty да dy dx _ 1 d , 2
ds дп J х у У ^s ^s 2 ds
на
Г:
). C.2.7)
Задача Неймана (определение гармонической функции по за-
заданию на контуре области ее нормальной производной), к ко-
которой приведено определение депланации w(x,y), имеет опре-
определяемое с точностью до аддитив-
аддитивной постоянной решение, так как
п выполнено необходимое и достаточ-
достаточное условие его существования
Рис. 27.
Ц j / dy + xdx) = 0. C.2.8)
Г Г
Независимость ф от 2 следует из
третьего условия C.2.1).
3.3. Теорема о циркуляции ка-
касательных напряжений. Предпола-
Предполагается, что призматический стержень
содержит незаполненные веществом
полости, так что его поперечное сечение S представляет
многосвязную область; ее контур Г состоит из наруж-
наружного контура Го и внутренних несоприкасающихся конту-
контуров Гь Гг, ¦ • •, I\i, ограничивающих внутренние области
S\, 52, ..., Sn (рис. 27). Через я обозначается единичный век-
вектор нормали к Го вовне S, а через nh — нормали к ГА, направ-
направленные также вовне S, то есть внутрь Sh.
На каждом из контуров Го, Гь .-., Г„, согласно C.1.6),
функция напряжений Ф сохраняет постоянное значение
Со, Си ..., Сп; одну из этих постоянных, не изменяя ни на-
напряжений, ни депланации, можно произвольно зафиксировать.
Мы примем Со = 0; тогда
Ф = 0 на Го, Ф = Ск на J\ (At = 1, 2 /г). C.3.1)
Постоянные Ch наперед неизвестны; их определение состав-
составляет трудную часть задачи; решение ее дается теоремой о цир-
циркуляции касательных напряжений.
Через Фо{х,у) обозначим решение в S дифференциального
уравнения Пуассона C.1.8):
У2Ф0 = —2 C.3.2)
§3]
ЗАДАЧА О КРУЧЕНИИ 393
при краевых условиях
Фо = 0 на Го, Г,, .... Г„, C.3.3)
а через Ф<г {х, у) — гармоническую в S функцию, равную 1 на
Гк и обращающуюся в нуль на всех прочих контурах
(Го, Гь • . • , Гй-ь Tk+i . . • , Гп):
У2ФА = О, Ф,{ = 0 на Го, Фи = b*k на Г.,. C.3.4)
Этими условиями все функции Фо, Фи определены в S, а функ-
функция напряжений Ф(х,у) может быть представлена через них
в виде
п
Ф (х, у) = Фо (х, у) + 2 СкФк (х, у). C.3.5)
Рассматривается циркуляция К касательных напряжений,
вычисляемая по любому замкнутому контуру L в области S; че-
через т обозначается единичный вектор нормали, направленный
вовне ограниченной L площади Q:
К=§ {txz dx + хуг dy) = Ga § (-^- dx - ~ dy) = - Ga (j) ~ rfs.
? L L
С другой стороны, по C.1.5) и C.2.4)
(x dy - у dx) = 2GaQ,
так как первый интеграл равен нулю вследствие однозначности
в S депланации w, а второй представляет удвоенную площадь,
ограниченную контуром L. Пришли к теореме о циркуляции
касательного напряжения. Итак,
— ф -;—ds = 2Q. C.3.6)
j dm v '
L
В применении к контуру Tt — границе полости St — эта формула
приводит к соотношению
. иъ — zc>t (i—i, г, ..., n), (o.o.i)
так как вектор щ направлен внутрь St, а направление обхода по
Г, сохранено прежнее (область St расположена слева). После
замены Ф его выражением C.3.5) приходим к системе п урав-
уравнений для определения неизвестных Ch:
* = 2b « = 1. 2,...,«). C.3.8)
394 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
В применении к Го соотношение C.3.6) дает
Г„ k<=l Г» \ * = 1 /
где в скобках справа — площадь, ограниченная контуром Го.
Однако это уравнение является следствием системы C.3.8).
Действительно, заменив Si, S2, ..., Sn их значениями C.3.8),
имеем
п
Через Г* назовем совокупность контуров Го, Гь . . ., Гп, ограни-
ограничивающих область S, через п* — единичный вектор нормали к
Г», внешней к S. Тогда после преобразования по формуле Гри-
Грина получим
а в применении к Фо
что и требовалось.
Разыскание постоянных Си сведено к системе линейных урав-
уравнений C.3.8):
и Mds> C-зло>
ft-1 г", ' Г^ '
причем в п. 3.5 доказывается симметричность матрицы ||B»J).
К системе уравнений C.3.10) мы вернемся в п. 3.17.
3.4. Жесткость при кручении. Преобразуя формулу C.1.9)
для крутящего момента, имеем
mz=-Ga \Ux^ + y^
~«.|||^+*«>1*.+м.я
а ф а
дх ду
г.
§ 3j ЗАДАЧА О КРУЧЕНИИ 396
Вместе с тем по C.3.3), C.3.4) и C.3.5)
п п
[хп*х + уп*у) Ф ds = 2j Ct <j) (xntx + Уtitу) ds = - 2 ? CtSt,
1\ <=1 r^
так как вектор nt направлен внутрь St. Итак,
_ C.4.1)
где величина
C = 2j j Odo + 2^CtStj, C.4.2)
имеющая размерность L4 (момента инерции площади), назы-
называется геометрической жесткостью при кручении. В случае одно-
связной области [см. B.5.3)]
С = 2 J J Q)do. C.4.3)
s
Из энергетических соображений — формулы Клапейрона C.3.3)
гл. II — сразу же следует, что геометрическая жесткость С по-
положительна. Действительно, выделяя отрезок стержня Z\ — z2 — I
и учитывая, что его боковая поверхность свободна от нагруже-
ния, тогда как поперечные сечения Si и S2 нагружены поверх-
поверхностными силами
и им сообщаются по C.2.3) перемещения
Щ = —ayzh vi = axzu u2 = —ayz2, v2 = axz2,
по упомянутой формуле и C.4.1) имеем
2а = {txziix + tVzv\) do — (т хгщ + х uzv2) do =
= /a {xTyz-yxzx)do.
Итак,
2a = CGa.4 C.4.4)
и С > 0, поскольку а > 0.
3.5. Мембранная аналогия Прандтля A904). Известно, что
задача о равновесии мембраны, закрепленной по наружному
контуру Го и нагруженной поверхностной нагрузкой р, сводится
к краевой задаче для уравнения Пуассона
4%{х, У)= - 4т\ ? = 0 на Го. C.5.1)
396
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
Здесь %,{х,у)—прогиб мембраны, а через Т обозначена одина-
одинаковая интенсивность сил натяжения; это значит, что, вырезав
из мембраны произвольную область Q, ограниченную контуром
L, следует для сохранения равновесия распределить по этому
контуру нормально к нему силы Т на единицу длины. По
C.5.1) имеем, считая здесь и далее р постоянным,
— это уравнение равновесия части Q мембраны (т — единич-
единичный вектор внешней нормали к L).
Представим теперь, что закрепленная по контуру Го мембра-
мембрана несет закрепленные на ней твердые диски Sb S2, ..., Sn,
ограниченные контурами Гь
Г2, ..., Гп; диски могут смещать-
смещаться лишь поступательно в направ-
направлении прогиба мембраны
(рис. 28). Область S, занятая ве-
веществом мембраны, теперь огра-
— ничена совокупностью Г* конту-
контуров— внешнего Го и внутренних
Гь ..., Гп- Задача о равновесии
сводится к решению в п-связной
области S краевой задачи, впол-
вполне аналогичной задаче круче-
кручения:
V2? (х, у) = - -f ; ? = 0 на Го,
? = Yft на Гь C.5.3)
Рис. 28.
где Yfc — наперед неизвестные постоянные. Ее решение, подобно
C.3.5), представимо в виде
где
По = -
, у) +
Р_
Т
= 0 на
Jks
на
(х, у),
= 0 на
d
C.5.4)
C.5.5)
Задача о кручении полностью отождествляется с задачей равно-
равновесия мембраны, если принять
Ф(х, y) = 2±
, у),
C.5.6)
3]
ЗАДАЧА О КРУЧЕНИИ 397
Сопоставление с мембраной делает очевидными результаты
проведенного в пп. 3.1—3.4 рассмотрения задачи о круче-
кручении. Так, горизонталям t, = const рельефа холма, образуе-
образуемого поверхностью мембраны, соответствует семейство траек-
траекторий касательных напряжений Ф(х, у) = const; горизонтали
сгущаются в местах резкого изменения рельефа — это места
концентрации напряжений в задаче кручения.
Объем V холма ограничен изогнутой поверхностью мембра-
мембраны и «плоскогорий», образуемых дисками; поэтому геометриче-
геометрическая жесткость при кручении пропорциональна этому объему:
? {х, У) do
Простое объяснение приобретает также теорема о циркуляции
C.3.6) — это уравнение равновесия C.5.2) участка мембраны Q;
действительно, по C.5.2)
dt , р С дФ , pQ Г дФ , „„
-=г- ds = -?=? ф -^— ds— —V", ф -=— ds= — 2п,
dm 2T j dm T J dm
L L L
что и требовалось.
Применяя теорему взаимности, легко также установить сим-
симметричность матрицы \\Bth\\ коэффициентов Bth системы урав-
уравнений C.3.10); обращаясь к мембране, надо проверить равен-
равенство
«Состоянием k» мембраны с дисками назовем такое, в котором
поверхностная нагрузка отсутствует (р = 0), диску S/t сообщено
перемещение yh = 1; при этом все прочие диски остаются непод-
неподвижными, а мембрана S изогнется по закону ?,к(х,у), опреде-
определяемому решением краевой задачи C.5.5). Тогда равнодей-
равнодействующая сил натяжения так изогнутой мембраны по контуру Г(
диска 5( (уравновешиваемая реакцией закрепления этого ди-
ска) окажется пропорциональной ф-^-ds. Равенство C.5.7)
vt
следует из применения теоремы взаимности к k- и ^-состояниям
системы. Другое доказательство симметричности матрицы \\Btk\\
приведено в п. 3.17.
3.6. Кручение стержня эллиптического сечения. Контуром
поперечного сечения является эллипс
Г: ? + ?-1-0, C.6.1)
398 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
и функция напряжений Ф, обращающаяся в нуль на Lo, может
быть представлена в виде
Остается подобрать постоянную А так, чтобы удовлетворялось
уравнение Пуассона C.1.8):
C.6.2)
Теперь находим
2Gaa» _ 2a
"' T</*~ a2 + 62
Максимальное касательное напряжение имеет место на контуре
в концах малой полуоси — в точках контура Г, ближайших к
центру сечения; при а > b оно равно
Траектории касательных напряжений Ф = const представ-
представляются семейством эллипсов, подобных и подобно расположен-
расположенных контурному эллипсу Г, сгущающихся в области, примыкаю-
примыкающей к концу полуоси Ь. Вектор касательного напряжения имеет
направление касательной к эллипсу семейства, проходящего
через рассматриваемую точку в сторону вращения от оси х
к оси у [см. знаки в формулах C.6.3)].
Далее имеем
/<ч . 1 / 9 i 9\ a2b2 , а2 — й2 /9 о\
^ = Ф + у(* 2+y2) = l?TW + ir(^T?T{x у) =
а?Ъг а2 — Ь2
= ^Тб2" + 2 (а2 + V) Im l (Х + ^ C-6-5)
и по C.2.6), отбрасывая аддитивную постоянную, находим де-
планацию
^ = a 2 (a2 + б2) Re '(Х + ^ = ~ a а2 + б2 ^' C>6-6)
Линии w = const, определяющие рельеф поперечного сечения
скручиваемого стержня, представляют семейства гипербол
ху = const, как представлено на рис. 29, воспроизводимом из
мемуара Сен-Венана.
Геометрическая жесткость при кручении, вычисляемая по
формуле C.4.3), оказывается равной
У2\ яа*Ь* 41Х1У 41Х1У
§3]
ЗАДАЧА О КРУЧЕНИИ
399
где Iх = -^ nab3, Iy = улй3й — моменты инерции поперечного сече-
сечения, /р —полярный момент инерции.
В случае круглого поперечного сечения депланация отсут-
отсутствует, а жесткость при кручении равна полярному моменту
инерции. Сен-Венан первый указал на ошибочность отожде-
отождествления геометрической жест-
жесткости при кручении с поляр-
полярным моментом инерции (Ку-
(Кулон) для стержней с попереч-
поперечным сечением, отличным от
кругового.
3.7. Неравенства для жест-
жесткости при кручении. Далее
жесткость при кручении стер-
стержней любого односвязного се-
сечения сравнивается с жестко-
жесткостью круглого и эллиптиче- Рис- 29-
ского стержня. С этой целью
жесткость при кручении представим, используя C.2.5) и B.5.5),
в виде
С = 2 (* J Ф do = 2 J f 1|з do - Ip = 2 (j) ф da> + <j) г|> Jj ds - /„.
*s s" г г
Теперь, обратившись к B.1.10) и вспомнив, что Ф равно нулю
на границе, имеем
2 ф г|з da = -5- ф {х2 + у2) {хпх + упу) ds =
так что по B.1.12)
Вместе с тем
дп
ds.
C.7.1)
¦ 2 Л
h2 do =
\2 / ^ \2Т
дп 2 J J T J J L\ дх ) \ ду ) J
г г s s
C.7.2)
так как V2i|J = 2Vi|) • Vi|). Этим доказывается, что жесткость
стержня меньше его полярного момента инерции:
С < /Р) C.7.3)
если исключить случай равенства, возможный только для круг-
круглого стержня (-ф = const). Доказана также более содержатель-
400 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
ная теорема: при заданной площади стержень круглого сечения
имеет наибольшую жесткость (Полна, 1948).
Более точную оценку может дать сравнение жесткости при
кручении с жесткостью не круглого сечения, а некоторого сече-
сечения So, для которого известно решение задачи кручения. Пола-
Полагаем
Ф(*.|/)=М*> «/) + /(*.«/), C.7.4)
где \j]0(.v, у) — известное решение для 50 — это гармоническая
в 5 функция, но не удовлетворяющая краевому условию на Г
(краевое условие задачи кручения выполнено на Го); значения
iTo, д^й/дп на Г известны, так как эта функция задана в обла-
области S. Корректирующая гармоническая функция f(x,y) в сумме
с i|>o(#, у) определяет решение $(х,у) задачи кручения в S, при-
принимающее значение -к(х2 + у2) на Г.
В формуле C.7.1) имеем теперь
По формуле Грина (см. п. 2.5), поскольку f, г|з0— гармонические
функции,
Поэтому, сославшись на формулы C.7.1), C.7.2) и заменив \|з
его краевым значением, получаем
С = 1р + J j Vifo, ¦ V^o do~§^t (x2 + У2) do-§Vf-Vf do. C.7.5)
В неравенстве Е. Л. Николаи A916) в качестве функции г|з0 при-
принято выражение
+ ljTTL(x2-y*), C.7.6)
Т0 Yn Ip ' 2/
где [х, 1У, Ip = lx + Iy—моменты инерции и полярный момент
инерции площади S; это — решение задачи кручения для стерж-
стержня эллиптического сечения 50 с такими же моментами инерции,
что легко проверить, подставив вместо 1Х, 1У, 1Р вышеприведен-
§ 3]
ЗАДАЧА О КРУЧЕНИИ
401
ные для эллипса значения (п. 3.6), тогда придем к решению
C.6.5). Имеем теперь
ds =
{хПх
и подстановка в C.7.5) приводит к неравенству Е. Л. Николаи
A916)
C.7.7)
причем знак равенства достигается для стержня эллиптического
сечения. Очевидно, что эта оценка точнее, чем C.7.3), так как
правая часть в неравенстве C.7.7) меньше /р.
3.8. Кручение стержня прямоугольного сечения. Тема о кру-
кручении стержней в течение ста с лишним лет, со времени клас-
классического мемуара Сен-Венана, была и остается предметом
многочисленных исследований. Накопленные результаты необо-
необозримы, а для построения решений использовалось все много-
многообразие точных и приближенных методов математической фи-
физики; следует отметить и обратное влияние — задача кручения
служила образцом, на котором развивались эти методы и про-
проверялись возможности их эффективного использования. Далее
будет приведено небольшое число решений для областей част-
частного вида.
Начнем с рассмотрения задачи кручения для бесконечной
полосы — оо<!х^оо, \у\-^.Ь. В этом простейшем случае функ-
функция напряжений не зависит от х и определяется решением крае-
краевой задачи
^y = -2; у=±Ь: Ф = 0,
имеющим вид
так что
Ф = &2 —г/2,
г„ = —2Gay, xyz = 0
и жесткость при кручении для области —а'
равна
Ъ
а Ъ
/* 1%
С = 2 J dx ) {& - у*) dy
Ь
J )
-а -Ь
= ~ аЬ\
C.8.1)
C.8.2)
полосы
C.8.3)
26 А. И. Лурье
402 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Решение для прямоугольной области |х|^а, \у\<СЬ, сводя-
сводящееся к краевой задаче
V2<? = — 2; х=±а, у = ±Ь: Ф = 0, C.8.4)
будем искать (в предположении а>6) в форме наложения на
решение C.8.1) для полосы корректирующей гармонической
функции f(x, у):
ф = Ь2-у2 + 1(х,у). C.8.5)
Тогда
V2/ = 0;x=±a: f(±a, у) = у2 — Ь2; у = ±b: f(x,±b)=O.
C.8.6)
Четное по х, у часшое решение уравнения Лапласа для прямо-
прямоугольной области, удовлетворяющее второму условию C.8.6),
представляется произведением
. Ik + 1 Tit/ , 2k + 1 ЛХ ,, л 1 п \
Л* cos—2 f-ch—g g- (k = 0, I, 2, ...)•
Поэтому, представляя f(x,y) в форме ряда
/ (х, у) = ? Л, cos ^±1Ж ch^+i i« , C.8.7)
ft=i
следует подчинить выбор постоянных условию
f{±a, у) = 2иА* cos ~1 & ch~~2 Г
fe=O
Можно определить коэффициенты Л^, умножая обе части этого
2s +1 Jty
равенства на cos—т ^- и интегрируя по г/ в пределах
(—6, 6). Получим
Bз+1)Яа _32 (-1)^' ,2
П 2& л3 Bs+1K '
И рЯД
32
k=0
является рядом Фурье для заданной в промежутке (—2b, 2b)
четной непрерывной функции, представляемой при 0 ¦<?/¦< 6 от-
отрезком параболы у2 — Ь2, а при b^y^Cib — параболы
Ь2 — B6 — уJ. Таким образом, в требуемом промежутке [—Ь,Ь]
его сумма равна у2 — Ь2, что и требуется. Приходим к решению
для функции напряжений
B + \)
)»+'
иг ф .326» У (-1)»+' 26
-& ^ + rt3 ^1) Bs +1K \ B5 + 1)да C°S 2b
§3]
ЗАДАЧА О КРУЧЕНИИ
ЮЗ
Геометрическая жесткость при кручении оказывается равной
а Ь
С = 2 J dx
-а -Ъ
1 192 Ъ УЧ
1 v? а 2л
th
Bk + \)па
2&
B/г+1M
C.8.9)
где Со — жесткость бесконечной полосы C.8.3). Максимум ка-
касательного напряжения имеет место в точках контура, ближай-
ближайших к центру прямоугольника. Он равен
= 2Gab
1
~ Bs+lJch
Bs + 1) яа
2&
t)- C-8.10)
Через Со, т^ах обозначены значения для полосы. Приводим
пересчитанную по данным Сен-Венана небольшую табличку зна-
значений функций /i, f2.
Таблица 11
а
Т
Mf)
'•(т)
1,00
0,420
0,675
1,25
0,514
0,775
1,50
0,584
0,85
2
0,681
0,93
3
0,783
0,985
4
0,838
0,995
5
0,870
1
10
0,932
1
оо
1
1
3.9. Решения в конечном виде. Большое число решений в ко-
конечном виде получено Сен-Венаном. Задается гармоническая
функция t|)(x, у), и разыскиваются контуры, на которых
1 = г|з {х, у) — ~2 {х2 + У2) + const = 0.
C.9.1)
Ограничимся двумя примерами.
а) Равносторонний треугольник. Задаемся гармоническим
полиномом о|з третьей степени
Ф = А (х3 - Зху2) - -j (х2 + у2) + D.
26*
404
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
1 о
Подобрав А = — у , D = -~ а2, имеем
Ф = - -^ (х3 - Ъху2 + Ъах2 + Ъау2 - 4й3) =
= ~ (а - х) (х + 2а + у /з) (х + 2а - у /з), C.9.2)
так что Ф обращается в нуль на прямых
х-а = 0, х + 2а± у /3 = 0,
образующих равносторонний треугольник с высотой За (см.
рис. 30, на котором изображено семейство траекторий касатель-
касательных напряжений Ф = const).
*- х
Рис. 30.
Рис. 31.
б) Круглый стержень с продольной круговой выточкой (Ве-
бер). Функция Ф в полярных координатах задается в виде
> = At cos9 + В
C.9.3)
Уравнение контура окружности радиуса а с круговой выточ-
выточкой радиуса Ь, центр которой расположен на окружности, при
выборе начала полярной системы координат в центре выточки
можно записать в виде (рис. 3L)
(Ь2 - г2) (г - 2а cos 6) = г (Ъ2 - 2ab2 ~- + 2аг cos 6 - г2),
и поэтому функция
Ф = ~(b2 - 2ab2 ~-+2ar cos 9 - г2), C.9.4)
ЗАДАЧА О КРУЧЕНИИ
406
имеющая требуемый вид C.9.3), является решением задачи кру-
кручения для рассматриваемой области. Касательное напряжение
в точках оси х равно
= - Ga
дФ
дх
= -Ga
дФ
)=о
дг
= Ga[r-
е=о
и при г = Ь в середине выточки, r = 2a — b в конце диаметра,
противоположном началу координат, имеем соответственно
"yz
и при а
T(i> | = 2Goa, t®
C.9.5)
Наличие сколь угодно малой выточки служит причиной кон-
концентрации напряжений; касательные напряжения в середине
выточки оказались вдвое больше расчетных Gaa для круглого
вала.
3.10. Двусвязная область. Поперечное сечение скручивае-
скручиваемого стержня является кольцевой областью S, ограниченной из-
извне контуром Го и изнутри контуром Гь площади внутри Го и
Г\ обозначаются Sa и Si, так что S = So — Si- Предполагается
известным конформное преобразование в 5 кругового кольца о
плоскости ? = рег'*; функция, осуществляющая это преобразова-
преобразование, задается в а рядом Лорана
(ап
1%)б'»». C.10.
Через ро, pi обозначаются радиусы окружностей yo, Yi> перехо-
переходящих в этом преобразовании в Го, Гь
Функция напряжений Ф, решающая задачу кручения для
области S, представляется в виде C.3.5):
Ф = Ф0(х,г/)+ С,Ф,(х,(/), C.10.2)
причем по C.3.2) —C.3.4)
V2O0=
У2Ф, =
2; Ф0 = 0 на Го, Г,;
Ф,=0 на ГО;
Ф, = 1 на Г!.
Из условий C.10.4) сразу же следует, что
C.10.3)
C.10.4)
Ро
406 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Предполагая известной функцию напряжений Ф»{х, у) для
сплошного стержня (для области 50), представим Фо(х,у)
в виде
Ф0{х,у) =
^ in
Ро
C.10.6)
Действительно, лапласиан над Фо равен —2 и эта функция рав-
равна нулю на Го; остается подчинить выбор постоянных bk, bi, bQ
условию C.10.3) на ГУ Через
оо оо \
2 Р" (а„ cos п® — pn sin nO), 2 pf (а„ sin nft + Pncostt#)
: — CO fl == — °O /
обозначим значение Ф*(х,у) на Ti (на у\)— это 2я-периодиче-
ская функция О, представимая тригонометрическим рядом
оо
X (в) = Ь + 2 (pk cos M + qk sin /eft), C.10.7)
и через коэффициенты этого ряда легко выражаются неизвест-
неизвестные bo, bn, bn- Решение C.10.2) теперь записывается в виде
in-е-
Ф(х, у) = (С1-х0)—^ +
Pi
00 k 2k 2fe
+ ф. (*, У) - У 4 P2fe"P2°fe (Pft cos ^ + <7a sin *ft). C.10.8)
При сохранении первого слагаемого в выражение комплекс-
комплексной функции кручения C.2.6) вошел бы член, пропорциональ-
пропорциональный 1п?; депланация w(x,y) не была бы однозначной. Этим оп-
определяется выбор Су.
2л 2я
| ^- C-10.9)
ЗАДАЧА О КРУЧЕНИИ
407
Переходим к вычислению геометрической жесткости; по
C.4.2) для двусвязной области имеем
С =
+ 2 J J Ф{х, у) do = 2x0S, + С. - 2 J J Ф, (*, у) do -
2k
Iя
2r4k
ks=i Pi -Po ? o
C.10.10)
Здесь учтено, что при переходе к интегрированию по пло-
площади кругового кольца а элемент площади do следует заменить
произведением элемента площади рфЙ} кругового кольца на
квадрат модуля производной преобразующей функции |co'(?)i2;
через С* обозначена геометрическая жесткость сплошного
стержня (площадь So, ограниченная контуром Го).
Проекция %s вектора т на касательную к траектории каса-
касательного напряжения Ф = const, определяемая по C.1.12),
равна
т, = — Ga
C.10.11)
так как бн = I со'(С) 16р. В частности, на принадлежащих семей-
семейству траекторий Ф = const контурах Го, Т\
- - Ga
]
Jk.
j.k
C.10.12)
Модуль т вектора касательного напряжения равен абсолютной
величине выражения C.10.11).
3.11. Эллиптическое кольцо. Поперечное сечение 5 пред-
представляет кольцевую область, ограниченную извне и изнутри
софокусными эллипсами Го, Гь конформное преобразование
C.10.1) кольца а на эту область осуществляется функцией
C.11.1)
408 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
где постоянные R, т определяются через полуоси (ао,Ьо),
(aub\) эллипсов Го, Т\ по формулам
2Р1 ' ай + Ьй а,+6, Рг I
( (о. 11 ,'Z
|
ао~
= = |
Pl ай+Ь0 а,-6) ' )
причем радиусы окружностей Yo, Yi> ограничивающих кольцо
а извне и изнутри, приняты равными р0 = 1, pi<I; итак,
0<m-^pi-^p-^l, ^>0и семейство эллипсов р = const — со-
фокусное с расстоянием между фокусами 2с=Уа2 — Ь2 =
= 4R V~m.
Функция напряжений Ф*(х,у) для сплошного эллипса C.6.2)
в этих обозначениях записывается в виде
~(l+mf-^), C.11.3)
и ее значение на эллипсе Г] оказывается равным
Ф, (/? (р, + -^-) cos Ъ, R (р, - -^-) sin fl) =
так что по C.10.9), C.10.8)
С, = 1^A-р?)-^Ь^, C.11.4)
2 Pi
2 9 9
Ф (х, у) = Ф. (jf, г/) + -^ ^^ (Л" - Р2) cos Ж C.11.5)
1 + m Р) + 1 \р /
Геометрическая жесткость при кручении определяется по
C.10.10):
2 о 2
5,
4^
pf+1
Здесь по C.11.3)
J J Ф,{х, y)do= A - fft2J S, -A - mJ-ф -A +
ЗАДАЧА О КРУЧЕНИИ
409
причем ii, /],—моменты инерции площади Si:
,2pt-m2
p?
Pi
Pi
Замечая еще, что
| со'(?) I2 = «>'(?) <*'(?) =
m
переходим после очевидного вычисления к выражению
m(l-mJ , \_1 _т_\2] +
т2 p]-m2 (l-p2J
1+га
Р?
1+pf
C.11.6)
Величина в скобках определяет уменьшение жесткости, вызы-
вызываемое присутствием полости S\.
3.12. Эксцентрическое кольцо. Поперечное сечение скручи-
скручиваемого стержня представляет кольцевую область 5 плоскости
г, ограниченную извне окруж-
окружностью Го радиуса г0, а изнутри
эксцентрической окружностью Г\
радиуса г{\ расстояние между
центрами окружностей обозна-
обозначается е. Функция, осуществляю-
осуществляющая конформное преобразование
кругового кольца а плоскости
I = рем в область S, представ-
представляется в виде
р (cos {> — ар) + ф sin ^
1 + а2р2 - 2ар cos ¦& '
C.12.1)
Рис. 32.
где а — вещественная постоянная, причем ар < 1 в области а,
то есть при pj <^ р ^ р0.
Окружности yo, Yi радиусов р0, pi — внешняя и внутренняя
границы кольца а —переходят в окружности Го, Г] —границы
области S; абсциссы точек пересечения этих окружностей с осью
х равны соответственно (рис. 32)
1-вРо '
г0 _
2 ~
1 + аро '
г1-
vl = —
Pi
410
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
Поэтому абсциссы центров окружностей Го, Гь их радиусы и
расстояние между центрами будут
ар,
._ Ро
C.12.2)
C.12.3)
Три уравнения C.12.3) позволяют определить параметры р0, pi,
а по заданным геометрическим размерам поперечного сече-
сечения S:
1 + 4о^+1 V 1 + 4о^+1 } C.12.4)
а = е [(г„ - г, + е) (г0 + ^ - е) (г0 + г, + е) (г0 - г, - е)\ ы. \
Уравнения окружностей Го, Г[ записываются в виде
C.12.5)
Функция напряжений сплошного круглого стержня с попереч-
поперечным сечением So записывается в виде [ср. C.6.2) при а = Ь]
Ф. (х, У) = \ [г\ - (х - cof - у2},
и ее значение на Г) по C.12.5) и C.12.3) будет
C.12.6)
<ЗЛ2-7>
Здесь использовано легко получаемое по C.12.1) представле-
представление хт тригонометрическим рядом. Итак, по C.10.8), C.10.9)
Ф(*, у) = Ф,{х, у) + е
где a = pf/p'f причем С, = —
-afe
§3]
ЗАДАЧА О КРУЧЕНИИ
41
Геометрическая жесткость определяется по C.10.10), при-
причем здесь С* = /р; далее,
Si
Замечая еще, что
имеем
p
ak
2Я
яг*
(ер)*
-aVJ U-
fe=I
A-a
Введением новой переменной G=1—й2р2 подынтегральная
функция преобразуется к легко интегрируемому виду
f
J
1
2o2
a2P2J
так что теперь получаем
Г 1 - а* J V Р*
ft=i
q0
412
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
Заменив q0. q\ их значениями и использовав формулы связи
C.12.2), C.12.3) геометрических параметров, приходим к сле-
следующему выражению геометрической жесткости:
C.12.9)
= С, - — + 2jte2r? + 2л— У /г -
k=\
Ряд в этой формуле можно преобразовать к форме, приводи-
приводимой Н. И. Мусхелишвили:
пг.
s=l
C.12.10)
3.13. Вариационное определение функции напряжений. Со-
Сохраняя все предпосылки полуобратного метода Сен-Венана, сле-
следует считать известными все соотношения задачи кручения, не
содержащие варьируемой функции напряжений, в частности
принять для перемещений и, v на торцах 2 = 0, z — I выраже-
выражения, следующие из C.2.3):
2 = 0: и = v = 0;
и = —aly, v = alx.
C.13.1)
По принципу минимума дополнительной работы (п. 2.5
гл. IV) напряженное состояние, реализуемое в упругом теле,
отличается от всех статически возможных напряженных состоя-
состояний (удовлетворяющих уравнениям статики в объеме и на по-
поверхности) тем, что оно сообщает минимум функционалу W —
дополнительной работе. В задаче кручения по Сен-Венану от-
отличны от нуля только касательные напряжения тжг, туг, поэтому
W представляется в виде
причем поверхностный интеграл берется по части границы, на
которой перемещения заданы; в рассматриваемом случае она
сводится к поверхности 5, торца z = I (на торце г = 0 по
C.13.1) равны нулю «, и). Вместе с тем система напряжений
Txz» tj,2, определяемых формулами C.1.5), тождественно удов-
удовлетворяет уравнению статики в объеме C.1.3); это позволяет
записать выражение C.13.2) в виде
§ 31 ЗАДАЧА О КРУЧЕНИИ 413
При этом должно выполняться и уравнение статики на поверх-
поверхности — контурное условие
на Г:
xxznx + tyzny=Ga-^-=0. C.13.4)
Это значит, что на контурах, ограничивающих поперечное сече-
сечение S, минимизирующая функционал 4я функция Ф должна
удовлетворять условиям C.3.1). Но тогда, повторяя ранее
проведенное вычисление, имеем
и минимизируемый функционал записывается в виде (отбрасы-
(отбрасываем ненужный постоянный множитель)
Вариация интеграла от суммы квадратов первых производных
представляется в виде
§
(д®.\2л-(д®.\2]и - Г Г (дФ д6ф I дй
. . А дх ) """" \ ду J J ~~ J J \ <Эх дх di
s s
дФ ,
дп,. '
а Г,
где Г* —совокупность контуров Го, Гь ..., Гп, ограничиваю-
ограничивающих S, а п.± — вектор внешней к S нормали (направленный во-
вовне S на Го и внутрь областей Sfl на контурах Г/,).
Как уже говорилось, минимизирующая функционал / функ-
функция Ф должна принимать фиксированное значение (нуль) на Го
и наперед неизвестные постоянные значения Си на Г^. Это зна-
значит, что
6Ф = 0 на Го;
6Ф = 8Ck на Гй (k=\,2 п),
причем bCh произвольны. Приходим к соотношению (nh — нор-
нормаль к Гй внутрь Sh)
б/= - J J 6Ф(У2Ф + 2) do + 2;6СJ §>^-ds-2Sk) = 0. C.13.6)
414 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Итак, вариационная задача C.13.5) при назначении функций
сравнения Ф, удовлетворяющих условиям C.3.1), эквивалентна
ранее сформулированной краевой задаче для уравнения Пуас-
Пуассона C.1.8); при этом на каждом из контуров Г\ решение ва-
вариационной задачи удовлетворяет условию теоремы о циркуля-
циркуляции, чем обеспечена однозначность депланации w(x,y). Урав-
Уравнение C.13.6) — вариационное уравнение способа Галеркина
(п. 2.4 гл. IV).
Без труда находится также значение минимума функциона-
функционала /. Достаточно переписать C.13.5) в виде
и заметить, что выражение в фигурных скобках равно нулю;
чтобы убедиться в этом, достаточно повторить только что про-
проведенное преобразование
Итак, по C.4.2)
/=-М JcPdo + ^C^U-i-C, C.13.7)
то есть достигаемый минимум равен взятой со знаком минус
половине геометрической жесткости. Удовлетворив приближенно
условию минимума с помощью функции Ф* и вычислив по ней
геометрическую жесткость С*, имеем
г* ' п*
~ 2
ОС,
C.13.8)
то есть С* дает оценку снизу геометрической жесткости С.
Второй способ вариационной постановки задачи кручения ос-
основан на применении принципа минимума потенциальной энер-
$ 3J ЗАДАЧА О КРУЧЕНИИ 415
гни (п. 2.2 гл. IV). Минимизируемый функционал Q записы-
записывается в виде B.1.3) гл. IV*):
где Sl + S° — поверхности торцов, на которых в постановке за-
задачи Сен-Венана силы предполагаются заданными. Но переме-
перемещения и, v также определены исходными предпосылками реше-
решения задачи Сен-Венана и поэтому неварьируемы — второе сла-
слагаемое в выражении C.13.9) отбрасывается. Вместе с тем
_ dw , ди _ / дц> \ _ dw , dv _ ( дц> .
так что, не учитывая множитель Gla2, приходим к задаче о ми-
минимизации интеграла
2
S
Его вариация равна
s
= — бфУ2ф do + ф бф (-p- + xny — ynx\ ds, C.13.11)
s г,
и уравнения Эйлера этой вариационной задачи сводятся к крае-
краевой задаче Неймана для уравнения Лапласа:
в 5: У2ф = 0; на Г,: ^;=упх-хпу. C.13.12)
Из выражения б/i следует, что минимизирующая функцио-
функционал /i функция ф(х, у) удовлетворяет краевому условию
C.13.12); поэтому, назначая выбор ф(х, у) в приближенном
решении задачи, можно не заботиться об этом условии.
Геометрическая жесткость при кручении может быть пред-
представлена через функцию ср(х, у) в виде
5
S
*) В формулировке принципа минимума он обозначался буквой Ф, кото-
которой здесь обозначена функция напряжений.
416 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Вместе с тем, сославшись на C.7.1), C.7.2), C.2.4), имеем
S S
Поэтому, возвращаясь к C.13.10), имеем
/, = ~AР- С) + С - /р + I /р = 1 С, C.13.14)
так что достигаемый функционалом 3\ минимум равен половине
геометрической жесткости. Поэтому, вычислив жесткость С**
с помощью приближенно минимизирующей функционал J{ функ-
функции ц>**(х,у), приходим к оценке геометрической жесткости
сверху
/J' = yC">/,=yCf С">С C.13.15)
Формулы C.13.7) и C.13.14), конечно, представляют в слу-
случае кручения следствия общих соотношений B.2.4), B.5.9) гл. IV.
3.14. Приближенное решение задачи кручения. Далее рас-
рассмотрены два примера применения способа Галеркина к реше-
решению задач кручения стержней прямоугольного и трапецеидаль-
трапецеидального сечений.
Для случая односвязной области выражение вариации
минимизируемого функционала / будет иметь вид
б/= JJ (У2Ф +2) 6Ф do. C.14.1)
s
1. Прямоугольник. Следуя видоизменению способа
Галеркина, предложенному Л. В. Канторовичем, примем
ф *=(Ь* — у){),
чем удовлетворены краевые условия на сторонах х = ±а,
у — ±Ь прямоугольника. Здесь назначена форма зависимости
искомого решения от координаты у, а его зависимость от х
определится условием C.14.1). Можно ожидать, что при а>Ь
это решение будет достаточно точным, так как в нем заключено
решение для бесконечной полосы, корректируемое учетом крае-
краевых условий при х = ±а.
Теперь
V-'Ф = — 2Х (х) + {Ь2 - у2) X" (х),
6Ф = (Ь2 - у2) дХ {х)
§ щ ЗАДАЧА О КРУЧЕНИИ 417
и условие C.14.1) приводится к виду
а Ь
\ ЬХ (х) dx j [(b2 - у2) X" (х) - 2Х (х) + 2] (b2 -y'2)dy = Q.
-а -Ь
Выполнив интегрирование по у и отбросив постоянный множи-
множитель, придем к соотношению
а
ЬХ (х) [X" -~Х + —-) dx = 0. C.14.3)
—а
Оно должно выполняться при произвольном выборе ЬХ(х); по-
поэтому
КС
2&2
Решением этого дифференциального уравнения при краевом
условии C.14.2) является _
и -1 / 5 х
chl/ -к-г
Ц4^
Жесткость при кручении оказывается равной
ь а
-Ь -а
C.14.5)
В случае квадрата (Ь = а) получаем совпадающее с точ-
точностью до трех знаков с точным решением п. 3.8 значение
С = 0,419 -д- Ь4. Меньшая точность достигается для значения
максимального касательного напряжения — ошибка в случае
квадрата равна примерно 5%. Это — общее свойство всех при-
приближенных методов. Даваемые ими значения интегральных ха-
характеристик, естественно, более точны, чем точечные значения
производных искомой функции. Просто оценивается объем хол-
холма мембраны, труднее знать подробности его рельефа.
Конечно, предложенное решение можно уточнить, задавая
Ф{х,у) зависящей от нескольких разыскиваемых функций, на-
например полагая
Ф(х, y)^(b2-t/)[X0(x) + y2Xl(x) + ^X2(x)}, Xk(±a) = 0.
Для определения функций Xh(x) приходим к системе линей-
линейных дифференциальных уравнений с указанными краевыми
27 А. И. Лурье
418 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
имовиями; число уравнений системы равно числу неизвестных
функций. Вычисление, естественно, усложняется.
В способе Л. В. Канторовича краевая задача для уравнения
в частных производных (Пуассона) заменена краевой задачей
теории обыкновенных дифференциальных уравнений. Но можно
вообще избегнуть решения дифференциальных уравнений, а све-
свести задачу к линейной алгебраической системе уравнений, зада-
задавая целиком форму решения и распоряжаясь неизвестными вве-
введенными в него постоянными. Например, полагаем для прямо-
прямоугольника
Ф = (Ь2 - у2) (а2 - х2) (с0 + схх2 + с2у2 + c3xhf + ...).
Тогда
бф = (Ь2 - у2) (а2 - х2) (бс0 + х2 dci + у2 бс2 + хУ бс3 + ...)
и к упомянутой системе линейных уравнений приходим, исполь-
используя произвольность вариаций 6ch.
Так, для квадрата, сохранив лишь одну постоянную с0,
имеем
а а
j dx J dy (У2Ф + 2) 6Ф =
— а —а
а Ъ
= 8 \ dx \ dy (а2 - х2) (а2 - у2) [1 - с0 (а2 - х2) - с0 (а2 - г/2)] бс0 = О
о о
и после вычисления (отбросив постоянный множитель) прихо-
приходим к соотношению
так что вследствие произвольности вариации 6с0 получаем
У2
с ошибкой для геометрической жесткости (—1,2%), для наи-
наибольшего касательного напряжения (—6,2%). Удержав два
коэффициента (с0, с\ = с2), получили бы для их определения си-
систему двух линейных уравнений; ошибки в определении жест-
жесткости и максимального касательного напряжения для такого
решения
(iUiUi295 525( 2
i _
2215 + 4432
составляют соответственно (—0,2%) и ( + 4,3%).
Применение способа Л. В. Канторовича дало почти такую
же точность уже в первом приближении. Этого можно было
^ 3] ЗАДАЧА О КРУЧЕНИИ 419
ожидать, так как решение (минимум функционала) разыскива-
разыскивалось в более широком классе функций: функция Х(х) не на-
назначалась наперед, а определялась решением построенной для
нее вариационной задачи.
2. Трапецеидальное сечение. Конечно, успешная
применимость способа Л. В. Канторовича связана с возмож-
возможностью проинтегрировать получающееся дифференциальное
уравнение. Еще одним таким примером может служить случай
"трапецеидального сечения. Оно ограничено прямыми
х = а, x = a + h=b, y±xtga = 0.
Краевые условия удовлетворяются, если выбрать
ф = (tf - х2 tg2 a) X (х), X (а) = О, X (Ь) = 0.
Вычисление дает (после интегрирования по у)
a + h х tg a
6Z dx \ (У2Ф + 2) (у2 - х2 tg2 а) dy =
-х tg а
a + h
. 16
(x) tg3 a (tg2 а - 1) - A x3 tg3 a] dx,
и это приводит к дифференциальному уравнению типа Эйлера,
интегрируемому в квадратурах:
х2Х" (х) + ЪхХ' (х) + 4 A - ctg2a) *(*) = ! ctg2 a.
Его решение записывается в виде
Х(х) cos2 a
cos 2a [ ау'Ьъ - by'ay'
где yi, Y2 — корни характеристического уравнения
Для равностороннего треугольника (а = 0, a = я/6) полу-
получаем Yi = 1, Y2 = —5, и второй корень надо отбросить, так как
функция Ф(х,у) должна оставаться конечной; вместе с этим
отпадает также первое краевое условие (в вершине треуголь-
треугольника). Приходим к решению
это точное решение [ср. с C.9.2)]; Ь — высота треугольника.
27*
420 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Случаю равнобедренного прямоугольного треугольника
(а = 45°) соответствует дифференциальное уравнение
, ч 5
Ему соответствующее характеристическое уравнение имеет ко-
корень yi — 0 и отбрасываемый корень уг = —4, а частное реше-
решение разыскивается в виде Clnx.
Получаем
Вычисляемая по этому решению
геометрическая жесткость оказы-
оказывается равной
С = 2 J
тогда как точное решение (Л. С. Лейбензон), определяемое ря-
рядом
I I + ch fat
k5 sh Ы
приводит к такому же числовому результату. Максимальное ка-
касательное напряжение в середине гипотенузы будет
Тшах = Get -gj = у Gab = 0,Q25Gab,
y=o
тогда как в точном решении числовой множитель равен 0,652.
Можно убедиться, проведя более тщательные вычисления,
что определенные по вариации J значения геометрической жест-
жесткости дают оценку этой величины снизу, как и должно быть по
сказанному в п. 3.13.
3.15. Удлиненные профили. Далее будет использована коор-
координатная система, в которой задается опорная кривая Г*, по-
положение точки М* на которой задается дугой о (криволинейной
абсциссой), отсчитываемой вдоль Г* от начальной точки Мо-
Вектор-радиус точки М* на опорной кривой, единичный вектор
касательной к ней в этой точке и единичный вектор нормали
(направленной в сторону, противоположную центру кривизны,—
противоположно главной нормали) обозначаются ro(a), t, n,
так что
, _ dr0 dt _ n dn _ J_ сч i к i \
do p ' do
где кривизна (рис. 33).
§ 3] ЗАДАЧА О КРУЧЕНИИ 421
Положение любой точки М профиля сечения задается криво-
криволинейными координатами а, ?, где ? отсчитывается по той нор-
нормали к опорной кривой в точке М*, на которой расположена
точка М; поэтому вектор-радиус г этой точки определен равен-
равенством
г = г0(ог) + п?, C.15.2)
так что по C.15.1)
\^йо2 + й1\ C.15.3)
Коэффициенты Ляме и элемент площади в системе координат а,
? равны
Яо=1+-|, ЯЕ=1, do = (l+l)dad?. C.15.4)
Выражения лапласиана и градиента над скаляром записывают-
записываются в виде [см. (III. 5.5), (III. 3.8)]
+1
Р
-\
C.15.5)
Минимизируемый в задаче кручения функционал C.13.5) пред-
представляется в виде
C.15.6)
причем предположено, что область, занимаемая профилем сече-
сечения, определена неравенствами
а,<а<а2, 6, (а) < % < б2 (а).
1. Сектор тонкого кругового кольца. Для тон-
тонкого сектора со средним радиусом р, центральным углом 2а и
толщиной 26
примем, следуя способу Л. В. Канторовича,
Ф = (б2 - ?2) / (a), f(±ap) = O.
422
Тогда
, 1
J
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. VI
-ар
ар
причем отброшены слагаемые порядка (б/рJ и более высокого.
Пришли к вариационной задаче, для которой уравнение Эйлера
записывается, как известно, в виде
da df
df
jLJtL — IL-off" 5_ f -i- — \ -
da df df ~~z\i 262 ' "+" олг ] -
262
так что
f=l-
chl/ TT
ch
-,/"_5_ ар
К 2 6
Ф = (б2
ch
1-
/5 а
chV ~J
Естественно, что в рассматриваемом приближении (пренебреже-
(пренебрежение кривизной) решение повторяет C.14.4). Геометрическая
жесткость по C.14.5) будет
п 16 si Л т / 2 б ,,_,/'5 ар\
С = -о- арб3 1 — 1/ -^ th I/ v ~я~ I •
3^\ г 5 ар У 2 6 У
При а = я (разрезанное круговое кольцо) получаем
С = ~7г лрб3 1 — 1/ -г— th V it а ~ ^j-ярб3 1 — 1/ -з- — ,
о ; v г о яр г z о I 6 \ го яр/
тогда как жесткость целого кольца равна
С. = у я [(р + бL - (р - бL] = 4л (р2 + б2) рб - 4яр3б,
так что
L, 3 р2 V к 5 яр / ' *
2. Симметричный авиационный профиль. Ог-
Ограничивающие эту область, симметричную относительно оси х,
кривые, задаваемые уравнениями (рис. 34)
г/ = <4Л -г
C.15.7)
5 41
ЗАДАЧА О КРУЧЕНИИ
423
каоаююя в начале координат оси у и пересекают ось х в точ-
точках О и Ь.
гН0) = 0, -ф A) = 0, ф'@)=оо.
Предполагается также, что производная ^r(t) непрерывна и
обращается в промежутке @,1) в нуль один раз при t — t^,
величина b определяет хорду профиля, 2аф(/„)—его толщину;
предполагается, что а <€. Ь (тон-
Kiiii профиль). Перечисленным
условиям удовлетворяют кривые
причем 0<т<1, р > О, q > 0, i
-Up
. Например, по-
полукубической параболе соответ-
соответствует р = q = 1, т = 1/2; за- рис 34.
дание /з = 1, q = т = 1/2 опреде-
определяет эллипс с осями — большой Ъ и малой а и с центром в точ-
точке (Ь/2,0).
Опорной кривой является ось х, и минимизируемый интег-
интеграл может быть представлен в виде
г _
1
dt
дФ \2
dt
где к = а/Ь — малый параметр. Ограничимся заданием функ-
функции Ф, обращающейся в нуль на контуре области, в простейшей
форме:
Ф = Act1 (г):2 - ту2), C.15.8)
где А — подлежащая определению постоянная. Приходим к со-
соотношению
1 ф (t)
а С С
(А) = y~or at [А1У-к>г-§ + А г) — АШ — тгI dx\
Л J J
О О
и по условию минимума ]'(А)= 0 получаем
А =
г.
C.15.9)
424 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Оценка снизу геометрической жесткости иршюлиг к выражению
1
^ dt. C.15.10)
0 0 0
Оценку сверху С+ можно получить, минимизируя интеграл
C.13.10), записываемый в виде
([^{¦f-abnJ + i-^ + abtJ}^,. C.15.11)
оо
Минимизирующая функция назначается в виде
Ф = Вху + СЬу = ah {Br\t + Сг\),
причем внесение линейного слагаемого соответствует переносу
1 с
начала координат в наперед неизвестную точку х0 •= —о -тг на
оси х. Параметры В, С определяются по условиям минимума.
Не останавливаясь на этом громоздком вычислении, подробно
проведенном в работе Л. С. Лейбензона *), приведем выражение
жесткости в случае полукубической параболы:
С+ - 256 g3& fo IK io\
3465 i+J-
тогда как
r-_ 256 a3b
3465 П_ ' С+ Я, а
+ 13 + 13
— приближение достаточно точное для длинного и узкого про-
профиля.
3.16. Кручение тонкостенной трубы. Рассматриваемый про-
профиль ограничен извне контуром Го и изнутри контуром Г]. Кон-
Контур Г*, проходящий посредине между Го и Гь принимается за
опорную кривую, так что в системе криволинейных координат
уравнения контуров a, Z, могут быть записаны в виде (рис. 35)
1 „ 1
где 6(а)—толщина стенки трубы. Функция напряжений за-
задается в виде
Cl Л 2t X C.16.1)
*) Вариационные методы решения задач теории упругости, Собр. соч.,
т. I, Изд.-во АН СССР, 1951, стр. 324-356.
ЗАДАЧА О КРУЧЕНИИ
425
— она обращается в нуль на Го и равна неизвестной постоянной
С] на Гь Такое задание Ф приемлемо при малой толщине стен-
стенки. В мембранной аналогии контур Г[ несет диск, получающий
поступательное перемещение Си а контур Го неподвижен и сама
мембрана расположена в узкой кольцевой щели между этими
контурами; задание Ф в форме C.16.1) оправдано соображе-
соображением о пренебрежимости кривизной
рельефа изогнутой мембраны поперек
щели.
Минимизируемый функционал / по
C.13.5), C.15.6) записывается в
виде
6/2
Г*
-6/2
C.16.2)
Рис. 35.
Через s~, s+ обозначим площади кольцевых областей между
контурами (Гь Г*) и (Г*, Го); очевидно, что s~ + s+ = S — пло-
площадь профиля. Имеем
Г* -*6/2
2 .
Г
б2
8 У р
Г»
так что
2C,S
,S,
~ C,
Г* -6/2
где Si = Si + s~ — площадь, ограниченная опорным контуром
Г*. Вычисление дает
или, если пренебречь слагаемыми порядка (б/рJ,
426 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
По условию минимума dljdCi = 0 получаем
. C.16.4)
Выражение геометрической жесткости (оценка снизу) по
C.13.8) представляется в виде
(ЗЛ6)
Эти формулы в предположении плавной изменяемости тол-
толщины стенки F'(а)<?1) и малости кривизны F/р<1) запи-
записывают в упрощенной форме:
1 <у с da * AS, d
J C\ §2CS C
с da
Y= Ф-5-, C-16.6)
что соответствует заданию функционала / в виде
6/2
J=i§da 1[AгJ-4ФИ-2С>51 =
г» -а/2
6/2
C.16.7)
-й/2
и пренебрежению разностью s+ — s~. Надо добавить, что исход-
исходное задание функции напряжений Ф в форме линейной зависи-
зависимости C.16.1) от ? ставит под сомнение пригодность уточнений,
даваемых соотношениями C.16.3) и C.16.5). Например, задав Ф
в виде
1 / 91 \ I Л?2
Ф = — С II— I J- R I 1 —
2 1 \ б J \ б2
так что Ф = 0 на Го и Ф = Cj на Г,, и.определив постоянные Сь
В по условиям минимума функционала /, вычисляемого по
C.16.2), получим выражение геометрической жесткости С, отли-
отличающееся от C.16.5) *).
*) Решение, в котором Ф определяется решением дифференциального
уравнения Пуассона V2<D + 2 = 0 в форме ряда по степеням параметра 8/1
(где /--длина контура Г*), приведено в гл. VII монографии II. X. Арутю-
ияна и Б. Л. Абрамяна (см. литературные указания к гл. VI).
§ i] ЗАДАЧА О КРУЧЕНИИ 427
3.17. Многосвязные области. Функция напряжений предпо-
предполагается представленной в форме C.3.5), где Фо, Фь ..., Фп
определены, как решения краевых задач C.3.2) — C.3.4).
При этом для разыскания неизвестных значений Си функ-
функции напряжений на внутренних контурах 1\ была получе-
получена система линейных уравнений C.3.10). К этой же системе
можно прийти, разыскивая минимум интеграла / по вхо-
входящим в него постоянным Ch. По C.13.5) и C.3.5) имеем
n
- 2 2 CkSk, C.17.1)
и условия минимума записываются в виде
*?.) do-2
дФа дФ* 4 дФ° дФ*
или
п
2CA-BS = O, s=l, 2, .... n, C.17.2)
где обозначено:
J J R дп j i3«ft '
J J \ 5л дх ду
s r* rft
= 2
C.17.4)
В этих преобразованиях использованы определения функций
Фо, Фь ..., Ф«. по соотношениям C.3.2) — C.3.4). Пришли к
формулам C.3.10), причем симметричность матрицы \\Bhs\\ те-
теперь не требует доказательства (см. п. 3.5).
Легко также проверить, что определитель этой матрицы
отличен от нуля (он положителен). Действительно, записав
428 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
выражение функции напряжений Ф(х, у) вместо C.3.5) в виде
п
®{х, г/) = 2 CfeOfe (*, у),
ft=0
имеем
= 0 s-0
п а
дх дх ' ду ду
* = 0 s = 0
Это — знакоопределенная положительная квадратичная форма
переменных Со, Си . .., С„; по тео-
теореме Сильвестра положителен опре-
определитель ее коэффициентов и все
его диагональные миноры, в их чис-
числе определитель
\Bks\ (k, s=l, 2, .... п).
Как пример рассмотрим трехсвяз-
ный профиль, представляющий тон-
тонкостенную трубу с перемычкой. Вво-
Вводимые в рассмотрение опорные кри-
кривые Г1( Г,2, Tl являются дугами
АСВ, ВА, BDA; абсциссы на них
обозначаются ои, аи, On. Наружный
контур Го и контуры отверстий Fi, Г2 при этом задаются сле-
следующими значениями координаты ? (рис. 36):
Го: С = -тг при 0 = аи g = -f при о = а2,
Рис. 36.
Г,:
= — -Т при а =
2
При 0 = 0,2
= y при 0==or2' ? = f ПРИ а =
C.17.5)
Это позволяет назначить функцию напряжений в виде
Г 1 ь
При G = 0!,
-^-) при о = о12, C.17.6)
при о = а2.
Интеграл по занятой материалом площади 5 профиля представ-
§ "¦]
ЗАДАЧА О КРУЧЕНИИ
429
лястся суммой трех интегралов
6, '2 «...'2
<S 2
r,
-6,/2
-6,/2
4 x 12 '2
и выражение функционала 7 по C.16.7) может быть записано
в виде
г J|_
J 6,
C.17.7)
Постоянные Сь С2 находятся теперь из системы двух линейных
уравнений
dJ
~ос;~сч j б,
Т"
dC,
¦ = —с,
_ 2sl = 0,
C.17.8)
При обозначениях
Yi.
(T12 _ „ Г
A — Y 12» ~л
У2
получаем
i)],
= (Yi + Y2) Y12 + YiYz-
C.17.9)
Геометрическая жесткость профиля определяется формулой
С = 2CiS\ + 2C2Sl = I [(Y12 + Y2) 5^ + 2\l2S]sl + (\i2 + Yi) sf].
C.17.10)
Касательные напряжения в стенке трубы и в перемычке опре-
определяются из соотношений
^ [S*( + ) + 5i2] вдоль Гь
дФ
| С, -
вдоль Г12, C.17.11)
вдоль Г2,
430 ЗАДАЧА CEH-BRHAHA [ГЛ. VI
и в случае симметричного профиля (\'i = "Y_> = Y, S\ = S-> = S)
напряжение в переборке отсутствует; конечно, удаление пере-
переборки не изменяет при этом геометрической жесткости. Это сле-
следует и из формул C.17.10), C.16.6), причем в последней надо
заменить S* и \ на 25* и 2\\
Изложенный здесь прием приближенного расчета без труда
обобщается на профили произвольной связности; он представ-
представляется более простым, чем приемы, основанные на теореме
о циркуляции касательного напряжения.
§ 4. Изгиб силой
4.1. Напряжения. В решении Сен-Венана задачи об изгибе
стержня силами отличны от нуля компоненты а:, tzx, хуг тен-
тензора напряжений. Нормальное напряжение az представляется
формулой A.4.6):
Ог=-(т-* + т-у){1-г), D.1.1)
\ 'у 'х I
а уравнения статики в объеме и на поверхности (на контуре
поперечного сечения стержня) записываются в виде [см. A.5.1),
A.5.3)]
P Q \
vv + 77^' Wx + ЬгПу-О- D-1.2)
Распределение напряжений, определяемое этими соотноше-
соотношениями, статически эквивалентно изгибающим моментам
Mx = -Q(l-z), Mu = P(l-z) D.1.3)
в сечении z и поперечным (перерезывающим) силам, в любом
сечении равным Р, Q, — последнему условию удовлетворяет лю-
любая статически возможная, то есть удовлетворяющая уравне-
уравнениям статики D.1.2), система напряжений tzx, xyz. Крутящий
момент mz, создаваемый этими напряжениями, равен
,пг = J J (xtijz - утгх) do = aQ - ЬР, D.1.4)
's
где (a, b) — точка на линии L действия силы i\P + kQ\ он обра-
обращается в нуль, если эта линия проходит через центр инерции О
поперечного сечения (начало координат), но тогда изгиб, во-
вообще говоря, сопровождается кручением (а=?0); кручение от-
отсутствует (а = 0), когда линия L проходит через центр жестко-
жесткости х*, у* [см. формулу B.6.1)]. Тогда пг2ф0; случай тг = 0,
а = 0 имеет место при условии, что L — прямая, соединяющая
центры инерции и жесткости. Например, для поперечного сече-
сечения, имеющего ось симметрии, являющуюся линией действия
¦¦) I!
ИЗГИБ СИЛОП
431
силы, или поперечного сечения с двумя осями симметрии, когда
линия действия проходит через центр инерции.
Определение касательных напряжений требует решения крае-
краевых задач, сформулированных в п. 2.1. Однако их среднее зна-
значение на любой кривой в плоскости сечения можно найти, осно-
основываясь только на уравнениях статики D.1.2). Действительно,
рассмотрим выделенную из S площадь Q (рис, 37), ограничен-
ограниченную контуром abca, составленным из дуги Ьса контура сечения
Г и дуги у (ab), проведенной в S. То-
Тогда по D.1.2)
| ЬгхП-х
abca
dxz
дх,.
дх
do =
4-1! и do
С другой стороны,
= | {xzxnx+%yzny)ds,
abca
так как величина под знаком интеграла на Г (Ьса) равна
нулю. Итак,
xdo+~ \ \ ydo\. D.1.5)
{xzxnx + %угПу) ds = —
В частности, отсекая площадь Q отрезком у, параллельным
оси у (рис. 37), имеем
пх = — 1, пу = 0, ds = — dy,
\ \ xdo = xnQ, ( I у do = г/цО; b = у2 - ух
g q
(Хц, г/ц —координаты центра инерции площади Q, Ь — длина
отрезка у) и по D.1.5) приходим к соотношению (Трикомн.
1933*))
У;
xzx dy = b (тг Jcp = Q (~ хц + -5- у Л. D.1.6)
\ 'У 'X I
У\
При г/ц = 0, когда ось х — ось симметрии поперечного сечения,
эта формула приводится в курсах сопротивления материалов.
*) В приведенном Трикоми доказательстве не \чгено, что формула D.1.6)
следует из чисто с i этических соображений.
432 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Конечно, она выражает равенство нулю суммы проекций на
ось х сил, действующих на объем (I— z)Q, отделенный пло-
плоскостью, параллельной уг.
4.2. Изгиб стержня эллиптического поперечного сечения.
Вследствие симметрии достаточно рассмотреть случай силы, па-
параллельной оси х, а линию действия силы совместить с осью х;
в противном случае на задачу изгиба наложится уже известное
решение задачи кручения (п. 3.6). Распределение касательных
напряжений по B.1.1), B.1.6), B.1.7) задается при несуще-
несущественном изменении обозначений соотношениями
xzx~ 2(l+v)/y Id* Х)' %У*~ 2(l+v)/«, [ду
причем функция напряжений % определяется решением задачи
Неймана для уравнения Лапласа:
в 5: \72"/ = 0; на Г: -g- = хЧх + 2vxynu. D.2.2)
На контуре эллипса C.6.1)
X dX . У dy п X t/ п / л г. п\
^г- + ^- = 0, — -^пу + -^пх = 0. D.2.3)
Нетрудно сообразить, что краевому условию D.2.2) можно
удовлетворить, задавая гармоническую функцию (она должна
быть нечетной по х) в виде
j + Bx. D.2.4)
Действительно, тогда
-g- = А [(*2 - г/2) я, - 2хупу] + Впх = А [х2 - A + 2 ?) f] nx + Впх
и условие D.2.2) можно записать в виде
на Г: ^
Справа добавлено слагаемое, обращающееся в нуль на эл-
эллипсе; три постоянных Я, Л, В разыскиваются из уравнений
так что по D.2.4)
^ 4] ИЗГИБ СИЛОЙ 433
и касательные напряжения определяются по формулам
D.2.6)
Р 2A+у)а2 + &2 Г 2 ,2 A-Яу)аУ
2A+ у) /у За2 + 62 L 2A+у)а2+&2
a2(l+v) + y&2 P
iyz- A+v)Ca2 + &2) Iу ЛУ
Вдоль полуоси х = 0 напряжение х1Х распределено по парабо-
параболическому закону
Ра2 2 A + у) а2 + Ь2 /, 1 - 2у
\ zx/x=o 2A+у)/у Зо2 + о' \ 2A + у) аг + о'
Среднее значение этого напряжения определяется выражением
_ Ра2 4 Р (т я з/,
I ^ ? х) \ П ^V Q Г ОС 1 * У Л '
\ ^^/j;_U -^ ^у^ С) О \" 4
— ft
не зависящим, как следовало ожидать, от коэффициента Пуас-
Пуассона и вычисляемым по элементарной теории [см. D.1.6)]. Од-
Однако отклонение от среднего значения, зависящее от v и от
отношения полуосей эллипса, может быть значительным. На-
Например, при v = 0,25 это отклонение
11 &2
~Z (,Tmax tCp) — \^xz'r = 0 V,Z\J q 2 i ft2
при by> а достигает 20%.
4.3. Функция напряжений С. П. Тимошенко. Введение этой
функции напряжений (вместо %) упрощает решение задачи об
изгибе симметричного односвязного профиля, нагруженного си-
силой, перпендикулярной оси симметрии. Через О обозначим гар-
гармоническую функцию, связанную с % условиями Коши — Ри-
мана
д% д& д% дд"
дх ду ' ду ~~ дх '
и введем в рассмотрение функцию F, задав ее соотношением
2F A + v) = G + vx2tj - 2 A + v) G (у), D.3.1)
причем G(y) будет определено далее. Тогда
^F = 1~y-G"(y), D.3.2)
а выражения напряжений D.2.1) и краевое условие D.1.2)
представятся в виде
2A+ у)
D.3.3)
Р 3F ]
17
28 А И. Лурье
434 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Уравнение контура, симметричного относительно оси у, может
быть представлено в виде x2 = 2f(y); поэтому достаточно при-
принять G'(у) —f(y), чтобы прийти к краевой задаче для уравнения
Пуассона:
в 5: V2F = -^ у - Г (у); на Г: F = 0. D.3-5)
Она эквивалентна задаче об изгибе закрепленной по контуру
мембраны, когда нагрузка задана функцией в правой части
уравнения D.3.5). Краевое условие сохраняет вид, если в состав
контура кроме дуг, симметричных относительно оси у, входят
отрезки прямых у = const, параллельных оси х (на них
dy/ds = 0).
4.4. Прямоугольное поперечное сечение. Длины сторон, па-
параллельных осям х и у, обозначаются 2а, 2Ь. Достаточно при-
принять теперь f(y) = -^a2; тогда по D.3.5)
j^y, F = 0 при х= ±а, у= ±Ь. D.4Л)
Напряжения определяются формулами D.3.3):
Решение разыскивается в форме ряда, удовлетворяющего
краевым условиям на сторонах у — ±Ь:
Тогда для определения неизвестных функций Хп (х) приходим
к соотношению
оо
mb ЗГы п sinT'
n=i 1
причем справа представлено разложение в тригонометрический
ряд периодической функции, равной у при —b <y <Ь. Решение
получающейся краевой задачи
четное по х, записывается в виде
Cll—;
Итак,
ИЗГИБ СИЛОН
F =
v 2b3 V (-1)"
1 +v n-
n=l
ch
пла
Sill
any
435
D.4.3)
а учитывая соотношение
263 V (-1)"
n = \
придем к выражениям напряжений ily = -^aib = -^ a2S
2S
1 a2'
V (-
VI Ch'
1+v а2\ 3
n=i ch
COS
ппа Ь
6Р v S2
л25 1 + v о2
nnx
ch
пиа
D.4.4)
Элементарное решение, получаемое по формуле D.1.6), пред-
представлено параболическим распределением напряжений
t' = —I 1 ——1
D.4.5)
Максимум напряжения х2Х будет иметь место на оси у в точ-
точках у = 0, у= ±6 наиболее резкого изменения рельефа мем-
мембраны:
г/=о
2S
1-
V i2
3 + л2
n=l
ch
яяа
ь
__v_ _^
1 + V a2
_2_ 4_ VI
1 1
ch
rtjta
ЗЯ f /a
h
_ 3P f /a
~ 25 '2
D.4.6)
В книге С П. Тимошенко и Гудье*) приведена небольшая
таблица значений этих функций (для v = 1/4).
*) S. Timoshenko and J. Goodie r, Theory of Elasticity, 1951. Снизу
во второй строке таблицы даны значения, вычисленные по приближенному
решению D.7.4).
28*
436
ЗАДАЧА СЕН-ВЕН AHA
[ГЛ. VI
Таблица 12
а
Т
'.A)
'¦(*)
2
0,983
1,033
1,065
1
0,940
1,126
1,146
1/2
0,855
1,396
1,424
1/4
0,805
1,988
2,064
Из таблицы следует, что элементарная теория хорошо со-
согласуется с точной при а/Ь^-2 и значительно расходится с пей
уже при а\Ь ¦< 1/2.
В задаче изгиба длинной узкой полосы (b ^а) можно в
первом приближении не учитывать краевых условий на корот-
коротких ее сторонах у = ±Ь; в мембранной аналогии это соответ-
соответствует предположению, что прогиб (как и нагрузка мембраны)
линейно зависит от у. Тогда по D.4.1), D.4.2)
дх2
v V Г
+ V
Г1
2A +v)
1 + v 21 у
—
D.4.7)
D.4.8)
— касательные напряжения в центре полосы оказываются
в 1 + v раз меньше вычисляемых по элементарной теории; при
v = 1/4 они составляют 80% последних, что согласуется с дан-
данными вышеприведенной таблицы уже при b = 4а. Конечно, это
решение непригодно при у = ±Ь, но, основываясь на нем, мож-
можно точное решение дифференциального уравнения D.4.1) искать
в виде
Тогда F* определяется из краевой задачи
= 0, F,{±a, г/) = 0, Ft(x, ±Ь) = ± тг^—-г-(а2 - х2),
решение которой записывается в виде (см. п. 3.8)
_ vb 16a3
(-1)"
2а
Bk+l)nb
2а
cosB'+a1)jtx. D.4.10)
ИЗГИБ СИЛОЙ 437
Напряжения представляются выражениями
Bk + \)щ
ЪР 1
2S 1 + v
(-1)* Ch 2a~
Cl ^^Ш» \Z.rV I LJ , I
т>'г 2S
>'г 2S 1 + v
Bfe+ 1)
Bk+lJ
COS
sin
Bft
B*
+ 1
2a
+ 1
2a
) nx
ЯХ
2a
D.4.11)
и при b > 15a наибольшими оказываются не учитываемые эле-
элементарной теорией горизонтальные напряжения хуг на сторонах
х = ±а в точках у = ±г|, близких к углам прямоугольника. На-
Например,
при 6 = 15а ^р-1
при Ь = 2
4.5. Вариационная формулировка задачи изгиба. Будем исхо-
исходить из представления касательных напряжений x1JZ, x2X через
функцию напряжений F:
-JLIEL — 1- з _¦ f с \ —_H^IL /4ru
тождественно удовлетворяющего уравнению статики D.1.2) в
объеме; уравнение статики на поверхности *) (на контуре Г по-
поперечного сечения)
на Г: fz = Xzxnx + %yzny = -^-{^-[jx2-f (#)]«,[ = 0 D.5.2)
не удовлетворяется тождественно. Поэтому, имея в виду при-
применение принципа минимума дополнительной работы, допу-
допускающего сравнение статически возможных напряженных со-
состояний, следует в рассмотрение вводить только функции, удов-
удовлетворяющие на Г условию D.5.2), и, значит,
на Г: б -^- = -jj 6F = О, 6F = const = SFr. D.5.3)
В принципе минимума дополнительной работы приравни-
приравнивается нулю выражение разности вариаций потенциальной энер-
энергии деформации, выраженной через напряжения, и работы ва-
вариаций поверхностных сил (udfx + vbfy + wbfz) do.
о
*) Поверхностная сила обозначается /; ее проекции на оси fx, fy, fz.
438 ЗАДАЧА CEII-BEHAHA [ГЛ. VI
На боковой поверхности в задаче Сен-Венана это выражение
по условию D.5.3) обращается в нуль. Напряжение oz задано
его выражением D.1.1) и поэтому не варьируется в объеме и
на торцах, следовательно, 6az = 0; значения проекций и, v векто-
вектора перемещения, определяемые формулами B.2.9), не зависят
от выбора функции /, и поэтому Ьи = 0, 6~о — 0. Имеем
v(l)~v{0) = alx-~xy-^l
III у Л
и, учитывая, что fx = +т„, fy = +xzy при г = 0 и z = I, можем
представить теперь работу вариаций поверхностных сил в фор-
форме вариации интеграла по площадям торцов
6 j J {[и(/) - и @)] хгх + [v (/) - v @)] xj do =
s
1 РЧ3
6 EI2 6J J -^7'
причем не выписаны слагаемые, вариация которых нуль,—
произведения иA) — «@) на не зависящие от F члены х2Х- Сла-
Слагаемые в третьей строке D.5.4) преобразуются в контурные ин-
интегралы, обращающиеся в нуль по D.5.3).
Вариация потенциальной энергии деформации записывается
в виде
\^do\, D.5.5)
'И Y " ' • - • - -s-
и принцип минимума дополнительной работы приводит к за-
задаче минимизации интеграла
1 Г Г Г / dF \2 , / dF Y г 9 ns. i м 3F ,
Iy I dF
D.5.6)
причем выбор минимизирующей функции F подчинен краевому
условию D.5.2).
1] ИЗГИБ СИЛОЙ 439
Варьируя этот интеграл и проведя надлежащие преобразо-
преобразования интегралов по 5 в контурные, придем к выражению
г.:
s
8Fv\
ds + aG Т § {хп* + уп^ds\'
г J
так как остающиеся контурные интегралы оказываются нулями,
например:
— У2) пу — %xynx] ds = — 4 j J у do = 0.
Приходим к дифференциальному уравнению Пуассона
в S: V2F-T^y + f'(y) + 2aG-^ = 0, D.5.8)
которое при a = 0 переходит в уравнение D.3.5). Из него следует
= — §f{y)nyds- aG -~- § (xnx + yny) ds,
г r
так что выражение в квадратных скобках формулы D.5.7), как
следовало ожидать, равно нулю.
4.6. Центр жесткости. Далее рассматриваются поперечные
сечения, симметричные относительно оси у и нагруженные си-
силой Р, параллельной оси х.
До сих пор использовалась система координат Оху с на-
началом в центре инерции О стержня; в задаче об изгибе пред-
предпочтительно от этого отказаться с целью иметь наиболее про-
простую запись уравнения контура области. Оси новой системы
О"Е,ц направлены параллельно старым, а ее начало располо-
расположено на оси симметрии в точке О'@,уо), так что
| = *. У]=у-у'о. D.6.1)
Уравнение линии действия силы у — Ь, координаты центра
жесткости ?*, т)* и уравнение контура в этой системе осей будут
г\ = Ь - у'п = Ъ'; Г = Xм = 0, Tf = y- у'й; \
|=JC==±0(n)i [О2 (Л) = 2/(*/)]. I
440
ЗАДАЧА СЕН-ВЕПЛНЛ
[ГЛ. VI
Далее предполагается, что линия действия силы проходит че-
через центр жесткости, так что Ь' = rf, а постоянная а = 0. Тогда
вариационное уравнение D.5.8) способа Галеркина запишется
в виде
Крутящий момент mz по D.5.1), A.2.4) определится из соот-
соотношения
s==-bP=-(y'0 + b')P=>-(y'0 + r\)P = j J [xxgy-(x\+t/0)xzx]do =
т
S ' S
Преобразуя входящие в него интегралы, имеем
так как по D.5.2), D.6.2) можно принять для односвязной
области
D.6.4)
на Г:
Далее,
ц[х2-
V V
S
е2(</)]
1*
do = Г| с
Т\1
Г =
sen)
гл J
= 0.
[x2~i
э2(п)]
dx =
Записывая еще выражение момента инерции 1У в виде
Пг 6A) 11.
Г Г 9 Г
х2 do = \ dr\ х2 dx = -^- О3 (г|) dr\,
S Hi -9 Сп) 11,
приходим к следующему выражению координаты центра жест-
жесткости (Дункан A933), Л. С. Лейбензон A933)) через функцию
напряжений F:
Ч =
J б3 (т]) йц J лб3 (л) йт\ - 3 J J F do
. D.6.5)
Для симметричного профиля выражение координаты центра
жесткости B.6.1) через функцию Ф и ф задачи кручения также
ч 4] изгив силой 441
может быть преобразовано к виду, содержащему одну лишь
функцию Ф. Действительно, сославшись на B.1.10), B.1.12),
имеем
, I § в' (,) чп, *> - { | j х» -fdo - -| JJ [e> (л) - /'1 ¦
J
так как Ф = 0 на Г. Приходим к формуле (Г. Ю. Джанелидзе,
1963)
D.6.6)
или, в системе координат О'|т],
1-1
где с — геометрическая жесткость при кручении.
4.7. Приближенные решения. Рассматривается задача изгиба
силой с линией действия, проходящей через центр жесткости,
симметричного профиля, ограниченного кривыми x=±Q(y\) =
= ±cr\m и отрезками прямых ц = Ь\, г\ = 6г- Решение вариа-
вариационного уравнения D.6.3), удовлетворяющего краевому усло-
условию D.6.4), задается в соответствии со способом Л. В. Канто-
Канторовича (п. 3.14) в виде
F = (cV"-x2)cu(ii), а»F,) = «оF2) = 0. D.7.1)
442 ЗАДАЧА СЕН-ВЕНАНА
Приходим к соотношению
\ dx\ бсо (п) J (с'2Ц2т - х2) [v2 (c2n2m - *2) со (л) + i
1ГЛ. VI
-of1
Из него, проведя интегрирование по х и воспользовавшись про-
произвольностью вариации бш, приходим к обыкновенному линей-
линейному дифференциальному уравнению
L («) = -
1-1 ~ j~ (П + Уо)} - D-7.2)
где
представляет дифференциальный оператор
L (со) = со + — со' + j[—2— т - -q^s-J ©.
D.7.3)
При любом т решение выражается через бесселевы функции;
мы ограничимся рассмотрением простейших случаев, когда ин-
интегрирование выполняется элементарно.
а) Прямоугольник (—а ^С х <! а, —Ь < ц ^ Ь). Здесь т = О,
с = а, у'й = 0, у = ц и решение записывается в виде
(a
2-t2)
sh1/if
shl/ f j
D.7.4)
вместо приведенного выше [см. формулы D.4.9), D.4.10)] точ-
точного решения. Вычисляемые по D.7.4) значения касательного
напряжения xzx при х = 0, у = Ь, записываемые в форме D.4.6),
для нескольких значений alb приведены во второй строке таб-
таблицы 12 снизу.
б) В случае т = 1 (трапецеидальное сечение, рассмотрен-
рассмотренное в п. 3.14 для задачи кручения) дифференциальное уравнение
DJ.2) типа Эйлера интегрируется в квадратурах. Остановимся
на двух примерах.
1) Равнобедренный прямоугольный треугольник (Ь\ = 0,
b<i = h, т — 1, с — 1)
2) Равносторонний треугольник (Ь\ = 0, Ь% == /г, m = 1, с =
= tg30°)
j]. D.7.6)
§ 4] ИЗГИБ СИЛОЙ 443
В обоих случаях начало координат расположено в вершине
треугольника. При v = '/2 формула D.7.6) дает точное решение
п интересно отметить, что в этом случае центры жесткости и
инерции поперечного сечения совпадают — легко проверить по
D.6.5), что V = ta-
h2
в) Сегмент параболы х2 = -ггх\, ограниченный хордой ц = b
длины h. Дифференциальное уравнение D.7.2), в котором те-
перь т = '/г, с2 = h2/4b, y'Q = —=-&, также интегрируется в эле-
элементарных функциях (бесселевы функции с «полуцелым» ин-
индексом) . Получаем
~ - A vb ГЗ , 5 2 + v л |
4b ^ Х } 2A + v) I. 5 т~ V, v >> +
1 ^ 'г~ ^ "С1» ~^~
где 7. = 40b2/h2 и выражение координаты центра жесткости
D.6.5) дается формулой
* 5.8 v 4 v г /л ч 2 + v г /, \
^ ~У + ЖТ+Т~ТТТ7'|(Л)~ 7(i+v) h(X)'
Вычисление по этим формулам дает (v = '/4)
Х = 0 0,4 2,5 4,9 со
-^- = 0,343 0,350 0,375 0,418 0,760
Интересно отметить, что использование при малых /. табличных
значений гиперболических функций (с пятью знаками) не дает
правильных числовых результатов; чтобы избегнуть при вычис-
вычислении fi(X), [2 (Я) малых разностей, следует удержать в разло-
разложении х cth х в степенной ряд слагаемые до х]0 включительно,
но этого не требуется для построения пятизначных таблиц.
4.8. Авиационный профиль. Уравнения контура профиля в
соответствии с обозначениями п. 4.6 записываются в виде (ср.
п. 3.15)
D.8.1)
444 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
Тогда по C.15.8), C.15.9)
1
J g3g'2 dt
Ф = Ла2(?2-!2), А= 1 + ^6 , е = ^Ц , D.8.2)
I g'dt
о
причем л; = а|, Я = а/6.
Используя знание функции напряжений, вычислим по фор-
формуле D.6.7) координату центра жесткости ц*. Чтобы предста-
представить результат в просто обозримой форме, введем обозначения
1 1
jlg3(t)dt
D.8.3)
1 @ dt g (f) dt
Величина ч\о представляет предложенное Гриффитцем при-
приближенное выражение координаты центра изгиба; т^—коорди-
т^—координата центра инерции сечения в системе осей 0%ц; очевидно, что
она противоположна по знаку координате у0 начала О' этой си-
системы в осях Оху с началом в центре инерции.
Теперь, учитывая, что
1 Г Г dgHt) , „ .2. ,
2 J J dt vs ъ'
S 0 0 0
D.8.4)
так как g@)=0, gfA) = 0, и использовав выражение C.15.10)
геометрической жесткости, после простого вычисления по D.6.7)
придем к полученному Л. С. Лейбензоном A933) выражению
координаты центра жесткости авиационного профиля:
2v 1
В приложении к удлиненному и узкому профилю множитель
A + ЗЯ2е)-' отбрасывают.
Перейдем к задаче изгиба авиационного профиля — опреде-
определению из вариационного уравнения D.6.3) функции напряже-
напряжений F, обращающейся в нуль на контуре D.8.1). Переписывая
это уравнение в виде
D.8.6)
§ 51 ЗАДАЧА МИЧЕЛЛА 445
где F = F\a2b, и ограничиваясь варьированием одной лишь по-
постоянной В, полагаем
F\ = B [g2 @ -12], 6Fi = (g2 @ - |2) 65.
Тогда В определяется уравнением
•At)
5 =
Lo
о о
причем последнее слагаемое в D.8.6) отпадает [см. D.8.4)]. Это
вычисление дает (при использовании обозначений D.8.3))
' v ^'П 2 ?2ч /4 8 7)
^ ~ 2Ь l+v 1
и по формуле D.6.5) теперь легко получить вышеприведенное
выражение D.8.5) координаты центра изгиба.
§ 5. Задача Мичелла
5.1. Постановка задачи. Эта впервые рассмотренная Мичел-
лом A900) задача является естественным продолжением задачи
Сен-Венана. Рассматривается напряженное состояние в призма-
призматическом стержне, равномерно нагруженном по его боковой по-
поверхности; краевые условия A.1.3), A.1.4) задачи Сен-Венана
на этой поверхности поэтому должны быть записаны в виде
на Г ... { Tvxnx + oyny = Fy(s), E.1.1)
где Г, как выше, — контур поперечного сечения, s — отсчиты-
отсчитываемая по нему дуга.
Поскольку принимается принцип Сен-Венана, а решение за-
задачи Сен-Венана предполагается известным, можно, не в ущерб
общности, считать правый торец z = I свободным от нагруже-
ния; в ранее принятых обозначениях A.2.3), A.2.4) это условие
записывается в виде
z = l: p = o, Q = 0, R = 0; ш, = 0, т„ = 0, тг = 0. E.1.2)
В рассмотрение вводятся интегральные величины; это проек-
проекции главного вектора сил, распределенных по контуру Г любого
446
ЗАДАЧА СЕИ-ВЕНАНА
[ГЛ. VI
поперечного сечения 2,
qx=§Fxds, qy=j>Fyds,
E.1.3)
г
и их главные моменты относительно осей Ozxyz с началом в
этом сечении
Fzds, цу = -j>xFzds, \xz=§(xFy-yFx)ds. E.1.4)
г г г
Как и выше, принято, что Ог — центр инерции сечения, х, у—
главные оси инерции в этой точке, z — продольная ось стержня.
Три интегральных уравнения равновесия отрезка стержня
[г, /], выражающих обращение в нуль главного вектора прило-
приложенных к нему внешних сил, записываются в виде
E.1.5)
(/ -z)qx- 11 хгх do = О, (/ - г) qy - J J %уг do = 0,
s 's
(l-z)qz- f fa, do = 0.
Моменты относительно осей системы Ozxyz сил, распределенных
по боковой поверхности этого отрезка стержня, равны
i
Г г
I
ds
Г г
Fx - xFz
2qx + {l-;
ds f (xFy - yFx) dt, = {l- z) \x,z,
Г г
и поэтому остающиеся три интегральных уравнения равновесия
будут иметь вид
1
E.1.6)
--k{1- zf qy-\\ yaz do = 0,
s
+ — (l-zfqx+ I ) x<yzdo=0,
- z) \iz - I J
= 0.
s 5] ЗАДАЧА МИЧЕЛЛА 447
Следуя идее полуобратного метода Сен-Венана, удовлетворим
лим "уравнениям, приняв, что х2Х, xyz линейно, а а2 квадратично
зависят от z:
E.1.7)
где введенные в рассмотрение семь функций т°*. •••> af
должны удовлетворять интегральным условиям
n'yz-yrlx)do=nz, E.1.9)
уо° do = 0, xa°do = 0, E.1.10)
azdo = — (i , E.1.11)
), l\yofdo=-qy, J J xo?do=-qx. E.1.12)
s s s
Обратимся теперь к уравнениям статики в объеме; подста-
подстановка в них выражений E.1.7) приводит к системам уравнений
д(У у дх п, дх YU до и
-rL + -T^- = T1 , -г^ + -г^ = т' E.1.13)
дх ду xz дх ду Уг N
il??. + J^?. = ai E.1.14)
дх ду г
^+^-=е E-1.15)
Их следует рассматривать при краевых условиях: для системы
E.1.13):'
на Г: oxnx + xxyny = Fx{s), ххупх + оупу = Fy{s), E.1.16)
а для систем E.1.14), E.1.15)—при условиях:
На Г: Т%хПх + Т%г% = ргМ' EЛ-17)
на Г: ^Л + т'Л = 0. E.1.18)
5.2. Распределение нормальных напряжений. Обратимся те-
теперь к рассмотрению зависимостей Бельтрами. Сохранив
448 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
обозначение V2 плоского оператора Лапласа и представив пер-
первый инвариант тензора напряжений а в виде
(Т = а° + (/-2)а' + у(/-гJа'2') а0 = ах + оу + а«, E.2.1)
можем удовлетворить этим зависимостям, полагая
E.2.2)
_ Г) __А_ = г _ z —Г) (К О V\
' дх2 ду2 дх ду ' ^^¦°>
. ?. _ ) _А_ =
дхг ду2 дхду ' дх2 ду2 дх ду
^ у^ L_^ E25)
дх ' VV~l+v ду ' 1°>Z- ^
<2) = О, W = 0, VV2) = 0, E.2.6)
2 2 ^
причем второе и третье соотношения повторяют E.2.3), а из по-
последних следует, что а1г, сг® — линейные функции х, у. Их вид
определяется интегральными условиями E.1.11), E.1.12):
o\{x,y)=qf-^x + ^-y, E.2.7)
^^j) E.2.8)
Итак, распределение нормальных напряжений по попереч-
поперечному сечению задается соотношением
М17х+т;у)' E-2-9)
а дифференциальные уравнения E.2.4), E.2.5) преобразуются
к виду
!
Из сказанного здесь и в п. 5.1 видно, что задача Мичелла
распадается на три задачи. Две из них «автономны» в том
смысле, что построение их решений не требует решений прочих
задач.
Первая состоит в разыскании напряжений т^, т^. Она
тождественна задаче Сен-Венана об изгибе силон и кручении
5 5] ЗАДАЧА МИЧЕЛЛА 449
стержня. Это следует из совпадения системы уравнений E.1.9),
E.1.15), E.1.18), E.2.11) с системой A.5.4), A.5.1), A.5.3),
A.5.2) после замены qx, qy, |j,z соответственно на Р, Q, тг.
Вторая задача — разыскание х°2Х, т°г; она возникает при на-
наличии растягивающих поверхностных сил Fz(s), которыми опре-
определяются силовые факторы qz, [ix, \iv, входящие в систему урав-
уравнений E.1.8), E.1.14), E.1.17), E.2.10), определяющих эти на-
напряжения. При некоторой замене обозначений ее можно свести
к краевым задачам Сен-Венана и еще к одной краевой задаче
для уравнения Лапласа (п. 5.3). Наиболее сложна третья за-
задача— определение ах, ау, гху; попутно находится а°. Она сво-
сводится к плоской задаче теории упругости (гл. VII), постановка
которой требует знания решений двух предшествующих задач.
5.3. Растяжение стержня. Как указывалось выше, наличие
продольных поверхностных сил Fz(s) создает нормальное на-
напряжение
In ii м \
E.3.1)
и касательные напряжения %\х, х° , определяемые системой
уравнений
дх ду Sly 'х
r°zxnx + xlzny = Fz(s), E.3.4)
°zx do = 0, j j r°yz do = 0, j j (xx°yz - yx°zx) do = 0. E.3.5)
s s s
Нетрудно убедиться, что всякое решение уравнений статики
E.3.2), E.3.4) в объеме и на поверхности тождественно удо-
удовлетворяет первым двум интегральным условиям E.3.5). Дей-
Действительно, по E.3.2)
— цу ~ J J x y-g^- + qt) do = j x (r°zxnx + TyZny) do — r°zx do,
s v s
так что по E.3.4) и E.1.4)
— ци = ф xFz ds —
г s
29 А. И. Лурье
450 ЗАДАЧА CEH-BF.HAHA [ГЛ. VI
Аналогично проверяется второе соотношение E.3.5); вместе
с тем
f + d4f)d0 = § «Л + 1Л)ds=§F,ds,
дх
s
что соответствует E.1.3).
Уравнениям статики и зависимостям Бельтрами E.3.3) мо-
можно удовлетворить, полагая
о (ЭФ р дх?° qz I /|x
хгх = Gao ~ду~ + Ту ^UX~ 2A +v) \~ly~ Х" ~'l"~T7 ХУ
E.3.6)
¦о = _| "
где Ф — функция напряжений, решающая задачу кручения для
области S:
в S: У2Ф=-2; на Г: ^ = 0, E.3.7)
a W0 — решение уравнения Лапласа, определяемое по краевому
условию
1 \»v ,..,.. , п ч Яг
E.3.8)
где, как выше в п. 2.5, ofco — элементарная секториальная пло-
площадь. Нетрудно, учитывая E.1.3), проверить, что так введенная
функция Ч/о однозначно определена на Г, так как
§^-ds = 0. E.3.9)
г
Можно представить Y0 в виде суммы трех слагаемых
E.3.10)
определяемых решениями краевых задач
в S: V2d, = 0; на Г: 4?i- = х2пх + 2vxyny, \
Z \ E.3.11)
+ y2ny \
в S: V% = 0; на Г:
в S: V^3 = 0; на Г: *»L = fz (s) _-|-g-. E.3.12)
Функции ¦6'j, дг были определены при рассмотрении задачи Сен-
Венана [см. B.1.7) —B.1.9)] об изгибе силами, причем теперь
§ 5, ЗАДАЧА МИЧЕЛЛА 451
роль Р, Q отходит к |ду, —цх; краевая задача для д3 ранее не
встречалась.
Крутящий момент р,01, соответствующий функции напряже-
напряжений Ф и компонентам <h, Q2 функции х?, вычислялся в п. 2.5; он
равен по B.6.2)
где х*. у* — координаты центра жесткости. Компоненте д3 соот-
соответствует крутящий момент, представляемый по формуле B.5.5)
в виде
г
Остается подчинить выбор постоянной ао третьему условию
E.3.5); оно сводится к требованию ii°J + iif = O и записывается
в виде
Г Чг Г Г
GCao = \х,хх + \Xyij' + ф F^ (s) cp as—V- ф do. E.3,13)
Г S
Легко находятся перемещения, определяемые по функции ф3:
E.3.14)
где хз—гармоническая функция, связанная с Ф3 условиями
Коши — Римана B.1.9). К этим выражениям надо добавить пе-
перемещения, получаемые по формулам B.2.9), в которых следует
принять R = 0, тх = щу = 0, заменить Р, Q на \iy, —\ix, а по-
постоянную а — ее значением по E.3.13).
5.3а. Растяжение стержня силами постоянной интенсивности.
При действии равномерно распределенной по контуру попереч-
поперечного сечения растягивающей силы (Fz = const) и в случае со-
совпадения центров тяжести площади S и контура Г
где L — периметр контура. Краевое условие E.3.12) записы-
записывается в виде
на : . ds ~Ltz
29*
452 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
и для односвязной области, введя для упрощения записей
вместо д3 гармоническую функцию
приходим к задаче Дирихле:
V2t/ = O в S; t/r=—--J-. E.3.1а)
Соответствующие напряжения согласно E.3.6), E.3 1) опреде-
определяются по формулам
2 S )'
E.3.2а)
Для стержня прямоугольного поперечного сечения (||,
\y\<Cb) краевое условие E.3.1а), если начало отсчета дуг взять
в точке х = а, у = О, как нетрудно проверить, приведется к виду
и оно удовлетворяется гармонической функцией *)
tit \ Ь — а ху 2 (Ь — а)
В частности, для квадрата U = 0, и этот результат верен для
любого правильного многоугольника и для круга. Действи-
Действительно, краевое условие E.3.1а) теперь принимает вид (!г —
апофема)
Задача становится более сложной для стержня эллиптиче-
эллиптического поперечного сечения. Введя эллиптические координаты
а, р:
х = с ch a cos p, ?/ = cshasinp (с = |Лг2 — Ь2),
и называя через ао значение а на контуре сечения эллипса с по-
полуосями а, Ь, имеем
1 1 ft
с ch a0 = а, с sh a0 = b, rfco = -^ (xvdyr — yrdxr) = ^ ab d$,a = S~-.
*) Решения, приводимые в этом пункте, получены Л. М. Зубовым
ЗАДАЧА МИЧЕЛЛА 453
Классическое представление дуги эллипса имеет вид
р
f
р
f ]
а0 - cos2
I /ch2 do - cos2 p dp
я
здесь Я -?г — p, &) — эллиптический интеграл второго рода в
нормальной форме Лежандра с модулем & = (chao)~1, а E(k) =
= ?(-^-, /г)—полный эллиптический интеграл второго рода.
Имеет место разложение в тригонометрический ряд *)
причем
_ 2Е [к)
_ 1 V (т + 1) ... (т + п) Г 1 ¦ 3-5 ... Bm +2n-l) ]2 k
,2m + 2ft
п 4J (т + п + \) ... (т+2п) I 2 • 4 • 6 ... B/n + 2ft) J 2m + 2я + 1 '
m=>0
Краевое условие E.3.1а) теперь представляется периодиче-
периодической, как можно было предвидеть, функцией
Uv = -^щ-(В, sin 2р + В2 sin 4р + В3 sin бр + . . .),
и решение задачи представляется рядом
Действительно, каждый член этого ряда, являясь мнимой частью
функции ch 2/г(а-М"Р), удовлетворяет уравнению Лапласа; он
непрерывен вместе с его производными по а и р в сплошном
эллипсе (и при переходе через разрез между фокусами!).
5.4. Касательные напряжения х\х, т^г. Как уже говорилось,
это — целиком задача Сен-Венана. Заменив Р, Q, т2 в реше-
решениях п. 2.1 на qx, qy, ц,, придем к выражениям
дФ cW 1
т^ =
дФ
*) А. М. Ж у р а в с к и й, Справочник по эллиптическим фучкциям,
Изд-во АН СССР, 1941.
454
ЗАДАЧА СЕН-ВЕНАНА
[ГЛ. УГ
причем здесь
Ях_
77
2 t
E.4.2)
a ft\, $2—решения краевых задач E.3.11). Постоянная <*i опре-
определяется условием
-\iz~{x^qy-ifqx). E.4.3)
5.5. Напряжения <зж,<зу,хху. Рассмотрению подлежат уравне-
уравнения статики в объеме E.1.13), на поверхности E.1.16), зависи-
зависимости E.2.2), определяющие az, соотношения E.2.6) и инте-
интегральные условия E.1.10).
По E.4.1), заменив ft\, #2 сопряженными с ними гармониче-
гармоническими функциями хь /2 [см. B.1.9)] и введя с помощью соотно-
соотношений B.1.10), B.1.12) функцию ф, можно первую группу, урав-
уравнений записать в виде
да i-
дх '
дх
д%ху
ду
, доУ
1 ду
Л =
д\
дх
5А
5//
Gа
\ E.5.1)
2A
ly
Ix
Этим уравнениям можно удовлетворить, приняв
1
6A
1
Т(Г-
dU
дхду '
E.5.2)
где введена известная в плоской задаче теории упругости
функция напряжений Эри U(x,y) (п. 1.2 гл. VII).
После подстановки этих выражений в зависимости Бель-
трами и несложных преобразований придем к соотношениям
l+v /ь
2 fy
l + v lx
+ 2Л
Я.
+ V ly
Ях
~ x - A + v) VU = j-z (a? + 2Л - vV
E.5.3)
ЗАДАЧА МПЧЕЛЛА
455
где V4 = V2V2 — бигармонический оператор — двукратно приме-
примененный плоский оператор Лапласа. Вместе с тем по E.2.6),
E.2.8)
Поэтому, сложив первое и второе уравнения E.5.3) и учитывая,
что Л — гармоническая функция, придем к бигармоннческому
дифференциальному уравнению
i E.5.5)
дх*
дх2 ду2 ~ di/
для функции Эри. Краевые условия, определяющие эту функ-
функцию, учитывая соотношения
d dU d2U , d2U d dU
d2U
Пх
d2U
__
ду2 Пх дхду У ds ду '
можно записать в виде
на Г: -jj- =
где по E.1.16), E.5.2)
дхду "х ' дх2 '"у
3U
дх
П„ = -
= - | Yds,
ds дх '
E.5.6)
(х2 - у2) пу - \пх,
} E.5.7)
-jGa!(x2-y2)nx-Any.
Нетрудно проверить, что (в случае односвязной области)
=0, E.5.8)
чем гарантируется однозначность заданий производных функ-
функции Эри на контуре. Действительно, по E.1.3) и преобразуя
контурные интегралы, имеем
= qx
Цх-
дЛ.
дх
do
456 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
и теперь по B.1.9), B.1.11), B.1.12), B.1.4)
дК Г Г дФ . 1
s
'Ь Г« . , Чу
= Gct,
г '¦ " г г
с,/г гт1 -г- Ф * —=r— ds —т— ф и —-,— ds ],
2A+v) yiy J ds lx 7J ds I'
откуда, сославшись на E.3.11), легко получим
Я ал , __ з + 2у _
s
как и требовалось. Аналогично доказывается второе равенство
E.5.8). Впрочем, сказанное следует и из чисто статических со-
соображений [ср. п. 1.5].
5.6. Определеннее*. Возвращаясь к E.5.3) и исключив
V2U с помощью E.5.2), придем к соотношению
+
а«=- 2A+ v)A + v(ax + <g + IB-
f- xtf + -^-x2y) + c0 + cxx + c9y, E.6.1)
причем постоянные c0, C\, c2 находят по условиям E.1.10), вы-
выражающим, что система напряжений a°z статически эквива-
эквивалентна нулю. Определение этих постоянных требует вычисления
моментов напряжений нулевого и первого порядка
\ j {<ух + ау) do, J J л; {ах + ау) do, J J у {ах + ау) do,
выполняемого по формулам пп. 4.3, 4.4 гл. I для двух уравнений
статики E.1.13), в которых —rxz, — хх играют роль объемных
сил, а поверхностными силами являются Fx, Fy. Поэтому
J J
s v s
x (ст, + Oy) do = ~§ [(x2 - y2) Fx + 2xyFy] ds -
do и т. д.,
§ 5] ЗАДАЧА МИЧЕЛЛА 457
тогда как входящие в эти выражения моменты второго порядка
для напряжений x]xz, ххг могут быть определены по п. 4.10 гл. I
только частично в комбинациях вида
s s
Вместе с тем интегралы
^\ J xt/ do.
s
не могут быть выражены через нагрузки при использовании
лишь уравнений статики.
5.7. Изгиб тяжелого стержня. Рассматривается горизонталь-
горизонтальный тяжелый стержень, торец которого z = / свободен; ось х
направлена по нисходящей вертикали, так что отлична от нуля
только компонента рКх = у объемной силы (у — вес единицы
объема). Частное решение уравнений равновесия может быть
взято в виде а'х = —ух, ему соответствует распределение по-
поверхностных сил на боковой поверхности
Но эта поверхность не нагружена; поэтому на взятое частное
решение следует наложить решение задачи Мичелла, в которой
Fx = yxnx, Fy = 0, Fz = 0, E.7.1)
так что из шести интегральных величин E.1.3), E.1.4) отлична
от нуля только
qx = у ф хпх ds = yS. E.7.2)
Поэтому по E.2.9)
Г\ 1 11 \0 ("91 0 11 4 9 V1^ /г* рч г\\
frlJ —f— I / — "У I- /TV1-' rfu — I / — •y\? ' V* I К V 4 1
г z ' 9 ^ ^ z — z 9 ^ / I ' v •' /
тгх = (/ - г) т^, туг = (/ — г) т^2, E.7.4)
и речь идет о задаче изгиба силой, решаемой формулами
п. 5.4, и о плоской задаче, в которой находятся напряжения
Ох, оу, хХу и статически эквивалентное нулю слагаемое аг на-
напряжения стг.
458 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
В частном случае стержня круглого сечения радиуса а по
D.2.5), E.5.1), D.2.6)
— ' ~2v / -з _ о :>\ , 3 + 2v 9 л _ Y5 _ 2у ")
_, . ... , l+2v
E.7.5)
и, далее, по E.5.2)
7
2a'G+v)
E.7.6)
¦*у дхду '
причем функция напряжений U представляет решение бигармо-
нической краевой задачи E.5.6), в которой значения X, Y на
контуре области х2 + у2 — а2 = 0 задаются выражениями
Легко проверить, что произведение х, или у, или х2 + у2 на
гармоническую функцию удовлетворяет бигармоническому диф-
дифференциальному уравнению; имеет место и обратное утвержде-
утверждение: всякая бигармоническая функция представима в одном из
трех видов:
fi + xf2, fi+yf-2, fi + (x2 + y2)f2, E.7.7)
где /ь /2 — некоторые гармонические функции. Для круговой
области косинусы пх, пу угла нормали с координатными осями
пропорциональны х, у; поэтому, записав теперь краевые усло-
условия в виде
d'U d2U v\x2 /4 о
ду2 дхду У аЦ\+у) \3 Х
нетрудно сообразить, что функцию U следует разыскивать в
форме бигармонического полинома не выше пятой степени. По
сказанному он представляется суммой гармонического полинома
пятой степени и произведения х (или у) на гармонический по-
полином четвертой степени; к этой сумме можно добавить любой
полином третьей степени (всегда, очевидно, бигармонический).
Оказывается достаточным принять
U = a41Y+v) lA (^5 ~ 10х3У* + ЪХ^ + ВХ ^ ~ 6^2 + У4) +
+ Ca2x5 + Dd2xy2}, E.7.9)
5 =,] ЗАДАЧА ЛШЧЕЛЛА 459
причем входящие в это выражение гармонические полиномы
равны вещественным частям (х + iyM, (x + а/L. Подстановка
в краевые условия E.7.8) приводит к системе пяти уравнений,
из которых одно является следствием прочих, так что оказы-
оказывается достаточным введения четырех постоянных. Получаем
v Г 1
24д A + v) L 5
- j{x5 - QxY + xif) - E + 2v) alt3 - A - 2v) alt/
и no E.7.6) выражения искомых напряжений (при учете также
напряжения а'х = — \х) будут
• [E + 2v) л;а2 - 3 A - 2v) ху2 - E + 2v) л:3],
12а2 A+v)
-T2^TTT^t"A~2v)^2 + Av)y3 + 3A+2v)^
[3A +2v)xa2-3(l +2v)xy2-(l -2v).t3].
E.7.10)
Распределение напряжений o°z по поперечному сечению по
E.6.1) представляется в виде
причем постоянная С] определена по условию E.1.10).
В точках поперечного сечения х = ± а, у = 0 напряжение oz
по E.7.3) оказывается равным
Второе слагаемое дает поправку, не учитываемую элементарной
теорией.
Такими же элементарными средствами может быть рассмо-
рассмотрена задача об изгибе тяжелого стержня эллиптического попе-
поперечного сечения; задача изгиба для него рассмотрена в п. 4.2,
функцию напряжений U следует задать в форме E.7.9), а в
записи краевого условия вида E.7.8) учесть, что пх, пц пропор-
пропорциональны х/а2, у/Ь2.
5.8. Средние значения напряжений. Средние значения на-
напряжений xzx, TyZ, ах, оу на отрезках, параллельных координат-
координатным осям, можно найти, не прибегая к решению краевых задач,
а основываясь только на статических соображениях.
Так, сославшись на системы уравнений E.1.14), E.1.17),
E.2.7) и соответственно на E.1.15), E.1.18), E.2.8) и повторив
460 ЗАДАЧА СЕН-ВЕНАНА [ГЛ. VI
рассуждения п. 4.1, получим в принятых там обозначениях
(рис. 37)
У-
It d и = h (т i = — п —-—-—!— I F A q A-
bzx UU u V lzjc/cp 4z с * I J z wo >
l/i Г,
\ E.8.1)
где Pi — дуга bca контура Г. Аналогично записывается выраже-
выражение среднего значения ху2 на отрезке, параллельном оси х.
Ниже требуется знание также среднего значения %\х по пло-
площади Q (х); имеем
дх + ду
где ]'у, jXy — момент инерции относительно оси х и центробеж-
центробежный момент инерции этой площади. С другой стороны, если
учесть E.1.18),
) d° - Iх «^+х>у)ds - J J т« d°=
Я
то, сославшись на E.8.1), получим
Ях Ян
1 do = ——(j — хх Q(х)) + —-(/ —xi/Q(x)) E 8 2)
fi(i» гХ 'у " 'х ХУ
Теперь по E.1.13), E.1.16) имеем
так что, применив E.8.2), приходим к такому выражению сред-
среднего значения напряжения ах на отрезке у.
xdy = b (x) {ах)ср =
= JFxds~^- AУ - xxaQ W) - -77 (!xv ~ ^«
Для поперечного сечения, симметричного относительно оси х,
в формулах E.8.1) — E.8.3) следует принять уп = 0, }ку = 0.
ЗАДАЧА МИЧЕЛЛА
461
5.9. О задаче Альманзи. Задачу о напряженном состоянии
в призматическом стержне, боковая поверхность которого на-
нагружена силами, полиномиально зависящими от осевой коор-
координаты г:
гхуПу =>FX =
?=0
"г Gyfty r у ^^ "k W/
E.9.1)
рассмотрел Альманзи A901). Она представляет естественное
продолжение задач Сен-Венана и Мичелла, а ее решение может
быть сведено к последовательности решений этих задач.
ГЛАВА VII
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
§ 1. Постановка плоских задач теории упругости
1.1. Плоская деформация. Наименование «плоская задача»
присвоено обширной и наиболее полно разработанной главе тео-
теории упругости. В ней рассматриваются вопросы, отличающиеся
по содержанию, но объединяемые математическим методом ре-
решения,— это задача о плоской деформации и задача о плоском
напряженном состоянии.
В задаче о плоской деформации рассматривается частное ре-
решение уравнений теории упругости, в котором перемещения и, v
предполагаются не зависящими от координаты х3 = z, тогда
как w не зависит от х, у, а его зависимость от z может быть
только линейной:
и = и{х,у), v = v{x,y), w = ez + w0. (l.l.l)
Очевидным следствием этих предположений является отсутствие
напряжений xzx, %yz
ди , dw \ n I dv , д
и, конечно, независимость от z остающихся компонент ах, оу, хху,
0Z тензора напряжений.
Обобщенный закон Гука при этих условиях записывается
в виде
( ди , dv \ о ^ v „ , 1 —
Здесь
л ди , dv I— 2v
§ lj ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ 463
причем последнее представление следует из двух первых соот-
соотношений закона Гука A.1.3). Заменив Oj этим значением, при-
приведем выражение а2 к виду
и этим задача определения az отодвигается на второй план, речь
идет о разыскании плоского поля напряжений ах, <т„, хху.
Плоская деформация реализуется в призматическом теле,
теоретически бесконечной длины, нагруженном поверхностными
и объемными силами, перпендикулярными оси г, интенсивность
которых не зависит от z. Тогда все поперечные сечения тела на-
находятся в одинаковых условиях, чем оправдывается задание
перемещений в форме A.1.1). Приближенно плоская деформа-
деформация осуществляется в удаленной от торцов средней части тела
конечного протяжения по оси г. Зависимость напряженного со-
состояния от z учитывается в постановке задач Мичелла и Аль-
манзи (§ 5 гл. VI), сводящихся к наложению задач Сен-Венана
и плоской.
Уравнения статики плоской задачи в объеме записываются
в виде
до г дтги дтги да,,
а на поверхности, иначе говоря, на контуре Г поперечного сече-
сечения тела,
axtix + ххупу = Fx, rxynx + Oytty = Fy. A.1.7)
Внешние силы — объемные и поверхностные, приложенные
к любой выделенной из тела двумя поперечными сечениями его
части, — должны находиться в равновесии. Это приводит к урав-
уравнениям равновесия, выражающим обращение в нуль их глав-
главного вектора
$ $pKxdo+§Fxds = 0, J J pKydo+ §Fyds = O A.1.8)
S Т S T
и главного момента относительно оси z
J J p (xKy - уКх) do + j(xFy - yFx) ds = 0. AЛ .9)
s г
Через 5 обозначена площадь поперечного сечения тела.
Уравнения A.1.8) легко получить, конечно, из уравнений
статики A.1.6), A.1.7) с помощью преобразования
S
J j
= ^ Fx ds + J j pKx do = 0,
464 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Аналогично можно прийти к уравнению моментов A.1.9):
S
= ¦§ (xFy - yFx) ds + f f p (xKy - yKx) do = 0.
г s
Этот же прием позволяет найти моменты нулевого и первого
порядков напряжений ах, ау. Имеем
дах
x2Fx ds + J| px2Kx do-2 J J xoxdo = 0,
xyFx ds + j J pxyKx do - J j (yox + xxxy) do = 0,
S S
§ \\ px2Kydo-2 J J xxxydo
T S S
Отсюда и из трех аналогичных равенств имеем
J J (о* + оу) do = j (xFx + yFy) ds + J J p (xKx+yKy)do,
S V S
\ I x (ox + oy) do = I j [(x2 - y2) Fx + 2xyFy] ds +
s г
= ~j [2xyFx + (y2 - x2) Fy] ds +
г
+ j {I p [2xyKx + (y2 - x2) Ky] do.
§ 1] ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ 465
Эти выражения позволяют определить через заданные объем-
объемные и поверхностные силы главный вектор и моменты напря-
напряжений а2 в поперечном сечении тела:
A.1.11)
R= | J azdo = v jj (ox + oy)do + ESe,
s s
*.«• = J J yazdo = v J J у (ax + ay) do + ESey0,
s s
гу = - J J xa2do-= - v J J x(ox + oy)do- ESex0,
где xq, г/о — координаты его центра тяжести.
Если закрепления торцов не создают продольной силы, то
R = 0, и этим определяется введенная в формулы A.1.1) по-
постоянная е; если же не допускается продольное смещение w,
то е = 0.
Формулы A.1.10), A.1.11) определяют силовые факторы—R,
—тх, —т.у простейших задач Сен-Венана (о растяжении и из-
изгибе парами), решения которых следует наложить на решение
задачи о плоской деформации призматического тела с ненагру-
женными торцами.
1.2. Функция напряжений Эри. Было показано в п. 1.6 гл. I,
что однородным уравнениям статики можно удовлетворять, вы-
выражая напряжения ах, ау, хху через одну функцию напряжений
[см. A.6.11) гл. I]. Этот результат легко получить и непосред-
непосредственно; действительно, каждое по отдельности из двух одно-
однородных уравнений статики
дох дхих дхх11 <Э(Тм
дх ^ ду U' дх + ду U 11'гл>
тождественно удовлетворяется с помощью функций
_ dqpi дф! . _ дфг _ дфг
°х~ ду ' %v*~ дх ' Т*у ~ ду ' °у~ дх
и условие тух = хху приводит к уравнению того же вида, что и
A.2.1):
дф! i ^Фг _ п
дх "f" ду
Поэтому, введя в рассмотрение новую функцию U(x, у) —функ-
—функцию напряжений Эри (Airy, 1862), имеем
dU dU
и отсюда приходим к основным соотношениям
_ d2U _ d2U __
°*~ ду2 ' Хх«~ дхду ' °У~
30 А. И. Лурье
466
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
Конечно, они легко проверяются подстановкой в A.2.1). На-
Называя еще а°х, хху, а°у (не зависящие от z) частные решения
уравнений статики A.1.6), определяемые действием объемных
сил, имеем
о . д*и п 1
°У = °1 +
лапласиан по двум перемен-
переменЗдесь и далее V2 обозначает
ным х, у.
1.3. Дифференциальное уравнение для функции напряжений.
Далее предполагается, что частное решение а°х, т° о0 не только
статически возможно в объеме, но и реализуемо в упругом теле,
то есть удовлетворяет зависимостям Бельтрами, причем о^ оп-
определяется соотношением A.1.5), a x°xz = х° = 0.Тогда (здесь и
во всем последующем опускаем постоянную е) сумма нормаль-
нормальных напряжений будет равна
и эти зависимости по A.5.7) гл. IV запишутся в виде
дх ду
dx
A.3.2)
)
причем последнее уравнение является следствием двух первых.
Остается потребовать, чтобы функция Эри удовлетворяла од-
однородным зависимостям Бельтрами. В них теперь
0 = (l + v)V2(/. A.3.3)
Это дает условия
приводящие к единственному уравнению
A.3.4)
ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ
467
Итак, функция напряжений Эри удовлетворяет этому диффе-
дифференциальному уравнению четвертого порядка, называемому би-
гармоническим. Оно однородно при выборе частного решения,
удовлетворяющего уравнениям статики в объеме и зависимо-
зависимостям Бельтрами.
1.4. Плоское напряженное состояние. Объемные и поверх-
поверхностные силы и в этом случае перпендикулярны оси г (Kz = О,
Fz = G). Предполагается, что частное решение, соответствующее
действию объемных сил, реализуемое в упругом теле, известно.
Поэтому в дальнейшем рассмотрении объемные силы не учиты-
учитываются.
Рассматривается напряженное состояние, в котором отсут-
отсутствуют напряжения на площадках, перпендикулярных оси z:
A.4.1)
хг, = \
xyz = О, ог = 0.
Оно называется плоским напряженным состоянием. Конечно, од-
однородные уравнения статики в объеме записываются в виде
A.2.1), и им можно удовлетворить введением функции напря-
напряжений Эри
_d4J_ _ d2U _ d2U ,. .
°х~ ду2 ' Х*У~ дхбу' аУ~ дх2 - \\Л.1)
Однако ни откуда не следует, что эта функция, значит и на-
напряжения, не зависит от г. Действительно, зависимости Бель-
Бельтрами теперь следует записать в виде
V2^ +
ду2 ^
- V2
д2и
дх ду
d4U
dz2 ду2
д*Ц .
дг2 дх2 + "
д*Ц
дг2 дх ду
1 дг
1 + v ду дг
1_ д2
1+v дгдх
_J clf_
1+v dz2
1 + v дх2
1 д2
v ду
= 0,
д2
~ 1+v дх ду
42U = 0,
v2t/ = о,
v2u = о.
v2t/ = о,
A.4.3)
Сложив первое и второе уравнения и учитывая шестое, не-
нетрудно увидеть, что и в плоском напряженном состоянии функ-
функция напряжений является бигармонической по переменным х, у.
(? ?) A.4.4)
Три последних уравнения A.4.3) дают
у),
A.4.5)
30*
468 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
где с — постоянная, а(х, у)—гармоническая функция. В рас-
рассмотрение вводится бигармоническая функция U\(x,y), лапла-
лапласиан которой равен а(х, у):
По A.4.5) получаем теперь
U (х, у, г) = \ cz (х2 + у2) + С/, (х, у) + Ь {х, у, г), A.4.6)
лричем Ъ — функция, гармоническая по х, у. Подстановка в три
первых уравнения A.4.3) дает соотношения
д2а1 д2а d4b n
_
ду2 + 1 + v дх2 "•" дг2 ду2
д2а .1 д2а дЧ
дх2 ' 1 + v ду2 ' дг2 дх2 '
д2а у д*Ь ^0
дх ду 1 + v 5г2 5л 5г/
Из них, учитывая, что д2а/дх2 = — д2а/ду2, имеем
где т", «", р" — произвольные функции z. Отсюда находим
b (x, y,z) = - 2(^v) а (х> У) + zU2 (х, у) + U3 (х, у) +
+ m(z)x + n(z)y + p (z),
где U2, U3 — гармонические функции. Подстановка в A.4.6) те-
теперь приводит к выражению
U (х, y,z) = \ cz (x2 + у2) + U, (х, у) - 2(^v) V2t/, (x, у) +
+ zU2{x, y)+ U3(x, у) + т{г) х + n(z)у + р (г),
в котором U3(x, у) можно включить в состав бигармонической
функции Ui (x, у), а группу слагаемых
т (z) х + п (z) у + р (г)
отбросить, не меняя напряженного состояния. Приходим к та-
такому выражению функции напряжений:
U (х, у, г) = t/, (х, у) - у^у- V2a, (х, у) + zU2 {x, у) +
cz(x + y), A.4.7)
причем Ui — блгармоническая, U2 — гармоническая функция:
V2V2f/, (х, у) = 0, V2U2(x, у) = 0. A.4.8)
§11
ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ
469
Здесь определен общий класс напряженных состояний, удовле-
удовлетворяющих условиям A.4.1), уравнениям статики A.2.1) и за-
зависимостям Бельтрами A.4.3).
Напряжения оказываются квадратично зависящими от z.
Поэтому плоское напряженное состояние реализуемо в упругом
теле лишь при условии, что и силы на его боковой поверхности
распределены по такому же закону.
1.5. Обобщенное плоское напряженное состояние. Через 2/г
назовем размер тела по оси z и вместо U\ введем в рассмотре-
рассмотрение также бигармоническую функцию Ф(х, у):
A.5.1)
Теперь, предполагая еще, что напряженное состояние в теле
симметрично относительно срединной плоскости тела 2 = 0, так
что U2 = 0, с = 0, можно переписать соотношение A.4.7) в виде
A.5.2)
2A+у) \ 3
Напряжения, определяемые по формулам A.4.2), оказы-
оказываются равными
<Э2Ф , у
3
д2Ф
dtf
•¦ + 2A+у)
а2Ф у
I h2 Л
I 3 Z )
дх2
дхду 2A+у)
/ h2 2\
\ 3 Z )
дх ду
A.5.3)
В дальнейшем предполагается, что тело представляет пла-
пластинку толщины 2/г, малой по сравнению с ее размерами в
плане. Это позволяет принять, что ее напряженное состояние
с достаточной точностью может быть описано заданием средних
по толщине значений напряжений
л л л
¦— fa dz x =— ft dz a =— fa dz A5 4)
2/г 2/г J У 2/г _J
-h
-h
-^-z2 \dx = 0,
Тогда, заметив, что
-ft
придем к следующим выражениям этих средних значений:
. о\.
- =
ау
470 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Эти формулы определяют так называемое обобщенное плоское
напряженное состояние. Конечно, поверхностные силы также
должны быть осреднены по толщине пластинки:
ft л
Fx (s) = ^ \ Fx (z, s) dz, Fy (S) = l J Fy (z, s) dz. A.5.6)
-ft -h
Обобщенный закон Гука при отсутствии напряжений xzx, %yz,
az записывается в виде
ди \ , ,
dtp
dw
-4
г '
_ 1
_1
dw
dx
Ox),
+ <*y)>
_ dv
dz
, dw
dy
= 0
A.5.7)
и для определения средних по толщине значений перемеще-
перемещений и, v служат формулы
da _ _1_,- _ _ ч dv_ __]_/-_ - \ дй_ , _3?_ _ J_ - ,. rm
dx Е * ¦*. у" dy E \ У х'г dy ' dx p w \ ' ' '
Далее по третьему соотношению A.5.7) находим, используя
также A.5.4), разность значений w(x, у, ±h) на верхней и ниж-
нижней сторонах пластинки — изменение ее толщины:
w(x, у, h) — w(x, у, — Н) = — t__ Gf~ + -g—) = ~ . _ ¦&. A.5.9)
Остающиеся уравнения A.5.7) определяют разности значений
и, v на сторонах пластинки через производные по х, у среднего
значения w(x, у), но последнее остается неизвестным.
1.6. Плоская задача. В обозначениях осредненных по тол-
толщине величин, описывающих обобщенное плоское напряженное
состояние, далее отбрасываются черточки, а для функции на-
напряжений вместо Ф принимается обозначение U. Тогда фор-
формулы в п. 1.5 переписываются в виде
\ 1.0.1
ду у дхду У дх2
ди 1
> lJ
V
du J
dy
<v
, dv
r~dx
dx dy ' °!
dv 1 /
— у xxy
v dx2 '
V
У 1+v
§ Ij ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ 471
В случае плоской деформации формулы A.6.1) сохраняются,
но обобщенный закон Гука по A.1.3) и A.1.4) записывается в
виде (при е = 0)
ди 1 / ч dv 1 , > ди , dv 1 ,. а „ч
ir = ^r(cT,-va)> — = —(ay-Va), — + — = -Xxy, A.6.3)
причем здесь, как и в A.6.2), введено обозначение
Gx + Gy = G. A.6.4)
Из сопоставления этих записей следует, что, имея решение
задачи о плоской деформации, можно получить при замене обо-
обозначения
v на -^ A.6.5)
решение соответствующей (при том же законе объемных сил и
при одинаково сформулированных краевых условиях) задачи
об обобщенном плоском напряженном состоянии*). В том и
другом случае речь идет об одной и той же бигармонической
краевой задаче, называемой плоской задачей теории упругости,
иногда плоской теорией упругости (plane elasticity).
Конечно, содержание этих задач различно. В первом случае
речь идет о состоянии в призматическом теле достаточно боль-
большой длины, а во втором — об осредненном напряженном со-
состоянии в тонкой пластинке. В' первом случае отсутствует (или
постоянно) относительное удлинение е2, но имеется напряже-
напряжение <tz, во втором az = 0, но не сохраняется толщина пластинки
(ггФ0).
В последующих рассмотрениях задач для плоских областей
имеется в виду (при отсутствии оговорок) случай плоской де-
деформации. Слово «обобщенное» при рассмотрении обобщен-
обобщенного плоского напряженного состояния опускается.
В дальнейшем не имеющий значения размер по оси 2 при-
принимается равным единице длины.
1.7. Перемещения в плоской задаче. Определение перемеще-
перемещений и, v сводится к интегрированию системы уравнений A.6.3),
в которых напряжения заменены их выражениями A.6.1) через
бигармоническую функцию напряжений Эри U(x,y). Эта си-
система трех уравнений, содержащая две неизвестные функции,
интегрируема, поскольку выполнены эквивалентные условиям
сплошности зависимости Бельтрами.
*) В случае тепловых напряжений это правило несколько усложняется,
так как в формулировку закона Гука вносятся новые слагаемые, зависяпше
от v. См. п. 5.8 этой главы.
472
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
Через s обозначается гармоническая функция V2U, а сопря-
сопряженная с s гармоническая функция — через t:
п9тт ds dt ds dt , ?, . , . . .
V2t/ = s; -3— = -3—> -3— = —5—'. s + it = Hz), z = x + ш *), A.7.1)
dx ay dy dx 1 \ /> v n \ 1
и рассматривается функция комплексного переменного, вводи-
вводимая как неопределенный интеграл над f(z) **):
S(х, у) + IT(x, y) = F(z)=lf(z)dz.
A.7.2)
Заметим, что / определено по s с точностью до веществен-
вещественной аддитивной постоянной (обозначаемой соо); поэтому F(z)
определено с точностью до аддитивно входящей линейной
функции
Имеем по A.7.2)
— = HL = f(\— 7 - dS ¦ дт
dx dz dx dx '
^ = ,-^ = ;f^ = ;._,_ 5S • • дт
dz
.7.3)
dy
и поэтому
dS
dT
dx dy ' dy dx
- t.
A.7.4)
Это позволяет заменить A.6.3) уравнениями
dy 2ii[dx!l
du__i_dv_
dy дх
Отсюда находим
2ц dy
dy
A.7.5)
dx dy '
и подстановка в третье уравнение A.7.5) с учетом A.7.4) дает
*H0, ft(*/)=-<o0, f2'(x) = (oo = const,
*) В рассмотрении плоских задач нет опасности смешения z = х + iу
с z = Хз-
**) Ниже, в соответствии с обозначениями Н. И. Мусхелишвили, F(z)
заменено на 4ф(г).
§П
ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ
473
так как сумма функций от х и у может быть нулем, если они
постоянны (и противоположного знака). Приходим к искомым
выражениям перемещений
причем слагаемые вида A.7.3) представляют перемещение твер-
твердой плоской фигуры в ее плоскости: («0, ^о) — проекции пере-
перемещения какой-либо ее точки, ©о — малый угол поворота во-
вокруг оси х3. В плоском напряженном состоянии v заменяется
по правилу A.6.5), так что
A.7.7)
)
1.8. Главный вектор и главный момент. В плоском поле тен-
тензора напряжений
f = WlOf, + hkOy + (М2 + Ml) Tjt» A -8.1)
рассматривается дуга /; единичные векторы нормали к ней п
и касательной t (в сторону возрастания дуги s) ориентированы,
как оси х, у декартовой системы. Тогда произведение
n-T=F
A.8.2)
представляет распределение поверхностных сил, действующих
со стороны среды, расположенной «над» кривой (в части пло-
плоскости, куда направлен вектор л), на среду «под» ней. По
A.8.1), A.8.2) имеем
Fx = я • f • i, = ахпх + ххипу =
дгУ dy . d2U dx
ду2 ds > дх ду ds
= ххупх
d*U - ду
дх ду ds
dx
ds
d
ds
d
ds
dU
dy
dU
dx
I A.8.3)
Отсюда получаем выражения проекций на оси х, у главного
вектора этого распределения сил на дуге / от начальной ее
точки (s = 0) до рассматриваемой M(s):
s
I
dU
дх
A.8.4)
474 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Его главный момент относительно начала координат (относи-
(относительно оси хг) равен
или
m°=U + xQ-yP. A.8.5)
В этих формулах отброшены не имеющие значения адди-
аддитивные постоянные интегрирования; их удержание внесло бы
в выражении U линейную функцию координат, не влияющую на
напряжения.
Формула A.8.5) может быть записана также в виде
U = tn°-xQ + yP = mM, A.8.6)
где tnM — главный момент относительно точки M(s) дуги / рас-
распределения сил F на этой дуге (от ее начальной точки Мо до
конечной М).
1.9. Ортогональные криволинейные координаты. Называя че-
через в\, е2 единичные векторы касательных к координатным ли-
линиям [^'J, [q2], имеем вместо A.8.1)
f = ахехех + о2е2е2 + (ехег + е2е{) т12 A.9.1)
и, сославшись на A.6.10) гл. I, а также на (III. 3.9), (II. 4.14):
после вычисления с использованием формул (III. 4.8) найдем
1 д dU . д\пН2 dU
0,=
1 Я2 dq2 Я2 dq2 ~ Я, dqx Я, dq
1 д dU , 3 In Я, dU
<г,=
2 ~ Я, б?1 Я, а<?' п Я2 d</2 Я2 dq2 '
d2U , din Я, at/ , <Э1пЯ, 5f/
l2 ~ ~ ~H~Jh dq1 dq2 + Я2 dq2 Я, dq1 + Я, dq1 Я2 dq2 ' J
A.9.2)
Следствием этих соотношений служит выражение суммы нор-
нормальных напряжений, определяющей лапласиан над U [см.
(III. 5.5)]:
§ I] ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ 475
Уравнения равновесия записываются по A.9.2) гл. IV; мож-
можно проверить, что они при отсутствии объемных сил тождествен-
тождественно удовлетворяются значениями напряжений A.9.2). Формулы,
выражающие связь компонент тензора деформации с вектором
перемещения, имеют вид (III. 5.9):
__ dui , «2 д 'п Н\ ди2 . ti\ д In H2 ]
ЁП~ Hldql Ж dq2 ' *22 = Н> dq2 ~^ dql ' \ A.94)
__ <3ц, . ди2 _ и, д In Нх _ и2 д In Н2 [ \ • '
'12 H2dq2 H\dq^ H2 dq2 Ht dq1 ' j
1.10. Полярные координаты на плоскости. В этих координа-
координатах, обозначаемых г, 0, уравнения равновесия принимают вид
[см. A.9.4) гл. IV]
да. а. — <т„ <Эт.
re
- "Г f>A r = и,
2т AЛ0Л)
АТгв , л^ 0
гд% ' дг ' г
и их нетрудно получить непосредственно, рассматривая силы,
действующие на элемент среды, выделенный радиусами 0, 0 -f
+ dQ и окружностями г, г + dr. Выражения напряжений через
функцию напряжений, тождественно удовлетворяющие однород-
однородным уравнениям равновесия, представляются в виде
d2U , 1 dU дЧ! д 1 dU ,, 1ППЧ
Компоненты деформации даются формулами
а«г а«е «г а«
zr=~w ев = Тдв+ — ' Ъв--дГ
1.11. Представление бигармонической функции. Конечно,
гармоническая функция является также и бигармонической. Не-
Непосредственной проверкой легко установить, что функции
4ь у! 2, (x2+y2)f3,
где fi(x,y)—гармонические функции, удовлетворяют бигармо-
ническому уравнению. Достаточно для этого вспомнить выра-
выражение лапласиана произведения (II. 4.20):
г|зУ2ф + 2V<p • Уг|з.
Поэтому, например,
476 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
и, далее,
( &
V4 (х* + у2) h = 4V2 (х &¦ + у &¦) = 8V*f3 = О,
что и требовалось.
Из сказанного следует, что
xfi + f*. yh + h, (x2+y2)h+h; v2f, = o (/=1 6), (l.ii.i)
являются бигармоническими функциями; ниже станет ясным и
обратное предложение: любая бигармоническая функция пред-
ставима в одном из этих видов (см. замечание в п. 1.14).
Покажем, например, что бигармоническая функция xfi + у\ъ
представима в первом из указанных видов. Достаточно для
этого ввести в рассмотрение гармоническую функцию f3> свя-
связанную с /г условиями Коши — Римана
Ёк^Ёк Ml= -Ik
дх ду ' ду дх '
Теперь, приняв обозначения f4 = yf2 — xf3, f, + f3 = f*, причем
f4 и fj— гармонические функции, имеем
xf, + yf2 = x (f, + f3) + (yf2 - xf3) = xf| + f4,
что и требовалось.
При решении плоских задач в декартовых координатах гар-
гармонические функции часто выбираются в форме однородных
гармонических полиномов, равных вещественной (Re) или мни-
мнимой части (Im) степеней z = х + iy.
Rezre, 1тгге. A.11.2)
Поэтому однородный бигармонический полином (п+1)-й сте-
степени представим в видах
С,* Re zn + C2 Re zn+\ Сгу Im zn + C4 Im гл+\
и т. д. Конечно, любой полином ниже четвертой степени — би-
бигармонический.
При использовании полярных координат, заменив комплекс-
комплексное переменное z его выражением через модуль и аргумент,
приходим к представлениям бигармонических функций
Само собой разумеется, что сказанным не исчерпывается много-
многообразие решений бигармонического уравнения.
1.12. Введение комплексного переменного. За независимые
переменные, вместо декартовых координат, принимаются
= x~iy [x=j{z + z\ у = -^ (z - г) j. A.12.1)
§ 1]
ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ
477
Вообще во всем последующем черточкой над буквой обозна-
обозначается переход к комплексно-сопряженной величине. Например,
обозначение ф (г) выражает, что в функции ф (z) совершен пере-
переход не только от г к г, но все прочие комплексные величины,
входящие в ф(г), например коэффициенты ряда Тейлора этой
функции, заменены сопряженными величинами. Через <p(z),
в соответствии с этим правилом, обозначается ф(г) и т.д.
Рассматривая теперь U(x,y) как функцию от z, 2, зависи-
зависимую от этих переменных через посредство х, у, приходим к пра-
правилам дифференцирования
<UL-A*L<!L.-x-AILJ!]L-L(A -АЛ и E1L = L(A 1 • д \
дг дх дг + ду дг ~ 2 \ дх 1 ду ) U' дг 2 \ дх +г ду )
A.12.2)
и, обратно,
дх
дг
ду
дг
дг
A.12.3)
Следствием этих формул являются выражения вторых про-
производных, лапласиана и бигармонического оператора:
дх2
-(¦
д2
дг2
+ 2
д2
дгдг ^ дг2
ду2
d2U
дх ду
V4U = 16
dzdz
дгдг
дг2 дг2 '
A.12.4)
1.13. Преобразование формул плоской задачи. Следствием
формул A.12.4) служат следующие выражения векторов напря-
напряжений на площадках, перпендикулярных осям *):
Их следствием, дающим более компактные выражения для вы-
вычисления напряжений, служат формулы Г. В. Колосова
d*U ¦ "'¦ =4^"- A-13.2)
Единичный вектор нормали к дуге / может быть представлен
комплексным числом
_ 4- / = — — / -^- — — " -^L
CIS uS US
A.13.3)
*) Далее векторы на плоскости задаются комплексными числами.
478 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ (ГЛ. VU
и вектор напряжения на площадке с нормалью п представляется
в виде
Fx -I- iFу = п • Т = (oxfix "t" хХуПу) -\-1 (хХуПх + ОуПу) =
= у [(Ojc + itXy) (п + п) + (о у — ixxy) (п — п)} =
1 г/ s / м -,
= "о" К^ж + Су) « + (C.v — О у + 2lXxy)\ n]
или, если сослаться на A.13.2),
<Э2?/ <Э*?/ П
<Эг<Эг rfs ' 5г2 й ) '* rfs dz ' v*-*"-"»/
Отсюда приходим к следующему представлению главного век-
вектора поверхностных сил на дуге I, соответствующему форму-
формулам A.8.4):
•fds=-2i~ = ^--i^r. A.13.5)
Главный момент этих сил на дуге / относительно начала коор-
координат по A.8.5), A.13.5) записывается в виде
В полярных координатах векторы напряжения на дуге кру-
круга и на площадках вдоль радиусов представляются соответ-
соответственно выражениями
ег-Т = етат + евтгв, ев-Т = егхгв + евав.
Но эти векторы ег, ев задаются комплексными числами
Поэтому, вернувшись к A.13.4), приходим к таким выражениям
векторов напряжений:
ИЛИ
A.13.7)
§ 1] ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ 479
Отсюда приходим к таким представлениям формул Г. В. Коло-
Колосова;
°г + 0е = 4 4ш' °е-ог + 21хгв = 4 -^ е™ = (с, - ох + 2ixxy) e™.
A.13.8)
Конечно, их можно было получить, перейдя к выражениям ком-
компонент тензора напряжений в системе осей, повернутых на
угол 0 относительно исходной декартовой системы.
Эти формальные преобразования закончим формулой для
вектора перемещения; сославшись на A.12.2), A.7.6) и введя
обозначение
, A.13.9)
имеем
2ц (и + to) = 4 A - v) ф (z) - 2 ^г- + 2ц («0 + iv0 + г<о0г) A.13.10)
или, в полярных координатах,
2ц (иг + шв) = е~ш [4 A — v) ф (г) — 2 -^-1 + 2це~ю (щ + iv0)+2ц/ш0г.
A.13.11)
1.14. Формула Гурса. Эта формула дает представление би-
гармонической функции через две функции комплексного пере-
переменного. Исходными служат соотношения A.12.4) и A.13.9):
= 4 wk' v2u + it = V B)>
Из них получаем
^ ^ Ф'(г) + ф'B), A.14.1)
и интегрирование по z, вводящее аддитивно входящую функ-
функцию от г, обозначаемую х'(г), дает
Еще одно интегрирование приводит к искомому представлению
2U = ар (г) + 2ф (г) + х (г) + х (г). A.14.2)
Внесенная справа при этом интегрировании по z функция равна
x(z), так как U — вещественная функция.
Все формулы предшествующего пункта легко выразить те-
теперь через функции фB), %{z). При этом используются упро-
упрощающие записи обозначения
jc'(z) = *(z), V(z) = 4(z). A.14.3)
480 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Приходим к основным соотношениям для напряжений
ах + оу = 2 [Ф' (г) + ф' (г)] = 2 [Ф (г) + Ф (г)] = 4Re Ф (г), 1 ,
ау-ах+ 2ixxy = 2 W (z) + г|/ (z)] = 2 [гФ' (z) + ? (z)] )
и для вектора перемещения
2ц (и + iv) = C - 4v) ф (z) - 2ф' (z) - if (z) + 2ц (м0 + *0О + /©„г).
A.14.5)
Отметим еще формулы
ох + ixxy = Ф (z) + Ф (z) - гФ' (г) - ? (г), \
— ( A.14.6)
P + iQ=-i [ф (z) + гф' (г) + if (z)], т° = Re [x (z) - zij3 (z) - 22Ф' (г)],
A.14.7)
а также соотношение
2ц (и + iv) = 4 A - v) ф (г) - J (Р + /Q) + 2ц (м0 + н>0 + гшог). A.14.8)
Представления в полярных координатах имеют вид
аГ + ft* = Ф (г) + Ф (z) - гФ' (z) - 4 ^ (г), ое - fr,e =
A.14.9)
ar + ae = 4ReФB), ае-аг + 2/тгв =
Функция x(z) входит лишь в выражение момента пг°; ее
знание чаще всего излишне. Поэтому часто оказывается ненуж-
ненужным и разыскание функции напряжений; напряженное состоя-
состояние и перемещения в плоской задаче целиком определяются
двумя функциями комплексного переменного <p(z), 1KB) и их
производными. Систематическое применение этих функций к ре-
решению краевых задач плоской теории упругости принадлежит
Н. И. Мусхелишвили; далее они называются функциями Мус-
хелишвили.
Изучение аналитического характера функций Н. И. Мусхе-
Мусхелишвили проводится в § 5 этой главы; в §§ 2—4 рассматри-
рассматриваются решения задач, не требующие применений теории функ-
функций комплексного переменного.
Проекция на ось xs вектора поворота ю, называемая поворо-
поворотом е, определяется по формуле
\ ( dv ди\ 1 17 д . д \ .( д д
^&e( [(+)vl(
§ 1) ПОСТАНОВКА ПЛОСКИХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ 481
и по A.14.5):
A.14.10)
Замечание. Полагая в формуле Гурса A.14.2)
<p(z) = Р + iq, Rex(z) =Л
имеем
U = хр + yq + г,
и это общее представление бигармонической функции преобра-
преобразуется к одному из видов
U = 2хр + (yq -xp + r) = 2yq + (хр - yq + г),
причем величины в скобках — гармонические функции. Приняв
же в формуле Гурса
<p(z) = z<p,(z), Req>i{z) = pi,
получим
U = 4^[Ф, (г) + ф, (г)] + г = (х2 + y2)Pl +г.
Этим подтверждается, что всякая бигармоническая функция
представима в одном из видов A.11.1).
1.15. Перенос начала координат. При параллельном пере-/
носе координатной системы в точку z — с,
z = z, + с, Zi = xi + iyu A.15.1)
новые значения функций Мусхелишвили обозначаются ()
^1B:1). Компоненты тензора напряжений остаются при этом
неизменными. Поэтому согласно A.14.4) имеем
Ф (г) + Ф (z) = Ф, (z,) + Ф, B,), гФ' (z) + V (z) = г,Ф; (z.) + V, B,).
A.15.2)
Отсюда следует
[Ф, (z,) - Ф (z, + с)] + [Ф, (г,) - Ф (z, + с)] = 0,
и можно удовлетворить этому соотношению, приняв
Ф^гО — ФB! + с) = /а,
причем а — вещественная постоянная; ее можно принять рав-
равной нулю, так как добавление чисто мнимой постоянной к вы-
выражению Ф1(^1) не влияет на напряжения и вносит лишь сла-
слагаемое, соответствующее перемещению фигуры как твердого
тела, в выражение вектора и + iv. Итак,
Ф,(г,) = Ф(*1 + с), <pi(z,) =<p(z,+ с). A.15.3)
Обращаясь теперь ко второму соотношению A.15.2), имеем
W,(Z,) = V(Z, + С) + (z, + С)Ф'B!1 + С) ~zM{Zi),
31 А. И. Лурье
482 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
так что по A.15.3)
^ 1 (zi) = ^ (zi + с) + сФ' (zi + с), ijj, (zi) == ¦ф (z; + с) + сФ (z, + с).
A.15.4)
§ 2. Балка и брус с круговой осью
2.1. Постановка плоской задачи о балке и плите. Рассматри-
Рассматривается обобщенное плоское напряженное состояние в прямо-
прямоугольной полосе длины / и высоты 26 @ < х < /, —6 < у < 6).
Принимается, что 26 <С /, и это делает приемлемой, в соответ-
соответствии с принципом Сен-Венана, допустимость точного выпол-
выполнения краевых условий только на длинных сторонах у = ±6
прямоугольной области и замену распределения поверхностных
сил на коротких сторонах (х = О, х = I) статически эквива-
эквивалентным распределением — продольной и поперечной силами Р,
Q и изгибающим моментом \i. Поперечное сечение балки пред-
представляет прямоугольник толщиной h и высотой 26, причем
h <С 6, что позволяет ограничиться рассмотрением средних зна-
значений напряжений и перемещений по толщине балки. Принятая
постановка задачи применима также к задаче о плоской дефор-
деформации плиты, теоретически бесконечно протяженной по оси х3,
когда закон нагружения ее граней у = ±Ь, х — 0, х = / не за-
зависит от х3. Размер по оси х3 не фигурирует в дальнейшем изло-
изложении, он может быть принят равным единице длины. Переход
к формулам задачи о плите от формул рассматриваемой далее
задачи о балке осуществляется в соответствии с правилом A.6.5)
путем замены
v на v, = y^. B.1.1)
При этом, поскольку значение модуля сдвига ц в этом пе-
переходе сохраняется,
В дальнейшем продольные стороны балки у = 6, у = —6 на-
называем верхней и нижней, а поперечные сечения х = 0, х = / —
торцами (левым и правым).
Условия нагружения сторон балки записываются в виде
у= - b: оу= - У" (х), х
ху
= - Х~ (х), J
где функции Х±(х), У±(л:) заданы при 0 < х < /. Следуя при-
принятому в строительной механике приему разложения нагрузки
БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ
483
на симметричную и кососимметричную части, введем в рас-
рассмотрение функции
т, (х) = 1 [Х+ (х) + Х~ (х)], т2 (х) = ~ [Х+ (х)-Х~ (х)}, ]
1 , B-1.4)
°i W = | [^+ W - Y- (х)}, о2 (х) = 1 f Y+ (x) + Y~ (ж)}. J
Это позволяет разбить задачу на две, называемые далее зада-
задачами А и Б:
А
Б
у= ± Ь:
оу = а, (х),
ау=±а2 (х),
хху = ± т, (*),
B.1.5)
Наложение решений этих задач приводит, что нетрудно прове-
проверить, к задаче с заданными краевыми условиями B.1.3).
\У
б,Сх)
62{x)
dtiUit
бг(х)
Рис. 38.
В задаче А нормальные поверхностные силы на верхней и
нижней сторонах имеют противоположные направления (растя-
(растяжение по оси у при ai > 0), а касательные — одинаковые на-
направления (растяжение по оси х при ti > 0). В задаче Б нор-
нормальные поверхностные силы на верхней и нижней сторонах
направлены одинаково (вверх, то есть по оси у при Стг > 0),
а касательные — противоположно (при у — Ь, тг > 0 — вправо).
В задаче А перемещение и четно, v нечетно по у; конечно, и не-
нечетно, a v четно по у в задаче Б. Задачу А следует назвать
задачей растяжения, а Б — изгиба (рис. 38).
Система поверхностных сил на части балки @, х) статиче-
статически эквивалентна продольной и поперечной силам
B.1.6)
Р (х) = J [Х+ (х) + Х~ (х)] dx = 2$xl (x) dx,
о о
Q(x)= j[Y+ (x) + Y~ (х)} dx = 2 J a2(x) dx
484 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
и изгибающему моменту относительно точки (х, 0)
= -2 J {x-l)a2(l)dl-2b (x2(l)dl. B.1.7)
о о
В частности, на правом торце
i i
= 2 J e2(x)dx,
B.1.8)
li(Q= - /Q + 2 J Io2(l)dl- 2b J x2(x)dx,
о о
и чтобы сделать этот торец свободным от нагружения в смысле
Сен-Венана, надо приложить к нему силы —РA), —Q(l) и мо-
момент —(х(/).
2.2. Плоская задача Сен-Венана. Предполагается, что про-
продольные стороны у = ±Ь свободны от нагружения, а поверх-
поверхностные силы на правом торце статически эквивалентны про-
продольной силе Р, поперечной силе Q и изгибающему моменту ц.
В задаче о растяжении продольной силой отлично от нуля
и равномерно распределено по высоте полосы напряжение ах,
тогда как оу = 0, хху = 0. Функция Эри представляется про-
простейшим выражением
[/А = ^-г/2. B.2.1)
Приложение положительного (вращающего от оси х к оси у)
изгибающего момента ц создает только напряжения ох, сжи-
сжимающие на верхней части полосы (у > 0) и линейно распреде-
распределенные по высоте. Сославшись, например, на A.4.6) гл. VI,
имеем
где / — момент инерции поперечного сечения относительно оси
х% (при единичном размере по толщине). Поэтому
Более сложна задача изгиба поперечной силой Q, прила-
прилагаемой на правом торце. Тогда
Q (/ - х) дхху _ ^ дох 0^ дву_ дхху
<*х ~ ~ i У' ду дх ]-У> ду - дх >
§ 2] БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ 485
и можно удовлетворить этим уравнениям и краевым условиям
отсутствия напряжений хху и ау на продольных сторонах у =
= ±Ь, приняв
Этим значениям напряжений удовлетворяет бигармониче-
ская функция напряжений
) B.2.3)
Сославшись на формулы п. 1.7, имеем
так что
и перемещения оказываются равными
Е1и=-%\A + \)у\Ьг—^) — 21ху + хгу—г-г/3 +?7(м0—<йо«),
B.2.4)
+ EI(vo+e>ox).
Постоянные ы0, v0 находим из условий обращения в нуль пере-
перемещений в точке @, 0); для определения щ полагаем, как ука-
указывалось в п. 2.2 гл. VI,
-3—1 =0 или 1-3- =0
Ях /ад \ ду /оо
— первый случай соответствует заделке примыкающего к точке
@, 0) элемента dx на оси балки, а второй — заделке элемента
dy в поперечном сечении. Уравнение упругой линии, находимое
по второму уравнению B.2.4) при у = 0, будет
v (х, 0) = A-(/r» _ f)+ [А *], B.2.5)
где слагаемым в квадратной скобке, добавляемым при втором
способе заделки, учитывается влияние касательных напряже-
напряжений на прогиб. Значение этой поправки можно характеризо-
характеризовать величиной ее отношения на конце балки к прогибу конца,
вычисляемому при заделке первым способом:
0 i qj3 ^2
-f-: w = 3(l + v)ir. B.2.6)
486 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Применимость принципа Сен-Венана предполагает, как указы-
указывалось, малость отношения b/l; поправка в прогибе на влияние
касательных напряжений пропорциональна квадрату этого от-
отношения — это обычный порядок коррективов, вносимых в тех-
техническую теорию балки.
2.3. Операторное представление решений. Этот простой спо-
способ записи решений задач математической физики для полосы
|у|^& проще всего пояснить на примере уравнения Лапласа
B.зл)
Его решение разыскивается в форме степенного ряда по у
F= 7, u2sf (x\A- У ti2s+lf (y\*\ (9 4 9\
г — ^j У I2s\x)^ ^-i У I2s\x) )¦ \z.o.z)
s=0 s=0
Подставив его в B.3.1), после перегруппировки получим
оо
" У2$ ld2f2s (x) + Bs + 1) Bs + 2) f2s+2 (x)] +
CO
+ 2 y2s+1 {dT2s I*) + Bs + 2) Bs + 3) f' Ш = 0
s=0
s=0
и, приравняв нулю коэффициенты при y2s, y2s+1 для s = 0, 1, 2,...,
приходим к цепи равенств
д% (х) + 1 • 2f2 (х) = 0, д% (х) + 2 • 3f$ (x) = О,
a2f2 (х) + 3 • 4/4 (х) = 0, д% (х) + 4 • б? (л) = О,
a2^2s (х) + Bs + 1) Bs + 2) /2s+2 (x) = 0, d2f'2s (x) + Bs + 2) Bs + 3) f2s+2 (*) = 0,
позволяющих выразить все коэффициенты ряда B.3.2) че-
через fo(x), f'u{x), то есть через значения искомого решения
F(x,y) и его первой производной по у на прямой у = 0 (на оси
полосы):
( — IV f IVs
f (y\ — !^_LL A2sf (у) f (r\—^AZLLL—fl2sff (у\ /О q o\
'2s \л-' Г9.«1 I /qW' '2s '¦A-' Г9с x ПI " /oV-V- V^.O.o;
Итак,
!№W ^^^]. B.3.4)
5=0
*) Здесь f2s(x) не обозначает производной f2s(x) по х\ дифференцирова-
дифференцирование по х указывается буквой д.
§ 2] САЛКА И БРУС С КРУГОВОЙ ОСЬЮ 487
но этот же результат можно представить в другой записи:
F (х, у) = cos у df0 (х) + ^f- /о' (х). B.3.5)
Смысл ее ясен — следует заменить cos yd, (sin yd) /д рядом по
степениям д2 и вернуть букве д ее значение оператора дифферен-
дифференцирования по х над функциями fo(x), f'o (x), перед которыми она
написана в B.3.5).
Легко, однако, прийти к решению B.3.5), не прибегая к дей-
действиям с рядами, а записав уравнение Лапласа B.3.1) в виде
обыкновенного дифференциального уравнения по независимой
переменной у, в котором д рассматривается временно как число
F" + d2F = 0. B.3.6)
Решению этого уравнения при начальных условиях
при у = 0 F = f0 (х), F' = fо (х), B.3.7)
записываемому в форме B.3.5), дается в конечном счете выше-
вышеприведенное истолкование. Промежуточные вычисления выпол-
выполняются не непосредственно над рядами, а по их представлениям
B.3.-5). Например, среднее значение F(x,y) по «высоте по-
полосы», значение ее нормальной производной при у = Ь могут
быть записаны в виде
1 Г п /
ж J F{x, w0
-ъ
— = _ д sin Ь df0 (х) + cos b df'o (х) и т. д.
» у—Ь
Нет нужды также заботиться о сходимости ряда B.3.4),
представленного записью B.3.5), дающей только формальный
прием построения решения, последнее в окончательном виде
может быть выражено не степенным рядом, а в другой форме.
2.4. Функция напряжений в задаче о полосе. Следуя ска-
сказанному в п. 2.3, запишем бигармоническое уравнение для функ-
функции Эри в виде
Ulv + 2д 2U" + д4и = 0. B.4.1)
Здесь требуется задание четырех начальных условий — значе-
значений U и ее производных первого, второго и третьего порядков
при у = 0. Для упрощения последующих формул будем искать
U в форме суммы ее четной и нечетной по у частей, что соот-
соответствует разбиению на задачи А и Б. Вычисления далее ве-
ведутся параллельно. Начальные условия записываются в виде
А у = 0: U = fo(x), U' = 0, U" = fZ(x), tf'" = 0, J
Б у = 0: U = 0, U' = fo(x), U" = 0, и'" = &" {х),\
B.4.2)
488
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
и соответствующие решения «обыкновенного» дифференциаль-
дифференциального уравнения B.4.1) будут
А
Б
U(x, y) =
B.4.3)
так что
А
Б
^filfo'(x)
B.4.4)
Краевые условия B.1.5) могут быть записаны в виде
Б у=±Ь: оу = д2и=±о2(х), хху = - д -Ц- = х2 (х)
и при обозначениях
X X
mk {X) =j(x-l)ak (?) dl, tk (x) = J xk (|) d%, k=l, 2, B.4.5)
о о
определяют выражения функции напряжений и ее нормальной
производной при у = ±Ь:
y=±b: V = mx{x), ^- = + tl(x),\
«L- t(x)\ BЛ6)
ду г \ / j
А
Б
y=±b: U=±m2(x),
По этим условиям определяются неизвестные функции в реше-
решении B.4.3), а по ним и сами эти решения
A U{x, у) = р BМ) [[у sin уд sin bd + cos уд cos bd +
BМ)
sin yd , -, -, sin 63
—f- cos &a - cos yd —^—
J
- cos yoz::j^-) m,(x) ¦
B.4.7А)
зг I (-1- cos уд cos 65 + sin уд s'mbd —
, -,\ / \ i / т sin 63 sin«3
-cosb^jmzW + ^i/cos;^ - -¦
Б U{x, у) =-р
M
bd
¦ cos
bd)t2(x)],
B.4.7Б)
§ 2] БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ 489
где введены обозначения
^ 1-^~. B.4.8)
Ряды по степеням д выражений в квадратных скобках в за-
задаче А начинаются слагаемым нулевой степени, а в зада-
задаче Б — второй степени. Поэтому функции U(x,y) в обеих за-
задачах представимы рядами, содержащими, кроме постоянных
слагаемых, только положительные степени д.
Перемещения, вычисляемые по формулам A.7.7), оказы-
оказываются равными
2\ш = „ Bbg) \д(—cos yd cos bd — -j-sin yd sin bd-\-
sin bd \ / \ ,
+ ( - cos yd sin bd + -j sin yd cos bd - j^ cos yd ^-j t\ (*)].
2[it» = p . bdj \d(sinyd cos bd — j cos yd sin bd-\-
sin bd
+ f sin yd sin bd + j cos yd cosbd — j-jjj^ s'^ cos bd\ t{ (
B.4.9A)
2ци = „ . ,,. Г — d f-f- cos г/5 cos 6d + siny6 sin 65 +
/*g (Zoo) |_ \ о
1 — v sin «d , a\ / \ ,
J cos bd)m2(x) +
J
cos
—-j cos yd sin bd + sin yd cosbd — l sin yd ^j^) ^2 (*) 1.
(zoo) L \ о
-f- sin yd cos 6d — cos r/5 sin bd +
-f [~ sin r/<5 sin bd + cos #d cos bd + t ~^ cos yd S1^ •
¦ B.4.9Б)
В эти формулы входят слагаемые, разложения которых
в ряды содержат и отрицательные степени; можно было это
предвидеть, так как определение перемещений требует дальней-
дальнейшего интегрирования выражений поверхностных сил.
Выражения напряжений легко получить дифференцирова-
дифференцированием функции напряжений B.4.7). Не приводя этих громоздких
490
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
формул, отметим, что представление наиболее важных в теории
балок величин оказывается достаточно простым. Например,
нормальные напряжения ах(х, ±Ь) на продольных сторонах
балки оказываются равными
ах(х, ±Ь) =
Bbd)
о1 (х) -
2 cos2 Ьд
fAB6<?)"lw FkBbd) 6 1V "
Б ax(x, ±b)= + -jr^2bd)°2 M^jT&bVT**{X)-
B.4.10)
Касательное напряжение xxy(x, 0) на оси балки оказывается
равным
А хху{х, 0) = 0,
к r i(x, 0)= р шп \-sinbdo2(x)+ B.4.11)
Уравнение упругой линии записывается в виде
А с(х, 0) = 0,
2 cos Ьд
—v
Ьд
1 — v sin ?><!?
y+^ ~ьд~
B.4.12)
Применимость этих формул, казалось бы, обусловлена не-
неограниченной дифференцируемостью функций, задающих по-
поверхностные силы. Однако ниже будет показано, что это огра-
ограничение может быть устранено. Приведенным формальным
представлениям оказывается возможным придать вполне опре-
определенный смысл и при наличии кусочно-непрерывных поверх-
поверхностных сил и даже сосредоточенных сил и моментов.
Отметим еще используемые ниже представления операто-
операторов FA и Fb и обратных им величин:
FkBbd) = 2 (l -1
±
Ь*д* - зуд Ь«д*+ ...),
105
1 _ 3 Л 1
BЬд) 2Ь2д2 V 5 '
2 4-
—
525
2635
34
23625
B.4.1 ЗА)
B.4.13Б)
§2J
БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ
491
Наличие множителя д~2 в выражении F'1 обусловливает
большую сложность задач изгиба по сравнению с задачей ра-
растяжения.
2.5. Элементарная теория балки. При удержании в степен-
степенных рядах по д только не зависящего от д слагаемого выраже-
выражения функции напряжений B.4.7) представляются в виде
А
Б
U*{x, y) = m1W + ^-F2-
B.5.1)
и определяемые по ним напряжения оказываются равными
к (х) 2
- у [(b2 ~ у2)
^b2- у2)
B.5.2)
2
Здесь, как выше, / = -^63. Эти выражения, конечно, удовле-
о
творяют уравнениям статики в объеме и краевым условиям на
продольных сторонах балки, тогда как зависимости Бельтрами
не выполнены, так как функции напряжений B.5.1) при произ-
произвольном задании поверхностных сил не являются бигармониче-
скими. Заметим еще, что в представленном решении B.5.2)
торец х = 0 свободен (в смысле Сен-Венана) от нагруже-
ния — на нем продольная и поперечная силы и изгибающий мо-
момент равны нулю [см. формулы B.4.5)].
Определяемые по B.5.2) распределения напряжений ах и
касательных напряжений, создаваемых нормальным нагруже-
нием, принимаются в элементарной теории балки; нормальные
напряжения ау в этой теории не учитываются.
Поскольку функции напряжений B.5.1) не являются бигар-
моническими, перемещения следует определить низшим членом
разложений в ряд по д из общих представлений B.4.9). Прихо-
Приходим к выражениям
B.5.3)
492 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
причем
ц° (х) = - 2 [т2 (х) + Ы2 (х)} B.5.4)
представляет изгибающий момент относительно точки (л:, 0), со-
создаваемый поверхностными силами, распределенными по от-
отрезку [0, х] балки.
Уравнение упругой линии представляется в виде
EI-?;v(x, 0)=-ц0(*). B.5.5)
Итак, элементарная теория полностью содержится в первом
члене разложения строгого решения; следующие его члены, со-
содержащие производные от задающих нагружение функций,
представляют коррективы, вносимые один за другим в элемен-
элементарную теорию. Порядок их по отношению к основным слагае-
слагаемым элементарной теории пропорционален последовательным
степеням отношения Ь2/12; они оказываются существенными при
резко изменяющихся по длине балки поверхностных силах и
для сравнительно коротких балок. Можно еще отметить, что эти
коррективы определяют статически эквивалентные нулю систе-
системы напряжений, так как уравнения статики в объеме и на по-
поверхности уже удовлетворены в исходном приближении B.5.1).
2.6. Полиномиальное нагружение (Менаже, 1901). При на-
гружении поверхностными силами, задаваемыми полиномом сте-
степени п, высшая степень полиномов, входящих в правые части
выражений B.4.7), равна п + 2; поэтому разложения этих вы-
выражений в ряды по степеням д обрываются; функция напряже-
напряжений представляется автоматически находимым полиномом от
х, у.
Например, при равномерном нормальном нагружении
Y+(x) = const
ffi = <*2 = j У+ (х), тх (x) = гп2 (х) = -j Y+x2
и в разложениях задачи А следует сохранить лишь слагаемые
с д2, тогда как в задаче Б должны быть учтены и члены разло-
разложения с д4, так как формулы B.4.7Б) содержат множитель д'2.
Степени слагаемых разложения возрастают через две единицы,
поэтому вычисление при линейном законе нагружения прово-
проводится до тех же степеней д2 и д4. В случае нагружения по квад-
квадратичному или кубическому закону требуется сохранить чет-
четвертую в задаче А и шестую степень д в задаче Б и т. д.
Вычисление при равномерном или линейном нормальном на-
нагружении приводит к таким выражениям функций напряжений
(в задаче А слагаемые с д2 уничтожаются):
A Ua(x, у)=и°А(х, у),
Б UB(x, у)=и%{х
§ 2] БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ 493
В них слагаемые Ц°А, ?7Б определяются формулами B.5.1). На-
Напряжения, налагаемые на решения B.5.2), оказываются рав-
равными
B.6.2)
причем а (х) = 0, а о'2 (х) постоянно при линейном и равно
нулю при равномерном нагружении.
В уравнение упругой линии, составляемое по формулам
B.4.12), кроме слагаемого элементарной теории, пропорцио-
пропорционального двойному интегралу над изгибающим моментом \i°(x),
войдут члены, пропорциональные этому моменту и его второй
производной О2(х):
EIv(x, 0)=- J!^ M
о
(^Ц^) , B.6.3)
Впрочем, слагаемое, пропорциональное О2{х), включается в вы-
выражение перемещения твердого тела.
Приведенные здесь формулы практически применимы к лю-
любому закону полиномиального нагружения, так как поправки
к ним будут иметь порядок б4//4 и более высокий; учет их в тео-
теории, предполагающий применимость принципа Сен-Венана, вряд
ли уместен.
Имея решение для случая линейного нагружения, можно
ограничиться рассмотрением только статически эквивалентных
нулю нагружении. Действительно, по заданному закону нагру-
нагружения f{x) может быть определено нагружение
B.6.4)
удовлетворяющее требованиям статической эквивалентности
нулю
f(x) dx = 0, J xf (x) dx = 0 B.6.5)
494 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VI!
и отличающееся от f(x) линейно зависящим от х нагружением
B.6.6)
J)J
i-o о
Но для этого нагружения решение известно. Можно ограни-
ограничиться рассмотрением нагружений с равным нулю главным
вектором; тогда достаточно в формуле B.6.4) сохранить справа
два слагаемых.
2.7. Синусоидальное нагружение (решения Рибьера A898)
и Файлона A903)). Соотношения п. 2.4 можно записать в еди-
единой общей форме
Ф(*. y) = Q(y, d)f(x), B.7.1)
в которой Ф(х, у) — искомая величина (функция напряжений,
напряжение, перемещения), f(x) определяется законом нагру-
нагружения, a Q(y,d)—заданная функция оператора д, зависящая
от у. При нагружений по закону синуса или косинуса
{sin ax
cos ax' °2f (Х) = " a2f{x) d'Sf (Х) = {~ а^f {х)
и соотношение B.7.1) оказывается возможным записать в яв-
явной форме
Ф(х, y) = Q(y, at)f(x), B.7.2)
не прибегая к разложениям в ряды. Например,
cos у df {х) = cos yaif (x) = ch ayf (x), ^f- f(x) = ^-f (x)
и т. д.
Задавая закон нагружения тригонометрическим рядом вида
оо
fW = X + S^COSafeX+6fesina^' ak = 2-y-, B.7.3)
fc-i
в котором, как известно,
i i
dk = у f (х)cos akx dx, bk = —\f(x)smakxdx, B.7.4)
о о
имеем
со
Ф (х, у) = Ф, (х, у) + 2 Q {у, aki) {ak cos akx + bk sin akx), B.7.5)
где Ф*(х, у)—решение, соответствующее постоянному члену
ряда B.7.3)—среднему значению f(x) на протяжении балки.
Оно строится по правилам п. 2.6.
§ 2] БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ 495
Например, при нормальном лишь нагружении верхней сто-
стороны балки у = Ь по закону
оо
У+ (*) = 2а, (х) = 2ст2 (*) = 2 (а* cos акх + bk sin akx) B.7.6)
ft-i
функция напряжений по B.4.7) представляется рядом
akcosakX + bksinakX
4
sh akb \ *
+ chakychakb + chaky ——r~ + C/A (x, y),
B-7.7)
^T"l dt COS Ct. X -f- 6t Sin Ctt,JC / //
sh a.^/
— sh aky sh afe& ^-y- ch akb
Здесь С/а(а;, г/), С/Б (я, г/)— решения вида B.6.1), соответ-
соответствующие постоянному и линейному по л; слагаемым в разло-
разложениях моментов mk{x) в тригонометрический ряд
. B.7.8)
ft-i aft J
Сходимость рядов B.7.7) и находимых по ним напряжений
при —ЬКу<Ь обеспечивается наличием слагаемого sh2aft6 в
знаменателе. Сходимость сохраняется и на нагруженной стороне
балки у = Ь, исключая точки разрыва нагрузки.
Пример. Рассматривается нагружение балки длины 2/ чет-
четной по х «треугольной» нагрузкой
Г+ (х) = 2а, (х) = 2o2(x) = ±q(l- ^-), | x | <
Ее представление тригонометрическим рядом имеет вид
и по B.7.8)
496 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
причем использовано известное соотношение
ОО
1 я4
Bk - IL 96 '
ft-i
Вычисляемые по B.4.10) нормальные напряжения ах на сто-
сторонах балки даются формулами
ах (х, ±Ь) =
2<7 vi cos аьх I sh 2Ьаь - ЪЬа. sh 2Ьаь + 2bab \ b qP
причем постоянное слагаемое определено по B.5.2).
Эти формулы преобразуются к виду
B.7.9)
и здесь обнаруживается не учитываемое в элементарной теории
различие абсолютных значений напряжений ах на нагруженной
и ненагруженной сторонах балки.
В случае очень тонкой балки (Ь <С /) коэффициенты рядов
B.7.9) заменяются их разложениями по степеням bah'
,2
ОО
i2 ?(t
^is
cos a
>Ь226аА
ее
ел: sh
-46:
%akx
гк-АЬ
2bak
Ч
Ъ
I
b qP
I 24"
qP
24 '
"ft 00 ttfc
и формулы B.7.9) представляются в виде
_ /.. и\ v+ /.л
^ f ^ 4 /24'
cos акк 6(? y\ cos akx b qP
k-i * fe-i й
или, если вспомнить представление Y+(x) тригонометрическим
рядом,
п I г ¦+- h\ I- I —- V+ I v\-X- ii° (yY\ Iе) 1 \(W
Ox (X, It 0) — ± -=¦ I \X)~\--f I* \X) . [Z.I .IV)
§ 2] БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ 497
Здесь введено обозначение
Согласно B.5.4) это — изгибающий момент относительно точки
(|*|, 0) на оси балки. При 0 < х < / его можно в соответствии
с B.4.5) представить также в виде
и нетрудно проверить, что представление четной по х функции
ц°(х) для |*| </ тригонометрическим рядом имеет указанный
выше вид.
В полученном приближенном решении B.7.10) исчезает упо-
упомянутое различие абсолютных значений величин ах(х, ±Ь). Не-
Нетрудно сообразить, что B.7.10) соответствует решению задачи
о балке длины /, левый конец которой (х = 0) свободен, нагру-
нагруженной по линейному закону
Отметим, что, вследствие симметрии нагружения левой и
правой (* < 0, * > 0) балки длины 2/, в ее середине * = 0 от-
отсутствуют перерезывающая сила и изгибающий момент. При-
Привычные представления элементарной теории изгиба балки позво-
позволяют • при таких условиях, отбросив левую часть балки
(—/<*<0), ограничиться рассмотрением только ее правой
части. Отличие строгого решения B.7.9) от приближенного
B.7.10) обусловлено тем, что воздействие левой части на пра-
правую, передаваемое через поперечное сечение * = 0, определяется
наличием напряженного состояния в этом сечении, а не только
его статически эквивалентными характеристиками.
2.8. Сосредоточенная сила (Карман и Зеевальд, 1927). Функ-
Функция f~{x), задающая закон нагружения, может быть определена
не рядом, а интегралом Фурье
оо
f (*) = -U f [fe {X) cos Хх + fs (к) sin %х\ d%.
у к J
— ОО
Здесь /с(^Ь fs(h)—косинус и синус Фурье-трансформанты:
оо оо
f,(A,) = —L f f(u)tosukdu, fs{X) = -}=- ff (и)sinuldu,
— oo —oo
32 А. И. Лурье
498
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
Тогда решение уравнения B.7.1) также представится интегра-
интегралом Фурье
оо
Ф (х, у) = -?= I [Ф, (А., у) cos Хх + Ф5 (Я,, у) sin Хх] dX,
причем ФС(Я, у), <DS(X, у)— Фурье-трансформанты:
Фс (X, y) = Q (Xi, у) U (X), Ф3 (X, y) = Q (Xi, у) U (X).
Далее рассматривается задача об опертой по краям х = ± /
балке, нагруженной нормально к ее продольной стороне у = b
сосредоточенной в точке (О, Ь) силой Q и уравновешивающими
ее силами — Q/2 (реакциями опор) на краях (± /, Ь). Изгибаю-
Изгибающий момент ц (х) в поперечном сечении х при таком загруже-
нии задается «треугольной» эпюрой
B.8.1)
1 l i
\х\>1.
оо
= |- J
-cosXl)dX.
Представление этой четной по х функции интегралом Фурье
записывается в виде
оо I
II (х)*=Ц J cosXxdX J(l - у)
0 0 0
По B.4.7), учитывая, что при только нормальном нагружении
Ш] = т2 = —уц, и заменив д на сХ, представим функцию напря-
напряжений в таком виде:
U(x, y) =
А
2я
J
0
1
sh2&A
26Л
1
-j ch yX ch bX —
Здесь выделено слагаемое, соответствующее решению элемен-
элементарной теории изгиба. Поэтому разложение в степенной ряд по
БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ
499
X подынтегрального выражения во втором интеграле начнется
со слагаемого второй степени.
Нормальное напряжение ах представляется выражением
оо
I
~
2bX
(Ch yX Ch ЬК ~ Т Sh
1
J
0 L 1~~Ш
(l-cosXl)cosXxdx\. B.8.3)
Отсюда находим не учитываемое элементарной теорией нор-
нормальное напряжение ах на оси балки
оо
ох (х, 0) = - f J
о
, ch ЬХ — sh ЬЛ
A - cos A/) cos Kx dX B.8.4)
и напряжения на ее продольных сторонах
Q Г U 2Ъ% - sh 2Ь%
sh
± -дг I (I — cos Xl) cos Я,д; dX.
На стороне г/ = — b это напряжение определяется сходящимся
интегралом
, 0) п
21V
X (l-cosAi)cosUcU-yn(x), B.8.5)
тогда как на нагруженной сосредоточенными силами стороне по-
полосы у = Ь сходимость, естественно, теряется. Получаемое вы-
выражение легко приводится к виду
оо
, Ь) = у |i (х) + -2- J A - cos AQ cos
о
Xx dX
. B.8.6)
32*
500 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Замечая, что
cos %x cos %l = -j [cos k(l + x) + cos X(l- х)], B.8.7)
и вспоминая представление дельта-функции с помощью инте-
интеграла Фурье
б (х) = — I
COS
о
приходим к выражению
J
о
ах(х, b) = j\
оо
Q Г ( 8Ь2Х2 3 \Г 1
л J \ sh2 26Л - 4й2л2 ~ imJ JLC0S Кх ~ Т cos Л ^ + ^ ~
—|- cos Л (/ — д:)] cf/.. B.8.8)
Выражение
00
-5- J (
следует назвать функцией влияния от единичной силы в точке
(|, Ь). Корректирующие вычисляемое по элементарной теории
значение ох(х, Ь) слагаемые формулы B.8.8) определяют дей-
действие сил Q в точке (О, Ь) и — Q/2 точках (—/, Ь), (I, Ь).
Знание функций влияния позволяет записать выражения кор-
корректирующих элементарную теорию слагаемых при действии
распределенной нагрузки. Например, для нагружения
имеем
а
а а
_ sin %a ,
= 2<7О —^— COS XX,
и нормальное напряжение ах(х, Ь) определяется выражением
f - si.) 'тг
§ 2] БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ 501
Здесь ц(х) —изгибающий момент в опертой по краям балке
при рассматриваемом нагружении.
Графики по х нормальных ах, ау и касательных хху напря-
напряжений, создаваемых сосредоточенной силой при у = ±Ь/2, 0, ±6,
приведены в работе Зеевальда*). Естественно, что возмущения
напряжений, вычисляемых по элементарной теории, прости-
простираются на расстояния, сравнимые с толщиной балки 2b. Отли-
Отличие даже напряжения ах(х, Ь) от вычисляемого по элементарной
теории практически исчезает уже при х = ЗЬ **).
Уравнение упругой линии составляется по формуле B.4.12)
2пЬЕ J
0
f
J
0
X [A + v) ЪХ sh Ы + 2 ch bl] cos lx dX. B.8.9)
Введя в рассмотрение элементарное решение B.6.3):
^. (М.К0
и вычитая его представление интегралом Фурье из B.8.9), най-
найдем выражение поправки «*(*, 0) к элементарной теории в виде
[A + v) ЬХ sh Ьк + 2 ch Ы] +
1--
1 — cos XI
B.8.11)
Постоянную v°t следует определить условием у*(/, 0) = 0. Вве-
Введенные в B.8.11) слагаемые уничтожаются с двумя первыми
членами разложения в ряд выражения
ЬХ sh bK + 2 ch
26Х
Это гарантирует сходимость интеграла B.8.11) при малых X.
Из сопоставления формул B.8.2) и B.8.7) легко заключить,
что слагаемыми в интеграле B.8.11), имеющими множитель
cos X х cos XI, учтено действие сил —Q/2 в точках х •= ±1;
*) F. S e e w a I d, Die Spannungen und Formanderungen von Balken mit
rechteckigem Quer»chnitt, Abhandlungen aus dem aerodynamischen Institut
Aachen, Heft 7, 1927.
**) Графики Зеевальда воспроизведены в «Теории упругости» С. П. Ти-
Тимошенко.
502
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
отбрасывая этот множитель и заменив х на х — ?, придем к вы-
выражению
vf(x-l, 0)=-
Q
2яЬЕ
J
о
3
J _
з ,
[(l+vN&,sh&X + 2ch&M +
-jr cos % (x -1) dl, B.8.12)
определяющему поправку к вычисляемому по элементарной тео-
теории прогибу от сосредоточенной в точке (|, Ь) силы Q.
2.9. Брус с круговой осью, нагруженный по торцам (Голо-
(Головин, 1881). Рассматривается круговой брус (арка), ограничен-
ограниченный концентрическими окружностями радиусов г0, г\ (го<Г\)
pffl> и отрезками прямых 8 = 0,
11 0 = 0о на левом и правом
торце. Поверхностные силы
на продольных сторонах от-
отсутствуют:
^ г = г0: О7 = 0, т,е = 0;
О
тге = 0, B.9.1)
а на правом торце они ста-
статически эквивалентны про-
Рис. 39. дольной P(Qq) и поперечной
Q(9o) силам и изгибающему
моменту т°@о) относительно центра окружностей О:
г,
J rae dr = т° (80).
» 0 Го
B.9.2)
Из уравнений равновесия бруса в целом следует, что система
поверхностных сил, которые должны быть распределены по ле-
левому торцу, статически эквивалентна силам Р@), и Q@) и мо-
моменту т°@), определяемым формулами
8 = 0: P(O) = P(eo)coseo + Q(eo)sin0o, j
Q @) = - р (80) sin 90 + Q (в„) cos 0O) B.9.3)
I
Растягивающие и поперечные силы положительны, если они соз-
создаются положительными нормальными (ае) и сответственно
касательными (тге) напряжениями; положительный изгибающий
§ 2]
БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ
503
момент создается нормальными напряжениями ав, положитель-
положительными на верхней стороне бруса (рис. 39).
При действии только изгибающего момента интегральным
условиям B.9.2) можно удовлетворить, предположив напряжен-
напряженное состояние в брусе не зависящим от 0. Но общее выражение
не зависящей от 0 бигармонической функции напряжений, пред-
представляемое суммой, не зависящей от 0 гармонической функции и
произведения г2 на такую гармоническую функцию, имеет вид
U = А + В In г + г2 (Л, + Я, In r),
B.9.4)
причем, конечно, постоянную А можно отбросить. Сославшись на
A.10.2), можно записать краевые условия B.9.1) в виде
B.9.5)
Условия B.9.2) на торце будут
Г\ Г,
О первом из них можно не заботиться, поскольку выполнены
условия B.9.5), а второе доставляет третье уравнение
В In ^ + Л, (г* - rl) + В, (г] In г, - г\ In r0) = тР. B.9.6)
Из трех уравнений B.9.5), B.9.6) определяются постоянные В,
А\, В\. Получаем
N
4тс
#? ,- Г
г, г
г
Го ' Г1
B.9.7)
где введено обозначение
= О2 — гЧ2 — 4r2r2 (\n —
B.9.8)
504 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Выражение функции напряжений записывается в виде
- rl (г? In Is. _ г] In -й- In r) +1 г2 (г? - г*)]. B.9.9)
Функция напряжений в задаче о действии продольной силы
разыскивается в форме произведения />(80) cos (90— Q)F(r), a
поперечной силы — в форме Q(9o)sin(9o—Q)F(r). Эти произ-
произведения будут бигармоническими функциями, если принять
i Cr In г.
Напряжения представляются теперь формулами вида
1 ди , 1 д*и \ р (9о)cos (во - 9) d F (г)
дг "г" r> dW lQ(90) sin @o-0) dr r
dV__)__PV_\ -P(9o)sin(9o-9) j_
дв г дгдв \ Q(9o)cos@o-0) dr
_( P@o)cos(eo-9) diF{r)
~\QF0)sin @o-0) dr*
-4-Ш, 1B.9.10)
Поэтому краевым условиям B.9.1) можно удовлетворить, по-
потребовав выполнения только двух соотношений
Тогда
и при выполнении условий B.9.11) изгибающий момент т° ока-
оказывается тождественно равным нулю.
Обратившись к остающимся условиям B.9.2), имеем
= QFo)f-
БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ
505
причем последнее равенство — следствие краевых условий
B.9.11). Итак, недостающее третье уравнение приводимо в обеих
задачах к одинаковому виду
[Г'=1. B.9.12)
Из трех уравнений B.9.11), B.9.12) определяются постоянные
А, В, С, и функция U, одновременно решающая обе задачи
(о продольной и поперечной силах), представляется в виде
и=ж[р (9о) cos @° ~е)+Q (9о) sln (9°"9)] х
X 2rIn г +
-2-2
г0Г1
r2_ 2
B.9.13)
а напряжения оказываются равными *)
ог = -щ [Р (во) cos (в0 - 0) + Q (в0) sin (в0 - 0)] X
(\ г2г2 1 г N
| 0 1 )
\Т ~ ,2 , _2 ~3 -2,-2/'
ае = -^- [Р (в0) cos (в0 - в) + Q (в0) sin (в0 - 0)] X
Зг
тгв = ^ [ - Р (во) sin (в0 - в) + Q (в0) cos (в0 - 6)] X
B.9.14)
В полярных координатах вектор перемещения по A.7.7) пред-
представляется выражением
-|e + foy. B-9.15)
ur + it*--j[{S + iT) е~*-{I+*)[%-+1
где S + iT определяется, как указано в п. 1.7.
*) Сравнение напряженных состояний в задачах Головина с принимае-
принимаемыми в элементарной теории кривого бруса подробно проведено в курсе
С. П. Тимошенко.
50б Плоская задача теории упругости [гл. vii
Очевидное вычисление по этим формулам дает: в первой за-
задаче
8m°
B.9.16)
и во второй задаче
)-'(88)
/ Г2Г2 , 2 \\
4- ГР + /Q} е-'' <е»-0> 1 — ° ' - /-о 9 17"»
причем Р = Р(9о), Q = Q(9o) и не выписаны слагаемые, соот-
соответствующие перемещению фигуры в ее плоскости как твердого
тела.
Конечно, приведенные решения являются строгими в рамках
принципа Сен-Венана. Напряженное состояние отличается от
найденного локальными возмущениями в области, примыкаю-
примыкающей к торцам.
2.10. Нагружение кругового бруса по поверхности. Предло-
Предложенный в пп. 2.3—2.8 прием рассмотрения задачи о балке
с прямолинейной осью можно применить и к случаю кругово-
кругового бруса. Действительно, записав уравнение Лапласа в по-
полярных координатах в форме «обыкновенного» уравнения типа
Эйлера:
d'F . 1 dF Я2 1 „ п , д
+ + dF 0 а
можно представить его решение в виде
трактуя, подобно B.3.4), эту запись как представление ряда
F " Ё [ Ж Сп гГ dff, @) + -^у (In f?» ¦ df\2 F)].
fc0
Бигармоническая функция представляется суммой гармониче-
гармонической и произведения гармонической функции на г2. Поэтому,
§ 2] БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ 507
введя вместо г новую независимую переменную t:
el = — @<f</1 = ln-^-), B.10.1)
будем далее пользоваться представлением функции напряже-
напряжений в виде
U = cos Wef, @) + ^-f2 @) + е* [cos tdef3 @) + -^ f4@)].
B.10.2)
Далее для сокращения записей рассматривается только нор-
нормальное нагружение бруса по поверхности г = ги так что
; = 0: аг = 0, тг9 = 0; * = *,: a, = fF), тг9 = 0. B.10.3)
Этим определяются функции /ч@) в представлении B.10.2).
Имеем
e
ае =
-It
Краевые условия на поверхности t = 0 выполняются, если при-
принять
г г /1 9/\ ( ± ~\ ?. ¦ Sill (Cfi p 1 • л ОУ Sin 1(Уй р //\\ /г* 1 г\ ^\
U = A — е2') I cos WefI -I g—- f21 + 2e2' —^-2- f] @). B.10.5)
Тогда
?e + 4 ~^- - A - e~20 a2e cos We] f, F) +
' — 1) (cos We + 5e sin We) — 2 S1" 91 f2 @),
We + cos We) - 2 -^^-J def, @)
sin We + 41— nd e + cos Wej +
+ (l-e-2')aecos We]/,@)-
- [{e~2t - 1) (cos We + <5e sin td0) + 2 (¦^s- + 2 cos We)] f2 @),
= 4 (de sin We + 2 s'"d fl + cos Wej f, @) —
B.10.6)
508 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Потребовав выполнения краевых условий на поверхности
t = t\ (r = г\), найдем /i(8), /2(8), после чего подстановка в вы-
выражение функции напряжений приводит к равенству
U = К1 - e2t) (l - е~^) dl cos (f, -t)de +
+ 2A+ е-2 <*>-')) sin /de sin f ,de - (e2' - e~2'') d9 sin (f, - /) дв +
или, в другом представлении,
et+u г
-<3еsh t shft cos(/, -t)de--^desh (/, +1) sin(/, - /) <59 +
+ y de sh (/,-<) sin (f, + /)ae]r«F (8). B.10.7)
Здесь F@) определяется соотношением
Ji2L=F(e), fF)= .
1 + "9
= J f (g) sin F-1) dg + C, cos 9 + C2 sin 9, B.10.8)
0
и легко проверяется выполнение равенств
а 9
подтверждающих, в соответствии с B.10.4), выполнение всех
краевых условий.
При отсутствии нагружения боковых поверхностей f(9) = 0;
тогда по B.10.8)
dfF (9) = i2n (С, cos 6 + С2 sin 91)
и по B.10.7) решение представится в виде
B.10.9)
— это лишь иная форма записи формулы B.9.13), определяю-
определяющей функцию напряжений в случае бруса, нагруженного по
торцам.
§ 2] БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ 509
При линейно зависящем от 0 нагружении
так как слагаемые F(Q), пропорциональные cos0, sin 6, опреде-
определяют лишь далее не учитываемое решение вида B.10.9). Реше-
Решение задачи получим, сохранив в разложении U в степенной ряд
по дв только свободный член
U = foe -Ih21 ittl Ch {tl - 0 - sh f sh f, - -^ (f, - /) sh «, +1) +
. +4- «i + 0 sh (f, - 0] (fo + fi8). B-10.10)
Никакого затруднения не представляет запись решения и при
нагружении по закону
Достаточно заменить в выражении U, как было разъяснено в
п. 2.7, оператор дв на ± ni; тогда
V = U \дв=±п1 = г» n,,h,;i_ril,Bfl [ch (/, -1) sh nt sh «/, -
-n2 ch n {ti - t) sh / sh /, - ^ n sh (/, + 0 sh n (f, - /) +
+1» sh «, - t) sh »(f, + t)} fn cos ^+_5ГSi" "9 ¦ B.10.11)
2.11. Косинусоидальное нагружение. Исключенный выше
«резонансный» случай п = 1 требует специального рассмотрения.
Имеем
f @) = f0 cos 6, F(9)=4-fo9sin9.
Теперь
dlF = - -i (9 sin 0 - 2 cos 0) f0, deF = -j @ sin 9 - 4 cos ft) fn
и вообще
Поэтому, обозначая через ф(/, dl) множитель-оператор при
F(Q) в формуле B.10.7) и представив его в виде
Ф (t, дв) = Фо @ + Ф1 (t) dl + Ф2 (/) а|_+ .... B.11.1)
имеем - -
{ ^) у[о[Фо(/)-Ф,(/) + Ф2(О- ...]9sin0 +
+
510 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
и это соотношение, сославшись на B.11.1), можно записать
в виде
U = j f0 [Ф (t, d2e) 6 sin 9 + ¦!• ^jj^ cos 9^ ^ . B.11.2)
Результат вычисления по этой формуле представляется суммой
трех слагаемых:
J+U
— rofo 4,hM/,eh/,-,h/,)
y С sh2^,-sh t sh *, ch (A,-0-2 {tx-t) sh f sh ^ sh (f, - <)] cos G,
/ fVl / —¦ сЪ f (^Ъ f/ —• fW fAC ft
t Cll i ( oil I \~Li- \V\ I )\ \Л)Ъ \Jy
B.11.4)
причем U3 определяет лишь нагружение по торцам бруса; его
далее можно не учитывать [ср. B.10.9)].
Слагаемое U\ удовлетворяет всем краевым условиям, что
легко проверить по B.10.4):
1 ch t, — sh t ch (t, — /I cos 0 +
TJe" - fo f.cht-sh/, [ch f, - ch B/ - *,)] у (sin 9 + 8 cos 9).
Однако оно не представляет решения задачи, так как 1^ не яв-
является бигармонической функцией. Функция f/2 также не бигар-
моническая, а вычисляемые по ней напряжения аг^ т% равны
(Г® 1 -*.-*
;2) = -/o2ahfl(f;chf,..hfl) к. sh«,+1) sh«, - о -
{cos 8,
sin 9
Решение представляется суммой
U=U1 + U2, B.11.5)
и нетрудно непосредственным вычислением проверить, что U —
бигармочическая функция,
§2]
БАЛКА И БРУС С КРУГОВОЙ ОСЬЮ
511
2.12. Однородные решения. Уточнение базирующихся на
применении принципа Сен-Венана решений задач о прямоуголь-
прямоугольной полосе и круговом брусе может быть достигнуто наложе-
наложением на них «однородных решений» — решений, оставляющих
продольные края полосы у = ±Ь (боковые поверхности г = Го,
г = Г\ бруса) свободными от нагружения. В задаче о круговом
цилиндре (п. 7.8 гл. V) они были использованы с целью уточ-
уточнить выполнение краевых условий на торцах. Здесь подобное
построение проводится в применении к прямоугольной полосе,
его можно повторить и в случае кругового бруса.
Задаваясь функциями напряжений вида B.4.3):
A U {х, у) = cos ydf0
[fo"' (х) + д% (х)},
B.12.1)
и требуя обращения в нуль напряжений ау, хху на краях по-
полосы у = ±Ь, придем к системам уравнений
А | Ьд sin bd (f" + д%) + cos Ьдд% = О,
sin bd
Б Y
sin bd
- b cos bd) (fo' + д%) + д sin bdf0 = 0,
j 6 sin bd (fo" + a2fo) + д cos Mfo = 0.
B.12.2)
Далее рассматривается экспоненциальное задание функций fo,
fo, fo', fo". так что дифференцирование их по х эквивалентно
умножению на постоянный множитель
dx
e = i
„ftJC
dx"
Pkx —
— knt>kx
Теперь в системах уравнений B.12.2) надо заменить д на k и
принять функции
fo, fo+fe2fo; U, fo" + fe2fo B.12.3)
пропорциональными ekx. Нетривиальные решения этих систем
существуют при значениях параметра bk = у, обращающих в
нуль их определители. Это приводит к рассмотрению трансцен-
трансцендентных уравнений
А Да By) = 2\ + sin 2y = 0;
Б
- sin 2y = 0
B.12.4)
512 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
и позволяет представить выражения B.12.3) в виде
X X
!о = — Ь—^-е b, fQ +kf0 = 2cosye b,
Lt . 1 sin v \ ~r t"' , 12i n Y • ~>r
/o = — b\ ¦— cosy ]e " , /о + к /o = 2 -г sin Y^ * .
\ У / о
Приходим к следующим выражениям функций напряжений,
оставляющих продольные края полосы у = ±Ь свободными от
нагружения:
A U(x, ?) = (-iii!cosYr] + r]cosY-™-
Б U (х. у) = (cos Y
- г,
cos
B.12.5)
причем bx\ = у, bl — х. Конечно, теперь легко записать формулы
для напряжений. При этом системы напряжений в любом попе-
поперечном сечении стержня \ = const будут статически эквива-
эквивалентны нулю. Достаточно проверить, что в задаче А обращаются
в нуль продольная сила
ь ь 1
d2U j._ I dU
Ь дц
-ь -ь " -i
а в задаче Б — поперечная сила и изгибающий момент
.Ь 1 1
* д2и — — l E1L
о о
Г А 1 Г
\ Оу аи = -г
J о J
1
-1
Г а Г
—b —1
-b
b
= 0,
-1
= 0.
Все корни уравнений B.12.4), исключая тривиальные (нуле-
(нулевые), оказываются комплексными; они располагаются в четы-
четырех квадрантах комплексной плоскости y симметрично относи-
относительно начала координат: если у — корень, то корнями являются
также числа —y. —V- Функции напряжений, определяемые фор-
формулами B.12.5), — комплексные; но по ним, конечно, легко со-
составить вещественные функции напряжений. Этим путем при-
приходим к представлению однородных решений — напряженных
состояний, оставляющих продольные стороны полосы свобод-
свободными от нагружения и статически эквивалентных нулю в любом
ее поперечном сечении.
В приведенной табл. 13 указаны удвоенные значения первых
пяти корней уравнений B.12.4), расположенных в первом квад-
§3]
УПРУГАЯ ПЛОСКОСТЬ И ПОЛУПЛОСКОСТЬ
Таблица 13
513
Корнн уравнения
Д. (х) = х + sin х = 0
ot= 4,21239
pt = 2,25072
о2= 10,74253
р2 = 3,10314
о3= 17,07336
Рз= 3,55108
а4 = 23,39835
р4 = 3,85880
а5 = 29,70811
р5 = 4,09337
Корни уравнения
АБ (х) — х — sin x = 0
О, = 7,45761
р, = 2,76867
о2= 13,89995
Р2 = 3,35220
О3 = 20,23871
рз= 3,71676
а4 = 26,55454
Р4 = 3,98314
о5 = 32,85974
Р5 = 4,19325
ранте плоскости у. Вещественные части этих корней быстро воз-
возрастают вместе с номером корня; поэтому напряжения, пропор-
пропорциональные, что нетрудно сообразить, е1/га\ будут весьма быстро
убывать по мере удаления от краев полосы — надо брать корни
второго квадранта при построении решений, относящихся к краю
х = 0, и первого — к краю х — I. Этим подтверждается приемле-
приемлемость принципа Сен-Венана для узкой и длинной полосы.
Было предложено несколько приемов использования одно-
однородных решений для выполнения краевых условий на попереч-
поперечных сторонах полосы. Ни один из них не дает строгого решения
этой задачи —точного выполнения краевых условий общего
вида по два на каждом из краев (левом и правом). Наиболее
простой прием выполнения краевых условий «в среднем» описан
в п. 7.9 гл. V. Выполнение краевых условий в ряде наперед вы-
выбираемых точек поперечной стороны затруднительно вследствие
знакопеременности однородных решений, тем более частой, чем
выше номер соответствующего взятому решению корня.
§ 3. Упругая плоскость и полуплоскость
3.1. Сосредоточенная сила и сосредоточенный момент в упру-
упругой плоскости. Сосредоточенная сила, проекции которой на оси
координат обозначаются X, Y, предполагается приложенной в
начале координат. Разыскивается создаваемое ею напряженное
33 А. И. Лурье
514 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
состояние в неограниченной плоскости, так что здесь речь идет
о построении в плоской задаче аналога тензора Кельвина —
Сомильяна (п. 3.5 гл. IV). Быстрее всего ведет к цели использо-
использование комплексного переменного—формул A.14.7), A.14.5).
Очевидно, что главный вектор напряжений на любом замк-
замкнутом контуре С, содержащем точку 2 = 0, должен уравновеши-
уравновешивать приложенную силу. Это соображение приводит к первому
условию задачи
где символом Acf здесь и далее обозначается изменение функ-
функции f при обходе замкнутого контура, оставляющем обходимую
область слева. Очевидно, что Ас/ = 0, когда функция f одно-
однозначна; в рассматриваемой задаче требование однозначности
налагается на вектор перемещения
Дс(ы + ш) = 0. C.1.2)
Этих условий, как увидим ниже, достаточно. При их выполнении
гарантируется однозначность напряжений и обращение в нуль
главного момента т° распределенных по С напряжений.
По A.14.7) имеем
Лс (Р + iQ) = - I Дс [ф (г) + гф' B) + -ф (г)]. C.1.3)
Нетрудно сообразить, что эта величина будет иметь постоянное
и не зависящее от выбора контура С, содержащего внутри себя
начало координат, значение для функций ф и 1|э вида
C.1.4)
где (a+tp), (a'+t'PO —постоянные.
Действительно, тогда
Лсф (г) = 2я/ (а + ф), ЛС2 ф' (г) = 0, Асф (г) = — 2я/ (а' - ф') C.1.5)
и по C.1.1), C.1.2), A.14.5) приходим к системе уравнений
- / [2ш (а + ф) - 2ш (а' - /р'I + X + iY = 0, 1
2ш C - 4v) (а + ф) + 2я/ (а' - ф') = 0. J { Л '
Из нее находим
a + * = -W^j-. a'-^ = C-^ll(T^-' C.1.7)
так что
l^ ^^z. C.1.8)
§ 3] УПРУГАЯ ПЛОСКОСТЬ И ПОЛУПЛОСКОСТЬ 515
Напряжения, выражаемые по формулам A.14.9) через функ-
функции Ф(г), W(z), конечно, однозначны; они определяются фор-
формулами
= -У (X cos 0 + Г sin 0) + i 2я\^1)г (X sin 0 - Y cos 9). C.1.9)
С точностью до не имеющего значения линейного по г слагае-
слагаемого имеем также
U [{X +
+ C - 4v) {X - IY) z In z + C - 4v) {X + iY) z In z], (ЗЛ .10)
и легко проверяется однозначность также и выражения A.13.6):
Acm° = 0. C.1.11)
Вектор перемещения определяется равенством
2Ц (« + iv) = * [ -43 - 4v) (X + /У) In/ + -?(*- /У) e
C.1.12)
Аналогично рассматривается действие сосредоточенного мо-
момента. Сохраняется условие C.1.2), а уравнение статики C.1.1)
заменяется уравнением
М° + т° = М° +
+ Ас у [х (г) + х (г)-2%' {z)-zy! (z)-zzq>r (z)-zzcpr B)] = 0. C.1.13)
Здесь М° — сосредоточенный в начале координат z = 0 упру-
упругой плоскости момент, а т° — определяемый по A.14.7) главный
момент напряжений по любому замкнутому контуру С, содер-
содержащему точку z = 0.
Условию C.1.13) можно удовлетворить, приняв
При этом выполняется и условие C.1.2), поскольку u + iv ока-
оказывается однозначной функцией координат. Получаем
М° + у 2я/ (а" + #" - а" + $") = 0,
так что а" остается неопределенным, а р" = — Л1°. Получаем
^ ^ # (ЗЛ.14)
33*
516 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
3.2. Задача Фламана A892). Рассматривается действие со-
сосредоточенной силы, нормальной к границе у = 0 упругой полу-
полуплоскости у > 0. Эта задача является аналогом частной задачи
Буссинека (п. 2.2. гл. V) для полупространства.
Ось Оу направлена внутрь полуплоскости, а точка приложе-
приложения сонаправленной с осью Оу силы Кг принимается за начало
координат системы Оху. За начало обхода границы у = 0 при-
принимается бесконечно удаленная точка х = —оо на ней, так что
обходимая область у > 0 остается слева. Тогда краевые условия
в соответствии с формулами A.8.4), A.8.6) могут быть запи-
записаны в виде
аи \ °. *<°
„_0: f- = 0, (/-„-_{ _^ х>0 C.2.1)
Бигармоническую функцию напряжений естественно разы-
разыскивать в виде
U = h(x.y) + yf2ix,y), C-2.2)
где ft, U — функции, гармонические в полуплоскости у > 0 [см.
также A.11.1)]. По первому условию C.2.1) имеем теперь
Но следствием равенства граничных значений двух гармониче-
гармонических в области функций является их равенство во всей области;
отсюда следует, что
«,>0: ^-=-f2, и{х,у) = и(х,у)~УЁЩА- C.2.4)
Здесь получено общее представление функции напряжений
в полуплоскости у > 0 при отсутствии нагружения, касательного
к границе (у = 0: хху = 0).
Переходя к построению функции напряжений вида C.2.4),
рассмотрим гармоническую функцию
На границе у = 0 области у > 0 она принимает значения
В ( 0, х<0,
У = 0: l-T-\i, x>0,
и теперь нетрудно проверить, что гармоническая функция
~)-У ^]=М*. У) C.2.5)
§3]
УПРУГАЯ ПЛОСКОСТЬ И ПОЛУПЛОСКОСТЬ
517
удовлетворяет краевому условию
, 0) =
О,
х<0,
х>0,
что и требуется согласно C.2.1). По C.2.4) находим
(
Не имеющие значения слагаемые, линейные относительно коор-
координат х, у, можно отбросить и представить решение в виде
U = — /Bл:е = i /Core cos 0. C.2.6)
я ^ я ч '
Напряжения легко вычисляются по формулам A.10.2). Отлич-
Отличным от нуля оказывается только
2/B sin 9 2К2 cos <b
C.2.7)
где \р — угол, отсчитываемый от оси Оу (от направления силы)
к оси Ох. Итак, на площадках, перпендикулярных вектор-ра-
вектор-радиусу г, имеются лишь сжимающие
нормальные напряжения, тогда как кУ
напряжения на площадках вдоль г, в
частности на границе, отсутствуют.
Напряжение в точке приложения си-
силы бесконечно; это объясняется тем,
что сосредоточенная сила мыслится
как предельный случай силы, распре-
распределенной по малой площадке.
Линиями одинаковых нормальных
напряжений являются кривые АД
-cosi|j = a° = const,
г = d cos i|)
C.2.8)
Рис. 40.
Это окружности диаметра d, касающиеся границы в точке при-
приложения силы (рис. 40). Известно (п. 2.2 гл. I), что максималь-
максимальное касательное напряжение равно полуразности главных нор-
нормальных напряжений, так что в плоском напряженном состоя-
состоянии (ог = 0)
1
lmax —
Поэтому линии Or = const одновременно являются и линиями
= const. Оптический метод изучения напряжений позволяет
518
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
непосредственно наблюдать и фотографировать линии Ттах =
= const в плоских прозрачных напряженных моделях. Эти ли-
линии вблизи точек приложения сосредоточенных сил, нормальных
к границе, действительно представляют круги.
Компоненты тензора напряжений в декартовых координатах
даются равенствами
2/С2 ух2 . 2ri 2/Cj у3
C.2.9)
Вектор перемещения, вычисляемый по функции напряжений
C.2.6), для плоского напряженного состояния по формулам
A.7.7), A.7.2), представляется его проекциями
- ЩУ, .
к
- ^h [2 In г + A + v) cos2 0] + vQ + щх.
C.2.10)
В задаче о плоской деформации эти формулы записываются в
виде
К" [(l-2v)e + jsin2e] + M0-cu0y,
и =
2ця
V = —
К*
[2 A - v) In г + cos2 0] + и0 + ЩХ.
C.2.11)
В частности, на оси х имеем г — \х\ и, отбрасывая постоянное
слагаемое, а также перемещение поворота, имеем
v(x, 0) = .K2pln-A-,
причем
C.2.12)
в задаче о плоском напряженном состоянии и
в случае плоской деформации.
3.3. Общий случай нормального нагружения. Решение п. 3.2
легко обобщается на случай нормального нагружения границы
упругой полуплоскости по любому закону
y_Q. а — — р (х\ т =- g C 3.1)
Действительно, напряженное состояние, создаваемое единич-
единичной силой, сосредоточенной не л начале координат, а в точке
х =* |, определяется по C.2.6) функцией напряжений
§3]
УПРУГАЯ ПЛОСКОСТЬ И ПОЛУПЛОСКОСТЬ
519
Поэтому, суммируя действия элементарных нагружений q(Qdl
по участку [хо, Х\] границы, придем к выражению функции на-
напряжений в виде
C.3.2)
Пусть, в частности, #(?) = ?о = const; поместив начало коор-
координат в середине участка нагружения, имеем
Через г назовем вектор-радиус точки наблюдения М(х, у) с на-
началом в точке «истока» (?, 0); г0, Г\ — вектор-радиусы М при
I = зр а _ их начала расположены в концах участка нагруже-
нагружения. Углы векторов г0, г, гх с осью Ох обозначаются 00, 05, 01§
Тогда (рис. 41)
+ а = r0 cos 90
и, далее,
d%= — yd ctg 0j,
^-^.f'Mctg2^.
Интегрируя по частям, найдем
' 0, + 1) - 0О (ctg2 0О + 1) - (ctg 0, - ctg e0)],
Рис. 41.
и это выражение преобразуется к виду
C.3.3)
причем, конечно, линейное по у слагаемое может быть отки-
откинуто. Напряженное состояние может быть определено суммой
состояний, вычисляемых с помощью формул A.10.2) в системах
полярных координат с центрами в концах участка нагружения.
520 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Называя через (е°г, ееI («г. ее) системы единичных векторов,
определяющих эти координатные системы, имеем
- да+«ю в0
Связь между векторами этих систем дается очевидными ра-
равенствами
ej = e° cos a + eg sin a, e' = — e°sina + eg cos а, а = 0, —90.
Отсюда получаем
ejee + е^е' = (е°е° - e°re°) sin 2а + (e°eg + е°е°) cos 2а,
и выражение тензора напряжений в системе ltPr, e§) представ-
представляется в виде
¦? Bа - sin 2а) е°ве°в + (e°eg + е°ве°г) sin2а].
Главные напряжения определяются по уравнению B.1.5)
гл. I
- 40г Bа + sin 2а) - a --^-sin2a
= 0
--^-sin2a — ¦—- Bа — sin 2a) — a
и оказываются равными
0! = — — (a + sin а), 02= — — (а — sin а),
а главные оси направлены под углами -ко. и -^{пЛ-щ к оси Ох
На оси х — границе полуплоскости — а = 0 вне и а = я вну-
внутри участка нагружения; этим подтверждается отсутствие каса-
касательных напряжений хГг,д0 = ^ху на всей границе; нормальные на-
напряжения 0Ж, Оу на границе равны друг другу; они обращаются
в нуль вне и равны —qo внутри участка нагружения.
3.4. Нагружение силой, направленной вдоль границы. В этом
случае краевые условия записываются по A.8.4), A.8.6) в виде
C.4.1)
§ 3] УПРУГАЯ ПЛОСКОСТЬ И ПОЛУПЛОСКОСТЬ 521
и, обратившись к C.2.2), найдем, что гармоническая функция
fi равна нулю на границе, а значит, и в области у > 0. Гармо-
Гармоническая функция /2 определяется решением задачи Дирихле
для полуплоскости
у = 0: f2(x,0) = P(x),
имеющим, как известно, вид
оо
г и\-1- [ Р {l) dl П 4 2
В случае сосредоточенной в начале координат силы К\ имеем
О, х<0,
Ки *>°>
и по C.4.2)
со оо
fп (х, и) = —- т rw,—г = — -зг" dE —
о о
К1 ^ / у \
Л TXi \ X j
так как 9|||^,00 = я, 6g|j^.0 = 6. По C.2.2), отбрасывая линей-
линейное по у слагаемое, получаем
U (х, у) = - -J- rB sin 9. C.4.3)
Отлично от нуля, как и в задаче Фламана, только напряжение
ог=*-Ц*- cos 9. C.4.4)
Поскольку угол 0 отсчитывается от направления силы (оси Ох),
оба случая — нормального и касательного нагружений сосредо-
сосредоточенной силой — приводят к одинаково формулируемому ре-
результату. В общем случае сосредоточенной силы, направленной
под углом y к оси Ох:
К = Kih + КчЧ = К (i\ cos y + h si" Y).
имеем, сославшись на формулы C.4.4), C.2.7),
2/f . t 2K 2K
Jtr Jtr ЗХ/*
C.4.5)
где ф — угол, отсчитываемый от направления силы. Эта фор-
формула включает только что упомянутые как частные случаи.
522 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
При равномерном распределении поверхностных сил по
участку —а < х -< а границы у = О
Р(х)
О, — оо < х^ — а,
q {х + а), — а^х^а,
2qa, a^.x< оо,
и по C.4.2)
а оо
с i \ ЯУ Г \+а ,«, , 2да Г ,
Выражение функции напряжений после несложного вычис-
вычисления приводится к виду
U(x, у) = ^-[(х-а)е1-(х + аN0-у1п^-], C.4.6)
причем использованы обозначения п. 3.3 и отброшено линейное
по у слагаемое.
3.5. Плоская контактная задача. Рассматривается задача о
напряженном состоянии в упругой полуплоскости, создаваемом
прижатым к ее границе по участку (—а,а) жестким гладким
штампом.
Принимается, что касательные напряжения отсутствуют на
всей границе, а нормальные — вне участка нагружения; на
участке нагружения задается перемещение
v = v(х, 0) = f(x), -а<х<а, C.5.1)
причем f(x) определяется формой контактирующей с пло-
плоскостью поверхности штампа. Конечно, закон распределения
нормальных напряжений на этом участке
о» = ~Я(х)
представляет основную неизвестную задачи. Известной является
прижимающая штамп сила
а
Q= jq(x)dx. C,6.2)
—а
Сославшись на C.2.12), можно представить перемещение инте-
интегралом
а
v (X, 0) = р | q (|) In j^jy 4 = / (х), C.5.3)
§ 3] УПРУГАЯ ПЛОСКОСТЬ И ПОЛУПЛОСКОСТЬ 523
и задача сводится к разысканию из этого интегрального урав-
уравнения первого рода неизвестной функции q(Q, подчиненной
условию C.5.2)*).
В рассмотрение вводится логарифмический потенциал про-
простого слоя, распределенного по отрезку (—а, а) с неизвестной
плотностью q(x):
а
®{х,у)= \q {%) In i dl, r = Y(x-lJ + y2. C.5.4)
—а
Это, как известно, гармоническая в плоскости Оху функция,
всюду непрерывная; ее нормальная производная испытывает
разрыв при переходе с «нижней» стороны слоя на его «верх-
«верхнюю» сторону; ее предельные значения на слое определяются
равенствами
дю J + nq(x), \x\<a,
W , + *>-{ 0 \х\>а, C-5>5)
причем q{x) предполагается непрерывной в точке х.
Поведение логарифмического потенциала простого слоя при
г->-оо определяется соотношением
/ \ 1 I /V\ rli' /~\ I "I/ 2 2 ^Q К A\
—a
непосредственно следующим из определения C.5.4) и условия
C.5.2). Обратно, всякая гармоническая функция, обладающая
перечисленными свойствами (непрерывность, характер разрыва
нормальной производной, поведение на бесконечности), является
логарифмическим потенциалом простого слоя; она представима
интегралом C.5.4).
Сославшись на C.5.4) и C.5.3), имеем
m I v Г\\ — — f С vi (Ч Ъ 7\
Ш \Х7 V) — ^р I \Х). \o,Q.l)
Задача сведена к разысканию в плоскости Оху гармонической
функции, принимающей на отрезке (—а, а) оси Ох заданные
значения C.5.7) и удовлетворяющей условию C.5.6) на беско-
бесконечности. Имея решение этой задачи, можно найти закон рас-
распределения давления на участке контакта, используя соотноше-
соотношение C.5.5).
Функцию <о(х,у) легко связать с введенной в п. 3.2 гармони-
гармонической функцией fi(x,y), через которую по C.2.4) выражается
*) Решение интегрального уравнения C.5.3) можно также получить све-
сведением его к краевой задаче Римана (см. Ф. Д. Г а х о в, Краевые задачи,
Физматгиз, 1963).
524
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
функция напряжений. Действительно, по C.2.4), C.3.2) и C.5.4)
имеем
так что
ду
C.5.8)
Это позволяет выразить напряжения через потенциал а>(х, у):
C.5.9)
ду2 > у ду
'У дх2 ~ \ ду2
к \ ду У ду2 ) '
ХУ дх ду " дх ду2 л " дх ду
Через эту же функцию и связанную с ней зависимостями Ко-
ши — Римана функцию
а
C.5.10)
выражаются также и перемещения в обобщенном плоском на-
напряженном состоянии
' !
I
C-5.11)
с соответствующими заменами упругих постоянных в случае
плоской деформации.
Из формул C.5.9) следует, что при действии только нор-
нормальных к границе поверхностных сил нормальные напряжения
Ох, оу на границе равны друг другу; на это уже указывалось в
п. 3.3 для случая равномерного нагружения участка границы.
3.6. Построение потенциала ю. Внутренность единичного кру-
круга ?= регф конформно отображается на разрезанную по участку
|| плоскость Оху. Это преобразование имеет вид
= -| (р
¦?) cos
C.6.1)
Круги р = ро < 1 плоскости ? преобразуются в эллипсы с полу»
осями — (on + —), 4 Ро на плоскости z с фокусами в
§ 3] УПРУГАЯ ПЛОСКОСТЬ И ПОЛУПЛОСКОСТЬ 525
точках ±а\ для окружности ро = 1 эллипс вырождается в отре-
отрезок (—а, я) плоскости г, причем нижней его стороне (у—*—0),
обходимой в направлении от +а до —а, соответствует верхняя
полуокружность ро = 1 @<ф<я), а верхней («/-»-+0) —ниж-
—нижняя полуокружность (я<ф<2я). Бесконечно удаленная точка
(х, у->оо) плоскости г переходит на плоскости ? в начало коор-
координат (р = 0).
Искомый потенциал са{х,у) преобразуется в функцию
ш*(р, ф), также гармоническую, поскольку преобразование
C.6.1) конформно. На «эллипсе» р0 = 1
х — a cos ф, у = 0,
и краевое условие C.5.7) для функции со* записывается в виде
0.A. <P)=j/(acosq>). C.6.2)
Замечая, далее, что при (х, у)->оо
9 9 й2 i 1 1 2р
х2 + у2 -> -гт , п > In — ,
" 4р2 r0 a
можно преобразовать условие на бесконечности C.5.6) к виду
«>4 @, Ф) - Q In Ц- ~> 0, р -* 0. C.6.3)
Поэтому, введя в рассмотрение вместо со*(р, ф) также гармони-
гармоническую функцию
О(р, Ф) = о.(р, <P)-Qln-f-, C-6.4)
приходим к задаче о разыскании этой функции по условиям
GO. <P) = y/(acos<p)-Qln-|-, Q(O,<p) = O. C.6.5)
Ее решение представляется известным интегралом Пуассона
2Л
причем следствием второго условия C.6.5) являются требова-
требования - - .
2л а
Q = l—y- f (a cos ip) cty = —Ц- f&) d^ (з.б.Т1)
2яв In — о яв In — _^ У аг - gz
r a r a a
526 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Вспоминая еще представление ядра Пуассона тригонометриче-
тригонометрическим рядом
и замечая, что f(acoscp) четна по ф (одинакова на верхнем и
нижнем берегах разреза), имеем
оо оо
Q (Р. ф) = ^ а*Р* cos kff> ф* (Р> Ч>) = <21п Т" + S р6(Х* cos fe(p- C-6-8)
k=l
Здесь a* — коэффициенты Фурье:
2Я
= -JfT I f (a cos ib) cos й'ф d^. C.6.9)
Остается составить выражение закона распределения q(x)
поверхностных сил на поверхности контакта. Имеем
да)* да> дх . да> ду а Г да> (. I \ , да I, , 1
и, сославшись на C.5.5), C.6.8), найдем
Эш,
= а
да
W
±о
sin ф = + anq {a cos ф) sin ф,
откуда, вспомнив, что э!пф^0 при г/->±0, придем к формаль-
формальному представлению q{x) в виде
Q + S kakcos
ajt|sn(p| ( ^J
C.6.10)
Ряд в правой части представляет предельное значение при
|?|= 1 вещественной части аналитической в круге |?|< 1 функ-
функции
оо
2 kakpk (cos Аф + / sin ^ф),
причем предельное значение ее мнимой части равно
оо
к • и 1 df (a cos ф)
a*v sinfe(P= - j d(f >
§ 3] УПРУГАЯ ПЛОСКОСТЬ И ПОЛУПЛОСКОСТЬ 527
что следует из определения C.6.9) коэффициентов а^. Из ска-
сказанного, сославшись на известные формулы обращения Гиль-
Гильберта *), имеем
2л
J
о
ь , 1 Г df (a cos ib) , ib — ф
C0S ^ = - f J ^ ct& ^
так что другим представлением q(x) может служить
Г f
f
rff(acosi|)) , -ф — ф
Разбивая промежуток интегрирования на два: @, я) и (я, 2я) —
и заменив во втором переменную интегрирования ty на 2я — я|),
преобразуем входящий в это выражение интеграл к виду
J
л
= 2 f
J
cos
dib cos ш — cos яр
откуда, возвращаясь к переменным # = acos(p, | = a cos tp, по-
получим
q(x) = nV^I7~ \Q ~^~ j ' l"~ dl\- С3-6-12)
Здесь интеграл в правой части понимается в смысле его
главного значения
' (?\ гЛ>2_?2
11—а *+е -J
и достаточным условием его существования является выполне-
выполнение условия Гельдера
В точках, где это условие не выполнено, q(x) не будет ограни-
ограничено. Например, в угловой точке х = 0 штампа, ограниченного
кривой у = /(|*|), производная у' = f'(\x\)sgnx, условие Гель-
Гельдера не выполнено и давление будет бесконечным.
*) См., например, Ф. Д. Г а х о в, Краевые задачи, Физматгиз, 1963,
стр. 56.
528 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
3.7. Плоский штамп. В этом простейшем случае f(x) =
=/о = const и распределение контактного давления по C.6.12)
определяется формулой (Садовский, 1928)
C-7Л)
Выражение потенциала со, определяемого формулой E.5.8),
имеет весьма простой вид:
co=Qln-f-. C.7.2)
Перемещение v упругой среды на оси Ох, определяемое по
C.5.11), может быть представлено в виде
= i§-lnp + f0. C.7.3)
Как и в пространственной задаче о плоском штампе (п. 6.3
гл. V), давление бесконечно на краю контактной площадки; в
отличие от этой задачи, перемещение плоского штампа может
быть определено лишь с точностью до аддитивной постоянной.
Это объясняется тем, что вектор перемещения точек упругой
среды в пространственной задаче на бесконечности равен нулю,
тогда как в плоской задаче он неограниченно возрастает по ло-
логарифмическому закону.
3.8. Штамп параболического очертания. Сославшись на
F.1.11) гл. V, примем
f(x) = 6-Ax2 = 6-Aa2cos2(p = 6-± Аа2 - \ Аа2 cos 2<p, C.8.1)
так что по C.6.10)
Q =
р'пт-
C.8.2)
а(х) = —Л—г (q-1 Аа2cos 2<p) =
4 v ' па | sin ф j V4' p V
Наперед неизвестная ширина 2а контактной площадки опреде-
определяется по условию конечности контактного давления на ее краях;
получаем
±а2 g-i/QP"--,/ 2Q
а а\ а У 1
и выражение контактного давления представляется в виде
g 3] УПРУГАЯ ПЛОСКОСТЬ И ПОЛУПЛОСКОСТЬ 529
3.9. Сосредоточенная сила в упругой полуплоскости. В п. 3.1
была рассмотрена задача о действии сосредоточенной силы
X + iY в упругой плоскости; ее решение в случае плоской дефор-
деформации выражено через функцию напряжений, определяемую
формулой C.1.10) в предположении, что сила приложена в на-
начале координат z = 0. В случае силы, приложенной в точке г|о
оси Оу, достаточно заменить z на z — trio-
Рассмотрим действие двух сил: силы K + iY в точке гг)о и
зеркально отображенной относительно оси Ох силы X— iY в
точке (—1т)о). Функция напряжений ?/„ описывающая состоя-
состояние упругой плоскости в этих условиях, очевидно, может быть
получена наложением функций вида C.1.10): ее производная по
z с точностью до аддитивной постоянной равна
(Х + iY) In (z - /По) -(Х- iY) In (z + /no) -
dz 4jt(l-v)
+ C - 4v) (X + iY) In (z + /no) + C - 4v) (J - iY) In (z - /%)]. C.9.1)
В рассматриваемой здесь задаче разыскивается напряжен-
напряженное состояние в упругой полуплоскости у > 0, в точке ir\o кото-
которой приложена сосредоточенная сила X+iY, тогда как граница
у = 0 свободна от нагружения. Называя через U функцию на-
напряжений этой задачи, полагаем
U = U.+ Utt. C.9.2)
Тогда краевые условия, определяющие {/,„ следует записать в
виде
при « = 0, z = z = x: —=—- = -^-^- Н—-?i- = 0 C.9.3)
г ^ dz dz dz v '
и в развернутом виде
dz
[ л + «Ло А -f- "По
Введя в рассмотрение угол 9<ь
sin9^ 6ct^- @<90<я),
можно переписать это соотношение также в виде (го= Ух +г\20)
29o] +
C.9.4)
34 А. И. Лурье
530 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Величина в правой части вещественна, производная по у иско-
искомой функции напряжений на границе оказалась равной нулю;
это можно было предвидеть, поскольку касательные напряже-
напряжения хху на оси Ох при нагружении плоскости силами X±iY в
точках ±nio, вследствие симметрии, отсутствуют. Функция ?/„
соответствует напряженному состоянию, создаваемому нормаль-
нормальным к границе нагружением, и ее можно разыскивать в форме
C.2.4):
Я *?? C.9.5)
ду ' дх
0=0
дх
у -о
где f(x,у) —функция, гармоническая в верхней полуплоскости,
причем df/dx определяется задачей Дирихле. Решение ее ча-
частично записывается сразу, так как
1П, д cos60
представляют значения на прямой у = О гармонических при
у > 0 функций
+ Т10 COS 6 X
которые в свою очередь представляют производные по х от гар-
гармонических функций
х\ 9 [*e + (y
cose
г
Вместе с тем
cos 290 = -г—| = 1 г~Т = Т- (* + 2%9о) = ~г{х + 2т1о9) U-
Приходим к следующему представлению гармонической в у > О
функции f(x,y):
f (x, y)=- ^Y^{
+ У [- 2 A - v){jc9 + (f/ + Ло)inr} + TjoIn r]},
и теперь по C.9.5), отбрасывая линейные слагаемые, находим
. C.9.6)
§4]
упругий клин 531
Решение задачи представляется в виде суммы функции на-
напряжений U\, создаваемой действием горизонтальной силы, и
ц2 — вертикальной силы. Получаем
Oh=_J_U C_4v)ln(i2 +rg)--ln(z» + rg)
dz 2n(l-v)L4V *¦ W 4 V W
^^ + 2% B + Ль) Щ , C.9.7)
+ 2(l-vN + 2(l -v)i-^-B
J^ i^^] C.9.8)
Эти бигармонические в верхней полуплоскости функции имеют
требуемую особенность в точке z = it\0 приложения силы X + iY
и принимают постоянное значение на границе у=0, что и требу-
требуется. Вычисление напряжений проводится по формулам A.13.2).
§ 4. Упругий клин
4.1. Сосредоточенная сила в вершине клина. Рассматривае-
Рассматриваемая клинообразная бесконечная область ограничена двумя по-
полупрямыми у = ±*tga под углом 2а; ось Ох направлена внутрь
этой области, а начало координат (вершина клина) принято за
начало полярной системы координат (г, 9), так что —a ^9-^ а.
Проекции силы, приложенной в вершине клина, на оси Ох, Оу
обозначаются X, Y; грани клина предполагаются ненагружен-
ными:
9=±<х: ав = 0, тг6 = 0. D.1.1)
Можно удовлетворить этим условиям, предположив, что они вы-
выполняются не только на границах, но и во всей области:
|6|<а: ав = 0, т,е = 0. D.1.2)
Напряжение стг при этих условиях будет гармонической в об-
области функцией, так как
V2 (or, + (те) = V2o> = V2V2i/ = 0. D.1.3)
34*
532 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Требуется также выполнить при всяком г уравнений статики
<r,sin8r dQ + Y = О, D.1.4)
выражающих условия равновесия части клина, отсеченной дугой
радиуса г. Этим соотношениям можно удовлетворить при любом
г, предположив аг обратно пропорциональным г; поскольку
Or — гармоническая функция, следует принять
D.1.5)
Отличающихся от нее других гармонических функций, удовле-
удовлетворяющих условиям D.1.4), не существует. Определив по этим
условиям постоянные А и В, найдем
2 / X cos 9 Y sin 6 \ . . .
°г г I 2а + sin 2а + 2а-sin 2а )' 14.1.0)
Напряжение ог всюду (при г ф 0) конечно (корни знаменателей,
исключая нулевые, все комплексны) и стремится к нулю на бес-
бесконечности (г-*-оо). Функция напряжений представляется в
виде
„ n/ XsinB У cos6 \_ / уХ xY \
\ 2а + sin 2а ' 2а - sin 2а ) \ 2а + sin 2а "¦" 2а - sin 2а J '
D.1.7)
По ней определяется вектор перемещения (для плоского напря-
напряженного состояния):
Г х» 1
_1_.L21nr + (l+v)^-j + O0 + «0x.J
D.1.8)
При a = я/2 возвращаемся к случаю полуплоскости, нагружен-
нагруженной сосредоточенной силой; a = я дает решение задачи о на-
напряженном состоянии в плоскости, разрезанной по отрицатель-
отрицательной оси Ох, когда сила приложена в вершине разреза.
С целью сравнения с элементарной теорией изгиба балки
примем в выражениях компонент тензора напряжений (при
§ 4] УПРУГИЙ КЛИН 533
где / — момент инерции поперечного сечения х = const, 2h-l —
его площадь. Придем к формулам
_ 2У х2у _ 4Ktg3g xy 4o
°х~ 2a-sin2а г4 ~ о~_о!„о„ ti cos y>
n
2a-sin 2a
2У xy> t, t|ru у 4
2а-
4Y
2а-
4Г1
sin
tg3
sin
tsj31
2a
a
2a
a
3/ '
У3
3Ix
У2
2a-sin2a /-4 2a-sin2a 3/
и при достаточно малых а, полагая
2a - sin 2a ~-J a3,
получим
~_l?? *V 3 Ky2
<Ъг ~ / » t^ « ; 2 h3 '
Выражения нормальных напряжений в этом приближении со-
совпадают с даваемыми элементарной теорией, тогда как
вдвое больше определяемых этой теорией максимальных напря-
напряжений.
4.2. Интегральное преобразование Меллина в задаче о клине.
Для сокращения записей далее рассматривается лишь нагруже-
ние клина нормальными к граням поверхностными силами, при-
причем по отдельности исследуются случаи симметричного и косо-
симметричного нагружений (задачи А и Б):
А . 9 = ± а:
Б 9 = ± а:
<7i(r), тг6 = 0, 1
Бигармонические функции напряжений, удовлетворяющие
условию отсутствия касательных напряжений на гранях клина,
представляются в виде
A Ui (p, 9) = Cip~s[(s+2)sm(s + 2)acoss9 — ssinsacos(s+2)9], |
Б U2 (р, 9) = C2p~s [(s + 2) cos (s + 2) a sin s9 - s cos sa sin (s + 2) 9], J
D.2.2)
где p = r/ro, rQ — некоторый линейный размер. Нормальные на*
пряжения <те определяются по формулам
А и Б ry?of> = s (s + 1) Uk (p0, 9) (k = 1, 2). D.2.3)
534 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Напомним, что трансформантой Меллина функции f(x), за-
заданной на интервале @,оо), называется интеграл
оо
f(s) = j f (x) x*~l dx, D.2.4)
о
где s — некоторое комплексное число. В предположении, что
f(x) удовлетворяет условиям Дирихле в любом конечном про-
промежутке, принадлежащем интервалу @, оо), имеет место фор-
формальное представление
c+ix
=i J f"(s)*-ds, D.2.5)
c-ioo
где L — параллельная мнимой оси плоскости s прямая. Не входя
в подробности, отметим, что если интеграл
/WI^.-'rfx D.2.6)
сходится, то прямая L проводится в полосе левее прямой Re s =
= s , но справа от ближайшей к s, особой точки «„ трансфор-
трансформанты /(s); значение интеграла D.2.5) не зависит от выбора с
в этом интервале («„, s,)*).
Теперь, сославшись на представления D.2.2), зададим в со-
соответствии с D.2.5) функции напряжений в виде
С+(°о
Аи Б tfk(p, e) = JL J Uk(s.Q)p-'ds, D.2.7)
С —100
где Uh(s, 6) —их трансформанты Меллина:
A Vi (s, 9) = Сх (s) [(s + 2) sin (s + 2) a cos sQ - s sin sa cos (s + 2) 8], \
Б U2 (s, Э) = C2 (s) [(s + 2) cos (s + 2) a sin sQ-s cos sa sin (s + 2) 8]. J
D.2.8)
Трансформанты Меллина функций г2о^ по D.2.3) равны
ft, так что
С+2оо
АиБ r2oj*)=-^- J s(s+l)C/fc(s, 9)p-ds. D.2.9)
*) О преобразовании Меллнна см., например, И. Снеддон, Преобразо
вания Фурыг, ИЛ, 1955.
§ 4) УПРУГИЙ КЛИН
Вместе с тем по D.2.1) и D.2.5)
L>3'j
rl
D.2.10)
Б r42)L±a=±'-y'72(p)=± 2НГ J Шр-ds,
C — ioo
где qh(s)—трансформанты функций p2^ft(p), равные по D.2.4)
CXI
Аи Б cjk(s)=jps+]qk(p)dp (A =1,2). D.2.11;
Теперь по D.2.1) имеем
А Г М - г'2 ?(s)
s, a)
92
i G2 (s, a)'
G2 (s, a) = - (s + 1) sin 2a + sin 2 (s + 1) a,
D.2.12)
так что выражения функций напряжений, удовлетворяющие
краевым условиям, записываются в виде
А [/, (р, 8) =
. c+ioo
(j\ (s) (s+2) sin (s+2) a cos s6—s sin sacos (s+2) 6
= A f
2я/ J
C-ioo
f/2(p, e) =
2
s (s+1)
(s+l)sin2a + sin2(s+
•p-^ds,
A f
2я/ J
?2(s) (s+2) cos (s+2) a sin s6—s cossasin (s+2) 6
. Q-S
sin
D.2.13)
Предполагается, что Uh(p, 8) растут при р —¦ oo не быстрее,
чем р*); тогда интеграл D.2.6) будет сходящимся при
s, < — 1, а прямая L проводится в полосе (Resb — 1), где
Si — корень функции Gk(s, а), расположенный слева от —1,
с наибольшей среди этих корней вещественной частью.
Вычисление интегралов D.2.13) производится по отдельности
при р < 1 и р > 1. В первом случае дополним слева прямую L
*) Это условие соблюдено, например, в задаче о действии сосредото-
сосредоточенной силы в вершине клина; см. D.1.7).
536 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
полукругом радиуса |s| = /?; в предположении применимости
известной леммы Жордана *) интеграл по полукругу при
R —> оо стремится к нулю и вычисляемые интегралы равны про-
произведениям 2ш на сумму вычетов по всем полюсам подынтег-
подынтегральных функций, расположенным слева от L. Из этого же рас-
рассуждения при р > 1 следует равенство интегралов произведению
суммы вычетов по всем полюсам, расположенным справа от L
на (—2я/) (обходимая область теперь остается справа).
Особый интерес представляют слагаемые ?/Г' (р, 9), Ul (р, 8)
этих сумм, соответствующие полюсам s = — 1 и s = 0 справа
от L. Введя обозначения
A f I (s, a) = -*—.—г [E + 2) sin (s + 2) a cos s9 — s sin set cos (s + 2)8],
"i ls> a)
Б f2(s, а) = 7гт—r[(s + 2)cos(s+2)asins9 —scossasin(s + 2)9],
U2 E, (X)
D.2.14)
по правилу Лопиталя имеем
д с / \i п (sin a + a cos a) cos 8+ 8 sin 6 sin a
„ (a sin a — cos a) sin Э + 6 cos 9 cos a V • • )
Вспомнив D.2.11), получаем равенства
Аи Б -2ro^(-l)sina = Z, 2r0^2(-l)cosa= Y, D.2.16)
где X, Y — проекции на оси Ох, О у главного вектора поверх-
поверхностных сил на гранях клина. Теперь, отбросив несущественные
линейные по х — г cos 8, у — г sin 8 слагаемые, получаем
Аи Б УГ1(Р,в)=-Ув^ 'di
D.2.17)
в полном соответствии с формулами D.1.7). Из этих соотноше-
соотношений следует, что при отсутствии в суммах Vh(p, 8) слагаемых,
растущих при р -* оо быстрее, чем р, напряженное состояние
в клине при р —* оо такое же, как при нагружении его в вер-
вершине силой (X, Y).
Аналогично имеем
. с /л \ 1 с 1 \i sin26— 26cos2a /лпю\
АиБ f,(O,a)=l, Ms, a) Uo= sin 2а-2а cos 2а' D'2Л8)
и поэтому G°(р, 9) = const, тогда как при условии, что
Б Gi@, а)= - sin2а + 2acos 2a =^=0, tg2a=^=2a, 1 /4219)
2а ф 2а» = 4,493 » 257°,
*) См., например, В. А. Д и т к и н, А. П. Прудников, Операционное
исчисление, изд-во «Высшая школа», 1966, стр. 34.
упругий клин 537
имеем
Б Щ(р, 9)= -
1 о sin 26 — 26 cos 2а , . ч ,. п ог.ч
= ~ Tm°sin2a-2acos2a <а ф «О- D-2-20)
Здесь по D.2.11)
оо
т° = 2rg J* */2 (р) р rfp D.2.21)
о*
представляет главный момент относительно вершины клина рас-
распределенных по его граням поверхностных сил. При а = а„ ко-
корень s = 0 функции G2(s, а) будет двукратным, и нет нужды
приводить результат громоздкого вычисления в этом специаль-
специальном случае.
Как будет показано в п. 4.3, решение f/° (p, 9) может быть
непосредственно получено из рассмотрения задачи о нагруже-
нии клина сосредоточенным в его вершине моментом т°. Из
сказанного здесь следует, что оно представляет главный член
выражения <72(р, 9) на бесконечности (р-»оо) при отсутствии
в полосе (—1,0) корней функции G2(s,а). Доказывается, что
это имеет место при а < а., тогда как при a > а» функция
G2(s, а) приобретает еще один простой вещественный отрица-
отрицательный корень *)
Б -|<s = A(a)<0. D.2.22)
Соответствующее ему слагаемое <7гЛ)(р, 9) функции напряжений
Б t4%, 9) =
q\(X) B+X)cos(X+2) a sinX6 - XcosXasin (Я+2) 6/г \ul
^X(k+l) sin2a-2acos2(X+l)a W D.2.23)
представляет главный член разложения функции напряжений.
Его выражение зависит от распределения поверхностных сил
q2(p) на гранях клина и не может быть определено только че-
через изгибающий момент т°. Через q\{k) в формуле D.2.23)
обозначен интеграл
4.3. Сосредоточенный момент в вершине клина. Краевые ус-
условия D.1.1)
9=±а: ое = 0, тг9 = 0 D.3.1)
*) См. ниже п. 4.9.
538 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
дополняются уравнениями равновесия части клина, отсеченной
дугой произвольного радиуса
а
X = — Г (стг cos в — xr6 sin 9) г dQ = О,
-а
а
Y = - J* (orr sin в + тгв cos 9) г dQ = О,
—а
а
J тгег2 d6 = - т°.
D.3.2)
Эти условия позволяют искать решение задачи, предполагающее
отсутствие нормального напряжения ав во всей области:
18 Ко: ^ = ^" = 0. D.3.3)
Функция напряжений, нечетная по 9, линейна по г; но нечет-
нечетной бигармонической функцией, пропорциональной г, исключая
тривиальную г sin 9, является CGrcosQ, дающая по D.1.7) ре-
решение задачи об изгибе клина сосредоточенной в его вершине
силой. Поэтому в задаче об изгибе моментом функцию напря-
напряжений следует принять зависящей только от 9; такой функцией,
удовлетворяющей краевым условиям D.3.1), является
U= i-С (sin 29-29 cos 2а). D.3.4)
Выразив через нее напряжения ог, т,е, легко проверить, что
первые два уравнения статики D.3.2) удовлетворятся тожде-
тождественно, тогда как третье приводит к соотношению
а
J тгег2 dQ = С (sin 2а - 2а cos 2а) = - т°,
—а
и из него в предположении [см. D.2.19)], что а фа,, приходим
к решению (Карозерс, 1912; Инглис, 1922)
г, 1 n sin 26 — 26 cos 2а / . ч ,. о _.
с соответствующими ему напряжениями
_ 2т° sin 26 _ п?_ cos 2ct - cos 29 , „.
Of~ r2 sin 2a - 2a cos 2a ' %rQ~ r2 sin 2a - 2a cos 2a * r1"^
Результат представляется парадоксальным — решение задачи
отсутствует при некотором единственном значении угла рас-
раствора клина 2а = 2а,.
§ 4) УПРУГИЙ КЛИН 539
Объяснение парадокса требует уточнения понятия об изги-
изгибающем моменте. Естественно принять такое определение: грани
клина предполагаются нагруженными в области его вершины
кососимметричной нормальной нагрузкой
9=±а; <re=±<72(r) @<r<r0); тг6 = 0 @<г<оо),
причем такой, что ее главный вектор равен нулю, а главный
момент относительно вершины клина задан:
г, г,
jqa(r)dr = O, 2Jq2(r)rdr = m°. D.3.7)
о о
Если эти равенства сохраняются при ro-*O, q2(r)-+со, то гово-
говорят, что в вершине клина приложен изгибающий момент т°.
Конечно, это определение можно распространить и на другие
загружения клина в области его вершины.
Функция напряжений для задачи о кососимметричном нор-
нормальном нагружении клина U2(p, 9) дается выражением D.2.13),
причем главный член ее представления D.2.20) на бесконечно-
бесконечности при а < а, в точности дает решение D.3.5). Вместе с тем
при а > а, главный член функции и2{р, 9) на бесконечности,
определяемый по D.2.23), и соответствующие ему напряжения
зависят от закона распределения поверхностных сил на участке
@, го), а не только от их момента. Слагаемое вида D.3.5) вхо-
входит в состав U2(p, 9) и при а> а,., но оно не является глав-
главным— соответствующие ему напряжения при р—> оо имеют по-
порядок г2, тогда как порядок напряжений, определяемых по
главному члену, будет /-2+1М.
В постановке задачи этого пункта использовались интеграль-
интегральные уравнения статики D.3.2); этим из рассмотрения были
исключены напряженные состояния, представляемые членами
ряда для ?/г(р, 9), отличными от D.3.5). Их присутствие следует
связать с наличием в угловой точке статически эквивалентных
нулю (с исчезающими главным вектором и главным моментом)
особенностей. Пренебрежение этими членами, когда они соз-
создаются нагружением по малому участку границы, характерно
для решений, в которых принцип Сен-Венана используется в его
классической формулировке. Оно законно, если соответствую-
соответствующие им напряжения затухают при удалении от участка распре-
распределения поверхностных сил быстрее, чем состояния, определяе-
определяемые действием момента этих сил.
Возвращаясь к задаче этого пункта, теперь следует признать,
что решение ' D.3.5)' Карозерса — Инглиса. применимо при
а < а,, тогда как при а > а. (и при а = а,) сама постановка
задачи о нагружении клина сосредоточенным в вершине момен-
моментом лишена смысла. Ее решение при а, > а зависит от закона
540 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
нагружения участков @, г0) граней клина и не сводимо к дей-
действию момента.
4.4. Нагружение боковых граней. Вычисления с помощью
формул D.2.13) можно продолжать двумя путями — примене-
применением теоремы о вычетах и непосредственным вычислением вхо-
входящих в них интегралов.
Первый способ требует знания корней функций D.2.12), на-
находимых решением уравнений
A
\ D.4.1)
г, д / \ sin 2a sin г /\1
Б ДB) ( ) j
Корни zh расположены симметрично в четырех квадрантах пло-
плоскости z:
zk = ±ak±ibk, sk-\-\=—(±ak±ibk). D.4.2)
В воспроизводимых здесь табличках приведены для нескольких
значений а значения этих корней. Их асимптотические значения
(при больших k) даются формулами
д _. 1гм. 1 \ _. , ,,/sin 2а
/ I \ / cin On \ D.4.3)
Б k (
Общее представление формул D.2.13) может быть записано
в виде
С+{оо
r'9)=2Sr J
причем с — — 1 — е, где е достаточно мало. Применение тео-
теоремы о вычетах приводит к различным аналитическим представ-
представлениям решения f(r, 9) при р < 1 и р > 1. При р < 1, иначе го-
говоря, в области, примыкающей к вершине клина, вычисление ве-
ведется по полюсам, расположенным слева от прямой s = — 1:
D.4.5)
тогда как продолжение решения в область р > 1, характеризую-
характеризующее поведение напряжений на бесконечности, строится по полю-
полюсам справа от этой прямой:
± D.4.6)
§41
УПРУГИЙ КЛИН
541
Таблица 14
А. Корни
sin 2a , sin z .
уравнения — -\ = 0
а
к
1
3
4
5
л
8
4,234
10,72
17,08
23,40
29,71
bk
2,137
2,996
3,445
3,753
3,951
л
4
ak
4,303
10, 75
17, 10
23, 42
29, 72
bk
1,758
2,641
3,095
3,404
3,640
Зл
8
ak
4,442
10,82
17,14
23,45
29,75
bk
0.8501
1,863
2,331
2,646
2,884
Ч
2,645
7,694
14,02
20,32
26,62
)Я
8
bk
0
0,8702
1,585
1,976
2,2553
Б. Корни Zk*= я/fe + 1Ьц уравнения
sin 2a sin z
2a
a
k
1
2
3
4
b
л
8
ak
0,7854
7,511
13,91
20,24
26,56
bk
0
2,660
3,246
3,611
3,878
я
4
ak
1,571
7,553
13,93
20,26
26,57
bk
0
2,300
2,894
3,262
3,529
ak
2,356
7,641
13,98
20,30
26,60
Зл
8
bk
0
1,497
2,125
2,501
2,772
ak
3,927
5,114
10,86
17,17
23,47
"in
bk
0
0
1,302
1,801
2,124
Примечание. Первому корню а\ — 2a, b\ = О таблицы Б соответствует корень
s = 0 функции G2 {s,u). Корень s = —\, г = 0 утерян при переходе к уравнениям в формуле
Функции напряжений при р < 1 поэтому представляются ря-
рядами вида
2a U*(8)p 2а + ЛЛ6)р 2a ,
D.4.7)
и напряжения в вершине клина будут стремящимися к нулю или
бесконечности в зависимости от знака неравенства
2a
ak ^ 2а.
D.4.8)
Исследование корней показывает, что при симметричном на-
гружении (уравнение AA(z) = 0) имеет место неравенство
542 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
с верхним знаком при 0 < 2а < л, тогда как при л < 2а < 2я
имеется вещественный корень, меньший 2а. В кососимметрич-
ном случае (уравнение ДБB)=0) перемена знака неравенства
происходит при значении 2а = 2а,, определяемом по D.2.19),—
напряжения в вершине клина стремятся к нулю при 2а < 2а, и
к бесконечности при 2а > 2а*.
Например, в случае симметричного нагружения при а = -д-
имеем а, = 4,303 > у, тогда как при а = -^- а{ = 2,645 <
< 1,25я — в первом примере напряжения в вершине клина от-
отсутствуют, во втором — бесконечны. В случае кососимметрич-
ного нагружения при этих значениях а имеем соответственно
а2 = 7,553 > —¦> «2 = 5,114 > 1,25л — напряжения отсутствуют,
тогда как при а» < а имеется корень а2 < 2а.
Поведение функций напряжений при р > 1 в соответствии
с D.4.6) представляется рядом вида
f (r, О) = Ц р' "? [вк (8) 9^ + Bk (8)р~1Щ, D.4.9)
k
причем в числе этих корней имеется z = а = 0, а при кососим-
метричном нагружении и корень щ = 2а; напряжения на беско-
нечности имеют порядок р 1 » /, Главный член этих рядов
при симметричном, равно как и при кососимметричном, нагру-
нагружении обусловлен корнем г = a (s = — 1)— это решение
D.2.17), определяемое главным вектором поверхностных сил.
При симметричном нагружении напряжения, находимые по сле-
следующим слагаемым ряда D.4.9), затухают при р -* оо значи-
значительно быстрее, чем р. При кососимметричном распределении
поверхностных сил и равенстве нулю их главного вектора на-
напряжения, обусловленные действием главного момента (ко-
(корень а.\), имеют порядок р~2, но при а > а, не этот член ряда
является главным; на это уже указывалось в п. 4.2 [см. фор-
формулу D.2.23)].
Дальнейшее рассмотрение проводится для случая симметрич-
симметричного нагружения равномерно распределенным по участкам
0<г<го, 8=±а давлением р, так что по D.2.11)
<7i(p) = -p(A)O-p).
D.4.10)
§ 4] УПРУГИЙ КЛИН 543
Возвращаясь к формуле D.2.13А), получим следующее вы-
выражение нормального напряжения аг:
C+ico
р0 [ft (¦?+4) sin 5a cos (s+ 2) 8—(^+2) sin (s+2) «cos sQ _2_s
[(s+l)sin2a + sin2(s+l)a](s
C — ioo
D.4.11)
Оно значительно упрощается при Э = ± a: действительно, пре-
преобразовав числитель к виду
(s + 4) sin sa cos (s + 2) a - (s + 2) sin (s + 2) a cos sa =
= (s + 1) sin 2a - 2 (s + 2) sin 2a + sin 2 (s + 1) a
и сославшись на D.4.10), получим
-e+ioo
причем путь интегрирования — прямая, параллельная мнимой
оси плоскости z = 2(s + l)a, проведенная слева от нее и сколь
угодно к ней близко (е —>• + 0).
При р < 1 интеграл равен произведению 2ni на сумму выче-
вычетов по полюсам
Zfc = - ак + ibk, zfc = -ak- ibk (ak>0)
в левой полуплоскости; поэтому
[ibk ibb -.
e-w^ e-w^ 1
sin2a+2acosZ +sin2a+2aco,d-
A-l , R e
D.4.13)
При p > 1 в число полюсов подынтегральной функции в правой
полуплоскости z
2fc = afc + ibk, zk = ak- ibk
включается полюс в нуле; сумма вычетов умножается на —2лг.
Получаем
sin 2«
Sin2a + 2a
fe-I
^а J[ЩГШШ^Т + sinl+2acoszj- <4-4Л
Ряды хорошо сходятся, так как числа ah быстро возрастают
с ростом номера k.
544 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Интеграл в формуле D.4.12) можно представить в веще-
вещественной форме, разбивая его на интегралы по мнимой оси
от — оо до 0, по полукругу радиуса е —> + 0 слева от начала
координат и по мнимой оси от 0 до оо. Тогда
[оо -,
1 | 2 С sin (и In p) da
2a+sin2ai~ л J «Sin2a+sh2a« '
о J
D.4.15)
Интеграл вычисляется численно; возникающие при этом затруд-
затруднения связаны с сильными колебаниями функции sin(«lnp)
при р, близких к нулю и очень больших.
§ 5. Краевые задачи плоской теории упругости
5.1. Классификация областей. Часть плоскости, занятая ма-
материалом, обозначается L, остальная — буквой R. Мы ограничи-
ограничиваемся рассмотрением случаев: а) односвязной конечной обла-
области, б) бесконечной области, снабженной отверстием, в) дву-
связной кольцеобразной области.. Границей области в первом
случае служит несамопересекающийся замкнутый гладкий (не
имеющий угловых точек) контур Г; во втором — к границе
кроме такого же контура, ограничивающего L изнутри, причис-
причисляется бесконечно удаленная точка z = оо; в третьем — гра-
граница Г распадается на два контура — наружный Го и внутрен-
внутренний IY При положительном направлении обхода по границе
область L должна оставаться слева*); иными словами, обход
конечной односвязной области совершается против часовой
стрелки, контура отверстия — по часовой стрелке, двусвязной
области —- против часовой стрелки по Го и по часовой стрелке
по Гь В соответствии с этим интеграл по контуру области в
каждом из этих случаев представляется в виде:
а) §, б) j, в)ф=^+ф. E.1.1)
Г Г Г Го Г,
Рассматриваются две наиболее простых краевых задачи: оп-
определение напряженного состояния в L или по заданному на Г
вектору перемещения (первая), или по распределению поверх-
поверхностных сил (вторая краевая задача). Решение их основывается
на очевидной предпосылке, что напряжения в L и на Г одно-
однозначны, равно как и перемещения при отсутствии дисторсий.
Исключая точки приложения силовых особенностей, задающие
их функции непрерывны и, как решения уравнений эллиптиче-
*) Предполагается, что поворот на 90°, совмещающий ось Ох с осью Оу,
происходит против часовой стрелки.
s 5] КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ 545
с ко го типа, дифференцируемы любое число раз в открытой об-
области L. Этим налагаются определенные требования на функции
Мусхелишвили <p(z), ty(z) ¦—они должны быть таковы, чтобы
определяемые по ним напряжения и перемещения удовлетво-
удовлетворяли перечисленным требованиям. В частности, в конечной и
односвязной области функции ф(г), гр (г) голоморфны. В двух
других случаях оказывается возможным отделение в них вполне
определенных условиями задачи логарифмических (неоднознач-
(неоднозначных) слагаемых от голоморфных в L частей <p»B), ^Лг); Ре'
шение сводится к разысканию этих частей.
5.2. Краевые задачи для односвязной конечной области.
Пусть
z = со @ E.2.1)
— функция, осуществляющая конформное отображение единич-
единичного круга |?|< 1 в область L; через ? = а = eie обозначается
значение ? на окружности |?| = 1, обозначаемой у. Не нарушая
общности, можно принять, что со@) = 0 — центру круга соответ-
соответствует .начало координат z = 0 в области L. Существенно пред-
предположение
со'@=^0, |?1<1, E.2.2)
обеспечивающее (при |?|< 1) однозначную разрешимость в L
равенства E.2.1) относительно ?. Выполнение условия E.2.2)
на у обеспечивается отсутствием угловых точек на Г — границе
области L. Итак,
оо
z = © (?) = Ц сп1п {с, = со' @) ф 0), E.2.3)
причем можно считать с\ вещественным числом. Обращая ряд
E.2.3), придем к представлению ? •= ?(z) в форме степенного
ряда, сходящегося в L.
Функции Н. И. Мусхелишвили <p(z), г|з(г), голоморфные в L,
представляются в у голоморфными функциями
оо сю
Этим устанавливается представимость функций ф(г), *|э(г) схо-
сходящимися в L рядами по степеням г:
оо оо
Комплексное число, определяющее единичный вектор внеш-
внешней к L нормали к Г, обозначается
п _ eia _, cos а I г- sjn а __ jty_ _ -t jdx_ _ dz_ __ . , , . da
ds ds ds m ^°' ds '
35 А. И. Лурье
546 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
Вместе с тем на Г
[ГЛ. VII
и на у
Поэтому
\ = \m'(a)\\do\ = yW (о) о»' (а) | da \,
= iadQ, \do\ = dQ, a = —,
. dz
(о'(о)
* //с п » ел' /гтЪ
E.2.6)
E.2.7)
Функции Ф(г), Чг(г) при преобразовании E.2.1) приводятся
к виду
ФB) = Ф'BН^|р YB) = f'@) = ^|. E.2.8)
Вектор поверхностной силы F на Г
F = Fx + iFy = (Fn + iFt) n, Fn + /F, = л (F, + IFU), E.2.9)
где Fn, Ft — проекции F на нормаль и касательную к Г, пред-
представим по A.13.4) и A.14.4) в виде
Fx + IFу = {[Ф (z) + Ф (г)] п - [г& (z) + V (г)] й}г, 1
Fn + /Ff = {Ф B) + Ф (г) - [2Ф' (г) + Ч (г)] п2}г. f E'2Л0)
В частности, когда Г —окружность, возвращаемся к формулам
A.14.9).
Главный вектор поверхностных сил на дуге / контура Г
дается формулой A.14.7):
- Q + iP = [ф B) + 2ф' (г) + ф (Z)]r =
(±) (|), E.2.11)
причем левая ее часть определена до аддитивной постоянной.
Другая запись условия на Г во второй краевой задаче дается
формулой E.2.10):
Fn + iFt =
+ Ф (г) - п2 [2Ф' (г) + V (г)]}г
m(g)
со' (а)
. E.2.12)
§ 5] КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ 547
Далее вводятся обозначения
5{§ %@ = ^~. E.2.13)
E.2.14)
По E.2.2) эти функции голоморфны в у. Очевидно, что
©'(?) ю'2(?) »'3(?)
и это позволяет переписать E.2.12) в виде
E.2.15)
Условия на Г первой краевой задачи записываются в виде
[C - 4v) Ф (г) - 2ф7 (г) - ф (г)]г =
= ГC - 4v) Ф1 (о) - -2&L. ф; A) _ ф AI = 2ii (и + /о)г. E.2.16)
По E.2.11)
(и + /о)г + i(Р + й»г = 4 A - v) Ф (г) |г, E.2.17)
так что, зная по решению первой (или второй) краевой задачи
Ф(г)|г, сразу же по заданному на контуре вектору и + iv (или
Р + iQ) находим (Р + iQ) г (или (« + iv)T).
По определению голоморфные в области функции одно-
однозначны в ней. Поэтому сама представимость решений краевых
задач в односвязной конечной области через функции Мусхели-
швили обусловливает однозначность напряжений и перемеще-
перемещений. Из формул E.2.11) и E.2.16) легко заключать, что след-
следствием однозначности этих функций [ф(г), ty(z),%(z)] является
обращение в нуль главного вектора и главного момента системы
поверхностных сил на Г (и на любом замкнутом контуре в L).
Обратно, условие статической эквивалентности нулю этой систе-
системы сил гарантирует однозначность этих функций и, значит, суще-
существование решения.
5.3. Степень определенности функций Н. И. Мусхелишвили.
Задание суммы нормальных напряжений определяет по A.14.4)
вещественную часть функции Ф(г); этим ее мнимая часть оп-
определяется с точностью до аддитивной постоянной С, а сама
функция—до мнимой постоянной /С, а ф(г) —до линейного по
z слагаемого
iCz + а + гр.
35*
548 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Вторая формула A.14.4) определяет теперь Ч^г) полностью,
a ty(z) по W (г) с точностью до постоянного слагаемого
а' + tp'.
Итак, при заменах
<p(z) на <p(z) + iCz + а + «р, -фB) на \|)(z) + а' + tp' E.3.1)
напряжения сохраняют свои значения, а вектор перемещения
по E.2.16) приобретает слагаемое
-^ [4 A - v) Ciz + C - 4v) (a + ф) - (а' - ip')l, E.3.2)
имеющее структуру перемещения твердой фигуры в ее плоско-
плоскости. Итак, при решении второй краевой задачи можно, распоря-
распорядившись выбором С, а, р, а', $', принять
Ф @) = 0, Im Ф' @) = 0, ф @) = 0, E.3.3)
и этим функции ф(г), ty(z) определяются полностью.
Структура выражения E.3.2) показывает, что при решении
первой краевой задачи одна из функций ф(г), \|з(.г) может быть
подчинена условию
ф@) = 0 или ф@)= 0. E.3.4)
5.4. Бесконечная область с отверстием. Конформное преоб-
преобразование внешности единичного круга (область |?|> 1) на об-
область L — бесконечную плоскость, ограниченную изнутри замк-
замкнутым гладким контуром Г, задается функцией
2 = e»tt) = c(?4-|- + -p-+ .... E-4.1)
причем бесконечно удаленная точка плоскости ? отображается
в бесконечно удаленную точку на плоскости г. Предполагается
выполненным условие
«/(?)=? 0, \1\>\, E.4.2)
гарантирующее однозначную разрешимость уравнения E.4.1)
относительно ?; с0 можно считать вещественным.
Сославшись( на C.1.8), введем в рассмотрение функции
E.4.3)
которыми определяется напряженное состояние в бесконечной
плоскости, когда в ее начале координат z = 0 (в точке, не при-
принадлежащей рассматриваемой здесь области L) приложена сила
X + (Т. Очевидно, что этой силе будет равен главный вектор
внешних сил на любом замкнутом контуре, содержащим внутри
КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ
549
точку z = 0, в частности, на контуре отверстия Г. Напомним
еще, что вычисляемый по функциям фо(г), яро (г) вектор пере-
перемещения однозначен.
Итак, введя в рассмотрение однозначные в L функции q>t(z),
tyt(z) и полагая
= q>o(z)+<p.(z), Ф (z) = Фо (z)
ть условие на Г второй крае
лу E.2.11), в виде
/ [Ф (г) + гф" (г) + ф (z)]r = Р. + iQ.,
E-4-4)
следует записать условие на Г второй краевой задачи, сослав-
сославшись на формулу E.2.11), в виде
E.4.5)
где P* + iQ*— главный вектор распределенных по дуге / кон-
контура поверхностных (внешних) сил. Изменение знака обуслов-
обусловлено тем, что в упомянутой формуле через Р + iQ обозначался
главный вектор распределенных по дуге / напряжений, созда-
создаваемых упругой средой, расположенной со стороны вектора
внешней к контуру Г нормали п, тогда как внешняя к области L
нормаль п, направлена противоположно п.
Другой формой записи условия E.4.5) служит
= Q, - IP Л 8п A'_ v) {(X + IY) [In z - C - 4v) In z] + (X- IY) j } .
E.4.6)
Задача сведена к определению однозначных в L функций ф, (г),
гр( (z); она требует задания условий на бесконечности. Из струк-
структуры формул Колосова — Мусхелишвили A.14.4) следует, что
напряжения, вычисляемые по q>o(z), ipo(z), на бесконечности
равны нулю, так что здесь речь идет о функциях ф, {z), i|),B)-
Нетрудно заключить из тех же формул, что сохранение в пред-
представлениях этих функций положительных степеней z до zn вклю-
включительно привело бы к напряжениям, возрастающим на беско-
беско|"~
нечности, как | z |"~ . Поэтому представлениям вида
Ф.
±-(а2 + ib2)z2 + Ф„(г)
= а'0
ib'o
1Ь\) z + j(a'2
(г),
E.4.7)
где ф„(г).
нечности:
голоморфны и обращаются в нуль на беско-
бескоE.4.8)
fc=i
550
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
соответствуют на бесконечности линейно зависящие от х, у на-
напряжения
Y К + a7) = 2ai+ (fl2 + Я2) г + [а2- ib2) z,
E.4.9)
1 @. _ а~ + 2l-t-) = (а2 + ib2) z + a[ + ib\ + {а'2 + ib'2) z
и вектор перемещения
2ц(«°° + ш°°) = 2A -2v)а{ -(а[ - ib\)z-(a2- ib2) zz +
+1 C - 4v) (a2 + ib2) z* -1 (aj - /6J) z2 +
+ [4A- v) /6,2 + C - 4v) (a0 + й0) - (oj - Щ\. E.4.10)
Следуя сказанному в п. 5.3, полагаем здесь
а0 + йо = 0, 6, = 0, flJ + t^ = O, E.4.11)
что не влияет на напряжения и исключает из E.4.10) плоское
перемещение твердой фигуры.
Приведенным выражениям соответствует линейное по х, у
напряженное состояние на бесконечности; в последующих запи-
записях ограничимся предположением, что оно однородно на беско-
бесконечности; тогда
а2 + ib2 = 0, а'2 + ib'2 = 0,
а остающиеся коэффициенты а,, а[, Ъ\ могут быть выражены
через главные напряжения на бесконечности о™, в™ и угол
первой главной оси тензора Т°° с осью Ох. Имеем по E.4.9)
~ °Т = (СТГ ~ а™
a=2
и, вернувшись к E.4.7), получаем
E.4.12)
Ф. (z) = Т (°Г + 02°°)z + Фм (z). t <z) = Y К ~ °") 1.
E.4.13)
Отметим еще, что постоянную bi можно по A.14.10) выразить
через поворот на бесконечности:
Функции Ф(г), W(z) однозначны в L, их выражения имеют вид
E.4.15)
5] КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ 551
причем разложения Ф„ (z),W,t(z) начинаются со слагаемых z~2.
Отметим, что мнимая часть коэффициента при zr2 в выраже-
выражении Wtt{z) определяется согласно C.1.14) заданием главного
момента внешних сил на Г. Условие на Г в форме, аналогичной
E.2.10), записывается через функции Ф, W в виде
Fx + iFy = {[Ф (z) + Ф (z)] п. - [гФ' (z) + 47 B)] п,}г, E.4.16)
причем я* —вектор нормали, внешней к L (внутрь отверстия),
а рх + iFy — распределенные по Г поверхностные силы. В част-
частном случае свободного от нагружения контура отверстия и одно-
однородного напряженного состояния на бесконечности краевые ус-
условия в форме E.4.6) или E.4.16) принимают вид
- - [т К + ОТ) z + Т (°Г - аГ) ™ш].
1 / Й2 J
E.4.17)
Решению так поставленной краевой задачи, связанной с опреде-
определением концентрации напряжений в окрестности отверстия, по-
посвящена очень большая литература. См. пп. 8.1—8.3 этой главы.
Выражение вектора перемещения записывается в виде
2ц (и + iv) = [C - 4v) фф< (z) - гф^ (z) - ф$< Щ + 2|ifee" +
+ \ [A - 2v) @f + of) z - (cx~ - of) ze2ia] -
^l' E.4.18)
и этим равенством представляется на Г условие первой краевой
задачи. Задания на Г только вектора перемещения недоста-
недостаточно, требуется задать также и главный вектор поверхностных
сил на Г. Требование исчезновения перемещений на бесконеч-
бесконечности, которое могло быть поставлено в пространственной за-
задаче при отсутствии на бесконечности напряжений (см., напри-
например, п. 3.5 гл. IV), выполнимо лишь при X + iY = 0.
Заметим еще, что, введя с помощью формул, аналогичных
E.2.8), E.2.13), функции <р,(?), ^(g), ф,(?), ?,(?), придем
к рассмотрению краевых задач на окружности отверстия у; они
сведутся к разысканию голоморфных на бесконечности функций
Фи. (?), ^и, (?); при переходе к переменной ? возможна замена
In z на In ?, так как второе слагаемое в равенстве
552 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
может быть отнесено к голоморфной на бесконечности части
функций <pi(?), ipi(?).
5.5. Двусвязная область. Дисторсия. В случае двусвязной
области, ограниченной изнутри контуром Fi, а извне Го, каждую
из функций cp(z), ^(z) можно представить в форме суммы
ф (г) = ф! (Z) + ф2 (г) , ф B) = ф! B) + ф2 B) ,
где 9i(z), \|)i(z) голоморфны в конечной области, ограниченной
извне контуром Го, а фгB), фгB) представляются выражениями
/• \ Х + iY
^ B) = fa(l-v)
** B) = J^) (^ - ^) In г + tj,2. B),
в которых фгЛ2). ^>2*B) голоморфны вне Гь X 4- iT — главный
вектор поверхностных сил на IY Таким образом, ф(г), ф(г)
представимы в виде
V
E.5.1)
причем разложения ф*B), \|)*(z) содержат положительные и от-
отрицательные степени z:
Ф. B) = 2 К + Фа) z"' * B) = S К + 'Ю 2%. E.5.2)
Краевые условия задаются на Го, Гь нет нужды после ска-
сказанного в пп. 5.4, 5.2 повторять формы их записей.
При разыскании напряженного состояния в двусвязной об-
области, подвергнутой дисторсии, при отсутствии нагружения
функции ф(г), ip(z) должны быть определены условиями
E.5.3)
Первое выражает обращение в нуль главного вектора напряже-
напряжений на любом замкнутом контуре Г*, не сводимом в L непре-
непрерывным преобразованием в точку. Второе определяет разрыв
вектора перемещения, задаваемый постоянными С\, с2, Ь3 посту-
поступательной и вращательной дисторсии (п. 2.4 гл. II).
Можно удовлетворить этим условиям, приняв
Ф (z) = Az In z + (Y + Щ In z + ф. (г), <ф (г) = (у' + гб') In 2 + -ф, (г),
E.5.4)
:. (и + to) = Лг. [C - 4v) Ф (г) - гф' (г) - ф (г)] =
(Cj + ic2) ¦
§5]
КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ
553
причем <рДг)' ^Л2) однозначны в L и, следовательно, предста-
вимы в форме E.5.2). Действительно, тогда
Аг.ф (z) = 2ш [zA + (y + Щ, Аг.гф' (г) = - 2nizA,
и условия E.5.3) приводят к уравнениям
г (А - А) + (у + й) - (y' - й') = 0;
2ш [C - 4v) (zA + y + й) + zA + у' — id'] = 2\i(c + ic, + ib:
Из них следует
A = A, 1тЛ = 0; y + id = y' — й';
4л A — v) A = ц&з. 4я A — v) (у + /б) -= — ц/ (с! + /с2),
так что
4n(l-v)
E.5.5)
Функции <p,(z), г);.(z) определяются по краевым условиям отсут-
отсутствия поверхностных сил на Го, IV
5.6. Представление функции напряжений в двусвязной об-
области (Мичелл). В общем случае — наличие дисторсии и нагру-
жений по контурам Го, Ti — функции cp(z), ty(z) в двусвязной
области представляются выражениями
zlnz —
1
to(l-v) E(X + iY)
r^- [C - 4v) (X - iY) + 2/Ц (c, - /c2)] In z + ^ (z),
E.6.1)
причем ф*B), a|3*(z) даются представлениями E.5.2); по A.14.3)
имеем
X (г) = зя^'-у) К3 - 4v) (Х ~ iY) + 2'И (с, - tc2)] z In z +
+ (а'_, + /p'_i) In z + %t (z), E.6.2)
где х*B) голоморфна в L и определена с точностью до
аддитивной постоянной а + i$. Образовав теперь по A.14.2)
функцию напряжений Эри, придем к ее представлению
—v(xX + yY)\r
554 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
где U,(г, 8) определяется однозначными частями функций <p(z),
()
V,(r, Q) = a + aox + fof/ + a/2 + r2^rk(<xfe+1 cos?0-pfe+1 sin
ft
x K-icos kQ - p*-i sin *8) ~
По E.6.3), C.1.14)
** ~' "—1 2я
где М° — главный момент относительно начала координат внеш-
внешних поверхностных сил на контуре Гь ограничивающем область
L изнутри.
Линейные по х, у слагаемые функции напряжений, не влияю-
влияющие на напряжения и вносящие в выражение вектора переме-
перемещения постоянное слагаемое, определяются членами
a + (a0 + a'0)x + (f>Q-$'0)y. E.6.6)
Отбросив их, получим в измененных обозначениях форму Ми-
челла функции напряжений Эри
~ С:У)ln
+ г3 (С, cos 8 + 5, sin в) + Л г" [(ап + Cnr2) cos пв +
п=2
+ (&„ 4- Snr2) sin пв] -f 7 К cos 9 + &i sin e) +
о
] -рг [(а» + СУ) cos и9 + (bn + S'nr2) sin яв]. E.6.7)
п=2
§ 5] КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ 555
5.7. Тепловые напряжения. Плоская деформация. Предпола-
Предполагается независимость температуры Q(x, у) от координаты х%.
Тогда, рассматривая случай плоской деформации (е3 = 0) и об-
обратившись к закону Гука в форме A.14.2) гл. IV, имеем
Поэтому
a = ах + оу + ог = A + v) @! - 2ца8), а{ = ах + ау E.7.2)
и выражения отличных от нуля компонент тензора деформации
представляются в виде
= ву- V0, + 2ц A + v) ав, \хуху = тху, \
и, конечно, сохраняются статические соотношения A.2.2), вы-
выражающие напряжения через функцию напряжений Эри, а сле-
следовательно, и формулы Колосова A.13.2). Однако сама функция
напряжений уже не является в общем случае бигармонической,
поэтому не имеет места ее представление в форме Гурса; в со-
соотношения Колосова — Мусхелишвили п. 1.14 должно быть вне-
внесено дополнительное слагаемое.
Обратившись теперь к зависимостям Бельтрами A.14.13)
гл. IV и учитывая E.7.2), имеем
E.7.4)
vV20, - 2ца A + v) V28 = - 2ца ~^- V29.
l — v
Последнее равенство при замене 0! на S?2U записывается в виде
E.7.5)
и нетрудно проверить, что при этом выполняются и остающиеся
зависимости E.7.4). По E.7.5) имеем
л &U „ 1 +
причем в правую часть аддитивно входит гармоническая функ-
функция s. В соответствии с п. 1.14 она обозначается
Итак,
= -j № («) + Ф Ш -у |юyi^9 (г, г). E.7.6)
556
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
Приходим к такому представлению функции напряжений:
Z Z
-у|1а|^-] rfS |в(С,
E.7.7)
причем неопределенному интегралу справа можно приписать ка-
какое-либо одно из возможных определений. Формулы Коло-
Колосова— Мусхелишвили A.14.4) теперь приобретают вид
E.7.8)
Первую формулу E.7.3) можно представить теперь в виде
2ц -^- = - Оу + A - v) 0! + 2ц A + <v) <х9 =
d2U
дх2
дх2
Аналогично преобразуется вторая; итак,
^ дх
Вместе с тем, сославшись на правила дифференцирования
A.12.3), имеем
и можно принять
= -^- + 2A-^[ф(г) + фB)],
E.7.9)
и, далее,
г
= C - 4v) Ф (г) - 2ф'(г) - гр (г) + ца|^ J 8 (?, г) dg. E.7.10)
§51
КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ
557
Нетрудно проверить, что выполнено также и третье соотноше-
соотношение E.7.3); по E.7.9) имеем
*($+¦?)-
= — 2
дЮ
дх ду
причем величина в скобках — тождественный нуль, что и тре-
требуется. Конечно, формула E.7.10) определяет вектор перемеще-
перемещения с точностью до плоского перемещения твердой фигуры.
5.8. Плоское напряженное состояние. По определению
A.4.1) этого состояния
1 z — fxz — fyz U,
E.8.1)
и задача осложняется зависимостью напряжений, перемещений
и температуры от Хз- Как и ранее, лапласиан по двум перемен-
переменным обозначается V2, по трем
Выражения напряжений A.2.2) через функцию напряжений,
конечно, сохраняются, но последняя теперь зависит и от Хз- При
учете этого зависимости Бельтрами A.14.13) гл. IV с темпера-
температурными слагаемыми записываются в виде
V2
V2
дЮ
д2и
дх2
д<Ц
дх\дх2
I d2V2U
дх\
1 + v
1 + v ду2
1-v
-v
558 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Складывая две первых и используя третью, придем к не со-
содержащему производных по Хз соотношению
= 0, E.8.3)
позволяющему представить V2U в виде
V2t/ = -2n<x(l+v)9 + s(x, г/), V2s = 0, s *= 2 fo'(z) + ф'(z)],
E.8.4)
причем выполняются -пятая и шестая зависимости E.8.2),
а третья может быть приведена к виду
Vle = O E.8.5)
— плоское напряженное состояние осуществимо в условиях ста-
стационарного поля температуры.
Теперь остающиеся (первая, вторая, четвертая) зависимости
Бельтрами приводятся к виду
S (ДС, У) \ Q д* (у2ц _ S(X, у) \ = Q
-?L-(v2u *ь-уЛ-о 1+V ' E'8>6)
дхду \ 3 1 + v ) ~ '
Это позволяет считать U решением пространственного уравне-
уравнения Пуассона
VlU (х, у; х3) = 4т-^- • E.8.7)
Перемещения определяются из уравнений обобщенного закона
Гука
(ди , dv \ ,
Из них, повторив преобразование п. 5.7, получим
iv) = - 2-^ + j^Ф (z). E.8.8)
Для определения перемещения w исходим из равенств, являю-
являющихся очевидным следствием E.8.1)
. dw v , Ollr,Q Зш а« аш до
и приводимых с помощью E.8.4), E.8.7), E.8.8) к виду
о dw d2U о дш d2U
2^ 2^
дх$ дх\ ' дг дх$ дг дх3
§ 5] КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ 559
Итак,
|?. E.8.9)
В обобщенном плоском напряженном состоянии, прибли-
приближенно реализуемом в тонкой пластинке, рассматриваются сред-
средние значения напряжений, функции напряжений и перемещений.
Сохранив для средних значений принятые выше обозначения,
перейдем от уравнения E.8.4) к соотношению, аналогичному
E.7.7):
яр(z) + zq> (г) + %B) + %(z) -ца A + v) J dt J" 9 ft, ?)
E.8.10)
Соответствующие замены в формулах E.7.8) для напряжений
также сведутся к замене
а\~ на ct(l+v). E.8.11)
Вектор перемещения дается теперь равенством
г
(?, г)
E.8.12)
отличающимся от E.7.10), кроме замены E.8.11), также заме-
заменой A.6.5)
v на -^. E.8.13)
5.9. Стационарное распределение температуры. Температура
в стационарном тепловом режиме при плоской деформации
(средняя температура в обобщенном плоском напряженном со-
состоянии) задается гармонической функцией координат
При этом условии функция напряжений по E.7.6) и E.8.4) яв-
является бигармонической, а ее лапласиан — гармонической функ-
функцией.
Будучи гармонической однозначной функцией, температура
представима в двусвязной области L выражением
оо
9 = J] rn (8„ cos «9 + gn sin яв) + % In г +1 (9; cos 9 + g\ sin 9) +
л=0
оо
+ jj —/г (В'а cos иб + g' sin «9). E.9.2)
л=2
560 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Функция комплексного переменного, для которой 8 является ве-
вещественной частью, обозначаемая в'(г), определяется равенством
п=0 п=2
E.9.3)
так что
в (г) - %z In z + (e; + ig[) In г + в, (г). E.9.4)
Здесь и далее звездочкой обозначается однозначная (голо-
(голоморфная) часть функции комплексного переменного*).
В последующих записях имеется в виду плоская деформа-
деформация. Представив 9 в виде
9 = у [©' (г) + в' (г)], F.9.5)
приходим по E.7.7), E.7.8), E.7.10) к формулам
ау-ах + 2пху = 2 [гФ' (z) + V (z) - \ (ха |±J гв" (z)],
E.9.6)
Сразу же становится очевидной целесообразность рассмотрения
функции
1^ E.9.7)
с помощью которой эта система соотношений может быть пред-
представлена в виде
U=\ [гФо(г) + гф0(г) + % (г) + -/(z)],
2 [Фо (г) + Ф„ (z)],
E.9.8)
2ц (и + iv) = C - 4v) ф0 (z) - 2фо (г) - ¦$ (г) + 2цл A + v) 0 (г). E.9.9)
При этих обозначениях выражение главного вектора напряже-
напряжений на любой дуге / в L-области по A.14.7) дается формулой
-Q + iP = % (г) + гф? (г) + ф (г), E.9.10)
*) Слагаемое —8q2 включено в в»(г).
§5] КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ 561
и при свободном от нагружения контуре Г краевое условие на
нем однородно _
z) + 4(z)}r~0. E.9.11)
Поэтому, если функция в (г) однозначна:
% = о, е; = о, г; = о, E.9.12)
что во всяком случае гарантировано, когда L — односвязная ко-
конечная область и при отсутствии в ней тепловых источников, то
решением задачи служит
ФоB) = 0, г|ф) = 0. E.9.13)
При этом по E.9.8) отсутствуют напряжения ох, оу, хху:
ах^0, <jy-Q, xxy = 0, E.9.14)
а однозначный вектор перемещения по E.9.9) оказывается рав-
равным
u + iv = {\ +v)a6(z). E.9.15)
Напряжение az определяется из обобщенного закона Гука усло-
условием ez = 0:
az= -2n(l + v)a9= - EaQ. E.9.16)
Рассмотрим теперь случай свободной от нагружения дву-
связной области, когда условия E.9.12) не соблюдены; тогда
нулевое решение E.9.13) непригодно, так как соответствующий
ему вектор перемещения не был бы однозначен. Требование его
однозначности и статическое условие обращения в нуль глав-
главного вектора напряжений на любом не сводимом непрерывным
преобразованием в точку контуре Г, в L приводят к рассмотре-
рассмотрению в точности тех же соотношений, которые были использованы
в п. 5.5 при установлении характера неоднозначности функций
<p(z), г|)(г), определяемых дисторсией. Здесь постоянные дистор-
сии равны по величине и противоположны по знаку постоянным,
определяющим характер многозначности функции в правой час-
части E.9.15). Сославшись на E.5.3) и E.9.4), имеем
с, + ic2 + ibgS = - A + v) аАг>в (z) =
=*- 2лю A + v) (9^2 + 9; + igQ, E.9.17)
так что
vN^. (8.9.18)
По E.5.5) имеем теперь
Фо (г) = - j Ц« \~^ [%z \nz + (9; + ig[) In 2] + ф0> (г),
¦ф B) = — у ца ^ v (9{ — /gfQ In 2 + г|з (г).
35 А. И. Лурье
562 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Вторая краевая задача при ненагруженном контуре сводится
теперь к разысканию голоморфных (значит, однозначных) в L
функций по условиям на Го и Т\\
%t {г) + гф^ (z) + $t (z) =
причем г = \г\.
Разыскание температурных напряжений ах, ау, хху требует
знания лишь логарифмического слагаемого и слагаемого, про-
пропорционального г\ в выражении температуры E.9.2). Задание
температуры используется при разыскании вектора перемещения
и напряжения oz; по E.9.9) имеем
2ц (и + iv) = C - 4v) cpOt B) - гф ^ (г) - ф4 (г) + 2ца A + v) в4 (г) +
E.9.21)
и из сравнения с E.9.20) следует, что на свободном от нагру-
жения контуре
Гр Го: 2^ (и + iv) = 4 A - v) Фо, (z) + 2^a (I + v) 0, (z). E.9.22)
Этим обобщается равенство E.9.15) на случай двусвязной обла-
области. В самой области L формула E.9.21) может быть записана
в виде
2ц (и + iv) = 4 A - v) фо„ (z) + 2ц A + v) в, (г) -l(P + iQ). E.9.23)
Отсюда следует, что
Ar.(^ + iQ) = 0 E.9.24)
— главный вектор напряжений по любому замкнутому контуру
в L равен нулю.
Формулировка первой краевой задачи основывается на со-
соотношении E.9.21). Например, в случае упругого тела, заклю-
заключенного в абсолютно жесткую и шероховатую обойму, отделен-
отделенную от тела теплоизолирующей прокладкой,
(и + iv)T = 0. E.9.25)
По E,9.23) распределение поверхностных реактивных сил,
создаваемых обоймой, дается равенством
(Р + iQ)r = - i[4 A - v) Фо,(z) + 2ц A + vN, (z)]r, E.9.26)
причем Фо, (г) определяется по решению краевой задачи E.9.25).
5.10. Теорема Коши, интеграл Коши. Рассмотрим сначала
случай L-области внутри простого замкнутого контура; значе-
значение z на Г обозначается t.
§ 5] КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ 563
Пусть f (t)— значение на Г функции f(z), аналитической в L
и непрерывной вплоть до границы; тогда имеют место теорема
Коши
§f(t)dt = O E.10.1)
г
и интегральная формула Коши
XCZLn E-Ю.2)
2т J / - г I 0, z сг 7?,
причем ^ — область, внешняя к L.
Пусть теперь L — бесконечная область вне Г, L' — двусвяз-
ная область, ограниченная Г изнутри и окружностью С доста-
достаточно большого радиуса г извне. Через f(t) обозначается зна-
значение на Г и на С голоморфной в L (значит, в L') функции f(z).
Применяя интегральную формулу Коши в L'-области, имеем
\1
причем здесь R — область, внешняя к L', то есть расположен-
расположенная внутри Г.
Вместе с тем
так что
L,
_ E.10.3)
J tz { -f (oo) гс^, v ;
t-z { -f (oo),
Пусть теперь /(г) —функция, голоморфная в области L вну-
внутри Г повсюду, кроме полюса z = а, а главная часть ее разло-
разложения в этом полюсе равна
Вместе с тем g(z) голоморфна в /^-области (вне Г), причем
g(oo) = 0, так что, основываясь на E.10.3), имеем
^ -g(z), zczR,
36*
564 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
и, учитывая, что функция f(z)— g(z) голоморфна в L, сослав-
сославшись на E.10.2), получим
2ш j/-z [ —^B), гс^. v '
Остается рассмотреть случай, когда L — внешняя к Г об-
область, a f(z) голоморфна в L всюду, кроме бесконечно удален-
удаленной точки, в которой она имеет полюс с главной частью
g (г) = а0 + а,г + ... + апг'\ E.10.6)
так что g(z)— функция, голоморфная в R.
Тогда
/ 0, zczL,
\-g(z), zczR,
так что
-zul~\ -g(z), гс^, к°-ш-"
так как функция f(z) — g(z) голоморфна в L и равна нулю на
бесконечности. Заметим, что обе формулы E.10.5), E.10.7)
имеют одинаковую структуру:
Ш. dt = ( ^(Z)~8(Z)> ZCZL' E 10 8)
(~z \ ~g{z), zcz R,
причем область L при обходе Г остается слева.
5.11. Интегралы типа Коши. Формулы Сохоцкого—Племели.
Пусть <р(/)—заданная на Г функция; ограничиваясь предполо-
предположением, что интеграл
§\4{t)\dt E.11.1)
г
ограничен, можно доказать, что функции
E.11.2)
называемые интегралами типа Коши, голоморфны — первая
в L-области, вторая в R. Этими равенствами определена во всей
плоскости z, исключая Г, функция
'-$-dt. E.11.3)
КРАЕВЫЕ ЗАДАЧИ ПЛОСКОЙ ТЕОРИИ УПРУГОСТИ 565
Следует отличать значения Ф(г) на контуре Г, предельные из-
изнутри и извне:
Пт Ф(г) = Ф^о). Hm Ф(г) = Ф*(*0), E.11.4)
от ее «прямого значения», определяемого главным значением
интеграла типа Коши:
Связь между этими величинами дается формулами Сохоц-
кого — Племели *)
E.11.6)
Их можно записать также в виде
Если известно, что функция Ф(г) на всей плоскости, исклю-
исключая контур Г, голоморфна и равна нулю на бесконечности, а на
Г задана разность ее значений ф(?) изнутри и извне Г, то по
первой формуле E.11.7)
^|=7й' <БЛ1-8)
Легко доказывается ссылкой на известную теорему Лиувилля
(голоморфная во всей плоскости функция может быть только
постоянной) единственность этого решения. Если же наперед
известно, что Ф(г) на бесконечности растет не быстрее, чем zn,
а в точке z = a cz L имеет полюс порядка' т, то
EЛЬ9)
S=I
где Рп(г)— произвольный полином м-й степени, as — некоторые
постоянные.
*) Ф. Д. Г а х о в, см. сноску на стр. 523.
566
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. УЩ
§ 6. Области с круговой границей
6.1. Круглый диск, нагруженный сосредоточенными силами.-
Сосредоточенные силы — нормальные Rs и касательные Ts —\
приложены в п точках Qs с угловыми координатами 9S nol
окружности Г диска радиуса г0. Каждая из этих точек приник
мается за начало местной системы координат Qsxsys, причем оЫ
QsXs, Qsys совмещаются с направлениями единичных векторов
Рис. 42.
Рис. 43.
esr, eg полярной системы координат г, 0 с началом в центре
диска С; эти же направления esr, eg приписываются силам Rs,
Ts при Rs > О, Г8 > 0. Через ra, \J)S обозначаются полярные коор-
координаты точки наблюдения М(г, 0) с началом в точке истока Q«
и с полярной осью ef. Конечно, предполагается, что система
сил Ra, Ts статически эквивалентна нулю:
2(ssss)
S (Я* sin 6, + Г, cos в,) = 0, S
s-l s-l
или, в другой записи,
+
s-l
Пусть
о, 2rs=o.
s-l
F.1.1)
Rs = Ks cos as, Ts = Ks sin a,,
ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ
567
где as — Угол с направлением esr приложенной в Qs силы Ks —
равнодействующей сил Rs, Ts. Сославшись на формулу C.4.5),
введем в рассмотрение функцию напряжений
U, = - ^
sin (i|3s - as) = - -^
s=l
/Фз (Rs sin ^s ~~ Ts COS l|)s),
F.1.2)
определяющую напряженное состояние, создаваемое особенно-
особенностями, соответствующими приложению в точках Q$ сосредото-
сосредоточенных сил. Функция напряжений U задачи о диске разыски-
разыскивается теперь в виде
U = Ut+U.., F.1.3)
причем корректирующая функция U„ определяется по условиям
о г =-стг- тге=-тг8- FЛ-4)
выражающим, что окружность диска не нагружена в точках, от-
отличных от Qs.
Напряженное состояние, создаваемое приложением в точке
истока силы Ks, сводится лишь к нормальному напряжению а,
на площадке, перпендикулярной rs:
а = _ 2KS
rs ni
cos (ф, - «s) = - -J- (Rs cos ф5 + Ts sin ф,).
Но на окружности Г (рис. 42)
• 6 - е.
0 —
так что
на Г:
1
nr0 sin ¦
Компоненты а*, т^е тензора напряжений в системе полярных
координат г, 9 теперь определяются известными формулами
на Г:
= or sin2
, = or,4sm-
•cos
9-е^
2
1-е,
-7, cos
в-в.
-sin
•cos
- Ts cos2 ¦
568 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. У1Ц
так как углы вектора rs с векторами еп ев в точке наблюде-а
ния М на Г равны соответственно у я — -^ @ — 6S), -^(в —9^
Теперь после простейших преобразований и использования урав-<
нений равновесия F.1.1), имеем
К* =
2
s=l s=l s=l
F.1.5)
Пришли к неожиданно простому результату: корректирую-
корректирующий тензор напряжений определяет осесимметричное напряжен-
напряженное состояние, создаваемое равномерно распределенным по Г
нормальным давлением:
а = —
4лг0 U
По F.1.3) теперь имеем
п
U ж N fs^ps (Rs sin \\>s — Ts cos tys) —т—
s=l ° s=l
причем на диске
rs =
-I - 2rr0 cos (8 - 9S)]V\ sin i|5s = -j- sin (8 - 6S),
r cos (8 — Qs) — л0
cos г^ =
F.1.7)
Как пример рассмотрим диск, сжатый двумя сосредоточен-
сосредоточенными силами, приложенными по концам диаметра (Герц, 1883).
Тогда #i = #2 = — R, Ts = 0 и по F.1.6)
F.1.8)
причем, напоминаем, углы tpi, г|J отсчитываются от векторов
е\, е^=— е\ в точках Q\, Q2, направленных противоположно
сжимающим диск силам.
Принимая для простоты, что диск сжимается по концам го-
горизонтального диаметра, имеем по рис. 43
г, sin \j)j = — г2 sin i|J = г sin 9 = -gr (z — z) = -^т (? — I),
Zi = ro(?-1), z2=-r0(?+l),
и поэтому
e2<'="ft ' e2t J = itt '
6, ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ 569
причем ? — точка в единичном круге. Теперь функция U может
быть представлена в виде
U(z, z) = r0U(t, D-i^r^+i(?-D(ln^i + ln^)j, F.1.9)
так что
-)• i
F.1.10)
Вычисление напряжений по формулам Колосова — Мусхели-
швили теперь не составит труда:
откуда следует, что на окружности диска (исключая точки Q\,
Q2 приложения сил) все напряжения равны нулю. На диаметре
диска, перпендикулярном линии действия сил, | = 0, ? = ir\, и
из формул F.1.11) следует
о /1 _„2\2 I (,0.1.1/;
_ /_. \ '< \i ц > л j
°У - Фг)ъ_0 - — A+тJJ . Т,в - U. j
6.2. Общий случай нагружения круглого диска. Рассматри-
Рассматривается общий случай нагружения круглого диска |г|-Сг0 нор-
нормальными и касательными поверхностными силами по его ок-
окружности
И = г0: or, = f, (в), тгв=-Мв) F.2.1)
в предположении, что эта система сил уравновешена сосредото-
сосредоточенными в его центре силой X + iY и парой с моментом М°.
Уравнения равновесия диска записываются в виде
j U, F) cos в - f2 @) sin 0] r0 dO + X = 0,
9
2л ' 2л
J \f, (в) sin 8 + f2 (9) cos 0] r0 rf9 + F = 0, r2Q J f2 F) dQ + M° = 0
570
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. УВД
ИЛИ
2я
2я
J / (Q)e* dQ + X + iY = 0, г* J [f F)-f F)] dQ + 2iM° = Q
F.2.2>
Для облегчения записей задача рассматривается в единичном
круге, что сводится к замене обозначений
= гй1, ? = ре'е = ро, o = e'e, do = i
. F.2.3)
При этом уравнения равновесия F.2.2) приводятся к виду
— -2^ = 0. F.2.4)
Сославшись на E.6.1), E.6.5), следует искать функции Мусхе-
лишвили ср(?), ij>(?) в виде
F.2.5)
где ф„(?), ¦vt'.(
этому
голоморфны в единичном круге |?|<1. По-
По!*лО
F.2.6)
8n(l-v)r0
По E.2.15) краевое условие на окружности у единичного круга
записывается теперь в виде
:-±: Ф.М + Ф.A)-±ф;A)-Л? A)
F.2.7)
Переходя к сопряженным величинам, имеем также
§ gj ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ 571
6.3. Способ интегралов Коши. Способ интегралов типа Коши
в применении к краевым задачам плоской теории упругости был
предложен и подробно разработан Н. И. Мусхелишвили. В его
труде даны строгое обоснование и многочисленные применения
этого способа, поэтому здесь можно ограничиться лишь пояс-
пояснением техники вычисления.
Умножив обе части соотношения F.2.7) на
1 da
2ni a-
и интегрируя по контуру у единичного круга, имеем
X-iY
4n(l-v)r0
Теперь, сославшись на интегральные формулы Коши E.10.2),
E.10.3) и учитывая, что Ф„ (у) — голоморфная при |?|>1
функция, имеем
. F-3.1)
r0
Аналогичное вычисление в применении к условию F.2.8) дает
1 XM9)rfa ¦ X-iY iM°
Здесь следует еще убедиться в обратном: определяемые равен-
равенствами F.3.1), F.3.2) во всей области функции Ф, (?), ^„A)
удовлетворяют краевым условиям F.2.7), F.2.8), по которым
они найдены способом интегралов Коши. Обоснование с по-
помощью теорем теории потенциала (теорема Гарнака) приводит-
приводится в упомянутом труде Н. И. Мусхелишвили. Другой вывод
этих же соотношений приводится в пп. 6.13, 6.14.
572 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
По F.3.1) при t = О имеем
[ГЛ. VFI
2л
2я
2ш-
2я
и условие вещественности левой части этого равенства
2я
представляет уравнение моментов. Итак, приняв Im Ф„ @) = О,
имеем
2п
a
2a
x~iY
4я A - v)
е-
F.3.3)
Остается по F.3.1), F.3.2) найти ^.(S); получаем
и определяемая этим равенством функция Wt (?) голоморфна в
круге |?|< 1 при условии, что в разложении в ряд по степеням
? правой части отсутствует свободный член и член первой
степени
F.3.5)
— это уравнения равновесия, причем одно из них записано в
форме, сопряженной в F.2.2). По F.3.4), F.3.5) находим теперь
6.4. Нормальное напряжение <те на окружности. Далее пред-
предполагается, что система поверхностных сил на у статически эк-
эквивалентна нулю. Тогда
2Я 2JI 2Л
= 0; Jf2(9)d9
= Jfi(9)d8 F.4.1)
§ 6] ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ 573
и по F.3.3) 2Я
Y О
При предельном переходе ? —* о\ = ег* с помощью формул
E.11.6) Сохоцкого — Племели имеем
2л
^-iJf,(e)de, F.4.2)
о
причем понимаемый в смысле его главного значения интеграл
преобразуется к виду
2л 2л
2Л 2л
О О
Приходим к соотношению
2л
так что
2л
(Or + oe) I, t,-,
или
= 2 [Ф (С) + Ф E)] = 2/, (Ч>) + -^ J f2 (9) ctg ~± dQ,
2л
тге Urictg lyt d6. F.4.4)
о
При отсутствии касательных напряжений нормальные напряже-
напряжения на окружности диска друг другу равны.
И ( 1 2)
я на окружности диска друг другу р
Известны соотношения (л = 1, 2,...)
2Л
sinлг|з = — g^- cosлбctg
о
о
о
2л
cos лт|з = --L J sin лб ctg ^^ d8, | F-4-5)
J
574
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
Поэтому, задавая распределение поверхностных касательных
сил рядом
00
г = г0' тгв = 2 {ап cos пд 4- Ъп sin «9), F.4.6)
Я = !
можно получить еще одно представление формулы F.4.4):
оа
г = г0: (те | = аг |г_г> + 2 2 (*>n cos «9 - an sin nQ). F.4.7)
п-1
Слагаемое ряда F.4.6) для п = 1 не может быть задано не-
независимо от соответствующего слагаемого (га=1) тригономет-
тригонометрического ряда для нормального напряжения (<зг)ГаГ. Последнее
должно иметь вид
—п\ sin 8 + Ь\ cos В,
так как в противном случае не удовлетворены условия равно-
равновесия поверхностных сил на у.
6.5. Напряжения в центре диска. При условиях F.4.1) по
формулам Колосова — Мусхелйшвили A.14.9) имеем
(Or + <*eUo = 2 [Ф @) + Ф @)], (<гв - ог + 2Jrr6)r=0 = 2e2'W @)
и по F.3.3), F.3.6) получаем
так что
2Л
dQ ~ ~k
(8)
cos 2 (* ~
К J
о
2л
((Уе — а, + 2ixrQ) 0 = — — е2' <*-
о
2J
if 1 Г
?Л_0 = -7- /i(9)d9 + — f, (9) cos 2 (ij) - 9) d9,
F.5.1)
0
2П
2Л
F.5.2)
Интересно отметить, что касательные поверхностные силы не
создают напряжений в центре диска. Эти напряжения создаются
только постоянным слагаемым и второй гармоникой разложе-
разложения нормальных поверхностных сил в тригонометрический ряд.
§ 6] ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ 575
6.6. Статически неуравновешенный вращающийся диск. Ре-
Решение этой задачи приводится в качестве примера на примене-
применение общих формул п. 6.3. Предполагается, что точка пересече-
пересечения О оси вращения однородного диска с его средней плоско-
плоскостью не совпадает с его геометрическим центром (являющимся
также центром тяжести). Отрезок ОС = е (эксцентриситет) рас-
расположен на оси Сх, связанной с диском и вместе с ним вращаю-
вращающейся с постоянной угловой скоростью со системой осей Сху.
Тогда координаты точки О будут х = —е, у = 0, а объемная
центробежная сила в точке М(х, у) может быть задана векто-
вектором
PK = -J-cu2(r + 'V), r = xil+yi2. F.6.1)
Главный вектор этих сил и их главный момент относительно
центра С равны
= -X. (о2 Г Г (r + iie) do = ?,еМсй2,
е V
mc = i3- rXpKdo=-
причем M——nr2Q — масса диска. Центробежные силы уравно-
уравновешиваются реакцией оси О — сосредоточенной силой —F в точ-
точке (—е, 0). Поэтому напряженное состояние в диске является
наложением, во-первых, состояния, создаваемого центробежны-
центробежными силами
J(uV, F.6.2)
и, во-вторых, состояния, создаваемого однородным полем сил
РК,=-|-соН. F.6.3)
статически уравновешенных реакцией в точке О
F2 = —F = —Мш2е/,. F.6.4)
Решение первой задачи элементарно. Частное решение урав-
уравнения статики, удовлетворяющее условию сплошности, дается
формулами C.11.6) гл. V, если в них заменить v по правилу
A.6.5):
a;=-^C + v)r2, a;=-^(l+3v)r2, <e = 0. F.6.5)
576 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Корректирующая осесимметричная функция напряжений Сг2
определяется условием обращения в нуль нормального напряже-
напряжения а'г на окружности диска
и напряженное состояние во вращающемся вокруг своего центра
тяжести диске дается формулами
F.6.6)
Частным решением уравнений теории упругости в однородном
силовом поле F.6.3) может служить
a0)=-X@2w==_«^lrcose> aw = 0, т<>> = О
или, в полярных координатах,
а0) = _ r cos3 8, а*,1' = 2~ r sin 9 cos 9.
п> Л/еи2 о a ¦ л
TJ? = 2~ Г C0S ° SU1 "•
F.6.7)
Функция напряжений, определяющая напряженное состоя-
состояние, создаваемое силой /2, представляется по C.1.10) выраже-
выражением *)
U2 (z, г) = lf.^l v) P + е) In (z + e) + (z + e) In (г + е) -
- C - 4v) [(г + е) In (z + e) + (z + e) In (z + е)]} F.6.8)
и по A.13.7)
О
B)
^юг Г _1- + -JL_ + (з - 4v) i- -Д-1. F.6.9)
8яA— v) Lz + e ' г + е ' г z + ej v ;
Наложение состояний F.6.7), F.6.9) определяет на окружно-
окружности у единичного круга напряжение
причем использованы обозначения F.2.3) и введен безразмер-
безразмерный параметр эксцентриситета а — е/г0.
Задача сведена к определению функций Ф(?), Y(?) таких,
чтобы определяемое по формуле A.14.9) напряжение
[ф (I) + Ф © ~ W (I) - ! W (?)] F.6.11)
*) Сохранены обозначения, относящиеся к случаю плоской деформации.
§ 6] ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ 577
принимало на у значение F.6.10), но противоположного знака.
Приходим к краевым условиям
ф(Л) + Ф(G)-аФ'((г)-(Л».Г(<г). j
Здесь
T) ()
F.6.13)
и нетрудно проверить, что система поверхностных сил, представ-
представляемая этим выражением, статически эквивалентна нулю. Дей-
Действительно, по F.2.4)
— отличны от нуля интегралы от подчеркнутых слагаемых, даю-
дающие в сумме нуль. Аналогично проверяется второе равенство
F.2.4).
Остается провести вычисление функций Ф(?), ^(g). По
F.3.1) имеем
X
Y
4v^
a(l+aq)
Отличны от нуля и непосредственно вычисляются по первой
интегральной формуле Коши E.10.2) интегралы, соответствую-
соответствующие подчеркнутым слагаемым. Остальные интегралы обра-
обращаются в нуль согласно второй интегральной формуле E.10.3).
Получаем
так что
37 А. И. Лурье
578 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
По F.3.2) находим теперь
[ГЛ. VII
1-Е- F.6.15)
Вычисление напряжений по функциям Фи f теперь не составит
труда. К этим напряжениям, измененным по A.6.5), добавляют-
добавляются напряжения F.6.6) от центробежных сил.
6.7. Первая краевая задача для круга. По E.2.16) краевое
условие на единичной окружности у имеет вид
C - 4v) ф (о) - аф' (Ц - фШ = 2ц {и + iv)y = / @), F.7.1)
причем f@) —заданная функция, а ср(о), -ф(or) —значения на у
голоморфных в единичном круге |?|<1 функций ф(?), фШ.
причем по E.3.4) можно принять ф@)=0. Сопряженное с
F.7.1) краевое условие имеет вид
C - 4v) Ф G) —5" Ч>" (°) ~ * (°) = / @)- F-7-2)
Из степенных рядов, представляющих ср(?), ф(^) в единич-
единичном круге:
следует
$ (а) = г|з @) + ог1/ @) + ...
Поэтому применение способа интегралов Коши п. 6.3 и интег-
интегральных формул E.10.2), E.10.3) приводит к соотношениям
F.7.3)
§ 6]
ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ
579
Сравнение свободных членов этих равенств и членов первой
степени в первом равенстве приводит к соотношениям
2л J
ф" @) + -ф @) = - ^- [ f (9) dQ, ф" @) + ib @) = - 4~ Г
о о
2л
C - 4v) q/ @) - ф' @) = JL J f (e) e-/e de,
F.7.4)
причем второе повторяет первое. Теперь первое равенство F.7.3)
представляется в виде
C - 4v) [Ф @ - &@)] = -^-
и из него дифференцированием находим
F.7.5)
так что по второму равенству F.7.3)
При обозначениях
Q(?)-2L(?
2nt
1
^ (g) = -^
f F)
можно теперь представить вектор перемещения в виде
2ц (и + iv) = C - 4v) Ф (?) - W (I) - ф (I) =
= ?2L (?) + i^|| Q (I) + M(l) + [C - 4v) Ф' (О) - ф' @)] g
или, сославшись на F.7.4),
-^rjf(Q)de. F.7.8)
v
580
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
Обратившись к формулам Сохоцкого — Племели E.11.6), не-
нетрудно проверить этот результат. Действительно, полагая
?->(ii = е**, имеем
2л
2nj I-.'»-»"'
2я
о
2Я
1 - 1 Г /.-2'(Ф-9)
@ U-~f (ч.) + ^ j ,'_,_,»-
F.7.9)
так что
2Л
__L f F(9)e-i(*-e)de
2я J ' w
2я
Учитывая еще равенства
приходим к требуемому соотношению
2ц (и —/о) |v = f (ф).
Отметим еще, что, задавая f (Э) в форме перемещения твердой
фигуры
имеем по F.7.7)
L (?) = 0, Q ft) = 0, М (С) = 2^ («0 - й>0),
так что
Т. (9) do = - 2^i@or0,
2ц (ы - iv) = 2ц («0 - iv0 - i(aorol),
что и требуется.
Остается определить ф'@). Обращаясь для этого к форму-
формулам
дг
<Эг J
= A - 2v) (a, + a,) = f A - 2v) [Ф' (?) + ф' (g)]
§ 6]
ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ
581
и сославшись на F.7.5), F.7.8), имеем
го (ох + ау) = -~^ KQ (?) + Щ (I)] + 2 [q/ @) + ф' @)],
' (I) ~
2л
2л
или, по F.7.7),
J
F.7.10)
2п
F.7.П)
где
мо = цо cos е + о0 sin 9
— радиальное перемещение на окружности. Итак,
2л
A -2v)[q/@) + ф' @)] = ^ J иу&. F.7.12)
Присоединив сюда ранее найденное соотношение F.7.4):
2л
C - 4v) q/ @) ~ Ф' @) = f J («r° + /u§) d9, F.7.13)
из двух уравнений F.7.12), F.7.13) находим
in 2л
F-7Л4)
и сопряженное значение для ф'@).
Теперь по F.7.5) имеем
2я b I 1 - 2v
6.8. Напряженное состояние. Функция ?Q(?) представляется
в виде
1
2Я
или
i = тт ф м ;" • F.8.1)
v
582
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
Это позволяет представить выражение F.7.10) суммы нормаль-
нормальных напряжений, учитывая также F.7.14), в виде
2л
N' (I) —^]]f (9) е-9 + / (9)
о
2Л
ide
или
Гй{ох
о
2л
Re I 2N'
Переходим к представлению второй формулы Колосова —
Мусхелишвили. Имеем
ех-еу- i\xy = 2 -^ (и - to) = j- е~2т (ат - ств - 2/тгв),
или
г0 (аг - огв - 2ягв) = 2 [} Ш (?) -
В центре круговой области
F.8.3)
г0{of-о,-2*т,в)|г_0 = 2^«[М'
Г 2Я
J (и-/о) |г=г,*-»rf9 + ^ J (« + /W)Uoe-
о о
2я
J
-о
F.8.4)
Для вычисления распределения напряжений на окружности тре-
требуется провести предельный переход ? —* о^ = ег* в выражениях
ЛГ(?), М'(С). Имеем
1 с... а 1 ,
2ш- У1(Ь) да а-S Й
da
ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ
583
так как первый интеграл отпадает. Остается применить формулу
Сохоцкого — Племели *)
[2Л Т
Г № + ^ f Г О) ctg ~^- dQ J . F.8.5)
Итак,
3-4v
Re
?-'* if I
2л
•]-
2л
F.8.6)
и аналогично
2л
2я
2Л
F.8.7)
Теперь распределение поверхностных сил, создающих на ок-
окружности г — г0 заданное перемещение, может быть определено
вектором
2Я
2л
" j^l ? J T 0) ctg ^dQ +
0
. F.8.8)
J
0
2л
*) Предполагается дифференцируемоеть заданных на у перемещений; до-
достаточным условием существования входящих в последующие формулы ин-
интегралов служит выполнимость условий Гельдера для /'F).
584 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Например, при чисто радиальном смещении
2я
Необходимость приложения касательных сил обусловлена
изменяемостью радиального перемещения на окружности. В слу-
случае mJ! = const, сославшись на F.4.5), находим
=^, (,8Л0)
и это легко проверить элементарным вычислением. Также легко
проверяется статическая эквивалентность нулю найденной си-
системы поверхностных сил F.8.9).
6.9. Тепловые напряжения в диске, заключенном в жесткую
обойму. При стационарном распределении температуры в (г, ¦ф) в
диске со свободным от нагружения краем вектор перемещения,
определяется формулой E.9.15), в которой следует сделать заме-
замены постоянных в соответствии с правилами E.8.11), E.8.13):
2ц {и + iv) = 2^ав (z) = 2ца J (9 + ig) dz, F.9.1)
причем g— гармоническая функция, сопряженная с 6. В случае
диска, спаянного с недеформируемой круговой обоймой через
не проводящую тепла прокладку, перемещения на .окружности
диска равны нулю; распределенная по этой окружности система
поверхностных сил — реакций обоймы — сообщает ее точкам пе-
перемещения, определяемые формулой F.9.1), но противополож-
противоположного знака. В формуле F.8.8) теперь
, F.9.2)
а коэффициент Пуассона должен быть заменен по правилу
E.8.13). Вместе с тем, ограничиваясь представлением гармони-
§ 6] ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ 585
ческой в круге |г|<г0 функции 9 тригонометрическим рядом по
косинусам, имеем
^i^Tzk+l, F.9.3)
причем постоянная интегрирования может быть откинута; не
имеет также значения аддитивная вещественная постоянная,
с точностью до которой определена сопряженная с 8 функция g.
Действительно, сохранение этих постоянных внесло бы в выра-
выражение вектора перемещения слагаемое, соответствующее пере-
перемещению диска как твердого тела, и, конечно, не сказалось бы
на напряженном состоянии диска.
По F.9.2) имеем теперь
k=0
оо
Р (г|з) = - 2\iair/* 2 6fcr*e'** = - 2(ioir0el* (9° + ig\
k=0
где 8°, g° — значения 9 и g на окружности диска.
Вычисление по формуле F.8.8) приводит теперь к равенству
+ te'* i J [9° (Ф) - ig° (q>)] в"» ctg ^ ЙФ +
о
2л 2Л |
+ |rv ~ J 9°(Ф) ЙФ + / A + v) ^ J ?°(Ф) d? F.9.4)
о о J
или, если возвратиться к представлению с помощью тригономет-
тригонометрического ряда,
[ l
ог - «re) U = " Т^Г
2цаA+у)
k m _
90l -
у e k m _ 2 JjL 0
3_v ,^40ftroe z^a i_vDo-
Здесь 9о — постоянное слагаемое ряда F.9.3). Можно этот ре-
результат представить в виде
^ 1, F.9.5)
586 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
так что
(cr,U=-2,af|±Jeo + ^(e-eoUl,
F.9.6)
Не зависящее от полярного угла слагаемое выражения ог,
конечно, легко получить из элементарных соображений.
Напряжение ав можно найти, например, по F.4.7):
- 80U,]. F.9.7)
Определение этих напряжений требует знания распределения
температуры только на поверхности диска.
6.10. Круговое отверстие в бесконечной плоскости. Край от-
отверстия предполагается нагруженным поверхностными силами,
проекции которых на оси ег, е9 полярной системы координат
обозначаются fr, fe- Их главный вектор X + iY и главный мо-
момент М° относительно центра отверстия представляются форму-
формулами, аналогичными F.2.4):
2Я
J f (8) е'\ dQ=- ir0 jf(Q)da = X + iY (f (9) = fr + ifb),
0 Y
2я
0
или
2nr0
F.10.1)
Краевое условие на контуре отверстия записывается в виде
= Ф(а) + фA)-1ф'A)-^?A)=-/F), F.10.2)
причем в правой части поставлен знак минус, так как внеш-
внешняя нормаль к L-области (|?|>1) упругой среды направлена
противоположно ег. Структура функций Ф(?), фЦ) дается фор-
формулами E.4.15):
F.10.3)
(S) = -o@f2 ~a\)e + a^n-.,\r- C-4v)T-
§ 6] ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ 587
причем разложение голоморфных на бесконечности функций
Ф„(?)> Ч'.Ш начинается со слагаемых ?~2. Краевое условие,
определяющее эти функции, теперь представляется в виде
=-f (в)--jК+ ог») + -2^-(а--а
Сопряженное с ним условие будет
ф. (|) + ф. И - оф1 (°) - °Ч И =
= - 7F) - у (а» + а") + ^ а2 (а- - а») е~21а +
F.10.5)
В последующем при применении способа интеграла Коши не
следует забывать, что |?|> 1. В этом случае интегральные фор-
формулы Коши в применении к функции F(?), голоморфной в L
(|^|> 1), повсюду, кроме бесконечно удаленной точки, в кото-
которой она задается полиномом gn{Q:
представляются в виде E.10.8):
—— Ф—Щг do = F (?) — gn (Q (|^|>1). F.10.6)
Y
Тогда функция
оо
/ I \ Г( _ ^ Г / \ \ Л
V S / -^ L \ S / J
k={
голоморфна при |?|<1, кроме начала координат, в котором
она имеет полюс «-го порядка, и по E.10.5)
F.10.7).
588
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
Руководствуясь этими правилами и учитывая форму разло-
разложения в степенные ряды искомых функций
приходим после умножения обеих частей равенств F.10.4),
F.10.5) на
1 da
2ju a-I
и интегрирования по у в направлении, обходящем область L
слева, к формулам
l X He) do . i
2го' J ff-g ^ 4n(l-v);
F.10.8)
так что
Остается определить коэффициент с^ + i%; обращаясь для
этого, например, к краевому условию F.10.5) и сравнивая по-
постоянные слагаемые его левой и правой частей, имеем
2я
Г +
<6Л0Л°)
где /о — свободный член тригонометрического ряда /(9).
§ 6] ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ 589
6.11. Равномерное нагружение края отверстия. В этом част-
частном случае
^f 4^fei9' or» = or2» = 0, F.11.1)
и поэтому •
im^f. ifw=«. т.-о.
По F.10.8), F.10.9), F.10.10) и F.10.3) имеем (принимая
е°° = 0)
^ 1
3-4V . 1 X + tr г]
W&>- &t(l-v) (^?Г)т 4n(l-v) г5
При г0->0 приходим к ранее найденному решению задачи о со-
сосредоточенной силе в плоскости (п. 3.1).
6.12. Растяжение плоскости, ослабленной круговым отвер-
отверстием. Край отверстия предполагается ненагруженным, так что
f(8) = 0, X + iY=*0. F.12.1)
Из перечисленных выше соотношений получаем
1 (О = т (°Г + °Г) + -w К - а?) е2'а-
F.12.2)
3 , s го о,
+ 2 Г2 а1 j 24 e I
и по формулам Колосова — Мусхелишвили A.14.9) имеем
ог + ов = aj° + of + 2 -7-К" - of)cos 2^> ав ~" аг + 2гЧе =
F.12.3)
где -ф == 0 — a — угол, отсчитываемый от первой главной оси.
Например, при растяжении пластинки, ослабленной круго-
круговым отверстием (задача Кирша, 1898),
¦ *
- 3 ^e~2i*). F.12.4)
590 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. Vlf
При г = г0 стг = т,е= 0, а
(при ф = ± |) F.12.5)
— максимальное напряжение на контуре круглого отверстия
равно утроенному номинальному. Концентрация напряжений
имеет отчетливо выражейный локальный характер; например,
вдоль диаметра, перпендикулярного направлению растяжения
(Ч /2)
и ое= l,074or~ при г = Зг0, ое = 1,022 при г = 5г0.
При всестороннем растяжении на бесконечности (о~ = о~ = <}г)
.rt=-2q. F.12.6)
При напряженном состоянии простого сдвига на бесконечно-
бесконечности (aj°=—о^° = т) по формулам F.12.3) имеем
сгг + (Tq = — 4т — cos 2i|), Og — ar + 2/тг9 =
г2
(г2 г4 \
= - 2т ^е2'* - 2 -Д е-2'* + 3 -^- е~^), F.12.7)
и максимальное напряжение на контуре отверстия оказывается
равным учетверенному номинальному напряжению.
6.13. Продолжение Ф (г). При преобразовании обратными
радиусами относительно окружности Т(г = а) точке М(г, 8) со-
сопоставляется точка М*(а2/г, 9), иначе говоря, точка M(z — reib)
переходит в точку ЛГ( —= —е!в| на том же луче, исходящем
из центра Г. Рассматривается упругое тело (L-область), огра-
ограниченное окружностью Г; это —круглый диск при \z\<a и пло-
плоскость с круговым отверстием при |г|>а. При обходеТ в по-
положительном направлении (против часовой стрелки при |z|<a,
по часовой стрелке при \z\> а) область L остается слева, R—
справа. Пусть M(z)—точка области L, М* (a2/z)—области R.
По A.14.9)
— / -\ ~^Кг / -\ 2 Ттт /-\ / т \ /л 1 о t \
0^*- "у" ЬъгС»'— \У \2-) ~т ^^ \^/ ~~* 2.\У \^) ~~ ~~ \^/ \^ (— i-'J* \"• 10• * I
Z
В 7?-области функции Ф(г), У (г) не определены, в ней г пре-
преобразуется в a2/z, а о,- + гтге = 0. Это позволяет определить
Ф(г) в 7?-области, приняв левую часть равенства F.13.1) ну-
нулем, заменив z на а2/г; сохранив при этом неизменным z, полу-
получаем соотношение, связывающее функции только от г:
ф(~)=—ФB)-\-2Ф'{2) + ~х?B) (zczL). F.13.2)
§ 6] ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ 591
Заменив здесь z на a2/z, приходим к эквивалентному соотноше-
соотношению между функциями от г:
Этим равенством определяется продолжение Ф(г) в 7?-область.
Пусть L-областыо является плоскость с круговым отвер-
отверстием, тогда R-областью служит диск \z\<a. Функция Ф(г),
W(z), голоморфные в L, разлагаются в ряды по отрицательным
степеням г, содержащие также постоянные слагаемые; поэтому
Ф(а2/г), xF(a2/z)—ряды по положительным степеням г и из
структуры формулы F.13.3) легко заключить, что Ф(г) голо-
голоморфна в R всюду, кроме начала координат, являющегося по-
люсом с разложением в его окрестности вида
Л+ f- + |-. F.13.4)
Если же L-область представляет диск, то бесконечно удален-
удаленная точка z = оо заключена _в_7?-области; Ф(г), чР(г) —ряды по
положительным, а Ф(а2/г), W(a2/z)—отрицательным степеням
z, содержащие также постоянные слагаемые. Постоянное сла-
слагаемое согласно F.13.3) войдет также в определяемое этой фор-
формулой аналитическое продолжение Ф(г) в /^-область; в этой об-
области Ф(г) является поэтому голоморфной всюду функцией,
влючая бесконечно удаленную точку z — оо, в которой ее глав-
главная часть постоянна.
Формулы F.13.1), F.13.2) позволяют составить равенство
zczL: Ф(г)-фD) + ^(г)|"A--^-) = (стг + /тге). F.13.5)
При предельном переходе \z\-*a обе точки M(z) и М*(а2/г)
приходят в одну и ту же точку M°(/ = aei*) на Г — первая из
L-, вторая из ^-области; вместе с тем zz — а2 = 0; получаем со-
соотношение
г=/сГ: ф*- @ - ф* (t) = (a, + nrr9)r. F.13.6)
Сославшись теперь на E.11.9), определим Ф(г) с помощью
интеграла типа Коши
F.13.7)
Интеграл в этой формуле представляет голоморфную в пло-
плоскости, исключая Г, функцию z. Интегрирование ведется в на-
направлении, оставляющем L-область слева. Функция y(z)> вве'
денная для учета возможных особенностей Ф(г) при 2 = 0 и
592
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
z = оо, в соответствии со сказанным ранее принимается равной
выражению F.13.4), если L-область — плоскость с круговым
отверстием; она равна постоянной (пусть D), когда L — диск.
Итак,
1 г (аг +иггп)г
t-z dt + D; zczL, \z\<a,
, \z\>a.
F.13.8)
Возвращаясь к формуле F.13.2) и записав сопряженное с
ней выражение, имеем
D)] 2CL. F.13.9)
Этим равенством определяется голоморфная в L функция
Ч^г). Й нем Ф(г) определена одной из формул F.13.8). Слагае-
Слагаемое Ф(а2/г) вычисляется так: входящий в F.13.8) интеграл
определяется для zcR; составляется сопряженное с так по-
построенной функцией Ф(г) выражение, и в последнем, чтобы вер-
вернуться в Z,-область, z заменяется на a2/z. Очевидно, что так
построенная голоморфная в L функция отличается от получаю-
получающейся формальной заменой в выражении Ф(г) для zczL пере-
переменной z на a2/z. Для последней примем обозначение Фх(а2/г);
очевидно, эта функция уже не голоморфна в L.
6.14.Решение краевых задач пп. 6.2, 6.10 способом продолже-
продолжения. Начнем с рассмотрения случая диска |?|<1 в предполо-
предположении, что поверхностные силы уравновешены. Краевые условия
и уравнения равновесия записываются в виде [см. F.2.4)]
вг + ixrQ = f (8) =
00
2 A-k<s~\ F.14.1)
f = Ao-Ao = O. F.14.2)
V Y
По F.13.8) с помощью формул п. 5.10 имеем
f F) da
A-l
F.14.3)
§6]
ОБЛАСТИ С КРУГОВОЙ ГРАНИЦЕЙ
593
и в соответствии со сказанным в п. 6.13 определяется голо-
голоморфная в L функция
оо
LkZk + D. F.14.4)
Это выражение, учитывая, что
F.14.5)
можно записать также в виде
F.14.6)
По F.13.9) получаем
1-/F)
а -
Но функция Чг(?) голоморфна в круге |?|<1; поэтому тре-
требуется приравнять нулю в выражении в скобках коэффициент
при ? и постоянное слагаемое. Приходим к равенствам
/@) л~
Первое выражает условие обращения в нуль главного вектора
поверхностных сил. Второму также можно удовлетворить; это
следует из уравнения моментов (Ао вещественно). Конечно, D
определяется с точностью до мнимого слагаемого, которое мо-
может быть принято равным нулю. Приходим к уже известным
результатам п. 6.3:
1 1
2n/
F.14.7)
В случае плоскости с отверстием, записывая краевое условие
в виде
J
F.14.8)
38 А. И. Лурье
59'4 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
по F.13.8) имеем
[ГЛ. VII
4=1
F.14.9)
Поэтому
F.14.10)
и по F.13.9)
t<=MCI>.:
+ C
F.14.11)
Эта функция голоморфна в_бесконечно удаленной точке, и ее
главная часть в ней равна С. Постоянные А, В, С могут быть
выражены через главный вектор поверхностных сил в отвер-
отверстии и через напряжения и вращение на бесконечности. Сослав-
Сославшись на F.10.1), F.10.3), имеем
3-4v
(X-iY),
причем
2ni
КРУГОВОЕ КОЛЬЦО
595
Возвращаясь к F.14.9), F.14.11), приходим к таким выраже-
выражениям искомых функций:
* (о -1 к - от) «-*¦
F.1.4.12)
(cr-gJ. 2ш
y v
и это полностью согласуется с результатами п. 6.10.
§ 7. Круговое кольцо
7.1. Напряженное состояние, вызываемое дисторсией. Будем
исходить из представления функции напряжений в форме Ми-
челла E.6.7). При отсутствии нагружения по внешней {г = г0)
и внутренней (г = г\) окружностям, ограничивающим кольцо,
достаточно в этом выражении сохранить слагаемые
U = 2я(Г-у) { [Т 6з/ + {°2Г C°S 9 ~ Cl/" Sln 9)] 1П Г +
+ [а,г2 + al, In г + г3(С, cos 9 + S, sin 0) + -J-(aj cos 8 + 6; sin 9)]},
G.1.1)
причем пары постоянных (a,, al,), (С,, а[), [Sv b\) опреде-
определяются из независимых систем уравнений, получаемых по крае-
краевым условиям
1 dU . 1 д2и
д
\ ди
G.1.2)
Найдя эти постоянные, приходим к следующим напряженным
состояниям: осесимметричное состояние, вызываемое вращатель-
вращательной компонентой дисторсии,
2пA -v)
2n(l-v)
г Г2 ,2 .
' ' 1 'л ' . ' 1
In k
1п-^
'о
Г Гп — 1
г Г, ri-
1 +1п Ь — —
-In
G.1.3)
38*
596
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
и напряженное состояние от поступательных дисторсий
2n(l-v)r
(с2 cos 9 — Cj sin 6) 1 s
л г
0 2n(l-v)r
т'9" 1мгЬу7(c* sin e + Cl cos e) (* - 717T
7.2. Вторая краевая задача для кругового кольца. Рассмат-
Рассматривается напряженное состояние в кольце, ограниченном извне
и изнутри концентрическими окружностями Го и Г г, для упро-
упрощения записей радиус наружной окружности принимается рав-
равным 1, радиус внутренней обозначается а @<ос<1). По
A.14.9)
аг - пг,е = Ф @ + Ф (?) - ?Ф' @ ~{^ (». G.2.1)
и краевые условия могут быть записаны в виде
на Го: I = а, Ф (а) + Ф A) - аФ' (<т) - a2^F (a) = / (9), G.2.2)
на Г,: ? = acr, Ф (aa) + Ф (-J) - ааФ' (оа) - О2У? (ао) = - F (9).
Здесь через
G.2.3)
/(8) = /0+Si/y+2L^-fe. F(9) = F0+SFy+SF_,a^
G.2.4)
обозначены векторы внешних поверхностных сил, распределен-
распределенных по Го и Гь
Сопряженные векторы представляются выражениями
G.2.5)
= 0,
G.2.6)
Из уравнений статики
выражающих условия равенства нулю главного вектора и глав-
главного момента внешних сил, приложенных к кольцу, следуют ус-
§ 7] КРУГОВОЕ КОЛЬЦО 597
ловия, налагаемые на коэффициенты тригонометрических рядов
G.2.5):
= 0. G.2.7)
Можно удовлетворить уравнению G.2.2), задав функцию
О в кольце а^С|?|^ 1 выражением
^ @ = ^ [ф й) + °~ (т) ~?ф/ (?) ~ L (s)]' Gl2-8)
в котором L(t) определяется рядом Лорана
US*. G-2.9)
Конечно, при этом удовлетворяется и сопряженное с G.2.2)
краевое условие на Го.
Теперь имеем
aa) = р- [Ф (сиг) + Ф (^-) - ааФ' (оа) - L (оа)],
а краевое условие G.2.3) на Fi переписывается в виде
A - а2) [Ф (аа) - ааФ' (оа)] - а2Ф (-^) + Ф (-~) =
= a2F(8) + I(aa) = a2Fo + fo-
оо
2u{aF-k + af-k)a- G.2.10)
Сопряженное краевое условие будет
/о + ( )
7.3. Определение функций Ф(^), 'F(S). Функцию Ф(^), анали-
аналитическую в кольце а<|?|<1, представим ее разложением в
ряд Лорана
Ф @ = Со + S Cft?* + -^ + S С_*Г*. G.3.
598 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ (ГЛ. VII
Тогда W(t) по G.2.8) определится из соотношения
Г оо оо
= тг Ко + Со
G.3.2)
Здесь важно отметить, что коэффициенты при ?-| в выраже-
выражениях Ф(?) и TF(g) соответственно равны C_i и C_i—/_i, и по-
поэтому в представлении <р(?), ф(?) войдут неоднозначные сла-
слагаемые
и условие однозначности вектора перемещения A.14.5) позво-
позволяет определить С^
C-4v)C_I + (C_,-f_1) = 0, C_1 = TT^- G-3.3)
Обратившись теперь к краевым условиям G.2.10), G.2.11)
и заменив в них Ф(?) его выражением G.3.1), придем к системе
уравнений _ _ _
(l-a2)(C0 + C0) = a2F0+7o, G.3.4)
A -a2)A -k)akCk + (ak-a~k+2)C_k = a2F_k + akJ^k ]
и к сопряженной с ней системе.
По G.2.7) правая часть уравнения G.3.4) вещественна, рав-
равно как и левая его часть; коэффициент Со определен с точностью
до его мнимой части; принимая ее равной нулю, получаем
и°~ 2A-а2) ~ 2A-а2) ' VЛЯ)
При k = 1 первое уравнение G.3.5) удовлетворяется тождествен-
тождественно, а второе дает
(l-a4)CI+2(l-a2)C_I=a3F1 + f1,
и к такому же уравнению для сопряженных величин приводит
рассмотрение случая k — —1.
По G.3.3) получаем
_ a^.+Z, _ 7-, G _
bl 1-a4 2(l-v)(l+a2) ' \i-6.i)
§ 7] КРУГОВОЕ КОЛЬЦО 599
При k = ±2, ±3, ... система уравнений G.3.5) имеет един-
единственное решение, так как ее определитель
не обращается в нуль при вещественных t.
Достаточным условием сходимости построенных рядов — ре-
решения G.3.1)—является убывание коэффициентов тригономет-
тригонометрических рядов G.2.4) при п-*оо, как пгФ+М, 0<ц<1. Для
этого требуется, чтобы первые производные функций f(9), F(Q)
удовлетворяли условиям Гельдера с показателем ц.
7.4. Труба под равномерным внешним и внутренним давле-
давлением (задача Ляме). В этом простейшем случае отличны от
нуля коэффициенты /о, Fo-
(ar)r~r, = - Ро = fo. (°rr)r=r, = ~Pl = -F0,
и по G.3.6), G.3.1), G.3.2), G.2.8)
По формулам Колосова — Мусхелишвили получаем
ggp.-Po аг pi-po п
°г~ 1-а2 рг 1-а2
в 1-а2 ' р2 1 - а2
7.5. Температурные напряжения в кольце. Предполагается,
что поле температуры стационарно; в выражении температуры
достаточно знать лишь логарифмическое слагаемое и слагаемое
ZT1. Наружный радиус кольца принимается равным 1, а внут-
рений а. Краевое условие E.9.20) служит для определения двух
голоморфных в кольце функций q>o*(?), ^*(t):
(8 =
{] G.5.1)
По ним с помощью соотношений E.9.19) находим функции
Фо(?), i|)(?), что решает задачу.
К краевым условиям для функций Ф, W можно прийти диф-
дифференцированием соотношения G.5.1) по дуге на любой окруж-
окружности ? =*= рег'е, р = const. Вдоль этой окружности
Полагая
600
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
дифференцируя входящие в G.5.1) функции (при р = const) в
соответствии с правилами G.5.2) и переходя к сопряженным ве-
величинам, придем к равенству
Ц
G.5.3)
Здесь по G.2.1), G.2.4) отличны от нуля коэффициенты
и по G.3.6), G.37) имеем
°о- 2 АОо\2 1-а2
и выражения функций Ф*(?)> ^*{1) записываются в виде
Теперь, сославшись на соотношения E.9.19), получаем
-f-
¦S-т
1+a2 ь 2 g J>
G.5.4)
и вычисляемые по формулам Колосова — Мусхелишвили напря-
напряжения определяются из соотношений
G-5.5)
a2 1
Напомним, что эти формулы имеют место при любом стацио-
стационарном распределении температуры в полом круговом цилиндре;
§ 7] КРУГОВОЕ КОЛЬЦО 601
знание температурного поля требуется для вычисления переме-
перемещений и напряжения стг.
Выражение G.5.1) коэффициента А предполагает случай
плоской деформации (цилиндр); в плоском напряженном со-
состоянии А = jxa(l + v) *).
7.6. Растяжение кольца сосредоточенными силами. Противо-
Противоположно направленные растягивающие силы одинаковой вели-
величины R приложены в концах (р = ±1, г ~ ± г0) горизонталь-
горизонтального диаметра наружной окружности кольца (a^p^Cl); его
внутренняя граница (р = а) не нагружена.
Задача о таком нагружении сплошного диска была рассмо-
рассмотрена в п. 6.1. Функции Фо(?), ТоЮ. определяющие ее решение,
легко находятся по F.1.10):
Изменение знака обусловлено тем, что силы R предположены
растягивающими. Вектор напряжения на любой окружности в
диске, определяемый по A.14.9), равен
1 о -о Г > S4-2| + C*l
— (a° - /т°е) = 2 [ ,_?! A — g2J J '
G.6.2)
и легко проверить, что это выражение обращается в нуль на
всей окружности |?j= 1, исключая точки ? = ± 1 приложения
сил. На окружности ? = аа оно равно
2 a2a4 - 2 + a2
О2
Г 1
ТГТТ
^Jft - ^(°2а4-2
В задаче о кольце решение G.6.1) задачи о диске коррек-
корректируется слагаемыми <Di (?), Wi (?):
4f0(O + T1(S). G.6.4)
Краевые условия для корректирующих функций должны выра-
выражать отсутствие соответствующих им поверхностных сил на на-
наружной границе кольца:
A))-а2?1(а) = 0, G.6.5)
*) Здесь, как и в G.5.1), конечно, a — коэффициент температурного рас-
расширения.
602 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
и отсутствие поверхностных сил, определяемых решением Фо(?)>
I = ао: ф, (ао) + Ф, (•?•) - аоф\ (ао) - о2?, (ао) = j(or- птъ\-™ =
= -F@), G.6.6)
причем /'(Э) определено по G.6.3), а по G.2.5)
FQ = 2q, F2k = 2qa2k, F_2ft = 2o \^—fi-k - (k - l)la2ft. G.6.7)
Функция ^id), согласно G.2.8) и G.6.5), задается выраже-
^i (?) = тг[Ф. (S) + Ф] (т) - SOi (S)]. G-6.8)
нием
а коэффициенты ряда Лорана G.3.1), определяющего Ф^?), на-
находятся из системы уравнений G.3.4), G.3.5).
7.7. Способ продолжения. Плоскость Z, разбивается на три
области: содержащее упругую среду кольцо L (a^|?|^l),
область R\ A-^|?|^=-°°)—плоскость вне единичной окружно-
окружности ус область /?2 — круг @<1|?|^а) внутри окружности yi-
Преобразование обратными радиусами относительно yo перево-
переводит точку t,cz L в точку 1/1 области R\ (в кольцо этой области
1 <|?|<С 1/сс), а относительно Yi —в точку а2/% области /?2
(кольцо а2 ^ j t, | ^ а в ней).
Продолжения Ф(?) в области R\ и R2, определяемые по
F.13.3), представляются выражениями
Функция W(z) в I, согласно F.13.9), определяется двумя спо-
способами:
(ScI) G.7.2)
Эти соотношения приводят к «тождеству связи»
|) 0. G.7.3)
Краевые условия на yo и yi в соответствии с F.13.6) запи-
записываются в виде
eie c= Y: Ф^ (о) - Ф*'
= о = eie c= Yo: Ф^ (о) - Ф*' (о) = (аг + лгв)^ = f0 (о),
= ао = ает с= Yl: Ф^ (о) - Ф% (а) - (о, + /x,e)Vi = h (о),
§ 7] КРУГОВОЕ КОЛЬЦО 603
и по F.13.7) функция Ф(?) на всей плоскости ? определяется
равенством
^j^ ^J^ G.7.5)
Yo Yi
Здесь голоморфная в кольце функция g(t,) представима рядом
Лорана. Первый интеграл в формуле G.7.5) непрерывен на уь
второй — на yo- Поэтому на у0 и на yi функция Ф (?) испыты-
испытывает диктуемые краевыми условиями G.7.4) разрывы непрерыв-
непрерывности.
В тригонометрических рядах, задающих /о(о), /i(o), отде-
отделим слагаемые /+(о), содержащие положительные степени а
(включая свободный член а0), от слагаемых f~(o) с отрицатель-
отрицательными степенями а:
|
J G-7.6)
j
так
что
ft
(о) =
(а) =
ао
Ро
+
+
I
k =
оо
2
Го
п
(о)
(о)
= 2 а ьО
- 2 P_,a~ft
4 = 1
M°) = fo»H-@). ft(a) = f,+ (a) + fr(a). G.7.7)
Заметим, что f<f(a), fГ (°) ~ значения на yo, Yi функций
fo (S). /П~)' голом°РФНЫх внутри уо и соответственно уь
точно так л<е f~ (о), /j" (о) — контурные значения функций fQ (?),
f~ f —), голоморфных вне уо- Yi-
Имея это в виду и применяя правила вычисления интегралов
Коши (п. 5 10), получаем следующие представления функции
с L: Ф ft) = U (?) + fГ (i) -* «Г (?), ^ G-7.8)
и это вполне согласуется с краевыми условиями G.7.4).
Переходим к записи тождества связи G.7.3); входящие в
него функции ФA/?), Ф(а2/?) определяются по выражениям
( для Z, a Rh ? с:/?2, если в них заменить t, на 1/? и
604
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
[ГЛ. VII
соответственно на а2/?, возвращаясь тем самым в область L. По-
Получаем
и подстановка в G.7.3) дает равенство
Из него можно исключить функцию g, определив ее по выраже-
выражению для Ф (?) при ? с: L:
причем ФхA/?), Фх(а2/^)—результат формальной замены в
Ф(?) для Z, cz L переменной ? соответственно на 1/?, a2ft, (см.
п. 6.13).
Используя обозначение G.7.7), приходим к функциональ-
функциональному уравнению для Ф(?)
Из него легко получить уравнения, определяющие коэффи-
коэффициенты ряда Лорана этой функции:
G-7.12)
n=l
Подставив его в G.7.11), получим
A - а2) ( Со + S [A - п) СГ + A + п) С_„Г 11 +
I 1 )
[
п=1
а2)С0 + S Ш + С_„Г] -а2 S (Спа2Тп+С-па-2Г) =
«о + S КГ" + б_„?л) - а2 [ft, + 2 (ряа"Г" + Р^а^Г)! .
G.7.13)
§7]
КРУГОВОЕ КОЛЬЦО
605
Приравнивая коэффициенты при ?°, g1, ?-' слева и справа, полу-
получаем
G.7.14)
A - а2) 2С_, + С, A - а4) = а, - а%.
Наконец, сравнение слагаемых при ?п, ?,""¦ при и = 2, 3, ...
приводит к уравнениям (в уравнении для коэффициентов при
?-" переходим к сопряженным величинам)
A - а2) A - п) Сп + С_п A - а-2«+2) = а_„ - а-«+2р_„, ) ^^
A - а2«+2) Са + A - а2) A + и) С_„ = а„ - а«+2р„. J
Эти уравнения (если учесть отличия обозначений) совпадают
с G.3.5). Эта система уравнений позволяет определить все коэф-
коэффициенты С„, С-п при п^-2, так как ее определитель
Ai = а2(а" — а-"J — я2A — а2J G.7.16)
отличен от нуля.
Уравнения статики, выражающие обращение в нуль главного
момента и главного вектора распределенных по уо. Yi поверхно-
поверхностных сил, имеют вид
| [тге lv, - а\в |YJ d6 = "у [(«о - йо) - «2 (Ро - РоI = 0,
1т(ао-а2Ро) = О,
2Я
J [(аг + iTr6) lYo - а (ог + гтг9) IJ в'9 de = 2я (а_,-ар_,) = 0.
G.7.17)
Они соответствуют первому и второму уравнениям G.7.14) и яв-
являются условиями существования решения. Из уравнений
G.7.15) имеем
Сп = -?- [A - а2) A + п) (а_п - а-«+2р_„) -
-A-а-2«+2)(а„-а«+2р„)],
A-а2)A-п)(а„-а«+2р„)].
G.7.18)
Третье уравнение G.7.14), связывающее два неизвестных
С-\, С\, должно быть дополнено по E.4.15) соотношением
606 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
вывод которого основывался на требовании однозначности пере-
перемещений. Получаем
Cl= 4n(l-v) I+a2 "^ 1-a4 - G.7.20)
Функция TF(^), определяемая, например, первым равенством
G.7.2), составляется заменой в нем ФA/?) по G.7.9)
Ъ2Ч ft) = Ф ft) -1& ft) - Г0""Ш + п~(-т-) + в (т
ь \to/ vto/ ь vb/ '0\C/\aC/s\C
и последующей заменой f(l/S) по G.7.10). Получаем
> = Ф(г;)-?Ф'(9 + Фх(|)-Го({). G.7.21)
С помощью второго равенства G.7.2) получили бы
t a L: t?W (I) = а2 [ф ft) - ЬФ' ft) + Фх(^) - f~ (|)],
что совпадает с G.7.21) вследствие G.7.11). При таких опре-
определениях W(t,) выполняются краевые условия, записываемые по
A.14.9):
ь = а с \0: Ф (a) - оФ' (а) + фх(-) - о2х? (а) = /0 (-) =
; = aa с: Yi: Ф (ао) - аоФ' (а) + Фх(-^-) - o2xV (a) =J, Ц
)к rt)
что и требуется.
Как ожидалось, результаты применения способа продолже-
продолжения тождественны с теми, которые можно получить непосред-
непосредственно построением функций ф, W по краевым, условиям. Од-
Однако для некоторых частных случаев нагружения этот способ,
сводящийся к рассмотрению одного лишь функционального
уравнения G.7.11), быстрее ведет к цели.
§ 8. Применение конформного преобразования
8.1. Бесконечная плоскость с отверстием. Краевое условие
на контуре отверстия Г в предположении, что заданные напря-
напряжения на бесконечности ограничены, то E.4.15), E.4.17)
§ 8]
применение конформного преобразования
607
записывается в виде
Ф (z) + Ф (г) + [гФ' (г) + W (z)} ~ =
X-iY
8n(l-v) \z
dz
4-(о'Х'-о^е2111—
+la2 ci)e dz
Здесь —(Fn + iFt) = (Fx + iFv)n — вектор поверхностных сил на
площадке с нормалью /г к Г, направленной внутрь среды;
X + iY — главный вектор поверхностных сил Fx + iFy; о^°, о™ —
главные напряжения на бесконечном удалении от отверстия;
а — угол первого главного направления с осью Ox; z и z свя-
связаны уравнением контура Г. Функции ФB), ^(z) голоморфны
в L (плоскости вне отверстия), а их разложения в ряды по сте-
пениям г~' начинаются со слагаемого 2~2*).
Предполагается, что известно конформное преобразование
области |?| > 1 вне единичного круга плоскости ? на рассматри-
рассматриваемую область L; оно дается соотношением вида E.4.1):
2 = со(?) = с0? + ^- + -р-+ ... =со? + т(?) (с0Ф0), (8.1.2)
причем &'(?,) ФО при |?|^1, а Со вещественно. Функция m(t,)
голоморфна при |?|>1. Далее будет показана разрешимость
задачи конечным числом действий, когда т(?) представляет
полином от ?-'; предполагается, что это условие выполнено, а
степень полинома обозначается п.
Используя обозначения E.2.13) и учитывая, что на Г
2 = со (о), 2 = <в(^-), dz = со' (a) da, dz=-a,'[^
da
(8.1.3)
можно преобразовать теперь краевое условие (8.1.1) к виду
на y. ?, = о = еш:
со' (а) Ф, (а) + о/ (а) Ф, (±) -
ф\ A) -
а2
*ш
X-iY
8n(l-v)
со'(а)
со' —
7 J_
" 2
.,/in
й —
(8.1.4)
') В п. 5.4 они обозначались через Ф,,,, 4f,t.
608 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Можно несколько упростить эту запись, учитывая, что
=
«МО с<&
и введя в рассмотрение функции
3~4v (v m от(?)
также голоморфные и обращающиеся на бесконечности в нуль
не медленнее, чем ?~2. Краевое условие (8.1.4) запишется в виде
8яA-у) \ со ' с„
+<з - 4*>s' (f)]
to (a) \_
)
и сопряженное условие будет
со' (|) Ф. (|) + со' A) Ф, (а) - 02со A) Ф: (а) - а2со' (а) Т. (а) =
8n(l-v)
. (8.1.7)
8.2. Способ интегралов Коши. Вспомнив характер разложе-
разложений искомых функций
an
а„
4 4 ч (8>2Л)
^. (?) = Тг" + ТТ + • • • + Т7Г + • • •»
легко выяснить поведение в области |?|> 1 функций
§ 81 ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ 60Й
входящих через их краевые значения в условие (8.1.6). Имеем
(8.2.2)
причем Z(?)— голоморфная в круге |?|<1 функция (ее раз-
разложение в ряд содержит только неотрицательные степени ?).
Итак,
± со (?) Ф4 (|) = ря_, (|) + Z' (S), (8.2.3)
где pn_i(l/?)—полином (я—1)-й степени по ^~', зависящий
линейно от неизвестных коэффициентов «2, • • •. On-i'
Разложение в степенной ряд функции 'р'®'(т) ^* (т) с°ДеР'
жит только неотрицательные, а (х>'A)Ф*(Ъ) —только отрицатель-
отрицательные степени ?.
Функция, соответствующая слагаемым левой части сопря-
сопряженного краевого условия, представляется в виде
«I-1 . .„ Vfc, -•-• - \W •- -
(8.2.5)
тогда как функции
со'
представимы: первая — рядом, содержащим только положитель-
положительные степени, а вторая — по отрицательным степеням с главной
частью со«2 на бесконечности.
39 А. П. Лурье
610
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
(ГЛ. VII
Сославшись теперь на правила вычисления интегралов типа
Коши в п. 5.10, имеем
г
-,/1 \ Л<у
da
2я(
(8.2.6)
причем Z'Q—главную часть функции 2'{\jt) при
выразить, возвращаясь к (8.2.2):
С2«3
— легко
(8.2.7)
Собрав эти результаты, придем к соотношениям
«' A
(8.2.8)
Их правые части, вычисляемые по тем же правилам п. 5.10,
известны. Систему уравнений, определяющих входящие в левые
части неизвестные коэффициенты а2, а2, ..., ап+1, а'2, можно по-
получить сравнением коэффициентов в разложениях по степеням
1/? правой и левой частей равенств (8.2.8). Это будет далее по-
пояснено на примерах.
ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ
611
8.3. Эллиптическое отверстие. Конформное преобразование
области j?!> 1 на плоскость с эллиптическим отверстием дается
функцией
z = ©(?)«=/?(s + ^j (/?>0, 0<т<1), (8.3.1)
причем окружности \?,\ = 1 соответствует эллипс с полуосями
обращающийся в окружность при т = 0; значению т = 1 соот-
соответствует преобразование области |?|> 1 в плоскость разрезан
1 в плоскость, разрезан-
разрезанветствует преобразование области
ную по отрезку (—2R, 2R).
Отметим, что производная преобразующей функции
(8.3.2)
не обращается в нуль при |?|^ 1, если т < 1. При т = 1 она
становится нулем при ?=±1, что соответствует наличию на
контуре области «угловых точек» — концов —2R, 2R разреза.
Далее предполагается, что по краю отверстия действует по-
постоянное нормальное давление р и известно напряженное со-
состояние на бесконечности. Тогда X + iY = 0 и по (8.1.6)
-F(8)=-[p + 4(
так что
F (в)
4- ('о00 — а°
00 — а°°\ р21а
U ) е
r-S
(8.3.3)
(8.3.4)
Повторив вычисление, представленное в общем виде формулой
(8.2.2), имеем
Рп-1 = °. Z0
и по (8.2.8) получим
(8.3.5)
Ф' (О ~ та, -
39*
612 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Сравнение не зависящих от о слагаемых, например, во вто-
втором краевом условии (8.1.7), принимающем в случае эллиптиче-
эллиптического отверстия вид
A - тс2) Ф.^ + О - то2)ФДо)-
- о2 (у + та) Ф[ (о) - (а2 -т)Ч (а) =
= - [р + Т(СТГ + °2°°)] 0 - та2) + j (а~ - а~)(<г2 -
дает
та2
- а'2 = - [р + j(o™ + a«)] -jm (o~ - of) е-2га. (8.3.6)
Теперь Ф*(С), ^«(^ вполне определены. Приводимые ниже ре-
результативные формулы составлены по отдельности для двух
случаев:
1°. Напряжения на бесконечности отсутствуют, по краю от-
отверстия действует постоянное нормальное давление
(8.3.7)
Отсюда находим
06 + ар = 2 [Ф. ft) + Ф, (|)] = 2тр (_jl_+ ^1
Р р4 _ 2mp2 cos 26 + ffl2
На контуре эллипса р = 1, <тр = —р, так что
cos 29 — яг
Максимум достигается в концах большой полуоси @ = 0) и
оказывается равным
Am , , „а ,
р=1 1~т
(8.3.8)
2°. Край отверстия свободен, в™ = q, a™ = 0. Тогда
= q, a
2ia
и по E.4.15)
ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ
613
Получаем
1 / , \ р4 - 2р2 cos B8 - 2а) - от2 + 2m cos 2а , .
-q-(Op + Oe)= p*-2mp2cos28 + m2 (ВЛ.П)
и на контуре отверстия
1 - т2 + 2т cos 2а - 2cos B8 - 2а) ,Q 0 . оч
.<1 = 1-2m cos 28+^ • ф.6Л2)
8.4. Гипотрохоидное отверстие. С помощью функции
область |?|> 1 вне единичного круга конформно преобразуется
в область L плоскости z вне
отверстия, образуемого конту-
контуром Г — гипотрохоидой *):
x = R cos6
cosnB ,
т
F.4.1/ плоскость г плоскость |
При п — 1 возвращаемся к рис- 44.
случаю эллипса, при целых
п > 1 получаем кривые, представляющие правильные криволи-
криволинейные многоугольники со скругленными углами, — треугольник
при п = 2, квадрат при п = 3 и т. д. (рис. 44).
По (8.2.2), (8.2.7) имеем теперь
га-2 _ га-3 , . ап-Л у, __ Rm
?П-1 3 ^п-2 g /' ° П n + V
(8.4.2)
и выражения функций Ф*(?), ^«(Q по (8.2.8) записываются в
виде
-я— 2,~я — 3, . ап.
т
—
—S A-
j.n+1
(D + «2 = - -1- (f -^- rfa. (8.4.3)
2яе/? J а — с.
*) Гипотрохоида — геометрическое место точки на круге, катящемся
внутри неподвижного круга.
614 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
Ограничимся далее рассмотрением случая ненагруженного
края отверстия и задания напряженного состояния на беско-
бесконечности, в котором, чтобы не загромождать записей, примем
а?> = 0, а = 0.
Тогда
2niR
у
. = -<тГ' т 1
a-
И по (8.4.3)
Сравнение коэффициентов при ^~2, ?~"+1 приводит к системе
уравнений
т -
Остальные коэффициенты аз, а^, ..., ап_2 равны нулю. Этим
определяется полином pn_Jy):
RmiHn-2) ( 1 , т 1 \ , ,
и, далее, функция
Остается найти входящую во второе уравнение (8.2.8) по-
постоянную а'2- это достигается сравнением свободных членов в од-
одном из краевых условий (8.1.6), (8.1.7); имеем
^±aT^. (8.4.6)
Этим вполне определяется функция 1F*(?):
- (t + f ГНК И -1 «Г „/^(Д (Г1 + f f) ¦ (8.4.7)
§8] ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ 615
Вычисление напряжений требует теперь лишь проведения
громоздких алгебраических выкладок. Достаточно просто, как
всегда, находится сумма нормальных напряжений, а по ней
значение а9 на контуре отверстия:
1
ие l+m2-2mcos(tt+ 1)9
+ п"-(п-2)т* № ~ m2" + 2m2)cos 2 (а - 6) - 2m cos Bа + nQ- 6)] j
(n = 2, 3, ...).
Здесь (Tj°, o^° — главные напряжения на бесконечности, а — угол
оси aj° с осью х.
8.5. Односвязная конечная область. Конформное преобра-
преобразование единичного круга |?|-^1 на рассматриваемую область,
ограниченную гладким замкнутым контуром Г, дается голо-
голоморфной в круге функций со(?):
причем С\ можно считать вещественным числом, а (д'A,)ф 0 при
|?|^1. Далее будем считать, что ш(?) — полином я-й степени.
Тогда, как и в случае бесконечной области с отверстием, реше-
решение задачи может быть получено в конечном виде.
Краевые условия по E.2.15) записываются (при несколько
измененных обозначениях) в виде
(8.5.1)
Здесь по E.2.9)
Fn + iFt = n{Fx + IF у),
где Fx + iFv — вектор поверхностных сил, a Fn, Ft — его проек-
проекции на внешнюю нормаль и касательную к Г. Главный вектор
616 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ (ГЛ. Vtl
поверхностных сил, вычисляемый с помощью формул E.2.6),
E.2.7), представляется в виде
{Fx + iFy) ds = ф (Fn + IF,) nds =
= у ^ {Fn + iFt) со' (a) da = - i § F (9) da. (8.5.2)
V Y
Их главный момент относительно точки г = 0, в которую ото-
отображен центр круга, равен
j y - yFx) ds = jij[z (Fx - iFy)
т° = j (xFy - yFx) ds = jij[z (Fx - iFy) -z(Fx + iFy)\ ds =
a, (8.5.3)
Y
и условия статической эквивалентности нулю системы поверхно-
поверхностных сил записываются в виде [ср. F.2.4)]
p^-f(e)-u^-)F(e)]dc = O. (8.5.4)
Y Y
He составит труда убедиться, что этим условиям удовлет-
удовлетворяют и левые части краевых условий (8.5.1), если функции
Ф(?), Ч' (?) голоморфны в единичном круге. Действительно,
F (9) Ах = ^ со' (ст) Ф (<т) rfa + ^ d [со (а) ф(^-
— первый и третий интегралы равны нулю, поскольку подынте-
подынтегральные функции являются краевыми значениями функций, го-
голоморфных при |?|<1 и соответственно |?|>1; второй — по-
поскольку со(о)Ф( —) однозначна. Образуя аналогичным образом
уравнение моментов, имеем
(о)F(9) ^ - ©A)F(9)]
do
что и требуется.
§ 8] ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ 617
Применение способа интегралов Коши к первому краевому
условию (8.5.1) приводит к соотношению
Вместе с тем
(а-О' rfg =
Y
ш(а)Ф( —
Y
Через рп(?) обозначим голоморфную часть функции
f-+ ••• + fr+ •--
(y) (8-5.7)
причем
P«(S) = (ciai+c2a2+ ... +cnan) + {clao + c2al+ ... +craare_,)g +
, (8-5-8)
a Z(?) —голоморфная в круге |?|< 1 функция.
Теперь равенство (8.5.5) записывается в виде
«' (?) Ф (?) + р; (?) = -га- § ^- da. (8.5.9)
Y
Сославшись на (8.5.7), имеем
(8.5.10)
Поэтому
= р; (о) - р'п {{)+й' ({) ф (?) - ?2« ({
и второе краевое условие приводит к зависимости
+ш'(^ ф (?) - ?2« (j) ф
618 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
причем по (8.5.8)
P'n(®> = cpQ + c2a{ + ... +спап_г (8.5.12)
По (8.5.9) и учитывая, что da = iadB, имеем
Y
Вместе с тем по (8.5.4)
Y
Эти соотношения позволяют представить (8.5.11) в виде
Y
или
со' @ ^ (?)=¦?-]>' (}) Ф (?) -12® (~) Ф' (S) - К (f)] -
Ш-v- (8-5.13)
Y
По (8.5.10) первая группа слагаемых равна — Z'{Q- Это под-
подтверждает предположенную наперед голоморфность ^F(^) в кру-
круге |?|<1.
8.6. Пример. Рассматривается конечная область L, ограни-
ограниченная контуром (эпитрохоидный овал, рис. 45)
х = R fcos6 + 4 т cos 36), у = R (sin 9 + 4"т sin 36V
В нее преобразуется внутренность единичного круга с помощью
преобразования
( 4) (8.6.1)
причем условие (а'(?)Ф0 при i^l^l требует 0<ш<1; при ус-
условии 0^«t^l/3 точки на Г, соответствующие 6 = 0, 9 = я,
наиболее удалены от начала координат, тогда как точки
6=-тг, 9 = -у- переходят на Г в точки, наиболее к нему близ-
близкие. Кривая (8.6.1) представляет напоминающий вытянутый
эллипс овал с полуосями a = R\\ +-%¦), 6 = ^A —5~; область
/- ограничена извне этим овалом.
§ 8] ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ
В рассматриваемом случае по (8.5.8)
р'п (?) = Ra0
Rm (б2
619
(8.6.2)
и по (8.5.9) приходим к следующей системе уравнений, опреде-
определяющих неизвестные а0, а\, а^.
1 j F^
у
(«о + «о) = "i J ~r~ da,
2niR J ст3
Y
(8.6.3)
и к сопряженной с ней системе. Из них легко определяются не-
неизвестные а0, а\, а2; по ним составляется выражение полинома
p'JQ и далее (8.5.9), (8.5.13) оп-
определяют искомые функции
Ч?)
8.7. Первая краевая задача. Ог-
Ограничиваясь случаем внешней за-
задачи, сохраним предположение, что
функция, реализующая преобразо- Рис 45.
вание внешности единичного круга
на рассматриваемую бесконечную область L, ограниченную из-
изнутри гладким контуром Г, имеет вид (8.1.2), причем т{?) —
полином п-п степени от ?~]. Считая напряжения на бесконечности
отсутствующими, имеем по E.4.18)
C - 4v) ф, (г) - 2ф{ E) - ^х (z) = 2ц (и + iv) +
причем ф1(г), ty\{z) голоморфны в L; X + iY — главный вектор
поверхностных сил на Г (он предполагается заданным).
Полагая
переходим к записи
X-iY
620
ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ
(ГЛ. VII
В искомые функции ф*(?), iC*(?) можно включить голоморфную
при l?i> 1 функцию In-—I, приняв
Тогда
(8.7.2)
Ф. ^ & E) Ф
»'(?) ' 8n(l-v) \ш(?) I й'(?)
и предшествующее равенство запишется в виде
C - 4v) Ф(?) - -p^jф' (?) - ф (S) =
Это приводит к представлению краевых условий
C - 4v) ш' A) Ф (о) - ш (а) ф' A) - ш' A) фA) =
= 2ц5^ A) (и + |0)г - JG5V) осо (а),
C - 4v) со' (а) ф (i-) - со A) Ф' (о) - со' (а) г|> (а) =
так как 1п|?|= 0 на у.
Следуя приемам, примененным в п. 8.2, рассмотрим, полагая
ф(оо) = 0, функцию
- ... -ncnt,n+l)x
. (8.7.5)
Здесь ^n(S) —полином n-й степени по ?, a zfyj— голоморфная
в |^|> 1 функция, причем Z(oo) = 0. Тогда
Y
Произведение со (g) ф' (у) представляет сумму полинома от ?-'
и функции, голоморфной в круге |^|< 1:
(8.7.6)
§ 8) ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ 621
причем принято
г„_2 (<*>) = О, Q@) = - [с.2ах + 2с3а2 + ... +{п- 1)с„а„_,]. (8.7.7)
Поэтому
_ ( I \
) (а) ф'1 — I da
Теперь применение способа интеграла Коши приводит к со-
соотношению
C - 4v) [V ({) Ф @ - qn ($] - г„_2 A)
{^(О-с^-С]]. (8.7.8)
у
Аналогичные действия над вторым краевым условием дают
Q @) — m' (S) Ч» (С)
Постоянная г|з(°о) определяется сравнением не зависящих от
а слагаемых (свободных членов их тригонометрических рядов)
в левой и правой частях второго краевого условия (8.7.4). Уы-
I da
ножив их на -^—. и проинтегрировав по контуру единичного
круга у> имеем
2л» J a
-ш
Ш а
ИЛИ
C - 4v) «?„ @) -Q@) -coi|>(°°) =
2л7^ ' о и" ta(l-v)
Y
622 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
8.8. Эллиптическое отверстие. В этом случае по (8.3.1),
(8.7.8), (8.7.9) имеем
(8.8.1)
и W-Trr^ - ^^ ^ • (8.8.2)
v
В частном случае, когда впаянному в упругую среду твер-
твердому эллиптическому ядру дается перемещение
(и + iv)T = м0 + гао + fez = н0
имеем
= - 5г («о - /»0) -Ш[A-т2)^--^-] (8 -8.4)
и далее по (8.8.1), (8 7.5), (8.7.6)
? I. 2 з • • • . (8.8.5)
^га @) = 0, Q @) = 0.
Обратившись к (8.7.10), получаем
и по (8.8.2)
\+т ?2_
iY 1 + wE2 .-
-v)"F^r- (8.8.6)
Этим определены голоморфные в области |?|> 1 части иско-
искомых функций; функции, определяющие решение задачи (назо-
§ 81 ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ 623
вем их снова ф(?), i|>(?)), получим, добавляя, в соответствии
с (8.7.2), E.4.3), к выражениям (8.8.5), (8.8.6) логарифмические
у | :у у :у
слагаемые - 8яA_у) Ing, 8(l -v) C~4v)ln?- Итак>
/5Л 2\iizmR 1 X + iY . ? 1
(^^) (8.8.7)
Вектор перемещения определяется теперь равенством
2ц (и + /у) = 2ц («о + too) + 2ц&Я (у + у) ~
2|ife/?m l-K/1 m\ X - iY 1 - ?g / mg
3-4v S2-U j+ l
На достаточном удалении от отверстия в его выражения входят
логарифмически возрастающее слагаемое и остающиеся огра-
ограниченными члены
Момент внешних сил, сообщающий ядру поворот е, опреде-
определяется, согласно C.1.14), по коэффициенту при z~l в выражении
(). По (8.8.7) слагаемое степени С равно
m2
и по C.1.14)
(^) (8.8.9)
8.9. Двусвязная область. Предполагается, что известно кон-
конформное преобразование
z = <o(?) (8.9.1)
кругового кольца плоскости ?, ограниченного окружностями уо,
Yi радиусов ро, pi (po<|Si^pi). на двусвязную область L пло-
плоскости z. Принимается, что наружному контуру Го (внутреннему
Ti) этой области соответствует внутренняя окружность yo (на-
(наружная yi) кольца.
Рассматривается случай, когда системы поверхностных сил
на каждом из контуров Го, Г[ по отдельности статически экви-
эквивалентны нулю. Тогда существует решение вспомогательной за-
задачи о нагружении односвязной области, ограниченной конту-
624 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
ром Го. Предполагается, что это решение известно; им опреде-
определяются нормальное и касательное напряжения на контуре
Г) — вектор (On +'Тп() г ¦ Тогда, рассмотрев для двусвязной
области L задачу с краевыми условиями
(о„ + hnt)Yit = 0, (<хй + hnt)Vi = (оя + it at) г, ~ (fin + fratJr, (8-9-2)
и наложив на него решение вспомогательной задачи, приходим
к решению задачи, в котором оба контура нагружены заданным
образом. В дальнейшем поэтому рассматривается случай, когда
наружный контур Го не нагружен*). По E.2.10) на любом кон-
контуре Г области L, в который преобразуется окружность p = const
в кольце, вектор ап — hnt дается выражением
ап - hni = {Ф, (г) + Ф, B) - [2Ф{ (z) + Wl (z)] n2)r, (8.9.3)
причем по E.2.7) квадрат вектора нормали п будет
Переходя в (8.9.3) к переменной ? и обозначая
Ф( (г) = Ф, (ю @) = Ф (?), ^i (г) == % (ю) (?)) = ^ (t),
приходим к соотношению
Ф (?) + Ф (9 - |^gy [со (I) Ф' (I) + ©' (g) lF (С)] = с„ - «тп/. (8.9.5)
На окружности уо имеем $=роО, |= ро/с, и первое краевое
условие (8.9.2) приводится к виду
Ф (Рост) + Ф (&¦) - -^г—у [со [^) Ф' (Роа) + со' (роа) ^F (Роа)] = 0.
(8.9.6)
Оно удовлетворяется, если определить 4х (t) в кольце ро<|?|<
^.pi равенством
.-гD)[фв+*D)]-D)*в-
*) Конечно, можно предварительно «снять нагружение» с внутреннего
контура; например, когда область L—кольцо между конфокальными эллип-
эллипсами, решение внутренней задачи для сплошного эллипса значительно более
сложно, чем для плоскости с эллиптическим отверстием.
§ 8] ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ 625
Краевое условие на Т\ записывается в виде
Ф (Р,а) + Ф (-?-) - щ^у [»(-5-) Ф' (р,а) + ш' (р,а) V (Pla)] =
= К-/т„()Г1. (8.С-.8)
Поверхностную силу на Гь задаваемую рядом Фурье
со
(оп - ixaX = а0 + У /flftafe + ^), (8.9.9)
можно рассматривать как значение на Fi функции от ?, опреде-
определенной в кольце рядом Лорана
оо
g @ = «о + S H S* + ^Г Pi) •
(8-9-10)
Это позволяет дать еще одно представление функции ?(?), ана-
аналогичное (8.9.7),
-|-«' D) g(S)- (8.9.11)
Сопоставление двух представлений одной и той же функции Wit)
приводит к соотношению связи
» (8.9.12)
Решение (о'(^)Ф(^) этого функционального уравнения должно
разыскиваться в форме ряда Лорана, в котором отсутствует сла-
слагаемое вида (г1:
Тогда такое же слагаемое будет отсутствовать и в представлении
Лорана функции
9 / 9
Из второго представления (8.9.7) видно, что функция g/
40 А. И. Лурье
626 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ [ГЛ. VII
также не содержит слагаемого ?-*. Поэтому представления функ-
функций
будут лишены логарифмических членов, что гарантирует одно-
однозначность вектора перемещения (отсутствие дисторсии).
8.10. Неконцентрическое кольцо. Область L ограничена извне
окружностью Го радиуса г0, а изнутри — окружностью Г] ра-
радиуса г и эксцентриситет — расстояние между центрами О0, Ot
этих окружностей — обозначается е. Конформное преобразова-
преобразование кругового кольца на эту область было рассмотрено в п. 3.12
гл. VI. Здесь оно представляется в другой форме:
2 = с|^|, (8.10.1)
(8-10.2)
причем с —вещественная постоянная. По (8.10.1) имеем
? = ?±^=1 + -??-. ??-1 = т тт=—г.
b г — с z — с аъ (г — с) (г — с)
откуда следует, что
(*¦
i\2
2с V
(8.10.3)
Концентрическим окружностям ?? = р2 = const в кольце со-
соответствуют в L окружности с центрами на оси абсцисс (в точ-
точках d) радиусов г.
(8.10.4)
Таким образом, концентрическое кольцо, образованное окружно-
окружностями yo и Yi радиусов р0 и pi (l<po<pi), отображено на
кольцевую область L: наружной окружности Го (внутренней Г0
соответствует внутренняя окружность yo (наружная Yi) кольца.
Величины с, ао, oci (или ро, pi) связаны уравнениями
roshao = r1 sha! = с, е = \ rochao — rxchax |. (8.10.5)
Исключив из них ао, аь получаем уравнение, определяющее с:
е = уг% + с2 - Уг\ + с2. (8.10.6)
Ограничимся далее рассмотрением наиболее простого случая
нагружения — равномерное давление р, распределенное на
окружности Гь Соотношение связи (8.9.12) (в нем g{t) = —р),
после подстановок значения (8.10.1) функции ы(?) приводится
к виду
Ц \ С /J г\
§ 8] ПРИМЕНЕНИЕ КОНФОРМНОГО ПРЕОБРАЗОВАНИЯ 627
причем для краткости принято
9
Z = pg-? Z = pf-? <? = —^. (8.10.8)
~Р
Pi
Оказывается возможным удовлетворить этому соотношению,
приняв (Со, Си С2 вещественны)
Ф (?) = - 2с (tt^V + , + %] ,
' (8.10.9)
Точка ? = 0 не является простым полюсом функции сй'(?)(?)
При таком задании функции Ф(?) уравнение (8.10.7) приво-
приводится к виду
ад [ф (о + ?Ф' (О] + ?Ф (о (z0 + z,) + с0 (pgpf - ?) -
-~т^ + -тт^ = яг20. (8.Ю.10)
* PoPi
Нетрудно проверить, что в разложении левой части по степеням
? при условии
будут отсутствовать отрицательные степени ? (?~2, ?~'). При этом
же условии обратятся в нуль и коэффициенты при ?3 и ?4. При-
Придем к соотношению
С, [I2 BХ + 2ц - 2 - и2) + 2? (Лц - 4Л + и) + BЛ - 212 +
- и2)] + 2С0(I -I2) = q(р* ~ 29% + g2) (8.10.12)
и к системе трех уравнений для двух неизвестных Си Со:
С, B1 + 2 |i - 2 - ц2) - 2 Со - q = 0,
С, Aц - 41 + ц) + <7р2 = О,
d B1 - 212 + 21ц - ц2) + 2С01 - qp* = 0.
(8.10.13)
Но она совместна, так как ее определитель, что легко прове-
проверить, равен нулю. Этим определены по (8.10.9) и (8.9.7) функции
Ф(?), Ч^). Напряжения находим по формулам Колосова —
Мусхелишвили; вектор перемещения однозначен.
40*
ЧАСТЬ IV
ОСНОВНЫЕ СООТНОШЕНИЯ
НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
ГЛАВА VIII
ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА
§ 1. Потенциальная энергия деформации
1.1. Идеально-упругое тело. В гл. I и II в рассмотрение
были введены две группы величин: первая группа величин, опре-
определяющих тензор напряжений, служила для описания напря-
напряженного состояния, возникающего под действием внешних мас-
массовых и поверхностных сил, тогда как величины второй груп-
группы— меры и тензоры деформации — определяли изменения
геометрических объектов (отрезок, площадка, объем) при дефор-
деформировании среды. Никаких предположений о связи между
величинами этих двух групп — о законах состояния среды — не
было сделано. Поэтому сказанное в этих главах приложимо
к средам любой природы; но его недостаточно для суждения
о поведении какой-либо реальной среды, для построения ее ме-
механики.
Установление законов состояния среды, то есть зависимо-
зависимостей тензора напряжений от тензоров деформации и скорости
деформации при учете термодинамических параметров и влия-
влияния предшествующей истории деформирования, составляет пред-
предмет реологии. В этой книге, как уже говорилось в пп. 1.1, 1.3
гл. III, рассматривается одна лишь реологическая модель —
идеально-упругое тело. Основным его свойством является обра-
обратимость происходящих в нем процессов; можно предложить два
способа определения этого свойства. Первый — полная восста-
восстанавливаемость формы тела, второй — возвращение без потерь
энергии, сообщенной телу при деформировании. Предполагается,
что тело из некоторого начального состояния подвергается на-
гружению, протекающему «столь медленно и постепенно», что
в каждый момент сохраняется равновесие, соответствующее
условиям, в которых тело находится в этот момент (игнори-
(игнорируются динамические явления). Возникает деформированное
состояние; оно целиком исчезает, и тело восстанавливает на-
§ 1) ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ДЕФОРМАЦИИ 629
чальную геометрическую форму при медленном и постепенном
разгружении. Второй способ построения модели — энергетиче-
энергетический; работа сил нагружения затрачивается на сообщение телу
накопляемой им потенциальной энергии деформации, при раз-
разгружении тело возвращает ее без потерь.
В математической формулировке первый способ состоит
в задании закона связи между тензорами напряжений и дефор-
деформации. При втором способе построения закона состояния исхо-
исходят из задания выражения потенциальной энергии через компо-
компоненты деформации и по нему определяют тензор напряжений.
«Упругое тело» характеризуется только наличием однознач-
однозначной зависимости тензора напряжений Г от меры деформации ?х
(или М). Требование существования потенциальной энергии де-
деформации выделяет из класса упругих тел «гиперупругие» тела
(Трусделл), названные здесь идеально-упругими. Далее рассма-
рассматриваются только идеально-упругие тела, поэтому слово «идеаль-
«идеальный» часто опускается.
Применимость модели идеально-упругого тела к реальным
телам, как и любой другой реологической модели, должна быть
подтверждена экспериментально. Однако осуществима проверка
только следствий, получаемых теоретически из исходного за-
закона. Чем больше накоплено таких следствий, тем больше воз-
возможностей создается для экспериментального исследования.
Трудная задача установления закона состояния материала
«должна быть передана экспериментаторам как можно позже»
(Синьорини). Необходимо еще добавить, что непосредственному
измерению доступно только поле деформаций, тогда как о на-
напряжениях можно судить только по их интегральным эффек-
эффектам— параметрам нагружения (растягивающая сила, крутящий
момент, давление на поверхности образца и т. п.). Поэтому
опыты чаще всего проводятся на образцах достаточно простой
геометрической формы (призматический стержень, тонкостенная
цилиндрическая трубка) в условиях статической определенности
компонент напряженного состояния. Экспериментальные знания
сосредоточены лишь на многообразиях одного, двух, редко и от-
отрывочно — трех измерений шестимерного пространства компо-
компонент тензора деформации. Эти недостаточные сведения могут
служить подтверждением не одного-единственного, а отличных
друг от друга представлений закона состояния. Довольствуются
принятой формой закона состояния, если констатируется его
достаточно удовлетворительное подтверждение опытными дан-
данными в использованном диапазоне измеряемых величин.
1.2. Потенциалы деформации. Рассматривается единичный
объем идеально-упругого тела в его начальном состоянии
630 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
(у-объем). Согласно первому закону термодинамики удельная
элементарная работа внешних сил ё А(е), сложенная с подведен-
подведенным элементарным количеством тепла 6'Q (выраженным в ме-
механических единицах), равна приращению б? внутренней энер-
энергии (п. 2.1 гл. III):
ЬЕ = Ь'Ауе) + 6'Q. A.2.1).
Добавив сюда определение энтропии в обратимом равновес-
равновесном процессе
6S=-^, A.2.2)
где в — абсолютная температура, и сославшись на выражение
C.5.8) гл. 1 элементарной работы, имеем
A.2.3)
Рассматривая теперь внутреннюю энергию как функцию
семи независимых переменных — шести компонент тензора де-
деформации § и энтропии S, имеем
и вследствие независимости вариаций b&st,
st
Напомним, что tsl—контравариантные компоненты тензора на-
напряжений Т в V-объеме, &sl — ковариантные компоненты В в
метрике о-объема; подстрочные индексы, как принято в термо-
термодинамике, напоминают, каким переменным при дифференциро-
дифференцировании приписываются постоянные значения. Итак,, знание внут-
внутренней энергии Е{8\\, ..., &ж, S) определяет закон состояния
среды —зависимость компонент тензора напряжений и темпера-
температуры от деформаций и энтропии. Выражение закона состояния
через температуру и компоненты деформации определяется за-
заданием свободной энергии F. Вариация этого термодинамиче-
термодинамического потенциала B.2.3) гл. III равна по A.2.3)
A.2.5)
так что
i = i/i(iL| s=-(—\ A2 6)
— I/ n \ at I ' ° — \ ЛЙ I ' vi.^.uy
§ 1J ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ДЕФОРМАЦИИ 631
При адиабатическом процессе деформирования отсутствует
приток тепла, 6'Q = 0, и по A.2.1)
6Е = Ь'А(е) = j/"— 1st b%st. A.2.7)
Аналогичное заключение делается при изотермическом процессе,
но тогда 60 = 0 и функцией, полный дифференциал которой ра-
равен удельной элементарной работе, оказывается свободная энер-
энергия
Г~-Г*Ь&а. A.2.8)
Итак, в том и другом процессах может быть введена в рас-
рассмотрение величина, называемая удельной потенциальной энер-
энергией деформации. Эта величина, обозначаемая Л, зависит от
компонент тензора деформации, а ее вариация равна
= 6 А,е) = у —- t O0sf = Y|/ у i oGsi. A.2.9)
Сохранив одно и то же наименование и обозначение для
удельной потенциальной энергии деформации, не следует за-
забывать, что речь идет о двух отличных друг от друга величи-
величинах. В адиабатическом процессе А отождествляется с внутрен-
внутренней, в изотермическом — со свободной энергией. В определяе-
определяемые ими законы состояния, внешне описываемые одинаковыми
соотношениями, входят отличные друг от друга модули упру-
упругости— «адиабатические» в первом процессе, «изотермиче-
«изотермические»— во втором. См. п. 2.3 гл. III.
Выражения контравариантных компонент тензора напряже-
напряжений через удельную потенциальную энергию записываются
в виде
или же в виде
У G dtst ~Z\G dG
Эта запись предохраняет от возможных ошибок; в ней &sU Sis
(или Gsi, Gis) считаются отличными друг от друга.
Потенциальная энергия деформации тела, обозначаемая а,
равна интегралу по о-объему от удельной потенциальной энер-
энергии:
а = J f J Л rfx0. A.2.12)
632 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА (ГЛ. VIM
Ее вариация равна
ба = 6 J J J Л dx0 = J J j 6Л dT0, A.2.13)
и знак вариации мог быть внесен под знак интеграла, поскольку
у-объем не варьируется. Отсюда следует возможность отожде-
отождествления вариации Ьа с элементарной работой внешних массо-
массовых и поверхностных сил. Этим объясняется необходимость
относить удельную потенциальную энергию деформации к еди-
единице начального объема (и-, а не V-объема).
1.3. Однородное изотропное идеально-упругое тело. Предпо-
Предполагается, что в начальном состоянии среда однородна и изо-
изотропна, ее плотность ро постоянна. Этим исключается зависи-
зависимость удельной потенциальной энергии деформации от ориента-
ориентации осей выбранной координатной системы и явное вхождение
в ее выражение координат точек среды.
Это выражение представляется поэтому функцией только
трех главных инвариантов тензора или мер деформации (п. 3.3
гл. II) Коши:
л = л(/,(#), 12ф), i3(i)) A.3.1)
или
Л = Л(/,(ех), /2(Gx), /3(G*)). A.3.2)
Вторая форма записи часто предпочтительнее первой, по-
поскольку введение мер деформации упрощает запись формул.
Переход к тензору деформации, конечно, не составит труда.
Наличие формул E.2.3) — E.2.5) гл. II, связывающих инва-
инварианты мер деформации Коши и Альманзи, а также обратных
им тензоров позволяет рассматривать А и как функцию инва-
инвариантов меры или тензора деформации Альманзи:
A = A(h(gxh Ш*)> Ш*)\ Л = Л(/,A), /2A),./3(|)). A.3.3)
Представления удельной потенциальной энергии через глав-
главные инварианты тензоров М, т не отличаются от A.3.2) и со-
соответственно от A.3.3), поскольку /ft(Gx) = 1к{Щ, Ih(g*) =
— Ik(m). Это, конечно, не означает, что записи законов состоя-
состояния через, скажем, тензоры Gx и М одинаковы, так как это
различные тензоры.
В дальнейшем для сокращения записей применяются обозна-
обозначения
Ik(Gx) = Ik(M) = l:i, /*(#) = /*. ]
с A.3.4)
§ 2] ЗАКОН СОСТОЯНИЯ ИДЕАЛЬНО-УПРУГОГО ТЕЛА 633
Заметим еще, что удельную потенциальную энергию можно
представлять и в функции от трех независимых, но не главных
инвариантов той или иной меры деформации, например от пер-
первого главного инварианта ее, второго инварианта ее девиатора
и еще одной величины, зависящей также от третьего главного
инварианта. Инвариантами являются, конечно, главные значения
меры деформации, главные удлинения и т. д.
§ 2. Закон состояния изотропного идеально-упругого тела
2.1. Общая форма закона состояния. Вариация удельной по-
потенциальной энергии деформации, равная согласно A.2.9) в
принятых предположениях удельной элементарной работе внеш-
внешних сил, представляется формулой C.6.4) гл. I:
B.1.1)
Здесь введен «энергетический» тензор напряжений Q —тензор,
контравариантные компоненты которого в базисе rs начального
у-объема равны контравариантным компонентам Ist тензора на-
напряжений 7 в базисе V-объема; по C.6.5) гл. I
f=VR* -Q-VR. B.1.2)
Обратившись теперь к соотношению A.12.7), дающему инва-
инвариантное определение градиента скалярного инварианта по
тензору
6Л = 4^Г.6СХ FGX = 6GX*), B.1.3)
имеем
Считая А заданной функцией главных инвариантов Ik(Gx), со-
сославшись на формулы (I. 12.12), (I. 12.13), приходим к соотно-
соотношениям
[[ + I8G +1° ] BЛ-5)
дА . . дА\л ( дА ,. дА \лх, дА
2]
B.1.6)
В них § — единичный тензор в и-объеме.
Вводим обозначения
1-дЛ ~с1 дА
i + / 1. с1
с~ E/, +/' д!2 ' с~д12' с~1*~дТ>'
дА . . дА . . дА \ дА . . дА j дА
634 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
Заметив, что
приходим к записям закона состояния в виде
- {cgst-XcGmngsmgtn + ~cGst), B.1.9)
f' = 2-|/f (dgst-dGmngsmgt>l + dGmnGrqgnrgmsg«<) B.1.10)
Здесь контравариантные компоненты тензора напряжений вы-
выражены через компоненты метрических тензоров v- и V-объе-
k k
мов. Величины с, d могут быть названы обобщенными модулями
упругости.
Принимая за материальные координаты точки ее декартовы
координаты в начальном состоянии (qs = as), приходим к записи
закона состояния B.1.9) в виде
^ <2-ul>
и т. д.
В случае несжимаемой среды — среды, сохраняющей объем
при деформации,
/зEх)=|/| =1, Л(/„/2, 1)=А(/„/2) B.1.12)
и по A.12.7), A.12.8)
з ^(Jx 3v / • (z.l.lo)
Введя в рассмотрение лагранжев множитель,- назовем его
-I
c/h, перепишем теперь соотношения B.1.1), B.1.2) в виде •
6Л = —^rr + cGx • '6Gx =— Q. .6GX. B.1.14)
V<9G x / 2
Отсюда находим
Здесь А не зависит от /3, так что по A.12.12) приходим к уже
знакомому представлению энергетического тензора напряжений
cGx + cGx ). B.1.16)
§ 2] ЗАКОН СОСТОЯНИЯ ИДЕАЛЬНО-УПРУГОГО ТЕЛА 635
-1
Но теперь отпадает представление с как «обобщенного модуля
упругости» — эта неизвестная для несжимаемого материала ве-
величина (лагранжев множитель) определяется из уравнений ста-
статики, к которым присоединяется условие несжимаемости B.1.12).
2.2. Начальное и натуральное состояния. Напомним, что пе-
перемещения точек среды отсчитываются от их положения в
а-объеме, названного начальным. В нем
и = 0, R = r, G = g, /, = /2 = 3, /3=1, B.2.1)
так что
Cmra/Y* = l6r = ^. Gst = gst B.2.2)
и напряжения в начальном состоянии представляются равен-
равенством
l~(%T- + 2-§f + -Ш Gst. B.2.3)
Здесь нуликом показано, что величина в скобках вычисляется
для значений аргументов Ih, соответствующих начальному со-
состоянию. Тензор напряжений в этом состоянии является шаро-
шаровым и представляет всестороннее равномерное растяжение или
сжатие [см. C.5.9) гл. I]. Только такое состояние может быть
принято за начальное, если сохранить единственное предполо-
предположение об изотропии среды, на котором основывался вывод за-
закона состояния B.1.9). Итак, среда, изотропная в натуральном
состоянии, может сохранять изотропию в напряженном состоя-
состоянии только при условии, что последнее является всесторонним
равномерным растяжением или сжатием. Для начальных состоя-
состояний с распределением напряжений, отличных от всестороннего
равномерного сжатия или растяжения, закон состояния B.1.5)
не имеет места. Такие состояния создают анизотропию свойств
среды.
2.3. Связь между обобщенными модулями при различных
начальных состояниях. Рассматриваются два состояния упру-
упругого тела — первое (ио-объем) является натуральным, второе
получено из первого преобразованием подобия (их-объем) с ко-
коэффициентом подобия К; тогда
я = гх = Кг> х^ах = Ка^ B.3.1)
Соответствующие плотности ро и рх связаны соотношением
Меры деформации, вычисляемые по первому и второму началь-
начальным состояниям, и их инварианты связаны соотношениями
E.6.2), E.6.3) гл. II. Потенциальная энергия деформации
636 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
в V-объеме обозначается а и соответственно ах. Конечно,
а = ах, поскольку численное значение потенциальной энергии ах
является суммой потенциальных энергий, накопленных в перехо-
переходах v0 -* vx, vx —*¦ V, и не может отличаться от ее значения
в переходе Vo-*V. Поэтому, сославшись на A.2.12), имеем
\\\а №. I* h)d4
»0 О.
B.3.3)
и, поскольку объем v0 может быть, произвольно выбран,
B-3.4)
Теперь
так что
_,
с
по
д.
31
по
и
— Л
B.
А
Г
'B
yd
3.4)
.1.4)
Ах
1/Х
< дА
dli
имеем
д1х '
< К3
дА
:1
К с
1 дА
К д1\
х дА
К dl?
1 л 4 х
ь-3 д,Х
О 1 -1
где, конечно, с с, с, — обобщенные модули упругости, когда
0 1-1
начальным состоянием является натуральное, а сх, сх, сх —
когда начальным служит их-объем:
—Т7-, сх=—5Г'з- B.3.7)
o/j- ш2 dl? dig
Закон состояния при этом выборе начального состояния запи-
записывается в виде
,0.1.. -1 sk
?x+cxGx ). B.3.8)
'з
Заменив здесь Q*qt qxS соответственно на K'2Gkq, K2Gst,
а Iх на Л'~6/з и используя B.3.6), получим
0 . -1
V h
§ 2] ЗАКОН СОСТОЯНИЯ ИДЕАЛЬНО-УПРУГОГО ТЕЛА 637
ИЛИ
jx" = j^r*. B.3.9)
При такой связи между его контравариантными компонен-
компонентами тензор напряжений сохраняет в V-объеме значение, не
зависящее от выбора начального состояния:
7Х = Ix"r*R* = №st ~ RsRt = f, B.3.10)
что и требуется.
2.4. Представление тензора напряжений. Переход от энер-
энергетического тензора напряжений к тензору напряжений прово-
проводится с помощью соотношения B.1.2). Используются зависимо-
зависимости [см. C.3.2), C.3.7), D.1.5), D.1.6) гл. II]
V«* • ? • V« = R/ ¦ г/ ¦ r"RQ = glqRtRQ = M,
V«* • G>< • VR = V«* • VR • VR' • V« = M2,
VR* • Gx"' • VR = V/?' • (WR ¦ VRY1 ¦ V/? =
= V«* • (VflT1 • (V«)-'• V/? = G,
V/?* • Gx2 -VR = M3 = IXM2 - I2M + /3G,
no B.1.5) или B.1.6) приходим к записи закона состояния
в форме Фингера A894):
f = 2]A§- (сМ-сМ2 + с6). B.4.1)
В него входят тензоры, определенные в векторных базисах
V-объема, G —единичный тензор в этих базисах (не смеши-
смешивать с Gx!).
Конечно, вместо тензора М можно использовать обратный
тензор М'1 = gx. Обратившись к формулам (I. 10.12), (I. 10.13),
дающим выражения целых отрицательных степеней тензора,
придем к записи закона состояния в виде
Т = 2 j/j- CeG - её* + 4х2)- B-4.2)
Здесь обобщенные модули даются формулами
дА ,/ дА j_f дА ' _ . дА , . дА * __ т дА
+ 77+ 3 Ж1 е~'2Ж+ 3Ж' е~'3Ж'
B.4.3)
Их можно также выразить через инварианты /* = h (,tx); обратив-
обратившись к формулам E.2.5) гл. II, получим после очевидного вы-
вычисления
0 i' дА ' дА . ,/ дА 2 дА ,п . ..
д/3 »/] д!2 д!2
638 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
В форме записи уравнения состояния Фингера, промежуточ-
промежуточной между B.4.1) и B.4.2), используются тензоры Mug;
имеем [см. A.10.12), A.10.14), A.10.15)]
М2 = М • ?х~' = м • -L (gx2 - I\gx + I'2G) = I3g>< - /2G + / Д
и подстановка в B.4.1) с учетом B.1.7) приводит к соотно-
соотношению
^Н^^ ^ ^гM!- <2-4'Б>
5/ / J
Некоторые авторы вводят в рассмотрение тензор, главные
значения которого, значит и главные инварианты, равны глав-
главным значениям тензора напряжения Т, но главные оси совме-
совмещены с главными осями меры деформации 8х. Заметив, что
тензор Т соосен не с Gx, а с тензором gx, и сославшись на
E.3.3) гл. II, можно определить «повернутый тензор напряже-
напряжений», обозначаемый Г через тензор поворота А соотношением
Г = А • f • А* B.4.6)
и по B.4.1)
Г = -L (cGx - io><2 +~c g), B.4.7)
У h
так как А • G-A* = А • А* = g. По B.4.1) имеем также
Gx-'.r=Q, rx = Gx-Q. B.4.8)
2.5. Выражение закона состояния через тензоры деформации.
Переход от мер к тензорам деформации осуществляется с по-
помощью соотношений C.6.3), D.3.3) гл. II:
<y = yEx-g), f = l(G-?x), B-5.1)
а формулы связи между их главными инвариантами перечис-
перечислены в п. 5.4 гл. II. Из них имеем
дА__±дА__}__дА_,}_дА_ _9А_ _ _\_ М_ __ J_ дА_ дА _ 1 дА
~Щ~~2 ~dh~t~dk +8 "а/Г' ~Щ~Т dj2 8~dh' dls ~ 8 dj3 "
B.5.2)
Пользуясь этими соотношениями и заменив Gx2 его выражением
можно представить выражение B.1.5) энергетического тензора
напряжений в виде
¦л/Я Q = d'g- d'i + d'$\ B.5.3)
• о
§2]
закон состояния идеально-упругого тела
639
причем выражения обобщенных модулей й' через главные инва-
инварианты /ft тензора 8 сохраняют структуру B.1.8):
^ = ^ + /liA + /-|d( }>-g. + lMt i-?. B.5.4)
Аналогично строится представление повернутого тензора на-
напряжений Р; при этом оказывается удобным вместо третьего
главного инварианта ввести в рассмотрение квадратный корень
из него — отношение объемов среды в V- и у-состояниях:
в = |/J- = //3«5х) = A + 2/, + 4/2 + 8//2 = Я + 1, B.5.5)
где D, согласно E.5.1) гл. II, — относительное изменение эле-
элемента объема. Теперь вместо B.5.2) имеем
1А
dj2
1A
dl2
A.J1A- _^
4 dj2 ' dl3
28 д&
и выражение повернутого тензора напряжений B.4.7) записы-
записывается в виде
о 1 ^ 2 л
¦mS2) B.5.7)
•1
с модулями
0 дА , . дА
дА
о
III &
B.5.8)
Аналогично представление тензора напряжений через тензор
деформации Альманзи — Гамеля
П 1 ~ 9 л
B.5.9)
! = (D + 1), B.5.10)
Здесь
а модули т даются формулами
.,дА_
Л У' «5/2
ал ,
? дА
т — —Т
д\\
дА
дв''
дА
дB
B.5.11)
640 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
В начальном состоянии
<У = 0, 1 = 0, в = в'=1 /, = /* = ° (k= 1,2,3),
и выражения введенных в рассмотрение тензоров приводятся
к виду
6А\ у(дАдА\ т (дА дА\ г /ос юч
^ То=[ж~^г B-5Л2)
В первой формуле удельная потенциальная энергия дефор-
деформации А рассматривается как функция от /ь /2, /з, во второй
(третьей) — от /ь /2, в О'ь /г в')- Этим объясняется отличие
записей формул для Qo и То. Если начальным состоянием яв-
является натуральное, то
^4 [(^Г)]о = О B.5.13)
или же
о _о
В случае несжимаемого материала модули m (и т) в фор-
формулах B.5.7), B.5.11) остаются неизвестными. Они опреде-
определяются из уравнений статики и условия несжимаемости
2.6. Главные напряжения. Следствием закона состояния
Фингера B.4.1) является соосность тензора напряжения Т с тен-
тензором меры деформации М (или gx). Вспомнив, что главные
значения этой меры равны главным значениям Gs тензора Gx,
и называя ts главные напряжения, имеем
II 22 33 11 22 33
M = Giee + G2ee + G3ee, f =^ее + t2ee + t3ee, B.6.1)
s
где е— единичные векторы главных направлений этих тензоров.
3 s s
По B.4.1), учитывая, что G = 2 ее — единичный тензор У-объ-
ема, имеем
t^-^icGs-cGl+'c). B.6.2)
В рассмотрение вводятся также главные относительные удли-
удлинения 6S; по C.4.4) гл. II они определяются равенствами
GS = A+6SJ, s=l, 2, 3, B.6.3)
5 2] ЗАКОН СОСТОЯНИЯ ИДЕАЛЬНО-УПРУГОГО ТЕЛА 641
а инварианты //,(GX) выражаются через них по формулам
/, (бх) = A + б,J + A + б,J + A +б3J,
/2(ОХ) = A + б1JA+б2)ЧA+б2JA+б3J + A+бзJA+б1J, B.6.4)
/3(GX) = (l+61J(l+6.2J(l+63J. |
Поэтому
^ = 2A+6S), ^-2A+*.)(/,-G.), |^ = 2(l-f6s)Tr^7.
B.6.5)
Теперь, вспомнив определение B.1.7) обобщенных модулей,
представим B.6.2) в виде
причем по B.6.5)
[|A |l ^«]. B.6.7)
Это позволяет записать выражения главных напряжений в про-
простом виде:
/5=-ЦУ^— (s = 1,2,3), B.6.8)
так что
|f = A+62)A+б3)/„ #- = (!¦
Удельная потенциальная энергия деформации предпола-
предполагается заданной через главные удлинения.
Величины справа в формулах B.6.9) представляют главные
напряжения о^> отнесенные к площадкам do в и-объеме, нор-
мальным главным направлениям е тензора Gx\ действительно,
0?j do = ^s dO, ots = ts — = ts ¦ , ,
do I+Os
и формулы B.6.9) представляются в простейшей форме:
|?=-о'.. ' B.6.10)
41 А. И. Лурье
642 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VII!
Возвращаясь к B.6.8), составим выражение вариации удель-
удельной потенциальной энергии деформации:
з
63N(\ + 6,) +
+ t2 A + 63) A + б,) 6A+ б2) +13 A + 6,) A + 62) 6A+ 63); B.6.11)
его левая часть представляет приращение потенциальной энер-
энергии деформации в единичном кубике уобъема с ребрами, на-
S
правленными в У-объеме по главным осям е тензора напряже-
напряжений Т; его правая часть равна элементарной работе приложен-
приложенных нормально к граням этого кубика сил
Ml+62)(l+63), Ml
Этим объясняется неожиданно простая форма соотношений
B.6.8). Для несжимаемого материала
1 = A+61)A+62)A+6з)-1=О> B.6.12)
и к соотношению B.6.11) добавляется уравнение связи между
вариациями величин 1 + bs:
+63NA +6,) + A + 63)A+61NA+62,+
Теперь, введя лагранжев множитель р, придем к выражениям
главных напряжений для несжимаемого материала в виде
ts = p + {\+bs)~. B.6.13)
-1
Заметим, что величина с в законе состояния B.4.1) также имеет
смысл лагранжевого множителя.
2.7. Выражение тензора напряжений. Формулы B.6.1),
B.6.7) позволяют представить тензор напряжений также в виде
? i
Заменив здесь е единичными векторами е главных направлений
меры деформации Gx:
? ~ s s ti
е = А* • е = е • А (А = ее),
где Л —тензор поворота [см. E.3.3) гл. II], получим
+65)-|^.Л. B.7.2)
§ 2] ЗАКОН СОСТОЯНИЯ ИДЕАЛЬНО-УПРУГОГО ТЕЛА 643
Можно этому выражению придать инвариантную форму, рас-
рассматривая удельную потенциальную энергию деформации как
функцию трех инвариантов
Sl = 6i+62+63) S2 = 6? + 62 + 6l S3 = 6f+ 62+ 63. B.7.3)
Тогда
и с помощью тождественных преобразований
6? A + 6S) = A + б/ -2A+ 6sf + A + 6S)
это выражение записывается в виде
<1+6> <1+б
Возвратившись к B.7.2) и вспомнив теперь представление
меры деформации Gx в виде
3 SS 3 SS 3 SS
Gx = 2 Gsee= 2 A+6/ее, Gx'/2 = 2A +6s)ee,
придем к выражению
лЛ/г+з
У7Г LUsi ds2 ds
которое с помощью формул E.3.6) гл. II записывается в виде
Yh LV^s, ds2 dsj
+ 2(й-з|й-)^+3^ех''.УЛ]. B.7.5)
Для несжимаемого материала вместо формул B.7.2) имеем
выражение
41*
1+д$)-^ее-Л + р6, B.7.6)
S-1
644 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
так как G = 2 ее — единичный тензор в V-объеме. Инва-
риант s3 теперь может быть с помощью условия несжимаемо-
несжимаемости B.6.12) и соотношений E.4.2) гл. II выражен через Si, s2:
ЬАА = - [«, + I (*? - s2) = {Bs3 - 3s,s2 + sf), B.7.7)
и поэтому исключен из выражения удельной потенциальной
энергии деформации; обозначая результат такого исключения
через A(si,S2), получаем вместо B.7.6)
2.8. Тензор напряжений Пиола A836) — Кирхгоффа A850).
По определению тензора напряжений его произведение на век-
вектор ориентированной площадки N dO в У-объеме равно дей-
действующей на эту площадку силе F dO:
FdO^N-fdO. B.8.1)
Перейдя в этом выражении к площадке ndo в о-объеме
с помощью соотношения C.5.3) гл. II, получим
FdO= VT3n • (Vr)' -fdo^n-Ddo. B.8.2)
Здесь в рассмотрение введен несимметричный тейзор
5 = УГ3(Щ'-Т, D*=VT3f-4r, B.8.3)
называемый тензором напряжений Пиола — Кирхгоффа. Урав-
Уравнение статики в объеме, выражающее условие обращения в нуль
главного вектора сил, действующих на произвольно выделен-
выделенный из тела объем,
здесь приводится к виду
Q.. B.8.4)
Дивергенция вычисляется в векторном базисе начального
объема у; это облегчает решение ряда задач. Знание наперед
неизвестной геометрии У-объема предполагается в записи урав-
уравнения статики на поверхности [см. C.5.4) гл. II]
. B.8.5)
§2] ЗАКОН СОСТОЯНИЯ ИДЕАЛЬНО-УПРУГОГО ТЕЛА 64-5
Уравнение состояния для тензора Пиола по B.7.5), B.8.3)
и C.2.6) гл. II записывается в виде
B.8.6)
Оно нашло применение в ряде работ (Джон, 1956) для мате-
материала «гармонического типа». Предполагается, что удельная по-
потенциальная энергия деформации не зависит от инварианта s3,
а ее зависимость от Si, S2 записывается в виде
А = jks] + \is2 = -i[{I + 2ц) s* - 4ц F,62 + 6263 + 636,)], B.8.7)
где Х, ц. — постоянные. При отождествлении к, ц с постоянными
Ляме, а главных относительных удлинений 8S с диагональными
компонентами ess линейного тензора деформации приходим к из-
известному выражению удельной потенциальной энергии в линей-
линейной теории упругости. Для материала «гармонического типа»*)
D = (lsl — 2\i)A + 2\i4R, B.8.8)
2.9. О задании удельной потенциальной энергии деформации.
Выбор-формы зависимости удельной потенциальной энергии де-
деформации от инвариантных характеристик деформации пред-
представляет трудную и, конечно, неразрешимую единственным обра-
образом задачу. Можно указать ряд критериев, которым должна
удовлетворять разумно назначаемая зависимость.
Свойство упругого материала накоплять энергию при дефор-
деформировании приводит к требованию положительности удельной
потенциальной энергии деформации А для всякого сопрово-
сопровождающегося деформацией («нетвердого») перемещения из на-
натурального состояния (принимается, что в этом состоянии
Л=0).
В натуральном состоянии [см. B.6.8)]
6S = 0, ts = 0, ~д^~ — ^ (s — 1. 2, 3),
и поэтому представление А F1,02,63) степенным рядом в окрест-
окрестности натурального состояния начинается с квадратичных по 6S
слагаемых
Л = 4(дГ?Л6А+ ... B.9.1)
*) Наименование обусловлено тем, что рассмотрение плоской деформа-
деформации тела из такого материала сводятся к нелинейной краевой задаче теории
гармонических функций. Мо'жно назвать этот -материал «полулинейным».
646 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
Необходимым критерием пригодности выбранного представле-
представления является положительность квадратичной формы
д*А \ ||
— матрица Н~да~ла~) должна удовлетворять известным не-
неравенствам Сильвестра. Этим гарантируется положительность А
в некоторой окрестности натурального состояния, но, конечно,
не во всей области значений 6S (—l<6s<oo).
По формулам B.6.7), B.6.5) имеем
Я'Л дА dbs
6., d6s dbk
W"S I
ЛХ. "I
dl3 3[(l + bkf ^ A + 6SJ J^ dl\ A + &sf A + б,J
дА ! Г L_^l
dl3 14(l+bs)(l+bk) A+6,)* 06* J
+ 4 dl3 14(l+bs
и, далее,
BA3)
Введя обозначения постоянных
B.9.4)
придем к представлению удельной потенциальной энергии де-
деформации
А = | [(Я + 2ц) (б, + б2 + б3J - 4м, (б,б2 + 6263 + б3б,)] + ... B.9.5)
}is2+ ... B.9.6)
или, при обозначениях B.7.3),
A%s
§ 3] ПРЕДСТАВЛЕНИЕ ЗАКОНА СОСТОЯНИЯ ТРЕХЧЛЕНОМ 647
Выписанные явно слагаемые дают выражение удельной потен-
потенциальной энергии деформации «гармонического» («полулиней-
(«полулинейного») материала. Необходимые (конечно, недостаточные) кри-
критерии положительности А представляются теперь в форме не-
необходимых и достаточных критериев положительности этой ве-
величины в линейной теории упругости [см. C.3.7) гл. III]:
|i > О, ЗА + 2ц >0 B.9.7)
или, по B.9.4),
Можно предложить также статические критерии — поведение
материала не должно противоречить интуитивно ожидаемым
представлениям. Один из таких критериев формулируется не-
неравенствами:
если 6i > 62 > 63, то U>t2> h. B.9.9)
Пусть 6i > 62- Тогда t\> t2 и по B.6.6), B.6.4) получаем нера-
неравенство
[+°+6зJ ж\[A + 6iJ"A + 6гJ] > °- B<9Л0)
Второй множитель положителен; пришли к неравенствам (Тру-
сделл)
^ ^->0 E = 1,2,3). B.9.11)
Было получено одно из них (для s = 3), но аналогично доказы-
доказываются остальные. Если же 6i = 6г>6з, то неравенства B.9.11)
сохраняются для s = 1 и s = 2; теперь t\ — t2 и суждение о знаке
величины
_34_ , ,2 дА
достигается предельным переходом: при 61 = 62 + 8 (е > 0) эта
величина положительна при сколь угодно малом е. Поэтому при
е—>-0 она или сохраняет знак, или становится нулем:
1 = 62) -gj—h(l +63) 2-gj-^0. B.9.12)
§ 3. Представление закона состояния квадратичным
трехчленом
3.1. Квадратичная зависимость между двумя соосными тен-
тензорами. Законы состояния, представленные в § 2, выражают
зависимости между парами соосных тензоров (Q,GX), (Г, 5х),
(Т, М), (T,gx). Структура этих зависимостей одинакова —
648 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
определяемый тензор представляется квадратным трехчленом,
равным сумме квадрата, первой и нулевой степени (единичного
тензора g в v- или G в V-метрике) тензора, через который он
выражен. Коэффициенты этого трехчлена являются функциями
инвариантов, определяемыми по заданию удельной потенциаль-
потенциальной энергии деформации.
Как указывалось в п. I. 12, возможность установления квад-
квадратичной зависимости между соосными тензорами является
следствием теоремы Кейли — Гамильтона A.10.11), позволяю-
позволяющей заменить степени тензора выше второй его нулевой, первой
и второй степенями. Этим указывается другой способ вывода
закона состояния. Форма связи рассматриваемого тензора на-
напряжения с соответствующей мерой (или тензором) деформа-
деформации задается квадратным трехчленом, коэффициенты которого
далее определяются по условию интегрируемости вариации
удельной потенциальной энергии деформации. Легче всего это
проследить на примере энергетического тензора напряжений Q,
через который эта вариация непосредственно определяется по
формуле B.1.1)
/f /f i C.1.1)
3.2. Представление энергетического тензора напряжений. Со-
осным с ним является тензор деформации Коши &, и квадра-
квадратичный трехчлен, их связывающий, представляется в виде
Q = ag + ai + ai2, C.2.1)
так как тензоры Q, 8 определены в метрике начального состоя-
состояния (у-объема):
Q = lstrsrt> i = 8str?. C.2.2)
Имеем, далее, *)
g..б# = /, (g • {&) = /, FЙ) = б/,
%-) = \б/, (<У2),
Ц-} = ~ б/, (Й3).
Но по (I. 10.10), (I. 10.11)
/, (^2) = j\ - 2/2, /, {&*) = у? - зу,у2 + зу, (у, = ik (i)),
*) ЬР2 = Р-ЬР + FР) ¦ РФ2Р- ЬР; однако /, (Р ¦ ЬР) = /, ( FР) • Р), и поэ-
поэтому h (Р • ЬР) = -i- б/, (Р2). Точно так ' же бР^ЗР2 • 6Р, но /, (Р2 • 6Р) =
§ 3] ПРЕДСТАВЛЕНИЕ ЗАКОНА СОСТОЯНИЯ ТРЕХЧЛЕНОМ 649
так что
t -bi = б/р й- -ъё = /,6/, -б/2, #• -б#=(j\-/2)б/, -/^ + б/3.
C.2.3)
Теперь выражение вариации удельной потенциальной энер-
энергии деформации записывается в виде
ЬА = |/-| {[а + а/, + а (j\ - /2)] 6/, - (а + а/,) 6/2 + аб/3). C.2.4)
Это выражен-ие должно удовлетворять условиям интегрируемо-
интегрируемости — коэффициенты при bjh следует приравнять производным А
по /^ Приходим к трем уравнениям:
Из них сразу же следует представление B.5.3) энергетиче-
энергетического тензора напряжений и выражения B.5.4) входящих в него
k
коэффициентов d'.
3.3. Представление тензора напряжений. Соосным с тензо-
тензором напряжений Т является тензор меры деформации Альманзи
gx; оба тензора определены в метрике У-объема; полагаем
0 - ' v 2 *2
T = bG + b?x + bgx . C.3.1)
Последующее вычисление несколько осложняется тем, что
в выражение вариации удельной потенциальной энергии дефор-
деформации, тензор напряжений непосредственно не входит; он может
быть введен в него через посредство энергетического тензора
напряжений Q с помощью равенства B.1.2): Q = (Vr)* • Т • Vr.
Получаем
bgx + bgx2) ¦ Щ-.дб* C.3.2)
и, сославшись на определение C.2.2) гл. II тензора Vr, а также
на формулы C.3.7), D.1.2) гл. II, имеем
(Vr)' -G -Vr^ (Vr)*. Vr = Gx~',
(Vr)* • gx • Vr = (Vr)* • Vr • (Vr)* • Vr = Gx~\
(Vrr-|x2-Vr = Gx~3.
Итак,
бЛ = |у j {bGx~* + bGx~2 + bGxJ'-6Gx. C.3.3)
650 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
Дальнейшее вычисление основано на тензорных преобразова-
преобразованиях A.10.11) (I. 10.12), A.10.14):
лх-« .л 60, , 6О2 6О3 _
и "oG—-p—h-я—г-р~ =
— п п п \W2^3UU1 i V-*34J1U4J2 ' *"M*J2UW4/—
_ 6(О.О2Оз) _ 6/3 «"а
GiGoGo lo lo
I ? О О О
••6G =/!(G -6G )= 6/, (G )= 6 ^ =
2 2 /j
Подстановка в C.3.3) теперь дает
[ Г I 2 2 ° 6/' 1
6Л = ]//3 (й + ЬГ1)Ы'1 — ЬЫ'2 + b—L\ C.3.4)
так что
C.3.5)
Возврашаемся к закону состояния B.4.2) и к определениям
к
B.4.3) обобщенных модулей е.
3.4. Разбиение тензора напряжений на шаровой тензор и
девиатор. Общее соотношение между двумя соосными тензо-
тензорами, рассмотренное в п. I. 13, в применении к энергетическому
тензору напряжений Q и тензору деформации Коши & записы-
записывается в виде [см. (I. 13.15)]
Тензор & здесь определен тремя характеристиками: его пер-
первым инвариантом j\ — U{<§), углом -ф, входящим в тригономет-
тригонометрическое представление главных значений Devff (I.11.16):
I . Г . g, 1 . Г . / , 2Я
; sinib в/ sin NH
3 л /з 3 /з
§ 3] ПРЕДСТАВЛЕНИЕ ЗАКОНА СОСТОЯНИЯ ТРЕХЧЛЕНОМ 651
и его вторым инвариантом *)
/2(Dev<#)= - -^-. C.4.3)
Закон состояния задается здесь тремя функциями этих ха-
характеристик: 1) отношением первых инвариантов [(I. 13.5)]
3к = -ЬЖ; C.4.4)
2) отношением^ вторых инвариантов девиаторов [см. (I. 13.9)]
^ ~ "г" ~ L 4/2 (Dev §) J ' ' '
3) углом подобия девиаторов [(I. 13.13)]
со = х_г(,. C.4.6)
Через угол % выражаются главные значения Dev Q формулами,
аналогичными C.4.2) [см. (I. 13.12)]:
1 - 2tq . 1 - 2tq . / 2я
/3 'Л) ^ 3 1W /3" Г 3 Г
Напомним, что Г — интенсивность деформации сдвига
[C.7.6) гл. II], %q — интенсивность касательных напряжений
[B.2.11) гл. I], вычисляемая по тензору Q.
Три функции
А = *(/ь Г. Ч>). M- = l*C/i. Г- *), © = ©(/„ Г, ф) C.4.7)
связаны тремя дифференциальными соотношениями, определяе-
определяемыми требованием существования удельной потенциальной энер-
энергии деформации. Последнюю здесь можно также рассматри-
рассматривать как функцию трех инвариантных характеристик /ь Г, if>
тензора деформации Коши
А = Л(/ь Г.ф). C.4.8)
Сославшись на основное равенство C.1.1) и пользуясь пред-
представлением C.4.1) энергетического тензора напряжений, имеем
sin ш [(DevfJ. -at - ~Г2б/!] } C.4.9)
*) В обозначениях п. I. 13 этот инвариант обозначался Г2; этим объяс-
объясняется различие в численных коэффициентах равенств C.4.1) и A. 13.15).
652
ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА
[ГЛ. VIII
и для преобразования входящих в это равенство выражений
полагаем
Тогда
Dev i- -b
(Dev #J- • b j
Но, сославшись на A.11.17), имеем
It (Dev S • ЬЙ) = ~ 6/, [(Dev
j ft/, [(Dev f K] + j /, [(Dev #J] 6/,.
/, [(Dev if] = - -j— Г3 sin Ц, 6/, [(Dev tJ] = Г6Г,
/! [(Dev #K] = - ?~ (Г2 sin 3^ 6Г + Г3 cos
и подстановка в C.4.9) приводит к достаточно простому выра-
выражению— обобщению формулы B.4.1) гл. III линейной теории
со Г 6Г
sin со 6^). C.4.10)
Из него следуют энергетические определения «обобщенных мо-
дулей» k, \i, &
ЗА _/"G~ ,. дА ¦,/~~G~
дА
~О
C.4.11)
и дифференциальные соотношения, их связывающие,
C.4.12)
В линейной теории упругости k и ц, представляют соответ-
соответственно модуль объемного сжатия и модуль сдвига; аналога
угла подобия м в ней нет.
31
ПРЕДСТАВЛЕНИЕ ЗАКОНА СОСТОЯНИЯ ТРЕХЧЛЕНОМ
653
Связь инвариантов Г, -ф с главными инвариантами ju /2, /з
тензора деформации устанавливается с помощью формул
(I. 11.6), (I. 11.7), а также (I. 11.14), (I. 11.15) с заменой обозна-
обозначения Г на -g-Г:
Г2 1
— = ~- /?
4 3 '
Г3
12/3
'=-/з + Т'Л-"?¦/?. C-4.13)
27
так что
—j^= (Г2 sin Зф 6Г + Г3 cos Зф бф) =
, . , / 1 2 .,
C.4.14)
С помощью этих формул и соотношения C.4.10) получаем
а/з ~ V g *
— = — 2 1/ =-
аи V g
V cos Зф '
аи
дА
1
ал /1 .
fx cos а ( — /, Н^=
* а/з \зп 2/з
= 1 sin ЗтЬ),
з т/'
i
Удельная потенциальная энергия деформации материалов
с углом подобия девиаторов, равным нулю (со = 0), не зависит
от третьего главного инварианта /3. Для таких материалов
J? = - 2
, C.4.16)
а уравнение состояния имеет квазилинейную структуру.
Q = khu + 2^ Dev i = [k - j ji) he + 2ja#. C.4.17)
Ее отличие от обобщенного закона Гука линейной теории [см.
A.3.9), C.1.1) гл. 111] состоит не только в замене линейного
тензора деформации ё тензором &, но и в замене постоянных
модулей k, (i «обобщенными», зависящими от всех трех инва-
инвариантов тензора & (в том числе от /3 через посредство G). Сле-
Следует принять
y~ = ak (/„ /2), 1*Ут = 0^ Wi- w • ^3-4Л8)
654 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VII!
Тогда уравнение состояния C.4.17) примет вид
|/у Q = 0Q = Мё + V Dev § = (ok -1 oJx) ни + 2„|х?. C.4.19)
Здесь 0Q, согласно п. 3.4 гл. I, энергетический тензор напряже-
напряжений, рассчитанных на единицу площади в начальном состоянии.
Выражение тензора деформации Коши через энергетический
тензор напряжений — обращение формулы C.4.1)—имеет по
A. 13.15) вид
i = ib Л (Q) Й + gjri^ { cos (Ззс - to) Dev Q +
C.4.20)
Совершенно очевидно, что в записи, аналогичной C.4.1), мо-
может быть представлен закон состояния, связывающий тензор
напряжений Т с соосным ему тензором деформации Альманзи:
f = kj'.G + -^-r\ cos (со + Щ Dev I -
cos
inSr(DevfJ--Gf2lj. C.4.21)
f—sin
Здесь величины, снабженные знаком тильды (~), составлены
по тензорам &, Т с помощью формул, повторяющих C.4.2) —
C.4.6). Однако усложняется вычисление вариации удельной по-
потенциальной энергии
и энергетические определения модулей k, Г, со представляются
громоздкими формулами.
3.5. Применение логарифмической меры деформации. Этот
тензор соосен с тензором 7Й1/г, а его главные значения равны
логарифмам главных значений A + 6S) тензора Л4''2:
3 s s 3 s s 3 s s
N = Е v~ee, \s = InA + б5), Mk =2A+ **)ее = 2 eVsee, C.5.1)
s=l s=l s=I
и при этом
У7з = A + 6,) A + 62) A + бз) = е'. W, /, (TV) = v, + v2 + v3.
Основываясь на соотношении B.6.8), имеем
C.5.2)
ПРЕДСТАВЛЕНИЕ ЗАКОНА СОСТОЯНИЯ ТРЕХЧЛЕНОМ
655
В тензорах Т, N выделяются шаровые и девиаторные части *)
Т = ~ ?/, (?) + Dev f, JV = j Eli (Ю + Dev N,
и в рассмотрение вводятся вторые и третьи инварианты девиа-
торов (см. п I. 11)
т2 = - l2 (Dev Т) = j [(/, - hf + (t2 - tzf + % - txn
¦^ = - /2 (Dev JV) = 1 [(Vl - v2J + (v2 - v3J + (v3 - v,J],
Главные компоненты девиаторов определяются по формулам
(I. 11.16):
^ = 7fsinXs> Xl = b X2==x +
, _ Г __ _ . 2я _ 4л
C.5.3)
причем,конечно,
s=l
s=!
Возвращаясь теперь к формуле C.5.2), имеем
= S [i Л (f) + ^'] [j 6/, (АО + fiv
I
и, далее,
к=-у Ёsin Xs (sin ^бГ+r cos
: t (cos со бГ + Г siii со
") й— единичный тензор.
656 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
где со = (х — ^) — Угол подобия девиаторов. Приходим к соот-
соотношению
6Л = е'< w [j /, (f) 6/, (JV) + т (cos © 6Г + Г sin © 61M)] C.5.4)
и, рассматривая А как функцию инвариантных величин Ii(N),
Г, \J), получаем
дА I е/, (л?) 7i (f )t М. = е/, (Л) т cos и, -М. = в/, от тг sin a.
a/, (jv) з 'х ' дт дф
C.5.5)
При обозначениях
4 Л (Г) = fe/i (JV), т = цГ C.5.6)
возвращаемся к формулам C.4.11), с той разницей, что теперь
в рассмотрение введены инварианты логарифмической меру
деформации.
Дифференциальные зависимости между инвариантами h(f),
х, со тензора напряжений теперь записываются в виде
дх cos (о
-t-L- = т cos а + • „ ,
з аг a/, (N)
г, arsin (о
TSin
дх sin (о \
тг- .
а/, (лг) /
C.5.7)
з аф \ а/,
Они упрощаются для материалов с равной нулю фазой подобия
девиаторов: исчезает зависимость А от параметра if>, но вели-
величины т, h (Г) остаются связанными соотношением
- -^21 = т + ——^- = е-'- W —^г- (ef> ^Ч). C.5-8)
з аг а/! (лг) a/, (vv)
Ему можно удовлетворить, полагая
C.5.9)
Тогда /i(T) оказывается зависящим только от первого инва-
инварианта логарифмической меры деформации (отношения объе'-
мов тела в деформированном и начальном состояниях). Второй
инвариант девиатора напряжений (значит, и модуль ц) оказы-
оказывается зависящим не только ¦ от Г, но и от упомянутого отноше-
отношения объемов.
Уравнение состояния материала с равной нулю фазой подо-
подобия в соответствии с C.5.3), C.5.6) записывается в форме
Генки:
*s = ft/, (N) + 2nv;, f = ft/, (N) E + 2ц, Dev N, C.5.10)
§ 4] АППРОКСИМАЦИЯ ЗАКОНОВ СОСТОЯНИЯ 657
и при экспериментальном определении «модулей сжатия и сдви-
сдвига» k ц \i следует (для идеально-упругого тела) руководство-
руководствоваться соотношениями
1^ C.5.11)
В случае несжимаемого материала,
, C.5.12)
выражение вариации удельной потенциальной энергии дефор-
деформации C.5.4) представляется в виде
ЬА = т (cos со 6Г + Г sin со 6if>),
причем величина 1\ (Т) = Зр остается неопределенной. Для ма-
материала с равной нулю фазой подобия девиаторов (со = 0)
| ,2) C.5.I3)
и выражение тензора напряжений имеет вид
f = pE + 2\i{T)N. C.5. IV
§ 4. Аппроксимации законов состояния
4.1. Квадратичный закон состояния Синьорини. Общие за-
законы состояния нелинейно-упругой среды конкретизируются или
заданием явного выражения удельной потенциальной энергии
деформации через инварианты мер либо тензоров деформации,
или совместимых с ее существованием явных выражений этих
законов. Рассмотрение простейших напряженных состояний, ис-
использующее эти выражения с априорно вводимыми коэффициен-
коэффициентами, приводит к соотношениям, допускающим сравнение с дан-
данными измерений и позволяющим дать числовые оценки этих
коэффициентов.
Синьорини рассмотрел закон состояния с квадратичной за-
зависимостью компонент тензора напряжения от компонент соос-
ного с ним тензора деформации Альманзи &. Вместо послед-
последнего вводится мера деформации ?х, а общее выражение такой
зависимости записывается в виде
Т = (т,/; + m2/f + тъ1\ + т4) 6 - (тй1[ + т6)gx + m7t\ D.1.1)
42 А. И. Лурье
658 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
причем mft •—постоянные, I'k = 1к(@х)- Сравнивая его с B.4.2) и
используя формулы B.4.4), приходим к соотношениям
3
и далее подлежат рассмотрению два из трех условий интегри-
интегрируемости (третье удовлетворяется тождественно):
д!'2д1'3
т7 = - 1
1 2
Приходим к равенствам
т7 = 2m I, m5 = 2ffii + 4т2, т6 = 2т3,
так что закон состояния оказывается зависящим от четырех
постоянных:
Т = (m,/^ + m2/f + т3/; + т4) G -
- [Bт, + 4т2) I\ + 2m3] gx + 2m{gx\ D.1.3)
Удельная потенциальная энергия деформации теперь дается
равенством
А = ~= (пг{1'2 + m2l\2 + тъ1\ + m4) + const, D.1.4)
что легко проверить по D.1.2).
Постоянную т4 можно выразить через значение всесторон-
всестороннего растяжения в начальном состоянии (тогда 1\ = 1'2 = 3, /3=1,
gx = G). В этом состоянии
fQ = qG = (—m, — 3m2 + m3 + m4)G, D.1.5)
и, возвращаясь к D.1.3), D.1,4), имеем
Т = [q + m, GJ + 1) + m2(/f + З) + m3 (/; - 1)] G -
- [Bm, + 4m2) I\ + 2m3\ gx + 2т,йХ\ D.1.6)
А = -j=r [m, (/2 + 1) + т2{1\2 + 3) + m3(/; - 1) + q\ + const. D.1.7)
§ 4] АППРОКСИМАЦИЯ ЗАКОНОВ СОСТОЯНИЯ 659
Если начальным состоянием служит натуральное, то q = О
и закон состояния определяется тремя лишь коэффициентами.
С целью сопоставить его с обобщенным законом Гука линей-
линейной теории заменим меру деформации тензором &, а инва-
инварианты 1'к = 1гк(§х) инвариантами fk = lk ($). Это вычисление
проводится по формулам D.3.3), E.4.6) гл. II. Тогда при обо-
обозначениях
4m, = с, 4m2 = Y(^ + H-—o")> 4m, + 12m2 + 2m3 = ц +-н- D.1.8)
можно записать D.1.6), D.1.7) в виде
D.1.9)
D.1.10)
причем аддитивная постоянная выбрана так, что в натураль-
натуральном состоянии А = 0.
Замечания. 1. Квадратичный закон состояния идеально-
упругого тела, содержащий пять постоянных, предложенный
Н. В. Зволинским и П. М. Ризом A939), записывается в виде
+ [2ц' + (С + к' - 2ц,') }\] 8 + (А + 5ц') Р D.1.11)
и может быть согласован с энергетически допустимым законом
состояния Синьорини D.1.9), если принять
С= -с-ЗА,, D.1.12)
где к, \i, с — постоянные, входящие в D.1.9). Отсюда следует,
что предложение считать А, В, С нулями приводит к противо-
противоречию с предпосылкой о существовании удельной потенциаль-
потенциальной энергии деформации.
2. Сетх рассмотрел большое число нелинейных задач, осно-
основываясь на законе состояния
T = kj\G+2\ig, D.1.13)
представляющем, казалось бы, естественное обобщение закона
Гука линейной теории упругости, в который он вырождается
42*
660 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
при Ж = ё, /[ = ¦&. Этот закон энергетически неприемлем, что
видно из сравнения с D.1.9). Но он позволяет учесть некоторые
особенности нелинейной теории, например конечность растяги-
растягивающей силы, вызывающей разрыв образца, необходимость при-
приложения нормальных усилий для осуществления простого сдвига
(см. далее пп. 4.4, 4.5). При малых относительных удлинениях
и сдвигах количественные результаты применения квазилиней-
квазилинейного закона D.1.3) не могут заметно отличаться от получае-
получаемых по закону состояния Синьорини; вместе с тем квазилиней-
квазилинейный закон не накладывает ограничений на перемещения и по-
повороты и поэтому приложим к задачам, недоступным для
рассмотрения с помощью закона Гука.
4.2. Зависимость коэффициентов квадратичного закона от
начального состояния. Как в п. 2 3, рассматриваются два на-
начальных состояния — натуральное v0 и получаемое из него пре-
преобразованием подобия B.3.1) состояние у*. Инварианты
l'k = Ik (gx) связываются при этом второй группой формул
E.6.3) гл. II, а соотношение B.3.4) теперь должно быть запи-
записано в виде
Этому равенству можно удовлетворить, приняв
К = ~т= \т\ G2* + ^4) + т\Gi! + 3/D)-+ т\{1\, - К2)}, D.2.2)
К 4
причем
m, = -jTf, tn9 = -jA-, fn, = -^f. D.2.3)
1 Д* Z Д* Л Д*
Действительно, заменив m*, l'ktt их значениями через тк, l'k,
придем к соотношению D.2.1).
Выражение тензора напряжений, когда начальным состоя-
состоянием является и«-объем, составляется по формулам B.4.3),
B.4.4):
- [Bm; + Ат2) 4 + 2m'3] д? + 2m\ef. D.2.4)
Переходя теперь к тензору деформации & и вводя аналогич-
аналогичные D.1.8) обозначения
4т] = с, 4т; = !(*• +|*ф--у)» \т\ + \2т2 + 2т\^\С+~,
D.2.5)
§4] АППРОКСИМАЦИЯ ЗАКОНОВ СОСТОЯНИЯ 661
придем к выражению тензора напряжений, во всем повторяю-
повторяющему D.1.9), но содержащему слагаемое, не обращающееся
в нуль в и*-объеме (когда <%г* = 0, }[* = О):
[( ^)l] D.2.6)
где обозначено
( 4) ] D.2.7)
а связь измененных постоянных К*, ц*, с* с К, ц, с, получаемая
сопоставлением D.2.3), D.2.5), D.1.8), дается равенствами
D.2.8)
= № + ^/С2 A -/С2) (ЗГ + ц* --f),
с = К4с\
Процесс деформирования при повышении температуры мож-
можно считать происходящим в два этапа: температура кубика,
мысленно выделенного из среды с (условно) нулевой темпера-
температурой, повышается до 9; это сопровождается сообщением де-
формации &й, задаваемой преобразованием подобия с коэффи-
коэффициентом подобия
К0 = 1 + сев, D.2.9)
причем не возникает напряженного состояния. Последнее со-
создается реактивными воздействиями окружающей кубик среды
и определяется порождаемой им деформацией &', так что
Т = Т ф') = Т ф— &°). Здесь % — тензор деформации, равной
нулю в среде с нулевой температурой, аГ° = Г(— S0) — шаровой
тензор напряжения, определяющий всестороннее сжатие, кото-
которое должно быть сообщено кубику, чтобы при температуре 0
сообщить ему размеры, соответствующие нулевой температуре.
Из сказанного следует, что в вышеприведенных формулах
следует считать натуральным (и0-объемом) состояние мысленно
выделенного кубика при температуре 9 (тогда Т — 0), а по-
подобно преобразованным с коэффициентом
662 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
(и*-объемом) — состояние при температуре 8 = 0; тензор на-
напряжения Г(—8°) в этом состоянии по D.2.6) равен
D.2.11)
причем Я*, ц*, с* — значения модулей при 0 = 0; их значения
Я, ц, с при температуре 0 определяются по D.2.8), D.2.10).
При пренебрежении степенями а8 выше первой по D.2.11)
имеем
? б D.2.12)
Такое температурное слагаемое добавляется в выражение
тензора напряжений линейной теории упругости — формула
C.4.8) гл. III.
4.3. Знак удельной потенциальной энергии деформации. Да-
Далее рассматривается «упрощенный» закон состояния Синьорини
с постоянной с = 0; ее удержание привело бы к значительному
усложнению последующих рассмотрений. Теперь по D.1.9),
D.1.10)
\ ± Л + 2[р-(К+ »)![]§, D.3.1)
причем входящая в это выражение аддитивная постоянная оп-
определена условием, что А — 0, когда деформация отсутствует
(при г3=\, /; = з).
Упрощенный закон Синьорини содержит, подобно закону
Гука линейной теории, две постоянные (Я, ц), но существенно
отличается от него не только заменой линейного тензора дефор-
деформации тензором &', но и вхождением подчеркнутых в формуле
D.3.1) слагаемых.
Требуется установить область изменения параметров (Я, ц),
в которой удельная потенциальная энергия деформации А по-
положительна в любом состоянии, отличном от натурального (при
любых положительных /,, /Q. Необходимые условия B.9.7) га-
гарантируют положительность А лишь при малых деформациях
(при 1[, Г3, близких к 3 и к 1); рассмотрение более трудной
задачи построения критериев положительности А при любых
деформациях требует оценки Га при заданном /'. Обозначив
через gs главные значения меры деформации ?х, имеем
§ 4] АППРОКСИМАЦИЯ ЗАКОНОВ СОСТОЯНИЯ 663
Но известно, что произведение нескольких положительных чи-
чисел с заданной суммой достигает максимума, когда эти числа
равны, так что
l'z = 818283 < [j fa + ?2 + ?3)] = W ¦
Имея в виду, что
/f (з - /;J=/f (з 4- /Q2 -12/f > 0,
можно усилить предыдущее неравенство:
/fC + /02>27.i2/^ v7T<^-C + /;)/;. D.з.з)
В частности, при /{ = 3, /з^1. причем знак равенства до-
достигается только в натуральном состоянии, так что условие
приводит к уже известному критерию
ц > 0. D.3.4)
Входящие в выражение D.3.2) слагаемые представляются те-
теперь в виде
fa + х) /f = ^ i<+4 (9А + 5^) 7f •
- 2 (ЗА, + |i) /; = j \il\ - -=- (9Л. ¦
и поэтому
8Л /7[ = 4и-[(^ + 3)/,-18 ^/7[1+(9Я + 5ц)^-1] . D.3.5)
Слагаемое в квадратных скобках по D.3.3) неотрицательно,
и достаточным условием положительности А служит неравен-
неравенство
9к + 5ц > 0. D.3.6)
Критерии D.3.6), D.3.4), гарантирующие положительность
удельной потенциальной энергии деформации А во всей об-
области главных относительных удлинений —1 ^ 6S-^ оо (или
главных значений —оо < <§% < 1/2 тензора деформации &), по-
повышают нижнюю границу B.9.7) значений параметра X
(X > —5/э вместо К > —2/зй) ¦ Этого уменьшения области допу-
допустимых параметров (К, ц) можно было ожидать, поскольку не-
необходимый критерий B.9.7) обеспечивает положительность А
только при достаточно малых 6,s-
664 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VI11
С помощью величины v, связанной с К, ц соотношением
определяющим в линейной теории коэффициент Пуассона, кри-
критерий D.3.6) записывается в виде
>0, D.3.8)
l-2v
так что v может изменяться в пределах
—|<v<-i. D.3.9)
4.4. Применение к задачам об одноосном растяжении. При
растяжении стержня Т = t\\i\i\. По D.3.1), D.3.7) имеем
, 1 d
l-2v ;1 + l-2v 4 ^l1 l-2v
^4
D.4.1)
(А =2, 3),
так что
iks = 0 (зФк), %п = %ж И = «\, + 2#я. D.4.2)
Подставив это значение /J во второе уравнение D.4.1) для
k = 2, придем к квадратному уравнению
^22-^22-V^u-j#n = 0. D.4.3)
Его дискриминант
неотрицателен для значений v в промежутке D.3.9) и для до-
допустимых значений
-оо <?„<!, D.4.4)
соответствующих относительным удлинениям [см. D.2.2),
D.3.3) гл. II]
-l<6i<oo. D.4.5)
Корень уравнения D.4.3), меньший '/г. равен
#и = i [ 1 ~0 + 4v?n + ^n)V1> I - 2#22 = (l + 4v«n + ^п)'/г.
D.4.6)
§ 4] АППРОКСИМАЦИЯ ЗАКОНОВ СОСТОЯНИЯ 665
Сославшись на равенство
A+6йГ2 = 1-2<§^, в* = A-2^ккГ'А-1, D.4.7)
имеем
В этом приближении отношение v поперечного сжатия стерж-
стержня к его удлинению оказывается линейной функцией удлинения.
По D.4.6), D.4.2), D.4.1) имеем также
-^-(l-2v)=l+2v + #11-#?i-AI/'(l+2v-<f11). D.4.9)
Площадь S поперечного сечения растянутого стержня свя-
связана с ее начальным значением равенством
позволяющим представить выражение растягивающей силы в
виде
l-2v
il» . D.4.10)
Сохранив лишь вторую степень разложения правой части
в ряд по &п, придем к равенству
] v), D.4.11)
причем Е — модуль Юнга линейной теории.
При бесконечном удлинении Fi—>°o, J?u—*lj2) растягиваю-
растягивающая сила остается конечной; эта сопровождаемая разрывом об-
образца сила оказывается в теории Синьорини равной
Qoo= 9(^\ JV5 + 8v — A +4v)| D.4.12)
и остается конечной при всех допустимых v:
--|<v<-|-, 4 H"So < Qco < f M-So. D.4.13)
В противоположность этому сжимающее усилие, доводящее
длину стержня до нули (i5i -* — 1, &\\—*—оо), бесконечно.
4.5. Простой сдвиг. Это деформированное состояние опре-
определяется тензором (п. 6.3 гл. II)
% = -Kkhh + l&\)s--Ks4.}v /i = — -к-s2, D.5.1)
666
ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА
[ГЛ. VIII
и компоненты тензора напряжений в упрощенной теории Синьо-
рини по D.3.1) оказываются равными
— *зг= ~" "о" М-'
' - — .«2
l-2v
l-2v
= ^31 = 0.
D.5.2)
Осуществление сдвига требует приложения нормальных уси-
усилий по всем граням испытуемого кубика; это — одно из суще-
существенных отличий нелинейной теории от линейной; в последней
присутствует только касательное напряжение ti2 = [is.
4.6. Закон состояния Мурнагана. Удельная потенциальная
энергия деформации представляется рядом по степеням инва-
инвариантов тензора деформации Коши с постоянными коэффициен-
коэффициентами
А = а/, + -j (I + 2ц) 1\ - 2ц/2 + j (I + 2т) /? - 2mjJ2 + nj3+ ...=
, + |-(в2- l)+ ... D.6.1)
Обозначения согласованы с принятыми Мурнаганом. Сохра-
Сохранив только представленные в этой записи слагаемые, по B.5.7)
приходим к таким выражениям модулей т, входящих в опре-
определение повернутого тензора напряжений:
о
т = а + Ц + Щ - {2т - п) /2 + 2п/3,
1
т
т
= 2 [ц + а + (я, + т - |-) /, + Щ - 2тjJ1,
= 2B^ + 1 +2т/,),
D.6.2)
причем а = 0, если начальное состояние является натуральным.
При удержании в выражении А лишь «классических» слагае-
слагаемых линейной теории
2ц/2 D.6.3)
получили бы закон состояния, отличающийся от закона Гука:
D.6.4)
§41
АППРОКСИМАЦИЯ ЗАКОНОВ СОСТОЯНИЯ
667
Данные о коэффициентах /, т, п в формулах Мурнагана
немногочисленны и малодостоверны. Приводим небольшую таб-
лицу для нескольких материалов (v = 2 ,. I.
Таблица 15*)
Коэффициенты Мурнагана ХЮ~" дн/см2
Материал
Полистирол A) ...
Железо армко A, 2)
Стекло (пирекс) A, 2)
Никелевая сталь 535
A.3)
Медь D)
Сталь 6ОС2Н2А E)
V
0,338
0,32
0,165
0.28
0,34
0,3
А.
0,138
8,20
2,75
7,8
4,9
8,1
—1,89
—3,48
1,40
—4,6
—16
—34
т
-1,33
-103
92
-59
-62
-63
-1,00
по
42
-73
-159
-76
4.7. Поведение материала при сверхвысоких давлениях. Как
и выше, в п. 2.3, рассмотрим натуральйое состояние (оо-объем)
и состояние, получающееся из него преобразованием подобия
с коэффициентом подобия К (и*-объем). Коэффициенты зако-
законов состояния У-объема при первом и втором выборе началь
ных состояний обозначаются соответственно
а = 0, X, ц, I, т, п; а*, X*, ц*, /*, т*, п*,
и, основываясь на B.3.4), запишем равенство
А = -1 (X + 2|х) /2 - 2|х/2 + jd + 2m) ft - 2m/,/2 + nj3 =
= К3 [а'/; +1 (Я* + 2,0 jf - 2ц'/2] +-JP + 2m*) jf -
D.7.1)
*) Данные этой таблицы взяты из перечисленных ниже работ:
1. А. К. Зарембо и Б. А. Красильников, Введение в нелинейную
акустику. Изд-во «Наука», 1966.
2. D. S. Hughes, J. L. Kelly, Second-order elastic deformation of so-
solids, Phys. Rev., 92, стр. 1145, 1953.
3 D J Creckraft, Ultrasonic wave velocities on stressed nickel steel,
Nature, 95, № 4847, стр. 1193, 1962.
4 A Seeger, O. Buck, Die experimentelle Ermittlung der elastischen
Konstanten hoherer Ordnung, Z. Natur., 15a, 12, 1960.
5. С. С. С е к о я н, Н. Е. Е р е м е е в, Измерение констант упругости
третьего порядка для стали ультразвуковым методом. Измерительная тех-
техника 7, 1966.
668 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
После замены fk их выражениями через /ц по формулам
E.6.4) гл. II и сравнения коэффициентов слагаемых с одинако-
одинаковыми степенями /ft приходим к равенствам (Бриллуэн)
п=пК\ т'
X + 2ц* = К [Я. + 2ц + A - К2) {2т + 31)}, D.7.2)
. D.7.3)
Последняя формула определяет напряженное состояние и*-
объема при всестороннем сжатии:
D-7.4)
где введено обозначение модуля объемного сжатия линейной
теории
& = Я + |ц. D.7.5)
Учитывая теперь, что
где У», Vo — объемы образца в сжатом и натуральном состоя-
состоянии, 0 — относительное объемное сжатие, приходим к соотно-
соотношению
В опытах Бриджмена давление доводилось до 100 000 атм.
Результаты этих опытов над натрием Мурнаган представил
формулой вида D.7.6) с численными значениями
k = 0,628 • 104 атм, п + 91 = —406,2 • 10* атм.
Они подбирались по условию совпадения измеренных и вычис-
вычисленных значений 6 при р = 2,5 • 104 атм и р = 105 атм, причем
погрешность для промежуточных значений р от 104 до 10s атм
не превышала 1%; относительное объемное сжатие 6 при воз-
возрастании давления от 2,5-104 до 105 атм возрастало от 0,211 до
0,394. Интересно отметить, что \п + 9l\^k. Это указывает на
необходимость учета слагаемых третьей степени в выражении
удельной потенциальной энергии деформации.
Сохранив в формуле D.7.6) только квадратичные по 6 сла-
слагаемые, получим
'(±) D.7.7)
§ 4] АППРОКСИМАЦИЯ ЗАКОНОВ СОСТОЯНИЯ 669
Линейное приближение при k = 11,85- 104 атм, что соответ-
соответствует измеренному в = 0,211 при р — 2,5 • 104 атм, уклоняется
весьма сильно от результатов измерения при 5 • 104 атм — вы-
вычисление дает в = 0,422 при измеренном в = 0,292. Не улуч-
улучшает существенно дела учет второго слагаемого в D.7.7), если
входящие в него коэффициенты определить по двум измерениям
при р = 2,5 • 104 и р = 5 • 104 атм.
Здесь речь шла о «сверхвысоких» давлениях и податливом
материале. Для давлений до 104 атм и технически применяемых
металлов формула D.7.7) уже в линейном приближении дает
вполне надежные результаты.
'4.8. Одноосное растяжение. В задаче о растяжении призма-
призматического стержня силами, имеющими направление его оси {Хг),
тензоры Gx и gx соосны, так что Р = Т. Представив тензор де-
деформации & в виде
§ = (М, + ЧЧ) $х + #Ж*з = <М + (#з ~ #i) *з*з. D-8.1)
где &и — его главные значения, Е — единичный тензор, имеем
[см. (I. 10.10)]
& = §\Ё + (Щ - «*) Уз, /, = 2#, + Sv \г = 8\ + 2^,
Пользуясь законом состояния Мурнагана и потребовав обраще-
обращения в нуль компонент тензора напряжений, отличных от ^Зз, при-
придем к соотношениям
2 (Я + ц)«", + Шъ +1 D^ + 4^,^3 + «D +
+ 2т<Г, {8Х - #,) + пШх8ъ = 0, D.8.2)
'зз = "I" ^з - «"i) A +
причем
e = (l+2«F,)Vl+2ar3 =A+б,J/1+2^3-
Усилие /з, рассчитанное на единицу площади поперечного
сечения стержня в натуральном состоянии, оказывается равным
*3 = ^зз A + М2 = 2 (#3 ~ #i) УТТ2^з [|i + m {x 3) j
D.8.4)
Следуя Мурнагану, представим результаты опыта по растя-
растяжению образца в виде
хх = A - vc + рс2) аи х2 = A - vc + ре2) а2, *з = A + с + 6с2) а3,
D.8.5)
670 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
где р, 6 — эмпирически подбираемые коэффициенты, с — пара-
параметр малости, в линейной теории совпадающий с относительным
удлинением стержня. Сохранив лишь квадраты с, по формулам
C.6.4) гл. II имеем
и после подстановки в D.8.2), D.8.4) из рассмотрения линей-'
ных по с слагаемых находим
v = 2 " , t; = 2c\i(l+v) = ^f^iic = Ec. D.8.6)
Итак, v, E выражается через К, ц, как коэффициент Пуассо-
Пуассона и модуль Юнга линейной теории упругости. Приравнивая
нулю остающиеся слагаемые второй степени по с, приходим
к двум уравнениям:
2 (I + ji) р + ХЬ = - Я A + v2) - nv2 - / A - 2vJ - 2mv A+ v) + nv,
связывающим коэффициенты /, m, n закона состояния с эмпи-
эмпирически определяемыми коэффициентами 6, р.
4.9. Несжимаемый материал. Для несжимаемых материалов
/3(GX) = G1G2G3 = 1, D.9.1)
где Gs — главные значения меры деформации Коши Gx, выра-
выражение удельной потенциальной энергии, предложенное Муки
A940), представляется в виде
А = С, (/, — 3) + С2 (/2 — 3), D.9.2)
причем Сь- Сг — неотрицательные постоянные:
С, > 0, С2 > 0. D.9.3)
Нетрудно убедиться, что неравенства D.9.3) являются необ-
необходимыми и достаточными условиями положительности А во
всех состояниях, отличных от начального (когда А=0). Дей-
Действительно, вспоминая, что
/, = G, + G2 + G3, h - GiG2 + G2G3 + G3Gb Gs > 0,
можно представить D.9.2) в виде
Д = С1(С1 + С2+Оз-3) + С2(-^--Ь-^- + -^--з). D.9.4)
§4] АППРОКСИМАЦИЯ ЗАКОНОВ СОСТОЯНИЯ 671
Но сумма трех положительных чисел, произведение которых
Р9вно единице, имеет минимум, когда эти числа равны и, зна-
значит, каждое из них равно 1. Итак, при условии D.9.1)
G, + G2 + G3-3>0, т!-+7Г + -Г--3>0 D.9.5)
*-Ч ^2 L*3
и неравенства D.9.3) — достаточные условия положительности
А. Они также необходимы; действительно, по крайней мере
одна из постоянных С\, С% (пусть С\) должна быть положи-
положительна, а приняв Сг < 0, всегда можно подобрать положитель-
положительные числа G\, G2, G3, произведение которых равно единице,
чтобы выполнялось неравенство
с, /„-з ог' + ог'-юг'-з
<
, /„з ог + огюгз
<= А<0-
Тензор напряжений для материала Муни представляется,
например, формулой Фингера B.4.6), принимающей здесь вид
T = 2[(C1+IlC2)M-C2M2 + cG]. D.9.7)
Другим представлением удельной потенциальной энергии де-
деформации в форме Муни через меру деформации Альманзи
служит
Л = С1(/^-3) + С2(/;-3) [Ifk = lk(gx)} D.9.8)
[см. E.2.4) гл. II]. При этом тензор напряжения согласно
B.4.2) представляется равенством
f = 2 [°еЬ - (С2 + CXI\) gx + Clgx2]. D-9.9)
Конечно, уравнения состояния D.9.7), D.9.9) —формы запи-
записи одного и того же соотношения; в этом можно убедиться, за-
заменив gx тензором М = gx~ .
Энергетический тензор напряжений Q по B.4.6) дается вы-
выражением
Q = 2[(Cl + I1C2)g-C2Gx+~c6x~1}. D.9.10)
Было бы ошибкой, основываясь на записи D.9.2), считать
производную дА/д13 равной нулю; она является неизвестной
наперед функцией инвариантов 1\, /г, определяемой по уравне-
уравнениям статики и условию /3 = 1. Формула D.9.2) дает значение
А на плоскости /3 = 1 пространства параметров /ь /2, /3, а
dA'dIs — производная по нормали от A (Iit /2, /3) на этой пло-
плоскости. Возвращаясь к определениям B.1.7), B.4.3), имеем
д. -I о
|? =c = e-CJx-C2l2. D.9.11)
ah /a_i
672 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
Представлению удельной потенциальной энергии деформа-
деформации в форме Муки D,9.2) предшествовала упрощенная его
форма
A = Ci(Fi — 3). D.9.12)
Она была предложена (Треолар) на основании рассмотрения
конструктивной модели резины как системы связанных друг
с другом длинных молекулярных цепочек. Эта же форма зави-
зависимости («неогуково тело») была использована в первых рабо-
работах Ривлина A948).
Формула Муни в известной мере сокращает разрыв теории
с экспериментом; однако при измерениях в большом диапазоне
деформаций была обнаружена зависимость отношения -^г ~я1~
от /2 (Ривлин и Сондерс, 1951). Это дало основание корректи-
корректировать формулу Муни соотношением более общего вида:
А = d (/, — 3) +/(/г — 3). D.9.13)
4.10. Материалы с углом подобия девиаторов, равным нулю.
Следуя определению C.4.1) гл. I, введем в рассмотрение изме-
измененный энергетический тензор напряжений
Д = VjQ- D.10.1)
Можно сохранить для тензора 0Q выражение закона состоя-
состояния в форме C.4.1), условившись в замене k, \i величинами
*«/Г,, D.10.2)
r g
3/, ' g L 4/2
Формулы C.4.11) теперь запишутся в виде
дА ,. дА р дА гч ¦ и m o\
-g— = okh, -Qfr = оН-г cos со, --^=0цГ281пю D.10.3)
и для материалов с фазой подобия w, равной нулю,
дА , . дА тл дА п /л in а\
Ж=о*Ь ^г=о^, ^=0. D.Ю.4)
Для таких материалов
A = A{ju ;2) = Л(/Ь Г), |^ = 8-|^ = 0, D.10.5)
и они не являются несжимаемыми. Заметим еще, что, рассмат-
рассматривая А как функцию j\, /2, имеем по C.4.16)
§ 4] АППРОКСИМАЦИЯ ЗАКОНОВ СОСТОЯНИЯ 673
Уравнение состояния C.4.1) приобретает классическую струк-
структуру закона Гука:
oQ = Ш + V Dev ? = („ft - -| оц)/, g + 20ti i, D.10.7)
причем ok, оц — функции /ь Г (или /ь /2).
Тело Генки представляет частный пример материала с рав-
равным нулю углом подобия при постоянном ф,; тогда 0\i = оц. (Г),
что следует из требования совместности соотношений D.10.4):
0Л = const, ^!А_ = 0 = Г^; оЦ = оИ(Г). D.10.8)
Другим частным примером может служить закон состояния,
рассмотренный Нейбером. Используя классические обозначения
D.3.9), D.7.5):
ou-yo^o^oH'-nrW' D.10.9)
примем в законе состояния D.10.7)
g) D.10.10)
постоянным «коэффициент Пуассона» v. Тогда по D.10.4),
D.10.9)
дА _\ , _ 1 1 + у дА _ 1
так что
^_1_L±^^4=O) D.10.11)
dj\ 3 l~2v дТ2 '
и общее решение этого уравнения в частных производных пер-
первого порядка может быть записано в форме
о
Здесь ом- — постоянная, А+ — классическое (гуково) выражение
удельной потенциальной энергии упругого тела с коэффициен-
коэффициентом Пуассона v и с модулем сдвига, равным половине.
Для тела Нейбера «модулем сдвига» является функция от
А+, определяемая в соответствии с D.10.4), D.10.12):
^# D.шз)
43 А. И. Лурье
674 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА (ГЛ. V1H
Для построения закона состояния в форме Нейбера должна
быть известна экспериментальная зависимость сообщенной
удельной потенциальной энергии деформации от вычисляемой
по измеренным деформациям величины А+.
§ 5. Вариационные теоремы статики нелинейно-упругого тела
5.1. Принцип виртуальных перемещений. Формулировка это-
этого принципа в применении к сплошной среде была дана в п. 3.5
гл. I. Равенство C.5.6) гл. I, определяющее элементарную ра-
работу внешних сил Ь'сЦе), в ходе которого использовались урав-
уравнения статики У-объема C.3.1) гл. I, было получено с помощью
этого принципа. Здесь будет показано обратное: уравнения ста-
статики в У-объеме и на его поверхности О заключены в принципе
виртуальных перемещений, если предположить выражение эле-
элементарной работы C.5.6) гл. I известным.
Действительно, по C.5.3), C.5.5) гл. I имеем
= 1" {JJ
V
E.1.1)
или, переходя к интегрированию по и-объему и его поверх-
поверхности о,
Ь'а{е) =\\\\ ]/f ^bGst dx0 = j j j po/C • 6ft drQ +
Я V'J
6ftdo. E.1.2)
Здесь использовано равенство C.5.4) гл. II, связывающее пло-
площадки dO на О с do на о. Теперь, замечая, что
=7T [w vwr%
и используя преобразование объемного интеграла в поверхност-
поверхностный (V. 8.1), имеем
§ 5] ВАРИАЦИОННЫЕ ТЕОРЕМЫ 675
и, возвращаясь к E.1.2), приходим к соотношению
+ Я Vf (^°'*«'я* F - f'Rsnt) -6Rdo = 0. E.1.4)
о
Требование обращения в нуль объемного интеграла, вслед-
вследствие произвольности поля виртуальных перемещений би = 6R
в объеме тела, возвращает к уравнениям статики в объеме
-^ УбГ% + Ро VgK = 0. E.1.5)
В поверхностном интеграле 8R — би = 0 на той части Оу по-
поверхности о, на которой задан и, значит, не варьируется вектор
перемещения и; на той же ее части Ог, где заданы поверхност-
поверхностные силы F, вектор 8R = би произвольный, и требование обра-
обращения в нуль поверхностного интеграла (по о2) приводит
к уравнениям статики на поверхности C.3.6) гл. I:
r'Rsnt = VGikntnkF. E.1.6)
5.2. Стационарность потенциальной энергии системы. В иде-
идеально-упругой среде элементарная работа внешних сил Ь'а^)
равна вариации потенциальной энергии деформации. Вспомнив
ее определение A.2.13) и возвращаясь к E.1.1), имеем
б [ f J AdrQ- J f \ pK-6Rdr- \ j F-6RdO = 0, E.2.1)
v V ' ' О
причем А — удельная потенциальная энергия деформации.
Далее принимается, что массовые и поверхностные силы по-
потенциальны. Элементарная работа потенциальной массовой
силы может быть определена соотношением
K-6R=- 6(о(хь хъ х3) = - Ую • 6R, E.2.2)
где ®(х\, х% х3)—потенциальная энергия силового поля; на-
например, в поле силы тяжести со = gx3, Vco = kg (k — вектор вос-
восходящей вертикали). Поэтому
J J Г рД- - 6/? й?т = — JJJp6©dT=- JJJp06©dT0 =
V V v
= -б J J J рою с*т0; E.2.3)
V
знак вариации здесь вынесен за знак интеграла, так как ни
объем и0, ни плотность ро в нем не варьируются,
43*
676 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
Случай потенциального распределения поверхностных сил
имеет место, когда усилие на элементарной площадке сохра-
сохраняет величину и направление («мертвая нагрузка»):
F(xu x2, x3)d0 = F>(fll, a2, a8) do. E.2.4)
Здесь as — координаты на о точки М, переходящей при дефор-
деформировании в точку М'(xs) на О. Поскольку вектор F0 остается
неизменным,
J J F ¦ 6R dO = J J F° • 6Д do = J J F° • би do = б J J F° • и do,
О о2 ог о?
E.2.5)
причем, как выше, о2 — часть поверхности о, на которой заданы
силы.
Другим примером поверхностных сил, которым можно сопо-
сопоставить потенциал, служит равномерно распределенное по О
нормальное давление. Тогда
J J F • 6Я dO = — р0 J J N • bRdO = - p0 J J J V • bR dx.
0 0 V
Но по определению набла-оператора в V-объеме
и предшествующее равенство переписывается в виде
J J F • bRdO = - p0 J* JJ "j/y *s • 6«sdT0. E.2.6)
О о
Вариация величины yTF может быть представлена в виде
(Y~g не варьируется)
E.2.7)
так как RlRt = G представляет единичный тензор У-объема. Ра-
Равенство E.2.6) теперь преобразуется к ожидаемому виду
\\ E.2.8)
v
причем V — рб>ем тела в деформированном состоянии.
§ 5J ВАРИАЦИОННЫЕ ТЕОРЕМЫ 677
Выражение E.2.1) принципа возможных перемещений приоб-
приобретает вид
А + росо + р0 |/у) dx0 - | J F° • и do\ = 6П = 0, E.2.9)
где П — функционал над вектором перемещения и:
°'udo, E.2.10)
называемый потенциальной энергией системы (упругого тела и
силового поля). Равенством E.2.9) доказывается стационар-
стационарность этого функционала: из всех мыслимых (то есть принимаю-
принимающих на О] наперед заданные значения) полей перемещений
в состоянии равновесия идеально-упругого тела осуществляется
поле перемещений, в котором потенциальная энергия системы
сохраняет стационарное значение.
Напомним, что стационарным значением функционала назы-
называется такое его значение, которое при задании вектору и ва-
вариации 6и приобретает приращение АП порядка более высо-
высокого, чем |б«|. В линейной теории упругости доказывалось
(п. 2.2 гл. IV), что
ЛП>0,
так что стационарное значение функционала П было его мини-
минимумом. В нелинейной теории столь общее утверждение не имеет
места.
Замечания. 1. Дифференциальные уравнения и натураль-
натуральные краевые условия вариационной задачи о стационарности
функционала П представляют уравнения статики в объеме и на
поверхности, в которых тензор напряжений заменен его пред-
представлением через закон состояния.
Действительно, повторив преобразование п. 5.1, имеем
Элементарная работа внешних (массовых и поверхностных)
сил представляется в виде E.1.2). Приходим к соотношению
^do-0 E.2.11)
678 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
и вследствие произвольности 6R в объеме и на той части по-
поверхности о2, на которой заданы силы, приходим к дифферен-
дифференциальным уравнениям
^f = O E>2Л2)
с краевыми условиями на о2
и достаточно вспомнить соотношения A.2.10), чтобы вернуться
к уравнениям статики C.3.3), C.3.6) гл. I.
Уравнения равновесия в перемещениях изотропного упругого
тела приводятся к виду
^] E.2.14)
а Ц ал +/l di2)g a/, °e 8 +h ь J«n
= У&кщпк F. E.12.16)
Их представления через контравариантные компоненты внеш-
внешних сил даются равенствами [см. (V. 2.2)]
E.2.16)
2. В случае несжимаемого тела варьирование функционала
П проводится при добавочном условии
/"а — 1=0, E.2.18)
а удельная потенциальная энергия зависит лишь от инвариан-
инвариантов 1\, 1% Варьируемый интеграл при введении лагранжева
множителя p{q\ q2, q3) принимает вид
E,2,19)
§ 5] ВАРИАЦИОННЫЕ ТЕОРЕМЫ 679
В уравнениях равновесия в перемещениях следует заменить
слагаемое
h^Gsq на pGsq.
Для тела Муни они значительно упрощаются и принимают
вид
-h КС, + ЛО gsq - C2Gmngmt!gns + pGit!}
+ 2 [(С, + /,C2) gst-C2Gmngmtgns + pGst] {I}
E.2.20)
Напомним, что по теореме Риччи [см. (V. 3)] производные
компонент метрических тензоров выражаются через эти компо-
компоненты и символы Кристоффеля; например,
дОтп ~~ ~
dqr
и т. д.
5.3. Дополнительная работа деформации. Будем исходить из
уравнений статики в объеме и на поверхности B.8.4), B.8.5),
выраженных через тензор Пиола — Кирхгоффа
= 0, n- Ddo = FdO = N-fdO. E.3.1)
Вариация потенциальной энергии деформации ба, равная ра-
работе внешних сил на возможном перемещении б/? = би из со-
состояния равновесия, дается выражением
6а = J J J р/С • 6Rdx + |J F ¦ bR dO = |J J ро/С • 6Rdx0 +
О v
+ V • D) ¦ 6Rdx0 +
+ | J J D- -(VbRY <йо= J | J D- -6Vr dt0. E.3.2)
Здесь использованы уравнение равновесия в объеме E.3.1),
преобразование поверхностного интеграла в объемный, извест-
известная формула дивергенции произведения тензора на вектор
(II. 3.10), а также переставимость операций V и 6.
Величина под знаком интеграла E.3.2) представляет ва-
вариацию удельной потенциальной энергии деформации
E.3.3)
680 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VII]
Отсюда, сославшись на определение градиента скаляра по тен-
тензору (I. 12.7), имеем
6 ' <534>
Выражение E.3.3) переписывается в виде
6Л = б (б • • V/?*) - 6D • • VR\ , E.3.5)
и в рассмотрение вводятся величины, называемые удельной
дополнительной работой и дополнительной работой деформации
B=±D--4R*-A, Ь = J J | В <*т0. E.3.6)
V
Из E.3.5) и E.3.6) имеем
6B = dD--VRt = VR--6D\ E.3.7)
Предполагая теперь, что В выражено через тензор 6 и, сно-
снова сославшись на (I. 12.7), придем к соотношениям, обратным
E.3.4):
V* = -§. E.3.8)
В проведенном здесь преобразовании Лежандра удельная
потенциальная энергия деформации играет роль производящей
функции преобразования V/?—*D\ производящей функцией об-
обратного преобразования D —>V/f служит удельная дополнитель-
дополнительная работа деформации.
Соотношение E.3.4) является уравнением состояния нели-
нелинейно-упругого тела, выражающим тензор D через VR. Из этой,
в общем случае, системы девяти уравнений требуется опреде-
определить тензор WR. Ее разрешимость требует необращения в нуль
гессиана
дгА
# =
dus dus
dq* dqr
=^=0 (s,/,r= 1,2,3),
где Vu — VR — Ё, dujdq1 — компоненты Vu. Конечно, эта -за-
-задача трудна. Ее решение для полулинейного материала (п. 2.8)
приведено ниже в п. 5.5.
5.4. Стационарность дополнительной работы. Рассматри-
Рассматривается статически возможное состояние равновесия нелинейно-
упругого тела, близкое к его истинному состоянию равновесия
под действием тех же «мертвых» массовых и поверхностных сил.
§ 5] ВАРИАЦИОННЫЕ ТЕОРЕМЫ 681
Тогда в варьированном состоянии уравнения равновесия в объе-
объеме и на поверхности записываются в виде
E.4.1)
так как по условию Kdm = Kodm в объеме тела, a FdO = Pdo
на части поверхности, на которой заданы поверхностные силы
Ко, Р — значения сил в начальном состоянии тела). На ох задан
вектор R = г + и. Здесь в варьированном напряженном состоя-
состоянии возникают добавочные (неизвестные) реактивные силы
bFdO, создаваемые приспособлениями, осуществляющими зада-
задание предписанного вектора /?. По E.3.1), E.4.1) имеем
f 0 .... на о,,
V-6D = 0, n-6Ddo = I ._ .Л E.4.2)
I 6FdO на о,.
Учитывая эти соотношения по E.3.6) и E.3.7), имеем
ЬЬ = J J | 60- -V/?' dr0 = 111 [V • FD • R) - (V • 6D) - R] dt0 =
E.4.3)
Знак вариации вынесен за знак интеграла, так как вектор R
на о\ задан.
Пришли к соотношению
bib- \\ n-D-Rdo\ = 0, E.4.4)
о,
выражающему принцип стационарности дополнительной работы:
фактически реализуемое равновесное состояние в нелинейно-
упругом теле отличается от любого статически возможного тем,
что в нем величина
bt = b - J J n ¦ D • R do, E.4.5)
o,
называемая дополнительной работой, имеет стационарное зна-
значение.
В фактически реализуемом напряженном состоянии обеспе-
обеспечивается сплошность среды — вычисляемый с помощью формул
E.3.8) по тензору D тензор С = V/? должен быть интегрируем,
т. е. должен действительно представлять градиент вектора /?.
По (II. 6.7) отсюда следует, что ротор этого тензора должен
быть равным нулю
VXC = O. E.4.6)
682 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
Это условие эквивалентно принципу стационарности допол-
дополнительной работы, иными словами, оно представляет уравнения
Эйлера вариационной задачи о стационарности функционала Ь*
при условиях E.4.2). Это доказывается способом, указанным
в п. 2.5 гл. IV. Введя лагранжев вектор К, имеем
= J J J [ЬВ + (V ¦ 6D) • X] dx0 =
6D--(C*-VX*)dT0+ J Jn-6D-Xdo
V Oi
и по принципу стационарности дополнительной работы
ЬЬ. = J J J ьЬ- -(С* - VX*) dxQ - J J n • D • (/? - X) do = 0. E.4.7)
О Oi
Вариацию бб при надлежащем выборе Я, можно считать
в объеме и на О\ произвольной, поэтому тензор С будет в v
градиентом некоторого вектора "к и сам этот вектор равен R на
О\. Пришли к соотношению E.4.6), выражающему условие
сплошности, записанное через тензор Пиола D.
5.5. Удельная дополнительная работа деформации для полу-
полулинейного материала. Удельная потенциальная энергия дефор-
деформации задается равенством B.8.7)
Л = 1я*? + Ц52> E.5.1)
в котором Si и s2 по B.7.3), B.6.4) представляются через инва-
инварианты тензора 6х
/,Fxl/>) = s, + 3, /1(G><) = s2 + 2s1 + 3. E.5.2)
Закон состояния задается формулой B.8.8)
D = \{%sl - 2ц) GX~V2 + 2ц?] • V/?. E.5.3)
Из нее получаем представления симметричных тензоров
D • D" = [(A,s, - 2ц) Я + 2|iGxVl]2, 0 • 5')'/2 = (Я,в, - 2ц) Е + 2цEх'/2-
E.6.4)
Их первые инварианты, обозначаемые f2, fi, если учесть E.5.2),
§ 5] ВАРИАЦИОННЫЕ ТЕОРЕМЫ 683
оказываются равными
f, = /, [0 • D'f} = (ЗЯ, + 2ц) s,, U = Л 0 • D*) = % C1 + 4ц) s2 + 4ц252>
E.5.5)
так что выражения sb s2 через инварианты fb f2 можно запи-
записать в виде
. (ЗЛ. + 4|х)
4ц2 1'
Подстановка в E.5.1) позволяет выразить удельную потен-
потенциальную энергию деформации через инварианты тензоров
E.5.4)
Имеем также, снова обратившись к E.5.2), E.5.6),
Ь. -V/?' = /, ф • V/?*) = Л [(A.S! - 2ц) Gx'/2 + 2(xG><] =
и удельная дополнительная работа деформации в соответствии
с определением E.3.6), выраженная через тензор D, оказы-
оказывается равной
-U- E.5.8)
Для определения тензора V/? по E.3.4) следует вычислить
производные по D инвариантов f%, f\. Имеем
5f2 = 6 (/)• -6*) = Ь' -6D* + 6D • - D* = 2D • -6D*
и в соответствии с определением (I. 12.7)
Д^ = 2?. E.5.9)
dD v ;
Для вычисления 6fi предварительно отметим, что производ-
производная первого инварианта любого симметричного тензора Q по Q2
равна
6/j(Q) = —Q~'. -6Q2 =-Q~'- -Q-6Q+ —Q- -6Q-Q,
так как Q- -6Q-Q = (Q~T- -Q* ¦ 6Q* = Ё--6Q = &/, (Q), поскольку
Q — симметричный тензор.
684 ЗАКОНЫ СОСТОЯНИЯ НЕЛИНЕЙНО-УПРУГОГО ТЕЛА [ГЛ. VIII
В приложении к симметричному тензору {?> - D*)' получаем
—j[(D- б'Г'1г • б- -6D' + {D ¦ б*)'4*- -Ьб • б*]
и во втором слагаемом в скобках можно тензор bD-D* заменить
на (бб.б*)* = D.bD*, поскольку тензор (б • б*)~'1г симметричен.
Получаем
bf, = (D ¦ D*)~''2 • D-'bD\ ^hr = {D • DV'/2 • ?>. E.5.10)
3D
Теперь, обратившись к E.5.8), получим
V/? = -?
д
и по E.5.9), E.5.10)
V/? = -??- = — (^Ь- - _^_ f -Щ + -^L
дб 4ц \ <??> l+v дб I дЗ
E.5.11)
Вектор /? в соответствии с E.4.6) определяется интегралом
м
по любой кривой, соединяющей точки М°, М. Базисные векторы
в деформированном объеме представляются теперь выраже-
выражениями
(D • DT'h} ¦ D. E.5.13)
Замечания 1. Напряженное состояние, удовлетворяющее
уравнению статики E.3.1) в и-объеме (при отсутствии массо-
массовых сил) можно задать, полагая
б = УХФ, E.5.14)
где Ф — любой, дважды дифференцируемый тензор. Он должен
быть выбран так, чтобы выполнялось краевое условие на Ог
n-D = F^- = P. E.5.15)
Принцип дополнительной работы не может быть обобщен на
случай произвольного (не «мертвого») нагружения, так как за-
задание К, F требует знания геометрии деформированного тела.
§ 5] ВАРИАЦИОННЫЕ ТЕОРЕМЫ 685
2. Применение тензора Пиола, задаваемого в векторном ба-
базисе начального состояния среды, позволило в случае «мерт-
«мертвого» нагружения выразить принцип стационарности дополни-
дополнительной работы только через статические величины; здесь пре-
преодолена трудность исключения из формулировки принципа гра-
градиентов вектора перемещения. Изложение в пп. 5.3—5.5 основано
на работе Л. М. Зубова*).
*) Л. М. Зубов, Принцип стационарности в нелинейной теории упру-
упругости (Прикл. матем. и механика, 34, № 2, 1970).
ГЛАВА IX
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ
УПРУГОСТИ
§ 1. Напряженное состояние при аффинном преобразовании
1.1. Тензор напряжений при аффинном преобразовании.
В §§ 1—3 этой главы будут рассматриваться задачи нелинейной
теории упругости, решение которых можно получить, не специа-
специализируя формы задания удельной потенциальной энергии от ин-
инвариантов деформации. Эта специализация, конечно, становится
неизбежной для достижения числовых результатов.
Решение строится «обратным методом» и состоит из не-
нескольких этапов: 1) задаемся формой осуществляемого преобра-
преобразования v- в У-объем, 2) составляется выражение меры (или
тензора) деформации, 3) записывается закон состояния, и осу-
осуществляется проверка, что определяемый им тензор напряже-
напряжений удовлетворяет уравнениям статики в V-объеме, 4) опреде-
определяются поверхностные силы, требующиеся для поддержания
этого напряженного состояния. Получаемые при этом порядке
построения решения содержательны, если распределение так
найденных поверхностных сил (массовые считаются отсутствую-
отсутствующими или наперед заданными) достаточно просто реализуемо,
а также если постановка задачи допускает замену найденного
распределения статически эквивалентной системой поверхност-
поверхностных сил.
Аффинное преобразование было определено в п. 6.1^ гл. II;
в принятых там обозначениях мера деформации М = gx-' за-
задается выражением F.1.3):
/? = A.A*t (l.i.i)
где Л — тензор, осуществляющий преобразование. Тензор на-
напряжений, определяемый здесь законом состояния в форме Фин-
гера B.4.1) гл. VIII, записывается в виде
У
I 1} НАПРЯЖЕННОЕ СОСТОЯНИЕ 687
Здесь Е = Ms — единичный тензор (в декартовой системе осей),
lh(M) =/ft(Gx).
При обозначениях пп. 5.2, 5.3 гл. II
/,Л • Л* - (Л • Л*J = 1ХМ - М2 =
11 22 33 11 22 33
= (G{ + G2 + G3) (G,ee + G2ee + Gsee) - (G,ee + G\~e~e + Glee) =
так как gx = M~l. Пришли к соотношению
/, (Gx)M - M2 = 12 Fх) Ё-/3 (Gx) ix,
причем выражения инвариантов даются формулами F.1.8) гл. II,
в частности,
Подстановка в A.1.2) приводит теперь к следующему (ука-
(указанному Трусделлом) представлению тензора напряжений:
1 дА л , дА р.-] . ( I т дА , . дА\ $ ,. . о.
Уравнения статики при отсутствии массовых сил, конечно,
удовлетворяются, так как Т — постоянный тензор:
V-f = 0.
Для несжимаемой среды Я = 1; тогда
pE, A = A(IUI2), A.1.4)
где /? — неизвестное всестороннее давление:
Главные значения тензора М легко выражаются через глав-
главные относительные удлинения bq=YG~q— 1. Имеем
II 2 2 3 3
М = евA + б;J + ееA + б2J + ее A + б3J,
11 2 2 3 3
688 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Выражения инвариантов записываются в виде
/, = A + 6tJ + A + 62J Ч- A + б3J,
/2 = A + б,J A + б2J + A + б2J A + б3J + A + б3J A + б,J,
Тензор напряжений соосен с М, то есть имеет те же главные
направления ё; обозначая через tq его главные значения:
II ?2 3 3
Т = t1ee + t2ee + t3ee,
имеем
I . дА ( 1+62 1 +
+ —-A+б2)A+б3)] A.1.6)
и две аналогичные формулы с круговой заменой индексов отно-
относительных удлинений bq. Эти формулы представляют лишь изме-
измененную запись общего соотношения B.6.6) гл. VIII.
Для несжимаемой среды по A.1.4)
1^|?
A.1.7)
1.2. Всестороннее сжатие. Аффинное преобразование вырож-
вырождается в преобразование подобия с коэффициентом подобия
(^), (б1 = б2 = б3 = б), A.2.1)
и по A.1.6)
tl = t2 = t3 = 2(j(j^ + 2KJ^ + K^)^-p, A.2.2)
где р — всестороннее давление. Вместе с тем
/, = ЗК2, h = Ж\ /з = К6,
так что
дА | уя дА
Приходим к соотношению
(L2-3)
указывающему, что при всестороннем сжатии любая форма
§ 1] НАПРЯЖЕННОЕ СОСТОЯНИЕ 689
связи давления с плотностью совместима с соотношениями не-
нелинейной теории упругости.
1.3. Одноосное растяжение. Ось растягиваемого стержня со-
совместим с осью А; тогда t\ — t2 = О, 61 = 62 и по A.1.6) имеем
дА 1| дА ( 1+6, | 1+63\ , дА „ , , w< , , ч п
Г+1 + ) + A+б')A+бз) = 0'
A.3.1)
. 0.3.2)
Из первого уравнения 6i выражается через бз, после чего по
второму уравнению строится диаграмма растяжения t3 = tsFz).
Но уравнение A.3.1) может и не иметь вещественных решений;
это укажет на необходимость приложения поверхностных сил
на боковой поверхности (^,^2^0) для осуществления простого
растяжения Fi = 62). Уравнение A.3.1) может иметь и не един-
единственное решение, так что не исключена возможность неодно-
неоднозначной зависимости растягивающего усилия от относительного
удлинения бз-
Эти усложнения не имеют места в случае несжимаемой
среды. Тогда для определения трех неизвестных f3, P. 6i имеем
три уравнения: два уравнения A.1.7)
и уравнение сохранения объема
1+бз = A+б,Г2. A.3.4)
Находим
^ ^^+бз-а+бз)-2], A.3.5)
где /з — усилие, отнесенное к единице площади начального по-
поперечного сечения растягиваемого стержня.
Для материала Муни (п. 4.9 гл. VIII) первая производная
t*3 по бз остается положительной при —1 < б3 < оо, поскольку
Ci^-0, C2X) — растягивающая сила монотонно растет вместе
с бз; ее рост замедляется при возрастании бз- Но, в противопо-
противоположность материалу в упрощенной теории Синьорини (п. 4.4
гл. VIII), диаграмма растяжения не имеет асимптоты —растя-
—растягивающая сила, разрывающая стержень (бз—»-оо), растет не-
неограниченно.
44 а. и. Лурье
690
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
1.4. Простой сдвиг. Тензоры Л, Л* задаются формулами
F.3.2) гл. II, так что
М = Л • Л* = (Ё + siii2) ¦ (Е + si2i,) = Е + s {цц + i2ix) + s2i,ii.
М'1 = Л^'Л = {Ё-sy,) • (? -sifo) = E-s(M2 + Mi) + s42i2,
По A.1.4) находим выражение тензора напряжений
Его компоненты (в осях декартовой системы OXYZ) равны
1 , дА ,, . у. , дА 1п , ,-. , дА
1 , дА , п , 9ч дА , дА
1 , ( дА . дА\ I ,
дА
ЗА . дА
+
A.4.2)
Единичный вектор нормали N площадки а.\ = const опреде-
определяется по формуле C.5.5) гл. II; в ней
так что
и нормальное напряжение на этой площадке равно
. A-4.3)
Если начальное состояние является натуральным, то по
B.2.3) гл. VIII
откуда следует, что нормальное напряжение, которое должно
быть распределено по граням а,\ = const, чтобы осуществлялась
деформация простого сдвига, пропорционально s2.
Касательное напряжение по этим граням равно
дА
A.4.4)
§ 1]
НАПРЯЖЕННОЕ СОСТОЯНИЕ
691
где t — единичный вектор касательной линии а\ = const:
да2
да2
V'\
В линейной теории упругости простой сдвиг создается только
касательными напряжениями на гранях а.\ = const, a2 = const.
В нелинейной теории осуществление простого сдвига требует
приложения нормальных напряжений на всех гранях параллеле-
параллелепипеда — на грани аз = const, чтобы предотвратить изменение
объема (эффект, предсказанный Кельвином), а в плоскости
сдвига, чтобы обеспечить сохранение размера по оси OY (это —
одно из проявлений эффекта Пойнтинга). Прилагаемые нормаль-
нормальные напряжения пропорциональны s2, но их значения на раз-
различных гранях отличны друг от друга. Касательные напряже-
напряжения, равные тлг и tn на гранях а,\ — const и соответственно
й2 = const, отличаются слагаемыми порядка s3.
Замечание. В линейном приближении для материала
Муни (п. 4.9 гл. VIII) в соответствии с A.4.2)
fi2 = 2(d + C2)s, A.4.5)
а по A.3.5)
6(С+ С2)в8. A.4.6)
Этим дается основание назвать 2{С\ + С2) модулем сдвига,
6(С] + Сг)—модулем Юнга:
2 (С, + С2) = ц, 6(Ci + С2) = Е. A.4.7)
«Коэффициент Пуассона» оказывается равным 1/2:
чего следовало ожидать, поскольку материал несжимаем.
Ривлин, сохранив в формуле Муни лишь первое слагаемое
(С2 = 0), ввел в рассмотрение «неогуково» тело. Уравнения со-
состояния этого тела по A.4.7), A.1.7) представляются равен-
равенствами (в главных осях)
Варга, принимая упрощенный вариант этих соотношений
t, = jE6s-p\ A.4.9)
указывает на приемлемое совпадение получаемых по ним рас-
расчетных формул с результатами некоторых измерений на образ-
образцах из резины.
44*
692 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
§ 2. Упругий слой
2.1. Цилиндрический изгиб прямоугольной плиты. Эта дефор-
деформация плиты из несжимаемого материала была описана в п. 6.5
гл. II. Компоненты мер деформации G, Gx~' и главные инва-
инварианты 4F) по F.5.5), F.5.6) гл. II задаются формулами
'2
С'2 (a), G22 = ^rC*(a), G33 = ^, Gsfc = 0 (s Ф k),
B.1.1)
причем материальными координатами служат декартовы коор-
координаты а\ = а, а2, as и-объема (начального состояния).
Компоненты в осях декартовой ортогональной системы энер-
энергетического тензора напряжений в соответствии с B.1.5), B.1.16)
гл. VIII даются равенствами
-1
а2 ~9\ дА , с
B.1.2)
Удельную потенциальную энергию деформации
можно рассматривать здесь как функцию от С {а):
дА дА 3/, 5Л д/2
ас а/, ас "^ а/2 ас ¦
причем
Поэтому
дА _ дА
~a77~"ac~
§ 21 УПРУГИЙ СЛОЙ 693
и теперь исключение из первых двух уравнений B.1.2) слагае-
слагаемого, содержащего неизвестную с, приводит к равенству
_!_ tn bi r~2 L +22r2 — —
2 aV ^ 2 l ь b2 ~
_ dA dC ( b* „-2 r2 a2 \ _ \ r dA ,0 , .
~ дС~дГА~№ ~L ~bT)-~ JL~dC- ^лл'
Здесь использована также формула B.1.3). Еще одно соотноше-
соотношение связи между /п, t22 дается уравнениями статики. Имея
в виду, что здесь по F.5.1) гл. II
записываем векторное уравнение статики в виде
е, 4~ ma) > + ^«з = О
или
Существенно только первое уравнение
-^-t»C'(a)-^t22C(a) = 0, B.1.5)
так как два других удовлетворяются тождественно, поскольку
напряжения по B.1.2) зависят лишь от переменной а,\ — а.
Из B.1.4) и B.1.5) после исключения t22 приходим к диф-
дифференциальному уравнению
4^g B.1.6)
Вспоминая теперь, что по F.5.6) гл. II
С г = — Г'2 А- ГС" — П — С д @ 1 7^
и переходя к независимой переменной С, приходим к дифферен-
дифференциальному уравнению
^C-g^.. B.1.8)
694 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ, IX
Его легко находимое общее решение имеет вид
^ B.1.9)
где D — постоянная интегрирования. Теперь по B.1.5), B.1.2)
легко определяются остающиеся контравариантные компоненты
тензора напряжений Т в векторном базисе /?i, /?2, Яз-
aVC2
Сославшись на приведенные выше выражения базисных век-
векторов, а также на соотношения B.1.7), получаем
т = t1 ад,+/2зд2+
= erer {A + D) + евев ~^C(A + D) + e^W33. B.1.11)
Здесь ег, е9 — единичные векторы нормалей к цилиндрическим
поверхностям а — const и к меридиональным сечениям
а2 = const.
Через ll, ii назовем значения инвариантов на цилиндриче-
цилиндрических поверхностях радиусов: г0, гь ограничивающих тело в де-
деформированном состоянии. По F.5.3) гл. II
и по B.1.1) имеем
\62
rO ,1 B ,2\ 2 fa2 Ь2
12-12={Гй-г')е\у~^
так что при гог{ = Ь2/а2е2
/? = /!, 72-/i. A(llll) = A(l\,I$. 'B.1.12)
Эти соотношения позволяют подчинить выбор одной лишь
постоянной D условиям отсутствия нагружения на обеих по-
поверхностях г — г0, г = т\\
(er-T- er)r=r = А (/?, ll) + D = 0, (er-f- er)r_fi = А (/}, /2) + D = 0.
B.1.13)
§ 2} УПРУГИЙ СЛОЙ 695
Приходим к следующим выражениям физических компонент
тензора напряжений (в цилиндрической системе координат г,
6, г):
Cr=A(Iuh)-A(l°uI02),
B.1.14)
где обозначение С (а) заменено на г, причем напомним, что по
F.5.8) гл. II
У^-гй^+г*. B.1.15)
Главный вектор сил в любом меридиональном сечении
(8 = сса2 = const) цилиндра, отнесенный к единице длины,
в осевом направлении оказывается, в согласии с B.1.13), рав-
равным нулю:
= г0А (/?, Ц) ~гхА (/}, /') - (г0 - г,) А (/о, /о) = 0,
что можно было предвидеть из соображений симметрии. Их
главный момент относительно оси цилиндра определяется ра-
равенством
г,
=4(г^-/1) А (/?,/«)- { rA(IvI2)dr. B.1.16)
Га
Дальнейшее вычисление требует задания зависимости удель-
удельной потенциальной энергии деформации от инвариантов в яв-
явном виде.
2.2. Сжатие и растяжение упругой полосы*). Рассматри-
Рассматривается упругий слой из несжимаемого материала, в начальном
состоянии заполняющий область |ai|</, |аг|</г плоскости
XOY и неограниченно простирающийся по оси Z. По граням
*) W. VV. Klingbeil and R. T. Shield, Large-Deformation Analysis
of Bonded Elastic Mounts, Zeitsch. fur angew. Math, und Physik 17, 2 A966),
281—305.
696
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IX
а2 = ±h слой спаян с абсолютно твердыми плитами, тогда как
торцевые поверхности а,\ = ±1 свободны от нагружения. Пли-
Плитам сообщаются направленные в противоположные стороны,
параллельные оси OY одинаковые перемещения, причем тол-
толщина слоя 2/i становится равной 2#, так что Я > h при растя-
растяжении слоя, а при сжатии #<Л (рис. 46).
Декартовы координаты аь а2, а3 точки слоя в начальном
состоянии вводятся в качестве материальных координат. Иско-
Искомыми величинами являются ее декартовы координаты Х\, Xj
в деформированном состоянии (V-объеме); при этом пред-
предполагается, что х2 не зависит от ах — материальные пло-
плоскости а2 = const остаются па-
параллельными
F-объеме:
плоскостями в
х2 = х2(а2), хг = а3. B.2.1)
Эти функции подчинены геоме-
геометрическим краевым условиям
Х\(ах, ±h) = au x2(±h)= ±H
B.2.2)
и требованию .статической эквивалентности нулю системы на-
напряжений на поверхностях а,] = ±1.
Вследствие несжимаемости материала
Рис. 46.
О
О
да2
О
B.2.3)
так что Х\ только линейно заиисит от а,\ и вместо B.2.1) можно
принять
xi = uxf (a2) + k(a2), х2 = g (а2), х3 = а3,
причем
g'(a2)f(a2)=\. B.2.4)
Из постановки задачи следуют еще свойства симметрии
искомых функций: х\ нечетна по as и четна по а2, -х2 нечетна
по а2. Поэтому &(а2) = 0, так что рассматриваемая деформация
определяется двумя функциями f(a2), g{a2):
x3 = a3, B.2.5)
B.2.6)
связанными условием B.2.4).
Координатный базис V-объема задается векторами
,2]
УПРУГИЙ СЛОИ
697
и вычисляемые по нему ко- и контравариантные компоненты
метрического тензора G оказываются равными
G13 = 0||
g'2 G23 = 0[!, B.2.7)
Gl2=-atff
G33=
B.2.8)
и равные друг другу главные инварианты будут
/, = h = 1+ f + а2/ + / = 1 + f + Г2 + а\\'\ B.2.9)
Удельная потенциальная энергия предполагается заданной
в форме Муни D.9.2) гл. VIII, и контравариантные компоненты
Ist тензора напряжений по B.1.5), B.1.4) гл. VIII будут
\ " ~) {а2/ + Г2),
(С2
~
-1
B.2.10)
1 ?и = 1 pi = - (С2 + с') ajf, P = F = 0.
Его физические компоненты определяются равенствами
_ 733
_ T _ f)
lyz w<
B.2.11)
2.3. Уравнения статики. Векторное уравнение статики пред-
представляется в виде
-^ (?" я, + ?12*2) + ^-
= о.
Сославшись на B.2.6), приходим к двум уравнениям:
+ ~
П = о,
B.3.1)
B.3.2)
698
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[гл. IX
приводимым с помощью соотношения несжимаемости B.2.4) к
виду
а?11 , да» ,nf,i,,.f"
да.
-¦?-!* = о.
f
B.3.3)
Подставив сюда значения компонент напряжения B.2.10) и
используя формулы B.2.7) — B.2.9), после несложного вычисле-
вычисления приходим к системе уравнений
-I
д с
дс
Из нее имеем
-1
-1
д с
-1
B.3.4)
-1
ajf", U = - (С,
-f)- B-3.5)
и условие совместности
-1 -1
приводит к дифференциальному уравнению для неизвестной
функции f:
fr = f'f", jr=T> AпГ)' = (М)', -9=c, B.3.6)
где с —постоянная.
-i
Функция с легко определяемая по B.3.5) с учетом условия
интегрируемости B.3.6), представляется в виде *¦
~с = - 1 (С, + С2) (afff" + ^)+ со - С2 =
= - 1 (С, + С2) (а?ср + -1) + со - С2, B.3.7)
-1
причем через со—С2 обозначена постоянная интегрирования.
Тензор напряжений теперь определяется формулами B.2.10)
с точностью до аддитивной постоянной; последнюю находим по
условию обращения в нуль главного вектора Р сил на поверх-
поверхности а\ = I деформированного тела; их главный момент обра-
обращается в нуль вследствие симметрии этой поверхности относи-
относительно плоскости аг = 0.
2]
УПРУГИЙ СЛОЙ
699
Сославшись на формулу C.2.3) гл. I и учитывая, что нор-
нормаль п сонаправлена с i\, имеем
h h
= Г (?и
-1
da2^ix f
= 0, B.3.8)
причем слагаемое, направленное по h, вследствие симметрии от-
отпадает:
h h
-Л
-h
так как функция f(a2) четна.
Уравнение B.3.8) после подстановки в него значений компо-
компонент напряжения и при использовании соотношений B.2.4),
B.2.2) дает
-1
~ 2>
Силы Q, сообщающие спаянным с упругим телом плитам
перемещения, рассчитываемые на единицу длины по оси Z, опре-
определяются по C.2.3) гл. I равенством
i t i
Q = J (?21*, + Р*2) da, = i2 J FV (ft) dax = t2 J
так как слагаемые, направленные по i\, отпадают вследствие
их нечетности по ах и g'{h) = [/(/г)] = 1. Заменив t22 его вы-
выражением, получим
Q = 2?2/{ 2 c
+ (С, + С2) [l -1 /2 (с + Г2 (/г)) -1 /4cf * (А)]}. B.3.10)
В точке щ = I, а2 = 0 по B.2.5) и вследствие четности функ-
функции f(a2)
дао
/, а,)
и ATi (/, а2) имеет при а2 = 0 минимум при О 0, максимум при
р < 0; в первом случае материал в окрестности этой трчкн
700 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX-
«втягивается» внутрь слоя, во втором — «выпучивается» наружу.
Поэтому с > 0 соответствует растяжение, с < 0 — сжатие слоя.
2.4. Сжатие слоя. Полагая с = —а2 в B.3.6) и учитывая
B.2.2), имеем
Iw)- cosah - Xi-Щ cosah ¦ B.4.1)
По B.2.4) и вследствие нечетности функции ?(аг) получаем
(aa2). B.4.2)
Здесь А(х) обозначает известную ламбда-функцию:
2 1 — sin x
о
B.4.3)
Постоянная а определяется теперь по краевому условию B.2.2):
Н cosah .... ,_ . ..
2.5. Растяжение слоя. Решения, аналогичные полученным в
п. 2.4, выражаются теперь через гиперболические функции. По-
Полагая с = а2, имеем
chaa2 v — п chaa2 (9 К П
Функция g(a2) представляется в виде
(aa2), Л* (х) = arctgsh x, B.5.2)
причем для определения постоянной а служит уравнение
4=^Л*(«/>). B.5.3)
Расчетные формулы для напряжений, получаемые из соотно-
соотношений п. 2.3, не приводятся здесь вследствие их громоздко-
громоздкости*).
На рис. 47 приведены изображения деформированных полос
для случаев растяжения и сжатия для значений отношения на-
нагруженной площади к ненагруженной
и для относительных удлинений (сжатий)
е = -^- = 0,25 (-0,25).
*) См- упомянутую в сноске на стр. 695 статье ^дингбейля и Щилдз,
§3]
УПРУГИЙ ЦИЛИНДР, УПРУГАЯ СФЕРА
701
Одна из кривых нагружения, рассчитанных по приведенным
формулам (для того же значения S), приведена на рис. 48.
а)
I } У У
1 1
[ \
\ \ \ ч
а) Растяжение 25 %
б) Сжатие 25%
Рис. 47.
а
F
-0,2
1
/
/
1
2.0 г
/0 0,2 Й4 0,6 0,8
/г-1.0 е
' L-2.0
--J.5
-4,0
--5,5
--6,0
Рис. 48.
Видно, что при относительном удлинении е>40% величина
силы уменьшается с ростом е; это может быть объяснено умень-
уменьшением площади поперечного сечения вследствие втягивания
материала внутри слоя*).
§ 3. Упругий цилиндр, упругая сфера
3.1. Цилиндрическая труба под давлением (задача Л яме
для нелинейно-упругого несжимаемого материала). В качестве
материальных координат q] = r, q2 = 6, q3 — z рассматри-
рассматриваются цилиндрические координаты точки начального объема
(о-объема). Деформация предполагается происходящей с со-
сохранением осевой симметрии; поэтому положение в У-объеме
точки М(г, 6, z), остающейся в той же меридиональной пло-
плоскости, может быть задано в той же цилиндрической системе
величинами
R^R(r), 6 = 9, z' = az, C.1.1)
причем а = const.
Вектор-радиусы начального и конечного положения точ-
точки М и базисные векторы в о- и V-объемах представляются в
виде
i rx = er, r2 = ree, r3 = i3, C.1.2)
x = Rr{r)er, R2 = Ree, R3 = ai3. C.1.3)
*) Рис. 47 и 48 взяты из упомянутой статьи, содержащей большое
число расчетных результатов, сопоставляемых с экспериментальными дан-
данными других авторов,
702 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Только диагональные компоненты метрических тензоров g
и G отличны от нуля; в и-объеме
gll = l. ё22 = Г2 g33=l (g='-2)> ]
и в V-объеме
= R'\ G22 = /?2, G33 = a2 (G = R/2R2a2),
CL5)
I 1 1
G" = (J22 _ _i_ Q33 __ _i_
Я'2 ' Я2 ' a2 '
По условию несжимаемости материала
/3=J-=1, R'Ra = r. C.1.6)
Через r0, гх назовем внутренний и наружный радиусы цилинд-
цилиндра в начальном состоянии; Ro, R\—значения величин Го, г\ в
деформированном цилиндре, так что
а (#2-#2) = г2-г2,, a{R\-R'i) = r]-r\ C.1.7)
Поскольку г0 < г < гь то /?0 < R < Я] при a > 0 и /?о, )?i —
внутренний и наружный радиусы деформированного цилиндра.
При а < 0, Ri^C R ^C Ro, так что в деформированном цилиндре
i?i становится внутренним, i?0 — наружным радиусом; цилиндр
«вывернут наизнанку».
Теперь выражения ковариантных и контравариантных ком-
компонент метрического тензора G представляется в виде
Gu=_^i_i G2, = ^2, G33 = a2, t
a2*2' 2' ' ,' \ C.1.8)
1 j
~ a2 ' J
а главными инвариантами меры деформации Коши Gx будут
^
'1 ~ а2^2 Т^ Г2 I " > '2~ f2 + /^2 Т" а2 » '3~ *•
Из этих равенств и из C.1.6) следует соотношение
dlx -2 0/, 2
а
3]
УПРУГИЙ ЦИЛИНДР, УПРУГАЯ СФЕРА
703
3.2. Напряжения. По B.1.5) гл. VIII приходим к следующим
выражениям отличных от нуля контравариантных компонент
тензора напряжения:
a2R2
1 ?22 = с
2 г2 С
C.2.1)
21 — ь — си -г- -j^- .
Исключив из двух первых неизвестную (для несжимаемого
-1
материала) величину с, придем к соотношению, связывающему
Г11, ?22:
Его правая часть по B.1.7) гл. VIII и по C.1.9) преобразуется
к виду
Вместе с тем по C.1.10)
dA__M_dh_dA_dl1_=di}_ldA_, 2 дА \ =
А . 2дА\
и соотношение C.2.2) оказывается возможным записать в виде
ar R2 dA
.R\-r\ dr
C.2.4)
-i
Исключив с из первого и третьего уравнений C.2.1), полу-
получим
г2 I г2
R* дА\ /о о к\
Обратимся теперь к уравнениям статики. Их запись в век-
векторном виде, если учесть C.1.6), C.1.3), при отсутствии массо-
массовых сил дается равенством
Здесь только ев зависит от 6, причем
704 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
а остальные величины зависят только от г. Приходим к двум
уравнениям:
причем второе удовлетворяется тождественно.
Перейдем от контравариантных к физическим компонентам
тензора напряжения; имеем
и поэтому
Это позволяет представить уравнения C.2.4), C.2.5), C.2.7) в
виде
"~т г^> C.2.9)
. + ^^.)i C.2.10)
^^ = 0. C.2.11)
После исключения ав из C.2.9), C.2.11) придем к дифферен-
дифференциальному уравнению
faRo,or?Tf, C.2.12)
dr R a#o~'o dr
которое легко преобразуется при переходе к независимой пере-
переменной R; имея в виду, что
aRdR = r dr,
получим
doT __ _ г2 ^Л
,.dA_dR + c) = iff
так что
/* \ / г
i / Г j л \ 1 / С j л
¦dr + C\.
C.2.13)
3.3. Определение постоянных. Кроме постоянной интегрирова-
интегрирования С неизвестными являются величины, определяющие геомет-
геометрические размеры деформированного цилиндра, — постоянные
a, Ro, Ru связанные соотношением C.1.7):
§ 3] УПРУГИЙ ЦИЛИНДР, УПРУГАЯ СФЕРА 705
Для определения С, a, Ro служат задания давлений q0, q\
на поверхностях г — г0, г = г, (в У-объеме) и осевой силы на
торцах. Первые два условия записываются в виде
Чг0=-</о, Ы_„=-<7., C-3.2)
так что по C.2.13)
C = qo(aRl~rl), C.3.3)
Выражения физических компонент напряжения по C.2.13),
C.2.3), C.2.9), C.2.10) теперь представляются в виде
C.3.5)
C.3.6)
C.3.7)
3
Сила, действующая на площадку dO поперечного сечения
цилиндра, определяемая формулой C.2.3) гл. I (при n = i3),
равна
N 3 ¦
t dO = ?33/?3/' drdQ — — azr dr dQ i3,
и выражение осевой силы Z может быть записано в виде
TT+^-M-)rdr\- С3'3-8)
Это уравнение совместно с C.3.4), C.3.1) определяет по-
постоянные а, Ro, Ri- В случае, когда торцы свободны, 2 = 0. Если
же цилиндр помещен между двумя твердыми плитами, не до-
допускающими изменения его длины, ос=1; тогда уравнение
C.3.8) служит для определения осевой силы, а неизвестные
Ro, R] находятся из уравнений C.3.4), C.3.1).
Входящую в приведенные выше формулы производную по г
от удельной потенциальной энергии деформации следует заме-
заменить через ее производные по инвариантам — «обобщенные
45 А. И. Лурье
706 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
модули упругости». Для этого служит формула C.2.3), преоб-
C.2.3), преобразуемая к виду
dA _ 2с2Bгд+с) (дА , _2 дА\ ,„ „ Q,
IF a(r2 + cJr31а77+а Ж Г l '
Здесь и далее принимается для краткости обозначение
c^aRl-rl^aR'i-n^atf-r2, C.3.10)
причем по C.3.4)
^o-?i =-1. C.3.11)
. f 2<2Л
J rfr
dr
3.4. Материал Муни. В приводимом далее вычислении пред-
предполагается задание удельной потенциальной энергии в форме
Муни D.9.2) гл. VIII. Уравнение C.3.4) записывается в виде
2с 2
Го
а входящий в него интеграл равен
(* 2г
Это позволяет при обозначении
U{x) = x + \пх C.4.2)
представить уравнение C.3.4) в виде
Аналогичное представление выражения осевой силы C.3.8)
требует вычисления двойного интеграла
Г\ Т Г, Г,
Г л Г дА „ , 1 Л ад , , 1 Гад
Гч Гл Го Гл
По C.3.5) получаем
§ 3) УПРУГИЙ ЦИЛИНДР, УПРУГАЯ СФЕРА 707
и выражение осевой силы приводится к виду
C.4.4)
3.5. Цилиндр, «вывернутый наизнанку». Внутренний и на-
наружный радиусы в начальном состоянии, как выше, обозначены
го, n;B конечном состоянии, в вывернутом «наизнанку» цилиндре,
Ro является наружным, Ri— внутренним радиусом; внешние си-
силы в конечном состоянии отсутствуют:
(/0 = 71=0, Z = 0. C.5.1)
Постоянная a < 0, равно как и постоянная с; вводятся обо-
обозначения
_a = p, -c = Krl —I—jxg, -г = Ц?, ~=n>\, C-5-2)
r0 r! r0
позволяющие записать соотношение C.3.10) в виде
/C-ftig+l=n(fti« + l). C.5.3)
Из него следует, что
Напряжение ат, определяемое по C.3.3), C.3.4) и C.3.8),
равно
г
Г2 1 \
5" 5-
2 |J
, = —: —rdr = — (С, + В2С2) In
C.5.4)
Оно обращается в нуль при г = г0, г также при г
2 | 1/1 1 \ / 1 1
In ¦!-?¦+ — - yj = (-S - In —у) - (—т - In —J-1 = 0. C.5.5)
Это соотношение, записываемое также в виде
представляет при обозначениях C.5.2) другую форму записи
условия C.4.3),
45*
708
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IX
По изображенному на рис. 49 графику функции f(x) для
х > 0, имеющей равный единице минимум при х = 1, сразу же
видно, что уравнение C.5.6) определяет для любого Рц§> 1
единственное значение р^<1.
Меридиональные напряжения ае, определяемые по C.3.6),
на наружной (R = Ro, г = г0) и внутренней (R = Rh г = гх)
сторонах вывернутого цилиндра оказываются равными
C.5.7)
как и следовало ожидать, они являются растягивающими на
наружной стороне и сжимаю-
faM щими на внутренней.
| \ Условие обращения в нуль
растягивающей силы пред-
представляется по C.4.4) теперь в
виде
Рис. 49.
C.5.8)
Это соотношение, сославшись на C.5.5), можно преобразо-
преобразовать также к виду „
2 {п ~
в?) •
По заданному « неизвестные Pfx;;, Рц? определяются урав-
уравнениями C.5.3), C.5.6); тогда по измеренному значению р мо-
может быть найдено отношение C2/Ci для рассматриваемого мате-
материала Муни. Границы возможных значений р определяются ус-
условием положительности этого отношения (см. п. 4.9 гл. VIII).
3.6. Кручение круглого цилиндра. Как и в п. 3.1, материаль-
материальные координаты отождествляются с цилиндрическими коорди-
координатами точки в начальном состоянии. Деформация кручения
задается поворотом поперечных сечений цилиндра, сопровождае-
§ 3] УПРУГИЙ ЦИЛИНДР, УПРУГАЯ СФЕРА 709
мым осевым перемещением; оно вводится, как и выше, с по-
помощью постоянного параметра ос:
z = оса3.
Вектор-радиус /? точки скрученного цилиндра представляет-
представляется формулой F.4.2) гл. И:
причем в выражение F.2.12) гл. II тензора Л следует внести из-
изменения, учитывающие осевое перемещение и сохранение
объема:
А = —г=г [(егег + евев) cos % - (евег - егев) sin %] + ai3i3,
Постоянная г|л представляет угол кручения на единицу длины в
осевом направлении.
Записывая теперь /? в виде
# = г • А = (re, + i3a3) • А = у~ (е, cos х + ее sin х) + aa3i3
и вспомнив формулы дифференцирования
де, __ дед _ _
получаем такие представления базисных векторов в деформиро-
деформированном цилиндре:
/?, = —=¦ (е, cos х + ее sin х), ^2 = -р=- («е c°s X - е, sin x),
/?3 = "ф -^ (- er sin х + ее cos х) + cti3
или
1
где
е* = er cos х + ee sin х, е^ = — er sin x + e9 cos х- C.6.2)
Этим определяются ковариантные компоненты метрического
тензора
и=7- О,2-0, GJ3 = 0,
C.6.3)
г'
— ib,
9 . Г2
так что
G = г2. C.6.4)
710
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. !Х
Контравариантные компоненты и главные инварианты тензора
Gx равны
Gu=a, GI2 = 0, G13 = 0,
1
а2 '
C.6.5)
^, /3=1. C.6.6)
Выражения контравариантных компонент тензора напряже-
напряжений записываются в виде
-I
а
о 1
±«2__?_ !_+¦;' i^±. ч>2 \
2 l ~ г2 or!tCU2ta2)'
1 /
с\а -
а
Г*1|,М
о j
1
-1
h а2
C.6.7)
Из представления тензора напряжений в векторном базисе
деформированного объема
Т = fkRsRk
получаем выражения физических компонент напряжения
C.6.8)
Закон состояния C.6.7) для этих компонент записывается
в виде
1 _ 1 дА , ( 1 , . г2ф2\ дА . -'
дА
"'
а2
2 г.
а I а/, а/2
C.6.9)
§3] УПРУГИЙ ЦИЛИНДР, УПРУГАЯ СФЕРА 711
Здесь совершен переход с помощью формул B.1.4) гл. VIII от
«модулей» с, с к производным удельной потенциальной энергии
по инвариантам.
-1
После исключения неизвестной с приходим к используемым
далее соотношениям
„ „ о г2ф2 дА
C.6.10)
причем
2Ш- + ±^А.\ = -±4?-. C.6.11)
3.7. Напряжения, крутящий момент, осевая сила. Уравнение
статики имеет вид
Имея в виду формулы дифференцирования [см. C.6.2)]
и учитывая, что остальные величины зависят только от г, при-
приходим к одному лишь уравнению
— -)= г?" - ~ г2 (f22 + 2?23г|з + РгЬ2) = 0, C.7.2)
йг У а у а
которое после перехода к физическим компонентам принимает
хорошо известный вид
i ^LZ^e=0. C.7.3)
i?L + =0.
Из него, применив первое соотношение C.6.10), получим
Го
п ф2 Г дА , , п гЧ2 дА /<3 _ .ч
Константа интегрирования определена по условию отсутствия
внешних сил на наружной поверхности цилиндра г = г0; приня-
принятая картина деформации не дает решения задачи кручения
712
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IX
полого цилиндра, так как в нашем распоряжении имеется толь-
только одна постоянная и требование освободить от напряжений а,
внутреннюю поверхность не может быть выполнено. Было бы
грубой ошибкой думать, что задача о кручении полого цилиндра
может быть решена наложением на приведенное здесь решение
решения «задачи Ляме» пп. 3.1—3.4. В нелинейных задачах
недопустимо раздельное рассмотрение нагрузок. Решение за-
задачи кручения для полого цилиндра требует отказа от предполо-
предположения об отсутствии радиальных перемещений и независимости
от г осевых; картина деформации должна быть усложнена вве-
введением задающих их функций от г.
Определяемая формулой C.2.3) гл. I сила, действующая на
з
площадку dO в поперечном сечении цилиндра, -равна
tdb =
dr dQ =
F33R3)
r dr dQ =
r dr
Главный вектор и главный момент этой системы сил равны
I
о о
т° =
Го
J R Х (те/е
2Я г.
о о
и из соотношений
2я 2я
2я
2я
о
о
= 0
следует, что эти векторы, как заранее предвиделось, параллель-
параллельны оси <з- Приходим к выражениям осевой силы и крутящего
момента
Го Г,
[ \
C.7.5)
Замечая, что
§ 3] УПРУГИЙ ЦИЛИНДР, УПРУГАЯ СФЕРА 713
и обратившись к формулам C.6.10), C.6.11), придем к фор-
формулам
Z= -2я
\
J
(го)-Л(О)]|, C.7.6)
дА о . 2 r „ . ,..
г»
C.7.7)
Здесь Л(г0), ^4@)—значения удельной потенциальной энергии
деформации на поверхности и на оси стержня,
а = 2я I Ardr
— потенциальная энергия деформации, отнесенная к единице
длины скрученного стержня.
Здесь отчетливо обнаруживается эффект Пойнтинга — необ-
необходимость сжимающей осевой силы, чтобы сохранить неизмен-
неизменной длину скручиваемого стержня (а = 1):
C.7.8)
Изменение длины стержня (параметр а) при отсутствии осе-
осевой силы определяется по уравнению C.7.6) при Z = 0.
В нелинейной теории кручение сопровождается не только
касательными напряжениями -tez, но и возникновением всех нор-
нормальных напряжений.
Для материала Муни сжимающая сила, требуемая для со-
сохранения длины стержня, оказывается равной
C.7.9)
где /р — полярный момент инерции поперечного сечения. При
этом условии
Л-3 = /2-3 = гУ, Л = (С, + С2)г2г|з2. а = (С, + С2) /рг|Д
и по C.7.7), вводя обозначение модуля сдвига A.4.7), прихо-
приходим к тому же, что и в линейной теории, выражению крутя-
крутящего момента:
т, = 2(С1 + С2)/рг|з = (г/рг|з. C.7.10)
При отсутствии осевой силы выражение крутящего момента
записывается в виде
|(^)^' <3-7Л1>
714 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
причем а — функция от ф, определяемая по C.7.6) из уравне-
из уравнения
+ 2С2) = 0. C.7.12)
C.7.13)
Например, для неогукова материала (С2 = 0)
-^
v^>
— стержень удлиняется, а рост крутящего момента уменьшается
с ростом угла закручивания г|з.
3.8. Симметричная деформация полого шара (задача Ляме
для шара). Материальными кординатами точки служат сфери-
сферические координаты (п. III. 8) точки в начальном состоянии ша-
шара (в у-объеме)
</' = р, <72 = Ф, Т8-*-
Отличны от нуля только диагональные компоненты метриче-
метрического тензора g этого состояния:
i ' S ~2 >
p2 sin2
C.8.1)
Деформация предполагается радиально-симметричной: пере-
перемещения точек сферы из начального состояния в конечное на-
направлены радиально и зависят лишь от координаты р. Полый
шар остается полым шаром; его наружный и внутренний радиу-
радиусы в начальном состоянии обозначаются ро, рь в конечном
Ro, R\-
Вектор-радиус точки и определяемые по нему базисные
векторы /?., в деформированном шаре даются выражениями
[см. (III. 8.4)]
Я = Я(р)ер, «, = «/(p)ep, R2=R{9)et, R3 = Я(р)е%sinЪ. C.8.2)
Предполагается, что шар подвержен действию постоянного
давления изнутри и извне:
К)р=Ро=-<7о, K)p=p,= -4i- C.8-3)
При таком нагружении возникают только нормальные напряже-
напряжения ар, ав, о*.:
Т = аререр + а^е^ + алеЛ = -^-«,!?, + -^- R2R2 + °\ R3R3,
д Н. A Sin tr
и формулы связи контравариантных компонент тензора напря-
напряжений с его физическими компонентами имеют вид
\ ax = ?ai?2 sin2 О. C.8.4)
§ 3] УПРУГИЙ ЦИЛИНДР, УПРУГАЯ СФЕРА 715
Компоненты метрического тензора G в деформированном
шаре и инвариантны меры деформации Коши равны
Gn = R'\ G22 = tf2, G33 = R2sin2b (G = R'°R4sin2в), 1)
= -L, G22=—, G33=
D'2 D2 '
sin2
C.8.5)
Закон состояния записывается системой формул
1 Я2 ¦_ Р2 ( С ' Л* С \ \ C.8.6)
2 Я'/?2 \ р2 С р4 ' R2 )'
2 1 2 sin2 * * I
Уравнение статики
г УЪ f'Rt = ^— i?'2i?2 sin Ф?"е0 + -^R'R3^22^ sin'
раскрывается с помощью деривационных формул (III. 8.4):
sin* [~- R/2R2Jn - R'RS (I22 + Р3 sin2 *)] ер +
+ R'R3 cos d (F - F sin2 *) efl = 0.
Из него следует уже отмеченное выше соотношение
F = ?33sin2u C.8.7)
и дифференциальное уравнение
^L V 0. C.8.8)
Через физические компоненты тензора Т оно представляется в
более простом виде:
± ^ 4-K-ae) = 0. C.8.9)
Замечая еще, что R'dp = dR, можно привести уравнения
C.8.6), C.8.7) к виду
-^- + 2^^- = 0, а^а,,, C.8.10)
716 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
и эту форму записи можно было непосредственно получить из
уравнений статики в сферических координатах деформирован-
деформированного объема.
Остается подставить в уравнение статики значения разности
2 !p*R'2 Л/дА.ф дА\ /ост
ap-a« = -sr —5г и-лТГ + ТГ-лТГ C.8.11)
и напряжения ор:
2R' ( дА 9 R* дА R< дА\ /qo,9\
+2тж+1г'д1;)- C-8Л2)
Приходим к нелинейному дифференциальному уравнению
второго порядка для функции R(p); краевые условия ее, форму-
формулируемые соотношениями C.8.3), C.8.12), также нелинейны.
Задача громоздка даже для наиболее простых формулировок
закона состояния сжимаемого упругого материала.
3.9. Несжимаемый материал. Для несжимаемого материала
эти затруднения отпадают. Условие несжимаемости определяет
производную R' искомой функции R:
/3=1, *' = ¦?, C.9.1)
и по C.8.11)
^2 /6 ( А , R2 дА
Уравнение статики C.8.10) приводится к виду
дЛ R* дА'
), C.9.3)
и задача сводится к рассмотрению системы двух уравнений
C.9.1), C.9.3). Она облегчается введением новой независимой
переменной
Выражения инвариантов C.8.5) принимают вид
Y + 2%2- C-9>4)
Поэтому
dA _ л( дА | ' ^
rfx \ 5/, т х2 з,
и уравнение статики преобразуется к виду
da0 х3 dA
dx -%3-i df C-9-6)
§ 3] УПРУГИЙ ЦИЛИНДР, УПРУГАЯ СФЕРА 717
Учитывая краевые условия C.8.3), приходим к выражению
нормального напряжения
х
^г|^Х C-9.7)
и к формуле, связывающей неизвестные хь
Второе соотношение между ними дается условием несжимае-
несжимаемости
D2D* — п2 Do __ г\о _— Do __ г\о , Do лЗ /Q Q Q\
/\ I\ ~~ М • лД ^^ [J "^ ¦'Л Л ^^ Мл J\ 1 ^^ U. \\J**Jm\s)
представимым в виде
C.9.10)
Pi/ 5Co
3.10. Применение принципа стационарности потенциальной
энергии. В рассмотренных задачах о цилиндре и шаре простота
выражений инвариантов через функции и постоянные пара-
параметры, задающие деформацию, допускает достаточно простой
вывод уравнений равновесия с помощью принципа стационар-
стационарности удельной потенциальной энергии.
Остановимся на примере шара. Инварианты зависят от иско-
искомой функции R(p) и ее производной, поэтому
дА (dlk AD , dlk .-Л /о inn
^\~w6R + w6R)- (злол)
Элемент объема dro = 4np2dp, а варьируемая величина преобра-
преобразуется к виду
k=l ft-l Ро
3 Pi
Г дА
2
P
Го
C.10.2)
718
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Элементарная работа поверхностных сил давления —
О 1 1
—qoN, — qN на концентрических сферах О0, О\ равна
- q0 J J N ¦ bRQd0 - qx J J N • б/?, dO
Oo O,
= An(qX6R0 - qxR\Щ.
O,
Здесь учтены очевидные соотношения
О g I g
N • 6/?0 = ——• • 6/?о= ~ bR0, N' 6/?i = -гг
и вместе с тем на любой сфере
R2 [С R2 Г Г
dO = —г do, 6RdO = —z-bR do —
P J J p J J
Приходим к равенству
3 Pi
Г
Из него- следует дифференциальное уравнение
и краевые условия
„2 / 3
дА
дА
C.10.4)
Их развернутая запись по C.8.5) повторяет C.8.12), C.8.3):
-2 . / дА дА R2 дА R* \
1Г1-+1П-— )ещ-Я, (s = 0.1), C.10.5)
>/2 р^ а/3 р /
M_ у ам dik у &а (oik , д!к i?, , aik n/f\
dls ±J dlkdls dp ^ dlkdls \ dp ~т~ dR* + dR' * )'
§ 4] МАЛАЯ ДЕФОРМАЦИЯ ПРИ НАЧАЛЬНОМ НАГРУЖЕНИИ 719
тогда как дифференциальное уравнение C.10.3), конечно, экви-
эквивалентно уравнению статики C.8.8) или C.8.9):
J_n2W-M_L9 дА X2 I дА Ri \
dp V А U/i "•¦ dlt р2 + dh p4 )
дА , дА ( R1 ,2\ дА R*R'2] „ , .„ ,
+ + R °- (ЗЛ0-6)
Приведенный вывод требует только знания выражений инва-
инвариантов и выполнения стандартных операций по составлению
уравнений, соответствующих вариационной задаче. Нет нужды
заботиться о различении контравариантных и физических компо-
компонент, записывать выражения закона состояния и т. д.
Запись в развернутом виде громоздка, так как в нее дол-
должны войти производные вида
3 3
dp s
Применение метода Ритца, допускаемое вариационной фор-
формулировкой задачи, приводит к рассмотрению нелинейной си-
системы конечных уравнений (по числу введенных в задание иско-
искомой функции параметров).
§ 4. Малая деформация при наличии начального нагружения
4.1. Малая деформация деформированного объема. Далее
рассматриваются три состояния упругого тела: начальное со-
состояние в у-объеме, ограниченном поверхностью о, первое со-
состояние деформации (V-объем, поверхность О) и второе состоя-
состояние, получаемое из первого сообщением его точкам малого
перемещения, задаваемого вектором цгт. Объем тела и его по-
поверхность в этом состоянии обозначаются V*, Q*; т) — малый
параметр, во всем последующем сохраняются слагаемые только
червой степени относительно этого параметра*).
Вводится декартова система осей OXYZ, неизменные направ-
направления которых задаются единичными векторами is. Координаты
точки среды в этой системе в v-, V- и У*-объемах обозначаются
соответственно as, xs, x*s, а ее вектор-радиусы
r = asis, R = itxt, /?* = »X = ^ + ^- D.1.1)
Для материальных координат точек среды сохраняются обо-
обозначения q\ q2, g3, векторные базисы в v-, V-объемах образуют-
образуются тройками векторов rs, Rs; взаимные базисы — векторами г\
Rs; метрические тензоры обозначаются, как выше, g, G.
*) Операция транспонирования тензора будет обозначаться индексом «т»
720 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Координатный базис в У*-объеме определен тройкой векторов
Rl=^=Rs + r]^. D.1.2)
Ранее операции в V-объеме отмечались (в отличие от опе-
операций в и-объеме) знаком тильды (~); теперь нет нужды в
таком усложнении записей, так как все действия будут прово-
проводиться в V- и в У*-объемах; операции с величиной в метрике
У*-объема отмечаются звездочкой.
По определению набла-оператора V и градиента вектора
[см. (V.4.2), (V.4.5)]
\ dw dw n ,-7
dqs ' dqs s
Поэтому, введя в рассмотрение единичный (метрический) тен-
тензор G, имеем
Rs = Rs + 4Rs -SJw = Rs-(G + t\Vw) = (G + t\VwJ) ¦ Rs, D.1.3)
причем индексом «т» обозначается транспонирование тензора:
Vw = RsRqVswq, VwT = RVR^sWq. D.1.4)
Ковариантные компоненты метрического тензора G* в
У*-объеме определяются формулами
= Rs ¦ Rk = (Rs + r\Rs ¦ Vw) • {Rk + nVwT ¦ Rk) =
Вспомнив определение линейного тензора деформации векто-
вектора w:
z = j(Vw + VwT), D.J.5)
получаем
G'Sk = Gsk + 2t\Rs .?.Rk = Gsk + 24Rsk- D.1.6)
Определение взаимного базиса R*s основыаается на равен-
равенстве метрических тензоров G, G* (тот и другой — единичные
тензоры, каждый в своей метрике):
6 = 6*. D.1.7)
Представив их в форме сумм диадных произведений
заменив Rs значением D.1.3), a r\R*s на r\Rs, имеем
R*SRS • Rk + nRsRs -Vw-Rk = Rsk + ^w ¦ Rh = Rk,
или
r* = Rk~ «iR* ¦ VwT = Rk ¦ (G - T)Vm»T) = (G - tiVw) • Rk. D.1.8)
§ 4] МАЛАЯ ДЕФОРМАЦИЯ ПРИ НАЧАЛЬНОМ НАГРУЖЕНИИ 721
Выражения контравариантных компонент G*sk метрического
тензора теперь представляются в виде
D.1.9)
Для вычисления определителя G* = 10*^1 проще всего исхо-
исходить из равенства
• fdG"\ ! ас*
Введя в рассмотрение первый инвариант тензора ё (в У-мет-
рике)
® = GstesU D.1.10)
получим
G* = GA+2t}0), V& = УЪ (I + ifl). D.1.11)
Мера деформации У*-объема определяется тензором Gx*
с ковариантными компонентами в метрике начального и-объема,
равными ковариантным компонентом Gst метрического тензора
У*-объема:
Gx* = G>V = Gx + 2nes/rV. D.1.12)
Главные инварианты этого тензора, определяемые форму-
формулами E.2.6) — E.2.8) гл. II, равны
f
'* = h (Gx) + 2ц[/2 (Gx)® ~ /з (б)
Ниже r]/s обозначают разности главных инвариантов:
tl/, = /,(Gx')-/, (Gx), D.1.13)
так что
D.1.14)
Вектор ориентированной площадки определяется по C.5.3)
гл. II:
JV dO* = |/-^ /?*s^s dO = A + л*) (Я1 - tiVw • /?s) Ns dO =
= [JV + T](OJV-Vm»-^]dO. D.1.15)
Поэтому
46 А. И. Лурье
722 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
и, далее,
ЛГ = N + ц {NN • Vw • N - Vm» • N) = N + 4N X [N X (Vw • ЛГ)].
D.1.16)
Вектор /V* отличается от N, как следовало ожидать, векто-
вектором, перпендикулярным N.
Заменив тензоры Vffi>, VwT их разложениями A.2.13) гл. II
на симметричную и кососимметричную части
¦" Vw = ё - Q, Vt«T = ё + Q
и сославшись также на формулы A.5.8), A.5.11), можно пред-
представить базисные векторы и вектор нормали в виде
Й-Я.-г|(Л'« + вХ«,), R's-Rs=-r){Rs-s-«>XRs), 1
ЛГ-ЛГ = Т1{ЛГХ [ЛГх(ЛГ-ё)] + о>Х #}. J
D.1.17)
4.2. Тензор напряжений. Через T^psf обозначается разность
контравариантных компонент t"st, tst тензоров f* и Т:
r = fstR:R>t = (tst + 4Pst)R:Rt. D.2.1)
Сославшись на D.1.3), имеем
Г = t" (Rs + TiVa>T • Rs) (Rt + i\Rt • Vw) + r)PstRsRt =
= f + ц (P + ts'RsRt • Slw + f'W • RsRt),
= f + i\S, S = P + f-Vw-bSJwT-f, P = pstRsRt. D.2.2)
Уравнение состояния далее представляется в форме Фингера
B.4.1) гл. VIII:
Т = 2 yf-fr (cM. - сЛ!2 +~cG). D.2.3)
Тогда в У*-объеме, учитывая D.1.7), имеем
Г = 2 |/"-|г (с'М* - с'Л1*2 +~с'6) D.2.4)
или, при обозначении
с*-с = ч\Ь (s = 0, 1, -1), D.2.5)
Г = f - iybf + 2л "|/"-§- (ЬЛ - Ш2 + ~bG) +
или
+ 2 У&- [с (АГ -М)-с (М*2 - УЙ2)]. D.2.6)
МАЛАЯ ДЕФОРМАЦИЯ ПРИ НАЧАЛЬНОМ НАГРУЖЕНИИ
723
Здесь по определению тензора М
М'-М = gsk(rIrI-RsRk) = i)(M-Vw + Vwr- M),
ЛГ2 - M2 = (M* - M) • M' + M • (ЛГ - M) =
Л D 2 7)
= (ЛГ - M) • M + M • (ЛГ - M) =
= т] (M • Vtw • Л1 + Vt?»T • Л12 + Л12 • Vw + M ¦ Vwr • M)
или
M*2 - Л12 = Tj BЛ1 • ё • Л1 + Л12 • Vw + VwT • M2). D.2.8,
Это позволяет записать группу входящих в D.2.6) слагаемых в
виде
2 |/ -§- [с (ЛГ - М) - i ОЙ*2 - М2)] =
= 2л )/-§- (сЛ1 - сМ2 + сб) • Va» + 2ц |/-|- Va»T • (с°М - сМ2 + сб) -
- 4т] |/-|- (сЛ1 • е • Л1 + сё) =
|- (сМ • ё • М
= ц (т . Vw + Vwr • Т) - 4
Возвращаясь к D.2.6), получаем
-|- (&Л1 - ЬЛ?2 + bG) + Т • Vw +
+ VwT-f-4 y-jk- (cM'R-M + ее), D.2.9) •
и теперь можно представить тензор Р в виде
Р = 2 У^г[(Ъ -Ъс)М-{Ь-Ъс)М2 + {b-йс) G-2(cM-e-M + cs)].
D.2.10)
Его компоненты в метрике У-объема определяются по формулам
pst = 2 j/? [gs'(!-flc)-(b-®c)gsrgt9Grq +
+ (Ь- Ъс) Gst - 2 (igV +~cGsrG'?) er,]. D.2.11)
4.3. Необходимые условия равновесия. Вектор массовой си-
силы в У*-объеме обозначается К*, объемной р*К*\
D.3.1)
46*
724 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Уравнения равновесия в V- и в У-объемах записываются
в форме C.3.2) гл. I:
= 0. D.3.2)
Из них следует равенство
Величина в скобках представляется в виде
/G [A + л*) (^ + ПР*') (Я, + л ^ • V») - /"*,] =
Ъ + pstRt + ts% • Vw).
Вместе с тем, вычисляя дивергенцию тензора Т • Vw, имеем
[см. (V.4.7)]
и, возвращаясь к D.3.3), приходим к равенству
V • {ЪТ + Р + Т • Vw) + р* = 0. D.3.4)
Переходим к уравнению равновесия на поверхности; сила
F*dO*, действующая на элемент поверхности dO*t равна
F'dO* = FdO + r\fdO, D.3.5)
и уравнение равновесия на О* по D.1.15), D.2.2) представляется
в виде
ГdO* = N*-r dO* = [N + y\{$N-Vw N)] ¦ (f + tj§)dO =
После замены
Vo> • N = N • Vw\ N-f^F
получаем
JV-(S + -&f-Va>T-f) = /
или, сославшись на D.2.2),
f f. D.3.6)
Уравнения равновесия в объеме и на поверхности оказались
выраженными через один и тот же несимметричный тензор вто-
второго ранга
e = df + P + f-Vt?) = #7' + P + 7'.e + (o)X Т)\ D.3.7)
Это можно было предвидеть, так как уравнение равновесия
в объеме выражает условие обращения в нуль главного вектора
§ 4} МАЛАЯ ДЕФОРМАЦИЯ ПРИ НАЧАЛЬНОМ НАГРУЖЕНИИ 725
внешних сил, действующих на любой объем V*', мысленно вы-
выделенный в У*-объеме:
| Ы*-ГсЮ+
о*' v*'
Заменив подынтегральные выражения их вышеприведенными
значениями
N* • f * dO = N • f dO + 4N • ё dO, p'K'dt* = pKdx + i\pk dx,
получаем
j N-f dO+ ^ j pKdT + цП j N-@dO+
O' V \O'
и при обозначении D.3.7) снова приходим к уравнению равнове-
равновесия D.3.4). Внешне полученные уравнения равновесия
У.в + рЛ = 0, N-S = f D.3.8)
напоминают уравнения равновесия
V • f + р/С = 0, N-f^F,
но не надо забывать, что тензор в не равен разности тензоров
f' — f, определяемой тензором 5:
в = S + ЪТ -VwT • Т = S + ЪТ - е • Т - <л X Т. D.3.9)
Несимметрию тензора в, обусловленную наличием слагаемого
о X f, следует объяснить поворотом объемного элемента при
деформации У-объема.
Тензор в представляет линейный дифференциальный опера-
оператор над вектором w. При отсутствии добавочных массовых и
поверхностных сил (k = 0, / = 0) *) задача разыскания w све-
сведется к однородной системе линейных относительно w дифферен-
дифференциальных уравнений второго порядка с однородными краевыми
условиями. Это — так называемые уравнения нейтрального рав-
равновесия. Они допускают, конечно, тривиальное решение w = 0. Но
могут иметь место решения, отличные от тривиального, когда
наряду с рассматриваемым состоянием равновесия У-объема,
нагруженного силами К, F, существуют близкие к нему рав-
равновесные состояния. Значения параметров нагружения, для ко-
которых уравнения нейтрального равновесия имеют нетривиальное
решение, называются бифуркационными. Сформулированная
однородная краевая задача позволяет найти бифуркационные
*) Или силы k, f представляются линейными дифференциальными опе-
операциями над w.
726 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
параметры, но не определяет целиком форм равновесия V-объе-
ма, отличающихся от исходной. Их разыскание потребовало
бы рассмотрения полных уравнений равновесия У*-объема.
4.4. Представление тензора в. В соответствии с D.3.7),
D.2.3), D.2.10) тензор в представляется суммой тензоров
О = R + Т ¦ Vro, R = -L- \{ЪМ - ЬМ2 + bG)-2(cM-e-M + се)],
D.4.1)
причем по D.1.13), D.2.5)
S
°Ь = 1Щ1к (^ = 0, 1, — 1). D.4.2)
Величины /й определяются формулами D.1.14), приводимыми
к виду
/. = 2gm4m = 2A?..e, l2 = 2W2-I3gskGsmGknBmn)= \
, ~ ~ n \ D.4.3)
причем /ft = /ft(Gx) = Ih(M). Это преобразование и используе-
используемое далее основано на соотношениях
Теперь симметричный тензор R представляется в виде
о 1 -1
; = Г(-^?- ast — -^- askSrtG +-^- n~st^ "mn
о 1 -1
с st _ дс sk rts, , дс f
!2 Ol<i Oi2
- (cgsmgnt +~cGsmGnt)} RsRfimn. D.4.4)
Его контравариантные компоненты определяются формулами
Rst = с^тпгт^ cstmn = ctsmn=cstnmt ^^
причем cstmn — компоненты тензора четвертого ранга <4)С, опре-
определяемые величинами в квадратных скобках в формуле D.4.4).
Далее тензоры М, ЛИ, G, е представляются в главных
S
осях е тензора М:
3 г г .3 ~ -
r~\ r=l r-1 s-1
r s
(Btrs) = e • ё • e).
§ 4] МАЛАЯ ДЕФОРМАЦИЯ ПРИ НАЧАЛЬНОМ НАГРУЖЕНИИ 727
Вспомнив еще выражения инвариантов
/i = G1 + G2+G3, I2= G\G2+ G2G3+ G^Gi, /3 = GiG2G3
и легко проверяемые соотношения
/.-зг-ол/.-ол-о^, -?&-?> D-4-6)
можно записать выражения /& также в виде*)
ll = 2GrB(rr), l2 = 2Gr-g^Eirr), /3 = 2/3e(rr).
Это позволяет значительно упростить запись выражения R
4
D.4.7)
После замены М его представлением в главных осях, а с их
выражениями
0 _ дА . дА ' = _дА_ ~'_ , дА
С~ a/, +/l 77' С ^2 ' 3 а/3
получаем также
Величина в квадратных скобках, обозначаемая C(Gr,Gs),
симметрична относительно ее аргументов и представляется
в виде
д2А д2А 1\ д2А
С (G,, G.) = —Г + (/, - G.) (/, - G,) —г + -~г -Т7Г +
Вместе с тем
дА дА . /г „ ч дА . ls дА
дйГ(
D.4.9)
Далее знаки суммирования по одинаковым индексам опускаются.
728 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
и выражение R представляется в видах
\ Vh R = GrGs [С (Gn Gs) е*цп) +
дА . дА /3 \,~~ ~~ I
Ж+Ж ~оЖ){ee&(rr) ~ ee&(rs)\=
)в j ее -
или, в развернутой форме,
12
, . , . 23 32
)
3 1 I 3
[ее + ееЦ. D.4-11)
Величины д„ ,д могут быть выражены через главные на-
напряжения ts и их производные по Gr. Действительно, сославшись
на B.6.8) гл. VIII, имеем
20, дА , 2G, д*А _ dts . . i I 6rj
^) D4 1
G Г ' "
dGs~Ls' УТЪ dGrdGs dGr^s\2Gr Gs
Заметим еще, что тензор T-Vw представляется в виде
Т • Vw = tsee • (е-Q) = tsee[e(sr) + (eXe)- ©]. D.4.13)
4.5. Трехосное напряженное состояние. При равномерном
растяжении по направлениям осей декартовой системы OXYZ
S
главные направления е совпадают с направлениями этих осей t,.
За материальные координаты принимаются координаты точки х„
в У-объеме. Итак,
~_ . _ _ 1 (dwr , dws
где wr—проекции вектора w на координатные оси. Прини-
Принимается обозначение
Gj = x2 = (l+6J2, D.5.1)
где 6S — главные относительные удлинения. Тензоры R, T-Vw
представляются линейными дифференциальными операторами
над вектором w с постоянными коэффициентами.
§ 41 МАЛАЯ ДЕФвРМАЦИЯ ПРИ НАЧАЛЬНОМ НАГРУЖЕНИИ 729
Предполагая, что массовые силы отсутствуют, а поверхност-
поверхностное нагружение представлено, во-первых, нагрузкой, не изме-
изменяющейся при сообщении точкам У-объема перемещения w
(«мертвая нагрузка»), и, во-вторых, равномерно распределен-
распределенным по всей поверхности тела давлением р, нормальным к де-
деформированной поверхности О* («следящее давление»), имеем
по D.1.15) и D.3.5)
/=- p($N-N-S>wT). D.5.2)
Уравнения равновесия в объеме и на поверхности D.3.8)
записываются в виде
Повторяя ход доказательства теоремы Кирхгоффа о един-
единственности решения уравнений линейной теории упругости
(п. 4.1 гл. IV), рассмотрим интеграл
J J J да • V ¦ Grft= J J J [V • (в • тзу) —О- • VwT] dx =
V V
= J J N-e-wdO- JJjG--Vm»TdT = O
V
или
p I J (N • to?> - N • Vm»T • w) dO + | J | (R + f • Vw)- -Vw^dx = 0.
О V
Поверхностный интеграл преобразуется в объемный
J J (N • ftt?> - N • S/wT ¦ w) dO = J | J [V • bw - V • (Vm»T • w)\ dx =
О V
= J J j (O2 + w ¦ W - w • V • VwT - Vm»T • • VwT) dx =
V
= j J j(ft2—VwT--SJwT)dx,
V
так как V • Vw1 = VO. Приходим к соотношению
![[{[? + (? -Vw-pS7wr)] ¦¦VwT+p№}dx= |J |2Фйт = 0. D.5.3)
Квадратичная форма компонент тензора Va» под знаком ин-
интеграла оказывается равной
.. 4
2Ф - ^
р#2 + [(f - р?) • е - (f + p?) • Q] • • Vw\ D.5.4)
730 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Она в общем случае не знакоопределенна — ее знак зависит
от задания удельной потенциальной энергии деформации и на-
гружения тела. Поэтому, конечно, не исключено существование
отличных от нуля значений переменных dWgldxh формы, для
которых интеграл D.5.3) отличен от нуля.
4.6. Гидростатическое напряженное состояние. В этом наи-
наиболее простом случае
к, = х2 = х3 = к, Т=*-рЁ, /, = 3х2, /2 = 3х4, /3 = к6. D.6.1)
Удельную потенциальную энергию деформации можно рас-
рассматривать как функцию от х2, зависящую от этого аргумента
через инварианты Ik'
Л (/ь /2, /3) = А (Зк\ Зх4, х6) = А (к2). D.6.2)
Поэтому
dv. \ dlx dl2 д1г
и, далее, по D.4.8), D.4.9)
. п Г д2А , / дА . о дА \~\ /л с о\
+ 9 яг дг +&дг("д7~ + х ^7~ • D.6.3)
\_dGrdGs ST\dIt dhJlK^K=x v '
T S
Теперь выражение D.4.11) тензора R и дифференциальное
уравнение равновесия записываются в виде
дА\«\ /л а а\
Эта форма уравнений равновесия подсказывает целесообраз-
целесообразность ввести обозначения приведенных коэффициентов Ляме
d*A Ъ ( дА
1
D.6.6)
Тогда эти уравнения примут известный вид уравнений рав-
равновесия в.перемещениях линейно-упругого изотропного тела
(X + и) Vft + йЛ%> = 0, D.6.7)
§ 4] МАЛАЯ ДЕФОРМАЦИЯ ПРИ НАЧАЛЬНОМ НАГРУЖЕНИИ 731
а выражение тензора в представляется в виде
в=ЫЁ + 2у.е-р(ЪЁ-Утт), D.6.8)
откуда снова приходим к D.6.7).
Из формул D.6.6) находим также
, , 2 _ 4 / (РА , 3 \ /лет
Но, введя в рассмотрение переменную х3 = т, равную отноше-
отношению объема тела при гидростатическом сжатии к начальному
объему (т = У/3), имеем
dA _ _2_ _dl_ <РА_ 4 d_ t\_ _dA\ _ _4х_ d2A 1_ dA_
dx ~ 3x dx2 ' dt2 ~~ 9x dx2 \ x rfx2 j ~ 9т (dx2J Зт dx
и, сославшись на A.2.3), приходим к соотношению
выражающему «приведенный» модуль объемного сжатия через
вторую производную удельной потенциальной энергии деформа-
деформации по параметру, определяющему отношение объемов.
При учете соотношений D.6.3), D.6.6) квадратичная форма
D.5.4) преобразуется к виду
2Ф = (Я -р) t2+2 (Д+р) /, (ё2) + рФ2 -2рё • • Vm»T = Ш+2Д/, (ё2) = 2А.
Здесь
А=±№+&1(&) D.6.11)
— выражение удельной потенциальной энергии линейно-упругого
изотропного тела с «приведенными» коэффициентами Ляме.
Из D.5.3) теперь следует, что при наличии «следящего дав-
давления» и при условиях знакоопределенности А перемещение w
не может отличаться от перемещения твердого тела. Эти усло-
условия в соответствии с D.6.6), D.6.10) и C.3.5) гл. IV приводят
к неравенствам
d2j - п - п..(дА . .., дА\^ Г) D.6.12)
Первое из них представляется интуитивно естественным требо-
требованием к поведению упругого материала — темп роста потен-
потенциальной энергии деформации увеличивается при росте дефор-
деформации.
Было показано (п. 2.9 гл. VIII), что одним из условий по-
положительности А в области достаточно малых деформаций
732 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
(при х « 1) служит неравенство B.9.8) гл. VIII. Можно пред-
предположить, что оно выполняется и при немалых деформациях:
Второе неравенство D.6.12) выражает, что эта величина, харак-
характеризующая материал, а при гидростатическом сжатии являю-
являющаяся функцией давления, не только положительна, но и пре-
превосходит приложенное давление р.
Даже при сверхвысоких давлениях не наблюдалось потери
простейшей формы равновесия гидростатически сжатого тела.
Задание выражения удельной потенциальной энергии, описы-
описывающей поведение материала, должно удовлетворять этим тре-
требованиям.
Например, удельная потенциальная энергия деформации в
упрощенном законе состояния Синьорини (с = 0) по D.1.7),
D.1.8) гл. VIII задается выражением
и вычисление по формулам D.6.12) приводит к следующим со-
соотношениям связи между «приведенными коэффициентами
Ляме» и «коэффициентами Ляме» закона состояния Синьорини:
D-6.13)
2
Конечно, Х = К, Д=ц при х=1. Здесь р.>0, X + ^iiX), так
как к< 1.
4.7. Одноосное растяжение. При деформации растяжения
стержня по оси х3
D.7.1)
Условия обращения в нуль главных напряжений tu t2
жжж=0 D-7-2)
позволяют представить главное напряжение 4
, 2х / дА , _ , дА . . ЗА \ ,. _ „>
в одном из двух видов:
дА\ 2х / о 2\ (дА . , дА \ ,. _ .ч
j (X2x2)^+x2). D-7.4)
МАЛАЯ ДЕФОРМАЦИЯ ПРИ НАЧАЛЬНОМ НАГРУЖЕНИИ 733
Тензор R по D.4.10) представляется выражением
f X*xR = X4 [С (х2, X2) (У, + Ш («11 + <%) +
( А А
ЗА , ч ЗА
/V [С (к2, х2) + [-g^—fT -gj^jj l(<i*i + i2i2) e33 + «з'з (еп + е22)] +
+ V 1^ IV UM J f Р„п - ¦ Л/^ I ^. ., I v* \ О 111 -.1— i < \ —
л о ^л , /v ^ **з*3 33 Л \ л у ^^ -л г I С] 9 \*1*2 ' *2 |/
/ дА дА \
\ Ul2 У*3 /
Здесь по D.4.2)
VX)X^,,2'VXi'c^ 2т^лл ,г2т^
а/| а/2 0/3
р (V2 y2\ _ 2_.
5/2 dl3 „M..2 D7б)
a/2a/3 ' ~л a/3a/, •
С(х2,х2) = 4:
По внешнему виду тензор R представляет тензор напряже-
напряжений трансверсально изотропного тела. Но надо иметь в виду,
что квадратичная форма
+ 2х2н2С (и2, х2) (в„ + е22) е33 + Ж (и2, и2) е233 +
в трансверсально-изотропном теле представляет удельную по-
потенциальную энергию деформации и поэтому знакоопределен-
но-положительна, тогда как в задаче растяжения (или сжатия
при h < 0) нелинейно-упругого тела суждение о знаке этой
формы связано со свойствами материала (заданием A(Iuh,h))
и степенью нагружения (величиной *3)-
Тензор 0 определяется формулой
Q = R + f -Vw = R + Уз [h (е31 + ©г) + h (е2з - Щ) + Мзг1- D-7-8)
734 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
4.8. Деформация кручения сжатого стержня. При дефор-
деформации кручения
wx = — ах2хъ, w2 = ax3xu w3 = <xq> (л;,, х2), D.8.1)
так что
8M = e12 = 0 (s= 1,2,3), e'U==Ya\~dx^~
-g^ + Xij, е31 + щ= - ах2, 623-0, = ах,.
Обратившись к D.7.5), D.7.8), D.7.4), получим
= а*з ^т [(Уз + Ш ("^+х,) + (У, + Мз) (-^ ~ х2)] +
), D-8.2)
и уравнения равновесия в объеме сводятся к одному лишь урав-
уравнению
^!| ^ . D.8.3)
\ дх2
На боковой поверхности стержня (N = Af,*, + Л^г
и при отсутствии на ней поверхностных сил
% N2xx. D.8.4)
Вектор напряжений в поперечном сечении определяется со-
соотношением
/ = h • в = <х/3 { ^г [h (-§; * *) + i2 (^ + х,)] + (^ - hx2)}.
D.8.5)
Оси ОА", OY направлены по главным центральным осям инер-
инерции поперечного сечения стержня в его начальном состоянии.
Но при сжатии стержня его поперечное сечение подвергалось
преобразованию подобия
Х\ = xd, х2 = %а2. D.8.6)
Поэтому оси OX, OY остаются главными центральными осями
сжатого стержня
JJ jj = 0, D.8.7)
§ 4] МАЛАЯ ДЕФОРМАЦИЯ ПРИ НАЧАЛЬНОМ НАГРУЖЕНИИ 735
тогда как площадь его поперечного сечения, полярный момент
инерции и жесткость при кручении выражаются через эти ве-
величины в начальном состоянии с помощью равенств
S = %2S0, IP=X% С = №0. D.8.8)
Обратившись теперь к вычислению главного вектора сил в по-
поперечном сечении сжатого стержня, имеем по D.8.7), D.8.5)
Нетрудно проверить, что эта величина равна нулю. Действи-
Действительно, по D.8.3), D.8.4) имеем, например,
Переходим к вычислению главного момента напряжений в по-
поперечном сечении
J J (/,*, + i2x2 + i3x3) XfdQ = i3m3 + x3i3 X J J / dO = i3m3,
- S S
так как по доказанному главный вектор их равен нулю. Имеем
теперь по D.8.5)
и по D.8.8), а также C.13.13) гл. VI
т3 = а/3Х4 (¦?=$¦ Со + 1р). D.8.9)
Крутящий момент может оказаться равным нулю, если
Аг= /р~0С°. D.8.10)
Известно, что /°!>С0, причем равенство возможно только
для круглого поперечного сечения и концентрического кольца.
Для большинства материалов при сжатии длина стержня умень-
уменьшается (х<1), а его поперечные размеры увеличиваются
736 ЗАДАЧИ. И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
(X > 1). Итак, как левая, так и правая части равенства D.8.10)
заключены в интервале @, 1):
так что по заданным геометрическим характеристикам стержня,
если его поперечное сечение отлично от круга (или кольца), мо-
может быть определено такое (бифуркационное) значение пара-
параметра х2/х2, при котором деформация сжатия сопровождается
деформацией кручения при отсутствии крутящего момента на
торце стержня.
Значение сжимающей силы Q, при котором может иметь ме-
место это явление, ее «критическое» значение, определяется фор-
формулой D.7.4):
QH^fso = ^(x2-x2)(^ + x2J?). D'8Л1)
Три неизвестных Q, %, к определяются из трех уравнений:
D.8.10), D.8.11) и уравнения D.7.2):
-*/, ' ^ r-^/2^^2U = 0. D.8.12)
В случае несжимаемого материала это уравнение отпадает
(оно служит для определения неизвестной dA/dh) и должно
быть заменено условием несжимаемости %2х = 1. Получаем
причем А — функция инвариантов /,, /2:
1 ~ X ' 2 X2 ' \" /о
Например, для стержня эллиптического сечения из «неогукова»
материала (п. 1.4) t%
1 с0 _ / а2 - Ь2 \2
? ь 1 ~ ~~[Г ~ \ а2 + Ь2 ) '
-'/Т 2 2 2 2% D'8Л5)
/о / ~ 3 ° (а2 + б2J \ а2 — Ь2 )
§ 5. Эффекты второго порядка
5.1. Выделение линейных слагаемых в законе состояния.
В рассматриваемых далее решениях нелинейных задач пред-
предполагается малость производных перемещений по координатам
начального состояния:
§ 5] ЭФФЕКТЫ ВТОРОГО ПОРЯДКА 737
и допускается пренебрежение слагаемыми третьей и более вы-
высоких степеней относительно этих величин. Сохраняются их про-
произведения и квадраты.
Будем исходить из закона состояния в форме Фингера
B.4.1) гл. VIII; приняв в качестве материальных декартовы ко-
координаты точки в начальном состоянии (qs = as), получим
Т = у=-(сМ-сМ2 + сЁ), E.1.2)
где Ё — Ms — единичный тензор. Базисные векторы v- и V-объ-
емов равны
EЛ>3)
Вспомнив определение E.1.1) гл. II тензора М, имеем
М = V#T • VR = Rsrs • rkRk =
du \(. , du \ _ л , du , du . , du du
aa5 *s ' das da
. a«,. du. du
..
и, далее,
«^ ди„
причем ё — линейный тензор деформации, Vu — градиент век-
вектора и, а индексом «т» обозначается операция транспонирова-
ния. Вспомнив также A.2.13) гл. II, а также A.6.12), имеем
V«T • V« = (е + Q) • (е - Q) = е2 + ?<» • © - юю + <» X е + (<» X ё)т.
Итак,
М = E + 2e + VaT-Уи = ? + 2ё +ё2 + ?<»•<»-<»<» + <» X ё+(«>Хе)т
E.1.4)
и при оговоренных пренебрежениях
М2 = ? + 4ё + бе2 + 2 [?ю • <» - <»<» + w X е + (<» X s)T]. E.1.5)
Сославшись на формулы
/3(М) - 4 {/, (А*») - /, (М)[/, (Л?2) - 12(М))},
47 А. И. Лурье
738 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
учитывая, что первый инвариант тензора <» X ё равен нулю [по-
[поскольку ё — симметричный тензор; см. A.5.9)], и вспомнив, что
Ik(M)=h(Gx) = Ilit получаем
/, = 3 + 2/, (е) + /, (е2) + 2» • w = 3 + 2* + /, (е2) + 2ю • ©, )
/2 = 3 + 4* + 2Л2 + 4® • «о, E.1.6)
/3 = 1 + 20 + 2#2 + 2© • <» - /, (ё2). '
Подстановка в E.1.2) позволяет теперь представить тензор
напряжений в виде
dA
«•<»-<»<» + <» XH(*)X8)']). E.1.7)
Инварианты lh{&) — jh тензора деформации & определяются
по формулам E.4.3) гл. II:
/, = -О + ® • в» + 4 /i (&2). /2 = ^2-{/,(е2), /з = 0. E.1.8)
Как следовало ожидать-, в состав ]\ входят величины первой,
/2 — второй, /з — третьей степени относительно величин E.1.1).
Теперь, сославшись на B.5.2) гл. VIII, имеем
2 dji 2 dj
1 дА , 1 . ал , 1 . дА
а/3'
дА АП 9\ дА - ! 1*. - ' М П
а/2 ~ 2 а/, 4 а/2 Vi ""' 4 а/, "•
-ЛАа(Г Q) дА = 1 дА 5 дА 1 дА
причем величины во второй и третьей формулах достаточно
было выписать с точностью до линейных слагаемых и слагае-
слагаемых, не содержащих производных перемещений.
Удельная потенциальная энергия деформации аппроксими-
аппроксимируется формулой Мурнагана D.6.1) гл. VIII в предположении,
что начальным состоянием является натуральное
А = ~ {к + 2ц) ;2 - 2W-2 +\{l + Itn) ft - 2т}1]2 + nj3. E.1.9)
§ 51 ЭФФЕКТЫ ВТОРОГО ПОРЯДКА 739
Тогда
1Г I n\ 1 1 EЛЛ0)
a, = ?[ц + [х + т - т)д], а2 = |Eц + п) J
и вычисленное с точностью до величин второго порядка выра-
выражение тензора напряжений приводится к виду
Т = -^=-Т° + Гя,® • <» + U - m + -) Ф2 + - (Я + 2т - л) /, (е2)] ? +
+ 2 (Ш + 2це2) + 2 ^m - f) U + пе2 +
+ [х[ё2 + ?й) •<» — (!)<» + ю X ё + (<» X ё)т], E.1.11)
где Т° — тензор напряжений линейной теории упругости:
Г° = ЯО? + 2цё. E.1.12)
Замечая, что
1 =1-0+ .... ЛОе + 2цё2 = f° ¦ ё = ё • f°,
можно представить E.1.11) также в виде
f = f°-0f0 + 2e -Г° + Г E.1.13)
с тензором г, задаваемым выражением
Г = [ы • & + (/ - т + у) О2 + |(Х + 2/п
+ B/п-п)д8 + пё2 + ц[ё2 + ?<»-(й-сой)+<» X ё + (ю X ё)т], E.1.14)
причем последнее слагаемое может быть записано также в виде
HV«T-V«. E.1.15)
5.2. Уравнения равновесия. Уравнение статики в объеме за-
записывается в метрике деформированного тела; векторный базис
в нем задается тройкой векторов Rs, определяемых формулой
E.1.3):
ди ди.
s s das s ' das
Векторы R* взаимного базиса с требуемой точностью (до первой
степени производных перемещений) задаются выражениями
*-''-''Иг- E'2Л)
47»
740 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Действительно, при таком их определении
ди. ди
что и требуется.
Обозначив через F поверхностную силу, отнесенную к еди-
единице площади поверхности О деформированного объема V, и
сославшись на C.5.3) гл. II, имеем
F dO = N • Т dO = Vh nsRs • f do.
Ho no E.1.13) и E.2.1)
V77f=f°+ 28-f°+f' = fo + (Va + VaT).f°+f',
nsRs-=n-n- V«\
и поэтому
FdO = (n-f° + n-Vu-f° + n-f')do = n ¦ Sdo, E.2.2)
причем в рассмотрение введен тензор
e = T0 + V«.f° + Г. E.2.3)
Соотношение E.2.2) применимо, очевидно, к поверхности О*
любого мысленно выделенного, в деформированном теле ^-объ-
^-объема. Поэтому уравнение равновесия этого объема может быть
записано в виде
О*
Уравнения равновесия в объеме и на поверхности выражены
теперь в метрике начального и-объема через тензор 0:
в v: У-в + ро/С = О, E.2.4)
на о: F^ = F° = n-&. E.2.5)
Здесь F° — поверхностная сила, отнесенная к единице площади
поверхности о.
Тензор в представляет дифференциальный оператор над век-
вектором и. Его выражение может быть записано в виде
e=f° + e-f°+ Г-<»Х f°, - E.2.6)
причем последнее слагаемое представляет несимметричную
часть этого тензора.
§ г,] ЭФФЕКТЫ ВТОРОГО ПОРЯДКА 741
5.3. Эффекты второго порядка. Приближенное решение крае-
краевой задачи E.2.4), E.2.5) представляется вектором перемеще-
перемещения и, задаваемым геометрической суммой:
u = v + w. E.3.1)
Здесь v — вектор, определяющий решение уравнений линейной
теории при заданных поверхностных силах:
f ) = F°, E.3.2)
. E.3-3)
Оно предполагается известным. Корректирующее слагаемое —
вектор w — вносится, чтобы удовлетворить уравнениям, учиты-
учитывающим слагаемые второй степени относительно величин
E.1.1)—производных вектора перемещения и. Поскольку оно
имеет такой же порядок, дифференциальные операторы над век-
вектором и, входящие в состав тензора в (исключая Т°), могут
быть заменены с принятой ранее точностью операторами над v:
V« • f°(u) = V(v + w)T(v + w)Vv f(v), |
~ ~ f E.3.4)
Г (a) = V (v + w) « T (v). j
Неучтенные члены имеют по крайней мере третий порядок ма-
малости. Поскольку 7"° — линейный оператор, имеем также
Т°(и) = T°(v + w) = f°(v) + f° (w) E.3.5)
и по E.2.3)
в (и) = в {v + w) = f° (v) + f°(w) + Vvf° (v) + Г (i>). E.3.6)
Уравнения равновесия E.2.4), E.2.5) в объеме и на поверх-
поверхности теперь представляются в виде
V • Т° (v) + Ро/С + V • f°(w) + V • [Vv ¦ f°(v) + T'(v)] = О,
Vv-r v+r v =u j E>3J)
Вспомнив теперь, что вектор v определен уравнениями E.3.2),
приходим к уравнениям также линейной теории
V-T°(w) + V-[Vv-f°(v) + T'(v)] = O, ,
E.3.8)
определяющим вектор w по известным «объемным» и «поверхно-
«поверхностным» силам
k = V • [Vv • f°(v) + f' (v)], f=-n-[S7vT°(v) + Г (v)]. E.3.9)
He составил бы труда также учет слагаемых второй степени
в выражениях массовых и поверхностных сил К и F.
742 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Задача будет иметь решение, если «внешние силы» k, f удовлет-
удовлетворяют уравнениям статики
kdro+ jjrxfdo = 0. E.3.10)
О
Выполнение первого легко проверить, преобразуя поверхностный
интеграл в объемный:
J $ fdo=- J J n-[4v?(v) + f'(v)]do =
о о
= - JJ/V- [Vo-f°(o) + f'(o)Uto=- J J J fe dT0,
v v
что и требуется. Затруднение возникает со вторым уравнением,
поскольку входящий в состав в(») тензор Vv-T°(v) несиммет-
несимметричен. Сославшись на (II. 5.6), имеем
J jrXfdo=- J j r X n • [Vt> • f» + Г (t>)] do =
о о
= - J / J r X V • Fv ' f°(v) + T'(v)] dto + 2 J J J
и v
= - JJ JrXfcdxo +
а о
Здесь а — вектор, сопутствующий несимметричной части
-Q(v)-f°(v)=- ox f°(w) E.3.11)
тензора У»-Г°(»). Этот вектор может быть определен равен-
равенством
2a = *,Xfc-[oxf° (*)]}, E.3.12)
и второе уравнение статики будет выполнено при условии
2 | J J adto= J J J *, X {is • [® X fo(t»)»rfTO = O.
а о
В развернутой записи выражение вектора 2а имеет вид
Ча = *, X {is • [а X f ° (t>)]} = ts X [is • (ir X i,it) ©r^] =
= eSrqestmim®rtqt = (or^6?m — Oz-mO^j) irn®>Aqt = ®ttqtiq ~ (i>rtqqir
ИЛИ
2a = ffl.f°(t»)-ffla, a = ^(tr) = /,(f°(t»)). E.3.13)
Итак, необходимым условием существования решения крае-
краевой задачи E.3.8) служит равенство
0. E.3.14)
§ 51 ЭФФЕКТЫ ВТОРОГО ПОРЯДКА 743
Но в рассматриваемой второй краевой задаче (на о заданы
поверхностные силы F0) вектор <» определен с точностью до
аддитивного постоянного слагаемого <»о; поэтому, приняв
со = <о' + «о, причем <а'@, О, 0) = 0, например, следует подчинить
выбор вектора <оо условию
«V [ [ [ {T°-Ea)dxQ=- f Г f ю' • (f о - Eo) dx0 = vb.
j j j j j j
V V
В нем вектор b известен. Пришли к системе уравнений для не-
неизвестных сйог:
®or(Crq-cbrq) = bq q = A,2,3), E.3.15)
коэффициенты которой — средние по объему значения напряже-
напряжений
1 Г Г Г
а а~ с = с А-с А- с E 3 1РЛ
— можно выразить через внешние силы р0К, F0 с помощью фор-
формул D.3.2) гл. I. Определитель этой системы должен быть отли-
отличен от нуля:
A = |crg — сЬгд\Ф0, E.3.17)
и при невыполнении этого условия (при А = 0) краевая задача
E.3.8) может не иметь решения; учет эффекта нелинейности не
достигается внесением поправки в решение линейной задачи.
Проверка критерия E.3.17) осуществляется лишь по заданию
внешних сил р0К, F0 и не требует решения линейной краевой
задачи E.3.2), (б.З.З). Аддитивный постоянный вектор <»о, вхо-
входящий в решение этой задачи, определяется на этапе учета не-
нелинейного эффекта второго порядка (вектора w).
Решение краевой задачи E.3.8) для вектора w затруднено
сложностью выражений «объемных и поверхностных сил» k, f.
Применение теоремы взаимности позволяет определить по ним
средние значения деформаций и напряжений; этим можно до-
довольствоваться во многих задачах, когда необходимость учета
деталей распределения перемещений в теле отодвинута на вто-
второй план.
Вычисления, требуемые теоремой взаимности, несколько уп-
упрощаются вследствие специальной структуры векторов k и f.
Обращаясь к формуле C.3.5) гл. IV, имеем
v
l-2v
= 2^(JJJft-e'"-^+JJ/-e'.rdOJ. E.3.18)
Здесь ё' — вспомогательный постоянный симметричный тензор
второго ранга; Ь' — его первый инвариант; ёт(ш), Ът(т) —
744 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
средние по объему значения тензора деформации e(w) и объем-
объемного расширения ®(w); г = isas — вектор-радиус; в'--вт(т) =
= /i(e'-em) — первый инвариант произведения тензоров
ё', ёт(и>). Полагая для сокращения записи
Q = Vv
имеем
JJn-Q-e'-г do =Jj nsqstrtmam do
jjJ-ё' E-3.19)
V
и, вспомнив формулы E.3.9),
J J J k ¦ Г • г dx0 + J J f • е' • г do - - J J J Q dt0- -8.
Соотношение E.3.18) теперь приводится к виду
E.3.20)
Например, полагая е' = ?, ¦&' = 3, получаем среднее значение
G()
J117' (W ' f°
о
Приняв ё' = /iii, ё' = i\i2 + Ыи соответственно находим средние
значения
-^ К (») + [вп (.)]. - - ^- J J J [^L й, (г,) + t'n (v)] dro,
E.3.22)
2[e12WL= -^ JJ j [^-/0fel(.) + ^f&H + 2^H]dT0,
" E.3.23)
так что
Ш [5r<°« (*)+'»w]dT4- f5<3-24)
§ 5) ЭФФЕКТЫ ВТОРОГО ПОРЯДКА 745
5.3а. Изменение объема тела, подвергнутого дисторсии. Рас-
Рассмотрению этого пункта предпошлем выражение среднего зна-
значения тензора напряжений по объему тела (см. также D.3.2)
гл. I). Введя диады pKR, FR, запишем соотношение
FRdO = j j j pKRdx + j j N-TRdO =
E.3.1a)
Но нетрудно проверить, что дивергенция тензора 77? третьего
ранга преобразуется к виду
поскольку fT = f. Возвращаясь теперь к E.3.1а), имеем
j j j pKRdr + j j FRdO =
dr. E.3.2a)
В теле, подвергнутом дисторсии Вольтерра*), тензор напря-
напряжений Т отличен от нуля и при отсутствии объемных и поверх-
поверхностных сил; оказывается равным нулю его среднее значение по
объему:
JJ|fdT=.O. E.3.3а)
v
Отсюда следует, что в линейно-упругом теле равно нулю и сред-
среднее значение линейного тензора деформации ё; изменение объ-
объема упругого тела, подвергнутого дисторсии, поэтому может
найти объяснение лишь в нелинейной теории упругости.
Заменив в E.3.3а) тензор Т его приближенным выражением
E.1.13), с принятой точностью имеем
v E.3.4a)
Вместе с тем по E.1.6)
| j \x{&), E.3.5a)
*} Сказанное относится к дислокации и более общей природы.
746 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
и выражение относительного изменения объема тела записы-
записывается в виде
||j[ ^ ]T0. E.3.6а)
Возвращаясь к E.3.4а), составим выражение первого инва-
инварианта подынтегрального выражения; сославшись на формулы
E.1.12), E.1.14), получим
/, (?° + 2е ¦ Т° + 7") = (ЗА. + 2ц) Ь + (ЗА + 2ц) со • со +
+ 3/- m + j n) + /I(e2)Eti + ~% + 3m -± п) =
и, сославшись на E.3.4а), E.3.6а), приходим к соотношению
(Тупин и Ривлин, 1959)
Входящие в правую часть инварианты ¦& и /i(e2) при приня-
принятой точности определяются решением задачи о напряженном
состоянии подвергнутого дисторсии линейно-упругого тела в
и-объеме.
5.4. Выбор исходного приближения. В качестве исходного
приближения необязательно назначать решение линейной крае-
краевой задачи E.3.2), E.3.3), точно соответствующие заданию сил
К, F0. Бывает предпочтительнее включение в состав вектора v
слагаемых, имеющих второй порядок относительно предпола-
предполагаемо малых параметров, описывающих рассматриваемую де-
деформацию. Принимаем
v = Vq + vu u = v + w = vu + vl + w, E.4.1)
где i>o — решение линейной задачи, удовлетворяющее упомяну-
упомянутой системе. Вместо E.3.6) имеем при пренебрежении членами
третьего порядка
6 (и) = ?° (и) + Wu-f° (и) + Г (и) =
?) + Vi>0 • Т°Ы + T'{v0), E.4.2)
§ 51 ЭФФЕКТЫ ВТОРОГО ПОРЯДКА ' 747
и подстановка в уравнения равновесия E.2.7), E.2.8) при усло-
условиях
V-fo(fo) + Po# = O, n.f°(vo) = F° E.4.3)
требует лишь внесения в выражения E.3.9) корректирующих
«сил» еще одного слагаемого
j
Вектор w должен быть найден, как и ранее, из системы уравне-
уравнений
V-f°(w) + ft = 0, n-f°(w) = f E.4.5)
при определении векторов k, f no E.4.4). Добавочные слагаемые
V-7°(i>i), n-T°(Vi) представляют статически уравновешенную
систему
<5-4-6>
j J J г X V • ГЧ^Ло- J J г X п • T^v^do = 0.
Первое соотношение — немедленное следствие преобразования
поверхностного интеграла в объемный, второе следует из пер-
первого и из симметрии тензора T°(V[). Поэтому необходимые кри-
критерии E.3.14), E.3.17) существования корректирующего вектора
w сохраняются — в них v следует заменить на Vq.
В соотношение E.3.20) должно быть внесено дополнительное
слагаемое; оно теперь записывается в виде
а формулы E.3.21), E.3.23), E.3.24) будут
vo)+ fo(f,)]rfTO) E.4.8)
O, E.4.9)
. E.4.10)
748 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
5.5. Эффекты второго порядка в задаче о кручении стержня.
Вектор 1>0 в классическом решении, предполагающем малость
угла закручивания а на единицу длины оси стержня, задается
известными формулами
t>0I = -aa2a3, vOi = aa3ai, г>03 = аф(а„ а2). E.5.1)
Отличны от нуля напряжения
Компоненты линейного вектора поворота по B.2.10) гл. VI да-
даются выражениями
Щ (t»0) = -^ & Ы - ааи юг М = - -щг'« Ы - <ха2, ю3 = аа3.
E.5.2)
Поэтому
Но в задаче кручения
J
s s
а сославшись на B.5.5) гл. VI, имеем
J j (fll J^" + a2iaBdo= ~2 J J
s ' s
так как функция ф2 однозначна." Этим проверяется необходимое
условие существования корректирующего вектора w:
f f f [® • f °(vu) - «a (v0)] dx0 = 0. E.5.3)
В выражении вектора г» далее учитываются слагаемые вто-
второй степени по параметру а; представляя декартовы координаты
Хи х2, х3 точки (аи аг, аз) после деформации формулами
Y\ С® ) = fll COS afl3 ~ '
а2 + а\ sin (9 + аа3) = a, sin аа3 + а2 cos aa3 =
аф (а,, а2) + а3 (а, = У а] + а\ cos 8, а2 = Vй] + &\ sin б),
§ 6] ЭФФЕКТЫ ВТОРОГО ПОРЯДКА 749
имеем
v{ = х, — а{ — — аа2а3 —къ2а\ау,
v2 = х2 - а2 = аа3а{ ~ j a2a\a2,
vl3 = 0.
v3 = ay{al, a2)
и по E.5.1)
va2a\a v
Вычисляемый по этим перемещениям линейный тензор напря-
напряжений равен
Ё aj3 (а,*, + a2i2) +
]}. E.5.4)
Без труда записываются также выражения входящих в состав
векторов k, f тензоров:
Vi>o • f°Ы = Ц^- t°w + ^ Ц + is~^{IA + h&), E.5.5)
^F Bm - л) (/& + /§!) }? + -— \{tl + tQ Уз
• E-5-6)
. Как видно, система «объемных и поверхностных сил» k, f
достаточно сложна. Ограничимся учетом эффекта изменения
длины стержня, равного /[езз(и»)]т. Это требует знания только
первых инвариантов рассматриваемых тензоров и их [3,3] ком-
компонент
Л
/, [Vt>o • Т° Ы] = ?¦ (^31 + Й; «з • Vt>o • f ° (со) • <з = a (a,& - a2f31);
/1 [f' К)] = (ЗЯ + 2,1) [-^j- й + tQ - ^ (a,/o3 - a/31) +
750 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Остается привести, сославшись на п. 3.13 гл. VI, значения интег-
интегралов
•р Я (К + <?) do-a'C, -2- J | (а Д - аД) *> = а'С,
К
После очевидного вычисления по формуле E.4.10) придем к сле-
следующему выражению среднего значения относительного удлине-
удлинения стержня, сопровождающего кручение:
E,5.7)
отличающемуся только обозначениями от приводимого Ривли-
ном A953).
Очевидно, что Ip(\ + v)> 2vC, так как /р > С, v < 1/2; но
отсюда нельзя заключить, что кручение стержня сопровождается
уменьшением его длины, так как для большего числа материа-
материалов п < 0 и т < 0.
5.6. Несжимаемая среда. Удельная потенциальная энергия
деформации задается формулой Муни
А = Ci(/i—3)+ С2(/2 — 3),
и выражение тензора напряжений E.1.7) представляется в виде
~f(u) = \cl + 2C2 + (^-) ]E + 2(Cl + C2)i{u) + C2(I1-3)E-
А I \ илз / / j I
- 4С2е2 (а) + (С, + С2) VaT • Va + C2 (/, - 3) (Зе + VaT • Va). E.6.1)
Здесь использована замена E.1.15); далее принимается обозна-
обозначение A.4.7)
2(С, + С2)= 1х
и в рассмотрение вводится скаляр (давление)
С +2С + — = - 1 я
3 /з=1
определяемый далее условием
Далее принимаем, как выше в п. 5.3,
и = v + w, E.6.3)
§ 5] ЭФФЕКТЫ ВТОРОГО ПОРЯДКА 751
где v — вектор перемещения в линейном приближении, w — кор-
корректирующий вектор, определяющий эффекты второго порядка.
Тогда по E.6.2)
20 (v) + 2# (ю) + 2О2 (») - /, (е2 (v)) + 2© (о) • © (») == О,
причем отброшены слагаемые третьего и более высоких поряд-
порядков. Условие несжимаемости должно выполняться как в ли-
линейном приближении, так и при учете членов второго порядка;
поэтому
0(©) = V •© = (), E.6.4)
0(») = {/,(е2(»))-<»М-в(»). E.6.5)
По E.1.6) имеем теперь
(v)) + 2<*(v)-<*(v) = 2Il(B2(v)), |
Скаляр q также представляется суммой его значения в линей-
линейном приближении q° и корректирующего слагаемого q{\
q = q° + ql. E.6.7)
Теперь с принятой точностью выражение тензора напряжений
E.6.1) может быть представлено в виде
Т (и) = Т ° (v) + Т ° (ю) + Г (v), E.6.8)
причем T°(v)—тензор напряжений в линейном приближении:
Т°(о) = - <7°? + 2це(v), E.6.9)
.Г°(г«) —тензор напряжений, вычисляемый по корректирующему
вектору:
и 7"'(к)—вычисляемое по линейному приближению слагаемое:
T'(v) = 8C [~Ё1,(г2^))-г2(у)] + \1^т-^. E.6.10)
5.7. Уравнения равновесия. Определив, как и в п. 5.2, поверх-
поверхностную силу F dO равенством
F^ = N.f^=VT3nsRs-T=Vh(n-n-Vtf)-f E.7.1)
и учитывая представление E.6.8) тензора напряжений и усло-
условие несжимаемости E.6.2), приходим к уравнению равновесия
на поверхности
^ [f° (ю) - V»T • f° (v) + Г (»)]. E.7.2)
752
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IX
Имея это выражение и рассуждая, как в п. 5.2, получаем также
уравнение равновесия в объеме
V • T°(v) + ро# + V • [f° (w) - Vvr ¦ f° (v) + Г (v)] = 0. E.7.3)
В линейном приближении
V-fo^ + poK^O, n-?»-F° = 0. E.7.4)
При учете соотношений E.6.9), E.6.4)
S7-q°E = V<7°, V • 2e {v) = V2t> + VV • v = V2v E.7.5)
полученные соотношения приобретают форму уравнений движе-
движения вязкой'несжимаемой жидкости Навье — Стокса (в послед-
последних v — вектор скорости).
liV2v + pnK = Vq0, V.i> = 0; 2|ш • e(v) = nq° + F°. E.7.6)
Возвращаясь к E.7.2), E.7.3), E.6.5), приходим к следую-
следующей системе уравнений, определяющих корректирующий век-
вектор w:
V • Т°(w) + V • [ - Vi>T • f° (v) + f'(v)] = 0,
E.7.7)
п ¦ f° (w) + п ¦ [ - V»T • f° (») + Г (v)] = 0.
Их запись в форме уравнений Навье — Стокса имеет вид
[4/,(e2(fl))-<«>(i>)-fi>(i>)]+ * = (),
E.7.8)
Здесь векторы k, f, играющие роль объемных и поверхностных
сил, определены равенствами
k = V • {q°VvT - 2nVi>T. i (V) + f' (v)},
f = - n • {q°VvT - 2nVi>T • e (v) + f' (v)}.
Несимметричная часть тензора в фигурных скобках равна
q°Q - 2|o.Q • е (v) = - <» (v) X f ° (v),
и в соответствии с E.3.14) необходимое условие существования
решения краевой задачи E.7.8) записывается в виде
f J f М*) • f°{v) + 3«> [v) q°]dx0 = 0
§ 6] ПЛОСКАЯ ЗАДАЧА 753
или, если заменить Т° его значением, в виде
§ 6. Плоская задача
6.1. Геометрические соотношения. В состоянии плоской де-
деформации координаты xs точек среды связаны с их координа-
координатами as в начальном состоянии зависимостями
х, = xi(ai, а2), х2 = х2(а„ а2), х3 = Аа3 (I = const). F.1.1)
Введя материальные координаты q\ q2, q3 = х3, имеем
„3
а _ а <qi д2\ а _ ч__. д. _ ^. /„I д2\ д. _ „3 /g_j 2)
причем здесь и в дальнейшем (п.п. 6.1—6.9) греческие индексы
принимают значения 1, 2 (латинские, как и ранее, — значения
1, 2, 3). Вектор-радиусы точки в начальном (о-объем) и в де-
деформированном состояниях (V-объем) равны
„3 „Э
и базисные векторы в этих состояниях будут
Ковариантные компоненты метрических тензоров g, G опреде-
определяются теперь формулами
= 6-6=6 =0 р = — • I
} F.1.5)
Gap = Ва • Вр = Вар, 0,13 = 0, G33=l, j
так что
F.1.6)
Их контравариантные компоненты (отличные от нуля) равны
Q12 _ gl2 _ ^12 /J33_ I
F.1.7)
А. И. Лурье
754
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Этим в рассмотрение вводятся плоские метрические тензоры 5,
В в у- и V-объемах:
причем векторы взаимных базисов определяются известными
равенствами
Ьа = 6а|56р, Ва = Ва3В„. F.1.9)
В записи компонент тензоров Леви-Чивита €, ? опускается
третий индекс 3:
?,. = *«., F.1.10)
где
еар
F.1.11)
0, а = р,
1, а=1, р = 2,
_ 1 « = 9 ft = 1
Пользуясь ими, можно переписать формулы F.1.7) и им об-
чатные в виде
;«vrpe.
3Y6.
ьЬУ\ BaR = ,
F.1.12)
Инварианты меры деформации Gx, определяемые формула-
формулами E.2.6) —E.2.8) гл. II, равны
F.1.13)
Сославшись на F.1.12), имеем
Но нетрудно, пользуясь определениями F.1.11), проверить соот-
соотношения
Поэтому
F.1.14)
ЬарВ„3 = 4 616X^ = 4 ЬуьВ*, F.1.15)
чем устанавливается соотношение, связывающее инварианты:
*i-tf = -tf---&- или /3-/2?i2 + IX-X6 = 0. F.1.16)
§ 6] ПЛОСКАЯ ЗАДАЧА 755
6.2. Уравнение состояния. Удельная потенциальная энергия
деформации далее рассматривается как функция инвариантов
/j и /3:
= Л,(/„/з), F.2.1)
так что
а/, а/, ' а/2 • а/3 а/3 г я2 а/2 ¦
Уравнение состояния B.1.9) гл. VIII может быть записано
в виде
дА ~si\
u;G J
и по F.1.5), F.1.7)
Г3 0 ?зз 2
a/ j
~g
у h
Заменив инвариант /) его значением F.1.13) и используя
F.2.2), имеем, далее,
V /3 L а/i . а/2 а/3
При фиксированных а, C возможны четыре сочетания значе-
значений у, б:
Y = a, 6 = а; у = а, 6 = р; y = P. 6 = a; Y = P. ^ = P-
Поэтому (не суммировать по а, р!)
так что по F.1.6), F.1.7)
F«V6 - &aV6) sv6 = [(baj - ьааь®\ вар = {flaf = A
и, возвращаясь к F.2.4), F.2.2), имеем
b +hB ) F>2-5)
Для несжимаемой среды
/3=1, A^Adh), htf-lxV-l-W, F.2.6)
48*
756 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
так что
1а* = 2^-Ь<*+рВ*, F.2.7)
Г03-0, f* = 2[-f?A.2 + tf(/,-A,2)-f?-] + p, F.2.8)
где р — наперед неизвестная функция координат.
6.3. Уравнения статики. При отсутствии массовых сил урав-
уравнения равновесия в объеме записываются в виде
Но Га3 = 0, a ?33, G не зависят от q3; поэтому последнее уравне-
уравнение тождественно удовлетворяется, а первая группа уравнений
записывается в виде
-~УвГ\ = о F.3.1)
или
-?- V~B ?ар + У~В ?av ( Р ) = 0, F.3.2)
3<7а lav J
причем символы Кристоффеля вычисляются по метрическому
тензору В.
Уравнения равновесия на поверхности могут быть записаны
в одной из форм C.3.7) или C.3.8) гл. I:
УНЬ^ faP^a = Fp, F.3.3)
причем па, Na — ковариантные компоненты единичных векторов
внешних нормалей п, N к контурам у, Г поперечного сечения
тела в начальном и соответственно в деформированном состоя-
состояниях тела:
па = п-Ьа, Na = N-Ba. F.3.4)
Через F& обозначены контравариантные компоненты поверхно-
поверхностной силы:
Fp = f.Bp. F.3.5)
6.4. Функция напряжений. Тензор функций напряжений
(п. 1.6 гл. I) задается в виде
а тензор напряжений определяется по нему равенством A.6.6)
гл. I:
УХ[УХ U(q\q2)i3i3Y' F-4.1)
§ 6) ПЛОСКАЯ ЗАДАЧА 757
Здесь не рассматривается независимо определяемая по F.2.3)
компонента F3.
Вычисление проводится так:
V X ицц = RS~X UR43 = *3 * *з JW |3 €»<ВД
oq aqv
10k Ш3*з = Г X *з ^г
F.4.2)
По условию обращения в нуль ковариантной производной тен-
тензора Леви-Чивита
ар J
имеем, изменив наименования немых индексов,
R% dq* dqa
и подстановка в F.4.2) приводит к следующему представлению
тензора напряжений:
Величина в скобках представляет ковариантную производную
ковариантных компонент градиента U:
V(y-/? 59р ' Va а?» ~ а,а^ tap) а?" ~ve ^a -^э^-
Итак,
f = i^e^^VaVpC/; Г"х = €""«^VaVpC/ = -|-'w«VVaVaC/. F.4.4)
Обратные соотношения имеют вид
VaVp?/ = e^f * = |- V^p?", F-4.5)
и по F.2.5), F.1.12), F.1.13)
^4^) F.4.6)
758 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Выражение первого инварианта тензора напряжений пред-
представляется в виде
/, (?) = е^е'Чл,^ = ?apvavptf = y2v. F.4.7)
Как и следовало ожидать, он оказался равным лапласиану
над U (в метрике деформированного тела):
W2(j = V • W = Ra -4г • Яр-Щ- = Ba\v,U. F.4.8)
5? dqp p
Единичные векторы касательной t и нормали N плоской кри-
кривой Г в деформированном теле
R = В (S) + i3x3 (x3 = const)
определяются, в предположении, что IV, t, i3 ориентированы, как
оси XYZ, по формулам
Вектор напряжения, передаваемого частью среды «над Г» (куда
направлен вектор N) на среду, расположенную «под Г», равен
F = JV • Г = 1руВ* - i^~*4BAVaVp[/ ^- =
х «з. F.4.Ю)
Вместе с тем, как указывалось выше,
и поэтому
м
, J FdS = P = Vf/Xtft. F.4.11)
Этой формулой определен главный вектор напряжений Р по
дуге AM кривой Г; его можно представить также в виде
р-&*»!$¦- ~p"-^jj' <6-4л2>
так что
Это — обобщение формул A.8.4) гл. VII. В них Ра—контрава-
риантные компоненты главного вектора напряжений в метрике
деформированного тела.
§ 6] ПЛОСКАЯ ЗАДАЧА 759
Главный момент напряжений на дуге кривой Г относитель-
относительно начала координат в плоскости х3 = const представляется ин-
интегралом
мм м
m°= J BXFdS= J BX {dWU X i3) = - i3 J В ¦ dVU.
A A A
Обратившись к соотношению
В • dVU =d{B-VU)- d^Bp • Vt/ =
= d (B - V?/) - Щг dq$ = d(B ¦ VU) - dU,
dqP
приходим к такому выражению главного момента относительно
оси Oz:
F.4.14)
иВ-В%
dqp '
Здесь дано обобщение формулы A.8.5) гл. VII.
6.5. Плоское напряженное состояние. Рассматривается тело,
имеющее в начальном состоянии (у-объем) форму плиты малой
по сравнению с ее размерами в плане постоянной толщины
ho(\a3\^Cho). Торцы плиты не нагружены, а поверхностные силы
на ее боковой поверхности параллельны срединной плоскости
плиты аз = 0 и распределены симметрично относительно этой
плоскости. Предполагается, что они сохраняют эти свойства (па-
(параллельность и симметричность относительно срединной плоско-
плоскости) в деформированной плите (V-объем), так что напряженное
состояние в ней симметрично относительно срединной плоскости
*з = 0.
Материальные координаты q\ q2, q3 вводятся соотношениями
xa = xa(ql, q2), x3 = q3; R = xaia + i3q3. F.5.1)
Поэтому векторы исходного и взаимного базисов в У-объеме
равны
Ra = Ba = ^-iy, R3 = i3; /?a = Sa3Bp = Ba, R3 = i3 F.5.2)
и ко- и контравариантные компоненты метрического тензора
У-объема G определяются формулами F.1.5), F.1.7).
a
Единичный вектор нормали N к площадке qa = const, сона-
правленный с вектором Ra взаимного базиса, определяется по
формуле
a pa «
N = -rTT^-^L^Ra. F.5.3)
760 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
а
Поэтому вектор напряжений на этой площадке / равен
? 4 a • rkRmRk = -J==- Г%, F.5.4)
a
а их главный вектор по толщине плиты, обозначаемый Т, будет
ft h
J
-h V а -h
Введя обозначения
= jf9 = p9a F.5.6)
-л
и замечая, что ?а3, вследствие симметрии напряженного состоя-
состояния, нечетны по <?3:
л
{ 3dq3 = 0, F.5.7)
-л
приходим к формулам
0 F.5.8)
Функции /5ар можно рассматривать как контравариантные ком-
компоненты поверхностного симметричного тензора
Р = /И*ВаВр. F.5.9)
На поверхности q3 — h(ql, q2), ограничивающей деформиро-
ограничивающей деформированную плиту,
q>), F.5.10)
и векторы Ra (отличные от базисных векторов Ra = Ba):
расположены в ее касательной плоскости, а вектор
t X *2 = Bi X В2 + В1 X*3|^ + i3 X В2^- =
в, х в? + €21в2 ^ - в1^^- = в, х в2 ~]Гв ва
§ 6) ПЛОСКАЯ ЗАДАЧА 761
3
сонаправлен с единичным вектором нормали N к ней. Замечай,
что
получаем
Л Л , Da8 dh dh \-'h I. Da dh
Условие отсутствия нагружения на этой поверхности принимает
вид
N ¦ f = 0, (*3" Blj^j ¦ [Г*ВаВ& + Г3(Ва«3 + i3Ba) + f%i3] = О
или
dh \ gii /7ЗЗ _ таз dh \ _ ~ (& *> \1\
dq4 a 4 dqaj ' ' ' ;
Из получающихся трех соотношений
fct3 т^хб €ftl л у33 уСьЗ Cftl л
— г —з- = U, t — t —— = U
исключаются компоненты ?а3 тензора напряжений. Приходим
к уравнению:
при q =±h(qa,q) I =1 ———^. F.5.13)
6.6. Уравнения равновесия. Уравнения статики в объеме при
отсутствии объемных сил, записываемые в виде
— VG VkRk ^-^-VG ?akRk + ArV~G fkRk =
dq dq dq
r% , rO3. \ , d
интегрируются по толщине плиты. Приходим к равенству
h
= 0. F.6.1)
-h
Пределы интеграла зависят от q\ q2; поэтому
-h
h
h
-h
-h
762 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
и равенство F.6.1) записывается в виде
h
l
Величина в квадратных скобках по F.5.12) обращается в
нуль. Обратившись теперь к формулам F.5.6), F.5.7), приходим
к уравнению равновесия, в которое входят только величины,
определяемые на средней поверхности:
-^УВр^В^О. F.6.2)
Они целиком повторяют уравнения статики F.3.1) задачи о
плоской деформации. Поэтому им можно удовлетворить, введя
в рассмотрение функцию напряжений U, так что по F.4.4)
p ^ p[/. F.6.3)
На боковой поверхности деформированной плиты
F.6.4)
где 5 — дуга кривой Г, ограничивающей поперечное сечение в
срединной плоскости q% = 0. Векторы
-•
3
R _
dS ~ « dS ' dq3 3
расположены в касательной плоскости этой поверхности, а век-
вектор
5°-7? х 'з = «яЖ -ж- = ^ F.6.5)
сонаправлен с нормалью к ней; это — единичный вектор нор-
нормали, так как *
*Ы° •t(i-Pi> dS dS ~^^^D dS dS ~ Cap dS dS
Здесь использована формула F.1.12) и учтено, что
Поверхностная сила F на поверхности F.6.4) определяется
равенством
или
Р-1у^-(^ + ГЧ3). F.6.6)
§ 6] ПЛОСКАЯ ЗАДАЧА 763
Главный вектор этих сил по толщине плиты по F.5.6), F.5.7)
равен
А
/ = J F dq* = е^Вр 4? = &BJX%U -^. F.6.7)
Пришли к равенству F.4.10); из него, повторив сказанное в
п. 6.4, можно получить краевые условия F.4.13), F.4.14) для
функции напряжений U.
6.7. Уравнение состояния. Вследствие предположенной сим-
симметрии деформации относительно плоскости q3 = xs = 0, декар-
декартовы координаты точки aa(q\ q2, q3) в начальном состоянии пли-
плиты четны, a a3{ql, q2, q3) нечетна по q3. Поэтому
озод^.оно, Iff) =o, /|%)8o = o, /|^so = -L,
F.7.1)
где X— неизвестная функция qx, q2.
Эти соотношения позволяют записать выражения компонент
метрического тензора $и определителя g в виде F.1.5), F.1.7):
( 1
= 0, F.7.2)
Повторив вычисление п. 6.1, приходим также к выражениям
F.1.13), F.1.15) инвариантов меры деформации 6х:
F.7.3)
и к соотношению связи между ними F.1.16). Это позволяет
записать в форме F.2.3), F.2.5) выражения компонент тензора
напряжения на срединной плоскости:
15/,
3
F.7.4)
В случае несжимаемой среды приходим к формулам F.2 7),
F.2.8). Для весьма тонкой пластинки в соответствии с F.7.1)
имеем
q\ q^) = az{q\ q\ °> + @")e,_/" Г ^
764 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
и при q3 = х3 = h, а3 — h0
h = h0X. F.7.5)
При этой степени точности связь компонент ?аC тензора напря-
напряжений на срединной плоскости с компонентами осредненных
внутренних усилий может быть определена из соотношения
А
—ft
так что
^вЭ = 2АоЯ..(?вЭ),,.о- F-7-6)
По F.5.13), F.7.5) имеем также
з з . , ?зз тар dh dh , 2га8 дХ дХ
4 dqa dq$ dqa dq^
и при ^io-^О можно принять
(П^0 = 0. F.7.7)
6.8. Система уравнений задачи о плоском напряженном со-
состоянии. В предположении малости толщины плиты задача о
напряженном состоянии при симметричном нагружении ее бо-
боковой поверхности сведена к рассмотрению величин на средин-
срединной плоскости. Разыскивается не тензор напряжений, а усред-
усредненные значения ра$ основных напряжений ?аР, тогда как осталь-
остальные компоненты ?а3, ?33 этого тензора, вследствие их малости
сравнительно с основными, исключены из рассмотрения.
Две группы соотношений, определяющих симметричный тен-
тензор осредненных напряжений, сводятся к уравнению статики
r „, =0 F.8.1).
dq"- p
и к уравнениям состояния
О =s — ZAZqA I t? 1*3 13 I • ^O.o.ZJ
y/3 \ a/, a/3 /
Здесь ^i — функция инвариантов Iu /3:
представляющая выражение удельной потенциальной энергии
деформации A{h,h, Iz), из которого инвариант h исключен с
помощью соотношения
I3-I2l2 + liV-lb = 0. F.8.4)
§6] ПЛОСКАЯ ЗАДАЧА 765
Дополнительное условие, служащее для определения неизвест-
неизвестной функции hiq1, q2), выражает требование отсутствия напря-
напряжения Р3 на срединной поверхности:
жк2+жк2{1>-%2)+1*ж=°- F-8-5)
Краевое условие на контуре Г — сечении плиты срединной
плоскостью — представляется соотношением
на Г: layp^B^ = f, F.8.6)
где f — главный вектор поверхностных сил на боковой поверх-
поверхности:
f= JFdq3, h = h^. F.8.7)
-ft
Уравнениям статики можно удовлетворить, выражая напря-
напряжения через функцию напряжений Эри:
^ = ^a€^VaVpf/. F.8.8)
Обратные соотношения имеют вид
Краевые условия для функции напряжений даются форму-
формулами F.4.11) —F.4.14).
В случае несжимаемого тела
/з = 4а2=1 F.8.10)
и неизвестная скалярная функция р, вводимая вместо дА/д13,
определяется из уравнений статики, дополненных этим усло-
условием.
6.9. Применение логарифмической меры в задаче о плоской
деформации. В плоском поле перемещений F.2.1) гл. II глав-
главные значения тензоров м'А или 6х * равны 1 +6a = eVa(a= 1, 2),
63 = 0, eVs = 1 (см. п. 3.5 гл. VIII). Через х обозначается угол
S
поворота, совмещающего оси OXYZ с главными осями е тен-
тензора 6*Чк
1 2
е = i, cos X + i2 sin %, e = — i, sin % + i2 cos %.
1 2
Эти оси совмещаются с осями е, е тензора М поворотом на
угол а, так что
I 1 2 2 1 2
е = ecosa + esina, e= — esina + ecosa,
1 2
е =«! cos{% + a) + hs»n(X + a), e=- i, sin(% + a) + i2cos{% + a).
766
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Вместе с тем по C.4.5) гл. II имеем
v ~ k k
ИЛИ
Приходим к соотношениям
ev' sin (%+a) = b21 cosx+A22 sinx, ev* cos(x+a) =
= - X21 sin x + Я,22 cos x,
позволяющим выразить величины Kts через четыре инвариант-
инвариантных параметра eVl, eVi, x, a:
hi = у [(eV| + eV2) cos a + (ev' - ev0 cos Bx + a)],
Я-22 = у I(eVi + ev0 cos a - (ev> - ev0 cos BX + a)],
hi = у KeVl + ev0 sin a + (e*. - ev=) sin {2% + a)],
Л.]2 = -g- [ - (ev' + eV!) sin a + (ev' - ev') sin Bx + a)].
Эти параметры связаны условиями интегрируемости
F.9.1)
даг
да\
F.9.2)
Заметим также, что представления компонент тензора М'/!восях
OXYZ даются формулами [см., например, A.3.14)]
") + (ev< - е^) cos
+ а)],
'^ = 1 (eVl - eV!) sin 2
a), Af Й = 1,
а соосная с M'/j логарифмическая мера деформации N опреде-
определяется ее компонентами
=\ l(v, + v2) + (v, - v2) cos 2 (x + a)],
= j f(vi + v2) - (v, - v2) cos 2 (x + a)],
| + a), JV33-O.
F.9.3)
6] ПЛОСКАЯ ЗАДАЧА 767
В случае плоской деформации несжимаемого материала
i + V2 = 0, vi = —V2 = v > 0 и эти выражения упрощаются:
а величины Я,ар представляются в виде
Я,,, = ch v cos a + sh v cos B% + а),
X22 = ch v cos а — sh v cos B% + a), i
A-21 = ch v sin a + sh v sinB% + a), j \ • • )
Я-12 = — ch v sin a + sh v sin B% + a). J
Компоненты тензора напряжений Т для несжимаемого мате-
материала с равной нулю фазой подобия и согласно C.5.14) гл. VIII
и F.9.4) оказываются равными
*12 = 2|*(r)vsin2(x + a), t33 = p Fl9'6)
(Г = 2v)
Для определения четырех неизвестных параметров имеется
такое же число уравнений — два уравнения статики и два усло-
условия интегрируемости F.9.2).
6.10. Плоская деформация несжимаемого материала с равной
нулю фазой подобия девиаторов *). Уравнения статики при от-
отсутствии массовых сил можно записать в виде
~д \ 11 22 ' Ы1>\2/ I Izlz \ 11 1^ 22/ — \ — 1 ' ?Л21»
За независимые переменные приняты координаты точки в де-
деформированном состоянии тела. Обратившись к формулам
F.9.6), получим
-^f(v)e2*(x+a> + -fj = 0 (f(v) = 2vfi(r)). F.10.1)
Этому соотношению можно удовлетворить, полагая
f(v)=-2-g е-2'<*+«>, Р = 2^, F.10.2)
и, поскольку р вещественно, надо принять, введя вещественную
функцию U,
(D — dU дФ — d*U
~ dz ' дг ~ dzdz'
*) Этой задаче посвящена работа Л. А. Толоконникова «Конечные пло-
плоские деформации несжимаемого материала» (Прикл. магем. и мех., т. XXIII,
№ 1 A959), 146-158).
768 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Приходим к соотношениям, которые можно было предвидеть:
= -4
д2и
дг2
дх2 * ду2
d2U , d2U
,. д2и
Л дх ду '
F.10.3)
и функция U оказалась, конечно, функцией Эри плоской за-
задачи:
ч d2U
~ ду*>
_ d2U
d2U
дхду '
F.10.4)
Следствием первого соотношения F.10.3) является формула,
связывающая величину v с функцией напряжений:
d2U
дг2 '
Из нее можно определить производные v по г и г:
F.10.5)
Из того же соотношения F.10.3) имеем
f(v) dz2
и, далее, учитывая F.10.5), F.10.6),
dz
дг 1П d2U
F.10.6)
F.10.7)
F.10.8)
и аналогичное уравнение для производной по I.
Возвращаясь к соотношениям F.9.5), представим их в виде
= ch
|i = ch ve-*«
F.10.9)
i в] ПЛОСКАЯ ЗАДАЧА 769
причем ? = й] + ia2. Из них находим обратные соотношения
F.10.10)
dz c ve ' dz Cilve '
— = — sh ve~
Записав условия их интегрируемости
дК d*t, д%
dz dz dz dz ' dz dz dz dz '
придем к двум уравнениям:
da
, 5v . . , da T , dv . , fd2(% + a) da\l 9
on v 1- / ГП V = — СП V / ЧП V — I p~
snv dz^lCnV dz [cnv dz lsnv\ d2 dz)\e
F.10.11)
В них следует заменить величины
21 Ё1 д2(X +а) д
21 Ё1 №10 12^
dz' dz> dz ' dz Vo-iv.iz)
их значениями по F.10.6) — F.10.8). Это позволит выразить про-
производные от а по г и z через производные функции напряжений
и величину v (параметр а исключен). Вслед за этим условие
интегрируемости
dzdz ~ dzdz io.iu.idj
приведет к дифференциальному уравнению четвертого порядка
для функции напряжений U, в которое войдет также величина v.
Но последняя связана с U соотношением F.10.5).
Переход к исходным независимым переменным ?, ?. осуще-
осуществляется с помощью соотношений
dU [dU , . dU , o//vj.m1 in
-gf = I-j?chv + -^j-shve~2;^+a)\eia и т. д.
с последующей заменой производных вида F.10.12) их значе-
значениями.
Не останавливаемся на не представляющих затруднений
записях краевых условий.
6.11. Пример. Радиально-симметричная деформация. При
такой деформации
2 = /?(р2)? = /ШК & = pe* = a1 + ia2), F.11.1)
причем /?(р2)—вещественная функция. По F.10.9) имеем
J
49 А. И. Лурье
Jr = R' (P2) ? = Я' (Р2) Р2 { = sh ve' B"+°),
770 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. 1л
так что а = 0,
= |.==в2» F.Ц.2)
Отсюда находим
2Я(р2)#'(р2)Р2 + Я2(Р2)=1, #2=1-? F-П.З)
и далее
Я(Р2) = е- = -|/1-|г, F.11.4)
так что 0<С<р2, где ро — радиус отверстия в деформируемом
цилиндрическом теле.
Теперь, сославшись, например, на формулу A.13.8) гл. VII,
по F.10.3) и F.11.2) имеем
fr-^e + 2tYre = 2f(v)=-4|^, f,-*e = 2f(v), tre = 0 F.11.5)
и, далее,
%-%?+%%-vi-V*» + t**)-ru'. F.„.6)
Здесь, как и выше, штрихом обозначается производная по
р2 = IX- Теперь находим
и дифференциальное уравнение равновесия F.11.5) приводится
к виду
После замены р2 его значением по (-6.11.4)
U"--^(l-e-2v)sh2vU'=- ^f(v)e-2v(l-e~2v) F.11.7)
и введения новой независимой переменной (вместо р2)
приходим к легко интегрируемому дифференциальному уравне-
уравнению относительно V:
~lq q ~ 2 ' ^V' \-q '
§ 7] ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ 771
Из него имеем
¦^ = ?/'=-^4C' + Jf(v)T=7d4' FЛЬ8)
/с 1 1 с\ dU d2U
после чего по (о. 11.о) определяется -т=-и далее , д- , то есть
по F.10.4)—сумма нормальных напряжений, а значит, и каж-
каждое из напряжений tr, te. He останавливаемся на этом вычисле-
вычислении и на определении постоянных по краевому условию*).
§ 7. Полулинейный материал
7.1. Уравнения равновесия полулинейного материала. Удель-
Удельная потенциальная энергия деформации «полулинейного», или
«гармонического», материала, введенного в рассмотрение в
п. 2.8 гл. VIII, представляется выражением B.8.7) гл. VIII. За-
Закон состояния его B.8.8) гл. VIII определяет связь тензора на-
напряжения Пиола — Кирхгоффа D с величинами, характеризую-
характеризующими деформацию, — тензором поворота А главных осей" меры
деформации 5х и тензором-градиентом VR:
D = (Xsl-2v)A + 2pffR. G.1.I)
Уравнение равновесия B.8.4) гл. VIII для тензора Пиола, запи-
записываемое в векторном базисе начального объема, представляет-
представляется в виде**)
G.1.2)
Это — аналог уравнений равновесия в перемещениях линейной
теории упругости. При задании поверхностных сил F к нему
присоединяется краевое условие
()V. G.1.3)
Итак, уравнения статики в объеме и на поверхности пред-
представлены в базисах начального состояния; этим обусловлено
упрощение, вносимое применением тензора Пиола — Кирхгоффа
в рассмотрение задач нелинейной теории упругости. Однако оно
затруднено тем, что в выражение этого тензора входят тензор
поворота А и инвариант sj. Их представление требует знания
тензоров б*ч\ Gx~Vs:
('/ G.1.4)
*) См. статью В. Г. Громова в книге Г. Н. Савина «Распределение на-
напряжений около отверстий», гл. IX, стр. 676—691 (изд-во «Наукова думка»,
1968).
**) Звездочкой обозначается транспонирование тензора.
49*
772 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
а определение этих тензоров предполагает знание главных зна-
чений Gs и главных направлений е меры деформации Gx:
и 22 зз
Gx = Giee+G2ee + G3ee. G.1.5)
7.2. Сохранение главных направлений. Эти затруднения от-
отпадают при совпадении главных направлений тензоров Gx и Т
(или Gx и М). Тогда е — е и
Л = ев-5, V/?=Gx'/2 = V^, s, = V-*-3, G.2.1)
где g— единичный тензор в о-объеме. Уравнение равновесия
G.1.2), линейное относительно вектора R, принимает вид
0, G.2.2)
и нелинейность задачи определяется только правыми частями
краевого условия
[XV-R- (ЗА + 2ц)]п + 2цл • VR = F^-. G.2.3)
Заменив в этих уравнениях вектор R вектором перемещения
и = R — г и учитывая, что теперь V« = W, придем к уравне-
уравнениям
(Я, -h 2р.) V2« + роК = 0, XnV-u + 2fi/fV« = i7-^-. G.2.4)
Их левые части представляют частный случай уравнений равно-
равновесия в перемещениях линейной теории упругости (здесь
W-« = V2u).
7.3. Примеры (цилиндр и сфера). Случаи сохранения глав-
главных направлений имеют место при осесимметричной деформации
круглого цилиндра и радиально-симметричной* деформации
сферы.
1°. Цилиндр. Введя цилиндрические координаты г, 0, 2 и
предполагая, что осевое перемещение не зависит от г, имеем
= f (r) er + kaz, R{ = ]' (r) er, R2 = f (r) ee,
G.3.1)
г
Поэтому
VR = ererf'(
G.3.2)
¦¦ererf (r) + i
§ 7]
ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ
773
так что главные оси тензоров Gx, g совпадают с координат-
координатными направлениями векторов ег, ев, k. При этом
l> VV. Я = ег (/' + !)' =V.V*
и уравнение равновесия G.2.2) при отсутствии массовых сил
приводится к соотношению
+ -?¦)'= 0, F + ± = 2CIf f ^
-^-. G.3.3)
Постоянные Сь Сг, а определяются по заданию давлений на
наружной и внутренней поверхностях полого цилиндра г = г0
и г = г\ и осевой силы Q на торце S. Приходим к трем уравне-
уравнениям, которые можно записать в виде
G.3.4)
2^ (С, -¦ 1) + (Я, + 2ц) (а - 1) =
Например, в случае цилиндра, расположенного между двумя
неподвижными гладкими плитами (а = 1) и нагруженного рав-
равномерно распределенным давлением по наружной поверхности
(ро — р, р\ = 0), имеем
и внутренний радиус деформированного цилиндра
->0 при
2° Сфера. При центрально-симметричной деформации сфе-
сферы, введя сферические координаты R, ¦&, X, имеем
R-f{R)eR,
G.3.5)
так что
причем
зора
^-(е,е, + екек) = [f (R) -
— единичный тензор. В этом случае главные оси тен-
тен^e G.3.6)
774 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
также имеют направления eR, e$ , е%, сохраняющиеся при дефор-
деформации. Получаем
-P) eR,
I fV G-3.7)
и по G.2.2)
^ j G.3.8)
Далее по G.2.3) имеем
iH?]l = aR) G.3.9)
и постоянные С\, Сг находятся по заданию давлений на наруж-
наружной (R = Rq) и внутренней (R = R\) поверхностях полой сферы.
Например, в случае только наружного давления (р0 = р, Р\ =0)
приходим к уравнению
[с, +^~
Внутренний радиус деформированной сферы дается равенством
и, поскольку р > 0, f(Ri)~^ 0, имеем
1/1 ^ 3(Я + 2ц) •
Рассматриваемое решение осуществляется для значений наруж-
наружного давления
„ 12[х(Х + 2ц.)
7.4. Плоская деформация. Рассматривается поле перемеще-
перемещений, в котором декартовы координаты xs точки деформирован-
деформированного призматического тела связаны с ее декартовыми координа-
координатами as в начальном состоянии соотношениями
ха = ха(а{, а2), а=1,2; хъ = сау G.4.1)
Единичные векторы is координатных осей представляют вектор-
векторный и взаимный векторный базисы rs, rs начального состояния;
в конечном состоянии векторный базис и тензор-градиент VR
определяются равенствами
. § ?] ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ 775
(греческим индексам задаются значения 1, 2). Имеем теперь
даа
= О, G33 = с2,
п 2(п п п%\ ч[дхх дхг дх{ дх2 \2
(j = С \(j \IU22— (j\2) — C -3—^-5-^ 5 Ъ— •
\ dux оа2 оа2 оа1 /
Тензоры G* и Л вычисляются, как показано в п. 6.2 гл. II,
Gх 2 = (У«cos х - <з X iaia sin x) %
Л = С*1*1 + Мг) cos х + («1*2 - Mi) sin x + hh-
Здесь
• _ I
Sln5t~ ?
dXi
G.4.2)
G.4.3)
причем
/,(е><1/2) = д + с, sl = q + c-3. G.4.4)
Далее вводятся комплексные обозначения координат точки
поперечного сечения тела
? = щ + ia2, z = xi + ix2.
Это позволяет представить формулы G.4.3) в виде
дг
" яг '
дг
дг
##) • G-4-5)
Представление тензора D по G.1.1) приводится к виду
D = [ЛG - 2 (А, + ц) + Я (с + 1)] Л
и его компоненты равны
а21 = -
sin x
G.4.6)
776 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
причем введено обозначение
G.4.7)
\V== 2 (Л + ц) ) *
В рассмотрение удобно ввести комплексные выражения
0" + id12 = ф (?) в«х + 2ц/ ^-, а22 - й2' - ф (</)е'х - 2ji ^-. G.4.8)
Тогда уравнения статики при отсутствии массовых сил
ддп . дд21 _» dd12 dd22 n dd33 _-.
записываются в виде
? ?-о,
и по G.4.8) приводят к соотношениям
Величина г|з(^)ег^ оказывается функцией комплексного пере-
переменного ?:
Ф^в'^Ф'Й), ^х = т^§Г- G-4<9)
Этим, по-видимому, объясняется наименование «гармонический»
для материала с удельной потенциальной энергией деформации,
задаваемой выражением B.8.7) гл. VIII.
Равенства G.4.5) и G.4.7) позволяют установить соотно-
соотношение
дг _ Ф'(?) , l-v(c-l) Ф'(?) (? т
связывающее искомые функции z{?, I), Ф'(?).
Рассматривая в поперечном сечении деформированного тела
дугу L (в начальном состоянии /), называя ее элемент dS
(ds на /) и обратившись к уравнениям равновесия на поверх-
поверхности G.1.3), имеем
на
где F\, F2 — проекции на оси OX, OY поверхностной силы на L.
При обозначениях
г п , •г . • da2 ¦ da, . dt
F = Fj + tF2, п = П1 + щ = ^2- - 1 -d± = - i-±,
§ 7] ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ 777
используя равенства G.4.8), G.4.9), получаем
на /: ^ = аИ?)^1-2^ = Ф'(С)$ -*§. G.4.11)
Отсюда находим также значение главного вектора поверхно-
поверхностных сил на отрезке дуги М0М:
S
на /: icV = ic { F dS = Ф (?) - Ф (So) - 2ц [z (S, S) - 2 (So, So)].
G.4.12)
Например, при действии равномерно распределенной нормаль-
ной нагрузки
на /: F= - pN = pi-~, Ф (?) = Bц - ср) г (S, S) + const.
G.4.13)
На прямых, параллельных в деформированном теле коорди-
координатным осям OX, OY, имеем
i 1
dS = dx2, F = F^ + iF2 = cr, + гт12,
dt, = -^- dx2t dz = / dx2 {dxx = 0),
2 2
d5 = dx\, F = Fi + ?F2 = — (t21 + /cr2),
dS = -gj- rf*i, dz = dx, (^л:2 = О),
гак что, обратившись к G.4.11), получаем
1
+ (с<г2 + 2|О = ф(<7)в'*-??-.
I (ССГ] + Zfl) u >|2 — ipWt 5JC~*
Из соотношений
dt, dz dt, dz dt, ' dt, dz dt, dz dt, '
учитывая G.4.5) и легко проверяемое тождество
дг dz_ _ dz_ jte _ 5лг1 дх2 __ ^ЛГ| 5л:2 1_ ^лрт
3J (Э^ ^S dt, дп\ да2 да2 да1 с '
получаем
dt, с дг __ 1 с _г„ dt, __ с дг
778 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
и по G.4.14) приходим к формулам
^12 = ^21, С ((Г, + СГ2) + <!
7=
(<т2 - а,) - 2tcxn = - —=- -S^U. — —.
\Q q dt, dl
G.4.15)
Нормальные напряжения в поперечном сечении тела опреде-
определяются из соотношения
и продольная сила —их главный вектор — равна
Q =
G.4.16)
-\). G.4.17)
Здесь Qo — площадь поперечного сечения в начальном состоя-
состоянии тела.
7.5. Напряженное состояние при плоском аффинном преоб-
преобразовании. Преобразование задается линейными соотношениями
или, в другой форме,
G.5.1)
Напряжения, вычисляемые по формулам G.4.15), и осевая
сила равны
= —— l-т—т г—г Ь II,
'Ф (д) А.) 1Я21 + А.12Я.22
со, . _
G.5.2)
G.5.3)
1°. Одноосное растяжение. В этом состоянии oi = О
= 0, ti2 = 0; из последнего усл<
тогда из первого и второго следует
I
О2 = 0, ti2 = 0; из последнего условия имеем к\2 = —a2i т^'»
Л22
п — Л22,
Л21.
Полагая
С -— 1 — Е3, Aj j — Л22 — 1 — 6j, А|2 — Л21 — ' CDq,
§ 7] ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ 779
имеем
ib (о) Я + 2ц 1— ve3 n/, ч
= ™-, 9 = я + |? !_v3 =2(l-v)e3, e3 =
и по G.5.3), G.5.4)
^ 2v) + 2fi]e3 = ?e3 [? = 2[хA + v)]. G.5.4)
Это решение уравнений G.5.2) при отсутствии напряжений
сгь &2, ti2 приводит к уравнениям линейной теории
хх = а, A - ve3) - ща2, х2 = а2{\- ve3) + (а^аи х3 = A + е3) а3,
G.5.5)
определяющим перемещения с точностью до произвольного ма-
малого поворота.
2°. Простой сдвиг. Эта деформация задается уравне-
уравнениями
Х\ = а\ + sa2, х2 = 02, х3 — а3; Я,ц = Я22 = 1, Х-12 = s, Я21=0, с=1.
Напряжения вычисляются по формулам
причем
Здесь сохранены лишь члены порядка s2; с этой степенью точ-
точности /
_ 5-8у 2 _ цла Q _ vs2
T18-|iS, °1-^4A-2г) S> <T2-4(l-2v)' ¦q7~(X4A-2v)'
G.5.6)
7.6. Изгибание полосы в цилиндрическую панель*). Дефор-
Деформирование прямоугольного параллелепипеда
—h -< а\ *?> h, —Ь 4* а2^СЪ, —/ < а3 <
в цилиндрическую панель
г0 ^ г < г\, —
осуществляется с помощью преобразования (пример п. 6.5
гл. II)
—
z = xl+ix2 = C{a1)e b<h, x3 = ca3, G.6.1)
*) В п. 2.1 эта задача рассмотрена для случая несжимаемого мате-
материала.
780 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
причем
С (—А) = г0, С (А) = ru cl = L G.6.2)
Здесь
^ [ f] G.6.3)
и можно принять
Теперь по G.4.7), G.4.9) имеем
?) = (А + 2|*) [С (а,) +1 С (а,) - 1~^С~1)], Ф' (?) =
G.6.4)
и дифференциальное уравнение, определяющее неизвестную
функцию С(а\), будет
a l-v(c-l)
. -v
Его решение при краевых условиях G.6.2) представляется в
виде
Г chML sh^L 1
Для определения постоянных т\, г0 служат условия отсутст-
отсутствия нагружения поверхностей панелей а\ — ±h; вдоль этих по-
поверхностей ds = da% и по G.4.11) (при F = 0), G.6.1) и G.6.4)
получаем
l-v(c-l)
l-v
или
Отсюда находим
+ro = 2|-[l-v(c-l)], r,-ro-2-|[l-v(c-l)]thY, G.6.7)
§ 7] ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ
и это позволяет представить С{а{), С'(щ) в виде
781
С (а,) = [1 - v(c - 1)]
sh-
G.6.8)
Распределение поверхностных сил на плоскостях a-i = ±6
определяется по G.4.11) при ds = 41da\\ приходим к равенству
; -2цС (а,),
G.6.9)
из которого находится распределение нормальных напряжений
на этих границах
caN -j— = с(— Fi sin a ± r2cosa) =
1 ^
G.6.10)
и выявляется отсутствие на них касательных напряжений (пра-
(правая часть G.6.9) вещественна).
Главный вектор нормальных напряжений, конечно, равен
нулю, а их главный момент — изгибающий момент в любом се-
сечении 0 = const, отнесенный к единице длины по оси ОХ3, — оп-
определяется равенством
G.6.11)
Осевая сила (в направлении ОХ3), отнесенная к единице
длины по оси ОХ2, определяется по G.4.17):
h
-h
(q-2)dai+ (к + 2iiJh(c-l) =
Для полосы со свободными торцами
782 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ (ГЛ. IX
Формулы G.6.11), G.6.13) служат для определения неизве-
неизвестных сиу (или а) по заданному изгибающему моменту.
7.7. Наложение малой деформации. Как и в п. 4.1, предпо-
предполагается, что точкам упругого тела сообщено малое перемеще-
перемещение r\w(q\ q2, q3) из предполагаемого известным состояния рав-
равновесия. Иными словами, рассматриваются три состояния тела:
о
начальное (у-объем), заданное напряженное (V-объем) и вто-
второе напряженное состояние (V-объем), близкое к заданному.
Вектор-радиус точки в этих состояниях обозначается соответ-
0
ственно г, R, R, причем
о
R = R + x\w.
Для величин в У-объеме сохраняются ранее принятые обозна-
,-. ~ о
чения (например, R, D, Аи т. д.), а их значения в 1/-объеме
о « Л
различаются ноликом сверху (R, D, А и т. д.). Разности («воз-
(«возмущения»), вычисляемые с удержанием первой степени пара-
параметра малости ц, представляются в форме произведения этого
параметра на величину, обозначаемую сверху точкой:
о . . о ^ о А
R = R + r\R, D = D + r\D, A = А + цА и т. д.
Очевидно, что R = w, а все величины, обозначенные точкой
сверху, представляют линейные операции над вектором w. Их
можно трактовать как производные по ц при t) = 0 от вели-
величин, определенных в V-объеме:
D=(-JLd) , А =D~ А) и т. д.
В соответствии с определением C.3.2) гл. II меры деформации
Gx тензор G* представим в виде
G>< = VR ¦ VJ?' + VR • V/?* = Va;. VR*+VR ¦ Vw\ G.7.1)
причем звездочкой обозначается, как всегда, операция транс-
транспонирования тензора второго ранга.
Далее предполагаются известными главные значения Gs,
оо . о Ч 9. л
Ms = Gs и главные направления es, es мер деформации G, М
[см. E.3.1) гл. II*)]. Для построения тензора
о
0 л.
А = eses + eses G.7.2)
о о
*} Индекс помещен снизу, чтобы избежать обозначений е, е.
§ 7] ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ 783
надо определить векторы es, es; попутно найдутся также выра-
выражения величин Gs. Нетрудно заметить, что эти векторы ортого-
о 2.
нальны es, es; действительно, •
0 0. 0
e«-ee=l, es-es + es-es = 0, es-es = 0 (s= 1,2,3). G.7.3)
Сославшись на определения A.9.1), A.9.4) главных значе-
значений и главных направлений тензора, имеем
? . о . . о л о
пх , р о р _ С\ пх , р п р _ п р Г}х , р И 1 А\
о
причем, конечно, в У-объеме
?ооо о? оо
Gx-ek — Gkek = 0 или ek- Gx = Gkek. G.7.5)
о
Поэтому, умножив скалярно обе части G.7.4) на eh, имеем
о? . оо. .оо 0i о
или, по G.7.5),
Отсюда при k = s получаем
о оо. . о л о
(Gk - Gs)ek-es = GAk -ek-G><-es.
0 л 0
Gs = es-Gx-es, G.7.6)
а при k ф s
es " ek — о 0
Этим совместно с G.7.3) определены проекции вектора es на оси
о
триэдра eh\ поэтому
Z efeo"G><oe' «* (s=l,2,3) G.7.7)
k Gs—Gk
(штрихом указывается пропуск слагаемого k = s). Точно так
же для тензора М имеем
0 д 0 . А _, °~ А "- 0
es • Af • es = Gs, eft = J^ -^ 5— es, G.7.8)
s Gft-Gs
причем, аналогично G.7.1),
л 0 0
784 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Выражение G.7.2) тензора А теперь записывается в виде
(отбрасываем знаки суммирования)
о °
А 0 0 0 0
А = оо tgfe • (Va; • WT + V* ¦ Vw*) • es-
Gs-Gk
H о о ?
- es • (V/Г • Vw + Vw' • VR) • eA]. G.7.9)
Далее используются соотношения
о » „ 5. /~о~ ой о /"Т~ о о
VI? =(тх-А = Л/Прр
из которых следует
о о /"о о оо ° ~ ./~о о
Это позволяет представить G.7.9) в виде
0 °~ о о о о
? оо 0
(eft • Vts>* • es — es • Ww* • et
°.A о ? о о
ek • V© • es - es ¦ Vw • ek),
причем использованы соотношения вида
о^оо ?
Приходим к выражению
0 о
А = р— we^= (ekes — ej!k). G.7.10)
V Gs +V Gk
Для представления тензора
А 0 Л ?
D = {ls1 — 2\i)A + lslA + '2\i4R G.7.11)
требуется еще вычисление величины
§ 7] ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ 785
Сославшись на G.7.6), G.7.1), имеем
k Г Gk k
или (отбросив знак суммы)
о ?
s^ek-Slw-ek. G.7.12)
Приходим к такому представлению формулы G.7.11):
* _ Xst - 2ц ° ~ ° ~ __ ° ~ ~° ° ~
V Gs +V Gk
G.7.13)
При преобразовании У°-объема в V-объем массовая сила
предполагается остающейся неизменной. Тогда уравнение рав-
равновесия в V'-объеме представится в виде
V-Z) + pK = 0, G.7.14)
причем по закону сохранения массы
р уъ~=р° у g , р у g + р° уъ~=о,
_0/i
р = — р \\
или по G.7.1)
о ?
G.7.15)
Уравнение равновесия на поверхности
FdO = n-Ddo
приводится к виду
do I ' * Д I do
аи,
Здесь
^ -./"G~( Ях-' V/2^ ^Л 1 (G , n-Gx~l-n\ .о
^ g 2U a-6x-n ]
и уравнение равновесия на поверхности О объема V приводится
к виду
*-D-Vi \[f+ifj)^-gx •") +tf( о v 1-
ё L\ О/ U-Gx n) J
G.7.16)
50 а. и. Лурье
786 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
Представление величины (Gx~')* через вектор w основывается
на соотношениях
Из них следует
о.о . о.о. оооо.
# = - # • RSRS, Gqt = RqRt + RtRq=~ (GSQR{ + GstRq) ¦ Rs,
G.7.17)
так что
В частном случае давления неизменной величины р, остающе-
остающегося нормальным поверхности О, ограничивающей V-объем, по
C.5.7) гл. II имеем
(л fT ГТ- о \
п- Ddo=-p{N do)' = - р[ У — Ж + Л/ — If nsdo
и, поскольку
n 0
Vo
получаем
|/-0- ЛЛ гГ
У G k У
/~ ( о ? \
7 У+S k "Rs)ns. G.7.18)
7.8. Случай сохранения главных направлений. Как в п. 7.2,
в дальнейшем рассмотрении принимается, что главные 'направ-
о о о о
ления es, es тензоров Gx и М совпадают; это будет иметь место,
если матрицы тензоров g и G диагональные; тогда единичные
векторы ts касательных к координатным линиям gs = const, об-
9 о 2.
разующие ортогональный триэдр, сонаправлены с es, es.
Сославшись на G.2.1) и заменив тензор Vw его представле-
представлением A.2.13) гл. II, можно преобразовать теперь выражение
G.7.10) тензора А, учитывая симметричность тензора дефор-
деформации ё, к виду
А =
j О 00^00000
+У Gk
о о
2 о^ооо 2е.е о о
ek • Q • eseke. = / к s r-= w • (es X ek).
V У
G.8.1)
§ 7] ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ 787
Здесь ю — линейный вектор поворота, определяемый по век-
вектору W.
Далее по G.7.12) имеем
о оо^о
s, - ek ¦ г • ek - ek . п • ek = /, (е) = V ¦ w. G.8.2)
и подстановка в G.7.13) приводит к равенству
D = - 2 _|u^|t_ ю . 4 х Jfc) ekls - 2jiQ + ^V • w
Gs + ft
или, если сослаться также на A.4.6),
*¦ ( U, -2u \ 0 0 0 0
D = Г (w) + 2 Л! ^_ + ц U • (et X е.) ekes, G.8.3)
\ У Gs + V Gk I
причем T(w)—тензор напряжений, определяемый обобщенным
законом Гука по вектору w:
(Vw + Vw*)] G.8.4)
7.9. Уравнения нейтрального равновесия Саусвелла A913).
о
Рассматривается деформация а-объема в V-объем, задаваемая
преобразованием
xs = (l+es)as, J? = 2iA(l+es). G.9.1)
Тогда
i es)Ms = V/r = Gxv\ А = Ё,
о
и тензор D, определяемый по G.1.1), представляется в форме,
не отличающейся от обобщенного закона Гука линейной теории
упругости:
5, о~ о~ ол оо
D = ЫЕ + 2fi (V/? - Е) = A.'&S + 2цё, е = 2 es»sts. G.9.2)
s
Поэтому
8*=21Г
так что
50*
G,
788
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
и тензор D представляется в виде
D = ?{w) +
+ 2ц [Л,ю, (Уз - Ш + 4«2 (*з*1 - Уз) + А3а>3 (У2 - У,)], G.9.3)
причем для краткости приняты обозначения
0 0 0 0 0 0
. 1 д22 + д33 , 1 а33 + д" . 1 ди + д22 ,п п .ч
А. = —— — , Л9 = т; 1 Лч = . G.9.4)
1 2(i 2 + 82 + 8j ¦* 2ц 2 + 83 + 8) d 2ц 2 + 81 + 82
0 0 0
Величины dss связаны с главными напряжениями as в V-объеме
соотношениями
Уравнения равновесия в V-объеме G.7.14) при отсутствии мас-
массовых сил теперь записываются в виде
1 - 2v
1
да
2 _ о Л д«3 _ q
-2Л,
да2
1 — 2v aa2
1 а»
1 - 2v да3
Здесь приняты обозначения:
да2
G.9.5)
л 0X3) CfO
2ш, = -3 з— и т. д.
1 аа2 За3
Учитывая известное соотношение
у2яу = VV • w - V X (V X w) = VO - 2V X «,
можно представить эти уравнения также в виде "
да.
}2 "а^Г ~ U>
где обозначено
G.9.6)
G.9.7)
Уравнения «нейтрального равновесия» в форме G.9.5) были
получены из других соображений Саусвеллом.
§7]
ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ
789
7.10. Представление решений уравнений Саусвелла. Уравне-
Уравнения G.9.6) переписываются в виде (ds = -r—)
{д\ + В2д\ + В3д22) и + A - fi3) d&v + A - В2) dxd3w = 0,
A - В3) дхд2и + {д\ + В3д\ + Вхд23) v + A - Bi) d2d3w = 0, G.10.1)
- В,) d2d3v + {д23 + Вхд\ + B2df)w = 0
A - В2) дхд3и
или, короче,
(/=1,2,3),
G.10.2)
где ejs = eSj — записанные выше дифференциальные операторы.
Представляя одно из частных решений этой системы в виде
G.10.3)
определим операторы дифференцирования Ais как решения од-
однородной системы двух уравнений G.10.2) для / = 2, 3. Подста-
Подстановка в эти уравнения дает
e2iAn + е22А12 + e23Ai3 = 0,
езД, + е32А12 + е3зА13 = 0,
и с точностью до общего множителя
Ац = е22езз — 623632, Ai2 = 623631 — 621633, Д13 = 621632 — 622631.
Как следовало ожидать, А«л представляет алгебраическое допол-
дополнение элемента esh определителя
бц б,2 е13
e21 е22 е23
e3i е32 е33
Теперь, подставив выражения G.10.3) искомых функций в пер-
первое уравнение системы G.10.2), придем к дифференциальному
уравнению для %ь
(епДп + е,2А12 + е13А13) %х = к%{ = 0. G.10.5)
Аналогично записываются решения систем уравнений G.10.2)
для / = 3, 1 и для /=1,2:
"г = А21Х2. v2 = Д22х2) w2 = А23х2,
G.10.4)
«з =
w3 = А33Х3,
и подстановка в остающееся уравнение (/ = 2 и соответственно
/ = 3) приводит к дифференциальным уравнениям этого же
вида G.10.5). Итак,
О <s = l, 2,3). G.10.6)
790
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IX
Остается записать общее решение
и = AnXi + Д21Х2 + А31Х3 = I %s, ел, es3|,
v = Ai2Xi + Д22Х2 + А32Х3 = I ел, %s, es3 |,
w = A13X! + A23X2 + Д33Х3 = I esi» eS2. %s I.
G.10.7)
причем выражение справа представляет определитель G.10.4),
в котором соответствующий столбец заменен столбцом %ь %2, %з',
например,
Xi е,2 е13
Х2 е22 е23
Хз ез2 езз
В применении к системе G.10.1) это вычисление приводит к
следующему представлению решений:
и = di [d] + dI- B1V2) (d,x, + a2x, +
- V2 [д2 (дуВ2%2 - д2В1%1) -
о = д2 {D\ + Dt- B2V2) (d,x, + 52Х2 +
- V2 [д3 (й2В3Хз - д3В2%2) - а,
G.10.8)
,J
причем введены обозначения дифференциальных операторов
з, G.10.9)
а дифференциальные уравнения G.10.6) для функций %s запи-
записываются в виде
E=1,2,3).
G.10.10)
Найденное представление решения можно существенно упро-
упростить, приняв
C :' C=1,2,3)
G.10.11)
G.10.12)
\7.10.13)
и определив %rs, %" соотношениями
?Д'5 = ^Ф (s=l, 2, 3);
SJYsf = xVs (s= 1,2,3);
Тогда по G.10.10)
§71
ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ
791
Решение G.10.8) теперь представлено суммой вектора
(j, B2x'2, В3%'3) с равным нулю ротором и соленоидального
вектора (%", %", %"). Первый выражен через бигармонический
скаляр Ф, второй — через соленоидальный вектор D?i, W2, Ч'з).
Частные решения, соответствующие этим слагаемым, записы-
записываются в виде
и =
и" =
v =
, - дх (fi^W, +
D\ - B2V2) д2Ф,
2 - д2 (в.а.т, +
d\ - b3v2) а3Ф,
G.10.14)
д3 (fijd,^, + в2д2ч>2 + в3д3ч>3).
Им соответствуют выражения объемных расширений и ли-
линейных векторов поворота
0i = (i?2
@2 = \Въ
©3 = (Bi
- B3) д2
-В{)д3
- В2) di
¦& =
^2Ф,
д^2Ф,
д2Ч2Ф,
D2Si
©Г
и
©3
Ф,
= v2
= v2
= v2
ь
(В
(в
(В
= 0,
заг^з-Вгаз^),
1а34г1 - Взд^а),
idM-B&Vi),
G.
G-
10.
10.
15)
16)
и, сославшись на G.10.11) —G.10.13), несложно проверить, что
исходные уравнения G.9.6) удовлетворены.
о о
Отметим еще, что при d*s = 0, когда состояние V-объема на-
натуральное (он совпадает с у-объемом), по G.9.4), G.9.7)
4 = 0, BS = T^ = « (,-1,2,3).
Теперь, введя в рассмотрение вектор G:
можно записать решение G.10.8) в виде
o;=-aVV-G + VX(VX G) = A-a) W • G-V2G =
= 2A1_V)W-G-V2G,
G.10.17)
причем согласно G.10.10) G—бигармонический вектор. Пришли
к решению уравнения теории упругости A.7.4) гл. IV в форме
Буссинека — Галеркина.
7.11. Бифуркация равновесия сжатого стержня. Предпола-
Предполагается, что стержень расположен между двумя горизонтальными,
792 ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ. IX
твердыми и гладкими плитами, а его боковая поверхность не
о
нагружена. Одноосное напряженное состояние в V-объеме соз-
создается вертикальным смещением верхней плиты (а3 = L) вниз
на величину Ьг3, тогдй как нижняя плита остается неподвижной.
о о
В этом состоянии ди = д22 = 0; по G.4.16), G.4.17), G.5.4),
G.9.4) имеем
и по G.9.7)
G.11.1)
причем —1 < ез < 0, так что 0 < а < 1.
На остающейся в V-объеме ненагруженной боковой поверх-
поверхности стержня по G.9.3)
я • 6 = п • Т (w) + 2\iA ((o,«2 — ©2«i) t3 = О,
и три краевых условия на ней записываются в виде
G.11.2)
На торцах стержня
i3-D = i3-f (w) - 2цА (ш,*а - co2i,),
и поскольку речь идет о разыскании форм равновесия стержня,
о
отличных от равновесия в V-объеме, но при описанном способе
его осуществления, в краевых условиях на торцах следует вы-
выразить требования отсутствия на них горизонтальных поверх-
поверхностных сил и вертикального смещения:
при a3 = L, a3 = 0: i3-D-ii = 0, i3-D-i2 = 0, w = 0,
Они сводятся к условиям
и,-0, <?3u = 0, <V = 0, G.11.3)
ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ
793
автоматически выполняющимся, если выбрать частные решения
G.10.14) так, чтобы и, v были пропорциональны косинусу,
a w — синусу аргумента пп^~ (п—1, 2, ...). Далее примем
G.11.4)
G.11.5)
причем выполняется условие соленоидальности вектора
(^Fi, ^2, ^з); по G.10.14), отбросив несущественные постоянные
множители, имеем
и' = [acrV2 ~5gi A - or + сш2)] <Э1ф„ cos -^ a3,
v' = [aaV2 - ^- A - a + ao*)] d2<?n cos -^ а„
G.11.6)
и, далее,
г/ At JX
t»"=--p-5,ij)ncos-ra3, ш" = 0. G.11.7)
Функции ф„, a])ra определяются из дифференциальных урав-
уравнений (V^di + di)
(^)B(fli. fl2> = 0 G.11.8)
и на боковой поверхности стержня подчинены краевым условиям
G.11.2), записываемым здесь в виде
V /, ч П2П2 B П2К2
д Г /„2 «2я2\ п2п2 п W1 Л
я2я2
G.11.9)
«2я2 ( д
'¦ +
L2
п-
о2)
2
-B
д
дп
п2п2'
L2
-а)
I*.
Фп
дЦ?Г
ds
+
0,
0
794
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IX
7.12. Стержень круглого поперечного сечения. Ограничимся
рассмотрением решений вида
Ф« = Rn (r) cos 8, i|>n = Qn (r) sin 6.
Здесь функции Rn{>), Qn{r) определяются дифференциальными
уравнениями
d2Qn | 1 dQn !
решения которых, если ограничиться случаем сплошного ци-
цилиндра, выражаются через модифицированные функции Бесселя
х=™. G.12.1)
Переменная 9 отделяется также и в краевых условиях, при-
приводимых к виду: при г — г0
d2Qn
2L2 \ dr2
1 dQn
г dr
G.12.2)
¦|-[Baa - с + a2) V^ - B - 3a + 2aa2 + a2)] Rn +
^1B_0)^=О.
Здесь
dx2
1 rf
1
и при подстановке в G.12.2) выражений Rn, Qn полезно иметь
и виду соотношение вида
Vf/i
^ /, (*), (V? - -5^-) xlo (х) = ^ 2/, (х) и т. д.
По сокращении на общий множитель -т- придем к системе
трех однородных уравнений, линейных относительно постоян-
постоянных Си С2, Сз. Бифуркационные значения о, значит и е3, яв-
являются корнями определителя этой системы (причем 0<сг<1).
Они являются функциями параметра xo = mt-?- и зависят так-
также от коэффициента Пуассона,
§ 7]
ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ
795
7.13. Бифуркация равновесия полой сферы, сжатой равно-
равномерно распределенным давлением. Радиально-симметричное со-
состояние равновесия было рассмотрено в о. 7.3; близкие к нему
осесимметричные формы равновесия можно получить, налагая
перемещение, не зависящее от координаты К (долготы):
G.13.1)
G.13.2)
Отлична от нуля только компонента со*, вектора ю:
Сославшись на формулы G.2.1), G.3.7), G.8.3), получаем
Здесь
D = Г (w) + 2-ф (/?) ©„ (еле<, -
Оц
G.13.3)
GЛ3.4)
причем постоянная Сг определена из формулы G.3.9) условием
отсутствия нагружения по внутренней поверхности R = Ri по-
полой сферы. Имеем, далее,
V • Т (w) = (Я, + 2ц) VV • а; - 2\хЯ X ю =
+ 2ц) (V • w)> - -^L- j. K Sin
G.13.5)
причем штрихом указывается дифференцирование по R. Уравне-
Уравнения равновесия G.7.14) при отсутствии массовых сил пред-
представляются в виде
причем
1 Q (
G.13.7)
793
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ [ГЛ, IX
Предполагая, что давление остается нормальным к дефор-
деформированной поверхности сферы, обратимся к записи краевого
условия G.7.18). По G.7.17) имеем
L dwR
f/2 —
1 (dw,
и, далее,
О О
eh-Vw e.
V
o
1 dwR 1 /dw
1 dw
_ 1 dwR R I dwR\
~Т~дГ+ f \W-W- OR )'
так как
Поэтому
Т
G.13.8)
Ы
Вместе с тем на поверхности сферы {eR = n)
п • D = eR - Т {w) + 2-ф (R) ©лев =
Краевые условия G.7.18) теперь приводятся к виду: на на-
наружной поверхности сферы
2g (R) щ + Bм - р t
я на внутренней
w
dw
^
G.13.9)
G.13.10)
§ 7]
ПОЛУЛИНЕЙНЫЙ МАТЕРИАЛ
797
Дифференциальные уравнения G.13.6) совместно с краевыми
условиями G.13.9), G.13.10) дают формулировку однородной
краевой задачи; условия существования ее нетривиальных ре-
решений определяют бифуркационные значения параметра р; наи-
наименьшее из них представляет критическое давление. Аналогич-
Аналогичные вычисления позволяют сформулировать краевую задачу, от-
относящуюся к разысканию критического наружного давления в
случае полого круглого цилиндра.
Решение системы дифференциальных уравнений равновесия
G.13.6) разыскивается в виде
= an(R)Pn(cos&), wb= -bn{R)P\(cosЪ) =
{R)P'n(cosф)sinФ,
G.13.11)
причем штрихами обозначаются производные по аргументам R,
cos ¦&. Оно остается конечным в обоих полюсах сферы ¦& = 0,
¦& = я только при целых п. По G.13.8), G.13.2), использовав
известные рекуррентные соотношения для полиномов Лежандра,
получим
5.12)
-Ф,, (J?) P. (cos*)
— 2@, sin Ф = %п (R) n(n+\)Pn (cos ф),
причем введены обозначения
G.13,13)
В уравнениях G.13.6) переменные разделяются; приходим
к системе обыкновенных дифференциальных уравнений, запи-
записываемой в виде
(k + 2li)R\'n(R)-Rg(R)n(n+l)%n(R) = 0,
(I + 2ц) ф„ (/?) - [Rg (R) %п (/?)]' = 0.
Ее решение легко находится:
^
G.13.15)
причем Лп, 5„ — произвольные постоянные. Подставив теперь
эти значения <р„(#), Хп(^) в систему G.13.13), придем к также
798
ЗАДАЧИ И МЕТОДЫ НЕЛИНЕЙНОЙ ТЕОРИИ УПРУГОСТИ
[ГЛ. IX
легко интегрируемой системе линейных неоднородных уравне-
уравнений, определяющей неизвестные функции an(R), bn(R):
Здесь
Сп =
1
2я+1
1
2ft+1
к
Л
R
G.13.16)
R,
G.13.17)
причем Cn, Dn — постоянные.
Переменные R, ¦& разделяются также в линейных краевых
условиях G.13.9), G.13.10); подставив в них найденные значе-
значения an(R), bn(R), придем к системе четырех однородных линей-
линейных уравнений для постоянных Ап, Вп, Cn, Dn. Приравняв
нулю ее определитель, придем к уравнению, определяющему
бифуркационные значения параметра р. Последний войдет в
это уравнение также и через выражение функции g(R), опре-
определяемой по G.13.7), G.13.4), причем постоянная с\ нелинейно
связана с р соотношением G.3.10). Критическое давление рКр
является минимальным бифуркационным значением р, опреде-
определяемым надлежащим выбором числа узлов п искомой формы
равновесия при заданном отношении Ri/Ro-
ПРИЛОЖЕНИЕ I
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ
1.1. Скаляр и вектор. В математическом естествознании рас-
рассматриваются величины, определяющие свойства физических
объектов и происходящих в них процессов. Задание численных
значений (при выбранной системе единиц) заключает в себе
произвол, обусловленный выбором той или иной координатной
системы — системы отсчета, но существующие между величи-
величинами связи не зависят от этих извне привнесенных способов
описания. Тензорное исчисление представляет математическое
средство, с помощью которого формулируются такие инвариант-
инвариантные (не зависящие от системы отсчета) соотношения между
изучаемыми объектами.
Простейшим объектом является скаляр — физическая вели-
величина, задаваемая ее численным значением, одним и тем же во
всех системах отсчета; таковы плотность, температура, работа,
кинетическая энергия. Скаляр — инвариант по его определению.
Вектор — следующий по сложности объект. Это — физическая
величина, которой помимо ее численного значения приписы-
приписывается некоторое направление. Таковы скорость, ускорение,
сила. Для обозначения вектора используется жирный шрифт и
преимущественно строчные буквы латинского алфавита. Дей-
Действия векторной алгебры предполагаются известными; скаляр-
скалярное произведение векторов а и Ъ обозначается а-Ь, вектор-
векторное а X Ь. Но для последующего необходимо напомнить пра-
правила преобразования проекций вектора при преобразовании
поворота ортогональной декартовой системы координат; только
такие системы применяются в дальнейшем, пока не оговорено
противное. Заметим еще, что во всем последующем рассматри-
рассматриваются величины в трехмерном пространстве Евклида (Е3).
Пусть ОХ1Х2Х3 — исходная система осей («старые оси»), а
Ох\х'2х'3 — получающаяся из нее преобразованием поворота
(«новые оси»); через i's, ik обозначаются единичные векторы,
задающие направления новой оси Ox's и старой Oxh, через
a**='s' h~ КОСИНУС Угла межАУ этими осями. Вектор а может
800 ПРИЛОЖЕНИЕ 1
быть задан его проекциями а^'и ак на оси новой и старой си-
систем и представлен его разложениями по единичным векторам is:
з
Здесь и во всем последующем знак суммирования по повторяю-
повторяющемуся индексу («немому» индексу) будет опускаться, а случай,
когда суммирование не должно иметь места (когда рассматри-
рассматривается только одно слагаемое суммы), оговаривается особо пе-
перечеркнутым знаком суммы (>] —«не суммировать по s»).
Конечно, немой индекс, не изменяя смысла формул, можно по
произволу менять, например, asbs — akbk, astbsbt — arqbrbq —
одни и те же суммы, три слагаемых в первой сумме, девять — во
второй. Неповторяющиеся индексы называются свободными, им
поочередно приписываются значения 1, 2, 3. Свободные индексы
в обеих частях равенства должны иметь одинаковые наимено-
наименования, например, записи qr = 6rftaft представляют три равенства,
Цп — СтппЬглп — девять равенств и девять слагаемых в правой
части каждого.
В применении к единичным векторам i's, ik формулы A.1.1)
записываются в виде
V = а Л., i.=a.i', (I.I.2)
поскольку asn — проекция i's на ik (или ik на iQ. Теперь, введя
в рассмотрение символ Кронекера
0, s^t,
1, s = t, (LU)
и записывая условия Ортонормированности этих векторов
приходим к известным соотношениям связи между косинусами
углов между осями новой и старой систем:
К * '* = 6st = askh • atJm = askatmbkm = asJkatt ,
I
Подстановка A.1.2) в формулы A.1.1) приводит к закону пре-
преобразования проекций вектора
а = ак1к = ака,? = а'/3, aJ = a,fcaA, J
а = a'fs = aXA = %h> 4 = %k<- 1
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 801
Конечно, численное значение проекции вектора зависит от на-
направления оси, на которую проектируется вектор. Поэтому не-
неудачно встречающееся словоупотребление «проекция вектора на
ось — скаляр», так как скаляр — инвариантная физическая ве-
величина. Инвариантом вектора а является его модуль, обозна-
обозначаемый а. Конечно, это следует и из закона преобразования
A.1.6):
а2 = аа = akak = askafka'sat = bsta'a't = a'sa's. (\ Л Л)
Скалярным инвариантом двух векторов служит их скалярное
произведение
b
Если известно, что asbs = arkb'k, где bs и b'k — проекции век-
вектора Ь на старые и новые оси, то as, a'k являются также про-
проекциями вектора а на те же оси. Действительно,
так как направления i'k можно выбрать по произволу; вели-
величины a'k также преобразуются, как проекции вектора, что и
требовалось.
При преобразовании поворота старые и новые системы одно-
именны — обе правые или обе левые, а определитель матрицы
косинусов равен единице:
«11 °12 «13
а21 °22 °23
а31 И32 аЗЗ
= !<*.* 1=1. A.1.9)
Если же поворот соединен с зеркальным отображением, про-
простейшим примером служит /,' = ?,, i2 = i'2, i3— — i'3, to |asfe| = — 1,
новые и старые оси разноименны. Далее рассматриваются
только преобразования поворота; это позволит избежать неко-
некоторых усложнений, например различения истинных векторов и
псевдовекторов.
1.2. Символы Леви-Чивита. Так называют величины
Они равны нулю, если в числе индексов г, s, t имеются одина-
одинаковые, + 1, если индексы г, s, t различны и следуют в порядке
123, или 231, или 312, и —1, когда этот порядок нарушен. Это
определение верно в любой ортогональной декартовой системе,
получаемой из исходной преобразованием поворота (ent — e'rs^.
51 А. И. Лурье
802 ПРИЛОЖЕНИЕ I
Векторные произведения единичных векторов с помощью сим-
символа Леви-Чивита записываются в виде
поэтому
c = aXb = asisX btit = erstirasbt, с, = erstasbt. A.2.3)
Например,
Cl = e
Имеем также, используя A.2.2) и известное правило представ-
представления двойного векторного произведения,
ir X (is X if) = isbrt - itbrs = ir X eqstiq = emrqestqim.
Умножая теперь скалярно обе части этого равенства на 4, при-
приходим к соотношению
ekTqZstq = SftAf - &kAs- A.2.4)
Из него при г = t, то есть при суммировании по двум индексам
t и q, имеем
— 36fts — 6ks = 2bks. (I. 2.5)
Наконец, при суммировании по трем индексам находим -
ё«^«, = 2й** = 6. A.2.6)
Используя A.2.5), имеем еще
eqsth Xit = eqsterstir = 2bqrir = 2iq, iq = -i e,^, X it. . A.2.7)
Например,
« ('X/*Xi)
Введение символов Леви-Чивита и использование перечислен-
перечисленных правил значительно сокращает вычисления в тензорной
алгебре.
1.3. Тензор второго ранга. Определение этого следующего
за вектором по сложности физического объекта можно вводить
различными способами. Сначала остановимся на одном из них.
В системе осей Ох^х&г рассматривается квадратная мат-
матрица \\qsi\\\
^21 <722 <723
<7з1 <7з2 <7зз
\ЯЛ A-3.1)
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 803
и с помощью чисел этой матрицы проекциям а& вектора а сопо-
сопоставляются числа bs по правилу
b2 =
(I. 3.2)
или, короче,
bs = qshah. A.3.3)
По такому же правилу определяется умножение квадратной
матрицы \\qst\\ на столбец а, в результате которого получаем
столбец Ь.
Определение. Матрица ||<7«И1 определяет тензор второго
ранга, обозначаемый Q, если известно, что для любого векто-
вектора а числа bs являются проекциями вектора Ъ. Элементы qst
матрицы называются компонентами тензора Q в принятой си-
системе осей. Операцию сопоставления вектору а вектора Ь с по-
помощью тензора называют умножением справа этого тензора на
вектор а; она обозначается так:
b = Qa. (I.3.4)
С помощью матрицы A.3.1) один физический объект (век-
(вектор а) преобразуется в другой — вектор Ь. Отсюда следует, что
этой матрицей в системе осей Oxix2x3 определена величина,
имеющая самостоятельное физическое содержание. Остается
потребовать, чтобы ее способность сопоставлять вектору вектор
сохранялась в любой координатной системе. Это значит, что
элементы q,t матрицы ||^|| должны при переходе к новым осям
Ох[х'2х'3 подчиняться закону преобразования, обеспечивающему
преобразование чисел bs, как проекций вектора, то есть по пра-
правилу A.1.6), в предположении, что ah преобразуются по этому
же правилу. Итак,
откуда имеем
где обозначено
<, = «А<7«- A-3.6)
Сравнение A.3.5) и A.3.3) указывает, что правило умножения
справа тензора Q на вектор а сохраняется в новой системе осей,
если компоненты этого тензора подчиняются закону преобразо-
преобразования A.3.6). Обратное преобразование имеет вид
51*
804 ПРИЛОЖЕНИЕ I
Было бы смешением понятий отождествлять матрицу с тен-
тензором. Последний является самостоятельной физической вели-
величиной, задание которой требует знания этой матрицы. Основы-
Основываясь на законах преобразования A.3.6), A.3.7), можно дать
вцэрре определение тензора второго ранга как физической вели-
чины,~компоненты которой подчиняются этим законам при пре-
преобразовании поворота координатной системы.
Определитель матрицы \\qst\\ обозначается \qst\ = q- Он яв-
является одним из инвариантов тензора Q. Действительно,
Здесь использовано правило умножения определителей, а так-
также A.1.9).
Примеры. Г. Вектор момента количеств движения &°
твердого тела, вращающегося вокруг неподвижной точки О,
определяется через его вектор угловой скорости по известным
формулам
^ = 02,0),+6^@2+6^3
k\-= Од,©, +в32(о2 + вззсо3.
(I. 3.9)
где Gift = —вйг- при i ф k — центробежные моменты, вг,- — момен-
моменты инерции твердого тела относительно связанных с ним осей.
Таблицей этих величин определен тензор инерции 6° тела в
точке О, а формулы (I. 3.9) можно записать в виде
Тензор инерции определяет присущее вращадощемуся твер-
твердому телу поведение — это физическое свойство, количественно
задаваемое матрицей чисел в^, преобразуемых при повороте
системы осей по правилу A.3.6).
2°. Рассмотрим стержень с прямолинейной осью (ось Хз),
левый конец которого заделан. Начало системы осей Сх\х2Хз
поместим в центре инерции правого сечения стержня, направив
оси Сх\, Сх2 по главным центральным осям инерции этого се-
сечения. Приложение в точке С поперечной силы Fi (или F2)>
имеющей направление оси Сх\ (Схг), вызывает смещение этой
точки }\ — G\F\ (f2 = O2F2) по направлению силы; через f3=0zFz
обозначается смещение по оси Сх3 при действии осевой силы FA.
Формулы
fF f2 = <y2F2, /3 = or3f3 A.3.11)
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ
805
являются частным случаем A.3.2), когда матрица A.3.1) имеет
диагональную форму:
<т, 0 0
0
A.3.12)
0 а2
0 0 <т3 J
Этим определен тензор податливости стержня в точке С, обо-
обозначаемый 2, а формулы A.3.11) можно записать в виде
f = 2 • F.
Отсутствие диагональных слагаемых в матрице A.3.12) об-
обусловлено специальным выбором координатной системы и, ко-
конечно, не является инвариантным свойством тензора 2. Напри-
Например, при повороте системы осей на угол <р вокруг оси Сх3 таб-
таблица косинусов примет вид
х2
coscp sinqp 0
— ЭШф СОЭф О
A.3.13)
0
О
1
и по A.3.6) матрица компонент тензора 2 будет
2ф]
(сг2 — <r() sin 2ф
0
•?(<r2-<r,)sin2q>
0
~ °i)cos 2ф] 0
0
так что теперь с помощью формул A.3.2) имеем
К = Т f(ffl
A.3.14)
-°l)(- F\ C0S
F2
F2
I sin 2Ф + F^ cos 2Ф)],
F = a F'
h 3J 3*
Элементарный вывод этих формул «косого изгиба» общеиз-
общеизвестен. Достоин внимания автоматизм вычисления, достигнутый
применением простейших понятий тензорного исчисления.
3°. Формулами
A.3.15)
806 ПРИЛОЖЕНИЕ I
где as, xs обозначают координаты точек М и М' с вектор-ра-
вектор-радиусами г и R в системе осей O.XTZ, определяется аффинное
преобразование. При таком преобразовании прямая остается
прямой, отрезок прямой, поворачиваясь, изменяет длину, пря-
прямоугольник преобразуется в параллелограмм, круг — в эллипс.
Матрицей \\%st\\ определяется тензор второго ранга Л, а фор-
формулы A.3.15) записываются в виде
R = Ar.
1.4. Простейшие операции с тензорами. Суммой тензоров
Р и Q называют тензор Т, который по умножении справа на
вектор а определяет вектор, равный геометрической сумме Р- а
и Q-c. Он обозначается
Из определения следует, что компоненты tst тензора Т равны
суммам соответствующих компонент слагаемых тензоров Р, Q
(tst = Pst + Qst)- Аналогично определяется произведение XQ тен-
тензора на скаляр X. Компоненты этого тензора равны Kqst-
Составим скалярное произведение векторов с и Ь = Q-a:
c-b = c-Q-a = qstcsat = qtsctas.
Немые индексы s, t переставлены местами, что, конечно, не из-
изменило суммы. Обозначая теперь qtsct = es, имеем
с ¦ Ь = ases,
и поскольку слева стоит инвариант, а а~вектор, то, сослав-
сославшись на замечание в конце п. I. 1, следует заключить, что es —
проекции вектора. Они образованы с помощью матрицы
Un <72i <7з11 «
Я12 <722 <732 . A-4-1)
<7ш ^23 <7зз1
транспонированной с матрицей A.3.1). Из сказанного выше
следует, что этой матрицей определены компоненты тензора
второго ранга Q*, называемого транспонированным к Q, так что
e = Q* -а.
Произведение слева тензора Q на вектор а определяется как
произведение справа Q* на этот же вектор а:
a Q = Q*-a. (I.4.2)
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 807
Проекции этого вектора, в отличие от A.3.3), равны quat- Осно-
Основываясь на этем, можно записать тождества
c-{Q-a) = {c-Q)-a = a-{Q' ¦ с) = qstatcs
и опускать скобки в записи билинейной формы величин а<, с5:
c-Q-a = a-Q* -с. A.4.3)
Тензор второго ранга называется симметричным, если он равен
своему транспонированному:
5 = 5*, skt=*slk. (I.4.4)
Такой тензор задается шестью компонентами. Тензор
Q = — Q*, (akt = — (atk (I.4.5)
р равными нулю диагональными элементами называется косо-
симметричным; он задается тремя компонентами, часто обозна-
обозначаемыми аг' х
«W = - еш<лт, со, = - j eqst(ast, (I.4.6)
так что "матрица компонент Q записывается в виде
О со12 = — со3 <о13 = «2
^21 = юз 0 со2з== — **>
С031 = — С02 С032 = COj О
Тождество
Q ^(Q + Ql+(QQ') S +
определяет разбиение тензора на симметричную и кососиммет-
ричную части; их компоненты равны
Stk = у (Qik + Qkd, «г = j eTstqts. A.4.9)
Например,
«1 = eistqts = J («123732 + ^132^2з) = ~2 (^32 — <?2з)-
Свойство тензора быть симметричным инвариантно относитель-
относительно поворота системы осей. Действительно, по A.3.6)
Я'РЧ =
808 ПРИЛОЖЕНИЕ I
Компоненты кососимметричного тензора преобразуются при по-
повороте координатной системы, как проекции вектора е>; действи-
действительно,
Юг = Т erst&ts = ~9 К ' (К Х *<) atpas Шр = Т К ' {Kas X Kat ) Ю =
1 1
= -—if • (i X i \ с л =-—i'>? р с\ = i' • i
так что
что согласуется с законом преобразования (I. 1.6) проекций век-
вектора. Этот вектор, определяемый по A.4.9), называют сопут-
сопутствующим тензору Q; его обращение в нуль свидетельствует
о симметричности тензора. Заметим еще: вектор Ь = Q • а по
A.3.3) имеет проекции
bs = &stat = — erstarat = esrtd)rat,
так что, сославшись на A.2.3), приходим к часто применяемым
соотношениям
Обратившись еще к A.4.8), имеем
Q-a=S -а + аха, a-Q = S • а-& X а. A.4.11)
Следствием этой формулы является соотношение
выражающее легко предвидимый результат, что в образовании
квадратичной формы с помощью тензора Q имеет значение
только его симметричная часть.
Рассмотрим билинейную форму qShasbh, где as, bh — проек-
проекции векторов с, Ь. Предположение, что она инвариантна, то
есть что ее численное значение сохраняется независимо от вы-
выбора координатной системы, выражается равенством
Оно выполняется, если коэффициенты формы преобразуются по
закону A.3.6), а ее переменные — по A.1.6). Это позволяет
дать третье определение тензора второго ранга как величины,
задаваемой матрицей ||^s/|l коэффициентов инвариантной били-
билинейной формы. Коэффициентами инвариантной квадратичной
формы задается симметричный тензор второго ранга.
Примеры. 1°. Известно, что удвоенная кинетическая энер-
гяя_ твердого тела, вращающегося вокруг неподвижной точки О
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 809
с угловой скоростью, задаваемой вектором ю, определяется по
формуле
Эта форма инвариантна, так как, конечно, численное значение
кинетической энергии не зависит от выбора системы координат.
Поэтому 6,й — компоненты симметричного тензора второго
ранга в0 — тензора инерции твердого тела в точке О, а выра-
выражение 271 можно записать еще в виде
271 = « • в • « == © • К°.
2°. В примере 2° п. I. 3 квадратичная форма
представляет удвоенную потенциальную энергию упругого
стержня. Этим подтверждается, что 2— симметричный тензор
второго ранга.
1.5. Диада векторов, диадное представление тензора второ-
второго ранга. Заданием двух векторов а, Ь определяется матрица
A.5.1)
Ею определяется тензор второго ранга, называемый диадным
произведением векторов а, Ь (или диадой) и обозначаемый ab.
Это согласуется с принятым в п. 1.3 определением тензора, по-
поскольку для любого вектора с величины, определяемые по пра-
правилу A.3.2):
as (&ic, + b2c2 + b3c3) = asb • с,
только скалярным множителем Ь-с отличаются от проекций
вектора а. Эти формулы определяют произведение справа ди-
диады на вектор:
{аЬ)-с = аЬ-с A.5.2)
Транспонирование матрицы A.5.1) приводит к замене а и Ъ
местами:
{аЬ)* = Ьа, A.5.3)
так что по A-4.2)
abc = c-ba = c- {аЬ)\ A.5.4)
В матрице, определяющей диаду isik, только элемент s-й
строки и k-to столбца отличен от нуля и равен 1. Сумма трех
диад
Ё = ili[ + i.2i2 + /Уз = bstisit (I-5.5)
810 ПРИЛОЖЕНИЕ 1
определяет в ортогональной декартовой системе координат еди-
единичный тензор — тензор, только диагональные элементы кото-
которого, равные единице, отличны от нуля. Это свойство единичного
тензора инвариантно относительно поворота, так как
Очевидно также, что
Ёа = аЁ = а, (J.5.6)
и это равенство можно принять за определение единичного
тензора — его произведение (справа или слева) на любой век-
вектор а дает тот же вектор а.
Тензор Q может быть представлен суммой девяти диад:
это следует из того, что тензор справа задается в избранной
системе той же, матрицей компонент, что и тензор Q. Такое
диадное представление тензора существенно облегчает опера-
операции тензорной алгебры. Примером могут служить уже знакомые
действия умножения справа и слева:
Q • а = Я*&Ь • akik = qstakisbik = qstatis,
a-Q = akik • qstisit = qstakbksit = qstasit,
— пришли к ранее известным выражениям.
Векторное умножение тензора второго ранга на вектор
справа и слева приводит к новым тензорам этого же ранга:
QXa= qstakisit Xik = ertkqstakisin \
) (I.o.o)
«XQ = qstakik X isit = erksqstakirit. '
Например, матрицей компонент последнего тензора будет
A.5.9)
В частности, диаде аЬ и вектору с сопоставляются диады
(аЬ)Хс = а(ЬХс), с X (аЬ) = (с X а)Ь. A.5.10)
Легко проверяются тождества
(axQT^-Q'Xa, ах(Р ¦ Ь)~{аХ Р)-Ь. A.5.11)
Введем еще в рассмотрение величины
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 811
Они не являются векторами, поскольку qst не преобразуются,
как проекции вектора; но введение этих «квазивекторов» в фик-
фиксированной системе осей допустимо и упрощает записи формул.
Тензор Q с их помощью записывается в формуле суммы трех
диад:
Сопутствующий ему вектор а представим в виде
« - -4?! X it = -4-*, X qs = ~ertsqjr. A.5.14)
В частности, вектор, сопутствующий диаде ab, равен
<* = jertsasbtir = -jaxb. (I.5.15)
Отметим еще, что ^/-компонента тензора Q может быть пред-
представлена в виде
¦ q.t = i,-Q'U- 0-5.16)
1.6. Тензоры высших рангов. Свертывание индексов. Усло-
Условимся называть скаляр тензором нулевого, вектор — первого
ранга. Из трех родов операций над двумя векторами а, Ь —
диадного, векторного и скалярного умножения — наиболее об-
общей является первая; с ее помощью из двух тензоров первого
ранга образуется тензор второго ранга ab, задаваемый матри-
матрицей компонент \\asbt\\; ранг этого тензора понижается на еди-
единицу при сопоставлении ему тензора первого ранга — сопутст-
сопутствующего вектора -^eTstatbsir. Он понижается на две единицы
(тензор становится скаляром), когда в рассмотрение вводится
величина bstasbt = asbs = a-b. Происходит свертывание по паре
индексов s, t.
Величина
определяет тензор /г-го ранга, если его компоненты (их всего
3") подчиняются при повороте координатной системы закону
преобразования
q'tt t = 4S я sat sats • • • at s > A.6.2)
t s >
представляющему непосредственное обобщение правила A.3.6).
Ранг тензора снижается на две единицы при каждом сверты-
свертывании; например, при свертывании по двум последним индексам
приходим к тензору
(п-2)<2 = ?„...*„ .....АА •••'
°/I-2
812 ПРИЛОЖЕНИЕ I
(по индексу sn_! —суммирование!). Ранг тензора можно пони-
понизить на единицу введением «сопутствующего» тензора; одним
из них будет тензор
(л-1)Л_ 1 /, . ч. . _
2 4Sls2 ... sn\ Sj sj *3 • • • sn
1
= --2^s riris ¦.. is qs s s .
Свертывание тензора второго ранга приводит к скаляру, на-
называемому следом (Spur) тензора или его первым инвариан-
инвариантом:
~! = Л (Q) = qstis ¦ it == qsAt = qss. A.6.3)
В частности, например, для единичного тензора
а для диады
С помощью двух тензоров Q, Р второго ранга образуются тен-
тензоры четвертого ранга; примерами служат
QP = qstprqWriq, PQ = Prqqstiriqisif
Из них можно образовать тензоры второго ранга^при однократ-
однократном свертывании. В частности, произведением Q на Р справа
является тензор
Q • Р = qstPrqhh • tAq = qstPtqhtq- A-6.6)
При вторичном свертывании приходим к инварианту — следу
тензора A.6.6). Он представляется в виде
Q. .р = Sp (Q • Р) = <7e<p^ • iq = qsiPts- A-6-7)
Легко проверяется тождество
(Q-PT^P*-Q* = qstptqiqis, (I.6.8)
из которого следует, что тензор Q-Q* симметричен; однако
Ф-ЯФЯ-Q*.
При Q = Р приходим к тензору второго ранга, называемому
квадратом тензора:
Q-Q = Q2 = qstqtrisir- d-6.9)
Аналогично представляются более высокие степени тензора, на-
например:
2
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 813
Следы этих тензоров равны
qstqirqrs- ^ ^ A.6.10)
Степени тензора выше второй выражаются через Q2, Q, Q0 = Е.
Эта теорема Кейли— Гамильтона доказывается в п. 1.10, 1.12.
Умножение тензора второго ранга справа или слева на еди-
единичный тензор Е приводит к тому же тензору:
Q-E = E-Q = Q. (I.6.11)
Для последующего представит интерес выражение тензора
Q • Q* через симметричную часть 5 тензора Q и сопутствующий
вектор о». Имеем
Q*. Q = (§ - Q) ¦ (S + Q) = S2 - Q • § + § • Q - Q2
и, сославшись на A.4.6), A.5.8), найдем
Q ¦ S = a>trSrq?q = emrt^msTJitiq = oXS,
а учитывая еще, что й* = —Q, S* = S, получаем по (I. 6.8)
(Q • SY = 5* • Q' = - S • Q = emrt«>msrqiqit = (<o X §)*
и также
Q • Q = (nst(sitrijLT = etmeTtq(sim(siqisir = FJ(?6mr - б5Гбт„) (am(aqijr =
= cor(osisir — a)m(amisis = <»<» — ?« • ©.
Итак,
Q* • Q = 52 + Я« • © - юю - © X 5 - (ю X 5)* =
= [stsSrq - btq(om(om - щ<йд - <am (emrtsrq + emr,sr<)] it», A.6.12)
и аналогично
Q. Q* = S2 + ?w . © - ©со + © X 5 +(©X S)*, A.6.13)
так что
Q • Q* - Q* • Q = 2 [« X 5 + («a X S)*]. A.6.14)
Примером тензора третьего ранга является тензор Леви-
Чивита — его компонентами служат 27 символов Леви-Чивита
(отличны от нуля только шесть). Их тензорный характер легко
обнаружить, основываясь на определении A.2.1) и на форму-
формулах A.1.2)
Ktr = К • {К Х К) = askatiarmh • ft X Q = %katlarmeklm
и сославшись на A.6.2). Величины е5гтеЫт определяют тензор
шестого ранга. Его сворачивание по трем парам индексов при-
приводит к инварианту A.2.6), по двум парам индексов - по
814 ПРИЛОЖЕНИЕ I
A.2.5) к удвоенному единичному тензору, по одной паре индек-
индексов— к тензору четвертого ранга A.2.4).
Изотропным называют тензор, компоненты которого сохра-
сохраняют неизменные значения во всех координатных системах, по-
получающихся одна по другой преобразованием поворота. При-
Примером изотропного тензора второго ранга может служить про-
произведение скаляра на единичный тензор КЁ, а произведение
скаляра на тензор Леви-Чивита есть изотропный тензор третье-
третьего ранга. Можно доказать, что других изотропных тензоров
второго и третьего ранга не существует. Наиболее общий вид
компонент изотропного тензора четвертого ранга представ-
представляется формулой, содержащей три скалярных множителя X, \i, v:
Cikmp = Mtllfimp + V i^ltrfikp + 6,-p6fem) + V {bimbkp - blpbkm)- A-6.15)
При наличии требований симметрии
cikmp = cmpik< clkmp ~ clkpm A.6.16)
третье слагаемое в A.6.15) отпадает (v = 0).
1.7. Обратный тензор. Соотношения A.3.2) можно рассмат-
рассматривать как систему линейных уравнений относительно неизвест-
неизвестных аг; она имеет решение, если матрица \\qst\\ невырожденная,
то есть ее определитель отличен от нуля:
<7 = |<Ы#0. A.7.1)
Тогда аг определяются известными равенствами
аг = ~- (Мп + Мг2 + Mrs) = j btArt, (I.7.2)
в которых Art — алгебраическое дополнение элемента qtr опре-
определителя q (обратить внимание на расстановку индексов!). Тен-
Тензор с матрицей компонент
<!rt = jArt (I.7.3)
называется обратным тензору Q и обозначается Q:
Q-' = M^ = M<^-. 0.7.4)
Соотношения A.7.2) теперь записываются в виде
a = Q~l.b, A,7.5)
и подстановка в A.3.4) приводит к равенству
Из него имеем
= Q-Q~1-b,
qsqisiq ¦ q%h = qsrfVt = Ё = bstisit, A.7.7)
основы тензорной алгебры 815
откуда приходим к известному свойству определителей
Заметим еще также, что
A -J2- ntr-lJl
Известно, что определитель q представляет сумму взятых с над-
надлежащими знаками произведений вида qstqqrqmn, причем в трой-
тройках индексов sqm, trn не должно быть одинаковых; в против-
противном случае сумма будет нулем. Нетрудно проверить, что
q = -^ esqmetrnqstqqrqmn. A.7.10)
Введем обозначение
qU=-bq-esqmetmqqTqmn- (I.7.11)
Тогда
и 1
так как при !#«в тройках индексов sqm, trn неизбежно повто-
повторение; пришли к равенству A.7.8), откуда следует, что форму-
формулой A.7.11) дается другое представление компонент тензора:
Q —q hh-
Заметим еще соотношения
(Q"T1=Q. (Q~T = (Qs)"' (I.7.12)
— тензор, обратный обратному, равен исходному тензору; транс-
транспонирование обратного тензора приводит к тензору, обратному
транспонированному. Далее, отметим свойство переставимости
Q-Q~{ = Q~! -Q = E A.7.13)
и соотношение, определяющее тензор, обратный произведению
тензоров:
проверяемое умножением обеих частей на P-Q:
P-Q-(P- Q)~l = E = P-Q-Q~l-P~l = P-E-P~l = P-p-l = E,
что и требуется.
Г.8. Тензор поворота. Как 'выше, is обозначают единичные
векторы осей триэдра OxiX2x3, а ^ — триэдра Ох\х'2х'3, получа-
получающегося из первого с помощью поворота. В рассмотрение
816 ПРИЛОЖЕНИЕ I
вводится тензор А, равный сумме трех диад isi's, и транспони-
транспонированный ему тензор А*:
А = 1& A* = i'sis. (I.8.1)
Умножение А слева на вектор а (или А* справа на с) приводит
к вектору, обозначаемому а:
а = а.А = а. isi's = a/s, A'-a = i'sas = й. A.8.2)
Проекции этого вектора на новые оси i' равны проекциям ди-
дивектора а на старые оси is; это значит, что вектор а получен
из а путем поворота последнего вместе с триэдром Oxix2x3.
Тензоры А, А*, осуществляющие эту операцию, называются тен-
тензорами поворота.
Проекции векторов ix и i[ на старые оси равны соответ-
соответственно A, 0, 0) и (оси, <zi2, «в); поэтому матрица компонент
диады ixi[ представляется в виде
а11 а12 а13
0 0 0
0 0 0
а компоненты тензора А — матрицей косинусов llctS(i|. Получаем
что и требуется.
Отметим еще соотношение
A.8.4)
выражающее, что транспонирование тензора поворота приводит
к обратному тензору. Это — характеристическое свойство тен-
тензора поворота; всякий тензор, обладающий этим свойством, яв-
является тензором поворота. Действительно, пусть "
Поскольку определители q и q*, конечно, равны друг другу,
а определитель |6S«| = 1, имеем q2 = 1 и примем q = 1; в A.7.8)
имеем qrt = qtr и приходим к шести равенствам
определяющим вместе с условием q = 1 по A.1.5) матрицу ко-
косинусов.
Известно, что поворот твердого тела (системы связанных с
ним осей из старого положения Ох1х2х3 в новое Ox'x^Q может
быть задан вектором конечного поворота 0; этот вектор имеет
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 817
направление оси, вокруг которой производится поворот, и ве-
величину 2tg-|-, где % — угол поворота:
6 = 2* tg-§-.
Вектор а, заданный в системе осей Ох\Х2Хз, при этом становится
вектором й, определяемым формулой О. Родрига*):
A.8.5)
4
Его можно представить также в виде
X a + (fc*-
Введем кососимметричный тензор
Q = * X Е = kx (i3i2 - i2i3) + k2 (i{i3 - «V,) + k3 (i2i, - t,i2), A.8.7)
так что
* X a = Q • a.
Тогда A.8.6) можно будет преобразовать к виду
а = [(Ё- kk) cost + kk + Q, sin %]-a = A* -a,
позволяющему дать инвариантное (не связанное с выбором
осей) представление тензоров поворота:
А = (Е — kk) cos x + kk — Q sin %, A" = {E — kk) cos % + kk + Q sin %.
A.8.8)
1.9. Главные оси и главные значения симметричного тензора.
Разыскивается такое направление (определяемое единичным
вектором е), чтобы вектор Q-e, где Q — заданный симметрич-
симметричный тензор второго ранга, был параллелен этому направле-
направлению е:
Здесь к — пока неизвестный скаляр. Полагая е = eiU, можно
переписать это равенство в виде
(q,t-Mat)et = 0 E=1,2,3). A.9.2)
*) См. п. 1. 10а.
52 А. И. Лурье
818 ПРИЛОЖЕНИЕ I
Пришли к трем уравнениям
(<7зз ~
= 0,
= 0, J
A.9.3)
к которым надо еще присоединить уравнение, выражающее,
что е — единичный вектор:
e2. + el + e\=l. (I.9.4)
Им исключается из рассмотрения тривиальное решение (es — 0)
системы линейных однородных уравнений A.9.3). Ее определи-
определитель должен быть равным нулю:
Q22 ~
= 0, A.9.5)
так что числа Я являются корнями этого кубического уравне-
уравнения— характеристического уравнения тензора Q. Они инва-
инвариантны относительно преобразования поворота координатной
системы, что сразу же^следует из соотношения A.3.8) в приме-
применении к тензору Q — кЕ.
Пусть Яь Я2 — два не равных друг другу корня уравнения
1 1
A.9.5), соответствующие им векторы е назовем е = etit,
2 2
е = etit. Тогда
л 1 ^ 2
A.9.6)
откуда следует
2^1
в • Q • е =
е, е • Q • е • = Я2е • е^
Но для симметричного тензора
2 1 2 1 12 1 л 2
2 л 1
е • Q • e = i
и поэтому
12
е • е = 0.
A.9.7)
Если бы корни Яь Яг были комплексными сопряженными, то
1 2
таковыми были бы и соответствующие решения es, es систем
1 2 1
уравнений A.9.3) для Я = м и Я = Яг; но сумма eses = \es\2,рав-
\es\2,равная сумме квадратов модулей чисел es, не может быть нулем;
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 819
этим доказано, что корни полинома Рз(Х) вещественны, а век-
векторы, соответствующие его двум различным корням, взаимно
перпендикулярны.
Г. Пусть корни полинома Рз (Я) простые (Х\ ф Яг =^Я3).
Имеем
- Р' (Xs) = Д„ (Я,) + Д22 (Я,) + Д33 (U A.9.8)
где kik(Xs)—алгебраическое дополнение элемента i-й строки,
&-го столбца определителя A.9.5) при Я = Xs. Хотя бы одно
слагаемое этой суммы (пусть третье) отлично от нуля — в про-
противном случае имели бы P'(XS) = 0 и корень Xs не был бы про-
простым. Тогда из первого и второго уравнений A.9.3) имеем (см.
также A.10.14а))
6\ == &з 7) Г", &2 ^3 ~д 7j \~
и по A.9.4) найдем
lk = ± ~ bsk (Xs), D2 = Alt (Xs) + Дзз (Я,) + Д2зз (Я,), A.9.9)
причем, конечно, удовлетворено и третье уравнение A.9.3), так
как
Ggj/\gi ^A^J ~Т~ ^32 32 \/ ~Т~ \^733 ~~" ™S/ ^33 \/ == * 3 \ S/ ^= **•
Итак, для каждого из корней Xs уравнения A.9.5) определено
S S
его направляющими косинусами ед направление е такое, что
Q-l = Xse ($,).
Эти три направления взаимно ортогональны, их называют глав-
главными направлениями тензора Q, а числа Xs — его главными
значениями. Из соотношений
k ^ S k S
е.Й.л 1 о . а 1 X, П О |A\
1 2 3
следует, что в ортогональной системе направлений е, е, е мат-
матрица компонент тензора Q является диагональной:
Я, 0 0
0 Я, 0
0 0
A.9.11)
а диадное представление тензора имеет трехчленный вид*):
11 22 33 3 ss
Q = Я,её + Я2ее + Я3ее = Z Xsee. (I.9.12)
1
*) В подобных записях, когда немой индекс повторяется трижды (а не
дважды), предпочтительно сохранить знак суммирования.
52*
820 ПРИЛОЖЕНИЕ I
2°. Случай двукратного корня (?»i = Х2ФХ3). Сказанное выше
з
сохраняется для направления е— оно ортогонально прочим на-
направлениям:
33 3] 3s 3s
0 (s=l, 2). A.9.13)
Для двойного корня Я„
Р' (К) = 0, j Р" (К) = (<7„ - К) + (<722 ~ К) + (<7зз - U
и хотя бы одно слагаемое в этой сумме, пусть первое, отлично
1
от нуля. Для определения трех неизвестных eh служат лишь два
уравнения — первое уравнение A.9.3) и уравнение A.9.4); вто-
второе и третье уравнения A.9.3) удовлетворены тождественно —
2
это следствие того, что P'{h) = 0, />(Ai) = 0. Направление е
2 1 1
доопределяется требованием е • е = 0 его ортогональности к е.
Итак, в случае двойного корня лишь одно из трех главных на-
3 1 2
правлений е определено однозначно, а два других е, е произ-
з
вольно ориентированы в плоскости, перпендикулярной е, — си-
система направлений е, е, е определена с точностью до поворота
з л
вокруг е. Диадное представление тензора Q записывается в виде
^ И 22 ,33 л 33
Q = А-, (ее + ее) + Х3ее = Я,? + (Я3 - Я,) ее. A.9.14)
з
Из него следует, что лишь направление е является характер-
характерным для тензора Q..
3°. В случае трехкратного корня (Х\ = Яг = Яз)
и главные направления произвольны. Тензор Q является изо-
изотропным; его называют также шаровым.
В заключение заметим, что определитель произведения двух
тензоров равен произведению их определителей; поэтому
detA -B = detA det5 = detB- A, A.9.16)
и из A.9.5) следует, что главные значения тензоров А-В и В-А
равны.
Рассмотрим еще тензор
Q1 = А* ¦ Q ¦ А = i% ¦ qrtirit • ijm = qmi'/m; A.9.17)
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 821
это «повернутый тензор Q» — главные значения тензоров Q и
Q равны, а триэдры главных осей связаны преобразованием
поворота.
1.10. Выражение компонент тензора через главные значения.
Инварианты. Теорема Кейли — Гамильтона. Совместим «ста-
S
рые» оси с главными направлениями тензора е и (чтобы не
усложнять обозначений) назовем через is единичные векторы
новых осей. Тогда по A.3.6)
qst = М^а,, + Л2а*2а/2 + Я3а*за<з (I. 10.1)
— таковы формулы, выражающие компоненты тензора в про-
произвольно направленных осях через его главные значения; в них
т т
asm — is-e — косинус угла оси is с главным направлением е.
Главные значения симметричного тензора второго ранга яв-
являются его инвариантами. Это следует из замечания в п. 1.9,
что корни полинома Яз(^) не зависят от выбора системы коор-
координат, в которой задавалась матрица компонент тензора. Оче-
Очевидно, что любая функция главных значений тензора Ф(ЯЬ Я2, %%)
является его инвариантом. Наиболее удобны для применения ин-
инварианты, являющиеся симметрическими функциями главных
значений — корней полинома Рз{к), так как они рационально
выражаются через коэффициенты этого полинома, то есть ком-
компоненты тензора. Они называются главными инвариантами. Ко-
Конечно, инварианты тензора не зависят от ориентации триэдра
его главных осей — тензоры Q и Q имеют одни и те же ин-
инварианты.
Развернутая запись полинома Яз(Я) имеет вид
Р3 {%) = -%3 + %ЦЯп + q22 + q33) -
<722?зз + ЯззЯп "*¦ <7?2-9гз- <7зО + \Яа|- (L 10-2)
Вместе с тем
= - X3 + X2 (Я, + Х2 + h) ~ *> (h^2 + М*з + АЛ) + ^1^3, (I. 10.3)
и сравнение этих записей позволяет записать следующие выра-
выражения главных инвариантов:
h (Q) = Л, + h + h = qn + q22 + <7зз, (I. 10.4)
h (Q) = h
~ I + №2ъ ~ Я\ъ + Яагвп -4%i = 4 (qn + Я22 + Я33), A-10.5)
822 ПРИЛОЖЕНИЕ I
Отправляясь от диадного представления тензора A.9.12),
можно записать диадное представление Q2 в виде
Q2 = 2 Xsee • 2 hee = 22 W«e,k = Me« + Чее + Чее
s = l ft=l s=l ft-=l
и вообще
„11 22 33
Q" = l"ee + Klee + ^"ее. A.10.7)
Эта формула сохраняет смысл при п целом отрицательном и
при нецелых п. Например,
~ , 1 П 1 22 1 33
Q~]=~ee + ^-ee + ^-ee (I.10.8)
Aj A2 Аз
и при Xs > 0
~„ , И 22 33
Q/a = Ук^ее + УГ2ее + \%ее, A.10.9)
поскольку при таком определении
~_, ^ И 22 33 л л л 11 22 33 ^
Q -Q = ee + ee + ee = ?, Q/j ¦ Q1' = Т^ее + %2ее + Х3ее = Q,
что и требуется.
По A.6.10) имеем 1\ (Q2) = Я2 + л2 + лз, и это позволяет пред-
представить /2(Q) также в виде
y (Ы0.10)
Используя A.10.3) и A.10.7), имеем
Зое S S
Q3 = 2 ее [ - Р3 {ls) + /, (Q) ^ - /2 (Q) ^s + /3 (Q)j = 2
l l
и, поскольку Рг(К) = 0,
-Q3 + /i(Q)Q2-/-2(Q)Q + /3(Q)?=o (i.io.il)
— тензор удовлетворяет тому же характеристическому уравне-
уравнению, что и его главные значения. Это — теорема Кейли — Гамиль-
Гамильтона, она позволяет выразить любую целую степень тензора Q
через Q2, Q, Е, а его инварианты любой степени — через три
главных инварианта. «Отрицательные степени» тензора также
выражаются через Q2, Q, Е. Действительно, по A.10.11)
A.10.12)
Q = - (Q - hE + hQ'1) - 4
3 3
Q = -7- (Q - hE + hQ'1) - 4- [(/I - /1/5) ? + (/3 - /1/2) Q + /2Q2],
3 3
A.10.13)
где для краткости принято h 4(Q)
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ §23
Основываясь на этих равенствах, составим выражения инва-
инвариантов /ft(Q"')- Имеем, сославшись на A.10.10),
Далее,
= ¦— [il - 3 (l\ - hh) - (h - hh) h - h (/? - 2/2)J,
так что
/2(Q4) = f|. d.io.15)
Наконец, вспомнив известное свойство определителя обратной
матрицы, имеем
Теорема Кейли — Гамильтона, доказанная здесь для симметрич-
симметричного тензора второго ранга, имеет место для любой (симметрич-
(симметричной или несимметричной) матрицы — матрица удовлетворяет ее
характеристическому уравнению.
Симметричный тензор Q называется положительным, если
образуемая по нему квадратичная форма компонент любого
вектора а — положительная определенная:
a-Qa = qstasat > 0
(знак равенства возможен лишь при ai=a2 = a3 = 0). Все
главные значения %s положительного тензора положительны,
так как
s=l
а = Vi + V
!
k
(здесь (ik. = а • е — проекции а на главные оси). Определение
тензора Q'/! имеет смысл только для положительных тензоров Q.
Примером положительного тензора может служить тензор Р -Р*,
если Р — невырожденный тензор (I pst I =? 0). Действительно,
а-Р-Р' -а = а- pstpqiisiq • а = pstaspqtaq = 2 iPstOsf > 0,
и равенство нулю возможно только при
ps(as = 0 (/ = 1,2,3).
824 ПРИЛОЖЕНИЕ I
Но эта однородная система трех уравнений имеет только три-
тривиальное решение (as = 0), поскольку \р&\Ф0.
Теперь можно доказать, что невырожденный тензор Р пред-
представим в форме произведения тензора поворота слева (или
справа) на определяемый по Р симметричный положительный
тензор Я (или К):
Р = А-Н или Р = К-В.
Действительно,
Р* = Я • А" или Р* = В* • R,
и поэтому
Р*-Р = Н-А'-А-Н=-Н2 или P-F = R'B-B--R = R2. ¦
Но по сказанному Р*-Р (равно как Р-Р*)—положительный
тензор. Поэтому
Итак,
Р = А-(Р* • Р)'1', Р = {Р- Р*)'А -В. A.10.17)
Из этих представлений следует, что
А=Р-{Р*-Р)~\ В = {Р*Р*)~'12'Р A.10.18)
— тензоры поворота; действительно, тензоры (Р* • Р)~1г,
(Р • Р*)~1/2 симметричны, и поэтому
А* = (р* • р)~1\ ¦ Р\ в* = Р* • (Р • Р*)~1/2,
Л*. л = (Р* • Р)~'/г -Р*-Р-(Р*- РУ% = Ё, А* = А~\
В ¦ В* = (Р • Р*)~'/г -Р-Р'-{Р- Р')~'А = ?, *В~' = В*,
что и требовалось доказать.
1.10а. Главные оси и главные значения несимметричного
тензора. Как и в п. 1.9, ограничимся случаем тензора второго
ранга. Здесь можно ввести в рассмотрение две системы глав-
главных направлений (е и е) — «правых» и «левых»:
Q-e = ke или e-Q = le. A.10.1a)
Скалярные множители % и 1 равны друг другу, так как они
определяются одним и тем же кубическим уравнением
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 825
В развернутой записи это уравнение имеет вид
причем коэффициенты Ih(Q) — главные инварианты Q — выра-
выражаются через компоненты qst по формулам, аналогичным
A.10.4) —A.10.6):
h (Q) = h + X2 + l3 = qn + q22 + q33, A.10.2a)
h (Q) = ^1^2 + М-з + Я3Я1 = (^11^22 — <7i2^2i) + (<722<7зз — <72з<7з2) +
+ Ы7п ~ <7з1<7.з) = q {qn + Q2' + Л = qh (Q), (I- Ю-За)
/3(Q) = ^^3 = |^| = <7- A.10.4a)
Вещественный корень этого уравнения обозначается Аз, ему со-
соответствует правое главное направление ез. Остальные корни Xh
Я2 могут быть или вещественными, или комплексными сопря-
сопряженными: К\ — Hi + i\i2, Я2 = fxi — i'm-2- Остановимся на последнем
предположении и назовем через е2 + iex, е2 — ie\ соответствую-
соответствующие им также комплексные сопряженные векторы е (правые).
По определению
Q • (е2 ± iex) = (Hi ± щ2) (е2 ± iex),
так что
Q • ех = \ixex + ц2е2, Q-e3 = l3e3. A.10.5а)
Теперь в рассмотрение вводится взаимный (неортогональ-
(неортогональный) векторный базис
1 ¦ 2 [ 3 j
е = -е2Хе3, е = -е3Хе,, е = -е,Хе2 (g = е, . (е2 X е3)),
так что
e-es = bks. A.10.6а)
Это позволяет записать диадное (правое) представление Q
в виде
12 12 3
Q = цх (е,е + е2е) + ^2 (е2е - е,е) + %3е3е. A.10.7а)
Действительно, при этом вследствие A.10.6а) выполняются со-
соотношения (I! 10.5а).
Если все корни %s вещественны, a es — им соответствующие
векторы главных направлений, то, определив взаимный базис
теми же соотношениями, имеем
„12 3
A.10.8а)
826 ПРИЛОЖЕНИЕ I
Когда Q — симметричный тензор, то es — ортонормированный
s
векторный базис, совпадающий со взаимным базисом е, — при-
приходим к представлению A.9.12).
Диалогично вводятся левый базисный и ему взаимный три-
триэдры es, e главных направлений.
Примеры. Г. Кососимметричный тензор й представляется
через сопутствующий вектор ю:
0 = <МА = ?хю. A.10.9а)
Поэтому
Q ¦ е = (? X «>) • е: = <й X е - he,
и этому соотношению можно удовлетворить, полагая
Характеристическое уравнение тензора Q
—h —
— @2
= - к3 - Ы2 = 0 (со2 = со2 + о* + со|)
кроме нулевого имеет два чисто мнимых корня ±ia. Через
е2 ± tei обозначаются им соответствующие векторы е, так что
&Х(е2± ie^) = (ое3 X (е2 ± iex) = ± /со {е2 ± ie{),
в[ = е2 X в3, в2 = <?3 X в(.
Векторы ей е2, е3 образуют ортогональный базис; можно при-
принять, что в\, е2 — единичные векторы, они определены с точ-
точностью до поворота вокруг е3. В таких ортонормированных ба-
базисах тензор Q представляется его диадным разложением
Q = со (е2е, - е1е2). A.10.10а)
Действительно, при этом
Q • (е2 ± /е,) = со (e2«i — е^) • (е2 ± ie{) = ± г'со (е2 ± /е,),
что и требуется.
2°. Тензор поворота Л = asti$it- Учитывая известные соотно-
соотношения
I ast | - 1, ап =- а22азз - «23аз2 и т. д.,
можно записать его характеристическое уравнение в виде
- h3 + h (h - 1) (о„ + а22 + а33) +1=0.
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 827
Один из корней Я3 = 1, а два других пред ставимы в виде
К,, = е~ш, А2 = еш, причем
2 cos ю = 1 + ап + а22 + а33 = 1 + 1Х (Л). A.10.1 la)
Разыскиваются левые главные направления (правые направле-
направления тензора Л*). Корню Х3= 1 соответствует направление еди-
единичного вектора е3, остающееся неизменным при преобразова-
преобразовании поворота, — ось поворота
е3 • Л = ё3 = А3<?3 = е3.
Векторы в\ ± ie2, соответствующие корням Ai, Яг, определяются
соотношениями
(в, ± ie2) -А = е*ш (е, ± ie2), А* • (в, ± ie2) = е^а (е, ± ге2),
так что, поскольку Л.- Л* = Е,
(в, ± ге2) • (в1 ± /в2) A - e-2to) = 0.
Точно так же
е3 • Л • Л* • (е, ± /е2) = е3 • (в! ± 1еа) = е3 ¦ е*'* (в, ± ге2),
так что, исключая случай eTia> = 1, получаем
в, • е2 = 0, е, • е3 = 0, е2 • е3 = 0,
причем ei • d = е2 • е2. Квадрат модуля векторов е\ ± ie2 примем
равным 2:
(е{ + ге2) • (е[ — ге2) = е, • е, + е2 • е2 = 2ej • ej = 2e2 • е2 = 2.
Тогда векторы еь е2 будут единичными, а вектор в\ + ге2 опре-
определен с точностью до множителя eiX. Итак, векторы еи е2, е3
образуют ортонормированный триэдр, причем е\, е2 определены
с точностью до поворота вокруг е3.
Тензор поворота теперь представляется в виде
Л = е3ег + 1 [(в, - /в2) (в, + ie2) е~1<» + (в, + fc2) (в, - /в2) е'и].
A.10.12а)
Действительно, при этом выполняются требуемые соотношения
е3 • А = «з, («1 ± ie2) • А = ет'и(е, ± ге2).
Другая запись формулы A.10.8а), повторяющая A.8.8), име-
имеет вид
А = е3е3 + (ехех + е2е2) cos w + (ele2 — е2е{) sin со =
e3e3(l — cos©) — e3 X ?sinco. A.10.13a)
828 ПРИЛОЖЕНИЕ I
В этой инвариантной записи тензора поворота А вектором е3
задается ось поворота, со — угол поворота вокруг нее. В по-
последнем можно убедиться, заметив, что
в\ = е{ • А = ех cos со + е2 sin со, е2 = е2 • А = — ех sin со + е2 cos со,
то есть повернутые векторы е\, е2 образованы поворотом векто-
векторов в], е2 вокруг е3 на угол со в положительную сторону.
Отметим также представления диад главных направлений
симметричного тензора. Они следуют из соотношений (qs — глав-
главные значения Q)
П 22 33
ее + ее + ее = Е,
11 22 33
qxee + q2ee + q3ee = Q,
11 22 33 л
gfee + <72ee*+ <73ee = Q2.
Получаем
) +_Q2 _ (Q-??2) • (Q-Eg3)
(<71-<72)(<71-9з)
(Q-EgJ-jQ-Egj)
(«72 - <7зН<72 - Я\) (<7г - <7з) №-
зз
ее =
Теперь легко получить выражения квадратов косинусов
углов eh = e•/ft главных направлений с осями координат и их
попарных произведений. Например,
' \2 _ Ыъ - Qss (Я г + <7з) + qstqts
sfe
1.11. Разбиение симметричного тензора второго ранга на
девиатор и шаровой тензор. Изотропный тензор -g-/,(Q)? на-
называется шаровой частью тензора Q; выделяя из тензора Q
его шаровую часть, приходим к тензору, называемому девиа-
гором тензора Q и обозначаемому DevQ:
Характеристическое уравнение девиатора по A.9.5) записы-
записывается в виде
" =0, A.11.2)
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 829
откуда следует, что главные значения девиатора равны
или
1 1 1
v _ /OJi 1 I \ v —— ОУ 1 1 \ v _ (O\ ^ ^ \
Л| л V^'^l *^9 '"'^/» '^'9 — о \^''^9 *^4 ' /» fto "~~ <x V^Aio ~~ f\i\ ~~ /Vol.
О o/ О * ° О ° ' "'
A.11.3)
Его главные направления совпадают с главными направлениями
тензора. Действительно, из равенства
Q . е = Хе = у /: (Q) е + (DevQ) • е
следует
то есть вектор е, определяемый уравнениями A.9.1), удовлет-
удовлетворяет также уравнениям A.11.4).
Инварианты девиатора. Из формул A.11.3), A.10.4),
A.10.5) имеем
/2(Dev Q) = к1щ + х2х3 + щщ = /2(Q) - ~l\(Q), A.11.6)
Легко проверить, обратившись к A.11.5) и A.11.6), что выра-
выражение второго инварианта девиатора может быть записано так-
также в виде
j
h(DevQ)=-j[(Я, -X2f + (Я,2-X3f + (Я3-Xtf]. A.11.8)
Еще одно выражение второго инварианта девиатора можно по-
получить, заменив в A.10.10) Q на DevQ и учтя A.11.5):
./2(DevQ)=-|/.[(DevQJ]. (I.I 1.9)
Заметим, что /2(DevQ)<0. Ниже потребуются еще выраже-
выражения первого инварианта степеней девиатора до четвертой вклю-
включительно через его второй и третий инварианты. Для их вычис-
вычисления обратимся к уравнению, выражающему теорему Кейли —
Гамильтона (I. 10.11) для девиатора. Имеем
(D.ev QK = - h (Dev Q) Dev Q + /3 (Dev Q) Ё, j
(Dev QL = -/2 (Dev Q) (Dev QJ +/3 (Dev Q) Dev Q I
830 ПРИЛОЖЕНИЕ t
и т. д. Отсюда, сославшись на A.11.5), A.11.9), легко найдем
/,[(DevQK] = 3/3(DevQ), /, [(DevQL] = 2/l(DevQ). A.11.11)
Характеристическое уравнение девиатора, сославшись на
A.11.5), A.10.3), можно записать в виде
Это кубическое уравнение, не содержащее квадрата неизвест-
неизвестного и имеющее только вещественные корни; его решение по-
поэтому можно представить в тригонометрической форме, положив
х = -JL /- /2(Dev Q) sini|3 = -^L sin ф, A.11.13)
У о У о
где для краткости принято
r2=-/2(DevQ). (I.11.14)
Подстановка в A.11.12) дает
"~ 2Г3 2Г3
х3 + /2 (Dev Q) к = —т= Dsin3 -ф - 3 sin г|з) = -т= sin Зг|),
так что
Отсюда определяются три значения к и соответствующие им
главные значения девиатора:
2Г ._ . 2Г . /. , 2я'
Величины Г и 1|з, выражающиеся через главные инварианты де-
девиатора, также являются его инвариантами. В некоторых во-
вопросах применение инвариантов h(Q), Г, ф следует предпо-
предпочесть главным инвариантам тензора Q.
Формулы A.11.9) — A.11.11) теперь переписываются в виде
/, [(Dev QJ] = 2Г2, /, [(Dev Qf) = - Щ- sin Ц, /, [(Dev QL] = 2T\
A.11.17)
1.12. Функции тензоров. Г. Скаляр. Функция f(Q), удо-
удовлетворяющая условию
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 831
называется инвариантным скаляром*). Соотношение A.12.1)
выражает, что не только численное значение, но и форма зави-
зависимости f(Q) «т компонент тензора Q одинаковы во всех си-
системах'осей, связанных преобразованием поворота. Инвариант-
Инвариантным скаляром является функция от инвариантов тензора, в
частности его главных инвариантов:
f(Q) = f(/i(Q), /2(Q), h(Q))- A.12.2)
Термин «инвариантный скаляр» далее применяется в этом (огра-
(ограниченном) смысле.
2°. Тензорная функция над тензором Q. Пред-
Предполагаются заданными п2 функций psft = f$h(qmn), причем qmn —
компоненты тензора, и известно, что элементы матрицы ||/аА||
также подчинены закону преобразования A.3.6) компонент тен-
тензора. Этим определяется тензорная функция Р — F(Q) над тен-
тензором Q.
Тензорной функцией является тензорный степенной ряд
в котором аи — инвариантные скаляры. Теорема Кейли — Га-
Гамильтона **) позволяет степени Q выше второй заменить че-
через Q°, Q1, Q2. Поэтому тензорная функция, о которой известно,
что она представима степенным рядом, может быть определена
квадратичным трехчленом
P = AE + BQ + CQ\ (I.12.4)
где А, В, С — инвариантные скаляры.
Примерами тензорной функции, не представимой степенным
рядом, может служить Р = Q*.
Тензор Р представляет изотропную функцию над тензором Q
при выполнении равенства
Я1 = F{Q) или Л* ¦ Р ¦ А = F{A* • Q • А). (I. 12.5)
Это значит, что в системах осей is, is, связанных преобразова-
преобразованием поворота^ сохраняется форма зависимости Р над Q, при-
причем численные значения тензоров Р и Р1 (первого в осях is,
второго в i's) равны друг другу. Не следует смешивать термины
*) В наименовании содержится тавшюгия. Скаляр — инвариант по оп-
определению.
**) Ниже эта теорема доказывается и для несимметричного тензора вто*
рого ранга.
832 ПРИЛОЖЕНИЕ I
«изотропная тензорная функция» и «изотропный тензор» — ком-
компоненты последнего одинаковы во всех системах осей (п. 1.6).
Может быть доказана теорема: симметричная тензорная функ-
функция (Р — Р*) над симметричным тензором Q изотропна тогда
и только тогда, когда она представима в форме (I. 12.4), причем
А, В, С представляют скалярные инварианты вида A.12.2).
Симметричные тензоры Р и Q в соотношении A.12.4) со-
осны.
3°. Градиент скаляра по тензору. Пусть
f(qi\, ••-, <?3i) = }(qst)— функция компонент тензора Q, задан-
заданных в осях is. Элементы матрицы hr-M преобразуются при за-
дании компонент Q в новых осях по правилу A.3.7); действи-
действительно,
Л U-J3*L-n „ JL
dQmn dc<st дЧтп
что и требуется. Поэтому величина, обозначаемая
v^p{Q) = JLisiu AЛ2-6)
dQ dqst
представляет тензор второго ранга — градиент функции / по Q.
Из этого определения следует соотношение
^bQ ^isifiminbqnm ^bqstbU (I12.7)
dQ dqst dqst
Пусть /—инвариантный скаляр; тогда в соответствии с опре-
определением A.12.1) /(<?) = /($), qat = q*t и по A.12.3)
F (О1) = F (А* • Q • Л) = -^- i% = A*-is^-it-A = A*-F{Q)- A,
так что в этом предположении F(Q)—изотропная функция тен-
тензора Q. „
4°. Производные главных инвариантов тен-
тензора по тензору. Сославшись на A.7.9), A.12.6), имеем
^p = /3(Q)(QT!- (Ы2.8)
Вместе с тем
h (Q - *,?) = | Q - IE | - - I3 + X4X (Q) - Л/2 (Q) + /3 (Q) A.12.9)
и по A.12.8)
4- /3 (Q - Щ = /3 (Q - Я,?) [(# - Я?)*] -1 =
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 833
Поэтому
Заменив теперь левую часть ее выражением (I. 12.9) и сравни-
сравнивая коэффициенты при одинаковых степенях Я, получим выра-
выражения тензорных функций
и соотношение
Оно по (I. 12.10) преобразуется к виду
- Q*2 + Q7, (Q) - EI2 (Q) + /3(Q) (QTl = 0, A.12.11)
определяющему одну'из форм записи теоремы Кейли — Гамиль-
Гамильтона A.10.11). Действительно, имея в виду, что /ft(Q*) =/ft(Q),
можно представить A.12.11) после умножения на Q* в виде
A.10.11).
5°. Градиент инвариантного скаляра. Выражение
этой величины непосредственно следует из формул A.12.8),
A.12.10):
Q \ i 2 2 3
A.12.12)
Заменив здесь Q'r значением (I. 10.12), придем к другой форме
записи:
+ж^ AЛ2ЛЗ)
Здесь изотропная тензорная функция, образованная с помо-
помощью инвариантного скаляра /(Q), представлена в виде квад-
квадратичного полинома (или в эквивалентном виде A.12.12)) над
тензором Q = Q* с коэффициентами, являющимися инвариант-
инвариантными скалярами. Это — частный случай представления A.12.4)
изотропной тензорной функции Р — f(Q).
Замечание. Соотношением A.12.4), конечно, не исчер-
исчерпывается многообразие соотношений между двумя симметрич-
симметричными тензорами. В выражение инвариантной связи между ними
P = F(Q, IS(Q), h(P), R, S, ...)
53 А. И. Лурье
834 ПРИЛОЖЕНИЕ I
могут входить некоторые тензоры R, S, с помощью которых
может быть из тензора Q сконструирован симметричный тен-
тензор Р. Примером может служить соотношение
P-W/f-.Q, Pst = rstmnqmn, (I.12.14)
в котором тензор Р получен двойным свертыванием тензора
шестого ранга WRQ. Компоненты тензора WR должны быть при
этом симметричны относительно индексов в каждой паре <st,
тп, что уменьшает их число от 81 до 36. Такова, в частности,
связь тензоров напряжения и деформации в упругом анизотроп-
анизотропном теле (тогда число независимых компонент WR уменьшается
до 21).
1.13. Выделение шаровой и девиаторной частей. Возвращаясь
к общему представлению изотропной тензорной функции (I. 12.4),
выделим в нем шаровую и девиаторную части тензора Р
/1(P) = 3A + fi/1(Q) + C/i(Q2), (I.13.1)
Dev P = Р - \ 2?/, (Р) = В Dev Q + С Dev Q2. A.13.2)
Вместе с тем по A.10.10) и A.11.6)
U (Q2) = /? (Q) - 2/2 (Q) = j /i (Q) - 2/2 (Dev Q),
так что
DevQ2 = Q2 -1 Eli (Q2) = (Dev Qf +1 /, (Q) Dev Q +1 /2 (Dev Q) ?,
и подстановка в A.13.1) приводит к соотношениям
DevP = [В + § С/, (Q)] DevQ + С [(Dev q/-| ?Г2]. A.13.4)
Введя теперь новые обозначения
Ii(P) = 3kIi(Q), а = Я + f С/, (Q), Р=С, A.13.5)
можно представить общую форму зависимости между двумя
соосными тензорами в виде
Р = kll(Q)E + a DevQ + p [(DevQJ -jET^, A.13.6)
причем
Dev P = a DevQ + p[(Dev QJ--f ЁГ2]. A.13.7)
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 835
Постоянные аир можно связать с инвариантами Dev А Для
вычисления его второго инварианта используется первая фор-
формула A.11.17) в виде
2т2 = /, [(Dev Pf),
где обозначено
т2 = - /2 (Dev Р). A.13.8)
Имеем
(Dev Pf = a2 (Dev Qf + 2ар [(DevQK -1 Г2 Dev Q] +
+ р2 [(Dev QY - 4 Г2 (Dev Qf + j ЁГ*]
и, сославшись снова на A.11.17), после простого вычисления
найдем
т2 = - /, [(Dev Pf] = Г2 /а2 - -jL apT sin Зф + Г2 i!) =
При обозначении
получаем
Мы удовлетворим этому соотношению, положив
г . „ г
[х, cos со = a —-= р sin Щ, ц sin ю = ^=
или
cos (fi> + 3ib) „ Кз sin fi) /т io in\
a = u ^ 3-i-t к = — -~— и , \it lo. i\J)
Теперь формула A.13.7) записывается в виде
Dev P - -^з^- { cos (со + Зф) Dev Q - -^ sin со [(Dev Qf -1 ?Г2]},
A.13.11)
причем введенный в рассмотрение вспомогательный угол со мо-
может быть выражен через главные значения Dev Я; следуя
A.11.16), представим их в виде
2Т -- "¦ 2Т SHHX1-—J.
[.13.12)
53*
836 ПРИЛОЖЕНИЕ I
Соотношение, связывающее главные значения тензора Dev Я
и DevQ, в соответствии с A.3.11) можно записать в виде
v =
COS 3lj5
[cos (со + Зф) к - ?f- sin ® (х2 - -| Г2)].
Заменив здесь v и к их значениями [см. A.13.12), A.11.16)]
и учитывая (I. 13.9), получим
sin -/ = со [cos (со + 3f) sin -ф — sin со B sin21|) — 1)] =
= cosco sin -ф 4- -ps 3 (cos2i|) —sin3i|)sini|)) = cos(osini|3 + sin(o cosijj.
Итак, величина со определяется равенством
sinx = sin(co + я|з), со = x — "Ф- A.13.13)
При «^=0, х — Ч> отношения главных значений девиаторов
тензоров Р и Q равны друг другу:
такие соосные тензоры называются подобными. Это дает осно-
основание назвать со углом подобия девиаторов. Соосные девиаторы
подобны при со = 0, отличие со от нуля определяет степень их
«неподобия».
Итак, формула A.13.6) связи между двумя соосными тен-
тензорами приведена к виду
Р = kit (Q) Ё + -^^ { cos (со + Зф) Dev Q -
- Jy- sin со [(Dev Qf - f ?Г2] }. A.13.15)
В задание тензора Р входят три величины — это определяемые
формулами A.13.5) и (I. 13.9) модули k и \х, и фаза подобия
девиаторов со. Их следует рассматривать как функции трех ин-
инвариантных характеристик тензора Q —его первого инварианта
/i(Q) и величин Г и if, определяемых по второму и третьему
инвариантам DevQ с помощью формул A.11.14) и A.11.15).
Совершенно очевидно, что при перестановке Р и Q местами
следует заменить Г на т, ф на %, a k и ц, соответственно на
3 h(P) 9k ^' К /2(DevP) ц
QL=i. (Ы3.16)
ОСНОВЫ ТЕНЗОРНОЙ АЛГЕБРЫ 837
Этим решается задача обращения соотношения A.131C1):
Ц- sin со [(De • Р? -1 ?т2]}.
Предложенное В. В. Новожиловым преобразование исходного
соотношения A.12.4) между двумя соосными тензорами к фор-
форме A.13.15) позволило выразить исходные коэффициенты А,
В, С через величины, поддающиеся интерпретации в терминах
механики сплошной среды. Решение задачи обращения стано-
становится при этом прозрачно простым. Можно, конечно, предло-
предложить и ее прямое^ решение; для этого достаточно, записав вы-
выражение тензора Q через Р в виде
подставить в него выражение (I. 12.4)-тензора Р, заменив при
этом Q3, Q4 с помощью теоремы Кейли — Гамильтона через Ё,
Q, Q2. Придем к трем линейным уравнениям, которые позволят
выразить неизвестные Аи В\, С\ через А, В, С и главные инва-
инварианты /ft(Q). Соотношения оказываются громоздкими; они не-
несколько упрощаются, если выделить из Р его шаровую часть,
DevP представить в форме A.13.7), а решение задачи обра-
обращения разыскивать в этой же форме:
Dev Q = a, Dev Р + р, [(Dev РJ + J- ?/2 (Dev Р)]. A.13.18)
Здесь по A.13.1), A.13.5)
/, (Q) = ЗЛ, + Я,/,(Р) + С, \~ 1\ (Р) - 2/2(Dev P)l, j
, \ (Ы3.19)
a^B. + fC/.CP), p,=C,. J
Для определения ai и Pi подставим в правую часть A.13.18)
выражение A.13.7). Получающееся равенство может быть при
использовании теоремы Кейли — Гамильтона записано в виде
Dev Q = a, { a Dev Q + p [(Dev Qf + f EIa (Dev Q)] } +
+ p! | a2 [(Dev Qf + J- EI2 (Dev Q)] - f- ap Dev Q/2 (Dev Q) +
+ p2 [Dev Q/3 (Dev Q) + j h (Dev Q) (Dev QJ + } El\ (Dev Q)]} +
+ p,? [| /2 (Dev P) —| a2/2 (Dev Q) + 2ap/3 (Dev Q) +1 p2/^ (Dev Q)].
838 ПРИЛОЖЕНИЕ I
Теперь замечая, что
/, (Dev Q) = 0, /, [(Dev Qf] = - 2/2 (Dev Q)
по условию обращения в нуль /i(DevP), приходим к соотно-
соотношению
12 (Dev Р) = аЧ2 (Dev Q) - Зсф/3 (Dev Q) - ± р2/2 (Dev Q), (I • 13.20)
представляющему другую форму записи связи т с Г. Для опре-
определения а\ и Pi получаем два уравнения:
а,а + р, [ - | ар/2 (Dev Q) + Р2/3 (Dev Q)] = 1,
из которых получим
+ ^Ч2феуЩ, Р, = - \ ,
Я = а3 + /2 (Dev Q) ар2 - /3 (Dev Q) Р2.
1.14. Линейная связь между тензорами. Соотношения стано-
становятся весьма простыми. Имеем
P = AE + BQ, (I.14.1)
так что
/, (Р) = ЗА + BI{ (Q), DevP = BDevQ (I.14.2)
и, далее,
/2(DevP) = #72(DevQ). (I.14.3)
Получаем
р = 1; (Q) Аф g + i/Ai^|). Dey q
3 ' /i(Q) К /2(DevQ)
или, при обозначениях (I. 13.5) и (I. 13.9),
P = kIl(Q)E + nDevQ. A.14.4)
Сославшись на A.11.6), легко получить также соотношение
/2 (Р) = ЗА2 + 2ЛЯ/, (Q) + ВЧ2 (Q). (I. 14.5)
ПРИЛОЖЕНИЕ П
ОСНОВНЫЕ ОПЕРАЦИИ ТЕНЗОРНОГО АНАЛИЗА
II. 1. Набла-оператор. В скалярном поле, задаваемом функ-
функцией координат ф(х1,Хг, Хз), может быть определен вектор
gradcp (градиент), проекции которого на оси ортогональной де-
декартовой системы координат равны частным производным от
скаляра ф по xs:
= |j4. (II. 1.1)
Скалярное произведение grac^ на вектор dr, определяющий
взаимное расположение двух бесконечно близких точек М я М'
с вектор-радиусами г и г + dr, представляет скаляр:
gvzAy.dr=^ris-ikdXk = ^jdXs = dy, (II. 1.2)
и этим доказывается, что grad<p представляет вектор (см. п. 1.1).
Операция вычисления градиента может быть записана с по-
помощью символического вектора — набла-оператора Гамильтона:
V = i,?. (II. 1-3)
так что
grad ф = Уф.
Проекции набла-оператора — операторы дифференцирования
¦з подчинены закону преобразования проекций вектора;
oxs
действительно, при повороте координатной системы
<Эср дер dxk (Эф д д
dxs dxk dxs dxk dxs dxk
в соответствии с формулами (I. 1.6).
Известное правило дифференцирования произведения распро-
распространяется на набла-оператор:
(II. 1.4)
840 ПРИЛОЖЕНИЕ II
II. 2. Дифференциальные операции в векторном поле. Изве-
Известно (п. 1.6), что операции над двумя векторами сводятся к по-
построениям их скалярного инварианта а-Ь, вектора ах Ь и тен-
тензора— диады аЬ. В соответствии с этим простейшей дифферен-
дифференциальной операцией в векторном поле служит образование
скалярного произведения набла-оператора на вектор:
^Jj=diva. (П. 2.1)
Этот скаляр называется дивергенцией вектора.
Следующий шаг — образование вектора
д даь
erskT~ir = roia, (II.2.2)
называемого ротором (вихрем) вектора.
Наконец, образование диады приводит к тензору второго
ранга
д даъ
(И. 2.3)
— градиенту вектора. Транспонированный тензор
{Va)' = ikis^- (II. 2.4)
axs
имеет матрицу компонент
да, да
! дх, дх2 дх3
/Л] UA2 УАЗ
)аз да$ дал
)х, дх2 дх3
Произведение справа этого тензора на вектор dr приводит к век-
вектору da:
даь даь
(Va)* • dr = ikis -~ ¦ iq dxq = hj^ dxs = ik dak = da,
и, основываясь на этом равенстве, естественно называть тензор
(Va)* производной вектора а по вектор-радиусу г и принять
обозначение
(Va)* = -^-. (II. 2.6)
Выделяя из тензора (Va)* его симметричную часть, получаем
тензор
ОСНОВНЫЕ ОПЕРАЦИИ ТЕНЗОРНОГО АНАЛИЗА 84t
называемый деформацией вектора а. Сопутствующий тензору
(Va)* вектор о по A.4.9) определяется равенством
1 dat . 1 . . . . dat I . д ., . 1 „ 1
@ = Te"'^7^ = I^Xl'^7=T^^ Xitat = jVXa = jTota.
(II. 2.8)
Обозначая еще через Q кососимметричную часть (Va)*, имеем
(Va)' = def a + Q, Va = defa-Q, (Va)* = Va + 2Q, (II. 2.9)
причем
даь да Л
f а (II.2.10)
Получаем
da = (Va)* -dr = dr- Va = def a • dr + U • dr = def a • dr + со X a>.
A1.211)
Применение набла-оператора к композициям из двух векто-
векторов иллюстрируется приводимыми ниже примерами.
Г. Градиент скалярного произведения
- дак и , dbk
— *s /з к ' us л —
"~ OXg 0Х$
(II.2.12)
Это правило дифференцирования вполне аналогично (И. 1.4).
Его записывают еще в другой форме, вводя в рассмотрение век-
вектор, называемый производной b по направлению а:
a-Vb^a- ЦЩ" - 2Q] = а • (V6)* + 2ео х а = а • (V6)* - а X rot 6,
так что
а . (Vb)' = а • V6 + а X rot b; grad a • b =
= а- Vb + b • Уа + аХ rot6+ 6 X rota. (II.2.13)
2°. Дивергенция векторного произведения
divaX 6 = V-(aX 6) = i,-(tfl|^-X ft) + is-(eXi,|
(II.2.14)
842 ПРИЛОЖЕНИЕ II
3°. Ротор векторного произведения
rota X Ь- V X (а X Ь) = [I, X (iq X i,)\-?-aqbr =
db
откуда следует
rotaX 6 = 6-Va + adivfr-a- Vfr + frdiva. (II.2.15)
II. 3. Дифференциальные операции над тензорами. Сказан-
Сказанное в п. II.2 обобщается на тензорные поля любого ранга. Ранг
тензора уменьшается на единицу при умножении его слева на
набла-оператор — образовании дивергенции тензора:
= iS2 .. . iSn -A- qSSi... ,n = divWQ. (II. 3,1)
Векторное умножение слева на V приводит к тензору того же
ранга — ротору тензора
Наконец, градиент тензора образуется при диадном умножении
его слева на V:
В частности, дивергенция тензора второго ранга представляет
вектор
V-Q = l,A..9rtMt=-^-i<> (II. 3.3)
а для кососимметричного тензора
div Q = it ^j- = itestr -gi = *r x *eig- = V X © =3 rot«. (II. 3.4)
Поэтому, выделив из тензора Q его кососиммятричную часть,
получим
div Q = div S + rot <o. (II. 3.5)
Дивергенция диады выражается через дифференциальные опе-
операции над ее векторами
diva& = &diva + a-V&. (И. 3.6)
Ротор тензора второго ранга представляет тензор второго ранга
(H-3.7)
ОСНОВНЫЕ ОПЕРАЦИИ ТЕНЗОРНОГО АНАЛИЗА 843
Развернутая матрица его компонент дается таблицей A.5.9),
в ней надо аь заменить на -»—. Свертывая этот тензор, полу-
получим, сославшись на A.4.9), его след
^ ^|^, (II.3.8)
где о — сопутствующий Q вектор.
В случае кососимметричного тензора
rot U = esrqiqit ^fL = е^еит **в. iqit = {bslhqm - bsmhqi) ^s. iqit =
= ^-^-'Л1^ = (^)*-^^ю. (П.3.9)
Приведем еще многократно используемую в механике сплошной
среды формулу для дивергенции вектора Q-a:
(II. 3.10)
так как по A.6.7) и (II. 2.4)
qstj^ = Q--(Vay = Q*--Va. (II.3.11)
11.4. Двукратное дифференцирование. По вектору Уф опре-
определяется симметричный тензор второго ранга VV<p:
010s axk 0Xs 0Xk
Его след V-Уф = V\ представляет лапласиан скаляра ф:
^^^.^^З^^-^-^Ц. + Ц. + Ц.. (Ц.4.2)
т * dxsdxk dxsdxs дх\ дх\ дх\
Сопутствующий симметричному тензору вектор равен нулю — в
применении к тензору VVf приходим к известному свойству гра-
градиента скаляра:
V X Vф = rot grad ф = 0.
Тензор третьего ранга Wa допускает следующие свертывания,
снижающие его ранг на две единицы:
а) образование вектора-лапласиана
V • Va = V2a =» div grad a = ik -dxJXg \ (II. 4.3)
б) вектор-градиент дивергенции a:
* (II. 4.4)
844 ПРИЛОЖЕНИЕ II
в) вектор-ротор ротора а:
-Q— X iq(lq I = (ifisq ~ lqOst) , , ,
t I s t
так что
rot rot a = grad diva — V2a. (II. 4.5)
Тензоры второго ранга получим, снижая ранг VVa на еди-
единицу; Это ротор градиента вектора а
д да„ д2аа
rot grad a = V X Va = -г- is X itiq ~- - estririq -z-j- =
S E S t
— = — e' ' " n '
dX{ dXs estririq
и градиент его ротора
<Э2а, д2а.
След этого тензора равен нулю:
_ ... . .. . д2а. д2а.
t _
Переходим к тензору четвертого ранга VVQ:
Из возможных свертываний по двум парам индексов отметим
divdivQ = V-V. Q = 6,Am^ = J^. (П. 4.9)
Si Si
Свертывание по одной паре индексов дают тензоры второго
ранга
V-VQ = divgradQ=V2Q, VV • Q= graddivQ, VVSpQ. (II. 4.10)
Можно образовать также тензоры третьего ранга
V X(VQ)= rot grad Q, V(V X Q) = grad rot Q (II. 4.11)
и тензор второго ранга
V X(VXQ) = rotrotQ= W-Q-V2Q. (II. 4.12)
ОСНОВНЫЕ ОПЕРАЦИИ ТЕНЗОРНОГО АНАЛИЗА
845
Большое значение в механике сплошной среды имеет тензор
второго ранга, представляющий ротор транспонированного ро-
ротора тензора второго ранга:
М = rot (rot Q)' = V X (V X QY = eimqesrhikiq ~^-. (II. 4.13)
Этот тензор симметричен, если Q — симметричный тензор. Дей-
Действительно,
..р Р . д2Чтт ¦ d2qrm _
ujl 1ул . ~ мл t fix.
В литературе этот тензор называют Ink Q, причем Ink — первые
буквы слова «Inkompatibilitat» — несовместимость (см. п. 2.1
гл. II):
Ink Q = rot (rot QY = V X (V X Q)\
(II. 4.14)
Таблица компонент Ink Q, когда Q — симметричный тензор, за-
записывается в виде
„ _
дх\
дх\ дх2дх3
дх2,
-2
дх3дх{
m12 = m2i = -
|
-г-
5")-
(II.4.15)
dXl дХ
Из тензоров третьего ранга (II. 4.11) при свертывании пары ин-
индексов образуются векторы
rotgrad Sp Q = 0,
rotdivQ = V X(V- Q) = e,,A-
(II. 4.16)
846 ПРИЛОЖЕНИЕ II
Приведем еще выражения некоторых дифференциальных опе-
операций над произведением вектора на скаляр:
Ща = (V-ф) а + т|) Va, (II. 4.17)
div фа = ф div а + а • grad ijj, rot фа = ф rot а + grad ф X а,
(П. 4.18)
V>l = фУ2а + аУ2ф + 2 Уф- Va. (II. 4.19)
Лапласиан произведения скаляров определяется соотношением
У2фф = ФУ2ф + о|>У2ф + 2 Уф • Уф. (II. 4.20)
11.5. Преобразование объемного интеграла в поверхностный.
Предполагается известной формула Гаусса — Остроградского
Б ней dx — элемент объема V, do — элемент поверхности О, ог-
ограничивающей этот объем, «s — проекции на ось xs единичного
вектора нормали п к этой поверхности, направленной вовне
объема. Функция ф непрерывна вместе с ее частными производ-
производными первого порядка в замкнутом объеме V + О. Простей-
Простейшим обобщением формулы (II. 5.1) служит соотношение
=ЯИ-а^ (И. 5.2)
связывающее интеграл по замкнутому объему от дивергенции
вектора с потоком вектора через ограничивающую этот объем
поверхность.
Заключающееся в формуле (II. 5.2) правило замены набла-
оператора в объемном интеграле вектором п в, поверхностном
можно распространить на более сложные соотношения, посколь-
поскольку в конечном счете дело сводится к исходному преобразованию
Гаусса — Остроградского (II. 5.1). Например,
Xarft= J J J rot a dr = ^ nXado, (II. 5.3)
V V 0
так как
= j J isns X ikdk do = j J nX ado.
ОСНОВНЫЕ ОПЕРАЦИИ ТЕНЗОРНОГО АНАЛИЗА 847
Другими столь же просто проверяемыми примерами служат
| J Jvadt= J J nado, J* J J (Va)*dr = J J (na)*do = J J ando.
F О V 0 0
(П. 5.4)
В применении к тензору второго ранга имеем формулы
j J J V-Qdt= J J n-Qdo, J J jS/XQd%= f J nXQdo.
V О V 'о
(II. 5.5)
Как пример приведем еще преобразование
J J г X (n-Q)do = - | J (n-Q) X
о "о
Но ¦
h X{is- Q) = isX i,qST = esnqsrit = - 2»,
где (» — сопутствующий Q вектор. Итак,
J j r X (я • Q) do = J J J (r X div Q - 2o>) dr. (II. 5.6)
О V
II. 6. Преобразование Стокса. Известно, что линейный интег-
интеграл (циркуляция) вектора по дуге С
м
\a-dr (П. 6.1)
Мо
не зависит от выбора С, а определяется лишь координатами на-
начальной и конечной точек Мо, М при условии
rot a = 0, a = grad<p = V(p. (II. 6.2)
Тогда
мм м
/ф = Фм-Ф (II. 6.3)
Аналогичное равенство для линейного интеграла от тензора
м
JQ.dr^aM-aM (II. 6.4)
Мо
848 ПРИЛОЖЕНИЕ II
имеет место при условии
J Q' = Va, rotQ'-O. (II. 6.5)
Действительно, тогда
мм м
J Q-dr = J ^-dr = j
M, M» Mo
Аналогично доказывается, что условием независимости от пути
интеграла
м м
J dr-Q = [ Ct-dr (II.6.6)
' Мо Л1,
служит равенство
rotQ = 0, Q = Va. (II. 6.7)
Согласно теореме Стокса
(|) а • dr = j j и • rot a do
s
I
— циркуляция вектора по замкнутому контуру равна потоку ро-
ротора этого вектора через произвольную поверхность, опираю-
опирающуюся на этот контур. Поверхность, не выходящую из рас-
рассматриваемого объема, можно постро-
построить на замкнутом контуре, сводимом
в точку непрерывным преобразова-
преобразованием, при котором не пересекается
граница области; в односвязном объ-
объеме— это любой замкнутый контур.
Однако в двусвязном объеме, напри-
например в торе или в пространстве между
двумя коаксиальными цилиндрами,
Рис. 50. существуют контуры? назовем их
/(-контурами, сводимые непрерывным
преобразованием друг к другу, но не сводимые в точку. Таковы
осевая линия в торе, окружность в плоскости, перпендикулярной
оси цилиндра, охватывающая внутренний цилиндр. Двусвяз-
ная область может быть превращена в односвязную проведе-
проведением барьера. Например, область между коаксиальными ци-
цилиндрами становится односвязной, если построить плоский
барьер, проходящий через ось цилиндра и начинающийся на
ней. После проведения барьера двусвязная область не теряет
связности, не распадается на два куска.
Пусть выполнено условие интегрируемости (П. 6.2). Но по-
поскольку теорема Стокса не может быть применена к /(-контуру,
циркуляция по нему может быть отличной от нуля; скаляр ср
ОСНОВНЫЕ ОПЕРАЦИИ ТЕНЗОРНОГО АНАЛИЗА 849
в этом случае —неоднозначная функция координат:
ф а • dr = я> d<p = %, (II. 6.8)
причем циклическая постоянная % одна и та же для всех /(-кон-
/(-контуров. Доказательство заключается в рассмотрении интеграла
по замкнутому контуру N\MiM2N2MzM\NzN\ (рис. 50), своди-
сводимому непрерывным преобразованием в точку. К нему применима
теорема Стокса
М, M, М, W,
j а • dr + Г а • dr + Ф а ¦ dr + | а • dr + Фа • dr+ \ а • dr = 0,
JV, М, К. М, К, U
и, поскольку
М. JH, JV, М, - '"
f a-dr+ Г а • dr = 0, J а • dr + [ а • dr = 0,
Mi M2 M, JV,
имеем
ф а • dr + ф а • dr = 0, Ф а • dr = Ф а • dr,
что и требуется.
Сказанное здесь распространяется на интегралы вида
(II. 6.4). При соблюдении условия интегрируемости (II. 6.5)
а = с (II.6.9)
причем с — циклический постоянный вектор, один и тот же для
всех /(-контуров.
54 А. И. Лурье
ПРИЛОЖЕНИЕ III
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
III. 1. Определения. Три числа, задающие положение точки
в пространстве, обозначаемые q1, q2, q3, называются ее криволи-
криволинейными координатами. Связь декартовых координат с криво-
криволинейными выражается тремя соотношениями
xs = xs(?WW) (III. 1.1)
или, в векторной записи (/? — вектор-радиус),
R=iaXs = R(qi,q*tq*y. (III. 1.2)
Функции (III. 1.1) предполагаются в области их задания непре-
непрерывными, однозначными и имеющими непрерывные частные
производные до третьего порядка включительно. Они должны
быть разрешимы единственным образом относительно q\ q2, q3;
это условие равносильно требованию необращения в нуль яко-
якобиана
1= -JT • (Ш. 1.3)
dqR
Нумерация координат предполагается выбранной так, чтобы
якобиан был положительным.
Преобразование (III. 1.1) определяет три семейства поверх-
поверхностей qr — qrQ, координатные линии представляют кривые, по
которым пересекаются координатные поверхности. Вдоль коор-
координатной линии, обозначаемой [qs\ переменной является коорди-
координата qs. Координатные поверхности одного и того же семейства
при условии (III. 1.3) не пересекаются.
Хорошо известными примерами являются цилиндрические и
сферические координаты. Для цилиндрических координат
qi = r, q2 — ф, q3 = z— радиус, азимутальный угол, высота.
Формулы (III. 1.1) имеют вид
Х\ — Г COS ф, Х2=Г&1Х\Ц, Хз = Z. (III. 1.4)
Область их задания представляется неравенствами
0</"<оо, 0<ф<2л, —oo<Z<oo.
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 851
Координатными поверхностями являются круговые цилиндры
г = Го, осью которых служит ось Охз, полуплоскости ф = фо, про-
проходящие через эту ось, плоскости z = z0, ей перпендикулярные.
Координатными линиями в пересечении соответствующих пар
поверхностей являются прямые [г], параллельные оси Охз, ра-
диально направленные полупрямые [г], окружности [<р]. Якобиан
J = г обращается в нуль на оси Охз, по которой пересекаются
плоскости ф = фо; эта прямая не включается в область задания
координат.
Для сферических координат ql = R, q2 = •&, q3 = К (радиус,
угол, отсчитываемый по меридиану от северного полюса, дол-
долгота) имеем
хх = R sin Ь cos Я, х2 = R sin •& sin %, х3 = Rcos$. (III. 1.5)
Область их задания определена неравенствами
0<R<oo, 0<#<я,
Координатными поверхностями являются сферы R — Ro с цент-
центром в начале координат О, круговые конусы Ь = г% с вершиной
в этой точке, проходящие через ось Ох3, полуплоскости % — Яо.
Координатные линии представляют параллельные круги [к], по
которым пересекаются поверхности сфер и конусов, радиально
расходящиеся из центра О полупрямые [R] и меридианы [•&].
Якобиан J = R2s\n$ обращается в нуль в центре О и в полю-
полюсах сфер.
III. 2. Квадрат линейного элемента. В рассмотрение вводится
тройка векторов, обозначаемых Rh:
имеющих направления касательных к координатным линиям
[qh]. Ими в окрестности точки M(q\q2, q3) определяется беско-
бесконечно малый вектор
dR = Rhdqh. (III. 2.2)
Квадрат его длины — квадрат линейного элемента, выраженный
через криволинейные координаты,— определяется из равенства
ds2 = dRdR = Rs dqs • Rk dqk = gsk dqsdqk. (III. 2.3)
Шесть величин
gsh = ghs = Rs-Ru (III. 2.4)
определяют метрику в принятой системе координат. Это —кова-
риантные компоненты метрического тензора*).
*) См. далее п. V.I.
852 ПРИЛОЖЕНИЕ Ш
Вторые производные вектор-радиуса R обозначаются
dqs dq' s'
Далее потребуется знание скалярных произведений Rst'Rh\
они выражаются через производные от ковариантных компонент
метрического тензора. Имеем
_р в j. в . в
dq" ~ dqk ~ sk K* + Ks к*к
и два равенства, получающихся из написанного круговой пере-
перестановкой индексов. Приходим к соотношениям
, ft ~ Rsk ' Rt + Rs • Rtk>
(III. 2.6)
К искомому соотношению приходим, вычитая первое из суммы
второго с третьим:
Эти величины называются символами Кристоффеля первого ро-
рода (или прямыми скобками Кристоффеля).
III. 3. Ортогональная криволинейная система координат. Ба-
Базисные векторы. Для ортогональной системы криволинейных ко-
координат выполнены равенства
0, s ф k,
щ, s = k. щ
Величины Hs называются коэффициентами Ляме. Они равны
модулям векторов Rs:
Ортогональный триэдр единичных векторов es, касательных
к координатным линиям [qs], направленных в сторону возраста-
возрастания qs:
? (JJ*) (Ш. 3.3)
*) Напомним, что перечеркнутый знак суммы 5]s обозначает: «не сумми-
суммировать по s».
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 853
представляет векторный базис в принятой системе ортогональ-
ортогональных криволинейных координат. Векторы es, очевидно, имеют так-
также направления нормалей к координатным поверхностям qt
Векторы и тензоры задаются их представлениями в вектор-
векторном базисе es:
a = ases, Q = qskesek, (III. 3.4)
но существенное отличие от декартовой ортогональной системы
состоит в том, что векторы es не сохраняют, подобно is, неизмен-
неизменных направлений, поэтому, например, компоненты as постоян-
постоянного вектора а меняются от точки к точке и, наоборот, из по-
постоянства as нельзя заключить, что а — постоянный вектор.
Следствием (III. 3.3) являются формулы
1 дхк 1 дхк dqs 1 дхк
причем последняя группа формул проверяется соотношением
У -6st~ дхг а,' ~ н] <V df Hi «*«< \ i, 8 = /,
что и требуется.
Квадрат линейного элемента по (III. 2.3) и (III. 3.1) в орто-
ортогональных криволинейных координатах задается выражением
ds2 = H\dql<x + H\dq2<i + H\dqb\ (III. 3.6)
Проведение действий векторного и тензорного анализа в криво-
криволинейных координатах целиком связывается со знанием величин
gsh, а в случае ортогональных криволинейных координат — коэф-
коэффициентов Ляме Hs. Часто для вычисления последних можно
избежать использования формул (III. 3.2), требующих примене-
применения соотношений связи (III. 1.1), заменив его рассмотрением
элемента дуги dhs координатной линии [qk\.
= Hkdqk ($J. (III.3.7)
Далее знак «не суммировать» \У, \ будет опускаться, когда
индекс входит в правую и левую части формулы.
Набла-оператор V, как и в п. П. 1, вводится с помощью оп-
определения градиента скалярного поля
d<f> = -jjr dqs = dR-Vq> = Rs dqs • Уф = Hses • grad ф dqs,
так что по (III. 3.4)
i^ = v9 = ^^ AЦ.3.8)
854 ПРИЛОЖЕНИЕ Ш
и набла-оиератор следует определить равенством
Элемент объема в ортогональных криволинейных координа-
координатах задается очевидным выражением
dx = Rxdql ¦ (R2dq2 X R^dq3) = НхН2Нгех ¦ (e2 X ez)dql dq2dq* =
= HIH.2H3dqldq2dq*
или
dx^Ygdqidtfdq3, Yg = HlH2H3 = Rl-{R2XR3) = J. (Ill 3.10)
Здесь J — якобиан (III. 1.3).
III.4. Дифференцирование базисных векторов. Проведение
операций векторного и тензорного анализа в криволинейных ко-
координатах усложняется необходимостью учета изменяемости
векторного базиса es; обязательно знание выражений производ-
производных этих векторов по координатам qk.
Представив формулы (III. 3.1) в виде
е* = н%к = Н2А* = ВДА*.
имеем по (III. 2.7)
х ц k t H dHs
Учитывая, что левая часть этого соотношения представляется
в виде
^ (ВД Я*в* ^f HAk + HsHk ^
dql dq' dq
приходим к равенству и
des о Ht I dHk ^ afl,.\ дНк х dHs
\ a<?s й?* / Hs dqs Hk dq"
¦ ек,
Его правая часть равна нулю при s = k и меняет знак при пере-
перемене s и k местами; так и должно быть, поскольку
Итак, матрица скалярных произведений (t фиксировано)
iifl*j=b'IH (IIL4i3)
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 855
t
кососимметрична и для ее задания достаточно трех чисел ог,
представимых в виде
' _ 1 <>es_ _ 1 / J^t_ 4- -EHi— \ - дН'
Or - 2 е„кек ¦ dqt~ 2{ H$dqs erst + ~Hkdqk erkt) - -^^ ermf
(III. 4.4)
(суммирование no ml). Введя теперь в рассмотрение векторы
/ t
о = eror,
имеем
t р\тт rif-f
o== Hmdqm ermter = Hmdqm emXet = gradHtX et. (III.4.5)
t
Таково выражение сопутствующего матрице (III. 4.3) вектора о.
Выражение ее компонент по (III. 4.4) и A.4.6) записывается в
виде
^¦ek = erskon (III. 4.6)
dq'
так что
де * ' '
—f = erskorek = eT X esor = o X es. (III.4.7)
Это — искомые формулы дифференцирования базисных векторов
(деривационные формулы). По (III. 4.5) они записываются так-
также в виде
^f- = eeX(e<Xgrad^) = e(-^7-es<grad^. (III. 4.8)
Формулы (III. 4.7) допускают кинематическую интерпретацию,
известную под наименованием «метод подвижного триэдра-».
Пусть вершина М триэдра базисных векторов es движется с еди-
единичной скоростью v — 1 по координатной линии [<7™], так что
dms — Hmdqm = dt (здесь / — время). В каждом мгновенном
положении триэдра векторы es должны иметь направления
касательных к координатным линиям в точке М. Поэтому дви-
движение этой точки сопровождается вращением триэдра вокруг
m
нее, вектор угловой скорости этого вращения назовем са. По из-
известной формуле кинематики твердого тела скорости концов
единичных векторов es относительно вершины триэдра при этом
будут равны
des де, m ^
dt ~ Hmdqm Ле*'
856 ПРИЛОЖЕНИЕ III
откуда сравнением с (III.4.7) находим
(III.4.9)
т
т
@
Часто вектор о можно найти без вычисления, основываясь на
этом кинематическом истолковании.
III.5. Дифференциальные операции в ортогональных криво-
криволинейных координатах. Вычисления основываются на определе-
определении набла-оператора (III. 3.9) и на деривационных формулач
(III. 4.8).
1°. Градиент вектора. Имеем
е. д да а 1
да$ ag t I да$ ak ' \
„ , ( "r ~7T~ °r^rsketek = etes I „ _ ( ~г ~тг~ Orerks\ •
Ho no (III. 4.4)
' = dHl - дН' ГА Л _Л Ь \-
°r rks Hmdqm ermierks Hmdqm ^°mk»ts Ums0tk)
sdq
и выражение Va приводится к виду
Ubls H,dg> btk №J'
Htdq1 HtHs dqs S HtHk dqk
2°. Дивергенция вектора. Основываясь на (III.3.10),
запишем соотношение
d\nY~q _ i ^l^g _ э inЯ] . a in я2 . а!пяэ ,»,, гп\
a<?J ~ /g dqs ~ dqs dqs dqs '
так что, образуя след тензора Va, найдем *
as dHs ak dfg д a a, df~g
aiva_v. _
Hsdqs И] dqs Hk Ygdqk dq' Hs
HO'
Yg dqs \ Hs
isuq ns uq nk
и окончательно-
.. 1 a (V}> ,
div a = -r?= гг-r I ~ as} =
. (III. 5.3)
3°. Лапласиан скаляра. Если, в частности,
(III.5.4)
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 857
то
%-ч i .j- j , 1 д Vё <?Ф
\ 1|з = div grad ^ = —=¦—- —f- —-7 =
У g dq Hs dq
1 ( а Я2Я3 aij) j а н%Н\ a^ . a H\H2 аф \
Я)Я2Яз \ a</' Я[ di?1 a^2 я2 а^2 а</3 я3 a^3 / *
(III. 5.5)
4°. Ротор вектора. Следует заменить в (III.5.1) диады
векторными произведениями
etes на et X es = | et X es - j es X e<.
Придем к выражению
\ I да а, дНЛ
V X a = rota = - S" e/ X es-
2 \ Я< а?' H,HS dqs I
1 / 5a, a дН \
[ t s s_ j g v g
2 \Я,<??* Я,Я( dq' ) * s
ИЛИ
,Xes. (III. 5.6)
Проекции этого вектора равны
ee.rota = —^-(-^-tf,as-— Hta\. (III. 5.7)
" 2H(HS \dql ms s dqs ) '
5°. Тензор defa. Он был определен формулой A1.2.7). Со-
Сославшись на (III. 5.1), получим
da: да, a, dHt
, . 1 ( да а
; = def a = — e,es ^ -^ . ,
2 \Htdql Hsdq» HSH, dqs HsHt dqf
(III. 5.8)
Выражения компонент этого тензора записываются в виде
\ i da\ . aa2 fli affi a2 ая2 \
e12 = e21 = j \ //2 dq2 + я, a?1 ~ TTJU ~dq* ~ ~HJh 'Wl'
6°. Дивергенция тензора второго ранга
858 ПРИЛОЖЕНИЕ III
По (III.4.5)
er • (о X es) = e, • [(grad Hr X er) X ea] =
_ dHr _ dHr _ дНг _ _aflj_
~ я^а^ °« яга?г ~ я^а?-5 я5а^
так что
и в окончательном виде
divf = -L_E_VjLfgA
. (III.5.10)
7°. Тензор VVi|). Вычисление дает
е„ л е, 5ф
я^ a?-9 Ht <V
a in -
HsHt\dqsdq' dqs dq' dqf dqs j H2r dqr dqr '
(III. 5.11)
Отсюда следует запись выражения лапласиана
VVb V2b
2rH, dqr dqr
(in,5.12)
легко преобразуемая в (III. 5.5).
III. 6. Зависимости Ляме. Соотношения
agra^ dq'dqr
с помощью деривационных формул (III. 4.7) представляются в
виде
(оХ«) Хв + вХ(оХв)
ИЛИ
(|ifV )es = 0 E=1,2,3).
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 859
t
Полученные дифференциальные соотношения между векторами о
4-^-+оХо = 0 (III.6.2)
dq dq'
преобразуются в зависимости, связывающие* коэффициенты
Ляме. Вычислим для этого проекции векторов, входящих в
(III. 6.2), на оси триэдра es. По (III. 4.7) имеем
= ^^o(oXes) + o(oX
dqr dq1
= ^_^_(oxi.es = 0. (III.6.3)
dqr dq'
Далее,
о ¦ es = grad Ht • (et Xes) = -~ J^- etsm,
(oXo)-es= HmQqm HsdTqs etrm - (grad Hr X grad Ht) • etbrs,
и подстановка в (III. 6.3) дает равенство
а [_дН±_ _д 1_ дНг , дН, дНг
dq' Hm dqm e'Sm dq' Нтд^^ Hmdqm 1^d
+ (gradЯr X gradЯ<)•eЛs = O. (III.6.4)
Конечно, оно удовлетворяется при t = г. Поэтому далее надо
рассмотреть случаи: a) s Ф t ф г, б) s = t и, значит, s Ф г.
a) etSm = etSr, ersm = erst, еПт = erts, 6rs = 0. Получаем
дНг
дНг dHt _ п ,ттт ft-.
и, поскольку г, ? входят симметрично, a s Ф t Ф г, здесь имеется
только три различных соотношения:
_д 1_ дН2 _д 1_ dHt . _1_ дН, дН2 _ „ 1|
dq1 Hx dq1 dq2 H2 dq2 H% dq3 dq3 ~ '
д 1 дН3 . д 1 дН2 . 1 дН2 дНъ ^Q !
dq2 H2 dq2 dq3 H3 dq3 Щ dq1 dq1
dq3 dq1 Я, dq1 H% dq2 dq2
(III.6.6)
860
ПРИЛОЖЕНИЕ III
б) В случае s = t ф г
дНт дНг
дНТ dHt
dq1 dqm Hm dq' dqm Ht dq' dqm '
причем т, t, г различны. Получаем еще три соотношения:
з2я, 1 дн3 ая, . 1 он, зн2
dq2 dq3
дгН2
dq3 dq1
Я3
dq2 dq3
H2
dq2 dq3 '
дН2 дНг
H, dq3
1 дн2
dq[
dq'dq2 Я2 a.?1 dq2
Я3 dq3 dq1
dq1 dq2
(HI.6.8)
Шесть зависимостей Ляме (III. 6.6), (III. 6.8), полученные
преобразованием тождества (III. 6.1), тождественно удовлетво-
удовлетворяются, если коэффициенты Ляме определены по заданному то-
точечному преобразованию (III. 1.1) с помощью формул (III. 3.2).
Обратно, три наперед заданные функции H$(q\q2,qz) являются
при выполнении этих зависимостей коэффициентами Ляме для
некоторого преобразования, определяемого системой дифферен-
дифференциальных уравнений (III. 3.2); зависимости Ляме представляют
условия интегрируемости этой системы.
III. 7. Цилиндрические координаты. Базисные векторы е{ = ег,
е2 = вер, е3 = k имеют направления радиусов окружностей, ка-
касательных к ним, и оси концентрических цилиндров. Коэффи-
Коэффициенты Ляме равны
Я, = НТ = 1, Я2 = ЯФ = г, Я3 = Н2 = 1. (III. 7.1)
3 1
Векторы о, о равны нулю, поскольку движение вершины ба-
базисного триэдра по координатным линиям [г], [г] — поступатель-
поступательное; угловая скорость, которую приобретает этот триэдр при дви-
движении его вершины по окружности [<р], определяется вектором
ф 1 и
(О = — А.
Итак,
о = 0, о =
(III.7.2)
и отличны от нуля только производные
По определению (III. 3.9) набла-оператора имеем теперь
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 861
и, далее,
Лапласиан в цилиндрических координатах по (III. 5.5) за-
записывается в виде
III. 8. Сферические координаты. Базисные векторы е, — ед,
е2 — е$, е3 — eh имеют направления: eR — радиуса (восходящей
вертикали места), efl—касательной к меридиану (на юг),
е% = eR X «в — перпендикуляра к плоскости меридиана (на во-
восток). Коэффициенты Ляме легко определяются по (III. 3.7):
Я,=ЯД=1, Я2 = Яе=/?, Я3 = Нк = R sin ft. (III. 8.1)
Вектор о = 0; угловая скорость триэдра при движении его вер-
* 1
шины по меридиану [О] определяется вектором со = -п-ех, а при
X j
движении по параллельному кругу [X] — вектором о = »sin-^ ft,
где k — единичный вектор, направленный по оси Ох3 к север-
северному полюсу.
Итак,
R О \
о = 0, о = ек, o = fe = e^cosd —eosiirO (III.8.2)
и по деривационным формулам (III. 4.7)
так что
дея _„ деъ _ . де>.
(III.8.4)
Выражение лапласиана в сферических координатах записывает-
записывается в виде
причем введена новая переменная
III.9. Тела вращения. Формулы вида (III. 1.1.), выражаю-
выражающие декартовы координаты через криволинейные q\ q2, q3 = /р.
862 ПРИЛОЖЕНИЕ Ш
где ф—азимутальный угол цилиндрической системы координат,
задаются в виде
х{ = г {q\q2) cos у, x2 = r(ql, q2)smy, x3 = z(q\q2). (III. 9.1)
Координатными поверхностями ql, q\ являются поверхности
вращения вокруг оси Охъ, меридиональные сечения которых пло-
плоскостями ф° представляют ортогональные семейства кривых
-Я\- r = r(q\,q2), z = z(ql,q2), ( _
Вектор-радиус точки R(q\q2, <p) представляется в виде
R = r{q\q2)er + z(q\q2)k. (III.9.3)
Отсюда имеем
Rs = Wer + l?jsk (s=l,2), R3=*r{q\q*)e4, (III.9.4)
так что
а условие ортогональности семейств кривых (III. 9.2) записы-
записывается в виде
Единичные векторы ортогонального триэдра касательных к
координатным линиям [q*] представляются в виде
е* (s l2) V
Они связаны с единичными векторами ft, er цилиндрической си-
системы осей равенствами
L Jl ь4L^ J
1' I
^L i
й1 ^ )
2 Я2 dq2 Я2 dq2 T Hi dq1 H{
Отметим еще, что третья группа формул (III. 3.5) приобретает
вид
i2! = -L.il, i9l = _^^L. (III.9.9)
дг H2S dqs дг Н] dqs
s
Выражения векторов о по (III.4.5) записываются в виде
rsxes E=1, 2),
о
1 дг 1 дг I дг 1 дг
О= '"Щ Jq^e2+TT^ ~dq~fei=~fh W е2~Т~ Ж W
(III.9.10)
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
863
и деривационные формулы будут
?г-««Л1;-e*'8rad "'•?*-•»
dq Hs dq dq>
в\ дг е2 а
~H~xlw ~~hI di
дг
{s,t =1,2),
(III.9.11)
dq1 ' d(f
Упрощаются зависимости Ляме; две из них тождественно
удовлетворяются, а остающиеся четыре записываются в виде
_д 1_ _дг^ , J_ _5r_ dHL
aJ и aJ ' u2 ,2 л 2
dq1 Hy dq1
д l
H\
dq'
д2г
dq2 H2 dq2
1 дг dHi
* = n
1' ~ '
dq1 dq2
Я, dq1 dq2
_а 1_ dHj_
H\ dq1 dq
1 дг дН2 _„
H2 dq2 dq1 ~U>
1
— = 0
(III.9.12)
dq2 H2 dq2
III. 10. Вырожденные эллиптические координаты. Одним из
семейств координатных поверхностей служат эллипсоиды вра-
вращения вокруг оси Охг; по отдельности рассматриваются два
случая: первый, когда ось вращения эллипсоида является его
меньшей осью (сжатые эллипсоиды, сфероиды), второй — его
большей осью.
1°. Связь цилиндрических координат с криволинейными
q1 = s, q2 = ji, q3 = ф
задается формулами
г = а /1 + s2 /1 - ц2, z = as\i. (III. 10.1)
Координатными поверхностями s = const служат сжатые эллип-
эллипсоиды вращения, a \i = const — однополые гиперболоиды враще-
вращения вокруг оси z. Два взаимно ортогональных семейства кри-
кривых в меридиональном сечении ф = const представляют эллипсы
г~-а2 = 0 (III. 10.2)
1+S2
и софокусные с ними гиперболы
7
- Аг - а2 = 0.
(i2
(III. 10.3)
«Эллипсоид», на котором s = 0, вырождается в круговую пла-
пластинку радиуса а
г = а]Л-ц2, 2 = 0, (III. 10.4)
на «верхней» стороне которой ц > 0, а на «нижней» ^ < 0.
864 ПРИЛОЖЕНИЕ III
«Гиперболоид» |j = 0 представляет часть плоскости 2 = 0 вне
круга радиуса
г = а>АГ+5Г, 2 = 0. (III. 10.5)
Окружность г = а в плоскости 2 = 0 является геометрическим
местом фокусов поверхностей (III. 10.2), (III. 10.3) (фокальный
круг). На нем ц — 0, s = 0.
Область задания параметров s, \i при решении краевых за-
задач для эллипсоидов определяется неравенствами
0<s<oo, |ц|<1, (III. 10.6)
а для гиперболоидов — неравенствами
-0O<S<OG) 0<Ц<1. (III. 10.7)
Коэффициенты Ляме вычисляются по формулам (III. 9.5):
' 2 " К l-(i2 ' (Ш. 10.8)
ii+H
так что якобиан преобразования оказывается равным
и фокальный круг является особой линией преобразования.
Выражения единичных векторов триэдра касательных к ко-
координатным линиям [qs] или, что (в, рассматриваемом случае
ортогональной системы) то же самое, нормалей к поверхностям
qs = const через единичные векторы цилиндрической системы за-
задаются формулами
(Ш.10.9)
Приведем еще выражение лапласиана скаляра; по (III. 5.5)
имеем
("мело)
2°. Для второй координатной системы — системы вытянутого
эллипсоида
r = a ]/"(! — n2)(s2— I), z = asp (III. 10.11)
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 865
и ортогональные семейства кривых в меридиональной плоско-
плоскости ф = const представляют эллипсы
^4т + ^- = а2 (III. 10.12)
и софокусные с ними двуполые гиперболоиды
|г-7^-а2 = 0 (III. 10.13)
с общими фокусами в точках ±а на оси z. Областью задания
переменных s, \i служит
l<s<oo, -1<ji<1. (III. 10.14)
«Эллипсоид» s= 1 вырождается в отрезок |z|^a оси г, а «ги-
«гиперболоиды» ц, = ±1—в полупрямые a^z<oo и —оо<2<—а
этой оси. Коэффициенты Ляме равны
(ШЛ0Л5)
Выражение лапласиана имеет вид
III. 11. Эллиптические координаты (общий случай). Рас-
Рассматривается эллипсоид
4+^т + ^7-а2 = 0 (р0 > 1 > е) (III.11.1)
Ро Ро ~~е Ро '
и семейство софокусных с ним поверхностей
У2 У2 У2
Л1 Л|) ло
где а—переменный параметр. Считая хи х2, х3 заданными, бу-
будем рассматривать (III. 11.2) как кубическое уравнение относи-
относительно а:
Q(*) = 7$f = o, (ill. п.з)
в котором
P(o) = x\(a-e2){a-l) + xl{a~l)c + xl(a-e2)a-a2f{a), (III. 11.4)
f (о) = о @-е2) (а-1). (III. 11.5)
55 А. И. Лурье
•868 ПРИЛОЖЕНИЕ III
Придавая о положительные значения, получим следующую таб-
таблицу чередования знаков:
Я@)>0, Р(е2)<0, РA)>0, Р(оо)<0.
Из нее следует, что корни полинома Р(а) расположены в про-
промежутках @, е2), (е2, 1), A,оо). Обозначим их соответственно
v2, (X2, р2:
0<v2<e2, е2<ц2<1, 1<р2<оо. (III. 11.6)
Этим определяются три семейства софокусных поверхностей вто-
второго порядка: двуполые гиперболоиды v = const
,.2 2 2
А1 An ¦ Л о
^¦-ТГ^-т^-а^О, (III.11.7)
однополые гиперболоиды
г2 г2 у2
-^ + -р^г-тф-а2 = 0 (Ш. 11.8)
и эллипсоиды
„2 2 2
-^+^г^ + ^т-а^0. (III. 11.9)
При принятом обозначении его корней полином Р(в) может
быть записан в виде
Р(а)= -а2(<т-^)(<х-ц2)(сг-р2), (III. 11.10)
и по (III. 11.2), (III. 11.3) приходим к основному тождеству:
*?, 4 , 4 2 9(q-v2Hq-V)(q-p2)
v+-o^^+^=r-a=-fl m -
Из него легко выразить х\, х\, х\ через введенные параметры
v, ц, р. Так, умножая обе части этого тождества на а и затем
полагая о = 0, найдем х\, а умножением на a — е2, о—1 и по-
последующей заменой о на е2 и соответственно а на 1 получим
х\ и х\. Приходим к равенствам
е2х\ — a2p2n2v2,
A-е2)<?2*2 = a2(p2 - e2)(ц2-e2)(e2 -v\
(III. 11.12)
Таким образом, через корни полинома (III. 11.4) при задан-
заданных координатах хи х2, х3 точки М определяются единственным
образом три координатные поверхности (III. 11.7) — (III. 11.9),
проходящие через эту точку; обратно, задав р, ц, v, по (III. 11.12)
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
'867
определяем с точностью до знака декартовы координаты точек
пересечения этих поверхностей в каждом из восьми октантов си-
системы осей Х\, х2, Хг-
Числами р, fi, v:
<7' = р, ?2 = ji, <73 = v, (III.11.13)
определяется криволинейная система эллиптических координат.
Положение точки на поверхности эллипсоида р = const задается
параметрами ц, v, и заданная на нем функция может быть вы-
выражена через эти параметры. В частности, при р = 1
е2х2 = а2ц\\ e2x2 = a2{ii2-e2)(e2-v'!), х3 = 0. (III. 11.14)
Кривые ц = const представляют эллипсы Е с полуосями аи,
(Е)
х2
! _р2
- - а2 = О,
(III. 11.15)
расположенные между отрезком (—ае,ае) оси Х\ и эллипсом
(Ео) с полуосями а, а ]Л — е2:
- а2 = 0.
(III. 11.16)
Итак, «эллипсоид» р = 1 представляет эллиптическую пластинку
в плоскости Хз = 0, ограниченную эллипсом (?0).
Однополый гиперболоид при ц = 1 вырождается в часть пло-
плоскости Хз = 0 вне эллипса (Ео), на которой
9 0 9 9 9 9 9 9/9 9\ / 9 9\ /ТТТ 111 ^ \
G л> — (X 0 v . G Лп — (X \\f " с- ) \Q ~~" V j• ^111* 11*1/ F
Эллипс (Ео) является линией пересечения поверхностей р=1.
ц = 1. Он представляет геометрическое место фокусов системы
координатных поверхностей.
Переходим к вычислению коэффициентов Ляме. По
(III. 11.12)
dxx _ dp . dp . dv
~i P~+ |x + v '
dx2 p dp . \i dji v dv
(III. 11.18)
dxz _ p dp ц rfn _ v dv
~xT ~ p2-l ~ 1 - n2 1 - v2
Отсюда получаем таблицу производных
¦
dx,
dp
a*,
ац
dv
Xi
P '
Xl
H '
v '
dx2
dp
dx2
an
dx2
dv
x2p
' p2-e2 '
X2\i.
X2V
e2 - v2 '
dxs x3p
dp p2 — 1
d\i 1 —
dv 1 —
r
v- )
A11.11.19)
55*
$68
ПРИЛОЖЕНИЕ III
и по (III. 2.4) находим
хЛ2 (дхЛ2
; +
(р2_
_ _ dxi дх{ дх2 дх2 . дхъ дхъ
! врц ^р ^ц ар ац ар ар,
ц2 ' (р2 - е2) (|i2 - е2) ' (р2- 1) ((л2- 1) J
и т. д. При s ф k, заменив в выражениях gSh декартовы коорди-
координаты их значениями (III. 11.12), получим
ё\2~ §23= ёъ\ — 0. (III. 11.20)
чем устанавливается ортогональность системы эллиптических ко-
координат. Имеем, далее,
'¦ — U1
[
1
__ гг2 __ ..2 I L J z
> ПУ~У I V4 "Г (g2_v2J -Г (l_v:
J 2 = V2 П2
T^ П _,,2\2 v -^v*
(III.11.21)
Исключение из этих выражений декартовых координат проще
всего осуществить, дифференцируя по 0 основное тождество
(III. 11.11)
2
Ч
a2 ' (a-e2J ' (a-IJ
« последовательно полагая а = р2, о = ц2, а = v2. Получаем
т -
/(р2)
и т. д. Приходим к равенствам
(р2_е2)(р2_1) .
e2_v2)(,_v2) •
(III. 11.22)
При обозначениях
Л (v) =
(III. 11.23)
ОРТОГОНАЛЬНЫЕ КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
якобиан оказывается равным
= Н Н Н =
д(P) д, (ц) д(V) '
и выражение лапласиана по (III. 5.5) приводится к виду
-f-A(v)^- . (III. 11.25)
Сославшись на (III. 3.5) и на (III. 11.19), отметим также
формулы
др _ 1 Xi _ Х\ др _ 1 д:гр __
дхо Hi р2 - 1 р (р2 -
(III. 11.26)
Предельный переход к координатам сплющенного эллипсои-
эллипсоида (сфероида), назовем их здесь s, q, ф, осуществляется, если
принять, что е — 0, v —> 0, но v/e остается конечным, и положить
P2 = l+s2, ц2=1-<72, v = ecosф. (III. 11.27)
Тогда по (III. 11.12) получим
-<72
<72sin<p, x3
(III. 11.28)
что и требуется [см. (III. 10.1)]. Здесь д —координата, которая
в п. III. 10 обозначалась ц.
Для перехода к координатам вытянутого эллипсоида пола-
полагаем
¦coscp.
Тогда по (III. 11.12)
хх = asq, x2 = a ]/s2 — 1 ]/l — g2 cos ф, л:3 = a j^s2 — 1 К 1 — q2 sin ф
(III. 11.29)
и координатными поверхностями s = const служат эллипсоиды
вращения вокруг оси Х\\
А
аг (s2-
1)
-1=0.
(III. 11.30)
56 А. И. Лурье
ПРИЛОЖЕНИЕ IV
ТЕНЗОРНАЯ АЛГЕБРА В КОСОУГОЛЬНОМ БАЗИСЕ
IV. 1. Основной и взаимный базисы. В рассмотрение вво-
вводятся три некомпланарных вектора, обозначаемые е\, г%, е^. Это
не единичные и не взаимно ортогональные векторы. Объем па-
параллелепипеда, построенного на этих векторах, обозначается v:
о = е, • («2 X е3)- (IV.1.1)
Распоряжаясь нумерацией векторов, можно принять v > 0.
Векторы еи е2, е3 образуют основной базис. Взаимный базис
определяется векторами е\ е2, ег:
el-~e2Xe3, е2 = 7езХе1- е3 = -^е,Х<?2, (IV. 1.2)
и из этого определения следуют соотношения
о,
U
(IV. 1.3)
В рассмотрение вводятся также скалярные произведения векто-
векторов основного и взаимного базисов
h с fro srSk /ТЛ7 1 yj \
Нетрудно проверить, что базис, взаимный со взаимным, — это
основной базис. Действительно,
и поэтому
что и требовалось.
IV. 2. Вектор в косоугольном базисе. Вектор а может быть
представлен его разложениями в основном и во взаимном ба-
базисах:
а = а*<?4 = aseJ- (IV. 2.1)
ТЕНЗОРНАЯ АЛГЕБРА В КОСОУГОЛЬНОМ БАЗИСЕ
871
Здесь s — немой индекс. В ранее принятых обозначениях, когда
использовались ортогональные декартовы координаты (ортого-
(ортогональный триэдр единичных векторов is), не было нужды в раз-
различении верхних и нижних индексов. В общем тензорном ана-
анализе оно должно последовательно проводиться; немые индексы
всегда располагаются один сверху, второй снизу, а свободные
имеют одинаковое расположение в левой и правой частях фор-
формулы. По повторяющемуся дважды снизу или дважды сверху ин-
индексу суммирование не ведется. Например g* = 3 (три слагае-
слагаемых), тогда как запись g$s представляет одночлен (значение gst
при s = t).
По (IV. 2.1) и (IV. 1.3) имеем
as = а ¦ es, as —
(IV. 2.2)
Величины as называют контравариантными, as — ковариантны-
ми компонентами а. Они равны произведениям проекций векто-
вектора а на векторы взаимного и соот-
соответственно основного базисов на мо-
модули этих векторов:
а,е
е, =
(IV. 2.3)
Другое истолкование основывается
на представлении (IV. 2.1); каждое
слагаемое в суммах ases, ases пред-
представляет ребро косоугольного па-
параллелепипеда, построенного на
векторах основного и взаимного
базисов, а — диагональ этого па-
параллелепипеда. Это показано на
рис. 51, построенном в предположе-
предположении, что вектор е3 перпендикулярен
плоскости векторов в\, е2, а вектор а
расположен в ней. Пояснение терминов «ко-» и «контравариант-
ный» дается ниже (п. IV. 6).
Формулы, выражающие одни компоненты через другие, сле-
следуют из (IV. 1.3), (IV. 1.4):
а.е'
Рис. 51.
as = gskak, qs = gska
= п . nk
Величины
" VF
а . = «w
(IV. 2.4)
(IV. 2.5)
называются физическими компонентами а, они равны проекциям
этого вектора на es и es. Квадрат величины вектора по (IV. 2.1)
56*
872 ПРИЛОЖЕНИЕ IV
можно представить в одном из видов
а2 = а-а = а%- akek = gskasa\ j
а2 = а • а = ases ¦ akek = gskasak, 1 (iv. 2.6)
а? = а-а = ases ¦ a"ek = gskasak = asas. j
IV. 3. Метрический тензор. Из формул (IV. 2.6) следует, что
величины gsh(gsh) являются коэффициентами инвариантной
квадратичной формы переменных а$ (или as), а отсюда по ска-
сказанному в п. 1.4 следует заключить, что этими величинами оп-
определен симметричный тензор второго ранга, обозначаемый g;
gsk и gks — его ко- и контравариантные компоненты; его смешан-
смешанные компоненты gl суть коэффициенты билинейной формы пе-
переменных as, ak. Тензор g определяет в принятом базисе квадрат
длины. Это объясняет его наименование — метрический тензор.
Диадное представление тензора ^записывается в одном из трех
видов
U = §skesek = gskesek = g%ekes = eses = e,e». (IV- 3.1)
Из них следует:
frskptn .op . о — ptn , в рт , р • as^amo = amor
& е esek eq e ere eq> В es&kq &r&q'
ИЛИ
gm%q = g^ (IV. 3.2)
Этой формулой определяется правило свертывания по немому
индексу с помощью компонент метрического тензора, тогда как
формулы (IV. 2.4) иллюстрируют операции подъема и опуска-
опускания индекса — перехода от ковариантных компонент к контра-
вариантным (и обратно) путем умножения на gsh (на gsk) с по-
последующим свертыванием по немому индексу.
К метрическому тензору в косоугольном базисе отходит
роль единичного тензора. Это следует из того, что его произве-
произведение на вектор а справа или слева приводит к тому же вектору:
g • а = gskesek • а = esgskak = esas = a,
a- g = a- gskesek = asgskek = акек = a. J ( " 3' )
Еще проще это доказывается, если исходить из билинейного
представления
а ¦ g = a ¦ eses = ases = а, g • а = eses • а = e"as = а.
Обозначим на минуту g в его контравариантном представлении
через g*. Тогда
так что
Г = Г'- (IV. 3.4)
ТЕНЗОРНАЯ АЛГЕБРА В КОСОУГОЛЬНОМ БАЗИСЕ 873
Этого следовало ожидать, поскольку свойство единичного тен-
тензора быть равным своему обратному сохраняется в любом коор-
координатном базисе, af — это тот же тензор g, но иначе обозна-
обозначенный.
Из (IV. 3.4) следует, что матрицы \\gah\\ и ||gsft|| обратные; по-
поэтому, обозначив Ask = Ahs алгебраическое дополнение элемента
gsh первой матрицы, имеем
Ask
?** = J7-. (IV-3-5)
где g = \gsh\ — определитель матрицы ковариантных компонент
метрического тензора. К этому же легко прийти, рассматривая
произведение определителей g и g* матриц \\gst\\ и \\gst\\.
Площадь о параллелограмма, построенного на векторах е2,
вз *), может быть представлена в двух видах:
~ ?23
Итак,
c=V7. o=Vg^g~. (IV. 3.6)
IV. 4. Тензор Леви-Чивита. Его компоненты в косоугольном
базисе, основном и взаимном, определяются подобно A.2.1)
формулами
«,« = е.-(е*Хе(), «'*'= е* • (е* X е') (IV. 4.1)
и будут равны нулю, если в числе индексов skt имеются одина-
одинаковые, равны Yg в первом определении и \\Yё ~ во втором,
когда индексы следует в порядке 123, 231, 3.12; при нарушении
этого порядка они соответственно равны — Ye> ~ 4Yg ¦ Сказан-
Сказанное может быть записано и в виде
^<^, (IV. 4.2)
где символам eSkt, esht приписываются значения нуль или ± 1 по
сформулированным правилам.
С помощью этих определений можно составить выраженил
ко- и контравариантных компонент векторного произведения:
с = аХЬ = akbtek X е\ cs = c-es = akbtekts,
*) Индекс над буквой применен для обозначения номера величины; ха-
характер ее вариантности этим индексом не указывается.
57 А. И. Лурье
874 ПРИЛОЖЕНИЕ IV
так что
cs = 'sktakb' = Vg емакЬ\ cs = esktakbt = y=- esUakbt. (IV. 4.3)
В частности,
ekXes = Yg еше\ e'Xe'=f ешеь (IV. 4.4)
и обратные формулы имеют вид
е1 = j±jешек X es, et = 1 /geto<ek X е\ (IV.4.5)
IV. 5. Тензоры в косоугольном базисе. С помощью векторов
основного и взаимного базисов образуется четыре типа диад:
esek, eV, esek, esek. (IV. 5.1)
Им соответствуют выражения вида
Pskesek> Раке$ек< Р%еэе"> PskeSek- (IV. 5.2)
Если их произведения справа на вектор а определяют один и
тот же вектор Ь, то этим они представляют различные записи
одной и той же инвариантной величины — тензора Р второго
ранга:
Ь = Р . а = pskesak = pskesak = p°kesak = pskesak, (IV. 5.3)
причем
определяют контра-, ко-, контрако- и коконтравариантные ком-
компоненты этого тензора. Связь между ними легко устанавли-
устанавливается. Действительно, по (IV. 5.3) и (IV. 2.4)
bs = pskak = gs% = g"Prmcr = Prmesrgkmak,
так что
psk = g^gkmprm
и, далее, по (IV. 3.2)
РВ В li = Bsr8 B^mB^V = Я'B'Pt) = О 1.
° Sq1-* Kl ° ojqo & ИХ* ТШ aQat • Ftn г qt
Приходим к соотношениям
и т. д., подтверждающим те же легко запоминаемые правила
подъема, опускания и свертывания индексов.
Для симметричного тензора psh = phs, psk = phs и нет нужды
указывать место индекса смешанных компонент (psk = p'ks = /?|).
Свойство тензора быть симметричным инвариантно по отноше-
ТЕНЗОРНАЯ АЛГЕБРА В КОСОУГОЛЬНОМ БАЗИСЕ 875
нию к выбору базиса. Тензор, симметричный в ортогональном
базисе единичных векторов is, остается симметричным в косо-
косоугольном базисе; действительно, называя p(si) компоненты Р в
базисе is, имеем
Р • ек = plk = рЫ)е2 ¦ isit - ек = рШ)еь • itis • ек =
(IV. 5.5)
Аналогично доказывается, что pih — pki.
IV. 6. Преобразование базиса. Векторы нового базиса обо-
обозначаются e's; они связаны линейными соотношениями с векто-
векторами исходного базиса
Я < . ел)
с определителем I c's > отличным от нуля; обратные соотношения
записываются в виде
о — гТо' СГ _ о . У HV fi 9^
так что
о,
Формулы, определяющие векторы е'ч взаимного базиса, полу-
получим, сославшись на (IV. 3.3) и (IV. 6.2):
= g . e'q =
Теперь, представив вектор а через его ковариантные компонен-
компоненты, имеем
а = а/=;а/с'гч = а'/, а'г-а/гя, (IV. 6.5)
и сравнение с (IV. 6.1) показывает, что эти компоненты преобра-
преобразуются как базисные векторы, чем объясняется их наименова-
наименование («ковариантные»). Контравариантные компоненты преоб-
преобразуются как векторы взаимного базиса:
a^ases = ascrse'r = a're'r, tfr = ascrs. (IV. 6.6)
Подобным же образом получим формулы преобразования ком-
компонент тензора:
/>rf=c'Mv pfS'=cSAPrq' prS.t=^c'qtP:q: (iv.6j)
57*
876 ПРИЛОЖЕНИЕ IV
IV. 7. Главные оси симметричного тензора. Главные инва-
инварианты. Основываясь на инвариантном определении п. 1.9 глав-
главных направлений тензора
где п — единичный вектор, имеем
p*seset • п = p'sesnt = Ъёщ = lg'se%. (IV. 7.1)
Приходим к системе трех уравнений
в которой неизвестные nt связаны также соотношением
n-n = grtnrnt=l. (IV. 7.3)
Запись характеристического уравнения тензора
Я3(Я) = |^-Я^|-0 (IV. 7.4)
отличается от (I. 9.5) только лишь тем, что роль компонент в ор-
ортогональной системе отошла к смешанным компонентам. По-
Поэтому в выражения главных инвариантов (I. 10.4), (I. 10.6) до-
достаточно внести измененные обозначения и далее использовать
формулы преобразования (IV. 5.4). Получаем
(IV. 7.6)
Второй главный инвариант вычислим, сославшись на соотно-
соотношение (I. 10.14):
/2(Р) = /1(р-')/3(Я). (IV. 7.7)
Здесь тензор Р~' по A.7.8) определяется выражением
P~x = feset, (IV. 7.8)
причем
Р*Ч = <- (IV. 7.9)
Тогда
р->. Р = р*е,ег ¦ pje< = psrprne/ = *;•/ = е/ = ?,
что и требуется; так как g — единичный тензор. Было бы ошиб-
ошибкой отождествить pst с контравариантными компонентами Р; по-
последние определяются по его ковариантным компонентам с по-
помощью (IV. 5.4), тогда как определение pst требует построения
матрицы, обратной ||pstll-
ТЕНЗОРНАЯ АЛГЕБРА В КОСОУГОЛЬНОМ БАЗИСЕ 877
По (IV. 7.5) и (IV. 7.7) теперь получаем
h(P) = jgstPls, P = \pstl (IV. 7.10)
Другую форму записи второго главного инварианта получим,
основываясь на соотношении (I. 10.10). Имеем
Р2 = РчРчгМд1*, /, (П = gsrg">PstPqT
и поэтому
У " ?V') A/P,r. (IV. 7.11)
Величину в скобках можно записать также в виде
es • (е'е9 - ет - е'е' • е") = es. [в« X (е* X ел)] =
так что по (IV. 4.2)
/2 (Р) = ^ gmneS4metrnpstpqr. (IV. 7.12)
Конечно, эту же формулу можно получить непосредственно по
(IV. 7.10), использовав определение A.7.11) компонент обрат-
обратного тензора.
ПРИЛОЖЕНИЕ V
ОПЕРАЦИИ ТЕНЗОРНОГО АНАЛИЗА
В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
V. 1. Введение базисов. В отличие от ранее принятого обо-
обозначения в этом Приложении декартовы координаты точки обо-
обозначаются п\, а%, из, а вектор-радиус ее — через г:
r = isas. (V.I.I)
Для криволинейных координат сохраняются обозначения qx, q2,
q3 Приложения III, так что
as = as(q\q2,q5), r = r(q\ q\ qs), (V. 1.2)
причем в области их задания якобиан
das
j —
(V.1.3)
dq
отличен от нуля и положителен.
Основной векторный базис определяется тройкой векторов
и соотношениями (IV. 1.2), (IV. 4.5) задается взаимный базис
г" = Iешг$ Xf/~eMr, X rt. (V. 1.5)
В рассмотрение вводится метрический тензор
й =¦ gskrsrk = gskrsrk = glr/k = r/s, (V. 1.6)
причем величины
?»fc = Vfc. gsk = r*.r\ gsk = rs-rk (у. 1.7)
представляют его ковариантные, контравариантные и смешан-
смешанные компоненты.
Бесконечно малый вектор dr определяется очевидным равен-
равенством
(lr = r?dq% (V. 1.8)
ОПЕРАЦИИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 879
и квадрат его длины — квадрат линейного элемента — выра-
выражается через ковариантные компоненты метрического тензора:
ds2 = dr-dr = rs dqs ¦ rk dqk = gsk dqs dqk. (V. 1.9)
С изменением обозначения es на rs далее можно повторить все
сказанное в Приложении IV.
Ограничимся приведением выражений элемента объема
(V. 1.10)
и элементов поверхностей
do = /ip dq2 dq\ do = VW2 dq3 dq\ do = VetF dql dq2,
(V.I.11)
причем
? = I Ы, Vg = j est"rs ¦ (rt X rq) = /. (V. 1.12)
Формулы (V. 1.11) можно представить также в единой записи:
¦$?¦• (УЛЛЗ)
V. 2. Производные базисных векторов. Векторы
_ drs _ д2г _ (v 9 П
rst — -TJ — , t я s — rts {V.Z.I)
dq1 dq' dqs
могут быть представлены их разложениями по базисным векто-
векторам. Эти разложения можно записать в виде
, (V.2.2)
и речь будет идти о вычислении коэффициентов этого разло-
разложения, обозначенных фигурными скобками и называемых сим-
символами Кристоффеля второго рода; другое их обозначение:
(V.2.3)
В формулах (V. 2.2) свободные индексы расположены снизу,
а немой повторен один раз сверху и второй — снизу. Из самого
определения (V. 2.2) следует симметрия по нижним индексам:
так что общее число символом равно 18. По (V. 2.2) имеем
(V.2.5)
880 ПРИЛОЖЕНИЕ V
Величины слева т-скалярные произведения rst-rq — были вве-
введены в п. III. 2, это символы Кристоффеля первого рода (пря-
(прямые скобки), определяемые формулами (III.2.7):
C? g?). (V.2.6,
Возвращаясь к (V. 2.5), имеем
{*} = 8"№, q), (V.2.7)
причем вторая группа формул получена из первой с помощью
(IV. 3.2).
Этим вполне определены производные векторов основного
базиса. Для вычисления производных векторов взаимного бази-
базиса исходим из соотношения
Из него имеем
и, сославшись на (IV. 2.2), (IV. 2.1), найдем
. ¦ (V.2.9)
dq< \tq
V. 3. Ковариантное дифференцирование. Проведение вычис-
вычислений с векторными и тензорными величинами требует введения
координатного базиса и рассмотрения в нем компонент той или
иной природы (ко-, контравариантных, смешанных). Изменение
инварианта (скаляра, вектора, тензора) при смещении из дан-
данной точки в соседнюю обусловлено лишь свойствами этого инва-
инварианта; иначе обстоит дело с компонентами, так как их измене-
изменения зависят еще от величин и направлений базисных векто-
векторов. Пусть, например, контравариантные компоненты ап век-
вектора а не зависят от координат qh, их частные производные по
этим переменным — нули, но было бы ошибкой считать, что
остается неизменным и вектор а. Верно и обратное: при постоян-
постоянном векторе а его компоненты as или as не сохраняют постоян-
постоянных значений. Задачей последующего является введение таких
характеристик изменяемости векторов и тензоров, в которых
учитывались бы изменения как самих этих величин, так и коор-
координатного базиса, к которому они отнесены. Это достигается
введением операции ковариантного (или абсолютного) диффе-
дифференцирования.
ОПЕРАЦИИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 881
Рассмотрим производную а по qs; начнем со случая зада-
задания а его контравариантными компонентами. Имеем
да д k дак
= aT^r +
или, после замены немых индексов,
да к
Аналогично, сославшись на (V. 2.9), имеем
да
Выражения
dak ( k 1 , даи ( t
называют ковариантными (абсолютными) производными от кон-
травариантных и ковариантных компонент вектора а. При этих
обозначениях
^r = rk4sak = rk4sak. (V.3.4)
Величины Vsah и Vscik'представляют соответственно контра- и
ковариантные компоненты вектора dajdq\
Сказанное обобщается на тензоры любого ранга. Например,
представляя тензор второго ранга его контравариантными ком-
компонентами, имеем
или
Аналогично получим '
^{;}\:}К, (V.3.6)
Тензор -j?-f P здесь представлен его контравариантными, кова-
ковариантными и смешанными компонентами.
882 ПРИЛОЖЕНИЕ V
Частое применение имеет теорема Риччи: ковариантная про-
производная компонент^ метрического тензора равна нулю. Это сле-
следует из соотношения
dq' dq'
ИЛИ
= rsrS,sk = 0.
ё tgsk
Итак,
Vrt = °. W = 0, V^ = 0, (V.3.8)
что и требовалось. Этого следовало ожидать, поскольку метри-
метрический тензор играет роль единичного тензора.
При ковариантном дифференцировании компоненты метри-
метрического тензора играют роль постоянных — их можно выносить
за знак и вносить под знак символа Vs (но, конечно, не трг)
Например,
^ k = rsrkS!tgmsgqkpmq =
как и должно быть, поскольку производная инварианта (тензо-
(тензора Р) является инвариантом, не зависящим от способа его пред-
представления (через ковариантные VtPsh или контравариантные
V(Pm« его компоненты).
При ковариантном дифференцировании сохраняется правило
дифференцирования произведения, например:
Vrasbt = (Vras)bt + asVrbt. (V. 3.9)
Обращается в нуль и ковариантная производная тензора Леви-
Чивита; например, рассматривая его ковариантные компоненты,
имеем
Vre^ = 0. (V.3.10)
В развернутой форме это равенство имеет вид
W *st«~ \ {Z \imii+ {frJ €smi
и, поскольку stq — тройка различных индексов, только в одной
из троек индексов
tntq, stnq, sttn
ОПЕРАЦИИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 883
нет повторяющихся — в первой при т = s, во второй при т = /,
в третьей при т = q. Пусть такой тройкой будет первая; тогда,
замечая, что _
д , ... dVJ _dlnVg
dqr *stq— &qr estg— д(/Г erf,,
имеем
v _(dlnVg (s
и сказанное следует из легко проверяемого соотношения
f s \ _ дInУ7 1 dg rV4
Его вывод основан на определениях (V. 2.7), (V. 2.6); имеем
Слагаемые
nst dgrt st dgST
очевидно, сокращаются; поэтому, используя формулу A.7.9)
дифференцирования определителя, найдем
\ ^ ' a* d8st = ' dg dgst = 1 dg
f 2 ё 5<7r 2g '
что и требуется.
V. 4. Дифференциальные операции в криволинейных коорди-
координатах. Полный дифференциал скаляра ф(<7',<72. <73) представ-
представляется в двух видах:
йц, = |SL d^^ = УФ • dr = УФ • r,d^,
откуда следует, что производные ф по gs являются ковариант-
ными компонентами вектора Уф в векторном базисе rs и по
(IV. 2.1)
Аналогично вычисляется полный дифференциал вектора. По
(И. 2.11) имеем
и тензор Va может быть представлен суммой диад
Va-^-S-. (V.4.2)
'884 ПРИЛОЖЕНИЕ V
Из (V. 4.1) и (V. 4.2) следует представление набла-оператора в
виде
У V = '5^' (V.4.3)
Это правило в соединении с правилами ковариантного диффе-
дифференцирования обеспечивает автоматизм вычисления дифферен-
дифференциальных операций над тензорами любого ранга.
1°. Дивергенция вектора
= -^ + ff }ar,
dqR {kr)
dqs
и, сославшись на (V. 3.11), получим
diva = -U^^-. (V.4.4)
Vg dqr '
2°. Ротор вектора
rate-V X a = r° X r*.ak-furt ($¦ - {* }am).
Ho
так что
Vg ' dq> •
3°. Градиент вектора Р
4°. Тензор деформации
|H|H;j4 (V.4.6)
Величины в квадратных скобках представляют ковариантные
компоненты этого тензора.
5°. Дивергенция тензора второго ранга
Сославшись на (V. 3.11) и (V. 2.2), имеем теперь
ОПЕРАЦИИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 885
Получаем
(V-4J)
6°. Лапласиан скаляра
д<Г d<?s d^ d<?ft dqR {sr J
ИЛИ
Выражения дифференциальных операций второго порядка
над векторами и тензорами весьма громоздки. Как пример при-
приведем лапласиан вектора
dq' dq'
' dqs [ kt ) dqs ( st j dqr [ sk j dq'
dq
См. также п. V. 7.
V. 5. Переход к ортогональным криволинейным координатам.
Метрический тензор в случае ортогонального триэдра базисных
векторов является диагональным; его ковариантные компоненты
равны
f 0,
где Я8 — коэффициенты Ляме. Имеем, далее,
g = \gsk\ = H\H\H\ (V.5.2)
и, определяя по (IV. 1.2) векторы взаимного базиса, получаем
\ _ ' r v г — — \г V г I ' — '
— /— Г2 А Г3 — ,— | ' 2 Л Гз I ,, — „2
г'
-,з
/Г Hi
(V. 5.3)
Они сонаправлены векторам исходного базиса. Соответствую-
Соответствующие единичные векторы — касательные к координатным линиям
[gs] — обозначаются ts:
Ts = -?- = tfsr\ (V.5.4)
886 ПРИЛОЖЕНИЕ V
Из представлений вектора
з
находим следующие выражения его контра- и ковариантных
компонент через «физические» компоненты а^у
H (V-5.5)
Аналогичные выражения для тензора второго ранга записы-
записываются в виде
P't^ltPw PS'-^Pisty (V-5.6)
Символы Кристоффеля первого рода вычисляются по
(V. 2.6), а второго рода — по (V. 2.7). Учитывая еще, что контра-
вариантные компоненты метрического тензора равны
О,
(V.5.7)
Hi
находим
[ss, t]=- H,
1st, s] = Hs —
dHx
{:}¦
t[s_dHs
d<f
(V. 5.8)
Выражения производных базисных векторов составляются
по формулам (V. 2.2); эти выражения могут быть использованы
для составления формул дифференцирования единичных векто-
векторов, непосредственный вывод которых приведен в п. III. 4.
Внешняя простота и симметрия формул общего тензорного
анализа теряется при переходе к ортогональным криволинейным
координатам и физическим составляющим тензоров. Этот.пере-
Этот.переход вместе с тем сопряжен с громоздкими записями; поэтому
вычисления в ортогональных координатах, с которыми преиму-
преимущественно приходится иметь дело, предпочтительно проводить,
пользуясь изложенными в Приложении III приемами.
V. 6. Тензор Римана — Кристоффеля. Квадрат линейного
элемента в евклидовом пространстве ?з представляется суммой
квадратов дифференциалов декартовых координат:
ds2 = 'da\ + da* + da\. (V. 6.1)
При введении криволинейных координат с помощью преобра-
преобразования (V. 1.2) это выражение приобретает вид квадратичной
ОПЕРАЦИИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 887
формы дифференциалов:
ds2 = gstdq*dqt, (V. 6.2)
коэффициенты которой — ковариантные компоненты метриче-
метрического тензора — вычисляются по формулам
*., = '..r,-f*-fb (V.6.3)
dqs dql
когда преобразование (V. 1.2) задано. Поставим, однако, воп-
вопрос иначе; предполагается, что квадратичная форма (V. 6.2)
задана ее коэффициентами gst и что она определенно-положи-
определенно-положительна. Тогда говорят, что ею определена метрика в римано-
вом пространстве ^з- Теперь неизвестным является само преоб-
преобразование (V. 1.2), разыскание его сводится к интегрированию
системы шести уравнений (V. 6.3) с тремя неизвестными функ-
функциями а\, а2, а3; искомое преобразование существует лишь при
соблюдении условий интегрируемости этой системы. Если эти
условия выполнены, то риманово пространство Rs вырождается
в евклидово ?3, и положение точки в нем может быть опреде-
определено в единой декартовой системе осей, а квадрат линейного
элемента может быть представлен в евклидовой форме
(V.6.1).
Определенно-положительная форма (V. 6.2) линейным пре-
преобразованием переменных может быть приведена к сумме трех
квадратов
ds2 = bn (zk) dzi2 + b22 (zk) dz2* + b33 (zk) dzz\ (V. 6.4)
где z\ z2, г3 —новые переменные; величины Vbss(zk) dzs (не
суммировать!), вообще говоря, не являются дифференциалами
некоторых величин, и, только фиксируя zk, можно принять
das=vbss{zk)dzs и этим определить в окрестности рассматри-
рассматриваемой точки R3 декартову систему осей as. Этим доказывается
возможность локального внесения в R3 метрики Е3, тогда как
искомые условия интегрируемости должны обеспечить ее суще-
существование во всей области.
Итак, соблюдение этих условий гарантирует существование
трех функций as(ql, q2, qs) или, что то же самое, возможность
задания положения любой точки вектор-радиусом ее
r = r(q\q\q*) (V. 6.5)
и возможность внесения координатного базиса, векторами ко-
которого rk служат производные г по координатам qh. Тогда
(V-6.6)
888 ПРИЛОЖЕНИЕ V
и условия интегрируемости этих соотношений записываются в
виде
-U'U * (Ч о. (v.6.7)
dqr \sk) dqk\srj ' V '
Соблюдение этих условий гарантирует интегрируемость выра-
выражения
так как условия его интегрируемости
drs __ дтк
dqk dqs
выполняются при принятых определениях (V. 2.6), (V. 2.7) сим-
символов Кристоффеля и из свойств симметрии этих величин, обус-
обусловленных симметрией компонент метрического тензора — коэф-
коэффициентов квадратичной формы (V. 6.2).
Развернутая запись условий интегрируемости (V. 6.7) имеет
вид ,
К выражению такой же структуры приходим, рассматривая раз-
разность
VrVsa'-VsVra<.
Действительно, V5a( — смешанная компонента тензора Va. По-
Поэтому
и, далее,
= YW \ sq \~ W \ г Л + { ш Н sq \~ \ sm \\ 7q\ J а"
ЯЛИ, ПО (V.6.8),
VrVsa' - VsVra' = Rsrq'.aq. (V. 6.9)
Структура этого выражения показывает, что величины Rrsq*
представляют компоненты тензора четвертого ранга, трижды
ковариантные по индексам srq и контравариантные по индек-
индексу t. Это — тензор кривизны Римана — Кристоффеля; его ком-
компоненты вычисляются через компоненты метрического тензора.
Если последние заданы так, что тензор Римана — Кристоффеля
оказывается нулевым, то уравнения (V. 6.6) интегрируемы, а
пространство с линейным элементом (V. 6.2)—евклидово ?3.
ОПЕРАЦИИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 889
Сославшись на теорему Риччи п. V. 3, можно переписать
условие (V.6.9) в виде
VrVsa, - VsV,a, = gmtRsrqmaq = Rsrqtaq'. (V. 6.10)
Здесь введены в рассмотрение четырежды ковариантные ком-
компоненты тензора Римана — Кристоффеля; они выражаются че-
через символы Кристоффеля первого рода и поэтому легче вы-
вычисляются. Действительно,
+ gtp([sq, P)[rl, t]-[rq, p][sl, t]).
Учитывая, что
a _ , dgmt
mt dqr
dqr ~ g dqr >
а также развернув выражения производных прямых скобок и
сделав замены
^ [тг, t] + [rt, m], %jfi- = [ms, t) + [st, m],
придем к следующим выражениям ковариантных компонент
тензора Римана —Кристоффеля:
1 / d2gst d2gsq d*grq &grt \
^sr?<~ 2\dqrdq" dqT dql dqsdq( dqs dq» Г
+ gml([rq, m][st, l]-[sq, m][rt, /]). (V.6.11)
Из них следует;
1) симметричность относительно пар индексов sr, qt:
Rsrqt = Rqtsn
2) кососимметричность по индексам s и г, q и t:
Rsrqt = ~" Rrsqt ~ ~ Rsrtq'>
3) тождества Риччи
Rsrqt + Rrqsi + Rqsrt = "•
Можно доказать, учитывая эти свойства, что из 81 компо-
компоненты тензора имеется только шесть независимых:
°2323> А2331> °2312> -^3131» A3I12> A1212-
Они могут быть представлены через симметричный тензор вто-
второго ранга — тензор Риччи:
f (V.6.12)
58 А. И. Лурье
890 ПРИЛОЖЕНИЕ V
Действительно,
А ~ ~7Г *2323> "¦ =~^2331. А3— —
^ = 7
(V.6.13)
и в евклидовом пространстве
Лт" = 0. (V.6.14)
В ортогональных криволинейных координатах этим уравнениям
соответствуют зависимости Ляме п. III.6.
V. 7. Тензор Ink Р. Определение этого тензора было дано
в п. II. 4 формулой (II. 4.13):
Ink P = rot (rot P)\
Тензор Р далее предполагается симметричным. Имеем
ret Р = V X Р = г1 X r
так что
и, далее,
Величина в скобках — тензор второго ранга, представленный
его контравариантными компонентами. Учитывая (V. 3.10),
имеем
Ink Р = rk X fV,V^b'V(A( = W«V*%V^, (V. 7.1)
и остается отметить еще соотношение переставимости операций
ковариантного дифференцирования, аналогичное (V. 6.10):
= RklmtpT + Rlkmspmt = 0. (V. 7.2)
Оно позволяет проверить симметричность рассматриваемого
тензора:
М = Ink P = rprqikt
что и требуется. Приходим к выражениям
М" = -J- (V5P33 + V23p22 - 2V2V3p23),
M12 = -i- [- V,V2p33 + V3 (V,p23 + V2p31 - V3p12)]
ОПЕРАЦИИ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ 891
и получающимся из них круговой перестановкой индексов. Это
естественное обобщение формул (II. 4.15)-— дифференцирование
заменено ковариантным дифференцированием. Развернутые вы-
выражения операций ViVhPst имеют, конечно, достаточно громозд-
громоздкий вид.
V. 8. Преобразование поверхностного интеграла в объемный.
Рассмотрим интеграл
ns(f (q\ q2, qz)do= J J n ¦ rs<p do,
в котором ns— ковариантная компонента вектора внешней нор-
нормали п = nsrs к замкнутой поверхности О. Тогда по (II.5.2),
(V.4.2), (V.2.2) и (V. 3.11) имеем
Итак,
1Ь^ = Щ^<^>7Г (У'8Л)
В применении к вектору а имеем
(V.8.2)
откуда снова приходим к выражению (V.4.4).
58*
ПРИЛОЖЕНИЕ VI
СВЕДЕНИЯ ПО ТЕОРИИ СФЕРИЧЕСКИХ
И ЭЛЛИПСОИДАЛЬНЫХ ФУНКЦИИ
VI. 1. Разделение переменных в уравнении Лапласа. В слу-
случае сферических координат решение уравнения Лапласа
(III. 8.5)
^ff if ^I^O, (VI..,.,)
в котором введена вместо ¦& независимая переменная
H = cos# (-1<ц<1), (VI. 1.2)
разыскивается в форме произведения
ty = f(R)M(\x)C0SmX. (VI. 1.3)
ып
Постоянную разделения назовем п(п+\)\ она не изменяет
своей величины при замене п на —(п + 1). Приходим к двум
дифференциальным уравнениям для искомых функций f(R),
M{yi):
[R2r(R))'-n(n+l)f(R) = 0, (VI. 1.4)
[A - ti2) M' И' + [п (п + 1) - -^У М М = 0. (VI. 1.5)
Далее будет достаточно считать п целым положительным чис-
числом. Из двух частных решений уравнения (VI. 1.4)
fAR) = Rn, f2(R)-R~{n+l} (VI. 1.6)
первое используется при решении внутренней краевой задачи
для сферы (OKRKRo), второе—внешней (R0KR <°°); реше-
решение краевых задач для полой сферы (Ro-^-R ^CRi) требует вве-
введения обоих решений.
СФЕРИЧЕСКИЕ И ЭЛЛИПСОИДАЛЬНЫЕ ФУНКЦИИ 893
В сфероидальных координатах (координатах сжатого эллип-
эллипсоида) по (III. 10.10) имеем
(VI. 1.7)
и, полагая
i|> = S(s)Af(n)^m<p, (VI. 1.8)
приходим после разделения переменных s, |i к дифференциаль-
дифференциальным уравнениям
[A - ц2) М' (ц)Г
или, вводя новое обозначение «(/г + 1) = X + яг2 для постоянной
разделения,
[A + s2) 5' {s)Y -[п(п+ 1) --f^r] 5 (s) = 0, (VI. 1.9)
, [A - м-2) М' (ц)Г + [«(/г + I) - т^г] М (м-) = 0. (VI. 1.10)
Уравнение (VI. 1.10) приводится к виду (VI. 1.9) при за-
замене |л на is. Отметим также тождественность уравнений
(VI. 1.10) и (VI. 1.5).
Переходим к случаю эллиптических координат р, ц, v, опре-
определенных в п. III. 11. Разыскивая решение уравнения Лапласа
(III. 11.26) в виде «произведений Ляме»
, (VI. 1.11)
приведем его к виду
Шf (р)Г -(v2 -р2) W)[л'((х) м'
Вместе с тем имеем очевидное тождество
(Яр2 + h) (ix2 - v2) + (Я (х2 + h) (v2 - р2) + (tfv2 + h) (p2 - (х2) = 0,
в котором Я, h — любые постоянные. Учитывая его, можно пе-
переписать предшествующее равенство в виде
894 ПРИЛОЖЕНИЕ VI
и, пользуясь произволом выбора Н, h, приравнять нулю вели-
величины в фигурных скобках. Придем к трем дифференциальным
уравнениям второго порядка:
), (VI. 1.12)
- Д, (ц) [А, (ц) М' (\х)У = [п(п + 1) у2 + h] M (ц), (VI. 1.13)
A (v)[Д(v)JV'(v)]' = [я(я + 1) v2 + h]N (v). (VI. 1.14)
Здесь введено новое обозначение п(п + 1) для постоянной Н.
VI. 2. Сферические функции Лапласа. Пусть <рп (х, у, г) —
однородный полином гс-й степени. Всего существует
¦j(n+ \){n + Tf таких линейно независимых полиномов. По
определению однородности
Ф„(**, ky, kz) = k\n{x, у, г), (VI.2.1)
и следствием этого функционального соотношения является из-
известная теорема Эйлера
$ (VI.2.2)
Однородные гармонические полиномы, обозначаемые далее
Рп(х, у, г), удовлетворяют уравнению Лапласа. Поскольку в вы-
выражение полинома V2Pn степени (п — 2) входит у я (я— 1) про-
произвольных коэффициентов, требование его тождественного обра-
обращения в нуль приводит к такому же числу соотношений, связы-
связывающих у (я + 1) (я+ 2) коэффициентов Рп; доказывается, что
эти соотношения линейно независимы. Поэтому существует
~ (п + 1) (п + 2) - -i- п {п - 1) = 2я + 1
линейно независимых гармонических полиномов га-й степени.
Например, для п = 0, 1,2 это полиномы
I; х, у, г; х2 - у2, у1-z1, xy, yz, zx. (VI. 2.3)
По (VI.2.1) представление гармонического полинома Pn(x,y,z)
в сферических координатах записывается в виде
Рп{х, у, z) = Рп(R sin¦&cosX, /? sin#sinX, /?cos#) =
= RnPn (sin Ь cos Я, sin О sin I, cos#). (VI. 2.4)
Коэффициент при ^п, обозначаемый Fn(#, A):
Kn(O, A) = Pre (sin О cos A, sin О sin A, cosfl), (VI. 2.5)
называется сферической функцией Лапласа. Это значение гар-
гармонического полинома п-я степени на сфере единичного радиуса.
СФЕРИЧЕСКИЕ И ЭЛЛИПСОИДАЛЬНЫЕ ФУНКЦИИ 895
Очевидно, что представление сферической функции Лапласа в
форме тригонометрического полинома по аргументу к имеет вид
п
Yn{®, A) = co(#)+ % [с% (в) cos тХ+ с'пп(Ъ) sin тЦ. (VI.2.6)
Но сумма степеней q\ + q2 + qz каждого слагаемого x^yi"z4>
гармонического полинома Pn(x,y,z) равна п. Поэтому слагае-
слагаемые, входящие в выражение сферической функции Лапласа, бу-
будут иметь вид
sin?1 к cos«2 к sin?1*"?2 ft cos # = sin?1 к cos к sinm ft cos"~m d,
sin X cos"?' % sin4i+ § cos § = sin X cos X sinm ¦& cos*1" ¦&,
где m = gi + g2- Заменив теперь тригонометрические функции
от к представлениями
cos к = -j (еа + е~а), sin к = -^т- (еа — е"а),
нетрудно сообразить, что показатель степени sind в коэффи-
COS
циентах с^(д), с'™{Ь) при . тА, выражения (VI. 2.6) имеет
ту же четность, что и т; -вместе с тем sinmd входит как мно-
множитель в коэффициенты с™ {Ь) и с^т (д). Поэтому последние
могут быть представлены в виде
С(<>) = апЛ(Л С(*) = *„«С0*). (VI- 2-7)
где, как выше, n = cos#; anm, Ьпт — постоянные; р%(\х)— про-
произведение A — ц2) на полином от |i степени /г — т.
Таким образом, приходим к следующим представлениям не-
независимых гармонических полиномов Рп(х, у, z):
RnPn{v); RnPl (ц) cos mk, RnP% (ц) sin mk, (VI. 2.8)
причем P°n(ii) = Pn{ii).
Сославшись на (VI. 1.3), теперь легко заключить, что диф-
дифференциальные уравнения (VI. 1.5), значит и (VI. 1.10), имеют
частные решения
Л*(ц) = Я»(ц), от = 0, 1 п, (VI.2.9)
представляемые произведением A — jx2)m/2 на полином степени
(я — т) от |j,. Вместе с тем общее представление сферической
функции Лапласа записывается в виде
P^(d). (VI.2.10)
896
ПРИЛОЖЕНИЕ VI
Полиномиальное решение уравнения (VI. 1.5) при т — 0 хорошо
известно. Это — известный полином Лежандра
1-3 ... Bя-3)Bя- 1)
я(я-1) „-а
я! Lp 2-BI-1)
я(я-1)(я-2)(я-3) п-4_
2-4-Bя-1)Bя-3) ^
причем ряд кончается при нечетном п членом, содержащим и,
а при п четном — членом, не зависящим от ц. В частности,
(VI.2.12)
Вещественные полиномиальные решения уравнения (VI. 1.9) мо-
могут быть представлены в виде
и, в частности,
po(s)=l, p,(s)
(VI.2.13)
[(VI.2.14)
p3(s) = 2" Es3 + 3s), p4 (s) = I C5s4 + 30s2 + 3) и т д. j
Возвращаясь к уравнению (VI. 1.5) при тФО, можно не-
непосредственной проверкой убедиться, что функция Р™(\х) свя-
связана с п-м полиномом Лежандра соотношением
(VI. 2.15)
то есть что упомянутый ранее полином (п — т)-й степени пред-
представляет т-ю производную Рп(\>-) по \к. Решения Pj?(fO назы-
называются присоединенными к Pn(|i,). Здесь они определены для
Имеем, в частности,
(VI.2.16)
СФЕРИЧЕСКИЕ И ЭЛЛИПСОИДАЛЬНЫЕ ФУНКЦИИ
897
Соответствующие гармонические полиномы представляются
в виде
Л°Р0(ц)=*1, /?Р,(ц) = 2, RP\(ц)cosX = x, RP\(yi)smX = y,
= у Bг2 - x2 ~ у2),
cos Я =
cos 2Я = 3 (jc2 - г/2), R}P\ (ц) sin 2A = блгг/ и т. д.
(VI. 2.17)
Аналогично записываются решения дифференциального урав-
уравнения (VI. 1.9) ^О
В частности,
р\ (s) =
р2 E) = 3 A + 52),
(VI. 2.19)
Pl(s)=\5(\+s2)% и т. д.
VI. 3. Решения Qn(|Li),, qn(s)- Известно, что знание одного
частного решения линейного дифференциального уравнения вто-
второго порядка позволяет свести к квадратуре задачу разыскания
его второго частного решения. В применении к уравнению Ле-
Лежандра (VI. 1.5), называя его линейно независимые (с отличным
от нуля вронскианом W) решения через Мь М2, имеем
2ц
W = (М М' — М М'У —
М' — М
и, далее,
(VI. 3.1)
Выбирая надлежащим образом постоянные С, С\ и прини-
принимая Мх — Рп{[\), из этого соотношения находим второе реше-
решение уравнения Лежандра — функцию Лежандра второго рода
(т = 0)
(VL3-2)
Это решение обращается в нуль при ц—>оо; точки ц= ±1 яв-
являются его особыми логарифмическими точками, так что Pn(ii)
898 ПРИЛОЖЕНИЕ VI
представляет единственное регулярное решение при |х = ± 1
(в полюсах сферы Ф = О, О = я). Путь интегрирования в выраже-
выражении (VI. 3.2) предполагается идущим от ц, = оо по вещественной
оси, и функция Qn(|x) вещественная при |uj> 1.
При п — О, 1,2 вычисление дает
';
u —
(VI. 3.3)
и общим представлением служит доказываемая в теории сфери-
сферических функций формула
Q» (И) = { Рп (ц) Infrr + /?„-, (ц), (VI. 3.4)
в которой полином (п — 1)-й степени Rn-i(n) определяется ра-
равенством
(VI. 3-5)
Аналогично определяется второе решение уравнения Ле-
жандра (VI. 1.9) при т = 0:
вещественное на всей вещественной оси и обращающееся в нуль
при s—>оо. Его выражения для п — 0, 1, 2 имеют вид
<70(s) = arcctgs, ^1(s) = p1E)arcctgs-l, q2{s) = p2(s) arcctgs - |s,
(VI. 3.7)
а общее представление будет
<Ь («) = Pn (s) arcctg s - rre_j (s),
л Г2я— 1 , ч 2л — 5
= 2 [~2J- Pa-1 E) - 3Bя_2) Р«-3
(VI.3.8)
i 2л-9 , .
+ 5B«-4) P«-8(S)--
Исходя из представлений
l. u+i 1,1.1. , ll.l
ln = + + + аГСС^5 = +
можно доказать, что при (i-»oo, s—>-oo
n (a1» «a~(rt+1) о (s) s~(re+ "¦
— a(+) о (s) ~ — s
1.3.5.,. Bя+1) ^ ' 9raW l-3-5...Brt+l)S
(VI. 3.9)
СФЕРИЧЕСКИЕ И ЭЛЛИПСОИДАЛЬНЫЕ ФУНКЦИИ
899
Отметим еще выражения вронскианов, непосредственно сле-
следующие из представлений (VI. 3.2), (VI. 3.6):
1
(VI. ЗЛО)
При шфО решения уравнений (VI. 1.5), (VI. 1.9)—функции,
присоединенные к Qn(n) и qn(s) — определяются равенствами
причем т может принимать любые целочисленные значения.
В частности, например,
(VI. 3.12)
и т.д.,
(VI. 3.13)
и можно доказать, что в общем случае при пг > п
От(а)~ Ln+m-l (Ц) „т/д\_ Wwt-l (s)
где Ln+TO_i(n), /n+TO_i(s) — полиномы степени не выше, чем
п + т—1. Этим построена одна система решений уравнений
Лежандра для т> п. Вторая может быть определена теперь со-
соотношением (VI. 3.1); ее назовем ЛГ(ц) и соответственно P%(s):
-С\
(VI. 3.15)
с надлежащим выбором постоянных. Таким образом, получим
решения
1-Ц2
I _.с2
»*"зм
1-ц2
. 1 .
T + s*
и т.д.,
(VI. 3.16)
и т. д.
(VI. 3.17)
900 ПРИЛОЖЕНИЕ VI
VI. 4. Решение внешней и внутренней задач для шара. Пред-
Предполагается, что заданная на поверхности сферы R = Ro функция
удовлетворяет условиям представимости ее рядом по сфериче-
сферическим функциям Лапласа
оо
f(l*. k)= 2 Yn{\x, к). (VI. 4.1)
Тогда гармоническая внутри (R < Ro) сферы и вне ее (R > Ro)
функция, принимающая на этой сфере значения (VI. 4.1) и об-
обращающаяся (в случае внешней задачи) в нуль при R-^-oo, не
медленнее, чем R~l, представляется рядами
р- Уя ([х, к) = ФЬ R< #0,
(VI-4.2)
Эта непрерывная во всем пространстве функция представляет
потенциал распределенного по поверхности сферы R = Ro про-
простого слоя, плотность которого р (\i, X) определяется известным
равенством
ii(^^) (VI.4.3)
где и — единичный вектор внешней нормали к поверхности.
В рассматриваемом случае имеем
оо
J Bп + 1) У„ Oi, X). (VI. 4.4)
4Я&
га=0
Слагаемые ряда (VI. 4.1) — сферические функции Лапласа
Уп(цД)~опРеДеляются п0 заданной на сфере функции f{\x,%)
формулами
?Л 1
J to! J rf|*'f Ox', Я') Рп (cos y), (VI. 4.5)
о -1
где
cos y = cos Ь cos ¦&' + sin Ь sin #' cos (к — к') =
= ущ' + V(l — p.2)(l —и-'2) cos (Л - X') (VI. 4.6)
и
Рп (cos y) = Рп Ы Р» 0*') + 2 S "ётШ ^« W p« W cos k (^ ~ Ю-
(VI. 4.7)
СФЕРИЧЕСКИЕ И ЭЛЛИПСОИДАЛЬНЫЕ ФУНКЦИИ 931
Для задач с осевой симметрией (при f, не зависящем от к)
формула (VI.4.5) упрощается. Получаем по (VI.4.5), (VI.4.1)
1,
J
1
п=0 -I
(VJ.4.8)
Это — известное разложение функции f(^) в ряд по полиномам
Лежандра.
VI. 5. Внешняя и внутренняя задачи Дирихле для сжатого
эллипсоида (сфероида). Сравнение форм частных решений урав-
уравнений Лапласа (VI. 1.3) и (VI. 1.8) для сферы и для сфероида
показывает, что задание искомой гармонической функции на по-
поверхности эллипсоида s — So можно также мыслить представле-
представлением в форме ряда (VI. 4.1); но в этом случае приходится раз-
разбить на отдельные слагаемые каждый член этого ряда:
Yn 0*. *) = «„(Л 0*) + S Km C0S ™P + Km SW /Пф) Р™ (|i). (VI. б. 1)
Вместе с тем
представляет значение при s = s0 гармонических внутри сфе-
сфероида (s < So) и соответственно вне его (s > s0) функций:
Pn (ц) . /пф, (VI. 5.2)
sin
„. Pn Ы . пщ, т Pn (ц) .
р„ (s0) sin <7„ (s0) sin
причем второе из этих представлений удовлетворяет требованию
обращения в нуль на бесконечности (при s~юо).
Приходим к решению
. _ч im s \, (VI. 5.3)
m= I n J
^"^ I _ , v G» Ы ,
s>s0: _
n-0 I.
. (VI. 5.4)
902 ПРИЛОЖЕНИЕ VI
По (III. 10.8) отрезок нормали Ьп к поверхности эллипсоида
s = s0 определяется равенством
Поэтому
Г« / Рп оо С
_дп\р™ (s0)
1
пЫ1^а
К (so) ^ (^o)j-1 {[р^1 Ы]' С (s0) - к N К (so)]'}
(VI. 5.5)
так что, сославшись на формулу (VI. ЗЛО), определяющую врон-
вронскиан решений p%(s), q%(s), имеем по (VI. 4.3)
о (u w)~^ l У i a"°P"(|x) I
^' ^; Ana УD^Щ^Т) Л f_ „(So) ?n(So)
(Й«т COS Шф + ftrem Sin АПф)
\
(VI. 5.6)
Таково выражение плотности потенциала простого слоя на по-
поверхности сфероида s = s0, представляющего гармоническую
функцию, определяемую по (VI. 5.3) внутри сфероида и по
(VI. 5.4) вне его.
VI. 6. Представление гармонических полиномов произведе-
произведениями Ляме. В теории функций Ляме доказываемся, что произ-
произведения Ляме (VI. 1.11) при целом п и при надлежащем вы-
выборе h в дифференциальных уравнениях (VI. 1.12) — (VI. 1.14)
представляются гармоническими полиномами п-н степени
Fa(x,y, z) = R(9)M(li)N(v). (VI.6.1)
Для применений в этой книге достаточно рассмотреть случаи
п = 0, 1, 2.
1°. п — 0. Тогда, конечно,
Я0(р)=1, ЛМц)~1, ЛШ~1 (VI.6.2)
И упомянутые уравнения удовлетворяются при h = 0.
СФЕРИЧЕСКИЕ И ЭЛЛИПСОИДАЛЬНЫЕ ФУНКЦИИ
903
2°. п = 1. Имеются три гармонических полинома первой сте-
степени — это сами декартовы координаты, представимые по
(III. 11.12) в виде
A) = ? 1
1 е
a
efl-e2
а
V(p2-e2)(ix2-e2)(e2-v2),
v2),
(VI. 6.3)
и для них надо принять
*{•> (р) = р, я <2) =
. 6.4)
а постоянную h принять соответственно равной
3°. /г = 2. Три из пяти гармонических полиномов второй сте-
степени непосредственно угадываются. Это произведения
№=*уг, Ff = zx, Ff = xy, (VI. 6.5)
для которых
что сразу же следует из (VI. 6.3). В этом случае
(VI. 6.6)
2),
= - D + е2). (VI. 6.7)
Для построения еще двух гармонических полиномов второй сте-
степени потребуем, чтобы левая часть основного тождества
(III. 11.11)
2 г'2_ 2 (а - у») (а-ц») (д-р»)
" а f (a)
У2
а ^ а - е2 "^ а - 1
удовлетворяла уравнению Лапласа
W + Т^
~ «2) = 2 (^
(VI. 6.8)
Отсюда получаем два значения постоянной а:
A+е2)-р ? = ±
(VI. 6.9)
904
ПРИЛОЖЕНИЕ VI
которым соответствуют гармонические полиномы
alax
сE) _
2 —
я2 (ffi - О
- 1.
(VI. 6.10)
' а2 (ст2 - е2) ^ а2 (ст2 ¦
Для них
А2 (.Р) = #1—Р, А2 = <*2 — Р, (VI. 0.11)
а значения постоянной в уравнениях (VI. 1.12) — (VI. 1.14) соот-
соответственно будут
М4> = - 6<т2, hf = - 6а,. (VI. 6.12)
VI. 7. Функция Sik)(p). Каждому из построенных в предше-
предшествующем пункте решений дифференциального уравнения
(VI. 1.12)
М%) (/ = 0,1,2; ft =1,2 2/+1)
можно сопоставить второе решение этого уравнения, обращаю-
обращающееся в нуль на бесконечности (при р—юо). Подобно (VI. 3.2)
оно представляется в виде
(VI. 7.1)
Отсюда следует, что вронскиан решений R, S равен
Приходим к решениям:
1°. /г = 0
(VI. 7.2)
(VI. 7.3)
2°. n=l Si%) = M*4p)<o!%) (fe= 1,2,3), (VI. 7.4)
где ©<fe)(p) представляются, как и и0 (р), эллиптическими интег-
интегралами
оо
Ц'>(Р)=/
X2 Л(Л)'
ии
А (X) '
К2-1)&.(Х) 4
(VI. 7.5)
3°. л = 2 S2(p) =
= 1, 2, ..., 5). (VI. 7.6)
СФЕРИЧЕСКИЕ И ЭЛЛИПСОИДАЛЬНЫЕ ФУНКЦИИ 905
Здесь,
оо
< <Р> = I (Л»--)(?-!) А Щ = jh* К (Р) - < W]. (VI- 7-7)
ей!," (о) = I -TVs—.f\ . ,;, = - [©<') (р) - afi (p)j} (VI. 7.8)
flJw4)T(Xr ^W2)(p)-«i1)(p)] (VI.7.9)
р
и, далее,
Все эти эллиптические интегралы известными приемами при-
приводятся к нормальным формам Лежандра первого и второго
рода; отсутствие интегралов третьего рода не случайно, а яв-
является следствием некоторых свойств функций Ляме.
VI. 8. Потенциалы простого слоя на эллипсоиде. Сопоставим
два решения уравнения Лапласа —одно, представимое гармо-
гармоническим полиномом (VI. 6.1):
Fn(x, у, 2) = /?(p)Af(n)tf(v), (VI.8.1)
(VL8-2)
и второе, определяемое согласно (VI. 7.1) формулой
1
Приходим к рассмотрению функции
Fn(x, У, z), Р<Ро,
(VI. 8.3)
G(x, у, z) =
Р>Ро'
со(ро) F"{X> У' Z
гармонической внутри (р < р0) и вне (р > ро) эллипсоида
,2
2/2 2^+ 2Л л
-8-4)
обращающейся в нуль на бесконечности (р->-оо), непрерывной
во всем пространстве и принимающей на поверхности О эллип-
эллипсоида р = ро значения
G(x, у, z)\^ = Fn(x, У, z)U,. (VI-8.5)
906
ПРИЛОЖЕНИЕ VI
Функция G(x, у, г), обладающая всеми характеристическими
свойствами потенциала простого слоя, распределенного по этой
поверхности, представима в виде
G
(х, у, г) = f Г ?(?¦ Л, »*> . (VI. 8.6)
У V [(*-1J + (у-чJ + (г-?>2]'/2
Плотность этого потенциала q вычисляется по известному соот-
соотношению
Г dG (х, у, г)
Ъ~
) Л Г dG (х, у, г) Л
L сл Jp^.Po-o L an -!
где п — внешняя нормаль к эллипсоиду р = ро и дп = Яр6р,
причем коэффициент Ляме Яр определен по (III. 11.21) или
(III. 11.22). Вместе с тем
dG {х' у' Z) = -U'(PoWn)iV(v) = -
р-»р„-0 "о
дп
Р=Ро
dG (x, у, г)
дп
1
р=р»
так
и по
q(x,
что
4nq(x
(VI. 7.
У> *)
, У,
2),
4л
z)-
(VI.
Fn{x, у,
Нр (р0) А
7.1)
[Fnix,
Ро) ^?2 (ро) \
z)
Чр«
г/.
Чр!
1
4я
5"
г)],
со
?'(Рс
(Ро)у
,)МРо)
'о ~ Iх2)
l(«, I/, 2
?2(Ро)Ро
)]р=
к
d / ^ <
=р*
Д(Ро)
(VI. 8.7)
Перечисленным в пп. VI. 6, VI. 7 решениям соответствуют
потенциалы:
1, Р<Ро,
1°.
G0(x, у, z) =
Ро>
(VI-8.8)
— это поле электростатического потенциала, создаваемого про-
проводящей поверхностью эллипсоида р = ро, на которой поддер-
поддерживается постоянный потенциал; формула (VI. 8.7), в которой
надо принять F — 1, R = \ и определить соо(ро) эллиптическим
интегралом (VI. 7.3), дает распределение заряда на этой по-
поверхности.
СФЕРИЧЕСКИЕ И ЭЛЛИПСОИДАЛЬНЫЕ ФУНКЦИИ 907
2°. п = 1. Трем решениям (VI. 7.4) соответствуют потенциалы
[ xs, Р<Ро,
G<f>(xlt х2, х3) = \ со^(р) (s=l, 2, 3). (VI. 8.9)
\х'~Фы' р>р0
3°. При п — 2 имеем три потенциала, принимающие на по-
поверхности р = ро значения, равные произведениям ху, yz, zx; на-
например,
[ yz, Р < Ро,
GP{x, у, г) = \ 4%) (VI.8.10)
I У2 (П. . > Р > Ро-
I а2 ' (Ро)
Еще два потенциала, принимающие на поверхности р = ро
значения (VI.6.10), строятся с помощью функций юг" (р),
а>25> (р), определяемых по (VI.7.10):
(fP(x, у, z), р<р0>
G^Hx, у, z) = { 44'5)(р) рD 5,, , ^ (VI.8.11)
| D 5) F\' '(х, у, г), р>р0.
I 4' (Ро)
При ро = 1 выражение (VI. 8.3) для четных относительно z
функций Fn(x,y,z) определяет потенциал пластинки, ограничен-
ограниченной фокальным эллипсом Ео [см. (III. 11.16)]. Этот потенциал
на поверхности пластинки имеет значение
G(x, у, 0) = [Fn(x, у, <))]„_, = Я(l)Af(n)tf(v), (VI.8.12)
а вне ее
G(x, у, z)=^Fn(x,y,z). (VI.8.13)
Выражение плотности получим путем предельного перехода
в (VI. 8.7) с удвоением результата, что соответствует наличию
слоя на «верхней» и «нижней» (z > 0, z < 0) сторонах выродив-
выродившегося в пластинку эллипсоида:
ф. у)¦
4 ' 2па со A) /?2 A) V A —V2) A — (л2)
Сославшись на (III. 11.14), легко преобразовать это выра-
выражение к виду
Г'/г
908 ПРИЛОЖЕНИЕ VI
На границе пластинки — на фокальном эллипсе Ео — плотность
становится бесконечной, но она на Ео будет нулем, если в со-
состав [Fn(x, у, 0)]р=1 входит множитель
v-2 ,,2
1 ±_ У
а2 а2 A-е2) '
Такой потенциал пластинки с непрерывной плотностью может
быть построен как линейная комбинация потенциалов Go, Gj4', Gj>5):
G.(x, У, z)=C0Go(x, у, z) + CiGi2)(x, у, z) + C2Gf{x, у, z),
(VI.8.16)
если в соответствии с (VI. 8.15) определить постоянные Со, С\,
С2 условием
?
сооA)
?
у* Л х*
2B) ) а2
(VI. 8.17)
[см. (VI. 6.10), (VI. 6.11)]. Тогда выражение плотности, соответ-
соответствующей потенциалу G*, будет
д(Х,у) = -j^fl-*!.. ? 1\ (VI. 8.18)
Соотношение (VI. 8.17) дает три уравнения, определяющие
постоянные Со, Сь Сг. Этим определяется потенциал G*; опу-
опуская промежуточные вычисления, приводим его выражение:
оо
а "' Г dX Г| х" ? z* 1 (\п я iq\
Q*~2J AWL Л2 a2(A,2-e2) а2 (Я2 — 1) J" ^ьол^
Р
Это — объемный (ньютонов) потенциал эллипсоида
*2 , У2 , *
1 —
постоянной плотности на внешнюю точку (р>р0). Вместе с
тем он представляет потенциал слоя на эллиптической пла-
пластинке, ограниченной эллипсом Ео, с плотностью, изменяющейся
по закону (VI. 8.18). Заметим еще, что ньютонов потенциал
эллипсоида на его внутреннюю точку (р < р0) представляется
квадратичной функцией координат х, у, г:
_ 1 Г dk Г,
~ J Л (Л) L1
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
Общие сочинения
В первую очередь следует назвать капитальный курс:
1. Л я в А., Математическая теория упругости, перев. с англ., ОНТИ,
Москва 1935.
Основные уравнения теории упругости, плоская задача, задача о
кручении и изгибе стержня изложены в труде:
2. Мусхелишвили Н. И., Некоторые основные задачи математической
теории упругости, изд. 5, «Наука», Москва 1966.
Более доступен по примененным математическим средствам изоби-
изобилующий инженерными приложениями курс теории упругости С. П. Ти-
Тимошенко (имеется несколько изданий перевода этой книги на русский
язык). Последнее американское издание этой книги вышло в сотрудни-
сотрудничестве с Дж. Гудиром:
3. Timoshenko S. P. and G о о d i e r J. N., Theory of Elasticity, McGraw-
Hill, New York 1951.
Изложение на современном уровне с применением средств тензор-
тензорного анализа и включающее главы по нелинейной теории упругости со-
содержится в труде:
4. G r e e n А. Е. and Z e r n a W., Theoretical Elasticity, Clarendon Press,
Oxford, 1954.
Краткое изложение основ теории содержится в книгах:
5. С н е д д о н И. Н. и Б е р р и Д. С, Классическая теория упругости, пе-
перев. с англ., Физматгиз, Москва 1961.
6. Треффтц Е., Математическая теория упругости, перев. с нем., ГТТИ,
Москва 1934.
Изложение основных уравнений нелинейной теории упругости и не-
некоторых вопросов линейной теории дается в книге:
7. Новожилов В. В., Теория упругости, Судпромгиз, Ленинград 1958.
Техническим аспектам теории главным образом посвящены книги:
8. Ван Цзи-де, Прикладная теория упругости, перев. с англ., Физмат-
Физматгиз, Москва 1959.
9. Саусвел.л Р. В., Введение в теорию упругости для инженеров и фи-
физиков, перев. с англ., ИЛ, Москва 1948.
Богатством материала и педагогическим мастерством отличаются
книги:
10. Fung Y. С, Foundations of Solid Mechanics, Prentice-Hall, New York
1965.
11. S oko 1 n i ko f f I. S., Mathematical Theory of Elasticity, McGraw-Hill,
New York 1946.
59 А. И. Лурье
910 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
Учебными руководствами на русском языке являются университет-
университетский курс:
12. Лейбензон Л. С, Курс теории упругости, Гостехиздат, Москва 1947.
и предназначенные для технических учебных заведний курсы:
13. К а ц А. М., Теория упругости, Гостехиздат, Москва 1956.
14. Жемочкин Б. Н., Теория упругости, Стройвоенмориздат, Москва
1948.
15. Ф^илоненко-Бородич М. М., Теория упругости, Гостехиздат,
Москва 1947.
Оригинальным построением теории и богатством приложений отли-
отличается труд:
16. Папкович П. Ф., Теория упругости, Оборонгиз, Москва 1939.
Не утратило и в наше время своего значения классическое сочи-
сочинение:
17. Clebsch A., Theorie de 1'elasticite des corps soiides, Paris 1883. Пере-
Перевод с примечаниями Сен-Венана с немецкого курса: Clebsch A., Theo-
Theorie der Elasticitat fester Korper, Leipzig 1862.
Основные этапы истории развития теории упругости освещены в
книге:
18. Тимошенко С. П., История науки о сопротивлении материалов с
краткими сведениями из истории теории упругости и теории сооруже-
сооружений, перев. с англ., Гостехиздат, Москва 1957.
Очерк развития теории упругости содержится во введении в книге
Лява [1].
При написании настоящей книги существенно использованы мате-
материалы обзоров:
19. Grioli G., Mathematical Theory of Elastic Equilibrium, Springer, Berlin
1962.
20. Trues dell C, The Mechanical Foundations of Elasticity and Fluid
Dynamics. International Science Review Series, 8, Gordon and Breech,
1966 (перепечатка из Journal of Rational Mechanics and Analysis, 1,
стр. 125—300, 1952; 2, стр. 595—616, 1953).
Большая часть перечисленных сочинений [1, 2, 3, 11, 19, 20]*) со-
содержит обширные литературные указатели.
К главам I, II
При изложении основных определений механики сплошной среды
(тензор напряжений, меры и тензоры деформации) использованы мате-
материалы следующих книг:
21. Седов Л. И., Введение в механику сплошной среды, Физматгиз, Москва
1962.
22. Е г i n g e n А. С, Nonlinear Theory of Continuous Media, McGraw-Hill,
New York 1962,
а также обзоры [19, 20].
К п. 1.3 гл. I. Основоположным трудом по моментной теории упру-
упругости является книга:
*) При написании этой книги не могли быть использованы материалы
недавно опубликованного курса: Solomon L, Elasticite lineaire, Masson,
Paris, 1968. В нем приведено большое число библиографических данных, отно-
относящихся к последним годам.
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 91]
23. С о s s e r a t E. et F., Theorie des corps deformables, Herrmann, Paris
1909.
Из большого числа работ, посвященных построению общей теории
и рассмотрению частных задач, укажем на следующие:
24. Аэро Э. П. и Кувшинский Е. В., Основные уравнения теории
упругости сред с вращательным взаимодействием частиц. Физика твер-
твердого тела, 2, стр. 1399—1409, 1960.
25. Нальмов В. А., Основные уравнения несимметричной упругости.
Прикл. матем. и мех., 28, № 3, стр. 401—407, 1964. Пальмов В. А.,
Плоская задача несимметричной теории упругости. Там же, 28, № 6,
стр. 1117—1120, 1964.
26. М и н д л и н Р. Д., Влияние моментных напряжений на концентрацию
напряжений, перев. с англ. В сб. «Механика», 4 (88), стр. 115—128, 1964.
Миндлин Р. Д., Т и р с т е н Г. Ф., Эффекты моментных напряжений
в линейной теории упругости, перев. с англ. Там же, 4 (88), стр. 80—: 114,
1964. Mindlin R. D., Stress Functions for a Cosserat Continuum. Inter-
International Journ. of Solids Structures, 1, стр. 73—78, 1965.
27. К о i t e r W. Т., Couple-Stresses in the Theory of Elasticity. Kon. Nederl.
Akad. v. Wetenschappen-Amsterdam, Proc. Ser. B, 67, N 1, стр. 17—44,
1964 (имеется русский перевод в сб. «Механика», 3 (91), стр. 88—112,
1965).
28. М u k i R., S t e r n b e r g E., The Influence of Couple—Stresses on Singu-
Singular Stress Concentration in Elastic Solids. Zeitsch. f. angew. Math. u. Phys.,
16, 5, стр. 611—618, 1965.
Несимметричная теория упругости излагается в гл. X книги
Гриоли [19].
К. п. 1.6 гл. I. Тензоры функций напряжений частного вида рас-
рассматривались Максвеллом (Scientific Papers, 2, 1870) и Морера (Rendi-
conti d. Lincei, Ser. 5, 1, стр. 137—141, 1892). Соединение этих решений,
указанное Бельтрами (там же, стр. 141—145), дает тензор функций на-
напряжений общего вида, введенный в монографии:
29. Кр утков Ю. А., Тензор функций напряжений и общие решения в
статике теории упругости, Изд-во АН СССР, 1949,
и в работах:
30. FI n z i В., Integrazione della equazione delta Meccanica dei sistemi conti-
nui. Rendiconti d. Lincei, Ser. VI, 19, 1934.
31. Блох В. И., Функции напряжений в теории упругости. Прикл. матем.
и мех,, 14, стр. 415—422, 1950. Теория упругости. Изд-во Харьковского
ун-та, 1950.
К пп. 3.4 гл. I. Принятое здесь определение тензора напряжений
предложено в статьях:
32. Trefftz E., Zur Theorie der Stabilitat des elastischen Gleichgewichts.
Zeitsch. fur angew. Math, und Mech., 12, стр. 160—165, 1933.
33. К a p p u s R., Zur Elastizitatstheorie endlicher Verschiebungen. Zeitsch.
fiir angew. Math, und Mech., 19, стр. 271—285, 344—361, 1939,
и в книге:
34. Hamel G., Theoretische Mechanik, Springer, Berlin 1949.
К пп. 4.1—4.12 гл. I. В этом параграфе излагается часть содержа-
содержания гл. V книги Гриоли [19] и статьи:
35. Signorini A., Sopra alcune questioni di statica dei sistemi continui.
Ann. Scuola Norm. Sup. Pisa, Ser. II, 2, стр. 3—23, 1933.
К пп. 2.1—2.2 гл. il. Вывод уравнений сплошности Сен-Венана как
условий интегрируемости системы дифференциальных уравнений, опре-
59*
912 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
деляющих перемещения по заданному линейному тензору деформации,
приведен в XXII лекции классического труда:
36. Кирхгофф Г., Механика. Лекции по математической физике, перев.
с нем., Изд-во АН СССР, 1960.
Кирхгофф намечает ход процесса интегрирования; см. также [6];
формулы, определяющие перемещения через деформации, даны Чезаро:
37. Cesaro E., Sulle formole del Volterra, fondamentali nella teoria delle
distorsioni elastiche. Rendiconti d. Academia R. di Napoli, 12, стр. 311—
321, 1906.
К п. 2.4 гл. II. Понятие дисторсии введено в фундаментальном ме-
муаре:
38. Volterra V., Sur l'equilibre des corps elastiques multiplement connexes.
Annales de ГЁс. Norm. Sup., 3-me serie, 24, стр. 401—507, 1907 (воспро-
(воспроизведен в «Opere matematiche», т. II).
К §§ 3, 4 гл. II. Изложение этих параграфов основывается на обзоре
Трусделла [20]; см. также гл. IX книги:
39. Прагер В., Введение в механику сплошной среды, перев. с англ., ИЛ,
Москва 1963.
Предложенные Генки логарифмические меры деформации
40. Hencky H., Uber die Form des Elastizitatsgesetzes bei ideall elastischen
Stoffen. Zeitsch. fur techn. Physik, 9, стр. 214—227, 1928,
представляют известные преимущества при обработке экспериментальных
результатов. О возможных определениях мер деформации см. также статью:
41. Рейнер М., Феноменологическая микрореология, перев. с англ. в Сб.
«Реология» под ред. Ф. Эйриха, стр. 22—86, ИЛ, Москва 1962.
К п. 3.5 гл. II. На геометрическую интерпретацию тензора Gx ,
указываемую формулой C.5.5), обращено внимание в заметке:
42. Т г u e s d е 11 С, Geometric Interpretation for the Reciprocal Deformation
Tensors. Quart, of Appl. Math., 15, № 4, стр. 434—435, 1958.
К п. 6.2 гл. II. Построение тензора поворота в случае плоского поля
перемещения указано Синьорини в работе:
43. Signorini A., Transformazioni termoelastiche finite. Ann. di Mat. pura
e appl., Ser. IV, 22, стр. 33—143. 1943.
К главе III
Построение линейной теории связи тензоров напряжений и дефор-
деформации, принятое в этой главе, основано на статьях:
44. Н е п с к у Н., Zur Theorie plastischer Deformationen und der hierduch
im Material herforgerufenen Nachspannungen. Zeitsch. fur angew. Math,
und Mech., 4, стр. 323—334, 1924 (имеется русский перевод в сб. «Теория
пластичности», ИЛ, Москва 1948).
45. К а ч а н о в Л. М., Упруго-пластическое состояние твердых тел. Прикл.
матем. и мех., 5, № 3, стр. 431—437, 1941.
В п. 2.1 использовано изложение, принятое в гл. VIII книги:
46. Jeffreys H., Cartesian Tensors, Cambridge University Press, 1931.
Таблица в п. 2.3 воспроизведена из книги:
47. Гольденблат И. И., Некоторые вопросы механики деформируемых
сред, Гостехиздат, Москва 1955.
К п. 2.4. Русский перевод статьи Роша и Эйхингера опубликован
в сборнике [44].
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 913
К пп. 3.4—3.6.
48. Новацкий В., Вопросы термоупругости, перев. с польского, Изд-во
АН СССР, Москва 1962.
49. Б о л и Б., У э й н е р Дж., Теория температурных напряжений, перев.
с англ., «Мир», Москва 1964.
50. Коваленко А. Д., Введение в термоупругость, изд-во «Наукова дум-
думка», Киев 1965.
К главе IV
К п. 1.4. Первая публикация П. Ф. Папковича в Изв. АН СССР
(сер. матем. и естеств. наук) относится к 1932 г. Подробное изложение
дано в его курсе [16]. Эта же форма решения была получена Г. Нейбе-
ром в статье:
51. Neuber H., Ein neuer Anzatz zur Losung raumlicher Probleme der
Elastizitatstheorie. Zeitsch. fur angew. Math, und Mech., 14, N 4, 1934.
Ее содержание повторено и дополнено формулами для компонент
тензора напряжений в ортогональных криволинейных координатах в
книге:
52. Н е й б е р Г., Концентрация напряжений, перев. с первого немецкого из-
издания, Гостехиздат, Москва 1947.
Вопрос о допустимости использования в представлении решения
уравнений равновесия в перемещениях трех (а не четырех) гармониче-
гармонических функций рассмотрен в работах:
53. С л о б о д я н с к и и М. Г., Общие формы решений уравнений упругости
для односвязных и многосвязных областей, выраженные через гармони-
гармонические функции. Прикл. матем. и мех., 18, стр. 55—74, 1954.
54. Юбенкс Р., С тер н бе р г Э., О полноте функций напряжений Бусси-
нека—Папковича, перев. с англ. в сб. «Механика», 6 D6), стр. 99—109,
1957.
К п. 1.7. См. [28], [31], а также работы:
55. Галеркин Б. Г., К вопросу об исследовании напряжений и деформа-
деформаций в упругом изотропном теле (Собрание сочинений Б. Г. Галеркина,
т. 1, стр. 318—321, Изд-во АН СССР, Москва 1953; впервые опубликова-
опубликовано в Докл. АН СССР, 1930).
56. М i n d I i n R. D., Note on the Galerkin and Papkovich Stress Functions.
Bull. Amer. Math. Soc, 42, стр. 373, 1936.
К § 2. Принципы минимума потенциальной энергии и дополнительной
работы излагаются в большинстве перечисленных курсов теории упру-
упругости. Им и их разнообразным приложениям посвящена также книга:
57. Л е й б е н з о н Л. С, Вариационные методы решения задач теории упру-
упругости, Гостехиздат, Москва 1943, а также в Собрании трудов Л. С. Лей-
бензона, т. 1, Изд-во АН СССР, Москва 1951.
К п. 2.5. На естественную связь принципа минимума дополнительной
работы со «связанной задачей» вариационного исчисления обратил вни-
внимание Саусвелл A936); доказательство Саусвелла воспроизведено в [57]
и [12].
К п. 2.6. Изложение смешанного принципа стационарности основы-
основывается на статье:
58. R e i s s n e r E., On Some Variational Theorems in Elasticity. Problems
of Continuum Mechanics. Contributions in Honor of N. I. Muskhelishvili
(имеется издание на русском языке), стр. 370—381, Philadelphia, 1961.
Превосходное изложение вариационных принципов теории упруго-
упругости приводится в книге [6].
914 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
К п. 2.7. Вариационные принципы при учете температурных слагае-
слагаемых представлены в монографии:
59. М а и з е л ь В. М., Температурная задача теории упругости, Изд-во АН
УССР, Киев 1951.
Полный обзор вариационных принципов теории упругости дан в
статье:
60. Т о n t i E., Variational principles in Elastostatics. Meccanica, 2, N 4,
стр. 201—208, 1967.
Исторический очерк развития принципа Сен-Венана и приемов его
доказательств дан в содержащей исчерпывающие литературные указа-
указания статье:
61. Джанелидзе Г. Ю., Принцип Сен-Венана (к столетию принципа).
Труды Ленингр. политехи, ин-та. Динамика и прочность машин, № 192,
1958.
См. также [10].
К пп. 3.1—3.4. Излржения теоремы взаимности и ее простейших при-
приложений приводятся в курсах [1, 3, 6, 10] и др. Об учете температурных
слагаемых см. [49, 50].
К п. 3.5. Задача о действии сосредоточенной силы в неограниченной
упругой среде (построение тензора влияния) впервые рассмотрена
В. Томсоном (Кельвином) в мемуаре 1848 г.; см. также
62. Thomson W., Note on the Integration of the Equations of Equilibrium
of -an Elastic Solid. Mathematical and Physical Papers, 1, Cambridge,
1882.
К пп. 3.6—3.7. Об используемых здесь и далее предложениях теории
потенциала см. книгу:
63. С р е т е н с к и й Л. Н., Теория ньютоновского потенциала, Гостехиздат,
Москва 1948.
К п. 4.1. Доказательство теоремы единственности Кирхгоффа см. в
[36], а также в курсах [1, 2, 6] и др.
О формулировке теоремы единственности в случае сосредоточенных
сил см. статью:
64. Стернберг Е. и Юбанкс Р., О понятии сосредоточенных сил и рас-
расширении применимости теоремы единственности в линейной теории упру-
упругости, перев. с англ. в Сб. «Механика», 5 C9), стр. 56—84, 1956.
В изложении пп. 4.2—4.8 (вывод интегральных уравнений первой и
второй краевых задач и доказательства существования решений) исполь-
использована книга:
65. Купрадзе В. Д., Методы потенциала в теории упругости, Физматгиз,
Москва 1963*).
Очень кратко постановка и решение этих задач приведены в книге:
66. М их лин С. Г., Многомерные сингулярные интегралы и интегральные
уравнения, Физматгиз, Москва 1962.
См. также обзорный доклад:
67. Купрадзе В. Д., Метод сингулярных интегральных уравнений в про-
пространственной задаче упругости. Труды Всесоюзного съезда по теорети-
теоретической, и прикладной механике, Изд-во АН СССР, Москва 1962.
*) Изложению исследований по существованию и единственности реше-
решений краевых задач статики и установившихся колебаний упругого тела посвя-
посвящен труд: Купрадзе В. Д., Гегелия Т. Г., Башелейшвили М. О., Бурчу-
ладзе Т. В., «Трехмерные задачи математической теории упругости», Изд-во
Тбилисского ун-та, Тбилиси 1968.
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 915
Вопрос о численной реализации решений интегральных уравнений
рассмотрен в статьях:
68. К у п р а д з е В. Д., Об одном методе приближенного решения предель-
предельных задач математической физики. Журнал вычислит, математики и
математической физики, 4, № 6, стр. 1118, 1964.
69. К у п р а д з е В. Д., Методы потенциала в теории упругости. Приложе-
Приложения теории функций к механике сплошной среды. Труды Международ-
Международного симпозиума 1963 г. в Тбилиси, стр. 211—216, изд-во «Наука»,
Москва 1965.
Доказательства Лихтенштейна и Корна существования решения
краевых задач теории упругости изложены в [6].
Изложение пп. 5.1—5.5 основывается целиком на мемуаре [38].
К главе V
По способам решений и рассмотренному материалу содержание этой
главы в значительной мере отличается от книги автора:
70. Лурье А. И., Пространственные задачи теории упругости, Гостехиздат,
Москва 1955.
К п. 1.4. Работы Буссинека собраны в его классическом сочинении:
71. Boussinesq J., Application des potentieles a l'etude de l'equilibre et
du mouvements de solides elastiques, Paris 1885.
К п. 1.5. Эти же результаты приводятся Новацким [481.
К п. 1.6. Содержание этого пункта представляет переработанное из-
изложение раздела «Определение поля упругих напряжений, создаваемого
эллипсоидальным включением, и задачи, связанные с этой проблемой»
в книге:
72. Э ш е л б и Д., Континуальная теория дислокаций, перев. с англ., ИЛ,
Москва 1963.
К пп. 2.1—2.4. Решение задачи о действии на упругое полупростран-
полупространство сосредоточенной силы, нормальной к его плоской границе, впервые
дано Буссинеком [71]. Более общую задачу о нагружении полупростран-
полупространства системой нормальных и касательных поверхностных сил одновре-
одновременно с Буссинеком, основываясь на методе интегрирования Бетти, рас-
рассмотрел Черрути в мемуаре:
73. С е г г u t i V., Ricerche intorno all'equilibrio de corpi elastici isotropi. Atti
della R. Accademia dei Lincei, Memoriae della classe di scienze fisiche,
matematiche e naturali, 13, стр. 81, 1881—1882.
См. также [1, 70].
К п. 2.5. На плодотворность применения метода изображений в за-
задачах теории упругости указал Сомильяна:
74. S о m i g 1 i a n a C., Sul principo delle imagini di Lord Kelvin e le equa-
zioni dell' Elasticita. Rendiconti d. Lincei, Ser. 5, 11, стр. 145, 1902.
Решение задачи о напряженном состоянии в упругом полупростран-
полупространстве, создаваемом сосредоточенной в его точке силой, дал Миндлин в
работе:
75. Mindlin R. D., Force at a point in the interior oi a semi infinite solid.
Proc. First Midwestern Conf. Solid Mech., Univ. of Illinois, стр. Ill, Ur-
bana, 1963.
К п. 2.6. Задача о температурных напряжениях в упругом полу^
пространстве подробно рассмотрена в работе:
916 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
76. Sternberg E. and McDowell E. L., On the Steady-State Thermo-
elastic Problem for the Half-Space. Quart, of Appl. Math., 14, N 4,
стр. 381—398, 1957.
Отсутствие напряжений на плоскостях, параллельных границе полу-
полупространства, установлено ранее в книге [70]. См. также работу:
77. Sneddon I. N. and Tait R. I., On Lure's Solution of the Equations of
Termoelastic Equilibrium. Problems of Continuum Mechanics. Contributions
in Honor of N. I. Muckhelishvili (имеется издание на русском языке),
стр. 497т-513, Philadelphia, 1961.
К пп. 2.10—2.11. Решения краевых задач для упругого полупростран-
полупространства приведены также в работе:
78. Michel I I. H., The Transmission of Stress across a Plane of Disconti-
Discontinuity in an Isotropic Elastic Solid, and the Potential Solutions for a Plane
Boundary. The Collected Mathematical Works of I. H. M. and A. G. Mi-
chell, стр. 189—195, Noordhoff, 1964 (впервые опубликовано в 1899 г.).
К пп. 2.12.—2.14. См. [10, 61], а также
79. Mises R. V., On Saint-Venant's Principle. Bull. Amer. Math. Soc, 51,
стр. 555, 1945.
80. Sternberg E., On Saint-Venant's Principle. Quart, of Appl. Math. 11,
N 4, стр. 393—402, 1954 (January).
К § 3. Решение в сферических координатах задачи о равновесии
упругой сферы впервые дано в классическом сочинении:
81. Lame G., Lecons sur les cordonnees curvilignes et leurs applications,
Paris 1859.
Существенным шагом вперед явилась работа:
82. Thomson W., Dynamical Problems Regarding Elastic Spheroidal Shells
and Spheroids of Incompressible Liquid. Mathematical and Physical Papers,
3, стр. 351, 1892 (впервые опубликовано в 1863 г.),
в которой решение представлено в декартовых координатах через три
гармонических функции, разыскиваемых в форме рядов по однородным
гармоническим полиномам. Это решение воспроизведено в классическом
трактате:
83. Thomson W. and Tait P. G., Treatise on Natural Philosophy, т. 1,
часть II, 1883.
Решение Томсона первой краевой задачи для сплошной сферы
(п. 3.2) воспроизведено в работах [1, 12, 6]; в работах [1, 6] указан ход
вычисления также во второй краевой задаче (п. 3.5). Для более слож-
сложного случая полой сферы Томсон дал решение первой краевой задачи
и наметил способ решения второй.
Задача о равновесии сферы рассматривалась также в работах:
84. Те done О., Saggio di una teoria generale delle equazioni dell' equilibrio
elastico per un corpo isotropo. Annali di Matematica pura et applicata,
Ser. Ilia, 10, стр. 13, 1904.
85. Somigliana C, Sopra l'equilibrio di un corpo elastico isotropo limitato
da una о due superfici sferiche. Annali della Scuola Normale Superiore di
Pisa, Scienze Fisiche e Matem., Ser. I, стр. 100, 1887.
86. Cerruti V., Sulla deformazione di un involucro sferico isotropo per date
forze agenti sulle due superfici limiti. Atti della Reale Acad. dei Lincei,
Mem. della Classe di Sc. Fisiche, Matematice e Naturali, 1891.
87. Лурье А. И., Равновесие упругой полой сферы. Прикл. матем. и мех.,
17, № 3, стр. 311, 1953.
Решения краевых задач для сплошной и полой сферы даны в гл. 8
книги [70]. Случай симметрично нагруженной сферы рассмотрен в гл. 6
этой книги, а также в работах:
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 917
88. Г а л е р к и н Б. Г., Равновесие упругой сферической оболочки. Прикл.
матем. и мех., 6, стр. 487, 1942.
89. Лурье А. И., Равновесие упругой симметрично нагруженной сфериче-
сферической оболочки, там же, 7, стр. 393, 1943.
90. Weber С, Kugel mit normalgerichteten Einzelkraften. Zeitsch. fur angew.
Math, und Mech., 32, N 6, стр. 186, 1952.
91. Sternberg E., Rosen tal F., The Elastic Sphere under Concentrated
Loads. JoUrn. of Appl. Mech., 19, N 4, стр. 413, 1952.
92. Fichera G., Sur colcolo delle deformazioni, dolate di simmetria assiale,
di uno strato sferico elastica. Atti dell' Accad. Nazionale del Lincei, Classe
di Sc. Fisiche, Ser. 8, 6, стр. 583, 1949.
К пп. 3.4 и 3.8. Задача о напряженном состоянии шара при неуста-
неустановившемся тепловом режиме рассмотрена в книге [3] по результатам
работы:
9J. Griinberg G. (Г. А. Гринберг), Ober die in einer isotropen Kugel durch
ungleichformige Erwarmung erregten Spannungszustande. Zeitsch. fur
Physik, 35, стр. 548, 1925.
К пп. 3.9, 3.10. Задачи о напряженном состоянии в окрестности сфе-
сферической полости рассматривали:
94. Southwell R. V., On the Concentration of Stress in the Neighborhood of
a Small Spherical Flow. Phil. Mag., Ser. 7, 1, сто 71, 1926.
95. Larmor J., The Influence of Flaws and Air-Cavities on the Strength of
Materials. Phil. Mag., Ser. 5, 33, стр. 70, 1892.
В связи с геофизическими применениями (теория фигуры Земли
и др.) задачам пп. 3.12, 3.13 посвящена большая литература, указанная
в книге [1] и в труде:
96. Джеффрис Г., Земля, ее происхождение, теория и строение, перев.
с англ., ИЛ, Москва 1960.
К § 4. В работе:
97. Абрамян Б. Л., Александров А. Я-, Осесимметричные задачи тео-
теории упругости. Труды второго всесоюзного съезда по теоретической и
прикладной механике. Механика твердого тела, изд-во «Наука», 1966,
дан подробный обзор многообразных направлений исследований по про-
пространственным задачам теории упругости; перечислены работы 241 ав-
автора. Значительное место уделено (не рассмотренному в этой книге)
методу решения осесимметричщых задач с помощью функций комплекс-
комплексного переменного.
См. содержащий такж§ многочисленные литературные указания
обзор:
98. С терн б ер г Е., Трехмерная концентрация напряжений в теории упру-
упругости, перев. с англ. в Сб. «Механика», 6 E2), стр. 73—80, 1958.
Решения рассмотренных в пп. 4.1—4.4 задач о кручении, растяжении
и изгибе однополого гиперболоида вращения впервые даны Г. Нейбе-
ром; в его книге [52] приведены многочисленные графики распределения
напряжений, формулы и числовые таблицы.
Исходные уравнения задачи о кручении тел вращения, рассмотрен-
рассмотренной в этой книге только применительно к случаям цилиндра, гипербо-
гиперболоида и области со сферической полостью, впервые A899), по-видимому,
указаны Мичеллом в статье:
99. М i с h е 11 I. H., The Uniform Torsion and Flexure of Incomplete Tores,
with Applications to Helical Springs. The Collected Mathematical Works
(см. [78]).
Этой задаче посвящена монография:
918 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
100. Соляник-Красса К. В., Кручение валов переменного сечения, Гос-
техиздат, Москва 1949,
и значительное место уделено ей в книге Н. X. Арутюняна и Б. Л. Абра-
Абрамяна [131].
О задачах равновесия кругового конуса см. [70], а также статью:
101. Ну л л ер Б. М., К решению задачи теории упругости об усеченном
конусе. Механика твердого тела, 5, стр. 102, 1968.
К § 5. Задача в пп. 5.1—5.5 рассмотрена в работе:
102. Лурье А. И., Эластостатическая задача Робена для трехосного эллип-
эллипсоида. Механика твердого тела, 1, стр. 80—83, 1967.
К пп. 5.6—5.8. Задача о напряженном состоянии в окрестности
эллипсоидальной полости рассмотрена в работе.
103. Sternberg E. and Sadowsky M. A., Stress Concentration around
a Triaxial Ellipsoidal Cavity. Journ. of Appl. Mech., 16, N 2, стр. 149, 1949.
Решение представлено через эллиптические функции Якоби от криволи-
криволинейных эллиптических координат. В решении, приведенном в этой книге,
выраженном в декартовых координатах и содержащем эллиптические
интегралы, исправлена ошибка, допущенная в книге автора [70]. Пра-
Правильное решение дано в работе:
104. Подильчук Ю. Н., Напряженное состояние в окрестности эллипсои-
эллипсоидальной полости при произвольных постоянных усилиях на бесконечно-
бесконечности, Докл. АН УССР, № 9,- стр. 1150—1154, 1964.
Задачи п. 5.9 подробно рассмотрены Г. Нейбером в работе [52],
а задачи пп. 5.10, 5.11 в книгах:
105. Снеддон И., Преобразования Фурье, перев. с англ., ИЛ, Москва 1955.
106. Уфлянд Я. С, Интегральные преобразования в теории упругости,
и в статье:
107. Подильчук Ю. Н., Плоская эллиптическая трещина в произвольном
однородном поле напряжений. Прикл. мех., IV, № 8, стр. 93—100,
1968*).
К § 6. Начало рассмотрению контактных задач было положено в
классическом мемуаре Г. Герца:
108. Hertz H., Uber die Beriihrung fester elastischer Korper. Gesammelte
Werke, т. 1, стр. 155, Leipzig 1895 (впервые опубликован в «Journ. fur
reine und angew. Math. (Crelle)», 92, стр. 156, 1882).
В последующие шестьдесят лет усилия были направлены на экспе-
экспериментальную проверку теории и развитие ее применении к инженерным
расчетам. К работам этого направления принадлежат:
109. Динник А. Н., Удар и сжатие упругих тел. Избранные труды, т. 1,
Изд-во АН УССР, 1952 (впервые опубликовано в 1909 г.).
ПО. Беляев Н. М., Местные напряжения при сжатии упругих тел. Сб.
статей «Инженерные сооружения и строительная механика», изд-во
«Путь», Ленинград 1924.
Побудительным толчком к математическому рассмотрению новых
контактных задач теории упругости послужила серия работ И. Я. Штаер-
мана (первая работа датирована 1939 г.), объединенных в его моно-
монографии:
111. Штаерман И. Я-, Контактная задача теории упругости, Гостехиздат,
Москва 1949.
*) Решение задачи об эллиптической трещине приведено также в книге:
Панасюк В. В., «Предельное равновесие хрупких тел с трещинами», изд-во
«Наукова думка», Киев, стр. 194—204, 1968.
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 919
Дальнейшее развитие решения контактных задач получили в иссле-
исследованиях Л. А. Галина, изложенных в книге:
112. Галин Л. А., Контактные задачи теории упругости, Гостехиздат, Моск-
Москва 1953.
Большее место, чем в настоящей книге, контактным задачам уде-
уделено в книге [70]; решения многочисленных задач даны в монографии
[106]. Достаточно полный обзор исследований по контактным задачам,
пространственным и плоским (перечислены 134 работы), дан в статье:
113. Попов Г. Я-, Ростовцев Н. А., Контактные (смешанные) задачи
теории упругости. Труды второго Всесоюзного съезда по теоретической
и прикладной механике. Механика твердого тела, изд-во «Наука», 1966.
К пп. 6.2а, 6.5а, см. работу:
114. Моссаковский В. И., К вопросу об оценке перемещений в простран-
пространственных контактных задачах. Прикл. матем. и мех., 15, № 5, 1951.
К § 7. Классическими работами, относящимися к задаче о напря-
напряженном состоянии в круглом цилиндре (сплошном и полом), являются:
115. Filon L., On the Elastic Equilibrium of Circular Cylinders under Certain
Practical Systems of Loads. Phil. Trans, of the Royal Soc. London, Ser. A,
198, 1902.
116. S с h i f f P. А. (П. А. Шифф), Sur l'equilibre d'ue cylindre elastique. Journ.
de math, pures et appliquees, Ser. 3, т. 9, стр. 407, 1883.
К п. 7.5. Задача о кручении силами, распределенными по торцу, рас-
рассмотрена впервые, по-видимому, в [116]. См. также [1].
К п. 7.6. В работе:
117. Валов Г. М., Об осесимметричной деформации сплошного кругового
цилиндра конечной длины. Прикл. матем. и мех., 26, № 4, стр. 650, 1962,
решение некоторых краевых задач представлено в рядах, коэффициенты
которых определяются бесконечной (вполне регулярной) системой урав-
уравнений.
К п. 7.7. Задача о напряженном состоянии в цилиндре, нагруженном
нормальным давлением по участку боковой поверхности, рассмотрена в
книге [70], а для других способов загружения в работах:
118. Лившиц П. 3., Напряженное состояние в упругом цилиндре, нагру-
нагруженном по его боковой поверхности касательными усилиями. Инженер-
Инженерный сборник, 30, стр. 47, 1960; Изв. АН СССР, Механика и машинострое-
машиностроение, № 4, стр. 105, 1964. К задаче об изгибе стержня кругового попереч-
поперечного сечения. Изв. АН СССР, Механика и машиностроение, № 1, стр. 76,
1963.
119. Никишин В. С, Напряженное состояние симметрично нагруженного
упругого цилиндра. Труды Вычисл. центра АН СССР, 1965. Температур-
Температурные напряжения в составном цилиндре при произвольном распределении
температуры по высоте. Там же, 1964.
В [119] приведены таблицы функций влияния, облегчающие расчеты на-
напряжений.
Решение в тригонометрических рядах рассматривалось в работе:
120. Berton M; W., The Circular Cylinder with a Band of Uniform Pressure
on a Finite Length of the Surface. Journ. of. Appl. Mech., 8, N 3, стр. 97,
1941.
С помощью интеграла Фурье эта задача для полого цилиндра ре-
решена в работе:
121. Шапиро Г. С, О сжатии бесконечного полого цилиндра давлением,
приложенным на участке боковой поверхности. Прикл. матем. и мех., 7,
№ 5, стр. 379, 1943.
920 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
Решение в рядах задачи о полом цилиндре дано в работе:
122. Галеркин Б. Г., Упругое равновесие полого кругового цилиндра и
части цилиндра. Собрание сочинений, т. 1, Изд-во АН СССР, 1953,
стр. 342 (опубликовано впервые в 1933 г.).
Случай осесимметричного нагружения изучен также в статьях:
123. Прокопов В. К., Равновесие упругого толстостенного осесимметрич-
осесимметричного цилиндра. Прикл. матем. и мех., 12, № 2, стр. 135, 1949. Осесиммет-
ричная задача теории упругости для изотропного цилиндра. Труды Ле-
нингр. политехи, ин-та, № 2, стр. 286, 1950.
К п. 7.10. Свойство обобщенной ортогональности однородных реше-
решений было указано П. А. Шиффом [116]. Эта работа была незаслуженно
забыта/указанием на нее автор обязан Б. М. Нуллеру. В изложении
п. 7.10 использована рукопись Б. М. Нуллера, а основной результат
П. А. Шиффа представлен в принятых в § 7 обозначениях. См. так-
также [123].
Независимо от П. А. Шиффа свойство ортогональности однородных
решений в применении к задаче изгиба прямоугольной плиты было уста-
установлено П. Ф. Папковичем в его книге:
124. Папкович П. Ф., Строительная механика корабля, т. II, стр. 634,
Судпромгиз, Ленинград 1941.
Рассмотрению возможности одновременного представления двух
функций рядами по однородным решениям (в применении к задаче
П. Ф. Папковича) посвящена работа:
125. Гринберг Г. А., О методе, предложенном П. Ф. Папковичем для
решения плоской задачи для прямоугольной области и задачи изгиба
прямоугольной плиты и о некоторых его обобщениях. Прикл. матем. и
мех., 17, № 2, стр. 211, 1953.
Исследования аналогичных вопросов применительно к цилиндру ав-
автору неизвестны.
Приближенные приемы выполнения краевых условий на торцах ци-
цилиндра предложены В. Л. Бидерманом в книге:
126. Пономарев С. Д., Бидерман В. Л., Лихарев К. К., М а ку-
куши н В. М., Мал инин Н. Н., Феодосьев В. И., Расчеты на проч-
прочность в машиностроении, т. II, гл. V, Машгиз, Москва 1958,
и в работе:
127. Horvay G., Mirabal I. A., The End Problem of Cylinders. Journ.
of Appl. Mech. Trans. ASME, Paper N 58-A-24, стр. 1—у), 1958*).
К главе VI
Термин «задача Сен-Венана» введен Клебшем [17]. Классические
труды Сен-Венана о кручении и изгибе призм переведены на русский
язык:
128. Сен-Венан Б., Мемуар о кручении призм. Мемуар об изгибе призм.
Под редакцией и со вступительной статьей Г. Ю. Джанелидзе. Серия
«Классики естествознания», Физматгиз, Москва 1961.
*) Оценка быстроты затухания напряжений в цилиндре, нагруженном
по торцу статически эквивалентной нулю системой сил, дается в стйтъе:
Knowles J. К. and H organ С. О., On the Exponential Decay of Stresses
in Circular Elastic Cylinders Subject to Axisymmetric Self-Equilibrated End
Loads. Intern. Journ. o"f Solid Structures, 5, стр. 33—50, 1969.
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 921
Большое место задаче Сен-Венана уделено в курсах [1, 3, 12, 16].
Применение метода теории функции комплексного переменного подробно
разработано в [2] для стержней, содержащих полости, заполненные ма-
материалом с различными упругими постоянными (составные стержни).
К пп. 2.5—2.6. Задача об определении координат центра жесткости
подробно рассмотрена в статье:
129. Джанелидзе Г. Ю., Определение координат центра жесткости до
различным функциям напряжений при кручении. Труды Ленингр. поли-
политехи, ин-та (ЛПИ). Динамика и прочность машин, № 226, стр. 93—102,
1963,
содержащей подробный перечень литературы. См. также [7]. Формулы
для многосвязной области даны в работе:
130. Прокопов В. К-, О центре жесткости многосвязного профиля. Научно-
информационный бюллетень ЛПИ, № 7, стр. 91, 1960.
К § 3. Исчерпывающие литературные указания и оригинальные ре-
решения многочисленных задач о кручении стержней даны в монографии:
131. Арутюнян Н. X., Абрамян Б. Л., Кручение упругих тел, Физмат-
гиз, Москва 1963.
Применения функций комплексного переменного к задаче кручения
развиты подробно в книге:
132. Weber С, Giinter W., Torsionstheorie, Akademie-Verlag, Berlin 1958.
К пп. 3.5—3.7. Мембранная аналогия предложена в работе:
133. Р г a n d 11 L., Eine neue Darstellung der Torsionsspannungen bei prisma-
tischen Staben von beliebigem Querschnift, Jahresbericht Deutsch. Math.-
Ver., 13, стр. 31, 1904.
О применении аналогии к экспериментальному решению задачи кру-
кручения (способ мыльной пленки) см. литературу в [131].
Большое число изопериметрических задач, относящихся к проблеме
кручения, рассмотрено в монографии:
134. Полна Г., Сеге Г., Изопериметрические неравенства в математиче-
математической физике, Физматгиз, Москва 1962.
Неравенство C.7.7) получено в работе:
135. Николаи Е. Л., К задаче об упругой линии двоякой кривизны. Труды
по механике (Библиотека русской науки), Гостехиздат, 1955 (впервые
опубликовано в 1916 г.).
К пп. 3.13—3.17. О вариационных способах решения задачи круче-
кручения см. [57]. Первая публикация о вариационном способе Л. В. Канто-
Канторовича представлена статьей:
136. Канторович Л. В., Один прямой метод приближенного решения
задачи о минимуме двойного интеграла. Изв. АН СССР, Отд. физ.-матем.
наук, № 5, стр. 647—652, 1933.
Кручению удлиненных и тонкостенных профилей уделено значи-
значительное место в гл. VII монографии [131]. Задача о кручении многосвяз-
многосвязных тонкостенных конструкций полно рассмотрена в [16].
К § 4. Задача об изгибе силой подробно рассмотрена в курсах тео-
теории упругости [1, 2, 3, 12] и в монографии [57]. Литература, к ней отно-
относящаяся, не столь обширна, как к задаче о кручении.
В упоминаемой в п. 4.1 работе:
137. Tricomi F., Sulla Problema della trave soggetto a una sforza di traglio.
Atti della Accad. Naz. dei Lincei, Ser. VI, 18, стр. 484—488, 1934 предло-
предложен также прием графо-аналитического определения не среднего, а ис-
истинного значения касательного напряжения.
922 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
При изложении пп. 4.5, 4.6, 4.8 использованы материалы работ
[57, 129]. Упоминаемые в тексте результаты Дункана и Гриффитца со-
содержатся в статьях:
138. Griffith А., Т а у 1 о г G., The Problem of Flexure and its Solution.
Reports and Memoranda, N 399, 1917.
139. Dunk an W., Torsion and Flexure of Cylinders and Tubes, Reports апЗ
Memoranda, N 1444, 1932.
Вычисления п. 4.7 взяты из статьи:
140. Лурье А. И., Приближенное решение некоторых задач о кручении
и изгибе стержня. Труды Ленингр. индустр. ин-та, № 3, стр. 121-^-125,
1939.
К § 5. Теория впервые предложена Мичеллом в статье:
141. Mi с hell I. Н., The Theory of Uniformly Loaded Beams. Quart. Journ.
( of Math., 32, стр. 28—42, 1900. Вновь напечатано в книге [78].
С неоправданной сложностью задача Мичелла изложена в [1]. При-
Принятое в пп. 5.1—5.6 изложение основано на статье:
142. Лурье А. И., Задача Мичелла. «Строительная механика». Юбилейный
сборник статей к 80-летию И. М. Рабиновича, Стройиздат, Москва 1966.
О центре изгиба в задаче Мичелла см. статью:
143. X а сие А. Л., Задача Мичелла и линия центров изгиба, Изв. АН СССР,
ОТН, Механика и машиностроение, № 5, стр. 58—65, 1960.
Вычисление, выполненное в п. 5.7 (изгиб тяжелого стержня) прове-
проведено также в [1]. В п. 5.8 дается обобщение задачи, рассмотренной
в п. 4.1, на случай равномерно нагруженной балки. См. также [19].
К п. 5.9. Постановка и ход решения задачи о балке, нагруженной
на ее боковой поверхности по полиномиальному закону, даны в статьях:
144. А 1 m a n s i E., Sopra la deformazione dei cylindri sollecitati lateralmente.
Rendiconti della Reale Accad. dei Lincei. Ser. 6, 10, стр. 333—338,400—408.
1901.
В отчетливой форме решение задачи Альманзи представлено в ра-
работе:
145. Джанелидзе Г. Ю., Задача Альманзи. Труды Ленингр. политехи,
ин-та. Динамика и прочность машин, № 210, стр. 25—38, 1960.
К главе VII
На плодотворность применения комплексного переменного в пло-
плоской задаче теории упругости указал впервые Г. В. Колосов в моно-
монографии:
146. Колосов Г. В., Об одном приложении теории функций комплексного
переменного в плоской задаче математической теории упругости, Юрьев,
1909.
Постановка, доказательство существования и практические приемы
решения краевых задач даны Н. И. Мусхелишвили в труде [2] (первое
издание вышло в 1933 г.) и в предшествующих ему публикациях; из них
основополагающими являются:
147. Мусхелишвили Н. И., Sur 1'integration de l'equation brharmonique,
Изв. Росс. Академии наук, стр. 663—686, 1919. Applications des integ-
integrates analogues a celles de Cauchy a quelques problemes de la physique
mathematiques, Tiflis, edition de I'LJniversite, 1922.
Применение комплексного переменного к плоской задаче посвя-
посвящены также монографии:
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 923
148. Babuska I., Rektorys K-, Vycichlo F., Mathematische Elastizi-
tatstheorie der ebenen Probleme, Akademie-Verlag, Berlin 1960.
149. Mi lne- Thorns on L. M., Plane Elastic-Systems. Ergebnisse der ange-
wandten Mathematik, N 6, Springer-Verlag, Berlin — Gottingen 1960.
150. Бе доносов С. М., Основные плоские статические задачи теории упру-
упругости, АН СССР, СО, Новосибирск 1962.
Большое число задач для областей частного вида рассмотрено в
двухтомной монографии:
151. Teodorescu P. P., Probleme plane in teoria elasticitatii, т. 1, 995 стр.,
1960; т. II, 669 стр., 1965 (на румынском языке).
В настоящей книге применение комплексного переменного к пло-
плоской задаче ограничено примерами решения наиболее простых краевых
задач (первой и второй). Смешанные краевые задачи, решение которых
требует применения средств теории линейного сопряжения и сингуляр-
сингулярных интегральных уравнений, полно представлены в последних изданиях
книги [2], а также в [149, 150]; в книге [148] основное место уделено
применению интегральных уравнений.
Здесь нет возможности и нужды останавливаться на труднообозри-
труднообозримом множестве работ по применению теории функций комплексного
переменного и интегральных уравнений к плоской задаче; исчерпываю-
исчерпывающая библиография дана в [2] и в обзорах:
152. В е к у а И. Н., Мусхелишвили Н. И., Методы теории аналитиче-
аналитических функций в теории упругости. Труды Всесоюзного съезда по теоре-
теоретической и прикладной механике, Изд-во АН СССР, 1962.
152а. Ш е р м а н Д. И., Метод интегральных уравнений в плоских и про-
пространственных задачах статической теории упругости. Труды Всесоюз-
Всесоюзного съезда по теоретической и прикладной механике, 1962.
Решение ряда плоских задач, не основывающееся на методах тео-
теории функций, рассмотрено в книгах [3, 16] и в статье:
153. Т i m p e A., Probleme der Spannungsverteilung in ebenen Systemen, einfach
gelost mit Hilfe der Airyschen Funktion. Zeitsch. fur Math. u. Phusik, 52,
стр. 348—383, 1905.
К § 2 гл. VII. Библиографические указания, относящиеся к работам
Менаже (A. Mesnager, 1901), Рибьера (С. Ribiere, 1898), Файлона
(L. Filon, 1903), X. Головина, см. в книге [3]. Предложенное в пп. 2.3—
2.10 решение задач о полосе и брусе с круговой осью является перене-
перенесением приемов, развитых в гл. Ill, IV книги [70] в применении к упру-
упругому слою и толстой плите. Интегральное преобразование Фурье в за-
задаче об упругой полосе (п. 2.8) было применено в работах:
154. v. К arm an Th., Ober die Grundlagen der Balkentheorie. Abhandlungen
aus dem aerodynamischen Institut Aachen, стр. 3—10, 1927.
S e e w a 1 d F., Die Spannungen und Formanderungen von Balken mit
rechteckigem Querschnitt. Там же, стр. 11—33.
Результаты Зеевальда, представленные графиками поправок, вно-
вносимых в элементарную теорию изгиба балки, подробно воспроизведены
в книге [3].
Однородные решения задачи о равновесии упругой полосы впервые
введены в работе:
155. Fa die I., Die Selbstspannungs-Eigenwertfunktionen der quadratischen
Scheibe. Ingenieur-Archiv, 11, № 4, стр. 125—149, 1940.
Таблица корней в п. 2.12 воспроизведена из этой работы. К иссле-
исследованиям [124, 125J, связанным с применением однородных решений для
учета искажений напряженного состояния, вносимых влиянием торцов,
следует добавить:
924 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
156. Гринберг Г. А., Лебедев Н. Н., Уфлянд Я. С, Метод решения
общей бигармонической задачи для прямоугольной области при задании
на контуре значений функции и ее нормальной производной. Прикл. ма-
тем. и мех., 17, № 1, стр. 73—86, 1953.
Обзор исследований по однородным решениям содержится в докладе:
157. Джанелидзе Г. Ю., Прокопов В. К., Метод однородных решений
в математической теории упругости. Труды IV Всесоюзного математиче-
математического съезда, изд-во «Наука», 1964.
Начало применению приближенных решений в плоской задаче по-
положено С. П. Тимошенко в работе:
158. Ti mos h e nko S. P., The Approximate Solution of Two-Dimensional
Problems in Elasticity, Phil. Mag., 47, стр. 1095—1104, 1924 (воспроиз-
(воспроизведено в «Collected Papers» of St. P. Timoshenko, McGraw-Hill, 1953).
Далее эти приемы в соединении с использованием однородных реше-
решений развивались в работах:
159. Horvay Q., The End Problem of Rectangular Strip. Journ. of Appl.
Mech. Trans. ASME, N 52-A-2, стр. 87—94, 1953.
160. Horvay Q., Born J. S., The Use of Self-Equilibrating Functions in
Solution of Beam-Problems. Proc. of the 2nd V. S. Nat. Congr. Appl.
Mech., Ann-Arbor, Mich., 1954.
К § 3. Решение задачи о сосредоточенной силе в упругой плоскости
(п. 3.1) дано Мичеллом в статье:
161. Michel I I. H., Elementary Distributions of Plane Stress. Proc. London
Math. Soc, 32, стр. 35—61, 1900 (воспроизведено в [78]).
В ней рассмотрены также другие плоские задачи о действии сосредото-
сосредоточенных особенностей.
К пп. 3.5—3.8. Теория плоских контактных задач рассмотрена в кни-
книгах [2, 111]; см. также обзор [113]. Простейший случай плоского
' штампа (п. 3.7) впервые, по-видимому, рассмотрел М. А. Садовский в работе:
162. Sadowsky M. A., Zweidimensionale Probleme der Elastizitatstheorie.
Zeitsch. fur angew. Math. u. Mech., 8, стр. 515—518, 1928.
¦К § 4. Задача (п. 4.1) о сосредоточенной силе в вершине клина ре-
решена впервые в [161]. Интегральное преобразование Меллина к задаче
о клине при произвольном нагружении его сторон применил впервые
В. М. Абрамов в работе:
163. Абрамов В. М., Распределение напряжений в плоском безграничном
клине при произвольной нагрузке. Труды конференции по оптическому
методу изучения напряжений, ОНТИ, 1937.
Случай нагружения грани сосредоточенной силой рассмотрен в
статье:
164. Лурье А. И., Брачковский Б. 3., Решение плоской задачи теории
упругости для клина. Труды Ленингр. политехи, ин-та, № 3, стр. 158—
165, 1941.
Разъяснению парадокса Карозерса (п. 4.3) уделено место в книге
[150]. Этому же вопросу посвящена обстоятельная статья:
165. Stern berg E., Koiter W., The Wedge under Concentrated Couple:
A Paradox in the Two-Dimensional Theory of Elasticity. Journ. of Appl.
Mech., 25, N 4, стр. 581—585, 1958 (имеется русский перевод в сб. «Ме-
«Механика», № 3, стр. 98—110, 1959).
Другое истолкование дано в работе:
166. Neuber H., Losung des Carothers-Problems mittels Prinzioien der
Kraftubertragung (Keil mit Moment an der Spitze). Zeitsch. fur angew.
Math. u. Mech., 43, N 4—5, стр. 211—228, 1963.
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 925
Значение сформулированного в этой работе принципа «передачи
напряжений через поверхность переноса силы» не ограничивается воз-
возможностью объяснения парадокса Карозерса.
С большой обстоятельностью задача о клине рассмотрена в книге
[106]; из нее взята таблица в п. 4.4; более подробно, чем в п. 4.4, слу-
случай нагружения клина по части поверхности рассмотрен в [105].
К § 5. Конечно, основным источником при написании этого пара-
параграфа послужила книга [2]; использованы также материалы книги [149].
Общее представление функции напряжений в двусвязной области
(пп. 5.5—5.6) дано Мичеллом в работе:
167. Michell I. H., On the Direct Determination of Stress in on Elastic Solid
with Application to the Theory of Plates. Proc. Lond. Math. Soc, 31,
стр. 100—124, 1899 (воспроизведено в [78]).
К § 6. Задача пп. 6.1—6.2 о диске, нагруженном сосредоточенными
силами, подробно рассмотрена в [2]; частные примеры нагружения си-
силами на окружности, уравновешенными сосредоточенными силой и мо-
моментом в центре диска, рассмотрены в [167]. Приведены графические
представления распределения напряжений в диске.
Классическая задача Кирша A898) о растяжении плоскости, ослаб-
ослабленной круговым отверстием (п. 6.12), послужила началом многочис-
многочисленных исследований местных напряжений в окрестности полостей в пло-
плоском напряженном поле; они подробно представлены в книге:
168. Савин Г. Н., Распределение напряжений около отверстий, изд-во «На-
укова думка», Киев, 1968 (первое издание вышло в 1951 г.). Книга со-
содержит исчерпывающие библиографические указания.
Большое число частных задач рассмотрено в работе:
169. Найман М. И., Напряжения в балке с криволинейным отверстием,
Труды ЦАГИ, № 313, 1937.
Изложенный в пп. 6.13—6.14 способ решения краевой плоской задачи
дан в книге [149].
К § 7. Решение задачи в пп. 7.2—7.3 о круговом кольце представ-
представляется более простым, чем в [2]. Решение в замкнутом виде через эллип-
эллиптические функции предложено в книге:
170. Колосов Г. В., Применение комплексной переменной к теории упру-
упругости, ОНТИ, 1935.
Решение по способу аналитического продолжения, предложенное
в работе в [149], некорректно. В п. 7.7 ошибка устранена.
К § 8. При рассмотрении плоских задач для областей, в которые
круг преобразуется с помощью полинома, мы ограничились указанием
хода решения. Более подробно задача рассмотрена в [2]. Многочислен-
Многочисленные примеры, доведенные до расчетных формул, приведены в работах
[168, 169]. Пример пп. 8.4, 8.6 приведены в [149]. Результаты расчетов
для задачи о неконцентрическо-ы кольце приведены в [168]. Эта задача
была рассмотрена в работе:
171. Чаплыгин С. А.. Аржанников Н. С, К вопросу о деформации
трубы, ограниченной двумя эксцентрическими цилиндрами и сжатой по-
постоянным давлением, Труды ЦАГИ, № 123, 1933 (воспроизведена в Со-
Собрании сочинений С. А. Чаплыгина, т. Ill, стр. 323—338, 1935).
Применению биполярных координат к плоской задаче для области
между неконцептрическими окружностями посвящена работа:
172. Jeffery G. В., Plane Stress and Plane Strain in Bipolar Coordinates.
Phil. Trans. Roy. Soc. London, Ser. А, стр. 265—293, 1921.
60 А. И. Лурье
926 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
К главе VIII
К общим сочинениям, кроме указанных выше книг [4, 7, 19—22],
следует отнести также книги:
173. Грин А., Адкинс Дж., Большие упругие деформаций и нелинейная
механика сплошной среды, перев. с англ., «Мир», 1965.
174. Murnaghan F. D., Finite Deformation of an Elastic Solid, 1951.
175. Varga О. Н., Stress-Strain Behavior of Elastic Materials. Selected
Problems of Large Deformations, Interscience Publichers, 1966.
176. Truesdell C, Noll W., Nonlinear Field Theory of Mechanics, Hand-
buch der Physik, т. Ill, 3, 1965.
В этом капитальном труде ставится цель построить единую, осно-
основанную на минимуме исходных предпосылок (принципы инвариантности,
детерминизма, локального действия), теорию поведения сплошной среды.
Выделен класс «простых материалов», для них тензор напряжений зави-
зависит от истории изменения градиента вектора перемещения (но не от
градиентов более высокого порядка). К числу таких материалов отно-
относятся упругое и гиперупругое тела. Дан исчерпывающий обзор решений
частных задач, большое место уделено установлению приемлемых форм
задания законов состояния и критериям выбора зависимости удельной
потенциальной энергии деформации гиперупругого тела от инвариантов
деформации. Книга снабжена исчерпывающей библиографией по нели-
нелинейной теории упругости, доведенной до 1965 г.
177. Brillouin L., Les Tenseurs en Mecanique et en Elasticite, Paris 1938.
К п. 2.4. Закон состояния в форме, эквивалентной B.4.6), сформу-
сформулирован в статье:
178. Finger J., Ober die allgemeinsten Beziehungen zwischen Deformationen
und den zugehorigen Spannungen in aelotropen und isotropen Substanzen.
Sitzungsberichte d. Akad. Wiss. Wien, Ser. Ha, 103, стр. 1073—1100, 1894.
К п. 2.9.
179. Grioli G., On the Thermodynamic Potential for Continuums with Rever-
Reversible Transformations — Some Possible Types, Meccanica, Journ. of the
Italian Ass. of Theor. and Appl. Mechanics, 1, N 1—2, стр. 15—20, 1966.
Повернутый тензор напряжений и его представление через тензор
деформации Коши рассматриваются в книге [174].
К п. 3.4. Представление энергетического тензора напряжений с по-
помощью модулей k, ц и фазы подобия со дано в работе:
180. Новожилов В. В., О связи между напряжениями и деформациями в
нелинейно-упругой среде. Прикл. матем. и мех., 15, № 2, с*гр. 183—194,1952.
К пп. 4.1—4.2. Квадратичный закон состояния сформулирован в ме-
мемуарах Синьорини:
181. Signorini A., Transformazioni termoelastiche finite. Ann. Mat. pur.
appt, Ser. IV, 22, стр. 33—143, 1943; Ser. IV, 30, стр. 1—72, 1948.
К п. 4.1. Замечания 1, 2.
182. Зволинский Н. В. и Риз П. М., О некоторых задачах нелинейной
теории упругости. Прикл. матем. и мех., 2, № 4, стр. 417—426, 1939.
183. Seth В. R., Finite Strain in Elastic Problems, Phil. Trans. Roy. Soc. Lon-
London, Ser. A, 234, стр. 231—264, 1935.
К пп. 4.6—4.9 см. [173, 174, 175], а также
184 Моопеу М., A Theory of Large Elastic Deformation. Journ. Appl. Phys.
11, стр. 582—592, 1940.
185. Rivlin R. S., Saunders D. W., Large Elastic Deformations of Isotro-
pic Materials. VII. Experiments on the Deformation of Rubber. Phil. Trans.
Roy. Soc. London, Ser. A, 243, стр. 251—288, 1951.
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 927
186 Bri dgmann P. W., The Concession of 39 Substances to 100,000 kg/cm*.
Proc. Acd. Sci. Amsterdam, 76, стр. 55—70, 1948.
Таблица в п. 4.6 взята из книги:
187. Зарембо А. К., Красильников Б. А., Введение в нелинейную
акустику, изд-во «Наука», 1966,
и из указанных на стр. 667 работ.
К п. 4.10. Нейбер предложил закон состояния D.10.10), D.10.13)
в работе:
188. Neuber H., Statische Stabilitat nichtlinear elastischer Kontinua mit
Anwendung auf Schalen. Zeitsch. fur angew. Math. u. Mech., 46, N 3—4,
стр. 211—220, 1966.
К § 5, пп. 5.3—5.4. Принцип стационарности дополнительной работы
рассмотрен в статье:
1'89. Левинсон, Теорема о дополнительной энергии в нелинейной теории
упругости, «Journal of Applied Mechanise, Trans. ASME, N 4, 1965 (из-
(издается также на русском языке под названием «Прикладная механика»).
К гл. VIII см. также
190. Толоконников Л. А., Уравнения нелинейной теории упругости в
перемещениях. Прикл. матем. и мех., 21, № 6, 1957. О связи между на-
напряжениями и деформациями в нелинейной теории упругости. Прикл.
матем. и мех., 20, № 3, 1956.
К главе IX
К §§ 1—3 см. [20, 4, 176] и основоположные в нелинейной теории
упругости работы Ривлина:
191. Rivlin R. S., Large Elastic Deformation of Isotropic Materials, Further
Developments of the General Theory. Part IV, Phil. Trans. Roy. Soc Lon-
London, Ser. A., 241, стр. 379—397, 1948; Rivlin R. S. Large Elastic Defor-
Deformation of Isotropic Materials, Part V. Problem of Flexure. Proc. Roy. Soc.
London, Ser. A, 195, стр. 463—473, 1949;
Rivlin R. S., A Note on the Torsion of an Incompressible Highly-
Elastic Cylinder. Proc. Cambridge Phil. Soc, 45, стр. 485—487, 1949;
Rivlin R. S., Large Elastic Deformation of Isotropic Materials, Part VI,
Further Results in the Theory of Torsion, Shear and Flexure. Phil. Trans.
Roy. Soc. London. Ser. A, 242, стр. 173—195, 1949.
Содержание пп. 2.2—2.4 основывается на работе:
192. Klin gbeil W. W., Schield R. Т., Large-Deformation Analyses of
Bonded Elastic Mounts. Zeitsch. fur angew. Math. u. Phys., 17, N 2,
стр. 281—305, 1966.
К § 4, пп. 4.1—4.5. Предложенный вывод уравнений равновесия пер-
первоначально нагруженного упругого тела отличен от приводимого в [4].
См. также [32, 33] и работы:
193. Biezeno С. В., Не ncky H., On the General Theory of Elastic Stabi-
Stability, K. Akad. Wet. Amsterdam Proc, 31, стр. 569—592, 1929; 32, стр. 444—
456, 1930.
194. Pearson С. Е., General Theory of Elastic Stability. Quart, of Appl.
Math., 14, стр. 133—144, 1956.
195. Лурье А. И., Бифуркация равновесия идеально-упругого тела. Прикл.
матем. и ыех., 30, № 4, стр. 718—731, 1966.
К п. 4.6. Задача о кручении растянутого стержня рассматривалась
196. Gr'fe^A.^Thield R. Т., Finite Extension and Torsion of Cylinders,
Phil. Trans. Roy. Soc. London, Ser. A, 244, стр. 47-84, 1951.
60*
928 ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
Задача о равновесии первоначально сжатого стержня рассмотрена
в [195].
К § 5. Об эффектах второго порядка см. [19], а также
197. Green А. Е„ Rivlin R. S., Shield R. Т., General Theory of Small
Elastic Deformations, Proc. Roy. Soc. London, Ser. A, 211, стр. 128—154,
1952.
198. Rivlin R. S., The Solution o! Problems in Second Order Elasticity
Theory. Journ. of Rat. Mech. and Analysis, 2, стр. 53—81, 1953.
К п. 5.3а.
199. T о u p i n R, A. and R i v 1 i n R. S., Dimensional Changes in Crystals Caused
by Dislocation. Journ. of Mathematical Physics, 1, № 1, стр. 8—15, 1960.
К § 6. Теория конечной плоской деформации развита в работах:
200. Ad kins J. E., Green A. E., Shield R. Т., Finite Plane Strain. Phil
Trans., Ser. A, 246, стр. 181—213, 1953.
201. A d k i n s J. E., G r e e n A. E., Nicholas G. C, Two-dimensional Theory
of Elasticity for Finite Deformations. Phil. Trans. Roy. Soc, London,
Ser. A, 247, стр. 279—306, 1954.
202. To л окон ник об Л. А., Плоская деформация несжимаемого материа-
материала. Докл. АН СССР, 119, № 6, 1957.
Плоская задача для клина рассмотрена в статье:
203. Klingbeil W. W., Shield R. Т., On a Class of Solutions in Phys.
Finite Elasticity. Zeitsch. fur Math. u. Phys., 17, N 4, стр. 489—511, 1966.
Большое число работ посвящено решениям методом последователь-
последовательных приближений с использованием комплексного переменного (метод
Н. И. Мусхлншвили). Упомянем следующие:
204. Carlson D. E., Shield R. Т., Second and Higher Order Effects in
a Class of Problems in Plane Finite Elasticity. Arch, for Rat. Mech. and
Andlysis, 19, N 3, стр. 189—214, 1965.
205. К о й ф м а н Ю. И., Решение плоской задачи нелинейной теории упру-
упругости для бесконечной пластинки с криволинейным отверстием. Изв.
высш. учебн. заведений, Строительство и архитектура, № 1, стр. 44—51,
Новосибирск 1961.
Койфман Ю. И., Развъязашя деяких задач нелшшно1 плоско! теории
пружности. Изв. Львовского гос. ун-та, Отд. мех. и матем., № 9, 1962.
Койфман Ю. И., Напряженно-деформированное состояние труб и коль-
кольцевых дисков из высокоэластичных нелинейно-упругих материалов. Ди-
Динамика и прочность машин, № 3, стр. 75—81, Изд-во Харьковского
ун-та, 1966.
Савин Г. Н., Койфман Ю. И., Нелинейные эффекты в задачах
о концентрации напряжений около отверстий с подкрепленным краем.
Прикл. мех., 1, № 9, стр. 1—13, 1965 *).
Койфман Ю. И., Ланглейбен А. Ш., Большие упругие деформа-
деформации двухслойного цилиндра. Прикл. мех., 2, № 9, стр. 71—72, 1966.
206. Громов В. Г., О влиянии физической нелинейности на концентрацию
напряжений возле кругового отверстия при больших деформациях. Прикл.
мех., 1, № 10, 1965.
Громов В. Г., Концентрация напряжений около круговой цилиндри-
ской полости в бесконечно протяженном нелинейно-упругом теле. Научн.
сообщ. Ростовского ун-та, серия точных и естеств. наук, 67, 1964.
Громов В. Г., Т о л о к о н н и к о в Л. А., К вычислению приближений
в задаче о конечных плоских деформациях несжимаемого материала.
Изв. АН СССР, ОТН, 2, 1953.
*) Плоская задача нелинейной теории упругости рассмотрена в гл. IX
книги [168]. Приведена подробная библиография.
ЛИТЕРАТУРНЫЕ УКАЗАНИЯ 929
К § 7. Уравнение состояния, эквивалентное G.1.1) приведено в
работе:
207. Sense nig С. В., Instability of Thick Elastic Solid. Commun. Pure and
Appl. Math., 17, N 4, стр. 451—491, 1964.
Постановка краевых задач, относящихся к случаю плоской дефор-
деформации, дана в работе:
208. John F., Plane Strain Problems for a Perfectly Elastic Material of Har-
Harmonic Type. Commun. Pure and Appl. Math., 13, N 2, стр. 239—296, 1960.
К пп. 7.9—7.10.
209. Southwell R. V., On the General Theory of Elastic Stability, Phil.
Trans. Roy. Soc. London, Ser. A, 213, стр. 187—244, 1913.
210. Б и цен о К. Б., Грамм ель Р., Техническая динамика, т. I, перев.
с нем., Гостехиздат, Москва 1950.
Задачи пп. 7.11—7.13 и несколько аналогичных (полый цилиндр под
внешним давлением, круглая плита, нагруженная по краю) рассмотрены
в [207]. В иной постановке задача для сферической оболочки рассмотрена
в работе:
211. ФеОдосьев В. И., О формах равновесия резиновой сферической обо-
лоЧКи при внутреннем давлении. Пр'икл. матем. и мех., 32, № 2,
СТр. 339—344, 1968.
К § 7 см. также
212. Лурье А. И., Теория упругости для полулинейного материала. Прикл.
матем. и мех., 32, № 6, 1968.
приложения
I—V. Более подробные сведения по тензорному анализу можно найти
в книгах:
213. Кильчевский Н. А., Элементы тензорного анализа и его приложения
к механике, Гостехиздат, Москва 1954.
214. Мак-Коннел А. Дж., Введение в тензорный анализ с приложениями
к геометрии, механике и физике, перев. с англ., Физматгиз, Москва 1963.
215. Схоутен Я. А., Тензорный анализ для физиков, перев. с англ., изд-во
«Наука», 1965.
При написании Приложения VI использована книга [63], а также
216. Гобсон Е. В., Теория сферических и эллипсоидальных функций, перев.
с англ., ИЛ, Москва 1952.
217. Ann ель П., Фигуры равновесия вращающейся жидкой массы, перев.
с франц., ОНТИ, 1936.
ИМЕННОЙ УКАЗАТЕЛЬ
Абрамов В. М. 924
Абрамян Б. Л. 426, 917, 918, 921
Адкинс Дж. (Adkins J.) 104, 926, 928
Александров А. Я. 917
Альманзи Э. (Almansi E.) 81, 461, 922
Аппель П. (Appell P.) 929
Аржанников Н. С. 925
Аржаных И. С. 131
Арутюнян Н. X. 426, 918, 921
Аэро Э. П. 911
Бабушка И. (Babuska I.) 923
Бак О. (Buck О.) 667
Башелейшвили М. О. 914
Белоносов С. М. 923
Беляев Н. М. 918
Бельтрами Э. (Beltrami E.) 911
Берри Д. С. (Berri D. S.) 909
Бертон М. У. (Berton M. W.) 919
Бетти Э. (Betti E.) 167, 915
Бидерман В. Л. 920
Бицено К. В, (Biezeno С. В.) 927,
929
Блох В. И. 27, 911
Боли Б. (Boley В.) 913
Борн (Born J. S.) 924
Брачковский Б. 3. 924
Бриджмен П. У. (Bridgman P. W.)
105, 668, 927
Бриллуэн Л. (Brillouin L. ) 668, 926
Бурчуладзе Т. В. 914
Буссинек Ж. (Boussinesq J.) 135, 163,
224, 368, 915
Валов Г. М.. 919
Ван Цзи-де (Shi-Ten Wang) 909
Варга О. Г. (Varga О. Н.) 926
Вебер К. (Weber С.) 404, 917, 921
Вейнгартен Г. (Weingarten Q.) 67
Векуа И. Н. 923
Вольтерра В. (Volterra V.) 67, 198,
204, 912
Ворович И. И. 12
Вычихло Ф. (Vycichlo F.) 923
Галеркин Б. Г. 135, 913, 917, 920
Галин Л. А. 919
Гамель Г. (Hamel Q.) 39, 81, 911
Гахов Ф. Д. 523, 527, 565
Гегелия Т. Г. 914
Генки Г. (Hencky H.) 912, 927
Герц Г. (Hertz H.) 306, 568, 918
Гобсон Э. В. (Hobson E. W.) 929
Головин X. 502, 923
Гольденблат И. И. 912
Граммель P. (Grammel R.) 929
Грин А Э. (Green A. E.) 104, 909,
926—928
Гринберг Г. А. 363, 917, 920, 924
Гриоли (Grioli G.) 910, 911, 912, 926
Гриффитц A. (Griffith A.) 444, 922
Громов В. Г. 771, 928
Гудье Дж. Н. (Goodier J. N.) 435,
909
Гурса Э. (Goursat E.) 479
Гюнтер В. (Giinter W.) 921
Джанелидзе Г. Ю. 441, 914, 920, 921,
922 924
Джеффри Г. Б. (Jeffery G. В.) 925
Джеффрис Г. (Jeffreys H.) 912, 917
Джон Ф. (John F.) 645, 929
Динник А. Н. 918
Диткин В. А. 536
Дункан У. (Dunkan W.) 440, 922
Еремеев Н. Е. 667
Жемочкин Б. Н. 910
Журавский А. М. 453
Зак М. А. 88
Занабони О. (Zanaboni О.) 164
Зарембо А. К. 667, 927
Зволинский Н. В. 659, 926
Зеевалд Ф. (Seewald F.) 497, 501, 923
Зубов Л. М. 12, 452, 685
Инглис (Inglis С. Е.) 538, 539
ИМЕННОЙ УКАЗАТЕЛЬ
931
Канторович Л. В. 416, 921
Каппус P. (Kappus R.) 39, 911
Карлсон (Carlson D. Е.) 928
Карман Т. (von Karman Th.) 497,
923
Карозерс С. Д. (Carothers S. D.) 538,
539
Кац А. М. 910
Качанов Л. М. 912
Келли (Kelly I. L.) 667
Кельвин (Thomson W.) 368, 691, 914,
916
Кильчевский Н. А. 929
Кирхгофф Г. (Kirchhoff Q.) 87, 644,
Кирш Г. (Kirsch G.) 589
912
Клапейрон В. (Clapeyron В. Р. Е.)
916
Клебш A. (Clebsch A.) 910, 920
Клингбейль В. (KHngbeil W. W.) 695,
700, 927, 928
Коваленко А. Д. 913
Койтер В Т. (Koiter W. Т.) 911, 924
Койфман Ю. И. 928
Колоннетти Г. (Colonnetti Q.) 201
Колосов Г. В. 477, 922, 925
Корн А. (Когп А.) 915
Коссера Ф. (Cosserat F.) 18, 19, 911
Коссера Э. (Cosserat E.) 18, 19, 911
Коши О. (Cauchy A. L.) 21, 71, 127
Красильников Б. А. 667, 927
Крекрафт Д. И. (Creckraft D. I.) 667
Кри (Chree С.) 284
Крутков Ю. А. 27, 133, 135, 911
Кувшинский Е. В. 911
Кулон Ж- (Coulon J.I 399
Купрадзе В. Д. 914, 915
Лаиглейбен А. Ш. 928
Лармор Дж. (Larmor J.) 917
Лауричелла (Lauricella G.) 212
Лебедев Н. Н. 924
Левинсои Н. (Levinson N.) 927
Лейбензон Л. С. 420, 424, 440, 444,
910, 913
Лехницкий С. Г. 104
Лёш Ф. (Losch F.) 317, 345
Лившиц П. 3. 919
Лихарев К. К. 920
Лихтенштейн Л. (Lichtenstein L.T
915
Локателли П. (Locatelli P.) 164
Лурье А. И. 817, 915—918, 922, 924,
927, 928
Ляв A. (Love A. E. Н.) 67, 139, 909,
910
Ляме (Lame G.) 112, 368, 916
Майзель В. М. 914
Мак-Доуэл Э. Л. (McDowell E. L.)
915
Мак-Коннел А. Дж. (McConnell A. J.)
929
Максвелл Дж. (Maxwell J. С.) 911
Макушин В. М. 920
Малинин Н. Н. 920
Менаже (Mesnager A.) 492, 923
Мизес P. (Mises R.) 163, 244, 916
Милн-Томсон Л. М. (Milne-Thom-
(Milne-Thomson L. М.) 923
Миндлин Р. Д. (Mindlin R. D.) 911,
913, 915
Мирабаи (Mirabai I. A.) 920
Михлин С. Г. 154, 914
Мич^лл Дж. (Muchell J. H.) 445, 553,
916, 917, 922, 924, 925
Мор О. (Mohr О.) 32
Морера (Morera G.) 26, 911
Моссаковский В. И. 919
Муни М. (Mooney M. А.) 670, 750,
926
Мурнаган Ф. Д. (Murnaghan F. D.)
666, 668, 669, 926
Мусхелишвили Н. И. 412, 472, 480,
571, 909, 913, 916, 922, 928
Навье К. (Navier С. L. М.) 127
Найман М. И. 925
Нейбер Г. (Neuber H.) 11, 128, 276,
673, 913, 917, 918, 924, 927
Никишин В. С. 919
Николаи Е. Л. 400, 401, 921
Нихолас Г. К. (Nicholas G. С.) 928
Новацкий В. (Nowacki W.) 913,
915
Новожилов В. В. 382, 837, 909, 926
Ноул В. (Knols W.) 926
Нуллер Б. М. 918, 920
Пальмов В. А. 12, 911
Панасюк В. В. 918
Папкович П. Ф. 128, 362, 910, 913,
920
Пиола (Piola G.) 644
Пирсон (Pearson С. Е.) 927
Подильчук Ю. Н. 918
Пойнтинг Дж. (Pointing J. H.) 95,
691
Полна Г. (Polya G.) 400, 921
Пономарев С. Д. 920
Попов Г. Я. 919
Прагер В. (Prager W.) 912
Прандтль Л. (Prandtl L.) 395, 921
Прокопов В. К. 920, 921, 924
Прудников А. П. 536
932
ИМЕННОЙ УКАЗАТЕЛЬ
Рабинович И. М. 922
Рейнер М. (Reiner M.) 912
Рейсснер Э. (Reissner E.) 159, 913
Ректорис К. (Rektorys K-) 923
Рибьер (Ribiere С.) 494, 923
Ривлин (Rivlin R. S.) 672, 746, 691,
926—928
Риз П. М. 659, 926
Ритц В. (Pitz W.) 153
Родриг (Rodrigues О.) 817
Розенталь Ф. (Rosental F.) 917
Ростовцев Н. А. 919
Рош (Rosch) 111, 912
Савин Г. Н. 771, 925, 928
Садовский М. А. 528, 918, 924
Саусвелл Р. В. (Southwell R. Щ 787,
788, 909, 913, 917, 929 Д
Сеге Г. (Szego G.) 921 '
Седов Л. И. 910
Секоян С. С. 667
Сен-Венан В. (Saint-Venant В.
163, 369, 371, 378, 380, 390, 398, 39
401—403, 412, 910, 920
Сенсениг К- Б. (Sensenig С. В.) 929
Сетх В. P. (Seth В. R.) 659, 929
Сигер A. (Seeger A.) 667
Сильвестр Дж. Дж. (Sylvester J. J.)
646
Синьорини A. (Signorini A.) 629, 657,
665, 911, 912, 926
Слободянский М. Г. 131, 913
Снеддон Я. Н. (Sneddon I. N.) 534,
909, 916, 918
Сокольников И. С. (Sokolnikoff I. S.)
909
Соломон Л. (Solomon L.) 910
Соляник-Красса К- В. 918
Сомильяна К. (Somigliana С.) 915,
916
Сондерс Д. У. (Saunders D. W.) 672,
926
Сретенский Л. Н. 914
Стернберг Э. (Sternberg E.) 163, 246,
913—918, 924
Схоутен Дж. A. (Schouten J. A.) 929
Тедоне О. (Tedone О.) 127, 916
Теодореску П. П. (Teodorescu P. Р.)
923
Тимошенко С. П. 433, 435, 501, 505,
909, 924
Тимпе A. (Timpe A.) 923
Тирстен Г. Ф. (Tiersten G. F.) 911
Толоконников Л. А. 767, 927, 928
Томсон В. (Thomson W.), см. Кельвин
Тонтй Э. (Tonti E.) 914
Трелоар Л. (Treloar L. R. G.) 672
Трикоми Ф. (Tricomi F.) 431, 921
Треффтц Э. (Trefftz E.) 39, 247, 909,
911
Тупин P. A. (Toupin R. А.) 746, 928
Трусделл (Truesdell С.) 647, 687, 910,
912, 926
Тэйлор Дж. (Taylor J.) 922
Тэт П. (Tail P. G.) 916
Тэт P. (Tait R. I.) 916
Уфлянд Я. С 918, 924
Уэйнер Дж. (Weiner J.) 913
Фадле И. (Fadle I.) 923
Файлон (Filon L. N. G.) 350, 494, 919,
923
Феодосьев В. И. 920, 929
Фикера Г. (Fichera G.) 917
Филоненко-Бородич М. М. 910
Фингер (Finger J.) 638, 926
Финци Б. (Finzi В.) 27, 911
Фламан (Flamant) 516
Фын (Fung Y. С.) 909
Хасис А. Л. 922
Хорви Г. (Horvay G.) 920, 924
Хоргэн (Horgan С. О.) 920
Хьюджес Д. С. (Hughes D. S.) 667
Чаплыгин С. А. 925
Чезаро Э. (Cesaro E.) 63, 912
Черрути В. (Cerruti V.) 224, 368, 915,
916
Шапиро Г. С. 919
Шерман Д. И. 923
Шилд Р. Т. (Shield R. Т.) 695, 700,
927, 928
Шифф П. А. 361, 362, 919, 920
Штаерман И. Я. 918
Эмде Ф. (Emde F.) 317, 345
Эйрих Ф. (Eirich F.) 912
Эйхингер A. (Eichinger A.) Ill, 912
Эри (Airy G. В.) 465
Эринген A. (Eringen А. С.) 910
Эшелби Дж. (Eshelby J.) 219, 222,
915
Юбенкс P. (Eubanks R. А.) 913, 914
Янке Э. (Janke E.) 317, 345
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аналогия мембранная 395
Базис взаимный 825, 870
— основной 870
Балка, элементарная теория 491
Брус круговой, нагруженный на по-
поверхности 506
— —, — по торцам 502
Брус с круговой осью 482—513
Бифуркация равновесия сжатого
стержня 791, 794
сферы 795
Вектор 799
— градиент 839
дивергенции 843
— дисторсии поворотный 198
—• — поступательный 198
— лапласиан 843
— напряжения 20
— напряженности электростатическо-
электростатического поля 36
— Папковича — Нейбера 287
— перемещения 14, 57
— площадки ориентированной 17
— поверхностных сил, главный 473
— поворота 60
— ротор ротора 844
—, сопутствующий feH30py 803
— теплового потока 121
Векторное произведение векторов 799
двойное 802
Векторы единичные 800
— сферические Лапласа 248
Вихрь вектора 840
Включение 219
Градиент 839
— вектора 840, 856
— скаляра по тензору 832
— скалярного произведения 84'1
— тензора 842
Давление следящее 729
Дчойникование в кристалле 219
Девиатор 35, 650, 828
— тензора напряжений 33
Депланация 380
Деформации главные 77
Деформация вектора 841
— круглого цилиндра осесимметрич-
нач 772
— плоская 462
— полого цилиндра осесимметричная
98
— — шара 714
— полулинейного материала плоская
775
— радиально-симметричная 769
— — — полой сферы 97
— сферы 773
— тела вращения 141
Диада 809
Дивергенция вектора 840, 856, 884
— векторного произведения 841
— диады 842
— произведения тензора на вектор
679
— тензора 842, 857, 884
Диполь силовой 209
Дислокация 67, 745
Дисторсия в двусвязной области 552,
595
— Вольтерра 67, 745
— в полом цилиндре вращательная
337
— поступательная 337
Дифференциал полный вектора 883
скаляра 883
Дифференцирование ковариантное
(абсолютное) 880
Диск вращающийся 575
—, заключенный в обойму 584
— круглый, нагруженный сосредото-
сосредоточенными силами 566
, общий случай нагружения 569
—.сжатый двумя силами 568
Жесткость геометрическая при кру-
кручении 381, 395
934
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Зависимости (соотношения) Коши 20,
29, 37 *
— Бельтрами 131, 133
— Бельтрами — Мичелла 369
— Ляме 860
— Сен-Венана 60
Задача Альманзи 461
— Буссинека 224
— Буссинека — Черрути 227
— Герца 306, 329
— Головина 505
— Дирихле внешняя 186
для полупространства 237
для сфероида 901
— изгиба авиационного профиля 444
• балки 483
,вариационная формулировка
437
гиперболоида 276
— Кирша 589
— краевая вторая внешняя 196
внутренняя 192
• для кольца 596
сферы 254
первая внешняя 196, 619
— внутренняя 191
— • для полупространства 240
¦ для круга 578
сферы 248
: теории дисторсий 206
— контактная, плоская 522
— кручения гиперболоида 279
— Ляме 599, 701
для полого цилиндра 335
шара 714
— Мичелла 445
— Неймана 373, 392
— о балке 482
— об изгибе стержня силами 430
— о кручении 388—429
— о плоской деформации плиты
482
— о штампе 306
— плоская нелинейной теории" упру-
упругости 753
¦ теории упругости 462, 470
— растяжения балки 483
— Римана, краевая 523
— Робена 187, 195
— — эластостатическая 187
— для шара 250
— —• эллипсоида 284
— Сен-Венана 366, 920
— •— плоская 484
— Файлона 350
— Фламана 516
— —, обобщение 518
Задачи аксиально-симметрические 139
— контактные 306
— краевые для бесконечной области
с отверстием 548
двусвязной области 552
односвязной конечной области
545
¦ линейной теории упругости 125
плоской теории упругости 544
— нелинейной теории упругости 687
— смешанные для полупространства
241
Закон Гука обобщенный 102, 112
— — — для плоской задачи 462
Закон состояния 101
в форме Фингера 637, 687
изотропного идеально-упругого
тела 633
квадратичный идеально-упруго-
идеально-упругого тела 659
Синьоринн 657
квазилинейный 659
— — линейной теории 102, 124
Мурнагана 666
Нейбера 673
Синьорини, упрощенный 662
среды 628
— термодинамики, первый 630
Значение главное интеграла по по-
поверхности 177
—• функционала стационарное 677
Значения главные девиатора 830
тензора 819, 824
Изгибание полосы в цилиндрическую
панель 779
Изгиб гиперболоида вращения парой
281
силой 280
Изгиб стержня 430
— — авиационного^профиля 443
— — прямоугольного сечения 434
эллиптического сечения 432
— тяжелого стержня 457
— цилиндрический плиты 95, 692
Изменение объема относительное
42
Инвариант первый тензора 812
Инварианты главные 27
— девиатора 829
— мер деформации главные 632
— тензора 821
главные 821, 876, 632
— — напряжений 44
— тензоров конечной деформации 85
Индекс немой 800
— свободный 800
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
935
Интегралы типа Коши 564
,главное значение 565
Интенсивность деформации сдвига
78, 651
— диполя 209
— касательных напряжений 32, 651 -
— центра расширения 208
История развития теории упругости
Квадрат линейного элемента 851
— тензора 812
Квазивекторы 811
Клин упругий 531—544
Кольцо круговое 595—606
— неконцентрическое 625
Компоненты вектора ковариантные
871
контравариантные 871
физические 871
— тензора 803
метрического, ковариантные 851
Координаты криволинейные 136, 850-
ортогональные 474
— лагранжевы 15
— материальные 15, 37
— ортогональные 138
— полярные 475
— сферические 851, 861
— цилиндрические 850, 860
— эллиптические 865
• вырожденные 863
— эйлеровы 15
Коэффициент линейного расширения
56
— Пуассона 51, 112, 120
, экспериментальное определение
388
— температурного расширения 601
— температуропроводности 122
— теплопроводности 121
Коэффициенты Ляме 111, 852
Критерий Мизеса 52
Круги Мора 30
Кручение гиперболоида вращения
279
— круглого цилиндра 94, 708
— полого цилиндра 343
— сжатого стержня 734
— стержня прямоугольного сечения
-401
— — круглого, с выточкой 404
, приближенное решение 416
— — трапецеидального сечения 419
• треугольного сечения 403, 407
— —• эксцентрического кольцевого
сечения 409
Кручение стержня эллиптического
кольцевого сечения 407
¦ сечения 397
удлиненного профиля сечения
420 .
— тела вращения 141
— трубы тонкостенной 424
— с перемычкой 428
Лапласиан скаляра 843, 856, 885
Линии координатные 850
Материал «гармонического типа» (по-
(полулинейный) 645
— Муни 689, 706
— несжимаемый 670
— при сверхвысоких давлениях
667
Матрица квадратная 802
Мера конечной деформации вторая
80
первая 68
— деформации вторая 58
Коши 72
логарифмическая 765
первая 57, 72
Меры деформации 82
Альманзи 632
Коши 632
Метод оптический 517
— подвижного триэдра 855
— полуобратный Сен-Венана 368
— Ритца 153, 719
Методы прямые вариационного исчи-
исчисления 153
Модуль вектора 801
— объемного сжатия 105
адиабатический 108
изотермический 108
— сдвига 105
— Юнга 51, 112
Модули упругости, обобщенные 634,
652
— —.связь между ними 114
Момент дипольный 209
— изгибающий 48, 273, 367
— крутящий 48, 273, 367
— поверхностных сил, главный 474
— сосредоточенный 208
в вершине клина 537
Моменты компонент тензора напря-
напряжений 45
— напряжений второго и более вы-
высокого порядка 52
— — первого порядка 47
— функции 45
93S
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Набла-оператор Гамильтона 839
Нагрузка «мертвая» 676
— на полупространство распределен-
распределенная нормальная 225
Нагружение балки полиномиальное
492
— — косинусоидальное 509
— — синусоидальное 494
сосредоточенной силой 497
— полуплоскости силой, направлен-
направленной вдоль границы 520
— — силами, нормальными к грани-
границе 518
Направления главные тензора 28, 819
Напряжение касательное 20
— нормальное 20
Напряжения главные 28, 640
касательные 32
— номинальные 275
— температурные в упругом полупро-
полупространстве 232
— тепловые 555
в сфере 259
в шаре 251
— в эллипсоидальной полости 292
Неравенства Трусделла 647
Неравенство Николаи 401
Несовместимость (Ink) 63
Области многосвязные (в задаче о
кручении) 427
Область бесконечная с отверстием
544
— двусвязная 623
¦ ¦ кольцеобразная 544
— односвязная конечная 544, 615
Объем двусвязный 197
Овал эпитрохоидный 618
Опыты Бриджмена 105, 668
Ортогональность обобщенная 361
Оси деформации главные 77
— тензора главные 876
Отверстие в бесконечной плоскости
586
Параметры нагружения 629
бифуркационные 725
Парадокс Карозерса 538, 924
Параллелепипед элементарный 21
Перемещение точки 14
Перемещения виртуальные 42
— термоупругие 217
Плоскость упругая 513—531
Плотность 13
¦ Площадка октаэдрическая 32
— ориентированная 17
Поверхности координатные 850
Поворот среды конечный 78
Поле напряжений 18
— перемещений плоское 90
Полость в упругой среде сфероидаль-
сфероидальная 299
эллипсоидальная 292
Полупространство упругое 223
Постоянная барьера 198
— диэлектрическая 36
Полуплоскость упругая 513—531
Потенциал термодинамический Гиб-
бса 118, 163, 630
, вариация 630
Потенциалы Буссннека 216, 217
— простого слоя на эллипсоиде 905
— теории упругости 176
Предел текучести ПО
Представление бигармонической функ-
функции 475
Преобразование аффинное 89, 806
— базиса 875
— конформное 607
— Круткова 133
— подобия начального состояния 87
— Стокса 847
Применение конформного преобразо-
преобразования 606—627
Принцип виртуальных перемещений
40, 674
— Гамильтона 153
— минимума дополнительной работы
148, 156
— — потенциальной энергии 148,
151
— Сен-Венаиа 163
— —, формулировка Мизеса 244
— стационарности дополнительной
работы 681
смешанный 148, 159
— упругой эквивалентности 163
Принципы вариационные при учете
температурных слагаемых 161, 914
статики 143
— энергетические 148
Произведение диадное векторов 809
— диады на вектор справа 809
¦— скалярное векторов 799
— тензора на вектор слева 806
справа 809
скаляр 806
Произведения Ляме 893
Производная ковариантная (абсолют-
(абсолютная) 881
Производные главных инвариантов
тензора по тензору 832
Пространство трехмерное Евклида
799
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
937
Профили удлиненные 420
Профиль авиационный 422, 443
Процесс деформирования адиабатиче-
адиабатический 108, 631
¦ изотермический 107, 631
Работа дополнительная 157
— деформации дополнительная 679
удельная 680, 682
— элементарная внешних сил 40, 102
•— —¦ удельная 41
— — удельная изменения объема 44
формы 44
Равновесие упругого цилиндра 331—
365
— упругой сферы 247—272
Рассмотрение «квазистатическое» 123
Распределение температуры стацио-
стационарное 559
Растяжение гиперболоида вращения
276
— кольца сосредоточенными силами
601
— одноосное 664, 669, 689, 732, 778
— пластинки с круговым отверстием
(задача Кирша) 589
¦— плоскости с круговым отверстием
589
— стержня 449
— упругой полосы 695
Расширение объемное 86
Реология 628
Решение Буссннека — Галеркина 135
— Карозерса — Ипглиса 538
— Лява 139
— Папковича — Нейбера 128, 177
— —¦ — для тел вращения 144
— приближенное задачи о кручении
стержня 416
— Треффтца 247
Решения однородные задачи о ци-
цилиндре 353
о полосе (брусе) 511
— Рибьера и Файлона 494
— задачи о равновесии цилиндра в
бесселевых функциях 346
— полиномиальные 339
Ротор вектора 840, 857, 884
— векторного произведения 842
•— тензора 842
Свертывание индексов 811
Сдвиг 59
— простой 92, 665, 690, 779
— чистый 33
Сдвиги главные 77
Сжатие всестороннее 688
— слоя 700
— упругой полосы 695
Сила инерции переносного движения
16
— объемная 16
— осевая 367
— перерезывающая 48, 273
— растягивающая 18, 273
— сосредоточенная 497, 513, 529,
531
— центробежная 16
Силы близкодействия 19
¦— внешние 15
— внутренние 15
— массовые 15
потенциальные 16
— поверхностные внешние 16
— поперечные 367
Символ Кронекера 800
Символы Кристоффеля второго рода
88, 879
первого рода (прямые скобки
Кристоффеля) 852
— Леви-Чивита 21, 801, 813
Система напряжений Максвелла элек-
электростатическая 36
— сил в малом объеме 209
— сил сверхстатическая 244
Системы сил статически эквивалент-
эквивалентные 163
Скаляр 799
— инвариантный 831
Скорости волн сдвига и сжатия 117
След тензора 812
Слой упругий 692—701
Соотношения Коши 21
Соприкасание поверхностей 324
Состояние напряженное плоское 467,
759
, Обобщенное 469
— среды конечное 13
— — натуральное 13, 635
начальное 13, 635
Способ Галеркина 154
— Канторовича 418
— сечений 17
Среда Генки 104, ПО
— Гука 104
— несжимаемая 634
— упрочняющаяся ПО
Стационарность дополнительной ра-
работы 680
— потенциальной энергии системы
675
Стержень призматический 366
Сходимость по энергии 155
938
Л'РЕДМЕТПЫИ УКАЗАТЕЛЬ
Тело Генки 673
— идеально-упругое 628
— Нейбера 673
— упругое 629
Температура абсолютная 106
— средняя 559
Тензор влияния 168, 175
— —-в упругом полупространстве
230
— второго ранга 802
— второй меры деформации 80
— деформации конечной, второй (тен-
(тензор деформации Альманзи — Гаме-
ля) 81
—, первый (тензор деформации
Коши — Грина) 75
линейный 59, 101
—• «деформация вектора» 841, 857,
884
— единичный 810
— изотропный 814
— инерции 804
— Ink Q 845, 890
— Кельвина — Сомильяна (тензор
влияния) 175
— — —,его аналог 514
— кососимметричный 807
— кривизны Римана —Кристоффеля
888
— метрический 872, 878
— напряжений 18, 39, 101, 220, 637,
642, 687, 722
• диадное представление 37
Пиолы — Кирхгоффа 644
.разбиение на шаровой тензор и
девиатор 32, 650
— — энергетический 43, 633
, измененный 672
— обратный 814
— одинаковых касательных напряже-
напряжений 35
— первой меры деформации 57, 72
— поворота 84, 642, 815
— податлиьости стержня 805
— производная вектора по вектору-
радиусу 840
Тензор Риччи 889
— силовой 208
— симметричный 807
— — положительный 823
— транспонированный 806
— функции напряжений 26, 756
— шаровой 32, 820
Тензоры высших рангов 811
— Леви-Чивита 754, 813, 873
— подобные 836
Теорема взаимности 167, 200
Теорема при учете температурных
слагаемых 172
— Гаусса обобщенная 176
— Кейли — Гамильтона 813 822,
829
— Кирхгоффа об единственности ре-
решения 182
— Максвелла 168
— о циркуляции касательных напря-
напряжений 393
— Риччи 882
— Стокса 848
— существования решения 191
Теоремы Стернберга 246
Теория сплошной среды линейная 102
— упругости моментная (несимме-
(несимметричная) 19
Теплоемкость при постоянном давле-
давлении 56
Термодинамики закон второй 107
первый 106
Тождества Риччи 889
Точка истока 168
— наблюдения 168
— центральная 204
Трансформанта Меллина 534
Труба под давлением (задача Ляме)
599, 701
Угол кручения 391
— подобия 652
девиаторов 656, 836
— сдвига 74
Удлинения относительные 59, 73
главные 640
Умножение векторное тензора на век-
вектор 810
— тензора на вектор справа 803
слева 806
Уравнение дифференциальное для
объемного расширения 127
— — цилиндрических функций 346
для функции напряжений Эри
466
— состояния Фингера 638, 772
— теплопроводности 121
Фурье 122
—¦ состояния в форме Генки 656
для тензора Пиолы 645
Уравнения интегральные второй крае-
краевой задачи 187
первой краевой задачи 185
— линейной теории упругости 124
в криволинейных коорди-
координатах 136
— в ортогональных коорди-
координатах 138
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
939
Уравнения Навье —Стокса 752
¦— нейтрального равновесия Саусвел-
ла 787
— равновесия в объеме 22
— — стержня интегральные 367
— равновесия теории упругости (урав-
(уравнения статики) 23
в перемещениях 126
в форме Тедоне
127, 240
, решение Папковича —
Нейбера 128, 129
, решение Аржаных — Сло-
бодянского 131
на поверхности 25
— способа Галеркина 156
кругового цилиндра 331
— состояния 763
— статики плоской задачи 463
Условие текучести Мизеса 111
Условия ортонормированности еди-
единичных векторов 800
— совместности (сплошности) дефор-
деформаций 61
Формула Гаусса — Остроградского
45, 846
— Грина 382
— Гурса 479
— Клапейрона 116
— Лауричеллы 209
— Муни 672
— Родрига 817
— Чезаро 63
Формулы Вейнгартена 67
— деривационные 855
— Колосова 477
— Колосова — Мусхелишвили 480,
549
— связи главных инвариантов 83
Функции Мусхелишвили 480, 547
— напряжений в задаче Сен-Вепана
372
— — Максвелла 26
— — Морера 26
— Папковича — Нейбера 227
— тензоров 830
Функция влияния 500
Функция депланации 385, 392
— кручения комплексная 392
— Лява 140, 184
— напряжений при кручении 389
Тимошенко 433
Эри 27, 454, 465
форма Мичелла 554
— положения 176
— тензорная под тензором 831
Центр вращения 211
— жесткости 384, 439
— изгиба 384
— расширения 210
Цилиндр «вывернутый наизнанку»
702, 707
Циркуляция вектора 847
Шар вращающийся 266
— гравитирующий 266
Штамп жесткий 306, 522
•— — плоский 309
— эллиптический в плане 315
— неплоский 313, 319
эллиптический в плане 321
— параболического очертания 528
— плоский 528
Щель в упругой среде круговая 300
эллиптическая 303
Эллипсоид вращающийся 281
Эффект Пойнтинга 691, 713
Эффекты второго порядка 736, 741,
928
Энергия внутренняя 630
удельная 106
— деформации потенциальная 106,
628, 631
удельная 109, 114, 631, 646
в формуле Муни 670, 672
линейно-упругого тела
114
— дисторсин потенциальная 202
— свободная 630
— системы потенциальная 149, 677
свободная 108
— энтропия 107, 630
Анатолий Исаакович Лурье
ТЕОРИЯ УПРУГОСТИ
М., 1970 г., 940 стр. с илл.
Редактор В. А. Пальмов
Техн. редактор Л. П. Колесникова
Корректор Л. Н. Воровина
Сдано в набор 24/11 1970 г. Подписано
к печати 7/IX 1970 г. Бумага 60Х90/,6.
Физ. печ. л. 58,75. Условн. печ. л. 58,75.
Уч.-изд. л. 62. Тираж 11000 экз. Т-12572.
Цена книги 4 р. 11 к. Заказ 528.
Издательство «Наука»
Главная редакция
физико-математической литературы.
Москва, В-71, Ленинский проспект, 15.
Ордена Трудового Красного Знамени
Ленинградская типография № 2 имени
Евгении Соколовой Главполиграфпрома
Комитета по печати при Совете Министров
СССР. Измайловский проспект, 29.