/




















































































































































































































































































































































































































































































































Text
А. Л. Гольденвейзер
Теория упругих
тонких оболочек
ИЗДАНИЕ ВТОРОЕ» ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
щ
ш
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
Москва 1976
531
Г.63
УДК 531
Теория упругих тонких оболочек, А. Л. Гольденвей-
Гольденвейзер, Главная редакция фнзико-математвческой литературы
изд-ва «Наука», 1976 г., стр. 512.
В книге со всей разумной полнотой и строгостью рассма-
рассматривается линейная статика тонкой упругой однородной изо-
изотропной оболочки. Выводятся общие уравнения теории, обсу-
обсуждаются возможные приближенные методы их решения, иссле-
исследуются краевые задачи, возникающие в процессе приближенного
расчета оболочек.
Проводится качественное исследование свойств напряженно-
деформированного состояния оболочки в зависимости от условий
закрепления ее краев и знака кривизны срединной поверхности.
Большое внимаиие уделено обоснованию теории оболочек, оценке
ее погрешностей и обсуждению путей уточнения.
В приложении излагаются некоторые положения теории
асимптотического интегрирования дифференциальных уравнений
в частных производных, в том виде, в котором эту теорию удоб-
удобнее всего использовать для расчета оболочек.
НЕ БОЛЕЕ1И КНИГИ В
одни руки и гх в две
ВИВЛИОТЗИГ4
КОЛОХЗА
ОСКОРЩк
Алексей Львович Гольденвейзер
ТЕОРИЯ УПРУГИХ ТОНКИХ ОБОЛОЧЕК
М., 1976 г., 512 стр. с илл.
Редактор В. А. Брострем
Техн. редактор Н. Я- Мурашова
Корректор О. А. Бутусова
Сдано в набор 19/11 1976 г. Подписано к печати П/Х1 1976 г. Формат
бумаги 70Х1081/., Фнз. печ. л. 32. Усл. печ. л. 44,8. Уч.-изд. л. 45.9.
Тираж 6000 экз. Т-20323. Цена 3 р 22 к. Заказ № 861.
Издательство «Наука>
>атуры
издательство «паука>
Главная редакция физико-математической литера
117071, Москва^ В-71, Ленинский проспект. 15
Отпечатано с матриц Ленинградской типографии Ni 6
в Московской типографии № 7 «Искра революции» Союзполнграфпрома
при Государственном комитете Совета Министров СССР
оо делам издательств, полиграфии и книжкой торговли.
Москва, Трехпрудный пер., 9.
Зак. 01620
20304—149
053 @2)-76
143-76
© Главная редакция
физико-математической литература
издательства «Наука», 1976
ОГЛАВЛЕНИЕ
Предисловие
ЧАСТЬ 1
ОБЩАЯ ТЕОРИЯ ОБОЛОЧЕК
Глава 1. Сведения нз теории поверхностей 12
§ 1. Криволинейные координаты на поверхности и первая квадратичная форма 12
§ 2. Основной триэдр поверхности 14
§ 3. Деривационные формулы Гаусса—Вейнгартена. Уравнения Кодацци—Гаусса 15
§ 4. Вторая квадратичная форма поверхности и индикатриса Дюпена 17
§ 5. Сопряженные линии, линии кривизны, асимптотические линии 19
§ 6. Дифференцирование вектора, заданного на поверхности 21
§ 7. Гауссова кривизна и изгибание поверхностей 22
§ 8. Криволинейные координаты в пространстве 22
Глава 2. Трехмерные уравнения теории упругости. Сведение к двумерным урав-
уравнениям . ... 25
§ 9. Уравнения теории упругости в триортогональной системе координат ... 25
§ 10. Гипотезы теории оболочек 26
§ П. Компоненты деформации трехмерной среды 27
§ 12. Обобщенный закон Гука 29
§ 13. Первое осредненное уравнение равновесия теории упругости 30
§ 14. Второе осредненное уравнение равновесия теории упругости 32
§ 15. Полная двумерная система дифференциальных уравнений теории оболочек 34
§ 16. Напряженно-деформированное состояние упругой среды оболочки .... 35
Глава 3. Статика теории оболочек 37
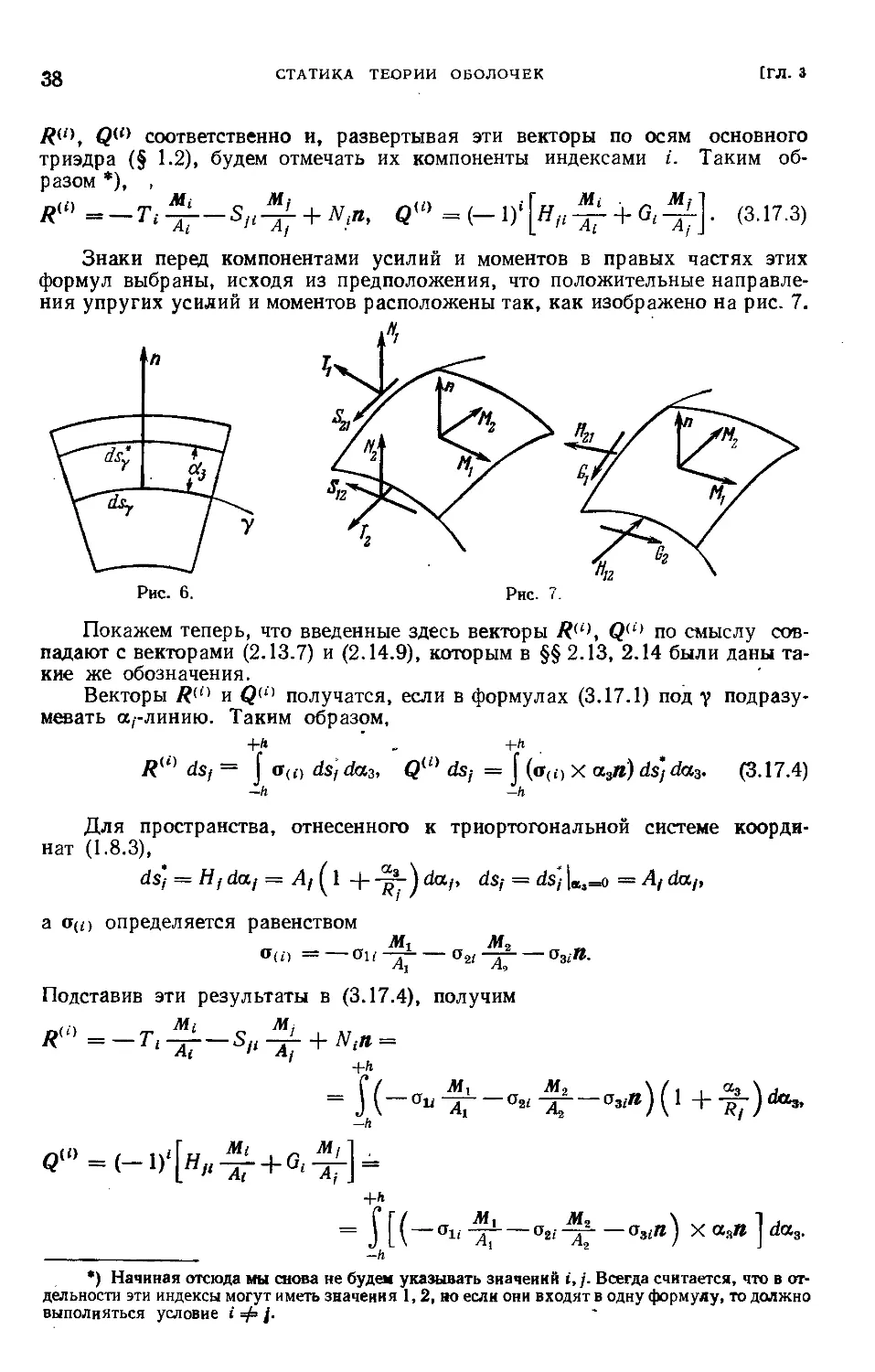
§ 17. Усилия и моменты 37
§ 18. Векторы внешних сил и внешних моментов 39
§ 19. Уравнения равновесия теории оболочек 40
§ 20. Усилия и моменты на косых сечениях 43
§ 21. Функции напряжения 44
Глава 4. Геометрия теории оболочек 47
§ 22. Векторы упругого перемещения и упругого вращения срединной по-
поверхности 47
§ 23. Компоненты тангенциальной деформации срединной поверхности оболочки 50
§ 24. Компоненты изгибной деформации срединной поверхности 51
§ 25. Производные от векторов упругого перемещения и упругого вращения 52
§ 26. Выражение компонент деформации и углов поворота через перемещения 53
§ 27. Определение перемещений по заданным компонентам деформации. Урав-
Уравнения неразрывности деформаций 54
Глава 5. Уравнения состояния. Общие вопросы 58
§ 28. Уравнения состояния (соотношения упругости) 58
§ 29. Дополнительное уравнение статики и шестое уравнение равновесия .... 60
§ 30. Работа сил трехмерной упругой среды оболочки 61
§ 31. Энергия деформации 64
§ 32. Общие теоремы теории оболочек 67
§ 33. Граничные условия 70
§ 34. Основные уравнения и формулы теории оболочек . • 73
§ 35. Полная система уравнений теории оболочек 74
§ 36. Статико-геометрическая аналогия 75
1*
ОГЛАВЛЕНИЕ
Глава 6. Тензорные уравнения теории оболочек 79
§ 37. Тензорная символика 79
§ 38. Тензоры срединной поверхности • 80
§ 39. Тензоры усилий и моментов 80
§ 40. Тензоры деформаций, перемещений и углов поворота 83
§ 41. Статические и геометрические соотношения теории оболочек в скалярной
форме 84
§ 42. Уравнения состояния (соотношения упругости) 85
§ 43. Преобразование тензорных уравнений 86
§ 44. Уравнения общей теории оболочек в произвольной ортогональной системе
координат 91
ч а с т ь и
ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА ОБОЛОЧЕК
Глава 7. Безмомеитиая теория 97
§ 1. Основное напряженное состояние 97
§ 2. Безмоментное напряженное состояние 99
§ 3. Чисто моментное напряженное состояние. Безмоментная теория оболочек 101
§ 4. Статические уравнения безмоментной теории 104
§ 5. Геометрические уравнения безмоментной теории 107
§ 6. Головная система уравнений безмоментной теории 108
§ 7. Статическая и геометрическая краевые задачи безмоментной теории .... 109
§ 8. Полная краевая задача безмоментной теории 111.
Глава 8. Теория простого краевого эффекта 113
§ 9. Исходные предположения теории простого краевого эффекта 113
§ 10. Разрешающее уравнение теории простого краевого эффекта 114
§11. Расчетные формулы 116
§ 12. Интегрирование разрешающего уравнения 119
Г л ава 9. Метод расчленения 124
§ 13. Область применимости метода расчленения напряженного состояния ... 124
§ 14. Схема применения метода расчленения 126
§ 15. Краевой эффект вблизи заделанного края 128
§ 16. Краевой эффект вблизи шарнирно опертого края 130
§ 17. Краевой эффект на свободном крае оболочки 131
§ 18. Краевой эффект у внутренней линии искажения напряженного состояния 133
§ 19. Заключительные замечания 135
Глава 10. Пологие оболочки. Напряженные состояния с большой изменяемостью 137
§ 20. Вырождение оболочки в пластинку 137
§ 21. Пологие поверхности и почти плоские системы координат 137
§ 22. Приближенная теории пологих оболочек 141
§ 23. Свойства разрешающих уравнений теория пологих оболочек 144
§ 24. Приближенная теория напряженных состояний с большой изменяемостью 146
Глава 11. Оболочки с асимптотическими линиями искажения 149
§ 25. Обобщенные краевые эффекты 149
§ 26. Свойства простых и вырожденных краевых эффектов 152
§ 27. Обобщение метода расчленения 154
§ 28. Поверхности нулевой гауссовой кривизны 155
§ 29. Приближенные методы расчета цилиндрических оболочек 158
Глава 12. Обзор приближенных методов расчета оболочек 162
§ 30. Границы применимости приближенных методов расчета оболочек .... 162
§ 31. Приближенные методы расчета цилиндрических оболочек 168
§ 32. Область применимости приближенных уравнений В. 3. Власова 172
ч А с т ь ш
КРАЕВЫЕ ЗАДАЧИ БЕЗМОМЕНТНОЙ ТЕОРИИ
Глава 13. Методы построения интегралов безмоментиых уравнений 175
§ 1. Общий интеграл полной системы безмоментных уравнений оболочек нулевой
кривизны 175
§ 2. Преобразование безмоментных уравнений сферической оболочки 178
§ 3. Интегрирование уравнений безмоментиой теории сферических оболочек 180
ОГЛАВЛЕНИЕ¦
§ 4. Применение теории аналитических функций комплексного переменного
в безмоментной теории сферических оболочек 183
§ 5. Преобразование безмоментных уравнений оболочки произвольного очер-
очертания 186
§ 6. Безмоментные ураннения оболочек, имеющих форму поверхностей второго
порядка положительной кривизны 188
§ 7. Безмоментные уравнения оболочек, имеющих форму поверхностей второго
порядка отрицательной кривизны 192
§ 8. Применение обобщенных аналитических функций к безмоментной теории
произвольных оболочек положительной кривизны. • 193
Глава 14. Безмоментиые оболочки вращения. Применение тригонометрических
рядов .-.••. '96
§ 9. Поверхности вращения 196
§ 10. Статические и геометрические безмомеитные уравнения оболочек вращения 198
§ 11. Оболочки вращения второго порядка. Параболические оболочки вращения 199
§ 12. Применение тригонометрических рядов в статической безмоментной задаче
оболочек вращения 202
§ 13. Интегральные уравнения равновесия безмомеитиой теории. Применение
. к оболочкам, вращения 204
§ 14. Применение тригонометрических рядов в безмоментной геометрической
задаче оболочек вращения 208
Глава 15. Безмомеитиые оболочки нулевой кривизны 211
§ 15. Постановка краевых задач для безмоментных уравнений 211
§ 16. Граничные задачи безмоментной теори-и оболочек нулевой кривизны ... 212
§ 17. Консольная оболочка нулевой кривизны 213
§ 18. Консольная оболочка нулевой кривизны (продолжение) 215
§ 19. Консольная оболочка нулевой кривизны с косыми краями 216
§ 20. Изгибания поверхностей нулевой кривизны 217
§ 21. Теорема о возможных изгибаниях 219
§ 22. Шарнирно опертая оболочка нулевой кривизны 223
§ 23. Жестко заделанная оболочка нулевой кривизны 225
§ 24. Оболочка нулевой кривизны со свободными краями 226
§ 25. Задачи с дополнительными условия-ми внутри области 227
Глава 16. Выпуклые замкнутые безмомеитиые оболочки. Сосредоточенные воз-
воздействия 230
§ 26. Полюсы комплексной функции иапряжеии-и 230
§ 27. Действие сосредоточенных сил и моментов на полную сферическую обо-
оболочку 237
§ 28. Перемещения полной сферической оболочки под сосредоточенными силами
и моментами 238
§ 29. Действие сосредоточенных сил и моментов на произвольную оболочку по-
положительной кривизны 242
Глава 17. Безмомеитиые купола 245
§ 30. Сферический купол с одним геометрическим и одним статическим гранич-
граничным условием 245
§ 31. Сферический купол с одним геометрическим и одним статическим гранич-
граничным условием (продолжение) 250
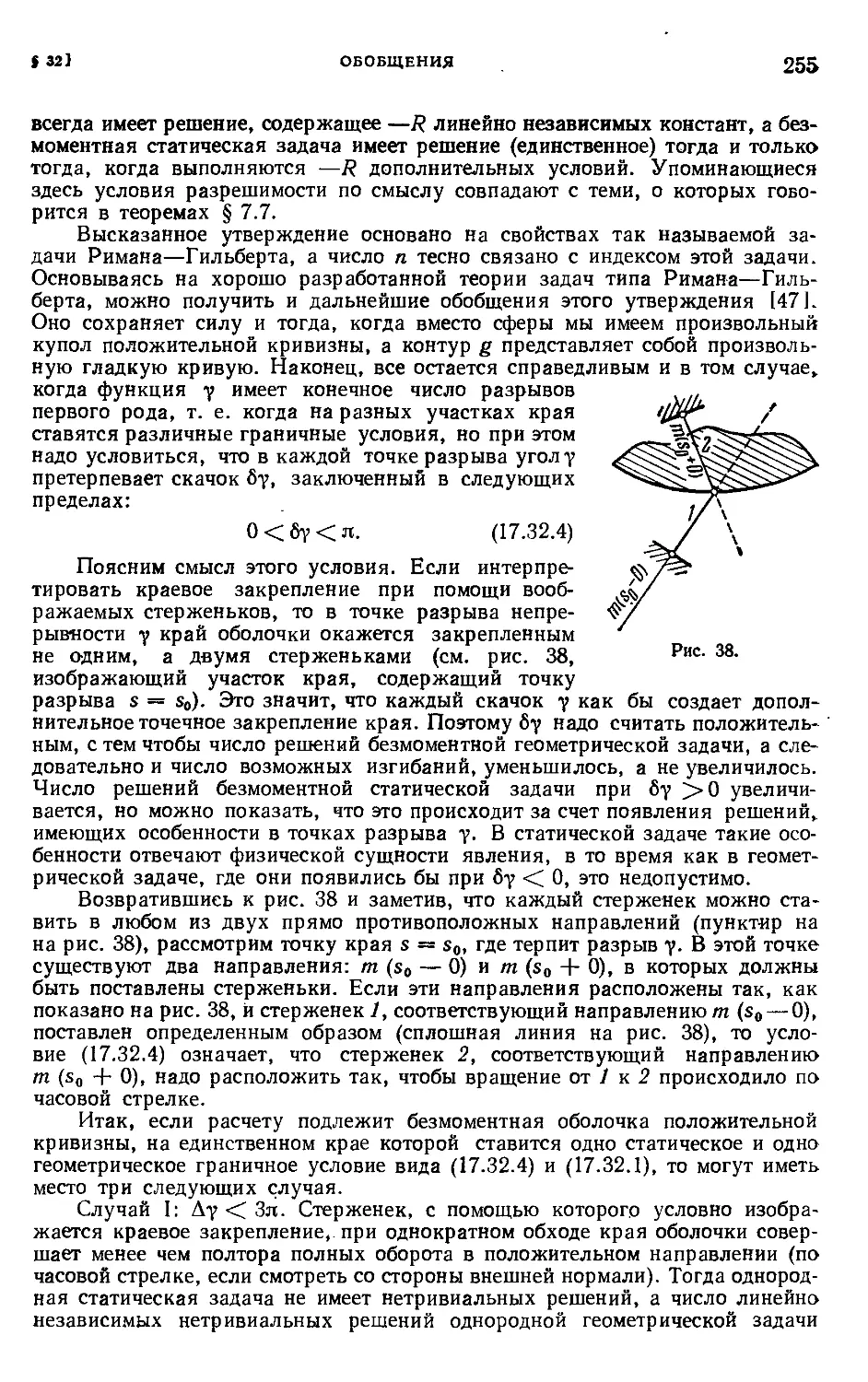
§ 32. Обобщения 254
§ 33. Купол с одним геометрическим и одним статическим тангенциальными усло-
условиями. Полная краевая задача 258
§ 34. Сферический купол с двумя геометрическими граничными условиями . . . 259
§ 35. Обобщения 260
Г л а в.а 18. Безмомеитиые оболочки с двумя краями 262
§ 36. Оболочка положительной кривизны со снободными краями 262
§ 37. Оболочка с двумя краями (однотипные граничные условия) 263
§ 38. Оболочка с двумя неоднотипно закрепленными краями 266
§ 39. Оболочка с двумя неоднотипно закрепленными краями (продолжение). . . 269
ОГЛАВЛЕНИЕ
ЧАСТЬ IV
ИТЕРАЦИОННЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ УРАВНЕНИЙ
ТЕОРИИ ОБОЛОЧЕК
Глава 19. Итерационные процессы построения интегралов уравнений теории
оболочек 273
§ 1. Краткая запись уравнений теории оболочек 273
§ 2. Безмоментный итерационный процесс 274
§ 3. Чисто моментный итерационный процесс 277
§ 4. Итерационный процесс для основного напряженного состояния 278
§ 5. Главные уравнения безмоментного и чисто моментного итерационных про-
процессов 280
§ 6. Построение частного интеграла 281
§ 7. Оболочки переменной толщины 282
§ 8. Итерационный процесс для простого краевого эффекта 282
§ 9. Уравнения итерационного процесса для простого краевого эффекта .... 285
Глава 20. Итерационные процессы выполнения граничных условий. Купола . . . 289
§ 10. Метод расчленения 289
§ 11. Купол с двумя тангенциальными закреплениями 294
§ 12. Купол с одним жестким тангенциальным закреплением 295
§ 13. Купол с одним нежестким тангенциальным закреплением 298
§ 14. Купол с одним нежестким тангенциальным закреплением (продолжение) 300
§ 15. Купол с косым закреплением 301
§ 16. Купол, не имеющий тангенциальных закреплений 303
Глава 21. Итерационные процессы выполнения граничных условий. Оболочка
с двумя краями 304
§ 17. Оболочка с двумя краями 304
§ 18. Оболочка с двумя краями, закрепленными в обоих тангенциальных направ-
направлениях 305
§ 19. Оболочка положительной кривизны с двумя краями (одно тангенциальное
закрепление) 306
§ 20. Оболочка отрицательной кривизны с двумя краями (одно тангенциальное
закрепление) 307
§ 21. Оболочка с двумя неоднотипно закрепленными краями 309
§ 22. Оболочка с двумя неоднотипно закрепленными краями (случай приложе-
приложения краевых сил) 310
§ 23. Оболочка с изломом срединной поверхности 311
§ 24. Оболочка с изломом срединной поверхности. Краевые задачи 315
§ 25. Оболочка с изломом срединной поверхности. Краевые задачи (продолжение) 318
Глава 22. Зависимость напряженного состояния оболочки от услбвий закрепле-
закрепления ее краев 322
§ 26. Безусловная и условная применимость безмоментной теории 322
§ 27. Физический смысл непротиворечивых значений ноказателей интенсивности 324
§ 28. Асимптотика напряженно-деформированного состояния при безусловной
и условной применимости безмоментной теории 325
§ 29. Случай неустойчивой асимптотики напряженно-деформированного состоя-
состояния оболочки ' 328
§ 30. Зависимость асимптотики напряженно-деформированного состояния обо-
оболочки от нетангенциальных закреплении . 330
ЧАСТЬ V
КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
Глава 23. Применение тригонометрических рядов 333
§ 1. Уравнения теории круговых цилиндрических оболочек 333
§ 2. Разрешающее уравнение 335
§ 3. Применение тригонометрических рядов по переменной 6 338
§ 4. Применение тригонометрических рядов по переменной | 342
ОГЛАВЛЕНИЕ
§ 5. Расчет замкнутой круговой цилиндрической оболочки в тригонометрических
рядах по 6 346
§ 6. Расчет открытой круговой цилиндрической оболочки в тригонометрических
рядах по | 347
Глава 24. Замкнутые круговые цилиндрические оболочки 349
§ 7. Свойства корней характеристического уравнения B3.3.6) 349
§ 8. Нулевые корни и их физический смысл 356
§ 9. Анализ напряженного состояния замкнутой цилиндрической оболочки . . . 358
§ 10. Анализ напряженного состояния замкнутой круговой цилиндрической обо-
оболочки (продолжение) 361
§ 11. Приближенные методы построения обобщенного основного напряженного
состояния 364
§ 12. Приближенный метод построения простого краевого эффекта . 370
§ 13. Напряженное состояние с большой изменяемостью 372
§ 14. Приближенные методы расчета замкнутых круговых цилиндрических
оболочек 376
Глава 25. Открытые круговые цилиндрические оболочки 379
§ 15. Свойства корней характеристического уравнения B3.4.9) 379
§ 16. Приближенные методы расчета открытых цилиндрических оболочек .... 383
ЧАСТЬ VI
ОБОСНОВАНИЕ ТЕОРИИ ОБОЛОЧЕК
Глава 26. Итерационные процессы интегрирования уравнений теории упругости 388
§ 1. Трехмерные уравнения теории упругости 388
§ 2. Преобразование уравнений теории упругости 390
§ 3. Интегрирование уравнений теории упругости 391
§ 4. Основной итерационный процесс 396
§ 5. Сопоставление с двумерной теорией оболочек 399
§ 6. Вспомогательный итерационный процесс 404
Глава 27. Погрешности теории оболочек 409
§ 7. Нормальная асимптотика напряженно-деформированного состояния. . . 409
§ 8. Асимптотические погрешности гипотез теории оболочек 411
§ 9. Асимптотические погрешности гипотез теории оболочек (продолжение) 415
§ 10. Область применимости итерационной теории оболочек 418
§ 11. Область применимости итерационной теории оболочек (продолжение). . . 421
§ 12. Чисто моментное напряженное состояние 422
§ 13. Обобщенный краевой эффект 423
Глава 28. Теория пограислоя 428
§ 14. Преобразование уравнений теории упругости 428
§ 15. Преобразование уравнений теории упругости (продолжение) 430
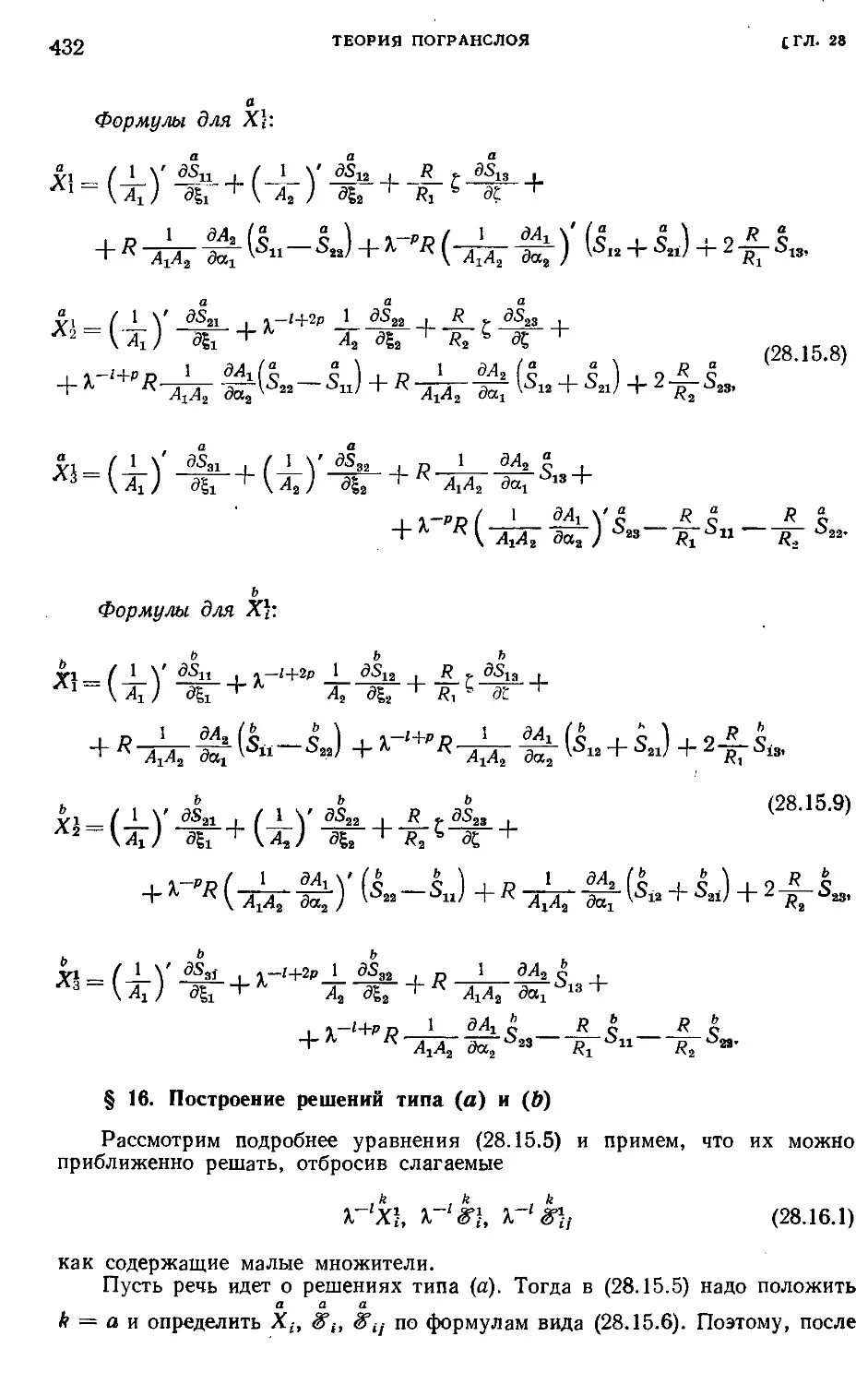
§ 16. Построение решений типа (а) и (й) 432
§ 17. Плоский и антиплоский погранслои 435
> 18. Структура полного напряженно-деформированного состояния оболочкв 436
Глава 29. Взаимодействие пограислоя с внутренним напряженным состоянием
оболочки 439
§ 19. Свободный край . 439
§ 20. Жестко заделанный край 446
§ 21. Шарнирно опертый край 451
§ 22. Приведенные граничные условия 457
§ 23. Краевое напряженно-деформированное состояние оболочки 461
§ 24. Решение вспомогательных плоских и антиплоских задач 464
Пр вложение. Асимптотическое интегрирование уравнений в частных произ-
производных 469
§ 1. Простой итерационный процесс 470
§ 2. Интегралы с большой изменяемостью . 471
§ 3. Интегралы с большой изменяемостью для уравнений с малой главной частью 473
§ 4. Интегралы с заданной квазистацнонарной линией 476
. § 5. Интегралы с заданной квазистационар ной линией. Обобщение 477
§ 6. Интегралы, соответствующие r-кратиому семейству характеристик L . . . 478
g ОГЛАВЛЕНИЕ
§ 7. Интегралы, соответствующие г-кратному семейству характеристик L (про-
(продолжение) . . 481
§ 8. Интегралы, соответствующие r-кратному семейству характеристик N.. . . 482
§ 9. Интегралы, соответствующие г-кратному семейству характеристик Л/ (про-
(продолжение). '.'.'... ' 484
§ 10. Интегралы с- заданной характеристической квазистапионарной линией . . . 485
§ 1,1. Частный интеграл 488
§ 12. Решение краевых задач ,.„ 489
§ 13. Решение краевых задач (продолжение) 493
§ 14. Краевая задача теории оболочек 497
§ 15. Изменяемость напряженно-деформированного состояния оболочки .... 499
§ 16. Зависимость изменяемости иапряжеиио-деформированного состояния обо-
оболочки от изменяемости краевого воздействия 501
Литература- . . . .' ; . . . . 505
Предметный указатель 511
ПРЕДИСЛОВИЕ
В книге рассматривается линейная статическая задача теории оболочек.
Предполагается, что материал оболочки однороден и изотропен и что o6oj
лочка не имеет подкреплений. В рамках всех этих ограничений автор стре-
стремился рассмотреть задачу с максимальной общностью и с разумной (в книге,
предназначенной для механиков) математической строгостью.
Теорию оболочек, в принципе, можно трактовать как один из разделов
общей теории твердых деформируемых тел, и поэтому, выделяя ее в самостоя-
самостоятельную дисциплину, необходимо с максимальной четкостью выявить спе-
специфические свойства оболочки как объекта исследования, а именно, свойства,
связанные с малостью ее толщины. Этой цели автор старался подчинить все
изложение книги.
Еще одна особенность теории оболочек, определяющая характер изло-
изложения, заключается в ее практической направленности. Это объясняется
как тем, что оболочка весьма широко используется в реальных конструкциях,
так и тем, что значение точных решений возникающих в ней краевых задач
в значительной степени обесценено погрешностями, содержащимися в их
формулировке. Поэтому на первый план здесь выдвигаются приближенные
подходы, и основное внимание уделяется тем свойствам тонкой оболочки,
на которых могут базироваться те или иные упрощения расчета.
С математической точки зрения особенностью книги является широкое
использование асимптотических подходов, что естественно вытекает из вы-
высказанных выше соображений. Кроме того, больший, чем обычно, удельный
вес имеют геометрические аспекты теории. Сильнее, чем в первом издании,
подчеркивается связь теории оболочек с теорией бесконечно малых изгиба-
изгибаний поверхностей.
Второе издание книги радикально отличается от первого. В частности,,
изменены и обозначения, которые теперь выбраны так, чтобы упростить-
запись формул.
Общие уравнения двумерной теории оболочек выводятся в части 1 при
помощи гипотез, которые пока, как и в первом издании, принимаются на
веру. Однако теперь в книгу введен новый раздел (часть VI), в котором
проблема сведения трехмерных краевых задач теории упругости к двумер-
двумерным задачам теории оболочек решается методом асимптотического интегри-
интегрирования. Здесь дается обоснование гипотез теории оболочек, обсуждается
область их применимости, оцениваются связанные с ними погрешности и на-
намечаются пути уточнения.
Все общие уравнения и формулы теории оболочек в частях 1 и VI вы-
выводятся в предположении, что срединная поверхность оболочки отнесена
к линиям кривизны. Эти результаты переносятся на случай произвольной
метрики при помощи тензорного формализма.
Приближенные методы расчета оболочек обсуждаются в части II. Здесь
широко используются различные гипотезы, по поводу которых даются не-
некоторые разъяснения, но вопросы более строгого обоснования принятых упро-
упрощающих предположений перенесены в последующие разделы книги. Теория
ПРЕДИСЛОВИЕ
асимптотического интегрирования дифференциальных уравнений при изло-
изложении приближенных методов почти не используется (даются только форму-
формулировки некоторых выводов, к которым она приводит). В связи с этим зна-
знание теории асимптотического интегрирования не считается обязательным для
чтения второго издания книги. Эта теория изложена (в новой трактовке)
в приложении.
Больше, чем в первом издании, внимания уделено методам интегриро-
интегрирования так называемых безмоментных уравнений теории оболочек. Этому
зюсвящена часть III.
Новой является во втором издании часть IV. В ней строятся некоторые
итерационные процессы, позволяющие дать обоснование гипотезам, приня-
принятым в части II, но основное внимание уделено исследованию влияния условий
закрепления на характер напряженно-деформированного состояния обо-
оболочки.
Часть V посвящена обстоятельному исследованию круговой цилиндри-
цилиндрической оболочки. Оно представляется автору полезным, так как, во-первых,
именно круговая цилиндрическая оболочка наиболее часто встречается на
практике, а во-вторых, для нее уравнения теории оболочек решаются отно-
относительно легко, и это позволяет более конкретно осмыслить общие свойства
напряженно-деформированного состояния оболочки.
Библиография в книге совершенно не претендует на полноту. В нее,
помимо монографий, включены только те работы, в которых содержится мате-
материал, имеющий прямое отношение к вопросам, разбираемым в книге. Пре-
Преобладание отечественных работ объясняется тем, что они оказали большее
влияние на научные взгляды автора книги.
Формулы всюду нумеруются тремя числами. Первая из них указывает
главы, для которых принята сквозная нумерация, а вторая — параграфы,
которые в каждой части нумеруются заново.
С рукописью этой книги ознакомился академик Арм. ССР С. А. Амбар-
цумян, сделавший ряд весьма ценных замечаний. Автор принял их с большой
признательностью и внес соответствующие исправления. Автор также выра-
выражает глубокую благодарность доктору физико-математических наук
Г. Н. Чернышеву, кандидатам наук М. И. Гусейн-Заде, Е. М. Зверяеву,
Н. Н. Рогачевой, а также О. Н. Смирновой, Л. В. Марковой, В. С. Бойцо-
Бойцовой, Т. С. Федотовой и А. Л. Радовинскому, оказавшим большую помощь
<в работе над книгой.
А. Гольденвейзер
Ч а с т ь 1
ОБЩАЯ ТЕОРИЯ ОБОЛОЧЕК
В этом разделе книги строятся и обсуждаются общие соотношения дву-
двумерной теории оболочек. Все эти уравнения и формулы выводятся из трех-
трехмерных уравнений теории упругости на основе некоторых гипотез, которые
пока принимаются без какого бы то ни было обоснования.
Используемые здесь гипотезы необычны, хотя в сущности они мало
отличаются от гипотез Кирхгофа—Лява. Автор отдает себе отчет, что его
предположения не обладают такой физической наглядностью, как предпо-
предположения Кирхгофа—Лява, но они имеют и свои преимущества, которые
выявляются в части VI. В ней показано, что соответствующая этим гипотезам
теория заслуживает названия итерационной в том смысле, что ее можно рас-
рассматривать как исходное приближение итерационного процесса интегриро-
интегрирования уравнений теории упругости. При обсуждении и сопоставлении воз-
возможных гипотез теории оболочек автор стремился подчеркнуть, что, если не
принимать в расчет вопросы обоснования и уточнения теории оболочек, то
выбор гипотез не играет существенной роли (конечно, если не выходить за
разумные рамки). Поэтому читатель, питающий вполне объяснимую симпа-
симпатию к гипотезам Кирхгофа—Лява, найдет в книге все вытекающие из них
соотношения.
Оценки ошибок гипотез теории оболочек, в том числе и гипотез Кирх-
Кирхгофа—Лява, обсуждаются в части VI. Это сделано потому, что порядок оши-
ошибок существенно зависит от некоторых свойств искомого напряженно-дефор-
напряженно-деформированного состояния, в особенности от его изменяемости. Обо всем этом
с достаточной определенностью удобно говорить только после изложения
соответствующих понятий.
При выводе общих уравнений и формул теории оболочек использована
векторная символика. Тензорной записи уравнений теории оболочек посвя-
посвящена последняя, глава части I. Автор не пытался при помощи тензорной сим-
символики избежать необходимости выписывать громоздкие соотношения теории
оболочек, так как в последующих разделах книги обсуждаются методы инте-
интегрирования уравнений теории оболочек, а для этого необходимо исходить из
их развернутой записи.
Больше, чем в других книгах, здесь уделено внимание геометрическим
аспектам теории оболочек и особенно выделена роль понятия бесконечно
малых изгибаний. Это необходимо для лучшего понимания материала, из-
изложенного в частях II—IV.
ГЛАВА 1
СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ
§ 1. Криволинейные координаты на поверхности
и первая квадратичная форма
В первой главе, кратко и почти без доказательств, излагаются те сведе-
сведения из теории поверхностей, которые используются в дальнейшем.
Кривую в пространстве трех измерений можно задать векторным урав-
уравнением
г = г@, A.1.1)
где г — радиус-вектор кривой, a t — произвольный параметр.
Равным образом, поверхность в пространстве трех измерений опреде-
определяется векторным уравнением
M = M(alt a2), A.1.2)
где М — радиус-вектор поверхности; alt а2 — произвольные параметры.
Равенством A.1.2) не только определяются геометрические свойства по-
поверхности, но и дается способ задавать точки на ней, так как каждой паре
численных значений параметров (alt a2) соответствует определенная точка
(или точки) на поверхности. Допустим, что параметр а,1 сохраняет постоян-
постоянное значение аг = a10, a а2 изменяется. Тогда уравнение A.1.2) определит
пространственную кривую, лежащую на рассматриваемой поверхности.
Такие линии называются а2-линиями, так как они характеризуются тем, что
на них изменяется только параметр а2. Совокупности всех значений а10,
заключенных в определенном интервале, будет соответствовать семейство
а2-линий. Так же можно ввести и понятие о семействе аглиний (примеры
поверхностей, отнесенных к криволинейной системе координат, приведены
в §§ 10.21, 11.28, 13.6, 13.7, 14.9).
Задав одновременно значения обоих параметров, мы определим на по-
поверхности точку (или. точки),-являющуюся пересечением некоторой о^-линии
с некоторой а2-линией. Таким образом, имеет место полная аналогия между
поверхностью, заданной уравнением A.1.2), и плоскостью, отнесенной к опре-
определенной системе координат, и поэтому про поверхность, заданную уравне-
уравнением A.1.2), говорят, что она отнесена к криволинейной системе координат,
а а±- и а2-линии называют координатными линиями.
Если в уравнении A.1.2) произвести замену независимых параметров по
формулам вида
ai=ai(ai, a2), aj = а'ц(оц, Ог), A-1-3)
то получится уравнение
М' = М' (ai, аг).
§ 1] КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ И ПЕРВАЯ КВАДРАТИЧНАЯ ФОРМА J3
Оно определяет, разумеется, ту же поверхность, что и уравнение A.1.2),
но криволинейные координаты, к которым отнесена эта поверхность, изме-
изменятся. Однако в частном случае, когда формулы A.1.3) имеют вид
а{ = а( (ai), аг = аг (а2),
геометрическое очертание координатных линий останется прежним, так как
при этом постоянным значением аг и а2 отвечают постоянные значения ai, ai
соответственно.
Введем обозначения
м дм » дМ
1 дах 2 да2
а2
и рассмотрим векторы Мх и М2. Они, очевидно, направлены по касательным
к а^ и а2-линиям соответственно. Обозначим их длины через Аи Аг. Тогда
будем иметь
М\ = А\, N11 = AI, A.1.4)
^.-^ = cosx, A.1.5)
где х — угол между координатными линиями.
Как всегда делается в теории поверхностей, будем предполагать, что
всюду в интересующей нас области
= 0, A.1.6)
т. е. что а^ и а2-линии нигде не касаются друг друга.
Зададим на поверхности две сколь угодно близкие точки (alt a2) и (ax +
+ dau a2 + da2), которые определят некоторое направление, произвольно
ориентированное относительно координатных линий. Тогда главная часть
приращения, которое получит вектор М при переходе от первой точки к«/
второй, будет
dM = Ml dax -\- Ж
Отсюда, пользуясь соотношениями A.1.4) и A.1.5), получим формулу для
квадрата дифференциала длины дуги произвольной линии на поверхности
= ds2 = AI da? + 2AiA2 cos x dai da2 -f Ai dal A.1.7)
Правая часть этого равенства квадратична относительно dalt da2 и назы-
называется первой квадратичной формой поверхности. Она вполне определяется
заданием трех величин Л„ Л2, %, которые здесь будут называться коэффи-
коэффициентами первой квадратичной формы *).
Первая квадратичная форма поверхности определяет ее внутреннюю
геометрию. Под этим подразумевается следующее. Пусть alt a2 выражены
через параметр (J:
оц = аг ф), а2 = а2 ф).
Тогда равенством A.1.2) вектор М будет определяться как функция одного
параметра р. Это значит, что написанные равенства можно рассматривать как
уравнение некоторой кривой у, лежащей на поверхности. Выразив в A.1.7)
дифференциалы dalt da2 через dp, получим формулу для dsv — дифферен-
дифференциала длины дуги у:
*) Строго говоря, коэффициентами первой квадратичной формы называются величины
А\, А\ и Л-[Л 2 cos х. но в теории оболочек удобнее оперировать величинами Ах, Ах и %.
14
СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ
[ГЛ. 1
в которой правую часть равенства можно построить, зная только Аи А%, %
и задав уравнения кривой у. Уметь строить дифференциалы длин дуг кривых
на поверхности — это и значит определить внутреннюю геометрию по-
поверхности. ,
Уравнение поверхности A.1.2) при построении dsy непосредственно не
используется. Поэтому, если есть две поверхности с одинаковыми первыми
квадратичными формами, то геометрия на обеих поверхностях будет одина-
одинакова. Показано, что можно строить семейства поверхностей
М = М (аь
a).
A.1.8)
зависящих от непрерывного параметра а, для которых первая квадратичная
форма одинакова, т. е. не зависит от а. Равенство A.1.8) при фиксированном а,
например, при а = О, можно рассматривать как уравнение некоторой по-
поверхности So, а под поверхностями Sa, получающимися при а ф 0, понимать
результат некоторой непрерывной деформации поверхности So. Если, как мы
считаем, первая квадратичная форма не меняется, то при переходе от So
к Sa сохранятся длины линий на поверхностях, а следовательно, не изменятся
и углы между линиями (так как для сколь угодно малых криволинейных тре-
треугольников имеет силу плоская тригонометрия). Такая деформация, т. е.
деформация поверхности, при которой длины нанесенных на ней линий и углы
между ними сохраняются, называется изгибанием. Это понятие играет важ-
важную роль в теории тонких оболочек.
§ 2. Основной триэдр поверхности
Введем единичный вектор нормали к поверхности и обозначим его через».
Он ортогонален векторам Мг и М2 и связан с ними соотношением
п =
мы назовем основными
sin x * s
(знак Х обозначает векторное произведение).
Тройку единичных векторов -г-Мг, -т- М2,
1 2
векторами поверхности A.1.2) и будем говорить, что в совокупности они обра-
образуют основной триэдр поверхности.
В силу условия A.1.6) основные
векторы нигде не лежат в одной пло-
плоскости. Отсюда вытекает, что любой
вектор 5 (а1г а2) может быть пред-
представлен в виде линейной комбинации
трех основных векторов
fs2^- + snn. A.2.1)
Про вектор, представленный
в форме A.2.1), будем говорить, что
он развернут по осям основного три-
триэдра, а скалярные величины sb s2, sn
рнс jt будем называть основными компонен-
компонентами вектора S.
Если криволинейные координаты на поверхности М ортогональны
(%—п/2), то основной триэдр будет состоять из взаимно ортогональных век-
векторов. Тогда slf s2, sn в формуле A.2.1) по смыслу совпадают с проекциями
$3] ФОРМУЛЫ ГАУССА—ВЕЙНГАРТЕНА. УРАВНЕНИЯ КОДАЦЦИ—ГАУССА JCJ.
вектора 5 на оси основного триэдра, а формулы для попарных векторных,
произведений векторов основного триэдра будут иметь вид
Здесь знаки расставлены, исходя из предположения, что основной три
эдр ориентирован так, как показано на рис. 1.
§ 3. Деривационные формулы Гаусса—Вейнгартена.
Уравнения Кодацди—Гаусса
Введем обозначения
и поставим перед собой задачу представить Мц, nt как линейные комбинации,
векторов М1г Мг и п.
Формулу для Жц в теории поверхностей принято записывать так:
Мц = Т\,Мх + Т*цМ2 + Li,n (i, /=1,2). A.3.1
Здесь скалярные коэффициенты при Мг и М2 обозначены при помощи
так называемых символов Кристоффеля, т. е. буквы Г с тремя индексами^
из которых два нижних индекса показывают, по каким переменным дифферен-
дифференцируется М в левой части соответствующего равенства, а верхний индекс
показывает, при какой производной от М стоит данный коэффициент.
Помножая скалярно равенство A.3.1) на и и помня, что вектор и орто-
ортогонален Л1, и М2, получим
Lit = n-Mlt (i, /=1,2). A.3.2).
Эту формулу можно преобразовать и к другому виду, заметив, что
nMt = 0 0 = 1,2).
Дифференцируя это равенство по а,,, получаем
пгМ1-{-пМц = 0 (i = 1,2)
и, следовательно,
Ltl= — nrMi= — ni-Ml. A.3.3)
Величины L{,, определенные формулами A.3.2) или A.3.3), называются
коэффициентами второй квадратичной формы, которая будет обсуждаться
в следующем параграфе.
Символы Кристоффеля могут быть выражены через коэффициенты первой
квадратичной формы Ль Л2 и %. Соответствующие формулы выводятся
в любом курсе теории поверхностей; для случая, когда поверхность отне-
отнесена к ортогональным координатам, они имеют вид
i tt —
дАс
1 »¦ ~ At dai ' i tt — ? da, ' l 4 ~ l ft ~ At da, ' V-o.t)
Здесь и всюду в дальнейшем считается, что индексы могут принимать
значения 1, 2, но не могут быть равны друг другу. Это значит, что если в фор-
формулу входит только один из этих индексов, то ему надо придавать значения 1
и 2, а если в формулу входят оба индекса i, j, то в этой паре индексов надо
придавать две и только две пары значений t = 1, / = 2 и t = 2, / = 1. Такое
правило будет применяться всегда, когда не оговорено противоположное.
Jg СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ [ГЛ. Г
Оно, в частности, означает, что всякое равенство, содержащее индексы I, /,
надо рассматривать как двойное.
¦Вектор й, лежит в касательной плоскости, так как л2 = 1, откуда
Таким образом, л,- можно представить в виде линейной комбинации век-
векторов Мi и М2. Соответствующие формулы для случая ортогональных криво-
криволинейных координат записываются так:
n'~ aT~a7~~a~~a~ { '
Их легко проверить, помножая скалярно написанные равенства на Mt и учи-
учитывая A.3.3) и A.1.4).
Нетрудно вывести и соотношения, при помощи которых развертываются
по осям основного триэдра производные первого порядка от основных век-
векторов -г- М, и -т- М2. Для этого надо преобразовать A.3.1) к виду
д I Mi \ Aj Mj Ln g I Mj \ д, jfl. Ltj
В правильности этих формул можно убедиться, выполнив дифференци-
дифференцирование в левых частях равенств и приняв во внимание A.3.1) и A.3.4).
Равенства A.3.1) или A.3.6) вместе с A.3.5) образуют деривационные
формулы Гаусса—Вейнгартена и играют важную роль в теории поверхностей.
Они дают возможность выразить любую производную от вектора М через Мх,
М2 и п. Для этого надо дифференцировать нужное число раз уравне-
уравнения A.3.1), заменяя величины М1и М12, М21, УИ22, пу и п2 через М,, М2
и п при помощи A.3.1) и A.3.5).
Разложим вблизи какой-либо точки а,1 = а10, а2 = а20 радиус-вектор
поверхности в степенной ряд:
м = м°+ж?gi ~ ai° + mi aa ~ a*° + Шх (ctl 7laioJ +
+ Mh {ai ~ aioJ ,("8 ~ "m) + Mh ( ~a"f + • • • A.3.7)
(нуликами сверху отмечается, что значения соответствующих векторов надо
брать при ах = а10 и а2 = а20) и выразим .Mil, М\ъ, . . . через М\, Mi, п.
Так как в деривационные формулы входят только коэффициенты первой и
второй квадратичных форм, то правая часть равенства A.3.7) будет пол-
полностью определяться значениями величин М°, Ml, Ml, »°, A\, A\, L\\,
а. л.Ц....
Отсюда вытекает одна из основных теорем теории поверхностей: коэф-
коэффициенты первой и второй квадратичных форм данной поверхности опре-
определяют эту поверхность с точностью до М", М\, М\, п°, т. е. с точностью
до ее положения в пространстве.
Таким образом, поверхность с точностью до ее положения в простран-
пространстве можно задать шестью величинами: Аи А2, %, Lllt L12, L22. Однако эти
шесть величин нельзя задавать совершенно произвольно, так как тогда
-смешанные производные от М, если их вычислять указанным выше приемом,
не будут, вообще говоря, удовлетворять соотношениям вида
57 ^""lar^»
S 4) ВТОРАЯ КВАДРАТИЧНАЯ ФОРМА ПОВЕРХНОСТИ J7
В теории поверхностей доказывается, что это несоответствие устраняется,
если коэффициенты первой и второй квадратичных форм поверхности подчи-
подчинены трем уравнениям, которые для ортогональных координат имеют вид
д_(±ц\ ¦ 1 д (AfLtf\ c)Ai Lh
да, \ At )'T А, доц \ A( ) da,- A *
A.3.8)
Z-UI22 — L12 i_ г д I 1 дАг \ д / 1 Mi N1
A\A\ ~ -Mi L dat \ Ax da, ) "+" 3a, V А, «a» ) J "
Первые два из них носят название уравнений Кодацци, а последнее —
уравнения Гаусса. Наиболее важным является уравнение Гаусса, к геометри-
геометрическому смыслу которого нам еще придется вернуться.
§ 4. Вторая квадратичная форма поверхности
и индикатриса Дюпена
Обозначим через т единичный вектор касательной к некоторой линии
на поверхности; тогда
dM л. da, . .. йа»
(s — длина дуги рассматриваемой кривой). В теории пространственных кри-
кривых выводится формула Френе
их v
где р — радиус кривизны кривой, v — единичный вектор ее главной нор-
нормали. Поэтому для линии, расположенной на поверхности, получим
Помножим скалярно обе части этого равенства на и и заметим, что n-v =
= cos ф, где ф — угол между нормалью к поверхности и главной нормалью
рассматриваемой кривой. Получим:
Внесем в правую часть этого равенства значения скалярных произве-
произведений п-М.ц по формулам A.3.2) и заменим ds2 его значением в соответ-
соответствии с A.1.7). Тогда мы придем к важному соотношению
cosq> Lu da\ -\- 2LU da, da, -(- La._, da'j ,. . .>
p A\ da\ -t- 2/l,/l.2cosxda, da2 4- A'i da.\*
Числитель правой части этого равенства и есть вторая квадратичная
форма поверхности:
// = Lii da? + 21-12 dai da2 -f L22 da%.
Выберем для некоторой точки поверхности в ее касательной плоскости
направление / и проведем через него нормальную плоскость поверхности.
В пересечении с поверхностью она образует плоскую кривую y[t называемую
нормальным сечением (оно, конечно, будет зависеть от направления /). Кри-
Кривизна нормального сечения поверхности Y/ называется нормальной кривизной
, 2 Д. Л. Гольденвейзер
13
СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ
[ГЛ. 1
поверхности в направлении I. Очевидно, что главная нормаль v плоской кри-
кривой yi совпадает с нормалью и поверхности. Поэтому при вычислении нор-
нормальной кривизны 1/R надо в A.4.1) положить ф равным 0 или п. Это дает
следующую формулу для нормальной кривизны поверхности:
A.4.2)
=
R Л? da\ + 2AtA2 cos % d^
A\ da\'
Рис. 2.
R>0
в которой, как это обычно делается в теории поверхностей, перед \/R из двух
возможных знаков поставлен минус. Это значит, что основной триэдр поверх-
поверхности надо строить так, чтобы вектор п был направлен в сторону выпук-
выпуклости тех нормальных сечений поверхности, кривизны которых считаются
положительными (рис. 2).
Принято говорить, что вторая квадратичная форма вместе с первой квад-
квадратичной формой определяют внешнюю геометрию поверхности. Смысл этого
утверждения раскрывается
формулой A.4.2). С ее по-
помощью при заданных Lllt
L12, L22 и Аи А2, х можно
найти нормальные кривизны
поверхности в любом задан-
заданном направлении. Для этого
надо только в A.4.2) соответ-
соответствующим образом выбрать
отношение дифференциалов
da, и da.2.
Выберем на поверхности
некоторую точку Р, построим
в ней касательную плоскость Е и рассечем поверхность плоскостью, па-
параллельной Е и отстоящей от нее на сколько угодно малое расстояние.
В пересечении получится некоторая кривая, которую мы спроектируем на
Е и обозначим буквой S.
Если отнести Е к декартовой системе координат, начало которой на-
находится в точке Р, а оси направлены вдоль векторов Mt и М2, то, сохраняя
в выкладках только бесконечно малые величины самого низкого порядка,
можно показать, что уравнение кривой S будет иметь вид
Изменим подобно кривую S, положив в правой части этого равенства
константу равной =?1. Тогда мы придем к уравнению кривой, носящей наи-
наименование индикатрисы Дюпена.
Индикатриса Дюпена в весьма наглядной форме показывает, как в дан:
ной точке поверхности изменяется кривизна нормального сечения поверх-
поверхности в зависимости от направления этого сечения. Если г|э — угол, который
составляет интересующее нас сечение с аг-линией (рис. 3), то радиус-вектор,
проведенный под углом г|з к оси | из начала координат до пересечения с инди-
индикатрисой Дюпена, равен V~R.
Индикатриса Дюпена в данной точке поверхности может оказаться
а) эллипсом, когда А = LltL22 — Lfa > 0;
б) парой сопряженных гипербол, когда А < 0;
в) парой параллельных прямых, когда А = 0.
В соответствии с этим говорят, что в данной точке поверхность имеет
положительную (при А > 0), отрицательную (при А < 0) или нулевую (при
А = 0) гауссову кривизну (более конкретное содержание этого понятия будет
указано ниже).
$6]
ЛИНИИ КРИВИЗНЫ, АСИМПТОТИЧЕСКИЕ ЛИНИИ
19
Типичным примером поверхности, которая всюду имеет положительную
гауссову кривизну, является эллипсоид (индикатриса Дюпена имеет вид
эллипса). Однополостныи гиперболоид является примером поверхности всюду
отрицательной гауссовой кри-
кривизны (индикатриса Дюпена
превращается в пару гипербол).
Цилиндр дает наглядное пред-
представление о поверхности всюду
нулевой гауссовой кривизны
(индикатриса Дюпена вырож-
вырождается в пару параллельных
Рис. 3.
Рис. 4.
прямых). Тор (рис. 4) имеет зону положительной гауссовой кривизны и
зону отрицательной гауссовой кривизны. Эти зоны разделяются двумя
замкнутыми кривыми (одна из них показана на рис. 4), вдоль которых гаус-
гауссова кривизна поверхности равна нулю.
В дальнейшем гауссову кривизну там, где это не может вызвать недора-
недоразумений, мы будем называть просто кривизной поверхности.
§ 5. Сопряженные линии, линии кривизны, асимптотические линии
В каждой точке поверхности, в которой она имеет определенную каса-
касательную плоскость, можно построить кривую второго порядка (или пару
параллельных прямых), являющуюся индикатрисой Дюпена. В связи с этим
в теории поверхностей используются некоторые термины, заимствованные
из аналитической геометрии. Направления сопряженных диаметров индика-
индикатрисы называются сопряженными направлениями на поверхности. Главные
направления индикатрисы называются главными направлениями поверхности.
Наконец, направления асимптот индикатрисы (если они действительны)
называются асимптотическими направлениями поверхности.
Два семейства кривых, касательные к которым в каждой точке поверх-
поверхности сопряжены, образуют сопряженную сеть кривых на поверхности.
Кривые на поверхности, касательные к которым везде совпадают с главными
¦направлениями, называются линиями кривизны.
Кривые, касательные к которым везде совпадают с асимптотическими
направлениями, называются асимптотическими линиями поверхности. Асимп-
Асимптотические линии существуют только в таких точках поверхности, где гаус-
гауссова кривизна не положительна. Через точку, в которой кривизна поверх-
поверхности отрицательна, проходят две асимптотические линии. В точках, где кри-
кривизна поверхности равна нулю, эти две линии сливаются в одну, а в точках,
где кривизна поверхности положительна, они становятся мнимыми. '¦
Отнесем поверхность к криволинейным координатам, в которых аг-
и а2-линии образуют сопряженную сеть. Тогда и индикатриса Дюпена будет
20 СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ [ГЛ. 1
отнесена к сопряженным осям. Это значит, что в левой части равенства A.4.3)
должно пропасть второе слагаемое. Следовательно, для поверхности, отне-
отнесенной к сопряженным криволинейным координатам, L12 = 0.
Поверхность, отнесенная к криволинейным координатам, в которых
<*!- и а2-линии являются линиями кривизны, или коротко, поверхность,
отнесет ai к линиям кривизны, характеризуется тем, что для нее % = л/2,
L12 = 0, так как главные направления поверхности сопряжены и одновре-
одновременно ортогональны.
В теории поверхностей доказывается, что всякую поверхность можно
отнести к линиям кривизны. Координатные линии при этом, вообще говоря,
определятся единственным образом. Исключением является случай, когда
поверхность имеет области с постоянной кривизной. Такие области всегда
представляют собой части сферы, а на сфере любая кривая может рассматри-
рассматриваться как линия кривизны.
Радиусы кривизн нормальных сечений, проведенных вдоль линий кри-
кривизны, мы будем обозначать через Rx и R% и называть главными радиусами
кривизны. Они, как легко убедиться с помощью индикатрисы Дюпена, обла-
обладают экстремальными свойствами, т. е. один из них дает локальный макси-
максимум, а другой — локальный минимум (первый не обязательно будет соответ-
соответствовать наименьшим значениям 1/R).
Считая, что поверхность отнесена к линиям кривизны, и положив
в A.4.2) последовательно а2 = const и а1 = const, получим формулы для
главных кривизн поверхности:
Аналитически не всегда легко бывает найти линии кривизны данной
поверхности, поэтому полезно иметь в виду следующее чисто геометрическое
свойство этих линий: две бесконечно близкие нормали поверхности, проведен-
проведенные через точки одной и той же линии кривизны этой поверхности, не перекре-
перекрещиваются, а пересекаются (пример применения этой теоремы к поверхностям
вращения дан в § 14.9).
В общем случае, когда поверхность отнесена к произвольным криволи-
криволинейным координатам, положив в A.4.2) последовательно а2 =const и а1 =
= const, получим формулы
определяющие нормальные кривизны поверхности в направлениях at- и
аа-линий. Правые части равенств A.5.1) и A.5.2) по форме совпадают, но
величины, входящие в правые части A.5.2), имеют другой смысл, и нормаль-
нормальные кривизны A.5.2) экстремальными свойствами, вообще говоря, не обла-
обладают. В связи с этим для них введены другие обозначения (Rlt R2 — экстре-
экстремальные радиусы нормальных кривизн, a Rllt R22 — произвольные радиусы
нормальной кривизны поверхности в направлении координатных линий;
когда поверхность отнесена к линиям кривизны, Rx = Rlu R2 = R^)-
В дальнейшем в некоторых случаях будет использовано еще одно обозначение
-в- = ~ГГ- A-5.3)
Оно аналогично A.5.2), но R12, представляющее собой меру несопряженности
координатных линий, не имеет такого простого геометрического истолко-
истолкования, как Rllt Ri2.
Пусть поверхность имеет хотя бы одно действительное семейство асим-
асимптотических линий (для этого гауссова кривизна поверхности должна быть
§ 6] ДИФФЕРЕНЦИРОВАНИЕ ВЕКТОРА, ЗАДАННОГО НА ПОВЕРХНОСТИ 21
не положительна). Совместим его с сц-линиями. Тогда в уравнении индика-
индикатрисы Дюпена A.4.3) должен пропасть член с ?2, т. е. будет иметь место
равенство
Lu = 0.
В соответствии с A.5.2) это значит, что Rtl — со, т. е. что нормальная
кривизна поверхности вдоль асимптотических линий равна нулю (кривизна
самой асимптотической линии может быть и отлична от нуля). Это — опре-
определяющее геометрическое свойство асимптотической линии.
В дальнейшем мы часто будем считать, что срединная поверхность обо-
оболочки отнесена к линиям кривизны, так как тогда все формулы максимально
упрощаются. В частности, в этом случае деривационные формулы Гаусса—
Вейнгартена приобретают такой вид:
Л_(М±\ !_ dAt_ _М? _ _Aj_ д I Mf \ 1 дА, М1
da.t\ At ) A, dat A, R, П дац \ А, ) А/ да, At '
„ дп Mi V'5A)
а уравнения Кодацци—Гаусса в линиях кривизны записываются так:
д ( А,- \ 1 dAt
dat \ Rt / *, uu.j ,j gg.
__L_ = !_ Г^_(_L_?jk\. _?_(_!_ .Mi \].
R-iRi /4, A, L da, \ Аг da, / •" da2 \ A, da^ /J *
В несколько более общем случае, когда поверхность отнесена к произ-
произвольной ортогональной системе координат, деривационные формулы Гаусса—
Вейнгартена выражаются равенствами
d / Mi \ 1 dAi ™j Aj Q I Mj \ 1 dA( Mi Ai
Ъщ\~А7)= ~Aj ~daj ~Aj ~~ ~Ril П' "da? \~~Aj) ~ ~A~'Щ ~Aj + Rtj '
дщ - Ru Ac Rtl A, '
а уравнения Кодацци—Гаусса имеют форму
J
_i_f_dL\_l_ J ( Л =
da,- V Ru )~т~ Aj да,- {Ra) Rh да, *
A.5.7)
1 1_ 1 Г д / 1 дА« \ _д_ / 1 дАг \~\
«ii«22 Rb ~ AiA L *ti V Аг даг ) + да., { А2 да., )}'
§ 6. Дифференцирование вектора, заданного на поверхности
Пусть в каждой точке поверхности задан вектор Ь, который разверты-
развертывается по осям подвижного триэдра следующим образом:
4 # A.6.1)
Дифференцируя A.6.1), получим
да( Ах ^ da, А, ^ да{ п "•"" dat\ А,
22 СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ [ГЛ. t
Производные от векторов подвижного триэдра определяются дерива-
деривационными формулами Гаусса—Вейнгартена, которые, в случае, когда по-
поверхность отнесена к линиям кривизны, имеют вид A.5.4). Воспользовав-
Воспользовавшись этим, можно записать следующие равенства:
J м
At dac \Ai da, AiA,- 6a,- Ri I At '
л_(Л-^И. J__4^b(o)-^i_i_(J_!i*! 4r-)« A6 3)
' \Ai 6a, Л,Л, 6a,- / Л,- \Л,- da^ Ri J
представляющие собой формулы дифференцирования вектора, заданного на
поверхности, в случае, когда последняя отнесена к линиям кривизны.
§ 7. Гауссова кривизна и изгибание поверхностей
Выражения, стоящие в левых частях вторых равенств A.5.5) и A.5.7),
инвариантны относительно замены криволинейных координат. Они назы-
.ваются гауссовой кривизной поверхности и обозначаются через К:
JS 1 1 I ^-11^-22 ^-12 /1 7 П
Легко видеть, что К отличается от дискриминанта индиктрисы Дюпена
А всегда положительным множителем А~2 А^2, и рассмотренные в § 1.4 слу-
случаи А>0, Д<0, Д = 0 отвечают случаям, когда поверхность имеет поло-
положительную, отрицательную и нулевую гауссовы кривизны соответственно.
Теперь можно с новой точки зрения посмотреть на второе из равенств
A.5.5) или A.5.7), т. е. на уравнение Гаусса. Из него вытекает, что К пол-
полностью определяется коэффициентами первой квадратичной формы. Это чрез-
чрезвычайно важное положение возвращает нас к затронутому в § 1.1 понятию
об изгибании поверхностей. Эта деформация характеризуется тем, что пер-
первая квадратичная форма поверхности остается неизменной, и можно теперь
сделать вывод, что при изгибании поверхности остается неизменной также
и ее гауссова кривизна, хотя главные кривизны, конечно, будут меняться.
Одним из простых и вместе с тем чрезвычайно важных следствий этого
положения является то, что из всех поверхностей только поверхности нулевой
гауссовой кривизны могут быть путем изгибания превращены в плоскость,
так как гауссова кривизна плоскости равна, очевидно, нулю (в связи с этим
поверхности нулевой гауссовой кривизны часто называются развертываю-
развертывающимися). Наоборот, никакая часть такой поверхности, как, например,
сфера, не может быть без сморщиваний и разрывов превращена в часть
плоскости.
§ 8. Криволинейные координаты в пространстве
Пусть в трехмерном пространстве дан вектор, зависящий от трех произ-
произвольных параметров
/> />(«„«,). A.8.1)
Тогда, рассматривая Р как радиус-вектор, можно говорить, что каждой
тройке чисел аъ а2, а3 соответствует точка в трехмерном пространстве или
что в трехмерном пространстве определена некоторая система координат.
Положим а3 = aSo = const в A.8.1). Тогда
Р = Р(аи а2, а30) = М (аь а2)
и, следовательно, уравнением а3 = а30 определяется некоторая поверхность,
отнесенная к криволинейной системе координат (ах> аа). Аналогичный смысл
имеют уравнения ах = а10 и а2 = аа0.
$ 81 КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ В ПРОСТРАНСТВЕ 23
Назовем поверхности а3 = const, а2 = const, а3 = const координатными
поверхностями. Тогда можно говорить, что с помощью равенства A.8.1)
точка в трехмерном пространстве определяется как результат пересечения
трех координатных поверхностей, принадлежащих разным семействам.
Координатные поверхности а2 = const и а3 = const в пересечении дают
пространственную кривую, которую можно назвать о^-линией, так как вдоль
нее изменяется только параметр ах. Аналогично определяются а2- и а3-линии.
Таким образом, можно также говорить, что равенством A.8.1) точка опре-
определяется как результат пересечения трех пространственных кривых, в связи
с чем описываемая система координат называется криволинейной, перемен-
переменные аг, а2, а„ называются параметрами этой координатной системы.
Введем обозначение
Р' = ЖГ (' = 1.2,3).
(В §§ 1.8—2.15 часть индексов принимает, как и раньше, значения 1,2,
но будут встречаться и индексы, принимающие значения 1, 2, 3. Поэтому
мы в §§ 1.8—2.15 будем указывать значения, которые надо придавать ин-
индексам.)
Очевидно, что векторы Р, направлены по касательной к аглиниям,
поэтому координатные линии будут взаимно ортогональны, если выпол-
выполняются равенства
prpf = 0 (i=hi= I, 2, 3), A.8.2)
и в этом случае система координат называется триортогональной.
Здесь и в дальнейшем запись (i Ф j = 1, 2, 3) означает, что индексы i,)
могут принимать значения 1, 2, 3 в любой комбинации, исключая те, в ко-
которых i = /.
Запишем дифференциал вектора Р
dP = />, da, + Рг da, + Ря da*.
Возводя обе части этого равенства в квадрат, получим формулу для
дифференциала длины дуги в криволинейной системе координат (а1, а2, а3).
Для случая, когда последняя триортогональна, она в силу A.8.2) будет иметь
вид
ds2 = Hl da\ -f- HI da% + Ш dal
Здесь величины Н ъ Н а, Н3, называемые коэффициентами Ламе, определяются
формулами
Я? = /« (i = 1, 2, 3).
Для построения теории оболочек наиболее удобна криволинейная система
координат, в которой равенство A.8.1) имеет вид
Р = Ж (о^ а2) + а8» (а„ а2). A.8.3)
где М (а,, а2) — радиус-вектор некоторой поверхности, которую мы будем
называть исходной и которая отнесена к криволинейным координатам
(а,, а2), а « — единичный вектор нормали исходной поверхности.
Если на исходной поверхности установлены ортогональные криволиней-
криволинейные координаты, то система координат A.8.3), вообще говоря, будет орто-
ортогональна лишь в точках самой исходной поверхности. Рассмотрим в связи
с этим вопрос: как надо выбрать криволинейные координаты на исходной
поверхности, чтобы равенством A.8.3) определялась триортогональная си-
система координат в пространстве.
24 СВЕДЕНИЯ ИЗ ТЕОРИИ ПОВЕРХНОСТЕЙ 1ГЛ. 1
Имеем
Pi = М, (osJt об,) + a3nt (i = 1, 2), Рв = п. A.8.4)
Так как по предположению « — единичный вектор, ортогональный Mit то
и, следовательно,
РгР3 = 0 ' (t = l, 2).
Остается потребовать, чтобы при любых а3 выполнялось равенство
Рх-Р2 = 0. Это приводит к трем требованиям
= 0, М1-«2 + Л12«1 = — 2^ = 0, л1-л2 = 0.
Из первых двух следует, что % = я/2, L12 = 0. Таким образом, криволиней-
криволинейная система координат A.8.3) может быть триортогональной только тогда,
когда на исходной поверхности (а3 = 0) координатными линиями являются
линии кривизны. Это условие не только необходимо, но и достаточно, так как
для поверхности, отнесенной к линиям кривизны, векторы пи n% в силу
A.5.4) пропорциональны векторам Mt и М2 и третье из обсуждаемых требо-
требований также выполняется. Доказанное утверждение представляет собой част-
частный случай теоремы Дюпена, в которой установлено, что координатные линии
произвольной триортогональной системы координат являются линиями кри-
кривизны для координатных поверхностей этой системы.
Выведем формулы для коэффициентов Ламе триортогональной системы
координат A.8.3). Возведя в квадрат обе части каждого из двух'равенств
A.8.4) и учтя равенства A.1.4), A.3.3), A.5.1), A.5.4), получим
(» = 1, 2), /У3=1, A.8.5)
где At и R, не зависят от а3 и представляют собой соответственно коэффи-
коэффициенты первой квадратичной формы и главные радиусы кривизны исходной-
поверхности.
Из A.8.4) и A.8.5), снова учтя A.5.4), имеем
¦jfT = -jr- (« = 1, 2), ~^-=п. A.8.6)
Дифференцируя первое равенство A.8.5), получим
дН{ dAi д
ctay dat ' 3 да,/
но для множителя при а3 в правой части этого равенства имеют место фор-
формулы A.5.5). Отсюда
(t°hi= 1, 2). A.8.7)
Кроме того, легко видеть, что
dHi Ai <5tf3
ГЛАВА 2
ТРЕХМЕРНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ.
СВЕДЕНИЕ К ДВУМЕРНЫМ УРАВНЕНИЯМ
§ 9. Уравнения теории упругости
в триортогональной системе координат
Отнесем упругую среду, образующую оболочку, к триортогональной
системе координат (а^ а2, а3), описанной в § 1.8, т. е. будем считать, что
Р — радиус-вектор точки трехмерного пространства задается уравне-
уравнением A.8.3), а коэффициенты Ламе Я, подчиняются формулам A.8.5), A.8.7),
A.8.8).
В такой системе координат дифференциальные уравнения теории упру-
упругости для анизотропного тела можно записать так.
Векторное уравнение равновесия:
JL + HiHiH-iq = 0. B.9.1)
- -~
Здесь о(О — вектор упругих напряжений на площадке, нормаль которой
проходит вдоль аглинии, a q — вектор массовых сил. В развернутом виде ff(o
и q будем записывать с помощью формул
(t-1,2,3), B.9.2)
в которых, как и всюду в дальнейшем, векторы Plt Pit P3 выражены через
Ми М2, п в соответствии с A.8.6).
Формулы «деформации ¦— смещения»:
L^K A ±lvMi ... 9
Hi
Щ
i
дщ
dV
Hi
' н3
Pi
~ Hi
dai
¦•«,
dV
Ai
Pi
B.9.3)
1_ dV_ J_,_±_dV_ Pi L dZ. UlLli. — -— M-L
e4 ~ Hi дщ ' Hi "+" Hi da, ' Hi ~ Hi дац ' A, "+" H/ da./ ' Ac
(i=hj=l, 2),
1 dV />3 , 1 dV Pi _ 1 dV dV_ Mi w _ i оч
eu - -Щ -far • -щ + -щ -щ ¦ -щ - -щ ^ -a -f-^ • A. (i - i, i).
26 ПРИВЕДЕНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ | ГЛ. 2
Здесь еи и etj — компоненты деформации, V — вектор смещения:
Обобщенный закон Гука
Ее,. = о„ — v (а,.,. + а«) (t * / ^ k = 1, 2, 3),
Ее,, = 2A + v)a(/ (I + j = 1, 2, 3). B"~5'
Здесь ? — модуль Юнга, а v — коэффициент Пуассона.
Под оболочкой постоянной толщины 2h будем подразумевать тело, огра-
ограниченное поверхностями
a3=+fc, a3 = — h. B.9.6)
Исходную поверхность а3 = 0 назовем срединной поверхностью оболочки,
а поверхности a3 = h и а3 = —ft назовем ее лицевыми поверхностями.
Примем, что к лицевым поверхностям B.9.6) приложены силы, векторы
которых, отнесенные к единице поверхности, обозначим через q+ и q~ соот-
соответственно,
Такому загружению отвечают векторные условия на лицевых поверх-
поверхностях
*<••?> |a,=ft = — q+, во» L=-a = tf~. B.9.7)
эквивалентные скалярным условиям
о,-з|а,=±л = :р^ (* = 1.2,3). B.9.8)
§ 10. Гипотезы теории оболочек
В терминах линейной теории упругости определение напряженно-де-
напряженно-деформированного состояния тонкой упругой анизотропной оболочки сводится
к решению трехмерной краевой задачи, состоящей в интегрировании системы
уравнений B.9.1), B.9.3), B.9.5) с учетом условий на лицевых поверхностях
B.9.7) и некоторых граничных условий (вид которых мы пока предрешать не
<5удем) на боковых поверхностях.
Основная проблема общей теории тонких оболочек заключается в при-
приближенном седении сформулированной трехмерной краевой задачи к некоторой
двумерной краевой задаче,Эт;ъ проблема будет подробно рассмотрена в части VI,
а пока, не касаясь связанных с этим математических вопросов, будем решать
ее при помощи некоторых предположений, законность которых подробно
обсуждаться не будет. Наиболее популярны из них предположения, состав-
составляющие так называемую гипотезу Кирхгофа—Лява, которая формулируется
в § 5.28 и более подробно обсуждается в части VI. Однако сейчас будет по-
показано, что проблему сведения можно решить и при помощи несколько из-
измененных гипотез, а именно:
Гипотеза 1 заключается в предположении, что перемещения и не-
некоторые напряжения трехмерной среды, образующей оболочку, меняются
по толщине по определенным законам, а именно
„ (\ j. a" ^ - 7' а" 3<?' п A -)- аМ - S* 4- а" ЗЯ"
" V + ~Ri) ~~W~~h W aH \ ' + ~R, ) — 2ft + h ~2hT
(t^/=l,2), B.10.1)
Ofe = "fe—азЪ (A=l, 2), os=-— w — a8il>, B.10.2)
S И)
КОМПОНЕНТЫ ДЕФОРМАЦИИ ТРЕХМЕРНОЙ СРЕДЫ
27
где величины 7\, S12, S21, Г2, d, Я12, Я21) G2, иъ ы2, ay, Vl v2, t|> — функ-
ции двух переменных а1 и а2, смысл которых выяснится ниже.
Гипотеза 2 заключается в предположении, что некоторые из ра-
равенств, выражающих обобщенный закон Гука, можно заменить более про-
простыми, а именно: вместо
Ееш = 2 A + v) ai3 (i = 1, 2), Ее^ = <т33 — v (<ju -+- cr22)
можно брать равенства
Гипотеза 3 заключается в предположении, что напряжение а33
играет второстепенную роль, вследствие чего в двух следующих равенствах
обобщенного закона Гука
С / \ С л / I \ /О 1 /\ Л\
1~1 0\л === Uii V (CJgo —J— tJoal, С, €aa === tJgo V (CTii —r~ ^33) \^* * U.ftl
o33 можно выразить приближенно формулами
«зз= -Ym + ~2FZ'' m=~
Это значит, что мы заменяем о83 двумя членами его разложения в ряд
Тейлора, т. е. выражаем ст33 формулой
«33 = <*
0 1
и определяем ст33 и о83 так, чтобы выполнялись требования, получающиеся
из B.9.8) при i = 3.
Физический смысл величин, введенных в формулах B.10.5), виден из
рис. 5; т — интенсивность поперечного сжатия; Z' — нормальная равно-
равнодействующая сил, приложенных к лицевым поверхностям оболочки.
§ 11. Компоненты деформации трехмерной среды
Перепишем второе равенство B.10.3)
?езз = — v (o + )
u
а) ¦ B.11.1)
и расшифруем в нем компоненту деформации е33 с помощью формул B.9.3),
B.9.4)
28 ПРИВЕДЕНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ |ТЛ. 2
В правой части этого равенства от сс3 зависит только vlt o2, о8, поэтому,
учтя B.10.2), получим
^33 = —^. B.11.2)
Помножив B.11.1) на A 4- щ/Ri) A + a3/R2) и использовав B.11.2)
и B.10.1), будем иметь
Это равенство должно выполняться тождественно по а8. Оно эквивалентно
трем равенствам, вытекающим из требования исчезновения коэффициентов
при аР3, аз, «з. Однако здесь и ниже в подобных случаях мы будем
сохранять только те равенства, которые в дальнейшем не приведут
к противоречию (гипотеза 1 и состоит в предположении о допустимости
таких действий: если бы можно было выполнить все равенства, вытекаю-
вытекающие из принятого закона распределения искомых величин, то это
была бы не гипотеза, а констатация факта существования этого закона).
В данном случае мы ограничимся только коэффициентами при а3', откуда
следует
Обратимся к первому равенству B.10.3). В нем компоненты деформа-
деформации е,3 расшифровываются с помощью B.9.3). Поэтому, учтя A.8.5), можно
написать
Из B.9.4) и B.10.2) вытекает, что V можно представить в виде
у= и + щт—а8г|>«, B.11.5)
где
U=Ul^- + u2^—wn, т = -ъ1Ь.-ъ^. B.11.6)
Поэтому можно написать
_LdV \ dU_ а^дт^ а» д$ а-\ 1\
(п — единичный вектор и поэтому п #-^7 = 0),
Внеся эти результаты в B.11.4) и приравняв нулю коэффициенты при сс§,
получим
(равенство, получающееся приравниванием нулю коэффициента при
отбрасывается).
S 12] ОБОБЩЕННЫЙ ЗАКОН ГУКА 29
Обратимся к компонентам деформации е1Ъ е12 и е22. Для них, заменив
в B.9.3) величины Н, и V с помощью A.8.5) и B.11.5), будем иметь
Aj дщ At А( дсц Aj аз Aj дщ Aj ,. . о-.
(* = I, ^),
Aj дщ At А( дсц Aj аз Aj дщ Aj
^ B.11.8)
1
Введем обозначения
__ 1 аг/ жг 1 зи _ Mi
Аг даг Л2 ~т Л2 da2 Лх '
~[ да, А., ' /?, Л2 аа2 Лх ~ Л2 да2 Л, "^~ /?2 Лх За, Л2
(для т даны два выражения, но, как выяснится в дальнейшем, различие между
ними только кажущееся). Тогда внеся B.11.9) в B.11.8) и учтя формулы A.5.4)
для производных от вектора п, будем иметь
(t=
где
_ _1 1_ dm ф Ж2 | 1 !_ dm _ Л!L _
§ 12. Обобщенный закон Гука
Будем теперь преобразовывать упрощенные в соответствии с принятыми
гипотезами равенства обобщенного закона Гука.
Начнем с B.10.4). Эти равенства можно рассматривать как уравнения
относительно ст1Х и ст22, так как ст88 по формуле B.10.5) выражается через
компоненты поверхностной нагрузки. Решая эти уравнения, будем иметь
Помножим обе части этого равенства на (l + -^М ( 1 +$) и примем
во внимание B.10.1) и B.11.10). Получим
B-m)
30 ПРИВЕДЕНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ I ГЛ. 2
Возьмем далее второе равенство B.9.5), положив в нем i = 1, / = 2,
и выразим деформацию e(j по формуле B.11.10). Тогда, помножив получен-
полученное равенство на A + a3/#i) A + ot,s/R2) и воспользовавшись B.10.1),
можно написать
521 а
а3 \ _ / S12 а3 ЗЯ12 \ / . а8
Приравняв в B.12.1) и B.12.2) коэффициенты при аз и од\ получим соот-
соответственно две группы формул
B.12.3)
о»
1+V
W _1_ Я И I ?
Яи + "З^Г^21 - 2 + ~Щ Л" - 3A+v) Т-
Во второй из них можно величину г|> выразить с помощью B.11.3), а ве-
величины Tlt 512, S21, Г2 исключить с помощью B.12.3). Тогда, пренебрегая
членами порядка mh по сравнению с членами порядка R,Z', получим
,2), B.12.5)
В части VI показывается, что допускаемые при этом погрешности не вы-
выходят за рамки тех, которые связаны с принятием гипотез § 2.10.
§ 13. Первое осредненное уравнение равновесия теории упругости
Будем теперь преобразовывать векторное уравнение равновесия B.9.1),
B.9.2).
Учитывая формулы A.8.5) и B.10.1), можно написать
и) = Л,- [-^ о31( 1 + -|l)я + -§- т«>] (* * / = 1, 2), B.13.1)
где приняты обозначения
^i^L -в(^- + Н^ (i + l= 1,2). B.13.2)
S 13] ПЕРВОЕ ОСРЕДНЕННОЕ УРАВНЕНИЕ РАВНОВЕСИЯ 31
Назовем первым осредненным уравнением равновесия теории упругости
результат интегрирования по а3 в промежутке (—h, +h) векторного уравне-
уравнения равновесия теории упругости. Оно записывается так:
+ +
— J а|- (Я2Яз<гA,Маз— j -~ (HxH3ai2))da3—
-h -ft
"~ J Ш; (Я»Я2О<3>)daa + J Я1Я2Я3^г daa =» 0. B.13.3)
J
—й
Учитывая B.13.1), B.13.2), можно написать
= -?- (Л;#('») (t + } = 1, 2), B.13.4)
где
J
—ft
но г<'> и ira<" определены равенствами B.13.2) и не зависят от а3, поэтому,
введя обозначения
J
J(jg) 2) B.13.6)
—А
и выполнив в B.13.5) интегрирование, можно написать
/?"> = /" + N(n = - Tt Щ- - Slt ^ + Ntn (i + j = 1, 2). B.13.7)
Далее имеем
а так как значения а<з) на лицевых поверхностях определяются равен-
равенствами B.9.7), то
J
- B-13'8)
Подставив B.13.4) и B.13.8) в равенство B.13.3), получим первое осред-
ненное уравнение равновесия теории упругости в виде
где
32 ПРИВЕДЕНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ ?ГЛ. 2
§ 14. Второе осредненное уравнение равновесия
теории упругости
Под вторым осредненным уравнением равновесия теории упругости под-
подразумевается результат векторного умножения уравнения равновесия теории
упругости на а3п и последующего интегрирования по а3 в промежутке
(—h,+h). Оно записывается так:
— J [-^-(Я2ЯзОA)) X <хзй] da3— J
—h —ft
— j [-А-(HiH&w) X а,,/»] das + j" НгН2НЛ(q x a3w)da3 = 0. B.14.1)
Подсчитаем выражения, входящие в левую часть B.14.1). Учитывая
B.13.1), можно написать
) х asn =
(^/=Ь 2).
В этом равенстве под я, подразумевается производная от я, определяемая
формулами A.5.4). Имея это в виду, получим
x
—А
(i + i=\, 2). B.14.2)
Кроме того, интегрируя по частям, будем иметь
j [ 1§7 (HlH*a^ х азЛ] dtt3 = 1Я1Я20<3) X азЯ]±й — J (Я1
А ft
j [ 7 ] J 12() X
—А —ft
B.14.3)
Здесь в силу условия на лицевых поверхностях B.9.7), для первого слагае-
слагаемого правой части можно написать
[Я1Я2аC, х
B.14.4)
! НЕ БОЛЕЕ »И КНИГИ В
\ ОДНИ РУКИ И 2XS ДВЕ ]
§ 14]
ВТОРОЕ ОСРЕДНЕННОЕ УРАВНЕНИЕ РАВНОВЕСИЯ
33
а второе слагаемое расшифровывается так:
-4-h
X n)da3 =
+ft
^гхи)[с
. B.14.5)
В свою очередь, интегралы, входящие в последнее равенство, можно с по-
помощью B.13.6) преобразовать так:
* 0 +i-)A +it)da°=-N' +^r
l, 2).
B 14.6)
Раскрыв смысл mA), m<2) согласно B.13.2) и выполнив векторное пере-
перемножение, напишем
mw х -^- = (—1)' Я/Чи
Введем, кроме того, обозначения
1, 2).
B.14.7)
+Г
J
-g-)(l+-^)da8, B.14.8)
ц^/= 1, 2). B.14.9)
Тогда, подставив все эти результаты в B.14.2), B.14.3), будем иметь
+ (— 1)'
: + /«!. 2),
+h +h
— j [•^-(Я1Я2а{3)) X а3л] da3 -f J H\H2(q X a3n)da3
—л —ft
! НЕ БОЛЕЕ »И КНИГИ В
\ ОДНИ РУКИ И 2ХВДВЕ !
3 А.Л.Гольденвейзер
КОЛОХ2А
\
'4
ПРИВЕДЕНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ i ГЛ. 2
Отсюда следует, что второе осредненное уравнение равновесия теории упру-
упругости B.14.1) можно записать в виде
—N^) + AxAaQ = 0. B.14.10)
Замечание. Второе осредненное уравнение равновесия получается в результате вектор-
векторного иомножения некоторого равенства на я. Поэтому нормальная составляющая его левой
части должна тождественно исчезать. Может показаться, что этому противоречит вид левой
части уравнения B.14.10). Однако можно убедиться, что в ней нормальные составляющие,
содержащиеся в первых двух слагаемых, взаимно уничтожаются с третьим слагаемым. При
проверке этого утверждения надо использовать деривационные формулы A.5.4).
§ 15. Полная двумерная система дифференциальных уравнений
теории оболочек
В §§ 2.10—2.14 были введены в рассмотрение следующие двумерные (за-
(зависящие только от двух переменных а1г а2) величины.
С помощью формул B.10.1) определено восемь величин
Tlt Sn, S,,, Тш, G1( Я21, Ни, Ga. B.15.1)
Формулами B.11.9) определено шесть величин
е^ со, еа, къ Иг, т. B.15.2)
Формулами B.13.6) определены две величины
Nlt Nt. B.15.3)
Кроме того, были использованы вектор U, имеющий компоненты
«!, ua, w, B.15.4)
и вектор т, имеющий компоненты
Ti. Ys- B-15.5)
Всего, таким образом, введена 21 величина B.15.1) — B.15.5). Для них
построены следующие соотношения *).
1) шесть формул B.11.9), с помощью которых величины B.15.2) выра-
выражаются через компоненты векторов U и т, т. е. в конечном итоге через
величины B.15.4) и B.15.5);
2) две формулы B.11.7), с помощью которых B.15.5) выражаются через
B.15.4);
3) восемь формул B.12.3) и B.12.4), связывающих между собой B.15.1)
и B.15.2);
4) первое осредненное векторное уравнение равновесия теории упругости
B.13.9), эквивалентное трем скалярным уравнениям, относительно величин
B.15.1) и B.15.3);
5) второе осредненное векторное уравнение равновесия теории упру-
упругости B.14.10), эквивалентное двум скалярным уравнениям (см. замечание
в § 2.14) относительно величин B.15.1) и B.15.3).
•) Учитывается, что каждое равенство, содержащее индексы I, J, эквивалентно двум.
§ 16 НАПРЯЖЕННО-ДЕФОРМИРОВАННОЕ СОСТОЯНИЕ ОБОЛОЧКИ 35
В общей сложности получилось 21 двумерное уравнение для определе-
определения 21 двумерной величины. Это значит, что гипотезы, принятые в § 2.10,
достаточны, чтобы свести систему трехмерных дифференциальных уравне-
уравнений теории упругости к системе двумерных уравнений теории оболочек
B.11.9), B.11.7), B.12.3), B.12.4), B.13.9) и B.14.10).
§ 16. Напряженно-деформированное состояние
упругой среды оболочки
Пусть решена некоторая краевая задача двумерной теории оболочек,
т. е. определены величины B.15.1)—B.15.5), удовлетворяющие описанной
в § 2.15 системе двумерных (с независимыми переменными а.г, а2) уравне-
уравнений. Тогда можно приближенно построить все напряжения и перемещения
упругой среды, составляющей оболочку.
Зная величины B.15.1)—B.15.5), по формуле B.11.3) находим функ-
функцию я|). В результате станут известны все члены правых частей равенств
B.10.1), B.10.2), определяющих напряжения а,,, а12, а22 и упругие пере-
перемещения Oj, v2, v3. Для полного определения напряженно-деформированного
состояния остается построить напряжения ai3 и а33. Этого можно достичь
при помощи уравнений равновесия теории упругости.
Векторное уравнение равновесия B.9.1) эквивалентно трем скалярным
уравнениям, которые, учитывая, что Н3 = 1, можно записать следующим
образом:
°« + ЖГа" + HtHfli = ° ° ф' = 1( 2)' BЛ6Л)
а2,
- 0.
Первое из этих равенств эквивалентно двум уравнениям, и в каждом из
них содержится по одному неизвестному а13 и ags. Остальные напряжения
уже построены по формулам B.10.1). Каждое из напряжений а13 и а23 опре-
определяется при помощи одной квадратуры по а3, которую можно эффективно
выполнить, так как зависимость величин <т11( а12, а22, Нг, Н2 от а3 выраже-
выражена явно: это видно из формул A.8.5), B.10.1). Для определения произ-
произвольных функций интегрирования мы имеем условия на лицевых поверх-
поверхностях B.9.7).
Таким же образом, ценой еще одной квадратуры по а3 из второго равен-
равенства B.16.1), считая в нем уже известными и а13, а23) найдем последнее
напряжение а33. Для него произвольная функция интегрирования опре-
определится из условий на лицевых поверхностях B.9.8).
Замечания. 1. Условия на лицевых поверхностях B.9.7), B.9.8) содержат шесть равенств,
а для определения произвольных функций интегрирования, возникающих при вышеописанном
методе построения а,-3» Озз- достаточно только трех. В этом нет противоречия, так как можно
показать, что из каждой пары условий B.9.7), B.9.8) достаточно выполнить только какое-либо
одно. Второе условие каждой пары будет выполняться автоматически, как следствие того, что
удовлетворяется первое осредненное уравнение равновесия.
2. После того как будут определены а,-а, можно по формуле B.13.6) найтн величины Nt,
но они входят в число величин B.15.1)—B.15.5), которые, по предположению, уже найдены
независимо от того, чему равны 0,-3. В этом тоже нет противоречия, так как можно показать,
что, если выполнено второе осредненное уравнение равновесия, то по формуле B.13.6) мы
получим для Ni такое же значение, как и при интегрировании уравнений § 2.15.
36 ПРИВЕДЕНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ I ГЛ. 2
Формулы для а13, а23, о33, получающиеся вышеописанным способом,
громоздки, и мы их не приводим. В части VI будет показано, что во всех тех
случаях, когда можно применять двумерную теорию оболочек, а13, а23, <*зз
существенно меньше напряжений ollt а12, а22, и, как правило, достаточно
вычислить только последние. Отметим однако, что принципиально возможно
построить и второстепенные напряжения а13, а23, а33- Поэтому можно счи-
считать, что точное выполнение первого и второго осредненных уравнений равно-
равновесия обеспечивает точное выполнение уравнений равновесия трехмерной тео-
теории упругости. Для этого достаточно условиться, что а13, а23. о33 должны
быть определены из уравнений равновесия B.16.1).
Для понимания дальнейшего надо иметь в виду, что напряженно-де-
напряженно-деформированное состояние оболочки, построенное описанным приближенным
методом, не удовлетворяет (во второстепенных слагаемых) закону парности
касательных напряжений. Это видно из второго равенства B.10.1), в силу
которого а12 ф а81.
ГЛАВА 3
СТАТИКА ТЕОРИИ ОБОЛОЧЕК
§ 17. Усилия и моменты
Введем понятие о нормальных сечениях оболочки, проведенных вдоль
некоторых линий у ее срединной поверхности S. Под этим подразумевается
сечение оболочки линейчатой поверхностью, составленной семейством нор-
нормалей к S, построенных в каждой точке у.
Если срединная поверхность S замкнута, то замкнутой будет называться
и соответствующая оболочка; в этом случае можно сказать, что оболочка
разграничивается от остального пространства двумя лицевыми поверхно-
поверхностями: наружной S* и внутренней S', равноотстоящими от S. В более общем
случае, когда S имеет боковые границы, можно считать, что оболочка выде-
выделена из некоторой замкнутей оболочки нормальными сечениями, проведен-
проведенными вдоль кривых уъ у2, . . ., уп. Эти нормальные сечения будут называться
краями оболочки. В реальных конструкциях края оболочки не всегда совпа-
совпадают с нормальными сечениями, но такое различие, ввиду малости h, можно
игнорировать.
Будем считать, что оболочка, как трехмерное тело, отнесена к триорто-
гональной системе координат A.8.3), рассмотрим нормальное сечение, про-
проведенное вдоль линии у и обозначим через о (аг, а2, а3) напряжения, возни-
возникающие в этом сечении.
Тогда вектор отнесенного к длине дуги усилия /?(VI и вектор отнесен-
отнесенного к длине дуги момента Q(v) в соответствующем нормальном сечении обо-
оболочки определяются равенствами
4-ft -t-h
Rwdsy= I ads"yda3, Q(v)dsv= f (о х а3л) ds"y da3, C.17.1)
Л Л
где dsy — дифференциал длины дуги линии у, a ds*v — дифференциал длины
дуги линии 7*. которую описывает на рассматриваемом поперечном сечении
точка, отстоящая на расстоянии а3 от срединной поверхности (рис. 6).
Построим в каждой точке у триэдр, состоящий из трех взаимно перпен-
перпендикулярных единичных векторов s, t, п, где п — вектор нормали срединной
поверхности, s — вектор касательной к кривой у, a t — вектор тангенциаль-
тангенциальной нормали, т. е. вектор, лежащий в касательной плоскости к срединной
поверхности и направленный так, что тройка векторов t, s, n ориентирована
в пространстве так же, как тройка векторов Mlt М2, п. Тогда векторы /?<?>
и Q(v) можно представить в виде
C.17.2)
(вектор Q(y), как видно из C.17.1), не имеет нормальной составляющей).
Когда у совпадает с координатной линией at = const, мы условимся
обозначать векторы усилий и моментов на этих нормальных сечениях через
38
СТАТИКА ТЕОРИИ ОБОЛОЧЕК
[ГЛ. 3
/?<<>, QO соответственно и, развертывая эти векторы по осям основного
триэдра (§ 1.2), будем отмечать их компоненты индексами i. Таким об-
образом *), ,
%% [?,^]. C.17.3)
Знаки перед компонентами усилий и моментов в правых частях этих
формул выбраны, исходя из предположения, что положительные направле-
направления упругих усилий и моментов расположены так, как изображено на рис. 7.
Рис. 6.
Рис. 7.
Покажем теперь, что введенные здесь векторы /?('>, Q(" по смыслу сов-
совпадают с векторами B.13.7) и B.14.9), которым в §§ 2.13, 2.14 были даны та-
такие же обозначения.
Векторы /?(() и Q<" получатся, если в формулах C.17.1) под у подразу-
подразумевать а/-линию. Таким образом,
RU) ds, = j a@ dSjda.3, QU) ds, = j (а@ х as») dsjda3. C.17.4)
-ft
-ft
Для пространства, отнесенного к триортогональной системе коорди-
координат A.8.3),
ds} = Н, da, = А, A + -^-) daf, ds; = dsj |ej=0 = Л, da,,
а <1(п определяется равенством
м
м
IT О21 —Г
/1] /l<f
Подставив эти результаты в C.17.4), получим
>('¦)
Mt
*а—*¦%¦-
Mi
—ft
J
х
-ft
*) Начиная отсюда мы снова не будем указывать значений (', j. Всегда считается, что в от-
отдельности эти индексы могут иметь значения 1, 2, но если они входят в одну формулу, то должно
выполняться условие i ф /.
—h
§ 181 ВЕКТОРЫ ВНЕШНИХ СИЛ И ВНЕШНИХ МОМЕНТОВ 39
Отсюда вытекают равенства
+h ' +h
Т,- Jofl(l + ^)d*3, S,« = Jo/((l + ^)da9,
—h —h
B) C.17.5)
H,t
связывающие усилия и моменты, возникающие на координатных сечениях
оболочки, с напряжениями трехмерной среды.
Третья из этих формул совпадает с B.13.6), остальные формулы легко
получить из B.10.1), интегрируя эти равенства по а8. Отсюда и следует спра-
справедливость обсуждаемого утверждения.
Согласно закону парности касательных напряжений теории упругости
должно выполняться раренство
о*-о*. C.17.6)
В теории оболочек, как уже говорилось, оно нарушается, так как ему про-
противоречит гипотеза 1 (§ 2.10). Если тем не менее считать справедливым
C.17.6), то второе и пятое равенства C.17.5) в развернутом виде можно за-
записать так:
+h
j j a12as da3, S12 = j <r12 da3 + -щ- j a12a3
C.17.7)
+h ¦ +h 4-h +h
Я21 = J <т12а3 da3 + — J o\2al da3, Ни = J ai2a3da3 + -^- J
—h т-h —h —ft
Три интеграла, входящих в эти четыре равенства, можно исключить, и
тогда получится условное уравнение
S21-S12 + 4f-^- = 0. C-17.8)
Ниже мы увидим, что существуют различные варианты теории оболочек.
В некоторых из них уравнение C.17.8) «случайно» выполняется, а в других
оно оказывается нарушенным. К обсуждению связанных с этим вопросов еще
предстоит вернуться.
§ 18. Векторы внешних сил и внешних моментов
Пусть на оболочку действуют внешние силы, которые могут быть при-
приложены к внутренним точкам оболочки (массовые силы) нли к ее лицевым
поверхностям S*, S~. Нанесем на срединной поверхности некоторый замк-
замкнутый контур у и выделим часть оболочки, проведя через у нормаль-
нормальное сечение. Внешние силы, приложенные к этой части оболочки, будут
статически эквивалентны силе /?' и моменту Q', взятому относительно
некоторой точки срединной поверхности, лежащей внутри у.
40 СТАТИКА ТЕОРИИ ОБОЛОЧЕК [ГЛ. 9
Составим выражения
(Sv — площадь части срединной поверхности, охваченной контуром у) и
перейдем к пределу при Sv —> 0. Полученные таким предельным переходом
величины R и Q мы будем называть вектором внешних сил и вектором внеш-
внешних моментов.
Если q+ (аь а2) и ^~ (аь а2) — силы, приложенные соответственно
к внешней и внутренней поверхностям оболочки, a q (а1; а2, а3) — массовые
силы, то
<Г J
—ft
+f" C.18.1)
Q dS = (tf+ x ha) dS+ — far x ha) dS~ + J (q x а3л) dS* das,
где dS, dS+, dS~, dS* — соответственно дифференциалы площади средин-
срединной поверхности, наружной и внутренней поверхностей и поверхности, от-
отстоящей на расстояние а3 от срединной.
В триортогональной системе координат A.8.3) имеем
dS* = ВД dot! dc% = A + ¦%) A + -g
(^) ( |) dS =
Подставив этот результат в C.18.1) и произведя сокращение на
АгА2 da1 da2, получим снова формулы B.13.10) и B.14.8). Отсюда следует,
что вектор внешних сил R и вектор внешних моментов Q по смыслу совпа-
совпадают с теми величинами, которые были обозначены теми же буквами
в §§ 2.13, 2.14.
§ 19. Уравнения равновесия теории оболочек
Первое осредненное уравнение равновесия B.13.9) получено в резуль-
результате интегрирования по толщине оболочки дифференциального уравнения
равновесия теории упругости. Это значит, что, если выделить показанный
на рис. 8 элемент тела оболочки V с помощью поперечных сечений, проведен-
проведенных через стороны сколь угодно малого координатного четырехугольника, то
равенство B.13.9) будет представлять собой условие уравновешенности всех
сил, приложенных к У (в направлении а3 элемент V имеет конечное, хотя
и малое протяжение, а в направлении аг, а2 он сколь угодно мал). Основы-
Основываясь на этом, будем называть первое осредненное уравнение равновесия
теории упругости, т. е. равенство
-4r(A*R{1))~ik{AiRi2)) + AiAiR = 0' (ЗЛ9Л)
силовым уравнением равновесия теории оболочек.
Рассмотрим второе осредненное уравнение равновесия теории оболочек
B.14.10) и перепишем его так:
AlA1Q = 0. C.19.2)
S 191
УРАВНЕНИЯ РАВНОВЕСИЯ ТЕОРИИ ОБОЛОЧЕК
Здесь под Q подразумевается следующее выражение:
Й— Q С _i_ ^ai #ia
— «21 ^12 -Г ~р р~ »
C.19.3)
так что C.19.2) получено из B.14.10) прибавлением и вычитанием одной
и той же величины.
Учитывая, что
М,. = А, (- Ti Jjj— S,, ^
х М
,
уУ~ + 5,/л)> C.19.4)
можно второе осредненное уравнение равновесия теории упругости пере-
переписать так:
х Л,-
Х
= 0. C.19.5)
Оно получается в результате векторного умножения на а3п и последующего
интегрирования по толщине уравнения равновесия теории упругости, а сле-
следовательно, выражает условие уравновешенности моментов относительно
тангенциальных осей от всех сил,
приложенных к V (рис. 8). Уравно-
Уравновешенность моментов относительно
оси п уравнение C.19.5), как было
указано, не обеспечивает. Можно по-
показать, что условие отсутствия мо-,
ментов относительно оси п выра-
выражается равенством
й = 0. C.19.5а)
Отсюда следует, что уравнение
Рис. 8.
C.19.6)
получающееся из C.19.5) при Q = 0, выражает уравновешенность моментов
относительно всех осей; оно будет называться моментным уравнением равно-
равновесия теории оболочек.
Таким образом, силовое уравнение равновесия идентично первому осред-
ненному уравнению равновесия (последний термин больше употребляться не
будет), но моментное уравнение равновесия содержит больше требований,
чем второе осредненное уравнение равновесия (в дальнейшем эти понятия будут
различаться).
Векторы /?<'>, Qi(), входящие в C.19.1) и C.19.6), расшифровываются
с помощью формул C.17.3). Их можно рассматривать как векторы интенсив-
интенсивности сил и моментов, приложенных к сторонам сколь, угодно малого коор-
координатного прямоугольника S, выделенного на срединной поверхности обо-
оболочки. Равным образом R и Q, которые в развернутом виде мы будем запи-
записывать так:
О V -* I V " V— Г\ V "li V ^ /о ]Л 7\
1\ = Ai —. \~ Ла -. Lill, W = I \ ; I о —я ' • \0. IZ/. I Г
42 СТАТИКА ТЕОРИИ ОБОЛОЧЕК [ГЛ. 3
можно рассматривать как векторы интенсивности сил и моментов, приложен-
приложенных к поверхности S. Тогда уравнения C.19.1) C.19.5), C.19.6) будут выра-
выражать условия уравновешенности всех сил и всех моментов, действующих на S.
Силовое и моментное уравнение равновесия представляют собой вектор-
векторные равенства. В совокупности они эквивалентны шести скалярным уравне-
уравнениям. Их можно получить, пользуясь формулами A.6.3) для дифференциро-
дифференцирования вектора, развернутого по осям основного триэдра.
Положим в A.6.3) последовательно
b = A,Ra) и Ь=АгЯB). C.19.8)
Тогда, раскрывая #A), R<2\ по формулам C.17.3) можно каждое из вектор-
векторных равенств C.19.8) заменить тремя скалярными
Отсюда с помощью A.6.3) получаем
^r,].. C.19.9)
Равным образом, положив в A.6.3) последовательно
и b =
и заметив, что, в силу C.17.3), каждое из этих векторных равенств эквива-
эквивалентно трем скалярным
получим с помощью A.6.3)
f3.19.10)
Подставив теперь C.19.4), C.19.7), C.19.9), C.19.10) в силовое и момент-
моментное уравнения равновесия C.19.1) и C.19.6), получим шесть искомых скаляр-
скалярных уравнений равновесия для оболочки, средняя поверхность которой от-
отнесена к линиям кривизны:
т АА^ +
-0, C.19.11)
S20]
УСИЛИЯ И МОМЕНТЫ НА КОСЫХ СЕЧЕНИЯХ
43
Векторы R и Q выше были определены формулами B.13.10) и B.14.8),
а здесь для них приняты формулы C.19.7). Поэтому, учтя еще B.9.2), можно
компоненты векторов интенсивности внешних сил и интенсивности внешних
моментов выразить через компоненты вектора массовых сил q и компоненты
векторов сил q+, q~, приложенных к лицевым поверхностям оболочки, сле-
следующим образом:
)
—h
—h
(ЗЛ9Л2)
$
—й
§ 20. Усилия и моменты на косых сечениях
Напряженное состояние оболочки в данной точке срединной поверх-
поверхности задается четырьмя векторами /?A), R<2), Q(l>, Qi2>, которые с помощью
формул C.17.3) в свою очередь задаются десятью усилиями и моментами 7\,
52i, S12, T2, Gu H21, H12, G2, Nlf N2.
Усилия и моменты на косых (не коорди-
координатных) сечениях могут быть выражены
через эти величины. Чтобы вывести соот-
соответствующие формулы, выделим на средин-
срединной поверхности оболочки вблизи интере-
интересующей нас точки бесконечно малый кри-
криволинейный треугольник abc (рис. 9) и
будем считать, что стороны ab и ас обра-
образуются отрезками ах- и а2-линий соот-
соответственно, а сторона be направлена так,
что она составляет с с^-линией угол к.
Обозначим через dslt ds2, dsy длины сто-
сторон ab, ас и be и заменим действие от-
отброшенной части оболочки усилиями и
моментами, приложенными к сторонам выделенного треугольника (на ри-
рисунке векторы моментов не изображены). Из рассуждений, приведенных
в § 3.19, вытекает, что силы, приложенные к сторонам треугольника abc,
должны уравновешивать друг друга (силы, распределенные по площади тре-
треугольника, не надо учитывать, как дающие равнодействующую высшего по-
порядка малости). Таким образом,
Рис. 9.
Учитывая, что
dsk = cos A. dsy, dst — sin A, dsy,
44
СТАТИКА ТЕОРИИ ОБОЛОЧЕК ЛЛ- 3
можно написать также
/?B) cos X + /?A> sin Jt + /?w = О
или,1 развернув векторы /?<'>, /?<2) и /?<v> по формулам C.17.3), C.17.2),
— Ss — П + й) = ". C.2П.1)
Выполним последовательно скалярное помножение C.20.1) на единич-
единичные векторы s, t, n и заметим, что, как видно из рис. 9,
S--%± = — cos A,, s--^-=slnA,, sb = 0,
Отсюда для усилий S, Т, N на косом сечении получаем такие формулы:
S = G\ — Г2) sin Я, cos Я, — Sn sin2 Я, + S12 cos2 Я,,
Г = — Г, sin2 А.— Г2 cos2 А.—(S12 + Sgl)sin Я, cos A,, C.20.2)
Формулы перехода от моментов на координатных сечениях к моментам,
возникающим на косых сечениях, можно таким же образом вывести из тре-
требования уравновешенности всех моментов, приложенных к сторонам тре-
треугольника abc. Они записываются так:
Н = Я21 sin2 А,— Н1г cos2 A. -f (Gi — G2) sin Я, cos A.,
G = (Ha + H12)sm XcosX—GlSin2^ — G2cos2X. C.20.3)
§ 21. Функции напряжения
Покажем, что в теории оболочек, так же как и в теории упругости,
можно построить функции напряжений, т. е., что десять усилий и моментов
теории оболочек 7\, S21, S12, 7\, Glt Я21, Я12, G2, Л^!, jV2 можно выразить
через некоторые произвольные функции и их производные так, что однород-
однородные уравнения равновесия будут тождественно (при любом выборе этих
функций) удовлетворяться [38, 77].
Замечание. Строго говоря, функции, которые будут здесь введены, надо было бы назвать
функциями усилий и моментов, но для краткости мы используем здесь термин теории упру-
упругости, укоренившийся уже и в теории оболочек.
Легко видеть, что при R = 0 силовое уравнение равновесия C.19.1)
тождественно удовлетворяется, если положить
где L — произвольный вектор.
Заменим в моментном уравнении равновесия C.19.6) A^RM и Л2/?A)
по формулам C.21.1); тогда при Q = 0 оно примет вид
-¦? DQA>)- ? 04xQB)) —? X Af2 + ? X Ж, = 0. C.21.2)
§ 21] ФУНКЦИИ НАПРЯЖЕНИЯ 45
Этому уравнению можно удовлетворить, положив
AtQ{2> = ^+LxMu A2Qa> = —1?— L x M» C.21.3)
каков бы ни был вектор К.
Таким образом, /?(I), /?B), Qa\ Q<2) оказались выраженными через два
произвольных вектора L и К так, что оба однородных уравнения равновесия
тождественно удовлетворяются. Однако L и К нельзя брать совершенно не-
независимыми друг от друга, потому, что при этом QA> и QB), определенные
равенствами C.21.3), будут в общем случае иметь отличные от нуля нормаль-
нормальные компоненты, что противоречит второму равенству C.17.3). Помножим
поэтому обе части равенств C.21.3) скалярно на п и потребуем, чтобы левые
части обратились в нули.
Тогда, воспользовавшись формулами скалярного умножения A.2.2), по-
получим два скалярных равенства
«L.e + (_lLL.-^-O. C.21.4)
ограничивающие произвол векторов L и К.
Из C.21.1), C.21.3) легко вывести формулы, выражающие усилия и мо-
моменты через векторы функций напряжения L и К. Для этого внесем в C.21.1),
C.21.3) развернутые выражения C.17.3) для /?"', Q"» и будем помножать
полученные равенства на единичные векторы основного триэдра. Получим
ы*-ь-Ъ1-к?;-* C-2L5)
(в силу C.21.4) равенства, получаемые помножением C.21.3) на п, обращаются
в тождества).
Примем, что L и К развертываются по осям основного триэдра следую-
следующим образом:
^^ ^ ^—сп, C.21.6)
где ij?!, г(э2, %, а1г а2, с — произвольные функции, которые будут называться
функциями напряокения.
Отождествим в формулах дифференцирования A.6.3) вектор & с L, т.е.
положим
тогда можно написать
46 СТАТИКА ТЕОРИИ ОБОЛОЧЕК 1ГЛ. 3
Подставив этот результат в C.21.5), получим формулы, выражающие
усилия через функции напряжения ¦^>1, тр2, %:
' ( > Ж '
A, да,^ AiA, да( W" °i'~ А, да, ^ AtA, да(
т (-1)' д% %
{~ А, да, ~Rj'
C.21.8)
. Таким же образом, отождествив Ь с К в формулах A.6.3), будем иметь
jw_ _ (_^., j_mln — а _?_^ jul л.
dat ~ \ da,i "^ A, da.j u' ' Rt ) А ~*~
Отсюда по. формулам C.21.5) получаем также формулы, связывающие мо-
моменты с функциями напряжения аи а2, с,
С — _JL_^ ^
? ~~ Л, За
JL ^
Л, За, + AtA, dat °'
_ 1 За, 1 3^;
"I* - ~А~, Ж7 ~ ATA; 'даТ '
Кроме того, внеся C.21.7) и C.21.9) в формулы C.21.4), мы получаем
равенства
¦'--зг ¦?¦ + ¦?• <3-21Л°)
которые показывают, что две из шести введенных выше функций напряжения
не являются независимыми.
Исключив в C.21.8) tylt г|>2 с помощью C.21.10), получим формулы
Г — ' д ( ' дс I. °') I I dAi ( I & , а{ \
1 А, да, \Aj да/ "•" R,}^ А{А, dat \ At да( "^ R{ ) '
с 1 3 / 1 дс at \ 1 ^// 1 дс а,\ , t
°'1 * А, да, \ At да{~т~ Rt ) ^ AtA, да( \ А, да, ^ R,) { l> R, '
\ ( \ дс at \ (o «I ¦ 1ч
\ + ) C.21.11)
А, ,да, "*¦ AiA, da, ' R, '
Очевидно, что выражение таким образом усилия и моменты будут удо-
удовлетворять шести однородным скалярным уравнениям равновесия теории
оболочек, какими бы ни были достаточное число раз дифференцируемые функ-
функции напряжения аи а2, с, %. Это значит, что последние играют в теории обо-
оболочек такую же роль, как функции Максвелла—Морера в теории упругости.
ГЛАВА 4
ГЕОМЕТРИЯ ТЕОРИИ ОБОЛОЧЕК
§ 22. Векторы упругого перемещения
и упругого вращения срединной поверхности
В § 2.11 вектор смещения упругой среды, образующей оболочку, был
формулой B.11.5) представлен в виде
V = U + аат — а3^п, D.22.1)
где векторы U, т и скаляр г|з зависят только от (аъ аг). Положив а3 = О
в D.22.1), убеждаемся, что U представляет собой значение, которое прини-
принимает V на срединной поверхности. Поэтому естественно назвать U вектором
упругого перемещения срединной поверхности. В развернутом виде будем за-
записывать U, так же как в § 2.11, с помощью формулы
U=u1^ + u^~wn D.22.2)
и назовем иь и2 — тангенциальными компонентами упругого смещения
оболочки, a w — нормальной компонентой или прогибом оболочки.
В книге вопросы нелинейной теории оболочек не рассматриваются, и
поэтому всюду будет считаться, что компоненты упругого смещения ии
и2, w и все их производные по (аи а2) настолько малы, что члены, нелиней-
нелинейные относительно этих величин, можно отбрасывать.
Введем далее следующие обозначения для углов поворота, возникающих
в процессе деформации или смещения оболочки (рис. 10):
у, — угол, на который поворачивается вектор Mt в сторону вектора п
в плоскости М,, п\
со, — угол, на который поворачивается вектор Mt в сторону вектора Af>
в касательной плоскости.
Очевидно, что са = <ог + са2 равно изменению угла % между координат-
координатными линиями, аб= (са2 — <fli)/2 можно принять за меру угла поворота
элемента срединной поверхности вокруг нормали от М1 к Af2.
Введем понятие о векторе упругого вращения Г, определив его равен-
равенством
r = T,4L-Ti4s~e». D-22.3)
Вектор Г изображает упругие повороты, имеющие место в срединной
поверхности оболочки. Его направление выбрано так, что положительный
поворот при взгляде с положительной стороны Г будет совершаться против
часовой стрелки *).
*) В [48] было принято прямо противоположное правило знаков для углов поворота.
Вектор упругого вращения там был обозначен через Q. Эта величина по смыслу совпадает
с — Г. Компоненты ?,, ?». 6 вектора Q в [48] имеют тот же смысл, что и здесь.
48
ГЕОМЕТРИЯ ТЕОРИИ ОБОЛОЧЕК
1.ГЛ. 4
Векторы U и Г, конечно, не независимы, так как упругие повороты в сре-
срединной поверхности полностью определяются смещениями, которые она ис-
испытывает. Поэтому можно вывести три скалярных соотношения, связываю-
связывающие V и Г.
Помножая скалярно D.22.3) на Мх, М2 и п, получаем
Т>, = (-1)'Г.^, б = — Тп
Вместе с тем -уц Va» 6 можно выразить и через вектор U.
1Ч Плоскость М. ,п
D.22.4)
Рис. 10.
Пусть М' обозначает вектор деформированной срединной поверхности
М' = М -f U, D.22.5)
откуда
(индексы при М' и U обозначают производные по соответствующим аргу-
аргументам). Помножив это равенство скалярно на п, получим:
M'in = Mrn-\-Utn = Ut-n.
Длина вектора Mi равна А'{, а угол между МJ и п согласно данному выше
определению равен -^ yt. Таким образом,
Mi-n = At sin у.
Но А\ (коэффициенты первой квадратичной формы деформированной средин-
срединной поверхности) отличаются от А, на величину порядка компонент смеще-
смещения, поэтому в линейной теории последнее равенство надо заменить таким:
Таким образом,
D.22.6)
§ 221 ВЕКТОРЫ УПРУГОГО ПЕРЕМЕЩЕНИЯ И УПРУГОГО ВРАЩЕНИЯ 49
Сопоставляя это равенство с первым из соотношений D.22.4), получим:
-^¦•Я — (—1)'Г.-^- = 0. D.22.7)
Далее имеем:
№j __ М) м{ _ №j ц{ ^ Mj ul rMj
А{ Af A( Aj д{ Af Xt A/
В левой части этих равенств стоит скалярное произведение единичных
векторов, равное косинусу угла между этими векторами. Таким образом
(рис. 10),
ял' ля
В правой части равенств D.22.8) стоит малая величина; поэтому А{
можно заменить на А{. Таким образом,
откуда
" e4K-j4ft-f-H)' D-22-10)
Но последней из формул D.22.4) угол б связан также и с вектором упругого,
вращения. Отсюда легко выводятся равенства
-^-.^ + Г.я=-^—^~Г.я=-1-(»1 + вЧ) = -?- ..D.2.2,11),
Равенства D.22.7), D.22.11) и представляют собой искомые скалярные
соотношения, связывающие U и Г. . .
Формулы D.22.6) повторяют полученные ранее равенства B.11.7). Это
значит, что формально введенные выше величины у( по смыслу совпадают
с упругими углами поворота, которым здесь даны такие же обозначения.
Пользуясь этим, покажем, что вектор т, введенный с помощью второго ра-'
венства B.11.6), можно определить формулой
т = п' — п, D.22.12)
где п' — единичный вектор нормали деформированной поверхности. При-'
няв во внимание, что п и п' — единичные векторы, получим:
тп = пп'— 1 = cos<p— 1,
где ф — угол между нормалями деформированной и недеформированной по-
поверхностей. Этот угол мал, и его косинус может быть заменен единицей, так
что
тп = 0.
Из геометрических соображений (см. рис. 10) получаем также
i?.„'= cos (J1+ ?,)=_sin7, = -*.
Таким образом, получены все скалярные произведения вектора т на
единичные векторы основного триэдра, и можно написать
т = -ъ-^—ъ*?- D-22.13)
4 А. Л. Гольденвейзер
50 ГЕОМЕТРИЯ ТЕОРИИ ОБОЛОЧЕК [ГЛ. 4
Требуемое положение доказано, так как D.22.13) совпадает со вторым
равенством B.11.6).
? Согласно D.22.3) имеем
Сопоставляя этот результат с D.22.13), получим формулу
/й = Гхл. D.22.14)
§ 23. Компоненты тангенциальной деформации
срединной поверхности оболочки
В процессе преобразования компонент деформации трехмерной упру-
упругой среды были с помощью формул B.11.9) введены величины
А{ А{ ' Ю Ах А, + А
в1г к», е2 будут в дальнейшем называться компонентами тангенциальной де-
деформации срединной поверхности оболочки.
Покажем, что е1( е2, w полностью определяются приращениями, которые
получают коэффициенты первой квадратичной формы срединной поверх-
поверхности оболочки в результате ее деформации.
Пусть средииная поверхность оболочки до и после деформации задаются,
соответственно, векторами
М и М' = М + U.
Тогда для недеформированной поверхности
а для деформированной поверхности
ds" = А[' da? -f 2A2A2 cos %' da\ da2 -f A%
где
A'i = (Mi + U if, A[A2 cos % = (Mi + Ui) ¦ (M 2 -f Щ.
Последние формулы в линейном (относительно Ut) приближении можно
переписать так:
или, учитывая D.23.1),
А,' = А] A + 2е,), А[А'ъ cos х' = AiA&. D.23.2)
В обоих частях первого из этих равенств извлекаем квадратные корни
и пользуемся известной формулой приближенного исчисления, тогда, раз-
разрешая полученное уравнение относительно е*, получим
е^-^4!. D.23.3)
Заметим, далее, что
cosx' «= cos (-5 65с) = бх.
где бх — величина, на которую уменьшился угол между координатными ли-
линиями в результате деформации.
$ 241 КОМПОНЕНТЫ ИЗГИБНОЙ ДЕФОРМАЦИИ 51
Так как 8% — малая величина, то в левой части второго равенства D.23.2)
можно пренебречь различием между А\ и Л,. В результате получим
ю = 6*. D.23.4)
Формулами D.23.3) и D.23.4) устанавливается искомая связь компонент
тангенциальной деформации с изменением коэффициентов первой квадратич-
квадратичной формы срединной поверхности.
§ 24. Компоненты изгибной деформации срединной поверхности
Вторая группа величин, через которые в § 2.11 выразились компоненты
деформации упругой среды, записываются так:
~'~ At At '
*** жж i тт mi *** mi i ft ля (& v4 1 \
"J л» **1 ^2 1 2 1 ^3 1 2
(—S)-
Величины xlt и2, т назовем компонентами изгибной деформации средин-
срединной поверхности. Они связаны с приращениями, которые в процессе дефор-
деформации получают коэффициенты второй квадратичной формы.
Коэффициенты второй квадратичной формы деформированной поверх-
поверхности определяются формулой A.3.3)
L;,= — M',-n,, D.24.2)
в которой М' и п' можно выразить по формулам D.22.5) и D.22.12). Таким
образом,
L\, = — (Мi + Ut) • (я, + т,) (i, /=1,2)
(здесь и ниже запись i, j = 1,2 означает, что допускаются и значения i — j).
Раскроем скобки, отбросим нелинейный член, поделим обе части на А(А/
и воспользуемся последней из формул A.5.4). Получим
L'n = Mj _ я/ Mj^^i LSl.JIl (i, /=-1, 2).
AiAi A{ A/ Ai Af Rf At A/
Поэтому, учитывая формулы A.3.3), D.23.1), D.22.9), D.24.1) и помня, что
для поверхности, отнесенной к линиям кривизны, L12 = 0, Mt-M2 = О,
можно написать
Равенства D.24.3) имеют силу только для случая, когда срединная по-
поверхность отнесена к линиям кривизны. Первое из них показывает, что ком-
компоненты изгибной деформации xlt и2, равно как и ги а, е2, совпадают с теми
компонентами, которые использованы в основопологающей трактовке теории
оболочек [84]. Однако для компоненты т здесь принято другое определение,
предложенное, по-видимому, впервые в {36] и ставшее теперь общепринятым
(для компонент изгибной деформации предлагались и другие определения,
как, например, в [30]). Равенства D.24.3) показывают, что компоненты из-
изгибной деформации связаны с изменениями, которые испытывают в процессе
деформации коэффициенты второй квадратичной формы.
52 ГЕОМЕТРИЯ ТЕОРИИ ОБОЛОЧЕК [ГЛ. 4
Из формул D.23.3), D.23.4), D.24.3) следует, что если заданы шесть ком-
компонент деформации г1у е2,(о, и1( и2)т и известны первая и вторая квадратичная
форма недеформированной срединной поверхности, то можно алгебраическим
путем,найти коэффициенты первой и второй квадратичных форм деформиро-
деформированной срединной поверхности. Вместе с тем первая и вторая квадратичная
формы определяют поверхность с точностью до ее положения в пространстве
(см. § 1.3). Это значит, что компоненты тангенциальной деформации вместе
с компонентами изгибной деформации полностью определяют деформацию
срединной поверхности, т. е. шесть величин еь е2, а, иь иа, т составляют
полную систему компонент деформации.
§ 25. Производные от векторов упругого перемещения
и упругого вращения
Формулами D.22.6), D.22.9) и первым равенством D.23.1) определяются
все скалярные произведения векторов Ut на единичные векторы основного
триэдра. Мы имеем
Отсюда следует, что производные от вектора упругих смещений в раз-
развернутом виде записываются так:
Введем вспомогательные векторы КA>, КB) (нижние индексы взяты
в скобки, так как они не обозначают дифференцирования по соответствую-
соответствующим переменным), задав их равенством
и покажем, что эти векторы лежат в касательной плоскости и определяются
только компонентами тангенциальной деформации elt е2, со.
Из D.22.3) получаем
Отсюда, учтя формулы D.22.10), D.22.11), D.25.2), получим требуемый ре-
результат:
У(О _ - Мi , <в М,
А.
Из формул D.24.1) и D.22.9) следует
»'-*'»x-^L. D.25.5)
~АТ Ai ~ л" Ai A; - Ri'
В левых частях этих равенств вектор т можно выразить через вектор Г
с помощью D.22.14). Получим
itii "* / Т(
At A/ At
§ 26] ВЫРАЖЕНИЕ КОМПОНЕНТ ДЕФОРМАЦИИ 53
Заменив здесь л, согласно A.5.4) и выполнив векторное умножение, напишем
Ac At - к 1> А{ ' А, •
Подставим этот результат в D.25.5) и заметим, что согласно D.22.3), D.22.10)
Получим
Введем обозначения
Тогда формулами D.25.6) и D.25.7) определятся все скалярные произведения
векторов Гь Г 2 на единичные векторы основного триэдра, и можно написать
§ 26. Выражение компонент деформации и углов
поворота через перемещения
В предыдущих параграфах были введены углы поворота уг, у2, ®i,
<о2, б, компоненты тангенциальной деформации elf а, е2, компоненты изгиб-
ной деформации xlf x2, т и две дополнительные величины ^ь ?2. Все эти
величины с помощью формул D.25.1), D.25.6), D.25.7), D.22.10), D.22.11),
выражены через скалярные произведения первых производных от векторов
упругого смещения U и упругого вращения Г на единичные векторы основ-
основного триэдра. В свою очередь U и Г выражаются формулами D.22.2) и D.22.3)
через компоненты упругого смещения иг, ы2, w и через углы поворота ylt
у2, б. Пользуясь этим, можно записать формулы, выражающие в скалярной
форме перечисленные величины через перемещения. Для этого надо приме-
применить формулы дифференцирования векторов, заданных на поверхности,
к U к Т. Выкладки здесь совершенно аналогичны тем, которые были опи-
описаны в §3.21. Поэтому, опуская подробности, напишем окончательный
результат.
Из D.25.1) получаем формулы для упругих углов поворота:
m - Jl^L Х—ЁЬ.„ л, _ ( \ дх ut\
Wi ~. At да{ AiA, да,- и" " ~ V Ас да, + R, )'
D.26.1)
и формулы для компонент тангенциальной деформации:
1 dui , 1 dAi w
D.26.2)
Ах да*
54 ГЕОМЕТРИЯ ТЕОРИИ ОБОЛОЧЕК [Гл. 4
Из D.25.6) вытекают формулы, выражающие компоненты изгибной
деформации через углы поворота,
А{ да( AiAj да, ^>'
А. D.26.3)
т L ilL . !
L ilL _!_ Ц. « 4- -?L
Д/ da,- T /М, 3«? v/ T 2/?,
и формулы для величин Ci, Са
Подставив в D.26.3) выражения для углов поворота и деформации сдвига
согласно D.26.1) и D.26.2), получим формулы, выражающие компоненты
изгибной деформации через перемещения:
,- 3a/
A, da, \ At dai ^ Ri ) A(A, dat \ A,- da,
"*" R, \A( dat AiA, da, Ul)'
§ 27. Определение перемещений по заданным компонентам
деформации. Уравнения неразрывности деформаций
В теории упругости доказывается, что компоненты деформации упругой
среды подчиняются уравнениям неразрывности деформаций Сен-Венана,
которые можно рассматривать как условия интегрируемости в задаче
о построении перемещений по заданным деформациям. Таким же образом
можно получить уравнения неразрывности деформаций и в теории оболочек.
Выше при помощи формул D.25.2) и D.25.8) мы выразили производные
от векторов (/ и Г через компоненты деформации, углы поворота и величины
?i и ?2. Будем теперь рассматривать эти равенства как дифференциальные
уравнения, определяющие векторы U и Г, считая, что нам заданы не только
компоненты деформации, но и все перечисленные скалярные величины.
Тогда условиями интегрируемости систем D.25.2) и D.25.8) будут два век-
векторных равенства
-?г U, — 4- U2 = 0, D.27.1)
Если эти соотношения выполнены, то U и Г можно определить при
помощи формул:
U^jlUi da, + Ut da,], Г = J [I\ da, + Г2 da,], D.27.3)
в которых криволинейные интегралы в односвязной области не зависят
от пути интегрирования. Это значит, что будет обеспечена геометрическая
сплошность деформированной поверхности. Поэтому D.27.1) и D.27.2) можно
назвать уравнениями неразрывности деформаций [36, 38 ].
.$27] ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ. УРАВНЕНИЯ НЕРАЗРЫВНОСТИ ДЕФОРМАЦИЙ 55
Обсудим уравнение D.27.1). Заменим в нем Ut через V(<> по формуле
D.25.3). После очевидных преобразований получим
к § к + г х м* ~ Tl х м*= ° D>27<4)
(в дальнейшем мы будем пользоваться только этим уравнением вместо
D.27.1)).
Векторное уравнение D.27.4) эквивалентно трем скалярным равенствам.
Первые два из них можно получить, помножая последовательно обе части
равенства D.27.4) скалярно на Мlt M^. Тогда, используя обозначения
D.25.7), будем иметь:
Эти соотношения можно рассматривать как уравнения, определяющие
величины ?,, которые выше были введены чисто формально. Формулы
D.25.4) показывают, что в выражение У(*> входят только elt е2 и со. Следо-
Следовательно, величины l,i определяются только компонентами тангенциальной
деформации и их производными.
Последнее скалярное соотношение, вытекающее из D.27.4), записы-
записываются так (круглые скобки означают смешанные произведения трех заклю-
заключенных в них векторов):
](Г* Мъ п)—(Гь М» п) = °- D-27-6)
Ниже будет показано, что это соотношение представляет собой тож-
тождество.
Итак, векторное равенство D.27.4) можно рассматривать как уравнение
неразрывности только формально; оно эквивалентно трем уравнениям,
из которых одно является тождеством, а два других связывают введенные
ранее величины ?? с компонентами деформации ги е2, а.
Обратимся к уравнению D.27.2). В нем векторы Г1г Г2, как показывают
формулы D.25.8), выражаются только через компоненты изгибной деформа-
деформации х1( и2, т и величины ?ь ?,, а последние в свою очередь выражаются
через компоненты изгибной деформации еь е2) а формулами D.27.5). Это
значит, что равенство D.27.2) представляет собой векторную запись трех
скалярных уравнений неразрывности деформаций теории оболочек.
Тот факт, что в теории оболочек число уравнений неразрывности дефор-
деформаций оказалось равным трем, очевиден. Уравнения, вытекающие из D.27.2),
можно было бы получить и другим путем, выразив в уравнениях Кодацци—
Гаусса A.3.8) коэффициенты первой и второй квадратичной форм дефор-
деформированной поверхности А{, Ai, %', L'u, L\i, L22 через коэффициенты пер-
первой и второй квадратичной форм недеформированной поверхности A lf
A*, Lllt L22 и компоненты деформации еи а, е2, хь т, >с2. Таким методом
уравнения неразрывности и были впервые получены в [36 3.
Поставленная выше задача определения перемещений решается при
помощи формул D.27.3). Правда, в начале параграфа было сделано предпо-
предположение, что нам известны не только деформации, но и величины d, ?2
и упругие углы поворота <olt (o2, ylt yit 8, однако легко показать, что,
выбрав надлежащим образом последовательность выкладок, мы можем
от этого предположения избавиться. Величины ?i> ?2 следует считать изве-
известными, если заданы компоненты деформации elt e2, со, так как для опре-
определения их даны формулы D.27.5). Следовательно, вектор Г по заданным
компонентам деформации может быть вычислен при помощи второй из формул
D.27.3). Считая известным Г, можно векторы Ult ?/2 выразить по формулам
56 ГЕОМЕТРИЯ ТЕОРИИ ОБОЛОЧЕК [ГЛ. 4
D.25.3) через K<i) и КB), а последние зависят только от компонент дефор-
деформации elf е2, к». Пользуясь этим, мы можем вычислить U припомощи первой
формулы D.27.3), и задача построения перемещений по заданным деформа-
деформациям .будет решена. Изложенный подход к ее решению предложен в [78].
В вычислениях дважды встречается интегрирование. Поэтому в оконча-
окончательный результат войдут два произвольных постоянных вектора. Они, оче-
очевидно, представляют собой векторы смещения и вращения срединной поверх-
поверхности оболочки как жесткого целого.
В качестве простейшего примера рассмотрим случай, когда все компо-
компоненты деформации равны нулю, т. е. найдем компоненты смещения срединной
поверхности как жесткого целого.
При ех = е2 = к» = хг = и2 = т == 0 мы имеем
1\ = Г2 = КA) = КB, = 0.
Второе из соотношений D.27.3) при этом дает
Г = Го = const. D.27.7)
Поэтому по формуле D.25.3) имеем:
Ui = Го х М^
Интеграл, определяющий вектор смещения, принимает вид
U = J [Го х (ЛМ«1 + Mtdaj\,
и, выполнив интегрирование, мы придем к известной формуле:
U = Го х М + Uo D.27.8)
Ее можно также записать в виде
Помножая скалярно это равенство на единичные векторы основного
триэдра, получим окончательно
0, М, -^) + Uo-^, w = (M,ro,n) — Uo-n. D.27.9)
Векторные уравнения D.27.1) и D.27.2) можно заменить скалярными,
снова воспользовавшись формулами дифференцирования вектора, заданного
на поверхности. Соответствующие выкладки аналогичны тем, которые опи-
описаны в § 3.19, и не требуют пояснений. Для оболочки, срединная поверхность
которой отнесена к линиям кривизны, эти уравнения имеют вид
J-tA.x)—^i-(x М_-Мл (т — ^1 —
dctf ' *' deli \ • 2/?,- / dttj 1_ \ 2/?^ / J
/х х ч д 1 д 1 D.27.10)
AxAt ( ^- + -нЧ - 4г (AM + 4г (AM = 0.
\ *^2 **1 / игл-^ UfJC/2
§ 27] ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ. УРАВНЕНИЯ НЕРАЗРЫВНОСТИ ДЕФОРМАЦИЙ 57
Здесь приведены пять уравнений. Шестое скалярное равенство формально
записывается так:
2R1 ) V 2R2 ) + 2R, 2R2 ~ U"
Оно, как уже говорилось, представляет собой тождество.
Мы будем в дальнейшем условно называть пять скалярных равенств-
D.27.10) или два векторных равенства D.27.1) и D.27.2) уравнениями нераз-
неразрывности деформации, хотя в них, помимо компонент деформации, входит
величина ?,. Ее можно исключить с помощью третьего равенства D.27.10).
Тогда число уравнений неразрывности деформаций сократится до трех.
Они записываются так:
Rt [да, Wi) да, 2 да, \Л' 2 )~ даТ
D.27.11)
д
{ А, [ да, <ЛА> да2 Т ~ да7 И1 2 ) да,
(первое из этих равенств содержит индексы i, j и, следовательно, эквивалентно
двум уравнениям).
Замечание. В интересной работе [181 ] для вывода уравнений неразрывности деформаций
был применен вариационный метод и были получены четыре уравненвя. Они содержат, помимо
Bj, со, 82, х1? т, и2, дополнительные геометрические величины, которые в рамках излагаемой
теории надо положить равными нулю. В результате снова получатся равенства D.27.11).
Такие обобщенные уравнения неразрывности деформаций могут быть получены при построе-
построении некоторых уточненных теорий, в частности теорий, учитывающих поперечные сдвиги.
ГЛАВА 5
УРАВНЕНИЯ СОСТОЯНИЯ. ОБЩИЕ ВОПРОСЫ
§ 28. Уравнения состояния (соотношения упругости)
Чисто статические и чисто геометрические уравнения и формулы, рас-
рассмотренные в двух предыдущих главах, связаны между собой уравнениями
состояния, выражающими усилия и моменты через компоненты деформации.
Они были уже выведены раньше и записаны с помощью равенств B.12.3)
и B.12.5). Перепишем их еще раз:
) J ~T~n=v"z''
я - 2EhS
-
П~ 3A+v)
Равенства E.28.1) представляют собой лишь один из возможных вариан-
вариантов уравнений состояния. В литературе по теории оболочек можно найти
и другие варианты тех же формул. Это объясняется тем, что любая двумер-
двумерная теория оболочек опирается на те или иные упрощающие предположения,
характер которых не сказывается на чисто статических и чисто геометриче-
геометрических соотношениях, но отражается на структуре уравнений состояния (вы-
(выкладки, ведущие к последним, обычно также выполняются не точно).
Равенства E.28.1) представляют собой уравнения состояния, соответ-
соответствующие гипотезам § 2.10. Последние сформулированы не совсем обычно,
хотя в сущности мало отличаются от других гипотез теории оболочек. Они
обладают следующими преимуществами.
Теорию оболочек, основанную на гипотезах §2.10, можно рассматривать
как исходное приближение некоторого итерационного процесса интегриро-
интегрирования трехмерных уравнений теории упругости и, кроме того, для определен-
определенного класса (наиболее важных в практическом отношении) задач она дает
максимальную точность. Это утверждение будет обосновано в части VI
книги.
Среди других гипотез, предлагавшихся для построения двумерной теории
оболочек, наибольшей популярностью пользуется гипотеза Кирхгофа—Лява,
которую можно сформулировать так:
(а) прямолинейные волокна оболочки, нормальные к недеформированной
срединной поверхности, остаются прямолинейными и нормальными к дефор-
деформированной срединной поверхности и не меняют своей длины; (б) нормальными
напряжениями а33 можно пренебречь по сравнению с напряжениями а1и
с12 и о22.
§ 28J УРАВНЕНИЯ СОСТОЯНИЯ 59
Эту гипотезу Кирхгоф положил в основу теории изгиба пластинок,
а Ляв с ее помощью получил первую формулировку современной теории
оболочек.
Сравнив гипотезу Кирхгофа—Лява с предлагаемыми здесь гипотезами,
можно отметить, что в последних
A) сохранено предположение о том, что нормальный элемент остается
нормальным; это выражено первым равенством B.10.3),
B) отброшено предположение о неизменности длины нормального
элемента, о чем свидетельствует второе равенство B.10.3),
C) предположение о возможности отбросить а33 заменено предположе-
предположением о возможности выразить его приближенной формулой B.10.5),
D) приняты равенства B.10.1), B.10.2), которыми, как отмечалось
в §2.11, в сущности устанавливается правило отбрасывания некоторых вто-
второстепенных членов (при реализации гипотезы Кирхгофа—Лява отбрасы-
отбрасывания тоже производятся, но они заранее не регламентируются).
Исходя из гипотезы Кирхгофа—Лява и сохраняя в выкладках только
старшие члены, можно вывести такие уравнения состояния:
т 2Eh /ii со Eh
^ = ПГ^(е. + ^е/). sn = St, -= -j^ <o,
r 2Eh* . . „ „ 2Eh* E.28.2)
G' = — 3A-v»)(X' + vx/)« H" = H'i = 3A
В работе [77] была также принята гипотеза Кирхгофа—Лява, но в вы-
выкладках были сохранены все степени а3 до третьей включительно. Это при-
привело к таким уравнениям состояния:
гг 2ЕН . . . 2Eh3
. 2Eh3 ( 1 1 \ / ei \
Eh „ EflS f l l \ («¦ ш \ №. OO 1\
®)\х) E-28-3)
Сравним E.28.1) с E.28.3) и выясним причины расхождений между
этими формулами.
Прежде всего равенства E.28Л) неоднородны. Они содержат слагаемые,
зависящие от интенсивности внешнего сжатия т, которым соответствует
некоторое напряженное состояние, не связанное с деформированием средин-
срединной поверхности. Это является очевидным следствием эффекта Пуассона,
вызванного напряжением а33, и в формулах E.28.3) оно не нашло отраже-
отражения потому, что в рамках гипотезы Кирхгофа—Лява а33 не учитывается.
В выражении длябг в квадратных скобках согласно E.28.1) надо учи-
учитывать выражение
тогда как согласно E.28.3) вместо него надо брать
- ' E-28-3а)
Лишние члены в E.28.1а) появляются как результат учета изменения
длины нормального элемента. В E.28.3а) они исчезают вследствие при-
принятия гипотезы Кирхгофа—Лява. Вместе с тем нет никаких оснований счи-
считать, что первое слагаемое выражения E.28.1а) будет больше второго. Это
60 УРАВНЕНИЯ СОСТОЯНИЯ. ОБЩИЕ ВОПРОСЫ (ГЛ. 5
значит, что формулы E.28.3) нельзя считать до конца последовательными.
К ним ведут выкладки, учитывающие все члены до а3 включительно. Эта
точность не адекватна точности гипотез Кирхгофа—Лява, и в результате
в E.28.3) учитываются члены E.28.3а) того же порядка, как и отброшенные.
В свою очередь в E.28.3) в выражения для Тх, Т2, S21, S12 входят сла-
слагаемые, которых нет в E.28.1), и эти слагаемые при определенных обстоя-
обстоятельствах могут оказаться существенными *). Отсюда следует, что уравнения
состояния E.28.1) формально столь же не последовательны, как и E.28.3).
Однако надо помнить, что формулы E.28.1) предлагаются для определенного
класса задач, а не как универсальные уравнения состояния. В части VI
этот класс задач будет определен и будет показано, что в нем пропущенные
слагаемые не могут оказаться существенными.
Из сказанного можно сделать вывод, что в теории оболочек вид урав-
уравнений состояния в известных пределах зависит от нашего желания и от целей,
которые мы преследуем. Здесь не всегда решающим является даже стремле-
стремление добиться наибольшей точности, так как простейшие варианты уравнений
состояния часто оказываются в этом смысле вполне приемлемыми. Будем
поэтому пока считать равенства E.28.1)—E.28.3) равноценными и присоеди-
присоединим к ним еще один вариант уравнений состояния, предложенный незави-
независимо и одновременно Л. И. Балабухом [13] и В. В. Новожиловым [98]:
т 2Eh < i ч с Eh (, i 2Л т \
(O.ZQA)
При своей, почти предельной простоте он обладает важными свойствами,
которые выявятся впоследствии.
Замечание. Формулы, связывающие усилия и моменты оболочки с компонентами дефор-
деформации ее срединной поверхности, названы здесь уравнениями состояния, так как этот термин
все чаще появляется в зарубежной научной литературе. При этом допускается некоторая
условность: обсуждаемые формулы зависят не только от состояния материала оболочки, ио
также и от свойств, приписываемых самой оболочке в силу принимаемых гипотез.
§ 29. Дополнительное уравнение статики
и шестое уравнение равновесия
Уравнения состояния, в любом варианте, связывают восемь усилий и
моментов Тх, Т2, Sal, S12) Glt #21, H12, G2 с шестью компонентами дефор-
деформации е1( со, е2, х1г т, х2. Поэтому, исключив компоненты деформации,
можно получить два алгебраических равенства для усилий и моментов,
к обсуждению которых мы и переходим.
Одно из упомянутых равенств в некоторых случаях, и в частности в слу-
случаях, когда уравнения состояния имеют вид E.28.3) или E.28.4), записы-
записывается так:
SO | ^21 ^*12 Л /С OQ 1\
Оно совпадает с последним скалярным уравнением равновесия C.19.11),
которое мы будем называть шестым уравнением равновесия, подразумевая
под этим равенство, выражающее условие уравновешенности моментов отно-
относительно оси п.
Выше уже говорилось, что шестое уравнение равновесия не входит
в число статических уравнений в теории оболочек и, вообще говоря, оно
*) Это будет показано в части VI.
$30]
РАБОТА СИЛ ТРЕХМЕРНОЙ УПРУГОЙ СРЕДЫ ОБОЛОЧКИ
61
не выполняется. Однако оно может оказаться следствием уравнений состоя-
состояния. Примером, как мы видели, служат уравнения состояния, выражаемые
формулами E.28.3), E.28.4). Пример противоположного характера пред-
представляет собой уравнения состояния, выражаемые формулами E.28.1) и
E.28.2). Из них вместо E.29.1) вытекает уравнение
Sai —512 = 0, E.29.2)
которое отличается от E.29.1) отсутствием членов с Я21 и Я12.
Замечание. Как правило, моменты //21, #12 малы по сравнению с усилиями Sai, S12.
Поэтому нарушение шестого уравнения часто не имеет существенного значения. Напомним
в связв с этим, что речь идет о несоблюдении уравновешенности некоторых воображаемых сил
и моментов, приложенных к воображаемой срединной поверхности, а равновесие трехмерной
среды, образующей оболочку, будет выполняться всегда, когда удовлетворены первые пять
уравнений равновесия C.19.11) и когда должным образом определены напряжения а13, сг23, стзз
(§ 2.16). Вместе с тем возможны и случаи, когда разница между уравнениями E.29.1) и E.29.2)
станет существенной. Поэтому в дальнейшем мы будем иногда различать уравнения состоя-
состояния, удовлетворяющие или противоречащие шестому уравнению равновесия.
Второе равенство, вытекающее из уравнений состояния, будет назы-
называться дополнительным статическим уравнением. К дополнительному ста-
статическому уравнению простейшего вида приводят уравнения состояния
E.28.2) и E.28.4). В этих случаях получаем
Я
21 '
¦Я12 =
E.29.3)
«А
§ 30. Работа сил трехмерной упругой среды оболочки
Вернемся к трехмерным уравнениям теории упругости и будем снова
пользоваться триортогональной системой координат A.8.3).
Выделим нормальными сечениями некоторую конечную часть оболочки
и будем считать, что ей соответствует односвязная или многосвязная область G
изменения параметров (ах, а2), ограниченная контуром (или контурами) g
(рис. 11). Можно считать, что к рассматриваемой
части оболочки приложены внешние силы и
упругие силы, заменяющие отброшенную часть
оболочки. Обозначим через Z работу всех этих
сил на перемещениях трехмерной среды обо-
оболочки. Ее можно представить в виде следую-
следующей суммы:
Z = ZG + Z+ + Z- + Zg. E.30.1)
Здесь ZQ представляют собой работу массовых
сил
Za = J da3 J J q ¦
da2
E.30.2)
Рис. 11.
(q — вектор массовых сил, V— вектор смещений трехмерной упругой среды).
Z+, Z~ представляют собой, соответственно, работу сил, приложенных
к лицевым поверхностям оболочки:
*т^- L I s*i / \ti 1 и \ а** a** i /^ч ^Л ^\
(^± — векторы сил, приложенных к лицевым поверхностям).
Под Zg подразумевается работа упругих сил, развивающихся нз боковых
поверхностях оболочки. Чтобы найти Zg, выделим малый объем тела оболочки
62
УРАВНЕНИЯ СОСТОЯНИЯ- ОБЩИЕ ВОПРОСЫ
[ГЛ. 5
двумя сечениями а3 = а30 и а3 = а30 + da30, параллельными срединной
поверхности, двумя поперечными сечениями, проведенными через аг- и
ос2-линии, и поперечным сечением, проведенным через малый участок гра-
границы g. В плоскости а3 = а30 этот объем изобразится в виде криволинейного
треугольника аЪс (рис. 12).
Силы, приложенные к поперечным сечениям, проходящим вдоль ас
и аЪ, будут, соответственно,
~OB)H\da,\da,3 и 0(i)H2doc2da,3.
Поэтому из условия уравновешенности элемента abc следует, что к стороне,
проходящей через cb, будет приложена сила, которая с точностью до беско-
бесконечно малых величин более высокого по-
порядка равна
— О/1) Я,
Отсюда имеем
zs =
J
E.30.4)
В E
Поэтому
(контурный интеграл должен браться вдоль
рис 12. всей границы односвязной или многосвязной
области G, изображенной на рис. 11).
.30.4) величины V, Ях, Я2 определяются формулами B.11.5) и A.8.5).
j
—h
г
J
I —h
+h
j
(Г+h
j
—h
•+*
J
—h
. E.30.5)
Из формул B.9.2) и B.10.1) следует, что
Г'1 At ^' ~Ajr ^F Г' ~Ai "/' -If) — \ ! Ч- -R-
Si 30] РАБОТА СИЛ ТРЕХМЕРНОЙ УПРУГОЙ СРЕДЫ ОБОЛОЧКИ
Отсюда, учитывая формулы B.13.2), B.13.6), B.13.7), получаем
+А +*
-A —ft
Поэтому можно написать
(г V1 1 r+h
—h J 1—h
E.30.6)
и, кроме того,
{Г "J»h -j p +h -i
j wB)a3 (l +-^-)da3 Midai— j a<i>a3 (l +^) da3
j
= — (j> [m
В последнем равенстве вектор /я с помощью D.22.14) можно выразить
через вектор упругого вращения Г. Тогда, воспользовавшись формулами,
B.14.9), получим
i».jB«> = Г-<?<*>,
и обсуждаемое равенство примет вид
фот- J atajae (l +-J-)da3 Uidai— J oa)a3 (l +^-)da3 U2doc2 =
= _ ф Г • (Q<aMi dai—С'^Лг rfa2). E.30.7>
Введем обозначения
+h
( -|l ) do3 = iVt. E.30.8>
-A ' ' _h V
Тогда, подставив в E.30.5) выражения E.30.6), E.30.7) и E.30.8), получим,
требуемый результат:
i—RA)A2 da2) + § T-(Qi2)A1 dai— Qll)A2 da2) —
lAi da — N[A2 dak)- E.30.9^
Обратимся к выражению ZQ. В нем также можно раскрыть смысл век~
тора V по формуле B.11.5) и вектора т по формуле D.22.13). Тогда равен-
равенство E.30.2) примет вид
+h
в <•—h
{+A
J
—h
E.30.10>
C4 УРАВНЕНИЯ СОСТОЯНИЯ. ОБЩИЕ ВОПРОСЫ 1ГЛ. 5
Равным образом вместо E.30.3) можно написать
- J Jr -{± (д± х hn) (l ± A) (i ± JL
E.30.11)
Подставив в E.30.1) выражения E.30.9), E.30.10) и E.30.11), получим
искомую формулу:
J J и RAXA2 dai da2 —
— J I Г • QAtA2 dax do^ + J J фЯЛ!^ cfccj da2. E.30.12)
Здесь под R и Q подразумеваются векторы внешних поверхностных сил и
•моментов, определяемые формулами B.13.10) и B.14.8), а под Р подразуме-
подразумевается следующее выражение:
—h
§ 31. Энергия деформации
Помножим скалярно .силовое уравнение равновесия C.19.1) на вектор
упругих смещений U, а моментное уравнение равновесия C.19.5) на вектор
упругих вращений Г, проинтегрируем полученные равенства по области G
и вычтем второе из первого. Получим
J | U-RA^A2dalda2 — J J
— [ f ГЧ^Я'2) x M2+A2R^ x iW1]da1rfaa+ f [
aJ _ JoJ
E.31.1)
К первым двум слагаемым правой части равенства E.31.1) применим
¦формулу интегрирования по частям. Если положительное направление
« 31] ЭНЕРГИЯ ДЕФОРМАЦИИ gg
обхода G взято так, как показано на рис. 13, то эта формула записывается
следующим образом:
ф dat)—^ J (<7g^— Р^ ) d«i <*«*• E.31.2)
Отсюда
J J ?/ • RAХЛ, dax da2 — f f Г ¦ QЛхЛа dax da2 =
G G
— J J [Л2Д<1>• ^x + Л/?'2»• U2\daxdaa + [ f [A,Q(l>-Гх + Лх(?B)-Г,]daxda2 —
о а
— J |"г.[Лх/г<2> X Жз + Лз/го xJW1]da1da2 + j f fir• »ЛХЛ2daxda2. E.31.3)
g a
Преобразуем в правой части этого равенства двойные интегралы, раз-
развернув /?<'>, QO по формулам C.17.3) и раскрыв векторные произведения.
Будем иметь
j J
G
H
G
х M, + A,RM х Mjdebda,— [ \
а
. E.31.4)
В правой части равенства E.31.4) множители, стоящие при тангенциаль-
тангенциальных усилиях Тх, S2l, T2, 512 и моментах Gx, #21, Я12, G2, можно выразить
через компоненты деформации с помощью D.25.1), D.22.4) и D.25.6), мно-
множители, стоящие при перерезывающих усилиях, исчезают в силу D.22.7),
а множитель при величине ?1 выражается через б согласно D.22.4). Преобра-
Преобразуем соответствующим образом правую часть равенства E.31.4) и внесем
полученный результат в E.31.3). Будем иметь
U ¦ RAtA2 dax da2 — J J Г •
+ Я„(т—gg-J + йв] iMi **!**«• E.31.5)
5 А. Л. Гольденвейзер
gg УРАВНЕНИЯ СОСТОЯНИЯ- ОБЩИЕ ВОПРОСЫ [ГЛ. 5
Полученное равенство можно рассматривать как формулировку тео-
теоремы Клапейрона для двумерной теории оболочек, т. е. записать его коротко
так:
E.31.6)
и считать, что L представляет собой работу поверхностных и краевых сил
оболочки и определяется формулой
I = f f U¦ RAiAtda^dxii— J JГ¦ QAxAtdatda2 +
а о
2da2), E.31.7)
a W представляет собой энергию деформации оболочки и определяется фор-
формулой
E.31.8)
Для работы L получилось выражение E.31.7), которое соответствует
обычно принимаемому в теории оболочек предположению, что силы работают
на соответствующих им перемещениях, а моменты — на соответствующих
им углах поворота. Однако это лишь фор мал ь-
'* ный результат, так как построенная здесь
работа L, вообще говоря, не совпадает с ра-
работой Z, которая была получена в § 5.30 при
рассмотрении оболочки как трехмерного те-
тела. Сопоставив E.30.12) с E.31.7), убеж-
убеждаемся, что совпадение этих двух понятий
будет иметь место только в том случае, если
обращается в нуль величина ф, характери-
характеризующая изменение длины нормального эле-
элемента. Таким образом, предположение, что
в теории оболочек работа есть сумма попар-
°4 ных произведений сил на перемещениях и мо-
Рис- '3. ментов на углах поворота, в смысле точности
адекватно предположению о сохранении длины
нормального элемента. Если мы хотим учесть изменение длины нормального
элемента г|з, то E.31.7) надо рассматривать как величину, которую следует
формально отождествить с работой, чтобы можно было считать справедли-
справедливой теорему Клапейрона, выраженную равенством E.31.6).
Замечание. Предлагались и другие определения понятия работы в теории оболочек.
Укажем в качестве примера [179].
Возможность принять E.31.8) в качестве формулы энергии деформации
тоже требует оговорок. Энергия деформации должна исчезать, если отсут-
отсутствует деформация, т. е. если срединная поверхность оболочки смещается
как жесткое целое. Таким свойством W, вообще говоря, не обладает, так как
в правую часть равенства E.31.8) входит член Q6, где б — угол поворота,
а не компонента деформации. Этот недостаток формулы E.31.8) снимается,
когда Q = 0, т. е. когда уравнения состояния удовлетворяют шестому
§ 321 ОБЩИЕ ТЕОРЕМЫ ТЕОРИИ ОБОЛОЧЕК 57
уравнению равновесия (§5.29). Тогда в равенстве E.31.6), выражающем
теорему Клапейрона, W будет определяться формулой
+ Я21(т —2J-) +Hn(x — ^-)]A1A2da1da2, E.31.9)
свободной от отмеченного выше недостатка.
Легко заметить, что единственные соотношения, связывающие между
собой статические и геометрические величины теории оболочек, т. е. уравне-
уравнения состояния, в настоящем разделе не были использованы. Поэтому можно
считать, что статические величины, с одной стороны, и геометрические, —
с другой, ничем не связаны друг с другом в равенстве E.31.6), и записать
его так:
L12 = 2W12, E.31.10)
где
U 2 1 f f 2 1
U RAiA2 dax daz — Г • QAXA2 dax da2 +
G V
] E.31.11)
1 2 12 1 Д 1 Д 12
S21 -f + S,, -f -
(^)(^jJ E.31.12)
под
11111111
Ть S2l, Sl2, T2, Gx, Я21, Я^, G2 E.31.13)
подразумеваются усилия и моменты некоторого внутреннего напряженного
состояния, соответствующего поверхностным силам и моментам /?, Q, а под
2 222 2222
еь со, е2, jtj, к2, т, i/, Г E.31.14)
— компоненты деформации, вектор перемещений и вектор вращения неко-
некоторого деформированного состояния; причем E.31.13) и E.31.14) ничем не свя-
связаны друг с другом.
§ 32. Общие теоремы теории оболочек
12
Обозначим через / подынтегральное выражение в правой части равен-
равенства E.31.12) и заменим в нем усилия и моменты через компоненты деформа-
деформации с помощью уравнений состояния E.28.4). Получим формулу
12 2Eh Г1 2 1 2 t1 2 2 М 1 —V ' 21
[е^ + ЧЧ + v lee + eeJ Л 2~ Ю@] +
2Eh3
1 2
121
~ v) TTJ' E-32.1)
58 УРАВНЕНИЯ СОСТОЯНИЯ- ОБЩИЕ ВОПРОСЫ [ГЛ. 5
12
из которой непосредственно видно, что / симметрично относительно верх-
верхних индексов. Отбросив последние в обеих частях равенства E.32.1), будем
иметь
2veie2
1=1
+ з A-V) [ *? + *22 + Swixa + A — v) т2] . E.32.2)
Покажем, что при любых значениях компонент деформации выпол-
выполняется соотношение
/ ss 0. E.32.3)
Для этого достаточно установить, что справедливы неравенства
е? _(_ е| + 2veie2 3*0, xjf + x| + 2wi«2 S= 0. E.32.4)
Рассмотрим первое из них. Пусть ехе2 < 0 (иначе доказываемое положение
станет очевидно), тогда, учитывая, что v «^ 1/2, можно написать
ejf _|_ el + 2vei82 ^ ef + е2 +
В правой части этого неравенства отрицательно лишь третье слагаемое и
оно не превосходит по модулю наибольшего из первых двух слагаемых.
Поэтому обсуждаемые неравенства, а вместе с тем и соотношения E.32.3)
справедливы. Знак равенства в E.32.3) будет иметь место только в том случае,
когда
ех = е2 = ш = щ = х2 = т = 0, E.32.5)
т. е. когда срединная поверхность, не деформируясь, смещается как жесткое
целое.
Из свойства симметрии / вытекает, что в теории оболочек, так же как
в теории упругости, справедлива теорема взаимности Бетти. Из соотноше-
соотношений E.32.3) вытекает, что в теории оболочек выполняется теорема единствен-
единственности, аналогичная теореме Кирхгофа в теории упругости. Доказательство
обоих утверждений основано на таких же рассуждениях, как в теории упру-
упругости [39]. Остановимся только на теореме единственности.
Краевую задачу теории оболочек можно схематически записать так:
С (М) = с, D (М) = d. E.32.6)
Здесь М — обсуждаемое решение, т. е. совокупность искомых величин
(усилий, моментов, перемещений и т. д.); первое равенство E.32.6) — сим-
символ дифференциальных уравнений теории оболочек, в котором с — правые
части этих уравнений, составленные из известных функций; второе равен-
равенство E.32.6) — символ граничных условий теории оболочек (они могут
быть неоднородными и d обозначает их правые части).
Пусть сформулированная краевая задача имеет два решения Ми М2.
Тогда справедливы равенства
С (Л*,)-с, DTO-rf,
С ТО = с, D (M2) = d.
Будем считать, что не только дифференциальные уравнения теории обо-
оболочек, но и граничные условия линейны, и вычтем друг из друга соответству-
соответствующие равенства E.32.7). Получим
С (М') = 0, D (М1) =0, М' = Мх — М2.
§ 321 ОБЩИЕ ТЕОРЕМЫ ТЕОРИИ ОБОЛОЧЕК gg
Таким образом, предположение о множественности решения неоднород-
неоднородной линейной краевой задачи теории оболочек равносильно предположению
о существовании нетривиального решения соответствующей однородной
краевой задачи (краевой задачи, которая получается из первоначальной,
отбрасыванием правых частей в уравнениях и граничных условиях).
Для однородной задачи в равенствах E.31.6), E.31.7) и E.31.9), выра-
выражающих теорему Клапейрона, надо положить равными нулю векторы поверх-
поверхностной силовой и моментной нагрузки. Отсюда, учитывая E.32.2), получим
L = ф U-\R^A1dax — RWA2da2) — fr-[Q^A1da1—QO)A2da2], E.32.8)
2W = J J 1АгА2 dax da2.
Примем, что граничные условия задачи таковы, что из соответствую-
соответствующих им неоднородных граничных условий следует неравенство
ф U-[RMA1da1—R^A2da2--<§>r-[Q<2)A1da1—Q^A2da2)^Q. E.32.9)
Тогда левая часть первого равенства E.32.8) в силу E.32.9) неположительна,
а правая часть этого равенства в силу E.32.3) неотрицательна. Следовательно,
равенство возможно только тогда, когда E.32.3) и E.32.9) из неравенств
превратятся в равенства. Первое из них возможно только при выполнении
равенств E.32.5), которые означают, что срединная поверхность может сме-
смещаться лишь как жесткое целое.
Итак, имеет место следующая
Теорема единственности решения краевой
задачи теории оболочек. Если из однородных граничных условий
вытекает неравенство E.32.9), которое будет называться условием един-
единственности, то решение неоднородной краевой задачи будет единственным
с точностью, быть может, до смещений срединной поверхности как жесткого
целого.
Замечание. Граничные условия задачи могут быть и неоднородными, но при проверке
теоремы единственности, как видно из предыдущего, правые части в граничных условиях
надо отбрасывать.
В теории оболочек теоремы взаимности и единственности не имеют столь
абсолютного характера, как в теории упругости. Условия, обеспечивающие
их выполнение, зависят от принятого варианта уравнений состояния и в неко-
некоторых случаях они могут нарушиться (конечно, в малом). Эти условия заклю-
заключаются в следующем:
A) должно выполняться шестое уравнение равновесия, так как иначе
будет незаконным переход от формулы E.31.8) к E.31.9) и равенство E.31.12)
станет неправильным;
B) выражение вида E.32.1) должно быть симметричным относительно
верхних индексов;
C) выражение вида E.32.2) должно быть не отрицательным.
Уравнения состояния E.28.4) всем этим требованиям удовлетворяют
(в чем нетрудно убедиться непосредственно). Такими же свойствами обладают
и уравнения состояния E.28.3). В противоположность этому уравнения
состояния E.28.1) и E.28.2) не обеспечивают выполнения теоремы существо-
существования и единственности (отсюда, конечно, не следует, что решений не будет
или они станут не единственными; это лишь значит, что теряет силу приве-
приведенное выше доказательство теоремы).
-УРАВНЕНИЯ СОСТОЯНИЯ ОБЩИЕ ВОПРОСЫ [ГЛ. 5
§ 33. Граничные условия
В теории оболочек граничные условия всегда можно рассматривать как
аналитическое выражение того факта, что каждый край оболочки соединен
с примыкающей к нему конструкцией, которую можно назвать опорой (сво-
(свободный край надо при этом считать примыкающим к опоре нулевой жест-
жесткости). Характер соединения края с опорой можно учесть, наделив послед-
последнюю некоторыми условными свойствами. Например, для шарнирного соеди-
соединения надо считать, что опора не обладает жесткостью по отношению'к пово-
повороту, вокруг оси шарнира.
В реальных конструкциях встречаются опоры, обладающие самыми
разнообразными упругими свойствами. Поэтому, строго говоря, расчет
оболочки должен заключаться в совместном интегрировании дифференциаль-
дифференциальных уравнений оболочки и дифференциальных уравнений опоры (или опор).
Последнюю надо рассматривать как некоторое упругое тело, например, как
криволинейный стержень, и требовать, чтобы выполнялись условия сочле-
сочленения оболочки с опорой. Это связано с большими трудностями, которые
часто обходят, принимая некоторые упрощающие предположения об упру-
упругих свойствах опоры. В частности, если жесткость опоры относительно како-
какого-либо обобщенного перемещения мала по сравнению с жесткостью края
оболочки, то часто жесткость опоры считают равной нулю, а если она доста-
достаточно велика, то ее полагают равной бесконечности. Граничные условия,
соответствующие такому предположению, назовем идеализированными гра-
граничными условиями и пока только их и будем рассматривать (предполагается,
что в одной и той же точке жесткость опоры может быть равной нулю в одном
направлении и равной бесконечности — в другом).
Пусть край оболочки проходит вдоль замкнутой линии ocj = const.
Тогда условие единственности E.32.9) запишется так:
— <p(U-R<l) — Г
Раскрыв здесь подынтегральное выражение с помощью формул C.17.3),
D.22.2) и D.22.3), получим
I G\"i + S21u2 ~\-wN1 — Нпу2 -j- GxYi) Аг da2 ^ 0. - E.33.1)
Здесь изменению а2 в интервале (а21, а22) соответствует полный обход гра-
границы g. Для углов поворота у, имеем формулу D.26.1). В частности,
V А2 да2
Внесем это в E.33.1) и исключим в полученном выражении производную
от w поа2 с помощью интегрирования по частям. Тогда, полагая, что ш, Н21
непрерывны по а2, получим
1 ow я, „ д2г f 1 o//2i л а /К oq о
Если считать, кроме того, что Н21 и w возвращаются к прежним значе-
значениям после обхода контура g (т. е. непрерывны как функции точки g), то в пра-
правой части равенства E.33.3) пропадет первое слагаемое. Поэтому, подставив
E.33.2) в E.33.1) и учтя E.33.3), будем иметь
Т [Т,Щ + (Sn —^-) и, + (N, + J- ^) w + GVl] Л2da, <0. E.33.4)
0Е„
$ 33] ГРАНИЧНЫЕ УСЛОВИЯ 71
Пусть рассматриваемый край жестко заделан, т. е. опора такова, что
направление любого обобщенного перемещения можно рассматривать как
направление ее бесконечной жесткости. Тогда, очевидно, необходимые усло-
условия, выражающие такие свойства опоры, будут заключаться в четырех равен-
равенствах
щ — «2 = w = Vi = 0 при аг — а10. E.33.5)
При этом условие единственности E.33.4) выполнится, так как в нем
левая часть обратится в нуль. Это значит, что решение уравнений теории
оболочек, подчиненное граничным условиям E.33.5), будет единственным.
Никаких других граничных требований ставить уже нельзя и условия
E.33.5) надо рассматривать не только как необходимые, но и как достаточные.
Пусть имеет место прямо противоположный случай: в направлении всех
обобщенных перемещений опора имеет нулевую жесткость (свободный
край). Тогда, как может показаться, нужно было бы потребовать выпол-
выполнения таких граничных условий:
7, = Sx = Nt = Gx = О при ах = а10. E.33.6)
Однако при этом условие E.33.4) примет вид
1
и ни из чего не следует, что оно будет выполняться. Попытка преодолеть
это противоречие, добавив к E.33.6) еще одно требование
#21 = 0 при а^ссю, E.33.7)
несостоятельна. Действительно, если выполняются E.33.7), то с помощью
этого равенства условия E.33.6) можно преобразовать к виду
Ту = Su- ^ = N, + ± ^ = G1 = О, E.33.8)
но из структуры условия единственности E.33.4) видно, что для его выполне-
выполнения достаточно четырех равенств E.33.8). Следовательно, нельзя ставить
на краю пять граничных условий E.33.6), E.33.7).
Получающееся противоречие было замечено на самых первых этапах
развития теории оболочек, и чтобы обойти его, принимается, что на свобод-
свободном краю необходимо и достаточно выполнить условия E.33.8). Вообще,
принимается, что при наложении граничных условий надо оперировать
не с истинным, а с приведенными краевыми усилиями, под которыми на краю
°4 = аю. проходящем вдоль линии кривизны, должны пониматься следую-
следующие величины, отмеченные штрихами:
7-1 = 7-,, ^ = S2l-^., N[ = Ni + ±-^, Gi = G,. E.33.9)
С этой точки зрения условия E.33.8) выражают требование отсутствия
приведенных усилий в четырех направлениях нулевой жесткости опоры.
К вопросу о правомерности введения понятия приведенных усилий
мы еще вернемся в части VI (§ 29, 22).
Обобщая результаты, полученные для жесткого и свободного краев,
примем, что в случае идеализированной опоры надо требовать, чтобы на краю
обращались в нуль обобщенные перемещения, соответствующие бесконечной
жесткости опоры, и обобщенные приведенные усилия, соответствующие нуле-
нулевой жесткости. В совокупности в каждой точке края должно быть сфор-
сформулировано четыре таких условия, соответствующих четырем линейно
72 уравнения состояния, общие вопросы [гл. 5
независимым направлениям. Под ними в дальнейшем всегда будут подразу-
подразумеваться три некомпланарных линейных направления и угловое направление
поворота вокруг касательной к краю.
Пример 1. Оболочка имеет замкнутый плоский край, жестко соединен-
соединенный с плоской тонкой диафрагмой (рис. 14). Тогда можно принять, что в обоих
направлениях, лежащих в плоскости диафрагмы, последняя значительно
жестче оболочки, а в направлении, нормальном к диафрагме, и в угловом
направлении диафрагма значительно податливей оболочки. При формули-
формулировке идеализированных граничных условий принимается, что два линей-
линейных направления, лежащих в плоскости диафрагмы, являются направле-
направлениями бесконечной жесткости, а угловое и линейное нормальное направле-
направления являются направлениями нулевой жесткости.
Пример 2. Оболочка присоединена к массивной конструкции с помощью
шарнира. Тогда любые три линейных направления можно принять за напра-
направления бесконечной жесткости, а угловое
направление за направление нулевой
жесткости.
Условие единственности E.33.4) мож-
можно записать и так:
Рис. 14.
E.33.10)
считая, что g—замкнутый контур, образованный краем аг = const, ds —
дифференциал длины дуги g, R' — вектор приведенных усилий
G' = GT — изгибающий момент, у = уг — угол поворота относительно каса-
касательной к g. Таким образом, условие единственности в сущности предста-
представляет собой требование неположительности работы краевых приведенных
обобщенных сил на обобщенных перемещениях, соответствующим четырем,
описанным выше направлениям. Его можно записать в виде E.33.10) и в слу-
случае, когда край произвольно располагается относительно координатных
линий (остается пока открытым только вопрос о том, что подразумевать
в общем случае под приведенными усилиями и моментами). Если на краю
ставятся идеализированные граничные условия, то из физических сообра-
соображений очевидно, что условие единственности E.33.10) будет всегда выпол-
выполняться, так как левая часть этого соотношения обратится в нуль.
Формулы перехода к приведенным усилиям и моментам для случая,
когда край проходит вдоль линии а2 = const, выводятся так же, как E.33.9),
и записываются так:
П =Г2, S'21 = S2l—^, N'2 = N2 — ±-^., G2 = G2. E.33.11)
Рассмотрим теперь общий случай упругой опоры, т. е. опоры, которую нельзя считать
идеализированной. Пусть край проходит вдоль линии ах = а10 (для определенности) и жестко.
соединен с упругим криволинейным стержнем, не слишком жестким и не слишком податливым
по сравнению с оболочкой.
Примем, что перемещения %lt %2, ? и угол закручивания 9 стержня равны соответственно
перемещениям uv u2, w и углу поворота Vi края оболочки
5i = «i. 62 = «2. и" = Е. Vi = e-
Но упругое поведение стержня определяется некоторой системой дифференциальных уравне-
уравнений (скажем, уравнениями Кирхгофа—Клебша), которые связывают |х, |2, ?, 9 с силами и
моментами Рг, Рг, Р3 и М, действующими на стержень. Поэтому Pv Р2> Рз и М можно выра-
5 34] ОСНОВНЫЕ УРАВНЕНИЯ И ФОРМУЛЫ ТЕОРИИ ОБОЛОЧЕК 73
зить с помощью дифференциальных операций через краевые значения иг, u2, w, yv Если на-
направлении сил Рг, Р3, Ря совмещены с направлением векторов Mi, M%< п, то можно принять,
что
Ps=-^|a,=a10. м=-а: E.33.12)
Левые части этих равенств выражаются через краевые значения ult u2, w, yv Следова-
Следовательно, E.33.12) и представляют собой граничные условия, соответствующие примыканию,
края оболочки к упругому стержню.
Условие единственности E.33.10) в силу E.33.12) будет выполняться. Действительно,
работа сил Рг, Р2, Ря и момента М на обобщенных перемещениях стержня или, что то же, на
обобщённых перемещениях края оболочки должна быть положительной, а краевые обобщен-
обобщенные усилия и моменты в силу E.33.12) будут давать отрицательную работу.
Замечание. Были рассмотрены только однородные граничные условия. Однако можно-
представить себе и случаи, когда граничные условия будут неоднородными. Если речь идет
06 идеализированных граничных условиях, то это произойдет тогда, когда в направлении
нулевой жесткости опоры к краю приложена заданная внешняя сила (момент) или в направле-
направлении бесконечной жесткости опоры краю предварительно придано заданное смещение (угол
поворота). Граничные условия, соответствующие жесткому соединению со стержнем, будут
неоднородными, если через стержень на оболочку передаются заданные силы (моменты) или-
если стержень был предварительно деформирован.
Рассуждения, относящиеся к единственности решения, остаются в силе, так как свобод-
свободные члены в граничных условиях в теореме существования не учитываются.
§ 34. Основные уравнения и формулы теории оболочек
Результаты, полученные в предыдущих разделах, сводятся к следую-
следующему:
Выведены силовое и моментное уравнения равновесия, которым должны
удовлетворять Ра), /*B) — векторы упругих усилий и QA), Q<2> — векторы
упругих моментов (§ 3.19)
E.34.1
и уравнения неразрывности деформаций (§ 4.27)
Г Г0
В них используются обозначения:
Г
Г1 хЛа-.О. E.34.2>
Ж7 gГхЖ,, E.34.3)
причем U и Г — векторы упругого смещения и вращения, связанные тремя
скалярными соотношениями (§ 4.22):
^..й__(_1)'Г.^ = 0,-^.^-^-^-2Г-я = 0. E.34.4>
Доказано, что уравнения равновесия E.34.1) при R = Q = 0 (в случае,,
когда отсутствует поверхностная нагрузка и выполняется шестое уравнение-
равновесия) тождественно удовлетворяются, если /?<•">, QW выразить форму-
формулами (§3.2П
74 уравнения состояния- общие вопросы Сгл. 5
где L и К—произвольные дифференцируемые векторы, удовлетворяющие
равенству (§ 3.21)
Векторы /?'", Q('\ входящие в уравнения равновесия, выражаются
-через внутренние усилия и моменты оболочки формулами (§3.17)
,,^ + G,3l], E.34.7)
а векторы Г,, УA), входящие в уравнения неразрывности деформаций, выра-
выражаются через компоненты деформации следующим образом (§ 4.25):
-о
±tL
At ~ ' At ~r 2 A/
E.34.8)
Векторы {/иГ развертываются по осям основного триэдра по формулам
(§ 4.22)
U^ib^ + b-f—wn, r = v.41~YiJTL-e». E.34.9)
Векторы L и К развертываются по осям основного триэдра по формулам
<§ 3.21)
?=Ъ-7Г-Ъ^-ХЯ. К^а^ + а^-сп. E.34.10)
Этим исчерпываются все чисто статические и чисто геометрические соот-
соотношения теории оболочек. Они связываются друг с другом с помощью урав-
уравнений состояния, которые вследствие приближенности теории оболочек
в известных пределах зависят от нашего произвола. В частности, один из воз-
возможных вариантов уравнений состояния записывается так (§ 5.28):
™ 2Eh . , . со Eh
r 2Eh* . , . „ „
2Eh3 E.34.11)
§ 35. Полная система уравнений теории оболочек
Совокупность уравнений и формул предыдущего параграфа полна в том
•смысле, что из нее различными способами можно составить системы, в кото-
которых число уравнений равно числу неизвестных. В частности, в теории обо-
оболочек можно получить аналог уравнений Ламе теории упругости, т. е.
построить систему из трех уравнений относительно трех компонент сме-
смещения uly u2, w. Для этого надо воспользоваться
а) уравнениями равновесия E.34.1),
б) восемью уравнениями состояния E.34.11),
в) формулами «деформации —j смещения», вытекающими из E.34.8),
E.34.3), E.34.4) и E.34.9).
В скалярной форме уравнения равновесия выражаются шестью равен-
равенствами C.19.И), из которых надо сохранить только первые пять, считая,
что шестое равенство точно или приближенно должно вытекать из уравне-
уравнений состояния. Формулы «деформации — смещения» имеют вид D.26.2),
<4.26.5).
$ 36] СТАТИКО-ГЕОМЕТРИЧЕСКАЯ АНАЛОГИЯ 75
В четвертое и пятое уравнения C.19.11) усилия ЛГг и ЛГ2 входят алге-
алгебраически (это свойство сохраняется и в том случае, когда срединная поверх-
поверхность отнесена к произвольной системе координат). Пользуясь этим, можнб
в первых трех уравнениях C.19.11) исключить Nlt N2 и получить три урав-
уравнения относительно усилий и моментов Tlt Т2, S12, S21, Gx, H21, #12, G2,
которые в свою очередь выражаются через компоненты деформации е„ е2,
(о, кг, ка, т с помощью уравнений состояния E.34.11) или какого-либо дру-
другого варианта этих уравнений. Наконец, формулами D.26.2), D.26.5) компо-
компоненты деформации выражаются через перемещения, что и приводит нас к трем
уравнениям равновесия в перемещениях иъ и2, w. Эти уравнения очень
громоздки и в расчетах используются редко. Они, конечно, зависят от того,
какой вариант уравнений состояния был использован при их выводе. Для
общего случая мы не будем приводить эти уравнения. Пример их применения
будет дан в части V при рассмотрении задачи о круговой цилиндрической
оболочке.
Полную систему уравнений в теории оболочек можно получить и дру-
другими способами. Примеры таких систем будут приведены ниже.
§ 36. Статико-геометрическая аналогия
Формулы и уравнения общей теории оболочек можно разбить на три
группы.
К первой группе относятся статические соотношения, т. е.
Aа) уравнения равновесия E.34.1);
A6) формулы E.34.5), связывающие Ri'\ Q<° с векторами L и К',
Пв) скалярные равенства E.34.6), которым должны подчиняться L и /С;
Aг) равенства E.34.7), расшифровывающие смысл векторов Л'1», /?B),
Aд) равенства E.34.10), расшифровывающие смысл векторов L и К-
Ко второй группе относятся геометрические соотношения, т. е. .
Bа) уравнения неразрывности деформаций E.34.2);
B6) формулы E.34.3), связывающие векторы Г*, V{t) с векторами упру»
гого смещения U и упругого вращения Г;
Bв) скалярные равенства E.34.4), которым должны подчиняться УиГ;
Bг) равенства E.34.8), расшифровывающие смысл векторов I\, Vu)',
Bд) равенства E.34.9), расшифровывающие смысл векторов U и Г.
К третьей группе относятся уравнения состояния, один из возможных
вариантов которых представляют равенства E.34.11).
Если не обращать внимания на члены, содержащие векторы R и Q в урав-
уравнениях равновесия, то можно заметить, что статические соотношения Aа)—
Aд), с одной стороны, и геометрические соотношения Bа)—Bд), с другой
стороны, тождественны друг другу по структуре, причем исключение соста-
составляет только последнее равенство E.34.4), которое не имеет статического ана-
аналога. Точнее говоря, эти две группы соотношений переходят друг в друга,
если положить R = Q — 0, т. е. принять, что оболочка не загружена
по поверхности, и установить следующие соответствия между статическими
и геометрическими величинами:
G,—»e/f Я„~-?. E.36.1)
76 УРАВНЕНИЯ СОСТОЯНИЯ. ОБЩИЕ ВОПРОСЫ [ГЛ. 5
Таким образом, в теории оболочек существует своеобразная косая сим-
симметрия: растягивающему усилию в направлении одной из линий кривизны
G\) отвечает величина (хг), характеризующая изгиб в направлении другой
линии кривизны и, наоборот, изгибающему моменту, действующему в напра-
направлении одной линии кривизны (G2), отвечает величина (&г), характеризую-
характеризующая растяжение в направлении другой линии кривизны. Перерезывающим уси-
усилиям N I, N 2 при этом соответствуют формально введенные геометрические
величины ?, и ?2.
Обсуждаемое соответствие нельзя назвать полным по следующим npnv
чинам:
A) статические величины Я12 и #21, вообще говоря, различны, но им
соответствует одна и та же геометрическая величина со/2;
B) из E.36.1) легко выводятся соответствия
в которых две, вообще говоря, различные, статические величины отвечают
одной и той же геометрической величине;
C) последнее равенство E.34.4) с точки зрения статико-геометрической
аналогии является «лишним», из него вытекает геометрическая формула
в то время как соответствующая статическая формула для % отсутствует;
D) существуют два статических соотношения, вытекающих из уравне-
уравнений состояния (§ 5.29), и их можно рассматривать как два «лишние» статиче-
статические равенства, связывающие функции напряжения.
Все эти несоответствия пропадут, если будет выбран такой вариант
уравнений состояния, при котором статические соотношения, вытекающие
из уравнений состояния, имеют вид
#21 —#12 = 0, S21-S12 + ^--^- = 0. E.36.4)
Две статические величины, отвечающие геометрической величине со/2,
так же как две статические величины, отвечающие геометрической величине т,
в силу E.36.4) будут равны друг другу и, следовательно, отпадут первые
два несоответствия. Два дополнительных равенства, связывающие функции
напряжения, превратятся в одно, так как второе равенство E.36.4) совпадает
с шестым уравнением равновесия, которое выполняется всегда, каковы бы
ни были функции напряжения (§ 3.21). Единственное дополнительное равен-
равенство для функций напряжения получается после подстановки в первое равен-
равенство E.36.4) выражений C.21.1). Оно имеет вид
E-36-5)
т. е. двойственно «лишнему» геометрическому равенству E.36.3). Это значит,
что отпадают третье и четвертое несоответствия.
Один из примеров уравнений состояния, приводящих к равенствам
E.36.4), представляют собой формулы E.28.4) После некоторых легко про-
проверяемых преобразований эти уравнения состояния можно записать так:
r( = F(ei + ve/), S,7-^- = F{\ -v) f,
' E.36.6)
$36} СТАТИКО-ГЕОМЕТРИЧЕСКАЯ АНАЛОГИЯ 77
где
2Eh
р
V*' " ~ 2Eh3 '
Заменим в первых четырех равенствах E.36.6) величины
Т Т С #12 С #21 „ „ <° Ш
'li ' 2i °2i ^—> ^и ^—> fci> fc2> ~2* > *
соответствующими им по статико-геометрической аналогии E.36.1) вели-
величинами
и введем дополнительные условные соответствия
F*—>D', v—»—v. E.36.7)
Тогда первые четыре равенства E.36.6) перейдут в четыре последних равен-
равенства E.36.6), и можно считать, что уравнения состояния E.36.6) также
подчиняются статико-геометрической аналогии, переходя при этом в са-
самих себя.
Можно подобрать и другие уравнения состояния, обеспечивающие такого
рода симметрию.
Разумеется, существуют и такие уравнения состояния, при которых
равенства E.36.4) не будут выполняться, тогда нарушатся и обсуждаемые
здесь свойства общих уравнений теории оболочек, но эти отступления от ста-
статико-геометрической аналогии будут проявляться в членах, играющих вто-
второстепенную роль.
Итак, в теории оболочек выполняется так называемая стати ко-геоме-
ко-геометрическая аналогия [38], которая может быть сформулирована следующим
образом.
Если существует однородное равенство
I = 0, E.36.8)
связывающее усилия, моменты, компоненты деформации, углы поворота и
смещения, то в рамках точности теории оболочек существует двойственное
ему однородное равенство
т = 0, E.36.9)
получающееся из предыдущего, если в нем заменить перечисленные искомые
величины соответствующими им величинами согласно E.36.1), а вместо F,
D' и v подставить —D', —F, —v. Это правило будет выполняться точно,
если уравнения состояния взять, например, в форме E.28.4).
Замечание. Часто уравнения теории оболочек преобразовывают так, что в них пара-
параметры F и D входят не порознь, а составляют вместе одну величину
/га 1
3A —V2) ~ FD' (I— v2J'
При переходе от равенства E.36.8) к равенству E.36.9) эту величину согласно E.36.7)
надо оставить без изменения.
Причины существования статико-геометрической1 аналогии не совсем
ясны (в связи с этим представляют интерес работы [148, 169]), но пути ее при-
применения оказались весьма разнообразными.
1. Она позволяет автоматически удваивать казкдое соотношение теории
оболочек или контролировать уже полученные соотношения и в некоторых
случаях помогает осмыслить те или иные положения теории оболочек.
78 уравнения состояния, общие вопросы [гл. 5
Так, например, заранее не ясно, что однородные уравнения равновесия
допускают введение функций напряжения *), и совершенно очевидно, что
уравнения неразрывности должны тождественно выполняться, если в них
компоненты деформации выразить через перемещения, а с точки зрения ста-
тико-ге©метрической аналогии здесь речь идет об идентичных математиче-
математических утверждениях.
2. Со стати ко-геометрической аналогией связана возможность записать
уравнения теории оболочек в комплексной форме. Для осесимметричных
оболочек вращения она была обнаружена в [162, 163, 1831, а затем в работах
[90, 96—98] было показано, что такой результат может быть достигнут и
для оболочек произвольного очертания. На этом основан хорошо известный
комплексный метод В. В. Новожилова, породивший обширную литературу
[21, 129, 130, 185, 189]. Примеры применения комплексной записи уравне-
уравнений теории оболочек встретятся и в предлагаемой книге, но специально
на комплексном методе мы останавливаться не будем. '
3. Существует тесная связь между теорией бесконечно малых 'изгибаний
поверхностей (§1.1) и так называемой безмоментной теорией оболочек,
также вытекающая из статико-геометрической аналогии.
Под бесконечно малыми изгибаниями можно понимать такую деформа-
деформацию поверхности, при которой в принятых здесь обозначениях выполняются
равенства
е1 = <й = е2 = 0, ?,= ?2 = 0. E.36.10)
Первая группа этих равенств вытекает из формул D.23.3), D.23.4) и из того,
что при изгибаниях первая квадратичная форма поверхности не изменяется.
Вторая группа равенств E.36.10) следует из первой в силу D.27.10).
Согласно статико-геометрической аналогии равенствам E.36.10) двой-
двойственны равенства
G2 = Я21 = Я12 = G, = 0, W2 = Nt = 0,
и можно принять (с оговорками, которые выявятся в части II), что ими
выражаются гипотезы безмоментной теории. В этом и заключается обсу-
обсуждаемая связь между теорией бесконечно малых изгибаний и безмоментной
теорией. Она проявляется в идентичности соответствующих дифференциаль-
дифференциальных уравнений и была использована в работах [18, 19, 134]. Об этом будет
еще говориться и в предлагаемой книге.
4. Показана возможность заменить при помощи статико-геометрической
аналогии одни краевые задачи статики оболочек другими [83, 125, 126,
128—130].
5. Статико-геометрическая аналогия была использована в задачах о дей-
действии на оболочку сосредоточенных сил [99, 186].
6. Она оказалась полезной также и при рассмотрении термоупругих
задач теории оболочек [42, 70, 74, 100].
В заключение рассмотрим с точки зрения статико-геометрической анало-
аналогии предельный случай, когда оболочка превращается в пластинку. Тогда
в уравнениях теории оболочек надо положить Rt — R2 = оо, и оболочки,
как будет показано в § 10.20, распадутся на две самостоятельные системы.
Одна из них представляет собой уравнения изгиба пластинок, а другая —
уравнения обобщенного плоского напряженного состояния, для которых
роль функции Эри играет функция напряжений с. Статико-геометрическая
аналогия в этом случае объясняет хорошо известный факт, что для функции
Эри в плоской задаче и для нормального прогиба в теории изгиба пластинок
получается одинаковое уравнение (бигармоническое).
*) Не всякая система с избыточным числом уравнений допускает построение функций
с такими свойствами.
Г Л А В А 6
ТЕНЗОРНЫЕ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК
§ 37. Тензорная символика
Уравнения и формулы общей теории оболочек в предыдущих главах
были выведены для случая, когда срединная поверхность оболочки отнесена,
к линиям кривизны. Обобщение этих результатов для произвольной косо-
косоугольной системы координат можно получить, используя приемы и символику
тензорного анализа. Приводимые ниже тензорные уравнения и формулы заим-
заимствованы в основном из [41 ]. Предлагались и другие варианты этих соотно-
соотношений, которые можно найти, например, в изданных в СССР работах [77,
107] и в работах зарубежных авторов [165—168].
Все тензоры, которые в дальнейшем понадобятся, будем определять,
задавая их физические компоненты в произвольной ортогональной системе-
координат, и записывать это так:
Здесь Р и Q — двумерные тензоры первого и второго ранга соответственно,,
а индексами в скобках отмечаются их физические составляющие.
Переход к ковариантным и контравариантным компонентам в произ-
произвольной ортогональной системе координат осуществляется по формулам:,
для тензоров первого ранга
р, = №A), л2>B)), (^<i), 4
\А А
для тензоров второго ранга
?
a?qA1) aIa;qA2)\ I a? 44
A'XQi J Q [
2l)
Mi.
а:а; а?
\A2 A?
Здесь под А\ подразумевается величина, которая раньше обозначалась,
через Аи т. е. коэффициент первой квадратичной формы срединной поверх-
поверхности (звездочкой всюду в этой главе отмечаются величины, заимствованные
из предыдущих глав, в тех случаях, когда индексы при этих буквах не имеют
тензорного значения).
Замечание. Физические компоненты тензоров, конечно, нельзя назначать произвольно.
Они должны выбираться так, чтобы ковариантные и контравариантные компоненты, получае-
получаемые вышеизложенным способом, обладали известными свойствами, т. е. вели себя определен-
определенным образом при переходе к новой системе координат. Ниже физические компоненты вводимых
в рассмотрение тензоров будут выписываться без объяснений. Правильность их выбора выте-
вытекает из тензорного характера тех соотношений, в которые они входят.
В дальнейшем всегда считается, что ковариантные и контравариантные-
индексы могут принимать значения 1, 2, и будет применяться правило сум~
мирования по повторяющимся индексам.
?0 ТЕНЗОРНЫЕ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК ГГЛ. 6
§ 38. Тензоры срединной поверхности
Введем три тензора, характеризующие геометрические свойства средин-
срединной поверхности и установленную на ней метрику. Их физические компо-
компоненты зададим так:
2 ^22
Здесь R*u, R]2, R2 имеют тот же смысл, что R1U R12, #22 в § 1-5, т. е.
_L- = Щ, _1_ = _Д., F.38.2)
причем R*u — нормальный радиус кривизны поверхности вдоль аглинии;
R\., — величина, характеризующая степень несопряженности принятой
•системы координат (напомним, что если срединная поверхность отнесена
к линиям кривизны, то Ru = Rt, R12 = 00).
Пользуясь правилом перехода от физических компонент к ковариантным
и контравариантным компонентам (§ 6.37) и учитывая F.38.2), A.3.2), легко
лроверить, что
uti-Ml.M,-%-M., Ъц-Мц.ш-^.ш. F.38.3)
Здесь вместо а, введено более привычное в тензорном анализе обозначение х',
векторы М(, Mtl, n имеют тот же смысл, что и в предыдущих главах (звез-
(звездочки при Ми Mtj не ставятся, так как в данном случае индексы имеют тен-
тензорный смысл).
Величины пц, Ъц, ctl представляют собой, соответственно, метрический
¦тензор срединной поверхности, тензор кривизны и дискриминантный тензор.
Структура формул F.38.3) свидетельствует о том, что величины, стоящие
в правых частях равенств F.38.1), действительно могут служить физическими
компонентами тензоров.
§ 39. Тензоры усилий и моментов
Эти тензоры введем с помощью их физических составляющих следую-
следующим образом:
Тензор тангенциальных усилий
/~. ..
1 <->12
VS2I T;
*№ = Ь „.). F.39.1)
Т{, S*2l, S*2, T\ — тангенциальные усилия (§ 3.17).
Тензор перерезывающих усилий
S(/) = (—#;, -Nl), F.39.2)
N{, N1—перерезывающие усилия (§3.17).
$ 391 ТЕНЗОРЫ УСИЛИЙ И МОМЕНТОВ g|
Тензор моментов
м""= «* г- Ь F-39-3)
G;, Я12) Я;,, G;— моменты (§3.17).
Кроме того, введем первый и второй тензоры функций напряжения соот-
соответственно с помощью равенств
«<„ = с;. °2*). ф(» = №¦ ^). F-39-4)
в которых а,, а2, i|)J, i|)*—функции напряжения (§3.21).
Пользуясь формулами перехода (§ 6.37), можно проверить, что спра-
справедливы следующие равенства:
JL /?<<> = - Т»Мц — S'n. -L Q<<> = о^ЛГ'Лв,
Л, /4,
в которых я, как и раньше, — единичный вектор нормали, a R\<\ Q<p —
векторы усилий и моментов соответственно (§3.17) (у величин, отмеченных
звездочкой, индексы не имеют тензорного значения, и правило суммирования
по повторяющимся индексам не должно применяться в левых частях двух
последних равенств). Равным образом имеют место равенства
L = с?*-щМа — хп, К = (^Ма — gn, F.39.5)
в которых g, % — функции напряжения, совпадающие по смыслу с величи-
величинами с, х, a L и К— векторы функций напряжения (§3.21).
Формулы C.21.5), выражающие усилия и моменты через векторы функ-
функций напряжения, в тензорной записи примут вид
, = —. К.—
Замечание. Утверждение, что некоторое равенство!*), имеющее силу для линий кривизны,
записывается в тензорном виде с помощью равенства (**), здесь и всюду в дальнейшем озна-
означает, что(*) можно получить как частный случай из (**), считая, что срединная поверхность
отнесена к линиям кривизны. Например, равенство, имеющее в линиях кривизны вид
Г* Т\
записывается так:
baSSTa ' = 0. (**)
Действительно, развернув (**), получим равенство
ЬцТ11 + fc127-12 + Ь21ТП + Ь22Т** = 0,
в котором ковариантные компоненты тензора Ъ „ и контравариантные компоненты тензора
можно заменить физическими компонентами этих тензоров. Вместе с тем из формул § 6.37
следует, что
а физические компоненты Та^ и Ьаа определяются формулами F.39.1) и F.38.1), причем в ли-
линиях кривизны >
и мы приходим к равенству (*).
Таким же образом проверяются и другие тензорные равенства (если дано соответствующее
равенство в линиях кривизны), и в дальнейшем они будут даваться без пояснений.
6 А. Л. Гольденвейзер
g2 ТЕНЗОРНЫЕ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК [ГЛ. &
Силовое уравнение равновесия C.19.1) можно записать так:
--^^(VaRa) + R = 0. F.39.7)
Здесь R — вектор внешних поверхностных сил; а — определитель метриче-
метрического тензора (в ортогональной системе координат Ya = ^1^2); Rs опреде-
определяется формулой
Rs = JL /?<s> = T^Ma—Sm. F.39.8)
Равным образом моментное уравнение равновесия C.19.6) выразится
равенством
~~ 71 a?" {V~aCt) + а^"^му + с^Т^п + Q = °' F'39-9)
в котором Q — вектор внешних поверхностных моментов
Q* = ' Q<s) = а^СуаАГМ^ F.39.10)
Для проверки равенств F.39.7) и F.39.9) надо только помнить правило
суммирования по повторяющемуся индексу и учитывать следующие формулы
векторного умножения:
М$х п = а^с^М^, Msx Mt = cstn,
которые для поверхности, отнесенной к линиям кривизны, вырождаются
в формулы A.2.2).
Справедлива следующая формула Фосса—Вейля *):
~7г= ~Т~Т V О = lsa>
Va dx?
где Гр7—символ Кристоффеля (§ 1.3). Отсюда следует, что для любого
вектора Еа, у которого а имеет значение контравар иантного индекса, можно
написать
Va дха
Поэтому силовое и моментные уравнения равновесия, можно, соответственно,
записать так:
F.39.11)
-Q = 0.
Равенства F.39.8), F.39.10), F.39.11) имеют тензорную структуру.
Отсюда следует, что физические составляющие тензоров Т, М, S правильно
определены формулами F.39.1)—F.39.3).
Равным образом из F.39.5), F.39.6) следует правильность выбора физи-
физических составляющих первого и второго тензоров функций напряжения.
*) Каган В. Ф., Основы теории поверхностей, ч. I, Гостехиздат, 1947, стр. 350.
5 401| ТЕНЗОРЫ ДЕФОРМАЦИЙ , ПЕРЕМЕЩЕНИЙ И УГЛОВ ПОВОРОТА 33
§ 40. Тензоры деформаций, перемещений
и углов поворота
Эти тензоры можно ввести с помощью их физических компонент сле-
следующим образом.
Тензор тангенциальной деформации
"«/>=„. . Ь F.40.1)
е*, ео\ е* — компоненты тангенциальной деформации (? 4.23) (звездочка
при величине, не имеющей индексов, означает, что эта величина не является
инвариантом).
Тензор изгибной деформации
И(|#) -1 . *'2 **" I. F-40.2,
к\, т", х,— компоненты изгибной деформации (§4.24).
Тензор углов поворота
у\, у2 — углы поворота относительно тангенциальных осей (§ 4.22).
Вспомогательный тензор деформаций
hn = (й. S). F.40.4)
?J, fj — вспомогательные геометрические величины (§§ 4.25, 4.26).
Тензор тангенциальных смещений
°</> — ("ь ), F.40.5)
и*. и\—компоненты тангенциального смещения (§ 4.22).
С помощью введенных величин можно записать следующие выражения
для векторов упругого перемещения U и упругого вращения Г:
U = гРМа — wn. Г = с^аКпМа— б». F.40.6)
Формулы D.25.1), D.25.6), D.25.7), выражающие компоненты деформа-
деформации, углы поворота уи у2 и вспомогательные величины Си ?г через векторы
U и Г, теперь принимают вид
es, = у (U> M, + Ur М,), |1„ = а,6с^Г, • Ма, yt = U,-«,
, dU „ ' дТ \ F:40.7)
где б — угол поворота вокруг нормали.
Тензор ци можно выразить и через вектор т, определяемый, как и
в § 4.22, равенством
т = Г х п = 1аМа;
соответствующая формула записывается так:
list = 4" ("*-< -Mt^-nii- Ms) + Cos &?б.
ТЕНЗОРНЫЬ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК [ГЛ. в
Структура формул F.40.7) свидетельствует о правильности выбора физи-
физических компонент тензоров F.40.1)—F.40.5).
Формулу D.25.3), при помощи которой были введены вспомогательные
векторы V{i), КB>, теперь можно записать так:
Vs = Us + Ж5 х Г. F.40.8)
Здесь под Vs понимается тот же вектор, который раньше обозначался K(s).
В предыдущих главах индекс брался в скобки, чтобы подчеркнуть, что он не
обозначает дифференцирования по as, здесь скобки отброшены, так как
из F.40.8) видно, что индекс при V имеет тензорный характер.
Уравнения неразрывности деформаций D.27.2), D.27.4) можно записать
в виде равенств
у а дх
F.40.9)
В них векторы Г3 и К3 выражаются через тензоры [ist, e.t, gs с помощью
формул
Kp = аа\уМа, F.40.10)
вырождающихся при переходе к линиям кривизны соответственно в D.25.8)
и D.25.4).
§ 41. Статические и геометрические соотношения
теории оболочек в скалярной форме
Полученные в §§6.37—6.41 статические и геометрические формулы и
уравнения можно записать и в скалярной форме.
Уравнения равновесия
Varsa - b'JST + Р = 0, Vе -f VcS* - Z = 0,
о (- •
где ps, Z, <7J — компоненты векторов внешних сил и внешних моментов —
определяются равенствами
R = р*Ма — Zn, Q = qaMa. F.41.2)
Уравнения неразрывности деформаций
WVaHa, - b«Sah = о. ^cwc8V,x + cpavas3 = 0,
Формулы «деформации — перемещения, углы поворота»
Формулы «углы поворота — перемещениям
Ks=*\sW—b?va, б- а-^"Ч,о&- F.41.5)
f
§ 421 УРАВНЕНИЯ СОСТОЯНИЯ g5
Формулы «усилия, моменты — функции напряжения»
Г1 = Л'ХФз + с'Хх- Mst = cascw (Vaep + ba,g)-cst%,
cp* = Vsg — b«ea. F.41.7)
Соотношения F.41.1)—F.41.7), в которых под Va подразумевается кова-
риантная производная, пока принимаются на веру. Их правильность будет
показана в §6.44, а пока заметим, что F.41.1)—F.41.7) подчиняются ста-
тико-геометрической аналогии. Она в тензорной форме выражается такими
формулами соответствия:
, t 10.41.o)
е*<—>vs> g<—>w> ф««—*K г*—-6-
Это значит, что при
ps = z = q' = О
равенства F.41.1), F.41.6), F.41.7) перейдут соответственно в равенства
F.41.3), F.41.4), F.41.5), если в первой группе равенств статические тензоры
заменить геометрическими тензорами согласно F.41.8) (исключение из этого
правила, так же как и в § 5.36, представляет собой второе равенство F.45.1),
не имеющее статического аналога). При проверке этого утверждения надо
учесть соответствия
Они следуют из первого и третьего соответствий F.41.8), в силу тензорного
равенства
= а1 F.41.9)
справедливость которого легко проверяется непосредственно. Кроме того,
надо помнить, что метрический тензор ast и дискриминантный тензор cst
по отношению к ковариантному дифференцированию ведут себя как кон-
константы *).
§ 42. Уравнения состояния (соотношения упругости)
Эти формулы с помощью тензорной символики записываются так:
Ba& + m^ ( "'
Здесь В, D — величины, зависящие от свойств материала оболочки и
от ее толщины,
В 2Eh n_ 2Eh* Г6 42 21
Е, F, G, Н — тензоры упругости, зависящие от aaP, &ae, cap и v, а т™5 и
/n°* — тензоры неоднородности, зависящие от сил, приложенных к лице-
лицевым поверхностям.
Смысл -тензоров упругости определяется в зависимости от того, как
выбраны уравнения состояния.
*) К а г а н В. Ф., Основы теории поверхностей, ч. I, Гостехиздат, 1947, стр. 361.
gg ТЕНЗОРНЫЕ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК [ГЛ- 6
В качестве одного из возможных вариантов можно положить
= т«е = mp« = 0; F423)
Для случая, когда срединная поверхность оболочки отнесена к произ-
произвольной ортогональной системе координат, формулам F.42.3) соответствуют
следующие уравнения состояния:
F-42-4)
Простейший вариант уравнений состояния E.28.2), который часто
используется в тех случаях, когда срединная поверхность оболочки отне-
отнесена к линиям кривизны, не может быть записан в тензорной форме, т. е.
не существует таких уравнений состояния, которые имеют силу для любых
криволинейных координат на срединной поверхности, а для линий кривизны
приводят к формулам E.28.2).
Уравнения состояния E.28.3) имеют тензорный характер. Им соответ-
соответствуют такие тензоры упругости:
- i±
HasaatSi + 2asoVp- ^ (bsaa'p — bV), F.42.5)
Я8'а(! = HaV + 2asos&'p— i±l (asos&'p- a«Va), xap = map = 0,
где Н — средняя кривизна оболочки, т. е. инвариант, определяемый фор-
формулой # = —a^baft.
Уравнения состояния E.28.4) также не обладают тензорными свойствами
(это показано в работе [139]). Таким образом, не существует достаточно
простых тензорных уравнении состояния, обеспечивающих, подобно фор-
формулам Л. И. Балабуха — В. В. Новожилова, выполнение всех общих теорем
теории оболочек (§5.32). Этот вопрос подробно рассмотрен в работе [68].
В ней показано, что в произвольных координатах аналог уравнений состоя-
состояния E.28.4) можно построить, только отказавшись от одного из выявлен-
выявленных в § 5.32 преимуществ этих формул (например, от выполнения принципа
взаимности).
§ 43. Преобразование тензорных уравнений
В качестве примера преобразований тензорных соотношений теории
оболочек выполним здесь некоторые выкладки, результаты квторых нам
понадобятся ниже.
В теории оболочек существует так называемое дополнительное уравнение
статики (§ 5.29). В простейшем варианте оно записывается в виде первого
J 43 ПРЕОБРАЗОВАНИЕ ТЕНЗОРНЫХ УРАВНЕНИЙ 87
равенства E.29.3). Его мы и примем во всех дальнейших преобразованиях
и запишем в тензорной форме так:
ca3Ma|i = 0. F.43.1)
Это равенство позволяет одну из функций напряжений, вводимых фор-
формулами F.41.6), выразить через другие. Заменим в F.43.1) индексы сумми-
суммирования на s, t и внесем полученный результат во второе равенство F.41.6).
Получим
cstc™ c'P (Vae6 + ba&g) + c^'x = 0. F.43.2)
Выполним свертку дискриминантных тензоров с по повторяющимся
индексам, пользуясь здесь (и всюду ниже) формулой F.41.9). Заметим при
этом, что из F.38.3) следует симметричность тензора Ьа$, в то время как
тензор с0* — обратно симметричен. Поэтому
c"»bati = 0.
Кроме того, справедливо равенство
cstcsl
Учитывая все это, получаем из F.43.2) требуемую формулу
cstcsl == a't = 2.
^e. F.43.3)
Помножим первые два равенства F.41.6) на cptcse, выполним свертки,
учтем, что тензоры а и с при ковариантном дифференцировании ведут себя
как константы (в дальнейшем мы будем этим пользоваться без напоминания),
и запишем полученные результаты, присоединив к ним равенство F.41.7),
" = V* + bpQg + С0Д, F.43.4)
cSPct0Tsl -- Voq>p — c
sp
Этим статическим равенствам по статико-геометрической аналогии двой-
двойственны первые два геометрических равенства F.41.4) и первое геометриче-
геометрическое равенство F.41.5). Кроме того, мы имеем статическое равенство F.43.1)
и двойственное ему второе геометрическое равенство F.41.5). Введем обозна-
обозначение
1/3A —
F.43.5)
помножим все перечисленные геометрические равенства на 2Ehp, а все ста-
статические — на i и сложим их попарно. Получим формулы
Ера = VPV, + Ьм W + cMd, Ам = VA, — capb*d,
F.43.6)
Ар = VPW — b%Va, d = L capVaye,
в которых использованы следующие обозначения: ,
+ icptc,sMsl, Аря = 2Eh9V,Dq + icspctqTs\
Vp = 2Ehpvp + iep, W = 2Ehpw + ig,
Ap = 2EhpXp + tq>p, d = 2Ehpb + i%.
ТЕНЗОРНЫЕ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК (.ГЛ. в
Введем теперь в рассмотрение уравнения неразрывности деформаций
F.41.3). Исключив во втором из этих равенств величину Ъ,р при помощи треть-
третьего равенства, получим
<?*РЪ<ф„ + срас9CУаУ6вр/, = 0. F.43.8)
Аналогичным образом исключим величину Sa во втором уравнении рав-
равновесия F.41.1), воспользовавшись третьим из этих уравнений. Тогда, счи-
считая, что внешние поверхностные моменты отсутствуют (ср = 0), можно напи-
написать равенство
Его можно переписать в следующем виде:
cpac^b^cs!)ct(lTst + cpacq^a^cptcs(lMa + Z = 0, F.43.9)
в чем 'нетрудно убедиться, выполнив свертку тензоров с и помня, что в силу
F.43.1) тензор Mst симметричен.
Помножив F.43.8) на 2Ehp, a F.43.9) — на i, сложив их и использовав
обозначения F.43.7), получим
сГас^ЬаЬАвд + cpV>VaV6?M + iZ = 0. F.43.10)
Обратимся к уравнениям состояния F.42.1) и будем считать, что пред-
предстоящие выкладки должны быть выполнены на уровне точности, соответству-
соответствующей простейшему варианту этих уравнений, выражаемому формулами
F.42.3). Однако пока мы положим равными нулю лишь тензоры т и т, a F
и Н обратим в нули несколько позже. В промежуточных выкладках тензоры
F и Н будут показывать, величинами какого вида мы пренебрегаем в каждом
конкретном выражении, 'избрав простейший вариант уравнений состояния.
Если при этом в данном выражении содержатся другие слагаемые того же
вида, то будет приниматься, что в рамках принятой точности их также можно
отбросить.
Возьмем уравнения состояния в виде
Г' = В (аюа** + vcsVp) вае + DFs'aVap, F-43.11)
Mst = D (а*ааф + vcsVp) fxap + Dtfs'apBap. F.43.12)
Первое из них заменим следующим равенством, разрешенным относи-
относительно тензора тангенциальной деформации:
2EhsPa = (apsat!t — vcpscqt)Tst + Q^M8'. F.43.13)
Если в формулах F.43.11) и F.43.13) положить F и Q равными нулю,
то правильность перехода от одной из этих формул к другой можно прове-
проверить, подставив, например, F.43.13) в F.43.11) и произведя свертку. Что же
касается тензора Q, то его конкретный смысл для нас несуществен. Этот
тензор также будет положен равным нулю в окончательных результатах,
а пока он будет играть ту же роль, что и F и Н, т. е. будет указывать те сла-
слагаемые, которые можно отбрасывать в рамках принятой точности.
При помощи формул F.43.4) равенство F.43.13) можно привести к такому
виду:
— Ь\еу) + с^ЬЬЛ +
-г- Qw №Sc*(Va% + b^g)-cst%].
$ 431 ПРЕОБРАЗОВАНИЕ ТЕНЗОРНЫХ УРАВНЕНИЙ 89
Замечание. Если тензор имеет верхние и нижние индексы, а порядок последних для этого
тензора является существенным, то ставятся дополнительные точки, фиксирующие место
индекса. Так, например, символ с? означает, что в обратно симметричном тензоре с нижний
(ковариаитиый) индекс а стоит на первом месте, а верхний (контравариантиый) индекс f5 —•
на втором. Для а и Ь точки не ставятся, так как эти тензоры — симметричны.
В последнем равенстве слагаемые, содержащие тензоры е и %, попарю
подобны в том смысле, что в каждую пару входят одноименные тензоры и
одинаковое число символов ковариантного дифференцирования. Поскольку
в каждую пару подобных слагаемых входит тензор Q, истинный смысл кото-
которого нам не известен, отбросим не только члены с Q, но и подобные им сла-
слагаемые. Получим
2Ehepq = {С4 — vaapa%) VpVag. F.43.14)
Аналогично поступаем с равенством F.43.12). Помножим его на cpt, csqt.
выполним свертку и выразим тензоры еаР, ц,^ по формулам F.41.4),
F.41.5). Получим
D (ср*.с% —vapa«)
= DcptcsqHsta*
В этом равенстве в вышеуказанном смысле подобны друг другу две пары
слагаемых с тензорами оу, б. Положив тензор Н равным нулю и отбросив все
слагаемые, подобные тем, которые содержат тензор Н, будем иметь
i4Mst = D (с?с% — vcfyg) V3Уаш. F.43.15)
Забегая вперед, заметим, что в выражении Vf$aw символы ковариантного
дифференцирования можно поменять местами (к вопросу о замене порядка
ковариантного дифференцирования мы еще вернемся в этом параграфе).
Поэтому в коэффициенте при VpVaw можно заменить а на р\ а р наа и
представить формулу F.43.15) так:
cptcsqMst = — D (cp%} + v?##) VpVat». F.43.16)
Из равенств F.43.14) и F.43.16) очевидным образом составляется ком-
комплексная комбинация
Е„ = — tp (cPX%Va.W + va^V3VaF), F.43.17>
в которой черточка над буквой — символ комплексной сопряженности.
Из первого и четвертого равенств F.43.6) следует, что Ет — симметрич-
симметричный тензор. Поэтому равенство F.43.17) эквивалентно трем равенствам.
В них Epq при помощи F.43.6) можно выразить через Vp, W, и мы получим
систему из трех уравнений с тремя неизвестными. Sh-o так называемые уравне-
уравнения теории оболочек в комплексных перемещениях, впервые предложенные
в работе [98]. Под комплексными перемещениями в них подразумеваются
величины Vp, W, задаваемые третьим и четвертым равенствами F.43.7).
Из F.43.17) очевидным образом получается следующее важное для
дальнейшего равенство:
= — ipc"V^Vp {cf.cJV^W + va|aJV4V6F}. F.43.18)
Тензор Epq в левой части F.43.18) можно выразить при помощи F.43.10)
через Apq и, учтя F.43.6), написать
iZ, F.43.19)
где
ТЕНЗОРНЫЕ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК 1ГЛ.
S = cV^aPV0VDr 1 (?**„ ЫУу,
3 F.43.20)
Будем вычислять величины F.43.20), пользуясь равенством
Vac°%v = 0, F.43.21)
представляющим собой тензорную запись уравнений Кодацци (для поверх-
поверхности, отнесенной к линиям кривизны, эти уравнения выписаны в § 1.3).
Выполнив в правой части третьего равенства F.43.20) свертку по ин-
индексу р и заметив, что по индексам р, q тензор Ьа(,Ъаа симметричен, а тензор
(ро обратно симметричен, получим
S = — сфЬацС%Ь*ё = (Pbarfid = 0. F.43.22)
Далее, в силу F.43.21), имеем
S = c^V/V V— с» (Vp&a3) VnW = VV&epV^. F.43.23)
Равным образом
S = — ср<ЧЛр&Х
Справедливо равенство
{К — гауссова кривизна срединной поверхности), которое легко проверить,
построив в линиях кривизны компоненты тензоров, стоящих в его правой
и левой частях. Поэтому можно написать
F.43.24)
Таким образом, из F.43.19), F.43.20), F.43.21)—F.43.23) следует, что
с"V4.Vp?w = Vqcpa^bafiVpW - awVCVV — iZ. F.43.25)
Обратимся к правой части равенства F.43.17) и введем обозначения
т = cpv3vav3c;!4Xv^, т = (f^ayfflld^^W. F.43.26)
Первое из этих равенств преобразуем так:
Т = cpac^c^ceriVaVpVtlV|Tr = aVVaVpV^lF. F.43.27)
Далее нам надо будет менять порядок ковариантного дифференцирова-
дифференцирования. Оно, вообще говоря, не подчиняется закону переместительности, и фор-
формулы, к которым нам придется прибегать, записываются так *):
(V,,V6— V5V^) S = 0, (V»V4Vt — V^VeVa) S = R^VyS. F.43.28)
Здесь S — произвольный инвариант, а Rap,mn — тензор Римана—Кристоф-
<феля, для которого справедлива следующая формула Бианки:
Rat, mn = Kca&cmn. F.43.29)
•) К а г а и В. Ф., Основы теории поверхностей, ч. 1, Гостехиздат, 1947.
$ 441 УРАВНЕНИЯ В ПРОИЗВОЛЬНЫХ ОРТОГОНАЛЬНЫХ КООРДИНАТАХ д]
Поэтому можно написать
= [(a°*VeV6) (a^V.Vr,) + УаКса\!^у\ W = [AAW + aayVaKVv] W. F.43.30)
Здесь использовано обозначение
am"VmVn = Д.
и под А подразумевается обобщенный оператор Лапласа; в произвольной
ортогональной системе координат он расшифровывается так:
д Ал с
АхА2 \ д^ А-, дс^
Из второго равенства F.43.26) получаем
су
Т =
Применив снова формулы F.43.28), F.43.29), будем иметь
Т = с&с*Ча (V^V3V4 + Kc^c^Vy) W =
Но выражение, взятое в квадратные скобки, равно нулю в силу первой
формулы F.43.28), и следовательно,
Т = aayVaK VVW. F.43.31)
Подставив в левую часть равенства F.43.18) выражение F.43.25) и
преобразовав правую часть F.43.18) при помощи F.43.26), F.43.27), получим
важное для дальнейшего уравнение
cpacqt>VqbafiypW - awV, (KVV) - iZ =
= — tp [AAW + aaTVa (КV4W) — aavVa (KVVW)J. F.43.32)
§ 44. Уравнения общей теории оболочек
в произвольной ортогональной системе координат
Уравнения §§ 6.41—6.43 сохраняют силу при любой системе координат,
установленной на срединной поверхности, так как все они имеют тензорный
характер. В частности, их можно расшифровать для случая, когда средин-
срединная поверхность отнесена к произвольной ортогональной, не сопряженной
системе криволинейных координат. Для этого надо иметь в виду правила
перехода к физическим компонентам § 6.37 и учитывать формулы F.38.1),
F.39.1)—F.39.4 , F.40.1)—F.40.5), F.41.2), с помощью которых были опре-
определены все использованные здесь тензоры. Кроме того, надо пользоваться
формулами ковариантного дифференцирования, которые записываются так:
Vr dL rj т п dL . „л га п ; mn dL . j^n j am . pm г па
d«s d^ dr
\7 t &Ln pa г у r dLnm „a j га Т
vs*^n — ^Ti sn/^a> Уь*-тт — T~^ i sn '-¦am 1 sm^na-
Здесь Гар — символы Кристоффеля, определяемые для произвольной орто-
ортогональной системы координат формулами A.3.4); L — инвариант; La, La —
92
ТЕНЗОРНЫЕ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК ГЛ. 6
ковариантный и контравариантный тензоры первого ранга; Z-ap, Z.aB —
контравариантный и ковариантный тензоры второго ранга.
Приняв все это во внимание, получим следующие уравнения и формулы
общей теории оболочек, срединная поверхность которых отнесена к произ-
произвольной ортогональной системе координат (здесь мы возвращаемся к обозна-
обозначениям глав 3—5; индексы i, j не имеют тензорного характера и могут при-
принимать две пары значений i = 1, /' = 2 и i = 2, / = 1; звездочки, употребляв-
употреблявшиеся в §§ 6.37—6.39, теперь не ставятся).
Уравнения равновесия
D •" D D T~ A A | Л^»
F-44Л)
21 ^12 "Г D Г
«11 Э
Уравнения неразрывности деформаций
F
Формулы «деформации — перемещения, углы поворота"»
_1_ 5»i , 1 dAi w
Bi ~ ~A~i да, ^ ~Щ~, 57 "' ~~ ~Щ'
F.44.3)
AiA,
441 УРАВНЕНИЯ В ПРОИЗВОЛЬНЫХ ОРТОГОНАЛЬНЫХ КООРДИНАТАХ 93
Формулы «углы поворота—перемещения»
( 1 dw , и,- uj \
\ Ai da,- ' Rn Rij)
Ш< ~ А~ —~ ~A~A~~~d~Llti~b~~7r~' F.44.4)
Формулы «усилия, моменты — функций напряжения»
= — д (— дс -4- al —
A, da \ A, da, "•" Rj
— ( -4- —
A, da, \ A, da, "•" Rjj Rij
Af daf \ A{ dat
C, = -j-?i.+ *?Lat-° F.44.5)
r, 1 QUi 1 ЗЛ; с . . ...
"''"""da" ЛД7 За( ' "•" й?/ "*" [~ ' 1г
Л,
= r_ ui _L Jz L f_L
v ^ Л, dar %\Л,
J^ ^
da. ^ /??,- /?
I / I дс ч< сц
да/
_ \ дс , at ai
~ — ^oT + Rtl ~ Rt, '
Уравнения состояния
2Eh
F-44-6)
(вариант, соответствующий простейшим тензорным уравнениям состояния
F.42.4)).
94 ТЕНЗОРНЫЕ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК 1ГЛ. 6
Соответствия статика-геометрической аналогии
" F.44.7)
<0
В этих формулах использованы обозначения § 1.5, т. е. Rt{ — нормальные
радиусы кривизны поверхности в направлении координатных линий, а /?12 —
величина, характеризующая степень несопряженности координатных линий.
При переходе от произвольных ортогональных координат к линиям кривизны
надо положить
Ru = R,, /?1з = оо .
Тогда приведенные здесь уравнения и формулы перейдут в уравнения и
формулы глав 3, 4, и это служит доказательством правильности тензорных
соотношений § 6.43.
Часть II
ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА ОБОЛОЧЕК
Под оболочкой понимается тонкое упругое тело. Поэтому основной'
задачей теории оболочек надо считать создание таких приближенных методов-
анализа, которые существенным образом опираются на малость относительной
толщины оболочки \. Разумеется, в некоторых случаях можно исследовать
оболочку, исходя из уравнений теории упругости и не внося в них никаких
упрощений (такие решения даны для сферы и цилиндра). Однако эти резуль-
результаты надо относить к достижениям теории упругости, хотя и имеющим очевид-
очевидную большую ценность для теории оболочек.
Малость толщины в неявном виде использована уже в части I при фор-
формулировке гипотез теории оболочек (в части VI показано, что все они явля-
являются следствием малости h^). В части II малость А„ используется для форму-
формулировки приближенных методов интегрирования двумерных уравнений-
теорий оболочек. Соответствующие упрощения исходных уравнений произ-
производятся на основе дополнительных предположений, которые, так же как
и в части I, принимаются пока без попыток серьезного обоснования. Однако,
как выяснится в последующих разделах книги, все они отражают асимптоти-
асимптотические (при h# —» 0) свойства напряженно-деформированного состояния
оболочки.
Для теории оболочек характерна поражающая на первый взгляд пестрота
приближенных подходов и кажущаяся противоречивость предположений,,
положенных в их основу. То, что объявлено второстепенным в одной ситуа-
ситуации, может быть признано главным при других обстоятельствах. Так, напри-
например, моменты и перерезывающие усилия, которыми можно пренебречь в без-
моментной теории, превращаются в определяющие статические факторы,
когда речь заходит о напряженных состояниях с большой изменяемостью.
Асимптотический анализ интегралов уравнений теории оболочек вскрывает
причины такой разнородности, но, как бы то ни было, она остро ставит вопрос
об области применимости каждого отдельно взятого приближенного приема
расчета оболочек. В части II он также обсуждается, и для этого вводится
понятие о показателе изменяемости. Оно в теории оболочек в высшей степени
важно, но вместе с тем и крайне расплывчато. Автору представляется, что
такая ситуация отражает сущность рассматриваемой проблемы, и полностью'
устранить возникающую в связи с этим неопределенность, по-видимому,
невозможно. Пусть, например, на замкнутую упругую тонкую сферу дей-
действует «спокойная» (медленно меняющаяся от точки к точке) нагрузка. Тогда
в оболочке возникнет безмоментное напряженное состояние. Столь же ясно,
что если нагрузка станет достаточно «бурной», то напряженное состояние
станет моментным. Однако граница между спокойной и бурной нагрузкой,
конечно, не будет резко очерченной даже для такого сравнительно простого
объекта обсуждения, как тонкая упругая сфера. Здесь в сомнительных
случаях нужен разумный учет всех конкретных обстоятельств. Несмотря
на это, в книге делается попытка придать максимальную определенность.
понятию показателя изменяемости.
ЧАСТЬ П
Формулируются некоторые из утверждений теории асимптотического
интегрирования дифференциальных уравнений в частных производных,
изложенной в приложении, и показывается, как они связаны с вопросом об
изменяемости.
Наибольшие трудности вызвало изложение такого, казалось бы, ясного
понятия, как безмоментная теория. Читателя, возможно, удивит сложность
избранного здесь подхода, однако, перебрав все более простые трактовки,
автор не нашел среди них ни одной свободной от противоречий или хотя бы
такой, которая не повредила бы правильному пониманию обсуждаемых
вопросов.
ГЛАВА 7
БЕЗМОМЕНТНАЯ ТЕОРИЯ
§ 1. Основное напряженное состояние
Напряженно-деформированное состояние оболочки часто представляет
собой сумму основного напряженного состояния и краевых эффектов. Первое
из них распространяется на всю оболочку, а вторые имеют местный характер
и локализуются вблизи определенных кривых, которые в дальнейшем будут
называться линиями искажения напряженно-деформированного состояния
или просто линиями искажения (к ним принадлежат края оболочки, линии
излома срединной поверхности или, вообще, линии скачкообразного измене-
изменения исходных данных).
Существуют некоторые условия, при которых напряженно-деформиро-
напряженно-деформированное состояние оболочки заведомо обладает такими свойствами. Эти усло-
условия выявятся ниже, а пока мы постулируем, что они выполняются. Тогда
в качестве приближенного подхода к решению задач теории оболочек может
быть использован метод расчленения напряженно-деформированного состоя-
состояния или, просто, метод расчленения. Его идея заключается в следующем.
Основное напряженное состояние и краевые эффекты по своим свойствам
существенно отличаются друг от друга. Поэтому существенно различны и те
дифференциальные уравнения, которыми приближенно описываются эти
напряженные состояния. На этом базируется основная идея метода расчле-
расчленения: строить на первых этапах расчета основное напряженное состояние
и краевые эффекты раздельно (пользуясь для этого различными вариантами
приближенных дифференциальных уравнений) и вводить их в совместное
рассмотрение только для выполнения граничных условий, так как только эта
операция и обусловливает их взаимодействие. К подробностям реализации
метода расчленения мы вернемся в главе 9 и особенно подробно обсудим их
в части IV, а сейчас обратимся к основному напряженному состоянию и при-
примем (пока без объяснений) следующее
Предположение. При определении основного напряженного со-
состояния в силовых уравнениях равновесия члены с перерезывающими усилиями
N г, Nz играют второстепенную роль.
Отбросим в соответствии с принятым предположением в силовых уравне-
уравнениях равновесия члены с перерезывающими усилиями Nlt N2. Тогда для
оболочки, отнесенной к произвольной ортогональной системе координат,
получим следующую систему приближенных уравнений.
1. Силовые уравнения равновесия F.44.1)
?(№—gfr2 + ^(^S12) + ^S21+^AX1 = 0, G.1.1)
7 А. Л. Гольденвейзер
98
БЕЗМОМЕНТНАЯ ТЕОРИЯ , ГГЛ. 7
2. Тангенциальные уравнения состояния F.44.6) (здесь и ниже танген-
тангенциальными называются те уравнения состояния, которые связывают 7\,
S2i. S12, Ta с деформациями)
^ Su=»Sla = T^<B. G.1.4)
3. Формулы «компоненты тангенциальной деформации — перемещения»
F.44.3)
1 ди2 1 дЛ2 w ,,
4. Формулы «компоненты изгибной деформации — перемещения»
F.44.3)
_
Л2
l2
5Г
V Л! во, "Г Rn Rn ) '
j*2_ »i_ N
/?22 /?12 У'
=
да2
7 1+ «'
1 диг 1
~~л7"а7~ "л7л
Ю1"~- л, да,
0J л7а«7 л7л7ааГ ^
6 = X 1мГ 1"*ьГ(/llUl) ~ 5Г (Лг) J'
5. Нетангенциальные уравнения состояния F.44.6) (под этим подразу-
подразумеваются уравнения, связывающие моменты с деформациями)
G.1.7)
n2i~n12~ 3(l+v)T-
6. Моментные уравнения равновесия F.44.1)
и / Л /** \ i f"! /-» , и / Л ZJ \ l uri% U \ Л Л AT Л /*7 1 О\
Лгу * ¦•¦ */ I Нг/ *¦ > t\n * " ^ ' ritf ^* * * "
'^H21 — A1A2Nl = 0. G.1.9)
$ 2] БЕЗМОМЕНТНОЕ НАПРЯЖЕННОЕ СОСТОЯНИЕ 99
(В приближенной теории основного напряженного состояния берутся про-
простейшие уравнения состояния, а шестое уравнение равновесия отбрасы-
отбрасывается.)
В дальнейшем, когда надо подчеркнуть отличие G.1.1)—G.1.9) от неупро-
неупрощенных уравнений F.44.1)—F.44.6), будем называть последние уравнениями
моментной теории оболочек.
§ 2. Безмоментное напряженное состояние
Важное следствие отбрасываний, произведенных в силовых уравнениях
равновесия G.1.1)—G.1.3), заключается в том, что они вместе с дополнитель-
дополнительным равенством
S21 =S12. G.2.1)
вытекающим из G.1.4), образуют самостоятельную подсистему, состоящую
из четырех уравнений с четырьмя неизвестными Тг, S2U Sl2, Тг. Это значит,
что G.1.1)—G.1.3) н G.2.1) определяет некоторую совокупность таких напря-
напряженных состояний (Ти S21, Sl2, T2), которые находятся в равновесии с внеш-
внешними силами Q, состоящими из поверхностной нагрузки (X ъ Х2, Z) и краевых
тангенциальных сил (t, s)
Q = (Х„ Х„ Z, t, s) G.2.2)
(t, s — тангенциальные усилия, возникающие на сечении, проведенном
вдоль края, и выражающиеся через краевые значения Ти S21, S12, Tt
по формулам C.20.2)).
Коэффициенты уравнений G.1.1)—G.1.3) и G.2.1) не зависят от пара-
параметра /г*, под которым здесь подразумевается малое число (по сравнению
с единицей), равное отношению полутолщины оболочки к характерному
радиусу кривизны срединной поверхности. Поэтому при некоторых допол-
дополнительных условиях (таких, например, как требования ограниченности
области, отсутствие линий вырождения типа уравнений и т. п.) решения этих
уравнений имеют относительно h% такой же асимптотический порядок, как
и внешние силы Q. Запишем это так:
(Tlt S21, S12, Тг) = О (Q). G.2.3)
Для каждого из решений G\, S2i, S12> Тг) уравнений G.1.1)—G.1.3),
G.2.1) можно найти соответствующие ему моменты, перерезывающие усилия,
перемещения и деформации, поступая следующим образом.
Для определения elf ©, е2 имеем тангенциальные уравнения состояния
G.1.4). Относительно величин 2Ehsu 2?/ш, 2Ehs2 они образуют алгебраи-
алгебраическую систему уравнений, также не содержащую h^ в коэффициентах. По-
Поэтому справедливо соотношение
2Eh(su со, 82) = O(Q). G.2.4)
Для определения перемещений служат формулы «тангенциальные
деформации—перемещения». Они образуют систему дифференциальных урав-
уравнений относительно иъ иг, w (считается, что elt со, г2 уже определены) и
снова не содержат в коэффициентах параметра Л„.. Поэтому при некоторых
дополнительных условиях (такого же характера, как «и упомянутые выше)
для каждой определенной тройки (е^ со, е2) можно построить тройку (ии
и2, w), имеющую тот же порядок по h^. Сохраняя только такие решения,
будем иметь
2Eh(ult иг, w)=>0(Q). G.2,5>
J00 БЕЗМОМЕНТНАЯ ТЕОРИЯ (ГЛ. 7
Для определения xlt т, и2 служат формулы G.1.6). По ним переход от
перемещений к деформациям выполняется прямыми действиями, не завися-
зависящими от h^. Поэтому
2EhGi1, т, *s) = O(Q). G.2.6)
' Далее можно воспользоваться нетангенциальными уравнениями состоя-
состояния, из которых при помощи алгебраических действий находятся моменты.
При этом легко видеть, что
(Gi, Я21, Н12, G2) = О (h\Q). G.2.7)
Наконец, Nlt Nz из уравнений G.1.8), G.1.9) определяются прямыми
действиями, не зависящими от кл. Следовательно,
(Nu N,) = O(hlQ). G.2.8)
Приближенные силовые уравнения равновесия G.1.1)—G.1.3) получены
за счет отбрасывания следующих величин:
(<Ф/ = 1, 2),
Поэтому можно считать, что напряженно-деформированное состояние
Р(б), соответствующее внешним силам Q и построенное описанным способом,
отличается от некоторого «истинного» значения этой величины Р на попра-
поправочное напряженно-деформированное состояние Р', соответствующее внеш-
внешним силам (Xi, Х'2, Z', s', t'). Причем под Х'и Х'2, Z' — компонентами поверх-
поверхностной поправочной нагрузки — надо подразумевать величины G.2.9),
as', И зависят от нашего выбора и можно, в частности, положить s' = f = 0.
Из асимптотического соотношения G.2.8) и формул G.2.9) следует, что
(Xi, X2, Г, 0, 0) = O(fc,2Q). G.2.10)
Но выше было принято, что тангенциальные усилия имеют такой же
порядок, что и внешние силы. Поэтому асимптотическое соотношение G.2.10)
означает, что для решений рассмотренного вида отбрасывание членов с Nlt
N2 приводит к незначительным погрешностям, неограниченно уменьшаю-
уменьшающимся при кл —» 0, т. е. предположение теории основного напряженного
состояния (§ 7.1) при достаточно малом h* можно считать оправданным.
Назовем напряженно-деформированное состояние, удовлетворяющее
асимптотическим соотношениям G.2.3)—G.2.8), безмоментным напряженным
состоянием. Сказанное в предыдущем абзаце означает, что для него остается
справедливым предположение, сформулированное в § 7.1 для основного
напряженного состояния.
Обозначим через аг и ав наибольшие напряжения, порождаемые соот-
соответственно тангенциальным усилием Г и моментом G. Из формул B.10.1)
легко вывести, что
_ Т 3G
(эти формулы, конечно, можно получить и непосредственно).
Отсюда, учитывая G.2.3) и G.2.7), будем иметь асимптотическое соот-
соотношение
aG = O(/yjr), G.2.11)
из которого вытекает, что при достаточно малом h^ безмоментное напряженное
состояние оправдывает свое название в том смысле, что в нем напряжения от
моментов играют второстепенную роль.
S3] ЧИСТО МОМЕНТНОЕ СОСТОЯНИЕ БЕЗМОМЕНТНАЯ ТЕОРИЯ Ю1
Прежде чем идти дальше, поясним смысл высказанных утверждений.
В формулировке каждой краевой задачи теории оболочек содержится
в явном или неявном виде некоторое число параметров. Если, например, надо
рассчитать замкнутую круговую цилиндрическую оболочку, подверженную
действию поверхностной нагрузки, меняющейся по закону sin na1 sin ma2,
то параметрами задачи будут: Л* — относительная полутолщина, г — радиус
оболочки, / — длина облочки, а также числа пит, определяющие характер
внешних воздействий. В связи с этим обратим внимание читателя на то, что
полученные здесь оценки выявляют некоторые свойства, связанные с поведе-
поведением только одного из параметров задачи, а именно, с малостью Л„. Это —
асимптотические свойства, т. е. свойства, проявляющиеся при достаточно
малом h^.. В конкретных задачах значение этого параметра фиксировано,
и как бы оно ни было мало, может случиться, что при выбранных значениях
других параметров задачи асимптотические свойства еще не имеют силы.
Возвратимся к соотношениям G.2.10), G.2.11). Из них следует, что при
достаточно малом А,, безмоментное напряженное состояние обладает следую-
следующими свойствами:
A) оно может быть с известной точностью построено при помощи уравне-
уравнений G.1.1)—G.1.9),
B) в нем напряжения от тангенциальных усилий превышают по абсолют-
абсолютной величине напряжения от моментов.
Если А„. фиксировано, а другие параметры рассматриваемой краевой
задачи ничем не ограничены, то безмоментное напряженное состояние может
утратить оба упомянутых свойства. Условимся в связи с этим говорить, что
безмоментное напряженное состояние не существует, когда для его построения
непригодны уравнения G.1.1)—G.1.9), а если оно существует, но в нем напря-
напряжения от моментов не меньше напряжений от усилий, то такое безмоментное
напряженное состояние назовем выродившимся.
Пример. Фиксируем в описанной выше цилиндрической оболочке пара-
параметры h^, r, п, т, примем, что пят соизмеримы с единицей, и будем менять
параметр /. Тогда можно показать, что при малых /безмоментное напряженное
состояние существует и является невырожденным. При увеличении / (/ > /j)
безмоментное состояние выродится, так как слишком возрастут напряжения
от моментов, но оно еще будет существовать, так как компоненты дополни-
дополнительной нагрузки Xi, X'2, Z' останутся малыми. Дальнейшее возрастание
1A > 1г) поведет к возрастанию Х\, Xi, Z', и безмоментное напряженное
состояние перестанет существовать. Все эти утверждения легко проверить
по формулам, которые выводятся для цилиндрической оболочки в § 13.1.
§ 3. Чисто момеитиое напряженное состояние.
Безмомеитная теория оболочек
При определении перемещений в предыдущем параграфе удерживались
только такие решения уравнений G.1.5), которые удовлетворяют асимпто-
асимптотическому соотношению G.2.5), а последнее в силу G.2.4) равносильно тре-
требованию
(щ, и2, w) = O (е), е = max \su ©, %}. G.3.1)
Вместе с тем очевидно, что уравнения G.1.5) имеют решения, не удовлет-
удовлетворяющие этому соотношению. К ним, например, принадлежат все решения
однородной (при ех = со = е2 = 0) системы G.1.5), так как для них 8 = 0,
a ult u2, w отличны от тождественного нуля. Рассмотрим теперь эти
решения и построим соответствующие им напряженно-деформированные
состояния.
|02 6ЕЗМОМЕНТНАЯ ТЕОРИЯ {ГЛ.
Для каждого решения (и1г и2, до) однородной системы G.1.5) можно
подсчитать xlt т, и2 по формулам G.1.6). Это требует только выполнения
прямых действий. Поэтому
2Eh(x1, т, щ) = ОBEhU), U = max \ux, иъ w\. G.3.2)
Из нетангенциальных уравнений состояния алгебраически получаем
моменты, а затем из моментных уравнений равновесия прямыми действиями
находим перерезывающие усилия. При этом будут справедливы соотношения
(d, Я2Ь На, (к) = О (HpEhU), (Nu N2) = О (h\2EW). G.3.3)
Все остальные величины, определяющие искомое напряженное состояние,
можно в первом приближении положить равными нулю:
7\ = S21 = Slt = Г2 = 8l = © = е2 = 0. G.3.4)
Тогда уравнения G.1.1)—G.1.9) при
X, = Х2 = Z = 0 G.3.5)
будут удовлетворяться.
Формулы G.3.4) можно при желаний уточнить следующим образом.
Возвратимся к силовым уравнениям равновесия моментной теории, т. е.
возьмем вместо G.1.1)—G.1.3) первые два равенства F.44.1), отбросим в них
свободные члены в силу G.3.5) и будем считать, что N ь N2 известны. Тогда,
использовав дополнительное равенство G.2.1), получим систему из четырех
уравнений для определения Тъ S21, S12, T2, в которой роль свободных
членов играют некоторые выражения, содержащие #!, #2. Так же как это
делалось в § 7.2 при определении перемещений, примем, что эта система
имеет решение, порядок которого равен порядку свободных членов, и сохра-
сохраним только такие решения. Тогда будет справедливо соотношение
(Ти S2l, S12, T2) = O(h«iEhU). G.3.6)
Далее при помощи G.1.4) получаем (алгебраически) компоненты танген-
тангенциальной деформации, для которых оценочное соотношение имеет вид
(еь со', ег) = О (/#/). G.3.7)
Напряженно-деформированное состояние, удовлетворяющее асимптоти-
асимптотическим соотношениям G.3.1)—G.3.3), G.3.6), назовем чисто моментным
напряженным состоянием.
В чисто моментных напряженных состояниях, если их строить при
помощи приближенных уравнений G.1.1)—G.1.9), компоненты тангенциаль-
тангенциальной деформации обращаются в тождественный нуль. Уточнения, которые
можно получить, обратившись к уравнениям моментной теории, приводят
к значениям, удовлетворяющим асимптотической оценке G.3.7), играющей
гакую же роль, как оценка G.2.10). Основываясь на этом, можно утверждать,
что приближенные уравнения G.1.1)—G.1.9) в равной мере применимы
к построению как безмоментных, так и чисто моментных напряженных
состояний.
Из G.3.3) и G.3.6) легко вывести асимптотическое соотношение
аТ = О (h^oo). G.3.8)
Оно по смыслу прямо противоположно соотношению G.2.11) и показы-
показывает, что при достаточно малом h^ чисто моментное напряженное состояние
оправдывает свое название: в нем наибольшие абсолютные значения имеют
§ 3] ЧИСТО МОМЕНТНОЕ СОСТОЯНИЕ. БЕЗМОМЕНТНАЯ ТЕОРИЯ 1Q3
напряжения, обусловленные моментами. Вместе с тем при малом, но фикси-
фиксированном h^ свойства, выражаемые соотношениями G.3.7), G.3.8), могут и
не проявиться, т. е. чисто моментное напряженное состояние, так же как
безмоментное, может не существовать или оказаться вырожденным.
Замечание. Чисто моментное напряженное состояние по смыслу совпадает с тем, что
Ляв [84] назвал деформацией без растяжения и сжатия. Поскольку чисто моментное напряжен-
напряженное состояние здесь будет постоянно противопоставляться безмоментным напряженным состоя-
состояниям, автор счел более уместным отразить в названиях состояний те их свойства, в которых
выражено наиболее существенное различие между ними.
При решении уравнений G.1.1)—G.1.9) надо, кроме выполнения некото-
некоторых прямых действий, дважды интегрировать системы дифференциальных
уравнений: при определении тангенциальных усилий интегрируется система
G.1.1)—G.1.3), G.2.1), s при определении перемещений — система G.1.5).
Можно считать, что все производи, содержащиеся в интегралах уравнений
G.1.1)—G.1.3), G.2.1), переходят в безмоментное напряженное состояние,
а все произволы, содержащиеся в интегралах уравнений G.1.5), переходят
в чисто моментное напряженное состояние. Это значит, что основное напря-
напряженное состояние представляет собой сумму безмоментного и чисто момент-
ного напряженных состояний.
Одним из самых распространенных приемов анализа напряженно-
деформированного состояния оболочки является так называемая безмомент-
ная теория. В самых общих чертах ее можно определить как метод, стремя-
стремящийся использовать то обстоятельство, что вдали от линий искажения в обо-
оболочке, как правило, господствует безмоментное напряженное состояние,
т. е. выполняется соотношение G.2.11). Эта предпосылка явно или неявно
принимается во всех трактовках безмоментной теории, но детали метода
у разных авторов выглядят совершенно по-разному. Так, например, иногда
считается, что цель безмоментной теории заключается лишь в определении
тангенциальных усилий и что в ней надо учитывать только уравнения G.1.1)—
G.1.3), G.2.1). В других случаях определение перемещений также включается
в задачу безмоментной теории, и соответственно увеличивается число уравне-
уравнений, с которыми надо оперировать. Можно указать и другие расхож-
расхождения.
В настоящей книге безмоментная теория также занимает видное место
и, избегая путаницы, постараемся достаточно четко определить это понятие
(предлагаемая трактовка, может быть, и не является наилучшей, но она
удобно увязывается с принятым здесь способом изложения).
В некоторых случаях (часто встречающихся в практических задачах)
в процессе применения метода расчленения построение основного напряжен-
напряженного состояния выделяется в совершенно самостоятельную задачу. Это
происходит тогда, когда, не вводя в рассмотрение краевые эффекты, удается
из четырех граничных условий общей теории оболочки выделить два гранич-
граничных условия, которые надо учитывать при интегрировании уравнений G.1.1)—
G.1.9) и которые вместе с этими уравнениями однозначно определяют основ-
основное напряженное состояние. Такие случаи будут здесь разобраны в §§ 9.15—
9.17. Там же приведен и пример противоположного характера. В части IV
при более систематическом рассмотрении метода расчленения будет показано,
что, если построение основного напряженного состояния выделяется в само-
самостоятельную задачу, то в нем господствует безмоментное слагаемое и основное
напряженное состояние будет безмоментным (если оно не вырождается).
Здесь под безмоментной теорией подразумевается один из вариантов
метода расчленения, заключающийся в построении основного напряженного
состояния при помощи интегрирования уравнений G.1.1)—G.1.9) с учетом
двух граничных условий, выделяемых из четырех граничных условий теории
104 БЕЗМОМЕНТНАЯ ТЕОРИЯ [ГЛ. 7
оболочек по определенному правилу без введения в рассмотрение краевых
эффектов.
По поводу принятого определения полезно сделать ряд замечаний.
1. Не предполагается, что в результате применения безмоментной
теории обязательно должно получиться напряженно-деформированное состоя-
состояние, в котором преобладают напряжения от тангенциальных усилий. В общем
случае это будет так потому, что возможность самостоятельно строить основ-
основное напряженное состояние означает, как уже говорилось, господство без-
моментного напряженного состояния, в котором, как правило, наибольшими
являются напряжения от тангенциальных усилий. Однако возможны и исклю-
исключения, которые будут иметь место, если безмоментное напряженное состояние
выродится.
2. В предлагаемой трактовке цель безмоментного расчета заключается
в построении некоторого основного напряженного состояния, в котором
господствует безмоментное напряженное состояние. Поэтому, вообще говоря,
надо находить не только тангенциальные усилия G\, <S21, S12, Т%) и пере-
перемещения (и1г ыа, w), но также моменты (G1? Н21, Н12, G2) и перерезывающие
усилия (Nlt N2)- Построение (Glt #21, #12, G2, Nlt N2), как мы уже могли
убедиться, достигается прямыми действиями и не связано с дополнительными
принципиальными затруднениями. Вместе с тем оно может дать существенные
поправки, если господствующее безмоментное напряженное состояние выро-
выродилось или близко к вырождению (когда есть уверенность, что вырождение
или близость к ней невозможна, необходимость в вычислении моментов,
конечно, отпадает).
3. Требование, чтобы выделение задачи построения основного напря-
напряженного состояния производилось без связи с краевыми эффектами, нуждается
в дополнительном разъяснении, но здесь, было бы не своевременно на этом
останавливаться. Вопрос станет яснее после общего рассмотрения метода
расчленения в части IV.
Мы будем называть уравнения G.1.1)—G.1.9) уравнениями безмоментной
теории, так как их интегрирование составляет математическую задачу этой
теории. Однако надо помнить, что эти уравнения лежат также в основе и
более общего приближенного подхода, т. е. метода расчленения. Логически
правильней было бы называть G.1.1)—G.1.9) уравнениями основного напря-
напряженного состояния, но упомянутый выше термин прочно вошел в теорию
оболочек, а, кроме того, метод расчленения на практике применяется чаще
всего в том варианте, который здесь назван безмоментной теорией.
§ 4. Статические уравнения безмоментной теории
Силовые уравнения равновесия безмоментной теории G.1.1)—G.1.3)
вместе с дополнительным равенством G.2.1), как уже говорилось, образуют
самостоятельную подсистему. Введя обозначение
Sn = Su = S, G.4.1)
ее можно записать в виде
*? S + ЛИ А = 0, G.4.2)
Эти уравнения мы будем называть статическими уравнениями безмо-
безмоментной теории, или короче, безмоментными статическими уравнениями.
СТАТИЧЕСКИЕ УРАВНЕНИЯ БЕЗМОМЕНТНОЙ ТЕОРИИ
105
Найдем характеристики безмоментных статических уравнений G.4.2).
Для этого положим Xt — Х2 = Z = 0, оставим в первых двух уравнениях
только главные (содержащие производные от искомых величин) слагаемые
и заменим в них символы д/да{ на множитель df/da(. Тогда G.4.2) превра-
превратится в систему однородных алгебраических уравнений относительно Ти
S, Г2. Обратив определитель этой системы в нуль, получим дифференциальное
уравнение характеристик системы G.4.2):
Ж. _L ?L
dat A2 doj
1
da, A2
2
0
П ' "' ' "'
Л
и
= 0,
G.4.3)
или в раскрытом виде:
#11 V А2 да?/
R1
Уравнения G.4.2), а следовательно, и уравнение G.4.4), имеют силу
в любой ортогональной системе криволинейных координат. Выберем послед-
последние так, чтобы а2-линии совместились с асимптотическими линиями срединной
поверхности. Тогда в G.4.4) надо положить R22 = оо, и одно из решений этого
уравнения станет очевидным / = / (а^. Как известно из теории дифферен-
дифференциальных уравнений, равенство / = const, где / — нетривиальное решение
уравнения G.4.4), определяет семейство характеристик системы G.4.2).
Это значит, что характеристиками уравнений G.4.2) являются линии а, =
= const, т. е. а2-линии. Следовательно, характеристиками статических
безмоментных уравнений являются асимптотические линии срединной по-
поверхности [109, 116].
На поверхности положительной гауссовой кривизны (К > 0) асимпто-
асимптотические линии мнимы. При К <С 0 существует два действительных семейства
асимптотических линий, а при К = 0 существует одно действительное (двой-
(двойное) семейство асимптотических линий. Отсюда вытекает, что тип стати-
статических безмоментных уравнений зависит от знака гауссовой кривизны сре-
срединной поверхности. Для оболочек положительной кривизны это будет эллип-
эллиптическая система, для оболочек отрицательной кривизны — гиперболическая
и для оболочек нулевой кривизны — параболическая.
Систему G.4.2) в однородном случае, т. е. при Х1 = Хг = Z = 0, можно свести к одному
уравнению, воспользовавшись формулами, связывающими усилия и моменты с функциими
напряжения.
В части I были введены четыре основные функции напряжений а1? а2, с, х и две вспомога-
вспомогательные функции напряжения \plt \p2 (последние называются вспомогательными, так как
даются формулы, при помощи которых -фг. 'Фг можно выразить через Oj, a2, с, х).
Для оболочки, отнесенной к произвольной ортогональной системе координат, согласно
формулам F.44.5) усилия выражаются через ipj, г|J, X следующим образом:
Ах йах
7-1'
S21 =
L
At
#22
Л! daj
JQg БЕЗМОМЕНТНАЯ ТЕОРИЯ [ГЛ 7
Полные (не упрощенные за счет отбрасывания N^, Л?2) однородные уравнения равновесия
будут тождественно удовлетворяться в силу формул G.4.5), каковы бы нн были достаточное
число раз дифференцируемые функции i|)|, i|J, %. Свяжем их равенствами
% , % _ 1 дх Ь Ф2 _ 1 дХ
i г "р 1 Лп~' ~р • ~р а лиг—' ('.*.о;
¦\22 **12 Л2 ОСЬ2 *М2 *М1 Л1 ^*1
^^+^^^^~"^1^ + A^" + "^)х=0 G<7)
из которых следует, что
/V, = Л', з 0. S21 = Si2 = S.
Это значит, что полные силовые уравнения равновесия F.44.1) обратятся в систему
G.4.2), и последняя будет тождественно удовлетворяться в силу G.4.5)—G.4.7).
Разрешим уравнения G.4.6) относительно iplr t|>2:
* _J_(JL_L
да? /?12 Л, da, /' К \ #22 Л, да-, Rl7 Л, <Эа2
G.4.8)
(ft = -гг—5 gj гауссова кривизна срединнойтповерхности ) . Внеся G.4.8) в 47.4.7),
" 11^22 ^12 /
получим искомое уравнение
J д 1_ / _| |_ д%_ _}¦ 1 дх
rtj-rtg ^^2 Л \ л\22 С*С&1 ^12 ^2
_1__б i_/_i L^. +J L.
Л| <5ах ft \ i?22 A1 да^ R12 Л2
Оно эквивалентно системе G.4.2) в том смысле, что каждому решению уравнения G.4.9)
соответствует решение системы G.4.2), в котором Тг, S, Тг выражаются следующими фор-
формулами:
r(n'LLJ/'LL&, J
LJ-/_L_L-& J LJ2L\
да/ К \ R/i At dat ^ Rtf A/ da, J
I ( I I dX . I 1 ax \ x
К \ A d ^ R A d J "*"
dat К \Ru Aj da, ^ Rt/ At dat J "*" RtJ '
ax \
dat J
s=(_hiJ д i_/j L^L4._L_LiJL
^ ' А, да, К \ Ru Aj da, ^ Rif At da(
йа,- К \ Rjj At aat ^ Rtj A, da., )^K ' Ru
Aф,= 1, 2).
Они получаются, если подставить G.4.8) в G.4.5) и отбросить индекс при S (два выражения
для S отличаются друг от друга, конечно, только по форме).
Замечание- Уравнение G.4.9) имеет смысл только при К Ц= 0, т. е. для оболочек ненуле-
ненулевой гауссовой кривизны.
Ниже выяснится, что при К = 0 безмоментные статические уравнения настолько просты,
что для них вопрос о приведении к одному уравнению не представляет интереса.
§ 5] ГЕОМЕТРИЧЕСКИЕ УРАВНЕНИЯ БЕЗМОМЕНТНОЙ ТЕОРИИ
§ 5. Геометрические уравнения безмоментной теории
Под геометрическими уравнениями безмоментной теории или просто
геометрическими безмоментными уравнениями будут подразумеваться ра-
равенства
_ 1 Эй, . I dAj w
E + Л7 U '
)¦?• <7-51>
ди„ . 1 дА2
Е* = А да?
в которых компоненты тангенциальной деформации рассматриваются как
известные величины.
Равенства G.5.1) образуют систему из трех уравнений с тремя неизвест-
неизвестными иlt иг, ши имеют простой геометрический смысл. В однородном случае,
т. е. при б! = ю = е2 = 0, уравнениями G.5.1) определяются такие переме-
перемещения срединной поверхности оболочки, при которых компоненты танген-
тангенциальной деформации обращаются в нуль. При этом, как следует из формул
D.23.3), D.23.4), сохраняется первая квадратичная форма срединной поверх-
поверхности, а следовательно, однородные уравнения G.5.1) определяют перемеще-
перемещения, соответствующие бесконечно малым изгибаниям срединной поверхности
оболочки (§ 1.1).
С геометрической точки зрения однородную (ех = ю = е2 = 0) систему
G.5.1) можно назвать дифференциальными уравнениями изгибаний в пере-
перемещениях (здесь и всюду в дальнейшем бесконечно малые изгибания для
краткости называются просто изгибаниями). Легко вывести и дифференциаль-
дифференциальные уравнения изгибаний в деформациях. Шесть компонент деформаций
гх, &, е2, хь т, х2 удовлетворяют трем уравнениям неразрывности, которые
в произвольной ортогональной системе координат записываются в виде
равенств F.44.2). Положив в них ъ± = ю = е2 = 0, получим искомую си-
систему
п I о * D '
¦U1 2 2
состоящую из трех уравнений с тремя неизвестными кг, х, х2.
Два варианта дифференциальных уравнений изгибаний, т. е. системы
G.5.1) и G.5.2), в известном смысле эквивалентны друг другу. Каждому
решению ии ы2, w системы G.5.1) можно с помощью формул G.1.6) поставить
в соответствие некоторое решение xlt т, к2 системы G.5.2). При этом надо
заметить, что существуют и такие решения G.5.1), которым соответствует
тривиальное решение G.5.2), т. е. хг = т = х2 = 0. Смысл их очевиден: это
будут смещения, определяющие движение срединной поверхности как
жесткого целого, при котором все компоненты деформации обращаются
в нуль. В дальнейшем, так же как это делается в (теории поверхностей,
будем иногда жесткое движение срединной поверхности называть тривиаль-
тривиальным изгибанием.
Пусть, наоборот, известно некоторое решение
х1 = и?) т = т°. к2 = и§ G.5.3)
уравнений изгибаний в деформациях G.5.2).
БЕЗМОМЕНТНАЯ ТЕОРИЯ [ГЛ 7
Тогда, присоединив к G.5.3) равенства ех = со = ех = О, мы будем
знать все шесть компонент деформации. Они заведомо удовлетворяют уравне-
уравнениям неразрывности, и значит, по ним, как показано в § 4.27, можно восста-
восстановить смещения и1з и2, до, являющиеся решениями уравнений G.5.1). Эти
смещения 'определятся с точностью до тривиальных изгибаний, т. е. до жест-
жесткого движения срединной поверхности.
Заметим, что G.5.2) по структуре идентичны статическим безмоментным
уравнениями G.4.2): системы G.5.2) и G.4.2) переходят друг в друга, если
установить такие соответствия:
щ *--» Т2, т-^-> — S, x2^-*7V G.5.4)
Это одно из проявлений статико-геометрической аналогии, о котором уже
говорилось в § 5.36.
Из G.5.4) следует, что между статическими безмоментными уравнениями
G.4.2) и геометрическими безмоментными уравнениями G.5.1) существует
тесная связь. Пусть известно решение однородных уравнений G.4.2). Тогда
с помощью G.5.4) можно найти соответствующее ему решение уравнений
G.5.2), а следовательно, и решение уравнений G.5.1). Очевидным образом
устанавливается и обратное соответствие. Это значит, что уровень трудности
решения статических безмоментных уравнений G.4.2) и геометрических
безмоментных уравнений G.5.1) одинаков. Более того, можно утверждать,
что всякий метод решения одной из этих систем может быть использован
и как метод решения другой системы.
Характеристики дифференциальных уравнений G.5.1) можно найти
так же, как это делалось для уравнений G.4.2). В результате вместо G.4.3)
получим равенство, в левой части которого стоит транспонированный опре-
определитель. Это значит, что характеристики геометрических безмоментных
уравнений также совпадают с асимптотическими линиями срединной поверх-
поверхности, а следовательно, эта система будет эллиптической Для оболочек
положительной кривизны, гиперболической для оболочек отрицательной
кривизны и параболической для оболочек нулевой кривизны.
§ 6. Головная система уравнений безмоментной теории
Головной системой уравнений безмоментной теории или, короче, голов-
головной системой безмоментных уравнений будет называться совокупность ра-
равенств, состоящих из равенства G.4.2) и двух следующих групп равенств:
[_ди±, 1 дЛд
A doL Ал A cioL
62 - Т2да^ + Л,Л2 ва, Ы1 /?22 ' (ЛЬ'^
ш ~ Агдаг \ Л, У "Г Аг даЛ Аг ) ^ Rlt '
Кроме G.4.2), G.6.1), G.6.2), в уравнения безмоментной теории входят
равенства G.1.6)—G.1.9), которые можно рассматривать как дополнитель-
дополнительные. Из них прямыми действиями определяются не содержащиеся в головной
системе неизвестные хь т, х2, Glf H12, Я21, G2, Nlt N2.
Головную безмоментную систему легко свести к трем уравнениям относи-
относительно ии и 2, w. Выразив в G.6.1) компоненты деформации через перемеще-
§ 7] СТАТИЧЕСКАЯ И ГЕОМЕТРИЧЕСКАЯ БЕЗМОМЕНТНЫЕ ЗАДАЧИ ]Qg
ния при помощи G.6.2) и внеся этот результат в G.4.2), получим следующие
головные безмоментные уравнения в перемещениях:
I д Г 1 IdAfH dAiU,\ , i I \
Л, da, L AiAj \ da,- "+" da, ) KRi^ R,J
да,-
¦+" «/y- Л,- да,- "T" i?f/ Л,- да,- J ^ 2Eh л' - u
(i + j =1,2), G.6.3)
/ll\l/ дЛ2Ы1 , дЛ]Ы2 \ / 1 ¦ 2v I \
V R,. + «J ЛХЛ2 l да, ' <Эа2 J U,2 + Я,«, + «I /
Уравнения G.6.3) представляют собой результат суперпозиции стати-
статических и геометрических безмоментных уравнений *). Отсюда следует, что
характеристики G.6.3), так же как характеристики G.4.2) и G.5.1), сов-
совпадают с асимптотическими линиями срединной поверхности, но в головной
системе безмоментных уравнений однократному семейству асимптотических
линий (семейству, существующему на поверхности отрицательной кривизны)
соответствуют двухкратные характеристики, а двухкратному семейству
асимптотических линий (семейству, существующему на поверхности нулевой
кривизны) соответствуют четырехкратные характеристики.
§ 7. Статическая и геометрическая краевые задачи
безмоментной теории
Вернемся к формуле E.31.5), выражающей теорему Клапейрона в теории
оболочек. В ней под
Я<". <?«>, 7\, Sjt, Gt, Hjt, Nit Q (i*/ = l, 2) G.7.1)
подразумеваются статические неизвестные теории оболочек (Rw, Q(i) опре-
определяются формулами C.17.3); для Q в линиях кривизны справедлива формула
C.19.3)), а под
U, Г, е„ <о, щ, т (i = l, 2) G.7.2)
подразумеваются геометрические неизвестные теории оболочек.
При выводе E.31.5), как уже говорилось, не используются уравнения
состояния, связывающие между собой G.7.1) и G.7.2). Поэтому каждую из
этих двух групп величин можно в E.31.5) выбрать независимо друг от друга.
Надо только требовать, чтобы величины G.7.1) удовлетворяли уравнениям
равновесия, а величины G.7.2)—формулам «деформации — смещения». В ча-
частности, в E.31.5) можно положить
G1 = Ha = Hu = Gt = N1 = N,=:0, 521=5U = 5, G.7.3)
О = КД- YA = Q. G.7 А)
Л1 Л
*) Ниже выяснится, что иногда удобно рассматривать головную безмоментную систему
как единую, не обращая внимания на возможность расчленить ее на статические и геометри-
геометрические уравнения.
[JO БЕЗМОМЕНТНАЯ ТЕОРИЯ (ГЛ. 7
При этом моментные уравнения равновесия F.44.1) тождественно выпол-
выполнятся, а силовые уравнения равновесия F.44.1) превратятся в статические
безмоментные уравнения. Кроме того, в силу C.19.3) и G.7.3) мы будем иметь
Q(» = Q = 0 A = 1, 2), G.7.5)
поэтому, подставив G.7.3)—G.7.5) в E.31.5), получим равенство
J j U-RA^da,. da2+$>U- [/#2)Л, dati — Ril)A2 da2] =
о
= \\ 17>, + Sa + 7>2] AtAt da, da,. Г7.7.6)
G
в котором через R\l) обозначена составляющая вектора /?"', лежащая в каса-
касательной плоскости срединной поверхности,
а под G и g, так же как в E.31.5), подразумеваются соответственно область
изменения параметров (а1( а2), отвечающая рассматриваемой оболочке, и
контур (или контуры), ограничивающий эту область.
В G.7.6) криволинейный интеграл выражает, очевидно, работу танген-
тангенциальных краевых сил на соответствующих им перемещениях. Его, можно
преобразовать к виду
ф U-[R(t2)Ai da,— RpAtdob] = ф (P,V, + PnVn) ds, G.7.7)
где Ph Pn — проекции краевых сил на два взаимно ортогональные танген-
тангенциальные направления /, п, а Vh Vn — проекции краевых смещений на те же
направления, ds—'дифференциал длины дуги контура.
Рассмотрим две краевые задачи.
Статическая безмоментная краевая задача. Под этим подразумевается
построение в области G решения статических безмоментных уравнений G.4.2),
для которого на контуре g краевая сила Я, в заданном тангенциальном напра-
направлении I принимает заданные значения.
Геометрическая безмоментная краевая задача. Под этим подразумевается
построение в области G такого решения геометрических безмоментных уравне-
уравнений G.5.1), для которого на контуре g краевое перемещение Vn в заданном
тангенциальном направлении п принимает заданное значение.
Из равенства G.7.7) следует, что статическая безмоментная задача и
геометрическая безмоментная задача взаимно сопряжены, т. е. справедливы
следующие теоремы.
Теорема 1. Если однородная геометрическая безмоментная задача имеет
нетривиальное решение и\К), «?*¦>, а»<*->, то статическая безмоментная задача
может иметь решение только тогда, когда выполняется интегральное ра-
равенство
j j U{X) ¦ RAi A2 dan da2 + (j) P{V\X) ds = 0. G.7.8)
о g
Теорема 2. Если однородная статическая безмоментная задача имеет
нетривиальное решение Т[м, 5(!1), Т^\ то геометрическая безмоментная
задача может иметь решение только тогда, когда выполняется интегральное
равенство
ф
ds=\ \\Тг'г1А-Тй &2 + S(x}w\AiA2daiua2. G.7.9)
V
$ 8] ПОЛНАЯ КРАЕВАЯ ЗАДАЧА БЕЗМОМЕНТНОЙ ТЕОРИИ J][
Доказательство. Примем, что существует нетривиальное решение одно-
однородной геометрической безмоментной задачи, и будем считать, что геометри-
геометрические неизвестные в G.7.6) соответствуют этому решению. Для последнего
8t = (о = е2 = 0 (в области G) и Vn = О (на контуре g).
Подставив это в G.7.6) и учтя G.7.7), получим равенство G.7.8). Анало-
Аналогично, если под статическими неизвестными в G.7.6) понимается нетривиаль-
нетривиальное решение однородной статической безмоментной задачи, то в G.7.6) надо
положить
R — О (в области G), Р( = 0 (на контуре g),
что и приведет к равенству G.7.9).
Возможны случаи, когда однородная геометрическая безмоментная
задача имеет несколько линейно независимых решений. Тогда будет суще-
существовать столько же различных необходимых условий G.7.8). Равным образом
и условие G.7.9), вообще говоря, будет не единственным.
Если поставлено геометрическое граничное условие, выражающее
отсутствие перемещений в некотором направлении р в каждой точке края, то
будем говорить, что оболочка имеет закрепление в направлении р. Кроме
того, будем говорить, что решение статической безмоментной теории порож-
порождается поверхностными и краевыми силами, первые из которых определяются
свободными членами уравнений равновесия, а вторые — свободными членами
граничного условия. Тогда теореме 1 можно дать простое физическое толко-
толкование. Если в геометрической безмоментной задаче закрепление в направлении
п не препятствует изгибанию (v) срединной поверхности, то статическая
безмоментная задача, в которой на краю задается тангенциальное усилие
в направлении I, ортогональном п, может иметь решение только тогда, когда
равна нулю работа сил, порождающих это решение, на перемещениях изги-
изгибания (v).
§ 8. Полная краевая задача безмоментной теории
В § 5.33 введено понятие об идеализированных .граничных условиях.
В однородном случае они выражают либо требование отсутствия краевого
смещения в заданном линейном или угловом направлении, либо — требова-
требование обращения в нуль краевых приведенных сил и моментов определенного
направления. В некоторых случаях направления, для которых формулиру-
формулируются идеализированные граничные условия, можно разделить на танген-
тангенциальные и нетангенциальные. Под первыми подразумеваются линейные
направления, параллельные касательной плоскости, а под вторыми — линей-
линейное направление нормали и направление угла поворота. Тогда будем говорить,
что идеализированные граничные условия разделяются на тангенциальные
и нетангенциальные. В дальнейшем выяснится, что возможность такого
разделения оказывает существенное влияние на характер напряженного
состояния оболочки. Примеры разбиения граничных условий на танген-
тангенциальные и нетангенциальные приводятся в §§ 9.15—9.17.
Под полной краевой задачей безмоментной теории или полной безмомент-
безмоментной краевой задачей будет подразумеваться задача интегрирования головных
уравнений безмоментной теории с выполнением двух тангенциальных гра-
граничных условий в каждой точке края (или краев) оболочки. Всегда будет
предполагаться, что эти граничные условия таковы, что в однородном случае
из них следует обращение в нуль правой части равенства G.7.7), т. е. выпол-
выполнение равенства
$iVi + PaVJds = O. G.8.1)
Ц2 БЕЗМОМЕНТНАЯ ТЕОРИЯ [ГЛ. ^
Для этой краевой задачи остается в силе (с оговоркой, о которой будет
сказано ниже) теорема единственности, доказанная в § 5.32. Чтобы показать
это, рассмотрим, как и там, соответствующую однородную краевую задачу.
Для нее надо считать, что R = 0, и принять, что выполняется равенство
{7.8.1). Поэтому G.7.6) примет вид
и
Sa> -f 7>2) ЛИ* d«! dat = 0.
в"
Но здесь выражение, взятое в скобки, в силу формул G.6.1) всюду в области G
неотрицательно (§ 5.32), и следовательно, должны выполняться равенства
et = (о = е2 = 0.
Отсюда вытекает, что решение полной безмоментной краевой задачи един-
единственно с точностью, быть может, до перемещений, удовлетворяющих выпи-
выписанным равенствам, т. е. с точностью до перемещений, соответствующих
изгибаниям срединной поверхности.
Сравнив этот результат с общей теоремой единственности (§ 5.32),
отметим следующие черты различия.
A) Для головных безмоментных уравнений единственность обеспечи-
обеспечивается не четырьмя, а двумя граничными условиями (тангенциальными).
Последние должны отвечать требованию G.8.1), которое можно называть
условием единственности полной безмоментной краевой задачи.
B) Роль смещений срединной поверхности как жесткого целого играют
теперь смещения, соответствующие изгибаниям.
Замечание 1. Произволы, содержащиеся в решении полной краевой задачи безмоментной
теории, могут и исчезнуть. Это будет тогда, когда ее тангенциальные геометрические граничные
условия не допускают изгибаний срединной поверхности.
Замечание 2. Если в каждой точке края ставится одно тангенциальное статическое гра-
граничное условие, заключающееся в требовании, чтобы тангенциальная краевая сила />; имела
заданное значение, и одно геометрическое граничное условие, заключающееся в требовании,
чтобы тангенциальное смещение Vn имело заданное значение, то полная безмоментная задача,
в сущности, представляет собой соединение статической безмоментной задачи и геометриче-
геометрической безмоментной задачи. Действительно, в этом случае можно сначала иайти 71,, S, Т2,
интегрируя статические безмоментные уравнения совместно со статическим граничным" усло-
условием, а затем выразить (алгебраически) гг, ш, е2 через Тг, S, Т2, при помощи уравнений состоя-
состояний, и, наконец, найти перемещения uI, u2, а;, интегрируя геометрические безмоментные
уравнения совместно с геометрическим граничным условием. Вместе с тем, легко указать на
случаи, когда такое разделение станет невозможным. Это будет, например, в том случае, когда
оба граничных условия — геометрические. Тогда целесообразно говорить о полной краевой
Задаче безмоментной теории, не расчленяя ее на статическую и геометрическую задачи.
ГЛА В А 8
ТЕОРИЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА
§ 9. Исходные предположения теории простого
краевого эффекта
Кроме основного напряженного состояния, о котором шла речь в преды-
предыдущих параграфах, в оболочке, как уже говорилось, могут возникать краевые
эффекты, т. е. местные напряженные состояния, локализующиеся вблизи
некоторых линий у, названных в § 7.1 линиями искажения напряженного
состояния (более подробно о них будет сказано в § 9.14).
Здесь будет рассматриваться простой краевой эффект, под которым под-
подразумевается местное напряженное состояние, проявляющееся вблизи не-
неасимптотической линии искажения у (это значит, что у нигде не проходит
вдоль асимптотических линий срединной поверхности и ни в одной точке
не касается их; другими словами, нормальная кривизна поверхности в на-
направлении неасимптотической линии искажения нигде не должна обращаться
в нуль).
Условимся считать, что срединная поверхность оболочки отнесена
к некоторой ортогональной системе криволинейных координат, в которой
рассматриваемая линия искажения у проходит вдоль одной из линий at =
= const. Предполагается, что для конкретно указанной линии искажения
такую систему можно построить, но она может быть сопряженной только
в том случае, когда у совпадает с линией кривизны. Поэтому при выводе
теории простого краевого эффекта мы будем считать, что оболочка отнесена
к общей ортогональной системе координат, и исходить из системы уравнений,
выведенной в § 6.44.
Приближенную теорию простого краевого эффекта можно построить
на основе следующих предположений.
Предположение 1. Простой краевой эффект — быстро затухающее на-
напряженное состояние, поэтому связанные с ним искомые величины (усилия,
моменты, перемещения, компоненты деформации и т. д.) существенно увели-
увеличиваются при дифференцировании в направлении нормали к у, т. е. по пере-
переменной aj. Дифференцирование по а2> если и приводит к увеличению искомых
функций, то не к такому значительному, как дифференцирование по аг.
Предположение 2. Наибольшим из тангенциальных усилий является
усилие Тг (рис. 15), возникающее в сечениях, ортогональных к линии иска-
искажения у; величины Тъ S21, S12 существенно меньше и подчиняются соотно-
соотношениям
|7,|. ' (8.9.1)
да.
dS21
да.
dSl2
да.
Предположение 3. Моменты играют существенную роль; главным явля-
является Gx — изгибающий момент в сечениях, параллельных линии искажения
у (рис. 15). Изгибающий момент G2 связан с Gx равенством
G^vGi, (8.9.2)
8 А. Л. Гольденвейзер
114
ТЕОРИЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА
[ГЛ. 8
а крутящие моменты #21, Я12 играют второстепенную роль, подчиняясь
соотношениям
I ЗГГ 1 I а г» |
^ | G11. (8.9.3)
Предположение 4. Из перерезывающих усилий главным является усилие
Nlt действующее в сечениях, параллельных у (рис. 15), и справедливо соот-
соотношение
1 -\»г ¦
*\К\- (8.9.4)
Предположение 5. Деформация срединной поверхности имеет в основном
изгибный характер, и ее главными компонентами являются величины хи
х, х2; они связаны между собой соотношениями
дх
(8.9.5)
показывающими, что наибольшую
роль играет хх.
Предположение 6. Растяжения
(сжатия) и сдвиги срединной по-
поверхности относительно малы. Из
трех величин е1( w, е2, характери-
характеризующих эту деформацию, наиболь-
наибольшие значения имеет е2, а осталь-
остальные связаны с ней соотношениями
Рис. 15.
— ve,
| e21
da>
(8.9.6)
(8.9.7)
Предположение 7. Точки срединной поверхности смещаются в основном
по нормали к срединной поверхности, и справедливы соотношения
*|w|. (8-9.8)
Предположение 8. В первом и втором уравнениях равновесия F.44.1)
слагаемые, содержащие перерезывающие усилия Nlt N2, играют второстепен-
второстепенную роль.
Всегда считается, что простой краевой эффект не связан с поверхностной
нагрузкой, а вызывается некоторыми воздействиями, распределенными вдоль
линии искажения напряженного состояния. Поэтому его надо строить, исходя
из однородных уравнений теории оболочек, т. е. полагать XX = X2 = Z =
= Y1 = У2 = 0.
§ 10. Разрешающее уравнение теории простого
краевого эффекта
. Выпишем без каких бы то ни было отбрасываний те из общих уравнений
§ 6.44, которые здесь будут нужны.
а) Третье уравнение равновесия
Т Q _!_ Q Т 1
1 1 1 i J12 I ' 2 I '
Ri
10] РАЗРЕШАЮЩЕЕ УРАВНЕНИЕ ПРОСТОГО КРАЕВОГО ЭФФЕКТА
б) Пятое уравнение равновесия
1 д (л г,-\. !_^Г7 ' д (А И \ * dAl И — Л/ —
в) Формулы «.деформации—перемещения»
_J__du^, 1_ dAg_ w_
2 ~ Аг a«s "•" AtAs А*! "х Я22 '
1 Лх a«t \ i4t a«! "•" i?u /?!J "•" A±A2 da2 \ A2 da2 "•" R2.2 R1S
.11 1 Г а ,я .
г) Уравнения состояния
Будем упрощать выписанные равенства, оставляя в каждом из них
только те слагаемые, которые являются главными в силу предположений
предыдущего параграфа. В частности, всегда будет учитываться предположе-
предположение 1, означающее, что производная по ах от любой искомой величины суще-
существенно больше ее первообразной.
Из (8.9.1) и (8.9.4) следует, что третье уравнение равновесия можно
записать так:
ё- + ^а!^> = 0- (8Л0Л>
Из (8.9.2) и (8.9.3) вытекает, что пятое уравнение равновесия можно
! взять в виде
А^^(ЛА)-М^0. (8.10.2)
Формулы «деформации—перемещения» при помощи (8.9.8) упрощаются
следующим образом:
Наконец, в соответствии с (8.9.5) и (8.9.6), получаем следующие уравне-
уравнения состояния:
ОРЬЗ
(?!=— з(Г-*)х*' ^ = 25/18,. (8.10.4)
Приближенные уравнения (8.10.1)—(8.10.4) образуют систему из шести
уравнений относительно шести неизвестных
Т2) G1; #!, Hl e2, м;, (8.10.5)
определение которых составляет самостоятельную задачу. Отметим, что
величины (8.10.5) можно назвать главными неизвестными теории простого
краевого эффекта: из предположений, принятых, в § 8.9, вытекает, что Т2 —
наибольшее из тангенциальных усилий, Gj — наибольший из моментов,
Nt ¦— наибольшее из перерезывающих усилий, кг и е2 — наибольшие из
изгибных и тангенциальных деформаций, aw — наибольшее из перемещений:
В качестве проявления эффекта Пуассона, в простом краевом эффекте момент
Gx и тангенциальная деформация е2 вызывают появление момента G2 и
деформации еи которые можно дополнительно определить по формулам
(8.9.2) и (8.9.6).
ТЕОРИЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА [ГЛ. 8
Система (8.10.1)—(8.10.4) легко сводится к одному уравнению относи-
относительно w. Для этого из (8.10.1), (8.10.2) надо исключить перерезывающее
усилие Л^х и выразить в полученном равенстве изгибающий момент Glt
а также нормальное усилие Т2 через прогиб w при помощи (8.10.3) и (8.10.4).
Это приводит к следующему уравнению:
Рассмотрим тождество
й будем считать, что в нем W — одна из искомых величин теории оболочек
(усилие, момент, перемещение и т. п.), а Р — один из коэффициентов этих
уравнений. Тогда в рамках точности, с которой выводилось уравнение (8.10.6),
в правой части обсуждаемого тождества можно пренебречь вторым слагаемым
по сравнению с первым и написать
~(PW)=P^-. (8.10.7)
Таким образом, из предположения 1, в частности, следует, что при
Построении простого краевого эффекта коэффициенты уравнений теории
оболочек в первом приближении надо рассматривать как постоянные по аг
величины. Конечно, это будет неверно, если в рассматриваемой области
(вблизи у)
дР ~ '"' (8.10.8)
Поэтому всегда считается, что вблизи той линии, у которой простой
краевой эффект строится при помощи предлагаемого приближенного метода,
кривизны и метрика срединной поверхности оболочки не слишком быстро
изменяются по аг.
Из (8.10.7) вытекает, что в уравнении (8.10.6) коэффициенты Аи А2
можно выносить за знак дифференцирования, т. е. брать (8.10.6) в виде
Это уравнение мы назовем разрешающим уравнением теории простого
краевого эффекта.
Замечание. Термин «краевой эффект» введен Лявом [84 ]. Он совпадает по смыслу с при-
принятым здесь термином «простой краевой эффект», введенным в [48]. Дополнительным сло-
словом «простой» подчеркивается, что существуют и обобщенные краевые эффекты, понятие о ко-
которых будет введено в § 11.25. (А. Ляв ограничился рассмотрением оболочек вращения,
в которых обобщенные краевые эффекты возникнуть не могут.)
Приближенные подходы исследования напряженно-деформированного состояния, назван-
названного здесь простым краевым эффектом, обсуждались в общей постановке в работах [48, 108,
135, 146, 147]. Кроме того, применительно к круговым цилиндрическим оболочкам этот вопрос
рассмотрен в [178].
§11. Расчетные формулы
Разрешающее уравнение (8.10.9) составлено относительно нормального
прогиба w. Через него остальные величины; определяющие простой краевой
эффект, можно выразить при помощи прямых действий.
Рассмотрим первое и второе уравнения равновесия F.44.1). Согласно
предположению 8 (§ 8.9) в них можно отбросить члены с перерезывающими
усилиями, а это значит, что они перейдут в безмоментные уравнения G.4.1),
S 11J РАСЧЕТНЫЕ ФОРМУЛЫ
G.4.2). Последние можно преобразовать, выразив в них тангенциальные
усилия через перемещения. Эти действия уже выполнялись и привели к пер-
первому равенству G.6.3). В теории простого краевого эффекта два вытекающих
из него уравнения можно значительно упростить при помощи соотношений
(8.9.8) и (8.10.7). Тогда, положив Хг = Х2 = 0, получим
2 Л| da? + Я^ "Л7 da, ~~ '
Помножим оба уравнения на А г и проинтегрируем их по аи рассматри-
рассматривая коэффициенты как постоянные. Будем иметь
1 диг / 1 . v \ I ди, 2 /о 11 1 ч
Здесь и в последующих выкладках этого параграфа отброшены произ-
произвольные функции интегрирования. Ниже выяснится, что произволы, которые
содержит w как интеграл разрешающего уравнения, достаточны для решения
нужных краевых задач. Сохранять произволы интегрирования было бы и
неправильно по причинам, которые изложены в § 8.12.
Заменив в правых частях (8.11.1) w через его четвертую производную при
помощи разрешающего уравнения (8.10.9) и вновь выполнив интегрирование
по alf можно написать
„ - (J-Л- v \ УЩ2 1 д*ш
Щ~ \Ru "^Ли У 3A -v2) А\ да\ '
_ 2 h*Rh I SHb (8.11.2)
7?l23(l-v2) A\ да% ¦
Компоненты деформации при известных перемещениях ии ы2» w П°Д*
считываются при помощи формул G.1.5), G.1.6). Учитывая снова соотноше-
соотношения (8.9.8) и (8.10.7), сохраняя только главные члены и выполнив некоторые
преобразования, вытекающие из (8.11.1), получим
I диг w v w
At oaj Kn л; ^82
_ 1 дА2 1 dw . 1 д 1 dw _ 1 д 1 dw
г ~ Л,Л3 da, Л7йа, ~*~ ~аТ даг ~А^ даг ' ~ Л2 йаг Аг да,
(в выражении для х2 из осторожности оставлена вторая производная по а2:
двухкратное дифференцирование по а2 в отличие от однократного может
в некоторых случаях привести к достаточно большому увеличению).
Для подсчета тангенциальных усилий и моментов имеются уравнения
состояния G.1.4), G.1.7), из которых при помощи (8.11.3) получаем
2Eh3 I d2a; r r 2Eh3
^ vGv
2?/i3 I d I dai
3d
ТЕОРИЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА [ГЛ. 8
Напомним, что равенства (8.11.4) —приближенные. Поэтому обращение
в нуль величин 7\, S21, S12 не надо понимать буквально. Оно только обозна-
обозначает, что взаимно сократились главные слагаемые в соответствующих выра-
выражениях. Это объясняется тем, что был принят такой путь вычислений, при
котором все четыре величины 7\, S21, 512, 72 должны недифференциально
выражаться через w, а согласно (8.9.1) четвертая из них по модулю суще-
существенно превышает остальные. Построив выкладки иначе, можно уточнить
результат и получить для 7\, S21, S12 ненулевые значения. Для этого мы
примем
Дополнительное предположение. В простом краевом эффекте в формулах
F.44.5), выражающих тангенциальные усилия через функции напряжений,
можно оставить только члены, содержащие функцию с.
Отсюда следует, что, сохраняя в F.44.5) только главные члены, мы
получим
j, __ _1 д 1 дс . 1 dAt дс j, __ 1 дгс
* Аг да., Аг даг А\А2 да^ дах' s А\ йа2 '
„ _„ 1 д 1 дс
21 12 Аг да2 А-у да.1
Поэтому, учитывая (8.11.4), будем иметь
2Ehw
*22
- Заменив здесь w через его четвертую производную при помощи разрешаю-
разрешающего уравнения (8.10.9) и выполнив двухкратное интегрирование, можно
написать
2?fts RM d*w
°~ 3A — v2) "Tf да\ '
Отсюда по формулам (8.11.5) и получим требуемый результат:
- 2Eh3 /1 д 1 д 1 дЛ2 д \ R22 о*т
1 "~ 3 (I — v2) \ Аг даг А2 даг ' '
(8.11.5)
5,
А\ да\ '
2Eh3 I д R2U d*w
3A—v2) Аг даг А\ да.\ '
Если линия искажения, около которой строится простой краевой эффект,
совпадает с линией кривизны, то /?12 = оо и второе равенство (8.11.2) даст
ы2 = 0. Этот результат тоже нетрудно исправить. Второе равенство (8.11.1)
можно уточнить, написав
1 du8 2ш _ 1 + v о 2ft2 1 д RM д3ш
Ах dat "¦" R12 Eh 2i 3A — v) Аг даг А\ да\ '
Отсюда при /?12 = оо следует
2ft2 A^ _й_ Rt2 d*w_
V*~ 3 A — v) Аг даг ~Aj 6tef '
Остается определить перерезывающие усилия. Для этого можно восполь-
воспользоваться четвертым и пятым уравнениями равновесия F.44.1), которые после
элементарных преобразований и отбрасываний второстепенных членов дадут
д, 2?ft3 1 дЧ) д, 2Eh3 I о 1 u-w
"I— 3A—V») Л^ daf ' П*~ 3A—v8)l
$ 12J ИНТЕГРИРОВАНИЕ РАЗРЕШАЮЩЕГО УРАВНЕНИЯ
§ 12. Интегрирование разрешающего уравнения
При интегрировании разрешающего уравнения (8.10.9) будут сохранены
те предположения, которые принимались при его выводе, т.е. Аг и /?22
будут рассматриваться как константы не зависящие от аг. Тогда (8.10.9)
обращается в обыкновенное линейное уравнение с постоянными коэффи-
коэффициентами и интегрируется без труда. Решение его можно искать в виде
w — С (а2) ef (а*> <«>-«io>.
Подставим это выражение в разрешающее уравнение и сократим на
экспоненциальный множитель. Тогда для определения функции / получится
уравнение
1 fi 3A-у')
Чтобы оно не приводило к противоречивому результату, т. е. чтобы / не
зависело от аи учтем, что в предлагаемой теории простого краевого эффекта
коэффициенты рассматриваются как константы по alf и положим в получен-
полученном уравнении
А\ = А\ (ф) = А\ |а,=о„,» #22 = #22 («г) = #22 |а,=а„
(ниже всюду в приближенной теории простого краевого эффекта вместо
коэффициентов берутся их значения при аг = а10, » это отмечается точкой
сверху).
Тогда для f получатся четыре значения, которые можно записать так:
Здесь g (a2) и константу k с принятой точностью можно определить
равенствами
(8.12.2)
В последнем из них Я, — константа, равная некоторому среднему
значению величины К-п на интересующем нас участке контура а1 = а10.
Общий интеграл разрешающего уравнения (8.10.9) запишется теперь так:
w = Сг (а2) ek <г+'> <«!-«.•) г -\- Сг (ctj,) ek A~'> <«>-«») е +
+ С3(аг) e-ft (г+'>'«•-«»•) 2 + С4 (аг) е-* d-"'«--«••) г.
В правой части этой формулы первые два слагаемых быстро затухают
при удалении от линии ах = а10 в область ах <С а10, а два последних слагае-
слагаемых быстро затухают при удалении от линии а1 = а10 в область ах >а10.
Физический смысл этого очевиден: первые два слагаемых соответствуют крае-
краевому эффекту в области а1 =^ а10, и только при таких значениях at их нам и
придется вычислять впоследствии; последние два слагаемых дают краевой
эффект в области ах $г а10 — их придется вычислять только при ах ^ а10.
Отсюда вытекает, что погрешность, которую мы допускаем, заменяя Аг
и /?22 через А\, /?22, будет невелика (конечно, если \АХ и Ri2 не слишком
быстро изменяются по ocj вблизи ах = а10), так как нас практически будут
интересовать только значения аи близкие к а10.
Итак, будем считать, что при at «ё а10
ТЕОРИЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА [ГЛ. 8
а при аг Ssa10
w = Cs (a2) е~к <i+i) (ai-«>«) e -f C4 (a2) e~* <'-'> (on-on») e.
Эти выражения соответствующей заменой произвольных функций интегриро-
интегрирования можно преобразовать к действительной форме, и тогда получатся такие
формулы (г|I? г|J, г|K, г|э4— произвольные функции а2):
при а1 fi^ a10
2Ehw = [% cos fe («! — a10) g + г|J sin fe («j — a10) g] ek («.-«..) e,
при «i ^ a10
— a10) ^ -f % sin fe (ax — a10) g]e~k (a>-a>«>s.
Подставим эти выражения в расчетные формулы § 8.11, заменим всюду
коэффициенты их контурными значениями и введем обозначения
3A —V2)'
с0 = cos fe К — a10) g, s0 = sin fe («! — a10) g,
^ = g* («,-«..) «> g»- = e-k (a,-a,.)
Получим:
при ax 4
L 4" K^T (^- + r?1) [№ — ^) со + (*i + ^2) so]
2Ehu2 = — /2~4 ^^ K% —^2) со + (% + %) so]
f= -j- y=
i—ад со + (ь+ад «о! st%
( • • >
T2 = \- (a|5iCo + ^asb) af, (8.12.4)
s21 = su = pL 4- ^r ^- j^ № - ад со + № + ад so]
Gx = ^- G2 = — -g- -
v ^2
§ 12) ИНТЕГРИРОВАНИЕ РАЗРЕШАЮЩЕГО УРАВНЕНИЯ
При Kj 5г «10
= — J= А ]ГЩ^ (-г!- + ¦?-) 1(Ь + %) со — (Ь — %)so]
2Ehu2 = V2 4 —^- № + г|>4) со — (ife — ф4) so]
-f-
^ №~^4) Со + (^3 + ^4) So]
(8.12.5>
Цг|>з + 1|ч) Со — A|>з — %) So] aJ
Gi = ~ G2 = -?¦ -i- (^4co —
Я21 = Я12 =- -j^ -?- -i- ^-
Ni=— pL. 4 —L- [(a|3s + г|L) со' — ('фз — %) So]
При выполнении граничных условий нам будут нужны значения, которые-
принимают усилия, моменты, перемещения и углы поворота краевых эффек-
эффектов на кривой а1 = al0. Соответствующие формулы можно получить из
(8.12.4), (8.12.5), положив в них аг — al0, т. е. считая, согласно (8.12.3),
что с0 = 1, s0 = О, <!Г+ = &~ = 1 (при этом, чтобы отличить краевой эффект в
области «л >а10 от краевого эффекта в области о^а^, мы при подстановке-
будем в первом случае писать аг = а1в — 0, а во втором аг = a1Q + 0)>
Получим:
при «! = а10 — 0
2Ehu, = - FT -L -^2. ft _ W,
A/ _±J. ^1-^2 A/ _ ^ 1
iVl i^n 6 ^'3/2 > 'V2 Ь2 ¦•
(8.12.6)
jj22 ТЕОРИЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА ||ГЛ. 8
при «! = сс10 + О
2Нш, = VI 4" ¦*?
12
4
4 у
—— -^
А,А9, дах
4>з с_с_ • г1 д t3 + ^4 (8
' д
В формулах настоящего параграфа k есть безразмерная величина,
значения которой для тонкой оболочки, вообще говоря, велики по сравнению
•с единицей. Отсюда вытекает, что при некоторых дополнительных условиях,
-о которых будет сказано ниже, в полученном решении выполняются все
предположения, положенные в § 8.9 в основу теории простого краевого эф-
эффекта. Все искомые величины выражаются через функции
e±k @,-0,0) g Sin k (ocj — a10) g, e±k «*<-<*.•>«cos k («j — ocio) g.
Отсюда следут справедливость предположения 1 (о быстром затухании
простого краевого эффекта). В справедливости остальных предположений
§ 8.9 легко убедиться при помощи формул (8.12.4) и (8.12.5), позволяющих
сравнивать порядки искомых величин простого краевого эффекта по степеням
'большого параметра k, входящего в их выражения.
Напомним, что в §8.11 при выводе расчетных формул произволы, свя-
связанные с интегрированием по ос^ отбрасывались. Их нельзя было сохранять
потому, что в соответствующих решениях, как можно проверить, предположе-
предположения § 8.9 не выполняются.
Итак, предположения приближенной теории простого краевого эффекта
(§ 8.9) можно считать оправданными, если параметр k достаточно велик и
-если остальные величины, входящие в (8.12.4), (8.12.5), после приведения
к безразмерной форме соизмеримы с единицей. Однако два последних условия
могут и не выполняться. Это случится тогда, когда на рассматриваемой линии
¦искажения Ri.2 приближается к нулю или бесконечности.
Для практических применений особенно важен случай, когда на линии
искажения (всюду или на некоторых ее частях) R22 обращается в бесконеч-
бесконечность или имеет весьма большие абсолютные значения. К решению соответ-
соответствующих задач изложенную приближенную теорию простого краевого
эффекта применять нельзя. В § 8.9 было оговорено, что линия искажения
•простого краевого эффекта должна быть неасимптотической. Этим исключается
§ 12) ИНТЕГРИРОВАНИЕ РАЗРЕШАЮЩЕГО УРАВНЕНИЯ 123
случай обращения Rh в бесконечность (хотя бы даже в одной точке). Однако
из сказанного выше следует, что недопустимы и «почти асимптотические»
линии искажения (линии, вдоль которых нормальный радиус кривизны
поверхности где-нибудь слишком велик по абсолютной величине). В дальней-
дальнейшем для краткости мы будем по-прежнему говорить о неасимптотических
линиях искажения, считая, что они нигде не должны быть и «почти асимптоти-
асимптотическими».
В этой главе теория простого краевого эффекта изложена в самом гру-
грубом приближении. Ниже, в § 19.8, приводятся общие соображения о воз-
возможности улучшить этот результат при помощи итерационного процесса.
Кроме того, более точные варианты теории простого краевого эффекта можно
найти в работах [49, 130, 184).
ГЛАВА 9
МЕТОД РАСЧЛЕНЕНИЯ
§ 13. Область применимости метода расчленения
напряженного состояния
При интегрировании дифференциальных уравнений теории оболочек
в каждой точке края надо выполнять четыре граничных условия (§ 5.33).
Для этого недостаточно произволов, содержащихся в решениях дифферен-
дифференциальных уравнений безмоментной теории. Они представляют собой супер-
суперпозицию двух систем (статических и геометрических безмоментных уравне-
уравнений), каждая из которых эквивалентна уравнению второго порядка (§§ 7.4,
7.5). Поэтому, вообще говоря, при интегрировании безмоментных уравнений
в каждой точке края удается выполнить лишь два граничных условия.
Естественно искать выход из этого затруднения, используя произвольные
функции i^ (ос2), -ф2 (а2) или г|з3 (а2), т|з4 (аг). входящие в формулы (8.12.4),
(8.12.5) теории простого краевого эффекта. На этой идее и основан метод
расчленения напряженно-деформированного состояния, о котором уже
говорилось в § 7.1.
Идея применения приема, который мы называем методом расчленения,
используется в теории оболочек очень давно и восходит к работам Лява [84].
В более общей форме она высказана в [41 ] и положена в основу изложения
в [48]. Существенную роль метод расчленения играет и в книге [185].
Простейшие примеры, показывающие, что метод расчленения действи-
действительно позволяет выполнить (хотя и приближенно) все граничные условия
теории оболочек, будут приведены в §§ 9.15—9.18. В части IV это доказыва-
доказывается для широкого класса задач. Вместе с тем можно привести и примеры
противоположного характера. Поэтому, прежде чем идти дальше, сформули-
сформулируем некоторые предварительные требования, без выполнения которых воп-
вопрос о применении метода расчленения ставиться не будет.
Первое требование заключается в том, что все края ободочки должны
быть неасимптотическими. Оно вытекает из следующих соображений.
Во-первых, если край оболочки (будем считать, что он совмещен с ли-
линией ocj = ос1О) в некоторой точке проходит вдоль асимптотической линии
срединной поверхности, то в этой точке обращается в нуль нормальная
кривизна в направлении линии аг = ос1О, т. е. R'22 — °°> а в этом случае
теряет силу приближенная теория простого краевого эффекта, построенная
в главе 8.
Во-вторых, асимптотические линии срединной поверхности совпадают
с характеристиками уравнений безмоментной теории (§§ 7.4, 7.5). Поэтому,
когда край касается асимптотической линии (или проходит вдоль нее),
граничные задачи для этих уравнений надо ставить особым образом.
Ниже выяснится, что существуют оболочки такого очертания, при
котором решения безмоментных уравнений становятся неограниченными.
В этом случае будем говорить, что срединная поверхность оболочки — особая.
S 13] . ОБЛАСТЬ ПРИМЕНИМОСТИ МЕТОДА РАСЧЛЕНЕНИЯ 125
Второе требование применимости метода расчленения заключается в том,
что срединная поверхность оболочки должна быть не особой и в достаточной
степени отличаться от нее. Это требование, конечно, сформулировано
нечетко. Остается неясным, по каким геометрическим признакам можно
отличить особую поверхность от неособой и какой мерой можно охаракте-
охарактеризовать близость между ними. В общем виде эти вопросы в книге не рас-
рассматриваются, но в конкретных случаях мы к ним еще будем возвращаться.
Забегая вперед, укажем, что к оболочкам с особыми срединными поверхно-
поверхностями относятся:
(а) цилиндрические оболочки, содержащие бесконечно удаленные точки;
(б) оболочки, содержащие острие (в частности, конические оболочки,
содержащие вершину);
(в) оболочки, срединная поверхность которых касается плоскости
вдоль замкнутой кривой (в частности, тор);
(г) оболочки с плоской срединной поверхностью, т. е. тонкие пластинки.
Приведенный список не претендует на полноту и охватывает только
оболочки, особые свойства которых выявились в расчетной практике.
Поскольку нельзя допускать близости срединных поверхностей к осо-
особым поверхностям, из второго требования вытекает, что метод расчленения
не должен применяться к длинным цилиндрическим оболочкам, к усеченным
коническим оболочкам, край которых близко подходит к вершине конуса,
и к пологим оболочкам, срединная поверхность которых в каком-то смысле
близка к плоскости.
Третье требование применимости метода расчленения заключается в том,
что основное напряженное состояние не должно иметь большой изменяемости,
т. е. соответствующие ему усилия, моменты деформации и перемещения, взя-
взятые в отдельности, должны в близких точках иметь не слишком сильно раз-
.личающиеся значения.
Понятие изменяемости первостепенно важно в теории оболочек, и оно
будет более подробно обсуждено ниже (§ 12.30 и Приложение § П. 15). Пока,
чтобы не прерывать изложения, мы ограничимся некоторыми предваритель-
предварительными разъяснениями.
Рассмотрим функцию
f(ait 0C2) = A sin nax sin тщ (А, п, т—константы). (9.13.1)
Ее изменяемость, т. е. скорость, с которой меняются значения функции при
переходе от точки к точке, очевидно, будет тем больше, чем большие значе-
значения имеют параметры пит. Можно сказать и более определенно: значениями
пит определяются изменяемости функции f по переменным аг и а2 соответ-
соответственно. Отсюда следует, что можно говорить о частной изменяемости функ-
функции, т. е. о ее изменяемости по каждой из независимых переменных в отдель-
отдельности (при этом под общей изменяемостью функции подразумевается наиболь-
наибольшая из частных измеияемостей). Формулы
-J— = пА cos raocj sin ma2, ~- = mA sin паг cos mx%
показывают, что если изменяемость функции по некоторой переменной (ocj)
характеризуется достаточно большим числом (я) и если f = О (А), то
dflda-i = nO (А). Выражая это свойство функций с большой изменяемостью,
будем для краткости говорить, что такие функции существенно увеличи-
увеличиваются при каждом дифференцировании по рассматриваемой переменной.
Рассмотренный пример, конечно, предельно упрощен, но в § 12.30 будет
показано, что существует весьма широкий класс функций, обладающих
такими же свойствами, и говоря о функциях с большой изменяемостью,
можно пока считать, что их моделью является функция (9.13.1), откуда,
126 МЕТОД РАСЧЛЕНЕНИЯ > [ГЛ. 9
в частности, вытекает, что важнейшее свойство функции с большой изменяе-
изменяемостью заключается в том, что она существенно увеличивается при каждом
дифференцировании по рассматриваемой независимой переменной.
Внимательный читатель, конечно, заметил, что в теории простого крае-
краевого эффекта понятие о функциях с большой изменяемостью уже было исполь-
использовано. Все искомые величины простого краевого эффекта быстро меняются
(затухают) по аг и имеют заведомо меньшую изменяемость по ос2. Это свой-
свойство было введено в теорию как предположение, на основе которого получи-
получились решения, действительно обладающие таким свойством.
Возвратимся к обсуждению третьего требования применимости метода
расчленения. В § 7.2 было введено понятие о компонентах поправочной
нагрузки Х^, Х'2, Z', определяемых формулами G.2.9), и считалось, что
погрешность безмоментной теории тем больше, чем больше Х\, Х\, Z' по
сравнению с истинными компонентами нагрузки.
Полагая, что перемещения основного напряженного состояния
известны, можно подсчитать Х[, Х^, Z', последовательно применяя формулы
G.1.6)—G.1.9). Ими предусматривается многократное дифференцирование
перемещений. А именно, перемещения дифференцируются при подсчете упру-
упругих углов поворота yt, <о„ б, углы поворота дифференцируются при подсчете
компонент изгибной деформации хи т, х2, затем моменты, линейно выра-
выражаемые через xlf т, х2, дифференцируются при подсчете перерезывающих
усилий Nlt N2, а последние дифференцируются при подсчете компонент
дополнительной нагрузки Х[, Х'%, Z'. Таким образом, в общей сложности
перемещения дифференцируются четырежды.
Компоненты дополнительной нагрузки, вообще говоря, будут малы
потому, что, как показано в § 7.2, в процессе вычислений появится множи-
множитель вида О (Л2), но четырехкратное дифференцирование может уравнове-
уравновесить влияние этого множителя или даже оказаться сильнее его. Так слу-
случится тогда, когда основное напряженное состояние имеет большую изме-
изменяемость, так как в этом случае при каждом дифференцировании абсолют-
абсолютное значения искомых величин будут существенно увеличиваться. Это
поведет к возрастанию погрешностей уравнений безмоментной теории, а зна-
значит, и метода расчленения.
§ 14. Схема применения метода расчленения
Пусть расчету подлежит я-связная оболочка, край которой g состоит
из п замкнутых кривых g = g! + g2 + • • • + gn- Во всех точках каждой
из них задаются по четыре граничных условия. Примем, что это — идеали-
идеализированные граничные условия (§ 5.33) и что их можно разделить на танген-
тангенциальные и нетангенциальные (§7.8). Тогда схема расчета методом расчлене-
расчленения будет состоять в следующем.
Интегрируем дифференциальные уравнения безмоментной теории, учи-
учитывая только тангенциальные граничные условия, и строим, таким образом,
основное напряженное состояние. Допустим, что такой расчет возможен и
что он выполнен (условия существования решения краевых задач безмо-
безмоментной теории и методы фактического получения этих решений рассматри-
рассматриваются в части III). В нетангенциальных граничных условиях, которые при
этом не учитываются, будут допущены невязки. Чтобы устранить их, при-
прибавляем к решению уравнений безмоментной теории простой краевой эффект.
В нем содержатся произвольные функции а|з1( г|з2 или ty3, 1|з4, которые можно
использовать для ликвидации невязок в нетангенциальных граничных усло-
условиях (при этом, конечно, появятся вторичные невязки в тангенциальных гра-
граничных условиях, но в части IV будет показано, что они существенно меньше
первоначальных невязок).
$ 14] СХЕМА ПРИМЕНЕНИЯ МЕТОДА РАСЧЛЕНЕНИЯ 127
Пусть на замкнутом контуре gk, являющемся частью края (имеется
в виду многосвязная оболочка), допущены невязки в нетангенциальных
граничных условиях. Тогда gk можно принять за одну из линий искаженна
напряженного состояния, построить вблизи нее простой краевой эффект и,,
воспользовавшись содержащимися в нем двумя произвольными функциями,,
устранить невязки в нетангенциальных граничных условиях на краю gk.
Так как простой краевой эффект быстро затухает, то эта операция практи-
практически не окажет влияния на напряженное состояние вблизи остальных зам-
замкнутых участков края оболочки, и значит, ликвидацию невязок в нетанген-
нетангенциальных граничных условиях можно выполнять самостоятельно для каж-
каждого замкнутого участка края (конечно, если края не слишком близки друг
к другу). Воспользовавшись этим, можно вблизи каждого замкнутого уча-
участка края gk строить свою криволинейную систему координат так, чтобы;
в ней контур gk задавался уравнением а.1 = а10. Тогда для краевых зна-
значений усилий, моментов, перемещений и углов поворота можно воспользо-
воспользоваться формулами (8.12.6), если внутренним точкам оболочки соответствует
ai ^ аю. или формулами (8.12.7) — в противоположном случае.
Замечание. Подчеркнем, что раздельное рассмотрение упругих явлений на каждой зам-
замкнутой части границы основано на свойстве быстрого затухания простого краевого эффекта,
и только прн операциях, с напряженным состоянием такого рода, оно и применимо. При по-
построении основного напряженного состояния граничные условия, конечно, надо вынолнять
одновременно на всех участках края.
Таким образом, в общем случае целесообразно строить, во-первых»,
такую общую координатную систему, которая удобна для определения основ-
основного напряженного состояния, и, во-вторых, такие локальные системы коор-
координат (вблизи каждого замкнутого участка края), которые удобны для опре-
определения простых краевых эффектов.
Заметим, что при решении уравнений безмоментной теории невязки мо-
могут получаться не только на краях, но и внутри области интегрирования-
Это будет происходить тогда, когда на некоторой линии g^ оказываются
негладкими условия задачи. Примером могут служить случаи, когда на g^
терпят скачки компоненты внешней нагрузки или модули материала, когда
вдоль gm оболочка усилена элементом жесткости пренебрежимо малой,
ширины, и когда на §„. срединная поверхность имеет излом или скачкооб-
скачкообразно меняются ее кривизны.
В таких задачах решение уравнений безмоментной теории нельзя под-
подчинить на g,,. всем требованиям непрерывности, вытекающим из физических
соображений (так же как нельзя выполнить все граничные условия на краях).
Так, например, если срединная поверхность оболочки гладкая, а компоненты-
внешней нагрузки имеют скачки на линии аг = а* = const, то надо требо-
требовать, чтобы при переходе через эту линию остались непрерывными величины
Т'\, Si, N'u Gu u\, и2, w, yi
(штрихом, как и в § 5.33, отмечены приведенные усилия).
Однако при решении безмоментных уравнений можно требовать, чтобы
оказались непрерывными только четыре из этих величин, а четыре остальные
величины будут претерпевать скачки. Избавиться от этих невязок можно
также при помощи метода расчленения. Для этого при интегрировании урав-
уравнений безмоментной теории, кроме тангенциальных граничных условий»,
принимаются во внимание еще тангенциальные условия непрерывности.
на линии g^, т. е. требования непрерывности для величин
Г. S', ии и,
(Т, S — тангенциальные усилия на сечении, проведенном вдоль gj*
128 МЕТОД РАСЧЛЕНЕНИЯ [ГЛ. 9
При этом получатся невязки в нетангенциальных условиях непрерыв-
непрерывности, т. е. при переходе через g^ приращения
8N', вС, 8w, 67 (9.14.1)
•будут отличны от нуля. Чтобы ликвидировать эти невязки, принимаем g^
за линию искажения напряженного состояния, строим, если надо, вблизи нее
новую криволинейную систему координат так, чтобы в ней линия g^. зада-
задавалась уравнением аг = ос*, и вводим в рассмотрение простые краевые
эффекты по обе стороны от линии ах = а*. Один из них определяется форму-
формулами (8.12.4), (8.12.6) и содержит произвольные функции if>1( if>2, другой —
определяется формулами (8.12.5), (8.12.7) и содержит произвольные функ-
функции -фз» tyt- Распоряжаясь этими четырьмя функциями, можно ликвидиро-
ликвидировать невязки (9.14.1).
Замечание. Может случиться, что две линии искажения пересекаются (например, если
линия, по которой оболочка снабжена усилением, доходит до края). Сама диния искажения
шшет иметь излом (например, края с углами), и каждый гладкий ее кусок' рассматривается
как самостоятельная линия искажения.
В этих случаях раздельное устранение невязок на разных линиях искажения, строго
говоря, недопустимо. Однако в практических расчетах оно часто применяется. При этом надо
¦отдавать себе отчет, что картина напряженного состояния в угловой точке будет, вообще
говоря, совершенно неправильной.
Таким образом, под линиями искажения напряженного состояния надо
понимать:
(а) края оболочки;
(б) линии излома срединной поверхности или скачкообразного измене-
изменения ее кривизн;
(в) линии скачкообразного изменения жесткостей оболочки (в частности
линий, по которым она снабжена усилениями);
(г) линии разрыва внешней поверхностной нагрузки или (не всегда)
«е производных.
В настоящем параграфе описаны схемы применения метода расчлене-
расчленения, предусматривающие существование линий искажения типов (а) и (г).
Не вызывают затруднений и задачи с линией искажения типа (в). Сложнее
оказываются случаи, когда надо учитывать линию искажения (б) (оболочка
•с изломом срединной поверхности). Они обсуждаются в части IV.
Выполнение всех требований § 9.13 не только означает возможность
применить метод расчленения как приближенный прием расчета, но позво-
позволяет также сделать выводы относительно характера напряженного состоя-
состояния оболочки. В этом случае в оболочке будет господствовать основное на-
лряженное состояние (что оправдывает его название), но вблизи каждой из
перечисленных линий оно будет искажено добавлением простых краевых
эффектов, быстро затухающих при удалении от них.
Замечание. Обычно вдалн от линий искажений напряженное состояние оказывается
безмоментным. Это объясняется тем, что оно выгодней чисто моментного напряженного состоя-
состояния и, как правило, оболочки конструируются так, чтобы последнее было «подавлено» (что
.достигается должным закреплением краев). Однако возможны случаи, когда н вдали от линий
искажения будет преобладать чисто моментное напряженное состояние. Примеры будут пока-
показаны в части IV.
§ 15. Краевой эффект вблизи заделанного края
При расчете оболочек методом расчленения мы всегда будем исходить
из равенства
Р = Р(осн) + /гсР(кр) (9.15.1)
в котором k имеет тот же смысл, что н в § 8.12, с — произвольное целое число,
§ 15] КРАЕВОЙ ЭФФЕКТ ВБЛИЗИ ЗАДЕЛАННОГО КРАЯ J29
а каждый из символов Р, Р<Осн), P^v) означает некоторое напряженное со-
состояние оболочки, т. е. совокупность усилий, моментов, перемещений и т. д.,
причем под Р понимается полное напряженное состояние, а под Р<осн) и
ЛкР) — основное напряженное состояние и простой краевой эффект. Таким
образом, равенство (9.15.1) означает, что, например,
Т\ = Т\ (оси) + ?С^1 (кр) у 71 = 71 (осн) + ^71 (кр) и Т. Д.
Напомним, что простой краевой эффект строится как решение однород-
однородных уравнений, поэтому все составляющие его величины можно подобно
изменять. Соответственно этому в равенство (9.15.1) и введен постоянный
множитель kP. В нем целое число с будет впоследствии выбираться в зави-
зависимости от условий задачи.
Пусть оболочка имеет жестко заделанный край, совпадающий с линией
а,1 = а10 — 0 (это значит, что внутренним точкам оболочки соответствует
«1 < аю)- Тогда на нем надо выполнить четыре условия (§ 5.33)
u;=0, «2 = °. of = 0, 7- = 0 (9.15.2)
(здесь снова точка сверху означает переход к краевому значению рассма-
рассматриваемой величины).
Первые два из условий (9.15.2) — тангенциальные, а два других —
нетангенциальные.
Расшифруем (9.15.2), воспользовавшись равенствами (9.15.1) и (8.12.6):
2Ehu[ = 2Ehu\ (осн) + -у-_- УЩ> (^ + ~^) (* — Ь) = О,
(осн) у (
2Еки2 = 2Еки2 (осн) — V2 lkc-1 ^-2- № — Ь) = О,
2Ehw" = 2Ehw(OCII) + k%. = О,
2Ehy\ = 2Ehy\ (OCH) — ~^~ ™ (*i + Ь) = 0.
' V R22
Примем, что в этих равенствах
2ЕЛ(и1(осн„ (осн), Ш(оен). 7*1 (осн)) = О (fe°) , (9.15.3)
положим с = 0 и оставим во всех равенствах только слагаемые, содержащие
множителем наивысшую для этого равенства степень k (здесь и во всех рас-
рассматриваемых ниже примерах задачи решаются в самом грубом приближе-
приближении; в части IV будет показано, что эти результаты можно, в случае необхо-
необходимости, уточнять при помощи итераций). Получим тангенциальные гранич-
граничные условия
= 0 (9.15.4)
и нетангенциальные граничные условия
2?W@CH> + *1 = 0, ф, + Ь = 0- - (9.15.5)
Этот результат вполне соответствует схеме, описанной в § 9.14. Полу-
Получены приближенные граничные условия (9.15.4), которым должно подчи-
подчиняться основное напряженное состояние; ими оказались тангенциальные
граничные условия, и в рамках принятой точности в них не вошли величины,
9 А. Л. Гольденвейзер
J3Q МЕТОД РАСЧЛЕНЕНИЯ ГГЛ. 9
связанные с простым краевым эффектом. Для определения произвольных
функций простого краевого эффекта служат нетангенциальные граничные
условия (9.15.5), а это значит, что г^, г?>2, подбираются так, чтобы была
устранена невязка в граничных условиях.
Нетрудно 'видеть, что число с в рассматриваемой задаче определяется единственным
образом. Равенство с = О обеспечивает выполнение двух важных требований:
A) для основного напряженного состояния получилось два граничных условия, что соот-
соответствует порядку дифференциальных уравнений безмоментной теории;
B) для определения произвольных функций \f>j, if>2 простого краевого эффекта получи-
получилась непротиворечивая неоднородная система уравнений.
При с =j= О по меньшей мере одно из этих требований будет нарушено: если с > 0, то
после отбрасывания второстепенных членов в левой части первого уравнения (9.15.5) про-
пропадет первое слагаемое и решение системы (9.15.5) станет тривиальным: ifij = \f>2 = 0, а если
с<С 0, то в первом уравнении (9.15.5) исчезнет второе слагаемое левой части и основное напря-
напряженное состояние надо будет подчинить трем граничным условиям
2?7ш((Осн) = 0, 2Ehti2 (осп) = 0, 2?W(Och) = 0.
Во всех примерах §§ 9.16—9.18 число с также определяется единственным образом,
но проверка этого утверждения будет опускаться.
Вернемся к условиям (9.15.4), (9.15.5) и примем, что существует основ-
основное напряженное состояние, удовлетворяющее условиям (9.15.4), и что оно
нам известно. Тогда, решая систему (9.15.5), получим
ifi = — ¦фг = — 2Ehw\oca).
Отсюда для расчетных (дающих наибольшие напряжения) усилий и
моментов простого краевого эффекта будем иметь по формулам (8.12.3),
(8.12.4)
1 2 (кр) = г: ¦ (Со — So) о и .
*22 (9.15.6)
Г ! Г h 2?W(och) , , . ср+
G: (кр) = — G2 (KP) =__j7f=_(co + So) «To .
В рассмотренной задаче, так же как в задачах, которым посвящены
§§ 9.16—9.18, построение основного напряженного состояния в исходном
приближении выполняется самостоятельно (не требует каких бы то ни было
операций с краевым эффектом). Оно достигается интегрированием уравне-
уравнений безмоментной теории с учетом тангенциальных граничных условий
(9.15.4). Это значит, что в данном случае применима безмоментная теория,
которая позволяет с известной точностью описать напряженно-деформирован-
напряженно-деформированное состояние обол зчки вдали от краев (§ 7.3).
§ 16. Краевой эффект вблизи шарнирно опертого края
Пусть оболочка имеет шарнирно опертый край, задаваемый уравнением
ai — аю — 0- Тогда на нем должны выполняться (§ 5.33) тангенциальные
граничные условия
Т\ = 0, и" = 0
и нетангенциальные граничные условия
да- = 0, G; = 0
(при расчете методом расчленения напряженного состояния в граничных
условиях не надо заменять истинные усилия приведенными, так как и в без-
безмоментной теории, и в приближенной теории простого краевого эффекта
крутящие моменты Я21 и Я12 считаются пренебрежимо малыми).
$ 17] КРАЕВОЙ ЭФФЕКТ НА СВОБОДНОМ КРАЕ ОБОЛОЧКИ J3J
Воспользовавшись формулами (9.15.1) и (8.12.6), напишем все четыре
граничных условия в развернутом виде:
т\ = т;(осн) + -±= ^= (-J—^a.)^^ (ь—ь) = о,
2Ehu2 = 2?/ш2,осн, — V2 lti~xV-^ (Чя — *a) = О,
l2kC~ 2
2?/ш/ = 2Ehw\0CH) + &Ч1 =0, Gj = Gi @CH) ^—1|% = 0.
Примем, что
(Т'цося), 2?Au"i,och), 2?ta/@CH)) = О (/г°). (9.16.1)
Тогда можно считать, что
GicocH) = О (к'4), • (9.16.2)
так как для подсчета Gx нужно воспользоваться формулой G.1.7), в которую
по сравнению с формулами G.1.4) входит лишний множитель h", а согласно
(8.12.2) он имеет вид О (к~*).
Учтем это, положим снова с = 0 и оставим в граничных условиях только
главные члены. Получим тангенциальные граничные условия
Т\ (осн) = 0. М2(осн) = 0,
которые надо выполнять при интегрировании уравнений безмоментной
теории, и нетангенциальные граничные условия
2?W<och) + i|>i = 0, -фг = 0,
из которых определятся произвольные функции простого краевого эффекта.
Остается написать расчетные формулы, подставив в (8.12.4) полученные
значения if^, ij;2,
2(кр)= r-2, оАь Gl(Kp)= v 2(KP)=-^FI!T^) '
§ 17. Краевой эффект на свободном крае оболочки
Пусть край ах = а10 свободен и к нему не прикладываются краевые
силы. Тогда (§ 5.33) надо выполнять следующие тангенциальные гранич-
граничные условия:
Г; = 0, S-u = 0 (9.17.1)
и нетангенциальные граничные условия
W; = 0, Gi = 0. (9.17.2)
Эти равенства расшифровываются так:
А\
(9.1/.
j2?C—2 , ,c—1
Gi = Gi (осн) -^- ^ = 0, N1 = ЛГ, @CH) — -^ —g^ (ф| — i|>i) = 0.
Принимая, что
(Ti (.сн), 5и (осн)) = О (ft0), (ATi @СН), Gi (осн)) = О (k~4), (9.17.4)
9'
i»
132 МЕТОД РАСЧЛЕНЕНИЯ [ГЛ. 9
заключаем, что в данном случае надо положить с = —2. В результате,
оставив лишь старшие члены, будем иметь тангенциальные условия для
основного напряженного состояния
Т'цосп) = 0, Si, (OCH) = 0 (9.17.5)
и нетангенциальные граничные условия для определения произвольных
функций простого краевого эффекта
k*G\ (осн) —1|>2 = 0, ife — % = 0.
«22
Теперь можно было бы выписать выражения для Т2(Кр), Gi (Kp) и Сг(Кр),
но в данном случае это практически не нужно. Для свободного края в фор-
формуле (9.15.1) пришлось положить с — —2, в то время как у заделанного и
шарнирно опертого краев получилось с = 0. Это значит, что относительная
интенсивность простого краевого эффекта вблизи свободного края весьма мала
и практически строить здесь простой краевой эффект не нужно.
Пусть теперь к свободному краю приложены распределенные силы или
моменты. Тогда граничные условия (9.17.1), (9.17.2) станут неоднородными.
Если краевые силы — тангенциальны, т. е. их направления параллельны
касательной плоскости, то свободные члены появятся только в равенствах
(9.17.1). Это приведет только к тому, что вместо (9.17.5) получатся танген-
тангенциальные граничные условия
Т\ (осн) = Tt, Si (осн) = 5.,
в которых Т1,, S,. — заданные функции переменной ос2.
Наоборот, случай, когда края загружены моментами или силами, нор-
нормальными к срединной поверхности, требует особого рассмотрения.
Пусть тангенциальные граничные условия (9.17.1) остаются прежними,
а нетангенциальные граничные условия (9.17.2) принимают вид
где N^ — заданная функция переменной ос2, определяющая краевые нормаль-
нормальные силы, приложенные к оболочке.
Примем дополнительно, что оболочка не загружена по поверхности и что
N, = О (*•).
В этом случае полагаем с — 1. Тогда третье и четвертое равенства
(9.17.3) в первом приближении дадут
Ф* = 0. У5-й$гЪ—*0 = 1** (9-17.6)
Равным образом из первых двух равенств (9.17.3) получается
П + 71
/О 17 7^
( ]
В (9.17.7) функции oj?! и г|з2 можно исключить при помощи (9.17.6).
Тогда тангенциальные граничные условия для основного напряженного
состояния примут такой вид:
18]
КРАЕВОЙ ЭФФЕКТ У ВНУТРЕННЕЙ ЛИНИИ ИСКАЖЕНИЯ
133
Теперь остается только выписать расчетные усилия и моменты. Из
(9.17.6) и (8.12.4) для расчетных усилий и моментов получаем
i/" j l^2~ /
Тч (Кр) = —— У R22 ^*Со®о ' (кр) = "^Г (кр) =
J
Замечание. Здесь, как и в других примерах, принимается, что существует основное напря-
напряженное состояние, удовлетворяющее тангенциальным граничным условиям. Вместе с тем
в части III будет показано, что нельзя, вообще говоря, требовать, чтобы во всех краевых точ-
точках оболочки решения уравнений безмоментной теории удовлетворяли двум тангенциальным
статическим граничным условиям. Поэтому рассмотренный пример имеет смысл только тогда,
когда, помимо а, = а1П, оболочка имеет по меньшей мере еще одни, достаточно жестко закреп-
закрепленный край.
Так, например, если речь идет о консольной оболочке, то надо соединить результаты,
полученные для жестко заделанного и для свободного краев. Это значит, что основное напря-
напряженное состояние следует подчинить условиям (9.15.4) на одном крае и условиям (9.17.5)
иа другом, что, как будет показано в части III, всегда возможно (краевые эффекты строятся,
как мы знаем, на каждом краю совершенно независимо).
Рассмотренная задача представляет собой случай, когда безмоментную
теорию (в смысле § 7.3) надо считать неприменимой. Граничные условия,
необходимые для определения основного напряженного состояния, здесь
удается сформулировать только в результате введения в рассмотрение про-
простого краевого эффекта: он необходим для того, чтобы можно было написать
равенства (9.17.7), и для того, чтобы исключить из них произвольные функ-
функции i]5x, я|з2. В части IV такие примеры подвергаются более общему рассмо-
рассмотрению, и для них вводится понятие об условной применимости безмомент-
безмоментной теории.
§ 18. Краевой эффект у внутренней линии искажения
напряженного состояния
Пусть на некоторой линии g' компоненты внешней нагрузки терпят
разрыв первого рода. Будем считать, что g' рассекает область интегрирова-
интегрирования G (вообще говоря, многосвязную) на две подобласти G+ и G", как пока-
показано на рис. 16, а. (Если это
неверно, то контур g' можно
должным образом продол-
продолжить, как показано пункти-
пунктиром на рис. 16, б, и считать,
что на продолженной части g1 ~^ ¦ о1 %>^ ^JZ /0 гг- Е*
разрывы обращаются в нуль.)
В таком случае искомое на-
напряженное состояние Р в об-
областях G+ и G~ можно строить
раздельно, снабжая соответ-
соответствующие искомые величины
дополнительными индексами
«+» и «—». При этом на ли-
линии g' должны быть выпол-
выполнены условия сопряжения
(они по смыслу совпадают с условиями непрерывности § 9.14). Послед-
Последние для случая, когда g1 задается уравнением ах
Рис. 16.
когда g1 задается уравнением ах = ai, имеют вид
1 = 11'
N N
(9.18.1)
= Glt w —
w, уг= Yi-
Решение задачи будем снова искать в виде (9.15.1), полагая, что это ра-
равенство справедливо и в G+ и в С. Далее, можно считать, что областям G*
! НЕ БОЛЕЕ 1И КНИГИ В ]
t ОДНИ РУКИ И 2Х В ДВЕ 1
134 МЕТОД РАСЧЛЕНЕНИЯ [ГЛ. 9
и G" отвечают неравенства ах ^ а10 и ах =^ а10 соответственно и что в них
имеют место простые краевые эффекты, определяемые для G+ формулами
(8.12.5), а для G~ — формулами (8.12.4).
Учитывая это, раскроем (9.18.1) при помощи (9.15.1), (8.12.6), (8.12.7)
и напишем ,
г + (
г, („он) + 7^ 1/^( ^7 "^г )<*,=<*,„(ap2—iW:=
D'
«2
01=0! о
?•
соси, -у^ —^-у^- - &и (ос„,
2EhtUoCK) +-j~ к^У^(~ + ^А(Ь-Ь) = (9.18.2)
-~
+• / Й . / k
Nl (оен) — T^ —T372- (*2 — <pl) = -Vl (оен) —jT=" —Г372- (Я|53 + 1|М),
i4 ^(9.18.3)
«22
+ —
2Ehw[0CH) -f /j>i = 2Ehw'@CH) + /г>
Отсюда, предполагая по-прежнему, что основное напряженное состоя-
состояние удовлетворяет соотношениям (9.15.3), (9.17.4), заключаем, что, вообще
говоря, можно положить с = 0. Тогда в первом приближении получатся тан-
тангенциальные условия сопряжения
+ -+ - + - + -
Т\ (оен) = Т\ (оен), "J21 (оен) = О21 (оен), U\ (оен) = Ml (оен), 42 (оен) == U2 (оен),
(9.18.4)
которые относятся к основному напряженному состоянию, и нетангенциаль-
нетангенциальные условия сопряжения
+ Ь, $
Из последних можно определить произвольные функции простого крае-
краевого эффекта, возникающего по обе стороны от линии g',
-. +.
*l>i = — 'фз = Ehdw, i|32 = -ф4 = 0, бю = а\осн) — w(oca).
§ 19] ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАНИЯ 135
Аналогичным образом решается задача и в случае, когда вдоль линии g'
оболочка имеет дополнительное усиление. Пусть, например, вдоль g' обо-
оболочка контактирует с конструкцией, которая препятствует нормальным сме-
смещениям оболочки, но не стесняет свободу смещений во всех других линейных
и угловых направлениях. Тогда вместо условий сопряжения (9.18.1) надо
написать
+ —+-+- + — + —
Тх = 7\, Sx = Sx, их = иъ и2 = и2, Gx = G1(
+ - + -
w = О, w — О, Yi = Yi-
Равенства (9.18.2) сохранятся. Из равенств (9.18.3) останутся без изменения
второе и четвертое, а вместо первого и третьего равенства надо написать
2Ehw'(OCH) + &4i = 0, 2Ehw'(OCH) + к%ч = 0.
Учитывая это, можно положить с = 0, и тогда в первом приближении
для основного напряженного состояния вновь получатся тангенциальные
условия сопряжения (9.18.4), а уравнения для произвольных функций про-
простого краевого эффекта примут вид
^2— ^1 = ^3 + ^4. — ^2 = ^4-
Отсюда
ih = — 2Ehw'(OCH), % = —2?to('ocH), ^2 = —%==—Eh[w'i0CH) f w'{0Ch)}.
§ 19. Заключительные замечания
В разобранных примерах применение метода расчленения базировалось
на формуле (9.15.1), выражающей главную идею метода: представление пол-
полного напряженного состояния в виде суммы основного напряженного состоя-
состояния и простых краевых эффектов. В ходе рассуждений принимались допол-
дополнительные предположения (9.15.3), (9.16.1), (9.17.4), определяющие асимпто-
асимптотику краевых значений усилий, перемещений и углов поворота основного
напряженного состояния. Можно принять, что перечисленные величины
имеют такой же порядок и во всей рассматриваемой области, т. е. что
G\, Su, 2Ehuh 2?/ш)(осн) = 0(/г°). (9.19.1)
Действительно, во всех рассмотренных примерах приближенное построе-
построение величин (9.19.1) свелось к решению краевых задач, в которых ни уравне-
уравнения, ни граничные условия не зависят от малого параметра h, а следова-
следовательно, и от большого параметра k (множитель 2Eh считается включенным
в состав искомых величин), а случаи, когда полная краевая задача не имеет
ограниченных решений, исключены из рассмотрения (в таких оболочках
срединная поверхность считается особой).
Из (9.19.1) вытекает, что напряжения ат от тангенциальных усилий
имеют порядок
°т = Ж = ° <А)' <9Л9-2)
а для напряжений от моментов, исходя из формулы (9.16.2), получим
afi = |- = O(/l«) (9.19.3)
(считается, что изменяемость основного напряженного состояния не слиш-
слишком велика и не учитывается возможность увеличения искомых величии
при дифференцировании). Таким образом, во всех разобранных примерах
J36 МЕТОД РАСЧЛЕНЕНИЯ [ГЛ. 9
вдали от краев напряженное состояние безмоментно. Для определения про-
произвольных функций простого краевого эффекта были получены уравнения,
не зависящие от параметра k. Это значит, что для г|эх, а|J можно написать
оценку
№, г|>2) = О(П
из которой при помощи формул (8.12.4) легко получить оценку усилий и мо-
моментов простого краевого эффекта. Учитывая, что k = О (к~1/г), получаем
для наибольшего из усилий (Г2) и наибольшего из моментов (GJ
а следовательно, в простом краевом эффекте
*г =-&-= О (Л), aG = -g-=O(/t-1). (9.19.4)
Итак, в формуле (9.15.1) величины Р(Осн) (основное напряженное состоя-
состояние) и Р(Кр) (простой краевой эффект), взятые в отдельности, эквивалентны
друг другу в том смысле, что дают напряжения одинакового порядка. Однако
при составлении полного напряженного состояния краевой эффект, согласно
(9.15.1), множится на kc, а это значит, что числом с определяется относитель-
относительный порядок вклада простого краевого эффекта в полное напряженное состоя-
состояние оболочки. Если с = 0, то дополнительные краевые напряжения будут
соизмеримы с основными. Такая картина в рассматриваемых случаях имеет
место вблизи заделанного края. Если с <С_ О, то вклад краевого эффекта будет
ничтожным, так как k в тонкой оболочке весьма велико. Примером служит
свободный край. Наконец, при с ^> О краевые напряжения будут значи-
значительно больше основных. Соответствующих примеров мы пока не имели,
но они, как выяснится в части IV, возможны. В частности, весьма большие
дополнительные напряжения могут появиться в оболочке вблизи линии
излома ее срединной поверхности. Этот случай рассматривается в части IV.
В противоположность этому разрыв нагрузки вдоль некоторой линии вызы-
вызывает, как было показано в § 9.18, дополнительные напряжения такого же
• порядка, как и основные (с = 0).
Разумеется, различие между основным напряженным состоянием и про-
простым краевым эффектом заключается не только в том, что они могут давать
напряженные состояния различных порядков. Простой краевой эффект,
как уже говорилось,— местное, быстро затухающее напряженное состояние,
а кроме того, как видно из оценок (9.19.4), связанные с ним напряжения,
вообще говоря, имеют смешанную природу, т. е. обусловливаются в равной
мере усилиями и моментами, в то время как основное напряженное состоя-
состояние в большинстве случаев безмоментно.
Остановимся несколько подробнее на структуре напряжений, соответ-
соответствующих простым краевым эффектом. Все связанные с ним величины быстро
затухают, поэтому при качественных рассуждениях можно исходить не из
формул (8.12.4), определяющих простой краевой эффект в окрестности линии
возмущения, а из формул (8.12.6), задающих его только на самой этой линии.
Формулы (8.12.6) показывают, что главное тангенциальное усилиг Т2 и
главный момент Gx пропорциональны соответственно произвольным функ-
функциям -фх и г|J. Таким образом, простой краевой эффект имеет черты сходства
с дополнительными напряженными состояниями, возникающими вблизи
отверстий как в пластинке, растягиваемой в своей плоскости, так и в пла-
пластинке, подвергаемой изгибу. Первое из этих дополнительных напряженных
состояний связано с функцией г|?х и дает в освном нормальные усилия на сече-
сечениях, ортогональных к линии возмущения. Второе связано с функцией i|J
и дает в основном изгибающие моменты на сечениях, параллельных линии
возмущения.
ГЛАВА 10
ПОЛОГИЕ ОБОЛОЧКИ. НАПРЯЖЕННЫЕ СОСТОЯНИЯ
С БОЛЬШОЙ ИЗМЕНЯЕМОСТЬЮ
§ 20. Вырождение оболочки в пластинку
Одним из условий применимости метода расчленения является требо-
требование, чтобы срединная поверхность оболочки в достаточной мере отлича-
отличалась от плоскости, т. е. чтобы оболочка не вырождалась в пластинку и не
превращалась в пологую оболочку (§ 9.13). Плоскость в терминологии § 9.13
отнесена к особым поверхностям (особым с точки зрения возможности приме-
применения безмоментной теории или метода расчленения) по совершенно ясным
причинам. Если срединная поверхность есть плоскость, то
Яи = Яц = Ям = оо, A0.20.1)
и третье безмоментное уравнение равновесия G.1.3) потеряет всякий смысл.
Возвратившись вновь к общим уравнениям теории оболочек F.44.1)—
F.44.6) и подставив в них. A0.20.1), мы получим, как легко проверить,
уравнения, которые распадаются на две подсистемы. В первую подсистему
входят:
(а) первое, второе и шестое уравнения равновесия F.44.1);
(б) тангенциальные уравнения состояния F.44.6);
(в) формулы «тангенциальные деформации — перемещения» F.44.3).
Эта группа соотношений образует уравнения теории обобщенного на-
напряженного состояния.
Во вторую подсистему входят:
(а) третье, четвертое и пятое уравнения равновесия F.44.1);
(б) нетангенциальные уравнения состояния F.44.6);
(в) формулы «изгибные деформации — перемещения» F.44.3), F.44.4).
Эта группа соотношений образует уравнения теории изгиба пластинки.
Как в случае обобщенного плоского напряженного состояния, так и
в случае изгиба пластинки получаются уравнения для плоского упругого
тела, срединная поверхность которого отнесена к произвольной ортогональ-
ортогональной криволинейной системе координат. Мы не будем обсуждать эти уравне-
уравнения, считая их известными из курсов теории упругости.
§ 21. Пологие поверхности и почти плоские
системы координат
Обратимся к пологим оболочкам, т. е. к оболочкам, срединная поверх-
поверхность которых в некотором смысле мало отличается от плоскости. Тогда
описанное выше противоречие формально устраняется, но можно ожидать,
что в этом случае применение безмоментной теории приведет к далеким
от истины результатам. Вместе с тем именно пологие оболочки особенно
J38 ПОЛОГИЕ ОБОЛОЧКИ. СОСТОЯНИЯ С БОЛЬШОЙ ИЗМЕНЯЕМОСТЬЮ [ГЛ. 10
интересны с точки зрения практических применений, и поэтому целесообразно
обсудить возможность приближенных подходов к исследованию их напряжен-
напряженно-деформированного состояния.
Начнем с обсуждения координатных систем, которые можно построить
на пологой поверхности. Коэффициенты первой квадратичной формы А 1(
А 2 в любой системе криволинейных координат, построенной на плоскости,
удовлетворяют уравнению Гаусса A.5.7), которое в рассматриваемом случае
можно записать так:
да, \ А, да, ) + да, \ Аг да,
а = -=г-= 52 гауссова кривизна.
Назовем почти плоской такую систему криволинейных координат на по-
поверхности (при К ф 0), для которой вместо написанного равенства будет спра-
справедливо соотношение
A0.21.1)
На произвольной поверхности S такую систему, разумеется, построить
нельзя, но если S полога, т. е. все ее точки близки к плоскости Р, то при неко-
некоторых дополнительных условиях (их смысл выявляется в рассматриваемых
ниже примерах) на S можно построить почти плоскую криволинейную си-
систему координат, прибегнув, например, к такому приему. Установить на Р
какую-либо криволинейную систему координат аь а2, а затем «снести» ее
на поверхность S, т. е. считать, что, если некоторая пара значений (а^ а2)
задает на плоскости Р некоторую точку т, то на поверхности S эти же зна-
значения определяют точку т', проекцией которой является т.
Пример 1. Почти декартова система координат на пологой поверхности.
Пусть в декартовой системе координат рассматриваемая поверхность S
задана уравнением
z = f(x, у).
Примем, что на плоскости хОу ей соответствует некоторая область s из-
изменения х, у с характерным размером /. Тогда декартовы координаты (х, у)
можно снести на поверхность S, введя обозначения
х у
а, = —, а2 == -j-
и задав радиус-вектор М так:
М = laJx-\-laJy + f(lalt 1а,Iг A0.21.2)
(ix, i9, iz — орты декартовой системы координат).
Коэффициенты первой квадратичной формы для поверхности A0.21.2)
подсчитываются по формулам A.1.4), A.1.5):
,ln
S21i ПОЛОГИЕ ПОВЕРХНОСТИ И ПОЧТИ ПЛОСКИЕ КООРДИНАТЫ J39
Отсюда следует, что на поверхности S обсуждаемая система координат
не ортогональна, но если выполняется условие
тах|/1(/2|«1, A0.21.3)
то значения cos % будут малы, и ее можно рассматривать как почти орто-
ортогональную. В рамках той же точности формулы для коэффициентов первой
квадратичной формы можно записать так:
Л1 = Л2 = /. A0.21.4)
Для коэффициентов второй квадратичной формы имеем формулы A.3.2).
Выполним выкладки
_ М, X М.г _ — fiix — hi у + iz
П ~ АхАг sin % ~ I/*! +/2 + /2 '
м =р^1 м _ f *f j м =p^Li
' -М П- дХ*- г - А* »- ду''
дхду
Отсюда видно, что на поверхности S рассматриваемые криволинейные
координаты образуют несопряженную сеть (L12 в общем случае будет такого
же порядка, что и Lu, L22). Поэтому для подсчета нормальных кривизн
поверхности S надо воспользоваться формулами A.5.2), A.5.3), которые дают
1 L^ дх*
«и ~ А\
1 L^
«22 - ¦ ?.
1
ду*
дхду
А-
/!-
и!'
1-й J
«12 ЛЛ т/A+/?)A+^)-1/-1 + /2 + /2 •
Будем считать, что требование A0.21.3) выполнено, пренебрежем малой
неортогональностью выбранной системы координат и заменим последние
формулы приближенными равенствами
— - — — (IU.Z1.O;
J_J^L_ J_ Л.
«п ~ Э* ' Ru ~дхду' R22 ~ ду* '
Тогда сильное неравенство A0.21.1) превратится в требование
\
1.
дх* ду* \ дхду
Отсюда видно, что если к A0.21.3) присоединить требования
1 (i, / = 1,2), A0.21.6)
дх1 дх>
140
ПОЛОГИЕ ОБОЛОЧКИ. СОСТОЯНИЯ С БОЛЬШОЙ ИЗМЕНЯЕМОСТЬЮ [ГЛ. 10
то сильное неравенство A0.21.1) выполнится, а если, кроме того, требовать,
чтобы
дх'дх'дх*
< 1 (/, /, k = 1, 2),
то будут выполняться и более жесткие условия
дК
дК
A0.21.7)
A0.21.8)
Криволинейную систему координат, определяемую равенством A0.21.2),
мы назовем почти декартовой.
Пример 2. Почти полярная система координат на пологой части сферы.
Отнесем сферу к географической системе координат, в которой положе-
положение точки задается полярным углом 8 и долготой <р (рис. 17). Тогда, обозна-
обозначив через г радиус сферы, можно задать ее векторным равенством
М = г sin 8 cos ф/г + r sin 9 sin <р/„ -f- r cos 8/?.
Считая, что роль параметров (аг, а2) здесь играют соответственно (8, ф),
получим по формулам A.1.4), A.1.5)
М, = г cos 8 cos ф/, + r cos fl sin ф'у — r sin ^'z.
Л12 = — r sin 8 sin ф4 -f ^ sin 8 cos <piv,
Подставив эти результаты в A0.21.1) и заметив, что для сферы
22 = Г' #12 = °°i ПОЛУЧИМ
Это значит, что для того, чтобы выполнялось сильное неравенство
A0.21.1), 8 должно быть мало, т. е. срединная поверхность должна уме-
умещаться в малой окрестности полюса географической системы координат.
В этом случае можно положить sin 8 = 8,
и коэффициенты первой квадратичной фор-
формы будут выражаться так:
А, = г, Аг = rO, cos % = 0.
Поэтому, введя обозначение гв = р,
можно написать
откуда
х
A0.21.9)
Рве. 17.
. и мы приходим к формуле дифференциала
длины дуги для плоскости, отнесенной
к полярной системе координат р, ф. От-
¦ сюда следует, что на пологой части сферы,
примыкающей к полюсу географической системы координат, можно по-
построить описанную выше координатную систему, которую мы будем называть
почти полярной. По своим свойствам она мало отличается от полярных коор-
координат на плоскости, т. е. является разновидностью почти плоских систем.
Для почти полярной системы координат на сфере соблюдается не только
A0.21.1), но и сильные неравенства A0.21.8), так как К иг — константы.
S 22] ПРИБЛИЖЕННАЯ ТЕОРИЯ ПОЛОГИХ ОБОЛОЧЕК J4J
Не останавливаясь на подробностях, заметим, что .почти полярную сис-
систему координат можно построить на пологой части произвольной поверх-
поверхности вращения, примыкающей к полюсу географической системы коорди-
координат. При этом для того, чтобы выполнялись соотношения A0.21.8), надо
только требовать, чтобы были достаточно малы первые три производные
от функции, задающей меридиан оболочки.
Замечание. На пологой поверхности можно построить и такую систему координат, кото-
которая не удовлетворяет сильному неравенству A0.21.1). Примером может служить географиче-
географическая система координат на сфере, если под пологой частью сферы будет подразумеваться
малая окрестность какой-либо точки, расположенной у экватора, так как там sin 9 мало отли-
отличается от единицы.
В дальнейшем всегда, когда речь идет о пологой оболочке, будет предпо-
предполагаться, что на ней установлена почти плоская система координат, и, сле-
следовательно, выполняются сильные неравенства A0.21.8).
§ 22. Приближенная теория пологих оболочек
В основу приближенного расчета пологих оболочек мы положим два
следующих предположения.
Предположение 1. В первых двух уравнениях равновесия, выражаемых
первым равенством F.44.1), можно отбросить члены, содержащие перере-
перерезывающие усилия N ъ N2.
Предположение 2. В первых двух уравнениях неразрывности деформа-
деформаций, выражаемых первым равенством F.44.2), можно отбросить члены, со-
содержащие величины ?х, ?2.
Первую из этих гипотез можно подкрепить такими рассуждениями.
Рассмотрим подъемистую оболочку с неособой срединной поверхностью
(§ 9.13) и неасимптотическими краями. Ее приближенный расчет, вообще
говоря, можно выполнить методом расчленения (§ 9.13) (исключение пред-
представляет случай, когда основное напряженное состояние имеет слишком
большую изменяемость; к нему мы еще вернемся). Эго равносильно приня-
принятию предположения 1, так как и в теории основного напряженного состояния
(§ 7.1), и в приближенной теории простого краевого эффекта (§ 8.9) в пер-
первых двух уравнениях равновесия перерезывающие усилия Nи N\ отбрасы-
отбрасываются. В случае, когда оболочка вырождается в пластинку, предположение 1
превращается в тривиальное утверждение, так как коэффициенты при Nu
N, в первых двух уравнениях равновесия при этом обращаются в нуль.
Но пологая оболочка занимает промежуточное положение между подъеми-
подъемистой оболочкой и пластинкой, поэтому естественно ожидать, что предполо-
предположение 1, имеющее силу для крайних случаев, останется правильным и для
промежуточного случая.
Предположение 2 двойственно предположению 1 в смысле статико-
геометрической аналогии. Его можно подкрепить рассуждениями такого же
рода, но на этом мы останавливаться не будем.
Поскольку наша задача заключается в приближенном исследовании
пологих оболочек, будем пользоваться простейшим вариантом теории обо-
оболочки и, в частности, будем считать законным комплексное уравнение
F.43.32), выведенное без каких бы то ни было отбрасываний, выходящих
за рамки точности такой теории. Это уравнение можно существенно' упро-
упростить, если считать, как мы условились выше, что на срединной поверх-
поверхности пологой оболочки установлена почти плоская система координат.
Тогда будет обеспечено выполнение сильных неравенств A0.21.8), а это, как
легко убедиться, означает, что в уравнении F.43.32) члены, содержащие
гауссову кривизну К, играют второстепенную роль. Отбросив эти члены и
перейдя от тензорной символики к простой по формулам главы 6, получим
142 пологие оболочки, состояния с большой изменяемостью [гл. 10
основное комплексное равенство приближенной теории пологих оболочек
(в произвольной ортогональной системе координат)
_1_ М AJ *L + A \
АхАг \ даг Ах Rta да^, ~ да„ Я1
w да2 ^ даг Аг Rn да?}
= ipAAW—iZ. A0.22.1)
В нем содержится единственное комплексное неизвестное W, имеющее сле-
следующий смысл:
W = $>2Ehw + ic, A0.22 2)
р-—_^=^, A0.22.3)
^3A— v2)
а под А подразумевается обобщенный оператор Лапласа
д - х { д ( А* д \ | д ( А! д v\ H0 22 4V
Л~" АхАг \дах\ А, да, ) ^ да2 \ Аг dajj' (lU.zz.^
Комплексное уравнение A0.22.1) эквивалентно двум действительным
уравнениям, содержащим нормальный прогиб w и функцию напряжений с.
Эта система получится, если потребовать, чтобы в обсуждаемом уравнении
обращались в нуль в отдельности действительная часть и коэффициент
при мнимой части. Будем иметь
^О. A0.22.5)
Здесь в дополнение к A0.22.4) использовано обозначение
1 / д А2 I д__ , _а I
~ АъАг \ д^ At Ri!s aat "•" да2 ~R
д 1 / д А2 Iд , аIд
_dL_J <L^ П0226)
A R da /
5a, ^l2 da2 ' da2 A2 Rn
(индекс R напоминает, что оператор существенно зависит от радиусов кри-
кривизны оболочки).
Равенство A0.22.1) или, что то же, равенства A0.22.5) будут называться
разрешающими уравнениями теории пологих оболочек. Каждая пара функ-
функций w, с, представляющая собой решение этих уравнений, определяет неко-
некоторое напряженно-деформированное состояние оболочки. Последнее можно
построить при помощи прямых действий, к описанию которых мы переходим.
В § 6.43 было показано, что в рамках точности простейшего варианта
теории оболочек справедливы тензорные равенства F.43.14) и F.43.15).
Первое из них показывает, что в формулах «тангенциальные усилия — функ-
функции напряжения» должны быть оставлены только слагаемые, содержащие Ее-
личину g, соответствующую в обычных (не тензорных) обозначениях функ-
функции напряжения с. Это значит, что в теории оболочек, основанной на простей-
простейшем варианте уравнений состояния, вместо первых двух равенств F.44.5)
надо брать формулы
• - А,- да,- А, да,- + а]а. да{ да, <1 + * ~ 1' *>- ^
s ^ „ 1 _ д*с 1 дАх дс , 1 дА2 дс
¦i^^it- АгАш да1даг + А2Аз даа ди, ~Г Аха1 аа, да2 '
§ 22] ПРИБЛИЖЕННАЯ ТЕОРИЯ ДОЛОГИХ ОБОЛОЧЕК {43
Равным образом из F.43.15) вытекает, что третье и четвертое равенства
F.44.3), учитывая F.44.4), надо заменить формулами
К'~ At дач Ас дас ^ А& daf да, ^ f 1 - ^ *>>
, ' , . ,. , A0.22.8)
1 d*w 1 дА-i dw 1 дА2 dw v '
T "^7 ^ "^~
Ими и формулами A0.22.7) тангенциальные усилия и компоненты изгиб-
ной деформации, а вместе с последними и моменты, выражаются через с
и w. Перерезывающие усилия после этого можно найти при помощи уравне-
уравнений равновесия и, наконец, при помощи первых двух равенств F.44.6)
определяются компоненты тангенциальной деформации.
Равенства A0.22.7), A0.22.8) вместе с уравнениями состояния можно
назвать расчетными формулами теории пологих оболочек. Ими приближенно
определяется напряженно-деформированное состояние. Остались неизвест-
неизвестными только тангенциальные смещения иг, и2, но, так как все компоненты
деформации уже получены, перемещения можно строить, например, так,
как описано в § 4.27.
Есть и другой путь построения перемещений пологой оболочки. Поскольку Bj, со, s2 —
известны, можно рассматривать равенства G.5.1) как систему дифференциальных уравнений
относительно их, и2, w.
Третью из этих величин надо также считать известной, так как она определяется при
интегрировании разрешающего уравнения. Поэтому, сохранив два из трех равенств G.5.1),
мы будем иметь уравнения для определения иг, иг. При их решении произволы надо выбирать
так, чтобы выполнилось отброшенное равенство G.5.1).
Просмотрев еще раз выкладки § 6.43, можно убедиться, что при выводе
равенства F.43.32) не были использованы ни первые два уравнения равно-
равновесия, выражаемые первым равенством F.44.1), ни первые два уравнения
неразрывности деформаций, выражаемые первым равенством F.44.2).
Покажем теперь, что если правильны предположения 1 и 2 и если отсутствуют
внешние поверхностные тангенциальные силы, т. е.
Xt = Х2 = 0, A0.22.9)
то эти уравнения приближенно выполняются в силу формул A0.22.7) и
A0.22.8), каковы бы ни были в них достаточное число раз дифференцируе-
дифференцируемые функции с, w. Для рассматриваемых уравнений равновесия это выте-
вытекает из следующих равенств, которые легко проверить при помощи A0.22.7):
= \ д ( х дАЛ \ д ( х дАг \ 1 1 дс
[ даг V Л, дах ) ^ да2 \ Аг да2 )\ Ах да,, '
' д дА д дА A0.22.10)
дсц (/il1 г) ~да~; 1 * + да (Л^' ^
да, ^ ~
д I \ дАх\\ \ дс
Г д I 1 дАг \ , д I \ дАх\\
L даг \ Аг дах ) "•" да2 \ Л2 да2 )\
Левые части их совпадают с левыми частями первого равенства F.44.1),
если в последних отбросить члены с Nh а правые части будут малы,
если срединная поверхность пологой оболочки отнесена к почти плоской
системе координат и вследствие этого выполняется сильное неравенство
A0.21.1).
144 пологие оболочки, состояния с большой изменяемостью [гл. ю
Уравнения неразрывности деформаций двойственны уравнениям равно-
равновесия, поэтому, повторив вышеприведенные рассуждения и выкладки, можно
убедиться, что первые два уравнения неразрывности деформаций прибли-
приближенно удовлетворяются в силу допущения 2 и формул A0.22.8).
Замечания. 1. Требование A0.22.9) обязательно для излагаемого варианта теории поло-
пологих оболочек. Оио имеет силу лишь в случае, когда внешняя поверхностная нагрузка нор-
нормальна к срединной поверхности оболочки. Обобщение иа случай X,- ф 0 не сложно, но мы не
будем иа этом останавливаться.
2. Возможность отбрасывать в выражении для компонент изгибиой деформации танген-
тангенциальные перемещения, а в выражении для тангенциальных усилий — функции а, Ь часто
принимается как самостоятельные предположения теории пологих оболочек. Вышеизложен-
Вышеизложенные результаты показывают, что эти отбрасывания надо рассматривать как действия, логи-
логически вытекающие из свойств упрощенной теории оболочек. Если в какой-либо задаче воз-
возникнет необходимость удержать такие члены, то это значит, что для иее нельзя пользоваться
упрощенной теорией оболочек и надо с большой осторожностью подойти к выбору уравне-
уравнений состояния.
Изложенная здесь трактовка приближенной теории пологих оболочек
предлагается, по-видимому, впервые, хотя получившиеся разрешающие
уравнения и расчетные формулы известны очень давно. Историю создания
теории пологих оболочек надо, по-видимому, начинать с тридцатых годов,
когда в работах [86, 142, 143] были высказаны важные идеи применительно
к задачам устойчивости. Уравнения и формулы современной теории поло-
пологих оболочек, в частности и те, которые приведены здесь, выводились в ра-
работах [30, 31, 87, 121, 161].
§ 23. Свойства разрешающих уравнений теории пологих оболочек
Структуре разрешающих уравнений теории пологих оболочек можно
дать простую физическую интерпретацию. Отбросив в A0.22.5) члены,
содержащие оператор AR, получаем два самостоятельных уравнения. Одно
из них имеет вид
и совпадает с уравнением, которому подчиняется нормальный прогиб w
в теории изгиба пластинок. Второе уравнение имеет вид
ААс = 0
и совпадает с уравнением, которому подчиняется функция Эри в теории
обобщенных плоских напряженных состояний.
Отбрасывание членов с операторами ДА также приводит к двум само-
самостоятельным уравнениям
Длс+г = 0, Ддау = 0. A0.23.1)
Если оболочка отнесена к криволинейным координатам, удовлетворяю-
удовлетворяющим сильному неравенству A0.21.1), и если Х1 = Х2 = 0, то первое из
этих уравнений будет приближенно эквивалентно статическим уравнениям
безмоментной теории (§ 7.4), а второе — геометрическим уравнениям без-
моментной теории (§ 7.5).
Действительно, положим Х1 — Х2 = 0 в безмоментных статических
уравнениях G.4.2), будем считать, что S21 = 512 = S, и выразим 7\, S21,
512. Т2 по формулам A0.22.7) через функцию напряжений с. Тогда первые
два уравнения G.4.2) можно отбросить, так как они приближенно удовлет-
удовлетворяются, а третье уравнение G.4.2) превратится в первое равенство
A0.23.1). Далее, геометрические уравнения безмоментной теории выражают
требования
6l = со = еа = 0 A0.23.2)
§ 23] РАЗРЕШАЮЩИЕ УРАВНЕНИЯ ТЕОРИИ ПОЛОГИХ ОБОЛОЧЕК {45
и в определенном смысле (см. § 7.5) они эквивалентны системе G.5.2), в кото-
которой в силу A0.23.2) можно считать
Поэтому, выразив х,, т, и2 по формулам A0.22.8), мы приближенно вы-
выполним первые два уравнения G.5.2), а оставшееся уравнение сведется ко
второму равенству A0.23.1).
Таким образом, в разрешающих уравнениях A0.22.5) операторы ДД
отражают влияние теории изгиба пластинки и теории обобщенного плоского
напряженного состояния, а операторы Дл отражают влияние безмоментной
теории.
Порядок и тип системы A0.22.5) определяют операторы ДД, так как
они содержат старшие производные. Это значит, что система A0.22.5) —
эллиптическая и при ее интегрировании можно выполнять в каждой точке
границы области по четыре условия (столько, сколько учитывается гранич-
граничных условий в теории изгиба пластинок и в теории обобщенного напряжен-
напряженного состояния в совокупности). Таким образом, описанные в § 10.22 преобра-
преобразования не повели к потере интегралов, необходимых для решения краевых
задач теории пологих оболочек.
Напомним, что разрешающие уравнения теории пологих оболочек, будь
это действительная система A0.22.5) или комплексное уравнение A0.22.1),
составлены в предположении, что оболочка отнесена к почти плоской системе
координат, в которой коэффициенты первой квадратичной формы Аи А г
должны удовлетворять сильному неравенству A0.21.1). В § 10.21 были по-
построены две такие системы: почти декартова система координат, удобная для
исследования пологих оболочек с прямоугольным планом, и почти полярная
система координат, удобная для исследования пологих оболочек с круговым
планом. Ими и ограничивается список почти плоских систем, применявшихся
до сих пор. Поэтому можно условно говорить о двух вариантах теории поло-
пологих оболочек. В первом из них используется почти декартова система коорди-
координат и в равенствах A0.22.4), A0.22.6), а также в расчетных формулах
A0.22.7), A0.22.8) надоЛ^ Л2, /?„, R12, R22 брать по формулам A0.21.4),
A0.21.5). Во втором варианте используется почти полярная система коорди-
координат, а А1у Л 2 берутся по формулам A0.21.9).
Методы интегрирования уравнений теории пологих оболочек весьма
разнообразны. Этому вопросу посвящена обширная литература, и мы на нем
не будем останавливаться.
В заключение заметим, что равенства A0.22.1) или A0.22.5) с некоторыми
оговорками, которые выявятся ниже, можно рассматривать и как разрешаю-
разрешающие уравнения теории оболочек нулевой кривизны (в частности, цилиндри-
цилиндрических и конических оболочек), независимо от того, пологи они или нет
[80, 81, 86, 92, 120]. Чтобы убедиться в этом, достаточно просмотреть еще
раз рассуждения § 10.22. Они показывают, что для вывода равенств A0.22.1)
и A0.22.5) достаточно предполагать, что в оболочке
(а) срединная поверхность должна быть не особой,
(б) линии возмущения и, в частности, края должны быть неасимпто-
неасимптотическими,
(в) на всей срединной поверхности может быть установлена криволиней-
криволинейная система координат, отвечающая сильному неравенству A0.21.1).
Но при К = 0 последнее условие становится тривиальным: ему удов-
удовлетворяет любая система координат, следовательно, остаются два первых
требования. Первое из них означает, в частности, что цилиндрическая обо-
оболочка, к которой можно применять уравнение'A0.22.1) или A0.22.5), не
10 А. Л. Гольденвейзер
J46 ПОЛОГИЕ ОБОЛОЧКИ. СОСТОЯНИЯ С БОЛЬШОЙ ИЗМЕНЯЕМОСТЬЮ [ГЛ. 10
должна быть слишком длинной, а для конической оболочки нельзя допу-
допускать большой близости точек срединной поверхности к вершине конуса.
Второе требование означает, например, что цилиндрическая оболочка
должна быть замкнута, так как прямолинейные края открытой оболочки
являются асимптотическими линиями искажения. Ниже, в разделах, посвя-
посвященных цилиндрическим оболочкам, выясняется, что первое требование
является необходимым: для длинных цилиндрических оболочек уравнения
A0.22.1) или A0.22.5) могут дать ошибочные результаты. Будет установлено
также, что второе требование самостоятельного значения не имеет и сводится
к первому. Так, например, открытую цилиндрическую оболочку можно
рассчитывать при помощи обсуждаемых уравнений, пока эта оболочка ко-
короткая.
§ 24. Приближенная теория напряженных состояний
с большой изменяемостью
Обратимся к случаю, когда нарушается третье условие применимости
метода расчленения (§ 9.13), т. е. к случаю, когда искомое напряженное
состояние имеет большую изменяемость, и покажем, что для приближенного
исследования таких напряженных состояний снова остаются в силе разре-
разрешающие уравнения A0.22.1) или A0.22.5) и расчетные формулы A0.22.7),
A0.22.8), какова бы ни была подъемистость оболочки.
На непологой поверхности, вообще говоря, нельзя установить почти
плоскую систему координат, а следовательно, неравенство A0.21.1) теряет
силу. Тем не менее отбрасывание в уравнении F.43.32) слагаемых, содержа-
содержащих гауссову кривизну К, остается законным, так как речь идет о напряжен-
напряженном состоянии с большой изменяемостью, в котором искомые величины уве-
увеличиваются по модулю при дифференцировании. Отсюда следует, что в пра-
правой части равенства F.43.32) второе и третье слагаемые в скобках малы по
сравнению с первым, а в левой части F.43.32) первое слагаемое превышает
второе. Конечно, последняя часть высказанного утверждения основана на
предположении, что | V | не может существенно превышать | W\. При помощи
простых, но кропотливых рассуждений, на которых мы не будем останавли-
останавливаться, можно убедиться в справедливости этого предположения. Более
того, выясняется, что | W\ существенно больше, чем | V\.
Далее, следует убедиться, будут ли удовлетворяться неиспользованные
при выводе F.43.32) первое и второе уравнения равновесия, а также первое
и второе уравнения неразрывности деформаций. Для этого, не останавли-
останавливаясь на подробностях, которые можно найти, например, в [50], примем,
что предположения 1, 2, сформулированные в § 10.22 для пологих оболочек,,
остаются правильными и для приближенного исследования напряженных
состояний с большой изменяемостью, и будем считать, что выполняются
равенства A0.22.9). Тогда вопрос о выполнении первых двух уравнений
равновесия сведется к рассмотрению равенств A0.22.10). Они получены в ре-
результате применения формул A0.22.7). Следовательно, выражения, стоящие
в правых частях равенств и содержащие только первые производные от с,
получились в результате взаимного сокращения слагаемых, содержащих
третьи производные от с. Это значит, что правые части A0.22.10) надо счи-
считать приближенно равными нулю. Отсюда вытекает, что расчетные формулы
A0.22.7) не противоречат первым двум уравнениям равновесия. Так же дока-
доказывается двойственное по статико-геометрической аналогии утверждение,
что расчетные фомулы A0.22.8) не противоречат первым двум уравнениям,
неразрывности деформаций.
Итак, разрешающими уравнениями A0.22.1) или A0.22.5) и расчетными
формулами A0.22.7), A0.22.8) можно пользоваться также и при расчете
S 241 НАПРЯЖЕННЫЕ СОСТОЯНИЯ С БОЛЬШОЙ ИЗМЕНЯЕМОСТЬЮ 147
оболочек любой подъемистости, если в них возникает напряженное состоя-
состояние с большой изменяемостью.
Равенства A0.22.5) были первоначально выведены как уравнения поло-
пологих оболочек, и их часто называют разрешающими уравнениями теории
пологих оболочек, независимо от того, для каких целей они предназначены.
Такая терминология не способствует правильному пониманию сущности воп-
вопроса. Мы будем называть уравнения A0.22.5) в разных случаях по-разному,
в частности, они будут здесь называться и разрешающими уравнениями тео-
теории напряженных состояний с большой изменяемостью. Остановимся на
специфике этих теорий.
Особенность расчета пологих оболочек заключается в том, что на средин-
срединной поверхности надо выбирать криволинейные координаты так, чтобы
выполнялось сильное неравенство A0.21.1).
Особенность теории напряженных состояний с большой изменяемостью
заключается в том, что при ее построении было использовано свойство боль-
большой изменяемости того напряженного состояния, которое мы собираемся
находить. Это свойство можно использовать и при интегрировании A0.22.5).
В § 8.10 было показано, что при построении простого краевого эффекта
(обладающего большой изменяемостью по ах) в первом приближении допу-
допустимо пренебречь переменностью коэффициентов по at. Равным образом,
если речь идет о напряженных состояниях с большой изменяемостью по обеим
переменным, то коэффициенты уравнений A0.22.5) можно в первом прибли-
приближении рассматривать как константы по ах, а2. С другой стороны, когда
строятся напряженные состояния с большой изменяемостью, надо следить,
чтобы интегралы уравнений A0.22.5) действительно обладали этим свой-
свойством, а интегралы, не имеющие большой изменяемости, надо отбрасывать
(либо ставить заново вопрос об их законности).
Последнее утверждение можно пояснить следующими рассуждениями.
Уравнения A0.22.5) сохраняют силу и в теории простого краевого эффекта.
Тогда в них надо положить Z = 0, а в формулах для ДиДяв первом прибли-
приближении можно отбросить все производные от искомых величин, кроме стар-
старших производных по а х- В результате получим систему
1 д*с 2Eh3 I d*w _ n
AlR22 да\ 3A-v») A\ да\ '
A\R22 да\ +
Она в рамках той же точности приводится к одному уравнению
1 dsw . 3A — v2) _1_ а4ш _ 0
которое, в частности, имеет такие решения:
Во («a), Bi(a2)ai, 62(^2) a?, B3(a2)ai
(В,- — произвольные функции). Однако эти решения незаконны, так как
они не обладают большой изменяемостью по а-,. От них можно избавиться,
отбросив символический множитель -тг -^ ¦ В результате мы вновь придем
к разрешающему уравнению теории простого краевого эффекта (8.10.9).
Уравнения A0.22.5), как уже говорилось, можно использовать и при
расчете цилиндрических оболочек. Особенность такого истолкования этих
Ю*
148 пологие оболочки, состояния с большой изменяемостью [гл. ю
уравнений заключается в требовании, чтобы цилиндрическая оболочка не
была слишком длинной.
В заключение отметим, что все обсуждаемые здесь факторы могут уси-
усиливать друг друга. Например, напряженно-деформированное состояние
пологой оболочки может иметь большую изменяемость. Тогда уравнения
A0.22.5) будут «вдвойне справедливы», т. е. точность их повысится. Если
изменяемость не мала, то эти уравнения можно применять и к не слишком
пологим оболочкам. Если оболочка не слишком подъемиста, то A0.22.5)
будут иметь силу и в том случае, когда большая изменяемость не очень
сильно выражена. Равным образом надо учитывать, что срединная поверх-
поверхность оболочки может иметь малую гауссову кривизну (например, в почти
цилиндрической бочкообразной оболочке). Для такой оболочки требования
к пологости и к изменяемости напряженного состояния также смягчаются
11571.
ГЛАВА 11
ОБОЛОЧКИ С АСИМПТОТИЧЕСКИМИ ЛИНИЯМИ
ИСКАЖЕНИЯ
§ 25. Обобщенные краевые эффекты
Под простым краевым эффектом подразумевается (§ 8.9) местное напря-
напряженное состояние, возникающее вблизи неасимптотической линии иска-
искажения. Требование, чтобы линия искажения была неасимптотической, т. е.
нигде не касалась асимптотических линий срединной поверхности, оказалось
существенным с математической точки зрения, так как разрешающее уравне-
уравнение простого краевого эффекта (8.10.9) теряет силу в тех точках, где R2z
обращается в бесконечность. Введем теперь понятие об обобщенном краевом
эффекте, под которым будем подразумевать напряженное состояние, локали-
локализованное вблизи асимптотической линии искажения, т. е. вблизи контура,
всюду совпадающего с одной из асимптотических линий срединной поверх-
поверхности [48].
Предполагается, что обобщенный краевой эффект затухает при уда-
удалении от линии искажения, следовательно, по соответствующей переменной
он имеет большую изменяемость. Поэтому примем, что обобщенные краевые
эффекты можно изучать при помощи приближенной теории напряженных
состояний с большой изменяемостью, т. е. исходя из однородного разрешаю-
разрешающего уравнения A0.22.1)—A0.22.4). Перепишем его еще раз в развернутом
виде:
I / д А2 д д At д \ \ / д А2 dW д Аг dW \
АХА2 \ дах Ах дах ' да2 А2 да2 / АХА2 \ даг Аг даг ' да2 А2 да2 )
1 dW д| № .
i 1/3A—у2) 1 Г д Л2 1
V № АгА2 L дах Ах R
at + да2 R12 даг
=0'
Замечание. Строго говоря, для вывода уравнения A1.25.1) было использовано свойство
быстрой изменяемости по обеим координатам. Поэтому высказанное предположение надо
было бы обосновать, но мы не будем на этом останавливаться и сошлемся на тот факт, что оно
выдержало проверку в применении к теории простого краевого эффекта (§ 10.24).
Обсуждение обобщенных краевых эффектов мы начнем со случая,
когда кривизна срединной поверхности отрицательна, и выберем криволи-
криволинейные координаты так, чтобы то семейство асимптотических линий, к кото-
которому принадлежит интересующий нас контур, совпало с линиями осх = const.
При этом будет справедливо равенство #22 = оо (так как нормальная
кривизна поверхности вдоль асимптотической линии равна нулю по опреде-
150 оболочки с асимптотическими линиями искажения [гл. и
лению). Вместе с тем гауссова кривизна поверхности выражается форму-
формулой A.7.1), из которой следует, что если одна из координатных линий сов-
совмещена с асимптотической линией, то Ri2 и R12 обращаются в бесконечность
только тогда, когда /С = 0. Итак, для оболочек отрицательной кривизны
можно принять
#22 = оо, R12 ф оо.
При таком выборе параметров аи а2 комплексная функция W для иско-
искомого напряженного состояния должна существенно увеличиваться при ди-
ференцировании по av Что касается дифференцирования по а2, то оно либо
вовсе не должно увеличивать абсолютные значения W, либо должно приво-
приводить к менее значительному увеличению, чем дифференцирование по аг.
Поэтому, так же как это делалось в § 8.10, все величины, кроме искомых,
можно рассматривать как не зависящие от аг. Учитывая все это и отбрасы-
отбрасывая в уравнении A1.25.1) все члены, кроме главных, получим:
1 ачг .-./3(i-v2) i / а ^_ j а_\ air_e0
А* да\ ' h* А1А2 \ За2 #12 #12 5а2 / да1 '
или после однократного интегрирования по аг:
L.*+*z.-JL) W = Q. A1.25.2)
..j -..j - °°2 "-12 2 "а2 /
Это соотношение и является разрешающим уравнением обобщенного краевого
эффекта в оболочке отрицательной кривизны.
Перейдем к обобщенному краевому эффекту в оболочке нулевой кри-
кривизны. Чтобы удобнее было сопоставлять получаемые результаты с теми,
которые приводятся в литературе, сделаем предположение, что срединная
поверхность отнесена к линиям кривизны таким образом, что в бесконечность
обращается главный радиус кривизны Rt. Это значит, что теперь асимпто-
асимптотическими будут «j-линии, а линия искажения будет задаваться уравнением
а2 = а,0. Поэтому при упрощении уравнения A1.25.1) можно пользоваться
тем, что W будет существенно увеличиваться при дифференцировании по а2
и сохранять порядок своей величины или увеличиваться не столь значительно
при дифференцировании по ах. Следовательно, все функции, кроме W,
можно считать не зависящими от а2. Кроме того,
Учитывая все это, легко найти в уравнении A1.25.1) главные члены и,
отбросив все остальные, написать разрешающее уравнение обобщенных крае-
краевых эффектов в оболочке нулевой кривизны. Оно имеет вид
) 1 д Л2 1 0W
-1/3A
У
да,
Обобщенный краевой эффект в оболочке отрицательной кривизны мало
изучен, и в дальнейшем о разрешающем уравнении A1.25.2) будут высказы-
высказываться лишь некоторые общие соображения. Разрешающее уравнение
A1.25.3) обобщенного краевого эффекта в оболочке нулевой кривизны мы
рассмотрим более детально.
Будем считать, что комплексная величина W, удовлетворяющая уравне-
уравнению A1.25.3), известна (а следовательно, известны нормальный прогиб w
и функция напряжений с), и выразим через них усилия и моменты оболочки.
Для этого можно исходить из расчетных формул A0.22.7), A0.22.8) теории
напряженных состояний с большой изменяемостью. Учитывая, что в рас-
рассматриваемом случае дифференцирование искомых функций по а2 приводит
S 25] ОБОБЩЕННЫЕ КРАЕВЫЕ ЭФФЕКТЫ ]5J
к более существенному увеличению, чем дифференцирование по ах, их
можно упростить еще больше и записать так:
__ _1 д 1 dw . 1 дАх dw _ I дЧ>
Ki - ах да, -j;-щ; + АхА\ -5^^' ** ~ ~д да*'
т== 1 JL »*Lf (Ц.25.4)
т —_L_E!i т — —L_^ \
1 ~ А\ да\ ' 2 ~ А да, А,
А\ да\ ' 2 Ai dai At dai ^ AXA\ da2 ^«2 '
о о . 1 о 1 дс
21"~ 1г ~ л7 "аа7 Гл7 ^«Г
(вторые производные по ах не считаются малыми по сравнению с первыми
производными по а2).
Из этих формул вытекает, между прочим, что обобщенный краевой
эффект в оболочке нулевой кривизны обладает свойствами, выражаемыми
сильными неравенствами:
7\»Т2, х,»х*. A1.25.5)
Рассмотрим теперь соотношения упругости F.44.6). Учитывая A1.25.5),
их можно упростить и записать так:
2Eh3
3A-v«) A\ до% *
н — w — a i аш
л 2i - я„ - з A + v) —^ ^ A^ dai . A1.25.7)
Из равенств A1.25.6) вытекает, что
ех = —-Ь-> ©. A1.25.8)
Вместе с тем компоненты тангенциальной деформации связаны с перемеще-
перемещениями формулами G.1.5), которые при Rtl = оо и /?22 = R2 имеют вид
1 дих 1 дА, 1 ди2 I дА2 w
(Н.25.9)
" л, аа
Здесь в выражения для е2 и со входят слагаемые, заведомо большие, чем
любое слагаемое в выражении для elf так как
А\ <L_ ( Jh_ W _J_ ±tL 1 ди2
A2 да2 К Л, / " Л, да, ' Л2 да2 " At
*'
A2 да2 *
Это не будет противоречить соотношениям A1.25.9) только в том слу-
случае, если в правых частях последних двух формул A1.25.9) взаимно уничто-
уничтожатся главные члены. Отсюда вытекает, что в рамках той точности, с кото-
152 оболочки с асимптотическими линиями искажения [гл. и
рой строится теория обобщенного краевого эффекта, вместо второй и третьей
из этих формул надо написать равенства
1 ди^ i__ ал, ш_ _ „
Л да "г" АХА да! х R
Л2 да2
А2 да2 \ Л,
(П.25.10)
которые при приближенных вычислениях означают, что в левых частях про-
происходит взаимное уничтожение главных членов.
В соотношениях A1.25.10) величину w надо считать известной, и мы
получаем два уравнения для определения иг и ы2.
Остается определить перерезывающие усилия. Для этого могут быть
использованы моментные уравнения равновесия G.1.8), G.1.9). Порядок
величин, входящих в левые части этих равенств, можно установить с помощью
формул A1.25.7). Пользуясь этим и оставляя только главные члены, получим
П*~ А1 да, Л2 да2 + АгА, да, <Ul °2'' П* ~ A, ~da^'
Отсюда после простых преобразований приходим к окончательным фор-
формулам:
3(l-v2) A1 da, A2
§ 26. Свойства простых и вырожденных
краевых эффектов
Представим комплексное разрешающее уравнение обобщенного крае-
краевого эффекта в оболочке нулевой кривизны A1.25.3) в виде системы двух дей-
действительных уравнений. Для этого надо раскрыть смысл комплексной пе-
переменной W и приравнять нулю в отдельности действительную часть и коэф-
коэффициент при мнимой части в полученном уравнении. Это приведет нас к си-
системе
1 а л2 1 дс 2еи.3 1 а4© „
АХА2 ~dali~Aj~R2' ~да~^ ~ 3 A — v2) ~Ж &4 ~ '
A1.26.1)
1 а Л, 1 дт , 1 1 а4с _
Л Л ^fv Л D s^sv I О J* tf л 4- ^ Л. )
jA2 OWj Ax K2 OUj ZCn A* QqQ
в которой, как и раньше, все коэффициенты можно рассматривать как ве-
величины, независящие от а2. Пользуясь этим, легко исключить неизвестное с
и получить одно уравнение относительно w. Продифференцируем первое ра-
равенство A1.26.1) четыре раза по а2 и разделим на А\. Получим уравнение
1 а л. 1 а / д*с
_ Q
3A-v2) A\ da*
в котором с легко исключается при помощи второго равенства A1.26.1),
и после очевидных преобразований будем иметь искомое уравнение
^fr + ^V^H. <1L26-2>
где
г / \ _ ' д А2 I д А% д А2 1 dw /11 9fi Ч\
4 Щ ~ ~A^aJ ^Г X ~Rl да- ~А~ да-^^-д^- (И "*>•*'
§ 26 J СВОЙСТВА ПРОСТЫХ И ВЫРОЖДЕННЫХ КРАЕВЫХ ЭФФЕКТОВ J53-
Так же можно преобразовать и разрешающее уравнение A1.25.2) обоб-
обобщенного краевого эффекта в оболочке отрицательной кривизны. Оно приво-
приводится к следующей действительной системе двух уравнений:
1 / д с 1 дс \ 2Eh3 I d3w _ „
+ ) ^ -Ц ~ и'
L_^!? —n (ll.26.4)
Исключим отсюда неизвестное с учитывая, что все коэффициенты урав-
уравнений можно рассматривать как функции одного а2. Продифференцировав
первое равенство три раза по ах и разделив его на А\, получим уравнение
1 / _д 1_ 1 д_ \ д3^ _ 2Eh3 J_ dhv- _ „
А\А2 \ да2 /?и + Ж7 да2 ) ^ 3 A -v«) A\ да\ ~ '
в котором третью производную от с по ах легко выразить из второго равен-
равенства A1.26.4). Это позволяет после очевидных преобразований записать
искомое уравнение так:
1 Л> з A -у2) г ( , _ 0 П1 2fi ^
где
Т (Ш\ - ' ( д 1 , ' д \ А* ( д W 4- ' dW \ (\ 1 26 6^
Сравним теперь уравнения A1.26.2) и A1.26.5) с разрешающим уравне-
уравнением (8.10.9) простого краевого эффекта. Во всех трех уравнениях в левых
частях стоят по два слагаемых, из которых второе имеет большой коэффи-
коэффициент, пропорциональный /Г2. Для того, чтобы уравнения выполнялись,
величины
должны быть равны по модулю соответственно
П. /<22
Здесь L2 и L4 — операторы второго и четвертого порядков, определяе-
определяемые формулами A1.26.3) и A1.26.6), но, отвлекаясь пока от этого обстоя-
обстоятельства, будем рассматривать L4 и L2 как множители при до, значения кото-
которых соизмеримы с /г°. Тогда можно утверждать, что решение уравнения
A1.26.2) должно увеличиваться при дифференцировании по а2, а решения
уравнений A1.26.5) и (8.10.9) должны увеличиваться при дифференцирова-
дифференцировании по ах. В A1.26.2) считается, что линией искажения является a2=const,
а в A1.26.5) и (8.10.9) считается, что линией искажения является
ах = const, поэтому во всех случаях речь идет о большой изменяемости в на-
направлении, перпендикулярном к линии искажения. Однако здесь есть и важ-
важное различие: увеличение одинакового порядка в простом краевом эффекте
должно достигаться в результате четырехкратного дифференцирования,
а в обобщенном краевом эффекте — в результате восьмикратного или шести-
шестикратного дифференцирования соответственно. Отсюда заключаем, что быст-
быстрее всех затухает простой краевой эффект, следующим по быстроте затуха-
затухания идет обобщенный краевой эффект в оболочке отрицательной кривизны и,
наконец, обобщенный краевой эффект в оболочке нулевой кривизны.
154 оболочки с асимптотическими линиями искажения [гл. и
Вернемся теперь к структуре величин A1.26.8). В простом краевом эф-
эффекте она пропорциональна w. Отсюда следует, что быстрота затухания про-
простого краевого эффекта стабильна, не зависит от характера изменения w
вдоль линии искажения (по переменной а2). В обобщенных краевых эффектах
вместо w мы имеем дифференциальные выражения A1.26.3) или A1.26.6).
Их абсолютные значения могут существенно зависеть от закона изменения w
по аг или а2, т. е. вдоль линии искажения. Поэтому быстрота затухания
-обобщенных краевых эффектов нестабильна; она существенно связана с из-
изменяемостью искомых функций вдоль линии искажения. Если w увеличи-
увеличивается при дифференцировании по а2 или аг, т. е. имеет большую изменяемость
вдоль линии искажения, то увеличится и быстрота затухания обобщенного
краевого эффекта. Наоборот, если w таково, что приближенно выпол-
выполняется уравнение
?4(ш) = 0 A1.26.9)
или уравнение
L1(a») = 0, A1.26.10)
то быстрота затухания обобщенного краевого эффекта уменьшится, а если
точность выполнения уравнений A1.26.9) или A1.26.10) станет достаточно
большой, то может случиться, что затухания вообще не будет. В этом случае
краевой эффект утеряет свое основное свойство, и мы будем его называть
вырожденным.
Уравнения и формулы §§ 11.25, 11.26, не имеют силы для вырожден-
вырожденного краевого эффекта, так как под этим подразумевается напряженное со-
состояние, изменяемость которого мала по обеим переменным, и для него ста-
становится неоправданным предположение о возможности исходить из разре-
разрешающего уравнения напряженных состояний с большой изменяемостью.
Отметим в заключение, что все рассуждения и выводы этого параграфа
имеют качественный и несколько расплывчатый характер. Более определен-
определенное описание обсужденных здесь свойств краевых эффектов можно найти
в § 12.30.
§ 27. Обобщение метода расчленения
Вернемся снова к разрешающим уравнениям краевых эффектов (8.10.9),
A1.26.2), A1.26.5) и заметим, что по переменным, соответствующим движе-
движению по перпендикуляру к линии искажения, порядки этих уравнений раз-
различны.
Для простого краевого эффекта, т. е. для уравнения (8.10.9), порядок
равен четырем, и на примерах, разобранных в §§ 9.15—9.17, было пока-
показано, что за счет простого краевого эффекта можно устранить невязки в двух
граничных условиях.
Для обобщенных краевых эффектов, т. е. для уравнений A1.26.2) и
A1.26.5), эти порядки равны шести и восьми соответственно. Поэтому по
аналогии заключаем, что за счет обобщенных краевых эффектов можно устра-
устранить невязки в трех граничных условиях для оболочки отрицательной кри-
кривизны и в четырех граничных условиях для оболочки нулевой кривизны.
Это полностью согласовывается с числом граничных условий, которые
можно выполнить при решении уравнений безмоментной теории. Если край
неасимптотический, то решение безмоментных уравнений можно подчинить
двум условиям, а невязку в двух оставшихся условиях ликвидировать за счет
простого краевого эффекта. Если край проходит вдоль асимптотической ли-
линии на поверхности отрицательной кривизны, то эта линия является одно-
однократной характеристикой как для статических, так и для геометрических
7равнений безмоментной теории (§§ 7.4, 7.5), и значит, она есть двухкратная
5 28] ПОВЕРХНОСТИ НУЛЕВОЙ ГАУССОВОЙ КРИВИЗНЫ J55
характеристика полной системы безмоментных уравнений. На двух таких
краях при решении полной краевой задачи безмоментной теории можно
ставить только по одному граничному условию, но за счет обобщенного кра-
краевого эффекта можно ликвидировать невязки в трех оставшихся уравнениях.
Наконец, если край проходит вдоль асимптотической линии на поверхности
нулевой кривизны, то это будет двухкратная характеристика и статических,
и геометрических уравнений безмоментной теории. В рамках последней на
таких краях вообще нельзя ставить граничных условий. Невязки получатся
во всех четырех граничных условиях, и их надо ликвидировать за счет обоб-"
щенного краевого эффекта.
Таким образом, метод расчленения напряженного состояния формально
можно трактовать шире, чем это делается в § 9.13, включив в область его
применимости и случаи, когда линии искажения проходят вдоль асимптоти-
асимптотических линий срединной поверхности (при этом все условия применимости
метода расчленения § 9.13, кроме первого, останутся в силе). О; :..iko инте-
интегрирование разрешающих уравнений A1.26.2) и A1.26.5) не так элементарно,
как интегрирование уравнения (8.10.9), что снижает эффективность таких
видоизменений метода расчленения.
Тем не менее этот приближенный метод удалось применить к расчету
оболочек отрицательной кривизны [111, 187]. Для оболочек нулевой кри-
кривизны произволы основного напряженного состояния не могут быть исполь-
использованы для выполнения граничных условий на асимптотических краях, и
метод расчленения сводится к предположению о возможности составить на-
напряженно-деформированное состояние оболочки из обобщенных и простых
краевых эффектов. В §§ 11.29, 12.32 мы увидим, что методы В. 3. Власова
и В. В. Новожилова можно трактовать как некоторые видоизменения такого
варианта метода расчленения (в них дополнительно предполагается, что
можно игнорировать простые краевые эффекты).
§ 28. Поверхности нулевой гауссовой кривизны
Обращаясь к изложению приближенных методов расчета цилиндричес-
цилиндрических оболочек, начнем с рассмотрения некоторых геометрических вопросов.
Выберем в пространстве систему ортогональных декартовых коорди-
координат х, у, г. Тогда произвольный цилиндр с образующими, параллельными
оси х (рис. 18), может быть задан в криволинейных координатах тремя ска-
скалярными уравнениями:
или одним векторным уравнением:
М = ajx + у (а2) iy + 2 (eg t2 A1.28.1)
(?t. iy, iz — орты выбранной системы де-
декартовых координат).
Функции у (а2) и г (а2) должны быть
выбраны так, чтобы уравнениями
у = у (об,) 2 = z (о,) A1.28.2) Рис. 18.
задавался контур поперечного сечения цилиндра (направляющая кривая).
В этой системе криволинейных координат о^-линиями будут образующие
цилиндра, а а2-линиями — поперечные сечения цилиндра.
Положение произвольной точки цилиндра М задается значениями па-
параметров ах и а2. Параметр аг равен расстоянию от поперечного сечения,
лежащего в плоскости х = 0, до поперечного сечения, содержащего точку М.
Параметром а2 определяется положение точки М на направляющей кривой.
156
ОБОЛОЧКИ С АСИМПТОТИЧЕСКИМИ ЛИНИЯМИ ИСКАЖЕНИЯ
[ГЛ. 11
В частности, под <х2 можно подразумевать и длину дуги направляющей кри-
кривой A1.28.2), отсчитываемой от некоторой начальной образующей до
точки М.
Произвольный конус, вершина которого совпадает с началом декарто-
декартовой системы координат х, у, z (рис. 19), может быть задан тремя скалярными
уравнениями
х = <Xj cos 0, у = аг sin 0 sin a2, z = at sin 0 cosas
или одним векторным уравнением
М = a, cos 0/, -(- 0^ sin 6 sin ajv -\- a, sin 0 cos a2i2,
A1.28.3)
где 0=0 (a2)— функция, зависящая от геометрического очертания конуса.
Заметив, что при этом
х2 + У2 + ^ = «ь -|- =
A1.28.4)
легко выявить геометрический смысл принятой системы криволинейных коор-
координат. В ней с^-линиями (линиями a2=const) будут сечения конуса плоско-
плоскостями, проходящими через ось х, т, е. образующие конуса, а <хг-линиями
(линиями ax=const) будут кривые, по ко-
которым конус пересекается с семейством
сфер, задаваемых первым равенством
A1.28.4). Таким образом, <х2-линии на ко-
конусе в общем случае оказываются неплос-
неплоскими. Исключение представляет только
круговой конус F = const).
В круговом конусе ось х является осью
симметрии конуса, 9 равно половине угла
раствора конуса, ах-линии остаются по-
прежнему образующими, а <х2-линии пре-
превращаются в поперечные сечения, т. е.
в сечения конуса плоскостями, ортого-
ортогональными оси х (рис. 19).
Произвольная точка М на конусе задается значениями параметров ах
и а2, причем аг равно расстоянию от точки М до вершины конуса, а параметр
а2 определяет положение точки М на а2-линии.
Вычислим коэффициенты первой квадратичной формы. В соответствии
с A1.28.1) и A1.28.3) имеем:
для цилиндра
м, = ix, мг = у' (eg /,+*' К) fc
для конуса
Мj = cos Qix 4- sin Э sin аг1у -\- sin 0 cos ajz,
Мг = — aft' sin Qix -[- o^ (9' cos 9 sin аг -\- sin 9 cos a2) iy -\-
4 «j. @' cos 0 cos a2 — sin 9 sin a2) iz.
Отсюда:
для цилиндра
для конуса
9'2,
A1 A~ ~
$ 28] ПОВЕРХНОСТИ НУЛЕВОЙ ГАУССОВОЙ КРИВИЗНЫ J57
По формулам главы 1 можно вычислить и коэффициенты второй квадра-
квадратичной формы цилиндра и конуса. Получим:
для цилиндра
т п т от— У'г" — г'У" .
La = 0, Lft = U, LM - Vy,.i + z,2 .
для конуса
г п г _п т — «1 (cos 9 sin2 0 + 29'2 cos2 9 — 9" sin 9)
Следовательно, цилиндр и конус векторными уравнениями A1.28.1)
и A1.28.3) задаются в линиях кривизны, так как в обоих случаях система
криволинейных координат ортогональна (cos % = 0) и сопряжена (L12 = 0).
Кроме того, так как Ln = 0, то можно утверждать, что о^-линии, т. е. обра-
образующие цилиндра и конуса, являются асимптотическими линиями.
Главные радиусы кривизны для поверхностей, отнесенных к линиям кри-
кривизны, подсчитываются по формулам A.5.1), поэтому
для цилиндра
_!__0 1 = у'г"-г'у" 1
A/р — кривизна направляющей кривой);
для конуса
_1_ _ _ 1 _ cos 9 sin2 9 + 29>а cos» 9 — У sin 9
Гауссова кривизна К для обоих видов рассматриваемых поверхностей
будет во всех точках равна нулю.
Кроме цилиндров и конусов, к поверхностям нулевой кривизны принад-
принадлежат так называемые поверхности касательных, представляющие собой
геометрическое место касательных к произвольной пространственной кри-
кривой *). Цилиндром, конусом и поверхностями касательных исчерпываются
все поверхности нулевой кривизны, которые называются также торсами
и развертывающимися поверхностями (последнее название связано с тем, что
эти поверхности и только они могут быть с помощью непрерывных конечных
изгибаний «развернуты» до совпадения с плоскостью). Отнесем произвольную
поверхность нулевой кривизны к линиям кривизны (a1} a2) и найдем, какой
вид при этом будут принимать коэффициенты первой квадратичной формы
и главные радиусы кривизны.
Если, как мы предполагаем, кривизна рассматриваемой поверхности
равна нулю, то одна из величин Rt или #а должна обратиться в бесконеч-
бесконечность. Пусть (как в цилиндре и конусе) /?х = оо. Тогда уравнения Кодацци—
Гаусса A.5.5) примут вид
да, \ R2 ) ~ U> Я8 да
_д_ I _1_ дАг \ ,Л_ ( _i_ Mi \ = О (И .28.5)
йа, \ Аг даг ) ' йа2 \ Л2 5а2 / *
Второе из них показывает, что А х зависит только от аг. Следовательно,
дифференциал длины дуги ах-линии можно записать так:
dst = Л, (a,
. *) К а г а н В. Ф., Основы теории поверхностей, ч. 1, Гостехиздат, 1947.
J58 ОБОЛОЧКИ С АСИМПТОТИЧЕСКИМИ ЛИНИЯМИ ИСКАЖЕНИЯ [ГЛ. II
Функция Аг (ах) зависит от выбора параметра alt и, если за последний
принять длину дуги ocj-линии, т. е. положить al = sb то вновь (как для ци-
цилиндра и конуса) мы получим
При таком значении Аг третье равенство A1.28.5) дает
А2 = АО» (оа) + «i^!) («2). A1-28.6)
а первое равенство A1.28.5) показывает, что
R2 = #<0) (ац) 4- auRp (ова). A1.28.7)
Таким образом, если соответствующим подбором параметра аг коэффи-
коэффициент А, первой квадратичной формы поверхности нулевой кривизны обращен
в единицу, то второй коэффициент этой квадратичной формы А2 и отлич-
отличный от бесконечности главный радиус кривизны R2 будут линейно зави-
зависеть от а.
В частных случаях Af^ и А^ могут обращаться в нуль (не одновре-
одновременно). При этом, как было показано выше, для цилиндра
а для конуса
§ 29. Приближенные методы расчета
цилиндрических оболочек
В § 11.26 было установлено, что обобщенный краевой эффект в оболочке
нулевой кривизны может при некоторых обстоятельствах выродиться.
При этом он утеряет свойство быстро затухать при удалении от породившей
его асимптотической линии возмущения, и вследствие этого станут незакон-
незаконными уравнения и формулы §§ 11.25, 11.26. В связи с этим мы изложим здесь
еще один приближенный метод расчета цилиндрических оболочек, который,
как выяснится ниже, сохраняет силу и в случае, когда в оболочке возникает
вырожденный обобщенный краевой эффект.
Выпишем дифференциальные уравнения цилиндрической оболочки.
Они получаются из уравнений произвольной оболочки, отнесенной к линиям
кривизны, если в последней положить
Л] = 1, Аа = В, Ri = Rii = oo, Ra = R A1.29.1)
и считать, что величины В и R зависят только от а2.
Запишем получающиеся при этом уравнения, введя в них дополнительные
условные множители /ь /2, /8J4 (они будут использованы ниже, а пока надо
считать, что ]г = }2 = /3 = /4 = 1).
(а) Уравнения равновесия F.44.1)
дТг 1 dSlt у п 1 дТ2 dS2r
да., + ~Т д(ц z~u- 'з da,
S 29] ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК 159"
(б) уравнения неразрывности деформаций F.44.2)
д*2 LJl__n — — I- —(г— i —\— ?1 -О
даг В дсц и> В д(ц д^ \ И 2R ) R ~ *
/з daj 2 8 fcI+tl~ U> dotj В да* 2 "Г"fea ~~U>
(в) уравнения состояния F.44.6)
= 71! — UvTt, 2EhE2 = ДГ, — vTit
ЕЫ = A + v) Sgl = A + v) Slg, A1.29.4)
3A
Эти уравнения мы будем упрощать, основываясь на следующих пред-
предположениях, представляющих собой несущественно видоизмененные гипо-
гипотезы, сформулированные В. 3. Власовым [26, 27].
Предположение 1. Справедливы сильные неравенства
Тг^Т2, к^щ, A1.29.5)
в силу которых в уравнениях состояния можно отбросить Т2 и кг по сравне-
сравнению с 7\ и к2, соответственно.
Предположение 2. Справедливы сильные неравенства
5„»-^-, т»-йг, A1.29.6)
в силу которых в шестом уравнении равновесия можно пренебречь слагае-
слагаемым H12/R по сравнению с S21, а во втором уравнении неразрывности де-
деформаций — слагаемым со/2# по сравнению с т.
Предположение 3. В четвертом уравнении равновесия можно отбросить
слагаемое, содержащее Я21, а в четвертом уравнении неразрывности дефор-
деформаций — слагаемое, содержащее со.
Предположение 4. В третьем уравнении равновесия можно отбросить сла-
слагаемое с Nlt а в третьем уравнении неразрывности — слагаемое с ?2-
Нетрудно проверить, что предположения 1, 2, 3, 4 соответственно экви-
эквивалентны утверждению, что в уравнениях A1.29.2)—A1.29.4) можно поло-
положить
/i = 0, yi==0, /з = 0, п = 0. A1.29.7)
Будем преобразовывать систему A1.29.2)—A1.29.4), A1.29.7). В ней
девять неизвестных Ти S2l, Slg, elt со, еа, ?,i, ?2. «i можно выразить через
произвольную функцию t таким образом, что будут тождественно удовлетво-
удовлетворяться: первое и шестое уравнения равновесия, первые три уравнения со-
состояния и последние три уравнения неразрывности деформаций. Соответ-
J5Q ОБОЛОЧКИ С АСИМПТОТИЧЕСКИМИ ЛИНИЯМИ ИСКАЖЕНИЯ (ГЛ. 11
¦ствующие формулы, которые легко проверить непосредственной подстанов-
подстановкой, имеют вид:
k = -lf-!~, (П.29.8)
JL
Оставшиеся неизвестные х2, т, Gb G2, #21, #12, JVj, N2, T2 можно вы-
выразить через другую произвольную функцию т так, что будут тождественно
удовлетворяться первое уравнение неразрывности, последние четыре урав-
уравнения состояния, третье, четвертое и пятое уравнения равновесия. Соот-
Соответствующие формулы аналогичны A1.29.8) и имеют вид
/t2 v дт сft2 I dm
J~ 3A—v2) S За,1 г~ 3A— v2) В dot '
д. h? I д I dm j, ft8 R д 1 д 1 dm . py
*~ 3A — v2)T 'да^'в"дщу a ~ 3A —v2) Т~дщ~В~ Sa7 ~B ~da^ "*"
Остается выполнить только второе уравнение равновесия и второе урав-
уравнение неразрывности деформаций. Подставляя в них неизвестные величины по
формулам A1.29.8) и A1.29.9), получим систему уравнений для определения
функций t и т. Ее можно записать в виде
да2
A1.29.10)
где использовано обозначение
Назовем A1.29.10), A1.29.11) разрешающими уравнениями теории
В. 3. Власова. Соответствующими им расчетными формулами являются
равенства A1.29.8), A1.29.9). Отметим, что метод В. 3. Власова отличается
от всех изложенных выше приближенных подходов тем, что в нем во втором
уравнении равновесия учитывается усилие N2, а во втором уравнении нераз-
неразрывности деформаций учитывается величина ?i- Как выяснится ниже, об-
областью рациональной применимости метода В. 3. Власова являются доста-
достаточно длинные цилиндрические оболочки (для этого случая он и был предло-
предложен его автором). Для таких оболочек, как уже говорилось, теряют силу пред-
предположения 1, 2 теории пологих оболочек (§ 10.22), т. е. становятся непра-
неправильными утверждения, что можно отбрасывать Nt, N2 в первых двух урав-
уравнениях равновесия, а Zi, ?2 — в первых двух уравнениях неразрывности
29) ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
деформаций. Таким образом, в теории цилиндрических оболочек уравнения
A1.29.10), A1.29.11) и уравнения A0.22.5) естественным образом дополняют
друг друга. Первыми целесообразно пользоваться для длинных цилиндри-
цилиндрических оболочек, а вторыми—для коротких. Более обоснованное обсужде-
обсуждение сформулированных здесь предположений В. 3. Власова, а также свойств
уравнений A1.29.10) будет проведено в следующей главе, а также (для кру-
круговых цилиндрических оболочек) в части V. В этих разделах такие понятия,
как короткая и длинная цилиндрическая оболочка, получают более четкое
определение.
В. В. Новожилов назвал предложенный В. 3. Власовым метод полу-
безмоментной теорией, подчеркивая этим, что в нем сохраняется только часть
моментов, а именно, моменты G2, действующие по поперечным сечениям обо-
оболочки.
Если исследованию подлежит цилиндрическая панель (не слишком длин-
длинная и не слишком короткая цилиндрическая оболочка), то можно восполь-
воспользоваться приближенным методом В. В. Новожилова, который назвал его
упрощенной теорией цилиндрических пластин [92, 120]. Эта теория представ-
представляет собой дальнейшее упрощение теории В. 3. Власова и может быть полу-
получена, если к сформулированным выше гипотезам присоединить следующие
дополнительные предположения.
Дополнительное предположение 1. Во втором уравнении неразрывности
деформаций A1.29.3) можно отбросить слагаемое, содержащее ?х.
Дополнительное предположение 2. Во втором уравнении равновесия
A1.29.2) можно отбросить слагаемое, содержащее N 2.
Дополнительное предположение 3. При дифференцировании по перемен-
переменной а2 во всех уравнениях коэффициенты можно рассматривать как кон-
константы.
Легко проследить, что дополнительные предположения 1 и 2 эквива-
эквивалентны отбрасыванию второго слагаемого в правой части формулы A1.29.11),
задающей вид оператора М. Учитывая дополнительное предположение 3,
этот оператор можно записать так:
M(F) = -?-^. A1.29.12)
Эта формула вместе с равенствами A1.29.10) и определяет систему раз-
разрешающих уравнений метода В. В. Новожилова. Возможна и другая интер-
интерпретация: формулы, и уравнения этого метода эквивалентны соотноше-
соотношениям приближенной теории -невыродившегося обобщенного краевого эф-
эффекта, изложенной в § 11.25. На обосновании этого утверждения мы оста-
останавливаться не будем.
11 А. Л. Гольленгейзер
ГЛАВА 12
ОБЗОР ПРИБЛИЖЕННЫХ МЕТОДОВ РАСЧЕТА ОБОЛОЧЕК
§ 30. Границы применимости приближенных методов
расчета оболочек
Основным приближенным приемом исследования напряженно-деформи-
напряженно-деформированного состояния оболочки можно считать метод расчленения (§§ 9.13—
9.19), во многих случаях вырождающийся в безмоментную теорию (§ 7.3).
На нем, в сущности, базируется большинство практических приемов расчета
оболочек, хотя термин «метод расчленения» обычно и не употребляется.
Вместе с тем, метод расчленения не универсален, так как его применимость
обусловлена целым рядом требований (§9.13). Поэтому, обращаясь к обзору
приближенных методов расчета оболочек, будем поступать так: перебирать
ситуации, не позволяющие применить метод расчленения, и обсуждать воз-
возможность заменить его в этом случае каким-либо другим приближенным ме-
методом, основанным на особенностях разбираемой ситуации.
Одно из условий применимости метода расчленения заключается в тре-
требовании, чтобы изменяемость искомого напряженного состояния была не
слишком велика. С него мы и начнем намеченное обсуждение.
Рассмотрим4 равенство
Ф = ц>(аи аъ)екИа1>а1\ A2.30.1)
в котором k — большая константа, а ф и / — функции, имеющие «среднюю»
изменяемость, т. е. такие, что модули их производных не слишком малы
и не слишком велики по сравнению с модулем соответствующей первообраз-
первообразной функции (напомним, что, как говорилось в § 9.13, об изменяемости функ-
функций можно судить, сопоставляя абсолютные значения самой функции и ее
производных).
; Продифференцируем A2.30.1) по некоторому направлению у и, учитывая
свойства величин k, f, ф, напишем
Отсюда следует, что в общем случае дифференцирование функции вида
A2.30.1) сводится, грубо говоря, к помножению ее на величину порядка
О (k). Исключение представляет случай, когда точно или приближенно вы-
выполняется равенство
|?~0. , . A2.30.2)
Основываясь на этом, будем говорить, что функции вида A2.30.1) при больших
k имеют большую однородную изменяемость, и заметим, что могут существо-
существовать направления, в которых изменяемость функции Ф становится значи-
$.30] ¦ ГРАНИЦЫ ПРИМЕНИМОСТИ ПРИБЛИЖЕННЫХ МЕТОДОЙ
тельно меньше. Такие квазистационарные направления проходят вдоль ли-
линий уровня функции /. Им соответствует переменное у, для которого выпол-
выполняется равенство A2.30.2).
В качестве числовой характеристики изменяемости функции Ф можно
принять константу k. Она определит порядок отношения абсолютных вели-
величин, производных от Ф, к модулю самой функции Ф во всех точках, где k,
f, ф имеют оговоренные выше свойства. Однако в теории оболочек удобнее
пользоваться для этого показателем изменяемости, т. е. числом t, определяе-
определяемым формулой
k = h~\ A2.30.3)
где h^ — безразмерная полутолщина оболочки, равная отношению полу-
полутолщины к характерному радиусу кривизны оболочки. Смысл / можно по-
пояснить на следующем примере. Если h^ — 0,001, а / = 1/3, то изменяемость
функции вида A2.30.1) будет такой, что при каждом дифференцировании в на-
направлении, отличном от квазистационарного, функции Ф будут приобретать
множитель порядка /цг1/3, т. е., грубо говоря, увеличиваться на порядок
(в 10 раз).
Изменяемость функции в квазистационарном направлении надо харак-
характеризовать другим числом, а именно, если приближенное равенство A2.30.2)
означает, что
~ду
то изменяемость Ф можно охарактеризовать константой k! = khat или числом
t', которое можно ввести при помощи формулы
В дальнейшем, в тех случаях, когда надо подчеркнуть существование ква-
квазистационарных направлений, мы будем называть t общим показателем'
изменяемости, at' — частным показателем изменяемости (f < t).
Формулой вида A2.30.1), при тех ограничениях, которые были нало-
наложены на k, f, ф, охватывается широкий, но далеко не всеобъемлющий класс
функций. Последние могут, в частности, быть неоднородными по изменяе-
изменяемости. Вместе с тем, практически любую функцию, определяющую внешние
воздействия (кроме сосредоточенных), и вызванное ими напряженно-дефор-
напряженно-деформированное состояние можно, с достаточной точностью, аппроксимировать
при помощи сумм, составленных из выражений вида A2.30.1). Это следует
хотя бы из того, что, положив в A2.30.1)
ф = с, k = ip, f = a1a1-\-a2<x2 (с, р, af, a2 = const, i = V— 1),
мы получим общий член комплексного тригонометрического ряда, и, следова-
следовательно, даже в частном случае обсуждаемую сумму можно рассматривать
как отрезок ряда Фурье, способного аппроксимировать функции весьма
общего вида.
В дальнейших рассуждениях мы ограничимся случаем, когда внешние
воздействия, вызывающие рассматриваемое напряженно-деформированное
состояние, задаются одной величиной В (имеют одну, отличную от нуля ком-
компоненту), которая представляет собой функцию вида A2.30.1). В линейной
теории оболочек это ограничение несущественно: если В есть функция более
общего вида, то ее можно аппроксимировать некоторой суммой функций
вида Ф и каждый член этой суммы рассмотреть отдельно. Так же можно по-
поступить и в случае, если отличны от нуля не одна, а несколько компонент
внешних воздействий. . , ¦
11*
J64 ОВЗОР ПРИБЛИЖЕННЫХ МЕТОДОВ РАСЧЕТА ОБОЛОЧЕК 1гЛ. 12
Итак, зададим В следующим образом:
В = фвк7, A2.30.4)
будем считать, что ф и / определены в некоторой двумерной области (если
это, например, компонента поверхностной нагрузки) или на некоторой линии
(если это, например, краевая сила), под к будем понимать фиксированную
константу и назовем число 9, удовлетворяющее равенству
к = h~\
показателем изменяемости внешних воздействий. В приложении (§§ П. 12,
П. 13) показано, что если внешнее воздействие имеет вид A2.30.4), то поро-
порожденное им напряженно-деформированное состояние оболочки, вообще го-
говоря, имеет вид
R ь s
Р = Е Л» Рр = <V*p4 A2.30.5)
р=0
т. е. составляется как сумма некоторого числа напряженных состояний Рр,
s
каждая компонента которых Рр задается функцией вида A2.30.1), причем
при фиксированном р число k9 и функция /р имеет одинаковый смысл для
Ь S
всех компонент Рр (они отличаются друг от друга смыслом функций фр).
Показано также (§ П. 16), что, если показатель изменяемости 9 удовле-
удовлетворяет соотношениям
п . {1/3 при К ф 0,
9<6'= ,. К „ . A2.30.6)
{ 1/4 при К = 0 v '
(К — гауссова кривизна срединной поверхности), то четыре слагаемых суммы
A2.30.5), которые мы для определенности обозначим через Рд (ц = 1,2, 3, 4),
можно с некоторой степенью приближения найти, исходя из безмоментных
уравнений. Это значит, что Рд соответствуют основному напряженному со-
состоянию. Остальные члены суммы A2.30.5) соответствуют (в случае, когда все
края — неасимптотические) простым краевым эффектам. Таким образом, не-
неравенство A2.30.6) представляет собой условие, которому должен отвечать'
показатель изменяемости внешнего воздействия, чтобы можно было приме-
применять метод расчленения в его простейшем виде.
Для существования простых краевых эффектов требование A2.30.6)
не является необходимым. Его можно заменить менее сильным, не завися-
зависящим от знака кривизны, требованием, выражаемым неравенством
Заметив это, рассмотрим случай, когда показатель изменяемости внеш-
внешнего воздействия заключен в пределах
13**°' A2-30-7>
При таком значении 9 все члены суммы A2.30.5), кроме первых четырех,
будут по-прежнему соответствовать простым краевым эффектам. Напряженно-
деформированные состояния Рц (|а = 1, 2, 3, 4) можно при этом рассматри-
рассматривать как некоторое обобщение основных напряженных состояний. Чтобы
пояснить смысл этого утверждения, заметим следующее. Если компоненты
напряженно-деформированного состояния Рр определяются вторым равен-
равенством A2.30.5) и в нем &р — большое число, то при приближенном определе-
§ 301 ГРАНИЦЫ ПРИМЕНИМОСТИ ПРИБЛИЖЕННЫХ МЕТОДОВ
s
нии Рр надо функцию /р определить с повышенной точностью, так как она
содержит большой множитель и входит в показатель степени. Поэтому
высказанное выше утверждение, что при выполнении A2.30.6) можно при-
приближенно построить Рд исходя из безмоментных уравнений, означает, что
этих уравнений достаточно для точного определения fp и приближенного
s
построения фр. Если же вместо A2.30.6) станут справедливы неравенства
A2.30.7), то, как показано в приложении, безмоментные уравнения позво-
позволят определить fp лишь приближенно и будут совсем недостаточны для пост-
построения фр. Таким образом, под обобщенным основным напряженным состоя-
состоянием подразумевается такое напряженное состояние, для которого безмомент-
безмоментные уравнения продолжают управлять качественными свойствами (позво-
(позволяют приближенно определить /р), но уже недостаточны для количественного
s
анализа (не позволяют строить фр).
Итак, в случае, когда показатель изменяемости Э заключен в пределах
A2.30.7), можно применить еще один вариант метода расчленения (кроме
указанного в § 11.27). Он заключается в том, что полное напряженно-дефор-
напряженно-деформированное состояние оболочки ищется в виде суммы обобщенного основного
напряженного состояния и краевых эффектов (последние также могут быть
обобщенными). Обобщенное основное напряженное состояние, как мы ви-
видели, нельзя строить при помощи безмоментных уравнений, но вопроса о том,
чем должны быть заменены эти уравнения, мы разбирать не будем. В § 24.11
показан пример применения обобщенного метода расчленения к расчету
круговых цилиндрических оболочек.
Неравенства A2.30.6) и A2.30.7), как условия применимости простого
или обобщенного методов расчленения, удобны для практического исполь-
использования, так как в них в — показатель изменяемости внешних воздействий —
есть число, которое можно считать известным из условий задачи. Надо, од-
однако, помнить, что мы существенно опирались на предположение об одно-
однородной изменяемости внешних воздействий. Как правило, в конкретных
задачах это будет не так, поэтому прежде чем применять критерии A2.30.6)
и A2.30.7), надо в общем случае разложить внешние воздействия на однород-
однородные (по изменяемости) слагаемые, т. е., например, в случае, когда оболочка
деформируется под действием нормальной поверхностной нагрузки, задавае-
задаваемой компонентой Z, эту величину надо представить в виде
00
а затем расчленить в правой части сумму на три слагаемых
<2)
r=p,+l
таким образом, чтобы к Z(U относились все слагаемые, в которых Э < 9\
а к Z<2> относились все слагаемые, в которых О' <С Э <С 1/2. При этом метод
расчленения и обобщенный метод расчленения будут пригодны для прибли-
приближенного исследования напряженно-деформированных состояний, вызван-
вызванных воздействиями ZA> и ZB) соответственно. Для исследования результата
воздействия Z в целом методом расчленения можно воспользоваться только
тогда, когда ZA) достаточно хорошо аппроксимирует Z; практически это часто
можно установить и не прибегая к разложению внешних воздействий.
Jg§ ОБЗОР ПРИБЛИЖЕННЫХ МЕТОДОВ РАСЧЕТА ОБОЛОЧЕК [ГЛ.12
Если вместо A2.30.6) или A2.30.7) выполняется неравенство
1/2,
то и метод расчленения, и обобщенный метод расчленения станут непригод-
непригодными. В этом случае все члены суммы A2.30.5) будут соответствовать напря-
напряженным состояниям с большой изменяемостью (§ П. 14). Приближенное ре-
решение таких задач можно выполнять, исходя из теории напряженных со-
состояний с большой изменяемостью (§ 10.24).
Итак, по признаку изменяемости внешних воздействий возможны три
приближенных подхода к расчету оболочек: метод расчленения, имеющий
силу при 6 < 6', обобщенный метод расчленения, имеющий силу при 6' <
<С 6 < 1/2, и теория напряженных состояний с большой изменяемостью,
имеющая силу при 0 ;з= 1/2. Надо, однако, заметить, что выделение обобщен-
обобщенного метода расчленения связано с формальными математическими соображе-
соображениями и не является обязательным. Обобщенный метод расчленения можно
рассматривать как частное проявление, теории напряженных состояний
с большой изменяемостью, так как последняя базируется лишь на предпо-
предположении о достаточно большой изменяемости искомого напряженно-дефор-
напряженно-деформированного состояния, а обобщенное основное напряженное состояние
и краевые эффекты этим свойством обладают. Встав на такую точку зрения,
можно считать, что альтернативой метода расчленения по признаку изменяе-
изменяемости является теория напряженных состояний с большой изменяемостью,
но область применимости последней надо определить неравенством
1/4 при К = 0.
Если край (или другая линия искажения) проходит вдоль асимптоти-
асимптотической линии срединной поверхности и 6 < 1/2, то вместо обсужденных выше
методов расчленения надо прибегнуть к методу расчленения, описанному
в § 11.27 и основанному на использовании обобщенных краевых эффектов.
Не имея в виду обсудить все связанные с этим детали, отметим некоторые
обстоятельства, важные при оперировании с обобщенными краевыми эф-
эффектами.
Для определения понятия функции с большой изменяемостью было вве-
введено представление A2.30.1), в котором под k подразумевалась большая
положительная константа. Оно играет важную роль и ниже во всех рассу-
рассуждениях, относящихся к учету влияния большой изменяемости. Поэтому
важно отметить, что формулой A2.30.1) задается широкий класс функций,
поскольку в ней / и <р почти произвольны (ограничены только требованием
«средней изменяемости».). В приложении показана справедливость утвер-
утверждения, выраженного равенствами A2.30.5). Оно означает, что решения
граничных задач, характерных для статической теории оболочек, могут быть
приближенно представлены в виде суммы конечного числа слагаемых вида
A2.30.1). Поэтому можно считать, что понятие функции, имеющей большую
изменяемость, определено с достаточной для интересующих нас задач общ-
общностью.
Значительно труднее ввести определение функций с весьма малой изме-
изменяемостью, с которыми приходится часто иметь дело в теории обобщенных крае-
краевых эффектов. Для этой цели неприемлем, казалось бы, естественный подход:
сохранить представление B0.30.1), но считать, что в нем k весьма мало. Дело
в том, что под функцией с малой изменяемостью надо подразумевать такую
функцию, производные которой по модулю малы по сравнению с ней самой,
а A2.30.1) при малых k таким свойством, вообще, не обладает. Можно пока-
показать (но на этом мы останавливаться не будем), что достаточно общих для
f 30] ГРАНИЦЫ ПРИМЕНИМОСТИ ПРИБЛИЖЕННЫХ МЕТОДОВ 167
задач теории оболочек представлений функций с весьма малой изменяе-
изменяемостью и не существует. Поэтому в дальнейшем показатель изменяемости t
будет, как правило, считаться неотрицательным, а в тех случаях, когда при-
придется вводить в рассуждения отрицательный показатель изменяемости, будет
считаться, что это понятие в каждом конкретном случае некоторым образом
уточнено. Это легко сделать для. круговой цилиндрической оболочки, как
будет видно в части V, но для оболочек более сложной формы это сопряжено
с трудностями, на которых мы не будем останавливаться.
Изменяемость обобщенных краевых эффектов имеет свои характерные
черты, качественное описание которых было дано в § 11.26. Количественно
они выражаются формулой
<=-Tqrr. A2.30.8)
в которой t — общий показатель изменяемости, f — показатель изменяе-
изменяемости в квазистационарном направлении, as — удвоенная кратность асим-
асимптотических линий срединной поверхности, проходящих в рассматриваемом
квазистационарном направлении. Равенство A2.30.8) доказывается в § П.10
Приложения при рассмотрении свойств интегралов с заданной характери-
характеристической квазистационарной линией, которыми и определяются обобщенные
краевые эффекты. Оно верно не только для обобщенных краевых эффектов
в оболочках нулевой кривизны (когда надо полагать s = 2) и в оболочках
отрицательной кривизны (когда надо полагать s = 1), но и для простых
краевых эффектов. В последнем случае квазистационарное направление не
проходит вдоль асимптотических линий и надо положить s = 0, что ведет
к уже известному результату: t = 1/2 при любом Г.
Из формулы A2.30.8) видно, что при f = 0, когда изменяемость в квази-
квазистационарном направлении не велика (но и не слишком мала), получаем t =
= 1/4 для оболочки нулевой кривизны и t = 1/3 для оболочки отрицательной
кривизны, в то время как для простого краевого эффекта t — 1/2. Это вполне
согласуется с качественными выводами § 11.26. Из A2.30.8) видно также,
что только при s = 0, т. е. в простом краевом эффекте, общий показатель
изменяемости t не зависит от ?. В обобщенных краевых эффектах t возрастает
вместе с f и при f = 1/2 общий показатель изменяемости t для всех (простых
и обобщенных) краевых эффектов получается одинаковым: t = t' = 1/2,
а при дальнейшем возрастании t понятие о краевых эффектах, как мы знаем,
теряет смысл.
Значительно более сложными являются случаи, когда линии искажения
не проходят вдоль асимптотических линий срединной поверхности оболочки,
а касаются их в отдельных точках. Они встречаются, например, в таких прак-
практически важных задачах, как расчет оболочек неположительной кривизны
с отверстиями. По-видимому, не случайно задача о цилиндрической оболочке
с отверстием получила приемлемое аналитическое решение только в случае,
когда отверстие мало [80].
Разнообразные и трудные проблемы возникают в случаях, когда оболочка
имеет особую или близкую к особой срединную поверхность (§ 9.13). При этом
снова будет нарушено одно из условий применимости метода расчленения,
а единого альтернативного приближенного подхода, по-видимому, не су-
существует. Можно ожидать, что они будут разными, когда различны причины,
по которым срединная поверхность должна считаться особой.
Одним из примеров особых поверхностей является плоскость. Если обо-
оболочка вырождается в пластину, то метод расчленения следует заменить рас-
расчетом по теории изгиба пластинки или по теории обобщенного плоского на-
напряженного состояния. Если оболочка делается пологой, то на смену методу
расчленения приходит приближенная теория пологих оболочек.
168 ОБЗОР ПРИБЛИЖЕННЫХ МЕТОДОВ РАСЧЕТА ОБОЛОЧЕК [ГЛ. 12}
Совсем иные подходы требуются при расчете торообразной оболочки,
срединная поверхность которой также относится к особым (§ 9.13). Этому
вопросу посвящена обширная литература (см., например, [69, 98, 118, 123,
124, 130, 131, 141, 154]). Мы на нем останавливаться не имеем возможности.
Наконец, особыми или близкими к особым могут быть цилиндрические
оболочки, если их длина достаточно велика. Такие оболочки первостепенно
важны для практических применений, и поэтому мы посвятим им весь сле-
следующий параграф.
§ 31. Приближенные методы расчета
цилиндрических оболочек
Приближенные методы исследования напряженно-деформированного
состояния цилиндрической оболочки мы будем обсуждать, исходя из урав-
уравнений A1.29.10), A1.29.11) и расчетных формул A1.29.8), A1.29.9). Примем
для простоты, что компоненты внешней нагрузки Xlt X2, Z обращаются
в тождественные нули, перепишем A1.29.10), A1.29.11) еще раз:
L
m = -L — A-.JLJ-JL_L_iL J__iL_L i_
В д<х2 В да.г В даг В д<х2 "•" BR da3 В да2
и обсудим физический смысл этих уравнений.
При определенных обстоятельствах, которые выявятся ниже, слагае-
слагаемые, содержащие оператор М, можно отбросить, т. е. заменить A2.31.1)
приближенными равенствами
-^- = 0, ^г = 0. A2.31.2)
Общее решение этих уравнений, очевидно, составляется из двух следую-
следующих решений:
t = to + a1tu m = 0; A2.31.3)
/ = О, т = то-{-а1т1, A2.31.4)
в которых t0, tu т0, тх — произвольные функции независимой переменной
ос2. Тангенциальные усилия, соответствующие A2.31.3), и компоненты из-
гибной деформации, соответствующие A2.31.4), подсчитываются по форму-
формулам A1.29.8), A1.29.9). Положив в них Xv = Х2 = Z ее 0, получим
Т = — Ж- _ JL ^о_4- ai ^i
1 ~ В да? В да2 > В да2 '
dt ' A2.31.5)
п р, 1 din I dttiQ . ctj ^^i
В да, В да2 В да2 A2.31.6)
2?/гт = -^~ = пги 2?/гк, = 0.
Формулы A2.31.5) определяют точное решение однородных статичес-
статических безмоментных уравнений G.4.2), а формулы A2.31.6) определяют точное
решение геометрических безмоментных уравнений G.5.2). В этом можно
убедиться непосредственной подстановкой, при которой надо, конечно, при-
принимать во внимание геометрические свойства цилиндрических оболочек, выра-
§ 31] ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
жаемые формулами A1.29.1). Таким образом, вырождение системы A2.31.1)
в A2.31.2) соответствует переходу к уравнениям безмоментной теории, так
как решения A2.31.5), A2.31.6) дают и безмоментное, и чисто моментное на-
напряженные состояния, а из комбинации последних и составляется любое
решение безмоментных уравнений (§ 7.3). Аналогичные свойства были от-
отмечены и при обсуждении уравнений A0.22.5). Вырождение их в уравне-
уравнения A0.23.1) соответствует переходу к уравнениям безмоментной теории.
Однако надо иметь в виду существенную подробность: соответствие A0.23.1}
с уравнениями безмоментной теории — приближенное, в то время как урав-
уравнения A2.31.2) точно эквивалентны уравнениям безмоментной теории.
Выясним условия, при которых решения системы A2.31.2) приближенно-
удовлетворяют исходным уравнениям A2.31.1). Пусть
t = f + f, m = m' + m"
и f, m' представляют собой решение вида A2.31.3). Тогда для поправок t",
т" получится следующая система уравнений:
f| 0, Щ- + М(П= — М(П A2.31.7)
и ответ на поставленный вопрос будет положительным, если среди решений
системы A2.31.7) найдутся такие, в которых /", т" по абсолютным значениям
существенно меньше модулей t', m' соответственно. Постулируя, что t"',.
т" действительно обладают такими свойствами, заменим нулем правую часть-
второго равенства A2.31.7) и заметим, что согласно A2.31.1) оператор М не
содержит производных по а,. Следовательно, считая, что f определяется
первым равенством A2.31.3), где *0, tx есть функции ос2, получаем
Поэтому частный интеграл второго уравнения A2.31.7) можно взять
в виде
и нетрудно убедиться, что ему будет соответствовать следующий частный инте-
интеграл первого уравнения A2.31.7):
A2.31.8)
* ~ 3A—v2)
Далее, очевидным образом можно построить итерационный процесс.
Однако мы не будет входить в его детали и примем грубое предположение, что
погрешности, допускаемые при переходе к системе A2.31.2), можно оценить,
сравнивая правые части равенства A2.31.8) и первого равенства A2.31.3).
В результате условия применимости уравнений A2.31.2) запишутся так:
A2.31.9>
И.Ч*
513A—
рвЛ1Л1
hH*
413A— va)pe
рвЛШ
Здесь под / подразумевается длина оболочки (разность между наиболь-
наибольшим и наименьшим значениями at в рассматриваемой области), а постоянный
множитель р6 введен для того, чтобы сделать безразмерными левые и правые
части неравенств (под р можно, например, подразумевать средний радиус
кривизны поперечного сечения).
Такие же неравенства получатся, если вместо A2.31.3) взять решение
A2.31.4).
Примем, что уравнения A2.31.1) сохраняют силу для любых напряженно-
деформированных состояний, показатель изменяемости которых меньше
J70 ОБЗОР ПРИБЛИЖЕННЫХ МЕТОДОВ РАСЧЕТА ОБОЛОЧЕК [ГЛ. 12
1/2 (в §§24.7, 24.11 это будет доказано для круговой цилиндрической обо-
оболочки). Тогда можно утверждать, что неравенства A2.31.9) определяют
область применимости безмоментных уравнений в зависимости от длины
цилиндрической оболочки. Они показывают, что в цилиндрических оболочках
погрешности безмоментных уравнений растут не только при увеличении из-
изменяемости (как и должно быть в соответствии с общими результатами
§ 12.30), но также и при увеличении длины оболочки. Последнее обстоя-
обстоятельство объясняется тем, что длинный цилиндр надо рассматривать как осо-
особую срединную поверхность (§ 9.13).
Влияние длины / отражено в неравенствах A2.31.9) явно: обсуждае-
обсуждаемые погрешности растут пропорционально четвертой степени /. Влияние из-
изменяемости по а2 выявляется в структуре правых частей неравенств A2.31.9).
В них в знаменателях содержится дважды повторенный оператор М, который
определяется третьим равенством A2.31.1) и содержит четырехкратное диф-
дифференцирование по а2. Это значит, что если изменяемость функций t0 (а2),
/х (а2) характеризовать величиной
Г
П =
t
(oнaJ^aзьIвaeтcя мерой изменяемости и более подробно обсуждается в § П.13),
то можно условно принять, что
1
р«ММ
рвММ
A2.31.10)
Таким образом, для цилиндрических оболочек погрешность безмомент-
безмоментных уравнений пропорциональна квадрату толщины, четвертой степени длины
и восьмой степени меры изменяемости искомого напряженно-деформиро-
напряженно-деформированного состояния.
Замечание. Если относительная длина цилиндрической оболочки соизмерима с единицей,
то из сказанного следует, что погрешность безмоментных уравнений будет оцениваться фор-
формулой
Обозначив через 9 показатель изменяемоств искомого напряженно-деформированного состоя-
состояния в поперечном направлении, получим п = Л~". Следовательно,
Отсюда вытекает, что область применимости безмоментных уравнений по изменяемости
Ограничена требованием 9<jV4. вполне согласующимся с неравенством A2.30.6)
Приведем примеры определения области применимости безмоментных
уравнений при помощи неравенств A2.31.9). Ограничимся вторым из них
и примем, что в нем знак сильного неравенства означает требование, чтобы
правая часть была в 10 раз больше левой части. Получим
10
413A—v2)
* (t0)
A2.31.11)
где
* — р » *~~р' *~р4
Считая, что цилиндрическая оболочка имеет круговое поперечное се-
сечение, положим
В = R == р — const, tx = a0cos paa
$31] ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
и будем понимать под а2 центральный угол, задающий положение точки на
направляющем круге. Тогда в соответствии с третьим равенством A2.31.1)
получаем
а следовательно, при достаточно большом р в A2.31.11) можно положить
п = р.
Пусть h^ = 0,01 и мера изменяемости функции t0 равна единице. Тогда
из A2.31.11) для максимально допустимой относительной длины оболочки
будем иметь
. 4/413A-у)'
*~ V 10@.01)а
10 @,01 )а
Это значит, что для обеспечения точности, грубо говоря, равной 10% при
расчете по безмоментным уравнениям, нельзя допускать, чтобы длина ци-
цилиндрической оболочки была больше восьми диаметров.
Положив в A2.31.11) /ц = 0,01, 4 = 4, получим п — р «=* 2. Это зна-
значит, что безмоментные уравнения, даже для относительно короткой цилин-
цилиндрической оболочки (представляющей собой в плане прямоугольник 2 : 1),
могут применяться лишь при малой мере изменяемости искомого напряженно-
деформированного состояния. Для обеспечения ориентировочной точности
в 10% надо требовать, чтобы р =s? 2, т. е. при использовании тригонометри-
тригонометрических рядов по а2 можно вычислять гармоники не выше второй.
По поводу рассмотренного примера полезно сделать ряд замечаний.
Цилиндрическая оболочка представляет собой один из самых плохих
объектов для применения безмоментных уравнений, так как, во-первых, ци-
цилиндрическая оболочка имеет нулевую кривизну и для нее ограничение по
изменяемости, выраженное неравенством A2.30.6), оказывается наиболее
сильным; во-вторых, при увеличении длины срединная поверхность цилин-
цилиндрической оболочки становится «почти особой».
Замена средней части равенств A2.31.11) величиной п~3, конечно, очень
грубый прием, тем более, что, как выяснилось, число р оказывается неболь-
небольшим. Для оболочек некругового очертания надо среднюю часть равенств
A2.31.11) оценивать более точно, используя конкретные условия задачи.
Это позволит учесть влияние переменности радиуса кривизны R на область
применимости безмоментных уравнений (вычисления, на которых мы не оста-
останавливаемся, показывают, что для некруговых цилиндрических оболочек
эта область делается еще более узкой).
Наконец, обратим внимание на то, что в настоящем параграфе речь все
время шла о применимости безмоментных уравнений, т. е. о применимости
метода расчленения, но не о безмоментности искомого напряженного состоя-
состояния. Безмоментные уравнения, как уже говорилось, определяют основное
напряженное состояние, т. е. некоторую линейную комбинацию безмомент-
ного и чисто моментного напряженных состояний, и для того, чтобы в ней
господствовало безмоментное напряженное состояние, должны выполняться
дополнительные требования. Они связаны со способом закрепления краев
и будут обсуждаться в части IV. Кроме того, безмоментное напряженное
состояние может выродиться (§ 7.2), и в цилиндрической оболочке это про-
происходит раньше, чем оказывается исчерпанной область применимости метода
расчленения. В этом случае основное напряженное состояние не будет без-
безмоментным при любом способе закрепления краев.
|72 ОБЗОР ПРИБЛИЖЕННЫХ МЕТОДОВ РАСЧЕТА ОБОЛОЧЕК 1ГЛ. 12
§ 32. Область применимости приближенных уравнений
В. 3. Власова
Возвратимся к общему случаю и покажем, что плохая применимость
безмоментных уравнений к расчету цилиндрических оболочек является пра-
правилом, допускающим важные исключения. Для этого будем искать такие
решения безмоментных уравнений A2.31.2), которые точно удовлетворяют
уравнениям A2.31.1). Такие решения, если они есть, должны, помимо
A2.31.2), удовлетворять уравнениям
M(t) = 0, М(т) = 0, A2.32.1)
в которых оператор М, согласно A2.31.1), содержит дифференцирования
только по а2. Подставив сюда t и т по формулам A2.31.3), мы обратим второе
равенство A2.32.1) в тождество, а первое из этих равенств даст два обыкно-
обыкновенных дифференциальных уравнения
М(/о) = 0, М(^) = 0 A2.32.2)
для определения величин t0, tx, как функций переменной а2. Отсюда получаем
решение
'* = ScJ(o.) № = 0, 1),
s=l
в котором Csk — константы, а / (а2) — линейно независимые решения одного
из уравнений A2.32.2).
Так же, исходя из формул A2.31.4), будем иметь
4 s
Щ = IiDskm(a,) (k = 0, 1).
Окончательно получаем следующие решения:
4 S 4 S 4 6 4 S
t = Ij Cs 4 К) + «i S Cs xt (a2), m = ? DsOm (a2) -f ax ? D^m (a2),
S=l S=l S=l 5=1
)
точно удовлетворяющие как уравнениям A2.31.1), так и безмоментным урав-
нениям~{42.31.2). Они и только они обладают искомым свойством, т. е. опре-
определяют напряженно-деформированные состояния оболочки, удовлетворяющие
безмоментным уравнениям при любых / и п.
Эти решения мы более подробно обсуждать не будем. Можно показать,
что ими описываются случаи, когда оболочка работает как балка или как
арка. Таким образом, можно сказать, что в структуре системы A2.31.1) отра-
отражено родство цилиндрической оболочки с балкой и аркой.
Разумеется, среди решений уравнений A2.31.1) содержатся и такие,
при построении которых надо учитывать как члены с оператором d2/da'i,
так и члены с оператором М, на равных основаниях. Это будут, очевидно,
решения, соответствующие обобщенным краевым эффектам (§§ 11.25, 11.26),
в том числе и вырожденным. Наконец, существуют и такие интегралы урав-
уравнений теории цилиндрических оболочек, которые при помощи приближенной
системы A2.31.1) нельзя строить даже в самом грубом приближении. Не имея
возможности войти в детали этого вопроса, мы сформулируем только оконча-
окончательные результаты. Они получат подтверждение в части V при рассмотре-
рассмотрении круговой цилиндрической оболочки.
Исходя из уравнений A2.31.1), можно с той или иной степенью точности
строить:
(а) основное напряженное состояние,
(б) обобщенное основное напряженное состояние,
S 32l ОБЛАСТЬ ПРИМЕНИМОСТИ УРАВНЕНИЙ В. 3. ВЛАСОВА 173
(в) обобщенный краевой эффект вблизи линии у, проходящей вдоль
прямолинейной образующей цилиндра. '
В то же время уравнения A2.31.1) могут привести к ошибкам даже
в главных членах, если применять их к построению напряженных состояний
с большой изменяемостью или краевого эффекта вблизи линии у, не проходя-
проходящей вдоль образующей.
Таким образом, областью применимости уравнений A2.31.1), а вместе
с тем и метода В. 3. Власова является расчет цилиндрических оболочек при
условии, что в них не играют существенной роли напряженные состояния
с большой изменяемостью и что по тем или иным причинам не возникает необ-
необходимости обследовать краевой эффект вблизи поперечных краев оболочки.
Таким образом, метод В. 3. Власова можно трактовать как приближенный
прием, заключающийся в использовании обобщенного метода расчленения
и в дополнительном предположении о возможности пренебречь простым кра-
краевым эффектом.
Ч а с т ь III
КРАЕВЫЕ ЗАДАЧИ БЕЗМОМЕНТНОЙ ТЕОРИИ
Этот раздел посвящен рассмотрению краевых задач безмоментной тео-
теории. Под последними подразумевается интегрирование дифференциальных
уравнений безмоментной теории с учетом так называемых идеализированных
тангенциальных- граничных условий, т. е. равенств, определяющих краевые
значения либо усилий, либо перемещений, лежащих в касательной плоскости.
Излагаются методы эффективного построения этих решений и много
внимания уделяется обстоятельствам, при которых решения существуют
и единственны. Эти вопросы в безмоментной теории решаются нетривиально.
Общая линейная краевая задача моментной теории оболочек единообразна:
она заключается в интегрировании эллиптической системы уравнений с вы-
выполнением в каждой точке края (или краев, если область многосвязна) че-
четырех граничных условий. Она всегда имеет единственное решение. Однако
при переходе к описанной выше безмоментной краевой задаче картина ста-
становится весьма пестрой, так как тип уравнений, подлежащих интегриро-
интегрированию, может оказаться любым (эллиптическим, гиперболическим и парабо-
параболическим). Различными по своему характеру оказываются и краевые задачи
безмоментной теории: это могут быть задачи типа Дирихле, задачи типа
Коши, а также задачи, не предусмотренные существующей классификацией.
К тому же может существовать несоответствие между типом краевой задачи
безмоментной теории и типом уравнений, для которых ее надо решать. На-
Например, задачу Дирихле иногда приходится решать для гиперболического
уравнения, а задачу Коши — для эллиптического. Все это приводит к тому,
что теоремы существования и единственности для краевых задач безмомент-
безмоментной теории формулируются далеко не единообразно и в них вопрос не всегда
решается положительно. Однако такая ситуация не свидетельствует о прин-
принципиальной порочности самой идеи выделения в самостоятельное рассмотре-
рассмотрение краевой задачи безмоментной теории. Каждая из описанных выше
«странностей» краевых задач безмоментной теории свидетельствует об опре-
определенных особенностях искомого напряженно-деформированного состояния
оболочки. Для широкого класса задач это будет показано в части IV.
Физически ясно, что, если мы хотим, чтобы напряженное состояние
оболочки было безмоментным, то надо так закрепить края, чтобы исключить
бесконечно малые изгибания ее срединной поверхности. Высказанное утвер-
утверждение иногда называют гипотезой В. В. Новодворского. В части IV предпри-
предпринята попытка положить эту гипотезу в основу формулировки условий суще-
существования краевых задач безмоментной теории. Они сформулированы в виде
гипотетической теоремы о возможных изгибаниях, которая вкратце заклю-
заключается в том, что, если при данном способе защемления краев изгибания
срединной поверхности возможны, то решение краевой задачи безмоментной
теории будет существовать только тогда, когда внешние силовые воздей-
воздействия не совершают работы на перемещениях этих изгибаний. Выяснилось,
что теорема о возможных изгибаниях должна быть обусловлена целым рядом
дополнительных предположений, полного списка которых получить не уда-
удалось. Тем не менее в части III постоянно проводятся сопоставления получае-
получаемых там теорем существования с теоремой о возможных изгибаниях. Это позво-
позволяет обнаружить те обстоятельства, которые исключают возможность по-
построения решения краевых задач безмоментной теории, а следовательно, как
уже говорилось, являются причиной некоторого искажения свойств напря-
напряженно-деформированного состояния оболочки.
ГЛАВА 13
МЕТОДЫ ПОСТРОЕНИЯ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ
УРАВНЕНИЙ
§ 1. Общий интеграл полной системы безмоментных
уравнений оболочек нулевой кривизны
Примем, что срединная поверхность оболочки есть произвольная по-
поверхность нулевой кривизны (цилиндр, конус или поверхность касательных),
и отнесем ее к линиям кривизны (alt a2), как изложено в § 11.28. Тогда будут
справедливы формулы
4=1, ?u = tfi,-°o, R» = R, A3.1.1)
и внеся их в G.4.2), G.5.1) и G.1.4), получим следующую головную систему
уравнений безмоментной теории оболочек нулевой кривизны:
а) статические уравнения
? ?^ -О,
A3.1.2)
б) геометрические уравнения:
<?mx 1 dut . д ( и2 \ 1 ди2 | 1
в) тангенциальные уравнения состояния
Пользуясь уравнениями пп. б) и в), геометрические уравнения можно
записать так:
r r . А д ( щ \ _ \ дих 1 +v о
A3.1.3)
1 ди2 1 дА 1
pp дифференциальных уравнений безмоментной оболочки
нулевой кривизны не представляет труда и может быть выполнено в общем
виде.
ПОСТРОЕНИЕ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ УРАВНЕНИЙ [ГЛ. 13
Перепишем в другом порядке статические уравнения A3.1.2), придав им
такой вид:
и представим тангенциальные усилия так:
Г1 = Г}Ч) + Г}6), S = SD) + Si6), T2 = 7Т° + 7f\ A3.1.5)
где (Т\ч), SD), Дч)) — частный интеграл неоднородных уравнений A3.1.4),
а (Т\б), SF), Т{б)) — общий интеграл соответствующей однородной системы.
Обе группы введенных величин легко находятся с помощью квадратур.
А именно, величины с индексом (ч) можно записать так:
о, [ a,
A3.1.6)
a,
_L I \ Л- -A- IU7\ Al yS\ Ar,. Г1Ч> D7
a.
причем нижний предел интегрирования а1 есть функция переменной а2,
которую надо считать фиксированной, но зависящей от нашего выбора.
Для величин с индексом (б) получим:
= 0, A3.1.7)
где /j = /j (а2), /2 = /2 (а2) — произвольные функции интегрирования.
Функции /г и /2 удобно заменить другими, положив
/i (кг) = ^2,1^ (а2), /г (аг) = ^2,1^ (а2)>
где Л2,1 = Л2|а1=а1.
Тогда вместо A3.1.7) будем иметь:
"' 2 2
jiF) 1_ Г д / Л2<\ Л ^2,1 ^(б) ^2,1 . jiF) q /»о I о\
Ql v 2 / 2
В этих формулах произвольные функции t=t(a2) и п = п(а2) имеют
простой физический смысл. Они представляют собой значения, которые
принимают SF) и Т\б) на линии аг = аг. Считая известными 7\, S, Т2 и
вводя в рассмотрение равенства A3.1.3) в том порядке, в котором они за-
записаны, легко при помощи квадратур записать решения этих уравнений.
Представим компоненты перемещения в виде трех слагаемых:
и = ыр) -)- м(б> -)- и\ыК и2 = ui4) -|- ы^б) -(- икы\ w = ш(чЧ-ш*б)-(-ш(м), A3.1.9)
§1] ОБЩИЙ ИНТЕГРАЛ УРАВНЕНИЙ ОБОЛОЧЕК НУЛЕВОЙ КРИВИЗНЫ 177
где (u[q\ «2Ч). и><"°) и (и\6), Цб\ w<6)) — частные интегралы неоднородной
системы A3.1.3), отвечающие (Т\ц\ S<4\ 7p>) и (Т\б\ S<6>, Г|б>) соответственно,
а (и{м), и2м), а>(м))— общий интеграл однородной системы A3.1.3).
Внося в правые части уравнений A3.1.3) вместо тангенциальных усилий
последовательно (Цч\ S<4>, 7]ч>) и (Т[б\ S<6>, Л,б>), получим:
о,
a, 2 a,
1 ^ it fw '
2 , J 2?й "ai 2?Л
и равным образом
(г}
(Нижний предел интегрирования а2 в формулах A3.1.10) и A3.1.11) также
есть функция а2, которую можно выбрать произвольно.)
Наконец, положив в правых частях уравнений A3.1.3) тангенциальные
усилия 7\, S и Т3 равными нулю и выполнив интегрирование, мы получим
иГ = Ф, (a2), aiM) = — Л2 J -— ^ da, + Л2ф2 (оя),
A3.1.12)
]
где срг (а2), ф2 (а2) — произвольные функции.
12 Д. Л. Гольденвейзер
178 ПОСТРОЕНИЕ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ УРАВНЕНИЙ [ГЛ. 13
Пусть при «j = аг величины А 2, и[м> и и|м) принимают следующие зна-
значения:
А2 = Л2,2, "iM) = Ф1 (ofc) = I (а2), «Г' = А2,2 Ф2 («г) = т] («г)-
Тогда, выразив в A3.1.12) функции фх (а2), ф2 (а2) через | (а2), т] (а2),
мы получим формулы, связывающие перемещения и(,м), и?м), ш(м) произ-
произвольной точки оболочки нулевой кривизны с теми значениями, которые при-
принимают тангенциальные перемещения и\ы), и|м> на краю:
а,
«Г = 5, «2М)=— Л2
A3.1.13)
а,
и<м» _ 1 д . ? 1 di , 1 а / а2
Замечание. В формулах A3.1.10) и A3.1.11) величина Eh ие вынесена из-под знака инте-
интеграла, так как можно считать, что Е, h, v переменны. В связи с этим отметим, что если речь
идет о системе уравнений моментной теории оболочек, то методы ее интегрирования будут
существенно зависеть от того, постоянны или переменны Е, h, v. Например, система уравне-
уравнений момеитной теории круговой цилиндрической оболочки при постоянных Е, h, v ие будет
иметь переменных коэффициентов, что существенно упрощает ее решение. Однако, если речь
идет о безмоментиых уравнениях, то переменность Е, h, v с точки зрения методов интегриро-
интегрирования становится не очень существенной.
§ 2. Преобразование безмоментных уравнений
сферической оболочки
Рассмотрим сферическую оболочку и отнесем ее срединную поверхность
к географической системе координат F, ф), описанной в § 10.21. Тогда
в векторной форме ее уравнение запишется так:
М = г sin 6 cos ф ix -f- r sin G sin q>iy -f- г cos 6/г
(ix, iy, lz — орты декартовой системы координат, изображенной на рис. 17).
Сделаем замену независимых переменных:
ai = lntg-|-. сс2 = Ф. A3.2.1)
При этом будут иметь место следующие формулы:
W A3.2.2)
и векторное уравнение сферы примет вид
. A3.2.3)
Замена переменных A3.2.1) не изменяет координатных линий (§ 1.1),
и следовательно, на сфере, заданной уравнением A3.2.3), о^-линиями будут
меридианы, а а2-линиями — параллели географической системы координат,
изображенной на рис. 17. Подсчитаем коэффициенты первой квадратичной
формы сферы A3.2.3)
V cos, = ^-.^- = 0. A3.2.4)
§ 2] ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ СФЕРИЧЕСКОЙ ОБОЛОЧКИ J79
Таким образом, в криволинейных координатах (аи а2) имеем:
(такая система координат называется изотермической).
Приступим к преобразованию статических безмоментных уравнений
G.4.2). На сфере любая кривая есть линия кривизны (§ 1.5), и следовательно,
в этих уравнениях можно положить /?п = Rlt R2i = R2, Ru = °°- Кроме
того, мы имеем R1 = ^2 = г и Л, = А2 — А. Поэтому G.4.2) можно пере-
переписать так:
Tt + Тг + rZ = 0.
Выразим Т\ и Тг через функцию Т при помощи формул
7\= —71 — -?-, Г,= Г —4"- A3.2.5)
Тогда третье уравнение равновесия обратится в тождество, а первые
два примут вид
4
2
да^ ' a оа2 V 2 /
Помножив каждое из этих равенств на Л/г2 и положив
г=^-7\ s = ^-S, A3.2.6)
получим для определения t и s следующую систему уравнений:
dt . ds _l 'А* у А* dz _п
~~ ион +5a7"t'~^-Al T5a7~ '
dt ds As у A* dZ _- A3.2.7)
5a2 + 5a7+ г* Лг~~ 2г ЙОа ~ U'
Приведение статических безмоментных уравнений сферической обо-
оболочки к виду A3.2.7) и составляло цель описанных преобразований. Для
оболочки, отнесенной к географическим координатам A3.2.3) согласно A3.2.4),
надо под А подразумевать величину
ch a,
Замечание. Для того чтобы безмоментные уравнения сферической оболочки приводились
к виду A3.2.7) при помощи подстановок A3.2,5) и A3.2.6), нет необходимости пользоваться
географической системой координат. Достаточно потребовать, чтобы срединная поверхность
оболочки была отнесена к изотермической системе координат (А1=А2и%= я/2). В связи
с этим полезно иметь в виду следующую теорему теории поверхностей: на любой поверхности
существует бесчисленное множество изотермических систем координат, причем все оии полу-
получаются из какой-либо одной при помощи преобразования независимых переменных:
li = li («l. «а). 1а = 1а (<*i. <Ч). .
12*
|gO ПОСТРОЕНИЕ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ УРАВНЕНИЙ 1ГЛ. 13
удовлетворяющего условиям
(конечно, при этом А будет иметь другой смысл).
Обратимся к преобразованию геометрических уравнений безмоментной
теории сферической оболочки. В общем случае они записываются в виде
равенств G.5.1). Положим в них Ах = А2 = А, /?12 = со, Rn = /?12 = г
и составим разность первого и третьего из этих уравнений. Присоединив
к полученному соотношению второе равенство G.5.1), получим систему, не
содержащую ш:
А da, "+" А2' da2 A daa ~ А2 da, "» ~ Bl Б2*
Эти уравнения при помощи подстановок
после простых преобразований приводятся к виду
Легко убедиться, что уравнения A3.2.9) и подстановка A3.2.8) остаются
в силе для сферической оболочки, срединная поверхность которой отнесена
к любой изотермической системе координат.
§ 3. Интегрирование уравнений безмоментной теории
сферических оболочек
Безмоментные дифференциальные уравнения сферической оболочки,
срединная поверхность которой отнесена к изотермической системе коорди-
координат, сведена в § 13.2 к уравнениям A3.2.7) и A3.2.9). Каждому интегралу t,
s уравнений A3.2.7) соответствуют тангенциальные усилия, вычисляемые
по формулам A3.2.5), A3.2.6), последним можно придать следующий вид:
Tj= — -дг-t 2~> Тл = -д?-г 2~, S21 = S12 = —jp s. A3.3.1)
Каждому интегралу уравнений A3.2.9) соответствуют тангенциальные сме-
смещения оболочки, вычисляемые по формулам:
«i-?. «а = ^- A3.3.2)
Нормальное перемещение w при известных ult ы2 можно найти без
интегрирования при помощи первого или третьего уравнения G.5.1). При
Аг = Аг = А и Ru = R22 = г оии дают
г диг . г дА г ди, . г дА /io о ъ\
В дальнейшем для определенности будем предполагать, что сфера
отнесена к изотермическим географическим координатам A3.2.3). Тогда
A =rcha1 и формулы A3.3.1) примут вид
7\ = — fchX — Ц-, T^tctfat — -^-, Su = S11 = sch2a1, A3.3.4)
§ 3] ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ СФЕРИЧЕСКИХ ОБОЛОЧЕК
а формулы A3.3.2) запишутся так:
Тангенциальные усилия и компоненты перемещения безмоментной
сферической оболочки, как и для оболочки нулевой кривизны, представим
в виде A3.1.5), A3.1.9).
Соответственно этому и функции t, s, р, q, через которые выражаются
усилия и перемещения безмоментной оболочки, также удобно представить
в виде
t = tl4l + tl6), s = sl4) + ^\ Р = Р(ч) + Р(б> + Р(М)- <? = <7<4) + <7(б) + ?(м).
причем #ч>, s<4> — частный интеграл уравнений A3.2.7); р<">, ^ч» — част-
частный интеграл уравнений
где
r<4)-vr{4)), ш(Ч) = i^- SD>;
)> s<6) — общий интеграл однородных уравнений
dt ds n
_ часТньш интеграл уравнений
dt ds n dt ds _ .
lk
где
A3.3.8)
~ "~ Eh
/?<M), 9<M) — общий интеграл уравнений
Задача определения ^<ч>, s<4>, так же как идентичная ей с математиче-
математической точки зрения задача определения р(ц\ фч), легко приводится к построе-
построению частного интеграла уравнения Пуассона. Этому вопросу посвящена
обширная литература, и, основываясь на этом, мы будем считать, что #ч),
s<4\ /?<">, <7(ч) известны.
Определение ^<б) и sF) сводится к интегрированию уравнений A3.3.6).
Эта система по форме совпадает с условиями Коши—Римана, которым
должны подчиняться действительная часть и коэффициент при мнимой части
аналитической функции комплексного переменного. Отсюда следует, что
/<б> _j_ /s<6> = ф G), A3.3.10)
где 7 = «1 + i«2 — комплексное переменное, а ф (у) — аналитическая функ-
функция этого аргумента.
Функция ф (у) в дальнейшем будет называться комплексной функцией
напряжений, так как через нее выражаются тангенциальные усилия Т\6),
SF) и Т?б> безмоментной сферической оболочки, не загруженной в рассма-
Jg2 ПОСТРОЕНИЕ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ УРАВНЕНИЙ [ГЛ. 13
триваемой области изменения (alt a2) поверхностной нагрузкой. Соответст-
ствующие формулы мы получим, отбросив в A3.3.4) члены, содержащие Z,
и выразив t и s по формуле A3.3.10):
Т\б) = — ch^
7f' = ch2at Re {Ф (у)\ = -L ch2at [Ф (у) + ф(у)], A3.3.11)
SF) = ch'a, Im
Здесь и ниже Re и Im — символы действительной части и коэффициента
при мнимой части от выражений, заключенных в фигурные скобки, а ф (у)—
величина, сопряженная с ф (у), т. е.
Формулами A3.3.11), если считать в них ф произвольной аналитической
функцией, определяются все напряженные состояния незагруженной без-
моментной сферической оболочки.
Система A3.3.9), определяющая р<м) и <7(м). также представляет собой
условия Коши—Римана, следовательно,
p(M) + i<7(M)=/(Y), A3.3.12)
где / (у) — аналитическая функция.
Функцию / (у) мы будем называть комплексной функцией перемещений;
ею определяются тангенциальные смещения безмоментной сферической
оболочки, так как, пользуясь A3.3.12) и A3.3.5), можно написать:
^(?)Ь 4 bImtf<Y)} 03.3.13)
Этими соотношениями, если считать в них f произвольной аналитиче-
аналитической функцией, определяются все бесконечно малые изгибания сферы.
Остается рассмотреть методы определения частного интеграла уравне-
уравнений A3.3.7), т. е. методы построения функций /?(б), фб). Преобразуем эти
уравнения, выразив их правые части через функцию ф (у) с помощью фор-
формул A3.3.8) и A3.3.11):
Задача заключается в построении частного интеграла полученной
системы в предположении, что ф есть произвольная аналитическая функция
своего аргумента. Помножим второе из этих уравнений на i, сложим с пер-
первым уравнением и введем обозначение k = р + iq. Получим:
A3-зл4)
§4] ПРИМЕНЕНИЕ ТЕОРИИ АНАЛИТИЧЕСКИХ ФУНКЦИЙ 183
Но а1 -f- г«г = V> ai — гаг = У> поэтому, рассматривая у и у как
независимые переменные, можно написать:
о _ _ду_ д ду д _ д д д _ . /_5 : _д_\
~дсй ~"дщ ~ду + d«7 ~^ ~ "Зу"*" ~^' ~да^~1\ду ~^)'
Вместе с тем
ch2a, = — (е'
6
tel + 2 +
. д
е-гс,
= 2 —
¦>--}-
В силу этого A3.3-14) принимает вид
Это уравнение интегрируется элементарно, и для определения /?1б),
мы получаем следующую формулу:
^"()^] + е(у). A3.3.16)
Здесь через е (у) обозначена произвольная функция интегрирования.
Под /?<б), 9<б) понимается некоторый определенный частный интеграл урав-
уравнения A3.3.14), поэтому и под е (у) надо подразумевать некоторую, вполне
определенную функцию, выбор которой зависит от нас (ниже выяснится,
что этим можно воспользоваться для выполнения условий однозначности
перемещений).
Замечание. Величины ?, A, v в A3.3.16) можно считать и переменными (см. замечание
в § 13.1). В этом случае при интегрировании их надо рассматривать как функции у и у-
Таким образом, общий интеграл безмоментных уравнений сферической
оболочки содержит две произвольные аналитические функции комплексного
переменного: комплексную функцию напряжений ф (у) и комплексную функ-
функцию перемещений f (у). Этот результат был получен в работе [37].
§ 4. Применение теории аналитических функций
комплексного переменного в безмоментной теории
сферических оболочек
Будем считать, что безмоментная сферическая оболочка находится
под воздействием такой поверхностной и краевой нагрузок, что возника-
возникающие в ней тангенциальные усилия и перемещения будут непрерывными
функциями точки срединной поверхности всюду, за исключением полюсов
географической системы координат *). Тогда, очевидно, можно принять, что
такими же свойствами обладают и величины, отмеченные индексом (ч),
так как выбор частного интеграла зависит от нашего произвола. Следова-
Следовательно, требования непрерывности надо накладывать и на величины Т[б\
S( \ 7^б), и[б) + и[ч\ ы|6) + ы|ч). Основываясь на этом, уточним условия,
которым удовлетворяют комплексные функции напряжений и перемещений.
*) Полюсы являются особыми точками географической системы координат. Поэтому
поведение усилий и перемещений в этих точках будет рассмотрено особо.
184 ПОСТРОЕНИЕ ИНТЕГРАЛОВ ВЕЗМОМЕНТНЫХ УРАВНЕНИЙ [ГЛ. 13
Пусть сфера, составляющая срединную поверхность оболочки, задается
векторным уравнением A3.2.3). Тогда можно принять, что всем точкам
сферы соответствует в плоскости комплексного переменного у бесконечная
полоса
Прямым а2 = я и а2 = —я соответствует один и тот же меридиан
сферы. Поэтому / (у) и ф (у) должны быть периодическими функциями.
Обходя связанные с этим дополнительные трудности, рационально ввести
следующую замену комплексного переменного:
| _|_ it] = ? = еУ = е«« (cosaa -f i sina,). A3.4.1)
Тогда все точки сферы будут находиться во взаимно однозначном соот-
соответствии со всеми точками плоскости комплексного переменного ?, и если
положить
ФAп?)=ар(?), /(In ?) = ?(?),
то на ар (?), g (?) достаточно наложить условия однозначности (эти функции
также будут называться комплексными функциями напряжений и пере-
перемещений, соответственно).
В дальнейшем в качестве независимого переменного мы всегда будем
пользоваться величиной ?. Установим, в каком соответствии находятся
точки сферы с точками плоскости ?. Параллелям и меридианам географиче-
географической системы координат на сфере, т. е. линиям аг = const и <х2 = const,
соответствуют на плоскости ? концентрические окружности | С | = const
и полупрямые arg ? = const. Комплексное переменное ? обращается в нуль
при аг = —ею, откуда, согласно A3.2.3), следует, что точке ? = О соот-
соответствует верхний полюс географической системы координат, т. е. точка
х — у — О, г = г. При ах = +°° мы получим на плоскости ? бесконечно
удаленную точку ? = оо, которой отвечает на сфере нижний полюс х =
= у = 0, г = —г. Единичный круг |?| ^ 1 соответствует верхней поло-
половине сферы, а внешняя часть этого круга |?|!Э= 1 соответствует нижней
части сферы.
Для Т[б\ S<6), Г<б) имеем формулы A3.3.11). Заметив, что
перепишем их так:
)=—г (к + 2 + -i
= ^ (К + 2 + i) Re № (?)}. A3.4.2)
1 'к
Отсюда вытекает, что во всякой точке, кроме ? = 0 и ? = оо *), вели-
величины Т[б\ Si6) и Т!,б> будут непрерывны и однозначны тогда и только тогда,
когда комплексная функция напряжений аналитична. В полюсах географиче-
географической системы координат, т. е. при ? = 0 и ?=оо, эти величины будут
удовлетворять условиям ограниченности лишь при дополнительном требо-
*)Там, где это не может вызвать недоразумения, мы не будем делать различия между
точками плоскости ? н соответствующими им точками сферы.
§ 4] ПРИМЕНЕНИЕ ТЕОРИИ АНАЛИТИЧЕСКИХ ФУНКЦИЙ J35
вании, что ф (?) имеет в этих точках нули по меньшей мере второго порядка,.
т. е. что if (?) вблизи ? = О может быть представлена разложением
Ф@ = ^ + 03? + .... A3.4.3)
а вблизи ? = оо — разложением
-^-+-^- + ... A3-4.4)
Рассмотрим теперь формулу A3.3.16), которой определяются величины
р<б>, qFK Заменив здесь у на ? по формуле A3.4.1), приняв, что Е, h и v
постоянны, и переменив знак у i, получим:
4||^] A3.4.5)
где
H(Z)=7(lnZ).
Линии, вдоль которых надо, вычислять криволинейные интегралы,
можно выбирать произвольно, и мы будем считать, что они нигде не выходят
за пределы той области G, где i|) (?) обладает сформулированными выше
свойствами. Тогда подынтегральные функции будут всюду (за исключением,
быть может, границ области) аналитичными. Следовательно, если область
односвязна, то по теореме Коши все интегралы в формуле A3.4.5) будут
аналитическими функциями. Если G — многосвязная область, то эти инте-
интегралы будут, вообще говоря, неоднозначны. Но мы условимся, что Н (?)
всегда будет выбираться так, чтобы р(б) — i<7F) оставалось однозначной
функцией.
Компоненты тангенциального перемещения ы1( и2 выражаются через
р(б)> ^(б> ПрИ помощи формул A3.3.5). Учитывая A3.4.1), их можно пред-
представить в виде
„(б) = A JlSLo<6) A3.4.6)
г 1+ffi Г г г 1+к
(корни надо понимать в арифметическом смысле).
Отсюда видно, что всюду, за исключением точек ? = 0 и ? = оо, усло-
условия ограниченности и[б), и[б) эквивалентны условиям ограниченности р{б),
<7<б), и, как показывает формула A3.4.5), они выполняются (разумеется,
при надлежащем выборе Н) в силу аналитичности i|) (?). При С = 0 и ? =
= сю интегралы, входящие в A3.4.5), остаются конечными, что легко про-
проверить, так как вблизи ? = 0, ? = сю для гр (?) справедливы разложения
A3.4.3), A3.4.4). Это значит, что и<б), и^б) в силу A3.4.6) остаются конеч-
конечными и при ? = 0, ? = оо, а следовательно, однозначными и ограничен-
ограниченными должны быть также функции н<м), ы<м>. Последние определяются
формулами, аналогичными A3.4.6), которые в комплексной форме запи-
записываются так:
Ы(м, + iur = _H_J^L(p(M, + ;,,<„>) = !_ -^-g@. A3.4.7)
?
Это соотношение показывает, что во всех внутренних точках срединной
поверхности оболочки, за исключением, быть может, ? = 0 и ? = оо, ком-
комплексная функция перемещений g (?) должна быть аналитической, а в точках
? = 0 и ? = сю она может иметь полюс, но не выше первого порядка.
186 ПОСТРОЕНИЕ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ УРАВНЕНИЙ 1ГЛ. 13
§ 5. Преобразование безмоментных уравнений оболочки
произвольного очертания
Силовые уравнения равновесия моментной теории записываются
в виде векторного равенства C.19.1), которое мы перепишем здесь так:
— ^|- (Л,/?'2') — ^|- (Ла/?A)) Н- ЛИ2 sin ^/? = 0, A3.5.1)
где согласно C.17.3) и C.19.7)
Здесь % — угол между координатными линиями, которые теперь мы не будем
считать взаимно ортогональными.
Положив в A3.5.1)
Д/, = N2 = О, Sn = S12 = 5,
мы перейдем от точных уравнений к безмоментным и, следовательно, полу-
получим такую векторную запись статических уравнений безмоментной теории:
0. A3.5.3)
Выполним дифференцирование, помножим обе части полученного ра-
равенства на п и учтем, что
Мгп = М2п = 0, Mun=Ln, Mi2-n = L12, М22-п = Ьм.
Будем иметь
A- Li2T2 + 2L125 -f -к- LUTX — АгА2 sin %Z = 0. A3.5.4)
В теории поверхностей доказывается, что на произвольной поверхности
можно установить изотермически сопряженную систему координат, т. е.
систему, в которой коэффициенты второй квадратичной формы удовлетво-
удовлетворяют равенствам
bn=±L22, L13 = 0 A3.5.5)
(в первом из них знак должен совпадать со знаком гауссовой кривизны
поверхности).
Примем, что выбраны изотермически сопряженные координаты, т. е.
что выполняются равенства A3.5.5). Тогда скалярное уравнение A3.5.4)
будет тождественно удовлетворяться, если положить
Т Т \ ^'^2 sln X 7 "Я Т -г Т I "!"¦% sln X 7 /1о С R\
—7— 1 2— ' -\ о? л> ~Т~ ' 1~ + ' i о/ ~ С' (.^O.O.DJ
Имеют место деривационные формулы A.3.1). Пользуясь ими, а также
формулами A3.5.6), можно векторное уравнение A3.5.3) привести к виду
д (SM + TM)(±TM sM) + x;M + xiM=o, A3.5.7)
§ 5] ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ ПРОИЗВОЛЬНЫХ ОБОЛОЧЕК J87
где
: (i^/=l, 2).
Векторное равенство A3.5.7) эквивалентно двум скалярным уравнениям,
соответствующим проекциям на направления векторов Ми Мг. Они с по-
помощью деривационных формул A.3.6) могут быть записаны так:
где
fli-^rh + Ib. fl2= —2Г21!, bi = + r!i+r222, Ь2 = —2ГЬ. A3.5.9)
Уравнение A3.5.4), соответствующее проекции на направление п, выше
уже было использовано.
Обращаясь к геометрическим уравнениям безмоментной теории, рас-
рассмотрим вектор упругого смещения
Введем обозначение
UMt = и* = At (ui + cos %щ) (i ф } = 1, 2).
Тогда будут справедливы следующие очевидные тождества:
да1 д«2 a* i ааИ A3510)
Раскроем их правые части, считая, что срединная поверхность оболочки
отнесена к изотермически сопряженным координатам, и имея в виду формулы
+ f/a • Ali = ЛИ* (-f- sin X + -^f^- cos X
(они представляют собой обобщение формул B.11.9), на случай косоуголь-
косоугольных координат), а также равенства
М u + М22 = + a1Ml + bjAl2, 2Л112 = — агМх — ЬгМг, A3.5.11)
вытекающие из A3.5.5), A.3.1) и A3.5.9).
Учитывая все это, получим из A3.5.10) требуемые уравнения
A3.5.12)
где
\ Кг = — Л!Л2(-|-51П5С + ^±i cos Х) .
A3.5.13)
188 ПОСТРОЕНИЕ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ УРАВНЕНИЙ 1.ГЛ. 13
§ 6. Безмоментные уравнения оболочек,
имеющих форму поверхностей второго порядка
положительной кривизны
К поверхности второго порядка положительной кривизны относятся:
эллипсоид, двухполостный гиперболоид и эллиптический параболоид.
В декартовых координатах эти поверхности можно задать следующими урав-
уравнениями:
~^з + "р- + тг = 1 (эллипсоид) A3.6.1а)
хг tfi г2
-^а" + -fs ^ = — 1 (двухполостный гиперболоид), A3.6.16)
~т + ~fa 2г =0 (эллиптический параболоид). A3.6.1в)
В криволинейных координатах они задаются векторными уравнениями:
эллипсоид A3.6.1а)
м=а isft1'+b S; 1»—° tha^> Aз-б-2а>
двухполостный гиперболоид A3.6.16)
эллиптический параболоид A3.6.1в)
М = ае°" cosog/* + ъ^х sin аЛ + \ ^а^г, A3.6.2в)
где /,, 1У, I, — орты декартовой системы координат, к которой отнесены
поверхности уравнениями A3.6.1).
Из A3.6.2) вытекает, что при ax = const координата г сохраняет по-
постоянное значение, а при a2 = const постоянным остается отношение у/х.
Это значит, что линии а1 = const и a2 = const образуют на поверхности
второго порядка такую же координатную сетку, какую дают параллели и
меридианы географической системы координат на сфере (рис. 20). Мы будем
поэтому говорить, что поверхности второго порядка векторными уравне-
уравнениями A3.6.2) отнесены к географической системе координат.
Коэффициенты первой и второй квадратичных форм поверхностей вто-
второго порядка, отнесенных к географической системе координат, выписаны
в табл. 1 (коэффициент L12 во всех случаях равен нулю). Из нее видно,
что географическая система координат на поверхности второго порядка
не ортогональна. Исключение представляют поверхности вращения второго
порядка (случай а = Ь).
Векторы A3.6.2), как нетрудно проверить, удовлетворяют двум равен-
равенствам
A3.6.3)
в которых под |х надо подразумевать следующую функцию:
а) для эллипсоида ц = спаа1,
б) для двух полостного гиперболоида (i = sh2a1, A3.6.4)
в) для эллиптического параболоида ц = е~2а».
6] УРАВНЕНИЯ ОБОЛОЧЕК ВТОРОГО ПОРЯДКА ПОЛОЖИТЕЛЬНОЙ КРИВИЗНЫ J89
Сравним A3.6.3) с A3.5.11), взяв в последних равенствах верхние знаки
(речь идет о поверхностях положительной кривизны). Эти две пары вектор-
векторных равенств совпадут, если положить
_ д!пц « д In ц,
п1~ да, * Ol ЩГ
. _ сIпц
A3.6.5)
Отсюда, в частности, следует, что на поверхностях вращения второго
порядка географические координаты образуют изотермически сопряженную
сеть.
z
6)
Внесем A3.6.5) в статические уравнения безмоментной теории A3.5.8)
и возьмем в первом из них верхний знак. Тогда после очевидных преобра-
преобразований эти уравнения примут вид
dt
6s
dt
Os
_1_
A3.6.6)
где
Ц H
A3.6.7)
Связь тангенциальных усилий с величинами ?, s выражается формулами
Tt = -^-vt %^-sinx, Г1==—•
-?-5lnx,
2] = S12 = S = |us,
A3.6.8)
которые следуют из A3.5.6), A3.6.7) и из равенства A.5.2).
Геометрические уравнения безмоментной теории A3.5.12), A3.5.13),
взятые с верхними знаками, при помощи A3.6.5) преобразовываются к виду
A3.6.9)
190
ПОСТРОЕНИЕ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ УРАВНЕНИЙ
[ГЛ. 13
a.
о
¦B-
X
ичны
ft
3
рой
8
со
S
э2
О
03
О.
С
3
"га =
ч •!¦
га §
олои
та
о.
с
«3
§
ч
ч
m
«
о
| пербол
отннй rv
о
пол
ш
е?
п
ПСО1
ч
с;
8
.5
(Л
СМ
\~
i
О
О
[
П~
?-Г
о
та
С
(Л
?
О
U
та
О
xi
О
8~
та
•S
i
О1
с
ел
-Cl
+
та
'COS
s"
та
Xi
81
О
U
-Cl
с?
см
г sin
ч.
«
ba cos3 (
64
8
С
t
8"
СЛ
К
о
Ъ
о.
сч
+
1 sin
"а
Xi
и
8"
COS
8*
-С»
см
1
о
(Л
S
64
(Л
84
х:
о
8~
СО
|
(Л
о
О
8*
.S
ел
1-4
в
5
?
xi
и
-Cl
1
1
•—•
(А
О
и
$
— abc
abc
8
см
-Cl
1
8"
CM
?
"s
о
та
-Cl
9*
JS
ел
С
8"
x:
и
%
h
в
-5
8
3=
С
"сд
та
1
8"
та
Xi
^С)
'а
8"
j3
— abc
1
+
I'
^cos
-а
СМ
S
(Л
«Г
coss
с?
с
'«а
та
х:
о
ъ
х:
S
Г"
га
с
ел
i
ъ
ей
"а
г?
Xi
и
Л"
§ 6] УРАВНЕНИЯ ОБОЛОЧЕК ВТОРОГО ПОРЯДКА ПОЛОЖИТЕЛЬНОЙ КРИВИЗНЫ \§\
Здесь
p=fiMi, q = \iu*. A3.6.10)
Связь между перемещениями ult u2 и величинами р, q выражается фор-
формулами
A3.6.11)
Таким образом, показано, что статические и геометрические уравнения
безмоментной теории оболочек, имеющих форму поверхностей второго
порядка, приводятся к виду A3.6.6) и A3.6.9) соответственно. Они анало-
аналогичны преобразованным уравнениям A3.2.7) и A3.2.9) безмоментной теории
сферической оболочки, и, следовательно, показана возможность применить
методы теории функций комплексного переменного и к расчету безмоментной
оболочки, очерченной по любой поверхности второго порядка положительной
кривизны [29, 43]. Не останавливаясь на подробностях, сформулируем свя-
связанные с этим обобщения результатов § 13.4.
Если срединная поверхность безмоментной оболочки представляет собой
эллипсоид, двухполостный гиперболоид или эллиптический параболоид
A3.6.1) и если оболочка не загружена поверхностной нагрузкой, то ее на-
напряженное состояние определяется комплексной функцией напряжения:
причем г|з (?) должна быть аналитической функцией комплексного перемен-
переменного ? = ea<+ia* в рассматриваемой области G и должна иметь нули по
меньшей мере второго порядка в точках ? = 0 и ? = оо, если эти точки
принадлежат области G*).
Тангенциальные усилия незагруженной по поверхности оболочки вида
A3.6.1) выражаются через действительную часть t и коэффициент при мни-
мнимой части s комплексной функции напряжений а|) (?) при помощи формул
A3.6.8), в которых под ц надо подразумевать функцию A3.6.4) и положить
Z = 0.
Для оболочек, срединная поверхность которых задается радиусом-
вектором A3.6.2), с помощью методов теории функций комплексного пере-
переменного решается и однородная геометрическая задача: все бесконечно малые
изгибания такой оболочки определяются комплексной функцией переме-
перемещений
Здесь под g (?) подразумевается функция, которая должна быть аналитиче-
аналитической всюду в интересующей нас области, за исключением точек ? = 0 и
? = оо; в этих точках функция g (?) может иметь полюс, но ие выше первого
порядка.
Тангенциальные смещения срединной поверхности оболочки выра-
выражаются через действительную часть р и коэффициент при мнимой части q
функции перемещений формулами A3.6.11), в которых под уь надо подразу-
подразумевать функцию A3.6.4).
*) Исключение представляет оболочка, имеющая форму эллиптического параболоида.
Для нее точка ? = оо соответствует бесконечно удаленной параллели географической системы
координат, и поэтому на функцию i|5 (Q надо в точке ? = оо накладывать требования, соответ-
соответствующие условиям работы оболочки на бесконечности.
|92 ПОСТРОЕНИЕ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ УРАВНЕНИЙ (.ГЛ. 13
§ 7. Безмоментные уравнения оболочек,
имеющих форму поверхностей второго порядка
отрицательной кривизны
Рассмотрим поверхности второго порядка отрицательной кривизны.
В декартовых координатах они задаются так:
однополостный гиперболоид
гиперболический параболоид
а в географических координатах так:
однополостный гиперболоид
Jn = о. ix -\- о iy -J- ctg &iiz, A3.7.1 а)
Гиперболический параболоид
В обоих случаях выполняются два векторных равенства
„ д\пц м д\т\\х м
даг да* A3.7.2)
2 „ д\пу, м Э1щи „
в которых под ц. надо подразумевать следующую функцию:
а) для однополостного гиперболоида ja = cos2oc1, .
Aо. / .о)
б) для гиперболического параболоида ц — еак
Формулы A3.7.2) переходят в A3.5.11), если в последних взять нижние
знаки. Это значит, что на поверхностях второго порядка географическая
система координат образует изотермически сопряженную сеть и в том слу-
случае, когда гауссова кривизна отрицательна.
Уравнения безмоментной теории для оболочек, срединная поверхность
которых задается формулами A3.7.1), можно преобразовать по такой же
схеме, как и в предыдущем параграфе (теперь в уравнениях § 13.5) надо
брать нижние знаки). А именно, статические уравнения A3.5.8) в силу
A3.6.5) принимают вид
dt _ds_ , J_ v» _ л dt л. ds ' Y* — 0
t = — Г, s =
A3.7.4)
а геометрические уравнения A3.5.12), A3.5.13) можно записать так:
A3.7.5)
Я =
$8]
ПРИМЕНЕНИЕ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
193
Тангенциальные усилия выражаются формулами
а для тангенциальных перемещений сохраняются формулы A3.6.11).
Уравнения A3.7.4) и A3.7.5) представляют собой системы гиперболиче-
гиперболического типа, как и должно быть для оболочек отрицательной кривизны
(§§ 7.4, 7.5). В однородном случае (при X* = Х\ = 0) система A3.7.4)
приводится к уравнению колебания струны [29, 43]
да* ~ да2 '
и его решение можно записать при помощи формул Даламбера
/ = /(«, _}_og-f g(a, — <Ц), s = /(а, — Og) -j- s (а, 4- <h)
В табл. 2 для справок приводятся коэффициенты первой и второй ква-
квадратичной формы (кроме Llit который равен нулю) для поверхностей вто-
второго порядка отрицательной кривизны, задаваемых уравнениями A3.7.1).
Таблица 2
Коэффициенты первой и второй квадратичных форм
А,
AjA,cosx
La
Однополостный гиперболоид
V sin2 а, (а2 cos2 а, 4- Ьг sin2 а2) 4- с2
cos2 а,
Va2 sin2a2 4-&2cos202
cosaj
(Д2 t9) sinai sinaacosaa
cos3 a,
COS Ct-j ^
4- c2(a2 sin2a2 + 6acos2a2)]~1/2
4- c2 (a2 sin2 a2 4- 62cos2 a2)J"~1/2
Гиперболический
V a2 ch2 a, 4- b2
V 2 2
ate2"-
* (a2 sh2 a2 4- b2
abe2"'
a' (a2 sh2 оц 4- 62
параболоид
sh2 a, 4- *
2 2
sh Oj ch a,
ch2a,L-
ch2 a2) 4-
a2bl
§ 8. Применение обобщенных аналитических функций
к безмоментной теории произвольных оболочек
положительной кривизны
Для произвольных оболочек положительной кривизны общий интеграл
безмоментных статических уравнений можно выразить через так называемые
обобщенные аналитические функции. Это показано в работах [18, 19],
результаты которых пересказываются в настоящем параграфе.
13 А. Л. Гольденвейзер
ПОСТРОЕНИЕ ИНТЕГРАЛОВ БЕЗМОМЕНТНЫХ УРАВНЕНИЯ
[ГЛ. 13
Рассмотрим два комплексных уравнения
-??-*= О,
A3.8.1)
A3.8.2)
Здесь черточка сверху обозначает переход к сопряженной величине,
у = <xt + ta2 — независимое комплексное переменное, W = Wt + iW2 —
искомая комплексная функция, /, т, п', п" — заданные комплексные функ-
функции (/ = 1г + i/2 и аналогично для т, п', п"), д- = -^— -|_ i'-^г- •
Функции W, удовлетворяющие однородному (при п' = 0) уравнению
A3.8.1) или однородному (при п" = 0) уравнению A3.8.2), называются
обобщенными аналитическими функциями. В цитированных работах пока-
показано, что по своим свойствам они аналогичны обычным аналитическим функ-
функциям (для обобщенных аналитических функций построены аналоги фор-
формулы Коши, рядов Тейлора и Лорана и т. д.).
Развернув уравнения A3.8.1) и A3.8.2), потребовав, чтобы в них обра-
обращались в нуль действительная и мнимая части, и положив
получим вместо A3.8.1)
ТЕГ # + + +
' A3.8.3)
+
«2 = 0,
— Ьг,
а вместо A3.8.2) будем иметь
Систему A3.8.3) можно отождествить со статическими уравнениями
безмоментной теории A3.5.8), взяв в последних верхние знаки и положив
w^s, w^ — t «; = x;, «; = x;.
Равным образом, система A3.8.4) становится тождественной геометри-
геометрическим уравнениям безмоментной теории A3.5.12), если в последней взяты
верхние знаки и принято, что
Отсюда вытекает, что решение однородных уравнений безмоментной
теории для произвольных оболочек положительной кривизны, отнесенных
к изотермическим сопряженным координатам, можно выразить через обоб-
обобщенные аналитические функции.
В § 13.6 было показано, что, если срединная поверхность оболочки
есть поверхность второго порядка положительной кривизны, то нет необ-
необходимости пользоваться обобщенными аналитическими функциями, так как
решение безмоментных уравнений можно выразить и через обычные анали-
аналитические функции. Этот результат не может быть улучшен. В [19] показано,
что такими свойствами обладают только поверхности второго порядка поло-
положительной кривизны.
§ 8] ПРИМЕНЕНИЕ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ 195
Надо заметить, что в [19] поверхности второго порядка отнесены к ли-
линиям кривизны, в то время как в [43 ] они задаются в географической системе
координат. Покажем, что в этом нет противоречия.
Возможность выразить через обычные аналитические функции решения
безмоментных уравнений основана на том, что последние удается отожде-
отождествить с уравнениями Коши—Римана, т. е. в однородном случае привести
к виду A3.3.6). Но, как известно, эти уравнения инвариантны относительно
преобразования независимых переменных
аг = аг (ix, gg), а2 = а2 (?ь ?2), A3.8.5)
если в нем аъ а2 как функции glt |г в свою очередь удовлетворяют условиям
Коши— Римана
cfai да2 даг д«г /П8п
Преобразование A3.8.5), A3.8.6) сохраняет и изотермическую сопря-
сопряженную сеть. Чтобы доказать это, примем, что
Mu-n = M& п, М12-п = 0. A3.8.7)
Эти равенства, в которых, как обычно, нижние индексы обозначают
дифференцирование по а1г а2, показывают, что (аи а2) являются параме-
параметрами изотермически сопряженной сети. Обозначив через М'ц производные
от вектора М по %t, ?/, можно написать
ял> ля да, да, . „• / даг да, да, да, \ . ,- да, да, ,
A3.8.8)
(точками обозначены слагаемые, пропорциональные векторам Мг, М2)-
Составим выражения Mtj-n, примем во внимание, что слагаемые, обо-
обозначенные точками в A3.8.8), обратятся в нули, и преобразуем полученные
выражения с помощью A3.8.6) и A3.8.7). Будем иметь равенства
= Ми-п =
которыми и доказывается требуемое утверждение.
Таким образом, если для оболочки, очерченной по поверхности S и отне-
отнесенной к некоторой изотермически сопряженной системе координат (аг,
а2), однородные уравнения безмоментной теории приводятся к условиям
Коши—Римана, то при замене переменных, также удовлетворяющей усло-
условиям Коши—Римана, сохранится и изотермическая сопряженность коорди-
координат на S, и вид преобразованных безмоментных уравнений.
На поверхности второго порядка (и только на ней) к бесчисленному
множеству изотермически сопряженных сетей принадлежит и сеть линий
кривизны, поэтому результаты § 13.6 находятся в полном согласии с резуль-
результатами работы [19]. Для поверхностей вращения параллели и меридианы
географической системы координат, как будет показано в § 14.9, совпадают
с линиями кривизны, но на произвольных поверхностях второго порядка
линии кривизны имеют весьма сложное очертание. Поэтому для практиче-
практических целей, вероятно, более удобна та форма безмоментной теории оболочек,
имеющих форму поверхностей второго порядка, которая изложена в § 13.6,
хотя использованные в § 13.6 координаты, вообще говоря, не ортогональны.
Заканчивая изложение общих методов интегрирования уравнений без-
безмоментной теории, упомянем работу [109]. В ней показано, что эти уравне-
уравнения можно решить при помощи квадратур для случая, когда одно из семейств
асимптотических линий срединной поверхности совпадает с семейством
геодезических линий.
13*
ГЛАВА 14
БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ ВРАЩЕНИЯ. ПРИМЕНЕНИЕ
ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ
§ 9. Поверхности вращения
В декартовых координатах поверхность вращения можно задать тремя
скалярными уравнениями
x = rsinq>, y = rcos<p, z — z, A4.9.1)
эквивалентными одному векторному уравнению
М = г sin q>ix + r cos yiy + ziz. A4.9.2)
В этих равенствах z и ф представляют собой параметры криволинейной
системы координат, а под г подразумевается некоторая функция
r = r{z). A4.9.3)
Так как из A4.9.1) вытекает, что х2 + у2 = г2, то г представляет собой
радиус поперечного (ортогонального оси вращения г) сечения. Равенствами
A4.9.1) или, что то же, равенством A4.9.2) поверхность вращения отнесена
к географической системе координат (см. рис. 21). Линии z = const образуют
систему параллелей, совпадающую с поперечными сечениями поверхности,
а линии ф = const образуют систему меридианов, получающуюся пересече-
пересечением поверхности плоскостями х/у = tg ф = const, проходящими через
ось г. Равенство A4.9.3) представляет собой уравнение меридиана в декарто-
декартовой плоскости (г, г), изображенной на рис. 21.
Считая, что нижние индексы 1 и 2 при М обозначают дифференциро-
дифференцирование по г и ф соответственно, получим
Mt = r' sin ф/ж -f r' cos yiy -f i2, M2 = r cos yix—r sin ф/„ ( r' = ~- \.
A4.9.4)
Отсюда
Ai = У Ml = УI + r'2, A2 = У Ml = r, AxA2cosx = Mi-M2 = 0.
A4.9.5)
Третье их этих равенств показывает, что параллели и меридианы гео-
географической системы координат ортогональны на любой поверхности вра-
вращения.
Вторые производные от М записываются так:
Ми = г* sin ф/х 4- г" cos ф/у, Ml2 = г' cos yix — г' sin ф/г
Жаа = — /"Sin ф/ж — г COS ф/^,
ПОВЕРХНОСТИ ВРАЩЕНИЯ
197
а для единичного вектора нормали п получаем
Atx х At2
АА ~
: (sin ф/х + cos ф/„— г'/г).
A4.9.6)
Отсюда по формулам A.3.2) имеем следующие выражения для коэффи-
коэффициентов второй квадратичной формы:
A4.9.7)
Среднее из этих равенств означает, что меридианы и параллели геогра-
географической системы на любой поверхности вращения не только ортогональны,
но и сопряжены, т. е. они являются линиями кривизны. Это можно было
12
Рис. 21.
Рис. 22
предугадать и из геометрических соображений. Вдоль любой параллели
нормали поверхности вращения образуют конус с вершиной на оси враще-
вращения (см. рис.. 22). Следовательно, эти нормали не перекрещиваются, а пере-
пересекаются, что является признаком линий кривизны (§ 1.5). По этому же
признаку линиями кривизны являются и меридианы: они представляют собой
плоские кривые, нормали которых совпадают с нормалями к поверхности,
а, следовательно, вдоль меридиана последние также не перекрещиваются,
а пересекаются.
При помощи A4.9.5) и A4.9.7) получаем для радиусов кривизны поверх-
поверхности вращения такие формулы:
1 _ 1 Lv i"
¦»
A + г'2K'2
I
1
A4.9.8)
из которых видно, что R± — это радиус кривизны меридиана, a R2, как
нетрудно проверить, равно расстоянию по нормали от поверхности до оси
вращения. Знаки в формулах для Ru R2, принятые в § 1.4, в данном случае
означают, что радиус кривизны Rt считается положительным, если в пло-
плоскости (г, г), изображенной на рис. 21, выпуклость меридиана направлена
наружу.
Замечание. В принятой системе координат роли at- и а2-линий играют меридианы и
параллели соответственно. Меридиан — это нормальное сечение поверхности, поэтому в дан-
данном случае первый главный радиус кривизны поверхности совпадает с радиусом кривизны
о^-линнн. Вообще же такого совпадения не будет. Примером является второй главный раднус
кривизны поверхности /?2; он не равен радиусу кривизны аг-лииии, т. е. величине г.
198
БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ ВРАЩЕНИЯ
1ГЛ. 14
§ 10. Статические и геометрические безмомеитиые
уравнения оболочек вращения
Положив в уравнениях G.4.2)
<*! == г, аг = ф, Аг = У 1 -+- г'2, Л2 = г,
1 г- _±__0 * '
A4.10.1)
/•К 1 + <-'2
запишем статические безмоментные уравнения оболочек вращения сле-
следующим образом:
~5— (тТЛ -4-1/1 -4- г'2 -д т'Та -Х- ту\ -4- г'2 X-i = 0,
OZ OW
-^ (rS) + VTT7* ^- + r'S + r VT+7*x2 = о, A4. ю.2)
A+Л'2K/2 М-Г-
Третье уравнение этой системы будет удовлетворяться, если положить,
* 1
Z, Т2
и рассматривать t как новую неизвестную величину.
Подставим A4.10.3) в A4.10.2) и заменим S через s по формуле
S =»-?•• A4.10.4)
Тогда после очевидных преобразований получим относительно t n s систему
уравнений
dt . ds
dt . 1 ds . v.
A4.10.5)
в которой
X =-
/•A+ /•'')
A4.10.6)
Геометрические безмоментные уравнения G.5.1) для оболочек вращения
в силу формул A4.10.1) можно записать так:
1 ди± г"
L ^ |
Г
¦ w = е2,
A4.10.7)
/• йф ' J/ 1 _)_ г'2 дг \ г J
Здесь из первых двух равенств можно исключить ш. В результате,
после очевидных преобразований, получим равенство
4 ^И!) + ^ ^ = A + ^'2) «1 + "-8*
§11] ОБОЛОЧКИ ВТОРОГО ПОРЯДКА. ПАРАБОЛИЧЕСКИЕ ОБОЛОЧКИ J99
которое вместе с третьим равенством A4.10.7) составляет систему двух
уравнений относительно ии иг. Ее можно записать в виде
A4.10.8)
В § 7.5 было показано, что между статическими и геометрическими
уравнениями безмоментной теории в общем случае существует тесная связь,
вытекающая из статико-геометрической аналогии. В предыдущей главе мы
уже встречались с ее проявлениями, которые выражались в следующем:
A) для оболочки нулевой кривизны как геометрические, так и стати-
статические безмоментные уравнения удалось решить квадратурами;
B) для оболочек имеющих форму поверхностей второго порядка, обе
системы привелись к уравнениям Коши—Римана или к уравнению колеба-
колебания струны;
C) для произвольных оболочек положительной кривизны решения и
статических, и геометрических безмоментных уравнений выражаются через
обобщенные аналитические функции.
Для оболочек вращения эту связь можно выразить более просто и кон-
конкретно: статические и геометрические безмоментные уравнения становятся
тождественными друг другу в силу следующих соотношений двойственности:
A4.10.9)
§ 11. Оболочки вращения второго порядка.
Параболические оболочки вращения
Если уравнение меридиана A4.9.3) имеет вид
г = Уаг1 + bz + с (а, Ь, с— константы), A4.11.1)
то мы будем иметь поверхность вращения второго порядка.
В этом случае
, 2дг + Ь » 4ос — Ьг
2r ' ~~ ir» '
Сопоставив последнее из этих равенств с формулами A4.9.8), заклю-
заключаем, что, если
Аас—62<0, A4.11.2)
т. е. если г" <; 0, то гауссова кривизна поверхности будет положительной
(при а >> 0 это будет двуполостный гиперболоид, при а <3 0 — эллипсоид,
при а = 0 — параболоид), а если
Аас—&2>0, A4.11.3)
т. е., если г" j> 0, то гауссова кривизна поверхности будет отрицательна
(однополостный гиперболоид).
Пусть выполняется неравенство A4.11.2), тогда, введя обозначение
Ч-snrzs. A4.11.4)
200 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ ВРАЩЕНИЯ [ГЛ. 14
можно преобразовать уравнения A4.10.5) к виду
x+r*i+4(М+к+х*"°' ^-bS-srtte) + xs = о.
Отсюда следует, что если ввести замену независимого переменного а —
= а (г) так, чтобы выполнялось равенство
то статические безмоментные уравнения превратятся в неоднородные урав-
уравнения Коши—Римана
+<М> + КЖ-0, ^-^.(М) + хг-О, A4.11.6)
т. е. мы вновь придем к результату, полученному уже в § 13.6.
В уравнении A4.11.5) легко выполнить квадратуру. Выразив в нем г
через z по формуле A4.11.1), получим:
при а ф 0 (для двух полостного гиперболоида и эллипсоида)
1 . 2аг-\-Ь— 1^6*—4ас ... .. _.
а=Т1П 2с- ' - ¦ "zr—^T ' A4.11.7)
при а = 0 (для параболоида)
a = ^ln|&z + c|. A4.11.8)
Если вместо A4.11.2) выполняется неравенство A4.11.3), то, введя
обозначение
М= . 4 .,, A4.11.9)
4ac — b2' v '
можно привести уравнения A4.10.5) к виду
Это значит, что при помощи подстановки вида A4.11.5) мы, как и
в § 13.7, получим неоднородные уравнения колебания струны
В этом случае для однополостного гиперболоида результат интегриро-
интегрирования уравнения A4.11.5) записывается так:
п. = ятг\р A4.11.10)
Положим теперь, что уравнение меридиана A4.9.3) имеет вид
г ~"kz* (A,, jx — положительные константы, (г Ф 1), A4.11.11)
т. е. что меридиан представляет собой параболу произвольной степени.
При ц <С 1 она имеет горизонтальную (параллельную оси г) касательную
в начале координат, а при ц > 1 касательная в начале координат будет
вертикальной (рис. 23). Это значит, что знак гауссовой кривизны поверх-
$ 11]
ОБОЛОЧКИ ВТОРОГО ПОРЯДКА. ПАРАБОЛИЧЕСКИЕ ОБОЛОЧКИ
201
ности противоположен знаку числа |л—1 (исключенному из рассмотрения
случаю ц, = 1 соответствует круговой конус; он обсуждался в (§ 13.1).
Подставим A4.11.11) в статические безмоментные уравнения A4.10.5)
и заметим, что имеет место легко проверяемая формула
dz
дг
Получим
ж
A4.11.12)
Эти равенства можно рассматривать как уравнения относительно вели-
величин t и Bx~2tls). Тогда в них переменными будут только коэффициенты при
производных по 2, и положив
а = 1п2, A4.11.13)
мы придем к следующей системе уравнений с постоянными коэффициентами:
A4.11.14)
Изложенное здесь преобразование статических безмоментных уравне-
уравнений для оболочек вращения вида A4.11.5) предложено в [28], где выведены
и уравнения вида A4.10.5).
Рис. 23
При помощи соотношений двойственности A4.10.9) результаты этого
параграфа можно без труда перенести со статических на геометрические
безмоментные уравнения. Окончательные формулировки сводятся к сле-
следующему.
Для оболочек вращения второго порядка с меридианом A4.11.1)
геометрические безмоментные уравнения приводятся к виду
A4.11.15)
202 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ ВРАЩЕНИЯ 1ГЛ. 14
Здесь надо брать верхние знаки, если выполняется неравенство A4.11.2),
т. е. для оболочек положительной кривизны, и нижний знак, если выпол-
выполняется неравенство A4.11.3), т. е. для оболочек отрицательной кривизны;
новое независимое переменное а выражается через г по формуле A4.11.7)
для двухполостного гиперболоида и эллипсоида, по формуле A4.11.8) для
параболоида и по формуле A4.11.10) для однополостного гиперболоида;
константы К+ и К_ определяются формулой A4.11.4) или A4.11.9) соответ-
соответственно.
Если меридиан оболочки задается уравнением A4.11.11), то геометриче-
геометрические безмоментные уравнения можно привести к виду
К* (?) +
Ш
(¦?¦) + W ^~2
т. е. превратить их в уравнения с постоянными коэффициентами относительно
величин и2/г и гх~^ У\ + г1гиг. В уравнениях A4.11.16) независимое
переменное а связана с z формулой A4.11.13).
§ 12. Применение тригонометрических рядов
в статической безмоментной задаче
оболочек вращения
Коэффициенты дифференциальных уравнений теории оболочек враще-
вращения не зависят от ц>. Это позволяет в общем случае, т. е. при любом очерта-
очертании меридиана, искать решение при помощи тригонометрических рядов.
Применим этот метод к интегрированию статических безмоментных урав-
уравнений.
Примем для конкретности, что уравнения приведены к форме A4.10.5),
и допустим, что компоненты поверхностной нагрузки имеют вид
X-i (z, ф) = аг (z) cos пф, Xs (z, ф) = а^ (z) sin nq>, Z (г, ф) = с (z) cos «ф,
откуда в силу A4.10.6)
X* = хг (z) cos пф, X* = хг (z) sin пц>. A4.12.1)
Заметив это, зададим решение уравнений A4.10.5) в виде
t (z, ф) = т (г) cos пф, s (z, q>) = a (z) sin ntp. A4.12.2)
Тогда, подставив A4.12.1), A4.12.2) в A4.10.5) и сократив первое урав-
уравнение на cos пф, а второе на sin mp, получим для определения т, а систему
обыкновенных дифференциальных уравнений
+n(T + * 0 пт + %0, A4.12.3)
в которой звездочка при п поставлена для удобства дальнейшего изложения;
пока надо считать, что пч = п.
Равным образом, если
¦Xi (z, ф) = Ox (z) sin «ф, Xs (z, ф) = q2 (z) cos пф, Z (z, ц>) = с (z) sin rup,
S 1J] ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ 203
т. е. если
X* = хг (г) sin Пф, Хг = ^2 (z) cos mp, A4.12.4)
то, положив
t (г, ф) = т (z) sin Пф, s (z, ф) = a (z) cos nq>, A4,12.5)
получим для т, а снова систему A4.12.3), в которой теперь нужно считать
В общем случае, т.е. при произвольной поверхностной нагрузке, можно
положить
со
*1 =* ТГ + У! (*1" COS Пф + Xln Sin Пф),
Xf — -f + ^ (xL cos пф -1- ;&, sin
n=l
(принимается, что компоненты поверхностной нагрузки удовлетворяют
условиям Дирихле).
Тогда, задав решение уравнений A4.10.5) в виде
сведем задачу к определению двух последовательностей пар искомых функ-
функций (t'n, s'n) и (fn, s^). Пара функций (t'a, s'^ удовлетворяет системе A4.12.3),
в которой надо положить
Т = t'n, a = Sn, Хг = Х\п, Х% = Х2п, «* = П,
а пара функций (^, si) удовлетворяет системе A4.12.3), в которой надо
положить
Т = t'n, О = O"|i, *i = Х\а, Х2 = Хгл, tlt = П.
Итак, для весьма общего случая интегрирование статических безмомент-
ных уравнений, приведенных к виду A4.10.5), сводится к решению урав-
уравнений A4.12.3), к обсуждению которых мы и обратимся.
Уравнения A4.12.3) образуют систему обыкновенных линейных диффе-
дифференциальных уравнений, эквивалентную одному уравнению второго по-
порядка с переменными коэффициентами, зависящими от формы меридиана.
В некоторых частных случаях она допускает упрощения. Для оболочек
вращения второго порядка система A4.10.5) приводится к уравнениям
типа Коши—Римана или к уравнениям колебания струны; для оболочек
вращения с меридианом, имеющим вид параболы A4.11.11), система A4.10.5)
приводится к уравнениям с постоянными коэффициентами (§ 14.11). Во
всех этих случаях можно, очевидным образом, избавиться от переменных
коэффициентов и в уравнениях A4.12.3). Для этого надо, например, исхо-
исходить не из системы A4.10.5), а из уравнений вида A4.11.6) или A4.11.14).
Более подробно на общем обсуждении уравнений A4.12.3) мы останав-
останавливаться не будем, покажем только, что при л,=0и п^. = ±1 они инте-
интегрируются элементарно при любой форме меридиана (в практических зада-
задачах наиболее важны случаи, когда внешние силы либо остаются постоян-
постоянными по ф, либо меняются по закону cos <p или sin ф, т. е. именно случаи
«» = 0, % = 1).
204 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ ВРАЩЕНИЯ [.ГЛ. М
§ 13. Интегральные уравнения равновесия
безмоментной теории. Применение к оболочкам вращения
Прежде чем переходить к подробному обсуждению утверждения, выска-
высказанного в конце § 14.12, выведем интегральные уравнения равновесия без-
безмоментной теории.
Статические уравнения безмоментной теории записываются в виде
векторного равенства A3.5.3). Помножим обе его части на dax da% и проин-
проинтегрируем по области G, занятой оболочкой. Получим, считая, что sin % = 1,
т. е. что система координат ортогональна,
Также помножив обе части равенства A3.5.3) векторно на М da1 da,
и вновь проинтегрировав по области G, будем иметь
> 17 + х' * ~ Zn) х м
Левые части полученных равенств можно преобразовать, применив
к ним формулу интегрирования по частям E.31.2). Тогда после несложных
преобразований получим (g — контур области G)
A4.13.1)
A4.13.2)
Равенства A4.13.1), A4.13.2) и представляют собой векторные инте-
интегральные уравнения равновесия безмоментной теории. Первое из них выра-
выражает уравновешенность сил, а второе — уравновешенность моментов (отно-
(относительно начала декартовой системы координат). К ним мы еще вернемся,
а пока применим их для случая, когда G соответствует части поверхности
вращения, заключенной между двумя параллелями географической системы
координат, и для одной из параллелей фиксируем г, положив г = г0, а для
другой оставим г произвольным. В этом случае в A4.13.1), A4.13.2) надо
отождествить аи аг с z, q> соответственно, под М, Мг, Мг подразумевать
$ 13] ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ РАВНОВЕСИЯ 205
выражения A4.9.2) и A4.9.4), двойные интегралы в A4.13.1), A4.13.2)
надо заменить двукратными (по z от z0 до z и по ф от —п до +п), а в кон-
контурных интегралах надо считать, что dax = 0, и заменить их разностью
двух однократных интегралов (по ф от —я до +я), считая, что в первом
из них z произвольно, а во втором z = z0. Проделав все это и перейдя от
векторов к проекциям (на ix, iv, iz), получим шесть скалярных интегральных
уравнений равновесия
+ я
Г ( — -^-Тхйпф—Scos
+
+я +я
— \ ~г гdy-\- С9 = RB, \ ( — f г~г7\cosф-f- zSsini
J Л1 J v Al
-я —я
A4.13.3)
4-я 4-я
\ ( r z ~r 7\ sin ф -f- zS cos ф ) r dф -f- D2 = Q2, ~ \ Sr2 dф -f- D3 = Q3.
—я —я
Здесь приняты следующие обозначения:
+я г
Ri = \ \ (-^f—Xi sin ф + ХоСОвф -г- sin ф ) г у 1 + г'2 dq> dz,
J J \ Ах A-i i
—я г0
4-я 2
R = \ ^(---ХхСОЗф—Х2ЗШф j- COS ф ) Г У 1 + г'2 Йф dz,
J J \ А1 А\ I
—я
Л -Т
J
—я
+я
О, =т f | [<r'z — г)Хл cos ф — zl/1 + г'2X,sin ф—(z + rr') Z со8ф]г ^ф dz,
—яг,
4-я 2
J J
—яг,
+я г
J J
—it г„
+я г
J \
—я г„
+ (z -j- rr') Z'sin ф] г йф dz,
+Я г
= I I X2r2 V\ + r'2 d<$ dz, A4.13.4)
J J
+я
—я
4-я
1
C9 =
¦•3
—я
206 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ ВРАЩЕНИЯ [ГЛ. 14
-Г
J
+„ A4.13.4)
ф)гос(ф, D3= j
(дополнительный индекс «0» обозначает, что надо брать значение соответ-
соответствующей величины при г = г0).
Физический смысл величин R{ и Q,- очевиден: это, соответственно, проек-
проекции (на tx, iy, iz) равнодействующей и главного момента поверхностных
сил, приложенных к рассматриваемой части оболочки. Что касается Ct
и Dit то, как видно из определяющих их формул, это константы, завися-
зависящие от Т10, 5о, т. е. от краевых (на г = г0) значений тангенциальных
усилий. Так как Т10, So зависят от нашего выбора, то С, и D, нужно рас-
рассматривать как произвольные константы.
Пусть компоненты поверхностной нагрузки и тангенциальные усилия
заданы тригонометрическими рядами
+ S (Хы cos mp + Х\п
A4.13.5)
?i (Tin cos nq> -f- Tln sin ггф),
oo
S (^2n COS ftф + TJnSin /2ф), A4.13.6)
^+ 2(
Здесь X'tj, X"ih Z'k, Z"k — известные функции переменной г, a Tlh Тч,
S'k, S'k — искомые величины.
Подставим A4.13.5) в первые шесть формул A4.13.4), заметим, что в них
величины г, г', z не зависят от ф, учтем свойство ортогональности триго-
тригонометрических функций и используем известные формулы для вычисления
коэффициентов Фурье. Получим
A4.13.7)
с, г. 1Х г
*Н Tofe^-^-TTb^K1 +r"dr'
г
/?з=л J (X'w + r'Zu)rdz,
$ Ui ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ РАВНОВЕСИЯ 207
П J( ~ Fff^1 + ^ + F& ЯУ^П^А. (Н.13.7)
2о
зог2 УТ+У2 dz,
выражающие величины #,, Q? (i = 1, 2, 3) через известные функции г,
а именно, через коэффициенты при 1, sin ф и cos ф в разложениях A4.13.5).
Коэффициенты при cos Лф и sin Пф в правые части A4.13.7) не входят,
вследствие того, что соответствующие им нагрузки являются самоуравно-
самоуравновешенными.
Равным образом, подставив A4.13.6) в левые части интегральных урав-
уравнений равновесия A4.13.3), будем иметь равенства
У* +r A4.13.8)
nr (- ~f== Гц + zSi) + Di = Qx,
которые можно рассматривать как алгебраические уравнения относительно
шести неизвестных
7Ъ, 55, TU, Ти, Si, 5i, A4.13.9)
т. е. относительно коэффициентов при 1, cos ф, sin ф в разложениях Tt
и S. Величины Tva, SI определяются из третьего и шестого уравнений
A4.13.8), для определения 7п, Si имеем первое и пятое уравнения, а для
определения Т'и Si, —второе и четвертое уравнения.
Для построения Т'ц, Т'%и Т-п. можно воспользоваться третьим безмомент-
ным уравнением равновесия A4.10.2). Подставив в него A4.13.5), A4.13.6)
и приравняв коэффициенты при 1, cos ф и sin ф, получим три уравнения,
определяющие эти величины.
В конечном итоге величины A4.13.9), равно как и T'w, T'2\, Т^и выра-
выразятся через 6 произвольных констант С{, D, и через интегралы, стоящие
в правых частях равенств A4.13.7), а это и значит, что решения системы
A4.12.3) при л' = 0 и я* = ±1 достигаются при помощи квадратур. Дру-
Другими словами, если статические безмоментные уравнения решаются в триго-
тригонометрических рядах, то нет необходимости интегрировать те уравнения,
которые получаются для коэффициентов при 1, cos ф, sin ф (хотя это сделать
и нетрудно). Эгн коэффициенты можно построить элементарно, выделяя
часть оболочки между двумя параллелями географических координат и
требуя, чтобы приложенные к ней внешние и внутренние силы находились
в равновесии, т. е. воспользовавшись методом сечений.
208 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ ВРАЩЕНИЯ 1ГЛ. М
§ 14. Применение тригонометрических рядов
в безмоментной геометрической задаче
оболочек вращения
Геометрические безмоментные уравнения, конечно, тоже можно инте-
интегрировать при помощи тригонометрических рядов. Возьмем для определен-
определенности эти уравнения в виде A4.10.8) н будем считать, что их правые части
разложены в ряды следующим образом:
г у\ + г'2 со = -у- + 2j (<°п cos «ф + (й'п sin пф),
"^ A4.14.1)
Т, 8, 4~ 8« = —^ f- 2j (8л COS Пф 4~ 8п Sin Пф).
rr 1 п=1
Тогда решение уравнений A4.10.8) можно задать в виде
«2 16 V
"Г1 A4.14.2)
У 4- г'2 «1 = -%- + S Ob cos «Ф + Tin sin П(Р)-
Для определения коэффициентов разложения A4.14.2) получится си-
система, аналогичная системе A4.12.3):
г* Л-+ nj] = b, —n*% ^s--^- = d, A4.14.3)
в которой под (?, т), п„.) надо подразумевать либо A„, г)„, п), либо A^,, т]п, —п).
Все сказанное относительно A4.12.3) относится и к системе A4.14.3):
она составляется из уравнений с переменными коэффициентами, но для
поверхности вращения второго порядка и для случая, когда меридиан пред-
представляет собой параболу вида A4.11.11), система A4.14.3) приводится к урав-
уравнениям с постоянными коэффициентами. При п = 0 и я, = ±1 решение
системы A4.14.1) можно выразить через квадратуры.
Чтобы доказать справедливость последнего утверждения, рассмотрим
смещения поверхности вращения как жесткого целого и назовем эти сме-
смещения жесткими. Для произвольной поверхности жесткие смещения выра-
выражаются равенством D.27.8).
Перепишем его:
U = roxM-\-Uo A4.14.4)
и зададим постоянные векторы Uo, Го следующим образом:
Uo = аА 4- aJu + a3iz, Го = ft A + Vtf + Ms, A4.14.5)
считая, что at, bt — произвольные константы.
Вектор смещения U развертывается по осям подвижного триэдра при
помощи равенства D.22.2).
Поэтому считая, что выбрана ортогональная система координат, можно
написать
Выразив в правых частях этих равенств М, Mlt Af2, п, Uo н Го при
помощи A4.9.2), A4.9.4), A4.9.6) и A4.14.5) и давая i значения 1, 2,
? 14] БЕЗМОМЕНТНАЯ ГЕОМЕТРИЧЕСКАЯ ЗАДАЧА ОБОЛОЧЕК ВРАЩЕНИЯ 209
получим
"х = j/т+т* (r'z ~r) sin ф + утт?-* (r'z ~r) cos ф +
sin <р + __*_ /со5Ф+-^=-, (Н.14.6)
и2 = bxr'z cos ф 4- Kr'z sin ф — 63'"''" + aisln Ф + aicos Ф-
¦ Таким образом, при жестком смещении поверхности вращения вели-
величины ии и2, а, следовательно, и величины и2/г и У 1 -f-г'2 и, выражаются
как сумма величин, меняющихся по ф по закону 1, sin ф или cos ф и зави-
зависящих в общей сложности от шести произвольных констант. Вместе с тем,
очевидно, что жесткие перемещения являются решениями однородных (при
е, = е2 = со = 0) геометрических безмоментных уравнений. Отсюда сле-
следует, что, если Ej = е2 = со = 0, то в решении геометрических безмо-
безмоментных уравнений вида A4.14.2) коэффициенты при 1, cos ф и sin ф соот-
соответствуют смещениям срединной поверхности как жесткого целого. Но
в обыкновенных линейных дифференциальных уравнениях переход от реше-
решения однородных уравнений к решению неоднородных уравнений совер-
совершается элементарно (например, методом вариации постоянных). Поэтому
и из решения A4.14.6) можно элементарно получить решение неоднородных
геометрических безмоментных уравнений, если имеют силу разложения
A4.14.1) и в них отличны от нуля только коэффициенты при 1, cos ф и sin ф.
Это и будут те решения уравнений A4.14.3), которые можно элементарно
получить при п^ = 0 и п, = ±1. Другими словами, при решении гео-
геометрических безмоментных уравнений в тригонометрических рядах нет
необходимости интегрировать те уравнения, которые получаются для коэф-
коэффициентов при 1, cos ф, sin ф. Эти величины в однородном случае (при гг ~
= е2 = со = 0) соответствуют жестким смещениям срединной поверхности
и могут быть получены элементарно, а в неоднородном случае решение можно
получить методом вариации постоянных.
Заключая главу, отметим, что разложением в тригонометрические
ряды можно воспользоваться не только в безмоментной, но и в моментной
теории оболочек вращения. При этом в моментных уравнениях также отде-
отделится поперечная переменная, и для каждого отдельно взятого члена раз-
разложения получится система дифференциальных уравнений без частных
производных. На соответствующих конкретных подробностях мы останав-
останавливаться не будем. Им посвящена обширная литература (ограничиваясь
лишь монографиями, укажем работы [35, 62, 81, 98, 124, 136]).
Для упомянутых выше систем обыкновенных дифференциальных урав-
уравнений не удалось найти достаточно простых общих точных методов решения
(в качестве исключения можно привести сферическую оболочку [40, 90,
110, 114, 149, 190], для которой общий интеграл однородных моментных
уравнений, соответствующий п-ыу члену разложения, удалось выразить
через элементарные функции и присоединенные функции Лежандра ком-
комплексного индекса).
Более общие результаты в теории оболочек вращения получены при
помощи асимптотических подходов. Обыкновенные дифференциальные урав-
уравнения, получаемые после отделения поперечной переменной, содержат в каче-
качестве параметров относительную толщину оболочки h^ и число п, равное
номеру рассматриваемого члена разложения в тригонометрические ряды
по ф. Соответственно, существует и два основных пути применения асимпто-
асимптотических методов в теории оболочек вращения.
Первый из таких подходов основывается на малости параметра h.%.
Он заключается в разложении решения по положительным степеням п^
14 А. Л. Гольденвейзер
210 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ ВРАЩЕНИЯ [ГЛ. К
и принес наибольшее количество эффективных решений. Первые его при-
применения были даны в работах [137, 162, 163, 183]. Этот метод нашел отра-
отражения и во всех книгах, посвященных теории оболочек вращения. Особенно
последовательно и полно использована малость h^ в монографии [81 ].
Обсуждаемый асимптотический подход, в сущности, эквивалентен методу
расчленения, хотя это обстоятельство и не всегда бросается в глаза при
чтении литературы по теории оболочек вращения. Дело в том, что в ней
обсуждаются преимущественно случаи п — 0, п = 1, когда основное напря-
напряженное состояние строится элементарно, а, следовательно, асимптотический
метод используется лишь для построения (более точного, чем в главе 8) про^
стого краевого эффекта. Если п ^ 2, но не слишком велико, то в процессе
применения обсуждаемого варианта асимптотического метода построение
основного напряженного состояния и построение простого краевого эффекта
превращается в почти самостоятельные задачи, и черты сходства с методом
расчленения проявляются более отчетливо.
Второй путь применения асимптотического метода в теории оболочек
вращения может быть избран в случаях, когда п становится настолько
большим, что искомое решение можно раскладывать по отрицательным
степеням п. О нем будет подробнее сказано в приложении, а пока заметим,
что такой подход является альтернативой метода расчленения, точность
которого падает с возрастанием п (§ 12.30).
Г Л А В А 15 . :
БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ
§ 15. Постановка краевых задач
для безмоментных уравнений
Обращаясь к рассмотрению краевых задач, которые надо решать при
интегрировании уравнений безмоментной теории, начнем с обсуждения поста-
постановки вопроса.
В § 5.33 было показано, что в общей теории оболочек в каждой точке,
края надо выполнять по четыре граничных условия, выражающие упругие
свойства элементов, к которым примыкает край. Кроме того, может возник-
возникнуть необходимость выполнить на тех или иных внутренних линиях обо-
оболочки дополнительные требования, называемые условиями сопряжения.
Последние появляются, когда оболочка контактирует вдоль некоторой линии
с каким-либо упругим телом (оболочкой, усиливающим ребром и т. д.)
или когда вдоль внутренней линии g' претерпевают скачок величины
Хъ Xit Z, Яш Rlit R22, h, E, v, A5.15.1)
задающие поверхностную нагрузку, геометрию оболочки и упругие свойства
ее материала.
Пример условий сопряжения для случая, когда терпят скачки компо-
компоненты внешней нагрузки, а линия скачка g' совпадает с <хх = const, пред-
представляют собой равенства (9.18.1). Они выражают требования непрерывности,
четырех обобщенных усилий и четырех обобщенных перемещений и, так же
как граничные условия, могут быть разбиты на две группы. К первой группе
мы отнесем первые четыре равенства (9.18.1), заключающиеся в требовании
непрерывности тангенциальных усилий и тангенциальных перемещений,
и назовем их условиями тангенциальной непрерывности. Вторую группу
составят условия не тангенциальной непрерывности, выражаемые четырьмя
последними равенствами (9.18.1).
Переход от общей теории оболочек к безмоментной теории сопровож-
сопровождается понижением порядка уравнений. Поэтому необходимо условиться,
какие краевые задачи должны ставиться для безмоментных уравнений,
чтобы их решение представляло определенный физический интерес. Напра-
Напрашивающийся ответ на этот вопрос заключается в том, что безмоментные
уравнения надо интегрировать с учетом таких граничных условий и таких
условий сопряжения, которые связаны с тангенциальными (параллельными'
касательной плоскости) направлениями, т. е. что в безмоментиой теории,
должны быть сохранены только тангенциальные граничные условия и усло-
условия тангенциальной непрерывности. Эта точка зрения и будет принята в на-
настоящем разделе книги. Она оправдана результатами, полученными в части II.
Во всех рассмотренных там примерах оказалось, что решение сформулиро-
сформулированной таким образом безмоментной краевой задачи определяет в первом
приближении напряженно-деформированное состояние оболочки с точностью;
14*
212 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ [ГЛ. 15
до простых краевых эффектов, т. е. с точностью до локальных напряженных
состояний, вызванных краями или другими линиями возмущения.
Таким образом, нам предстоит рассматривать краевые задачи, совпа-
совпадающие по смыслу с полной краевой задачей (§ 7.8), с.дополнительным пред-
предположением, что достаточно выполнять только требования тангенциальной
непрерывности.
Замечание. Принятая постановка краевых задач безмоментной теории неуниверсальна,
так как могут встретиться случаи, когда невыполнимо разбиение граничных условий и условий
непрерывности на тангенциальные и нетангенциальные. Для граничных условий это может
произойти, например, в случае, когда направление бесконечной жесткости опоры расположено
косо, т. е. составляет с нормалью угол, отличный от нуля и я/2. Для условий непрерывности
это произойдет тогда, когда они ставятся на линии излома срединной поверхности. Такие
случаи мы исключим из рассмотрения в настоящем разделе книги и вернемся к ним в части IV.
Ограничим, кроме того, класс полных безмоментных краевых задач,
подлежащих рассмотрению в этой части книги, введя следующие
Дополнительные предположения.
1. Срединная поверхность оболочки всюду имеет определенную каса-
касательную плоскость, не содержит бесконечно удаленных точек, не касается
плоскости вдоль замкнутой кривой и не имеет частей, совпадающих с пло-
плоскостью.
2. Все края оболочки — неасимпто^.ические, т. е. нигде не проходят
вдоль асимптотических линий и не касаются их.
3. Внешние силы, кривизны срединной поверхности и граничные усло-
условия достаточно гладки (понятие о гладкости граничных условий будет разъ-
разъяснено ниже).
Замечание. Нетрудно видеть, что требования, сформулированные в п. 1, сводятся к тому,
что срединная поверхность должна быть иеособой, в том смысле, как это понимается в § 9.13.
В дальнейшем речь идет только об идеализированных граничных усло-
условиях, и они будут подразделяться на геометрические и статические. Под
геометрическими граничными условиями подразумеваются требования, чтобы
краевые перемещения или углы поворота в некотором направлении, опре-
определенном в каждой точке края, имели заданное значение (в однородном слу-
случае равное нулю). Аналогичный смысл имеют статические граничные усло-
условия, в которых вместо перемещений и углов поворота задаются усилия и
моменты.
§ 16. Граничные задачи безмоментной теории оболочек
нулевой кривизны
В § 13.1 построены общие интегралы безмоментных уравнений произ-
произвольных оболочек нулевой кривизны. В них тангенциальные усилия и пере-
перемещения записываются с помощью равенств
Т. = 7<-> + 7(б>, S = S<4> + .S<6>, T, = 7Y>
, и.2= м<
ч>
в которых величины, отмеченные верхним индексом (ч), определены един-
единственным образом при помощи формул A3.1.6), A3.1.10), величины, отме-
отмеченные верхним индексом (б), выражаются формулами A3.1.8), A3.1.11),
т. е. зависят от двух произвольных функций t (а2), п (а2), а величины,
отмеченные верхним индексом (м), выражаются формулами A3.1.13), т. е.
зависят от двух других функций 1 (а2), ц (а2).
Для определения произвольных функций t (а2), п (а2), | (а2) и t] (а2)
надо использовать граничные условия. В настоящей главе мы рассмотрим
$ 17]
КОНСОЛЬНАЯ ОБОЛОЧКА
213
эту задачу в предположении, что граничные условия ставятся на двух краях
оболочки Yi и у2, не имеющих общих точек, и что учитываются только тан-
тангенциальные условия.
Часто будет приниматься, что уравнения краев имеют вид
а2 = а12 (а11( а12— константы),
A5.16.2)
т. е. что края проходят вдоль координатных а2-линий, как это обычно бывает
в практических задачах. В этом случае для краткости Yi, Y2 будут называться
поперечными краями оболочки (для произвольного цилиндра и для круго-
кругового конуса а2-линии представляют собой сечения поверхностей плоскостью,
ортогональной оси вращения).
§ 17. Консольная оболочка нулевой кривизны
Под консольной будет подразумеваться такая оболочка, у которой один
край (для конкретности — Yi) свободен, а другой (y2) жестко заделан.
В § 5.33 были рассмотрены граничные условия на свободном и на заде-
заделанном краях. Для-случая, когда они проходят вдоль линии а1 = const,
эти условия соответственно записы-
записываются так:
Т[ = 7, = О,
N[ = N, + -4--
1 о
да.2
= 0, и2 — 0, w = 0, Yi = 0-
Рис. 24.
Первые два из каждой группы представляют собой тангенциальные
граничные условия. Поэтому, если края консольной оболочки совпадают
с поперечными сечениями, то тангенциальные граничные условия можно
брать в виде
7\ = 0, S = 0 (при «! = а^,
л л / ч A5.17.1)
иг = 0, и2 = 0 (при а, = а12). ;
Здесь принято, что моменты Н21 относительно малы и приведенные
усилия Т[ и Sn заменены истинными усилиями Т\, S21, кроме того, в силу
равенства G.4.1) отброшены нижние индексы при S.
В общем случае, когда края ylt y2 не совпадают с поперечными сече-
сечениями, тангенциальные граничные условия можно записать в виде равенств
= 0 (на
и = 0, v = 0 (на у2),
A5.17.2)
в которых Ту, Sy — нормальное и сдвигающее тангенциальные усилия
в сечении, проведенном вдоль линии Yi, au, v — тангенциальные переме-
перемещения, направленные по тангенциальной нормали и по касательной к ли-
линии у2 (см. рис. 24).
Таким образом, для консольной оболочки надо рассмотреть полную
краевую задачу безмоментной теории, в которой тангенциальные граничные
условия имеют вид A5.17.1) или A5.17.2).
214 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ [ГЛ. 15
В этом параграфе будем считать, чтоуь Тг представляют собой попереч-
поперечные сечения, т. е. что граничные условия имеют вид A5.17.1). Их можно
выполнить, приняв, что
u2 = u|-), w = да<ч>, A5.17.3)
определив правые части этих равенств при помощи формул A3.1.6) и A3.1.10)
и считая, что в последних а1 = аХ1, аг = а12, т. е. что в A3.1.6) интегриро-
интегрирование ведется от свободного края, а в A3.1.10) от заделанного. При этом
как в A3.1.6), так и в A3.1.10) все интегралы обратятся в нуль и условия
A5.17.1) выполнятся.
Итак, если считать, кто в A3.1.6) и A3.1.10) нижние пределы инте-
интегрирования at, а2 постоянны, то величины, отмеченные верхним значком (ч),
составляют решение полной краевой задачи безмоментной теории для загру-
загруженной поверхностной нагрузкой консольной оболочки нулевой кривизны,
у которой край а1 = а2 жестко заделан, а край аг = аг свободен и не загру-
загружен краевыми силами.
В частности, перейдя от произвольной поверхности нулевой кривизны
к цилиндру, т. е. положив Аг = Л2 (а2), R = R (а2) в A3.1.6) и A3.1.10),
получим следующее решение полной краевой задачи безмоментной теории
для консольной цилиндрической оболочки произвольного очертания:
= - J da, J -L -<L [-J- ? (RZ) - Х2] da, - j ^ da,
«11
a,
""а, «, A5.17.4)
a
1 д
f '
Eh
а,
(это решение остается в силе и в случае, когда Е, h, v меняются по аи а2).
Для произвольной консольной оболочки нулевой кривизны решение
определяют формулы A5.17.3), A3.1.6), A3.1.10), и нетрудно убедиться,
что оно — единственное. Действительно, из A5.16.1), A3.1.8), A3.1.11)
и A3.1.13) следует, что обсуждаемое решение получается при следующем
выборе произвольных функций безмоментной теории оболочек нулевой
кривизны:
= 0.
Вместе с тем ни одну из этих функций нельзя считать отличной от тож-
тождественного нуля, так как из A3.1.8) и A3.1.11) вытекает, что при этом нару"
шится по меньшей мере одно из условий A5.17.1).
§ 18] КОНСОЛЬНАЯ ОБОЛОЧКА 215
Из единственности решения A5.Г7.3), A3.1.6), A3.1.10) следует, что
если речь идет об открытой (имеющей прямолинейные края а2 = const)
оболочке (рис. 25), то для выполнения граничных условий на ее прямоли-
прямолинейных краях а2 = const у нас нет произволов и эти
условия могут выполниться только случайно. Поэтому
формулы A5.17.3), A3.1.6), A3.1.10) мы будем тракто-
трактовать как решение замкнутой (не имеющей прямолиней-
прямолинейных краев) оболочки и заметим, что полная безмомент- /^n. у//ф
ная краевая задача для открытой оболочки нулевой кри- [/ \,/<уг
визны, вообще говоря, не имеет решения. Этого можно
было ожидать заранее, так как прямолинейные образую- 25-
щие цилиндра являются асимптотическими линиями, т. е.
совпадают с характеристиками уравнений безмоментной теории (§§7.4, 7.5).
Аналогично ведут себя и нецилиндрические оболочки нулевой кривизны.
§ 18. Консольная оболочка нулевой кривизны
(продолжение)
Будем считать, как и в § 15.17, что расчету подлежит консольная обо-
оболочка нулевой кривизны с поперечными краями аг = allt аг = а12, но
теперь будет предполагаться, что поверхностная нагрузка отсутствует,
а к свободному краю (at = аи) приложены тангенциальные силы Т* (а2)
и S*21 (а2). Тогда тангенциальные граничные условия примут вид
Ti = Т*л i (аг), S = S* («г) при а = ац( A5.18.1)
иг=о, «2 = 0 при а1 = а12, A5.18.2)
а величины с верхним значком (ч) (частный интеграл) обратятся в нуль,
так как предполагается, что поверхностная нагрузка отсутствует, т. е.
Хг = Х2 = Z = 0.
Заметив это, можно получить решение соответствующей полной задачи
безмоментной теории, положив
и считая, что в формулах A3.1.8), A3.1.11) нижние пределы интегрирования
выбираются так же, как в § 15.17 (ах = а1Ъ а2 — а12).
Из A3.1.11) следует, что граничные условия A5.18.2) на жестко заде-
заделанном крае выполнятся при любых t (a2) и п. (а2), а для того, чтобы выпол-
выполнились граничные условия A5.18.1) на свободном крае, надо положить
t = S? (о,). A5.18.4)
Итак, решение рассматриваемой задачи получено. В общем случае
оно определяется формулами A5.18.3), A3.1.8), A3.1.11), а например, для
произвольной цилиндрической оболочки, когда А2 — А2 (a2), R = R (а2),
его можно записать так:
«1
~ я I At , .\ С л Т. .
A5.18.5)
216
БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ
[ГЛ. 15
u2 = щ =
пг
«1 «!
Аз J Al да, J S
1
2Eh A,
Формулы A5.18.5) так же, как и более общие формулы A3.1.8), A3.1.11),
дают единственное решение рассматриваемой задачи. Действительно, от-
отброшенные в равенствах A5.18.3) величины с индексом (м) нельзя считать
отличными от нуля, так как тогда, согласно A3.1.13), надо положить отлич-
отличными от нуля {• (а2) и ц (а2), а это поведет к нарушению по меньшей мере
одного из условий A5.18.2).
Отсюда вытекает, что A5.18.5), так же как A3.1.8) и A3.1.11), надо
рассматривать как решение для замкнутой оболочки, так как в нем отсут-
отсутствуют произволы для выполнения граничных условий на прямолинейных
краях а2 = const.
Таким образом, если считать, что в A3.1.8) и A3.1.11) нижние пределы
интегрирования не зависят от а2, то определяемые ими величины,
отмеченные верхним значком (б), составляют решение полной краевой
задачи безмоментной теории для консольной оболочки, у которой попереч-
поперечное сечение аг = ах заделано, а поперечное сечение ах = а2 свободно и загру-
загружено краевыми силами. Функции п, t в этом случае связаны с краевыми си-
силами 7^.1, Si формулами A5.18.4).
§ 19. Консольная оболочка нулевой кривизны
с косыми краями
Если края консольной оболочки расположены произвольно, то надо
выполнить граничные условия A5.17.2), подразумевая в них под 7^, Sy
усилия на косых (по отношению к принятой системе координат) сечениях,
т. е. величины, которые можно выразить через Tlt S2l, S12, T2 при помощи
формулы C.20.2). Равным образом перемещения и, v, отнесенные к направ-
направлению косого сечения, можно выразить через перемещения ult иг, отнесен-
отнесенные к координатным направлениям. Тогда граничные условия A5.17.2)
запишутся так:
— Ту = Tj sin2 Я, + 2S sin Я, cos Я, + 72 cos2 Я, = 0 (на yj,
Sy = 71! sin Я, cos Я, -f- S (cos2 Я, — sin2 X) — T2 sin X cos Я, = 0 (на yj,
и — щ sin \i -\~ «2 cos ц = 0, v = — Uj cos \i -\- u2 sin fi = 0 (на у2). A5.19.2)
A5.19.1)
Здесь Я, — угол между о^-линией и краем Yi (см. рис. 9), а \л — угол
между а2-линией и краем у2. Кроме того, принято во внимание, что в без-
моментных уравнениях S21 = S12 = S.
Разрешив равенства A5.19.1) относительно Ти S, получим
cosU T s = S^Tt (на Yi), A5.19.3)
*» С1Т1 i H VIA/» \ /
sin2 X '*' sin Я 2
равным образом равенства A5.19.2) дают
иг = 0, и2 = 0 (на y2)-
A5.19.4)
§ 20] ИЗГИБАНИЯ ПОВЕРХНОСТЕЙ НУЛЕВОЙ КРИВИЗНЫ 217
Примем, что кривые Yi и у2 задаются уравнениями ах = а1Х (а2) и
ai = ai2 (аг). и будем считать, что в формулах A3.1.6) и A3.1.10), опреде-
определяющих величины с верхними индексами (ч), а также в формулах A3.1.8)
и A3.1.11), определяющих величины с верхними индексами (б), нижние
пределы интегрирования выбраны так: а1 = аг1 (а2), а2 = а12 (а2). Тогда,
при ах = аХ1 (а2), т. е. на краю ylt будут справедливы равенства
Т[ч) = 0, SD) = 0, Т\б) = л (а2), SF) = * (о2).
Равным образом при аг = а12 (а2), т. е. на краю у2, будут справедливы'
равенства
«<ч) = и\б) = 0, 4Ч) = 46) = 0.
Учитывая, кроме того, что Г2б) = 0, заключаем, что граничные усло-
условия A5.19.3) и A5.19.4) можно выполнить, положив
Тх = Т[ч) + Т[б), ..., и, = и\ч) + «S6), ... A5.19.5).
и выбрав в формулах A3.1.8) функции п (а2), ? (а2) так:
1=а„. A5.19.6)
Решение полной краевой задачи безмоментной теории для консольной
оболочки с косыми краями построено..Оно единственно. Это следует из того,
что величины, отмеченные индексом (м), которые отброшены в A5.19.5),
не могут быть отличны от нуля, так как они не удовлетворяют усло-
условиям A5.19.4).
Полученное решение, вообще говоря, теряет смысл, если sin Я. обращается
в нуль где-либо в интересующей нас области изменения а2, т. е. если край ух
касается прямолинейных образующих или проходит вдоль них. Это объяс-
объясняется тем, что прямолинейные образующие поверхности нулевой кривизны
являются характеристиками безмоментных уравнений.
§ 20. Изгибания поверхностей нулевой кривизны
Величины u|M>, u<M>, йу<м>, введенные в § 13.1, удовлетворяют однородным-,
геометрическим уравнениям безмоментной теории, а следовательно, пред-
представляют собой перемещения, которые испытывает поверхность нулевой
кривизны при изгибаниях (§7.5). Таким образом, формулы A3.1.13), опре-
определяющие ыС,м>, и^\ до(м), задают при произвольных ? (а2) и г\ (а2) переме-
перемещения всех изгибаний, которые может иметь поверхность нулевой кривизны.
В дальнейшем будет важно знать, может ли срединная поверхность
оболочки иметь изгибания, если смещения точек ее края (или краев) должны
подчиняться некоторым тангенциальным геометрическим граничным усло-
условиям. Если такие изгибания невозможны, то будем говорить, что соответ-
соответствующие граничные условия обеспечивают жесткость срединной поверх-
поверхности.
Обсудим, при каких обстоятельствах станет жесткой поверхность нуле-
нулевой кривизны. Пусть геометрические граничные условия имеют вид
иг sin fi -f и2 cos ц = 0, A5.20.1)
т. е. представляют собой требования обращения в нуль краевого перемеще-
перемещения, образующего угол ц с а2-линиями (рис. 26), причем fx может быть и
функцией точек контура.
218 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ [ГЛ. 15
Примем, что на краю у поставлено два условия вида A5.20.1), т.е.
должны выполняться равенства
u\w) sin ц' + *4М> cos ц' = 0, и\ы) sin ц" + и{2ы) cos ц ' = 0 A5.20.2)
и будем считать, что край у охватывает поперечное сечение оболочки, т. е.
задается уравнением а1 — а1 (а2), в котором
A5.20.3)
и интервалу (а21, а22) соответствует полный обход поперечного сечения.
Если \i' Ф \i" во всех точках y> то A5.20.2) эквивалентны равенствам
и[ы) = 0, uia) = 0, A5.20.4)
а из A3.1.13) видно, что им можно удовлетворить, только положив % (а2) =
= ц (а2) = 0 во всем интервале A5.20.3), т. е. для всех точек поперечного
сечения поверхности. Одновременно A3.1.13) показывают, что при ? = tj = O
все перемещения тождественно исчезают. Это
значит, что два геометрических граничных
условия вида A5.20.1) или, что тоже, вида
A5.20.4), поставленные на краю y. охваты-
охватывающем поперечное сечение поверхности ну-
нулевой кривизны, обеспечивают ее жесткость,
т. е. обращают в тождественный нуль все
перемещения, соответствующие изгибаниям
этой поверхности.
Рассмотрим теперь случай, когда в общей сложности ставятся два гео-
геометрических граничных условия и одно из них задается на охватывающем
поперечное сечение контуре Yi, а другое на таком же контуре Y2 (если гео-
геометрических условий больше, чем два, или если они оба ставятся на одном
краю, то, как показал разобранный выше случай, жесткость срединной
поверхности будет обеспечена). Тогда, положив для простоты, что Yi и у2—
поперечные сечения, задаваемые уравнениями аг — ах и аг = a2, получим
из A3.1ЛЗ)
cos u, = 0,
A5.20.5)
J
I sin ц2 + т| cos ц2 = 0
lf р,2 — углы, определяющие направления нулевых перемещений на YiH Y2
соответственно). Эти равенства образуют относительно ?, т) систему обыкно-
обыкновенных линейных однородных дифференциальных (по а2) уравнений, кото-
которые надо интегрировать, требуя, чтобы | и rj возвращались к первоначаль-
первоначальному значению после обхода замкнутой поверхности. Но система A5.20.5),
вообще говоря, не имеет нетривиального (не нулевого) решения, удовлетво-
удовлетворяющего таким требованиям. Это следует из того, что она сводится к одно-
однородному линейному уравнению первого порядка и ее общий интеграл опре-
определяется равенствами
I = сф (а2), т) = сф (а2),
•в которых можно распоряжаться только константой с.
Итак, два геометрических граничных условия, поставленные на разных
•охватывающих краях Yi, Тг> вообще говоря, делают поверхность жесткой.
Однако возможны и исключения, к которым принадлежит случай, когда
геометрические граничные условия имеют вид
ых = 0 (на Yi и на Y2)-
§ 21] ТЕОРЕМА О ВОЗМОЖНЫХ ИЗГИБАНИЯХ 219
При этом в уравнениях A5.20.5) надо положить цг = ц2 — 0, и полу-
полученная система будет иметь решение | = const, ц = 0. Оно соответствует
тривиальному изгибанию, заключающемуся в движении оболочки как
жесткого целого (для цилиндра и кругового конуса это будет движение
в направлении оси х).
Пусть для некоторой оболочки (не обязательно нулевой кривизны)
поставлена полная краевая задача безмоментной теории, заключающаяся
в том, что на каждом краю сформулированы по два идеализированных тан-
тангенциальных граничных условия, среди которых, вообще говоря, будет
находиться и некоторое число геометрических условий. Тогда можно ввести
важное для дальнейшего понятие о возможных изгибаниях, подразумевая
под этим такие изгибания срединной поверхности, которые удовлетворяют
всем однородным тангенциальным геометрическим граничным условиям
данной полной краевой задачи безмоментной теории. В число тангенциаль-
тангенциальных граничных условий задачи могут и не входить геометрические гранич-
граничные условия. Тогда возможными надо считать все изгибания, которые имеет
срединная поверхность оболочки, когда ее края ничем не стеснены. В даль-
дальнейшем выяснится, что с прочностной точки зрения наиболее выгодны (они
Чаще всего и применяются на практике) те оболочки, в которых тангенциаль-
тангенциальные геометрические граничные условия обеспечивают жесткость срединной
поверхности, т. е. не допускают каких бы то ни было ее изгибаний. В таких
случаях будем говорить, что возможные изгибания равны нулю.
Поясним понятие о возможных изгибаниях на примере консольной
оболочки нулевой кривизны. Если края такой оболочки проходят вдоль
поперечных сечений, то для полной краевой задачи тангенциальные гранич-
граничные условия формулируются в виде четырех равенств A5.17.1), из которых
к геометрическим граничным условиям относятся два последних равенства.
Они совпадают с граничными условиями A5.20.4) и, как было показано
выше, обеспечивают жесткость срединной поверхности. Это значит, что
для консольной оболочки нулевой кривизны возможные изгибания равны
нулю.
§ 21. Теорема о возможных изгибаниях
Для широкого класса случаев справедлива следующая
Теорема о возможных изгибаниях. Полная безмоментная краевая задача,
отвечающая дополнительным предположениям (§ 15.15), имеет решение,
удовлетворяющее тангенциальным условиям непрерывности, тогда и только
тогда, когда соответствующие ей заданные внешние силы не совершают
работы на перемещениях U всех возможных изгибаний срединной поверх-
поверхности, и это решение единственно с точностью до U [61 ].
Сформулированную теорему мы доказывать не будем, приняв ее как
условное утверждение, правильность которого будет проверяться по мере
получения конкретных результатов. А пока ограничимся обсуждением
условий теоремы.
Легко показать, что, если полная безмоментная краевая задача имеет
решение, то в нем будут присутствовать элементы произвола, соответ-
соответствующие возможным изгибаниям срединной поверхности. Перемещениям
любого изгибания соответствуют нулевые компоненты тангенциальной
деформации, а значит, в силу формул G.1.4), и нулевые тангенциальные
усилия. Поэтому перемещения возможного изгибания заведомо удовлетво-
удовлетворяют однородным безмоментным статическим уравнениям и однородным
статическим тангенциальным условиям. Кроме того, они по определению
удовлетворяют однородным безмоментным геометрическим уравнениям и
однородным геометрическим тангенциальным условиям. Таким образом,
220 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ [ГЛ 15
возможные изгибания удовлетворяют всем уравнениям и граничным условиям
полной однородной граничной задачи безмоментной теории, и соответствую-
соответствующие перемещения всегда можно прибавить к решению этой задачи.
В практических применениях, как правило, приходится иметь дело с оболочками, в кото-
которых тангенциальные геометрические условия обеспечивают жесткость срединной поверхности,
т. е. исключают ее изгибания (в противном случае оболочка станет иевыгодиой в прочностном
отношении; этот физически понятный факт подтвердится в части IV). Тогда возможные изгиба-
изгибания надо считать равными нулю, а это значит, что любая внешняя нагрузка будет удовлетво-
удовлетворять условию нулевой работы и теорема о возможных изгибаниях превратится в теорему суще-
существования и единственности решения полной безмоментной краевой задачи при любой, доста-
достаточно гладкой, нагрузке.
Необходимость основного требования теоремы, т. е. условия нулевой
работы, вытекает из равенства G.7.6). В нем под U можно подразумевать
любой вектор смещений, а под е1( со, е2 — соответствующие ему компоненты
тангенциальной деформации. Примем поэтому, что U определяет поле сме-
смещений некоторого возможного изгибания рассматриваемой задачи. Тогда
в равенстве G.7.6) надо положить гг = со = е, = 0, и оно примет вид
JJ
=0. A5.21.1)
Здесь в левой части первое слагаемое выражает работу всех (тангенциальных
и нормальных) поверхностных сил. Во втором слагаемом под R\l) подразу-
подразумевается тангенциальная проекция вектора R(i), и оно 'выражает работу
тангенциальных краевых сил. При произвольном U на краю будут совер-
совершать работу как заданные внешние силы, так и силы реакции опоры. Однако
вектор U задает возможные изгибания и должен удовлетворять геометри-
геометрическим граничным условиям, т. е. он не имеет составляющей в тех направ-
направлениях, где могут возникнуть реактивные силы. Это значит, что равен-
равенство A5.21.1) представляет собой именно то условие нулевой работы всех
заданных внешних сил, которое входит в формулировку теоремы, и необ-
необходимость его становится очевидной.
Дополнительные предположения, сформулированные в § 15.15, также
необходимы.
Края оболочки должны быть неасимптотическими. Это следует из рас-
рассмотрения консольной оболочки нулевой кривизны. В такой оболочке тан-
тангенциальные граничные условия обеспечивают жесткость срединной по-
поверхности (§ 15.20), и по теореме о возможных изгибаниях решение полной
безмоментной краевой задачи должно было бы существовать при любой,
достаточно гладкой, нагрузке. Однако в § 15.17 показано, что это решение
можно построить только тогда, когда оболочка не имеет продольных краев,
которые в данном случае проходят вдоль асимптотических линий. Более
того, результаты § 15.19 показывают, что нельзя допускать даже касания
края оболочки с асимптотической линией срединной поверхности.
На примере консольной оболочки нулевой кривизны можно убедиться
и в необходимости требования гладкости величин A5.11.1). Решение соот-
соответствующей полной безмоментной краевой задачи определяется форму-
формулами A5.17.3), A3.1.6), A3.1.10), в которых все операции по переменной аа
заключаются только в дифференцировании. Поэтому усилия и перемеще-
перемещения A5.17.3), A3.1.6), A3.1.10) будут, вообще говоря, непрерывными только
тогда, когда величины A5.15.1) достаточно гладки как функции точек попе-
поперечного сечения оболочки (для замкнутой оболочки по переменной а2 должны
выполняться не только условия гладкости, но и условия возврата, т. е.
требования, чтобы рассматриваемая величина вместе с некоторым числом
ее производных вернулась к прежним значениям после обхода поперечного
сечения). А именно, для того чтобы выполнились тангенциальные условия
$ 21] ТЕОРЕМА О ВОЗМОЖНЫХ ИЗГИБАНИЯХ 221
непрерывности (§ 15.15), т. е. были непрерывны величины S, Т2, иъ и2,
надо, чтобы величины A5.15.1) вместе со своими производными по а2 до
порядков
d3z axt a2x2 зе ah
да% ' даг ' да$ ' да2 ' !fo^
включительно были непрерывны как функции точек поперечного сечения.
Конечно, в некоторых случаях, когда скачки взаимно погашаются, это
требование можно смягчить.
По переменной ах в формулах A3.1.6), A3.1.10) выполняются только
операции интегрирования, и нетрудно проследить, что условия танген-
тангенциального сопряжения на линии ах = const, т. е. требования непрерывности
величин S, Ти ии и2 по аи будут выполняться даже в том случае, когда
скачки по ах имеют сами величины A5.15.1).
Итак, полная краевая задача безмоментнои теории для консольной
оболочки нулевой кривизны имеет единственное решение A5.17.3), A3.1.6),
A3.1.10), как и должно быть, так как возможные изгибания в данном слу-
случае равны нулю. Однако это решение законно (удовлетворяет условиям
тангенциальной непрерывности) только тогда, когда величины A5.15.1)
подчинены определенным требованиям гладкости (значительно более жестким
по а2, нежели по ах).
Замечание. Повышенные требования гладкости по а2, так же как невозможность учесть
граничные условия на продольных краях, для оболочки нулевой кривизны связаны с тем, что
для нее линии а2 = const совпадают с характеристиками уравнений безмоментнои теории.
Требование гладкости граничных условий, включенное в дополнитель-
дополнительные предположения (§ 15.15), также необходимо. Если в какой-либо точке
края оболочки меняется смысл граничного условия или терпит скачок функ-
функция, входящая в формулировку граничного условия, и через эту точку
проходит действительная характеристика безмоментных уравнений у, то
на у, вообще говоря, произойдет нарушение условий тангенциальной непре-
непрерывности. Это, видно из результатов решения полной краевой задачи для
консольной цилиндрической оболочки, загруженной на свободном крае:
усилия и перемещения в данном случае определяются формулами A5.18.5),
имеющими силу только тогда, когда в правых частях условий A5.18.4)
функции Т\ 1 и Si достаточно гладки. Другие примеры читатель найдет
в § 15.25.
Общий интеграл безмоментных уравнений оболочек нулевой кривизны
определяется формулами A3.1.6), A3.1.8), A3.1.9), A3.1.10), A3.1.11),
A3.1.13). При этом в формулах A3.1.6), A3.1.10) компоненты поверхностной
нагрузки Хг, Х2, Z неоднократно интегрируются по ах. Отсюда следует,
что усилия и перемещения безмоментнои теории будут при некоторых обсто-
обстоятельствах неограниченно возрастать, даже если Xly X2, Z остаются всюду
ограниченными. Рассмотрим, например, случай, когда Хи Х2, Z постоянны
поа1; и проследим по формулам A3.1.6), как ведут себя усилия T[4\S<4), Т|ч).
Если оболочка — цилиндрическая, т. е. если (§ 10.28)
А2 = AT (aj), R, = RB0) (а2),
то, выполнив вычисления по формулам A3.1.6), получим
г(ч) (gt — О!J 1 д 1 д Г 1 д (ЫО)
S<4> = (а, - а,) j^-ф- ? (*J°>Z) -X2 J, 7f" —
222
БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ
[ГЛ. 15
Отсюда видно, что в цилиндрической оболочке усилия Т\ч\ 5(t° при
постоянной по длине поверхностной нагрузке неограниченно возрастают
с ростом <*!, т. е. с увеличением длины оболочки. Легко проверить, что
такими же свойствами обладает и оболочка нулевой кривизны, имеющая
форму произвольной поверхности касательных, для которой (§ 10.28)
А2 = 4°> + Араь, Я2 - Ri°> + /#>
Если оболочка — коническая, т. е. если
то вычисления по формулам A3.1.6) дают
A 4"
"-K-flfa
Эти формулы показывают, что в конической оболочке при нагрузке,
не меняющейся вдоль образующей, усилия Т\ч\ SD) возрастают как при
ttj —» сх>, т. е. при увеличении длины оболочки, так и при ctj —» 0, т. е. при
\а
Рис. 27.
Рис. 28.
приближении к вершине конуса. Отсюда следует необходимость дополни-
дополнительных предположений об отсутствии бесконечно удаленных точек средин-
срединной поверхности и о существовании определенной касательной плоскости.
Недопустимо, конечно, и существование участков, на которых средин-
срединная поверхность превращается в плоскость, так как при этом Rlt — Rl2 =
— Rzz — °° и третье силовое уравнение безмоментной теории становится
бессмысленным.
Остается пояснить, с чем связано дополнительное предположение об
отсутствии касания срединной поверхности с плоскостью вдоль замкнутой
кривой. Для этого рассмотрим оболочку, срединная поверхность которой
представляет собой полный круговой тор (на рис. 27 показан его меридиан).
Цилиндром аа он рассекается на две части: А — поверхность неотрицатель-
неотрицательной кривизны и В — поверхность неположительной кривизны. Пусть осе-
симметричная внешняя поверхностная нагрузка приложена как к части А,
так и к части В, так, как это показано на рисунке. В целом нагрузка стати-
статически уравновешена, но в отдельности для А и В ее равнодействующая дает
ненулевую проекцию на вертикальную ось. Для полной краевой задачи
безмоментной теории все условия обсуждаемой теоремы выполнены; в теории
поверхностей доказано, что тор жёсток (см., например, [19]), т. е. он может
§22] ШАРНИРНО ОПЕРТАЯ ОБОЛОЧКА 223
лишь двигаться как жесткое целое, а на таких смещениях самоуравновешен-
самоуравновешенная нагрузка, приложенная к тору, не будет совершать работу. Тем не менее
физически ясно, что решение полной краевой задачи безмоментной теории
в этом случае невозможно. Отбросим часть В и заменим ее действие танген-
тангенциальными усилиями, приложенными к части А на сечениях, разделяющих
эти части; тогда равновесие окажется невозможным, так как тангенциальные
усилия не дают составляющей на вертикальную ось.
Подобные рассуждения можно провести и для любой другой замкнутой,
оболочки, срединная поверхность которой касается плоскости вдоль замк-
замкнутой кривой (примером может служить оболочка вращения, [меридиан
которой изображен на рис. 28). Отсюда и следует недопустимость касания,
срединной поверхности с плоскостью вдоль замкнутой кривой.
§ 22. Шарнирно опертая оболочка нулевой кривизны
Возвращаясь к рассмотрению краевых задач безмоментной теории обо-
оболочек нулевой кривизны, примем теперь, что оболочка ограничена кри-
кривыми Yii Уз, совпадающими с поперечными краями A5.16.2), и что на них
осуществлено шарнирное опирание. Тогда тангенциальные граничные усло-
условия можно записать в виде равенств (§5.33)
Ti = T\.i, ы2 = 0 (нрио1=оц), A5 22 1>
Т\= Г1.2, И2 = 0 (При OCi =0Cl2),
в которых предполагается, что а12 >ап и что к краям ylt y2 приложены
заданные силы 77, i и 77,2.
Решение полной краевой задачи безмоментной теории, соответствующей,
условиям A5.22.1), зададим в форме A5.16.1), будем считать, что в форму-
формулах A3.1.6), A3.1.8), A3.1.10), A3.1.13) нижние пределы интегрирования'
выбраны обычным образом (а^ = allt a2 = ala), и начнем с выполнения
статических условий.
Подставим в первое и третье равенства A5.22.1) выражения A5.16.1).
и расшифруем Т[ч) и Т[б) по формулам A3.1.6) и A3.1.8). Получим
-'1.1' д
0!ц L J
A5.22.2>
Здесь
n2- 2
Л A \ Л Л I
Л2, l — Л2 |osi=au> -^2, 2 — /1а [osi=o!12-
Равенства A5.22.2) позволяют найти сначала п (<х2), а затем и t (а2)>
причем для определения последней получается простейшее дифференциаль-
дифференциальное (по а2) уравнение, которое можно записать так:
p= f^-dGd. A5.22.3)
J A
6ЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ
[ГЛ. 15
"Отсюда, воспользовавшись первым равенством A5.22.2), будем иметь
а,
t = -L J [ Аг. 2 (Т'и 2 + Т[?2) + Аг, iK i] A2 da2 + Ci (d = const, cm = const).
A5.22.4)
Обратимся к тангенциальным геометрическим условиям, выраженным
вторым и четвертым равенствами A5.22.1). Введя обозначение
«2."\ =')|а,=сс„>
•подставив выражения A5.16.1) во второе и четвертое равенства A5.22.1)
и расшифровав ы?ч\ ы<2б>, ы^м) по формулам A3.1.10), A3.1.11), A3.1.13),
лолучим для определения произвольных функций \ (а2), т) (а2) уравнения
?) ^+"^гл (а2)=~ "':)l ~ "'•>ь "(а2) = 0> A52'5)
в которых
da, da,
2EhA2 f Al
Л2. i л \ da,!
Здесь снова надо выполнять интегрирование по а2, и функция \ будет
определена с точностью до двух констант (Съ содержащейся в t, и С2)
появляющейся при определении 1).
Как и раньше, полученные результаты следует рассматривать как
решение безмоментных уравнений для замкнутой оболочки нулевой
кривизны, и значит, надо выполнять условия возврата (по сс2).
Пусть величины X,, Х2, Z, E, h, v достаточно гладки для того, чтобы
частный интеграл, отмеченный значком (ч), удовлетворял условиям возврата.
Тогда надо потребовать, чтобы и t (a2) удовлетворяло условию возврата,
иначе, как видно из A3.1.8), будет иметь скачок сдвигающее усилие S.
Выполнить это условие с помощью константы Сг, входящей в t (a2), нельзя,
так как константа сама удовлетворяет условию возврата. Отсюда, учиты-
учитывая A5.22.4), заключаем, что полученное решение для замкнутой оболочки
имеет силу только тогда, когда выполняется равенство
а12
j [А3. 2 (П. 2 + ТТг) + К хТ'и i] dcco = 0
A5.22.6)
(пределы интегрирования соответствуют обходу поперечного сечения обо-
оболочки).
Условие A5.22.6) имеет простой физический смысл. Усилия, отмечен-
отмеченные индексом (ч), для любой конечной части оболочки должны, очевидно,
S 23] ЖЕСТКО ЗАДЕЛАННАЯ ОБОЛОЧКА 225
находиться в равновесии с поверхностными силами Xlt Х2, Z. Так как на
свободном конце оболочки Г<ч) = 0, то величина
равна проекции равнодействующей всех поверхностных сил, приложенных
к оболочке, на направление оси х декартовой системы координат (см. рис. 18,
§ 11.28). Отсюда следует, что A5.22.6) представляет собой условие уравно-
уравновешенности в том же направлении всех сил (поверхностных и краевых),
приложенных к оболочке. Это условие, конечно, необходимо для существо-
существования решения, так как реакции шарнирных опор не могут воспринять
продольных сил.
Если выполнено условие A5.22.6) и если исходные данные задачи, т. е.
величины Xlt X2, Z, E, h, v, T\j, 71,2, представляют собой достаточно глад-
гладкие функции точек поперечного сечения оболочки, то усилия и перемещения,
отмеченные индексом (б), определяются формулами A3.1.8), A3.1.11), так же
как достаточно гладкие функции точе^ поперечного контура, и будут зави-
зависеть от константы С1. Последнюю надо выбрать так, чтобы при интегриро-
интегрировании первого равенства A5.22.5) для функции Ъ. (а2) выполнились условия
возврата (иначе ии как функция точек поперечного сечения, будет иметь
скачок). Константа С2, получающаяся при интегрировании первого равен-
равенства A5.22.5), останется неопределенной. Это естественно, так как шарнир-
шарнирная опора не препятствует смещению оболочки как жесткого целого в на-
направлении оси х декартовой системы координат.
Тангенциальные геометрические граничные условия рассмотренной
полной краевой задачи, как было показано в § 15.20, допускают изгибание
срединной поверхности (тривиальное изгибание, сводящееся к продольному
жесткому смещению), и полученные результаты полностью соответствуют
теореме о возможных изгибаниях. Условие разрешимости A5.22.6) сводится
к требованию обращения в нуль работы внешних сил на жестких продоль-
продольных смещениях, а решение определяется с точностью до этих смещений.
§ 23. Жестко заделанная оболочка нулевой кривизны
Пусть оба поперечных края ylt y2 оболочки нулевой кривизны жестко
заделаны. Тогда тангенциальные граничные условия будут записываться
так (§ 5.33):
ы1=0, ы2=0 (при ос,=аи и при а, = а12). A5.23.1)
Решение полной краевой задачи и в этом случае будем искать в виде
A5.16.1). При этом удобно считать, что в формулах A3.1.10), A3.1.11),
A3.1.13), определяющих перемещения, интегрирование ведется от одного
из заделанных краев, т. е. положить, например, а2 = а12. Что же касается
формул A3.1.6), A3.1.8), определяющих тангенциальные усилия, то в них
в данном случае выбор предела интегрирования а2 не имеет значения.
Граничные условия A5.23.1) на краю <хг — а12 выполнятся, если, в фор-
формулах A3.1.13) положить
15 А. Л. Гольденвейзер
226
БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ
[ГЛ. 15
Для определения t (a2), n (а2) надо использовать граничные усло-
условия A5.23.1) при аг = сс21. Они приводят к равенствам
2Eh
«11
— J ~2?/Г
«12
a,
a,2
где
которые образуют систему двух обыкновенных дифференциальных (по а2)
уравнений с двумя неизвестными t и п. При интегрировании этой системы
(в общем случае это будут линейные дифференциальные уравнения с пере-
переменными коэффициентами) надо учитывать условия возврата. Легко пока-
показать, что такое решение (единственное) существует при любых, достаточно
гладких, нагрузках. Это вполне согласуется с теоремой о возможных пере-
перемещениях, которая превращается, в данном случае, в теорему существования
и единственности, так как геометрические тангенциальные граничные усло-
условия обеспечивают жесткость оболочки (§ 15.20).
По аналогичной схеме решается и задача для оболочки, один край ко-
которой шарнирно оперт, а другой — свободен. На этом мы не будем оста-
останавливаться.
§ 24. Оболочка нулевой кривизны
со свободными краями
Пусть оба поперечных края оболочки нулевой кривизны свободны и
к ним приложены краевые силы Т^д, S\, Т\п_, Si соответственно. Тогда
тангенциальные граничные условия запишутся так:
Ti = fUu S = S] (при я, =oni), A5.24.1)
Г, = — Т\,2, S = S*2 (при «! = a12). A5.24.2)
Все эти четыре равенства, вообще говоря, невозможно выполнить в рам-
рамках решения полной краевой задачи безмоментнои теории, так как в общем
$25] ЗАДАЧИ С ДОПОЛНИТЕЛЬНЫМИ УСЛОВИЯМИ 227
интеграле A5.16.1), A3.1.6)—A3.1.8), A3.1.10), A3.1.11), A3.1.13) безмо-
ментных уравнений в выражение для тангенциальных усилий входят только
две произвольные функции п (а2) и t (a2), содержащиеся в величинах с ин-
индексом (б). Две другие произвольные функции | (а2) и т) (а2) нельзя исполь-
использовать потому, что они входят лишь в величины с индексами (м), которые
не содержатся в выражениях для тангенциальных усилий.
Будем выполнять только условия A5.24.1). Они совпадают с усло-
условиями A5.18.1). Поэтому можно воспользоваться результатами §§ 15.17,
15.18 и записать тангенциальные усилия, удовлетворяющие условиям A5.24.1),
при помощи первых трех равенств A5.16.1), считая, что величины
с индексами (ч) и (б) определяются равенствами A3.1.6), A3.1.10) и A3.1.8),
A3.1.11), в которых принято al = all, и что функции п (а2) и t (сс2)
выбраны так:
п (ог) = Т\, I, <(сс2) = 5*. A5.24.3)
Подставив соответствующие выражения в граничные условия A5.24.2),
получим два равенства
а,,
а,
а
1
Ч8. 2
а.
г; 2 = 0, A5.24.4)
•¦2i 2
«1! г,
В них, как и раньше, А2<1, А2<2 — значения коэффициента А2 на соответ-
соответствующих краях оболочки.
Равенства A5.24.4), очевидно, представляют собой необходимые и
достаточные условия существования решения рассматриваемой полной
краевой задачи безмоментной теории. Если поверхностные и краевые силы
удовлетворяют равенствам A5.24.4), то тангенциальные усилия будут одно-
однозначно определены формулами A5.16.1), A3.1.6) и A3.1.8). Перемещения
при этом не будут однозначными, так как можно считать, что ии ы2, w оп-
определяются тремя последними равенствами A5.16.1), в которых и\м), и[м),
w(K) надо брать по формулам A3.1.13), а последние содержат две произволь-
произвольные функции | (сс2), т) (а2).
Условия A5.24.4) по смыслу совпадают с требованиями, чтобы внешние
поверхностные силы (Хь Х2, Z) и внешние краевые силы (Т|,ь T\i2, Si, S2)
не совершали работы на всех таких перемещениях срединной поверхности,
которые соответствуют ее изгибаниям (на доказательстве мы не останавли-
останавливаемся, его можно найти в работе [60]). Такое же утверждение остается
верным и для произвольных оболочек положительной кривизны (см. § 18.36).
§ 25. Задачи с дополнительными условиями
внутри области
Пусть расчету подлежит замкнутая цилиндрическая оболочка, жестко
заделанная по обоим поперечным краям аг = аи а1 = а2 и имеющая раз-
разрез вдоль части одного из поперечных сечений (рис. 29). Покажем, что
15*
228
БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ НУЛЕВОЙ КРИВИЗНЫ
ГГЛ. 15
соответствующая полная краевая задача безмоментной теории не имеет
¦ решения.
Расчленим оболочку на три части, как изображено пунктирными линиями
на рис. 29, и будем решать полные краевые задачи безмоментной теории
в отдельности для каждой из полученных оболочек. Части 1 я 2 представ-
представляют собой консольные оболочки, а часть 3 — оболочку, жестко заделанную
Рис. 29.
Рис. 30.
по обоим краям. Соответствующие полные краевые задачи рассмртрены
в §§ 15.17, 15.23. Каждая из них при любой, достаточно гладкой, нагрузке
имеет решение и притом единственное. Это значит, что в пределах каждой,
отдельно взятой части безмоментная теория не может дать никакого другого
напряженно-деформированного состояния, кроме найденного вышеописан-
вышеописанным способом. Вместе с тем, для оболочки в целом это решение, во-
вообще говоря, непригодно: на линиях, по которым
оболочка мысленно рассекалась на части (пунк-
(пунктир на рис. 29), мы не можем выполнять какие-
либо требования, и в обсуждаемом решении не
будет обеспечено выполнение условия танген-
тангенциальной непрерывности.
Полная краевая задача безмоментной теории
в этом случае не решается потому, что условие,
появившееся внутри области, негладко (§ 15.15):
на разрезе надо ставить условие отсутствия уси-
усилий, а на продолжении разреза должны выпол-
выполняться обычные условия тангенциальной непре-
непрерывности. Таким образом, здесь нарушается одно
из условий теоремы о возможных изгибаниях.
Замечание. Добавление промежуточного условия само по себе не ведет к невозможности
решать краевую задачу. Например, если в консольной цилиндрической оболочке на некотором
промежуточном поперечном сечении закрепить все точки от тангенциальных перемещений,
то появится дополнительное условие тангенциальной непрерывности и решение полной краевой
задачи будет существовать, в чем читатель легко убедится сам.
Нетрудно привести и пример противоположного характера, когда про-
промежуточного условия нет, но решение полной краевой задачи безомомент-
ной теории не существует, так как граничные условия негладки. Пусть
цилиндрическая оболочка жестко заделана по всему периметру на одном из
краев, а на другом краю — частично заделана, частично свободна (рис. 30).
Тогда исследование можно свести к задаче для консольной оболочки / и
к задаче для заделанной на обоих концах оболочки 2. Их решениями, един-
единственным образом, определяется напряженно-деформированное состояние
в зонах 1 и 2, но для оболочки в целом результат будет снова непригоден,
Рис. 31.
$ 25] ЗАДАЧИ С ДОПОЛНИТЕЛЬНЫМИ УСЛОВИЯМИ 229
так как в нем, вообще говоря, не выполняются условия тангенциальной
непрерывности по прямолинейной образующей.
При исследовании оболочек с отверстиями можно поступить так же,
как и в задаче об оболочке с разрезом. Снова получаются три самостоятель-
самостоятельные задачи, как видно из схемы, изображенной на рис. 31. В данном случае
края консольных оболочек / и 2 не совпадают с поперечными сечениями
цилиндра, т. е. получается задача, разобранная в § 15.19. Она, вообще говоря,
не имеет решения, так как в точках а, Ь происходит касание края с прямо-
прямолинейными образующими. Кроме того, в тех исключительных случаях,
когда такие решения существуют, полученное напряженное состояние,
вообще говоря, не будет удовлетворять условиям стыка на линиях разрезов.
ГЛАВА 16
ВЫПУКЛЫЕ ЗАМКНУТЫЕ БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ.
СОСРЕДОТОЧЕННЫЕ ВОЗДЕЙСТВИЯ
§ 26. Полюсы комплексной функции напряжений
Пусть срединная поверхность оболочки представляет собой полную
(замкнутую) сферу и поверхностная нагрузка отсутствует (X1 = X2 = Z =
= 0). Из теоремы единственности (§5.32) вытекает, что для такой оболочки
моментные уравнения будут иметь лишь тривиальные (нулевые) решения.
Это утверждение остается верным (хотя и не таким очевидным) и для безмо-
ментных статических уравнений. Действительно, решение последних в рас-
рассматриваемом случае определяется комплексной функцией напряжения г|? (С),
которая (§ 13.4) должна быть аналитической во всей плоскости ? и иметь
нули в точках С = 0, С = °°- По теореме Лиувилля она тождественно рав-
равняется нулю, что согласно формулам A3.4.2) и означает обращение в нуль
напряженного состояния оболочки.
Вместе с тем не представляет труда построить отличную от нуля ком-
комплексную функцию напряжений \|з (С), обладающую перечисленными выше
свойствами всюду, кроме некоторой точки С = Со. в которой для \р (С) до-
допускается полюс. Примером служит функция
R
г=0 vs
Она определяет безмоментное напряженное состояние полной сфери-
сферической оболочки для случая, когда поверхностная нагрузка равна нулю
в любой области, не содержащей точки С = Со- Поэтому естественно считать,
что полюс функции напряжений \|з (С) при С = Со (Со =? 0> Со Ф °°) соот-
соответствует приложению в данной точке некоторого сосредоточенного силового
воздействия. Равным образом естественно, принять, что полюсу функции
С~2г|з (С) в точке С = 0 и полюсу функции С2^ (С) в точке С = °° отвечают
сосредоточенные силовые воздействия, приложенные, соответственно, в точ-
точках С = 0 и С = ©о.
Рассмотрим очевидное равенство
lim Г -.—^-тг- -—-1 —-, = "° „,, (с = const).
Оно показывает, что, если два полюса порядка п, расположенных в точ-
точках Со и Со. бесконечно сближаются, а их коэффициенты различаются только
знаком и возрастают как (С^ — Со^1. то в пределе получается полюс порядка
п + 1. Это значит, что сосредоточенные воздействия, соответствующие
полюсам более высокого порядка, можно рассматривать как результат слия-
слияния равных и противоположно направленных неограниченно возрастающих
S 26]
ПОЛЮСЫ КОМПЛЕКСНОЙ ФУНКЦИИ НАПРЯЖЕНИЙ
231
сосредоточенных воздействий, которые отвечают полюсам более низкого
порядка.
Пример. Пусть некоторому полюсу соответствует тангенциальная
сосредоточенная сила р. Сближая pup' ортогонально р (рис. 32, а), полу-
получим момент Н, ось которого совпадает с нормалью срединной поверхности.
а)
6)
Рис. 32.
Сближая р и р' вдоль направления р, получим нормальную сосредоточенную;
силу q (рис. 32, б). В обоих случаях по мере сближения р и р' надо безгра-
безгранично увеличивать интенсивность р. Таким образом, в безмоментной тео-
теории Н и q надо рассматривать как сосре-
сосредоточенные силовые воздействия более высо-
высокого (на единицу) порядка, нежели р.
Равным образом легко сообразить, что,
сближая силы q и q', мы получим момент т
относительно оси, лежащей в касательной
плоскости (рис. 33); такой же момент полу-
получится и при сближении Н с Н'. Ниже все
эти рассуждения будут подтверждены вы-
выкладками.
При сближении сосредоточенных момен-
моментов могут получаться уже и самоуравнове-
самоуравновешенные сосредоточенные воздействия, кото-
которые естественно назвать полимоментами.
Поэтому под сосредоточенным силовым воз-
воздействием, соответствующим полюсу про-
произвольного порядка, в безмоментной теории
сферических оболочек надо понимать некоторую сумму сосредоточенных
факторов, включающую, кроме сил и моментов, также и полимоменты.
Если задан полюс комплексной функции напряжений г|э (?), то можно
подсчитать интенсивность несамоуравновешенной части соответствующего
сосредоточенного воздействия, т. е. найти входящие в него силу и момент,
при помощи интегральных уравнений равновесия. В § 14.13 они были полу-
получены для произвольной оболочки. Перепишем их в виде равенств
/?, A6.26.1)
Рис. 33.
232 ВЫПУКЛЫЕ ЗАМКНУТЫЕ БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ [ГЛ. 16
и будем применять 'их к статическим безмоментным уравнениям сфериче-
сферической оболочки. Считая, что последняя имеет зоны, свободные от поверхност-
поверхностной нагрузки, выберем в A6.26.1), A6.26.2) контур интегрирования g так,
чтобы он целиком находился внутри незагруженной зоны. Тогда в контур-
контурных интегралах тангенциальные усилия Tlt T2, S будут, согласно A3.3.4),
выражаться через t и s так:
T1= — tch2al, T2 = tch2alt S = sch2a1,
и интегральные уравнения равновесия приведутся к виду
Irn i^ (t -f is) ch2ax (Mt -f- iM2) {dax + tda2) j = /?,
.. A6.26.3)
Im IJ (t + is) [chX (Mt + iM2) x M] {dax + idaA = Q.
\s . j
Но в точках, где отсутствует поверхностная нагрузка, и, в частности, на
кривой g должны выполняться однородные уравнения A3.2.7). Следова-
Следовательно,
^ _|_ is = фG). A6.26.4)
Кроме того, мы имеем
dy. A6.26.5)
Рассмотрим векторные множители, входящие в подынтегральные выра-
выражения A6.26.3). По формуле A3.2.3) получим
сЬ'сМЖ, + Ш.) = — rshv^ + fVchv^—rtx. A6.26.6)
Помножив обе части этого равенства векторно на М и выполнив очевидные
действия, получим
ch2ax (Ж, + Ш2) X М = — ir'shyt, — r2chyiy — irH,. A6.26.7)
Внесем A6.26.4)—A6.26.7) в формулы A6.26.3). Тогда, приравняв
в обеих частях каждого из полученных равенств коэффициенты при одина-
одинаковых ортах, мы придем к следующим скалярным соотношениям:
Rt = — r Im I [ ф (y) sh у dy\ , Rv = r Im ft ф (у) ch v dy\»
u I W I
Rz = — rim fj (p(y)dy\,
U • )
, Q^-rMmfj
Qz — — г Im) i ф (y) dy \,
1 i I
которые удобно, сгруппировав по два, записать в виде трех комплексных
равенств:
§ 26] ПОЛЮСЫ КОМПЛЕКСНОЙ ФУНКЦИИ НАПРЯЖЕНИЙ 233
Наконец, заменив независимое комплексное переменное у через ? по фор-
формуле A3.4.1), получим для сферической оболочки, отнесенной к изотерми-
изотермической географической системе координат:
—r ' — — -j-J
Ry / Q
y
,
A6.26.8)
Эти равенства можно назвать интегральными уравнениями равновесия
в комплексной форме.
Пусть в некоторой окрестности точки ? = 0 функция ?,~\ (?) всюду
аналитична, за исключением ? = 0, где она имеет полюс. Тогда при доста-
достаточно малом р в круге | ?| «^ р функцию г|з (?) можно представить в виде
¦ф (?) == а|H (Q _|- а& + а0 + a-i?~' + ""У a«S". A6.26.9)
где 2Г2г|H (С) — аналитическая функция при | ?| «S р-
Будем выяснять, какие силы и моменты входят в состав сосредоточен-
сосредоточенных воздействий, соответствующих отдельным слагаемым правой части
этого равенства.
Слагаемое г|)§ (?) удовлетворяет всем условиям, сформулированным
в § 13.4, и не будет давать каких бы то ни было сосредоточенных воздействий.
Для исследования других слагаемых правой части A6.26.9) будем подстав-
подставлять их в интегральные уравнения равновесия, считая, что интегрирование
надо производить по окружности |?| = р. Тогда вычисление интегра-
интегралов A6.26.8) для каждого отдельно взятого члена разложения A6.26.9)
может быть выполнено при помощи известной формулы теории функций
комплексного переменного
? 9-р j* с ¦ *р f 0 при рф — 1,
ф ?р d? = 2ш res ?р = ^ ' A6.26 10)
J Bni при /7 = — 1,
в которой ф обозначает интегрирование по любому замкнутому контуру,
окружающему точку ? = 0 (в частности, по окружности |?| — р).
Имея в виду A6.26.10) и положив в формулах A6.26.8)
г|з (?) = а& + а0 + а_?~х, A6.26.11)
получим:
A6.26.12)
Слагаемые, объединенные в A6.26.9) знаком суммы, после подстановки
в интегральные уравнения равновесия A6.26.8) дают
Их — Ry = ^г = Qx = Qy = Qz = 0.
Таким образом, в правой части формулы A6.26.9) первое слагаемое
в точке Z, = 0 вообще не дает никаких сосредоточенных силовых воздей-
воздействий, три следующих слагаемых дают силовые воздействия, в состав которых
входят сила и момент, а слагаемые вида ап1? при п «^ —2 дают статиче-
статически самоуравновешенные сосредоточенные силовые воздействия.
234
ВЫПУКЛЫЕ ЗАМКНУТЫЕ БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ
(ГЛ. 16
Формулами A6.26.12) сосредоточенная сила и момент выражаются через
заданные коэффициенты alt а/и а_х главной части ряда Лорана функции
?~2Ф (?*• Разрешив эти равенства относительно а1( а0, а_и получим фор-
формулы
а, =
1
2я
i I Rx , Qy
2я
ЯУ
2я
Ru
A6.26.13)
Я..
позволяющие по заданным сосредоточенной силе и моменту в точке ? = О
найти три первых коэффициента ряда Лорана функции г|э (?).
В интегральных уравнениях рав-
равновесия под Qx, Qy, Qz подразумева-
подразумеваются компоненты вектора того момента,
который дает внешние воздействия от-
относительно начала координат: Если в со-
состав внешнего воздействия входит со-
сосредоточенный момент с компонентами
Qx, Q°y, Q2 и сосредоточенная сила
с компонентами Rx, Ry, Rz, то можно
написать формулы
Qx^Qx + Q'x, Qy = Q°yQ+l,
В них звездочкой отмечены компонен-
компоненты вектора момента, который дает со-
сосредоточенная сила {Rx, Ry, Rz) относи-
относительно начала декартовой системы ко-
координат. Нетрудно видеть (рис. 34), что
Рис. 34. Qx = rRy, Qy = — rRx, Ql = 0.
Воспользовавшись этим, перепишем формулы A6.26.13) так:
1
2я
¦*->.-
а, =
1
2я
2RX
i
2я
¦^ , A6.26.14)
0-1= —
2лг
+
2лг
Из них вытекает, что: 1) если в точке С = 0 (верхний полюс географи-
географической системы координат) приложена сосредоточенная сила, лежащая
в касательной плоскости, то этому соответствует полюс первого порядка
функции t,~h\> (?); 2) если в точке ? = 0 приложена нормальная сосредото-
сосредоточенная сила и сосредоточенный момент, вектор которого направлен по
нормали, то этому соответствует полюс второго порядка 'функции S^ (?);
3) если в точке ? = 0 приложен сосредоточенный момент, вектор которого
§ 26] ПОЛЮСЫ КОМПЛЕКСНОЙ ФУНКЦИИ НАПРЯЖЕНИЙ 235
лежит в касательной плоскости, то этому соответствует полюс третьего по-
порядка функции ?~2г|) (?).
Эти результаты полностью подтверждают общие рассуждения, приве-
приведенные в начале настоящего параграфа. Дополнительно выяснилось, что
в сферической оболочке простейшему силовому воздействию — тангециаль-
ной сосредоточенной силе — соответствует простейшая особенность ком-
комплексной функции напряжения — полюс первого порядка. Учитывая это,
назовем тангенциальной сосредоточенной силой такое сосредоточенное воз-
воздействие, которое статически эквивалентно этой силе и соответствует наи-
наименьшей из всех возможных особенностей комплексной функции напряжения.
Можно показать (на чем мы не будем останавливаться), что такое формаль-
формальное определение, во-первых, остается в силе не только для сферической обо-
оболочки, но и для любой оболочки положительной кривизны, и во-вторых,
оно по смыслу совпадает с обычным представлением о сосредоточенной силе
как о пределе, к которому стремится равномерно распределенная нагрузка
лри беспредельном уменьшении области ее приложения и беспредельном
увеличении ее интенсивности.
Случай, когда функция ?2г|5 (?) имеет полюс в точке ? = сю, исследуется
точно так же. Пусть вблизи ? = оо функция ф (?) может быть представлена
в виде
1
П=2
A6.26.15)
где ?афСо (?) — функция, аналитическая вблизи ? = оо. Тогда слагаемое
ярсо (?) не будет давать никаких сосредоточенных факторов; слагаемые, объ-
объединенные знаком суммы, дадут статически уравновешенные сосредоточен-
сосредоточенные воздействия, а слагаемые b^, b0, Ь_11>~Л будут соответствовать действию
на оболочку сосредоточенной силы и момента. Компоненты этой силы и
момента определяются формулами:
- = 2я&0, A6.26.16)
обратив которые, получим соотношения
b° = 1зГ\~~7 1~^
Я* <М , i ( Ry , Qx
Здесь также компоненты момента составляются из двух слагаемых:
из которых первые соответствуют сосредоточенному моменту, а вторые —
tomv моменту, который дает сосредоточенная сила (Rx, Ry, Rz) относительно
начала координат. Для Q'x, Q"y, Q* мы имеем формулы (см. рис. 34)
236 ВЫПУКЛЫЕ ЗАМКНУТЫЕ БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ 1.ГЛ. 1й
Поэтому вместо A6.26.17) можно написать
A6.26.18)
b-*==-w[—rL + -7-)+-w\-r- +—)-
Рассмотрим теперь случай, когда комплексная функция напряжения
имеет полюс в произвольной точке ? = ?0 (?0 отлично от нуля и бесконеч-
бесконечности). Пусть в некоторой односвязной достаточно малой области G', содер-
содержащей точку ? = ?0, функция -ф (?) имеет вид
Первое слагаемое правой части, под которым подразумевается аналити-
аналитическая часть функции г|э (?), будет в малой окрестности точки ? = Со давать
напряженное состояние, отвечающее случаю, когда область G' свободна от
внешних поверхностных сил. Три последних слагаемых соответствуют загру-
жению оболочки в точке ? = ?„ сосредоточенной силой и моментом. Чтобы
убедиться в этом, воспользуемся интегральными уравнениями равнове-
равновесия A6.26.8) и подсчитаем с их помощью Rx, Ry, Rz, Qx, Qu, Qz, положив
.1, />\ ^1 ^2 ^3
T (.У — f f If- f \2 If Г 43 -
i — ЬО Ib — to) Vfe — tui
ЬО Ib — to)
Получающиеся при этом интегралы подсчитываются при помощи из-
известной формулы для п-й производной аналитической функции комплекс-
комплексного переменного
г(п) ,г > _ п\ г f (?) dj
Используя ее, получим без труда
Rx ,- Qx _ _ Г^о-1 r , ^c2 зс31
L Ч) to ьо J
Ео ьо
I + 1 с _2Сз , _ЗС;
feo to to
Эти соотношения можно разрешить относительно Съ С2 и С3, и тогда
они примут вид
» = —" ~ЪГ [~Т l ~k) + 1ST ( J «"J'
-Ш-(-г * -^-J (Со 4- Со) 4- тг V,— г—
i 27] СОСРЕДОТОЧЕННЫЕ ВОЗДЕЙСТВИЯ НА СФЕРИЧЕСКУЮ ОБОЛОЧКУ 237
§ 27. Действие сосредоточенных сил и моментов
на полную сферическую оболочку
Пусть к замкнутой сферической оболочке в точках ? = 0 и ? = ?0
и только в них приложены сосредоточенные силы и моменты. Примем пока,
что ?„ Ф оо, и будем искать соответствующую комплексную функцию напря-
напряжений ф (?). Эта функция должна быть аналитической во всей плоскости ?,
за исключением точек ? = 0и? = ?0. В общем случае функция ф (?) имеет
полюс третьего порядка при ? = ?0, а функция ?-аф (?) имеет полюс третьего
порядка при ? = 0.Кроме того, должно быть выполнено условие, что ?гг|> (?)—
аналитическая функция при ? = оо. Всем этим требованиям удовлетворяет
функция вида
A6.27.1)
в которой Съ С2, С3 — произвольные комплексные константы. Последними
можно распорядиться так, чтобы компоненты сосредоточенной силы Rx,
Ry, Rz и сосредоточенного момента Qx, Qy, Qz имели заданное значение.
Так как в правой части равенства A6.27.1) первое слагаемое вблизи ? = ?0—
аналитическая функция, то формула A6.27.1) представляет собой частный
случай A6.26.19). Следовательно, константы С1( С2, С3 определяются фор-
формулами A6.26.21).
Поставленная задача решена (в вычисления не вошли сила и момент,
приложенные в точке ? = 0; это происходит потому, что они должны удов-
удовлетворять условиям уравновешенности оболочки в целом, из которых и
определяются единственным образом).
Замечание. Первое слагаемое в правой части равенства A6.27.1) введено для того, чтобы
^^ (?) не имела полюса при ? = оо. Если имеется в виду случай, когда ? = оо ие входит в рас-
рассматриваемую область, то это слагаемое можно отбросить.
Не представляет труда обобщить полученный результат на случай,
когда оболочка загружена сосредоточенными силами и моментами в п + 1
точках ? = ?р (?р ф оо, р = 1, 2, . . ., п) и ? = 0. Комплексная функция
напряжений, соответствующая этому случаю, имеет вид
/1С 97^
р=1
где СР1, Cpjj, Cp3 — комплексные константы. Эти константы для каждого р
в отдельности вычисляются по заданным компонентам силы и момента,
приложенных в точке ? = ?р при помощи формул A6.26.21).
Формула A6.27.2) составлена в предположении, что в верхнем полюсе
географической системы координат, т. е. в точке ? = 0, оболочка, вообще
говоря, будет испытывать действие силы и момента. Однако A6.27.2) остается
в силе и в случае, когда точка ? = 0 не загружена. Для этого надо только
выбирать силы и моменты, приложенные в точках ? = ?р, так, чтобы они
были в совокупности уравновешены. При этом в точке ? = 0 сосредоточен-
сосредоточенные силы и моменты будут отсутствовать. Более существенно принятое выше
предположение, что ни одна из точек приложения сосредоточенных сил и
моментов не совпадает с нижним полюсом географической системы коор-
координат (?р = оо). Поэтому задачу о построении комплексной функции напря-
напряжения для случая, когда сосредоточенная нагрузка действует в точке ? = оо,
надо рассмотреть отдельно.
Пусть сосредоточенные силы и моменты, действующие на замкнутую
сферическую оболочку, приложены только в точках ? = 0 и ? = оо. Тогда
238 ВЫПУКЛЫЕ ЗАМКНУТЫЕ БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ [ГЛ. IS
искомая комплексная функция напряжений, очевидно, может быть задана
в виде
1ИО = я,е-Мо + ^-. A6.27.3)
Она уже была исследована в § 16.26, и, пользуясь этим, комплексные кон-
константы a lf а0, аг при заданных силах и моментах можно подсчитать по
формулам A6.26.13) или A6.26.18).
§ 28. Перемещения полной сферической оболочки
под сосредоточенными силами и моментами
Рассмотрим изгибания сферы. Если последняя замкнута, то они задаются
комплексной функцией перемещений g (?), которая должна быть аналити-
аналитической во всей плоскости ?, за исключением точек ? = 0, ? = оо; в них
для g (?) можно допустить полюсы не выше первого порядка (§ 13.4). Па
теореме Лиувилля все функции, обладающие такими свойствами, задаются
равенством
в котором Въ Вп, В_, — произвольные комплексные константы.
Таким образом, все изгибания полной сферы зависят от трех комплекс-
комплексных, или, что то же, от шести действительных констант. Это будут так назы-
называемые тривиальные изгибания, т. е. смещения сферы как жесткого целого,
что легко проверить прямыми вычислениями при помощи формул D.27.9).
Отсюда следует хорошо известное утверждение о жесткости (неизгибае-
(неизгибаемости) полной сферы. Оно является частным случаем классической теоремы
Гаусса о жесткости овалоида (произвольной достаточно гладкой замкнутой
поверхности всюду положительной кривизны).
В силу статико-геометрической аналогии из теоремы о жесткости ова-
овалоида следует теорема единственности решения статических безмоментных
уравнений для любой оболочки, имеющей форму полного овалоида. Дей-
Действительно, рассмотрим уравнения изгибаний в деформациях G.5.2). Для
полного овалоида они могут иметь только тривиальное решение хг = х2 =
= т = О (иначе овалоид был бы не жестким). Из статико-геометрической
аналогии следует, что для полного овалоида однородные статические безмо-
ментные уравнения G.4.2) также имеют лишь тривиальное решение.
Обратимся теперь к определению по безмоментной теории перемещений,
возникающих в полной сферической оболочке при действии на нее сосре-
сосредоточенных сил. В § 13.4 при постоянных Е, h, v выведено равенство A3.4.5),
при помощи которого можно определить искомые перемещения по форму-
формулам A3.3.5).
В A3.4.5) под ф (?) надо подразумевать комплексную функцию напря-
напряжений, соответствующую действию на оболочку заданной системы сосредо-
сосредоточенных сил и моментов (§§ 16.26, 16.27). Задача, таким образом, сводится
к такому подбору аналитической функции Н (?), при котором р(б) + iqi6>
будет на всей плоскости ? однозначной функцией точек срединной поверх-
поверхности.
Покажем, как это может быть сделано, считая для простоты записи,
что сосредоточенные силы и моменты приложены только в двух точках ? = О
и ? = Со (обобщения очевидны).
В силу принятых предположений ip (?) будет регулярной функцией во
всей плоскости комплексного переменного ?, за исключением точек ? = О
и ? = ?о, причем при ? = оо она должна иметь нуль по меньшей мере вто-
второго порядка (случай ?0 = оо будет рассматриваться особо). Заметив это,
§ 28] ПЕРЕМЕЩЕНИЯ СФЕРИЧЕСКОЙ ОБОЛОЧКИ 239
проведем в плоскости комплексного переменного ? замкнутый несамопере-
секающийся контур g, не проходящий через точки ? = 0и? = ?0и охва-
охватывающий конечную односвязную область G. Возможны четыре случая:
1) обе точки ? = 0 и ? = ?о попадут в область G, 2) в область G попадет только
точка ? = 0, 3) в область G попадает только точка ? = ?0, 4) в область G
точки ? = 0 и ? = ?„ не попадут. В четвертом случае в формуле A3.4.5)
под интегралами будут стоять функции, регулярные во всей области G.
В первом случае эти подынтегральные функции будут регулярными в об-
области G', которая дополняет G до полной плоскости *). Следовательно, по
теореме Коши после обхода такого рода замкнутого контура интегралы
в формуле A3.4.5) не получат приращений. Во втором и третьем случаях
обход по замкнутому контуру приведет к тому, что интегралы получат при-
приращения. Введем поэтому следующие обозначения:
= А,
=Лг, A6.28.1)
где дополнительными индексами «О» и «?„» отмечены интегралы, берущиеся
по замкнутому контуру (в положительном направлении), окружающему
точки ? = 0 и ? = ?0 соответственно. Здесь использованы равенства вида
Они вытекают из того, что, обходя точку ? = 0 в положительном направле-
направлении, мы одновременно обходим и точку ? = ?0 в отрицательном направлении.
Формулу A3.4.5) теперь можно заменить равенством (индекс «б» в ле-
левой части опущен)
в котором под р0—iq0 подразумевается однозначная функция. Отсюда ясно,
что однозначность функции р—iq будет достигнута, если положить
н(I) = сИ1±^-[А.?~ + 4 + 4-^J-2irln fz^« A6-28>2)
и тогда, учитывая A6.28.1), получим
06.28.3)
Случай ?0 = оо соотношением A6.28.3) не охватывается, и мы рассмотрим
его отдельно. На этом более конкретном случае удобно исследовать поведе-
поведение перемещений вблизи точки приложения сосредоточенных сил и моментов.
Пусть в верхнем полюсе географической системы координат к замкнутой
сферической оболочке приложены сосредоточенная сила с компонентами Rx,
*} Напомним, что ip (°°) = Ч> \ро) = 0.
240 ВЫПУКЛЫЕ ЗАМКНУТЫЕ БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ [ГЛ. 16
Ry> Rz и сосредоточенный момент с компонентами Q%, Q°, Q°» а в нижнем
полюсе возникает уравновешивающая реакция. Тогда комплексную функцию
напряжений надо брать в виде A6.27.3), а входящие в это соотношение ком-
комплексные константы вычислять по формулам A6.26.13). Это дает
Вычислим для этой комплексной функции напряжений интегралы,
входящие в правую часть равенства A3.4.5):
Отсюда
Следовательно, приращение, которое получит функция р<б)—/<7<б1 после
обхода по замкнутому контуру точки С = 0, согласно A3.4.5) будет (ин-
(индексы «б» вновь опускаются)
Отсюда вытекает, что требование однозначности функции р—iq будет
выполнено, если взять Я (?) в виде
§ 28] ПЕРЕМЕЩЕНИЯ СФЕРИЧЕСКОЙ ОБОЛОЧКИ 241
Внося полученные результаты в A3.4.5), мы придем к следующей фор-
формуле:
¦~2/? 0°
Й-'Й)-^}. A6-28.4)
Из A6.28.3) и A6.28.4) следует, что в точке приложения сосредоточенных
сил и моментов функция р—iq неограниченно возрастает. Для случая A6.28.4)
это видно непосредственно, а для случая A6.28.3) такой же вывод получается,
если в эти формулы внести выражения A6.27.1). Переход от р, q к танген-
тангенциальным перемещениям выполняется при помощи формул A3.3.5). Учиты-
Учитывая это и проведя принципиально простое, но кропотливое исследование,
в детали которого мы не будем входить, можно прийти к следующему вы-
выводу: если к безмоментной сферической оболочке в точке ? = ?0 приложены:
(а) сосредоточенные моменты, векторы которых лежат в касательной пло-
плоскости (при ?„ = 0 это будут моменты с компонентами Q°, Q^); б) сосредото-
сосредоточенная сила и момент, векторы которых ортогональны к срединной поверх-
поверхности; (в) сосредоточенные силы, лежащие в касательной плоскости, — то
перемещения ии и2 в точке ? = ?0 неограниченно возрастают соответственно
как (С— ?о). (С — С) или In (? — So)-
Вернемся еще раз к формуле A6.28.4). Вместе с A3.3.5) она определяет
перемещения замкнутой сферической оболочки.
Для Н (?) в правой части A3.4.5) было найдено выражение A6.28.2),
обеспечивающее однозначность перемещений. Однако это не единственное
выражение Н (?), обладающее таким свойством: к правой части равенства
A6.28.2) можно добавить слагаемое Нп (?), где
(аг ¦— произвольные комплексные константы).
Таким образом, для замкнутой сферической оболочки, подверженной
действию сосредоточенных сил и моментов, перемещения в рамках безмомент-
безмоментной теории определяются не единственным образом, а лишь с точностью
до перемещений, соответствующих комплексной функции перемеще-
перемещений A6.28.5).
В связи с этим отметим, не останавливаясь на подробностях, что кон-
константы, входящие в правую часть равенства A6.28.5), нельзя подобрать
так, чтобы в точке ? = ?0 перемещения стали конечными.
Функция A6.28.5) обладает всеми свойствами комплексной функции
перемещений всюду, кроме ? = ?0. Это значит, что Нп (?) при помощи A3.3.5)
16 А. Л. Гольденвейзер
242 ВЫПУКЛЫЕ ЗАМКНУТЫЕ ВЕЗМОМЕНТНЫЕ ОБОЛОЧКИ [ГЛ. U
определяет перемещения, соответствующие изгибаниям полной сферы с «вы-
«выколотой» (удаленной) точкой ? = ?0. В теории поверхностей доказывается,
что овалоид (и в частности сфера) с выколотой точкой не обладает жесткостью,
т. е. допускает изгибания. Соответствующие им перемещения и задаются
функцией Нп (?).
Результаты §§ 16.27, 16.28 можно рассматривать как решение полной
краевой задачи безмоментной теории, в которой искомые функции должны
быть построены во всей плоскости комплексного переменного ?, за исклю-
исключением точек приложения сосредоточенных воздействий. В этих точках для
искомых функций допускаются полюсы, а роль граничных условий играют
требования, чтобы они имели определенный вид. С точки зрения теоремы
о возможных изгибаниях мы имеем дело с задачей, в которой жесткость
оболочки не обеспечена: возможными в данном случае являются упомянутые
изгибания полной сферы с выколотыми точками. Поэтому тот факт, что в ре-
решение вошла неопределенная функция A6.28.5), находится в полном соот-
соответствии с теоремой о возможных изгибаниях.
§ 29. Действие сосредоточенных сил и моментов
на произвольную оболочку положительной кривизны
В § 16.27 изложен метод решения статической задачи безмоментной
теории для полной сферической оболочки, загруженной произвольной
системой сосредоточенных сил и моментов. Он легко переносится и на случай,
когда срединная поверхность оболочки представляет собой поверхность
второго порядка положительной кривизны.
Пусть срединная поверхность задается одним из трех векторных урав-
уравнений A3.6.2). Тогда решение однородных статических безмоментных урав-
уравнений, как было показано в § 13.6, выражается через аналитическую функ-
функцию г|э (?). Точкам полного эллипсоида, двухполостного гиперболоида или
эллиптического параболоида соответствует вся плоскость комплексного
переменного ?. Полюсы комплексной функции напряжения имеют такой же
смысл, что и для сферы: в точке ? = ?0 (?0 отлично от нуля и бесконечности)
полюс не выше третьего порядка соответствует сосредоточенным силам и
моментам, а полюсы выше третьего порядка дают сосредоточенные воздей-
воздействия более сложной структуры; в точках ? = 0 и ? = оо такой же смысл
имеют полюсы функций ?-2:ф (?) и ?2я|) (?) соответственно. Интенсивность
и направление силы и момента, входящих в состав сосредоточенного силового
воздействия, можно определить с помощью комплексных интегральных
уравнений равновесия. Для оболочек второго порядка они выводятся так же,
как для сферы, при помощи равенств A6.26.1), A6.26.2). Опуская подроб-
подробности, приведем эти уравнения:
а) для эллипсоида A3.6.2а)
A6.29.1а)
б) для двухполостного гиперболоида A3.6.26)
A6.29.16)
$ 29] СОСРЕДОТОЧЕННЫЕ ВОЗДЕЙСТВИЯ НА ПРОИЗВОЛЬНУЮ ОБОЛОЧКУ 243
в) для эллиптического параболоида A3.6.2в)
A6.29.1b)
Этими равенствами обобщаются формулы A6.26.8).
Таким образом, для оболочек второго порядка полностью сохраняется
описанный в § 16.27 метод подбора комплексной функции напряжений ф (С),
соответствующей действию на оболочку произвольной системы сосредото-
сосредоточенных сил и моментов. Формула A6.27.2) остается в силе, но в ней при опре-
определении констант Ср/ надо вместо A6.26.8) пользоваться формулами A6.29.1),
Перенос этих результатов на произвольные оболочки положительной
кривизны связан с более существенными трудностями, которые можно
преодолевать, например, при помощи теории обобщенных аналитических
функций. В книге [19] показано, что можно построить обобщенные аналити-
аналитические функции, являющиеся аналогом аналитических функций вида (?—С*)*,
где 5* — произвольная комплексная константа, a k — целое, положи-
положительное или отрицательное число. Отсюда следует, что можно построить
и аналог функции вида A6.27.2), с помощью которого при соответствующем
подборе констант Ср1 и должна решиться задача о действии произвольной
системы сосредоточенных сил и моментов на оболочку, имеющую форму
замкнутого овалоида. Однако в дальнейшие подробности мы не можем вда-
вдаваться, так как пока еще не дано эффективных примеров приложения теории
обобщенных аналитических фудкций к решению задач безмоментной теории.
Заканчивая главу о сосредоточенных воздействиях, обсудим, в какой
мере полученные результаты можно считать правильными, если учесть, что
они получены по безмоментной теории. Физически ясно, что вблизи точки
приложения сосредоточенной нагрузки соответствующее напряженно-де-
напряженно-деформированное состояние имеет большую изменяемость (и расчет по безмо-
безмоментной теории не вызывает доверия), но при удалении от этой точки изме-
изменяемость делается малой (и можно надеяться, что безмоментная теория станет
достаточно точной). Для сферической оболочки это можно подкрепить и
математически. Комплексная функция напряжений, соо ветствующая при-
приложению сосредоточенных сил в точке ? = ?о> имеет вид
Поэтому
@
Вместе с тем, как уже говорилось, отношение модуля производной
к модулю первообразной функции может служить мерой изменяемости,
а следовательно, для г|э (?) последняя действительно весьма велика вблизи
Z = to и быстро убывает при удалении от этой точки.
В работе [133] показано, что, если сосредоточенные нагрузки действуют
на оболочку положительной кривизны, то, так же как и при действии распре-
распределенных сил, соответствующее напряженно-деформированное состояние
состоит из основного напряженного состояния, определяемого описанным
выше способом, на которое вблизи точки приложения нагрузки накладывается
локальный краевой эффект, быстро убывающий при удалении от этой точки
в любом направлении. Таким образом, изложенные в этой главе результаты
надо считать приближенно правильными в достаточном удалении от точки
16*
244 ВЫПУКЛЫЕ ЗАМКНУТЫЕ БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ [ГЛ. 16
приложения сосредоточенных воздействий. В какой-то мере это утверждение
остается правильным и для оболочек нулевой или отрицательной кривизны,
но в таких оболочках явление осложняется тем обстоятельством, что ло-
локальный краевой эффект значительно медленней затухает вдоль асимпто-
асимптотических линий срединной поверхности, т. е. вдоль характеристики безмо-
ментных уравнений (по этому поводу некоторые соображения можно найти
в [119]).
Поправки, которые вносит локальный краевой эффект в окрестности
точки приложения нагрузки, имеют не только количественный, но и каче-
качественный характер. Он меняет порядок особенностей функций, определяющих
перемещения, усилия и моменты оболочки. А именно, за счет локального
краевого эффекта происходит снижение порядка особенностей. Для общего
случая порядок особенностей в перемещениях, усилиях и моментах оболочки
под сосредоточенными воздействиями разобран в работе 1132]. Для сфери-
сферической оболочки этот вопрос обсуждался в статье [40]. Там же задача дей-
действия на сферическую оболочку произвольной системы сосредоточенных сил
и моментов решена по моментнои теории точно (в замкнутой форме).
ГЛАВА 17
БЕЗМОМЕНТНЫЕ КУПОЛА
§ 30. Сферический купол с одним геометрическим
и одним статическим граничным условием
Рассмотрим сферический купол, т. е. оболочку, срединная поверхность
которой есть сферический сегмент, и будем считать, что на краю должны
выполняться одно статическое и одно геометрическое тангенциальное гра-
граничное условие (край примыкает к опоре, имеющей весьма малую жесткость
в одном тангенциальном направлении и весьма большую жесткость в другом).
Точнее говоря, будут обсуждаться сферические купола с граничными усло-
условиями двух видов:
а) граничные условия, выражающие тот факт, что опора не восприни-
воспринимает реакций в направлении касательной к краевому контуру и исключает
перемещения в тангенциальном направлении, нормальном к краевому
контуру;
б) граничные условия, выражающие тот факт, что опора не восприни-
воспринимает реакций в тангенциальном направлении, нормальном к краевому
контуру, и исключает перемещения в направлении касательной к краевому
контуру.
Если для определенности считать, что полюс географической системы
координат совмещен с вершиной купола, то тангенциальные граничные
условия будут в первом случае заключаться в требованиях:
приа,=а10 S==Q, ut = 0, A7.30.1)
а во втором случае — в требованиях:
при ах = а10 7\ = 0, и, = 0. A7.30.2)
В рассматриваемых случаях полная краевая задача безмоментной теории
сводится к последовательному решению статической и геометрической
задач безмоментной теории (§7.7). Статическая задача, рассмотрением
которой мы пока и ограничимся, заключается в определении тангенциаль-
тангенциальных усилий Tlt S, Т2 из безмоментных уравнений равновесия с учетом ста-
статического граничного условия. Оно для случаев A7.30.1) и A7.30.2) запи-
записывается соответственно так:
5|в1-о1. = 0, A7.30.3)
Ti |a,=a,0 = 0. A7.30.4)
Задача 1. Найти тангенциальные усилия в сферическом куполе, если
он загружен произвольной сосредоточенной силой и моментом в верхнем
полюсе географической системы координат и соединен по краю ах = ос1О
с опорой, не воспринимающей реакций, направленных по касательной к краю
(на рис. 35 изображена рассматриваемая сферическая оболочка, отнесенная
246
БЕЗМОМЕНТНЫЕ КУПОЛА
(ГЛ. 17
к географической системе координат; опора схематически показана в виде
абсолютно жесткого заштрихованного основания, с которым оболочка
соединена бесчисленным множеством стерженьков, расположенных по
касательной к меридианам).
По предположению распределенная поверхностная нагрузка отсутствует.
Поэтому искомое напряженное состояние определяется некоторой комплекс-
комплексной функцией напряжения i|>.(?), которую надо построить в области G,
соответствующей срединной поверхности оболочки. На контуре области G
функция ij> (?) должна удовлетворять граничному условию, вытекающему
из A7.30.3), а в точке приложения сосредоточенной нагрузки ? = 0 функция
?-аф (?) должна иметь заданную особен-
особенность.
Край ах = а10 охватывает область G,
которая представляет собой круг
В нем и надо построить i|) (?).
Усилия связаны с комплексной функ-
функцией напряжения формулами A3.4.2). По-
Поэтому на окружности |?| = р0 должно вы-
выполняться граничное условие
= 0. A7.30.5)
Ему удовлетворяет функция вида
f-).. A7.30.6)
рис 35 где ^Pi (?) — любая функция, определенная
в области ? =^р0- В самом деле, при | ?| = р0
комплексное переменное ? может быть представлено в виде ? = роб'Р, отсюда
а следовательно,
и доказываемое утверждение становится очевидным.
Чтобы комплексная функция напряжения i|> (?) соответствовала случаю,
когда к оболочке в точке ? = 0 и только в ней приложены сосредоточенные
сила и момент, положим
% (?) = ?i? + go + g_i?-\ A7.30.7)
считая, что glt g0, g_! — комплексные константы, которые предстоит опре-
определить. Тогда
Пользуясь этим, введем обозначения
и запишем функцию i|) (?) так:
r-0 A7.30.8)
30]
СФЕРИЧЕСКИЙ КУПОЛ ПРИ СМЕШАННЫХ УСЛОВИЯХ
247
Таким образом, по форме г|) (?) не отличается от комплексной функции
напряжения A6.27.3), решающей задачу о замкнутой оболочке, загружен-
загруженной сосредоточенными силами и моментами в противоположных полюсах
географической системы координат. Поэтому в A7.30.8) константы аг, aOf
д_! надо определить формулами A6.26.13). Однако из A7.30.8) вытекает,
что константы alt a0, а_г должны удовлетворять двум равенствам
Im \ао\ = 0,
= a_i.
A7.30.9)
Это значит, что предложенным способом поставленная задача не всегда
может быть решена. Надо требовать, чтобы действующая на оболочку сосре-
сосредоточенная нагрузка удовлетворяла условиям, вытекающим из A7.30.9)
и из формул A6.26.14), связывающих константы аи а0, а_г с компонентами
сосредоточенной силы и момента. Эти условия записываются так:
но, согласно A3.2.1), р^ = е2а*
купола), и эти равенства можно преобразовать к виду
tg2 -у- (Эо — половина угла раствора
(".золе)
Условия A7.30.10) не связаны с выбранным методом решения задачи.
Из физических соображений ясно, что они необходимы для решения постав-
поставленной задачи. Чтобы показать это, вернемся к схеме закрепления оболочки,
показанной на рис. 35. На ней все
условные стерженьки при продолжении
пересекаются в одной точке О на оси
г декартовой системы координат. Сле-
Следовательно, рассматриваемая безмо-
ментная оболочка является механизмом
с тремя степенями свободы. Она не мо-
может находиться в равновесии, если при-
приложенная к ней нагрузка дает отлич-
отличные от нуля моменты относительно осей,
проходящих через точку О. Нетрудно
проверить, что A7.30.10) и выражают
это требование.
Для сосредоточенного нагружения,
удовлетворяющего условиям A7.30.10),
комплексная функция напряжения, решающая задачу 1, определяется фор-
формулами A7.30.6)—A7.30.8), в которых комплексные константы аг, а0, а_х
находятся по формулам A6.26.14).
Задача 2. Найти тангенциальные усилия в сферическом куполе, загру-
загруженном в вершине произвольной сосредоточенной нагрузкой и соединенном
по краю с опорой, не воспринимающей реакций, направленных по танген-
тангенциальной нормали (на рнс. 36 изображен такой купол, отнесенный к гео-
географической системе координат; закрепление края также условно показано
при помощи стерженьков).
Здесь, как и в задаче 1, комплексная функция напряжения i|) (?) должна
быть определена в области |?| «^ р0. Граничное условие A7.30.4) означает,
что при |?| = р0 надо требовать выполнения равенства
Re №@1 = 0.
Рис. 36.
248 ' БЕЗМОМЕНТНЫЕ КУПОЛА . [ГЛ- 11
Ему удовлетворяет функция вида
*@=*i@-*iD): A7.30.11)
пользуясь этим, остальные выкладки можно построить по схеме задачи 1.
Положим
t. = gi?-r-go + g-ir\ A7.30.12)
тогда
1^-)=gi^- + go + g-1^-.
Отсюда
где
= -р" (Pogi — g-i), flo = go — go, a-i = — (pogi — g-i), A7.30.13)
Константы flj, a0, a_1 также не являются независимыми. Они связаны
соотношениями
Re {ао\ — 0, poai = — а_ь
из которых в силу A6.26.14) вытекают три условия существования решения
поставленной задачи:
A7.30.14)
Физический смысл этих условий также очевиден. В схеме закрепления
края, изображенной на рис. 36, все стерженьки (предполагается, что их бес-
бесчисленное множество) лежат в плоскости, перпендикулярной оси г. Они не
препятствуют смещениям оболочки как жесткого целого в направлении оси г
и повороту около осей р и q, лежащих в плоскости края (рис. 36). Поэтому
внешняя нагрузка не должна иметь составляющей Rz и не должна давать
моментов относительно осей р и q. Эти условия и выражают равен-
равенства A7.30.14).
Для нагрузки, удовлетворяющей требованиям A7.30.14), задача 2 ре-
решается комплексной функцией напряжений A7.30.11)—A7.30.13), в которой
константы alt a0, a_x надо выбирать по формулам A6.26.14).
Задача 3. Найти тангенциальные усилия в сферическом куполе, если он
загружен сосредоточенной нагрузкой в г произвольных точках ? = t,k (k =
= 1, 2, . . ., г) и соединен по краю ах = а10 с опорой, не воспринимающей
реакций в направлении касательной к краевому контуру.
Здесь, как и в задаче 1, расчет сводится к построению комплексной функ-
функции напряжения i|) (?), которую надо определить в области | ?| «^ р„.
Условие на контуре |?1 = Ро будет выражаться равенством A7.30.5).
Поэтому комплексную функцию напряжения мы снова зададим в виде
A7.30.6). В результате требуемое граничное условие будет выполнено
при любом выборе i)^ (?), и останется только назначить эти функции так,
чтобы г|) (?) имела заданные особенности в точках ? = ?^. Для этого
§ 3Q] СФЕРИЧЕСКИЙ КУПОЛ ПРИ СМЕШАННЫХ УСЛОВИЯХ
положим:
Отсюда
_l_ X ' I *ЯЬ _l_ C2& I
6=1
Эта функция во всей плоскости комплексного переменного ? имеет по-
полюсы только в точках
? = 0, ? = оо, ? = ?*, ?=f,
из которых точки, соответствующие второму и четвертому равенствам, не-
непредставляют интереса, так как они лежат вне области |?|=??ро (предпо-
(предполагается, что | ?я| < р0, следовательно, | р§^^* | >Ро)- Вблизи точки ? = ?*.
функция яр (?) имеет вид
(¦фо — функция, регулярная в окрестности С = ?*)• Поэтому по заданным
компонентам сосредоточенной нагрузки можно подсчитать константы Clft,
^2*. Сза при помощи формул A6.26.21). Вместе с тем, вблизи точки ? = 0
функция \|з (?) может быть представлена так:
^* \ ья ¦ с,» fee / ?Tf L bfe
(¦ф0 (?) — функция, регулярная в окрестности ? = 0).
Из последнего равенства вытекает, что при сделанном выборе ^1 (?)
сосредоточенные силы возникают не только в заданных точках ? = ?ft, но
и в вершине купола. Следовательно, надо освободить точку ? = 0 от нагрузки.
Это можно сделать, наложив на полученное решение задачи 1. Если бы по-
последняя допускала решения при произвольных значениях силы и момента, то
их можно было бы подобрать так, чтобы точка ? = 0 оказалась свободной от
нагрузки; однако, как мы видели выше, в общем случае этого сделать нельзя.
Если заданные сосредоточенные нагрузки, приложенные в точках ? = ?ft,
дают отличный от нуля момент относительно осей, проходящих через точку О
(см. рис. 35), то сосредоточенные нагрузки в точке ? = 0 полностью уничто-
уничтожить нельзя. В последнем случае можно считать, что построенная функция
напряжения определяет тангенциальные усилия оболочки, в которой в точке
? = 0 могут возникать силовые или моментные реакции. Они и дадут ту силу
и момент, которые не могут дать реакции края оболочки. Если сосредоточен-
сосредоточенные силовые воздействия в точках ? = ?* дают не нулевой момент относи-
относительно точки О (рис. 35), то в точке ? = 0 возникнут реакции, уравновеши-
уравновешивающие этот момент, а если последний равен нулю, то в точке ? = 0 сосре-
сосредоточенные воздействия не возникнут.
Замечание. Представляется естественным интерпретировать решение задачи 3 как расчет
оболочки, дополнительно закрепленной в точке ? = 0 (вследствие чего там и возникает реак-
реакция). Однако такое представление весьма условно, так как по безмоментной теории под сосре-
сосредоточенными силами перемещения обращаются в бесконечность (§ 16.28).
250
БЕЗМОМЕНТНЫЕ КУПОЛА
|ГЛ. 17
Решение задачи 3 можно рассматривать как функцию Грииа для обо-
оболочки, закрепленной так, как показано на рис. 35. Выполнив обычным образом
интегрирование, можно получить решение на любую нагрузку, как распреде-
распределенную по поверхности, так и приложенную вдоль некоторой линии.
Очевидным образом можно построить и решение безмоментных уравнений
для случая, когда оболочка загружена сосредоточенной нагрузкой в произ-
произвольной точке и закреплена так, как показано на рис. 36.
§ 31. Сферический купол с одним геометрическим
и одним статическим граничным условием (продолжение)
Пусть рассмотрению подлежит сферический купол, на краю at = а10
которого надо выполнить одно геометрическое тангенциальное граничное
условие
0 A7.31.1)
A7.31.2)
и одно статическое тангенциальное граничное условие
7\ sin na2 + S cos na^ = 0.
В этих равенствах п — произвольное целое положительное или отри-
отрицательное число, а а2, как и в § 13.2, — долгота рассматриваемой точки.
Граничные условия A7.31.1), A7.31.2) соответствуют опоре, которую
схематически можно представить себе как абсолютно жесткое основание,
соединенное в каждой точке края с оболоч-
оболочкой при помощи стерженьков, лежащих в ка-
касательной плоскости и наклоненных под
углом па2 к меридиану (схема закрепления
показана на рис. 37, где из бесчисленного
множества стерженьков показан только
один). Равенствами A7.31.1) и A7.31.2) об-
обобщаются граничные условия A7.30.1) и
A7.30.2): так, например, A7.30.1) получается
из A7.31.1) и A7.31.2) при п = 0.
Рассмотрим безмоментную статическую
задачу, соответствующую принятому виду
закрепления края и заключающуюся в опре-
делении усилий на загруженной по поверх-
ности сферической оболочке с учетом гра-
граничного условия A7.31.2). В этом соотноше-
соотношении усилия 7\ и S можно выразить через функции t и s при помощи формул
A3.3.4), в которых надо положить Z = 0. Тогда A7.31.2) после простых пре-
преобразований примет вид
37.
— t sin na2 + s cos гаа„ = 0.
A7.31.3)
Здесь h s — действительная часть и коэффициент при мнимой части
комплексной функции напряжения i|) (?). Эту функцию, как и в § 17.30,
надо определить в круге ? < р0 = ?*>• так, чтобы на окружности | ?| = р0
выполнялось соотношение A7.31.3). В круге | ?|<р0 функция i|) (?) должна
быть аналитической, а в точке ? = 0 иметь нуль по меньшей мере второго
порядка (§ 13.4).
Имеет место тождество
-lm {?-'"ф (?)} = lm {e-«.a> (cos na2 — i sin naa) (t + is)} =
= e~na' (— t sin na3 -f- s cos na2).
§31] СФЕРИЧЕСКИЙ КУПОЛ ПРИ СМЕШАННЫХ ГРАНИЧНЫХ УСЛОВИЯХ 251
Оно показывает, что i|> (?) будет удовлетворять граничному условию A7.31.3),
если при ах = а10 выполняется равенство
Im{S-^(Ql=0. A7.31.4)
Поэтому, как нетрудно проверить, i|) (?) можно выбрать так:
t@ = AQtr + V [ Д?- (-|- + |
где ЛА, Bft — действительные константы, am — целое положительное число.
При этом i|) (?) в круге | ? | < р0 будет удовлетворять требованиям, предъ-
предъявляемым к комплексным функциям напряжения (§ 13.4), всюду, за исклю-
исключением, быть может, точки ? = 0, где надо выполнить условие аналитичности
функции t'bty (?). Этого можно достичь, только подчинив в равенстве A7.31.2)
число п неравенству п 5з 2 (конечно, исключается тривиальная возможность
положить все Ак и Bk равными нулю). При таком п цель будет достигнута,
если в A7.31.5) положить т = п — 2. В результате получим формулу
^"(-^--^-)]- . A7.31.6)
Она и решает рассматриваемую безмоментную статическую задачу для
случая, когда отсутствуют поверхностные силы (в том числе и сосредоточен-
сосредоточенные). Это значит, что однородная безмоментная статическая задача, соответ-
соответствующая условию A7.31.2), при п~^2 имеет нетривиальное решение, зави-
зависящее от 2я — 3 действительных констант Л„, Ak, Bk (k = 1, 2, . . .
.... п — 2). Можно показать (на этом мы не будем останавливаться), что при
рассматриваемых условиях формула A7.31.6) дает самое общее выражение
комплексной функции напряжения и что множители при Ak и Bk линейно
независимы.
Обратимся к безмоментной геометрической задаче, соответствующей
граничному условию A7.31.1) и заключающейся в построении таких изгиба-
изгибаний сферы, которые совместны с закреплением, изображенным на рис. 37 (по-
(показан только один из бесчисленного множества воображаемых стерженьков).
Справедливы формулы A3.3.5), при помощи которых граничное соот-
соотношение A7.31.1) может быть преобразовано к виду
pcosna2 — <7 sin паг = 0. A7.31.7)
где рад — действительная часть и коэффициент при мнимой части ком-
комплексной функции перемещений g (?,). Эту функцию надо определить в круге
I ?1 < Ро = е<х"> так, чтобы на окружности | ?| = р0 выполнялось граничное
соотношение A7.31.7). При | ?| <С Ро функция g (?) должна быть аналитична
всюду, кроме точки ? = 0, а в последней она может иметь полюс не выше
первого порядка (§ 13.4).
Обсуждаемая задача эквивалентна задаче об определении функции
?"? (?)> удовлетворяющей при ? = р0 условию
= 0,
в чем легко убедиться, раскрыв выражение, стоящее в левой части только что
написанного равенства. Отсюда, повторив рассуждения, которые привели
к формуле A7.31.5), получим:
252 БЕЗМОМЕНТНЫЕ КУПОЛА [ГЛ. 17
Действительные константы, входящие в правую часть этого равенства,
надо подобрать так, чтобы при ? = 0 порядок полюса g (?) (если он есть)
был не выше первого. Этого можно достичь (не полагая все Ak, Вк равными
нулю) только при п «^ 2. Для таких п, положив в A7.31.8) в верхнем пределе
суммирования т — 1 — п, получим общее выражение для комплексной
функции перемещений
[ D й D 4г) } 2).
Ро fJ
^ L \ Ро
Отсюда вытекает, что однородная геометрическая задача, соответствую-
соответствующая граничному условию A7.31.1), при п^2 имеет только тривиальные
решения, а при п < 2 она имеет R — —2п + 3 линейно независимых нетри-
нетривиальных решений, соответствующих множителям при А 0, Ак, Bk (k =
= 1,2 1 - л).
Таким образом, одноролная статическая задача A7.31.2) и однородная
геометрическая задача A7.31.1) не могут одновременно иметь нетривиальные
решения, но одна из них нетривиальное решение всегда имеет.
Покажем теперь, что при п ^ 2 безмоментную статическую задачу
A7.31.2) можно решить и в том случае, когда к оболочке в точках t =
= ?fe (k = 1, 2, . . ., г) приложена произвольная система сосредоточенных
сил и моментов. Обозначим через яр,. (?) комплексную функцию напряжения,
решающую поставленную задачу, и будем искать ее в виде
[ (f)] A7.31.9)
где
2[%A^] <17-31Л0>
(Cik — произвольные комплексные константы).
Из результатов § 17.30 вытекает, что^ удовлетворяет условию A7.31.4),
следовательно, положив ij) = "ф^, мы при любом выборе ipj выполним тан-
тангенциальное статическое граничное условие A7.31.2). Предполагается, что
точки ?ft лежат внутри оболочки, т. е. |?ft|< Ро. поэтому в интересующей
нас области функция ^ (?) имеет полюсы только в точках ? = ?,k. Поведение
ty,,. (?,) в точке ? = 0 зависит от /г, и легко видеть, что при п ^ 2 она не только
аналитична, но и имеет нуль по меньшей мере второго порядка. Это значит,
что формулами A7.31.9), A7.31.10) определяется комплексная функция на-
напряжения, отвечающая случаю действия на оболочку сосредоточенных сил
и моментов, приложенных в точках ? = t,k и только в них.
В окрестности точки ? = ?ft функцию % (?) можно представить в виде
где i|jft — аналитическая функция, a C'ik — комплексные константы, выра-
выражающиеся через Cik по следующим формулам:
C\k = feftCu -\-nC,k (~>2k -\ 2 ь* ^зъ
Из них видно, что если С« произвольны, то на Cik тоже не наклады-
накладывается никаких ограничений, а следовательно, их можно выбрать по фор-
§ 313 СФЕРИЧЕСКИЙ КУПОЛ ПРИ СМЕШАННЫХ ГРАНИЧНЫХ УСЛОВИЯХ 253
мулам D6.26.21) так, чтобы сила и момент имели произвольно заданные
значения. Требуемое положение доказано. Из него вытекает, в частности,
что при п ^ 2 для рассматриваемой задачи может быть построена функция
Грина (под этим надо понимать решение задачи о произвольной сосредоточен-
сосредоточенной силе, действующей в некоторой точке ? = ?'), а это значит, что доказано
существование решения любой неоднородной безмоментной статической за-
задачи, соответствующей действию на оболочку произвольной нагрузки (рас-
(распределенной по поверхности или по линии). Полученное решение статической
задачи, конечно, не однозначно: к нему можно прибавить любые решения
однородной статической задачи, выражаемые формулой A7.31.6).
Замечание. Решение A7.31.9), A7.31.10) получено в предположении, что Zk Ф 0. н0
оно сохраняет силу и при Х& — 0-
Положим теперь, что в граничном условии A7.31.2) п <С 2 (п может быть
•и отрицательным), и подсчитаем число дополнительных условий, которым
надо подчинить внешние силы, чтобы решение статической безмоментной
задачи стало возможным.
Введем обозначение
и потребуем, чтобы гр^ была комплексной функцией напряжений для обо-
оболочки, подверженной действию некоторой системы сосредоточенных сил,
при статическом граничном условии A7.31.2). Тогда согласно A7.31.4) для
t|) (?) получится граничное условие
Пусть сосредоточенные силы и моменты приложены к оболочке в точ-
точках ? = ?А (& = 1, 2, . . ., г). Тогда •$„. (?), а вместе с тем и i|) (?) должны
при t, — Zk иметь в общем случае полюсы третьего порядка, а это значит, что
¦ф (?) по смыслу совпадает с комплексной функцией напряжений задачи 3
(§ 17.30). Это значит, что надо принять
и дополнительно потребовать, чтобы вблизи ? = 0 функция ip (?) имела вид
s?s- A7.31.12)
В § 17.30 при решении задачи 3 было показано, что такое представле-
представление существует тогда и только тогда, когда константы Clk {i = 1, 2, 3;
k = 1, 2, . . ., г), входящие во второе равенство A7.31.11), связаны одним
действительным и одним комплексным равенствами. Константы as в A7.31.12)
будут при этом линейными функциями Clk.
Положим, что равенство A7.31.12) справедливо, тогда можно написать
Но ty^ (?), по предположению, есть комплексная функция напряжений
и должна при ? = 0 иметь нуль по меньшей мере второго порядка. Поэтому
надо требовать, чтобы выражение в правой части написанного равенства
было ограничено (напомним, что п может быть отрицательным), т. е. чтобы
выполнялись — п комплексных равенств
а0 = ах = • • • = а_„_! = 0.
' 254 БЕЗМОМЕНТНЫЕ КУПОЛА [ГЛ. 17
Они также представляют собой условия, которым должны подчиняться
комплексные константы Clk. Таким образом, в общей сложности Clk свя-
связаны —п + 1 комплексными равенствами и одним действительным равен-
равенством, что эквивалентно —2п + 3 действительным равенствам.
Функция о|э (О в общем случае имеет в точках ? = ?s полюсы третьего
порядка. Обозначим через С« коэффициенты при главных частях соответ-
соответствующих рядов Лорана. Тогда С** можно выразить через компоненты сил
и моментов, приложенных в точках ? = t,k. Но C\k линейно выражаются
через Cik, а это значит, что С\\ должно удовлетворять всем —2п + 3 действи-
действительным условиям, которые были найдены для Ctk. Таким образом, число
необходимых и достаточных условий существования решений рассматривае-
рассматриваемой задачи равно —2п + 3.
Сформулированное утверждение тесно связано с теоремами, доказан-
доказанными в § 7.7. Граничные условия A7.31.1) и A7.31.2) определяют сопряжен-
сопряженные статическую и геометрическую задачи безмоментной теории. Если п •< 2,
то, как было здесь показано, безмоментная геометрическая задача имеет
—2п -\- 3 линейно независимых решений, а это согласно теореме 1 (§ 7.7)
значит, что есть —2п + 3 необходимых условий существования решений без-
безмоментной статической задачи. Они и были здесь выведены. Попутно выясни-
выяснилось, что в данном случае эти условия не только необходимы, но и достаточны.
§ 32. Обобщения
Результаты, полученные в § 17.31 для сферической оболочки, допускают
широкие обобщения.
Пусть в сферическом куполе, край которого g совмещен с параллелью
географической системы координат, должны выполняться следующие тан-
тангенциальные граничные условия:
0, A7.32.1)
0, A7.32.2)
т. е. можно считать, что в каждой точке края g поставлен условный стерже-
стерженек, составляющий угол 7 с меридианом географической системы координат
(один из них изображен на рис. 37).
Будем считать, что 7 — непрерывная функция точек контура g. Тогда
после однократного обхода g в положительном направлении (в направлении
возрастания а2) угол 7 получит приращение Д7. Оно выражается формулой
А7 = 2пп, в которой п — целое положительное или отрицательное число,
равное числу полных поворотов воображаемого стерженька вокруг нормали
поверхности, совершаемых в положительном направлении при однократном
обходе g.
Условия A7.32.1), A7.32.2) представляют собой обобщение условий
A7.31.1), A7.31.2), а введенное здесь число п совпадает по смыслу с числом п,
входящим в A7.31.1), A7.31.2). Статическая и геометрическая задачи без-
безмоментной теории, соответствующие условиям A7.32.2) и A7.32.1), подчи-
подчиняются теоремам существования, сформулированным в § 17.31, для безмо-
безмоментной статической задачи A7.31.2) и безмоментной геометрической за-
задачи A7.31.1). А именно, если ввести число R формулой
R = 2n — 3, A7.32.3)
то при R > 0 безмоментная статическая задача всегда имеет решение, содер-
содержащее R линейно независимых констант, а безмоментная геометрическая
задача имеет решение (единственное) тогда и только тогда, когда выполняется
^дополнительных условий; при R •< 0 безмоментная геометрическая задача
S 32] ОБОБЩЕНИЯ 255
всегда имеет решение, содержащее —R линейно независимых констант, а без-
моментная статическая задача имеет решение (единственное) тогда и только
тогда, когда выполняются —R дополнительных условий. Упоминающиеся
здесь условия разрешимости по смыслу совпадают с теми, о которых гово-
говорится в теоремах § 7.7.
Высказанное утверждение основано на свойствах так называемой за-
задачи Римана—Гильберта, а число п тесно связано с индексом этой задачи.
Основываясь на хорошо разработанной теории задач типа Римана—Гиль-
Римана—Гильберта, можно получить и дальнейшие обобщения этого утверждения [47].
Оно сохраняет силу и тогда, когда вместо сферы мы имеем произвольный
купол положительной кривизны, а контур g представляет собой произволь-
произвольную гладкую кривую. Наконец, все остается справедливым и в том случае,,
когда функция 7 имеет конечное число разрывов
первого рода, т. е. когда на разных участках края
ставятся различные граничные условия, но при этом
надо условиться, что в каждой точке разрыва угол 7
претерпевает скачок Ьу, заключенный в следующих
пределах:
0<6y<ji. A7.32.4)
Поясним смысл этого условия. Если интерпре-
интерпретировать краевое закрепление при помощи вооб-
воображаемых стерженьков, то в точке разрыва непре-
непрерывности у край оболочки окажется закрепленным
не одним, а двумя стерженьками (см. рис. 38, Рис- 38>
изображающий участок края, содержащий точку
разрыва s = s0). Это значит, что каждый скачок 7 как бы создает допол-
дополнительное точечное закрепление края. Поэтому 67 надо считать положитель-
положительным, с тем чтобы число решений безмоментной геометрической задачи, а сле-
следовательно и число возможных изгибаний, уменьшилось, а не увеличилось.
Число решений безмоментной статической задачи при 67 > О увеличи-
увеличивается, но можно показать, что это происходит за счет появления решений,
имеющих особенности в точках разрыва 7- В статической задаче такие осо-
особенности отвечают физической сущности явления, в то время как в геомет-
геометрической задаче, где они появились бы при 67 < 0, это недопустимо.
Возвратившись к рис. 38 и заметив, что каждый стерженек можно ста-
ставить в любом из двух прямо противоположных направлений (пунктир на
на рис. 38), рассмотрим точку края s = s0, где терпит разрыв 7- В этой точке
существуют два направления: т (s0 — 0) и т (s0 + 0), в которых должны
быть поставлены стерженьки. Если эти направления расположены так, как
показано на рис. 38, и стерженек 1, соответствующий направлению т (s0— 0),
поставлен определенным образом (сплошная линия на рис. 38), то усло-
условие A7.32.4) означает, что стерженек 2, соответствующий направлению
т (s0 -f 0), надо расположить так, чтобы вращение от 1 к 2 происходило по
часовой стрелке.
Итак, если расчету подлежит безмоментная оболочка положительной
кривизны, на единственном крае которой ставится одно статическое и одно
геометрическое граничное условие вида A7.32.4) и A7.32.1), то могут иметь
место три следующих случая.
Случай I: Д7 < Зл. Стерженек, с помощью которого условно изобра-
изображается краевое закрепление, при однократном обходе края оболочки совер-
совершает менее чем полтора полных оборота в положительном направлении (по
часовой стрелке, если смотреть со стороны внешней нормали). Тогда однород-
однородная статическая задача не имеет нетривиальных решений, а число линейно
независимых нетривиальных решений однородной геометрической задачи
256
БЕЗМОМЕНТНЫЕ КУПОЛА
ГГЛ. 17
положительно. Это значит, что связи, наложенные на края оболочки, не
препятствуют некоторым изгибаниям срединной поверхности. Получается
аналог геометрически изменяемой фермы. Приведем примеры.
Пример 1. Оболочка в виде сферического купола с одним плоским краем.
Примем, что опора исключает нормальные к краю смещения и не вос-
воспринимает касательных реакций. Такая задача для сферы уже рассмотрена
Рис. 39.
в § 17.30, где на рис. 35 с помощью условных стерженьков показана схема
закрепления края. В данном случае 7 = const = 0, и, следовательно, Д7 = 0;
R = —3. Это значит, что возможны три линейно независимых изгибания
срединной поверхности. Для сферы причины этого были уже вскрыты
Рис. 40.
Рис. 41.
в § 17.30. Все стерженьки (рис. 35) пересекаются в точке О, и срединная по-
поверхность оболочки может вращаться около этой точки как жесткое целое,
а это значит, что существуют тривиальные изгибания. Безмоментная стати-
статическая задача, вообще говоря, решений не имеет, а для того, чтобы такое
решение стало возможно, внешние силы надо подчинить трем условиям. Они
в данном случае сводятся к требованию, чтобы внешние силы не давали мо-
моментов относительно точки О.
Оболочка с такими же закреплениями, но не с плоским краем, показан-
показанная на рис. 39, также трижды геометрически изменяема, так как Д-р = 0, од-
однако возможные малые изгибания ее срединной поверхности уже нетриви-
§ 32]
ОБОБЩЕНИЯ
257
альны, потому что стерженьки, изображающие закрепление края, не пере-
пересекаются в одной точке, не лежат в одной плоскости и не параллельны од-
одному направлению. Для разрешимости безмоментной статической задачи
снова надо выполнить три дополнительных условия, но теперь они не так
очевидны и заключаются в требовании, чтобы внешние силы не совершали
работы на перемещениях возможных изгибаний.
Пример 2. Сферический купол — абсида с одним горизонтальным и од-
одним вертикальным плоскими краями.
Будем считать, что купол оперт по вертикальному краю на стенку, жест-
жесткую лишь в своей плоскости, а на горизонтальном крае осуществляется то же
закрепление, что в примере 1 (рис. 40).
В плоскости комплексного переменного ?
куполу соответствует область с угловыми
точками и, строго говоря, обсуждаемые ре-
результаты в данном случае не применимы.
Поэтому будем считать, что углы оболочки
скруглены, а так как условные стерженьки,
изображающие закрепления краев, с одной
стороны угла направлены по нормали, а с дру-
другой — по касательной к краю (рис. 41), то
примем, что в некоторой точке скругления
происходит скачкообразный поворот угло-
углового стерженька на угол л/2 (рис. 41). Тогда
дважды, на каждом из двух скруглений,
граничные условия будут терпеть разрыв,
а так как согласно A7.32.4) скачок 67 всегда должен считаться положитель-
положительным, то после, однократного обхода края оболочки мы получим Ay = я. От-
Отсюда
Рис. 42.
-2п
3= —2-^+3 =
Двухсрезный купол геометрически изменяем, но уже дважды, а не трижды
Рис. 43.
Рис. 44.
Замечание. В частном случае, когда срединная поверхность купола представляет собой
часть эллипсоида, а его края лежат в экваториальных плоскостях, оба возможные изгибания
купола становятся тривиальными. Это будут смещения в направлении оси / и вращения вокруг
оси 2, показанные на рис. 42. В монографии [31 ] дается пример расчета купола, изображенного
на рис. 42. Этот расчет оказался возможным потому, что нагрузка (собственный вес) не совер-
совершает работы на упомянутых перемещениях.
Случай II: Ay = Зя. Стерженек, изображающий граничное условие,
делает полтора полных положительных оборота, когда край оболочки одно-
однократно обходится в положительном направлении. Тогда
2п — 3 = 3 — 2п = 2 -?~ — 3 = 0,
17 Д. Л. Гольденвейзер
258 БЕЗМОМЕНТНЫЕ КУПОЛА [ГЛ. 17
»
а это значит, что статическая задача имеет при любом нагружении единствен-
единственное решение.
Пример такой оболочки дает купол с тремя вертикальными и одним гори-
горизонтальным краями, закрепленными так же, как в примере 2 (рис. 43).
Случай IH- \у ;> Зя. Здесь мы имеем 3 — 2п < 0. Изгибания срединной
поверхности невозможны. Любая внешняя нагрузка может быть уравно-
уравновешена безмоментными усилиями, и притом не единственным образом. Урав-
Уравнения статики дают возможность определить усилия лишь с точностью до
2п — 3 действительных констант. Такими свойствами обладает, например,
купол, изображенный на рис. 44, если закрепление горизонтальных и верти-
вертикальных краев будет такими же, как в примере 2.
§ 33. Купол с одним геометрическим и одним статическим
тангенциальными условиями. Полная краевая задача
Примем снова, что имеется купол, на кр-аю которого ставятся одно ста-
статическое и одно геометрическое тангенциальные граничные условия, и рас-
рассмотрим для него полную краевую задачу безмоментнои теории. Она заклю-
заключается в решении головной системы безмоментных уравнений (§ 7.8) с учетом
обоих тангенциальных граничных условий, и в данном случае его удобно
разбить на три этапа.
Этап 1. Решение статической безмоментнои задачи, т. е. определение
тангенциальных усилий Г1( S, Г2 при помощи интегрирования статических
уравнений безмоментнои теории (§ 7.4) с учетом тангенциального статического
граничного условия.
Этап 2. Определение компонент тангенциальной деформации еь со, еа
через Tlt S, Т из тангенциальных уравнений состояния G.1.4).
Этап 3. Решение геометрической безмоментнои задачи, т. е. опреде-
определение перемещений иг, иг, w при помощи интегрирования геометрических
уравнений безмоментнои теории (§ 7.5) с учетом тангенциального геометри-
геометрического граничного условия.
Если невозможно выполнить этап 1, т. е. если не существует решения
безмоментнои статической задачи, то, очевидно, не существует и решения
полной краевой задачи безмоментнои теории. Это произойдет тогда, когда
тангенциальное геометрическое граничное условие допускает изгибания сре-
срединной поверхности, а работа внешних сил на перемещениях таких изгиба-
изгибаний отлична от нуля, т. е. когда нарушатся условия теоремы о возможных
изгибаниях.
Верно и обратное утверждение: если этап 1 выполним, то решение пол-
полной краевой задачи существует. Здесь возможны два случая.
Случай I имеет место, когда введенное в § 17.32 число R положительно;
тогда при любой внешней нагрузке безмоментная статическая задача имеет
решение, зависящее от R существенных констант Сг (г = 1, 2, . . ., R).
В результате будут найдены Tlt S, Т2 с точностью до констант Сг. На этапе 2
будут получены ги со, е2, в выражения которых также войдут Сг. Следова-
Следовательно, эти R констант попадут в свободные члены геометрических уравне-
уравнений, подлежащих интегрированию на этапе 3, т. е. при решении геометри-
геометрической задачи. Последняя, как показано, допускает решение (единственное)
только в том случае, если выполняются R дополнительных условий. По тео-
теореме 2 (§ 7.7) эти условия можно записать в виде равенств G.7.9). В них входят
величины elt со, е2, содержащие Сг. Следовательно, эти условия можно рас-
рассматривать как систему R линейных алгебраических уравнений относительно
R констант Сг. Из нее они будут определены единственным образом (прини-
(принимается, что определитель отличен от нуля). После этого станет возможным
решить (единственным образом) и геометрическую задачу этапа 3.
S 34] СФЕРИЧЕСКИЙ КУПОЛ ПРИ ДВУХ ГЕОМЕТР. ГРАНИЦ. УСЛОВИЯХ 259
Итак, в случае I, т. е. когда геометрическое граничное условие исклю-
исключает все изгибания срединной поверхности (так как R >0), полная краевая
задача безмоментной теории всегда имеет решение, и оно единственно.
Случай II имеет место, когда R <С 0 (тангенциальное граничное условие
допускает изгибания срединной поверхности), но внешние силы не совер-
совершают работы на перемещениях возможных изгибаний. Тогда статическая
задача будет иметь решение (единственное), и на первом этапе будут един-
единственным образом определены тангенциальные усилия G1,, S, Т2). Поэтому
на этапе 2 единственным образом определятся (ех, со, е2). На этапе 3 в гео-
геометрических уравнениях в правых частях произволов уже не будет, но они
и не нужны, так как при R <С 0 соответствующая краевая задача решается
всегда. Перемещения будут при этом определяться не единственным образом
(с точностью до перемещений возможных изгибаний).
Таким образом, результаты этого параграфа позволяют утверждать, что
для куполообразной оболочки, на краю которой ставятся одно статическое
и одно геометрическое тангенциальные граничные условия, справедлива тео-
теорема о возможных изгибаниях (§ 15.21).
Задачи, сформулированные в § 17.30, относятся к случаю II. В них
R = —3 (это показано в § 17.31), что и отразилось в появлении трех условий
разрешимости статической задачи. Для определения перемещений надо вы-
выполнить действия, предусмотренные здесь этапами 2 и 3, т. е., в частности,
найти решение геометрической задачи. Оно существует, но определяет пере-
перемещения с точностью до трех констант. Так и должно быть, так как из ри-
рисунков 35, 36 видно, что рассмотренная оболочка представляет собой кон-
конструкцию с тремя степенями свободы.
§ 34. Сферический купол с двумя геометрическими
граничными условиями
Рассмотрим сферический купол постоянной толщины и с постоянными
Е иг, у которого на краюс^ = а10 оба тангенциальные граничные условия —
геометрические, т. е. записываются так:
их = 0, ы» = 0 приа! = а10. A7.34.1)
Решение этой задачи, которая была рассмотрена в [37], можно искать
в виде A3.1.9), считая, что ы(ч>, ы<ч) — перемещения, соответствующие част-
частному интегралу, — нам известны.
Введем обозначения
гспоцир = р<->, гспоцыр = q^\ рс> -f iqr) = g(') (?),
подразумевая под (•) любой из индексов (ч), (б), (м). Тогда g<4) надо считать
заданной комплексной функцией, для g<6) (?) = /г'б> + iqF) мы имеем фор-
формулу A3.4.5), а g(M) (?) можно определить равенством
?<"> @ = ?(?), A7.34.2)
в котором g (?) — комплексная функция перемещений, обладающая свой-
свойствами, сформулированными в § 13.4.
Комплексную функцию напряжений ф (?), входящую в g<6) (?), и ком-
комплексную функцию перемещений g (?) надо подобрать так, чтобы внутри
области они обладали свойствами, сформулированными в § 13.4, а на гра-
границе удовлетворяли условиям A7.34.1).
Граничные условия A7.34.1) эквивалентны комплексному равенству
Х(в) (t) _(_ Х(м) до = _ Х(,) p)f A7.34.3)
в котором
17*
260 БЕЗМОМЕНТНЫЕ КУПОЛА [ГЛ. 17
a t — контурное значение ?, т. е.
t = рев'*, р0 = е*".
Отбросим в A3.4.5) 'функцию Н (?) (производи, которые она содержит,
повторяются произволами g|(?))> заменим в этом равенстве i на —i и помножим
его на ?. Получим
A7.34.4)
Здесь можно избавиться от интегралов, положив
^^ A7.34.5)
Дифференцируя эти равенства дважды по ? и решив полученные уравне-
уравнения относительно входящих в них интегралов, будем иметь
о о
г A7.34.6)
о
и, внеся эти выражения в A7.34.4), запишем требуемый результат:
. A7.34.7)
Заметим, что на краю оболочки ?? = Ро, и внесем A7.34.7) в A7.34.3).
Получим
A7.34.8)
Задача свелась к определению двух аналитических функций F (?) и
g (С) в области G по условию A7.34.8), наложенному на них на границе. Она
почти тождественна той, к которой приводит плоская задача теории упру-
упругости, и всегда имеет решение (единственное). Для эффективного построения
этого решения можно использовать методы Колосова—Мусхелишвнли, но на
соответствующих подробностях мы останавливаться не будем, отсылая чи-
читателя к работе [37].
§ 35. Обобщения
В § 17.34 показано, что для сферических изотропных однородных купо-
куполов постоянной толщины с плоским жестко заделанным краем в безмомент-
ной теорнн можно использовать почтн без изменения наиболее эффективный
метод решения плоских задач теорнн упругости, разработанный для круго-
круговых областей. Переносятся на безмоментную теорию сферических оболочек
и некоторые более общие методы решения плоских задач, относящиеся к не-
некруговым и многосвязным областям. Они соответствуют случаям, когда край
§ 35J ОБОБЩЕНИЯ 261
сферической оболочки — не плоский и когда оболочка имеет жестко заде-
заделанные отверстия. В частности, остается в силе и метод конформных отобра-
отображений.
Замечание. Конформные отображения в безмоментной теории можно использовать двумя
способами.
Первый из них заключается в том, что система криволинейных координат фиксируется
(например, выбираются географические координаты) и конформное отображение применяется
к той области, которая получается для рассматриваемой задачи в выбранной координатной
системе.
Второй способ вытекает из замечания, сделанного в § 13.2. Представление общего инте-
интеграла безмоментных уравнений сферической оболочки через аналитические функции комплекс-
комплексного переменного сохраняется в любой изотермической системе координат, а последняя
остается изотермической при конформном преобразовании ее независимых параметров. Поэтому
можно заранее подобрать такую изотермическую систему координат, в которой край задается
наиболее просто, например, проходит вдоль координатной линии. Преимущество второго
подхода заключается в том, что он позволяет упростить не только область, но и граничные
условия задачи (последние всегда формулируются наиболее просто на краях, проходящих
вдоль координатных линий).
Перенесение методов плоской задачи теории упругости в безмоментную
теорию принципиально возможно и для оболочек второго порядка, и для про-
произвольных оболочек положительной кривизны (в последнем случае надо
оперировать уже с обобщенными аналитическими функциями). Однако та-
такого рода конкретные результаты пока не получены.
Если поверхность (любого знака кривизны) не имеет бесконечно удален-
удаленных точек, ограничена только неасимптотическими краями и во всех точках
этих краев она лишена свободы смещения в обоих тангенциальных направ-
направлениях, то такая поверхность не может изгибаться. Отсюда по теореме о воз-
возможных изгибаниях должно следовать, что полная краевая задача безмомент-
безмоментной теории при граничных условиях вида A7.34.1) на всех краях оболочки,
не имеющей бесконечно удаленных точек, должна иметь решение (единствен-
(единственное) при любой, достаточно гладкой, нагрузке, если ни один из краев обо-
оболочки не касается асимптотических линий срединной поверхности. Справед-
Справедливость этого утверждения доказана в § 17.34 для сферического купола с пло-
плоским краем, а в § 15.23 — для произвольной замкнутой оболочки нулевой
кривизны с двумя неасимптотическими краями. Оно, по-видимому, останется
правильным и в самом общем случае.
ГЛАВА 18
БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ С ДВУМЯ КРАЯМИ
§ 36. Оболочка положительной кривизны
со свободными краями
Пусть на всех краях оболочки свобода смещений в обоих тангенциаль-
тангенциальных направлениях ничем не стеснена (в этом случае край можно условно
назвать свободным, но надо помнить, что речь идет лишь об отсутствии тан-
тангенциальных реакций, а в нетангенциальных направлениях край может быть
и закреплен).
В теории изгибаний показано, что незамкнутая поверхность со свобод-
свободными краями не является жесткой. Поэтому согласно теореме о возможных
изгибаниях соответствующая полная краевая задача безмоментной теории
не должна, вообще говоря, иметь решения. Это подтвердилось на примере
замкнутой оболочки нулевой кривизны, рассмотренной в § 15.24. При этом
выяснилось, что в данном случае теорема о возможных изгибаниях полностью
выполняется.
Для оболочек положительной кривизны в этом направлении весьма
общие результаты получены в работах [16—19]. Там в принятых в настоя-
настоящей работе терминах считалось, что заданы внешние поверхностные и крае-
краевые силы, действующие на оболочку, и ставился вопрос, существует ли реше-
решение безмоментных статических уравнений, отвечающее этому случаю? При
этом предполагалось, что внешние поверхностные силы направлены про-
произвольно, но краевые силы имеют только тангенциальные составляющие.
Это соответствует случаю, когда в статической краевой задаче безмоментной
теории должны выполняться два тангенциальных статических граничных
условия, выражающие тот факт, что краевые силы имеют заданные тан-
тангенциальные компоненты. Показано, что для этой задачи справедлива
следующая
Теорема существования. Решение (единственное) безмоментных стати-
статических уравнений, удовлетворяющих во всех точках края [или краев) двум
тангенциальным условиям для оболочки положительной кривизны, существует
тогда и только тогда, когда внешние поверхностные и краевые силы не совер-
совершают работы на перемещениях всех возможных изгибаний неподкрепленной
срединной поверхности оболочки.
Подробности можно найти в монографии [19], где сформулированы и
условия гладкости функций, определяющих геометрию оболочки, а также
приложенных к ней сил. Для оболочки положительной кривизны условия
гладкости слабее, чем для оболочки нулевой кривизны (§ 15.21).
Если условия сформулированной теоремы не выполняются, то, конечно,
полная краевая задача безмоментной теории решения не имеет. Если условия
выполняются и внутренние тангенциальные усилия, уравновешивающие за-
заданную нагрузку, существуют, то при помощи G.1.4) можно выразить через
них компоненты тангенциальной деформации е1( со, е2. Для определения пере-
$ 37) ОБОЛОЧКА С ОДНОТИПНО ЗАКРЕПЛЕННЫМИ КРАЯМИ 263
мещений мы будем располагать безмоментными геометрическими уравне-
уравнениями G.5.1), левые части которых надо рассматривать как известные ве-
величины. При решении этой системы не надо выполнять никаких граничных
условий, т. е. любой частный интеграл системы G.5.1) представляет собой
некоторое поле смещений для рассматриваемой задачи. Такие поля, конечно,
существуют; они определены с точностью до совокупности решений соответ-
соответствующей однородной системы, т. е. с точностью до всех возможных изгиба-
изгибаний неподкрепленной срединной поверхности оболочки. Это значит, что об-
обсуждаемая строго доказанная теорема по смыслу совпадает с теоремой о воз-
возможных изгибаниях для случая, когда оболочка свободна, а ее кривизна
положительна.
§ 37. Оболочка с двумя краями
(однотипные граничные условия)
Обратимся к оболочкам, имеющим два края, и будем пока считать, что
на них тангенциальные граничные условия однотипны, т. е. на разных краях
число статических и геометрических тангенциальных условий остается оди-
одинаковым.
В этом случае некоторые теоремы существования решений полной крае-
краевой задачи безмоментнои теории формулируется точно так же, как и для
оболочки с одним краем. Примером могут служить оболочки, края которых
жестко заделаны в обоих тангенциальных направлениях. Как уже говори-
говорилось в § 17.34, решение полной задачи в этом случае существует и единственно
при любой, достаточно гладкой нагрузке, независимо от числа краев (если
только они неасимптотические) и даже независимо от знака кривизны сре-
срединной поверхности. По-видимому, сохраняется при любом числе краев
также и теорема существования, обсужденная в § 18.36; надо только требо-
требовать, чтобы все края оболочки были неасимптотическими и свободными
в обоих нетангенциальных направлениях. Для оболочек положительной
кривизны это следует из результатов работ [16—19], в которых теорема
доказана при любом числе краев. В § 15.24 показано, что теорема остается
в силе для оболочек нулевой кривизны и не видно оснований предполагать,
что исключение представят оболочки отрицательной кривизны. Более слож-
сложным является случай, когда гауссова кривизна оболочки меняет знак, так как
при этом может иметь место касание с плоскостью вдоль замкнутой линии,
что является нарушением условий теоремы о возможных изгибаниях (§ 15.21).
Вместе с тем не исключено, что теорема снова станет справедливой при от-
отсутствии такого касания.
Если на обоих краях оболочки в тангенциальных направлениях ставится
одно статическое и одно геометрическое граничные условия, то формулировка
теорем существования решений полной краевой задачи безмоментнои теории
зависит от знака кривизны срединной поверхности. Для оболочки всюду
положительной кривизны сохраняются теоремы существования решений
безмоментных краевых задач, подобные тем, которые формулировались в
в §§ 17.31, 17.32. Однако для оболочек отрицательной кривизны получаются
непривычные результаты; покажем их на примере оболочки, имеющей форму
одно полостного гиперболоида вращения.
Если срединную поверхность однополостного гиперболоида вращения
отнести к географической системе координат (рис. 45), то как однородные
безмоментные статические уравнения, так и однородные безмоментные гео-
геометрические уравнения можно привести к следующей системе (§ 13.7):
д^ З1 д1 дГ\ Л ЛОО7П
Ж^0- A8.37.1)
264
БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ С ДВУМЯ КРАЯМИ
[ГЛ. 18
Для перехода к безмоментным статическим уравнениям надо в A7.37.1)
под |, т) подразумевать
Для перехода к безмоментным геометрическим уравнениям надо согласно
A3.6.10), A3.6.11) положить
I = Ци'ъ Т) = Ц«2-
Будем считать, что оболочка замкнута в поперечном направлении и огра-
ограничена двумя параллелями географической системы координат, т. е. что
параметры а1? а2 меняются в следующих пределах:
«и ^«х «^ а12, —зх^а2^ + я- A8.37.2)
Пусть в каждой точке обоих краев должны выполняться одно статиче-
ское и одно геометрическое условия
S = 0, щ. = 0.
Тогда безмоментная статическая и геометри-
геометрическая задачи будут заключаться в определении
(?, tj) в области A8.37.2) с учетом условий пе-
периодичности по а2 и граничных условий, имею-
У щих вид:
для статической задачи
для геометрической задачи
I к=а„ = I к-»,, = 0.
A8.37.3)
A8.37.4)
Рис. 45.
Зададим (|, ц) при помощи тригонометрических рядов по а2:
СО , 00
I = S (S* cos ^«2 + tk sin ?а2), tj = S (nft cos ?а2 + tju sin йа2).
Тогда определению будут подлежать при каждом k две пары функций
(?*. Цк) и (?L т]а) переменной ах. Это делается очевидным образом, и, опу-
опустив пояснения, запишем для ?, ц окончательные формулы:
cos йах
T) = У КДн cos ftax
j sin fea^ cos fea2 +
-)- (— О^ cos kax -\- Dkl sin kaj sin j
2 sin kax) cos fexj +
+ (— CA2 cos feax + Ckl sin feax) sin /
A8.37.5)
В них Cki, Dki — константы, которые надо определять из граничных
условий A8.37.3) или A8.37.4). Это для k-vo члена разложений A8.37.5)
приведет к таким системам:
а) в статической задаче, т. е. при условиях A8.37.3),
Ckl sin fean — Ck2 cos feau = 0,
Ckl sin /ea12 — CM cos kal2 = 0,
Dftl cos kalt -f- Oto sin feau = 0,
DAl cos ka12 -j- L^jj sin /ta12 = 0,
A8.37.6)
§ 37] ОБОЛОЧКА С ОДНОТИПНО ЗАКРЕПЛЕННЫМИ КРАЯМИ 265
б) в геометрической задаче, т. е. при условиях A8.37.4),
Ckl cos /ean -f- Ck2 sin kan = 0, | Dkl sin kalt — Dk2 cos kan — 0, |
Ckl cos ta12 + Ck2 sin fea12 = 0, J DAiSinfcx12— DA2 cos ka12 = 0, J ' " ''
В обоих случаях определитель систем одинаков:
А = sin& (aja — au).
Таким образом, однородные статическая и геометрическая задачи без-
безмоментной теории могут иметь нетривиальные решения только тогда, когда
a12 — au = qn, q = -^- (т, п—целые числа). A8.37.8)
По формулам § 13.7 легко установить, что для однополостного гиперболо-
гиперболоида а12—ац не превышает числа я, поэтому надо требовать, чтобы выполня-
выполнялось неравенство /п <С п.
Итак, для однополостного гиперболоида вращения, закрепленного выше
описанным способом, существуют размеры, определяемые равенством A8.37.8)
(они будут в дальнейшем называться собственными размерами), при которых
однородные статическая и геометрическая задачи безмоментной теории одно-
одновременно имеют нетривиальные решения. При этом собственные размеры одно-
однополостного гиперболоида расположены всюду плотно среди всех возможных
его размеров (как рациональные числа расположены среди всех возможных
действительных чисел) [32, 112, 113, 151].
Существование решения однородной статической задачи означает, что
срединная поверхность оболочки имеет изгибания. Выясним характер соот-
соответствующих перемещений. Примем, что выполняется равенство A8.37.8)»
и выразим в нем целые числа тип формулами
т = гц, п = rv (г = 1, 2, 3...),
в которых (х и v — наименьшие целые числа, удовлетворяющие равенству
q = (j,/v.
Отсюда следует, что при выполнении A8.37.8) в однополостном гипер-
гиперболоиде возможно бесчисленное множество изгибаний. Соответствующие им
перемещения будут меняться по а2 по закону sin rva2 или cos rva2, и каждому
фиксированному целому значению г соответствует два линейно независимых
изгибания, определяемых соответственно решениями первой и второй си-
системы A8.37.7) при k = rv.
Число rv является характеристикой изменяемости функций sin rva2
и cos rva2. Поэтому можно утверждать, что если собственный размер одно-
однополостного гиперболоида задается при помощи равенства A8.37.8) числом
q = fi/v (ц, v — несократимые целые числа), то эта поверхность имеет бес-
бесчисленное множество изгибаний, наименьшая изменяемость которых харак-
характеризуется числом v (соответствующим г — 1).
Будем теперь искать решение неоднородной статической задачи, соот-
соответствующей случаю, когда на оболочку действуют поверхностные силы, ме-
меняющиеся по ocj как sin kat или cos kau а по a2 — как sin ka2 или cos &a2,
а также краевые силы, меняющиеся по ос2 как sin ka2 или cos ka2. Тогда ре-
решение можно строить в виде A8.37.5), оставив в правых частях этих равенств
только k-e члены рядов. При этом для определения констант CHl, Dni полу-
натся уравнения (очевидные и несущественные для дальнейшего подробности
опустим)
Ckl slnteu — Ckicos&*„ = aku j Dklcoska11 -f D^sinkait = Ьн, ) {l837 9>
Ck, sin ka,2 — Ck2 cos ka12 = ate, J DM cos fea12 + D& sin ka^ = bk2, J
в которых aki, bkl — известные константы.
266 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ С ДВУМЯ КРАЯМИ ГГЛ. 18
Левые части этих уравнений — такие же, как в A8.37.6). Поэтому их
определители будут равны нулю, если при п = k и некотором целом т вы-
выполняется равенство A8.37.8). Решение неоднородной статической задачи
будет в этом случае, вообще говоря, невозможно. Это можно было предвидеть
заранее. Рассматриваемые здесь статическая и геометрическая безмоментные
задачи сопряжены (в смысле § 7.7). Поэтому, если выполнено A8.37.8), т. е.
если однородная геометрическая задача имеет нетривиальные решения, то
согласно теореме 1 § 7.7 надо требовать, чтобы внешние силы статической
задачи не совершали работы на перемещениях «сех возможных изгибаний.
Выше было показано, что таких изгибаний бесконечное множество. Однако
соответствующие им перемещения меняются по а2 как sin rva% или cos r\a.2,
а внешние силы меняются по а2 как sin &a2 или cos ka2, поэтому, в силу орто-
ортогональности тригонометрических функций, работа внешних сил может от-
отличаться от нуля лишь при rv = k. При фиксированном г существуют только
два линейных независимых изгибания, а значит, и число нетривиальных
условий Существования решения статической задачи также равно двум. Это
и будут те два условия, которым должны отвечать правые части двух систем
A8.37.9) для того, чтобы эти уравнения, а вместе с ними и статическая за-
задача безмоментной теории, были разрешимы. Решение статической задачи,
очевидно, будет при этом зависеть от двух произвольных констант.
Рассмотрим полную краевую задачу безмоментной теории для внешней
нагрузки вышеописанного вида. Решение здесь также можно разбить на
этапы, описанные в § 17.33, и задавать %, л в виде г-го члена разложений
A8.37.5). При этом возможны два случая.
Случай I. Равенство A8.37.8) при выбранном k не выполняется. Тогда
обе краевые безмоментные задачи приводятся к системам алгебраических
уравнений с ненулевыми определителями. Это значит, что полная краевая
задача имеет решение (единственное).
Случай II. Равенство A8.37.8) при выбранном k выполняется. Тогда
получатся алгебраические системы уравнений с одинаковым нулевым опре-
определителем. Для разрешимости систем, отвечающих статической задаче, надо
на внешнюю нагрузку наложить два условия, вытекающие из вышеприведен-
вышеприведенных рассуждений. При выполнении их статическая задача будет иметь реше-
решение, зависящее от двух констант E(k (i = 1, 2). Последние попадут в конеч-
конечном итоге в правые части систем, отвечающих геометрической задаче. Опре-
Определители этих систем равны нулю, но Eik можно подобрать так, чтобы си-
системы были разрешимы. Это значит, что решение полной краевой задачи
безмоментной теории существует и в случае II, но оно будет определяться
с точностью до бесчисленного множества тех изгибаний, которые имеет
срединная поверхность при выполнении A8.37.8).
Полученные результаты полностью согласованы с теоремой о возможных
изгибаниях, и мы получаем пример применимости этой теоремы к оболочкам
отрицательной кривизны.
§ 38. Оболочка с двумя неоднотипно закрепленными краями
Рассмотрим теперь случай, когда оболочка имеет два края ylt yt, причем
на Vi тангенциальные закрепления отсутствуют, а край yt заделан от обоих
тангенциальных перемещений. Тогда условия существования решений пол-
полной краевой задачи безмоментной теории могут оказаться довольно Неопре-
Неопределенными, как вытекает из нижеследующего примера.
Пусть речь идет о сферическом куполе, нагруженном только краевыми
силами, т. е. полная краевая задача безмоментной теории сводится к по-
построению комплексной функции напряжений г|з (?) и комплексной функции
перемещений g (?).
S 38]
ОБОЛОЧКА С НЕОДНОТИПНО ЗАКРЕПЛЕННЫМИ КРАЯМИ
267
Функции ф (?) н g (?) должны быть аналитическими в двухсвязной об-
области G, ограниченной замкнутыми контурами gt и g2, отвечающими краям Vi,
у2 соответственно (рис. 46, а). На краю Yi надо выполнить два тангенциаль-
тангенциальных граничных условия, отражающих тот факт, что на оболочку действуют
заданные краевые силы. В общем случае, когда край произвольно располо-
расположен относительно координатных линий, тангенциальные статические гра-
граничные условия записываются в виде двух равенств
qaS = fl, A8.38.1)
в которых pi, qt, fi — заданные функции точек края, а Т, S — нормальное
и касательное тангенциальные усилия на косых сечениях, проходящих вдоль
края. Для последних имеются формулы C.20.2). Поэтому вместо A8.38.1)
можно написать равенства
+ blS + ciTt = ft, A8.38.2)
в которых a,, bt, fi — заданные функ-
функции точек края.
Кроме A8.38.2), мы имеем третье
статическое безмоментное уравнение
G.1.3). Его можно записать в виде
а37\
+ <ьТш = /з- A8.38.3)
Равенства A8.38.2) и A8.38.3) об-
образуют линейную алгебраическую си-
систему уравнений, которую можно раз- рис 4б
решить относительно тангенциальных
усилий, и следовательно, условия A8.38.1) эквивалентны равенствам
Из них в силу A3.6.8) вытекает, что, если на краю уг сферической оболочки
заданы два тангенциальных статических условия, то это эквивалентно зада-
заданию краевых значений комплексной функции напряжения на соответствую-
соответствующем контуре gt. Точно так же, если на краю у2 сферической оболочки оба
тангенциальные граничные условия — геометрические, то этим на g2 опре-
определятся граничные значения комплексной функции перемещения g (?).
Известно, что нельзя произвольно задавать контурные значения действи-
действительной и мнимой частей аналитической функции комплексного переменного.
Однако, имея в виду разобраться в этом детально, будем искать для рассматри-
рассматриваемого случая решение полной безмоментной краевой задачи, придержи-
придерживаясь такой последовательности действий.
1. В области G (рис. 46, а) строим комплексную функцию напряже-
напряжений ij) (?), которая на gx принимает заданные значения.
2. Зная г|з (?) по формуле вида A3.4.5) находим комплексную функцию
р(б) — i<7<6>» подобрав Н (?) так, чтобы соблюсти однозначность. Функ-
Функция р(б) —;<7(б) вместе с A3.4.6) определит тангенциальные смещения, ко-
которые, вообще говоря, на контуре g2 будут давать невязки в тангенциальных
геометрических граничных условиях.
3. В области G строим комплексную функцию перемещений g (?), кото-
которая на g2 принимает заданные значения (их надо подобрать так, чтобы по-
погасить невязки п. 2).
Таким образом, для достижения цели надо дважды построить в.двух-
в.двухсвязной области G аналитическую функцию, сначала функцию напряжений,
268 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ С ДВУМЯ КРАЯМИ [ГЛ. 18
а затем функцию перемещений, так, чтобы на одной из двух границ области
она принимала заданные значения.
Приступая к рассмотрению этой задачи, обозначим искомую функцию
через / (?), примем для конкретности, что она принимает заданные значения
на glt и запишем соответствующее условие так:
f(t) = q>(f) (*—значения ? на gj. A8.38.4)
Ограничимся случаем, когда <р (t) есть контурное значение некоторой
функции ф (?), которая в односвязной области Gu ограниченной контуром gx
(рис. 46, б), мероморфна, т. е. аналитична всюду, за исключением некоторых
точек 51( ti, • • • > 5ь где она может иметь полюсы. Примем, что ни одна из
этих точек не содержится в достаточно узкой полосе, примыкающей изнутри
к границеgj. Тогда условие A8.38.4), как вытекает из теоремы единственности
аналитических функций, можно выполнить единственным образом, положив
/(О = Ф(О- A8.38.5)
При этом возможны два случая:
1. Если точки 5i, 5г> ¦¦•.?* отсутствуют, либо находятся внутри кон-
контура g2, то формулой A8.38.5) в области G определится искомая аналитиче-
аналитическая функция,
2. Если хотя бы одна из точек ?lt 5а. • • •» С* попадет в двухсвязную
область G, то функция A8.38.5) не будет удовлетворять нужным требованиям,
а это значит, что рассматриваемая задача не имеет решения.
Итак, если оболочка положительной кривизны имеет два края, из ко-
которых один закреплен в обоих тангенциальных направлениях, а другой
в этих направлениях свободен, то для нее полная краевая задача может иметь
или не иметь решение в зависимости от обстоятельств, которые трудно пред-
предвидеть заранее.
Мы воспользовались некоторыми теоремами теории аналитических функ-
функций, чтобы наиболее просто обосновать это утверждение, но, в сущности,
в этом не было необходимости. При построении комплексных функций напря-
напряжений и перемещений должна быть дважды решена задача с начальными усло-
условиями Коши. Вблизи рассматриваемого контура решение задачи Коши, как
известно, всегда существует, но его не всегда можно продолжить достаточно
далеко вглубь области. Поэтому высказанное выше утверждение относится
к любым оболочкам положительной кривизны, независимо от того, можно ли
для них решать безмоментную задачу при помощи аналитических функций.
К двухкратному решению задачи Коши сводится вопрос и в случае,
когда кривизна оболочки неположительна. Если кривизна равна нулю, то рас-
рассуждения становятся элементарными. Они проведены в §§ 15.17—15.19 и пока-
показали, что для оболочки нулевой кривизны обсуждаемая здесь полная краевая
задача безмоментной теории всегда имеет решение, конечно, если края —
неасимптотические. Если кривизна оболочки отрицательна, то обе упоминав-
упоминавшиеся выше задачи Коши должны решаться для систем гиперболического
типа. Это значит, что их решение будет существовать в двухсвязной области
при любой, достаточно гладкой нагрузке. Исключение может иметь место
только тогда, когда в области G будут содержаться некоторые особые точки
срединной поверхности, например, точки, через которые проходят две асимп-
асимптотические линии одного семейства.
Таким образом, теорема существования обсуждаемой полной безмомент-
безмоментной краевой задачи имеет запутанный характер только тогда, когда кривизна
оболочки положительна. Это связано с тем, что в этом случае осутствует соот-
соответствие между характером краевых задач (задачи с начальными условиями)
и типом (эллиптическим) уравнений.
S 39]
ОБОЛОЧКА С НЕОДНОТИПНО ЗАКРЕПЛЕННЫМИ КРАЯМИ
269
Замечание. В § 18.37 мы могли убедиться, что применение безмоментной теории к оболоч-
оболочкам отрицательной кривизны связано с некоторым «насилием» над свойствами соответству-
соответствующих краевых задач (например, необходимость решать задачу Дирихле для гиперболиче-
гиперболических уравнений). Здесь получился пример прямо противоположного характера: краевые
задачи безмоментной теории оказались более естественными для оболочек отрицательной
кривизны.
§ 39. Оболочка с двумя неоднотипно
закрепленными краями (продолжение)
Вернемся к оболочкам положительной кривизны. Если один из краев
такой оболочки закреплен от тангенциальных смещений, то независимо от
того, имеются ли другие края, и от того, как они закреплены, ее срединная
поверхность не может иметь изгибаний. Этот факт известен. Он относится
к любым поверхностям положительной кри-
кривизны и очевиден с точки зрения теории диф-
дифференциальных уравнений, так как построе-
построение изгибаний при таком закреплении края
сводится к однородной задаче Коши. Из ска-
сказанного вытекает, что по теореме о возмож-
возможных изгибаниях (§ 15.21) решение полной
краевой задачи безмоментной теории для
оболочки, рассмотренной в предыдущем па-
параграфе (один край свободен от тангенциаль-
тангенциальных закреплений, а второй — заделан в обоих
тангенциальных направлениях), должно су- рис. 47.
ществовать и быть единственным. Однако это
утверждение может оказаться и неверным, и чтобы разобраться в получаю-
получающемся несоответствии, вернемся еще раз к задаче построения аналитиче-
аналитической функции по условию A8.38.4).
Пусть
С =- С (г) A8.39.1)
— аналитическая в Gx (рис. 46, б) функция, осуществляющая конформное
преобразование области Gx на круг \г\ < 1. Тогда рассматриваемая задача
сведется к построению в плоскости г функции % (г), принимающей на окруж-
окружности | г = 1 заданные значения и остающейся аналитической в той части
круга | г г^ 1, которая соответствует области G. На рис. 47 эта часть области
ограничена пунктирным контуром g, на который отображается контур g2
(рис. 46, а). Не поступаясь общностью, можно считать, что центр круга (г = 0)
лежит внутри g; для этого надо выбрать конформное преобразование A8.39.1)
так, чтобы точка г = 0 соответствовала некоторой точке области G, ле-
лежащей внутри g2 (рис. 46, а).
Пусть г = ге'ф, тогда условие на окружности \г\ = 1 запишется так:
% (e«t) = t (ф) + is (ф). A8.39.2)
Примем, что правую часть этого равенства можно представить в виде
суммы
N
ЗС(е'ф) = S (An cos mp -)- Вп sin racp) A8.39.3)
(Ап, Вп — комплексные константы).
В этом случае искомая функция запишется следующим образом:
X(г) = 2 [ А2~ (г" + 2~") + "fr (г"— г~")] •
A8.39.4)
270 БЕЗМОМЕНТНЫЕ ОБОЛОЧКИ С ДВУМЯ КРАЯМИ 1ГЛ. 18
она удовлетворяет условию A8.39.2) и аналитична всюду, за исключением
точки г = 0, которая заведомо лежит вне интересующей нас области.
Таким образом, для граничного условия частного вида A8.39.3) решение
вспомогательной задачи построено. Под общим случаем условно можно под-
подразумевать случай, когда в A8.39.3) и в A8.39.4) в правых частях N — оо.
Тогда правая часть A8.39.4) обратится в ряд Лорана, который сходится в не-
некотором кольце, не покрывающем, вообще говоря, рассматриваемую область.
Отсюда вытекает, что вопрос о существовании решения обсуждаемой задачи,
соответственно результатам § 18.38, в этом общем случае остается открытым.
Однако приведенные рассуждения позволяют сделать важное для дальней-
дальнейшего уточнение. При достаточно большом N общие (в указанном выше смысле)
граничные условия можно аппроксимировать условиями вида A8.39.3),
а это значит, что рассматриваемая задача не имеет решения только тогда,
когда она ставится совершенно строго. Смягчив постановку задачи, т. е. за-
заменив истинное граничное условие равенством A8.39.3), всегда можно по-
построить решение.
Отметим, что описанное выше смягчение постановки задачи заключается
в том, что ее граничное условие выполняется с точностью до слагаемых,
имеющих сколь угодно большую изменяемость.
Замечание. Большая изменяемость невязки в граничных условиях получается в пре-
преобразованных переменных (на плоскости г). Нетрудно, однако, показать, что такое свойство
невязки сохранится и после обратного преобразования (на плоскости ?). Это следует из того,
что если /(?)=% [г (?)], то
a dzld% ограничено и отлично от нуля во всякой неугловой точке контура g,.
Таким образом, обобщая полученные результаты, можно утверждать,
что для оболочки с двумя краями, из которых в тангенциальных направле-
направлениях один закреплен, а другой свободен, полная краевая задача также
подчиняется теореме о возможных изгибаниях, ие только при этом постановка
задачи должна быть смягчена указанным образом.
Ч а с т ь IV
ИТЕРАЦИОННЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ
УРАВНЕНИЙ ТЕОРИИ ОБОЛОЧЕК
Рассматриваются итерационные методы решения уравнений теории обо-
оболочек. Вначале формулируются итерационные процессы, позволяющие
строить интегралы, соответствующие безмоментному и чисто моментному
напряженным состояниям, а также простому краевому эффекту. Процессы
существенно основываются на малости относительной толщины оболочек
и строятся формально в том смысле, что не делается попыток исследовать их
асимптотические свойства. Однако существование формальных разложений
для безмоментного и чисто моментного напряженных состояний и для про-
простого краевого эффекта в какой-то мере может служить обоснованием тех
предположений, которые были положены в основу приближенных методов
построения этих напряженных состояний в части III.
Наиболее существенны в части IV результаты, относящиеся к итерацион-
итерационным методам выполнения граничных условий. Дело в том, что каждое из
тех напряженных состояний, которые были введены в рассмотрение в части II
(безмоментное и чисто моментное напряженные состояния, напряженное со-
состояние с большой изменяемостью, простые и обобщенные краевые эффекты),
обладают отличительными свойствами, важными для суждения о работе обо-
оболочки. Очевидно существенное различие между безмоментным и чисто мо-
ментным напряженными состояниями: в первом из .них материал оболочки
работает по толщине равномерно, в то время как во втором загружены только
области, примыкающие к лицевым поверхностям. Общим свойством и без-
безмоментного, и чисто моментного напряженных состояний является их тоталь-
тотальность, охват всех областей срединной поверхности. В этом смысле оба они
радикально отличаются от краевых эффектов, локализующихся вблизи линий
искажения (хотя иногда это свойство и нивелируется). Полное напряжен-
напряженное состояние составляется определенным образом из перечисленных выше
более простых напряженных состояний, и роль, которую играет в этой сумме
отдельные слагаемые, зависит, в частности, от характера граничных условий.
Поэтому можно утверждать, что построив асимптотические процессы выпол-
выполнения граничных условий, мы, помимо чисто математических выводов, смо-
сможем сделать заключения и о физических свойствах полного напряженного
состояния оболочки. В частности, здесь выясняются те последствия, которые
влекут за собой те или иные «странности» поведения решений краевых задач
безмоментной теории, выявившиеся в части III.
Итерационные процессы выполнения граничных условий изучаются
в рамках ряда ограничений. Считается, что выполняются условия примени-
применимости метода расчленения (часть III). Принимаются во внимание только иде-
идеализированные граничные условия (часть I) и не учитывается влияние изме-
изменяемости внешних воздействий (другими словами, показатель изменяемости
внешних воздействий полагается равным нулю, в то время как для примени-
применимости метода расчленения достаточно было бы считать, что он меньше поло-
половины). Несмотря на такие ограничения, число случаев, подлежащих разбору,
получилось весьма значительным. Большим оказалось и число различных
итерационных процессов, которыми надо пользоваться для решения соот-
соответствующих задач. Это значит, что структура напряженного состояния обо-
оболочки зависит от способа закрепления ее краев в большей мере, чем этого
272
ЧАСТЬ IV
можно было бы ожидать: граничные условия могут повлиять на асимптотику
решения, т. е. увеличить (уменьшить) искомые величины на порядок или даже
на несколько порядков.
Рассмотрение итерационных процессов выполнения граничных условий
позволяет сделать и некоторые чисто математические заключения. В теории
оболочек можно говорить о возмущенной и невозмущенной краевых задачах.
Под первой подразумевается интегрирование неупрощенных уравнений
с учетом всех (тангенциальных и нетангенциальных) граничных условий,
а вторая заключается в интегрировании предельных (при к„. = 0) уравнений
с учетом одних тангенциальных условий. Возмущенная краевая задача в тео-
теории оболочек всегда представляет собой корректно поставленную задачу
типа Дирихле. Однако вырожденная задача теории оболочек может оказаться
в том или ином смысле некорректной. В ней может иметь место несовпадение
числа граничных условий с порядком уравнений, несоответствие типа урав-
уравнений типу краевой задачи (может получиться, например, задача Дирихле
для гиперболической системы или задача Коши для эллиптической системы)
и т. д. Очевидно, что все такие «неправильности» невозмущенной задачи ока-
оказывают существенное влияние на характер напряженного состояния обо-
оболочки, и их полезно иметь в виду при разработке любых подходов к факти-
фактическому решению задачи (в том числе и непосредственного счета на ЭЦВМ).
Если стать на путь приближенных подходов к решению краевых задач теории
оболочек, то здесь результаты настоящего раздела находят непосредственное
применение. Исходное приближение каждого из рассмотренных итерацион-
итерационных процессов можно рассматривать как приближенный метод решения соот-
соответствующей краевой задачи. Получаемые таким образом результаты при
желании можно уточнять, увеличивая количество итераций.
ГЛАВА 19
ИТЕРАЦИОННЫЕ ПРОЦЕССЫ ПОСТРОЕНИЯ ИНТЕГРАЛОВ
УРАВНЕНИЙ ТЕОРИИ ОБОЛОЧЕК
§ 1. Краткая запись уравнений теории оболочек
Введем в рассмотрение матрицу тангенциальных усилий Т, матрицу мо-
моментов G, матрицу перерезывающих усилий N, матрицу тангенциальных
деформаций Е, матрицу изгибных деформаций К, матрицу смещений U,
определив их равенствами
т=
A9.1.1)
i, u2, w).
Тогда дифференциальные уравнения теории оболочек можно условно запи-
записать следующим образом.
Уравнения равновесия
= 0,
/п,(О) + ЛГ, + ЛУ, = 0 (i + i = \, 2).
Формулы «деформации — перемещения»
E=E[U\, K = K[U). A9.1.3)
Уравнения состояния
E = F[T} + H[G] + h*F'[T] + hf, 0 = h* {— V[K]+ W[E]\. П9.1.4)
В уравнениях равновесия использованы такие обозначения: Xt, Z, Y, —
компоненты внешних поверхностных сил и моментов, Nt — перерезывающие
усилия; /(, щ, I, n, mt — линейные однородные дифференциальные опера-
операторы от элементов указанной в скобках матрицы, а именно
д A9.1.5)
/ = 1, 2).
18 л. Л. Гольденвейзер
274 ИНТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ ОВОЛОЧ ЕК [ГЛ. 1»
В формулах «деформации — перемещения» под Е [U], К [U] подразуме-
подразумеваются матрицы, элементы которых представляют собой однородные линей-
линейные дифференциальные операторы от элементов матрицы U. А именно,
KlU]=2Eh(Xl T\, A9.1.6)
где под е(, со, к,-, т надо подразумевать линейные дифференциальные опера-
операторы от uh w, смысл которых определяется формулами F.44.3), F.44.4).
В уравнениях состояния матрицы
F[T], H[T], F'[T], V[K], W[E]
составлены из элементов матриц, указанных в квадратных скобках, а кон-
конкретное содержание их зависит от принятого варианта уравнений состояния.
В любом случае можно считать, что
7,—vT2 Stf
и понимать под / матрицу, составленную из компонент внешних поверхност-
поверхностных сил Xlt Z. Что же касается матриц Н, F' и W, то ^вопрос об их конкрет-
конкретном содержании надо считать открытым. Мы не будем их задавать, заметив
только, что эти матрицы можно при желании подобрать так, чтобы A9.1.4)
стали тождественны любому из обсужденных в части I вариантов уравнений
состояния. Так, например, простейший вариант уравнений состояния полу-
получается, если положить
Н[О] = F'[T] = / = W[E] = 0, A9.1.8)
а матрицы F и V определить формулами A9.1.7).
В дальнейшем мы будем считать, что матрицы Н, F' и / могут выбираться
произвольно, но, избегая некоторых технических трудностей, примем, что
W=0. A9.1.9)
§ 2. Безмоментный итерационный процесс
Обращаясь к асимптотическому интегрированию уравнений теории обо-
оболочек A9.1.2)—A9.1.4), введем малый безразмерный параметр ц с помощью
формулы
'""'" A9.2.1)
в которой под г поиимается некоторый характерный радиус кривизны сре-
срединной поверхности. Будем пока предполагать, что компоненты внешних
иил равны нулю, и зададим решение однородных уравнений A9.1.2)—A9.1.4)
в виде
Т от—a /nsT. Л П — от—в+4 InsH. .\ А/ — п—а+4 CotsA/. . )
A9.2.2)
Здесь и всюду в части IV символ ()s означает сумму по s от нуля до не-
некоторого числа о от выражения, заключенного в скобки, а величины, отме-
отмеченные нижним индексом (s), представляют собой матрицы, не зависящие от
$ 2] БЕЗМОМЕНТНЫЙ ИТЕРАЦИОННЫЙ ПРОЦЕСС 275
параметра т|. Таким образом, например, первое из равенств A9.2.2) в развер-
развернутом виде эквивалентно четырем равенствам
0
S i (s), r S Л (,
s=0 s=0
в которых Т\ (s), S21 (s), S12 (s), T2 (S) не зависят от tj.
Число а в A9.2.2) пока остается неопределенным; оно считается одина-
одинаковым для всех величин, т. е. ц" представляет собой некоторую константу,
на которую помножено рассматриваемое решение (этот множитель понадо-
понадобится для дальнейшего; введение его законно, так как, по предположению,
речь идет о решении однородных линейных уравнений). Верхний предел сум-
суммирования а в разложениях A9.2.2) может быть различным для разных
величин.
Справедлива очевидная формула
li(T) = vratiifl,(Tw) A9.2.3)
s=0 '
вместе с подобными формулами для
l(T), E[U], K[U), F[T]. A9.2.4)
Условимся в дальнейшем всегда считать, что
/V = 0 при /<0, A9.2.5)
т. е. примем, что коэффициентам разложений вида A9.2.2) можно приписы-
приписывать и отрицательные индексы, считая, что такие коэффициенты тождественно
равны нулю. Тогда суммы A9.2.2) для G и N можно записать следующим
образом:
О = ту-* f TfG(s_4), N = ц-а ? t]W(s_4) A9.2.6)
s=0 s=0
(в верхних пределах суммирования здесь надо было бы написать а + 4,
но это число заменено на а, так как смысл последнего не определен и а можно
выбирать по-разному для разных величин).
Отсюда, учтя A9.1.5), получим равенства
nt (N) = ц~а ? rfn, (W(s_4>), Я [G] = тг» S 4sH lG(s-4)],
s=0 s=0
h*F [T\ = tir" t r\'F lTis-л)].
которые в сокращенной записи имеют вид
П, (N) = Ц~а (Х?Щ (W(s_4,)s, Н [О] = Т1— (грН [О,«-4,])„
h*F' \T] = /-Vе (rfF [7-(s_4,])s. A9-2-7)
Кроме того, в формулах A9.1.4) по предположению f составляется из
компонент поверхностных сил, поэтому в однородном случае надо пола-
полагать / = 0.
Аналогичные равенства получатся для
п(Л0, m,(G), h*V\K\. A9.2.8)
18*
276 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ ОБОЛОЧЕК [ГЛ. 19
Обратимся к однородным уравнениям теории оболочек A9.1.2)—A9.1.4).
Подставим в них разложения A9.2.2)—A9.2.4), A9.2.7), A9.2.8) и потребуем,
чтобы в каждом отдельно взятом равенстве обращались в нуль коэффициенты
при всех степенях т). Тогда, учитывая A9.1.9), придем к такой последователь-
последовательности систем уравнений:
Z(s)=0, Ew
K[U{S)], O(s,= — r*V[KM], A9.2.9)
m,(GE)) + iV/(s) = 0 (i*j=l, 2; s = 0, 1, 2...).
В ней, в последних двух равенствах, произведена замена индекса (s — 4)
На (s) и, кроме того, введены обозначения
Xi E) = — tit (N{s-4)), Zis) = —re(JV(S_4)),
A9.2.10)
(уравнения, которым должны удовлетворять остаточные члены разложе-
разложений A9.2.2), не выписываются, так как, насколько известно автору, их пока
исследовать не удалось).
Уравнения A9.2.9) относительно
Tw, Ем, Uw, Kw, Ow, Nils) A9.2.11)
образуют рекуррентную цепочку систем уравнений, позволяющую строить
величины A9.2.11) последовательно, в порядке возрастания (s). При этом
величины, отмеченные звездочкой, можно считать известными: при s< 4
они обращаются в тождественный нуль в силу A9.2.5), A9.2.10), а при s^4
они выражаются через величины с индексами (s — 4), которые предпола-
предполагаются уже построенными.
Таким образом, мы приходим к итерационной процедуре интегрирова-
интегрирования уравнений теории оболочек. Она будет называться безмоментным ите-
итерационным процессом и заключается в том, что решение задается в виде раз-
разложений A9.2.2), коэффициенты которых A9.2.11) строятся описанным об-
образом.
Безмоментный итерационный процесс заслуживает такое название по-
потому, что в однородном случае (при отсутствии поверхностной нагрузки) его
можно рассматривать как метод, позволяющий строить безмоментные напря-
напряженные состояния со сколь угодно большой точностью (здесь и ниже посту-
постулируется, что итерационные процессы, рассматриваемые в этой части, имеют
асимптотический характер). Чтобы показать это, перепишем уравнения без
моментной теории G.1.1)—G.1.9) в принятых здесь коротких обозначе-
обозначениях, отбросив нагрузочные члены и введя некоторые слагаемые со звездо-
звездочкой. Получим л>~
F, E = E[U].
0 (i^/ = l,2). AУ' AZ)
Эти уравнения отличаются от однородных уравнений безмоментной
теории только тем, что A9.2.12) содержат дополнительные слагаемые, отме-
отмеченные звездочкой сверху. С другой стороны, если в A9.2.12) выразить h
через г\ по формуле A9.2.1) и положить
(г, Е, К, U, Xlt Z, F ri4G, iffft) =
* * * \
i (s>, ZE), F(S), G(s), Ыц$)),
§ 3] ЧИСТО МОМЕНТНЫЙ ИТЕРАЦИОННЫЙ ПРОЦЕСС 277
то они станут тождественны уравнениям A9.2.9). Но из A9.2.10) следует,
что при s < 4 величины со звездочкой тождественно равны нулю, а это
значит, что приближения @), A), B), C) в безмоментном итерационном
процессе представляют собой некоторые решения уравнений безмоментной
теории, а вычисляя дальнейшие приближения, мы получим уточнение этих
решений. Они соответствуют безмоментным напряженным состояниям, так
как последние характеризуются асимптотическими соотношениями G.2.3)—
G.2.8), находящимися в полном соответствии с принятой формой решения
A9.2.2.).
§ 3. Чисто моментный итерационный процесс
В однородном случае (при Xt = Z = Yt = 0) интегрирование уравне-
уравнений A9.1.2.)—A9.1.4) можно выполнять и при помощи другого итерацион-
итерационного процесса. Зададим искомое решение в виде таких разложений
Т = г,-Н-2 (vfTw )s, G = тг-о+2 (t,«G(i,),, N = т]-*+2 (t)W(s> Ь,
fU) ( '
в которых общее для всех неизвестных число Ъ остается неопределенным,
а величины с индексами, взятыми в скобки, представляют собой матрицы,
не зависящие от малого параметра.
Действуя так же, как в § 19.2, получим для определения коэффициентов
разложений A9.3.1) такую последовательность систем уравнений:
) — m(N{s)) = 0, l(T{S)) — n(Nw) = 0, m,(OA))+ #,(„ = 0,
.= E[Uis)], KM=K[UM\, EW=F[TM] + H[QM] + FW, A9.3.2)
] (l=hj = l, 2; s = 0, 1, 2,...).
Здесь, в первых трех равенствах, индекс (s — 2) заменен на (s), а в осталь-
остальных равенствах индекс (s + 2) заменен на (s). Кроме того, введены обозна-
обозначения
/ = r2F' [ГE_4)]. A9.3.3)
Исходя из A9.3.2), можно последовательно, в порядке возрастания (s),
строить коэффициенты разложений A9.3.1), и этот процесс также будет иметь
рекуррентный характер. Для каждого (s) в отдельности надо интегрировать
систему A9.3.2), считая, что в ней величины со звездочкой заданы. Они
определяются формулами A9.3.3), а следовательно, либо равны нулю (при
s < 4) в силу A9.2.5), либо выражаются через построенные ранее величины
с индексами @), A), . . ., (s — 4). Т. :ую процедуру решения однородных
решений уравнений теории оболочек назовем чисто моментным итерацион-
итерационным процессом.
Уравнения A9.3.2) можно получить из равенств
= K[U], G = —h*V\K], i(O) + l 0,
. A9.3.4)
положив в последних
(Г, G, N, Е, К, U, E. F)
ъ Gls), Ni
(s),
278 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ ОБОЛОЧЕК [ГЛ. 19
В A9.3.4) входят величины со звездочкой, которые в приближениях
@), A), B), C) обращаются в тождественный нуль. Но если их отбросить, то
A9.3.4) превратится в систему, определяющую по схеме § 7.3 чисто моментное
напряженное состояние. Следовательно, обсуждаемый итерационный процесс
можно рассматривать как формальный асимптотический метод построения
чисто моментного напряженного состояния. Это находится в полном соответ-
соответствии с тем обстоятельством, что асимптотические свойства последнего,
вытекающие из G.3.2), G.3.3), G.3.6), G.3.8), можно получить и из формул
A9.3.1).
§ 4. Итерационный процесс для основного
напряженного состояния
При выполнении безмоментного итерационного процесса надо много-
многократно решать систему A9.2.9). Для Каждого, отдельно взятого (s) эти
вычисления заключаются в следующем. Величина Tis) определяется интегри-
интегрированием системы дифференциальных уравнений
/IG(s))-fXMs)-0, l(Tw) + Zw=0. A9.4.1)
Из третьего равенства A9.2.9) находится ?(s). Величина U(s) определяется
интегрированием системы дифференциальных уравнений
?[tf(s)] = ?(s>. A9.4.2)
Наконец, /C(S), G(s) и Ыц$) строятся последовательно при помощи пятого,
шестого и седьмого равенств A9.2.9). Таким образом, построение каждого
приближения сводится к интегрированию двух систем дифференциальных
уравнений A9.4.1) и A9.4.2), из которых определяются ГE), //(s), а также
к выполнению некоторых прямых действий, при помощи которых подсчиты-
ваются ?(s), K{s), G(s> и NjW.
Равным образом выполнение чисто моментного итерационного процесса
требует многократного решения системы A9.3.2), а это для каждого (s)
требует выполнения следующих операций: определения /7(s) из уравнения
E(S), A9.4.3)
последовательного нахождения величин /Coo, G(S) н JV(S> при помощи пя-
пятого, седьмого и третьего равенств A9.3.2), определения T"(S) из уравнений
0, ЦТШ) — п(М.)) = 0 A9.4.4)
и, наконец, подсчета величины ?(s) при помощи шестого равенства A9.3.2).
Это значит, что снова для каждого (s), кроме выполнения некоторых прямых
действий, надо интегрировать две системы дифференциальных уравнений,
записанных с помощью матричных равенств A9.4.3) и A9.4.4).
Сопоставив уравнения A9.4.1), A9.4.2), с одной стороны, и уравнения
A9.4.3), A9.4.4) — с другой, увидим, что, в сущности, они совпадают друг
с другом. Различие заключается только в последовательности решения этих
уравнений и в том, какие величины надо рассматривать в них как известные.
Это значит, что введение двух итерационных процессов — безмоментного и
чисто моментного носит искусственный характер. Их при желании можно
объединить в общий итерационный процесс следующим образом.
Перепишем еще раз уравнения A9.2.9), расшифровав величины со звез-
звездочкой по формулам A9.2.10) и снабдив каждую искомую величину дополни-
« 41 ИТЕРАЦИОННЫЙ ПРОЦЕСС ДЛЯ ОСНОВНОГО СОСТОЯНИЯ 279
тельным индексом (б), напоминающим, что речь идет о безмоментном итера-
итерационном процессе:
/, G$) - щ «14>) = 0, / (О - п «14,) = О,
В уравнениях A9.3.2) расшифруем величины, отмеченные звездочкой,
по формулам A9.3.3), заменим в первом, втором и шестом равенствах (s)
на (s — 4) и припишем каждой искомой величине значок (м), напоминающий,
что речь идет о чисто моментном итерационном процессе.
Получим
fU)) = 0, / Gfl%) - п (МГ%) = О,
т, (ОДО) + ОД, = О, [} (ftO
A9.4.6)
]
Сложим каждое уравнение A9.4.5) с соответствующим уравнением
A9.4.6), введем обозначения
б> i гг(и) _ /Иосн) U»•"*•'/
Е-(б) |^ p.(M, E-(OCH) «-(б)
C(s) +C(s-4) = C(S> . A(s)
и запишем полученный результат так:
= о, /(гйГ-{« WS»,)} = о,
A9.4.8)
Здесь в фигурные скобки заключены слагаемые, которые при построении
приближения (s) можно рассматривать как известные величины.
Так же, как это делалось для уравнений A9.2.9) и A9.3.2), можно убе-
убедиться, что для приближений @), A), B), C), когда величины в фигурных
скобках обращаются в тождественный нуль, равенства A9.4.8) совпадают
с уравнениями безмоментной теории. Отсюда следует, что полученный итера-
итерационный процесс позволяет с произвольной формальной точностью строить
любое основное напряженное состояние (будь оно безмоментным или чисто
моментным). Его можно поэтому назвать итерационным процессом для основ-
основного напряженного состояния. С математической точки зрения он эквивалентен
безмоментному и чисто моментному итерационным процессам, взятым вместе.
Однако с физической точки зрения такое объединение часто оказывается
невыгодным. Результаты, даваемые безмоментным и чисто моментным ите-
итерационными процессами, с физической точки зрения отличаются друг
от друга коренным образом. Первый из них определяет безмоментное
280 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ ОБОЛОЧЕК [Гл. 19
напряженное состояние, асимптотические свойства которого выражаются
соотношением (§ 7.2)
crG = О Ofcrr).
Второй итерационный процесс приводит к чисто моментному напряжен-
напряженному состоянию, для которого имеет силу прямо противоположное асимпто-
асимптотическое соотношение (§ 7.3)
ат = 0 (цгав).
В оболочке в зависимости от условий закрепления ее краев удельный вес
безмоментного и чисто моментного напряженных состояний может быть
совершенно различным, и это коренным образом отражается на прочностных
качествах конструкции: оно будет достаточно высоким только тогда, когда
не велика роль чисто моментного напряженного состояния (в «подавлении»
последнего, в сущности, и состоит одна из важнейших задач разумного кон-
конструирования оболочек). Ниже (§§ 20.10—21.25) будет изучаться влияние
условия закрепления на асимптотические свойства напряженного состояния
оболочки, а для этого выгодно считать, что безмоментное и чисто момент-
ное напряженные состояния строятся при помощи разных итерационных
процессов.
§ 5. Главные уравнения безмоментного
н чисто момеитного итерационных процессов
Возвратимся к уравнениям A9.4.1)—A9.4.4) и введем некоторые допол-
дополнительные условия, которые должны учитываться при выборе произвольных
элементов, возникающих в процессе решения этих уравнений.
Условие 1 заключается в том, что произволы интегрирования уравнений
A9.4.1)—A9.4.4) не должны зависеть от параметра ц, так как они входят
в коэффициенты разложений A9.2.2) или A9.3.1), а эти коэффициенты по
предположению не зависят от ц.
Заметим далее, что обсуждаемые уравнения образуют две пары равенств
A9.4.1), A9.4.4) и A9.4.2), A9.4.3), внутри каждой из которых различными
являются только члены, считающиеся известными. Это значит, что при
одинаковых (s) произволы интегрирования уравнений A9.4.1) и A9.4.4)
повторяют друг друга. Повторяются произволы интегрирования также
в уравнениях A9.4.2) и A9.4.3). Учитывая это, введем
Условие 2. При выполнении безмоментного итерационного процесса
должны сохраняться только произволы уравнений A9.4.1), а для системы
A9.4.2) надо строить только частный интеграл (для каждого определенного
J5(S) следует указывать определенное f/(S>); при выполнении чисто момент-
моментного итерационного процесса надо сохранять только произволы, возникаю-
возникающие при интегрировании системы A9.4.3), а для системы A9.4.4) надо строить
только частный интеграл (для каждого определенного JV(S) следует указывать
определенное T(s)).
Из сказанного выше слудует, что в безмоментном итерационном процессе
особую роль играет система A9.4.1). С ее решения начинается построение
приближения номер (s); с ней и только с ней связаны произволы, которыми
можно распоряжаться при выполнении граничных условий. Равенства
A9.4.1) мы будем в дальнейшем называть главными уравнениями безмомент-
безмоментного итерационного процесса. Равным образом, главными уравнениями чисто
моментного итерационного процесса будем называть равенства, вытекающие
из A9.4.3). Отметим, что главные уравнения безмоментного итерационного
процесса по форме совпадают со статическими уравнениями безмоментнои
теории, а главные уравнения чисто моментного итерационного процесса —
с геометрическими уравнениями безмоментнои теории. В обоих случаях
главные уравнения однородны при s < 4 и неоднородны при s&s 4.
§ 6] ПОСТРОЕНИЕ ЧАСТНОГО ИНТЕГРАЛА 281
§ 6. Построение частного интеграла
Примем теперь, что компоненты внешних поверхностных сил и внешних
поверхностных моментов отличны от нуля, и будем предполагать, что эти
величины можно представить в виде
Xt = (risX((s))s, Z = (TpZ,,,),, Yc = (rfYC{s))s, A9.6.1)
где X((s), Z(s), Yi (s) не зависят от r\.
Матрица f в уравнениях состояния A9.1.4), как уже упоминалось, выра-
выражается через компоненты внешних поверхностных сил. Поэтому из A9.6.1)
вытекает, что
/ = №/(.)).• A9.6.2)
В практических задачах, как правило, можно ограничиться предположе-
предположением, что X,, Z, Yt не зависят от t]. Если все эти величины будут пропор-
пропорциональны некоторой степени т| (например, пропорциональны ц2, как при
расчете на собственный вес), то, пользуясь линейностью задачи, соответствую-
соответствующий множитель можно ввести в окончательный результат. Это значит, что
коэффициенты разложений A9.6.1) часто имеют вид
Хцо}=Хс, Z(o) =Z, -Yno)=Y{,
Xt (f) = Z(s, = Yt (s) == 0 (s > 0, I = 1, 2). (iy-b-d)
Будем искать частный интеграл неоднородных уравнений теории оболо-
оболочек A9.1.2)—A9.1.4), задав его в виде
T=(rfTM),, G=44№G,s))s. N=vf(rfNM),,
) U=(rfU) ( >
Здесь, как и всюду, считается, что величины со значком (s) тождественно
равны нулю при s < 0. Вместе с тем предполагается, что величина N[S)
(нижний значок в квадратной скобке) может отличаться от тождественного
нуля при s 5» —2 и, соответственно, в выражении для N суммирование по s
должно начинаться cs = —2.
Подставив в A9.1.2)—A9.1.4) разложения (.19.6.1), A9.6.4) и применив
прежний прием приравнивания коэффициентов при одинаковых степенях т],
получим такую последовательность систем уравнений:
A9.6.5)
пи (G(s_2)) + Nj [s_2] + r»Yt (s) = 0 (I + j = 1, 2; s = 0, 1, 2,...).
Здесь величины, отмеченные звездочкой, имеют следующий смысл:
4i), X(S)=X(S) n(N[s4]), /1псСч
A9.6.6)
Г2/7' [7\s_4)] + г/„-2,.
Последнее из равенств A9.6.5), в котором (s — 2) заменено на (s), при-
принимает при s < 2 вид
Ntlt-ai + r2Yt (s) =0 (s = 0, 1).
Оно показывает, что величина
при отрицательных Is] отлична от нуля только тогда, когда компо-
компоненты поверхностной моментной нагрузки отличны от нуля в приближе-
приближении @) и A).
282 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЯ ТЕОРИИ ОБОЛОЧЕК [ТЛ. 19
Снова получился итерационный процесс для последовательного опреде-
определения коэффициентов разложений A9.6.4) в порядке возрастания индекса
{s). В нем при определении величин с индексом (s) величины, отмеченные
звездочкой, можно рассматривать как известные, так как они выражаются
через заданные компоненты разложений A9.6.1), A9.6.2) и через величины,
у которых индекс в скобках меньше (s).
При s = 0,1 имеем
* * *
X-i (S) = Xi (S), Z(s) = Z(S), H(S) = 0, Yt (s_2) = 0, A9.6.7)
Заметив это и сравнив уравнения A9.6.5) с уравнениями A9.1.2)—
19.1.4), заключаем, что в приближениях @), A) предлагаемый здесь итера-
итерационный процесс будет давать такой же частный интеграл, как если бы он
строился при помощи безмоментной теории (без учета компонент поверхно-
поверхностных моментов).
§ 7. Оболочки переменной толщины
Пусть толщина оболочки переменна, т. е. h имеет вид
¦ h=hcpp, A9.7.1)
где hcp — средняя постоянная толщина, а р = р (аь а2) — заданная функ-
функция, учитывающая переменность h.
Будем считать, что понятие срединной поверхности сохраняет смысл,
т. е. каждая точка М делит пополам расстояние по нормали между лицевыми
поверхностями, и примем, что уравнения теории оболочек сохраняют свой
вид (изменяется только смысл h). Тогда все рассмотренные здесь итерацион-
итерационные процессы остаются в силе, если в них параметр разложения т) определить
формулой
г]= У -f-, A9.7.2)
обобщающей равенство A9.2.1). При этом останется неизменным не только
характер обсуждаемых итерационных процессов, но сохраняются (с точно-
точностью до членов, рассматривающихся как известные) и те уравнения, которые
надо интегрировать при выполнении этих процессов. Покажем это на примере
¦безмоментного итерационного процесса.
Для каждого приближения безмоментного итерационного процесса
интегрировать системы дифференциальных уравнений приходится дважды:
при построении Г и при построении U. Для Гмы имеем уравнения A9.4.1).
В них Xt (s), Z(S) следует рассматривать как известные величины, а операторы
/, и /, как видно из A9.1.5), не зависят от h. Для определения U служат
уравнения A9.4.3). В них левые части расшифровываются при помощи
первого равенства A9.1.6) и формул G.5.1), а следовательно, содержат h
только в виде общего множителя, который можно перенести в правые части
уравнений A9.4.3), в результате чего он войдет в состав величин, которые
считаются известными.
§ 8. Итерационный процесс для простого
краевого эффекта
Решения, соответствующие простому краевому эффекту, также можно
находить при помощи итерационного процесса. Обращаясь к его построению,
будем считать, что толщина оболочки, вообще говоря, переменна, и снова
воспользуемся обозначениями, вытекающими из равенств A9.7.1) и A9.7.2).
§ 8] ПРОЦЕСС ДЛЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА 283
Примем, кроме того, что линия у, порождающая рассматриваемый простой
краевой эффект, задается уравнением ах = а10. в некоторой ортогональной
системе координат (в общем случае эту систему координат надо специально
строить для изучения простого краевого эффекта у данной линии у, и мы
предположим, что это возможно сделать таким образом, чтобы аг-пинии
не пересекались друг с другом в окрестности у, достаточно широкой для того,
чтобы в ней простой краевой эффект успел затухнуть).
Введем обозначения
A9.8.1)
i (i + j =1,2)
(аналогично — для г'{, ©', щ, т') и будем под В подразумевать любой коэффи-
коэффициент уравнений теории оболочек, включая функцию р, характеризующую
переменность толщины оболочки:
Выполним замену независимой переменной ах по формуле
(«х-а10) = т]| A9.8.2)
и разложим величины В в ряды Тейлора вблизи у и, оставив в этих разложе-
разложениях некоторое число первых слагаемых, получим приближенное равенство
которое мы, воспользовавшись введенной выше символикой, коротко запи-
запишем так:
ВМлЧВ],),, [В], = ГВ,. A9.8.3)
Будем исходить из полной системы уравнений для оболочки, отнесенной
к произвольной ортогональной системе координат, т. е. из соотношений
§6.44. Внеся туда A9.7.1), A9.7.2), A9.8.1) и (Ш-8.2), получим следующие
уравнения.
Уравнения равновесия F.44.1)
21)-(^--|b)=o, A9.8.4)
У1 =
(шестое уравнение равновесия не учитывается).
284 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ1 ОБОЛОЧЕК [ГЛ. 19
Формулы «тангенциальные деформации — перемещения» F.44.3)
, ti ди'х
w'
= 0, A9.8.5)
, 2w' п
0
Формулы «изгибные деформации — перемещения» F.44.3), F.44.4)
К = **"' d2w' . г]'1 дАг dw' k^ dw' г]'1 1 ди{
Al ~ Щ А\ д?2 "г ~Aj дах dl А2~д^ ~R^~A^ dg ~"
__J l__^i 3 тр1 1 ди'2
2R12 А2 да2 + 2 ^и Аг д% +
_ , 1 d*w' х]-% dw' . 1 дА2 dw' 3 1 ди[
~ Х2 А\ Щ Ах dl "т" Л| Эа2 5а2 "^ 2i?la А2 да2
da2
Rla У Ru T 2R12 J Ml
, т)~г g2a>f . fett] dw' . k2 dw' . т) 1 du\
1Х 56
L_i_ Г ' д ( ' \ i ki i Ь 1,/
(в этих формулах дифференцирование по новой переменной применяется
только к искомым функциям, т. е. компонентам перемещения, а для за-
заданных величин — Alt Rllt R12, R22 — сохраняется дифференцирова-
дифференцирование по ах).
Уравнения состояния F.44.6)
h = 7\—j-^ (ei + vej) = 0, k = Га—y^i («и + vei) - 0,
— о Pm'n с Рш'п
T b =U ^ = ^ — TqrV" = U.
A9.8.7)
g, = C, + 3^2) («i + ^2) = 0, g2 = G2
$9] УРАВНЕНИЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА.. 285
(последние два из этих равенств упрощены за счет отбрасывания слагае-
слагаемых с со).
Решения выписанных уравнений, соответствующие простому краевому
эффекту, зададим формулами
Тх = ГГ-+1 (ifTi („)„ Т2 = тг* МП (О)„ 5,/ = T)-c+1(Tls5t7(s))s,
«i = Ц-с+1 Dsut (s))s, of = ЧГ* (Tide's))„ vi = Л" (ifn и))i,
ej = трон (л'еа (,))•, «' = тг^-i (if co(s))S) е2 = тр6 (Tjse2 (s))s,
*i = тре-2 (ifxi (s))s, t' = tj-^-1 (ifT(s))s, X2 = tj-^-1 (tisx2 ))
N2 = л-^+2 (^iVz (s))s {i + j = 1, 2),
в которых с — общая для всех искомых величин константа, имеющая такой же
смысл, какой имеют в безмоментном и чисто моментном итерационных процес-
процессах константы а, Ь.
Подставив A9.8.3), A9.8.8) в уравнения A9.8.4)—A9.8.7), мы получим
обычным образом рекуррентную последовательность систем уравнений для
определения коэффициентов разложений A9.8.8). В решении этих уравнений
и заключается итерационный процесс для простого краевого эффекта.
В следующем параграфе мы убедимся, что в исходном приближении он
совпадает с приближенным методом построения простого краевого эффекта
(§§ 8.9—8.11).
§ 9. Уравнения интерационного процесса для простого
краевого эффекта
Чтобы выписать последовательность систем уравнений, о которых
говорилось в § 19.8, рассмотрим для конкретности одно из уравнений A9.8.4)—
A9.8.7). Пусть речь идет о первом равенстве A9.8.4). После подстановки
в него разложений A9.8.3), A9.8.8) получим равенство
(Ti-7-i у,).--
{rfN* ,„), = 0, A9.9.1)
в котором символ [ ]s расшифровывается вторым равенством A9.8.3) и
означает, что для выражения в скобках надо найти s-й коэффициент разложе-
разложения Тейлора вблизи at = a10 и помножить на |".
Произведя в A9.9.1) почленное перемножение сумм, обозначенных
символами ( )s, можно привести х^ к такому виду:
Здесь хл представляет собой некоторое линейное дифференциальное
выражение от коэффициентов разложений A9.8.8), т. е. от величин, имеющих
дополнительный индекс (к), причем X = 0, 1,2,...,/. Общая формула
286 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ ОБОЛОЧЕК ГГЛ. 19
/ I
для Xj громоздка, и мы ее приводить не будем. Однако, если представить xt
в виде
Х\ — х\1)-\-х[1~х\
считая, что Зс|'> — совокупность слагаемых, содержащих величины с нижним
индексом (/). а х\1~~1) — совокупность слагаемых, у которых значение ниж-
нижнего индекса в скобках не превосходит /— 1, то выражение х<'> записать
нетрудно. Оно составляется так. В средней части равенства A9.9.1) надо
оставить только те произведения двух сумм вида ( )s, перед которыми стоит
множителем tj в наименьшей степени (в данном случае tj-c); в каждом остав-
оставшемся произведении в первом сомножителе надо оставить слагаемое, соот-
соответствующее s — 0, а во втором сомножителе сохранить слагаемое, соответ-
соответствующее s — I.
Таким образом,
и последовательность уравнений, которая получается в обсуждаемом итера-
итерационном процессе из первого равенства A9.8.4), запишется так:
причем х{1 г) надо здесь рассматривать как известную величину, так как
приближение @ будет строиться только тогда, когда приближения @),
A), . . ., (/— 1), входящие в х[1~Х), уже найдены.
Легко сформулировать правило, при помощи которого можно от пер-
начального равенства (в данном случае от первого равенства A9.8.4)) перейти
к окончательному равенству A9.9.1). Для этого надо, руководствуясь фор-
формулами A9.8.8), найти в средней части интересующего нас равенства A9.8.4)
—A9.8.7) асимптотически главные члены (имеющие множителем tj в низшей
степени), приписать в них к искомой величине индекс (/) внизу, заключить
коэффициент в квадратные скобки со значком нуль, а все неглавные слагае-
слагаемые заменить соответствующим символом (стоящим в левой части рассматри-
рассматриваемого равенства), приписав ему сверху значок (/ — 1). Руководствуясь
этим правилом, выпишем искомую последовательность систем уравнений,
заметив попутно, что символ [ \t при / = 0 сводится просто к подстановке
ai — аю. которую, так же как в § 8.12, мы будем отмечать точкой. Получим
две следующие группы уравнений.
Группа I.
— j^—i (ei („
-« = 0,
= 0,1,2,...). A9.9.2)
S 91 УРАВНЕНИЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТ* 287
Группа II.
jr
= °' Ни "-
(/=0'
Уравнения группы I можно выделить в самостоятельное рассмотрение.
Они образуют систему из семи уравнений с семью неизвестными
T2uu #!</), Gi«), xi(/), ©(о, ei(o, ej«). A9.9.4>
В группе II содержатся 12 уравнений с двенадцатью неизвестным»
Тщ), Smi), G20), Т(О. ^21@. ^12 (Оi ^2@,
A9.9.5)
В совокупности A9.9.4) и A9.9.5) охватывают все неизвестные теории
оболочек.
Решение уравнений группы II не вызывает затруднений: если вводить их
в рассмотрение в том порядке, как они здесь записаны, то в каждое новое
уравнение будет входить только одно новое неизвестное. Поэтому все вели-
величины A9.9.5) можно выразить через величины A9.9.4) при помощи квадратур
(по |) или алгебраически (конечно, и в группе I, и в группе II величины
с верхним индексом (/ — 1) считаются известными).
Выведем в качестве примера формулы для Т\ (о и Sn «>, которые пона-
понадобятся в дальнейшем. Из первого равенства A9.9.2) выразим Та <о»
т #22 d^i (О „A-1)
72@ = —— Щ 1-^2221 ',
и подставим этот результат в первое и второе равенства A9.9.3). Тогда»
выполнив интегрирование по ?, получим искомые формулы в виде
г, (о =—Аи/им (о - л; j Ы'-1}
@
- л; J [4~l) —? ?
288 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ ОБОЛОЧЕК ГГЛ. 19
Вернемся к уравнениям группы I и исключим в них все величины с ин-
индексом (/), кроме w'w- Получим равенство
DL а? ^
где
л,2
3A— v2) /f<i-i) M-U\ 3A —-
Оно представляет собой обыкновенное линейное дифференциальное
уравнение относительно w[t), так как W(l~1} при / = 0 обращается в нуль,
а при / > 1 эту величину надо рассматривать как известную. В исходном
приближении, когда / = 0, A9.9.7) по смыслу совпадает с разрешающим
уравнением (8.10.9) приближенной теории простого краевого эффекта и
интегрируется так, как описано в §8.12 (напомним, что коэффициенты урав-
уравнения (8.10.9) считались «замороженными», т. е. соответствующие функции
были заменены их граничными значениями). Отсюда следует, что в обозначе-
обозначениях § 8.12 для w'@) можно написать
= сю (а2) ек <'+'> («.-«<») s _|_ Сг0 (а2) ek t1-'» («.-«.«) е _)_
+ Сад (а2) е-* "+*> («».-«..)« -f- с40 (а2)
Это значит, что w[o) зависит от четырех произвольных функций с10,
*2о» сзо. С4о переменной а2 (задающих положение точек на линии искажения),
из которых первые две определяют решения, экспоненциально затухающие
при убывании аг, а две последние связаны с решениями, экспоненциально
затухающими при возрастании а1.
Если / = 1, то правая часть уравнения A9.9.7) в нуль не обратится и,
как следует из формул этого параграфа, будет выражаться формулой
Wl0) = Ztc10 (од е" ll+t) <а>-<х'») g + Z,C20 (а2) ek (I~° (a'-aio) e +
+ Z3c30 (a2) e-k "+') (».-«i.) s _
в которой Z, — некоторые комплексные множители.
Интегрируя уравнение A9.9.7) при / = 1, получаем
«/ц> = (сп + ziaicio) е* '1+?) №-«") s _|_ (C2j _|_ 22aic2o) e*
(г, — комплексные множители).
Очевидным образом этот результат обобщается и на случай любого I.
Поэтому можно утверждать, что, если простой краевой эффект построен при
1 = 0, 1, 2, . . ., L — 1, т. е. уже найдены произвольные функции ctj (a2),
где i = l, 2, 3, 4; / = 0, 1, 2, . . ., L — 1, то величины, определяющие
простой краевой эффект, в приближении (L) зависят отчетырех произвольных
функций а2, а если сохранить только решения, экспоненциально затухаю-
затухающие б определенном направлении, то число произвольных функций а2 будет
равно двум.
ГЛАВА 20
ИТЕРАЦИОННЫЕ ПРОЦЕССЫ ВЫПОЛНЕНИЯ
ГРАНИЧНЫХ УСЛОВИЙ. КУПОЛА
§ 10. Метод расчленения
В главе 9 к некоторым конкретным задачам был применен метод расчле-
расчленения, заключающийся в том, Что полное напряженное состояние оболочки
представляется в виде суммы основного напряженного состояния, распро-
распространяющегося на всю оболочку, и простых краевых эффектов, возникающих
вблизи линий искажения. Здесь мы рассмотрим метод расчленения более
подробно, используя асимптотические разложения предыдущих параграфов.
В настоящем разделе книги будет считаться, что выполняются все
условия применимости метода расчленения, которые заключаются в следую-
следующем (§ 9.13):
A) все края оболочки должны быть неасимптотическими;
B) срединная поверхность оболочки должна в достаточной мере отли-
отличаться от особых поверхностей (примеры последних даны в § 9.13);
C) изменяемость основного напряженного состояния, определяемого
уравнениями безмоментной теории, не должна быть слишком большой.
Полагая, что все эти условия выполнены, будем исходить из следующей
формулы:
B0.10.1)
Здесь под К подразумевается полное напряженно-деформированное
состояние оболочки, т. е. любая из определяющих его статических или
геометрических величин, /е<осн> — основное напряженное состояние, /С(кр) —
простой краевой эффект. В последней части равенства основное напряженное
состояние заменено суммой частного интеграла /С(ч), безмоментного напря-
напряженного состояния /С(б) и чисто моментного напряженного состояния /С<м).
Каждую из величин, входящих в B0.10.1), можно при помощи формул
A9.2.2), A9.3.1), A9.6.4) и A9.8.8) представить в виде обобщенных степенных
рядов, т. е. рядов, расположенных по возрастающим степеням т), помножен-
помноженных на некоторую дополнительную степень т). Поэтому B0.10.1) можно пере-
переписать в виде
B0.10.2)
В этом равенстве принимается, что р\ Я,, \i, v — целые числа, имеющие
разный смысл для различных искомых величин, а, Ь, с — числа, одинаковые
в каждом отдельно взятом напряженном состоянии для всех искомых величин.
Таким образом, т)Р, г\х, тр, T)v в B0.10.2) отвечают множителям, стоящим перед
знаками ,сумм, в асимптотических разложениях предыдущих параграфов,
19 д. Л. Гольденвейзер
290 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. КУПОЛА [ГЛ. 20
а т|~в , х]-*, г]-0 представляют собой постоянные масштабные множители,
введенные, соответственно, в §§ 19.2, 19.3, 19.8 для безмоментного напря-
напряженного состояния, чисто моментного напряженного состояния и краевого
эффекта.
В развернутом виде равенство B0.10.2) для некоторых конкретных
величин, нужных для дальнейшего, можно, учитывая A9.2.2), A9.3.1),
A9.6.4) и A9.8.8), записать следующим образом:
и, = W«ra,). + Ц-а ft1"}?.,). + Ц-Ь~2 Ый). + Ц~с+1 (т,ВД1). (i = 1, 2),
71 = WW + *Г WA). + rf*-2 Ш%). + 'Г (чУЙ).. B0.Ю.З)
Тг = (Vm>). + С° (
iV, = r,4
я21 = г,4
Такие же выражения легко получить и для приведенных усилий (§ 5.33).
Для случая, когда край проходит вдоль линии кривизны а! = const, они
выражаются формулами E.33.9).
Составляя соответствующие линейные комбинации из равенств B0.10.3),
легко заметить, что формулы для Т\, S'<n, N'\ будут иметь такую же струк-
структуру, что и формулы для 7\, S2i, Nlt хотя, конечно, величины Т[^, S',\'\
N[^ отличаются по смыслу от T\'V, Sl'J, N['>. В тех рассуждениях, которые
нам предстоят, это различие, как правило, не имеет значения, и при форму-
формулировке граничных условий мы для простоты будем Т{, S'u, N[ заменять на
Ти S21, N-у. Однако надо помнить, что, если необходимо получить доста-
достаточно высокую точность, то при выполнении фактических вычислений такую
замену делать не надо.
В §§ 19.1—19.9 были построены итерационные процессы для интегриро-
интегрирования дифференциальных уравнений теории оболочек. Теперь потребуем,
чтобы итерационный характер имела также и процедура выполнения гранич-
граничных условий. Напомним, что во всех итерационных процессах кроме того,
который предложен для построения частного интеграла (§ 19.6), для каждого
отдельно взятого (s) в нашем распоряжении остаются некоторые произволы,
возникающие при интегрировании дифференциальных уравнений данного
итерационного процесса. Все эти произволы надо выбирать так, чтобы не
нарушалось условие 1 (§ 19.5), т. е. чтобы коэффициенты разложений A9.2.2),
A9.3.1), A9.8.8) не зависели от параметра т). Другими словами, надо по-
построить такую процедуру выполнения граничных условий теории оболочек,
при которой произволы, возникающие при выполнении безмоментного, чисто
моментного итерационного процессов и итерационного процесса для простого
краевого эффекта, определялись последовательно в порядке возрастания (s)
и чтобы соотношения, определяющие эти произволы, не зависели от т).
Ниже мы увидим, что для широкого класса задач построение такой
процедуры всегда возможно, и что для этого числа а, Ь, с должны считаться
целыми и в каждой достаточно конкретно сформулированной задаче выби-
выбираться определенным образом (в этом и заключается смысл введения не-
неопределенных показателей а, Ь, с [46]).
Будем в дальнейшем называть а, Ь, с показателями интенсивности без-
безмоментного, чисто моментного напряженных состояний и краевого эффекта,
$ 10] МЕТОД РАСЧЛЕНЕНИЯ 291
соответственно. От их значений зависит, очевидно, асимптотический порядок
того вклада, который вносит каждое из перечисленных напряженных состоя-
состояний.в полное напряженное состояние оболочки.
Чтобы продемонстрировать, как находятся показатели интенсивности
а, Ь, с, рассмотрим следующий
Пример, Пусть оболочка всюду имеет положительную кривизну и огра-
ограничена одним замкнутым краем (купол) и пусть на краю надо выполнить
условия жесткой заделки.
Выберем систему ортогональных координат так, чтобы в ней край был
совмещен с линией <х1 — а10 = const, и запишем граничные условия задачи
следующим образом (§ 5.33):
Ul = 0, ы2 = 0, ffi> = 0, Yi = ° («,=«!„). B0.10.4)
Внеся сюда выражения B0.10.3), будем иметь
Ы <>). 4- л'"-2 Ш%), 4- *Г+1 (tW.1). = о-
(л5«ЭД>). + л'6 (л'«О. + л~с+1 (л'«. = о,
(т, <>), + т,- (rf<>M + л-6-2 (т,'<,>M + л"* Ы<П = о,
(tiVV.)). 4- л~* (л5Л). 4- л"* (л8тП1>), + гГ-1 (лМ?.!). = о.
Потребовав, чтобы в каждом из этих равенств обращались в нуль коэф-
коэффициенты при всех степенях т] в отдельности, получим такие граничные
условия для приближения (s):
«17s) 4- "i6(Uo) 4- "uUft+2) 4- «ГЙ-е-п = 0,
«47«> 4- «^(s-н.) 4- "^"s+ft+2, 4- <?h-i> = 0, B0.10.5)
<? 4- »!^) 4-^Srib+2, 4- »{?|i> = Q.
viVs» 4 vi(V> + ?I"i+b+2) 4- yIk(pA*+i> = о
(«i = a10).
Выберем целые числа а, Ь, с следующим образом:
a = 0, b= — 2, c = 0 B0.10.6)
и перепишем B0.10.5) так:
IS4-</ (S, ЭД(?! V,,,,i(U)
(«i = a10).
Замечание. В последнем из этих равенств нижний индекс s заменен на s — 1; в дальней-
дальнейшем, там, где потребуется, мы постоянно будем делать такие замены без пояснений.
Назовем непротиворечивыми значениями а, Ь, с такие целые числа, при
которых становится возможной итерационная процедура выполнения данных
граничных условий теории оболочек. Эти числа являются показателями
интенсивности для оболочки с соответствующим образом закрепленными
краями. . •
Наша цель теперь заключается в том, чтобы доказать непротиворечи-
непротиворечивость значений B0.10.6), т. е. продемонстрировать возможность итерацион-
итерационного выполнения граничных условий B0.10.7).
Применяя метод индукции, примем, что построены безмоментное напря-
напряженное состояние, чисто моментное напряженное состояние и простой краевой
19*
. 292 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. КУПОЛА [ГЛ. 20
эффект в приближениях от @) до (s), а частный интеграл построен во всех
приближениях, какие могут понадобиться. Тогда может быть применена
следующая
Схема построения приближения (s):
A) Безмоментное и чисто моментное напряженные состояния (s) опре-
определяются с учетом двух первых граничных условий B0.10.7).
B) Простой краевой эффект (s) определяется с учетом двух последних
граничных условий B0.10.7).
Подобные схемы будут ниже формулироваться неоднократно. Всегда
надо иметь в виду следующее:
(а) В схеме указываются только граничные условия, которые надо учи-
учитывать при построении тех или иных напряженных состояний. Конечно,
считается, что должны быть выполнены и соответствующие дифференциаль-
дифференциальные уравнения, т. е. уравнения A9.2.9) для безмоментного напряженного
состояния, уравнения A9.3.2) для чисто моментного напряженного состояния,
уравнения A9.4.8) для основного напряженного состояния и уравнения
A9.9.2), A9.9.3) для простого краевого эффекта. Таким образом, схему надо
понимать как перечисление краевых задач, подлежащих решению при по-
построении приближения (s), причем для краткости указываются только гра-
граничные условия, так как уравнения не меняются от случая к случаю.
(б) Предполагается, что краевые задачи должны решаться в том порядке,
в котором они указаны в схеме.
(в) В граничных условиях B0.10.7) в правые части равенств перенесены
все слагаемые, которые при построении приближения (s) надо рассматривать
как известные. Это правило будет соблюдаться' и ниже. В рассмотренном
случае величины, попавшие в правые части, известны, так как по предполо-
предположению все приближения до (s) построены, а частный интеграл известен
в любых приближениях. В дальнейшем будет учитываться, что построение
приближения (s) выполняется в определенном порядке и после выполнения
п-го этапа часть величин, относящихся к приближению (s), становится уже
известной. В граничных условиях, вводимых в рассмотрение на п + 1-м
этапе, соответствующие слагаемые также записываются в правых частях
равенств.
Изложенная выше схема построения приближения (s), так же как и
последующие схемы, требует обоснования: нужно показать, что предусма-
предусматриваемые ею краевые задачи имеют решения и, если эти решения не един-
единственны, то надо выяснить, как использовать появляющиеся произволы
(напомним, что в окончательном итоге решение задачи теории оболочек
должно быть единственным). Итак, рассмотрим
Обоснование схемы. Первые два равенства B0.10.7), воспользовавшись
обозначениями A9.4.7), можно переписать так:
/Носн) и(ч) ы(кр) „(осн) _ и(ч) ц(кр) B0 108}
"l (s) "l (s) 1 (s-1I (s) 2 (s) 2(s—1) (/-u.iu.u;
и рассматривать их как граничные условия, которые надо принимать во
внимание при интегрировании уравнений A9.4.8) итерационного процесса
для основного напряженного состояния, объединяющего безмоментное и
чисто моментное напряженные состояния. Эти уравнения, как уже говорилось,
отличаются от уравнений безмоментной теории только смыслом свободных
членов. Поэтому краевая задача, предусмотренная в п. A) схемы, эквивалент-
эквивалентна полной краевой задаче безмоментной теории (§ 7.8) для оболочки, закре-
закрепленной во всех точках края в обоих тангенциальных направлениях. В этом
случае (он обсуждался в § 17.35) срединная поверхность оболочки не может
изгибаться, и в соответствии с теоремой о возможных изгибаниях полная
краевая задача безмоментной теории при условиях B0.10.8) имеет решение
(единственное), каковы бы ни были достаточно гладкие правые части уравне-
§ 10] МЕТОД РАСЧЛЕНЕНИЯ 293
ний и граничных условий. Это значит, что п. A) обсуждаемой схемы выпол-
выполним и приводит к единственному решению. Два последних равенства B0.10.7)
теперь можно переписать так:
(слагаемые о»^"', yj^"* перенесены в правые части равенств, так как основ-
основное напряженное состояние (s) уже можно считать известным). Эти равенства
должны играть роль граничных условий при интегрировании уравнений
A9.9.2), A9.9.3), которым удовлетворяет простой краевой эффект (s). Однако
было показано (§ 19.9), что затухающие в нужном направлении решения
уравнений A9.9.2), A9.9.3) выражаются для каждого (s) через две произволь-
произвольных функции переменного а2. Поэтому B0.10.9) можно рассматривать как
алгебраические уравнения относительно этих функций. Не представляет
труда показать, что определитель этой системы отличен от нуля (такого рода
элементарные исследования будут опускаться). Поэтому можно утверждать,
что операция, сформулированная в п. B) схемы, также выполнима (един-
(единственным образом).
Таким образом, B0.10.6) действительно определяют непротиворечивые
значения а, Ь, с, так как они приводят к итерационной процедуре выполнения
граничных условий теории оболочек (в ней возможность построения прибли-
приближения @) не вызывает сомнения: при s = 0 величины, считавшиеся извест-
известными, обращаются в тождественный нуль, а при этом все приведенные выше
рассуждения сохраняют силу).
Значения B0.10.6) представляют собой единственную приемлемую ком-
комбинацию для чисел а, Ь, с. Противоречия, возникающие при других комбина-
комбинациях, вытекают из нижеследующих рассуждений.
Пусть
а = 0, b = — 2, c>0,
тогда, положив s = —с, s = —с — 1 в третьем и четвертом равенствах
B0.10.5) соответственно и отбросив величины с отрицательными индексами
в скобках, получим равенства
представляющие собой однородную систему алгебраических уравнений для
определения произвольных функций краевого эффекта в приближении @).
Эти функции, а с ними и в целом приближение @) простого краевого эффекта
надо положить тождественно равными нулю. Такой результат следует рас-
рассматривать как противоречивый: число с должно определить относительную
интенсивность краевого эффекта, а если обращается в нуль приближение @),
то исчезает главная часть этого напряженного состояния, откуда вытекает,
что с было выбрано неправильно. Вообще, значения показателей а, Ь, с
всегда должны выбираться так, чтобы не исчезало ни одно из нулевых прибли-
приближений в отдельности безмоментного, чисто моментного напряженных
состояний и простого краевого эффекта.
Пусть
а = 0, 6> — 2, с = 0,
тогда при s = —Ь— 2 первые три равенства B0.10.5) будут:
°- B0.10.10)
Но при построении чисто моментного напряженного состояния, согласно
условию 2 (§ 19.5), можно распоряжаться только произволами главных
уравнений чисто моментного итерационного процесса, которые совпадают
294 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. КУПОЛА [ГЛ. 20
с геометрическими уравнениями безмоментной теории. Это надо рассматри-
рассматривать как противоречие, так как геометрические безмоментиые уравнения
эквивалентны уравнению второго порядка (§ 7.5), и содержащихся в них
произволов недостаточно для выполнения трех граничных условий.
Замечание. В приближении @) главные уравнения чисто моментного итерационного про-
процесса (§ 19.5) однородны. Поэтому тривиальное решение, удовлетворяющее условиям
B0.10.10), конечно, существует, но оно, как уже говорилось, недопустимо. Других решений
задача не имеет, так как в однородном случае геометрические безмоментные уравнения совпа-
совпадают с уравнениями изгибаний, а последние, как доказано в теории поверхностей, невозможны
для поверхности положительной кривизны с закрепленным краем.
Пусть
а>0, Ь = — 2, с=0,
тогда при s — а получим для нулевого приближения безмоментного напря-
напряженного состояния три граничных условия
<()о) = °. «ЭД, = 0. <) = 0- B0.10.11)
Этот результат также противоречив, так как согласно условию 2 (§ 19.5)
в безмоментном итерационном процессе можно распоряжаться только про-
изволами главных уравнений. Они совпадают по смыслу со статическими
безмоментными уравнениями, эквивалентными одному уравнению второго
порядка, и не обеспечивают возможности выполнить три условия.
§ 11. Купол с двумя тангенциальными закреплениями
Обратимся к более общему исследованию граничных задач теории оболо-
оболочек. Всегда будет считаться, что выполняются требования применимости
метода расчленения (§ 20.10) и что на краю ставится только идеализирован-
идеализированные граничные условия (§ 5.33), т. е. условия, выражающие либо требование
отсутствия перемещения, либо требование отсутствия реакции в заданном
направлении. Эти требования должны формулироваться для трех линейных
некомпланарных направлений и для углового направления, соответствую-
соответствующего повороту вокруг касательной к краю оболочки.
Граничные условия будут разделяться на статические (требование отсут-
отсутствия реакций) и геометрические (требование отсутствия смещений). Геоме-
Геометрические условия, как и в части II, назовем закреплениями (ввести закре-
закрепление — это значит определить в каждой точке края некоторое направление
и потребовать, чтобы всюду смещения в этом направлении равнялись нулю).
Рассмотрение начнем с куполов, т. е. с оболочек всюду положительной
кривизны, имеющих один замкнутый край, и будем всегда считать, что выб-
выбрана такая ортогональная система координат, в которой край купола за-
задается уравнением ах = а10 = const (условие 1 применимости метода расчле-
расчленения для купола всегда выполняется, так как на поверхности положитель-
положительной кривизны нет действительных асимптотических линий).
Пусть край оболочки закреплен в двух тангенциальных направлениях.
Тогда, очевидно, любое тангенциальное направление следует рассматривать
как направление закрепления и, значит, тангенциальные граничные условия
можно записать в виде
«! = 0, «2 = 0 («! = а10).
Нетангенциальные идеализированные граничные условия должны ста-
ставиться в оставшемся линейном направлении, т. е. в направлении нормали
и в угловом направлении. Это значит, что они сводятся к двум требованиям:
а» = 0 или Ni = 0 и yt = 0 или Gi = 0. Таким образом, в рассматриваемом
$ 12] ОДНО ЖЕСТКОЕ ТАНГЕНЦИАЛЬНОЕ ЗАКРЕПЛЕНИЕ 295
случае существуют только четыре следующие комбинации граничных усло-
условий теории оболочек:
Ul = 0, «2 = 0, w = 0, Yi = °. B0.11.11)
Ml = 0, «г = 0, w=Q, G, = 0, B0.11.12)
«, = 0, н2 = 0, #, = 0, Ti=0. B0.11.13)
ы, = 0, н2 = 0, Л^1==0, G, = 0. B0.11.14)
Для них во всех случаях непротиворечивыми значениями показателей
интенсивности а, Ь будут
а = 0, Ь = — 2, B0.11.2)
а значения с надо выбирать в зависимости от вида нетангенциальных гранич-
граничных условий. А именно
с = 0, B0.11.31)
с = 0, B0.11.32)
с = —1, B0.11.33)
с = — 2. B0.11.34)
Граничные условия B0.11.11) рассмотрены уже в § 20.10, и для них
были найдены непротиворечивые значения а, Ь, с B0.10.6), совпадающие
с B0.11.2), B0.11.31), и указан соответствующий итерационный процесс
выполнения граничных условий. Он останется в силе и для всех остальных
вариантов граничных условий B0.11.1). Покажем это на примере.
Пусть нас интересуют граничные условия B0.11.13). Тогда, повторив
выкладки § 20.10, получим вместо B0.10.7) равенства
v!kp>4-vJ6) 4-v!M) = — v,D) (^u.li.4)
• 1 (s) ^ <1 (s) Т^ 'I (s) <1 (s)
К = о,,).
Первые два из них надо рассматривать как граничные условия, которые
должны быть учтены при определении безмоментного напряженного состоя-
состояния (s) и чисто моментного напряженного состояния (s) или, что то же, основ-
основного напряженного состояния (s). Два последних равенства B0.11.4) обра-
образуют систему алгебраических уравнений для определения произвольных
функций простого краевого эффекта (s).
§ 12. Купол с одним жестким тангенциальным
закреплением
Рассмотрим теперь случай, когда на краю ах = а10 в тангенциальном
направлении п осуществлено закрепление, а в другом тангенциальном напра-
направлении I, ортогональном п, свобода края ничем не стеснена (рис. 48). Речь,
таким образом, идет о случае, когда тангенциальные граничные условия
записываются так:
р=0, /э = 0 («, = «!„). B0.12.1)
Здесь Р — равнодействующая краевых усилий в направлении /, а р —
краевое перемещение в направлении п.
Для общности будет считаться, что направления / и п при переходе от
одной точки края к другой могут по произвольному закону поворачиваться
296
ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЯ КУПОЛА [ГЛ. 20
относительно координатных направлений, оставаясь взаимно ортогональны-
ортогональными. Это значит, что угол i|j (рис. 48) должен рассматриваться как функция
точки края.
Нетангенциальные граничные условия, как и в § 20.10, примем в четырех
следующих вариантах:
цг = О, Yi = °. B0.12.21)
ш = 0, Gt=0, B0.12.22)
JVj; = O, Vi = °. B0.12.23)
Nt = Q, G, = 0. B0.12.24)
Величины Р и р, входящие в B0.12.1), выражаются через координатные
усилия и перемещения следующим обра-
образом (рис. 49):
— «2sino|x B0.12.3)
Поэтому к формулам B0.10.3) можно
м присоединить еще две:
}).,
B0.12.4)
получающиеся из
очевидным образом
B0.10.3) и B0.12.3).
Рис. 48. Будем для конкретности говорить
о граничных условиях B0.12.1), B0.12.24).
Им соответствуют непротиворечивые значения а, Ь, с, определяемые равен-
равенствами
а = 0, 6 = 2 — ц, с = 2 — ц, B0.12.5)
в которых [х — пока неопределенное целое число (причина неединственности
значений а, Ь, с выяснится ниже).
Начнем с обсуждения непротиворечивой комбинации
а = 0, Ь = — 2, с = —2, B0.12.6)
получающейся из^B0.12.5) при \i = 4. Ей соответствуют такие граничные
равенства приближения (s):
B0.12.7)
($)¦
(ai = аю)
и такая
Схема построения приближения (s):
A) Безмоментное напряженное состояние (s) определяется с учетом
первого граничного условия B0.12.7).
B) Чисто моментное напряженное состояние (s) определяется с учетом
второго граничного условия B0.12.7).
C) Простой краевой эффект (s) определяется с учетом двух последних
граничных условий B0.12.7).
Обоснование схемы. Введем понятие о задаче Р и задаче р. Под первой
подразумевается интегрирование главных уравнений безмоментного итера-
итерационного процесса A9.4.1) с учетом первого граничного условия B0.12.7),
S 12]
ОДНО ЖЕСТКОЕ ТАНГЕНЦИАЛЬНОЕ ЗАКРЕПЛЕНИЕ
297
под второй — интегрирование главных уравнений чисто моментного итера-
итерационного процесса A9.4.3) с учетом второго граничного условия B0.12.7).
Обе задачи неоднородны, т. е. могут содержать свободные члены, как в урав-
уравнениях, так и в граничных условиях. По смыслу задачи Р и р совпадают,
соответственно, со статической и геометрической задачами безмоментной
теории (§ 7.7). В § 17.32 было показано, что в зависимости от поведения угла
¦ф, входящего в B0.12.3), возможны два случая. Сформулируем пока
Случай I. Статическая безмоментная задача, т.е. задача Р, при
любых, достаточно гладких свободных членах в уравнениях и граничных
условиях имеет решение, содержащее г констант С/ (»> (/ = 1, 2, . . . , г),
в то время как геометрическая безмоментная задача, т. е. задача р, имеет
Рис. 49.
решение (единственное) тогда и только тогда, когда свободные члены в урав-
уравнениях и граничных условиях удовлетворяют г интегральным требованиям.
Обсуждаемая схема построения приближения (s) соответствует случаю I.
При таких обстоятельствах краевая задача, предусмотренная п. A), заведомо
решается и определяет безмоментное напряженное состояние (s) с точностью
до констант С/ (s). Последние попадут и в выражение р<?>, т. е. войдут в фор-
формулировку задачи р (р^ поставлено в правую часть второго равенства
B0.12.7), т. е. рассматривается как известная величина, так как считается,
что безмоментное напряженное состояние (s) уже построено). Составив г
требований разрешимости задачи р, получим г уравнений для с;- (s). Можно
показать, что это будет линейная алгебраическая система с ненулевым опре-
определителем, из которой с/ (S) найдутся единственным образом. Одновременно
будет обеспечена разрешимость краевой задачи р, предусмотренной п. B)
схемы. В результате единственным образом определится чисто моментное
напряженное состояние (s). Схему можно считать обоснованной: простой
краевой эффект (s), как и раньше, строится элементарно, а возможность
построения приближения @) также не вызывает сомнения.
Физический смысл случая I очевиден. В нем однородная задача р по
предположению имеет только тривиальное (нулевое) решение. По смыслу она
совпадает с однородной геометрической безмоментной задачей, заключающей-
заключающейся в построении перемещений, соответствующих изгибаниям срединной
поверхности. Это значит, что в случае I не существует таких изгибаний сре-
срединной поверхности, перемещения которых удовлетворяют второму гранич-
граничному равенству B0.12.1).
Введем понятие о жестком закреплении, подразумевая под этим такое
закрепление, т. е. геометрическое граничное условие, которое исключает
любое изгибание срединной поверхности оболочки. Тогда можно утверждать,
что непротиворечивые значения показателей интенсивности B0.12.6) и выте-
вытекающая из них схема построения приближения (s) настоящего параграфа
соответствует случаю, когда оболочка имеет одно тангенциальное закрепление
и оно — жесткое.
298 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЯ. КУПОЛА [ГЛ. 20
В более общем случае, когда к тангенциальным условиям B0.12.1)
присоединяется любая из пар нетангенциальных условий B0.12.2), непроти-
непротиворечивые значения а, Ь, с записываются так:
а = 0, Ь = — 2, с = 0, B0.12.81)
а = 0, Ь = — 2, с = 0, B0.12.82)
а = 0, Ь = — 2, с = — 1, B0.12.83)
я = 0, й = —2, с = — 2. B0.12.84)
Им отвечают последовательности граничных условий, в которых первые
два равенства останутся такими же, как в B0.12.7).
Последние два равенства B0.12.7) изменятся, но легко проверить, что
они также будут образовывать системы алгебраических уравнений для опре-
определения произвольных функций простого краевого эффекта (s).
Подчеркнем, что жесткость (неизгибаемость) срединной поверхности,
о которой здесь идет речь, должна обеспечиваться только тангенциальными
закреплениями. Жесткость срединной поверхности оболочки, если она
частично или целиком обеспечивается нетангенциальными закреплениями,
не означает, что сформулированная здесь схема наложения граничных усло-
условий останется в силе.
§ 13. Купол с одним нежестким тангенциальным
закреплением
Вернемся к условиям B0.12.1), B0.12.24) и положим теперь в формулах
B0.12.5) ц = 0, т. е. рассмотрим следующие непротиворечивые значения
показателей интенсивности
а = 0, й = 2, с = 2. B0.13.1)
Им в приближении (s) отвечают тангенциальные граничные условия
D<6> _ D<4> D<M> P<KP> o<M> _ „CI „(б> „<КР>
"(s) — "(s) -^(s) "(s+I). P[s) — /?(s-4) P(s-4) /?C)
(«! = «!„) B0.13.2)
и нетангенциальные граничные условия
Заметим, что первое краевое равенство B0.13.3) можно записать в виде
N\K$ = Nis-l), B0.13.4)
считая, что здесь и в дальнейшем буквы с верхним индексом (s— 1) обозна-
обозначают некоторые линейные выражения, составленные из величин, у которых
верхний индекс может быть любым, а нижний индекс в скобках не превосхо-
превосходит (s — 1).
Для Г<к(р> и5^р]} были выведены формулы A9.9.6), при помощи которых
они выражаются через Nl.l), x[l~l\ х^~г), z<'~'>, причем верхний индекс
в скобках в трех последних величинах имеет тот же смысл, что и в B0.13.4).
Поэтому A9.9.6) можно переписать так (I заменено на s):
П^-^л^ + тГЛ
А' я //?-Л/<кР>\ ЦиЛбА)
С(кр) л! J) ( 2;vl (s) \ , и,-и- м(кг>) , o(s—I)
(р J ( _ ,и м
Л 2 \ Л) /
S 13] ОДНО НЕЖЕСТКОЕ ТАНГЕНЦИАЛЬНОЕ ЗАКРЕПЛЕНИЕ 299
Подставив этот результат в B0.12.3), получим
Р{Т = (- *а sin ф + ki cos-ф) /&М?,} +
+ А-1^°(ЪЩ+Р^. B0.13.6)
А2 аа2 \ А1 I
Равенства B0.13.5) и B0.13.6) показывают, что из краевого равенства
B0.13.4) следуют краевые равенства
т(кр) rp(s—1) Ыкр) o(s—1) п(кр) D(s—I) / ч ,пг\ 1О7\
' 1 (s) = 1 1 . <->21 (s) = ^21 . ^(s) = " («I = ОСю). (AJ.lJ../)
Учитывая B0.13.7), можно утверждать, что непротиворечивым значе-
значениям B0.13.1) соответствует следующая
Схема построения приближения (s):
A) Чисто моментное напряженное состояние (s) определяется с учетом
второго граничного условия B0.13.2).
B) Простой краевой эффект (s) определяется с учетом условий B0.13.3).
C) Безмоментное напряженное состояние (s) определяется с учетом
первого граничного условия B0.13.2).
Замечание. При выполнении п. C) величину Я|^.\^ надо рассматривать как известную:
для нее справедливо последнее равенство B0.13.7), а простой краевой эффект (s) считается
уже построенным в результате выполнения п. B).
Обоснование схемы. Предусмотренные в ней действия будут выполнимы,
если условия разрешимости задач Р и р прямо противоположны условиям
разрешимости, принятым в § 20.12, т. е. если имеет место
Случай II. Геометрическая безмоментная задача, т.е. задача р,
при любых достаточно гладких свободных членах в уравнениях и граничных
условиях имеет решение, содержащее г констант dj (s) (/ = 1, 2, . . ., г),
в то время как статическая безмоментная задача, т. е. задача Р, имеет реше-
решение (единственное) тогда и только тогда, когда свободные члены в уравнениях
и граничных условиях удовлетворяют г интегральным требованиям.
Действительно, при таких обстоятельствах краевая задача, предусмо-
предусмотренная п. A), имеет решение по предположению, и в этом решении содер-
содержатся константы dj (S). Они войдут в правые части граничных условий
B0.13.3), а именно в слагаемое G\M^S), и после выполнения п. B) схемы будут
содержаться в простом краевом эффекте (s), а следовательно, dj (s) попадут
и в правую часть первого граничного условия B0.13.2). П. C) схемы заклю-
заключается в решении задачи Р. Условия ее разрешимости дадут г уравнений для
определения d,- (s), после чего может быть решена (единственным образом)
и задача Р.
Физический смысл условий разрешимости задач Р и р, принятых в этом
параграфе, также очевиден. Предполагается, что задача р имеет г линейно
независимых решений, но в однородном случае она определяет такие изгиба-
изгибания срединной поверхности оболочки, которые согласуются с тангенциаль-
тангенциальным закреплением. Это значит, что речь идет о случае, когда рассматриваемое
закрепление нежестко.
Изменение нетангенциальных граничных условий в случае нежесткого
тангенциального закрепления, так же как и в случае жесткого, не вносит
существенного изменения в схему построения приближения (s). Если вместо
B0.12.24) для нетангенциальных граничных условий выбрать другие ва-
варианты равенств B0.12.2), то непротиворечивые комбинации а, Ь, с соответ-
соответственно запишутся так:
а = 0, b = — I, c=l, B0.13.81)
а = 0, Ь= — 1, с=1, B0.13.8s)
а = 0, Ь = 1, с = 2. B0.13.83)
300 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. КУПОЛА ГГЛ. 20
Им отвечают такие тангенциальные граничные условия приближения (s):
р(б> р<ч) п(м) р(кр> „<м> _ „С) п(б) _(кр) /oniQQl\
Ms) = Ms) Ms—3) r(s) . P(S) — P(s-l) — P(s—1) — P(s-I)> (ДЫо.У)
D<6> _ P<"> P(M) P<KP> o<M) — nO „<6> n<KP> /on lonav
Ms) = Ms) MS_3| Ms) , P(s) = P(s-l)—P(s-l) — P(s-I>> (A).1,3.9*)
П(б) nD) n(M) n(KD) (M) (Ч) (б) _(КР) /ПП 1QQS4
Hi» = Ms) Ms~l) Ms+1)> P(s) = P(s—3) P(s—3) — P(s—2)- (Л>.1с$.Уо)
а нетангенциальные граничные условия приближения (s) запишутся так:
7|i;U. B0.13.10^)
Gi^>_2), B0.13.10я)
Y,6)s_3)_Y,M,)i B0.13.10s)
Нетрудно убедиться, что для всех этих вариантов описанная здесь схема
построения приближения (s) сохраняет силу.
§ 14. Купол с одним нежестким тангенциальным закреплением
(продолжение)
Вернемся еще раз к условиям B0.12.1), B0.12.24), предполагая, как
и в § 20.13, что тангенциальное закрепление — нежесткое, но теперь будем
считать, что краевые и поверхностные силы, приложенные к оболочке, с неко-
некоторой степенью приближенности, удовлетворяют условиям разрешимости
статической безмоментной краевой задачи, т. е. задачи Р. Другими словами,
мы теперь примем, что W — работа краевых и поверхностных сил на пе-
перемещениях любого изгибания, допускаемого закреплением (р = 0) —
имеет вид
й7=0(т^). B0.14.1)
В этом случае непротиворечивые значения а, Ь, с будут определяться
формулами B0.12.5), в которых число \i имеет тот же смысл, что и в B0.14.1).
Условия B0.12.1), B0.12.24) в силу B0.12.5) приведутся к таким гра-
граничным равенствам:
п(б) п(ч) п(м) р(кр)
Ms) — Ms) Ms-ц) Ms—H+l)»
MM,U-D> B0.14.2)
) - Gi6(U - GiM(U>
(«1 = «io)-
Потребуем, чтобы ц заключалось в пределах
B0.14.3)
Тогда в третьем равенстве B0.14.2) в правой части все нижние индексы
будут меньше (s — \i), и заменив в этом равенстве s на s + 1» можно написать
граничное равенство, аналогичное B0.13.4):
S 15] КОСОЕ ЗАКРЕПЛЕНИЕ 301
Следовательно, но аналогии с B0.13.7) будем иметь
п(кр) n(s-H)
Ms-ц+О = г
Примем, что построены (однозначно) безмоментное напряженное состоя-
состояние— во всех приближениях включительно до (s— 1), а чисто моментное
напряженное состояние и простой краевой эффект — во всех приближениях
включительно до (s— ц— 1). Тогда возможна следующая
Схема построения приближения (s):
A) Чисто моментное напряженное состояние (s—ц) определяется
с учетом второго граничного условия B0.14.2).
B) Простой краевой эффект (s — ц) определяется с учетом двух послед-
последних граничных условий B0.14.2).
C) Безмоментное напряженное состояние (s) определяется с учетом пер-
первого граничного условия B0.14.2).
Обоснование схемы. Схема, в сущности, не отличается от той, которая
была принята и обоснована в § 20.13. Поэтому, не повторяя приведенных там
рассуждений, подчеркнем только следующее.
При s ^ (J. задача Р, предусмотренная п. C) схемы, будет разрешима
только при выполнении г интегральных условий. Их можно выполнить,
подобрав должным образом константы d, (s) (/ = 1, 2, .... г). Они появля-
появляются при решении задачи р п. A) и содержатся в первом равенстве B0.14.2)
в величинах
P\fL». PW-i+iy-P*-**. B0.14.4)
При s < ц обе величины B0.14.4) обращаются в тождественный нуль,
констант в нашем распоряжении уже не будет, но в этих приближениях
задача Р по предположению разрешима.
Итак, результаты §§ 20.10—20.14 можно резюмировать следующим обра-
образом. Непротиворечивые значения а, Ь, с для граничных условий B0.12.1),
B0.12.24) определяются формулами B0.12.5), т. е. оказываются неоднознач-
неоднозначными. Причина этого заключается в том, что тангенциальное закрепление
р = 0 может оказаться жестким или нежестким, в зависимости от того, какой
смысл в равенстве B0.12.3) имеет угол г|з (§ 17.32). Непротиворечивые значе-
значения B0.12.5), получающиеся при ц = 0, 1, 2, 3, отвечают случаю, когда
закрепление р = 0 является нежестким, а работа сил на перемещениях
изгибаний, допускаемых этим закреплением, удовлетворяет соотношению
B0.14.1). Непротиворечивые значения B0.12.5), получающиеся при ц = 4,
отвечают либо случаю, когда р = 0 есть жесткое закрепление, либо случаю,
когда р — 0 является нежестким закреплением, но в B0.14.1) ц > 3, т. е.
W обращается в нуль с достаточно большой точностью.
§ 15. Купол с косым закреплением
В конкретных задачах часто встречаются идеализированные граничные
условия, которые нельзя разбить на тангенциальные и нетангенциальные.
К ним принадлежат граничные условия вида
Q = 0, p = 0, ?/ = 0, Lt = O B0.15.1)
и граничные условия вида
/> = 0, q = 0, Q = 0, Lf = O. B0.15.2)
Здесь Р и р имеют тот же смысл, что и в § 20.12, Q и q — косое (не лежащее
в касательной плоскости и не совпадающее с нормалью) усилие или переме-
перемещение соответственно, а под Lx подразумевается либо Glt либо у1%
302 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. КУПОЛА 1ГЛ. 20
Введем обозначения
4^-3 = cos xi. ¦TL-G = cosjd, n-Q =
y±--q = ca6\L1, y±-q=cos\it, nq =
где Q и q — единичные векторы направлений усилия Q и перемещения q*
Тогда при помощи формул C.17.3) и D.22.2) получим
Q = 7\ cos х, + Sa, cos x2 — #х cos xs,
B0.15.3)
<7 = Ы, COS Ц, -f- U2COS fX2 — IWCOS[1S.
В первом из этих равенств надо считать, что cos Xi, cos Хг одновременно
не обращаются в нуль, а во втором — что cos \i3 =f* 0. Учитывая это и под-
подставив в B0.15.3) выражения B0.10.3) для перемещений и усилий, получим
Рассмотрим граничные условия B0.15.1) и, положив в них для конкрет-
конкретности Lj = Gj, запишем их так:
Q = 0, p = 0, q = 0, G1 = 0. B0.15.5)
Они отличаются от граничных равенств B0.12.1), B0.12.22) только тем,
что в B0.15.5) вместо Р и w стоят Q и q соответственно. Вместе с тем Q и q
определяются формулами B0.15.4), w определяется вторым равенством
B0.10.3), а для Р справедливо первое равенство B0.12.3). Сопоставив их,
замечаем, что Р и р по структуре совпадают с Q и ц. Поэтому все результаты
§§ 20.11—20.14 остаются в силе и для граничных условий B0.15.5). А именно,
если в B0.15.5) тангенциальные закрепления не жесткие, то надо положить
с = 0, Ь = —2, с = 0
и решать задачу по схеме § 20.12, а если второе условие B0.15.5) определяет
нежесткое тангенциальное закрепление, то надо согласно B0.13.82) положить
а = 0, Ъ= — \, с=1 B0.15.6)
и применить схему § 20.13.
Разберем теперь граничные условия B0.15.2), снова положив L, = Gu
т. е. записав их так:
Р = 0, <7 = 0, Q = 0, G, = 0. B0.15.7)
Тогда одна из непротиворечивых комбинаций значений а, Ь, с будет
а = 0, & = —1, с=1. B0.15.8)
Для нее при помощи B0.10.3), B0.12.4), B0.15.4) получатся в приближении
(s) такие граничные условия:
р(ч> | р<б) | р(м) I р<кР) _ п
ql2.» + q№-» + qW + q\F = 0.
Q[s4)' + QS + <3[Пз, + Q\T = 0, B0.15.9)
+ Й = 0
(ax = a10).
Им соответствует схема § 20.12.
§ 16] КУПОЛ БЕЗ ТАНГЕНЦИАЛЬНЫХ ЗАКРЕПЛЕНИЙ 303
§ 16. Купол, не имеющий тангенциальных закреплений
Пусть оба тангенциальные граничные условия — статические, т. е.
записываются так:
а нетангенциальные граничные условия выражаются одной из четырех пар
равенств B0.12.2). Тогда непротиворечивые значения а, Ь, с выразятся такими
формулами:
а = 0, b= — I — fx, c=l— ц @<fxs=:l), B0.16.21)
а = 0, b = — I— fx, c=l —fx @<и<1), B0.16.22)
а = 0, & = 1—ц, с = 2—ц @ < ц < 2), B0.16.23)
а = 0, & = 2 — ц, с = 2 — ц @ < ц < 4). B0.16.24)
В них ц имеет такой же смысл, как и в задаче о куполе с одним нежестким
закреплением: это число определяется формулой B0.14.1), т. е. показывает,
с какой точностью обращается в нуль W — работа внешних сил на переме-
перемещениях, соответствующих изгибаниям срединной поверхности оболочки,
край которой ничем не стеснен. Неравенства, полученные в скобках, по
смыслу совпадают с неравенствами B0.14.3). В них верхний предел допусти-
допустимого изменения fx показывает порядок той погрешности в выполнении требо-
требования W = 0, при достижении которого оболочка начинает работать так же,
как если бы требование W = 0 выполнялось точно.
Выберем для конкретности нетангенциальные граничные условия в ва-
варианте D), считая, что край ах = а1о свободен от каких бы то ни было за-
закреплений, т. е. на нем выполняются граничные условия
7\ = 0, S2I = 0, Ni = 0, Gx = 0 К = а10), B0.16.3)
и положим в равенствах B0.16.24) ц = 0 (это значит, что требование W = 0
не выполняется даже приближенно). Тогда непротиворечивая комбинация
значений а, Ь, с будет записываться так:
а=0, & = 2, с = 2, B0.16.4)
и подставив этот результат в B0.10.3), получим обычным образом последова-
последовательность граничных соотношений
0с(ч) I с(б) | с(м) | с!кр) п
, ^21 (s) -\- ^г! (s) -J- *^21 (s) ~Г &ii (s+I) — ">
(o1=o10t s = 0, 1,...). B0.16.5)
Ей соответствует такая
Схема построения приближения;
A) В четырех равенствах B0.16.5) при каждом (s) входят две произволь-
произвольные функции ф; (s), содержащиеся в приближении (s) простого краевого эф-
эффекта (считается, что при помощи формул вида B0.13.7) величины Т'^+п,
Si^s+i) выражены через величины с индексом, не превосходящим s).
Исключив ipf(s), получим два равенства, содержащих безмоментное и чисто
моментное напряженное состояние (s). Они составят совместные граничные
условия для главных уравнений безмоментного итерационного процесса
A9.4.1) и головных уравнений чисто моментного итерационного процесса
A9.4.3) в приближениях (s).
B) Два последних равенства B0.16.5) позволяют определить произволы
простого краевого эффекта (s).
На обосновании этой схемы мы останавливаться не будем. Она применя-
применялась при расчете замкнутой цилиндрической оболочки со свободными краями
в [60].
ГЛАВА 21
ИТЕРАЦИОННЫЕ ПРОЦЕССЫ ВЫПОЛНЕНИЯ ГРАНИЧНЫХ
УСЛОВИЙ. ОБОЛОЧКА С ДВУМЯ КРАЯМИ
§ 17. Оболочка с двумя краями
Перейдем к рассмотрению оболочек, имеющих два края (рис. 50). Будем
предполагать, что оба края glt g2 — неасимптотические, что выбрана такая
система ортогональных координат, в которой gj и g2 проходят вдоль линий
ai = аи = const и а1 ~ а12 = const, и что gu g2 расположены настолько
далеко друг от друга, что простой краевой
эффект, возникший у glt затухает, не дости-
достигнув g2, и наоборот. Кривизна срединной по-
поверхности не обязательно положительна.
Оболочка может, например, иметь вид одно-
полостного гиперболоида, изображенного на
рис. 50.
ft
1
1
Рис. 51.
Будет удобно считать, что на срединной поверхности установлена система
координат, подобная географической, причем краям аг = ct,, и at = а12
соответствуют параллели, а а2 является аналогом долготы. Тогда можно
принять, что область, где надо строить решения уравнений теории оболочек,
представляет собой бесконечную полосу, разбитую на прямоугольники Gn
(см. рис. 51) прямыми
а2 = па2,
B1.17.1)
где п—целое, а2—константа. Срединной поверхности оболочки будет
соответствовать любой прямоугольник Gn, на сторонах B1.17.1) которого
должны выполняться условия периодичности.
Для оболочки, имеющей два края, надо находить непротиворечивые
значения четырех показателей а, Ь, с1( с2. Здесь а, Ь — показатели интен-
интенсивности безмоментного и чисто моментного напряженных состояний, господ-
господствующих во внутренних частях оболочки, а си с2— показатели интенсив-
интенсивности простых краевых эффектов вблизи gi и g2 соответственно (эти напря-
напряженные состояния, по предположению, взаимно независимы).
§ !8] ОБОЛОЧКА С ДВУМЯ ТАНГЕНЦИАЛЬН. ЗАКРЕПЛЕНИЯМИ 305
§ 18. Оболочка с двумя краями, закрепленными
в обоих тангенциальных направлениях
Обращаясь к рассмотрению конкретных граничных условий, начнем со
случая, когда на каждом из краев оба тангенциальные граничные условия —
геометрические, т. е. оба края закреплены в двух тангенциальных направле-
направлениях. Тогда можно использовать результаты §§ 20.10, 20.11. В первом из
них было показано, что если оболочка имеет один край и последний закреплен
в обоих тангенциальных направлениях, то существует только одна непроти-
непротиворечивая комбинация значений а, Ь, с. Поэтому надо считать, что и в случае
двух краев, закрепленных в обоих тангенциальных направлениях, непроти-
непротиворечивые комбинации значений a, b, clt c2 определяются однозначно.
А именно, в соответствии с B0.11.2) надо положить
а = 0, Ь = —2, B1.18.1)
a Cj и с2 следует выбирать в зависимости от принятого варианта нетанген-
нетангенциальных граничных условий. Например, если граничные условия сформули-
сформулированы следующим образом:
Ы1 = Ыа = ш = 71 = 0 (на gl),
„, = „, = ^ = ^ = 0 (на gt), (ZlA*-Z)
то исходя из B0.11.31), B0.11.34), надо положить
Cl = 0, c2 = — 2. B1.18.3)
При этом в приближении (s) граничные равенства запишутся так:
"}?¦> + "Г,',) = - иП) - "№-U> (на 8г и ft). B1 18 4)
(i = 1, 2; k = 1 на glf k = 3 на g2),
<>р) =-<,'- "I??-»!.-,». B1185)
TiKEj=-vi7i_1)-vie()i_n-vil{J-i) (Ha ft)-
^{K(^> = - M',U - N{%^} - JVifU (на g2). ( * ^ '
Им соответствует такая
Сл:ежа построения приближения (s):
A) Безмоментное и чисто моментное напряженные состояния (s) опре-
определяются с учетом граничных условий B1.18.4).
B) Простые краевые эффекты (s) вблизи краев glt g2 определяются раз-
раздельно; для первого из них учитываются граничные условия B1.18.5), а для
второго — граничные условия B1.18.6).
Обоснование схемы. В ней, очевидно, достаточно обсудить выполнимость
этапа A). При всех (s), включая @), он эквивалентен решению полной краевой
задачи безмоментной теории для оболочки с двумя краями, закрепленными
в обоих тангенциальных направлениях. Эта задача обсуждалась в § 17.34;
она разрешима при любых, достаточно гладких правых частях уравнений и
граничных условий для оболочек весьма широкого класса, включающих
оболочки положительной, отрицательной н нулевой кривизны.
20 А. Л. Гольденвейзер
306 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. ОБОЛОЧКИ (ГЛ. 21
§ 19. Оболочка положительной кривизны с двумя краями
(одно тангенциальное закрепление)
Примем теперь, что на обоих краях оболочки осуществлено по одному
тангенциальному закреплению, и запишем граничные условия задачи так:
= 0, ю=0, 7i = O (Hag,), B1.19.1)
= 0. #1 = 0, 7i = 0 (на g2). B1.19.2)
Здесь Р и р имеют тот же смысл, что и в равенствах B0.12.1), а дополни-
дополнительные индексы [ 1 ] и [2 ] обозначают, что эти величины определены на
краях gu g2 соответственно; для конкретности выбраны определенные (раз-
(разные на разных краях) нетангенциальные граничные условия.
Назовем задачей Р интегрирование статических уравнений безмоментной
теории с учетом граничных условий Рщ = 0 на gi и Рщ = 0 на g2, а зада-
задачей р — интегрирование геометрических уравнений безмоментной теории
с учетом граничных условий р[\\ =0 на gL и р\г\ = 0 на g2. По смыслу они
совпадают с задачами Р и р, введенными в § 20.12, только здесь их надо
решать в двухсвязной области.
Если кривизна оболочки всюду положительна, то теоремы разрешимости
задач Р и р формулируются одинаково для областей любой связности, надо
только должным образом определить понятие об индексах этих задач. Поэтому
для оболочек положительной кривизны, используя результаты §§ 20.12—
20.14, можно поступать следующим образом.
Примем, что условия р^ц = 0 и р\2\ = 0 соответствуют жесткому тан-
тангенциальному закреплению (не существует изгибаний срединной поверхно-
поверхности, удовлетворяющих обоим этим условиям), и рассмотрим граничные
равенства B1.19.1) и B1.19.2) в отдельности. Первые из них соответствуют
граничным условиям B0.12.1), B0.12.21), а вторые — граничным условиям
B0.12.1), B0.12.23). Для этих случаев в § 20.12, считая тангенциальное
закрепление жестким, мы получили непротиворечивые значения B0.12.81),
B0.12.83), в которых dub одинаковы, а различны только значения с. Учиты-
Учитывая, что простые краевые эффекты на краях gx и g2 не влияют друг на друга,
заключаем, что непротиворечивые значения a, b, clf c2 для задачи B1.19.1),
B1.19.2) можно записать так:
а = 0, Ь = —2, с1 = 0, с2 = —1.
В справедливости этого утверждения можно убедиться, приняв описан-
описанную в § 20.12 схему построения приближения (s) и буквально повторив при-
приведенное там же обоснование этой схемы (оно основано на условии разре-
разрешимости задач Р и р, которые по предположению сохраняются).
Так же можно поступить для оболочек положительной кривизны и
в любых других задачах, если для обоих, в отдельности взятых краев непро-
непротиворечивые значения а и b окажутся одинаковыми.
Примем теперь, что условия р{\\ = 0 и р^] = 0 определяют нежесткое
тангенциальное закрепление и что внешние силы уже в главных членах не
удовлетворяют условиям разрешимости задачи Р. Тогда надо исходить из
результатов § 20.13, в котором для отдельно взятых условий B1.19.1) и
B1.19.2) получены непротиворечивые значения B0.13.81) и B0.13.8s). Здесь
возникает новая ситуация, связанная с тем, что в B0.13.&1) и B0.13.83)
число b неодинаково.
В этом случае надо положить
а = 0, b = — 1, сх = 1, сг = 0.
§ 20] ОБОЛОЧКА ОТРИЦАТЕЛЬНОЙ КРИВИЗНЫ. ОДНО ТАНГЕНЦ. ЗАКРЕПЛЕНИЕ 307
Тогда в приближении (s) граничные условия примут вид (дополнительные
значки [II, [21 при Р и р опущены)
ЧТ <,, <„ < B1-19.3)
ад=-^u-vr(U)-^u
(на &),
B1-19.4)
(на g2).
Им соответствует следующая
Схема построения приближения (s):
A) Чисто моментное напряженное состояние (s) определяется с учетом
второго граничного условия B1.19.3) и второго граничного условия B1.19.4).
B) Простые краевые эффекты (s) определяются с учетом третьего и
четвертого граничных условий B1.19.3) и B1.19.4); первые два из них при-
принимаются во внимание для простого краевого эффекта на краю gt, а послед-
последние два — для простого краевого эффекта на краю g2.
C) Безмоментное напряженное состояние (s) определяется с учетом пер-
первых граничных условий B1.19.3), B1.19.4).
Эта схема, в сущности, не отличается от схемы § 20.13, и на ее обосно-
обосновании можно не останавливаться. Используя результаты § 15.22, легко
убедиться, что схема настоящего параграфа сохранит силу и для оболочки
нулевой кривизны.
§ 20. Оболочка отрицательной кривизны с двумя краями
(одно тангенциальное закрепление)
Для оболочек всюду отрицательной кривизны условия разрешимости
задач Р и р — могут оказаться не такими, как в случае, когда кривизна
оболочки положительна. Так, например, могут оказаться справедливы
и такие
Условия разрешимости задач Pup:
Неоднородные задачи Р и р имеют решение (единственное) при любых,
достаточно гладких свободных членах в уравнениях и граничных условиях,
если размеры прямоугольников Gn (§21.17, рис.51) удовлетворяют неко-
некоторому требованию А, одинаковому для задачи Р и задачи р; при наруше-
нарушении требования А обе задачи имеют решение тогда и только тогда, когда
выполнена бесконечная последовательность интегральных условий (в послед-
последнем случае обе задачи имеют бесчисленное множество линейно независимых
решений).
Такие условия разрешимости справедливы, например, для оболочки,
имеющей форму однополостного гиперболоида (§ 18.37); в этом случае тре-
требование А заключается в том, что отношение длин сторон прямоугольника
Gn (рис. 51) должно быть иррациональным числом.
20*
308 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. ОБОЛО ЧКИ [ГЛ. 21
Будем искать непротиворечивые значения a, b, clt е2, соответствующие
сформулированным здесь условиям разрешимости задач Р и р, взяв для
конкретности такие граничные условия:
Р = 0, р = 0, w = 0, d = 0 (на ft и ft) B1.20.1)
(значки 1, 2 при Р и р опущены).
Тогда будет существовать два варианта непротиворечивых значений
a, b, clt c2:
а = 0, Ь= — 2, Cl = c2 = 0, B1.20.2)
а = 0, ft= —I, d = c2=l. B1.20.3)
Первый из них отвечает случаю, когда требования А выполняются, а вто-
второй — случаю, когда требования А нарушены. Например, для однополост-
ного гиперболоида будут справедливы формулы B1.20.2), если отношение
сторон прямоугольника Gn иррационально, а формулы B1.20.3) будут спра-
справедливы в противоположном случае.
Исходя из B1.20.1) и B1.20.2), получим обычным образом граничные
условия для приближения (s)
р(б) _ р(ч> р(м) р(кр) (б) __ (ч) (м) (кр)
И,(кр) _ да(ч) ...(б) ..Ли) /;(кр) Ыч) W6) ым)
tt(s) — "'(s) шE) шE)> (s) = al (s-2) E—2) (s—2)
(на ft, g2).
В этом случае приближение (s) можно строить по схеме §20.12. При
проверке этого утверждения надо учесть, что требование А выполнено, и
следовательно, задача Р имеет единственное решение, а для задачи р не надо
выполнять каких бы то ни было условий разрешимости.
Перейдем к случаю, когда требование А нарушено. Тогда соотношения
B1.20.1), B1.20.3) приведут к таким граничным условиям для приближе-
приближения (s):
(на glt ft). B1.20.4)
Пусть все напряженные состояния построены в приближениях @),
A), . . ., (s— 1), причем при @), A), . . ., (s— 2) все они определены един-
единственным образом, а в приближении (s— 1) единственным образом опреде-
определены чисто моментное напряженное состояние и простой краевой эффект,
в то время как безмоментное напряженное состояние выражается через по-
последовательность произвольных констант c/(s_i)(/ = 1, 2, . . .). Тогда
будет применима следующая
Схема построения приближения (s):
A) Чисто моментное напряженное состояние (s) определяется с учетом
второго граничного условия B1.20.4) на gL и g%.
B) Простые краевые эффекты (s) определяются раздельно вблизи gt и gt
с учетом третьего и четвертого граничных условий B1.20.4).
C) Безмоментное напряженное состояние (s) определяется с учетом пер-
первого граничного условия B1.20.4) на g1 и g2.
Обоснование схемы. В п. A) речь идет о неоднородной задаче р. Условие
ее разрешимости составляет некоторую последовательность равенств. Для
их выполнения мы располагаем последовательностью констант Сцв-1), кото-
которые по предположению входят в приближение (s— 1) безмоментного напря-
напряженного состояния. Примем, что с; (s—иможно выбрать гак, что условия раз-
( 81) НЕОДНОТИПНОЕ ЗАКРЕПЛЕНИЕ КРАЕВ 309
решимости будут удовлетворены и что в результате ct (S_d определятся един-
единственным образом. Тогда задача р, предусмотренная в п. A), будет иметь
решение, и оно будет содержать новую последовательность констант d/(S)
(/ = 1, 2, . . .). В результате выполнения п. B) константы df(s) перейдут
в приближение (s) простого краевого эффекта и попадут в правую часть пер-
первого равенства B1.20.4). Поэтому при выполнении п. C) мы вновь будем
располагать последовательностью констант для выполнения условий раз-
разрешимости задачи Р. Решение этой задачи будет зависеть от последователь-
последовательности произвольных констант с,-(s) (/ = 1, 2, . . .)» которая будет нужна
для построения приближений (s •+¦ 1).
Для полного обоснования обсуждаемой схемы остается рассмотреть
случай s = 0. При таком значении s правая часть второго равенства B1.20.4)
обращается в тождественный нуль и не содержит констант. Одновременно
задача р становится однородной. По предположению, она имеет решение,
зависящее от констант йцо) (/" = 1, 2, . . .). Эти константы после выполне-
выполнения п. B) схемы войдут в формулировку задачи Р для приближения @)
через величину P{o)P>. Из условий разрешимости задачи Р константы d/@)
определятся, а в решение этой задачи войдут новые константы С/ (о>, которые
пока остаются неопределенными, как и было предположено.
§ 21. Оболочка с двумя неоднотипно
закрепленными краями
Рассмотрим случай, когда тангенциальные граничные условия на края*
gi и g2 различны. А именно, примем, что
„1==0, и2 = 0, ш = 0, Yi = 0 (на gl), B1.21.1)
Г, = 0, S21 = 0, #, = 0, G1==0 (на й) B1.21.2)
(консольная оболочка).
Для граничных условий B1.21.1) и B1.21.2), взятых в отдельности, были
получены непротиворечивые значения а, Ь, с B0.11.2), B0.11.31) и B0.16.24)
соответственно. Перепишем их еще раз:
а = 0, Ь = —2, с = 0иа = 0, 6 = 2 — ц, с=2 —ц.
Потребовав, чтобы число b было одинаковым в обоих группах, находим
|j, = 4. Отсюда получаем равенства
а = 0, Ь= —2, Ci = 0, c2 = —2, B1.21.3)
которые обычным образом приводят к таким условиям в приближении (s):
4%, +<>>=-Л—«{«pi,,,
= - <>s> - 4\»Ll)t
(на gt),
T<6) «W') т>(м) TKP
' I (i) = J 1 (s) ' 1 (s-4) 1 1 (s—3I
S21 (S) = S2l\s) S2l\s-4) S
U-tfiM<U. (
^-Gi",»,
(на gt)
310 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. ОБОЛОЧКИ [ГЛ. 21
Им отвечает следующая
Схема построения приближения (s):
A) Безмоментное напряженное состояние (s) и чисто моментное напря-
напряженное состояние (s) определяются с учетом первых двух граничных условий
B1.21.4) на gj и первых двух граничных условий B1.21.5) на g2.
B) Простые эффекты (s) вблизи gj и g2 определяются раздельно; для
первого из них учитываются два последних граничных условия B1.21.4),
для второго — два последних граничных условия B1.21.5).
Обоснование схемы. Достаточно обсудить только выполнимость п. A).
Он эквивалентен решению полной безмоментной краевой задачи для кон-
консольной оболочки, обсужденной в §§ 18.38, 18.39. Эта задача при любых
достаточно гладких свободных членах уравнений и граничных условий имеет
решение либо в точной постановке (для оболочек неположительной кривизны),
либо в смягченной постановке (для оболочек положительной кривизны), и
следовательно, п. A) выполним.
Замечание. Как правило, роль напряженных состояний с большой изменяемостью отно-
относительно мала, и ошибка, совершаемая при их построении, несущественна. Если расчет ве-
ведется методом расчленения, то логически правильно было бы всегда решать задачи безмомент-
безмоментной теории в смягченной постановке, отбрасывая слагаемые с большой изменяемостью (как
малые добавки, недоступные правильному построению в рамках применяемого метода). Однако
не всегда удобно строить решение так, чтобы члены с большой изменяемостью могли быть
выделены и отброшены. Поэтому, вообще говоря, надо считать, что смягчение постановки
задачи или отказ от нее зависят от нашего выбора. С этой точки зрения особенность обсу-
обсуждаемой ситуации сводится только к тому, что в ней смягчение условий задачи стано ится
обяз тельным
Задачи, в которых по той или иной причине напряженные состояния
с большой изменяемостью отбрасывать нельзя, должны рассматриваться
особо; для них надо использовать итерационный процесс, базирующийся
не на уравнениях безмоментной теории, а на уравнениях напряженных состоя-
состояний с большой изменяемостью (§ 10.24).
§ 22. Оболочка с двумя неоднотипно закрепленными
краями (случай приложения краевых сил)
Пусть поверхностная нагрузка отсутствует, но к свободному краю
консольной оболочки приложены заданные силы. Тогда граничные условия
B1.21.1) сохранятся, а вместо B1.21.2) надо написать
Г, = Т\, S2I = S1, Ni = N'u G, = G| (на gj. B1.22.1)
ны со зв
олагать,
(Т\, S'2b
Здесь величины со звездочкой определяют заданные краевые силы и моменты.
Будем предполагать, что все они представимы в виде
.9=0
(если, как это обычно бывает, левая часть не зависит от h, а следовательно,
и от ц, то надо считать, что Тц$>, S21 <s>, Ni(s), Gi (s) отличны от тожде-
тождественного нуля только при s = 0).
Далее следует раздельно рассматривать три случая:
Gь S«)#0, N\ = 0, Gl=0; B1.22.2)
Т\ = 0, Sli ее 0, И\ф 0, G'i ее 0; B1.22.3)
Т\ = 0, 5л ее 0, N1 = 0, в\ф0. B1.22.4)
В случае B1.22.2) для а, Ь, си с% остаются в силе формулы B1.21.3)
и граничные равенства B1.21.4), B1.21.5). Различие будет заключаться
§ 23J ОБОЛОЧКА С ИЗЛОМОМ СРЕДИННОЙ ПОВЕРХНОСТИ 311
только в том, что в B1.21.4), B1.21.5) величины с индексами (ч) обратятся
в нули, так как поверхностная нагрузка, по предположению, отсутствует,
а в B1.21.5) появятся величины Ti(S), S21 (S>. Эта замена совершенно несу-
несущественна для выполнения описанной в §21.21 схемы построения прибли-
приближения (s).
В случаях B1.22.3), B1.22.4) в формулах B1.21.3) надо изменить зна-
значение с2, приняв соответственно
а = о, & = — 2, сх = 0, са = 1; B1.22.5)
а = о, Ь = — 2, с, = 0, с2 = 2. B1.22.6)
Значениям B1.22.5) соответствуют граничные условия
1 (s) = ^ 1 (s-4) I l(s). ^J (s) = -biMs—l) 021 (s),
ДГ(КР) дт* дт(б) дт(М) (^l^i/)
)
(s_3)
(на g2),
а значениям B1.22.6) — граничные условия
Tl (s) == 7\ (s—i) T\ (s-f i), S21 (S) = S21 (S_4) S2MS+I)»
(кр) дт(б) дг(м)
1 (s) = m («_5) /V 1 (s_5),
КР) П Л (б> Л(м)
(s) = Oi (s) Oi (s_4, Oi (s_4,
(на gs).
Как B1.22.7), так и B1.22.8) надо пополнить равенствами B1.21.4), остаю-
остающимися без изменения во всех случаях. Если, для конкретности, говорить
о граничных условиях B1.21.4), B1.22.8), то им соответствует такая
Схема построения приближения (s):
A) Простой краевой эффект (s) вблизи g2 определяется с учетом двух
последних граничных условий B1.22.8).
B) Безмоментное и чисто моментное напряженные состояния (s) опре-
определяются с учетом первых двух граничных условий B1.21.4) и первых двух
граничных условий B1.22.8).
C) Простой краевой эффект (s) вблизи gl определяется с учетом двух
последних граничных условий B1.21.4).
Схема обосновывается так же, как в § 21.21. Надо только заметить, что
в B1.22.8) величины 7V(Ks!fi) и S21((Ks+i) должны быть преобразованы при
помощи формулы B0.13.7).
Описанная здесь схема сохраняет силу и для граничных условий
B1.21.4), B1.22.7).
§ 23. Оболочка с изломом срединной поверхности
Пусть вдоль некоторой замкнутой линии X срединная поверхность обо-
оболочки имеет излом. Тогда, как это. обычно делается, мы будем рассекать
поверхность вдоль этой линии и выполнять на X условия сопряжения. Сре-
Срединная поверхность оболочки / будет при этом состоять из двух частей /
2
и /. Установим на ней единую ортогональную систему криволинейных коор-
координат (а„ аг), так, чтобы в этой системе линия стыка задавалась уравнением
«j = const, и условимся считать, что движению от X соответствует на f
2
уменьшение а1г а на f— увеличение аг.
Линии a j = const и, в частности, X в общем случае будут пространст-
пространственными кривыми. Построим для них подвижный триэдр, образованный
312
ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. ОБОЛОЧКИ [ГЛ. 21
единичными векторами т (касательная), v (главная нормаль) и р (бинор-
(бинормаль). Тогда векторы т и v определятся формулами
1 дМ
дМ
да
да
B1.23.1)
(а — длина дуги а2-линий, р—главный радиус кривизны а2-линий).
Плоскость (v, P), т. е. плоскость нормалей линии К, ортогональна век-
1 2
тору М2. Это значит, что для обеих поверхностей / и f на линии их стыка
(v, р) представляет собой нормальную плоскость, проведенную в направле-
Гх а>
Рис. 52.
нии ocj-линии. В этой плоскости лежат перемещения ult w и следовательно,
можно написать равенства >
1 = — «iCosx + tosinx, r = щ sin % + w cos ij) (на Я,), B1.23.2)
где х—угол между положительным направлением иг и отрицательным
направлением v (по разные стороны линии стыка % имеет различные значе-
значения), I, г — проекции полного смещения на v и р соответственно (рис. 52, а).
Равным образом можно написать
Ь== —TiCosx + ^sinx, i? = T1sinx + ^1cosx, B1.23.3)
где L, R — проекции краевых усилий на v и р (рис. 52, б).
На линии стыка должны выполняться геометрические условия сопря-
сопряжения, которые можно записать так:
I
2
-I.
1
«2
2
1 2
(на К),
B1.23.4)
и статические условия сопряжения, которые можно записать так:
12 12 1 2 12
L = L, R = R, S^^Su, G,=G1 (на А,). B1.23.5)
Преобразуем равенства B1.23.4) и B1.23.5).
Величина р — главный радиус кривизны а2-линии — связана с R2t
радиусом нормальной кривизны поверхности в направлении а2-линии фор-
формулой Менье
-^-=-^-, B1.23.6)
в которой гр— угол между — п и v (рис, 53).
§ 23J
ОБОЛОЧКА С ИЗЛОМОМ СРЕДИННОЙ ПОВЕРХНОСТИ
313
Имеют силу деривационные формулы A.5.4). Положим в первом из
этих равенств i = 2, / = 1 и помножим его скалярно на М^А^ Получим
дА% = М± д ( М2 \
даг Ах ' до \ At )'
Справедливы формулы B1.23.1), и кроме того, можно написать
(рис. 53)
- -.— = — cos % = — sin ijj.
Отсюда
sin
B1.23.7)
Подставив эти результаты в формулу
+
-«*—
и учтя B1.23.2), получим
- _^?_ L
г*~ до p
B1.23.8)
Продифференцируем по а обе части второго равенства B1.23.4) и вычтем
из него первое равенство B1.23.4), поделенное на р. Тогда в силу B1.23.8)
получим преобразованное геометрическое уело- ;
вие сопряжения
1
(на X),
B1.23.9J
равенство
которым можно заменить первое
B1.23.4).
Главные уравнения чисто моментного ите-
итерационного процесса в приближении (s) можно
выразить равенствами (§ 19.3)
B1.23.10) Рис. 53.
Здесь, как и в §20.13, верхним индексом (s—4) отмечаются некоторые
линейные выражения, составленные из величин, относящихся к прибли-
приближениям не выше (s— 4). Третье из этих равенств мы будем считать выпол-
выполняющимся всюду, включая А., и используем ниже при действиях с условием
сопряжения B1.23.9).
Обращаясь к преобразованию статических условий сопряжения B1.23.5),
помножим первое из них на р, продифференцируем по а и вычтем из полу-
полученного равенства третье равенство B1.23.5). Тогда, введя обозначение
д ¦ " B1.23.11)
будем иметь условие сопряжения
i
2
2
B1.23.12)
которым можно заменить третье равенство B1.23.5).
314 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. ОВОЛОЧКИ [ГЛ. 21
Для простого краевого эффекта были доказаны равенства B0.13.5).
Первое из них при помощи B1.23.6), B1.23.7) преобразовывается к виду
{учитывается также, что г|> = л/2 — %)
= Я'5'- B1.23.13)
Запишем равенства B1.23.3) для простого краевого эффекта в прибли-
приближении (s), выразим Я(?,р) по выше написанной формуле и будем рассматри-
рассматривать полученные равенства как уравнения относительно Т|к(?> и Ы\к$. Тогда
для NlYsl получим
дг(Кр) г (КР)
Это позволяет второе равенство B1.23.5) преобразовать при помощи
{19.7.1), B1.23.6) и B1.23.11) к виду
2&Р) = 2е*""- B1.23.14)
Формулы B1.23.13) и B1.23.14) будут нужны для действий со вторым
условием сопряжения B1.23.5) и с условием сопряжения B1.23.12).
Напряженное состояние оболочки, имеющей излом, также можно пред-
представить как сумму безмоментного напряженного состояния, чисто момент-
ного напряженного состояния и простого краевого эффекта, считая, что
вблизи излома простой краевой эффект возникает по обе стороны от линии К.
Конечно, при этом надо требовать, чтобы выполнялись условия примени-
применимости метода расчленения и, в частности, чтобы линия излома была неасимп-
неасимптотической.
Для введенных здесь величин /, г, L, R легко получить формулы вида
B0.10.3). Внеся в правые части равенств B1.23.2), B1.23.3) разложения
B0.10.3) и расположив должным образом полученные выражения по степе-
степеням ц, будем иметь
i = WVJs + гГ (л'С). + С6 (лВД. + Сс (rfCOs,
г = dfrttl). + ч- (лvj,e,>), + гг"-2 (лТОД). + *Г (nW..
l = (цВД). + л- (rfL\t\)s + л-6+2 №,»). + Гс+1 (тВДО..
r = (^j;)), + rr (л W/?|.U + rw WffiO. + Tc+1 ОТ}.?»)..
Коэффициенты этих разложений очевидным образом связаны с коэффи-
коэффициентами разложений B0.10.3). В частности,
= - П% cos х + M6(U) sin х, /?{?,> = Т{6(>, sin x + AZ/^U) cos x.
B1.23.16)
Равным образом для величин еа, S в соответствии с формулами
{20.10.3), B1.23.8) и B1.23.11) можно написать разложения
2 = (if ei7.>), + С Ш%})$ + С^
= (л5 SisOs + л- (л5 2(A)))s + л4 (л5 2ЙГ>>). + B1-23-17)
в которых, в частности,
2$ =-Si?w + -|r (P^ffl)- B1.23.18)
Внесем выражения B0.10.3), B1.23.15) и B1.23.17) в условия сопряже-
сопряжения и запишем их следующим образом.
§ 24j ОБОЛОЧКА С ИЗЛОМОМ. КРАЕВЫЕ ЗАДАЧИ 315
Геометрические условия сопряжения
* + ц'с' (л'#Й).И = о,
л~*'+1 Wfl).}? = о
-2 Ш%)* + ц'с' (л'#Й).И = о,
+ л- (л1 А). + С"-2 (л**). + л~*'+1 Wfl).}? = о,
КлТО. + л" (чГЛ). + л (л'Л). + л"'' (л'Л).)? = о
(на к).
Статические условия сопряжения
+2 (л'ДО). + л-'+1 dWW? = о,
+2 (л5<>>M + л^'+1 (л1/?!?').}? = о,
Кл SIS). + л-а (л5 ZI.U + л'^2 (л8 SW). +
{Л4
(на Я.).
Л \Ц J}
Здесь индексы у фигурных скобок обозначают, что заключенное в них
1 2
выражение надо построить на линии X для / и f и вычесть первое значение
из второго; под а, Ь, с' подразумеваются показатели, соответствующие без-
моментному, чисто моментному напряженным состояниям и простому крае-
1 2
вому эффекту на линии излома. Принимается, что а, Ь, с' для / и / одинаковы.
(Общность рассуждений от такого предположения не нарушается. Если,
1 , 1
например, М — чисто моментное напряженное состояние в f—окажется
2 2
асимптотически более интенсивным, чем М, то нулевое приближение для М
тождественно исчезнет).
§ 24. Оболочка с изломом срединной поверхности.
Краевые задачи
Одной из непротиворечивых комбинаций значений а, Ь, с' для
B1.23.19), B1.23.20) будет
а = 0, Ь= — 2, с' = 0, B1.24.1)
а соответствующие ей условия сопряжения для приближения (s) можно
записать в виде двух групп равенств
|/(б)J _ |/(ч) ,(м) , ,(кр) 12
i4s) /1 — \L(s) -f- b(s_4) + L(s_i)Ji,
/d<6)|2_ |d<4> I n(M> I d(kp) 12
j A(s) )l — i«(S) + ".(s-4) + «(s-l)|b
IVF)I2_ |vD) . V(M) , v(Kp) 12 (l\.l\.l)
I2(s)/1 — I2j(s) +2(s4) +2(sl)|l»
Мб) (м) 12 I (ч) , (кр) >2
(s) + M2 (s))l = 1U2 (s) + (s-l)Jl
( )
) , (р) 2
1 (s) + (s-l)J
(на л);
s))l = (Ё2 (s) + Ё2 (s) + Ё2 (s)Jli
r(KP)l2 )r(r) , „F) . r(M)r>
,) ll = — k() Г Г() + r }l
r
(s)
и + Ti«U., + vlii-.,}?. {L -
—2, + Giei_2> + GiK,pL2)}2
(на-A,).
316
ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ ОБОЛОЧКИ [ГЛ. 21
Преобразуем равенства B1.24.2). Первые два из них можно записать так:
/(б) /(б) __ г <s-l) р(б) р(б) _ p(s-n /91 94 44
Ms) — Ms) — ь » ^(s)—K(s) = К ¦ (z 1.24.4)
Здесь значки над буквами означают принадлежность данной величины
к поверхностям f или /, а значком (s— 1) отмечаются выражения, которые
при построении приближения (s) можно считать известными (смысл таких
выражений мы не будем раскрывать, как не имеющий значения в обсуждае-
обсуждаемых вопросах).
Раскрывая левые части равенств B1.24.4) по формулам B1.23.16),
получим уравнения
- f{6(>) cos \ + Т{% cos х = L<rl),
f И
7T(i>sinx — TiYs) sin % =
решая которые, будем иметь
<б)
M)
Д(8—I).
B1.24.5)
B1.24.6)
Равенства B1.24.6) теряют силу только тогда, когда определитель
2 I
системы B1.24.5) обращается в нуль, т. е. при %— % = пп. Этот случай
1 2
мы исключим из рассмотрения, считая, что на X поверхности / и / не имеют
общей касательной. Это значит, что нормальное сечение срединной поверх-
поверхности вблизи стыка не должно представлять собой гладкую кривую или
кривую, имеющую острие (такая конфигурация не допускается даже в от-
отдельных точках X).
Третье равенство B1.24.2), учитывая B1.23.18)
1244
i
I
I
р р (
и B1.24.4), перепишем так:
- S
B1.24.7)
Рис. 54.
и будем в дальнейшем вместо B1.24.2) пользоваться
равенствами B1.24.4), B1.24.7) и равенством
k%> + ill) - k%, - &U = U^ (на Х),
B1.24.8)
которое очевидным образом следует из последнего соотношения B1.24.2).
Перечисленные равенства должны выполняться на линии стыка X и
могут в определенных случаях рассматриваться при построении приближе-
приближения (s) как условия сопряжения. Чтобы показать это, рассмотрим
Пример 1. Цилиндрическая и коническая оболочки соединены по линии Я,
и жестко заделаны в двух поперечных сечениях, как схематически показано
на рис. 54.
Будем отдельно рассматривать в этой конструкции цилиндрическую
1 2
часть f и коническую часть f и считать, что на линии X к каждой из них при-
приложены обобщенные силы (заменяющие действие отброшенных частей),
которые мы обозначим соответственно через
1111 2 2 2 2
Т, S, N, G и Т, S, N, d
$ 24] ОБОЛОЧКА С ИЗЛОМОМ. КРАЕВЫЕ ЗАДАЧИ 317
12
Тогда для f и f получатся однотипные задачи, рассмотренные в §§ 21.21,
21.22. Их решения можно получить, положив а = О, b = —2 (значение с
сейчас не существенно), что находится в соответствии с формулами B1.24.1).
Определение безмоментного и чисто моментного напряженных состояний (s)
1 2
как для f, так и для f, сводится при этом к решению задач, эквивалентных
полным безмоментным краевым задачам для консольных оболочек, подвер-
11 2 2
женных на краях X действию тангенциальных сил Т, S и Т, S соответственно.
Эти задачи рассмотрены в § 15.18. Анализ полученных там решений пока-
показывает, что произволы безмоментных геометрических уравнений полностью
определяются из условий заделки, а произволы безмоментных статических
11 2 2
уравнений выражаются через функции Т, S и Т, S. Таким образом, в без-
безмоментных и чисто моментных напряженных состояниях цилиндрической
и конической оболочек будут содержаться четыре
112 2
функции Т, S, T, S, которые пока не определены.
Естественно предположить, что их можно выбрать
(единственным образом) так, чтобы выполнились все
четыре условия сопряжения B1.24.6)—B1.24.8).
Тогда останутся невыполненными только требова-
требования B1.24.3), в которых слагаемые перенесенные в
правые части, надо рассматривать как известные ве-
величины, так как безмоментное и чисто моментное
напряженные состояния (s) предполагаются уже по- Рис. 55.
строенными. Эти требования надо наложить на про-
простые краевые эффекты (s), возникающие вблизи X. Они возникают по обе
стороны от линии излома X, а следовательно, зависят в общей сложности от
четырех произвольных функций. Для определения последних и должны
служить четыре равенства B1.24.3).
Таким образом, для рассмотренного примера B1.24.1) действительно
представляют собой непротиворечивые значения показателей интенсивности,
так как вытекающие из них равенства B1.24.2) и B1.24.3) можно рассма-
рассматривать как условия сопряжения для приближения (s).
Возможны и другие случаи, когда B1.24.2) и B1.24.3) становятся непри-
непригодными в качестве условий сопряжения для приближения (s). Чтобы пока-
показать это, рассмотрим „
Пример 2. Конструкция — такая же, как и в примере 1, но ее правый
край свободен (рис. 55).
Здесь снова коническую и цилиндрическую оболочки можно изучать
раздельно, но при этом оба края конической оболочки надо будет рассматри-
рассматривать как свободные. Эта задача обсуждалась в § 15.24, и там было показано,
что если заданы поверхностные силы и тангенциальные силы, приложенные
к одному краю оболочки, то на втором крае тангенциальные силы уже не
будут зависеть от.нашего выбора, так как они определятся из условий раз-
2 2
решимости задачи. Это значит, что функции Т, S, которыми мы распоряжа-
распоряжались в примере 1, теперь уже надо рассматривать как фиксированные и для
выполнения четырех условий сопряжения B1.24.6)—B1.24.8) в нашем распо-
1 1
ряжении останутся только две функции Т, S. Таким образом, при граничных
условиях, выбранных в примере 2, значения B1.24.1) только случайно могут
оказаться непротиворечивыми.
Итак, формулы B1.24.1) для непротиворечивых значений а, Ь, с' и
вытекающие из них условия сопряжения B1.24.2) и B1.24.3) оказались
318 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. ОБОЛОЧКИ [ГЛ. 21
применимы в примере 1 и неприменимы в примере 2. Обсудим, в чем заклю-
заключается различие между этими случаями. В примере 2 число статических
тангенциальных граничных условий и число геометрических тангенциальных
граничных условий или, что то же, тангенциальных закреплений, на обоих
краях в общей сложности равны друг другу. Будем для кратности говорить
про такую оболочку, что она не имеет лишних тангенциальных закреплений.
В примере 1 мы имеем дело с оболочкой, имеющей лишние закрепления.
Отсутствие лишних тангенциальных закреплений означает возможность
расчленить полную безмоментную краевую задачу на статическую задачу,
при решении которой учитываются статические граничные условия, и гео-
геометрическую задачу, решаемую с учетом геометрических граничных условий.
Если есть лишние тангенциальные закрепления, то такое разделение дела-
делается невозможным, так как в статической задаче граничных условий будет
недостаточно, а в геометрической их станет слишком много.
Возможность выделить статическую безмоментную задачу и является
препятствием при использовании обсуждаемых условий сочленения. В равен-
равенствах B1.24.6)—B1.24.8) содержатся три статических условия сочленения,
и все их надо выполнить при решении статической безмоментной задачи.
Это, вообще говоря, невозможно, так как статические безмоментные уравне-
уравнения эквивалентны уравнению второго порядка (§ 7.4).
Итак, область применимости формул B1.24.1) и условий сочленения
B1.24.2), B1.24.3) определяется требованием, чтобы оболочка имела лишние
тангенциальные закрепления (как, скажем, в примере 1).
§ 25. Оболочка с изломом срединной поверхности.
Краевые задачи (продолжение)
Наряду с B1.24.1) существует и другая непротиворечивая комбинация
значений а, Ь, с':
а = 0, 6 = — 1, с'=1. B1.25.1)
Ей соответствуют две следующие группы условий сопряжения для прибли-
приближения (s):
/01 OH 04
Гу(б)
«ili,}?
ИГ,
|2
}!-
= —
>}? =
— —
{DD>_i_D(M> _|_
fv<4) i v(M> i
12j(s) + 2j(s—3) -f
¦ICo + Ci,-
1,D) . ,F) ,
(на X);
^(sK)P>}l,
V<KP>12
- ^j(s) Jl>
1 ,j'kP» \2
f «2 (s--l)Il»
L /-(Kp))?
i (s) J1
= - {G\%_з> + G16(>_3, + GiM(UK, B1.25.3)
(на X).
Пусть оболочка представляет собой купол, имеющий излом вдоль вну-
внутренней замкнутой линии X. Примем, что край купола совмещен с линией
а1 = <х]0 и вдоль него оболочка закреплена только в одном (тангенциальном)
направлении. Это значит, что надо потребовать выполнения граничных
§ 26J ОБОЛОЧКА С ИЗЛОМОМ. КРАЕВЫЕ ЗАДАЧИ
условий
Р = 0, р = 0, Nt = 0, Gt = 0 (приа,=а10), B1.25.4)
совпадающих с B0.12.1), B0.12.24) и соответствующих случаю, когда лиш-
лишних тангенциальных закреплений нет. Для гладкой оболочки непротиворе-
непротиворечивые значения а, Ь, с в этом случае зависят от целочисленного параметра {г
и определяются формулами B0.12.5). Условия сопряжения B1.25.2),
B1.25.3), которые, как следует ожидать, должны найти применение в этом
случае, можно использовать вместе с граничными условиями B1.25.4) только
в том случае, когда B1.25.1) и B0.12.5) приводят к одинаковым значениям
а, Ь. Отсюда получаем ц = 3 и, следовательно,
а = о, &= —1, с= — 1, с' = 1. B1.25.5)
Этим равенствам соответствуют в приближении (s) граничные условия
d -f Gi'U + G!M(>) +G|"# = 0, B1.25.6)
= 0.
К ним надо присоединить условия сопряжения B1.25.2), B1.25.3), и
тогда будет применима следующая
Схема построения приближения (s):
A) Безмоментное напряженное состояние (s) определяется с учетом
первого граничного условия B1.25.6) и первых двух условий сопряжения
B1.25.2).
B) Чисто моментное напряженное состояние (s) определяется с учетом
второго граничного условия B1.25.6) и двух последних условий сопряжения
B1.25.2).
C) Простые краевые эффекты (s) по обе стороны от Я, определяются
с учетом четырех условий сопряжения B1.25.3).
D) Простой краевой эффект (s) вблизи края ах = а10 определяется
с учетом двух последних граничных условий B1.25.6).
Обоснование схемы. Краевые задачи, предусмотренные п. A) и B), пред-
представляют собой обобщение задач Р и р, сформулированных в § 20.12; разли-
различие заключается лишь в том, что в рассматриваемом случае они должны-
решаться для оболочки с изломом \ и что на А. в каждой задаче должны выпол-
выполняться два условия сопряжения. Примем, что теоремы существования задач
Pup здесь формулируются так же, как и в §20.12, 20.13. Тогда можно
утверждать, что обсуждаемая схема соответствует случаю, когда танген-
тангенциальное закрепление — жесткое, т. е. когда изгибания срединной поверх-
поверхности невозможны, а следовательно, задача Р при любых, достаточно глад-
гладких правых частях уравнений и граничных условий имеет решения, зави-
зависящие от г констант с/ (s), а задача р имеет решение (единственное) тогда и
только тогда, когда выполнены г интегральных требований. В рамках этоп>
предположения обоснование схемы построения приближения (s) превра-
превращается, в сущности, в повторение рассуждений § 20.12. Опуская их, оста-
. новимся только на следующем обстоятельстве.
Последнее равенство B1.25.2) должно быть использовано уже при реали-
реализации п. ^) обсуждаемой схемы, но в него входит величина rffi, связанная
320 ИТЕРАЦИОННОЕ ВЫПОЛНЕНИЕ ГРАНИЧНЫХ УСЛОВИЙ. ОБОЛОЧКИ (ГЛ. 21
с простым краевым эффектом (s), а последний, по предположению, должен
определяться только на этапе C). Это значит, что п. B) и C), строго говоря,
надо соединить в один пункт, заключающийся в совместном определении
чисто моментного напряженного состояния (s) и простых краевых эффектов
(s) вблизи Я. Однако последние выражаются явным образом через четыре
произвольные функции, и можно считать, что четвертое равенство B1.25.2)
вместе с равенствами B1.25.3) образует систему пяти уравнений, из которых
четыре произвольные функции краевых эффектов могут быть исключены.
В результате получится равенство, не содержащее членов с верхним индек-
индексом (кр). Его и можно принять за второе условие сопряжения для чисто
моментного напряженного состояния (s).
Условиями сопряжения B1.25.2), B1.25.3) можно пользоваться и в слу-
случае, когда оболочка имеет два края, из которых один жестко заделав, а дру-
другой свободен, т. е. в случае, когда граничные условия имеют вид B1.21.1),
B1.21.2).
Положим
а = 0, Ь = — \, с±=\, ct = — \, c' = \ B1.25.7)
и выпишем соответствующие граничные условия для приближения (s):
и\"Ъ = - и? A_„ - ы{б(>->, - ы1к(?1,„
„(м) (ч) (б) (кр)
(s) = «2 (s-1) U2(s-1) W2(s-1). ,9] „с оч
Л — vttU - v.F<U - Y.4U
(на ft);
т<б> т(ч> т<м> т<кр>
* 1 (s) = 1 1 (s) 1 \ (s—3) i I (s—2),
С(б) . о(ч) Ым) о(кр)
<->21 (s; = —О21 (s) O2l (s_3) -321 (s-2). ,„, пс Q\
А7(КР) М(Ч) д/(б) jLTtU) VZl.ZO.y)
« 1 (s) = « I (s—2) ^V 1 (s—2) Л/ j (s-1),
/7(кр) _ Л(Ч) г(б) г(ы)
(s) = Ul (s—1) ui (ч_1) Ol (S)
(На ft,).
К ним надо присоединить условия сопряжения B1.25.2), B1.25.3).
В результате станет возможна следующая
Схема построения приближения (s):
A) Безмоментное напряженное состояние (s) определяется с учетом
первых двух граничных условий B1.25.9) и первых двух условий сопря-
сопряжения B1.25.2).
B) Чисто моментное напряженное состояние (s) определяется с учетом
первых двух граничных условий B1.25.8) и последних двух условий сопря-
сопряжения B1.25.2).
C) Простые краевые эффекты (s) вблизи X определяются с учетом четы-
четырех условий сопряжения B1.25.3).
D) Простые краевые эффекты (s) вблизи gt и g2 определяются самостоя-
самостоятельно (предполагается, что края не слишком близки), вблизи gx учитываются
два последних граничных условия B1.25.8), а вблизи g2 — два последних
граничных условия B1.25.9).
Обоснование схемы. В ней допущена та же условность, что и в предыду-
предыдущей схеме этого параграфа: считается, что в последнем условии сопряжения
B1.25.2) величина /•{"/ исключена с помощью равенств B1.25.3).
Замечание. При s= 0 первые два граничных условия B1.25.8) будут однородными. По-
Поэтому, как нетрудно проверить, исходное приближение чисто моментного напряженного состоя-
состояния обратится в тождественный нуль для той части оболочки, край которой закреплен. Это не
противоречит высказанному в § 20.10 требованию, что не должны обращаться в тождественный
¦иуль исходные приближения в отдельности взятых безмоментного, чисто моментного наприжен-
$ 26] ОБОЛОЧКА С ИЗЛОМОМ. КРАЕВЫЕ ЗАДАЧИ 321
ных состояний и краевого эффекта. Дело в том, что условия сопряжения остаются неоднород-
неоднородными и при s = 0, и поэтому в другой части оболочки (имеющей свободный край) исходное при-
приближение чисто моментного напряженного состояния будет отлично от нуля. Таким образом,
обращение в нуль исходного приближения чисто моментного напряженного состояния на части
оболочки означает лишь, что эта часть будет относительно мало деформироваться.
Пп. A) и B) схемы в совокупности сводятся к решению полной краевой
безмоментной задачи для консольной оболочки, которая разобрана
в §§ 18.38, 18.39. Там было показано существование решения такой задачи
для гладкой оболочки (в точной или смягченной постановке), и мы примем
предположение, что это утверждение останется верным, когда есть излом,
на котором должны выполняться два статических и два геометрических усло-
условия сопряжения B1.25.2) Тогда применимость обсуждаемой схемы станет
очевидной.
Рассмотренные примеры показывают, что условия сопряжения B1.25.3),
B1.25.4) действительно непротиворечивы. Область их применимости, как и
следовало ожидать, ограничивается оболочками, не имеющими лишних тан-
тангенциальных закреплений.
21 А. Л. Гольдервейаер
ГЛАВА 22
ЗАВИСИМОСТЬ НАПРЯЖЕННОГО СОСТОЯНИЯ ОБОЛОЧКИ
ОТ УСЛОВИЙ ЗАКРЕПЛЕНИЯ ЕЕ КРАЕВ
§ 26. Безусловная и условная применимость
безмоментной теории
В § 7.3 безмоментная теория была определена как приближенный
метод исследования оболочек, базирующийся на возможности выделить
построение основного напряженного состояния в самостоятельную задачу,
не требующую введения в рассмотрение краевого эффекта. Просматривая
полученные здесь схемы построения приближения (s), замечаем, что в опре-
определенных случаях в них построение безмоментного и чисто моментного напря-
напряженных состояний во всех приближениях, включая приближение @), должно
производиться вначале, и оно не требует знания простого краевого эффекта
(s). В этих случаях для определения нулевого приближения безмоментного
и чисто моментного напряженных состояний не нужно знать даже нулевого
приближения простого краевого эффекта, а следовательно, эта операция
по смыслу совпадает с расчетом оболочки по безмоментной теории. Такими
свойствами обладают схемы построения приближения (s) в §§20.10—20.12,
21.18—21.21, 21.24.
Существуют и такие схемы построения приближения (s), в которых оты-
отыскание основного напряженного состояния (s) может быть закончено только
после того, как будет найден простой краевой эффект (s). Они приведены
в §§20.13—20.16, 21.19,21.22, 21.25. Вместе с тем простой краевой эффект
ясно выражается через произвольные функции точек породившей его линии
искажения, и эти функции при желании можно исключить. Рассмотрим,
например, схему, приведенную в § 20.13.- В ней безмоментное напряженное
состояние (s) должно удовлетворять первому граничному условию B0.13.2),
содержащему простой краевой эффект. Поэтому последний надо определять
раньше, требуя, чтобы его произвольные функции грх, гр2 удовлетворяли
граничным условиям B0.13.3). Присоединив B0.13-3) к первому граничному
условию B0.13.2), будем иметь три уравнения, содержащие две функции
¦фх, гр2. Их можно исключить и получить искомое граничное условие, кото-
которому должно подчиняться безмоментное напряженное состояние (s). Таким
образом, случаи, рассмотренные в §§20.13—20.16, 21.19, 21.22, 21.25, фор-
формально можно объединить со случаями, рассмотренными в §§20.10—20.12,
20.15, 21.18—21.21, 21.24, считая, что все они могут быть получены методом
расчленения и что всегда определение основного напряженного состояния
можно рассматривать как самостоятельную задачу, только иногда для
этого надо выполнить некоторые промежуточные выкладки, сводящиеся,
в сущности, к преобразованию граничных условий. Однако ниже мы увидим,
что, если основное напряженное состояние выделяется «чисто», то оно по своим
свойствам существенно отличается от основного напряженного состояния,
выделенного ценой предварительных преобразований. Поэтому мы будем
J 26] ПРИМЕНИМОСТЬ БЁЗМОМбНТНОЯ ТЕОРИИ 323
различать эти два случая и говорить, что в первом из них безмоментная тео-
теория применима безусловно, а во втором — что имеет место условная примени-
применимость безмоментной теории.
Замечание. Строго говоря, безусловная применимость безмоментной теории в соответствии
с определением, данным в §7.3, означает простую применимость этого приближенного метода,
а слова «условная применимость» в том же смысле надо было бы заменить словом «непримени-
«неприменимость». Однако в этом разделе будет удобнее предлагаемая терминология, подчеркивающая
возможность расширительного толкования столь важного понятия, как безмоментная теория.
Схемы построения приближения (s), приведенные в §§20.10—20.12,
20.15, 21.18—21.21, 21.24, показывают, что безмоментная теория безусловно
применима тогда, когда
(а) оболочка не имеет излома,
(б) возможно выделение двух тангенциальных граничных условий,
(в) тангенциальные закрепления обеспечивают жесткость срединной
поверхности оболочки,
(г) к краю оболочки не приложены нетангенциальные краевые силы.
Это значит, что оставаясь в круге рассмотренных здесь задач, надо к обо-
оболочкам, допускающим безусловную применимость безмоментной теории,
отнести
A) купола, закрепленные в обоих тангенциальных направлениях
(§20.11),
B) купола, имеющие одно жесткое тангенциальное закрепление (§§ 20.12,
20.15),
C) оболочки с двумя неасимптотическими краями, на каждом из кото-
которых поставлены два тангенциальных закрепления (§21.18),
D) оболочки с двумя неасимптотическими краями, на каждом из кото-
которых поставлено по одному тангенциальному жесткому закреплению (§§ 21.19.
21.20),
E) оболочки с двумя неасимптотическими краями, на одном из которых
поставлено два тангенциальных закрепления, а на другом тангенциальные
закрепления отсутствуют (§21.21).
Если срединная поверхность оболочки имеет излом на линии X, то,
помимо граничных условий, надо учитывать условия сопряжения. Для них
в §§21.24, 21.25 были получены два варианта. Безусловной применимости
безмоментной теории отвечает только тот из них, который приведен в § 21.24.
Поэтому к сказанному можно добавить, что для оболочек с изломом безмо-
безмоментная теория будет, безусловно, применима только тогда, когда выпол-
выполняются требования (б), (г) и, кроме того,
(д) оболочка имеет лишние тангенциальные закрепления.
Таким образом, в приведенном выше списке оболочек, допускающих
безусловную применимость безмоментной теории, излом срединной поверх-
поверхности могут иметь только оболочки A) и C). Если излом имеют оболочки B),
D) и E), то к ним безмоментная теория будет применима лишь условно.
Для безусловной применимости безмоментной теории надо, как уже
говорилось, чтобы граничные условия разделялись на тангенциальные и
нетангенциальные. Просмотрев еще раз соответствующие схемы построения
приближения @), можно заметить, что в этих случаях при определении нуле-
нулевого приближения основного напряженного состояния используются только
тангенциальные граничные условия. Поэтому различие между безусловной
и условной применимостью безмоментной теории можно охарактеризовать
и так. Безмоментная теория безусловно применима тогда, когда существует
основное напряженное состояние @), удовлетворяющее тангенциальным гра-
граничным условиям и (если есть излом) первому варианту условий сопряжения.
Безмоментная теория условна применима тогда, когда (для гладких
21*
324 ЗАКРЕПЛЕНИЕ ОБОЛОЧКИ И ЕЕ НАПРЯЖЕННОЕ СОСТОЯНИЕ [ГЛ. -22
оболочек) существует основное напряженное состояние @), удовлетворяющее
тангенциальным граничным условиям, должным образом преобразованным при
помощи нетангенциальных граничных условий, или тогда, когда (для оболо-
оболочек с изломом) существует основное напряженное состояние @),' удовлетво-
удовлетворяющее тангенциальным граничным условиям и второму варианту условий
сопряжения,
§ 27. Физический смысл непротиворечивых значений
показателей интенсивности
Безмоментное напряженное состояние определяется разложениями
A9.2.2). Из них, учитывая формулы
<=VT
h T 3G
можно сделать вывод, что оно имеет следующую асимптотику:
af> = О (г,-"), oh6) = О (тГ1), «$> = О (тГ*2), tfl6) = О (тГ), B2.27.1)
где (а{т\ (Х$\ ct'g6)) — напряжения от тангенциальных усилий, перерезы-
перерезывающих усилий н моментов соответственно, ,UF)- — вектор смещения.
Точно так же из разложений A9.3.1) и A9.8.8), вытекают следующие
асимптотики для чисто моментного напряженного состояния:
оР = О (Ч-ь), <#> = О (т,"*), <#> = О (тГ"-2), ?/<"> = О (г,-") B2.27.2)
и для простого краевого эффекта
аГ> = О (тГ*-2), а#р) = О (тГ). аЬкр) = О (г,"^2), ?/ = 0^).
B2.27.3)
Простой краевой эффект имеет довольно сложную асимптотику. Здесь,
например, различные тангенциальные усилия, обозначенные в совокупности
через Т, ведут себя различно (нормальное усилие в сечении, ортогональном
к линии искажения, имеет наибольший порядок). Поэтому в B2.27.3) ука-
указывается асимптотика наибольшей из величин, входящих в данную группу.
Если линия искажения совмещена с ах == а10, то надо считать, что
а под U следует понимать нормальный прогиб w.
При заданных а, Ь, с формулы B2.27.1)—B2.27.3) позволяют сравни-
сравнивать между собой безмоментное напряженное состояние, чисто моментное
напряженное состояние и простой краевой эффект, т. е. определять относи-
относительный порядок вклада перечисленных напряженных состояний в полное
напряженное состояние оболочки. Такое сравнение можно производить двоя-
двояким образом: по напряжениям и перемещениям. Сравнение по напряжениям
(конечно, подразумеваются напряжения, имеющие наивысший порядок)
показывают, что равенства
а = Ъ = с B2.27\4)
представляют собой условия асимптотической эквивалентности всех напря-
напряженных состояний по напряжениям.
Равным образом условиями асимптотической эквивалентности по пере-
перемещениям служат равенства
а = Ь -1- 2 = с. B2.27.5)
$ 28) АСИМПТОТИКА НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ 325
Когда нарушаются условия асимптотической эквивалентности по напря-
напряжениям и имеет место, например, равенство
а = b + s (s — целое, положительное),
то будем говорить, что чисто моментные напряжения на s порядков больше
безмоментных напряжений.
Замечание. Считается, что величина А иа порядок больше величины В, если
т. е., если относительная толщина оболочки равна 0,01, то слова «иа порядок больше» имеют
обычный смысл, означающий, грубо говоря, увеличение в десять раз.
Итак, значения показателей интенсивности а, Ь, с определяют каче-
качественную характеристику напряженного состояния оболочки. Так, напри-
например, если
а = 0, Ь = — 2, с=0,
то получается следующая характерная для многих реальных оболочек кар-
картина. Вдали от краев и других линий искажения господствует безмоментное
напряженное состояние (моментные напряжения в этих зонах на два порядка
меньше безмоментных), а по перемещениям чисто моментное и безмоментное
напряженные состояния эквивалентны; у линии искажения появляется
простой краевой эффект, который накладывается на безмоментное напряжен-
напряженное состояние и асимптотически эквивалентен ему как по напряжениям,
так и по перемещениям. Из формул B2.27.3) видно, что в простом краевом
эффекте напряжения от тангенциальных усилий и от моментов асимптоти-
асимптотически эквивалентны друг другу. Это значит, что у линии искажения без-
моментность напряженного состояния оболочки, вообще говоря, будет
утрачена.
В дальнейшем, если выполняются равенства
а = О, Ъ = 2, B2.27.6)
мы будем говорить, что напряженно-деформированное состояние оболочки
имеет оптимальную асимптотику, так как можно показать, что вдали от краев
для напряжений и перемещений лучшей асимптотики достигнуть нельзя
(конечно, если не уменьшается порядок приложенных сил).
§ 28. Асимптотика напряженно-деформированного состояния
при безусловной и условной применимости
безмоментной теории
Область условной применимости безмоментной теории включает случаи:
(а) когда тангенциальные закрепления оболочки — не жесткие
(§§20.13, 20.14, 20.16, 21.19, 21.20);
(б) когда единственное закрепление (не считая закреплений от поворо-
поворотов) является косым (§20.15);
(в) когда на оболочку действуют краевые нормальные силы или мо-
моменты (§21.22);
(г) когда оболочка имеет излом, а лишние тангенциальные закрепления
у нее отсутствуют (§21.25).
Во всех этих случаях непротиворечивые значения обладают следую-
следующими свойствами:
а = 0, 6> — 2, с>0. B2.28.1)
326 ЗАКРЕПЛЕНИЕ ОБОЛОЧКИ И ЕЕ НАПРЯЖЕННОЕ СОСТОЯНИЕ [ГЛ. 22
В противоположность этому в случаях безусловной применимости безмо-
ментной теории свойства непротиворечивых показателей изменяемости выра-
выражаются соотношениями
. а = 0, Ь = — 2, с<0. B2.28.2)
Это значит, что оболочки, допускающие условную и безусловную приме-
применимость безмоментной теории, отличаются друг от друга не только по фор-
формальным математическим признакам, но по существенным свойствам их
напряженно-деформированных состояний. Если безмоментная теория при-
применима безусловно, то асимптотика ее напряженно-деформированного состоя-
состояния оптимальна, а если безмоментная теория может быть применена лишь
условно, то это приводит к ухудшению асимптотики напряженно-деформи-
напряженно-деформированного состояния оболочки как внутри оболочки, так и вблизи линий
искажения.
Исключением из сформулированного правила является случай, когда
тангенциальные закрепления оболочки — жесткие, но непосредственное
применение безмоментной теории невозможно потому, что к краю оболочки
приложены нормальные силы или моменты. Тогда для а, Ь, с получаются
формулы B1.22.5) или B1.22.6), и следовательно, второе соотношение B2.28.1)
переходит в равенство Ь = —2. Это значит, что в таких оболочках вдали
от краев асимптотика напряженно-деформированного состояния остается
оптимальной. Приложение краевых сил ухудшает только асимптотику крае-
краевого напряженно-деформированного состояния. Ухудшение получается зна-
значительным, что совершенно естественно, так как здесь простой краевой эффект
служит передаточным звеном, трансформируя внешние нетангенциальные
силы во внутренние тангенциальные воздействия.
Второе соотношение B2.28.1) в ряде случаев конкретно значит, что фор-
формулы B2.27.6), отвечающие оптимальной асимптотике, заменяются равен-
равенствами
а = 0, 6= — 1, B2.28.3)
из которых следует, что
а>Ь, Ъ + 2 > а. B2.28.4)
Первое неравенство B2.28.4) показывает, что безмоментное напряжен-
напряженное состояние остается преобладающим, т. е. вдали от краев напряжения
в основном будут обусловливаться тангенциальными усилиями, и асимпто-
асимптотика останется оптимальной. Второе неравенство B2.28.4) означает наруше-
нарушение эквивалентности безмоментного и чисто моментного напряженных состоя-
состояний по перемещениям. Преобладать будут чисто моментные перемещения,
т. е. вдали от краев деформативность оболочки по сравнению с оптимальной
возрастет на порядок.
Итак, равенства B2.28.3) означают существенное увеличение деформаг
тивности оболочек при сохранении асимптотики напряженного состояния.
Это явление будет иметь место в следующих случаях:
(а) когда жесткие тангенциальные закрепления заменяются жесткими
косыми закреплениями (§20.15);
(б) когда у оболочки есть излом, лишних тангенциальных закреплений
нет, а имеющиеся тангенциальные закрепления обеспечивают жесткость
срединной поверхности;
(в) когда тангенциальные закрепления не обеспечивают жесткости
срединной поверхности.
Особого внимания заслуживает случай (в). При этом, как показано
в §§20.13, 20.15, 21.20, число Ъ — показатель интенсивности чисто момент-
моментного напряженного состояния — зависит от того, имеются ли нетангенциаль-
§ 28] АСИМПТОТИКА НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ 327
ные закрепления и обращается ли в нуль работа внешних сил на перемеще-
перемещениях возможных изгибаний.
Примером, в котором Ь увеличивается относительно мало, служит задача,
рассмотренная в §21.20. Ей (с некоторыми оговорками) соответствует кон-
конструкция, рассматриваемая в работе В. 3. Власова [32], т. е. оболочка
в форме однополосного гиперболоида вращения, закрытая по двум попереч-
поперечным сечениям относительно тонкими днищами. Если принять, как это обычно
делается, что днища абсолютно жестки в своей плоскости и абсолютно подат-
податливы как в линейном направлении, нормальном плоскости днища, так и в угло-
угловом направлении, то мы придем к условиям вида B1.20.1) (различие между
нормальными и косыми закреплениями в данном случае,не'существенны).
Для полученной задачи были найдены два варианта непротиворечивых зна-
значений а, Ь, с]( с2. Первый из них задается формулами B1.20.2) и относится
к случаю, когда размеры срединной поверхности — не собственные, второй
вариант B1.20.3) справедлив для оболочки, имеющей собственные [размеры.
Переход от B1.20.2) к B1.20.3) означает ухудшение асимптотики [напря-
[напряженно-деформированного состояния оболочки: у краев получается повыше-
повышение напряженности и деформативности, а вдали от краев повышается только
деформати вность.
Таким образом, попадание на собственный размер, когда тангенциаль-
тангенциальные закрепления становятся нежесткими, в данном случае приводит к уве-
увеличению показателя интенсивности чисто моментного напряженного состоя-
состояния лишь на одну единицу (благодаря дополнительным нетангенциальным
закреплениям). Однако эта единица означает увеличение на порядок, и не
приходится удивляться, что на моделях, которые изготовлял В. 3. Власов,
повышенная деформативность при попадании на собственные размеры обна-
обнаруживалась даже без приборов.
В качестве наихудшего варианта в случае (в) могут получаться ра-
равенства
а = 0, & = — 2. B2.28.5)
Они, например, будут иметь место, если край (или все края, когда их
несколько) совсем не имеет закреплений, в том числе и нетангенциальных
(§20.16).
Сравнив B2.28.5) с B2.27.4) и B2.27.5), заключаем, что в незакрепленных
оболочках вдали от линий искажения интенсивность напряженно-деформи-
напряженно-деформированного состояния будет превышать интенсивность оптимального напря-
напряженно-деформированного состояния на два порядка по напряжениям и на
четыре порядка по перемещениям, т. е. при относительной толщине, равной
0,01, грубо говоря, напряжения увеличатся в 100 раз, а перемеще-
перемещения в 10 000 раз. Конечно, это — чисто формальный результат. При на-
нагрузках, обычно передаваемых на оболочки, перемещения будут настолько
велики, что расчет придется вести по нелинейной теории, однако отсюда
следует качественный вывод об огромном влиянии, которое могут оказать
краевые закрепления на масштабы напряженности и деформативности
оболочки.
Показатели интенсивности B2.28.5) определяют наихудшую асимптотику
основного напряженно-деформированного состояния оболочки. Дальней-
Дальнейшее существенное увеличение напряженности или деформативности может
произойти только за счет существенного увеличения интенсивности внешних
сил. Наоборот, улучшение асимптотики основного напряженного состоя-
состояния при нежестких тангенциальных закреплениях или при их отсутствии
возможно. Формулы B0.16.2) показывают, что такого результата можно дос-
достичь введением нетангенциальных закреплений. Остановимся на этом под-
подробнее.
328 ЗАКРЕПЛЕНИЕ ОБОЛОЧКИ И ЕЕ НАПРЯЖЕННОЕ СОСТОЯНИЕ [ГЛ. 22
Напомним, что равенствами B0.16.2) задаются показатели интенсивности
для куполообразной оболочки, на краю которой тангенциальные закреплег
ния отсутствуют. Приводятся четыре варианта, соответствующие четырем
типам нетангенциальных граничных условий B0.12.2). Число ц, в B0.16.2)
выбирается в зависимости от того, с какой точностью внешние силы удо-
удовлетворяют условиям теоремы о возможных изгибаниях, и если эти условия
не выполняются в главных членах, то надо положить ц, = 0.
Из B0.16.2) и B0.12.2) следует, что нетангенциальные закрепления
улучшают асимптотику основного напряженного состояния. Введение закре-
закрепления в направлении нормали (варианты A) и B) нетангенциальных гра-
граничных условий) снижает интенсивность чисто моментного напряженного
состояния на три порядка. В результате асимптотика основного напряжен-
напряженного состояния будет характеризоваться формулами B2.28.3), т. е. останется
повышенной (на один порядок) только деформативнрсть оболочки.
Угловое закрепление (вариант C) нетангенциальных граничных условий)
снижает интенсивность чисто моментного напряженного состояния на один
порядок. В результате основное напряженное состояние по сравнению с опти-
оптимальным случаем будет интенсивнее на один порядок по напряженности и
на три порядка по деформативности.
Все эти выводы вытекают из рассмотрения случая, когда на краю обо-
оболочки тангенциальные закрепления совсем отсутствуют. Однако они остаются
в силе и тогда, когда имеется одно тангенциальное закрепление, если оно
нежесткое. В этом можно убедиться, просмотрев формулы B0.13.1) и B0.13.8),
которые показывают, что нежесткое тангенциальное закрепление не оказы-
оказывает влияния на асимптотику напряженного состояния. Значение такого
закрепления заключается лишь в том, что оно сокращает число линейно
независимых изгибаний срединной поверхности, а следовательно, и умень-
уменьшает число условий, которые по теореме о возможных изгибаниях надо выпол-
выполнить, чтобы стало возможным решение полной краевой задачи безмоментнои
теории. В частности, может случиться, что тангенциальное закрепление
оставит возможными лишь так называемые тривиальные изгибания, т. е.
смещения срединной поверхности как жесткого целого (примеры см. § 17.32).
Тогда изменятся и выводы, относящиеся к асимптотике основного напряжен-
напряженного состояния оболочки. Действительно, если возможные изгибания три-
тривиальны, то им отвечают нулевые компоненты изгибной деформации xlt
т, к2. Это значит, что в исходных приближениях чисто моментного напря-
напряженного состояния обратятся в нуль все усилия и моменты, а последние и
порождают напряжения наибольшей интенсивности. Более подробно на этом
случае мы останавливаться не будем.
§ 29. Случай неустойчивой асимптотики
напряженно-деформированного состояния оболочки
Как уже упоминалось, асимптотика напряженного состояния оболочки,
не имеющей жестких тангенциальных закреплений, улучшается, если работа
приложенных к ней внешних сил на возможных (допускаемых тангенциаль-
тангенциальными закреплениями) перемещениях будет с той или иной точностью обра-
обращаться в нуль. В этом случае в формулах B0.16.2) и подобных им надо выби-
выбирать число ц отличным от нуля и давать ему тем большее значение, чем точ-
точнее обращается в нуль работа внешних сил. Если последняя точно равна
нулю, то для ц надо выбирать максимальное из значений, которые допускают
неравенства, указанные в B0.16.2). Нетрудно заметить, что выбрав для \i
максимально допустимое значение, мы во всех вариантах получим формулы
B2.27.6). Это значит, что, если тангенциальные закрепления оболочки неже-
нежестки (в частности, вовсе отсутствуют), но работа внешних сил на перемеще-
$ 29] СЛУЧАЙ НЕУСТОЙЧИВОЙ АСИМПТОТИКИ 329
ниях допускаемых ими изгибаний с достаточной точностью равна нулю,
то асимптотика напряженного состояния станет такой же, как и в случаях,
когда безмоментная теория применима безусловно. Однако к физическому
истолкованию этого результата надо относиться с большой осторожностью,
как вытекает из нижеследующих соображений.
Рассмотрим формулы B0.16.2*), т. е. будем считать, что на единственном
краю оболочки отсутствуют и тангенциальные, и нетангенциальные закре-
закрепления. Тогда оптимальная асимптотика B2.27.6) получится лишь при ц = 4,
т. е. только тогда, когда работа внешних сил на возможных перемещениях
будет равна нулю с ничтожной погрешностью О (т|4) (при hlr = 0,01 — с по-
погрешностью порядка 0,0001). Малейшее изменение характера внешних сил,
если оно сопровождается нарушением условия нулевой работы, будет в корне
менять свойства напряженно-деформированного состояния оболочки. Так,
например, при изменении нагрузки на величину порядка О (тK) надо положить
у. = 3, что приведет к формулам
а = 0, Ь= — 1, с = — 1,
т. е. будет означать повышение деформативности на порядок (при hlr = 0,01
получается, что изменение нагрузки на величину порядка 0,1 % вызовет уве-
увеличение перемещений в 10 раз). Если отклонение нагрузки достигнет вели-
величины порядка О (т|2), то надо считать ц = 2.
Отсюда
а = 0, 6 = 0, с=0.
Вдали от краев деформативность увеличится на два порядка, а напря-
напряженное состояние качественно изменится, перейдя из безмоментного в сме-
смешанное (моментно-безмоментное).
Таким образом, в оболочке с нежесткими тангенциальными закреплениями
может иметь место неустойчивость асимптотики напряженно-деформиро-
напряженно-деформированного состояния, т. е. явление, заключающееся в том, что исчезающе малые
(при h —» 0) изменения во внешней нагрузке вызывают не малые изменения
напряженности и деформативности оболочки (отклонения от невозмущенного
случая могут даже неограниченно расти).
Неустойчивость асимптотики напряженного состояния оболочки наи-
наиболее ярко проявляется в рассмотренном выше случае, когда тангенциаль-
тангенциальные закрепления нежестки, а нетангенциальные закрепления отсутствуют.
Введение нетангенциальных закреплений ослабляет или совсем уничтожает
это явление, как видно из соотношений B0.16.2). Если оболочка имеет закре-
закрепление в направлении нормали, т. е. если осуществлены варианты A) или
B) нетангенциальных граничных условий, то оптимальная асимптотика
получится уже тогда, когда работа внешних сил на возможных перемещениях
станет равной нулю с точностью до величин порядка О (т|), а при увеличении
этой погрешности будет быстро расти только деформативность оболочки,
но не ее напряженность. Промежуточное положение занимают оболочки,
на краю которых осуществлено только угловое закрепление (вариант C)
нетангенциальных граничных условий). Тогда условие нулевой работы внеш-
внешних сил надо выполнить уже с точностью до величин порядка О (п3), а боль-
большие погрешности, например порядка О (тI), приведут уже не только к воз-
возрастанию деформативности (на два порядка), но и к коренному изменению
характера напряженности: к переходу от безмоментного к смешанному напря-
напряженному состоянию.
Замечание. В оболочке с нежесткими тангенциальными закреплениями можно получить
напряженное состояние с оптимальной асимптотнкой (неустончнвон) выполннв условне нулевой
работы внешних сил. Однако даже в этом случае надо считать, что безмоментиая теория приме-
330 ЗАКРЕПЛЕНИЕ ОБОЛОЧКИ И ЕЕ НАПРЯЖЕННОЕ СОСТОЯНИЕ [ГЛ. 22
нима только условно. В этом читатель может удебиться, просмотрев еще раз соответствующие
схемы построения приближения (s) и обратив внимание на то, что безмоментная теория счи-
считается безусловно применимой, если решения безмоментных уравнений с учетом тангенциаль-
тангенциальных граничных условий не только возможны, но и единственны, так как иначе для определе-
определения оставшихся произволов надо ввести в рассмотрение следующее приближение, а следова-
следовательно, в какой-то мере учесть и простые краевые эффекты.
Таким образом, если сравнить оболочку с жесткими тангенциальными
закреплениями, с одной стороны, и оболочку с нежесткими тангенциальными
закреплениями и нагрузкой, не совершающей работы, с другой стороны,
то, хотя асимптотика их напряженного состояния и будет одинаковой,
но между ними существует важное различие: в оболочке второго типа асимп-
асимптотика неустойчива и безмоментная теория к ней применима лишь условно.
§ 30. Зависимость асимптотики напряженно-деформированного
состояния оболочки от нетангенциальных закреплений
Сформулируем теперь некоторые выводы, относящиеся к влиянию нетан-
нетангенциальных закреплений на напряженное состояние оболочки.
В тех случаях, когда оболочка имеет жесткие тагненциальные закрепле-
закрепления, роль нетангенциальных закреплений отрицательна: они только увели-
увеличивают интенсивность простого краевого эффекта. Это в равной мере видно
из равенств B0.11.3), относящихся к оболочке с двумя тангенциальными
закреплениями, и из равенств B0.12.2), B0.12.8), относящихся к оболочке
с одним жестким тангенциальным закреплением.
В обоих случаях при отсутствии нетангенциальных закреплений, т. е.
при нетангенциальных граничных условиях B0.12.2*), получается с = —2,
что соответствует наилучшей асимптотике простого краевого эффекта (послед-
(последний и по напряжениям, и по деформациям на два порядка менее интенсивен,
чем основное напряженное состояние).
Введение углового закрепления, т. е. принятие нетангенциальных гра-
граничных условий B0.12.23), приводит к равенству с = —1, что отвечает ухуд-
ухудшению асимптотики простого краевого эффекта на один порядок (он, однако,
останется менее интенсивным, чем основное напряженное состояние).
Введение закрепления в направлении нормали (безразлично — одного
или в совокупности с угловым закреплением), т. е. принятие нетангенциаль-
нетангенциальных граничных условий B0.12.21) или B0.12.22) ухудшает асимптотику про-
простого краевого эффекта на два порядка и делает его уже соизмеримым с основ-
основным напряженным состоянием.
Из сказанного, разумеется, не следует, что всегда надо стараться осво-
освободить края оболочки от нетангенциальных закреплений. Если тангенциаль-
тангенциальные закрепления нежестки, то нетангенциальные закрепления улучшают асим-
асимптотику напряженно-деформированного состояния оболочки. Об этом говорят
формулы B0.16.2), относящиеся к случаю, когда тангенциальных закрепле-
закреплений вовсе нет. Тогда при любых ц (при любой точности выполнения условия
нулевой работы внешних сил на возможных перемещениях) с введением не-
нетангенциальных закреплений асимптотика основного напряженно-дефор-
напряженно-деформированного состояния улучшается. Наихудшая асимптотика B0.16.24)
получается, когда нетангенциальных закреплений нет. Несколько лучшую
асимптотику B0.16.23) дает введение углового закрепления, а наилучшую
асимптотику B0.16.21) или B0.16.22) обеспечивает закрепление, располо-
расположенное по нормали. Однако нетангенциальные закрепления никогда не
становятся эквивалентными тангенциальными, так как при ц = 0 получить
оптимальные равенства B2.27.6) не удается.
В главах 20—22 исследовано влияние условий закрепления краев
оболочки на асимптотику ее напряженно-деформированного состояния.
§ 30] ВЛИЯНИЕ НЕТАНГЕНЦИАЛЬНЫХ ЗАКРЕПЛЕНИЙ 331
При этом мы не имели возможности обсудить влияние некоторых других
факторов.
К ним, например, относятся:
A) величина показателя изменяемости внешних сил 0 (считалось, что
6 =0);
B) некоторые особенности геометрической формы срединной поверх-
поверхности (из рассмотрения были исключены оболочки с особой поверхностью);
C) расположение краев оболочки (считалось, что края — неасимпто-
неасимптотические);
D) соотношение между жесткостью оболочки и краевых подкреплений
(учитывались только идеализированные граничные условия);
E) знак кривизны срединной поверхности К (учитывались только свя-
связанные со знаком К особенности формулировок теорем существования реше-
решений безмоментных краевых задач, но не обсуждались возможные послед-
последствия некорректности этих задач).
Часть V
КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
В части V рассмотрена относительно простая с математической точки
зрения теория круговых цилиндрических оболочек. Она представляет инте-
интерес по следующим соображениям.
Прежде всего именно цилиндрические оболочки чаще любых других
находят применение на практике. Кроме того, эти оболочки при определен-
определенных условиях закрепления краев допускают точное решение (в тригономе-
тригонометрических рядах), структура которого может быть выражена при помощи
некоторого числа явных, хотя и довольно громоздких формул. Это позво-
позволяет на основе элементарных соображений выявить роль тех или иных фак-
факторов на окончательный результат расчета, и, следовательно, конкретно
проверить те общие соображения о различных приближенных подходах,
которые были изложены в части II.
Таким образом, здесь цилиндрическая оболочка использована как эта-
эталон, и надо заметить, что в этом отношении она очень удобна. Дело в том,
что несмотря на относительную простоту своей геометрии, цилиндрическая
оболочка является объектом, для которого возможности применения различ-
различных приближенных методов расчета переплетаются весьма сложным образом.
Изучение свойств цилиндрической оболочки в части V выполняется сле-
следующим образом. При помощи тригонометрических рядов и применения
метода Эйлера задача построения каждого члена разложения сводится к иссле-
исследованию некоторого алгебраического уравнения восьмой степени (характе-
(характеристического уравнения), в коэффициенты которого входит малый параметр h%
и еще один параметр, связанный с номером рассматриваемого члена разло-
разложения. Последний может принимать (в известных рамках) как большие,
так и малые значения. Поэтому можно поставить вопрос об асимптотической
зависимости модулей корней характеристического уравнения от упомянутых
параметров. Он решается элементарными приемами, и располагая ответом,
мы можем получать оценки любого члена в формулах, определяющих напря-
напряженно-деформированное состояние оболочки, а следовательно, и судить
о ценности того или иного приближенного метода, а также выяснить область
его применимости [48, 89, 182]. С этой точки зрения на примере круговой
цилиндрической оболочки обсуждены практически все приближенные методы,
описанные в части IL
ГЛ А В А 23
ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ
§ 1. Уравнения теории круговых
цилиндрических оболочек
Для цилиндрической оболочки произвольного очертания в §11.28
были построены на срединной поверхности криволинейные координаты.
В них под «1 подразумевалось расстояние по прямолинейной образующей,
а за а2 принят произвольный параметр, задающий точку на направляющей
кривой. При этом
Если под аг также подразумевать длину дуги, то первая квадратичная
форма будет иметь вид
ds2 = da\ + dai
В теории круговых цилиндрических оболочек удобно принять, что
а, = rl, а2 = г9,
где г — радиус оболочки, ? — относительные (измеренные в долях г) рас-
расстояния по образующей, 9 — относительное расстояние по направляющему
кругу, т. е. центральный угол. При этом первая квадратичная форма запи-
запишется так:
ds2 = r2 dl2 + r2 d32,
откуда следует, что
Аг = Ла = г.
Имеют силу также очевидные формулы
Ri = /?!„ = ©О, #2 = Г.
Подставив эти выражения в общие соотношения теории оболочек, получим
для круговой цилиндрической оболочки
Уравнения равновесия F.44.1)
^ + ^ + 'XO *jjL + *fЛГ + ХО
334 ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ 1.ГЛ. 23
Формулы «деформации—перемещения, углы поворота» F.44.3)
Уравнения состояния E.28.4)
^ (e + v
J,
c
)'
2Eh3
2Eh
2
3A
2Eh
Etf
- V8i),
2Eh /i^i.JL\ <; —
(принят вариант Л. И. Балабуха—В. В. Новожилова; он, как известно, согла-
согласован с шестым уравнением равновесия, поэтому последнее здесь не выписано
и в дальнейшем не будет приниматься во внимание).
Исключив перерезывающие усилия в уравнениях равновесия B3.1.1),
получим
dG2 dHtl
n 2
B3.1.4)
Из B3.1.2) и B3.1.3) выводим следующие формулы, связывающие тан-
тангенциальные усилия и моменты с перемещениями:
= _2Ек_Гди^ /ди2__w\) T __2a_fJ«? J^l
и,),
в которых принято обозначение
а2 = -з5- B3.1.6)
§ 2] РАЗРЕШАЮЩЕЕ УРАВНЕНИЕ 335
Наконец, при помощи B3.1.1), B3.1.5), B3.1.6) можно получить уравне-
уравнения равновесия в перемещениях для круговой цилиндрической оболочки:
—4- X~v д* \и Л- 1+v a2"a v dw _ы2Х -п
B3.1.7)
a2 a2
где Д = -^p- + -^gg- — оператор Лапласа,
-у J_— V^ у -y 1 — V2 у 7 _ 1 — va 7
Al ~ ~~2?ft~ Al' Ла ~ ~Т?Л^ Ла> Z ~ 2Eh Л"
Система B3.1.7) содержит три уравнения с тремя неизвестными. Из нее
мы и будем исходить в этом разделе книги, имея в виду две основные задачи:
1) задачу расчета замкнутой в поперечном сечении оболочки, ограни-
ограниченной двумя плоскими сечениями, ортогональными оси цилиндра; сюда
мы отнесем и предельные случаи, когда одно или оба концевые сечения обо-
оболочки бесконечно удалены (полубесконечная и бесконечная замкнутая обо-
оболочки);
2) задачу расчета открытой оболочки, которая, помимо указанных
выше поперечных краев, имеет продольные края, идущие вдоль образую-
образующих цилиндра.
Для открытой оболочки должны быть выполнены: а) четыре граничных
условия на каждом из двух поперечных краев ? = ?i и ? = ?а; б) четыре
граничных условия на каждом из двух продольных краев 0 = 01и0 = 02.
Для замкнутой оболочки должны быть выполнены: а) четыре граничных усло-
условия на каждом из двух поперечных краев ? = ?х и \ = |2; б) восемь условий
возврата, заключающихся в требовании, чтобы усилия, моменты, переме-
перемещения и углы поворота на продольных сечениях возвращались к своим пер-
первоначальным значениям после обхода поперечного контура.
§ 2. Разрешающее уравнение
Приведем систему B3.1.7) к одному уравнению, воспользовавшись опе-
операторным методом. Он основан на том, что коэффициенты уравнений B3.1.7)
постоянны и эти соотношения можно рассматривать как алгебраические урав-
уравнения (относительно ult u2, w), в коэффициенты которых наряду с другими
величинами входят и символы дифференцирования д/д% и д/dQ (символ крат-
кратного дифференцирования рассматривается как произведение соответствую-
соответствующих степеней 5/5? и d/dQ).
Составим определитель уравнений B3.1.7):
0 =
?. + i=XJL i_+v_ai_ a.
??a 2 d92 2 dfc дв ЙЕ
i + v d' i-v аг , a2 .
2 ag^e
ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ [ГЛ. 23
и рычислим некоторые его миноры, оперируя символами дифференцирования
как алгебраическими величинами. Получим
¦ v(l-v) &
-г 2 ^8 г
а»
A—v)B+v) ffl , 1— v
B3.2.1)
Положим
. «, = S ^.^^ и, = S ЯЛ. ю = S ^^s B3.2.2)
4=1
и подставим эти выражения в исходные уравнения B3.1.7). Тогда в соответ-
соответствии с известными теоремами теории линейных алгебраических уравнений
мы получим три соотношения:
a -f 2X2 = 0, DW3— r2Z = 0, B3.2.3)
где D — выписанный выше определитель рассматриваемой системы уравне-
уравнений, который в раскрытом виде записывается так:
Таким образом, если Ч^щ, Wi0 и Ч^зо — какие-либо частные интегралы урав-
уравнений B3.2.3), то и10, ы2о> w0, определяемые формулами
3
= S Dls4
s=1
fs0. «20 =
3
V ?) TJf
s=1
3
s=l
дают частный интеграл исходных неоднородных уравнений. Это утвержде-
утверждение основано на том, что все действия, которые нам пришлось здесь выпол-
выполнять, сводились к сложениям, вычитаниям и умножениям, а при этом, как
известно, символы дифференцирования ведут себя как алгебраические вели-
величины (конечно, если коэффициенты при них постоянны).
Тройку функций «Г, «2, w*, составляющих интеграл однородной системы,
соответствующей уравнениям B3.1.7), можно также искать в виде B3.2.2).
Для определения fj, W2, W3 мы получим при этом вместо B3.2.3) три урав-
уравнения
DW.t = О, DW, = О, DW3 = 0. B3.2.4)
i 2] РАЗРЕШАЮЩЕЕ УРАВНЕНИЕ 337
Таким образом, функции и*. и%, w*, определяемые равенствами
О О О
и\ = S АЛ'', «2 = S ft.YJ, ю = S А*МГ.
^l l 1
S
s=l
будут давать интеграл однородных уравнений B3.1.7) для любых W*, Щ,
Wt, удовлетворяющих уравнениям B3.2^4). В частности, можно положить
Тогда каждому решению уравнения
DO = 0 B3.2.5)
будет соответствовать интеграл однородных уравнений равновесия в пере-
перемещениях B3.1.7), определяемый формулами
| ^ ^ B3.2.6)
Обратное положение, как мы увидим впоследствии, неверно: не всякий
интеграл однородных уравнений B3.1.7) может быть выражен через интеграл
уравнения B3.2.5) формулами B3.2.6).
Развернув символы D13, ?>2з> ^зз согласно B3.2.1) и отбросив в обо-
обозначениях искомых функций звездочки, мы можем переписать B3.2.6) в виде
A+v)B-v> дЬ I
» +V &> . а3 2у
_ v ag зе* + 4V a|s + 1 — }
B3.2.7)
КЗ2 . д2
4-Зу + у2
^ 1 — v
2B —2v + y2)
i-v -
Написанными формулами при каждом конкретно выбранном Ф, удовле-
удовлетворяющем уравнению B3.2.5), определяются перемещения, соответству-
соответствующие некоторому напряженному состоянию круговой цилиндрической
оболочки, не загруженной поверхностной нагрузкой. Формулы для усилий,
моментов, компонент деформации и углов поворота, отвечающих выбран-
выбранному Ф. могут быть выведены при помощи соотношений B3.1.2), B3.1.5)
и двух последних равенств B3.1.1). Получающиеся при этом формулы очень
громоздки, и мы их приводить не будем.
При интегрировании однородных уравнений равновесия цилиндриче-
цилиндрической оболочки Ф можно рассматривать как потенциальную функцию, а соот-
соотношение B3.2.5), которое в развернутом виде записывается так:
«L=0. ,23.2.8)
можно назвать разрешающим уравнением для однородной системы B3.1.7).
22 Д. Л. Гольденвейзер
338 ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ [ГЛ. 23
Замечание. Отыскание частного интеграла неоднородных уравнений B3.1.7), как мы ви-
видели, сводится к построению частных интегралов неоднородного разрешающего уравнения
B3.2.8). Методов решения этой задачи в настоящем разделе мы специально рассматривать ие
будем. Для поверхностных нагрузок, обычно встречающихся на практике, частный интеграл
строится относительно просто с помощью приближенных методов, описанных в части II. Во
многих случаях частный интеграл можно строить, исходя из уравнений безмоментнон теории.
В этом разделе книги всегда будет считаться, что частный интеграл точно или приближенно уже
построен.
§ 3. Применение тригонометрических рядов
по переменной 6
Интегралы разрешающего уравнения B3.2.8) удобно искать с помощью
разложения потенциальной функции Ф в тригонометрические ряды либо
по переменной 0, либо по переменной |. Начнем с рассмотрения первого
из этих приемов. Будем искать Ф в виде
Ф= ?ф« (Фт = ФшA)^те), B3.3.1)
т=0
где т — целое число, а <рт — комплексная функция.
Подставив это выражение в разрешающее уравнение B3.2.8), получим
для фот следующее обыкновенное дифференциальное уравнение (индекс
при ф опущен):
A + 4а2) -^— 4A + а*)т*^
— 4т2(т2—1J-^Е- + т4(т2—1Jф = 0. B3.3.2)
Каждому члену ряда B3.3.1) соответствует напряженно-деформирован-
напряженно-деформированное состояние круговой цилиндрической оболочки, перемещения и моменты
которого можно вычислить по формулам §§ 23.1, 23.2. Так, положив Ф =
= Фт, в B3.2.7) получим
и, = Vime^, w = V° (/ = 1, 2), B3.3.3)
где '
т d(p т3со а2 Г 2 B~ v)
4 —3v_+v2 з d?(f> 5 ,, OQ „ ..
1 — v d?2 i^ т | f» v /
2 B — 2v ~f- v2) 2
1" ТТЬ
— v
(этими формулами перемещения определяются как комплексные функции
вещественных переменных).
§ 3] ТРИГОНОМЕТРИЧЕСКИЕ РЯДЫ ПО 8 339
Усилия, моменты, компоненты деформации и углы поворота можно
выразить через перемещения B3.3.3), B3.3.4) по формулам § 23.1, но резуль-
результаты этих выкладок мы приводить не будем.
Обратимся к интегрированию уравнения B3.3.2). Это — обыкновенное
линейное уравнение с постоянными коэффициентами, решение которого
можно искать в виде
q = Aeki (А и k — константы). B3.3.5)
Для k обычным образом получаем характеристическое уравнение
A + 4с2) k8 — 4 A + с2) m2ke +
+ {[6 + а2 A — v2)]m4— (8— 2v2)m2 + A — v2) (-1- + 4)) /г4 —
— 4m2 (m* — 1 fk2 + m4 (m2 — 1 J = 0. B3.3.6)
Корни уравнения B3.3.6) мы будем считать комплексными (это будет
так при любых т, кроме случаев т = 0 и т = 1. когда четыре из восьми
корней обращаются в нуль, а остальные четыре остаются комплексными).
Каждому корню уравнения B3.3.6) соответствует напряженно-деформи-
напряженно-деформированное состояние оболочки, которое в силу B3.3.1) и B3.3.5) можно опре-
определить равенством
F = AFet*+im». B3.3.7)
Здесь F — любая величина из перемещений, углов поворота, деформаций,
усилий или моментов оболочки, a F — некоторое комплексное выражение,
зависящее от т и k. Так, например, для перемещения их и усилия S21 фор-
формула B3.3.7) расшифровывается следующим образом:
иг = Au-le^+imti, Sn = ASne^+imtd.
Выражения F выводятся при помощи равенств B3.3.4), B3.3.5) и фор-
формул § 23.1. Они записываются так:
(I+VLB-V) nW +
[-
,
и, = — imhm* — B -f v) /г2]
+ [7lv + ] , B3.3.8)
+ vnf -I- 2v(l — v)m2/fe2 —vm4]},
-f a2 [D — v2) m2fe4 — 4m4fe2 + me —
— 4 A — v*) k* -t- 4m*A? — m4]},
22*
340 ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ [ГЛ. 23
{A — v2)/г3 + а2 [-/г5 — A — v2) т2/г3 + т*/г+
4 A — v) B + 3v) k9 — nfk] + а4 [— 2v/s6 4 v A — v) nfk?]},
r-a2[B — v)fe5 — A— vJm2fe3—vm4fe —
— 2v(l—
+ a2 [4fee — Am2k* + A — v2) т*/г2]},
— m2J (v/г2 — m2) - B + v) т2/г2 + m*+
+ a2 [4V/S6 — 2v A — v) m2k*]},
т*Г + B + ^к— B3.3.8)
— m2fe— a2 [ jl^- /г5 + vm?]j,
~ тУ - B +
i = -L {m>k> + v» + a* [-
а2|4/г' —2B —v)m2fe5 + A — v)m4/s3]},
тГ +A—v) B + v) k*~ 3/n^ +
+ m* + a2 [2v/s6 — v A — v)
ea - X- {— vmW — k* + a2 [ 2 f JTvv) m'fe*—
«2 = "Ts- {— т2(й2 — m2J — B 4 v) m2/s2 4 m4 4
S 3) ТРИГОНОМЕТРИЧЕСКИЕ РЯДЫ ПО 9 341
Общий интеграл уравнения B3.3.2) записывается следующим образом:
Из этого равенства в силу B3.3.7) вытекает формула
Вместе с формулами B3.3.8) она определяет все компоненты напря-
напряженно-деформированного состояния оболочки, соответствующего т-у члену
разложения B3.3.1), как комплексные функции действительных аргумен-
аргументов. Переход к действительной форме достигается обычными приемами и,
не останавливаясь на подробностях, мы сформулируем окончательный
результат.
Коэффициенты характеристического уравнения B3.3.6) действительны,
и неизвестное k входит в него только в четных степенях. Отсюда следует,
что B3.3.6) имеет только два существенно различных корня
h = Pi + i, К = Р* + *<7i. B3.3.10)
а остальные корни можно получить из них, меняя всеми возможными спо-
способами знаки при действительных числах pt, qu p2, q2. В соответствии
с этим в формуле B3.3.9) величины F в зависимости от / имеют только
два существенно разных значения, которые мы обозначим так:
Остальные F получатся из этих двух должным выбором знаков при дей-
действительных величинах а'р, $'F, a"F, $р.
Имея все это в виду, можно следующим образом записать действительные
выражения для компонент напряженно-деформированного состояния обо-
оболочки, соответствующего т-у члену разложения B3.3.1):
Ф = [(Cj sin (?,I + С2 cos G,|) е"^ + (С, sin q& + C4 cos (?,?) e~°* +
+ (С, sin q? + Ce cos qJQ && + (C7 sin q& +
-f C8 cos G,1) е-"Л) cos m9, B3.3.11)
u, = {[{a'UtCi —.p'e,C3) sin Gi? + (pi,C, + aL,C2) cos 9,|] e"«« +
+ [ — (a'UtC3 + p'UtC4) sin</,| + (р'ь,С3 — a«,C4) cos^|] e-"-* +
+ [(aS,C6—P'e.Ce) sin <7aE + (ft.Ce + c?,C6) cos qg\ e"A +
+ Г— (eu,C7 + K,C8) sin G2| + (P"UlC7 — o*UtCe) cos ^J е~"^| cosm9, B3.3.12)
= {[(au,Ci — fr^Cs) sin qril +_ (ft.Ci + aUlC2) cos G,|] &>& +
4- f(oifC, + ftsC4) sin </,| + (— ft,C3 + oi,C4) cos 9li] e-^e +
+ [KtC5 — p;2C6) sin qu + (p;,C6 + «;2C6) cos qraEl e"'6 +
+ [«C7 + p"U!C8) sin G2| + (— ft;2C7 +
+ a;,C8)cosG2|]e-p=4sinm9. B3.3.13)
Здесь Су — новые произвольные константы.
Выписаны формулы только для трех величин Ф, иъ и2. Остальные
формулы идентичны. Надо только иметь в виду следующее.
Множители cos тв должны ставиться при следующих величинах:
ць м;, 7V Т„ Glt Gt, Nlt г1г в,, хх, х8. B3.3.14)
342 ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ [ГЛ. 23
Они характеризуются тем, что в соответствующие формулы B3.3.8) не входит
явно мнимая единица i. Множитель sin m0 должен ставиться при величинах
. 521, S12, Н21, Я12, N2, со, т, B3.3.15)
у которых в правых частях равенств B3.3.8) есть общий множитель i.
По формулам вида B3.3.12) должны строиться величины
и„ w, Т„ 7„ Glt G2) Nt, е„ в,, х1( х„ B3.3.16)
для которых правые части формул B3.3.8) —четные функции k. По фор-
формулам B3.3.13) должны строиться величины
«1. Sn, S12, Я21, Я12, Wx, со, т, B3.3.17)
для которых правые части формул B3.3.8) — нечетные функции k.
Формулами вида B3.3.11)—B3.3.13) определяется только часть напря-
напряженно-деформированных состояний, соответствующих т-у члену разло-
разложения B3.3.1). Остальная часть может быть получена, если в B3.3.11)—
B3.3.13) множители cos m0 и sin m0 поменять местами: ставить sin mQ
при величинах B3.3.14) и cos m0 при величинах B3.3.15). Это связано с тем,
что формулами вида B3.3.11)—B3.3.13) определяется симметричное (отно-
(относительно образующей 0 == 0) напряженно-деформированное состояние кру-
круговой цилиндрической оболочки, а взаимная замена множителей cos m.Q
и sin m0 соответствует переходу к обратно-симметричному напряженно-
деформированному состоянию.
§ 4. Применение тригонометрических рядов
по переменной |
Возможен и другой метод интегрирования разрешающего уравнения
B3.2.8), основанный на разложении в тригонометрический ряд по пере-
переменной |. Зададим Ф (|, 0) в виде
Ф= fWm@)suam? B3.4.1)
т=\
(Хт — константа, которая будет выбрана ниже).
После подстановки m-го члена этой суммы в B3.2.8) и сокращения на
sin X.m| получим последовательность таких обыкновенных дифференциальных
уравнений:
- [4 A + a3) Vm — (8 - 2v2) К,
(I—v2)(^ + 4)^OT]a|)OT = 0. B3.4.2)
Для подсчета перемещений можно воспользоваться равенствами B3.2.7).
В результате перемещения также выразятся рядами
@) cos Яот|, и2 = ? (У2ОТ @) sin Xm%,
а:
и»= S ^от@)зшЯ^ B3.4.3)
п»=1
§ 4] ТРИГОНОМЕТРИЧЕСКИЕ РЯДЫ ПО ? 343
(в первом из них суммирование начинается с т = 0 по причинам, которые
выяснятся ниже). Коэффициенты рядов B3.4.3) выражаются через г|зт так:
^ ? + iKVty ^
J »
B3.4.4)
m
Усилия, моменты, компоненты деформации и углы поворота с помощью
соотношений §23.1 можно также без труда выразить через ряды вида B3.4.3).
Формулы для коэффициентов этих рядов громоздки, и их приводить не будем.
Заметим только, что величины иг, S2i, 5l2, #21, Я12 и Л/г будут при этом
разложены в ряды по косинусам, а величины «2, w> Tlt Тг, Glt G2, Л^2 —
в ряды по синусам. Отсюда, между прочим, вытекает, что ряды для первой
группы величин оказываются неполными — в них отсутствуют слагаемые,
отвечающие m = 0. Это связано с тем, что для потенциальной функции Ф
использовано разложение B3.4.1), в котором соответствующий член отсут-
отсутствует. В дальнейшем считается, что Я,т пропорционально т. поэтому было бы
бессмысленно начинать ряд для Ф с нулевого члена, но к разыскиваемому
решению надо присоединить еще одно, в котором ы1? S2l, S12, Яа, Hl2, Ni
являются функциями одного 0, а остальные перемещения, усилия и моменты
равны нулю. При помощи уравнений B3.1.7), положив в них X — Y = Z =
= 0, мы без труда найдем такое напряженное состояние. Соответствующие
перемещения будут
, ы2 = 0, ю = 0, B3.4.5)
откуда по формулам B3.1.5) получим:
Тг = Тш = G2 = G2 = Hit = Ни = ATi = АГ, = О,
S2i = S12 = r(f^ftv2) i^L c2. B3.4.6)
Будем строить напряженно-деформированное состояние оболочки, соот-
соответствующее ш-у члену разложения B3.4.1). Тогда для функции я|зот надо
решать уравнение B3.4.2). Перепишем его еще раз, отбросив в коэффициен-
коэффициентах величины порядка а2 по сравнению с величинами порядка единицы
и опуская индекс тп при "к и if),
-^-D^-2) ^- + F^-8^+ 1)^--
1=^!) = 0 B3.4.7)
(а~2 — большое число, однако в коэффициенте при ty сохранены оба члена,
так как пока не сделано никаких предположений относительно значений,
которые может принимать К).
344 ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ [ГЛ. 23
Решение B3.4.7) — линейного уравнения с постоянными коэффициен-
коэффициентами — ищем в виде
я|з = Ле'*9 (А, к — константы) B3.4.8)
и для определения х получаем характеристическое уравнение
х8 — DЯ2 — 2) х6 + FЯ4 —-8Я2 + 1) и4 — [4Яв — (8 — 2v2) Я4 + 4Я2] х2 +
= О, B3.4.9)
корни которого отличны от нуля всегда, за исключением не представляющего
интереса случая Я = 0.
Дальнейшие выкладки строятся так же, как в § 23.3, н не требуют под-
подробных пояснений. Напряженно-деформированное состояние, соответству-
соответствующее решению B3.4.8), записываем в виде
¦ F = AFe** ° Я?.
sin
о
Здесь под F, как и раньше, подразумевается любое из перемещений,
усилий или моментов; символ «cos» относится к случаю, когда под F подра-
подразумеваются величины
«1, SM, Su, Hn, Я12, Nlt B3.4.10)
символ «sin» относится к случаю, когда под F подразумеваются величины
и„ w, Tu T2, Glt G,, ЛГ2, B3.4.11)
выражения F — разные для разных F — определяются следующими фор-
формулами:
= (Я2 — x2J+a2 [ 4Я4 — 2B~^vv+v2) Я2х2 + x4] ,
= ^~ {Я2х2 + -^ [B - v) Я*х2 - A - vJ Я2х* -
— vxe -{- 2v A — v) Я2х2 — vx4]},
А = -^¦{-Я4 + -г^г[-D-г2)Я4х2 + 4Я2х4-
— х6 — 4 A — v2) Я4 + 4Я2х2 — х4]|,
х + y-^s [Я5х + A — v2) Я3х3 — Ях5 + '
+ A — v) B + Зу) Я3и—Ях3] + -пЁ^Г t2v^ — v A — v) Я3х3)|,
х + -j^-r [B - v) Я5х - A - vJ Я»х3 -
— vЯx5 + 2v A — v) Я8х —
$ 4] ТРИГОНОМЕТРИЧЕСКИЕ РЯДЫ ПО % , 345-
(*2—к2J (Я2—vx2) — vB + v)A,V-b
2а2 [•—2Я6 + 2Я4х2 —
^- Я2х4]},
г~га21—(^2 —«Т(^2—«2)~B + v) Я2х2 + х4
+ а2 [—4vA,e + 2v (I — v) А,4х2] [,
B3.4.12).
A=^") ^ Iя (^ - "У + B + v) ^V
-1-а2[4Я7 — 2B— v)Я8х2 + A — v) IW]},
— ЗЯ2х3 + и5 + а2 [—2vA,6x + v A — v) Я4х3] \.
Общему интегралу уравнения B3.4.7) соответствует напряженно-дефор-
напряженно-деформированное состояние, записываемое в комплексной форме так:
)8С^. B3.4.13).
Для перехода к действительной форме записи можно поступить так же,
как в § 23.3. Характеристическое уравнение B3.4.9) имеет действительные-
коэффициенты и содержит только четные степени неизвестного х. Поэтому
оно имеет только два существенно различных корня
*i = Hi + 'Ч. х, = ji2 + iv,- B3.4.14).
Им в формуле B3.4.13) соответствуют два существенно различных значения'
о
величины F</>
F0) = dF + ib'F, FB) = fl; + tV B3.4.15)
Учитывая это, получим следующие действительные формулы, опреде-
определяющие напряженно-деформированное состояние для т-го члена разло-
разложения B3.4.1):
W = [(Сх sin vx 8 -f Ca cos vx9) e^>e + (C3 sin vt0 + C4 cos Vie) e-»4'9 -f
+ (C5 sin v29 + C6 cos v29) e»*e + (G7 sin va9 + C8 cos va9) e-^»9] sin Ят|, B3.4.16).
«x = UK,Ci — bu,C2) sin vi9 4. (bujCi + fli,C2) cos vi9] e^ +
+ [«C3 + fe^CJ sin vi9 — (Ь'ъСа — ai,C4) cos V18] e-^e +
+ [(flL,C6—6L.Ce) sin v29 + F"UlC5 4. aUlC6) cos v2 9] e^»9 4
— {ЬщСч—a^C8)cosv29] e-^6}^ Яд|, B3.4.17).
= U(aL.Ci — 6L,Cu) sin vi8 4. (fti.Ci 4- ai.Cj) cos vi9] e^e 4.
+ [— «C3 4- 6i8C4) sin vi9—(— b'U2C3 + ai,C4) cos Vi9] e-^9 4.
+ [{au,C5—b'U2Ce) sin v29 + (b"UzC5 + a"UjC6) cos v29j e^ +
+ I— (a;,C7 4. b;,C8) sin у,в — (—6;,C7 + au,C8) cosv,9] e-^9} "'" Я.^. Л\23.4.18).
346 ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ [ГЛ. 23
Эти формулы, в которых С/ — произвольные действительные константы,
выписаны только для трех величин. Остальные формулы имеют такую же
структуру. Равенствами вида B3.4.17) надо пользоваться при построении
величин
щ, w, Tit T2, Gi, G2, Nit
для которых в правые части B3.4.12) .корень х входит в четных степенях.
Равенствами вида B3.4.18) надо пользоваться при построении величин
иг, S21, S12, #21, Я1а, N2,
для которых в правые части BЭ.4.12) корень х входит в нечетных степенях.
Знак «cos» надо брать для величин B3.4.10), знак «sin» — для величин
<23.4.11).
§ 5. Расчет замкнутой круговой цилиндрической оболочки
в тригонометрических рядах по 0
Пусть расчету подлежит замкнутая круговая цилиндрическая оболочка,
¦ограниченная двумя поперечными краями ? = ^ и I = ?2. В этом слу-
случае при интегрировании дифференциальных уравнений теории круговых
цилиндрических оболочек, помимо граничных условий на поперечных
краях, надо учитывать условия возврата, т. е. требование, чтобы после
обхода контура поперечного сечения некоторые усилия, моменты, переме-
перемещения и углы поворота вернулись к прежним значениям. В связи с этим
для исследования замкнутых цилиндрических оболочек широко исполь-
используется метод тригонометрических рядов по переменной в, так как в нем
условия возврата очевидно выполняются в каждом отдельно взятом члене
разложения. Схема такого расчета заключается в следующем.
Примем, для конкретности, что в числе граничных условий, которые
надо выполнить на поперечных краях оболочки, содержится требование
щ=.и? при E = glt B3.5.1)
где и* = и* (в) — заданная функция 0 (если граничное условие однородно,
то надо положить и? = 0). Тогда представим их в виде
со
Щ = S Wim © cos m6 + U\m (I) sin m6] +
m=0
+ f K7{m(!)cosme + ?7im(i)sinme], B3.5.2)
m=0
считая, что первая сумма есть общий интеграл однородных уравнений
B3.1.7), а вторая—частный интеграл неоднородных уравнений B3.1.7).
Функции U\m и U"\m находятся для каждого т, как показано в_ § 23_Д
и содержат произвольные константы интегрирования. Функции U[m, U'[m
надо считать заданными, так как частный интеграл предполагается извест-
известным (чтобы получить U[m, U\m, вообще говоря, надо частный интеграл
разложить в тригонометрический ряд, но, как правило, частный интеграл
также ищется в виде тригонометрических рядов, и эти функции мы полу-
получаем сразу).
Представим правую часть условия B3.5.1) в виде
со
«1 = 2 ft/J» cos m6 + U[m sin me]
т=л B3.5.3)
[й[т, U'im — заданные константы],
$ 6] ОТКРЫТАЯ ЦИЛИНДРИЧЕСКАЯ ОБОЛОЧКА 347
подставим B3.5.2) и B3.5.3) в B3.5.1) и потребуем, чтобы обращались
в нуль коэффициенты при каждой функции sin mO и cos mQ в отдельности.
Получим для каждого т два равенства
U[m (Ь) + Vim (Ei) = U[m, U[m (Ei) + V\m A0 = U'[m.
Такие же пары равенств можно составить и для всех восьми граничных
условий, которые должны быть выполнены на поперечных краях. В резуль-
результате для функций вида U[m, U\m получится при любом т две системы урав-
уравнений, каждая из 8 линейных алгебраических уравнений. Их можно вы-
выполнить за счет, констант, входящих в полученные выше решения B3.3.12)
и B3.3.13). Таким образом, расчет замкнутой круговой цилиндрической
оболочки в тригонометрических рядах по 0 можно строить так, что в каж-
каждом отдельно взятом члене разложения будут выполняться и условия воз-
возврата при обходе контура поперечного сечения, и граничные условия на
поперечных краях.
Разумеется, тригонометрические ряды по 0 можно применять и для дру-
других задач, но для конкретности мы будем в дальнейшем трактовать инте-
интегралы, полученные этим методом, как решения, определяющие напряженно-
деформированное состояние некоторой замкнутой круговой цилиндрической
оболочки.
§ 6. Расчет открытой круговой цилиндрической оболочки
в тригонометрических рядах по ё
Разложение в тригонометрические ряды по продольной переменной \
мы будем применять к расчету открытых (имеющих прямолинейные края)
круговых цилиндрических оболочек и будем требовать, так же как при
расчете замкнутых оболочек, чтобы граничные условия удовлетворялись
в каждом члене разложения в отдельности. Это возможно только в тех слу-
случаях, когда на поперечных краях осуществлены некоторые определенные
закрепления, из которых практический интерес представляют шарнирные
опоры. Только их мы и будем в дальнейшем иметь в виду- Это значит, что
на поперечных краях оболочки (? = Eii ? = ?2) Должны выполняться
граничные условия (§ 5.33)
Ti = 0, ua = 0, ш = 0, 6^ = 0. B3.6.1)
Будем считать, что частный интеграл неоднородных уравнений круговой
цилиндрической оболочки известен и соответствующие перемещения, усилия
и моменты разложены в тригонометрические ряды по переменной Е» так
что, в частности
Тю = S 'iSislnX^E, «20= fj fCsintai,
B3.6.2)
wo = 2 W% sinXmE, Gio = S Sim sin %ml.
*
Это решение в каждом члене разложения будет при S = Si и ? = 52
удовлетворять граничным условиям'B3.6.1), если принять, что |х = 0,
|2 = llr (I — длина оболочки), и определить Я,от формулой
К = ^. B3.6.3)
Граничным условиям на прямолинейных краях 0 == 0t и 0 = 02
решение B3.6.2), вообще говоря, удовлетворять не будет, и для ликвидации
348 ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ ГГЛ. 23
этой невязки к нему надо прибавить общий интеграл однородных диффе-
дифференциальных уравнений теории круговых цилиндрических оболочек. Его
можно тадже искать в форме
СО
д> = ye <Q\ cos i t
(!? — любая из неизвестных функций теории оболочек).
Тогда для каждого отдельно взятого члена разложения получится
задача, рассмотренная в § 23.4. Нетрудно видеть, что в силу формулы B3.6.3)
полученные там решения также удовлетворяют граничным условиям B3.6.1)
и, значит, восемь констант, содержащихся в них при каждом т. можно
использовать для выполнения граничных условий на прямолинейных краях
в = 6i и е = еа.
Г Л А В А 24
ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
§ 7. Свойства корней характеристического
уравнения B3.3.6)
Задача построения напряженного состояния, соответствующего т-у
члену разложения потенциальной функции в тригонометрический ряд по Э,
принципиально решена до конца. Однако полученные формулы слишком
громоздки, и в дальнейшем нашей главной задачей будет упрощение выве-
выведенных в предыдущих параграфах соотношений за счет отбрасывания вто-
второстепенных членов. Для этого прежде всего надо изучить корни харак-
характеристического уравнения.
Коэффициенты характеристического уравнения B3.3.6) зависят от трех
параметров: а, т, v. Параметр а определяется формулой B3.1.6). Для тон-
тонкой оболочки он всегда мал, и можно принять, что
1>а>0. B4.7.1)
Параметр т принимает только неотрицательные целые значения. Область
его изменения определяется неравенствами
0=s?m<oo. B4.7.2)
Коэффициент Пуассона v изменяется в малых пределах и оказывает
незначительное влияние на величину коэффициентов характеристического
уравнения B3.3.6). Поэтому в дальнейшем мы будем считать, что а и т
могут меняться в пределах, ограниченных неравенствами B4.7.1) и B4 7.2),
a v всегда сохраняет фиксированное значение.
Для упрощения выкладок и рассуждений примем, что в каждом отдельно
взятом коэффициенте характеристического уравнения B3.3.6) можно отбро-
отбросить величины порядка а2 по сравнению с величинами порядка единицы,
и вместо B3.3.6) будем рассматривать несколько более простое уравнение
/е8 — 4т2/гв + 6т*/г4 — (8 — 2v2) т2/г4 + A — v2) a'W —
— 4m2 (m2 — 1J/г2 + т4(тг — IJ = 0. B4.7.3)
Параметр т в левой части этого уравнения удобно представить в виде
т = т.а-», B4.7.4)
считая, что т» — число, мало отличающееся от единицы, а ц — новый
параметр, удовлетворяющий неравенствам
(отрицательные значения ц. исключаются из рассмотрения; им соответствует
случай, который будет изучен другим методом).
350 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
Помножим уравнение B4.7.3) на а1, заменим в нем т по формуле
B4.7.4), a k по формуле
k = а-*к, B4.7.5)
и запишем полученный результат так:
Л8к8 + А6кв + (Л4 + ^4 + A'i) *4 + (^2 4- л2 4- Л?) *а +
+ (Л, + Л6 + Ло) = О, B4.7.6)
где
B4.7.7)
8 = a- 8s+'. Лв = — Ат\ а-6*-2^, Л4 = — (8 — 2v2) m2 a-4s-2
Л; = 6m4a-4s-4H-«, A"t = A — v2) a-4s-2+', Л2 = — 4m6»a-2s-6>1+«,
Л; = —
(Ihs — пока произвольные числа). Каждый из коэффициентов Л содержит
в качестве множителя некоторую степень малого параметра а; показатели
всех этих степеней выписаны в первой строке нижеследующей таблицы.
Задачу исследования корней характеристического уравнения B4.7.3)
поставим так: найти, с какими степенями а соизмеримы модули корней k
при а —» 0 в зависимости от значений параметра ц. Это значит, что надо
найти в формуле B4.7.5) те значения s, при которых величина -л стре-
стремится к конечному и отличному от нуля пределу, если а —» 0.
Как известно, корни алгебраического уравнения являются непрерыв-
непрерывными функциями его коэффициентов при всех таких значениях коэффициен-
коэффициентов, при которых эти корни определены. Поэтому, если какой-либо корень
уравнения B4.7.6) имеет при а —> 0, как мы предполагаем, конечный пре-
предел, то этот предел будет равен корню предельного уравнения (конечно,
если последнее не обращается в тождество). Учитывая это, будем искать
такие значения t и s, при которых уравнение B4.7.6) после перехода к
пределу при а —» 0 имеет конечные и не равные одновременно нулю коэф-
коэффициенты.
Подбор таких значений t и s не представляет принципиальных труд-
трудностей, но связанные с ним кропотливые рассуждения мы излагать не будем
(их можно найти, например, в [85]). Уточним только требования, которые
надо выполнять при подборе значений t и s.
Пусть фиксировано ц = ^ и выбрана некоторая комбинация показа-
показателей t = t' и s = s'. Внесем щ, t', s' в B4.7.6) и подсчитаем во всех коэф-
коэффициентах Л показатели при а. Комбинацию t', s' надо [считать правиль-
правильной для ц = щ, если, во-первых, в B4.7.6) существует по меньшей мере
два коэффициента, в которые а входит в нулевой степени, и, во-вторых,
во всех остальных коэффициентах (если они есть) степени а положительны.
Действительно, отсутствие в коэффициентах отрицательных степеней а
означает, что переход к пределу при а —» 0 сводится просто к отбрасыва-
отбрасыванию в уравнении B4.7.6) всех таких членов, в коэффициенты которых вхо-
входят положительные степени а. В результате получится предельное уравне-
уравнение, содержащее по меньшей мере два члена. Оно заведомо имеет некоторое
число г' не нулевых корней (конечно, считается, что в предельном уравне-
уравнении сохранились два члена с разными степенями и). Это значит, что при
ц = щ комбинации t', s' соответствует г' таких корней уравнения B4.7.6),
асимптотика которых определяется равенством B4.7.5) при s = s'. Нулевые
корни предельного уравнения, разумеется, сохранять нельзя. Поэтому,
если предельное уравнение допускает сокращение на некоторую степень и,
то такое сокращение является не только допустимым, но и обязательным.
§7]
КОРНИ ХАРАКТЕРИСТИЧЕСКОГО УРАВНЕНИЯ B3.3.6)
351
: о
ч
\°
ч?
ч
ч?
ч!
2.
1
+
1
1
«2-
1
1 1
1 +
1 1
СО
1
to
1"
<м
1
т
1 +
м
1 +
1 1
1
1
иэнэ
Э1ВЁВ
её
о
о
о
_
-
о
О)
со
о н
II 1
II
(О
1
1
=.
00
1
°|
со
=.
1
со
<§¦
1
со
о
2.
1
1
О)
2.
1
о
^ т
СО
3.
о
+
—
CN
1
—
о'
А.
1
О)
ся
1
см
ё-
1
со
5-
i
А
О)
00 ^»
¦" 1
II
со
3.
CN
О
2.
2.
О
+
CN
о
CN"
о
о
00 2^
II II
*»•• V3
Ю
352 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ 1ГЛ. 24
Число г' может оказаться меньшим, чем степень уравнения (это про-
произойдет в том случае, если не все корни исходного уравнения имеют одина-
одинаковую асимптотику). Тогда должны существовать другие правильные ком-
комбинации (t = f, s = s"), и в совокупности ими определится асимптотика
всех корней уравнения. Исключение представляет только случай, когда
при данном ц исходное уравнение B4.7.3) имеет нулевые корни, так как
они отбрасывались.
При подборе значений t, s будем различать четыре случая.
Случай I: ц = 0. При этом существуют две правильные комбинации
значений t, s:
a)t = O, s = — V,, б) Г = 4, s = V,. .24.7.8)
Отвечающие им показатели степеней а в коэффициентах А помещены
во второй и третьей строках таблицы показателей (в третьей строке надо
положить [i = 0). Выбранные значения удовлетворяют сформулированным
требованиям, и нетрудно записать соответствующие им предельные урав-
уравнения. Для этого в B4.7.6) надо оставить только те члены, для которых во
второй и третьей строках таблицы получились нулевые значения. Получим
A — v2)K4 + mt(m2»—1J = 0 (s = —Vi, H = 0), B4.7.9)
Х4 + A _ v2) = 0 (s = 1/ff ^ = 0) B4 7 л 0)
(второе из этих уравнений, в соответствии со сказанным выше, сокра-
сокращено на х4).
Случай II: 0 < [i < V2. При этом снова существуют две правильные
комбинации значений t, s:
a) t = 8ц, s = — V, + 2ц, б) * = 4, s = % B4.7.11)
Отвечающие им показатели а помещены в четвертой и третьей строках
таблицы показателей. Просмотрев их, замечаем, что они обладают нуж-
нужными свойствами, в силу неравенства ц < V2. Предельное уравнение,
соответствующее комбинации а), записывается так:
A — v2) х4 + щв = 0 (s = — х/2 + 2ц, 0 < ц < VJ, B4.7.12)
а комбинации б) соответствует предельное уравнение B4.7.10).
Случай III: ц. = V2. При этом существует только одна правильная
комбинация значений t, s
f = 4, s = V«. B4.7.13)
Ей соответствует четвертая строка таблицы показателей, в которой надо
положить [i = V2, а предельное уравнение записывается так:
(х2 —m2j4 + (l—v2)x4 = 0. B4.7.14)
Случай IV: \i > V2. При этом единственной комбинацией t, s будет
f = 8|A, s = |i. B4.7.15)
Ей соответствует пятая строка таблицы показателей, а предельное уравне-
уравнение имеет вид 4
(х2 —т2L = 0. B4.7.16)
Асимптотика корней характеристического уравнения B4.7.3) построена.
Сформулируем результаты.
Г. При 0 «^ ц, < V2 (случаи I и II) корни характеристического уравне-
уравнения разделяются на две группы. К первой из них относятся корни, кото-
которые мы назовем малыми; их асимптотика определяется равенствами
$ 7] КОРНИ ХАРАКТЕРИСТИЧЕСКОГО УРАВНЕНИЯ B3.3.6) 353
B4.7.5), B4.7.8а), B4.7.11а) и записывается так:
k = О (а>'2-2»). (О ^ ц < 1/2).
Ко второй группе относятся корни, которые мы назовем большими;
их асимптотика определяется формулами B4.7.5), B4.7.86), B4.7.116) и
записывается так:
2°. При (л 5г г''г (случаи III и IV) все восемь корней имеют одинаковую
асимптотику, вытекающую из формул B4.7.5), B4.7.15). Она записывается
так:
Замечание. Малые корни при а ->¦ оо безгранично уменьшаются по модулю при ц < V4 и
безгранично растут при \>С>11^ Называй их малыми мы подчеркиваем, что они по модулю мень-
меньше больших корней (пока jj, < V2).
Предельные уравнения можно, конечно, использовать и для прибли-
приближенного подсчета корней характеристического уравнения. Выразим в пре-
предельных уравнениях х и тж через k и т по формулам B4.7-4), B4.7.5)
и примем во внимание равенства, указанные в скобках для некоторых из
предельных уравнений. Тогда после очевидных преобразований получим
равенства: при ц. = О
~ A — v2)/j* + a2rn4(m2 — IJ = 0, B4.7.17)
Й4 + -Ц^=О, B4.7.18)
при 0 < ц < Va
A — v2)/г4 4-a2m8 = 0, B4.7.19)
при ц = х/2
(/г2 — m2L + '~v2 /г4 = 0, B4.7.20)
при \х > V2
(k2 — m2L = 0, B4.7.21)
которыми при соответствующих значениях ц определяются приближенные
значения корней характеристического уравнения B4.7.3).
Можно построить итерационный процесс для беспредельного уточнения
результатов, вытекающих из равенств B4.7.17)—B4.7.21). Принципы его
изложены в статье [85]. Мы не будем описывать здесь этот процесс и сформу-
сформулируем только вытекающий из него метод определения асимптотической
оценки погрешностей уравнений B4.7.17)—B4.7.21).
Структура предельных уравнений, а следовательно, и обсуждаемых
уравнений, определяется таблицей показателей (стр. 351). В предельное
уравнение входят только те члены левой части равенства B4.7.6), в которых
показатель степени а равен нулю. Для определения асимптотической погреш-
погрешности надо найти в данной строке наименьшую ненулевую степень а. Пусть
это будет число X (в таблице числа X обведены рамкой). Тогда относитель-
относительная асимптотическая погрешность уравнения, отвечающего этой строке,
будет задаваться формулой
е = О
где р — кратность рассматриваемого корня, вычисляемого по приближен-
приближенному уравнению.
23 Д. Л. Гольденвейзер
354 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
Рассмотрим, например, уравнение B4.7.19). Оно имеет силу при 0 <3
< ц < У s и получено из предельного уравнения B4.7.12), а при выводе
последнего мы исходили из четвертой строки таблицы показателей. В этой
строке взяты в рамку два числа, так как при разных ц наименьшие отличные
от нуля цифры будут разными. А именно,
Я. = 2fi при 0 < ц < */«, Я. = 1 —2ц при V* < ц < V*
Отсюда следует, что относительную асимптотическую погрешность урав-
уравнения B4.7.19) можно выразить так:
в = 0(а>»)=0 (-±г). если 0<^V4, B4 ? 22)
е = О (а1-2**) = О (am2), если 1/i^]i< Va.
Так же находим и относительные асимптотические погрешности других
приближенных уравнений. Они выражаются так: для уравнения B4.7.17)
согласно второй строке таблицы
г = О(а1), B4.7.23)
для уравнения B4.7.18) согласно третьей строке таблицы
8 = 0 (а1-2») = О (am2) @ < ц < V2)> B4.7.24)
для уравнения B4.7.20) согласно четвертой строке таблицы (при ц. = V2)
г = О(а) (ц = 1/2), B4.7.25)
для уравнения B4.7.21) согласно пятой строке таблицы
-2+4ц\
4 ; О(Д) B4.7.26)
V а
т
При выводе этих формул принято во внимание, что корни уравнений
B4.7.17)—B4.7.20) однократны, а все корни уравнения B4.7.21) четырех-
четырехкратны.
Точность каждого из выведенных здесь упрощенных уравнений будет,
конечно, падать по мере приближения \i к границе тех значений, которые
допустимы для данного уравнения. Вместе с тем одному и тому же значе-
значению [х могут соответствовать различные варианты приближенных характе-
характеристических уравнений, и оказывается, что их всегда можно выбирать так,
что погрешность останется достаточно малой. Чтобы показать это, надо
уточнить некоторые результаты, относящиеся к уравнениям B4.7.17) и
B4.7.20).
Уравнение B4.7.17) и отвечающая ему оценка погрешности B4.7.23)
получены в предположении, что \i = 0. При таком значении \i погрешность
B4.7.17) имеет порядок а, и очевидно (по непрерывности), что это уравне-
уравнение должно иметь силу и при ц > 0. Имея в виду показать это, заметим,
что вторая строка таблицы показателей (стр. 351), определившая структуру
уравнения B4.7.17), может быть получена из четвертой строки, если в послед-
последней положить ц = 0. Поэтому уравнение B4.7.17) можно получить и из
четвертой строки таблицы показателей. Для этого надо сохранять не только
те слагаемые, для которых в соответствующей клетке стоят нули, но и те,
в которых в соответствующей клетке получится нуль при \i = 0. Исходя
из этого, можно найти и оценку погрешности уравнения B4.7.17). Степень а,
характеризующая порядок этой погрешности, равна наименьшему из таких
чисел четвертой строки, которые не только отличны от нуля, но и не обра-
обращаются в нуль при ц = 0. Числа 1 —-2[л и 2ц были взяты в четвертой
строке в рамку потому, что при 0 < у, < V2 одно из них оказывается
§ 7] КОРНИ ХАРАКТЕРИСТИЧЕСКОГО УРАВНЕНИЯ B3.3.6) 355
меньше всех других, отличных от нуля чисел этой строки. Но число 2ц
при ц = 0 обращается в нуль'. Следовательно, соответствующий ему член
характеристического уравнения уже учтен в B4.7,17). Отсюда вытекает,
что погрешность обсуждаемого уравнения определяется числом 1—2ц,
т. е. формальная область применимости уравнения B4.7.17) ограничена
неравенством 0 < ц. < V2, а его асимптотическая погрешность определяется
формулой
8 = 0 (а1-2^) = О {am2), B4.7.27)
обобщающей оценку B4.7.23).
Перейдем к уравнению B4.7.20). Его структура была определена циф-
цифрами, получающимися при ц = V2 в четвертой строке таблицы показателей.
При этом обратились в нуль числа, стоящие в столбцах А», А%, Al, A'i,
Л 2, Ао, и соответствующие им члены вошли в обсуждаемое приближенное
характеристическое уравнение. Не обращаются в нуль при ц = х/а в чет-
четвертой строке следующие выражения:
2 —2ц, 1, 1 + 2ц, 2ц, 4ц.
Из них наименьшим при ц «S V2 является выражение 2ц, а при ц ^ V2 —
выражение 2—2ц. Отсюда следует, что оценка погрешностей уравнений
B4.7.20) выражается соотношениями
(J)
8 = 0 (а2-2*) = О (а*та), V, < ц < 1,
обобщающими формулу B4.7.25).
Итак, мы имеем пять вариантов приближенных характеристических
уравнений B4.7.17)—B4.7.21), погрешности которых оцениваются соответ-
соответственно формулами B4.7.27), B4.7.24), B4.7.22), B4.7.28) и B4.7.26).
Сопоставляя эти оценки и выбирая для каждого ц наилучшие в смысле
погрешностей варианты, можно сформулировать следующие результаты:
A) При 0 < ц <3 V4 наилучшую точность дает пара уравнений B4.7.17),
B4.7.18),
B) при V4 <5 и <Z 6/e наилучшую точность дает единое уравнение
B4.7.20),
C) при 6/е < И <3 1 наилучшим является единое уравнение B4.7.21),
D) при ц = V4 одинаково точными оказываются три варианта: пара
уравнений B4.7.17), B4.7.18), пара уравнений B4.7.19), B4 7.18) и единое
уравнение B4.7.20). Предпочтения, конечно, заслуживает пара уравнений
B4.7.19), B4.7.18) как наиболее простая; ею рационально пользоваться
и в случаях, когда ц мало отличается от х/4, хотя это и сопровождается неко-
некоторой потерей точности.
В заключение настоящего параграфа отметим, что из всех членов, вхо-
входящих в левую часть характеристического уравнения B4.7-3), только один,
а именно член (8—2v') m2k*, не вошел ни в одно из приближенных соот-
соотношений B4.7.17)—B4.7.21). Поэтому не представляет труда выписать и
единое приближенное характеристическое уравнение, пригодное для вычис-
вычисления всех корней при всех значениях ц. Оно имеет вид
k* _ 4m2fee + 6m4A4 + A — v2) аГ2/г4—4m2 (m2 — 1 J fe2 + m* (ma — 1 J = 0.
B4.7.29)
Это уравнение предложено в монографии 198]. Его можно рассматри-
рассматривать как наилучший вариант универсального приближенного уравнения
характеристического уравнения, так как оно содержит все слагаемые,
23*
356 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
которые являются главными хотя бы при одном из возможных значений
т, и в нем нет ни одного второстепенного при любых т слагаемого.
В уравнении B4.7.29) отброшено слагаемое, которое в B4.7.6) обозна-
обозначено через At. Поэтому не представляет труда оценить погрешности урав-
уравнения B4.7.29). В соответствующем столбце таблицы показателей простав-'
лены выражения 2, 2—\л и 2ц. Последнее из них находится в строке, отве-
отвечающей случаю, когда n>V2. Поэтому наименьшие значения имеет выра-
выражение 2—2ц, а следовательно, погрешности уравнения B4.7.29) имеют
порядок
O22
В части VI мы убедимся, что существенно уменьшить эту погрешность
можно, только уточнив исходные уравнения теории оболочек.
Уравнение B4.7.29) значительно сложнее любого из приближенных
уравнений B4.7.17)—B4.7.21). Это еще раз подтверждает ту мысль, что
в теории оболочек существенных упрощений можно добиться лишь на пути
введения разумной классификации задач и составления приближенных мето-
методов расчета для каждого класса задач в отдельности.
§ 8. Нулевые корни и их физический смысл
При т = 0 и т = 1 и только при этих значениях характеристическое
уравнение B4.7.3) имеет нулевые корни, причем кратность каждого из них
равна четырем. Это значит, что при т = 0 и т = 1 четыре частных реше-
решения B3.3.5) уравнения B3.3.2) выродятся в решения вида
Ф=1, ф = |, cp = ia, Ф = |3.
Таким образом, разложение потенциальной функции Ф в ряд B3.3.1) будет
содержать следующие слагаемые:
ф, = Ао + АЦ + A3? + Аз13 +
+ (В? + ВЦ + В.;|а + В3Е3) cos 6 + (Во 4 ВЦ + в%* + в'&*)sin е B4-8- О
(А к В — константы); эти слагаемые надо рассмотреть особо, так как к ним
формулы § 23.3 неприменимы.
Перемещения, отвечающие функции B4.8.1), определяются непосред-
непосредственной подстановкой Ф =Ф, в формулы B3.2.7). Отбросив в этих выра-
выражениях а2 по сравнению с единицей, будем иметь
и, = 6v^3 + [(В[ 4- 2?2| + ЗВаб») + 6vBa] cos 9 4
4 [(BI 4- 2В& + 3BS?) 4- 6vBs] sin 6,
и, = [-B 4- ^) № 4 6B5I) 4 (Во + ВЦ 4 BJI1 4- ВД] sin 9 4
4- [B 4 v) BВГ2 4 6В?) — (Во 4 ЯП + Я?* + в%3)\ cos в, ( -b-Z)
w = [—2 BBi 4 6ВЙ) 4 (Яо 4 В& + В%* + Вз13)] cos 0 4
4 1-2 BS2 4 6Вз|) 4 Ф'о + ВЦ 4- ЯаТ + S3?3)] sin 9,
а соответствующие этим перемещениям усилия и моменты запишутся так:
Тх = -Щ^ [BВ2 4 6В3|) cos 0 4 BВ 4 6B5|) sin в], Т2 = О,
S21 = 512 = — i^L FB3 sin 6—6B3'cose),
.1 d = — -^ а* [BBj 4 6Вз|) cos6 4 BBJ 4- 6Вз|) sin в], G2 = 0, B4.8.3)
_L tfai * -1" Яи = — ^- \а2 FВ;; sin 9 — 6В3 cos 9),
N1 = — -—- A — v) а* FВ3 cos 0 -г- 6Ba sin 0), iV2 = 0.
§ 8] НУЛЕВЫЕ КОРНИ И ИХ ФИЗИЧЕСКИЙ СМЫСЛ 357
Формулы B4.8.2), B4.8.3) целиком определяют напряженно-деформи-
напряженно-деформированное состояние оболочки, но, просмотрев их, можно заметить, что из
12 констант, содержащихся в B4.8.1), в формулах B4.8.2), B4.8.3) сохрани-
сохранились только 9. Постоянные Ао, А{, A'i исчезли при дифференцировании, и
возникает несоответствие между числом граничных условий и числом кон-
констант, которыми можно распоряжаться для их выполнения. Оно объясняется
недостаточной общностью формул B3.2.7), связывающих перемещения с по-
потенциальной функцией Ф. Ниже потерянные решения будут восстановлены.
Круговая цилиндрическая оболочка представляет собой частный случай
оболочки вращения, поэтому здесь можно использовать некоторые общие
соображения § 14.14. Одно из них заключается в том, что среди всех напря-
напряженно-деформированных состояний оболочки вращения, меняющихся по
переменной 0 по закону l.sin 0, cos 0, должны содержаться и шесть линейно
независимых смещений срединной поверхности как жесткого целого. Пять
из этих жестких смещений в формулах B4.8.2), B4.8.3) легко обнаруживаются:
они соответствуют константам Аз, Во, Во, В[ и В?, так как последние
содержатся в формулах B4.8.2) для перемещений, но не входят в фор-
формулы B4.8.3) для усилий и моментов. Нетрудно проверить, что константа
Аз соответствует смещению в направлении образующей цилиндра, кон-
константы В6 и Во соответствуют смещениям в направлениях осей гиг/ (см.
рис. 18), а константы В[ и В'{ соответствуют жестким поворотам относи-
относительно осей гиг/. Отсутствует, таким образом, только жесткий поворот
срединной поверхности относительно оси х (оси цилиндра). Ему должен
был бы соответствовать интеграл
Ml=0, и2 = А0, ю = 0, B4.8.4)
который, как нетрудно видеть, действительно удовлетворяет однородной
системе уравнений B3.1.7). Это и есть одно из трех потерянных решений.
Перейдем к установлению физического смысла напряженных и дефор-
деформированных состояний, связанных с константами В'ч, В'ъ, В., B'j. Формулы
B4.8.3) показывают, что обусловленные ими тангенциальные усилия Тх
изменяются вдоль образующей по линейному закону, сдвигающие усилия S2i
и S12 остаются постоянными, а усилия Т2 равны нулю. Именно такое реше-
решение получается по безмоментной теории, как мы имели возможность убе-
убедиться в § 13.1. Более того, можно убедиться, что первая, вторая и третья
формулы B4.8.3) получаются, если рассмотреть замкнутую круговую цилин-
цилиндрическую оболочку как балку.
Константы В3 и B'i отвечают поперечному изгибу оболочки-балки сила-
силами, направленными по осям у и z соответственно, а константы В'ч и Вз — чис-
чистому изгибу оболочки-балки краевыми моментами с векторами, направлен-
направленными по осям г и у соответственно. Таким образом, из всех элементарных
напряженных состояний оболочки-балки отсутствуют напряженные состоя-
состояния, соответствующие растяжению и кручению. Первому из них отвечает
интеграл вида
7\ = At, Sn = S12 = 0, Т2 = 0,
r vr B4.8.5)
второму — интеграл вида
Tj = 0, S21 = S12 = A2, 72 = 0, Ul = 0,
Ml + v) -. п B4.8.6)
«2 = к Eh ' i4,6, w = 0.
Непосредственной подстановкой легко проверить, что B4.8.5). B4.8.6)
удовлетворяют однородным уравнениям теории круговых цилиндрических
358 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
оболочек B3.1.1)—B3.1.3). Следовательно, B4.8.5), B4.8.6) и определяют
еще два потерянных решения.
Итак, нулевые корни характеристического уравнения соответствуют
двенадцати линейно независимым напряженно-деформированным состояниям.
Шесть из них описывают смещения срединной поверхности как жесткого
целого, а остальные шесть — напряженные состояния оболочки, работающей
как балка.
Надо помнить при этом, что формальные выкладки, основанные на
использовании потенциальной функции, не дают всех этих двенадцати
напряженных состояний, и в общем случае необходимо использовать реше-
решения B4.8.4), B4.8.5) и B4.8.6) [33].
§ 9. Анализ напряженного состояния замкнутой
цилиндрической оболочки
Дадим т определенное целочисленное значение и будем, для конкрет-
конкретности, считать, что речь идет о симметричном напряженном состоянии,
определяемом формулами B3.3.11)—B3.3.13). Кроме того, воспользовав-
шись свободой выбора корней kx и /г2 в формулах B3.3.10), условимся наз-
назначать их так, чтобы их действительные части рх, р2 были положительны
0»i > 0, р2 > 0).
Положим в B3.3.11) произвольные константы С3, С4, С,, Са равными
нулю и, заменив Е на Е—Еь перепишем эту формулу так:
Ф={[С1 sin q, (| — Ь) + С2 cos qx (g — gj] e" (l'^> +
+ [C5sin q2 (g —gj + Cecos<78 (E —Ex)] e<" *~ы } cosmQ. B4.9.1)
Такую же структуру имеют формулы для любого перемещения, усилия
и момента оболочки.
Речь идет об интегралах однородных уравнений. Это значит, что поверх-
поверхностные силы отсутствуют и формулами вида B4.9.1) определяется напря-
напряженно-деформированное состояние, возникающее в результате воздействия
на оболочку некоторой системы краевых сил, приложенных к поперечным
краям оболочки (напомним, что оболочка считается замкнутой в попереч-
поперечном направлении). Примем, что поперечные края оболочки совмещены
с линиями Е = Ei, Е = Ег и что Е2 < Ei- Тогда в правой части равенства
B4.9.1) экспоненциальные функции будут монотонно убывать при удалении
от края Е = Ei в силу предположения о положительности рь р9 и, если
край Е = Ег расположен достаточно далеко, то вблизи него интенсивность
напряженно-деформированного состояния B4.9.1) станет практически рав-
равной нулю. Таким образом, можно считать, что формулами B4.9.1) задается
напряженно-деформированное состояние замкнутой круговой цилиндриче-
цилиндрической оболочки, порожденное силами, приложенными к краю Е = Ei
(при условии, что внутренним точкам оболочки соответствует неравенство
Е < Ei).
Равным образом, положив в B3.3.11) константы Сь С2, Съ, Св равными
нулю и заменив Е на Е—Ег. получим для потенциальной функции Ф формулу
Ф = {[С, sin q, (E — Ь) + С4 cos qi (E - Ь)] е» (гг~1) +
E—E2)J<?Ps(b~5)}cos/n0, B4.9.2)
из которой вытекают формулы такой же структуры и для соответствующего
напряженно-деформированного состояния. Оно будет убывать при удалении
от края | = Ег в сторону Е > 1а. и его можно рассматривать как напряженно-
§ 9] НАПРЯЖЕННОЕ СОСТОЯНИЕ ЗАМКНУТОЙ ОБОЛОЧКИ 359
деформированное состояние, вызванное силами, приложенными к краю
I = 1,.
Вспомним теперь, что корни характеристического уравнения B4.7.3)
разделяются на большие и малые (случай больших т, когда такое разделе-
разделение не имеет места, пока исключается из рассмотрения),, и условимся в связи
с этим считать, что рх является действительной частью малого корня, а рг —
действительной частью большого корня. Тогда каждое из напряжеиво-
деформированных состояний B4.9.1) и B4.9.2) естественно разбить на два
и рассмотреть в связи с этим четыре вида потенциальных функций:
Ф = \Сг sin qt (I—Ь) + С, cos qt (g—I,)] «"• <5~ы cos тв, B4.9.1а)
Ф = [С, sin qs (I— I,) + Св cos qs (g — Et)l e* <5~ы cos тв, B4.9.16)
O=[C,sin</1(g^ |,) + C4cos?2(i — ?2)]ePl<6s~5>C0S/n0, B4.9.2a)
Ф = [C, sin ?, (? — b) + C8 cos <?2 ft - b)] e* «¦-»> cos mfi. B4.9.26)
Напряженные и деформированные состояния B4.9.16) и B4.9.26) будут
затухать значительно быстрее, чем напряженные и деформированные состоя-
состояния B4.9.1а) и B4.9.2а). Поэтому первые из них мы будем называть быстро
затухающими, а вторые — медленно затухающими.
Краевые силы, порождающие напряженно-деформированные состоя-
состояния B4.9.1) и B4.9.2), меняются вдоль поперечных краев по закону sin m%
или cos тЭ, и следовательно, при т > 1 это будут самоуравновешенные
воздействия (см. § 14.13), и затухание вызванных ими напряженно-дефор-
напряженно-деформированных состояний согласуется с принципом Сен-Венана. При т = О
и т = 1 и только при таких т краевые воздействия, порождающие напря-
напряженно-деформированные состояния B4.9.1), B4.9.2), могут оказаться стати-
статически несамоуравновешенными, но именно при т = 0 и т = 1 характери-
характеристическое уравнение B4.7.3) имеет нулевые корни, для которых формулы
вида B4.9.1) и B4.9.2) теряют смысл. Таким образом, появление нулевых
корней обусловлено физическим смыслом рассматриваемой задачи. Отсут-
Отсутствие их привело бы к противоречию, так как тогда получилось бы, что
эффект приложения к краю I = ii статически неуравновешенной нагрузки
для достаточно длинной оболочки затухает в некоторой зоне, примыкающей
к Е = Ij и не доходящей до g = |2. Оболочка в целом была бы не уравно-
уравновешена. К этому надо добавить, что, как видно из формул § 24.8, при
смещениях кругового цилиндра как жесткого целого компоненты переме-
щениячменяются по ? по линейному закону, а по в остаются постоянными,
либо меняются по закону sin 0 или cos 0. Поэтому если бы при т = 0 и
т = 1 характеристическое уравнение не имело нулевых корней, то оказа-
оказалось бы невозможным и смещение оболочки как жесткого целого. Таким
образом, характеристическое уравнение B4.7.3) не только должно при
т = СГ и т = 1 иметь нулевые корни, но кратность последних при каждом
из этих значений т должна равняться четырем, так как только при этом
мы получим в общей сложности двенадцать линейно независимых напря-
напряженных и деформированных состояний, соответствующих, как было пока-
показано в § 24.8, всем шести перемещениям оболочки как жесткого целого
и всем шести видам статически неуравновешенного загружения оболочки.
Замечание. Характеристическое уравнение B4.7.3) имеет нужное число нулевых корней
только в том случае, когда уравнения состояния выбраны надлежащим образом.
Пусть теперь т больше единицы, но не настолько велико, чтобы было
нарушено неравенство ц < V2. Тогда корни характеристического уравне-
уравнения разделятся на большие и малые. Соответственно этому напряженно-
360 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ 24
деформированные состояния, вызванные краевыми нагружениями, будут
подразделяться на медленно затухающие и быстро затухающие.
Положим
С5 = Св = С7 = Cs = О,
т. е. исключим из рассмотрения быстро затухающие напряженно-деформи-
напряженно-деформированные состояния B4.9.16) и B4.9.26) и заменим, не заботясь пока о точ-
точности, четыре малых корня нулями. Тогда для потенциальной функции
вместо B4.9.1а) и B4.9.2а) можно написать
Ф = (Во + BiS + 5*ia + ВД cos me. B4.9.3)
Такому Ф будет соответствовать некоторое напряженно-деформиро-
напряженно-деформированное состояние, для которого тангенциальные усилия можно найти так,
как описано в § 23.3. После отбрасывания величин порядка аг и а* для Ти
Т2, Stl и 512 получатся такие формулы:
Т1=^-т2 BВ2 + 6В31) cos m9, Тг = 0, Su = Slt = ^- mvC3 sin m 0.
Они являются частным случаем формул A3.1.7), полученных при расчете
произвольной цилиндрической оболочки по безмоментной теории *). Отсюда
следует, что при расчете оболочки по безмоментной теории мы приближенно
определяем только медленно затухающие напряженные состояния. Быстро
затухающие напряженные состояния при расчете по безмоментной теории
выпадают, а малые корни характеристического уравнения заменяются
нулями.
Пусть замкнутая цилиндрическая оболочка, которую мы хотим рассчи-
рассчитывать при помощи уравнений безмоментной теории, ограничена попереч-
поперечными краями 1=0, | = Иг, где / — длина оболочки. Тогда о точности
безмоментной теории можно судить по погрешности, с которой на интер-
интервале @; I) аппроксимируются потенциальные функции B4.9.1а) и B4.9.2а)
выражениями вида B4.9.3). Обозначим через k любой из малых корней
характеристического уравнения и выпишем известную формулу разложения
экспоненциальной функции
Переход от моментной теории к безмоментной равносилен предположе-
предположению, чго в правой части этого равенства может быть отброшено последнее
слагаемое, или предположению, что
П4
4!
1.
Величина k\ должна быть, следовательно, мала и, основываясь на
этом, можно в левой части написанного неравенства отбросить экспонен-
экспоненциальный множитель, как мало отличающийся от единицы. Имея в виду
оценить наибольшую погрешность, мы должны, кроме того, положить | =
= Иг. Отсюда
Mr*
1. B4.9.4)
*) Мы здесь говорим о безмоментной теорнн для краткости. Точнее было бы говорить
о расчете при помощи уравнений безмоментной теорнн, так как последняя (§ 7.3) предполагает
использование не только определенных уравнений, но и определенных граничных условий,
вопрос о которых здесь не затрагивается.
§ 10] НАПРЯЖЕННОЕ СОСТОЯНИЕ ЗАМКНУТОЙ ОБОЛОЧКИ 361
Можно принять, что малые кории k приближенно определяются урав-
уравнением B4.7.17). Внеся соответствующее этому выражение для /г" в B4.9.4)
и раскрыв в нем аг согласно B3.1.6), получим сильное неравенство
3-4! A—v2)/-e ^ *' ч^.-.~,
которое определяет область применимости безмоментных уравнений при
расчете замкнутых круговых цилиндрических оболочек. Оно представляет
собой частный случай второго из двух сильных неравенств A2.31.9), игра-
играющих ту же роль, что и рассматриваемые неравенства, в теории цилиндри-
цилиндрических оболочек произвольного очертания. Действительно, в соотношениях
A2.31.9) под р подразумевается характерный радиус кривизны цилиндра,
и можно положить р = г. Оператор М для круговой цилиндрической обо-
оболочки принимает вид
М = 4-
а так как мы пользуемся тригонометрическими рядами по 9, то надо считать,
что t0 = a cos /п0 (а = const), откуда следует, что
to 1
=
О) m*(m2—1J'
и обсуждаемое утверждение становится очевидным.
Сильное неравенство B4.9.5) при т = 0 и т = 1 выполняется, каково
бы ни было /. При таких и только таких значениях т безмоментные урав-
уравнения остаются в силе для расчета замкнутых оболочек любой длины
(в части II подобные случаи были выявлены и в теории произвольных цилин-
цилиндрических оболочек). При т > 1 предельная длина цилиндрической обо-
оболочки с точки зрения применимости безмоментных уравнений ограничена
неравенством B4.9.5).
§ 10. Анализ напряженного состояния замкнутой
круговой цилиндрической оболочки (продолжение)
Допустим теперь, что длина оболочки слишком велика, чтобы малые
корни характеристического уравнения можно было заменить нулями, и
обсудим свойства соответствующих напряженных состояний.
Пусть интегралы разрешающего уравнения B3.3.2) составляются из
функций вида e*<?-6i>, где k — малый корень характеристического урав-
уравнения. Для оценки модуля k мы имеем формулу
которая получается из B4.7.17) после отбрасывания делителя 1—v8, как
мало отличающегося от единицы. Из написанного равенства следует, что
перемещения, углы поворота, усилия и моменты исследуемого напряженно-
деформируемого состояния затухают в пространстве между двумя попереч-
поперечными сечениями ? = ?i и ? = |х—б^, если б|х таково, что
в-1*|вь, ^х B4.10.1)
Примем, например, что величины порядка 0,01 по сравнению с единицей
уже не представляют для нас интереса. Тогда неравенство B4.10.1) можно
считать выполненным, если
e-'*'fl6' = 0,01, т. е. если |/г|8|1 = 4,6.
362 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
Отсюда для 6^! — отношения ширины области затухания основного
напряженного и деформированного состояния к радиусу оболочки — полу-
получается формула
8Ь = ,г _ =, B4.10.2)
в которой численный коэффициент носит, разумеется, условный характер.
Выведенная формула показывает, что б|] обращается в бесконечность
при т = 0 и т = 1. Физический смысл этого очевиден: при т = 0 и т = 1
к краю оболочки прикладываются статически неуравновешенные силы и
моменты, и затухание вообще не должно иметь место. При т з== 2 крае-
краевые нагрузки становятся самоуравновешенными. При т = 2 нагрузка
самоуравновешена на всем поперечном сечении, при т = 4 нагрузка само-
самоуравновешена уже на любой половине контура поперечного сечения и т. д.
Соответствующие напряженные и деформированные состояния, как показы-
показывает формула B4.10.2), будут затухать тем быстрее, чем больше т, т. е.
чем уже наименьший из участков поперечного сечения, на котором оказы-
оказываются самоуравновешенными краевые силы и моменты, вызвавшие рас-
рассматриваемое напряженно-деформированное состояние. Таким образом,
поведение медленно затухающих напряженно-деформированных состояний
находится в полном соответствии с принципом Сен-Венана.
Замечание. Надо иметь в виду, что в цилиндрических оболочках принцип Сен-Венана хотя
и остается в силе, но проявляется менее ярко, чем обычно. Это связано с тем, что правая часть
равенства B4.10.2) содержит большой множитель а~1/2, увеличивающий зону затухания дей-
действия самоуравновешенных краевых воздействий.
Медленно затухающие напряженно-деформированные состояния круго-
круговой цилиндрической оболочки, связанные с малыми корнями характеристи-
характеристического уравнения, в частном случае, когда выполняется неравенство B4.9.5),
приближенно определяются безмоментными уравнениями, т. е. по смыслу
совпадают с основными напряженными состояниями (§ 7.1). Вместе с тем
разделение корней характеристического уравнения на малые и большие
обусловливаются требованием ц < Va или, что то же, требованием т2 <С
< а. Оно слабее неравенства B4.9.5), и возможны случаи, когда напря-
напряженные состояния, обусловленные малыми корнями, нельзя назвать основ-
основными, так как для их определения уже не пригодны безмоментные уравне-
уравнения, но они еще сохраняют свойство относительно медленного затухания
и с этой точки зрения могли бы называться основными. Такие напряженно-
деформированные состояния уже выявились при анализе произвольной
оболочки в § 12.30 и были названы обобщенными основными состояниями.
Теперь можно утверждать, что в круговой цилиндрической оболочке обобщен-
обобщенные основные напряженные состояния соответствуют таким малым корням
характеристического уравнения, которые при данной длине оболочки нельзя
заменить нулями.
Большим корням характеристического уравнения, очевидно, соответ-
соответствуют напряженно-деформированные состояния, названные в части II
простыми краевыми эффектами.
Если относительную ширину области затухания простого краевого
эффекта задать числом 6?i, то, рассуждая так же, как при выводе формулы
B4.10.1), получим соотношение
в котором под k надо теперь подразумевать большой корень характеристиче-
характеристического уравнения. Для оценки его модуля можно воспользоваться прибли-
S 10] НАПРЯЖЕННОЕ СОСТОЯНИЕ ЗАМКНУТОЙ ОБОЛОЧКИ 363
женным уравнением B4.7.18), которое дает \ k\ = а,-1'2 (величина 1—Vs
снова заменена единицей). Отсюда, в тех же предположениях, в которых
была выведена формула B4.10.2), получим:
б|1 = 4,6а1/2. B4.10.3)
Таким образом, область затухания краевых эффектов оказывается очень узкой: для доста-
достаточно тонких оболочек она будет исчисляться сотыми долями радиуса. Эта область, как можно
судить по полученной приближенной оценке, ие зависит от числа т, т. е. от характера краевого
загружения, вызвавшего рассматриваемое напряженное состояние, и поэтому представляется,
что появление простых краевых эффектов не следует рассматривать как прямое проявление
принципа Сен-Венана. Правильнее будет трактовать краевые эффекты, в том числе и простой
краевой эффект, как особое явление, характерное только для тонкого искривленного упругого
тела. Оно обусловлено взаимодействием двух факторов: малой толщиной оболочки и искривлен-
искривленностью ее срединной поверхности. Чтобы пояснить эту мысль, опишем схему возникновения
краевого эффекта в тонкой оболочке (необязательно цилиндрической).
Положим, что в некоторой части оболочки по тем или иным причинам возникли моменты
и перерезывающие усилия (это произойдет, например, если к краю оболочки будут приложены
внешние моменты и нормальные к срединной поверхности силы). Так как срединная поверх-
поверхность оболочки искривлена (первый фактор, вызывающий краевой эффект), то равновесие будет
в общем случае возможно только при одновременном наличии и тангенциальных сил. Но если
обратиться теперь к выражению потенциальной энергии оболочки E.31.9), то заменив в нем
компоненты деформации через усилия и моменты по формулам
можно написать
т
в
Я1(Гг+TsJ ~2 A+v) {TlT*+ Sm Sl2I AlA% dai da2 +
в
+ 2Ж"з J J K°i + GsJ - 2 A + v) (G^, + H21H12)] AtA2 da, das.
о
Отсюда видно, что посредством моментов накапливается значительно больше потенциальной
энергии, чем посредством тангенциальных усилий. Это является следствием малой толщины
оболочки (второй фактор, вызывающий краевой эффект). Таким образом, если мы начнем уда-
удаляться от той области, где действовали внешние причины, вызывающие появление моментов и
перерезывающих усилий (скажем, от края оболочки), то в силу принципа минимума потенциаль-
потенциальной энергии должен начаться процесс затухания интенсивности моментов и перерезывающих
усилий (конечно, при условии, что исчезновение моментов и перерезывающих усилий не поведет
к невозможности выполнить условия статики). В результате и возникают те быстро затухающие
напряженные состояния, которые носят название краевых эффектов. Напряжеиио-деформиро-
ваииые состояния такого рода не возникают и в тонких иеискривлеиных телах (плитах), ии
в упругих телах, все три протяжения которых одинакового порядка.
Изложенное физическое истолкование краевого эффекта вполне согласуется с формаль-
формальными математическими результатами.
Скорость затухания простого краевого эффекта в цилиндрической обо-
оболочке не зависит от т (пока т не слишком велико). Это значит, что,
вопреки классической трактовке принципа Сен-Венана, здесь оказывается
несущественной длина участка, на котором краевая нагрузка статически
эквивалентна нулю. В общем случае (§8.10) в разрешающее уравнение
простого краевого эффекта не входят производные по а2, что тоже свидетель-
свидетельствует о малом влиянии изменяемости вдоль края. Вместе с тем толщина
оболочки и искривленность ее края, т. е. параметры h и R22, существенно
влияют на скорость затухания простого краевого эффекта. Разрешающее
уравнение (8.10.9), показывает, что скорость затухания возрастает с умень-
уменьшением h и Ra.
364 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
Замечания. 1. В части VI книги будет показано, что в тонких упругих телах возникает так
называемый погранслой, т. е. дополнительное напряженно-деформированное состояние, тоже
быстро затухающее от края. Оно в равной мере характерно и для искривленных, и для плоских
тонких упругих тел. Это не противоречит сказанному, так как природа погранслоя совсем дру-
другая и согласие с принципом Сен-Венана в погранслое в полной мере соблюдается.
2. Скорость затухания различных напряженно-деформированных состояний в оболочках
произвольного очертания рассматривается в Приложении ("§ П.16).
В заключение параграфа коснемся кратко случая больших т, который
пока был исключен из рассмотрения. При больших т, когда
т = а~» (ц > V2),
корни характеристического уравнения уже перестают разделяться на боль-
большие и малые. Соответственно этому теряет смысл и попытка разделить напря-
напряженные состояния на быстро и медленно затухающие. Для таких значений т
все напряженные состояния будут быстро затухать, как это и должно быть
в соответствии с принципом Сен-Венана.
§ 11. Приближенные методы построения
обобщенного основного напряженного состояния
Обобщенное основное напряженное состояние существует только тогда,
когда корни характеристического уравнения могут быть достаточно четко
разделены на большие и малые, т. е. если (§ 24.7)
rrf^a-1. B4.11.1)
Это сильное неравенство одновременно является и условием примени-
применимости приближенных уравнений B4.7.17) и B4.7.19). Таким образом, один
из приближенных способов построения обобщенных напряженных состоя-
состояний заключается в использовании уравнения B4.7.17).
Перепишем его еще раз:
ki + T^V2rni(m2—\)t = 0. B4.11.2)
Оно приближенно определяет малые корни характеристического урав-
уравнения, модули которых, как легко видеть, оцениваются следующим образом:
|/г| = О (а^т2). B4.11.3)
Опираясь на это соотношение, можно упростить выражения комплекс-
0
ных коэффициентов F, определяемых формулами B3.3.8). Отбрасывая
в них величины, выходящие за рамки асимптотической погрешности B4.7.27),
уже допущенной при переходе к B4.11.2), получим
0 0 0
ut = m2k, u2 =— im3, w = m\
SSI =
B4-П.4)
§ 11] ПРИБЛИЖЕННЫЕ МЕТОДЫ ДЛЯ ОБОБЩЕННОГО ОСНОВНОГО СОСТОЯНИЯ 36 5
(здесь, как и во многих последующих формулах, пропущены выражения,
относящиеся к компонентам деформации и не имеющие самостоятельной
ценности). .
Характеристическое уравнение B4.11.2) и приближенные формулы
B4.11.4) можно получить и сразу, введя некоторые гипотезы и упростив
с их помощью исходные уравнения теории цилиндрических оболочек. Эти
гипотезы заключаются в следующем:
1) Геометрические соотношения
1 / dut , ди,
могут быть заменены равенствами:
%-— = 0- ^ + |г = 0. B4.11.5)
2) Уравнения состояния
с 2?А / ш . А2 т \ rp 2Eh
2Eh3
могут быть заменены равенствами:
2Eha r 2Eh .-.
T^^)V«2, Gt. зп^г&Ъ. B4
3) Во всех уравнениях равновесия, кроме четвертого, можно положить
G, = Я21 = Я12 = N1 = 0. B4.11.7)
Замечание. Все сформулированные гипотезы сводятся к предположениям, что то или иное
точное (конечно, в рамках двумерной теории оболочек) равенство может быть заменено прибли-
приближенным. Нигде не предлагается считать какую-либо величину равной нулю (это было бы логи-
логически противоречиво, так как повело бы к появлению лишнего уравнения). Так, например,
если мы говорим, что вместо точного выражения
иожно приближенно написать:
ди,
то это обозначает только, что ге2 мало по сравнению с duJdQ и w ио ничего не говорит о том,
в каком соотношении стоит е2) например, с е,.
Принятые гипотезы эквивалентны утверждению, что при построении
обобщенного основного напряженного состояния можно исходить из сле-
следующей упрощенной системы уравнений.
Геометрические соотношения:
91 ^ д% т B4.11.8)
1 d^w I д ( dw
72'~а?2-> К2 = >2 00
\
366 ЗАМ.КНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
Уравнения состояния *):
i, 0 = е2 + vej,
|-, B4.11.9)
2Eti>\ „ 2Eh3
Уравнения равновесия:
B4.11.10)
дв
Нетрудно проверить, что при Х{ — Хг = Z = 0 все соотношения
B4.11.8)—B4.11.10), кроме третьего уравнения равновесия, обращаются
в тождества, если искомые величины выразить через потенциальную функ-
функцию Ф следующим образом:
д"Ф д3Ф д*Ф Т 2Eh д*Ф
„ &_,(_*•_«>) B4ЛМ1)
2Eh
1 g«O _ у д«Ф _ 2A -fv) а«Ф
- г* д?2д94 ' Кг - г2 V 59в + а9* )' Т ~ г* \ aga95 + а&Э93 )'
Третье уравнение равновесия при этом дает
Отсюда вытекает, 4tq обсуждаемые гипотезы находятся в полном соот-
соответствии с теми упрощениями, которые привели к характеристическому
уравнению B4.11.2) и расчетным формулам B4.11.4), так как, если подставить
в B4.11.11) и B4.11.12) Ф = е>* cos m0, то мы придем к B4.11.2) и B4.11.4).
Замечание. Равенства вида B4.11.11) — приближенные. Ими можно пользоваться лишь
тогда, когда вычисления не сопровождаются взаимным уничтожением главных слагаемых.
Так, например, из первых двух формул B4.11.11) и третьей формулы B3.1.2) вытекает, что
со = 0, но этот результат указывает лишь на то, что произошла потеря точности.
*) Принято во внимание, что es = —vet.
§11] ПРИБЛИЖЕННЫЕ МЕТОДЫ ДЛЯ ОБОБЩЕННОГО ОСНОВНОГО СОСТОЯНИЯ 367
Покажем теперь, что B4.11.8)—B4.11.10) представляют собой частный
случай уравнений приближенной теории В. 3. Власова, т. е. уравнений
A1.29.2)—A1.29.4), A1.29.7). Соотношения В. 3. Власова выведены для
произвольной цилиндрической оболочки и для перехода к круговому ци-
цилиндру в них надо положить
B = r, R = r, a.x = r\, Оз = е. B4.11.13)
Уравнения A1.29.2), A1.29.7) переходят при этом в B4.11.10), а фор-
формулы A1.29.4), A1.29.7) становятся идентичными формулам B4.11.9).
Остается рассмотреть уравнения неразрывности деформаций A1.29.3),
A1.29.7). Исключив во втором и третьем из них величины ?х, ?2 и учтя
B4.11.13), получим три уравнения
дщ дх __ дх± дх 1 de1_f) , _L^ei_0 /0411 14^
и нетрудно убедиться, что все они тождественно выполняются в силу фор-
формул B4.11.8).
Так, например, для третьего равенства B4.11.14) зто следует из таких,
выкладок:
Xl + r aea ~~ r2 ag2 "+" r2 dim ~ r» \ ai2 agaae) ~~
ae~
Таким образом, тождественность уравнений В. 3. Власова с получен-
полученными здесь приближенными уравнениями обобщенного основного напря-
напряженного состояния в замкнутой круговой цилиндрической оболочке доказана.
Постулируя, что этот результат сохраняется и для произвольной цилиндри-
цилиндрической оболочки, можно утверждать, что формулы В. 3. Власова, а следо-
следовательно, и сформулированные им гипотезы правильны в том смысле, что-
позволяют приближенно строить обобщенные основные напряженные состоя-
состояния в произвольной замкнутой цилиндрической оболочке.
В § 24.7 было показано, что если ц не слишком сильно отличается
от V4, то приближенное уравнение B4.11.2) можно дополнительно упростить,
заменив его таким:
*4+П^'«8 = 0- B4.11.15)
Соответственно упростятся и расчетные формулы B4.11.4); в них, как
и в уравнении B4.11.2), можно отбросить единицу по сравнению с т.2, так.
что они примут вид *)
и 0 0 0 пси 0 9Ph
Uj. = m*k, и, = — im3, w = m\ T1 = ^- m2k\ Ta = — =^- k\
0 0
aW, Я31 = Я12 = i
B4.11.16)
0
*) В формуле для Тг отброшено еще одно слагаемое, содержащее /я", так как оно малб
по сравнению с сохраненным слагаемым в силу уравнения B4.11.15).
368 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
К уравнению B4.11.15) и формулам B4.11.16) можно также прийти
ценой некоторых допущений, относящихся к исходной системе уравнений.
Для этого надо к гипотезам B4.11.5)—B4.11.7) присоединить два дополни-
дополнительных предположения.
Дополнительное предположение 1 заключается в том, что в форму-
формулах B4.11.8) в выражениях для компонент изгибной деформации можно
сохранить только члены, содержащие нормальный прогиб до.
Дополнительное предположение 2 заключается в том, что во втором
уравнении равновесия можно отбросить член, содержащий N2-
Это значит, что характеристическое уравнение B4.11.15) и расчетные
формулы B4.11.16) получатся без всяких дополнительных отбрасываний,
если исходная система уравнений будет взята в таком виде:
Геометрические соотношения
„ _
81 ~
г ~Щ~' и - "Ж ш' и - ~аГ + ~W'
B4.11.17)
1 52ш _ 1 d2w _ 1 d2w
Уравнения состояния
2Eh
T
0 = ег + v8l,
, B4.11.18)
G — G 2?ft8v „ __ _ 2Eh3
Уравнения равновесия
ae
B4.11.19)
~u' ag ae ^1 - u.
Чтобы доказать это, перейдем к однородным уравнениям, т. е. положим,
что X! = X2 = Z = 0, и введем потенциальную функцию Ф следующими
формулами:
а^Ф_ _ азФ _ а4Ф __ 2?л а4
~~ д\ ее2 ' ~~ ее3 ' w ~ ае« ' ' ~ ~т~ "al^
т _ ^» а«Ф с _ о 2?Л
^- ^ абф B4.11.20)
j2 с -Э66»,
$ И] ПРИБЛИЖЕННЫЕ МЕТОДЫ ДЛЯ ' ОБОБЩЕННОГО ОСНОВНОГО СОСТОЯНИЯ 369
Тогда все соотношения B4.11.17)—B4.11.19) будут удовлетворяться тож-
тождественно, кроме третьего уравнения равновесия, которое даст для опреде-
определения функции Ф разрешающее уравнение
<*-».2I)
Если в B4.11.20) и B4.11.21) внести
Ф = е** cos /пЭ,
то после очевидных сокращений мы получим вновь характеристическое
уравнение B4.11.15) и расчетные формулы B4.11.16).
Область применимости приближенных уравнений B4.11.17)—B4.11.19)
совпадаете областью применимости характеристического уравнения B4.7.19),
т. е. определяется соотношениями B4.7.22). Ее можно выразить сильными
неравенствами
l^m^flT1. B4.11.22)
Таким образом, приближенному характеристическому уравнению
B4.11.15) соответствует дополнительно упрощенный метод построения
обобщенного основного напряженного состояния замкнутой круговой цилин-
цилиндрической оболочки, и легко установить, что он является частным случаем
метода В. В. Новожилова (§ 11.29). Действительно, было показано, что
переход от метода В. 3. Власова к методу В. В. Новожилова осуществляется
в общем случае ценой принятия трех дополнительных предположений,
сформулированных в § 11.29. Третье из них относится к случаю, когда
коэффициенты уравнений зависят от переменной а2, а потому является
лишним в теории круговых цилиндрических оболочек. Вторые дополни-
дополнительные гипотезы настоящего параграфа и § 11.29 совпадают. Остается
обсудить первое дополнительное предположение. Им в конечном итоге
утверждается возможность заменить геометрические соотношения В. 3. Вла-
Власова B4.11.8) более простыми формулами B4.11.17). Выше было показано,
что B4.11.8) обращают в тождество уравнения неразрывности деформаций
в том виде, в котором их надо брать в теории В. 3. Власова. Так же можно
убедиться, что B4.11.17) обратят в тождество эти уравнения, если во втором
из них отбросить слагаемое с Zi- Отсюда и вытекает, что дополнительные
предположения 1 здесь и в § 11.29 по смыслу также совпадают.
Итак, приближенный метод В. В. Новожилова, так же как и связанные
с ним дополнительные предположения, правильны в том смысле, что они
дают возможность приближенно строить обобщенное основное напряженное
состояние замкнутой цилиндрической оболочки. Этот результат, полученный
для круговых цилиндрических оболочек, по-видимому,также можно экстра-
экстраполировать и на произвольные цилиндрические оболочки, однако надо
заметить, что область применимости метода В. В. Новожилова в теории
круговых цилиндрических оболочек ограничена двухсторонними сильными
неравенствами B4.11.22). Такого рода оценками надо проверять примени-
применимость обсуждаемого метода и в более общем случае.
Уравнениями В. 3. Власова и В. В. Новожилова часто пользуются
и для полного расчета замкнутых цилиндрических оболочек (а не только
для построения обобщенного основного напряженного состояния). Это тоже
законно. Надо только помнить, что при этом опускаются простые краевые
эффекты на поперечных краях оболочки (и вообще на линиях искажения).
Замечание. В § 24.9 изучались погрешности, связанные с заменой малых корней харак-
характеристического уравнения нулевыми корнями, и было установлено, что для длинных оболочек
погрешностн определення напряженно-деформированного состояния могут оказаться сущест-
существенно выше тех, которые были допущены при замене малых корней нулем. Поскольку результат
24 Ai Л. Гольденвейзер
370 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
оказался не тривиальным, естественно обсудить такой же вопрос и для других случаев.
Например, для случая, когда малые корни не полагаются равными нулю, но находятся из при-
приближенного уравнения B4.11.2). Однако подробно мы на этом не останавливаемся, так как
выяснилось, что прн любой длине оболочки погрешности определения напряженно-деформиро-
напряженно-деформированного состояния имеют такой же порядок, как и погрешности корней во всех случаях, кроме
рассмотренного в § 24.9. Это объясняется тем, что с увеличением длины оболочки усиливается
эффект экспоненциального затухания искомых величин.
§ 12. Приближенный метод построения простого
краевого эффекта
Понятие о простом краевом эффекте было введено в § 8.9. В круговой
цилиндрической оболочке его можно определить как напряженно-деформи-
напряженно-деформированное состояние, связанное с большими корнями характеристического
уравнения, а соответствующая приближенная теория может быть построена
по схеме, которая была уже дважды применена в § 24.11, поэтому мы здесь
сократим пояснения.
Большие корни характеристического уравнения могут быть найдены
из приближенного соотношения
i-=^- = 0. B4.12.1)
Отсюда вытекает оценочная формула
k = V\— v2 a-1'2 «=> а-1'2. B4.12.2)
К ней надо добавить сильное неравенство
пк^а-1'2. B4.12.3)
так как если т не подчиняется этому ограничению, то разделение полного
напряженного состояния на основное напряженное состояние и краевой
эффект уже не будет иметь места.
Пользуясь B4.12.2) и B4.12.3), можно значительно упростить расчет-
расчетные формулы B3.3.8), отбросив в каждой из них второстепенные слагаемые.
Тогда, оставаясь в рамках асимптотической погрешности B4.7.24), к которой
приводит уравнение B4.12.1), мы получим следующие расчетные формулы:
0 0 0 0 t)Fh
их = vfe3, ц2 = i B -f v) mk2, w = fe4, 7\ = -=?- m2fe2,
T2 = _i^_ ki J J i *Eh_ mk3 q = vG = 2?ftv g8fc6
B4.12.4)
Гипотезы, которые надо принять в исходных уравнениях круговой
цилиндрической оболочки, чтобы получить характеристическое уравне-
уравнение B4.12.1) и расчетные формулы B4.12.4), формулируются так:
1) В геометрических соотношениях, связывающих компоненты дефор-
деформации с перемещениями, главную роль играет нормальный прогиб, и по-
поэтому формулы
1 / Эца \ _ 1 а
^ w)' ха-тг ае
1 д / dw ,
T
$ 12] ПРИБЛИЖЕННЫЙ МЕТОД ДЛЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА 371
можно заменить такими:
с _ w « — ' d*w т - — d*w B4 12 сч
2) Уравнения состояния
с 2Eh / ш , Л2 т
(X,
могут быть заменены равенствами:
с 2Eh ш .
6 e+e
B4.12.6)
C=— 3d-V) ™"
3) Во всех уравнениях равновесия, кроме четвертого, можно положить
G,=H, = H2 = N2 - 0. B4.12.7)
а в четвертом уравнении можно оставить только G2 и #2.
При расчете краевого эффекта исходные уравнения круговой цилиндри-
цилиндрической оболочки надо брать в таком виде:
Геометрические соотношения:
1 дщ w __ 1 / ди2 . 5% \
е1~~Г"аГ' 6г Г' ** ~ Т \~Щ~+ ~Ж )'
B4.12.8)
Уравнения состояния
п _, 2ЕЛ . . с, с, 2ЕЛ m
6j -)- ТЬ2 U, У 2 ] V2 Ve2 -+" Velji °21 °12 1 4- V ^^ '
B4.12.9)
^ 2ЕЛ8 ^ 2Eft3
"' - 4() _V2) Xl' °2— 3A_V2)
Уравнения равновесия:
<24.12.10)
24»
S 12] ПРИБЛИЖЕННЫЙ МЕТОД ДЛЯ ПРОСТОГО КРАЕВОГО ЭФФЕКТА
371
можно заменить такими:
w
-
1 дгя>
2) Уравнения состояния
с 2Eh / со . Л2
2Eh
2Eh3
2Eli
4- vxa), G2 = 3(i l
могут быть заменены равенствами:
с. 2Eh со .
6 8 + v
2ЕЛ3
———j-
B4.12.6)
3) Во всех уравнениях равновесия, кроме четвертого, можно положить
С, = Я, = Я2 = Л^а = 0. B4.12.7)
а в четвертом уравнении можно оставить только G2 и #2.
При расчете краевого эффекта исходные уравнения круговой цилиндри-
цилиндрической оболочки надо брать в таком виде:
Геометрические соотношения:
г д\ '
dUl
B4.12.8)
Уравнения состояния
2Eh
et), 521 = 51г = y
B4.12.9)
2Eh3
2Eh3
3A—v2) Xl1
Уравнения равновесия:
^ + -^
=0,
ев
riV.-O.
2 _ .
<24.12.10)
24»
372 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
Искомые величины можно теперь выразить через потенциальную функ-
функцию при помощи формул:
Т — 2Eh а*Ф r 2g/t д*Ф „ _„ _2Eh
eg* ^врвв B4I2I!)
i абФ я -и 2Eh n* абф
2Eh g8 д->Ф N 2Eh a2 Й'Ф
причем все исходные равенства B4.12.8) — B4.12.10) обращаются в тож-
тождества, кроме третьего уравнения равновесия. Последнее будет также
удовлетворяться, если потребовать, чтобы потенциальная функция была
связана разрешающим уравнением
4г + ^-Ф = 0. B4.12.12)
Отбрасывания, вытекающие из сформулированных гипотез, вполне
эквивалентны тем, которые были получены путем анализа корней характе-
характеристического уравнения, так как если мы будем искать интегралы разре-
разрешающего уравнения B4.12.12) в виде
Ф = ekl cos mB,
то получится характеристическое уравнение B4.12.1), а соотноше-
соотношения B4.12.11) превратятся в расчетные формулы B4.12.4).
Разумеется, систему уравнений B4.12.8) — B4.12.10) можно интегри-
интегрировать и другими способами. В частности, исключив все неизвестные, кроме
нормального проги&а до, ее легко свести к одному уравнению
которое представляет собой частный случай разрешающего уравнения общей
теории простого краевого эффекта (8.10.9).
§ 13. Напряженное состояние с большой изменяемостью
Качественное различие между основным напряженно-деформированным
состоянием и простым краевым эффектом уменьшается при увеличении т,
так как скорость затухания основного напряженного состояния возрастает
с возрастанием т. а скорость затухания простого краевого эффекта не зави-
зависит от т. Поэтому при больших т, когда нарушается сильное неравенство
B4.12.3), ограничивающее область применимости приближенных методов
§§ 24.11, 24.12, расчленение полного напряженного состояния становится
невозможным. Вместо этого при больших т надо исходить из приближенного
уравнения
(fe2-m2L + -^-fe4 = 0, B4.13.1)
модули корней которого имеют одинаковый порядок. Очевидно, что корням
уравнения B4.13.1) соответствуют напряженные состояния, которые были
названы в части II напряженными состояниями с большой изменяемостью.
S 13] НАПРЯЖЕННОЕ СОСТОЯНИЕ С БОЛЬШОЙ ИЗМЕНЯЕМОСТЬЮ 373
Сформулируем приближенный метод построения напряженных состояний
с большой изменяемостью для замкнутых круговых цилиндрических обо-
оболочек.
Уравнение B4.13.1) совпадает с уравнением B4.7.20), а структура
последнего была определена при помощи четвертой строки таблицы пока-
показателей (стр. 351). Поэтому для оценки модулей корней можно воспользо-
воспользоваться формулой B4.7.5), внеся в нее значение s из четвертой строки таб-
таблицы показателей.
Получим
\k\ = 0(al'*-^) = 0(yTm2). B4.13.2)
При помощи B4.13.2) можно так же, как это делалось в §§ 24.11,
24.12, упростить формулы B3.3.8). Тогда они примут вид
иг = ft (т2 + vie), ы2 = — im [т?—B + v) ft2], w = (/re2 — ft2)*,
T1 =
0 9 PI»
G2 = _??!_ a* (ft»—m2J (vft2 — /n2), B4.13.3)
Характеристическое уравнение B4.13.1) и приближенные формулы
B4.13.3) можно получить и непосредственно из исходных уравнений круго-
круговой цилиндрической оболочки, внеся в них некоторые упрощения. Для этого
надо принять следующие гипотезы:
1) В геометрических соотношениях, выражающих компоненты изгибной
деформации через перемещения, можно сохранить только слагаемые, содер-
содержащие нормальный прогиб, т. е. принять, что
2) Соотношение упругости для сдвигающего усилия можно брать в упро-
упрощенном виде:
3) Во втором уравнении равновесия можно положить
#2 = 0. B4.13.6)
Другими словами, исходные уравнения круговой цилиндрической
оболочки надо взять в виде:
374 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
Геометрические соотношения:
1 аи\ ' / дий \ 1 / ди, , д«» \
B4.13.7)
_ 1 й2^ __ 1 5%; 1 дгш
Уравнения состояния:
Т 2Eh . Т 2Eh / . ч о с 2Eh a
Ti = i_v2 (ei + ve,), T2 = 1-v3 (e, + ve,), Sa = 512 =
B4.13.8)
2Eh3 .
2Eh% T
Уравнения равновесия:
ag + ae "ггл1— u>
Потенциальная функция для этой системы вводится формулами:
2Eh д*ф т 2Eh д*ф
2Eh
^(^ + ^)AA0 B4.13.10)
Все соотношения B4.13.7)—B4.13.9) при Хх = Х2 = Z = 0 обра-
обращаются в тождества, если в них внести B4.13.10). Исключение представляет
третье уравнение равновесия. Оно будет удовлетворяться, если потенциаль-
потенциальную функцию связать разрешающим уравнением
ддддф +1^1^ = 0. B4.13.11)
13}
НАПРЯЖЕННОЕ СОСТОЯНИЕ С БОЛЬШОЙ ИЗМЕНЯЕМОСТЬЮ
375
Положив в B4.13.10) и B4.13.11)
Ф = е*& cos тЭ,
мы придем вновь к характеристическому уравнению B4.13.1) тт к расчетным
формулам B4.13.3).
При весьма больших т, а именно при т >-«-1/2, в соотношения B4.13.7)—
{24.13.9) можно внести новые упрощения, которые соответствуют переходу
к характеристическому уравнению
(fe2 — тУ = 0. B4.13.12)
Это эквивалентно введению дополнительных предположений, что в геоме-
геометрических соотношениях B4.13.7) формулу для ег, отбросив в ней слагаемое,
содержащее нормальный прогиб, можно брать в виде
е2 = 4-^Г» B4.13.13)
а в третьем уравнении равновесия B4.13.9) можно отбросить нормальное
усилие Т2, т. е. записать это уравнение в виде
M.
B4.13.14)
Тогда уравнения цилиндрической оболочки распадаются на две, не связан-
связанные между собой группы соотношений.
Первая группа соотношений, содержащая только тангенциальные
перемещения, компоненты тангенциальной деформации и тангенциальные
усилия, будет:
1 ~
дв
^-, B4.13.15)
Это — уравнения обобщенного плоского напряженного состояния.
Вторая группа соотношений, содержащая только моменты, перерезы-
перерезывающие усилия, компоненты изгибной деформации и нормальный прогиб
будет:
2Eh3
2Eh3 ( ,
= — 3(l-v2) KVl% + VXl]
¦ rZ = U, -,r д^-
2Eh3
B4.13.16)
f
Это — уравнения изгиба пластинки.
376 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. ?4
§ 14. Приближенные методы расчета замкнутых
круговых цилиндрических оболочек
Подведем итог обсуждению методов расчета замкнутых круговых цилинд-
цилиндрических оболочек. Пусть надо решить однородную задачу, условия которой
таковы, что потенциальную функцию Ф, введенную в § 23.2, надо искать
в виде следующей суммы:
Ф= Ii<Pm(t)elmd, B4.14.1)
m=0
представляющей собой начальную часть комплексного тригонометрического
ряда.
Разобьем правую часть B4.14.1) на три подсуммы, представив ее так:
шв, B4.14.2)
и будем считать, что Мо = 0, а Мх, М% выбраны так, что при т ^ Mj
выполняется неравенство B4.9.5) и при Мх < т <? Мг выполняется нера-
неравенство /па <? с. Тогда для построения каждой из потенциальных функ-
функций Фи Ф2, Ф3 можно указать свой приближенный метод.
В подсумме, образующей потенциальную функцию Фь параметр т
удовлетворяет неравенству B4.9.5). Это значит, что для нахождения Фх
можно воспользоваться обычным методом расчленения, т. е. считать, что
соответствующее напряженно-деформированное состояние составляется из
основного напряженного состояния, определяемого с достаточной точностью
из уравнений безмоментной теории, и простого краевого эффекта, для кото-
которого имеют силу уравнения и формулы §24.12 (они представляют собой
частный случай уравнений и формул общей теории простого краевого эф-
эффекта).
Во всех слагаемых потенциальной функции Ф2 параметр т удовлетво-
удовлетворяет сильному неравенству т2 <? с, обеспечивающему разделение корней
характеристического уравнения на большие и малые. Это значит, что функ-
функции Ф2 соответствует напряженно-деформированное состояние, составляю-
составляющееся из обобщенного основного напряженного состояния и простого крае-
краевого эффекта. Следовательно, процедура построения Ф2 (с удовлетворением
граничных условий) представляет собой некоторое обобщение метода рас-
расчленения, в котором основное напряженное состояние заменено обобщенным
основным напряженным состоянием (§11.27).
Во всех слагаемых потенциальной функции Ф3 параметр т не удовлет-
удовлетворяет сильному неравенству т2 <? с, а это значит, что корни характери-
характеристического уравнения не разделяются на большие и малые. Поэтому любой
вариант метода расчленения для построения Ф3 становится неприменимым.
Простейшим характеристическим уравнением для таких т является урав-
уравнение B4.7.20), которому отвечает теория напряженных состояний с большой
изменяемостью. Она и должна быть использована для построения потен-
потенциальной функции Ф3.
Итак, для приближенного расчета замкнутой круговой цилиндрической
оболочки можно использовать три основных приближенных подхода: про-
простой метод расчленения, обобщенный метод расчленения и теорию напря-
напряженных состояний с большой изменяемостью. Каждый из них обладает
своими преимуществами, но может быть использован лишь в рамках опре-
определенной области применимости, и ни один из них не является универ-
с альным.
378 ЗАМКНУТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 24
Невозможность дополнительных упрощений объясняется высокими
требованиями к ожидаемой точности. Если снизить их, считая, что сильное
неравенство А > В выполняется, когда А 2з 20В, то получим Мг = 3,
М2 = 9. Это значит, что область применимости простого метода расчленения
осталась столь же узкой, но для обобщенного метода расчленения она рас-
расширилась. При тех же предположениях получаем, что сильное неравенство
1 < тг эквивалентно требованию т > 4. Следовательно, обобщенный метод
расчленения при любых допустимых для него т, кроме т = 4, можно упро-
упростить, используя для построения обобщенного основного напряженного
состояния метод В. В. Новожилова, основанный на уравнениях и фор-
формулах B4.11.17)—B4.11.20). Сильное неравенство B4.14.3) теперь становится
эквивалентно требованию т > 832. Такие т не представляют практиче-
практического интереса и стоят на границе области применимости любой теории
оболочек. Таким образом, упрощенный метод построения обобщенного
основного напряженного состояния в практических расчетах может оказаться
вполне приемлемым (при не слишком высоких требованиях к точности),
но возможность расчета оболочки как плоского упругого тела практической
ценности, по-видимому, не представляет.
ГЛАВА 25
ОТКРЫТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
§ 15. Свойства корней характеристического
уравнения B3.4.9)
Рассмотрим характеристическое уравнение B3.4.9) и поставим перед
собой задачу, как и в § 24.7, изучить свойства его корней.
В уравнение B3.4.9) входят три параметра. Один из них а определяется
формулой B3.1.6), и следовательно, для тонкой оболочки он мал по сравнению
с единицей. Вторым параметром является %т (напомним, что в характери-
характеристическом уравнении индекс т опущен). Он определяется формулой B3.6.3)
и зависит как от т — номера члена разложения, так и от Иг — отношения
длины оболочк i к радиусу. Поэтому X может изменяться практически в не-
неограниченных пределах: от значений, близких к нулю (при больших Иг),
до сколь угодно больших значений (при больших т или малых Иг). Третий
параметр — коэффициент Пуассона v. Он изменяется в узких пределах
и оказывает незначительное влияние на модули корней уравнения B3.4.9),
поэтому в дальнейших рассуждениях мы будем считать, что v всегда имеет
одно и то же значение.
Следуя приему, использованному в §24.7, положим
а, = оГц B5.15.1)
и будем считать, что ц может принимать любые (как положительные, так и
отрицательные) значения. Введем, кроме того, замену искомой величины
по формуле
y. = cTsk B5.15.2)
и подставим эти выражения для А, и х в уравнение B3.4.9). Тогда после умно-
умножения обеих частей полученного равенства на а' придем к уравнению
Bgfe8 — (В6—Вб) k6 + (В4 — В4 + Bl) k* —
— (В2 — В2 + Bl) k2 + (Во + Во) = 0, B5.15.3)
где
** В6 = 4а'-*-211, в; = 2а'-*, В4 = ба'-^-*
V -*-*», В'2 = (8 — 2v2) a'8^,
Во = (l -v2)a^-2.
Наша цель снова будет заключаться в том, чтобы определить асимпто-
асимптотику корней х, т. е. указать, с какими степенями малого параметра а соиз-
соизмеримы х. Для этого, так же как в § 24.7, надо подобрать такие пары зна-
значений Ihs(b зависимости от ц,), при которых уравнение B5.15.3) после
380
ОТКРЫТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. 25
'<n
ВД
*<0
"ад
ад
$вд"
ад
ад
00
to
ад
о)
ад
1
а.
1
Tig
а.
еЗ
,1
а.
2s—4
0
3
а.
1
/—4s
а.
т
i
^1
ii
я Si
я j;
о ?
С 5
-
1
а.
1
5-
i
а.
¦
1
1
ё-
i
о
а.
1
а.
1
о
а.
1
о
о
II
о*
II
см
о
+
а.
1
—
+
1
—
+
а.
те
1
о
а.
1
1
1.
1
—
1
-4ц
|
1
+;
IIII
СО
О
Ч"
(N
СО
(N
3.
А
СО
(N
+
1
а.
1
(N
а.
(N
о
те
+
(N —
- (N
+
И И
Л п
СП
1
а.
те
о
а.
те
а.
о
о
о
а.
II
«3-
II
§ 15] КОРНИ ХАРАКТЕРИСТИЧЕСКОГО УРАВНЕНИЯ B3.4.9) 381
перехода к пределу при а —* 0 будет иметь конечные и ненулевые корни.
Рассуждения, приводящие к правильному выбору t и s, остаются такими же,
как в §24.7. Опуская их, приведем здесь только соответствующую таблицу
показателей и сформулируем окончательно результаты.
Надо различать пять случаев.
Случай I. Если \i <3 —Va, то существует две комбинации значений t, s:
a) t = 0, s = О, б) t = 4ц -|- 2, s = \i -f- V2,
которым соответствуют предельные уравнения (в них уже выполнен переход
к первоначальному неизвестному х)
\Х -j- I) — U (S — U^, X -j ^— Л = U (S = \l -j- с). у1.ОЛОЛ)
Случай II. Если \i = —Va, то
f о с о vi (vz 1 \\2 1 v № П (9^ 1 ^ Ъ\
Случай III. Если —x/2 < ц < V2, то
t — z -j- t(i, &— 4 ' 2 ' "• o2^ — ^zo.io.u;
Случай IV. Если ц = Va, то
f = 4, s = 4-> (x2 —X2L + i=^X4 = O*). B5.15.7)
Случай V. Если ц > V2, то
f = 8fj,, s = fx, (x2 — VL = 0. B5.15.8)
В таблице показателей случаю 1а соответствует вторая строка,
случаю 16 — третья строка, случаю II — вторая строка при ц = —V2,
случаю III —четвертая строка, случаю IV — четвертая строка при ц =
= V2, случаю V — пятая строка.
Каждому из этих вариантов приближенных характеристических урав-
уравнений соответствуют свои асимптотические погрешности и оценки модулей
корней. Погрешности уравнений определяются так же, как в §24.7, только
теперь, конечно, надо исходить из таблицы показателей на стр. 380 (в ней
во второй и третьей строках в рамку взяты числа, равные наименьшему
ненулевому показателю). Оценки модулей корней выводятся элементарно,
н на подробностях мы не останавливаемся. Окончательные результаты,
в которых величина а.—*1 согласно B5.15.1) заменена на Я,, заключаются
в следующем.
I. Уравнения B5.15.4) дают две группы корней. Корни первой группы
подчиняются соотношению
х = ОA) B5.15.9)
и определяются нз первого уравнения B5.15.4) с асимптотической погреш-
погрешностью
О (К) при К^а,
в=|./».1ч , ,,- B5.15.10)
При fl<A,<"
*) Принято во внимание, что в данном случае "к— а 1/2.
382
ОТКРЫТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ 25'
Корни второй группы подчиняются соотношению
V-aV
B5.15.11)
и определяются из второго уравнения B5.15.4) с асимптотической погреш-
погрешностью
е =
О (а) при *,«=?
B5.15.12)
II. Уравнение B5.15.5) даег восемь корней. Оно выведено в предпо-
предположении, что ц = —V2, и при таком значении ц асимптотика его корней
и оценка погрешности получаются без труда:
х = 0A), г = О(а).
Таким образом, при ц = —V2 B5.15.5) имеет довольно высокую точ-
точность, и можно рассчитывать, что это уравнение будет пригодно и в некото-
некоторой окрестности точки ц = —V2. Область применимости B5.15.5) можно
установить, исходя из второй и третьей строки таблицы показателей (стр. 380).
Они определяют структуру первого и второго уравнений B5.15.4). содер-
содержащих в совокупности все слагаемые, входящие в B5.15.5). Поэтому при
ц Ф —V8 уравнение B5.15.5) можно трактовать как приближенное равен-
равенство, которое получается, если оставить в B5.15.3) все члены, соответствую-
соответствующие нулям во второй или в третьей строчках таблицы показателей. Учиты-
Учитывая это и просмотрев еще раз третью строку, замечаем, что уравнение B5.15.5)
получено ценой отбрасывания слагаемых, содержащих малый параметр а
в следующих степенях:
— 4ц—1, —4ц, —2ц, — 4ц+ 1, — 2ц+ 1, 1, —4ц+ 2.
Все эти числа остаются положительными тогда и только тогда, когда
ц < —V4. Этим неравенством и определяется область применимости урав-
уравнения B5.15.5). Далее замечаем, что среди выписанных выше чисел наи-
наименьшим будет —A\i — 1 (если ц > —V2) или 1 (если ц < —V2). Отсюда
ааключаем. что уравнение B5.15.5), корни которого однократны и имеют
следующую асимптотику:
B5.15.13)
выведено с погрешностью, которая согласно правилу, сформулированному
в § 24.7, имеет порядок
8 = i
(-^-) при
О (а) при
B5.15.14)
к 5=
III. Уравнение B5.15.6) дает восемь корней, для которых выполняется
соотношение B5.15.13). Использование этого уравнения приводит к асимп-
асимптотической погрешности
е =
О
О
при
при —i=
V а
к > У~а,
B5.15.15)
$ 16] ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА ОТКРЫТЫХ ОБОЛОЧЕК 383
IV. Уравнение B5.15.7) дает восемь корней. При \i =^ г/2 они подчи-
подчиняются соотношению B5.15.13), а при \i Зг */2—соотношению
х = О(Я,). B5.15.16>
Асимптотическая погрешность уравнения B5.15.7) равна
при
е= " " B5.15.17>
<w) при ^^уГ-
V. Уравнение B5.15.8) дает восемь корней, для которых выполняется
соотношение B5.15.16). Асимптотическая погрешность этого уравнения.
е =
~\тг) ПРИ 1Г<
П1
B5.15.18)
Из соотношений B5.15.10), B5.15.12), B5.15.14), B5.15.15), B5.15.17)-
и B5.15.18) вытекает, что области применимости приближенных уравне-
уравнений B5.15.4)—B5.15.8) определяются следующими сильными неравенствами:.
1) для уравнений B5.15.4) Я, < J/а, '>
2) для уравнения B5.15.5) Я, <^ ,
V а.
3) для уравнения B5.15.6) У~а < Я, <^L=,
а
4) для уравнения B5.15.7) Я, ^> Y^а,
5) для уравнения B5.15.8) Я, > ^т="#
§ 16. Приближенные методы расчета открытых
цилиндрических оболочек
Пусть потенциальная функция имеет вид
Ф = if. @) sin Xg, B5.16.1>
причем г|з является интегралом уравнения B3.4.7). Она удовлетворяет одно-
однородному разрешающему уравнению теории круговых цилиндрических обо-
оболочек и, следовательно, определяет некоторое напряженное состояние обо-
оболочки, не загруженной по поверхности и шарнирно опертой по поперечным
краям | = 0, Ъ, = Иг. Соответствующие усилия, моменты, перемещения и
углы поворота определяются по формулам § 23.4. Эти величины также
меняются по | по закону cos %\ или sin Я,|, где % = тяг/1. При т > 1 функ-
функция sin Я,| проходит через нуль т + 1 раз на интересующем нас
интервале @, /), и можно считать, что оболочка разбнвается в продольном.
направлении на т равных отсеков длины 1/т. На их краях sin Я.| проходит
через нули, а это значит, что каждый отсек работает так, как если бы он
был изолирован от других н так же, как оболочка в целом, шарнирно оперт
по криволинейным краям. Поэтому можно считать, что т всегда равно-
384
ОТКРЫТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ
[ГЛ. '25
единице, но I означает не полную длину оболочки, а лишь т-ю часть этой
величины, которую мы будем называть приведенной длиной оболочки. Под
приведенной длиной оболочки подразумевается, таким образом, длина
отсеков оболочки, изображенных на рис. 56.
Параметр \i был определен формулой B5.15.1). Внеся в это равенство
значение К = тяг/1, запишем его в виде
где L = относительная приведенная длина. Это равенство позво-
* т г
ляет связать классификацию, выявившуюся при исследовании корней харак-
характеристического уравнения B3.4.9), с понятием о приведенной относительной
длине и формулировать результаты так:
Случай I (\i <—V2) — оболочки весь-
весьма большой относительной приведенной
длины, для которых
1 // nll* I nn „—Vi /on; if; 9^
л <^ а , i^ s$> а • \ло. io.z^
Случай II (jx = —V2) — оболочки
большой относительной приведенной дли-
длины, для которых
Я, = О(а'2), l^ — O \a г). B5.16.3)
оболочки средней относительной при-
Рис. 56.
Случай III (—Vs <\i < V2)
веденной длины, для которых
L
B5.16.4)
Случай IV (\л = V2)
длины, для которых
оболочки малой относительной приведенной
(a~lu), ^ = 0(aVl). B5.16.5)
Случай V (\i > V2) — оболочки весьма малой относительной приве-
приведенной длины, для которых
Х»а~'/г, /*«а'/!. B5.16.6)
Для каждого из этих пяти классов задач теории открытых цилиндриче-
цилиндрических оболочек кругового очертания существует свой приближенный метод,
основанный на возможности заменить характеристическое уравнение B3.4.9)
одним из приближенных уравнений B5.15.4)—B5.15.8) и внести соответ-
соответствующие упрощения в формулы § 23.4 для F. В этих формулах можно оце-
оценить все слагаемые, пользуясь соотношениями B5.15.9), B5.15.11), B5.15.13),
B5.15.16), и отбросить те, которые выходят за пределы асимптотических
погрешностей B5.15.10), B5.15.12), B5.15.14), B5.15.15), B5.15.17),
B5.15.18), допущенных при переходе к приближенным уравнениям B5.15.4)—
B5.15.8). Не входя в подробности всех этих рассуждений и выкладок, при-
приведем окончательные результаты.
Оболочки средней приведенной относительной длины. Для них К и /„.
ограничены сильными неравенствами B5.16.4). Приближенное характери-
характеристическое уравнение имеет вид B5.15.6), а модули его корней оцениваются
соотношением B5.15.13). С той же асимптотической погрешностью, с которой
16] ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА ОТКРЫТЫХ ОБОЛОЧЕК 385
о
составлено уравнение B5.15.6), приближенные формулы для F могут быть
записаны так:
B5.16.7)
о о 2?/i • ° 2?7г
Приближенное характеристическое уравнение B5.15.6) и формулы
B5.16.7) можно получить сразу, введя некоторые упрощения в исходные
уравнения теории круговых цилиндрических оболочек. Соответствующие
гипотезы и предположения совпадают с теми, на которых в $24.11 был
построен упрошенный приближенный метод определения обобщенного основ-
основного напряженного состояния замкнутой оболочки, т. е. метод В. В. Ново-
Новожилова. Действительно, рассмотрим еще раз приближенные уравне-
уравнения B4.11.17)—B4.11.19), лежащие в основе этой теории. При Хх = Х2 =
¦= Z = 0 их можно заменить формулами B4.11.20) и разрешающим урав-
уравнением B4.11.21), но легко проверить, что, если в этих соотношениях по-
положить
, B5.16.8) '
т. е. применить их к расчету открытой шарнирно опертой оболочки, то фор-
формулы B4.11.20) обратятся в B5.16.7), а B4.11.21) перейдет в приближенное
характеристическое уравнение B5.15.6).
Оболочки малой приведенной относительной длины. Для них X и /„. под-
подчиняются требованиям B5.16.5). Приближенное характеристическое урав-
уравнение имеет вид B5Л5.7), и модуль его корней оценивается соотношением
B5:15.17). В рамках этой точности приближенные формулы для F могут
быть записаны так:
и\ = — (Ъса + v*,8), щ = — B + v)Vk + k8. w = (V — Ky,
— Л , Ои — О1г — — Л Г,
B5.16.9)
Гипотезы, которые могут быть использованы для оболочек малой при-
приведенной длины, т. е. предположения, сразу приводящие кформулам B5.16.9)
и характеристическому уравнению B5.15.7), совпадают с предположе-
предположениями B4.13.4)—B4.13.6), введенными для приближенного определения
полного напряженного состояния замкнутой круговой цилиндрической
оболочки при больших значениях номера разложения т (т > 1), т. е.
25 А. Л. Гольденвейзер
386 ОТКРЫТЫЕ КРУГОВЫЕ ЦИЛИНДРИЧЕСКИЕ ОБОЛОЧКИ [ГЛ. 25
с гипотезами теории напряженных состояний с большой изменяемостью.
Они привели к соотношениям B4.13.10) и разрешающему уравне-
уравнению B4.13.11). Те и другие сохраняют силу и для открытых оболочек малой
ариведенной относительной длины, так как, если в B4.13.10) и B4.13.11)
взять Ф в виде B5.16.1), то мы получим расчетные формулы B5.16.9) и раз-
разрешающее уравнение B5.15.7).
Оболочки большой приведенной относительной длины. Для них Я. и /„.
определяются требованиями B5.16.3). Приближенное характеристическое
уравнение имеет вид B5.15.5), и модуль его корней оценивается равен-
равенством B5.15.13). В рамках такой погрешности приближенные формулы для F
могут быть записаны так:
0 OPh
B5.16.10)
. = 4.—
2Eh
r (I— va)
1), kt =' r(fgv8) aV (ха + 1).
Гипотезы, которые можно использовать для открытых оболочек большой
приведенной относительной длины, т. е. предположения, сразу приводящие
к формулам B5.16.10) и характеристическому уравнению B5.15.5), совпа-
совпадают с гипотезами B4.11.6)—B4.11.8), введенными для неупрощеиного
приближенного метода определения обобщенного основного напряженного
состояния замкнутой цилиндрической оболочки, т. е. для метода В. 3. Вла-
Власова. Это нетрудно проверить, сопоставив B4.11.11), B4.11.12) с B5.16.10),
B5.15.5) при помощи подстановки B5.16.8).
Оболочки весьма малой приведенной относительной длины. Для них А,
и /„. ограничены сильными неравенствами B5.16.6). Приближенное харак-
характеристическое уравнение имеет вид B5.15.8). С присущей ему асимптоти-
асимптотической погрешностью B5.15.18) можно снова пользоваться форму-
формулами B5.16.10). Гипотезы, которые ведут к этим соотношениям, совпадают
с гипотезами B4.13.4)—B4.13.6), B4.13.13), B4.13.14), полученными выше
для замкнутых оболочек при весьма больших значениях номера разложе-
разложения т (т > а~1/2).
Оболочка весьма большой приведенной относительной длины. Для нее X.
и 1^ ограничены сильными неравенствами B5.16.2). Оболочки такой длины
надо относить уже к тонким стержням, и мы на этом вопросе останавли-
останавливаться не будем.
ЧАСТЬ VI
ОБОСНОВАНИЕ ТЕОРИИ ОБОЛОЧЕК
Настоящий раздел посвящен главным образом оценкам возможных
асимптотических погрешностей двумерной теории оболочек. Обсуждаются
также и пути ее уточнения. Применяется асимптотический метод, т. е. счи-
считается, что интересующей нас краевой задаче теории оболочек соответствует
некоторая краевая задача трехмерной теории упругости, и для последней
ищется итерационный метод решения, который основан на малости толщины
области и в исходном приближении возвращает нас к двумерной теории.
Намеченная цель достигается при помощи двух итерационных процессов
итерирования трехмерных уравнений теории упругости. Первый из них
позволяет строить внутреннее напряженно-деформированное состояние обо-
оболочки. Оно в однородном случае соответствует внешним воздействиям, не
самоуравновешенным по толщине оболочки (т. е. на любом отрезке нормали
к срединной поверхности), и в исходном приближении описывается двумер-
двумерными уравнениями (часть I). Второй итерационный процесс позволяет
строить так называемые погранслои, т. е. краевые напряженные состоя-
состояния, соответствующие самоуравновешенным по толщине краевым воздейст-
воздействиям *). В исходном приближении нахождение погранслоев сводится
к интегрированию уравнений плоской и антиплоской задач теории упру-
упругости.
Итерационный процесс для внутреннего напряженного состояния обсу-
обсуждается в главе 26. Для его построения приходится принять некоторые
предположения об асимптотических свойствах искомого напряженно-дефор-
напряженно-деформированного состояния и, в частности, ввести понятие о нормальной асимпто-
асимптотике. Полученные результаты используются в главе 27, где даются оценки
погрешностей различных вариантов двумерных теорий оболочек и показы-
показывается, что вариант, построенный в части I, в известном смысле является
наилучшим. Показано также, что в тех случаях, когда искомое напряженно-
деформированное состояние имеет особую (не являющуюся нормальной)
асимптотику, погрешности классической теории оболочек повышаются.
Итерационный процесс для погранслоев обсуждается в главе 28. В ней
формулируются также и условия затухания, которым должны (в силу прин-
принципа Сен-Венана) удовлетворять погранслои.
В конкретно сформулированной трехмерной краевой задаче теории
упругости, моделирующей рассматриваемую задачу теории оболочек, вну-
внутреннее напряженное состояние должно определенным образом взаимодей-
взаимодействовать с погранслоями. Это взаимодействие обсуждается для трех вариан-
вариантов граничных условий в главе 29. Показано, что в рамках определенной
асимптотической точности полный расчет оболочки (включающий обследо-
обследование краевых упругих явлений) можно разбить на самостоятельные этапы,
первый из которых состоит из обычного расчета оболочки по классической
двумерной теории. На последнем этапе при этом могут быть найдены и краевые
напряженно-деформированные состояния, вопрос о которых в классической
теории оболочек вообще не может ставиться. Попутно выясняется, что эти
краевые напряженно-деформированные состояния по своей интенсивности
асимптотически эквивалентны получающимся по классической теории.
*) Таким образом, слово «погранслои» надо понимать как условный термин, заменяю-
заменяющий слова «иапряжеиио-деформированное состояние, локализованное в пограничной зоне».
25*
ГЛАВА 26
ИТЕРАЦИОННЫЕ ПРОЦЕССЫ ИНТЕГРИРОВАНИЯ УРАВНЕНИЙ
ТЕОРИИ УПРУГОСТИ
§ 1. Трехмерные уравнения теории упругости
Будем снова рассматривать оболочку как трехмерное упругое тело и
отнесем его к триортогональной системе координат. Тогда дифференциаль-
дифференциальные уравнения задачи будут иметь такой вид (в этом разделе снова всюду
считается, что i Ф i и каждый из этих индексов может принимать значе-
значения 1, 2):
Уравнения равновесия:
+ -^ (H(H3o{i) + -JL (
-Н^он — Н^оп + Н^о,, + Н,-^-аш + Hflfla = 0, B6.1.1)
-А- (ВДа„) + ~- (HsHto31) + -±- (Н.Н^) -
- Нш Ц- аи - Я, ™? а22 + Я2 ^ а18 + Я, *?. а23 + HtHJI*M = О
(в части I они были записаны одним векторным равенством B.9.1)).
Уравнения, выражающие обобщенный закон Гуна:
j 2)
(в части I эти уравнения были записаны при помощи равенств B.9.3)—B.9.5)).
Кроме того, будут приниматься во внимание условия на лицевых по-
поверхностях оболочки
a«|o,-h = Clft °33 |о,=А
а13 |a,= h = + GГ» СТ33 |о,=—h
j оч
Все обозначения в уравнениях B6-1.1)—B6.1.3) заимствованы из §2.9.
Так же как в § 2.9, считается, что срединная поверхность оболочки
отнесена к линиям кривизны при помощи векторного равенства
М = М {и1г а,),
$ 1) ТРЕХМЕРНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ 389
а триортогональная система координат в пространстве задается равенством
Р (alf ая, а3) = М (at, ая) + а8в,
в котором Р — радиус-вектор точки трехмерного пространства, п—еди-
п—единичный вектор нормали срединной поверхности.
При этом коэффициенты Ламэ Hk в уравнениях B6.1.1), B6.1.2) будут
определяться формулами A.8.5)
Н,-А,(\+Щ), Я3=1, B6.1.4)
а при дифференцировании этих величин надо пользоваться формулами A.8.7),
A.8.8)
дА{ I. а, \ дЩ _ At dHt _ дНя _ dHt _ . ((>f. .
(срединная поверхность отнесена к линиям кривизны, поэтому координат-
координатные нормальные радиусы кривизн отмечаются одинарными индексами).
Введем несимметричные напряжения *). определив их так:
преобразуем равенства B6.1.1)—B6.1.3) при помощи формул B6.1.4)
B6.1.6) и запишем результат следующим образом:
Уравнения равновесия
Уравнения состояния
Условия на лицевых поверхностях
B6Л'9)
*) Под этим подразумеваются величины, более удобные для дальнейшего, чем обычные
напряжения. Достаточно наглядного физического содержания они не имеют.
* 1 Г т 1
^ Rj Лаг h L V Hi / \ Кг I Jas
390 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЯ УПРУГОСТИ 1ГЛ. 26
Здесь приняты следующие обозначения:
1 <Эт(. I ^i, 1 дА, 1 dAi
Ri ^ R* ' At daj, ^ A2 dat ^~ AtA2 dat %l3"+"
+ ^-^Т»з. B6.1.10)
AiA, да,
ft-
dat
Замечание. Введение несимметричных напряжений увеличило иа единицу число неизвест-
неизвестных величин теории упругости, так как т12 4= T2i- Co ответственно увеличилось и число уравне-
уравнений: так как каждое уравнение, в котором можно варьировать индексы i, /, надо считать за два,
то равенства B6.1.1), B6.1.2) эквивалентны 9 уравнениям, а равенства B6.1.7), B6.1.8) эквива-
эквивалентны 10 уравнениям. Лишнее уравнение дает последнее (двойное) равенство B6.1.8), оно
после возвращения к симметричным напряжениям станет одинарным.
§ 2. Преобразование уравнений теории упругости
Введем новые независимые переменные, положив
а, == RX~" lh а3 = ЮГ%, B6.2.1)
где R — некоторый характерный радиус кривизны срединной поверхно-
поверхности, р, I — целые числа, удовлетворяющие неравенствам
/>р=гО, B6.2.2)
а Я — большой постоянный параметр, определяемый формулой
h=:RX~l. B6.2.3)
Замечание. Ниже будут постоянно употребляться величины А, /, р, хотя мы ие распола-
располагаем формулами, позволяющими определять их в отдельности. В этом и нет необходимости, так
как нужно знать только к1 и кр. Для X1 мы имеем формулу B6.2.3), а кр выражается через А,'
и р/l, т. е. через число, совпадающее по смыслу, как мы увидим в § 27.3, с показателем изме-
изменяемости t. Что же касается t, то в конкретных задачах его можно считать известным (§ 12.30)
Пользуясь такой неопределенностью, будем считать, что / — небольшое число, и следова-
следовательно, при лостаточно малом hlR параметр А весьма велик по сравнению с единицей.
Сделаем также следующие замены искомых величин:
Т/ = А т.-, т>,- = А Хц, Т/о = К Т/Ч,
, " '[' '8. 3 ^ B6.2.4)
и будем считать, что b и с — числа, из которых первое пока принимается
равным нулю:
6 = 0, B6.2.5)
а второе всегда задается следующим образом:
с = 0 при 2p«s;/, с=2р—/ при 2р^/. B6.2.6)
Смысл подстановок B6.2.1), B6.2.4) обсуждается в §27.7. Пока будем
выполнять их формально. Внеся B6.2.1), B6.2.4) в B6.1.10), получим
^++ B6.2.7)
§ 3] ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ 391
где
1 ?t 1 ач/ ля-* ал/ . • ля
-* ал/ . • ля-* ал,- • •
7( '~
/гл.—" dAt * . RX-" дАх • B6.2.8)
"ай7 у+ *~*Г*
^~р дА!
Подставив B6.2.7) в исходные уравнения и выполнив очевидные сокра-
сокращения, будем вместо B6.1.7) иметь
Ъ+
B6.2.9)
ala4t = 0.
Здесь и ниже применяется обозначение
a<=1+nf-? = 1+J^- B6.2.10)
Таким же образом B6.1.8) приводятся к виду
-g-ajei = b diti — vk apj — vk т т3,
T3 VA Vuili ~f l«/>
," . "b N B6.2.11)
-?- (а<тг + fl/m^) = 2 A -f- v) л а,т;/.
§ 3. Интегрирование уравнений теории упругости
Наша цель теперь будет заключаться в том, чтобы приближенно свести
трехмерные (с независимыми переменными ?ь |2, ?,) уравнения предыдущего
параграфа к двумерным (с независимыми переменными |ь 12) уравнениям.
Для этого, в частности, надо избавиться в B6.2.9), B6.2.11) от дифференци-
дифференцирования по ?• Эту операцию мы будем выполнять так, чтобы в коэффициентах
получаемых уравнений был виден характер их зависимости от параметра X
и переменной ?,.
В уравнения B6.2.9), B6.2.11) входят в различных комбинациях ве-
величины at, aa. Они определены формулой B6.2.10), т. е. являются функ-
функциями переменной (k~~lt). Заменим такие комбинации рядами вида
: 1л \J)r а* ъ • BО.О.1)
г=0
392 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ УПРУГОСТИ 1ГЛ. 26
Например, будем принимать, что
Символом (Л, обозначен коэффициент ряда Тейлора по (^~f?) от функ-
функции, стоящей в скобках, т. е. , t
Из этой формулы, в частности, вытекают следующие равенства:
B6.3.2)
Будем рассматривать второе и третье равенства B6.2. Н) как уравне-
• * *******
ния, определяющие vt, v3, а величины gt, xt, т{/, xi3, т8 считать известными,
задав их формулами
B6-3-3)
в которых
о • • о о
(
Тогда, интегрируя второе и третье равенства B6.2.11) по ?, получим
^ | г 2 (
0 L r=O
о L я v * >r J
| Г у / _L)rjr*r| Сч» + A
о
0 ()
Vi, v3 — произвольные функции интегрирования, зависящие от J-lt |2).
Запишем этот результат в следующем виде:
*»*l к к 1+%к 21+2Рк B6.3.4)
S 3] ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ 393
1 1
считая, что vt, v3 зависят только от |х, |а и определяются формулами
1 0 1 ^ 0 U
vi=—gi, v3= — vX -?~ (т.! + т2). B6.3.5)
2 2
Тогда для v'i, 1>з (штрихом отмечено, что эти величины зависят и от С)
получатся следующие выражения:
2 „га \ С 1 2
IT1
*8d?, B6.3.6)
Здесь введено обозначение
00
?»(/) = S (/)Д~'<Г~Т~'1- B6.3.7)
По такой же схеме ниже выводятся формулы вида B6.3.4) и B6.3.5)
для остальных искомых величин. Однако при этом мы не будем здесь раскры-
раскрывать смысла величин, отмеченных штрихом сверху. Для них можно построить
формулы вида B6.3.6), которые пока не нужны. Все они выписаны
в § 26.6.
Внеся B6.3.4) в три последних формулы B6.2.8) и следуя изложенной
схеме, напишем
2
т, = т( + l-l+2p-c&i{ + %-2l+2pm'u B6.3.8)
Здесь для величии с верхними индексами 0, 1 справедливы формулы
к
* [ дь, /?Х—Р ЗА; * . а к Q *
B6.3.9)
7Tvi' s'~~a7Wi *" "рГ°"
' /4/ 5|у A{Aj dui
ао = —с, at = —2p-(-c, do = — 2p-fc. di = —с. B6.3.10)
Сравнивая последнее равенство B6.3.8) с первым равенством B6.3.3).
получаем
B6.3.11)
394 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ УПРУГОСТИ [ГЛ. 26
В первом равенстве B6.2.11) можно варьировать значения индексов t, /.
Поэтому оно эквивалентно двум уравнениям. Решив последние относи-
относительно ть та, получим
Внесем сюда выражения е( и т3 согласно B6.3.8), B6.3.3) и запишем
полученный результат так:
*Л = ЩгЬ^ [% А + Ъ
Здесь при помощи прибавления и вычитания одинаковых величин
искусственно введены слагаемые cm и Z'. Под последними подразумеваются
некоторые функции, которые должны быть выбраны так, чтобы оба выражения
в ломаных скобках были величинами вида О A). В § 26.5 будет показано, что
отвечающие этому требованию т и Z' выражаются через компоненты сил,
приложенных к лицевым поверхностям, поэтому мы будем рассматривать
их как известные величины.
Последнее равенство B6.2.11) с учетом B6.3.8) запишется так:
(т, + Я" /+2р->/ 4- *2|+«Ч
Поэтому тг, т(/ можно представить в виде
• о
х< = т.*
. О _, 2р-с+Ь * _„ 2р+ЬК B6-3'12)
Здесь принимается, что
оо
г Б П 1
B63.13)
B6.3.14)
S 3] ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ 395
Сравнивая B6.3.12) со вторым и третьим равенствами B6.3.3), получаем
т* = ?т,- + аг'+ст;, т* = ?т„- +1-1+%. B6.3.15)
Далее, внеся B6.3.12) в две первые формулы B6.2.8), перепишем их так:
. О 1 2 (ZD.O.lD)
где
; i A l ?ч? ,
(/D.d.l/J
Введем теперь в рассмотрение первое уравнение равновесия B6.2.9),
внесем в него разложения вида B6.3.1), выразим L,- по формуле B6.3.16)
и, интегрируя по ?, определим из полученного равенства тC:
Х
0
(т,8— произвольная функция интегрирования, зависящая от |i, ?2).
Примем для простоты, что компоненты массовых сил qt, q не зависят
от ?, и запишем последнее равенство в следующем виде:
л ?т*з + л xi3. Bb.c5.lo)
о 1
Здесь т,8, т,8 имеют тот же смысл, что и в четвертом равенстве B6.3.3),
2 2
а т,-а связано с т^ следующим образом:
fe 2 /+ет;з. B6.3.19)
При этом
2 , 1 , Я' ! о /1X0 B6-3.20)
я
а для т^з получится выражение, выписанное в § 26.6.
396 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЯ УПРУГОСТИ 1.ГЛ. 26
Из B6.2.8) и B6.3.18) вытекает, что
F = F + tF + x-i^p-c+bF'x, B6.3.21)
Fx = ?2F + b~'+cF', B6.3.22)
где
= 0, 1, 2). B6.3.23)
*
Наконец, рассмотрев второе уравнение B6.2.9), найдем для т8:
х3 = I + Л-с f \L + Л-'+2"-+ь^ 2'+2р+"
е j
Перепишем ее так:
и '+2+Ч21 2<+«+»?, B6.3.24)
4х = ?3т3 + Х-2р+2сг3. B6.3.25)
о 1
Тогда т8, т3 будут иметь тот же смысл, что и в равенствах B6.3.3), и справед-
справедливы следующие формулы:
i о , .„ о
т8 = %~CL— я-М-2"-^ — RX~'-cqz,
-е 1 1—ft 13 i 2
V B6.3.26)
т8
2 1-е 1 1—ft 13 i
4
а для т3 получим выражение, выписанное в § 26.6.
§ 4. Основной итерационный процесс
Обозначим через Р совокупность величин, отмеченных в §§ 26.2, 26.3
звездочкой сверху, а именно, будем считать, что
Р = (vit vs, et, т„ glt т„ хф Lh L, xta, F, xa).
Можно принять, что величиной Р определяется некоторое напряженно-
деформированное состояние трехмерной упругой среды, составляющей обо-
оболочку, так как, если известно Р, то напряжения и перемещения находятся
при помощи простых формул B6.2.4) и B6.1.6). Получены формулы
B6.3.4), B6.3.8), ^B6.3.12), B6.3.16), B6.3.18), B6.3.21), B6.3.24), при
помощи которых Р выражаются через величины Р и Р', где
000000000 000
Р = (vh и3, т*з. Ч, eh mt, glt xh хф Lh L, F, .^ 4 j.
1111 11 I I 112 223 \ • • I
vh t»3, st, mh gt, xiS, xt, Lh L, F, xC, x3, F, x3),
223 22 42222 23
P1 = (v'l Оз, TJ-з, x'i, x'ih тз, e'i, mh g'u Ц, L', F'). B6.4.2)
б 4] ОСНОВНОЙ ИТЕРАЦИОННЫЙ ПРОЦЕСС 397
Просмотрев перечисленные формулы и учитывая B6.2.5), легко убе-
убедиться, что их можно коротко выразить равенством
'- B6.4.3)
где В (Р) — некоторая лцнейная алгебраическая комбинация вели-
величин B6.4.1).
Представим Р как сумму
-P = P, + Pt,
в которой под Pt понимается совокупность следующих величин:
и о о и и о
P-i = (l»i, Ua, t»3, т1з, Таз, тз). B6.4.4)
а в Р2 входят все оставшиеся величины Р. Тогда можно принять, что имеет
место равенство
Pa = G(Pi), B6.4.5)
которым выражается тот факт, что любую из величин Р2 можно выразить
как линейную дифференциальную комбинацию из величин Ри т. е. из сово-
совокупности всех произвольных функций, которые появились в результате
интегрирований, выполненных в предыдущем параграфе.
Соотношения, условно записанные в виде равенства B6.4.5), можно
фактически получить по следующей схеме:
(I, к, gt)^K vs), [26.3.9; 26.3.10];
0 0.00
(т„ то)^(е(, mi), [26.3.13];
(L,, L) — (т„ т,,), [26.3.17]; F—Ы, [26.3.23];
К k) — (gi, т,), [26.3.5];
(в„ т,, ft)-»^!. оз) B6.3.9; 26.3.10];
,оо too <26-4-6)
т,,-.^, тC), [26.3.20]; т3— (L, F), B6.3.26]);
F—T,3> [26.3.23];
(Lt, ?.)-»(•!„ т„) [26.3.17]; |,-»(L, f). [26.3.26];
(т,, х1{) -. (в„ т„ в„ т{), [26.3.14]; тя-.A„ Lf), I26.3.20];
F— т,8, [26.3.23]; Ts—F. [26.3.26].
Здесь слева от стрелки выписываются величины, для которых строятся
выражения типа B6.4.5). Справа помещены величины, входящие в эти выра-
выражения, а в квадратной скобке указан номер соответствующей формулы.
Считается, что выкладки должны выполняться в гом порядке, в котором они
здесь приведены. Поэтому величины, поставленные справа от стрелки, надо
рассматривать как известные: они либо входят вРх, либо определены на пре-
предыдущих стадиях выкладок (компоненты внешних массовых сил, конечно, счи-
считаются известными). В качестве примера укажем, что четвертую строку B6.4.6)
надо читать гак: есть формулы B6.3.5), при помощи которых величины vt, va
398 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ УПРУГОСТИ [ГЛ. 2в
0 0 0
(стоящие слева) выражаются через gh т,, т2 (стоящие справа), а для трех
последних величин такие же формулы уже значатся в предыдущих стро-
0 0
ках B6.4.6), а именно, в первой строке для gt и во второй — для т(-.
В § 26.3 не были использованы условия на лицевых поверхностях B6.1.9).
Они представляют собой линейные недифференциальные равенства, связы-
*
вающие между собой различные величины, входящие в совокупность Р,
и учитывая формулу B6.4.3), их можно коротко записать так:
31 {в (Р) + %-2l+2pP) = Q. . B6.4.7)
Здесь 01 — символ некоторой совокупности линейных алгебраических вы-
выражений, а под Q подразумеваются нагрузочные члены, происходящие от
правых частей равенств B6.1.9) и зависящие от компонент поверхностной
нагрузки.
Множитель X~21+2d b выражении, заключенном в фигурные скобки,
имеет малые значения, в силу B6.2.2). Это позволяет применить для инте-
интегрирования дифференциальных уравнений теории упругости итерационный
процесс, который в дальнейшем будет называться основным и заключается
в следующем.
Исходное приближение для Р обозначим через Р(о> н определим его
как решение уравнения
В нем Р@) можно выразить равенством
Ло> = И' (Л ,о,),
в котором Н' — символ некоторой совокупности линейных дифференциаль-
дифференциальных операторов, а именно: если речь идет о величине, принадлежащей Ри
то Я' = 1, если речь идет о величине, принадлежащей Р2, то согласно B6.4.5)
надо положить Я' = Ga. Таким образом, введя обозначение
Н = ВН',
можно написать равенство
Sl\H(Pim)) = Q.
Оно ведет свое происхождение от условий на лицевых поверхностях,
т. е. эквивалентно шести уравнениям, и в силу B6.4.4) содержит шесть не-
неизвестных.
Для величин Р' справедливы формулы, выписанные в §26.6. Просмо-
Просмотрев их, мы убеждаемся, что они имеют вид
P' = J(P,P'). B6.4.8)
Поэтому исходное приближение для Р' можно определить как решение
системы
B6.4.9)
В ней неизвестными считаются величины, перечисленные в правой части
равенства B6.4.2) (к каждой из них надо в качестве дополнительного индекса
приписать внизу нулик в скобках). Система B6.4.9) содержит столько урав-
уравнений, сколько и неизвестных, так как в § 26.6 приводится формула для
каждой из величин B6.4.2). +
Пусть система B6.4.9) решена. Тогда можно принять, что P(i) — пер-
первое приближение для Р — определится из уравнения
$ 5] СОПОСТАВЛЕНИЕ С ДВУМЕРНОЙ ТЕОРИЕЙ ОБОЛОЧЕК 399
Пользуясь линейностью оператора 91, его можно представить в виде
Я {В (/><„)} = Q — Я-2'+2р<#{Р'@)[. B6.4.10)
Таким образом, для P(i) получается уравнение такого же типа, как и
для Р@), но с поправкой в свободных членах или, если угодно, с заменой
истинных компонент поверхностной нагрузки некоторыми приведенными
компонентами. Далее, очевидным образом, итерации можно повторять.
Итак, можно считать, что построен основной итерационный процесс,
который сводится к многократному решению уравнений вида B6.4.10).
Это утверждение имеет условный характер, так как принимается, что известно
решение системы B6.4.9). Справедливость такого предположения мы обсу-
обсудим в § 26.6, а пока заметим, что B6.4.10) представляет собой систему диф-
дифференциальных уравнений с двумя независимыми переменными \х, \2,
так как уравнения B6.4.10) выражают условия на лицевых поверхностях,
т. е. равенства, получающиеся при ? = — 1, и входящие в них неизвестные
величины B6.4.4) представляют собой произвольные функции интегриро-
интегрирования (по С) и также зависят только от %х, |а. Таким образом, основным ите-
итерационным процессом в известном смысле решается основная проблема тео-
теории оболочек — сведение трехмерных уравнений теории упругости к двумер-
двумерным уравнениям.
Заключая параграф, отметим следующее обстоятельство. Исходное
приближение основного итерационного процесса определяется уравнениями,
которые в короткой записи выражаются двумя следующими равенствами
(дополнительный индекс @) отброшен):
В развернутом виде первое из них эквивалентно формулам схемы B6.4.6),
а второе — уравнениям, приведенным ниже под номерами B6.5.6), B6.5.7).
Просмотрев все эти соотношения, можно убедиться, что в каждом из них
в отдельности по меньшей мере один из коэффициентов при искомых вели-
величинах B6.4.1) не зависит от большого параметра Я., а остальные коэффициенты
содержат А. в неположительных степенях. Поэтому при некоторых дополни-
дополнительных предположениях (они будут обсуждаться ниже) можно принять,
что основной итерационный процесс позволяет строить такие напряженно-
деформированные состояния, для которых все величины Р имеют одинаковый
асимптотический порядок.
Число d здесь зависит от условий задачи, т. е. от порядка величин
q?, q?, qx, q2, q3) и порядка свободных членов в граничных условиях.
В частности, если граничные условия однородные, а внешние силы имеют вид
(ft. ft. ft. Ф = 0, (<#, qfi = О A°),
то, основываясь на формулах B6.5.6), можно принять
Р = О {К'р max (qt + qT, qf — qV)) (i = 1, 2), B6.4.11)
а если
(Qu ft. ft. #. Ф = 0, ft± = О (А0),
то
P = 0 [k-c max (qt + qT. qt — qr)\. B6.4.12)
§ 5. Сопоставление с двумерной теорией оболочек
Рассмотрим более подробно полученную в § 26.4 систему уравнений
первого приближения основного итерационного процесса и будем сравни-
сравнивать1 ее с системой двумерных уравнений теории оболочек части I.
400 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ УПРУГОСТИ [ГЛ. 26
Подставим в B6.2.4) выражения для величин со звездочкой по фор-
формулам B6.3.4), B6.3.12), B6.3.18), B6.3.24) и отбросим в полученных ра-
равенствах величины со штрихами:
_ л I /_ . л—/+2р—с+Ьу . л ( / , л — l+2p—c+bf. .
%t = А (т, + A feT?), Xtj = А (т(/ -f Л ?тг/),
43 — "¦ УЧЗ-Г S'i8-T'v iWi B6 5 1
0 1 2 3
Tg = XC (Xg -J- ^Тд + А С T3 + А С Tg),
Усилия и моменты в теории оболочек определяются формулами C.17.5).
Используя несимметричные напряжения B6.1.6), их можно записать так:
п п п
Tt = J т,; daa, Si, = ] хц da3, G, = — j т,а3 dc^,
h n
Htj = J то-а3 docg, N, =^ — j x(-g da3.
Внеся сюда B6.5.1), учтя B6.2.1), B6.2.3) и выполнив интегрирование
по I, будем иметь
S 2R Nk
OD2 1 OD2 1 B6.5.2)
G, = — Х-и-^р-с+ь _^_ х?, Яг/ = а-2'+2р-+* -^|- Х|/.
Перемещения срединной поверхности оболочки связаны с перемещениями
трехмерной среды, образующей оболочку, следующими очевидными соот-
соотношениями:
Щ — Vi\l=o, W= % |j=0,
из которых в силу B6.5.1) получаем
о, = x-'+p-but, v3 = —k-l+c-bw. B6.5.3)
Для определения величин
О в 0111 1 1 0 01 1012
et, mh gh vh v3, eh mh gh Lt, L, Lt, L, F, F, F
-служат соответственно формулы B6.3.9), B6.3.10), B6.3.5), B6.3.17),
B6.3.23). С их помощью, воспользовавшись равенствами B6.5.2) и B6.5.3),
перечисленные величины можно выразить через перемещения срединной
поверхности, усилия и моменты. Эти формулы записываются так:
et = RK-'-%, щ = RX-'-foij, g, = RX-l-p+c-by{,
V, =—R'k-l-P+c-yh щ = —X-b _^ (Ti + Tt)f
et-KK + щ — Кк p+ -gj- ^—, B6.5.4)
Г 1
L л
дТ( , 1 dS{, i дА,
СОПОСТАВЛЕНИЕ С ДВУМЕРНОЙ ТЕОРИЕЙ ОБОЛОЧЕК 401
3
l - ТА L At dot ^ А, д*г
] B6-5-4)
Здесь под у», ©г. 8«. хс т подразумеваются упругие углы поворота я
компоненты деформации срединной поверхности оболочки. Эти величины
выражаются через перемещения срединной поверхности формулами D.26.1)—
D.26.3). На выкладках, ведущих к B6.5.4), мы не останавливаемся. Их легко
проверить, имея в виду, что в них всюду выполнен переход отдифференци-
отдифференцирования по li к дифференцированию по а, при помощи первого равен-
равенства B6.2.1).
Все величины, входящие в B6.3.13) и B6.3.14), можно теперь выразить
при помощи B6.5.2) и B6.5.4). Проделав это и выполнив некоторые преобра-
преобразования, получим равенства
2?Л , . . vh Q c Eh
i_V2 («i + ve/) + 7=v m> sa - sn ¦=
B6.5.5)
со
совпадающие по внешнему виду с уравнениями состояния E.28.1). Это
совпадение пока не совсем полно, так как в B6.5.5) величины /пиГ еще
не определены, но мы скоро убедимся, что они имеют тот же смысл, что
и в уравнениях состояния E.28.1).
Введем теперь в рассмотрение условия на лицевых поверхностях, запи-
записанные в виде равенств B6.1.9). Выразим в них т13 и т8 по формулам B6.2.4),
B6.3.18), B6.3.24), B6.3.25) и отбросим величины со штрихом. Тогда после
простых преобразований, с использованием формул B6.2Л), получим
2 " "" " B6.5.6)
тй = —V~ [I* +1* +к ' ~Ж~ №
.
Из равенств B6.5.7) видно, что функции m и Z', входящие в формулы
B6.3.13), B6.3.14), надо определить следующим образом:
m = — (qt — Яз), Z=~ {qt +"<ftT). 'B6.5.8)
26 А. Л. Гольденвейзер
402, ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ УПРУГОСТИ [ГЛ. 26
так как тогда из B6.5.7) будет следовать
&^—4^ =0A)> B6-5-9)
^ар+г» (т3 — Х-« ~
-Х-
О A).
Именно в выполнении этих асимптотических соотношений и состояло
единственное требование, которое накладывалось на т и Z' (§ 26.3).
Сравнив B6.5.8) с формулами B.10.5), убеждаемся, что введенные
здесь величины т и Z' совпадают по смыслу с теми, которые входят в урав-
уравнения состояния E.28.1), и следовательно, совпадение этих соотношений
с B6.5.5) является полным.
Преобразуем теперь к нужному виду формулы B5.5.6), B5.5.7).
Равенства B6.3.20) при помощи B6.3.2) можно привести к виду
^ =0, B6.5.10)
Д _ЗА,-2»Н*-* -Х- Д _(_ 2т?3) =- 0. B6.5.11)
Первое и третье равенства B6.3.26) перепишем так:
Я.-* L—К-1+2Р-Ф — т3 — Rk-'-'qs = 0, B6.5.12)
_ K-.2t+ip-2c+b ( i_ /? + х3) = 0. B6.5.13)
Вычитая из B6.5.10) первое и второе равенства B6.5.6), помноженные
соответственно иа k-lR/Rt и 1, получим
А + А"' -?
-'-'Я* = 0- B6.5.14)
Прибавив к B6,5.11) равенство B6.5.10), помноженное на ЗЯ~'-?-,
Г)
а также первое и второе равенства B5.5.6), помноженные на —3 и —ЗЯ.-<-?-,
будем иметь
$ Б) СОПОСТАВЛЕНИЕ С ДВУМЕРНОЙ ТЕОРИЕЙ ОБОЛОЧЕК 403
Наконец, сложив равенства B6.5.12) и B6.5.13), прибавив к ним второе
равенство B6.5.7) и учтя формулу B6.3.26), можно написать
j-
—/»г'-*<7з«0. B6.5.16)
В равенствах B6.5.14)—B6.5.16) величины с надбуквенными индек-
индексами можно выразить при помощи формул B6.5.2), B6.5.4). Проделав это
и заменив в B6.5.16) независимые переменные \х, |2 через alt се2 по форму-
формулам B6.2.1), получим требуемые равенства
i ЗГ, 1 dSij 1 dAj (Т т 1 dAt
да,
+ Х,+ 6Х, = О, B6.5.17)
1 дНп
— Л7, —К, —вК(«0,
в которых X,, У,, Z определяются формулами
7
—h
+ J (l +-^)(l +-%r)a3qlda3, B6.5.18)
A
т. е. совпадают по смыслу с компонентами внешних поверхностных сил
и моментов, введенными в §3.19, а ЬХ(, 6Yit Ы имеют вид:
op f / а.
я у = Х—21+зр—с+ь _2—2_ т?о 4- 2hat — 1A-4- ——
о Kl J.\ Ki
J
|)( *) B6.5.19)
f
—h
26*
404
ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ УПРУГОСТИ
СГЛ. 2»
Примем, что компоненты массовых сил qt, qa можно с достаточной точ-
точностью аппроксимировать в виде строки Тейлора по а3
N
(*=-1,2,3),
коэффициенты которой имеют одинаковый порядок (по Я). Тогда непосред-
непосредственным интегрированием легко убедиться, что, если
to величины
T
—h
-h
будут также иметь одинаковый порядок. Если считать, кроме того, что
справедливы формулы B6.4.11), B6.4.12), и сопоставить выражения B6.5.18)
с B6.5.19), то можно заключить, что (&Xt, 6Yt, 6Z) при b = 0 есть величины
порядка О (к~-21+2Р) по сравнению с Xit Yit Z. Следовательно, равенства
B6.5.17) с точностью до величин вида О (Л,-2'+2") совпадают с уравнениями
равновесия двумерной теории оболочек.
Итак, показано, что, если от нештрихованных величин с верхними
числовыми индексами, т. е. от B6.4.1), перейти к усилиям, моментам, пере-
перемещениям, углам поворота и деформациям двумерной теории оболочек, то
для последних будут верны уравнения равновесия (с точностью до вели-
величин ЬХ(, 6У,, 6Z по сравнению с Xt, Yt, Z) и уравнения состояния, соответ-
соответствующие гипотезам § 2.10. В полученных здесь уравнениях состояния ком-
компоненты деформации имеют такой же смысл, что и в части I, т. е. для них
справедливы формулы, связывающие эти величины с перемещениями. Это
значит, что с оговоркой, относящейся к уравнениям равновесия, будут иметь
силу все уравнения и формулы общей теории оболочек, выведенные в части I.
§ 6. Вспомогательный итерационный процесс
Вернемся к величинам, которые.были обозначены в совокупности через Р' и определены
равенством B6.4.2). Для каждой из них, как вытекает нз рассуждений § 26.3, есть своя фор-
формула. Все они приведены здесь под номерами B6.6.1)—B6.6.12), причем для удобства дальней-
дальнейшего всем этим формулам придан следующий вид: сначала дается представление рассматривае-
рассматриваемой величины как линейной комбинации двух других величин, отмеченных одной и двумя точ-
точками, а затем приводятся формулы для этих новых величин. Кроме того, постоянно исполь-
используется обозначение B6.3.7):
2, 2 ... 2
?
B6.6.1)
ВСПОМОГАТЕЛЬНЫЙ ИТЕРАЦИОННЫЙ ПРОЦЕСС
405
B6.6.1)
—
4"
R_ ;• , B6.6.2)
2, 2
v. = v;
+ 2 A + v) A
г
о/
B6.6.3)
2. 2
в, = в,1 + V
-'+<„
-?- \еГ ¦ B6.6.4)
2 2 2
Запись (е" ) означает, что для е(" имеет силу такая же формула, как и для et'. Подоб-
Подобные обозначения используются и ниже:
2
2- 2. , ,-н-с2.. 2. 1 *(' /?Г" й-4, 2. /2 \ B6.6.5)
1YI, == fJlf ~J- Л /И,- f Ш; ^= — ^Г "~" Г -J "д * V 1 I #И 1
г. г , , 2
и. с
-г
B6.6.6)
406 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ УПРУГОСТИ [ГЛ. 2 6
- [уЕ=1 -х-*-
_ [уЕ=_, -
2, (i
т3
2 2 2
а/ /1
B6.6.7)
г, г.
B6.6.8)
l; i;
4;
B6.6.9)
B6.b.lO)
$61
ВСПОМОГАТЕЛЬНЫЙ ИТЕРАЦИОННЫЙ ПРОЦЕСС
407
(Ml|.+i^i *.\ (
з.
\F
B6.6.10)
B6.6.11)
B6.6.12)
В B6.6.1)—B6.6.12) всюду в первых равенствах при величинах с одной точкой коэффи-
коэффициенты отсутствуют, а при величинах с двумя точками стоят множителями некоторые неположи-
неположительные степени большого параметра Я,. Поэтому, пользуясь такой же символикой, как в § 26.4.
можно написать
Р' =р"
B6.6.13)
причем, как показывают первые равенства B6.6.1)—B6.6.12), для разных величин показатель а
имеет разные значения, но всегда выполняется неравенство а ^ 0.
В § 26.4 описан итерационный процесс интегрирования уравнений теории упругости.
В нем постулировалось, что, если найдено Р, т. е. получены величины, не отмеченные штрихом
то можно определить и соответствующее Р', т. е. построить величины, отмеченные штрихом.
Покажем теперь, что это действительно можно сделать, прибегнув к новому (вспомогательному)
итерационному процессу. Вспомогательный итерационный процесс надо выполнять на каждом
этапе основного итерационного процесса, и заключается он в следующем.
Для получения нсходного приближения отбрасываем в правой части равенства B6.6.13)
второе слагаемое, положив
Р' — Р*
МО) — и •
Тогда, используя вторые равенства B6.6.1)—B6.6.12) и вводя их в рассмотрение в том
оорядие, как они здесь приведены, можно прямыми действиями выразить последовательно все
408 ИТЕРАЦИОННОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ УПРУГОСТИ [ГЛ. 28
величины, отмеченные точкой, через величины Р, а значит, найти P,Qy В этом легко убедиться,
просмотрев упомянутые равенства и помня, что в каждой следующей из формул B6.6.1)—
B6.6.12) надо в правой части считать известными все величины, перечисленные в правой части
B6.4.1), т. е. не отмеченные справа дополнительными значками, а также величины с одной точ-
точкой, если.они стоят в левой части одной из предыдущей формулы B6.6.1)—B6.6.12).
В третьи равенства B6.6.1)—B6.6.12) большой параметр к входит только в неотрицатель-
неотрицательных степенях, поэтому можно принять, что Р " есть величина порядка 0A). Отсюда заключаем,
что, отбрасывая в правой части равенства B6.6.13) второе слагаемое, мы совершаем ошибку
порядка О (к~а). Здесь смысл числа а определяется видом первых равенств B6.6.1)—B6.6.12),
т. е. можно сказать н более определенно: в исходном приближении вспомогательного итерацион-
итерационного процесса величины
2, 2, 2, 2 , 2, 2, 2, 2 3, 3 4
% »t, eu mu %U %ij, L , Li, *я, F , тз B6.6.14)
_ 2,
определены с погрешностью порядка О (к ~*~с), а величина g( —с погрешностью по-
порядка О (А.-2"+2<:).
Первую поправку во вспомогательном итерационном процессе можно получить, положи»
РA) ~ Р + *• "Р@)
и считая, что величина Р@) строится с помощью третьих равенств B6.6.1)—B6.6.12), в нравы*
частях которых величина Р заменена на Рту Можно убедиться, что при этом Р,0) будет отли-
отличаться от истинного Р " на величину, исчезающе малую при А,-»- оо. Это вытекает из структуры
правых частей третьих равенств B6.6.1)—B6.6.12). В них входят, во-первых, величины B6.6.14),
определенные с погрешностью порядка О (Х~1+с), во-вторых, величины со звездочкой, опреде-
определенные при Ъ — 0 с погрешностью порядка О (Х~~21+2р), в третьих, величины, не отмеченные
дополнительным значком или отмеченные точкой, т. е. величины, которые при выполнении
вспомогательного нтерационного процесса можно считать построенными точно; в четвертых, —
некоторые величины с двумя точками, но только такие, которые при рассмотрении данного ра-
равенства можно считать уже построенными на предыдущих этапах; в-пятых, — величины gX
1 3
Xf , Тз . Для которых есть соответственно формулы B6.3.11), B6.3.15), B6.3.25), показывающие,
что связанная с ними погрешность имеет порядок О (\~~21+2р).
Отсюда можно заключить, что погрешность определения Р@) имеет порядок О (Х~~1+с).
Здесь показатель степени при к всегда отрицателен, и следовательно, вспомогательный итера-
итерационный процесс можно считать построенным.
Существует много математических методов приведения трехмерных уравнений теории
оболочек к некоторой последовательности систем двумерных уравнений, описывающих напря-
напряженное состояние тонких оболочек. С этой целью применялись разложения в степенные ряды
по толщине [72, 159], разложения по функциям Лежандра [15, 105, 106, 140], а также энер-
энергетические подходы [88]. Метод, изложенный в этой главе, можно назвать асимптотическим.
Он развивался в последние годы рядом авторов для изотропных однородных оболочек [3, 12,
20, 34, 54, 55, 75, 76, 144—147, 171, 172, 179], для анизотропных оболочек [1, 2] и, нако-
наконец, для слоистых пластин [65—68, 150]. Обзоры работ, посвященных проблеме сведения трех-
трехмерных уравнений теории упругости к двумерным уравнениям теории оболочек, можно иайти
в [34, 58, 157, 158].
Г Л А В А 27
ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК
§ 7. Нормальная асимптотика
напряженно-деформированного состояния
Примем, что при помощи итерационного процесса §§ 26.4—26.6 или
каким-либо другим способом можно построить такие решения уравнений
теории упругости, для которых правильно следующее.
попущение. Все величины Р Р' вместе с любыми их производными по ?{,
|2 в рассматриваемой области имеют порядок О (№), где d — число, одина-
одинаковое для всех величин, образующих совокупности Р или Р' (значение d
зависит от порядка величин, задающих внешние воздействия; оно не влияет
на дальнейшие рассуждения, и для упрощения записи всегда будет условно
считаться, что d = 0).
Обсудим, какими свойствами обладает напряженно-деформированное
состояние, соответствующее таким решениям.
При выводе формул § 26.3 была существенно использована замена неза-
независимых переменных а< на |4. Она определена первым равенством B6.2.1),
из которого следует, что
eta, ~ R fa- VI. t Л)
Вместе с тем, принятое допущение предполагает, в частности, что диф-
дифференцирование по |, не влияет на асимптотический порядок искомых ве-
величин. Поэтому из B7.7.1) вытекает, что в результате дифференцирования
поа, порядок искомых величин изменяется, и мерой этого изменения является
число %". Его можно выразить при помощи B6.2.3) как некоторую степень
относительной толщины оболочки равенством
в котором
а» = 4- B7-7-2)
Отсюда, в соответствии с определением показателя изменяемости t
A2.30.3), получаем
t = -?-. B7.7.3)
Следовательно, числами р и /, введенными в выкладки форму-
формулами B6.2.1), учитывается изменяемость искомого напряженно-деформиро-
напряженно-деформированного состояния.
Замечаниь, Из равенства B7.7.1) формально следует, что изменяемость искомого напря-
напряженно-деформированного состояния должна считаться одинаковой в обоих координатных на-
направлениях. Однако в дальнейшем мы будем говорить и о случаях не одинаковой изменяемости
410 ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК [ГЛ 27
считая, что им отвечают интегралы, существенно уменьшающиеся при дифференцировании в на-
направлении относительно малой изменяемости. Таким образом, под t здесь подразумевается об-
общий показатель изменяемости напряженно-деформированного состояния, и считается, что
могут существовать квазистационарные направления, для которых показатель изменяемости
¦меньше t
Неравенства B6.2.2) означают, что число t заключено в пределах
0==?/<1. B7 7.4)
Нас сейчас интересует вид дифференциальных уравнений теории обо-
оболочек, а он зависит только от локальных свойств напряженно-деформиро-
напряженно-деформированного состояния. Поэтому можно считать, что в разных частях рассма-
рассматриваемой области t имеет разные значения, но они нигде не должны выхо
дить за пределы B7.7.4).
Ограничение t сверху, вытекающее из B7.7.4). необходимо: без него
основной итерационный процесс (§ 26.4) теряет смысл, так как он базируется
«а отбрасывании величин вида О (Х~21+'2р), а последние не будут малы при
t ^s 1, т. е. при р За /•
Необходимость ограничить t сверху очевидна и с физической точки
зрения. При t ^ 1 любая двумерная теория оболочек (в обычном понимании
этого термина) становится совершенно не пригодной, так как тогда на рас-
расстояниях, соизмеримых с толщиной оболочки, напряжения и перемещения
будут претерпевать радикальные изменения (например, падать от макси-
максимума до нуля и т. п.).
Ограничение t снизу введено в связи с тем, что понятие об отрицатель-
«ом показателе изменяемости не является достаточно определенным. Нару-
-шение неравенства t ^ 0 означает только, что случаи, когда показатель
изменяемости искомого напряженно-деформированного состояния в извест-
«ом смысле может считаться отрицательным, требуют специального рассмо-
рассмотрения.
Величины vt vb, т,, xif, xiS, т3 определяются формулами B6.3.4),
{26.3.12) B6.3.18). B6.3.24). B6.3.25), в которые величины Р и Р' входят
с множителями вида (считается, что Ь = 0)
К0, К-1+2"-с, %~1+\ А,-2'+2'.
Все показатели степеней здесь неположительны. Это значит, что в силу
B6.2.4) при Ь — 0 будут справедливы следующие оценки перемещений и
«есимметричных напряжений:
«). B7.7.5)
В дальнейшем условимся говорить, что, если выполняются равенства
{27.7.5), то оболочка имеет нормальную асимптотику. Тогда сформулиро-
сформулированное в этом параграфе допущение будет означать, что постулируется
¦существование напряженно-деформированных состояний с нормальной асимп-
асимптотикой и пока учитываются только случаи, когда именно оно реализуется
¦в оболочке.
В преобразованиях §§ 26.2, 26.3 было также использовано второе
равенство B6.2.1), определяющее замену переменной а3- Можно показать
(но на этом мы не будем останавливаться), что если первая формула B6.2.1)
и формулы B6.2.4) фиксированы, то вид этого равенства не зависит от нашего
произвола. Это значит, что задав а3 формулой
мы должны выбрать в ней q' единственным образом, положив q' = /. При
других значениях q' попытка построить итерационный процесс приведет
$8] АСИМПТОТИЧЕСКИЕ ПОГРЕШНОСТИ ГИПОТЕЗ 411
для исходного приближения к системе уравнений, не имеющей достаточно
общих решений, т. е. получатся несоответствия такого же рода, как и в § 20.10
при неправильном выборе показателей интенсивности а, Ь, с.
Физически второе равенство B6.2.1) означает, что показатель изменяе-
изменяемости напряженно-деформированного состояния оболочки в направлении
толщины оболочки принимается равным единице. Это совершенно есте-
естественно: в трехмерной среде, образующей оболочку, напряжения а,-3 и а3
должны на лицевых поверхностях принимать значения, предписанные им
граничными условиями, а это значит, что в поперечном направлении на
расстоянии, равном толщине оболочки, а,-3 и а3, вообще говоря, радикально
изменят свои значения.
Итак, смысл преобразований искомых величин и независимых пере-
переменных, выполненных при помощи равенств B6.2.1) и B6.2.4), заключается
в следующем.
Первым равенством B6.2.1) в рассуждения введена изменяемость искомого
напряженно-деформированного состояния и обеспечена возможность просле-
прослеживать ее влияние. Равенствами B6.2.4) вместе с допущением, принятым
в этом параграфе, класс рассматриваемых напряженно-деформированных
состояний ограничен требованием, чтобы они имели нормальную асимпто-
асимптотику. Второе равенство B6.2.1) делает возможным изучение этих напря-
напряженно-деформированных состояний при помощи итерационного процесса,
описанного в § 26.4.
Забегая вперед, отметим, что возможны случаи, когда асимптотика
напряженно-деформированного состояния оболочки окажется особой, т. е.
не будет обладать вышеописанными свойствами. Они выявятся ниже, причем
будет показано, что для таких напряженно-деформированных состояний
асимптотику также можно определить формулами B6.2.4), если в них счи-
считать Ь отличным от нуля.
§ 8. Асимптотические погрешности гипотез теории оболочек
Выясним теперь, каков асимптотический порядок погрешностей раз-
различных двумерных теорий оболочек, в том случае, когда они применяются
для построения напряженно-деформированного состояния с нормальной
асимптотикой.
При расчете оболочек по любой двумерной теории допускаются неточ-
неточности двух родов. Во-первых, неточно определяются неизвестные величины
двумерной теории (перемещения срединной поверхности, углы поворота,
усилия, моменты). Во-вторых, допускаются погрешности при переходе от
двумерных неизвестных к перемещениям и напряжениям трехмерного тела
оболочки. Оцедить неточности второго рода не представляет труда. Опре-
Определив перемещения, углы поворота, усилия и моменты, мы, как показывают
формулы § 26.5, будем знать и следующие величины:
U 0 1 1 0 0 11
Vl, Из, Vh Vs, Т„ Xtj, Т„ Xtj,
а следовательно, сможем приближенно найти смещения vu v3 и главные
несимметричные напряжения xt, xtj по формулам B6.2.4), B6.3.4) и B6.3.12).
Две последние из них показывают, что, если речь идет о напряженно-дефор-
напряженно-деформированном состоянии с нормальной асимптотикой, т. е. если Ь = 0, то
погрешность будет иметь порядок
е = О(А,-2'+2") (Ь = 0). B7.8.1)
Здесь запись Ь = 0 напоминает, что обсуждается пока только напря-
напряженно-деформированное состояние с нормальной асимптотикой; при Ь > 0
погрешности второго рода согласно B6.3.12) увеличатся.
412 ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК 1ГЛ. 27
Погрешности первого рода оценить труднее. Обычно учитывают, что
в теории оболочек не точны только уравнения состояния и принимают, что
погрешность определения перемещений, углов поворота усилий и моментов
равна наибольшей погрешности, допущенной в уравнениях состояния.
Примем и мы пока это предположение, имея в виду обсудить его в конце
главы. Тогда обсуждаемую погрешность можно найти при помощи формул
B6.2.11). представляющих собой результат преобразования равенств,
выражающих обобщенный закон Гука. В B6.2.11), помимо физических кон-
констант и характерного радиуса кривизны R, входят только величины at, щ,
мало отличающиеся от единицы, некоторые степени большого параметра Я. и
величины, отмеченные звездочкой. Последние, как уже говорилось, имеют
порядок О A). Отсюда следует, что порядок каждого слагаемого в равен-
равенствах B6.2.11) определяется явно выписанными степенями k(npub = 0).
Начнем с гипотезы Кирхгофа—Лява. сформулированной в §5.28 и
заключающейся в принятии некоторых предположений. Мы сформулируем
их еще раз и укажем для каждого из них порядок е тех величин которые
в силу данного предположения отбрасываются по сравнению с единицей.
Величины е выписываются в квадратных скобках. Они не требуют поясне-
пояснений. Надо только учитывать, что в оценочных рассуждениях нет нужды
делать различие между симметричными и несимметричными напряжениями,
так как согласно B6.1.6) они отличаются только в малом.
Предположение 1. Нормальный до деформации элемеит оболочки остается
нормальным и после деформации, т. е. в третьем равенстве B6.2.11) можно
отбросить член с т,-8. При этом получаем [г = О (к—"+'грI.
Предположение 2. Нормальный элемент не меняет своей длины в про-
процессе деформации, т. е. во втором1 равенстве B6.2.11) можно оставить
только член, стоящий слева. При этом получаем [е = О (X.—>-с) ].
Предположение 3. Нормальным напряжением о38 можно пренебречь
по сравнению с напряжениями оп, о22, т. е. в первом равенстве B6.2.11)
можно отбросить член с т8. При этом [е = О(К~1+С)\.
Число с определяется формулой B6.2.6), из которой легко выводятся
соотношения
_i+c Or1 SsA,-2'+2p при 2р^1, т. е. при f«sl/2,
к (+С = |я-2'+2р при 2р^1, т. е. при *>1/2.
Отсюда, учитывая B6.2.3) и B7.7.3), заключаем, что, если построению
подлежат напряженно-деформированные состояния с нормальной асимпто-
асимптотикой, то использование гипотезы Кирхгофа—Лява означает отбрасывание
по сравнению с единицей величин вида
е = О (Я,-', = О </д при / < 1/2,
е = О (Я--2'+2") = O(/t2-2') при t ^ 1/2, (г/л.г)
к = -#¦•
Эти соотношения, как уже говорилось, можно принять за оценку по-
погрешности определения перемещений срединной поверхности, усилий и
моментов. Неточности, связанные с переходом к трехмерным перемещениям
и напряжениям, как показывает B7.8.1), не выходят из этих рамок Поэтому
оценка B7.8.2) характеризует полную погрешность определения напряженно-
деформированного состояния оболочки, которую мы совершаем, пользуясь
уравнениями, основанными на гипотезе Кирхгофа—Лява.
Первая оценка погрешностей гипотезы Кирхгофа—Лява приведена
в работе [93]. В ней не учитывалась изменяемость искомого напряженно-
i В] АСИМПТОТИЧЕСКИЕ ПОГРЕШНОСТИ ГИПОТЕЗ
413
деформированного состояния, и оценка выражена формулой е = О (h^).
Она совпадает с B7.8.2) при малой изменяемости, когда t ^ Ч 2. Оценка,
полностью совпадающая с B7.8.2), получена в работах [155, 156]. В них
показано, что решения двумерных уравнений теории оболочек отклоняются
по энергии от решений трехмерной теории упругости на величину порядка
B7.8.2). При этом было установлено, что уравнения состояния теории обо-
оболочек можно брать в простейшем виде, выполняя лишь единственное усло-
условие, чтобы они не противоречили шестому уравнению равновесия (§ 5.29).
Так, например, оценка B7.8.2) в описанном выше смысле остается верной
и в случае, если для оболочки, отнесенной к линиям кривизны, уравнения
состояния взять в следующем виде:
r <8 + V8) S +
2Eh3 . , . „ 2ЕЛ» B7.8.3)
Hti =
т. е. считать, что они отличаются от простейших уравнений состояния E.28.2)
только выражением для Sti.
Результат работ [155, 156] верен для любых напряженно-девоомиро-
ванных состояний, показатель изменяемости которых меньш единицы.
Предположения о нормальности асимптотики он не требует. Более гого,
допускается геометрическая нелинейность (конечно, если она не превосхо-
превосходит известного предела).
В этой книге теория оболочек построена при помощи гипотез, принятых
в § 2.10. Для них, так же как и для гипотез Кирхгофа—Лява, легко найти
порядки величин е, отбрасываемых по сравнению с единицей.
Гипотеза 1 в принятых здесь обозначениях заключается в пред-
предположении, что тм Т( , vt, v3 меняются по толщине по линейному закону.
Согласно B6.3.4) и B6.3.12) при этом отбрасываются величины порядка
[в = О (Я,-2'+2р)].
Гипотеза 2 предполагает, что в следующих равенствах, выра-
выражающих закон Гука,
Eei3 = 2 A + v) ai3 (t = 1, 2), Ее33 = os3 — v (<ju + a22)
можно отбросить члены с ai3 и a3s. Это значит, что допускается отбрасыва-
отбрасывание члена с те3 в третьем равенстве B6.2.11) и члена с т3 во втором равен-
равенстве B6.2.11). Соответствующая величина е определится так:
е = О [max (A,-2'+2p, А,-2'+2с)].
Отсюда, в силу B6.2.6), получаем [е = О (А,-2'+2р)].
Гипотеза 3 предполагает, что в следующих равенствах закона
Гука:
Eetl = au — v (a22 + о-в). Ее22 = a22 — v (an + a33)
можно сохранить только ту часть величины о33, которая линейно меняется
по толщине оболочки. Это значит, что в первом равенстве B6.2.11) вели-
величину т3 можно заменить приближенным выражением, получающимся, если
в правой части B6.3.24) оставить только два первых слагаемых. При этом
отбрасываются величины порядка A,-'+2"-f. Но т3 входит в первое равенство
B6.2.11) с множителем Х~1+с, а следовательно, и здесь мы получаем 1е =»
0Яз'а)]
414 ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК ГЛ 27
Итак, все три гипотезы, принятые в §2.10, предусматривают отбрасы-
отбрасывание величин одинакового порядка
е = О (Аг-2г+2Р) = О (Л*-*<). B7.8.4)
Можно считать, что этой формулой оценивается порядок полной погреш-
погрешности варианта теории оболочек, принятого за основу в этой книге.
Таким образом, гипотезы, предложенные в этой книге, более последо-
последовательны с точки зрения связанных с ними погрешностей, нежели гипотеза
Кирхгофа—Лява. Кроме того, важное свойство принятых здесь предполо-
предположений заключается в том, что вытекающий из них вариант теории оболочек,
как показано в §§ 26.4—26.6, может рассматриваться как исходное прибли-
приближение некоторого итерационного процесса интегрирования уравнений
теории упругости. Поэтому будем в дальнейшем выведенную в части I теорию
оболочек называть итерационной теорией или (когда важно подчеркнуть,
что она дает только исходное приближение) итерационной теорией исход-
исходного приближения.
Отметим, что различные варианты теорий оболочек, предусматривающие
применение итераций, предлагались на основе физических соображений
в работах [4—10]. Существуют и другие варианты гипотез, на базе
которых можно строить теорию оболочек. Их можно подразделить на две
группы.
К первой группе относятся гипотезы, приводящие к двумерной теории
оболочек, система уравнений которых в известном смысле эквивалентна
одному уравнению восьмого порядка, т. е. должна интегрироваться с уче-
учетом четырех граничных условий. Такие теории мы назовем теориями типа
Лява. В них уравнения состояния представляют собой недифференциальные
равенства, связывающие тангенциальные усилия и моменты, с одной стороны,
и компоненты деформации срединной поверхности, с другой стороны. При-
Примерами теории типа Лява служат теория, предложенная самим Лявом (под
ней в дальнейшем будет подразумеваться вариант, изученный в рабо-
работах [155, 1561), и изложенная здесь итерационная теория первого при-
приближения.
Ко второй группе отнесем все остальные гипотезы. Они приводят к тео-
теориям оболочек, требующим интегрирования уравнений более высокого по-
порядка. К ним, в частности, относятся гипотезы, в которых предположение
о сохранении нормального элемента заменено менее сильным допущением,
учитывающим деформацию поперечного сдвига. Такого рода гипотезы первым
использовал С. П. Тимошенко в предложенной им теории балок A171,
поэтому все теории, базирующиеся на учете деформации поперечного сдвига,
мы будем называть теориями типа Тимошенко. Примерами могут служить
теории, предложенные для пластин в известных работах [138, 174] и теория
оболочек, полученная в работе [164]. Во всех этих теориях уравнения
состояния сложнее, чем в теориях типа Лява, что и приводит к повышению
порядка уравнений.
Таким образом, уже учет поперечного сдвига выводит нас за пределы
теории Лява. Отсюда следует, что существует нижняя грань порядка по-
погрешностей любой теории типа Лява. Она равна порядку погрешности,
допускаемой при отбрасывании напряжений oi3 в соответствующем урав-
уравнении закона Гука, т. е. как показывает третье равенство B6.2.11), совпа-
совпадает с порядком погрешности B7.8.4) итерационной теории. Это значит, что
порядок погрешности итерационной теории в классе теорий типа
Лява является оптимальным: его нельзя улучшить без принципиального
усложнения теории, т. е. без увеличения порядка или без выполнения
итераций.
i 9] АСИМПТОТИЧЕСКИЕ ПОГРЕШНОСТИ ГИПОТЕЗ 415
§ 9. Асимптотические погрешности гипотез
теории оболочек (продолжение)
Сравним оценку B7.8.2), которую можно рассматривать как характе-
характеристику погрешностей теории Лява, с оценкой B7.8.4), характеризующей
погрешности итерационной теории.
Если 8 — показатель изменяемости внешних воздействий (включая
силы реакции) — удовлетворяет неравенству 9 ^ V2, то такое воздействие
порождает напряженно-деформированное состояние, общий показатель изме-
изменяемости которого t равен т (§ 12.30). При таком t оценки B7.8.2) и B7.8.4)
совпадают друг с другом. Вместе с тем уравнения состояния B6.5.5) итера-
итерационной теории сложней, чем уравнения состояния B7.8.3) теории Лява,
и последняя выглядит в этом случае более рациональной. Однако оказы-
оказывается, что при t^Vt и итерационная теория, и теория Лява содержат
много слагаемых, выходящих за рамки точности, присущей этим теориям,
и не увеличивая порядка погрешностей, можно и ту и другую заменить при-
приближенной теорией напряженных состояний с большой изменяемостью-
(§ 10.24).
Чтобы показать справедливость высказанного утверждения, заметим,
что при 2р 5* I надо положить с = 2р — /. Отсюда вытекает, что имеют
место легко проверяемые неравенства
Это значит, что в рамках точности любой теории типа Лява можно отбра-
отбрасывать величины порядка О (Я.~'.) и О (Я.—2р+с). Заметив это, введем в рас-
рассмотрение формулы B6.3.13), B6.3.14). Легко видеть, что при b — 0 в ука-
указанном выше смысле будут пренебрежимо малы в первой группе равенств
о
слагаемое с величиной т, а во второй группе — слагаемые с величинами еи
о
mt, Z'. Но по выкладкам § 26.5 можно проследить, что отбрасывание пере-
перечисленных слагаемых соответствует переходу от уравнений состояния B6.5.5)
к простейшим уравнениям состояния E.28.2). На этом и основана первая
часть упрощений теории напряженных состояний с большой изменяемостью
(§ 10.24). В первом равенстве B6.3.20) на том же основании можно ире-
0
небречь слагаемым с т<3 как величиной порядка О (Я,-'). Просмотрев вы-
выкладки § 26.5, можно убедиться, что это соответствует отбрасыванию пере-
перерезывающих усилий в первых двух силовых уравнениях равновесия, с ко-
которым связана вторая часть упрощений теории напряженных состояний
с большой изменяемостью. Третья часть упрощений этой теории вытекает
из возможности отбросить тангенциальные смещения в выражении для ком-
компонент изгибной деформации. Ей соответствует отбрасывание слагаемого-
и О
с у( в выражении для gt. Из последнего равенства B6.3.9) и формул B6.3.10)
следует, что погрешность при этом будет допустимого порядка О (Х-2"±с).
Четвертая и последняя часть упрощений в теории напряженных состояний
с большой изменяемостью заключается в отбрасывании в выражениях для
тангенциальных усилий функции напряжения а, Ь. Оно двойственно по-
статико-геометрической аналогии третьей группе отбрасываний и вносит
погрешности такого же порядка (этого мы доказывать не будем). Таким
образом, теорию напряженных состояний с большой изменяемостью § 10.20"
в рамках любой теории типа Лява можно рассматривать как точную в том-
смысле, что порядок связанных с ней дополнительных погрешностей не пре-
превышает порядка погрешностей, допущенных при выводе исходных уравнений.
Это делает бессодержательным сравнение различных теорий гипа Лява..
416
ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК 1ГЛ. 27
¦если они предназначаются для исследования напряженных состояний, общий
показатель изменяемости которых не меньше 1/2.
Более сложен (и более интересен для практических применений) случай,
когда Э имеет малые значения. Рассмотрим его, считая, что 9 = 0. При этом
будет выполняться условие применимости метода расчленения по признаку
изменяемости, и мы примем, что эти условия выполняются по всем остальным
признакам. Тогда искомое напряженное состояние будет составляться из
основного напряженного состояния и простого краевого эффекта. Обозна-
Обозначим через f и f показатели изменяемости этих напряженных состояний.
Тогда можно принять (§ 12.30), что
Г = 9 = 0, С= 1/2,
з следовательно, погрешности основного напряженного состояния (взятого
вне связи с простым краевым эффектом) в теории Лява и в итерационной
теории будут иметь, соответственно порядки
е = О (/t.) е = 0 (/t2.-29), B7.9.1)
а для погрешностей краевого эффекта (также рассматриваемого отдельно)
получится единая оценка
e-0(/g.
Итак, если значения показателя изменяемости внешних сил 8 малы,
то итерационная теория позволяет существенно повысить точность построе-
построения основного напряженного состояния, но для простого краевого эффекта
она в смысле погрешностей эквивалентна теории Лява. Вообще говоря, по-
погрешность расчета в целом не меньше, чем наибольшая из погрешностей,
допущенных на отдельных этапах. Поэтому формально надо считать, что
обе обсуждаемые теории приводят к одинаковой погрешности порядка 0 (и*).
Однако с точки зрения практических выводов, которые можно извлечь из
статического расчета оболочек, значительно важнее правильно знать основ-
основное напряженное состояние, нежели простой краевой эффект. Это значит,
что не следует пренебрегать возможностью более точно определить первое
из них. Вместе с тем вторая оценка B7.9.1), разумеется, не окончательна.
Ею не учитывается взаимодействие основного напряженного состояния
с простым краевым эффектом и связанное с этим взаимное влияние содержа'
щихся в них погрешностей. Чтобы учесть это влияние, будем считать, что
полное напряженное состояние оболочки строится при помощи одного из
итерационных процессов, описанных в главах 20, 21. В этом случае, как
было показано на примерах, разобранных в цитированных разделах, ос-
основное напряженное состояние может быть определено расчетом по безмо-
ментной теории (без учета краевого эффекта) с некоторой погрешностью в,
оцениваемой формулой
e = O(if) = o{hj) B7.9.2)
in — целое неотрицательное число). Для этого в итерационном процессе
надо сохранить только те п приближений, для построения которых не тре-
требуется вводить в рассмотрение простой краевой эффект. Из результатов
гл. 20 вытекает, что в любом случае число п заключено в пределах
Равенство п = 0 означает, что простой краевой эффект оказывает влия-
влияние уже на исходное приближение основного напряженного состояния.
Это — случай, который в § 22.26 был назван случаем условной применимости
безмоментной теории. Неравенство и >0 означает безусловную примени-
применимость безмоментной теории.
§ 9] АСИМПТОТИЧЕСКИЕ ПОГРЕШНОСТИ ГИПОТЕЗ 417
1
Заметим, что формулой B7.9.2) определяется е — порядок погрешно-
погрешности, связанный с приближенным подходом к интегрированию уравнений
теории оболочек, в то время как формула B7.9.1) дает е — порядок погреш-
погрешности самих уравнений. Было бы логически непоследовательно интегри-
интегрировать уравнения с большей точностью, чем они составлены. Отсюда и
вытекает ограничение п сверху; при п ?> 4, 8 = 0 оценка B7.9.2) становится
лучше оценки B7.9.1).
Улучшить оценку B7.9.2) при определении основного напряженного
состояния можно, только введя в рассмотрение простой краевой эффект.
Вместе с тем, для него t = 1/2, и следовательно, по любой теории типа Лява,
в том числе и по итерационной теории, простой краевой эффект нельзя по-
построить с погрешностью, меньшей чем
е = 0 (hi).
Отсюда следует, что наилучшая точность, на которую можно рассчи-
рассчитывать при построении основного напряженного состояния, определяется
формулой
12 / 14--5Л
г=гг = 0\К 2) B7.9.3)
(здесь не учитываются погрешности, связанные с неточностью уравнений
итерационной теории оболочек, поэтому полученная оценка имеет силу,
только пока 1 + -^-^ 2j.
При п >0, т. е. в случае безусловной применимости безмоментной
теории, оценка B7.9.3) лучше первой из оценок B7.9.1), а это значит, что
итерационная теория дает возможность определять основное напряженное
состояние точнее, нежели теория Лява [111.
Итак, если для искомого напряженно-деформированного состояния в це-
целом t^ 1/2, то уточнения, даваемые уравнениями состояния итерационной
теории, т. е. формулами B5.5.5), становятся бесполезными, более того,
в этом случае предельно достижимую точность можно получить, исходя из
еще более простых уравнений, т. е. из уравнений теории напряженных со-
состояний с большой изменяемостью (§ 10.24). Вместе с тем, если вдали от
краев выполняется неравенство t <C 1/2 и если условия закрепления краев
оболочки таковы, что безмоментная теория безусловно применима к данной
задаче, то итерационная теория позволяет существенно точнее строить
основные напряженные состояния. Точность построения простого краевого
эффекта, а следовательно, вообще говоря, и точность построения напряженно-
деформированного состояния вблизи краев оболочки останется при этом
такой же, как в теории Лява. Точность определения напряженно-деформи-
напряженно-деформированного состояния не повысится и вдали от краев, если имеет место услов-
условная применимость безмоментной теории.
Напомним, что условная применимость безмоментной теории (по сравне-
сравнению с безусловной) означает некоторое ухудшение напряженного состоя-
состояния (§ 22.28). Поэтому в подавляющем большинстве практически важных
случаев мы будем иметь дело с разумно сконструированными оболочками,
к которым безмоментная теория должна быть применима безусловно. Это
значит, что уравнения состояния итерационной теории позволяют добиться
уточнений для наиболее важных задач (допускающих безусловную приме-
применимость безмоментной теории) и для наиболее важных составляющих напря-
напряженно-деформированного состояния (основных напряженных состояний).
Приведем примеры, разъясняющие оценку B7.9.3).
Пусть расчету подлежит оболочка, все края которой — неасимптоти-
неасимптотические и жестко заделаны. Будем считать, что для нее выполнены все условия
27 д. д. Гольденвейзер
418 ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК [ГЛ. 27
применимости метода расчленения и что 0=0. Этот случай рассмотрен
в §20.10. Там для приближения (s) основного напряженного состояния
выведены граничные условия B0.10.8). Положив в них s = 0 и отбросив
величины с отрицательными нижними индексами (они равны нулю по пред-
предположению), убеждаемся, что слагаемые, связанные с простым краевым
эффектом, выпадают. Однако уже при s = 1 они войдут в вычисления. Это
значит, что для основного напряженного состояния без учета краевого эф-
эффекта может быть построено исходное приближение и только оно. Отсюда
вытекает, что в рассматриваемом случае в B7.9.3) надо положить п — 1,
и следовательно, погрешность основного напряженного состояния в итера-
итерационной теории будет порядка /t*/2. Она меньше погрешности теории Лява,
имеющей порядок h\. Для показателей интенсивности а, Ь, с справедливы
формулы B0.10.6). Из них следует, что краевой эффект в данном случае
асимптотически эквивалентен основному напряженному состоянию по напря-
напряжениям и перемещениям § 22.27. Поэтому на краю обе обсуждаемые теории
дадут одинаковые погрешности порядка h\.
В качестве второго примера рассмотрим такую же оболочку, что и
раньше, но будем считать, что ее край освобожден от закрепления по нор-
нормали, т. е. примем граничные условия в виде B0.11.13). Тогда для прибли-
приближения (s) основного напряженного состояния должны будут выполняться
первые два граничных условия B0.11.4). Они показывают, что теперь без
учета простого краевого эффекта можно строить уже приближения @) и A),
а следовательно, в B7.9.3) надо положить п = 2. Это значит, что погрешность
построения основного напряженного состояния снижается до величин по-
порядка h\. Для показателей интенсивности мы имеем формулы B0.11.2) и
B0.11.33). Из них вытекает, что интенсивность простого краевого эффекта
понижается, что приводит к уменьшению погрешности определения краевых
напряжений и перемещений до величин порядка №J2. Напомним, что устра-
устранение лишних нетангенциальных закреплений улучшает асимптотику напря-
напряженно-деформированного состояния (при условии, что тангенциальные
закрепления обеспечивают жесткость срединной поверхности). Мы видим
теперь, что это улучшает также и точность итерационной теории.
В заключение отметим, что усложнение уравнений состояний, связанное
с переходом к итерационной теории, в ряде случаев не имеет существенного
значения. В отношении тангенциальных уравнений состояний, т. е. первых
двух равенств B6.5.5), это очевидно: в них дополнительно появляются только
некоторые нагрузочные слагаемые. Более значительным выглядит усложне-
усложнение нетангенциальных уравнений состояния, т. е. двух последних равенств
B6.5.5). Однако в таком сложном виде их надо брать только тогда, когда
9 < 1/2, т. е. когда может быть применен метод расчленения, причем они
нужны только для того, чтобы подсчитать моменты по заданным деформа-
деформациям, т. е. выполнить некоторые элементарные действия. Это значит, что
усложнение нетангенциальных уравнений состояния приведет только к уве-
увеличению объема чисто технической работы.
§ 10. Область применимости итерационной теории оболочек
В начале § 27.7 принято допущение, относящееся к свойствам решений
системы уравнений итерационной теории исходного приближения. Оно весьма
существенно, так как для решений, не обладающих свойствами, оговорен-
оговоренными в этом допущении, итерационный процесс § 26.4—26.6 может стать
бессодержательным. Рассмотрим с этой точки зрения последствия, к которым
могут повести обращение в нуль или бесконечность величин Rx, R2, Alt
А 2, входящих в коэффициенты уравнений итерационной теории первого
приближения.
§ 10J ОБЛАСТЬ ПРИМЕНИМОСТИ ИТЕРАЦИОННОЙ ТЕОРИИ ОБОЛОЧЕК 419"
Пусть в некоторой зоне g (в частности, во всей интересующей нас об-'
ласти) главные радиусы кривизны Rt, R2 обращаются в бесконечность'
порознь или вместе. Тогда в соответствующих точках мы получим уравнения4
теории оболочек нулевой кривизны (или пластинки), т. е. уравнения, не
приводящие к каким бы то ни было явным противоречиям. Нет необходи-
необходимости отдельно рассматривать их свойства: они будут обсуждаться ниже,
когда это станет нужно. Наоборот, при R1 — 0 (или /?2 = 0) уравнения
теории оболочек становятся бессмысленными, и отсюда следует, что итера-
итерационная теория, так же как и любая другая двумерная теория оболочек,
теряет силу, если Rlt R2 станут слишком малыми. Это можно было заранее
предвидеть, так как оболочку сколь угодно большой кривизны уже нельзя
считать тонкой.
Влияние безграничного увеличения (уменьшения) коэффициентов пер-
первой квадратичной формы А±, А2 тесно связано с влиянием изменяемости
искомого напряженного состояния, и прежде чем идти дальше, необходимо
уточнить последнее понятие.
Показатель изменяемости t, определяемый формулой B7.7.3), харак-
характеризует изменяемость искомых величин по тем переменным (аъ а2), которые
приняты за параметры координатной системы. Таким образом, реальный
смысл t в известной степени зависит от нашего произвола. Если заменить а,-
на а\ = Dai и оставить в B7.7.3) числа р, I прежними, то при больших зна-
значениях константы D реальная изменяемость искомых функций уменьшится,
так как это будет уже изменяемость по «растянутой» переменной а\.
Уравнения теории оболочек всегда можно записать так, что все символы
дифференцирования будут иметь вид -.- , , т. е. дифференцирование
будет выполняться по длине дуги координатных линий срединной поверх-
поверхности. Заметим это и примем для конкретности, что за параметры at выбраны
величины, имеющие размерность длины, и что, следовательно, под Л, надо
подразумевать безразмерную величину. Если при этом в некоторой точке
коэффициент А, будет соизмерим с единицей, то в ней параметр а( можно
назвать квазилонгальным в том смысле, что единичное изменение at будет
соответствовать движению вдоль а,-линии на длину, соизмеримую с едини-
единицей в принятом масштабе. В этом случае / будет характеризовать реальную
изменяемость напряженно-деформированного состояния.
Если А, велики по сравнению с единицей, то упоминавшийся выше сим-
символ дифференцирования можно преобразовать следующим образом:
1 о 1 д А, At г
а константу D можно подобрать так, чтобы А\ стали соизмеримы с единицей.
При этом D должно быть большим числом, которое можно представить в виде
\ ц>0. B7.10.2)
Параметр а\ станет квазилонгальным, а следовательно, а{ в силу B7.10.1)
представляет собой «растянутый» параметр. Но t характеризует изменяе-
изменяемость по а{, а значит, реальная изменяемость будет в рассматриваемом
случае меньше, и если обозначить ее показатель через tpeajIbl{, то> учиты-
учитывая B7.10.2), можно записать
^реальн = ^ Н"
Итак, возрастание коэффициентов первой квадратичной формы At
при фиксированных р, I соответствует уменьшению реального показателя'
изменяемости. Равным образом можно показать, что уменьшение At сопро-1
27*
420 ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК [ГЛ. 27
вождается увеличением ^еялъ„. Отсюда следует, что область применимости
итерационной теории ограничена, в частности, требованием, чтобы ни один
из коэффициентов первой квадратичной формы не был слишком мал, так как
в противном случае реальный показатель изменяемости сделается больше
единицы. Случаи, когда At принимают весьма большие значения, требуют
более конкретного рассмотрения, так как при этом реальный показатель
изменяемости может стать отрицательным.
Обсудим полученные выводы на более конкретных случаях. В § 14.9
построена географическая система координат для произвольных поверх-
поверхностей вращения. В ней коэффициент Л2 обращается в нуль в той вершине
поверхности вращения Р, в которую помещен полюс географической системы
координат. Таким образом, в окрестности полюса географической системы
координат итерационную теорию оболочек, так же как и любую другую дву-
двумерную теорию, формально надо считать непригодной. Вместе с тем, вер-
вершина Р, вообще говоря (если она не представляет собой острие), не обладает
особыми геометрическими свойствами. Особой в точке Р является только
выбранная система координат. Поэтому обсуждаемый вывод требует пояс-
пояснений.
Будем считать, что мы рассчитывали оболочку вращения, применяя
тригонометрические ряды по углу <р, задающему долготу, и рассмотрим т-й
член разложения. В нем все компоненты напряженно-деформированного
состояния оболочки изменяются по закону sin тф (или cos m<p). Поэтому
на параллелях географической системы координат изменяемость рассма-
рассматриваемого напряженно-деформированного состояния по квазилонгальной
переменной может неограниченно увеличиваться по мере приближения
к вершине Р. Далее возможны два случая. В первом из них вершина Р при-
принадлежит оболочке (купол без отверстия в вершине). Тогда в условие задач
надо ввести требование ограниченности решения в Р (предполагается, что
в Р отсутствуют сосредоточенные воздействия), а это приведет к тому, что
интенсивность напряженно-деформированного состояния в т-м приближе-
приближении будет стремиться к нулю при приближении к Р. Несостоятельность
двумерных теорий оболочек вблизи Р будет при этом иметь чисто формаль-
формальный характер: по мере приближения к Р станут нарастать погрешности
определения напряженно-деформированного состояния, но его интенсив-
интенсивность будет при этом убывать. (Исключение представит только случай т = 0,
когда не будет ни убывания интенсивности, ни нарастания погрешностей.)
Второй случай будет иметь место, если вблизи Р оболочка имеет отверстие
или если в Р приложены сосредоточенные воздействия. Тогда, вообще го-
говоря, надо оставлять все решения, в том числе и возрастающие, и если от-
отверстие мало, то ошибки двумерных теорий оболочек могут оказаться
существенными. Это понятно из физических соображений. Отверстие вносит
в напряженно-деформированное состояние оболочки возмущение, реальная
изменяемость которого увеличивается по мере уменьшения отверстия, и
если периметр последнего станет соизмеримым с толщиной оболочки, то
область применимости любой двумерной теории будет исчерпана. Непри-
Неприменимы такие теории, конечно, и в окрестности приложения сосредото-
сосредоточенных воздействий.
Таким образом, окрестность любой точки, в которой выбранная система
координат имеет особенность, требует специального рассмотрения при
обсуждении возможности применения двумерных теорий оболочек. Равным
образом надо проявлять осторожность и в тех случаях, когда срединная
поверхность оболочки является особой или в каком-то смысле близка к ней.
Напомним, что понятие об особых поверхностях было введено в § 9.13 в связи
с обсуждением области применимости метода расчленения. По этому признаку
к особым были отнесены
§ Hi ОБЛАСТЬ ПРИМЕНИМОСТИ ИТЕРАЦИОННОЙ ТЕОРИИ ОБОЛОЧЕК 421
A) бесконечно протяженные поверхности;
B) поверхности, имеющие особенности типа вершины конуса;
C) плоскости;
D) поверхности, касающиеся плоскости вдоль замкнутой кривой.
С точки зрения применимости итерационной теории, плоскости и близкие
к ним пологие поверхности не должны вызывать беспокойства. Как выяс-
выяснится ниже, теорию изгиба пластинок, а также теорию обобщенного плоского
напряженного состояния можно трактовать как частный случай итерацион-
итерационной теории оболочек, и обращение в бесконечность' нормальных радиусов
кривизны также не ведет к нарастанию погрешностей. То же относится и
к пологим оболочкам. Наоборот, if расчету оболочки, срединная поверхность
которой имеет особенность типа вершины конуса, применять двумерные
теории нельзя; во всяком случае, надо отдавать себе отчет, что такие резуль-
результаты будут недостоверными в окрестности особенностей. Что же касается
оболочек с особыми поверхностями типа A) и D), то они требуют более кон-
конкретного обсуждения, на котором мы не будем останавливаться.
§11. Область применимости итерационной теории оболочек
(продолжение)
В двух следующих параграфах будут разобраны случаи, когда число 6,
введенное в § 26.2, становится не равным нулю, принимая положительные
значения. В связи с этим обсудим здесь погрешности, которые дает итера-
итерационная теория оболочек при определении таких напряженно-деформиро-
напряженно-деформированных состояний (соответствующую асимптотику мы будем называть особой).
Из формул B6.3.12) вытекает, что при b j>0 отбрасывание величин со
штрихом при вычислении т,, т?/ сопряжено с погрешностью порядка
в = О (Х-м+*р+Ь), B7.11.1)
которая заведомо выше, чем погрешность порядка B7.8.4), получающаяся
при 6 = 0. Это значит, что, если Ь >>-0, т. е. если напряженно-деформиро-
напряженно-деформированное состояние имеет особую асимптотику, то возрастают погрешности
второго рода (§ 27.8), связанные с переходом от усилий и моментов к на-
напряжениям упругой среды.
Замечание. Отметим два любопытных обстоятельства.
1. Просматривая еще раз формулы B6.2.11), которые являются результатом преобразо-
преобразования равенств, выражающих обобщенный закон Гука, можно заметить, что в правых частях
число Ь входит в показатели, при Я только со знаком минус. Поэтому погрешности первого рода
(§ 27.8), т. е. погрешности, связанные с отбрасынаннем тех.или иных слагаемых в правых частях
B6.2.11), при й> 0 ие растут, а уменьшаются. Однако решающими становятся погрешности
иторого рода, которые, как уже говорилось, растут.
2. Формулы B6.3.4), определяющие перемещения трехмерного упругого тела оболочки,
ие зависят от Ь, н погрешности второго рода, связанные с переходом от перемещений срединной
поверхности и углов поворота к трехмерным перемещениям, при Ь>0 остаются прежними.
Это значит, что понижение точности, которым сопровождается применение итерационной теории
к напряженно-деформированным состояниям с особой асимптотикой, относится только к опре-
определению напряжений, но не перемещений.
В части II была установлена классификация решений уравнений теории
оболочек и введены понятия о напряженных состояниях, обладающих раз-
различными свойствами. В связи со сказанным здесь становится существенным
выяснить, какие из них соответствуют напряженно-деформированным со-
состояниям с нормальной асимптотикой. Ответ на' такой вопрос не представ-
представляет принципиальных трудностей.
Все напряженные состояния, о которых идет речь, введены в части II
таким образом, что для любого из них можно найти асимптотику соответ-
соответствующих усилий, моментов и перемещений. Далее не представляет труда
422 ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК [ГЛ. 27
найти асимптотику напряжений и перемещений трехмерного тела оболочки
и выяснить, при каком значении Ъ она совпадает с асимптотикой B6.2.4).
Не останавливаясь на подробностях, сформулируем окончательный
результат. Безмоментное напряженное состояние, простой краевой эффект
и напряженные состояния с большой изменяемостью имеют нормальную
асимптотику. Асимптотика чисто моментного напряженного состояния и
обобщенных краевых эффектов, как будет показано в двух следующих
параграфах, — особая.
§ 12. Чисто моментное напряженное состояние
Перейдем к более подробному обсуждению напряженно-деформирован-
напряженно-деформированных состояний с особой (не являющейся нормальной) асимптотикой и будем
считать, что их можно получить, положив в формулах § 26.3
Ь>0, с = 0. B7.12.1)
Из B6.3.13) вытекает, что при этом с некоторой точностью должны
выполняться равенства
оо оо
ег = 0, е2 = 0, ml -f т2 = 0, B7.12.2)
о о о
так как иначе по меньшей мере одна из величин тъ г12, тг будет иметь вид
О (кь), а это при положительном Ь противоречит допущению § 27.7.
Величины, стоящие в левых частях равенств B7.12.2), пропорциональны
компонентам тангенциальной деформации срединной поверхности. Следо-
Следовательно, один из способов выполнить B7.12.2) заключается в требовании,
чтобы удовлетворились уравнения
Bl - At да2 ^ А,Аг да2 Rt ~ и>
) +
.
а = ~А; даг VAT) + Аг да, { А2
В § 7.3 было показано, что такими уравнениями связаны смещения
срединной поверхности в приближенной теории чисто моментного состояния.
Это значит, что последнее и представляет собой один из видов напряженно-
деформированных состояний с особой асимптотикой.
Напомним, что смысл чисто моментного напряженного состояния опре-
определен не совсем точно. В нем тангенциальные усилия находятся как частный
интеграл системы, образованной силовыми уравнениями равновесия, и асим-
асимптотику этого частного интеграла в известных пределах можно варьировать.
От этого будут зависеть относительные порядки величин аТ (напряжений,
обусловленных тангенциальными усилиями) и а0 (напряжений, обусловлен-
обусловленных моментами). Поэтому потребуем дополнительно, чтобы
от
= О(Х-Ь) B7.12.4)
(можно показать, что такое условие непротиворечиво, на этом мы останав-
останавливаться не будем).
§ 13] ОБОБЩЕННЫЙ КРАЕВОЙ ЭФФЕКТ 423
Оценка B7.12.4) должна быть увязана с формулами B6.2.4), B6.3.12).
Этого, как нетрудно видеть, можно достигнуть, положив
b = l—2p, B7.12.5)
0 0 0 0
т| = Я.-'т@, т(/ = Я,-'т(,7„ B7.12.6)
где
Из B6.3.12), B6.3.16), B6.3.18), B6.3.24), B6.3.25) видно, что, отбра-
2 2 Л 4
сывая в этих формулах величины т^, t'ti, т«, тз, мы допускаем при определе-
определении напряжений погрешности порядка
е = О (А.-2г+2"+»). B7.12.7)
Это значит, что, если итерационная теория оболочек, в которой такие
отбрасывания делаются, применяется для построения напряженно-деформи-
напряженно-деформированных состояний с особой асимптотикой, соответствующей неравенству
b > 0, то погрешности в определении напряжений увеличиваются и для них
вместо B7.8.4) получается оценка B7.12.7). Погрешности в определении пере-
перемещений, как показывают формулы B6.3.4), остаются прежними. В част-
частности, отсюда следует, что оценка погрешностей итерационной теории обо-
оболочек при построении чисто моментных напряженных состояний, в силу
B7.11.1), B7.12.1) и B7.12.5), записываются так:
e = O(k-l) = O(h*). B7.12.8)
Положив b = l — 2р, с = 0 в равенствах B6.3.13) и учтя B7.12.6),
легко убедиться, что в рамках погрешности B7.12.7) формулы B7.12.2)
и B6.3.13) эквивалентны друг другу. Вместе с тем, в § 26.5 было показано, что
равенствам B6.3.13) в итерационной теории оболочек соответствуют танген-
тангенциальные уравнения состояния. Отсюда следует, что если итерационная тео-
теория исходного приближения применяется к построению чисто моментного
напряженного состояния, то, не выходя за рамки погрешности этой теории,
тангенциальные уравнения состояния можно заменить приближенными урав-
уравнениями B7.12.2) или, что то же, B7.12.3). Другими словами, приближенная
теория чисто моментных напряженных состояний § 7.3 адекватна по точности
итерационной теории оболочек, а следовательно, и любой другой теории
типа Лява.
В заключение отметим, что принятое выше равенство с = 0 не умень-
уменьшает общности рассуждений этого параграфа, так как в нем речь шла о чисто
моментных напряженных состояниях, которые существуют только при t <j
<С 1/2, т. е. только тогда, когда с — 0.
§ 13. Обобщенный краевой эффект
Рассмотрим оболочку нулевой кривизны и отнесем ее срединную поверх-
поверхность к криволинейным координатам, в которых кривые аг = const и а2 =
= const являются линиями кривизны. В этом случае (§ 11.28) справедливы
формулы
Будем для такой оболочки строить напряженно-деформированные со-
состояния, для которых асимптотические направления на срединной поверх-
поверхности являются квазистационарными (§ 12.30). Формулы B7.13.1) составлены
в предположении, что аглинии совмещены с асимптотическими линиями, сле-
следовательно, надо потребовать, чтобы дифференцирование по ах сопровожда-
424 ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК 1ГЛ. 27
лось менее значительным увеличением искомых величин, нежели дифферен-
дифференцирование по а2. Вспомним в связи с этим, что при помощи первого равен-
равенства B6.2.1) мы выполнили замену переменных (а,, а2), соответствующую
увеличению масштабов длин в обоих координатных направлениях. Это по-
позволило учесть возрастание искомых величин при дифференцировании, при-
причем предполагалось, что оно по обеим переменным одинаково. Но теперь
принято, что направление ах-линий квазистационарно. Поэтому выполним
дополнительную замену переменного |1( соответствующую уменьшению мас-
масштаба длин в этом направлении, положив
1г = ^ B7.13.2)
и считая, что а — положительное число, которое будет выбрано впослед-
впоследствии.
Наша задача теперь будет заключаться в том, чтобы показать, что в рас-
рассматриваемом случае также можно принять соотношения B7.12.1), т. е.
считать, что искомое напряженно-деформированное состояние также имеет
особую асимптотику.
Внеся B7.13.1), B7.13.2) в формулы B6.3.9), получим
ТЕ-* B713'3)
dvl ° _ * dv2 _
Из B7.12.1), как было показано в предыдущем параграфе, вытекает не-
необходимость выполнить равенства B7.12.2). Этого с некоторой степенью точ-
точности можно достигнуть, положив в B7.13.3)
о о о
_!_.*!*. _|_JL.p = о 1 at)(D . dva =Q
0 0 0
и считая, что i»(d, i»B>, 1>(з> являются величинами вида 0A). При этом
О 0 0
три функции уA), «2, V3 будут связаны двумя уравнениями, которые в обо-
обозначениях двумерной теории оболочек записываются так:
82 = 0, @ = 0.
Эти приближенные формулы, как показано в §24.11, эквивалентны пред-
предположениям, положенным в основу теории расчета цилиндрических оболо-
оболочек В. 3. Власова или, что то же, приближенной теории обобщенного крае-
краевого эффекта. Основываясь на этом, примем, что обсуждаемое напряженно-
деформированное состояние (с квазистационарными направлениями, прохо-
проходящими вдоль асимптотических линий) по смыслу совпадает с обобщенным
краевым эффектом, и потребуем, чтобы число а в формуле B7.13.2) соответ-
соответствовало этому предположению.
Преобразования вида B7.13.2), как уже отмечалось, должны определять
характер изменяемости того напряженно-деформированного состояния, для
исследования которого они вводятся, поэтому при выборе а будем исходить
из формулы A2.30.8), связывающей общий и частный показатели изменяе-
изменяемости в краевых эффектах. Для обобщенного краевого эффекта в оболочке
нулевой кривизны в этом равенстве надо положить s = 4. Отсюда получаем
* = -Г+-ТГ- B7.13.4)
i \3) ОБОБЩЕННЫЙ КРАЕВОЙ ЭФФЕКТ 425
Вместе с тем, справедливы общие формулы t — pll, t' = р''II, во второй
из которых р' можно найти, сопоставляя B7.13.4) со следующими равен-
равенствами:
ctj =/?*.-"?!, li-^l1, a1 = ^-"'i1. B7.13.5)
Отсюда находим
а=~{1 — 2р). B7.13.6)
Остается определить число Ь. Оно должно быть назначено так, чтобы
асимптотика напряженно-деформированного состояния, вытекающая при
таком Ь из формул §§ 26.2, 26.3, была согласована с асимптотикой обобщен-
обобщенного краевого эффекта в оболочке нулевой кривизны. Из этих соображений
вытекает, что надо положить
Ъ = 1—2р. B7.13.7)
Это утверждение можно проверить на примере круговой цилиндрической
оболочки, для которой асимптотика обобщенного краевого эффекта легко
находится при помощи формул §§ 25.16. На подробностях мы останавливаться
не будем.
Итак, обобщенный краевой эффект в оболочке нулевой кривизны также
принадлежит к числу напряженно-деформированных состояний с особой
асимптотикой; для него Ь определяется формулой B7.13.7), т. е. имеет та-
такое же значение, как для чисто моментного напряженного состояния, поэтому
погрешности итерационной теории при построении обобщенного краевого-
эффекта, так же как и для чисто моментного напряженного состояния, оце-
оцениваются формулой B7.12.7).
На этом мы закончим рассмотрение напряженно-деформированных со-
состояний с особой асимптотикой. Проведенные обсуждения, конечно, не пре-
претендуют на общность. Список таких напряженно-деформированных состоя-
состояний можно было бы пополнить обобщенным краевым эффектом в оболочках
отрицательной кривизны (укажем без разъяснений, что в этом случае остаются
в силе формулы B7.13.7) и B7.12.8) для Ь и для погрешности е). Однако-
и это не исчерпывает вопроса, так как остаются в стороне, например, такие
напряженно-деформированные состояния, которые возникают вблизи пере-
переходных линий тора. Полный перечень случаев, которые надо было бы обсу-
обсудить для оболочки совершенно произвольного очертания, по-видимому, со-
составить невозможно. Поэтому остается открытым и такой вопрос: суще-
существуют ли обстоятельства, при которых Ь отлично и от нуля, и от / — 2р.
Асимптотическая точность итерационной теории оболочек для чисто
моментных напряженных состояний и для обобщенных краевых эффектов,
как показывает оценка B7.12.8), понижается. Однако можно показать, что-
в этих случаях существует такая модификация итерационных процессов инте-
интегрирования уравнений теории упругости, при которой погрешности исход-
исходного приближения снова попадают в рамки оценки B7.8.1). Соответствую-
Соответствующие подробности громоздки, и не останавливаясь на них, сформулируем,
некоторые окончательные результаты. Формулы B6.3.4), B6.3.12), B6.3.18),
B6.3.24) перейдут в такие равенства:
-f
х. =
426 ПОГРЕШНОСТИ ТЕОРИИ ОБОЛОЧЕК [ГЛ. 27
т3 = тз + ^
В них нештрихованные величины удовлетворяют некоторой системе,
эквивалентной уравнениям двумерной теории оболочек. При этом в уравне-
уравнении равновесия B6.5.17) изменится смысл величин 8Xt, 8Yt, 6Z, а уравне-
уравнения состояния для чисто моментного напряженного состояния должны браться
в следующем виде:
т %Eh . . ч 2Eh3
»¦
Gi = зA -v') ^ + VX')' НЧ = Я/' = 3A
(об уравнениях состояния для обобщенных краевых эффектов будет ска-
сказано ниже).
Замечание. В обсуждаемой приближенной теории предполагается, конечно, что штрихо-
штрихованные величины должны отбрасываться. В связи с этим может показаться, что формулы
B7.13.8) непоследовательны. В первых двух из этих равенств отбрасываемые величины имеют
порядок О(Х~31^'4р), а в остальных равенствах отбрасываются величины вида О(АГ/+2/)).
Однако это имеет свое объяснение; из формул B6.2.4) видно, что напряженно-деформированное
состояние с особой асимптотикой при Ь > 0 имеет повышенную деформативность и для того,
чтобы в ней добиться требуемой точности для напряжений, необходимо повысить точность опре-
определения перемещений.
Таким образом, в двумерной теории, оболочек вид наиболее рациональ-
рациональных уравнений состояния зависит от свойств того напряженно-деформиро-
напряженно-деформированного состояния, которое подлежит исследованию. Если оно имеет нор-
нормальную асимптотику (Ь = 0), то оптимальными надо признать равенства
^26.5.5), а если асимптотика особая и Ь = I — 2р, то предпочтения заслужи-
заслуживают формулы B7.13.9). Разумеется, два этих варианта можно объединить,
оставив все слагаемые, которые входят по крайней мере в одну из групп
¦формул B6.5.5) или B7.13.9). Тогда мы придем к таким уравнениям со-
состояния:
s -s - Eh со i m ( '
2Ehs
( L\T
v) { Ri R. ) T- B7 i3
3 1-
-
S 13 ОБОБЩЕННЫЙ КРАЕВОЙ ЭФФЕКТ 427
Их надо рассматривать как уравнения состояния, обеспечивающие асим-
асимптотическую точность B7.8.1) для весьма широкого класса напряженно-
деформированных состояний. К ним, помимо перечисленных в § 27.11, оче-
очевидно, надо присоединить чисто моментное напряженное состояние. Кроме
того, можно показать (но мы на этом не будем останавливаться), что в равен-
равенствах B7.13.10) содержатся также все члены, необходимые для построения
с точностью B7.8.1) обобщенных краевых эффектов. Не исключено, что
с обсуждаемой точки зрения формулы B7.13.10) — универсальны, но утвер-
утверждать этого с уверенностью нельзя потому, что, как уже говорилось, пока
еще рассмотрены не все напряженно-деформированные состояния с особой
асимптотикой.
Замечание. Уравнения состояния обсуждались лишь с точки зрения связанных с ними
асимптотических погрешностей. Разумеется, существуют и другие аспекты вопроса. Можно,
например, требовать, чтобы выражение энергии деформации оболочки, соответствующее выби-
выбираемому варианту уравнений состояния, обладало нужными свойствами. Этого также можно
добиться, опираясь на результаты §§ 5.30—5.32 и добавляя нужные слагаемые в уравнения
состояния (или отбрасывая лишние слагаемые, если нет необходимости в повышении точности),
но на подробностях мы останавливаться не можем.
Остановимся в заключение на теории изгиба пластинок. В ней иссле-
исследуется напряженно-деформированное состояние, в основном обусловленное
моментами. Из этого не нужно делать вывод, что итерационная теория пер-
первого приближения даст в теории изгиба пластинок пониженную точность.
Дело в том, что соответствующие главные напряжения обратно симметричны
по ?, а поэтому в третьем и четвертом равенствах B7.13.8) слагаемые с ?2,
отбрасывание которых и приводило к погрешности B7.12.8), теперь точно
обращаются в нуль.
Замечание. В настоящей главе считалось, что если в дифференциальных уравнениях
отбрасываются слагаемые, имеющие для решений данного типа определенный порядок ма-
малости, то порядок погрешности этих решений будет таким же. Вместе с тем, из результа-
результатов, изложенных в приложерши, вытекает, что это может быть и не так. Например, если для
однородного уравнения (П. 3.1) надо построить интеграл с положительным, ио ие слишком
большим показателем изменяемости т и мы выполняем это, отбрасывая второстепенное сла-
слагаемое t]2N (Ф), то для соответствующей погрешности выведена оценка (П. 7.8), показываю-
показывающая, что это есть величина вида
в то время как для решений такого типа справедлива оценка
rfN (ф) = I (ф) О (в2/т+'-п).
Здесь е — малый параметр, а г — положительное число, равное кратности некоторого
семейства характеристик оператора L. Поэтому в данном случае обсуждаемое правило при-
приводит к преувеличенно хорошей оценке.
Мы не будем разбирать вопросов, связанных с такими несоответствиями. В статике
оболочек оно, как правило, не влияет на окончательные выводы, т. е. иа выводы, относя-
относящиеся к погрешностям решений краевых задач. Это объясняется тем, что, как показано
в приложении (§ П. 12), в решение краевых задач статики оболочек входят обычно лишь
такие интегралы с большой изменяемостью, которые быстро затухают при удалении от края.
Это правило допускает и исключения, которые могут иметь место при статическом расчете
оболочек неположительной кривизны. В этом случае, а также при решении динамических
задач при оценке погрешностей надо проявлять осторожность.
ГЛАВА 28
ТЕОРИЯ ПОГРАНСЛОЯ
§ 14. Преобразование уравнений теории упругости
Обратимся к изучению краевых упругих явлений и будем снова отправ-
отправляться от уравнений трехмерной теории, взяв их в форме B6.1.1), B6.1.2),
B6.1.4). Так же как и раньше, введем несимметричные напряжения, а кроме
того, преобразуем компоненты перемещений упругой среды, приняв следую-
следующие формулы:
B8.14.1)
Vm = h-*vm (m = 1, 2, 3).
Здесь величины S{/ по смыслу совпадают с величинами it, iih xt3, т3,
введенными при помощи равенств B6.1.6), но для дальнейшего удобно обо-
обозначить их по-другому.
Будем считать, что край оболочки, вблизи которого надо исследовать
напряженное состояние, задается уравнением ct1 = а10, и введем замену не-
независимых переменных по формулам
«х-аю = ^-^ь ol2 = RX-p^, as = RX-%, B8.14.2)
в которых величины R, X, I, p имеют тот же смысл, что и в B6.2.1). В дальней-
дальнейшем будет считаться, что в краевом напряженно-деформированном состоянии
искомые величины не меняют своего асимптотического поведения при диф-
дифференцировании по Ij, ?2> S- Отсюда, рассуждая так же, как в § 27.7, можно
сделать вывод, что формулами B8.14.2) предопределяется характер изменяе-
изменяемости погранслоя. А именно, постулируется, что по переменным ах и as по-
показатель изменяемости погранслоя равен единице, а по переменной а2 —
числу /, определяемому формулой
t=^-. B8.14.3)
После подстановки B8.14.1), B8.14.2) в B6.1.1), B6.1.2), B6.1.4) уравне-
уравнения теории упругости можно переписать так:
К1 _l_ dStl , К" 1 dSi2 Xl ( R .lr\ dS13
+ ~3~ur +a Q)~W"t
X (
R 3baur~RV
E5^ + ^ E + 5) + -^-^ = o,
§ И] ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ 429
^ l_dS21 %p I dS22 Xl (. R .,\ dS2
_
R At ЙЬ + R А2 dl2 +
B8.14.4)
^7 E—5) + -^-^г E + 5) + -^-^23 = о,
R Аг д1г ~Т~ R А2 д%2 ~Т~ R дС,
~Т~
й7 ^Г^23""" "лГ ~ ~Ri ~ U)
у
AtA2 да,
u —vS«]=0,
B8.14.5)
X" (\ 4- Л l-'
R
r2
r2
A%
4.x-iC)v,—
— 2 A + v) ^ A + -|- Я.-'С) S18 = 0,
i
430 ТЕОРИЯ ПОГРАНСЛОЯ [ГЛ. 28
Обозначим через М любую из следующих величин:
!_
Л Л
B8 14
<ZO.lt.
входящих в коэффициенты уравнений B8.14.4), B8.14.5), и будем считать,
что М можно разложить в ряд Тейлора вблизи аг = а10, т. е. учитывая
B8.14.2), написать
р=0 . р=0
(под Мр подразумеваются коэффициенты тейлоровского разложения).
Пользуясь этим, будем иногда представлять М в виде
М = М0 + Ь-1М', B8.14.7)
где
Мо = М | «,=«,„, М' = S Я.-'""" ' Мо i?p|f.
0=1
§ 15. Преобразование уравнений теории упругости (продолжение)
Задача интегрирования уравнений теории упругости сводится к опре-
определению совокупности величин, стоящих в левых частях равенств B8.14.1).
Обозначим ее через S и разобьем на две группы, т. е. напишем
где под Р и Q подразумеваются следующие совокупности величин:
Р = EИ, 512, S23, V2), B8.15.0
Q = En, 522, S33, Su, Ki, 73). B8.15.2)
Введем понятия о решениях типа (а) и о решениях типа (Ь). Первое из
них определим условным равенством
B8.15.3)
Оно в развернутом виде эквивалентно соотношению
S = Di. 5И, SM, V» Я.-' ^
в котором буквой а сверху отмечены величины вида О (Я,0). Аналогично, ре-
решение типа Ъ определим требованием
S = k-'+pP + Q, B8.15.4)
которое означает, что
ь i ъ ь ь ъььъъьъ
5= U-'+'Sa, X-'+'Su, %-'+"S23, %-*+'Vt, Su, S2i, S33, S,3, V,. V
Подставим в преобразованные уравнения теории упругости B8.14.4),
B8.14.5) выражения B8.15.3) для решений типа (а) или выражения B8.15.4)
для решений типа (Ь), заменим коэффициенты уравнений выражениями вида
$ 15] ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ 431
B8.14.7) и запишем полученный результат следующим образом:
ft ft
1
¦"хо
1
d?i '
ft
dS2l .
dli
ft
d?
ft
dS2s
d?
ft
'Л2 = 0,
/г
\ — i vi
lx\ = o,
¦0 "fel "b
av Г * f * * \n * .ft.
rft /ft ft\lft ftj
— [S22 — v \Sn -f- S33JJ -|- <&z-\- к~'&>2 = 0,
г* /* * м k * B8.15.5>
I О I о i О I I i Й' i 1 I SP*- f\
ft
-f-4^-2(l+v),
л 35 *• 11 + V) О22 + <3 12 + Л~'еГ 12 = U,
*io "Si
k
?-^- — 2 (l + v)S23 + ?»+a.-4& = 0.
Уравнения B8.15.5) имеют силу как для решений типа (а), так и для ре-
решений типа (Ь), т. е. значку k можно придавать значения а и Ь. Величины X
и $ с различными индексами представляют собой выражения, не содержащие
в коэффициентах положительных степеней Я,. Ниже приводятся те из этих
выражений, которые понадобятся в дальнейшем. Не выписанные формулы,
имеют такую же структуру.
а а а
Формулы для Х(, &t, &'ц:
. Xl = 1? ~ЩГ + ^ А10А да V5i2 + S21J,
10А20
Л3 = —; 35 f- Л р
Ai0A2
т/
ч10л20
а а а а
Хор ор> ор> ср ср г\
2 = ®21 = ®12 = ®3 = 0 13 = 0 23 = U.
ft ft ft
Формулы для Xlt &\, &'ц-.
ft
^20 "S2 ^10^20 "а2
ft . \ Ь
B8.15.7>
ft " f> ft h b
Xi = Xa = <gx = S3 = ^'2 = 0=>3 = 0.
ТЕОРИЯ ПОГРАНСЛОЯ [ГЛ. 28
а
Формулы для X}:
дА1(а a ) 1 дА2 (a a ) R
R
ь
Формулы для X}:
9 P 4
b b
V as22 , R
§ 16. Построение решений типа (а) и (Ь)
Рассмотрим подробнее уравнения B8.15.5) и примем, что их можно
приближенно решать, отбросив слагаемые
\~lX\, %~lh, Ь~'Н B8.16.1)
как содержащие малые множители.
Пусть речь идет о решениях типа (а). Тогда в B8.15.5) надо положить
а а а
k = а и определить Xi7 <В"(, <§ц по формулам вида B8.15.6). Поэтому, после
5 16) ПОСТРОЕНИЕ РЕШЕНИЙ ТИПА (а) и F) 433
отбрасывания величин B8.16.1), второе, седьмое, восьмое и десятое уравне-
уравнения B8.15.5) можно записать так:
лы °ii °<? Л1о °Si /OR 16 2')
Они образуют самостоятельную подсистему, содержащую четыре урав-
а
нения с четырьмя неизвестными величинами Р, из которой последние и могут
быть определены.
Уравнения B8.16.2) имеют простой физический смысл. Положим в них
пока Л1в = 1 и будем понимать под \х, |2, ? — декартовы координаты, под
а а а а
•S12, S21, S23, V2 — напряжения и смещения упругой среды, отнесенной
к этим координатам (значки 1, 2, 3 соответствуют направлениям Е^ |2, ?).
Тогда B8.16.2) можно трактовать как уравнения антиплоской задачи теории
упругости, для которой плоскость отсчета задается равенством
|2 = |20 = const. B8.16.3)
При этом в системе B8.16.2) второе (двойное) уравнение можно отбросить,
заменив его равенством
5„ = Srf, B8.16.4)
выражающим закон парности касательных напряжений.
Такую интерпретацию системы B8.16.2) нетрудно распространить и на
случай, когда Л10 отлично от единицы. В этих уравнениях 12 можно рас-
рассматривать как параметр, так как искомые функции не дифференцируются
по ?2. Вместе с тем Л1в (краевое значение коэффициента первой квадратич-
квадратичной формы срединной поверхности) зависит только от ?2. Поэтому можно
ввести следующую замену переменной:
Л10|г = Й, B8.16.5)
которая эквивалентна принятому выше допущению Л10 = 1.
а
Итак, B8.16.2) относительно величин Р представляют собой уравнения
антиплоской задачи, в которой плоскость отсчета определяется равен-
равенством B8.16.3), а координата ?i растянута (в разных плоскостях B8.16.3)
а
по-разному) по закону B8.16.5). Для определения величин Q мы имеем не-
неиспользованные пока первое, третье, четвертое, пятое, шестое и девятое
уравнения B8.15.5). Их, отбросив снова величины B8.16.1), можно перепи-
переписать так:
a a
Лю 3Ei + dt +Ai-U' Al0
-^,, B8-16.6)
a I a a \
582 — v{Sn + Sj =
28 Д. Л. Гольденвейзер
434 ТЕОРИЯ ПОГРАНСЛОЯ [ГЛ. 28
а а а
Здесь величины вида Xlt Su &tj определяются равенствами B8.15.6).
Просматривая их, убеждаемся, что все эти величины либо равны нулю, либо
а
выражаются через Р, т. е. через величины, для которых уже выведены урав-
а а
нения B8.16.2). Итак, приближенное построение величин Р, Q может быть
а
выполнено в два этапа. Первый из них заключается в нахождении Р из
а
уравнений B8.16.2). Второй этап заключается в нахождении Q из уравне-
а а а
ний B8.16.6), в предположении, что Хи &\, &',,- известны.
Равным образом при построении решений типа ф) надо исходить из
системы B8.15.5), считая, что в ней положено k = b, отброшены слагаемые
b Ь Ь
B8.16.1), а величины Х1г &it &ц определяются формулами B8.15.7). В ре-
ь
зультате для Q получается следующая подсистема:
I b Oh
li L . 32- = 0 — — = О
Ли "Si "E ' Л%о д^х о? *
Е dV b (h b \ dV " (b h \
JL-?jg-= Sit — v lS22 + Sj, E ^ = Sm—v [Sit + Sj, B8.16.7)
= 0, E (^-+_^L-^) = 2A +v)Sl3.
Она составляется из первого, третьего, четвертого, пятого, шестого и девя-
ъ ь ь
того уравнений B8.15.5), в которые величины X,-, &it <&и не входят в силу
шести последних равенств B8.15.7).
Ь b
Физический смысл равенств B8.16.7) также прост. Считая, что 5U, S22,
ь ь ь ь
53з> S13 — напряжения, a Vu V3 — смещения упругой среды, отнесенной
к декартовой системе координат (?,{, ?2, S), легко убедиться, что B8.16.7)
представляют собой уравнения плоской задачи теории упругости, для которой
плоскость отсчета задается уравнением B8.16.3), а декартова координата |!
растянута при помощи замены B8.16.5).
ь
Величины Р определяются из следующих уравнений:
Al° f1 dZ ь ь Al° ^ ь ь B8.16.8)
X-#- = 2A + v)Su — ilt, Е-ф- = 2A +v)S23 — ?M,
они получаются из второго, седьмого, восьмого и десятого равенств B8.15.5)
ь ь ь
после отбрасывания слагаемых B8.16.1). Величины вида Х(, &\, &'(j
в B8.16.8) надо подсчитывать при помощи первых четырех равенств B8.15.7).
k Ь Ь
Просмотрев последние, убеждаемся, что Xt, &\, &ц выражаются только
Ь Ь b
через величины Q. Это значит, что построение величин Р, Q также может быть
ь
выполнено в два этапа: на первом из них определяется Q как интеграл урав-
ь
нений плоской задачи, а на втором этапе определяются Р ценой интегрирова-
ь ь ь
ния уравнений B8.16.8), в которых Xit &\, <?ц можно рассматривать как
известные величины.
§ 17] ПЛОСКИЙ И АНТИПЛОСКИЙ ПОГРАНСЛОИ 435
Полученные результаты можно сформулировать так. В решении типа (а),
а
как видно из B8.15.3), главными являются величины Р, которые удовле-
удовлетворяют однородным уравнениям антиплоской задачи теории упругости
B8.16.2).
В решении типа (Ь), как видно из B8.15.4), главными являются
ь
величины Q, которые удовлетворяют уравнениям плоской задачи теории
упругости B8.16.7). Основываясь на этом, будем называть решения типа (а)
и ф) антиплоским и плоским решениями уравнений теории упругости соот-
соответственно.
о Ь
Величины Q в антиплоском решении и величины Р в плоском решении,
как уже говорилось, второстепенны. Первые из них удовлетворяют неодно-
неоднородным уравнениям плоской задачи B8.16.6), а вторые — неоднородным урав-
уравнениям антиплоской задачи B8.16.8). В обоих случаях свободные члены со-
составляются как некоторые линейные дифференциальные выражения от ве-
величин, определенных ранее.
Отметим, что при интегрировании уравнений B8.16.2) или уравне-
уравнений B8.16.8) можно требовать, чтобы на лицевых поверхностях выполнялись
условия
4Jc-±i=0, B8.16.9)
а при интегрировании уравнений B8.16.6) или уравнений B8.16.7) можно
требовать, чтобы на лицевых поверхностях выполнялись условия
1±i =0. B8.16.10)
Описанный здесь подход позволяет строить антиплоское и плоское ре-
решения лишь приближенно, так как он базируется на отбрасывании членов
B8.16.1).
Легко показать, что полученный результат можно формально уточ-
уточнять при помощи итераций, но на подробностях мы останавливаться не будем
и примем, что построенные в этом параграфе уравнения позволяют строить
обсуждаемые решения с асимптотической погрешностью порядка
е = О (Х-1),
так как такой порядок имеют отбрасываемые слагаемые B8.16.1).
§ 17. Плоский и аитиплоский погранслои
В дальнейшем нас будут интересовать только такие решения уравнений
теории упругости типа (а) и ф), которые на лицевых поверхностях удовле-
удовлетворяют условиям B8.16.9), B8.16.10) и, кроме того, затухают при удалении
от края аг = а10 (последнее уравнение в дальнейшем будет записываться
также в виде |i = 0 или |i = 0). Такие решения мы будем называть анти-
антиплоским погранслоем и плоским погранслоем соответственно.
Дополнительное требование, чтобы погранслои затухали, не всегда
может быть выполнено. Из сказанного выше следует, что погранслои пред-
представляют собой напряженные состояния, возникающие в полуполосе
лицевые стороны которой и ее бесконечно удаленный торец |х = —оо сво-
свободны от внешних сил. Поэтому полуполоса будет уравновешена в целом
тогда и только тогда, когда краевые (при ?х = 0) напряжения находятся
28*
436 ТЕОРИЯ ПОГРАНСЛОЯ [ГЛ. 28
в равновесии с массовыми силами, т. е. когда выполняются следующие
четыре физически очевидных равенства:
1
J
1
1
In
J|,=o di+^dl^ (х, + K-lX{) A10dg, = О,
—1 —1
J J
—1 —1
г rV ,M
~\ 7 B8.17.1)
7 k
U ^ h) = 0,
| j
—1 —1
L l
J
J L l6,=odC + JdC J (x, + ^ Xj) Лю d& = 0,
1 1
J J
1 1
которые можно получить и формальными математическими выкладками, ин-
интегрируя первые три равенства B8.15.5), представляющих собой уравнения
равновесия.
Равенства B8.17.1) мы назовем условиями затухания. Очевидно, что
они необходимы для того, чтобы существовали затухающие решения типа (а)
и ф), а следовательно, и для того, чтобы существовали антиплоский и пло-
плоский погранслои. Основываясь на принципе Сен-Венана, примем, что они
являются и достаточными.
§ 18. Структура полного напряженно-деформированного
состояния оболочки
В дальнейшем мы будем исходить из предположения, что напряженное
состояние трехмерного тела оболочки составляется из внутреннего напря-
напряженного состояния и погранслоев*). Погранслои, как уже говорилось, лока-
локализуются вблизи краев оболочек (или других линий искажения), а под вну-
внутренним понимается напряженное состояние, не обладающее свойством за-
затухания и захватывающее, вообще говоря, все области тела оболочки. Итера-
Итерационная теория оболочек, изложенная в гл. 26, является приближенным
методом построения внутреннего напряженного состояния, а приближенная
теория погранслоев изложена в гл. 28. Для того чтобы оправдать высказан-
высказанное предположение, надо показать, что внутреннее напряженное состояние
и погранслои в совокупности содержат достаточно произволов для выпол-
выполнения трехмерных граничных условий на боковых поверхностях оболочки.
Это будет сделано в следующей главе для некоторых конкретных видов гра-
граничных условий.
Обозначим через Л напряженное состояние трехмерного тела оболочки,
а через Л(вн) и Л(п'с) внутреннее напряженное состояние и погранслои соот-
соответственно, и будем считать, что
*) Эта концепция характерна для всех работ, в которых теория оболочек строится асим-
асимптотическим методом (ссылки в § 26.6).
$ 18] СТРУКТУРА ПОЛНОГО НАПРЯЖЕННОГО СОСТОЯНИЯ ОБОЛОЧКИ 437
Конкретное содержание символов Л(вн) и Л(пс) определяется формулами
глав 26 и 28.
Внутреннее напряженно-деформированное состояние Л(вн) строится так,
чтобы выполнялись условия на лицевых поверхностях, которые, вообще го-
говоря, неоднородны и выражают тот факт, что к этим поверхностям приложены
внешние силы. Таким же условиям будут удовлетворять и полное напря-
напряженно-деформированное состояние Л, так как погранслой Л(пс) подчинен
однородным условиям на лицевых поверхностях. В соответствии с резуль-
результатами § 28.15 выразим Л(п"с) так:
д(П.С) __ Д(П.С) . Д(П.С)
а Ь
Здесь Л(п) и Л<п-е' соответствуют антиплоскому и плоскому погранслоям,
поэтому, учитывая соотношения B8.15.3), B8.15.4), напишем равенства
Л(п.о =^('+)
В них Ха, %? — постоянные множители, которые мы вводим, пользуясь тем,
что задача о погранслое однородна. Под аир подразумеваются произволь-
произвольные числа, которые в антиплоском погранслое и в плоском погранслое в от-
отдельности должны иметь одпнаковое значение для любого напряжения или
а а Ь Ь
перемещения. Асимптотика величин Р, Q, P, Q была определена выше,
а именно, было принято, что
(р, Q, Р, О) = 0A), B8.18.1)
поэтому порядок вклада погранслоев в полное напряженное состояние обо-
оболочки определяется значениями чисел а, р\ и мы назовем последние показа-
показателями интенсивности антиплоского и плоского погранслоев.
Таким образом, принимается формула
Л = Л(ВН) +Ха(р + Х-1+Ро) + Х*{%-1+рР + о), B8.18.2)
и следуя той же схеме, что и в части IV, мы будем в дальнейшем подбирать
в ней значения а, р так, чтобы граничные условия на боковых поверхностях
можно было выполнять при помощи итераций.
В B8.18.2) под Р, Q понимаются величины, определяемые формулами
B8.15.1)—B8.15.4), а для Л(вн) справедливы формулы B6.1.6), B6.2.4),
B6.3.4), B6.3.8), B6.3.16), B6.3.18), B6.3.24), B6.3.25). Учитывая все это
и принимая во внимание, что h = RX~l, можно следующим образом расшифро-
расшифровать равенство B8.18.2) для некоторых величин, которые понадобятся ниже:
on = X' ( + Х-***~
-g-) <r12 = X1 (xI2 + S.2 + A) +
438 ТЕОРИЯ ПОГРАНСЛОЯ [ГЛ. 28
Vl = %}-' (J, + Я-'+2р-с^1 + Х~21+2%21') + RX"-21^ + RX*-1 Vu
+ X-l+ct v3 + Я-2г+2"А) + RX«-2l+p V3 +
(считается, что асимптотика внутреннего напряженного состояния — не осо-
особая, и в относящихся к нему формулах положено 6 = 0).
В дальнейшем для простоты рассуждения будут проводиться на том
уровне точности, который соответствует итерационной теории исходного при-
приближения, хотя принципиально можно было бы показать, что во всех рас-
рассматриваемых случаях существуют и итерационные процессы. В связи с этим
в равенствах B8.18.3) всегда, когда не оговорено противоположное, будут
отбрасываться величины, отмеченные штрихом, что соответствует обычно
принимаемой в этой части книги точности порядка
г = О(Х~21+2р). B8.18.4)
В погранслоях пока никаких отбрасываний делаться не будет. Погреш-
Погрешности, допустимые для связанных с ними величин, выявятся ниже.
Замечание. В B8.18.3) в показателях степеней X при числах, относящихся к внутрен-
внутреннему напряженному состоянию, надо под р подразумевать число, определяющее по фор-
формуле B7.7.3) общий показатель изменяемости искомого общего напряженно-деформирован-
напряженно-деформированного состояния. В степенях Я при членах, относящихся к погранслоям, надо было бы вместо р
писать р', т. е. число, характеризующее частный показатель изменяемости в направлении
края аг = а10. При этом, очевидно, было бы справедливо неравенство р' sc; p.
Для простоты мы пренебрегаем таким различием н будем пользоваться в следующей
главе формулами B8.18.3), так как можно показать, что введение числа р' не изменило бы
окончательных результатов. Эта поправка сказывается только на оценках погрешностей
построения погранслоя (при р' Ф р точность возрастает).
ГЛАВА 29
ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ
НАПРЯЖЕННЫМ СОСТОЯНИЕМ ОБОЛОЧКИ
§ 19. Свободный край
Пусть край оболочки совмещен с боковой поверхностью аг = а10 и на
нем должны выполняться граничные условия, выражающие отсутствие внеш-
внешних поверхностных сил. Учитывая, что несимметричные напряжения, вве-
введенные формулами B6.1.6), пропорциональны симметричным напряжениям,
эти условия можно записать так:
•Ч = 0, *12 = 0. Чз = 0 (а, = а,0).
Расшифровав здесь левые части по формулам B8.18.3) и отбросив вели-
величины со штрихом, получим
т, + Х-Н^-^т, + A,-2'+p+«Su + *,-'+»» Sn = 0,
° 12 = о,
B9.19.1)
L + С13 + %\3 + la + i3 = 0
(«i = Ою)-
Входящие сюда числа а, р — показатели интенсивности плоского и анти-
антиплоского погранслоев — пока произвольны. Их надо выбрать так, чтобы
получить удобный итерационный процесс выполнения условий B9.19.1).
Чтобы сократить связанные с этим рассуждения, используем традиционные
граничные условия классической двумерной теории оболочек (см. часть I).
Пренебрегая в них поправками от крутящих моментов и учитывая фор-
формулы B6.5.2), запишем эти условия для свободного края следующим образом:
т, = 0, т12 = 0, т13 + -]-А,-г+2о-Ч,з = 0, т,= 0 (сч = а1О) B9.19.2)
и примем, что они верны с некоторой степенью приближенности.
Единственно приемлемые значения чисел а, р в случае свободного края
определяются так:
а = 2р — с, р = р. B9.19.3)
Чтобы показать это, внесем B9.19.3) в B9.19.1), учтем B9.19.2) и, сохранив
в полученных равенствах только главные члены, напишем
Su + Х- (+2p-cSu = 0, Sl2 + $т12 = 0,
1+"% ( 2) ^ = 0
B9.19.4)
440 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
Второе из этих равенств можно рассматривать как торцевое условие для
исходного приближения антиплоского погранслоя. Равным образом первое
и третье равенства B9.19.4) можно принять за торцевые условия для исход-
исходного приближения плоского погранслоя. При этом, считая, что сначала опре-
определяется антиплоский погранслой, величины с верхним индексом а в первом
и третьем равенствах B9.19.4) можно рассматривать как известные. Таким
образом, формулы B9.19.3) приводят для определения исходного приближе-
приближения антиплоского и плоского погранслоев к формально непротиворечивым
задачам. Они заключаются в интегрировании уравнений B8.16.2) или B8.16.7)
с учетом условий B8.16.9) или B8.16.10) на лицевых поверхностях, требова-
требований затухания при ?t =—со и торцевых условий B9.19.4). Эти задачи оче-
очевидно однородны, когда однородны торцевые условия, и неоднородны в про-
противоположном случае. При торцевых условиях B9.19.4) исходные прибли-
приближения погранслоев будут, вообще говоря, отличны от тождественного нуля
(случайные нарушения этого правила мы рассматривать не будем). В этом
и заключается формальная непротиворечивость задач, к которым приводят
формулы B9.19.3).
Легко проверить, что на свободном крае формулами B9.19.3) определяется единственная
комбинация значений а, р\ приводящая к формально непротиворечивым задачам для построения
погранслоев. В самом деле, если а > 2р — с, Р > р, то равенства вида B9.19.4) станут одно-
однородными относительно величин, связанных с погранслоями; если а<; 2р — с, Р <j p, то в ра-
равенства вида B9.19.4) не войдут величины, связанные с погранслоямн; если а = 2р — с,$У>р,
то для исходного приближения плоского погранслоя получатся однородные торцевые условия;
если а> 2р — с, р = р, то такая же ситуация получится для антиплоского погранслоя. Во
всех случаях задачи построения погранслоев не свободны от противоречий (противоречивымн
надо считать случаи, когда упомянутые задачи получаются однородными, так как тогда соот-
соответствующий погранслой можно считать приближенно равным нулю, а это и значит, что а или
Р были выбраны неправильно).
Подставив еще раз B9.19.3) в B9.19.1) и не производя пока никаких от-
отбрасываний, получим
тх + к~ 1+2р'%тг + к~ l+pSu = 0,
^ S12 = 0, B9.19.5)
Сат„ + Sa = 0
Смысл величин, отмеченных здесь звездочкой и точкой сверху, определяется
равенствами
Р=Р+хФ, $ = <$+*5,
а , Ь • а ,, Ь v '
Р = Р + 1Г1+СР, Q = Q + X~l+CQ.
а а Ь Ь
Величины (Р, Q) и (Р, Q) порознь удовлетворяют линейным уравне-
уравнениям B8.15.5). Из формул B9.19.6) вытекает, что это останется в силе и для
величин (f>, Q), (Р, Q), если в этих уравнениях заменить индекс k звездочкой
либо точкой и считать, что
Xt + Х-1Х\ = X, + %-Wp-cX + I'1 (x) + Г-'+2р-с
xt + к-'к) = xt + уг1+сХг + х-' (х\ + к-1+сх\).
Но, согласно B8.15.6) и B8.15.7),
Xs = 0 (s=l, 3), Х2 = 0,
§ 19]
СВОБОДНЫЙ КРАЙ
441
поэтому
xs +
- 1х\ =
(s = l, 3),
b a b
X2 -f- A, X2 — Я, Xi -f- A, X2 -f- ^ X2.
B9.19.7)
Равенства B9.19.5) должны выполняться при любых значениях ?. Вос-
Воспользовавшись этим, помножим каждое из них на а% и проинтегрируем в пре-
пределах (—1, 1). Кроме того, помножим первое равенство B9.19.5) на ? dt,
и выполним такое же интегрирование. Получим
Л
1
2 (тхз + -}-
-1
1
= 0,
e 0
B9.19.8)
j
= а10).
Здесь величины со звездочкой и точкой определяются формулами
B9.19.6) и представляют собой линейные комбинации погранслоев. Следо-
Следовательно, надо требовать, чтобы для них выполнялись условия затухания,
т. е. равенства, получающиеся из B8.17.1) в результате замены индекса к
звездочкой или точкой. Таким образом, введя некоторые дополнительные
множители, можно написать
j
— 1
J
— 1 —со
1
—1 —CO
-1
— 1
—1
+ %-l+p j dl j (x3 + IT'X$ Alb
-1 —m
(I, = 0).
Раскрыв в правых частях равенств подынтегральные выражения по
формулам B9.19.7), отбросив слагаемые, выходящие за пределы точности
442 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
а Ь
B8.18.4), и выразив величины Xi и Х\ при помощи B8.15.6) и B8.15.9),
получим
' 1
—1 —1 —со
J_L^
f« j (x-
а
US32 , . _„ /? <ЭЛ1
B9.19.9)
— 1 —1 '—со
-1
Правые части этих равенств можно значительно упростить, учитывая,
что точно или в пределах погрешностей порядка B8.18.4) мы имеем право
выполнять следующие действия:
1. Выносить за знаки интегрирования символ дифференцирования по 12,
а также величины, зависящие только от |г, к которым, в частности, относятся
величины, отмеченные дополнительным индексом 0.
2. Заменять величины
1 дл9 1 1
АхА% дсс^ * /?j ¦ /?г
их контурными значениями, т. е. приписывать им дополнительный индекс 0.
и также выносить их за знаки интегрирования (при этом совершается ошибка
порядка О (к~1)); она допустима при тех множителях, которые стоят при
интегралах в правых частях обсуждаемых равенств).
3. Пользоваться равенствами вида
(при i =h j = 1, 2 они приближенны, но и в этом случае погрешность имеет
порядок О (АГ'))-
Учитывая все это, получим
1 1
— 1+р
1 — 2/+Зр—с 15/, . _ 1+2р—с
19] СВОБОДНЫЙ КРАЙ 443
1к).'--щ''-%''}- <29-19-10»
— l+P
-21+Зр-! 1
1
j
— 1 —
1 °
ft
h = j dl j ^- Л10 j j
—1 —CO
B9'19Л1)
1
ft
— 1 —CO
10
/в =
/¦ =
-1
1
\d
-1
\d
-1
0
л
и
—со
0
С j
—со
х |
—со
0
¦с Г
— 1 -co —1 —со
Выписанные интегралы можно вычислить или привести к нужному виду
при помощи следующих приемов:
A) изменение порядка интегрирования;
B) выполнение квадратур по переменным |а или ? и интегрирование
по частям по той или иной из этих переменных;
C) использование условий затухания при |х = —со для вычисления
обынтегрированных слагаемых, получающихся при интегрировании по gx;
D) использование условий на лицевых поверхностях_B8.16.9) и B8.16.10)
для вычисления обынтегрированных слагаемых, получающихся при инте-
интегрировании по ?;
E) использование уравнений B8.15.5) для преобразования подынте-
подынтегральных выражений.
Замечания. 1. При использовании условий затухания принимается без доказательства, что
напряжения затухают экспоненциально, г. е. быстрее, чем ?р™ (л — любое).
2. Легко проверить, что для достижения точности B8.18.4) все интегралы /* достаточно
строить с погрешностями порядка О О^1^"), поэтому в уравнениях B8.15.5) можно отбросить
величины с верхним индексом 1, а это значит, что величины с индексом а и величины с индексом
Ь удовлетворяют однородным уравнениям B8.16.2) и B8.16.7) соответственно.
Преобразования интегралов Ik, в которых использованы все эти приемы,
приводятся ниже без дополнительных пояснений:
] {[Sjlco- f it -^ d
— 1
-л'°
{
—oo I—
444 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ И"Л. 29
О / +1 я ^ +1/0
-со V —1 ' —1 »—со
—1
+1
J j
—oo —1
J
+1
J j
oo —1
= Ao J ЫУ°-со-
— 1 I
+1
—1
j
j
— X
= — А
10
1 0
/« =
— CO
+ 1 0
j j
1 —CO
0
1 —QO
+1 b ^ +1 / 0 b
j -^ff-dS ds,= —v4u j J
—1 / —1 •¦—с
j
—1
h =
+1
—1
Ш
— 1 ^ CO
J
J
—1 —CO
+1
j
Итак,
j
— 1
J
—1
г1*
B9.19.12)
—/, = /, = /=
j
— 1
j j
—1 —CO
$ 19) СВОБОДНЫЙ КРАЙ 445
Вернемся к формулам B9.19.8). Они составлены с точностью B9.18.4).
Поэтому, сопоставив их с B9.19.10) и B9.19.12), получим такие оценки:
о
^ = О О
Условимся (здесь и всюду в дальнейшем), что краевое напряженно-
деформированное состояние оболочки будет строиться с меньшей точностью,
нежели внутреннее напряженно-деформированное состояние. А именно, будет
допускаться погрешность порядка
+p). B9.19.14)
Основание для этого выясняется ниже, а пока отметим, что форму-
формулой B9.19.14) оценивается погрешность суммы антиплоского и плоского по-
гранслоев. В рассматриваемом случае, когда ct^ р, принятые выше требо-
требования к точности означают, .что для антиплоского погранслоя допустимой
остается погрешность B9.19.14), в то время как для плоского погранслоя
она определяется так:
е = О (а,-'+И«-Р ) = О (Х-1+2р-с), B9.19.15)
Будем рассматривать первое и третье равенства B9.19.5) как торцевые
условия для плоского погранслоя, а второе равенство — как торцевое условие
для антиплоского погранслоя, и произведем в перечисленных равенствах от-
отбрасывания, соответствующие допустимым погрешностям B9.19.14),
B9.19.15). При этом для оценок слагаемых, относящихся к внутреннему
напряженнодеформированному состоянию, используем равенства B9.19.13),
третье из которых означает, что
Для величин со звездочкой и с точкой справедливы формулы B9.19.6).
Не выходя за рамки погрешности B9.19.14) для антиплоского погранслоя и
погрешности B9.19.15) — для плоского погранслоя, эти формулы можно за-
заменить более простыми:
» Ь , b , а . а
Учитывая все это, получим с нужной точностью торцевые условия для пло-
плоского погранслоя
Sn = 0, Si8 = ?т13 & = 0) B9.19.16)
и торцевые условия для антиплоского погранслоя
а 1
Пользуясь полученными равенствами, можно преобразовать формулы
B9.19.12) для /2 и /6 и написать
+i
fH- 2 ! I
l1=o J ? ас, = — j т1а ||1=0,
B9.19.18)
= — v J ^
1
-1
+1
Ь=о-
446 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
Замечание. Величины / 2 и Ц входят в третью формулу B9.19.10) с множителями Д,—'+2р—с
и %~~1 соответственно. Первая из них преобразовывалась при помощи равенства B9.19.17),
а вторая — при помощи равенств B9.19.16). Им отвечают указанные выше погрешности по-
порядка 0(Х~1+с) и О (к~1+2р~с), и в конечном итоге для B9.19.10) рамки точности B8.19.4),
с которой составлены эти равенства, будут соблюдены.
Преобразуем теперь формулу B9.19.12) для /. Введем в рассмотрение
а а
величину Si2 и будем подразумевать под этим такое напряжение S12, ко-
которое получается в результате решения уравнений антиплоского погранслоя
B8.16.2) с учетом условий B8.16.9) на лицевых поверхностях, требований
затухания на бесконечности и торцевого условия
_o-n? f29.19.19)
(смысл записи (ев) выяснится ниже).
В силу линейности задачи построения антиплоского погранслоя спра-
справедлива формула
Поэтому можно написать
/7 = —/8 = /=Dt12|i,=0) D= Jcdf Js{1BMlod|i. B9.19.20)
—1 —со
Полученные результаты позволяют исключить в граничных равенствах
B9.19.8) все величины, относящиеся к погранслоям. Для этого мы распола-
располагаем формулами B9.19.10), B9.19.11), B9.19.12), B9.19.18) и B9.19.20). Вос-
Воспользовавшись ими, получим
о о
B9.19.21)
Эти равенства представляют собой уточнение граничных условий для
внутреннего напряженного состояния, т. е. условий B9.19.2), которые выше
были заимствованы из двумерной теории.
§ 20. Жестко заделанный край
Пусть на боковой поверхности оболочки аг = а10 должны выполняться
условия, которые соответствуют жесткой заделке и в рамках трехмерной
теории упругости формулируются так:
Vl = 0, и2 = 0, vs = 0 («! = а10).
Их можно развернуть по формулам B8.18.3) и записать следующим образом:
а,1-* (щ + x-'+2p-eci) + Rf-2l+p Vi + R^-lVi = 0,
l
4- R^-2l+PV, = 0, B9.20.1)
V3 + RK^lVa = 0.
$ 203 ЖЕСТКО ЗАДЕЛАННЫЙ КРАЙ 447
Эти граничные равенства составлены с погрешностью порядка B8.18.4),'
и наша цель будет заключаться в том, чтобы выполнить их с такой же точ-
точностью.
Традиционные граничные условия классической двумерной теории обо-
оболочек для жестко заделанного края схх = а1о можно при помощи формул
B6.5.3) и B6.5.4) записать так:
к = к = к - к = 0 (Ь = 0). B9.20.2)
Кроме того, из формул B6.3.5), B6.3.9) следует, что
1 ft), .
а так как равенства B9.20.2) должны выполняться тождественно по перемен-
переменной |г, то будет справедливо и дополнительное краевое равенство
у2 Sj=0 = 0. B9.20.4)
Показатели интенсивности антиплоского и плоского погранслоев а, р
в равенствах B9.20.1) надо определить формулами
а = р, р = I. B9.20.5)
При таком выборе а, р, учитывая B9.20.2) и B9.20.4), мы получим в ис-
исходном приближении торцевые условия для плоского погранслоя
и торцевое условие для антиплоского погранслоя
а Ь
RV2 = — RV2,
которые обладают нужными свойствами: они позволяют сначала построить
плоский погранслой, а затем, считая последний известным, найти и антипло-
антиплоский погранслой. При этом обе краевые задачи, которые надо для этого ре-
решать, будут неоднородными и формально непротиворечивыми (§ 29.19), что
является проверкой правильности формул B9.20.5).
Подставим снова значения ос, р в B9.20.1) и отбросим в полученных ра-
равенствах только те слагаемые, которые выходят за пределы погрешности
BS.18.4). Получим
B9.20.6>
(«1 = «и).
Будем рассматривать первое и третье из этих равенств как торцевые
условия для плоского погранслоя и представим последний как сумму сим-
симметричного и обратно симметричного плоских погранслоев. Под симметрич-
симметричным понимается напряженно-деформированное состояние, соответствующее
ь ь
изгибу полосы. В нем V3 — четно, Vx — нечетно, а торцевые условия имеют
вид
k + RVl = Q, b'-cy3 + #K, = 0 (Ь = 0). B9.20.7)
-р (к + Ь-/+2р->а) + W'+P (V, + Vt) = 0,
448 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТО ЯНИЕМ [ГЛ. 29
В обратно симметричном напряженно-деформированном состоянии, со-
b b
ответствующем растяжению полосы, V3 — нечетно, Уг — четно, а торцевые
условия записываются так:
0 6 X Ь
Я'-"ог + RVt = 0, tp3 + RV3 = 0 (|г = 0). B9.20.8)
При построении симметричной и обратно симметричной частей плоского
погранслоя надо выполнять следующие действия:
A) интегрировать однородные уравнения B8.16.7) или, если мы хотим
увеличить точность, соответствующим им неоднородные уравнения, свобод-
свободные члены которых, как показывают равенства B8.15.5) и формулы B8.15.7),
имеют порядок О (h~l)\
B) выполнять условия на лицевых поверхностях B8.16.10);
C) выполнять условия затухания, т. е. требовать, чтобы при Ij—»—со
исчезали все перемещения и напряжения;
D) выполнять торцевые условия B9.20.7) или B9.20.8).
Как было уже показано (§ 28.17), это приводит к переопределенной
задаче, и для того, чтобы ее решение стало возможным, надо наложить неко-
0 0
торые дополнительные требования на граничные значения величин t»j, fg,
о 1 1
Щ, Vi, va, входящих в торцевые условия B9.20.7) и B9.20.8). Введем в связи
с этим неполные условия затухания
RVi |6l со = 0, RV3 l^-cc = 0 B9.20.9)
и рассмотрим вспомогательные задачи I, II, III, подразумевая под этим сле-
следующее. Первые две задачи заключатся в интегрировании однородных диф-
дифференциальных уравнений B8.16.7) с учетом условий на лицевых поверх-
поверхностях B8.16.10), неполных условий затухания B9.20.9) и торцевых условий:
ь ь
задача I: RV\ + ? = 0, RV3 = 0,
задача II: RVt = 0, RV3 +1=0.
В третьей задаче считается, что в дифференциальные уравнения B8.16.7)
входят свободные члены порядка О (А.~г), сохраняются условия на лицевых
поверхностях B8.16.10) и неполные условия затухания B9.20.9), а торцевые
условия однородны и имеют вид
задача III: RVt = 0, RV3 = 0
(считается, что все вспомогательные задачи имеют решения, так как из четы-
четырех условий затухания на бесконечности оставлены только два).
Теория погранслоя линейна, поэтому симметричную часть плоского по-
погранслоя можно очевидным образом представить как линейную комбинацию
решений грех вспомогательных задач, в которую задачи I, II и III входят,
соответственно, с множителями
1=0, k'~4L=o, I- B9.20.10)
В построенном таким образом плоском погранслое неполные условия
затухания B9.20.9) выполняются, очевидно, автоматически, и значит, пере-
перемещения при |г = —оо будут равны нулю. Остается потребовать, чтобы на
бесконечности исчезали и напряжения. Из статических соображений и из
принципа Сен-Венана ясно, что для этого необходимо и достаточно, чтобы
на торце li = 0 обращались в нуль вертикальная равнодействующая 91
20]
ЖЕСТКО ЗАДЕЛАННЫЙ КРАЙ
449
и главный изгибающий момент <ЗК, т. е. чтобы выполнялись равенства
[1-е
tl_o
\—l
%„ = О,
Ei«=O-
—I
в которых через (9ll5 ЗИ,), (91ц, 9№п) и ^ (91цi, 3№ш) обозначены торце-
торцевая вертикальная составляющая* и главный торцевой изгибающий момент
для соответствующих вспомогательных задач (рис. 57). Рассматривая эти
равенства как уравнения относительно первых двух величин B9.20.10), по-
подучим . формулы
0 1 _. . . . „ 1
v -2/-К
Pi.
ЛГ
B9.20.11)
в которых pi, p2 определяются, очевидным образом, по формулам Крамера
и имеют порядок О A).
Просмотрев еще раз равенства
B9.20.6) и вспомнив, что они составлены
с точностью B8.18.4), заключаем, что не
выходя за пределы уже допущенных
погрешностей, можно вместо B9.20.11)
написать равенства
О |
Оз1б,=о =0,
= 0.
Рис.57.
B9.20,12)
Их в рамках точности B8.18.4) и надо
рассматривать как условия существо-
существования симметричной части плоского погранслоя.
Точно так же можно поступить и с обратно симметричной частью пло-
плоского погранслоя, т. е. ввести вспомогательные задачи IV, V и VI, которым
соответствуют следующие торцевые условия (в задаче VI уравнения — не-
неоднородны):
задача IV:
задача V:
задача VI:
RVi +1 =0, RV3 = 0,
Vt = 0, RV3 + ? = 0,
KV, =0, RV3 = 0.
Все эти задачи можно решить, выполнив неполные условия затухания
B9.20.9) и условия на лицевых поверхностях B8.16.10). При этом выполне-
выполнение условий исчезновения напряжений при |г = —оо выразится равенством
3lv
о
Ч
vi — горизонтальная
I 5 О
1—'
= 0,
в котором »tiv, »t'v> A Jfvi — горизонтальная равнодействующая торце-
торцевых сил для задач IV, V, VI (рис. 57). Отсюда с точностью до величин порядка
О (Я~3'+р) получаем равенство
' щ |б|Н» + ггйГ1+ро,|6,=о = 0, B9.20.13)
выражающее условие существования обратно симметричной части плоского
погранслоя. Это равенство составлено с точностью до величин порядка
ЯГ~2'+Р+С, а коэффициент т в нем имеет следующий смысл:
SRv B9.20 14/
29 А Л Гольденвейзер
450 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
Обратимся теперь ко второму равенству B9.20.6) и будем трактовать его
ь
как торцевое условие для антиплоского погранслоя (величину V2 надо при
этом рассматривать как известную). Применяя прежнюю схему рассужде-
рассуждений, разобьем антиплоский погранслой на симметричную и обратно сим-
симметричную части. Им будут соответствовать торцевые условия
1'~РЪ + №~1+р (vt+ к) •= 0 (?, = 0), B9.20.15)
%p-clv2 + RX-l+p(v2 + к) = 0 (h = 0) B9.20.16)
(плоский погранслой также считается разбитым на симметричную, отмечен-
отмеченную штрихом, и обратно симметричную, отмеченную двумя штрихами, части).
Из физических соображений ясно, что единственным статическим тре-
требованием, обеспечивающим исчезновение напряжений при 1Х=—оо, является
требование, чтобы силы, приложенные к торцу ?i = 0, не давали равнодей-
равнодействующей, направленной по оси ?2. Обратно симметричная часть антипло-
антиплоского погранслоя, соответствующая торцевому условию B9.20.16), такому
требованию удовлетворяет тождественно в силу того, что в этом случае S2l
нечетно по ?. Для симметричного антиплоского погранслоя, соответствую-
соответствующего торцевому условию B9.20.15), исчезновение напряжений на бесконеч-
о
ности возможно только тогда, когда у2 с погрешностью порядка B8.18.4)
удовлетворяет равенству
aJ6l-o = O. B9.20.17)
(выполнение этого равенства с оговоренной точностью, как видно из B9.20.15),
необходимо также и для того, чтобы напряжения и перемещения симметрич-
симметричной части антиплоского погранслоя были порядка О (X0)).
Равенства B9.20.12), B9.20.13) и B9.20.17) в совокупности образуют
следующую группу краевых соотношений:
у, + mk~l+pvs = 0, v2 = 0, v3 = 0, и, = 0, B9.20.18)
которые выведены в предположении, что трехмерные граничные условия
теории упругости должны выполняться с погрешностью порядка B8.18.4).
Они составляют те граничные условия, которые надо выполнять при построе-
построении внутреннего напряженно-деформированного состояния, т. е. представ-
представляют собой результат уточнения граничных условий B9.20.2) классической
теории оболочек. Торцевые условия для плоского и антиплоского погранслоев
выражаются равенствами B9.20.6). Их можно упростить, отбрасывая второ-
второстепенные члены. Для этого можно воспользоваться оценками величин, от-
относящихся к внутреннему напряженно-деформированному состоянию. Они
вытекают из формул B9.20.11), из равенств B9.20.17) и B9.20.13), выполня-
выполняющихся с точностью О (К~21+с) и из точной формулы B9.20.3). Приняв все
это во внимание, можно написать
,1=0 + О (%-2l+p+<), °v2 l^o = О (к-21+с),
Ei=o
. B9.20.19)
Отсюда в рамках точности B9.19.14) получаем торцевые условия для пло-
плоского погранслоя
я?х —/от8=0, /?U, + ?ua = O Aг = 0) B9.20.20)
§21] ¦• ШАРНИРНО ОПЕРТЫЙ КРАЙ 451
и торцевое условие для антиплоского погранслоя
RV2 + RV2 + №-2»l2 = 0. B9.20.21)
В торцевом условии B9.20.21) последнее слагаемое левой части в рамках
принятой точности не может быть определено. Вторая оценка B9.20.19)
показывает, что величина k2'~2"v2 имеет порядок к~21+с, а это значит, что
t>2 надо знать с точностью до членов порядка к~" +с. что выводит нас за пре-
пределы принятой точности B8.18.4). В связи с этим заметим, что при погреш-
погрешностях порядка B9.19.14), которые допускаются в краевых напряженно-
деформированных состояниях, нет необходимости определять антиплоский
погранслой, так как для него допустимая погрешность определяется так:
е =
^) = О (к0).
а это значит, что вклад антиплоского погранслоя в краевое напряженно-
деформированное состояние вблизи заделанного края находится за преде-
пределами принятой точности.
§ 21. Шарнирно опертый край
Примем, что шарнирно опертому краю а\ = а10 соответствуют следую-
следующие трехмерные граничные условия:
т, = 0, v2 = 0, о„ = 0 («! = а10).
Запишем их в развернутом виде при помощи формул B8.18.3):
¦к1-" (?, + k-l+2p-cKv2) + R^l+a к + Rk-2!+p+*Vl = 0, B9.21.1)
к'~с (щ
+ Rk~2l+p+aVs + Rk-l+fiV3 = 0
(а, = а10)
и снова условимся, что при выполнении этих равенств допустимая погреш-
погрешность имеет порядок B8.18.4).
Следуя прежней схеме, выпишем в принятых здесь обозначениях гранич-
граничные условия классической двумерной теории для шарнирно опертого края
at =°ci<>:
oioo
т., = 0, т, = 0, v, = 0, v3 = 0 (ах = а10). B9.21.2)
Два последних из этих равенств влекут за собой так же, как и в случае
жестко заделанного края, выполнение дополнительного равенства B9.20.4).
Непротиворечивыми в данном случае, так же как и для жестко заделан-
заделанного края, являются следующие значения a, [J:
а = р, р = /. B9.21.3)
В силу B9.21.2) и B9.20.4), им соответствуют в исходном приближении
торцевые условия для плоского погранслоя
Su = 0, RV3-\-tv3 = 0 B9.21.4)
и торцевое условие для антиплоского погранслоя
29.
B9.21.5)
452 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
которые надо считать формально непротиворечивыми (§ 29.19), так как
B9.21.4) определяют отличный от тождественного нуля плоский погранслой,
а, исходя из B9.21.5), можно построить также ненулевой антиплоский по-
погранслой.
Подставив B9.21.3) в равенства B9.21.1) и отбрасывая только слагае-
слагаемые, выходящие за рамки точности B8.18.4), получим
у. Х'-р (vt + ?Г'+2р->а) + RK-l+p (v, + Vt) = 0, B9.21.6)
*-'"* (i + ь~1+%к) + Rv, = о
(«! = а10).
Проинтегрируем первое равенство B9.21.6) по ? на интервале (—1, +1),
помножим это же равенство на ? и вновь выполним такое же интегрирование.
Будем иметь
2т, + JsudC = O, yX'^ + b']?„?# = О (О1 = »ц). B9.21.7)
]
Входящие сюда интегралы можно выразить при помощи первых двух
ь ь ь ъ
условий затухания B8.17.1). Положив в них k == Ь, выразив Хи Х3, X], X]
по формулам B8.15.7), B8.15.9) и отбросив члены порядка B8.18.4), получим
—1 —1 —oo
+1 +1 О
( ( > V **j3__|_-*_ ?i§8._|_ B9.21.8)
—1 —1 -co
' b
-1
Правые части этих равенств можно преобразовать так же, как это дела-
делалось в § 29.19, и написать
H QA.i0 , .. g dAy , R
да, V* — J4— AiaAie doc,
$ 21]
Здесь
+1 0 6
j, = \ dt \ '
—t —со
/. = f di j Кл
—1 —oo
+1 0
ШАРНИРНО ОПЕРТЫЙ КРАВ
J
453
J J
—1 — со
j
1
+1
0
J
—1 -co
j J
—1 —CO
+1 ° b
—1 —
/lf=
— \ dc, \ \Z—sf~
—0
f z
J S-A
-oo
= Jd4^l7
0
p..
-1«!
—oo
+10
J J
—J —a>
J J
—1 —CD
—1 —oo
Интегралы в правых частях этих равенств можно вычислить при помощи
приемов, описанных в § 29.19. Ниже приводятся соответствующие выкладки:
+1
о +1
_] —o
J
J. = A
l0
—1 —oo
0
J -у Ж
j
—1
J j
-И \
K + J Si, dC
—1 J
—oo —]
|, = A10 J [liJL — J
—t I —00
dg,
—1 -co
—oo I—t
+fl
/б =
J
—1
J
о 4.1
= Л?о j d|i
= Al
—CD —1
+1 ь \ +io
—t
—1 —OO
+10
j J
/7 =
с dC J -1
0+1
—1 —ex>
+
= J dl, J -A- (^S13) d? = 0,
—oo —1
454
ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
+Г (Г * 1° С ss 1 2 Г +Г дк
Js = AlQ n[?i5uJ_oo— -дё" gi d|i d^ = Лю |id|i -л>-
—1 ^ —oo ' —oo —1
+1
J
— 1
= —Л
io
—1 — oo
Г +1
= v \A10
L —1
+1 0
^ J
+10
—1 —oo
J
+1 b
J
J
—1
+1
j
j J
—1 —oo
0 b +1
J -^ds, = vj8—f J
1
-co I—1
0' 1 0
0' 1 0 +1 0 -.
* dl J S,,Si d\x +\<^\ Sab d|i =
1 —oo —1 —oo J
+10
—1 —o
+1 b
J
J US J Ei-^-d^ = 410v j
—1 —oo —1
j
—1 I— CO
—1
+1 b s
—1 i
°
J
S 21]
ШАРНИРНО ОПЕРТЫЙ КРАЙ
455
Таким образом, формулы B9.21.8) принимают вид
+fs ,,,_,_, Я 9AW +С
jint,M)d?-^ АоЛ2О да{ vj.
—1
ь
S*
—i
B9.21.9)
R дА2„ ГД «W?_i_ ' f? ,j,
Л^47„ "*;- ISsi б-*? ^ + 3- J^ Si, Ij=o? d? J ,
а следовательно, B9.21.7) можно переписать так:
2т,1 ' --' * дА +'
т,
Будем теперь рассматривать первое и третье равенства B9.21.6) как тор-
торцевые условия для плоского погранслоя и вновь представим последний в виде
суммы симметричной и обратно симметричной частей (§ 29.20). При этом в ка-
чествр торцевых условий надо принимать следующие равенства:
для симметричной части плоского погранслоя
" 1 А О
Su + Х,-'+2р-с ?т! = О, RV3 + M-'Va = 0
(Si = 0),
для обратно симметричной части плоского погранслоя
5U + тх = 0, RVS +^з = 0 (Ej = 0). B9.21.11)
Введем в рассмотрение вспомогательные задачи VII, VIII, IX, определив
их так же, как вспомогательные задачи I, II, III (§ 29.20), и приписав им
следующие торцевые условия:
задача VII: Su +1=0. RVS = 0 (^ = 0),
задача VIII: Stl = 0, RV3 + t, = 0 (?х = 0),
ь ь
задача IX: Su = 0, RVS = 0 (^ = 0).
При этом условия существования затухающего решения для симметрич-
симметричной части погранслоя выразятся следующими двумя равенствами:
= 0,
= 0,
в которых (91уп, SKvn), (9?vni, SKvin) и %~l ($liX, 2*ix) — верти-
вертикальная равнодействующая и главный изгибающий момент от сил, прило-
приложенных к торцу, для соответствующей вспомогательной задачи. Рассматри-
456 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 2»
1 а
вая полученные равенства как уравнения относительно к-1+2Р-с х1 и V^-° v3
и решая их, приходим к формулам
т, ||>=0 = Х-ьр+Чн, u3L=o = ^-2'+cfX2, B9.21.12)
в которых Цх, fx2 — величины вида О A), очевидным образом получающиеся
по формулам Крамера.
Условие существования обратно симметричного плоского погранслоя,
удовлетворяющего торцевым условиям B9.21.11), не даег каких-либо новых
соотношений. В этом случае на заделанном торце может возникнуть только
горизонтальная реактивная сила. Поэтому, как показывают равенства
B9.21.11), единственным условием затухания обратно симметричной части
плоского погранслоя будет требование обращения в нуль краевого значения
о
величины тг. Но этот результат не является новым; он следует и из первого
равенства B9.21.10).
Итак, условие затухания плоского погранслоя в целом дает иам два
равенства B9.21.12). Ими можно воспользоваться, в частности, для оценки
1 0
граничных значений величин тг и v3. Первая оценка B9.21.12) совпадает
с той, которая вытекает из второго равенства B9.21.10), а вторая оценка
показывает, что в рамках точности B8.18.4) можно написать
б,_о = 0. B9.21.13)
Обратимся ко второму равенству B9.21.6). Оно полностью совпадает
со вторым равенством B9.20.6). Поэтому, повторив рассуждения § 29.20,
мы получим в рамках точности B8.19.4) равенство
о
02
0. B9.21.14)
Равенства B9.21.10), B9.21.13), B9.21.14) представляют собой уточне-
уточнение равенств B9.21.2) и образуют те граничные условия, которые в рамках
точности B8.18.4) надо выполнить при построении внутреннего напряжен-
напряженного состояния. При построении краевого напряженного состояния надо
учитывать равенства B9.21.6), рассматривая первое и третье из них как
торцевые условия для плоского погранслоя, а второе — как торцевое
условие для антиплоского погранслоя. Для шарнирно опертого края
показатели интенсивности погранслоев остаются такими же, как для
жестко заделанного края, поэтому вблизи шарнирно опертого края так же,
как и вблизи жестко заделанного, антиплоский погранслой можно целиком
отбросить, не превышая погрешности B9.19.14). Это значит, что отпадает
необходимость и в выполнении второго равенства B9.21.6). Первое и третье
равенства B9.21.6) в рамках точности B8.18.4) можно упростить, и пользуясь
для оценок равенствами B9.21.10), B9.21.12), B9.21.13), написать эти торце-
торцевые условия плоского погранслоя следующим образом:
Su = 0, KV, + ?o, = 0 0,=0). B9.21.15)
Вернемся к формулам B9.21.9) и преобразуем интегралы, входящие в их
правые части, при помощи равенств B9.21.15). Погрешность последних оце-
оценивается равенством B9.19.14), а так как при обсуждаемых интегралах стоит
множитель А.-', то окончательная погрешность не выйдет за пределы B8.18.4).
ь
Из B9.21.15) следует, что Va — нечетная функция С, а структура уравне-
$ 22] ПРИВЕДЕННЫЕ ГРАНИЧНЫЕ УСЛОВИЯ 457
ний B8.16.7), которым подчиняется плоский погранслой, показывает, что
ь
при этом Ssl также нечетна по ?. Поэтому
X 3 °
Далее, в силу первого равенства B9.20.15) получаем
f *
Sn ?,=o?dS = °-
Л
Из B9.21.15) следует, кроме того, что все величины, определяющие пло-
плоский погранслой, вблизи шарнирно опертого края могут быть получены из
решения вспомогательной задачи VIII умножением последнего на краевое
1
значение величины vs. Поэтому можно написать
V ь р II F +U
I о *- л* *-• гу „. Е* r\i I с v J5- /9Q 91 1 й\
—1 —1
h
где индекс (VIII) означает, что величина S3i должна быть получена в резуль-
результате решения вспомогательной задачи VIII, а множитель EIR внесен для
упрощения дальнейших формул. Учитывая все это, можно теперь равенства
B9.21.10), B9.21.12) и B9.21.13) переписать следующим образом:
2q 2 17)
оо ¦ ¦
о, = 0, t>3 = 0, A2=0).
Здесь D' определяется формулой B9.21.16).
Требуемый результат получен. Равенства B9.21.16) образуют граничные
условия для внутреннего напряженно-деформированного состояния и пред-
представляют собой результат уточнения соотношений B9.21.2). Торцевые усло-
условия для плоского погранслоя записываются равенствами B9.21.15), а торце-
торцевое условие для антиплоского погранслоя можно было бы получить в резуль-
результате упрощения второго равенства B9.21.6), но в этом нет необходимости,
так как в силу BЭ.21.3) вблизи шарнирного края вклад антиплоского по-
погранслоя в краевое напряженно-деформированное состояние лежит вне рамок
принятой точности.
§ 22. Приведенные граничные условия
В §§ 29.19—29.21 рассмотрены три вида закрепления боковых краев
оболочки, и для каждого получены граничные условия обеспечивающие по-
построение внутреннего напряженно-деформированного состояния с точностью
до величин порядка О (K-u+2p), а также торцевые условия для плоского и
антиплоского погранслоев, обеспечивающие построение краевого напряжен-
напряженно-деформированного состояния с точностью до величин порядка О (А,-'+р).
Во всех изученных случаях построение полного напряженно-деформирован-
напряженно-деформированного состояния оболочки распадается на следующие этапы.
A) Подсчет величин D, т и D', входящих в граничные условия для вну-
внутреннего напряженно-деформированного состояния.
B) Построение внутреннего напряженно-деформированного состояния
в предположении, что в соответствующих граничных условиях величины D, т,
D' известны.
458 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
C) Построение плоского и антиплоского погранслоев (а следовательно,
и краевого напряженно-деформированного состояния) в предположении, что
величины, относящиеся к внутреннему напряженно-деформированному со-
состоянию в соответствующих торцевых условиях, известны.
Обсудим этап A). Для определения величины D надо найти затухающее
решение уравнений антиплоской задачи B8.16.2), удовлетворяющее на ли-
лицевых поверхностях условию B8.16.9) и на торце |, = 0 условию B9.19.19).
а
В результате станет известна величина S\%B), и останется только применить
формулу B9.19.20).
Величину т можно определить из требования, чтобы, плоская задача тео-
теории упругости для бесконечной полуполосы при условиях B8.16.10) на лице-
лицевых поверхностях и при торцевых условиях
/?]/, —m = 0, /?V, + C = Qi (Ь=0) B9.22.1)
имела затухающее решение. При этом, очевидно, будет иметь затухающее
решение и такая же плоская задача с торцевыми условиями B9.20.20), что
и является определяющим свойством величины т.
Для подсчета D' надо знать решение вспомогательной задачи VIII
(§ 29.21), после чего останется только воспользоваться формулой B9.21.16).
Таким образом, для выполнения этапа A) нет необходимости знать ре-
результаты выполнения остальных этапов. Более того, D, т и D', как будет
видно в § 29.23, могут быть найдены заранее для любых анизотропных обо-
оболочек, как величины, зависящие только от коэффициента Пуассона v.
Обратимся к этапу B). При его выполнении надо учитывать граничные
условия для внутреннего напряженно-деформированного состояния. Они
были найдены в §§ 29.19—29.21 и записаны для свободного, жестко заделан-
заделанного и шарнирно опертого краев соответственно в виде равенств B9.19.21),
B9.20.18) и B9.21.17) (во всех случаях считалось, что край совмещен с коор-
координатной линией а1 = а10).
Во всех перечисленных равенствах величины, относящиеся к внутрен-
внутреннему напряженно-деформированному состоянию, можно выразить через тра-
традиционные величины классической теории оболочек. Для этого надо вос-
воспользоваться формулами § 26.5, которые мы выпишем еще раз:
0 1 О 1
0
v, = %-'+'
о 1
2
0
2
/0
-я,-'-
0
1
и, =
B9,22.2)
Кроме того, как легко проверить, справедливы равенства
Л ( l JL. -4- ^~Р dAi \ _J ^~Р д -1 — — R^~~P д
Заметив все это, получим граничные условия на свободном крае а^ = а{0
г\ с л \7 i "2 л П 1 *ХТ} ""la с\ /9Q 00 Ч\
_ =1 и *Ji« = U» iVi —!~ —л ^ == U. yJ-i ~+~ QLJ —-Л-~ —г — U. IZy.ZZ.O)
S 22] ПРИВЕДЕННЫЕ ГРАНИЧНЫЕ УСЛОВИЯ 459
Граничные условия на жестко заделанном крае ах = а10:
2Е/ш, — vmh (Г, -f Ts) = °. 2Ehu% = 0, 2Ehw = 0, 2Ehyt = 0. B9.22.4)
Граничные условия на шарнирно опертом крае ах = а10:
B9.22.5)
2?/ш8 = 0, 2Ehw,= О, Gj = 0.
Входящие сюда числа D, m, D' можно считать известными. Поэтому по-
построение внутреннего напряженно-деформированного состояния, в процессе
которого надо учитывать B9.22.3)—B9.22.5), составляет самостоятельную
задачу. В ее выполнении и заключается этап B).
Назовем B9.22.3)—B9.22.5) приведенными граничными условиями и
сравним их с граничными условиями классической двумерной теории обо-
оболочек, которые будем теперь называть каноническими. Для случая, когда
срединная поверхность отнесена к линиям кривизны, а край совмещен с ли-
линией а, = а10, канонические граничные условия формулируются следующим
образом (§ 5.33):
свободный край
жестко заделанный край
и, = о, иг = о, w = о, Yi = °;
шарнирно опертый край
7\ = 0, щ = 0, ш = 0, G1=0.
Сопоставление этих равенстве B9.22.3)—B9.22.5) показывает, что извест-
известную поправку Кирхгофа, которую надо вносить в граничное значение пере-
перерезывающего усилия, можно трактовать как результат взаимодействия пог-
ранслоя с внутренним напряженно-деформированным состоянием оболочки*).
Однако теми дополнительными слагаемыми, зависящими от крутящего мо-
момента, которые вносятся в классическую теорию оболочек, влияние погран-
слоя не исчерпывается. Чтобы обеспечить точность B8.19.4), надо учитывать
еще члены, входящие в равенства B9.22.3)—B9.22.5) с множителями D, m, D'.
Кирхгофовскую поправку для перерезывающего усилия можно выделить только
в том смысле, что она — асимптотически главная. Чтобы убедиться в этом,
достаточно вернуться к равенствам B9.22.3)—B9.22.5) и выяснить, какие
степени X стоят в слагаемых, отражающих влияние погранслоев. Получаем,
что слагаемым
B9.22.6)
отвечают соответственно следующие степени X:
¦K-i+2p-cf-x-i+Pt х-21+зр-^ х-1. B9.22.7)
Легко проверить, что при всех допустимых значениях рис выписанные
степени Я, идут в невозрастающем порядке, и требуемое утверждение доказано.
*) Это было показано для пластинки в работах [144, 145].
460 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ 1ГЛ. 2»
В § 27.8 было показано, что асимптотическая погрешность простейшего
варианта уравнений классической двумерной теории оболочек имеет порядок
О (к-1) при р<4~ и О(%-21+2») при Р^4"*
Но в рамки такой погрешности укладывается только последняя из че-
четырех степеней ^ B9.22.7). Это значит, что канонические граничные условия
асимптотически непоследовательны. В них отбрасываются второй и третий
члены B9.22.6), которые существенно больше (при h —» 0), чем члены, отбра-
отбрасывавшиеся в дифференциальных уравнениях.
В канонических граничных условиях на краю, проходящем вдоль линии
кривизны, поправки от крутящих моментов учитываются не только для
перерезывающих усилий Nly но и для тангенциальных усилий S21. Однако
в приведенных граничных условиях поправка в S21 отсутствует. Это объяс-
объясняется тем, что были рассмотрены только случаи, когда внутреннее напря-
напряженно-деформированное состояние имеет нормальную асимптотику (§ 27.7),
и считалось, что число b равно нулю, а при таких обстоятельствах обсуждае-
обсуждаемые поправки лежат за рамками принятой точности. Действительно, обо-
обозначим через аТ и oG.напряжения от тангенциальных усилий и от моментов
соответственно. Тогда из формул B6.3.12) можно заключить, что (при b = 0)
Вместе с тем, если Т — некоторое тангенциальное усилие, G — некото-
некоторый момент, справедливы формулы
_ г _ з<з
Но hIR = А,-', поэтому имеет место оценка
°-
rr
из которой и следует, что в выражении S ai #- второе слагаемое находится
Кг
вне рамок точности B8.18.4).
Для напряженных состояний с особой асимптотикой число b будет от-
отлично от нуля, и приведенные граничные условия должны быть пересмотрены.
Если фиксирована точность B8.18.4), которую должны обеспечивать при-
приведенные граничные условия, то последние могут оказаться и не такими, как
для внутренних напряженно-деформированных состояний с нормальной асим-
асимптотикой. Не останавливаясь на подробностях, выпишем приведенные гра-
граничные условия, соответствующие погрешности B8.18.4) на свободном крае
при b = I — 2р, с = 0:
Si—§—0, G1 + Юк-ф-^иУНг)- 0,
где
2
1 дА, 1 д_ J__J^_( j_ ЗАг \1
А\ да% Л2 За2 "*" Аг даг \ AtA2 5а2 / J
S 23] КРАЕВОЕ НАПРЯЖЕННОЕ СОСТОЯНИЕ ОБОЛОЧКИ 461
§ 23. Краевое напряженно-деформированное состояние оболочки
Обозначим через М краевое напряженно-деформированное состояние
оболочки, считая, что оно обусловлено плоским и антиплоским погранслоями.
Так как структура полного напряженно-деформированного состояния, по
предположению, определяется формулой B8.18.2), то это значит, что
B9.23.1)
где
М = Р + А.--Н-Р Q, М = АН+р P + Q.
Примем, что для краевого напряженно-деформированного состояния
допустимой является погрешность B9.19.14). Тогда два последних равенства
можно упростить и записать при помощи формул
М = Р, М = Q, B9.23.2)
которые означают, что в антиплоском и плоском погранслоях достаточно
строить только те величины, которые являются искомыми соответственно
в антиплоской и плоской задачах теории упругости. Кроме того, если раз-
разность между числами а и р по абсолютной величине не меньше чем I — р, то,
очевидно, в рамках той же точности в правой части равенства B9.23.1) надо
сохранить только слагаемое, содержащее наибольшую степень К. Таким обра-
образом, вместо B9.23.1) можно написать: вблизи свободного края, когда а =
= 2р — с, Р = р,
М = Мр-ср + k"Q; B9.23.3)
вблизи заделанного и шарнирного краев, когда а = р, р" = /,
М = KlQ. B9.23.4)
о Ь
В правой части равенства B9.23.3) под Р и Q подразумеваются затухаю-
затухающие решения антиплоской и плоской задач теории упругости в полуполосе,
удовлетворяющие на ее лицевых сторонах условию отсутствия напряжений.
При этом на торце |х = 0 должны выполняться условия B9.19.16), B9.19.17),
выведенные для свободного края. Введем в рассмотрение антиплоский погран-
слой PiCB) и плоский погранслой Q<CB>, определив их теми же требованиями,
а Ь
что и Р, Q, но считая, что торцевые условия имеют вид:
для антиплоской задачи
S|S«=—t B9.23.5)
для плоской задачи
Sg»> = О, S<«> = —?. B9.23.6)
Так как рассматриваемые задачи линейны, то, сопоставив B9.23.5)
и B9.23.6) с B9.19.16) и B9.19.17), можно написать
Внеся этот результат в формулу B9.23.3) и приписав букве М дополни-
дополнительный индекс (ев), напоминающий, что речь идет о напряженно-деформиро-
напряженно-деформированном состоянии вблизи свободного края, напишем
|Sl=o
B9.23.7)
462 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ 1ГЛ. 2»
1
Для т13 было получено равенство B6.5.6). Кроме того, справедлива фор-
формула C.19.12). Поэтому с погрешностью B9.19.14) будем иметь
(Хг — компонента внешней поверхностной нагрузки двумерной теории обо-
оболочек). |
Кроме того, согласно B9.22.2)
Поэтому B9.23.7) можно переписать так:
Прежде чем идти дальше, заметим, что оболочка занимает в трехмерном
пространстве область, имеющую изломы вдоль линий пересечения лицевых
и боковых поверхностей. Вблизи этих ребер граничные условия трехмерной
теории упругости могут оказаться несогласованными друг с другом. В ка-
качестве примера рассмотрим оболочку, загруженную по лицевым поверхностям
внешними силами qf, qt и имеющую свободный незагруженный силами боко-
боковой край a-i — а10. В этом случае условиями согласования граничных усло-
условий на лицевых и боковых поверхностях будут равенства
так как иначе не выполнится закон парности касательных напряжений. При
нарушении написанных равенств краевая задача теории упругости не будет
иметь решения в обычном понимании этого термина, и ее надо смягчить, до-
допустив появление особенностей определенного вида. В этом случае такие же
особенности надо допускать и в решении плоской задачи, при помощи кото-
которой определяется плоский погранслой Q(CB), так как для этой задачи торце-
торцевые условия B9.23.6) и условия на лицевых поверхностях B6.16.10) имеют
несогласованность такого же вида, как и в обсуждаемой трехмерной задаче
теории упругости.
Из разобранного примера видно, что характерный для асимптотического
метода прием выделения погранслоя является одновременно и приемом выде-
выделения тех особенностей, которые могут возникать в оболочке у ребра, отделяю-
отделяющего лицевую поверхность от боковой.
Обращаясь к жестко заделанному краю, введем в рассмотрение плоский
погранслой QOaKp)^ определив его обычными требованиями и считая, что на
торце полуполосы должны выполняться условия
?У(закР) _ т = о, ?у(закР) + ? = 0 (lj = 0). B9.23.8)
Вместе с тем, вблизи жестко заделанного края торцевые условия пло-
плоского погранслоя выражаются равенствами B9.20.20). Сравнив их с B9.23.8),
можно написать
Следовательно, вблизи жестко заделанного края формула B9.23.4)
примет вид
§ 23] КРАЕВОЕ НАПРЯЖЕННОЕ СОСТОЯНИЕ ОБОЛОЧКИ 463
Поэтому, учитывая последнее равенство B9.22.2), можно написать окон-
окончательную формулу
М(закР) = %Г(Т1 + T2)ll=0Q<3aKP», B9.23.9)
определяющую краевое напряженно-деформированное состояние вблизи
жестко заделанного края оболочки.
Таким же образом вблизи шарнирно опертого края краевое напряженно-
деформированное состояние оболочки определится формулой
^_
B9.23.10)
при составлении которой учтены торцевые условия B9.21.15) для плоского
погранслоя на шарнирно опертом крае и принимается, что плоский погран-
Ь
слой <2<шарн) д0ЛЖен подчиняться торцевым условиям
ь ь
5{шарн)=0> ?у<шарн) + С = 0 (ii = 0). B9.23.11)
Таким образом, для всех рассмотренных здесь видов закрепления краев
краевые напряженно-деформированные состояния оболочки можно с точ-
точностью B9.19.14) получить как линейные комбинации напряженно-дефор-
напряженно-деформированных состояний
abb Ь
p(CB)j Q(cB)t QCaKP)i .Q(mapH)j B9.23.12)
причем коэффициенты этих линейных комбинаций нам будут известны, коль
скоро найдено внутреннее напряженно-деформированное состояние, т. е.
решена краевая задача классической двумерной теории оболочек.
Остановимся на задачах, к решению которых приводится построение
напряженно-деформированных состояний B9.23.12). Все они состоят в инте-
интегрировании уравнений B8.16.2) антиплоской задачи теории упругости или
уравнений B8.16.7) плоской задачи теории упругости. Для этих уравнений
в полуполосе
должны строиться затухающие решения, удовлетворяющие условиям B8.16.9)
или B8.16.10) на лицевых поверхностях и соответствующим торцевым усло-
условиям B9.23.5), B9.23.6), B9.23.8), B9.23.11). Просматривая упомянутые
здесь уравнения, условия на лицевых поверхностях, торцевые условия,
а также неравенства, определяющие область интегрирования, легко заметить,
что все эти соотношения относительно искомых величин
и относительно независимых переменных
? и й
почти стандартны, т. е. не зависят ни от толщины рассматриваемой оболочки,
ни от геометрических свойств ее срединной поверхности, ни от расположения
бокового края, ни от модуля упругости Е (считается, что оболочка — изо-
изотропная). Имеет место только зависимость (слабая) от коэффициента Пуас-
Пуассона. Это значит, что для любой анизотропной оболочки с произвольно закреп-
закрепленными краями (свободными, жестко заделанными или шарнирно опертыми)
напряженные состояния B9.23.12) могут быть найдены заранее (как функции
второстепенного параметра v) ценой решения некоторых задач, все определяю-
464 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
щие параметры которых соизмеримы с единицей. После этого определение
краевых напряженно-деформированных состояний сведется к составлению тех
или иных линейных комбинаций из B9.23.12).
Числа D, m, D' в приведенных граничных условиях также можно под-
подсчитать заранее. Для D мы имеем формулу B9.19.20). Она получается в ре-
результате интегрирования по переменным А1<?1 и ?, величины S<?B\ а пос-
последняя определяется в результате решения одной из рассмотренных выше
задач (легко проследить, что D не зависит и от v). Число т может быть
найдено из условия существования затухающего решения задачи построе-
построения Q<3aKP>. Число D' подсчитывается по формуле B9.22.16). В ней noflS3i(vii)
понимается решение вспомогательной задачи VIII, соответствующей торце-
торцевым условиям
ь ь
== О-
Сравнив их с торцевыми условиями B9.23.11) задачи для Q<maPH>, видим,
что
SE о(шарн)
31 (VIII) = ~5~ 1 i
отсюда получаем формулу
—1
из которой и следует справедливость обсуждаемого утверждения.
§ 24. Решение вспомогательных плоских и антиплоских задач
Методы построения затухающих решений плоской задачи для полуполосы
со свободными лицевыми поверхностями предложены в работах [63, 64].
Не пересказывая содержания этих статей, сформулируем вытекающие из нее
результаты.
Для вычисления коэффициента D' по формуле B9.21.16) надо знать ре-
решение вспомогательной задачи VII (§ 29.21). Эта задача соответствует в тер-
терминах работ [63, 64] задаче 3, из решения которой легко выводятся следую-
следующие формулы для нахождения коэффициентов:
п=1
где рп — корень трансцендентного уравнения
sinpncospn = pn.
Вычисления показывают, что D* = 0,0960.
Коэффициент т, как уже говорилось, может быть найден из условия
существования затухающего решения вспомогательной плоской задачи, удо-
удовлетворяющей торцевым условиям B9.22.1) и являющейся частным случаем
задачи 4 работы 164). В этой работе указан путь получения условий затуха-
затухания. Подсчеты выполнены для конкретных условий задачи B9.22.1), и полу-
получено, что т = —0,3701v.
Для определения коэффициента D по формуле B9.19.20) надо распола-
располагать решением антиплоской задачи при торцевом условии B9.19.19). Это до-
достигается следующим образом.
§ 24] РЕШЕНИЕ ВСПОМОГАТЕЛЬНЫХ ПЛОСКИХ И АНТИПЛОСКИХ ЗАДАЧ 465
В дифференциальных уравнениях антиплоской задачи B8.16.2) пола-
полагаем А10 — 1 (это не уменьшает общности решения, так как переход к слу-
случаю А10 Ф 1 совершается при помощи замены |х на A^j) и ищем решение
полученных уравнений в виде
S = 2A— v)
n—l
n=l
г1" " 2 e'cosBn — l)~t, B9.24.1}
n=l
где Л„ и С — константы.
Легко проверить, что каждый член этого разложения удовлетворяет
всем уравнениям B8.16.2), лицевому условию B8.16.9), а также требова-
требованию затухания при \г —¦ —оо. Остается выполнить лишь торцевое условие
B9.19.19). Этого можно достичь, заметив, что,на интервале (—1, + 1) вели-
величина ? имеет следующее представление:
и положив
А"- пз Bп—IK • ^У.^4.^)
Формулами B9.24.1) и B9.24.2) определяется решение вспомогательной
задачи (с точностью до константы С, соответствующей смещению полосы,
как жесткого целого). Подставив эти результаты в формулу B9.19.20), по-
получим константу D в виде такого ряда:
Z Bга— IM '
откуда D = 0,4200 (этот ряд был получен в работе [75]).
Исходя из решения плоской задачи, предложенного в 163, 641, и изло-
изложенного здесь решения антиплоской задачи, численно построены все на-
а Ь Ь
пряженно-деформированные состояния Р(св) и Q<maPH> (для Q(CB) задачу надо
уточнить, так как в соответствующей плоской задаче не соблюдено согла-
согласование граничных условий). Как уже говорилось, составляя линейные ком-
комбинации из B9.23.12), можно построить краевые напряженно-деформирован-
напряженно-деформированные состояния вблизи свободного, жестко заделанного и шарнирно опертого
краев произвольной изотропной оболочки. Результаты вычислений представ-
представлены в таблицах, в которых помещены только асимптотически главные- на-
напряжения данного состояния, т. е. Sllf S22, S83, S13 для плоской задачи и
5j 2. S23 — Для антиплоской задачи.
30 А. л. Гольденвейзер
466 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
Таблица значений
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0
0
0,100
0,200
0,300
0,400
0,500
0,600
0,700
0,800
0,900
1,000
-0,05
0
0,950-1О
0,189
0,284
0,378
0,472
0,563
0,655
0,740
0,821
0,863
-0,1
0
0,901• 10
0,179
0,269
0,357
0,443
0,529
0,610
0,684
0,747
0,773
-0,5
0
0,543-10
0,107
0,159
0,209
0,254
0,295
0,330
0,356
0,373
0,378
-1
0
0,260-10
0,514-10
0,757-Ю-1
0,982-10
0,118
0,136
0,150
0,160
0,167
0,169
- 1,5
0
0,119- Ю-1
0,236-10-'
0,348- 10
0,450-10
0,542-10
0,621-Ю-1
0,684- КГ1
0,731-Ю-1
0,759-10"»
0,769-Ю
Таблица значений
N. s
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
I
0,01
0,742
0,737
0,722
0,696
0,659
0,610
0,547
0,466
0,363
0,224
0
0,05
0,694
0,688
0,673
0,647
0,611
0,561
0,498
0,418
0,316
0,183
0
0,10
0,647
0,642
0,627
0,602
0,565
0,517
0,455
0,376
0,278
0,153
0
0,5
0,361
0,357
0,346
0,327
0,301
0,266
0,225
0,176
0,121
0,622-10
0
I
0,167
0,165
0,159
0,149
0,136
0,119
0,998-Ю-1
0,773-10
0,527-Ю-1
0,267-10-'
0
1,5
0,767-Ю
0,758-10
0,730-10
0,684-10
0,621 • 10
0,543-Ю-1
0,452-10
0,349-10-1
0,238-Ю-1
0,120-10'1
0
Таблица значений S[fapm
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
I
-0,01
.
—0,726-Ю-2
—0,732-10-2
—0,751-Ю-2
—0,781 • 10" 2
—0,824-10
—0,87 МО
—0,924-10
—0,965-Ю-2
—0,948-10
—0,794-10- 2
1,089
-0,06
—0,272-Ю-1
—0,274-Ю-1
—0,280-Ю-1
—0,288-Ю-1
—0,302-10
—0,319-10-"
—0,340-10
—0,360-10
—0,353-Ю-1
—0,281-Ю'2
U046
-0,10
—0,537-Ю-1
—0,540-10
—0,550- Ю-1
—0,565-Ю-1
—0,586-Ю-1
—0,610-Ю-1
—0,628-10-»
—0,608-Ю-1
—0,396-10-1
0,105
0,992
-0,5
—0,184
—0,182
—0,176
—0,163
—0,142
—0,105
—0,422-10-»
0,513-10-2
0,192
0,380
0,595
-1
—0,141
—0,137
—0,124
—0,103
—0,724-Ю-1
—0,324-10-!
0,167-10-1
0,732-10-1
0,134
0,195
0,249
-1,5
—0,611-10-1
—0,586-10-1
—0,515-10"»
—0,400-10-»
—0,246-10-»
—0,614-10~2
0,142-10-1
0,348-Ю-1
0,540-10
0,695-Ю-1
0,789-10-»
S 241
РЕШЕНИЕ ВСПОМОГАТЕЛЬНЫХ ПЛОСКИХ И АНТИПЛОСКИХ ЗАДАЧ
467
Таблица значений
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
-0,01
—0,325
—0,325
—0,325
—0,325.
—0,324
—0,323
—0,321
—0,318
—0.311
—0,290
0,326
-0,05
—0.308
—0,30?
—0,306
—0,304
—0,300
—0,295
—0,286
—0,271
—0,239
—0,149
0,314
-0,10
—0,286
—0,285
—0,283
—0,279
—0,272
—0,261
—0,245
—0,216
—0,159
—0,281 • 10"'
0,297
-0,5
—0,135
—0,132
—0,126
—0,114
—0,964- КГ1
—0,721 • 10"'
—0,596-10
0,218- 10~2
0,528- КГ1
0,114
0,179
-1
—0,350 -КГ1
—0.337 10"'
—0,296- 10"]
—0,229- 10~'
—0,137-10
—0,208- 10
0,116-Ю
0,269-1О
0,431 ¦ 10
0,594- КГ1
0,747-КГ1
- 1,5
—0,367-Ю
—0,321 ¦ Ю
—0,184- 10
0,364 10
0,329-10~2
0,678- Iff
0,106- КГ1
0,145-10
0,182-Ю
0,214- 10"]
0,237 10
Таблица значений
1 ^\_
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0,01
—
—
—
—
—
,077
,077
,076
,074
,071
,067
,060
- 1,049
— 1,027
—0,960
—0,112-10
0,05
—0,998
—0,997
—0,992
—0,984
-0,972
—0,952
—0,920
-0,867
—0,761
—0,494
—0,124-Ю-4
0,10
—0,899
—0,896
-0,887
—0,872
—0,848
—0,810
—0,752
—0,658
—0,492
—0,199
—0,430 10
0,5
—0,265
-0,259
—0,243
—0,216
—0,180
—0,135
—0,879- 10"]
—0,440-10
—0,130- 10~1
—0,354 ¦ 10" 3
—0,170-Ю-6
1
0,245-10"J
0,248-10
0,257 10"'
0,266-10
0,267-10"'
0,254- 10
0,220-10-'
0,165-10
0,949-10
0,299-10'2
—0,164-10
1.5
0,488-10-'
0,480- 10
0.454- 10
0,412-10
0,355- Ю
0,287-10-'
0,212-10
0,136- 10"'
0,686-Ю-2
0,192 Ю-2
0,244. Ю-8
Таблица значений
о(шарн)
>23
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0,01
0
0,541 -10-'
0,109
0,165
0,223
0,284
0,349
0,418
0,493
0,571
0,448-10
0,05
0
0,541-Ю-1
0,109
0,164
0,223
0,283
0,346
0,411
0,469
0,459
0,203-10
0,10
0
0,520-10
0,104
0,157
0,211
0,266
0,318
0,361
0,371
0,250
0,994 ¦ 10" 6
0,5
0
0.924-10
0,165-10-'
0,196- 10
0,164-10
0,485- 10
—0,155-10-'
—0,415- 10"'
—0,622-10-'
—0,566-10-'
0,150-Ю
1
0
—0,176-10-'
—0,349 Ю
—0,514-Ю-1
—0,661-10-'
—0,776- 10-'
—0,837-10
—0,818-10
—0,688-10
—0,421 10
0,410-10
1.5
0
—0,123- 10'1
—0,239-10
—0,338- 10"'
—0,414-10-'
—0,457 10
—0,461 -10"'
—0,419- 10-'
—0,328- 10
—0,187-10-'
0,122-10-'
30*
468 ВЗАИМОДЕЙСТВИЕ ПОГРАНСЛОЯ С ВНУТРЕННИМ СОСТОЯНИЕМ [ГЛ. 29
Для погранслоев, как видно из формул B8.14.1), характерна относи-
относительно малая роль перемещений (как правило, в погранелое напряжения
соизмеримы с внутренним напряженным состоянием, а интенсивность пере-
перемещений на порядок ниже). Поэтому результаты подсчета перемещений
здесь не приводятся.
В плоском напряженном состоянии искомые величины имеют на торце
|i = 0 особенности, сильно осложняющие вычисления. Поэтому в таблицах,
относящихся к плоскому напряженному состоянию, вместо Ц — 0 берется
сечение ?i = 0,01. По переменной ? в таблице представлен только интервал
0 «? ? sg I. На интервал 0 ^ ? ^ —1 соответствующие результаты продол-
продолжаются либо симметрично (для величин Sl3, Sllt 522, S33). либо обратно
симметрично (для величин 51S, SZ3).
ПРИЛОЖЕНИЕ
АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
В ЧАСТНЫХ ПРОИЗВОДНЫХ
В приложении обсуждаются свойства интегралов дифференциальных уравнений в част-
частных производных с двумя независимыми переменными и предлагаются асимптотические ме-
методы построения этих интегралов. Показывается также, как из них можно составить решение
некоторых краевых задач типа Дирихле, близких по смыслу к краевым задачам теории обо-
оболочек.
Весьма общее и совершенно строгое изложение теории асимптотического интегрирова-
интегрирования дифференциальных уравнений в частных производных дано в серии работ [22—25]. В ней
можно найти строгое обоснование многих положений, которыми уже давно пользуются в тео-
теории оболочек. Значительная часть излагаемых здесь результатов также является частными
случаями результатов цитированных работ. Тем не менее описанный выше круг вопросов
освещается здесь с совершенно другой точки зрения, более способствующей пониманию явле-
явлений, с которыми приходится иметь дело при исследовании оболочек.
Предлагаемый вариант теории асимптотического интегрирования основан на использо-
использовании экспоненциального представления решения (см. формулу П.2.2). Этот прием хорошо
известен в теории асимптотического интегрирования обыкновенных дифференциальных урав-
уравнений, где его называют методом ВКБ. Для уравнений с частными производными, встречаю-
встречающихся в теории оболочек, метод экспоненциального представления применялся в [48, 51. 52,
160, 188].
Предлагаеу.ое изложение совершенно не претендует на математическую строгость. Обсуж-
Обсуждаются только формальные алгоритмы построения интегралов рассматриваемых уравнений,
заключающиеся в выполнении некоторых итерационных процессов. Вопрос об асимптотиче-
асимптотическом характере этих процессов остается вне рамок рассмотрения. Мы не останавливаемся
и на возможности использовать метод экспоненциального представления как эффективный
прием фактического получения решений задач теории оболочек, так как это заняло бы слишком
много места. Однако из общих рассуждений будет видно, что такая возможность вполне ре-
реальна, а соответствующие конкретные примеры даны в работах [101—104].
В современной теории оболочек все шире применяется понятие об изменяемости искомого
напряженного состояния или эквивалентное ему понятие о характерной длине рисунка де-
деформации, используемое в зарубежной литературе. От изменяемости зазисит как область при-
применимости различных приближенных методов расчета оболочек, так и область применимости
двумерной теории оболочек и целом. Вместе с тем, как уже говорилось в части II, это важней-
важнейшее понятие теории оболочек по самой сиоей сущности имеет расплывчатый характер, и, к со-
сожалению, кожио указать случаи, когда оно применяется непраиильно. В связи с этим напомним,
что и § 12.30 выражения вида (П.2.2)уже рассматривались в качестие примера функций с боль-
большой однородной изменяемостью, т. е. функций, по отношению к которым понятие изменяе-
изменяемости становится достаточно четким. Метод экспоненциального представления позволяет
в задачах теории оболочек получать искомые величины в виде некоторых сумм слагаемых,
к аждое из которых имеет достаточно определенную изменяемость. Более того, как выяснится
ниже, появляется возможность оперировать такими понятиями, как изменяемость, квази-
стацнонарные направления и т. д. для напряженно-деформированного состояния в целом,
пока же они даны (§ 12.30) лишь для некоторых функций. Попутно выявляется и зависимость
между изменяемостью внешних воздействий, т. е. величиной, которую мы знаем заранее,
и изменяемостью вызванного ими напряженно-деформированного состояния, т. е. величиной,
которую надо суметь предугадать, если мы не хотим, закончив расчет, убедиться, что он был
основан иа ложных предпосылках.
Для правильного понимания структуры напряженно-деформированного состояния обо-
оболочки важным является и то обстоятельство, что, если решению соответствующей краевой
задачи придать форму (П.2.2), то легко прослеживается характер изменения решения при
переходе от одной точки срединной поверхности к другой. В частности, выявляются ваправле-
ния, в которых с определенной скоростью убывают составляющие искомого решения. Это поз-
позволяет оценить и использовать явления, которые можно назвать сен-венановскими, так как их
470 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
существование (прн определенных обстоятельствах) и составляет содержание принципа Сен-
Венаиа.
Обнаруживаются направления и линии, названные здесь квазистационарными, вдоль
которых сен-венановское затухание в тонких оболочках проявляется значительно слабее,
чем в массивных телах. При этом легко прослеживается связь такого вырождения с существо-
существованием асимптотических линий на срединной поверхности.
§ 1. Простой итерационный процесс
Рассмотрим дифференциальное уравнение вида
т
L (Ф) +* 2 тJ^ц (Ф) = Р, (П.1.1)
где Ф — искомая функция, Р — заданная функция, tj — малый постоянный параметр, a L
и Np — линейные дифференциальные однородные операторы, которые пока будем считать
произвольными.
Будем строить асимптотические методы интегрирования уравнения (П.1.1), т. е. методы,
в которых используется малость параметра Т). Один из них очевиден: он может быть по-
получен так.
Зададим решение уравнения (П.1.1) в виде
s
Ф= 21 85ф,
s=0
где е — малый параметр, связанный с т) формулой
ег — гJ (г
и потребуем, чтобы в (П.1.2) функции
ег — гJ (г—целое положительное число), (П. 1.3)
Фо. Фъ Ф2. • • •> ®S (П. 1.4)
удовлетворяли следующим уравнениям:
т
M®s)+ 5j #u (Ф»-гц) = 6?Р (s = 0, 1, 2 5; б^ — символ Кронекера). (П.1.5)
Здесь и всюду в дальнейшем считается, что
Ф^ = 0 при Х<0. (П. 1.6)
Тогда для функции Cl?s+i, входящей в остаточный член суммы (П.1.2), получится такое
уравнение:
S+цг т
2 ? е5^5 ^ Ы„ (&,_„,) = 0. (П. 1.7)
ц=1 s=S+l ц=1
Система (П.1.5) имеет рекуррентный характер. Из нее можно последовательно опреде-
определять функции (П. 1.4), интегрируя уравнения вида
L(<DS)=FS, (П. 1.8)
где Fs либо равно заданной функции Р (при s = 0), либо равно нулю (при 1 ^ s < г), либо
(при s ^ г) выражается через Фо, Фх, . . ., «Ds.x. Во всех случаях при построении Ф5 можно Fs
рассматривать как известную функцию, считая, что Фо, Фц . . ., OS-i уже найдены.
Если известны решения уравнений (П.1.5), то приближенное решение исходного урав-
уравнения (П.1.1) можно определить формулой (П.1.2), отбросив в ней остаточный член. Такой
прием построения решений уравнений вида (П.1.1) назовем простым итерационным процес-
процессом, а соответствующие решения — простыми интегралами.
Простой итерационный процесс, как видно, имеет смысл только в применении к уравне-
уравнениям, содержащим малые множители в коэффициентах. В нем остается элемент неопределен-
неопределенности, заключающийся в возможности произвольно выбирать целое положительное число г
в формуле (П. 1.3).
Если уравнение (П. 1.7) имеет решение, в котором
1 < М,
§ 2] БЫСТРОМЕНЯЮЩИЕСЯ ИНТЕГРАЛЫ 471
то можно утверждать, что простой итерационный процесс имеет асимптотический характер,
т. е. что он позволяет строить решение, асимптотическая погрешность которого X определяется
равенством
*.= 0(es+1). (П. 1.9)
Обстоятельства, при которых имеет место оценка вида (П. 1.9), здесь обсуждаться не
поэтому в дальнейшем X называется формальной асимптотической погрешностью.
§ 2. Интегралы с большой изменяемостью
Пусть дано однородное линейное дифференциальное уравнение порядка q
Q(<D) = 0, Q
¦i, t=0
в котором Ф — искомая функция двух независимых переменных (ах, аг), %s, t — переменные
коэффициенты, а суммирование распространяется на все целые неотрицательные значения s, t,
не превышающие в сумме числа q.
В (П.2.1), так же как и во всех других рассматриваемых здесь уравнениях, коэффициенты
считаются дифференцируемыми столько раз, сколько может понадобиться в рассуждениях.
Будем искать решение уравнения (П.2.1) в виде
Ф = Ф ехр (е/), (П.2.2)
где (г, / — искомые функции с^, а2, а е — малый постоянный параметр.
Подставив (П.2.2) в (П.2.1), получим
Здесь под
подразумевается sat раз повторенные символические множители, заключенные в скобки,
a ft— производная от / по а,- (иногда вместо /,• будет применяться развернутая запись df/da,i).
Выражение, взятое в (П.2.3) в фигурные скобки, есть полином степени q относительно е.
Поэтому (П.2.3) можно представить в виде
(Q )
V вч-1<уч-П (ф) ехр (e"V)» (П.2.4)
1
^ 5t..«(e-Vi + 3§-)S(e-V,+^L exp(e-V). (П.2.3)
l==fT^IS et>-'Q(q-i) (ф)
l/=o J
где Q'r' — дифференциальные операторы порядка г, коэффициенты которых составляются из
коэффициентов оператора Q и из частных производных от {.
Нетрудно вывести; что
@)
__ V (Srt—s
— Zj Xs, q—sill2 у
й
" dft da, ^ dft da^ ^ 2 5/? '" ^
^2q@) j ^2л@) G—1
+ W^T- fa + -n- -572-^22 + S Х^, „-I-s^/T1"*. (П-2-5)
s=0
Общие формулы для Q(I"> громоздки, и мы их приводить не будем. В конкретных случаях со-
составить Q(r) не представляет труда.
Выберем /так, чтобы
s=0
472 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
тогда, подставив (П.2.4) в (П.2.1) и сократив на е1"' и на экспоненциальный множитель,
получим
^ eo-l-lQl4-l) (ф) = о. (П.2.7)
Уравнение (П.2.1) свелось к двум уравнениям (П.2.6) н (П.2.7). Первое из них опреде-
определяет функцию f и представляет собой уравнение первого порядка степени q. Второе — опреде-
определяет ф и представляет собой линейное уравнение порядка q. Оно содержит малый параметр е
и принадлежит к классу уравнений, рассмотренных в § П.1.
Функция (П.2.2) пропорциональна экспоненциальной функции, имеющей большой коэф-
коэффициент в показателе, поэтому значения Ф весьма быстро меняются от точки к точке, причем
характер изменения Ф в основном определяется поведением /, в то время как функция ср отно-
относительно мало влияет на характер изменения Ф (конечно, вне окрестности нулей ф). В связи
со сказанным, в дальнейшем будем называть функцию вида (П.2.2) при малых е функцией с боль-
большой изменяемостью, соответствующее решение уравнения (П.2.1) — интегралом с большой
изменяемостью, f — функцией изменяемости, ф — функцией интенсивности.
Полученный выше результат сводится к тому, что для интегралов с большой изменяе-
изменяемостью функция изменяемости определяется уравнением (П.2.6), а функция интенсивности —
уравнением (П.2.7). Так как в (П.2.7) входит малый параметр е, то интегралы с большой из-
изменяемостью можно строить асимптотическим методом, который в данном случае сводится
к интегрированию уравнения (П.2.7) с помощью простого итерационного процесса, описан-
описанного в § 1.
Замечание. Пока не предполагалось, что исходное уравнение (П.2.1) содержит малый
параметр, хотя в дальнейшем будут рассмотрены и случаи, когда он входит в уравнение.
Асимптотический подход стал возможен вследствие того, что класс допустимых решений огра-
ограничен формулой (П.2.2), в которую входит малый параметр е.
Изучим подробнее уравнения (П.2.6), (П.2.7). Средняя часть равенства (П.2.6) представ-
представляет собой однородный полином степени q относительно fl3 /2. Его можно разложить на ли-
линейные множители, т. е. представить в виде
(П.2.8)
\ UULi UULa. f
«=1
Здесь (Au, Bu) — пары функций, которые могут быть н комплексными, т. е. такими, что Аи/Ви
есть комплексная величина. В связи с этим в дальнейшем будет считаться, что интегралы
с большой изменяемостью строятся в классе комплексных функций действительных переменных.
Примем, что требование выполнения уравнения (П.2.8) эквивалентно требованию, чтобы
выполнялось одно из q уравнений
5^ = 0 (и=1, 2, . ... 9). (П.2.9)
Они представляют собой уравнения характеристик оператора Q. Это значит, что если [п (а^ а2)
есть нетривиальное (отличное от константы) решение л-го уравнения (П.2.9), то равенством
/„(а,, а2) = const определяется л-е семейство характеристик оператора L. Таким образом,
предлагаемым методом можно строить только такие интегралы с большой изменяемостью,
в которых линии уровня функции изменяемости f совпадают с некоторым семейством
характеристик оператора Q. Будем говорить, что этот интеграл с большой изменяемостью
соответствует данному семейству характеристик, а последнее назовем определяющим (по
отношению к соответствующему ему интегралу) семейством характеристик.
Уравнение (П.2.7) содержит малый параметр при старших производных, и это позволяет
для определения (р прибегнуть к тому или иному итерационному процессу. Однако мы усло-
условимся, что при построении интегралов с большой изменяемостью функция интенсивности ср
всегда должна рассматриваться как простой интеграл уравнения (П.2.7). Это значит, что ее
надо находить прн помощи простого итерационного процесса, описанного в § 1. Он приво-
приводится к последовательному интегрированию уравнений вида Q'1' (<fs) = Fs- Выражая этот
факт, будем в дальнейшем в подобных ситуациях говорить, что ф в первом приближении удов-
удовлетворяет уравнению
<?П1(Ф)+ ••• =0. (П.2.10)
В нем точки служат напоминанием, что есть еще слагаемые с малыми коэффициентами, влия-
влияние которых прн желании можно учесть прн помощи простого итерационного процесса.
Замечание. В §§ П. 12. П. 13 будет показано, что, отсеивая в (П.2.7) все интегралы, кроме
простых, мы все же сохраняем достаточно общности для того, чтобы из интегралов с большой
изменяемостью можно Оыло составить решение широкого класса краевых задач.
§ 3] БЫСТРОМЕНЯЮЩИЕСЯ ИНТЕГРАЛЫ ДЛЯ ВОЗМУЩЕННЫХ УРАВНЕНИЙ 473
Остановимся на структуре уравнений (П.2.10). Воспользовавшись третьим равенством
(П.2.5) и формулой (П.2.8), получим
(через Q' обозначены слагаемые, не содержащие символов дифференцирования по а1г
Выполнив дифференцирования по fx и ft, будем иметь
Здесь знак П(<> — символ произведения, в котором пропущен множитель номера /.
Пусть обсуждению подлежит интеграл, соответствующий ц-у семейству характеристик
оператора Q, и пусть это определяющее семейство однократно. Это значит, что функция /
есть нетривиальный интеграл уравнения (П.2.9) номера ц и что левые части других уравнений
(П.2.9) не могут обратиться в тождественный нуль.
В сумме, стоящей в правой части последнего равенства, есть только одно слагаемое,
которое не содержит множителя (А^г + В^2), обращающегося, по предположению, в нуль.
Этому слагаемому соответствует (=ци, следовательно,
П (АЛ + Buf2)
/г) г) \
(П.2.11)
Отсюда видно, что уравнение характеристик оператора QA) совпадает с (х-м уравнением (П.2.9),
т. е. характеристики обсуждаемых уравнений (П.2.11) совпадают с определяющим семейством
характеристик оператора Q. Множитель при главной части оператора QA), взятый в (П.2. II)
в квадратные скобки, не может обратиться в тождественный нуль, так как по предположению
рассматриваемое семейство характеристик однократно, а / отлично от константы. Обращение
в нуль этого множителя в отдельных точках с возможно. Это будет иметь место в следующих
случаях:
1) когда при некотором ы две пары чисел (Аи, Ви) и (Лй, Вй) будут в с пропорциональны;
2) когда в с выполняются равенства /х = ft = 0; .
3) когда в с какая-либо пара функций (Аи, Ви) обратится в нуль.
В случае 1) будем условно говорить, что с есть точка касания характеристики определяю-
определяющего семейства с характеристикой какого-либо другого семейства Q, хотя реальный смысл
это утверждение имеет только в случае действительных характеристик. В случае 2) с является
стационарной точкой функции f. В случае 3) с есть особая точка исходного уравнения (П.2.1),
т. е. точка, в которой обращаются в нуль коэффициенты при всех старших производных опе-
оператора Q.
Итак, каждому однократному семейству характеристик оператора Q соответствуют
интегралы с большой изменяемостью, в которых линии уровня функции изменяемости f
совпадают с характеристиками этого определяющего семейства, а функция интенсивности
Ф в первом приближении удовлетворяет уравнению первого порядка (П.2.10). Главная
часть этого уравнения может обращаться в нуль только:
1) в точках касания характеристик определяющего семейства с характеристиками дру-
другого семейства оператора Q;
2) в стационарных точках функции изменяемости /;
3) в точках, в которых исчезает главная часть всего оператора Q.
Замечание. Легко видеть, что, если Q<0) отлично от тождественного нуля, то для <ps полу-
получается рекуррентная система алгебраических уравнений, имеющая только тривиальное реше-
решение фь = 0. Поэтому предположение о выполнении равенства (П.2.6) является обязательным
для построения интегралов с большой изменяемостью.
§ 3. Интегралы с большой изменяемостью
для уравнений с малой главной частью
Рассмотрим однородное уравнение, содержащее малый параметр т]а:
: / vs, (—-—-t- (П.3.1)
474 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
Примем, что я>/, т. е. что малый множитель стоит перед старшими производными, и будем
искать для уравнения (П.3.1) интегралы с большой изменяемостью, т. е. решения вида (П.2.2).
Тогда в формулировку задачи будет входить два малых параметра: т), содержащийся в уравне-
уравнении, и е, содержащийся в равенстве (П.2.2), т. е. в определении класса искомых решений. Свя-
Свяжем две эти величины зависимостью
е = т)т (П.3.2)
и назовем т показателем изменяемости рассматриваемого интеграла (если г] фиксировано,
то функция (П.2.2) будет изменять свои значения от точки к точке тем быстрее, чем больше т).
Учитывая (П.2.2) и (П.3.2), можно по аналогии с (П.2.4) написать
L (Ф) = е-' I ? в'-'L»'-'» (ф)[ exp (e"V) »
U° J (П.3.3)
*N (Ф) = е2'-* { V t"-iN{-n-i) (фI ехр (е~Ч),
I 2) е"
где L<'"^> и N(n~n — операторы, определяемые формулами вида (П.2.5).
Подставим (П.3.3) в (П.3.1), отбросим экспоненту и помножим на г", считая, что а =
= max (/, л — 2/т). Получим равенство
е."-1 I ? e'-'L('~" (ф)[ + 8а"""+2/т \ ^ en~iNin~n (ср)[ = О, (П.3.4)
l/=o J l/=o J
в левой части которого коэффициенты содержат множителями неотрицательные степени р,.
Потребуем, чтобы функция интенсивности ср определялась как простой интеграл (§ 2) этого
уравнения, а функцию изменяемости / выберем так, чтобы простой итерационный процесс
при построении ср не приводил к противоречиям. Смысл последнего требования становится
ясным, если выписать для (П.3.4) уравнение первого приближения. Его можно представить
так:
Мо (ф) Н =0. (П.3.5)
Здесь в зависимости от значений числа а под Мо надо подразумевать L@) (если а = /?> л —
—2/т), Л/@> (если а= я—2/т> Г) или L(o> + Л/@) (если а— I— п — 2/т). Во всех случаях Мо
согласно формулам вида (П.2.5) представляет собой функцию, зависящую от f, а не оператор.
Поэтому из уравнения (П.3.5), вообще говоря, следует, что ср = 0, а такое значение ср нельзя
рассматривать как исходное приближение простого итерационного процесса. Основываясь
на этом, потребуем, чтобы f удовлетворяло уравнению Ма = 0.
Введем число т, с помощью формулы
и рассмотрим три следующих случая.
Случай I. т < t». Тогда —I < 2/т — я и, в соответствии со сказанным выше, функ-
функцию / надо подчинить уравнению
После подстановки (П.3.3) в (П.3.1) и сокращения на e~l+1 и на экспоненциальный множитель
это приведет для определения ср к уравнению
1-х п
^ e'-'-'L'41 (ф) + е"-' 5) 8"-'Af("-'l (ф) = 0 (/>=* — я + 2/т>0). (П.3.8)
,-=о - /=о
Случай II. т> г*. Тогда 2/т— п< — / и функцию / нужно подчинить требованию
а для функции ф получится уравнение
-lN1"-» (ф) = 0 (р.= л—2/т —/ >0). (П-3.10)
$3] БЫСТРОМЕНЯЮЩИЕСЯ ИНТЕГРАЛЫ ДЛЯ ВОЗМУЩЕННЫХ УРАВНЕНИЙ 475
Случай III. т = т*. Тогда —I = 21% — ли функцию / нужно подчинить уравнению
s=0 s=<l
а для ф получится
/—i п—\
^ bl-i-lL°-f) (ф) + ^j un-i-lN(n~i) (ф) = 0. • (П.3.12)
/=о /=о
Уравнение (П.3.7) аналогично (П.2.6). Из него вытекает, что, если изменяемость интегралов
уравнения (П.3.1) не слишком велика @ < т < т*), то для них определяющими могут быть
только семейства характеристик оператора L, т. е. линии уровня функций изменяемости
таких интегралов должны совпадать с характеристиками L. Кроме того, из (П.3.8) следует,
что при таком т функцию ф можно определить как простой интеграл, удовлетворяющий в ис-
исходном приближении уравнению первого порядка
(L(I> +6},ЛГ@))(фН =0 {р'=1 — n + 2/т; б}, — символ Кронекера). (П.3.13)
Главная часть этого уравнения совпадает с главной частью оператора LA), имеющего
такую же структуру, что и оператор QA). Поэтому, основываясь на § 2, можно утверждать,
что главная часть (П.3.13) будет обращаться в нуль только в точках касания характеристик
определяющего семейства с характеристиками L, принадлежащими другому семейству, в ста-
стационарных точках функции изменяемости f и в точках обращения в нуль главной части опе-
оператора L.
Из (П.3.8) видно, что, если (П.3.1) заменить приближенным уравнением
МФ)=0, .. (П.3.14)
то при определении ф мы будем допускать ошибки порядка ер~1. Поэтому можно принять, что
уравнение (П.3.14) позволяет строить функцию интенсивности ф с формальной асимптотиче-
асимптотической погрешностью (§ 1)
л = О(8р~1)= О(8'-'1+2/т-1). (П.3.15)
Замечания. 1. В дальнейшем под формальной асимптотической погрешностью интеграла
с большой изменяемостью будет подразумеваться формальная асимптотическая погрешность
его функции интенсивности. В рассматриваемом случае это значит, что формулой (П.3.15)
оценивается формальная асимптотическая погрешность приближенного уравнения (П.3.14),
если оно применяется для построения интеграла с большой изменяемостью при
2. Во второй сумме (П.3.8) член с е° равен Л/'0)ф. Он может обратиться в тождественный
нуль. Это произойдет тогда, когда функция изменяемости f удовлетворяет не только уравне-
уравнению (П.3.7), ио и уравнению (П.3.9), т. е. когда определяющее семейство характеристик опе-
оператора L совпадает с одним из семейств характеристик оператора N. Тогда формальная асим-
асимптотическая погрешность интеграла с большой изменяемостью уменьшится, но на анализе
таких случаев мы останавливаться не будем.
Если имеет место случай II, т. е. х^> х», то все рассуждения, относящиеся к случаю I,
в сущности, сохраняются, но операторы L и Л/ меняются ролями. Таким образом, при доста-
достаточно большой изменяемости (т > т„) определяющим семейством характеристик для интегра-
интегралов уравнения (П.3.1) может быть только одно из семейств характеристик оператора N.
Если при этом определяющее семейство характеристик N однократно, то ф в первом прибли-
приближении можно определить уравнением
Это значит, что вместо (П.3.1) при таком т можно брать уравнение
^{ф)== о, (П.3.16)
причем формальная асимптотическая погрешность (П.3.16) будет
X = О (е"-1) = О (ъп-1~2п~х). ' (П.3.17)
Формула (П.3.15), оценивающая погрешность уравнения (П.3.14), показывает, что по-
последнее имеет смысл только при р> 1. Отсюда при помощи (П.3.8) заключаем, что неравен-
неравенством
г<^л U1.3.18)
476 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
устанавливается область применимости (П.3.14) как приближенного уравнения для интегра-
интегралов с большой изменяемостью, соответствующих однократным характеристикам оператора L.
Равным образом неравенством
*>w^r=i (П-ЗЛ9>
определяется область применимости (П.3.16) как приближенного уравнении для интегралов
с большой изменяемостью, соответствующих однократным характеристикам оператора N.
§ 4. Интегралы с заданной квазистационарной линией
Перейдем к случаю III, т. е. будем считать, что т = т*, и рассмотримуравнение (П.3.11),
которому должна удовлетворять при этом функция изменяемости /. Будем интегрировать это
уравнение, требуя, чтобы одна из линий уровня искомой функции f совпала с некоторой про-
произвольно заданной действительной кривой у.
Замечание. При х =f= xt такая задача, вообще говоря, не имеет решения, так как тогда
линии уровня f совпадают либо с характеристиками L, либо с характеристиками N, т. е. не
зависят от нашего выбора.
Примем, что у — заданная линия уровня функции f — совмещена с линией ctj = ct10
(для этого в случае необходимости надо предварительно выполнить соответствующую замену
независимых переменных), и подчиним f следующему условию:
/•«айг--0 («i = aw)- (П.4.1)
Положив dj = а10 в уравнении (П.3.11) и учтя (П.4.1), получим равенство
Чо/l + Vo/F = ° («i=«io). (П.4.2)
которое можно рассматривать как алгебраическое уравнение относительно граничных зна-
значений f-y. Оно имеет п — / ненулевых корней
^ ("i - «»> (П-4-3>
(радикал понимается в алгебраическом смысле).
Таким образом, я — /способами можно найти значевие, которое принимает на у первая
производная от f no аг. Примем, не вдаваясь в подробности, что каждому такому значению fx
в некоторой окрестности у соответствует свое решение сформулированной задачи, определяе-
определяемое с точностью до аддитивной константы.
Замечание. Нулевые корни уравнения (П.4.2) не представляют интереса: им соответствует
тривиальное решение f = const.
Будем для конкретности считать, что аг = а10 — замкнутая линия, все точки которой
принадлежат интересующей нас области, и примем, что всюду на а, = а10 выполняются условия
Ь,оФО' Чп.оФ0 (а,=а10). (П.4.4)
Второе из них означает, что уравнение (П.4.2) всегда имеет смысл, а из первого соотно-
соотношения (П.4.4) вытекает отсутствие на ах = а10 стационарных точек функции /, т. е. точек,
в которых, кроме (П.4.1), выполняется и равенство fr = 0.
Дли определения функции интенсивности ср мы располагаем уравнением (П.3.12), содержа-
содержащим малый параметр. Под ср будет пониматься простой интеграл этого уравнения, которое
в первом приближении имеет вид
(LCD + Na>) (ф) ч =о. (П.4.5>
Пользуясь третьим равенством (П.2.5), запишем его так:
JL
JL (LO) + V"») ^- + U + Ы' А- ¦ ¦ ] (Ф) = 0 (П.4.6)
Ф =
+ JL
(¦через U + N' обозначены слагаемые, не содержащие символов дифференцирования).
Ненулевые корни двучленного уравнения (П.4.2) однократны, поэтому коэффициент
при д/да-у в последнем равенстве заведомо будет отличен от нуля во всех точках лиини ах=
= а10, и следовательно, эта линия нигде не касается характеристик уравнения (П.4.5).
S 5. ИНТЕГРАЛЫ С КВАЗИСТАЦИОНАРНОИ ЛИНИЕЙ 477
Заметив, что "Ki, 0 и vn, осуть коэффициенты при старших производных по ах в операторах L
и N соответственно, легко расшифровать смысл требований (П.4.4). Они означают, что линия
<*i = аю ие должна касаться соответственных характеристик L и N или совпадать с ними.
В дальнейшем всегда будет предполагаться, что N — эллиптический оператор. Касание его ¦
мнимых характеристик с действительной кривой аг = а10 невозможно. В противоположность
этому, случаи, когда характеристики L касаются линии ах = а10 или проходят вдоль нее,
возможны и представляют Для теории оболочек существенный интерес. Эти случаи должны
рассматриваться особо.
Если f сохраняет постоянное значение на выбранной кривой у, то соответствующие ин-
интегралы будут относительно медленно меняться вдоль у. Назовем такие решения интегралами
с заданной квазистационарной линией у, а в том случае, когда у не касается характеристик L,
будем говорить об интегралах с заданной нехарактеристической квазистационарной линией у.
(В следующем параграфе понятие о таких интегралах будет несколько обобщено.)
Среди интегралов с заданной квазистационарной линией аг = а10 выделим такие, у ко-
которых действительная часть / на линии <х1=; а10 равна нулю, а при а1 ^ а10 илн при <х1 ^
sg: а10 монотонно убывает, и будем называть их интегралами, локализованными в (аг =
= а10 + 0), или интегралами, локализованными в (ах = а10 — 0), соответственно. При до-
достаточно малом 8 их абсолютные значения в области <хх^ а10 (ах ^ а10) существенно отли-
отличаются от нуля только в непосредственной близости к линии ах = а10.
В силу (П.4.4) подкоренное выражение в правой части равенства (П.4.3) сохраияет знак.
Если это выражение отрицательно, а я — I кратно четырем, или если подкоренное выражение
положительно, а п — I равно удвоенному нечетному числу, то (П.4.3) определит 1/2 (п —¦ I)
решений, в которых действительная часть f1 положительна, и 1/2 (п — [) решений, в которых
действительная часть отрицательна. Это значит, что в описанных случаях, т. е. в случаях,
когда уравнение (П.4.3) не имеет чисто мнимых корней, можно вблизи любой линии ссх = а10
построить 1/2 (п — /) функций /, соответствующих интегралам, локализованным в (ах = aio +
+ 0), и 1/2 (я — Г) функций f, соответствующих интегралам, локализованным в (а1 = а19 —0).
§ 5. Интегралы с заданной квазистационарной линией.
Обобщение
Результаты предыдущего параграфа можно обобщить, приняв, что функция изменяе-
изменяемости / зависит от параметра е, а именно, имеет вид
/=/0 + 8х/ @<х<1). (П.5.1)
Под интегралами с заданной квазистационарной линией а1 = а10 будем в этом случае
подразумевать такие интегралы с большой изменяемостью, в которых вдоль линии ах = а10
сохраняет постоянное значение главная часть функции (П.5.1), т. е.
H (П.5.2)
Так же как в § 4, примем, что линия at = а10 нигде не касается ни характеристик L,
ни характеристик N, т. е. что выполняются требования (П.4.4), и будем строить интегралы
с заданной иехарактеристической квазистациоиарной линией. Тогда уравнения (П.3.11) и
(П.3.12) сохранят силу, но первое из них можно преобразовать, внеся в него (П.5.1) и рас-
расположив левую часть полученного равенства по степеням 8Ч. Получим
^ 6rxL<0) + |] 8rxiV@) = 0. (П.5.3)
Здесь выражения L'0), N<P> имеют очевидный смысл. В частности,
(П.5.4)
^+а+м
(через L[ + N{ обозначены слагаемые, не содержащие производных от /).
Таким образом, уравнению (П.3.11) или, что то же, уравнению (П.5.3) можно удовлетво-
удовлетворить, положив
L^ + AW» = 0,
1 (П.5.5)
> + 8х ( У. в*'» xL<0) + ? в*1-" "Nf 1 = 0.
[r=2 r=2 J
478 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
Первое из этих равенств представляет собой уравнение для /•„, а из второго, считая из-
известным /0> можно определить /. Из (П.5.5) вытекает, что в рассматриваемом случае главная
часть функции изменяемости /0 удовлетворяет такому же уравнению, какому в § 4 была под-
подчинена функция изменяемости / в целом. Сравнив (П.4.1) с (П.5.2), заключаем, что условия,
накладываемые при аг = а10 на функции f и /0, также одинаковы.
Уравнение, которому подчинено f, содержит малый параметр, и под /мы будем подразуме-
подразумевать его простой интеграл. Таким образом, в первом приближении J будет удовлетворять
уравнению
ц»> + що) j =о. (П.5.6)
Это значит, что (П.5.6) по структуре аналогично уравнению (П.4.6). В частности, можно
утверждать, что характеристики уравнения (П.5.6) также нигде не касаются линии аг = а10.
Функцию <р мы определим как простой интеграл уравнения (П.3.12), в коэффициентах
которого f надо расшифровать по формуле (П.5.1). При этом уравнение первого приближения
для ф будет отличаться от (П.4.5) только тем, что в последнем надо / заменить на /0, а эти две
функции определяются одинаковыми уравнениями и одинаковыми условиями на а, = а]0.
Итак, показана возможность строить интегралы с заданной нехарактеристической квази-
квазистационарной линией (<Xj = <х10) в предположении, что функция изменяемости / имеет вид
(П.5.1) и что на линии otj = <х10 постоянное значение сохраняет только главная часть f. Для
таких решений можно, как и в § 4, ввести понятие об интегралах, локализованных в (а., =
= а10± 0). Под этим теперь надо подразумевать интегралы, в которых действительная часть
/0 обращается в нуль при ах = а10, а в окрестности ах = ахо действительная часть fn моно-
монотонно возрастает или, соответственно, монотонно убывает по ах.
Введенный в § 3 показатель изменяемости характеризует скорость изменения функцни Ф
вида (П.2.2) в любом направлении, не являющемся направлением стационарности или относи-
относительно медленного изменения функции f. Для интегралов, локализованных в (ах = а1П — 0),
функция f, задаваемая равенством (П.5.1), относительно медленно меняется вдоль линии а, =
= а10, так как при ах = а10 обращается в нуль действительная часть функции f0 —главной
части /, поэтому показатель экспоненциальной функции в (П.2.2) на ах = <х10 можно опреде-
определить формулой
из которой следует, что при ах = а, 0 функцию Ф можно задать так:
Ф|а1=а10 = Ф«р[(е')-1Л (в'^-е1-").
Введем величину т' с помощью формулы
г = е1-* = т)х'. (П.5.7)
Она аналогична (П.3.2), а поэтому естественно считать, что %' характеризует изменяемость Ф
в направлении линии ах = а10. Сравнив (П.3.2) с (П.5.7), получим равенство
т' = A —х)т, (П.5.8)
устанавливающее завнсимость между наименьшим показателем изменяемости %' и наибольшим
показателем изменяемости т для интегралов, локализованных в (аг = a10 ± 0).
Обсуждаемые здесь интегралы при ч = 1 по смыслу совпадают с интегралами, построен-
построенными в § 4, так как в этом случае
фехр (е/) =<pexp/exp(e~Vo)- (П.5.9)
Здесь первый экспоненциальный множитель можно включить в функцию <р, и функция
(П.5.9) не будет по смыслу отличаться от (П.2.2).
Таким образом, показано, что интегралы, локализованные в (ax = ax ± 0), можно строить
так, чтобы их показатель изменяемости вдоль квазистационарной линии <хх = ахо определялся
формулой (П.5.7) и мог быть выбран по нашему усмотрению.
§ 6. Интегралы, соответствующие r-кратному семейству
характеристик L
Если семейство характеристик оператора L (или N) кратно, то соответствующие ему
интегралы нельзя строить тем методом, который описан в § 3, так как одним из условий его
применимости является требование, чтобы характеристики рассматриваемого семейства нигде
не касались характеристик другого семейства. Оно теперь очевидно будет нарушаться всюду.
Переходя к обсуждению этого случая, примем, что в уравненнн (П.3.1) оператор L имеет
r-кратное семейство характеристик %у что требуется построить интегралы, соответствующие %,
и будем считать, что установлена такая система координат, в которой (Xj-линии совпадают с ха-
$ 6] ИНТЕГРАЛЫ, СООТВЕТСТВУЮЩИЕ КРАТНЫМ ХАРАКТЕРИСТИКАМ*. 479
рактеристиками % (координатные линии в такой системе, конечно, могут быть и мнимыми).
В этом "случае надо считать, что функция изменяемости имеет вил
и принять, что интеграл соответствует характеристикам %, если
Представим L в виде суммы слагаемых, каждое из которых в отдельности однородно
относительно порядка производных
1 2
2 1 ?- 2 ^-spsp
Ц0 50
(П.6.3)
примем, что линии % являются /-^-кратными характеристиками оператора L, т. е. что выпол-
выполняются соотношения
Ks s = 0 при s < г„, кг „_г ф. О, (П.6.4)
в которых, очевидно, надо считать, что г, = г. Примем кроме того, что г„ = 0 ,если % не совпа-
м- м-
дает с характеристиками L, и что rtt = оо, если L з 0.
Согласно (П.2.3) и (П.6.3), (ГГ6.4) имеем
И
Подставив сюда (П:6.1) и (П.6.2), получим
ехр ( — е"V) L (Ф) = е ^ »/.. (ер), (П.6.5)
Отсюда
Воспользуемся этим, учтем второе равенство (П.3.3) и введем целое число т, определив
его требованием, чтобы при данном х выполнялось неравенство
i,_i-xr М-
е ^^ *L. (Ф). (П.6.6)
0
Тогда уравнение (П.3.1) можно представить в виде
2 (Ф) + 2 -W-/> (Ф) = О, (П.6.7)
и=0 . ,=0
причем под знаками обеих сумм все степени е будут неотрицательны.
Дальнейшие результаты существенно зависят от свойств целого числа т, и избегая не-
необходимости перебирать различные варианты, остановимся только на случае, когда т имеет
единственное значение, равное /, т. е. когда справедливо строгое неравенство
_1), (П.6.8)
так как только этот случай и представляет интерес в теории оболочек. При таких обстоятель-
обстоятельствах интеграл требуемого типа можно построить, положив в формуле (П.6.1)
480 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
При этом неравенства 0 < х < 1, которыми ограничена область применимости формулы
(П.6.1), будут выполняться лишь тогда, когда показатель изменяемости т заключен в пределах
%-г- <%<—2-г. (П.6.10)
п— I + г п— /
Положим в уравнении (П.6.7) т= I. Тогда в силу (П.6.9) в этом равенстве множители
при знаках суммирования станут равными друг другу. Отбросив их, получим
S ' *' ^"^ip) + S nW» (ф) = 0.
|i,=0 /=0
Оператор L. расшифровывается второй формулой (П.6.5). Его можно представить в виде
?.= L<0> +el~*L', (П.6.12)
*», (П.6.13)
р,
а под L' подразумевается некоторый дифференциальный оператор, коэффициенты которого
не содержат отрицательных степеней в. Уравнению (П.6.11) можно удовлетворить, положи?
L0, (П.6.14)
ц=0
п—1
S (ф + 2 "-^("-Л (ф) = 0. (П.6.15)
ц=0 ,-=0
Функция f0 была подчинена выше дифференциальному уравнению (П.6.2). Равенство
(П.6.14) мы будем рассматривать как уравнение для определения /. Оно содержит в коэффи-
коэффициентах малый параметр е, который входит в (П.6.14) явно, а, кроме того, степени е содержатся
и в выражениях (П.6.13) для Ll0). Все эти степени е неотрицательны, и основываясь на этом,
будем для / искать только простые интегралы. Тогда уравнение первого приближения для /
можно получить, оставив в (П.6.14) только члены с нулевыми степенями явно входящего е.
В силу (П.6.8) оно имеет вид
L<°> _|_ЛД°Ч = 0. (П.6.16)
Оставляя в выкладках только самые низкие степени е, можно написать
Из формулы (П.3.9) таким же образом следует, что
Поэтому в уравнении первого приближения (П.6.16) можно произвести дальнейшее упроще-
упрощение и записать его так:
(здесь fa надо рассматривать как известную функцию, так как для ее определения выше уже
было построено дифференциальное уравнение).
Равенство (П.6.15) будем рассматривать как уравнение для определения ф и также огра-
ограничимся для него простым интегралом. При этом в первом приближении для ф получится
уравнение первого порядка. В случае, когда, например,
min (I — кг — ц. -f- wn +1 — у.) < 1,
оно имеет вид
^1|=f#UP)+ •••=0. (П.6.18)
§ Й ИНТЕГРАЛЫ, СООТВЕТСТВУЮЩИЕ КРАТНЫМ ХАРАКТЕРИСТИКАМ 481
§ 7. Интегралы, соответствующие г-кратному семейству
характеристик L (продолжение)
В § 6 область допустимых значений показателя изменяемости т была ограничена сверху
и снизу неравенствами (П.6.10). Ограничение сверху существенно связано с постановкой во-
вопроса: если т превзойдет этот предел, то построение интегралов, соответствующих характери-
характеристикам оператора L, для уравнения (П.3.1) станет невозможным (§ 3). Обратимся к случаю,
когда
(П-7Л)
При таком т интеграл требуемого типа можно построить, прииив, что / ие зависит от с и что
в рассматриваемой области выполняется ураииеиие
-|?- =» 0. (П.7.2)
При этом, как легко убедиться, равенства (П.6.5) примут форму
ехр ( — в-Ц) ? (Ф) = в*4^ L. (ф),
(П.7.3)
)
Будем считать, что теперь вместо (П.6.8) при любых допустимых значениях ц выпол-
выполняются неравенства
— / + г < — ц 4- ги.
Тогда уравнение (П.6.7) примет вид
Ц=0 ,=0
в можно принять, что ф есть простой интеграл этого уравнения. Из (П.7.1) вытекает, что 2/т —
— п > — / 4- г. Поэтому в соответствующее уравнение первого приближения войдет только
слагаемое, содержащее L. . Этот оператор определяется вторым равенством (П.7.3) и содержит
лишь одно слагаемое, в которое не входят положительные степени е. Таким образом, уравие-
вие первого приближения для ф запишется так:
Сформулируем выводы.
Пусть % есть г-кратиое семейство характеристик оператора L, и для уравнения (П.3.1)
надо построить интеграл, соответствующий % при дополнительном предположении выражае-
выражаемом неравенствами (П.6.8). Тогда для ие слишком больших значений показателя изменяе-
изменяемости т, когда выполняется неравенство (П.7.1), можно считать, что функции изменяе-
изменяемости f не зависит от 8 и подчиняется уравнению (П.7.2), т. е. является произвольной
функцией а2
(П.7.6)
Для функции иитенсиииости <р получается при этом уравнение с малым параметром е.
Ему в первом приближении соответствует уравнение (П.7.5) порядка г, в котором коэффициент
при старших производных ие будет обращаться в нуль, если принять дополнительно, что
в рассматриваемой области
Ки-гфО, ¦!?-*<>. (П.7.7)
Первое из этих условий означает, что характеристики % нигде ие должны касаться характе-
характеристик оператора L, принадлежащих другому семейству; второе условие накладывает ограни-
ограничение на выбор функции (П.7.6), в остальном целиком зависящей от нашего произвола
Если показатель изменяемости т не удовлетворяет неравенству (П.7.1), но находится
в пределах (П.6.10), то функцию изменяемости для интеграла рассматриваемого тип;- надо
задать формулой (П.6.1) и подчинить главную часть функции измениемости /¦„ уравнению
31 А. Л. Гольденвейзер
482 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
(П.6.2), т. е. считать, что
При этом число v. определяется равенством (П.6.9), а функции Jи <р можно найти как про-
простые интегралы уравнений (П.6.14) и (П.6.15) соответственно. В первом приближении для/
получится уравнение (П.6.17) первого порядка и степени г, а для <р — линейное уравнение
первого порядка, имеющее при некоторых дополнительных условиях внд (П.6.18).
Таким образом, в рассматриваемом случае происходит явление, которое мы условимся
называть разветвлением функции изменяемости. Оно заключается в том, что для всех интегра-
интегралов, соответствующих г-кратным характеристикам оператора L, главная часть функции из-
изменяемости определяется единым дифференциальным уравнением первого порядка (П.6.2),
в то время как для / можно из (П.6.17) очевидным образом получить г различных линейных
уравнений первого порядка. Область значений показатели изменяемости т, при которых раз-
разветвляется функция изменяемости, определяется неравенствами (П.6.10).
При любых положительных значениях т должны выполняться условия (П.7.7), в которых
при т, удовлетворяющем неравенствам (П.6.10), надо / заменить иа /0. При нарушении этих
условий в уравнениях (П.6.17) и (П.7.5) появятся особые точки, т. е. точки, в которых коэф-
коэффициенты при старших производных проходят через нули.
Если показатель изменяемости т удовлетворяет иеравеиству (П.7.1), то функция интенсив-
интенсивности <р определяется уравнением (П.7.4). Из него видно, что при таких т можно пренебречь
влиянием оператора N, т. е. заменить (П.3.1) приближенным уравнением (П.3.14). Это равно-
равносильно отбрасыванию второй суммы в левой части (П.7.4). Поэтому можно принять, что (П.З.14)
при построении интегралов, соответствующих r-кратной характеристике оператора L, при-
приводит к формальной погрешности порядка
п-г). (П.7.8)
Этой формулой обобщается оценка (П.3.15). Равным образом обобщением (П.3.18) яв-
является неравенство (П.7.1). Им определяется область применимости приближенного уравнения
(П.З. 16) иа случай r-кратиой характеристики.
§ 8. Интегралы, соответствующие г-кратному
семейству характеристик N
Обратимся к интегралам, соответствующим линиям %, которые являются г-кратными
характеристиками оператора N и также совмещены с с^-лиииями. Оператор N зададим
в виде
л
2 1* (*
N. tf
и ограничимся случаем, когда линии %, будучи r-кратными характеристиками оператора N,
(*
не являются характеристиками ии для одного из операторов N, т. е. будем предполагать, что
выполняются соотношения
vs,n_, = 0 при s<r, \г,п-гФ0, v0>|alsjfe0, nsgn (П.8.1)
м.
и что ни один из операторов N не обращается в тождественный нуль.
Для построения витегралов требуемого вида, при некоторых дополнительных условиях,
которые обнаружатся ниже, надо принять, что функция изменяемости f задается формулой
(П.6.1), а ее главная часть f0 удовлетворяет уравнению (П.6.2). Поэтому по аналогии с (П.6.6)
можно написать следующую формулу:
ехр (- е-Ч) N (Ф) = ^ 8^+Hr'1 N. (<р), (П.8.2)
где
(П.8.3)
В силу предположения (П.8.1) надо считать, что в (П.8.3) г„ = г и г^ = 0 при ц Ф п. Поэтому
§ 81 ИНТЕГРАЛЫ. СООТВЕТСТВУЮЩИЕ КРАТНЫМ ХАРАКТЕРИСТИКАМ N 483
легко убедиться, что при
x<-L (П.8.4)
выполняются неравенства
— n + w< — ц + иги {ц?^п — 1), (П.8.5)
а при х = 1/г справедливы соотношения
— « + '«'¦ = — л+1< — Ц + w,, (ц^л —2). (П.8.6)
Если показатель изменяемости т удовлетворяет неравенствам
то для интеграла обсуждаемого вида число у. в формуле (П.6.1) надо определить равенством
(П.8.8)
Ограничеиие значений т сверху обеспечивает выполнение иеравеиства (П.8.4), а ограни-
ограничение снизу является необходимым условием существования интегралов, соответствующих
характеристикам оператора Л'.
Подставим (П.8.2) в уравнение (П.3.1), примем во внимание первое равенство (П.3.3),
а также неравенство (П.8.5) и запишем результат в следующем виде:
п i
д
'JV (с
ц=0 /=0
Для N. справедливо равенство (П.8.3). Поэтому по аналогии с (П.6.12) положим
N. = 5v@) + e1-4^', (П.8.10)
считая, что
,ii_ru (П.8.11)
и подразумевая под N' некоторый оператор, коэффициенты которого ве содержат отрицатель-
отрицательных степеней 8.
Далее можно поступать точно так, как и в § П.6. Учтя равенство (П.8.8), отбрасываем
в (П.8.9) множители при зиаках суммирования и заменяем получеиное равенство двумя сле-
следующими уравнениямв:
п
+ L<0) = 0.
(П.8.12)
l~K 5v'(q>) + V el~'L(l-') (ф) = 0.
Первое из них позволяет определить f как простой интеграл, для которого уравнение первого
приближения имеет вид
/ At \ г / At \ — г / AC \ i
= 0. (П.8.13)
Второе уравнение (П.8.12) позволяет определить <р как простой интеграл, для которого в пер-
первом приближении получится линейное уравнение первого порядка; так как т„ = т, то при
ц = п справедливо неравенство п — кг — ц + хгц +1 — х < 1 и это уравнение можно
записать так:
N' (<р) И =0.
п
Раскрыв здесь смысл оператора N' и вновь отбросив члены с положительными степе-
степенями е, получим
гу (jL\r(lk.\n~rJS-^ _0# (П.8.14)
31*
484 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
§ 9. Интегралы, соответствующие г-кратному семейству
характеристик N (продолжение)
Если показатель изменяемости т вместо (П.8.7) удовлетворяет неравенству
то в формуле (П.6.1) число х надо определить так:
(П.9.2)
При этом будет выполняться неравенство
— 2/т + п — кг — /$»0.
Учитывая это и использовав (П.8.10), запишем уравнение (П.8.9) следующим образом:
H=0 /=U
(перед вторым знаком суммирования степень е заведомо положительна).
Так как #@) и L@) — ие операторы, а функции, то полученному уравнению можно удов-
удовлетворить, положив
п
—2/1+п—*г—1^@) = q
(П.9.3)
Функция 7 при этом определится как простой интеграл первого уравнения (П.9.3). Но
если х определяется формулой (П.9.2), то справедливы соотношения (П.8.6), и следовательно,
уравнение первого приближения для J запишется так:
При расшифровке левой части этого равенства надо принимать во внимание (П.8.11)
и (П.6.1). В результате, после отбрасывания слагаемых, имеющих множителями положитель-
положительные степени 8, получим
Из второго уравнения (П.9.3) можно определить <р как простой интеграл, причем в пер-
первом приближении для го получается линейное уравиение первого порядка. В частности, если,
например, выполняется неравенство 1 —и>—2/i-f- п — у-г — /+ 1, то оно примет вид
ЛГ(<р)-| =0. (П.9.5)
Итоги рассуждений §§ П.8, П.9 сводятся к следующему.
Пусть % есть r-кратное семейство характеристик оператора N и для уравнения (П.3.1)
надо построить интеграл, соответствующий %, при дополнительном предположении, что %
ае являются характеристиками ии для одного из операторов N (р. г? я — 1). Тогда при любых
значениях т, удовлетворяющих неравенству
надо функцию изменяемости брать в виде (П.6.1) и считать, что в ней
1 2
х = —(я—/ —2/т) при т<- ] р,
— HpiTj» ,_,_,
$ 10] ИНТЕГРАЛЫ С ХАРАКТЕРИСТИЧЕСКОЙ КВАЗИСТАЦИОНАРНОЙ ЛИНИЕЙ 485
При этом всегда происходит разветвление функции изменяемости, т. е. ее главная часть f0
должна удовлетворять уравнению (П.6.2), а для / в первом приближении получается т различ-
различных линейных ур~внений, вытекающих из (П.8.13) и (П.9.4). Функция интенсивности <р
в первом приближении определяется линейным уравнением вида (П.8.14) или (П.9.5).
Если т не слишком велико, т. е. выполняется неравенство, стоящее в первой строке (П.9.6),
то для J справедливо уравнение первого приближения (П.8.13). Оно зависит от Х^, /, т. е. от
вида оператора L. Отсюда следует, что в рассмотренном здесь случае неравенство (П.3.19)
сохраняет свой смысл, как условие, ограничивающее область применимости приближенного
уравнения (П.3.16) при построении интегралов,соответствующих характеристикам оператора N.
Это значит, что при принятых здесь предположениях кратность характеристики ие меняет
результата. Легко показать (но мы на этом не будем останавливаться), что сохраняет силу и
соотношение (П.3.17), оценивающее формальную погрешность приближенного уравнения
(П.3.16).
§ 10. Интегралы с заданной характеристической
квазистационарной линией
Будем теперь для уравнения (П.3.1) искать интегралы с заданными квазистационарными
линиями, предполагая, что последние проходят вдоль характеристик оператора L, и применим
для этого распространенный в теории асимптотического интегрирования метод изменения
масштаба.
Рассмотрим функцию вида
Ф = Фехр (е~Ч), f=fo+eH? @<х<1). (П. 10.1)
Она будет обладать свойствами интеграла рассматриваемого вида, если потребовать, чтобы
выполнялись соотношения
<ai0-2)
(предполагается, что интересующие нас г-кратные характеристики совмещены с а,-лиииями).
Для функций (П. 10.1), (П. 10.2) справедливы равенства
в которых
Это значит, что первые производные по ах и а2 от функции вида (П. 10.1), (П. 10.2) остаются
функциями того же вида, но приобретают дополнительные множители в" и е~~'"и. Таким
образом, справедлива и более общая формула
дР+<>ф = ,-P-d-x) «ф (П. ю.з)
в которой Ф(Р> 9) —также функция вида (П. 10.1), (П.10.2).
Заметив это, примем, что равенство (П. 10.3) определяет свойства искомого решения,
и будем искать интеграл, обладающий такими свойствами, не считая, что он должен обяза-
обязательно иметь вид (П. 10.1), (П. 10.2). Выполним в (П.3.1) замену независимых переменных
по формулам
ai = e?i, а2=е1~и|г. (П. 10.4)
Тогда в нем, помимо т), появится новый малый параметр 8, а равенство (П. 10.3), определяющее
свойства искомого интеграла, примет внд
-ф(д.«. (П. 10.5)
486 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
Связав т) и е соотношением вида (П.3.2), можно интегрировать преобразованное уравне-
уравнение (П.3.1) с помощью простого итерационного процесса (§ П.1). Этим будет достигнута по-
поставленная цель, так как, вообще говоря, интегралы, получаемые прн помощи простого ите-
итерационного процесса, обладают свойством (П. 10.5), т. е. в них искомая функция и все ее про-
производные по независимым переменным glF |а имеют одинаковую асимптотику по е. Конечно,
при этом надо проявлять осторожность при выборе пронзволов интегрирования н не допускать
случаев, когда в первом приближении получаются решения, в которых частные производные,
начиная с некоторого порядка, тождественно исчезают.
В применении преобразования вида (П. 10.4) с последующим использованием простого
итерационного процесса и заключается метод изменения масштаба. Применим его к исследо-
исследованию интегралов с заданными квазистационарными <ха-лнниями, совпадающими с некоторым
r-кратным семейством характеристик оператора L. Будем считать, что операторы L н N заданы
формулами (П.3.1), и выполним в инх преобразование (П. 10.4). Получим
о 7=5 1 2 s=o
(П. 10.6)
Примем, что Л' — эллиптический оператор и его мнимые характеристики нигде не ка-
саютси действительных <ха-лнний. Это значит, что vn, 0 всюду отлично от нуля. Поэтому, учи-
учитывая неравенства, которыми в(П.10.1) ограничено число у., легко убедиться, что во втором
выражении (П. 10.6) наименьшая степень е, равна —п. Минимальная степень е в первом выра-
выражении (П. 10.6) зависит от вида оператора L и от свойств того семейства характеристик, ко-
которые являются квазистационарными линиями. Здесь получается та же ситуация, как и
в § П.6 (с заменой о^-линнй на <ха-линии). Для теории оболочек достаточно ограничиться
случаем, когда
min[ — s— (I— x)/| = — i-i-xr (П. 10.7)
и когда значение, стоящее справа, достигается только прн s = / — г, t = г. Этот случай со-
соответствует неравенству (П.6.8).
В рамках принятого предположения формулы (П. 10.6) можно переписать следующим
образом:
У,
(П.10.8)
причем под знаками сумм все степени е будут положительны, кроме тех, которые соответствуют
в первом выражении s= I — г, t = г, а во втором а= п, t = 0.
Потребуем, чтобы выполнялось равенство
„—'+НГ 2 —П /гт 1/ч Q\
ь — т| о > ^ii.iu.t?/
смысл которого выяснится ниже, подставим (П.10.8) в (П-3.1) и будем для полученного урав-
уравнения искать простой интеграл (§ П.1). Тогда уравнение первого приближения можно за-
записать так:
+4v..,
(П..0Л0,
В этих равенствах мы вернулись к первоначальным переменным аь а2, учли (П.10.9) и искус-
искусственно записали уравнение первого приближения в виде цепочки двух уравнений. Послед-
Последнее сделано, чтобы подчеркнуть, что в уравнении первого приближения существуют решения,
в которых частные производные отФ по а^ или, что то же, по |г, обращаются в тождественные
нули, начиная с некоторого порядка. Это — решения, соответствующие тривиальным интегра-
интегралам У = 0 первого уравнение (П. 10.10). Их, как уже говорилось, следует отбрасывать, как
не обладающие нужными свойствами.
Замечание. Принятие равенства (П.10.9) необходимо, так как иначе система (П. 10.10)
будет иметь только тривиальные решения типа V = 0.
Полученный результат можно рассматривать как дальнейшее обобщение результатов
§§ П.4, П.5. Рассмотренный там случай, когда квазистационарные линии не совпадают с ха-
<5 10] ИНТЕГРАЛЫ С ХАРАКТЕРИСТИЧЕСКОЙ КВАЗИСТАЦИОНАРНОЙ ЛИНИЕЙ 487
рактеристиками оператора L, получается, если положить равным нулю число г (кратность
характеристик L). Тогда уравнения (П. 10.10) примут вид
Этой системе соответствует уравнение (П.4.2) в том смысле, что, если искать решение
(П.10.11) в виде (П.2.2), то для построения функции изменяемости f снова получится уравне-
уравнение (П.4.2), которым определяются главные свойства интеграла с заданной квазистационар-
квазистационарной линией, не проходящей вдоль характеристик оператора L.
Первое равенство (П. 10.10) можно называть уравнением первого приближения для ин-
интегралов с квазистационарными <х2-линиями. В том и только в том случае, когда <х2-лиини не
совпадают с характеристиками оператора L, т. е. когда г = 0, это уравнение не содержит
производных по <х2 и, в сущности, является уравнением без частных производных. Для ин-
интегралов с характеристическими квазистационарными линиями, когда rj>0, оно перейдет
в (П. 10.10), т. е. станет параболическим.
Сопоставив (П. 10.9) с (П.3.2), получим формулу
т= Щ , . (П.10.12)
га — / -+- иг ' v
которой определяется показатель изменяемости интеграла с заданными квазистационар-
квазистационарными линиями проходящими вдоль r-кратных характеристик оператора L. Число и в настоя-
настоящем параграфе очевидно играет такую же роль, как и в § П.5: оио характеризует изменяе-
изменяемость рассматриваемого интеграла вдоль заданной квазнстационарной линии. А именно,
согласно (П.5.8) можно принять, что
Пользуясь этим, можно в (П.10.12) исключить и и получить следующую зависимость
между общим показателем изменяемости т и показателем изменяемости в направлении квази-
квазистационарной линии т':
" * = ЙТ7- (ПЛ0ЛЗ)
Отсюда видно, что т не зависит от т' тогда и только тогда, когда г— 0, т. е. для интегра-
интегралов с иехарактеристическими квазистационариыми линиями. В последнем случае получим.
как и в § П.4, что т = т» = 2/(га — /).
Из формулы (П. 10.13) легко вывести, что неравенство т' < т, которое очевидно должно
выполняться для интегралов с квазнстациоиарными линиями, будет действительно иметь
место тогда и только тогда, когда
' ^ n-l *
Этим требованием ограничиваются значения показателя изменяемости вдоль квазиста-
квазистационарной линии %, при которых существуют интегралы с этой квазнстационарной линией.
Замечание. Метод изменения масштабов очень широко применяется в геории оболочек
в зарубежных работах. Он выглядит весьма универсальным, но в действительности существуют
некоторые обстоятельства, существенно ограничивающие область его применения.
Если исследованию подлежат интегралы с большой изменяемостью, то изменение мас-
масштаба должно заключаться в его растяжении, а если изменяемость интегралов мала, то мас-
масштаб надо сжимать. При этом в первом случае изменяемость коэффициентов уравнения умень-
уменьшится, а во втором случае увеличится. Вместе с тем, как уже говорилось, надо требовать,
чтобы в новых независимых переменных решения имели «среднюю» изменяемость. Существо-
Существование таких решений при пониженной изменяемости коэффициентов (когда они мало отли-
отличаются от констант) представляется вполне естественным, но при весьма быстро меняющихся
коэффициентах это становится совсем не очевидным, а это значит, что для исследования ин-
интегралов с весьма малой изменяемостью метод изменения нельзя считать обоснованным.
В монографии Руттена [184] метод изменения масштаба положен в основу всего изло-
изложения общей теории оболочек, но сложности, вытекающие из вышеприведенных соображений,
не принимаются во внимание. Руттен отмечает, что его результаты не всегда согласуются
с результатами, изложенными в первом издании настоящей монографии [48]. При этом оказы-
оказывается, что все расхождения относятся к случаям, когда изменяемость исследуемого иапря-
женно-деформнрованного состояния весьма мала. При подготовке настоящего издания оспари-
оспариваемые Руттеном результаты были тщательно проверены. Однако поводов для их исправления
ие оказалось.
488 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
§ 11. Частный интеграл
Рассмотрим теперь неоднородное уравнение
(L + VW (Ф) = х е*Р (8?) (П.! 1.П
и покажем, что, если константа е достаточно мала, то при выполнении некоторых дополни-
дополнительных требований частный интеграл этого уравнения можно искать в виде
Ф = еа(рехр(е-1#). (П. 11.2)
Подставив (П. 11.2) в (П. 11.1) и отбросив экспоненциальный множитель, получим для
определения % уравнение
(Ф)н +enN<n) (<p)}f=e=-%. (П. 11.3)
В нем операторы U-1'^, Nia~-i> определяются формулами вида (П.2.5) с заменой Q
на L или N. a f — на g.
Будем считать, что в (П. 11.1) числа е и я связаны зависимостью (П.3.2), назовем х пока-
показателем изменяемости свободного члена, введем снова в рассмотрение число т*, определенное
формулой (П.3.6), и будем различать три следующих случая:
Случай I: т < т«. При таком т выполнится неравенство
в—1 > Ч2е-п+а = e2/t-n+o. (П. 11.4)
Заметив это, положим
а«=/ (П.11.5)
и будем считать, что ф определяется как простой интеграл полученного уравнения. В силу
(П. 11.4) и (П.2.5) это приведет иас к следующему уравнению первого 'приближения для ф:
Случай II: х <5т#. При таком т неравенство (П. 11.4) заменится иа обратное. По-
этому положив
а — п — 21%, (П.11.6)
получим для ф в первом приближении уравнение вида
Случай III: т = т». При таком т надо а определить формулами (П.11.5) или, что
то же. (П.11.6), а для ф при этом получится следующее уравнение первого приближения:
Итак, при любых х функцию ф можно, вообще говоря, строить при помощи итерацион-
итерационного процесса, заключающегося j последовательном решении алгебраических уравнений, выпи-
выписанных здесь в первом приближении. Исключение представляют случаи, когда где-либо
в рассматриваемой области будут выполняться соотношения
g = 0 прит<т#,
g = 0 прит>т„ (П.11.7)
Повторив рассуждения § П.З, легко заметить, что первые два равенства (П.11.7) имеют
простой смысл. Предлагаемый метод построения частного интеграла при с < т* или >*
S 12] РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ 489
применим только в том случае, если линии уровня функции g нигде не касаются характеристик
оператора L или N соответственно.
Если условия (П. 11.7) нарушены, то в общем случае вопрос построения частного ин-
интеграла уравнения (П. 11.1) становится сложным, и мы его разбирать не будем. Однако при
известных конкретных обстоятельствах здесь принципиальных трудностей не возникает.
Покажем это на примере.
Пусть линии уровня функции g совпадают с у—некоторым однократным семейством харак-
характеристик оператора L—и нигде не касаются линий другого семейства характеристик L. Тогда
при т, удовлетвориющем неравенству
ztt + T ¦ <ПЛ1-8>
можно указать простой итерационный процесс построения частного интеграла, положив
а—1-Х. (П.11.9)
Предполагается что g совпадает с характеристиками оператора L. Поэтому во всех точ-
точках рассматриваемой области выполняется уравнение
а так как характеристики у однократны и нигде не касаются характеристик других семейств,
то справедливо соотношение
означающее, что две функции левой части ни в одной точке не обращаются одновременно
в нуль.
В силу (П.11.10) уравнение (П. 11.3) можно записать так:
Вместе с тем из (П. 11.8) легко вывести неравенство
в следовательно, из (П.11.12) можно определить ф как простой интеграл, для которого урав-
уравнение первого приближения имеет вид
В этом уравнении оператор LA) расшифровывается по формулам вида (П.2.5), а следова-
следовательно, в силу (П. 11.11) главная часть (П.11.13) нигде не исчезает. Итак, показано, что, если
свободный член уравнения (П. 11.1) представляет собой функцию с большой изменяемостью
вида (П.2.2), то, вообще говоря, это уравнение имеет частный интеграл, представляющий со-
собой функцию такого же вида. При этом показатели изменяемости и функции изменяемости
у свободного члена и частного интеграла одинаковы. Различными могут оказаться только
функции интенсивности. В частном интеграле последняя содержит дополнительный множи.
тель е°, в котором число а определяется формулами (П. 11.5) или (П. 11.6). Это значит, что
функция интенсивности частного интеграла существенно меньше по абсолютным значениям,
нежели соответствующий свободный член. Достаточное условие справедливости высказанного
утверждения заключается в том, что линии уровня функции изменяемости свободного члена
при не слишком большом показателе изменяемости (т>тн<) не должны касаться характери-
характеристик оператора L, а при достаточно большом показателе изменяемости (т> т„ )они не должны
касаться характеристик оператора N. Частный интеграл обсуждаемого вида может существо-
существовать и при нарушении сформулированного выше условия. При этом, как показано на при-
примере, будут иметь место явления, которые можно назвать резонансными. Они заключаются
в том, что в дополнительном множителе в" число а уменьшается, так как формула (П. 11.5)
переходит в формулу (П.11.9).
§ 12. Решение краевых задач
Обсудим теперь, как можно из интегралов, рассмотренных в §§ П. 1—П.9, составлять
решения некоторых краевых задач.
Пусть область G, в которой надо решать краевую задачу, конечна и ограничена двумя
замкнутыми кривыми glt ga. Введем такую криволинейную систему координат (Ej, р"а), чтобы
в ней glt ga совпадали с 0г-линиями, а область G определялась неравенствами
^ t*2i Фц — констангы),
490
ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
я будем считать, что Plt рг — параметры криволинейной системы координат, подобной поляр-
полярной (рис. 58). Это значит, что два ураввення Рг = Рг0 и Рг = $п задают одну кривую, на ко-
которой должны выполняться условия возврата. Связанные с этим подробности несущественны
для дальнейшего и будут опущены. Допускается, что линия Pi = Рц может стягиваться в точку,
т. е. что область G может быть как двухсвязной, так н односвязноЙ.
Будем решать задачу Днрихле для уравнення вида (П.3.1), которое запишем теперь так:
(L 4- rfN) (Ф) = 0, L
tu
К
ds+t
gp+t
(П.12.1)
Напомним, что в §§ П.1.—П.9 криволинейная система координат аъ аг выбиралась
спепиальным образом (например, совмещалась с характеристиками операторов L или N).
В противоположность этому здесь криволинейная система координат р\, рг фиксируется с уче-
учетом вида области G. Поэтому будет считаться, чтоосц ос2 и р\, f32 имеют различный смысл, в связи
с чем коэффициенты операторов L, N отмече-
Pl'PlO ны штрихами. Переход от ах, а2 к р\, 0„ со-
совершается при помощи соотношений
Pi = Pi («1. «г)- Рг = Рг («i. <*г)- (П. 12.2)
Будет приниматься, что р\- и ра-лннии
нигде в интересующей нас области не каса-
касаются характеристик оператора L *)
Граничные условия задачи определим
равенствами (на р., = р10)
(П.12.3)
в которых g' — достаточно гладкие задан-
заданные функции точек контура Pj = р\0; 8% —
Рис. 58. символ Кронекера (неоднородным считается
только одно условие, относящееся к произ-
производной порядка т).
На линии рх = р1х также должны выполняться условия вида (П.12.3) или услония не-
непрерывности (если линия Р] = рп стягивается в точку), но мы пока нх не будем учитывать.
Постоянный параметр 8 в правой части (П.12.3) счнтается малым, т. е. рассматривается задача
Дирихле с сильно осциллирующими граничными условиями [24, 25]. Кроме того, прини-
принимаются следующие дополнительные предположения:
A) N и L — операторы порядка пи/, причем п и I — четные числа и п?> /;
B) N — эллиптический оператор, а тип оператора L произволен;
C) все семейства характеристик оператора L имеют одинаковую кратность, выражаемую
четным числом (такими же свойствами обладают и характеристики N);
D) если число е в правой части (П.12.3) связать с малым параметром 1) соотношением
.Т)"
(П.12.4)
то число в — показатель изменяемости граничных условий — огравичено неравенствами
2 -" - 2 , (П.12.5)
в которых г — кратность характеристик оператора L;
E). функция ч|> в (П.12.3) всюду на Pj = f310 удовлетворяет условию монотонности
(П.12.6)
Наша цель теперь будет заключаться в том, чтобы показать, что решение сформулирован-
сформулированной задачи можно составить как сумму интегралов, соответствующих характеристикам опера-
оператора L, и интегралов, локализованных в ф1 = р*1в + 0) и в (р*г = р*х1 — 0).
Рассмотрим интегралы вида
Ф
exp
Г = f0 + 8й 1,
(П.12.7)
*) Это, в частности, знаадм, что .раницы области О нигде не касаются характеристик L.
S 12] РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ 491
считая, что в них е имеет такой же смысл, как в граничных условиях (П. 12.3), и положим
е = г)х, т=9. (П. 12.8)
Тогда т в силу (П. 12.5) будет удовлетворять неравенстиам (П.6.10), а следовательно, будет
иметь силу изложенный в §§ П.6, П.7 метод построения интегралов вида (П. 12.7) для уравне-
уравнения (П. 12.1). Это значит, что в (П. 12.7) надо согласно (П.6.9) положить
x = -i- ("|- — « +Л (П.12.9)
и считать, что /0 и / удовлетворяют уравнениям (П.6.2) и (П.6.17). Оба эти уравнения выведены
в предположении, что о^-линии совмещены с характеристиками оператора L. Поэтому перейдя
а2 к Cj, Pa и разрешив равенство (П.6.17) относительно производной от /, можно написать
Потребуем, чтобы выполнялись условия
Ыв =В ='Ф. 71р =в, —О» (П.12.12)
равносильные требованию, чтобы в интеграле (П. 12.7) функция изменяемости f обладала сле-
следующим свойством:
Лр.=р„ == «t- (П. 12.13)
Уравнения (П. 12.10), (П. 12.11) представляют собой результат преобразования незави-
независимых переменных в уравнениях (П.6.2) и (П.6.17). Поэтому их характеристики совпадают
с тем семейством характеристик L, которое порождает рассматриваемый интеграл, а по пред-
предположению линия Рх = р10 не касается каких бы то ни было характеристик L. Отсюда выте-
вытекает что уравнения (П. 12.10) и (П. 12. И) заведомо имеют решения, удовлетворяющие усло-
условиям (П. 12.12). Для f0 это будет единственное решение, а для f получится г различных решений,
так как радикал в правой части (П. 12.11) надо, конечно, понимать в алгебраическом смысле.
Условимся называть интегралы вида (П. 12.7) при фиксированном в существенно различ-
различными, если их функции изменяемости f неодинаковы. Тогда полученный выше результат можно
сформулировать так; среди решений вида (П. 12.7), соответствующих /--кратному семейству
характеристик и удовлетворяющих условиям (П.12.12), есть ровно г существенно различных
интегралов (предполагается, что число е фиксировано и удовлетворяет требованиям (П. 12.4),
(П. 12.5))
Замечание. Из вышеприведенных рассуждений вытекает, что главная часть функции
изменяемости f0 остается одинаковой для всех существенно различных интегралов, соответ-
соответствующих фиксированному r-кратному семейству характеристик L. Различие в функциях
изменяемости в них проявляется лишь во второстепенных слагаемых, содержащих f.
Так как интеграл вида (П. 12.7) удовлетворяет условию (П. 12.13), то при р\ = р104>унк-
ция Ф является величиной порядка О (ф). Если, кроме того, выполняется условие
Reidfr) <0> (П. 12.14)
то абсолютные значения Ф в окрестности рх = C10 будут экспоненциально убывать с возраста-
возрастанием р\, н при достаточно малых е это убывание станет весьма интенсивным. Учитывая это,
назовем (П. 12.14) условием экспоненциального затухания вблизи рх = р10 (подразумевается
затухание при движении вглубь рассматриваемой области) и поставим вопрос: сколько можно
построить существенно различных интегралов, соответствующих всем характеристикам L,
которые удовлетворяют краевому равенству (П. 12.13) и условию экспонеипиального затуха-
затухания (П. 12.14).
Примем, что L имеет /--кратное семейство действительных характеристик, и рассмотрим
соответствующие ему интегралы, удовлетворяющие условиям (П.12.12). В этом случае можно
принять, что введенные в § П.6 независимые переменные а1? а2 яиляются параметрами дей-
действительной системы координат, и считать поэтому, что в правых частях (П. 12.2) стоят дей-
действительные функции. Тогда коэффициенты уравнения (П. 12.10) будут действительными, и его
решение, удовлетворяющее первому условию (П.12.12), очевидно должно быть чисто мнимым.
Это значит, что условие экспоненциального затухания (П. 12.14) и силу второго равенства
(П. 12.7) примет вел
dPjPi=P».
492 ПРИЛОЖЕНИЕ АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
Но функция/ определяется из уравнения (П. 12.11) и второго граничного условия
(П.12.12). Учитывая это, примем, что (П. 12.11) выполняется всюду, включай границу, положим
рх = р10 в этом равенстве н упростим его, заметив, что в силу второго условия (П.12.12) про-
изводнаи от f по Р2 исчезает при Pj = р10. Получим
(п-12'6>
Ни одна из величин
ие обращается в нуль. Первая из них — потому, что о^-линия есть характеристика L, а Рх-
линня с ней нигде не соприкасается; относительно второй и третьей величин соответствующее
предположение было принято в § П.6, а для последней величины это следует из первого ра-
равенства (П.12.12) н дополнительного условия (П. 12.6). Отсюда вытекает, что условие (П. 12.15),
а вместе с ним н (П. 12.14) будет, вообще говоря, выполняться ровно в г/2 решениях, которые
возможны для функции f (напомним, что г четно). Исключения возможны. Они имеют место,
когда в правой части (П. 12.16) радикал имеет чисто мнимое значение. Эти случаи легко обна-
обнаружить в конкретных задачах, и мы их исключим из рассмотрения, так они не реализуются
в уравнениях статической теории оболочек.
Итак, каждому г-кратному семейству действительных характеристик L при четном т
и некоторых дополнительных обстоятельствах, всегда имеющих место в теории оболочек,
соответствует ровно г/2 существенно различных интегралов, удовлетворяющих требованию
(П.12.13) и условию экспоненциального затухания (П. 12.14)
Обратимся к случаю, когда L имеет r-кратное семейство мнимых характеристик у. Так
каи по предположению оператор L действителен, то он одновременно должен иметь и г-крат-
ное семейство комплексно-сопряженных характеристик у. Под этим подразумевается следую-
следующее: если для у переход от alt a2 к Р1% Р2 осуществляется прв помощи (П. 12.2), то дли у этого
результата можно достигнуть при помощи равенств
Pi=== Pi (o&i» о^г)* Рг === Рг (^1» ^а)
(функции р1? Рг должны быть, разумеется, комплексными, а черточка сверху означает ком-
комплексную сопряженность).
Уравнение (П. 12.10), так же как и комплексно-сопряженное ему уравнение (получаю-
(получающееся заменой Р,, рг на Р], Рг), имеет, конечно, только комплексные^решения. При этом, если
первое из них имеет решение /0, то второе заведомо имеет решение — /0, а в том случае, когда /0
удовлетворяет первому условию (П.12.12), этому же условию будет удовлетворять и —/0.
Отсюда следует, что каждой паре комплексно-сопряженных г-кратных (г — необизательно
четно) мнимых характеристик L всегда соответствует ровно г существенно различных интег-
интегралов, удовлетворяющих краевому равенстну (П.12.13) и таких, что в них главная часть
функции изменяемости удовлетворяет условию экспоненциального затухания вблизи Bi = р10.
При достаточно малом е можно принять, что последнему условию, т. е. неравенству (П. 12.14),
удовлетвориет и функция f в целом.
*Если порядок оператора L равен четному числу /, то из сказанного выше вытекает, что
в общей сложности можно построить 1/2 существенно различных интегралов, соответствую-
соответствующих характеристикам L, удовлетворяющих краевому равенству (П.12.13) и условию экспо-
экспоненциального затухания вблизи рх = 610.
Введем теперь в рассмотрение интегралы, локализованные в (Р10 ¦+¦ 0) (см. § П.5), и
зададим их так:
считая, что X — малый параметр, определяемый формулой
2
*, =!)"-'. (П.12.18)
Из этого равенства и равенства (П. 12.8) следует, что
е —
X 2 =в. (П.12.19)
В силу (П. 12.5) справедливы неравенства
o<i-e^-<i.
I 13J РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ 493
Поэтому при построении интеграла X можно пользоваться результатами § П.5, отождествив
Ф> fo< 7> е с Х< *о> х> ^ соответственно и положив
В § П.5 при выборе координатной системы предполагалось только, что заданная квази-
квазистационарная линия должна совпадать са, = а10 = const. Поэтому можно считать, что пара-
параметры а1? а2 в данном случае совпадают с р\, ра. Для /0 и7 были выведены уравнения (П.5.2),
(П.5.6). Они сохраняют силу для х0, х, если в этих уравнениях отождествить а,1, ос2 с рх, |32,
под /х понимать производную от х0 по EХ и расшифровывать левую часть (П.5.6) при помощи
второй формулы (П.5.4). Эти уравнения обсуждались уже в § П.5. При их интегрировании
можно выполнять граничные условия
и требовать дополнительно, чтобы имело место экспоненциальное затухание. Из результа-
результатов § П.5 вытекает, что такая задача имеет ровно (п — /)/2 решений. Это значит, что есть ровно
(п — 1I2 существенно различных интегралов, локализованных в ф10 + 0) и таких, что в иих
выполняется краевое равенство
очевидным образом следующее из (П.12.17), (П.12.19) и (П.12.20).
§ 13. Решение краевых задач (продолжение)
Покажем теперь, что, если в обсуждаемой задаче Дирихле сохранить пока только гра-
граничные условия (П. 12.13), т. е. не учитывать условий на краю Pi=Pii, то решение можно
искать в виде
/1-4
1/2 2
Ф = Ц° S ф» + Ч* Ц Х*> (П.13.1)
Ф<, = Ф„ехр(8-1Н, Ха =Хвехр(Я.-1*<т). (П.13.2)
Здесь а, Ь — числа, которые будут выбираться ниже; Фв — существенно различные интегралы,
соответствующие характеристикам L, удовлетворяющие граничному равенству (П. 12.13)
и условию экспоненциального затухания вблизи фг = р"ю); Х<г — существенно различные
интегралы, локализованные в (Рх = ^10 + 0) и удовлетворяющие граничному равенству
(П.12.21). Из рассуждений § П. 12 вытекает, что существует ровно столько функций Фо
и Хв, сколько нужно для составления сумм (П.13.1).
Будем подставлять (П.13.1) в граничные условия (П. 12.3) и воспользуемся для этого
формулой (П.2.5). Положив в ней
"Pi
и приняв во внимание (П. 12.4), (П. 12.2), получим формулу
[(^f <РО + *Dp) (Фо)] ехр (в-if), (П.13.3)
в которой
/4ц, = а—цв, (П. 13.4)
a D^ — конечный (при е -*¦ 0) оператор.
Так же, учитывая (П.12.17), (П. 12.18), будем иметь
(Х„)]ехр OL-^i"). (ПЛ3.5)
(П.13.6)
ft ~~~
494 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
Функции /* и х° должны при любых о удовлетворять граничным равенствам (П. 12.13)
и (П.12.21). Поэтому равенства, получающиеся после подстановки (П. 13.1). (П. 13.3), (П. 13.5)
в граничные условия (П. 12.3), можно сократить на экспоненциальный множитель. В резуль-
результате мы будем иметь граничные условия
п-1
1/2 2
[@][(ш
(Pi = Рю; И = 0, 1, ..., и/2),
в которых точками обозначены слагаемые вида О (е).
Для того чтобы получить удобный процесс выполнения граничных условий, надо в фор-
формулах (П. 13.4), (П. 13.6) надлежащим образом выбрать числа а, Ь. Если число т (порядок
производной, граничное значение которой отлично от нуля) подчиняется неравенству т <
< 1/2, то надо положить
тб, Ъ = тв + ~ ( —— — в ) .
2 \ П — I I
При этом будут справедливы соотношения
А\х < вц ПРИ Ц < —, Аи = Ви при и = -?¦,
Вц<Ли при Ц>—, Аи = О, В„ > 0 при ц = т.
Из них следует, что если в (П. 13.7) сохранить только слагаемые вида О (т)°), то эти равенства
можно записать в виде
*?*110 (Р»=Р»: Ц = 0, 1, ¦••.//2-1), (П.13.8)
n—l
2
ж") Хо] = ° (Pi ==0ю-. Ц='/2, //2 + 1 , (п- 0/2-1).
Их можно рассматривать как систему алгебраических уравнений относительно граничных
значений ш„ и %а- Для фя мы получаем при этом неоднородную подсистему (П.13.8), состоя-
состоящую нз 1/2 уравнений со столькими же неизвестными. После определения ф„ можно найти %g
из подсистемы (П. 13.9), в которой также число уравнений н число неизвестных одинаковы.
Аналогичный результат получится и в случае, когда число т находится в пределах 1/2 ^
g; т < (п — /)/2. Тогда а и Ь надо выбрать так:
a = ; — I -=
В результате вместо (П.13.8), (П. 13.9) получим алгебраические уравнения
_ _ _ (П. 13.10)
п—1
X (ж-I" *<л = 6u«(|l) (Pi = Pi«: p=w, m +1 (л— o/2—i). (р.1з.л)
$ 13] РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ 495
Из них также можно определять граничные значения <р„ и Хя. но только надо сначала находить.
%, из подсистемы (П. 13.11), а затем находить (р„ из подсистемы (П. 13.10).
Определители Дг> Д, подсистем (П. 13.8), (П. 13.9) и подсистем (П. 13.10), (П. 13.11) оди-
одинаковы. Они имеют вид (нижний индекс 1 при fa и хв означает производную по EГ)
(Pi-Рю; «=1.2,
г±
д2 =
«- А к)Ч
La=l J
-a=l
(Pi = Pio: o = l,2, .... (n— 1I2, M=0, 1, .. ., (n-0/2— 1),
т. е. пропорциональны определителям Вандермонда.
Выше уже говорилось, что величины /? при разных о имеют разный смысл и что таким же
свойством обладают величины х*. Справедливо и более сильное утверждение (на доказатель-
доказательстве которого мы не будем останавливаться), что во всех точках контура р\ = р0
/f^/T, *f**i (т^-a). /f *0, *f=?0.
Отсюда вытекает, что Д, =? О, Да =? О, а следовательно, граничные значения функций фв
и Ха можно во всех точках контура р\ = $10 выразить через заданную функцию g(li). Вместе
с тем, из результатов §§ П.5, П.7 вытекает, что каждая из функций интенсивности <р0 и /»
в первом приближении удовлетворяет некоторому линейному уравнению первого порядка и
что характеристики этого уравнения нигде не касаются контура р1 = р0. Требуемое утвержде-
утверждение можно считать доказанным. Указан метод, при помощи которого в первом приближении-
можно выполнить (единственным образом) граничные условия (П. 12.3) за счет произволов,
содержащихся в решении вида (П. 13.1), (П. 13.2). Построение первого приближения сводится
к решению некоторого числа задач Коши для линейных уравнений первого порядка, поэтому
изложенный метод можно использовать и как эффективный прием полученяя приближенного
решения [101—104]. Его можно уточнить при помощи итерационного процесса, на подроб-
подробностях которого мы ие будем останавливаться.
Замечание. Функции f{, как уже говорилось, различаются друг от друга при разных о
только во второстепенных слагаемых , поэтому Alt хотя и отлично от нуля, но мало при малом е.
Связанные с этим вопросы мы также не будем разбирать.
В описанном решении использованы только экспоненциально затухающие интегралы.
Поэтому можно считать, что все члены суммы (П. 13.1) у края р\ = EU по модулю мало отли-
отличаются от нуля, и значит при (Зх = (Зи приближенно выполняются однородные условия вида
(П. 12.3) или условия непрерывности (если рх = рх1 стягивается в точку). Таким образом,
предлагаемый подход является приближенным методом решения задачи Дирихле для случая,
когда неоднородность содержится только в граничных условиях на краю рх = E]0.
Рассмотренная задача Дирихле линейна. Поэтому, использовав принцип суперпозиции,
можно значительно обобщить ее постановку, считай, что все граничные условия (П.12.3)-
неоднородны и имеют правые части вида
в которых gs, ips — заданные функции точек линии EХ = (im, а 8s — числа, отвечающие тре-
требованиям (П. 12.4), (П. 12.5) (в общем случае gs, *|)s, es могут иметь различный смысл для раз-
разных значений s). Очевидно также, что и на крае рх = ^Х1 в граничных условиях можно допус-
допускать неоднородность вида (П. 13.12). При этом, конечно, в решение войдут уже интегралы, со-
соответствующие характеристикам L, которые удовлетворяют при Pt = Р1Х равенствам вида
(П. 12.12) и для которых условия экспоненциального затухания имеют вид
а также интегралы, локализованные в (р\ = EU —0).
Вернемся к неравенствам (П. 12.5), которым должны удовлетворять значения показателя
изменяемости граничных условий 6, определенного формулой (П. 12.4), и начнем с обсужде-
обсуждения ограничения в сверху. Оно необходимо, так как при
6>—5Ц- (П. 13.13)
не существуют ни интегралы, соответствующие характеристикам оператора L, ни интегралы,
локализованные в (р\ = ^10 + 0). Вместе с тем становится возможным построение интегра-
интегралов, соответствующих характеристикам оператора N. Этн интегралы обсуждались в §§ П.8,.
496 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
П.9, где было показано, что по своим свойствам оин вполне аналогичны интегралам, соответ-
соответствующим характеристикам оператора L, поэтому, повторив приведенные здесь рассуждения,
легко убедиться, что есть ровно »/2 существенно различных интегралов, соответствующих
характеристикам N и таких, что они удовлетворяют граничным равенствам вида (П. 12.12),
а также условию экспоненциального затухания вблизи f3j = Р1(, вида (П. 12.14). Учитывая
все это, можно утверждать, что решение задачи Дирихле с граничными условиями вида (П. 12.3)
при рх = р10 и с однородными граничными условиями при р\ = p\j будет иметь вид
nfl
Здесь Ф„ — существенно различные интегралы, соответствующие характеристикам N, о кото-
которых говорилось выше (дли них оставлены обозначения, применявшиеся для интегралов, со-
соответствующих характеристикам L), а для и вместо (П. 12.9) надо принять такие определяю-
определяющие равенства:
) пи е^
-г(»-'-т) при ^=тз1
, 2 (П.13.15)
Обобщения ?того результата, связанные с линейностью задачи, очевидны.
Если показатель изменяемости граничных условий 6 заключен в пределах
0<8< п_]+г , (П.13.16)
то форма решения (П. 13.1), (П. 13.2) остается в силе (конечно, для того случая, для которого
она предназначена). Однако при выполнении условий (П.13.16) интегралы, соответствующие
характеристикам L, надо строить, основываясь на результатах § П.6. Это значит, что во втором
равенстве (П. 12.7) надо положить t = 0, т. е. считать, что функции изменяемости f" не зави-
зависят от в. Но выше было показано, что в интегралах, соответствующих фиксированному г-крат-
ному семейству характеристик L и удовлетворяющих условиям (П. 12.12), функции изменяе-
изменяемости / отличаются только смыслом слагаемого с /. Следовательно, теперь г существенно раз-
различных интегралов, порождаемых r-кратным семейством характеристик L, сольются в интег-
интеграл, в котором функция интенсивности удовлетворяет уравнению не первого, а r-го порядка.
Таким образом, в общей сложности число существенно различных янтегралов, соответствую-
соответствующих характеристикам L, будет равно /' = 1/г (напомним, что кратность всех семейств характе-
характеристик L одинакова). Примем, что /' четио, выберем каким-то образом из них /72 существенно
различных интегралов (не накладывая пока условий экспоненциального затухания по рх)
н будем считать, что в первом слагаемом (П. 13.1) верхний предел суммирования равен /72.
Тогда уменьшение числа членов первой суммы (П. 13.1) будет компенсироваться повышением
порядка уравнений, которым должны удовлетворять в них функции интенсивности ф0, и,
не входя в подробности, можно сформулировать следующий вывод: если показатель изменяе-
изменяемости граничных условий (П. 12.3) заключен в пределах (П.13.16), то (П. 12.3) можно выполнить
за счет пронзволов, содержащихся в решении (П. 13.1); при этом предел суммирования в пер-
первой сумме будет равен /72, определение каждой из функций ф„ сведется к решению задачи
Коши для линейного уравнения порядка г, а для каждой из функций %д получится по-преж-
по-прежнему задача Коши первого порядка.
Построенная таким образом функция Ф удовлетворяет только граничным условиям
(П. 12.3) на крае рх = E10. Если речь идет о задаче Дирихле, в которой, кроме того, ставятся
однородные условия (или условия непрерывности) на крае EХ = Р11( то Ф можно рассматри-
рассматривать как приближенное решение этой задачи только в том случае, если /72 существенно раз-
различных интегралов в первой сумме удастся подчинить требованиям экспоненциального зату-
затухания по р\. Но в рассматриваемом случае функцин изменяемости f в первом равеистве (П. 13.2)
не зависят от е и совпадают с /•, которые в общем случае назывались главными частями fe.
Вместе с тем было показано, что, если речь идет об интегралах, соответствующих мнимым
характеристикам L, то f% комплексны и, взяв пару комплексно-сопряженных семейств характе-
характеристик L, можно найтн нужное число соответствующих им интегралов, удовлетворяющих
условиям экспоненциального затухания. Это значит, что, если L — эллиптический оператор,
то предлагаемый здесь метод приближеиного решения задачи Дирихле сохраняет силу и в слу-
случае, когда в ограничено неравенствами (П.13.16). Наоборот, если L — гиперболический или
параболический оператор и имеет поэтому действительные характеристики, то в соответствую-
соответствующих им интегралах в силу граничного равенства (П. 12.13) функцин fo станут чисто мнимыми
н выполнить условие экспоненциального затухания не удастся. В результате в решении вида
* 14j КРАЕВАЯ ЗАДАЧА ТЕОРИИ ОБОЛОЧЕК 497
(П. 13.1) появятся интегралы, распространяющиеся без затухания иа всю область G, и прием
раздельного выполнения граничных условий на краях $г = р10 и Рх = Р,, станет непри-
неприменимым.
В этом случае возникнут осложнения такого же содержания, как и в задачах, рассмо-
рассмотренных в работе [22], если не выполнятся условия регулярности вырождения.
§ 14. Краевая задача теории оболочек
Обозначим через V напряженно-деформированное состояние оболочки, ограниченной
S
некоторым числом замкнутых краев 7/, и будем считать, что V задается своими компонентами V
(под ними подразумеваются пронумерованные в определенном порядке усилия, моменты, пере-
перемещения, углы поворота и т. д.). Примем, что существует разрешающее уравнение
М(Ф) = 0. (П. 14.1)
эквивалентное в некотором смысле однородной (при отсутствии внешних поверхностных сил)
S
системе уравнений теории оболочек, т. е. такое, что компоненты У можно выразить через ре-
решения уравнения (П. 14.1) при помощи формул вида *)
У = т(Ф) (П. 14.2)
t
(т — символ однородного линейного дифференциального оператора).
Пусть известно решение краевой задачи, заключающейся в интегрировании дифферен-
дифференциального уравнения (П. 14.1) с учетом некоторых граничных условий, которые однородны
иа всех краях V/. за исключением одного края у, а на у эти граничные условия имеют вид
v\y = &1трехр (te-Ч) (s = su s2> s3, s4) (П. 14.3)
(Si — символ Кроиекера, р. -ф — заданные функции точек линии у; sj, s8, &j, s< — номера
tn
тех компонент Ф, значения которых задаются на у. т = 1, 2, 3, 4).
Умея решать описанную выше задачу и пользуясь принципом суперпозиции, можно
найти решения и значительно более общих задач. Например, можно считать, что в правой
части неоднородного условия (П. 14.3) стоит выражение
позволяющее аппроксимировать функпии весьма широкого класса (§ 12.30)
Очевидным образом, решение можно распространить и на случай, когда неоднородны
все граничные условия на всех краях у/, а также на случай, когда на оболочку действуют
внешние поверхностные силы н уравнение (П. 14.1) становится неоднородным. Это значит,
что, изучив математические свойства решения краевой задачи (П. 14.1), (П. 14.3), мы сможем
судить о свойствах напряженно-деформированного состояния оболочки, вызванного краевыми
или поверхностными воздействиями практически любого вида.
При обсуждении свойств решения краевой задачи (П. 14.1), (П. 14.3) ограничимся слу-
случаем, когда в (П. 14.3) число е мало, т. е. будем считать, что изучаемое напряженно-деформи-
напряженно-деформированное состояние V вызвано краевым воздействием, имеющим достаточно большую нзменя-
Мость. Естественно предположить (и это подтвердится в дальнейшем), что изменяемость V
будет также не мала. Примем поэтому, что V можно приближенно строить, исходя из следую-
следующей системы уравнений:
(П.14.5)
^ ' / д Аг 1 д д А, 1 д \
АЛА2 \ <3а, Л, Я2 <3о, т да2 А2 Л, да? /'
*) Эта эквивалентность, по-видимому, может быть только приближенной, так как урав-
уравнения теории оболочек пока не удалось свести к одному уравнению.
32 д. Л. Гольденвейзер
498 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИИ
выведенной в § 10.24 для напряженно-деформированных состояний с большой изменяемостью
(для упрощения записи считается, что срединная поверхность отнесена к линиям кривизны).
При интегрировании уравнений (П. 14.5) с некоторой степенью приближенности можно
«заморозить» их коэффициенты, т. е. обращаться с ними, как с константами (§ 10.24). Поскольку
предстоящие рассуждения имеют качественный характер, воспользуемся этим (не касаясь
допускаемых погрешностей), чтобы привести систему (П. 14.5) к одному уравнению. Положим
= — ДДФ, с = ДяФ, (П.14.6)
тогда второе уравнение (П. 14.5) примет вид (считается, что 2Eh = const
— Ад ДДФ + ДДДдф = 0,
но коэффициенты операторов Д и Д# рассматриваются как константы. Поэтому символы Д
и Д« можно менять местами, и написанное равенство обращается в тождество. Следовательно,
второе уравнение (П. 14.5) выполнится прн любых Ф. Подставив (П.14.6) в первое равенство
(П. 14.5), получим искомое уравнение
f h' Г I ( д A, d d Ai d \Л*
\ 3A—v2) Ui4j \da, Ал да, "*" даг А2 da2 ) J "*"
Г 1 / б А2 1 d б A1 1 д \-\2\ (Г._п ,п
+ [а\а; \~д*7 Аг Т^ьн^'З^и; Г*?"Л /ф-° (п.м.7>
(оно записано в однородном варианте, т. е. в предположении, что Z = 0; в более общем слу-
случае справа надо написать — Z).
Уравнение (П. 14.7) мы и будем считать эквивалентным системе уравнений теории обо-
оболочек. Оно обладает зтим свойством, конечно, только в пределах определенных погрешностей,
и в рамках той же точности в (П. 14.7) можно было бы оставить только члены со старшими про-
производными, однако удобнее сохранить прежний внд этого уравнения.
Каждому решению уравнения (П. 14.7) соответствует некоторое напряженно-деформнро-
s
ванное состояние, компоненты которого V можно подсчитать при помощи формул (П.14.6)
и расчетных формул § 10.22. Не останавливаясь на подробностях, отметим, что это и приведет
иас к соотношениям, условно выраженным равенством (П. 14.2).
Уравнение (П.14.7) является частным случаем уравнения (П.3.1). Переход от второго
к первому можно осуществить, положив в (П.3.1)
г) = -Q- {R — характерный раднус кривизны),
-v«) [AtA2 \dal Аг да^ ^ да2 Аг да J J •
3A
1__*_+_д_ь±_*_— (п14-8>
?s даг да2 А2 /?i даг
Итак, для того чтобы использовать в теории оболочек математические результаты
§§ П.1—П. 13, надо считать, что
A) п=8, 1=4;
B/ N — эллиптический оператор, имеющий два комплексно-сопряженных семейства
мнимых характеристик, кратность каждого нз которых равна четырем (в рассуждениях, от-
относящихся к N, надо полагать г= 4);
C) L — оператор, характеристики которого совпадают с асимптотическими линиями
срединной поверхности, а тип определяется знаком гауссовой кривизны К\ если /С > 0, то
L — эллиптический оператор с двумя двухкратными комплексно-сопряженными семействами
мнимых характеристик, если К<10,то L — гиперболический оператор с двумя двухкратными
семействами действительных характеристик, если К = 0, то L — параболический оператор
с одним четырехкратным семейством действительных характеристик (в рассуждениях, отно-
относящихся к L, надо полагать г = 2 при К. Ф 0 и г = 4 при К = 0).
Приближенное равенство (П.3.14), получающееся в результате отбрасывания всех чле-
членов с малым множителем tf, соответствует уравнениям безмоментной теории (§ 7.3), а прибли-
приближенное равенство (П.3.16) соответствует уравнениям теории напряженных состояний с весьма
большой изменяемостью (§ 24.13).
Замечание. При рассмотрении интегралов, соответствующих характеристикам операто-
операторов L и N, в §§ П.6—П.8 мы, сокращая число вариантов, приняли предположение, что для L
справедливы неравенства (П.6.8), а для N справедливы неравенства (П.8.5) илн (П.8.6). Все
они, вообще говоря, выполняются, когда L и N определены формулами (П.14.8). Исклю-
Исключения возможны, и нетрудно показать, что они не изменяют окончательных выводов, но
на этом мы останавливаться не будем. >
$ 15] ИЗМЕНЯЕМОСТЬ НАПРЯЖЕННОГО СОСТОЯНИЯ ОБОЛОЧКИ 499
Сравним краевую задачу (П. 14.1), (П.14.3) с краевой задачей (П. 12.1), (П. 12.3). В них
дифференциальное уравнение (П. 14.1), как уже сказано, представляет частный случай
(П.12.1). Однако граничные условия (П.14 3) и (П.12.3) друг к другу, вообще говоря, не
сводятся. Равенства (П. 12.3) являются классическими условиями Дирихле: в них задают-
задаются нормальные производные всех порядков до л/2 — 1, а в левых частях условий
(П.14.3) стоят дифференциальные выражения (П. 14.2) более общего вида. Тем не менее, мы
будем здесь краевую задачу (П.14.1), (П.14.3) рассматривать как частный случай краевой
задачи (П. 12.1), (П. 12.3) и примем, что по выявленным в §§ П. 12, П. 13 свойствам послед-
последней можно судить о свойствах напряженно-деформированного состояния оболочки. Это, в част-
частности, значит, что края оболочки должны быть неаснмптотическими, так как в § П. 12 пред-
предполагалось, что граница области нигде не касается характеристик оператора L, а в теории
оболочек они совпадают с асимптотическими линиями срединной поверхности (возможное
влияние различия в типе граничных условий на окончательные выводы будет обсуждено
ниже).
§ 15. Изменяемость напряженно-деформированного состояния
оболочки
Пусть краевое воздействие определяется равенствами (П.14.3) и в них е мало. Тогда из
результатов § П. 12 вытекает следующий общий вывод. Соответствующее этому случаю на-
напряженно-деформированное состояние ?, вообще говоря, будет составляться из некоторого
числа напряженно-деформированных состояний, каждое из которых определяется решением
вида (ц — малый постоянный параметр)
Ф = ф ехр (\1~Щ. (П. 15.1)
Исключения из этого правила возможны и выявятся-ниже, но пока они не принимаются
во внимание.
Прежде чем идти дальше, внесем некоторые уточнения в первостепенно важное для тео-
теории оболочек понятие об изменяемости.
Изменяемость была введена в §§ 9.13, 12.30 как свойство функции с большей илн мень-
меньшей быстротой менять свои значения при переходе от точки к точке в плоскости независимых
переменных. Поэтому, если речь идет о функции двух (для конкретности) переменных g (аь а2),
то под мерой изменяемости по некоторой переменной Р = а1а1 + агаа естественно понимать
величину
3 g
(случай, когда в рассматриваемой области g = 0, исключается). Определенная таким обра-
образом мера изменяемости зависит как от значений а,, а2, так и от смысла варьируемой перемен-
переменной р. Это отражает тот очевидный факт, что в общем случае функция по-разному изменяется
в разных точках, а если точка фиксирована, то изменяемость будет различна в разных направ-
направлениях и при разном выборе масштабов р.
Унифицируем некоторым образом масштабы изменения варьируемых переменных, на-
например, примем, что все они выражают безразмерные длины дуг. Тогда о- можно назвать
частной мерой изменяемости (в направлении Р).
Для функции (П. 15.1; мы имеем
дФ _ _\
Поэтому, если модули ф и 3, имеют одинаковый порядок, а (.1 — малый параметр, то с точ-
точностью до величин вида О (ц) получим
(П.15.2)
В тех случаях, когда рассматриваются задачи, содержащие малый параметр А* (как,
например, безразмерная толщина в задачах теории оболочек), вместо меры изменяемости og
удобно пользоваться показателем изменяемости Тр, определив его при помощи равенства
^ = Л,Х (П. 15.3)
32*
500 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЯ
Логарифмируя это равенство при основании Л* и используя (П. 15.2), можно написать
Отсюда следует, что, если
-|^-| = ОA), (П.15.4)
то второе слагаемое в правой части формулы для т^ будет мало- Следовательно, справедлива
приближенная формула
т3 = т = lg^y. (П. 15.5)
Таким образом, дли функции вида (П. 15.1) показатель изменяемости можно прибли-
приближенно выразить общим для всех точек рассматриваемой области числом т, связанным с Л*
использованной уже выше формулой
Ц = й*. (П. 15.6)
Отсюда следует, что при малых ц выражение вида (П. 15.1) можно назвать не только функ-
функцией с большой изменяемостью, как делалось выше, но и функцией с большой однородной
изменяемостью, подчеркивая этим, что для нее понятие о показателе изменяемости, выра-
выражаемое некоторым числом, имеет реальный смысл, так как он мало мениется от точки к точке.
Условие (П.15.4), использованное при выводе формулы (П.15.5), может и нарушиться.
Это случится, например, тогда, когда точно или с достаточной степенью приближенности
выполнится равенство
Направление, в котором изменяется Р в левой части этого равенства, мы назовем квази-
квазистационарным направлением для данной функции вида (П. 15.1), а линии, идущие в каждой
точке в квазистационарном направлении, будем называть квазистационарными линиями.
Очевидно, что квазистационарным будет такое направление, в котором Ф меняется сущест-
существенно медленнее, чем в любом неквазистационарном направлении. При этом, еслиф комплексна,
то в квазистационарном направлении относительно медленно будут меняться и действитель-
действительная часть Ф, и коэффициент при ее мнимой части. Заметим, что при решении интересующих
нас краевых задач надо учитывать и случаи, когда функция изменяемости f комплексна. По-
Поэтому надо считать, что функция (П. 15.1), вообще говоря, не имеет дейстиительных квази-
квазистационарных направлений.
Пусть f в формуле (П. 15.1) определяется так:
г. е. имеет тот вид, в котором мы получили функции изменяемости при интегрировании урав-
уравнения (П.3.1). Тогда / будет приближенно удовлетворять равенству (П. 15.7), если
Вычисляя для этого случая меру изменяемости о» при помощи (П.15.2), получим приближен-
ную формулу
=, ц-1+*
Г
Поэтому, логарифмируя вновь (П.15.3) и воспользовавшись равенством (П.15.6), получим
формулу
тэ = A— xjt. (П. 15.8)
Она связывает частный показатель изменяемости тр в квазистационарном направлении с пока-
показателем изменяемости т в нестационарном направлении, который мы в дальнейшем будем
называть общим.
Функция вида (П. 15.1), если она является решением уравнения (П. 14.7), соответствует
s
векоторому напряженно-деформированному состоянию оболочки *F. Его компоненты *F опре-
определяются равенствами (П. 14.2), в правых частях которых, как уже говорилось, стоят однород-
S
яые дифференциальные операторы от Ф. Следовательно, *Р можно подсчитать по формулам
§ 16] ХАРАКТЕР НАГРУЗКИ И ИЗМЕНЯЕМОСТЬ СОСТОЯНИЯ ОБОЛОЧКИ 501
s
вида (П.2.4). Из них вытекает, что любая из величии V есть также функция с большой однород-
S
ной изменяемостью вида (П. 15.1). При этом все W имеют одинаковую функцию изменяемости f,
S
и смысл числа ц для всех V одинаков (они отличаются лишь смыслом функции иитенсивностн).
Это позволяет перенести все сказанное выше относительно свойств функции Ф и иа соответст-
соответствующее ей напряжеино-деформированиое состояние оболочки V. А именно, будем говорить,
что в этом случае V есть напряженно-деформированное состояние с большой однородной из-
изменяемостью, его общий показатель изменяемости т определяется формулой (П.15.6). Можно
говорить и о квазистационариых направлениях (линиях), под которыми надо понимать квази-
стаииоиарные направления функции (П. 15.1). Если последние действительны, то это будут
направления, вдоль которых существенно медленнее меняются все компоненты иапряжеиио-
деформированного состояния V. Если квазистациоиарные направления мнимы, то это значит,
что не существует направлений (действительных), в которых относительно медленно меняются
s
все компоненты Ч' (при этом, конечно, для отдельно взятых V направления относительно мед-
медленного изменения могут и существовать).
§ 16. Зависимость изменяемости напряженно-деформированного
состояния оболочки от изменяемости
краевого воздействия
Утверждение, высказанное в начале § П. 15, теперь можно сформулировать так: краевое
воздействие, имеющее большую однородную изменяемость, вызывает в оболочке некоторую
совокупность напряженно-деформированных состояний, каждое из которых в отдельности
также имеет большую однородную изменяемость. Переходя к более детальному обсуждению
зависимости напряженно-деформированного состояния оболочки от свойств породившего
его краевого воздействия, будем считать, что последнее задается краевыми условиями (П. 14.3),
и введем понятие о показателе изменяемости краевого воздействия, подразумевая под этим число
в, определяемое равенством
8 = А9.
*
Тогда, исходя из результатов §§ П. 12, П. 13 и помня, что в теории оболочек п — 8, / = 4.
надо различать два основных случая.
Случай I: 9>2/л — /= 1/2. При таких значениях 6 решение краевой задачи
складывается из интегралов, соответствующих характеристикам оператора N. Поэтому, обо-
обозначив определяемые ими напряженно-деформированные состояния через Vo. изм> можно
написать
С л у ч а й II: 0<С 8 < 2/(л — 0 = 1/2. При таких значениях 6 в решения войдут только
интегралы, соответствующие характеристикам L, и интегралы, локализованные вблизи у.
Следовательно, если обозначить первые из них через Ч'осн, а вторые — через Ч*Кр, то можно
написать
v= s *«¦+ 2 *«р- (ПЛ6-2)
Интегралы, соответствующие характеристикам N, с некоторой степенью приближенности
определяются уравнением (П.3.16), а интегралы, соответствующие характеристикам L, —
уравнением (П.3.14). В теории оболочек, как уже говорилось, приближенному равенству
(П.3.16) отвечают уравнения теории напряженных состояний с большой изменяемостью, а
приближенному равенству (П.3.14) — уравнения безмомеитной теории. Отсюда следует, что
в (П.16.1) под Ч^. изм надо понимать напряженные состояния с весьма большой" изменяе-
изменяемостью (§ 24.13), а в (П.16.2) под Чгосн — основные напряженные состояния (§ 7.1). Очевидно
также, что Ч*кр представляют собой простые краевые эффекты (напомним в связи с этим, что у
по предположению (§ П. 14) является неасимптотическим краем оболочки).
Все напряженные состояния в правых частях равенств (П.16.1), (П.16.2), вообще говоря,
можно подчинить требованиям экспоненциального затухания (исключения возможны и об-
обсуждаются ниже). Это позволяет выполнять граничные условия на у независимо от того, какие
граничные условия ставятся на других краях оболочки, лишь бы они были однородны. Физи-
Физический смысл этого свойства напряженно-деформированного состояния Ч> в общих чертах оче-
очевиден: краевое воздействие, вызвавшее 4f, при малом е быстро осциллирует, и затухание Ч*1
при удалении оту является следствием принципа Сен-Венаиа.
Обсудим подробнее характер затухания напряженно-деформированных состояний обо-
оболочки и начнем с Чгб. Нзм- При построении этдй величины в (П. 15.1) надо положить и = 8
(§ П.12). Отсюда следует, что общий показатель изменяемости т напряженных состояний Ye. изм
равен показателю изменяемости внешнего краевого воздействия 6. Вместе с тем Чгб. иэм стро-
502 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
ятся при помощи интегралов, соответствующих характеристикам N, и квазистациоиарными
линиями для Уб. изм могут быть только эти характеристики, а для уравнений теории оболочек
они заведомо миимы. Таким образом, не существует таких направлений (действительных),
в которых все компоненты Ч1^ изм меняются существенно медленнее, чем в других. Это значит,
в частности, что Vg. изм ПРИ удалении от у убывает с такой же скоростью, с какой осциллирует
на у внешнее воздействие, вызвавшее 4*6. изм (они имеют одинаковые показатели изменяемости).
Условимся в этом случае говорить, что сен-венановское затухание происходит с асимптотически
нормальной быстротой.
Чтобы разъяснить физическое содержание введенного понятия, рассмотрим следующую
краевую задачу. Для бигармонического уравнения
д*Ф д*Ф ,д*Ф
дх* ^ дхЧ)уг ^ ду ~"
иайти в верхней полуплоскости (—оо <g; х ^ -+- оо, у ^ 0) ограниченное прн у -* оо решение,
удовлетворяющее условиям
Ф \у=0 = sin nx,
дФ
0.
Решение этой задачи находится элементарно. Оно записывается так:
Ф = (пу + \)е~пу sinn*
и при больших п имеет асимптотически нормальную быстроту затухания. Вместе с тем задаче
можно дать очевидную физическую интерпретацию, из которой вытекает, что мы считаем нор-
нормальной такую асимптотику быстроты сен-венановского затухания, которая в плоской теории
упругости характерна для задачи о приложении к полуплоскости осциллирующей краевой
нагрузки.
Высказанное выше утверждение означает, что, если краевое воздействие осциллирует
достаточно сильно F^ 1/2), то искривленность оболочки не влияет на асимптотику сен-
венановского затухания. При 6< 1/2 искривленность оболочек, как мы увидим ниже, в этом
смысле оказывается существенной.
При построении ?кр в правой части равенства (П. 15.1) надо положить и, = X и считать,
что к определяется формулой (П. 12.18), которая для теории оболочек записывается так:
Л = й1/2.
Отсюда следует, что для YKp общий показатель изменяемости т равен 1/2 (это вполне со-
согласуется с результатами § 8.12). Действительные квазистационарные линиивЧ'Кр заведомо
существуют. Они составляют некоторое семейство, к которому, в частности, принадлежит
линия у. Частный показатель изменяемости Ту в направлении линии у легко найти при помощи
равенства (П. 12.21), выражающего краевые значения показателя экспоненциальной функции
иа линии у. В нем е имеет такой же смысл, как и в (П. 14.3). Поэтому
Это значит, что быстрота сен-венановского затухания напряженно-деформированного состоя-
состояния ^кр (простого краевого эффекта) превышает асимптотически нормальную, т. е. показатель
изменяемости (т = 1/2), характеризующий скорость затухания Ч'кр. заведомо больше пока-
показателя изменяемости (т7 = 6-< 1/2), характеризующего скорость осцилляции внешнего крае-
краевого воздействия.
Напряженные состояния Ч^си, строятся при помощи интегралов, соответствующих ха-
характеристикам L. Их общий показатель изменяемости т, так же как и для интегралов, соответ-
соответствующих характеристикам Af, равен показателю изменяемости внешнего краевого воздей-
воздействия. Однако вопрос о квазистационарных линиях здесь решается несколько сложнее. Надо
рассмотреть два подслучая.
2
Подслучай Па: 9' <: 9 < —^у, где
в'-Т=7+Г- (ПЛ63)
а под г подразумевается удвоенная кратность асимптотических линий срединной поверхности
(г = 2 при К Ф 0; г = 4 при К = 0).
Подслучай Иб: 0 < 9 < 9'.
Они отличаются друг От друга тем,что в подслучае Па функция изменяемости наиряженно-
деформированных состояний ^„сд разветвляется, т. е. имеет вид
i 16]
ХАРАКТЕР НАГРУЗКИ И ИЗМЕНЯЕМОСТЬ СОСТОЯНИЯ ОБОЛОЧКИ
503
а в подслучае 116 разветвления не происходит, т. е. можно считать, что при соответствующих
значениях 9 не существует различия между f н ее главной частью f0 (§§ П.7. П.8).
Если кривизна срединной поверхности оболочки положительна (УС> 0), то на ней асим-
асимптотические линии мнимы, а так как они и только оии могут являться линиями уровня функ-
функции изменяемости f (или ее главной части fB), то напряженно-деформированные состояния УРОСВ
при /С!> 0 не имеют действительных квазистационарных направлений. Поэтому, рассуждая
так же, как при рассмотрении Ч'б.йзм. мы заключаем, что в обоих подслучаях Па и Пб для
оболочки положительной кривизны сен-венановское затухание основного напряженно-деформиро-
напряженно-деформированного состояния имеет асимптотически нормальную быстроту.
Если К неположительно, то главная часть функции изменяемости fn будет оставаться
постоянной на определяющих (§ П.2) асимптотических линяях рассматриваемого интеграла
(П.15.1), а большая изменяемость Ч^н н, в частности, его экспоненциальное затухание будут
обусловливаться только функцией f. Это значит, что для оболочек неположительной кривизны
существуют направления, в которых быстрота сен-венановского затухания основного напряжен-
напряженного состояния Vqch меньше асимптотически
нормальной быстроты. Эти направления совпа-
совпадают с асимптотическими линиями срединной
поверхности. Для оболочки нулевой кривизны,
имеющей только одно семейство асимптотических
линий, все Vqch будут относительно медленно
затухать в одном и том же направлении, изобра-
изображенном стрелкой на рис. 59, а; для оболочки
отрицательной кривизны, имеющей два семей-
семейства асимптотических линий, часть напряженно-
деформированных состояний Yqch будет относи-
относительно медленно затухать в направлении, изо-
изображенном на рис. 59, б стрелкой /, а часть —
в направлении, изображенном стрелкой 2.
Ч
р р р
Число т„ — показатель изменяемости ос-
осРис. 59.
новного напряженного состояния Ч'осн в квази-
стациои арном направлении можно подсчитать
по формуле (П. 15.8). В ней надо положить т=9, а х заимствовать из (П.6.9). Получим
равенство
' ' ^ < ^ (П.16.4)
»-<--!-+') «•
в котором г — удвоенная кратность асимптотических линий на срединной поверхности.
Формула (П.6.9), а вместе с ией и (П. 16.4) имеют силу только тогда, когда 8 ограничено
неравенствами (П.6.10), т. е. когда имеет место подслучай Пб. При 9= 2/(л — I) — 1/2 ра-
равенство (П.16.4) дает т„ = 6, и асимптотические линии уже перестают быть линиями относи-
относительно медленного затухания Ч^н. При 6 = 6' из (П. 16.4) мы получаем тр = 0 Этот результат
надо считать верным и при 9< 9', т. е. в подслучае На, так как тогда функция изменяемости
в целом (а не только ее главная часть /„) сохраняет постоянное значение на асимптотических
линиях. Таким образом, в подслучае 1а сен-венановское затухание Ч'осн не будет уже связано
со структурой функции изменяемости f, т. е. станет настолько медленным, что для его иссле-
исследования необходимо ввести в рассмотрение функцию интенсивности.
Итак, с точки зрении свойств затухания основных напряженных состояний Ч'осн в обо-
оболочке неположительной кривизны число 9', определяемое формулой (П. 16.3). является крити-
критическим значением показателя изменяемости внешнего краевого воздействия: при 6 < 9' пока-
показатель изменяемости сен-венановского затухания Ч'осн равен нулю- при 9 > 6' это число ста-
становится отличным от нуля, но, как показывает формула (П. 16.4), остается меньше 6, наконец,
при 9-»-2/(/i — I) оно стремится к 9. Критическое значение 9 согласно (П. 16.3) опреде-
определяется так:
--г
1
(при К < 0, когда г = 2),
-j- (при К = 0, когда г = 4).
Итак, краевое воздействие с большой однородной изменяемостью приводит к возникнове-
возникновению в оболочке некоторой совокупности иапряженно-деформироваиных состояний Тосн, ^кр,
Ч'б. изм> каждое из которых в отдельности также имеет большую однородную изменяемость.
При этом общие показателн изменяемости т для Чгосв и Ч^б. взм подчиняются равенству
а для 4Vp (еущесшующего только при 6"< 1/2) имеем
504 ПРИЛОЖЕНИЕ. АСИМПТОТИЧЕСКОЕ ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
Обратимся к случаю, когда на оболочку действует поверхностная нагрузка и, снова
опираясь на принцип суперпозиции, будем считать, что отлична от нуля только одна ее компо-
компонента. Пусть для конкретности это будет Z. Тогда в правой части равенства (П. 14.7), как уже
говорилось, появится член — Z, который мы зададим так:
— 2 = Сехр(в-1г). (П. 16.5)
где е — малая константа. (Это предположение мало влияет на общность рассуждений, так как
из функций, стоящих в правой части, варьируя смысл функций ?, z и числа 8 и суммируя,
можно составить функцию весьма общего вида.)
Уравнение (П. 14.7) с правой частью вида (П. 16.5) представляет собой частный случай
уравнения (П. 11.1). Поэтому можно считать, что один из частных интегралов (П. 14.7)
нмеет внд
Ф = е°ф exp (e^z)
т. е. он соответствует некоторому нагрузочному напряженно-деформированному состоянию
с большой однородной изменяемостью. Общие показатели изменяемости нагрузочного иапря-
женно-деформированного состояния (т) и внешней поверхностной нагрузки (Ф) равны друг
другу. Они имеют также одинаковые функции изменяемости. Поэтому их квазистационарные
линии, совпадают.
В общем случае нагрузочное напряженно-деформированное состояние, построенное ме-
методом § П.11, будет давать в граничных условиях некоторые невязки, выражаемые функ-
функциями вида
Ф* ехр (е-1?,) (ср^ = ф |v; z^ = г |у). (п. 16.6)
Поэтому для решения краевой задачи надо к нагрузочному напряженно-деформирован-
напряженно-деформированному состоянию присоединить дополнительное напряженно-деформированное состояние,
снимающее невязки. Построение последних сводится к рассмотренной выше задаче об эффекте
приложения краевых воздействий. Отсюда вытекает, что дополнительное напряженно-де-
напряженно-деформированное состояние будет также определяться решениями вида (П. 15.1), в которых надо,
вообще говоря, число \i отождествлять с числом е, входящим в (П. 16.5). Исключение представ-
представляет случай, когда в (П. 16.6) функция г, точно или приближенно обращается в нуль, т. е.
когда край у близок или совпадает с линией уровня функции изменяемости внешней поверх-
поверхностной нагрузки.
Вернемся к вопросу о законности замены граничных условий (П. 14.3) на граничные ус-
условия вида (П. 12.3). Исходя из последних, мы свели в конечном итоге задачу Дирихле к неко-
некоторой последовательности задач Коши, но на пути к этому результату надо было для опреде-
определения граничных значений функций интенсивности ц>а решать систему алгебраических линей-
линейных уравнений (П. 13.8) с определителем Вандермонда, поведение которого хорошо известно.
Система алгебраических уравнений для определения граничных значений ф„ получится и
и случае, когда граничные условия имеют более общий вид, однако исследование определителя
станет уже нетривиальным. Для того чтобы он оказался отличным от нуля, надо правильно
подобрать числа а и Ь, введенные формулами (П. 13.1). Здесь возникает много вариантов, свя-
связанных с большим разнообразием граничных условий теории оболочек, а соответствующие
результаты, в сущности, повторяют те, которые уже были получены в части IV. На подроб-
подробностях мы останавливаться не будем.
В §§ П. 15, П. 16 мы исходили из предположения (конец § П. 14), что линии искажения
оболочки — асимптотические. Если они совпадают с асимптотическими линиями срединной
поверхности, го в решение краевой задачи теории оболочек при 6 < 1/2 войдут интегралы
с заданной характеристической квазистационарной линией. Они обсуждены в § П.10, и и тео-
теории оболочек им соответствуют обобщенные краевые эффекты.
ЛИТЕРАТУРА
1. Агаловин Л. А., Применение метода асимптотического интегрирования к построе-
построению приближенной теории анизотропных оболочек, ПММ, 1966, т. 30, аып. 2.
2. Агаловян Л. А., Об уравнениях изгиба анизотропных пластин, Тр. VII Всесоюзной
конференции по теории оболочек и пластин, «Наука», 1970.
3. Аксентян О. К-, Ворович И. И., Напряженное состояние плиты малой тол-
толщины, ПММ, 1963, т. 27, вып. 6.
4. Амбарцумян С. А., О двух методах расчета двухслойных ортотропных оболочек.
Изв. АН Арм. ССР (серия физ.-матем. наук), 1957, т. X, № 2.
5. Амбарцумян С. А.,К расчету двухслойных ортотропных оболочек, Изв. АН СССР,
ОТН, 1957, № 7.
6. А м б а р ц у м я н С. А., Теория анизотропных оболочек, физматгиз, 1961.
7. Амбарцумян С. А., Теория анизотропных пластин. Прочность, устойчивость и
колебании, «Наука», 1967.
8. Амбарцумян С. А., Еще одна уточненная теория анизотропных оболочек, Механика
полимеров, 1970, № 5.
9. Амбарцумян С. А., Об одной уточненной теории анизотропных оболочек, Тр. Все-
Всесоюзной конференции по теории оболочек и пластин, «Наука», 1970.
10. А м б а р ц у м я н С. А., Общая теория анизотропных оболочек, «Наука», 1974.
П.Антропова Н. Н., Гольденвейзер А. Л., Погрешности построения основ-
основного напряженного состояния и простого краевого эффекта в теории оболочек, Изв.
АН СССР, МТТ, 1971, № 5.
12. Базаренко Н. А., Ворович И. И., Асимптотическое поведение решения задач
теории упругости для полого цилиндра конечной длины при малой толщине, ПММ, 1965,
т. 29, вып. 6.
13. Б а л а б у х Л. И., Изгиб и кручение конических оболочек, Труды ЦАГИ, 1946, № 577.
14. В е к у а И. Н., Интегрироиание уравнений сферической оболочки, ПММ, 1945, т. 9,
вып. 5.
15. В е к у а И. Н., Об одном методе расчета призматических оболочек, Тр. Тбилисского
матем. ин-та, 1955, т. 21.
16. В е к у а И. Н., Об условиях, обеспечивающих безмоментное напряженное состояние
равновесии выпуклой оболочки, Сообщ. АН Груз. ССР, 1958, т. 26, № 5.
17. В е к у а И. Н., Об условиях безмоментности выпуклых оболочек, Сообщ. АН Груз. ССР,
1958, т. 21, № 6.
18. В е к у а И. Н., Теории обобщенных аналитических функций и некоторые ее применения
в геометрии и механике, Тр. 3-го Всесоюзн. математич. съезда, т. 3, Изд-во АН СССР, 1958.
19. В е к у а И. Н., Обобщенные аналитические функции, Физматгиз, 1959.
20. Виленская Т. В., Ворович И. И., Асимптотическое поведение решения задач»
теории упругости для сферической оболочки малой толщины, ПММ, 1966, т. 30, вып. 2.
21. Виссарион В., Стэнеску К-, Исследование квазиинвариангов статико-гео-
метрической аналогии для тонких упругих оболочек, ПММ, 1961, т. 25, вып. 1.
22. В и ш и к М. И., Люстерник Л. А., Регулярное вырождение и пограничный слой
для линейных дифференциальных уравнений с малым параметром, Успехи матем. наук,
1957, т. 12, вып. 5G7).
23. В и ш и к М. И., Люстерник Л. А., Об асимптотике решений задач с быстро осцил-
осциллирующими граничными условиями для уравнений с частными производными, ДАН
СССР, 1958, т. IV), № 4.
24. В и ш и к М. И., Л ю с т е р н и к Л. А., Асимптотика решения некоторых краевых
задач с осциллирующими граничными условиями, ДАН СССР, 1958, т. 120, № 1.
25. В и ш и к М. И., Л ю с т е р н и к Л. А., Асимптотическое поведение решений линейных
дифференциальных уравнений с большими или быстро меняющимися коэффициентами
и граничными условиями, Успехи матем. наук, 1960, т. 15, вып. 4 (94).
26. Власов В. 3., Новый практический метод расчета складчатых перекрытий и оболочек.
Строительная промышленность, 1932, № 11—12.
27. В л а с о в В. 3., Строительная механика оболочек, Стройиздат, 1936.
506 ЛИТЕРАТУРА
28. Власов В. 3., О расчете оболочек вращения на произвольную несимметричную на-
нагрузку, Проект и стандарт, 1937, № 3.
29. В л а с о в В. 3., Расчет оболочек, очерченных по центральным поверхностям второго
порядка, В сб.: Пластины и оболочки, Госстройиздат, 1939.
30. Власов В. 3., Основные дифференциальные уравнения общей теории упругих обо-
оболочек, ПММ, 1944, т. 8, вып. 2.
31. Власов В. 3., Общая теория оболочек и ее приложение в технике, Гостехиздат, 1949.
32. В л а с о в В. 3., К теории безмомеитных оболочек вращения. Изв. АН СССР, ОТН,
1955, № 5.
33. Ворович И. И., О некоторых представлениях решения уравнений теории пологих
оболочек, ПММ, 1961, т. 25, вып. 3.
34. Ворович И. И., Общие проблемы пластин и оболочек, Тр. VI Всесоюзной конфе-
конференции по теории оболочек и пластин, «Наука», 1966.
35. Гек клер И., Статика упругого тела, ОНТИ, 1934.
36. Гольденвейзер А. Л., Дополнения и поправки к теории тонких оболочек,
В сб.: Пластины и оболочки, Госстройиздат, 1939.
37. Гольденвейзер А. Л., М р о щ и н с к и й А. К-, Р е п м а н Ю. В., Методы
расчета сферических куполов по безмомеитной теории, В сб.: Пластинки и оболочки,
Госстройиздат, 1939.
38. Гольденвейзер А. Л., Уравнения теории тонких оболочек, ПММ, 1940, т. 4,
вып. 2.
39. Гольденвейзер А. Л., О применимости общих теорем теории упругости к тон-
тонким оболочкам, ПММ, 1944, т. 8, вып. 1.
40. Г о л ь д е н в е й з е р А. Л., Исследование напряженного состояния сферической обо-
оболочки, ПММ, 1944, т. 8, вып. 6.
41. Гольденвейзер А. Л., Качественное исследование напряженного состояния
тонкой оболочки, ПММ, 1945, т. 9, вып. 6.
42. Гольденвейзер А. Л., Температурные напряжения в тонких оболочках, Труды
ЦАГИ, 1947, № 618.
43. Гольденвейзер А. Л., Безмомеитиая теория оболочек, очерченных по поверх-
поверхностям второго порядка, ПММ, 1947, т. 11, вып. 2.
44. Г,о льденвейзер А. Л.,О приближенных методах расчета тонких оболочек нуле-
нулевой гауссовой кривизны, ПММ, 1947, т. 11, вып. 4.
45. Гольденвейзер А. Л., Лурье А. И., О математической теории равновесии
упругих оболочек, ПММ, 1947, т. 11, вып. 5.
46. Гольденвейзер А. Л., Влияние условий закрепления краев тонкой оболочки на ее
напряженное состояние, Труды Мин-ва авиационной пром-сти СССР, 1948, № 669.
47. Гольденвейзер А. Л.,О применении решений задачи Римана—Гильберта к рас-
расчету безмоментных оболочек, ПММ, 1951, т. 15, вып. 2.
48. Гольденвейзер А. Л., Теория упругих тонких оболочек, Гостехиздат, 1953.
49. Гольденвейзер А. Л., Уточнение теории простого краевого эффекта, ПММ,
1956, т. 20, вып. 3.
50. Гольденвейзер А. Л., Уравнения теории оболочек в перемещениях и функциях
напряжений, ПММ, 1957, т. 21, вып. 6.
51. Гольденвейзер А. Л., Асимптотическое интегрирование дифференциальных
уравнений в частных производных с краевыми условиями, зависящими от параметра,
ПММ, 1958, т. 22, вып. 5.
52. Гольденвейзер А. Л., Асимптотическое интегрирование линейных дифференци-
дифференциальных уравнений в частных производных с малой главной частью, ПММ, 1959, т. 23,
вып. 1.
¦53. Гольденвейзер А. Л., Развитие теории упругих тонких оболочек, Тр. Всесоюз-
Всесоюзного съезда по теор. и прикл. мех., Изд-во АН СССР, 1962.
54. Гольденвейзер А. Л., Построение приближенной теории изгиба пластинки мето-
методом асимптотического интегрирования уравнений теории упругости, ПММ, 1962, т. 26,
вып. 4.
55. Гольденвейзер А. Л., Построение приближенной теории оболочек при помощи
асимптотического интегрирования уравнений теории упругости, ПММ, 1963, т. 27, вып. 4.
56. Гольденвейзер А. Л., Краевые задачи теории функций комплексного перемен-
переменного в безмоментной теории оболочек, В кн.: Приложения теории функций в механике
сплошной среды, Труды международного симпозиума, т. 1, «Наука», 1965.
57. Гольденвейзер А. Л., Погранслой и его взаимодействие с внутренним напря-
напряженным состоянием упругой тонкой оболочки, ПММ, 1966, т. 33, вып. 6.
58. Гольденвейзер А. Л., Методы обоснования и уточнения теории оболочек (Обзор
последних результатов), ПММ, 1968, т. 32, вып. 4.
5 9. Гольденвейзер А. Л., О двумерных уравнениях общей линейной теории тонких
упругих оболочек, В кн.: Проблемы гидродинамики и механики сплошной среды, «Наука»,
60. Гольденвейзер А. Л., Зверяев Е. М., Напряженное состояние незакреплен-
незакрепленных оболочек нулевой кривизны, ПММ, 1971, т. 31, вып. 2.
ЛИТЕРАТУРА
507
61. Гольденвейзер А. Л., Теорема о возможных изгибаниях в безмоментной теории
оболочек, В сб.: Механика сплошной среды и родственные проблемы анализа, «Наука»,
1972.
62. Г р и г о р е н ко Я. М., Изотропные н анизотропные слоистые оболочки вращения
переменной жесткости, «Наукова думка», 1973.
63. Г у с е й н - 3 а д е М. И., Об условиях существования затухающих решений плоской
задачи теории упругости для полуполосы, ПММ, 1965, т. 29, вып. 2.
64. Г у с е й и -3 а д е М. И., О необходимых и достаточных условиях существования зату-
затухающих решений плоской задачи теории упругости для полуполосы, ПММ, 1965, т. 29,
вып. 4.
65. Г у с е й и - 3 а д е М. И., К построению теории изгиба слоистых пластинок, ПММ,
1968, т. 32, вып. 2.
66. Гусейн-Заде М. И., О некоторых свойствах напряженного состояния тонкого
упругого слои, ПММ, 1967, т. 31, вып. 6.
67. Гусейн-Заде М. И., Напряженное состояние погранслоя для слоистых пластинок,
Тр. VI Всесоюзной конференции по теории оболочек н пластин, «Наука», 1970.
68. 3 в е р я е в Е. М.( О соотношениях упругости в линейной теории тонких упругих оболо-
оболочек, ПММ, 1970, вып. 6.
69. 3 е н о в а Е. В., Новожилов В. В., Симметричная деформация торообразных
оболочек, ПММ, 1951, т. 4, вып. 2.
70. Иванов С. Д., Чернышев Г. Н., Моделирование в задачах термоупругости обо-
оболочек с отверстиями на основе статнко-геометрической аналогии, Изв. АН СССР, МТТ,
1974, № 4.
71. И мен и то в Л. Б., Задача о сферической оболочке с неподкрепленным отверстием,
Инженерный ж., 1963, т. 3, вып. 1.
72. К и л ь ч е в с к и й Н. А., Обобщение современной теории оболочек, ПММ, 1939, т. 2,
вып. 4.
73. Кильчевский Н. А., Основы аналитической механики оболочек, Изд-во АН УССР,
Киев, 1963.
74. К о л к у н о в Н. В., Ч е р н ы ш е в Г. Н., О решении некоторых задач термоупругости
оболочек и об одном приложении теоремы об изгибаниях, Изв. АН СССР, МТТ, 1974, № 6.
75. Колос А. В., Методы уточнения классической теории изгиба и растяжения пластинок,
ПММ, 1965, т. 29, вып. 4.
76. К о л о с А. В., Об области применения приближенных теорий изгиба пластин типа
теории Рейсснера, Тр. VI Всесоюзн. конференции по теории оболочек и пластин, «Наука»,
1966.
77. Лурье А. И., Общая теория упругих тонких оболочек, ПММ, 1940, т. 4, вып. 2.
78. Л у р ь е А. И., Определение перемещения по заданному тензору деформаций, ПММ,
1940, т. 4, вып. 1.
79. Л у р ь е А. И., К теории толстых плит, ПММ, 1942, т. 6, вып. 2—3.
80. Л у р ь е А. И., Концентрация напряжений в области отверстия на поверхности кру-
кругового цилиндра, ПММ, 1946, т. 10, вып. 3.
81. Л у р ье А. И., Статика тонкостенных упругих оболочек, Гостехиздат, 1947.
82. Л у р ь е А. И., Об уравнениях общей теории упругих оболочек, ПММ, 1950, т. 14, вып. 5.
83. Л у р ь е А. И., О статико-геометрической аналогии теории оболочек, В сб.: Проблемы
механики сплошной среды, Изд-во АН СССР, 1961.
84. Л я в А., Математическая теория упругости, ОНТИ, 1935.
85. Меньшиков В. М., О приближенном методе расчета круговых цилиндрических
оболочек, ПММ, 1960, т. 24, вып. 4.
86. М у ш т а р и X. М., Об устойчивости. круглой тонкой цилиндрической оболочки при
кручении, Тр. Казанского авиац. ин-та, 1934, № 2 (см. также Муштари X. М., Неко-
Некоторые обобщения теории тонких оболочек, Изв. физ.-матем. о-ва при Казанск. ун-те,
1938, т. 11, сер. 8).
87. М у ш т а р и X. М., Об области применимости приближенной теории оболочек Кирх-
Кирхгофа—Лява, ПММ, 1947, т. 11, вып. 5.
88. М у ш т а р и X. М„ Те per улов И. Г., К теории оболочек Средней толщины, ДАН
СССР, 1959, т. 128, № 6.
89. Н и г у л У. К., Некоторые результаты исследования уравнений собственных колебаний
упругой круглоцилиндрической оболочки, Тр. Таллинского политехнического ин-та,
1960, № 171.
90. Н о в о ж и л о в В. В., Расчет напряжений в тонкой сферической оболочке при произ-
произвольной нагрузке, ДАН СССР, 1940, т. 27, № 6.
91. Н о в о ж и л о в В. В., Некоторые замечания по поводу теории оболочек, ПММ, 1941,
т. 5, вып. 3.
92. Новожилов В. В., Теория тонких оболочек, Оборонгиз, 1941.
93. Новожилов В. В., Финкельштейн Р. М., О погрешности гипотез Кирхгофа
в теории оболочек, ПММ, 1943, т. 7, вып. 5.
94. Н о в о ж и л о в В. В., К вопросу о решении задач теории тонких оболочек в усилиях
и моментах, ДАН СССР, 1943, т. 38, № 9.
508 литература
95. Н о в о ж и л о в В. В., Новый метод расчета тонких оболочек, Изв. АНС ССР, ОТН»
1946, № 1.
96. Н о в о ж и л о в В. В., Обобщение метода комплексных перемещений на неоднородную
задачу теории оболочек, ДАН СССР, 1946, т. 53. № 6.
97. Новожилов В. В., Расчет оболочек тел вращения, Изв. АН СССР, ОТН, 1946, № 7.
98. Новожилов В. В., Теория тонких оболочек, Судпромгиз, Ленинград, 1962.
99. Новожилов В. В., Черных К- Ф-, К расчету оболочек на сосредоточенные
воздействия, В сб.: Исследования по упругости и пластичности, № 2, Изд-во ЛГУ, 1963.
100. П i д с т р и г а ч Я. С, Ярема С. Я.. Температуря! напруженвя в оболонках. Кшв,
Видавництво АН УРСР, 1961.
101. Петрова-Денева А., Върху безмоментната теория на тънкостенните черупки
върху проективни повърхннни с отрицателна кривина (на болгарском языке), Годишник
на машинно-електротехническия институт, 1956, кн. 1, т. 2.
102. Петрова-Денева А., Расчет оболочек вращения положительной кривизны на
циклические нагрузки, Инженерный ж., 1965, т. 5, вып. 5.
103. Петрова-Денева А., Пресмятане на ротапионна черупка с положителна гаусова
кривина и граница наклонено сечение при цикличнн гранични условия (на болгарском
языке), Годишник на висшите технически учебни заведения, Математика. 1965, ки. 1, т. 1.
104. Петрова-Денева А., Расчет цилиндрической оболочки на циклические нагрузки.
Инженерный ж., МТТ, 1966, № 6.
105. Понятовский В. В., К теории пластин средней толщины, ПММ, 1962, т. 26, вып. 2.
106. Понятовский В. В., К теории изгиба анизотропных пластинок, ПММ 1964,
т. 28, вып. 6.
107. Работнов Ю. Н., Основные уравнения теории оболочек, ДАН СССР, 1945, т. 47, № 2.
108. Работнсв Ю. Н., Уравнения пограничной зоны в теорий оболочек, ДАН СССР,
1945, т. 47, № 5.
109. Работнов Ю. Н., Некоторые решения безмоментной теории оболочек, ПММ, 1946,
т. 10, вып. 5—6.
ПО. Р е п м а н Ю. В., Расчет сферических оболочек по моментной теории на произвольную
нагрузку. В сб.: Пластины и оболочки, Госстройиздат, 1939.
111. Р о г а ч е в а Н. Н., О методе расчленения напряженного состояния в оболочках отри-
отрицательной кривизны с асимптотическими краями, ПММ, 1975, т. 39, вып. 2.
112. Соболев С. Л., Пример корректной краевой задачи для уравнения колебаний струны
с данными на всей границе, ДАН СССР, 1956, т. 109, № 4.
113. Соколов А. М., К вопросу об области применимости безмоментной теории к расчету
оболочек отрицательной кривизны, Изв. АН СССР, ОТН, 1955, № 5.
114. Соколовский В. В., Расчет сферических оболочек, ДАН СССР, 1937, т. 16, № 1.
115. Соколовский В. В., О безмоментных оболочках вращения, ПММ, 1938, т. 1,
вып. 3.
116. С о к о л о в с к и й В. В., Уравнения равновесия безмоментных оболочек, ПММ, 1943,
т. 7, вып. 1.
117. Твмошенко СП., Колебания в инженерном деле, Физматгиз, 1959.
118. Ту маркин С. А., Асимптотическое решение линейного неоднородного дифферен-
дифференциального уравнения второго порядка с переходной точкой и его приложение к расчетам
торообразных оболочек и лопастей, ПММ, 1959, т. 23, вып. 6.
119. Урбанович Н. В., Чернышев Г. Н., Местные напряжения в оболочке от сосре-
сосредоточенных нагрузок и тепловых источников, Изв. АН СССР, МТТ, 1970, № 2.
120. Файнберг С. М., К вопросу 0 построении моментной теории цилиндрических обо-
оболочек, Проект и стандарт, 1936, № 12.
121. Файнберг СМ., К вопросу о построении приближенной теории тонкостенных
оболочек произвольного очертания, В сб.: Исследования по теории сооружений, Строй-
издат, 1939.
122. Ф л ю г е В., Статика и динамика оболочек, Госстройиздат, 1961.
123. Ч е р н и н а В. С, К расчету торообразных оболочек, Изв. АН СССР, ОТН, Механика
и машиностроение, 1961, № 4.
124. Ч е р н и н а В. С, Статика тонкостенных оболочек вращения, «Наука», 1968.
125. Ч е р н и н а В. С, Некоторые математически эквивалентные задачи статики оболочек
вращения, Изв. АН СССР, МТТ, 1973, № 3.
126. Ч е р в ы х К. Ф., О сопряженных задачах теории тонких оболочек, ДАН СССР, 1957,
т. 117, № 6.
127. Черных К. Ф., Связь межДу дислокациями и сосредоточенными воздействиями в тео-
теории оболочек, ПММ, 1959, т. 23, вып. 2.
128. Черных К. Ф., Сопряженные задачи теории тонких оболочек, В сб.: Проблемы меха-
механики сплошной среды, Изд-во АН СССР, 1961.
129. Черных К. Ф., Линейная теория оболочек, ч.1, Изд-во ЛГУ, 1962.
130. Черных К. Ф-, Линейная теория оболочек, ч. II, Изд-во ЛГУ, 1964.
131. Черных К. Ф., Ш а м и и а В. А., Расчет торообразных оболочек, В сб.: Исследо-
Исследования по упругости и пластичности, 2, Изд-во ЛГУ, 1963.
ЛИТЕРАТУРА 509
132. Чернышев Г. М., О действии сосредоточенных сил и моментов на упругую тонкую
оболочку произвольного очертания, ПММ, 1963, т. 27, вып. 1.
133. Чернышев Г. Н., Представление решений типа Грина уравнений оболочек методом
малого параметра, ПММ, 1968, т. 33, вып. 6.
134. Чернышев Г. Н., Малые иэгнбания оболочек с незакрепленными границами, Изв.
АН СССР, МТТ, 1974, № 5.
135. Штаерман И. Я., Расчет купола как аркн на упругом основании, Проект и стан-
стандарт, 1933, № 9.
136. Экстрем Дж. Э., Тонкостенные симметричные купола, Гос. научно-техн. изд-во
Украины, Харьков—Киев, 1936.
137. В lumen thai О., Ober assymptotische Integration von Differentialgleichungen mit
Auwendeung auf die Berechnung von Spannungen in Kugelschalen, Zeitschr. fur Math.
und Phys., Bd. 62, 1914.
138. BolleL., Contribution on problem lineaire de flexion d'une plaque elastique, Parts I, 2,
Bulletin technique de la Suisse Romande, 1947.
139. Bud iansky В., S a n d e r s J. L., On the «best» lirst-order linear shell theory, «Progr.
appl. mech.», The Prager anniv. volume, Macmillan Сотр., 1963.
140. Cicala P., Consistent approximations in shell theory, J. Engin. Mech. Div. Proc. Amer.
Soc Civil. Engrs, 1962, v. 88, № 4, pt. 1.
141. Clark R., On the theory of thin elastic toroidal shells, J. Math, and Phys., 1950, 29, № 3.
142. D о n n e 1 1 L., Stability of thin walled tubes under torsion, NACA, 1933, Rep. № 479.
143. D о n n e 1 1 L., A discussion of thin shell theory, Proc. 5th Congr. of Appl. Mech., 1939.
144. Friedrichs K. O., Kirchhof's boundary conditions and the edge effect for elastic
plates, Proc. Symp. Appl. Math. 3. Amer. Math. Soc., N. Y., 1950.
145. Friedrichs K- O., Dressier R. F., A boundary-layer theory of elastic plates,
Comm. Pure and Appl. Math., 1961. v. 14. № 1.
146. Green A. E., On the linear theory of thin elastic shells, Proc. Roy. Soc. A, 1962, v. 266,
№ 1325.
147. Green A. E., Boundary layer equations in the linear theory of thin elastic shells, Proc
Roy. Soc, A, 1962, v. 269, № 1339.
148. G п n t h e r W., Analoge systeme von Schalengleichungen, Ing.-Arch., 1961, Bd. 30, № 3.
149. Havers A., Assymptotische Biegetheorie der unbelasteten Kuqelschale. Ing. Arch.,
4, 1935.
150. Hussein-sade M. J., Zum Aiifbau der Biegetheorie mehrschichtiger Flatten, Plaste
urid Kautschuk, 15 Jahrgang, Heft 4/1968.
151. John F., The Dirichlet problem for a hyperbolic equation, Amer. Journ. Math., 1941,
v. 63, № 1.
152. John F., Estimates tor the derivatives of the stress in a thin shells and interior shell
equations, Comm. Pure and Appl. Math., 1965, v. 18, № 12.
153. Johnson M. W., R e i s s n e r E., On the foundations of the theory of thin jlastic
shells, J. Math. Phys., 1959, v. 37, № 4.
154. Jordan P. F., Stress and deformations of thin walled pressurized torus, IAS, Paper 14,
1961.
155. К о i t e i W. Т., A consistent first approximation in the general theory of thin elastic
shells, Proc. of the symposium on the theory of thin elastic shells, 1960, North-Holland
Publishing Company-Amsterdam.
156. К о i t e r W. Т., On the nonlinear theory of thin elastic shells, Proc. Koninkl. Nederl.
Akademie van Wetenschappen, Amsterdam, 1966, Ser. В., № 1.
157. К о i t e r W. Т., Foundations and basic equations of shell theory, A Survey of recent pro-
progress, Theory of thin shells, 2nd simpos., Copenhagen, 1967, Springer-Verlag, Berlin—
Heidelberg—New York, 1969.
158. К о i t e r W. Т., S i m m о n d s J. G., Foundations of shell theory, Appl. Mech. Proc
of 13 th Intern. Congr. of theoretical and Appl. Mech., Springer—Verlag., Berlin—Heidel-
Berlin—Heidelberg—New York, 1973.
159. К г a u s s F., Ober die Gerundgleichungen der Elastizitatstheorie, Schwachdeformierten
Schalen, Math. Ann., 1929, Bd. 101, № 1.
160. Logan T. R., Asymptotic solutions for shell with general boundary curves, PhD Thesis,
Standford University, 1970.
161. Marguere K- Zur Theorie der gekriimmten Platte grosser Forrnanderung, Proc. 5th
Int. Congr. Appl. Mech., 1939.
162. M e i s s n e r E., Die Elastizitat fur diinne Schalen von Ringsflachen, Kugel und Kegel-
form. Phys. Zeitschr., Bd. 14, 1913.
163. M e i s s n e r E., Ober Elastizitat und Festigkeit dunner Schalen. Viertelschr. d. natur.
Ges. Bd. 60, Zurich, 1915.
164. N a g h d i P. M., On the theory of thin elastic shells, Quart. Appl. Math., 1957, v. 14, № 4.
165. N aghdi P. M., Foundations of elastic shell theory. Progress in solid mechanics, v. 4.,
North-Holland publishing company, Amsterdam, 1963.
166 N aghdi P. M., A new derivation of the general equations of elastic shells, int. J. Engng
Sci., 1963, v. 1.
510 ЛИТЕРАТУРА
167. N a g h d i P. M., On a variational theorem in elasticity and its application to shell theory.
J. of Appl. mech., 1964, v. 31, № 4.
168. Naghdi P. M., Further results in the derivation of the genera! equations ot elastic shells,
Int. J. Engng Sci., 1964, v. 2.
169. Naghdi P. M., A static-geometric analogue in the theory of couple stresses. Koninkl.
Nederl. Akademie van Wetenschappen, Amsterdam, Proceedings, Ser. B, 1965, v. 68, № 1.
170. N e u b e г H., Allgemeine shalentheorie, I und II, Z. Angew. Math, und Mech. 1949,
Bd. 29, № 4 and № 5.
171. Reiss E. L., A theory for small rotationally symmetric deformation of cylindrical shells,
Comm. Pure and Appl. Math., 1960, v. 13, № 3.
172. Reiss E. L., On the theory of cylindrical shells. Quart. J. Mech. and Appl. Math.. 1962,
v. 15, № 3.
173. R e i s s n e г Е., A new derivation of the equations ior the deformation of elastic shells,
Amer. Journ. of Math., 1941, v. 63.
174. R e i s s ne E., On the theory of bending ot elastic plates, J. Math, and Phys., 1944,
v. 23, pp. 184—191.
175. R e i s s n e г Е., Stress-strain relations in the theory ot thin elastic shells, J. Math. Phys. 31,
1952, pp. 109—119.
176. R e i s s n e r E., Variational considerations for elastic beams and shells, J. Engin. Mech»,
Division., Proc. Amer. Soc. of Civil Engrs, 1962, v. 88, № EMI.
177. R e i s s n e r E., On asymptotic solutions for nonsymmetric deformations ot shallow
shells of revolution, Int. J. Engng. Sci., 1964, v. 2, pp. 27—43.
178. R e i s s n e r E., On asymptotic expansions for circular cylindrical shells, J. Appl. Mech.,
1964, v. 31, pp. 245—252.
179. Reissner E., On the foundations of the theory of elastic shells, Appl. Mech.. Proc
of the 11th Intern. Congr. of Appl. Mech., Munich A964), A966). ¦'
180. Reissner E., and Wan F. Y. M., On stress strain relations and strain displacement
relations of the linear theory of shells, The Folke Odqvist Volume, Stockholm, 1967.
181. Reissner E., A note on stress functions and compatibility equations in shell theory.
Topics in applied mechanics. Memorial volume to the late prof. E. Schwerin Amsterdam,
1965.
182. Reissner E., S i m m о n d s J. G., Asymptotic solutions ot boundary value problems
for elastic semi-infinite circular cylindrical shells, Journ. of Math, and Phys., 1966, v. 45, № 1.
183. Reissner H., Spannungen in Kugelschalen (Kuppeln), Muller, Breslau—Festschr., 1912.
184. R u t t e n H. S., Asymptotic approximation in the three-dimensional theory of thin and
thick elastic shells, Nederlandse boekdruk industrie N. Y., Hertogenbosch, 1971.
185. Sanders J. L., On the shell equations in complex form, IUTAM Symposium Copenha-
Copenhagen, 1967, Theory of thin shells, Springer-Verlag, 1969.
186. Sanders J. L., Singular solutions to the shallow shell equations, Journal of applied
mechanics, ASME, June 1970 (Paper № 70-WA/APM-l).
187. Stanescu C, V i s a r i о n V., Calculul starilor de tensiune in teoria placilor curbe
(cilindri cu sectiune arbitrea superfete de arie minima), Editura Academili Republicii Socia-
liste Romania, 1969.
188. Steel С R., A geometric optics solution for the thin shell equation. Int. J. Engng.
Sci., 1971, v. 8.
189. V i s а г i о n V., Elemente pentru calculul placilor curbe subtin, elastice, Bucunsti, 1961.
190. Van derNeut A., De elastische stabiliteit van den dunwandigen bol. Diss., Delft, 1932.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аналогия статико-геометрическая 75—78. 238
Асимптотика напряженио-дефорыироваиного со-
состояния нормальная 410
оптимальная 325
— особая 411
Быстрота сен-венановского затухания асимптоти-
асимптотически нормальная 502
Вектор внешних моментов 49
сил.40
— поверхности основной 14
— упругого вращения 47
— — перемещения 47
— функций напряжений 45
Гипотеза Кирхгофа—Лява 26, 5S
Гипотезы теории цилиндрических оболочек
В. 3. Власова 159
— упрощенной теории цилиндрических пластин
В. В. Новожилова 161
Гладкость граничного условия 212, 221, 228
Деформация без растяжения н сжатия 103
Длина рисунка деформации характерная 469
— цилиндрической оболочки приведенная 384
—— — — относительная большая 384, 386
— весьма большая 384, 386
малая 384, 386
малая 384, 385
средняя 384
Жесткость срединной поверхности 217
Компонента вектора основная 14
— деформации изгибной 51
тангенциальной 50
— перемещения нормальная (прогиб) 47
тангенциальная 47
— поверхностной поправочной нагрузки 100, 126
— тензора физическая 79
Координаты географические на поверхности вра-
вращения 196
второго порядка 188, 192
на сфере 140, 178
— криволинейные в пространстве 22
изотермические 179
изотермически сопряженные 186
на произвольной поверхности 12
на развертывающейся поверхности 155—158
Корни характеристического уравнении замкнутой-
цилиндрической оболочки большие 353, 359,
370
малые 352, 359, 364
нулевые 356—358
Коэффициенты квадратичной формы второй 15
первой 13
— Ламе 23
Край поперечный оболочки нулевой кривизны 213
Кривизна поверхности Гауссова 18, 22
нормальная 17
Линия асимптотическая на поверхности 19
— излома срединной поверхности 128
— искажения асимптотическая 149
напряженно-деформированного состояния 97.
128
иеаснмптотнческая 113, 149
— квазистацноиарная напряженно-деформирован-
напряженно-деформированного состояния 500
— кривизны на поверхности 19
Задача вспомогательная 448, 449, 455
— краевая бевмомеитиой теории геометрическая
ПО. 254, 297
полная 111, 212
статическая ПО, 254, 297
Закрепление в направлении п 294
— косое 301
— тангенциальное жесткое 297, 298
лишнее 318
Значения показателей интенсивности непротнво-
оечивые 291
Матрица деформаций изгнбиых 273
тангенциальных 273
— моментов 273
— смещений 273
— усилий перерезывающих 273
тангенциальных 273
Метод асимптотического интегрирования уравне-
уравнений 470
— комплексный В. В. Новожилова 78
— расчленения 97, 124, 162, 164, 166, 289, 376
обобщенный 154, 155. 165, 166. 376
Изгибание поверхности 14, 78
тривиальное 107
— срединной поверхности возможное 219
Излом срединной поверхности 128, 311
Изменяемость большая однородная 162
' — напряженно-деформируемого состояния 501
— реальная 419
— функции общая 125
частная 125
Интеграл локализованный в «xt0 ± 0) 477, 478
— простой 470
— с большой изменяемостью 472
, соответствующий данному семейству ха-
характеристик 472
— с заданной квазистационарной линией 477
характеристической квазистационариой ли-
линией 477, 485
Интегралы с большой изменяемостью существенно
различные 491
Интенсивность поперечного сжатия 27
Направления квазистационариые 163, 469. 500
Напряжения несимметричные 389
Неустойчивость асимптотики напряженно-дефор-
напряженно-деформированного состояния 329
Область применимости безмоментной теории без-
безусловная 323
условная 323
безмомеитных уравнений замкнутых цилин-
цилиндрических оболочек 361
уравнений цилиндрических оболочек
В. 3. Власова 172
Оболочка пологая 137
— -горообразная 125, 168, 222
— цилиндрическая замкнутая 215, 336
—— открытая 215, 335
512
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Поверхность оболочки лицевая 26
— срединная 2К
— особая 125
Пограислой 364, 387, 428
— антиплоский 435
— плоский 435
Погрешность асимптотическая формальная 470.
475
Показатель изменяемости 163, 409
внешних воздействий 164
граничного условия 490
¦ интеграла дифференциального уравнения 474
краевого воздействия 501
— — иапряженио-деформироваиного состояния 501
общий 163, 500
частный 163, 500
— интенсивности напряженных состояний 290
пограислоев 437
Постановка смягченная краевых задач безмомент-
иой теории 270, 310
Применимость безмоментной теории безусловная
323
. условная 323
Производная ковариаитная 84, 91
Процесс итерационный безмоментный 276
для основного напряженного состояния 279
для простого краевого, эффекта 285
простой 479
— — чисто моментный 277
Работа сил в оболочке 66
Разветвление1 функции изменяемости 482
Размеры собственные однополостного гипербо-
гиперболоида 265, 327
Решения типа (а) и типа (Ь) 433
Семейство характеристик,определяющее интеграл
с большой изменяемостью 472
Сечение оболочки нормальное 37
Символ Кристоффеля 15, 82, 91
Система координат почти декартова 140, 145
— плоская 138
' полярная 140, 145
триортогональиая 23
— уравнении безмоментиой теории головная 108
• теории оболочек полная 74, 75
Смещение срединной поверхности как жесткого
целого 56, 298
Состояние напряженно-деформированное внутрен-
внутреннее 387, 436
— краевое 461
полное 289
— напряженное безмоментиое 100, 103
выродившееся 101
основное 97, 101, 103, 164
обобщенное 164, 165, 362, 364, 367, 369
с большой изменяемостью 146, 37?, 376, 386
чисто моментиое 102, 103
выродившееся 103
Тензор деформации вспомогательный 83
изгибиой 83
тангенциальной 83
— дискрймииантный 80
— кривизны 80
— метрический 80
— моментов 81
— неоднородности 85
— перерезывающих усилий 80
— тангенциальных смещений 83
усилий 80
— углов поворота 83
— упругости 85
— функций напряжений второй 81
первый 81
Теорема взаимности Беттн в теории оболочек 68
— единственности Кирхгофа в теории оболочек 69
— Клапейрона в теории оболочек 66
— о возможных изгибаниях 174, 219, 225, 226.
228, 242, 259, 263, 266, 270
Теория безмоментная 78, 103, 322
— В. 3. Власова (полубезмоментиая) цилиндри-
цилиндрических оболочек 160, 367. 386
— оболочек итерационная Первого приближения
414
— типа Ляве 414
Тимошенко 414
Теория упрощенная цилиндрически* ттлвстив
В. В. Новожилова 161, 369, 38Б
Триедр поверхности основной 14
Уравнение первого приближения 472, 474
— равновесия теории упругости осреднеиное вто-
второе 32
первое 31
— разрешающее круговой цилиндрической обо-
оболочки 337
напряженных состояний с большой изме-
изменяемостью 147, 149
обобщенного краевого эффекта в оболочке
нулевой кривизны 150
отрицательной кривизны 160
пологих оболочек 142
простого краевого эффекта 116, 288
— статики дополнительное 60
— характеристическое цилиндрической оболочке
замкнутой 339, 349 — 358
открытой 344, 379 — 383
Уравнения безмоментиой теории 104
геометрические 107
статические 104
— в комплексных перемещениях 89
— главные безмоментного итерационного про-
процесса 280, 297
итерационного процесса для основного на-
напряженного состояния 292
¦ чисто моментного итерационного процесс*
280, 297
— изгибания в деформациях 107
в перемещениях 107
— Кодацци —Гаусса 17, 21, 90
— момент ной теории оболочек 99
— неразрывности деформаций 54 — 67, 84
— равновесия безмомеитные интегральные 204
интегральные в комплексной форме 233
моментиые 41, 82, 84, 92
силовые 40, 82, 84, 92
— состояния 58, 85, 93
иетаигеициальиые 98
тангенциальные 98
Усилие косое 300
— перерезывающее 80
— приведенное 71, 290
— тангенциальное 80
Условие граничное идеализированное 70, 111, 21J
геометрическое 212
иетангеициальиое 111, 211
статическое 212
тангенциальное 111, 211
приведенное 459
— единственности решений задач теории оболо-
оболочек 69
полной безмоментной краевой задачи 112
— затухания 436
экспоненциального 491
— непрерывности иетангеициальиое 128, 211
тангенциальные 127, 211
— сопряжения 133, 211, 311 — 321
Условия затухания неполные 448
— применимости метода расчленения 124, 125,
162, 289
Форма квадратичная вторая 17
—— первая 13
Формулы деривационные Гаусса—Вейигартеи»
16, 21
Функции аналитические о безмомеитной теории
181 — 191
— — обобщенные в безмомеитиой теории 194,
243, 261
Функция изменяемости 472
— интенсивности 472
— напряжения 44—46, 81
комплексная 81
— перемещения комплексная 182
— с большой изменяемостью 472
— с весьма малой изменяемостью 166
Энергия деформации оболочки 66
Эффект краевой 97, 114
вырожденный 154
обобщенный 149—155
простой 113, 164, 362, 363, 372