




















































































































































































































































































































































Author: Лемешевский С.А.
Tags: астрономия астрофизика исследование космического пространства геодезия междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) космическая техника
ISBN: 978-5-905646-09-6
Year: 2017



НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ
имени Семёна Алексеевича ЛАВОЧКИНА
является головным в ракетно-космической отрасли
по созданию автоматических космических комплексов^
для фундаментальных научных исследований Вселенной,
в том числе Солнечной системы и ее планет.
Для реализации этого направления предприятие
осуществляет разработку, испытания, производство,
дистанционное управление в полете
космическими аппаратами
научного и прикладного назначения,
а также средств выведения
(космических межорбитальныхбуксиров,
головных обтекателей, переходных отсеков).
гидрометеорологическим геостационарный
искусственный спутник Земли «ЭЛЕКТРО-Л»
создан на базе многофункциональной
космической платформы «НАВИГАТОР»
спутники серии «ЭЛЕКТРО-Л» осуществляют
многоспектральную съемку всего диска Земли
в видимом и инфракрасном диапазонах спектра
. периодичность съемки 30 минут
Л
•'jo
НПО имени С.А. ЛАВОЧКИНА
ул. Ленинградская, д. 24, город Химки,
Московская область, Российская Федерация, 141400
+7(495) 251-6744, факс:.+7(495) 573-3595
NPOL@LASPACE.RU
HTTP//WWW. LASPACE.RU
оперативная гидрометеорологическая
и гелиогеофизическая информация с КА
используются для:
• анализа и прогноза погоды
в региональном и глобальном масштабах;
• анализа и прогноза состояния
акваторий морей и океанов;
• анализа и прогноза условий
для полетов авиации;
• анализа и прогноза
гелиогеофизической обстановки;
• мониторинга климата,
глобальных изменений,
чрезвычайные ситуаций и др.
Ж с
МНОГОФУНКЦИОНАЛЬНАЯ КОСМИЧЕСКАЯ ПЛАТФОРМА НАВИГАТОР
й
научно-производственное
объединение имени
Семёна Алексеевича Лавочкина
Посвящается
80-летию
Научно-производственного
объединения
имени Семёна Алексе
Лавочкина
и 60-летиюv
космической эры
ИОНАЛЬНАЯ
под редакцией
к.э.н. С.А. Лемешевского
2017
ББК 39.62
УДК 52.6.08.629.78
М73
Многофункциональная космическая платформа «Навигатор» / Автор-
М73 составитель В.В. Ефанов; Под ред. С.А. Лемешевского. - Химки. Издатель
ФГУП «НПО им. С.А. Лавочкина», 2017. - 360 с.: ил.
В книге содержатся описания многофункциональной космической базовой плат¬
формы «Навигатор», на которой созданы гидрометеорологические спутники нового
поколения серии «Электро-Л», орбитальная астрофизическая обсерватория «Спектр-
Р-Радиоастрон», а также спроектированы автоматические космические аппараты
«Арктика М», «Спектр-РГ», «Спектр-УФ» и другие.
В книге описаны конструкция и основные служебные системы этой платформы, та¬
кие как бортовая система управления, радиокомплекс, двигательная установка, устрой¬
ство детонационной автоматики и другие.
В ряде разделов приведены методики расчета и проектирования служебных систем
и устройств.
Разделы книги написаны учеными и специалистами НПО имени С.А. Лавочкина,
МОКБ «Марс», АО «Российские космические системы», ФГУП «СКТБ ТЕХНОЛОГ».
Книга представляет интерес для ученых, инженеров, аспирантов и студентов, специ¬
ализирующихся в создании космической техники.
рецензенты:
член-корреспондент РАН О. М. Алифанов
доктор технических наук, профессор АЛ. Любомудров
издатель
автор-составитель
художник
макет-верстка
ФГУП «НПО имени С.А. Лавочкина»
В.В. Ефанов
В.М. Давыдов
А.Ю. Титова
ISBN 978-5-905646-09-6
9 785905 646096
ISBN 978-5-905646-09-6
О НПО им. С.А. Лавочкина, 2017
МНОГОФУНКЦИОНАЛЬНАЯ
КОСМИЧЕСКАЯ ПЛАТФОРМА
«НАВИГАТОР»
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ 7
АСТЫ ОБЩИЕ СВЕДЕНИЯ 9
Назначение и состав многофункциональной
космической платформы «НАВИГАТОР» 9
Целевые программы, реализуемые с применением
космической платформы «НАВИГАТОР» 15
1Йс1 Средства выведения для КА, разработанных
на базе платформы «НАВИГАТОР» 27
швя Обеспечение надежности 43
1М Организация управления полетом 54
Прочностные и кинематические испытания
многофункциональной космической
платформы «НАВИГАТОР» 76
АСТЬ 2 ОСНОВНЫЕ СЛУЖЕБНЫЕ СИСТЕМЫ 93
BI Бортовой комплекс управления 93
Система электроснабжения 126
ЧДЯ Бортовой радиокомплекс 132
EEI Антенно-фидерная система многофункциональной
космической платформы «НАВИГАТОР» 152
Телеметрическая система 169
Выбор проектных параметров двигательной установки
космического аппарата «ЭЛЕКТРО-Л» 184
Система обеспечения теплового режима 194
Система ориентации солнечной батареи
многофункциональной
космической платформы «НАВИГАТОР» 229
5
Конструкция и особенности силовой схемы
многофункциональной космической
платформы «НАВИГАТОР» 250
Efilf] Пиромеханческие системы разделения 254
Использование системы автономной навигации
на геостационарном
космическом аппарате «ЭЛЕКТРО-Л» 313
Система управления остронаправленной антенной
многофункциональной космической
платформы «НАВИГАТОР» 332
ЧАСТЬ 3 НАЗЕМНЫЕ КОМПЛЕКСЫ УПРАВЛЕНИЯ 344
ИсЯИ Наземный комплекс управления 344
ПРЕДИСЛОВИЕ
В Российской Федерации космические исследования и использование косми¬
ческих средств в интересах социально-экономического развития страны и науки
являются важнейшими приоритетами государственных интересов, реализация ко¬
торых обеспечит поддержание статуса России как ведущей мировой космической
державы.
Федеральные космические программы 2006-2015 и 2016-2025 направлены на
безусловное решение задач практически по всем направлениям, в том числе по вос¬
полнению космических систем высокопериодичного наблюдения Земли и атмосфе¬
ры из космоса в интересах гидрометеорологии и созданных отечественных орби¬
тальных астрофизических обсерваторий для проведения фундаментальных научных
исследований Вселенной.
Решение проблемы по восполнению орбитальной группировки в кратчайшие сро¬
ки требует применения новых методов и схемно-технических предложений. Наибо¬
лее рациональным является проектирование космического аппарата по модульному
принципу на базе многофункциональной космической платформы, в основу кото¬
рой положены отработанные проектно-конструкторские, технологические решения
и служебные системы.
В отечественной практике не было прецедента создания платформы для ши¬
рокого класса космических аппаратов, решающих задачи с существенно отличаю¬
щимися условиями функционирования и работающих на геостационарных, высо¬
коэллиптических, геосинхронных орбитах, а также в точке либрации L2 системы
Земля-Солнце.
Для решения поставленных задач в НПО имени С.А. Лавочкина была создана
и внедрена в промышленное производство многофункциональная космическая плат¬
форма «НАВИГАТОР» с реализацией на ее базе широкого спектра гидрометеоро¬
логических и астрофизических космических комплексов. Силовая схема и бортовые
служебные системы разработаны как основные для широкого ряда космических
аппаратов.
На базе платформы созданы и успешно функционируют на орбите гидрометео¬
рологический спутник «ЭЛЕКТРО-Л» № 1, № 2 и орбитальная астрофизическая об¬
серватория «СПЕКТР-Р - РАДИОАСТРОН». На платформе «НАВИГАТОР» спро¬
ектирован также перспективный гидрометеорологический спутник «АРКТИКА-М»,
работающий на высокоэллиптической орбите типа «МОЛНИЯ» для мониторинга об¬
становки в высоких широтах России. Такой космический аппарат не имеет аналогов
в мире. На этой же платформе создаются перспективные изделия, например астрофи¬
зические обсерватории «СПЕКТР-РГ», «СПЕКТР-УФ» и другие.
По конструкции рассматриваемая платформа представляет собой восьмигранный
корпус, на гранях которого закреплены элементы двигательной установки, панели
батарей фотопреобразователей с приводом поворота, радиаторы системы обеспече¬
ния теплового режима и др. На верхнем торце корпуса устанавливается полезная на¬
грузка, а на нижнем «НАВИГАТОР» крепится к межорбитальному космическому
буксиру.
Многофункциональная космическая платформа «НАВИГАТОР» конструктивно
представляет собой законченный модуль, оснащенный всеми необходимыми служеб¬
7
ными системами и агрегатами, для функционирования в космосе в течение 10 лет
с различными полезными нагрузками.
Настоящая книга посвящена техническому описанию многофункциональной кос¬
мической платформы «НАВИГАТОР». В ней приведены практически все служебные
системы и основные агрегаты, для ряда устройств, описаны основы расчета.
В написании книги принимали участие ученые и инженеры, создавшие пред¬
ставленную платформу. Это сотрудники НПО имени С.А. Лавочкина, Московского
ОКБ «МАРС», СКТБ «Технолог», Корпорации «ВНИИЭМ».
НПО имени С.А. Лавочкина благодарно авторам за труд, который они вложили
в создание книги.
ЧАСТЬ 1
ОБЩИЕ СВЕДЕНИЯ
1SI НАЗНАЧЕНИЕ И СОСТАВ
МНОГОФУНКЦИОНАЛЬНОЙ КОСМИЧЕСКОЙ
ПЛАТФОРМЫ «НАВИГАТОР»
Базовый модуль служебных систем (БМСС) «НАВИГАТОР» разработан в НПО
им. С.А. Лавочкина как унифицированный модуль для размещения и обеспече¬
ния работоспособности полезной нагрузки космических аппаратов (КА) различ¬
ного назначения. В зависимости от задачи космические аппараты, базирующиеся
на «НАВИГАТОРЕ», могут функционировать на низких круговых, эллиптических,
высоких эллиптических, геостационарных орбитах искусственного спутника Земли,
в окрестности точек либрации системы Солнце - Земля и т.д. (.Ефанов В.В., Марты¬
нов М.Б., Пичхадзе К.М., 2012).
Конструктивно-силовая схема платформы «НАВИГАТОР» и бортовые слу¬
жебные системы разработаны как базовые для широкого спектра космических
аппаратов.
БМСС «НАВИГАТОР» имеет летную квалификацию в составе космических
аппаратов «ЭЛЕКТРО-Л» № 1 и «СПЕКТР-Р», запуски которых состоялись в
2011 году, а также КА «ЭЛЕКТРО-Л» №2, выведенного на рабочую геостаци¬
онарную орбиту в декабре 2015 года (Асмус и др., 2012; Кардашев Н.С., Ала-
коз А.В. и др., 2016). В настоящий момент БМ’СС «НАВИГАТОР» изготовлен,
прошел необходимую наземную экспериментальную отработку с целью запуска
в 2017-2018 годах на рабочие орбиты целого ряда космических аппаратов, раз¬
работки ФГУП «НПО им. С.А. Лавочкина» («ЭЛЕКТРО-Л» № 3, «СПЕКТР-РГ»
и «АРКТИКА-М» № 1) СМартынов М.Б., 2010). Также БМСС «НАВИГАТОР»
изготавливается для КА «СПЕКТР-УФ», «АРКТИКА-М» № 2-4, «ЭЛЕКТРО-Л»
№ 4 и № 5 (Степанов В.В., 2016; Расторгуев А. С., Сачков М.Е., Заболотских М.В.,
2016). Серийность создания дает возможность модернизации БМСС, а также по¬
вышения его надежности путем прохождения через наземную экспериментальную
отработку и эксплуатацию на рабочих орбитах.
Космические аппараты, построенные на базе платформы «НАВИГАТОР», изо¬
бражены на рисунке 1.1.1.
Основные характеристики КА на основе платформы «НАВИГАТОР» приведены
в таблице 1.1.1.
Базовый модуль «НАВИГАТОР» конструктивно представляет собой законченный
модуль, оснащенный всеми необходимыми системами и агрегатами для обеспечения
функционирования в космосе различной полезной нагрузки.
Унифицированность платформы «НАВИГАТОР» заключается в наличии базовых
конструктивно-технологических решений. «НАВИГАТОР» базируется на отработан¬
ных технических решениях, обеспечивающих стабильную основу платформы - это
двигательная установка (ДУ), бортовой комплекс управления (БКУ), радиокомплекс,
9
1-1
Рисунок 1.1.1. Космические аппараты на базе БМСС «НАВИГАТОР»
система электроснабжения (СЭС). Для возможности применения в КА на базе плат¬
формы «НАВИГАТОР» различных типов полезных нагрузок платформа обеспечена
стандартными интерфейсами, которые при необходимости могут дополняться, - это
адаптер для механического интерфейса, БКС, а также блок информационно-логи¬
ческого сопряжения ПН с платформой. Таким образом, «НАВИГАТОР» состоит из
базовых модулей и модулей, расширяющих возможности. Например, в составе КА
«СПЕКТР-УФ» в качестве гироскопического измерителя вектора угловой скорости
(ГИВУС) применяется прибор Astrix 200, в то время как в составе остальных КА на
базе «НАВИГАТОРА» применяется КИНД 34020. Также для повышения надежно¬
сти, начиная с КА «ЭЛЕКТРО-Л» № 2, в составе БКУ астроприборы АД-1 заменены
на SED-26.
Таблица 1.1.1. Основные характеристики КА, созданных на основе платформы «НАВИГАТОР»
параметр
ЭЛЕКТРО-Л
АРКТИКА-М
СПЕКТР-Р
СПЕКТР-РГ
СПЕКТР-УФ
полезная
нагрузка
МСУ-ГС/БРТК/ГГАК
радиотелескоп
eROSITA,
ART-XC
Т-170М
масса ПН,
кг
730
730
2600
1250
1625
W, Вт
1500
2500
2500
1700
1700
заправка,
кг
540
300
540
300
300
орбита
ГСО
типа
«Молния»
вэо,
330000x600,
/=51,4°
точка
либрации L2
геосинхронная,
1=51,6,
/*=36000 км,
/=24 ч
САС,
лет
10
5-7
3
7,5
5
10
1-1
Информационно-логическое взаимодействие между БМСС «НАВИГАТОР» и ПН
осуществляется по стандартному магистральному последовательному интерфейсу
ГОСТ 52070. «НАВИГАТОР» позволяет подключить до 262 телеметрических дат¬
чиков ПН. Для питания ПН используется напряжение 27±1,35 В, а выделяемая мощ¬
ность - до 1200 Вт. Масса ПН, размещаемой на «НАВИГАТОРЕ», может достигать
2600 кг.
В состав базового модуля служебных систем входят следующие бортовые систе¬
мы и агрегаты:
- бортовой комплекс управления;
- система электроснабжения;
- бортовая аппаратура командно-измерительной системы;
- антенно-фидерная система;
- телеметрическая система;
- система ориентации солнечной батареи;
- система обеспечения теплового режима;
- двигательная установка;
- конструкция.
Для реализации платформы привлекаются ведущие организации отечественной
промышленности (таблица 1.1.2).
Таблица 1.1.2. Состав кооперации платформы «НАВИГАТОР»
организация
подсистема
ФГУП «НПО
им. С.А. Лавочкина»
система электроснабжения (СЭС)
средства обеспечения теплового режима (СОТР)
антенно-фидерные системы (АФС)
двигательная установка (ДУ)
конструкция
ПАО «Российские
космические системы»
бортовая аппаратура командно-измерительной системы (БА КИС)
ФГУП «МОКБ «Марс»
бортовой комплекс управления (БКУ)
ДООО «Ижевский
радиозавод»
телеметрическая система (ТМС)
АО «ИСС
им. М.Ф. Решетнева»
батарея солнечная (БС)
ПАО «Сатурн»
батарея фотоэлектрическая (БФ)
аккумуляторная батарея (АБ)
ОАО «НПЦ «Полюс»
комплекс автоматики и стабилизации (КАС)
ОАО «Корпорация
«ВНИИЭМ»
система ориентации солнечной батареи (СОСБ)
ФГУП «ОКБ «Факел»
двигательные блоки коррекции и стабилизации (ДБК, ДБС)
Новосибирский
государственный
университет
система контроля электризации
11
1-1
Конструктивно базовый модуль представляет собой восьмигранный корпус, на
гранях которого закреплены элементы двигательной установки, панели солнечных
батарей с приводом поворота, радиаторы системы обеспечения теплового режима;
в нижней части корпуса установлена тепловая сотопанель с аппаратурой базового мо¬
дуля; верхний торец корпуса используется для крепления полезной нагрузки, а ниж¬
ним торцом базовый модуль «НАВИГАТОР» крепится к межорбитальному косми¬
ческому буксиру или ракете-носителю непосредственно через переходной адаптер.
Общий вид базового модуля служебных систем «НАВИГАТОР» показан на ри¬
сунках 1.1.2, 1.1.3, 1.1.4.
Рисунок 1.1.2. Базовый модуль «НАВИГАТОР»
Рисунок 1.1.3. Базовый модуль «НАВИГАТОР»
12
1-1
Рисунок 1.1.4. Базовый модуль «НАВИГАТОР»
Основные характеристики платформы «НАВИГАТОР» приведены в таб¬
лице 1.1.3.
Таблица 1.1.3. Основные характеристики платформы «НАВИГАТОР»
параметр
характеристика
назначение
гидрометеорология/астрофизика/наблюдение
орбиты функционирования
ГСО/«Молния»/высокоэллиптическая/точка либрации/ССО
масса ПН, кг
до 2600
мощность ПН, Вт
до 1200
электропитание, В
27±1,35
система коррекции
и стабилизации
ЖРД однокомпонентная
радиокомплекс
С/Х-диапазоны
информативность служебной
радиолинии, Кбит/с:
- Земля - КА
- КА - Земля
1
32
информационно-логический
интерфейс с ПН
МПИ ГОСТ 52070
количество релейных
команд на ПН
140
количество ТМ
датчиков КНА:
- всего
- управляющих
262
18
точность наведения
Г
амплитуда стабилизации
± 2,5"
точность стабилизации
105 °/с
13
1-1
Список литературы
Асмус и др. Развитие космического комплекса гидрометеорологического обеспе¬
чения на базе геостационарных спутников серии «ЭЛЕКТРО-Л» // Вестник НПО
им. С.А. Лавочкина. 2012. № 1. С .3-14
Ефанов В.В., Мартынов М.Б., Пичхадзе К.М. Космические роботы для научных
исследований // Наука в России. 2012. № 5 (191). С. 66-71.
Кардашев Н.С., Алакоз А.В. и др. «РАДИОАСТРОН»: итоги выполнения научной
программы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016.
№ 3. С. 4-24.
Мартынов М.Б. Модульное построение космических аппаратов: анализ эффек¬
тивности, перспектива применения // Общероссийский научно-технический журнал
«Полет». 2010. № 7. С. 13-19.
Расторгуев А. С., Сачков М.Е., Заболотских М.В. Галактическая астрономия в уль¬
трафиолете // Вестник НПО им. С.А. Лавочкина. 2016. № 3. С. 38-47
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
М.Б. Мартынову И.В. Москатиньев, А. С. Митькин
НПО им. С.А. Лавочкина
14
КВ ЦЕЛЕВЫЕ ПРОГРАММЫ,
РЕАЛИЗУЕМЫЕ С ПРИМЕНЕНИЕМ
КОСМИЧЕСКОЙ ПЛАТФОРМЫ
«НАВИГАТОР»
В основу выполнения целевых программ по фундаментальным космическим иссле¬
дованиям и гидрометеорологии в качестве служебной космической платформы была
заложена многофункциональная космическая платформа (МКП) «НАВИГАТОР»,
разрабатываемая в ФГУП «НПО имени С.А. Лавочкина».
Ключевой задачей этих проектов стало создание универсальной служебной плат¬
формы, которая обеспечивала бы установку и размещение целевой аппаратуры для
различных задач и могла бы быть адаптирована для обеспечения функционирования
полезной нагрузки во всем многообразии особенностей и требований. Компоновка
платформы «НАВИГАТОР», несущая конструкция, конфигурация служебных си¬
стем и агрегатов проектировались из условия максимального удовлетворения раз¬
нообразных требований таких целевых программ, как космическая астрофизика и
гидрометеорология. Исходя из того, что современные космические телескопы для до¬
стижения уникальных характеристик по угловому разрешению имеют значительные
габариты, основное место под головным обтекателем предоставлено было им, для
чего платформу разработали с минимальными размерами по высоте (Хартов В.В.,
Мартынов М.Б., Бабышкин В.Е. и др., 2014).
Концепция создания платформы «НАВИГАТОР» была сформирована таким
образом, что ее базовая основа отрабатывалась под предельные требования из все¬
го спектра параметров различных целевых программ. В то же время была пред¬
усмотрена возможность модернизации базового, модуля с целью обеспечения тре¬
бований и условий конкретной целевой программы. Конструкция базового модуля
предполагает осуществление запуска космического аппарата различными сред¬
ствами выведения: PH «Союз» с МКБ «Фрегат», PH «Зенит» с МКБ «Фрегат-СБ»,
PH «Протон».
Таким образом, созданная НПО им. С.А. Лавочкина универсальная межорби-
тальная космическая платформа «НАВИГАТОР» была разработана как унифициро¬
ванный модуль для КА астрофизического и гидрометеорологического назначения.
Конструктивно-силовая схема и служебные системы платформы разработаны как
базовые для широкого спектра КА, предназначенных, в зависимости от целевой за¬
дачи, для функционирования на низких круговых, эллиптических, геосинхронных
и геостационарных орбитах, в точках либрации и т.д. (Хартов В.В., Мартынов М.Б.,
Бабышкин В.Е. и др., 2014).
Первой программой, реализованной на основе МКП «НАВИГАТОР», стал ги¬
дрометеорологический космический комплекс второго поколения «ЭЛЕКТРО»,
созданный НПО им. С.А. Лавочкина с кооперацией для нужд Росгидромета и Все¬
мирной метеорологической организации. Запуск первого космического аппарата
«ЭЛЕКТРО-Л» (рисунок 1.2.1) на геостационарную орбиту с помощью PH «Зенит-
ЗБЬБФ» состоялся 20 января 2011 года (Асмус В.В., Дядюченко В.Н., Загребаев В.А.
и др., 2012).
Каждые полчаса, круглосуточно, КА «ЭЛЕКТРО-Л» передает на наземные стан¬
ции многоспектральные изображения облачности и подстилающей поверхности все-
15
1-2
Рисунок 1.2.1. КА «ЭЛЕКТРО-JT»
го диска Земли с разрешением I км в каналах видимого диапазона и 4 км - в каналах
инфракрасного диапазона. Эти изображения необходимы для анализа и прогноза по¬
годы, состояния акваторий морей и океанов, условий для полетов авиации.
На целевую аппаратуру (рисунок 1.2.2) КА «ЭЛЕКТРО-Л» возлагаются также
задачи ретрансляции и обмена метеоинформацией, приема и ретрансляции данных
от автономных метеорологических платформ и сигналов аварийных буев системы
КОСПАС-SARSAT {Асмус В.В., Дядюченко В.Н., Загребаев В.А. и др., 2012).
Для проведения гидрометеорологических съемок КА «ЭЛЕКТРО-Л» оснащается
уникальным сканером МСУ-ГС (многозональное сканирующее устройство - геоста¬
ционар), который разработан в ОАО «РКС» (РНИИ космического приборостроения)
(Гехтин Ю.М., Селиванов А. С., 2015).
Масса КА «ЭЛЕКТРО-Л» на рабочей орбите составляет 1712 кг, из которых
462 кг приходится на полезную нагрузку (ПН).
Система электроснабжения космического аппарата обеспечивает мощность
до 1700 Ватт к концу срока активного существования при электропотреблении ПН
до 800 Вт (Бабышкин В.Е., 2011).
Планируемое Федеральной космической программой РФ на 2016-2025 гг. даль¬
нейшее развитие группировки КА серии «ЭЛЕКТРО-Л» (рисунок 1.2.3) приведет
к созданию постоянно действующей национальной системы гидрометеорологическо¬
го назначения.
16
1-2
передающая НА-3 БРТК
ГАЛС ГГАК-Э
приёмная ОНА-1 БРТК
передающая НА-4 БРТК
МНАБАКИС
МСУ-ГС (2 комплекта)
СКЛ-Э ГГАК-Э
магнитометр ГГАК-Э
Скиф-6 ГГАК-Э
ДИР-Э ГГАК-Э
ВУСС-Э ГГАК-Э
Рисунок 1.2.2. Целевая аппаратура КА «ЭЛЕКТРО-Л»
Прогресс в области прогнозирования погоды для Российской Федерации, как
северной страны, зависит от возможностей оперативного получения гидрометеоро¬
логических данных по арктическому региону Земли, существующие космические
гидрометеорологические комплексы на геостационарной орбите (ГСО) не могут
обеспечить мониторинг этого региона. Для решения гидрометеорологических задач
в Арктике с высокой оперативностью получения информации необходимо создание
специальных средств наблюдения. Разрабатываемая в НПОЛ высокоэллиптическая
гидрометеорологическая космическая система (ВГКС) «АРКТИКА-М» должна обе¬
спечить выполнение задач мониторинга арктического региона.
В основу создания ВГКС «АРКТИКА-М» положен принцип взаимного функцио¬
нального дополнения ВГКС «АРКТИКА-М» и геостационарной гидрометеорологи¬
ческой космической системы (ГГКС) «ЭЛЕКТРО».
Наиболее рациональной, с учетом вышеперечисленных принципов, является вы¬
сокоэллиптическая орбита типа «Молния» с высотой апогея порядка 39 тыс. км, пе¬
ригея - около 1.5 тыс. км, наклонением в 63° и периодом обращения порядка 12 часов
(рисунок 1.2.4). Непрерывное наблюдение заданного района обеспечивается двумя
космическими аппаратами с длительностью рабочих участков порядка 6 часов и от¬
носительным смещением их начала на 6 часов (Хартов В.В., Мартынов М.Б., Бабыги-
кин В.Е. и др., 2014).
приёмная НА-1 БРТК
ИСП-2М ГГАК-Э
передающая НА-2 БРТК
передающая ОНА-2 БРТК
17
1-2
Рисунок 1.2.3. КА «ЭЛЕКТРО-Л» № 2 в сборочном цехе
конец рабочего
участка ВЭО
зона качественного'
мониторинга с ВЭО
начало рабочего
участка ВЭО
70° предельный
угол/качественного
! на\Диодения
обеспечивается
квазинепрерывное
гидрометеорологическое
наблюдение территорий
севернее 60° с.ш.
с периодичностью обзора
и качеством данных,
аналогичными для
геостационарных КА
. зона качественного
мониторинга на ГСО
Рисунок 1.2.4. Схема обзора ВГКС «АРКТИКА-М»
18
1-2
Комплекс целевой аппаратуры КА «АРКТИКА-М» состоит из следующих основ¬
ных систем:
- многозональное сканирующее устройство (МСУ-ВЭ);
- бортовой радиотехнический комплекс (БРТК-ВЭ);
- гелиогеофизический аппаратурный комплекс (ГГАК-ВЭ);
- бортовая система сбора данных (БССД-ВЭ).
Состав целевой аппаратуры КА «АРКТИКА-М» определён в соответствии
с принципом максимальной преемственности с КА «ЭЛЕКТРО-JI», в том числе
и по основным характеристикам целевой аппаратуры, а также с учетом требования
по взаимному дополнению космических систем.
Для обеспечения запусков КА «АРКТИКА-М» в качестве средств выведения
определены высоконадежные серийные изделия: ракета-носитель «Союз-2-16» про¬
изводства ФГУП «ГНПРКЦ «ЦСКБ-Прогресс» и межорбитальный космический
буксир «Фрегат», изготавливаемый ФГУП «НПО им. С.А. Лавочкина» {Хартов В.В.,
Мартынов М.Б., Бабышкин В.Е. и др., 2014).
Космический аппарат «АРКТИКА-М» (рисунок 1.2.5), как и КА «ЭЛЕКТРО-Л»,
создается по модульному принципу в негерметичном исполнении, состоит из комплек¬
са целевой аппаратуры и из многоцелевой космической платформы «НАВИГАТОР»,
которая, являясь базовым модулем для КА «СПЕКТР-Р» и «ЭЛЕКТРО-Л», имеет
положительную летную историю. Запуск КА «АРКТИКА-М» планируется в первом
квартале 2019 года.
Высокий уровень современного развития космической отрасли обеспечил воз¬
можность создания космических аппаратов для проведения внеатмосферных астро¬
номических наблюдений практически во всем диапазоне электромагнитного излуче¬
ния - от инфракрасного до рентгеновского и гамма-излучения.
При этом оптимальной принята концепция создания специализированных под
конкретные задачи астрофизики космических орбитальных обсерваторий. В каждом
проекте, концентрируя научно-технические и исследовательские усилия на каком-
либо определённом участке спектрального диапазона, предполагается получать уни¬
кальную, наиболее подробную и полную научную информацию.
В рамках этой концепции в Федеральной космической программе РФ было пред¬
усмотрено создание целой серии КА «СПЕКТР» для астрофизических исследова-
Рисунок 1.2.5. Общий вид КА «АРКТИКА-М»
19
1-2
ний в радио- («СПЕКТР-Р»), рентгеновском («СПЕКТР-РГ»), ультрафиолетовом
(«СПЕКТР-УФ»), миллиметровом («СПЕКТР-М») и гамма- («ГАММА-400») диа¬
пазонах электромагнитного излучения. Головным исполнителем по созданию и раз¬
работке такой серии КА является НПО им. С.А. Лавочкина.
В современных космических программах мировых лидеров космического лагеря
астрофизические исследования занимают все более высокие позиции, поскольку раз¬
вивающиеся космические технологии позволяют предоставить ученым уникальные
данные об очень отдаленных космологических объектах и о событиях, происшедших
в период зарождения звезд и галактик, что дает возможность осуществления глубоко¬
го прорыва в исследовании фундаментальных свойств материи.
Однако реализация подобных проектов диктует необходимость обеспечения таких
технических параметров, как высочайшая разрешающая способность научных при¬
боров, высокая точность наведения и стабилизации, прецизионная геометрическая
стабильность конструкции, уникально высокая точность определения параметров
орбиты, большие объемы и скорость передачи научных данных и др. Модернизация
МКП «НАВИГАТОР» позволила выполнить все эти требования, что было подтверж¬
дено успешной реализацией проекта «СПЕКТР-Р». Запуск КА «СПЕКТР-Р» (рису¬
нок 1.2.6) состоялся 18 июля 2011 года.
Космический комплекс «СПЕКТР-Р» предназначен для построения уникально¬
го интерферометра Земля - Космос, созданного на основе высокоапогейного искус¬
ственного спутника Земли с радиотелескопом диаметром 10 метров на борту, рабо¬
тающего совместно с радиотелескопами, расположенными на разных континентах
Земли. Таким образом, получается научный прибор с апертурой, равной 20-25 диа¬
метров Земли, обеспечивающий сверхвысокое разрешение.
В качестве рабочей орбиты выбрана высокоэллиптическая орбита с апогеем
340 тыс. км, перигей 600 км. Для работы интерферометра требуется знание поло¬
жения космического аппарата с точностью несколько сот метров по расстоянию, по
скорости — не хуже 2 см/с и по ускорению — 10-7 м/с2.
Рисунок 1.2.6. КА «СПЕКТР-Р»
20
1-2
Рисунок 1.2.7. Кинематические испытания радиотелескопа «СПЕКТР-Р»
Радиотелескоп «СПЕКТР-Р» работает в диапазонах 92 см, 18 см, 6,2 см и 1,3 см
с угловым разрешением от 540 до 7 мкс (Кардагиев Н.С., Алакоз А.В., Ковалев Ю.Ю.
и др, 2014).
Многие технические решения, реализованные на КА «СПЕКТР-Р» (рису¬
нок 1.2.7), по-настоящему инновационны и уникальны. Как отмечают астрофизики
в России и за рубежом, этот в высшей степени успешный проект определяет на сегод¬
няшний день мировой уровень радиоастрономических наблюдений из космоса.
Следующий астрофизический проект, создаваемый на базовом модуле
«НАВИГАТОР», — международная орбитальная астрофизическая обсерватория
«СПЕКТР-РГ» («СПЕКТР-РЕНТГЕН») (рисунок 1.2.8), предназначенная для изуче¬
ния Вселенной в рентгеновском жестком диапазоне энергий (от 0,3 до 30 кэВ). Ос¬
новной задачей обсерватории является обзор всего неба в рентгеновском диапазоне
электромагнитного спектра с чувствительностью, в 40 раз превышающей чувстви¬
тельность предыдущего обзора в рамках астрофизического проекта Германии, США
и Англии «ROSAT» в 90-е годы XX века, а также поиск скоплений галактик, изучение
21
1-2
Рисунок 1.2.8. КА «СПЕКТР-РГ»
вспышек сверхновых чёрных дыр, нейтронных звёзд и галактических ядер. Полная
научная программа займет семь лет: четыре года — широкий обзор всего неба, три
года — точечный обзор отдельных галактик.
Комплекс научной аппаратуры состоит из двух телескопов - eROSITA и АРТ-ХС.
Рентгеновский телескоп eROSITA (рисунок 1.2.9) разрабатывается европейским со¬
обществом под руководством института Макса Планка в Германии. Его характери¬
стики: диапазон 0,3-10 кэВ, поле зрения 1°, угловое разрешение 15, эффективная
площадь 2400 см2, масса 760 кг.
Телескоп АРТ-ХС разрабатывается в Институте космических исследований РАН.
Он воспринимает излучение диапазона 6-30 кэВ, поле зрения телескопа - 0,3°, угло¬
вое разрешение 45, эффективная площадь 450 см2, масса 350 кг.
«СПЕКТР-РГ» - международный российско-германский проект, нацеленный на
создание орбитальной астрофизической обсерватории, предназначенной для изуче¬
ния Вселенной в рентгеновском диапазоне длин волн.
22
1-2
Проект предполагает создание на¬
циональной обсерватории астрофизики
высоких энергий, продолжающей после¬
довательность астрофизических спут¬
ников «АСТРОН» и «ГРАНАТ», также
разработанных в НПО им. С.А. Лавоч¬
кина. Аппарат строится по модульному
принципу, обладает хорошими характе¬
ристиками ориентации и стабилизации,
позволяет в течение года наблюдать
практически всю небесную сферу.
КА «СПЕКТР-РГ» будет выведен в
окрестность точки Лагранжа L2 системы
Солнце - Земля. Проведение астрофи¬
зических исследований запланировано
в течение 7,5 лет, из которых 4 года -
в режиме сканирования звездного неба,
а 3,5 года - в режиме точечного наблю¬
дения объектов во Вселенной по заявкам
мирового научного сообщества.
Межорбитальная космическая плат¬
форма «НАВИГАТОР», которая поло¬
жительно зарекомендовала себя в преды¬
дущих миссиях (например, «ЭЛЕКТРО»
и «СПЕКТР-Р»), была адаптирована под
программу «СПЕКТР-РГ» со сроком ак¬
тивного существования на орбите не ме¬
нее 7 лет. Запуск планируется на весну
2018 года на PH «ПРОТОН».
Ультрафиолетовая астрономия - весьма важное и быстро прогрессирующее на¬
правление изучения Вселенной. Успешная работа на орбите таких обсерваторий,
как Copernicus, IUE, российской обсерватории «АСТРОН», космического телескопа
им. Хаббла (HST), обсерваторий FUSE и GALEX убедительно подтвердили высокую
значимость наблюдений в УФ-диапазоне для развития современной астрофизики (Бо¬
ярчук А.А., Шустов Б.М., Моишеев А.А., Сачков М.Е., 2012).
Проект «СПЕКТР-УФ» («WSO-UV») (международное название «Всемирная
космическая обсерватория - Ультрафиолет») разрабатывается с участием Испании
с целевой задачей проведения фундаментальных астрофизических исследований
в ультрафиолетовом и видимом диапазонах электромагнитного спектра с высоким
угловым разрешением.
Реализация проекта «СПЕКТР-УФ» обеспечит астрофизикам возможность из¬
учать различные объекты Вселенной в не доступном для наблюдений с земной по¬
верхности ультрафиолетовом участке спектра 115-310 нм, а также регистрировать
гамма-излучения в энергетическом диапазоне от 10 кэВ до 10 МэВ (Сачков М.Е., Шу¬
стов Б. М., Моишеев АЛ. и др. 2014).
Основные возможности решения научных задач с помощью обсерватории
«СПЕКТР-УФ» (рисунок 1.2.10) заключаются в спектроскопии слабых источников
Рисунок 1.2.9. Подготовка макета eROSITA
к испытаниям
23
1-2
Рисунок 1.2.10. КА «СПЕКТР-УФ»
и построении изображений в УФ-участке спектра. При этом должны достигаться вы¬
сокое спектральное разрешение, максимальное пространственное разрешение, а для
изучения слабых источников - высокая проницающая способность.
Этот международный проект является на период 2020-2030 гг. главной и един¬
ственной российской и международной перспективой иметь широкое ультрафиоле¬
товое окно во Вселенной.
В состав комплекса научной аппаратуры обсерватории «СПЕКТР-УФ» входят:
телескоп Т-170М с диаметром главного зеркала 1.7 м (рисунок 1.2.11), спектрографы
высокого и низкого разрешения, камеры для построения высококачественных изо¬
бражений в УФ-диапазоне, блок управления научными данными, а также приборы
для регистрации космического гамма-излучения «Конус-УФ».
Основными разработчиками телескопа Т-170М являются НПО им. С.А. Ла¬
вочкина, ИНАСАН, ИКИ. Блок спектрографов создается в РФЯЦ-ВНИИЭФ, ка¬
меры поля и блок управления научными данными разрабатывает ИКИ, приборы
для регистрации космического гамма-излучения «Конус-УФ» разработаны в ФТИ
им. А.Ф. Иоффе РАН.
Главной задачей модернизации МКП «НАВИГАТОР» для этого проекта было
обеспечение точности наведения и стабилизации телескопа на уровне 0,1 угл.сек
(3Q). Достижение этих параметров требует вполне определённых характеристик из¬
мерительных средств и исполнительных органов, которые должны образовать контур
системы управления КА. Основным измерительным средством этого контура являет¬
ся система датчиков гида (СДГ), обеспечивающая измерение углов отклонения теле¬
скопа вокруг трех осей.
24
1-2
-*1
Рисунок 1.2.11. Сборка телескопа КА «СПЕКТР-УФ»
Чтобы получить необходимые точностные характеристики СДГ, чувствительные
элементы датчиков, использующие ПЗС-матрицы, расположили непосредственно
в фокальной поверхности оптической системы телескопа. При штатной работе ис¬
пользуется комбинация из любых двух датчиков, что позволяет измерять отклонение
оси от направления визирования с разрешением не менее 0.01 угл.сек, а разворот
вокруг оси визирования около - 3 угл.сек. Это эквивалентно перемещению изобра¬
жения на -0.8 микрон в пределах фокальной поверхности, что достаточно для нор¬
мальной работы исследовательской научной аппаратуры {Беляев Б.Б., Ульяшин А.К,
Ковалев Ф.А., 2014).
25
1-2
Для создания наиболее благоприятных условий функционирования комплекса на¬
учной аппаратуры КА «СПЕКТР-УФ» его орбита должна проходить вне радиацион¬
ных поясов Земли на высотах не менее 35 тыс. км. В качестве рабочей орбиты выбран
вариант геосинхронной орбиты с наклонением от 35 до 40 град. Для выведения КА
«СПЕКТР-УФ» на орбиту применяется PH «Протон» с разгонным блоком ДМ.
Перспективная программа фундаментальных космических исследований содер¬
жит еще два проекта, которые предполагается базировать на МКП «НАВИГАТОР»:
«СПЕКТР-М» - миллиметровый диапазон и «ГАММА-400» - гамма-диапазон элек¬
тромагнитного излучения.
Список литературы
Асмус В.В., Дядюченко В.Н., Загребаев В.А. и др. Развитие космического комплек¬
са гидрометеорологического обеспечения на базе геостационарных спутников серии
«ЭЛЕКТРО-JT» // Вестник ФГУП «НПО им. С.А. Лавочкина». 2012. № 1. С. 3-14.
Бабышкин В.Е. Инновационный гидрометеорологический космический комплекс
«ЭЛЕКТРО» нового поколения // Вестник ФГУП «НПО им. С.А. Лавочкина». 2011.
№ 1.С. 3-8.
Беляев Б.Б., Улъяшин А.И., Ковалев Ф.А. Система точного гидирования // Вестник
НПО им. С.А. Лавочкина. 2014. № 5. С. 108-113.
Боярчук А.А., Шустов Б.М., Моишеев А.А., Сачков М.Е. Проект «СПЕКТР-УФ»//
Вестник ФГУП «НПО им. С.А. Лавочкина». 2012. № 4. С. 64-73.
Гехтин Ю.М., Селиванов А. С. Многозональное сканирующее устройство для гео¬
стационарного метеоспутника «ЭЛЕКТРО-Л» № 1 // Вестник НПО им. С.А. Лавоч¬
кина. 2015. №3. С. 114-117.
Кардашев Н.С., Алакоз А.В., Ковалев Ю.Ю. и др. «РАДИОАСТРОН»: итоги вы¬
полнения ранней научной программы исследования объектов Вселенной со сверхвы¬
соким угловым разрешением // Вестник НПО им. С.А. Лавочкина. 2014. № 3. С. 4-11.
Сачков М.Е., Шустов Б.М., Моишеев А.А. и др. Комплекс научной аппаратуры об¬
серватории «СПЕКТР-УФ» // Вестник НПО им. С.А. Лавочкина. 2014. № 5. С. 34-39.
Хартов В.В., Мартынов М.Б., Бабышкин В.Е. и др. Новая высокоэллиптическая
космическая система «АРКТИКА» // Вестник НПО им. С.А. Лавочкина. 2014. № 3.
С. 104-108.
А.А. Моишеев
НПО им. С.А. Лавочкина
26
ЕЕ! СРЕДСТВА ВЫВЕДЕНИЯ
ДЛЯ КА, РАЗРАБОТАННЫХ НА БАЗЕ
ПЛАТФОРМЫ «НАВИГАТОР»
Выведение КА на заданную орбиту осуществляется:
1. PH «Союз-2» этапа 16 с межорбитальным космическим буксиром (МБ)
«Фрегат» (КА «АРКТИКА-М»).
2. PH «Зенит-2ББ80» с МБ «Фрегат-СБ» (КА «ЭЛЕКТРО-Л» № 1 и № 2,
КА «СПЕКТР-Р).
3. PH «Протон-М» с МБ ДМ (КА «ЭЛЕКТРО-Л» № 3 и последующие,
«СПЕКТР-РГ», «СПЕКТР-УФ»).
1.3.1. PH «Союз-2»
Общая информация о ракете-носителе
PH «Союз-2» этапа модернизации 1а и 16 (далее по тексту PH «Союз-2») создана
на конструктивной и производственной базе унифицированной PH «Союз» в соот¬
ветствии с требованиями тактико-технического задания (ТТЗ) на модернизацию ком¬
плекса ракеты-носителя РКН типа Р-7А.
PH «Союз-2» представляет собой трехступенчатую PH с продольно-поперечной
схемой деления ступеней, работающую на жидком топливе:
- окислитель - кислород;
- горючее - керосин.
PH «Союз-2» состоит из:
- четырех боковых блоков I ступени с маршевыми двигателями 14Д22 и рулевыми
агрегатами;
- центрального блока II ступени с маршевым двигателем 14Д21 и рулевыми
агрегатами;
- блока III ступени с маршевым двигателем 11Д55 для PH «Союз-2» этапа 1а
и с маршевым двигателем 14Д23 для PH «Союз-2» этапа 16, использующих го¬
рючее РГ-1.
Блоки I и II ступеней PH «Союз-2» представляют собой функциональную сбор¬
ку, состоящую из четырех боковых и центрального блоков, соединенных между
собой по схеме «пакет». Боковые блоки располагаются вокруг центрального блока
по плоскостям стабилизации и крепятся к нему автономно двумя узлами, верхним
и нижним.
Блок III ступени представляет собой окончательно собранное изделие, соединен¬
ное с центральным блоком через стержневую ферму по продольной схеме деления.
В состав PH «Союз-2» входят средства отделения (СО) следующих элементов
конструкции:
- боковых блоков (ББ) от центрального блока (ЦБ),
- ЦБ от блока III ступени,
- хвостового отсека (ХО) от блока III ступени.
Средства отделения PH предназначены для крепления элементов конструкции PH
на всех этапах эксплуатации РКН и разделения их по командам СУ в заданные мо¬
менты времени.
27
1-3
На PH используются:
- СУ с применением цифрового вычислительного комплекса;
- цифровая радиотелеметрическая система измерений (РТСЦ);
- цифровая система измерения уровня заправки (СИУЗ);
- система внешнетраекторных измерений (СВТИ) на базе навигационной аппара¬
туры потребителя 14JI91 -05.
Стартовая масса РКН ~310 т.
На рисунке 1.3.1 представлен общий вид РКН, созданной на базе PH «Союз-2»
этапа 16 с головным обтекателем 81 КС.
Универсальный межорбитальный космический буксир «Фрегат»
Универсальный межорбитальный космический буксир «Фрегат» (МВФ) создан
ФГУП «НПО им. С.А. Лавочкина» и предназначен для использования в составе ракет-
носителей среднего и тяжелого класса с целью выведения КА на заданные орбиты.
Базовый МБ «Фрегат» положил начало целому семейству высокоэффектив¬
ных разгонных блоков, которые созданы и создаются на его основе (Асюшкин В.А.,
Иьиин С.В., Пичхадзе К.М., Полищук Г.М., Смирнов А.И., 2006). Применение на МБФ
дополнительных топливных ёмкостей и сбрасываемого блока баков (МБ «Фрегат-
МТ» и МБ «Фрегат-СБ») позволило существенно увеличивать массу заправляемого
топлива и тем самым повысить эффективность разгонного блока.
Основой конструктивно-компоновочной схемы МБФ является блок баков, постро¬
енный по моноблочной несущей схеме. Он имеет торосферическую конфигурацию,
состоящую из шести сваренных между собой сферических емкостей, разделенных
сферическими донышками. Четыре емкости являются баками окислителя и горючего,
две отсеками для размещения приборов и оборудования (один из них герметичен).
В одном из контейнеров (герметичном) размещается моноблок системы управ¬
ления ПС 398, включая аппаратуру спутниковой навигации (АСН) и вентиляторы
СОТР, в другом (негерметичном) - малый приборный отсек с моноблоком СУ ПС032,
служебные блоки, а также шар-баллоны высокого давления МДУ и ДУ СОЗ.
МБ «Фрегат» обладает следующими особенностями:
- является универсальным и используется в составе ракет-носителей среднего и тя¬
желого класса;
- МБФ автономный, т.е. он обеспечивает весь процесс выведения полезной нагруз¬
ки без вмешательства с Земли;
- логика работы МБ предусматривает выход из возможных нештатных ситуаций;
- обеспечивает высокую точность выведения космических аппаратов на целевые
орбиты;
- впервые в России в контуре управления применена аппаратура спутниковой на¬
вигации, работающая от навигационных систем Глонасс и GPS, за счёт чего зна¬
чительно повышена точность выведения КА на целевые орбиты;
- возможность многократного включения МДУ с целью обеспечения оптимально¬
го выведения;
- заправляется компонентами топлива до установки на СК, что делает его универ¬
сальным по отношению к любым ракетам-носителям;
- длительное время (до 2-х суток) активного существования;
- с помощью МБФ производятся запуски с космодромов: Байконур, Плесецк и Гви¬
анского космического центра (Франция).
28
изделие 14А14этапа 16
1-3
А
Рисунок 1.3.1. Общий вид РКН с PH «Союз-2»
29
1-3
В состав МБ «Фрегат» (рисунок 1.3.2) входят системы и агрегаты:
- двигательная установка в составе:
- маршевая двигательная установка (МДУ);
- двигательная установка стабилизации, ориентации и обеспечения запуска
(ДУСОЗ);
- система управления (СУ);
- телеметрическая система (ТМ);
- передающее устройство (РПТ);
- антенно-фидерные системы (АФС);
- химические источники тока (ХИТ);
- система обеспечения теплового режима (СОТР);
- система контроля температур и давления (СКТД);
- радиодальномер 38Г6;
- система разделения;
- служебные блоки.
МБ «Фрегат» обеспечивает решение следующих задач:
- перевод КА с обриты, формируемой PH, на заданную орбиту;
- стабилизацию головного блока (ГБ) на пассивных и активных участках полета;
- формирование и выдачу команд на сброс головного обтекателя (ГО), отделение
ГБ, отделение КА;
- построение необходимой ориентации, а также, в случае необходимости, закрутку
головного блока на пассивных участках полета и перед отделением КА;
- измерение при помощи наземных средств параметров промежуточных орбит и
орбит выведения КА;
- контроль состояния МБ и, при необходимости, выводимого КА в процессе
выведения;
- увод МБ с рабочей орбиты выводимого КА.
Основные характеристики МБФ приведены в таблице 1.3.1.
Таблица 1.3.1. Общие сведения о МБ «Фрегат»
параметры
«Фрегат»
начальная масса с максимальной заправкой, кг
6235
конечная масса, кг
945
габариты: высота/диаметр (описанный), мм
1875 /3440
компоненты топлива: окислитель/горючее
АТ / НДМГ
максимальный рабочий запас топлива/полная заправка, кг
5235 / 5307
тяга МДУ: режим БТ/МТ, кгс
2030±100/ 1420±150
удельный импульс: режим БТ/МТ, с
333,2/320
максимальное число включений МД
7
30
1-3
ДУСОЗ
антенна
телеметрической
системы
рупорная антенна системы
радиоконтроля орбиты
малый приборный отсек (МПО) в ПО-1 с аппаратурой
системы управления, радиосистемы, телеметрии
панель
пневмоблока
Рисунок 1.3.2. Общий вид МБ «Фрегат»
приборный отсек системы
управления (ПО-2)
антенны
аппаратуры
спутниковой
навигации
узлы крепления
к переходному
отсеку
заправочная
панель
маршевый двигатель
31
1-3
Переходный отсек
Переходный отсек (ПхО) обеспечивает стыковку космической головной части
с блоком предыдущей ступени ракеты-носителя и установку головного обтекателя,
а также транзит электрических и газовых связей систем МБ, КА и ГО с системами
PH и наземной аппаратурой на СК через транзитные электрические цепи и газовые
магистрали PH.
Состыкованный с ГО корпус ПхО обеспечивает пылевлаго-защищенность МБФ
и КА от воздействия окружающей среды при подготовке к запуску и в полете (до сбро¬
са ГО).
Переходный отсек МБФСТМ разработан и изготавливается НПО им. С.А. Лавоч¬
кина для использования с ГО производства АО «РКЦ «Прогресс» (0 4110 мм, длина
11433 мм) и PH «Союз-2».
Сборка МБФ + ПХО МБФСТМ показана на рисунке 1.3.3.
Масса ПхО ~ 465 кг.
Рисунок 1.3.3. Общий вид сборки МБФ + ПхО МБФСТМ
Головной обтекатель 81 КС
Головной обтекатель предназначен для защиты КА и МБ «Фрегат» от аэродинами¬
ческих и тепловых нагрузок во время прохождения РКН плотных слоев атмосферы,
а также от внешних воздействий при транспортировании КГЧ автономно, в составе
PH на стартовый комплекс (СК) и нахождении на нем.
В обеспечение запуска КА с использованием PH «Союз-2», созданных на основе
платформы «НАВИГАТОР», используется ГО 81 КС диаметром 4110 мм разработки
АО «РКЦ «Прогресс».
Общий вид КГЧ показан на рисунке 1.3.4.
32
1-3
головной обтекател ь
зона размещения ПГ
плоскость стыка ГО
с переходным отсеком
КА «АРКТИКА-М»
адаптер
ферма
РБ «Фрегат»
плоскость отделения КА
плоскость стыка РБ
с фермой
плоскость стыка РБ
с ПхО
переходный отсек
Рисунок 1.3.4. Общий вид КГЧ
зз
1-3
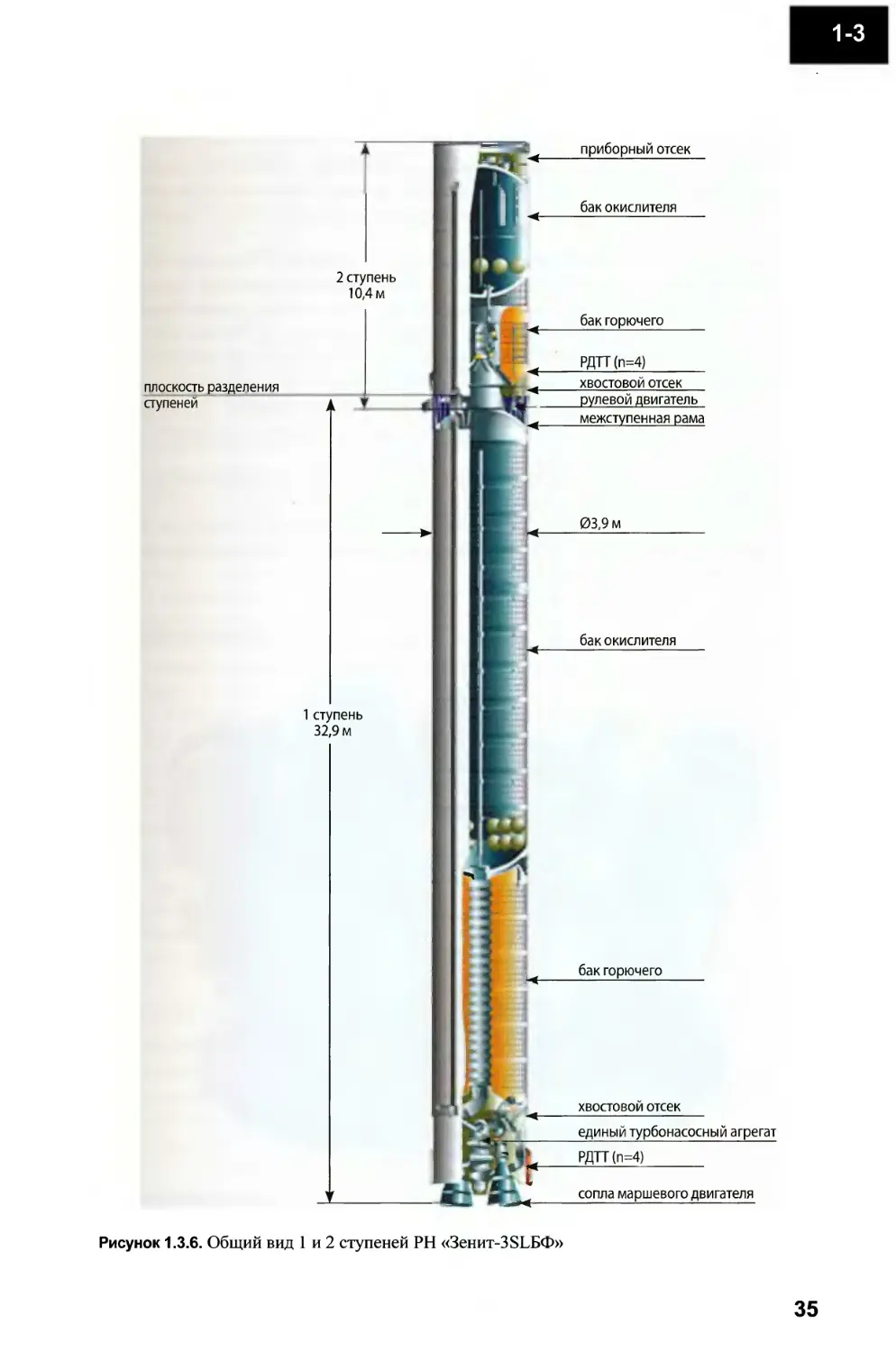
1.3.2. PH «Зенит-ЗБЬБФ»
Общая информация о ракете-носителе
PH «Зенит-2ББ80» разработки КБ «Южное» с МБ «Фрегат» создают РКН «Зенит-
ЗБЬБФ». РКН «Зенит-ЗБЬБФ» предназначена для выведения полезной нагрузки на
средние и высокие, круговые и эллиптические орбиты, в том числе на переходные
к геостационарной и геостационарную орбиты, а также на отлетные траектории. Пер¬
вая и вторая ступени PH «Зенит», используемые в РКН «Зенит-З БЬБФ», аналогичны
первой и второй ступеням, используемым в программах «Морской старт» и «Назем¬
ный старт» (рисунки 1.3.5, 1.3.6).
Двигатель РД-171М, установленный на первой ступени, работает на жидком
кислороде (ЖК) и керосине. В момент старта (на уровне моря) он развивает внуши¬
тельную тягу в 740000 кг (1,6 млн фунтов) и является самым мощным реактивным
двигателем в мире. В нём получили воплощение наиболее передовые технологии
изготовления ракетных двигателей, разработанные российскими предприятиями
двигателестроения. Головной разработчик - НПО «Энергомаш». Подача компо¬
нентов в четыре камеры сгорания обеспечивается одним турбонасосным агрегатом
вертикального расположения, который, в свою очередь, приводится в движение
двумя газогенераторами, подающими горячий газ, насыщенный окислителем, на
одну турбину. Управление полетом осуществляется за счет качания сопел, имею¬
щих карданный подвес, а возможность дросселирования тяги до уровня около 74%
от номинальной полной тяги создает значительную гибкость в выборе траектории
пуска.
Маршевый двигатель второй ступени представляет собой однокамерный ЖРД
с неподвижным соплом, работающий на жидком кислороде и керосине и развива¬
ющий тягу 93000 кгс. В конце работы маршевого двигателя РД-120 обеспечивается
его дросселирование до уровня приблизительно 78% от номинальной полной тяги.
Двигатель РД-120 был разработан специально для PH «Зенит».
Рулевой двигатель РД-8, устанавливаемый в хвостовой части второй ступени, обе¬
спечивает управление её движением по трём осям. В двигателе РД-8 используются те
же компоненты топлива, как и в РД-120. Единый турбонасосный агрегат подаёт то¬
пливо к четырем качающимся камерам сгорания, расположенным по внешнему пери¬
метру двигателя РД-120. РД-8 развивает тягу 8100 кг. Двигатель РД-8 был разработан
специально для PH «Зенит».
Рисунок 1.3.5. РКН «Зенит-ЗЗЬБФ»
34
1-3
плоскость разделения
ступеней
1 ступень
32,9 м
приборный отсек
бак окислителя
бак горючего
-<—
РДТТ(п=4)
*
хвостовой отсек
у
рулевой двигатель
ч
межступенная рама
03,9 м
бак окислителя
бак горючего
хвостовой отсек
единый турбонасосный агрегат
РДТТ (п=4)
сопла маршевого двигателя
Рисунок 1.3.6. Общий вид 1 и 2 ступеней PH «Зенит-З SLBO»
35
1-3
Межорбитальный космический буксир «Фрегат-СБ»
Межорбитальный космический буксир «Фрегат-СБ» (МБФ-СБ) создан на
базе разгонного блока «Фрегат» и отличается от него наличием сбрасываемо¬
го блока баков (СББ), рисунок 1.3.7. Основные параметры МБФ-СБ приведены
в таблице 1.3.2.
Для увеличения заправки рабочего топлива на каждом баке маршевой ДУ (ос¬
новной блок баков) предусмотрена установка дополнительных емкостей, состоящих
из сферических обечаек и имеющих единый объем с основными баками. Перед от¬
делением СББ от МБФ происходит разъединение топливных и газовых магистра¬
лей, а также транзитных кабелей между МБФ и СББ с помощью пиромеханических
устройств {Ефанов В.В., Котомин А. А. и др., 2001; Ефанов В.В. и др., 2013).
Сбрасываемый блок баков имеет тороидальную конфигурацию. В нем разме¬
щаются два бака горючего и два бака окислителя, разъединенные сферическими
донышками.
Восемь шпангоутов СББ имеют верхние и нижние узлы, соединенные попарно
силовыми стойками для передачи усилий от МБ с КА к PH.
На СББ установлены баллоны с гелием высокого давления для наддува баков,
узлы резки кабелей по стыку с МБФ, отрывные пироплаты, транзитная бортовая ка¬
бельная сеть {Ефанов В.В.и др.,2010).
дополнительные емкости
основной блок баков
сбрасываемый блок баков
Рисунок 1.3.7. Общий вид МБ «Фрегат-СБ»
36
1-3
Таблица 1.3.2. Основные характеристики модификации МБ «Фрегат»
параметры
«Фрегат-СБ»
начальная масса с максимальной заправкой, кг
11680
конечная масса, кг
1080
габариты: высота/диаметр, мм
2435/3875
компоненты топлива: окислитель/горючее
АТ/НДМГ
максимальный рабочий запас топлива/полная заправка, кг
10140/10330
тяга МДУ: режим БТ/МТ, кгс
2030± 100/1420± 15 0
удельный импульс: режим БТ/МТ, с
333,2/320
максимальное число включений МД
7
Головные обтекатели АМГ и АМГЭ (465ГК.Г)
Головной обтекатель РКН «Зенит-З БЬБФ», имеющий диаметр 4,1 м, производит¬
ся в НПО им. С.А. Лавочкина. ГО был разработан для МБ ДМ и использовался на
пусках, начиная с 1996 г. Для РКН «Зенит-З БЬБФ» предусматривается использование
двух конфигураций головного обтекателя (рисунки 1.3.8, 1.3.9), различающихся толь¬
ко длиной - 10,4 м и 11,35 м.
ГО обеспечивает защиту КА от внешних воздействий начиная с этапа накатки ГО
на техническом комплексе (ТК КГЧ).
ГО имеет алюминиевую конструкцию, состоящую из носовой части в виде двой¬
ного конуса, цилиндрической части диаметром 4100 мм и заднего конуса с диаметром
по стыку с ПхО диаметром 3715 мм.
ГО АМГ/АМГЭ успешно применялся при запусках КА «ЭЛЕКТРО-Л» № 1 и
№ 2, КА «СПЕКТР-Р» (PH «Зенит-28Б» и МБ «Фрегат-СБ»), КА «ФОБОС-ГРУНТ».
Аналогичный ГО 465ГК успешно применялся с разгонным блоком ДМ-SLB при ше¬
сти запусках КА по программе «Наземный старт» с PH «Зенит-28Б».
Переходный отсек
Переходный отсек МБФЗТ разработан и изготавливается НПО им. С.А. Лавоч¬
кина для использования с ГО АМГ/АМГЭ производства НПО им. С.А. Лавочкина
(0 4100 мм, длина 10400 мм или 11350 мм) и PH «Зенит».
Сборка МБФСБ + ПХО МБФЗТ показана на рисунке 1.3.10.
Масса ПхО ~ 390 кг.
1.3.3. PH «Протон-М»
Общая информация о ракете-носителе
Первые три ступени PH «Протон» изготавливаются на предприятии Государствен¬
ный космический научно-производственный центр имени М.В. Хруничева, располо¬
женном в Москве.
Общая высота ракеты около 60 м, диаметр второй и третьей ступеней, а также
центрального бака первой ступени 4,1 м. Максимальный диаметр первой ступени,
включая навесные топливные баки, 7,4 м.
Во всех трех ступенях PH в качестве окислителя применяется тетраоксид азота
(N204), а в качестве горючего - несимметричный диметил гидразин (н-ДМГ).
37
1-3
Рисунок 1.3.8. Головной обтекатель АМГ
Рисунок 1.3.9. Головной обтекатель АМГЭ (465ГК.Г)
38
1-3
Рисунок 1.3.10. Общий вид сборки МБФСБ + ПХО МБФЗТ
Первая ступень PH «Протон-М» состоит из центрального бака с окислителем,
окруженного шестью навесными баками с горючим. Хотя эти баки горючего выгля¬
дят как сбрасываемые ускорители, они не отделяются от центрального бака на этапе
полета первой ступени. Каждый бак с горючим снабжен одним из шести двигателей
РД-276, обеспечивающих требуемую мощность для полета первой ступени. Суммар¬
ная тяга двигателей первой ступени на уровне моря составляет около 10,0 МН с номи¬
нальным уровнем тяги в пустоте, равным 11,0 МН. Общая «сухая» масса первой сту¬
пени (без топлива) примерно 30 600 кг; общая масса компонентов ракетного топлива
в баках первой ступени около 428 300 кг.
Вторая ступень имеет стандартную цилиндрическую конструкцию и снабжена
тремя двигателями РД-0210 и одним двигателем РД-0211, развивающими в вакууме
тягу в 2,4 МН. Общая «сухая» масса второй ступени (без топлива) примерно 11 000 кг
Общая масса компонентов ракетного топлива в баках второй ступени около 157 300 кг
Третья ступень снабжена одним маршевым двигателем РД-0213, представляю¬
щим собой вариант двигателя РД-0210 без шарнирной подвески и развивающим тягу
58300 кгс, и четырехсопловым двигателем ориентации РД-0214 с шарнирной подве¬
ской сопел с тягой 3100 кгс. Общая «сухая» масса третьей ступени (без топлива) при¬
мерно 3 500 кг Общая масса компонентов ракетного топлива в баках третьей ступени
около 46 562 кг.
Функции наведения, навигации и управления на этапе работы первых трех сту¬
пеней ракеты-носителя «Протон-М» обеспечиваются с помощью цифровой системы
бортовой РЭА с обратной связью и «мажоритарным голосованием» со стойкостью
к одному отказу, смонтированной в третьей ступени PH «Протон». Эта автономная
инерциальная система управления основана на применении прецизионного трёхосе¬
вого гиростабилизатора и бортового цифрового компьютера с трехканальным мажо¬
ритарным голосованием. Эта система также обеспечивает прекращение полета в слу¬
чае серьезной неисправности на этапе выведения на орбиту.
39
1-3
Рисунок 1.3.11. Общий вид РБ «ДМ»
Разгонный блок
Для выведения КА «ЭЛЕКТРО-JI» № 3 на заданную орбиту в составе космиче¬
ской головной части PH «Протон-М» будет использоваться разгонный блок МБ ДМ.
Блок «ДМ» предназначен для выведения КА различного назначения на высоко¬
эллиптические, круговые (в том числе стационарные) орбиты и межпланетные тра¬
ектории. Блок «ДМ» разработан и производится РКК «Энергия», эксплуатируется
с PH «Протон» с 1974 года, а его прототип - блок «Д» - с 1967 года.
Выведение космического аппарата на геостационарную орбиту осуществляется
по двух- или трехимпульсной схеме в зависимости от долготы точки стояния КА.
Управление движением блока «ДМ» в полете осуществляется на активных участ¬
ках маршевым двигателем, на пассивных - двигательной установкой стабилизации
и ориентации.
40
10000
1-3
R 164,5
Рисунок 1.3.12. Зона полезной нагрузки под ГО 813ГЛН34
41
8315
1-3
Состав блока «ДМ»:
- маршевый двигатель;
- две ДУ стабилизации и ориентации;
- сферический бак окислителя;
- тороидальный бак горючего;
- приборный отсек;
- аппаратура командно-измерительного комплекса;
- отделяемые в полете нижний и средний переходники.
Блок «ДМ» (рисунок 1.3.11) существует в двух модификациях: с аппаратурой
командно-измерительного комплекса, размещаемой в приборном отсеке, и без нее,
когда для решения задач управления и измерения используется оборудование косми¬
ческого аппарата.
Маршевый двигатель 11Д58М является представителем семейства кислородно¬
углеродных ЖРД, разработанных РКК «Энергия» для разгонных блоков, обеспечи¬
вающих реализацию большинства национальных программ исследования космоса.
Компоненты топлива:
- окислитель - жидкий кислород с температурой от минус 194°С до минус 177°С;
- горючее - нафтил (керосин) или синтин.
Жидкостный ракетный двигатель 11Д58М серийно изготавливается на Воронеж¬
ском механическом заводе.
Головные обтекатели
Запуски КА, разработанные на базе платформы «НАВИГАТОР», при использова¬
нии PH «Протон-М» с РБ «ДМ» планируется осуществлять со следующими ГО:
- ГО 465ГК.Г - КА «ЭЛЕКТРО-Л» ( рисунок 1.3.9);
- ГО АМГ - КА «СПЕКТР-УФ» (рисунок 1.3.8);
- ГО 813ГЛН34 - КА «СПЕКТР-РГ» (рисунок 1.3.12).
Список литературы
Асюьикин В.А., Игиин С.В., Пичхадзе К.М., Полищук Г.М., Смирнов А.И. Разгон¬
ный блок «Фрегат». Максимальная эффективность при минимальных затратах // По¬
лет. 2006. № Ю. С. 3.
Ефанов В.В., Бирюков А.С., Деменко О.Г. К вопросу снижения динамических на¬
грузок при срабатывании устройств разделения перспективных орбитальных астро¬
физических обсерваторий // Вестник НПО им. С.А. Лавочкина. 2013. № 3. С. 21-26.
Ефанов В.В., Горовцов В.В., Котомин А.А, Душенок С.А. Детонационные
устройства и системы разделения универсального космического разгонного блока
«Фрегат» // Полет. 2010. № 12. С. 8-14.
Ефанов В.В., Котомин А.А. и др. Проблема снижения динамического воздействия
на космические аппараты при срабатывании взрывных систем разделения // Фунда¬
ментальные и прикладные проблемы космонавтики. 2001. № 4. С. 34-48.
Кобелев В.Н., Милованов А.Г. Средства выведения космических аппаратов. М.:
РЕСТАРТ, 2009. 528 с.
С.В. Ишин, Д.И. Федоскин, В. П. Вику ленков,
Н.Б. Жумаханов, А.Ю. Порешнев, Н,П. Строгудаев
НПО им. С.А. Лавочкина
42
Ш ОБЕСПЕЧЕНИЕ НАДЕЖНОСТИ
МКП «НАВИГАТОР» разработана для космических аппаратов различного на¬
значения. Как было сказано выше, в зависимости от задач, космические аппараты,
базирующиеся на платформе «НАВИГАТОР», могут функционировать на низких
круговых, эллиптических, высоких эллиптических, геостационарных орбитах, точ¬
ках либрации и т.д.
В настоящее время эксплуатируются космические аппараты «СПЕКТР-Р» (Зеле¬
ный Л.М. и др., 2015; Пичхадзе К.М. и др., 2012) и «ЭЛЕКТРО-Jl» (Пичхадзе К.М.
и др., 2012; Бабышкин В.Е. и др., 2009; Асмус В.В. и др., 2012), (Кардашев Н.С., Ала-
коз А.В. и др., 2016; Каневский Б.З.и др., 2014; Аставин А.С. и др., 2014), базовым
модулем служебных систем которых является МКП «НАВИГАТОР» {Зеленый Л.М.
и др., 2015). С использованием платформы «НАВИГАТОР» создаются также
КА «АРКТИКА-М» {Хартов В.В. и др., 2014), «СПЕКТР-РГ» {Зеленый Л.М. и др.,
2015), «СПЕКТР-УФ» {Моишеев А.А. и др., 2014), {Степанов В.В., 2016; Растор¬
гуев А.С. и др. 2016; Моишеев А.А., Бабышкин В.Е. и др.. 2014; Шустов Б.М., Сач¬
ков М.Е. Боярчук А.А. и др 2014), «СПЕКТР-М», «ГАММА-400» и перспективный
метеорологический аппарат «ЭЛЕКТРО-М».
МКП «НАВИГАТОР» относится к классу сложных технических систем длитель¬
ного функционирования, неремонтируемых и невосстанавливаемых в процессе их
использования по целевому назначению.
Под надежностью МКП «НАВИГАТОР» понимается ее свойство сохранять во
времени в установленных пределах значения всех параметров, характеризующих
способность выполнять требуемые функции в заданных режимах и условиях приме¬
нения, технического обслуживания, хранения и транспортирования.
Под отказом МКП понимается полная потеря ее работоспособности, приводящая
к невозможности получения целевой или научной информации установленного со¬
става и качества.
Компоновка платформы «НАВИГАТОР» для перечисленных аппаратов различна
из-за различия в целевых задачах и различных орбит, однако состав бортовых систем
и аппаратуры практически одинаковый.
В состав платформы «НАВИГАТОР» входят следующие системы:
- бортовой комплекс управления (БКУ);
- бортовая аппаратура командно-измерительной системы (БАКИС);
- антенно-фидерная система БАКИС (АФС БАКИС);
- телеметрическая система (ТМС);
- система ориентации солнечных батарей (СОСБ);
- двигательная установка (ДУ);
- система электроснабжения (СЭС);
- система обеспечения теплового режима (СОТР);
- система контроля электризации (СКЭ);
- бортовая кабельная сеть (БКС);
- конструкция.
43
1-4
Начиная с «ЭЛЕКТРО-JI» № 2, в МКП «НАВИГАТОР» входит также аппаратура
спутниковой навигации.
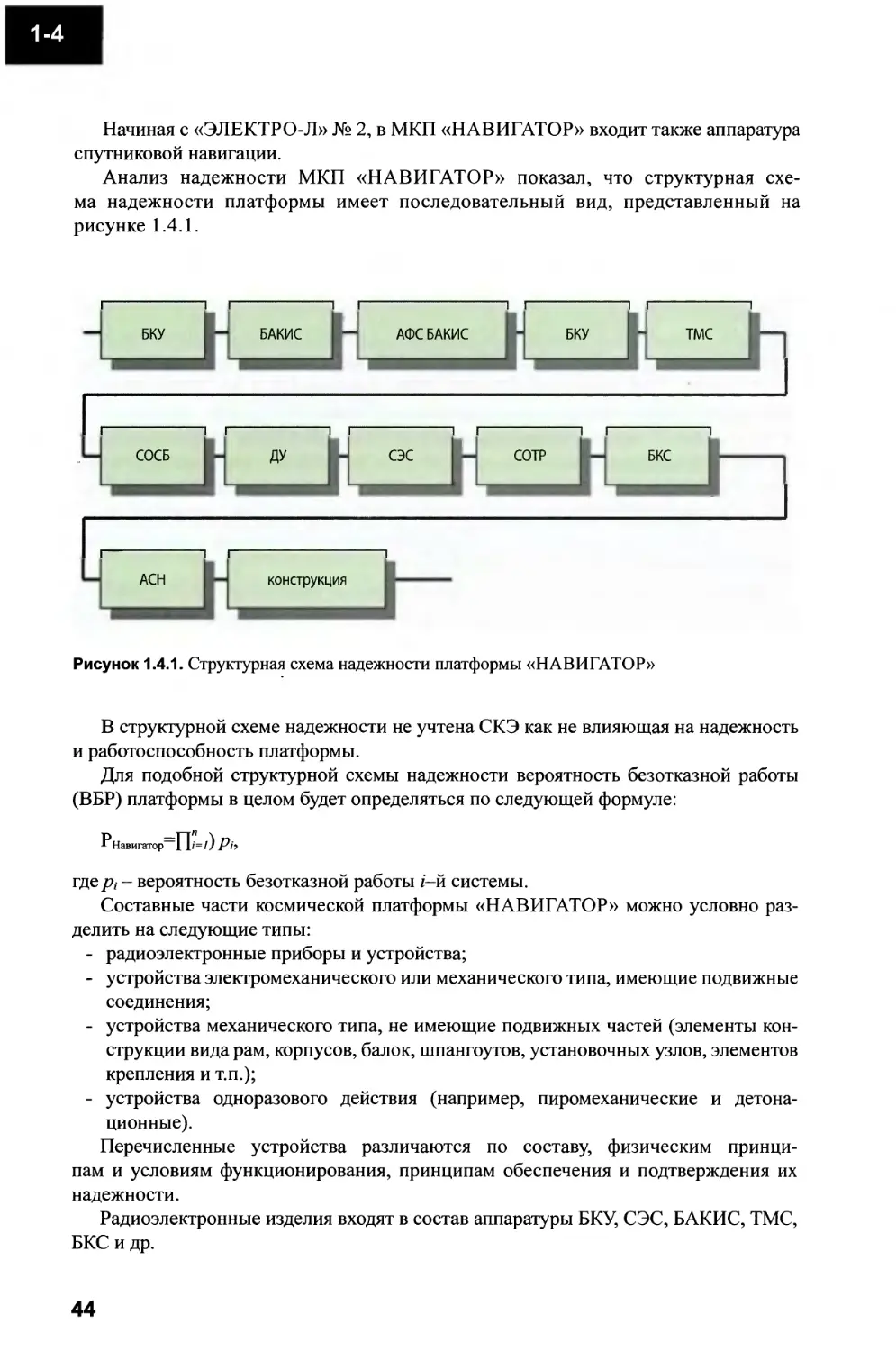
Анализ надежности МКП «НАВИГАТОР» показал, что структурная схе¬
ма надежности платформы имеет последовательный вид, представленный на
рисунке 1.4.1.
i 1 I 1 I 1 i 1 1 1
Рисунок 1.4.1. Структурная схема надежности платформы «НАВИГАТОР»
В структурной схеме надежности не учтена СКЭ как не влияющая на надежность
и работоспособность платформы.
Для подобной структурной схемы надежности вероятность безотказной работы
(ВБР) платформы в целом будет определяться по следующей формуле:
Р Навигатор" =ГБ-1)Рь
где pi - вероятность безотказной работы i-й системы.
Составные части космической платформы «НАВИГАТОР» можно условно раз¬
делить на следующие типы:
- радиоэлектронные приборы и устройства;
- устройства электромеханического или механического типа, имеющие подвижные
соединения;
- устройства механического типа, не имеющие подвижных частей (элементы кон¬
струкции вида рам, корпусов, балок, шпангоутов, установочных узлов, элементов
крепления и т.п.);
- устройства одноразового действия (например, пиромеханические и детона¬
ционные).
Перечисленные устройства различаются по составу, физическим принци¬
пам и условиям функционирования, принципам обеспечения и подтверждения их
надежности.
Радиоэлектронные изделия входят в состав аппаратуры БКУ, СЭС, БАКИС, ТМС,
БКС и др.
44
1-4
1.4.1. Оценка безотказности электронных приборов
Из-за невозможности получить достоверные статистические оценки для малых
и единичных выборок оценка производилась расчетным методом по ГОСТ 27.301-
95 с использованием методик и моделей (.Надежность электрорадиоизделий, 2006)
и качественно подтверждалась при наземной экспериментальной отработке платфор¬
мы «НАВИГАТОР» и её составных частей проведением ресурсных испытаний и
технологического прогона бортовой радиоэлектронной аппаратуры в объеме 400 час.
При этом делается допущение, что ВБР таких устройств подчиняется экспонен¬
циальному закону
где Х(и) - интенсивность отказов системы в момент времени t=u.
При оценке надежности электронного прибора качество, надежность и условия
использования каждого электрорадиоизделия (ЭРИ) учитываются соответствующи¬
ми коэффициентами, методика выбора которых приведена в (.Надежность электро¬
радиоизделий, 2006).
Основные коэффициенты, используемые в расчетных моделях:
КР - коэффициент режима в зависимости от электрической нагрузки и темпера¬
туры окружающей среды или корпуса ЭРИ, назначаемый на основании карт рабочих
режимов;
К, х - коэффициент, учитывающий изменение интенсивности отказов Ъс.с.г в за¬
висимости от температуры окружающей среды;
Кэ - коэффициент жесткости условий эксплуатации;
К||р - коэффициент приемки;
Кусл - коэффициент, учитывающий изменение интенсивности отказов А,х.с.г в за¬
висимости от условий эксплуатации в режиме ожидания (хранения), а также другие
коэффициенты, учитывающие специфику конкретного типа ЭРИ.
Исходными данными для расчетов являются перечни ЭРИ, электрические схемы,
карты рабочих режимов, справочные данные по интенсивностям отказов ЭРИ.
1.4.2. Оценка надежности одноразовых элементов
Оценка надежности системы отделения, а также узлов раскрытия производилась
расчетно-экспериментальным методом.
Точечное значение вероятности безотказной работы определялось расчетным ме¬
тодом по (Волков Л.И. и др., 1975).
Нижняя граница ВБР с доверительной вероятностью у подтверждалась экспери¬
ментальным путем с использованием формулы
где N - количество зачетных (успешных) испытаний; Рн - нижняя граница ВБР.
В практике, принятой в ракетно-космической отрасли, в ТЗ на указанные изде¬
лия требование к нижней границе безотказности задается на уровне 0,96 при у=0,8.
Данное требование подтверждается 40 зачетными испытаниями. При подтверждении
нижней границы ВБР учитывались результаты испытаний изделий-аналогов, имею¬
щих незначительные различия, например, в установочных элементах.
о
Рн=$Л>
45
1-4
1.4.3. Оценка и подтверждение надежности элементов конструкции
Оценка надежности элементов конструкции, не имеющих подвижных частей,
производилась расчетно-экспериментальным методом.
Под отказом конструкции понимается наступление хотя бы для одного элемента
конструкции одного из событий: разрушения, потери несущей способности, потери
устойчивости.
Уровень безотказности конструктивных элементов определяется напряженно-де¬
формированным состоянием, определяемым величиной эксплуатационных нагрузок,
и коэффициентом запаса (прочности, устойчивости и т.д. в зависимости от критерия
отказа рассматриваемого элемента).
В качестве основного критерия надежности принимается достижение макси¬
мальным напряжением, возникающим в конструкции, предела прочности (предела
текучести, предела усталости или предела устойчивости) хотя бы в одном элементе
конструкции.
Для оценки надежности устройств механического типа применяется принцип
«нагрузка-прочность» {Волков Л.И. и др., 1975), при котором сравниваются расчет¬
ные эксплуатационные нагрузки с разрушающими нагрузками.
Нагрузка и несущая способность рассматриваются как случайные функции.
Принимается допущение, что пересечения реализаций нагрузки N(t) и несущей
способности R(t) являются редкими случайными событиями, а распределение реали¬
заций в каждом сечении t = tj — нормальным.
Применение нормального закона оправдано тем, что в случае совместного дей¬
ствия большого числа случайных возмущений, подчиняющихся различным законам
распределения, если среди них нет превалирующего, результирующее возмущающее
воздействие имеет, согласно центральной предельной теореме теории вероятностей,
распределение, близкое к нормальному.
При этом вероятность непересечения реализаций нагрузки N(t) и несущей способ¬
ности R(t) определяются по формуле
Р = вер [R(t)>N(t)J,
где R(t) - расчетная нагрузка (в соответствии с требованиями конструкторской доку¬
ментации); N(t) - эксплуатационная нагрузка.
При нормальном распределении R(t) и N(t) и отсутствии между ними корреляци¬
онной зависимости ВБР конструкции определяется как {Волков Л.И. и др., 1975)
где Ф(х) - функция нормального распределения; mRi, mNi- математические ожидания
(МО) R(t) и N(t); oRi, среднеквадратические отклонения (CKO) R(t) и N(t).
При прочностных расчетах и при контроле прочностных характеристик конструк¬
ции под эксплуатационной нагрузкой понимают максимальное значение эксплуата¬
ционной нагрузки, под расчетной нагрузкой - минимальное значение предельной
(предела текучести, предела прочности, предела устойчивости, предела усталости
и др.) нагрузки.
Традиционно принимают, что предельные отклонения расчетной и эксплуатаци¬
онной нагрузок от математического ожидания равны трем СКО. При этом для ВБР
наиболее нагруженного элемента конструкции удобнее использовать выражение
/
\
46
1-4
Р = Ф
П 1
\-Ъи„ 1 + 3i>*
»»R
1-3 и
R У
\2
V
1 + Зу
n у
где п - коэффициент запаса прочности; oR, oN - коэффициенты вариации нагрузок.
Экспериментальным подтверждением безотказности конструктивных элемен¬
тов являлись успешные прочностные испытания (ударные, вибродинамические
и статические).
Расчет надежности МКП «НАВИГАТОР» для КА «СПЕКТР-Р» показал, что ве¬
роятность безотказной работы платформы «НАВИГАТОР» в течение трех лет со¬
ставляет 0,97.
Обеспечение надежности изделий высокой сложности, таких, как МКП
«НАВИГАТОР», осуществляется в НПО им. С.А. Лавочкина проведением следую¬
щих мероприятий:
- проектирование бортовых систем и приборов с высокими значениями вероятно¬
сти безотказной работы;
- использование на МКП глубоко резервированных бортовой вычислительной сети
и системы управления;
- применение предприятими-разработчиками радиоэлектронных бортовых систем
с элементной компонентной базой повышенного качества и надежности;
- глубокая экспериментальная отработка бортовых систем с подтверждением за¬
пасов работоспособности в условиях открытого космоса на уровне автономных
и комплексных испытаний, включая ресурсные испытания и электрические про¬
верки в условиях вакуума;
- разработка перечня нештатных ситуаций и порядка выхода из них, выявле¬
ние критичных элементов и дополнительных испытаний по подтверждению их
работоспособности;
- тщательная и полная отработка программно-алгоритмического обеспечения.
Основным методом подтверждения и обеспечения надежности космической тех¬
ники является наземная экспериментальная отработка. От глубины наземной отра¬
ботки и качества изготовления составных частей и космического аппарата в целом во
многом зависит надежность и качество космической техники.
Наземная экспериментальная отработка МКП «НАВИГАТОР» проводилась в со¬
ставе космических аппаратов.
Эксплуатация МКП «НАВИГАТОР» в составе КА «СПЕКТР-Р» в течение более
5 лет при заданном сроке активного существования 3 года доказала правильность за¬
ложенных в конструкцию МКП схемно-технических решений, эффективное функци¬
онирование на НПО им. С.А. Лавочкина системы менеджмента качества и перспек¬
тивность использования МКП «НАВИГАТОР» в других проектах.
1.4.4. Принципы комплектования МКП ЭКБ
Надежность унифицированной аппаратуры из состава МКП должна быть макси¬
мально возможной. Такой уровень достигается за счет многих факторов, одним из
основных является применение высоконадежной электронной компонентной базы
47
1-4
(ЭКБ). При этом должна быть решена задача по выбору оптимального пути комплек¬
тования МКП электронной компонентной базой высокого уровня качества и надеж¬
ности, исходя из совокупности требований в ТТЗ (ТЗ) на КС (КА).
Для достижения данной цели рассматриваются различные принципы и критерии
выбора электронной компонентной базы, соответствующей требованиям Заказчика:
- выбор номенклатуры ЭКБ, соответствующей требованиям ТТЗ (ТЗ) в части экс¬
плуатационно-технических характеристик, характеристик надежности и стойко¬
сти к внешним воздействующим факторам (ВВФ);
- максимальное применение ЭКБ, ранее подтвердившей требуемые характеристи¬
ки и надежность в условиях, соответствующих заданным в ТЗ;
- первоочередное применение ЭКБ отечественного производства (ОП), в случае
отсутствия ЭКБ ОП - применение ЭКБ иностранного производства (ИП);
- выполнение требования по снижению электрических и тепловых нагрузок на из¬
делия ЭКБ;
- взаимодействие с поставщиками ЭКБ, имеющими в своем штате специалистов
высокого уровня, способных оценить правильность выбора ЭКБ, обеспечить за¬
купку ЭКБ высокой степени надежности, а также способных провести дополни¬
тельные испытания и сертификацию изделий ЭКБ;
- определение оптимального объема номенклатуры ЭКБ (минимизация и унифика¬
ция номенклатуры ЭКБ);
- обеспечение гарантийного срока приборов МКП.
Реализация запланированных действий по комплектованию ЭКБ МКП предусма¬
тривает выполнение правил и процедур, определенных нормативной и технической
документацией, осуществление их управления и контроля, начиная с этапов техниче¬
ского предложения и эскизного проектирования и заканчивая летными испытаниями
космических аппаратов, созданных на основе МКП «НАВИГАТОР».
Выбор ЭКБ разработчиками МКП должен осуществляться с учетом обеспечения
срока активного существования (САС) КА не менее 10 лет.
Одним из основных критериев выбора ЭКБ является выполнение требований по
радиационной стойкости МКП и КА в целом.
Воздействие ионизирующего излучения космического пространства (ИИ КП) за¬
висит от рабочих орбит космических аппаратов: геостационарная и геосинхронная
орбиты (КА «ЭЛЕКТРО-Jl, «СПЕКТР-УФ»), солнечно-синхронная орбита, высо¬
кая эллиптическая орбита (КА «АРКТИКА-М»), окрестности либрационных точек
(КА «СПЕКТР-РГ»).
Рабочие орбиты характеризуются следующими дозовыми эффектами:
- геостационарные и геосинхронные орбиты (ГСО), при которых полет про¬
исходит во внешнем (электронном) радиационном поясе Земли (РПЗ) на высоте
36 ООО км, характеризуются существенными потоками электронов РПЗ, отсут¬
ствием потоков протонов РПЗ высоких энергий и практически полным отсут¬
ствием магнитного обрезания потоков солнечных космических лучей (СКЛ) и га¬
лактических космических лучей (ГКЛ);
- вытянутые высокоэллиптические орбиты (ВЭО) значительно отличаются
друг от друга по величине потоков частиц РПЗ в зависимости от баллистических
параметров орбиты, прежде всего высот перицентра и апоцентра и наклонения.
Существует частичное магнитное обрезание потоков СКЛ, степень которого за¬
висит от баллистических параметров орбиты.
48
1-4
Результаты оценок приведены в таблице 1.4.1.
Таблица 1.4.1. Требования к радиационной стойкости (по электронам и протонам)
ЭРИ для аппаратуры МКП «НАВИГАТОР»
тип орбиты
PC по электронам, крад
PC по протонам, крад
справочные
данные
результаты
радиационных
испытаний
справочные
данные
результаты
радиационных
испытаний
ГСО, САС 10 лет
300-3000
100-1000
8-25
3-8
ВЭО, САС 7 лет
600-3000
200-1000
60^100
20-200
Таким образом, в части дозовых эффектов рабочие орбиты платформы
«НАВИГАТОР» относятся к сценариям с достаточно жесткими радиационными усло¬
виями и, соответственно, с жесткими требованиями к радиационной стойкости ЭРИ.
Классификация полетов КА на основе МКП «НАВИГАТОР» по воздействию ио¬
низирующего излучения КП в части одиночных эффектов существенно отличается
от классификации, учитывающей только дозовые эффекты.
Экспедиции КА на основе МКП «НАВИГАТОР» для орбит ГСО и ВЭО
(КА «ЭЛЕКТРО», КА «СПЕКТР-УФ», КА «АРКТИКА-М»), а также полеты к точ¬
ке либрации L2 (КА «СПЕКТР-РГ) характеризуются отсутствием магнитного обре¬
зания потоков высокоэнергетических протонов (ВЭП) и тяжело-заряженных частиц
(ТЗЧ), СКЛ и ГКЛ, плотность которых, к тому же, практически одинакова для всех
этих полетов и модулируется только уровнем солнечной активности в период полета.
ВБР аппаратуры по отношению к одиночным отказам, естественно, зависит от срока
активного существования КА, в связи с чем длительные полеты характеризуются бо¬
лее жесткими требованиями к отказоустойчивости бортовой аппаратуры (БА).
Необходимо заметить, что, в отличие от дозового эффекта, консервативная за¬
щита (увеличение толщины стенок корпусов, установка дополнительных кожухов и
т.п.) для уменьшения в БА одиночных эффектов не является эффективной мерой: при
увеличении толщины защиты частично ослабляется поток протонов СКЛ, но, с дру¬
гой стороны, увеличивается поток вторичных ионов и ядер, рожденных в ядерных
реакциях первичного космического излучения с атомами кристаллической решетки
защитного материала.
Требования к стойкости интегральных микросхем (ИМС), полученные в резуль¬
тате анализа одиночных эффектов для МКП платформы «НАВИГАТОР», приведены
в таблице 1.4.2.
Таким образом, КА, создаваемые на базе МКП «НАВИГАТОР», совершающих дли¬
тельные полеты на ВЭО, на ГСО и в межпланетном пространстве на орбите Земли (точ¬
ка либрации L2), характеризуются самыми жесткими требованиями к ЭКБ в части до¬
зовых и одиночных эффектов ионизирующего излучения космического пространства.
Перед закупкой ЭКБ номенклатура электрорадиоизделий, планируемых для при¬
менения в МКП и КА, должна пройти экспертизу на подтверждение правильности
выбора ЭРИ (обеспечение заданных требований в условиях воздействия внешних
факторов, указанных в ТТЗ (общих технических требованиях, модели внешних воз¬
действующих факторов). Экспертиза проводится в уполномоченных организациях
заказчика. Необходимость проведения испытаний ЭКБ на радиационную стойкость
определяется по результатам экспертизы.
49
1-4
Таблица 1.4.2. Требования к радиационной стойкости ИМС по одиночным эффектам
тип орбиты,
или «сценарий» полета
САС
одиночные отказы*
L0 МэВ/(мг/см2)
Оо см2/чип
ГСО,
ВЭО,
полеты к точке либрации L2
7-10 лет
>45-50**
<103
Примечания:
* Разброс значений L0 определяется несколькими причинами: конкретной величиной значе¬
ния ВБРрэа, количеством ИМС в приборе и способом их соединения.
** Требования сформулированы при условии 0,99 < Р00 < 0,999, где Р00 - вероятность безотказ¬
ной работы радиоэлектронной аппаратуры по отношению к одиночным отказам, создаваемым
потоками заряженных частиц за САС КА.
ЭРИ ОП, предназначенные для установки в лётные комплекты МКП (БА КА для
лётных испытаний, предварительных испытаний и запасных частей, инструментов и
принадлежностей (ЗИП)), подвергаются входному контролю и дополнительным ис¬
пытаниям: отбраковочным испытаниям (ОП), диагностическому неразрушающему
контролю (ДНК), выборочному разрушающему физическому анализу (РФА).
ЭРИ ИП, предназначенные для установки в лётные комплекты МКП (бортовой ап¬
паратуры КА для лётных испытаний, предварительных испытаний и ЗИП), проходят
входной контроль, дополнительные испытания и сертификацию.
После проведения работ по экспертизе, дополнительным испытаниям и сертифи¬
кации разработчики бортовой аппаратуры представляют в НПО им. С.А. Лавочкина
отчетную документацию:
- заключения (протоколы) о результатах испытаний ЭКБ;
- сертификаты соответствия ЭКБ ИП условиям применения в БА КА;
- информационно-технические материалы (ИТМ) на ЭКБ ИП.
НПО им. С.А. Лавочкина и предприятия кооперации обеспечивают прослеживае-
мость каждой закупленной партии ЭРИ на всех этапах работ. Комплекс соответству¬
ющих мероприятий обеспечивает регистрацию:
- сопроводительных документов изготовителя (поставщика) ЭРИ,
- протоколов всех проводимых испытаний и измерений каждого ЭРИ (от закупки
до установки в оборудование),
- регистрацию предприятиями-изготовителями аппаратуры схемных позиций,
в которые устанавливаются ЭРИ соответствующих партий,
- хранение в течение установленного срока протоколов испытаний и измерений,
- журналов и документов, подтверждающих объем проведенных работ с ЭРИ.
Схема комплектования МКП и КА электронной компонентной базой повышенной
надежности и качества представлена на рисунке 1.4.2.
В соответствии с нормативной документацией предприятия-разработчики борто¬
вой аппаратуры должны выбирать электрорадиоизделия в соответствии с действую¬
щими перечнями ЭРИ, разрешенных к применению, отдавая предпочтение сертифи¬
цированным ЭРИ.
Сертификация ЭКБ проводится с целью документального подтверждения ее соот¬
ветствия требованиям заказчика для подтверждения возможности применения в ап¬
паратуре объектов ракетно-космической техники. Соответствие отечественной ЭКБ
требованиям заказчика для подтверждения возможности ее применения в бортовой
аппаратуре определяется следующими факторами:
50
1-4
электрические, механические
параметры, конструкция, дизайн;
•требования к монтажу, запрещенные
материалы;
■ неразрешенные ЭРИ;
• снижение электрических и тепловых
режимов ЭРИ;
■ выпуск карт рабочих режимов (КРР)
- ЭРИ ОП уровень «ОС», «ОСМ» и «Н»,
- наличие в перечне ЭКБ 01-22
(МОП44);
- высоконадежные ЭРИ ИП,
- наличие в Ограничительном перечне
ЭРИ ИП Роскосмоса;
- унификация и сокращение
номенклатуры ЭРИ
•
требования
нл
г*
^4
критерии выбора ЭКБ
]
и обеспечения качества
- применение радстойких ЭРИ;
- при необходимости проведения
испытаний:
1. на воздействие поглощенной дозы
2. на стойкость к воздействию
протонов и ТЗЧ
- возможность дополнительной
радиационной защиты
радиационная
стойкость
ограничения
- замещение ЭРИ ИП на ЭРИ ОП;
- закупка ЭРИ одной партией;
-устаревание, снятие с производства;
-наличие лицензий;
-технологическая независимость;
- информационная безопасность
анализ
роизводителей ЭК
и
- квалифицированные производители
ЭРИ ИП, технологическая партия;
- закупка у заводов-изготовителей
или аттестованных в системе
«Электронсерт» поставщиков ЭРИ,
- анализ проблем с качеством ЭРИ;
- изготовление «спецпартий» ЭРИ ОП
выбор второго
поставщика и ИТЦ
- аккредитация и аттестация в качестве
испытательной лаборатории, органа
по сертификации;
проведение 100% ВК ДИ (ОИ,ДНК);
- проведение выборочного РФА;
- сертификационные испытания
ЭРИ ИП;
- обеспечение прослеживаемости
Рисунок 1.4.2. Процесс обеспечения качества ЭРИ
- выбором ЭКБ ОП из перечня МОП 44.001;
- изготовлением ЭРИ ОП на предприятиях, имеющих сертифицированную систе¬
му менеджмента качества (с отметкой «+» в перечне ЭКБ 01-22 (МОП 44.001)
для изготовителей ЭРИ);
- техническими и эксплуатационными параметрами ЭРИ ОП, указанными в ТУ на
эти ЭРИ;
- представленным разработчиком бортовой аппаратуры в картах рабочих режи¬
мов анализом соответствия параметров ЭРИ ОП требованиям ТЗ на бортовую
аппаратуру.
Обязательная сертификация проводится для ЭКБ иностранного производства.
При сертификации ЭКБ ИП используют нормативную и техническую документацию,
информационно-технические материалы, программы, методы, методики, метрологи¬
ческое обеспечение, испытательное оборудование и средства измерения, результаты
испытаний и т.п., позволяющие:
- провести идентификацию образцов ЭКБ ИП, подтвердить их соответствие предъ¬
являемым требованиям по показателям назначения и другим характеристикам;
- полно и достоверно осуществить контроль соответствия образцов ЭКБ ИП требо¬
ваниям, установленным в нормативной и технической документации, а также за¬
явленным характеристикам и условиям договоров на проведение сертификации.
Сертификация ЭРИ ИП осуществляется в соответствии с РД 134-0154-2007
в системе ФСС КТ или «Электронсерт» с учетом условий ВВФ на бортовую аппа¬
ратуру КА.
51
1-4
Высоконадежные квалифицированные ЭРИ ИП имеют полный комплект сопро¬
водительной документации, в том числе сертификат соответствия условиям внешних
воздействующих факторов. Сертификат соответствия («Certificate of Compliance» или
«Certificate of Conformance») включает следующую информацию:
- наименование и адрес производителя;
- тип устройства;
- номер партии;
- дата изготовления;
- количество устройств на поставку от производителя;
- уровень качества и ссылка на стандарт;
- серийные номера изделий;
- пройденные группы тестов.
Сертификация ЭКБ ИП осуществляется независимым от поставщиков и потреби¬
телей органом по сертификации, аккредитованным в соответствии с «Положением об
органе по сертификации космической техники и порядке его аккредитации» ФСС КТ.
РД 2.01-2006.
Орган по сертификации рассматривает перечень доказательной документации,
представленный заявителем, оценивает его достаточность, определяет необходи¬
мость проведения сертификационных испытаний в ИТЦ, определяет возможность
и сроки выдачи сертификата.
Сертификация проводится по программе, разработанной органом по сертифика¬
ции (или ИТЦ при проведении сертификационных испытаний) и утверждается ФГУП
«НПО им. С.А. Лавочкина».
Сертификационные испытания проводятся для ЭРИ ИП в случае отсутствия сер¬
тификатов соответствия условиям ВВФ или в случае представления не полного объ¬
ема доказательной сопроводительной документации.
Учитывая, что в большинстве случаев ЭКБ ИП поставляются без гарантии стой¬
кости к воздействию ионизирующего излучения космического пространства, в про¬
грамме обеспечения стойкости аппаратуры к воздействию ИИ КП должно быть
предусмотрено проведение испытаний ячеек и блоков, содержащих микросхемы,
на моделирующих установках.
При сертификации ЭКБ ИП, в том числе ЭРИ ИП космического назначения, при¬
знание зарубежных сертификатов и результатов испытаний ЭРИ ИП проводится в со¬
ответствии с законодательством Российской Федерации.
Завершающим этапом работ по сертификации ЭКБ ИП является оформление
протокола результата анализа доказательной документации сертификационных
испытаний.
Орган по сертификации оформляет на сертифицированную ЭКБ ИП сертификат
соответствия, а также «Перечень основных данных», содержащий основные характе¬
ристики и эксплуатационные ограничения сертифицированной ЭКБ ИП. Сертификат
регистрируется в Реестре ФСС КТ. Срок действия сертификата на ЭКБ ИП опреде¬
ляется фактическими сроками применения бортовой аппаратуры, укомплектованной
сертифицированной ЭКБ ИП.
В настоящее время в МКП соотношение ЭКБ отечественного и иностранного про¬
изводства следующее: ЭКБ ОП - 62% , ЭКБ ИП - 38%.
НПО им. С.А. Лавочкина и предприятия кооперации постоянно проводят работы
по минимизации номенклатуры ЭКБ ИП.
52
1-4
Список литературы
Асмус В.В. и др. Развитие космического комплекса гидрометеорологического
обеспечения на базе геостационарных спутников серии «ЭЛЕКТРО-JT» // Вестник
ФГУП «НПО им. С.А. Лавочкина». 2012. № 4. С. 3-14.
Аставин А. С. и др. Создание прецизионной конструкции крупногабаритного кос¬
мического радиотелескопа // Вестник НПО им. С.А. Лавочкина. 2014. № 3. С. 91-95.
Бабышкин В.Е., Ерошкин В.Н., Яницкий А.А. Геостационарный гидрометеороло¬
гический космический комплекс «ЭЛЕКТРО» // Вестник ФГУП «НПО им. С.А. Ла¬
вочкина». 2009. № 1. С. 76-78.
ВолковЛ.И., Шишкевич А.М. Надежность летательных аппаратов. М.: Высш. шко¬
ла, 1975.296 с.
ГОСТ27.301-95. Надежность в технике. Расчет надежности. Основные положения.
Зеленый Л.М., Хартов В.В., ЗастенкерГ.Н., Ковражкин Р. А. и др. Изучение солнеч¬
но-земных связей с помощью космических аппаратов, созданных в НПО им. С.А. Ла¬
вочкина// Вестник НПО им. С.А. Лавочкина. 2015. № 3. С. 17-27.
Каневский Б.З. и др. Наземная станция слежения. Проект «РАДИОАСТРОН» //
Вестник НПО им. С.А. Лавочкина. 2014. № 3. С 47-54.
Кардашев Н.С., Алакоз А.В. и др. «РАДИОАСТРОН»: итоги выполнения научной
программы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016.
№ 3. С. 4-24.
Моишеев А.А., Бабышкин В.Е., Мартынов Б.Н., Скрипунов Е.В., Иванов А.В.
Проектная концепция космического аппарата «СПЕКТР-УФ» // Вестник НПО
им. С.А. Лавочкина. 2014. № 5. С. 16-19.
Надежность электрорадиоизделий: Справочник. М.: РНИИ Электронстандарт,
2006.
Пичхадзе К.М., Шевалев И.Л. К 75-летию НПО им. С.А. Лавочкина: основные
вехи истории // Вестник ФГУП «НПО им. С.А. Лавочкина». 2012. № 4. С. 7-23.
Расторгуев А. С., Сачков М.Е., Заболотских М.В. Галактическая астрономия в уль¬
трафиолете // Вестник НПО им. С.А. Лавочкина. 2016. № 3. С. 38-47.
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
Хартов В.В., Мартынов М.Б., Бабышкин В.Е., Москатинъев И.В., Митъ-
кин А.С. Новая высокоэллиптическая гидрометеорологическая космическая система
«АРКТИКА-М» // Вестник НПО им. С.А. Лавочкина. 2014. № 3. С. 104-108.
Шустов Б.М., Сачков М.Е., Боярчук А. А. и др. Космические перспективы изучения
ультрафиолетовой Вселенной: проект «СПЕКТР-УФ» // Вестник НПО им. С.А. Ла¬
вочкина. 2014. № 5. С. 4-15.
Е.Н. Корчагин, А.Ю. Колобов, А. В. Мурин
НПО им. С.А. Лавочкина
53
1-5
ОРГАНИЗАЦИЯ УПРАВЛЕНИЯ ПОЛЕТОМ
1.5.1. Построение программы полета КА с МКП «НАВИГАТОР»
Организация построения программы полета КА с платформой «НАВИГАТОР»
определяется тактико-техническим заданием на ОКР создания соответствующего
космического комплекса.
КА научного назначения на базе платформы «НАВИГАТОР», такие, как
«СПЕКТР-Р», «СПЕКТР-РГ», «СПЕКТР-УФ» и т.д. (Асмус и др., 2012; Моише-
ев А.А., Бабышкин В.Е. и др., 2014; Шустов Б.М., Сачков М.Е. Боярчук А.А. и др.,
2014; Степанов В.В., 2016; Кардагиев Н.С., Алакоз А.В. и др., 2016; Расторгуев А.С.
и др., 2016) являются уникальными единичными аппаратами, подвергающимися
летным испытаниям, продолжающимся и в ходе выполнения программы научных
исследований.
КА прикладного назначения на базе МКП - метеорологические КА, такие, как
«ЭЛЕКТРО-Л», «АРКТИКА» и т.д., - относятся к аппаратам, летные испытания ко¬
торых проводятся только для первых опытных изделий.
Для каждого конкретного комплекса порядок проведения летных испытаний опре¬
деляют государственный заказчик (заказчик) и головной разработчик комплекса со¬
вместным решением.
Общее руководство летными испытаниями осуществляет Госкомиссия, назначае¬
мая постановлением (решением) Правительства Российской Федерации.
Летные испытания КА проводятся в составе соответствующего космического ком¬
плекса (КК) в соответствии с «Программой летных испытаний КК».
Цель и задачи летных испытаний:
- всесторонняя проверка и подтверждение характеристик КК (его составных частей
и систем) требованиям, заданным в ТТЗ, в реальных условиях функционирования;
- проверка достаточности и эффективности наземной отработки изделий комплек¬
са и комплекса в целом;
- проведение отработки комплекса и его составных частей, которую невозможно
осуществить в наземных условиях;
- отработка эксплуатационной документации;
- определение возможности использования КК по назначению.
Выпуск программы летных испытаний КК должен сопровождаться выпуском
частных программ и методик определения и оценки характеристик комплекса, его
составных частей и систем, в том числе бортовых систем КА, по результатам летных
испытаний. Кроме того, должны быть разработаны «Программа полета КА» и пере¬
чень возможных нештатных ситуаций. Для научных КА выпускается также програм¬
ма научных исследований.
В ходе летных испытаний проводится совмещение летно-конструкторских и за¬
четных испытаний. По результатам выполнения программы летных испытаний Гос¬
комиссия принимает решение об использовании КК для выполнения целевой задачи:
для научных КА - программа научных исследований, для прикладных КА - эксплуа¬
тация по целевому применению.
Выполнение «Программы летных испытаний КК» и ее составных частей осу¬
ществляется в соответствии с «Программой полета КА».
54
1-5
Программой полета КА предусматривается разбиение всего периода летных ис¬
пытаний на следующие этапы:
- начальный участок полета (до 2-х недель);
- технологический этап летных испытаний (около 5 месяцев);
- заключительный этап летных испытаний, совмещаемый с зачетными испытани¬
ями (около 1 месяца).
Работа на начальном участке полета ведется в соответствии с документом «План
работы КА на начальном участке полета», детально описывающим режимы работы
КА и наземного комплекса управления.
На технологическом этапе работы проводятся в соответствии с программами ра¬
боты на месяц по заявкам оперативно-технических групп, разрабатываемым на осно¬
ве программ и методик испытаний бортовых систем КА.
1.5.1.1. Начальный участок полета
Работас КА начинается с выполнения операций в ходе выведения и построения де¬
журной ориентации аппарата является типовой и рассматривается здесь на примере
КА «СПЕКТР-Р». Научастке выведения, до отделения от межорбитального буксира,
осуществляется обогрев блоков двигателей стабилизации (ДБС), солнечного дат¬
чика положения (СДП-1) и гироскопического измерителя вектора угловой скорости
(ГИВУС) от химической батареи разгонного блока. Включение нагревателей про¬
изводится по командам СУ РБ «Фрегат-СБ»: нагреватели ГИВУС и СДП-1 вклю¬
чаются через ~ 2 минуты после старта, а нагреватели ДБС - через -55 минут
после КП.
За ~ 2 минуты до отделения КА от разгонного блока производится снятие питания
нагревателей ДБС, ГИВУС и СДП-1 от батареи разгонного блока и переключение на¬
гревателей ДБС и СДП-1 на выходы бортового комплекса управления (БКУ).
Начальный участок полета КА «СПЕКТР-Р» начинается с момента срабатыва¬
ния контактов отделения (КО) КА от разгонного блока, когда включается комплекс
автоматики и стабилизации системы электроснабжения (КАС-Р) и подается питание
на входы всех систем.
При появлении напряжения на выходной шине КАС-Р происходит:
- включение основного комплекса телеметрической системы (ТМС-Р) с установ¬
кой режимов функционирования;
- запитывание дежурной части бортового радиокомплекса (БАКИС);
- включение бортового комплекса управления (БКУ);
- запитывание приборов комплекса научной аппаратуры (КНА) космического ра¬
диотелескопа (КРТ).
Включение БКУ заключается в последовательном включении бортового управ¬
ляющего комплекса (БУК1) и бортовой цифровой вычислительной системы (БЦВС).
Сначала производится включение вычислительной системы БУК1, расширенное и
циклическое тестирование встроенного контроля ВС БУК1, определение конфигу¬
рации ВС БУК1, подключение и тестирование исполнительных плат БУК1. Затем
производится от БУК1 включение БЦВС, выполняется расширенный и циклический
тестовый контроль БЦВС, определяется конфигурация БЦВС.
55
1-5
Суммарная длительность тестирования вычислительных систем БУК1 и БЦВС -
90... 120 секунд (в зависимости от результатов тестирования). Далее БЦВС одно¬
временно с БУК1 переходит в полетную циклограмму и формирует признак первого
включения БКУ. Начинается счет бортового времени (формируется собственная -
бортовая шкала времени (БШВ) в БЦВС). По началу полетной циклограммы вы¬
полняются операции по включению выходных каскадов исполнительных плат БУК1
и блоков силовой автоматики БКУ (БУЗ-БУ7).
После подключения всех БУ БКУ реализует программу сеанса 1, в соответствии
с которой обеспечивается подготовка бортовых систем (в том числе аппаратуры БКУ)
к работе.
Выполняются следующие операции:
- запрет контроля аварийных сигналов и контрольных параметров комплекса авто¬
матики и стабилизации (КАС) системы электроснабжения (СЭС);
- включение записи ТМ-информации на кольцевое (КСЗУ) и линейное (ЛСЗУ) ста¬
тические запоминающие устройства со скоростью 8 кбод;
- разрешение температурного управления нагревателями СОТР и ТЭМХ;
- выключение вентиляторов фокального (ФК) и научного (НК) контейнеров;
- расчековка и раскрытие панелей солнечных батарей;
- подключение секций БФ1, БФ2, БФЗ солнечных батарей;
- расчековка штанги прибора ММФФ «Плазма-Ф»;
- подрыв разрывных болтов радиатора СТР фокального узла КРТ;
- раскрытие малонаправленных антенн, обеспечивающих связь с наземными стан¬
циями управления;
- расчековка привода ОНА;
- подготовка командных приборов БКУ;
- подготовка двигательной установки к использованию двигателей стабилизации
(ДС) для управления движением КА относительно центра масс (вакуумирование
и заполнение топливных магистралей, «прожиг» двигателей стабилизации, фор¬
мирование рабочей конфигурации ДС);
- успокоение КА после отделения от разгонного блока;
- поиск Солнца из произвольного положения и перевод КА из неориентированного
положения в режим одноосной солнечной ориентации, при которой ось визирова¬
ния Солнца прибора СДП1 отклонена от оси «-Х» КА на 15° в сторону оси «+Z»;
- включение вентиляторов НК и ФК, разрешение управление всеми нагревателями
СОТР после построения режима ПСО;
- включение усилителя мощности БАКИС, организация связи с наземной станцией
управления;
- после чего передача на наземную станцию управления в режиме НП со скоро¬
стью 1 Кбит/с телеметрической информации о состоянии бортовых систем и вы¬
полнении запланированных операций.
Через 10 минут после перехода в ПСО осуществляется переход с двигателей ста¬
билизации на комплекс управляющих двигателей махавиков (КУДМ).
Все операции, проводимые в сеансе 1, реализуются автономно ФИО БКУ, а после
наступления радиовидимости с Земли появляется возможность управления бортовы¬
ми системами по командам, выдаваемым с наземной станции управления.
56
1-5
По командам, выдаваемым из ЦУП-СР через КИС, в сеансе 1 после перехода
в ПСО могут быть проведены следующие операции:
- траекторные измерения;
- воспроизведение информации, записанной в сеансе на ЛСЗУ;
- расстыковка отрывной платы жгутов БКС панели СБ;
- увеличение скорости передачи телеметрической информации с 1 до 8 Кбит/с;
- управление работой нагревателей СОТР (при необходимости);
- расчековка механизма выноса балки высокоинформативного радиокомплекса
(ВИРК);
- перевод балки ВИРК из транспортного в рабочее положение;
- снятие блокировок в системе электроснабжения («Откл. КАС», «ДМН», «УКНА»);
- разрешение контроля сигналов ПБС, Uminl, Umin2, параметров ДАБ1 ДАБ6.
Операции по подрыву пиротехники (ПТ) расчековки механизма выноса балки
ВИРК и подрыву ПТ расстыковки отрывных плат жгутов БКС панелей СБ «±У»
не связаны жестко с циклограммой 1-го включения в «Сеансе 1» и проводятся после
перехода в ПСО по командам, выдаваемым из ЦУП-СР через КИС.
Общая продолжительность «Сеанса 1» - 4 часа.
В течение первых суток полета производится включение термостатов БВСЧ-1. Пол¬
ное включение БВСЧ-1 производится через ~6 суток после включения термостатов.
После перехода в ПСО БКУ обеспечивает управление нагревателями по темпе¬
ратурным датчикам, при этом настраиваемый параметр, определяющий включение
нагревателя кронштейна двигательной становки (НГКДУ), по кодовой команде (КК)
изменяется с 10°С на 15°С; настраиваемые параметры, определяющие диапазон тем¬
пературного регулирования нагревателей СДП-1, изменяются с диапозона от -20°С
до 10°С на диапозон от-10°С до 15°С; настраиваемые параметры, определяющие ди¬
апазон температурного регулирования нагревателей ДБС и ДБК, изменяются с 10°С
и 12°С на 15°С и 25°С соответственно, а также настраиваемые параметры, определя¬
ющие допуск на температуру включения нагревателей ДБС и ДБК при диагностике
их работы, изменяются с 3°С на 5°С. После построения ПСО изменяются по КК на¬
страиваемые параметры, определяющие длительность выключенного состояния на¬
гревателей рефлектора КРТ, с 15 мин на 4 мин.
По команде, выдаваемой из ЦУП-СР через КИС, после перехода в ПСО включает¬
ся система контроля электризации - СКЭ-Р.
Траекторные измерения (ИТНП) проводятся после перехода в ПСО не менее чем
двумя наземными станциями управления последовательно. Длительность «сеанса»
ИТНП 10-15 минут для каждой измерительной станции. Интервал между смежными
«сеансами» ИТНП - 1 мин.
После выведения схема проведения ИТНП следующая: на первом витке (~9 су¬
ток) ежедневно проводятся два «сеанса» ИТНП двумя КИС. Этот режим сохраняется
до получения хороших результатов по прогнозу параметров орбиты. В дальнейшем
основная схема траекторных измерений такая: ежесуточное проведение ИТНП двумя
КИС в сеансах управления (до и после разгрузки КУДМ).
Баллистическая информация для ввода в ОЗУ БЦВС при номинальном выведении
может быть заложена на борт после получения достоверного прогноза параметров рабо¬
чей орбиты. По результатам траекторных измерений через 3-9 суток полета может быть
проведено уточнение баллистической информации. В дальнейшем баллистическая ин¬
формация закладывается на борт КА ежесуточно с помощью четырех кодовых команд.
57
1-5
На КА «СПЕКТР-Р» за точку отсчета БШВ принято 0 часов 1 января 2000 года.
Текущее значение бортового времени устанавливается с помощью команды КК1174,
выдаваемой на 2-е - 3-и сутки полета. После исполнения команды и установки БШВ
проводится сверка БШВ и СЕВ. В случае их расхождения в составе команды КК1173
передается код рассогласования для совмещения бортовой и наземной шкал времени.
Для синхронизации секундных меток БШВ и СЕВ по команде КК1172 проводится их
фазирование.
После закладки на борт массивов баллистической информации и установки со¬
гласованного с СЕВ кода БШВ СИО приступает к проведению расчета бортового бал¬
листического прогноза.
В течение первых ~5 суток полета КА находится в режиме ПСО.
В режиме ПСО по мере насыщения маховиков по запросу СИО проводится раз¬
грузка двигателей-маховиков КУДМ (последовательно: сначала первый комплект,
затем второй). Суммарная длительность разгрузки составляет -370 секунд. При от¬
сутствии полетного задания (ПЗ СУД) разгрузка проводится в соответствии с настра¬
иваемыми параметрами СУД или по командам, выдаваемым из ЦУП-СР через с КИС.
На начальном участке полета проводится оценка:
- работы бортовых систем после выведения;
- работы всех систем в автономном режиме и по командам с НСУ;
- величины тока солнечных батарей;
- устойчивости и характеристики стабилизации на КУДМ в ПСО;
- состояния теплового режима и энергозатрат на его обеспечение;
- стабильности вхождения в связь и оперативности выполнения работ при управ¬
лении бортовыми системами по командам, при закладке на борт КА командно¬
программной информации (КПП), получении с борта КА всех видов телеметри¬
ческой информации;
- качества получаемой телеметрии.
Одновременно оценивается оперативность анализа полученной информации, опе¬
ративность - в случае необходимости - выработки управляющих воздействий и пере¬
дачи их на борт КА, а также оценивается взаимодействие наземных групп и служб,
обеспечивающих планирование и реализацию оперативной работы с КА.
Через ~5 суток после выведения на рабочую орбиту осуществляется переход из
режима ПСО в режим инерциальной ориентации (ИНО).
До перехода в ИНО должна быть проведена расстыковка отрывной платы жгутов
кабельной сети панели СБ.
Построение ИНО проводится в режиме «Астрокоррекция из неопределенного по¬
ложения» (АКН) с использованием астродатчиков АД1 и АД2.
В качестве резервного может быть применен режим «Астрокоррекция против
Солнца» (АКС) с использованием одного астродатчика АДО, визирная ось которого
направляется в сторону, противоположную Солнцу.
Для подготовки к переходу в ИНО предварительно проводится коррекция БШВ и
вводятся (или корректируются) баллистические данные, по которым СИО выполняет
баллистический прогноз.
Для проведения АКН выдается КК1100/30 «Переход в режим автономного управ¬
ления». При удачном проведении астрокоррекции СИО определяет ориентацию КА
в ИСК, а СУД задает штатную ориентацию КА в инерциальной системе координат,
обеспечивающую постоянное поступление энергии от Солнца. С этого момента ста¬
новится возможным ввод ПЗ СУД.
58
1-5
ПЗ СУД определяет программу проведения астрокоррекций на начальном участке:
- после перехода в ИНО последовательно выполняются две АКР с интервалом
-30 минут между ними;
- через -8 часов после них проводится астрокалибровка дрейфов ГИВУС (АКД).
Режим АКД выполняется на фоне постоянной инерциальной стабилизации в
течение -8 часов (мерная база калибровки). В начале и конце АКД проводятся ре¬
жимы АКР.
По результатам обработки данных астрокалибровок в БКУ вводятся поправки
формулярных данных ГИВУС.
На КА метеорологического назначения после перехода в режим ПСО по командам
с Земли включается режим очистки радиационного холодильника на обоих комплек¬
тах сканирующего устройства МСУ-ГС.
Для обеспечения штатных температурных условий эксплуатации приводов ОНА
не позднее чем через 4-5 часов после построения режима ПСО, должна быть про¬
ведена операция выведения ОНА1 и ОНА2 из транспортного в рабочее положение.
Начальный участок для КА «ЭЛЕКТРО-Л» заканчивается разворотом КА из ре¬
жима ПСО в режим штатной орбитальной ориентации КА.
После построения штатной орбитальной ориентации по командам с НКУ-Э осу¬
ществляется перевод БВУ-К и БУКЫ из трёхгранного режима работы в режим «1+1»
(с реконфигурацией).
Сеансы управления проводятся ежесуточно: 1-4 сеанса в сутки. Длительность се¬
анса управления - около 2 часов.
Назначение сеансов управления на этом этапе:
прием текущей телеметрической информации о состоянии бортовых систем;
- воспроизведение информации, записанной на ЛСЗУ (при необходимости - КСЗУ);
- закладка на борт необходимой баллистической информации;
- закладка на борт необходимой командно-программной информации (ПЗ СУД
и кодовые команды);
- проведение одного из сеансов траекторных измерений для каждой КИС.
Кроме этого, в сеансе управления может быть проведена сверка и коррекция БШВ.
1.5.1.2. Технологический этап полета
Для КА «СПЕКТР-Р» основными задачами технологического этапа являются:
- исследование динамических процессов при реализации режимов стабилизации,
переориентации и коррекции;
- проведение тестовых разворотов по ПЗ СУД для различных модификаций режи¬
ма инерциальной ориентации (ИНО-2, ИНО-3, ИНО-5, ИНО-7, ИНО-8);
- оценка точности определения параметров ориентации КА по результатам
астроопределений;
- определение стабильности характеристик и точности ПК ГИВУС по результатам
астрокалибровок;
- определение рассогласований между фактическими и расчетными значения¬
ми угловых параметров установки астродатчиков относительно ВСК по ре¬
зультатам проведения серии астрокоррекций с использованием различных пар
астродатчиков;
- проведение взаимной союстировки астродатчиков;
- выработка рациональной схемы проведения астрокоррекций и астрокалибровок
для этапа регулярных научных наблюдений;
59
1-5
- исследование работы каждой системы в основных режимах, выбор конфигура¬
ции системы, проведение необходимой настройки и регулировки для работы на
этапе регулярных научных наблюдений;
- проверка работы БКУ при управлении смежными бортовыми системами, выбор
основных способов управления для этапа регулярных научных наблюдений;
- оценка надежности работы бортовых алгоритмов диагностики и управления, при
необходимости - корректировка соответствующих настраиваемых параметров;
- проверка различных вариантов конфигурации системы обеспечения вычисли¬
тельного процесса (СОВП) БЦВС и БУК1;
- выведение ОНА из транспортного в рабочее положение;
- проведение тестовых проверок и настройки научной аппаратуры, проверка ее
функционирования во всех используемых режимах;
- определение рассогласований между фактическими и расчетными значениями
угловых параметров установки научной аппаратуры относительно ВСК по ре¬
зультатам проведения серии ее включений на фоне астрокоррекций с использова¬
нием отъюстированной пары астродатчиков;
- отладка взаимодействия научной аппаратуры со служебными системами;
- отработка режимов передачи научной информации с борта КА;
- отработка взаимодействия между наземными службами при всех видах планиро¬
вания работ, при управлении КА и проведении работ, связанных с выполнением
научной задачи;
- отладка информационного взаимодействия всех составляющих космического
комплекса «РАДИОАСТРОН».
Для КА «ЭЛЕКТРО-Л», помимо работ в обеспечение функционирования целевой
полезной нагрузки, также важными являются работы, связанные с поддержанием КА
в точке «стояния».
Поддержание положения КА по долготе с заданной точностью ±0,1° осуществля¬
ется в течение всего срока активного существования путем периодического (пример¬
но один раз в 40-60 суток) проведения коррекций периода обращения орбиты. При
этом предусматривается также проведение нескольких коррекций периода обраще¬
ния КА с целью коррекции эксцентриситета орбиты (примерно, один раз в 90 суток).
Отработка заданного импульса характеристической скорости обеспечивается рабо¬
той двух двигателей стабилизации (ДС), создающих тягу в направлении оси «+Z»
или «—Z» ССК КА.
Поддержание положения КА по широте с заданной точностью ±0,1 Осуществля¬
ется посредством проведения коррекций наклонения плоскости орбиты примерно
один раз в ~80 суток с использованием четырех ДК. При этом для отработки соответ¬
ствующего импульса характеристической скорости проводится программный разво¬
рот КА с целью совмещения вектора тяги с нормалью к плоскости орбиты. Из-за оши¬
бок ориентации вектора тяги при коррекции наклонения возможно нежелательное
изменение периода обращения КА, поэтому после определения параметров орбиты
после коррекции наклонения (~ через двое суток) возможно назначение коррекции
периода обращения КА (ВКИ-2).
Основная схема проведения ИТНП на этом этапе - проведение равномерно рас¬
пределенных «сеансов» ИТНП (групп «сеансов» при работе нескольких КИП) на зам¬
кнутом мерном интервале:
- 4 «сеансов» с интервалом 6 часов на суточном интервале;
- 8 «сеансов» с интервалом 6 часов на двухсуточном интервале.
60
1-5
На этапе проведения коррекций орбиты для оценки параметров импульса коррек¬
ции и уточнения начальных условий необходимо проведение суточного цикла траек-
торных измерений до выдачи импульса и суточного цикла - после коррекции.
Учитывая высокие требования к точности определения параметров движения
центра масс КА, ИТНП по приведенной схеме ведутся ежесуточно. На технологиче¬
ском этапе проводится оценка возможности увеличения интервалов между сеансами
ИТНП и изменения схемы проведения ИТНП для этапа эксплуатации.
В ходе выполнения программы летных испытаний на технологическом этапе про¬
ходит проверку и подтверждение функционирование космического комплекса при ре¬
ализации целевых задач на основе отработки штатных циклограмм функционирова¬
ния КА и работы персонала ГОГУ в соответствии с эксплуатационной документацией.
1.5.1.3. Этап эксплуатации КА
Этап выполнения программы научных исследований. Космические комплек¬
сы народно-хозяйственного назначения по завершении выполнения программы лет¬
ных испытаний решением Государственной комиссии передаются в эксплуатацию.
Далее работа ведется в соответствии с отработанной эксплуатационной документа¬
цией на базе типовых циклов управления КА.
Космические комплексы научного назначения переходят к этапу регулярных на¬
учных наблюдений после завершения проверок функционирования служебной и на¬
учной аппаратуры КА и подтверждения готовности всех элементов КК. Дальнейшая
работа ведется в соответствии с отработанной эксплуатационной документацией на
базе месячных программ работы КА, разрабатываемых соответственно раз месяц на
базе научных программ наблюдений, которые, в свою очередь, строятся в соответ¬
ствии с программой научных исследований.
1.5.2. Логика взаимодействия бортовых систем КА
Организация взаимодействия бортовых систем КА на основе модуля
«НАВИГАТОР» рассмотрена на примере КА «СПЕКТР-УФ».
Космический аппарат «СПЕКТР-УФ» содержит в своем составе следующие
модули:
- базовый служебный модуль «НАВИГАТОР»,
- комплекс научной аппаратуры (КНА).
В составе базового модуля «НАВИГАТОР» функционируют следующие борто¬
вые системы:
- бортовой радиокомплекс (БРК);
- телеметрическая система (ТМС);
- бортовой комплекс управления (БКУ);
- двигательная установка (ДУ);
- система ориентации солнечных батарей (СОСБ);
- средства обеспечения теплового режима (СОТР);
- антенно-фидерная система (АФС);
- система электроснабжения;
- система контроля электризации.
Апробация базового модуля «НАВИГАТОР» осуществлена в проектах
«ЭЛЕКТРО-Л» и «СПЕКТР-Р».
61
1-5
С учётом задействования иностранных станций слежения в управлении КА
«СПЕКТР-УФ» предполагается работа в международном Х-диапазоне частот, с при¬
менением структуры КПП и ТМИ в соответствии с рекомендацией международного
Консультативного Комитета по Космическим Системам передачи Данных (CCSDS).
Новым по сравнению с БРК (БАКИС) КА «СПЕКТР-Р» и «ЭЛЕКТРО-Л» явля¬
ется использование единого радиоканала в БРК для передачи на Землю служебной
телеметрической и научной информации {Губанов И.П., 2014).
Радиолиния связи Земля - КА работает в Х-диапазоне (7.190-7.235 ГГц) для
передачи на борт командно-программной информации и запросных дальномерных
сигналов.
Радиолиния связи КА-Земля работает также в Х-диапазоне (8.450-8.500 ГГц) для
передачи телеметрической и научной информации, а также ответных дальномерных
сигналов.
Логика функционирования космического аппарата «СПЕКТР-УФ» строится по
принципу максимальной автономности с преимущественно программным управле¬
нием, т.е. формирование программы управления бортовыми системами КА и ее реа¬
лизация осуществляется бортовым комплексом управления, а также по радиокоман¬
дам с наземной станции управления (Микрин Е.А., 2003).
Вычислительная машина БКУ - БВУ должна бесперебойно работать при отказе
любого одного из каналов БВУ, обеспечивая работу бортовых систем по штатным
алгоритмам. Сосредоточение всех потоков информации в бортовом вычислительном
комплексе КА позволяет строить управление бортовыми системами как на основа¬
нии командно-программной информации, переданной с Земли и заложенной в память
БВУ, так и на оснований контрольной информации, получаемой от других систем,
по алгоритмам бортового процессора.
Радиосвязь КА с Землей по приему обеспечивается постоянно в сфере через мало¬
направленные антенны (МНА), каждая на свой приемник. Передача на Землю обе¬
спечивается через две МНА с диаграммой направленности в виде полусферы и две
направленные (рупорные) антенны на приводах. Подключение МНА или рупорных
антенн производится по командам БКУ или командам с Земли в зависимости от необ¬
ходимой скорости ТМИ (1-32 Кбод для служебных целей или 1-4 Мбод для научной
информации) и задействованной наземной антенны (ТНА-57 или ТНА-1500).
Выбор требуемой передающей МНА и наведение рупорных антенн осуществля¬
ется по результатам автоматического расчета в БВУ БКУ направления на заданный
наземный пункт для текущего участка орбиты.
Передача научной информации на Землю производится с использованием рупор¬
ных антенн, точное наведение которых на Землю осуществляется с помощью привода
в сеансе связи при трехосной ориентации КА. Научная информация передается или в
режиме непосредственной передачи (НП) в ходе научного наблюдения, проводимого
под контролем Земли, или путем воспроизведения информации (режим ВП), записан¬
ной в сеансе наблюдения, проведенного в автономном режиме.
Контроль передачи разовых команд и командно-программной информации НКУ
осуществляется по ТМ-информации, принимаемой на Земле.
Предназначенные к передаче КПП делятся на части, именуемые кадрами пользо¬
вателя, с объемом 56 байт.
На передающей стороне информационные блоки преобразуются в кодовые бло¬
ки путем кодирования модифицированным кодом БЧХ, способным исправлять одну
62
1-5
и обнаруживать две ошибки на блок. В процессе кодирования каждый информацион¬
ный блок дополняется семью проверочными битами кода БЧХ и одним проверочным
битом синхронизации блока, содержащим всегда символ «О» (плюс 1 байт).
В состав БРК входят:
- два приемопередающих устройства - ППУ № 1 и ППУ № 2;
- дублированный блок командно-телеметрический - прибор БКТ;
- дублированное командно-распределительное устройство - КРУ;
- дублированное программно-временное устройство - ПВУ.
Входящий в состав БРК блок командно-телеметрический (БКТ) предназначен для
приема и обработки кадров пользователя, поступающих в составе КПИ с Земли, на¬
правления их по назначению (в БРК или БКУ), организации обмена с БКУ в части
передачи в БВУ массивов КПИ, обработки и регенерации запросного сигнала дально-
метрии, приема потоков информации из ТМС и КНА, формирования единого инфор¬
мационного потока, его кодирования и передачи на передающее устройство.
Командно-распределительное устройство БРК предназначено для приема из БКТ
кадров КПИ с признаком БРК, их декодирования и выдачи в виде импульсных сигна¬
лов для включения/выключения приборов БРК, а также во внешние системы.
Программно-временное устройство представляет собой сторожевой таймер, обе¬
спечивающий по истечении 1-2 суток без связи с НКУ изменения конфигурации при¬
боров БРК.
К радиокомандам, т.е. к командам, исполняемым непосредственно в БРК, отно¬
сятся управляющие кодовые слова (УКС) и функциональные команды (ФК). По УКС
БКТ задает режимы работы БРК и отдельных приборов БРК. ФК после дешифрации
в КРУ преобразуются в позиционные импульсные исполнительные сигналы, кото¬
рые поступают для включения/выключения приборов БРК или в смежные системы
на исполнение.
Всего БРК принимает и выдает 112 ФК и УКС, в том числе 40 ФК в смежные
системы.
На начальном участке полета работа БКУ и выдача из БКУ управляющих команд
определяются циклограммой сеанса № 1. В дальнейшем, в сеансах связи КА с на¬
земной станцией управления, в БВУ БКУ передается командно-программная инфор¬
мация (КПИ) двух видов:
- кодовые команды;
- КПИ с массивами данных для БКУ.
КПИ с массивами данных для БКУ - это полетное задание (ПЗ) для системы
управления движением, управления приводами антенн, управления телеметрией, на¬
учным комплексом, массивы изменения программ и формулярные данные.
Кодовыми командами в БКУ передается информация трех видов:
- коды релейных команд управления смежными системами (РКУ);
- кодовая информация для смежных систем (КИ СС);
- кодовая информация для БКУ (КИ БКУ).
РКУ, КИ СС и КИ БКУ могут формироваться БВУ БКУ автономно:
- по бортовым алгоритмам диагностики параметров оперативного контроля и от¬
работки выхода из нештатной ситуации;
- по результатам выполнения отдельных операций в системе стабилизации
и ориентации;
- в результате отработки информации ПЗ;
63
1-5
- по результатам обработки информации рабочей программы, определяющей рабо¬
ту комплекса научной аппаратуры;
- по результатам вычислений, проведенных бортовой вычислительной системой
БВУ БКУ в соответствии с заданными алгоритмами.
Управление непосредственно по радиокомандам (ФК и УКС) и кодовым командам
(КК) ведется штатно только в сеансах связи или дежурном режиме непосредственно
перед сеансом связи. В нештатной ситуации в случае острой необходимости команды
могут быть выданы в любое время при наличии зоны радиовидимости КА с назем¬
ной станции управления. Автономное управление по командам БКУ осуществляется
в течение всего времени полета в соответствии с бортовыми алгоритмами и заложен¬
ными программами.
БКУ через пять блоков управления (БУ) обеспечивает взаимодействие со следую¬
щими системами:
- бортовым радиокомплексом (БРК);
- телеметрической системой (ТМС);
- антенно-фидерной системой БРК (АФС);
- системой электроснабжения (СЭС);
- системой обеспечения теплового режима (СОТР);
- пиротехникой для расчековки элементов конструкции КА;
- комплексом научной аппаратуры;
- двигательной установкой.
По командам БКУ осуществляется:
- управление приводами солнечных батарей (СОСБ);
- управление приводами направленных антенн (НА) в процессе наведения рупор¬
ных антенн на наземную станцию слежения, с сохранением наведения на нее
во время реализации программы наблюдений, при выполнении технологических
операций;
- управление пиротехническими средствами расчековки и раскрытия всех элемен¬
тов конструкции;
- управление нагревательными элементами системы СОТР;
- управление приборами системы стабилизации и ориентации, входящей в БКУ.
БРК передает в БКУ принятую с Земли командно-программную информацию по
мультиплексному каналу (МПИ ГОСТ 62070-2003). Для этого в составе БРК име¬
ется адаптер мультиплексного канала (устройство обмена). По этому же каналу от
БКУ в БРК поступают команды управления, сформированные по результатам ТМ-
измерений параметров БРК.
Аппаратура БРК работает в дежурном и в сеансном режимах.
В дежурном режиме постоянно работают два приемных устройства, каждое в сво¬
ей полусфере.
В сеансном режиме в дополнение к постоянно работающим двум приемным
устройствам по команде включается передающее устройство.
Для подключения к антеннам каждое ППУ имеет один вход приемного канала,
который подключён постоянно к одной из двух приёмных антенн. Передающий канал
БРК подключается к одной передающей антенне с помощью антенного переключа¬
теля. Вход приемного канала подключается внутри ППУ к тому приемному каналу,
на который подано питание.
64
1-5
Использование двух ППУ определяет и наличие двух выходов БРК для матриц
разовых команд и для цифровой КПИ, причем одновременно могут использоваться
сразу два выхода.
Для приема информации на КА «СПЕКТР-УФ» устанавливаются две малона¬
правленные антенны с шириной диаграммы 180 градусов каждая, охватывающие всю
сферу.
Передача информации на наземную станцию осуществляется в зависимости
от скорости передачи информации либо через одну из двух МНА, либо через одну
из двух НА.
От ТМС на БРК поступает последовательный код ТМИ, который в БКТ преобра¬
зуется в сверточный код или турбокод и подается на модулятор передающего устрой¬
ства. При работе в режиме измерения дальности в последовательный код ТМИ, на
определенных заранее местах, врезаются посылки ответного дальномерного сигнала.
От комплекса научной аппаратуры в БРК поступает последовательный код науч¬
ной информации (НИ) в сопровождении частоты (2Ft). Передача НИ совмещается
с передачей служебной ТМ-информации.
Служебная ТМИ может передаваться со скоростью 32, 8, 1 Кбод.
Бортовой радиокомплекс допускает совмещение следующих режимов работы:
- прием КПИ и передача ТМИ и (или) НИ;
- прием КПИ, передача ТМИ и (или) НИ и измерения радиальной скорости;
- измерения дальности и радиальной скорости.
На КА «СПЕКТР-УФ», дополнительно к основному режиму ориентации КА -
И НО, вводится режим ИНО-2: стабилизация КА в неподвижной относительно инер-
циального пространства системе координат с использованием сигнала с датчиков
Гида из состава научной аппаратуры.
Взаимодействие модуля «НАВИГАТОР» с научной аппаратурой КА «СПЕКТР-
УФ» производится с использованием блока управления служебным комплексом
(БУСК), который обеспечивает управление приборами служебного комплекса (СК)
телескопа Т-170, сбор, обработку, хранение и передачу служебной ТМ-информации,
а также с использованием блока управления научными данными (БУНД), который
обеспечивает управление приборами НА, сбор, обработку, хранение и передачу на¬
учной ТМ-информации.
БКУ выполняет централизованное управление смежными системами (СС), обе¬
спечивающее функционирование КА в автономном режиме и в сеансах связи с на¬
земным комплексом управления (НКУ). Помимо штатного управления СС от БКУ,
предусматривается возможность использования радиокоманд непосредственного
исполнения.
В части взаимодействия со смежными системами и управления их работой БКУ
должен обеспечивать:
- выдачу РКУ и ЦКУ на основе обработки КПИ, принимаемой от НКУ, а также
в соответствии с алгоритмами управления СС;
- выдачу в ТМС массивов цифровой информации («Отчет КА»), содержащих:
- собственно ТМИ БКУ,
- МИ, получаемую БКУ от ТМС по соответствующему запросу,
- ТМИ СС, формируемую БКУ,
- контроль и диагностику отдельных СС по сигналам оперативного контроля.
65
1-5
Управление СС на основе цифрового обмена БКУ с БРК, ТМС, СДГ, БУНД, БУСК
осуществляется с использованием МПИ по ГОСТ Р52070-2003.
В части диагностики СС БКУ обеспечивает:
- поддержание необходимого температурного режима;
- переключение на резервные приборы или комплекты;
- выполнение специальных программ по изменению конфигурации и режимов ра¬
боты при достижении критических параметров;
- определение ряда нештатных ситуаций и запуск аварийных программ для выхода
из них, в том числе в части КНА.
Информационно-логическая схема КА «СПЕКТР-УФ» приведена на рисунке
1.5.1.
Рисунок 1.5.1. Информационно-логическая схема КА «СПЕКТР-УФ»
1.5.3. Организация управления КА
1.5.3.1. Организация работы бортового программного обеспечения
Организация работы бортового программного обеспечения рассмотрена на при¬
мере КА «СПЕКТР-УФ».
Основой выполнения целевой задачи космическим аппаратом является смена ре¬
жима ориентации и управление смежными системами по типовым программам, по¬
этому функции диспетчера управления верхнего уровня выполняет система управле¬
ния движением - СУД.
СУД функционирует во взаимодействии со следующими основными системами
БКУ:
66
1-5
- система стабилизации и ориентации КА (ССО),
- система информационного обеспечения (СИО),
- система управления бортовыми системами (СУБС),
- система обеспечения вычислительного процесса (СОВП).
СУД может функционировать в одном из следующих режимов работы:
- Управление на начальном участке. Режим предназначен для реализации ци¬
клограммы первого (по срабатыванию контактов отделения - КО) или повторного
включения борта (по нештатной ситуации - НШС) или по кодовой команде (КК)) с
последовательным выполнением динамических операций (демпфирование угловых
скоростей, построение солнечной ориентации) и операций управления смежными
системами.
Выполнение динамических операций реализуется путем последовательного вы¬
полнения СУД соответствующих режимов управления движением во взаимодействии
с ССО и СИО.
Управление бортовыми системами осуществляется путем отработки СУД цикло¬
граммы первого включения с последовательным запуском алгоритмов управления
БС, реализуемыми СУБС.
- Автономное управление. Режим включается: по завершении режима управле¬
ния на начальном участке, по завершении отработки полетного задания, по прекра¬
щении отработки полетного задания, по КК.
Режим предназначен для поддержания инерциальной ориентации КА с АКР.
На фоне автономного режима функционирования СУД осуществляется управле¬
ние бортовыми системами от СУБС по прошитой логике; возможна отработка ПЗ
ТМС, ПЗ КНА (СУБС) и рабочей программы (РП) управления КНА, заложенной в
КНА (БУНД и БУСК).
- Управление по ПЗ СУД. Режим включается по времени, заданном в ПЗ, и может
быть зациклен.
Режим предназначен для выполнения основных полетных операций КА в режи¬
мах управления движением - инерциальная ориентация (ИНО) и выдача корректиру¬
ющего импульса (ВКИ) - и обеспечивает:
- проведение типовых сеансов, требующих смены (настройки) режима управления
движением (сеанс наблюдения, коррекции орбиты),
- проведение динамических операций (переориентация, разгрузка ДМ, астрокор¬
рекции и т.д.).
В соответствии с ПЗ СУД во взаимодействии с ССО выполняет заданную последо¬
вательность режимов управления движением, задействуя для их реализации требуе¬
мые динамические типовые полетные операции (стабилизация текущей ориентации,
торможение, одноосное нацеливание, ориентация в различных модификациях и т.д.).
На фоне данного режима функционирования СУД также осуществляется управ¬
ление бортовыми системами от СУБС по прошитой логике, отрабатывается ПЗ ТМС
(модулями СУБС) и рабочая программа (РП) управления КНА, заложенная в КНА.
- Управление в НШС. Режим включается по признаку НШС, формируемому си¬
стемами БКУ в нештатной ситуации, не парируемой алгоритмами данной системы
и требующей прекращения отработки всех ПЗ, и перевода КА в режим сохранения.
В случае возникновения нештатной ситуации СУД, как диспетчер верхнего уров¬
ня, прерывает отработку ПЗ. Парирование нештатной ситуации и приведение систем в
безопасный режим осуществляется ПО управления соответствующих систем (СУБС)
67
1-5
в соответствии с признаком, формируемым диспетчером, или признаком из системы,
в которой произошла нештатная ситуация.
Таким образом, реализация программы полета на определенных интервалах вре¬
мени осуществляется с помощью полетных заданий, которые определяют время, по¬
рядок и режимы задействования соответствующих бортовых систем: ПЗ СУД, ПЗ
ТМС, ПЗ ЦА, РП.
СУД, как диспетчер высшего уровня, в ходе работы выставляет признаки, исполь¬
зуемые СУБС (отработка ПЗ ТМС, ПЗ КНА и работа алгоритмов управления БС)
и КНА (БУНД, БУСК) - отработка РП, для синхронизации управляющих процессов.
Типовые сеансы связи реализуются как типовые последовательности режимов
управления движением и режимов работы СС и КНА, задаваемые через ПЗ и РП
соответственно. (Дополнительным средством управления в сеансах связи с Землей
является задание режимов работы по командам с Земли).
Задействование или запрет работы алгоритмов управления СС осуществляется по
командам с Земли.
Изменение параметров, используемых алгоритмами, производится с помощью
массива поправок настраиваемых параметров.
В полете возможна корректировка бортового программного обеспечения. Заклад¬
ка и контроль достоверности ввода новой версии ПО осуществляются без прерыва¬
ния функционирования текущей версии ПО.
В ходе комплексных испытаний КА «СПЕКТР-УФ» в НПО им. С.А. Лавочкина
проверяется функционирование штатного ПО БКУ по программам испытательных
сеансов. Для обеспечения отработки режимов, требующих имитации условий функ¬
ционирования аппаратуры в полете, соответствующее сопровождение режимов с по¬
лучением необходимых параметров, имитирующих изменение условий внешней сре¬
ды, обеспечивается технологическими программами, являющимися частью штатного
программного обеспечения. Их задействование на земле осуществляется заданием по
КПИ специальных признаков-ключей. При штатном функционировании КА в полете
работа технологических программ заблокирована, однако обеспечивается возмож¬
ность их задействования по КПИ для парирования нештатных ситуаций и решения
отдельных технологических задач.
Управление БКУ при КИ должно обеспечиваться штатными средствами.
1.5.3.2. Структура КПИ и радиокоманд на примере КА «СПЕКТР-УФ»
Любая информация с Земли на борт КА передается в кадре пользователя. По со¬
ставу кадры пользователя подразделяются на следующие виды:
- «холостой» кадр;
- кадр, содержащий разовые команды, обрабатываемые бортовым радиокомплек¬
сом (БРК);
- кадр, содержащий КПИ для БКУ.
Кадры передаются на борт без какой-либо паузы между ними.
Радиокоманды
Радиокоманды передаются на борт в составе кадров КПИ с признаком БРК.
Команды, обрабатываемые БРК, делятся на функциональные команды (ФК)
и управляющие кодовые слова (УКС). ФК и УКС имеют сквозную нумерацию. Общее
количество ФК и УКС - 112.
68
1-5
По УКС БКТ задает режимы работы БРК и отдельных приборов БРК. ФК после
дешифрации в КРУ преобразуются в позиционные импульсные исполнительные сиг¬
налы, которые поступают для включения/выключения приборов БРК или в смежные
системы на исполнение.
Вся остальная командно-программная информация (кроме ФК и УКС) с призна¬
ком БКУ передается из БКТ БРК в БВУ БКУ по мультиплексному каналу обмена
(МКО) в виде стандартного сообщения, включающего командные слова и слова дан¬
ных (не более 24).
Состав командно-программной информации для БЦВС БКУ
КПП для БВУ БКУ, передаваемая из БРК по МКО, включает в себя следующие
виды информации:
- кодовые команды;
- полетное задание;
- массив изменения программ;
- рабочая программа.
Вид информации задается в командном слове, которое формируется в БРК и со¬
провождает любую передачу КПИ в БВУ БКУ.
Кодовые команды
Кодовые команды являются программными командами и предназначены для воз¬
действия на функционирование БКУ и СС из НКУ. С помощью кодовых команд мож¬
но обеспечить выполнение следующих операций:
- задание рода работы БКУ;
- задание выдачи релейных команд управления (РКУ) с соответствующего БУ;
- задание включения/выключения нагревателей через БУ-3 (аналог РКУ);
- задание выдачи цифровых команд управления (ЦКУ) по МКО в смежные системы;
- запрет или разрешение работы бортовых алгоритмов, в том числе диагностики;
- установка программных признаков в БВУ и задание параметров работы бортовых
алгоритмов (настраиваемые параметры);
- задание времени выполнения определенной операции, в том числе выдачи
команды;
- задание информации о сдвиге (коррекции) бортовой шкалы времени.
Все кодовые команды можно подразделить на две группы:
- кодовые команды без параметров;
- кодовые команды с параметрами.
В свою очередь, команды и первой, и второй группы могут быть:
- непосредственного действия (тип 1);
- отложенного действия, т.е. с заданным временем исполнения (тип 2).
Для команд отложенного действия можно задавать несколько времен однократно¬
го исполнения, а также циклическую выдачу команды.
В составе одной фразы КПИ может быть одновременно передано несколько кодо¬
вых команд. Количество кодовых слов в каждой фразе КПИ ограничено только дли¬
ной самой фразы.
Кодовые команды могут выдаваться в любом режиме работы борта.
Полетное задание
Полетное задание определяет программу работы БКУ по управлению системой
управления движением, телеметрической системой и, возможно, целевой аппарату¬
69
1-5
рой (комплексом научной аппаратуры). В соответствии с назначением различаются
ПЗ СУД, ПЗ ТМС и ПЗ ЦА (КНА).
Вводу любого ПЗ предшествует выдача кодовой команды с заданием рода работы
«Получение ПЗ» с указанием вида ПЗ и количества принимаемых фраз.
ПЗ СУД представлено в виде последовательности выполнения типовых полетных
операций (ТПО).
Полетное задание состоит из специального раздела - заголовка ПЗ и параметров
для каждой ТПО.
Специальный раздел содержит контрольную сумму ПЗ, длину ПЗ в словах, абсо¬
лютное время начала программы полета, общее количество ТПО, а также их началь¬
ные адреса в памяти БЦВС.
Каждая типовая полетная операция задается жестко определенным набором слов,
в число которых обязательно входят два служебных слова и длительность ТПО.
Служебные слова определяют код ТПО, точность стабилизации по углу и угловой
скорости (грубая, точная, прецизионная и коррекция орбиты), способ разгрузки ДМ,
разрешение/запрет разворота солнечных батарей, разрешение/запрет проведения
астрокоррекции и выбор конкретных астродатчиков и т.п.
Количество параметров для задания ТПО определяется типом ТПО. Так, например,
для ТПО-3, задающего инерциальную ориентацию аппарата (с разворотом или без
него), требуется 10 слов. Таким образом, для каждого наблюдательного сеанса необ¬
ходимо задание двух-трех ТПО-3, которые будут отличаться друг от друга разной точ¬
ностью стабилизации, необходимостью проведения разгрузки ДМ и астрокоррекции.
С помощью ПЗ ТМС задается смена режимов работы телеметрии в заданное вре¬
мя вне сеансов управления.
Структура ПЗ КНА обеспечивает формирование циклограмм управления КНА
с переменным составом команд и числовых данных.
Каждая фраза КПП с полетным заданием, передаваемая с Земли, содержит по¬
рядковый номер. После приема и подсчета контрольной суммы БВУ выдает в теле¬
метрию результаты приема фразы КПП. В случае пропуска (непрохождения) фразы
сообщение об этом также передается в телеметрию. В случае несовпадения контроль¬
ной суммы фразы в телеметрию передается не только результат, но и вся принятая
фраза.
После приема всех фраз КПП с полетным заданием и совпадения контрольной
суммы по каждой фразе и всему полетному заданию разрешается его исполнение
в заданный в ПЗ момент времени.
Ввод ПЗ может осуществляться на фоне исполнения предыдущего ПЗ.
Кодовая команда «Окончание ввода ПЗ» выдается только при нештатном заверше¬
нии или прерывании операции по вводу полетного задания.
Массивы изменения программ
Массивы изменения программ (МИП) предназначены для коррекции бортового
программного обеспечения, которое проводится по специальному решению.
Вводу МИП предшествует выдача кодовой команды с заданием рода работы «За¬
грузка программы» и количества принимаемых фраз. Структура и технология ввода
МИП полностью соответствует структуре и технологии ввода МПНП.
В составе массива передается номер страницы репрограммируемого постоянного
запоминающего устройства (РПЗУ) БВУ, начальный адрес фрагмента или отдельной
ячейки памяти и собственно сама информация.
70
1-5
Каждая фраза КПИ с МИП, передаваемая с Земли, содержит порядковый номер.
После приема и подсчета контрольной суммы БВУ выдает в телеметрию результаты
приема фразы КПИ. В случае пропуска (непрохождения) фразы сообщение об этом
также передается в телеметрию.
После приема всех фраз КПИ с МИП и совпадения контрольной суммы по каждой
фразе и всему массиву он переписывается из буфера в РПЗУ БВУ.
Ввод массивов изменения программ производится только в дежурном режиме
БКУ после окончания отработки полетного задания.
Завершает выдачу МИП кодовая команда «Окончание загрузки программы».
Рабочая программа
Рабочая программа подготовки и проведения наблюдательного сеанса предназна¬
чена для управления полезной нагрузкой (КНА Т-170М) на участках наблюдения и
технологических участках и представляет собой временную последовательность из
150-200 команд, реализуемых в автономном режиме без вмешательства с Земли.
Отработка рабочей программы, реализуемая КНА из БУНД и БУСК, сопровожда¬
ется отработкой ПЗ КНА из БКУ, а также, при необходимости, временными коман¬
дами из БКУ. Телеметрическое сопровождение обеспечивается отработкой ПЗ ТМС.
1.5.3.3. Организация телеметрического обеспечения на борту КА
на примере КА «СПЕКТР-УФ»
Цель телеметрического обеспечения на борту КА - получение достаточного объ¬
ема информации для выполнения следующих основных функций:
- обеспечение работы бортовых алгоритмов управления и диагностики функци¬
онирования бортовых систем, с использованием сигналов оперативного кон¬
троля, получаемых непосредственно БКУ от БС и параметров оперативного
контроля, получаемых БКУ от ТМС путем запроса, а также с использованием
ТМ-параметров о работе бортовых систем, формируемых непосредственно БКУ
в обеспечение следующих задач:
- выполнение функциональных задач участков полета КА;
- контроль работоспособности бортовых систем КА с парированием предусмо¬
тренных нештатных ситуаций (НШС) и формированием признаков НШС;
- обеспечение возможности наземного контроля штатности функционирования
бортовых систем в полете как в сеансах связи (оперативный анализ текущей ин¬
формации), так и на автономных участках работы КА, предшествующих сеансам
сброса информации (анализ запомненной информации);
- обеспечение контроля работоспособности бортовых систем КА в ходе комплекс¬
ных испытаний КА в НПО имени С.А. Лавочкина.
Сбор служебной ТМ-информации на борту обеспечивает ТМС и БКУ.
На вход ТМС поступает датчиковая ТМИ и массивы цифровой информации от
БКУ, БРК и КНА.
ТМИ выдается ТМС в виде последовательного 8-разрядного кода и имеет струк¬
туру циклического чередования ТМ-кадров. Размер кадра - 4421 бит. Кадр состоит из
служебной (325 бит) и информационной (512 байт) частей.
Совокупность кадров в рамках одного цикла составляет программу выходной ин¬
формации или программу формирования кадров (ПФК), которая может содержать от
1 до 32 кадров.
71
1-5
Для КА «СПЕКТР-УФ» предполагается следующий состав ПФК:
- ПФК контроля функционирования БС;
- ПФК служебной информации функционирования КНА;
- ПФК воспроизведения информации системы контроля электризации (СКЭ);
- ПФК контроля функционирования БС и воспроизведения информации СКЭ;
- ПФК контроля функционирования БС и служебной информации функциониро¬
вания КНА;
- ПФК воспроизведения кольцевого статического ЗУ (КСЗУ);
- ПФК воспроизведения линейного статического ЗУ (ЛСЗУ);
- ПФК воспроизведения устройства регистрации событий (УРС);
- ПФК специальные или технологические для конкретных операций.
Хранение информации на борту осуществляется в ЛСЗУ (128 Мбит) и КСЗУ
(4 Мбит).
ТМС функционирует в следующих режимах:
- НП - режим непосредственной передачи с информативностью 1, 8 и 32 Кбод;
- ЗАП ЛСЗУ - режим записи на линейное СЗУ со скоростями 1, 8 и 32 Кбод;
- ЗАП КСЗУ - режим записи на кольцевое СЗУ со скоростями 1, 8 и 32 Кбод;
- ЗАП УРС - режим допускового контроля датчиков событий;
- ВП ЛСЗУ - режим воспроизведения информации, записанной на ЛСЗУ, со скоро¬
стями 1, 8 и 32 Кбод;
- ВП КСЗУ - режим воспроизведения информации, записанной на КСЗУ, со скоро¬
стями 1, 8 и 32 Кбод;
- ВП УРС - режим воспроизведения информации допускового контроля со скоро¬
стями 1, 8 и 32 Кбод;
- ВД - режим выдачи данных по МПИ.
1.5.3.4. Типовые участки функционирования КА на примере КА «СПЕКТР-УФ»
Программа работы КА «СПЕКТР-УФ» представляет собой последовательность
следующих типовых участков полета:
- участок управления,
- дежурный участок,
- технологический участок,
- участок наблюдения.
На данных участках могут выполняться следующие основные задачи:
- Участок управления:
- НП ТМ, контроль функционирования БС.
- ввод КПИ (ПЗ и иная КПИ),
- измерение текущих навигационных параметров (ИТНП),
- ВП служебного ЗУ,
- ВП ЗУ КНА,
- разгрузка двигателей маховиков (ДМ).
- Дежурный участок:
- поддержание текущего состояния КА (состояния достигнутого на момент
окончания действия очередного полетного задания).
- Технологический участок:
- переориентация КА,
- установка режима КНА,
- установка режима БС КА.
72
1-5
- Участок наблюдения:
- непрерывное наблюдение источника с передачей научной информации на
Землю или записью на ЗУ,
- настройка (смена) режима работы КНА,
- подправка ориентации КА.
Задачи участка управления и участка наблюдения выполняются путем проведения
типовых сеансов связи. В соответствии с программой работы на всех этапах полета
можно выделить следующие типовые сеансы:
- сеанс включения бортовых систем КА после выведения на орбиту;
- сеанс радиосвязи с Землей;
- сеанс коррекции орбиты;
- наблюдательный сеанс.
Программы сеансов запускаются по команде прямого или отложенного действия
либо при отработке полетного задания. Программы первого сеанса и сеанса радио¬
связи предполагают связь с Землей.
Сеанс коррекции и наблюдательный сеанс могут проводиться в автономном режи¬
ме функционирования КА.
Задачи технологического участка на начальном этапе полета будут осуществлять¬
ся под контролем Земли, и поэтому будут требовать проведения сеанса радиосвязи.
На последующих этапах полета задачи технологического участка будут отрабаты¬
ваться в автономном режиме полета КА в ходе отработки полетного задания.
1.5.3.5. Организация взаимодействия предприятий
при выполнении программы полета КА
Общее руководство летными испытаниями осуществляет Госкомиссия, назначае¬
мая постановлением (решением) Правительства Российской Федерации.
Исполнительным органом Госкомиссии является назначаемая ее решением Глав¬
ная оперативная группа управления (ГОГУ). Рабочими органами ГОГУ являются
оперативно-технические группы (ОТГ) и дежурные расчеты {Артюхов М.И., 2014).
Состав и задачи ГОГУ определяются «Положением по организации управления
космическим комплексом», которое разрабатывается ФГУП «НПО им. С.А. Лавоч¬
кина», как головной организацией по созданию космического комплекса. Положение
согласовывается со всеми заинтересованными организациями и утверждается Ро-
скосмосом. (Технические аспекты взаимодействия элементов наземных комплексов
подробно рассмотрены в разделе . «Наземный комплекс управления»).
Структура ГОГУ космического комплекса, состав оперативно технических групп
и дежурных расчетов отражают структуру наземного комплекса, который входит в
состав данного космического комплекса.
Космические комплексы народно-хозяйственного назначения («ЭЛЕКТРО-Л»,
«АРКТИКА») имеют в своем составе наземные комплексы управления (НКУ) и на¬
земные комплексы приема, обработки и распространения целевой информации
(НКПОР) (Комовкин. С.В.,2014).
Космические комплексы научного назначения включают в свой состав НКУ КА
и наземный научный комплекс (ННК).
73
1-5
Разработчиком наземных научных комплексов для КА с платформой
«НАВИГАТОР» являются научные академические организации. Для КА «СПЕКТР-Р»,
«СПЕКТР-М» - это Астрокосмический Центр ФИ АН, для КА «СПЕКТР-РГ»,
«СПЕКТР-УФ» и др. - это Институт космических исследований РАН.
Основными функциями ННК являются:
- обработка, анализ, архивирование, распространение научной информации,
- планирование научных экспериментов (долгосрочное, среднесрочное,
оперативное),
- сопровождение функционирования бортовой научной аппаратуры,
- обеспечение коммуникационных функций.
Основные функции НКУ:
- непосредственное управление КА с использованием радиотехнических средств
наземных станций,
- планирование работы КА и наземных средств при выполнении задач летных ис¬
пытаний бортовых систем и выполнении программы научных исследований,
- баллистико-навигационное обеспечение полета КА,
- коммуникационные функции.
В ряде научных проектов в состав ННК входят собственные средства приема на¬
учной информации. Так, например, в проекте «СПЕКТР-Р» для приема информации
космического радиотелескопа, передаваемой по высокоинформативному радиокана¬
лу (ВИРК), используется радиотелескоп наземной станции слежения в Пущино, а для |
приема информации исследуемых космических источников используются наземные |
радиотелескопы в различных частях земного шара. ;
Обмен данными между НКУ и НКПОР, а также между НКУ и ННК производится:
в соответствии с каталогом форм обмена данными, схемой связи и «Положением по I
организации управления космическим комплексом».
По результатам полета КА в сроки, установленные «Положением по организации
управления космическим комплексом», ФГУП «НПО им. С.А. Лавочкина» совместно
с участвующими организациями составляет Технический Отчет.
Список литературы
Артюхов М.И., Воробьев А.З., Калашников А.И., Ширшаков А.Е. Особенности
управления космическим аппаратом «СПЕКТР-Р» // Вестник НПО им. С.А. Лавоч¬
кина, 2014. № 3. С. 77-84.
Асмус и др. Развитие космического комплекса гидрометеорологического обеспе¬
чения на базе геостационарных спутников серии «ЭЛЕКТРО-Л» // Вестник ФГУП
НПО им. С.А. Лавочкина. 2012. № 1. С .3-14.
Губанов И.П., Артюхов М.И., Молодцов В.А. Организация функционирования бор¬
товых систем КА «СПЕКТР-УФ» // Вестник НПО им. С.А. Лавочкина. 2014. №5.
С. 24-33.
Кардашев Н.С., Алакоз А.В. и др. «РАДИОАСТРОН»: итоги выполнения научной
программы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016.
№ 3. С. 4-24.
Комовкин С.В., Мельников КН., Молчанов КВ., Калашников А.И. Наземный сег¬
мент управления полетом КА «СПЕКТР-Р» // Вестник НПО им. С.А. Лавочкина,
2014. №3. С. 72-76.
74
f
1-5
Мопшеев А.А., Бабышкин В.Е. и др. Проектная конференция космического аппара¬
та «СПЕКТР УФ» // Вестник НПО им. С.А. Лавочкина. 2014. № 5. С. 15-20.
Расторгуев А. С. Сачков М.Е. Заболотских М.В. Галактическая астрономия в уль¬
трафиолете // Вестник НПО им. С.А. Лавочкина. 2016. № 3. С. 38-47.
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
Шустов Б.М., Сачков М.Е. Боярчук А.А. и др. Космические перспективы изучения
ультрафиолетовой Вселенной: проект «СПЕКТР-УФ» // Вестник НПО им. С.А. Ла¬
вочкина. 2014. № 5. С. 4-15.
А.Е. Ширшаков, М.И. Артюхов, В.А. Молодцов,
А.З. Воробьев, А,И. Калашников
НПО им. С.А. Лавочкина
75
ЕЕ1 ПРОЧНОСТНЫЕ И КИНЕМАТИЧЕСКИЕ
ИСПЫТАНИЯ
МНОГОФУНКЦИОНАЛЬНОЙ КОСМИЧЕСКОЙ
ПЛАТФОРМЫ «НАВИГАТОР»
МКП «НАВИГАТОР», разработанная в НПО им. С.А.Лавочкина, является уни¬
фицированной платформой для космических аппаратов различного назначения.
Конструктивно платформа «НАВИГАТОР» выполнена в форме восьмигранной
призмы, на гранях которой закреплены элементы двигательной установки системы
ориентации и стабилизации, панели батареи фотоэлектрических преобразователей
с приводами поворота системы электропитания, радиаторы системы обеспечения
теплового режима; к нижнему торцу корпуса крепится термостабилизированная
сотовая панель (ТСП), на которой установлена служебная аппаратура; на верхний
торец корпуса устанавливается полезная нагрузка (ПН), а нижним торцом МКП
«НАВИГАТОР» крепится к МБ «ФРЕГАТ» посредством адаптера с системой
отделения.
Схема и состав МКП приведены на рисунке 1.6.1.
восьмигранник - структура КА радиатор
бак
Рисунок 1.6.1. Схема и состав МКП «НАВИГАТОР»
В процессе эксплуатации - на Земле во время подготовки к пуску и в полете в ос¬
новном на активном участке PH - космические аппараты подвергаются различного
рода механическим воздействиям. Задача прочностных испытаний - подтвердить це¬
лостность и работоспособность конструкции после воздействия на него всего спек¬
тра нагрузок, возникающих на всех этапах его эксплуатации.
76
1-6
Во время полета на КА, установленный на PH, действуют статические и динами¬
ческие нагрузки, создаваемые ракетой-носителем.
Механические нагружения, воспринимаемые КА, имеют следующий состав:
- статические ускорения (продольные и поперечные);
- низкочастотные продольные ускорения;
- низкочастотные поперечные ускорения;
- случайные вибрации;
- акустическое давление.
Прочностные и кинематические испытания элементов конструкции БМСС
«НАВИГАТОР» проводились согласно следующим директивным документам, раз¬
работанным в НПО им. С.А. Лавочкина: программа обеспечения надежности (ПОН),
перечню экспериментальных работ (ПЭР) и комплексной программе эксперимен¬
тальной отработки (КПЭО), а также перечню заводских испытаний (ПЗИ).
На этапе опытно-конструкторских работ выполнялись лабораторные отработоч¬
ные испытания, доводочные испытания, предварительные испытания агрегатов и
систем, а также зачетные прочностные испытания полноразмерного эксперименталь¬
ного образца МКП.
В процессе производства выполнялся целый ряд контрольных испытаний, начи¬
ная с технологических виброиспытаний и статических нагружений отдельных узлов
и заканчивая технологическими вибрационными испытаниями летного образца.
Результаты зачетных прочностных испытаний, наряду с другими видами (элек¬
трическими, тепловакуумными, радиотехническими, примерочными), являются
основанием для выдачи заключения в части прочности для допуска КА к штатной
эксплуатации.
Структурная схема наземной экспериментальной отработки МКП «НАВИГАТОР»
и части его агрегатов и систем (бака ДУ СОИС и системы отделения от МБ) приведена
на рисунке 1.6.2.
В процессе наземной экспериментальной отработки (НЭО) были проведены ви-
бродинамические, статические испытания, испытания на линейные ускорения, функ¬
циональные испытания системы отделения МКП «НАВИГАТОР» от МБ «Фрегат»,
испытание баков ДУ СОИС «НАВИГАТОРА» на внутреннее давление, испытания
на статическую прочность сотопанелей ТСПСС и ТСППН, а также в полном объёме
предварительные испытания крупных агрегатов, таких, как радиатор системы термо¬
регулирования (СТР) и других.
Все испытательное оборудование, используемое в этой наземной отработке, си¬
стематически проходило аттестацию и переаттестацию с привлечением метрологи¬
ческой службы, службы главного инженера предприятия и внешних специализиро¬
ванных организаций, имеющих соответствующие лицензии от головной организации
заказчика на право проведения работ, результатом которых являются аттестаты на
испытательное оборудование и свидетельства о поверке на измерительные и управ¬
ляющие системы.
1.6.1. Вибродинамические испытания
Вибродинамические испытания БМСС «НАВИГАТОР» включают в себя:
1. вибрационные испытания на случаи транспортирования - автомобильное
транспортирование и ж/д транспортирование КГЧ на ТК - и на полетные случаи -
выведение PH и активный участок МБ;
2. испытания на кратковременные затухающие низкочастотные колебания на слу¬
чай авиационного транспортирования - посадка транспортного самолета - и на по¬
летный случай - разделение ступеней PH.
77
1-6
Рисунок 1.6.2. Структурная схема НЭО МКП «НАВИГАТОР» и элементов его систем
78
1-6
Вибрационные испытания выполнялись на электродинамических стендах V984
(в составе двух вибраторов по 120 килоньютонов) и V8-440-T (с вибратором на 80 ки¬
лоньютонов) фирмы LDS (Англия), оснащенных многоканальными системами управ¬
ления SCADAS III фирмы LMS (Бельгия).
В процессе испытаний на испытываемом образце ускорения регистрировались из¬
мерительно-вычислительным комплексом на базе MIC-503 (на 200 каналов) научно-
производственного центра «Мера», а тензометрические измерения осуществлялись -
24 канальными ИВК MIC-300M и тензометрической станцией JTX-7006-2.
На участке вибрационных испытаний постоянно поддерживалась чистовая зона
9-го класса и осуществлялся контроль климатических факторов с помощью прибора
ИВА-6Н-КП.
Характеристики вибрационных электродинамических стендов приведены в та¬
блице 1.6.1.
Таблица 1.6.1
№№
характеристика
оборудование
п/п
V8-440
V984
V994
1
выталкивающая усилие, кН
80
120
280
2
жиапазон частот вибраций, Гц
5...2000
5...2000
5...2000
3
габариты испытываемого образца,
MXMXM
1,5x1,5x6,0
3,8x3,8x10,0
3,8x3,8x12,0
Это оборудование позволило воспроизвести практически любые динамические
нагрузки - от гармонических колебаний на фиксированной частоте до широкополос¬
ных случайных колебаний, а также различные виброударные нагрузки.
Особое место занимала наземная отработка на случай «Транспортирование КГЧ»,
при которой подтверждалась прочность на случай действия многоцикловой динами¬
ческой нагрузки и определялись резонансные частоты и формы собственных колеба¬
ний в области низких частот - менее 5 Гц, рисунок 1.6.3.
При испытании на полетный случай исходили из того, что условия нагружения
в полете и при наземных испытаниях существенно различаются - в полете воздей¬
ствия на конструкцию передаются как акустическим, так и механическим путем (ви¬
брация при работе двигательной установки ракеты-носителя).
При вибрационных испытаниях на электродинамическом вибростенде нагрузки
передавались только механическим путем, поэтому появлялась опасность недогрузки
пространственных элементов конструкции и перегрузки элементов с острыми резо¬
нансами (рисунок 1.6.4).
Для исключения ненормативного разрушения и обеспечения максимально точной
реализации заданных режимов была использована методика проведения испытаний,
которая включала в себя постепенный выход на режим вибраций, начиная с низких
безопасных уровней, с постоянным анализом откликов конструкции и корректировку
на основе этого анализа задаваемого режима, либо путем введения ограничений мак¬
симальных перегрузок на отдельных элементах конструкции, либо путем введения в
контур управления, наряду с задающими датчиками (установленными в соответствии
с программой испытаний), дополнительных датчиков отдела стендовых измерений.
79
1-6
Рисунок 1.6.3. Вибрационные испытания МКП «НАВИГАТОР» (с имитатором ПН) -
случай «Транспортирование КГЧ на ТП»
Испытания МКП «НАВИГАТОР» на кратковременные затухающие низкочастот¬
ные колебания, возникающие при посадке транспортного самолета или при разде¬
лении ступеней PH, проводились на стенде кратковременных циклических нагрузок
СКЦН-10000 (рисунок 1.6.5).
При испытаниях на данном стенде частота собственных колебаний зависела от
массы подвижной части (объект испытаний + переходное приспособление + плат¬
форма стенда) и жесткости сменных пружин, а величина максимальной перегрузки -
от начальной амплитуды взведения пружин. После срабатывания замкового устрой¬
ства начинались свободные затухающие колебания по продольной оси изделия. Для
исключения появления паразитных колебаний относительно поперечных осей при
сборке схемы испытаний центр масс подвижной части совмещался с продольной
осью стенда (с равнодействующей усилий в сжатых пружинах).
Параметрами динамического нагружения являлись пиковые знакопеременные
значения ускорения, частота затухания процесса и длительность воздействия ускоре¬
ния. Параметры динамического нагружения измерялись и регистрировались измери¬
тельно-вычислительным комплексом на базе MIC-503 (на 200 каналов) научно-про¬
изводственного центра «Мера».
Для испытаний агрегатов служебных систем базового модуля на низкочастотные
нагрузки используются стенды СКЦН различной грузоподъемности.
Характеристики стендов кратковременных циклических нагрузок приведены в та¬
блице 1.6.2.
80
1-6
Рисунок 1.6.4. Вибрационные испытания МКП «НАВИГАТОР» (с имитатором ПН)
по поперечной оси на комплексе из двух стендов V984 - полетный случай
81
1-6
Рисунок 1.6.5. Испытание МКП «НАВИГАТОР» (с имитатором ПН) в транспортном
контейнере на стенде СКЦН-10000 - случай «Авиапосадка»
82
1-6
Таблица 1.6.2
№№
п/п
характеристика
оборудование
СКЦН-500
СКЦН-3000
СКЦН-10000
1
грузоподъемность, кН
5
30
100
2
диапазон нормируемых ускорений, g
3...9
5...10
4...10
3
диапазон частот колебаний, Гц
6...12
4...15
4...12
4
габариты испытываемого образца,
МХМХМ
1,2.x 1.2x2.0
3,7x3,7x4.0
3,8x3,8x6,0
1.6.2. Статические испытания
В полном объеме были проведены статические испытания МКП «НАВИГАТОР»,
включающие в себя испытания по экспериментальной проверке прочностных и жест-
костных характеристик силовой схемы МКП в целом и определение несущей способ¬
ности и разрушающих усилий в области опорных узлов сотопанели ТСПСС и ТСППН,
используемой в конструкции модуля.
Характеристики силового оборудования для статических испытаний приведены
в таблице 1.6.3.
Таблица 1.6.3
№№
характеристика
оборудование
п/п
силовой стол
силовая стенка
силовой каркас
1
усилие нагружения, кН
20
70
300
2
размеры оборудования, мхмхм
2,2x2,2x1,5
4,0x4,0x6,0
6,5x8,0x16,0
3
габариты испытываемого образца,
МХМХМ
2,0x2,0x2,5
3,8x3,8x12,0
3,8x3,8x12,0
Статические испытания термостабилизированной панели (ТСП) позволили опре¬
делить не только величины разрушающих усилий в области опорных узлов, но и вы¬
явить влияние подкрепляющих элементов на жесткость заделки узлов приборов на
панели при заданной статической нагрузке.
Статические испытания образца МКП «НАВИГАТОР» проводились при верти¬
кальном положении продольной оси, и нагружения осуществлялись как в направле¬
нии поперечных осей (случай «Транспортирования КГЧ на ТП»), так и в направлении
продольной оси образца (полетные случаи: «Старт», «шах пх I», «Разделение ступе¬
ней PH»). При этом перерезывающие усилия прикладывались к различным стыкам
сборки образца БМ, а также к смонтированному на нем имитатору ПН.
Схемы статических испытаний МКП в сборе (с имитатором ПН) представлены на
рисунках 1.6.6, 1.6.7.
Силонагружающее оснащение обеспечило приложение расчетных нагрузок без
нарушения местной прочности конструкции МКП. Испытательное оборудование
включает в себя:
- для прочностных испытаний изделия в сборе - силовую стенку и силовой каркас,
которые позволяют прикладывать нагрузки по заданным осям;
83
1-6
Рисунок 1.6.7. Схема статических испытаний МКП «НАВИГАТОР» (с имитатором ПН)
на прочность - случай «Старт»
Рисунок 1.6.6. Схема статических испытаний МКП «НАВИГАТОР» (с имитатором ПН)
на прочность - случай «Транспортирования КГЧ на ТП»
84
1-6
- для прочностных испытаний отдельных узлов и агрегатов - силовые столы и си¬
ловой каркас;
- для создания нагружения - гидровозбудители (силовые гидроцилиндры) различ¬
ной мощности, получающие давление от несколько пультов нагружения, входя¬
щих в состав центральной насосной станции.
При проведении всех этапов статических испытаний конструкции МКП осу¬
ществлялась непрерывная запись прикладываемых нагрузок, перемещений, пока¬
заний тензодатчиков с помощью измерительно-вычислительного комплекса на базе
MIC-036, при этом в начале процесса испытаний при пробном нагружении (на 30%
от заданных величин усилий) проверялась работоспособность как силонагружаю¬
щего оснащения, так и датчиков системы измерения, установленных на изделии
и силовом оборудовании, с целью гарантированного проведения нагружения и по¬
лучения полного объёма измерительной информации об состоянии испытываемого
образца МКП.
Конструкция МКП постоянно дорабатывается для использования её в соответ¬
ствии с назначением КА, и, естественно, проводятся дополнительные статические
испытания как сборки штатного образца базового модуля, так и вновь устанавлива¬
емых или модернизируемых агрегатов и систем для подтверждения их прочностных
характеристик.
1.6.3. Испытания на линейные ускорения
Испытания на линейные ускорения проводились на центробежных стендах - цен¬
трифугах, и оказались более эффективными, чем традиционные методы статических
испытаний в случаях, когда объект испытаний требуется расположить в объемном
поле перегрузок. При этом задаваемое ускорение определялось скоростью вращения
вала центрифуги, расстоянием от оси вращения до точки задания ускорения и ориен¬
тацией объекта относительно оси водила центрифуги. Подробно опыт использования
центрифуг рассмотрена в статье (Гришин С.А., Захаров Ю.В., Маркачев Н.А, 2012).
Центробежные стенды различаются по грузоподъёмности и по величине создава¬
емого ускорения.
Характеристики центробежных стендов приведены в таблице 1.6.4.
Таблица 1.6.4
№№
п/п
характеристика
Оборудование
СУ-45
СУ-267
СУ-268
1
грузоподъемность, кН
1.5
15
60
2
диапазон создаваемых ускорений, g
2...50
2...400
2...500
3
диапазон частот вращения, об/мин
5...175
5...345
о
о
СП
ип
4
габариты испытываемого образца, м
0.9х0.9х1.1
1.8x1.8x1.2
3.8x3.8x4.5
Испытания МКП «НАВИГАТОР» в сборе (с имитатором ПН) на воздействие ли¬
нейных ускорений проводились на центрифуге СУ-268 в направлении продольной
оси, рисунок 1.6.8.
85
1-6
Рисунок 1.6.8. Испытание МКП «НАВИГАТОР» (с имитатором ПН) по продольной оси
на центрифуге СУ-268 - случай «max пх I»
Рисунок 1.6.9. Испытание бака ДУ СОИС МКП «НАВИГАТОР» на прочность
на центрифуге СУ-267 - полетный случай
86
1-6
Система измерения параметров нагружения на базе MIC-026, MIC-183, установ¬
ленная на центрифуге СУ-268, обеспечивала:
- измерение деформаций с помощью тензометрических резисторов с сопро¬
тивлением от 100 до 1000 Ом по схеме подключения - четверть (%) моста
(до 190 каналов);
- измерение линейного ускорения в различных диапазонах: от 0 до 20g, от 0 до 50g,
от 0 до 100g, от 0 от 300g (до 8 каналов);
- регистрацию информации от тензорезисторных датчиков давления, перемеще¬
ния и других параметров со схемой подключения - мост и/или (1Л) полумост
(до 16 каналов);
- регистрацию дискретной информации по 16-ти каналам от источников
TTL-сигналов.
ПО многоканального измерительного комплекса обеспечило в реальном време¬
ни вывод информации выбранных измерительных каналов на монитор ЭВМ (экран)
в цифровом и графическом виде. Кроме того, ПО позволило выдавать результаты из¬
мерений не только как величину деформации по времени, но и по числу оборотов
и по реализованным ускорениям.
Испытания герметичных емкостей, внутрибаковых вытеснительных и заборных
систем, конструкций антенн, а также приборных отсеков с аппаратурой на воздей¬
ствие линейных ускорений осуществлялись на центрифуге СУ-267, рисунок 1.6.9.
До и после проведения испытаний бака ДУ СОИС проводилась его проверка на
герметичность согласно программе.
1.6.4. Испытание систем и агрегатов на функционирование
Испытания на функционирование системы разделения КА от разгонного блока,
с учетом достаточно большого опыта их проведения, проводились по одной из тра¬
диционных схем, а именно при вертикальном положении сборки базового модуля без
применения системы обезвешивания (рисунок 1.6.10) {Ефанов В.В., Котомин А.А.
и др., 2001; Ефанов В.В., Бирюков А.С., Деменко О.Г., 2013; Ефанов В.В., Долгопо¬
лое В.П., 2016).
В процессе испытаний были выполнены основные задачи, рассматриваемые при
определении кинематических характеристик:
- обеспечены заданные режимы испытаний: скорости, ускорения, нагрузки, темпе¬
ратуры и других параметров;
- обеспечено улавливание и сохранность объектов испытаний;
- определены массово-инерционные характеристики.
Характеристики стендового оборудования для кинематических испытаний круп¬
ногабаритных агрегатов приведены в таблице 1.6.5.
Таблица 1.6.5
№№
п/п
характеристика
оборудование
МАС-3
СУ268-40
СУ-303
I
грузоподъемность, кН
30
100
30
2
диапазон рабочих температур, °С
НКУ
±60
±80
3
габариты испытываемого образца, мхмхм
2,0x2,0x6,0
3,8x3,8x10,0
2,0x2,0x6,0
87
1-6
Рисунок 1.6.10. Испытание МКП «НАВИГАТОР» на функционирование системы отделения
от разгонного блока - случай «Отстрел КА»
Автономные испытания (ДИ, ПрИ, ПИ) на работоспособность системы отделения
МКП от МБ «Фрегат», собранной на адаптере, проводились на стенде отработки си¬
стем отделения СУ-268-40.
Процесс подготовки испытаний начинается с установки адаптера с системой отде¬
ления на имитатор МБ «Фрегат», после чего имитаторы КА и РБ стыковались межд)
собой через гильзы замков. После стыковки на имитаторе КА устанавливались специ¬
альные крышки и упоры, а также собиралась и монтировалась система улавливания
каждого из имитаторов КА и РБ. Заключительной операцией по подготовке испыта¬
ний является сборка и установка системы измерения: по три датчика в центрах масс
имитаторов - для измерения высокочастотных перегрузок; шесть триангуляционных
лазерных датчиков около пружинных толкателей - для измерения относительной и
абсолютной скоростей; термометры сопротивления на корпусах замков (при темпе¬
ратурных испытаниях) и аппаратура для регистрации и обработки измерительной
информации.
При проведении температурных испытаний монтировалась система термостата-
рования: к замкам и толкателям системы отделения пристыковывались шланги для
подачи горячего воздуха или жидкого азота. После монтажа система отделения на¬
крывалась теплоизоляционными матами. Нагрев системы отделения осуществлялся
подачей горячего воздуха с пульта высокого давления через воздушный нагреватель,
а охлаждение обеспечивалось подачей жидкого азота.
88
1-6
После термостатирования и снятия матов теплоизоляции происходило срабаты¬
вание системы отделения за счет подачи напряжения одновременно на оба электро¬
моста первого контура, а затем, с задержкой по времени t=lc, - на оба электромоста
второго контура системы отделения. Во время процесса разделения велась запись по¬
казаний датчиков перемещений и датчиков перегрузок, входящих в систему измере¬
ния на базе MIC-200 и MIC-300.
Улавливание разделяемых имитаторов отсеков КА и РБ осуществлялось устрой¬
ством, состоящим из звеньев: «груз - блок трения - отсек», соединённых тросом.
Устройство такого типа, благодаря наличию блока трения со спиральной канавкой,
где уложено несколько витков троса, позволяет обеспечить «мягкое» улавливание от¬
секов или их имитаторов при незначительном начальном натяжении троса.
После срабатывания системы отделения проводился внешний осмотр на наличие
механических повреждений и следов выброса газа.
Схема испытаний образца системы отделения МКП «НАВИГАТОР» на функци¬
онирование после воздействия температур приведена на рисунке 1.6.11. Особое вни¬
мание уделялось определению ударных перегрузок, сопровождающих срабатывание
устройств разделения (Ефанов В.В., Котомин А. А. и др., 2001; Ефанов В.В., Бирю¬
ков А.С., Деменко О.Г., 2013; Ефанов В.В., Бирюков А.С. и др., 2014).
Рисунок 1.6.11. Схема испытаний системы отделения МКП «НАВИГАТОР»
на функционирование после воздействия температур на стенде СУ268-40
89
1-6
Стенд СУ268-40 представляет собой силовой каркас с размерами в плане 9x11
метров и двумя передвижными катучими балками грузоподъемностью G=10 т, уста¬
новленными на высоте Н=12,4 м. Каждая из балок оборудована перемещающими¬
ся вдоль неё дистанционно управляемыми тельферами грузоподъемностью G=6,5 т,
а также узлами крепления тросов для подвески специально изготовленных имитато¬
ров КА и РБ.
Кроме этого, в состав стенда входят:
- нагреватели СУ192М (два комплекта, мощностью по 15 кВт);
- ёмкость для жидкого азота ЦТК8/0,25М с трубопроводом от ёмкости до стенда;
- распределительное устройство КОМ20.209 с двенадцатью шлангами, длиной
по 6 метров;
- два устройства улавливания с грузами по 50 кг с тросами.
Заключительным этапом наземной экспериментальной отработки (НЭО) являлось
испытание на технологическую вибрацию штатной МКП на щадящих режимах при
плавном изменении частоты с одинаковым временем прохождения октавных диапазо¬
нов, при этом режим задавался таким образом, чтобы отклики конструкции в местах
крепления приборов и агрегатов на образце не превышали значений, определенных
программой испытаний.
Технологическая вибрация штатного образца МКП «НАВИГАТОР» проводилась
с целью выявления возможных технологических дефектов, которые могут возник¬
нуть в процессе изготовления и сборки летного изделия (рисунок 1.6.12).
Предварительно режимы уточнялись при выброиспытаниях изделия ВДСИ.
Рисунок 1.6.12. Вибрационные технологические испытания МКП «НАВИГАТОР»
по продольной оси на стенде V984
90
1-6
Все испытания в процессе НЭО базового модуля завершены с положитель¬
ными результатами и в полном объёме. Результаты испытаний, в том числе все
измерения, проводимые как на конструкции сборки базового модуля, так и на от¬
дельных агрегатах, обработаны и сведены в отчетную документацию по отработке
МКП «НАВИГАТОР».
В комплект документации на образец МКП, согласно принятым в НПО име¬
ни С.А.Лавочкина стандартам, входят конструкторские документы (техническое
задание и программы испытаний) и отчетные документы (протоколы испытаний
и проверок, отчеты по результатам испытаний и акты о завершении испытаний), вы¬
пускаемые в процессе наземной экспериментальной отработки конструкции базового
модуля.
На основании вышеназванного комплекта документов и протокола технологиче¬
ских вибрационных испытаний (ТхВИ) выпущено заключение о допуске к летным
испытаниям штатного образца МКП «НАВИГАТОР».
1.6.5. Перспектива развития стендовой базы
По традиции в НПО имени С.А. Лавочкина уделяется большое внимание назем¬
ной экспериментальной отработке, так как многолетний опыт показывает, что создать
надежные космические аппараты без НЭО невозможно.
В связи с этим, при очередной структурной реорганизации ОКБ и 03 была соз¬
дана специальная служба НЭО во главе с заместителем генерального конструктора,
состоящая из комплексов прочностных и кинематических испытаний конструкций на
механические нагрузки, комплекса электрических испытаний электро- и электрон¬
ной аппаратуры и комплекса летных испытаний КА на полигоне. Подразделения этой
службы проводят также отработку всех основных систем на функционирование -
двигательных установок, пиротехнических систем, служебных систем и целевой ап¬
паратуры, антенно-фидерных систем, механических приводов и т.д.
Стендовое оборудование для обеспечения всех этих испытаний должно быть
укомплектовано соответствующими системами управления и измерения.
Особенность экспериментальной базы состоит в том, что для сохранения тре¬
буемого уровня НЭО она должна постоянно модернизироваться и обновляться.
Эта работа ведется постоянно в соответствии с ежегодными планами технического
перевооружения.
Возможности испытательного комплекса существенно возрастут после введения
в эксплуатацию в экран-камере сборочного цеха ЭДВС V994LDS повышенной мощ¬
ности, предназначенного для проведения технологических виброиспытаний летных
изделий. Стенд укомплектован скользящим столом, расширителем, расположен в чи¬
стовой зоне и может также использоваться для НЭО других изделий и сборок, изго¬
товленных по «чистовой» технологии.
НЭО целого ряда перспективных КА требует дополнительно к вибродинамиче-
ским испытаниям на ЭДВС проведения испытаний в реверберационной акустической
камере. При этом нужно уточнить акустические нагрузки на аппаратуру под голов¬
ным обтекателем и улучшить конструкцию ГО с целью повышения его демпфирую¬
щих характеристик.
Некоторые технические трудности, возникшие при эксплуатации центрифуги
СУ-268, потребовали реконструкции силового привода и системы управления стен¬
91
1-6
дом. Эта работа проводится с целью замены физически и морально устаревшего
электропривода и системы управления центрифугой СУ-268, расширения её функ¬
циональных возможностей, удобства управления, снижения энергозатрат и повыше¬
ния безопасности эксплуатации центрифуги.
В зале статических испытаний, на двух имеющихся рабочих местах необходимо
внедрить систему автоматического нагружения конструкций на базе комплекта ги¬
дроцилиндров с сервоклапанами в количестве 32 каналов. Также для обеспечения вы¬
дачи оперативной информации в темпе эксперимента необходимо модернизировать
систему измерений. Для этого потребуется доработка программного обеспечения
и доукомплектование рабочих мест соответствующей аппаратурой.
Заключение
Наземная экспериментальная отработка МКП «НАВИГАТОР» осуществлялась
в основном на испытательной базе НПО им. С.А. Лавочкина, стендовое оборудова¬
ние которой позволяет комплексно провести и отработку прочности конструкции, и
проверку работоспособности отдельных агрегатов и систем платформы, при её адап¬
тации под КА конкретного назначения, а более чем пятилетний опыт эксплуатации
платформы в составе КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р» подтверждает правильность
методик испытаний, используемых при наземной отработке МКП «НАВИГАТОР».
Список литературы
Гришин С.А., Захаров Ю.В., Маркачев Н.А. Опыт использования центробежных
установок для наземной отработки автоматических космических аппаратов // Вест¬
ник ФГУП НПО им. С.А. Лавочкина, 2012. № 2. С. 44-51.
Ефанов В.В., Долгополов В.П. Луна. От исследования к освоению (к 50-летию кос¬
мических аппаратов «ЛУНА-9» и «ЛУНА-10») // Вестник НПО им. С.А. Лавочкина.
2016. №4. С. 3-9.
Ефанов В.В., Бирюков А. С. и др. Совершенствование систем разделения современ¬
ных КА по снижению ударных нагрузок // Полет. 2014. № 2. С. 30-36.
Ефанов В.В., Бирюков А.С., Деменко О.Г. К вопросу снижения динамических на¬
грузок при срабатывании устройств разделения перспективных орбитальных астро¬
физических обсерваторий // Вестник ФГУП «НПО им. С.А. Лавочкина». 2013. № 3.
С. 21-26.
Ефанов В.В., Котомин А.А. и др. Проблема снижения динамического воздействия
на космические аппараты при срабатывании взрывных систем разделения // Фунда¬
ментальные и прикладные проблемы космонавтики. 2001. № 4. С. 34-48.
А. С. Бирюков, С.А. Гришин, М. И. Леднев, В.А. Лошаков,
Н.А. Маркачев, Д.Н. Михайлов, Е.О.Четвериков
НПО им. С.А. Лавочкина
92
ЧАСТЬ 2
ОСНОВНЫЕ СЛУЖЕБНЫЕ СИСТЕМЫ
И1 БОРТОВОЙ КОМПЛЕКС УПРАВЛЕНИЯ
Работа по созданию БКУ для платформы «НАВИГАТОР» была начата в конце
2003 году по ТЗ НПО имени С.А. Лавочкина на базе сложившегося к этому времени
технического задела МОКБ «Марс» по бортовой аппаратуре негерметичного испол¬
нения для эксплуатации на КА вне гермоотсеков (Бровкин А.Г. и др., 2010).
По кооперации к работе были привлечены НИИ командных приборов, г. Санкт-
Петербург (комплекс управляющих двигателей-маховиков - КУДМ «Колер-Э»)
и НИИ прикладной механики им. академика В.И. Кузнецова (гироскопический из¬
меритель вектора угловой скорости - ГИВУС КИНД34-020).
Первоначально был выпущен совместный технический отчет МОКБ «Марс»
и НПО имени С.А. Лавочкина, в котором были определены основные технические
решения по аппаратуре и ПО БКУ как в части КА «СПЕКТР-Р» {Кардаьиев Н.С., Ала-
коз А.В. и др., 2016), так и для перспективных КА разработки НПОЛ. В отчете были
представлены результаты взаимного технического понимания поставленной задачи
и путей ее решения, причем исходно задача не ставилась как изготовление БКУ для
космической платформы. Приоритетным был БКУ конкретно для КА «СПЕКТР-Р».
(Сыров А.С. и др., 2014).
Затем, по мере развития работ и появления задачи по БКУ КА «ЭЛЕКТРО-Л»
(Асмус и др., 2012), естественным образом возникла уже обобщенная задача - БКУ
для платформы «НАВИГАТОР».
Следует отметить, что на начальном этапе работы по БКУ КА «СПЕКТР-Р»,
для которого критичным был вопрос по точности наведения радиотелескопа (Аста-
вин А.С. и др., 2014), АКЦ ФИАН, в том числе академик Н.С. Кардашов, жестко кон¬
тролировал принимаемые технические решения по подсистеме ориентации и стаби¬
лизации. В результате все было согласовано, и пошла планомерная работа по созданию
аппаратуры и ПО БКУ одновременно и унифицировано для КА «СПЕКТР-Р» и КА
«ЭЛЕКТРО-Л». Работа фактически была выполнена к 2008 году, а далее начались
испытания в НПОЛ, завершившиеся пусками КА в 2011 году.
Ниже представлено краткое описание разработанного БКУ и рассмотре¬
ны вопросы его развития как БКУ платформы «НАВИГАТОР» для серий КА
«ЭЛЕКТРО-Л», «СПЕКТР» и «АРКТИКА-М» (Соколов В.Н. и др., 2015; Сте¬
панов В.В., 2016).
2.1.1. Назначение и требования к БКУ
платформы «НАВИГАТОР»
БКУ платформы «НАВИГАТОР» представляет собой аппаратно-программный
комплекс управления для тяжелых КА различного назначения: метеорология, науч¬
но-космические телескопы и т.д. БКУ должно функционировать на круговых и эллип¬
тических околоземных орбитах, в том числе на геостационарных и высокоэллипти¬
93
2-1
ческих, на солнечно-синхронных орбитах, в окрестностях точки Лагранжа системы
Земля - Солнце.
БКУ предназначен:
- для решения задач управления движением КА на базе автономного определения
его ориентации и на базе бортового баллистического прогноза с коррекцией про¬
гноза от спутниковой навигации или от НКУ;
- для решения задач управления работой смежными бортовыми системами:
- двигательными установками;
- средствами обеспечения тепловых режимов;
- раскрытием и ориентацией солнечных батарей;
- телеметрической станцией;
- командной радиолинией;
ориентацией антенн;
- целевой аппаратурой и т.д.
БКУ должен обеспечивать штатное функционирование:
- по программам, задаваемым полетными заданиями и кодовыми командами от
НКУ;
- автономно при длительном отсутствии связи с НКУ.
Заданный срок активного существования БКУ на указанных орбитах должен со¬
ставлять 10 и более лет.
Выведение КА, реализованных на платформе «НАВИГАТОР», осуществляется
на PH типа «Союз», «Зенит» или «Протон-М» с использованием разгонных блоков
«Фрегат» и «Бриз-М» или «ДМ» (в случае PH «Протон-М»), что определяет основ¬
ные требования по механическим и акустическим воздействиям.
Требования по радиационной стойкости аппаратуры БКУ соответствуют наихуд¬
шим условиям в части радиации для указанных выше орбит применения КА.
Базовыми требованиями к БКУ являются требования по выполняемым операциям
ориентации и точности ориентации и стабилизации. При реализации целевых задач
КА должны выполняться следующие требования по точности:
- стабилизационные отклонения по углам должны не превышать трубки
± 2,5 угл. сек относительно среднего значения на интервале времени 120 сек;
- для метеоспутников на ГСО погрешность фактической ориентации относительно
программной не должна превышать ± 1 угл. мин;
- для КА научного назначения (телескопы) предельная погрешность фактической
ориентации не должна превышать ± 18 угл. сек;
- погрешность стабилизации программной угловой скорости не более
± 5* 10'4 град / сек вокруг оси X ССК и ± 2 -10'4 вокруг осей Уи Z.
К БКУ также предъявляются требования по обеспечению контроля и диагностики
работоспособности как собственной, так и смежной бортовой аппаратуры с автома¬
тическим парированием расчетных нештатных ситуаций (НШС). Для нерасчетных
НШС должна быть обеспечена возможность коррекции в полете ПО БКУ и смежных
систем.
Кроме перечисленных требований, предъявлено требование по максимальной
унификации аппаратуры БКУ вплоть до полной идентичности для КА «ЭЛЕКТРО-Л»
и «СПЕКТР-Р».
94
2-1
2.1.2. Принятые подходы к построению БКУ платформы «НАВИГАТОР»
Аппаратно БКУ платформы «НАВИГАТОР» строится как резервированная мо¬
дульная система. Структура БКУ сформирована на базе центрального бортового
вычислителя (БЦВС или БВУ), блока управления и коммутации (БУК) и цифровых
интерфейсов, образующих бортовую вычислительную сеть. Унификация БКУ по соб¬
ственным задачам обеспечивается за счет использования типового ядра БКУ (рису¬
нок 2.1.1), включающего БЦВС (БВУ), БУК, шины мультиплексных каналов обмена
(МКО), датчики информации и исполнительные органы.
Следует отметить, что предложенная схема ядра БКУ базируется на разнесении ин¬
формационных связей внутри БКУ и связи БКУ с командной радиолинией. При этом
взаимодействие с KPJT (БАКИС) асинхронно по факту прихода информации от НКУ.
МКО-БСУ
на БСА
Рисунок 2.1.1. Типовое ядро БКУ платформы «НАВИГАТОР»
Для обеспечения электрофизического взаимодействия БКУ со смежными борто¬
выми системами (ДУ, СОТР, ЦА и т.д.) в состав БКУ включены блоки силовой авто¬
матики (БСА), которые специализированы по функциональному назначению. Унифи¬
кация блоков управления (БУ) из состава БСА в первую очередь обеспечивалась за
счет унификации со стороны НПО имени С.А. Лавочкина требований электрофизи¬
ческого сопряжения со смежными системами по каналам выдачи команд и каналам
приема сигналов. Очевидно, что в этом случае, если учитывать различный состав
смежных систем на различных КА, возникает некоторая избыточность по незадей-
ствуемым каналам, как, например, в БСА БКУ КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р».
Адаптация аппаратно унифицированного БКУ под задачи конкретного КА реализу¬
ется за счет переменной части бортовой кабельной сети (БКС) и изменяемой части
бортового программного обеспечения (БПО).
Важно отметить, что указанная бортовая вычислительная сеть позволяет гибко на¬
ращивать функции БКУ также при необходимости использовать различные по прин¬
ципу действия и характеристикам измерительные приборы и исполнительные органы.
95
2-1
Базовый состав измерительных приборов (датчиков) и исполнительных органов
БКУ выбирался исходя из условия обеспечения высокопрецизионной точности ори¬
ентации и стабилизации КА и наличия летной квалификации. Учитывалась также
возможность реализации непрерывной комплексной обработки информации с одно¬
временно работающих гироприборов и астродатчиков (на базе различной природы
случайных погрешностей измерителей).
В результате в части измерительных приборов были выбраны:
- гироскопия - гироскопический измеритель вектора угловой скорости (ГИВУС)
разработки НИИ ИМ им. академика В.И. Кузнецова (КИНД34-020);
- астродатчики - астродатчик АД-1 разработки МОКБ «Марс»;
- солнечный датчик - солнечный датчик положения СДП-1 разработки МОКБ
«Марс».
В части электромеханических исполнительных органов был выбран комплекс
управляющих двигателей-маховиков (КУДМ) «Колер-Э» разработки НИИ команд¬
ных приборов, г. Санкт-Петербург.
Внешний вид аппаратуры базового ядра БКУ платформы «НАВИГАТОР» для
КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р» показан на рисунке 2.1.2. Следует отметить, что
КУДМ, ГИВУС, БЦВС, астродатчики и СДП использовались по протоколам примене¬
ния. Блок БУК применен с доработками под задачи БКУ КА НПОЛ из состава систе¬
мы управления КА «Экспресс-МД».
Для обеспечения надежной работы БКУ, помимо использования электронно-ком¬
понентной базы (ЭКБ) с требуемым качеством и реализации мероприятий по до¬
полнительной радиационной защите, повышению электромагнитной совместимости
Рисунок 2.1.2. Внешний вид аппаратуры БКУ
96
2-1
(ЭМС) и стойкости к электростатическим разрядам (ЭСР), реализовано применение
различных видов аппаратного резервирования (дублирование, троирование, четырех¬
кратное) с возможностью реконфигурации структуры БКУ как автоматически, так
и по специальным командам от НКУ.
Аппаратное резервирование обеспечивается работой специального бортового ПО
системы контроля и диагностики и ПО функционального контроля работы БКУ, ба¬
зирующегося на оперативной оценке качества реализуемых процессов управления.
Используемые подходы к резервированию аппаратуры БКУ обеспечивают,
во-первых, парирование первого отказа любой аппаратуры (согласно ТЗ на БКУ),
во-вторых, живучесть БКУ и КА в целом при вторых (иногда - третьих) отказах.
Например, БЦВС (БВУ) является четырехкратно резервированным вычислителем
(четыре идентичных вычислительных грани), который сохраняет работоспособ¬
ность при отказах трех граней. Аналогичная ситуация с вычислительным ядром
БУК, включающим четыре грани. В БСА используется троирование исполнитель¬
ных плат (исходно с мажоритированием выдаваемых команд). В настоящее время
с учетом опыта эксплуатации БКУ КА «ЭЛЕКТРО-JI» и «СПЕКТР-Р» при созда¬
нии БКУ КА «АРКТИКА-М» уточняется логика работы БСА в части резервирова¬
ния: внедряется возможность гибкого управления задействованием резервных ис¬
полнительных плат (1 горячая + 2 холодных; 2 горячих + 1 холодная), что позволит
сохранять работоспособность блоков управления при двух одноименных отказах.
Для реализации подобной логики используется объективный контроль работы ка¬
налов исполнительных плат, в том числе с замерами уровней токов, что также обе¬
спечивает ускорение реакции на SEL-эффекты от действия высокоэнергетических
излучений.
Для внедрения указанной логики доработано как ПО системы контроля и диагно¬
стики, так и ПО функционального контроля работы трактов управления смежными
системами.
ГИВУС включает в свой состав четыре идентичных измерительных канала (ПК),
установленных в пирамиду, что обеспечивает автоматическое парирование БКУ пер¬
вого отказа одного из ПК. Для фиксации второго отказа ПК задействуется астрокон¬
троль ГИВУС средствами функционального ПО БКУ. Второй отказ ПК, т.е. отказ ГИ¬
ВУС, парируется переходом на стабилизацию КА по информации от астродатчиков
(режим САД).
Резервирование в части получения астроопределений обеспечивается применени¬
ем трех (двух) идентичных астродатчиков. Функционирование БКУ сохраняется и
при одном работающем астродатчике.
Резервирование в части определения солнечной ориентации обеспечивается как
за счет использования двух СДП, так и за счет внутреннего дублирования измери¬
тельных каналов СДП.
КУДМ включает в свой состав дублированную электронику и четыре идентичных
двигателя-маховика (ДМ), установленных в пирамиду. Первый отказ одного из ДМ
или канала электроники автоматически парируется БКУ. Отказ КУДМ с потерей воз¬
можности создания управляющих моментов купируется БКУ задействованием для
управления ориентацией двигателей стабилизации (с потерей точности).
При разработке алгоритмов БКУ была реализована достаточно широкая но¬
менклатура алгоритмов контроля, диагностики и парирования НШС. Парирова¬
ние НШС осуществляется как на уровне подсистем БКУ для случая отказа резер¬
97
2-1
вированных элементов, так и на уровне системы управления движением (СУД)
с изменением режима работы. Типичные отказы, парируемые СУД: отказ ГИ¬
ВУС, КУДМ, привода СБ, солнечного датчика, двигателей стабилизации, потеря
ориентации.
Возможные варианты режимов парирования НШС (изменение режима всегда на¬
чинается с прекращения выполнения полетного задания) по степени глубины: пере¬
ход в автономное управление, переход в постоянную ориентацию в ИСК, переход
в ПСО, переход в неориентированный полет (в т.ч. с закруткой КА).
При выборе способа парирования НШС применялось основное требование: мак¬
симальная безопасность КА (энергоприток, температурные режимы, связь) при ми¬
нимальном отклонении от штатного режима.
Немаловажным фактором обеспечения живучести БКУ и КА в целом являет¬
ся реализованная возможность коррекции БПО БКУ в полете. Это позволяет при
нерасчетных НШС восстановить функционирование КА за счет изменения логи¬
ки работы БКУ и внедрения на борт новых или уточненных алгоритмов (ремонт
на орбите) по информации, получаемой от НКУ. При этом либо реализуется кор¬
рекция РПЗУ БЦВС, либо вводятся программные вставки в ОЗУ. Кроме этого,
предусмотрена возможность изменений от НКУ так называемых настраиваемых
параметров ПО БКУ, т.е. констант алгоритмов (например, передаточных чисел
регуляторов).
2.1.3. БКУ КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р»
Платформа «НАВИГАТОР» с разработанным МОКБ «Марс» БКУ использова¬
лась при создании метеорологического КА «ЭЛЕКТРО-Л» на ГСО и радиотелеско¬
па «СПЕКТР-Р» (проект РАДИОАСТРОН) на высокоэллиптической орбите (апогей
до 340 тыс. км). Состав аппаратуры БКУ этих КА практически идентичен, несмо¬
тря на различие функций и орбит. С учетом больших массы и моментов инерции
КА «СПЕКТР-Р» его БКУ включает два комплекта КУДМ. Данные БКУ, кроме того,
имеют различия в БКС и ПО БКУ, как это ранее указывалось.
Структурно-функциональные схемы БКУ КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р»
во взаимодействии со смежными системами представлены соответственно на рисун¬
ках 2.1.3 и 2.1.4.
Основные характеристики аппаратуры БКУ представлены ниже.
БЦВС БКУ является четырехкратно резервированным бортовым вычислитель¬
ным комплексом, содержащим четыре идентичных грани. Архитектура каждой грани
БЦВС представляет собой фон - неймановскую 2-процессорную 16-битовую струк¬
туру, построенную на базе микропроцессоров 1874ВЕ05Т (радиационно-стойкий) -
российский аналог 8ХС196КС20 фирмы Intel с мультиплексированными системными
шинами адрес/данные. Один из процессоров выполняет функции центрального, реа¬
лизуя прикладные (управленческие) алгоритмы, другой работает в качестве контрол¬
лера ввода/вывода.
Процессоры работают параллельно и независимо, что позволяет достигнуть двой¬
ной производительности каждой грани БЦВС: при тактовой частоте 20 МГц произво¬
дительность составляет до 4,5 млн оп./с. Объем памяти каждой грани БЦВС:
98
2-1
СДП-1
АД1 Q[
АД1 [IT
АД1 QT
КИНД34-020-01
КУДМ «Колер-3» —
'О
к НКПА
к] БЦВС
~f°J НИ ДХ
*—*}£] БЧ3 Цр^
► К БАКИС АФС БАКИС*
СКЗ
X
"ЧСц,и—►; СОТР !
£J БЧ7 II
РКУ, Сиск
-i эт/ ц
1 1
СОСБ МУБС
;
СЭС |
ш
МПИ №1
тмс
О' ТМС-Б
О ПКТР
► О СУ ОНА 1
► О СУ DHA 2
МСУ-ГС
ГГ АК
-О БССД
► 0: БРТК
ЦА
Рисунок 2.1.3. Структурно-функциональная схема БКУ КА «ЭЛЕКТРО-Л»
РКУ. РКУ Вт, т
к НКПА
Рисунок 2.1.4. Структурно-функциональная схема БКУ КА «СПЕКТР-Р»
- постоянной перепрограммируемой:
- центрального процессора - 4 Мб;
- процессора ввода/вывода - 512 Кб;
- оперативной:
- центрального процессора - 512 К;
- процессора ввода/вывода - 64 Кб.
99
2-1
Перепрограммируемая память центрального процессора делится на две части (два
банка), что позволяет в полете корректировать (перезаписывать) ПО в одном банке
без нарушения текущих операций управления, реализуемых ПО другого банка. Вы¬
равнивание ПО в банках осуществляется после положительной проверки нового (от¬
корректированного) ПО по факту выполнения тестовых операций.
Четырехкратно резервированная (четыре грани) БЦВС может работать при трех
отказах граней. Начальная конфигурация БЦВС - три грани рабочие с программным
мажоритированием, одна грань - в холодном резерве. По завершении начальных не¬
обратимых операций по выведению КА (подрыв всех пиропатронов, раскрытие СБ
и обеспечение необходимого энергопритока) БЦВС переводится в режим работы:
2 грани активные + 2 грани в холодном резерве с периодической ротацией граней, что
обеспечивает повышение надежности в условиях ИИ КП.
БУК включает в себя четырехкратно резервированное (четыре грани) вычис¬
лительное ядро, обеспечивающее реализацию вычислений по задачам включения
аппаратуры БКУ и взаимодействия с БАКИС по радиокомандам, а также по взаи¬
модействию со смежными бортовыми системами, и трехкратно резервированные
исполнительные платы, обеспечивающие выдачу электрических команд и прием
электрических (аналоговых) сигналов. Реконфигурация вычислительного ядра БУК
осуществляется аналогично БЦВС.
Блоки силовой автоматики (БСА) являются специализированными на определен¬
ных функциях электронными блоками с трехкратно резервированными исполнитель¬
ными платами. Например, блок БУЗ обеспечивает работу СОТР, блок БУ4 - подрыв
пироустройств и срабатывание приводов раскрытия элементов КА.
В качестве базового в БКУ использовался астродатчик типа АД-1 (МОКБ «Марс»)
на ПЗС-матрице. Основные характеристики АД-1:
- угловое поле зрения 13°х 13°;
- чувствительность Mv = 5-6;
- количество одновременно отслеживаемых звезд 15;
- частота измерений 0,5 Гц;
- точность до 2-15 угл. сек;
- вес 3,85 кг.
Начиная с третьего КА, разработанного на базе платформы «НАВИГАТОР»
(«ЭЛЕКТРО-Л» № 2), для обеспечения непрерывных астроопределений на всем САС
в качестве астродатчиков используются астрокоординаторы фирмы Sodem (Фран¬
ция) - SED-26. В дальнейшем предполагается переход на аналогичные российские
астрокоординаторы.
КУДМ включает в себя электронный прибор и четыре двигателя-маховика, уста¬
навливаемые в пирамиду. Основные характеристики КУДМ «Колер-Э»:
- управляющий момент двигателя-маховика ± 0,2 Н м;
- кинетический момент ± 20 Н• м ■ с;
- диапазон скорости вращения ± 6000 об/мин;
- масса комплекса 32 кг.
ГИВУС представляет собой комплект четырех гироскопических измерительных
каналов, работающих независимо и устанавливаемых в пирамиду. Основные харак¬
теристики ГИВУС:
- диапазон измерения ± 0,4 град/с;
- эквивалентный дрейф ± 0,003 град/час;
- масса не более 13 кг.
100
2-1
Солнечный датчик положения (СДП) представляет собой простейший щелевой
солнечный прибор, работающий по схеме «есть засветка - нет засветки» и обеспе¬
чивающий автономный поиск направления на Солнце за счет вращения КА. Угловое
поле зрения до 185°х5°, погрешность до ±2,5°.
Конструктив электронных блоков БКУ для КА «ЭЛЕКТРО-Jl» и «СПЕКТР-РГ»
выполнен в виде набора устройств, состоящих из печатных плат, закрепленных на
обечайках. По периметру обечаек установлены 10 пружинных межплатных соедини¬
телей по 25 контактов каждый (рисунок 2.1.5).
Рисунок 2.1.5. Межплатный соединитель
Для обеспечения механической прочности, отвода тепла от ЭРИ и экранирования
устройства к каждой плате с одной стороны приклеен теплопровод - алюминиевая
пластина толщиной 1 мм (рисунок 2.1.6).
обечайка
плата
теплопровод
соединитель
Рисунок 2.1.6. Установка теплопровода на обечайку
101
2-1
Для обеспечения установки внешних соединителей часть устройств выполнена
более высокими. На них установлены планки с соединителями, которые распаивают¬
ся проводами на плату (рисунок 2.1.7).
Рисунок 2.1.7. Обечайка с внешними соединителями
Сборку блоков производят стягиванием всего набора устройств болтами, обе¬
спечивая этим гарантированный электрический контакт между устройствами
(рисунок 2.1.8).
Рисунок 2.1.8. Собранный электронный блок
102
2-1
Радиационная защита блока обеспечивается толщиной обечаек 5 мм, крышек
6 мм, планок с соединителями 5 мм, наружных экранов 1 мм, сделанных из алюми¬
ния. Для повышения радиационной защиты дополнительно устанавливаются сталь¬
ные экраны.
Защита от статического электричества обеспечивается электропроводным покры¬
тием всех алюминиевых деталей и металлизацией по ГОСТ 19005-81.
Крепление блоков на сотовую панель осуществляется за обечайки с шагом
70x70 мм (рисунок 2.1.9).
Рисунок 2.1.9. Блок управления и контроля
КА «ЭЛЕКТРО-Jl» был выведен на орбиту 20.01.2011, КА «СПЕКТР-Р» -
18.07.2011. Оба аппарата прошли летно-конструкторские испытания (ЛКИ) с по¬
ложительным результатом, в том числе и БКУ. По результатам ЛКИ подтверждено
выполнение всех функций БКУ. На «ЭЛЕКТРО-Л» достигнуты точности стабили¬
зации: при работе целевой аппаратуры ошибки ориентации не превышают по углам
1,5 угл. сек, по фильтрованным угловым скоростям 4*10'4 град/сек, 2*10'4 град/сек.
Особо следует отметить высокопрецизионные точности стабилизации, достигну¬
тые с использованием рассматриваемого БКУ при выполнении сеансов научных на¬
блюдений радиотелескопом КА «СПЕКТР-Р:
- ошибка стабилизации не превышает 0,76 угл. сек.;
- амплитуда колебаний угловых скоростей не превышает 0,00015 град/сек;
- точность определения ориентации не более 5 угл. сек.
2.1.4. Состав подсистем БКУ, особенности построения,
отработки и испытаний БПО БКУ
Программно-математическое обеспечение БКУ реализовано в виде программных
комплексов в БЦВС (БВУ) и вычислительном ядре БУК.
Программное обеспечение БКУ детально структурировано по функциональным
задачам, что обеспечивает значительную преемственность программных модулей
при адаптации БКУ платформы «НАВИГАТОР» к функциям конкретного КА. ПО
БКУ может корректироваться в полете путем закладки в БЦВС от НКУ массивов
103
2-1
изменения программ, разрабатываемых при сопровождении полета с учетом измене¬
ния внешних условий и проявления нерасчетных нештатных ситуаций. При этом ис¬
пользуются как механизм коррекции РПЗУ, так и возможность записи программных
вставок в ОЗУ.
Состав и назначение программных комплексов ПО БУК представлены на рисун¬
ке 2.1.10, где обозначено:
СОВП - система организации вычислительного процесса;
СУД - система управления движением;
СИО - система информационного обеспечения;
ССО - система стабилизации и ориентации;
СУБС - система управления бортовыми системами;
ЦТМИ - система формирования цифровой телеметрической информации БКУ;
СВ ТКС - система взаимодействия с телекомандной системой;
СУ ТМС - система управления телеметрической станцией;
СУ ЦА - система управления целевой аппаратурой;
СУ БШВ - система управления бортовой шкалой времени;
СВ НКПА - система взаимодействия с НКПА БКУ;
КК - кодовые команды;
ПЗ - полетное задание;
НП - настроечные параметры;
ФД - формулярные данные.
1 i
организация
вычислительного процесса
и цифровых обменов
СОВП
СУ
(БКУ)
СВ ТКС взаимодействие с ТКС
организация
в целом упрвления полетом
и управление маневрами
СУД
СУ ТМС взаимодействие с ТМС
обработка
информации с датчиков,
определение ориентации
баллистический прогноз
стабилизация,
переориентация,
I
слежение
управление работой
смежных систем
СИО
ССО
СУБС
СУ ЦА
взаимодействие с ЦА
СУ БШВ ведение и раздача БШВ
СВ НКПА взаимодействие с НКПА
при наземной отработке
формирование ЦТМИ СУ
ЦТМИ
КК, НП, ФД, ПЗ
прием КК, НП, ПЗ
запись ФД
Рисунок 2.1.10. Типовое деление ПМО БКУ платформы «НАВИГАТОР»
104
2-1
Алгоритмы отдельных подсистем БКУ разрабатываются автономно, на рабочих
местах алгоритмистов, с использованием частных моделей движения (движения цен¬
тра масс, движения вокруг центра масс в «замороженной» точке и т.п.).
Для комплексной отработки и испытаний алгоритмов БКУ в «замкнутом» контуре
используется стенд математического моделирования (СММ), на котором производит¬
ся отработка прототипов бортового ПО в соответствии с «Программой и методикой
испытаний ПО БКУ».
СММ предназначен для:
- комплексной отработки алгоритмов БКУ при моделировании движения и функ¬
ционирования бортовых систем КА в ускоренном режиме (в десятки раз быстрее
реального времени) в режиме имитационного моделирования управляемого дви¬
жения БКУ (замкнутый контур);
- проверки правильности взаимодействия функциональных алгоритмов, СУД,
СИО, ССО, СУБС между собой в замкнутом контуре;
- оценки и подтверждения динамических и точностных характеристик БКУ;
- подтверждения требований к алгоритмическому обеспечению при воздействии
внешних возмущений, имитации разбросов характеристик аппаратуры, отказных
и нештатных ситуаций; отработки состава и полноты полетного задания;
- получения эталонных реализаций для последующей отработки ПО на полуна-
турном стенде АЦК.
Алгоритмическое обеспечение БКУ задействуется на СММ в виде прототипов
бортового программного обеспечения (БПО), выполненных на языке программирова¬
ния C++ для универсальных ПЭВМ. Кроме того, в состав СММ входит специальное
программное обеспечение (СПО), организующее процесс моделирования, включая
интерфейс пользователя, задание начальных условий, формирование результатов,
трехмерную визуализацию и т.д., и имитационное программное обеспечение (ИПО),
реализующее модели КА, внешней среды и бортовых устройств.
Разработка, отладка и испытания ПО БКУ реализованы в МОКБ «Марс» с исполь¬
зованием технологии создания бортового ПО, базирующейся на использовании спе¬
циализированного САПР и комплекса рабочих мест алгоритмистов и программистов
(рисунок 2.1.11). Отладка и испытания ПО БКУ осуществляются на математических
и полунатурных стендах, обеспечивающих замыкание контуров управления, а также
на комплексном стенде с реальной аппаратурой БКУ.
Основным средством отработки и испытаний собственно БПО является автомати¬
зированный цифровой комплекс (стенд АЦК), обеспечивающий в реальном времени
имитацию замыкания контуров управления при использовании реального БВУ.
Стенд АЦК представляет собой многомашинный стенд, включающий реальное
четырехгранное БВУ и персональные компьютеры, на которых реализованы мо¬
дель объекта (ИПО), имитаторы БУК, БСА, ТМС и смежных систем. Стенд АЦК
для проведения испытаний аттестован в установленном порядке. При моделирова¬
нии на АЦК реализуются все режимы полета КА, заданные ТЗ на БКУ КА, ими¬
тируется получение командно-программной информации (КПП) и радиокоманд.
Моделирование на АЦК включает имитацию работы необходимых для конкрет¬
ного участка полета информационных систем, исполнительных органов и смеж¬
ных систем. По результатам испытаний выполняется комплексная оценка качества
управления, точности угловой ориентации и стабилизации при выполнении всех
функций БКУ.
105
2-1
ТЗ на СУ.
постановка задачи по
подсистемам,
разработка протоколов
взаимодействия и другие
. исходные данные
I ИСР БПО I
Электронный
рабочее место
архив j
нормоконтролера
l"-—.—■—
t Сервер .
штатная версия
СММ
ИСР - интегрированная среда
разработки
ФАП - фонд алгоритмов и
программ
все коррекции предварительно
должны проходить отработку на
частном СММ разработчика
Рисунок 2.1.11. Разработка БПО с использованием САПР
Работа на стенде АЦК включает в себя этапы отладки ПО и испытаний ПО и про¬
водится в соответствии с утвержденной «Программой и методикой испытаний ПО
БКУ». По результатам работ на АЦК выпускаются акты по подсистемам БКУ и «Про¬
токол испытаний ПО БКУ на АЦК».
Отработка БПО БКУ на комплексном стенде реализуется с использованием ре¬
альных блоков БКУ, имитаторов или реальных датчиков информации и маховиков,
имитаторов или реальных (стендовых) смежных систем (например, привода СОСБ
и МУБС). Основой методик испытаний на КС являются методики, включенные в ТУ
на БКУ по всем функциональным трактам, и специальные программы и методики
стыковочных испытаний и испытаний с имитацией отказов.
В ходе разработки БПО платформы «НАВИГАТОР» в МОКБ «Марс» разработан
и внедрен ряд средств автоматизации процесса разработки ПО, включая информа¬
ционные системы организации испытаний на различных стендах, учета выявленных
замечаний, средства подготовки ИД для испытаний (КПИ), обработки результатов
испытаний (ТМИ), средства автоматизированной генерации программного кода, про¬
граммных сборок и программной документации и др.
методики ТУ
замечания
автоматическая
обработка ЦТМИ
106
2-1
2.1.5. Система информационного обеспечения
Система информационного обеспечения (СИО) предназначена для формирова¬
ния необходимой измерительной и расчетной информации о параметрах ориентации
и навигации для СУД и ССО в основных режимах функционирования КА.
СИО является функциональным объединением приборов, датчиков и программ¬
ного обеспечения систем расчета и определения ориентации и навигационных пара¬
метров, размещаемого в центральном вычислителе БКУ.
В целях обеспечения подсистем БКУ необходимой измерительной и расчетной
информацией СИО формирует следующий набор данных:
- ориентация КА: проекции вектора угловой скорости КА на оси ВСК, кватернион
ориентации ВСК КА относительно ИСК;
- навигация: проекции радиус-вектора положения центра масс КА в ИСК, кватер¬
нион ориентации ОСК относительно ИСК, положение Солнца, Земли и Луны
в ВСК, целеуказания для ОНА и МНА.
Для решения задач СИО в БКУ КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р» используются
следующие приборы и датчики:
- гироскопический интегратор вектора угловых скоростей (ГИВУС) КИНД34-020
(разработчик НИИ прикладной механики им. академика В.И. Кузнецова);
- звездный прибор (ЗП) АД-1 (разработчик МОКБ «Марс»);
- датчик ориентации на Солнце СДП-1 (разработчик МОКБ «Марс»).
Для обеспечения достоверности информации в СИО реализован многоступенча¬
тый контроль получаемой от приборов и датчиков информации. Первичный контроль
и обработка измерительной информации заключается в проверке состояния приборов
и мажоритированном контроле информации. На втором уровне контроля осущест¬
вляется проверка полученных данных на текущем такте и интегральных данных на
достоверность. Третий уровень контроля осуществляется с использованием данных
других типов измерителей и при помощи выполнения специальных маневров.
С использованием особенностей ЗП АД-1 в СИО реализована сильно связанная
система определения ориентации (рисунок 2.1.12). Система за счет комплексирова-
ния измерительной информации ГИВУС и ЗП обеспечила выполнение требований ТЗ
БЦВС
Рисунок 2.1.12. Состав основных алгоритмов СИО
107
2-1
на БКУ КА «ЭЛЕКТРО-JI» и «СПЕКТР-Р» по точности ориентации и высокие точ¬
ности наведения КРТ КА «СПЕКТР-Р». Механизм комплексирования осуществлен
с применением фильтра Калмана 6-го порядка.
Заложенные в СИО принципы и подходы обеспечили подтвержденную точность
наведения КРТ проекта РАДИОАСТРОН в 1,5 угловые секунды.
2.1.6. Система стабилизации и ориентации
В соответствии с требованиями по назначению система стабилизации и ориента¬
ции (ССО) должна обеспечивать выполнение следующих основных задач:
- управление движением вокруг центра масс с помощью КУДМ;
- управление движением вокруг центра масс с помощью ДС;
- демпфирование угловых скоростей КА вокруг связанных осей в неориентирован¬
ном пространственном положении;
- управление КА при выдаче импульса коррекции орбиты;
- разгрузку ДМ с помощью ДС;
- закрутку КА вокруг произвольной оси для пассивной гироскопической
стабилизации;
- автоматическое парирование отказов или отклонений в процессах управления
движением КА, выявленных в результате контроля.
Режимами работы ССО управляет СУД.
Диапазон предъявляемых требований по точности для ССО на различных типо¬
вых участках полета весьма широк: от нескольких секунд (±2,5” на участках работы
ЦА) до нескольких градусов (5° - участок ПСО).
На участках работы ЦА в качестве исполнительных органов используется ком¬
плекс управляющих двигателей-маховиков (КУДМ «Колер-Э»).
Особенностью КА «СПЕКТР-Р» является использование двух комплектов КУДМ
«Колер-Э».
В качестве входной информации алгоритма стабилизации с помощью КУДМ
используются показания ГИВУС, по которым определяются отклонения КА (свя¬
занной системы координат) от программного положения КА в гироинерциальном
пространстве.
С помощью наблюдателя Льюинбергера 2-го порядка при получении информации
от ГИВУС об угловом отклонении КА производится оценка угловой скорости.
Формирование сигналов управления в каждом канале стабилизации осуществля¬
ется по закону:
ох=кг Асрар+К,х 0)Хар,
<7у=кч, А^ар+кшу;
а2=к0 Avap+kw wZap,
где А(рар, А Чар, A vap- апостериорные оценки угловых рассогласований между теку¬
щим и программным положением ССК, град;
сох , (оу , со2 - апостериорные оценки угловых скоростей КА относительно
осей ССК (в режиме ИНО с постоянной трехосной ориентацией) или апостериорные
оценки рассогласований между текущими и программными значениями угловых ско¬
ростей относительно осей ССК (в режиме ИНО с изменяющейся трехосной ориента¬
цией и в режиме программных разворотов), град/с.
108
2-1
На участке работы ЦА для устранения статической ошибки по угловому положе¬
нию, вызванной действием внешних возмущающих моментов (в том числе и момен¬
тов сопротивления УДМ), в закон управления дополнительно вводится интегральная
составляющая в виде
O.xint kint к(р I Уф<7/;
J0
Gyint kint ( У^с//; dt,
J0
@:int kiiu К I Avap dt.
Jo
Апостериорные оценки параметров углового движения КА определяются с по¬
мощью Наблюдателя Льюинбергера, алгоритмы которого реализованы следующим
образом.
Априорная прогнозированная оценка:
<?х
j ?
Ш\у~
т =
Jy;
az
X'
Д<|у.-Дф^+оэ,^ h+m9(r£-);
Д%г,- арj-\+а>уари h+nlyi 2 ),
h2
До™-, =<
.. —А\>ар- , h (г~~п~~)9
I aPl-\ Cipj_ [ С UV 2
где hc=0, lc - такт БЦВМ;
/пф, ni-.j, т„ - угловые ускорения, создаваемые КУДМ по каждому каналу
стабилизации.
Gudin l Ml
G,
Gudim Ms2
Gy
= А
Gudim
Gz
Gudim M,
гае а„(,„,|+4 - входные сигналы управления КУДМ, Нм;
Msi, Мл, Msз, М,4 - сигналы компенсации моментов сопротивления УДМ, 4, Н м;
А - матрица установки КУДМ.
Апостериорная оценка:
А%р=А%п+къшы (Дф-Дфрг,.);
А^арГА^р,,+кы,ы (ДУ-ДУ,,,.);
Av^AVpr.+kM, (Дц-Дцр,..);
Am.v=Acbv+*2,wW (Дф-Дфр,..);
А%=АсоУр+к2„аы (ДУ-Д
Дох =Д(вг +къ,аы (Дц-Дц^,.,.),
109
2-1
-4
х 10
I : i i i
j i i i L
01:43:40 01:46:33 01:49:26 01:52:19 01:55:12 01:58:04 02:00:57
Рисунок 2.1.13. Угловые рассогласования (град), сеанс наблюдений от 29.07.2016
где Аф, Д'Р, До - угловые рассогласования между текущим и программным положе¬
нием ССК, град.
Дф=2Д^0 Aq. (^|г);
ДЧ'=2Д<?оЛЧ2(^);
Дг>=2Д<7о ДЧз (Ц~)>
где Aq, /=(КЗ - компоненты кватерниона рассогласования между текущим и про¬
граммным положением ССК, рассчитанные по информации ГИВУС.
Выбранные настройки закона стабилизации обеспечили выполнение требований
ТЗ по точности стабилизации, что подтверждается результатами летной эксплуата¬
ции КА «ЭЛЕКТРО-Л» № 1 и № 2 и КА «СПЕКТР-Р».
В качестве иллюстрации приведены графики изменения угловых рассогласований
и угловых скоростей КА «СПЕКТР-Р» на участке научных наблюдений (рисунки
2.1.13,2.1.14), полученные по результатам обработки ТМИ при летной эксплуатации.
2.1.7. Система управления движением
Система управления движением (СУД) является программной подсистемой, вхо¬
дящей в состав ФПО БКУ КА, и предназначена для осуществления координации под¬
систем БКУ КА и программного управления с целью обеспечения выполнения функ¬
циональных задач КА.
110
2-1
-5
х 10
Рисунок 2.1.14. Угловые скорости (град/сек), сеанс наблюдений от 29.07.2016
Основные задачи СУД:
1. Диспетчеризация режимов работы КА как автономно, так и под управлением
ЦУП, в т.ч. управление режимами работы СИО, ССО, СУБС.
2. Программное управление ориентацией КА и подвижных элементов КА путем
формирования кватерниона заданной ориентации КА, заданной угловой скорости КА
в ИСК и признаков режимов работы для ССО, целеуказаний для СБ и ОНА.
3. Контроль состояния КА по информации от других подсистем БКУ и парирова¬
ние НШС.
4. Реализации ЦГназемных испытаний (имитация полета).
В целях обеспечения указанных задач алгоритмы СУД сформированы как иерар¬
хическая структура (рисунок 2.1.15), включающая следующие уровни:
1. Способы управления режимами СУД, определяющие логику изменения режи¬
ма работы СУД в различных условиях, в т.ч. на начальном участке, по полетному за¬
данию, в случае отсутствия ПЗ, в случае НШС. Управление режимами СУД возможно
как автономно, по реализованным в алгоритмах циклограммам, так и по указанию
НКУ с использованием полетных заданий, описывающих заданную временную по¬
следовательность режимов работы СУД. Возможно управление с зацикливанием ПЗ,
что позволяет повысить автономность БКУ, а также по кодовым командам, задающим
выполнение конкретного режима, или путем смены настраиваемых параметров алго¬
ритмов, изменяющих исходные заложенные циклограммы работы.
2. Режимы работы, определяющие совокупность одновременно выполняемых
функций БКУ, в т.ч. набор используемых алгоритмов и бортового ПО, приборов СУ
и т.д. Основными режимами СУД являются: подготовительный, демпфирование угло-
111
2-1
управление
движением
КА
способ управления режимами работы
режимы работы
заданная ориентация
относительно Солнца
ИНО (ЗОС)
типовые полетные операции системы программного управления
г о-
стабилизация текущей
ориентации в ИСК
торможение
одноосное нацеливание
ориентация
по фиксированному
квартениону (ИСК)
ориентация
по полиномиальным
зависимостям
ориентация по заданному
квартениону (ИСК),
(о)н *0, Шк *0)
6
ориентация
по фиксированному
квартениону (ОСК)
1-7-
поворот на заданный угол
вокруг заданной оси
стабилизация в ОСК
с ограничением угла между
осьюОУ1 и направлением
на Солнце
Рисунок 2.1.15. Структура СУД
112
2-1
вых скоростей, поддержание солнечной ориентации (ПСО), инерциальная ориента¬
ция (ИНО), в т.ч. с астрокоррекцией, выдача корректирующего импульса (ВКИ), не¬
ориентированный полет (НОП), режим ИНО в НШС и др.
3. Типовые полетные операции (ТПО), определяющие способ задания ориен¬
тации КА. Выполнение ТПО обеспечивается системой программного управления
(СПУ) ориентацией КА, являющейся подсистемой СУД КА и отвечающей за выра¬
ботку программной информации для ССО и СУБС.
Целью программного управления ориентацией является формирование про¬
граммной (привязанной ко времени) опорной траектории перевода ориентации КА
из начальной в заданную с учетом начального и заданного конечного вектора угловой
скорости. При этом должны соблюдаться заданные ограничения как на программную
ориентацию, так и на скорость ее изменения, а также на управление (угловое уско¬
рение) КА. Такая постановка задачи обеспечивает условия для ограничения функций
ССО управлением «в малом», а СУД - диспетчированием целевых задач и режимов
управления. Качество программной траектории в целом обеспечивается минимизаци¬
ей числа разворотов, каждый из которых оптимален по быстродействию.
Реализованная структура системы управления движением позволила обеспечить
выполнение с необходимым качеством таких важных режимов действующих и про¬
ектируемых КА, как ориентация РУ, включая окрестность «сезонных разворотов»,
и разнообразные смены ориентации КА серии «ЭЛЕКТРО-Л», требующие недопу¬
щения засветки Солнцем криогенного радиационного охладителя целевой аппарату¬
ры и поддержания условий энергопритока к панели СБ, комбинированное вращение
для сканирования небесной сферы КА «СПЕКТР-РГ», съемку поверхности Земли
и дежурный режим КА «АРКТИКА-М» с недопущением засветки охладителя целе¬
вой аппаратуры Солнцем и минимизацией засветки Землей.
Принятая для первого КА на базе платформы «НАВИГАТОР» («ЭЛЕКТРО-Л»)
структура СУД и методы управления БКУ сохранены для всех последующих КА
с учетом расширения функций и изменения используемых приборов. Так, для
КА «СПЕКТР-Р» уже в полете проведена доработка алгоритмов, позволяющая из¬
менять ориентацию КА автономно при длительном отсутствии ПЗ с учетом обе¬
спечения температурного режима ЦА. Для КА с АК SED-26 («ЭЛЕКТРО-Л» № 2,
«СПЕКТР-РГ», «АРКТИКА-М») изменена логика управления режимами астрокор¬
рекции ГИВУС с учетом введения непрерывной работы приборов.
2.1.8. Система управления бортовыми системами
Система управления бортовыми системами (СУБС) представляет собой про¬
граммно-аппаратный комплекс, входящий в состав бортового комплекса управления
(БКУ) КА, основным назначением которого является управление бортовыми смеж¬
ными системами (БСС) в соответствии с заданной логикой и данными, получаемыми
от этих систем.
В состав СУБС входят вычислительная система (ВС) блока управления и контро¬
ля (БУК), блоки силовой автоматики (БСА), включающие, в свою очередь, вторичные
источники питания (ВИН) и исполнительные платы (ИП), обеспечивающие сопряже¬
ние с датчиками и исполнительными устройствами БСС.
113
2-1
СУБС предназначена для:
- управления режимами работы бортового оборудования в соответствии с полет¬
ным заданием;
- организации обмена информацией между БСС и БВУ БКУ;
- контроля и диагностики БСС;
- управления БСС изделия в штатных и нештатных режимах полета;
- парирования нештатных ситуаций при отказах БСС;
- формирования для выдачи в телеметрическую систему (ТМС) информации о со¬
стоянии БСС;
- управления включением и отключением систем БКУ
Структурная схема взаимодействия СУБС со смежными бортовыми системами
приведена на рисунке 2.1.16.
СУБС взаимодействует с бортовым вычислительным устройством (БВУ), имеет
связь с аппаратурой БСС, которая реализуется при помощи бортовой кабельной сети.
При наземных испытаниях СУБС взаимодействует с наземной контрольно-провероч¬
ной аппаратурой (НКПА).
НКПА
га
тмс
МКО БКУ
БВУ
0е
МКО
БАКИС
БАКИС
Рисунок 2.1.16. Структурная схема взаимодействия СУБС со смежными бортовыми
системами
114
2-1
от НКУ
115
2-1
Алгоритмы СУБС реализуются в ВС БУК. Как правило, ВС БУК выполняется
по четырехканальной схеме, а ИП - по трехканальной схеме, при этом они связаны
между собой последовательным интерфейсом. Переключение каналов ИП осущест¬
вляется из ВС БУК. Типовая структурная схема взаимодействия с БСС представлена
на рисунке 2.1.17.
Алгоритмы управления БСС обеспечивают формирование команд в исполнитель¬
ные устройства (ИУ) БС, а также прием аналоговых и дискретных сигналов от датчи¬
ков (Д). БСС содержат, как правило, блоки сопряжения с исполнительными устрой¬
ствами и датчиками.
В БСС имеются датчики, информация от которых может передаваться через ТМС
в НКУ, а также из ТМС через БВУ в ВС БУК. Кроме того, из НКУ через БАКИС (БРК)
и БВУ в ВС БУК могут поступать кодовые команды от НКУ, обеспечивающие непо¬
средственное управление БСС.
ПО СУД БВУ в соответствии с полетным заданием, а также интегральной инфор¬
мацией, получаемой от бортовых систем, формирует признаки, соответствующие ти¬
повым участкам полета. В соответствии с указанными признаками, а также состояни¬
ем бортовых систем ПО СУБС обеспечивает включение блоков силовой автоматики,
формирование признаков на подключение тех или иных алгоритмов управления БСС,
которые могут быть реализованы в ВС БУК.
В состав ПО управления смежными бортовыми системами входят алгоритмы на¬
земного контроля (НК), предназначенные для испытаний систем на стендах реально¬
го оборудования и при подготовке к пуску.
Типовая структура взаимодействия ПО управления БСС с ПО БКУ и системами
КА представлена на рисуйке 2.1.18.
Алгоритмы управления БСС должны обеспечивать выполнение следующих
функций:
- прием и исполнение кодовых команд;
- формирование команд в БС и прием сигналов;
- автоматическое управление БС;
- контроль и формирование признаков состояния смежных систем;
- парирование нештатных ситуаций, возникающих в смежных системах;
- подготовку параметров ТМИ.
Кроме того, алгоритмы управления БСС содержат настраиваемые параметры, при
помощи которых можно изменять характеристики управления БС.
СУБС реализует следующие функции:
- управление срабатыванием пиропатронов;
- управление МУБС для раскрытия солнечных батарей;
- управление СОТР;
- управление работой ДУ и топливной системы;
- управление поворотом солнечных батарей;
- взаимодействие с СЭС;
- взаимодействие с командной радиолинией в части приема радиокоманд и выдачи
команд управления;
- взаимодействие с целевой аппаратурой по командам управления и сигналам;
- прием информации от аналоговых датчиков;
- включение / отключение аппаратуры БКУ и т.д.
116
2-1
Кодовые
команды
БКУ
БАКИС
~1
ТМС
кНКУ
от
бортовых
систем
Телеметрическая
информация
ФПО БВУ
ПО управления
режимами работы
смежных систем
ФПО БУК
1 L...1
ПО управления БСС
Логика приема и
исполнения кодовых
команд
Логика автоматического
управления
Логика контроля БС и
формирования признаков
отказов
Логика реконфигурации и
парирования нештатных
ситуаций
Логика формирования
ТМИ параметров
Логика формирования НП
Логика
формирования
команд
Логика приема
сигналов
к БСА
от БСА
Рисунок 2.1.18. Типовая структура взаимодействия ПО управленияБСС с ПО БКУ
и системами КА
117
2-1
Рисунок 2.1.19. Структурная схема взаимодействия СУБС с МУБС
В качестве примера на рисунке 2.1.19 представлена структурная схема функцио¬
нального тракта управления МУБС. Взаимодействие ВС БУК с аппаратурой МУБС
осуществляется через блок силовой автоматики БУ4, который обеспечивает электри¬
ческое сопряжение с датчиками, двигателями МУБС и пироэлементами расчековки
СБ. Алгоритм управления МУБС начинает функционировать после срабатывания ПЭ
расчековки пакета панели СБ, что контролируется датчиками отхода пакета.
В случае нештатной ситуации по раскрытию СБ управление работой МУБС мо¬
жет осуществляться по кодовым командам от НКУ.
2.1.9 Взаимодействие с радиокомплексом
В качестве радиокомплексов для платформы «НАВИГАТОР» могут выступать
два типа приборов: БАКИС и БРТК. Первый прибор устанавливается на платфор¬
мы с высотами полета до 40000 км, второй - на аппараты, которые функционируют
за пределами данной дальности. Оба прибора подключаются к БВУ БКУ по внеш¬
ней линии МКО и являются контроллерами. Форматы взаимодействия между БКУ
и БРТК и БКУ и БАКИС различаются - это обусловлено спецификой самого при¬
бора для обеспечения приема командно-программной информации (КПИ). Так, на¬
пример, БРТК передает в БКУ информацию в виде посылок, содержащих 24 16-бит¬
ных информационных слова и 8 служебных слов (содержат идентифицирующую и
контрольно-проверочную информацию), БАКИС передает посылку, содержащую 30
информационных слов и 2 служебных.
118
2-1
Вся принятая информация квитируется БКУ как в телеметрическую систему, так
и в бортовой радиокомплекс. Кроме функций приема от бортового радиокомплекса
информации, переданной от НКУ, БКУ осуществляет управление радиокомплексом:
включение резервных комплектов, включение передатчиков, причем для БРТК функ¬
ции управления значительно расширены для обеспечения большей автономности
космического аппарата.
Основными видами передаваемой в БКУ из НКУ информации являются:
- кодовые команды;
- массивы цифровой информации.
Кодовые команды (КК) можно разделить на три типа:
- непосредственного исполнения (исполняются сразу по приходу этой команды
в БВУ);
- отложенного исполнения (в команде заложена заданная в абсолютном времени
циклограмма, по исполнении эта команда удаляется из специального буфера);
- циклического исполнения (аналогична предыдущей, но по завершении послед¬
ней операции циклограмма времени всех операций КК пересчитывается на но¬
вый интервал действия).
Особенностью КК является то, что объем КК не превышает одной посылки КПИ.
Массивы цифровой информации содержат в себе блоки информации, которая со¬
держится в нескольких посылках КПИ. К таким блокам информации можно отнести:
- массивы изменения программ (МИП);
- полетные задания (ПЗ);
- формулярные данные, содержащие начальные настройки БКУ для взаимодей¬
ствия с различными приборами (таблицы невязок, адресного пространства при¬
боров и т.п.);
- массивы программных вставок. Это готовые, откомпилированные дополнитель¬
ные рабочие программы, которые предназначены для реализации дополнитель¬
ных функций, не предусмотренных ранее при разработке БКУ, и работают без
изменения основного программного обеспечения БКУ. Обычно программные
вставки применяют для улучшения управления приборами по результатам ЛКИ
или при возникновении нештатных ситуаций. По сути они являются временным
средством, так как при получении положительного результата рекомендуется из¬
менение ПО с помощью МИП.
Полетные задания являются универсальным средством для обеспечения управле¬
ния различными подсистемами КА. Различают ПЗ для управления: целевой аппара¬
турой, остронаправленной антенной, телеметрической станцией, системой управле¬
ния движением, а также пакеты корректирующих программ для системы автономной
спутниковой навигации (КА «ЭЛЕКТРО-JI» № 2 и № 3, «АРКТИКА-М») и комплек¬
са научной аппаратуры (КА «СПЕКТР-РГ»).
В БКУ реализована возможность коррекции бортового программного обеспечения
БВУ и БУ-9 (КА «СПЕКТР-РГ») из НКУ без прерывания функционирования КА. Эта
возможность осуществляется с помощью МИП. В полете обеспечена возможность
откорректировать 100% функционального ПОБВУ и частично откорректировать спе¬
циальное ПО БКУ (БОС, СОВП). Обычно коррекция осуществляется фрагментар¬
но. На земле составляется модель отличий предыдущей версии от текущей версии
ПО, изменившиеся значения упаковываются в МИП, и в течение одного-двух сеансов
связи происходит коррекция неактивного банка программ БВУ. Далее закладываются
119
2-1
тестовые ПЗ для проведения проверки работоспособности нового программного обе¬
спечения, и производится переключение активного банка программ на загруженный.
В случае неудовлетворительного функционирования откорректированного ПО есть
возможность перейти к исходному, рабочему варианту программного обеспечения.
При успешном функционировании производится автоматическая запись ПО в вы¬
ключенные грани БВУ, а также выравнивание по текущему активному банку другого
неактивного банка.
Реализация такого большого функционала управления БКУ от НКУ позволяет ре¬
шать практически любые задачи по обеспечению надежного управления космиче¬
ским аппаратом, как при штатном функционировании, так и при сбоях и отказах раз¬
личных приборов и подсистем КА, которые можно парировать с помощью ПО БКУ.
2.1.10. Взаимодействие с телеметрической системой КА
и телеметрическое обеспечение БКУ
В качестве телеметрической станции платформы «НАВИГАТОР» выбрана теле¬
метрическая система (ТМС) разработки Ижевского радиозавода. Платформа состоит
из множества приборов, соединенных внутренней шиной данных. Взаимодействие
с БКУ происходит через внутренний канал МКО БКУ между базовой платой ТМС и
БВУ. С подобной организацией связаны некоторые временные ограничения на при¬
ем цифровой и управляющей информации телеметрической станции, которые реша¬
ются введением ограничений в циклограмму обменов между этими подсистемами
КА. Кроме задачи передачи телеметрической информации, существует ряд допол¬
нительных задач, которые решаются при взаимодействии телеметрической станции
и БКУ. Одной из задач является привязка бортовой шкалы времени к наземной шка¬
ле времени. БКУ передает в телеметрическую станцию сигнал метки времени (MB)
бортовой шкалы времени (БШВ), телеметрическая станция точно привязывает полу¬
ченную MB к началу своего кадра и передает эту привязку в каждом сформирован¬
ном бортовом кадре, что позволяет с точностью 1 мс рассчитать сдвиг сигнала MB
относительно времени СЕВ и провести соответствующую коррекцию БШВ. Второй
важной задачей, которая решается взаимодействием ТМС и БКУ, является передача
сигнальной и датчиковой информации, собираемой ТМС (температуры в различных
точках, положение солнечных батарей, состояние системы СЭС и т.д.) в контур управ¬
ления БКУ и использование этой информации как резервных или подтверждающих
источников информации при управлении КА. Кроме того, по этому каналу происхо¬
дят диагностика устройств самой ТМС и автоматическое переключение резервов по
логике, реализованной в ПО БКУ.
Само БКУ организовано как вычислительная многопроцессорная система, со¬
единенная различными каналами цифрового обмена (в основном шинами МКО),
поэтому практически вся телеметрическая информация о работе БКУ представляет¬
ся в виде цифровых массивов. При этом только на постоянной основе непрерывно
собирается информация о нескольких тысячах телеметрических параметров. Кроме
того, реализована возможность оперативного получения практически любых до¬
полнительных телеметрических параметров по кодовым командам без изменения
ПО БКУ. Для передачи на Землю всего многообразия телеметрических параметров
существует развернутый многоуровневый протокол взаимодействия между БКУ и
НКУ. В качестве несущего информационного протокола используются посылки МЦИ
120
2-1
из 32-х 16-разрядных слов по каналу МКО. Такие посылки передаются в ТМС либо
в линейное запоминающее устройство, либо в кольцевое запоминающее устройство
или в устройство формирования кадра, который передается в реальном времени на
Землю. Для решения задачи уплотнения телеметрической информации с учетом на¬
строек, которые определяет НКУ в каждом конкретном случае, БКУ по собствен¬
ной логике управляет работой линейного статического запоминающего устройства
(ЛСЗУ) ТМС. При накоплении определенного объема информации (задаваемого
НКУ, по умолчанию составляющего 8 кб) БКУ выдает в ТМС команду на подклю¬
чение ЛСЗУ с определенными параметрами приема (заданными по умолчанию или
настроенными от НКУ), после подключения передает в ЛСЗУ накопленную инфор¬
мацию и отключает данное устройство. Такая организация позволяет получать всю
накопленную информацию от БКУ за один-два сеанса связи с аппаратом в сутки.
Следующим уровнем протокола взаимодействия является соглашение о структуре
МЦИ, при котором МЦИ содержат или блочную информацию, т.н. массивы цифро¬
вой информации разовых срезов (PC), или признаковую информацию (сигнальную
или кодовую телеметрию, которая передается только существенными значениями).
В свою очередь, МЦИ PC имеют различные варианты наполнения. На сегодняшний
день в качестве признаковой информации может быть сформировано до 512-и 16-раз-
рядных сигнальных каналов, а в качестве МЦИ PC передаются семь различных ти¬
пов блочной информации, среди них пять типов передают массивы с постоянным
содержимым (причем в каждом типе PC зарезервировано 64 возможных варианта
наполнения). Один тип МЦИ PC зарезервирован под специальный протокол пере¬
дачи массивов постоянного содержания, но с длиной, не кратной посылке МЦИ (так
называемых массивов переменной длины). Еще один тип зарезервирован для расши¬
рения номенклатуры параметров для будущих вариантов КА (на КА «АРКТИКА-М»
через этот поток организована передача массивов переменной длины из других вы¬
числителей, вошедших в состав БКУ) без изменения общей структуры ТМИ БКУ
для возможности применения ранее разработанной унифицированной ПО обработки
телеметрической информации.
В целом телеметрическая система БКУ для платформы «НАВИГАТОР» позво¬
ляет полностью реализовать функции контроля и диагностики КА через НКУ, кроме
того, заложенные дополнительные возможности по расширению телеметрической
информации позволяют решать задачи при исследовании работы КА в различных
нештатных ситуациях или при возникновении неучтенных при разработке факторов
окружающего пространства, что повышает простоту и надежность эксплуатации КА
с платформой «НАВИГАТОР».
2.1.11. Реализуемая программа импортозамещения ЭКБ для БКУ
платформы «НАВИГАТОР»
Аппаратура БКУ для КА «ЭЛЕКТРО-JI» и «СПЕКТР-Р» была разработана до
2007 года с использованием доступной для Российской Федерации импортной ин¬
дустриальной элементной базы. Опыт эксплуатации аналогичных по составу ЭКБ
блоков СУ на КА «МОНИТОР-Э», «КАЗСАТ» и «ЭКСПРЕСС-МД» (все КА раз¬
работки ГКНПЦ им. М.В. Хруничева) выявил проблемные вопросы по надежности
ряда импортных ЭКБ, в том числе в части ПЛИС. С учетом этого для последующих
КА на базе платформы «НАВИГАТОР» примерно с 2008 года МОКБ «Марс» была
121
2-1
начата реализация программы импортозамещения. Эта программа базировалась как
на применении существующих российских аналогов импортных ЭКБ с требуемыми
характеристиками (что практически мало реализуемо), так и на заказной разработке
российскими электронными предприятиями требуемой номенклатуры ЭКБ.
В первую очередь была реализована программа замены импортных ПЛИС рос¬
сийскими микросхемами на БМК. К настоящему времени создан ряд БИС (21 шт.) на
основе БМК серии 5503, широко применяемых МОКБ «Марс» в электронных блоках
БКУ платформы «НАВИГАТОР», в том числе:
- Н5503ХМ2-142,554 интерфейсная БИС;
- Н5503ХМ1-555драйвер оптронов;
- Н5503ХМ5-418,611 контроллер памяти;
- Н5503ХМ2-420 узел межпроцессорного обмена;
- Н5503ХМ5-461 счетчик для формирования бортовой шкалы времени и т.д.
Решенным вопросом является и реализация отечественной ЭКБ для мультиплекс¬
ного канала обмена по ГОСТ Р 52070-2003 на базе микроконтроллера 1895ВА1АТ
(НТЦ «Модуль»).
Завершаются работы российскими электронными фирмами (Москва, Зеленоград,
Орел и т.д.) по созданию радиационно-стойких модулей питания, многоканальных
коммутаторов, аналого-цифровой БИС для опроса термодатчиков, многоканального
АЦП для шунтовых датчиков тока и т.д., применение которых осуществляется в БКУ
«ЭЛЕКТРО-Л», «СПЕКТР» и «АРКТИКА-М».
С учетом ситуации доводки ряда указанных элементов срок перехода на полно¬
стью российскую ЭКБ в БКУ платформы «НАВИГАТОР» оценивается как конец
2017- начало 2018 года.
2.1.10. Дальнейшее использование БКУ платформы «НАВИГАТОР»
Третьим КА на базе платформы «НАВИГАТОР» является «ЭЛЕКТРО-Л» № 2,
выведенный на орбиту 12.12.2015.
В части БКУ для КА серии «ЭЛЕКТРО-Л», начиная с № 2, уточнено взаимодей¬
ствие с БАКИС по количеству и назначению радиокоманд, проведено внедрение ап¬
паратуры спутниковой навигации, работающей на ГСО (на «прострел») и исполь¬
зуемой для оперативной коррекции бортового баллистического прогноза, проведена
замена астродатчиков типа АД-1 на астродатчики SED26 фирмы Sodem (Франция)
с непрерывным циклом работы. Кроме того, проведена замена БЦВС на аналогичный
по структуре и вычислительным ресурсам БВУ, спроектированный в значительной
мере с использованием отечественной ЭКБ. Структурно-функциональная схема БКУ
«ЭЛЕКТРО-Л» № 2 во взаимодействии со смежными системами показана на рисун¬
ке 2.1.20. К настоящему времени ЛКИ в части БКУ завершены с положительным
результатом.
На заключительном этапе разработки находится КА «ЭЛЕКТРО-Л» № 3. В части
БКУ для данного КА продолжена работа по дальнейшему импортозамещению ЭРИ,
помимо астродатчиков SED26 внедрен российский астродатчик 348К для получения
летной истории в составе БКУ. Кроме того, проведены доработки аппаратуры и ПО
БКУ в связи с уточнением взаимодействия с некоторыми доработанными смежны¬
ми системами. Структура БКУ «ЭЛЕКТРО-Л» № 3 отличается от структуры БКУ
«ЭЛЕКТРО-Л» № 2 только наличием прибора 348К.
122
2-1
СДП-1
СДП-1
SED26 Q[ *-
SED26 [[«-
КИН ДЗА--020-01
кина 1.02132 020-01
КУДМ
«Колер-Э»
ИНАЯ 4Q2I13 061
к НКПА
К] БВЧ'К [51
I—1 С ИЯМ 466S3S оэо
т:
0J БУК1-1
СИЯН&68ПЭ W6
*
H0J БУ5
СИЯМ <.60333 061
0J БУ4
СИЯМ <.60333 060
H0J БУЗ
СИЯМ 460333 059
У'
40J БУ6
СИЯН <.60333 062
3=
4oJ БУ7
СИЯМ 466333 063
скэ
X
► сзс
HI
МПИ №1
► К.БАКИС АФС БАКИС<«-^-
ТМС
► 0 ТМС-Б
► О СУ ОНА 1
► О СУ ОНА 2
► О САН
МСУ-ГС
ГГ АК
► О БССД
► О БРТК
ЦА
Рисунок 2.1.20. Структурная схема БКУ КА «ЭЛЕКТРО-Jl» № 2
Следующим этапом развития БКУ платформы «НАВИГАТОР» является создание
БКУ для КА «АРКТИКА-М». При этом, помимо дальнейшей реализации импортоза-
мещения с использованием современной российской ЭКБ с необходимой стойкостью
к ИИКП, решаются задачи:
- унификации аппаратуры по стойкости к ВВФ для всего комплекса исполь¬
зуемых средств выведения и орбит КА серий «ЭЛЕКТРО-Л», «СПЕКТР» и
«АРКТИКА-М»;
- максимальной унификации аппаратуры и ПО БКУ по функциональному приме¬
нению на КА указанных серий;
- повышения надежности и живучести БКУ и КА в целом за счет изменения логики
использования резервов блоков силовой автоматики на базе расширенного объ¬
ективного (по уровням тока) и функционального контроля. При этом в трактах
управления, где это возможно, реализуется отказ от классического мажоритара
(2 из 3) и переход на гибкое задействование резервов - использование холодных
резервов с их автоматической реконфигурацией (или по командам от НКУ) при
возникновении сбоев и отказов.
Следует отметить, что с учетом замечаний к работе ГИВУС и КУДМ проведена
их модернизация предприятиями-разработчиками, а в части КУДМ рассматривается
возможность перехода на КУДМ другого разработчика.
Структура БКУ «АРКТИКА-М» показана на рисунке 2.1.21.
БПО БКУ «АРКТПКА-М» в целом базируется на БПО предшествующих КА на
базе платформы «НАВИГАТОР». Однако с учетом особенностей функционирования
КА и его целевой аппаратуры на высокоэллиптической орбите со значительным на¬
клонением проведены существенные доработки БПО БКУ с обеспечением минимиза¬
ции засветки радиатора ЦА от Солнца и Земли, минимизации «смазов» изображения
Земли при съемке, а также нацеливания остронаправленной антенны на наземный
пункт приема / передачи информации.
123
2-1
РКЦ. РКЦ Вид Пию
СДП-1
SED26 [£
SED26 [F
КИНД34-020-01
кинлшш 020-01
КУДМ
«Колер-Э»
ИНАЯ 402113 061
к НКПА
БВУ-0
СИЙМ 466S3S 036
щ
ТГ-т
—it:
"j(1 СИЯИ168333 130 Г в“'1 Пд
0J БУ5-А
СИЯМ 466333 133
_0J БУ4-А
СИЯН46ВЭЗЭШ
0J БУЗ-А
СИЯМ46В)Э3131
0J БУ6-А II
4 ь. Ли.
РКУ. Сигм
СИЙМ46В333134 И
0] БУ7-А ||
4 в» hun
РКЧДигм
СИЯМ 46ВЭЗ3135 И
1
“С
пт
МУБС
ДУ
СЭС
СОСБ | | i
МПИ №1
Рисунок 2.1.21. Структурная схема БКУ КА «АРКТИКА-М»
► К БАКИС АФС БАКИС*
► 0 ТМС
► О СУОНА
► О АСН-ВЭ
МСУ-ГС/ВЭ
ГГАК-3
► 0 БССД
- О БРТК
ЦА
Создаваемые БКУ для КА «СПЕКТР-РГ» и «СПЕКТР-УФ» исходно также ба¬
зируются на использовании унифицированной аппаратуры и структуре БКУ для
платформы «НАВИГАТОР». Однако в силу специфики научной аппаратуры и тре¬
бований к процессам управления движением имеются некоторые отличия, в связи с
чем в состав БКУ введен дополнительный блок связи для выделения целевой аппа¬
ратуры на отдельную линию МКО. Используются двигатели-маховики другого раз-
124
2-1
работника, обеспечивающие снижение минимального момента управления. Для КА
«СПЕКТР-УФ» с учетом жестких требований по точности стабилизации планирует¬
ся использовать гироскоп Astrix-200 фирмы Astrium (Франция).
Структурная схема БКУ КА «СПЕКТР-РГ» представлена на рисунке 2.1.22.
Следует отметить, что принятый подход к построению БКУ платформы
«НАВИГАТОР» позволяет проводить указанные выше замены аппаратуры и ПО
с минимальными затратами.
Накопленный совместный опыт МОКБ «Марс» и НПО им. С.А. Лавочкина по
созданию, отработке и эксплуатации в полете БКУ платформы «НАВИГАТОР», ре¬
ализуемая программа импортозамещения ЭКБ БКУ, а также реализуемые техниче¬
ские решения при построении БКУ КА «АРКТИКА-М» позволяют в дальнейшем
рассматривать БКУ платформы «НАВИГАТОР» как унифицированный аппаратно-
программный комплекс управления для КА массой от 1 т и выше для любых орбит и
назначений КА с использованием только российской радиационно-стойкой элемент¬
ной базы.
Список литературы
Асмус и др. Развитие космического комплекса гидрометеорологического обеспе¬
чения на базе геостационарных спутников серии «ЭЛЕКТРО-Л» // Вестник НПО
им. С.А. Лавочкина. 2012. № 1. С. 3-14.
Аставин А.С. и др. Создание прецизионной конструкции крупногабаритного кос¬
мического радиотелескопа // Вестник НПО им. С.А. Лавочкина. 2014. № 3. С. 91-95.
Бровкин А.Г., Бурдыгов Б.Г., Гордийко С.В. и др. Бортовые системы управления
космическими аппаратами: учебное пособие / Под ред. А.С. Сырова. М.: Изд-во
МАИ-ПРИНТ, 2010. 304 с.
Кардаьиев Н.С., Алакоз А.В. и др. «РАДИОАСТРОН»: итоги выполнения научной
программы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016.
№ 3. С. 4-24.
Соколов В.Н., Сыров А.С., Смирнов В.В., Иодко Г.С., Мищихин В.В., Кособо¬
кое В.Н., Шатский М.А., Добрынин Д.А. Бортовой комплекс управления платформы
«НАВИГАТОР» // «Вестник НПО имени С.А. Лавочкина». № 3 (29). 2015. С. 58-63.
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
Сыров А.С., Лисаков М.М., Войнаков С.М., Добрынин Д.А., Шатский М.А., Ка-
малъдинова Р.А., Сосновцев В.В., Рябогин Н.В., Въюницкая Т.Б., Филиппова Е.Н. Ра¬
бота системы ориентации космического аппарата «СПЕКТР-Р» // Космические ис¬
следования. 2014. Том 52. № 5. С. 399—407.
Б.Г Бурдыгов, В.М. Глебов, С.В, Гордийко, Д.А. Добрынин,
ГС, Иодко, Р.А. Камальдинова, А.Ю. Ковалев, В.Н, Кособокое,
С.В, Кравчук^ Н.В, Рябогин, А.Б, Петров, И.В. Полосин, В.В. Синельников,
В.В. Смирнов, В.Н. Соколов, А. С. Сыров, М.А. Шатский
Московское опытно-конструкторское бюро «Марс»
125
WZM СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ
Работа по созданию системы электроснабжения (СЭС) для платформы
«НАВИГАТОР» была начата в конце 2003 года. Разработка велась под руководством
начальника отдела разработки СЭС Позднякова Андрея Ивановича, при участии на¬
чальника сектора Назимко Анатолия Ивановича и ведущего специалиста Смирнова
Леонида Александровича.
Энергопреобразующая аппаратура и аккумуляторная батарея должны были иметь
негерметичное исполнение для эксплуатации в условиях вакуума.
По кооперации к работе были привлечены следующие организации:
- АО «НПЦ «Полюс» - разработчик комплекса автоматики и стабилизации (КАС-Э);
- ПАО «Сатурн» - разработчик никель-водородной аккумуляторной батареи (АБ)
30НВ-70А;
- АО «ИСС» - разработчик батареи солнечной (БС).
Составные части системы электроснабжения КАС-Э и АБ 30НВ-70А проектирова¬
лась как универсальные (за исключением БС) для платформы «НАВИГАТОР». Сол¬
нечная батарея проектировалась как универсальная для КА серии «ЭЛЕКТРО-Л».
Для КА серий «СПЕКТР» и «АРКТИКА-М» БС разрабатывались вновь {Степа¬
нов В.В., 2016; Кардаьиев Н.С., Алакоз А.В. и др., 2016; Расторгуев А.С., Сачков М.Е.,
Заболотских М.В., 2016; Моишеев А.А., Бабышкин В.Е. и др., 2014; Шустов Б.М.,
Сачков М.Е., Боярчук А.А. и др., 2014; Асмус и др., 2012), поскольку габаритно-массо¬
вые и энергомощностные характеристики БС как составной части СЭС в существен¬
но большей степени, чем остальные элементы системы, определяются циклограм¬
мой электропотреблений бортовой аппаратуры (БА) и внешними воздействующими
факторами.
2.2.1. Назначение и требования к СЭС
платформы «НАВИГАТОР»
Система энергоснабжения предназначена для обеспечения электроэнергией бор¬
товой служебной и целевой аппаратуры во всех режимах работы космического аппа¬
рата в течение срока активного существования на уровне:
- 2000 Вт на освещенных участках орбиты;
- 1500 Вт в теневых участках орбиты.
СЭС платформы «НАВИГАТОР» представляет собой централизованную систему
электроснабжения с общей шиной электропитания бортовой аппаратуры стабилизи¬
рованным напряжением (27±0,27) В. Структура системы является последовательно¬
параллельной (рисунок 2.2.1) с полной развязкой шины электроснабжения БА от ис¬
точников энергии (БС и АБ).
БС является первичным источником электроэнергии и обеспечивает работу бор¬
товой аппаратуры и восполнение емкости АБ на освещенных участках орбиты. В со¬
став БС входят три секции батареи фотоэлектрической (БФ) - БФ1, БФ2, БФЗ. БФ1
и БФ2 - силовые секции равной мощности, они подключены к АБ через зарядное
устройство, входящее в состав КАС. БФЗ подключена непосредственно к АБ и ис¬
пользуется для подзаряда и компенсации саморазряда АБ.
Все секции БС размещаются на одной панели. Полезная площадь солнечной бата¬
реи, на которой размещены фотоэлектрические преобразователи, ~8,5 м2.
126
2-2
АБ 30НВ-70А, состоящая из 30 соединенных последовательно никель-водород-
ных аккумуляторов, предназначена для накопления электрической энергии и питания
бортовой аппаратуры в отсутствии или при недостаточной мощности БС.
Рисунок 2.2.1. Структурно-функциональная схема СЭС КА «ЭЛЕКТРО-Л»
Шесть аккумуляторов батареи снабжены встроенными датчиками измерения
давления (ДАБ НДАБ6) и температуры (ТАБ НТАБ6) - по одному датчику дав¬
ления и температуры на каждом аккумуляторе. Датчики используются автомати¬
ческим контуром управлении зарядом и разрядом батареи. «Шестерки» датчиков
давления и температуры поделены на две группы - каналы управления. В каждой
тройке сигналы управления зарядным устройством формируются по мажоритарной
схеме.
В процессе штатной эксплуатации СЭС функционирует автономно по внутренней
логике, при этом внешнее управление по радио или кодовым командам не требуется.
В зависимости от соотношения потребляемой БА мощности, а также уровня мощно¬
сти, генерируемой БС, СЭС может работать в следующих четырех режимах:
- режим «СН» - электропотребление БА обеспечивается от БС, аккумуляторная
батарея отключена от нагрузки и находится в режиме хранения;
- режим «СН+ЗУ» - электропотребление БА обеспечивается от БС, АБ заряжается
избытком мощности БС;
- режим «СН+РУ» - электропотребление БА обеспечивается от БС и АБ (мощно¬
сти БС недостаточно для компенсации нагрузки);
- режим «РУ» - электропотребление БА обеспечивается только от АБ; мощность,
генерируемая солнечной батареей, равна нулю.
Система осуществляет автоматический переход из режима в режим при измене¬
нии уровня электропотребления БА или мощности генерируемой БС, а также при
изменении текущего состояния заряженности АБ.
127
2-2
2.2.2. Логика функционирования СЭС КА «ЭЛЕКТРО-Л»
С целью парирования возможной нештатной ситуации, связанной, например, с
нарушением энергобаланса, СЭС выдает в бортовой комплекс управления (БКУ)
по цепям оперативного контроля три управляющих сигнала (сигналы оперативного
контроля):
- «итЫ» - при достижении минимального напряжения на любом никель-водород-
ном аккумуляторе (НВА);
- «Umin2» - при достижении минимального напряжения на АБ;
- «ПБС» - при перегрузке бортовой сети (ПБС).
Сигнал «Umini» формируется устройством контроля напряжения аккумуляторов
(УКНА), входящим в состав КАС, при снижении напряжения на любом из 30 аккуму¬
ляторов АБ до 0,5 В.
Сигнал «Umin2» формируется датчиком минимального напряжения (ДМН), входя¬
щим в состав КАС, при снижении напряжения на АБ до 28 В.
Сигнал «ПБС» формируется пороговыми устройствами КАС при снижении на¬
пряжения на выходных шинах КАС до 25 В («Напряжение ниже нормы») или превы¬
шении тока нагрузки более 85 А («Ток выше нормы»).
Формирование любого из перечисленных выше сигналов запоминается в КАС и
сохраняется до выдачи из наземного контура управления (НКУ) кодовой команды на
снятие запоминания.
По сигналам «Umini», «Umin2» и «ПБС» БКУ производит по соответствующим алго¬
ритмам отключение неактуальной для функционирования в НС бортовой аппаратуры,
осуществляет подключение секций БФ1 и БФ2 (если они были отключены, напри¬
мер, при регламентных работах) и изменяет режим ориентации КА «ЭЛЕКТРО-Л»
(при необходимости). Подключение секций БФ1 и БФ2 осуществляется также авто¬
матикой КАС при формировании в приборе соответствующих сигналов датчиками
УКНА и ДМН.
С целью исключения достижения предельного состояния разряженности АБ
по напряжению, а также обеспечения прохождения очередного теневого участ¬
ка БКУ осуществляет контроль давления в АБ по телеметрическим параметрам
(ТМ-параметрам) ДАБНДАБб, передаваемым из КАС в ТМ-систему.
БКУ запускает аварийные программы по обеспечению восстановления заряжен-
ности АБ при следующих условиях:
- при достижении предельного разряда батареи по давлению (настраиваемый
параметр);
- при отсутствии полного заряда АБ перед прохождением очередной тени.
В исходном (предполетном) состоянии в СЭС отключены секции БФ и заблоки¬
рована функция обесточивания выходной шины КАС при снижении напряжения на
шине КАС ниже 25 В. Кроме того, при первом включении программно заблокирована
реакция БКУ на сигналы «ПБС», «итЫ» и «Umin2», а также запрещена диагностика
БКУ предельного разряда АБ.
По замыкании контактов отделения (КО) АБ подключается на вход разрядного
устройства, КАС включается (запитываются внутренние источники) и электропи¬
тание стабилизированным напряжением подается на входы всех бортовых систем.
В соответствии с циклограммой первого сеанса через 4 минуты 12 секунд от начала
счета БШВ и после раскрытия СБ секции БС подключаются на вход КАС.
128
2-2
После построения постоянной солнечной ориентации из НКУ выдаются команды
на снятие блокировки выключения КАС, на разрешение обработки сигналов «ПБС»,
«Цпы», «ит1п2» и диагностику предельного разряда АБ.
В дальнейшем при штатной работе СЭС кодовые команды в систему не вы¬
даются. Исключение составляют снятие запоминания ТМ-параметров и операция
проверки располагаемой емкости АБ. При проведении этой операции произво¬
дится отключение БФ1 и БФ2. В последнем случае при формировании сигналов
«Umini» или «Umin2» производится подключение БФ без отключения бортовых си¬
стем. Команда на подключение БФ формируется автоматикой КАС и дублируется
алгоритмами БКУ.
Последовательно-параллельная структура СЭС базового модуля «НАВИГАТОР»
имеет полную гальваническую развязку источников от шины стабилизированного
электропитания, что позволяет реализовать в КАС функцию обесточивания выходной
шины при возникновении фатальной нештатной ситуации, приводящей неизбежно
к полному разряду АБ с переполюсовкой аккумуляторов и, как следствие, к выходу
батареи из строя. Автоматика КАС позволяет обесточить выходную шину электро¬
питания (закрыть силовые ключи модулей разрядного устройства и стабилизатора
напряжения). Обесточивание бортовой сети происходит при последовательном фор¬
мировании сигналов «Umin2» (напряжение на АБ ниже 28 В) и «ННН» (напряжение
на выходных шинах КАС ниже 25 В). При обесточенном состоянии выходной шины
СЭС переходит в режим автономномного функционирования.
При автономном функционировании СЭС и периодической засветке панелей сол¬
нечных батарей Солнцем (при неуправляемом движении КА вокруг центра масс) так¬
же периодически включается зарядное устройство КАС и осуществляется заряд АБ
всей избыточной мощностью БФ, при этом часть энергии БФ в нагрузку не переда¬
ется, а расходуется только на собственное электропотребление КАС (выходная шина
обесточена).
Подача электропитания на выходную шину КАС происходит после достижения в
процессе «пунктирного» заряда АБ уровня заряженности, обеспечивающего возмож¬
ность повторного построения постоянной солнечной ориентации.
При штатном функционировании управление зарядом АБ осуществляется по сле¬
дующему алгоритму:
- зарядное устройство отключается при достижении в одном из двух каналов
управления в процессе заряда АБ уровня давления водорода в аккумуляторах, со¬
ответствующего полному заряду АБ - порог максимального давления «давление
верхнее» (ДВ);
- запрет на заряд АБ снимается (идет заряд АБ при наличии избыточной мощности
БС) при снижении давления в АБ в процессе разряда или саморазряда батареи до
уровня, составляющего 0,95 от уровня ДВ (порог минимального давления «дав¬
ление нижнее» - ДН).
Для управления системой в нештатных ситуациях либо для регламентных работ
с системой используются 13 релейных команд типа РКУ. Выдача всех РКУ может
быть инициирована по кодовым командам из НКУ. РКУ на подключение БФ форми¬
руется также при отработке алгоритмов БКУ сеанса 1, диагностики сигналов «ПБС»,
«Umjni», «Umin2», предельного разряда АБ и разряда АБ перед тенью. Перечень релей¬
ных команд управления СЭС приведен в таблице 2.2.1.
129
2-2
Таблица 2.2.1. Перечень релейных команд управления
№
наименование РКУ
выполняемые действия
1
включение БФ
подключение всех секций БФ, обесточивание КО
2
отключение БФ1, БФ2
отключение БФ1, БФ2 от СЭС
3
отключение БФЗ
отключение БФЗ от АБ
4
включение ЗУ
включение зарядного устройства АБ
5
повышение уставки ДВ
повышение уставки ДВ отключения заряда
в обоих каналах на одну ступень
6
понижение уставки ДВ
понижение уставки ДВ отключения заряда
в обоих каналах на одну ступень
7
снятие запоминания
ТМ-датчиков
снятие запоминания срабатывания пороговых датчиков
ДВС1, ДВС2, ДНС1, ДНС2, УКТС1, УКТС2 в ТМИ
8
блокировка канала № 1
блокировка канала № 1 управлением заряда
9
блокировка канала № 2
блокировка канала № 2 управлением заряда
10
блокировка УКНА
блокировка прохождения сигнала «Umi„i»
по срабатывании УКНА
11
блокировка ДМН
ьлокировка прохождения сигнала «Umin2»
по срабатывании ДМН
12
снятие блокировок
снятие блокировок датчиков УКНА, ДМН,
каналов управления. Разрешение выключения КАС.
Снятие запоминания сигналов
ДМНС, УКНАС, НННС, ТВНС
13
блокировка выключения
КАС
запрет выключения КАС
Команда на включение зарядного устройства может быть использована только
в аварийной ситуации, когда по срабатывании ДВ зарядное устройство отключилось,
а по ДН не включилось.
Команды на блокировку каналов управления, УКНА и ДМН выдаются только при
нештатной работе указанных устройств для исключения реакции КАС и БКУ на лож¬
ное срабатывание этих же устройств.
Команда на снятие запоминания ТМ-датчиков выдается по завершении сеанса
связи при штатном цикле заряда АБ и срабатывании датчиков ДВ и ДН.
Команды на повышение/понижение уставки ДВ выдаются при повышении / по¬
нижении давления, соответствующего максимальному заряду АБ. Решение о выда¬
че этой команды (при необходимости) принимается службой СЭС после проведения
проверки располагаемой емкости АБ.
Команда на снятие блокировок выдается либо для подключения ранее отключен¬
ных УКНА, ДМН и каналов управления, а также разрешения обесточивания (выклю¬
чения) КАС, либо для снятия запоминания сигналов «Umini», «Umin2» и «ПБС» («ННН»
и «ТВН») после их формирования соответствующими устройствами.
130
2-2
Список литературы
Асмус и др. Развитие космического комплекса гидрометеорологического обеспе¬
чения на базе геостационарных спутников серии «ЭЛЕКТРО-JT» // Вестник «ФГУП
НПО им. С.А. Лавочкина». 2012. № 1. С. 3-14.
Кардашев Н.С., Алакоз А.В. и др. «Радиоастрон»: итоги выполнения научной про¬
граммы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016. № 3.
С. 4-24.
Моишеев А.А., Бабышкин В.Е. и др. Проектная конференция космического аппара¬
та «СПЕКТР УФ» // Вестник НПО им. С.А. Лавочкина. 2014. № 5. С. 15-20.
Расторгуев А. С., Сачков М.Е., Заболотских М.В. Галактическая астрономия в уль¬
трафиолете // Вестник НПО им. С.А. Лавочкина. 2016. № 3. С. 38-47
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
Шустов Б.М., Сачков М.Е., Боярчук А. А. и др. Космические перспективы изучения
ультрафиолетовой Вселенной: проект «СПЕКТР-УФ» // Вестник НПО им. С.А. Ла¬
вочкина. 2014. № 5. С. 4-15.
А.И. Назимко
НПО им. С.А. Лавочкина
131
ШВЯ БОРТОВОЙ РАДИОКОМПЛЕКС
На платформе «НАВИГАТОР» устанавливались две разновидности бортовой ап¬
паратуры командно-измерительной системы (БА КИС): J1A903, на первых двух КА
серии «ЭЛЕКТРО-JI» и КА «СПЕКТР-Р» {Автоматические космические... , 2010),
на последующих КА «ЭЛЕКТРО-Л» и КА «АРКТИКА-М» {Степанов В.В, 2016;
Кардашев Н.С., Алакоз А.В. и др., 2016; Моишеев А.А., Бабышкин В.Е. и др., 2014;
Шустов Б.М., Сачков М.Е, Боярчук А.А. и др., 2014; Расторгуев А. С., Сачков М.Е., За¬
болотских М.В., 2016; Асмус и др, 2012). На шгатформе «НАВИГАТОР», предназна¬
ченной для КА астрофизических исследований - «СПЕКТР-РГ» и «СПЕКТР-УФ»,
устанавливается бортовой радиокомплекс Х-диапазона радиоволн.
2.3.1. БАКИС ЛА903.
Назначение БА КИС ЛА903.
Б А КИС ЛА903 предназначена для выполнения следующих задач:
вхождение в связь с наземными станциями в ориентированном и неориентирован¬
ном режимах полета КА и формирование когерентного и некогерентного сигналов
для траекторных измерений;
- прием от наземного комплекса управления (НКУ) разовых команд (РКН), их де¬
кодирование и выдача в бортовые системы КА;
- прием от НКУ командно-программной информации (КПИ), ее декодирование и
передача в бортовой комплекс управления (БКУ) по магистральному последова¬
тельному интерфейсу;
- формирование и передача на НКУ квитанций о прохождении РКН и КПИ;
- передача на НКУ телеметрической информации (ТМИ) от телеметрической си¬
стемы (ТМС);
- измерение текущих навигационных параметров (ИТНП) - наклонной дальности
и радиальной скорости.
Основные технические характеристики БА КИС ЛА903 приведены в таблице 2.3.1.
Состав и структурная схема БАКИС ЛА903
БА КИС ЛА903 состоит из двух основных частей: высокочастотной аппаратуры
и низкочастотной аппаратуры.
К приборам высокочастотной аппаратуры относятся приемопередающее устрой¬
ство, сумматор-разветвитель и усилитель мощности.
К приборам низкочастотной аппаратуры относятся дешифратор КПИ и коммутатор.
Состав БА КИС JIA903 представлен в таблице 2.3.2.
Все приборы БА КИС JIA903 устанавливаются на соответствующие посадочные
места тепловой сотопанели КА. Между собой приборы соединяются высокочастот¬
ными и низкочастотными кабелями.
Для повышения вероятности безотказной работы используется горячее и холод¬
ное резервирование приборов.
Технические характеристики БА КИС J1A903 обеспечивают адаптивность систе¬
мы к различным типам КА при сохранении внутрисистемных связей, конструктив¬
ных решений приборов.
132
2-3
Таблица 2.3.1. Основные технические характеристики БА КИС JIA903.
№
п/п
наименование параметра
размерность
значение
параметра
примечание
I
несущая частота:
запросного канала
ответного канала
ГГц
5,7
3,4
2
максимальная дальность
км
360000
3
скорость передачи КПИ
(при этом вероятность
правильного прохождения
КПИ не хуже 0,99)
скорость передачи РКН
(при этом вероятность
правильного прохождения
РКН не хуже 0,999)
бит/с
1000
100
/
4
скорость передачи ТМИ
при вероятности ошибки
10'5 на бит
кбит/с
1,8, 32
5
количество внешних команд
16
6
аппаратурные ошибки
траекторных измерений:
дальности
радиальной скорости
м
мм/с
10
1
без учета влияния среды
распространения
радиоволн
7
напряжение питания
в
27±1,35
8
мощность передатчика
Вт
не менее 7
9
потребляемая мощность:
дежурный режим
сеансный режим
Вт
30
80
10
масса комплекта
кг
не более
16,5
без учета
межприборных кабелей
Таблица 2.3.2. Состав БА КИС JIA903.
№ п/п
наименование
количество
1
приемопередающее устройство (ППУ) ША924
3
2
усилитель мощности (УМ)
SSPA
УМ3334-10
2
1
3
сумматор-разветвитель (СР) ША874-10
1
4
дешифратор КПИ (ДКПИ) ЦА048
1
5
коммутатор JIA100
1
6
комплект кабелей
1
В качестве сменных модулей могут использоваться высокостабильные кварцевые
генераторы, синтезаторы частот, усилители мощности, формирователи ответных сиг¬
налов, дешифраторы КПИ на разное количество команд.
Структурная схема БА КИС JIA903 представлена на рисунке 2.3.1.
133
2-3
Рисунок 2.3.1. Структурная схема Б А КИС ЛА903
Назначение ППУ ША924
ППУ ША924 представляет собой приемопередающее устройство БА КИС JIA903
и должен выполнять следующие функции:
- прием высокочастотных сигналов, демодуляция сигналов радиокоманд (РКН)
управления и командно-программной информации (КПИ);
- передача телеметрической информации, квитанций РКН и квитанций КПИ;
прием и регенерация сигналов измерения текущих навигационных параметров.
В зависимости от вида используемого сигнала прибор может работать в узкопо¬
лосном и широкополосном режимах.
Чувствительность ППУ :
- в узкополосном режиме:
не более минус 146 дБВт по приему РКН;
- не более минус 143 дБВт по приему КПИ;
- в широкополосном режиме:
- не более минус 143 дБВт по приему РКН;
- не более минус 140 дБВт по приему КПИ.
134
2-3
Энергопотребление ППУ:
- в дежурном узкополосном режиме не более 11 Вт;
- в дежурном широкополосном режиме не более 12,5 Вт;
- блока высокочастотного формирователя ответного сигнала не более 4 Вт.
Масса прибора - (3,0 ± 0,15) кг.
Назначение ДКПИ ЦА048
ДКПИ ЦА048 является дешифратором командно-программной информации
и обеспечивает:
- прием и дешифрацию разовых команд (РК) и их выдачу в системы КА;
- выдачу РКН в приборы Б А КИС;
- прием КПИ с последующей выдачей в БКУ по магистральному последователь¬
ному интерфейсу;
- формирование квитанций РКН и КПИ с последующей выдачей в ППУ;
- формирование телеметрических сигналов и передачу их в телеметрическую си¬
стему (ТМС).
Значение питающего напряжения (БС) 27+7_4В.
Масса прибора (3,1 ±0,2) кг.
ДКПИ ЦА048 выполнен в рамочной конструкции и состоит из шести плат:
- блок питания в составе трех комплектов на одной плате;
- троированный дешифратор командно-программной информации на трех платах;
- коммутационно-распределительное устройство на двух платах.
Два включенных комплекта ДКПИ ЦА048 различаются адресами, третий ком¬
плект находится в выключенном состоянии и включается по команде при выходе из
строя одного из включенных комплектов, причем ему присваивается адрес отключа¬
емого комплекта.
Назначение УМ
УМ БА КИС JIA903 предназначен для усиления высокочастотного сигнала от¬
ветного канала представляет собой твердотельный усилитель мощности.
Прибор SSPA функционально состоит из вторичного источника питания и непо¬
средственно усилителя
Значение питающего напряжения 27+7_4В.
Потребляемая мощность SSPA не более 29 Вт в номинальном режиме.
Значение номинальной выходной мощности SSPA составляет 10 Вт.
Масса прибора SSPA не более 1,04 кг.
УМ3334-10 функционально состоит из вторичного источника питания и четырех
последовательно включенных каскадов усилителя мощности.
Значение питающего напряжения 27+7_4В.
Потребляемая мощность не более 41,85 Вт.
Значение номинальной выходной мощности УМ3334-10 составляет не менее 10 Вт.
Масса прибора (0,96±0,05) кг.
Назначение коммутатора ЛА100
Прибор JIA100 предназначен для включения и отключения УМ по электропи¬
танию. является коммутационным устройством (коммутатором) БА КИС JIA903
и обеспечивает:
135
2-3
- распределение питания сеансного режима, коммутацию электропитания на аппа¬
ратуру УМ;
- распределение команд управления и коммутацию;
- трансляцию сигналов телеметрических датчиков УМ.
Масса прибора ЛА100 (1,00±0,05) кг.
Назначение ША874-10
Прибор ША874-10 предназначен для деления высокочастотной мощности, вклю¬
чаемой на любой входной переход, между всеми выходными переходами. Прибор
выполнен на основе тандемных трехдецибельных направленных ответвителей на не¬
симметричных микрополосковых линиях.
Значение мощности входного высокочастотного сигнала не более 0,05 Вт.
Ослабление между входными и выходными переходами не более 10 дБ.
Масса прибора (0,19±0,019) кг.
Режимы работы БА КИС ЛА903
По характеру работы в процессе эксплуатации БА КИС JTA903 различают два
режима:
- дежурный режим (ДР), в котором задействуются приборы, работающие в течение
всего времени активного существования изделия (приборы дежурного режима);
- сеансный режим (СР), в котором задействуются приборы, работающие в режиме
периодического включения (приборы сеансного режима).
В дежурном режиме работают два ППУ и ДКПИ. Обеспечивается прием от НКУ
(с помощью антенно-фидерной системы) РКН и КПП, исполнение или выдача в си¬
стемы КА.
В сеансном режиме по команде включается усилитель мощности и формирова¬
тель ответного сигнала ППУ, и БА КИС JIA903 обеспечивает:
- прием КПИ и передачу её в БКУ, передачу на НКУ квитанций о приеме;
- прием, дешифрирование и выдачу на исполнение РКН, передачу на НКУ квитан¬
ций об их приеме;
- прием от ТМС телеметрической информации, формирование модулированного
радиосигнала и передачу на НКУ.
- прием и регенерацию сигналов ИТНП.
По способу формирования несущей частоты ответного канала БА КИС JIA
903 различают следующие режимы:
- когерентный (КР) - несущая частота ответного канала формируется с использова¬
нием частоты запросного канала;
- некогерентный (HP) - несущая частота ответного канала формируется без ис¬
пользования частоты запросного канала, а с использованием высокостабильного
кварцевого задающего генератора.
В зависимости от вида используемого сигнала БА КИС JTA903 может работать
в узкополосном режиме (УР) или широкополосном режиме (ШР).
В Б А КИС JIA903 применяются следующие виды сигналов:
- узкополосный сигнал - информационный сигнал без наложения псевдошумового
сигнала;
- широкополосный сигнал - информационный сигнал с наложением псевдошумо¬
вого сигнала.
136
2-3
Электромагнитная совместимость между БА КИС JIA903 различных КА
обеспечивается:
- в УР - частотным разделением по несущей и поднесущим частотам и простран¬
ственной селекцией;
- в ШР - дополнительным разделением спектров сигналов по структуре псевдос¬
лучайной последовательности.
По типу передаваемой информации БА КИС ЛА903 различают следующие
режимы:
- РКН;
- КПИ;
- ТМИ;
- ИТНП.
Режим РКН. Передача разовых команд от НКУ на БА КИС J1A903 осуществля¬
ется циклическим кодом. Темп выдачи РКН от НКУ определяется с учетом време¬
ни распространения радиоволн. Перед выдачей кода РКН НКУ формирует и выдает
11-разрядный код адреса РКН. Высокочастотный сигнал поступает на входы ком¬
плектов ППУ БА КИС JIA903, и после детектирования код принятой РКН поступает
на входы комплектов ДКПИ. Комплектам ДКПИ присвоены индивидуальные адреса.
Всегда включены два комплекта ДКПИ. После дешифрации первых 11-ти разрядов
пришедшего от ППУ кода, содержащего информацию об адресе ДКПИ, обработка
последующих разрядов поступающего кода осуществляется комплектом, определен¬
ным пришедшим адресом РКН. После дешифрации полученного кода РКН, в случае
правильного приема, ДКПИ выдает на ППУ 7-разрядную квитанцию. Затем ДКПИ
выдает одну из релейных команд в соответствии с принятым кодом. Если в течение
1 секунды после выдачи РКН нет приёма положительной квитанции, то ППУ пере¬
ходит в исходное состояние для приёма следующей посылки от НКУ. Квитанция по
радиолинии «Борт - Земля» передается на НКУ и подтверждает факт приема и пра¬
вильной расшифровки БА КИС разовой команды.
Режим КПИ. Передача КПИ от НКУ осуществляется фразами по 512 разрядов.
Темп выдачи одной фразы КПИ определяется с учетом времени распространения ра¬
диоволн. Перед выдачей кода КПИ НКУ формирует и выдает 5-разрядный код адреса
КПИ. КПИ, передаваемая по запросной радиолинии, подается на комплекты ДКПИ.
Из двух включенных комплектов ДКПИ прием КПИ осуществляет тот комплект,
адрес которого был заложен при исполнении команды «Включить режим КПИ».
Прием и ретрансляция КПИ из БА КИС в БКУ осуществляется после исполнения
команды «Включить режим КПИ». Анализ кода адреса КПИ (при условии предвари¬
тельного исполнения РКН «Включить режим КПИ») производится путем сравнения
поступившей информации с образцом кода адреса. В случае совпадения ДКПИ про¬
изводит прием кода КПИ и передачу его в БКУ. В случае несовпадения адреса КПИ
с образцом, а также в случае приема фразы КПИ меньше 512 разрядов выдача её
в БКУ не производится и квитанция для передачи на НКУ не формируется. После
получения от ДКПИ кода КПИ БКУ проводит анализ пришедшей фразы КПИ и в
случае положительного результата выдает на ДКПИ «положительную» квитанцию
либо «отрицательную» - при отрицательном ДКПИ на основе полученной от БКУ
квитанции формирует «положительную» или «отрицательную» квитанцию для пере¬
дачи на НКУ. В случае отсутствия какой-либо квитанции от БКУ в течение заданного
времени, ДКПИ формирует «отрицательную» квитанцию для передачи на НКУ. Кви¬
танция по радиолинии «Борт - Земля» передается на НКУ для анализа факта приема
КПИ в БКУ. Отключение режима приема КПИ осуществляется по команде.
137
2-3
Режим ТМИ. Передача ТМИ на НКУ осуществляется кадрами. Каждый кадр со¬
стоит из служебной и информационной частей. Служебная часть кадра содержит
кадровую синхропосылку и другие служебные поля. Информационная часть кадра
содержит 512 байт ТМИ. ТМИ в виде телеметрических кадров поступает на ППУ
ША924 от ТМС и после преобразования передается на НКУ через антенно-фидерную
систему (АФС) платформы «НАВИГАТОР». Скорость передачи ТМИ 1000 бит/с.
8000 бит/с или 32000 бит/с.
Режим ИТНП. Измерение дальности до КА осуществляется в широкополосном
режиме работы Б А КИС JIA903. В ШР БА КИС JIA903 осуществляет регенерацию
с точностью до постоянной фазы псевдослучайной последовательности запросного
сигнала и преобразование псевдослучайной последовательности запросного сигна¬
ла в псевдослучайную последовательность ответного сигнала, «жестко» связанную
с псевдослучайной последовательностью запросного сигнала, но с отличной от нее
структурой. Измерение дальности до КА заключается в определении задержки фазы
псевдослучайной последовательности ответного сигнала относительно фазы псев¬
дослучайной последовательности запросного сигнала.
Систематические аппаратурные составляющие ошибок измерения дальности
определяются в процессе наземной калибровки.
Кроме систематических ошибок, связанных с задержкой сигнала во время его
прохождения через ППУ, которые выбираются калибровкой времени задержки, суще¬
ствуют и медленные флюктуации задержки этого сигнала, связанные с температур¬
ными изменениями в основном в фильтрующих цепях из-за изменения группового
времени запаздывания на краях рабочей полосы частот. Величина этих флюктуаций,
которые проявляются в виде погрешности измерения наклонной дальности, невели¬
ка (изменение времени задержки порядка 4 не приводит к погрешности измерения
наклонной дальности 1,2 м). Аналогичные погрешности имеют место и в наземной
станции командно-измерительной системы.
При прохождении сигналов ИТНП по радиолиниям «Земля - Борт» и «Борт - Зем¬
ля» также имеют место медленные флюктуации во времени прохождения сигнала,
связанные с изменением угла места и условиями распространения сигнала в атмос¬
фере и тропосфере из-за облаков, дождя и других осадков. Это происходит в связи
с изменением эффективной диэлектрической проницаемости атмосферы при наличии
в ней облаков или осадков. Значения этих погрешностей не превышают 5-7 метров,
т.к. изменение эффективной диэлектрической проницаемости в атмосфере не превы¬
шает 0,0001 от номинального значения, равного 1.
Измерение радиальной скорости по доплеровскому сдвигу частоты несущей сиг¬
нала возможно при передаче любой информации в ответном канале.
Совмещение режимов работы БА КИС ЛА903
Совмещение режимов измерения текущих навигационных параметров, управле¬
ния КА посредством выдачи радиокоманд, передачи командно-программной инфор¬
мации и контроля функционирования КА по телеметрической информации позволяет:
- уменьшить полосу занимаемых частот;
- сократить время технологического цикла управления;
- оперативно принимать решения с целью повышения коэффициента использова¬
ния системы по целевому назначению.
Возможные совмещения режимов работы БА КИС JIA903 представлены в таб¬
лице 2.3.3.
138
2-3
таблица 2.3.3. Совмещение режимов работы БА КИС JIA903
наименование
УР
ШР
КР
HP
РКН
ИТНП
КПИ
тми
режимов
1
8
32
УР
-
+
+
+
-
+
+
+
+
ШР
-
+
+
+
+
+
+
+
+
КР
+
+
-
+
+
+
+
+
+
HP
+
+
-
+
+
+
+
+
+
РКН
+
+
+
+
+
-
+
+
+
ИТНП
-
+
+
+
+
+
+
+
+
КПИ
+
+
+
+
-
+
+
+
+
ТМИ, кбит/с
1
+
+
+
+
+
+
+
-
-
8
+
+
+
+
+
+
+
-
-
32
+
+
+
+
+
+
+
-
-
Примечания:
+ режимы совмещаются;
-режимы не совмещаются.
Режим ТМИ совмещается с режимом РКН, КПИ с перерывом в выдаче ТМИ
на время передачи квитанции на РКН, КПИ и вхождения в синхронизацию телеме¬
трической аппаратуры НКУ.
Функционирование БА КИС J1A903 в различных режимах работы
Включение БА КИС JIA903 в дежурном режиме осуществляется подачей стабили¬
зированного электропитания от системы электроснабжения (СЭС).
СЭС подает питание на БА КИС JIA903 с момента отделения КА от носителя по
срабатыванию контактов отделения.
Время готовности БА КИС JIA903 для работы в дежурном режиме при первой по¬
даче питания на БА КИС и при переключении ППУ - не более 5 минут.
Время готовности БА КИС J1A903 после включения сеансного режима - не более
10 секунд.
Для управления БА КИС JIA903 необходимо пятнадцать команд, в том числе две
команды - «Включение УМ» и «Выключение УМ» - подаются от БКУ. По команде
«Включение УМ» включается тот комплект УМ, который был включен в предыду¬
щем сеансе. Команда «Выключение УМ» выключает все комплекты УМ.
БА КИС JIA903 выдает шестнадцать разовых команд управления в системы КА.
Организация вхождения в связь с НКУ.
Вхождение в связь может осуществляться:
- по инициативе НКУ - путем подачи РКН на включение УМ и формирователя от¬
ветного сигнала. В узкополосном режиме вхождение в связь занимает не более 10 се¬
кунд. Для включения широкополосного режима в БА КИС JIA903 необходимо выдать
РКН. Вхождение в связь в широкополосном режиме занимает не более 40 секунд;
- по инициативе БКУ - путем выдачи команды включение УМ и формирователя
ответного сигнала. Дальнейшие операции аналогичны приведенным выше.
139
2-3
Завершение сеанса связи с НКУ осуществляется подачей РКН от НКУ либо по ко¬
манде от БКУ
2.3.2. БАКИС ЛА916
Назначение БА КИС JIA916 аналогично БА КИС JTA903.
Основные технические характеристики БА КИС JTA916 приведены
в таблице 2.3.4.
Таблица 2.3.4. Основные технические характеристики БА КИС JIA916
№
п/п
наименование параметра
размерность
значение
параметра
примечание
1
несущая частота:
запросного канала
ответного канала
ГГц
5,7
3,4
2
. максимальная дальность
км
42000
3
скорость передачи КПИ
(при этом вероятность
правильного прохождения
КПИ не хуже 0,99)
скорость передачи РКН
(при этом вероятность
правильного прохождения
РКН не хуже 0,999)
бит/с
1000
100
4
скорость передачи ТМИ .
при вероятности ошибки
10'5 на бит
кбит/с
1,8, 32
5
количество разовых команд
79
6
аппаратурные ошибки
траекторных измерений:
дальности
радиальной скорости
м
мм/с
5
1
без учета влияния среды
распространения
радиоволн
7
напряжение питания
в
27 ± 1,35
8
мощность передатчика
Вт
не менее 10
9
потребляемая мощность:
дежурный режим
сеансный режим
Вт
не более
40
100
10
масса комплекта
кг
не более 25
Состав и структурная схема БАКИС J1A916
БА КИС JIA916 состоит из двух основных частей: высокочастотной аппаратуры
и низкочастотной аппаратуры.
К приборам высокочастотной аппаратуры относятся приемо-передающее устрой¬
ство, сумматор-разветвитель и усилитель мощности.
К приборам низкочастотной аппаратуры относится дешифратор КПИ.
Состав Б А КИС JIA916 представлен в таблице 2.3.5.
140
2-3
Таблица 2.3.5. Состав БА КИС J1A916
№ п/п
наименование
количество
I
приемопередающее устройство (ППУ) ША1053М
3
2
усилитель мощности (УМ)
УМ3334-10
3
3
сумматор-разветвитель (PC) ША874-10Б
1
4
дешифратор КПИ (ДКПИ) JIA009
1
5
комплект кабелей
1
Все приборы БА КИС J1A916 устанавливаются на соответствующие посадочные
места тепловой сотопанели КА. Между собой приборы соединяются высокочастот¬
ными и низкочастотными кабелями.
Для повышения вероятности безотказной работы используются горячее и холод¬
ное резервирование приборов.
Технические характеристики Б А КИС J1A916 (рисунок 2.3.2) обеспечивают адап¬
тивность системы к различным типам КА при сохранении внутрисистемных связей,
конструктивных решений приборов.
В качестве сменных модулей могут использоваться высокостабильные кварцевые
генераторы, синтезаторы частот, усилители мощности, формирователи ответных сиг¬
налов, дешифраторы КПИ на разное количество команд.
ППУ 1к
Рисунок 2.3.2. Структурная схема БА КИС J1A916
141
2-3
Назначение ППУ ША1053М
ППУ ША1053М представляет собой приемопередающее устройство БА КИС
ЛА916 и аналогичен по своим функциям ППУ ША924 БА КИС JIA903.
Чувствительность ППУ ША1053М:
- в узкополосном режиме:
- не более минус 148 дБВт по приему РКН;
не более минус 143 дБВт по приему КПП;
- в широкополосном режиме:
- не более минус 145 дБВт по приему РКН;
- не более минус 140 дБВт по приему КПП.
Энергопотребление ППУ ША1053М:
- в дежурном режиме не более 13 Вт;
- в сеансном режиме не более 17 Вт.
Масса прибора - (1,72 ± 0,086) кг.
Назначение ДКПИ ЛА009
ДКПИ JIA009 является дешифратором командно-программной информации и
обеспечивает:
- прием от ППУ и дешифрацию разовых команд (РК) и их выдачу в системы КА;
- выдачу РКН в приборы Б А КИС;
- прием КПП с последующей выдачей в БКУ по магистральному последователь¬
ному интерфейсу;
- формирование квитанций РКН и КПП с последующей выдачей в ППУ;
- исполнение команд управления от БКУ на включение и отключение сеансного
режима;
- программно-временное управление переключением комплектов приборов БА
КИС и режимов работы в случае выхода из строя двух включенных комплектов
ППУ и/или двух включенных комплектов ДКПИ, с целью определения рабочего
сочетания ППУ-ДКПИ;
- формирование телеметрических сигналов и передачу их в телеметрическую си¬
стему (ТМС).
Значение питающего напряжения (БС) 27+7_4В.
Масса прибора (9,5±0,35) кг.
ДКПИ JIA009 состоит из коммутационно-распределительного устройства, источ¬
ника вторичного электропитания, платы резервированного программно-временного
устройства (ПВУ) и трёх плат дешифратора командно-программной информации.
Два включенных комплекта ДКПИ JIA009 отличаются адресами. Третий комплект
ДКПИ J1A009 находится в выключенном состоянии и включается по команде при
выходе из строя одного из включенных комплектов, причем ему присваивается адрес
отключаемого комплекта.
Назначение ША874-10Б
Прибор ША874-10Б не отличается по назначению от ША874-10 и имеет незначи¬
тельные конструктивные отличия.
Режимы работы БА КИС J1A916.
Режимы работы БА КИС JIA916 аналогичны режимам работы БАКИС JIA903.
142
2-3
Функционирование БА КИСЛА916 в различных режимах работы
Включение БА КИС JIA916 в дежурном режиме осуществляется подачей стабили¬
зированного электропитания от системы электроснабжения (СЭС).
СЭС подает питание на БА КИС JTA916 с момента отделения КА от носителя по
срабатывании контактов отделения.
Время готовности БА КИС JIA916 для работы в дежурном режиме при первой по¬
даче питания на БА КИС и при переключении ППУ - не более 2 минут.
Время готовности БА КИС JTA916 после включения сеансного режима - не более
10 секунд.
Для управления БА КИС JIA916 необходимо 28 команд, в том числе две коман¬
ды - «Включение УМ и формирователя ответного сигнала» и «Выключение УМ и
формирователя ответного сигнала» подаются от БКУ. По команде «Включение УМ
и формирователя ответного сигнала» включается тот комплект УМ и формирователя
ответного сигнала, который был подключен ранее. Команда «Выключение УМ и фор¬
мирователя ответного сигнала» снимает питание со всех комплектов УМ и формиро¬
вателя ответного сигнала.
БА КИС JIA916 может выдавать до 51 -й разовой команды управления в системы
КА.
Организация вхождения в связь с НКУ
Вхождение в связь может осуществляться:
- по инициативе НКУ - путем подачи РКН на включение УМ и формирователя от¬
ветного сигнала. В узкополосном режиме вхождение в связь занимает не более
2 секунд. Для включения широкополосного режима в БА КИС JIA916 необходи¬
мо выдать РКН. Вхождение в связь в широкополосном режиме занимает не более
12 секунд;
- по инициативе БКУ - путем выдачи команды на включение УМ и формирова¬
теля ответного сигнала. Дальнейшая работа не отличается от вхождения в связь
по инициативе НКУ.
Завершение сеанса связи с НКУ осуществляется подачей РКН от НКУ либо по ко¬
манде от БКУ.
2.3.3. Бортовой радиокомплекс Х-диапазона радиоволн
БРК предназначен для выполнения следующих задач:
- прием от наземной станции командно-программной информации, декодирова¬
ние, дешифрация и исполнение или передач принятой КПИ в бортовой комплекс
управления КА;
- проведения траекторных измерений совместно с наземной станцией;
- сбор собственной диагностической информации БРК, выдача ее в общем потоке
телеметрической информации на наземную станцию для оперативного анализа
состояния аппаратуры БРК;
- прием телеметрической и научной информации от телеметрической системы
и комплекса научной аппаратуры (КНА), формирование общего потока ТМИ
(в том числе и собственной диагностической информации БРК), формирование
кадров передачи, преобразование и передача их на наземную станцию;
- прием от БКУ команд управления и их исполнение.
143
2-3
Основные технические характеристики БРК приведены в таблице 2.3.6
Таблица 2.3.6. Основные технические характеристики БРК
№
наименование
параметра
размерность
значение
параметра
примечание
1
несущая частота:
приёмника
передатчика
МГц
от 7145 до 7235
от 8400 до 8500
2
дальность радиосвязи:
км
от 200 до 1 800 000
РК СРГ
128,512
3
скорость передачи ТМИ
при вероятности ошибки
на бит 10'8
бит/с
1024, 4096, 16384,
32768, 65536,
131072, 262144,
524288
РК СРГ
1048576, 2097152,
4194304
4
скорость приема КПИ
при вероятности ошибки
на бит 10‘6
бит/с
125,500
1000, 2000
5
дежурный режим работы
приемников (ПРМ) •
одновременная
работа двух ПРМ.
Каждый ПРМ
принимает сигнал
в своей полусфере
6
мощность передатчика
(ПРД)
Вт
не менее 40
7
интерфейсы связи
МПИ - с БКУ
LVDS - с КНА
RS-422 - с ТМС
8
число функциональных
(релейных) команд
для систем КА
не менее 32
9
точность траекторных
измерений:
по дальности
по скорости
м
мм/с
не более 10
не более 0,5
10
потребляемая
мощность:
дежурный режим
сеансный режим
Вт
не более 25
не более 220
11
напряжение питания
В
27,00±1,35
12
масса БРК
кг
не более 15
без учета кабелей
144
2-3
Состав БРК представлен в таблице 2.3.7.
Таблица 2.3.7. Состав БРК
№ п/п
наименование
количество
I
приемопередающее устройство ША1253
2
2
усилитель мощности
УМ8485-40
1
3
делитель мощности (ДМ)
4
4
блок командно-телеметрический (БКТ) МАЗ 15
1
5
командно-распределительное устройство (КРУ) МАЗ 16
1
6
программно-временное устройство МАЗ 17
1
7
комплект кабелей
1
Структурная схема БРК приведена на рисунке 2.3.3.
дм
дм
ДМ
nny2-Z+
дм
RS-422 (485)
h
RS-422 (485)
RS-422 (485)
БКТ
МАЗ 15
If
Л
Пит. ФК ТМ
11
Пит.
КРУ
ФК j
ПВУ
МА316
Метки
МА317
БКУ КНА ТМС
U6/c
Рисунок 2.3.3. Структурная схема БРК
Назначение ППУ ША1253
ППУ ША1253 предназначено для организации двухстороннего канала связи КА
с наземными станциями и должно выполнять следующие функции:
- осуществлять прием запросных сигналов, выделение цифровой информации ка¬
нала КПИ, выделение и регенерацию дальномерного сигнала;
- формировать ответный сигнал, частота которого формируется из частоты запро¬
сного сигнала (когерентный режим) или из частоты эталонного кварцевого гене¬
ратора (некогерентный режим);
- осуществлять модуляцию сигнала несущей частоты канала «Борт - Земля» циф¬
ровым потоком телеметрической и научной информации с использованием коди¬
рования (или без кодирования) и выдачу модулированного сигнала на УМ;
145
2-3
- осуществлять модуляцию сигнала несущей частоты сигналом измерения даль¬
ности и выдачу модулированного сигнала на УМ;
- обеспечивать передачу выделенного цифрового потока КПИ в БКТ;
- осуществлять сбор собственной цифровой телеметрической информации и вы¬
дачу ее в БКТ;
- принимать цифровые команды от БКТ на управление режимами ППУ.
Чувствительность ППУ ША1253 в режиме приема немодулированной несущей
не более минус 183 дБВт.
Чувствительность ППУ ША1253 в режиме приема КПИ в узкой полосе при скоро¬
сти 125 бит/с не более минус 166 дБВт.
Чувствительность ППУ ША1253 в режиме приема КПИ в узкой полосе при скоро¬
сти 500 бит/с не более минус 160 дБВт.
Чувствительность ППУ ША1253 в режиме приема КПИ в широкой полосе при
скорости 125 бит/с не более минус 158 дБВт.
Чувствительность ППУ ША1253 в режиме приема КПИ в широкой полосе при
скорости 500 бит/с не более минус 152 дБВт.
Чувствительность ППУ ША1253 в режиме измерения дальности не более минус
176 дБВт.
ППУ ША1253 выполнен в виде двух полукомплектов, один из которых всегда на¬
ходится в «холодном» резерве.
Мощность электропотребления ППУ ША1253 в дежурном режиме не более 10 Вт.
Мощность электропотребления ППУ ША1253 в сеансном режиме не более 12 Вт.
Масса ППУ ША1253 - (1,9 ± 0,095) кг.
Назначение БКТ МА315
БКТ МАЗ 15 предназначен для выполнения следующих функций:
- прием и дешифрации КПИ:
- передача принятой КПИ в БКУ;
- сбор и формирование телеметрии БРК;
- формирование собственного бортового времени;
- прием телеметрической и научной информации от телеметрической системы
(ТМС) и комплекса научной аппаратуры (КНА), формирование общего потока
ТМИ, в том числе и собственной диагностической информации;
- формирование импульсов релейных команд для БРК и других систем КА.
Для обмена с БКУ в БКТ используется магистральный последовательный интер¬
фейс (МПИ) с дублированием информационной магистрали в соответствии с ГОСТ
Р 52070-2003.
БКТ МАЗ 15 является контроллером шины на МПИ и выполняет следующие
функции:
- передача КПИ в БКУ;
- выдача запроса слова состояния, содержащего информацию о достоверности по¬
сылки КПИ в БКУ;
- прием слова состояния, содержащего информацию о достоверности посылки
КПИ из БКУ;
- выдача запроса на команду управления от БКУ;
- прием команды управления от БКУ;
- выдача запроса кода бортового времени в БКУ;
146
2-3
- прием кода бортового времени от БКУ для синхронизации собственного борто¬
вого времени.
Длина посылок - не более 512 бит.
Для обмена с КНА в БКТ МАЗ 15 используется интерфейс с низковольто¬
выми дифференциальными сигналами (LVDS) соответствующими стандарту
TIA/EIA-644A. Обмен осуществляется пакетами по 645 байт с частотой тактовой
синхронизации до 8 МГц.
Для обмена с ТМС в БКТ МАЗ 15 используется дублированный интерфейс RS-422.
Обмен информацией осуществляется методом двухсторонней поочередной передачи
информации со скоростью 115,2 кбит/с. Длина посылки от ТМС 515 байт, из которых
512 байт-ТМИ.
БКТ МАЗ 15 выполнен в виде двух полукомплектов, один из которых всегда на¬
ходится в холодном резерве.
Мощность электропотребления не более 2,5 Вт.
Масса БКТ МАЗ 15 - (2,9 ± 0,15) кг.
Назначение КРУ МА316
КРУ МАЗ 16 предназначено для выбора и включения приборов БРК, входящих
в них блоков и узлов (внутренняя реконфигурация), выбора режимов работы прибо¬
ров, сбора и выдачи в БКТ МАЗ 15 сигналов с телеметрических датчиков приборов
БРК.
Основные коммутации, осуществляемые в КРУ МАЗ 16, приходятся на выбор и
подачу питания на один из двух полукомплектов приемопередающих устройств, вы¬
бор и включение одного из двух полукомплектов усилителя мощности, выбор и вклю¬
чение одного из полукомплектов БКТ МАЗ 15.
Коммутация цепей питания дублированных полукомплектов приборов ППУ
ША1253, усилителя мощности и БКТ МАЗ 15 осуществляется в КРУ МАЗ 16 с по¬
мощью поляризованных реле.
Для формирования 32 релейных команд и для управления системами КА, посту¬
пающих непосредственно от БРК, используется матрица команд, сигналы управления
с которой передаются на исполнительные элементы, входящие в состав систем КА.
Масса КРУ МАЗ 16 не более 1,4 кг.
Назначение ПВУ МА317
ПВУ МАЗ 17 предназначено для восстановления работоспособности командной
радиолинии при отсутствии связи. Для восстановления работоспособности команд¬
ной радиолинии ПВУ выдает цикл управляющих команд на изменение конфигурации
аппаратуры БРК. Работоспособность командной радиолинии может быть восстанов¬
лена, если ее нарушение произошло по причине неисправности аппаратуры БРК.
Мощность электропотребления не более 7,5 Вт.
Масса ПВУ МАЗ 17 - (1,15 ± 0,06) кг.
Назначение усилителя мощности УМ8485-40
Усилитель мощности УМ8485-40 предназначен для усиления высокочастотного
сигнала ответного канала БРК в Х-диапазоне радиоволн. УМ8485-40 представля¬
ет собой твердотельный усилитель мощности и выполнен в виде дублированного
прибора.
147
2-3
УМ8485-40 функционально состоит из вторичного источника питания, четырех
последовательно включенных каскадов усилителя мощности и выходного каскада
усилителя мощности, выполненного по балансной схеме.
Выходная мощность не менее 40 Вт.
Мощность электропотребления не более 190 Вт.
Масса УМ8485-40 - (2,7 ±0,1) кг.
Назначение ДМ
ДМ предназначен для деления высокочастотной мощности с минимальными
потерями.
Мощность входного высокочастотного сигнала не более 20 Вт.
Ослабление между входными и выходными переходами не более 1,2 дБ.
Масса ДМ - (0,03 ± 0,003) кг.
Режимы работы БРК
По характеру работы в процессе эксплуатации БРК различают два режима:
- дежурный (ДР), в котором задействуются приборы, работающие в течение всего
времени активного существования изделия (приборы дежурного режима);
- сеансный (СР), в котором задействуются приборы, работающие в режиме перио¬
дического включения (приборы сеансного режима).
В дежурном режиме БРК осуществляет:
- приём в зоне радиовидимости КА КПИ с Земли от наземной станции, обработ¬
ку полученной информации, выделение из КПИ функциональных команд (ФК) и
управляющих кодовых слов (УКС) и выдачу их на исполнение в БРК;
- прием, декодирование и передачу КПИ с признаком “БКУ” в БКУ для использо¬
вания в других служебных системах и в научной аппаратуре;
- сбор и преобразование информации телеметрических датчиков приборов БРК;
- прием команд управления от БКУ и их исполнение;
- программно-временное управление переключением комплектов приборов БРК и
режимов работы в случае отсутствия связи;
- счет собственного бортового времени.
Сеансный режим включается по командам, поступающим от наземной станции
или БКУ. В сеансном режиме аппаратура БРК осуществляет:
- выполнение функций дежурного режима;
- приём в зоне радиовидимости КА запросных сигналов дальности, их регене¬
рацию и передачу ответных сигналов для обеспечения совместно с наземными
средствами измерений радиальной скорости и дальности до КА;
- формирование несущей частоты в радиолинии “Борт - Земля”, когерентной с за¬
просной несущей частотой (режим “Когерент”), или от собственного задающего
генератора (режим “Самоход”), для обеспечения совместно с наземными сред¬
ствами измерений радиальной скорости КА;
- передачу на Землю телеметрических кадров, формируемых из потоков ТМИ, по¬
ступающих в БРК от ТМС и КНА, а также собственной диагностической инфор¬
мации БРК;
- в нештатной ситуации (отсутствие ТМИ от ТМС и КНА в режиме передачи
ТМИ) - формирование и передачу на Землю аварийных телеметрических кадров
с собственной диагностической информацией о состоянии аппаратуры БРК.
148
2-3
По способу формирования несущей частоты ответного канала БРК различают сле¬
дующие режимы:
- «Когерент» - несущая частота ответного канала формируется с использованием
частоты запросного канала;
- «Самоход» - несущая частота ответного канала формируется без использования
частоты запросного канала, а с использованием дополнительного кварцевого
генератора.
По виду кодирования передаваемой ТМИ в БРК различают режимы:
- без кодирования;
- кодирование турбокодом;
- кодирование сверточным кодом.
По типу передаваемой информации БРК различают режимы:
- КПИ;
- ТМИ;
- измерение дальности.
Режим КПИ. Для передачи КПИ используется фазовая манипуляция поднесущей
частоты, в которй используется сигнал в виде меандра частотой 8 кГц. Тактовая ча¬
стота передачи КПИ: 125 Гц, 500 Гц, 1000 Гц, 2000 Гц. Индекс фазовой модуляции
поднесущей частоты 0°-180°. КПИ передается кадрами по 56 байт.
По назначению различают следующие типы кадров КПИ:
- кадры с УКС для БРК;
- кадры с ФК для БРК;
- кадры с УКС и ФК для БРК;
- кадры с массивами КПИ для БКУ;
- «холостые» кадры.
Перед передачей кадр КПИ рандомизируется. Затем, для повышения помехозащи¬
щенности, каждые 56 бит кадра защищаются кодом БЧХ(63,56) и превращаются в ко¬
довые блоки, после этого к массиву кодовых блоков добавляются стартовая (2 байта)
и завершающая последовательности (8 байт). Общая длина массива при передаче по
радиолинии составляет 74 байта (592 бита).
Режим ТМИ. В БРК для передачи ТМИ используется фазовая манипуляция не¬
сущей частоты двоичной цифровой последовательностью.
Для передачи информации с малыми скоростями используется поднесущая часто¬
та, которая модулируется информационными двоичными символами по фазе с ин¬
дексом модуляции ±90°. Сформированный модулирующий сигнал поступает на мо¬
дулятор передающего устройства, где осуществляется фазовая модуляция несущего
колебания с индексом 0°-90° или 0°-180°.
Телеметрическая и научная информация КА может передаваться в двух режимах
без избыточного кодирования и с использованием помехоустойчивого кодирования
(сверточное кодирование или кодирование турбокодом).
Используются помехоустойчивые коды со следующими характеристиками:
- сверточный код с параметрами: кодовое ограничение К=7, кодовая скорость
R=l/2;
- турбокод с параметрами: кодовая скорость R=l/3, размер блока 1784 бит.
149
2-3
Телеметрическая и научная информация КА, а также диагностическая информация
самого БРК передается на наземную станцию с помощью транспортного кадра, имею¬
щего одинаковую структуру и разную длину в зависимости от режима передачи ТМИ.
В БРК различают следующие режимы передачи ТМИ:
- совмещенная передача научной информации от КНА, ТМИ от ТМС и диагности¬
ческой информации самого БРК;
- совмещенная передача ТМИ от ТМС и диагностической информации самого БРК;
- передача диагностической информации самого БРК.
При передаче диагностической информации самого БРК длина транспортного ка¬
дра составляет 64 байта. При передаче научной информации от КНА и ТМИ от ТМС
совместно с диагностической информацией БРК длина транспортного кадра состав¬
ляет 223 байта.
Для передачи информации от КНА, ТМС и собственной диагностической инфор¬
мации БРК используется временное уплотнение пакетов данных с формированием
транспортных кадров, которые непрерывно следуют друг за другом. Скорость пере¬
дачи ТМИ может быть от 128 бит/с до 4194304 бит/с.
Режим измерения дальности. Для измерения дальности используются фазовые
методы, при которых дальность определяется путем измерения разности фаз между
излученным и принятым дальномерными сигналами.
Дальномерный сигнал представляет собой набор меандровых колебаний, наивыс¬
шая частота которых определяет точность измерения, а наименьшая - максимальную
измеряемую дальность. При частоте точной шкалы 300 кГц обеспечивается точность
измерения дальности 20 метров, а при частоте точной шкалы 1,2 МГц - 10 метров.
Дальномерные сигналы, модулирующие по фазе несущее колебание «Земля - Борт»,
демодулируются в БРК, далее осуществляются регенерация дальномерного сигнала
и дальнейшая модуляция им несущей частоты ответного канала.
Измерение радиальной скорости по доплеровскому сдвигу частоты несущей сиг¬
нала возможно при передаче любой информации в ответном канале.
Совмещение режимов работы БРК.
БРК может обеспечивать одновременное выполнение следующих функций:
- прием КПП и передача ТМИ;
- выполнение режимов измерения дальности и радиальной скорости;
- прием КПП и выполнение режима измерения радиальной скорости;
- прием КПП, передача ТМИ и выполнение режима измерения радиальной
скорости.
Функционирование БРК в различных режимах работы
Включение БРК в дежурном режиме осуществляется подачей стабилизированно¬
го электропитания от СЭС.
СЭС подает питание на БРК с момента отделения КА от носителя по срабатыва¬
нии контактов отделения.
Время готовности БРК для работы в дежурном режиме при первой подаче пита¬
ния на БРК и при переключении полукомплектов ППУ - не более 5 минут.
Время готовности БРК после включения сеансного режима - не более 10 секунд.
Для управления БРК используется до 14 ФК и до 45 УКС, в том числе ряд команд
может выдаваться от БКУ.
БРК выдает до 32 разовых команд управления в системы КА.
150
2-3
Организация вхождения в связь с НКУ
Вхождение в связь может осуществляться:
- по инициативе НКУ - путем подачи ФК и УКС на включение УМ и задания необ¬
ходимого режима передачи в ответном канале. Время вхождения в связь не более
10 секунд.
- по инициативе БКУ - путем выдачи команды на включение УМ и задания не¬
обходимого режима передачи в ответном канале. Время вхождения аналогично
приведенному выше.
В случае отсутствия вхождения в связь в течение заданного времени начинает
работать ПВУ для восстановления рабочей конфигурации БРК.
Завершение сеанса связи с НКУ осуществляется подачей ФК от НКУ либо по ко¬
манде от БКУ.
Список литературы
Автоматические космические аппараты для фундаментальных и прикладных
научных исследований / Под общ. ред. Г.М. Полищука, К.М. Пичхадзе. М., Изд-во
МАИ-ПРИНТ, 2010, 659 с.
Асмус и др. Развитие космического комплекса гидрометеорологического обеспе¬
чения на базе геостационарных спутников серии «ЭЛЕКТРО-JT» // Вестник НПО
им. С.А. Лавочкина. 2012. № 1. С .3-14.
Кардашев Н.С., Алакоз А.В. и др. «Радиоастрон»: итоги выполнения научной про¬
граммы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016. № 3.
С. 4-24.
Моишеев А.А., Бабышкин В.Е. и др. Проектная конференция космического аппара¬
та «СПЕКТР УФ» // Вестник НПО им. С.А. Лавочкина. 2014. № 5. С. 15-20.
Расторгуев А.С., Сачков М.Е., Заболотских М.В. Галактическая астрономия в уль¬
трафиолете // Вестник НПО им. С.А. Лавочкина. 2016. № 3. С. 38-47.
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
Шустов Б.М., Сачков М.Е. Боярчук А.А. и др. Космические перспективы изучения
ультрафиолетовой Вселенной: проект «СПЕКТР-УФ» // Вестник НПО им. С.А. Ла¬
вочкина. 2014. № 5. С. 4-15.
А.Ю. Русанов
НПО им. С.А. Лавочкина
151
ЕЕ! АНТЕННО-ФИДЕРНАЯ СИСТЕМА
МНОГОФУНКЦИОНАЛЬНОЙ
КОСМИЧЕСКОЙ
ПЛАТФОРМЫ «НАВИГАТОР»
В составе МКП «НАВИГАТОР» КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р» (Карда-
шее Н.С., Алакоз А.В. и др.. 2016; Асмус и др., 2012) используется антенно-фидерная
система (АФС) бортовой аппаратуры командно-измерительной системы (БА КИС),
работающая в С-диапазоне частот. АФС БА КИС этих КА аналогичны и различают¬
ся лишь ориентацией малонаправленных антенн (МНА), конструкциями механизмов
выноса и штанг МНА, а также длиной коаксиальных кабелей.
АФС БА КИС в составе КА «ЭЛЕКТРО-Л» № 1 эксплуатировалась на орбите
в течение 5 лет и 9 месяцев. К настоящему времени АФС БА КИС в составе КА
«СПЕКТР-Р», а также в составе КА «ЭЛЕКТРО-Л» эксплуатируется на орбите около
6 лет.
Аналогичная АФС БА КИС используется в составе КА «ЭЛЕКТРО-Л» № 3 и
КА «АРКТИКА-М», запуск которых запланирован на ближайшее время (Степа¬
нов В.В, 2016).
2.4.1. Состав, функционирование, конструкция
и основные параметры АФС БА КИС
В состав АФС БА КИС входят:
- приемное антенно-фидерное устройство (АФУ):
- передающее АФУ.
Функциональная схема приемного АФУ приведена на рисунке 2.4.1.
Две приемные МНА ориентированы по осям «+Х» и «-Х» МКП «НАВИГАТОР».
Каждая МНА обеспечивает прием в полусфере радиоволн эллиптической поляри¬
зации с левым направлением вращения векторов электромагнитного поля. От двух
МНА радиочастотные сигналы поступают на входы двух включенных приемных
устройств: ПРМ1 и ПРМ2. Таким образом, обеспечивается прием радиоволн в сфере
при любой ориентации КА. Третье приемное устройство находится в «холодном»
резерве.
Балансные делители мощности ДМБ1, ДМБ2 и переключатель ПВ2 обеспечивают
передачу радиочастотных сигналов на вход резервного приемного устройства ПРМЗ.
В исходном (первом) положении переключателя ПВ1 МНА+Х подключена к при¬
емному устройству ПРМ1, а МНА-Х - к приемному устройству ПРМ2. Во втором по¬
ложении переключателя ПВ 1 МНА+Х подключена к приемному устройству ПРМ2,
а МНА-Х - к приемному устройству ПРМ1.
Для выявления отказов приемных устройств ПРМ1 и ПРМ2 путем контроля про¬
хождения команд один раз в сутки по командам от бортового комплекса управления
(БКУ) выполняется переключение ПВ1 во второе положение и обратно.
После выявления отказа приемного устройства ПРМ1 по командам от наземного
комплекса управления (НКУ) включается приемное устройство ПРМЗ, а переключа¬
тель ПВ2 устанавливается во второе положение. При этом к приемному устройству
ПРМЗ подключается МНА+Х.
152
2-
МНА+Х
МНА-Х
КПРМ1
л
5
ФР1
УС1
1 J
1
УС2
J
•
i
т
Т
КВП1
КВП2
упр тм
кПРМЗ
МНА - антенна малонаправленная
УС - устройство согласующее
ФР - фильтр режекторный
ПВ - переключаетель волновой
ДМБ - антенна малонаправленная
КВП - коаксиально-волновой переход
НС - нагрузка согласования
1-9 - коаксиальные кабели
Рисунок 2.4.1. Функциональная схема приемного АФУ
КВП5
ДМ 62
0
I
к ПРМ2
153
При отказе двух приемных устройств (ПРМ1 и ПРМ2) требуемая МНА подклю¬
чается к приемному устройству ПРМЗ выбором соответствующего положения пере¬
ключателя ПВ2, при этом обеспечивается прием радиоволн в одной полусфере. Сле¬
дует отметить, что в этой ситуации обеспечивается резервирование ПВ (подключение
любой МНА к приемному устройству ПРМЗ может осуществляться как переключе¬
нием ПВ2, так и переключением ПВ1).
Требуемое ослабление в фидерных трактах приемного АФУ (не менее 50 дБ) в ди¬
апазоне частот зеркального канала обеспечивается использованием двух режектор-
ных фильтров - ФР1 и ФР2.
Требуемое ослабление в фидерных трактах приемного АФУ (не менее 90 дБ)
в диапазоне частот передачи обеспечивается использованием отрезков запредельных
волноводов в режекторных фильтрах ФР1 и ФР2, переключателях волноводных ПВ1
и ПВ2 и в коаксиально-волноводных переходах КВП1 - КВП8.
Функциональная схема передающего АФУ приведена на рисунке 2.4.2.
Передающие МНА ориентированы по осям «+Х» и «-Х» МКП «НАВИГАТОР».
Каждая МНА обеспечивает излучение в полусфере радиоволн эллиптической поля¬
ризации с правым направлением вращения векторов электромагнитного поля.
Входы передающего АФУ подключены к выходам трех передающих устройств БА
КИС. Подключение любой МНА к выбранному передающему устройству происходит
переключателями-фильтрами ПФ1 и ПФ2.
Управление каждым ПФ осуществляется по командам, поступающим на ПФ через
блок управления антенным переключателем (БУАП) от БКУ или от НКУ через БА КИС.
БКУ выдает на БУАП команды управления ПФ по результатам расчета угла между
осью «+Х» МКП «НАВИГАТОР» и направлением на НКУ во всех штатных режимах
ориентации КА.
В нештатных ситуациях переключение МНА осуществляется от НКУ по разовым
командам непосредственного исполнения.
Использование в передающем АФУ переключателя ПФ1 типа «Два направления-
два положения (2Н2П)» позволяет реализовать функциональное резервирование это¬
го переключателя. Например, переключатель ПФ1 находится в первом положении и
не переключается во второе положение. При этом для работы через МНА+Х тре¬
буется включить передающее устройство ПРД1, а для работы через МНА-Х нужно
включить передающее устройство ПРДЗ.
Требуемое ослабление в фидерных трактах передающего АФУ (не менее 40 дБ)
в диапазоне частот второй гармоники сигнала передающего устройства обеспечива¬
ется использованием полосовых фильтров ФП1 и ФП2, а также переключателей -
фильтров ПФ1 и ПФ2.
Требуемая величина ослабления между входами передающего АФУ и выходами
приемного АФУ обеспечивается за счет ослабления в фидерных трактах и ослабления
между входами передающих МНА и выходами приемных МНА.
Согласующие устройства УС1 - УС4 используются для настройки АФС БА КИС
по коэффициенту стоячей волны (КСВ) на входах передающего АФУ и на выходах
приемного АФУ.
154
отПРДЗ от ПРД1
МНА - антенна малонаправленная
УС - устройство согласующее
ФП - фильтр полосовой
ПФ - переключаетель-фильтр
10-17 - коаксиальные кабели
МНА-Х
ОТПРД2
Рисунок 2.4.2. Функциональная схема передающего АФУ
Таблица 2.4.1. Основные параметры АФС БА КИС МКП «НАВИГАТОР»
для КА «ЭЛЕКТРО-Л»
наименование параметра АФС
значение параметра
достигнутое
требуемое
КСВ на выходах приемного АФУ
в диапазоне частот (5747±22) МГц, не более
1,5
1,6
КСВ на входах передающего АФУ
в диапазоне частот (3405±16) МГц, не более
1,36
1,5
ослабление в каналах приемного АФУ, дБ, не менее:
- в диапазоне частот зеркального канала (5327±25) МГц;
- в диапазоне частот (3405±16) МГц, дБ, не менее
62
110
50
90
ослабление в каналах передающего АФУ, дБ, не менее:
- в диапазоне частот второй гармоники (6810±32) МГц;
- в диапазоне частот (5747±22) МГц, не менее
100
102
40
90
ослабление со входов передающих каналов
до выходов приемных каналов, дБ, не менее:
- в диапазоне частот (5747±22) МГц;
- в диапазоне частот (3405±16) МГц;
- в диапазоне частот зеркального канала (5327±25) МГц
141
149
120
120
60
КУ каждой приемной МНА в секторе углов (±90)°
с учетом ослабления в фидерном тракте, поляризационных
потерь и влияния конструкции КА, не менее
0,053
0,05
КУ каждой передающей МНА с учетом ослабления
в фидерном тракте, поляризационных потерь
и влияния конструкции КА:
- в секторе углов (±90)°, не менее;
- в секторе углов (±10)° для МНА+Х, не менее
0,22
1,17
0,2
1,0
масса АФС, кг, не более
14,5
16
Приемная и передающая МНА, ориентированные по оси «+Х» КА, закреплены
в рабочем положении на штанге, установленной на модуле полезной нагрузки (ПН)
(рисунок 2.4.3). На этой же штанге установлены согласующие устройства приемного
и передающего каналов.
Приемная и передающая МНА, ориентированные по оси «-Х» МКП
«НАВИГАТОР», установлены на механизме выноса антенн (рисунок 2.4.4).
В транспортном положении штанга с МНА зачекована на конструкции МКП
«НАВИГАТОР». После подрыва пирочеки механизм выноса антенн разворачи¬
вает штангу с антеннами против часовой стрелки на угол, равный 90°, и фикси¬
рует штангу в этом положении.
156
Рисунок 2.4.3. Размещение МНА по оси «+Х»
Согласующие устройства приемного и передающего каналов установлены на кор¬
пусе МКП «НАВИГАТОР» (рисунок 2.4.4).
Элементы фидерных трактов приемного и передающего АФУ закреплены на пли¬
те, установленной на внутренней стороне боковой стенки МКП «НАВИГАТОР» (ри¬
сунок 2.4.5). Там же установлены два БУАП.
2.4.2. Составные части АФС БА КИС
В качестве приемных и передающих МНА используются двухзаходные эквиу-
гольные конические спиральные антенны.
Традиционно для аналогичных космических радиолиний в Р-, L- и S- диапазонах
частот используют двухзаходные конические спиральные антенны с противофазным
возбуждением двух ветвей спирали в области вершины конуса. Размеры конуса и
угол подъема спиральных излучателей подбирают так, чтобы обеспечить область су¬
ществования волны Т_ь имеющей осевое излучение в сторону вершины конуса. При
этом диаграмма направленности (ДН) антенны имеет форму, плавно спадающую от
максимума (.Пригода Б.А., 2012). Такие антенны имеют небольшие размеры и про¬
стую систему питания.
В АФС БА КИС используются двухмодовые эквиугольные конические спираль¬
ные антенны. Размеры конической спиральной структуры выбраны так, чтобы в ней
могли существовать два типа волн: Т.\ и Т+1. Согласно {Юрцев О.А., Рунов А.В., Ка¬
зарин А.Н., 1974) волна T_i создает поле излучения в направлении вершины конуса,
а волна типа T+! - в противоположную сторону. Отражатель переизлучает волну Т+1
в переднюю полусферу.
157
Рисунок 2.4.4. Механизм выноса антенн в транспортном положении
Подбором положения отражателя обеспечивается увеличение ширины диаграммы
направленности и получение формы диаграммы направленности, близкой к столоо¬
бразной. При этом обеспечивается существенное увеличение коэффициента усиле¬
ния антенны в передней полусфере и уменьшение уровней ДН в задней полусфере по
сравнению с одномодовой антенной с волной T_i.
На рисунке 2.4.6 приведена ДН приемной МНА на частоте 5747 МГц.
На рисунке 2.4.7 изображена ДН передающей МНА на частоте 3405 МГц.
Приемная и передающая МНА показаны на рисунке 2.4.8.
Противофазное питание двух спиральных излучателей обеспечивается использо¬
ванием щелевого симметрирующего устройства, аналогичного {Бычков В.П., Калу¬
гин Н. К, Уваров С.Б., 1981).
Требуемая для С-диапазона частот точность изготовления спиральных излучате¬
лей МНА обеспечивается использованием гибких печатных плат из фольгированного
стеклотекстолита толщиной 0,12 мм, изготовленных методом фотолитографии (рису¬
нок 2.4.9). Печатная плата со спиральными излучателями приклеивается на кониче¬
ский каркас из стеклотекстолита.
На отражателях приемной и передающей МНА установлены вибраторные ан¬
тенны-зонды длиной близкой к четверти длины волны, которые обеспечивают связь
БА КИС с контрольно-проверочной аппаратурой для комплексных испытаний МКП
«НАВИГАТОР» и КА (рисунок 2.4.8).
158
Рисунок 2.4.5. Размещение элементов фидерных трактов
Таблица 2.4.2. Основные параметры МНА АФС БА КИС
значение параметра МНА
наименование
параметра
приемная
МНА
(5747±22) МГц
передающая
МНА
(3405±16) МГц
КУ в секторе углов (±90)°, не менее
минус 1,87
минус 1,87
КЭ в секторе углов (±90)°, не менее
0,4
0,4
КСВ на входе МНА, не более
1,2
1,2
КСВ на входе антенны-зонда, не более
1,6
1,6
ослабление с входа МНА
до входа антенны-зонда, дБ
от 20 до 35
от 20 до 35
масса, кг, не более
0,16
0,28
Переключатель-фильтр выполнен с использованием управляемых фильтров ана¬
логичных (Власов Е.Л., 1981) и сочетает в себе одновременно функции переключате¬
ля типа 2Н2П и полосового фильтра.
В отличие от переключателя {Власов Е.А., 1981), расстройка фильтров осущест¬
вляется введением в полость фильтра диэлектрических втулок соосных со стержне¬
выми резонаторами.
159
2-
Рисунок 2.4.6. Диаграмма направленности приемной МНА
Рисунок 2.4.7. Диаграмма направленности передающей МНА
160
Рисунок 2.4.8. Приемная и передающая МНА
Переключатель-фильтр (рисунок 2.4.10) выполнен в виде четырех гребенчатых
фильтров на стержневых резонаторах, расположенных в корпусе, имеющем коль¬
цевую полость прямоугольного сечения. Соседние фильтры имеют общие входные
трансформаторы, подсоединенные к четырем радиочастотным соединителями, уста¬
новленным на торцевой стенке корпуса. Эти радиочастотные соединители являются
входами (выходами) ПФ.
В процессе сборки переключателя-фильтра каждый из четырех гребенчатых
фильтров настраивается для получения минимальных значений КСВ и ослабления
в рабочем диапазоне частот путем изменения нагрузочных емкостей.
Переключатель-фильтр функционирует следующим образом. В первом положе¬
нии переключателя-фильтра в полость двух противоположно расположенных филь¬
тров (позиции 2 на рисунке 2.4.2, обозначены пунктирными линиями) введены ди¬
электрические втулки, смещающие полосу пропускания этих фильтров в область
высоких частот и обеспечивающие большое значение ослабления фильтров (пози¬
ция 2) в рабочем диапазоне частот. При этом радиочастотные сигналы передаются
через фильтры (позиция 1) (обозначены сплошными линиями), имеющие небольшое
значение ослабления в рабочем диапазоне частот.
Для переключения во второе положение диэлектрические втулки выводятся из по¬
лостей фильтров (позиция 2), а другие диэлектрические втулки одновременно вво¬
дятся в полость фильтров (позиция 1). После переключения радиочастотные сигналы
передаются через фильтры поз. 2, имеющие небольшое значение ослабления в рабо¬
чем диапазоне частот.
I
161
Рисунок 2.4.9. Печатные платы со спиральными излучателями
В качестве исполнительного органа для перемещения диэлектрических втулок ис¬
пользуется соленоид и рычажно-пружинный механизм, который вместе с упорами
обеспечивает два устойчивых положения переключателя-фильтра. Изменение на¬
правления перемещения сердечника соленоида обеспечивается использованием двух
обмоток соленоида со встречной намоткой и подачей управляющего импульса на со¬
ответствующую обмотку..
В качестве ТМ-датчиков положений переключателя-фильтра используются контак¬
ты магнитоуправляемые герметизированные типа КЭМ-2, переключаемые постоян¬
ным магнитом, установленным на механизме перемещения диэлектрических втулок.
Волноводный переключатель (рисунок 2.4.10) выполнен по классической схеме
в виде двигателя постоянного тока, в статоре которого симметрично расположены
четыре неподвижных отрезка волновода с фланцами снаружи, а в роторе - два изо¬
гнутых на 90° волновода, которые при развороте ротора на 90° переключают каналы.
Два устойчивых положения волноводного переключателя обеспечиваются упорами и
пружинным механизмом. Изменение направления вращения ротора обеспечивается
использованием двух обмоток статора со встречной намоткой и подачей управляю¬
щего импульса на соответствующую обмотку.
В качестве ТМ-датчиков положений волноводного переключателя используются
контакты магнитоуправляемые герметизированные типа КЭМ-2, переключаемые по¬
стоянным магнитом, установленным на роторе.
В качестве балансного делителя мощности используется коаксиально-щелевой
мост аналогичный (Фрадин А.З., Рыжков Е.В., 1972). В отличие от (Фрадин А.З.,
Рыжков Е.В., 1972), продольные щели на внешнем проводнике внутренней коакси¬
альной линии передачи в нашем случае выполнены длиной близкой к половине длины
волны, что позволило существенно расширить рабочий диапазон частот. Кроме того,
в отличие от аналога, входы для синфазного и противофазного деления выполнены со¬
осно. На свободном выходе делителя мощности установлена согласованная нагрузка.
Делитель мощности и его внутренняя часть показаны на рисунке 2.4.8.
2-
I
Рисунок 2.4.10. Переключатель-фильтр, переключатель волноводный и делитель мощности
Таблица 2.4.3. Основные параметры переключателей АФС БА КИС
наименование
параметра
значение параметра переключателя
переключатель
волноводный
(5747±22) МГц
переключатель-
фильтр
(3405±16) МГц
ослабление в подключенных каналах, дБ, не более
0,2
0,5
ослабление в отключенных каналах, дБ, не менее
35
30
КС В подключенного канала, не более
1,1
1,1
время переключения, с, не более
0,4
1,0
длительность управляющего импульса, мс
350±50
60±10
масса, кг, не более
1,05
0,97
163
2-
Таблица 2.4.4. Основные параметры балансного делителя АФС БА КИС
наименование параметра
значение параметра
делителя мощности
КСВ в диапазоне частот (5747±22) МГц, не более
1,2
Ослабление в каждом канале в диапазоне частот (5747±22)
МГц, дБ, не более
3,3
масса, кг, не более
0,275
1
Режекторный фильтр выполнен в виде отрезка волновода с ключенными последо¬
вательно короткозамкнутыми шлейфами {Sestroretsky В. V., Kustov V.Yu., Klimov K.N.,
Shepelev Yu.О., 1994) и (Рученков В.А., Камышев Т.В., Климов КН., Сестрорец-
кий Б.В., Белостоцкая КК, 2004).
В качестве полосового фильтра используется гребенчатый фильтр на стержневых
резонаторах аналогичный (Власов Е.А.,\91\).
Фильтры приведены на рисунке 2.4.11.
Рисунок 2.4.11. Фильтры
164 /
2-
Таблица 2.4.5. Основные параметры фильтров АФС БА КИС
наименование
параметра
значение параметра
фильтра
фильтр полосовой
КСВ в полосе пропускания (3405±16) МГц,
не более
1,15
ослабление в полосе пропускания (3405±16) МГц, дБ,
не более
0,3
ослабление в полосе запирания (5747±22) МГц, дБ,
не менее
55
ослабление в полосе запирания (6810±32) МГц, дБ,
не менее
66
Масса, кг, не более
0,14
фильтр режекторный
КСВ в полосе пропускания (5747±22) МГц,
не более
1,1
ослабление в полосе пропускания (5747±22) МГц, дБ,
не более
0,1
ослабление в полосе запирания(5327±25) МГц, дБ,
не менее
74
масса, кг, не более
0,18
Согласующее устройство (рисунок 2.4.12) выполнено в виде линии передачи,
имеющей участки с разным сечением. Средний участок имеет внешний прово¬
дник прямоугольного сечения и внутренний проводник круглого сечения, при¬
чем внутренний проводник смещен к одной узкой стенке, а в другой (удаленной)
стенке выполнена продольная щель. Крайние участки выполнены в виде сим¬
метричной коаксиальной линии передачи, с радиочастотными соединителями
на концах.
Внутри согласующего устройства установлены два элемента настройки - два
поршня, хвостовики которых выведены наружу через продольную щель. Каждый
поршень выполнен с пружинами, обеспечивающими контакт с корпусом согласую¬
щего устройства.
Хвостовик каждого поршня закреплен на каретке. Каретка установлена на ходо¬
вом винте, закрепленном на корпусе согласующего устройства. Вращением ходового
винта обеспечивается продольное перемещение каретки с поршнями. Кроме того, на
каретке установлены два винта, вращением которых изменяется глубина погружения
поршней.
Таким образом, каждый поршень образует в линии передачи участок длиной, рав¬
ной четверти длины волны с регулируемым волновым сопротивлением и регулируе¬
мым положением вдоль линии передачи.
После настройки АФС БА КИС поршни контрятся к корпусу винтами и клеем,
а детали механизмов перемещения снимаются; затем на согласующее устройство
устанавливается защитная крышка.
Согласующие устройства для приемного и передающего АФУ имеют одинаковую
конструкцию и отличаются лишь размерами (рисунок 2.4.12).
165
2-
■
Рисунок 2.4.12. Согласующие устройства
Таблица 2.4.6. Основные параметры согласующих устройств АФС БА КИС
наименование
значение параметра
согласующего устройства
параметра
(5747±22) МГц
(3405±16) МГц
собственный КСВ, не более
1,1
1,1
вносимый КСВ, не менее
2,4
2,4
масса, кг, не более
0,121
0,149
В приемном АФУ используются два типа коаксиально-волноводных переходов.
Один тип перехода состоит из короткозамкнутого отрезка прямоугольного волново¬
да и отрезка коаксиальной линии с радиочастотным соединителем, расположенной
перпендикулярно широкой стенке волновода. Внутренний проводник коаксиальной
линии выходит в полость волновода, образуя штыревой излучатель. Этот тип коакси¬
ально-волноводного перехода выполнен аналогично (Ronde F.C. de, 1988).
Другой тип перехода состоит из короткозамкнутого отрезка прямоугольного вол¬
новода, на короткозамкнутой стенке которого установлена соосно с волноводом ко¬
аксиальная линия с радиочастотным соединителем . Внутри волновода размещен
ступенчатый брусок, один конец которого крепится к широкой стенке волновода,
166
Рисунок 2.4.13. Коаксиально-волноводные переходы и коаксиальные кабели
а к другому концу подсоединен центральный проводник коаксиальной линии. Сту¬
пеньки бруска параллельны широкой стенке волновода. Этот тип коаксиально-вол¬
новодного перехода выполнен аналогично {Ивацуки Хадзимэ, Фудзицу К.К., 1989).
КСВ обоих типов коаксиально-волноводных переходов в диапазоне частот
(5747±22) МГц не более 1,08.
Масса первого типа перехода не более 0,165 кг, а второго - не более 0,188 кг.
Коаксиально-волноводные переходы показаны на рисунке 2.4.13.
В коаксиальных кабелях приемного и передающего АФУ используется полужест-
кий радиочастотный кабель типа РК 50-7-47. По сравнению с аналогами, производи¬
мыми в РФ для использования в открытом космосе, этот тип кабеля имеет наимень¬
шие массу и ослабление.
В качестве гибких секций на механизме выноса антенн используется гибкий ради¬
очастотный кабель типа РК 50-7-416.
Некоторые типы коаксиальных кабелей приведены на рисунке 2.4.13.
В комбинированных коаксиальных кабелях с гибкой вставкой полужесткий и гиб¬
кий радиочастотные кабели соединяются посредством неразъемного соединителя
(рисунок 2.4.13).
В коаксиальных кабелях используются прямые и угловые радиочастотные соеди¬
нители с присоединительными размерами тип III по ГОСТ 13317-89, разработанные
и изготавливаемые в НПО им. С.А. Лавочкина.
Список литературы
Асмус и др. Развитие космического комплекса гидрометеорологического обеспе¬
чения на базе геостационарных спутников серии «ЭЛЕКТРО-Л» // Вестник НПО
им. С.А. Лавочкина. 2012. № 1. С .3-14.
Бычков В.П., Калугин Н.Н., Уваров С.Б. Симметрирующее устройство // А.с. 881907
СССР, 1981. Бюл. №42.
Власов Е.А. Бесконтактный переключатель//А.с. 878121 СССР, 1981.
Власов Е.А. Волноводный фильтр // А.с. 312556 СССР, 1971.
Ивацуки Хадзимэ, Фудзицу К.К. Коаксиально-волноводный переход // Заяв¬
ка 1202001, Япония. Опубл. 15.08.1989 // Кокай токкё кохо. Сер. 7(3). 1990. 198.
С. 1-5.
167
2-
■
Кардашев Н. С., Алакоз А.В. и др. «РАДИОАСТРОН»: итоги выполнения научной
программы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016.
№ 3. С. 4-24.
Пригода Б.А. История развития спиральных антенн в НПО им. С.А. Лавочкина/
Вестник ФГУП НПО им. С.А. Лавочкина, 2012. № 2. С. 52-58.
Рученков В.А., Камышев Т.В., Климов КН., Сестрорецкий Б.В., Белостоц-
кая К.К. II Проектирование режекторных волноводных фильтров для диплексера
станции «Индия». М.: ОКБ МЭИ, Радиотехнические тетради, № 30, 2004. С. 20-23.
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
Фрадин А.З., Рыжков Е.В. Измерения параметров антенно-фидерных устройств/
М.: Связь, 1972. С. 70-71.
Юрцев О. А., Рунов А.В., Казарин А.Н. Спиральные антенны //М.: Советское ра¬
дио, 1974. С. 164-173.
Ronde F.C. de, Ideal W.G. to transmition using a F.D.M. monopole // IEEE MTT Int.
Microwave Symp. Dig., New York, N.Y., May 25-27, 1988. Vol. 2. -New York (N.Y.).
1988.- P.591-594.
Sestroretsky B.V., Kustov V.Yu., Klimov K.N., Shepelev Yu.O. Limit theortms and new
technology of design of microwave filtres. // Pros, of 27th Conference on Antennas Teory
and Technologe - (ATT 94), Moscow, Russia, 23-25 August, 1994. P. 441-445.
В.П. Бычков, A.M. Лысиков, Н.И. Снопок,
A.B. Погонышев, С.В. Протасов
НПО им. С.А. Лавочкина
168
К8ЯТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА
На три первые платформы «НАВИГАТОР» для космических аппаратов
«ЭЛЕКТРО-Л» № 1, «СПЕКТР-Р» и «ЭЛЕКТРО-Л» № 2 были установлены теле¬
метрические системы {Степанов В.В., 2016; Кардаьиев Н.С., Алакоз А.В. и др., 2016;
Расторгуев, А.С. Сачков М. Е., Заболотских М. В., 2016; Моишеев А. А., Бабышкин В.Е.
и др., 2014; Шустов Б.М., Сачков М.Е. Боярчук А.А. и др., 2014):
- ТМС-Э ЦВИЯ.468219.004 (КА «ЭЛЕКТРО-Л» № 1),
- ТМС-Р ЦВИЯ.468219.003 (КА «СПЕКТР-Р» и КА «ЭЛЕКТРО-Л» № 2) {Авто¬
матические космические..., 2010).
Модули системы выполнены в едином монолитном конструктиве и представля¬
ют собой моноблок. Соединители расположены на одной стороне модуля. Печатные
платы располагаются внутри единого корпуса. Электрические цепи на соединители
и межплатные соединения выполнены проводами внутри модуля.
Состав систем ТМС-Р и ТМС-Э приведен в таблицах 2.5.1 и 2.5.2, внешний вид
модулей - на рисунке 2.5.1.
Таблица 2.5.1. Состав системы ТМС-Р ЦВИЯ.468219.003
№
наименование
прибора
децимальный
номер
условное
обозначение
кол-во
I
базовый модуль
ЦВИЯ.468369.019
ТМС-Б
1
2
подсистема сбора данных
полезной нагрузки
ЦВИЯ.468369.020
ПСДПН
1
3
модуль сопряжения
с радиокомплексом
ЦВИЯ.468369.021
МС РК
1
4
подсистема контроля
температурного режима
ЦВИЯ.468369.022
ПКТР
1
5
комплект кабелей
ЦВИЯ.468921.072
1
Таблица 2.5.2. Состав системы ТМС-Э ЦВИЯ.468219.004
наименование
прибора
децимальный
номер
условное
обозначение
кол-во
1
базовый модуль
ЦВИЯ.468369.019
ТМС-Б
1
2
подсистема контроля
температурного режима
ЦВИЯ.468369.022
ПКТР
1
3
подсистема сбора данных
полезной нагрузки
ЦВИЯ.468399.023
ПСДПН-Э
1
4
модуль сопряжения
с радиокомплексом
ЦВИЯ.468369.024
МС РК-Э
1
5
комплект кабелей
ЦВИЯ.468921.055
1
169
Рисунок 2.5.1. Внешний вид модулей систем ТМС-Э, ТМС-Р
Телеметрические системы, устанавливаемые на платформу «НАВИГАТОР»,
предназначены для решения следующих задач:
- сбор информации с сигнальных, аналоговых и температурных датчиков;
- сбор информации с цифровых температурных датчиков и цифровых датчиков
давления;
- прием массива цифровой информации (МЦИ) от бортового комплекса управле¬
ния (БКУ) космического аппарата (КА) по магистральному последовательному
интерфейсу (МПИ);
- прием массивов цифровой информации от источников цифровых массивов
(ИЦМ) систем полезной нагрузки и комплекса научной аппаратуры;
- выдача в БКУ КА кодов параметров бортовых систем по МПИ в режиме выдачи
данных (ВД);
- запоминание телеметрической информации (ТМИ) в виде ТМ-кадров в линейном
статическом запоминающем устройстве (ЛСЗУ) и кольцевом статическом запо¬
минающем устройстве (КСЗУ);
- воспроизведение ТМИ из ЛСЗУ и КСЗУ;
- формирование кадров ТМ-информации и передача в бортовую аппаратуру ко¬
мандно-измерительной системы (БА КИС) или - по запросу - в бортовой радио¬
комплекс (БРК);
- непосредственная передача ТМ-информации в структуре БИТС-2Т на аппаратуру
автоматизированного испытательного комплекса в коде нулей и коде единиц
2-5
Функциональные схемы системы ТМС-Э и ТМС-Р приведены на рисунке 2.5.2
и 2.5.3 соответственно.
БАКИС
БКУ
«метка 1 с»
РКУ
I о
МСРК-Э
мпи
Т емп ерату рные датчи ки
64(2пр.),64 (4 п р.)
ТМС-Б
МПИ
10=04
Температурные
датчики 32(2 пр.),
32(4пр'
27В
Л2 <0
^ i|
^ S
° Z
4|
Аналоговые
датчики (64)
ТМпоНЧ
Аналоговые
датчики (128)
И_ЦМ СКЭ
Темпер ату рные датч и ки
3x32 (4 пр.)
Дискретные датчи ки
(192)
Рисунок 2.5.2. Функциональная схема системы ТМС-Э
171
2-5
БАКИС
мпи
)<=>!
БКУ
«метка 1 с»
РКУ
si
i 5
МСРК
Т емп ерату рные датчи ки
64(2пр.),64(4пр.)
27В
ТМС-Б
МПИ
27В
Температурные
датчики 32 (4 пр.)
11
JL1
га
s о
н сч
ПКТР
S m ч
i 00 ^
f со
Р о
псдпн
/ч /ч /ч /ч /ч /ч
a
m (О
$ й
X
. А) 5
> О*
bfi S
° Z
а!
Аналоговье
датчики (64)
ТМпоНЧ
Аналоговые
датчики(128)
ИЦМ Н-мазер
ИЦМ ПРМ 1,35
ИЦМ ССНИ-2
ИЦМСКЭ
Тем п ер ату рные датч и ки
Зх 32 (4пр.)
Дискретные датчи ки
(384)
Рисунок 2.5.3. Функциональная схема системы ТМС-Р
Базовый модуль телеметрической системы (ТМС-Б) функционально представляет
собой основное устройство систем ТМС-Э и ТМС-Р, выполняющее функции по фор¬
мированию выходного ТМ-кадра системы, опросу датчиков, управлению режимами
работы ТМ-системы и переключению полукомплектов устройств, входящих в состав
системы.
172
2-5
ТМС-Б имеет в своем составе: формирователь кадра непосредственной передачи
(ФКНП), модуль опроса датчиков, датчик времени (ДВ), кольцевое и линейное ста¬
тические запоминающие устройства, контроллер магистрального последовательного
интерфейса (МПИ), коммутаторы аналоговых, цифровых и температурных датчиков,
схему привязки бортовой шкалы времени (БШВ) к СЕВ.
Подсистема контроля температурного режима (ПКТР) представляет собой устрой¬
ство, которое выполняет функции по контролю температурных режимов работы си¬
стем КА.
В состав модуля ПКТР входит контроллер МПИ, устройство управления, комму¬
таторы 96 температурных датчиков.
В модуле ПКТР предусмотрено управление от БКУ по каналу МПИ независимо
от базового блока ТМС-Б.
Подсистема сбора данных полезной нагрузки (ПСДПН) представляет собой
устройство, которое выполняет функции сбора данных с системы контроля электри¬
зации (СКЭ), аппаратуры полезной нагрузки и комплекса научной аппаратуры.
В состав модуля ПСДПН входят: устройство управления; согласующее устрой¬
ство, имеющее четыре входа для приема цифровых массивов (СУ ЦМ); коммутаторы
аналоговых, цифровых и температурных датчиков; коммутатор цифровых темпера¬
турных датчиков (КЦТД) типа DS18B20.
Модуль сопряжения с радиокомплексом (МС РК) представляет собой согласую¬
щее устройство между базовым модулем ТМС-Б, БКУ, бортовой аппаратурой команд¬
но-измерительной системы (БА КИС) и устройством «Форматор» комплекса научной
аппаратуры.
Модуль МС РК имеет в своем составе схемы по приему:
- релейных команд управления от БКУ и БАКИС,
- сигнала «метка 1 секунда» от БКУ,
- символьной частоты от устройства «Форматор» (в модуле МС РК-Э отсутствует).
Модуль МС РК формирует:
- код «О» и код «1» для передачи ТМ-кадра в БАКИС,
- последовательный потенциальный код для передачи ТМ-кадра в устройство
«Форматор» (в модуле МС РК-Э отсутствует).
По условиям эксплуатации система относится к классу 5 по ГОСТ РВ 20.39.301-98,
к группе 5.3 согласно ГОСТ РВ 20.39.304-98.
Система устойчиво функционирует не более чем через 1 с после подачи на нее
напряжения питания.
Напряжение питания системы - от 23 до 34 В при пульсациях, импульсных поме¬
хах и просадках с амплитудой до 2 В любой длительности и периодичности в преде¬
лах диапазона напряжения питания.
Ток потребления системы при напряжении питания:
- 23 В не более 850 мА;
- 34 В не более 550 мА;
Сопротивление изоляции в нормальных условиях между электрически разобщен¬
ными цепями не менее 20 МОм.
Нормальными климатическими условиями считаются:
- температура окружающей среды от 15 до 35°С;
- относительная влажность от 45 до 80%;
- атмосферное давление от 8,4х 104 до 10,7* 104 Па (от 630 до 800 мм рт.ст.).
173
2-5
Система обеспечивает возможность приема информации следующего вида и
количества:
- на модуль ТМС-Б:
1) с датчиков аналоговой информации - не менее 64;
2) с датчиков дискретной информации - не менее 256;
3) с термометров сопротивления или термопар - не менее 128;
4) МЦИ с БКУ по МПИ;
- на модуль ПСДПН (ПСДПН-Э):
1) с датчиков аналоговой информации - не менее 128;
2) с датчиков дискретной информации - не менее 384 (на модуль ПСДПН-Э -
не менее 192);
3) с термометров сопротивления или термопар - не менее 32 (на модуль
ПСДПН-Э - не менее 64);
4) с цифровых датчиков типа DS18B20 (на модуле ПСДПН-Э - отсутствуют);
5) от 4-х источников МЦИ на СУ ЦМ;
- на модуль ПКТР:
1) с термометров сопротивления или термопар - не менее 96;
2) МЦИ с БКУ по МПИ.
Максимальное входное напряжение аналоговых и сигнальных каналов должно
быть от минус 1 до плюс 10 В.
Сигналы с датчиков при любых отказах не должны выходить за пределы от минус
1 В до плюс 10 В.
Источник питания аналоговых датчиков «+6,3 В» должен иметь параметры:
- напряжение (6,3 ± 0,1) В;
- максимальный ток нагрузки (200+10) мА.
К аналоговым входам системы могут быть подключены датчики с амплитудой вы¬
ходного сигнала от 0 до 6,3 В.
Ток опроса температурных датчиков не более 2,5 мА. Длительность импульса
опроса не более (10+0,1) мс.
Максимальная погрешность измерения параметров температурных датчиков, при
сопротивлении датчика от 10 до 500 Ом, не более 1%.
Система обеспечивает работу в следующих режимах:
- непосредственная передача ТМ-информации со скоростями 1000, 8000 и
32000 бит/с;
- запись информации на ЛСЗУ со скоростями 1000, 8000 и 32000 бит/с;
- запись информации на КСЗУ со скоростями 1000, 8000 и 32000 бит/с;
- воспроизведение информации, записанной на ЛСЗУ, со скоростями 1000, 8000,
32000 бит/с;
- воспроизведение информации, записанной на КСЗУ, со скоростями 1000, 8000,
32000 бит/с;
- выдача данных по МПИ.
Система ТМС обеспечивает выдачу ТМИ по заданной ТМ-программе, прошивае¬
мой в ПЗУ формирователя кадров.
ТМ-программа формируется из последовательности ТМ-кадров; количество ТМ-
кадров в одной ТМ-программе до 32-х.
Количество ТМ-программ - до 16-ти.
174
2-5
Управление системой производится цифровыми и релейными командами.
Форматы сообщений, содержащие цифровые команды, должны соответствовать
ГОСТ Р 52070-2003.
Вероятность безотказной работы системы ТМС-Р - 0,9995.
Ресурс работы системы не менее 50180 часов.
Гарантийный срок службы не менее 9 лет.
Масса системы ТМС-Р не более 8 кг.
Вероятность безотказной работы системы ТМС-Э - 0,999.
Ресурс работы системы - не менее 98360 часов.
Гарантийный срок службы не менее 14 лет.
Масса системы ТМС-Э - не более 8 кг.
После КА «СПЕКТР-РГ», «СПЕКТР-УФ», «ЭЛЕКТРО-Л»№ 3 и «АРКТИКА-М»
был разработан новый ряд телеметрических систем для платформы «НАВИГАТОР»
(Степанов В.В., 2016; Кардашев Н.С., Алакоз А.В. и др., 2016; Расторгуев А.С., Сач¬
ков М.Е., Заболотских М.В., 2016; Моишеев А.А., Бабышкин В.Е. и др., 2014; Шу¬
стов Б.М., Сачков М.Е. Боярчук А.А. и др., 2014).
В основу построения ТМС заложены: рамочная конструкция и поприборный
принцип. Модули системы выполнены в едином конструктиве и составляются из уни¬
фицированных рамок. На каждой рамке имеются соединители. Соединения между
рамками выполнены на стороне задней части рамки в негерметичной зоне рамки.
Элементы связи между приборами, а также между системой ТМС и другими систе¬
мами и агрегатами КА, не требующие высоких уровней защиты от ВВФ, вынесены
в негерметизируемую область приборов. Каждый из приборов, входящих в систему
ТМС, представляет собой функционально законченное изделие.
Данная конструкция позволяет модифицировать систему, гибко меняя конфигура¬
цию приборов в модуле.
Благодаря подобному принципу построения, в случае отказа будет достаточной
замена отказавшего прибора без дополнительной настройки всей системы. Связь
между приборами осуществляется посредством кабелей.
Система ТМС предназначена для решения следующих задач:
- программного сбора информации с сигнальных, аналоговых и температурных
датчиков;
- сбора информации с цифровых температурных датчиков и цифровых датчиков
давления;
- приема массива цифровой информации (МЦИ) от бортового комплекса управле¬
ния (БКУ) космического аппарата по магистральному последовательному интер¬
фейсу (МПИ);
- приема массивов цифровой информации (МЦИ) от систем полезной нагрузки;
- выдачи в БКУ КА кодов параметров бортовых систем по МПИ в режиме выдачи
данных (ВД);
- запоминания телеметрической информации (ТМИ) в виде ТМ-кадров в линейном
статическом запоминающем устройстве (ЛСЗУ) и кольцевом статическом запо¬
минающем устройстве (КСЗУ);
- воспроизведения ТМИ из ЛСЗУ или КСЗУ;
- формирования кадров ТМИ и передачи в бортовую аппаратуру командно-измери¬
тельной системы (БА КИС).
175
2-5
В состав ТМС входят:
- базовый модуль (БМ) - 1 шт.;
- модуль сбора сообщений (МСС) - 1 шт.;
- межприборный кабель - 1 шт.
БМ функционально представляет собой основное устройство системы, выполня¬
ющее следующие функции: опрос коммутаторов датчиков, формирование кадров те¬
леметрической информации, запись телеметрических кадров в ЛСЗУ и КСЗУ, а также
управление системой ТМС в части переключения полукомплектов устройств.
БМ содержит в своем составе устройство управления системой (УУ БМ), фор¬
мирователь кадра непосредственной передачи (ФКНП), устройство опроса комму¬
таторов, датчик времени (ДВ), линейное статическое запоминающее устройство,
кольцевое статическое запоминающее устройство, контроллер МПИ, коммутаторы
сигнальных, аналоговых, температурных датчиков, цифровых датчиков температуры
и давления, согласующее устройство с научными источниками массивов цифровой
информации (МЦИ).
МСС представляет собой периферийное устройство, выполняющее функции по
сбору данных с аналоговых, цифровых и температурных датчиков и передаче этой
информации в БМ по запросу.
МСС содержит в своем составе устройство управления (УУ МСС), коммутаторы
цифровых, аналоговых и температурных датчиков.
Все приборы, входящие в состав ТМС, имеют «холодный» резерв.
Внешний вид модулей телеметрической системы изображён на рисунке 2.5.4.
Рисунок 2.5.4. Модули ТМС
176
i
2-5
В составе модулей следующие приборы:
- модуль БМ
1) источник питания БМ ИПБМ-АЭ - 1 шт;
2) согласующее устройство приема ИЦМ СУЦМ4-АЭ- 1 шт;
3) контроллер МПИ КМПИ-АЭ - 1 шт;
4) устройство управления базового модуля УУ-АЭ - 1 шт;
5) коммутатор аналоговых датчиков А64П32АЭ - 1 шт;
6) коммутатор сигнальных датчиков Ц128АЭ - 1 шт;
7) коммутатор цифровых датчиков С256АЭ - 1 шт;
8) коммутатор температурных датчиков Т32АЭ - 4 шт;
9) плата базовая ПБ - 1 шт.
- модуль МСС АРМ
1) источник питания МСС ИПМСС-АЭ - 1 шт;
2) коммутатор аналоговых датчиков А64П32АЭ - 1 шт;
3) коммутатор сигнальных датчиков Ц128АЭ - 2 шт;
4) коммутатор температурных датчиков Т32АЭ - 4 шт;
- кабель - 1 шт.
Функциональная схема телеметрической системы приведена на рисунке 2.5.5.
Виды и количество принимаемой информации
Система ТМС обеспечивает возможность подключения следующего вида и коли¬
чества источников информации:
- к приборам модуля БМ:
1) датчиков аналоговой информации - не менее 96;
2) сигнальных датчиков информации - не менее 128;
3) термометров сопротивления или термопар - не менее 128;
4) цифровых температурных датчиков - не менее 128;
5) цифровых датчиков давления - не менее 128;
6) массивов цифровой информации (МЦИ) с аппаратуры полезной нагрузки и
комплекса научной аппаратуры - не менее 4;
7) МЦИ с бортового комплекса управления (БКУ) по магистральному последова¬
тельному интерфейсу (МПИ);
8) метки «1 секунда» от БКУ КА по двум каналам;
9) кода времени по МПИ от БКУ;
- к приборам модуля МСС:
1) датчиков аналоговой информации - не менее 96;
2) сигнальных датчиков информации - не менее 256;
3) термометров сопротивления или термопар - не менее 128.
ТМС имеет возможность подключать следующие виды датчиков:
1) аналоговые генераторные датчики с напряжением положительной полярности
от 0 до 6,3 В при Ддат не более 10 кОм. Максимальная погрешность измерений сиг¬
налов датчиков с выходным напряжением от 0 до 6,3 В не должна превышать 0,8% от
шкалы измерений при внутреннем выходном сопротивлении датчика не более 1 кОм.
Погрешность может увеличиваться на 0,2% на каждый дополнительный 1 кОм вы¬
ходного сопротивления (от 1 до 10 кОм). Указанная точность должна гарантироваться
при постоянной времени датчика (тдат) не более 10 мкс или при любой хдат, если при
этом Сдат не менее 1 мкФ;
177
2-5
Рисунок 2.5.5. Функциональная схема ТМС
178
2-5
2) аналоговые потенциометрические датчики, запитанные напряжением 6,3 В от
телеметрической системы;
3) аналоговые генераторные датчики милливольтового диапазона (термопары)
с выходным напряжением в пределах от минус 508 до плюс 510 мВ. Максимальная
погрешность измерений параметров аналоговых генераторных датчиков милливоль¬
тового диапазона не должна превышать 1%;
4) аналоговые параметрические датчики (термометры сопротивления) с диапазо¬
ном измерения RHa4 от 10 до 2000 Ом. Ток опроса датчиков не более 2,5 мА. Длитель¬
ность импульса опроса не более 10 мс. Максимальная погрешность телеметрической
системы при измерении величины сопротивления датчика не должна превышать
0,5%;
5) сигнальные генераторные датчики, представляющие собой запитанные элек¬
тронные ключи с выходным напряжением (0±1) В при втекающем токе до 1 мА
в состоянии «замкнуто» (логический «0») и выходным напряжением от 2,4 до 10 В
в состоянии «разомкнуто» при любом выходном сопротивлении. Допустимая ём¬
кость сигнальных генераторных датчиков с учетом БКС определяется нагрузочной
способностью выходного каскада датчика. При этом необходимо учитывать, что
при опросе датчика на его выход поступает втекающий ток примерно 0,4 мА;
6) сигнальные параметрические датчики в виде незапитанных электронных клю¬
чей, находящихся в режиме проводимости (логический «0») или в режиме запирания
(логическая «1»), падение напряжения на ключе в режиме проводимости при втека¬
ющем токе до 1 мА не более 1 В, сопротивление ключа в режиме запирания не менее
100 кОм при напряжении 3 В, ток утечки ключа в режиме запирания не более 30 мкА
при напряжении 3 В;
7) сигнальные параметрические датчики в виде «сухих» контактов с сопротив¬
лением не более 1 кОм в состоянии «замкнуто» (логический «0») и сопротивлении
не менее 100 кОм в состоянии «разомкнуто» (логическая «1»). Емкость сигнальных
параметрических датчиков с учетом БКС должна быть не более 3000 пФ при длине
БКС не более 10 м.
Примечания:
1. Сигналы с датчиков при любых отказах не выходят за пределы от минус 1 до
плюс 10 В.
2. Все сигналы с датчиков должны выдаваться относительно общего провода
ТМС («0» ТМС), не имеющего гальванической связи с цепями бортового пита¬
ния, управления, синхронизации и контроля, а также с корпусом. В случае не¬
возможности разделения «0» ТМС в приборе с нулевыми цепями других сигна¬
лов измерение параметров данного прибора должно производиться относительно
«корпуса» ТМС, при этом заданная точность измерения этих параметров не га¬
рантируется, так как ошибка может быть увеличена за счет разности потенциалов
между корпусами;
8) цифровые датчики температуры с 12 - разрядным последовательным выход¬
ным кодом и 64-разрядным идентификационным номером, подключаемые к теле¬
метрической системе по однопроводному интерфейсу (1 Wire), поддерживающему
исключительный протокол однопроводной магистрали компании Dallas. Напряже¬
179
2-5
ние питания от 3,0 до 5,5 В от телеметрической системы. Ток потребления не более
1,5 мА при напряжении питания 5,0 В. Время опроса одного датчика не более 750 мс:
9) цифровые датчики давления с 12 - разрядным последовательным выходным
кодом и 64-разрядным идентификационным номером, подключаемые к телеметриче¬
ской системе по однопроводному интерфейсу (1 Wire), поддерживающему исключи¬
тельный протокол однопроводной магистрали компании Dallas.
Система ТМС обеспечивает работу в следующих режимах:
- - НП-В - режим непосредственной передачи ТМ-информации с использованием
высокоинформативного радиоканала (ВИРК). Выдача информации производит¬
ся в виде последовательного потенциального кода (ППК), а также в коде нулей,
коде единиц. Скорость передачи ТМ-информации задается символьной частотой
(Бсимв.), поступающей на ТМС из ВИРК. При подаче питания на систему вклю¬
чается процедура ожидания символьной частотой от ВИРК, по приему которой
активируется режим НП-В и происходит передача ТМ-информации;
- НП-П - режим непосредственной передачи ТМ-информации с использова¬
нием бортового радиокомплекса (БРК). Производится выдача информации на
БРК по принципу пакетной передачи кадра с использованием линии стандарта
RS-422. При подаче питания на систему включается процедура ожидания за¬
просов от БРК, по приему которых активируется режим НП-П и происходит
передача ТМ-информации;
- НП - режим непосредственной передачи ТМ-информации с использованием БА
КИС;
- ЗАЛ ЛСЗУ - режим записи ТМ-информации на ЛСЗУ со скоростями 1000, 8000,
32000 бит/с. Переключение между режимами производится посредством подачи
кодовых команд по МПИ;
- ЗАЛ КСЗУ - режим записи ТМ-информации на КСЗУ со скоростями 1000, 8000 и
32000 бит/с. Переключение между режимами производится посредством подачи
кодовых команд по МПИ;
- ВОСПР ЛСЗУ - режим воспроизведения информации, записанной на ЛСЗУ со
скоростями 1000, 8000, 32000 бит/с, определяемыми режимом работы ФКНП.
Допускается воспроизведение как всей информации ЛСЗУ, так и участка ЛСЗУ
в прямом либо обратном относительно записи направлении. Допускается как
однократное воспроизведение ЛСЗУ, по окончании которого ФКНП переходит
к режиму НП по прерванной воспроизведением программе, так и многократное
воспроизведение ЛСЗУ. Передача признаков воспроизведения ЛСЗУ производит¬
ся посредством кодовых команд по МПИ;
- ВОСПР КСЗУ - режим воспроизведения информации, записанной на КСЗУ, со
скоростями 1000, 8000, 32000 бит/с, определяемыми режимом работы ФКНП. До¬
пускается воспроизведение как всей информации КСЗУ, так и участка КСЗУ в пря¬
мом либо обратном относительно записи направлении. Допускается как однократ¬
ное воспроизведение КСЗУ, по окончании которого ФКНП переходит к режиму
НП по прерванной воспроизведением программе, так и многократное. Передача
признаков воспроизведения КСЗУ производится посредством кодовых команд по
МПИ, а также по команде непосредственного доступа от радиокомплекса;
180
2-5
- ВД - режим выдачи данных по МПИ. Режим ВД совместим со всеми другими
режимами и активируется по подаче питания на систему. Режим реализуется по¬
средством подачи кодовых команд «Выдача массива адресов», «Прием массива
данных» по МПИ.
При подаче питания система включается в режим ВД, ЗАП КСЗУ со скоростью
1000 бит/с, ТМ-программа №«0».
Режимы НП и ЗАП имеют возможность совмещаться, в том числе с разными ско¬
ростями и программами формирования кадра.
Исполнение команд на переключение программ формирования ТМ-кадров и ре¬
жимов происходит после окончания текущего ТМ-кадра.
При переключении комплектов приборов время готовности системы к работе не
превышает 1 с.
Характеристики ЛСЗУ и КСЗУ
Объем ЛСЗУ - не менее 16 Мбайт. Число программ формирования ТМ-кадров -
не более 8, число ТМ-кадров в каждой программе - не более 32.
ЛСЗУ способно работать как в старт-стопном режиме, так и в непрерывном ли¬
нейном режиме записи. По окончании записи при заполнении всего объема ЗУ систе¬
ма останавливает режим записи ЛСЗУ. В системе предусмотрен индикатор заполне¬
ния памяти ЗУ. В исходном состоянии ЗУ данный параметр имеет значение «О», при
полном заполнении ЗУ - «32767».
При подаче команды «ИСХ ЗУ» на систему ТМС ЛСЗУ производит инициализа¬
цию ЛСЗУ и устанавливается в исходное состояние.
В случае полного однократного считывания ЛСЗУ ТМ-система переходит в пре¬
дыдущий режим работы формирователя кадра НП.
Объем КСЗУ - не менее 512 кбайт. Число программ формирования ТМ-кадров -
не более 8, число ТМ-кадров в каждой программе - не более 32.
КСЗУ способно работать как в старт-стопном режиме, так и в непрерывном коль¬
цевом режиме записи.
В случае полного однократного считывания КСЗУ ТМ-система переходит в пре¬
дыдущий режим работы формирователя кадра НП.
Структура выходного сигнала
Система обеспечивает выдачу ТМ-информации по заданной ТМ-программе, про¬
шиваемой в ПЗУ формирователя кадров. ТМ-программа формируется из последова¬
тельности ТМ-кадров, при этом количество различных ТМ-кадров в одной програм¬
ме - не более 32, количество ТМ-программ - 16.
Выдача ТМ-информации происходит по следующим направлениям:
- на БРК по принципу пакетной передачи кадра с использованием радиолинии
стандарта RS-422;
- на БА КИС или ВИРК в виде последовательного потенциального кода (ППК) со
структурой кадров, соответствующей структуре БИТС-2Т.
В случае передачи ТМ-информации с использованием ВИРК или БА КИС струк¬
тура ТМ-кадра состоит из служебной и информационной частей.
Служебная часть ТМ-кадра включает в себя следующие посылки:
- кадровую синхропосылку (СП) длиной 31 символ;
- командное слово длиной 30 символов;
181
2-5
- тестовое слово длиной 8 символов;
- синхропосылку СП-2 длиной 256 символов.
Информационная часть ТМ-кадра состоит из 512 восьмиразрядных слов, располо¬
женных в ТМ-кадре старшими разрядами вперед.
Для контроля достоверности переданной информации ТМ-кадр содержит параме¬
тры контрольных сумм по каждой половине ТМ-кадра - два байта.
Структура телеметрического кадра представлена на рисунке 2.5.6.
служебная часть
325 бит
С
U
х
4
А
О
О
с
о
Он
X
X
5
н
S
ю
ю
00
о
CQ
о
ч
ю
чо
in
(N
СЧ
С
и
03
ы
4
А
О
Он
X
S
о
информационная часть 4096 бит
(512 восьмизарядных слов)
н
00
04
О
О
О
Ш
in
in
6
о
г—(
1—1
cd
S
К
1
X
а
о
н
н
(D
о
к
S
S
03
X
оз
оЗ
л
X
м
с;
*
*
0
Он
а
а
<и
(D
ь
ч
ч
X
оЗ
оЗ
о
со
со
ьз
Рисунок 2.5.6. Система ТМ-кадра
Система обеспечивает выдачу ТМ-информации с вероятностью сбоя не хуже
10'6 на бит информации.
В системе ТМС имеется возможность контроля основных служебных параметров
приборов, входящих в ее состав. Эти параметры доступны пользователю в информа¬
ционной части ТМ кадра, а также в режиме ВД.
Управление системой осуществляется посредством:
- релейных команд;
- кодовых команд МПИ.
Форматы сообщений, содержащие кодовые команды, должны соответствовать
ГОСТ Р 52070-2003.
Параметры модулей системы ТМС:
- масса модуля БМ - 3,8 кг ± 0,18кг.
- потребляемая мощность модуля БМ - не более 12 Вт.
- мощность тепловыделения модуля БМ - не более 11 Вт.
- масса модуля МСС - 2,98 кг ± 0,18кг.
- потребляемая мощность модуля МСС - не более 8 Вт.
- мощность тепловыделения модуля МСС - не более 7 Вт.
- общая масса системы ТМС - не более 7 кг.
- потребляемая мощность системы ТМС - не более 20 Вт.
- мощность тепловыделения системы ТМС - не более 18 Вт.
182
2-5
Список литературы
Автоматические космические аппараты для фундаментальных и прикладных на¬
учных исследований / Под общ. ред. Г.М.Полищука, К.М.Пичхадзе. М.: Изд-во МАИ-
ПРИНТ, 2010, 659 с.
Кардашев Н.С., Ллакоз Л.В. и др. «Радиоастрон»: итоги выполнения научной про¬
граммы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016. № 3.
С. 4-24.
Моишеев А.А., Бабышкин В.Е. и др. Проектная конференция космического аппара¬
та «СПЕКТР УФ» // Вестник НПО им. С.А. Лавочкина. 2014. № 5. С. 15-20.
Расторгуев А. С., Сачков М.Е., Заболотских М.В. Галактическая астрономия в уль¬
трафиолете // Вестник НПО им. С.А. Лавочкина. 2016. № 3. С. 38-47.
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
Шустов Б.М., Сачков М.Е. Боярчук А.А. и др. Космические перспективы изучения
ультрафиолетовой Вселенной: проект «СПЕКТР-УФ» // Вестник НПО им. С.А. Ла¬
вочкина. 2014. № 5. С. 4-15.
В.Е. Куликов
НПО им. С.А. Лавочкина
183
На ВЫБОР ПРОЕКТНЫХ ПАРАМЕТРОВ
ДВИГАТЕЛЬНОЙ УСТАНОВКИ
КОСМИЧЕСКОГО АППАРАТА
«ЭЛЕКТРО-Л»
Жидкостная ракетная двигательная установка КА «ЭЛЕКТРО-JI» по типу по¬
дачи компонентов ракетного топлива (КРТ) относится к установкам вытеснитель¬
ного типа. В состав ДУ входят три топливных бака с внутрибаковыми устрой¬
ствами в виде металлических разделительных мембран, призванных обеспечить
бесперебойную подачу топлива к жидкостным ракетным двигателям в условиях
действия малой гравитации. Для обеспечения длительной работы металлической
разделительной мембраны в условиях переменного объёма топлива, вызванного
циклическими температурными изменениями на борту КА, в пневмогидравли-
ческую систему ДУ параллельно топливным бакам установлены компенсаторы
температурного изменения объёма топлива. На рисунке 2.6.1 приведён предва¬
рительный вариант принципиальной пневмогидравлической схемы многобаковой
ДУ вытеснительного типа, взятой за основу для проведения анализа её пригод¬
ности в условиях эксплуатации КА «ЭЛЕКТРО-JI» (Кардашев Н.С., Алакоз А.В.
и др. , 2016)
Б1, Б2, БЗ - топливные баки;
К1, К2, КЗ - компенсаторы;
АРД - автоматический регулятор давления;
ЭПК - электрический пневмоклапан;
АВД - аккумулятор высокого давления
Рисунок 2.6.1. Предварительный вариант пневмогидравлической схемы системы хранения
и подачи топлива
При проектировании выбранной многобаковой системы хранения и подачи то¬
плива к двигателям с наличием компенсаторов необходимо решить следующие
вопросы:
- обеспечение минимальной разновыработки топлива из баков;
- выбор вместимости и жёсткости топливной полости компенсатора с учётом кон¬
структивных характеристик разделительной мембраны, амплитуды температур¬
ного цикла и циклической прочности компенсатора.
184
2-6
2.6.1. Обеспечение минимальной разновыработки топлива из баков
в многобаковой системе хранения и подачи топлива
Обеспечение минимальной разновыработки топлива из баков в многобаковой
системе хранения и подачи топлива напрямую связано с обеспечением центров¬
ки аппарата по мере выработки топлива в космическом полёте. В ДУ с высокими
массовыми расходами компонентов топлива в реальной обстановке разновыработ-
ка может явиться причиной несоответствия расходной характеристики топливного
тракта проектным параметрам. Логично полагать, что для исключения разновыра¬
ботки соответственные пневматические и гидравлические тракты многобаковой
ДУ, подходящие и отходящие от топливных баков, должны быть спроектированы
и изготовлены одинаковыми в части гидравлических сопротивлений. Эта про¬
стая задача приобретает некоторую особенность, если в самих топливных баках
имеются внутрибаковые устройства, гидравлическое сопротивление которых из¬
меняется по мере выработки компонентов топлива. В качестве примера на рисун¬
ке 2.6.2 приведена зависимость перепада давления на мембране топливного бака
ДУ КА «ЭЛЕКТРО-Л».
Рисунок 2.6.2. Зависимость перепада давления АР на мембране топливного бака ДУ КА
«ЭЛЕКТРО-Л» от величины объёма вытесненного топлива AV
Представленная зависимость не только не линейна, но и не может считаться од¬
нозначной для массива изготавливаемых мембран в силу влияния на неё отклоне¬
ний характеристик материала, технологического процесса изготовления мембран.
На практике проектировщик топливных систем, в баках которых есть разделитель¬
ные мембраны, имеет дело с характеристикой, представляющей собой область значе¬
ний перепадов давлений от величины вытесненного объёма топлива. Известно, что
интерполяционная зависимость, полученная в результате обработки эксперименталь¬
ных данных, тем точнее описывает результаты испытаний, чем больше число этих ис¬
пытаний и чем достовернее каждое из них. Для того, чтобы показать, как выбирался
185
2-6
способ минимизации разновыработки из топливных баков ДУ КА «ЭЛЕКТРО-Л».
перейдем к известному физико-математическому анализу этого явления. Сколько бы
баков в топливной системе ни было, удобно сравнивать сначала системы «бак - тру¬
бопроводы» между собой попарно. Возможно, попадутся одинаковые системы, и это
упростит задачу. На рисунке 2.6.3 представлена расчётная система из двух топливных
баков и компенсаторов.
Рн, Р1, Р2 - давление наддува, давление жидкости в конце первого и второго трубопроводов
соответственно; ДР - дроссель
Рисунок 2.6.3. Расчётная схема многобаковой топливной системы
В каждом топливном баке имеется внутрибаковое устройство в виде раздели¬
тельной мембраны, характеризующееся некоторым значением перепада давления
(АРмБ1). Выходящий из каждого топливного бака трубопровод содержит местное
гидравлическое сопротивление (APMi), величина которого не зависит от значения
числа Рейнольдса, и участок трубопровода, гидравлическое сопротивление кото¬
рого определяется зависимостью Дарси - Вейсбаха. Давление наддува в баках Рн
имеет одинаковое значение. Топливная магистраль, в которую вливаются два тру¬
бопровода, представлена неким дроссельным устройством (ДР). Для двух гидрав¬
лических трактов от баков до точек 1 и 2 перед тройником можно записать выра¬
жения для перепадов давлений в них, используя закон Бернулли {Рабинович Е.З.,
1963). При этом принимается, что скорость движения среды в топливных баках Wh
равна нулю.
w„ W?
Рн — Pi — ДРМБ1 '( 2 “ 2 (2.6.1)
186
2-6
wH2 w22
PH -P2 = АРмБ2 +&p i-f- ~y), (2.6.2)
где ^,^2 - коэффициенты гидравлических сопротивлений трактов 1 и 2, соответ¬
ственно
р - плотность рабочей среды;
W\,w2- скорости потоков в трактах 1 и 2 соответственно.
С большой долей достоверности можно принять так как сопротивление
участков в большей степени определяется элементами, коэффициент сопротивления
которых не зависит от числа Рейнольдса или находится в области автомодельности
по этому критерию. Вычитания (2.6.2) из (2.6.1), получим выражение для разности
давлений между гидравлическими трактами 1 и 2:
2 2
pw2 pw,
Р2 -Р,+ДРмК-АРмб. = 5г( V" 2 ) (2-63)
Преобразуем выражение (2.6.3), помножив и разделив его правую часть на ком¬
плекс pF2, где F - площадь проходного сечения гидравлического тракта 1 или 2. Также
при преобразовании используем, что массовый расход компонента по трактам можно
записать формулой m=pFw. Тогда (2.6.3) примет вид
(ш22 - т,)
?2 — Pi ЛРмБ2 — ЛРмБ1 = р.р2 2 ' (2.6.4)
Представив в правой части выражения (2.6.4) разность квадратов расходов по
трактам 1 и 2 как произведение суммы и разности, получим
5Р2-1=А,-(т,+т2)*(т2-т,), (2.6.5)
где Р2_1 = Р2 - Pi + ЛРмБ2-ЛРмБ1 И А) — — —j—
2 -p-F\
Проанализируем смысл составляющих в правой части (2.6.5). В первой скобке
стоит сумма массовых расходов компонентов по каждому из трактов, т.е. расход по
тракту 3. Обозначим его индексом М^. Во второй скобке представлена разница рас¬
ходов компонентов между трактами, т.е. разновыработка, возникающая из-за различ¬
ных величин гидравлических сопротивлений 8P2_i трактов 1 и 2. Если в левой части
(2.6.5) величина 5P2-i>0, то и правая часть этого выражения должна быть положи¬
тельна, т.е. m2>rhi. Это значит, что увеличенному расходу компонента, например по
второму тракту, соответствует большая величина давления в конце тракта: P2>Pi,T.e.
перепад давления в тракте 2 меньше, чем в тракте 1. Очевидно, для исключения раз-
новыработки компонентов из баков необходимо выравнять расходы по трактам 1 и 2,
снизив величину давления Р2 до величины Рь например, путём установки в гидравли¬
ческий тракт 2 некоторого гидравлического сопротивления Р2др. Продолжим дальней¬
шие преобразования (2.6.5) введением обозначения (m2-riii)=5m2-b Выражение (2.6.5)
запишется в новой форме:
1
6т2_, = *6Р2_,. (2.6.6)
' 1 . 5Мб
Далее преобразуем (2.6.6), используя соотношение 8m2_i — , где 6МБ - масса
Ат
компонента, недорасходуемого по одному из двух баков за интервал времени Ат. Тог¬
да (2.6.6) примет вид
187
2-6
8Мб 8P2_i
1 = —-г • (2.6.7)
Ат А1 ■ IVI^
Если правую часть (2.6.7) умножить и разделить на Mz и использовать то обсто¬
ятельство, что произведение (МЕ*Атду) = AMZ6 , где AMS6 - масса компонента, вы¬
рабатываемого из топливных баков за время работы ДУ - Атду, то (2.6.7) запишется
следующим образом:
s луг AMSB *5P2_i
6Мб= “—• (2-6-8>
Ms-A,
При проектировании многобаковых систем задаётся допустимая величина разно-
выработки, выражаемая отношением 5МБ/ДМБ, где АМБ - масса заправляемого ком¬
понента в один бак. Тогда АМЕБ= 2 АМб. С учётом преобразования выражения (2.6.5)
можно записать, что А3- Ml = Р3. Подставив эти соотношения в (2.6.8), получим
6МБ 2К-8Р2_,
= , (2.6.9)
ДМБ ДР3
Аз
где К =
Из (2.6.9) видно, что минимизировать величину разновыработки можно либо све¬
дением величины 8Р2-1, близкой к нулю, либо повышением величины перепада давле¬
ния АР3 в общей магистрали, в которую сходятся первые две. Первый способ мини¬
мизации разновыработки уже обсуждался после вывода выражения (2.6.5). Для того
чтобы оценить приемлемость второго способа, решим выражение (2.6.9) относитель¬
но величины перепада давления, который надо создать в общей магистрали, чтобы
минимизировать величину разновыработки:
2К-5Р2_,
АРз= ,_Л/Г ч (2.6.10)
8Ме
дмк
Если К немногим более единицы, а величина разновыработки не превышает сотой
доли единицы, то получается, что величина АР3 должна в десятки раз превышать 8P2.i.
Это потребует существенного роста общего давления в системе, что будет сопрово¬
ждаться ростом массы конструкции топливной системы.
В результате представленного здесь анализа в ДУ КА «ЭЛЕКТРО-Jl» было при¬
нято решение ограничить величину изменение центровки КА из-за разновыработки
топлива из баков введением в выходящие из топливных баков магистрали электриче¬
ских клапанов (рисунок 2.6.4).
К подаче топлива в двигатели в этом варианте системы баки подключаются по¬
очерёдно в определённой последовательности. Величина поэтапной выработки мас¬
сы топлива из баков определена исходя из возможностей системы стабилизации КА
парировать возмущения, возникающие из-за изменения центровки КА по мере вы¬
работки топлива из того или иного бака.
188
2-6
ЭПК1, ЭПК 2, ЭПК 3 - магистральные электрические гидроклапаны
Рисунок 2.6.4. Принципиальная пневмогидравлическая схема системы хранения и подачи
топлива ДУ КА «ЭЛЕКТРО-JI»
2.6.2. Определение параметров компенсатора,
парирующего температурные изменения объёма топлива
в баке с металлической разделительной мембраной
Выше было сказано о назначении компенсатора в топливной системе ДУ КА
«ЭЛЕКТРО-Л». Чтобы мембрана топливного бака не перемещалась при цикличе¬
ском изменении температуры топлива, компенсатор должен воспринимать прираще¬
ния объёма компонента топлива, появляющиеся с ростом температуры компонента, и
отдавать топливо в топливную полость бака с уменьшением температуры компонен¬
та. Это происходит тогда, когда разделительный элемент компенсатора (например,
мембрана или сильфон) обладает меньшей, чем металлическая мембрана топливного
бака, жёсткостью. При этом топливная полость компенсатора под действием изменя¬
ющегося объёма топлива изменяет свой объём. Поэтому при проектировании компен¬
сатора весьма важным делом является выбор объёма жидкостной полости компенса¬
тора и жёсткости его разделительного элемента.
Далее рассмотрим порядок выбора вместимости топливной полости компенсато¬
ра, имеющего в своём составе сварной сильфон, разделяющий топливную и газовые
полости компенсатора, как показано на рисунке 2.6.5.
Перед заправкой компонента топлива газовые и топливные полости бака и ком¬
пенсатора вакуумируются. Положение разделительных элементов (мембраны и
сильфона) в баке и компенсаторе не отклоняется от исходного. Мембрана в баке
прижата к верхней (условно) полусфере, а сильфон в компенсаторе находится в по¬
ложении, определяющем максимальный объём его топливной полости. При заправ¬
ке компонент оказывается в топливных полостях бака и компенсатора, в которых
устанавливается давление насыщенного пара компонента, определяемое его видом
и температурой. Топливо ДУ КА «ЭЛЕКТРО-JI» в рабочем диапазоне температур
имеет ничтожно малое давление насыщенного пара по сравнению с давлением над¬
дува, поэтому в дальнейших рассуждениях его влиянием на рассматриваемые про¬
цессы будем пренебрегать. Во время подготовки ДУ к работе происходит наддув
189
2-6
1 - корпус, 2 - сильфон, 3 - топливная полость, 4 - газовая полость
Рисунок 2.6.5. Компенсатор ДУ КА «ЭЛЕКТРО-JI»
топливных баков и компенсатора. По мере роста давления в полостях наддува бака и
компенсатора разделительные элементы внутри них начинают движение, уменьшая
объём своих топливных полостей до объёма заправленного в них топлива. Так как
жёсткость сильфона компенсатора меньше жёсткости мембраны топливного бака, то
сильфон начинает сжиматься под действием нарастающего давления наддува рань¬
ше и быстрее, чем мембрана бака. Имеющееся в сильфоне компенсатора топливо
передавливается в бак. Этот процесс завершается тогда, когда мембрана топливного
бака останавливается, достигнув границы топливного объёма, заправленного в ДУ.
На сильфоне и мембране устанавливается одинаковый перепад давления, определя¬
емый жёсткостью мембраны.
Записать значение остаточного объёма топлива в компенсаторе (VK ост) после за¬
вершения наддува системы можно выражением
Vк ост VKH СМК АРмб над, (2.6.11)
где VKH - начальный (заправочный) объём компенсатора;
AVK
сМк = условная «жёсткость» разделительного сильфона компенсатора;
АРК
AVK - изменение объёма топливной полости компенсатора под действием пере¬
пада давления на нём (ДРК);
АРмБнад - перепад давления на мембране топливного бака в момент первоначаль¬
ного наддува.
Для минимизации начального объёма компенсатора будем считать, что величина
остаточного объёма топливной полости компенсатора (VK0CT) должна быть такой, что¬
бы позволить компенсатору ещё уменьшить свой объём на величину, определяемую
уменьшением температуры топлива от температуры заправки (Тзапр) до минимальной
эксплуатационной температуры (Тмин э), в том числе при наличии невырабатываемого
остатка (AVKH0), т.е.
VK0CT = (aVtE^;J + AVKH0, (2.6.12)
190
2-6
где ДУтбт‘""> = УтБзапр • [1+а(Тзапр-Тминэ)],
1 МКП Э
VTB3anp - объём заправленного компонента топлива в бак;
а - коэффициент температурного изменения объёма компонента топлива.
Причём рассчитывается коэффициент температурного изменения объёма компо¬
нента топлива согласно зависимости
/6т мин э
— 6т
макс э ^
QyMHH з • Qtm
Тмакс э
<х= —: , (2.6.14)
макс э *- мин э
где ^ ртмин э, дтмаксэ - среднее значение плотности компонент топлива в диапазоне экс¬
плуатационных температур (Тминэ; Тмаксэ) и значения плотностей компонента по краям
температурного диапазона соответственно.
Тогда для определения объёма топливной полости компенсатора из (2.6.11) с учё¬
том (2.6.12) и (2.6.13) получим
VKH — Смк APMg над УтБзапр
[1+а(Тзапр-Тминэ)] + AVKH0. (2.6.15)
Если теперь предположить, что после первоначального наддува ДУ произойдёт
повышение температуры топлива до Тмакс э, то логично выдвинуть условие, чтобы
приращение объёма компонента топлива от температуры Тзапр до Т макс э подчинялось
выражению
дут тиа,„= смк-дрмЬнад, (2.6.16)
* заир
где АУтБ £*»“3 = смк• ДРмБ „ад = УтБзапр• [ 1 +а(Тмакс, -Тзапр)]. (2.6.17)
* запр
Решив (2.6.16) с учётом выражения (2.6.17) относительно смк, получим выражение
для определения условной «жёсткости» сильфона:
УтБзапр [ 1 "^^(Тмакс э Тзапр)]
Смк = . (2.6.18)
АРмб над
Если в (2.6.15) первое слагаемое выразить с учётом выражений (2.6.16) и (2.6.17),
то получим расчётную формулу для определения объёма топливной полости с учётом
эксплуатационных температур
VKH = УтБзапр*[1+а(Тмаксэ-Тминэ)] + AVkho. (2.6.19)
Выражение (2.6.19) получено решением «статической» задачи в диапазоне мини¬
мальной и максимальной эксплуатационной температуры топлива, которые для ДУ
КА «ЭЛЕКТРО-JI» находятся в диапазоне плюс 5... плюс 40°С. Данный эксплуатаци¬
онный диапазон температур определяется и условиями выведения КА на орбиту функ¬
ционирования, и сезонными положениями КА относительно Солнца. Эти сезонные
изменения температур топлива происходят очень медленно, имеют малую частоту по¬
вторений и практически никогда, благодаря работе системы обеспечения температур¬
ного режима (СОТР) КА, не доходят до крайних значений температурного диапазона.
Однако из-за работы СОТР КА происходят колебания температуры топлива большой
частоты (одно-два колебания в сутки), но малой амплитуды (3-5°С в каждую сторо¬
ну от установившегося значения температуры топлива). Поэтому работоспособность
сильфона компенсатора должна реализоваться в условиях длительного воздействия
191
2-6
большого (несколько тысяч циклов) числа циклических нагружений. Для обеспечения
работоспособности сильфона необходимо, чтобы изменения объёма топливной поло¬
сти компенсатора, вызванные циклическими нагружениями, составляли некоторую,
весьма малую, долю от величины полного изменения объёма в эксплуатационном диа¬
пазоне температур. Это условие можно записать выражением
Vkh A V кно У тБзапр
• [ 1 +а(Тмакс э -Тм„„ э)]
Фрасч = = . (2.6.20)
AV AV
v цикл ^ v цикл
С учётом того, что циклическое изменение объёма компонента топлива вызвано
циклическим изменением температуры компонента в диапазоне (Тмин цикл; Т макс Ш1КЛ).
можно записать выражение (2.6.20) в окончательной форме:
У тБзапр
• [1+а(Тшксэ-Тминэ)]
Фртсч— ГГ г, . ГГ» (2.6.21)
V TBi Ц ' 1Щ *■ макс цикл А мин цикл/J
где VтБ1 - объём компонента топлива в баке.
Для начала работы ДУ выполняется равенство VTB3anP = Уты- Расчётная величина
фрасч, полученная при решении (2.6.21), не должна превышать некоего граничного зна¬
чения ф^н, при котором ещё обеспечивается длительная циклическая работоспособ¬
ность сильфона компенсатора. Для сильфона, используемого в компенсаторах ДУ КА
«ЭЛЕКТРО-JI», имеем фгран = 5. В случае получения по выражению (2.6.21) фраСч>Фгран
необходимо - при невозможности сузить диапазон (Тмин ЦИКл ;Т макс цикл) - увеличить
объём топливной полости VKH. Реализация конструкции сильфонного компенсатора с
параметрами, рассчитанными по приведённой методике, позволяет обеспечить отсут¬
ствие циклических перемещений мембраны топливного бака. На рисунке 2.6.6 пред¬
ставлены результаты измерения температуры бака и результаты расчёта перепада
давления на разделительной мембране по данным измерений давлений в наддувной
и топливной полостях бака ДУ КА «ЭЛЕКТРО-Л» № 1. Теоретически, изменение
величины перепада давления на мембране должно происходить в противофазе изме¬
нению температуры топлива в баке: температура топлива растёт - величина перепада
давления падает, и наоборот. Несоответствие реального сдвига фаз между кривыми
температуры и перепада давления теоретическому можно объяснить тем, что ведётся
измерение температуры поверхности бака, а температура топлива реально изменяет¬
ся с задержкой, зависящей от величины термосопротивления стенки бака, интенсив¬
ности конвективного и кондуктивного теплообмена в массе топлива.
Удвоенная амплитуда колебаний перепада давления на мембране не превышает
20 кПа, что составляет 25% от полного перепада давления на сильфоне компенсато¬
ра в случае его полного опорожнения. Следует отметить, что амплитуда колебаний
перепада давления на мембране топливного бака по мере выработки топлива должна
снижаться из-за уменьшения общего объёма топлива. На рисунке 2.6.7 представлено
изменение в течение года параметров: температуры бака и перепада давления на мем¬
бране. Рост средней температуры бака - зимой и летом, падение - осенью и весной.
В противофазе изменяется перепад давления на мембране.
Максимальное значение перепада давления на мембране, вызванное циклически¬
ми изменениями температуры топлива, не превышает максимального перепада дав¬
ления на мембране при её движении в установившемся процессе вытеснения топлива
из бака, представленном на рисунке 2.6.2, что может свидетельствовать о работе ком¬
пенсатора по предотвращению циклических колебаний мембраны.
192
2-6
Т°,С ЛР-105 Па
бортовое время, чч:мм:сс
Рисунок 2.6.6. Изменение температуры топлива в баке ТБ и перепада давления АР
на разделительной мембране бака ДУ КА «ЭЛЕКТРО-Jl» № 1 в течение суток
ЛР-105 Па
06
0,5
0,4
0,3
0,2
08:53:20
05:46:40 02:40:00 23:33:20
бортовое время, чч:мм:сс
20:26:40
17:20:00
Рисунок 2.6.7. Изменение температуры бака и перепада давления на мембране топливного
бака ДУ КА «ЭЛЕКТРО-Л» № 1в течение года
Список литературы
Кардашев Н. С., Ллакоз А.В. и др. «РАДИОАСТРОН»: итоги выполнения научной
программы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016.
№ 3. С. 4-24.
Рабинович Е.З. Гидравлика. М.: Государственное изд-во физико-математической
литературы, 1963. 408с.
Л.Г Александров, В.П. Крылов, Н.В. Ксенофонтова,
О.А. Кузьмин, В.П. Макаров, Н.С. Осипова
НПО им. С.А. Лавочкина
193
1
ESI СИСТЕМА ОБЕСПЕЧЕНИЯ ТЕПЛОВОГО РЕЖИМА
Анализируя ход теплового проектирования и разработки системы обеспечения
теплового режима многофункциональной космической платформы «НАВИГАТОР»,
можно утверждать, что, несмотря на преобладание в этом процессе интуитивного
подхода, основные принципы системного подхода проектантами и специалистами по
тепловому режиму были соблюдены.
2.7.1. Принципы системного подхода
при тепловом проектировании многофункциональной
космической платформы «НАВИГАТОР»
Сложная система - характеризуется большим числом элементов и, что наиболее
важно, большим числом взаимосвязей элементов. Сложность системы определяет¬
ся также видом взаимосвязей элементов, свойствами целенаправленности, целост¬
ности, членимости, иерархичности, многоаспектности. Очевидно, что современ¬
ные СОТР КА являются сложными в силу наличия у них перечисленных свойств
и признаков.
Система обеспечения теплового режима (СОТР) наряду с другими служебными
системами принадлежит к числу важнейших систем обеспечения жизнеспособности,
как всего КА, так и отдельных его фрагментов, основным из которых является модуль
служебных систем. Для ряда космических аппаратов разработки НПО им. С.А. Ла¬
вочкина таким фрагментом является МКП «НАВИГАТОР», представляющая собой
автономный конструктивный модуль с размещенной на нем аппаратурой служебных
систем.
Основное назначение СОТР МКП - поддержание в течение всего назначенного
срока существования температуры элементов конструкции, блоков аппаратуры и обо¬
рудования в диапазоне, обеспечивающем штатное, безаварийное функционирование
их и МКП в целом.
Задачей проектирования СОТР является выбор её схемы, элементного состава,
конструкционной, физической и тепловой взаимосвязи этих элементов, а также
определение теплоэнергетических параметров системы, позволяющих обеспечивать
необходимый тепловой режим в течение всего срока эксплуатации КА. Одновремен¬
но с этим в процессе проектирования СОТР устанавливается порядок управления
ее элементами, узлами и агрегатами, обеспечивающий надежное поддержание тем¬
пературного состояния всех систем и составляющих узлов и элементов КА в тре¬
буемом диапазоне температур. Заданный тепловой режим должен поддерживаться
на всех этапах эксплуатации КА: при проведении электрических проверок и испы¬
таний, хранении и транспортировке, отработке на техническом комплексе при под¬
готовке к пуску, нахождении на старте, атмосферном участке полета и орбитальном
функционировании.
Особенностью СОТР является входимость в ее состав, помимо средств обеспече¬
ния теплового режима, всей совокупности элементов конструкции и оборудования
КА. Все материальные точки КА являются коммуникациями СОТР, передающими
тепло от элемента к элементу и в окружающее пространство одним из способов те¬
плообмена - теплопроводностью, излучением, теплоотдачей через газовый или жид¬
костный теплоноситель. Поскольку любое изменение конструкции КА неминуемо
194
в
приводит к изменению температурного состояния, проектирование СОТР не может
проводиться в отрыве от проектирования всего КА в целом.
При рассмотрении СОТР вне связи с космическим аппаратом утрачивается свой¬
ство целостности системы. Вышеперечисленное обуславливает тесную взаимосвязь
между процессом проектирования и разработки всего КА и его системы обеспечения
теплового режима. Поэтому, несмотря на то, что объектом проектирования являет¬
ся СОТР, объектом анализа является тепловой режим объекта терморегулирования
(КА или его фрагмента - в рассматриваемом случае МКП). Учитывая взаимосвязь
между процессами проектирования и разработки всего КА и его СОТР, отдельное
техническое задание на СОТР, как правило, не разрабатывается. Все требования по
обеспечению заданных температурных условий эксплуатации элементов конструк¬
ции, аппаратуры и оборудования, а также ограничения на выходные параметры
средств обеспечения теплового режима (масса, энергопотребление, габариты и т.д.)
отражаются в документации на КА. С учетом этих требований и ограничений осу¬
ществляется выбор средств обеспечения теплового режима, которые после интегра¬
ции в состав КА совместно с конструкцией и оборудованием и при функциональном
взаимодействии с частью аппаратуры КА и образуют систему обеспечения теплового
режима данного космического аппарата.
В процессе теплового проектирования МКП «НАВИГАТОР» использованы прин¬
ципы системного подхода, которые заключаются в рассмотрении частей исследуемой
сложной системы с учетом их взаимодействия и, применительно к СОТР, содержат
выявление структуры системы, типизацию связей, определение атрибутов, анализ
влияния внешней среды, формирование модели системы, исследование модели и по¬
следующую оптимизацию ее структуры и функционирования.
На начальных стадиях проектирования модуль служебных систем разраба¬
тывался применительно к использованию в составе ИСЗ для метеорологических
исследований «ЭЛЕКТРО-JT», работающего на геостационарной орбите. Затем
было принято решение разрабатывать унифицированный модуль служебных си¬
стем, который наряду с использованием в составе ИСЗ «ЭЛЕКТРО-Л» мог быть
использован в составе высокоапогейного ИСЗ для астрофизических исследований
«СПЕКТР-Р». Разработанный унифицированный модуль служебных систем пред¬
ставлял собой многофункциональную космическую платформу и получил название
«НАВИГАТОР». Унификация наложила отпечаток, как на облик самой платформы,
так и на облик СОТР.
Как отмечено в {Тулин Д.В., Финченко B.C., 2014), космический аппарат, являясь
сложной системой, обладает иерархичностью - свойством, выражающим возмож¬
ность и целесообразность его иерархического описания, т.е. представления в виде
нескольких уровней, между компонентами которых имеются отношения целое -
часть. В той же книге приведена структурная схема космического аппарата, пред¬
ставляющая его сложной системой, имеющей пять иерархических уровней (рису¬
нок 2.7.1).
Использованный при создании МКП «НАВИГАТОР» блочно-иерархический
подход к вопросам теплового проектирования предполагает декомпозицию описаний
сложных объектов, каковыми являются КА, и соответственно их средств обеспечения
теплового режима, на иерархические уровни и аспекты; устанавливает связь как меж¬
ду параметрами СОТР соседних иерархических уровней, так и между параметрами
СОТР одного иерархического уровня. -
195
Рисунок 2.7.1. Структурная схема космического аппарата
Данный подход позволяет для каждого иерархического уровня вопросы обеспе¬
чения теплового режима решать автономно. Это возможно и для отдельных фраг¬
ментов, принадлежащих к одному иерархическому уровню. Так, для каждого из
КА «ЭЛЕКТРО-JI» и «СПЕКТР-Р» СОТР элементов четвертого иерархического
уровня (модуля служебных систем и комплекса целевой аппаратуры) выполнены ав¬
тономными. Это позволило для двух совершенно разных по конструктивно-компоно¬
вочному исполнению и условиям функционирования КА использовать очень близкие
по схеме и параметрам СОТР платформы «НАВИГАТОР».
«ЭЛЕКТРО-Л» и «СПЕКТР-Р» были первыми КА в практике НПО им. С.А. Ла¬
вочкина, не содержащими в своем составе газонаполненных приборных отсеков со
служебной аппаратурой {СтепановВ.В., 2016; КардашевН.С., АлакозА.В. и др., 2016;
Расторгуев А. С., Сачков М.Е., Заболотских М.В., 2016; Асмус и др., 2012).
Аппаратура и оборудование, устанавливаемые ранее в газовой среде приборного
контейнера, предполагались к установке на термостабилизированные элементы кон¬
струкции МКП «НАВИГАТОР». Такими термостабилизированными элементами мо¬
гут являться сотопанели со встроенными тепловыми трубами, платформы приборов
внешнего расположения и т.д.
D
Подсистемы МКП разрабатывались с учетом того, что приборы и элементы бор¬
товых служебных систем должны изготавливаться в негерметичном исполнении и
предусматривать сброс тепла через посадочную поверхность. Для такого способа
термостатирования блоков аппаратуры была пронормирована средняя плотность
теплового потока от блоков на посадочную термостабилизируемую поверхность,
величина которой была задана не более 0,2 Вт/см2. Для обеспечения минимального
контактного термического сопротивления между блоком и конструкцией КА были со¬
гласованы способ крепления каждого блока и наличие теплопроводного заполнителя
между блоком и конструкцией КА (специальной теплопроводной пасты или проклад¬
ки из высокотеплопроводного материала). Были также заданы единые требования по
механическому интерфейсу между блоками аппаратуры и посадочной термостабили¬
зируемой поверхностью.
НПОЛ обязался разрабатывать подсистемы СОТР МКП «НАВИГАТОР», которые
должны обеспечивать температуры элементов конструкции МКП в зоне установки
блоков в согласованном диапазоне при согласованных значениях тепловых потоков
между блокамии конструкцией МКП. В свою очередь, предприятия-разработчики
блоков аппаратуры должны были обеспечивать тепловой режим блоков при задан¬
ных температурах конструкции МКП и согласованных значениях тепловых потоков
между блоками аппаратуры и конструкцией МКП.
При таком разграничении ответственности стало возможным использование
параллельного проектирования, при котором разработчиками бортовой аппарату¬
ры создавались средства обеспечения теплового режима блоков, а в это же время
в НПОЛ разрабатывалась СОТР МКП, т.е. параллельно были решены задачи тепло¬
вого проектирования для компонентов КА, относящихся к разным иерархическим
уровням. Эти задачи связаны друг с другом- по входным и выходным данным таким
образом, что для решения одной из них требуется знание результатов решения дру¬
гой задачи. Хотя эти результаты к началу процедуры параллельного проектирова¬
ния еще не получены, они уже оговорены в согласованных параметрах теплового
интерфейса.
Применение параллельного проектирования при решении тепловых задач позво¬
лило существенно сократить временные затраты. При этом параллельно во времени
были решены задачи теплового проектирования не только компонентов КА, отно¬
сящихся к разным иерархическим уровням, но и задачи теплового проектирования
компонентов одного иерархического уровня. Примером этого при разработке СОТР
могут служить: параллельная разработка средств обеспечения теплового режима,
проведение тепловых расчетов и экспериментальная отработка автономных фрагмен¬
тов КА, и МКП в частности, что будет проиллюстрировано ниже.
При проектировании СОТР КА цели достигаются в многошаговых процессах
принятия решений. Тепловое проектирование КА включает в себя выполнение
трудоёмких задач, связанных с определением принципов построения СОТР КА
и оценкой параметров применённых средств обеспечения теплового режима на
основе исследования теплового режима КА. Процесс теплового проектирования
КА является итерационным, сложность его возрастает по мере перехода от стадии
к стадии одновременно с увеличением степени проработки как СОТР, так и всего
КА в целом.
Структура процесса решения задачи теплового проектирования, изложенная в (Ту¬
лин Д.В., Финченко B.C., 2014), представлена на рисунке 2.7.2.
197
Рисунок 2.7.2. Структура процесса решения задачи теплового проектирования
2.7.2. Назначение СОТР, основные исходные данные
для проектирования
Как уже отмечалось, СОТР предназначена для поддержания в течение всего назна¬
ченного срока существования заданного теплового режима элементов конструкции,
аппаратуры и оборудования МКП «НАВИГАТОР».
Тепловой режим - это временная последовательность требуемых температурных
состояний элементов КА при эксплуатации. Каждый элемент КА должен иметь свою
собственную температуру, поддерживать отдельно температуры абсолютно всех эле¬
ментов довольно сложно. Поэтому для упрощения СОТР в КА целесообразно выделить
ограниченное число термостатируемых элементов, которые при организации соот¬
ветствующих тепловых связей с ними и будут определять температуры всех осталь¬
ных элементов КА. Как уже отмечалось, при проектировании КА «ЭЛЕКТРО-JI» и
«СПЕКТР-Р» модуль служебных систем (в последующем МКП «НАВИГАТОР») и
комплекс целевой аппаратуры выполнены автономными. Соответственно автоном¬
ными должны были выполнены и СОТР этих фрагментов КА, т.е. температурное со¬
стояние элементов одного из фрагментов не должно было оказывать практического
влияния на тепловой режим другого. Такое решение позволяло одновременно проек¬
тировать СОТР модуля служебных систем и комплекса целевой аппаратуры.
Кроме этого, методика параллельного проектирования, использованная при те¬
пловом проектировании МКП «НАВИГАТОР», позволила разграничить создание
системы обеспечения теплового режима МКП и разработки средств обеспечения те¬
плового режима бортовой аппаратуры и оборудования.
198
D
На начальных стадиях проектирования были определены допустимые темпера¬
турные условия эксплуатации блоков аппаратуры и оборудования и допустимые тем¬
пературы конструкции МКП и топлива двигательной установки. Поскольку платфор¬
ма «НАВИГАТОР» не предполагала в своем составе газонаполненных приборных
отсеков со служебной аппаратурой, под температурными условиями эксплуатации
блоков аппаратуры и оборудования понималась температура конструкции платфор¬
мы «НАВИГАТОР» в зоне посадочных мест блоков. С разработчиками аппаратуры
и оборудования были согласованы значения тепловых потоков между блоками и кон¬
струкцией МКП.
В такой постановке основной задачей СОТР МКП «НАВИГАТОР» явля¬
лось обеспечение заданных температур элементов конструкции МКП и топлива
ДУ, а также элементов конструкции МКП в зоне установки блоков аппаратуры и
оборудования.
В таблице 2.7.1 представлены температурные условия эксплуатации эле¬
ментов конструкции, аппаратуры и оборудования, обеспечиваемые СОТР МКП
«НАВИГАТОР».
Таблица 2.7.1
№
п/п
Наименование объекта
терморегулирования
Температура, °С
I
Конструкция МКП в зоне посадочных
мест служебной аппаратуры
от -20 до +40
2
Конструкция МКП в зоне посадочных мест АБ:
- в конце разряда в тени;
- в режиме хранения
от +10 до +30
от-10 до +15
3
Конструкция МКП в зоне установки
гироскопического измерителя вектора
угловых скоростей (ГИВУС)
от 0 до +35
4
Конструкция в зоне посадочных мест
звездных датчиков АД-1
от-15 до +35
5
Конструкции МКП в зоне посадочных мест
приборов СДП-1
от -20 до +40
6
Топливо в баках и компенсаторах
от +5 до +35
7
Агрегаты ДУ
от +5 до +45
8
Конструкция МКП в зоне установки кронштейна
крепления двигательных блоков коррекции (ДБК)
и стабилизации (ДБС)
от +5 до +40
9
Конструкция МКП в зоне посадочных мест:
- электромеханического блока СОСБ (блок Э16);
- электронного блока СОСБ (блок Э15)
от -20 до +50
от -20 до +40
199
ш
Основные исходные данные
для проектирования СОТР платформы «НАВИГАТОР»
Основными исходными данными, определяющими облик СОТР, являются:
- назначение и срок функционирования проектируемого КА, определяющие об¬
ласть и условия космического пространства, в котором предполагается эксплуа¬
тация КА (околопланетная, околосолнечная, межгалактическая);
- общая компоновка КА, конструктивные особенности аппарата, используемые ма¬
териалы в конструкции, массогабаритные параметры конструкции, аппаратуры
и оборудования КА, производительность системы энергопитания КА;
- требования к тепловому режиму служебной аппаратуры и элементов конструк¬
ции МКП;
- внутренние тепловыделения блоков аппаратуры и оборудования;
- циклограмма включения и отключения источников внутреннего тепловыделения
МКП;
- программа ориентации КА относительно Солнца и планет.
Рассмотрим перечисленные выше факторы, влияющие на облик СОТР.
Назначение КА определяет область космического пространства, в котором пред¬
полагается эксплуатация КА, а также характерную ориентацию относительно источ¬
ников внешнего теплового воздействия на аппарат.
Как уже отмечалось, было принято решение разрабатывать унифицированный мо¬
дуль служебных систем для использования как в составе ИСЗ для метеорологических
исследований «ЭЛЕКТРО-Jl», работающего на геостационарной орбите, так и в со¬
ставе высокоапогейного ИСЗ для астрофизических исследований «СПЕКТР-Р».
КА «ЭЛЕКТРО-Л» проектировался для работы на круговой стационарной орбите
с периодом обращения 24 часа. Большую часть времени (за исключением прохожде¬
ния тени Земли) КА освещен Солнцем; теневые интервалы (один раз в сутки) имеют
место в периоды прохождения КА весеннего и осеннего равноденствия, а их продол¬
жительность зависит от угла между направлением на Солнце и плоскостью орбиты.
При нулевом угле между направлением на Солнце и плоскостью орбиты номи¬
нальное значение теневого интервала достигает 1,2 часа (72 минуты). При увели¬
чении угла между направлением на Солнце и плоскостью орбиты до 8,6 градуса
теневой интервал уменьшается до нуля. При угле между направлением на Солнце
и плоскостью орбиты более 8,6 градуса (в пределе может достигать 23,5 градуса)
теневые интервалы отсутствуют.
КА «СПЕКТР-Р» предполагалось выводить на рабочую орбиту с параметрами:
высота перицентра Нп = 600 км; высота апоцентра На = 3300000 км; наклонение
/=51,3 градуса; период обращения г = 196,6 часа, при этом в течение срока функ¬
ционирования КА параметры орбиты могли изменяться: - от 2000 до 6000 км,
На - от 300000 до 400000 км. Важным моментом функционирования КА «СПЕКТР-Р»
является прохождение тени. Номинальное значение теневого интервала с вышеука¬
занными параметрами орбиты может превышать 4 часа. Однако, в связи с ограни¬
чениями, накладываемыми бортовыми системами КА, при приближении к такому
теневому интервалу орбита должна корректироваться так, чтобы максимальная дли¬
тельность теневого интервала не превышала 2,0 часа.
Области, в которых предполагалась эксплуатация данных КА, определяют поле
внешних тепловых потоков, поступающих на КА, а также их спектральный состав и
интенсивность. Основным источником внешнего теплового потока к аппарату, функ-
200
в
ционирующему в околосолнечной области космического пространства, является
Солнце. Источниками внешнего теплового потока, достигающего КА в околоземной
области космического пространства Солнечной системы, помимо излучения Солнца,
являются собственное излучение планеты и отраженное от ее поверхности солнечное
излучение.
Земля движется вокруг Солнца по эллиптической орбите на расстоянии около
150 000000 км. Из-за изменения расстояния между Землёй и Солнцем в перигелии
количество солнечной энергии, достигающей Землю, на 6,9% больше, чем в афелии.
В настоящее время перигелий Земли приходится примерно на 3 января, афелий -
примерно на 4 июля. Номинальное значение плотности потока солнечного излуче¬
ния в районе Земли составляет 1367 Вт/м2. С учетом эллиптичности земной орбиты
плотность потока солнечного излучения в районе Земли в течение года меняется от
1320 до 1414 Вт/м2.
Величина собственного излучения Земли и отраженного от ее поверхности сол¬
нечного излучения, поступающего на элемент поверхности ИСЗ, существенным
образом зависит от ориентации данного элемента относительно планеты и высоты
орбиты. При ориентации нормали к элементу поверхности ИСЗ по местной верти¬
кали тепловой поток, поступающий на его поверхность от Земли, максимален. Рису¬
нок 2.7.3 иллюстрирует взаимное расположение элемента F поверхности КА планеты
и потока солнечного излучения.
На рисунке 2.7.4 представлены зависимости поступающих на элемент поверхно¬
сти ИСЗ собственного излучения Земли и отраженного от ее поверхности солнечного
излучения от высоты орбиты.
F- нормаль к элементу поверхности КА; п - нормаль к поверхности элемента поверхности
КА; S - вектор центр Земли - центр Солнца
Рисунок 2.7.3. Взаимное расположение элемента F поверхности КА, планеты и потока
солнечного излучения
201
Тепловой поток солнечного излучения, поступающий на элемент поверхности
КА, определяется выражением
Qs = AsFMS, (2.7.1)
где As - коэффициент поглощения солнечного излучения поверхностью КА;
FM - площадь проекции освещенной Солнцем поверхности ИСЗ на плоскость,
перпендикулярную направлению на Солнце, м2;
S - плотность потока солнечного излучения, Вт/м2.
высота орбиты, км
Рисунок 2.7.4. Зависимость собственного излучения Земли и отраженного от ее поверхности
солнечного излучения, поступающих на элемент поверхности ИСЗ, от высоты орбиты
Как уже отмечалось, значение плотности потока солнечного излучения в районе
Земли составляет ~ 1400 Вт/м2, а от Земли на каждый квадратный метр поверхности
КА «ЭЛЕКТРО-JI» и «СПЕКТР-Р» поступают единицы ватт тепловой мощности.
Лучистые тепловые потоки от Земли практически не влияют на тепловой режим дан¬
ных КА и на облик и параметры СОТР. При понижении высоты орбиты тепловые по¬
токи от Земли, поступающие на поверхность КА, значительно возрастают, обуслав¬
ливая необходимость доработки СОТР МКП.
Существенным образом на облик и параметры СОТР влияет срок функциони¬
рования проектируемого КА. Под воздействием факторов космического простран¬
ства происходит деградация средств обеспечения теплового режима. При проекти¬
ровании СОТР МКП «НАВИГАТОР» параметры средств обеспечения теплового
режима брались с учетом деградации, соответствующей концу срока активного
существования (САС) КА. Были использованы средства обеспечения теплового ре¬
202
жима, обладающие необходимым ресурсом. При проектировании СОТР было пред¬
усмотрено резервирование средств, имеющих недостаточную вероятность безот¬
казной работы.
Конструктивно-компоновочной особенностью КА «ЭЛЕКТРО-JI» и
«СПЕКТР-Р», в значительной мере определившей облик МКП «НАВИГАТОР»,
было отсутствие герметичных приборных отсеков для размещения служебной аппа¬
ратуры. Данное обстоятельство обусловило использование при разработке МКП ряда
средств обеспечения теплового режима, ранее не использовавшихся в составе КА
разработки НПО им. С.А. Лавочкина.
Следует также отметить, что конструктивно-компоновочное исполнение МКП
«НАВИГАТОР» для КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р» имеет ряд существенных
различий.
Ниже дано краткое описание конструктивного исполнения КА «ЭЛЕКТРО-Л, в
состав которого входят:
- комплекс целевой аппаратуры;
- модуль служебных систем (МКП «НАВИГАТОР»).
В состав модуля целевой аппаратуры входят:
- многоканальное сканирующее устройство МСУ-ГС;
- гелиогеофизический аппаратурный комплекс ГГАК-Э;
- бортовая система сбора данных (БССД);
- бортовой радиотехнический комплекс (БРТК-Э);
- система управления остронаправленной антенной (СУ ОНА);
- элементы конструкции.
В состав МКП «НАВИГАТОР» входят:
- бортовой комплекс управления (БКУ);
- система электроснабжения (СЭС);
- система обеспечения теплового режима (СОТР);
- бортовая аппаратура командно-измерительной системы (БА КИС);
- система ориентации солнечной батареи (СОСБ);
- телеметрическая система (ТМС);
- антенно-фидерная система (АФС);
- двигательная установка (ДУ);
- бортовая кабельная сеть (БКС);
- система контроля электризации (СКЭ);
- элементы конструкция.
Общий вид КА «ЭЛЕКТРО-Л» представлен на рисунке 2.7.5. Основным элемен¬
том конструкции МКП «НАВИГАТОР» является восьмигранный корпус, на гранях
которого закреплены элементы ДУ, электронный блок СОСБ, привод СОСБ, к кото¬
рому крепится панель батареи солнечной (БС).
Для обеспечения работы низкотемпературного радиационного холодильника
(РХ-ГС) целевой аппаратуры МСУ-ГС в его поле зрения не должны попадать
никакие элементы конструкции КА. Поэтому МКП «НАВИГАТОР» в составе
КА «ЭЛЕКТРО-Л» имеет только одну панель БС, в составе КА «СПЕКТР-Р» две
панели БС.
Каркас корпуса (рисунок 2.7.6) состоит из двух шпангоутов уголкового сечения,
соединенных вертикальными стойками. Пространство между стойками зашито ли¬
стами из алюминиевого сплава с элементами, обеспечивающими жесткость листов
203
(рисунок 2.7.7). К верхнему (со стороны оси «+Х») шпангоуту базового модуля кре
пится ферма с целевой аппаратурой. К нижнему (со стороны оси «-Х») шпангоут
базового модуля пристыковывается адаптер, посредством которого ИСЗ крепится!
разгонному блоку.
1 - корпус; 2 - топливный бак; 3 - двигательный блок; 4 - блок служебной аппаратуры;
5 - ТСП ПН; 6 - ТСП ПП; 7 - приборы МСУ-ГС; 8 - ОНА; 9 - панели БС
Рисунок 2.7.5. Общий вид КА «ЭЛЕКТРО-Л»
Рисунок 2.7.6. Общий вид каркаса
204
Рисунок 2.7.7. Общий вид каркаса, зашитого листами
В полость корпуса базового модуля со стороны нижнего шпангоута устанавли¬
вается панель служебных систем, на которой размещена большая часть служебной
аппаратуры. Конструктивно панель представляет собой плоскую восьмигранную
трехслойную конструкцию со встроенными тепловыми трубами, выполняющую
одновременно роль силовой рамы для установки приборного оборудования и роль
теплоотводящего агрегата СОТР. Наряду со встроенными тепловыми трубами в кон¬
струкцию панели входят два поверхностных листа из материала В95 и алюминие¬
вые соты, заполняющие промежутки между корпусами тепловых труб. В процессе
проектирования для такой конструкции было принято наименование «тепловая со-
топанель» (сокращенно - ТСП). Поскольку на данной сотопанели установлены блоки
служебных систем, она именуется «тепловая сотопанель служебных систем» (сокра¬
щенно - ТСП СС). Общий вид ТСП СС с установленными блоками аппаратуры пред¬
ставлен на рисунке 2.7.8.
Заданные требования к тепловому режиму служебной аппаратуры и элементов
конструкции МКП (таблица 2.7.1) предусматривают поддержание температурных ус¬
ловий эксплуатации элементов конструкции, аппаратуры и оборудования в достаточ¬
но узких диапазонах, что необходимо для обеспечения надежного функционирования
МКП в течение всего срока эксплуатации.
МКП «НАВИГАТОР» содержит значительное количество элементов (приборов,
узлов конструкции, агрегатов и т.п.), каждый из которых должен иметь свою соб¬
ственную температуру. Поддерживать отдельно температуры всех элементов доволь¬
но сложно. При тепловом проектировании МКП «НАВИГАТОР» был использован
принцип декомпозиции. Как любая сложная система, СОТР обладает свойством чле-
нимости, т.е. её можно рассматривать как совокупность отдельных подсистем. По¬
этому при проектировании СОТР в составе МКП было выделено несколько термо-
205
Рисунок 2.7.8. Общий вид ТСП СС
статируемых элементов, которые при организации нормируемых тепловых связей с
ними должны были определять температуры всех остальных элементов МКП. Таки¬
ми термостатируемыми элементами были выбраны: ТСПСС, ТСП аккумуляторной
батареи (АБ), корпус МКП, двигательная установка (ДУ) и некоторые другие эле¬
менты. Именно температура термостатируемых элементов и условия тепловой связи
с ними остальных элементов и определяют тепловой режим МКП «НАВИГАТОР».
Подробно данные термостатируемые элементы будут рассмотрены ниже.
Внутренние тепловыделения блоков аппаратуры и оборудования существен¬
но влияют на выбор СОТР, прежде всего на площадь радиационных поверхностей и
принцип регулирования внешнего теплообмена, так как все избыточное тепло, выде¬
ляемое служебной аппаратурой, должно быть сброшено в окружающее пространство.
Источниками внутреннего тепловыделения для МКП «НАВИГАТОР» в основном
являются блоки служебной аппаратуры и оборудования. Некоторое количество тепла
к конструкции МКП поступает от работающих двигательных блоков ДБС и ДБК.
Мощность внутреннего тепловыделения служебной аппаратуры составляет
380-420 Вт для КА «ЭЛЕКТРО-Л» и 420-450 Вт - для КА «СПЕКТР-Р».
Количество тепла, выделяемое внутри КА, наряду с мощностью внутреннего
тепловыделения определяется временем и режимами (циклограммой) работы ис¬
точников внутреннего тепловыделения. Циклограмма включения и отключения ис¬
точников внутреннего тепловыделения определяет последовательность во времени
и соответствующую продолжительность выделения тепла различными элементами
206
в
МКП, позволяет выделить моменты и продолжительность максимального и мини¬
мального тепловыделения.
При проектировании СОТР МКП «НАВИГАТОР» источники тепловыделения
были распределены по термостабилизируемым группам. Это позволило, с одной сторо¬
ны, сблизить максимум и минимум суммарного на данный момент времени тепловыде¬
ления соответствующей группы источников, а с другой - распределить тепловыделение
равномерно по времени на определенных циклах выполнения функциональных задач,
возложенных на проектируемый космический аппарат. СОТР МКП «НАВИГАТОР»
должна была отводить тепло от источников платформы и распределять по всей кон¬
струкции служебного модуля, подводить избыточное тепло к «выходным» устройствам,
отводящим его в космическое пространство. Поскольку теплоотвод от тел в космосе
может происходить лишь излучением с их поверхностей, «выходные» устройства, отво¬
дящие тепло в космическое пространство, представляют собой радиаторы-излучатели.
В околоземной области космического пространства источниками внешнего тепло¬
вого потока, достигающего КА, являются Солнце и Земля, поэтому тепловой режим
МКП «НАВИГАТОР» в значительной мере определяется программой ориентации
КА относительно Солнца и Земли.
При штатном функционировании ось «+Х» изделия ориентирована по местной
вертикали, ось «+Y» перпендикулярна плоскости орбиты. При этом отличительной
особенностью КА «ЭЛЕКТРО-JI», связанной с обеспечением работы низкотемпера¬
турного радиационного холодильника целевой аппаратуры МСУ-ГС, является недо¬
пущение нахождения Солнца со стороны оси «-У» изделия. Поэтому раз в полгода
(в момент весеннего и осеннего равноденствия) КА «ЭЛЕКТРО-Л» поворачивается
на 180° таким образом, чтобы следующие полгода Солнце находилось со стороны оси
«+Y» изделия. Таким образом, ось «+Z» изделия направлена либо по направлению
вектора скорости, либо против него. В дежурном режиме КА «ЭЛЕКТРО-Л» перево¬
дится в режим постоянной солнечной ориентации (ПСО). При этом направление на
Солнце отклонено от оси «-Х» КА на угол 7±5 градусов в сторону оси «+Y», осталь¬
ные оси могут быть ориентированы произвольно; панель БС не вращается.
Для КА «СПЕКТР-Р» углы между направлением на Солнце и связанными осями
изделия могут изменяться в следующих пределах:
- SOX - от 90 до 165 град;
- SOY - от 80 до 100 град;
- SOZ - от-10 до 10 град.
То есть Солнце может находиться только со стороны оси «+Z», отклоняясь от нее
в сторону оси «—X» не более чем на 75 градусов, и в стороны осей «±Y» не более чем
на 10 градусов.
Следует отметить, что для геостационарных ИСЗ (связных и метеорологических)
оптимальной для обеспечения теплового режима является компоновочная схема,
представленная на рисунке 2.7.9.
Модуль служебных систем и комплекс целевой аппаратуры выполнены в виде
четырехгранных параллепипедов, при этом основная часть аппаратуры размещена
на панелях, ориентированных в сторону осей «±Y» (панели «±Y»). В течение суток
Солнце, в осях космического аппарата, совершает полный оборот. В периоды весен-
207
о
1 - модуль служебных систем;
2 - модуль целевой аппаратуры;
3 - блоки служебной аппаратуры;
4 - топливные баки;
5 - панели БС
Рисунок 2.7.9. Вариант компоновочной схемы
и
1 - модуль служебных систем;
2 - модуль целевой аппаратуры;
3 - блоки служебной аппаратуры;
4 - топливные баки;
5 - панели БС
Рисунок 2.7.10. Вариант компоновочной схемы КА «ЭЛЕКТРО-Л»
208
в
него и осеннего равноденствий угол между направлением на Солнце и плоскостью
орбиты равен нулю. В эти периоды поток солнечного излучения параллелен плоско¬
сти «XOZ» и непосредственно не попадает на панели «±У». По мере приближения
летнего (зимнего) солнцестояния поток солнечного излучения начинает попадать на
одну из панелей «±У», при этом угол между плоскостью «XOZ» и направлением на
Солнце достигает 23,5 градуса на момент солнцестояния.
При таком конструктивном исполнении можно организовать теплоотвод от блоков
аппаратуры излучением с поверхностей панелей «±Y». Для этого часть поверхности
панелей не должна быть закрыта теплоизоляцией и иметь покрытие типа «солнечный
излучатель». Использование в качестве панелей ТСП в данном случае позволяет по¬
лучить достаточно равномерное температурное поле для каждой панели. Затраты на
транспортировку тепла от аппаратуры до радиатора при этом минимальны.
Учитывая, в каких пределах углы между направлением на Солнце и связанны¬
ми осями могут находиться для КА «СПЕКТР-Р», можно утверждать, что с точки
зрения обеспечения теплового режима данное компоновочное решение также весьма
рационально.
Для КА «ЭЛЕКТРО-Jl» работа сканеров МСУ-ГС обеспечивается только при от¬
сутствии в его поле зрения оно низкотемпературных холодильников, излучающая по¬
верхность которых ориентирована по оси «-Y», а также каких-либо элементов кон¬
струкции КА. Поэтому МКП «НАВИГАТОР» в составе «ЭЛЕКТРО-Л» имеет только
одну панель БС, расположенную со стороны оси «+Y». Для этого случая вариант ком¬
поновочной схемы представлен на рисунке 2.7.10.
Следует отметить, что такой вариант компоновочной схемы КА «ЭЛЕКТРО-Л»
какое-то время был основным; для обеспечения теплового режима он, безусловно,
оптимальный, имеет большой потенциал для модернизации.
Из-за совпадения сроков создания КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р» было
принято решение о разработке унифицированного модуля служебных систем для
метеорологического ИСЗ «ЭЛЕКТРО-Л» и КА для астрофических исследований
(«СПЕКТР-Р», «СПЕКТР-УФ» и т.д.).
В процессе разработки выяснилось, что для размещения под головным обтека¬
телем в составе космической головной части КА «СПЕКТР-Р» и «СПЕКТР-УФ»,
имеющих габаритный модуль целевой аппаратуры, необходимо существенно умень¬
шить высоту модуля служебных систем. Поэтому к дальнейшей проработке была
предложена компоновочная схема с восьмигранным корпусом минимальной высоты,
в конструкцию которого интегрированы элементы двигательной установки и внутри
которого параллельно плоскости «YOZ» расположена восьмиугольная приборная па¬
нель со служебной аппаратурой. Данная схема явилась прообразом нынешнего об¬
лика МКП «НАВИГАТОР».
2.7.3. Выбор основных принципов обеспечения теплового режима,
состав и характеристики СОТР МКП «НАВИГАТОР»
СОТР МКП «НАВИГАТОР» при тепловом проектировании была рассмотрена
как совокупность отдельных подсистем, каждая из которых предназначена для созда¬
ния стабилизированного теплового состояния конкретного фрагмента или элемента
209
оборудования платформы. Было учтено, что конструкция КА имеет негерметичное
исполнение.
Был проведен анализ средств обеспечения теплового режима исходя из воз¬
можности их разработки в заданные сроки для использования в составе МКП
«НАВИГАТОР».
При проектировании СОТР космических аппаратов, разрабатываемых к тому вре¬
мени в НПО им. С.А. Лавочкина, широкое применение нашли тепловые трубы раз¬
личных типов, создаваемые на современном уровне технологий, материаловедения
и новых способов регулирования их работы. Было освоено производство тепловых
сотопанелей на базе аксиальных тепловых труб (ATT), возник значительный задел
в создании теплопроводов на основе контурных тепловых труб (КнТТ).
Исходя из результатов проведенного анализа, к использованию были рекомендо¬
ваны следующие средства и методы обеспечения теплового режима:
- электронагреватели и термоэлектрические модули холодильные (ТЭМХ) -
объекты управления СОТР;
- управляющие термодатчики - чувствительные элементы контура управления
СОТР;
- покрытия с заданными термооптическими характеристиками;
- теплопроводы на базе аксиальных тепловых труб;
- тепловые сотопанели на базе аксиальных тепловых труб;
- контурные тепловые трубы - теплопроводы с активным элементом, обеспечива¬
ющим изменение теплового потока с изменением температуры;
- теплоизоляция;
- нормируемые термические связи между элементами конструкции;
- использование теплоемкости конструкции и оборудования;
- расположение термостатируемого объекта на КА определенным образом относи¬
тельно внешних источников тепловых потоков и смежных элементов конструк¬
ции и оборудования.
С учетом широкого использования тепловых труб, в том числе и контурных, для
обеспечения теплового режима и предложенного конструктивно-компоновочного
исполнения МКП «НАВИГАТОР» при проектировании СОТР стабилизированное
тепловое состояние было организовано для пяти фрагментов платформы. Соответ¬
ственно в составе системы обеспечения теплового режима МКП «НАВИГАТОР»
были предусмотрены следующие автономные подсистемы СОТР:
- СОТР тепловой сотопанели служебных систем (СОТР ТСП СС);
- СОТР двигательной установки (СОТР ДУ);
- СОТР тепловой сотопанели аккумуляторной батареи (СОТР ТСП АБ);
- СОТР посадочных мест солнечных датчиков СДП-1 (СОТР ПМ СДП-1);
- СОТР посадочных мест приборов СОСБ (СОТР ПМ СОСБ).
Каждая подсистема предназначена для обеспечения теплового режима конкрет¬
ного фрагмента платформы «НАВИГАТОР». В процессе теплового проектирова¬
ния обеспечивался отрицательный тепловой баланс каждого такого фрагмента. Для
уменьшения неуправляемого теплообмена с окружающим пространством большая
часть поверхности объекта терморегулирования закрыта ЭВТИ. Компенсация тепло-
потерь осуществляется управляемыми по температуре электронагревателями.
В двух фрагментах (ТСП СС, ТСП АБ) транспортировка тепла от них к радиатору
затруднена и возможна только с использованием теплопроводов на базе контурных
тепловых труб.
210
в
Таким образом, в СОТР МКП «НАВИГАТОР» можно выделить подсистемы,
выполненные без использования контурных тепловых труб: СОТР ДУ, СОТР ПМ
СДП-1, СОТР ПМ СОСБ, и подсистемы, имеющие контурные тепловые трубы
в своём составе: СОТР ТСП СС, СОТР ТСП АБ.
В подсистемах, выполненных без использования КнТТ, сброс тепла осуществля¬
ется излучением через незакрытую ЭВТИ поверхность конструкции, которая выпол¬
няет роль радиатора-охладителя. Компенсация теплопотерь осуществляется управля¬
емым по температуре электронагревателем.
Управление электронагревателями, т.е. изменение их состояния (BKJI или
0TKJ1), осуществляется по командам из борпгового комплекса управления (БКУ).
Изменение состояния (BKJl/OTKJI) каждого объекта управления производится с
использованием одного или нескольких каналов управления (последнее - если
мощность объекта управления превышает предельную величину, определяе¬
мую допустимым током электронного ключа блока электроавтоматики). БКУ КА
«ЭЛЕКТРО-Л» обеспечивает коммутацию электронагревателей мощностью до
60 Вт. Объект управления включается по одной команде, выданной в один или не¬
сколько каналов управления.
Изменение состояния (включено/выключено) каждого объекта управления может
производиться следующими способами:
- по показаниям управляющих термодатчиков;
- по временной циклограмме.
Предусмотрена возможность изменения способа управления состоянием каждого
объекта управления, а также изменения характеристик каждого контура управления
по командам из наземного сегмента управления. Принципиальная схема управления
электронагревателем приведена на рисунке 2.7.11.
электрона гревател ь запитка электронагревателя
БКУ
БУЗ
А
объект
терморегулирования
управляющие датчики
температурная информация
Рисунок 2.7.11. Схема управления электронагревателем
211
При рассмотрении режимов работы электронагревателей приняты следующие
обозначения:
Т1 - значение температуры объекта терморегулирования, ниже которого включа¬
ется электронагреватель;
Т2 - значение температуры объекта терморегулирования, выше которого выклю¬
чается электронагреватель.
Если температура объекта терморегулирования по управляющим термодатчикам
уменьшается и снизится до значения Ть то подается команда на включение соот¬
ветствующего электронагревателя. Как только температура объекта терморегулиро¬
вания повысится до значения Т2 - подается команда на выключение соответствую¬
щего электронагревателя. Для повышения надежности используются группы из трех
управляющих термодатчиков. Упрощенно алгоритм управления изменением состоя¬
ния каждого электронагревателя может быть представлен следующими шагами:
- показания каждого из трех термодатчиков, входящих в конкретную группу управ¬
ляющих термодатчиков, поочередно сравниваются со значением нижнего преде¬
ла регулирования для этой группы термодатчиков, а затем - со значением верхне¬
го предела регулирования;
- если показания двух термодатчиков данной группы управляющих термодатчиков
меньше (больше) или равны значению нижнего (верхнего) предела регулирова¬
ния, то показания этих термодатчиков запоминаются;
- если при следующем опросе (через минуту) вышеизложенная ситуация в отноше¬
нии тех же двух термодатчиков подтверждается, то вырабатывается суждение о не¬
обходимости включении (выключении) соответствующего электронагревателя.
Повторные команды на включение (выключение) электронагревателя при его на¬
хождении в состоянии «ВКЛ» («ВЫКЛ») не изменяют состояние электронагревателя.
Выход показаний «управляющих» термодатчиков из пределов диапазона их изме¬
рений не изменяют состояние электронагревателя. При возврате показаний термодат¬
чиков в пределы диапазона измерения алгоритм диагностики возобновляет штатное
функционирование.
Основными элементами СОТР ТСП СС и СОТР ТСП АБ являются теплопроводы
радиаторов. Теплопровод радиатора представляет собой контурную тепловую трубу,
предназначенную для передачи теплового потока, собранного коллектором, к стоку
тепла - на радиационный теплообменник. Тепло подводится к испарителю контур¬
ной тепловой трубы, корпус которого выполнен из стальной трубы. Для обеспечения
подвода тепла к стальной трубе припаивается контактное основание из алюминие¬
вого сплава. Конфигурация контактного основания имеет форму, обеспечивающую
минимальный градиент температур между поверхностью теплоподвода и корпусом
испарителя. Сборка «контурная тепловая труба + радиационный теплообменник» это
и есть теплопровод радиатора.
Общий вид и основные элементы ТПР представлены на рисунке 2.7.12.
Теплопровод радиатора содержит следующие компоненты:
- капиллярный насос (испаритель);
- компенсационную полость, соединенную с испарителем со стороны конден-
сатопровода;
- транспортные каналы для пара и жидкости (паропровод и конденсатопровод);
- радиатор-теплообменник (конденсатор), который представляет собой трехслой¬
ную клееную сотопанель со встроенными каналами конденсатопровода из алю¬
миниевого сплава.
212
в
1
з б
1 - радиатор; 2 - капиллярный насос-испаритель; 3 - компенсационная полость;
4 - ТЭМХ; 5 - КнТТ; 6 - байпасная магистраль
Рисунок 2.7.12. Общий вид и основные элементы ТПР
В том случае, когда собственное тепловыделение аппаратуры, установленной на
ТСП, минимально, регулируемый теплопровод радиатора по достижении некоторой
нижней границы регулирования «отключает» радиатор от ТСП.
Регулирование термического сопротивления теплопровода радиатора (контурной
тепловой трубы) осуществлено двумя способами: пассивным (с помощью автомати¬
ческого клапана-регулятора) и активным (с помощью термоэлектрического модуля
холодильного).
Пассивный способ является основным при штатном функционировании, посколь¬
ку не требует управления и не потребляет электроэнергии, а активный работает толь¬
ко в случае выхода из строя автоматического клапана-регулятора.
Тепловая мощность, выделяющаяся в аппаратуре, установленной на ТСП, отводит¬
ся от посадочных мест аксиальными тепловыми трубами, объединенными в тепловом
отношении поперечным коллекторным теплопроводом на базе ATT, являющихся высо-
213
в
коэффективным теплопередающим устройством, представляющим собой герметичную
оболочку, заполненную теплоносителем. ATT состоит из корпуса, изготовленного из
профиля (материал АД31), имеющего на внутренней поверхности продольные канав¬
ки, торцевой заглушки и заправочного фланца. Теплоносителем ATT является аммиак.
Тепло с ATT ТСП собирается коллекторными тепловыми трубами и далее регули¬
руемым теплопроводом (контурной тепловой трубой) передается к рабочей поверх¬
ности радиатора, откуда излучается в окружающее пространство. Теплоноситель те¬
плопровода радиатора - пропилен.
При минимальном тепловыделении аппаратуры теплоотвод с ТСП через незакры¬
тые экранно-вакуумной теплоизоляцией поверхности компенсируется установлен¬
ным на ТСП электронагревателем, автоматически включающимся и выключающим¬
ся по сигналам температурного датчика. Управление электронагревателем и ТЭМХ
осуществляется по командам из бортового комплекса управления ИСЗ. Управление
работой ТЭМХ осуществляется по результатам анализа текущего значения темпера¬
туры коллекторного теплопровода и текущего значения температуры соответствую¬
щего радиатора в зоне входа магистралей контурной тепловой трубы.
1- радиаторы СОТР ТСП СС; 2 - радиатор СОТР ТСП АБ;
3 - радиаторы СОТР ТСП ПН; 4 - радиатор СОТР ТСП МСУ
Рисунок 2.7.13. Радиаторы подсистем СОТР КА «ЭЛЕКТРО-Л»
214
D
Всего на «ЭЛЕКТРО-JI» установлено шесть теплопроводов радиационных тепло¬
обменников (РТО). С целью унификации все они имеют одинаковое конструктивное
исполнение и различаются только температурой настройки клапана-регулятора. Пло¬
щадь каждого РТО ~ 0,6 м2.
Размещение и элементы крепления радиаторов подсистем СОТР изображены на
рисунке 2.7.13.
В состав СОТР ТСП СС входят два ТПР, в СОТР ТСП АБ - один ТПР. На из¬
лучающую поверхность всех данных радиаторов установлено терморегулирующее
покрытие, состоящее из элементов ТРП - К208СрЭ.
Схема размещения ATT внутри ТСП СС представлена на рисунке 2.7.14, профили
одинарных и сдвоенных ATT - на рисунке 2.7.15.
1 - ТСП СС; 2 - одинарная ATT; 3 - сдвоенная ATT
Рисунок 2.7.14.Схема размещения ATT внутри ТСП СС
Рисунок 2.7.15. Профили одинарных и сдвоенных ATT ТСП СС
215
Теплоотвод от ТСП СС осуществляется с двух радиаторов ТПР СОТР ТСП СС
и с незакрытой ЭВТИ части тыльной поверхности ТСП СС (радиационная поверх¬
ность). Радиационная поверхность представляет собой часть поверхности «тыльной»
стороны ТСП СС со стороны оси «-Х» изделия, на которую установлено терморегу¬
лирующее покрытие, состоящее из элементов ТРП - К208СрЭ (рисунок 2.7.16). Пло¬
щадь радиационной поверхности ~ 0,8 м2.
1 - тыльная поверхность ТСП СС; 2 - радиационная поверхность
Рисунок 2.7.16. Вид ТСП ССсо стороны оси «-Х»
Принципиальная схема СОТР, имеющей в своем составе контурную тепловую
трубу, представлена на рисунке 2.7.17.
На коллекторном теплопроводе ТСП СС установлен двухсекционный электрона¬
греватель - одна секция по оси «- Z», другая по оси «+Z» КА. Тип электронагревате¬
ля - электрический фольговый (НЭФ).
НЭФ устанавливается на пластину, изготовленную из листа АМгЗМ толщиной
3 мм. Каждая секция электронагревателя крепится к коллектору винтами. Мощность
каждой секции электронагревателя - (30±3,5) Вт при напряжении (27±1,2) В. Обе
секции электронагревателя включаются/выключаются одновременно, в соответствии
с показаниями группы управляющих термодатчиков Т331.1,2,3.
216
в
Рисунок 2.7.17. Схема СОТР с контурной тепловой трубой
ТЭМХ, входящий в состав теплопровода радиатора СС, радиатор-охладитель
(РТО-1) которого установлен по оси «+Z» КА, имеет индекс ТЭМХ1. Управление им
производится по показаниям двух групп управляющих термодатчиков:
- группа ТЗЗ1.1,2,3 установлена в центре коллектора;
- группа Т350.1,2,3 установлена в месте входа магистралей КнТТ в РТО-1.
ТЭМХ, входящий в состав теплопровода радиатора СС, радиатор-охладитель
(РТО-2) которого установлен по оси «-Z» КА, имеет индекс ТЭМХ2. Управление им
производится по показаниям двух групп управляющих термодатчиков:
- группа ТЗЗ 1.1,2,3;
- группа Т351.1,2,3, установлена в месте входа магистралей КнТТ в РТО-2.
Одной из важнейших систем КА «ЭЛЕКТРО-JI» является двигательная установ¬
ка, в ее состав входят:
- шар-баллон;
- блок наддува;
- три топливных бака;
- три компенсатора температурного изменения объема топлива;
- три магистральных клапана;
- четыре двигательных блока коррекции (ДБК) - по два двигателя коррекции (ДК)
ТК500М в каждом (один основной и один резервный);
- восемь двигательных блоков стабилизации и ориентации (ДБС) по два двигателя
стабилизации (ДС) К50-10.1 в каждом (один основной и один резервный);
- трубопроводы;
- кабельная сеть;
- элементы конструкции (пилон, кронштейны для установки двигательных блоков,
ложементы и пр.).
217
в
Несущей конструкцией для установки ДУ на КА «ЭЛЕКТРО-JI» служит корпус
платформы «НАВИГАТОР».Топливные баки ДУ расположены между вертикальны¬
ми стойками каркаса корпуса. Для их установки в листе обшивки корпуса сделаны
отверстия таким образом, что часть конструкции топливного бака находится вну¬
три полости корпуса. Два компенсатора топливных баков расположены на обшив¬
ке между вертикальными стойками каркаса корпуса. Один компенсатор топливного
бака установлен аналогичным способом на пилоне, предназначенном для размеще¬
ния кронштейнов с двигательными блоками. Пилон имеет незамкнутую коробчатую
форму. На пилоне внутри полости короба расположен шар-баллон. Блоки двигате¬
лей коррекции и блоки двигателей стабилизации устанавливаются на четырех оди¬
наковых кронштейнах, выполненных на баках и на пилоне. На каждом кронштейне
устанавливается по два двигательных блока стабилизации и один двигательный блок
коррекции.
1 - теплопровод СОТР ДУ; 2 - дополнительный теплопровод; 3 - радиатор ДУ
Рисунок 2.7.18. Схема размещения теплопровода СОТР ДУ
218
в
В систему обеспечения теплового режима двигательной установки входят:
- теплопровод на основе тепловых труб;
- электронагреватели;
- четыре группы управляющих термодатчиков;
- термооптические покрытия элементов конструкции ДУ;
- теплоизоляция;
- бортовой комплекс управления (функционально).
По верхнему шпангоуту корпуса проходит теплопровод СОТР ДУ, представляю¬
щий собой две тепловые трубы. Теплопровод предназначен для выравнивания тепло¬
вого поля конструкции ДУ и корпуса базового модуля служебных систем.
Схема размещения теплопровода СОТР ДУ представлена на рисунке 2.7.18. Ука¬
зана полная комплектация, характерная для КА серии «СПЕКТР». Элементы, харак¬
терные для КА «ЭЛЕКТРО-JI», выделены зеленым цветом.
На каждом топливном баке установлен электронагреватель, состоящий из трех
секций. Каждая такая секция представляет собой электронагреватель типа НЭСТ
с номинальной мощностью 8,2 Вт. Суммарная номинальная мощность трех секций
электронагревателя, установленных на одном баке, 24,6 Вт.
Все три секции электронагревателя включаются/выключаются одновременно,
в соответствии с показаниями своей группы управляющих термодатчиков.
Электронагреватель, установленный на пилоне кронштейна с двигательными бло¬
ками, выполнен в виде двух секций. Тип электронагревателя - НЭСТ. Электронагре¬
ватели размещены на внутренней перегородке кронштейна. Номинальная мощность
каждой секции электронагревателя (5,12-0,77) Вт. Обе секции электронагревателя
включаются/выключаются одновременно, в соответствии с показаниями своей груп¬
пы управляющих термодатчиков.
Управление электронагревателями топливных баков и электронагревателями
кронштейна на пилоне производится по показаниям следующих групп управляющих
термодатчиков:
- группа Т460.1,2,3, управляет электронагревателем, установленным на кронштей¬
не на пилоне;
- группа Т461.1,2,3, управляет электронагревателем, установленным на топливном
баке 1;
- группа Т462.1,2,3, управляет электронагревателем, установленным на топливном
баке 2;
- группа Т463.1,2,3, управляет электронагревателем, установленным на топливном
баке 3.
Каждая группа управляющих термодатчиков состоит из трех термодатчиков. Тер¬
модатчики, входящие в состав группы Т460.1,2,3, установлены вплотную друг к дру¬
гу и размещаются на кронштейне непосредственно около секции электронагревателя
кронштейна.
Аккумуляторная батарея требует более узкого температурного диапазона,
чем остальная служебная аппаратура, поэтому АБ размещена на отдельном ТСП
(ТСП АБ). Размещение АБ показано на рисунке 2.7.19.
В состав СОТР ТСП АБ входят:
- тепловая сотопанель на базе аксиальных тепловых труб;
- коллектор на базе тепловых труб;
- теплопровод радиатора АБ, включая собственно радиатор-охладитель (радиаци¬
онный теплообменник);
219
Рисунок 2.7.19. Общий вид установки АБ на МКП «НАВИГАТОР»
(теплопровод радиатора АБ условно не показан)
- электронагреватель;
- две группы управляющих термодатчиков;
- терморегулирующее покрытие с заданными термооптическими характеристиками;
- теплоизоляция;
- воздуховод;
- вентилятор РБФ-5210-100 (работает только на СК при заряде АБ);
- бортовой комплекс управления (функционально).
Конструктивно ТСП АБ Н-5061-0 представляет собой плоскую прямоугольную
трехслойную конструкцию (800x548) мм со встроенными аксиальными тепловыми
трубами, выполняющую одновременно роль силовой рамы для установки приборно¬
го оборудования и роль теплоотводящего агрегата СОТР.
Наряду со встроенными тепловыми трубами в конструкцию ТСП АБ входят два
алюминиевых поверхностных листа и алюминиевые соты, заполняющие промежутки
между корпусами тепловых труб. Толщина ТСП АБ ~ 18,6 мм.
Встроенные тепловые трубы предназначены для сбора и отвода к коллектору теп¬
ла, выделяемого приборным оборудованием. В конструкцию ТСП АБ входят пять ак¬
сиальных тепловых труб. Расстояние между осями аксиальных тепловых труб 92 мм.
Коллектор представляет собой три параллельные тепловые трубы, установленные
на поверхности ТСП АБ под углом ~ 35° к аксиальным тепловым трубам, встроенным
в ТСП АБ. Для установки управляющих термодатчиков на коллектор применяется
пластина, изготовленная из АМгЗМ толщиной 2 мм.
Для отвода тепла от коллектора используется теплопровод радиатора - контурная
тепловая труба, передающая тепло от коллектора к радиатору-охладителю, который
сбрасывает тепло в окружающее пространство. Нормаль к рабочей поверхности ра¬
диатора-охладителя СОТР ТСП АБ совпадает с осью «+Y» изделия. Размеры ради¬
атора-охладителя СОТР ТСП АБ (1900x320) мм совпадают с размерами радиатора-
охладителя СОТР ТСП СС.
220
На внешнюю поверхность радиатора-охладителя со стороны оси «+Y» изделия
(ориентированную в сторону космического пространства) установлено терморегули¬
рующее покрытие, состоящее из элементов ТРП К-208СрЭ.
ТЭМХ, входящий в состав теплопровода радиатора АБ, имеет индекс ТЭМХЗ.
Управление им производится по показаниям двух групп управляющих термодатчиков:
- группа Т335.1,2,3, установлена по Э2-5011-90 на краю коллектора рядом с регу¬
лятором давления;
- группа Т352.1,2,3, установлена по Э2-5070-590 в месте входа магистралей КнТТ
в радиатор-охладитель.
Каждая группа управляющих термодатчиков состоит из трех термодатчиков.
Обе группы управляющих термодатчиков опрашиваются БКУ.
На испаритель установлен электронагреватель, имеющий индекс НГ18, состо¬
ящий из двух секций. Тип электронагревателя - электрический фольговый (НЭФ).
Мощность каждой секции (15±3) Вт при напряжении (27±1,2) В. Общая мощность
электронагревателя (30±6) Вт при напряжении 27 В. Электронагреватель включает¬
ся/выключается в соответствии с показаниями группы управляющих термодатчиков
Т335.1,2,3.
Теплоизоляция, состоящая из матов ЭВТИ, закрывает все поверхности ТСП АБ,
вместе с установленным на ней оборудованием.
Нерабочие поверхности радиаторов-охладителей СОТР ТСП АБ и СОТР ТСП
МСУ не закрыты теплоизоляцией для организации теплообмена между ними.
Элементы крепления радиатора-охладителя СОТР ТСП АБ не закрыты
теплоизоляцией.
Для обеспечения теплового режима АБ при заряде, проводимом при нахождении
КА на СК, применен вентилятор РБФ-5210-100, подающий воздух по воздуховоду
в зазор между корпусом МКП и ТСП АБ.
Вентилятор запитывается от наземного источника одновременно с подачей пита¬
ния на заряд АБ. Отключение происходит перед командой подъема (КП). Вентилятор
установлен на адаптере, который после отделения КА остается на разгонном блоке.
Основные параметры вентилятора РБФ-5210-100:
- тип вентилятора - осевой одноступенчатый;
- рабочая среда - азот или воздух;
- производительность не менее 16 л/с (016 м3/с);
- развиваемое статическое давление 29 Па (3,0 кгс/м2);
- потребляемая мощность 6,48 Вт при номинальном напряжении питания 27 В;
- частота вращения рабочих колес 5000 об/мин;
- диаметр 90 мм.
В состав СОТР ПМ приборов СДП-1 входят:
- радиационный теплообменник;
- три электронагревателя;
- одна группа управляющих термодатчиков;
- терморегулирующее покрытие с заданными термооптическими характеристиками;
- теплоизоляция;
- бортовой комплекс управления (функционально).
Два прибора СДП-1 установлены на кронштейне (рисунок 2.7.20). Плоскость
кронштейна со стороны оси «-Х», являющаяся посадочным местом приборов
СДП-1, наклонена под углом 10° к оси «+У» КА.
221
1 - кронштейн; 2 - радиатор; 3 - посадочное место СДП-1; 4 - основание кронштейна
Рисунок 2.7.20. Общий вид кронштейна приборов СДП-1
Отвод тепла от посадочного места приборов осуществляется радиатором со сто¬
роны полупространства «+У» площадью ~ 0,037 м2, а со стороны полупространства
«-Y» - площадью ~ 0,06 м2. На радиатор нанесено терморегулирующее покрытие:
эмаль ХС-973 серая, эмаль ЭКОМ-1 белая. Для компенсации теплостоков при нахожде¬
нии КА в тени Земли на кронштейне установлены три электронагревателя типа НЭСТ:
- два электронагревателя, имеющие индексы НГ15-1и НГ15-2, мощностью
(6,5+0,65) Вт каждый;
- электронагреватель, имеющий индекс НГ15-3, мощностью (5,5 + 0,75) Вт.
Все три электронагревателя включаются/выключаются одновременно по показа¬
ниям группы управляющих термодатчиков Т552.1,2,3. Три электронагревателя и тер¬
модатчики (три управляющие и один телеметрический - Т550) установлены на крон¬
штейне СДП-1.
Внешняя поверхность основания кронштейна закрыта теплоизоляцией.
В состав СОТР ПМ блоков СОСБ входят:
- теплоизоляция;
- терморегулирующее покрытие с заданными термооптическими характеристиками.
В установленную на изделии СОСБ входят:
- привод СОСБ - электромеханический блок Э16;
- блок электроники (БЭ) - Э15.
Конструктивно электромеханический блок состоит из токосъемника и электродви¬
гателя вместе с редуктором и корпусом. Привод СОСБ установлен на боковой стен¬
ке корпуса МКП «НАВИГАТОР» по оси «+У» КА на установочном фланце. Блок
электроники установлен на пасту кремнийорганическую теплопроводную на боковую
стенку корпуса МКП по оси «+У» изделия, правее и выше электромеханического бло¬
ка Э16, если смотреть с оси «+У» изделия. Конструктивное исполнение описываемой
части базового модуля служебных систем таково, что блок электроники Э15 и привод
СОСБ полностью закрыты ЭВТИ, кроме верхней крышки токосъемника привода.
222
в
Поэтому для обеспечения заданного температурного режима посадочных мест
блоков СОСБ применены пассивные СОТР - заданный температурный режим реали¬
зуется за счет кондуктивных и лучистых связей блоков СОСБ с установочным флан¬
цем и боковой стенкой корпуса МКП в сочетании с установкой общей с этой стенкой
экранно-вакуумной теплоизоляции.
На открытую верхнюю крышку токосъемника привода СОСБ нанесено терморе¬
гулирующее покрытие - эмаль ЭКОМ-1 белая.
2.7.4. Моделирование теплового режима и определение параметров
СОТР КА «ЭЛЕКТРО-Л»
Структурный подход, использованный при создании СОТР МКП «НАВИГАТОР»,
обусловил необходимость организации следующих процессов:
- структуризация процесса теплового проектирования, выражаемая декомпози¬
цией проектных задач и документации, выделением стадий, этапов, проектных
процедур;
- обеспечение итерационного характера теплового проектирования;
- использование типизации и унификации проектных решений СОТР.
Схемные решения, которые изложены в предыдущем подразделе, появились
в результате многошаговых итераций в соответствии с принятой структурой про¬
цесса решения задачи теплового проектирования, схема которой представлена на
рисунке 2.7.2.
В процессе создания СОТР служебных систем было последовательно разработа¬
но несколько математических моделей теплового режима. На этапе проектирования,
когда проходило определение конструкции и выбор средств СОТР, использовались
упрощенные модели теплового режима с минимальным количеством расчетных эле¬
ментов и тепловых связей между ними.
Параметры тепловых связей для упрощённой математической модели были взя¬
ты с изделий-аналогов, параметры тепловых интерфейсов приборов и оборудования
заданы из условий обеспечения заданных температурных условий эксплуатации
приборов.
На основе расчётов по упрощённой модели теплового режима были определены
состав и параметры средств СОТР и согласованы с разработчиками приборов пара¬
метры теплового интерфейса.
Далее, по мере разработки конструкции и средств подсистем СОТР, уточнения
параметров приборов, проводились тепловые расчёты аксиальных труб, контурных
тепловых труб, элементов конструкции СОТР и тепловых сотопанелей. С учётом по¬
лученных данных были разработаны детализированные математические модели те¬
плового режима, как всего КА, так и отдельных его фрагментов. Результаты расчётов
легли в основу методик тепловакуумных испытаний.
Можно выделить ряд взаимосвязанных задач, решаемых при анализе теплового
состояния КА «ЭЛЕКТРО-JI»:
- расчет внешних падающих потоков и тепловых связей фрагментов и конструкции
КА;
- расчет угловых коэффициентов между элементами конструкции;
- расчет температурных полей по конструкции и элементам КА.
223
Рисунок 2.7.21. Расчетная геометрическая модель КА «ЭЛЕКТРО-JI»
В качестве примера на рисунке 2.7.21 представлена геометрическая модель,
которая использовалась для расчета внешних тепловых потоков на поверхность
КА «ЭЛЕКТРО-Л». Модель представляет собой набор плоских площадок, при рас¬
чете потоков используется блок расчета траекторных параметров, который для каж¬
дого заданного момента времени позволяет определить положение КА относительно
Солнца и Земли.
В тепловой модели конструкция КА «ЭЛЕКТРО-Л» описывается набором изотер¬
мических узлов, для которых задаются теплоемкость, оптические свойства поверх¬
ностей геометрической модели, кондуктивные связи, циклограммы тепловыделений
аппаратуры и приборов. При расчете температур используется метод сосредоточен¬
ных параметров, в котором для каждого расчетного узла составляется уравнение те¬
плового баланса, и полученная система решается численно.
Фрагменты КА «ЭЛЕКТРО-Л» соединяются между собой элементами несущей
конструкции. Поскольку термическое сопротивление данных элементов конструкции
весьма велико, то в тепловом отношении они оказываются слабо связанными между
собой, что позволяет проводить экспериментальную отработку теплового режима на
отдельных фрагментах КА.
Для расчета теплового режима агрегатов и элементов конструкции «ЭЛЕКТРО-Л»
использовалось программно-алгоритмическое обеспечение (ПАО) пакета ТЕРМ
(Алыпов В.В., Залетаев С.В., 2011).
224
Расчет теплового режима «ЭЛЕКТРО-JI» проводится методом изотермических
узлов. Тепловое состояние Т, любого изотермического узла (элемента) в произволь¬
ный момент времени т описывается уравнением
dTj
crYii— =Q 1 /+Q2/+Q3/+Q4/+Q5,,
dx
где от-, - массовая теплоемкость изотермического узла, Дж/К;
Q1/ — тепловой поток, характеризующий наличие внутреннего источника тепла
в изотермическом узле, Вт;
Q2/— тепловой поток, характеризующий теплообмен изотермического узла с эле¬
ментами конструкции, имеющими заданную температуру, Вт;
Q3, - тепловой поток, характеризующий теплообмен изотермических узлов друг
с другом, Вт;
Q4/ - тепловой поток, характеризующий теплообмен изотермического узла с окру¬
жающим пространством, Вт;
Q5, - тепловой поток, характеризующий мощность электрообогрева СОТР в изо¬
термическом узле, Вт.
Математическая модель теплового режима объединяет тепловую модель изделия
(ш, и Q1,) и модели внешних и внутренних тепловых воздействий на элементы кон¬
структивно-тепловой модели (Q1,Q2,Q3,Q4,Q5).
Тепловая модель включает выделение в конструкции КА расчетных узловых эле¬
ментов (изотермических узлов), температура в пределах которых в каждый момент
времени может считаться постоянной. Для работы в данном пакете тепловая модель
совмещается с геометрической моделью конструкции. Выделенные в конструкции
КА изотермические узлы моделируются поверхностями, воспроизводящими форму
узлов. На основе полученных моделей в рамках пакета ТЕРМ формируется модель¬
ный файл.
Модельный файл является основным файлом проекта задачи. Он содержит все
данные, необходимые для расчета теплового режима КА (или фрагмента КА): изотер¬
мические узлы, модели их поверхностей и модели окружающих поверхностей КА,
тепловые связи, динамические и статические тепловые нагрузки, в том числе алго¬
ритмы работы и параметры средств обеспечения теплового режима.
Для поверхностей, моделирующих геометрическую форму изотермических уз¬
лов, задаются координаты в принятой системе координат, термооптические харак¬
теристики и указывается наличие и характеристики используемой теплоизоляции,
определяются поступающие потоки от внешних источников тепла и коэффициенты
лучистого теплообмена.
Для узлов задаются начальные или фиксированные температуры, изменения фик¬
сированных температур, теплоемкости, циклограммы работы внутренних источни¬
ков тепла, наличие в узлах управляемого по температуре электрообогрева и алгоритм
его работы, определяются кондуктивные и лучистые термические связи между рас¬
четными узлами.
В соответствии с технологией работы с пакетом ТЕРМ формирование файлов
для расчета угловых коэффициентов лучистого теплообмена между поверхностями
геометрической модели, падающих внешних тепловых потоков на поверхности гео¬
метрической модели, распределения температур по изотермическим узлам тепловой
модели осуществляется внутри пакета в диалоговом окне работы с модельным фай¬
лом в соответствующих вкладках «Потоки», «Лучистые связи», «Температуры».
225
ЕВ
В моделирование теплового потока, характеризующего внутренние источники
тепла, входит определение циклограммы включения внутреннего источника тепла
(Q1, = Дт)) и реализация заданной циклограммы включения в рамках модельного фай¬
ла проекта пакета ТЕРМ.
В моделирование теплового потока, характеризующего теплообмен изотермиче¬
ского узла с элементами конструкции, имеющими заданную температуру Тт входят
определение изменения заданной температуры по времени (Tw определение
термических связей изотермических узлов с узлами с заданной температурой и реа¬
лизация полученных данных в рамках модельного файла проекта пакета ТЕРМ.
Исходными данными для расчета теплообмена изотермического узла с окружа¬
ющим пространством являются геометрическая модель КА «ЭЛЕКТРО-JI», состав
и характеристики используемого пакета теплоизоляции, тип ориентации КА, угол
между плоскостью орбиты и плоскостью эклиптики, параметры орбиты. Потоки рас¬
считываются для видимого и инфракрасного участков спектра с учетом возможности
взаимного экранирования поверхностей КА «ЭЛЕКТРО-Л» с использованием соот¬
ветствующей вкладки пакета ТЕРМ.
В моделирование теплового потока, характеризующего мощность электрообогре¬
ва СОТР, входит определение алгоритма включения электронагревателя, а именно:
определение узла, по температуре которого осуществляется включение-выключение
электронагревателя, определение температурного диапазона регулирования, опреде¬
ление размещения электронагревателя в тепловой модели и реализация заданного ал¬
горитма в рамках модельного файла проекта пакета ТЕРМ.
По принятой в НПО имени С.А. Лавочкина методике решение задачи теплового
проектирования происходит поэтапно по следующей схеме.
Этап 1: решение прямой задачи, т.е. составление тепловой модели с разбивкой
конструкции на элементы, представляющие собой области с усредненными по массе
и по поверхности характеристиками, и задание расчетных значений этих характери¬
стик: геометрических (площадь излучающих поверхностей элементов модели и угло¬
вые коэффициенты излучения между поверхностями и на границе), теплофизических
(теплоемкость элементов модели, оптические коэффициенты излучающих/поглоща¬
ющих поверхностей и связи теплопроводностью и/или конвекцией между элемен¬
тами модели и на границе) и компьютерный расчет вариантов теплового состояния.
Этап 2: проведение экспериментальных работ по отработке теплового режима.
Этап 3: решение обратной задачи, т.е. проведение коррекции тепловой модели, что
означает идентификацию расчетных результатов с экспериментальными данными,
введение поправок в тепловую модель при их рассогласовании с уточнением функци¬
ональной тепловой схемы и/или характеристик элементов модели с учетом погреш¬
ностей измерения температуры.
Этап 4: использование откорректированной тепловой модели для проведения
вычислительного эксперимента и предсказания теплового состояния КА (или его
фрагмента) при специфических граничных условиях, т.е. расчетное воспроизведение
ситуаций, которые не проверяются или не могут быть проверены в процессе физиче¬
ского эксперимента.
В соответствии с решением Р-Э2-14-07 выпущены итоговые тепловые расчеты
составных частей изделия «ЭЛЕКТРО-JI».
1) Расчет тепловой. Часть вторая. «Изделие на стартовой позиции».
2) Расчет тепловой. Часть третья. «Изделие на выведении и при раскрытии эле¬
ментов конструкции».
226
в
3) Расчет тепловой. Часть четвертая. «Тепловая сотопанель аккумуляторной
батареи».
4) Расчет тепловой. Часть пятая. «Тепловая сотопанель служебных систем».
5) Расчет тепловой. Часть шестая. «Двигательная установка».
6) Расчет тепловой. Часть седьмая. «Посадочное место приборов СДП-1».
7) Расчет тепловой. Часть восьмая. «Устройства системы ориентации
солнечных батарей».
8) Расчет тепловой. Часть девятая. «Привод ОНА».
9) Расчет тепловой. Часть десятая. «Тепловая сотопанель МСУ».
10) Расчет тепловой. Часть двенадцатая. «Тепловая сотопанель полезной
нагрузки».
11) Расчет тепловой. Часть тринадцатая. «Посадочные места приборов ГГАК».
12) Расчет тепловой. Часть четырнадцатая. «Посадочные места датчиков элек¬
трического поля».
Результаты расчетов показали, что все заданные требования по обеспечению
температурного режима элементов аппаратуры, конструкции и оборудования, изло¬
женные в ТУ на КА «ЭЛЕКТРО-Jl» (Э2-0000-0ТУ), выполнены. Проведенная иден¬
тификация результатов тепловакуумных испытаний и расчетных тепловых моделей
фрагментов КА показала хорошую сходимость, что подтвердило достоверность раз¬
работанных тепловых моделей фрагментов КА.
Летная эксплуатация КА «ЭЛЕКТРО-Л» и «СПЕКТР-Р» подтвердила обоснован¬
ность решений, принятых в процессе теплового проектирования МКП «НАВИГА¬
ТОР». В качестве примера на рисунке 2.7.22 представлен график изменения темпера¬
туры ТСП СС КА «ЭЛЕКТРО-Л» № 1 за время эксплуатации на орбите.
45
40
35
% 30
25
Я 20
| 15
10
5
0
Рисунок 2.7.22. Изменение температуры ТСП СС КА «ЭЛЕКТРО-Л» № 1
за время эксплуатации на орбите (диапазон допустимых температур
от минус 20 до плюс 40°С)
227
Список литературы
Алыпов В.В., Залетаев С.В. и др. Расчет теплового режима космических аппара¬
тов в орбитальном полете. Пакет прикладных программ «Терм». Регистрационный
№4151 от 18.10.2011г. ФАП. ФГУП ЦНИИмаш.
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
Асмус и др. Развитие космического комплекса гидрометеорологического обеспе¬
чения на базе геостационарных спутников серии «ЭЛЕКТРО-Л» // Вестник ФГУП
НПО им. С.А. Лавочкина. 2012. № 1. С. 3-14.
Кардаьиев Н.С., Алакоз А.В. и др. «РАДИОАСТРОН»: итоги выполнения научной
программы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016.
№ 3. С. 4-24.
Расторгуев А. С., Сачков М.Е., Заболотских М.В. Галактическая астрономия в уль¬
трафиолете // Вестник НПО им. С.А. Лавочкина. 2016. № 3. С. 38-47.
Тулин Д.В., Финченко B.C. Теоретико-экспериментальные методы проектирования
систем обеспечения теплового режима космических аппаратов // Проектирование ав¬
томатических космических аппаратов для фундаментальных научных исследований
Сост. В.В. Ефанов; Под редакцией В.В. Хартова, К.М. Пичхадзе: В Зт. Т.З. М.: Изд-во
МАИ ПРИНТ, 2014. С. 1320-1437.
И.В. Москатиньев, Д.В. Тулин
НПО им. С.А. Лавочкина
228
на СИСТЕМА ОРИЕНТАЦИИ СОЛНЕЧНОЙ БАТАРЕИ
МНОГОФУНКЦИОНАЛЬНОЙ КОСМИЧЕСКОЙ
ПЛАТФОРМЫ «НАВИГАТОР»
В период 2004-2009 г. «Корпорация «ВНИИЭМ» по техническому заданию НПО
им. С.А. Лавочкина выполняла составную часть (СЧ) ОКР по созданию системы ори¬
ентации солнечной батареи (СОСБ) для КА «ЭЛЕКТРО-Л» № 1 и «СПЕКТР-Р». Из¬
делие, разработанное в рамках СЧ ОКР, получило условное наименование система
ЭЮ (рисунок 2.8.1).
Система ЭЮ является служебной в составе универсальной космической плат¬
формы (УКП) «НАВИГАТОР». В дальнейшем при разработках КА на базе МКП
«НАВИГАТОР», таких, как «СПЕКТР-УФ», «СПЕКТР-РГ», «АРКТИКА-М»,
система ЭЮ нашла унифицированное применение (Авербух В.Я., Лещинский Э.А.,
2005; Степанов В.В., 2016; Кардагиев Н.С., Алакоз А.В. и др., 2016, № 3; Расторгу¬
ев А.С., Сачков М.Е., Заболотских М.В., 2016; Моишеев А.А., Бабышкин В.Е. и др.,.
2014; Шустов Б.МГ, Сачков М.Е., Боярчук А.А. и др., 2014; Асмус и др., 2012; Ефа¬
нов В.В., Долгополов В.П., 2016).
На КА «ЭЛЕКТРО-Л» устанавливается одна СОСБ, а на КА «СПЕКТР-...»
и «АРКТИКА-М» - две (рисунок 2.8.2).
СОСБ предназначена для разворота без ограничения угла поворота панели сол¬
нечной батареи (БС) активной стороной на Солнце по внешним командам от борто-
Рисунок 2.8.1. Система ЭЮ с пультом ПЭ10
229
2-8
вого комплекса управления (БКУ) КА, а также для передачи по транзитным цепям
токосъёмника системы электрического тока, генерируемого солнечной батареей, в си¬
стему электроснабжения космического аппарата, обеспечения электропитанием при¬
боров, установленных на ферме панели БС и транзитной передачи информационных
сигналов от этих приборов.
Рисунок 2.8.2. КА «ЭЛЕКТРО-Л» и КА «СПЕКТР-Р»
230
2-8
Для обеспечения функций назначения в состав системы включены:
- электромеханический блок привода (ЭМБ), условное наименование блок Э16;
- блок электроники (БЭ), условное наименование блок Э15;
- межблочные соединительные кабели.
ЭМБ предназначен для обеспечения поворота крыла БС относительно оси,
лежащей в его плоскости (оси Y на рисунке 2.8.3), и формирования сигналов
об угловом положении выходного вала (положения БС) относительно корпуса
КА. Блок управления предназначен для приема команд от БКУ на конфигурацию
системы и команд на движение, для выдачи в БКУ и телеметрическую систему КА
информации об угловом положении выходного вала ЭМБ, а также для управле¬
ния питанием электродвигателя ЭМБ и датчиков положения его выходного вала.
Межблочные кабели предназначены для соединения БЭ и ЭМБ по цепям питания
электродвигателя и датчиков положения ЭМБ, а также цепям сигналов датчиков
положения.
1
Рисунок 2.8.3. Оси координат УКП «НАВИГАТОР-М»
Для разных орбит, на которых эксплуатируются КА на базе У КП «НАВИГАТОР-М»,
скорости изменения азимута Солнца различны, и их величины значительно меньше,
чем скорость движения выходного вала ЭМБ системы ЭЮ. Для обеспечения эффек¬
тивного энергопритока БКУ КА управляет СОСБ, реализуя упреждающее или дого¬
няющее наведение панелей БС на Солнце.
2.8.1. Основные параметры и характеристики СОСБ
Система ЭЮ обеспечивает следующие режимы работы:
- поворот выходного вала ЭМБ в любом из двух направлений в соответствии с ко¬
мандами, поданными на вход системы из БКУ КА. При этом погрешность изме¬
рения углового положения выходного вала ЭМБ не более 4°;
231
2-8
- установку выходного вала ЭМБ в фиксированные положения: «0°», «90°», «180 ».
«270°» при движении из любого положения выходного вала по кратчайшему пути
в соответствии с командами, поданными на вход системы из БКУ КА. Погреш¬
ность установки выходного вала ЭМБ в фиксированные положения не более Г.
СОСБ выдает информацию о положении выходного вала ЭМБ относительно кор¬
пуса ЭМБ в БКУ КА и в телеметрическую систему (ТМС) с дискретом 6°.
Установившаяся скорость движения выходного вала электромеханического блока
Э16 относительно собственного корпуса, скрепленного с корпусом КА, составляет
(0,25±0,025)%. Время разгона от нулевой скорости до установившегося значения
скорости выходного вала ЭМБ, а также время торможения выходного вала при ли¬
нейном снижении скорости от установившегося значения до нулевого значения ско¬
рости - от 6 до 8 с.
Система ЭЮ обеспечивает измерение углового положения вала привода, связан¬
ного с панелью БС, в диапазоне значений от 0 до 360° с погрешностью не более 4°.
Система ЭЮ формирует и выдает в систему телеметрии КА сигналы температур¬
ных датчиков, установленных на корпусах электроприводов БС.
Включение и выключение электропитания системы Э10 выполняется по внешним
командам, формируемым БКУ КА.
При включении электропитания СОСБ напряжение электропитания подается на
один из двух каналов управления электроприводами (основной или резервный).
Питание СОСБ осуществляется напряжением (27,0± 1,35) В в процессе летной
эксплуатации и (27,0±3,0) В - в процессе наземной эксплуатации.
В системе применены схемно-технические решения, позволяющие ей сохранить
работоспособность при восстановлении питания после несанкционированного сня¬
тия, а также при снижении напряжения питания на входе системы до 15 В.
Максимальный рабочий ток в цепи электропитания системы ЭЮ в процессе
наземной и летной эксплуатации не более 0,5 А. При неисправностях (в том чис¬
ле и при внутренних коротких замыканиях) система обеспечивает ограничение
тока потребления по цепи электропитания включенного канала с помощью плавкой
вставки (предохранителя) при номинальном токе срабатывания защиты не более
4 А в течение времени не более 1 с.
2.8.2. Команды управления
Управление системой ЭЮ осуществляется по командам, поступающим из
БКУ КА.
Перечень команд, подаваемых в систему ЭЮ из БКУ КА, приведен в таблице 2.8.1.
Команды на включение и выключение питания (ВОК, ВРК, ВЫК) системы вы¬
даются из БКУ КА в виде импульсов напряжения постоянного тока. Формирование
командных импульсов должно обеспечиваться в БКУ КА коммутацией «Общей шины
команд включения-выключения питания», подключенной в аппаратуре системы
к шине «Минус питания», на соответствующую командную цепь.
При несанкционированном снятии электропитания память о последней команде
на включение или выключение питания сохраняется в БЭ, что обеспечивает после
восстановления напряжения электропитания на входе системы ее возврат в исходное
состояние, имевшее место до момента нарушения электропитания - включённое со¬
стояние канала или отключённое состояние системы.
232
2-8
Таблица 2.8.1. Перечень команд
№
обозначение команды
функциональное назначение команды
команды управления конфигурацией системы
1
ВОК
включение питания основного канала СОСБ
2
ВРК
включение питания резервного канала СОСБ
3
ВЫК
выключение питания основного и резервного каналов СОСБ
(выключение системы)
команды на движение
4
КВ-ОК
команда «Движение вперёд», основной канал
5
КН-ОК
команда «Движение назад», основной канал
6
КС-ОК
команда «Стоп», основной канал
7
КВ-РК
команда «Движение вперёд», резервный канал
8
КН-РК
команда «Движение назад», резервный канал
9
КС-РК
команда «Стоп», резервный канал
команды на установку фиксированного положения
10
УО-ОК
команда установки в положение 0°, основной канал
11
У90-ОК
команда установки в положение 90°, основной канал
12
У 180-ОК
Команда установки в положение 180°, основной канал
13
У270-ОК
команда установки в положение 270°, основной канал
14
УО-РК
команда установки в положение 0°, резервный канал
15
У90-РК
команда установки в положение 90°, резервный канал
16
У180-РК
команда установки в положение 180°, резервный канал
17
У270-РК
команда установки в положение 270°, резервный канал
Формирование команд управления движением (КВ-ОК, КН-ОК, КС-ОК, УО-ОК,
У90-ОК, У 180-ОК, У270-ОК, КВ-РК, КН-РК, КС-РК, УО-РК, У90-РК, У180-РК,
У270-РК) для включённого канала системы обеспечивается в БКУ КА коммутацией
«Общей шины команд управления движением» этого канала, подключенной в аппара¬
туре системы к шине «Плюс питания», на соответствующую командную цепь.
Исполнение команды управления движением обеспечивается системой в соответ¬
ствии с памятью о последней поступившей команде.
233
2-8
t
При включении канала холодного резерва, несанкционированном снятии электро¬
питания или понижении напряжения электропитания до 15 В на входе системы па¬
мять о последней принятой команде управления движением не сохраняется и может
быть восстановлена повторной подачей этой команды через время не менее 0,1 с по¬
сле включения другого канала или после восстановления напряжения электропита¬
ния на входе системы на требуемом уровне.
При исполнении команд КВ-ОК и КВ-РК система обеспечивает движение выход¬
ного вала электропривода по направлению против часовой стрелки при виде с конца
выходного вала («Движение вперёд»).
При исполнении команд КН-ОК и КН-РК система обеспечивает движение выход¬
ного вала электропривода по направлению по часовой стрелке при виде с конца вы¬
ходного вала («Движение назад»).
При исполнении команд КС-ОК и КС-РК система обеспечивает прекращение дви¬
жения в любом направлении.
При исполнении команд КВ-ОК, КВ-РК, КН-ОК, КН-РК система обеспечивает
разгон выходного вала при линейном возрастании скорости от нулевого до устано¬
вившегося значения (0,25±0,025)% за время от 6 до 8 с. При этом в процессе разгона
для обеспечения плавности равномерно-ускоренного движения скорость увеличива¬
ется не более чем на 0,05% за каждую секунду движения.
При исполнении команд КС-ОК и КС-РК система обеспечивает торможение вы¬
ходного вала при линейном снижении скорости от установившегося значения до ну¬
левого значения скорости за время от 6 до 8 с. При этом в процессе торможения для
обеспечения плавности равномерно-замедленного движения скорость должна умень¬
шаться не более чем на 0,05% за каждую секунду движения.
При приёме команды управления движением, поступившей в процессе исполне¬
ния ранее поданной команды и требующей изменения направления движения выход¬
ного вала, в системе последовательно выполняются торможение и разгон в требуемом
направлении.
При приёме команды управления движением, не требующей изменения направле¬
ния движения выходного вала электропривода, режим разгона или установившийся
режим движения сохраняется и завершается исполнением последней команды.
При исполнении команд УО-ОК, У90-ОК, У 180-ОК, У270-ОК и У0-РК, У90-РК.
У180-РК, У270-РК система в зависимости от исходного положения выходного вала
ЭМБ обеспечивает движение этого вала по кратчайшему пути в соответствующее
команде угловое положение.
Разгон после приёма команды на движение и торможение после приёма команды
«Стоп» или по достижении выходным валом заданного фиксированного положения
производится аналогично выполнению команд КВ (КН) и КС.
2.8.3. Сигналы контроля
Для выдачи в БКУ и телеметрическую систему КА информации о значении угло¬
вого положения, занимаемого выходным валом ЭМБ и - как следствие - панелью БС.
а также о конфигурации СОСБ в системе ЭЮ предусмотрены сигналы контроля.
Перечень сигналов контроля, выдаваемых СОСБ в БКУ КА, представлен в табли¬
це 2.8.2.
234
2-8
Таблица 2.8.2. Перечень сигналов контроля, передаваемых в БКУ КА
№
условное
обозначение
канал формирования
сигнала в СОСБ
канал-приемник
сигнала в БКУ
1
СП ГОК
основной
1
2
СП2-ОК
2
3
СПЗ-ОК
3
4
СП1-РК
резервный
1
5
СП2-РК
2
6
СПЗ-РК
3
Сигналы контроля, сформированные системой ЭЮ, передают в БКУ КА значе¬
ние углового положения выходного вала ЭМБ по результатам обработки сигналов
6-разрядных датчиков положения основного и резервного каналов {Авербух В.Я.
и др., 200\). Сигналы контроля формируются в виде последовательности импульсов
напряжения и передаются по троированной схеме с выходов основного и резервного
каналов системы.
Угловое положение выходного вала ЭМБ однозначно определяется БКУ по ре¬
зультатам измерения периода следования импульсных сигналов СП, перечисленных
в таблице, с погрешностью не более 4°.Соответствие между угловым положени¬
ем вала привода и периодом следования импульсов устанавливается БКУ согласно
таблице 2.8.3.
Перечень сигналов контроля, формируемых в системе Э10 и передаваемых в ТМС
КА для телеметрического контроля системы ЭЮ, приведен в таблице 2.8.4. В табли¬
цах 2.8.5 и 2.8.6 представлены коды телеметрических сигналов об угловом положе¬
нии выходного вала системы ЭЮ.
Сигналы формируются с помощью транзисторных ключей с открытым коллекто¬
ром и соответствуют следующим требованиям:
Открытое состояние транзисторного ключа идентифицируется как состояние
«О», закрытое состояние (при отсутствии токопроводимости в режиме запира¬
ния) - как состояние «1». При этом для сигналов типа ТП и ТУ за наличие сиг¬
нала - «1» принимается ток ключа не более 100 мкА при напряжении не более
9 В, а за наличие сигнала «0» - ток ключа от 450 до 550 мкА при напряжении не
более 1 В.
При выключении питания системы, в том числе несанкционированном, и при
понижении напряжения электропитания до 15В транзисторные ключи-формиро¬
ватели телеметрических сигналов, переходят в закрытое состояние, соответству¬
ющее значению «1», при этом 6-разрядный сигнал положения вала и 4-разрядный
сигнал установки не отображают истинное угловое положение выходного вала
ЭМБ.
Частота опроса телеметрических сигналов (транзисторных ключей) системы ЭЮ
со стороны ТМС КА в режиме непосредственной передачи составляет 7,2 Гц, в режи¬
ме записи - 1,56 Гц.
235
2-8
i
Таблица 2.8.3. Коды углового положения
№
Угловое
положение
выходного вала
ЭМБ, °
Период следования
импульсов,
МКС
№
Угловое
положение
выходного вала
ЭМБ, °
Период следования
импульсов,
МКС
1
0
1703...1711
31
180
4384...4405
2
6
2043...2053
32
186
4044...4063
3
12
2086...2095
33
192
4001...4020
4
18
3448...3464
34
198
2639...2651
5
24
3107...3121
35
204
2980...2994
6
30
3065...3079
36
210
3022...3036
7
36
3235...3250
37
216
2852...2865
8
42
1873...1881
38
222
4214...4234
9
48
2554...2566
39
228
3533...3550
10
54
2384...2395
40
234
3703...3721
11
60
3746...3763
41
240
2341...2352
12
66
3831...3849
42
246
2256...2267
13
72
3150...3165
43
252
2937...2951
14
78’
3490...3507
44
258
2596...2609
15
84
3405...3421
45
264
2682...2694
16
90
4086...4106
46
270
2001...2010
17
96
4129...4148
47
276
1958...1967 !
18
102
3788...3806
48
282
2299...2309
19
108
3959...3977
49
288
2128...2138
20
114
3916...3934
50
294
2171...2181
21
120
4257...4277
51
300
1830...1839
22
126
2894...2908
52
306
3192...3207
23
132
2724...2737
53
312
3363...3378
24
138
2809...2823
54
318
3278...3293
25
144
4171...4191
55
324
1915...1924
26
150
4342...4362
56
330
1745...1753
27
156
3661...3678
57
336
2426...2438
28
162
3576...3592
58
342
2511...2523
29
168
3618...3635
59
348
2469...2480
30
174
4299...4319
60
354
1788...1796
236
2-8
Таблица 2.8.4. Перечень сигналов контроля, передаваемых в ТМ-систему
№
условное
обозначение
сигнала
информационное
содержание
сигнала
значения
параметров
1
ТВОК
наличие/отсутствие
питания
основного канала
0 - основной канал включён
1 - основной канал выключен
2
ТВРК
наличие/отсутствие
питания
резервного канала
0 - резервный канал включён
1 - резервный канал выключен
1
оо
ТП1 -ТП6
состояние разрядов
датчика
положения
ТП1 - младший разряд
ТП6 - старший разряд
0 - наличие сигнала
1 - отсутствие сигнала
по каждому из разрядов
9-12
ТУ1 - ТУ 4
состояние разрядов
датчика
установки
ТУ 1 - младший разряд
ТУ4 - старший разряд
0 - наличие сигнала
1 - отсутствие сигнала
по каждому из разрядов
Таблица 2.8.5. Коды углового положения, формируемые датчиком фиксированного
положения
№
Угловое положение вала,0
4-х разрядный сигнал установки
ТУ 4
ТУЗ
ТУ 2
ТУ1
1
(0-90)°
0
0
1
0
2
о
О
Os
0
1
1
0
3
(90-180)°
0
1
0
0
4
о
О
ОО
1
1
0
0
5
(180-270)°
1
0
0
0
6
270°
1
0
0
1
7
(270-360)°
0
0
0
1
8
360° (0°)
0
0
1
1
237
2-8
Таблица 2.8.6. Коды углового положения, формируемые датчиком положения выходного вала
№
угловое
положение
вала,0
6-разрядный сигнал
положения
№
угловое
положение
вала,0
6-разрядный сигнал
положения
ТП6
ТП5
ТП4
тпз
ТП2
ТП1
ТП6
ТП5
ТП4
тпз
ТП2
Ё
1
0 (360)
0
0
0
0
0
0
31
180
1
1
1
1
1
1
2
6
0
0
0
1
0
0
32
186
1
1
1
0
1
1
3
12
1
0
0
1
0
0
33
192
0
1
1
0
1
1
4
18
1
0
0
1
0
1
34
198
0
1
1
0
1
0
5
24
1
0
0
0
0
1
35
204
0
1
1
1
1
0
6
30
0
0
0
0
0
1
36
210
1
1
1
1
1
0
7
36
0
0
1
0
0
1
37
216
1
1
0
1
1
0
• 8
42
0
0
1
0
0
0
38
222
1
1
0
1
1
1
9
48
0
0
1
0
1
0
39
228
1
1
0
1
0
1
10
54
0
0
0
0
1
0
40
234
1
1
1
1
0
1
11
60
0
0
0
0
1
1
41
240
1
1
1
1
0
0
12
66
0
1
0
0
1
1
42
246
1
0
1
1
0
0
13
72
0
1
0
0
0
1
43
252
1
0
1
1
1
0
14
78
0
1
0
1
0
1
44
258
1
0
1
0
1
0
15
84
0
0
0
1
0
1
45
264
1
1
1
0
1
0
16
90
0
0
0
1
1
1
46
270
1
1
1
0
0
0
17
96
1
0
0
1
1
1
47
276
0
1
1
0
0
0
18
102
1
0
0
0
1
1
48
282
0
1
1
1
0
0
19
108
1
0
1
0
1
1
49
288
0
1
0
1
0
0
20
114
0
0
1
0
1
1
50
294
1
1
0
1
0
0
21
120
0
0
1
1
1
1
51
300
1
1
0
0
0
0
22
126
0
0
1
1
1
0
52
306
1
1
0
0
0
1
23
132
0
0
0
1
1
0
53
312
1
1
1
0
0
1
24
138
0
1
0
1
1
0
54
318
1
0
1
0
0
1
25
144
0
1
0
1
1
1
55
324
1
0
1
0
0
0
26
150
0
1
1
1
1
1
56
330
1
0
0
0
0
0
27
156
0
1
1
1
0
1
57
336
1
0
0
0
1
0
28
162
0
0
1
1
0
1
58
342
1
1
0
0
1
0
29
168
1
0
1
1
0
1
59
348
0
1
0
0
1
0
30
174
1
0
1
1
1
1
60
354
0
1
0
0
0
0
238
2-8
Токосъемник
Для передачи электроэнергии, сгенерированной фотоэлектрическими преобра¬
зователями солнечной батареи, металлизации ее каркаса и электропитания научных
приборов, устанавливаемых на каркас БС, в составе электромеханического блока си¬
стемы ЭЮ имеется токосъемное устройство.
Токосъемник блока Э16 обеспечивает транзитную связь без ограничения угла по¬
ворота выходного вала блока по 18 цепям:
- четырем силовым цепям, каждая из которых обеспечивает пропускание постоян¬
ного тока до 40 А при напряжении до 40 В и падении напряжения не более 0,15 В;
- одной силовой цепи, обеспечивающей пропускание постоянного тока до 2 А;
- двенадцати слаботочным цепям, каждая из которых допускает пропускание по¬
стоянного тока от 1 мА до 0,6 А при напряжении от 40 мВ до 30 В. Суммарный
ток, пропускаемый через 12 цепей, не должен превышать 4,5 А;
- цепи «Экран», объединяющей цепь металлизации каркаса БС, экранную оболоч¬
ку цепей термодатчика БС и экраны цепей приборов, установленных на панели
БС. Данная цепь допускает прохождение импульсов тока до 100 А в течение не¬
скольких мкс. Падение напряжения в цепи «Экран» не более 0,08 В.
Интересно отметить, что за САС КА (4000 оборотов выходного вала) пробег ще¬
ток по кольцам токосъемника составляет всего 700 м, что гарантирует практически
полное отсутствие износа трущихся поверхностей.
2.8.4. Обеспечение надежности и долговечности СОСБ
При разработке СОСБ основное внимание было уделено обеспечению ее надеж¬
ности и долговечности. Примененные конструкторские, схемно-технические реше¬
ния и организационные мероприятия, описанные ниже, позволяют обеспечить сохра¬
нение работоспособности при одном отказе любого ЭРИ, объемного или печатного
проводника или пайки.
Вероятность безотказной работы (ВБР) системы за время её эксплуатации в натур¬
ных условиях в составе КА по штатной циклограмме в течение 10 лет (87648 часов)
от момента последней электрической проверки составляет 0,999.
Для повышения надежности все ЭКБ ОП, предназначенные для комплектования
летных образцов блоков системы ЭЮ, проходят дополнительные отбраковочные ис¬
пытания в испытательном техническом центре. Образцы ряда типов ЭКБ, отбира¬
емые от партий закупленных радиоэлементов, такие, как микросхемы, полупрово¬
дники, реле, с целью проверки стабильности и обеспечения качества их изготовления
дополнительно подвергаются разрушающему физическому анализу.
С целью выявления потенциально ненадежных ЭКБ, установленных в блоках Э15
и Э16, каждая система ЭЮ до проведения предъявительских испытаний подвергается
электротермотренировочным испытаниям в объеме 400 часов.
ЭМБ выполнен в негерметичном исполнении. Для сохранении работоспособно¬
сти подшипников в вакууме (при давлении Ю'6мм рт.ст.) применяются подшипники
с защитными уплотнениями (стальные бесконтактные защитные кольца), в которые
закладывается смазка ВНИИНП-274Н, специально разработанная для применения
в космической технике. Этой смазкой покрыты также зубья шестерен и зубчатых ко¬
лес редуктора и выходной ступени.
239
2-8
В конструкции силового и сигнального токосъемника дублированы щеткодержа¬
тели в сборе со щетками. Так, в конструкции силового токосъемника с одним контакт¬
ным кольцом контактируют одновременно три щетки, каждая из которых рассчитана
на пропускание полного тока. При этом даже при работе на одной щетке падение
напряжения при токе 40 А не превысит 0,15 В. В сигнальном токосъемнике с одним
контактным кольцом контактируют две щетки, каждая из которых рассчитана на са¬
мостоятельную работу.
Двигатель и редуктор в ЭМБ не резервированы. Для обеспечения высокой надеж¬
ности нерезервированных обмоток двигателя двухфазная статорная обмотка намота¬
на на изолированных полюсах статорного шихтованного железа и залита теплопро¬
водящим компаундом. Долговечность работы редуктора и двигателя обеспечивается
низкими скоростями вращения. Так, при рабочей частоте коммутации фаз двигателя
100 Гц и шаге 1,8° частота вращения вала двигателя составляет 30 об/мин. Основной
нагрузкой редуктора является трение в токосъемнике блока, расчетный момент со¬
противления которого не превышает 2 Нм.
Блок электроники состоит из общего фильтра питания и двух одинаковых суббло¬
ков управления и питания, один из которых находится в холодном резерве.
Все элементы фильтра дублированы.
Переход на резервный канал блока электроники происходит по внешней команде в
случае обнаружения неисправности в системе при анализе ее работы со стороны БКУ.
Эта структура позволяет выполнить требование ТЗ по сохранению работоспособно¬
сти при одном отказе любого ЭРИ или пайки.
Срок службы системы на момент поставки на завод-изготовитель КА составляет
от 7 лет (для СОСБ КА «СПЕКТР-Р») до 14 лет (для СОСБ КА «ЭЛЕКТРО-Л»)
и обеспечивает:
а) эксплуатацию на заводе-изготовителе КА в течение 1 года;
б) хранение в наземных условиях в составе КА и эксплуатацию на ТК и СК в те¬
чение 3 лет;
в) натурную эксплуатацию в составе КА в пределах назначенного ресурса в тече¬
ние срока активного существования:
КА «ЭЛЕКТРО-Л» - 10 лет;
КА «СПЕКТР-Р» - 3 года;
КА «СПЕКТР-УФ» - 5 лет;
КА «СПЕКТР-РГ» - 7,5 лет;
КА «АРКТИКА-М» - 7 лет.
Так, назначенный ресурс СОСБ для КА «ЭЛЕКТРО-Л» на момент поставки на
завод-изготовитель КА составляет не менее 98913 часов и обеспечивает:
а) эксплуатацию на заводе-изготовителе КА в объёме 2000 часов;
б) эксплуатацию на ТК, СК в составе КА и при регламентных проверках в про¬
цессе хранения не менее 500 часов;
в) эксплуатацию на орбите в составе КА не менее 96360 часов при 4000 оборотах
выходного вала.
За срок штатной эксплуатации СОСБ в составе любого из вышеперечисленных
КА выходной вал ЭМБ должен совершить не более 4000 оборотов.
СОСБ - служебная система, которая функционирует непрерывно весь срок актив¬
ного существования КА. И хотя работа электромеханической части СОСБ за САС -
4000 оборотов при управлении поворотом БС через 6 угловых градусов составляет
1133 часа, вся электронная часть СОСБ и транзитные цепи токосъемника запитаны
напряжением в течение всего САС КА.
240
2-8
2.8.5. Габаритно-массовые характеристики и потребление СОСБ
Масса системы ЭЮ - не более 14,15 кг, в том числе масса межблочных кабелей -
не более 1,5 кг.
В процессе летной эксплуатации мощность, потребляемая системой Э10, состав¬
ляет не более 10 Вт в установившемся движении выходного вала ЭМБ и не более
2 Вт - при отсутствии движения.
2.8.6. Устройство и работа системы
На участке выведения КА на орбиту привод Э16 системы Э10 находится в нуле¬
вом положении, при этом панель БС зачекована на корпус КА и система ЭЮ находит¬
ся в выключенном состоянии.
После отделения КА от головной части ракеты-носителя производится подача на¬
пряжения питания на соединитель питания системы ЭЮ и расчековка панелей СБ.
Включение электропитания канала системы ЭЮ (основного или резервного) осу¬
ществляется после подачи из БКУ КА в блок Э15 команд ВОК для включения ос¬
новного канала или ВРК - для включения резервного канала. После этого в течение
1 с система Э10 готова к принятию команд на движение и начинает формировать и
выдавать в БКУ и ТМ-систему КА сигналы контроля работы.
Управление системой осуществляется БКУ КА командами, перечень и функцио¬
нальное назначение которых приведены в разделе 2.8.2.
Команды управления движением привода (КВ-ОК, КН-ОК, КС-ОК, УО-ОК, У 90-
ОК, У 180-ОК, У270-ОК, КВ-РК, КН-РК, КС-РК, УО-РК, У90-РК, У180-РК, У270-РК)
выдаются коммутацией «Общей шины команд управления движением» канала, под¬
ключенной в аппаратуре системы к шине «Плюс питания», на соответствующую ко¬
мандную цепь.
По достижении выходным валом блока заданного углового положения при рабо¬
те СОСБ по командам типа КВ (КН) БКУ КА на основании показаний 6-разрядно-
го датчика положения СОСБ формирует команду «Стоп» - КС. При работе СОСБ
по командам У0, У90, У180 и У270 на занятие фиксированного углового положения
(0°, 90°, 180°, 270° соответственно) остановка вращения выходного вала производит¬
ся по команде, сформированной внутри СОСБ на основании показаний 4-разрядного
датчика фиксированного положения.
Сигналы контроля, сформированные системой ЭЮ, передают в БКУ КА значе¬
ние углового положения выходного вала ЭМБ по результатам обработки сигналов
6-разрядных датчиков положения основного и резервного каналов. Сигналы контро¬
ля формируются в виде последовательности импульсов напряжения и передаются по
троированной схеме с выходов основного и резервного каналов системы.
Перечень сигналов контроля, формируемых системой и передаваемых в БКУ КА
(таблица 2.8.2).
Сигналы контроля, сформированные системой ЭЮ и передаваемые в ТМ-систему
КА для телеметрического контроля, соответствуют перечню, приведенному в табли¬
це 2.8.4.
Соответствие кода сигнала положения и кода сигнала установки угловому положе¬
нию вала блока Э16 относительно корпуса блока при включении любого из двух кана¬
лов (основного или резервного) приведено в таблицах 2.8.3, 2.8.5 и 2.8.6. Допуск для
значений угловых положений, приведенных в таблицах 2.8.3 и 2.8.5, составляет ±4°,
для значений фиксированных угловых положений, приведенных в таблице 2.8.5, ±1°.
241
2-8
Несоответствие значениям сигналов, указанных в таблицах, характеризует состо¬
яние неисправности системы.
По команде отключения электропитания ВЫК в соответствии с назначением ко¬
манды, указанным в таблице 2.8.1, обеспечивается отключение электропитания лю¬
бого ранее включенного канала. Повторное поступление ранее выданной команды на
движение или на отключение движения не вызывает изменений в процессе исполне¬
ния отрабатываемой команды.
2.8.7. Особенности конструкции электромеханического блока Э16
Электромеханический блок Э16 представляет собой однокоординатный электро¬
привод, который предназначен для:
- кругового вращения панели БС вокруг оси YKA;
- транзитной передачи электроэнергии с вращающейся панели БС в систему элек¬
троснабжения изделия;
- формирования сигнала об угловом положении БС относительно корпуса изделия:
- транзитной передачи сигналов аппаратуры, расположенной на панели БС.
Характеристики блока Э16:
- количество транзитных цепей 18
- тип двигателя блока шаговый
- количество фаз двигателя 2
- частота коммутации фаз двигателя, Гц 100± 10
- потребляемый ток двигателя, А 0,3 - 0,4
- максимальная мощность, рассеиваемая двигателем, Вт, не более 6
- максимальная мощность, рассеиваемая токосъёмником, Вт, не более 24
- угол поворота вала при единичном шаге двигателя, угл.с 9±0,9
- удерживающий момент на валу блока при отсутствии питания двигателя, Н м.
не менее 2
- скорость вращения выходного вала блока, % 0,25±0,025
- погрешность информации об угловом положении вала блока, угл. град ±4
- передаточное отношение редуктора блока 726
- момент инерции нагрузки на валу блока, кг-м2, не более 17,25
- температура окружающей среды при эксплуатации блока, °С от минус 20 до 50
- атмосферное давление окружающей среды при эксплуатации блока,
мм рт.ст 10-6
- габаритные размеры блока, мм 0220x431
- масса блока, кг, не более 10,1
В состав блока Э16 входят следующие узлы (рисунок 2.8.4): двигатель; редуктор:
блок датчиков; корпус; корпус нижний; выходной вал; соединители.
Основу конструкции составляют корпус 13 и корпус нижний 4, скрепленные
болтами.
В полости нижнего корпуса расположены: двигатель 3, редуктор 5, блок датчи¬
ков 7 с маской 6. В полости корпуса 13 расположены коллектор 10, блок секций 9.
жгуты транзитных цепей 72, выходной вал 16 с подшипниками 8 и 14, вращающееся
уплотнение 75.
242
2-8
На выходном валу 16 с помощью шпонки 17 установлен и закреплен болтом 20
фланец 27, предназначенный для монтажа БС, которая прикрепляется к нему с помо¬
щью пяти шпилек 19. Снаружи корпус 13 закрывается кожухом 11. Фланец 22 кожуха
предназначен для установки блока Э16 на основное изделие, к которому он прикре¬
пляется сквозь отверстия под крепеж 2. На боковой поверхности 23 шкалы нанесены
деления через 1° от 0 до 360° (таким образом, шкала на блоке - подвижная). На боко¬
вой поверхности 18 кожуха укреплен полуградусный нониус 24.
Совмещение нулевого деления шкалы с центральной риской означает, что блок
находится в исходном (нулевом) положении.
Отверстие 1 служит для однозначной ориентации блока при установке его на ос¬
новное изделие.
Вращение двигателя 3 через редуктор 5 передается выходному валу 16 с установ¬
ленной на нем БС. Частота вращения двигателя и передаточное отношение редуктора
обеспечивают вращение БС с требуемой скоростью. Угол поворота выходного вала
(и БС) относительно нулевого положения определяется с помощью неподвижного
блока датчиков 7 и маски 6, закрепленной на выходном валу и имеющей несколько
вырезов на своей цилиндрической части. В блоке датчиков равномерно по окруж¬
ности размещены в основном и резервном каналах по шесть соосных оптопар 25
(фото- и светодиоды). При вращении выходного вала часть фотодиодов в оптопарах
засвечена светодиодами через вырезы в маске 6. Остальные фотодиоды затемнены
материалом маски. Определенные сочетания засвеченных (сигнал «1») и затемнен¬
ных (сигнал «0») фотодиодов позволяют определить угловое положение выходного
вала блока и БС.
Устройство и работа отдельных частей представлены ниже:
а) Двигатель. Для обеспечения требований по управлению положением панели
БС разработана оригинальная конструкция гибридного шагового двигателя (ШД)
с шагом 1,8°, который сочетает в себе достоинства реактивного ШД (малая величина
шага) и ШД с постоянными магнитами (наличие фиксирующего момента при снятии
напряжения питания). Двигатель представляет собой двухфазный гибридный шаго¬
вый двигатель с возбуждением от высокоэнергетических постоянных магнитов, вы¬
полненных из материала Nd-Fe-B {Авербух В.Я., 201 \).
Двухфазная статорная обмотка намотана на изолированные полюса статорного
шихтованного железа. Обмотка в корпусе залита теплопроводящим компаундом. Ро¬
тор двигателя собран на немагнитном валу. Магнитопроводящая часть ротора пред¬
ставляет собой пакет из намагниченного в осевом направлении магнита, заключен¬
ного между двумя наконечниками из магнитомягкой стали. Ротор вращается в двух
подшипниках. На валу ротора установлена и закреплена шестерня для сочленения
двигателя с редуктором. Вращающий момент передается на шестерню через сегмент¬
ную шпонку.
б) Редуктор. Набран из стальных блоков шестерен, вращающихся в подшипни¬
ковых опорах, с числом ступеней шесть, размещенных в алюминиевом корпусе. Для
соединения с выходной шестерней вала 16, редуктор содержит три паразитные ше¬
стерни. Зубчатые венцы шестерен - эвольвентные, прямозубые. Общее передаточное
отношение редуктора 1/726. Редуктор рассчитан на передачу максимального момента
на его выходном валу - 20 Н м. Основной статической нагрузкой редуктора является
трение в токосъемнике. Расчетный момент от трения в токосъемнике не превышает
2 Н м.
243
2-8
Г;
о
о
о
о
/
/
■4г
1
V /
IV/
W
Рисунок 2.8.4. Конструкция блока Э16
244
2-8
в) Токосъемник (коллектор, блок секций). Каждая электрическая цепь то¬
косъемника содержит кольца, установленные на подвижном коллекторе, и три не¬
подвижных контакта, равномерно по окружности соприкасающихся с кольцом. Уси¬
лие прижатия контактов к кольцам создается пружинами и составляет (1,50±0,15) Н
на каждый контакт. Основу материала контактов и контактных колец составляет
серебро. 18 колец набраны на каркасе, установленном на валу коллектора. Кольца
друг от друга изолированы кольцевыми прокладками. Пакет колец с прокладками
поджимается гайкой. В каркасе выполнены осевые пазы, в которые вкладываются
ушки колец с подпаянными к ним проводами с фторопластовой изоляцией электро¬
монтажа коллектора. Провода электромонтажа собраны в четыре жгута 12 и распа¬
яны в соединители. Для фиксации проводов электромонтажа в каркасе они залиты
компаундом.
Щеткодержатели блока секций, к которым твердым серебряным припоем
припаяны контакты, соединены гибкой токопроводящей связью с медными ши¬
нами, прикрепленными к основанию каждой секции. Пакет секций скреплен
шпильками. К каждой шине прикреплены наконечники жгутов, распаянных в
выходные соединители 26 в соответствии с принципиальной электрической схе¬
мой блока. Максимальная плотность тока при 40 А в силовых цепях блока Э16
составляет - 4,44 А мм2.
г) Датчик положения выходного вала. В полости с двигателем и редуктором
расположен оптронный датчик положения выходного вала. Датчик выполнен двух¬
канальным и имеет независимые основной и резервный каналы. Каждый канал
датчика состоит из шестиразрядного датчика положения вала и четырехразрядного
датчика фиксированных положений вала (0°,‘ 90°, 180°, 270°); кроме того, датчик
формирует информацию о четырех угловых зонах, в которых может находиться вал
блока (0°-90°; 90°-180°; 180°-270°; 270°-360°). Четырехразрядный датчик исполь¬
зуется в качестве функционального, он выдает в блок электроники информацию в
виде кодового сигнала (параллельный четырехразрядный код). Кодовые сигналы,
соответствующие фиксированным положениям и угловым зонам, приведены в та¬
блице 2.8.5.
2.8.8. Особенности конструкции блока электроники Э15
Блок Э15 предназначен для управления блоком Э16 по командам БКУ и формиро¬
вания сигналов контроля, передаваемых в БКУ и телеметрическую систему КА.
Блок представляет собой параллелепипед объемом 3,9 л, массой не более 2,55 кг
и состоит из фильтра питания и двух субблоков Э15-УП.
Субблоки собираются в блоке «этажеркой», последовательно один за другим,
с помощью стоек, втулок и гаек.
Блок обеспечивает:
- в соответствии с поступающими внешними командами питание двигателя блока
Э16 двухфазным переменным током прямоугольной формы с 90-градусным за¬
полнением полу периода, амплитудой от 0,3 до 0,4 А. Максимальная рассеиваемая
мощность блока - не более 3 Вт. Сдвиг фаз 90 и минус 90 градусов. Частота ком¬
мутации фаз в установившемся режиме (100±10) Гц, при разгоне и торможении
изменяется линейно с погрешностью 10%;
245
2-8
- питание датчиков блока Э16;
- выдачу контрольных сигналов в систему БКУ и ТМС КА.
Для управления приводом системы используются два субблока (основной и ре¬
зервный), которые имеют общие команды коммутации каналов и общий выход на
фазы двигателя. Команды управления движением и цепи датчиков угла для каждого
субблока разделены.
Функциональная схема одного субблока приведена на рисунке 2.8.5.
Рисунок 2.8.5. Функциональная схема субблока Э15-УП
246
2-8
Напряжение питания блока поступает с входного соединителя на коммутатор ка¬
налов, который включает основной или резервный канал, а также отключает оба ка¬
нала в соответствии с поданными командами.
При включении канала напряжение питания поступает:
- на стабилизатор питания узлов управления движением выходного вала, гальвани¬
чески связанных с цепями первичного питания «+27 В»;
- на вторичный источник с гальванической развязкой цепей датчиков положения.
Регистр команд движения принимает, дешифрует и запоминает последнюю по¬
данную команду на движение.
Триггеры регистра содержат информацию:
- режим (слежение или установка);
- направление и включение движения при слежении;
- код установки в фиксированные положения.
В режиме слежения сигналы управления движением поступают непосредственно
от регистра команд.
В режиме установки происходит дешифрирование кода датчика установки и кода
команды установки для определения направления движения и остановки в требуемом
положении.
Схема синхронизации формирует сигналы, обеспечивающие функционирование:
- вторичного источника питания;
- стабилизатора тока двигателя;
- схемы опроса датчиков.
Схема опроса периодически, с частотой 2 Гц, подает питание на излучающие ди¬
оды датчиков положений блока Э16. При засветке фотодиодов формируются коды,
которые поступают в блок Э15 и запоминаются в регистрах датчика установки и дат¬
чика положений.
Выходные сигналы датчика положения поступают на формирователи сигналов
положения и телеметрии.
Код датчика положения поступает на счетчик, формирующий последовательность
импульсов с периодом, соответствующим коду. Импульсы укорачиваются до 12 мкс
и поступают на схему трансформаторной развязки с троированным выходом.
Сигналы телеметрии поступают с двух формирователей:
- сигналы положения поступают с регистра на транзисторные ключи;
- сигналы установки поступают с гальванической развязкой с помощью оптронов.
Коммутация фаз двигателя приведена на рисунке 2.8.6.
2.8.9. Опыт летной эксплуатации СОСБ и ее аналогов
Надежность системы ЭЮ обеспечивается выполнением всего комплекса меро¬
приятий, предусмотренных программой обеспечения надежности.
Фактическая высокая надежность СОСБ подтверждена безаварийной эксплуата¬
цией СОСБ-аналогов системы ЭЮ, таких, как система У10, которая имеет положи¬
тельный опыт эксплуатации в составе КА «МОНИТОР-Э» (штатная эксплуатация
с 26.08.2005 до приостановления ее в 2011 г.), «ЭКСПРЕСС-МД1» (выведен на ор¬
биту 13.02.2009, эксплуатировался до 24.07.2013), КА «KAZSAT-1» (эксплуатация
на орбите с 18.06.2006 по 26.08.2009); системы У20 на КА «КАЗСАТ-2» (выведен на
орбиту 16.07.2011); а также эксплуатацией четырех образцов системы ЭЮ в составе
КА «ЭЛЕКТРО-JI» № 1 и № 2 (выведены на ГСО 20.01.2011 и 11.12.2015 соответ¬
ственно) и КА «СПЕКТР-Р» (выведен на орбиту 18.07.2011).
247
2-8
ОШФ
форма напряжения на общей шине фаз
Ф1
Ткф
и®1
Ф2
U®2
JL
прямое чередование фаз
Ф1
Ф2
обратное чередование фаз
Рисунок 2.8.6. Параметры напряжения питания фаз электроприводов
Форма сигнала ОШФ показана относительно шины питания 27 В; форма сигналов Ф1, Ф2
показана относительно потенциала ОШФ
Список литературы
Авербух В.Я. Космическая прецизионная электромеханика. Вопросы электроме¬
ханики // Труды НПП ВНИИЭМ.М.: ФГУП НПП ВНИИЭМ, 2011. Т. 124. С. 17-28.
Авербух В.Я., Вейнберг Д.М., Лещинский Э.А. Разработка системы ориента¬
ции солнечных батарей для унифицированной космической платформы. Вопросы
электромеханики // Труды НПП ВНИИЭМ.М.: ФГУП НПП ВНИИЭМ, 2001. Т. 100.
С. 97-103.
248
2-8
Авербух В.Я., Лещинский Э.А. Новое поколение систем ориентации солнечных ба¬
тарей космических аппаратов. Вопросы электромеханики // Труды НПП ВНИИЭМ.
М.: ФГУП «НПП ВНИИЭМ», 2005. Т. 102. С. 35-39.
Асмус и др. Развитие космического комплекса гидрометеорологического обеспе¬
чения на базе геостационарных спутников серии «ЭЛЕКТРО-Jl» // Вестник НПО
им. С.А. Лавочкина. 2012. № 1. С .3-14.
Ефанов В.В., Долгополов В.П. Луна. От исследования к освоению (к 50-летию кос¬
мических аппаратов «ЛУНА-9» и «ЛУНА-10») // Вестник НПО им. С.А. Лавочкина.
2016. №4. С. 3-9.
Кардашев Н.С., Алакоз А.В. и др. «Радиоастрон»: итоги выполнения научной про¬
граммы исследования за 5 лет полета // Вестник НПО им. С.А. Лавочкина. 2016. № 3.
С. 4-24.
Моишеев А.А., Бабышкин В.Е. и др. Проектная конференция космического аппара¬
та «СПЕКТР-УФ» // Вестник НПО им. С.А. Лавочкина. 2014. № 5. С. 15-20.
Расторгуев А. С., Сачков М.Е., Заболотских М.В. Галактическая астрономия в уль¬
трафиолете // Вестник НПО им. С.А. Лавочкина. 2016. № 3. С. 38-47.
Степанов В.В. Перспектива развития гидрометеорологического обеспечения
с помощью многоцелевой космической системы «АРКТИКА» // Вестник НПО
им. С.А. Лавочкина. 2016. № 4. С. 55-61.
Шустов Б.М., Сачков М.Е., Боярчук А.А. и др. Космические перспективы изучения
ультрафиолетовой Вселенной: проект «СПЕКТР-УФ» // Вестник НПО им. С.А. Ла¬
вочкина. 2014. № 5. С. 4-15.
А. С. Абдурагимов, В.Я. Авербух, А.Н. Аронзон,
А.В. Рогоза, А.П. Сарычев
Корпорация «ВНИИЭМ»
Л.П, Большакова, М.В. Мелехин
НПО им. С.А. Лавочкина
249
¥ШЖ КОНСТРУКЦИЯ И ОСОБЕННОСТИ
СИЛОВОЙ СХЕМЫ МКП «НАВИГАТОР»
Особенности конструктивно-силовой схемы МКП «НАВИГАТОР» определяются
решаемыми ею задачами. Назначение МКП - размещение служебной аппаратуры,
солнечных батарей, корректирующей двигательной установки - т.е. всего того, что
обеспечивает управление космическим аппаратом и функционирование его систем.
Именно поэтому «НАВИГАТОР» выполнен в виде компактного моноблока с тем рас¬
четом, что на верхнем его стыке должна быть размещена целевая аппаратура также в
виде моноблока, а нижним стыком он через переходную ферму или адаптер с систе¬
мой отделения должен быть установлен на РБ «Фрегат» {Автоматические космиче¬
ские аппараты..., 2010. С. 633). По существу условия интеграции «НАВИГАТОРА»
с разгонным блоком «Фрегат» задали внешний габарит МКП - она также имеет по
нижнему стыку восемь опорных точек с диаметром по стыковочным отверстиям 2 м.
Эти обстоятельства определили облик силового корпуса конструкции
«НАВИГАТОРА», по геометрии представляющей собой восьмигранную призму,
основу которой составляет каркас из вертикальных стоек и объединяющих их в го¬
ризонтальной плоскости профилей (рисунок 2.9.1). В силовой схеме вертикальные
стойки рассчитаны на передачу осевой силы и изгибающего момента от установлен¬
ного на верхнем стыке моноблока целевой аппаратуры. Для передачи боковой инер¬
ционной нагрузки от моноблока предполагалось все грани каркаса с помощью за¬
клепочного соединения зашить плоскими листами, работающими на сдвиг. Однако
из компоновочных соображений оказалось выгодным разместить на трех (или в ва¬
риантном исполнении - на двух) гранях вместо плоских листов сферические баки
корректирующей двигательной установки. Баки крепятся в четырех угловых точках
грани с помощью кронштейнов и болтового соединения и в силовом отношении, по¬
мимо своей основной функции, выполняют роль «зашивки», обеспечивая прочность
каркаса на сдвиг.
В целом элементы двигательной установки занимают четыре противоположных
грани каркаса - две или три грани занимают баки с топливом, на которых с наруж¬
ной стороны расположены блоки двигателей ДУ, на четвертой грани расположены
элементы пневмогидросистемы ДУ и пространственный кронштейн, закрепленный в
угловых точках каркаса, также с блоком двигателей.
На двух противоположных гранях (в вариантном исполнении для КА «ЭЛЕКТРО»-
на одной грани) в центральной зоне закреплены одностепенные приводы панелей сол¬
нечных батарей, предназначенные для их поворота при ориентации на Солнце. Сами
СБ в сложенном состоянии закреплены на выходном валу привода, а также на двух уз¬
лах зачековки, связанных стержневой конструкцией с каркасом платформы либо - в ва¬
риантном исполнении - с моноблоком целевой аппаратуры. В сложенном состоянии
на привод действуют инерционные нагрузки как на активном участке работы PH, так и
при наземной эксплуатации. Кроме того, привод нагружается динамическим моментом
и инерционной силой при раскрытии панели в рабочее положение. Для обеспечения
прочности и жесткости крепления привода к листовой детали грани последняя подкре¬
плена перекрестным силовым набором из стандартных профилей.
На одной из граней с помощью титановых кронштейнов, расположенных в углах
каркаса, закреплена тепловая сотопанель с химическим источником тока. Ввиду
большой массы ХИТа (~ 45 кг) угловые точки сотопанели укреплены силовыми на¬
кладками, связанными с сотопанелью болтовым креплением и клеевым соединением.
250
2-9
1 - корпус платформы; 2 - адаптер; 3 - баки ДУ; 4 - солнечные батареи;
5-радиаторы СОТР; 6 - ТСП с химическим источником тока;
7 - платформа служебной аппаратуры; 8 - элементы ДУ
Рисунок 2.9.1. Общий вид платформы «НАВИГАТОР» с адаптером
Грани каркаса, на поверхности которых не размещены какие-либо агрегаты, за¬
шиты плоскими листами толщиной 1,5 мм с продольными выдавками - зигами. Это
сделано для обеспечения их устойчивости от сдвигающих напряжений, возникаю¬
щих при действии боковой инерционной нагрузки.
Практически вся служебная аппаратура платформы размещена на восьмиугольной
термостабилизированной сотопанели, расположенной внутри каркаса в нижнем его
сечении. Сотопанель закреплена в восьми угловых точках каркаса через амортизиру¬
ющие элементы. Необходимость амортизаторов в креплении сотопанели объясняется
тем, что в этих же угловых точках каркаса, т.е. в непосредственной близости от сото¬
панели и установленной на ней аппаратуры, расположены детонационные пирозамки
системы отделения КА. Срабатывание детонационных замков {Ефанов В.В., Кото-
мин А.А. и др., 2001) сопровождается интенсивной высокочастотной ударной нагруз¬
кой, защиту от которой для аппаратуры обеспечивают амортизаторы {Ефанов В.В.,
Бирюков А.С., Деменко О.Г., 2013; Ефанов В.В., Бирюков А.С. и др., 2014).
По конструктивно-силовой схеме сотопанель - плоская конструкция, опертая
в восьми угловых точках на диаметре почти 2 м, конструкция, работающая на изгиб.
Ввиду большой массы аппаратуры - более 300 кг - для обеспечения прочностных и
жесткостных характеристик потребовалось увеличить строительную высоту сотопа¬
нели до 40 мм. Конструктивно она представляет собой трехслойную конструкцию,
у которой верхний и нижний слой выполнен их материала В 95 толщиной 0,8 мм,
251
2-9
средний слой - это алюминиевые соты. Все слои склеиваются пленочным клеем и
образуют монолитную конструкцию большой изгибной жесткости. Внутри сотопаке-
та расположены тепловые трубы системы СОТР для обеспечения теплового режима
расположенной на сотопанели аппаратуры.
В зависимости от назначения платформа может содержать элементы, отличные
от базовой комплектации. Так, для КА «СПЕКТР-Р» (Автоматические космические
аппараты..., 2010. С. 489) на одной из граней каркаса была установлена раскрыва¬
емая конструкция - так называемая балка ВИРК (рисунок 2.9.2), содержащая аппа¬
ратуру высокоинформативного радиокомплекса и параболическую антенну с двух¬
степенным приводом для передачи научной информации на Землю. Таким образом,
на «НАВИГАТОРЕ» может быть размещена не только служебная аппаратура, но и
элементы научной аппаратуры.
В ходе прочностных испытаний КА «СПЕКТР-РГ» (Автоматические космиче¬
ские..., 2010. С. 525) было выяснено, что «НАВИГАТОР» не обеспечивает необхо¬
димой для данного проекта стабильности относительного углового положения двух
рентгеновских телескопов «ART-ХС» и «eRosita», поскольку оба телескопа должны
Рисунок 2.9.2. Установка балки ВИРК на КА «РАДИОАСТРОН»
наблюдать в одно и то же время один и тот же объект с высоким разрешением. Анализ
результатов испытаний показал, что причина нестабильности состоит в нежесткости
верхнего «открытого» контура корпуса «НАВИГАТОРА», что приводило к недопу¬
стимой деформации стоящей на нем ферменной конструкции с рентгеновскими теле¬
скопами. Именно для этого проекта были разработаны дополнительные конструк¬
тивные мероприятия, а именно в верхний контур была введена стержневая система
(рисунок 2.9.3), обеспечивающая его геометрическую неизменяемость.
252
2-9
Рисунок 2.9.3. Усиление верхнего контура МКП «НАВИГАТОР» для проекта «СПЕКТР-РГ»
Последующие прочностные испытания показали эффективность введенных меро¬
приятий, стабильность углового положения телескопов была обеспечена.
Таким образом, конструкция МКП «НАВИГАТОРА» не является абсолютно не¬
изменяемой; в зависимости от задач, которые решаются в конкретном проекте, она
может в той или иной степени трансформироваться, оставаясь в пределах первона¬
чально выбранных габаритов и силовой схемы.
Список литературы
Автоматические космические аппараты для фундаментальных и научных иссле¬
дований /Под ред. Г.М. Полищука и К.М. Пичхадзе. М.: Изд-во МАИ-ПРИНТ, 2010.
С. 489, 525,633.
Ефанов В.В., Бирюков А.С. и др. Совершенствование систем разделения современ¬
ных КА по снижению ударных нагрузок // Полет. 2014. № 2. С. 30-36.
Ефанов В.В., Бирюков А.С., Деменко О.Г. К вопросу снижения динамических на¬
грузок при срабатывании устройств разделения перспективных орбитальных астро¬
физических обсерваторий // Вестник НПО им. С.А. Лавочкина. 2013. № 3. С. 21-26.
Ефанов В.В., Котомин А.А. и др. Проблема снижения динамического воздействия
на космические аппараты при срабатывании взрывных систем разделения // Фунда¬
ментальные и прикладные проблемы космонавтики. 2001. № 4. С. 34-48.
А.С. Бирюков, В.П. Макаров, А.А. Поляков
НПО им. С.А. Лавочкина
253
ИБ1 ПИРОМЕХАНИЧЕСКИЕ СИСТЕМЫ РАЗДЕЛЕНИЯ
2.10.1. ДЕТОНАЦИОННЫЕ УСТРОЙСТВА РАЗДЕЛЕНИЯ
НА ОСНОВЕ ВЫСОКОЭНЕРГЕТИЧЕСКИХ
ЭЛАСТИЧНЫХ МАТЕРИАЛОВ
В настоящее время и в обозримом будущем создание космических аппаратов для
научных, гражданских и социально-экономических задач немыслимо без использо¬
вания на борту различного рода устройств и систем разделения конструкции этих
аппаратов. В процессе полета производится разделение КА и ракеты-носителя, от¬
деляются отработавшие агрегаты, десантные и исследовательские зонды, доставля¬
емые на другие планеты. При выходе на заданную орбиту КА приводится в рабочее
состояние трансформированием панелей фотопреобразователей, антенн и других
научных и служебных систем. Наиболее эффективно эти операции осуществляются
с помощью пиромеханических или детонационных устройств и систем разделения.
Указанные устройства используют энергию сгорания порохов, пиротехнических со¬
ставов в системах пироавтоматики. Детонационная автоматика на основе детониру¬
ющих веществ дополнительно обеспечивает быстродействие и синхронность работы
исполнительных элементов, независимость их действия от давления и температуры.
Недостатком большинства известных устройств, снаряженных традиционными по¬
рошкообразными детонирующими веществами, являются высокие динамические
воздействия на конструкцию и аппаратуру, негерметичность и разрушение устройств
в процессе их функционирования (Котомин А.А др., 2001; Ефанов В.В. и др., 2002;
Ефанов В.В., Бирюков А.С. и др., 2014).
НПО им. С.А. Лавочкина, Санкт-Петербургским государственным технологиче¬
ским институтом и СКТБ «Технолог» созданы неразрушаемые устройства и системы
детонационной автоматики, в частности системы разделения космических аппаратов,
на основе высокоэнергетических эластичных материалов (ВЭМ), обеспечивающие
существенное снижение динамического воздействия на конструкцию КА и аппарату¬
ру при их срабатывании. Применение ВЭМ с высокой детонационной способностью
привело к повышению надежности и безопасности систем разделения, снижению их
массы и габаритов. Эти системы обеспечивают быстрый синхронный разрыв мно¬
жества механических связей, исключают выпуск продуктов взрыва в космический
аппарат и образование осколков. Системы разделения нового поколения на основе
ВЭМ подтвердили свою высокую эффективность и надежность в ряде отечественных
и международных межпланетных и астрофизических космических проектов (.Ефа¬
нов В.В., Бирюков А.С., Деменко О.Г. , 2013).
Высокоэнергетические эластичные материалы {Котомин А.А., 1997; Кото¬
мин А.А., Душенок С.А., Ефанов В.В, 2000; Котомин А.А., 2004; Котомин А.А. и др.,
2005; Котомин А.А. и др., 2008, Котомин А.А. и др., 2007; Котомин А.А., Душе¬
нок С.А., Козлов А. С, 2007; Душенок С.А. и др., 2004)
ВЭМ представляют собой сложные высоконаполненные полидисперсные си¬
стемы на основе кристаллических бризантных взрывчатых веществ (ВВ) и по¬
лимерных связующих различных классов, содержащие также пластификаторы,
254
2-10
структурообразователи, армирующие и вулканизующие добавки, сенсибилизато¬
ры, антиоксиданты, пламегасители, красители, ПАВ и другие компоненты. Повы¬
шенный интерес к ВЭМ обусловлен их уникальными структурно-механическими
свойствами и возможностью изготовления из них зарядов любой формы (листы,
пленки, ленты, диски, профилированные шнуры, трубки, шары, компактные из¬
делия сложной конфигурации) с требуемыми физико-механическими характери¬
стиками и стабильными параметрами детонации. Это позволяет совершенство¬
вать имеющиеся и создавать принципиально новые импульсные устройства и
технологии.
В ходе теоретических и экспериментальных исследований с целью установления
взаимосвязи свойств ВЭМ с их составом и структурой были изучены следующие
вопросы:
- особенности детонации ВЭМ как гетерогенных взрывчатых систем с различными
видами инертных органических и неорганических добавок (связующие, флегма-
тизаторы, пластификаторы, порошкообразные металлы, оксиды, соли и др.);
- реология высоконаполненных композиций: кристаллическое ВВ - полимерная
матрица;
- физико-механические свойства ВЭМ;
- термодинамическая и химическая совместимость компонентов;
- физико-химическая стабильность систем (химическая стойкость и тепловое старение);
- способы изготовления ВЭМ и зарядов из них.
Проведенные исследования позволили установить общие закономерности дето¬
национного процесса ВЭМ с различными видами невзрывчатых компонентов и раз¬
работать комплекс методов расчета и прогноза их энергетических характеристик и
параметров детонации, а также детонационной и метательной способности. К основ¬
ным параметрам эффективности ВЭМ относятся: скорость, давление детонации, по¬
казатель политропы продуктов взрыва и критический диаметр детонации. При этом
важно знать способы регулирования перечисленных характеристик для использова¬
ния ВЭМ в системах детонационной автоматики.
Регулирование скорости, давления детонации и показателя политропы про¬
дуктов взрыва ВЭМ (.Воскобойников И.М., Котомин А.А.,1985; Котомин Л.А., Ду-
шенок С.А., Ефанов В.В., 2002; Котомин А.А и др., 2010; Котомин А.А.и др., 2013;
Котомин А.А., 2000)
Основными факторами регулирования скорости и давления детонации ВЭМ явля¬
ются вид взрывчатого вещества и плотность заряда.
Важным способом регулирования является также введение в состав ВЭМ не¬
взрывчатых компонентов различного вида и дисперсности (порошкообразные метал¬
лы, оксиды, соли и др. с размером частиц от субмикронных до сотен микрон). При
детонации ВЭМ содержащиеся в них компоненты различного назначения из-за их
недостаточно высокой дисперсности и малой реакционной способности не успевают
прогреваться и не вступают в реакции с продуктами взрыва или другими компонен¬
тами за характерное время разложения г взрывчатого наполнителя - бризантного ВВ.
Эти компоненты в зоне химической реакции за фронтом детонационной волны по
существу выступают как инертные добавки, участвующие лишь в физических про¬
цессах - ударном сжатии и разгоне частиц продуктами взрыва.
255
2-10
В зависимости от дисперсности инертных добавок за фронтом детонационной
волны за время г успевают или не успевают выравниваться по сечению заряда давле¬
ние и массовая скорость. Если т«тх (ti - время, за которое выравнивается давление),
то введение в состав ВЭМ добавок не будет заметно сказываться на скорости рас¬
пространения детонации. Выравнивание давления происходит, если диаметры частиц
d\ < т Сх (Сх - характерная скорость волновых возмущений в материале добавки).
При т >т2 (т2 - время, за которое частицы добавки приобретают скорость, равную
массовой скорости продуктов взрыва) достигается газодинамическое равновесие
(полное выравнивание давления и скоростей продуктов взрыва и частиц добавки).
Время г2 определяется динамической вязкостью бризантного ВВ, разлагающегося
в условиях детонационной волны, и инерционностью частиц добавки, зависящей от
их диаметра и плотности. На основе экспериментальных данных о параметрах де¬
тонации смесевых ВВ можно заключить, что для различных типов добавок и видов
бризантных ВВ диаметр полностью разгоняемых в детонационной волне частиц d:
составляет 1-10 мкм, что значительно меньше размера dx для тех же составов. При
размерах частиц, больших d2, реализуется промежуточное состояние, соответствую¬
щее т2>т>ть при котором полного разгона частиц добавки не происходит и скорости
детонации зарядов находятся между значениями, отвечающими равновесию давле¬
ния и выравниванию скоростей продуктов взрыва и добавки.
В целом процесс детонации ВЭМ с учетом роли инертных компонентов с газоди¬
намических позиций с привлечением политропического уравнения состояния про¬
дуктов взрыва можно описать системой уравнений, предложенной И.М. Воскобой-
никовым и А.А. Котоминым для смесевых взрывчатых веществ (Воскобойников И.М.,
Котомин А.А., 1985):
и0 & 2*^02 V
/
\ 2
^02 ~^2 Ь [2 + Ь(и^2 — ^2 ) / ^02 ].
и02 ) [1 + Ь(и02-и2)/и02]2 ’
(2.10.1.1)
(2.10.1.2)
Ц>2 Ь ^\ + 4bpv01/Cl +Г
(2.10.1.3)
[(1-а2)(Чи ~Ц) + а2(и02-t>2)]’
Е = 0,5P(v0 -v) + (l-a2 )Q;
Ех -0,5Р(щх-vx) = Q = Exx-0,5Px{vm -ц,);
АЕ2 =0,5Р(и02-о2);
d2 />[(!-a2Hi +а2Ур2]2
(2.10.1.4)
(2.10.1.5)
(2.10.1.6)
(2.10.1.7)
(2.10.1.8)
v0 = а2о02 +(\-а2)и(п; р(п = ^
1/Ро-«2/Ро2
^02 =1/Рог; L'oi =1/Poi; ио =иРо-
v0 = а2о02 + (1 - а2)и01; рох =
(2.10.1.9)
256
2-10
Здесьp0,poi,p02- начальные плотности ВЭМ, ВВ в ВЭМ, инертной добавки; v0, о0ь
0о2, - начальные удельные объемы ВЭМ, ВВ в ВЭМ, инертной добавки; а2 - массовая
доля добавки; Д Р - скорость и давление детонации ВЭМ; Dx,Pun- скорость дето¬
нации, давление детонации, показатель политропы продуктов взрыва для ВВ в ВЭМ
при роь i>i, £>2 - удельные объемы продуктов взрыва ВВ, добавки при детонации ВЭМ
(при P);vu,Eu- удельный объем и внутренняя энергия продуктов взрыва при детона¬
ции ВВ без добавки (при Рх)\ Е, ЕХ,АЕ2 - внутренняя энергия продуктов взрыва ВЭМ
(при Р), продуктов взрыва ВВ в ВЭМ (при Р), изменение энергии добавки при ее
сжатии до Р; Q - теплота взрыва ВВ; С0 = а; b = Я, определяются из эксперименталь¬
ной ударной адиабаты материала добавки в форме D = а+ Хи либо С0= 1,2 Со 6=1,7 из
обобщенной ударной адиабаты в форме D= 1,2 С'0 +1,7 и, где и - скорость материала
добавки за ударным фронтом.
Параметры идеальной детонации взрывчатых композиций (ВК) в точке Жуге рас¬
считываются с учетом вычисленных значений показателей политропы пВк по извест¬
ным формулам:
где Р3- детонационное давление, кбар; Uj - скорость продуктов взрыва, км/с; pj -
плотность продуктов взрыва, г/см3; Cj- скорость звука в продуктах взрыва, км/с; р0 -
плотность заряда, г/см3; DPo -скорость детонации ВК при плотности р0, км/с.
Точка Жуге (плоскость Чепмена-Жуге) соответствует совпадению адиабаты про¬
дуктов детонации с их изоэнтропой, при котором ударный фронт перемещается от¬
носительно продуктов детонации со скоростью звука в них.
Большой объем экспериментальных исследований и анализ литературных данных
показали, что зависимость эффективного показателя политропы ВК от массовой доли
инертной добавки (~ до 50%) является линейной (Котомин А.Л., 1997):
где пж - показатель политропы ВК; пвв - показатель политропы ВВ (основы ВК); /? -
массовая доля инертной добавки.
Коэффициент пропорциональности к слабо зависит от плотности и дисперсно¬
сти добавок, и его значение было принято усредненным и постоянным, равным 2,85
{Котомин А.А.,1997).
Для более точного расчета пш и, соответственно, давления детонации составов,
используемых в системах детонационной автоматики КА, необходимо было уточнить
значения коэффициента к формулы (2.10.1.14) для ВК с органическими и неоргани¬
ческими видами инертных компонентов. С этой целью были проведены дополнитель¬
ные экспериментальные исследования давлений детонации и показателей политропы
продуктов взрыва ВК на основе гексогена с различными органическими и неорга¬
(2.10.1.13)
(2.10.1.10)
(2.10.1.12)
(2.10.1.11)
^ВК — ^ВВ кР
(2.10.1.14)
257
2-10
ническими инертными добавками. На основании полученных результатов построена
зависимость пвк от содержания инертных органических (рисунок 2.10.1.1) и неоргани¬
ческих (рисунок 2.10.1.2) добавок.
Как видно из рисунков 2.10.1.1,2.10.1.2, полученная зависимость является линей¬
ной и аппроксимируется следующими уравнениями:
nBK=nm + 2J0; (2.10.1.15)
пвк=пт + 3,\у, (2.10.1.16)
где Р - массовая доля инертной органической добавки; у - массовая доля инертной
неорганической добавки.
массовая доля инертной добавки
♦ - чистый гексоген, ■ - меламин, ▲ - а-нафтол, + - аминогуанидин солянокислый,
* - м-фенилендиамин, а - гуанидинкарбонат, - - гликоколь , х - связующее
Рисунок 2.10.1.1. Зависимость показателя политропы продуктов взрыва взрывчатых
композиций на основе гексогена от содержания инертных органических добавок
Для уравнения (2.10.1.15) коэффициент корреляции г = 0,998, среднеквадратиче¬
ское отклонение 5 = 0,022; для уравнения (2.10.1.16) г = 0,996, среднеквадратическое
отклонение s = 0,030. Таким образом, коэффициент к уравнения (2.10.1.14) для ВК с
инертными органическими добавками равен 2,7, а для ВК с инертными неорганиче¬
скими добавками - 3,1.
Для взрывчатых композиций, содержащих смесь инертных органических и неор¬
ганических добавок, показатель политропы продуктов взрыва рассчитывается адди¬
тивно по следующему уравнению:
пш=пш + 2Лр + ЪЛу. (2.10.1.17)
Регулирование критического диаметра детонации ВЭМ (.Котомин А.А., Душе¬
нок С.А., Ефанов В.В., 2002; Котомин А.А., Душенок С.А., Козлов А.С., 2004; Кото¬
мин А.А., Козлов А.С., Душенок С.А., 2007; Котомин А.А., Душенок С.А., Козлов А.С.,
2009; Котомин А.А. и др., 2010; Котомин А.А., Душенок С.А., Козлов А.С., 2013; Ко¬
томин А.А. и др., 2012; Котомин А.А. и др., 2016)
258
2-10
массовая доля инертной добавки
♦ - чистый гексоген, ■ - Al, А - Mg, + - CuO, * - NaCl, а - В, - - Zr, — - Fe, х -Ti
Рисунок 2.10.1.2. Зависимость показателя политропы продуктов взрыва взрывчатых
композиций на основе гексогена от содержания инертных неорганических добавок
Главное требование к ВЭМ - высокая детонационная способность, критерием ко¬
торой является критический диаметр детонации dK. Для обычно используемых в про¬
мышленности зарядов традиционных ВВ dK равен 1-10 мм, в то время как для реше¬
ния задач в аэрокосмической технике он должен составлять 0,1-1,0 мм.
Величина dK определяется совокупностью кинетических, термодинамических и
газодинамических факторов при детонации заряда ВЭМ; dK не является константой,
а зависит от ряда факторов: химической природы, дисперсности и дефектности кри¬
сталлов ВВ, плотности заряда, начальной температуры, наличия и характера оболоч¬
ки. Для ВЭМ он зависит также от концентрации ВВ в ВЭМ, физических свойств и
дисперсности инертных компонентов, микроструктуры заряда и от технологических
факторов (степени смешения компонентов, влажности и др.).
Нами были проведены систематические целенаправленные экспериментальные
исследования детонационной способности штатных и перспективных индивидуаль¬
ных ВВ различных классов, их смесей и ВЭМ на их основе. Выявлена и описана
математически зависимость dK индивидуальных ВВ от их удельной поверхности. При
этом показана роль дефектности кристаллов ВВ. Предложены уравнения для расче¬
та dK бинарных смесей, содержащих высокодисперсные (микронные) ВВ, и составов
на их основе. Проведены также широкие исследования детонационной способности
ВЭМ на основе ряда ВВ (ТЭН, гексоген, октоген, тротил, тетрил, бензотрифурок-
сан, CL-20, DNTF, FOX-7) с различными видами инертных добавок. Установлено,
что зависимость критических диаметров детонации ВВ от степени их разбавления
инертными веществами, как органическими, так и неорганическими, имеет единый
вид. Для органических инертных компонентов (связующих) определяющей физиче¬
ской характеристикой является их акустическая жесткость, связанная с ударной сжи¬
маемостью, для неорганических (металлов, оксидов и солей) - плотность и размер
259
2-10
частиц, что связано с характером ускорения частиц продуктами взрыва и изменением
скоростей волн разрежения при расширении продуктов.
Впервые получена система уравнений, описывающих зависимость критических
диаметров детонации гетерогенных полидисперсных композиций, которые содержат
кристаллические ВВ и инертные органические и неорганические вещества различ¬
ных классов, от физических свойств компонентов, их дисперсности и соотношения.
В результате проведенных исследований разработан метод расчета и прогнозирова¬
ния критических диаметров детонации сложных реальных взрывчатых композиций,
включая ВЭМ (Котомин А.А., Душенок С.А., Козлов А.С., 2013). Ниже кратко описа¬
ны основные методы регулирования критических диаметров детонации ВЭМ.
Вид ВВ
Главным фактором, определяющим детонационную способность ВЭМ, является
вид ВВ. В таблице 2.10.1.1 приведены критические диаметры детонации ВВ различ¬
ного химического строения и дисперсности при малой пористости зарядов 0,1-2%.
Из таблицы 2.10.1.1 видно, что из индивидуальных ВВ малым <7К обладают энергона¬
сыщенные ВВ, имеющие высокие положительные энтальпии образования либо не¬
большие энергии активации термораспада, такие, как полиазотистые гетероаромати-
ческие соединения и нитраты спиртов.
Таблица 2.10.1.1 Критические диаметры детонации индивидуальных ВВ
ВВ
Дс(мм) при различных размерах кристаллов ВВ
3 мкм
10 мкм
20 мкм
30 мкм
100 мкм
Тетрил
0,80
1,30
1,75
2,05
2,95
FOX-7
0,55
1,05
1,60
2,05
3,30
CL-20
0,45
0,75
1,05
1,30
2,00
Октоген
0,40
0,75
1,20
1,55
2,50
Гексоген
0,25
0,60
0,85
1.15
1,85
ТЭН
0,08
0,20
0,40
0,60
1,30
DNTF
0,07
0,15
0,25
0,30
0,55
БТФ
0,06
0,15
0,30
0,40
0,60
Дисперсность ВВ
Эффективным способом регулирования детонационной способности ВЭМ явля¬
ется изменение дисперсности ВВ. Зависимость критического диаметра детонации ВВ
(d4, мм) от удельной поверхности ВВ (Sg, м2/г) выражается формулой:
(S \
d4=a -f , (2.10.1.18)
VI/
где а - критический диаметр чистого ВВ при Sg= 1 м2/г, мм; S\ - удельная поверх¬
ность ВВ, равная 1 м2/г (10000 см2/г); 6 - коэффициент: для ТЭН я=0,08 мм, 6=0,93;
гексогена о=0,26 мм, 6=0,78; октогена я=0,38 мм, 6=0,64; БТФ а = 0,06 мм, 6=1,23; те¬
трила а=0,79 мм, 6=0,44; DNTF а=0,07 мм, 6 = 0,66; CL-20 а = 0,43 мм, 6=0,51; FOX-7
а=0,55 мм, 6=0,60 (Котомин АЛ. и др., 2010; Котомин АЛ. и др., 2012; Котомин А А
и др., 2016).
260
2-10
На рисунке 2.10.1.3 в качестве примера приведена данная зависимость для
октогена.
удельная поверхность, м2/г
Рисунок 2.10.1.3. Зависимость критических диаметров детонации октогена (с/к0, мм) от его
удельной поверхности (Sg, м2/г)
Концентрация ВВ в ВЭМ
Детонационная способность ВЭМ регулируется также концентрацией ВВ в нем.
Зависимость критического диаметра детонации ВЭМ с инертными добавками (.dK, мм)
от объемной доли ВВ (FBB) выражается следующей формулой:
dK=^, (2.10.1.19)
вв
где п - параметр, определяемый дисперсностью ВВ и физическими свойствами
добавок.
На рисунке 2.10.1.4 в качестве примера приведена данная зависимость для ВЭМ
на основе высокодисперсного FOX-7.
0,5 0,55 0,6 0,65 0,7
объёмная доля ВВ
Рисунок 2.10.1.4. Зависимость <7КВЭМ на основе FOX-7 (Sg= 0,80 м2/г) от объемной доли ВВ
261
2-10
Параметр п уравнения (2.10.1.19) находится в корреляционном соотношении
с акустической жесткостью сплошных инертных органических сред (органических
жидкостей, полимеров, связующих), связанной с их сжимаемостью в ударной волне
(рисунок 2.10.1.5).
р-Со, г/см3-м/с
1 - полисилоксан, 2 - полидивинилизопрен, 3 - дибутилфталат, 4 - дибромбензол,
5 - бромистый этилен, 6 - глицерин, 7 - тетрабромэтан
Рисунок 2.10.1.5. Зависимость параметра п для суспензий гексогена фракции 90-160 мкм
в органических средах (жидкости, полимеры) от их акустической жесткости
Параметр п для ВЭМ, содержащих как органические, так и неорганические до¬
бавки, рассчитывается по следующему уравнению:
п = Л(иорг) + £(и„еорг), (2.10.1.20)
Иорг= 4,14 + l,391g5x- О,3роас0пморг= g + 0,114рнл + 0,8971gr
А = -@—,В = -1—,
Р + У Р + У
где род - плотность органической добавки, г/см3; рнд - плотность неорганической до¬
бавки, г/см3; г - средний размер частиц неорганической добавки, мм; /?, у - массовые
доли органической и неорганической добавки в ВЭМ, соответственно; g - коэффици¬
ент: для металлов и оксидов g=3,46, для солей g=3,32.
Пористость заряда
Детонационную способность ВЭМ можно также регулировать пористостью заря¬
да. Пористость заряда (П) рассчитывается по формуле П=1- pjpmax, где р0 - реальная
плотность заряда, г/см3; ртах - максимальная плотность ВЭМ, г/см3.
262
2-10
Зависимость dK ВЭМ, а также индивидуальных ВВ от пористости заряда описы¬
вается уравнением:
1.14(1—^-)
^,=^,,•10 . (2.10.1.21)
где б/к(А)) - критический диаметр детонации ВЭМ при плотности р0; dK(PmaK) - критиче¬
ский диаметр детонации ВЭМ при плотности ртах.
На рисунке 2.10.1.6 в качестве примера приведена данная зависимость для инди¬
видуального ВВ и модельных ВЭМ.
п,%
1 - гексоген (160-200 мкм) / СКТ 85/15; 2 - тетрил (250-315 мкм) / СКТ 90/10;
3 - тетрил (250-315 мкм)
Рисунок 2.10.1.6. Зависимость dK(p0) от пористости заряда
Тяжелые высокодисперсные инертные неорганические добавки
Детонационную способность ВЭМ можно существенно повысить путем введения
в него небольшого количества (2-3 % мае.) тяжелых высокодисперсных неорганиче¬
ских добавок с плотностью (рпд) более 4 г/см3 и размером частиц (г) менее 5 мкм. При
этом проявляется эффект сенсибилизации ВЭМ и коэффициент g формулы (2.1.10.20)
рассчитывается из выражения
4,51 у-т
g--
(2.10.1.22)
0,004 + у
где т - коэффициент: для металлов и оксидов т=0,196, для солей т=0,225.
На рисунке 2.10.1.7 в качестве примера приведена зависимость критического диа¬
метра детонации ВЭМ: высокодисперсный ТЭН (0,53 м2/г) / СКТ / Fe203 (2,4 мкм,
рнд=5,24 г/см3) от содержания Fe203% мае.
Бинарные смеси высокодисперсных ВВ
Эффективным способом регулирования детонационной способности является ис¬
пользование в составе ВЭМ бинарных смесей кристаллических ВВ, одно из которых
имеет высокие энергетические характеристики, а другое - малый критический диа¬
метр детонации. При этом могут применяться как бинарные смеси грубодисперсного
ВВ с высокодисперсным, так и смеси двух высокодисперсных ВВ.
263
2-10
расчет без учета сенсибилизации
/
/
0,50
0,75
5
10
15
20 содержание Fe203, % масс
Рисунок 2.10.1.7. Зависимость dK ВЭМ: ТЭН (0,53 M2/r)/CKT/Fe203 (2,4 мкм)
от содержания Fe203
При использовании бинарных смесей грубодисперсного ВВ с высокодисперсным
зависимости критических диаметров детонации этих смесей и составов на их основе
от соотношения ВВ в смесях имеют S-образный вид. Пример такой зависимости при¬
веден на рисунке 2.10.1.8 (ВК - взрывчатые композиции: бинарная смесь ВВ/СКТ).
Данные зависимости аппроксимируются функцией Лапласа и могут быть выраже¬
ны следующими уравнениями:
где dK] - критический диаметр детонации ВК на основе ВВ с меньшей детонационной
способностью; dK2 - критический диаметр детонации ВК на основе ВВ с большей
детонационной способностью; dKc- критический диаметр детонации ВК на основе
бинарной смеси ВВ; V2 - объемная доля ВВ с большей детонационной способностью
в бинарной смеси ВВ; ctx^ - критический диаметр детонации чистого ВВ с меньшей
детонационной способностью; ct1^ - критический диаметр детонации чистого ВВ
с большей детонационной способностью; ctc^ - критический диаметр детонации чи¬
стой бинарной смеси ВВ.
При использовании бинарных смесей двух высокодисперсных (.микронных) ВВ за¬
висимости критических диаметров детонации этих смесей и составов на их основе
от соотношения ВВ в смесях являются неаддитивными и представлены в качестве
примера на рисунке 2.10.1.9.
Как видно из рисунка 2.10.1.9, полученные зависимости для ВК на основе смесей
высокодисперсного октогена с высокодисперсным ТЭНом имеют иной вид, чем для
ВК с грубодисперсным октогеном (рисунок 2.10.1.8). Наибольшее различие наблюда-
(2.10.1.23)
(2.10.1.24)
264
2-10
объёмная доля ТЭНа
1 - бинарные смеси ВВ; 2 - ВК 85/15; 3 - ВК 80/20;
4-ВК 75/25; 5-ВК 70/30
Рисунок 2.10.1.8. Зависимость dK смесей октогена (100 мкм, Sg=0,04 м2/г) с ТЭНом
(4 мкм, Sg=0,75 м2/г) и ВК на их основе от объемной доли ТЭНа в смесях
ется в характере снижения dK на начальном участке кривых - до 20% об. ТЭНа. Это
имеет не только важное теоретическое значение, так как эти зависимости отражают
изменение времени разложения компонентов в детонационной волне, но и практиче¬
ское - существенное снижение dK путем введения небольшого количества ВВ с высо¬
кой детонационной способностью в ВЭМ.
Для уточнения данной зависимости в интервале 0-25% мае. ТЭНа были более
подробно исследованы ВК на основе смесей высокодисперсного октогена с высоко¬
дисперсным ТЭНом (рисунок 2.10.1.10).
Как видно из рисунка, проведенные дополнительные исследования в области ма¬
лых концентраций ТЭНа подтвердили установленную зависимость для смесей вы¬
сокодисперсного октогена с высокодисперсным ТЭНом и составов на основе этих
смесей.
265
2-10
объёмная доля ТЭНа
1 - ВК 85/15, 2 - ВК 80/20, 3 - ВК 75/25, 4 - ВК 70/30
Рисунок 2.10.1.9. Зависимость dK ВК на основе смесей октогена (3 мкм, Sg=0,97 м2/г)
с ТЭНом (4 мкм, Sg = 0,77 м2/г) от объемной доли ТЭНа в смесях
объёмная доля I ЗНа
1 - ВК 80/20; 2 - ВК 75/25; 3 - ВК 70/30
Рисунок 2.10.1.10. Зависимость dK ВК на основе смесей октогена (0,90 м2/г)
с ТЭНом (0,72 м2/г) от объемной доли ТЭНа в смесях
266
2-10
Полученные результаты далее были дополнены исследованием высокодисперсных
смесей FOX-7 с ТЭНом (рисунок 2.10.1.11) и FOX-7 с DNTF (рисунок 2.10.1.12).
объёмная доля ТЭНа
1 - ВК 77,5/22,5; 2 - ВК 75/25; 3 - ВК 72,5/27,5; 4 - ВК 70/30
Рисунок 2.10.1.11. Зависимость dK ВК на основе смесей FOX-7 (0,80 м2/г) с ТЭНом (0,77 м2/г)
от объемной доли ТЭНа в смесях
Как видно из рисунков 2.10.1.11, 2.10.1.12, полученные зависимости для высоко¬
дисперсных смесей FOX-7 / ТЭН и FOX-7 / DNTF и составов на их основе имеют
такой же вид, как и для смеси октоген / ТЭН и ВК на основе этой смеси.
На рисунке 2.10.1.13 представлены аналогичные зависимости для исследованных
чистых бинарных смесей ВВ.
Из рисунка видно, что изученные зависимости имеют одинаковый характер как
для взрывчатых композиций, так и для чистых бинарных смесей ВВ.
В целом по результатам проведенных исследований можно сделать вывод, что для
бинарных смесей, содержащих высокодисперсные (микронные) взрывчатые веще¬
ства, а также для ВК на их основе зависимость критических диаметров детонации
от соотношения ВВ в смесях является неаддитивной и свидетельствует о преимуще¬
ственном влиянии кинетики разложения компонента с большей детонационной спо¬
собностью в зоне химической реакции детонационной волны.
267
2-10
го
s
d
объёмная доля DNTF
1 - ВК 80/20; 2 - ВК 77,5/22,5; 3 - ВК 75/25; 4 - ВК 72,5/27,5
Рисунок 2.10.1.12. Зависимость dK ВК на основе смесей FOX-7 (0,65 м2/г) с DNTF (0,59 м2/г)
от объемной доли DNTF в смесях
объёмная доля для наиболее детонационноспособного компонента смеси
1 - октоген / ТЭН; 2 - FOX-7 / ТЭН; 3 - FOX-7 / DNTF
Рисунок 2.10.1.13. Детонационная способность чистых высокодисперсных бинарных смесей
268
2-10
Все полученные зависимости для бинарных микронных смесей ВВ и ВК на их
основе с удовлетворительной точностью (средняя погрешность 10%) описываются
уравнениями:
dKc=dKx{\-V?) + dKy?- (2.10.1.25)
<%' =<}(1-1^)+<2)*7, (2.10.1.26)
где q - безразмерный коэффициент; остальные обозначения даны в формулах
(2.10.1.23), (2.10.1.24).
Для определения значений показателя степени q уравнения (2.10.1.25), (2.10.1.26)
были преобразованы в линейный вид:
\g{dKrdK) = \g{dKt-dKi) + q\gV2,
lg(<,)-<e,)=lg(<l,-<2))+?lgF2
По полученным экспериментальным данным для всех бинарных смесей ВВ раз¬
личного химического строения и ВК на их основе были построены графики, соот¬
ветствующие этим линейным уравнениям. На рисунке 2.10.1.14 в качестве примера
приведены графики для смеси FOX-7/ТЭН и ВК на основе этой смеси.
логарифм объёмной доли ТЭНа
Рисунок 2.10.1.14. Зависимость \g(dKi-dK) от \gV2:
нижняя прямая - чистые смеси FOX-7/ТЭН;
над ней расположены: ВК 77,5/22,5; ВК 75/25; ВК 72,5/27,5; ВК 70/30
Для каждой пары различных ВВ и ВК на их основе построенные линии практи¬
чески параллельны, что свидетельствует о близости значений коэффициента q для
смесей ВВ и составов на основе конкретной пары ВВ. По полученным результатам
значения коэффициента q составляют:
- для бинарных смесей октогена с ТЭНом и составов на основе этих смесей - 0,50;
- для бинарных смесей FOX-7 с ТЭНом и составов на основе этих смесей - 0,38;
- для бинарных смесей FOX-7 с DNTF и составов на основе этих смесей - 0,36.
Указанные значения коэффициента q для различных пар ВВ должны определяться
соотношением критических диаметров детонации индивидуальных ВВ в этих парах.
На рисунке 2.10.1.15 представлена зависимость величины q от соотношения ctty d\}0.
269
2-10
соотношение Л, компонентов бинарной смеси ВВ
Рисунок 2.10.1.15. Зависимость коэффициента q от соотношения ct'*J с/к’
Полученная зависимость аппроксимируется уравнением:
dm
q=0,69 - 0,046-^-. (2.10.1.27)
ч d
к
Формулы (2.10.1.25) - (2.10.1.27) хорошо описывают эксперимент при соотноше¬
нии от 3,0 до 8,0.
Практическое значение полученных результатов состоит в возможности тонкого ре¬
гулирования критических диаметров детонации ВЭМ, используемых в системах разде¬
ления космических аппаратов, путем целенаправленной научно обоснованной компо¬
новки ВЭМ. Результаты исследований открывают новые пути создания перспективных
высокоэнергетических материалов для современной аэрокосмической техники.
Параметры детонации ВЭМ, применяемых в системах разделения КА (Ко¬
томин А.А. и др., 2010; Котомин А.А., Душенок С.А., Ефанов В.В., Козлов А. С., 2013)
Результаты проведенных исследований позволили более точно рассчитать пара¬
метры детонации ВЭМ, применяемых в системах детонационной автоматики КА (та¬
блица 2.10.1.2).
Таблица 2.10.1.2. Параметры детонации ВЭМ
состав, назначение
ро
D
Pj
Pj
Uj
Cj
Явк
A
ВЭМ для детонационных замков,
болтов, ножей, чек
1,62
7,30
2,10
198
1,67
5,63
3,36
0,5
ВЭМ для трансляторов
детонации неразрушаемых - транеров
1,80
8,00
2,33
264
1,83
6,17
3,37
0,2
пресскомпозиция
для колпачков-усилителей транеров
о о
С) чо
5,45
7,70
1,37
2,14
80
239
1,46
1,94
3,99
5,76
2,73
2,97
0,2
0,1
ВЭМ для трансляторов
детонации трубчатых
1,55
7,30
2,02
193
1,70
5,60
3,29
0,5
заряды из флегматизированного гексогена
1,70
8,30
2,30
304
2,16
6,14
2,85
2,0
заряды из флегматизированного октогена
1,80
8,70
2,45
359
2,30
6,40
2,79
3,0
Примечание: р0- плотность заряда, г/см3; D - скорость детонации, км/с; pj- плотность про¬
дуктов взрыва, г/см3; Pj - давление детонации, кбар; Uj - массовая скорость продуктов взрыва,
км/с; Cj- скорость звука в продуктах взрыва, км/с; пш - показатель политропы продуктов взры¬
ва; dK - критический диаметр детонации, мм.
270
2-10
Устройства и системы разделения на основе ВЭМ
Исполнительные детонационные устройства {Горовцов В.В., Ефанов В.В. и др.,
2000; Котомин А.А., Ефанов В.В., Душенок С.А., Тимофеев В.Н., 2003; Горовцов В.В.,
Ефанов В.В. и др., 2008; Поплавский Е. Ч., Медведев А.А., и др.,2011; Брешев Е.Н., Го¬
ровцов В.В., и др., 2011; Душенок С.А., Котомин А.А., Ефанов В.В., 2004)
Разработан и находится в эксплуатации комплект детонационных замков и
разрывных болтов поршневого типа с усилием разрыва от 20 до 250 кН и массой
0,1-1,4 кг, практически не создающих импульса при срабатывании. Сконструиро¬
ваны и применяются в различных системах бортовой автоматики детонационные
ножи, чеки, клапаны и другие устройства на основе ВЭМ. Разработаны методики
расчета работоспособности и надежности этих устройств по двум критериям: «раз¬
виваемое усилие» и «совершаемая работа». Использование указанных методик при
проектировании зарядов ВЭМ и конструкций устройств обеспечивает существенное
ускорение проектирования и снижение объема отработки систем разделения КА.
На рисунке 2.10.1.16 представлена конструкция разрывного болта (РБ) на основе
ВЭМ. Принцип его работы заключается в следующем. При подаче инициирующего
импульса от электродетонатора 1 либо от заряда-усилителя 2 специального транс¬
лятора детонационного импульса 3 детонирует заряд ВЭМ 7 в зарядной камере, рас¬
положенной в корпусе 4 болта. Воздействие давления продуктов взрыва на рабочий
поршень 5 вызывает безосколочный разрыв «шейки» болта. При дальнейшем движе¬
нии поршень своей конической частью упирается в ответную выемку болта 6. При
этом обеспечивается обтюрация, исключающая прорыв газов.
Оптимизация конструктивных элементов РБ позволила снизить навеску ВЭМ
в рабочей зоне до 0,1-0,3 г при общем количестве ВЭМ в болте 0,2-0,5 г в зависимо¬
сти от усилия разрыва (20-80 кН), развиваемого РБ. Как показали испытания, разра¬
ботанные РБ являются безосколочными, герметичными и практически безымпульс-
ными. На основании проведенных исследований было разработано несколько типов
РБ, различающихся конструктивно и предназначенных для решения разнообразных
задач. На рисунке 2.10.1.17 показана одна из конструкций РБ, который встраивается
в кольцевую систему разделения.
Новые задачи по разделению объектов КА, когда РБ должен, кроме осевой, нести
и боковую нагрузку, потребовали создания новых типов РБ, названных нами дето¬
национными замками. Пример конструкции детонационного замка приведен на ри¬
сунке 2.10.1.18. При подаче инициирующего импульса от электродетонатора 1 или
от заряда-усилителя 2 транслятора детонации 3 детонирует заряд ВЭМ 6, располо¬
женный в кольцевой канавке корпуса 4 над поршнем (штоком) 5. Под действием
давления продуктов детонации происходит разрыв «шейки» штока, и он выходит из
плоскости разделения. Для снижения ударных нагрузок шток опирается на сминае¬
мый демпфер (7), который гасит энергию штока. Заряд ВЭМ в виде кольца в рабочей
зоне детонационного замка составляет 0,18-0,40 г и зависит от прочности разрывае¬
мой «шейки». В настоящее время разработаны детонационные замки с прочностью
«шейки» от 30 до 180 кН.
На рисунке 2.10.1.19 представлена конструкция детонационного замка нового
типа, объединяющего достоинства РБ (рисунок 2.10.1.16) и замка (рисунок 2.10.1.18).
Под действием продуктов детонации заряда ВЭМ происходит перемещение поршня
и разрыв «шейки» замка. При перемещении поршня происходит смятие демпфера и
перетекание газа из рабочей полости в полость стыка поршня с корпусом.
271
ЕВД
1 - электродетонатор; 2 - заряд-усилитель; 3 - транслятор детонации;
4 - корпус; 5 - поршень; 6 - болт; 7 - заряд ВЭМ
Рисунок 2.10.1.16. Разрывной болт на основе ВЭМ
1 - корпус; 2 - болт; 3 - поршень; 4 - демпфер; 5 - заряд ВЭМ; 6 - транслятор детонации
Рисунок 2.10.1.17. Разрывной болт, соединенный с двумя трансляторами детонации
2-10
1 - электродетонатор; 2 - заряд-усилитель; 3 - транслятор детонации;
4 - корпус; 5 - поршень (шток); 6 - заряд ВЭМ; 7 - демпфер
Рисунок 2.10.1.18. Конструкция детонационного замка на основе ВЭМ
1 - корпус; 2 - гильза со штоком; 3 - поршень; 4 - штуцер снаряженный;
5 - каналы дросселирующие; 6 - демпферы; 7 - заряд ВЭМ; 8 - шпангоут замка;
9 - шпангоут космического аппарата; 10 - насадка
Рисунок 2.10.1.19. Конструкция детонационного замка нового типа на основе ВЭМ
273
2-10
Детонационные замки также успешно прошли комплекс наземной отработки и
летные испытания в системах отделения КА.
В настоящее время проходят отработку детонационные шариковые замки, спо¬
собные выдерживать большие боковые и осевые нагрузки (до 250 кН). На рисунке
2.10.1.20 представлена конструкция такого замка.
1 - заряд-усилитель, 2 - транслятор детонации, 3 - корпус, 4 - поршень,
5 - заряд ЭВВ, 6 - шток, 7 - пружина
Рисунок 2.10.1.20. Конструкция шарикового детонационного замка на основе ЭВВ
Под действием продуктов детонации заряда ВЭМ происходит разрыв «шейки»
поршня 4, и поршень опускается, сминая демпфер. При этом освобождаются шари¬
ки замка, и под действием пружины 7 опускается шток 6, освобождая поверхность
разделения.
На рисунках 2.10.1.21, 2.10.1.22 представлены фотографии детонационного замка
и детонационного ножа на основе ВЭМ.
274
2-10
Рисунок 2.10.1.22. Детонационный нож
на основе ВЭМ
Таким образом, использование ВЭМ с высокой детонационной способностью по¬
зволило создать и успешно применить в ряде КА низкоимпульсные безосколочные
детонационные устройства, обеспечивающие требуемые технические параметры
и герметичность систем разделения.
Основные положения существующей методики расчёта работоспособности
детонационных устройств разделения поршневого типа (Котомин А.А., Душе-
нок С.А., Ефанов В.В., 2014; Котомин А.А., Дуиленок С.А., Ефанов В.В. и др., 2001)
Для обеспечения работоспособности и высокой надёжности детонационных
устройств разделения поршневого типа с зарядами из ВЭМ (разрывных болтов, дето¬
национных замков (ДЗ) и ножей (ДН) и др.) нами ранее была разработана методика
их расчёта.
Работоспособность ДЗ определяется их способностью с высокой степенью на¬
дёжности совершить необходимую операцию по команде от системы управления КА:
снятие силовой связи между отделяемыми частями КА.
Так как энергетическим элементом, дающим возможность совершить эту опера¬
цию в ДЗ, служит ВЭМ в виде сплошного заряда сложной конфигурации, имеющего
малые размеры и массу, то необходимым и достаточным условием является расчёт
работоспособности, надежности и полноты детонации такого заряда.
После проведения большого числа экспериментов с учетом аналитического ис¬
следования процесса срабатывания в ДЗ зарядов из ЭВВ сложной формы, малого се¬
чения и массы была разработана методика расчёта работоспособности ДЗ.
Разработанная методика базируется на основных энергетических и детонацион¬
ных характеристиках ВЭМ и газодинамике продуктов их взрыва.
Рисунок 2.10.1.21. Детонационный замок
на основе ВЭМ
275
2-10
Суть методики состоит в использовании следующих критериев:
- «Развиваемое усилие»;
- «Совершаемая работа».
По первому критерию заряд ВЭМ должен создать необходимое давление продук¬
тов взрыва в зарядной камере ДЗ, которое с помощью поршня создает усилие, превы¬
шающее прочность разделяемого элемента замка - «шейки» с учетом коэффициента
запаса работоспособности.
По второму критерию продукты взрыва при своем расширении по ходу поршня
должны произвести работу, больЩую, чем потребная механическая работа разделе¬
ния «шейки» ДЗ.
Схема расчёта заряда ВЭМ по критерию «Развиваемое усилие» следующая:
1. Расчёт усилия, развиваемого зарядом ВЭМ: Fp= F-k (кгс), где F- заданное уси¬
лие для совершения ДЗ механического действия; коэффициент запаса.
2. Определение необходимого давления в зарядной камере в момент начала дви¬
жения поршня ДЗ: Р2= Fp/S (кг/см2), где S - площадь поршня, на которую действует
давление.
3. Расчёт расширения продуктов взрыва ВЭМ к моменту начала разделения
«шейки». В это время происходит выбор зазоров и начало приложения действующей
силы на поршень ДЗ.
Здесь необходимо рассмотреть два варианта расчётной формулы процесса
расширения:
а) если Р2 больше Ркр (Ркр=4410 кг/см2), то уравнение политропы имеет вид
P^Vf = P2V2’\
где Рвзр=74950 кг/см2 (для ЭВВ-75В); п - показатель политропы, и=3,37; Vx - на¬
чальный объём зарядной камеры (см3), равный объёму рабочей части заряда ЭВВ;
V2 - объём зарядной камеры при перемещении поршня за счёт выборки зазоров в зам¬
ке и начала воздействия поршня на разделение «шейки» ДЗ;
б) если Р2 меньше Ркр, то из адиабаты расширения продуктов взрыва сначала
определяют соотношение удельных объёмов продуктов взрыва:
PKVj=P2V2\
где v2/v0 = V2/Vx \ Рк = 4470 кг/см2; v*= 1,425 см3/г; у = 1,3; v0= 0,617 см3/г - начальный
удельный объём продуктов взрыва ЭВВ-75В.
Из системы уравнений
V2/Vx=cp
<Vl+AVl=V2i,
А ^=6,-5
где AV\- увеличение объёма зарядной камеры при расширении продуктов взрыва
при выборке зазоров и деформации поршня; S - площадь поршня (см3); д\ - ход
поршня (по статистике, <5i=0,8... 1,6 мм для ДЗ в зависимости от типа замка и вели¬
чины «шейки»). Находим значения Vx и V2 и массу рабочего заряда: M=p0'V, (г), где
р0= 1,62 г/см3 - плотность ЭВВ-75В.
4. Зная конфигурацию рабочего заряда ВЭМ и его элементов, по найденным зна¬
чениям V\ и т определяем размеры рабочей части проектируемого заряда.
276
2-10
Рабочей частью зарядов ВЭМ в ДЗ и ДН, имеющих сложные протяженные за¬
ряды, является та основная их часть, продукты взрыва которой воздействуют непо¬
средственно на поршень и создают давление, необходимое для разрыва «шейки».
К рабочей части заряда, помимо диска или кольца, относится примыкающая часть
заряда в канале длиной не более пяти диаметров канала. Это объясняется тем, что
при одномерном разлете продуктов детонации (в нашем случае это удлиненный заряд
в полузамкнутой неразрушаемой оболочке) активная часть заряда, продукты взрыва
которой двигаются в направлении распространения детонационной волны, составля¬
ет не более трех - пяти диаметров заряда.
Таким образом, рабочая часть заряда в форме диска дополняется, например для
диаметра канала 2 мм, цилиндрическим зарядом диаметром 2 мм и длиной 6... 10 мм
и усечённым конусом (переходной элемент между диском и каналом) Д = 2 мм,
d2=4 мм; высота усечённого конуса h = 1 мм.
Ниже приведена схема расчёта заряда ВЭМ по критерию «Совершаемая работа».
1. Величина механической работы определяется формулой:
Ap=F(S}+S2)( Дж), (2.10.1.28)
где &2 ~ 0,5 мм - перемещение поршня, обеспечивающее полное разделение «шейки»;
8\ - величина деформации элементов корпуса и поршня ДЗ при приложении усилия
F, определенного для конкретного узла; F - усилие, требуемое для разделения «шей¬
ки» ДЗ.
2. Находим плотность продуктов взрыва в момент окончания разрыва «шейки» ДЗ:
AV2=S'S2 (cm3); V3=V2+AV2; p2=m/V2 (г/см3),
где V2, S, т берутся из расчёта в предыдущем разделе; V2 - объём зарядной камеры
в момент окончания разрыва «шейки» ДЗ.
3. Определяется удельная работа продуктов взрыва ЭВВ в соответствии
с формулой
Ауа=и/[п/(п-\М\ -(p2lpjTl\ (2.10.1.29)
где Uj- массовая скорость продуктов взрыва в точке Жуге (1,67 км/с); р3 - плотность
продуктов взрыва в точке Жуге (2,10 г/см3); /7=3,37 - показатель политропы.
4. Рассчитывается работа, совершаемая продуктами взрыва рабочего заряда:
А3=Луд-т (Дж), где т - масса рабочего заряда.
Рассчитанная работа продуктов взрыва сравнивается с механической работой, не¬
обходимой для разрыва «шейки» ДЗ.
Совершенствование методики расчёта работоспособности детонационных
замков и ножей {Горовцов В.В., Ефанов В.В., Котомин А.А., Душенок С.А., 2016)
Рассмотренная методика расчёта работоспособности ДЗ хорошо коррелируется
с экспериментальными данными при испытаниях ДЗ.
Однако в ходе анализа состояния материальной части ДЗ после испытаний нами
было замечено, что посадочное место рабочего заряда ЭВВ и торец поршня, при¬
легающий к рабочему заряду, имеют некоторую величину деформации из-за очень
быстрого воздействия высокого детонационного давления. Поэтому объём Кь равный
объёму рабочего заряда в формулах расчёта работоспособности ДЗ, должен прини¬
маться с некоторым коэффициентом увеличения объёма (Fi+AFi).
277
2-10
Для оценки практического значения коэффициента A Vx было разработано и изго¬
товлено приспособление - имитатор детонационного замка с различным диаметром
рабочего заряда. В реальных конструкциях часто применяют ДЗ:
- с номинальным зарядом диаметром 12 мм, толщиной 1 мм,
- с увеличенным зарядом диаметром 15 мм, толщиной 1 мм.
С использованием этих имитаторов ДЗ был проведен ряд экспериментов; после
срабатывания зарядов ВЭМ оценивалась величина изменения объёма зарядной каме¬
ры AF, (рисунки 2.10.1.23,2.10.1.24).
Изменение объёма инициирующего канала, заполненного ВЭМ, для всех зарядов
одинаково.
Объём исходного рабочего заряда:
- номинальный объём диска ВЭМ: V= S'h = 0,785 • 122* 1 = 113,04 мм3;
- номинальный объём канала, заполненного ВЭМ:
- цилиндр: V=S'l= 0,785-йР-10 = 0,785-4-10 = 31,40 мм3;
- усеченный конус: V= S'h; S = Z)cp2*0,785 = [(4+2)/2]2-0,785 = 7,06 мм2;
V= lfi6-h = 7,06-1 = 7,06 мм3;
номинальный суммарный объём заряда до его детонации:
ZFHOM= 113,04+31,4+7,06 = 151,50 мм3.
04
< ►
1 - поршень; 2 - рабочий заряд; 3 - корпус ДЗ
Рисунок 2.10.1.23. Исходное состояние зоны рабочего заряда ВЭМ
278
2-10
R - средний радиус мениска; h - максимальная высота мениска;
I - расчётная длина активной части заряда (I ~ пять номинальных диаметров)
Рисунок 2.10.1.24. Состояние зоны рабочего заряда ВЭМ после его детонации
Объём зарядной камеры, занимаемый продуктами детонации ВЭМ:
- цилиндрический канал: D = 3 мм, / = 10 мм; V= 57=0,785-З2-10 = 70,65 мм3;
- усечённый конус: D =5 мм, d =3 мм, Dcp = (5+3)/2 =4 мм;
К=0,785-44,5=18,84 мм3;
- объём основной части заряда - диска, который стал усечённым конусом:
DBep= 12+1+1 =\4 мм, dum= 12 мм, Др=(14+12)/2=13 мм,
1^=0,785-132-1=132,66 мм3, Vz= 132,66+70,65+18,84 = 222,15 мм3.
Геометрически вычислить объём мениска на торце поршня не удалось из-за его
сложной и неправильной формы. Был применён способ точного взвешивания массы
пластилина, заполнившего объем мениска, на аналитических весах с точностью до
0,00001 г.
Вычисленные средние объёмы мениска от воздействия номинального и усиленно¬
го зарядов: Км.ном = 47,64 мм3, Гмус= 91,80 мм3.
Суммарный средний объём зарядной камеры после детонации заряда ВЭМ с уче¬
том мениска на торце поршня:
£К„ОМЗар.кам = 222,15+47,64 = 269,79 мм3;
Д V= 269,79-151,50 = 118,29 мм3,
где AV- увеличение объёма взрывной камеры заряда.
279
2-10
Таким образом, относительное увеличение объёма составило 78,1%.
Приведём результаты аналогичного расчёта для усиленного заряда:
Щс = 176,63+31,4+7,06 = 215,09 мм3,
Щс.1аР.ка,и = 200,96+70,65+18,84+91,80 = 382,25 мм3,
AV= 382,25-215,09 = 167,16 мм3.
Таким образом, относительное увеличение объёма составило 77,7%.
Следовательно, коэффициент увеличения объёма зарядной камеры после детона¬
ции ВЭМ составляетк=1,777...1,781 (среднее значение 1,78).
В представленной выше методике расчёта определённую нами величину AV] не¬
обходимо учитывать и рассчитывать значение давления продуктов взрыва ВЭМ по
политропе в новом объёме (1,78Kj):
P^-Vl = P\-(\,7%-Vxy, (2.10.1.30)
где Лзр= 74950 кг/см2, п = 3,37.
Далее необходимо вести расчёт по существующей методике, подставляя вместо
значения давления Р2 его новое значение Р\. Для случая, когда Р2 меньше Ркр, также
вместо Vu равного объёму заряда, подставляем 1,78- V\ и ведем расчёт по методике с
использованием адиабаты расширения продуктов взрыва.
Трансляторы детонации {Душенок С.А., Котомин А.А., Ефанов В.В., Горов-
цов В.В., 2000; Горовцов В.В., Ефанов В.В., Душенок С.А., Котомин А.А., 2015; Горов-
цов В.В., Котомин А.А., Душенок С.А., 2015; Котомин А.А., Харченко В.В. и др., 2015)
Для передачи детонационного импульса исполнительным устройствам в системах
разделения КА потребовалось создать надежные неразрушаемые герметичные транс¬
ляторы детонации, исключающие при функционировании истечение газообразных
продуктов взрыва в окружающую среду. Решение этой задачи также стало возмож¬
ным благодаря применению ВЭМ.
Было разработано два типа трансляторов. Первый тип - неразрушаемые жесткие
трубчатые трансляторы детонации - использовались в КА «ВЕГА» и «ФОБОС».
Удлиненный заряд (УЗ) в этих трансляторах представлял собой шнур из ВЭМ диа¬
метром 1,2 мм в тонкой медной оболочке толщиной 0,1 мм. Диаметр титановой труб¬
ки (корпуса транслятора) составлял 10 мм, толщина - 1 мм. Для предотвращения
касания УЗ стенки титановой трубки на УЗ надевались центрирующие втулки из
капролона. С целью исключения возможности прожигания корпуса направленной
струей высокотемпературных газообразных продуктов взрыва от исполнительных
устройств транслятор снабжался дросселями.
Применение ВЭМ «Транелит», обладающего исключительно высокими детонаци¬
онной способностью и физико-химической стабильностью в широком интервале тем¬
ператур, позволило разработать неразрушаемые гибкие многослойные трансляторы
детонации второго типа - транеры с наружным диаметром 3,6^4,8 мм и небольшой
удельной массой 20-60 г/м, содержащие нить ВЭМ (0,3-0,5 г/м).
Транеры выпускаются двух видов: в пластичной металлической оболочке (алюми¬
ний, нержавеющая сталь), удобной для монтажа в космическом аппарате, и кабель¬
ный вариант. В новых проектах перспективных КА, создаваемых в настоящее время,
предусмотрено широкое использование транеров.
Проведено аналитическое и экспериментальное исследование работоспособно¬
сти, прочности и надёжности транеров, определены пределы их прочности с за¬
280
2-10
данным коэффициентом запаса. Выполнены расчёты детонационных параметров и
изоэнтропы расширения продуктов взрыва транелита по термодинамической про¬
грамме BKW-T. Определено расчётное давление продуктов взрыва, воздействующее
на металлическую оболочку транера. Экспериментально подтверждена работоспо¬
собность и прочность конструкции транеров, в том числе с мажорирующей оценкой
избыточного давления, разработана методика расчёта их прочности и надёжности.
Расчёт на прочность транера
Конструкция транера представлена на рисунке 2.10.1.25. На рисунке 2.10.1.26
приведены фотографии транеров в сборе. Основной силовой оболочкой транера явля¬
ется трубка из нержавеющей стали марки 12Х18Н10Т с наружным диаметром 4,5 мм
и толщиной стенки 0,9 или 1,0 мм. Внутри трубки расположена обмотка из сверх¬
высокомодульного волокна типа «Kevlar». Внутри обмотки находится медная труб¬
ка с толщиной стенки ~0,15 мм, в которой расположен шнуровой заряд диаметром
0,65 мм из ВЭМ «Транелит» с заданными параметрами взрывчатого превращения.
При функционировании транера должна сохраняться его целостность и обеспечи¬
ваться прочность конструкции с заданным коэффициентом запаса прочности 1,5. Вес
конструкции должен быть минимальным. Эти противоречивые требования можно
выполнить, в частности, при оптимизации толщины стенки трубки.
3 2 8 6 1 7 4 5
1 - удлиненный заряд (нить ВЭМ в металлической оболочке);
2 - покрытие из высокопрочных синтетических нитей;
3 - трубка из нержавеющей стали; 4 - заряд-усилитель;
5 - наконечник; 6 - шарик; 7 - запирающий конус; 8 - гайка
Рисунок 2.10.1.25. Неразрушаемый транслятор детонации Транер
Материал трубки транера под воздействием продуктов взрыва заряда ВЭМ под¬
вергается существенным деформациям, величина которых значительно превышает
предел упругости нержавеющей стали марки 12Х18Н10Т. Поэтому решение задачи
по прочности цилиндрической трубки, полностью находящейся в пластическом со¬
стоянии, будем искать в гидродинамическом приближении по теории Мизеса. Пола¬
гаем, что: материал трубки способен претерпевать значительные деформации (в экс¬
периментах показано, что относительное расширение составляет величину до 8%)
без разрушения; материал трубки является несжимаемым (гидродинамическое при¬
ближение), поэтому пренебрегаем упругой деформацией; под действием внутренней
нагрузки трубка расширяется устойчиво, так что перемещения являются радиальны¬
ми; в процессе расширения в материале трубки не происходит химических реакций
или фазовых превращений, сопровождающихся поглощением или выделением тепла;
материал трубки транера следует диаграмме идеальной пластичности.
281
2-10
Рисунок 2.10.1.26. Транеры в сборе
282
2-10
На рисунке 2.10.1.27 приведены эпюры распределения главных напряжений б2
и б,..
б- нормальные (главные) напряжения; z, г, (р- цилиндрические координаты;
а- внутренний радиус трубки; b - наружный радиус трубки;
при этом б^б^б,
Рисунок 2.10.1.27. Эпюры распределения напряжений по толщине стенки трубки,
находящейся под действием внутреннего давления
При увеличении внутреннего давления пластическое состояние достигается пре¬
жде всего на внутренней поверхности. Условие достижения состояния текучести бу¬
дет следующим: ^
а) по критерию Треска q-crT —,
2 Ь"
б) по критерию Мизеса q-<JT г 2 ,
л/3 Ъ2
где q - внутреннее давление; b - наружный радиус трубки; а - внутренний радиус
трубки; бт - предел текучести материала трубки.
Если продолжать увеличивать давление, в трубке образуются две области: вну¬
тренняя, где материал находится в пластическом состоянии, и внешняя, упругая.
Будем определять предельные значения давления, т.е. давление, при котором весь
материал переходит в пластическое состояние, по теории пластичности Мизеса.
Предположим, что в трубке осуществляется плоское деформированное состояние,
т.е. относительное удлинение материала вдоль оси z, sz = 0. Применяя известные
формулы, найдем, что crz = — (сгг +с^) Внесем это значение 6Z в условие пластич-
ности (сг,. + (сГр — ст. j2 + (<т_ — (7r )2 = 2<7j. Получим —(ст. - сг^)2 = 2оу, отсюда
2
~аг ~~^)<7т'
283
2-10
2
Формулы для напряжений 6Z получаются заменой бт на =бъ напряжение 6,
равно их полусумме:
Последняя формула позволяет определить внутреннее давление qT, при котором
весь материал трубки транера переходит в пластическое состояние, и даёт искомое
решение.
Проведём расчёт допускаемых предельных значений давлений Рпр для трубок тра-
неров при толщине стенки 0,9 и 1,0 мм и при коэффициенте запаса прочности 1,5.
Исходные данные для расчёта: внутренний диаметр трубки 2,7 и 2,5 мм; наруж¬
ный диаметр трубки 4,5 мм; предел текучести стали 12Х18Н10Т 276 МПа (по паспор¬
ту механических характеристик на данную партию трубок транеров). В дальнейшем
эта партия транеров была испытана экспериментально на работоспособность; коэф¬
фициент Пуассона для стали, характеризующий упругие свойства материала, при¬
нимаем ju = 0,3.
После подстановки этих данных в последнюю формулу получаем:
1. При толщине стенки трубки транера 0,9 мм
qT = -i 216 In ^ = 162,99 Мпа
Т 73 2,7
Рпр = 162,99/1,5 = 108,7 МПа.
2. При толщине стенки трубки транера 1,0 мм
Таким образом, допускаемые предельные значения давлений (Рпр) при коэффи¬
циенте запаса прочности 1,5 составляют соответственно 108,7 и 125,0 МПа. Следо¬
вательно, конструкция транера с трубкой с толщиной стенки 1,0 мм более прочная.
Расчёт детонационных параметров и изоэнтропы расширения продуктов взрыва
транелита по термодинамической программе BKW-T
Выполнены расчёты теплоты, температуры и удельного объёма газообразных про¬
дуктов взрыва ВЭМ «Транелит», рассчитаны его детонационные параметры. Прове¬
дены расчёты давления продуктов взрыва заряда из ЭВВ «Транелит» в замкнутом
объёме, т.е. давления, воздействующего на металлическую оболочку транера.
Расчет теплоты и температуры взрыва транелита гл
вп
Температура взрыва транелита рассчитывается по формуле Твзр = , где QvBn -
теплота взрывчатого превращения; СуПв - теплоемкость продуктов взрыва.
Исходя из уравнения взрывчатого превращения транелита, можно рассчитать те¬
плоту взрыва:
Здесь qT = —j= <ут In —.
л/3 a
/% = 187,55/1,5 = 125,0 МПа.
Qv вп Qo6p пв Q обр тран ?
284
2-10
где Qo6P пв - теплота образования продуктов взрыва; Q 0бР тРан - теплота образования
транелита (301,34 кДж/кг).
QVBn— 19,89-111,8+ 1,74-266,12+ 1,305-928,04-(-301,34) = 4200 кДж/кг.
Пользуясь табличными значениями теплоемкостей компонентов продуктов взры¬
ва транелита, получаем температуру его взрыва: 4000 К.
Некоторые особенности функционирования транера
а) Транер представляет собой удлиненный заряд ВВ в многослойной оболочке,
причем между слоями оболочки есть довольно существенные, сравнимые с тол¬
щиной оболочек, воздушные зазоры. Наличие зазоров настолько усложняет расчет
взаимодействия продуктов взрыва транелита с различными оболочками, что делает
точный расчет практически нецелесообразным. Проще и надежнее провести ряд опы¬
тов, чем смоделировать численную трехмерную задачу или задачу в ударных полярах
с учетом разгона и торможения метаемых взрывом оболочек.
б) При взрыве заряда транера можно считать, что расширение оболочек происхо¬
дит медленно по сравнению с детонацией заряда, так как скорость метания оболочек
существенно ниже скорости детонации. Скорость детонации транелита составляет
~8 км/с, а скорость метания (расширения оболочек), которую можно оценить по фор¬
муле Гарни, порядка 0,5 км/с. На рисунке 2.10.1.28 приведена схема цилиндрического
заряда массой С и листовой оболочки массой М для соответствующего расчета.
Рисунок 2.10.1.28. Схема цилиндрического заряда и листовой оболочки
Для нашего случая, когда длинный полый цилиндр полностью заполнен взрывча¬
тым веществом и стенка этого цилиндра при взрыве ускоряется наружу,
'.("♦■Г2.
4гЁ \с 2)
где V - максимальная скорость оболочки; М - масса метаемой оболочки; С - масса
ВВ; Е- энергия Гарни. В первом приближении можно принять (2£)°’5 = 0,27-0,28 км/с.
в) Следует также учесть, что на металлическую трубку - основную силовую обо¬
лочку транера - воздействует ударная волна, но она имеет низкую интенсивность
в связи с очень малой массой ЭВВ на погонный метр и наличием оболочек заряда из
различных материалов и воздушных зазоров. Учет влияния медной трубки и обмотки
из кевлара по ударным адиабатам Гюгонио для решаемой задачи в расширяющейся
системе не корректен.
Таким образом, на основании вышеизложенного расчет давлений продуктов
взрыва, воздействующих на стальную оболочку транера, будем проводить на основе
285
2-10
квазистатического подхода без учета динамических нагрузок. Для решения задачи
воспользуемся результатами расчётного моделирования по термодинамической про¬
грамме BKW-T.
Расчёт давления продуктов взрыва транелита в стальной трубке транера
а) Состав продуктов взрыва транелита в точке Жуге приведен в таблице 2.10.1.3.
Таблица 2.10.1.3. Расчетный состав продуктов взрыва транелита в точке Жуге
продукт
число молей (соответствует брутто-формуле транелита)
СО
0,251
С02
1,269
cf4
0,200
n2
1,491
NO
0,0015
no2
0,000005
NH3
0,00043
o2
0,000065
H20
0,193
HF
0,269
H2
0,0015
f2
0,000012
С (тв.)
2,128
б) Расчетные параметры детонации транелита в точке Жуге приведены в таб¬
лице 2.10.1.4.
Таблица 2.10.1.4. Параметры детонации транелита в точке Жуге
параметр
единица измерения
величина
скорость детонации транелита
м/с
7889
массовая скорость продуктов взрыва
м/с
2014
детонационное давление
ГПа
29,4
температура детонации
К
3833
энтропия продуктов взрыва
ккал/(моль*К)
211,5
показатель политропы продуктов взрыва
2,92
кислородный коэффициент транелита
0,44
Следует отметить близость значений: расчетной скорости детонации транелита
(7,9 км/с) с экспериментальной (8,0 км/с); температуры взрыва (3833 К) с рассчитан¬
ной ранее (4000 К).
в) Результаты расчётов характеристик продуктов взрыва транелита по программе
BKW-T для выбранного интервала степеней их расширения (F/F0ot 4,56 до 15,10
применительно к нашей задаче) приведены в таблице 2.10.1.5. Изоэнтропа расшире¬
ния продуктов взрыва учитывает изменение состава равновесных продуктов.
286
2-10
Таблица 2.10.1.5. Результаты расчётного моделирования
V/Vo
V, см3/г
Р, МПа
Г, К
4,56
2,46
295,15
1423,6
5,12
2,77
236,12
1381,8
5,77
3,117
188,89
1342,9
6,53
3,528
151,12
1306,6
7,42
4,011
120,89
1272,7
8,47
4,581
96,71
1240,7
9,72
5,256
77,37
1210,5
11,21
6,059
61,90
1181,8
12,98
7,017
49,52
1154,4
15,10
8,165
39,61
1128,1
Примечание: V0 - начальный удельный объем продуктов взрыва, см3/г; V - удельный объем
продуктов взрыва при различной степени расширения, см3/г; Р - давление продуктов взрыва,
МПа; Г-температура продуктов взрыва, К
г) Продукты взрыва транелита после взаимодействия с внутренними оболочками
в конце концов изоэнтропически расширятся до объема внутренней полости тране-
ра, т.е. до К/К0, равной отношению квадратов внутреннего диаметра транера после
взрыва к начальному диаметру заряда (с учетом объёма оболочек). Это отношение,
по оценкам, можно принять равным 8-10, что соответствует давлению на изоэнтропе
100-70 МПа, т.е. меньше, чем допустимые предельные значения давлений в трубке
транера (.Рпр = 109-125 МПа).
Следует отметить, что реальную степень расширения продуктов взрыва в замкну¬
том объёме с учётом меди и кевлара, оцениваемую в работе отношением К/К0, а также
падение давления из-за сопротивления обмотки из кевлара расширению теоретиче¬
ски учесть трудно. Эти вопросы далее будут уточнены по результатам эксперимен¬
тального исследования работоспособности и прочности транеров.
Экспериментальные исследования работоспособности
и прочности конструкции транеров
В ходе исследований была проведена серия из семи опытов. Толщина стенки труб¬
ки транера из нержавеющей стали марки 12Х18Н10Т с наружным диаметром 4,5 мм
во всех экспериментах составляла 1мм. В некоторых опытах был увеличен диаметр
заряда транелита по сравнению со штатным. В ряде экспериментов в конструкции
транера отсутствовала медная оболочка заряда. Обмотка из кевлара использовалась
только для штатного образца транера. Следует отметить, что отсутствие оболочки из
кевлара приводит к усилению воздействия ударной волны, образуемой при детонации
транелита, т.е. является более жёстким или мажорирующим воздействием на стенки
трубки транера по критериям прочности и безосколочности. В то же время медная
и кевларовая оболочка занимают определённый объём транера, который уменьша¬
ет расширение продуктов взрыва. Это приводит к увеличению давления в системе.
Шнуровой заряд транелита устанавливался соосно с трубкой, для чего использова¬
лись бумажные втулки. Измерения диаметров трубок транеров до и после испытаний
производились с использованием микрометра класса точности 2. Эксперименты про¬
водились в СКТБ «Технолог» при атмосферном давлении и температуре 20-25°С.
287
2-10
Результаты опытов систематизированы и сведены в таблице 2.10.1.6.
Все опыты, за исключением № 5, безосколочные. Относительное увеличение диа¬
метра трубки всегда более 0,2% и составляет величину от 1,1% до 15%, что говорит
о работе материала трубки транера при импульсном взрывном нагружении в области
пластических деформаций. Раскрытие трубок транеров преимущественно происходит
в области контакта заряда с бумажными втулками. Трещины раскрываются параллель¬
но оси заряда за счёт тангенциальных нормальных напряжений. Следует отметить,
что нержавеющая сталь марки 12Х18Н10Т после импульсного взрывного нагружения
приобретает магнитные свойства, которые усиливаются с увеличением массы заряда.
Таблица 2.10.1.6. Результаты испытаний работоспособности и прочности транера
№
опыта
масса
транелита,
г/пог.м
относительное
увеличение
диаметра
трубки,%
V/Vo
расчётное
давление
продуктов
взрыва
в трубке, МПа
толщина
стенки
трубки
(после
взрыва), мм
наличие
медной
оболочки
примечание
1
0,60
1,10
14,1
44,5
0,98
-
трубка цела
2
0,60
2,45
13,0
49,5
0,93
+
трубка цела, V/
Vo-с учётом
объема меди
3
0,60
4,00
5,2
93,2
0,94
медь и
кевлар
трубка цела, V/
Vo-с учётом
объема меди
и кевлара
4
1,28
6,70
6,9-
138,5
0,87
-
трубка цела
5
1,28
-
-
-
-
+
множественное
раскрытие
трубки, откол
6
1,48
9,50
5,8
185,0
0,86
-
раскрытие
трубки в одном
месте
7
2,00
15,00
4,7
280,0
0,78
-
раскрытие
трубки в
четырех местах
Сопоставление результатов аналитического
и экспериментального исследования прочности транеров
а) Рассчитанные ранее предельные (максимальные) значения давлений составля¬
ют 163 и 187 МПа для трубок с толщиной стенки 0,9 и 1,0 мм соответственно. Допу¬
скаемые предельные значения давлений Рпр при коэффициенте запаса прочности 1,5
составляют соответственно 108,7 и 125 МПа.
б) Анализ результатов экспериментальных исследований (таблица 2.10.1.6) по¬
казывает, что стальная трубка транера с толщиной стенки 1,0 мм без медной и кев-
ларовой оболочек заряда сохраняет целостность при воздействии давлений продук¬
тов взрыва транелита, рассчитанных из изоэнтропы их расширения по программе
BKW-T и составляющих 44,5-138,5 МПа (опыты № 1, 2, 4). При давлениях 185 и
280 МПа (опыты № 6, 7) стальная трубка разрушается. Указанные результаты под¬
тверждают проведенный расчёт по теории Мизеса предельного значения давления
для этой трубки транера - 187 МПа.
288
2-10
В опыте № 5 с медной оболочкой заряда транелита происходит разрушение труб¬
ки, которое объясняется как повышением давления вследствие уменьшения степени
расширения продуктов взрыва, так и тем, что расширяющаяся медная оболочка со
скоростью около 2000 м/с нагружает трубку транера (высокоскоростной удар). Эти
обстоятельства приводят к образованию напряжений, превышающих предел проч¬
ности трубки.
в) Сопоставление результатов опытов № 1, 4 и опыта № 3 (штатный образец тра¬
нера) позволяет рассчитать коэффициент падения давления продуктов взрыва из-за
сопротивления медной оболочки и обмотки из кевлара их расширению. Из соотно¬
шений давлений продуктов взрыва (44,5 и 138,5 МПа) и значений относительного
увеличения диаметра трубки (1,10 и 6,70%) в опытах №1,4 можно рассчитать давле¬
ние продуктов взрыва для штатного образца транера (деформация трубки 4,0%), оно
составило 93,2 МПа. Значение V/V0 для этого образца с учетом объема, занимаемого
медью и кевларом, составляет 5,2. Соответственно, давление продуктов взрыва тра¬
нелита для этой степени их расширения составляет 230 МПа. Отсюда коэффициент
падения давления из-за сопротивления медной оболочки и обмотки из кевлара их рас¬
ширению равен 2,5 (к = 230/93,2).
Методика расчета прочности конструкции неразрушаемых трансляторов
детонации на основе ВЭМ (транеров) при их функционировании
1. В предположении несжимаемости материала металлической трубки транера и
исключая упругую деформацию, при условиях, когда весь материал трубки перехо¬
дит в пластическое состояние (гидродинамическое приближение), задаваясь характе¬
ристиками трубки и металла, выполняют расчёт допускаемого значения давления по
теории Мизеса (Рпр) при коэффициенте запаса прочности 1,5.
2. По термодинамической программе BKW-T расчитывают детонационные пара¬
метры и изоэнтропу расширения продуктов взрыва транелита или иного ВЭМ, вы¬
бранного по условиям эксплуатации транера.
3. С использованием полученных результатов по п. 2 и с учётом найденного ко¬
эффициента падения давления продуктов взрыва ВЭМ из-за сопротивления медной
оболочки и обмотки из кевлара их расширению (к = 2,5) определяют расчётные дав¬
ления продуктов взрыва зарядов ВЭМ различного диаметра, воздействующие на ме¬
таллическую оболочку транера.
4. Сопоставляя полученные значения давлений продуктов взрыва, воздействую¬
щих на металлическую оболочку транера (п. 3), с допускаемыми значениями давле¬
ний (п. 1), определяют рабочий шнуровой заряд ВЭМ, его диаметр и массу на по¬
гонный метр.
Методика расчета надежности транера
Детонационная цепь транера состоит из шнурового заряда из ВЭМ «Транелит»
и зарядов-усилителей, содержащих ЭВВ-75В и ПК-92В. Работа транера состоит из
следующих процессов, по которым производят расчеты надежности:
1. Детонация комбинированного заряда из состава ПК-92В в алюминиевом кол¬
пачке (заряд состоит из высокоплотной и низкоплотной частей). Обозначим вероят¬
ность безотказной работы (ВБР) заряда Р\. ВБР этого заряда определяется из соотно¬
шения экспериментального критического диаметра детонации состава dK[р и рабочего
диаметра заряда. Р{ > 0,9999997, так как опытное значение dKp менее 0,5 мм, а рабочий
диаметр заряда составляет 4,5 мм, т.е. d4cpT>> dKp (более, чем в три раза).
289
2-10
2. Передача детонационного импульса от низкоплотной части заряда из состава ПК-
926 к кольцевому заряду из ЭВВ-75В. ВБР передачи импульса обозначим Р2. Надеж¬
ность передачи импульса определяется путем инициирования ЭВВ-75В зарядом ПК-
926 с уменьшенной (до 0,74 г/см3) плотностью (плотность штатного заряда 1,0 г/см3).
А,о = 5420 м/с, откуда детонационное давление Рио = 79,34 кбар; D0J4 = 4610 м/с,
отсюда детонационное давление P0t74 = 44,44 кбар (D - скорость детонации), тогда
при т = const: Р2\'0'Т / Р2ъл4т = 79,342 / 44,442 = 3,18, т.е. при уменьшении импульса
приблизительно в три раза заряд ЭВВ-75В надежно инициируется зарядом ПК-92В,
следовательно, Р2 > 0,9999997.
3. Детонация кольцевого заряда из ЭВВ-75В в бакелитовой втулке (ВБР - Р3).
ВБР этого заряда определяется из соотношения экспериментальной критической
толщины ЭВВ-75В (Акр) и рабочей толщины заряда. Р3 > 0,9999997, так как экспе¬
риментальный dKр состава равен 0,5 мм, соответственно, hKp - 0,3 мм, а рабочая тол¬
щина стенки кольцевого заряда равна 1,0 мм, т.е. h4epT>> hKp (более чем в три раза).
4. Передача детонационного импульса от кольцевого заряда из ЭВВ-75В к шну¬
ровому заряду из ЭВВ «Транелит» в медной оболочке (удлиненному заряду - УЗ)
(ВБР - Р4). Надежность передачи этого детонационного импульса определяется экс¬
периментально по уменьшенной в три раза длине заряда ЭВВ-75В (/ = 1 мм вместо
рабочей 1 = 3 мм). Все десять опытов дали положительные результаты, таким образом
Л > 0,9999997.
5. Детонация шнурового удлиненного заряда (УЗ) из ЭВВ «Транелит» в медной
оболочке (ВБР - Р5). ВБР УЗ определяется расчетно-экспериментальным путем по
методу Босса, основанному на анализе функции нормального распределения (кри¬
вой «прочности» R). Согласно этому методу вероятность безотказного срабатывания
(ВБС) заряда ВВ корректно определяется по величине разности между чертежным
(рабочим, реальным) значением диаметра заряда (0черт) и меньшим, но стабильно де¬
тонирующим в серии опытов диаметром заряда (0И). Известно, что с уменьшением
диаметра заряда ВВ его надежность уменьшается в связи с действием волн разреже¬
ния в продуктах детонации и приближением к критическому диаметру. Для зарядов
ВВ сложной формы это относится к наименьшему поперечному размеру (например,
толщине для плоского заряда).
ВБС заряда определяется по формуле
Р0 = F(z) z = (бчерт,- R ) / [sR,g( 1 + 0,5/?)], где F(z) - нормированная функция нор¬
мального распределения; R - математическое ожидание «прочности» (уровень воз¬
действующего фактора, соответствующий 50% срабатывания); 6Rt7 - среднее квадра¬
тическое отклонение; п - количество опытов на уровне Qu.
Р0 = F(z) находится из таблицы 2.10.1.7.
Таблица 2.10.1.7. Значения F(z)
Z
F(z)
2,33
0,9901
3,10
0,9990
3,73
0,99990
4,26
0,999990
4,76
0,9999990
5,00
0,9999997
>5,00
> 0,9999997
290
2-10
Верхняя доверительная граница среднего квадратического отклонения находится
по формуле бЯгУ = (Qu - Rmm) /(3-х),
где Rmm - максимальный диаметр заряда, при котором происходит 100% отказа, Qu -
минимальный диаметр заряда, обеспечивающий 100% срабатывания.
На практике экспериментально определяются близкие к /?minH (^значения. В пер¬
вом приближении в качестве Rmm принимается критический диаметр детонации за¬
ряда. Значения х берут из таблицы 2.10.1.8.
Таблица 2.10.1.8. Значениях
количество опытов, п
У
2
3
4
5
6
7
8
9
10
15
20
0,7
-0,12
-0,44
-0,64
-0,79
-0,92
-1,00
-1,08
-1,14
-1,20
-1,43
-1,57
0,8
0,13
-0,40
-0,44
-0,60
-0,72
-0,84
-0,91
-0,98
-1,04
-1,25
-1,44
0,9
0,48
0,09
-0,15
-0,33
-0,47
-0,58
-0,67
-0,75
-0,82
-1,07
-1,23
Математическое ожидание «прочности» R определяется по формуле:
R = Qu + x6RtY.
Приведем следующие характеристики:
Rmm = 0, так как оказалось практически невозможным определить диаметр заряда
ЭВВ «Транелит» в медной оболочке, при котором фиксируются отказы детонации
(dKр открытого заряда 0,2 мм, теоретическая оценка dKp заряда в медной оболочке
0,05-0,07 мм); Qu= 0,15 мм (100%-ное срабатывание зарядов диаметром 0,15 мм
в медной трубке с наружным диаметром 0,8 мм);
бчеРт.= 0,6-0,7 мм (рабочий диаметр заряда в транерах).
6Riy= (0,15 - 0) / (3 + 1,04) = 0,0371; R = 0,15 - 1,04-0,0371 = 0,1114 мм;
z = (0,6 - 0,1114) / [0,0371 -(1 + 1/20)] = 12,6,
отсюда из таблицы 2.10.1.7 находим Р5 > 0,9999997.
6. Передача детонационного импульса от УЗ к низкоплотной части заряда из
состава ПК-92В (ВБР - Р6). Надежность передачи этого детонационного импульса
определяется при испытаниях изделий с уменьшенной длиной отрезка УЗ в заряде из
ПК-92В. Экспериментально установлено, что при уменьшении длины отрезка УЗ в
три раза (до 1,3 мм) наблюдается надежное инициирование заряда ПК-92В (боковое
инициирование), что обеспечивает Р6 > 0,9999997.
Показано, что торцевое инициирование удлиненным зарядом также обеспечивает
устойчивую детонацию заряда ПК-92В, что дополнительно повышает надежность ра¬
боты стыка указанных зарядов.
7. Детонация комбинированного заряда из состава ПК-92В в алюминиевом кол¬
пачке (ВБР заряда Рх > 0,9999997).
На основании выполненных расчетов находим надежность транера в целом:
Рт= Л-Р. Рз Л Л Л Л; Рт = 0,99999977= 0,9999979.
Таким образом, надежность транеров Рт = 0,9999979, что обеспечивает требова¬
ние технического задания.
291
2-10
Методика экспериментальной отработки новых конструкций детонацион¬
ных устройств разделения (Брешев Е.Н.и др.,2011; Горовцов В.В., Ефанов В.В., Ко¬
томин А.А., Душенок С.А., 2016)
Опыт проектирования и экспериментальной отработки исполнительных детона¬
ционных устройств разделения поршневого типа позволил усовершенствовать соот¬
ветствующий методический аппарат. В качестве примера ниже приводится методика
экспериментальной отработки новых перспективных конструкций комбинированных
замков-ножей.
Часто перед отделением отработавших узлов и агрегатов КА и PH требу¬
ется разделить кабельную сеть, связывающую отделяемые части КА. Для это¬
го традиционно устанавливают пироножи или отрывные платы с разделяемыми
электросоединителями.
При этом перед командой на отделение необходимо ввести еще одну команду - на
резку или разъединение кабельной сети - и строго контролировать последователь¬
ность подачи команд на устройства отделения.
Это ведёт к усложнению и удорожанию системы управления - необходимы до¬
полнительные телеметрические ячейки контроля состояния пироузлов, дополнитель¬
ные блоки преобразования слаботочных командных импульсов системы управления
в «силовые» команды с величиной тока не менее 2 А на мостик пироузлов.
Конструкцию можно упростить, если обеспечить автоматическую резку кабеля
одновременно по команде на отделение частей КА.
Подобная задача была решена нами при разработке устройства сброса за¬
щитной крышки сопла камеры сгорания двигательной установки (ДУ) КА
«ЛУНА-ГЛОБ».
В процессе мягкой посадки на поверхность Луны для снижения затрат топлива
на торможение КА необходимо сбросить электрический привод закрытия и откры¬
тия крышки ДУ, а также саму крышку при дефиците команд системы управления.
Для этого был разработан детонационный замок (ДЗ) с поршнем-ножом, который
в начальный момент разделяет «шейку» ДЗ, затем нож перерезает кабельную сеть,
связывающую электропривод и электродетонаторы устройства отделения с системой
управления {Брешев Е.Н.и др.,2011).
На рисунке 2.10.1.29 представлена конструкция комбинированного детонацион¬
ного замка с ножом для автоматической резки электрического кабеля.
Общий вид устройства отделения электрического привода с защитной крышкой
ДУ {Горовцов В.В., Ефанов В.В., Котомин А.А., Душенок С.А., 2016) представлен на
рисунке 2.10.1.30.
При такой конструкции через разрезаемую кабельную сеть можно проложить
электрический кабель, подающий команду на отделение. После прохождения коман¬
ды кабель будет автоматически разрезан.
При расчёте необходимой массы рабочего заряда ДЗ необходимо учесть увеличе¬
ние его массы для обеспечения резки кабеля.
Ориентировочно величина необходимой энергии для резки кабеля определяется
статической резкой образцов кабеля, аналогичных штатному на разрывных машинах,
затем она увеличивается в 1,5-2 раза за счет потерь при динамической ударной резке
комбинированным замком-ножом.
292
2-10
крышки ДУ
1 - корпус; 2 - наковальня; 3 - гайка; 4 - насадка; 5 - шток-нож;
6 - ЭВВ; 7 - электродетонатор; 8 - хомут
Рисунок 2.10.1.29. Комбинированный детонационный замок с ножом
1 - ДУ; 2 - защитная крышка; 3 - привод; 4 - замок-нож; 5 - толкатель
Рисунок 2.10.1.30. Устройство отделения электрического привода с защитной крышкой ДУ
293
2-10
Первоначальный объём посадочного места рабочего заряда рассчитывают в соот¬
ветствии с приведенной выше методикой расчёта работоспособности ДЗ по макси¬
мальным параметрам:
- максимальное усилие разрыва «шейки» ДЗ;
- максимальное усилие резки электрического кабеля с учётом заданного запаса по
работоспособности ДЗ.
После этого разрабатывается ряд стальных колец, которыми можно изменять
объём заряда от максимального до минимального.
Далее снаряжают несколько ДЗ с различными массами рабочих зарядов.
Номинальную массу заряда уточняют по сравнению с расчётной эксперименталь¬
но - по величине внедрения ножа в наковальню после резки электрического кабеля
(глубина по статистике 1,0... 1,5 мм).
Затем снаряжают несколько замков с массой заряда, в 1,5 раза превышающей,
чем номинальную. При штатном срабатывании этих замков подтверждается их проч¬
ность, т.е. неразрушение корпуса ДЗ.
После этого снаряжают замки с массой заряда в 1,5 раза меньше, номинальной.
При штатном срабатывании определяют запас работоспособности ДЗ.
При положительных результатах экспериментальной отработки переходят к этапу
испытаний по программе предварительных испытаний.
Детонационные системы разделения в различных космических проектах
(Ефанов В.В. и др., 2007; Котомин Л.Л., Душенок С.А., Ефанов В.В., Горовцов В.В.,
2008; Котомин А.А., Душенок С.А., Ефанов В.В., 2010; Душенок С.А., Ефанов В.В.,
Котомин А.А., Куприков М.Ю. и др., 2004; Котомин А.А., Душенок С.А., Ефанов В.В.,
Горовцов В.В., 2006; Ефанов В.В., Горовцов В.В., Котомин А.А., Душенок С.А., 2010;
Пичхадзе К.М., Ефанов В.В., Мартынов М.Б., 2010; Ефанов В.В., Горовцов В.В., Ко¬
томин А.А., Душенок С.А., 2014; Котомин А.А., Душенок С.А., Демьяненко Д.Б., Ефа¬
нов В.В., Горовцов В.В., 2015)
Пространственные герметичные системы разделения, включающие узлы ини¬
циирования, разрывные болты, детонационные замки, ножи, чеки, транеры и узлы
их соединения на основе ВЭМ, обеспечивают синхронный разрыв нескольких де¬
сятков механических связей, исключают образование осколков и выпуск газообраз¬
ных продуктов взрыва из системы в КА; они обладают высокой надежностью, под¬
твержденной всеми видами испытаний и многолетним опытом эксплуатации в КА.
В НПО им. С.А. Лавочкина и СКТБ «Технолог» организовано совместное произ¬
водство разработанных устройств и систем детонационной автоматики для выполне¬
ния российских и международных космических программ и коммерческих проектов.
Созданные системы успешно прошли государственные испытания, приняты в штатную
эксплуатацию и используются в различных автоматических космических аппаратах.
Они подтвердили свою высокую эффективность в ряде реализованных и разрабатыва¬
емых международных проектов: «ВЕНЕРА - комета ГАЛЛЕЯ» (системы формирова¬
ния аэростатных зондов в атмосфере Венеры), «ФОБОС», «СКИППЕР», «МАРС-96»,
«ИНТЕРБОЛ-1,-2», «ЭЛЕКТРО», «АРКОН», «МКА», «СПЕКТР-РГ», «ЭКЗОМАРС»,
«ЛУНА-ГЛОБ», а также в универсальном космическом разгонном блоке «Фрегат-СБ».
А.А. Котомин, С.А. Душенок
СКТБ «Технолог»
В.В. Ефанову В.В. Горовцов
НПО им. С.А. Лавочкина
294
2-10
2.10.2. СИСТЕМА ОТДЕЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА
Система отделения КА предназначена для жесткого крепления КА с адаптером на
участке выведения и последующего отделения КА от разгонного блока с заданной от¬
носительной скоростью отделения и минимальными угловыми возмущениями.
Система отделения, представленная на рисунке 2.10.2.1, состоит из двух контуров,
включающих в себя по четыре детонационных разрывных замка, в двух из которых
установлены электродетонаторы. Замки (поз. 1 и 2 каждого контура соединены между
собой коммутационной линией трансляторов детонации - транеров поз. 3 из восьми
штуцеров (поз. 6), обеспечивающих перестык транеров. В состав системы также вхо¬
дят восемь пружинных толкателей (поз. 4) и два телеметрических датчика (поз. 5),
регистрирующих факт разделения.
Замок служит для надежного крепления КА к адаптеру и обеспечивает восприятие
осевых и перерезывающих усилий. Пружинные толкатели обеспечивают необходимую
относительную скорость отделения после снятия силовой связи между КА и адаптером.
Конструкция замков (поз. 1) представлена на рисунке 2.10.2.2. Детонационный за¬
мок состоит из титанового корпуса (поз. 1), в котором установлен вкладыш (поз. 2) с за¬
прессованным в нем эластичным высокоэнергетическим веществом ЭВВ (поз. 3), тита¬
нового штока (поз. 4) с разделяемым элементом, алюминиевого амортизатора (поз. 5),
упирающегося в торцы штока, и гайки (поз.6), навинчивающейся на корпус. Стык за¬
тягивается гайкой (поз. 7). К корпусу подводятся трансляторы детонации (поз. 8).
Замки (поз. 2) (рисунок 2.10.2.3) устроены аналогично замкам (поз. 1), но имеют
дополнительный штуцер для установки электродетонатора.
Трансляторы детонации в составе системы отделения обеспечивают передачу де¬
тонационного импульса к детонационным замкам и синхронизацию срабатывания
замков. Транслятор (рисунок 2.10.2.4) состоит из детонационного шнура в много¬
слойной металлической оболочке (поз. 1), двух усилителей детонации (поз. 4), рас¬
положенных в наконечниках (поз. 3), и служащих для надежной передачи детона¬
ции к исполнительному заряду замка, и накидных гаек (поз. 2), с помощью которых
транслятор соединяется с замками. При срабатывании транслятор не разрушается
и продукты детонации локализуются внутри конструкции.
На рисунке 2.10.2.5 показан штуцер соединительный, который обеспечивает пере¬
дачу детонационного импульса от транслятора к транслятору.
На рисунке 2.10.2.6 изображен пружинный толкатель, состоящий из корпуса
(поз.1), штока (поз. 2), упирающейся в него пружины (поз. 3) и гайки (поз. 4), под¬
жимающей пружину.
Процесс разделения происходит следующим образом: подается электрический
сигнал от системы управления на мостики накаливания электродетонаторов перво¬
го контура системы отделения; электродетонаторы срабатывая, инициируют заряды
в двух замках и через транеры детонация передается на оставшиеся два замка. Через
1 секунду сигнал от системы управления подается на оставшиеся два электродетона¬
тора второго контура системы отделения. Срабатывание замков каждого контура осу¬
ществляется практически одновременно благодаря большой скорости детонации (не
менее 7000м/с) В результате срабатывания детонационных замков происходит разде¬
ление штока по кольцевой канавке, при этом снимается силовая связь между шпанго¬
утом КА и адаптером и (рисунок 2.10.2.7). После этого вступают в работу пружинные
толкатели, которые обеспечивают отделение КА с заданной относительной скоростью.
Факт отделения определяется двумя телеметрическими контактными датчиками.
295
2-10
Наземная экспериментальная отработка системы отделения производится на спе¬
циальных массово-габаритных имитаторах КА и межорбитального буксира «Фрегат»
(рисунок 2.10.2.8).
Основные характеристики системы отделения
- относительная скорость отделения, м/с 0,4...0,8
- угловые скорости, не более, град/с:
относительно оси У 10,51
- оси Z 10,51
- вероятность безотказной работы, не менее 0,9995
- количество замков силовой связи, шт. 8
- минимальное разрушающее усилие одного замка, кН 10
- количество пружинных толкателей, шт. 8
- количество электродетонаторов, шт. 4
- тип электродетонатора ЭД-У-1
- количество мостиков накаливания в электродетонаторе, шт. 2
- сопротивление мостика накаливания, Ом 1...2
- минимальный ток срабатывания на один мостик накаливания, А 1
- скорость детонации, не менее, м/с 7000
- масса системы отделения, не более, кг 11,8
- температурный диапазон работы, °С -50...+50
плоскость
^разделения
адаптер
1 - замок детонационный проходной; 2 - замок детонационный с электродетонатором;
3 - транслятор детонации; 4 - толкатель пружинный;
5 - датчик контактный; 6 - штуцер; 7 - крышка
Рисунок 2.10.2.1. Конструктивная схема системы отделения КА
296
1 - корпус; 2 - вкладыш; 3 - ЭВВ; 4 - шток; 5 - амортизатор;
6, 7 - гайка; 8 - транслятор детонации
Рисунок 2.10.2.2. Замок детонационный проходной
297
2-10
1- корпус; 2 - вкладыш; 3 - ЭВВ; 4 - шток; 5 - амортизатор;
6, 7 - гайка; 8 - транслятор детонации; 9 - электродетонатор
Рисунок. 2.10.2.3. Замок детонационный с электродетонатором
298
2-10
4 3 2
ЗЕ
I f*BW«rrrrrg-l-*~
” Г
А-А
нитьСВМ
труба 12Х18Н10Т-А
шнурЭВ
1 - шнур ЭВВ в оболочке; 2 - гайка; 3 - наконечник; 4 - усилитель
Рисунок 2.10.2.4. Транслятор детонации
1 - штуцер; 2 - транслятор детонации
Рисунок 2.10.2.5. Штуцер соединительный
299
2-10
1 - корпус; 2 - шток; 3 - пружина; 4 - гайка
Рисунок 2.10.2.6. Толкатель пружинный
300
2-10
1 - адаптер; 2 - шпангоут КА; 3 - замок детонационный; 4 - крышка
Рисунок 2.10.2.7. Замок детонационный после срабатывания
/////
1 - имитатор КА; 2 - имитатор РБФ; 3 - система отделения;
4 - система улавливания; 5 - тяга; 6 - катучая балка
Рисунок 2.10.2.8. Схема испытаний системы отделения на срабатывание
А.А. Котомин, С.А. Душенок
СКТБ «Технолог»
В.В. Ефанов, В.В. Горовцов
НПО им. С.А. Лавочкина
301
2-10
2.10.3. ПИРОМЕХАНИЧЕСКИЕ ФИКСАТОРЫ
Пиромеханические фиксаторы являются составной частью узлов космического
аппарата (КА).
В состав всех КА входят трансформируемые элементы. В процессе наземной экс¬
плуатации и выведения на орбиту они находятся в исходном состоянии, в котором -
в нашем случае - удерживаются пиромеханическими фиксаторами.
После выведения КА на рабочую орбиту происходит срабатывание пиромеха-
нических фиксаторов по электрическим командам от системы управления; таким
образом освобождаются от жёсткой связи трансформируемые элементы (панели
СБ, антенны и др.), причём последние занимают рабочее положение с фиксацией,
например, механическими защёлками. Такой способ трансформации мы считаем
наиболее рациональным (.Ефанов В.В., Горовцов В.В., 2015; Колесников К.См др,
2006).
Конструкция и состав пиромеханического фиксатора
Каждый из пиромеханических фиксаторов состоит из следующих основных узлов
и деталей:
- электровоспламенитель - 1 шт.
- корпус - 1 шт.
- шток с чекой предохранительной - 1 шт.
- гайка фиксирующая - 1 шт.
- гайка ограничительная . - 1 шт.
- прокладка уплотнительная - 1 шт.
- кольцо уплотнительное - 2 шт.
- прокладка защитная - 2 шт.
В пиромеханическом фиксаторе (рисунки 2.10.3.1, 2.10.3.2) электровоспламени¬
тель (поз. 1), установленный в корпусе (поз. 2), создаёт рабочие пиротехнические
газы; шток (поз. 3) с чекой предохранительной (поз. 4) фиксирует трансформируемый
элемент в исходном состоянии, при этом чека удерживает шток в исходном положе¬
нии при воздействии нагрузок при выведении КА; шток освобождается после среза
чеки при воздействии на шток рабочих газов, и преодолевается радиальная сила Р от
механизма трансформируемого элемента; шток по завершении рабочего хода фикси¬
руется в гайке (поз. 5); кольца уплотнительные (поз. 8) и прокладки защитные (поз. 9)
препятствуют выходу рабочих газов за пределы рабочей полости пиромеханического
фиксатора.
Для вариантов пиромеханических фиксаторов №№ 1, 3,4,6, 7, 8 (рисунки 2.10.3.1,
2.10.3.2) выступавшая за пределы корпуса часть штока в исходном состоянии по за¬
вершении рабочего хода полностью утапливается в корпусе.
Для вариантов пиромеханических фиксаторов №№ 2, 5 (рисунки 2.10.3.1,2.10.3.2)
по завершении рабочего хода шток выступает за пределы торцевой части корпуса на
расстояние до 7 мм.
302
2-10
Технические характеристики пиромеханического фиксатора
- количество независимых мостиков накаливания электровоспламенителя 2
- значение рабочего постоянного электрического тока,
подаваемого на каждый мостик, А от 2 до 9
- значение безопасного постоянного электрического тока,
подаваемого на один мостик, А 0.05
- значение радиальной силы, прикладываемой
к выступающей части штока, не более, Н (кгс) 980 (100)
- диаметр выступающей части штока, мм 6
- материал штока ВТ6
- величина рабочего хода штока при срабатывании не менее, мм:
- для фиксаторов вариантов 1,2,4,57
- для фиксаторов вариантов 3, 6, 7, 8 12
- масса пироустройства не более, кг 0.08;
- температурный диапазон, К (°С) от 143 до 403
(от минус 130 до плюс 130)
- ВБР х не менее 0.99995
- срок службы пиромеханического фиксатора, лет 12,5.
Пиромеханический фиксатор имеет возможность технологических срабатываний
без демонтажа механизма трансформируемого элемента, для чего необходимо (ри¬
сунки 2.10.3.1, 2.10.3.2):
- расстопорить гайку ограничительную (поз.6);
- установить ключ для технологических срабатываний в резьбовое отверстие Е;
- поступательным движением переместить шток с чекой предохранительной
с одновременным освобождением механизма
- трансформируемого элемента.
Количество технологических перемещений не оговаривается.
Разработано восемь вариантов пиромеханических фиксаторов, которые разтлича-
ются друг от друга (рисунки 2.10.3.1, 2.10.3.2):
- способом установки на изделие,
- конфигурацией корпуса,
- длиной выступающей части штока,
- длиной хода штока, что расширяет область применения пиромеханических
фиксаторов.
Установка пиромеханического фиксатора в узле КА представлена на рисунке
2.10.3.3.
303
2-10
исполнение пиромеханического
фиксатора
длина выступающей части штока
к, мм
длина рабочего хода штока
I, мм
вариант 1
7
7
вариант 2
14
7
вариант 3
12
12
1 - электровоспламенитель; 2 - корпус; 3 - шток; 4 - чека предохранительная;
5 - гайка фиксирующая; 6 - гайка ограничительная; 7 - прокладка уплотнительная;
8 - кольцо уплотнительное; 9 - прокладка защитная;
Е - резьбовое отвестие для технологических срабатываний
Рисунок 2.10.3.1а. Пиромеханический фиксатор, варианты 1, 2, 3
304
2-10
исполнение
пиромеханического
фиксатора
точки крепления
пиромеханического
фиксатора
длина выступающей
части штока
к, мм
длина рабочего хода
штока
I, мм
вариант 4
Ж
7
7
вариант 5
Ж
14
7
варианте
Ж
12
12
1 - электровоспламенитель; 2 - корпус; 3 - шток; 4 - чека предохранительная;
5 - гайка фиксирующая; 6 - гайка ограничительная; 7 - прокладка уплотнительная;
8 - кольцо уплотнительное; 9 - прокладка защитная;
Е - резьбовое отвестие для технологических срабатываний
Рисунок 2.10.3.16. Пиромеханический фиксатор, варианты 4, 5 ,6
305
2-10
i'
В г
вариант
пиромеханического
фиксатора
точки крепления
пиромеханического
фиксатора
длина выступающей
части штока
т, мм
дли рабочего хода
штока
п, мм
привалочная
плоскость
7
Ж
12
12
Д
8
Ж
12
12
И
1 - электровоспламенитель; 2 - корпус; 3 - шток; 4 - чека предохранительная;
5 - гайка фиксирующая; 6 - гайка ограничительная; 7 - прокладка уплотнительная;
8 - кольцо уплотнительное; 9 - прокладка защитная;
Е - резьбовое отвестие для технологических срабатываний
Рисунок 2.10.3.2. Пиромеханический фиксатор
306
2-10
1 - пиромеханический фиксатор; 2 - направленная антенна
Рисунок 2.10.3.3. Установка направленной антенны
В.В. Ефанов, В.В. Горовцов, А.С. Даниэльбек
НПО им. С.А. Лавочкина
307
2-10
Список литературы.
Брешев Е.Н., Горовцов В.В., Ефанов В.В., Котомин А.А., Дуьиенок С.А., Короле¬
ва ТВ. Устройство для разделения коммуникаций: Патент РФ на полезную модель RU
105261 U1. Опубликовано: 10.06.2011. Бюл. № 16.
Воскобойников И.М., Котомин А.А. Расчет параметров детонации смесей взрывча¬
тых веществ с инертными добавками // ФГВ. 1985. № 5. С. 93-97.
Горовцов В.В., Ефанов В.В., Душенок С.А., Котомин А.А. Создание новых нераз-
рушаемых трансляторов детонации систем разделения космических аппаратов // Кос¬
монавтика и ракетостроение. 2015. № 5(84). С. 113-120.
Горовцов В.В., Ефанов В.В., Душенок С.А., Котомин А.А., Моишеев А.А. Разработ¬
ка безосколочных разрывных болтов и детонационных замков систем разделения кос¬
мических аппаратов // Сб. научн. трудов. М.: НПО им. С.А. Лавочкина; Российская
академия космонавтики им. К.Э. Циолковского, 2000. Вып. 2. С. 144-147.
Горовцов В.В., Ефанов В.В., Котомин А.А., Душенок С.А. Совершенствование ме¬
тодик расчета работоспособности детонационных устройств разделения поршневого
типа и их экспериментальной отработки // Вестник НПО им. С.А. Лавочкина. 2016.
№ 2. С. 69-77.
Горовцов В.В., Котомин А.А., Душенок С.А. Методика расчета неразрушаемых
трансляторов детонации систем разделения КА // Актуальные вопросы проекти¬
рования автоматических космических аппаратов для фундаментальных и при¬
кладных научных исследований. Химки: ФГУП НПО им. С.А. Лавочкина. 2015.
С. 215-222.
Горовцов В.В., Ефанов В.В., Королева Т.В., Сутугин С.Е., Душенок С.А., Кото¬
мин А.А., Тохтуев С.Г. Устройство для быстрого разделения частей космического ап¬
парата или ракетного блока: Патент РФ на изобретение RU 2321 527 С1. Опубликова¬
но: 10.04.2008. Бюл. № 10.
Душенок С.А., Ефанов В.В., Козлов А.С., Котомин А.А. Исследование свойств эла¬
стичных ВВ, предназначенных для аэрокосмической техники // Сб. научн. трудов. М.:
НПО им. С.А. Лавочкина; Российская академия космонавтики им. К.Э. Циолковско¬
го, 2004. Вып. 5. С. 232-240.
Душенок С.А., Ефанов В.В., Котомин А.А., Куприков М.Ю. и др. Система кол¬
лективного спасения пассажиров и экипажа самолетов / Под ред. А.М. Матвеенко,
В.В. Малышева. М.: Изд-во МАИ, 2004. 196 с.
Душенок С.А., Котомин А.А., Ефанов В.В. Гибкие безосколочные удлиненные
кумулятивные заряды для взрывных устройств разделения // Сб. научн. трудов. М.:
НПО им. С.А. Лавочкина; Российская академия космонавтики им. К.Э. Циолковско¬
го, 2004. Вып. 5. С. 241-247.
Душенок С.А., Котомин А.А., Ефанов В.В., Горовцов В.В. Создание неразрушае¬
мых трансляторов детонации // Сб. научн. трудов. М.: НПО им. С.А. Лавочкина, Рос¬
сийская академия космонавтики им. К.Э. Циолковского, 2000. Вып. 2. С. 150-154.
Ефанов В.В., Горовцов В.В. Конструкция и расчет систем и устройств разделения
космических аппаратов: Учеб. пособие. М. : Изд-во МАИ, 2015. 111с.
308
2-10
Ефанов В.В., Бирюков А. С. и др. Совершенствование систем разделения современ¬
ных КА по снижению ударных нагрузок // Полет. 2014. № 2. С. 30-36.
Ефанов В.В., Горовцов В.В., Котомин А.А., Душенок С.А. Современные системы
детонационной автоматики космических аппаратов: проблемы, решения, основы
проектирования // Фундаментальные и прикладные проблемы космонавтики. 2002.
№8. С. 37-41.
Ефанов В.В., Горовцов В.В., Подобедов Я.Г., Котомин А.А., Душенок С.А. Новое
поколение детонационных устройств разделения конструкции космических аппара¬
тов (основы проектирования) // Актуальные проблемы авиационных и аэрокосмиче¬
ских систем: процессы, модели, эксперимент. Т. 12, вып. 3(25). 2007.С. 18-24.
Ефанов В.В., Бирюков А.С., Деменко О.Г. К вопросу снижения динамических на¬
грузок при срабатывании устройств разделения перспективных орбитальных астро¬
физических обсерваторий // Вестник ФГУП НПО им. С.А. Лавочкина. 2013. № 3.
С. 21-26.
Ефанов В.В., Горовцов В.В., Котомин А.А., Душенок С.А. Детонационные
устройства и системы разделения универсального космического разгонного блока
«Фрегат» // Полет. 2010. № 2. С. 8-14.
Ефанов В.В., Горовцов В.В., Котомин А.А., Душенок С.А. Детонационные
устройства разделения космического комплекса «ЭкзоМарс-2018» // Вестник НПО
им. С.А. Лавочкина. 2014. № 2. С. 120-123.
Колесников КС., Кокушкин В.В., Борзых С.В., Панкова Н.В. Расчет и проектирова¬
ние систем разделения ступеней ракет: Учеб. пособие. М.: МГТУ им. Н.Э. Баумана,
2006. 373с.
Котомин А.А. Взрывчатые вещества в системах пироавтоматики летательных ап¬
паратов // Сб. научн. трудов. М.: НПО им. С.А. Лавочкина; Российская академия кос¬
монавтики им. К.Э. Циолковского, 2004. Вып. 5. С. 204-220.
Котомин А.А. Исследование неидеальной скорости детонации смесевых ВВ // Ма¬
тер. межд. конф. «Ударные волны в конденсированных средах». СПб., октябрь 2000.
С. 45-47.
Котомин А.А. Эластичные взрывчатые материалы // Российский химический жур¬
нал. 1997. Т. 41, № 4. С. 89-101.
Котомин А.А., Душенок С.А., Демьяненко Д.Б., Ефанов В.В., Горовцов В.В. Новое
поколение систем пироавтоматики КА - результат успешного сотрудничества //Вест¬
ник НПО им. С.А. Лавочкина. 2015. № 3. С. 48-54.
Котомин А.А., Душенок С.А., Ефанов В.В. Исследование детонационной способ¬
ности эластичных ВВ, используемых в системах разделения космических аппаратов //
Сб. научн. трудов. М.: НПО им. С.А. Лавочкина; Российская академия космонавтики
им. К.Э. Циолковского, 2002. Вып. 4. С. 122-132.
Котомин А.А., Душенок С.А., Ефанов В.В. Новое поколение систем детонацион¬
ной автоматики космических аппаратов на основе высокоэнергетических эластичных
материалов // Известия Санкт-Петербургского государственного технологического
института (технического университета). 2010. № 9(35). С. 69-74.
309
2-10
Котомин А.А., Душенок С.А., Ефанов В.В. Общие принципы проектирования де¬
тонационных устройств разделения на основе эластичных взрывчатых веществ II
Проектирование автоматических космических аппаратов для фундаментальных на¬
учных исследований: монография / Под ред. В.В. Хартова, К.М. Пичхадзе. В 3 т. Т. 3.
Раздел 4.3.2. М.: Изд-во МАИ-Принт, 2014. С. 1238-1319.
Котомин А.А., Душенок С.А., Ефанов В.В. Параметры детонации гетерогенных
взрывчатых композиций, предназначенных для систем разделения космических аппа¬
ратов // Сб. научн. трудов. М.: НПО им. С.А. Лавочкина; Российская академия космо¬
навтики им. К.Э. Циолковского, 2002. Вып. 4. С. 97-107.
Котомин А.А., Душенок С.А., Ефанов В.В. Эластичные взрывчатые материалы для
аэрокосмической техники // Сб. научн. трудов. М.: НПО им. С.А. Лавочкина; Россий¬
ская академия космонавтики им. К.Э. Циолковского, 2000. Вып. 2. С. 155-162.
Котомин А.А., Душенок С.А., Ефанов В.В., Горовцов В.В. Новое поколение систем
пироавтоматики космических аппаратов на основе высокоэнергетических эластич¬
ных материалов // Сб. статей «Памяти Бориса Вениаминовича Гидаспова. Научные
чтения». СПб.: РНЦ Прикладная химия, Изд-во ООО ТЕЗА, 2008. С. 46-64.
Котомин А.А., Душенок С.А., Ефанов В.В., Горовцов В.В. Системы разделения на
основе эластичных ВВ универсального космического разгонного блока «Фрегат» //
Матер, межд. конф. «Ударные волны в конденсированных средах». СПб, 3-8 сентября
2006. С. 243-246.
Котомин А.А., Душенок С.А., Ефанов В.В., Горовцов В.В., Заручевский А.А. На¬
дежность средств детонационной автоматики на основе эластичных ВВ в системах
разделения космических аппаратов // Сб. научн. трудов. М.: НПО им. С.А. Лавоч¬
кина; Российская академия космонавтики им. К.Э. Циолковского, 2001. Вып. 3.
С. 204-211.
Котомин А.А., Душенок С.А., Ефанов В.В., Козлов А. С. Регулирование параметров
эффективности высокоэнергетических материалов, применяемых в системах детона¬
ционной автоматики космических аппаратов // Полет. 2013. № 2. С. 11-23.
Котомин А.А., Душенок С.А., Ефанов В.В., Козлов А.С., Трапезников М.А., Горов¬
цов В.В. Новые пути создания взрывчатых материалов для систем разделения лета¬
тельных аппаратов // Полет. 2008. № 11. С. 33-41.
Котомин А.А., Душенок С.А., Ефанов В.В., Трапезников М.А., Козлов А.С., Горов¬
цов В.В. Критические диаметры детонации взрывчатых материалов, используемых в
системах разделения космических аппаратов // Вестник ФГУП НПО им. С.А. Лавоч¬
кина. 2010. № 1. С. 24-31.
Котомин А.А., Душенок С.А., Козлов А.С. Критические диаметры детонации
гетерогенных взрывчатых систем // Известия Санкт-Петербургского государствен¬
ного технологического института (технического университета). 2013. №21 (47).
С. 43-51.
Котомин А.А., Душенок С.А., Козлов А. С. Критические диаметры детонации гете¬
рогенных взрывчатых систем // Матер, межд. конф. «Ударные волны в конденсиро¬
ванных средах». СПб., 18-23 июля 2004. С. 97-100.
310
2-10
Котомин А.А., Душенок С.А., Козлов А.С. Критические диаметры детонации
взрывчатых композиций с органическими и неорганическими инертными компонен¬
тами. // Матер, межд. конф. «Экстремальные состояния вещества. Детонация. Удар¬
ные волны» XI Харитоновские тематические научные чтения. Саров, 16-20 марта
2009. С. 11-16.
Котомин А.А., Душенок С.А., Козлов А.С. Эластичные взрывчатые вещества
для аэрокосмической техники: основы построения, свойства, применение. // Ма¬
тер. межд. конф. «Экстремальные состояния вещества. Детонация. Ударные вол¬
ны» IX Харитоновские тематические научные чтения. Саров, 12-16 марта 2007.
С. 124-130.
Котомин А.А., Душенок С.А., Козлов А.С., Баранник Б.А., Широкова Н.П., Илю¬
шин М.А. Критические диаметры детонации высокодисперсных энергетических ве¬
ществ // Журнал прикладной химии. 2016. Т. 89, вып. 5. С. 660-667.
Котомин А.А., Душенок С.А., Козлов А.С., Ефанов В.В. Современные и перспек¬
тивные высокоэнергетические материалы в системах детонационной автоматики аэ¬
рокосмических аппаратов // Полет. 2005. № 8. С. 51-60.
Котомин А.А., Душенок С.А., Козлов А.С., Ефанов В.В. Эластичные взрывчатые
материалы в системах разделения космических аппаратов // Перспективные материа¬
лы и технологии для ракетно-космической техники / Под ред. А.А. Берлина и И.Г. Ас-
совского. Т. 3. М.: Торус Пресс, 2007. С. 256-266.
Котомин А.А., Душенок С.А., Козлов А.С., Трапезников М.А., Брешев Е.Н., Ефа¬
нов В.В., Горовцов В.В. Регулирование детонационной способности взрывчатых ма¬
териалов, применяемых в системах разделения космических аппаратов // Вестник
ФГУП НПО им. С.А. Лавочкина. 2012. № 2. С. 12-18.
Котомин А.А., Ефанов В.В., Душенок С.А., Горовцов В.В. Создание неразруша-
емых систем разделения на основе нового вида взрывчатых материалов и опыт их
применения в космических аппаратах // Актуальные вопросы ракетостроения: Сб.
статей. СПб., Институт ракетной техники и вооружения им. В.Ф. Уткина БГТУ
«Военмех», 2003. Вып. 2. С. 94-100.
Котомин А.А., Ефанов В.В., Душенок С.А., Тимофеев В.Н. Низкоимпульсные пи-
ромеханические устройства разделения для системы коллективного спасения пасса¬
жиров и экипажей самолетов // Полет. 2003. № 9. С. 14-20.
Котомин А.А., Ефанов В.В., Душенок С.А., Тимофеев В.Н. Проблема снижения
динамического воздействия на космические аппараты при срабатывании взрывных
систем разделения // Фундаментальные и прикладные проблемы космонавтики. 2001.
№ 4. С. 34-39.
Котомин А.А., Козлов А. С., Душенок С.А. Исследование детонационной способно¬
сти энергоемких гетероциклических соединений // Химическая физика. 2007. Т. 26,
№ 12. С. 5-7.
Котомин А.А., Харченко В.В., Душенок С.А., Васильев А.В., Ефанов В.В., Горов¬
цов В.В. Аналитическое и экспериментальное исследование прочности и надёжно¬
сти неразрушаемых трансляторов детонации систем разделения КА // Вестник НПО
им. С.А. Лавочкина. 2015. № 2. С. 36-44.
311
2-10
Котомин Л.Л., Широкова Н.П., Душенок С.А., Брешев Е.Н., Ефанов В.В., Бо¬
ровцов В.В. Давление детонации зарядов ВВ, применяемых в системах разделения
космических аппаратов // Вестник ФГУП НПО им. С.А. Лавочкина. 2010. №3.
С. 27-35.
Пичхадзе К.М., Ефанов В.В., Мартынов М.Б. Создание автоматических кос¬
мических комплексов для научных исследований Луны: Вчера. Сегодня. Завтра.
(К 45-летию космической деятельности НПО им. С.А. Лавочкина) // Полет. 2010.
№ 11. С. 3-8.
Поплавский Е.Ч., Медведев А.А., Душенок С.А., Котомин А.А., Тохтуев С.Г., Бо¬
ровцов В.В. Устройство для соединения и последующего разделения элементов кон¬
струкции: Патент РФ на изобретение RU 2426676 С1. Опубликовано: 20.08.2011.
Бюл. № 23.
Разработка технической документации на комплект зарядов системы
РБФЗТ-4314-0 изделия РБФСБ: Научно-технический отчет СКТБ «Технолог»: 2007.
А.А. Котомин, С.А. Душенок
СКТБ «Технолог»
В.В. Ефанов, В.В. Горовцов, А. С. Даниэльбек
НПО им. С.А. Лавочкина
312
fSB ИСПОЛЬЗОВАНИЕ СИСТЕМЫ
АВТОНОМНОЙ НАВИГАЦИИ
НА ГЕОСТАЦИОНАРНОМ
КОСМИЧЕСКОМ АППАРАТЕ «ЭЛЕКТРО-Л»
Космические аппараты «ЭЛЕКТРО-Jl», разрабатываемые в НПО имени С.А. Ла¬
вочкина, входят в состав орбитальной группировки космической системы (КС)
«ЭЛЕКТРО» и предназначены для функционирования на геостационарной орбите
(ГСО) (.Асмус и др.,2012).
КС «ЭЛЕКТРО» должна обеспечить решение следующих основных задач:
- анализ и прогноз погоды в региональном и глобальном масштабах;
- анализ и прогноз состояния акваторий морей и океанов;
- анализ и прогноз условий для полетов авиации;
- анализ и прогноз гелиогеофизической обстановки в околоземном космическом
пространстве, состояния ионосферы и магнитного поля Земли;
- мониторинг климата и глобальных изменений;
- контроль чрезвычайных ситуаций;
- экологический контроль окружающей среды и др.
Получаемая КС «ЭЛЕКТРО» целевая информация предназначена для подразде¬
лений Федеральной службы России по гидрометеорологии и мониторингу окружаю¬
щей среды, а также для соответствующих служб ВС РФ и других потребителей.
Для решения целевых задач, в частности для получения и предварительной об¬
работки (нормализации) многоспектральных снимков облачности и подстилающей
земной поверхности в пределах наблюдаемого диска Земли, необходима высокоточ¬
ная координатная привязка сцен мультиспектральной съёмки. Достижение требуемой
точности координатной привязки возможно только при обеспечении высокой точно¬
сти определения и прогнозирования движения центра масс КА.
КС должна обеспечивать определение параметров движения центра масс КА на
момент работы целевой аппаратуры с погрешностями (За) не более:
- вдоль орбиты - 1 км;
- в боковом направлении - 1 км;
- по высоте - 10 км.
Указанные точностные характеристики могут быть получены при проведении
измерений параметров орбиты с двух наземных измерительных пунктов. При этом
пункты должны быть разнесены по долготе на расстояние не менее чем на 2000-
3000 км. Желательно также, чтобы точка «стояния» КА находилась между этими
пунктами.
Для проведения внешнетраекторных измерений орбиты КА «ЭЛЕКТРО-JI» № 1,
запущенного в январе 2011 года, использовались две контрольно-измерительные
станции (КИС) типа «Клен», размещенные в Медвежьих Озерах и Железногорске.
Такой состав КИС был вполне достаточен для управления КА «ЭЛЕКТРО-Л» № 1,
функционировавшего в точке «стояния» 76° в.д. ГСО. Однако в состав орбитальной
группировки КС «ЭЛЕКТРО» должны входить три КА «ЭЛЕКТРО-Л», функцио¬
нирующих в трех заданных точках «стояния» ГСО: 76° в.д.; 14,5° з.д. и 165,8° в.д.
(Ефанов В.В., Семункина В.И., Шостак С.В., 2019; Ефанов В.В., Хайлов М.Н., Семун-
кина В.И., 2010).
313
2-11
Следует отметить, что обеспечение высоких точностных характеристик определе¬
ния параметров движения центра масс КА необходимо и для выполнения заданных
требований по погрешности поддержания КА в заданных точках «стояния» ГСО :
- по долготе - от минус 0,1 ° до плюс 0,1 °;
- по широте - от минус 0,5° до плюс 0,5°.
На рисунке 2.11.1 для трех заданных точек «стояния» КА «ЭЛЕКТРО-JI» пока¬
зана геометрия расположения зон радиовидимости КА относительно входящих в со¬
став КС «ЭЛЕКТРО» контрольно-измерительных станций, в том числе на пункте
Восточный.
Рисунок 2.11.1. Расположение зон радиовидимости КА «ЭЛЕКТРО-Л» для заданных точек
«стояния» орбитальной группировки КС «ЭЛЕКТРО»
Как видно из этого рисунка, возможность использования двух территориально
разнесенных КИС обеспечивается только для точки «стояния» 76° в.д. Для точек
«стояния» КА № 2 (14,5° з.д.) и КА № 3 (165,8° в.д.) проведение измерений с двух
территориально-разнесенных наземных пунктов на территории России невозмож¬
но и, соответственно, требования по точности определения параметров орбиты КА
не могут быть выполнены. Для их выполнения необходимо либо построить измери¬
тельный пункт на территории какого-то иностранного государства, либо установить
на борту КА систему автономной навигации (САН). Вариант использования САН,
позволяющий качественно повысить характеристики КА «ЭЛЕКТРО-Л» в части уве¬
личения его срока автономного функционирования, был признан более перспектив¬
ным. С учетом этого факта было принято решение использовать на следующих КА,
начиная с КА № 2, для определения параметров движения центра масс КА бортовую
систему автономной навигации.
Применение САН, использующих для работы радионавигационные сигналы на¬
вигационных космических систем (НКС), отечественной НКС ГЛОНАСС и амери¬
канской НКС GPS, уже давно вошло в практику управления полетом разгонных бло¬
ков и КА.
Ниже приведены краткие характеристики этих НКС.
Орбитальная группировка НКС ГЛОНАСС состоит из 24 КА, совершающих дви¬
жение в трех орбитальных плоскостях, по 8 КА в каждой. Наклонение плоскостей ор¬
бит составляет 64,8°, а высота - 19400 км. Принцип измерения аналогичен американ¬
314
2-11
ской НКС NAVSTAR с КА GPS. В отличие от системы GPS, орбитальное движение
КА в НКС ГЛОНАСС не синхронно с вращением Земли, что обеспечивает лучшую
стабильность ее орбитальной структуры. Орбитальная группировка КА ГЛОНАСС
не требует дополнительных коррекций орбит в течение всего срока активного суще¬
ствования КА.
Орбитальная группировка НКС NAVSTAR состоит из 24 КА GPS на орбитах вы¬
сотой около 20000 км с наклонением 55° и периодом обращения 11 ч 58 мин. КА GPS
размещены в шести орбитальных плоскостях, разнесенных по долготе на 60°.
На рисунке 2.11.2 представлена орбитальная структура НКС ГЛОНАСС, показан
вид с геостационарного КА в точке «стояния» 76° в.д.
Рисунок 2.11.2. Вид орбитальной структуры НКС ГЛОНАСС с геостационарного КА
в точке «стояния» 76° в.д.
На рисунке 2.11.3 представлен общий вид орбитальных группировок НКС ГЛО¬
НАСС и НКС GPS также из точки «стояния» 76° в.д. ГСО. Показанная на рисунках
2.11.2 и 2.11.3 координатная сетка соответствует сферической системе координат
с центром в соответствующей точке «стояния» ГСО. Шаг сетки составляет 10 гра¬
дусов. Представленные рисунки являются результатами визуального отображения
моделирования астробаллистических условий функционирования геостационарного
КА, полученные с помощью комплекса программ «Кеплер» (Назаров А.Е. и др., 2010;
Малышев В.В. и др., 2011).
315
2-11
Рисунок 2.11.3. Общий вид орбитальных группировок НКС ГЛОНАСС и НКС GPS
из точки «стояния» 76° в.д. ГСО
Несмотря на достаточно широкое использование систем автономной радионави¬
гации для управления низкоорбитальными КА их применение для геостационарно¬
го КА «ЭЛЕКТРО-Л» представляло значительные трудности. Тем не менее, необ¬
ходимость введения в состав бортовых систем КА «ЭЛЕКТРО-Л» № 2 САН была
обусловлена высокими требованиями по точности определения и прогнозирования
движения центра масс КА (не хуже 1 км) в условиях ограничений по составу и гео¬
метрии относительного расположения наземных измерительных средств, а именно
КИС «Клен».
Кроме обеспечения заданной точности определения параметров орбиты КА для
крайних западной и восточной точек «стояния», недоступных для использования
двух разнесенных КИС, применение САН позволит снизить затраты на эксплуатацию
средств наземного комплекса управления (НКУ).
Важным положительным фактором использования САН в навигационно-балли¬
стическом контуре управления КА является и возможность значительного увеличе¬
ния срока автономного функционирования КА, что не представляется возможным
при использовании только наземных измерительных средств.
316
2-11
Особенности использования аппаратуры радионавигации
на геостационарных КА
Особенностью работы САН на ГСО является отсутствие сплошного навигацион¬
ного поля НКС ГЛОНАСС и GPS, поэтому использование существовавших на тот
момент автономных систем навигации разработки РНИИКП и РИРВ для низкоорби¬
тальных КА и разгонных блоков не представлялось возможным.
Для описания особенностей использования навигационных сигналов НКС на ГСО
на рисунке 2.11.4 показана геометрия относительного расположения КА, функциони¬
рующего на ГСО, и навигационного КА.
Рисунок 2.11.4. Взаимное положение навигационного и геостационарного КА относительно
Земли во время приема навигационных сигналов
Навигационное поле НКС образуется излучаемыми каждым навигационным
КА в направлении Земли радиосигналами, содержащими информацию о его по¬
ложении в пространстве и во времени. Входящая в состав навигационного сиг¬
нала цифровая информация содержит эфемериды данного навигационного КА и
альманах всей системы. Определяя фазовый сдвиг и разность частот принятого
317
2-11
и опорного сигналов, производят измерение псевдодальности и радиальной псев¬
доскорости потребителя до навигационного КА. Сигналов от 4-х навигационных
КА и принятой в их составе цифровой информации достаточно для решения так
называемой прямой навигационной задачи. В этом случае определение текущих
координат КА по навигационным сигналам ИКС с погрешностью не хуже I км
не является проблематичным.
К сожалению, для КА «ЭЛЕКТРО-JI», предназначенного для функционирования
на ГСО при существующей геометрии его расположения относительно орбитальных
группировок НКС ГЛОНАСС и GPS, имели место и требовали своего решения сле¬
дующие проблемы:
- обеспечение необходимой энергетики приема навигационного сигнала при боль¬
шой удаленности КА от навигационных КА;
- необходимость решения навигационной задачи в условиях разрывного навига¬
ционного поля при ограниченном секторе пространственных углов приема на¬
вигационного сигнала.
Большая удаленность геостационарного КА, обусловленная его расположением
значительно выше орбит НКС, приводит к необходимости вести прием навигацион¬
ных сигналов на существенно больших расстояниях, чем это предусматривалось для
обычных пользователей НКС, а именно земных и низкоорбитальных.
Если КА, функционирующие на высоте до 2000 км, могут принимать навигаци¬
онный радиосигнал как «сверху», так и «снизу», то для КА на ГСО возможен прием
только «снизу». При навигации «снизу» геостационарный КА может быть удален от
навигационных КА до -62000-65000 км, что значительно снижает уровень мощности
навигационного сигнала. При этом прием навигационных сообщений можно вести
лишь от тех навигационных КА, которые восходят из-за диска Земли или заходят
за него при их наблюдении с геостационарного КА.
Ослабление принимаемого навигационного радиосигнала на борту КА из-за уве¬
личения расстояния радиолинии почти в 2,5 раза может быть скомпенсировано только
за счет применения на геостационарном КА приемной антенны с узкой диаграммой
направленности (ДН). Такая антенна должна быть рассчитана на прием сигналов от
навигационных КА с учетом реальной ДН их передающих антенн.
Основная мощность навигационного радиосигнала распространяется в пределах
конуса с углом полураствора 19° относительно направления на центр Земли, что со¬
ответствует высоте hmax - 2000 км над ее поверхностью. Поэтому для КА с высотой
орбиты до 2000 км создается сплошное навигационное поле, в котором непрерывно
обеспечивается получение навигационного сигнала одновременно с нескольких на¬
вигационных КА.
Земля, угловой радиус которой с высоты навигационного КА равен 14°, являет¬
ся естественным препятствием на пути радиосигнала, поэтому для КА на ГСО воз¬
можен прием радионавигационных сигналов лишь в диапазоне углов от 14° до 19°.
Таким образом, радионавигационная аппаратура геостационарных КА может прини¬
мать сигналы только в ограниченном секторе пространственных углов.
На рисунке 2.11.5 показана структура навигационного поля для КА, функциони¬
рующих на ГСО.
318
2-11
Рисунок 2.11.5. Структура навигационного поля для КА, функционирующих на ГСО
Радиосигналы, неэкранируемые Землей, образуют за ней так называемое раз¬
рывное навигационное поле, имеющее структуру пересекающихся кольцевых полос.
Пересечение этих полос с плоскостью орбиты геостационарного КА и определяет
участки орбиты, на которых возможен прием навигационного сигнала. Ширина по¬
лос и соответственно протяженность участков и продолжительность сеансов радио¬
навигации будет зависеть от коэффициентов усиления приемных антенн и чувстви¬
тельности навигационной аппаратуры потребителя.
Энергетические характеристики этой аппаратуры должны обеспечить на входе
приемника такое отношение сигнал/шум, которое позволило бы осуществить поиск,
захват и слежение за сигналом, а также достоверное выделение цифровой информа¬
ции навигационного сообщения.
Особенностью навигации геостационарного КА в разрывном навигационном поле
является наличие значительных участков полета, где не только не обеспечивается од¬
новременная видимость четырех навигационных КА, но и имеются участки длитель¬
ностью до 15-20 минут, где вообще нет видимости ни с одним из спутников. В таких
условиях определение параметров движения КА решением прямой навигационной
319
2-11
задачи не представляется возможным, и поэтому необходима разработка специаль¬
ных алгоритмов решения навигационной задачи в условиях нерегулярного наблюде¬
ния малого числа навигационных КА.
На рисунке 2.11.6 в качестве иллюстрации попадания малого числа навигацион¬
ных КА в кольцевую зону приема навигационного сигнала геостационарным КА по¬
казана геометрия расположения орбитальной группировки НКС ГЛОНАСС относи¬
тельно ДН приемной антенны геостационарного КА диаметром 30°.
Рисунок 2.11.6. Геометрия расположения орбитальной группировки НКС ГЛОНАСС
относительно ДН приемной антенны геостационарного КА
Работа САН в режиме приема сигналов от немногочисленных видимых навигаци¬
онных КА и наличия значительных перерывов в приеме приводит к необходимости
определять текущее место КА на ГСО алгоритмами на основе моделей орбитального
движения и объединения отдельных измерений, распределенных случайно во време¬
ни на интервалах одного-двух витков (суток) полета КА.
Возможность реализации таких алгоритмов обусловлена хорошей детерминиро¬
ванностью движения центра масс геостационарного КА. Для описания этого движе¬
ния используется система дифференциальных уравнений, и параметры, определяю¬
щие это движение, могут уточняться с использованием методов навигации на основе
статистической обработки совокупности навигационных измерений. В отличие от
320
2-11
решения прямой навигационной задачи (кинематический метод навигации), такой
динамический метод навигации геостационарного КА не требует одновременного на¬
блюдения четырех навигационных КА и не предъявляет высоких требований к уров¬
ню взаимной синхронизации бортовых шкал навигационных КА. В то же время
следует заметить, что реализация бортовых алгоритмов динамических методов нави¬
гации требует в общем случае наличия на борту КА более сложного вычислительного
устройства, чем для реализации алгоритмов решения прямой навигационной задачи.
Количество видимых навигационных КА существенно зависит от достигнуто¬
го разработчиком аппаратуры радионавигации энергетического потенциала, т.е. от
минимального порогового уровня принимаемого радиосигнала. Кроме того, боль¬
шое значение имеет возможность аппаратуры работать как с КА ГЛОНАСС, так и
с КА GPS.
Система автономной навигации для КА «ЭЛЕКТРО-Л»
Выбор возможных разработчиков бортовой системы автономной навигации для
КА «ЭЛЕКТРО-Л» рассматривался в НПО имени С.А. Лавочкина с учетом имеюще¬
гося практического опыта разработки бортовой аппаратуры радионавигации. В каче¬
стве таких организаций-разработчиков рассматривались РНИИКП (г. Москва) и ОАО
«ИСС им. академика М.Ф. Решетнёва» (г. Железногорск).
При выборе разработчика САН для КА «ЭЛЕКТРО-Л» было естественное же¬
лание получить прибор, прошедший летную квалификацию, и именно на ГСО. По¬
этому, с учетом положительного опыта использования на геостационарных КА разра¬
ботки ОАО «ИСС им. академика М.Ф. Решетнёва» аппаратуры радионавигации, было
принято решение об установке на борт КА«ЭЛЕКТРО-Л» № 2 системы автономной
навигации на базе АРН, получившей наименование «САН-ЭЛЕКТРО» Следует особо
отметить, что на КА «ЭЛЕКТРО-Л» устанавливалась не просто аппаратура радио¬
навигации (АРН), а именно система автономной навигации (САН). САН-ЭЛЕКТРО
предназначена для решения на борту задач определения параметров движения центра
масс КА по радиотехническим измерениям навигационных сигналов НКС ГЛОНАСС
и GPS и выдачи их в бортовой комплекс управления (БКУ) КА«ЭЛЕКТРО-Л».
В состав САН-ЭЛЕКТРО должны входить следующие основные элементы:
- аппаратура радионавигации (АРН), обеспечивающая обработку радионавигаци¬
онных сигналов навигационных КА НКС ГЛОНАСС и GPS и выделение из них
цифровой информации. АРН состоит из двух полукомплектов, один их которых
находится в холодном резерве;
- антенно-фидерные устройства (АФУ) АРН, обеспечивающее прием радионавига¬
ционных сигналов навигационных КА НКС ГЛОНАСС и GPS;
- программное обеспечение (ПО), обеспечивающее решение задач САН-ЭЛЕКТРО
и реализованное на средствах АРН.
Следует отметить, что, несмотря на летную квалификацию аппаратуры радио¬
навигации разработки ОАО «ИСС им. М.Ф. Решетнева», использовать ее непосред¬
ственно для установки на КА «ЭЛЕКТРО-Л» не представлялось возможным. Это
было обусловлено следующими обстоятельствами:
- программное обеспечение АРН входило в состав бортового комплекса управле¬
ния (БКУ) КА, и поэтому потребовалась определенная модернизация ПО АРН
для переноса задач, решаемых в БКУ КА, в вычислитель АРН;
321
2-11
- потребовалась доработка полосового фильтра антенно-фидерной системы (АФС),
который должен был обеспечить развязки между приемником САН и передающи¬
ми устройствами целевой аппаратуры КА «ЭЛЕКТРО-Jl» № 2;
- необходимость изготовления нового комплекта кабелей.
С учетом перечисленных обстоятельств для разработки САН-ЭЛЕКТРО в ОАО
«ИСС им. М.Ф. Решетнева» было выдано соответствующее ТЗ, в котором были учтены
особенности функционирования САН в составе бортовых систем КА «ЭЛЕКТРО-Л».
Аппаратура радионавигации
В основу разработки АРН для САН-ЭЛЕКТРО был положен прибор 727М.1406-0,
прошедший летную квалификацию.
Внешний вид АРН показан на рисунке 2.11.7.
Рисунок 2.11.7. Аппаратура радионавигации АРН
Аппаратура радионавигации предназначена для:
- приема от навигационных КА и выдачи в БКУ цифровой информации;
- измерений навигационных параметров (псевдодальности и псевдоскорости), их
привязки к шкале времени АРН;
- формирования и выдачи в БКУ КА текущих значений времени по шкале времени
(ШВ) САН, поправок к ШВ ГЛОНАСС и UTC, а также сигнала секундной метки
времени;
- определения и выдачи в БКУ КА текущих координат и вектора скорости КА
в гринвичской системе координат по измерениям навигационных параметров.
АРН позволяет проводить измерения отдельно по ГЛОНАСС, отдельно по GPS и
совместно по - ГЛОНАСС и GPS. Основные технические характеристики прибора
приведены в таблице 2.11.1.
322
2-11
Таблица 2.11.1 Основные технические характеристики АРН
наименование
значение
масса прибора, кг, не более
7,3±0,3
габаритные размеры, мм
286x186x171
напряжение питания, В
25-28
мощность, потребляемая прибором, Вт, не более
в режиме разогрева на время не более 6 сек, не более
25
40
чувствительность приемника (по входу МШУ), дБ Вт, не более
минус 164
аппаратурные погрешности измерения:
а) псевдодальности:
систематическая, м, не более;
случайная(Зб), м, не более;
б) псевдоскорости, м/с, не более
10
3
0,12
прием сигналов с доплеровским сдвигом частоты, кГц
±10
отношение сигнал/шум Q=Ps/N на входе приемника
в режиме поиска и захвата сигнала, дБ Гц, не более
35
Отношение сигнал/шум Q=Ps/N на входе приемника
в режиме слежения и измерения, дБ Гц
27
Антенно-фидерные устройства САН
Важными элементами САН являются антенно-фидерные устройства, обеспечива¬
ющие прием радионавигационных сигналов НКС ГЛОНАСС и GPS;
В состав АФУ САН входят:
- антенна;
- фильтр нижних частот;
- фильтр полосовой;
- комплект кабелей.
Внешний вид АФУ САН показан на рисунке 2.11.8. Фото сделано при проведении
входного контроля САН в ОАО «ИСС им. М.Ф. Решетнева». Кроме антенно-фидер¬
ных устройств САН, на этом рисунке показан и малошумящий усилитель (МШУ)
АРН, предназначенный для усиления входного радионавигационного сигнала.
АФУ САН предназначены для :
- приема навигационных сигналов ГЛОНАСС /GPS в диапазоне L;
- обеспечения развязки от передающих устройств целевой аппаратуры на борту
КА «ЭЛЕКТРО-Л № 2», работающих также в диапазоне L.
На рисунке 2.11.9 показана конструкция и размеры антенны, входящей в состав
АФУ.
Антенна САН представляет собой цилиндрическую спираль, состоит из излучате¬
ля 3 и экрана 1. Излучатель представляет собой стеклопластиковую трубу с кониче¬
ской верхней частью. На трубу намотан проводник из медной ленты. В нижней части
трубы имеется корончатая часть, которая служит для закрепления ее к экрану.
Работа приемника САН проводится через фильтр нижних частот и полосовой
фильтр. Эти фильтры осуществляют селекцию основного сигнала приемника САН
и обеспечивают развязку от передатчиков, подавляют паразитные внеполосные из¬
лучения передающих устройств. Внешний вид фильтров показан на рисунке 2.11.10.
323
2-11
Рисунок 2.11.8. Внешний вид элементов АФС и МШУ САН-ЭЛЕКТРО.
724
Рисунок 2.11.9 Конструкция антенны АФУ САН-ЭЛЕКТРО.
324
049
2-11
Рисунок 2.11.10. Фильтр нижних частот и фильтр полосовой
Для соединения СВЧ-приборов в тракте АФУ САН между собой, с антенной
и приемником используется полужесткий кабель РК-50-7-47 ТУ 16.705-109-90.
Основные технические характеристики АФУ САН приведены в таблице 2.11.2.
Таблица 2.11.2
наименование характеристики
значение
КУ АФУ САН в диапазоне частот 1575 - 1607 МГц, дБ, не менее,
в пределах ширины ДН ±15° от оси антенны, дБ, не менее
10
направление вращения поляризации
правое
КЭ антенны в пределах ширины ДН ±15° от оси антенны, дБ, не менее
0,8
КУ антенны, дБ
12
КСВ тракта АФУ САН в диапазоне частот 1575 - 1607 МГц, не более
1,4
потери в тракте АФУ САН в диапазоне частот 1575 - 1607 МГц, дБ, не более
(от антенны до входа МШУ), дБ, не более
2,0
0,5
подавление сигнала передающих устройств, дБ. не менее
на частотах:
1544,5±0,5 МГц;
1692±2 МГц;
1697±1 МГц
90
90
90
325
2-11
Малошумящий усилитель
МШУ САН предназначен для усиления спутниковых навигационных сигналов
ГЛОНАСС (диапазон L1) и GPS (диапазон L1) и обеспечения требуемой чувстви¬
тельности САН.
Для уменьшения потерь в тракте МШУ должен располагаться максимально близ¬
ко к приемной антенне. В усилители предусмотрено два комплекта, один из которых
находится в «холодном» резерве. Включение комплектов МШУ осуществляется по¬
дачей напряжения питания на соответствующий комплект.
МШУ имеет диапазон рабочих частот от 1565 до 1615 МГц и коэффициент усиле¬
ния не менее 40 дБ.
Основные характеристики САН-ЭЛЕКТРО
Основными целевыми характеристиками САН являются точность и оператив¬
ность определения текущих координат КА.
Погрешность определения текущих координат КА в гринвичской системе коорди¬
нат (вектора кинематических параметров ВКП) составляет не более 300 м (б).
Интервал времени, через который САН обеспечит определение ВКП с указан¬
ной погрешностью, не превышает 48 часов при отсутствии априорной информации
0 параметрах движения КА и через 24 часа - при ее наличии. В качестве априорной
информации для инициализации АРН по мультиплексному каналу обмена (МКО)
от БКУ должны передаваться следующие данные:
- текущее время в формате: число секунд секунды от 01.01.2000 00:00:00 МДВ
с погрешностью не более 10 с относительно шкалы времени UTC;
- вектор начальных условий движения КА в гринвичской системе координат с по¬
грешностью не более 100 км по координатам и не более 10 м/с - по скорости (б);
- режимы работы и настроечные параметры;
- альманахи системы ГЛОНАСС и GPS.
Темп выдачи из АРН ВКП КА может быть установлен в диапазоне от R86400 с.
Погрешность определения расхождения ШВ АРН от ШВ ГЛОНАСС и ШВ GPS не
превышает 500 не (б) при перерывах в сеансах измерений с навигационными КА до
1 часа. Погрешность привязки сигнала 1с к шкале времени UTC не превышает 1 мке
(СКО).
При необходимости АРН имеет возможность проведения перепрограммирования
ПО АРН. Оно может проводиться как при проведении наземных испытаний, так и в
процессе полета по командам от БКУ КА.
САН обеспечивает возможность измерения по восьми навигационным КА ГЛО¬
НАСС или GPS одновременно. Кроме измерений, АРН обеспечивает прием и выде¬
ление из радиосигнала навигационных КА эфемерид и альманахов КНС ГЛОНАСС и
GPS и выдачу их по запросу в БКУ.
Управление и информационный обмен между АРН и БКУ осуществляется через
мультиплексный канал обмена (МКО) по ГОСТ Р 52070-2003. Коммутация питания
при включении и выключении САН осуществляется в АРН по командам от БКУ. Име¬
ется возможность аварийного выключения АРН по радиокомандам с Земли.
Основные характеристики САН-ЭЛЕКТРО приведены в таблице 2.11.3.
326
2-11
Таблица 2.11.3 Основные характеристики САН
наименование
значение
время поиска сигнала при наличии альманахов и начальных данных, с,
не более
600
количество навигационных КА, от которых АРН позволяет одновременное
проведение измерений, не менее
8
диапазон измеряемой дальности, км
55000-75000
темп выдачи измерений в БКУ, с
1-86400
погрешность определения вектора кинематических параметров (б):
а) по координатам, м, не более
б) по скорости, м/с, не более
300
0,12
вероятность безотказной работы АРН в составе КА за САС КА 10 лет
0,99
общий ресурс АРН, час
100000
Для обеспечения работы алгоритма бортового прогноза движения центра масс КА
САН выдает в БКУ координаты и скорости КА с интервалом 1 час, при этом осущест¬
вляется контроль выдаваемых данных на диапазон допустимых значений. В случае
некондиционных данных или при отказе работы САН бортовой прогноз движения
центра масс КА осуществляется по последнему вектору кинематических параметров
движения КА.
Результаты летных испытаний САН-ЭЛЕКТРО
в составе бортовых систем КА «ЭЛЕКТРО-Л» № 2
Запуск КА «ЭЛЕКТРО-Л» №2 был осуществлен Пдекабря 2015 года в 16 час
45 мин 32,36 сек московского декретного времени (МДВ) с космодрома Байко¬
нур. В результате работы средств выведения (КРК «Зенит-М» в составе РКН
«Зенит-З БЬБФ» с РБ «Фрегат-СБ») была сформирована орбита выведения.
В результате проведения трех коррекций орбиты к моменту 16 января 2016 года.
КА «ЭЛЕКТРО-Л» № 2 был переведен с долготы орбиты выведения 55° в.д. в задан¬
ную точку «стояния» 77,8° в.д., предназначенную для проведения летных испытаний.
Испытания САН проводились в соответствии с «Программой летных испыта¬
ний САН в составе КА» с целью подтверждения ее основных функциональных
возможностей.
На начальном этапе проверок функционирования САН были выявлены замечания
к программному обеспечению АРН и БКУ КА, которые были устранены закладкой
в ПО АРН и ПО БКУ соответствующих программных вставок. В ПО АРН было уве¬
личено максимально допустимое значение наклонения орбиты с 0,3° до 7°, использу¬
емое для входного контроля вектора кинематических параметров (ВКП) из БКУ при
инициализации САН, а в ПО БКУ проведено уточнение алгоритма расчета ВКП для
САН в части составляющих по скорости.
327
2-11
В период с 24.01.2016 по 26.02.2016 специалистами АО «НПК «СПП» были прове¬
дены работы по оценке точностных характеристик САН (Суевалов В.В., Кисленко К.В.
и др., 2015/ Оценка проводилась с использованием измерительной информации оп¬
тических средств (ОС). Для проведения измерений угловых параметров положения
КА «ЭЛЕКТРО-JI» № 2 были привлечены следующие оптические средства:
1. Артём, Россия - 10078 (678);
2. Абастумани, Грузия - 10509 (509);
3. Лесосибирск, Россия - 10526 (526);
4. Крым, Россия - 10031(631), 10332 (332), 10543 (543);
5. Китаб, Узбекистан - 10059 (659);
6. Уссурийск, Россия - 10067 (667);
7. Биракан, Россия - 10301 (301), 10302 (302);
8. Кисловодск, Россия - 10093 (693), 10094 (694), 10095 (695), 10098 (698).
Основной целью проведения данной оценки являлось экспериментальное под¬
тверждение выполнения САН-ЭЛЕКТРО заданных требований по точностным ха¬
рактеристикам определения параметров движения (ОПД) КА. В качестве основных
рассматривались следующие требования:
а) САН должна обеспечивать определение текущего вектора состояния КА в грин¬
вичской системе координат с погрешностью по положению не более 300 м (СКО) и по
скорости не более 0,03 м/с;
б) САН должна обеспечивать измерения первичных навигационных параметров
со следующими предельными аппаратурными погрешностями:
- систематическая погрешность измерения псевдодальности - не более 10 м;
случайная погрешность измерения псевдодальности - не более 3 м (За);
- случайная погрешность измерения псевдоскорости - не более 0,12 м/с (За).
В качестве исходных данных для оценки точности ОПД были использованы:
- измерения САН, полученные в 813 сеансах;
- измерения оптических средств (ОС), полученные в 112 сеансах наблюдений;
- 2605 векторов кинематических параметров, полученных с борта КА.
При определении параметров движения КА использовались:
- выборка измерений САН на интервале 2 суток;
- в качестве уточняемых параметров кинематические параметры КА (проекции
вектора положения и проекции вектора скорости) и величина коэффициента све¬
тового давления.
Вектор кинематических параметров определялся в гринвичской системе коорди¬
нат на начало мерного интервала.
В качестве измерений бортовой САН использовались одномоментные разности
«кодовых» измерений псевдодальности до навигационных КА, полученных по сиг¬
налам НКА ГЛОНАСС и GPS. При этом для их обработки вместо данных оператив¬
ного навигационного кадра с борта КА использовалась более точная апостериорная
эфемеридно-временная информация по навигационным КА ГЛОНАСС и GPS, по¬
лученная из системы высокоточного определения эфемеридно-временных поправок
(СВОЭВП).
На интервале времени с 24.01.2016 по 24.02.2016 получено 26 решений задачи
ОПД, по которым была сформирована непрерывная таблица эталонных решений (ор¬
битальный эталон).Оценка точности полученного эталона была проведена с исполь¬
зованием 112 сеансов указанных выше ОС.
328
2-11
Результаты проведенной статистической оценки точности ОПД КА с использова¬
нием измерений САН относительно измерений ОС показывают, что среднее предель¬
ное (МО+За) значение отклонений составило 2,4 угловых секунды по прямому вос¬
хождению и 2,1 угловых секунды по склонению. При переводе угловых отклонений
в линейные предельные отклонения составили 450 м по ортогональным проекциям
положения в плоскости, перпендикулярной линии визирования КА с ОС, и на уровне
640 м суммарно по положению в указанной плоскости.
С учетом того, что точность измерений ОС находится на уровне 1 угловой секун¬
ды (б), а также полагая погрешности САН и ОС при определении параметров движе¬
ния КА в первом приближении равными, суммарная ошибка определения параметров
движения по положению составит -450 м и -320 м по ортогональным проекциям
положения.
Таким образом, погрешность определения параметров движения КА по измерени¬
ям САН с учетом использования апостериорной эфемеридно-временной информации
НКА ГЛОНАСС/GPSc вероятностью 0.997 не превысит 320 м по каждой из коорди¬
нат положения.
В период с 24.01.2016 по 24.02.2016 было получено 2605 бортовых векторов
САН, по которым был проведен расчет их отклонений от эталонной орбиты, по¬
лученной по измерениям бортовой САН. Анализ результатов расчета показал, что
с учетом отбраковки аномальных значений точность определения ВКП КА в БКУ
находится на уровне 130 м вдоль орбиты, 40 м - в радиальном и 320 м - в боковом
направлениях. Максимальное отклонение бортовых векторов от эталонной орбиты
достигает 115 м вдоль орбиты, 130 м - в радиальном направлении и 610 м - в боко¬
вом направлении.
Результаты испытаний САН-ЭЛЕКТРО в составе КА «ЭЛЕКТРО-Л» № 2 подтвер¬
дили выполнение всех заданных функциональных требований технического задания.
Работа САН по целевому назначению началась после проведения испытаний по
«Программе летных испытаний САН в составе КА». В процессе всего полета регу¬
лярно, с периодичностью 1 час, осуществлялось получение с борта ВКП, которые
использовались для формирования начальных условий движения центра масс КА
в интересах расчета задач баллистико-навигационного обеспечения в ЦУПе.
На рисунке 2.11.11 представлен график изменения текущей долготы КА
«ЭЛЕКТРО-Л» № 2, построенный по бортовым ВКП САН. По оси ординат графи¬
ка отложено значение географической долготы положения КА Lr в градусах, а по
оси абсцисс - календарная дата и число суток. Изменение географической долго¬
ты Lr показано при поддержании КА в точке «стояния» 77,8° в.д., предназначенной
для проведения испытаний, и в штатной точке «стояния» 76° в.д., включая этап его
перевода.
Во время летных испытаний была успешно проведена проверка по использованию
информации САН непосредственно в контуре управления КА, а именно выдаваемых
САН ВКП в качестве начальных условий для работы бортового алгоритма прогнози¬
рования движения центра масс КА в БКУ. Такое использование САН позволит зна¬
чительно сократить задействование наземных измерительных средств и качественно
повысить уровень автономности КА.
329
2-11
»»ч
78,20
77,%
77,60
I
77,30
i
u. 77,00 I
_i i
I
76,70 !
76,40 |
76,10 |
ул.
P V,yv
75,80 .
0,0 30,0 60,0 90,0 120,0 150,0 1 80,0 210,0 240,0 270,0 300,0 330,0 360,0
26.01 25.02 26.03 25.04 25.05 24.06 24.07 23.08 22.09 22.10 21.11 21.12 20.01
Рисунок 2.11.11. Изменения текущей долготы КА «ЭЛЕКТРО-JI» № 2
Проведенные испытания бортовой САН в составе КА «ЭЛЕКТРО-Л» .№ 2 под¬
твердили выполнение требований ТЗ на разработку САН-ЭЛЕКТРО. В ходе испыта¬
ний были определены следующие точностные характеристики:
1) САН обеспечивает определение текущего вектора состояния КА в гринвичской
системе координат с погрешностью по положению - 120 м (а);
2) САН обеспечивает предельные аппаратурные погрешности измерения первич¬
ных навигационных параметров со следующими характеристиками:
- систематическая погрешность измерения псевдодальности - 1,3 м;
- случайная погрешность измерения псевдодальности - 1,4 м (а);
- случайная погрешность измерения псевдоскорости - 0,011 м/с (а).
Для повышения точности определения параметров движения КА с помощью
бортовой САН необходимо исключить из обработки измерения на высотах до 800—
1000 км, где максимальны влияние ионосферы и погрешность ее расчета в существу¬
ющих моделях.
Список литературы
Асмус и др. Развитие космического комплекса гидрометеорологического обеспе¬
чения на базе геостационарных спутников серии «ЭЛЕКТРО-Л» // Вестник НПО
им. С.А. Лавочкина. 2012. № 1. С .3-14
Ефанов В.В., Семункина В.К, Шостак С.В. Особенности баллистического про¬
ектирования КА ДЗЗ оптико-электронного наблюдения типа «АРКОН -1» // Вестник
ФГУП НПО им. С.А. Лавочкина. 2009. № 1. С. 46-53.
Ефанов В.В., Хайлов М.Н., Семункина В.И. Отдельные аспекты оптимизации ор¬
битального построения ДЗЗ // Полет. 2010. № 1. С. 13-20.
330
2-11
Малышев В.В., Дарнопых В.В., Назаров А.Е. Методические рекомендации по вы¬
полнению лабораторных работ по дисциплине «Моделирование организационно-тех¬
нических систем и процессов их функционирования» с применением программного
комплекса «Кеплер»: Учеб. пособие. М.: МАИ-ПРИНТ, 2011. С. 1-52.
Назаров А.Е., Федоров А.В. Комплекс программ моделирования баллистических
условий функционирования космической системы: свидетельство о государственной
регистрации программы для ЭВМ № 2010613950 от 18 июня 2010 г.
Суевалов В.В., Кисленко КВ. и др. Результаты оценки точностных характеристик
бортовой САН КА «ЭЛЕКТРО-Jl» № 2 по результатам летных испытаний: Техниче¬
ский отчет. М.: АО «НПК «СПП» Филиал «Прецизионного навигационно-баллисти¬
ческого обеспечения», 2015. 177 с.
А.Е. Назаров, А.Е. Евграфов
НПО им. С.А. Лавочкина
331
ИВ СИСТЕМА УПРАВЛЕНИЯ
ОСТРОНАПРАВЛЕННОЙ АНТЕННОЙ
МНОГОФУНКЦИОНАЛЬНОЙ КОСМИЧЕСКОЙ
ПЛАТФОРМЫ «НАВИГАТОР»
Назначение
Система управления (СУ) остронаправленной антенной (ОНА) (далее - СУ ОНА)
предназначена для разворотов ОНА в двух взаимно перпендикулярных направлениях
в соответствии с получаемой из БКУ командно-программной информацией.
На КА «СПЕКТР-Р», «АРКТИКА-М» установлена одна СУ ОНА.
На КА «ЭЛЕКТРО-Jl» установлены две СУ ОНА:
- СУ ОНА1 по оси «минус Z» КА,
- СУ ОНА2 по оси «плюс Z» КА.
По составу, основным характеристикам и этапам работы системы идентичны.
Управление системами независимое.
Состав
В состав каждой системы входят:
- блок управления приводом (БУП) ОНА;
- привод ОНА;
- бортовая кабельная сеть (БКС) СУ ОНА.
Функциональная схема СУ ОНА приведена на рисунке 2.12.1.
Привод ОНА был разработан НПО им. С.А. Лавочкина и представляет собой
моноблок, в состав которого входят два модуля и волноводное вращающееся со-
мко
БКУ
РК
вкл/выкл
пит. БУП
БКУ
СЭС
пит.
СУОНА
БУП ОНА
канал
резервирования 1
канал
резервирования 2
привод ОНА
модуль канала ф
ШД
редуктор
ДУ
модуль канала и
ШД
редуктор
ДУ
Рисунок 2.12.1. Функциональная схема СУ ОНА
332
2-12
единение, конструктивно совмещенное с силовыми кронштейнами привода (.Пе-
трунин С.П. 1971, Чемоданов Б.К., 1976). Приводы ОНА для разных КА различа¬
ются по конструкции, единым для всех приводов является использование модуля
Н-4210-0.
Каждый модуль оснащен шаговым электродвигателем ДШГ-1,8-04
ТАИК.522414.008 ТУ производства АО «Корпорация «ВНИИЭМ»; редуктором, раз¬
работанным НПО им. С.А. Лавочкина, и датчиком угла поворота выходного вала типа
«вращающийся трансформатор» БВТВ80-12-0,2-0,16-2-С28 ИАРК.521585.010, изго¬
товленным ОАО «ВНИТИ ЭМ».
Конструкция модуля приведена на рисунке 2.12.2.
8 7 6 4 5 3 2 1
Рисунок 2.12.2. Конструкция модуля
Вращение от вала электродвигателя 1 передается на три сателлита 2 планетарной
передачи, которые, в свою очередь, передают вращающий момент на водило 3, где
установлен генератор волн 4. Генератор волн 4, гибкое колесо 5 и жесткое зубчатое
колесо 6 представляют собой зубчатую волновую передачу. Значение редукции вол¬
новой передачи 80, значение суммарной редукции модуля 667,83. На выходном валу
модуля установлен ротор 7 датчика угла поворота 8. Волновая передача, установлен¬
ная на выходном валу модуля, обеспечивает требуемую точность отработки задан¬
ных угловых положений выходного вала при заданных условиях работы, нагрузок и
ресурсной наработки {Иванов М.Н., 1981; Гинзбург Е.Г., 1969; Шувалов С.А. 1987).
Угол поворота выходного вала модуля, соответствующий одному шагу поворота вала
электродвигателя ДШГ-1,8-04, составляет 9,703".
Модуль допускает круговое вращение выходного вала. Ограничения по углам раз¬
ворота для каждого модуля реализуются в конкретной конструкции привода. Кинема¬
тическая цепь модуля не резервирована.
333
2-12
Каждый модуль в процессе изготовления и до установки его в привод проходит
контрольные испытания в соответствии с техническими условиями на него. Требо¬
вания к точностным параметрам модуля более жесткие, чем к приводам, в состав
которых входят модули. После сборки привода каждый модуль повторно проходит
контрольные испытания, но уже в составе привода, по предъявляемым к приводу
требованиям.
Для проведения испытаний модуля и привода ОНА разработаны контрольно-про¬
верочная аппаратура и стенд испытаний, которые обеспечивают погрешность изме¬
рения углового положения выходного вала не более 15 угловых секунд и позволяют
создавать требуемые механические и инерционные нагрузки.
Опыт летной эксплуатации КА «ЭЛЕКТРО-Jl» № 1 (выведен на орбиту 20.01.2011)
и КА «СПЕКТР-Р» (выведен на орбиту 18.07.2011) продемонстрировал высокую на¬
дежность трех образцов привода ОНА.
БУП ОНА разработан ФГУП НИИ «Субмикрон» по ТЗ НПО им. С.А. Лавочкина
и предназначен для управления приводом ОНА.
БУП ОНА решает следующие задачи:
- приём и обработка управляющей информации от БКУ;
- выдача управляющих импульсов током величиной 0,3 5+0,05А на обмотки каждо¬
го из двух ШД для разворотов валов привода ОНА в требуемое положение и обе¬
спечения условий торможения выходного вала ШД в соответствии с принимае¬
мыми командами из БКУ;
- приём и обработка информации каждого из двух датчиков угла (ДУ) о положении
валов привода ОНА;
- передача в БКУ информации о текущем положении валов привода ОНА и количе¬
стве выданных на ШД импульсов по запросу от БКУ;
- самотестирование по включению питания и выдача результатов тестирования
в БКУ.
В состав БУП ОНА входят два канала резервирования. Каждый из каналов вклю¬
чает в себя:
- вторичный источник питания;
- устройство резервированного интерфейса для связи с БКУ по магистральному
каналу обмена (МКО) в соответствии с ГОСТ Р 520702003 в режиме оконеч¬
ного устройства (ОУ);
- устройство формирования и выдачи импульсов управления ШД по каналам
о и \|/;
- устройство приема и обработки аналоговых сигналов с ДУ каналов v и у;
- микроконтроллер;
- термодатчик.
Конструктивно БУП ОНА состоит из двух ячеек и платы В ОНА (ВИП). Состав¬
ные части блока соединяются между собой объемным монтажом. Ячейка БУП ОНА
создана на основе многослойной печатной платы с размещенными на ней электрон¬
ными компонентами.
Блок имеет контакт защитного заземления, расположенный на передней панели
блока, который выполнен в виде металлического винта, гайки и шайбы для крепления.
Блок выполнен в негерметичном исполнении.
334
2-12
Технические характеристики
В приводе ОНА реализованы правые ортогональные приборная (ПСК) и подвиж¬
ная (ПдСК) системы координат.
ПСК OXnYnZn привода ОНА материализуется посадочной плоскостью, которой
привод устанавливается на КА, и системой классных отверстий конструкции привода.
ПдСК ОХпдУщ^пд привода ОНА материализуется посадочной плоскостью и си¬
стемой отверстий для установки ОНА на приводе.
Привод ОНА обеспечивает развороты ПдСК относительно ПСК на заданные углы
\|/пр (вокруг оси Увр, параллельной оси ОУп и направленной в ту же сторону) и цпр (во¬
круг оси ZBp, параллельной оси OZnRn направленной в ту же сторону). Схема отсчета
углов приведена на рисунке 2.12.3.
Хп
335
2-12
За положительное направление вращения привода вокруг осей Увр и ZBp принято
вращение против часовой стрелки, если смотреть с положительного направления оси
YBp и ZBp соответственно.
За нулевое положение (НП) привода для КА «СПЕКТР-Р» по обеим осям вра¬
щения принято положение, при котором ось ОХпд ПдСК параллельна и совпадает по
направлению с осью ОХпПСК. Для КА «ЭЛЕКТРО-JI» и «АРКТИКА-М» в нулевом
положении ось OZ^o ПдСК параллельна и совпадает по направлению с осью OZn
ПСК; ось ОХПдо ПдСК развернута в плоскости ХпОУпна угол п0, равный минус 38° i
со стороны положительного направления оси OZnA0.
Рабочий диапазон углов поворота ПдСК:
- для КА «ЭЛЕКТРО-Л» от минус 10° до 10° по углам \|/при опр;
- для КА «АРКТИКА-М» от минус 14° до 14° по углам \|/пр и нпр;
- для КА «СПЕКТР-Р» от минус 73° до 90° по углу \|/пр и от минус 90° до 90° по
углу опр.
Диапазон углов поворота, предназначенный для установки ОНА в транспортное
положение:
- для КА «ЭЛЕКТРО-Л» по углу опр- от 10° до 182°;
- для КА «АРКТИКА-М» по углу нпр- от 14° до 182°;
- для КА «СПЕКТР-Р» по углу \|/пр- от минус 92° до минус 73°.
Привод ОНА имеет механические упоры:
- для КА «ЭЛЕКТРО-Л» на углах \|/пр, нпр, равных минус (12±1)° и (12±1)°;
- для КА «АРКТИКА-М» на углах \|/пр, нпр, равных минус (15±1)° и (15±1)°;
- для КА «СПЕКТР-Р» на углах v|/пр, равных минус (91±1)°, минус (74,5±0,5)°
и (91±0,5)°; на углах цпр, равных минус (91±0,5)° и (91±0,5)°.
Конструкция механических упоров позволяет переводить привод из транспортно¬
го положения в рабочий диапазон привода на всех этапах эксплуатации в составе КА,
а также устанавливать привод в транспортное положение при наземных отработках.
Допускается непрерывная работа привода на механических упорах длительностью
не более 10 минут.
Нагрузкой на приводы ОНА являются:
- на КА «СПЕКТР-Р» - ОНА диаметром 1500 мм, кронштейн, кабельные линии
связи, аппаратура и элементы СТР, размещаемые на кронштейне под ОНА;
- на КА «ЭЛЕКТРО-Л» - ОНА диаметром 1200 мм, предназначенная для передачи
информации или ОНА диаметром 1200 мм, предназначенная для приема инфор¬
мации, кронштейн, кабельные линии связи.
- на КА «АРКТИКА-М» - ОНА диаметром 1200 мм, кронштейн, кабельные линии
связи.
Моменты инерции нагрузки относительно осей вращения привода не более:
- для КА «СПЕКТР-Р» 28,2 кгм2;
- для КА «ЭЛЕКТРО-Л» и «АРКТИКА-М» 14 кг м2.
Масса нагрузки на привод не более:
- для КА «СПЕКТР-Р» 55 кг;
- для КА «ЭЛЕКТРО-Л» и «АРКТИКА-М» 14 кг.
Нарисунке 2.12.4 изображен привод ОНА для КА «СПЕКТР-Р», на рисунке 2.12.5 -
привод ОНА для КА «ЭЛЕКТРО-Л». Конструктивно исполнение привода ОНА для
КА «АРКТИКА-М» идентично конструкции привода для КА «ЭЛЕКТРО-Л», но от¬
личается большими углами прокачки ОНА \|/пр и цпр.
336
2-12
Рисунок 2.12.4. Привод ОНА для КА «СПЕКТР-Р»
337
2-12
Рисунок 2.12.5. Привод ОНА для КА «ЭЛЕКТРО-JI»
Управление движением привода осуществляет блок управления приводом (БУП)
ОНА.
СУ ОНА обеспечивает работу привода ОНА на фиксированной частоте подачи
управляющих импульсов (130±0,5) Гц. При этом скорость разворота посадочной пло¬
скости крепления ОНА вокруг каждой оси вращения не менее 0,35%.
Угол поворота посадочной плоскости крепления ОНА вокруг каждой оси враще¬
ния, соответствующий одному шагу поворота вала шагового двигателя, входящего
в состав привода ОНА, равен 9,703” (0,0026953°).
Погрешность поворотов посадочной плоскости крепления ОНА вокруг каждой
оси вращения в рабочем диапазоне углов поворота не превышает 11f. Указанная по¬
грешность учитывает люфт, не превышающий З'.
СУ ОНА выдает информацию об угловом положении ПдСК относительно ПСК по
каждой оси поворота привода с погрешностью, не превышающей:
- в' в диапазоне углов поворота ±1 градус;
- 1 (/ в диапазоне углов поворота ±8,5 градусов;
- 30* - в остальном диапазоне.
Информация с датчиков угла в нулевом положении привода паспортизуется.
Масса СУ ОНА с учетом БКС составляет не более 11,91 кг, при этом:
- масса привода ОНА 8,74 кг для КА «ЭЛЕКТРО-Л»;
8,0 кг для КА «СПЕКТР-Р»;
10,06 кг для КА «АРКТИКА-М»;
- масса БУП ОНА 1,5 кг;
- масса кабельной сети 0,3 кг для КА «ЭЛЕКТРО-Л»;
1,7 кг для КА «СПЕКТР-Р»;
0,35 кг для КА «АРКТИКА-М».
338
2-12
Электропитание СУ ОНА (на входе системы) постоянным током осуществляется
от СЭС по двухпроводным, не имеющим гальванической связи с корпусом, цепям
питания:
- стабилизированным напряжением (27±1,35) В - в установившемся режиме;
- (27±3) В - при переходных процессах длительностью от 1 до 50 мс.
В СУ ОНА предусмотрена защита от КЗ по цепям первичного питания и цепь
контроля стыковки.
Включение и отключение СУ ОНА осуществляется подачей и снятием напряже¬
ния «-27 В» бортовой сети на линию управления питанием СУ ОНА. Коммутация
данного напряжения осуществляется в БКУ.
Время от момента включения СУ ОНА до готовности к приему системой первой
команды по МКО составляет не более 3 секунд с учетом самотестирования БУП ОНА.
Среднее значение потребляемой СУ ОНА мощности от первичной цепи питания в
режиме стоянки под током или непрерывного вращения по двум каналам (максималь¬
ная загрузка) не превышает 20 Вт.
Среднее значение потребляемой СУ ОНА мощности от первичной цепи питания в
режиме с отключенным приводом ОНА не превышает 7 Вт.
СУ ОНА предназначена для функционирования в условиях открытого космоса
при давлении не ниже 1,33* 10'11 Па.
БУП ОНА устанавливается на термостабилизированное основание, температура
которого в зоне посадочного места под БУП должна находиться в пределах от ми¬
нус 20 до плюс 40°С. В БУП ОНА установлен термодатчик, информация с которого
передается в составе ЦТМИ БКУ.
Температура корпуса привода ОНА при натурной эксплуатации должна быть
в пределах от минус 45 до плюс 50°С. На приводе ОНА устанавливаются два теле¬
метрических температурных датчика, входящих в состав СОТР.
Тепловой режим СУ ОНА обеспечивается средствами СОТР.
Срок службы СУ ОНА: не менее 7 лет для КА «СПЕКТР-Р», не менее 14 лет -
для КА «ЭЛЕКТРО-JT» и не менее 11 лет - для КА «АРКТИКА-М», в том чис¬
ле при натурной эксплуатация в составе КА на орбите в течение срока активного
существования:
- 3 года для КА «СПЕКТР-Р»,
- 10 лет для КА «ЭЛЕКТРО-Л»,
- 7 лет для КА «АРКТИКА-М».
Вероятность безотказной работы (ВБР) СУ ОНА за время натурной эксплуатации
по штатной циклограмме:
- 0,996 в течение 10 лет в составе КА «ЭЛЕКТРО-Л»,
- 0,998 в течение 3 лет в составе КА «СПЕКТР-Р»,
- 0,996 в течение 7 лет в составе КА «АРКТИКА-М».
Основные этапы функционирования
Включение СУ ОНА осуществляется путем выдачи из БКУ одной из команд
управления питанием:
- «ВКЛ КР1» включает питание КР1 БУП;
- «ВКЛ КР2» включает питание КР2 БУП.
339
2-12
Команды выдаются из БКУ в БУП по двухпроводной схеме в виде сигналов типа
«сухой контакт» на время работы СУ ОНА.
Единовременно может быть включен только один канал резервирования (КР) БУП
ОНА. Для переключения каналов резервирования БУП ОНА необходимо сначала от¬
ключить БУП, а затем, через время не менее 0,1 секунды, включить необходимый
канал резервирования.
При получении от БКУ команды включения одного из каналов резервирования
БУП ОНА выполняется включение вторичного источника питания (ВИП) соответ¬
ствующего канала резервирования и необходимых узлов соответствующего канала
резервирования БУП ОНА. Затем выполняются операции начального самоконтроля
включенного канала резервирования БУП ОНА и формируются признаки результатов
самоконтроля. На время операции начального самоконтроля БУП ОНА при обмене
по МКО выставляет в ответном слове признак «Абонент занят». При «отказе» управ¬
ляющего микроконвертора или микроконвертора-драйвера ШД или интерфейса SPI
с ОУ МКО или буфера ОУ МКО ЛПИ 17 разряд ОС («Неисправность абонента»)
выставляется в значение «абонент неисправен», после этого командные массивы по
линии передачи информации с отказавшим ОУ в БУП не отрабатываются.
Питание ДУ и ШД обоих каналов по включению БУП ОНА отключено.
Через время не более 3 секунд от получения команды включения канала резерви¬
рования БУП ОНА, обеспечивает готовность к обмену по МКО для решения целевой
задачи.
Через время не менее 3 секунд от получения команды включения канала резер¬
вирования БУП ОНА и до выдачи первого командного массива в БУП ОНА из БКУ
передается тестовый массив данных для запоминания в БУП ОНА и последующего
возврата по команде из БКУ.
Информационный обмен между БКУ и БУП ОНА осуществляется по резервиро¬
ванной линии передачи информации (ЛПИ) в соответствии с ГОСТ Р 52070-2003.
Обмен производится в форматах 1 и 2 основных сообщений стандарта. Информаци¬
онный обмен по МКО осуществляется с циклом не менее 100 мс.
Функции контроллера на магистральной шине и резервной магистральной шине
выполняют устройства интерфейса одной из включенных граней БЦВС БКУ.
Устройства интерфейса каналов резервирования БУП ОНА выполняют функцию
оконечного устройства (ОУ).
В течение минимального такта обмена 100 мс может осуществляться только один
обмен между БКУ и БУП ОНА (только выдача командного массива из БКУ в БУП
ОНА или считывание контрольного массива из БУП ОНА).
Включение ШД и ДУ осуществляется БУП ОНА после получения из БКУ команд¬
ного массива, содержащего соответствующие команды.
По первой цифровой команде «Включить ШД о(\|/)» после включения БУП ОНА
подает напряжение питания положительной полярности на обмотку первой фазы ШД
о(\|/). При получении последующих команд «Включить ШД п(\|/)» БУП ОНА подает
напряжение питания на ту обмотку, с которой было снято напряжение, той же поляр¬
ности, при которой было снято напряжение.
По цифровой команде «Включить ДУ о(ц/)» БУП ОНА подает напряжение возбуж¬
дения на ДУ по каналу v(\\/). После подачи питания на ДУ БУП ОНА начинает форми¬
340
2-12
ровать информацию об измеренных углах поворота привода с тактом 0,06 секунды,
последняя сформированная информация об измеренных углах поворота привода по
датчику угла выдается в составе контрольного массива из БУП ОНА в БКУ.
БУП ОНА выполняет управление приводом ОНА в соответствии с принятым по
МКО командным массивом до получения нового командного массива со словами дан¬
ных, изменяющими параметры управления приводом.
БУП ОНА вычисляет контрольную сумму полученного командного массива
и сравнивает ее со значением, содержащимся в командном массиве. При несо¬
впадении вычисленной и полученной контрольных сумм командный массив не
исполняется, в контрольном массиве формируется признак ошибки командного
массива.
Движение привода по какому-либо из каналов н или \|/ осуществляется при полу¬
чении командного массива со следующей информацией:
- команда на включение соответствующего ШД,
- команда на вращение в соответствующем канале,
- частота вращения, равная 130 Гц, в соответствующем канале,
- ненулевое количество импульсов в соответствующем канале.
Импульсы управления, выдаваемые в привод ОНА на ШД, представляют собой
коммутацию питания на обмотку одной из фаз статора двигателя.
По окончании отработки заданного из БКУ количества импульсов БУП ОНА
сохраняет питание фаз ШД т>(\|/), соответствующее питанию фаз последнего
импульса.
При обнулении частоты по каналу п(\|/) или нулевом значении количества импуль¬
сов в задании от БКУ БУП ОНА останавливает вращение в канале н(\|/) и сохраня¬
ет питание фаз ШД, имевшее место на момент начала отработки принятого задания
с обнуленной частотой.
БУП ОНА формирует контрольный массив, который содержит информацию:
- о реальном состоянии ШД и ДУ по соответствующим каналам,
- о задании на отработку импульсов из последнего принятого достоверного команд¬
ного массива,
- о направлении вращения и приращении выданных импульсов,
- информацию датчиков угла.
Информация с ДУ поступает в БУП ОНА в виде напряжений с синусной и коси¬
нусной обмотки датчика угла типа вращающийся трансформатор. Для компенсации
погрешностей ДУ в БУП ОНА прошивается тарировочная характеристика для каж¬
дого канала привода.
Выходная информация БУП об угле поворота изменяется в диапазоне от
OOOOh до FFFFh линейно, цена младшего разряда выходной информации БУП
ОНА-0,002746582°.
Зависимость выходной информации БУП ОНА об угле поворота вала привода от
величины угла представлена на рисунке 2.12.6. Вследствие особенностей сборки при¬
вода его нулевое положение может попасть на любую из двух «пил» характеристики,
в любое место «пилы». Показания ДУ, выдаваемые БУП ОНА при нулевом положе¬
нии привода, паспортизуются для каждого канала привода.
341
2-12
Эеуп А информация от БУП ОНА
FFFFh
kd
п
угол поворота привода
►
-180е
180е
ап - выходная информация БУП ОНА при нулевом положении привода, паспортизованное
значение
Рисунок 2.12.6. Зависимость информации БУП ОНА от угла поворота привода ОНА
Информация БУП ОНА об угле поворота привода ОНА переводится в угол пово¬
рота по следующей формуле:
где аБуп- выходная информация БУП;
фду - угол поворота привода.
При отказе какого-либо из тестируемых элементов в БУП ОНА выставляются
соответствующие признаки отказа в слове признаков самоконтроля в контрольном
массиве СУ ОНА. Интегральный признак исправности БУП ОНА в слове признаков
самоконтроля контрольного массива БУП ОНА выставляется в «отказ» при отказе
хотя бы одного элемента, тестируемого при самоконтроле.
По цифровой команде «Отключить ШД п(\|/)» БУП ОНА снимает питание с фаз
По цифровой команде «Отключить ДУ о(\|/)» БУП ОНА снимает питание с ДУ по
каналу о(\|/) и прекращает формирование информации об измеренных углах поворота
привода.
Если присутствует команда на отключение ШД о(\|/), то БУП ОНА не анализиру¬
ет наличие в командном массиве команды на вращение по каналу о(\|/), направление
вращения по каналу d(\j/), количество импульсов по каналу о(\|/), частоту вращения по
каналу о(\|/).
Команда на отключение канала резервирования БУП ОНА представляет собой
обесточивание цепи управления питанием канала резервирования БУП ОНА.
аБУП аП’ аБУП аПр
ФДУ НаБУП-аП-18()> еСЛИ аБУП_аП>90 ’
аБУП _аП <-90
ШДо(у).
342
2-12
Список литературы
Гинзбург Е.Г. Волновые зубчатые передачи. Л.: Машиностроение, 1969.
Иванов М.Н. Волновые зубчатые передачи. М.: Высшая школа, 1981.
Петрунин С.П. Конструирование редукторов следящего привода радиоаппарату¬
ры. М.: Советское радио, 1971.
Чемоданов Б.К. Следящие приводы. В 2 т. М.: Энергия, 1976.
Шувалов С.Л. Методические указания по расчету волновых зубчатых передач на
эвм. М.: МВТУ им. Н.Э. Баумана, 1987.
П.Н. Жесткое, Н.П. Снычев, М.С. Сохацкая, Д.А. Терехов
НПО им. С.А. Лавочкина
343
ЧАСТЬ 3
НАЗЕМНЫЕ КОМПЛЕКСЫ УПРАВЛЕНИЯ
НАЗЕМНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ
3.1.1. Общие принципы
Функционирование элементов наземного сегмента рассмотрено в контексте
проекта «РАДИОАСТРОН». Этот проект основан на использовании созданного
в НПО им. С.А. Лавочкина КА «СПЕКТР-Р» в качестве вынесенного в космос
радиотелескопа, установленного на космической платформе «НАВИГАТОР» и
связанного с Землей высокоинформативным радиоканалом (ВИРК). К отличитель¬
ным особенностям проекта также относятся:
- демонстрация универсальной применимости космической платформы
«НАВИГАТОР», являющейся базой для КА научного назначения;
- исключительная насыщенность и содержательность научной программы;
- уникальность в плане длительности практической эксплуатации современного
космического комплекса «СПЕКТР-Р» и приобретения бесценного опыта. На
данный момент проект успешно функционирует уже более пяти лет.
Совокупность указанных особенностей подчеркивает масштаб проекта и опре¬
деляет требуемый уровень взаимодействия (объем обмена данными, оперативность
и надежность) следующих его элементов:
- центра управления полетом КА «СПЕКТР-Р» (ЦУП-СР на базе ЦУП НПО
им. С.А. Лавочкина) {Казакевич Ю.И., Зефиров И.В., 2014);
- баллистического центра (БЦ в ИПМ РАН);
- сети наземных станций управления (НСУ) в составе: станция «Кобальт-Р», ис¬
пользующая антенну ТНА-1500 (ОКБ МЭИ) (Медвежьи Озера), и станции
«Клен-Д», использующей самую большую в РФ антенную систему П-2500, рас¬
положенную недалеко от г. Уссурийск;
- научного центра планирования эксперимента (ЦПНЭ) в АКЦ ФИАН;
- центра обработки научной информации (ЦОНИ) в ИКИ РАН;
- сети наземных станция слежения (НСС) в составе НСС в г. Пущино на базе ан¬
тенны РТ-22 (АКЦ ФИАН) и НСС в Грин Бэнк (США);
- наземных радиотелескопов (НРТ);
- заинтересованных научных центров, широкой научной общественности.
Первые три пункта приведенного перечня определяют состав наземного комплек¬
са управления (НКУ) (рисунок 3.1.1) {Комовкин С.В., 2014), остальные пункты входят
в состав наземного научного комплекса (ННК).
Организующими элементами миссии являются ЦУП-СР, обеспечивающий плани¬
рование работы КА и НСУ, и НЦПЭ, обеспечивающий планирование научной про¬
граммы, задействование НРТ и НСС. Общим органом управления миссией является
344
3-1
Малонаправленная антенна^
диапазона 5.7/3.4 ГГц
Источник
космического
излучения
Остроналрааленная антенна ВИРК
диапазона 15,0 ГГц, 8.4/7,2 ГГц
8 4/7, ГГц 1 1.0 ГГц
ТНА-1500 п 2500
HomiftM ста «ИИ
Медвежьи
Озера»
«Уссурийск»
РТ 22
Н&эемн 1я с- аниия слв* н • •
. ГГ»Ц4ЙНО
4-х диапазонная
антенна КР7
Л, (92 см)
Aj (18 см)
А3 (6 см)
К <1.35 см)
Станции слежения
Зем» ои радиотелескоп
гг*л 1500 К
S£Z
Зарубежные земные
радиотелескопы
Наземный комплекс управления На земный научный комплекс
Рисунок 3.1.1. Функциональное место НКУ в составе КК «СПЕКТР-Р»
Главная оперативная группа управления (ГОГУ), возглавляемая НПО им. С.А. Лавоч¬
кина и объединяющая в своем составе специалистов предприятий научной и техниче¬
ской кооперации, включая разработчиков бортовых систем КА.
Существует трехуровневая организация планирования работы комплекса. Пер¬
вым, верхним, уровнем является разработка баллистического прогноза и текущих
ограничений долгосрочной научной программы, определяющей программу на¬
блюдения источников и программу работы НРТ и НСС. Эти данные формируют¬
ся исходя из заявок исследователей. Второй уровень планирования - разработка
перспективного (месячного) плана работы, в котором детально определяются про¬
грамма работы КА, программа проведения сеансов управления, научных наблюде¬
ний, юстировки КРТ, лазерной локации КА, программа работы НСУ и уточняется
программа работы НРТ и НСУ. Третий уровень - суточное (сеансное) планирова¬
ние. Данная схема организации планирования позволяет максимально эффективно
использовать ресурсы КА.
В ходе реализации запланированной программы работы вся служебная информа¬
ция о состоянии КА оперативно обрабатывается и контролируется в ЦУП.
Информационный обмен между элементами наземного сегмента, куда включают¬
ся все объекты инфраструктуры, как научные, так и технологические, производится
с использованием специально организованной проектной сети передачи данных, а
также публичных каналов связи. Таким образом, организуется единое информацион¬
ное пространство проекта, доступ к которому для каждого участника определяется
согласованным регламентом.
Возможности информационного взаимодействия с использованием современных
коммуникационных технологий, открытая для кооперации структура ГОГУ, «домаш-
345
3-1
нее» размещение ЦУП-СР (в составе ЦУП-Л) позволили организовать сложный тех¬
нологический процесс управления космическим комплексом с участием разнородных
организаций различных ведомств, значительно разнесенных территориально, работа¬
ющих с разным режимом трудового дня и в разных часовых поясах. На этапе летных
испытаний КА это обеспечило надежное и оперативное выполнение программы по¬
лета, а на этапе научных исследований - дополнительно позволило минимизировать
состав дежурных смен ЦУП.
3.1.2. Организация управления КА «СПЕКТР-Р»
При проектировании контура управления КА как организационного процесса ре¬
шаются следующие задачи:
- определение в соответствии с задачами управления КА оптимального состава и
структуры главной оперативной группы управления (ГОГУ);
- определение конкретного состава работ по выполнению оперативными группа¬
ми ГОГУ их функциональных задач на каждом этапе технологического цикла
управления;
- организация взаимодействия оперативных групп ГОГУ;
- налаживание взаимодействия между организациями, участвующими в управле¬
нии КА.
Особенность организации работы наземно-космического радиоинтерферометра и
служб ГОГУ (Артюхов М.И., 2014) заключается в необходимости синхронного взаи¬
модействия большого числа разнородных элементов проекта, часть из которых (на¬
земные радиотелескопы, станции управления и т.д.) активно используется и в других
программах.
Опыт эксплуатации КА научного направления показывает, что основными крите¬
риями эффективности научных программ являются следующие показатели:
- количество времени, отведенного на научные исследования за определенный ка¬
лендарный период;
- оперативность и надежность работы персонала ЦУП при срочном изменении
программы наблюдений или режимов работы комплекса научной аппаратуры.
И первое, и второе достигается:
- выбором оптимальной схемы управления;
- построением соответствующей технологии планирования и реализации програм¬
мы научных наблюдений и сеансов связи;
- разработкой аппаратно-программных средств поддержки согласованных техно¬
логий проведения сеансов связи и научных наблюдений;
- оптимальным построением НКУ.
В НПО им. С.А. Лавочкина исторически сложилось, что специалисты, участво¬
вавшие в работе на всех этапах проекта, начиная с проектирования систем и кончая
наземными испытаниями КА на КИС, обеспечивают и управление КА в ЦУП.
При определенных недостатках этот подход имеет много преимуществ:
- использование опыта по управлению КА предыдущих поколений различного це¬
левого назначения;
- высокая профессиональная подготовка специалистов к управлению КА в полете
и оперативное парирование возможных нештатных ситуаций;
- отработка эксплуатационной документации и технологии управления КА в полете.
346
3-1
Отличительной особенностью последних проектов НПОЛ является использова¬
ние при наземных испытаниях и при управлении в полете КА однородных программ¬
ных и аппаратных средств.
В процессе управления полетом КА «СПЕКТР-Р» с использованием наземного
сегмента решаются следующие основные задачи:
- организация работ по координации взаимодействия всех элементов наземного
сегмента;
- планирование работ по управлению КА в целях проведения научных наблюдений;
- организация и проведение сеансов связи с КА для:
- передачи на борт командно-программной информации (КПИ),
- проведения измерений текущих навигационных параметров (ИТНП),
- приема с борта телеметрической информации (ТМИ);
- анализ функционирования бортовых систем КА, ЦУП и других элементов на¬
земного сегмента;
- баллистико-навигационное обеспечение полета;
- прием с борта научной информации наземными станциями слежения и передача
ее в заинтересованные организации для дальнейшей обработки.
Управление КА «СПЕКТР-Р» осуществляется по замкнутой схеме, условно пред¬
ставленной на рисунке 3.1.2.
Рисунок 3.1.2. Схема управления КА «СПЕКТР-Р»
Технология управления КА «СПЕКТР-Р» реализуется исходя из особенностей
данного проекта и с учетом следующих основных положений:
- использование в составе наземного сегмента управления КА сетевых структур,
средств планирования и управления полетом, объединенных общей сетью;
- «сквозное» планирование (результат работы планирующей программы предыду¬
щего этапа используется для планирования программы очередного этапа в зара¬
нее утвержденных формах);
- использование на всех этапах планирования в качестве базовых элементов еди¬
ных типовых конструкций (типовые программы сеансов, блоки, типовые масси¬
вы управления системами КА);
347
3-1
- автоматизация процессов технологического цикла управления КА (формирова¬
ния долгосрочной программы работ с КА, формирования КПИ и планирования
сеанса управления, процесса реализации сеанса);
- обеспечение автоматического приема ТМ-потоков, обработки, допускового кон¬
троля всех ТМ-параметров и автоматизированного анализа ТМ-информации
в ЦУП в реальном времени;
- автоматизация анализа состояния бортовых систем и КА в целом по результа¬
там вторичной обработки телеметрии до уровня НОРМА/НЕНОРМА, с целью
оперативности обнаружения на начальной стадии опасных тенденций в работе
бортовых систем и формирования рекомендаций для парирования нештатных си¬
туаций, возникающих на борту КА;
- применение математического моделирования, средств обработки и наглядно¬
го отображения результатов моделирования в задачах тестирования программ
управления КА и задачах анализа функционирования систем по ТМИ с целью
повышения надежности управления;
- возможность адаптации ПАО управления КА в полете к изменившимся условиям
работы комплекса научной аппаратуры и служебных систем;
- использование при управлении КА рабочей документации и аппаратно-про¬
граммных средств планирования, подготовки и реализации сеансов связи, про¬
шедших отработку при проведении комплексных испытаний КА на Земле.
На каждом этапе реализации технологического цикла управления КА осущест¬
вляется автоматизированный обмен необходимой информацией групп и служб ЦУП,
проверка (тестирование) полученных результатов, а также взаимодействие ЦУП со
средствами ННК, баллистическим центром и другими организациями, участвующи¬
ми в управлении.
Технологический цикл управления КА «СПЕКТР-Р» включает в себя следующие
этапы:
1. долгосрочное планирование работы КА:
- разработка программы научных наблюдений;
- разработка долгосрочного (месячного) плана работы КА;
2. оперативное планирование режимов работы КА и технических средств назем¬
ного сегмента управления:
- формирование командно-программной информации (КПИ);
- разработка программы сеанса связи (сеанса управления);
- тестирование КПИ, программы сеанса управления на наличие ошибок и про¬
верка функционирования КА на имитационно-моделирующем стенде на соот¬
ветствие заданной программе;
3. реализация (проведение) сеанса управления:
- выдача на борт командно-программной информации;
- оперативный контроль и анализ технического состояния бортовых систем КА;
4. послесеансная обработка реализованной программы сеанса:
- детальный анализ технического состояния бортовых систем КА;
обработка протокола реализации сеанса и уточнение параметров математиче¬
ской модели КА.
Программа работы КА разрабатывается согласно технологическому циклу с опре¬
деленным уровнем детализации на каждом этапе.
348
3-1
Долгосрочное научное планирование (на период до года) заключается в сборе
заявок на проведение научных экспериментов, наблюдений космических источни¬
ков, оценке их реализуемости, составлении приоритетности списка источников и
составлении программы исследований. На этом этапе проводится оценка реализуе¬
мости программы научных наблюдений и формируется взаимосогласованный план
работы с КА на месяц с учетом функциональных ограничений на наземные и бор¬
товые средства - по ориентации КА, возможности наведения на наземные станции
слежения остронаправленной антенны, обеспечения энергетического и теплового
баланса и т.д.
При месячном планировании детализируется программа работы КА, подтверж¬
дается задействование средств НКУ и сети наземных радиотелескопов, уточняются
времена наблюдения исследуемых источников и времена проведения сеансов управ¬
ления (рисунок 3.1.3).
Сеансы на 10.10.2013 (четверг)
>иакГ~ Ж Ж юсшр(этГ
1
00:00:00 02.00:00 04:00:00 06:00 00 08:00:00 ЮОООО 12:00:00 14:00:00 16:00 00 18:00:00 20:0000 22:00:00 00 00 00
Рисунок 3.1.3. Типовые сутки полета КА «СПЕКТР-Р»
Оперативное планирование работы КА осуществляется на основе сформиро¬
ванной месячной программы работ и исходных данных, полученных на планируе¬
мый интервал времени в виде научной программы, заявок на переориентации КА
и др., и заключается в разработке программы сеанса управления и формировании
КПП (радиокоманд и массивов цифрой информации) для реализации требуемой по¬
следовательности режимов работы систем КА в обеспечение программы научных
исследований.
Для оперативного планирования используется специально разработанное про¬
граммное обеспечение, предназначенное для:
- формирования кодовых команд управления КА;
- составления массивов полетных заданий (ПЗ) в автоматическом и полуавтомати¬
ческом режимах;
- редактирования команд управления и режимов ПЗ;
- составления сеансов связи;
- проверки заявок и сеанса связи на временные и структурные ограничения
КПП.
349
3-1
Управление уникальным астрофизическим КА требует высокого уровня автомати¬
зации составления и тестирования сеансов управления. Для автоматизации проверки
программы сеанса и функционирования КА «СПЕКТР-Р» используется имитацион-
но-моделирующий стенд (рисунок 3.1.4), на нем проводится «сквозное» (от сеанса к
сеансу) математическое моделирование работы КА, результатом которого является
протокол моделирования и ТМИ КА. При необходимости «физического» моделиро¬
вания используется комплексный стенд разработчика бортового комплекса управле¬
ния (БКУ) - МОКБ «Марс».
♦ПО БЦВС
ФПО БЦВС
ФПО БЦВС
ФПО БЦВС
ФПО БЦВС
ФПО БУК
ФПО БЗК
ФПО БЗК
ФПО БЦВС
ФПО БЦВС
ФПО БУК
ФПО БУК
ФПО БУК
ФПО БЦВС
ФПО БЦВС
ФПО БЦВС
ФПО БУК
ФПО БУК 15
СОВП ПВВ 15
ФПО БЦВС 15
ФПО БЦВС 15
ФПО БЗК
ФПО БЦВС
ФПО БЦВС
ФПО БУК 15
ФСО БУК 15
ФПО БУК 15
0658375 1
085837S 1
0658375 2
0858375.2
0858375.2
0858375.2
/0858375 Э
70858375 3
0 00 70858375.3
000 7085837S.3
0:00 70858375.3
0:00 70858375.5
70856376.0
"’08S6376.1
0858376-2
0858376.2
0858377.2
0858377 2
0858377.3
0856379
0858381
0858385
0858385
0858385
0858385
085836$
0858385
0856365
085836$
2 a^Kpu.nev/D
&cL_kpu/0
ettSltft7/10
s«dLt*?/15
sud_t*9 5
kvifcl_kk
kvilljtk
wkadl 0
*d_kpu_new/0
АЦ_крц/0
ad_kpu/8
ukad3/0
0858385-6
0858386.0
0858386 1
0858456.9
0858465.2
0858485.2
0858486 2
0858486.2
0858486 7
0858487.2
0858487.2
0858487.3
0856487.3
Buii.ta3s7
sdsubs_k/14
pcb3(l)/3
Р°ЬЗГ0КЗ
kvitljtk
kvitljck
koft_adl
avLkpta/2
ad_kpu 10
wkadl/2
dd_kpu_n«v/2
ikadl/2
edjkpu/lu
ukad3 2
*d_kpi\_nev/lG
ukad3/2 i
ed_kpu_nm».-2 i
(0081b)
АД (05E h,
AK (5dd2h)
а АД0 (OlOlh)
а АД2 (OlOlh)
Сеанс работы с АД (8501K)
Выбор ARC (850lb)
Выбор АД2 (850lh)
Режин HAK (6501b)
(ЗОООЬ)
(0008h)
Подача питания на АЦ0 (Olh)
Подача питана* на АД0 (OOOlh)
Подача питания на ДД0 (0000h)
Подача питания на ЛД2 (ООООЬ)
Подача питания на AR2 (01Ь)
По*ач* питан«я ка АД2 (OlOlh)
Подача питание на AR0 (OlOOh)
Пооачл питания на АД2 (0000b)
директорше D: ч11£\£хе\Р«длъта*и
частило разворота (0007Ь)
яы ССО (1 - программный разворот; 2 -
(00c2h)
(00c2h)
(3£5fh)
Запрет поворота СБ (4000h)
Признак запрета поворота СБ (5488Ь)
И f Запрет поворота СБ (4000Ь)
(0008h)
(0008h)
(7fSfh)
в АД0 (0404h)
в AR2 <0404h)
в 4Д0 (05h)
в ДД0 (0004h)
в АДО (Olh)
if
. .15101 .SINSsst
о гШТгГК.го врепя oese?oi £
Параметра движения КА вокруг центра касс
ж * 39.1 гр В»скамив - -20.3 гр Крен - -66 S г*
ые скорости -4L000CQ1 0.000002 С.ОСОООО вр/с
. -0 000319 -0.000143 -0.000328 Н«*
Работа ДС; ОООООООООООООООО Работа ДК: ОООООООС
Сигнал! ка КУДН1 -.0 003 -0 002 -0 001 -0 002
Сигналы На КУДН2: О 002 0.002 0 000 0 002
Обороты КУДК1- -413.8 -26Э 8 -57 5 -418 8 об/к
Обороты К9ДМ2 396.3 112 S 0 0 207.5 оБ/к
Ш СОСБ 27 I 332,9 гр (Ьибка СБ; 5,9 5 9
Рисунок 3.1.4. Протокол имитационно-моделирующего стенда КА «СПЕКТР-Р»
Результаты моделирования могут быть автоматически обработаны. По результа¬
там обработки протокола может быть сформирована временная диаграмма полета
(рисунок 3.1.5).
ГиТ
«тр^УДМ Р«ет*.(СУДМ
ОГ-фДО 0$.ЗР:07 ■
II IMI ill if llll I
Рюср.кУДМ
\\ II 1.1 II IIIIII II : II II II I
РетТО.кУДМ
ОР.ЗЛОО
АДС^ДО АдЩщ> ЛД2 «Жд! АД®Д1 АД^)1 Адо! I
И {
— ПЗТ&1С
i TMfc*: . : : 1 ' 1 Т ”Т ^ :
Й2
I ■ I
1 1 * Т
f 0
0
г I
г 1 , 1 ‘
1 м;
Рисунок 3.1.5. Временная диаграмма полета КА «СПЕКТР-Р»
350
3-1
Особенностью управления КА являются высокая автономность и широкие воз¬
можности командно-программного метода управления.
Задача управления полетом реализуется средствами автономного режима функци¬
онирования КА, который предусматривает управление бортовыми системами в тече¬
ние заданного времени средствами БКУ. Решение задач баллистико-навигационного
обеспечения и планирование работы КА в целях проведения научных наблюдений
осуществляется в НКУ.
Для обеспечения высокой надежности управления и передачи радиокоманд на
КА разработаны специальные средства управления, средства проверки исполнения
и подтверждения передачи команд. Средства реализации сеанса связи поддерживают
передачу радиокоманд в автоматическом и ручном режиме, позволяют наглядно ото¬
бражать квитанции переданных команд и МЦИ. Средства анализа ТМИ позволяют
контролировать прием радиокоманд БКУ КА и видеть их исполнение.
3.1.3. Баллистико-навигационное обеспечение полета
Баллистико-навигационное обеспечение (БНО) полета КА «СПЕКТР-Р» решает
следующие задачи:
- определение параметров движения КА (в целях обеспечения управления КА и
для привязки научных экспериментов);
- расчет целеуказаний для НСУ и для НСС;
- определение участков орбиты, на которых возможно проведение лазерной даль-
нометрии с учетом функциональных ограничений станций лазерной дально-
метрии;
- расчет параметров ориентации КА (с учетом функциональных ограничений на
ориентацию КА) для обеспечения научных наблюдений, для проведения лазер¬
ной дальнометрии и для обеспечения теплового режима КА;
- проверка возможности исполнения КА программы научных наблюдений;
- расчет справочной баллистической информации для планирования работ с КА
и управления КА (прогноз параметров орбиты КА, расчет интервалов тени, зон
радиовидимости и т.д.);
- подготовка баллистических данных для обеспечения работы бортового комплек¬
са управления для последующей передачи их на борт КА в составе массивов ко¬
мандно-программной информации.
Задачи БНО решаются баллистической группой в составе ГОГУ, состоящей из
сектора баллистического обеспечения в ЦУП НПО им. С.А. Лавочкина и баллистиче¬
ского центра в ИПМ им. М.В. Келдыша РАН.
В период подготовки к управлению полетом КА «СПЕКТР-Р» была принята кон¬
цепция максимальной автоматизации решения задач БНО. Подобный подход позво¬
лил уменьшить вероятность ошибок, допускаемых вследствие человеческого факто¬
ра, и увеличить производительность дежурного расчета БНО.
Заложенная с самого начала полета структура БНО показала свою работо¬
способность и адекватность поставленным задачам, обеспечила бесперебойное
управление аппаратом, несмотря на ряд технических и организационных проблем
этапа ЛКИ.
351
3-1
3.1.4. Информационное обеспечение наземного сегмента
Связующими техническими элементами наземного сегмента являются сети пе¬
редачи данных — проектная, специально спроектированная, и публичная, а также
связанные с ними технологии. При этом на пересечении проектной сети и объектов
наземного сегмента находятся элементы некоего унифицированного программного
обеспечения ЦУП-Л, которые имеют системообразующие свойства (рисунок 3.1.6).
МИР
радиотелескопы
институт Max-Planch
J
коррелятор DiFX
-
публичная сеть
АКЦ/ИКИ
(бррелятор АКЦ
Уссурийск МеОз
НС-3.7Л
станции НКУ
_ ПО ЦУП-Л _
ЦОНИ
ПО ЦУП-Л 'Ч
„г X
НСС
баллистический центр
GreenBank ПРАО
ИПМ РАН
\
ПО ЦУП-Л
-1
1
У ПО ЦУП-Л
ЦУП
НПО-Л
сущности
наземного
сегмента:
•прием
•планирование
•обработка
•сервис
• взаимодействие
•архивирование
•распространение
• систематизация
демонстрация
Рисунок 3.1.6. Взаимодействие элементов наземного сегмента
Центром принятия технологических решений, а также местом сбора, обработки
и хранения телеметрической информации с борта КА является Центр управления
полетом КА «СПЕКТР-Р» (ЦУП-СР) в НПО им. С.А. Лавочкина {Казакевич Ю.В.,
2014).
За скобки показанной на рисунке 3.1.6 схемы вынесены частные случаи подключе¬
ния удаленных исследователей, тестовые технологии совместной передачи по назем¬
ным каналам связи научной и технологической информации без разделения (вариант
использования станции в США). Станции НСС могут иметь также самостоятельный
выход в публичные сети для приема информации о планировании, а также для вы¬
дачи полученной с КА научной информации в ЦПНЭ/ЦОНИ. Шлюзование между
публичной и проектной сетью производится на средствах, подключенных напрямую
к крупному узлу обмена трафиком MSK-IX, чему способствует удачное географиче¬
ское расположение ЦОНИ и ЦПНЭ.
Гибкое использование специальных и публичных сетей предусматривает наличие
базовых механизмов разграничения доступа и защиты информации, а также механиз-
352
3-1
мов обеспечения необходимого качества сетевых сервисов (QoS). Проект не имеет пря¬
мой прозрачной ip-маршрутизации между сетями для всех абонентов, такая схема (до¬
ступ к ресурсам сети проекта из публичных сетей) используется в качестве резервной,
для выполнения экстренных операций или для использования возможностей систем ip-
телефонии и видеоконференцсвязи ЦУП-Л. Штатной схемой информационного обме¬
на является доступ на прикладном уровне к специальным вынесенным в ЦОНИ серве¬
рам приложений ЦУП, а также однонаправленный обмен типизированными формами.
Использование «облачных» технологий в проектной сети позволяет организовать
доступ к информации за счет расширения границ «облака» по общим инфраструктур¬
ным правилам, не прибегая к модификациям ПО и не согласуя какие-либо отдельные
протоколы взаимодействия между организациями. Наличие такой среды также позво¬
ляет повысить эффективность от использования в рамках наземного сегмента систем
ip-телефонии с номерным планом ЦУП-Л.
Научная информация, полученная с борта КА наземными станциями слежения
в ходе сеансов наблюдения, имеет автономную временную привязку и не требует ре¬
жима реального масштаба времени при передаче в ЦПНЭ для корреляционной об¬
работки. При этом технологическая информация, которая участвует при принятии ре¬
шения по управлению КА, т.е. информационно формирует так называемый «контур
управления», должна быть передана и доступна для автоматизированной обработки
и анализа как можно быстрее, в квазиреальном времени.
Элементы ПО ЦУП-Л на станциях НСС и НКУ — это специальные абонентские
окончания, предусматривающие выполнение станцией типовых сервисных функций,
как правило, в автоматическом режиме.
В составе пункта НКУ «Медвежьи Озера» используется станция типа «Кобальт-Р»
ОКБ МЭИ, разработанная непосредственно для проекта «СПЕКТР-Р» и изначаль¬
но имеющая в своем составе необходимые для работы компоненты ПО ЦУП UNIX-
системы. На пункте «Уссурийск» используется типовая станция семейства «Клен»
разработки ОАО «РКС», которая реализует свой собственный, менее технологичный,
набор обменных функций и ПО ЦУП для которой функционирует на отдельной, до¬
полнительной системе. Кроме этого, в качестве НСС используется «Наземная стан¬
ция приема и обработки телеметрической информации» НС-3.7Л, входящая в состав
ЦУП-Л и расположенная непосредственно на территории НПОЛ.
При выборе унифицированного протокола обмена производился анализ име¬
ющихся отечественных решений (в том числе реализованных в тех же системах
«Клен», как наиболее распространенных), а также зарубежных протоколов семейства
CCSDS SLE, для которых в НПОЛ также имеется собственная реализация, аттесто¬
ванная ЕКА.
Для обеспечения информационного взаимодействия с наземными станциями сле¬
жения на них реализованы высокотехнологичные решения, осуществляющие в ав¬
томатическом режиме набор информационных и сервисных возможностей станций
НСС и включающие в себя:
- средства приема, декодирования и разделения потоков технологической и науч¬
ной информации из радиолинии ВИРК;
- средства фильтрации и маршрутизации трафика, организации необходимых тун¬
нельных интерфейсов, шифрования данных;
- средства систематизации и локального архивирования данных ТМ-сеансов;
- подсистемы передачи данных в потоковом виде по ip-протоколам ЦУП;
353
3-1
- системы обеспечения сервисных функций — организации прогонов, диагности¬
ки НШС, состояния и статистики сеанса;
- средства удаленного доступа к функциям с использованием web-интерфейса.
На рисунке 3.1.7 показана стойка с оборудованием приема и декодирования стан¬
ции GreenBank. Два нижних 1 U-модуля — аппаратура системы «Реоп», на которой
функционирует соответствующее ПО.
Рисунок 3.1.7. Аппаратура проекта «РАДИОАСТРОН» станции GreenBank
354
3-1
Использование в проекте баллистического центра производится согласно тради¬
ционно сложившейся технологии. Предполагается, что все баллистические оценки и
расчеты, необходимые для поддержания оперативности контура управления, произ¬
водятся службой баллистико-навигационного обеспечения, находящейся непосред¬
ственно в ЦУП. Поэтому обмен данными с БЦ производится файл-ориентированными
формами обмена пониженной степени оперативности, и вынос каких-либо компонен¬
тов программного обеспечения ЦУП в БЦ не предусматривается. Такие формы обра¬
батываются и отображаются в соответствующие записи БД ЦУП-СР.
Важной точкой размещения ПО ЦУП является ЦОНИ ИКИ/ЦПНЭ АКЦ. Специ¬
ально установленный на территории научных организаций сервер приложений по¬
зволяет в комфортном режиме производить анализ и оценку состояния целевой аппа¬
ратуры. Сервер включен в вычислительное «облако» ЦУП-СР и имеет доступ ко всей
необходимой информации. Использование сервера осуществляется с применением
протокола XDMCP с рабочих мест научных групп в АКЦ ФИ АН и в ИКИ РАН. На
сервере функционирует часть типового программного обеспечения ЦУП, связанная
с представлением результатов обработки ТМИ (СПО-О). На рисунке 3.1.8 показана
работа такого клиентского компонента СПО-О (система «Цитрус») на примере отобра¬
жения формуляра температур на элементах КРТ. На рисунке можно также видеть под¬
светку вышедших за некоторый заданный диапазон температур тех или иных участков.
3»про |
Настройка от ораж ни»
|исто и» Формат датыдар * ни 3
Запрос к ТМИ серверу
[ЗГкрпсотг jy——
41 кп СОСОТР1
«~ТСПй£(СОТР)ФГ
« ТСП А6КОТР) ФО
«scale ТСП АБКГОТР) ФГ
43_nKKfHCOtP) ФО
43 ФК ФИСОТЙ ФГ
44-1ЛУ|СОТР)_ФГ
44-1JMC0TP) ФО
44-2_ДУ(С0ТМ ФО
44 Э ДУ1С0ТР» ФО
45-1 крпсотр! ФО
44.5 КЙТК-ПТ» ’сап
впввопан
4«ГС0Т! ) ФГ '
145 ТЭМХJefiCOTP) ФО
|47_KHArfOTW_®0
Fcc?p
Г Жи»ойр- ЖИ.
С-4НШ |1S 10 13 <
Z1
начало Г )
~ЗгГ'
J
«на. Г |
а г г -
и- J
Врем* Г СЕВ
г ешв
Источник,
Р Уссур й« Р М«0» Р МТС
р прао реагг
Р жим ТМС!
р НП р вп ЛСЗУ Р ВО ЛДЗУ
р епкезу Р ап урс р го кезу
- («отрастание" ил
Рисунок 3.1.8. Формуляры отображения результатов обработки ТМИ
Для работы специалистов группы анализа в ЦУП-СР комплекс программ СПО-О
реализован в полном объеме: общее количество имеющихся в ЦУП телеметрических
формуляров составляет около 500, в них используются результаты обработки более
чем 3000 ТМ-параметров с борта КА. Часть формуляров отображают так называемые
«вторичные параметры» или «обобщенные суждения», что является мощным инстру¬
ментом интегральной экспресс-оценки состояния КА.
355
3-1
При этом сам процесс выделения и обработки ТМ-параметров происходит в ре¬
альном масштабе времени на специальных отдельных серверах(система «Арника»).
Серверы обработки ТМИ автоматически готовят также специальные «срезы» инфор¬
мации, готовые к оперативной выдаче в сторонние организации, прежде всего на
комплексный стенд разработчика бортового комплекса управления (БКУ) - МОКБ
«Марс».
Серверы приложений ЦУП-CP имеют также возможность запуска остальных на¬
боров ПО, выполняющих функции планирования и реализации сеансов связи, а так¬
же множество сервисных функций контроля и диагностики, сбора и отображения
статистической информации, реализованных с помощью web-технологий (пример на
рисунке 3.1.9).
Фильтр 1
Интервал поиска
Показывать режимы
©
2013-09-14 06:45:20
Все режимы
- 2013-10-14 06:45:20
Сеансы [Дежурных режимов: 97 Научных наблюдений:96]
' -у»** .чб*1'9 -А»'5' vv'3 а**'1 .а'*3* дв41 «rttf»39 л***' л/л!* ,.(S4rt
*** *0*' Ъ** *** -£>** Я*’* Я* * «О'*
тз^шгм xonw<24e«*45 гмдегпмв юзтппль гздмо*<И9М$ юз т от им 2913*1010 гаде гязюм
Тип сеансе в время начала сеанса
Дежурный режим 2013-09-14 06:45
Научные наблюдения 2013-09-14 06:50 2013-09-14 07:45 3267
Дежурный режим 2013-09-14 07:45 2013-09-14 08:50 3923
Научные наблюдения 2013-09-14 08:50 2013-09-14 09:45 3277
Дежурный режим 2013-09-14 09:45 2013-09-14 10:50 ______ 3910
Научные наблюдения .2013-09-14 10:50 2013-09-1411:45 3289
Рисунок 3.1.9. Статистика СОТР КА (web-версия)
Большая часть комплекса ПО является унифицированной для различных ЦУП
разработки НПО им. С.А. Лавочкина и выполнена в соответствии со специальным
стандартом предприятия, что обеспечивает его высокие эксплуатационные и техно¬
логические свойства.
Стоящий несколько в стороне от систем темповой обработки информации ком¬
плекс программ планирования (использовался также на этапах стендовой отработки
КА) включает в себя:
- редактор составления программы сеанса связи (рисунок 3.1.10);
- редактор составления ПЗ;
- редактор кодовых команд;
- редактор команд управления с параметрами;
- редактор массивов цифровой информации;
- генератор МКПИ;
- модуль формирования заявок на функционирование КА.
Каждый редактор обладает графическим интерфейсом и мощными средствами
редактирования с контролем корректности ввода информации и защитой от ошибок,
вносимых оператором. На рисунке 3.1.10 приведено окно редактора полетного зада¬
ния системы управления движением (ПЗ СУД).
356
3-1
Выбор | Структура | Комекгарий Параметры J
“Общие параметры ИН0-3
Г” Ограничение угла У-Солмце
Г” Призн.смены зад кватерниона реж Штат Ориенг
Массив элементов Фиксированного кватерниона
Г Запрет поворота СБ
qzpz[0]=
1+0.000000000000
Г Фиксир положение СБ
Г* Разреш, разгрузки КУДМ с пом ДС
qzpz[1J=
1+0.000000000000
[Базовая СК: ИСК ▼[
qzpz[2)=
1+0.000000000000
Г Сеанс работы с АД
Г" Режим АКР
qzp2f3]=
1+0000000000000
Г Режим АКД
Г Режим АКП
Г” Режим АКН Г* Режим НАК
Г" Выбор АДО
Г~ Выбор АД1
Г Выбор АД2
Заданное значение угла поворота СОСБ
|000 00000 [градусов]
Рисунок 3.1.10. Редактор ПЗ СУД КА «СПЕКТР-Р»
Отдельной группой программного обеспечения является ПО наглядного отобра¬
жения. Такое ПО включает в себя так называемый «главный формуляр» и средства
3D-отображения на всех этапах полета КА, начиная с этапа выведения. Данные систе¬
мы выполнены в едином проектном ключе и допускают различные варианты исполь¬
зования, начиная от презентационных сборок, холл-комплектов, заканчивая сложны¬
ми редакциями с автоматическими сменами формуляров отображения. Программы
не являются «развлекательной мультипликацией», а оперируют большим набором
данных, полученных в реальном масштабе времени с серверов обработки ТМИ, и на¬
глядно в автоматическом режиме отображают те или иные наборы, сопровождая их
трехмерной сценой КА, освещенной Солнцем (рисунок 3.1.11).
ЦУП, как основной элемент управления, продолжает работу по повышению эф¬
фективности и надежности работы комплекса: оптимизируются режимы работы КА,
идет модернизация программного и аппаратного обеспечения ЦУП.
К моменту начала создания ЦУП-CP в проекте «РАДИОАСТРОН» ЦУП НПО
им. С.А. Лавочкина, на базе которого шла разработка, уже обладал серьезной ин¬
фраструктурой, развитыми средствами ПО и актуальным опытом работы с коопера¬
цией, что позволило в кратчайшие сроки после начала финансирования обеспечить
подготовку ЦУП-CP уже к этапу комплексных испытаний КА в НПОЛ. Это позво¬
лило подойти к полету с отлаженным программным обеспечением, отработанной
эксплуатационной документацией, подготовленной командой специалистов. Дей¬
ствующая нормативная документация не требовала передачи управления в эксплу¬
атирующие организации, что еще более сокращало сроки подготовки НКУ и про¬
ведения ЛИ.
357
3-1
6
«TP НК С0ТР-ДТНИ)в401Т2и<
нм мк«ем>* гт ми.
ЭНЕРГОПОТРЕБЛЕНИЕ БА
РЕПИН КАС 04
НАПРЖЕЖЕ НАГРУЗКИ 27 5
ТОК НАГРУЗКИ 23,9
ТЭН 15 4
РЫИН РАБОТЫ АБ
НАПРЯКЕНИЕ АБ 43,8
ТОК ЗАР5ДА АБ 0,8
ТОК РАЗРЯДА АБ 0,0
О РАЗР АБ 61,4
. РЕЛИН РАБОТЫ СБ
ВБФ1-2 Включены секцк-
НБФ 46 4
ТБФ 26,3
В6ФЗ Отключена
АВТОМАТИКА КАС
Отключено
WA
Усс-к НП8 ПФК-8 14 51 18
МеОз нет данных
НТС нет данных
Рисунок 3.1.11. Автоматические наглядные формуляры
Рисунок 3.1.12. Специалисты ЦУП-Л за работой
358
3-1
Управление КА из ЦУП-Л осуществляется минимальным составом операторов
дежурных смен. Размещение ЦУП-СР в НПОЛ позволяет при необходимости допол¬
нительно оперативно привлекать требуемых специалистов для детального анализа
функционирования бортовых систем КА и космической платформы «НАВИГАТОР»,
а также для парирования непредусмотренных нештатных ситуаций. Участие специ¬
алистов НПОЛ в управлении полетом КА повышает надежность и оперативность
управления, а также позволяет в ходе полета продолжать оптимизацию типовых тех¬
нологических операций с учетом накопленного опыта (рисунок 3.1.12).
Фактически накопленный положительный опыт организации управления миссией
«Радиоастрон», примененные информационные технологии дали начало новым от¬
ношениям в совместной работе таких предприятий, как НПО им. С.А. Лавочкина,
ИПМ РАН, АКЦ ФИАН, ИКИ РАН. Новые отношения дали новые возможности, со¬
хранить и использовать их - в наших общих интересах.
Список литературы /
Артюхов М.И., Воробьев АЗ., Калашников А.И., Ширшаков А.Е. Особенности
управления космическим аппаратом «СПЕКТР-Р» // Вестник НПО им. С.А. Лавоч¬
кина, 2014. №3. С. 77-84.
Казакевич Ю.В., Зефиров И.В. Центр управления полетами НПО имени С.А. Ла¬
вочкина при работе с межорбитальным космическим буксиром «Фрегат» // Вестник
НПО им. С.А. Лавочкина, 2014. № 1. С. 64-70.
Комовкин С.В., Мельников И.Н., Молчанов КВ., Калашников А.И. Наземный сег¬
мент управления полетом КА «СПЕКТР-Р» // Вестник НПО им. С.А. Лавочкина,
2014. №3. С. 72-76.
А.Е. Ширшаков, М.И. Артюхов, Ю.В. Казакевич, И.В. Зефиров,
А.З. Воробьев, С.В. Комовкин, Е.Н. Филиппова
НПО им. С.А. Лавочкина
ISBN 978-5-905646-09-6
85905
646096
научное издание
МНОГОФУНКЦИОНАЛЬНАЯ
КОСМИЧЕСКАЯ ПЛАТФОРМА
«НАВИГАТОР»
подписано в печать 03.04.17
бумага мелованная
формат 70x100 1/16
печать офсетная
уел. печ. л. 22,5
тираж 650 экз.
издатель - ФГУП «НПО им. С.А. Лавочкина»
отпечатано с готового оригинал-макета в типографии ООО «Трек принт»
Врачебный пр., д. 10, пом. III, ком. 1, г. Москва, 125367