







































































































































































































































































































































































































































































































































Author: Ефанов В.В. Личхадзе К.М.
Tags: астрономия астрофизика исследование космического пространства геодезия междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) проектирование зданий космическая техника издательство москва
ISBN: 978-5-7035-2299-8
Year: 2012



РОСКОСМОС
ФЕДЕРАЛЬНОЕ
КОСМИЧЕСКОЕ
АГЕНТСТВО
НАУЧНО-ПРОИЗВОДСТВЕННОЕ
ОБЪЕДИНЕНИЕ
имени С А. ЛАВОЧКИНА
OPOffflPOMHHE
МШ1ИЧШ
ККМИЧКШ
тип
ДЛЯ ФУНДАМЕНТАЛЬНЫХ
НАУЧНЫХ
ИССЛЕДОВАНИЙ
ЕФАНОВ
Владики р Бледный рович
доктор технических наук профессор
автор-составитель издания
В НПО им. С.А. Лавочкина
более 40 лет. Участвовал в разработке
и реализации проектов планетных
и астрофизических исследовании
и прикладного назначения,
создании и применении
перспективных средств в едения
ПИЧХАДЗЕ
Константин Михайлович
доктор технических наук, профессор
руководитель проекта издания
В НПО им. С.А. Лавочкина - более 40 лет.
Участвовал в разработке и реализации
проектов планетных и астрофизических
исследовании и прикладного назначения
создании и применении перспективных
средств выведения
ШЕВАЛЕВ
Игорь Львович
советник Российской академии
космонавтики им. КЗ. Циолковского
автор-составитель издания
В НПО им. С.А. Лавочкина - более 40 лет
Участвовал в разработке и реализации
проектов планетных и астрофизических
исследовании и прикладного назначения
создании и применении перспективных
средств выведения
ВОРОНЦОВ
Виктор Александрович
доктор технических на к
Специалист в области проектирования
автоматических космических аппаратов
для контактных исследовании
планет и малых тел Солнечной системы
Работая в НПОЛ более 35 лет,
участвовал в разработке и реализации
исследовательских миссии АКА
к В. »»ере Марсу, Фобосу.
ЕЖОВ
Антон Сергеевич
Специалист в области космической
баллистики и небесной механики
Работая в НПОЛ, участвовал в разработке
проектов астрофизических исследовании
в обеспечении применения перспективных
средств выведения
ЕРМАКОВ
Владимир Юрьевич
кандидат технических наук
Специалист в области проектирования
и испытания космической техники.
Работая в НПОЛ около 25 лет,
участвовал в разработке и реализации
проектов планетных и астрофизических
исследовании прикладного значения
создании перспективных
средств выведения
ЗАНИН
Кирилл Анатольевич
кандидат технических наук
Специалист в области
системного анализа и управления
Работая в НПОЛ,
участвовал в разработке
и реализации проектов
прикладного значения
МОИШЕЕВ
Ал. И с андр Ал*-мсандроиич
кандидат технических наук
Специалист в области механических
конструкции космических аппаратов
Работая в космической отрасли
более 43 лет (в НПОЛ - 41 год),
участвовал в разработке и реализации
проектов планетных и астрофизических
исследований, прикладного значения,
создании перспективных
средств выведения
hl
if
НАЗАРОВ
Анатолий Егорович
доктор технических наук
Специалист в области создания
баллистико-навигационного обеспечения
космических систем.
Работая в НПОЛ более 35 лет, участвовал
в разра-ботке и реализации проектов
прикладного значения
*3
СИМОНОВ
Александр Владимирович
Специалист в области
космической баллистики
и небесной механики.
Работая в НПОЛ, участвовал
в разработке и реализации
проектов планетных
и астрофизических исследовании
в обеспечении применения
перспективных средств выведения
ТУЧИН
Андрей Георгиевич
доктор физико-математических наук
Специалист в области разработки
баллистического обеспечения
околоземных пилотируемы
и беспилотных (научного и прикладного
назначения) полетов КА.
Работа в космической отрасли -
более 36 лет (ИПМ РАН им. М.В.Кел^ 1ша)
ТЕЛЕПНЕВ
Пётр Павлович
Специалист в области
проектирования и испытания
космической техники
Работая в НПОЛ около 25 лет
участвовал в разработке
и реализации проектов планетны-
и астрофизических исследовании
прикладного значения, создании
перспективных средств выведения
ФИНЧЕНКО
Валерий Семенович
доктор технических наук
Специалист в области аэрогазодинамики
и тепломассообмена.
Работая в космической отрасли
более 42 лет (в НПОЛ - более 30 лет)
участвовал в разработке и реализации
проектов планетных и астрофизических
исследовании, создании перспективных
средств выведения и средств теплозащиты
спускаемых аппаратов
ШЕЙХЕТ
Александр Израилевич
кандидат технических наук
Специалист в области создания
баллистического обеспечения
околоземных полетов АКА
научного назначения.
Работая в НПОЛ более 50 лет,
участвовал в разработке и реализа jph
проектов исследования Луны
и проведении исследовательских миссии
в области астрофизики
75-летию
НПО им. С.А. Лавочкина
посвящается
ПРОЕКТИРОВАНИЕ
АВГОМАШЧШ
КОСМИЧЕСКИХ
АППАРАТОВ
ДЛЯ ФУНДАМЕНТАЛЬНЫХ
НАУЧНЫХ
ИССЛЕДОВАНИЙ
под редакцией
д.т.н, профессора В.В.Ефанова,
д.т.н, профессора К.М.Пичхадзе
москва
2012
ББК 39.62
УДК 52.6.08.629.78
П79
П79 Проектирование автоматических космических аппаратов для фундаменталь-
ных научных исследований / Сост. В.В. Ефанов, И.Л. Шевалев; Под ред. В.В.
Ефанова, К.М. Пичхадзе: В 2-х т. Т. 1. — М.: Изд-во МАИ, 2012. — 526 с.: ил.
ISBN 978-5-7035-2299-8
ISBN 978-5-7035-2300-1(Т. 1)
В книге содержится описание методологии проектирования автоматических
КА для фундаментальных научных исследований, а также методы расчета от-
дельных служебных систем, в частности надувных космических конструкций,
оптико-электронных комплексов и др. Рассмотрены межпланетные перелеты,
специфические орбиты ИСЗ для астрономических и астрофизических исследо-
ваний.
Монография написана учеными НПО им. С.А. Лавочкина. Корректность
представленных материалов подтверждена практикой.
Для отечественных и зарубежных специалистов в области космических тех-
нологий.
Рецензенты'.
член-корреспондент РАН О.М. Алифанов',
доктор технических наук, профессор А.А. Любомудров
Научное издание в двух томах
Издатель
Составители
ФГУП «НПО им. С.А. Лавочкина» РОСКОСМОСА
В.В. Ефанов
И.Л. Шевалев
М.С. Винниченко
В.М. Давыдов
О. Г. Лаврова
Редактор М.С. Винниче
Художник В.М. Давыдов
Макет-верстка О. Г. Лаврова
Техническая поддержка А.В. Савченко
ISBN 978-5-7035-2299-8
ISBN 978-5-7035-2300-1(Т. 1)
© ФГУП «НПО им. С.А. Лавочкина», 2012
ПРОЕКТИРОВАНИЕ АВТОМАТИЧЕСКИХ
КОСМИЧЕСКИХ АППАРАТОВ
ДЛЯ ФУНДАМЕНТАЛЬНЫХ НАУЧНЫХ
ИССЛЕДОВАНИЙ
[В ДВУХ ТОМАХ]
ТОМ 1
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ .........................................7
Часть 1. МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ ПРОЕКТИРОВАНИЯ
АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ
ДЛЯ ФУНДАМЕНТАЛЬНЫХ НАУЧНЫХ ИССЛЕДОВАНИЙ.....................9
ESI Методологические основы формирования
схемных решений средств десантирования и дрейфа
в атмосферах планет и их спутников...................9
ED4 Методология создания прецизионных
конструкций космических аппаратов...................55
№ Решение задачи высокоточного удержания
геостационарного космического аппарата
в заданной точке «стояния»..........................90
IE! Методика проектирования траекторий
межпланетных космических аппаратов.................152
№1 Обеспечение управления полетом
при выполнении задач исследования Луны.............190
Часть 2. МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ ПРОЕКТИРОВАНИЯ
СЛУЖЕБНЫХ И ЦЕЛЕВЫХ СИСТЕМ АВТОМАТИЧЕСКИХ
КОСМИЧЕСКИХ АППАРАТОВ......................................297
KQI Методы проектирования оптико-электронных
комплексов космических аппаратов...................297
KW Проектирование устройств и систем разделения
космических аппаратов..............................372
RSJ Проектирование устройств гашения колебаний
конструкции космических аппаратов..................434
ИЕ! Основы проектирования надувных
космических конструкций............................466
5
6
ПРЕДИСЛОВИЕ
Отличительной особенностью нашего времени является существенное вли-
яние космонавтики на поступательное социально-экономическое развитие
стран мира, на получение новых знаний и др. Еще недавно только три стра-
ны (СССР, США, Франция) обладали полным набором космических техно-
логий: создание ракет-носителей, космических аппаратов и всей необходи-
мой наземной инфраструктуры, сейчас к ним присоединились Китай, Ин-
дия, Евросоюз; на подходе и ряд других стран. Многие страны имеют наци-
ональные космические агентства или аналогичные государственные струк-
туры. Обладание, в той или иной мере, космическими технологиями являет-
ся одним из важных критериев экономического и научного потенциала стра-
ны.
Весьма важную роль космонавтика играет в фундаментальных научных ис-
следованиях. Это — исследования планет и малых тел Солнечной системы,
Солнца и солнечно-земных связей, астрономия, астрофизика, физика кос-
мической плазмы и др. Эффективность проведения таких исследований тре-
бует установки на космический аппарат максимально возможного количества
научной аппаратуры, что осуществимо только при условии минимизации
массы конструкции и служебных систем.
В НПО им. С.А. Лавочкина накоплен значительный опыт создания авто-
матических космических аппаратов для фундаментальных научных исследо-
ваний. С 1965 года предприятие является головным в отрасли в этом направ-
лении. За этот период нами создано более 50 уникальных научных КА, обес-
печивших приоритет страны. Вот некоторые из них:
— мягкая посадка на Луну (КА «Луна-9»);
— доставка на Землю лунного грунта (КА «Луна-16»);
— доставка на Луну мобильной подвижной лаборатории «Луноход-1» (КА
«Луна-17»);
— мягкая посадка на Венеру и Марс (КА «Венера-7», «Марс-3»);
— доставка в атмосферу Венеры аэростатных станций и передача на Зем-
лю изображения ядра кометы Галлея (КА «Вега-1,-2») и др.
Значительный вклад в познание Вселенной внесли орбитальные астро-
номические и астрофизические обсерватории «Астрон», «Гранат», «Спектр-
Радиоастрон», а также КА «Фобос-Грунт».
В этой книге представлены методология и методы проектирования науч-
ных автоматических космических аппаратов, созданные учеными и инжене-
рами НПО им. С.А. Лавочкина и подтвержденные результатами летных ис-
пытаний.
Предполагается двухтомное издание книги. Первый том состоит из двух
частей: часть 1 «Методологические основы проектирования автоматических
космических аппаратов для фундаментальных научных исследований»; часть 2
7
«Методы проектирования служебных и целевых систем автоматических кос-
мических аппаратов». Второй том будет посвящен описанию методов расче-
та основных проектных характеристик служебных систем автоматических
космических аппаратов.
В работе над книгой принимали участие ученые и инженеры, создавшие
уникальные автоматические космические аппараты для фундаментальных
научных исследований. Знания и опыт этих людей бесценны для нового по-
коления специалистов по космической технике.
8
ЧАСТЬ 1
МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ
ПРОЕКТИРОВАНИЯ АВТОМАТИЧЕСКИХ
КОСМИЧЕСКИХ АППАРАТОВ
ДЛЯ ФУНДАМЕНТАЛЬНЫХ НАУЧНЫХ
ИССЛЕДОВАНИЙ
ESI МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ ФОРМИРОВАНИЯ СХЕМНЫХ
РЕШЕНИЙ СРЕДСТВ ДЕСАНТИРОВАНИЯ И ДРЕЙФА В АТМОСФЕРАХ
ПЛАНЕТ И ИХ СПУТНИКОВ
1.1.1. Введение
Большая роль в программе планетных исследований отводится контакт-
ным методам исследования атмосферы и поверхности с помощью различных
технических средств: десантных аппаратов, автономных станций, аэростат-
ных зондов, планетоходов и т.д. Методология формирования схемных реше-
ний для будущих экспедиций определяет как процесс проектирования средств
десантирования и дрейфа (особенно на первых этапах проработки), так и ре-
зультативность штатного функционирования.
Анализ опыта проектных разработок и реализации космических исследо-
ваний контактными методами, а именно десантными аппаратами и зонда-
ми, показывает, что в процессе их проектирования принципиально важное
значение имеет формирование схем спуска и функционирования аппаратов
в атмосфере.
Безусловная актуальность придается систематизации методов проектиро-
вания и разработке методик, способных повысить эффективность как при-
нимаемых решений, так и, в конечном счете, разрабатываемых средств.
Развитие ракетно-космической техники расширило пределы досягаемос-
ти космическими аппаратами объектов Солнечной системы и позволило осу-
ществить целый ряд уникальных межпланетных экспедиций, включая поле-
ты не только к нашим «ближайшим соседям» — планетам Земной группы,
но и к планетам-гигантам, к окраинам Солнечной системы. В процессе их
реализации получены результаты, имеющие большое значение для многих
фундаментальных и прикладных отраслей науки, а также накоплен огром-
ный опыт по реализации таких экспедиций [1—4].
Среди множества межпланетных полетов большой интерес представляют
полеты к Венере и Марсу отечественных межпланетных станций «Марс»,
«Венера», «Вега», утвердивших приоритет России в высокотехнологичных
отраслях науки и техники, обеспечивающих космические исследования. Кос-
мические аппараты доставляли научную аппаратуру непосредственно на пла-
неты, обеспечив исследователей достоверной и высокоточной информацией.
9
В процессе упомянутых космических полетов был решен ряд крупных на-
учных задач, включая:
• определение состава атмосферы;
• измерение температуры и давления атмосферы;
• получение панорамы поверхностей;
• проведение зондирования недр и др.
Решение каждой из этих задач связано с использованием специализиро-
ванной аппаратуры, работающей по дистанционному или контактному прин-
ципу. При дистанционных измерениях исследуется собственное или отражен-
ное излучение объектов. Оно может проводиться при больших расстояниях
до исследуемых объектов с пролетных космических аппаратов (КА) или ис-
кусственных спутников небесных тел. Обеспечивая охват значительных по раз-
меру областей пространства, дистанционные методы, особенно при больших
расстояниях до объекта, не во всех случаях способны обеспечить требуемую
точность измерений и достоверность исследований.
Более высокоточную и достоверную информацию способны дать контак-
тные измерения. Соответствующая аппаратура устанавливается на аппаратах,
двигающихся через исследуемую среду или совершающих посадку на иссле-
дуемый объект. Это обстоятельство является решающим для выбора схемно-
го решения КА и определяет наличие в его составе различных средств, та-
ких, как, десантные аппараты (ДА), зонды, посадочные модули и т.п., обес-
печивающих исследования контактными методами.
При разработке методологии формирования схемных решений средств де-
сантирования и дрейфа автоматических КА для исследования небесных тел
Солнечной системы, обладающих атмосферой, ставятся следующие основные
задачи:
• анализ опыта разработки схем спуска трех поколений ДА и эффективно-
сти применения систем аэродинамического торможения, парашютных си-
стем (ПС), систем активного торможения и дрейфа в атмосфере;
• выявление основных схемообразующих признаков, параметров, ограниче-
ний и наиболее существенных возмущений, влияющих на выбор техни-
ческих решений при формировании схем функционирования средств де-
сантирования и дрейфа;
• формирование обобщенной модели спуска в плотной и разряженной ат-
мосфере, ее декомпозиция и рациональное объединение частных систем с
учетом их взаимосвязи и особенностей проектирования в конструкторс-
ком бюро;
• разработка методик оценки проектных параметров средств десантирова-
ния и дрейфа и риска реализации операций по вводу их в действие с уче-
том неопределенности внешних условий и исходных данных;
• использование специально разработанных математических моделей, наи-
более полно отражающих реальные физические процессы, и математичес-
10
ких методов для оценки проектных параметров с учетом неопределенно-
сти исходных данных;
• исследование основных проектно-баллистических параметров систем тор-
можения и дрейфа с учетом возможных разбросов и возмущающих фак-
торов, сравнение модельных результатов с результатами штатной эксплу-
атации.
Наряду с проектированием систем спускаемого аппарата (СА) и зондов, в
частности систем торможения в атмосфере, осуществляется разработка схем
летных операций и траекторий движения в атмосфере. От того, насколько
удачно продумана и построена идеология осуществления всей последователь-
ности операций и перехода от одного этапа к другому, зависит вероятность
успешного проведения эксперимента и эффективность применения тех или
иных средств в целом.
Что касается экспедиций к Марсу и Венере, проектирование схем спуска
и дрейфа усложнялось полярно различными внешними условиями функци-
онирования, в частности сильно разряженной атмосферой у одной и чрезвы-
чайно плотной — у другой планеты. В то же время в процессе разработки этих
экспедиций удается найти ряд общих принципиальных решений, позволяю-
щих сформировать общую методику проектирования и оценки эффективно-
сти схем спуска и дрейфа в атмосферах с существенно различными характе-
ристиками.
Известно большое количество работ, посвященных специальным вопро-
сам проектирования ДА [5-10]: выбору траекторий спуска, тепловых режи-
мов, параметров отдельных систем, разработке алгоритмов управления. Од-
нако задача формирования схемных решений средств, обеспечивающих опе-
рации по вводу в действие аэростатных зондов (АЗ) в процессе спуска в ат-
мосфере, решалась впервые при создании КА «Вега-1», «Вега-2».
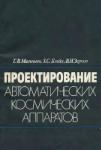
В 1996 году в России был запущен автоматический КА «Марс-96», в со-
став которого входили две малые автономные станции и два пенетратора, ко-
торые должны были обеспечить спуск в атмосфере с использованием пара-
шютной системы и надувного тормозного устройства (НТУ) (рис. 1.1.1,1.1.2).
КА не был переведен с орбиты Земли на орбиту перелета к Марсу, и десан-
тные аппараты не приступили к выполнению своей задачи. Однако был прой-
ден весь цикл наземных и летных испытаний, которые подтвердили работос-
пособность систем спуска, посадки и внедрения (пенетратора) в грунт. В 90-
е годы прошлого века и в начале наступившего тысячелетия разрабатывалось
несколько проектов, предусматривавших разворачивание на поверхности
Марса сети малых автономных станций: «MESUR», «MARSNET»,
«INTERMARS», «MARS-EXPRESS», «NETLANDER», «MICROMARS»,
«BEAGLE-2», «METLANDER».
В настоящее время рассматривается несколько вариантов использования
опыта разработки малой марсианской автономной станции в проекте «ЕХО-
11
Рис. 1.1.1. Схема спуска с надувным тормозным устройством
1 - переорпент ц. ОА
2 - отделе— МАС 1
V= 1Om.’C.6V«1.5%.60 = 1
3 - переориентация ОА. отдег.ение МАС 2
4 . увод ОА на лроможулхную траекторию
и 3-я чоррыщия ОА
aV<35m?c
5 • выход ОА на орбиту ИСМ
6 - bi еатмосфер <. yvarок
тра>ктогии МАС
Начало и^олмно* НАУ
Скорость 31 .52 мЛ
Скоростной напор 5 5.. 7.4 ин*’
Высота 1.3. 14 т»
Перецепка ПС на фалс вяз*.
Скорость 51. 89мЛ
Скоростной ныпср 13.6 .. 20.8 TVm’
Высота 17 14 в км
Отделение АЭ
Скоростной напор 18 3 312 Нел
Высота 1.5.. 14 5 тм
Вход в атмосферу
Скорость 55‘ 5825 ы>с
Угол а«ода -И 6* -216’
Упчвн -.юста «кода 133 км
а<ТОГ
I , ВмаПС
I/ Число МОЯ ..1.5
Скоростной магор154 460 мы*
Вмсотэ2.Т 159см
Ра*р«фсека ГС
Число МО 25 C6J
Касаний поверхности, отделений ПС
Время 163 618с
Скорость 19.. 26 м/с
Рис. 1.1.2. Схема спуска марсианской малой станции
MARS» Программы «AURORA» Европейского космического агентства. Пи-
онерские разработки и новая технология, полученная при создании НТУ пе-
нетратора, сегодня находят применение и развитие, в частности, в коммер-
12
ческом проекте «METLANDER», разрабатываемом совместно с финским ме-
теорологическим институтом.
В 1997 году НАСА был успешно реализован проект «PATHAINDER», под-
твердивший правильность технических идей и проектных решений в систе-
ме спуска и посадки, аналогичных тем, что были использованы при проек-
тировании российских малых станций проекта «Марс-96». Вновь обсуждает-
ся проект по доставке грунта с Марса. И сам проект, и проблемы, связанные
с проектированием схемы спуска и посадки, при этом на порядок сложнее.
Появляется необходимость использования средств активного торможения и
рассмотрения связанных с этим проблем, например, тех, что возникали в
процессе проектирования тяжелых ДА «MSSR» и «5М» в 70-е годы, в проек-
те «Викинг», успешно реализованном в 1975 году. В 1996—1997 гг. рабочими
группами РКА, НАСА, КН ЕС рассматривалась возможность осуществления
проекта «MARS-TOGETHER» («Вместе к Марсу»). Участие трех стран в до-
рогостоящем проекте подразумевало и разделение затрат, и разделение ответ-
ственности за различные части проекта. Последним выдающимся достиже-
нием российских ученых и инженеров в исследовании планеты Венера стало
осуществление проекта «Вега» в 1985 году. Впервые был предложен и исполь-
зован метод аэростатного зондирования атмосферы Венера. Был разработан
способ ввода АЗ непосредственно в процессе спуска в атмосфере на ПС. Раз-
работанная методика проектирования схемы спуска ДА и ввода в действие
аэростата позволила в дальнейшем рассматривать возможность исследования
атмосферы несколькими АЗ: проекты «Веста», «Тайфун» (для Земли).
Тщательный анализ проблемных проектных вопросов показал возможность
осуществления аналогичной схемы аэростатного эксперимента в трудных
марсианских условиях — проект «Марс-98». Система аэродинамического тор-
можения ДА прошла летные испытания. Модель плавающей аэростатной стан-
ции (ПАС) в свободном полете в течение восьми суток преодолела расстоя-
ние от г. Эр—Сюр—Адур (Франция) до г. Бельведер (США).
Блестяще осуществлен в 2006 году проект «CASSINI» с доставкой в атмос-
феру Титана ДА «HUYGENS». Рассматривается вопрос осуществления по-
лета к спутникам Юпитера: Ио и Европа.
Планируются вновь экспедиции к Венере: европейский венерианский зонд
«EVE» и российская долгоживущая станция «Венера-Д», в состав которых
будут входить ДА и несколько дрейфующих зондов.
1.1.2. Формирование схемных решений экспедиций для исследования
небесных тел Солнечной системы с использованием средств
десантирования и дрейфа
Условия проведения исследований с помощью средств десантирования и
дрейфа в атмосфере в значительной мере определяются спецификой внешних
условий [11 — 12], в частности характеристик атмосфер небесных тел. Следу-
ет отметить, что эти исследования являлись одной из главных задач в про-
13
цессе реализации первых программ изучения ближайших к Земле планет:
Венеры и Марса, и продолжение таких исследований является неотъемлемой
частью современных программ освоения космического пространства. От того,
насколько хорошо известны условия функционирования, зависит и подход к
выбору технических средств исследований, и схемные решения этапов экс-
педиции.
В настоящее время известно восемь планет Солнечной системы, в поряд-
ке удаленности от Солнца: Меркурий, Венера, Земля, Марс, Юпитер, Сатурн,
Уран, Нептун. У всех планет, кроме Меркурия, есть атмосферы. У всех пла-
нет, кроме Меркурия и Венеры, есть спутники. Только у одного, самого круп-
ного спутника Сатурна — Титана есть достаточно плотная атмосфера.
Начало исследованию планет Солнечной системы с помощью прямых кон-
тактных методов посредством СА было положено всего лишь 40 лет назад [4].
Впервые СА автоматической спускаемой станции «Венера-4» в 1967 году про-
вел непосредственные физико-химические исследования атмосферы плане-
ты в диапазоне температур от 25 до 270 °C и давления от 0,5 до 18 атм. СА
создавался на некоторую среднюю модель атмосферы и выдерживал давле-
ние около 20 атм. Парашют площадью 55 м2 обеспечивал спуск в атмосфере
в течение ~ 95 минут.
Площадь парашюта СА «Венера-5, -6» была уменьшена до 12 м2 и, таким
образом, было уменьшено время спуска в атмосфере. Измерениями, прове-
денными этими СА, было установлено, что давление у поверхности планеты
составляет 100 атм, а температура — около 500 °C. С учетом полученных дан-
ных были спроектированы схемы спуска следующих аппаратов: «Венера-7»,
1970 г. и «Венера-8», 1972 г. У этих СА площадь парашюта была уже 2,4 м2.
Опыт, приобретенный при создании первых венерианских аппаратов, по-
лученные данные о параметрах атмосферы и поверхности послужили осно-
вой при планировании более сложных экспериментов и разработки станций
нового поколения.
Схемы спуска в атмосфере Венеры аппаратов второго поколения становят-
ся все сложнее. ПС СА «Венера-9, -10» состояла из вытяжного парашюта, па-
рашюта увода верхней полусферы, тормозного площадью 24 м2 и основного
трехкупольного, общей площадью 180 м2. Основной парашют обеспечивал
нахождение в облачном слое атмосферы планеты в течение 20 минут, после
чего он был отделен, и дальнейшее снижение происходило на жестких аэро-
динамических тормозных устройствах, обеспечивающих скорость у поверх-
ности 7—8 м/с.
Для СА «Венера-11» и «Венера-12» была принята схема спуска и посадки,
в основном аналогичная схеме спуска и посадки СА «Венера-9» и «Венера-
10». Основной трехкупольной парашют был исключен из состава ПС, и за счет
этого общее время спуска в атмосфере уменьшилось на 15 минут. Отсек на-
учной аппаратуры у этих аппаратов и следующих «Венера-13» и «Венера-14»
был рассчитан на работу до самой поверхности и на поверхности. Последние
14
аппараты обеспечили уже не только уточнение условий в атмосфере и на по-
верхности, но и позволили проанализировать характеристики грунта с помо-
щью грунтозаборного устройства, а также получить цветные панорамные изоб-
ражения поверхности.
Проектирование схемы спуска венерианских ДА «Вега-1» и «Вега-2», до-
ставленных на планету в 1985 году, вобрало в себя весь накопленный в тече-
ние предыдущих восемнадцати лет опыт. Результаты исследований стали как
бы кульминацией проведения проектных разработок всех этих лет. Схема
спуска является одновременно и самой сложной из осуществленных, и са-
мой методически и экспериментально отработанной, и самой оригинальной.
Кроме того, она послужила базовой схемой для формирования будущих пер-
спективных экспедиций.
Рассмотрим основные принципы и решения, заложенные в сформирован-
ную схему.
Как видно из краткого обзора предыдущих экспедиций, происходило как
бы раздвоение идеологии осуществления научных исследований. С одной сто-
роны, необходимо было «по пути», в процессе спуска в атмосфере, провести
исследования ее характеристик. И это выдвигало требование увеличения вре-
мени функционирования в атмосфере, что привело к увеличению площади
основной ПС до 180 м2. С другой стороны, необходимо было сократить вре-
мя нахождения в плотных, горячих и химически агрессивных слоях атмос-
феры, быстрее достигнуть поверхности и максимально долго проводить на-
учные исследования на поверхности. Это обстоятельство приводило к умень-
шению площади парашюта (сначала 2,4 м2 у «Венеры-7, -8», потом 24 м2 —
у последних аппаратов «Венера») и использованию на конечной стадии дви-
жения в атмосфере жесткого аэродинамического тормозного устройства —
тормозного щитка диаметром 2 м (3,14 м2).
Объединить эти два противоречивых требования позволило разделение са-
мой схемы функционирования на две, а именно на схему спуска и посадки
на поверхность планеты посадочного аппарата (ПА) и на схему ввода в дей-
ствие плавающей аэростатной станции и дрейфа ее в облачном слое атмос-
феры Венеры.
Этот принцип разделения функций составных частей СА использовался в
дальнейшем при проектировании схем спуска в проектах «Веста», «Марс-94»
и «Марс-96».
Отсюда вытекают два последствия: схема спуска СА в атмосфере в целом
становится сложнее, а его составных частей — проще.
Появляются новые возможности:
1) унификации аппарата;
2) выполнения новых научных задач;
3) создания новых технических средств исследования;
4) увеличения количества средств исследования;
5) расширения рабочей зоны проведения эксперимента.
15
Схема спуска ПА «Вега -1, -2» в основном повторяет предыдущие, а схе-
ма ввода плавающей аэростатной станции (ПАС) формируется заново. При
этом задача эффективного торможения ДА до развертывания аэростатной
станции остается, а дальнейшее ее функционирование уже не связывается с
ограничениями по скорости снижения. Однако резко возрастают требования
к обеспечению необходимых условий ввода ПАС в области высоты облачно-
го слоя атмосферы планеты, в которой предусматривается проведение науч-
ных экспериментов. Это объясняется и скоротечностью процесса, и ограни-
чением времени перехода от участка торможения к участку наполнения обо-
лочки аэростата, и риском, связанным с возможной просадкой и разрушени-
ем оболочки от избыточного давления.
В развитой идее использования ПАС для исследования атмосферы плане-
ты, в условиях разряженной атмосферы Марса этот момент еще более обо-
стрится. Во-первых, наполнение оболочки должно происходить вблизи са-
мой поверхности планеты. И в этом случае две ветви схемы спуска как бы
сходятся к одной. Вводится новый элемент системы торможения — удлини-
тельный фал. Во-вторых, так как объем аэростата существенно возрастает по
сравнению с венерианским (с 15 м3 до 5000 м3), а толщина материала обо-
лочки существенно уменьшается (с 150 до 8 мкм), резко возрастает требова-
ние по безопасности и ограничение по конечной скорости торможения (при
наполнении оболочки).
Отметим усложнение систем, усложнение операций в процессе спуска и
усложнение требований при проектировании схемы спуска и ввода в действие
дрейфующей станции.
Схемы спуска в атмосфере Марса СА первого поколения, реализованные
с небольшой долей успеха, а также спроектированные, но не реализованные
по разным причинам, отличались от венерианских главным образом нали-
чием дополнительного участка торможения с помощью двигателей мягкой по-
садки. Высокая степень разреженности атмосферы Марса усилила требова-
ния к выбору средств торможения и их эффективности. Площадь ПС пер-
вых аппаратов «Марс-2, -3» и «Марс-6, -7» составляла 90 м2, а в последую-
щих проектах «4М», «М-75» и «5М» — 200, 300 и 500 м2. Масса СА, проекти-
ровавшихся в 70-е годы, достигала уже 5000 кг и больше.
Наряду с использованием ПС рассматривалась возможность использова-
ния дополнительных аэродинамических тормозных зонтичных устройств —
ТЗУ, раскрываемых как в атмосфере, после осуществления основного аэро-
динамического торможения, так и непосредственно перед входом в атмос-
феру. Реализуемость этих средств по многим причинам оказалась затрудни-
тельной, но необходимость использования дополнительных аэродинамичес-
ких поверхностей для более полного и эффективного торможения в атмос-
фере выразилась в идее создания нового тормозного устройства. В процессе
разработки проекта «Марс-94,-96» было спроектировано и прошло весь цикл
16
экспериментальной отработки перспективное средство торможения — надув-
ное тормозное устройство (НТУ). Схема спуска пенетратора, предназначен-
ного для внедрения в марсианский грунт, может послужить примером одной
из наиболее простых спроектированных схем спуска (рис. 1.1.1).
В некоторой степени это симптоматично: «простые» схемы спуска впер-
вые проектируемых аппаратов, усложнение схем проведения экспериментов
по мере получения новых данных и желание сделать все возможное с помо-
щью различных средств (при практически неограниченных ресурсах). Затем
— стремление упростить и удешевить проект (проблемы с финансировани-
ем) путем разделения функций и задач, внедрения новых технологий и воз-
врата к использованию опыта первых проектных разработок.
НТУ наполняется газом после отделения от орбитального аппарата еще до
входа в атмосферу. При спуске в атмосфере с тормозным устройством осу-
ществляется по сути только одна операция: ввод дополнительного надувного
устройства — увеличение его диаметра с 2,3 м до 3,8 м. Требуемая расчетная
скорость внедрения в грунт пенетратора составляет 80 м/с, и это более лег-
кие условия, чем обеспечение мягкой посадки. В то же время применение
новой технологии разработанного надувного устройства пока не ограничи-
вает его размеры. В связи с этим, возможно, вновь появится интерес к про-
ектированию беспарашютного варианта схемы спуска, но с использованием
НТУ вместо ТЗУ и участком активного торможения с помощью двигателей
мягкой посадки.
Наиболее сложной и наиболее полной схемой спуска в атмосфере Марса
с проектной точки зрения является схема, в которой последовательно исполь-
зуются:
• аэродинамическое торможение с помощью лобового экрана (зонтичного
устройства, надувного или т.п.);
• дополнительно раскрывающиеся аэродинамические поверхности — ПС
(одно-, двух-, трехкаскадная и т.д.) или ТЗУ, НТУ и т.п.;
• активное торможение с помощью двигательной установки (жидкостно-ра-
кетного двигателя — ЖРД или ракетного двигателя твердого топлива —
РДТТ).
Хорошим примером реализации такой схемы является посадка на повер-
хность Марса в 1985 году американского аппарата «Viking». Наиболее близ-
кими к нему российскими проектами являются: «5М» (парашютный вариант),
«Заря» и «Сигма».
Далее на примере такой общей модели схемы спуска проводится анализ
используемых средств торможения и оценка их эффективности.
Обсуждаемые проблемы и предложения по их решению относятся (в рам-
ках жизненного цикла сложной технической системы) к этапу концептуаль-
ного проектирования, когда формируется идеология целевых исследований
и стратегия их реализации.
17
Характерным новым элементом в процессе проектирования наряду со сце-
нарием экспедиции и схемой перелета становится формирование схемы эк-
сперимента.
Схема эксперимента отражает основные узловые моменты:
• цель экспедиции и основные научные задачи;
• основные этапы полета;
• общий вид СА;
• схема спуска и функционирование в атмосфере и на поверхности;
• внешние условия функционирования, место посадки и проведения экс-
периментов;
• циклограмма работы систем;
• основные проектные параметры и др.
Схема эксперимента, не являясь проектным документом, позволяет в очень
сжатом виде собрать и одновременно выделить самые характерные вопросы,
определяющие идеологию проведения эксперимента в целом.
Для примера рассмотрим схему проведения эксперимента с малыми авто-
номными станциями проекта «Марс-96». В основу проведения эксперимен-
та была заложена идея создания сети малых автономных станций. Необходи-
мо было «разбросать» станции на значительное расстояние друг от друга, чтобы
провести сравнительные метеорологические измерения и осуществить сейс-
мический эксперимент. Предполагалось, что «meteoeggs» — «метеояйца» мас-
сой в 1 кг будут сброшены при входе в атмосферу и каждое на своем пара-
шюте за счет разброса траектории входа и наличия ветра будет отнесено на
нужное расстояние от других. Аналогичную схему ввода метеостанций пред-
полагалось осуществить в начале рассмотрения проекта «Веста»: либо в про-
цессе парашютного спуска в атмосфере, последовательно отделяя их от СА,
либо в процессе дрейфа плавающей аэростатной станции. Предварительные
схемы спуска и расчеты траекторий движения показали техническую реали-
зуемость обоих вариантов. Возросли требования со стороны научной обще-
ственности. Желание провести еще и другие научные эксперименты вырази-
лось в увеличении массы полезной нагрузки (ПН), и масса малой автоном-
ной станции претерпела следующие изменения: с 1 кг до 15, затем 30, 60, 80
и, наконец, 100 кг.
Наверное, процесс увеличения массы научной аппаратуры и соответству-
ющего увеличения массы ДА неизбежен, но имеются границы применения
средств торможения и опасность возникновения критических ситуаций. Уве-
личение массы малой станции привело в результате к уменьшению их коли-
чества до двух и, в целом, к снижению эффективности проведения научного
эксперимента по созданию сети автономных станций. Более жесткое и чет-
кое определение схемы эксперимента на начальной стадии проектирования
могло бы повлиять на результирующие массовые характеристики и на эффек-
тивность проведения исследований.
18
Схема спуска малых станций в атмосфере (см. рис. 1.1.2) изначально про-
ектировалась исходя из малых весов, максимальной простоты и использова-
ния проектных и технических решений предыдущих разработок, т.е. исполь-
зовался метод проектирования от прототипа. Другой метод проектирования
с нуля характерен для проектирования первого поколения СА, при решении
новых уникальных задач и появлении новых средств и технологий. Напри-
мер, вторая часть проекта «Марс-96» — эксперимент «Визит». Схема экспе-
римента с использованием пенетраторов дополняла метод исследования пла-
неты с помощью сети автономных научных станций.
НТУ — новая разработка и в то же время простая схема функционирова-
ния. Преемственность технических решений, унификация используемых
средств и комплексный подход являются «краеугольными камнями» при раз-
работке схем проведения экспериментов и программы исследований.
1.1.3. Схемные решения ввода в действие средств
десантирования и дрейфа. Факторы, влияющие на их выбор,
и основные проектные параметры
Программы научных исследований атмосферы и поверхности небесных тел
Солнечной системы, разрабатываемые академическими организациями Рос-
сийской Федерации (а также в кооперации с зарубежными учеными), пре-
дусматривают решение целого ряда научных задач, включая:
• исследование физико-механических свойств атмосферы и поверхности;
• исследование внутреннего строения планет;
• исследование магнитного поля;
• исследование сейсмической активности;
• проведение радиолокационных съемок поверхности;
• получение фото- и телевизионных изображений;
• поиск воды и следов биологической активности;
• исследование динамических процессов в атмосфере и измерение метео-
рологических параметров и т.д.
Традиционными для решения большей части задач экспедиций к Марсу,
Венере, а также Юпитеру, Титану являлись контактные методы исследова-
ний с помощью спускаемых и ПА. По сравнению с дистанционными иссле-
дованиями с помощью орбитальных аппаратов контактные методы дополни-
тельно позволяют:
• проводить забор проб атмосферы и грунта для последующего анализа на
месте и передачи данных на Землю;
• проникать под слой облаков, препятствующих исследованиям планеты оп-
тическими методами;
• восстанавливать такие параметры атмосферы, как давление, температура,
плотность, ветер и др. при обработке телеметрической информации от на-
учно-служебных приборов;
• осуществлять панорамную съемку поверхности и ее элементов с высоким
разрешением и т.д.
19
Научные задачи исследований и схема проведения эксперимента в значи-
тельной степени определяют облик КА, состав систем и технических средств,
обеспечивающих их выполнение. Анализируя структурный состав ДА и тра-
екторные операции, осуществляемые во время спуска и посадки, можем вы-
делить основные участки и основные схемообразующие признаки (рис. 1.1.3):
• тип ДА, характер полезной нагрузки (ПН);
• конфигурация и геометрия ДА;
• конструкция;
• способ полета в атмосфере, аэродинамическое качество;
• условия входа в атмосферу;
• используемые тормозные устройства, чередование участков спуска;
• способы ввода в действие средств десантирования;
• расположение средств торможения в ДА;
• момент ввода в действие и условия ввода дополнительных средств тормо-
жения;
• тип измерительных устройств;
• тип систем разделения;
• тип ПС, каскадность;
• схема подвески;
• применяемые материалы;
• «весовая категория» ПН и т.п.
С учетом представленных выше схемообразующих признаков и вариантов
реализации по каждому из них представляется возможным формирование ог-
ромного числа вариантов схемных решений как допустимых их сочетаний,
каждому из которых будут свойственны определенные характеристики и по-
казатели качества. При этом, естественно, в каждом из вариантов можно вы-
делить параметры, которые в значительной степени влияют на их количествен-
ную меру (рис. 1.1.4, 1.1.5).
Анализ, проведенный в рамках обсуждаемых исследований, указал на зна-
чимость влияния целой группы параметров, имеющих разную физическую
основу, к которым в первую очередь следует отнести:
• скорость и угол входа в атмосферу;
• баллистический параметр;
• аэродинамическое качество;
• максимальные перегрузки;
• высота, скоростной напор и число Маха при вводе парашюта;
• площадь парашюта;
• количество парашютов и каскадов;
• параметр рифления;
• углы и угловые скорости колебаний;
• баллистический параметр лобового экрана;
• высота включения двигателей;
• тяга двигателей;
20
Рис. 1.1.3. Основные схемообразующие признаки
Граница атис>сф€ры
Рис. 1.1.4. Типовая схема спуска в атмосфере Марса
• моментные характеристики;
• скорости ветра;
• ошибки измерительной аппаратуры;
• рельеф поверхности и т.д.
Появление в составе исследовательских КА аэростатных зондов вызвано
необходимостью дополнения как возможностей дистанционного зондирова-
ния атмосфер исследуемых небесных тел, так и возможностей СА. Методы
контактных исследований с помощью СА имеют ряд недостатков, ограничи-
вающих или даже исключающих возможность решения ряда научных задач.
Исследования проводятся лишь в определенных местах посадки. Получен-
ный разрез атмосферы планеты позволяет определить характеристики лишь
для конкретной траектории движения от входа в атмосферу до посадки. Вре-
мя функционирования аппарата и, соответственно, проведения научных из-
мерений ограничено скоростью прохождения атмосферы и временем суще-
ствования на поверхности, особенно для Венеры из-за тяжелых условий фун-
кционирования, а именно высокой температуры и давления. Ограниченные
время функционирования аппарата и район проведения исследований при-
водят к ограничению объема информации, получаемой в результате прове-
денных научных измерений, которая передается на Землю.
Расширение возможностей исследований и улучшение технологии прове-
дения экспериментов за счет использования АЗ привело в то же время и к
необходимости решения новых технических задач.
Отечественный и зарубежный опыт разработки аэростатных средств раз-
личного назначения [13—16] указывает на большое разнообразие возможных
решений как аэростатов, так и систем ввода их в действие.
22
Этапы торможения АТ пс Г АкТ
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
Операции I Перекладка качества так Лг Вкл РБВБ Обнуление качества Ввод ПС Раэрифоека Сброс ЛЭ Замеры РВБВ Вкп.ТДУ ПускИ Сброс ПС иАК | Замеры ДА | i i Разворот на Вкл БТ V = comi Выпуск опор Выкл. ТДУ Посадка
Параметры участков Им Ое, Go К Рл Лх lean •п©Р к2 ъ та» Ъ я2 м 0 Q "ж Ф*ол а, -0 V- м- 0. <7 F„ Gn 3 fjritp Н V 0 р; G« Я 0 ф4ол Н..Г V— 0ам> Цэ л* , VZ н мр d (|ММ Яву V е р <2иом § о I > . II ф а н V е нй V. 0.
Возмущения AG АС. АС, Ат, АК Ла, АСлар 1авн гоэ Ан AV АО W Ас^ Дф о АНл» AV*. AV. АО» АсЦ) Дна. AV^ АН AV Тужл
Ограничения Go м <04. Мпз ipago* V.W, н, V. Gn, G„
Рис. 1.1.5. Этапы торможения в атмосфере. Основные проектные параметры
N)
CM
Отдельные блоки научной аппаратуры могут начать функционировать уже
в процессе спуска в атмосфере СА. На этапе ввода оболочки лобовой экран
вытягивает подвеску, на которой расположена гондола с научной аппарату-
рой. Производится «разрез» атмосферы, измеряются ее метеорологические
параметры и оптические характеристики. АЗ для исследования Венеры вы-
водится на определенную высоту в облачном слое атмосферы, а марсианс-
кий АЗ спускается до поверхности и затем осуществляет челночный дрейф:
плавает в атмосфере в дневное время, а ночью вновь опускается до поверх-
ности. После касания поверхности лобовым экраном при осуществлении
«просадки» работу продолжают приборы первой группы. В это же время на-
чинает функционировать расположенная в лобовом экране аппаратура для
проведения сейсмических экспериментов. При подъеме аэростата на высо-
ту, равную длине подвески, в работу включается аппаратура второй группы.
По показаниям солнечного датчика производится настройка телевизионного
комплекса и осуществляется панорамная съемка места посадки. При благо-
приятных обстоятельствах (отсутствие складок рельефа, пылевых вихрей и
близкое взаимное расположение) возможна съемка других элементов экспе-
диции, например, марсохода, который осуществляет посадку практически од-
новременно с аэростатным зондом.
1.1.4. Постановка задачи формирования и оценки схемных решений.
Показатели эффективности
Обеспечение максимальной эффективности систем торможения является
первостепенным требованием при формировании схемы спуска в атмосфере
и определении проектных параметров рассматриваемых средств. Практичес-
ки во всех исследованиях, проведенных до настоящего времени, в качестве
основного критерия эффективности (критерия качества) ДА принималась
масса полезной нагрузки (ПН), которую он доставляет на поверхность пла-
неты назначения или в ее атмосферу. В состав ПН входят: научная аппара-
тура, доставляемая на планету, посадочная платформа с планетоходом или
взлетной ракетой, обеспечивающей доставку грунта с поверхности планеты
и т.д. Использование критерия максимума массы ПН, как отмечалось, на-
пример, в [17], часто оказывается затруднительным. Величина ПН являет-
ся составной частью массы ДА и зависит от массы других составляющих:
массы конструкции, теплозащитного покрытия, системы управления, сис-
тем торможения и т.д.
Максимум ПН обеспечивается соответственно минимумом массы осталь-
ных систем, а их минимизация сопровождается подчас противоречивыми
требованиями. Для уменьшения массы конструкции необходимо обеспечить
торможение по пологим траекториям с минимальными перегрузками и боль-
шим временем полета, но при этом увеличивается масса теплозащитного по-
крытия и т.д. Поэтому для минимизации массы систем выбирают наиболее
характерную составляющую этой массы и осуществляют ее минимизацию. Ряд
исследований показывает, что такой характерной составляющей является
24
масса систем мягкой посадки. Масса систем, обеспечивающих мягкую посадку
ДА (или его составной части), может быть определена как сумма масс сис-
тем аэродинамического и активного торможения, представляющих участки
спуска в атмосфере. Масса системы мягкой посадки может составлять от 30
до 50 % массы всего ДА (табл. 1.1.1).
Таблица 1.1.1. Масса систем мягкой посадки
Проект/ Масса АИВХ ^ат ДИПС АИду ^смп
М-73 840 163,2 180,3 40 383,3
1 0,19 0,215 0,05 0,455
5М - ТЗУ 5350-5-6000 430-5-463 810-915 1170-1310 2410-2685
1 0,08 0,15 0,22 0,45
5М-ПС 5350-5-7400 1200 - 880 310-475 640-1100 1830-2775
1 0,22-0,12 0,06 0,12-0,15 0,3 - 0,43
MSSR 2858 ч-1361 276 -6-185 232 - 145 352-152 482-860
1 0,1-6-0,15 0,08-0,11 0,1-0,12 0,28-0,38
Viking 930 248 45 133,2 426,2
1 0,27 0,05 0,14 0,46
ВА 21,72 4,65 4,85 2,13 11,6
1 0,21 0,22 о,1 0,5
При выборе критерия оптимальности решались задачи:
1) определения основной составляющей массы систем аппарата, миними-
зация которой обеспечивала бы максимум ПН;
2) определения условий, приводящих к максимуму ПН, с целью обеспе-
чения максимальной эффективности оптимизации траектории.
В результате проведенного анализа критерий оптимальности формулиро-
вался как минимум массы систем мягкой посадки — это критерий верхнего
уровня, и отдельно формулировался критерий оптимальности для синтеза тра-
ектории спуска на участке основного аэродинамического торможения (кри-
терий низшего уровня).
На этом участке искалось оптимальное управление, обеспечивающее ми-
нимум конечной скорости на заданной высоте
при Я|ад, (1.1.1)
либо максимум конечной высоты при заданной конечной скорости
Я™х при V™. (1.1.2)
Однако, как отмечалось в работе [17], критерий K™in (равно, как и Я™ах)
не дает количественной оценки весовых затрат на посадку, и вместе с тем выс-
казывалось мнение о неполной эффективности этого критерия (И^п). От-
25
менялось, что такой подход не учитывает особенностей активного торможе-
ния, состоящих в том, что количество топлива (характеристическая скорость),
необходимого для реализации мягкой посадки, существенно зависит от угла
наклона у вектора скорости Ио к местному горизонту, при данной величине
его модуля и высоте включения двигателя Но. На основании сказанного при-
менялся и другой подход к выбору критерия оптимизации на участке аэро-
динамического торможения. Сущность его состоит в том, что оптимизация
проводится не по минимуму скорости на заданной высоте, а по минимуму
топлива, необходимого для реализации мягкой посадки. При этом точка вклю-
чения двигателя выбирается только из условия реализации оптимальной по
расходу топлива траектории торможения при заданной величине тяговоору-
женности. По-видимому, этот подход также не может послужить общим ме-
тодом оптимизации для различных участков спуска.
В большинстве случаев практического проектирования речь об оптимиза-
ции всей системы или всей совокупности этапов функционирования не ве-
дется. Первоначально определяется рациональность осуществления того или
иного этапа и выбора его границ. В этом плане предпочтительно рассматри-
вать параметры, отражающие физику процесса. Можно показать, что требо-
вания обеспечения минимума конечной скорости на заданной высоте и мак-
симизации высоты для заданной конечной скорости могут быть объедине-
ны. Если рассмотреть отношение кинетической и потенциальной энергии СА
- И2
в процессе спуска, то увидим, что минимум коэффициента К =-----обес-
2gA
печивается как при выполнении условия (1.1.1), так и при выполнении ус-
ловия (1.1.2). Таким образом, мы можем их объединить и ставить задачу вы-
полнения требования ^min .
Создание ДА, предназначенных для доставки на поверхность планеты или
ввода в атмосферу научных лабораторий, связано, прежде всего, с разработ-
кой средств аэродинамического торможения, способных погасить огромную
энергию аппаратов, которой они обладают при входе в атмосферу планеты.
Энергия, которой обладает СА при движении в атмосфере, складывается
из кинетической энергии, обусловленной скоростью аппарата, и потенциаль-
ной, обусловленной положением его относительно поверхности планеты.
Хотя общим требованием является обеспечение минимума суммарной
энергии аппарата перед достижением конечных условий (например, к моменту
контакта с поверхностью), уменьшение кинетической энергии должно опе-
режать уменьшение потенциальной энергии.
Постановка задачи формирования схемных решений. Задача выбора схем-
ного решения относится к проектным задачам высокого уровня, когда опре-
деляется облик исследовательского КА в целом. Под схемными решениями
прежде всего понимаются [18—21]:
• структурные схемы разрабатываемого объекта и его систем;
26
• схемы десантирования и дрейфа;
• схемы расположения средств торможения;
• схемы расположения АЗ на базовом аппарате;
• схемы интерфейсов с другими аппаратами экспедиции (ПА на «Веге» и
марсоход на «Марсе»);
• схемы экспедиции;
• схемы спуска;
• схемы ввода;
• схемы разделения;
• схемы функционирования (траекторные операции) и т.д.
Схема (алгоритм) исследования приведена на рис. 1.1.6.
Исходя из анализа факторов, влияющих на принятие решения, задача вы-
бора схемного решения в общем виде может быть сформулирована следую-
щим образом:
задано множество состояний объекта — физической системы L. Состоя-
ние физической системы L определено вектором дискретных параметров,
обусловливающих ее схемное решение,
Х = Х(х1,х2,...,хп)
и вектором непрерывных параметров
Y = Y(yi,y2,...,ym),
определяющих в совокупности показатель эффективности или значение кри-
терия, отражающего качество функционирования объекта:
где F = JXx^yjY N и М — множество допустимых параметров; пит — ко-
личество учитываемых параметров; z = l,n; у = 1, т.
На параметры могут быть наложены ограничения в виде равенств и нера-
венств:
<р(.(х,у) = 0,
уу(х,у)<0.
В зависимости от требований к экспедиции в качестве функционала мо-
жет быть использован тот или иной показатель. В частности, одним из клю-
чевых требований к системе десантирования является ее конструктивное со-
вершенство, под которым подразумевается отношение массы ПН к массе ДА.
В нашем случае именно этот показатель выбирается в качестве критерия эф-
фективности:
шах
ди z
—— (ХрУ)
Wnac 1
27
Рис. 1.1.6. Алгоритм формирования схемно-технических решений
где дипн — масса полезной нагрузки; дипас — масса плавающей аэростатной
станции.
Ставится задача минимизации массы системы ввода /исв АЗ:
min(wCB(x,.,j/y)),
при обеспечении минимальных рисков Rl для осуществления операции / или
обеспечения непревышения заданного риска R/ , т.е.
ИМЯ-
Основным объектом исследований являются средства десантирования и
дрейфа, включая их структуру, схему функционирования, и соответствующие
им параметры, что, по существу, является задачей структурного и парамет-
рического синтеза.
Основными элементами структуры средств десантирования и дрейфа яв-
ляются приведенные выше подсистемы торможения, ввода в действие, раз-
деления, разворачивания, наполнения, развертывания фалов, научно-служеб-
ных комплексов и.т.д.
В качестве непрерывных параметров рассматривались вышеприведенные
траекторные параметры, высота, скорость, дальность, скоростной напор, вре-
мя функционирования, масса подъемного газа и объем оболочки в процессе
наполнения и т.д.
Состав и параметры ограничений определялись требованиями со стороны
научной аппаратуры и возможностями базового блока экспедиции, его кон-
структивно-компоновочной схемы.
В общем случае масса ДА складывается из массы конструкции, теплоза-
щиты, средств торможения, топлива, бортовых систем, ПН и т.д. Важной со-
ставляющей, которая достигает 50% массы, является система мягкой посад-
ки или система спуска и посадки. Как было показано выше, требование ми-
нимизации этой массы при анализе спуска в атмосфере сводится к требова-
ниям обеспечения минимальной скорости на заданной высоте или обеспече-
ния максимальной высоты при заданной скорости и может ставиться задача
минимизации обобщающего показателя эффективности: отношения квадра-
та скорости к высоте.
Ввиду исключительной сложности схемных решений разрабатываемых
объектов для поиска наиболее рациональных из них используют в основном
вариантные расчеты, не исключая при этом экспертных оценок и традици-
онных численных методов оптимизации.
1.1.5. Математическая модель движения десантного аппарата
для исследования динамики спуска при интенсивном торможении
При создании математической модели движения ДА руководствуются сле-
дующими предпосылками:
• уровень сложности модели должен отражать степень априорной инфор-
мации о характеристиках объекта, полученных на стадии его предшеству-
29
ющих исследований, а также о параметрах среды и гравитационного поля
планеты;
• структура модели должна допускать ее последующее упрощение (либо ус-
ложнение по мере уточнения используемой априорной информации) в за-
висимости от характера решаемых задач;
• форма записи уравнений движения должна быть такой, при которой обес-
печивается минимизация времени, затрачиваемого на численное интегри-
рование в пределах одного шага вычислений.
Как показали исследования, указанным требованиям удовлетворяет мате-
матическая модель движения, кинематические и динамические уравнения
центра масс которой записываются в осях местной географической системы
координат, а уравнения моментов — относительно главных осей инерции
аппарата [22].
Показано, что блочный принцип построения опорной модели дает возмож-
ность использовать ее модификации для расчета движения центра масс ап-
парата и его движения относительно центра масс как раздельно, так и в рам-
ках единой модели, а также при проведении расчетов на участке активного
торможения. В сочетании с применением универсальных методов численно-
го интегрирования (классический вариант метода Рунге-Кутта и его разно-
видности) и использованием результатов экспериментальных аэродинамичес-
ких исследований модель позволяет проводить углубленный количественный
анализ аэробаллистических схем и осуществлять обоснованный анализ при
выборе рациональных вариантов конструктивно-компоновочных схем ДА.
Наиболее известными и широко применяемыми средствами дополнитель-
ного аэродинамического торможения, предназначенными для большего сни-
жения скорости аппарата при посадке на поверхность планеты, являются ПС
[23—24]. Проблемы, связанные, главным образом, с вводом в действие ПС
при больших скоростных напорах набегающего потока, и, наоборот, при
малых скоростных напорах (недостаточных для наполнения) в условиях раз-
реженных атмосфер; сложные динамические условия; сложности математи-
ческого моделирования и экспериментальной отработки многозвенных, мяг-
ких тканевых конструкций и т.д. привели к необходимости рассмотрения аль-
тернативных конструкций. К таковым в первую очередь относятся развора-
чиваемые жесткие или полужесткие конструкции зонтичного типа. Развитие
технологии надувных тормозных устройств привело к расширению возмож-
ностей и к новым решениям при формировании схем десантирования в ат-
мосфере. Следует отметить, что независимо от типа применяемых конструк-
ций при проведении проектных оценок могут использоваться одни и те же
уравнения движения и схемные решения.
Размерно-массовые модели тормозных устройств могут различаться даже
внутри одного класса или типа используемых средств. Диаметр лобового эк-
рана ограничен размерами обтекателя ракеты-носителя. Рассматривался ва-
30
риант использования ракеты-носителя «Протон» с допустимым диаметром
миделя экрана 4,26 м (рис. 1.1.7).
Рис. 1.1.7. Схема десантного аппарата (форма и геометрия)
Диаметр ТЗУ в раскрытом состоянии около 12 м, НТУ пенетратора 2,3 —
3,8 м, устройства для тяжелых ДА — 22 м. ПС различного назначения имеют
соответственно различные размеры, например: вытяжной парашют 0,5 м, ста-
билизирующий парашют 1—7 м, тормозной 10—50 м, основной 50—500,1000 м
и т.д.
Массы доставляемых на поверхность планет средств исследований:
• марсианская министанция, малая станция и пенетратор 20—100 кг;
• Д А с исследовательской лабораторией (марсоходом, аэростатным зондом)
или взлетной ракетой для доставки грунта на Землю — масса при входе в
атмосферу 1000—5000 кг;
• ДА для доставки пилотируемой экспедиции на Марс, масса — 70000 кг.
Для сравнения приведем размеры венерианской и марсианской дрейфую-
щих аэростатных станций. Диаметр первой в форме сферы составлял 3,5 м,
размеры второй, в форме цилиндра, составляли: диаметр 13 м, длина 42 м.
При этом массы АЗ были одного порядка. Конечно, главной причиной та-
кой разницы является большая разреженность атмосферы Марса, но, как было
показано в ходе работ, для ввода в действие этих средств исследований могут
быть использованы идентичные схемные решения [25, 27—31].
1.1.6. Формирование схемы спуска в атмосфере и ее декомпозиция.
Базовые конструктивно-компоновочные решения и средства
аэродинамического торможения. Анализ траекторных параметров
На первых этапах исследования контактными методами планет, обладаю-
щих атмосферой, и создания средств десантирования, обеспечивавших жес-
31
ткую или мягкую посадку на поверхность, формирование схем спуска в ат-
мосфере происходило в значительной степени волевыми решениями и из ряда
простых, но определяющих требований и соображений. Наиболее существен-
ным фактором, определяющим схему функционирования в атмосфере, по-
мимо выполнения условий осуществления научных задач, было знание вне-
шних условий на планете. Другой важнейший фактор — массовые и, конеч-
но, баллистические характеристики; они в целом для схем экспедиции явля-
ются первостепенными.
Следующий важнейший момент в формировании облика ДА и схемы его
функционирования — выбор аэродинамической формы и конструктивно-
компоновочной схемы. В первую очередь должны быть приняты во внима-
ние габаритно-массовые ограничения. Затем рассматриваются (с учетом вне-
шних условий и их неопределенности) возможности обеспечения максималь-
ного аэродинамического торможения и плотной компоновки аппарата.
Безусловно, тормозные свойства самой атмосферы наиболее значимы для
принятия решения при выборе формы. Так, для разреженной атмосферы
Марса была выбрана сегментально-коническая форма лобового аэродинами-
ческого экрана с большим коэффициентом сопротивления, а для плотной
венерианской атмосферы — сферическая форма СА, обеспечивающая наи-
более плотную компоновку доставляемого оборудования, средств торможе-
ния и пр. Не останавливаясь подробно на перечисленных важных факторах,
принимаем их во внимание в предлагаемой работе как исходные данные. За-
метим при этом, что опыт первых разработок имеет большое значение для
проведения оценки технической осуществимости новых экспериментов и, в
частности, формирования предварительных схем функционирования в атмос-
фере перспективных аппаратов. Конструктивно-компоновочные схемы пер-
вых марсианских и венерианских СА стали базовыми для последующих и
могут рассматриваться как базовые для перспективных аппаратов. (В опре-
деленной степени можно базовые схемы рассматривать и как традиционные
для национальных проектов. В то время как зарубежный проект прорабаты-
ваемого в настоящее время зонда для Венеры имеет сегментально-коничес-
кую форму.)
Одним из существенных недостатков конструктивной схемы базового ап-
парата «Венера-4, -8» являлось то, что теплозащитная оболочка (ТЗО), вы-
полнившая свое назначение после участка аэродинамического торможения,
не сбрасывалась. Это делало очень трудным, или даже невозможным, реше-
ние задачи создания ДА нового поколения, обладающего качественно новы-
ми техническими характеристиками. Так, например, возникли сложности при
установке остронаправленной антенны для увеличения информативности
бортового радиокомплекса посадочного устройства, для уменьшения перегру-
зок при посадке и обеспечения ориентированного положения ДА на повер-
хности, что необходимо для проведения съемки панорамы поверхности, и т.д.
32
Использование для этого раскрываемых или выносных элементов связано
с большими техническими трудностями и малой надежностью их в связи с
необходимостью работы в крайне агрессивных условиях в атмосфере Венеры.
Кроме того, необходимость посадки на поверхность Венеры теплозащит-
ной оболочки существенно увеличивала вес ПС.
Сброс теплозащитной оболочки ДА после выполнения ею своего назна-
чения позволял полностью устранить указанные выше недостатки и создать
принципиально новый ДА, обладающий качественно новыми техническими
характеристиками. С помощью этого аппарата были впервые получены изоб-
ражения поверхности Венеры и проведен ряд новых научных экспериментов
как при спуске, так и на поверхности Венеры.
Применение сбрасываемой ТЗО, а также использование верхней части теп-
лозащитной оболочки для ввода тормозного парашюта позволило уменьшить
относительный вес ПС ДА.
Такое заложенное в основу конструкции ДА схемно-техническое решение
позволило решить широкий класс задач по исследованию атмосферы и по-
верхности Венеры, а также использовать его и в перспективных разработках,
в частности, при разработке плавающей в атмосфере Венеры станции проек-
та «Вега».
Типовая (или комбинированная) схема спуска в атмосфере.
Есть три принципа декомпозиции схемы:
1. Способы торможения и участки:
• аэродинамическое торможение:
— без качества (баллистический спуск);
— с качеством, постоянным или управляемым, с перекладкой качества
• торможение с использованием дополнительных тормозных устройств
• активное торможение с помощью двигателей
• дрейф в атмосфере
• посадка с использованием НТУ (прыжки).
2. Средства торможения и движения в атмосфере (дрейфа, планирования):
• аэродинамическое торможение с помощью жестких лобовых экранов:
— разворачиваемых конструкций;
— надувных устройств;
- ПС
• активное торможение с помощью двигателей
• дрейф АЗ
• планирование.
3. Десантируемые аппараты, платформы или станции:
• министанции
• малые станции
• пенетраторы
• посадочные аппараты
• посадочные платформы с марсоходом, взлетной ракетой и др.
33
• АЗ
• самолеты
• планирующие зонды (змей, «ветролет» и др.).
Отсюда — многообразие возможных схем спуска [31, 34—36]. Рассмотрим
сначала, как наиболее комплексную, схему спуска тяжелого ПА (аналогич-
ного разработанному для экспедиции по доставке грунта с Марса), в кото-
рой применяется:
— аэродинамическое торможение;
— торможение с использованием ПС (ТЗУ или надувного устройства);
— активное торможение с помощью двигателей.
Соответственно разделяем схему на три схемы. Ниже рассмотрим вопро-
сы формирования более «простых» схем баллистического спуска в разряжен-
ной атмосфере планеты малых станций, пенетраторов и министанций.
Приведем для примера обоснование проектных параметров марсианского
ДА на участке аэродинамического торможения.
На рис. 1.1.8 изображены основные этапы схемы спуска участка аэроди-
намического торможения. Посадочный блок представляет собой тело с ло-
бовым экраном радиуса затупления R = 1,5 xD. В верхней части аппарата на-
ходится герметичный парашютный контейнер. Центр масс посадочного бло-
ка смещен относительно геометрических осей xt = 0,225; у{ = 0,026, в резуль-
тате чего его полет в атмосфере будет происходить при балансировочном угле
атаки аб = 18,5°. Это позволяет управлять спуском за счет изменения аэро-
динамического качества.
Аэродинамические характеристики посадочного блока на участке аэроди-
намического торможения приведены на рис. 1.1.9. Вес его G= 5000 кГ, ско-
рость входа в атмосферу Ко = 6350 м/с, номинальный траекторный угол
0О =-14°, ширина коридора Д0О =±2°, нагрузка на мидель Рх = 250 кГ/м2.
При проектировании ДА, совершающего мягкую посадку на Марс, и раз-
работке его отдельных систем одно из центральных мест занимает оптими-
зация траектории спуска. Одним из важнейших критериев оптимизации тра-
ектории является условие минимума массы системы мягкой посадки. Иссле-
дования, проведенные в процессе предыдущих разработок, показали, что од-
ним из наиболее рациональных вариантов для аппаратов с баллистическим
параметром Рх 300 кГ/м2 является парашютно-реактивная система мягкой
посадки.
К основным составляющим массы такой системы относится масса топли-
ва. Дополнительное торможение ДА парашютом позволяет существенно сни-
зить потребные затраты топлива, а следовательно, и массу системы мягкой
посадки (СМП). Начальный момент ввода в действие ПС можно характери-
зовать двумя основными параметрами: числом Маха, определяющим аэро-
динамическую картину обтекания парашюта, и скоростным напором q — ко-
личественной характеристикой потока, от которой зависят нагрузки на па-
рашют. Они определяют конструкцию и массу ПС.
34
1. Вход 2. Перекладка «качества» 3. Максимум перегрузки 4. Разблокировка радиовысотомера больших высот 5. Обнуление качества 6. Ввод парашютной системы
Vo = 6350 ±50 м/с 0о = —14°±2° К = 0,3 ±0,05 Р«=2500° Н/м2 ГПО= 5000 кг □б= 18,5 По = 8 —10 м/с At = 6 - 8 с К = 0,3 ±0,05 ПжШШ1 ^16 q™£ 40000 Н/м2 п- = 0,55 Н = 12 —22 q = 1000-1500 Н/м2 0 = 0-8° М = 3,5-5,5 At = 8— 10 с Н = 8 —12 км М = 1,9-3,1 0 = 0-8° 600 $ q S 1500 Н/м2
Рис. 1.1.8. Схема спуска на участке аэродинамического торможения.
Проектные параметры
Задача минимизации массы парашютно-реактивной системы является ком-
плексной, зависящей от всех участков спуска.
Задача участка аэродинамического торможения — обеспечить выведение
ДА в некоторую область пространства, из которой путем реактивного тормо-
жения можно произвести с минимальными энергетическими затратами мяг-
кую посадку на поверхность планеты. Разреженность атмосферы Марса вы-
зывает стремление организовать движение в ее нижних, приповерхностных
слоях, где плотность наибольшая, чтобы максимальным образом увеличить
эффективность ее тормозящих свойств.
Для аппаратов с приведенной нагрузкой на лобовую поверхность
Рх >200 кГ/м2 и в задаче мягкой посадки на планету Марс баллистический
35
Рис. 1.1.9. Аэродинамические характеристики
спуск невозможен, так как невозможно достичь числа Маха М <3,5 на за-
данной высоте для ввода ПС и необходимой заданной скорости на конечной
высоте при реактивном торможении. Поэтому для тяжелых аппаратов рас-
сматривалось движение при наличии подъемной силы (рис. 1.1.10).
Спуск с постоянным аэродинамическим качеством. Самым простым для ре-
ализации использования подъемной силы является спуск с постоянным зна-
чением эффективного качества = const. Было проведено параметричес-
кое исследование участка аэродинамического торможения аппаратов с Рх =
= 150* 250 кГ/м2, движущихся с постоянным малым аэродинамическим ка-
чеством 0,25—0,35. Рассматривались два варианта введения парашюта — по
сигналу от инерциально-временного устройства (ИВУ) при числе Маха и по
сигналу от радиовысотомера больших высот (РВБВ). Было показано, что за-
висимость параметров ввода парашюта от траекторного угла входа немоно-
тонна и с учетом разброса аэродинамического качества &К = ±0,05 в кори-
доре входа А0О > ±2° значения минимальной высоты ввода парашюта Нвв и
максимального скоростного напора #вв почти не зависят от 0О и К. При умень-
шении АК и А0О улучшаются условия ввода ПС. Коридор входа А0О умень-
шается с уменьшением ошибки прицельной дальности Ad и увеличением зна-
чения модуля 0О . Для аппарата с Рх= 250 кГ/м2 условия ввода парашюта
при М = 3,5 улучшаются при |0О| > 18,5°, но использование крутых углов вхо-
да в атмосферу уменьшает высоту просадки траектории Япр (минимальная
высота первоначального погружения в атмосферу), которая при К = 0,25,
36
Рис. 1.1.10. Траекторные параметры
|б0| > 21° меньше 5 км, что недопустимо в связи с неточным знанием пара-
метров атмосферы, отклонением рельефа поверхности планеты от среднего
уровня и пр. Значение Явв min растет, a qBB max уменьшается с уменьшением
ошибки прицельной дальности Да и баллистического параметра с увели-
чением числа Маха при вводе ПС растет Нвв min, но увеличивается и qBB max.
Анализ этих зависимостей показал, что для аппарата с Рх = 250 кГ/м2 и
постоянным аэродинамическим качеством К= 0,3 можно получить прием-
лемые условия ввода парашюта Нвв min > 10 км и qBB max < 150 кГ/м2, если обес-
печить значение разброса качества ДА" = ±0,03 и коридор входа
90 = 19,5°±1,2°. С уменьшением Рх условия ввода ПС улучшаются.
Спуск с одноразовой перекладкой аэродинамического качества. Дальнейшая
оптимизация параметров ввода системы мягкой посадки возможна при ис-
пользовании управления аэродинамическим качеством аппарата. Управление
качеством на траектории спуска осуществляется путем изменения эффектив-
ного качества = Кcosy,, где Къ — аэродинамическое качество при по-
лете с постоянным значением балансировочного угла атаки; у — угол крена.
При этом величина эффективного качества изменяется в пределах
-Кб < < К6 . Как показали ранее проведенные исследования, при движе-
нии аппаратов с нагрузкой на лобовую поверхность Рх < 300 кГ/м2 целесо-
образно применять перекладку аэродинамического качества с отрицательно-
го на положительное. Исследования различных видов перекладки показали,
что эффективнее всего перекладка -Ктах ~*+А'тах [47]. Перекладку можно
37
производить по различным параметрам, например по значению продольной
перегрузки пх. Выбор момента начала перекладки качества существенно влияет
на значения высоты и скоростного напора при вводе парашюта. Для различ-
ных значений 90 и К максимальное значение высоты ввода Явв тах и наи-
меньшее значение скоростного напора #вв получаются при определенных
значениях пх перекладки. С учетом выбора названных параметров определя-
ется значение аэродинамического качества ^ = 0,310,5 и возможный кори-
дор входа. С одной стороны коридор входа ограничен углом рикошетирова-
ния при максимальном значении качества (плюс один градус для гарантии
захвата атмосферой), с другой стороны — тем значением Оо, при котором
обеспечивается наименьшая допустимая высота введения парашюта при ми-
нимальном значении аэродинамического качества. Для ДА с баллистическим
параметром Рх= 250 кГ/м2, ^ = 0,310,5 за номинальный угол входа в ат-
мосферу взят 0О =-14°, а весь коридор входа —12-ь —16°.
Был проведен анализ ввода ПС по сигналу от радиовысотомера больших
высот. Фактически он выдает сигнал на обнуление качества, которое необ-
ходимо для обеспечения минимальных возмущений при вводе ПС. Выдача
сигнала от РВБВ должна быть заблокирована до определенной точки траек-
тории спуска, т.к. изменение высоты полета над поверхностью планеты у
аппарата с аэродинамическим качеством немонотонно.
На рис. 1.1.11 изображен выбор настройки по высоте и момент разблоки-
ровки радиовысотомера. Как видно из графиков данного рисунка, критичес-
кой по высоте является траектория при |%|тах и Л^, т.е. при 0о=-16° и
Рис. 1.1.11. Условия ввода парашютной системы
38
К = ±0,25. Разблокировать РВБВ целесообразно на «горке» этой траектории,
которой соответствует пх =0,55. Данному фиксированному значению пере-
грузки пх =0,55 во всем коридоре входа соответствует кривая «разблокиров-
ка РВ».
Настройку РВБВ выбираем по максимальной высоте критической траек-
тории, следовательно, на высоте Н = 12 км радиовысотомер выдает сигнал на
обнуление качества. Процесс обнуления качества длится А/ = 8 -ь 10 с, за это
время наибольшая потеря высоты происходит на траектории с минимальным
модулем угла входа |Оо |min и максимальным значением качества Ктгх (т.к. гра-
диент траектории максимальный).
Таким образом, ввод ПС происходит на высоте ~10 км. С учетом откло-
нений рельефа от среднего уровня поверхности планеты А = ±2 км были по-
лучены условия ввода парашюта на высоте Нвв = 8, 10 и 12 км.
Программа полета ДА с постоянным аэродинамическим качеством обла-
дает несомненным достоинством — простотой, однако дает очень большой
разброс по сравнению с управляемым. Программа, предполагающая одну пе-
рекладку эффективного качества, также достаточно проста по структуре, но
значительно уменьшает разброс конечных параметров. Для рассматриваемо-
го аппарата с основными проектно-баллистическими характеристиками
Рх = 250 кГ/м2 и К= 0,3 выбрана схема спуска с одноразовой перекладкой
качества -К +К на участке аэродинамического торможения. Необходимая
последовательность работы систем аппарата при спуске обеспечивается ра-
ботой автономной системы управления. Вход в атмосферу совершается с от-
рицательным аэродинамическим качеством К= —0,3. При достижении про-
дольной перегрузки пх = KtWk + K^Vk + К3 (соответствующей выбранному
закону перекладки) происходит поворот аппарата по крену на 180°, и далее
торможение продолжается с положительным качеством К= +0,3.
После прохождения пикового значения перегрузки, при пх = 0,55, проис-
ходит разблокировка радиовысотомера. При достижении высоты Н < 12 км
(соответствующей настройке высотомера) выдается сигнал на обнуление ка-
чества, и через А/ = 8 -НО с вводится в действие ПС (вытяжной, а затем ос-
новной, вначале зарифованный парашют).
Алгоритм управления качеством при действии возмущений на расчетную
траекторию. Первоочередная задача управления на участке аэродинамичес-
кого торможения заключается в обеспечении заданных условий работы ПС.
Проблему выбора оптимального управления КА обычно решают в два этапа.
На первом этапе выбирается номинальная траектория, удовлетворяющая по-
ставленным требованиям, и определяется соответствующее управление. На
втором этапе осуществляется синтез алгоритма управления, использование
которого позволяет парировать действия возмущений и обеспечивать движе-
ние вблизи расчетной траектории.
Реальное движение КА происходит в условиях, отличных от тех, которые
были приняты при расчете номинального движения. Основные возмущения,
39
действующие на КА в процессе спуска, можно разбить на четыре основные
группы:
1. Возмущения по начальным условиям входа: ошибки определения угла
входа, скорости входа, координат начальной точки, времени входа и др.
2. Возмущения, вызванные неточным знанием аэродинамических и кон-
структивных параметров КА: координат положения центра масс, аэродина-
мических коэффициентов Сх и Су, площади миделевого сечения Sm, массы
КА и т.д.
3. Возмущения, возникающие в результате неточного знания характерис-
тик атмосферы, и в первую очередь — зависимости плотности от высоты, тур-
булентности атмосферы и др.
4. Приборные ошибки: погрешности чувствительных элементов, средств
обработки информации, исполнительных органов и т.п.
Подавляющее большинство возмущений носит случайный характер с нор-
мальным законом распределения. Следует отметить, что при наличии различ-
ного рода возмущений высота ввода парашюта может быть ниже, а нагрузка
на парашют — выше их расчетного значения. Для оценки отклонений были
проведены соответствующие расчеты траекторий при различных возмущениях
с вероятностной оценкой по методу Доступова [26, 32]. Из всех возмущений
учитывались те, которые дают наибольшее отклонение конечных параметров
на участке аэродинамического торможения. В расчеты заложены следующие
исходные данные:
*1 - 0о = -14° ±ДХ] =±2°
Х2- К= 0,3 ±Дх2=±0,05°
хз- Го = 635О м/с ±Дх3 = ±50 м/с
Х4- Рх = 247 кГ/м2 ±Дх4=±10 кГ/м2
Х5 - среднесуточная атмосфера ±Дх5 = + max атмосфера — min атмосфера
Результаты расчетов по формулам квадратичной и кубичной аппроксима-
ции сравнивались для оценки достаточности степени аппроксимации; ока-
залось, что достаточно квадратичной аппроксимации.
При определении закона перекладки необходимо выбрать такой момент
изменения эффективного качества -К +К, чтобы он обеспечивал с уче-
том возмущений допустимые высоты при минимально возможной нагрузке
на парашют в момент его ввода.
Из анализа расчетов по названной методике выявлено, что перекладку це-
лесообразно производить:
для К= 0,25 0о=-12° при Л2^=1О
-14° 7
-16° 3
40
для 0,3 Оо=—12° при nx=ll
-14° 10
-16° 8
для К= 0,35 60=—12° при «*=12
-16° 11
-14° 10
Этим значениям продольной перегрузки соответствуют значения интег-
рала ее по времени (кажущаяся скорость) 1Икаж = J nxdt.
Данные зависимости являются законами перекладки для конкретного зна-
чения аэродинамического качества, аппроксимируя которые, получаем трех-
член вида пх = KxWk + KJVk + Ку
В табл. 1.1.2 и 1.1.3 приведены параметры ввода парашюта по датчику ИВУ
и по радиовысотомеру:
— высота и относительная нагрузка на парашют R при соответствующих
числах Маха;
— число Маха и относительная нагрузка на парашют R на соответствую-
щих высотах ввода парашюта.
Формирование схем спуска венерианских ДА, как было показано выше,
прошло определенный эволюционный путь, и основные схемно-технические
решения сконцентрировались в схеме спуска ПА и АЗ проекта «Вега».
Таблица 1.1.2. Параметры ввода парашюта (К= const, ЬК = ±0,03, ДО = ±1,2°)
ИВУ РВБВ
Ввод ПС Н км R ? кГ/м2 Ввод ПС М А , кГ/м2
М Зо М Зо м Зо м Зо
М=3,5 19,3 27,2 11,4 27 50,2 4 Н=8 км 2,35 2,6 2,1 62 68 56
М=3 16,0 20 12 37 54 20 Н=10км 2,48 2,7 2,3 55 63 48
М=2,5 10 14 6,5 53 75 31 Н=12км 2,65 3,0 3,6 49 51 47
41
Таблица 1.1.3. Параметры ввода парашюта (-К +К, &К = ±0,05, ДО = ±2°)
ИВУ РВБВ
Ввод ПС Н км > R 9 кГ/м2 Ввод ПС М R ; кГ/м2
М Зо М Зо м Зо м Зо
М=3,5 19,1 23 15,2 26,8 38 16 Н=8 км 2,5 2,8 1,9 61 72 50
М=3 15,5 21 10 38 55 20 Н=10км 2,5 3 2 55 62,4 47,2
М=2,5 10 16 4 55 85 27 Н=12км 2,65 3,1 2,15 49 52 46
Схема спуска содержит следующие основные этапы:
• аэродинамическое торможение СА в верхних слоях атмосферы;
• спуск с высоты облачного слоя до поверхности планеты ПА;
• полет аэростатного аппарата с выводом плавающей венерианской станции
на высоту дрейфа.
Первый этап:
— интенсивное торможение аппарата (перегрузки до 240 ед) от второй кос-
мической скорости 2 км/с до трансзвуковой скорости 280 м/с;
— ввод тормозной ПС на уровне верхней границы облачного слоя — 65 км;
— отделение верхней полусферы теплозащитной оболочки с аэростатным
аппаратом;
— сброс нижней полусферы теплозащитной оболочки.
Второй этап (рис. 1.1.12):
— спуск ПА на тормозном парашюте в облачном слое планеты;
— сброс парашюта у нижней границы облаков и последующий автоном-
ный полет на аэродинамическом тормозном щитке до поверхности;
— мягкая посадка аппарата на поверхность планеты Венера с целью взя-
тия и анализа проб грунта.
Третий этап — полет аэростатного аппарата:
— отделение аппарата от верхней полусферы теплозащитной оболочки и
полет на стабилизирующем парашюте;
— торможение до скорости 10 м/с и высоты 55 км с помощью парашюта
ввода аэростата;
— раскрытие контейнера плавающей станции, развертывание и наполне-
ние оболочки аэростата подъемным газом — гелием;
42
— отделение парашюта и погружение аэростата до высоты 50 км;
— сброс балласта и подъем станции на высоту дрейфа 53—55 км.
Т1+32
Т1+4С
Г1+18С
Т“0
Р»0.51
00.2 вт*
Т2
с* 180
г* 20С
Рис. 1.1.12. Схема спуска в атмосфере Венеры.
Ввод в действие аэростатного зонда
Т1+8
т + 30
Операции Расчетн. время ВЕГА-1 ВЕГА-2
Запуск ПВУ АЗ < 1 лрогр.) 05.00.дЪ 05.06.1u 05.06.U4
05.0047 05.06.21 05.06.15
0506.42 05.06.36
Отделение ПК ст АЗ; отделение от ВП 05.10.16 05.06.50 05.06.44
Запуск ПУД АЗ; отделение крышки ПК; ввод СП 05.09.10 05.09.04
05.09.40 05.09.34
Резка связей с гондолой и нижней частью контейнера с АЗ 05.12.10 05.12.04
Отделение нижне* части контейнера АЗ: развертывание оболочки 05.06.56 05.12.30 05.12.24
Начало наполнения оболочки
С^огчамие наполнения; отделение полюса оболочки 05.14,22
Р»0.9± 0 36атм Т = 60±1.5-С Сбрасывание ПУД
05.10.46 05.16.20 05.16.14
43
Отметим, что высокая плотность атмосферы Венеры позволяет в полной
мере использовать ее тормозные свойства, и тормозной щиток, размещаемый
в сфере ДА, обеспечивает требуемую конечную скорость ПА.
Вопросы формирования схемных решений для обеспечения ввода в дей-
ствие АЗ и вывода плавающей аэростатной станции на высоту дрейфа рас-
смотрены подробно в [35].
1.1.7. Схемно-технические решения возвращаемых аппаратов
Особый класс ДА в экспедициях по исследованию планет автоматически-
ми средствами составляют возвращаемые аппараты (ВА), которые должны
обеспечить выполнение ответственной задачи доставки, например образцов
грунта с другого небесного тела. Впервые в мире, как известно, успешная
доставка грунта была осуществлена в 1970 году ВА советского космического
аппарата «Луна-16». Для спуска в атмосфере Земли была использована ПС.
Известен, однако, и пример неудачного возвращения образцов грунта с ко-
меты КА «Deep Space», когда использовался баллистический спуск без задей-
ствования каких-либо дополнительных средств и ВА разбился при ударе о по-
верхность Земли.
Основными требованиями, предъявляемыми к В А, являются обеспечение
сохранности капсулы с грунтом при возможных аварийных ситуациях и на-
дежное обнаружение ее после посадки средствами поисково-спасательного
комплекса. Эти требования существенным образом влияют на выбор схемы
спуска и на выбор состава тормозных устройств.
Для повышения надежности и, соответственно, увеличения вероятности
успешной посадки целесообразно, чтобы форма ВА допускала неориентиро-
ванный вход в атмосферу планеты.
Наиболее изученными являются аппараты сферической формы. Для них
существуют отработанные методики расчета обтекания, хорошо согласующи-
еся с экспериментальными данными. Полезный объем сферической формы
ВА при постоянном баллистическом параметре является наибольшим. Сфе-
ра обеспечивает при любых начальных углах атаки балансировку около аб = 0
и обладает постоянным лобовым сопротивлением при всех углах атаки.
В связи с требованием обеспечения малого веса форма ВА должна иметь
возможно меньший объем при достаточно высоком лобовом сопротивлении.
Этому условно удовлетворяют формы сверхмалого удлинения (X < 0,5). Но
для них характерно наличие, кроме основного балансировочного угла атаки
аб = 0, дополнительной балансировки при аб = 180°. Щитковая система ста-
билизации обеспечивает поворот ВА в положении под нулевым углом атаки.
К настоящему времени проведен большой объем исследований по опре-
делению рациональных геометрических параметров таких форм ВА и их аэро-
динамических характеристик.
В связи с необходимостью сохранения капсулы с грунтом при посадке и
увеличения времени снижения ВА для надежного обнаружения с помощью
44
поисковых средств, желательно обеспечить снижение ВА с достаточно ма-
лой скоростью с высот порядка 10—20 км.
На рис. 1.1.13 показано несколько вариантов схемно-технических реше-
ний возвращаемых аппаратов различных конструктивно-компоновочных схем:
• ВА баллистического спуска типа « Диск»;
• ВА, использующий для спуска парашютную систему;
• ВА с надувным тормозным устройством;
• ВА с роторным тормозным устройством;
• ВА с аэростатной системой на конечном этапе.
Схема спуска с ПС
(рассыпной вариант)
й
Лояцу» в
Рис. 1.1.13. Варианты схемных решений ВА
Схема спуска 'Диск’
Для каждого из вариантов была проведена оценка проектных параметров
и разработана циклограмма осуществления операций по схеме спуска.
Оригинальным схемным решением является использование дополнитель-
ного аэродинамического торможения с помощью роторного устройства.
Форма ВА с роторным тормозным устройством (РТУ) выбирается из ус-
ловия обеспечения:
1) стабилизированного движения при гиперзвуковых скоростях полета, ког-
да лопасть ротора должна находиться в хвосте ВА и выполнять роль стабили-
затора,
2) входа в авторотацию при достижении чисел М < 4 и последующего тор-
можения в режиме авторотации.
45
В настоящее время не представляется возможным обсуждение формы РТУ
в деталях. Схематично же В А представляется в виде «кленового семечка».
Схема в рассматриваемом простейшем варианте однолопастного РТУ лише-
на недостатков, связанных с применением автоматики, но в остальном оста-
ется пока практически неизученной и требует тщательных теоретических и
экспериментальных исследований.
1.1.8. Комплексность и этапы программ исследований.
Принципы формирования программ в международной кооперации
Системный подход к решению задачи по формированию комплексной на-
учно-технической программы на примере исследования Марса позволяет
сформулировать ряд положений [33—35]:
— основной целью комплексной программы является доставка образцов
марсианского грунта на Землю;
— при разработке и осуществлении программы следует учитывать как тех-
нические аспекты и технический опыт предыдущих исследовании, так и эко-
номические и политические аспекты;
— учет фактора времени необходим с точки зрения повышения эффектив-
ности экспедиции и всей программы в целом (согласование дат старта, вре-
мени функционирования, выбор времени посадки и т. д.);
— для решения конечной цели программы необходимо провести комплекс
предварительных исследований.
Комплексность программы исследования планеты определяет выбор
средств, с помощью которых эти исследования проводятся (рис. 1.1.14).
Так, на первом этапе, при проведении исследований в отдельных райо-
нах, изучение атмосферы, поверхности и грунта Марса может проводиться с
помощью автономных станций, пенетраторов; схема спуска — простая. На
втором этапе, при проведении взаимосвязанных, детальных исследований
выбранных районов с помощью АЗ и тяжелого марсохода, схема спуска —
сложная, может быть комбинированная. На третьем этапе, когда решается
задача по сбору и доставке образцов грунта на Землю, схема эксперимента
существенно усложняется. Появляется взлетная ракета, новые операции: взлет
с поверхности, стыковка на орбите, возвращение и спуск в атмосфере Земли.
Что касается схемы спуска в атмосфере Марса, то к этому этапу все техни-
ческие средства торможения проходят отработку в реальных условиях на пер-
вых двух этапах.
Методы исследования и технические средства, с помощью которых про-
водится исследование атмосферы, поверхности планеты или ее недр, опре-
деляют не только общую программу и схему эксперимента, но и коренным
образом влияют на формирование схемы функционирования. Любая разно-
видность космического (спускаемого) аппарата обладает определенными воз-
можностями при функционировании: диапазонами скоростей, расстояний
и т. д. По-видимому, оптимальное отражение множества возможностей КА
и зондов на множестве научно-технических задач может быть основой эф-
46
Этяп Общий вид Задами Средства Отработка систем и операции
1 ДА Л Проведение исследований Марса в отдельных районах как со спутника так и с аэростатного зонда и «малого» марсохода взаимосвязанное изучение поверхности атмосферы недр ракета-носитель разгонный блок активное торможение Спутник аэростат марсоход 1. Система навигации 2. Система «аэроторможения» 3. парашютная система 4. Система радиосвязи 5 Элементы систем^ посад-” в Марсоход 7. Система забор» грунта 8. Обеспечение стерилизацм*
2 MX у С /' Детальное исследоымие выбранных районов с проведением анализа образцов грунта ори помощи ’большого’ ыерсоходв ракета-носитель разгонный блок «аэроторможение» спугни* аэростат марсоход 1 , Система мамгации 2 Система *аэротормажеиня* 3 Система’аэротормажеиия для посадки. 4 . Параедетная система 5 Система радиосвязи в. Система посад* и 7 Марсоход и мбор грунта
3 BP J * /л Сбор и доставка образцов грунта ме Землю Запуск 2-х аппаратов; 1. посадочного; 2. орбитального. ракета-носитель разгонный блок «вэротормсжение« посадочный аппарат взлетная ракета возвратная ра«ет» капсула грунтоноса 1 Система валета с поверхности 2. Сис го га догга ги грунта на земг.о 3. Обеспечение карантина < Стывоо«а на орбите искусственного ефимка Марса 5 Перехват на орбите искуственного спутника Земли.
Рис. 1.1.14. Комплексная программа и этапы исследований
фективного выполнения программы. Для подобного анализа обратимся к
рис. 1.1.15, показывающему разновидности аппаратов для исследования пла-
нет, технические возможности создания которых в настоящее время прора-
ботаны, за исключением дирижабля, вертолета, самолета, по которым ведут-
ся лишь перспективные научно-исследовательские работы.
Наибольшая эффективность изучения планеты будет получена при соче-
тании всех возможностей исследовательских операций. Могут быть выделе-
ны комплексы различных интеграций:
• СА — аэростат — самодвижущаяся платформа;
• СА — аэростат;
• СА — самодвижущаяся платформа;
• малые автономные станции — пенетраторы;
• СА — аэростат — малые станции и т.д.
Кроме того, могут быть выделены основные средства и факультативные,
отличающиеся, например, степенью отработки или небольшими отводимы-
ми массами и объемом информации. В случае, когда ветви функционирова-
ния таких средств независимы друг от друга, вероятность успешного функ-
ционирования того или иного средства также не зависит от другого.
Способы торможения и ввода в действие различных технических средств
при движении в атмосфере являются главным фактором, определяющим про-
филь траектории спуска и картину происходящих процессов. Используя пред-
ложенный метод исследования, мы должны выбрать максимально эффектив-
ный набор технических средств и оптимальным образом ввести их в действие.
47
Рис. 1.1.15. Задачи и технические средства исследований
Как уже отмечалось, необходимо рассматривать широкий диапазон средств
десантирования и особенности выбора схемных решений для различных по
массе аппаратов.
Увеличение массы марсианских аппаратов [36] следующего поколения (на-
пример, 5000 кг по сравнению с 894 кг у КА «Марс-3») приводит к рассмот-
рению способов максимального использования аэродинамического торможе-
ния и тормозных свойств атмосферы. На определенных этапах особенностью
исследований является требование организации посадки на поверхность пла-
неты с помощью орбитально-десантной схемы. Это объясняется необходи-
мостью предварительного выбора места и времени посадки в зависимости от
метеоусловий и других факторов. Реализация такой схемы возможна двумя
основными способами:
— с использованием тормозной двигательной установки (так называемый
«активный» способ торможения);
— с использованием предварительного аэродинамического торможения в
атмосфере и доразгон с помощью двигательной установки для выхода на ор-
биту (так называемый «аэродинамический» способ торможения).
Таким образом, возникает, необходимость выбора типа КА, который по-
служит базой для построения всей комплексной программы. Сравнение ап-
паратов возможно по ряду критериев, представляющих возможность каче-
48
ственно сравнить два различных типа. К положительным характеристикам
аппаратов с аэродинамическим типом торможения относятся:
1) по критерию необходимости:
— при посадке на поверхность Марса в любом случае используется управ-
ляемое аэродинамическое торможение;
— увеличивается точность посадки;
— меньше скоростные напоры и тепловые потоки, включая момент ввода
парашюта;
2) по энергомассовому критерию:
— увеличивается полезная масса аппарата, что позволяет выполнить дос-
тавку грунта марса одним пуском ракетоносителя;
3) по критерию перспективности:
— для исследования дальних планет, с целью повышения эффективности
экспедиции, целесообразно использование «аэрозахвата»;
4) по критерию универсальности:
— с разнообразными полезными нагрузками КА пригоден для исследова-
ния планет, имеющих атмосферу, с низких круговых орбит;
5) по критерию преемственности:
— КА с «аэрозахватом» допускает использование систем с аппаратов дру-
гого типа;
6) по критерию стоимости:
— универсальность аппарата ведет к снижению трудоемкости и стоимости;
7) по критерию надежности:
— вероятность выполнения всей программы по доставке грунта возраста-
ет при использовании однотипных аппаратов, и это возможно для аппаратов
с аэродинамическим типом торможения.
К недостаткам этих же аппаратов можно отнести:
— увеличенные требования к системам управления и навигации с целью
обеспечения более точного коридора входа в атмосферу и управления дви-
жением в самой атмосфере;
— повышенные требования к теплозащите, дважды работающей в усло-
виях движения в атмосфере.
Таким образом, базовым аппаратом для комплексной программы может
быть аппарат, использующий принципы аэродинамического торможения.
Разработанный проект «Фобос-Грунт», возможно, будет базовым аппара-
том, в том числе и для использования технических систем аппарата с «аэро-
торможением». При этом должна решаться задача отработки этих систем.
Независимо от того, ставится ли задача организации предварительного
аэродинамического торможения, прямого входа в атмосферу и посадки тя-
желого аппарата или организации сети метеорологических станций, подго-
товки пилотируемого полета для каждого из этих этапов рекомендован пред-
ложенный в работе методологический подход и разработаны схемно-техни-
ческие решения.
49
На рис. 1.1.15 были представлены схематические изображения техничес-
ких средств, предназначенных для решения названных технических и науч-
ных задач, их возможности и технические характеристики.
Возможная схема экспедиции с доставкой различных технических средств
и использованием различных средств десантирования, а также дрейфа пред-
ставлена на рис. 1.1.16.
Рис. 1.1.16. Комбинированная схема спуска и дрейфа в атмосфере
Рассматривая общую схему функционирования десантируемых средств и
переходя от декомпозиции общей схемы спуска в атмосфере к синтезу ком-
бинированной схемы для комплексного исследования атмосферы, поверхно-
сти, грунта произвольной планеты или небесного тела (спутника планеты),
можно сделать вывод, что накопленный в настоящее время огромный опыт
по формированию большого числа схемно-технических решений средств де-
сантирования и дрейфа в атмосфере позволяет реализовать практически лю-
бую экспедицию с любым набором средств.
Если говорить, например, о программе исследования Марса, то она все-
гда, и в последнее время особенно, привлекала внимание международной на-
учной общественности. В течение ближайших десяти лет, очевидно, основ-
ной задачей будут широкомасштабные исследования с помощью различных
технических средств. Важным этапом в исследованиях будет создание сети
исследовательских станций, которые позволят собирать информацию об ус-
ловиях на планете в различных удаленных на большие расстояния местах. Уже
сейчас, при разработке проекта «Фобос-Грунт», рассматривалась возможность
50
доставки на поверхность Марса нескольких миниметеорологических станций
российско-финской разработки. С этой же точки зрения интересным пред-
ложением является использование АЗ, способных преодолевать значительные
расстояния. Такие предложения были сделаны российской стороной для
программы «Скаут», разрабатываемой ПАСА. Европейская программа «Ав-
рора» также предусматривает использование широкого спектра технических
средств для исследования атмосферы и поверхности Марса, включая надув-
ные устройства. Справедливости ради следует отметить и вновь вспыхнув-
ший интерес международной научной общественности к исследованию Ве-
неры [37] (проект венерианского зонда «EVE»). Ведущиеся проработки под-
тверждают связь и преемственность методических подходов. Если говорить
о принципах формирования перспективных программ исследования планет
Солнечной системы в международной кооперации, неоходимо отметить сле-
дующее. На первых этапах планетных исследований разрабатывались сугубо
национальные проекты, осуществлявшиеся в чрезвычайно сжатые сроки,
практически без ограничений финансирования. Первые шаги международ-
ного сотрудничества выражались в установке иностранных научных прибо-
ров на советских космических аппаратах. Первым, блестящим, международ-
ным проектом, с большой кооперацией и сложнейшими задачами, стал про-
ект «Вега» в 1985 году. В это время закладывались такие принципы форми-
рования программы исследований, как: комплексность программы, преем-
ственность технических и схемных решений и одновременно введение но-
вых элементов научных экспериментов. Они были использованы в проектах
«Веста», «Фобос-88», «Марс-92», «Марс-96» по программам исследования
Венеры и Марса. Российские разработки новых технических средств иссле-
дований, таких, как: долгоживущие автономные станции, малые станции,
пенетраторы, подвижные лаборатории — планетоходы, дрейфующие в атмос-
фере АЗ, позволили рекомендовать их (или их системы) к использованию в
таких европейских, американских и международных проектах и программах
как: «Интермарс», «Марснет», «Вместе к Марсу», «Лед и Пламя», «Биоэксп-
лорер», «Карина», «Нетлэндер», «Пафайндер» и др. Разработка новых техно-
логий, таких, как технология надувных тормозных устройств позволяет рас-
ширять возможности проведения технических операций и научных экспери-
ментов.
Стремление снизить стоимость программ, снижение объема бюджетного
финансирования космических исследований приводит к необходимости объе-
динения усилий и увеличению роли международной кооперации при фор-
мировании долгосрочных и дорогостоящих программ планетных исследова-
ний. Выдвинутый в свое время лозунг «Быстрее. Дешевле. Лучше» хотя и
трудно реализуем, но весьма привлекателен.
Амбициозные планы США, Европы, Китая, Индии, Японии в освоении
Луны, Марса, Венеры, по общему мнению, могут быть осуществлены только
в международной кооперации. Использование российского опыта, предло-
51
жения по использованию российских ракетоносителей, разгонных блоков,
средств десантирования, научных разработок могут стать ключевым момен-
том в формировании перспективных программ исследования планет и дру-
гих небесных тел Солнечной системы.
Литература
1. Атлас планет Земной группы и их спутников / Краснопевцева Б.В.,
Кремнев Р.С., Карягин В.П., Пичхадзе К.М., Воронцов В.А. и др. — М.: МИ-
ИГАИК, 1992. Раздел IX. С. 126-148.
2. Успехи Советского Союза в исследовании космического пространства.
Второе космическое десятилетие. 1967—1977 гг. АН СССР. — М.: Наука, 1978.
3. Авдуевский В.С., Успенский Г.Р. Народно-хозяйственные и научные
космические комплексы. — М.: Машиностроение, 1985.
4. Шесть лет и вся жизнь конструктора Г.Н. Бабакина. — М.: Арт—Биз-
нес—Центр, 2004.
5. Базилевский А.Т., Григорьев Е.И., Ермаков С.Н., Карягин В.П., Пич-
хадзе К.М. Проектирование спускаемых автоматических космических аппа-
ратов: Опыт разработки диалоговых процедур. — М.: Машиностроение, 1985.
6. Мишин В.П., Безвербый В.К., Панкратов Б.М. Основы проектирова-
ния летательных аппаратов (транспортные системы): Учебник для техничес-
ких вузов. — М.: Машиностроение, 1985.
7. Алифанов О.М. Обратные задачи в исследованиях по тепло- и массооб-
мену. Энциклопедия по тепло- и массообмену. — М.: Наука, 1999.
8. Малышев Г.В., Калашников Л.М., Зернов В.И. Проектирование и кон-
струкция космических летательных аппаратов. Общее проектирование по
критериям эффективности. — М., 1977.
9. Каменков Е.Ф. Маневрирование спускаемых аппаратов. Гиперболичес-
кие скорости входа в атмосферу. — М.: Машиностроение, 1983.
10. Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических ап-
паратов: Учебник для вузов. — М.: Дрофа, 2004.
11. Мороз В.И. Физика планеты Марс. — М.: Наука, 1978.
12. Маров М.Я., Кузьмин А.Д. Физика планеты Венера. — М.: Наука, 1974.
13. Кремнев Р.С., Карягин В.П., Балыбердин В.В., Клевцов А.А. Аэроста-
ты в атмосфере Венеры. — Киев: Наукова думка, 1985.
14. Москаленко Г.М. Механика полета в атмосфере Венеры. — М.: Ма-
шиностроение, 1978.
15. Байбаков С.Н. Мартынов А.И. С орбиты спутника — в «глаз» тайфуна.
- М.: Наука, 1986.
16. Броуде Б.Г. Воздухоплавательные летательные аппараты. — М.: Ма-
шиностроение, 1976.
17. Иванов Н.М., Мартынов А.И. Управление движением космического
аппарата в атмосфере Марса. — М.: Наука, 1977.
52
18. Малышев Г.В., Блейх Х.С., Ильин М.Н. Проектирование и конструк-
ция космических летательных аппаратов: Учебное пособие. 4.2. Проектиро-
вание спускаемых аппаратов. Принципы конструирования. — М.: МАИ, 1976.
19. Горбатенко С.А., Макашов Э.М., Полушкин Ю.Ф., Шефтель Л.В. Расчет
и анализ движения летательных аппаратов. Расчет и анализ движения лета-
тельных аппаратов: Инженерный справочник. — М.: Машиностроение, 1971.
20. Гуд Г.Х., Макол Р.Э. Системотехника. Введение в проектирование. —
М.: Сов.радио, 1962.
21. Джонс Дж. К. Методы проектирования. — М.: Мир, 1986.
22. Васильев А.Ф., Шилов А.А. Программа расчета движения в атмосфере
осесимметричного аппарата, имеющего произвольное распределение масс //
Труды ЦАГИ. Вып. 1095. - М., 1968.
23. Лобанов Н.Л. Основы расчета и конструирования парашютов. — М.:
Машиностроение, 1965.
24. Лялин В.В., Морозов В.И. Повышение эффективности разработок гру-
зовых парашютных систем на основе компьютерных технологий // Полет.
2004. № 5. С. 8-15.
25. Воронцов В.А., Дерюгин В.А., Пичхадзе К.М. Метод исследования пла-
неты Венера с помощью плавающих аэростатных станций. Математическая
модель И Космические исследования. 1988. С. 430—433.
26. Статистические методы в проектировании нелинейных систем авто-
матического управления / Под ред. Б.Г. Доступова. — М.: Машиностроение,
1970.
27. Воронцов В.А. Надувные тормозные устройства для марсианских эк-
спедиций // Доклад на Международном космическом форуме 11-13 апреля.
Москва, 2001.
28. Полищук Г.М., Пичхадзе К.М., Воронцов В.А. Создание исследова-
тельской сети марсианских мини-станций. Варианты экспедиций. Междуна-
родное сотрудничество // Доклад на Пятом Международном аэрокосмичес-
ком конгрессе. Москва, 2006.
29. Ari- Matti Harry, V. Linkin, V. Vorontsov Metnet — a new generation
atmospheric observation network for mars. Towards Mars! Extra. Publisher. —
Helsinki, 2006. - P. 115-125.
30. Воронцов В.А., Кремнев P.C., Пичхадзе K.M., Роговский Г.Н. Аэро-
статные зонды и пенетраторы для исследования Марса // Доклад на 49-м кон-
грессе Международной астронавтической федерации. Хельсинки. Финляндия.
- IAF-88-395. - 1988.
31. Воронцов В.А. Проектирование схем лётных операций марсианских
спускаемых аппаратов // Сб. науч. тр. НПО им. С.А. Лавочкина. Вып. 3. —
М., 2001. С. 64-68.
32. Воронцов В.А. Разработка средств десантирования и дрейфа в атмос-
ферах небесных тел Солнечной системы с учетом неопределенности исход-
53
ных данных // Доклад на 11-й Международной конференции «Системный
анализ, управление и навигация». Крым, Евпатория. 2—9 июля 2006 г. С. 104—
105.
33. Полищук Г.М., Пичхадзе К.М., Воронцов В.А. Принципы формиро-
вания перспективных программ исследования планет Солнечной системы в
международной кооперации // Доклад на 11-й Международной конферен-
ции «Системный анализ, управление и навигация». Крым, Евпатория. 2—9
июля 2006 г. С. 9.
34. Воронцов В.А. Проектирование десантных аппаратов для планетных
исследований // Доклад на 42-х научных чтениях памяти К.Э. Циолковско-
го. Калуга, 2007.
35. Воронцов В.А. Проектирование аэростатных зондов для исследования
планет Солнечной системы: Учебное пособие / Под ред. К.М. Пичхадзе. —
М.: Изд-во МАИ-ПРИНТ, 2008.
36. Автоматические космические аппараты для фундаментальных и при-
кладных научных исследований / Под общ. ред. д-ра техн, наук, проф. Г.М.
Полищука и д-ра техн, наук, проф. К.М. Пичхадзе. — М.: Изд-во МАИ-
ПРИНТ, 2010.
37. Космический полет НПО им. С.А. Лавочкина / Под общ. ред. д-ра техн,
наук, проф. К.М. Пичхадзе и д-ра техн, наук, проф. В.В. Ефанова. — М.: Изд-
во МАИ-ПРИНТ, 2010.
Выражаем глубокую благодарность коллегам по работе: В.А. Дерюгину,
А.М. Защиринскому, А.В. Лукьянчикову, А.Б. Полякову, В.К.Сердюку,
В. С. Финченко и многим другим за плодотворную совместную деятельность, а
также за полезные советы. Искренне признательны за помощь в оформлении
материалов А. Г. Мейстеру, М.Г. Лохматовой.
В.А. Воронцов,
НПО им. С.А. Лавочкина
К.М. Пичхадзе,
НПО им. С.А. Лавочкина
54
ОЯ МЕТОДОЛОГИЯ СОЗДАНИЯ ПРЕЦИЗИОННЫХ КОНСТРУКЦИЙ
КОСМИЧЕСКИХ АППАРАТОВ
1.2.1. Характеристики прецизионных КА
Прецизионность космического аппарата является важным и в то же вре-
мя многоплановым критерием при формировании проектных параметров. Для
КА, а особенно для ДЗЗ и космических астрофизических обсерваторий важ-
на точность реализации заданных углов наведения и стабилизация осей КА в
заданном направлении.
По мере возрастания сложности вопросов, решаемых космическими тех-
нологиями, развивался и разноплановый подход к формированию требова-
ний по прецизионности КА. Сначала это были проблемы, которые решались
в постановке квазистатических исходных данных, а затем стало просто необ-
ходимым дополнять требования по реализации точностных параметров ус-
ловиями динамического состояния КА.
Поскольку задача обеспечения прецизионности КА содержит в исходной
информации много параметров, влияющих на конечный результат, оптими-
зация ее решения формируется путем решения связанных между собой, но
различных по технологии реализации проблем. Итог успешного решения
каждой из проблем может создать предпосылку положительного решения
задачи в целом.
Решение задачи обеспечения прецизионных параметров наиболее актуально
для КА ДЗЗ и космических астрофизических обсерваторий. Из всего много-
образия их целевых характеристик можно выделить три основные характе-
ристики, которые позволяют судить о прецизионности данного КА. К ним
относятся:
1 ) точность наведения;
2 ) разрешающая способность целевой аппаратуры;
3 ) производительность.
Подробное рассмотрение этих целевых характеристик выявляет цепочки
связей в процессе создания КА и технологии обеспечения заданных целевых
характеристик.
Параметр точность наведения актуален для КА как земного, так и планет-
ного или астрофизического мониторинга, а также для КА связи.
Под точностью наведения (5Н) в данном случае следует понимать предель-
ное значение рассогласования расчетного и фактического положения оси
целевой аппаратуры в заданное время.
В общем случае точность наведения КА зависит от следующих факторов:
— точность знания вектора состояния КА и точность его реализации на
борту;
— точность отработки заданного углового положения (скорости) КА
его исполнительными органами;
55
— точность знания некоторых геометрических параметров конструкции
КА, целевой и служебной аппаратуры (точность геометрической увязки си-
стем координат на борту КА).
В начале 70-х годов в технических заданиях на создание КА ставилась
задача наведения с точностью до 10—12 угл. мин и стабилизацию с ошибкой
(1 -ь 3) • 10-3 град/с. В 90-х годах [1] сформирована задача перехода к точно-
сти ориентации до единиц угловых минут (и даже единиц угловых секунд) и
стабилизации до уровня 1 • 1(Н град/с, что в свою очередь привело к необ-
ходимости разработки новых требований, выдачи новых технических зада-
ний на подсистемы и создания новых командно-измерительных и исполни-
тельных приборов системы управления:
— астроизмерительные системы с точностью определения ориентации
1 угл. сек. — при угловой скорости до 0,005 град/с (АИС);
— гироскопические измерители вектора угловой скорости с дискретнос-
тью измерений угловых перемещений аппарата от 0,015 до 0,006 угл. сек;
— инерционные исполнительные органы с широким диапазоном управ-
ляющего воздействия на космический аппарат: силовые гироскопические ком-
плексы, обеспечивающие как прецизионную стабилизацию со скоростями
0,0001—0,00001 град/с, так и переориентацию аппарата с угловой скоростью
до 1,5 град/с.
Современная постановка задачи наведения КА, а также современный уро-
вень целевой аппаратуры (ЦА) требуют в большинстве случаев реализации
высокой точности наведения оси ЦА в заданную точку и высокой точности
удержания этого направления оси ЦА (стабилизации) во время наблюдения.
Так, для КА типа «Спектр-УФ», «Спектр-Р», «Спектр-РГ» и других КА на-
учного и прикладного назначения, производящих те или иные наблюдения,
зачастую максимально допустимые ошибки наведения составляют единицы
и доли угловых минут, в то время как для многих других КА допускаются
отклонения в десятки минут.
Для космических аппаратов информационных систем, а также для косми-
ческих астрофизических обсерваторий одним из основных целевых парамет-
ров является параметр линейного разрешения. При выполнении целевой за-
дачи КА необходимо обеспечивать требуемую разрешающую способность (ли-
нейное разрешение) при соответствующих параметрах фоноцелевой обстанов-
ки, условиях и геометрии наблюдения, а также параметрах атмосферы.
Линейное разрешение существенно зависит от линейного и вибрацион-
ного смаза изображения, которые в свою очередь напрямую зависят от гео-
метрической стабильности конструкции КА. Поэтому в контексте проблемы
взаимовлияния целевых параметров и прецизионности конструкции КА пос-
ледние заслуживают более детального рассмотрения.
При использовании приемников изображения на основе ПЗС-матриц и
ПЗС-линеек направление движения изображения в фокальной плосости
должно совпадать со столбцами матриц оптической системы, а скорость пе-
56
ремещения зарядовых пакетов должна быть синхронизирована со скоростью
движения оптического изображения по фоточувствительной поверхности
матрицы. Отклонение скорости движения оптического изображения от ско-
рости движения зарядовых пакетов приводит к сдвигу изображения, который
является причиной смаза изображения и приводит к ухудшению разрешаю-
щей способности целевой аппаратуры.
Для КА ДЗЗ важно, чтобы положению визирной оси на поверхности Зем-
ли в каждый момент времени съемки соответствовали строго определенные
значения программных угловых скоростей КА. В связи с этим для получен-
ния заданного качества получаемой информации должна быть обеспечена:
— требуемая точность наведения визирной оси целевой аппаратуры в про-
цессе съемки;
— требуемая точность отработки программных угловых скоростей КА в
процессе съемки;
— требуемая синхронизация между положением визирной оси в простран-
стве и отрабатываемыми программными угловыми скоростями.
Вибрационные возмущения, создаваемые элементами конструкции КА,
работой исполнительных органов системы управления (СУ), работой служеб-
ных систем, работой элементов целевой аппаратуры, приводят к ухудшению
линейного разрешения (вибрационный смаз). Другими словами, вибрация
вызывает т.н. размытие изображения.
Одна из основных характеристик КА ДЗЗ — его производительность, ха-
рактеризующаяся числом съемок в сутки. Для обеспечения высокой произ-
водительности такого КА требуется быстрое, динамичное его перенацелива-
ние с одного объекта наблюдения на другой. Производительность — это не
точностной параметр, а временной. Однако он характеризует возможность КА
в максимально короткое время после возмущения (перенацеливания) восста-
новить все признаки прецизионного аппарата.
При решении динамических задач обеспечения целевых характеристик КА
выделяются два направления исследования, которые можно разделить по
фактору частотной характеристики изменения состояния: медленно меняю-
щиеся процессы с частотой менее 0,1 Гц — их относим к квазистатическим,
и быстроменяющиеся процессы, которые имеют частоту более 0,1 Гц, отно-
сим к динамическим.
Задача создания прецизионных КА безусловно является многопараметри-
ческой, при этом пути решения проблемы оптимизации каждого параметра
в силу специфики технологии создания той или иной системы КА могут быть
разными.
Однако их нельзя решать, не сравнивая результаты путей достижения по
параметрам стоимости, надежности, времени реализации. Комплексный ана-
лиз каждого варианта в сравнении по критериям стоимости, надежности,
управляемости может дать оптимальный результат.
57
Баллистическое построение, параметры СУОС, характеристики целевой
аппаратуры, ПАО бортовых систем и ПАО наземной обработки информации,
как и конструкция КА, и в статической и в динамической постановке долж-
ны комплексно обеспечивать возможность реализации целевых параметров
КА. Только учитывая влияние каждой составляющей и затраты на ее выпол-
нение, можно приближаться к оптимальным технологиям создания преци-
зионных КА (рис. 1.2.1). Таким образом, можно построить процесс миними-
зации отрицательного воздействия каждого фактора на целевые характерис-
тики КА, анализируя эволюцию каждого из них, выявляя как причины, так
и приемы снижения степени их влияния на целевые характеристики.
ПРЕЦИЗИОННОСТЬ КА:
6Н - точность наведения
6р— разрешающая способность
fп - производительность
ПАРАМЕТРЫ СЛУЖЕБНЫХ СИСТЕМ КА
5^ м погрешности баллистического обеспечения
бдн разрешающая способность аппаратуры
набл!оденияи ориентации
бсу - погрешности системы управления
био “ погрешности исполнения команд СУ
исполнительными органами КА
f д - динамические параметры СУ
ПАРАМЕТРЫ ПРЕЦИЗИОННОСТИ
КОНСТРУКЦИИ КА:
Анту ~ точность начальном геометрической увязки
приборов и агрегатов
Динин ~ изменение начальных параметров
геометрической увязки по этапам эксплуатации
Лдм - погрешность оценки динамической модели
конструкции КА
Tj- время динамического успокоения КА
(к критерию производ игел ь ноет и КА)
Рис. 1.2.1. Системное обеспечение прецизионности КА
58
1.2.2. Анализ тенденции изменения проектных параметров КА
В настоящее время сформировалась тенденция создания конструкций КА
с относительно малой массой и размерами центрального условно жесткого
тела и протяженных упругих элементов с все возрастающими пропорциями
последних по массе и габаритам. К этому побуждает необходимость иметь на
борту КА энергетику большой мощности, а это значит, что растет площадь
солнечных батарей. Перспективные КА предполагают наличие на борту раз-
личного рода антенн и ретрансляторов, раскрывающихся балок и штанг с
приборами и оборудованием. Такого типа конструктивные элементы вносят,
как правило, существенный вклад в облик динамической модели КА [2].
Если проследить тенденции совершенствования приборов оптических
информационных систем, то, несмотря на стремление всех разработчиков
космических аппаратов минимизировать габариты и массы, космические
телескопы с развитием технологий и возможностей производства увеличива-
ют свои размеры. Эту, казалось бы, дисгармонию можно объяснить следую-
щим:
1) бурное развитие технологий в электронной промышленности позволяет
из года в год уменьшать габариты блоков электроники служебных систем КА;
2) выходные параметры приборов целевой аппаратуры, таких как теле-
скоп, во многом зависят от площади собирающей поверхности (апертуры),
что, конечно, ведет к увеличению габаритов и массы телескопов (или анало-
гичной полезной нагрузки). Соотношение массы полезной нагрузки (теле-
скопа) к общей массе космического аппарата (рис. 1.2.2) показывает, что,
если в начале 70-х годов это соотношение равнялось 0,125, в начале 80-х —
0,14, в начале 90-х — 0,29, то в начале 2000 г. резко изменилось соотноше-
ние: 0,60—0,70.
Рис. 1.2.2. Изменение по годам соотношения массы ПН к общей массе КА
Такая ситуация говорит о том, что при создании прецизионных КА раз-
работчик должен заботиться не только о геометрической стабильности кон-
структивных элементах самого КА, но и задавать и оценивать параметры
прецизионности целевой аппаратуры, поскольку обычно существуют взаим-
но влияющие факторы, которые необходимо рассматривать в совместной
точностной модели.
59
От проектов по созданию КА для исследования околосолнечного простран-
ства до КА сложных информационных систем специалистами НПО им. С.А.
Лавочкина пройден путь наращивания арсенала конструктивно-технологи-
ческих приемов решения проблемы прецизионности первичной конструкции
КА. Принципы оптимизации компоновки и силовой схемы КА, методоло-
гия создания отдельных узлов и агрегатов, алгоритм выбора конструкцион-
ных материалов и технологий, разработка и внедрение прецизионно-ориен-
тированной идеологии эксплуатации КА в полете — все наработки легли в
основу формирования методологии поэтапного обеспечения прецизионнос-
ти конструкций космических аппаратов. В сочетании с созданием расширен-
ного банка конструктивно-технологических решений и методик, формиро-
ванием специализированной научно-исследовательской базы, опробование
этих приемов на целом ряде реализованных космических проектов дает ос-
нование заявить о наличии в НПО им. С.А. Лавочкина достаточно большого
положительного опыта по созданию КА с высокими параметрами прецизи-
онности.
На КА «Луна—15^-—24» (рис. 1.2.3) реализована увязка инерциальной
системы координат с базовой системой координат с точностью до 5 угл. мин.
Рис. 1.2.3. КА «Луна-24» на поверхности Луны
При создании КА «Марс—96» (рис. 1.2.4), «Венера—9—16» и «Вега—1,-2»
(рис. 1.2.5) решены вопросы точностной увязки осей инерциальной системы
координат и осей приборов системы ориентации с осями базовой системы
координат с точностью в 3 угл.мин. В основном это были задачи в квазиста-
тической постановке (минимизация рассогласования осей координат при
монтажно-сборочных работах, во время силового нагружения и при тепло-
вых нагрузках КА на орбите).
При создании КА «Астрон», запущенного на орбиту в 1984 году
(рис. 1.2.6), специалисты НПО участвовали в разработке прецизионного кос-
60
Рис. 1.2.4. КА «Марс-96»
Рис. 1.2.5. КА «Вега» (расчекованное положение АСП-Г при наличии на борту СА
показано условно)
мического ультрафиолетового (УФ) телескопа «Спика» с диаметром зеркала,
равным 0,8 м, где наряду с решением задач квазистатической прецизионно-
сти была успешно решена проблема динамической прецизионности (удержа-
ние изображения звезды на щели спектрометра с точностью до 0,5 угл. сек.).
61
Рис. 1.2.6. КА «Астрон» — внеатмосферная астрофизическая обсерватория
В 1990 году разрабатываются основные принципы обеспечения прецизи-
онности конструкции КА информационных систем, отрабатываются конст-
руктивно-технологические решения обеспечения союстировки визирной и
инерциальной систем координат при летной эксплуатации с точностью до
5 угл. сек.; также успешно решена задача обеспечения динамической пре-
цизионности конструкции.
Исходя из необходимости оптимизации силовой и динамической схем КА,
в проектах «Спектр-P» и «Спектр-УФ» в ОКБ НПО им. С.А. Лавочкина раз-
рабатывается конструктивный модуль целевой научной аппаратуры.
Для проекта «Спектр-Р» (рис. 1.2.7) разрабатывается прецизионная кон-
струкция трансформируемого радиотелескопа диаметром Юме обеспечени-
ем предельного отклонения рабочей поверхности от теоретического контура
не более 1 мм при всех условиях эксплуатации.
Для проекта «Спекгр-УФ» (рис. 1.2.8) создается уникальная прецизион-
ная конструкция космического УФ-телескопа с диаметром зеркала 1,7 м [3].
Таким образом, в течение всего периода космической деятельности спе-
циалистами НПО постепенно, шаг за шагом, разрабатываются и совершен-
ствуются конструктивно-технологические приемы обеспечения прецизион-
ности конструктивных элементов космических аппаратов для астрофизичес-
ких и планетных исследований, для КА дистанционного зондирования зем-
ной поверхности, а также для КА космических сегментов информационных
систем. Сначала эти задачи решались только в квазистатической постановке,
а позднее, с середины 80-х годов, параллельно с увеличением вычислитель-
ных возможностей, развитием средств измерения и созданием эффективных
средств гашения и демпфирования колебаний стало возможным ставить и
решать проблемы динамической прецизионности.
62
Рис. 1.2.7. КА «Спектр-Р»
Рис. 1.2.8. КА «Спектр УФ»
1.2.3. Прецизионность первичной конструкции
При создании прецизионных КА выполнение таких целевых характерис-
тик, как точность наведения, разрешающая способность, зависят от того,
насколько полным является наше представление о состоянии геометричес-
ких параметров конструкции КА, а также от состояния оптической системы
целевой аппаратуры. Поскольку деформации конструкции КА, оптического
блока целевой аппаратуры, самих оптических элементов, погрешности визи-
рования, динамические колебания и многие другие факторы безусловно вли-
яют на качество выполнения целевой задачи, среди прочих причин, влияю-
63
щих на выполнение целевой задачи, можно выделить отдельное направление
работ, вклад которого более чем значителен: прецизионность первичной кон-
струкции космических аппаратов.
Под прецизионностью космической конструкции следует понимать сохра-
нение ее геометрических параметров при всех видах внешних воздействий.
Однако, поскольку абсолютно неизменяемые конструкции в настоящее вре-
мя создать невозможно, то при проектировании закладываются ограничения
на величины деформаций, которые впрямую могут влиять на значения целе-
вых точностных параметров космических аппаратов. Причем решение этой
задачи было бы невозможно, если бы не удалось объединить и нацелить на
ее решение такие направления создания КА, как проектирование, материа-
ловедение, технология сборки, технология измерений и деформационный
анализ, алгоритмы и технология управления движением космического аппа-
рата на рабочей орбите.
В НПО им. С.А.Лавочкина созданы методические основы комплексного
обеспечения прецизионных характеристик конструкции КА, что позволяет
оптимизировать пути достижения заданных параметров и минимизировать
затраты при реализации проектов КА [4]. Методические основы проектиро-
вания и оптимизации конструктивно-технологических решений обеспечения
прецизионности конструкции КА в квазистатической постановке включают:
— при выборе предпочтение статически определимым силовым схемам
конструкций, во многом определяющим размерную стабильность;
— минимизация воздействия внешних факторов на прецизионные конст-
рукции;
— целенаправленный выбор конструкционных материалов, максимально
реализующих физико-механические свойства в обеспечение минимизации
деформаций от внешних воздействий;
— введение в структуру КА систем, позволяющих анализировать поведе-
ние конструкций под воздействием внешних факторов и корректировать па-
раметры КА, определяющие его прецизионность;
— формирование специальных методик, оборудования и средств измере-
ния, обеспечивающих наземную отработку прецизионных конструкций КА.
При выборе проектных и конструктивно-технологических решений пред-
почтение отдается тем, которые обеспечивают минимальное изменение ис-
ходного геометрического состояния. Это означает, что конструкция должна
быть изготовлена по специальной технологии, минимизирующей внутренние
напряжения, затем тщательно обмерена; она должна иметь минимальные
деформации после воздействия механического нагружения при выведении КА
на орбиту, а также минимально реагировать на изменение внешних тепло-
вых потоков, не менять геометрические параметры во времени. Обычно в
распределении значений погрешностей на уходы от эксплуатационных на-
грузок выделяется поле в 1—3 угл. мин. Для каждой точностной цепочки, в
зависимости от ее влияния на целевые параметры, эти значения конкрети-
64
зируются, а затем при наземной экспериментальной отработке подтвержда-
ются по специальным методикам. При необходимости повышения прецизи-
онного качества конструкции КА после выведения на орбиту проводится сеанс
юстировки систем КА с корректировкой программных уставок на борту.
При решении задач размещения оборудования на КА довольно распрост-
раненным приемом является применение кинематических устройств и меха-
низмов. Ограничение габаритов КА под головным обтекателем приводит часто
к необходимости выноса приборов в нужную зону после сброса ГО и выхода
КА на орбиту. Однако при наложении точностных условий на эти задачи
возникает целый ряд проблем, решение которых и составляет особенность
технологии создания трансформируемых прецизионных конструкций.
В конструкции целевой аппаратуры сконцентрированы все проблемы обес-
печения прецизионности, поскольку требования по величинам параметров
точности реализации целевой задачи начинаются именно с нее. А поскольку
довольно часто габаритные размеры целевой аппаратуры становятся соизме-
римыми и даже превышают размеры платформы КА, то в практике создания
КА все чаще целевую аппаратуру приходится создавать разработчику КА. В
случае когда технология создания прецизионных конструкций освоена и
широко применяется на всех этапах, разработка прецизионной, крупногаба-
ритной целевой аппаратуры реально может быть решена.
1.2.4. Приемы обеспечения прецизионности
Как следует из рис. 1.2.9, реализация целевых параметров прецизионнос-
ти КА опирается на решение проблем обеспечения точностных характерис-
тик конструкции как в квазистатической, так и в динамической постановке.
Приемы решений этих проблем довольно многочисленны, однако их влия-
ние на параметры прецизионности конструкции столь велико, что только
комплексный подход, с поиском оптимальных и компромиссных решений по
всем направлениям работ может привести к желаемому результату.
Анализ проблемы обеспечения точностных целевых характеристик КА
показывает, что этим вопросом необходимо заниматься начиная с проектных
работ. Важно, чтобы все системы КА в равной мере оценивались по пара-
метрам обеспечения прецизионности. Успешное решение задачи обеспече-
ния точностных характеристик конструкции позволяет значительно упрос-
тить её, сделать дешевле и одновременно повысить надежность в выполне-
нии требований ТЗ в части параметров прецизионности КА. Последователь-
ное решение этой проблемы по каждому из элементов методологии обеспе-
чения прецизионности позволяет оптимизировать результат на каждом из
этапов работ. Хорошо исследованное, прогнозируемое поведение прецизион-
ных конструктивных элементов дает возможность надежно строить точнос-
тную модель КА для ее применения при орбитальных условиях эксплуата-
ции.
Аналогичную работу целесообразно планировать и при создании преци-
зионной аппаратуры, устанавливаемой на борт КА. То есть решение пробле-
65
ЦЕЛЕВЫЕ ПАРАМЕТРЫ ПРЕЦИЗИОННОСТИ КА
Разрешающая способность «Р Производительность fn
Точность
наведения
бн
Рис. 1.2.9. Схема связей параметров прецизионности
мы обеспечения высокой геометрической стабильности взаимного располо-
жения элементов и систем КА можно отнести к отдельному блоку конструк-
тивно-технологических решений.
В начале выполнения этой задачи рассматриваются вопросы проектиро-
вания и выбора силовой схемы, минимизации внешних воздействий; затем
расчетным путем определяются деформации от всех видов воздействий на си-
стему; выбор конструктивно-технологических решений, которые дают мини-
66
мальные (приемлемые) деформации, в том числе выбор конструкционных ма-
териалов, определение видов технологий и их последовательности, выбор ме-
тодик и средств измерений для экспериментального подтверждения расчет-
но-аналитической модели геометрического поведения конструкции при всех
возможных эксплуатационных ситуациях. Завершается процесс обеспечения
прецизионности конструкции КА на орбите, где по специальной программе
проводятся сеансы союстировки осей ЦА и служебных систем, выявляются
систематические погрешности и корректируются алгоритмы управления.
Выделив параметры, определяющие геометрическую прецизионность пер-
вичной конструкции КА и ЦА, и отделив их от множества других системных
характеристик КА, можно упростить выполнение всей задачи, решая по от-
дельности каждую проблему. Причем, исходя из специфики решаемых про-
блем, такое разделение позволяет нацелить на получение желаемого резуль-
тата специалистов близкого профиля специализации.
Перечисленные проблемы решались специалистами НПО в рамках про-
ведения НИР и ОКР с применением теоретических методов аналитической
механики, путем постановки и проведения экспериментальных работ в на-
земных и натурных условиях.
К технологиям, обеспечивающим прецизионность конструкции в квази-
статической постановке, можно отнести:
— методы рационального проектирования, выбор силовой схемы;
— специальные технологические приемы изготовления конструкций КА;
— методику и специальные средства наземных испытаний;
— методику летной квалификации (юстировки) КА.
Работы по обеспечению прецизионности базируются на основных поло-
жениях теории принятия решений, достижениях материаловедения и техно-
логии, передовых средствах и методах измерений, теории прочности и стро-
ительной механики, при этом могут быть выделены следующие основные
направления:
1. Системный анализ влияния целевых параметров космических аппара-
тов (точность наведения, разрешение, производительность) на проблему
обеспечения прецизионности конструкций КА.
2. Анализ влияния внешних воздействий на параметры прецизионности
конструкции КА на всех этапах эксплуатации.
3. Принятие проектных и конструктивно-технологических решений при
разработке, изготовлении и испытаниях конструкций прецизионных КА.
4. Оптимизация выбора материалов и технологий при создании конструк-
ции КА.
5. Разработка средств и методик наземной экспериментальной отработки
конструкции КА.
6. Разработка методик исследования геометрических характеристик при
летной эксплуатации и проведение корректировки программы полета.
67
Все эти процедуры в конечном счете объединяются в одно направление:
конструктивно-технологические приемы обеспечения прецизионности конструк-
ции КА.
Поскольку основной характеристикой прецизионных конструкций явля-
ется размерная стабильность, проблема обеспечения стабильности решается
одновременно по двум направлениям: минимизация внешних воздействий
на прецизионный конструктивный элемент и минимизация чувствительно-
сти прецизионного конструктивного элемента к внешним воздействиям.
Возмущения любого вида: механические, тепловые, физические — все это
сказывается на геометрических параметрах конструкции. Обычно задача обес-
печения прецизионности рассматривается в квазистатической постановке,
анализируются процессы внешних воздействий с медленно меняющимися
параметрами.
1.2.5. Основные принципы обеспечения прецизионности
при проектировании
На стадии проектных работ и при разработке рабочей документации про-
блема минимизации геометрической чувствительности конструкции реша-
ется последовательными оптимизирующими действиями:
— выбор конструктивно-компоновочной схемы;
— выбор конструкционных материалов и технологии изготовления;
— оптимизация силовой схемы конструкции (предпочтительны статичес-
ки определимые варианты).
Очевидно, что чем короче размерная цепочка между объектами, находя-
щимися в точностной увязке, тем меньшая чувствительность присуща дан-
ной компоновочной схеме.
В практику проектирования вошли такие конструктивные элементы, как
астроблок, астроплатформа, блок приборов, балка выноса приборов и т.д. Их
объединяет правило: приборы, требующие повышенной точности взаимного
расположения, компонуются на едином конструктиве, в котором реализуются
основные принципы прецизионности, снижающие влияние разбалансирую-
щих воздействий на геометрическую стабильность:
— статически определимая схема крепления приборов на платформе и плат-
формы к КА;
— малая геометрическая чувствительность конструкционных материалов
к внешним воздействиям;
— минимизация термодеформации от внешних и внутренних источников.
При поиске конструктивно-технологических решений (рис. 1.2.10) при
создании прецизионных КА необходимо:
— предусмотреть возможность измерения взаимного геометрического рас-
положения приборов;
— выбрать силовую схему с минимальным влиянием избыточного давле-
ния в гермоотсеках на геометрическую увязку приборов;
68
Рис. 1.2.10. Схема этапов оценки состояния прецизионности КА
— для повышения достоверности деформационной модели конструкции
отдать предпочтение статически определимым схемам конструкции;
— предусмотреть методы и средства исследования геометрической стабиль-
ности конструкции при воздействии гравитации, нагрузок при выведении на
орбиту, при тепловых нагрузках на орбите.
При анализе влияния наземной эксплуатации на геометрическую преци-
зионность КА необходимо учитывать влияние гравитационных сил, монтаж-
ных усилий и давления в гермоотсеках, воздействующих на конструкцию.
Важно обеспечить такие условия внешнего нагружения штатной конструк-
ции, которые не привели бы к образованию остаточных деформаций.
Механическое воздействие на конструкцию при выведении КА на орбиту
необходимо учитывать, создавая и оптимизируя силовую и динамическую
схемы КА, разрабатывая программы-методики экспериментальной отработ-
ки.
При разработке эксплуатационной документации для управления КА на
орбите необходимо учитывать воздействие таких дестабилизирующих фак-
торов геометрических параметров прецизионных конструкций, как тепло-
вые нагрузки (от Солнца и от работающей аппаратуры), изменение парамет-
ров давлений в гермообъемах, а также динамические микровозмущения от
работающих систем исполнительных органов КА.
Главной задачей при создании прецизионной конструкции является зна-
ние ее геометрических параметров с высокой достоверностью на всех этапах
разработки, изготовления и испытаний КА, для чего необходимо оценивать
факторы, которые могут привести к изменению геометрической увязки сис-
тем КА. Математическое моделирование, наземные испытания, оценка гео-
метрического состояния КА в полете — это необходимые составляющие про-
цесса обеспечения прецизионности. При рассмотрении влияния механичес-
ких нагрузок важно проанализировать воздействие гравитации на всех эта-
пах наземной эксплуатации КА, оценить возможные деформации после вы-
ведения PH и при маневрах КА, исследовать деформации при изменении
параметров давления в гермоотсеках.
69
Анализ тенденций обеспечения точностных параметров КА перспектив-
ных проектов показывает, что все рассмотренные конструктивно-технологи-
ческие решения остаются актуальными. Несколько упрощается анализ вли-
яния давления в гермоотсеках, поскольку сформирована устойчивая тенден-
ция в мировой практике создания КА в негерметичном исполнении. Аппа-
ратура, в том числе и прецизионная, будет располагаться на открытых сило-
вых конструкциях, гермоотсеки будут принадлежать только двигательным
установкам. Отсюда вытекает условие: для уменьшения влияния деформации
гермоотсеков на размерную стабильность прецизионной конструкции КА
последнюю надо располагать дальше от зон влияния давления и механичес-
кую связь делать статически определимой.
Проблема минимизации механических внешних нагрузок при выведении
КА на орбиту с использованием современных ракет-носителей, а также средств
выведения ближайшего будущего не представляется сколько-нибудь суще-
ственной по сравнению с имеющимися значениями в ТТЗ на КА, по край-
ней мере, в квазистатической постановке. Гораздо более актуальной являет-
ся проблема унификации режимов нагружения конструкции и систем КА при
выведении на разных типах ракет-носителей. Эта проблема решается за счет
задания воздействующих механических нагрузок по огибающей от парамет-
ров значений для разных ракет. Вопрос уменьшения динамических воздей-
ствий на системы может решаться за счет внедрения новых технологий виб-
роизоляции и диссипации энергии колебаний [5].
В формуляр КА обычно вносятся значения геометрической увязки систем
КА на момент его отправки на космодром. Однако считать эти параметры
достоверными для состояния КА на орбите после выведения некорректно,
поэтому расчетно-экспериментальным путем определяются поправки, уточ-
няющие значения геометрической увязки КА в полете, которые вводятся в
уравнения управления КА через полетное задание. Кроме этого на некото-
рых КА эти поправки можно корректировать по результатам анализа состо-
яния КА в полете.
Влияние внешнего теплового потока на прецизионные конструкции не-
обходимо минимизировать за счет введения в СОТР КА специальных уст-
ройств, уменьшающих температурные перепады и стабилизирующих поле
температур прецизионных конструкций, повышения качества теплоизоляции.
1.2.6. Выбор конструкционных материалов
Важным моментом обеспечения прецизионности конструкции является
выбор и анализ комплекса физико-механических свойств конструкционных
материалов, из которых изготавливаются элементы конструкции, участвую-
щие в геометрических связях прецизионных зон КА [6]. Высокая размерная
стабильность материалов должна сочетаться с минимальным удельным ве-
сом, высоким модулем упругости, высокой удельной прочностью, низким и
стабильным КЛТР, большой удельной теплопроводностью и теплоемкостью.
70
На графиках, приведенных ниже, можно проследить логику определения
предпочтений при выборе конструкционных материалов. Однако следует
иметь в виду, что этот процесс не имеет однозначности решения. В обеспе-
чение требований ТЗ при выборе материала необходимо учитывать допол-
нительные факторы, такие, как технологичность, стоимость, совместимость
и др.
Рис. 1.2.11 иллюстрирует довольно большой разброс удельных характери-
стик различных конструкционных материалов. (Значком ф помечены ма-
у кв
АБМЗ _ J В
□
ню
80
60
40
20
10
ВТ22ф
ВТ? о
АЛ321
015?0
QAM<
КМУ-Л
АЬС
В95 О
V МД8/-Ч
-
фМЛ5
Ш5
32НКА
aju
□
□
□
АБМ4^_
АЛ321 Д16
□ □ □ вт* □
МА8д BT5Q
AMnS
100
80
60
40
20
Рис, 1.2.11. Сравнение конструкционных материалов по критериям — и —
(У — плотность материала)
териалы, предпочтительные по критерию прочности; значком [~i помечены
материалы, предпочтительные по критерию жесткости.) Как видно из ри-
сунка, материалы, предпочтительные по прочности, могут не оказаться в со-
ставе предпочтительных по жесткости, поэтому дальнейший анализ силовой
схемы конструкции может дать ответ на вопрос: что важнее в данном случае
— прочность или жесткость.
Из анализа удельных характеристик конструкционных материалов следу-
ет, что, поскольку предпочтительны большие значения по критериям проч-
ности и жесткости, наиболее благоприятное сочетание свойств у бериллие-
вых сплавов. Вследствие высокого уровня комплекса физико-механических
характеристик бериллий и его сплавы получили широкое применение в кон-
струкциях прецизионных блоков систем управления КА, в ракетной и авиа-
ционной технике (корпуса гироскопов, блоков акселерометров, астродатчи-
ков и Т.Д.).
Композиционные материалы, такие, как алюминий-бор и алюминий-уг-
Е
лерод, обладают хорошими удельными характеристиками —, поэтому их при-
Y
71
менение в качестве силовых элементов прецизионных конструкций является
весьма перспективным.
Кроме оценки механических свойств, важной является оценка способно-
сти конструкции сохранять геометрическую стабильность при тепловом воз-
действии при функционировании КА на орбите. В таких конструкциях це-
лесообразно применение материалов с минимальным отношением коэффи-
циента термического расширения а к коэффициенту теплопроводности X и
к коэффициенту теплоемкости С. Минимальные значения по критериям тем-
~ ОС ОС
пературнои стабильности — и теплопроводности — определяют наиболее
Л, С
предпочтительные материалы. Анализ конструкционных материалов по кри-
ос ос z . лл
териям и — (рис. 1.2.12) основан на предпосылках: чем лучше теплопро-
Л, С
водность материала и чем больше его теплоемкость при малом коэффициен-
те линейного расширения, тем меньше геометрическая чувствительность к
изменению температуры прецизионной конструкции.
Этот анализ показывает (см. рис. 1.2.11, 1.2.12), что предпочтительными
являются конструкционные материалы с более высокими параметрами
и при минимальных значениях
Однако из этих же рисунков
20
О ВТ5
AJ-B □
МЛ-5 АмГб
□ □
АЛ-2О 015"0_
О АЛЛО
□
ma-id
- 20
18
16
ВТ-22
□
ВТ-5 Q
- 15
14
12
10
ВЬ6°
- 10
Ис
А.Т9
9am:
мл;
АЛ19 Д16 О АмГб. MAS
ООО
-О-------------
. АМБЮ АМБДОЮ 52НКА
О--------------------о
AM5-3Q
А1СП
A1-BQ
КПУ г
8
- 5
Рис. 1.2.12. Сравнение конструкционных материалов по критериям
а а
X и С
72
следует, что материалы, предпочтительные по одним параметрам, не могут
быть приняты по другим. Например, титановые сплавы имеют хорошие по-
казатели по параметру —, т.е. они хорошо противостоят длительным на-
грузкам, однако по температурным деформациям по критерию
а
X
их надо
применять очень осторожно. Поэтому выбор конструкционных материалов
нередко построен зачастую на теории компромиссов. Условно обобщающим
ХЕ
условием размерной стабильности может явиться критерий ----, исходя из
(X • у
которого целесообразно выбирать материалы с большим значением критерия.
Среди легких сплавов оптимальным сочетанием характеристик размер-
ной стабильности отличаются сплавы на основе системы алюминий-медь
(Д16, ВАД1, В95), а также сплавы магний-ниодим (МЛ 10,МАП). Высоко-
легированные литейные сплавы системы Al-Cu-Mn (АЛ19, АЛ321) отлича-
ются большой структурной стабильностью и, следовательно, высокой релак-
сационной стойкостью. Марганец понижает скорость распада твердого раство-
ра, участвует в образовании устойчивой сложной фазы Т (Al12Mn2Cu), рас-
пределяющейся равномерно по зерну и по границам в виде мелко-дисперс-
ных частиц. Конструкционные сплавы системы Al-Mg (АМг2-АМг6) обла-
дают низкой релаксационной стойкостью, что объясняется большой разни-
цей в растворимости магния при изменении температуры и наличием неус-
тойчивой упрочняющей фазы Mg5Al8. Сплавы системы Al-Zn, Mg-Al, Mg-Zn
также характеризуются неудовлетворительной размеро-стабильностью. Опыт
применения порошковых алюминиевых сплавов САС, САП и АКП для из-
готовления деталей показывает хорошие результаты размеростабильности.
Безусловно перспективным является применение композиционных ма-
териалов (боралюминий, углеалюминий, углепластик). Применение современ-
ных и перспективных композитных материалов (КМ) позволяет создавать
конструкции с практически любым (в том числе и близкими к нулю) коэф-
фициентами линейного термического расширения (КЛТР). Одновременно
могут быть значительно улучшены массовые характеристики конструкции,
ее несущая способность, динамические характеристики и многие другие свой-
ства. В связи с этим несомненна актуальность задач комплексного проекти-
рования и отработки размеростабильных несущих конструкций космической
техники [7].
Однако следует исходить из того, что характеристики этих материалов за-
висят от технологии их изготовления. Поэтому в таких случаях необходимо
обеспечить точное соблюдение всех технологических параметров при значи-
тельно большем объеме приемосдаточных испытаний и входного контроля.
Входному контролю, как правило, подвергаются лишь характеристики
продольной прочности и жесткости в направлении армирования, тогда как
73
для проектирования прецизионных конструкций необходимо точное знание
всего набора констант анизотропного материала. В такой набор входят:
• термоупругие константы, включающие четыре характеристики жесткости
(модули упругости в продольных и поперечных осях, модуль сдвига и
коэффициент Пуассона) и два коэффициента линейного термического рас-
ширения в продольных и поперечных осях;
• характеристики прочности, включающие, как минимум, пять пределов
прочности при одноосном растяжении-сжатии материала в продольных и
поперечных осях и чистом сдвиге;
• характеристики, определяющие деформирование материала при измене-
ниях окружающей среды: коэффициенты влажностного расширения, а так-
же, если это необходимо, иные характеристики, определяющие, например,
реакцию материала на факторы космического пространства.
В случае если предусматривается работа композитной конструкции в зна-
чительном интервале температур, каждая из характеристик однонаправлен-
ного материала должна быть идентифицирована как функция температуры.
По состоянию на сегодняшний день с некоторым прогнозом на перспек-
тивные проекты можно отметить хорошо сформированный программно-ап-
паратный задел, применяемый при создании композиционных конструкций.
Математическое моделирование образцов изделий позволяет проектировать
и с хорошей достоверностью прогнозировать физико-механические параметры
формируемых композиционных материалов с оценкой предельных значений
отклонения от номинала за счет технологического несовершенства. Основ-
ной проблемой по обеспечению прецизионности конструкций из КМ яв-
ляется выдерживание технологических параметров при их изготовлении (по-
грешность угла выкладки, усилие в слое, характеристики исходного сырья
и др.).
К размеростабильным материалам относятся и ферромагнитные сплавы на
железоникелевой основе с малым коэффициентом линейного расширения —
инвары, однако низкая теплопроводность и высокая плотность существенно
ограничивают их применение.
В тех случаях, когда на конструкцию не воздействуют тепловые нагрузки,
могут эффективно использоваться упрочняемые титановые сплавы ВТ5, ВТ6,
ВТ8, ВТ22.
Свойства некоторых конструкционных материалов, наиболее часто исполь-
зуемых для космических прецизионных конструкций, при нормальных ус-
ловиях приведены в таблице.
Таким образом, из анализа свойств конструкционных материалов видно,
Е
что по критерию ~ резко выделяется бериллий (Be), у которого этот пара-
метр в семь раз выше по сравнению с большинством КМ. К тому же у берил-
лия высокая теплопроводность и теплоемкость, что при незначительном ко-
эффициенте термического расширения делает его наиболее предпочтитель-
74
Материал Плотность, г/см3 КЛТР, °C1 Модуль упругости, ГПа
Инвар 32НКА 7,95 0,4* 10-6 200
А1-В 2,52 6,5*106 240
А1-С 2,38 3,0* ю-6 190
Углепластик КМУ-4л 1,50 -0,2* 10'6 140ч160
д-16 2.78 22* Ю-6 72
САС1-400 2,72 15,2*10~6 90ч ПО
АЛ-19(Т5) 2,78 19,5*106 70
ВТ22 4,62 8,0*10'6 115
Be 1,84 12,2* 10'6 301,4
ным для создания прецизионных конструкций (корпуса гироскопов, астро-
блоков, элементов крупногабаритной оптики, приборных платформ).
В литературе по вопросам применения конструкционных материалов да-
ется подробный анализ прочностных характеристик материалов, но, к сожа-
лению, как правило, отсутствует информация о параметрах прецизионности.
Это создает значительные трудности при решении практических задач в пре-
цизионном машиностроении и вынуждает проводить дополнительные иссле-
дования, прежде чем выбрать тот или иной материал.
Для получения оптимальных решений практических вопросов выбора,
разработки и применения материалов для высокоточных изделий необходи-
мы обстоятельные исследования зависимости характеристик размерной ста-
бильности конструкции от структуры металлов и сплавов, изучение струк-
турных изменений в металлах на всех этапах технологического цикла изго-
товления деталей, а также при микропластических деформациях в условиях
эксплуатации КА.
Как правило, оптимальные решения в этой сфере интересов появляются
на стыке разных научно-технологических направлений с эффективным, хоть
и не всегда прогнозируемым конечным результатом. Среди металлических
полуфабрикатов в этом направлении могут оказаться интересными пористые
материалы (инвар и титан с 50—70% пористостью), порошковые материалы
и специальные сплавы.
При оценке стабильности прецизионных конструкций важно также учи-
тывать воздействие факторов космического пространства на физико-механи-
ческие свойства конструкционных материалов [8]. При почти полном ваку-
уме воздействие холода космического пространства в сочетании с нагревом
солнечными лучами может дать широкий диапазон рабочих температур эле-
ментов конструкции с циклированием по времени. Кроме того, материалы
конструкции КА подвергаются воздействию ультрафиолетового излучения
Солнца и облучению протонами и электронами. Облучение в УФ-области и
протонами влияет лишь на внешнюю поверхность КА, а облучение электро-
нами будет проникать на большую глубину материала.
75
В случае применения полимерных композиционных материалов в конст-
рукции КА необходимо исследовать влияние вышеперечисленных факторов
на физико-механические свойства материалов. Так, например, облучение
потоком электронов вызывает в связующем образование веществ с низким
молекулярным весом. Эти продукты распада пластифицируют смолу при
высоких температурах и увеличивают хрупкость при низких, вследствие чего
механические свойства композиционного материала изменяются.
В ряде случаев, в интересах обеспечения необходимых характеристик кон-
струкционных материалов, предпринимаются меры по минимизации воздей-
ствия ФКП на КА, целью которых является введение уровня внешних воз-
действий в определенные граничные условия, обеспечивающие нормальные
режимы применения материалов.
1.2.7. Дестабилизация геометрических параметров конструкции
При создании прецизионных конструкций важно учесть факторы, деста-
билизирующие геометрические размеры конструкции и выбирать такие кон-
структивно-технологические решения, которые минимизируют деформаци-
онные процессы, т.е.
А//°др ад2; ад3; (i-2.i)
где A/z — деформация z-го элемента конструкции; овн — остаточные внут-
ренние напряжения; од1 — действующие напряжения при наземной эксплу-
атации конструкции; од2 — действующие напряжения перегрузки при вы-
ведении на орбиту; од3 — действующие напряжения при работе КА на ор-
бите; А 7] — температурные изменения z-го элемента конструкции.
Важной составляющей дестабилизации геометрических размеров конструк-
ции является внутреннее напряженное состояние конструктивных элемен-
тов КА. Остаточные внутренние напряжения (?вн) провоцируют квазирелак-
сацию конструкционного материала, т.е. способность изделий к самопроиз-
вольному изменению формы и размеров, что является значительным препят-
ствием на пути создания прецизионных конструкций, так как изменение с
течением времени размеров деталей может привести к недопустимому иска-
жению конечных геометрических параметров КА.
Самопроизвольное изменение размеров изделий является следствием двух
факторов:
— нестабильности фазового или структурного состояния материала;
— релаксации остаточных внутренних напряжений, возникающих в дета-
лях в процессе различных технологических операций.
При определенных условиях, связанных с изменением внешней среды,
остаточные напряжения (овн) могут самопроизвольно уменьшаться за счет
пластической деформации (релаксировать).
Под термином внутренние напряжения понимается напряженное состоя-
ние детали при отсутствии внешних нагрузок. Причины, сформировавшие
76
внутренние напряжения в детали, многочисленны по своей природе, и мож-
но дать качественную оценку лишь некоторым из них.
В общем виде составляющие внутренних напряжений можно разбить на
две группы: остаточные напряжения и приобретенные (монтажные) напря-
жения.
Под остаточными понимают напряжения, сохраняющиеся в теле детали
после устранения вызвавших их появление причин. Сюда можно отнести
последствия технологии холодной или горячей обработки металлов; для де-
талей, изготовленных из композиционных материалов, — нестабильность
усилий натяжения армирующих волокон, неравномерную усадку связующе-
го при изготовлении деталей и др.
При сборке узла из предварительно тщательно стабилизированных дета-
лей возникают напряжения, явившиеся результатом погрешности изготовле-
ния геометрии поверхности зон их сопряжения. Такие параметры, как не-
плоскостность, несоосность, непараллельность и др., а также условия сопря-
жения деталей (неравномерность затяжки стыка, перекосы при запрессовке,
неравномерность нагрева при сварке или пайке) при сборке вносят в конст-
рукцию поле монтажных напряжений. Внутренние напряжения в конструк-
ции, сформированные технологической предысторией изготовления, явля-
ются причиной изменения микрогеометрии форм деталей конструкции во
времени.
Решение задачи минимизации внутренних напряжений может быть дос-
тигнуто на основе следующих методов стабилизирующей обработки:
— термического и термомеханического упрочнения сплавов, обеспечива-
ющего создание стойких при длительном воздействии напряжений и темпе-
ратуры дислокационных образований, концентрационных неоднородностей
из сегрегаций растворенных атомов и распределенных по объему высокодис-
персных вторых фаз;
— термоциклического воздействия, обеспечивающего получение стабиль-
ной дислокационной структуры с минимальным уровнем микронапряжений;
— дорекристаллизационного отжига материалов и изделий с наклепанным
поверхностным слоем от механической обработки резанием, обеспечивающего
получение стабильной слаборазориентированной субструктуры;
— термической обработки в наряженном состоянии, обеспечивающей ста-
бильную ориентированную структуру в микрообъемах;
— механико-термической обработки, повышающей устойчивость струк-
туры посредством блокирования дислокаций по механизму деформационно-
го старения.
Основную термическую операцию, как правило, следует производить после
изготовления заготовок. Последующий технологический процесс изготовле-
ния должен основываться на чередовании операций механической обработ-
ки и термостабилизации.
77
При наземной эксплуатации типичным является длительное нагружение
конструкции гравитационными силами, в результате чего появляются оста-
точные деформации (A/z), искажающие исходные геометрические парамет-
ры конструкции. В этом случае размерную стабильность материалов следует
характеризовать показателями сопротивления микропластическим деформа-
циям при длительном нагружении — пределом релаксации напряжений (оя).
Допускаемая остаточная деформация при этих условиях не должна превы-
шать 0,001%. Таким образом, для прецизионных конструкций чем выше зна-
чение <JR материала, тем меньшую геометрическую чувствительность к дли-
тельному нагружению имеет прецизионная конструкция.
На практике минимизация A/z =/( од1) достигается за счет подбора мате-
риала и условий нагружений, чтобы выполнялось неравенство од1 < aR.
В случае если од1 > aR, необходимо предусмотреть конструктивно-техно-
логические приемы, разгружающие конструкцию по крайней мере на пери-
од длительного хранения (съемные дополнительные устройства разгрузки).
Минимизация A/z =/(ад2) достигается выполнением условия од2 < o0,ooi •
Прецизионный предел упругости (о0 001 ) с допуском на остаточную дефор-
мацию 0,005% при растяжении и 0,001% при изгибе характеризует сопро-
тивление материала микропластической деформации при кратковременном
нагружении. Кроме этого, необходимо в размерных цепочках обеспечения
прецизионности исключать локальные зоны с концентраторами напряжений,
которые могут сформировать нерасчетные зазоры при динамическом нагру-
жении при выведении.
Минимизация зависимости A/z = f (од3) достигается при условии од3 <
aR при длительных воздействиях. Как правило, причиной этих нагрузок
может явиться избыточное давление в гермоотсеках, а также термодеформа-
ции корпуса.
Таким образом, в случае воздействия длительных нагрузок необходимо
использовать условный предел релаксации aR; при кратковременных нагруз-
ках (при выведении на орбиту) — критерий условного предела упругости
o0 ooi- Поскольку значения <JR и о0 001 довольно малы, их применяют для
оценки особо ответственных прецизионных конструкций. Для остальных
чаще используют критерий о0 2 с разным запасом, в зависимости от того,
насколько важным является данный конструктивный элемент в цепочке пре-
цизионности КА. На практике применяют зависимость од< 0,3 о02.
1.2.8. Технологические особенности
Создание современных прецизионных космических аппаратов невозмож-
но без организации на предприятии специализированных рабочих мест и
участков изготовления, сборки и испытаний изделий, оснащенных уникаль-
ным оборудованием и специальным технологическим оснащением, а также
без разработки новых технологий, нацеленных на обеспечение прецизион-
ности.
78
Характерной особенностью требований, предъявляемых к сборке преци-
зионных космических аппаратов, является высокая точность обработки (до
0,02—0,05 мм и 1—3 угл. мин) привалочных плоскостей и высокая точность
замеров (до 0,002—0,005 мм или до 5—10 угл. сек) их фактического положе-
ния. Необходимая точность при сборке КА достигается за счет использова-
ния следующих технологий:
— директивной технологии сборки и испытаний КА, обеспечивающей не-
обходимое качество изготовления изделия с заданными характеристиками;
— технологии контрольных раскрытий элементов конструкции с исполь-
зованием систем разгрузки, позволяющих обеспечить обезвешивание раскры-
вающегося элемента с точностью 1% от его массы;
— технологии подготовки оборудования и технологического оснащения к
проведению работ по юстировке изделия, позволяющей добиться выставки
базовых плоскостей измерительных стендов с точностью 0,05 мм и
5 угл. сек;
— технологии проведения контрольных замеров привалочных плоскостей
(юстировки) изделия, обеспечивающей точность измерения до 5—10 угл. сек;
— технологии определения положения центра масс (балансировки) изде-
лия, позволяющая определять координаты центра масс изделий с точностью
до 0,2 мм;
— технологии контроля выставки осей сопел двигателей коррекции (ДК)
и стабилизации (ДС) на двигательных установках (ДУ) с точностью до
20 угл. сек.
Характерной особенностью прецизионных космических аппаратов явля-
ется широкое применение в конструкции деталей и узлов с высокой точно-
стью обработки рабочих поверхностей. Необходимая точность при изготов-
лении достигается за счет использования следующих технологий:
— технологии термостабилизации заготовок, позволяющей снять напря-
жения в металле до механообработки;
— технологии обработки на металлорежущих станках с выбором оптималь-
ных режимов резания;
— технологии обработки на высокоточном прецизионном оборудовании;
— технологии разделки базовых и стыковочных отверстий по контрольно-
эталонной оснастке;
— технологии изготовления деталей и заготовок электроэрозионным ме-
тодом;
— технологии электронно-лучевой сварки конструкций из титана в вакууме;
— технологии отжига и термостабилизации после сварки для снятия на-
пряжений в конструкции;
— технологии сборки агрегатов в специальных приспособлениях, обес-
печивающей изготовление агрегатов с точностью 0,05 мм;
— технологии обмеров геометрических параметров конструкции с дове-
дением их до заданных значений.
79
Основным конструктивным приемом, реализуемым на проектной стадии
создания конструкции, является выполнение условий статически определи-
мого крепления прецизионного фрагмента конструкции КА. Рис. 1.2.13
поясняет необходимость оценки напряженного состояния типовой конструк-
ции кронштейна крепления прецизионного прибора.
Е-Е
Рис. 1.2.13. Пример технологического несовершенства в стыке прецизионной кон-
струкции
При монтаже прибора поз. 1 к основанию приборной рамы 2 вследствие
начальной неплоскостности поверхности Б прибор опирается на три точки,
которые на опорах а, б, в первыми коснулись плоскости В. При затяжке сты-
ка болтовым соединением зона кронштейна прибора 1 вводится в напряжен-
ное состояние, которое зависит от величины неплоскостности, от жесткости
конструкции прибора 1 и основания 2, от величины стягивающего усилия.
Последствия такой ситуации в случае бесконтрольности могут быть очень зна-
чительными. Если прецизионной прибор имеет в этой зоне юстируемые эле-
менты, то возможна его разъюстировка. Возможно возникновение напряже-
ний, превышающих ов материала конструкции, а значит, и его разрушение.
В любом случае сформированное монтажным стыком напряженное состоя-
ние приводит к дестабилизации геометрических параметров как корпуса при-
бора, так и опорного основания. С течением времени напряжения будут
приводить к деформациям, т.е. к изменению геометрии. Для минимизации
деформаций прецизионных конструкций в таких случаях допуски на техно-
логическое несовершенство конструкции необходимо назначать исходя из
результатов анализа конечно-элементной модели, построенной для худших
случаев. Кроме этого, важно варьировать параметры жесткости сопрягаемых
конструкций и характеристики их конструкционных материалов.
1.2.9. Термодеформации конструкции
Влияние внешнего теплового потока на прецизионные конструкции не-
обходимо минимизировать за счет повышения качества теплоизоляции, уве-
80
личения термического сопротивления на пути к прецизионным конструкци-
ям, введения в СОТР КА специальных устройств, уменьшающих температур-
ные перепады и стабилизирующие поле температур прецизионных конструк-
ций. Не менее важно оценить влияние тепловыделения приборов и систем
самого КА, причем именно здесь имеет место локализация зон с разными и
динамично меняющимися во времени температурными полями.
Проблема совершенствования СОТР во имя обеспечения стабильного теп-
лового состояния прецизионных конструкций КА продолжает быть актуаль-
ной и в перспективных проектах. Диапазон регулирования температуры тер-
мостабилизированных фрагментов выбирается с учетом всей совокупности
температурных требований к конструкции, аппаратуре и оборудованию. Та-
кие термостабилизированные фрагменты совместно с сопряженными с ними
в тепловом отношении элементами конструкции, аппаратуры и оборудова-
ния космического аппарата образуют подсистему СОТР. Расположение тер-
мостатируемых объектов на КА оптимизируется определенным образом от-
носительно внешних источников тепловых потоков и смежных элементов
конструкции и оборудования.
Путей решения проблемы минимизации величины разбалансирующих
тепловых воздействий на прецизионные конструкции может быть множество.
Они могут различаться даже по принципиальным моментам, но, в конечном
счете, главный результат — стабильность теплового состояния, а, значит,
высокая размеростабильность.
Исследование причин термодеформаций и их минимизация базируются на
результатах расчетно-экспериментальных работ с предварительной оптими-
зацией по выбору конструктивно-технологических решений и материалов,
минимизирующих геометрическую чувствительность конструкции к изме-
нению температурного состояния {А/у = / (А7])}.
С помощью конечно-элементной модели выявляются наиболее чувстви-
тельные к изменению температур элементы конструкции и формулируются
требования к параметрам СОТР КА и к характеристикам конструкции.
Модели позволяют проводить многовариантные расчеты с учетом множе-
ства реализаций температурных полей, выбирать конструктивно-технологи-
ческие решения по критерию заданной точности.
В общем виде зависимость геометрических параметров конструкции от ее
теплового состояния можно представить следующим образом:
А/^Лде;^;/,.), (1.2.2)
где А/. — изменение геометрического состояния z-го конструктивного эле-
мента; AQ — изменение теплового воздействия на /-й конструктивный эле-
мент; а1 — коэффициент геометрической чувствительности z-го конструк-
тивного элемента к изменению его температурного поля; /у — характерный
размер исследуемого геометрического параметра.
81
Причем параметр Д/. находится в прямой зависимости от приведенных
изменяемых параметров, т.е. при увеличении значения любого из них Л/; —
увеличивается.
Эта зависимость формулирует концепцию принятия проектно-конструк-
торских решений прецизионных конструкций КА:
— величина Д(? должна быть минимальной за счет качества СОТР;
— коэффициент а' должен быть минимальным за счет выбора конструк-
ционных материалов с малым КЛТР, в том числе за счет применения ком-
позиционных материалов;
— значение должно быть минимальным за счет компоновочных реше-
ний. Чем меньше расстояния, связывающие прецизионные элементы КА, тем
меньше будут термодеформационные смещения.
1.2.10. Анализ достоверности реализации прецизионных параметров
При поиске конструктивно-технологических решений при создании пре-
цизионных КА важно убедиться в корректности выбранных решений.
Для этого:
— необходимо предусмотреть возможность измерения взаимного геомет-
рического расположения приборов;
— выбрать силовую схему с минимальным влиянием избыточного давле-
ния в гермоотсеке на геометрическую увязку приборов;
— с целью повышения достоверности деформационной модели конструк-
ции отдать предпочтение статически определимым схемам конструкции;
— предусмотреть методы и средства исследования геометрической стабиль-
ности конструкции при воздействии гравитации, нагрузок при выведении на
орбиту, при тепловых нагрузках на орбите.
Размеростабильные конструкции имеют свою специфику и нуждаются в
дополнительном расчетно-экспериментальном подтверждении тех характе-
ристик, которые обеспечивают их высокую точность (рис. 1.2.14). Основной
задачей наземной экспериментальной отработки прецизионной конструкции
КА является проверка корректности математической деформационной модели.
Поэтому важно еще на этапе ее разработки закладывать тестовые условия,
которые впоследствии могут явиться условиями идентификационных испы-
таний. Необходимо предусмотреть операции, по подтверждению стабильно-
сти геометрических характеристик конструкций. Важно не упустить ни одно
условие, которое проявляет себя при наземной отработке или присутствует
при орбитальной эксплуатации.
Главное при изготовлении прецизионных конструкций — знание ее гео-
метрических параметров с высокой достоверностью на всех этапах эксплуа-
тации КА. Основными проблемами при решении задач измерения геометри-
ческих параметров конструкции КА являются:
• выбор средств измерений (погрешность измерений, способ регистрации
информации, влияние на схему измерений);
82
Рис. 1.2.14. Объем испытаний прецизионных конструкций
• разработка методики измерений, исключающей влияние паразитных фак-
торов (гравитация, влияние атмосферы, шумы и т.п.).
Для создания конструкций прецизионных КА необходимо в первую оче-
редь исследовать элементы, определяющие размеростабильность конструк-
ции. К ним относятся конструкции платформ для размещения астроприбо-
ров и конструкции для размещения целевой аппаратуры. Кроме того, необ-
ходимо обеспечить стабильность взаимного положения данной аппаратуры
при эксплуатации КА после паспортизации в наземных условиях.
Измерения проводятся двумя методами. Первый метод заключается в
применении системы дистанционного контроля положения посадочных мест.
Этот метод разработан для обмеров положения приборов, к которым невоз-
можен или затруднён доступ (приборы в гермоотсеках или снаружи в труд-
нодоступных зонах). Измерения осуществляются посредством специально
разработанных датчиков уровня с электрическим преобразователем сигнала
в комплекте с системой обработки и отображения измеряемых параметров.
В основе второго метода — использование специальных контрольно-юсти-
83
ровочных элементов, при этом измерения углов и геометрических парамет-
ров проводятся с помощью нескольких автоколлимационных теодолитов или
лазерных трекеров, объединенных в единую систему.
Технология создания прецизионных КА внесла новый акцент в процесс
исследования поведения конструкции при воздействии всех возможных вне-
шних факторов. К ним можно отнести такие воздействия, как влияние гра-
витации, воздействие перегрузок при выведении на орбиту, влияние изме-
нения давления в гермоотсеках, тепловое нагружение и пр. Проблема иссле-
дования конструкции при имитации этих воздействий привела к необходи-
мости создания дополнительных средств измерений и стендов комплексных
исследований и разработке специальных программ-методик испытаний. К
примеру, для анализа поведения размеростабильных протяженных стержней
в НПО им. С.А. Лавочкина был разработан и создан специальный стенд,
который позволяет проводить исследования элементов конструкций длиной
до четырех метров, измерять линейные удлинения с точностью до 10 мкм,
изгибы и закрутки с точностью до 5 угл. сек. в диапазоне температур ± 100 °C.
Для измерения линейного удлинения используется лазерный интерферометр,
а для измерения закрутки стержней вокруг продольной оси и изгиба стержня
в горизонтальной плоскости используются система зеркал, жестко связанная
с испытываемым объектом, и два автоколлимационных теодолита, образую-
щих единую систему измерения. Для одновременного замера закрутки и из-
гиба испытываемых элементов в вертикальной плоскости использована сис-
тема дистанционного измерения углов отклонения на базе датчиков измере-
ния уровня.
Эксперименты, проведенные с помощью данного стенда, позволили выя-
вить уникальные свойства композиционных материалов — стабилизацию
термодеформационных характеристик после нескольких циклов термо-нагру-
жения, и выработать рекомендации по термической обработке элементов
перед установкой их в конструкцию КА [9].
Важным элементом отработки прецизионных КА, а также их элементов
являются испытания в термовакуумной камере.
Задачи таких испытаний:
— создание поля температур на КА, максимально приближенного к на-
турному путем имитации солнечного излучения, имитации космического про-
странства с помощью установки азотных экранов и различной ориентации КА;
— идентификация расчетной модели деформации элементов КА с экспе-
риментально полученными данными.
Особенностью измерений при таких испытаниях является то, что объект
измерений находится в закрытой камере в условиях вакуума при температу-
рах, определяемых мощностью имитатора солнечного излучения и имитато-
рами окружающего космического пространства (азотными экранами). Для
оценки термодеформаций конструкции КА была разработана и реализована
методика исследования деформаций элементов конструкции при тепловаку-
84
умных испытаниях в вакуумной камере с погрешностью не более 20 угл. сек.
Эта система постоянно применяется для оценки термодеформаций при про-
ведении ТВИ каждого прецизионного КА.
Особенностью испытаний прецизионных конструкций является постоян-
ный контроль геометрического состояния конструкции после (при) разных
воздействиях, соответствующих условиям эксплуатации. Причем, как правило,
средства и методы контроля должны обеспечивать высокую (не более 10—
20мкм или 5—10 угл.сек) методическую погрешность измерений.
При обмере геометрических параметров прецизионных конструкций не-
обходимо анализировать влияние гравитационной нагрузки. В случае превы-
шения деформации значений, превышающих 30% от желаемой точности из-
мерения контролируемых параметров, конструкцию обезвешивают системой
сил для повышения достоверности измерений. В некоторых случаях компен-
сация сил веса может быть осуществлена способом переворота изделия на
180° вокруг какой-либо оси, перпендикулярной направлению силы тяжести,
с двукратным обмером геометрических параметров и усреднением измерен-
ных показаний. Такой прием универсален и дает достаточно точный резуль-
тат, однако он не всегда применим из-за технических трудностей переворота
изделия и измерения углового положения посадочных мест в перевернутом
состоянии.
1.2.11. Приемы обеспечения прецизионности КА
при летной эксплуатации
На этапе летных испытаний должен быть получен ответ о качестве пре-
цизионной конструкции на конечной фазе создания прецизионного КА.
Поэтому здесь исключительно важно иметь возможность точно оценить
ошибку взаимного геометрического рассогласования прецизионных элемен-
тов КА. С этой целью при проектировании КА и формировании алгоритмов
управления вводятся специальные технологические режимы орбитальной
союстировки приборов КА.
Назначение сеанса союстировки приборов КА должно коррелироваться
по внешним воздействиям с расчетной моделью и с экспериментальными
данными, полученными при наземных испытаниях.
Выявленные в результате орбитальной союстировки приборов КА систе-
матические составляющие деформационных уходов (8СИСТ ) могут вводиться
в алгоритм управления КА со своим определенным законом изменения. Для
этого в бортовом алгоритме необходимо иметь возможность введения попра-
вок в ручном или автоматическом режиме. В операции орбитальной союсти-
ровки приборов методически возможны различные приемы, положенные в
основу измерений. Базовыми опорными ориентирами могут быть как вне-
шние источники: звезды, Солнце, планеты, так и внутренние: базовые кон-
трольные поверхности приборов. На КА разработки НПО им. С.А. Лавочки-
на применяются и тот и другой методический прием.
85
Согласно анализу причин возникновения погрешности оценки геометри-
ческого состояния и деформаций конструкции, их величин и последствий в
цикле эксплуатации КА необходимо выделить три этапа с определением в
каждом из них необходимых технологий и предельных значений требований
по обеспечению прецизионности. В общем виде значение геометрического
состояния конкретной размерной цепочки можно представить как сумму
значений на каждом этапе эксплуатации:
8L = 8, + ^81+63+64,
где 8l — суммарное отклонение от теоретического значения на данный мо-
мент времени эксплуатации КА; 8] — измеренная величина отклонения от
теоретического значения при изготовлении конструкции; 82 — предельное
значение деформации при наземной эксплуатации КА; 83 — предельное зна-
чение деформации при выведении КА на орбиту; 84 — предельное значение
деформации при эксплуатации КА на орбите.
Значение 8] фиксируется технологическими средствами измерения при
паспортизации контрольных поверхностей КА. Значение 82 может быть оп-
ределено измерением на космодроме перед стыковкой с PH аналогично ме-
тодике определения 8]. Однако обычно значение 82 определяется расчет-
но-экспериментальным методом. Экспериментальная отработка на модели
вибростатических испытаний (ВСИ) дает вероятностную оценку предель-
ного значения деформации, поскольку нагружение модели выполняется с не-
которыми условностями. Значения 83 и б4 определяются расчетно-экспе-
риментальным методом, аналогично определению 82, с той лишь разницей,
что режимы и схемы нагружения соответствуют полетному случаю.
До определенного момента (до начала 90-х годов) на НПО им. С.А. Ла-
вочкина постоянно решалась задача повышения достоверности знания вели-
чины 8е , и достигалось это развитием и совершенствованием расчетно-экс-
периментальных методик. Однако с расширением возможностей бортового
комплекса управления КА в НПО была разработана и внедрена методика
союстировки приборов КА на орбите, что позволило значительно повысить
точностные параметры КА. Таким образом, в сочетании углубленной назем-
ной отработки конструкции с операциями исследования точностных пара-
метров на орбите наиболее полно реализуются инженерные возможности до-
стижения максимальных прецизионных качеств космических конструкций.
При наземной отработке выявляются основные закономерности поведения
конструкции при имитации эксплуатационных воздействий и определения
предельных значений деформаций, а на орбите после сеанса союстировки вво-
дится уточнение уставок полетного задания, которое поглощает погрешнос-
ти значений 8,, 82, 83 и 84.
Наряду с методикой союстировки приборов КА (рис. 1.2.15) на орбите в
современной практике обеспечения прецизионности применяются конструк-
86
13 ПО ОБЕСПЕНЕНИЮ точноеТИ ПАРАМЕТРОВ КОПСТРУКЦИИ
Вссжнмяпот-
КЖ1КОЖТР}>»
Ш UMBM В01ДГ»
ст»
Летте
wcatn аТашкж
Гибкое влпом вэ мжтема-
nrwci^io молехъ КА * полет»
Рис, 1.2.15. Схема решений обеспечения прецизионности конструкции
тивно-технологические приемы, обеспечивающие коррекцию формы и гео-
метрических параметров прецизионных конструкций. Эти задачи могут ре-
шаться как с помощью специальных систем и устройств, так и с применени-
ем интеллектуальных материалов с управляемыми свойствами. Особо акту-
альны эти приемы в случае крупногабаритных прецизионных систем КА и
невозможности достаточно корректно сымитировать при наземной отработ-
ке состояние конструкции в эксплуатационных условиях. Тогда одной из
задач наземной отработки становится определение соответствия корректиру-
ющих перемещений и возможности исправления предельного деформирован-
ного состояния прецизионных систем КА.
87
Анализ достоверности оценки погрешности прогноза некоторых точнос-
тных параметров при ЛКИ космических аппаратов для нескольких характер-
ных состояний конструкции в полете показал:
1. Минимальные погрешности (менее 10%) выявляются в случаях, когда
конструктивные связи агрегатов КА минимальны, обладают статической
определимостью и при минимальной динамике изменения температурных
полей конструкции (при малых углах изменения положения Солнца относи-
тельно осей КА и стабильных режимах функционирования бортовых систем).
Уменьшение погрешности расчета возможно при выявлении и учете систе-
матических составляющих оценки состояния конструкции, причем этот про-
цесс может состоять из нескольких итераций. Сначала используются данные,
сформированные на проектной стадии, затем они уточняются по результа-
там наземных испытаний и еще несколько раз могут уточняться в процессе
штатной эксплуатации на орбите. Все эти несоответствия могут находиться
в пределах допустимых интервалов, однако для прецизионных КА с целью
уменьшения погрешностей необходимо иметь в алгоритмах бортовых сис-
тем возможность постоянного выявления систематических составляющих
погрешностей и учета их при решении целевых задач.
2. Погрешности растут в точностных цепочках расположения агрегатов КА,
имеющих трансформируемые звенья, при наличии люфтов в шарнирах и узлах
фиксации. Люфты увеличивают случайную составляющую погрешности, осо-
бенно явно это проявляется после силовых воздействий на конструкцию (воз-
действие инерционных сил при программных разворотах КА).
3. Может быть выявлена непрогнозируемая и неопределенная при назем-
ных испытаниях деформация конструктивных элементов, например закрут-
ка трубчатых элементов из композиционных материалов вследствие техно-
логических отклонений по усилиям намотки слоев.
4. Таким образом, можно говорить о некоторой особенности эксплуата-
ции прецизионных КА на орбите и при наземной отработке. Важно после
выведения КА на орбиту иметь возможность провести сеансы по оценке со-
стояния прецизионной конструкции и соответствия ее расчетной точностной
модели, а выявленные систематические погрешности учесть в алгоритмах
управления КА.
Литература
1. Моишеев А.А. Результаты анализа зарубежных материалов по прецизи-
онности конструкций // Сб. научных трудов. НПО им. С.АЛавочкина. 2001.
Вып. 3. С. 223-227.
2. Бутылкин А.Ф., Жиряков А.В., Моишеев А.А., Савостьянов А.М., Стре-
калов Д.А. Динамические схемы КА с упругими выносными конструкциями
// Сб. научных трудов. НПО им. С.А.Лавочкина. 2004. Вып. 5. С. 330—339.
3. Боярчук А.А., Моишеев А.А., Сачков М.Е., Шустов Б.М. Проект «Все-
мирная космическая обсерватория — ультрафиолет»// Ультрафиолетовая
Вселенная. — М.: Янус-К. 2008. С. 7—19.
88
4. Моишеев А.А. Основные аспекты методологии проектирования высо-
копрецизионных космических конструкций // Материалы X Международного
симпозиума «Динамические и технологические проблемы механики конст-
рукций и сплошных сред». — М.: МАИ, 2004. Т. 1. С. 93—94.
5. Ермаков В.Ю., Моишеев А.А., Мордыга Ю.О., Савостьянов А.М. Пас-
сивное магнитожидкостное гашение колебаний космических конструкций //
Материалы 28-х академических чтений по космонавтике. — М., 2004.
6. Оптимизация выбора конструкционных материалов при создании пре-
цизионной космической конструкции// К.Э.Циолковский и проблемы раз-
вития науки и техники. Материалы 39-х научных чтений. — Калуга, 2004.
С. 204.
7. Моишеев А.А., Маркачев Н.А., Цвелев В.М., Калинин В.И., Бирю-
ков А.С., Алексеев С.В., Аставин А.С. Теоретические и экспериментальные
исследования несущей способности цилиндрического элемента тубуса теле-
скопа из металокомпозита // Сб. научных трудов. НПО им. С.АЛавочкина.
2004. Вып. 5. С. 456-466.
8. Климакова Л.А., Половый А.О., Комиссар О.Н., Смердов А.А., Мои-
шеев А.А., Цвелев В.М. Обеспечение заданной размерной стабильности уг-
лепластиковых профилей корпуса космического телескопа с учетом парамет-
ров влияния // Материалы 17-й научно-технической конференции, секция
«Полимерные композиционные материалы». — Обнинск, 2004. С. 21,76.
9. Моишеев А.А., Цвелев В.М. К обеспечению размерной стабильности
конструкций космических аппаратов из композиционных материалов// Ма-
териалы международной конференции «Космос без оружия — арена мирно-
го сотрудничества в 21 веке». — М., 2001. С. 40.
А.А.Моишеев,
НПО им. С.А. Лавочкина
89
КВЭ РЕШЕНИЕ ЗАДАЧИ ВЫСОКОТОЧНОГО УДЕРЖАНИЯ
ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА
В ЗАДАННОЙ ТОЧКЕ «СТОЯНИЯ»
Длительные сроки активного существования современных геостационар-
ных КА и жесткие требования к точности их удержания в заданной точке
«стояния» предполагают использование для коррекции орбиты, и прежде всего
для коррекции наклонения, двигательных установок (ДУ) с большой удель-
ной тягой [10]. В качестве таких ДУ успешно используют, например, элек-
трореактивные двигательные установки (ЭРДУ).
Высокий удельный импульс тяги (более 1400 с) двигателей коррекции (ДК),
входящих в ЭРДУ, позволяет существенно сократить бортовые запасы топ-
лива для коррекции и реализовать длительные сроки активного существова-
ния КА. К сожалению, величина самой тяги таких двигателей мала, что при-
водит к увеличению частоты и продолжительности проведения коррекций
[13,15]. Так, для удержания КА по широте, которое реализуется посредством
коррекции такого энергоемкого параметра орбиты, как наклонение, может
потребоваться ежесуточное проведение до двух коррекций на витке с дли-
тельным временем работы ЭРДУ. Кроме того, для современных геостацио-
нарных КА требуется обеспечивать длительный срок автономного функцио-
нирования (САФ), на котором не должна осуществляться передача на борт
КА командно-программной информации (КПИ). Продолжительность таких
интервалов автономности может составлять до 10—30 суток.
Таким образом, для коррекции наклонения должна быть принята страте-
гия, представляющая многократное включение двигательной установки по
программе, действующей на заданном интервале управления, большем или
равном САФ. Исходные данные для бортовой реализации таких программ
коррекций могут рассчитываться на земле в ЦУПе и периодически переда-
ваться на борт КА в составе КПИ. Следует отметить, что для реализации таких
бортовых программ важное значение имеет минимизация количества необ-
ходимых исходных данных, передаваемых в составе КПИ.
Под высокоточным удержанием КА в заданной точке «стояния» геоста-
ционарной орбиты понимается проведение коррекций соответствующих па-
раметров орбиты, при которых обеспечивается положение подспутниковой
точки КА в диапазонах не более +0,1° по долготе и широте. Решение этой
важной задачи далее рассматривается для геостационарных КА, оснащенных
ДУ с ДК малой тяги.
1.3.1. Постановка задачи
В общем виде кратко постановку рассматриваемой задачи можно сформу-
лировать следующим образом.
Обеспечить путем проведения коррекций поддержание значений параметров
геостационарной орбиты в течение заданного срока активного существования
КА в диапазонах, при которых отклонение КА от заданной точки «стояния» не
90
превысит допустимых значений по долготе и наклонению. При этом затраты
характеристической скорости на проведение коррекций орбиты должны быть
минимальны.
Для каждой вновь проектируемой космической смстемы (КС) эта форму-
лировка должна быть дополнена конкретным содержанием различного рода
технических ограничений. В качестве основных ограничений можно назвать
следующие:
• Характеристики системы коррекции удержания (СКУ).
• Ошибки исполнения корректирующих импульсов.
• Ошибки измерений параметров орбиты.
• Ограничения на интервалы расположения корректирующих импульсов.
1.3.1.1. Основные характеристики системы коррекции удержания КА
Система коррекции удержания (СКУ) представляет собой систему двига-
телей коррекции (ДК), размещенных на борту КА и предназначенных для
создания корректирующих импульсов, реализующих управление движением
центра масс КА на этапе его удержания в заданной точке «стояния».
Характеристики входящих в СКУ ДК и схема их размещения на бору КА
определяют возможные величины и направления управляющих ускорений,
определяют различного рода ограничения на процесс управления и величи-
ны возможных ошибок при отработке управляющих воздействий. Поэтому
выбор конкретной СКУ самым существенным образом определяет постановку
рассматриваемой задачи и методы ее решения.
Конкретное содержание этих ограничений рассмотрим на примере отече-
ственной КС «Банкир» с КА «Купон» [7, 8].
На этом КА применялась комбинированная СКУ, схема которой представ-
лена на рис. 1.3.1. Рассматриваемая СКУ относится к комбинированным, т.к.
Рис. 1.3.1. Схема расположения ДК СКУ для КА «Купон»
91
имеет в своем составе двигатели коррекции ЭРДУ и двигатели коррекции
обычной химической ДУ. Как видно из схемы, СКУ состоит из шести дви-
гателей коррекции, векторы тяги которых лежат в плоскости местного гори-
зонта. При этом два ДК химической ДУ (5 и 6) расположены с западной и
восточной стороны КА и создают тягу строго по трансверсали, а четыре ДК
ЭРДУ расположены парами соответственно с южной (3 и 4) и северной (1
и 2) стороны КА. Из-за конструктивных ограничений угол между вектором
тяги ДК ЭРДУ и линией Север-Юг равен 4°. Таким образом, векторы тяги
ДК каждой из этих пар, кроме основной бинормальной составляющей тяги,
имеют равные по модулю и противоположные по знаку дополнительные
трансверсальные составляющие.
Данная схема расположения ДК предполагает использование ДК ЭРДУ для
коррекции наклонения орбиты, а ДК химической ДУ — для коррекции пе-
риода обращения КА и эксцентриситета орбиты с целью управления долго-
той положения КА на ГСО. Сила тяги химических ДК, предназначенных для
управления долготой, равна 7 Г, а сила тяги каждого ДК ЭРДУ равна 4 Г.
Существенным ограничением для работы ЭРДУ является то, что в один
момент времени может быть включен только один ДК. Это обусловлено де-
фицитом бортовой электрической мощности, которой недостаточно для од-
новременной работы пары ДК. Это ограничение исключает возможность
такого режима работы ЭРДУ, при котором ее ДК, корректирующие накло-
нение, работают парами, и результирующий вектор силы тяги этих двигате-
лей не имеет трансверсальной составляющей. В этом случае можно было
бы разделить решение общей задачи удержания КА на задачи удержания КА
по долготе и по наклонению.
Тем не менее, в процессе разработки баллистического обеспечения (БО)
для рассматриваемой КС удалось использовать конструктивные ограничения
на угол установки двигателей ЭРДУ, а именно, трансверсальную составляю-
щую, в интересах совместного управления наклонением и долготой с исполь-
зованием только ЭРДУ.
1.3.1.2. Выбор стратегии удержания
В практике проведения коррекций удержания КА в заданной точке «сто-
яния» ГСО можно выделить две основные стратегии удержания:
• стратегия ожидания',
• стратегия предосторожности.
Стратегия ожидания предполагает проведение коррекции удержания
непосредственно перед выходом КА из допустимого диапазона по долготе
или по наклонению. Такая стратегия позволяет увеличить периодичность
проведения коррекций орбиты, что, несомненно, имеет важное практичес-
кое значение с точки зрения уменьшения загрузки ЦУП. Уменьшение числа
коррекций обеспечивается за счет выбора параметров орбиты после коррек-
ции, при которых обеспечивается максимально возможное время полета КА
со значениями параметров орбиты в заданном диапазоне.
92
При использовании стратегии ожидания для управления долготой ми-
нимизируется еще и расход рабочего тела на проведение коррекций.
К сожалению, для коррекции наклонения с использованием двигателей
малой тяги такая стратегия неприменима. Это обусловлено низким уровнем
тяги, не позволяющим реализовать требуемые величины корректирующих
импульсов характеристической скорости. Для рассматриваемой в данной
работе СКУ даже за 6 часов одновременной работы двух ДК ЭРДУ величина
корректирующего импульса скорости может быть увеличена только на 0,6
м/с, что явно недостаточно для одномоментной коррекции наклонения при
реализации стратегии ожидания. Кроме того, чем короче продолжительность
одного участка работы ДК малой тяги при коррекции наклонения, тем
меньше затраты рабочего тела на всю программу коррекции наклонения в
целом. Таким образом, для коррекции наклонения должна быть принята
стратегия, представляющая многократное включение двигательной установ-
ки для коррекции наклонения на заданную величину, известная в литерату-
ре как стратегия предосторожности.
В отличие от стратегии удержания наклонения, стратегия удержания по
долготе мало зависит от уровня тяги КДУ, и потому стратегия удержания по
долготе для отечественных и зарубежных КА является стратегией ожида-
ния. Несмотря на отмеченные выше достоинства этой стратегии, она имеет
и свои, весьма существенные, недостатки. Эти недостатки обусловлены, преж-
де всего, наличием различного рода ошибок, имеющих место в реальных
процессах управления:
— ошибки исполнения коррекции',
— ошибки определения параметров орбиты',
— ошибки прогнозирования движения центра масс КА.
Известно, что при удержании КА по долготе с использованием стратегии
ожидания коррекция удержания проводится на одной и той же границе (за-
падной или восточной) допустимого диапазона долгот (ДДД). При этом мак-
симум времени нахождения КА в ДДД обеспечивается выбором оптималь-
ного значения периода обращения КА. Это значение периода обращения КА
после проведения коррекции обеспечивает так называемый дрейф КА «по
параболе», касающейся своей вершиной противоположной границы ДДД и
пересекающей второй ветвью долготу границы проведения коррекции. Дол-
гота точки касания параболы или экстремальная долгота будет иметь место
при достижении периодом обращения КА значения, примерно равного звез-
дным суткам.
Возможность реализации подобного дрейфа КА по долготе обусловлена
тем, что практически для всего диапазона долгот ГСО трансверсальная со-
ставляющая возмущающего ускорения имеет один и тот же знак, а коротко-
периодическими колебаниями долготы в течение витка, связанными с отли-
чием от нуля эксцентриситета и наклонения орбиты, можно пренебречь.
Однако с учетом наличия указанных выше ошибок, а также отличия значе-
93
ний эксцентриситета и наклонения орбиты от нуля время нахождения КА в
ДИД может весьма существенно расходиться с оптимальным. Особенно это
касается случаев удержания КА в окрестностях точек равновесия ГСО, где
значение оптимального периода обращения КА близко к звездным суткам.
Следует отметить также, что неблагоприятное влияние указанных факто-
ров на возможность реализации оптимальной стратегии ожидания возраста-
ет с уменьшением ДДД. При этом для использования стратегии ожидания
при удержании КА в ДДД ±0,1° необходимо либо уменьшить уровень рас-
смотренных выше ошибок, либо отказаться от условия проведения коррек-
ций удержания на одной и той же границе ДДД.
Нужно подчеркнуть, что при решении рассматриваемой задачи удержа-
ния проблема состоит и в необходимости использования данной стратегии
на фоне отработки программы коррекций наклонения, вносящей свой су-
щественный вклад в недетерменированность процесса движения центра масс
КА на планируемом интервале управления.
Однако существуют и некоторые предпосылки для возможности частич-
ного использования стратегии ожидания при управлении долготой с помо-
щью ДК химической ДУ. Наличие трансверсальной составляющей у ДК ЭРДУ
может рассматриваться как дополнительное возмущающее ускорение к транс-
версальному ускорению от геопотенциала. При этом в случае увеличения
суммарного ускорения используемый при стратегии ожидания дрейф КА «по
параболе» имеет более ярко выраженный характер. В то же время наличие
ошибок исполнения корректирующих импульсов ЭРДУ эквивалентно увели-
чению ошибок прогнозирования при пассивном движении КА. Следует от-
метить, что реализация этой стратегии необходима на интервалах времени,
когда по каким-либо причинам ЭРДУ не может обеспечить требуемую ком-
бинацию включений ДК для совместной коррекции долготы и наклонения
или вообще временно не работает.
На интервалах времени, где возможно совместное управление наклонением
и долготой только с помощью ЭРДУ, должна быть применима только стра-
тегия предосторожности.
Таким образом, при решении задачи удержания по долготе и наклонению
должны рассматриваться обе указанные стратегии.
1.3.1.3. Выбор модели возмущенного движения КА
Эффективность результатов решения задачи удержания существенно за-
висит от состава и точности расчета возмущающих воздействий в модели,
описывающей движение центра масс КА на заданном интервале управления.
Поэтому чем точнее модель прогнозирования движения центра масс КА,
используемая в методе расчета параметров управления на этапе удержания,
тем эффективнее и сам метод. Конечно, с повышением точности математи-
ческой модели прогнозирования увеличивается сложность ее использования
для реализации различных методов оптимизации управления. Поэтому по-
строение эффективных методов удержания может заключаться в нахождении
94
разумного компромисса между точностью математической модели, описы-
вающей процесс удержания, и ее сложностью.
Именно такой подход с использованием различных приближенных мате-
матических моделей применялся ранее [4, 5].
В используемых в настоящее время приближенных методах удержания по
долготе, как правило, применяются модели движения КА, не учитывающие
притяжение Луны и Солнца, а также и зависимость от долготы в пределах
ДДД возмущающих ускорений от аномалий геопотенциала. Это допустимо
лишь в тех случаях, когда трансверсальное возмущение от аномалий геопо-
тенциала является относительно большим и время дрейфа КА в границах
ДДД настолько мало, что за это время возмущения от Луны и Солнца не
успевают привести к существенному изменению долготы КА.
Однако, например, в окрестности точек равновесия, в которых транс-
версальная компонента возмущений от аномалий геопотенциала мала во всем
ДДД, возмущение долготы от нее сравнимо с возмущением долготы от Луны
и Солнца. При этом, так как суммарные возмущения малы, существенно
увеличивается время дрейфа КА в ДДД, и потому необходимо обеспечивать
достаточно высокую точность прогнозирования на значительных интерва-
лах времени. Следует особо отметить, что на таких интервалах времени уже
нельзя воспользоваться допущением о взаимной независимости возмущений
от различных возмущающих факторов.
В то же время существуют и, что особенно важно, программно реализова-
ны достаточно точные методы прогнозирования движения центра масс КА
для широкого круга орбит, в том числе и для ГСО. Современные вычисли-
тельные средства практически не имеют ограничений при решении рассмат-
риваемых задач. С учетом этих обстоятельств была предпринята попытка
использования в методе решения задачи удержания вместо приближенной
математической модели, описываемой какой-либо системой уравнений,
непосредственно результатов расчета, полученных с помощью программы
точного численного интегрирования системы дифференциальных уравнений
возмущенного движения КА. При этом такая программа наряду с учетом
влияния на движение центра масс КА всех основных естественных возмуща-
ющих факторов должна учитывать и отработку всех управляющих воздействий
и таким образом фактически моделировать движение КА на заданном интер-
вале управления.
Использование данной программы целесообразно еще и потому, что она
является обязательным компонентом ПО ЦУП. В качестве такой модели была
использована программа прогнозирования движения центра масс КА мето-
дом численного интегрирования в неособенных переменных.
1.3.1.4. Учет случайных факторов
Под случайными факторами понимаются недетерминированные возму-
щения, обусловленные упомянутыми выше ошибками, характерными для
реального процесса планирования и исполнения коррекций удержания.
95
Все три вида ошибок, несомненно, необходимо учитывать при разработке
метода решения задачи удержания. Однако ошибки прогнозирования при ис-
пользовании предлагаемой модели возмущенного движения можно исклю-
чить, имея в виду тот факт, что в процессе реального полета эта модель может
еще и уточняться. Кроме того, определяющее влияние на точность прогно-
зирования оказывают не ошибки математической модели прогноза, а преж-
де всего ошибки начальных условий, т.е. ошибки определения орбиты, кото-
рые и должны быть учтены.
Ошибки исполнения коррекции, особенно при отработке программы много-
кратного включения ДК, конечно же, также необходимо учитывать.
Природа и величины учитываемых ошибок рассмотрены в соответствую-
щих разделах. При учете предлагается использовать так называемый гаран-
тированный подход, поэтому в качестве характеристик этих случайных оши-
бок при математической постановке задачи удержания будем рассматривать
их предельновозможные значения (Зо). При этом в качестве ошибки испол-
нения коррекции 8кор будем использовать ее относительное значение, кото-
рое может изменяться в диапазоне от 0 до 1.
Суть гарантированного подхода заключается в том, что рассчитанная
программа коррекций должна обеспечить решение задачи при любой самой
неблагоприятной реализации рассматриваемых ошибок.
Так, при использовании стратегии ожидания при удержании по долготе
значение требуемого периода обращения КА выбирается отличным от его
оптимального значения. Это отличие определяется соответствующей величи-
ной предельной ошибки его реализации с учетом ошибки его определения и
ошибки исполнения коррекции. При этом и ДДД должен быть уменьшен на
соответствующую величину предельной ошибки определения долготы.
Следует отметить, что предельные ошибки должны быть определены как
можно точнее, так как чрезмерно большой запас приведет к неоправданно-
му уменьшению времени между коррекциями. В противном случае не ис-
ключено также уменьшение времени между коррекциями из-за возможного
пересечения КА границы ДДД, которой он должен только в крайнем случае
касаться.
Гарантированный подход требует значительно меньшего объема априор-
ной информации об ошибках, в отличие от стохастического подхода, для
которого необходимо определить законы распределения и конкретные чис-
ловые характеристики рассматриваемых случайных процессов. Возможная
незначительная экономия топлива, которая может быть получена при стоха-
стическом подходе, несоизмерима с трудностями его методической и про-
граммной реализации. Кроме того, гарантированный подход, по определе-
нию, должен во всех случаях обеспечить успешное решение задачи, что весьма
важно при проведении динамических операций с КА.
Как было сказано выше, при решении рассматриваемой задачи удержа-
ния предполагается использование стратегии предосторожности, при кото-
96
рой коррекция удержания реализуется многократным включением двигатель-
ной установки на некотором интервале времени (далее интервал управления
— Гупр). Таким образом, коррекция удержания состоит из нескольких вза-
имосвязанных участков работы ДУ на заданном интервале управления.
Величина интервала управления может в принципе изменяться, поэто-
му рассмотрим проблему выбора этой величины с точки зрения учета рас-
сматриваемых случайных факторов. Большая длительность интервала управ-
ления в условиях действия непрогнозируемых возмущений может привести
к существенному изменению управляемых параметров (долготы и наклоне-
ния), в связи с чем требуемые значения этих параметров на конец интервала
управления должны выбираться с учетом этого обстоятельства.
Длительность интервала управления ограничивают ошибки прогнозиро-
вания, обусловленные, прежде всего, ошибками определения орбиты (началь-
ных условий). В то же время при малом интервале управления точность
рассчитанной программы включений ДК будет сильно зависеть от ошибок
определения орбиты, так как они становятся соизмеримыми с изменениями
самих управляемых параметров. Это может привести к лишним энергозатра-
там на парирование несуществующих возмущений, которые обусловлены
только ошибками определения орбиты. При длительных интервалах удержа-
ния изменения параметров орбиты увеличиваются и становятся значительно
больше, чем начальные ошибки их определения.
Особенно значительное влияние на процесс удержания могут оказывать
ошибки исполнения коррекции, представляющие собой отклонение управ-
ляющего ускорения от номинального значения. Причем это отклонение мо-
жет быть обусловлено как отклонением величины тяги ДК, так и отклоне-
нием вектора тяги от расчетного направления. При многократном проведе-
нии коррекций наклонения ошибки их исполнения на больших интервалах
времени будут приводить к непрерывному увеличению ошибки в значениях
корректируемых параметров, что ограничивает интервал времени, на кото-
ром может быть использована одна и та же программа управления.
Выбор оптимальной длительности интервала управления представляет
собой сложную отдельную задачу. Однако, исходя из положительного опыта
управления КА «Купон», можно рассматривать в качестве возможного зна-
чения интервала управления 14 суток. В пользу выбора такого временного
интервала можно привести следующие аргументы:
• 14 суток это примерно половина периода обращения Луны, оказывающей
определяющее влияние на характер эволюции наклонения орбиты;
• 14 суток или 2 недели хорошо согласуются с практикой недельного пла-
нирования работ в ЦУП.
Следует отметить, что для долгосрочного (обычно месячного) планирова-
ния работ ЦУП необходимо иметь расписание проведения коррекций и се-
ансов траекторных измерений на весь планируемый период. Для увеличения
интервала планирования, а также для проведения оценки характера измене-
97
ния корректируемых параметров и предстоящих энергозатрат можно решать
задачу удержания последовательно для нескольких интервалов управления.
При этом для каждого интервала будет находиться своя оптимальная програм-
ма коррекций.
1.3.1.5. Критерии оптимизации
Для рассматриваемой комбинированной ДУ возможно применение двух
вариантов проведения коррекций удержания.
Вариант 1. Использовать для коррекции наклонения ДК ЭРДУ, а для
коррекции периода обращения (управление долготой) — ДК химической ДУ.
Вариант 2. Использовать для коррекции наклонения и периода обраще-
ния КА только ДК ЭРДУ.
Для 1-го варианта постановку задачи удержания можно сформулировать
следующим образом.
Найти программу включений ДК ЭРДУ, обеспечивающую заданное гаранти-
рованное значение наклонения в течение заданного срока активного существо-
вания КА при минимальных энергозатратах.
Найти программу включений ДК химической ДУ, обеспечивающую гаранти-
рованное нахождение КА в ДДД для заданного С АС КА с учетом отработки
рассчитанной программы включений ДК ЭРДУ. При этом число включений ДК
химической ДУ должно быть минимальным.
Для 2-го варианта постановку задачи удержания можно сформулировать
следующим образом.
Найти программу включений ДК ЭРДУ, обеспечивающую заданное гаранти-
рованное значение наклонения и гарантированное нахождение КА в ДДД в те-
чение заданного срока активного существования КА при минимальных энерго-
затратах.
Требование минимизации числа включений ДК химической ДУ для 1-го
варианта практически не влияет на величину потребных энергозатрат для
удержания КА в ДДД, она будет определяться только изменением периода
обращения КА, обусловленного его естественной эволюцией и возмущения-
ми от реализуемой программы включения ДК ЭРДУ.
Из постановки задачи следует, что при поиске оптимального решения
необходимо учитывать два основных требования, а именно:
— гарантировать точность удержания в заданной точке «стояния»',
— минимизировать затраты характеристической скорости на коррекцию.
Между этими требованиями существует некоторое противоречие.
Гарантировать точность удержания в условиях действия случайных фак-
торов надежнее всего при реализации программы коррекций, направленной
на постоянное удержание КА в центре заданных границ точки «стояния»
КА, т.е. при постоянном поддержании номинальных значений контролиру-
емых параметров орбиты. Это можно обеспечить только своевременным па-
рированием на каждом витке всех возмущающих воздействий с помощью
98
приложения соответствующих корректирующих импульсов. Однако такая
стратегия удержания потребует дополнительных энергозатрат, которых можно
было бы избежать. Кроме того, для 1-го варианта проведения коррекций она
приведет к увеличению количества включений химической ДУ.
Далее будет показано, что изменение корректируемых параметров орби-
ты в результате эволюции носит периодический характер, обусловленный,
прежде всего, влиянием гравитационных возмущений от Луны. Амплитуда
этих колебаний значительно меньше допустимого диапазона удержания, и
потому для минимизации потребных запасов топлива достаточно парировать
коррекцией только средние на рассматриваемом интервале управления ухо-
ды корректируемых параметров орбиты. В качестве интервала управления
целесообразно рассматривать интервал времени, соизмеримый с периодом,
для которого может быть рассчитана и использована одна и та же программа
управления.
Для двух вариантов использования комбинированной ДУ рассмотрим
возможные стратегии проведения коррекций.
Вариант 1. Возможность использования химической ДУ для коррекции
периода обращения позволяет разделить решение общей задачи удержания
КА в заданной точке «стояния « на решение задачи поддержания наклоне-
ния и решение задачи поддержания долготы. При этом, как будет показано
далее, предлагается поэтапный подход в решении общей задачи, при кото-
ром сначала находится программа коррекций ЭРДУ для поддержания накло-
нения, а уже затем с учетом этой программы находятся параметры включе-
ний химической ДУ для коррекции периода обращения и управления долго-
той.
Для решения задачи поддержания наклонения, реализуемой многократ-
ным включением ЭРДУ, предлагается использование стратегии предосторож-
ности.
При этом для заданной величины интервала управления требуемые зна-
чения контролируемых (корректируемых) параметров в конце этого интер-
вала целесообразно выбирать исходя из их минимального отклонения от
номинальных значений.
Для решения задачи поддержания долготы с учетом заданной программы
включений ЭРДУ целесообразно использование стратегии ожидания, обес-
печивающей минимизацию числа включений химической ДУ на заданном
интервале управления.
В качестве критерия оптимальности при решении задачи поддержания
наклонения, учитывая большую энергоемкость этого параметра орбиты, сле-
дует рассматривать минимизацию потребных энергозатрат на заданном ин-
тервале управления, а именно минимизацию суммарного импульса характе-
ристической скорости:
w
/=1
99
где Д1< — импульс характеристической скорости /-го включения ДУ; N —
число включений ЭРДУ на заданном интервале управления.
В качестве критерия оптимальности при решении задачи поддержания
долготы естественно рассматривать минимизацию на заданном интервале
управления числа включений химической ДУ:
J= min TV,
где N — число включений химической ДУ на заданном интервале управле-
ния.
Вариант 2. Как и для 1-го варианта, при решении общей задачи удержа-
ния КА в заданной точке «стояния « предлагается использовать поэтапный
подход. Однако в этом случае первоначально найденная программа включе-
ний ЭРДУ для поддержания наклонения корректируется с учетом решения
задачи поддержания долготы. При первоначальном поиске программы вклю-
чений ЭРДУ для заданной комбинации используемых ДК ЭРДУ также не-
обходимо взять в качестве критерия оптимальности минимизацию затрат ха-
рактеристической скорости.
Использование для поддержания долготы многократного включения ЭРДУ
предполагает использование стратегии предосторожности. При этом в ка-
честве контролируемых параметров в конце заданного интервала управле-
ния необходимо рассматривать наклонение, долготу и период обращения КА.
Обеспечение минимального отклонения этих параметров от номинальных
значений и будет являться целью оптимизации выбора той или иной програм-
мы включения ЭРДУ.
Следует подчеркнуть, что наиболее динамичными и чувствительными к
различного рода случайным факторам параметрами являются период обра-
щения КА и долгота. Кроме того, энергозатраты на коррекцию наклонения
практически не зависят от используемой комбинации включения ДК ЭРДУ,
и в тоже время положительное решение задачи поддержания долготы возмож-
но только для определенных комбинаций использования ДК ЭРДУ. С уче-
том этих фактов в качестве критерия оптимальности при выборе программы
включений ЭРДУ на множестве вариантов комбинаций использования ДК
ЭРДУ целесообразно рассматривать минимизацию отклонений по периоду Тк
и долготе Хк на конец интервала управления, а именно:
/ = ттф-|Тк-Т„|+(1-Р).|Х,-Хтр|),
где Тст — значение стабильного периода обращения; Хтр — требуемое значе-
ние долготы точки «стояния» КА; р — весовой коэффициент, представляю-
щий собой число в интервале [0,1].
Выбор значения весового коэффициента р может быть осуществлен ите-
рационным способом на основе анализа характера изменения периода и дол-
готы на всем интервале управления.
100
1.3.2. Поэтапный подход к решению задачи
и анализ эволюции параметров ГСО
С учетом приведенных выше требований по поддержанию КА в заданной
точке «стояния» ГСО естественно принять в качестве контролируемых пара-
метров, по которым можно оценивать качество решения задачи управления,
текущие значения географических долготы и широты подспутни-
ковой точки.
Контролируемые параметры в первую очередь зависят от таких элементов
орбиты, как большая полуось а (сидерический период обращения КА Тсид),
эксцентриситет е и наклонение L Поэтому для поддержания контролируе-
мых параметров в допустимом диапазоне необходимо проводить коррекции
этих элементов орбиты с целью устранения их уходов в результате эволюции.
Таким образом, цель управления КА на этапе поддержания — «остановить»
эволюцию указанных элементов орбиты.
Достижение поставленной цели возможно только своевременным пари-
рованием на каждом витке всех возмущающих ускорений с помощью прило-
жения соответствующих корректирующих импульсов. Очевидно, что в иде-
альном случае для полного парирования эволюции в каждой точке витка
управляющие воздействия должны быть равны по величине и проти-вопо-
ложны по направлению действующим возмущающим воздействиям. Однако,
если пренебречь текущими изменениями элементов орбиты внутри витка, а
добиваться только устранения векового ухода элементов орбиты (накаплива-
ющегося от витка к витку), можно создавать управляющие воздействия, про-
тивоположные по действию только результирующим на витке возмущающим
воздействиям.
При этом следует подчеркнуть, что в течение витка многие возмущаю-
щие ускорения создают противоположный эффект в изменении элементов
орбиты и тем самым взаимно компенсируются. В результате управляющие
воздействия для компенсации только интегрального эффекта от возмущений
могут быть значительно меньшими. Заметим, что и величина отклонений
корректируемых параметров орбиты от этого интегрального эффекта от вит-
ка к витку (на интервале управления) носит периодический характер, обус-
ловленный прежде всего влиянием гравитационных возмущений от Луны.
Амплитуда этих колебаний значительно меньше допустимого диапазона
удержания, и потому для минимизации потребных запасов топлива на витке
достаточно парировать коррекцией только средние на всем интервале управ-
ления уходы корректируемых параметров орбиты.
Диапазон изменения контролируемых параметров географических долго-
ты и широты Фнд подспутниковой точки, как было отмечено выше, оп-
ределяется такими параметрами орбиты, как сидерический период обраще-
ния Гсид, эксцентриситет е и наклонение i. Таким образом, управление дол-
жно заключаться в устранении накапливающихся от витка к витку средних
101
уходов этих параметров орбиты в результате эволюции и осуществляться по-
средством проведения их своевременной коррекции.
Анализ влияния каждого из трех названных параметров орбиты на реше-
ние задачи удержания КА показывает, что успех ее решения зависит от под-
держания каждого из этих параметров в соответствующем допустимом диа-
пазоне. И, безусловно, рассматриваемая задача удержания ( это задача трех-
пара-метрической коррекции. Однако проведенный анализ взаимного влия-
ния указанных параметров орбиты показал, что без существенных погреш-
ностей можно провести декомпозицию решения этой сложной трехпарамет-
рической задачи поиска программы коррекций удержания. В результате де-
композиции решение общей задачи находится как результат решения отдель-
ных, более простых задач определения параметров:
• коррекции наклонения i;
• коррекции сидерического периода обращения Т ;
• коррекции эксцентриситета е.
При этом предлагается для решения общей задачи удержания КА исполь-
зовать поэтапный подход, предусматривающий определенную последователь-
ность решения перечисленных выше задач.
Учитывая тот факт, что коррекция наклонения наиболее энергоемкая и,
собственно, она предъявляет основные требования к характеристикам кор-
ректирующей двигательной установки КА, решение задачи коррекции накло-
нения целесообразно принять в качестве первоочередного базового решения,
т.е. поиски последующих решений задач коррекций поддержания периода и
эксцентриситета будут проводиться уже на фоне этого найденного решения
(определенной программы коррекций поддержания наклонения). В пользу
принятия решения задачи поддержания наклонения в качестве базового сви-
детельствует и то, что структура общей программы коррекций удержания КА
будет определяться прежде всего совокупностью корректирующих импуль-
сов для парирования бинормальной составляющей возмущающих ускорений
(парирование эволюции наклонения /).
Прежде чем приступить к изложению предлагаемого решения данной за-
дачи, проведем оценку эволюции элементов ГСО, а также качественный
анализ действующих на КА возмущений и рассмотрим механизм их влия-
ния на изменение положения плоскости орбиты КА в абсолютном простран-
стве.
1.3.2.1. Эволюция параметров ГСО и оценка потенциальных
энергетических затрат на коррекцию
Рассмотрение эволюции параметров геостационарной орбиты необходи-
мо, прежде всего, с точки зрения оценки потребных энергетических затрат
для проведения коррекций удержания КА. При этом целесообразно оценить
отдельно энергетические затраты на коррекцию плоскостных и внеплоскост-
ных параметров орбиты.
102
Расчет эволюции параметров ГСО осуществлялся с помощью программы
прогнозирования движения центра масс КА с учетом всех основных возму-
щающих факторов. Учитывая, что рассматривается управляемое движение КА
в достаточно узком диапазоне корректируемых параметров орбиты, целесо-
образно провести анализ эволюции элементов орбиты на соответствующих
интервалах времени, соизмеримых с возможными интервалами времени между
коррекциями.
Расчеты эволюции наклонения / для рассматриваемой орбиты были про-
ведены на срок 1 год и для начальных значений параметров орбиты, практи-
чески соответствующих идеальной ГСО. Известно, и далее это будет пока-
зано, что характер эволюции наклонения зависит от даты пуска КА. Поэто-
му для оценки величины изменения наклонения в течение года были прове-
дены расчеты для начальной календарной даты 22 июня для различных го-
дов пуска. Результаты расчета в виде графиков представлены на рис. 1.3.2,
1.3.3.
Характер изменения наклонения иллюстрирует рис. 1.3.2.
По оси абсцисс на этом графике отложено время в сутках, а надписи справа
у кривых соответствуют годам пуска КА. Как видно из рис. 1.3.2, наклоне-
ние в течение года увеличивается, при этом для каждого N-ro года уход
величины наклонения от его начального значения Д/д, будет различным.
На рис. 1.3.3 представлен график зависимости ухода величины наклоне-
ния за год для различных дат пуска КА, а именно: в интервале дат от 22.06.2004 г.
до 22.06.2025 г. По оси ординат на этом графике отложена величина изме-
нения наклонения Д/^ за год, а по оси абсцисс — год пуска КА. График на-
глядно подтверждает периодический характер зависимости скорости измене-
ния наклонения от даты пуска КА, обусловленный периодическим измене-
Рис. 1.3.2. Эволюция наклонения в течение года для различных дат пуска
103
1.00
Рис. 1.3.3. Зависимость ухода наклонения за год для различных дат пуска КА
нием положения плоскости орбиты Луны относительно плоскости эклипти-
ки с интервалом примерно 18,6 лет.
Для проведения оценки энергетических затрат на коррекцию соответству-
ющего параметра орбиты, а именно на парирование уходов этого параметра
в результате эволюции необходимо рассчитать скорость его изменения в те-
чение всего САС КА. При этом следует учесть, что эта скорость может быть
непостоянной. Зная величину изменения наклонения за год, можно рассчи-
тать и соответствующую характеристическую скорость для ее парирования с
помощью бинормального корректирующего импульса. На рис. 1.3.4 представ-
Рис. 1.3.4. Зависимость годовых затрат характеристической скорости
104
лен график зависимости потребных затрат характеристической скорости на
парирование эволюции наклонения ГСО для рассматриваемого диапазона дат.
При расчете запасов характеристической скорости при длительных САС
КА из-за непостоянства скорости ухода наклонения необходимо учитывать
конкретные значения потребных затрат для каждого года. На рис. 1.3.5 пред-
ставлен график величины суммарных затрат характеристической скорости на
парирование эволюции наклонения ГСО для САС 10 лет при различных да-
тах пуска КА.
5W
$20
180
>»ю 20i2 2016 2018
Год
Рис. 1.3.5. Зависимость затрат характеристической скорости на парирование эволю-
ции наклонения в течение 10 лет для различных дат пуска КА
Эволюция периода обращения КА существенным образом зависит от воз-
мущающего воздействия нецентральное™ гравитационного поля Земли. При
постоянном удержании КА в точке «стояния» средняя скорость изменения
периода обращения будет определяться долготой этой точки. На рис 1.3.6
представлен график изменения периода обращения за виток в зависимости
от долготы точки «стояния» КА при учете возмущений от нецентральное™
гравитационного поля Земли с числом гармоник 8x8. При этом следует от-
метить, что увеличение числа учитываемых гармоник, начиная с 4x4, прак-
тически не влияет на результаты расчетов и, соответственно, на вид данного
графика. По оси ординат на графике отложена величина изменения периода
обращения (сидирического) КА за один виток dT в секундах, а по оси абс-
цисс — долгота точки «стояния» КА L в градусах.
На каждом витке на КА действуют значительные возмущения от гравита-
ционного воздействия Луны и Солнца. На рис. 1.3.7 показан график, анало-
гичный графику на рис. 1.3.6, построенный по результатам расчета измене-
ния периода обращения за виток уже с учетом влияния Луны и Солнца для
105
Рис. 1.3.6. Зависимость изменения периода обращения за виток dT от долготы точ-
ки «стояния» КА для гравитационного поля Земли 8x8
Ь.град
Рис. 1.3.7. Изменение периода обращения за виток с учетом Луны и Солнца
различных дат. На этом графике символ «*» у надписи даты одной из кривых
указывает на то, что она построена только с учетом влияния нецентрально-
сти гравитационного поля Земли.
Как видно из этого графика, Луна и Солнце вносит весьма существенный
вклад в изменение величины dTна одном витке. Однако возмущения от Луны
и Солнца имеют периодический характер и на продолжительных интервалах
времени (более 28 суток) практически не оказывают никакого результирую-
щего влияния на изменение периода обращения КА. Наглядно этот факт
подтверждает график на рис. 1.3.8, на котором для тех же дат построены
106
0.80
Рис. 1.3.8. Осредненное за 28 суток изменение периода обращения за виток
соответствующие зависимости величины dT, но уже осредненной на интер-
вале времени 28 суток. Как видно из графика, среднее изменение периода
обращения КА за рассматриваемый интервал времени с учетом влияния Луны
и Солнца практически совпадает с изменением величины dT с учетом влия-
ния только нецентральности гравитационного поля Земли (кривая с симво-
лом «*»).
Таким образом, для оценки потребных энергозатрат на коррекции поддер-
жания периода обращения КА для заданной точки «стояния» можно восполь-
зоваться величиной dT, полученной с учетом влияния только нецентраль-
ности гравитационного поля Земли.
Соответствующие данные для различных точек «стояния» приведены в
табл. 1.3.1. В этой же таблице представлены данные по затратам характерис-
тической скорости для поддержания периода обращения в течение года. В таб-
лице приняты следующие обозначения:
L — долгота точки «стояния», град;
dT — изменение периода обращения, с;
dV — характеристическая скорость, м/с.
На рис. 1.3.9 представлен график зависимости потребных затрат харак-
теристической скорости от долготы точки «стояния» КА. Отрицательный знак
в значении характеристической скорости соответствует тормозному коррек-
тирующему импульсу.
Следует отметить, что проведенные выше оценки потребных энергозат-
рат приведены только для парирования уходов параметров орбиты в резуль-
тате эволюции. Вместе с тем, существуют и другие факторы, влияющие на
изменение параметров орбиты. К ним относятся, например, конструктивные
особенности ДУ КА, при которых могут иметь место потери в эффективно-
107
Таблица 1.3.1. Годовые затраты характеристической скорости
l ат av L ат av L ат av L ат av L ат av L dT av
0 -0.155 -0.676 60 -0.238 -1.038 120 0.471 2.054 180 -0.246 -1.073 240 -0.170 -0.741 300 0.338 1.472
1 -0.168 -0.733 61 -0.224 -0.977 121 0.469 2.045 181 -0.257 -1.121 241 -0.159 -0.693 301 0.339 1.477
2 -0.181 -0.790 62 -0.210 -0.915 122 0.466 2.033 182 -0.268 -1.166 242 -0.148 -0.645 302 0.339 1.480
3 -0.194 -0.845 63 -0.195 -0.851 123 0.463 2.019 183 -0.278 -1.210 243 -0.137 -0.596 303 0.340 1.482
4 -0.207 -0.901 64 -0.180 -0.785 124 0.459 2.001 184 -0.287 -1.253 244 -0.125 -0.547 304 0.340 1.482
5 -0.219 -0.955 65 -0.165 -0.718 125 0.454 1.982 185 -0.297 -1.294 245 -0.114 -0.498 305 0.340 1.481
6 -0.231 -1.008 66 -0.149 -0.650 126 0.449 1.959 186 -0.306 -1.333 246 -0.103 -0.448 306 0.339 1.478
7 -0.243 -1.061 67 -0.133 -0.581 127 0.444 1.934 187 -0.314 -1.370 247 -0.091 -0.398 307 0.338 1.474
8 -0.255 -1.112 68 -0.117 -0.511 128 0.437 1.907 188 -0.322 -1.405 248 -0.080 -0.348 308 0.337 1.468
9 -0.267 -1.163 69 -0.101 -0.439 129 0.430 1.877 189 -0.330 -1.438 249 -0.068 -0.298 309 0.335 1.461
10 -0.278 -1.212 70 -0.084 -0.367 130 0.423 1.844 190 -0.337 -1.470 250 -0.057 -0.248 310 0.333 1.451
11 -0.289 -1.260 71 -0.067 -0.294 131 0.415 1.809 191 -0.344 -1.499 251 -0.045 -0.197 311 0.330 1.441
12 -0.300 -1.306 72 -0.051 -0.221 132 0.406 1.772 192 -0.350 -1.527 252 -0.034 -0.147 312 0.328 1.428
13 -0.310 -1.352 73 -0.034 -0.147 133 0.397 1.733 193 -0.356 -1.553 253 -0.022 -0.097 313 0.324 1.414
14 -0.320 -1.395 74 -0.017 -0.072 134 0.388 1.692 194 -0.362 -1.577 254 -0.011 -0.047 314 0.321 1.399
15 -0.330 -1.437 75 0.001 0.003 135 0.378 1.648 195 -0.367 -1.598 255 0.001 0.003 315 0.317 1.381
16 -0.339 -1.478 76 0.018 0.078 136 0.368 1.603 196 -0.371 -1.618 256 0.012 0.053 316 0.313 1.363
17 -0.348 -1.517 77 0.035 0.153 137 0.357 1.555 197 -0.375 -1.636 257 0.024 0.103 317 0.308 1.342
18 -0.356 -1.554 78 0.052 0.228 138 0.345 1.506 198 -0.379 -1.652 258 0.035 0.152 318 0.303 1.320
19 -0.364 -1.589 79 0.069 0.303 139 0.334 1.455 199 -0.382 -1.665 259 0.046 0.201 319 0.297 1.297
20 -0.372 -1.622 80 0.087 0.378 140 0.322 1.402 200 -0.385 -1.677 260 0.057 0.249 320 0.292 1.271
21 -0.379 -1.653 81 0.104 0.452 141 0.309 1.348 201 -0.387 -1.687 261 0.068 0.297 321 0.285 1.245
22 -0.386 -1.683 82 0.121 0.526 142 0.296 1.292 202 -0.389 -1.695 262 0.079 0.345 322 0.279 1.216
23 -0.392 -1.710 83 0.137 0.599 143 0.283 1.234 203 -0.390 -1.700 263 0.090 0.392 323 0.272 1.186
24 -0.398 -1.735 84 0.154 0.672 144 0.270 1.176 204 -0.391 -1.704 264 0.100 0.438 324 0.265 1.155
25 -0.403 -1.758 85 0.171 0.744 145 0.256 1.116 205 -0.391 -1.706 265 0.111 0.484 325 0.257 1.122
26 -0.408 -1.779 86 0.187 0.814 146 0.242 1.055 206 -0.391 -1.706 266 0.121 0.529 326 0.249 1.088
27 -0.412 -1.797 87 0.203 0.884 147 0.228 0.993 207 -0.391 -1.703 267 0.132 0.574 327 0.241 1.052
28 -0.416 -1.814 88 0.219 0.953 148 0.213 0.930 208 -0.390 -1.699 268 0.142 0.618 328 0.233 1.014
29 -0.419 -1.827 89 0.234 1.020 149 0.199 0.866 209 -0.388 -1.693 269 0.152 0.661 329 0.224 0.976
30 -0.422 -1.839 90 0.249 1.086 150 0.184 0.801 210 -0.387 -1.686 270 0.161 0.703 330 0.215 0.936
31 -0.424 -1.848 91 0.264 1.151 151 0.169 0.735 211 -0.384 -1.676 271 0.171 0.745 331 0.205 0.894
32 -0.425 -1.855 92 0.278 1.214 152 0.154 0.669 212 -0.382 -1.664 272 0.180 0.786 332 0.195 0.851
33 -0.426 -1.859 93 0.293 1.276 153 0.138 0.603 213 -0.379 -1.651 273 0.189 0.825 333 0.185 0.807
34 -0.427 -1.860 94 0.306 1.335 154 0.123 0.536 214 -0.375 -1.635 274 0.198 0.864 334 0.175 0.762
35 -0.426 -1.859 95 0.320 1.393 155 0.107 0.468 215 -0.371 -1.619 275 0.207 0.902 335 0.164 0.716
36 -0.426 -1.856 96 0.332 1.449 156 0.092 0.401 216 -0.367 -1.600 276 0.215 0.939 336 0.153 0.668
37 -0.424 -1.850 97 0.345 1.503 157 0.076 0.333 217 -0.362 -1.579 277 0.224 0.975 337 0.142 0.619
38 -0.422 -1.841 98 0.357 1.555 158 0.061 0.265 218 -0.357 -1.557 278 0.232 1.010 338 0.131 0.570
39 -0.420 -1.830 99 0.368 1.604 159 0.045 0.198 219 -0.352 -1.534 279 0.240 1.044 339 0.119 0.519
40 -0.417 -1.817 100 0.379 1.652 160 0.030 0.130 220 -0.346 -1.508 280 0.247 1.077 340 0.107 0.467
41 -0.413 -1.801 101 0.389 1.697 161 0.014 0.063 221 -0.340 -1.482 281 0.254 1.109 341 0.095 0.414
42 -0.409 -1.782 102 0.399 1.740 162 -0.001 -0.004 222 -0.333 -1.453 282 0.261 1.140 342 0.083 0.361
43 -0.404 -1.761 103 0.408 1.780 163 -0.016 -0.071 223 -0.326 -1.424 283 0.268 1.169 343 0.070 0.306
44 -0.398 -1.737 104 0.417 1.818 164 -0.031 -0.137 224 -0.319 -1.392 284 0.275 1.198 344 0.058 0.251
45 -0.392 -1.710 105 0.425 1.853 165 -0.047 -0.203 225 -0.312 -1.360 285 0.281 1.225 345 0.045 0.196
46 -0.386 -1.682 106 0.433 1.886 166 -0.061 -0.268 226 -0.304 -1.326 286 0.287 1.251 346 0.032 0.139
47 -0.378 -1.650 107 0.439 1.916 167 -0.076 -0.332 227 -0.296 -1.291 287 0.292 1.275 347 0.019 0.082
48 -0.371 -1.617 108 0.446 1.943 168 -0.091 -0.396 228 -0.288 -1.254 288 0.298 1.298 348 0.006 0.025
49 -0.362 -1.580 109 0.451 1.968 169 -0.105 -0.459 229 -0.279 -1.217 289 0.303 1.321 349 -0.008 -0.033
50 -0.354 -1.542 110 0.456 1.990 170 -0.119 -0.520 230 -0.270 -1.178 290 0.308 1.341 350 -0.021 -0.091
51 -0.344 -1.501 111 0.461 2.009 171 -0.133 -0.581 231 -0.261 -1.138 291 0.312 1.361 351 -0.034 -0.149
52 -0.334 -1.458 112 0.464 2.025 172 -0.147 -0.641 232 -0.252 -1.098 292 0.316 1.379 352 -0.048 -0.208
53 -0.324 -1.413 113 0.468 2.039 173 -0.160 -0.700 233 -0.242 -1.056 293 0.320 1.395 353 -0.061 -0.267
54 -0.313 -1.365 114 0.470 2.049 174 -0.174 -0.757 234 -0.232 -1.013 294 0.324 1.411 354 -0.075 -0.326
55 -0.302 -1.316 115 0.472 2.057 175 -0.187 -0.813 235 -0.222 -0.970 295 0.327 1.424 355 -0.088 -0.384
56 -0.290 -1.264 116 0.473 2.062 176 -0.199 -0.868 236 -0.212 -0.925 296 0.330 1.437 356 -0.102 -0.443
57 -0.278 -1.210 117 0.473 2.064 177 -0.211 -0.921 237 -0.202 -0.880 297 0.332 1.448 357 -0.115 -0.502
58 -0.265 -1.155 118 0.473 2.064 178 -0.223 -0.974 238 -0.191 -0.834 298 0.334 1.457 358 -0.128 -0.560
59 0.252 -1.097 119 0.473 2.060 179 -0.235 -1.024 239 -0.181 -0.788 299 0.336 1.465 359 -0.142 -0.618
108
хот
О SO «О 90 120 ISO ISO 210 240 2’0 SOO ISO Sto
Смрад.
Рис. 1.3.9. Зависимость затрат характеристической скорости на парирование эволю-
ции периода обращения КА от долготы точки «стояния» КА
сти корректирующих импульсов и дополнительные энергозатраты, связанные
с компенсацией влияния коррекции одного заданного параметра орбиты на
изменение других параметров. Так, при отклонении результирующего век-
тора тяги ДУ при коррекции наклонения от бинормального направления будет
иметь место как потеря эффективности коррекции наклонения, так и изме-
нение периода обращения КА и эксцентриситета орбиты. Если потери эф-
фективности можно рассчитать заранее, зная углы установки векторов тяги
ДК ДУ, то дополнительные энергозатраты на компенсацию изменения пе-
риода обращения и эксцентриситета могут быть рассчитаны только после
определения конкретных вариантов программ проведения коррекций удер-
жания КА.
Следует подчеркнуть, что изменение эксцентриситета будет иметь место
при любой реализации трансверсального корректирующего импульса и эф-
фект от этого гораздо более существененный, чем от изменения этого пара-
метра орбиты в результате эволюции.
С учетом этих факторов потребные затраты характеристической скорости
могут отличаться от проведенных выше оценок. Для их определения необ-
ходимо перейти непосредственно к решению рассматриваемой задачи кор-
рекции и, прежде всего, задачи поддержания наклонения.
1.3.2.2. Анализ механизма эволюции наклонения ГСО
Известно, что изменение положения плоскости орбиты в процессе эво-
люции происходит в результате действия бинормального возмущающего ус-
корения. Основными факторами, обуславливающими возникновение бинор-
мальных ускорений при движении КА на ГСО, являются гравитационные
возмущения от Луны и Солнца. Действие бинормальных возмущений при-
109
водит к изменению положения плоскости орбиты КА и, соответственно,
изменению таких элементов орбиты, как наклонение i и долгота восходяще-
го узла . Наряду с этими параметрами положение плоскости орбиты мо-
жет определяться в виде единичного трехмерного вектора наклонения 7 , ком-
поненты которого можно записать как
sin z sin
sinzcosQ^
Jx
cosz
Расположение вектора I в абсолютной геоцентрической системе коорди-
нат (АГСК) OXYZ показано на рис. 1.3.10.
Рис. 1.3.10. Расположение вектора I в АГСК
На практике чаще используется проекция этого вектора на плоскость XY
— двумерный вектор наклонения i [20]. В силу малости значения наклонения
рассматриваемых орбит величину модуля этого вектора можно считать рав-
ной непосредственно угловому значению величины наклонения плоскости
орбиты z. Направлен этот вектор в плоскости XY в сторону — 90°
(рис. 1.3.11).
Рис. 1.3.11. Расположение^двумер-
ного вектора наклонения z в плос-
кости XY АГСК
Введение двумерного вектора наклоне-
ния z позволяет объединить два внеплос-
костных параметра орбиты z и и рас-
сматривать ограничение на величину на-
клонения как окружность в плоскости XY
АГСК:
max’
Кроме этого, далее будем пользоваться
понятием вектор углового момента орбиты
h , который определяется как h = х V
(рис. 1.3.12).
ПО
Рис. 1.3.12. Расположение вектора углового момента h в АГСК
Направление этого вектора параллельно трехмерному вектору наклонения
7 , а величина модуля для ГСО равна 130000 км/с/с. Малый импульс скоро-
сти A V , параллельный вектору 7 и приложенный к центру масс КА, изме-
няет вектор углового момента на величину ДА = х АЙ. Очевидно, что век-
тор ДА будет расположен в плоскости новой (скорректированной) орбиты, а
его модуль будет равен ДА = А • sin Az, где Az — изменение наклонения плос-
кости орбиты.
п а • А. ДА
В силу малости значения Az, его можно определить в радианах как Az = ——.
А
Отношение характеризует изменение величины наклонения орбиты. В то
А
же время направление изменения наклонения в пространстве можно опре-
делить как направление вектора ДА и ввести, таким образом, понятие век-
А- ДА
тор изменения наклонения Az = — .
А _
Использование наряду с двумерным вектором наклонения z вектора из-
менения наклонения Az позволяет определить вектор наклонения орбиты
после приложения бинормального корректирующего импульса zKop как сум-
му векторов zKop = z + Az, где Az — вектор изменения наклонения. Получен-
ный таким образом вектор zKop будет определять новые (скорректированные)
значения двух вне плоскостных параметров орбиты /кор и ^7кор •
На рис. 1.3.13 показана геометрия расположения орбиты и рассматрива-
емых векторов в АГСК OXYZ j\q и после приложения бинормального им-
пульса характеристической скорости А Й в точке орбиты с радиусом-векто-
ром • А ^ка и А й — соответствУюЩие векторы скорости полета КА.
Нижний индекс «кор» у изображенных параметров указывает на то, что они
получаются после приложения корректирующего (либо возмущающего) им-
пульса АЙ.
111
Рис. 1.3.13. Изменение вектора наклонения бинормальным корректирующим им-
пульсом
Проводя анализ природы бинормальных возмущений, отметим, что они
возникают только когда возмущающее тело (Луна или Солнце) не находится
в плоскости орбиты КА. В этом случае возникает бинормальная составляю-
щая силы гравитационного притяжения. Так как плоскость ГСО и плоско-
сти эклиптики и орбиты Луны не совпадают, то в общем случае бинормаль-
ные возмущения всегда имеют место и уровень этих возмущений тем боль-
ше, чем выше возвышение возмущающего тела над плоскостью орбиты КА.
Важным фактом в понимании механизма воздействия бинормальных воз-
мущений является то, что они имеют периодический характер, обусловлен-
ный периодическим характером движений Луны и Солнца. Далее будем
рассматривать бинормальные возмущения от Солнца как долгопериодические,
а от Луны как короткопериодические. При этом характерно, что, если рас-
сматривать не сами бинормальные возмущения (их знак и величину), а выз-
ванные ими возмущения элементов орбиты КА, то периоды их колебаний рав-
ны половине периода обращения соответствующего возмущающего тела. Так,
долгопериодические и короткопериодические колебания имеют соответственно
период 182.63 и 13.66 солнечных суток.
На рис. 1.3.14 представлен график изменения наклонения в течение года,
иллюстрирующий периодический характер действия лунно-солнечных воз-
мущений и характер влияния каждого из возмущающих факторов в отдель-
ности. Для этого на графике приведены четыре кривых изменения рассмат-
риваемых параметров, а именно: под воздействием только Солнца (кривая 1),
под воздействием только Луны (кривая 2), под воздействием нецентрально-
сти гравитационного поля Земли (кривая 3) и, наконец, (кривая 4) под воз-
действием всех основных возмущающих факторов (Солнца, Луны и нецент-
ральное™ гравитационного поля Земли). Как видно из рисунка, нецентраль-
112
Рис. 1.3.14. Изменение наклонения плоскости ГСО под воздействием различных воз-
мущающих факторов
ность гравитационного поля Земли практически не оказывает возмущающе-
го воздействия в бинормальном направлении и характер результирующего из-
менения наклонения определяется как результат «сложения» возмущений от
первых двух факторов.
Анализ графика показывает также, что максимальные возмущения от
Солнца имеют место в дни летнего и зимнего солнцестояния (максимальное
возвышение Солнца над плоскостью экватора), а в дни весеннего и осеннего
равноденствия (Солнце в плоскости экватора) возмущения практически
отсутствуют. Максимальные возмущения от Луны имеют место два раза в
месяц в моменты когда Луна имеет максимальное возвышение над плоско-
стью экватора, а в дни прохождения Луной плоскости экватора (также два
раза в месяц) возмущения практически отсутствуют.
Для более ясного понимания механизма эволюции плоскости ГСО рас-
смотрим схематично некоторые характерные картины действия бинормаль-
ных возмущений на КА в течение витка. Для простоты геометрической ин-
терпретации будем рассматривать предельную ситуацию положения возму-
щающего тела относительно плоскости орбиты КА, например для Солнца
день летнего солнцестояния. В этот день Солнце имеет максимальное воз-
вышение над плоскостью орбиты КА и находится в плоскости YZ АГСК.
Именно эта астробаллистическая ситуация показана на рис. 1.3.15. Точками
£р £2, £3, £4 обозначены характерные точки ГСО:
ИЗ
Рис. 1.3.15. Действие силы притяжения Солнца в различных точках ГСО в день лет-
него солнцестояния
Lx — точка, в которой КА находится на минимальном расстоянии от Сол-
нца;
£3 — точка, в которой КА находится на максимальном расстоянии от Сол-
нца;
Z2, Z4 — точки, в которых КА находится на расстоянии, равном рассто-
янию от центра Земли до Солнца.
В инерциальном пространстве и КА, и Земля вместе с рассматриваемой
системой координат XYZ движутся под действием гравитационного притя-
жения Солнца. При этом половину периода обращения КА находится на мень-
шем расстоянии от Солнца, чем Земля и, следовательно, притягивается с боль-
шей силой, а другую половину периода — соответственно с меньшей, так как
расстояние между КА и Солнцем становится больше, чем расстояние между
Солнцем и Землей. Если силу притяжения Земли Солнцем обозначить как
Fc , то силу, действующую на КА в экстремальных точках орбиты и £3 (наи-
меньшее и наибольшее расстояние от Солнца), можно записать соответственно
как FC + 8FC и FC-5FC (рис. 1.3.15).
Система координат XYZ с началом координат в центре Земли движется в
инерциальном пространстве под действием силы Fc , поэтому, рассматривая
движение КА в этой системе, силу Fc можно исключить и считать, что на
КА действует только дополнительная сила 8ГС (ну и, конечно, сила притя-
жения Земли).
Вектор силы 8ГС можно разложить на составляющие — нормальную SFN
и бинормальную 8FB (рис. 1.3.16). Как видно из этого рисунка, бинормаль-
ная составляющая 8FB будет создавать такой же эффект, как и проведение
коррекции по изменению вектора наклонения. При этом изменение вектора
наклонения в двух экстремальных точках орбиты Lx и £3 будет происходить
в одном направлении, а именно по оси +Х АГСК.
114
Рис. 1.3.16. Изменение бинормального возмущения в течение одного оборота КА
По мере удаления КА от экстремальных точек при его движении по орби-
те величина возмущающей силы 8FC, а следовательно, и ее составляющей
5FB, будет уменьшаться, пока расстояние от КА до Солнца не сравняется
с расстоянием до Солнца от Земли (точки £2 и Z4). В этих точках будет про-
исходить смена знака бинормальной составляющей 8F. Из рис. 1.3.16, где
схематично показано изменение величины бинормального возмущения в те-
чение одного оборота КА, видно, что действие бинормальной составляющей
можно рассматривать как действие протяженного (в течение витка) коррек-
тирующего импульса переменной величины и знака.
Рассмотрим характер изменения вектора изменения углового момента ДА ,
а следовательно, и вектора изменения наклонения А/ в течение одного вит-
ка движения КА по орбите на примере движения КА в системе координат
pqw, определенной следующим образом: центр этой системы координат со-
впадает с центром Земли; ось р направлена на экстремальную точку ось w
перпендикулярна плоскости орбиты, а ось # дополняет систему координат до
правой.
Геометрия расположения рассматриваемых векторов в этой системе коор-
динат и определяемые параметры показаны на рис. 1.3.17.
В силу малости значений наклонения рассматриваемых орбит и для боль-
шей наглядности будем считать, что плоскость орбиты совпадает с плоско-
стью экватора. На рисунке обозначено:
— радиус- вектор КА;
rQ — радиус- вектор Солнца;
г — вектор направления КА — Солнце;
АЙ — вектор корректирующего импульса скорости;
ЛА — вектор изменения углового момента;
А/ — вектор изменения наклонения плоскости орбиты;
8С — угол возвышения Солнца над плоскостью экватора;
0 — угол орбитального движения КА.
115
Рис. 1.3.17. Расположение векторов в системе координат pqw
Действие силы 8F (см. рис. 1.3.16) в любой точке орбиты в течение ма-
лого времени А/ создает бинормальный импульс скорости А V = 8яв • А/, где
8яв — дополнительное возмущающее ускорение, действующее на КА в би-
нормальном направлении. Это ускорение можно определить как разность
ускорений в инерциальном пространстве, действующих на КА и Землю в би-
нормальном направлении, а именно 8яв -я3 .
Значения ускорений, действующих соответственно на КА и Землю в би-
нормальном направлении, определяются следующими формулами:
_gcrcsin5c
"КА “ г3
_pcrcsin8c
"з - „3
гс
Для определения модуля вектора направления КА — Солнце г запишем
выражения для рассматриваемых векторов в системе координат pqw :
'KA=''KACOSe? + /kASine
rc = rc cos3c • р + rc sin 8С • w;
г =/с = 0сСО8^с _,каСО8®)?_гка8’п® <7 + /cSin3c w-
С учетом этих выражений определим модуль вектора направления КА —
Солнце г как
И = r = 7ГС + ГКА - 2rCrKA COS5С COSе’
116
а выражение для ускорения КА запишем следующим образом:
„ ___________Hcrcsin8c________
('с + 'кА - 2/CrKA COs5C cose)2
Таким образом, выражение для рассматриваемого бинормального импульса
скорости имеет вид
А К = pcrcsin6c
.('с + 'КА - 2rCrKA cos8c COS0)2 С .
С учетом приведенных выше выражений раскроем формулу для опреде-
ления вектора изменения углового момента ДЛ = /^д х Д И :
A/?=Hc''c'kAsin8c
-Hc/C/KASin8C
sin О
sin 0 sin О
(ГС + ГКА - 2гСГКА COS 8С COS 0)2
sin0
COS0
, , - fc
(>С + 'КА - 2/СГКА COS8C COS0)2
Л/ р-
M-q.
(1.3.1)
Время действия импульса определим из соотношения
где — скорость КА на стационарной орбите.
Таким образом, в выражении (1.3.1) выделим множитель Ис/сПса •
Его значение можно рассматривать практически постоянным в течение од-
ного оборота КА на ГСО.
Для перехода от вектора изменения углового момента АЛ к вектору из-
менения наклонения Az достаточно все компоненты вектора АЛ разделить
на величину модуля вектора углового момента ГСО Л = . В этом слу-
• к 1
чае указанный выше множитель можно записать как Нсгсгка sin °с 77Т~ • В
свою очередь, скорость КА на ГСО , поэтому с учетом этого
можно ввести в рассмотрение некоторую постоянную для ГСО величину
^гсо = МзМс/с'ка s*n 8с •
117
Использование постоянной £гсо позволяет записать формулу для опреде-
ления вектора изменения наклонения Az в следующем виде:
£гсо sin 0А0
з
<ГС + ГКА - 2rCrKA cos5c COS0)2
£гсо sin 0А0
rc
&ГСО cos 0 ^rco cos
I p
(rC + rKA - 2rCrKA cos5c COS0)2 C
(1.3.2)
С помощью этой формулы (1.3.2) можно определять текущее значение
вектора изменения наклонения Az в любой точке орбиты в зависимости от
величины угла орбитального движения 0 .
Анализ формулы (1.3.1) подтверждает тот факт, что в точках орбиты £2 и
£4, в которых выполняется условие г= гс, величина модуля вектора измене-
ния наклонения равна нулю, а в экстремальных точках орбиты Lx и £3 она
имеет максимальное значение. При этом направление вектора Az в этих
точках совпадает с осью — q. Таким образом, в течение витка происходит
равномерное вращение вектора изменения наклонения Az в плоскости ор-
биты, причем период изменения величины модуля этого вектора от макси-
мального значения до нуля и обратно составляет половину периода обраще-
ния КА. В течение одного витка вектор Az делает два оборота.
На рис. 1.3.18 схематично показано движение вектора изменения накло-
нения Az в плоскости орбиты в течение полета КА от точки £, к точке £3
Рис. 1.3.18. Схема движения вектора изменения наклонения Az в плоскости
орбиты для ситуации летнего солнцестояния
118
для ситуации летнего солнцестояния. Как видно из рис. 1.3.18, геометрия рас-
положения мгновенных векторов изменения наклонения в течение витка
представляет симметричную картину в плоскости орбиты относительно оси
H-JfArCK. Таким образом, и направление результирующего за виток векто-
ра изменения наклонения Д/в для ситуации летнего солнцестояния будет со-
впадать с направлением оси +Х.
Для определения результирующего за один виток КА вектора изменения
наклонения Д/в необходимо перейти от формулы (1.3.2) к сумме соответству-
ющих определенных интегралов по углу 0 в диапазоне от 0 до 2 л:
2? £rrnsin0d0 singj0
^ = Р- J----------~---------------з-Р- J —
О (г£ +r3. -2rcrv. cosfjp cose)2 О с
V-z 1Х/\ С-г Гм» V-'
2? A:rrncos0</0 _ krrr,cosQdQ
J T + J p
0 (rC + rKA “ ^rCrKA COS 8C COS 0)2 0 C
Раскрытие суммы интегралов (1.3.3) приводит к следующему выражению:
A7 _ Зл£Гсогсгка cos 8с
м в “ 5 ' Ч,
(1.3.4)
а последующая подстановка в (1.3.4) выражения для введенной постоянной
Аусо окончательно формирует формулу для определения вектора изменения
наклонения за виток Д/в
- -3niL3iLcr^sin26c
в ~ 5 Ч-
5
2('с+/ка)1
(1.3.5)
Анализ формулы (1.3.5) показывает, что направление результирующего за
виток вектора Д/в совпадает с направлением оси -q . Для рассмотренной
выше ситуации летнего солнцестояния (см. рис. 1.3.18) направления осей +Х
и -q совпадают.
Для других дней года и, соответственно, положений Солнца изменится и
расположение на орбите рассматриваемых экстремальных точек £р £3, и на-
правление оси -q . Следовательно, изменится и направление результирую-
щего вектора Д/в. На рис. 1.3.19 схематично показано движение результиру-
ющего за виток вектора изменения наклонения Д/в в плоскости орбиты в те-
чение полугода от летнего до зимнего солнцестояния.
Как видно из рисунка, геометрия расположения результирующих векто-
ров изменения наклонения Д/в в течение полугода также представляет сим-
119
Рис. 1.3.19. Схема движения результирующего за виток вектора изменения наклоне-
ния Л/в в течение полугода от летнего до зимнего солнцестояния
метричную картину в плоскости орбиты относительно оси +Х. Очевидно, что
в течение следующего полугода характер движения вектора AzB повторится
и, таким образом, направление результирующего за год вектора изменения
наклонения будет совпадать с направлением оси +Х АГСК.
Характер движения результирующего вектора AzB в течение года (перио-
да обращения возмущающего тела) по сути дела повторяет характер движе-
ния вектора Az в течение витка (см. рис. 1.3.18). При этом период измене-
ния модуля этого вектора от максимального значения до 0 также составляет
половину периода обращения Земли вокруг Солнца (182.63 суток). Таким об-
разом, за год вектор наклонения под воздействием возмущений Солнца из-
меняется в направлении вдоль оси +Х АГСК.
Следует отметить, что выше было рассмотрено влияние на характер изме-
нения наклонения орбиты КА только возмущающего воздействия Солнца.
Гравитационные возмущения от Луны аналогичным образом влияют на ха-
рактер изменения вектора наклонения в течение витка и в течение периода
обращения Луны. Правда, уровень гравитационных возмущений от Луны
значительно выше, а следовательно, и величина модуля вектора изменения
наклонения примерно в два раза больше.
Определенные коррективы в направление изменения вектора наклонения
вносит прецессия долготы восходящего узла орбиты Луны с периодом, рав-
ным 18,6 лет. Однако, так как угол между плоскостью эклиптики и плоско-
120
стью лунной орбиты мал (~5°), то практически в течение любого года вектор
наклонения под воздействием возмущений от Солнца и Луны в среднем из-
меняется в одном направлении, а именно вдоль оси ОХ. Так как Луна оказыва-
ет определяющее влияние на изменение наклонения, то и в любом месяце
года направление результирующего за оборот Луны вектора изменения накло-
нения практически совпадает с осью ОХ. Это очень важный вывод, который
можно сделать из проведенного анализа механизма эволюции наклонения
ГСО, и именно он будет использоваться в дальнейшем для решения задачи
поддержания наклонения.
На рис. 1.3.20 показан график годографа движения вектора наклонения в
течение года с учетом возмущений от Луны и Солнца. По осям ординат и
Рис. 1.3.20. Годограф движения вектора наклонения в течение года
абсцисс отложены соответствующие компоненты вектора наклонения IY и
1Х в градусах. Малая окружность соответствует движению вектора наклоне-
ния с учетом возмущения только от Солнца, три другие окружности -с уче-
том возмущений от Солнца и Луны. Надписи «Min», «Mid» и «Мах» соответ-
ствуют астробаллистическим ситуациям, когда угол между плоскостью эклип-
тики и плоскостью лунной орбиты имеет значения, при которых Луна ока-
зывает минимальное, среднее и максимальное воздействие на изменение
вектора наклонения. Следует заметить, что данный график и графики на рис.
1.3.21, 1.3.22 построены по результатам расчетов с использованием приведен-
ных выше формул.
Под влиянием возмущающего воздействия Луны в течение года вектор
наклонения совершает несколько оборотов, а именно — число, равное коли-
честву оборотов Луны. Тем не менее, как было указано выше, направление
121
результирующего вектора изменения наклонения практически совпадает с
осью ОХ. Этот факт наглядно иллюстрирует рис. 1.3.21, где показано изме-
нение результирующего вектора наклонения в течение года для соответству-
ющих астробаллистических ситуаций.
На рис. 1.3.22 для тех же ситуаций показано изменение модуля результи-
рующего вектора наклонения, т.е. непосредственно наклонения плоскости ор-
биты i в течение года.
Рис. 1.3.21. Изменение результирующего вектора наклонения в течение года
122
1.3.3. Использование стационарных циклических детерминированных
программ коррекций для удержания КА в заданной точке «стояния»
1.3.3.1. Решение задачи коррекции поддержания наклонения
Как было сказано выше, управление КА на этапе поддержания наклоне-
ния должно заключаться в своевременном парировании на каждом витке всех
возмущающих (в данном случае — бинормальных) ускорений с помощью при-
ложения соответствующих корректирующих импульсов (КИ). При этом, если
добиваться только устранения векового ухода наклонения орбиты на задан-
ном интервале поддержания, достаточно создавать КИ, противоположные по
действию результирующему возмущающему воздей-ствию, т.е. результирую-
щий вектор КИ импульса Д/кор должен быть противоположен результирую-
щему вектору изменения наклонения Д^. Так как для интервалов поддер-
жания наклонения более месяца среднее направление результирующего век-
тора изменения наклонения в абсолютном пространстве известно, то, следо-
вательно, известно и место приложения в абсолютном пространстве КИ.
Очевидно, что таких точек приложения КИ две: £ю и Lc. При этом на-
правление бинормальных КИ в них соответственно ДЙЮ и ДЙС должно
быть различным (рис. 1.3.23).
Рис. 1.3.23. Схема приложения КИ для парирования изменения вектора наклонения
Точки £ю и Lc определяются как точки пересечения орбиты с плоско-
стью YZ АГСК. В день летнего солнцестояния они будут совпадать соответ-
ственно с рассмотренными выше экстремальными точками Lx и £3.
Как видно из этого рисунка, в точке £ю КИ должен быть направлен по
оси —Z, а в точке £с — по оси +Z АГСК. В литературе такие импульсы
коррекции еще известны как соответственно «южный» и «северный» [19].
Очевидно, что парировать результирующий вектор изменения наклонения
Д^ можно как проведением коррекции наклонения в одной из указанных
выше точек, так и реализацией последовательно двух КИ Д Кю и Д Йс. При
этом величина суммарной характеристической скорости должна обеспечить
выполнение условия Д/кор = -Д^.
Уровень тяги ЭРДУ мал, поэтому для коррекции наклонения можно реа-
лизовать только протяженные КИ. Эффективность действия такого протя-
женного импульса на изменение вектора наклонения Д^ будет зависеть от
123
величины угла отклонения точки его приложения 0 от точки £ю или Lc.
Рис. 1.3.24 иллюстрирует геометрию расположения мгновенных векторов из-
менения наклонения di от действия протяженного бинормального импуль-
са, расположенного симметрично относительно точки £ю и имеющего угло-
вую протяженность 2 0.
Рис. 1.3.24. Геометрия расположения мгновенных векторов изменения наклонения
di от действия протяженного бинормального импульса
Следует отметить, что симметричное расположение импульса необходи-
мо для того, чтобы результирующий вектор изменения наклонения при кор-
рекции А/ был направлен противоположно парируемому вектору А^.
На рис. 1.3.24 и далее по тексту использованы следующие обозначения:
и — угловая дальность орбитального движения КА, отсчитываемая от на-
правления из центра Земли на точку пересечения орбиты с плоскостью XZ
АГСК;
$ — угловое отклонение точки приложения корректирующего импульса
от его середины;
wKOp — угловая дальность середины интервала приложения корректиру-
ющего импульса, отсчитываемая от направления из центра Земли на точку
пересечения орбиты с плоскостью XZ АГСК;
1Х и IY — соответствующие составляющие вектора А^;
di — мгновенный вектор изменения наклонения от действия корректи-
рующего импульса.
В общем виде вектор изменения наклонения на рассматриваемом участке
работы ДК можно записать как:
124
Л^кор
WKC>p+®
j di du,
WKOP-0
(1.3.6)
а с учетом того, что и = wKop + ft и wKOp = const,
_ +e _
4op=J^^- (1.3.7)
-e
Согласно рис. 1.3.24, направление результирующего вектора Д/кор можно
определить как противоположное направлению вектора Д^, поэтому для пол-
ного его определения достаточно найти величину модуля Д/кор .
Величина модуля мгновенного вектора изменения наклонения от действия
корректирующего импульса di постоянна на всем интервале работы ДК, од-
нако величина ее проекции на результирующее направление (эффективная
составляющая) будет зависеть от углового отклонения ft. Очевидно, что эту
проекцию можно определить как di cos ft. Величину модуля мгновенного век-
тора изменения наклонения от действия корректирующего импульса di можно
рассматривать как изменение модуля вектора наклонения Д/ на бесконечно
малом интервале времени или на участке движения КА по орбите на угол Aft:
д/ = глаАК = АИ = й„А/ = V^AO
ГКА^КА Н<А И<А Н
(1.3.8)
ак = — модуль бинормального управляющего ускорения от работы ДК.
«КА
т , ,. «ВГКА^
Таким образом, можно записать, что di= в — . С учетом влияния уг-
Ц
ловой протяженности корректирующего импульса на эффективность изме-
нения наклонения и выражения (1.3.7) определим величину модуля Д/кор
следующим образом:
ДУ = Г ^вГкА cosftJft= ЛвГкА sin ft +®=2ЛвГка sin0.
Р Д ц Ц -е Ц
(1.3.9)
В результате проведения коррекции изменение величины модуля Д/кор
должно быть равно величине модуля парируемого вектора Д^, поэтому
можно записать следующее равенство:
/7 >*2 -------
2 B KAsine = <J/2 +/2 (1.3.10)
Рассматривая равенство (1.3.10) как уравнение относительно неизвестной
величины 0, найдем требуемое значение половины интервала работы ДК:
125
0 = arcsin —J II + Il
7a г2 * л Y
I ZVKA
(1.3.11)
Определив в соответствии с (1.3.11) угловую протяженность половины
интервала работы ДК, найдем его полную временную длительность:
т
кор
те
л
Т . ( у.
=—arcsin —^-3—
71
(1.3.12)
Точку середины интервала работы ДК можно определить из следующей
системы уравнений (1.3.13) относительно переменной _нкор, которая вытека-
ет из геометрии расположения парируемого вектора относительно точки
. , л. Л,
sin (г/ —) = , у = - cos 11;
К°Р Г ^—[2 кор’
/ Л. /у
cos (и —)= , л---= sin и
р 2 T'F'F
(1.3.13)
Составляющие парируемого вектора в уравнениях (1.3.10) и (1.3.13)
представляют собой компоненты рассмотренного ранее двумерного вектора
наклонения и могут быть выражены через оскулирующие элементы орбиты:
Ix = sinzsinQy;
г . . о (1-3.14)
IY = sinzcosQy.
При проведении расчетов параметров планируемой коррекции наклоне-
ния значения этих оскулируюших элементов орбиты могут быть получены
путем численного интегрирования дифференциальных уравнений возмущен-
ного движения центра масс КА.
Точки £ю и Lc следует рассматривать как середины возможных интерва-
лов работы ЭРДУ. Так как эффективность корректирующего импульса с точки
зрения изменения вектора наклонения по мере удаления от этих точек пада-
ет, целесообразно стремиться к сокращению его продолжительности, а сле-
довательно, реализовать на витке два участка коррекции наклонения, в каж-
дой из этих точек. В этом случае точка середины второго интервала работы
ДК определится как z/KOp + л .
На рис. 1.3.25 схематично показано расположение на орбите участков ра-
боты ДК КА с тягой для парирования бинормального возмущающего воз-
действия б£в.
126
Рис. 1.3.25. Схема расположения на орбите участков работы ДК КА
В общем случае для полного парирования эволюции наклонения рас-
положение точек £ю и £с на орбите будет определяться конкретными зна-
чениями компонент 1Х и IY. Однако, как было показано выше, на интерва-
лах времени более месяца результирующим направлением изменения векто-
ра наклонения является ось +Х АГСК. С учетом этого обстоятельства мож-
но считать, что точки £ю и £с будут располагаться в точках пересечения
орбиты с плоскостью YZ АГСК. Это очень важный факт, который позволяет
детерминировать выбор моментов приложения КИ в течение года вне зави-
симости от конкретных параметров орбиты и текущего характера их эволю-
ции. Кроме того, такое расположение КИ в пространстве позволяет уже на
этапе проектирования сделать важный вывод о том, что участки работы ЭРДУ
не будут совпадать с интервалами нахождения КА в тени Земли.
Таким образом, в первом и достаточно хорошем приближении решения
задачи удержания наклонения предлагается парировать эволюцию плоскости
орбиты путем приложения двух протяженных импульсов с серединами в
точках пересечения орбиты с плоскостью У7АГСК. В этом случае точки £ю
и £с будут иметь текущее значение абсолютной долготы КА — соответственно
£ю = 90° — 50 и £с = 270° — 50, где 50 — начальное звездное время на дату про-
ведения коррекции в градусах. При условии поддержания географической дол-
готы «стояния» КА ^КА соответствующие моменты всемирного времени про-
хождения КА этих точек /ю и tc можно определить в секундах как
/ю = 216ОО-(5о+Хка)-24О;
(1.3.15)
/с = 64800 -(VW 240,
где ^КА — значение географической долготы точки «стояния» КА в граду-
сах.
127
При реализации импульса с центром в точке £ю вектор импульса дол-
жен быть направлен противоположно бинормали, а при реализации друго-
го импульса — по бинормали.
Для учета конкретного характера эволюции вектора наклонения и точно-
го определения моментов приложения КИ необходимо решить систему урав-
нений (1.3.13) относительно переменной «кор. Суммарная величина импуль-
сов должна рассчитываться исходя из потребной величины компенсации эво-
люции плоскости орбиты на рассматри-ваемом интервале управления. При
этом существенным моментом является то, что на каждом витке достаточно
парировать не все текущие уходы параметров в результате эволюции, а лишь
среднюю на всем интервале управления составляющую этих уходов. Такой
подход позволит не только избежать излишних потерь топлива, но обеспе-
чить постоянство продолжительностей и интервалов между включениями
одноименных ДК на всем интервале управления и перейти к использованию
стационарных программ включения ДК. Реализация таких программ на бор-
ту КА менее проблематична и требует меньших вычислительных ресурсов
бортового вычислительного комплекса (БВК).
Следует отметить, что можно обойтись и одним импульсом на витке. Это
может потребоваться, например, в интересах планирования каких-либо ра-
бот с КА на интервале времени, совпадающем со смежным участком коррек-
ции, или при наличии неисправностей на борту КА, не позволяющих орга-
низовать на витке второй участок коррекции. При этом из-за уменьшения
эффектив-ности КИ, обусловленного увеличением его протяженности, по-
требуется некоторый дополнительный расход топлива.
Моменты прохождения КА точек £ю и £с для известного значения дол-
готы точки «стояния» КА £КЛ и календарной даты проведения коррекции
являются детерминированными. Следует отметить, что этот факт стал опре-
деляющим при разработке предлагаемых программ коррекций под-держания
наклонения.
При условии поддержания долготы «стояния» КА эти моменты будут
от витка к витку иметь практически постоянный сдвиг по времени суток.
Следовательно, все моменты включения ДК могут быть заранее определе-
ны, и программа включений ДК является детерминированной. Практи-
чески постоянный сдвиг обусловлен незначительным изменением сиде-
рического периода обращения КА на рассматриваемом интервале управле-
ния. Величина этого сдвига равна примерно 240 с за виток. Следует отме-
тить, что в общем случае время одного цикла может быть более одного витка
(суток). Далее будет показана необходимость использования наряду с одно-
суточными циклами и циклов многосуточных с витками в одном цикле.
Сдвиг по времени суток в программах с такими многосуточными циклами
будет равен соответственно Nc • 240 с.
Из изложенного выше следует, что в качестве программы коррекции
поддержания наклонения предлагается стационарная детерминированная пос-
128
ледовательность КИ, которая включает в себя последовательность повторя-
ющихся циклов включения ДК, т.е. является еще и циклической. Такая про-
грамма включений ДК может быть полностью определена значением времен-
ного сдвига и характеристиками одного цикла, а именно первого цикла вклю-
чений ДК на данном интервале управления. В качестве характеристик цикла
включения ДК будем рассматривать следующие:
• Номер (имя) ДК.
• Время включения ДК.
• Длительность работы ДК.
Таким образом, введем понятие стационарная циклическая детер-мини-
рованная программа коррекции, сокращенно СЦД-программа. Именно такую
программу предлагается использовать в качестве программы коррекции под-
держания наклонения и в качестве базового решения общей задачи удержа-
ния КА в заданной точке «стояния» ГСО [11].
Анализ различных возможных вариантов СЦД-программ коррекций по-
зволил выявить следующие закономерности, способствующие их автомати-
ческой бортовой реализации, в том числе в условиях автономности функци-
онирования КА:
• постоянство продолжительностей и интервалов между включениями одно-
именных ДК на всем интервале управления}
• так как моменты включений детерминированы, то СЦД-программы могут
быть заранее рассчитаны для любого интервала управления}
• последовательность корректирующих импульсов представляет собой пос-
ледовательность повторяющихся циклов включения ДК}
• состав ДК и порядок их включений от цикла к циклу постоянны}
• моменты включений ДК от цикла к циклу имеют постоянный сдвиг по вре-
мени суток}
• количество исходных данных для задания на борт КА программы включения
ДК не зависит от продолжительности интервала управления.
СЦД-программа представляет собой последовательность повторяющихся
циклов работы ДУ. В общем случае эти циклы представляет собой последо-
вательность включений определенных ДК, входящих в состав ДУ, с различ-
ной продолжительностью их работы и с учетом возможных ограничений.
Например, при разработке штатных циклов работы ЭРДУ для КА «Купон»
имели место следующие ограничения:
• максимальное количество включений в цикле — не более четырех}
• один и тот же двигатель не может включаться чаще чем один разе сутки.
При этом предполагалось, что в цикле допускается различная продол-
жительность работы для каждого из четырех двигателей.
С учетом потенциальной возможности проведения коррекции наклонения
на двух участках орбиты в сутках цикл работы ДУ может быть:
• односуточным, состоящим из двух включений в сутки или из одного вклю-
чения в сутки;
129
• двухсуточным, имеющим четыре включения — по два в каждые сутки либо
два включения по одному в каждые сутки;
• четырехсуточным, образованным четырьмя включениями по одному включе-
нию каждые сутки.
Сразу следует отметить, что для решения задачи коррекции наклонения
тип цикла не имеет принципиального значения. Однако выбор типа цикла
оказывает определяющее влияние при последующем решении задачи кор-
рекции долготы.
Введем в рассмотрение основные понятия и параметры, которые будут
использованы при описании предлагаемых методов решения задач коррек-
ции с использованием СЦД-программ.
Рассмотрим порядок расчета параметров СЦД-программы для решения
задач коррекции наклонения. Поиск решения задачи будем вести на ограни-
ченном интервале времени, который будем называть интервал управления Т .
Интервал управления Т равномерно разделим на ограниченное число вре-
менных циклов (ВЦ) ,УВц. В качестве параметров, определяющих тип ВЦ, бу-
дем рассматривать продолжительность цикла Твц (витки, сутки) и число
включений ДК в цикле лц.
Целью коррекции наклонения является целенаправленное изменение
вектора наклонения i в зависимости от характера эволюции этого парамет-
ра на интервале управления Г . Для полного парирования эволюции на всем
интервале управления 7^ результирующий вектор КИ Д/кор должен быть
противоположен результирующему вектору изменения наклонения Д^. Как
было отмечено ранее, величину модуля вектора Д^ на интервале Г мож-
но определить через компоненты двумерного вектора наклонения, а именно
Ч=а//х+/г> (1.3.16)
где 1Х и IY — расчетные значения соответствующих компонент вектора на-
клонения в конце рассматриваемого интервала Гупр.
Рассматривая интервал управления Т как совокупность ВЦ с заданным
числом включений ДК лц, требуемую величину коррекции наклонения на
всем заданном интервале управления можно равномерно распределить меж-
ду включениями ДК. Таким образом, величина коррекции наклонения для
одного включения ДК равна
Чор=\ п • (1.3.17)
у’вц"ц
Учитывая это и используя выражение (1.3.12), определим соответствую-
щее время работы ДК при одном i-м включении
Xi=-Tr----arcsin , Jll + ll . /1 з 10\
' ^вц«ц" [2VkaVX ) (1’ЗЛ8)
130
Моменты середин приложения КИ являются детерминированными и мо-
гут быть определены соответственно для «северного» и «южного» импульса с
помощью зависимостей (1.3.15). С учетом определенного времени работы ДК
при одном включении т, московское время включения ДК для реализации
соответствующих импульсов на первом ВЦ можно рассчитать как
z//i=zi-y + l0800’ (1-3.19)
где tL — всемирное время прохождения КА соответствующей экстремальной
точки.
Времена последующих включений ДК в непрерывной шкале времени
можно определить исходя из выбранной периодичности реализации КИ, т.е.
из числа включений ДК на одном ВЦ лц и продолжительности самого ВЦ
^вц-
(1.3.20)
Моменты включения ДК будут иметь от витка к витку практически по-
стоянный сдвиг по времени суток , поэтому бортовая программа вклю-
чений ДК может быть полностью определена значением этого временного
сдвига и характеристиками первого ВЦ. В общем виде характеристики цикла
включения ДУ, состоящей из п ДК, которые должны быть переданы в соста-
ве КПИ на борт КА, можно представить в виде табл. 1.3.2.
Таблица 1.3.2. Характеристики бортовой программы включений ДК
Номер включения ДК ИмяДК Время включения ДК Время работы ДК
1 ДК_1 {н\
2 ДК_2 tH2 Ъ
п ДК_И fHn Ъ п
Временной сдвиг
Следует заметить, что в табл. 1.3.2 времена включений и времена работы
ДК приводятся индивидуально для каждого ДК, т.е. предполагается возмож-
ность реализации программы включений с различными длительностями ра-
боты ДК. Необходимость этого будет показана ниже, тем не менее, последо-
вательность корректирующих импульсов равной продолжительности т, , ко-
торая в принципе решает задачу удержания наклонения и представляет со-
131
бой типичную СЦД-программу, можно принять в качестве базового решения
общей задачи удержания КА в заданной точке «стояния».
Чем же не устраивает это базовое решение? Прежде всего тем, что оно не
учитывает характер изменения долготы точки «стояния» КА при реализации
корректирующих импульсов. Даже если реализовать идеальные бинормаль-
ные корректирующие импульсы при коррекции наклонения, то и в этом случае
будет иметь место некоторое изменение периода обращения КА, а следова-
тельно, и соответствующий дрейф долготы точки «стояния». Тем более, этот
эффект будет значителен при отклонении вектора тяги ДК от бинормали из-
за конструктивных особенностей расположения ДК. Поэтому реализация
последовательности корректирующих импульсов равной продолжительнос-
ти неизбежно приведет к нежелательному дрейфу долготы. Таким образом,
после определения базовой программы коррекции наклонения для опреде-
ленной схемы включения двигателей необходимо перейти к решению задачи
управления долготой КА. Решение этой задачи для конструкции ДУ КА,
предусматривающей наличие трансверсальной составляющей тяги ДК, мо-
жет быть реализовано также в рамках рассмотренных СЦД-программ и будет
заключаться в соответствующей корректировке базовой СЦД-программы в
части перераспределения суммарного времени работы ДК в цикле.
1.3.3.2. Решение задачи коррекции поддержания долготы
Наличие трансверсальной составляющей у двигателей ЭРДУ создает не-
обходимые условия для возможности управления движением КА в трансвер-
сальном направлении, т.е. для управления долготой КА.
В качестве базового решения задачи высокоточного удержания КА в за-
данной точке «стояния» было выбрано использование СЦД-программы.
В рамках таких программ управления следует искать и решение задачи
поддержания долготы. Таким образом, это решение будем рассматривать как
соответствующую корректировку базовой СЦД-программы коррекции накло-
нения, представляющей собой последовательность Увц временных циклов
включения ДК на заданном интервале управления Тупр.
Для описания предлагаемого метода решения задачи поддержания долго-
ты введем понятие предельного замкнутого цикла управления долготой или
замкнутого временного цикла (ЗВЦ). Под таким ЗВЦ будем понимать цикл
включений ДК, в конце которого обеспечиваются значения долготы и сиде-
рического периода обращения КА равными их значениям в начале цикла. Это
условие можно записать следующим образом:
X — Л.. . — ; -----
' '+' ° /=1,АВ11.
т.=тм=т0, вц
(1.3.21)
В общем случае период ЗВЦ и количество включений ДК в цикле может
быть различным, однако минимальное число включений равно двум. Дей-
ствительно, даже в случае совпадения заданной точки «стояния» КА с точ-
132
кой устойчивого равновесия в любом цикле включений ДК будет иметь место
изменение периода обращения КА от трансверсальной составляющей тяги ДК
ЭРДУ. При этом, если поддержание требуемого значения периода обраще-
ния КА возможно проводить и одним включением соответствующего ДК
ЭРДУ, то восстановление начального значения долготы в цикле не представ-
ляется возможным.
Прежде чем приступить непосредственно к изложению сути проводимой
корректировки базового решения, рассмотрим механизм влияния трансвер-
сальной составляющей тяги ЭРДУ на характер изменения долготы КА. Для
лучшего понимания проведем вначале анализ этого влияния без учета эво-
люции периода обращения КА и в предположении мгновенности приложе-
ния корректирующих импульсов.
В этом случае, например для компоновки КА «Купон» (см. рис. 1.3.1), при
отработке на витке двух корректирующих импульсов одинаковой продолжи-
тельности основной или резервной парой двигателей ЭРДУ результирующее
изменение периода обращения на витке будет равно нулю. Это обусловлено
тем, что импульсы имеют противоположные знаки трансверсальной состав-
ляющей Fz. Тем не менее, даже при нулевом результирующем изменении пе-
риода обращения и стабильном начальном значении периода обращения будет
иметь место изменение долготы в течение витка. Причина в том, что после
первого включения ДК появится дрейф долготы, который устраняется толь-
ко последующим включением другого ДК с противоположным знаком транс-
версальной составляющей. Таким образом, в начале следующего цикла зна-
чение периода обращения будет равно его значению в начале предыдущего
цикла, а значение долготы будет отличаться на величину ухода 8ХЦ на ин-
тервале времени между моментами приложения корректирующих импуль-
сов tx и t2:
8Ч=<Гст-7|)йЪ%-!-> (1.3.22)
2 ст
где Гст — значение стабильного периода обращения КА; Т} — значение пе-
риода обращения КА после приложения 1-го импульса.
Если в качестве ВЦ рассматривать один виток, то интервал времени меж-
ду включениями ДК составит половину периода и выражение для 5ХЦ мож-
но переписать следующим образом:
= (1.3.23)
где Л?, — отклонение периода обращения КА от стабильного значения пос-
ле приложения 1-го импульса.
Как видно из (1.3.23), направление ухода долготы 8ХЦ зависит от знака
величины АТ], который, в свою очередь, определяется знаком трансверсаль-
133
ной составляющей Fz первого включения ДК. Второе включение ДК с про-
тивоположным знаком Fz может устранить уход долготы к концу данного
ВЦ. Таким образом, первое включение ДК на ВЦ будет определять направ-
ление максимального отклонения долготы на ВЦ, а именно:
в восточном направлении, если знак трансверсальной составляющей пер-
вого включения отрицательный (Fz < 0);
в западном направлении, если знак трансверсальной составляющей пер-
вого включения положительный (Fz > 0) .
Величина ухода 5ХЦ определяет возможную ширину диапазона удержания
долготы, поэтому целесообразно располагать этот диапазон симметрично
относительно номинального значения долготы точки «стояния» КА.
Выше было показано, что базовая программа коррекции наклонения пред-
ставляет собой последовательность КИ равной продолжительности т, = тб, где
тб — время работы ДК при одном включении для базовой программы кор-
рекции наклонения. Наличие трансверсальной составляющей тяги Fz при-
ведет к изменению периода обращения КА на величину Д Гкор , которую можно
определить следующим образом:
(1.3.24)
„ 3aTVF7x.
кор ГЩ1
где m — масса КА.
Знак трансверсальной составляющей этих импульсов не имеет принципи-
ального значения для характера изменения корректируемого вектора накло-
нения. Поэтому для рассматриваемого односуточного цикла с двумя вклю-
чениями ДК можно организовать ЗВЦ с импульсами равной величины, но с
противоположными знаками их трансверсальных составляющих. При отсут-
ствии эволюции периода обращения КА 57\ для поддержания долготы внутри
- 8ХЦ
необходимо обеспечить определенные начальные
ВЦ в диапазоне ±
условия, а именно:
для положительного знака Fz первого
Т -Т
70 7 с
Хо - Л.
Л.Т
7 кор
ст 2
_8\.
н 2 >
для отрицательного знака Fz первого
^0 = ^ +
Л.Т
кор
2
X -X । 5Хц
Ло _ кн + 2 ‘
включения ДК:
(1.3.25)
включения ДК:
(1.3.26)
134
На рис. 1.3.26 представлен схематично характер изменения долготы и
сидерического периода обращения КА на интервале управления для СЦД-
программы с односуточным ЗВЦ. Кроме того, на этом рисунке условно пока-
заны величины и направления трансверсальных составляющих КИ, величи-
на которых определяется временем работы ДК т. Серым цветом изображе-
ны линии, соответствующие рассматриваемому выше допущению об отсут-
ствии эволюции периода обращения КА; черный пунктир соответствует до-
пущению о его учете.
Для учета эволюции периода обращения КА при организации ЗВЦ рас-
смотрим односуточный цикл работы ДУ с двумя включениями ДК. При этом
примем линейный характер ухода периода обращения КА на ВЦ с постоян-
ной скоростью 8ГЭ, соответствующей ее среднему значению на всем рассмат-
риваемом интервале управления. Такое допущение вполне правомерно при
условии поддержания КА в заданной точке «стояния».
Расчет среднего значения 87^ можно провести с помощью определения
суммарного изменения сидерического периода обращения А Тъ на всем ин-
тервале управления, обусловленного как непосредственно эволюцией этого
параметра, так и действием трансверсальной составляющей при работе ЭРДУ.
Определение величины А Тъ осуществляется с помощью численного интег-
рирования уравнений движения КА с учетом номинальной отработки базо-
вой программы коррекции наклонения.
Далее, исходя из общего числа ВЦ на интервале управления Ац, опреде-
ляют среднее изменение сидерического периода обращения КА для одного
ВЦ 87^. Заметим, что рассчитанную таким образом величину 8ТЭ следует
рассматривать как некоторое приближение, которое может уточняться в про-
цессе последующей корректировки базовой программы коррекции.
Для рассматриваемого ВЦ суммарное время работы двигателей в цикле
можно записать следующим образом:
ТГ=Т|+Т2, (1.3.27)
где Т] и т2 — продолжительности работы ДК при 1-м и 2-м включениях.
Величины Т] и т2 рассчитываются уже при формировании базовой про-
граммы коррекции наклонения, при этом определяющим фактором являет-
ся, прежде всего, величина суммарного времени работы двигателей в цикле
тЕ. Чтобы сохранить найденное положительное решение задачи поддержа-
ния наклонения, рассчитанное значение величины должно быть сохра-
нено при любой последующей корректировке базовой СЦД-программы кор-
рекции наклонения.
Как наглядно видно из рис. 1.3.26, для учета изменения периода обраще-
ния в результате эволюции достаточно соответствующим образом перерасп-
ределить величины изменения периодов обращения АТкор при 1-м и 2-м
включениях ДК, т.е. продолжительности работы ДК Т] и т2. При этом
должны быть изменены и начальные условия (1.3.25) , (1.3.26).
135
Рис. 1.3.26. Схема СЦД-программы коррекции долготы с односуточным ЗВЦ
Для положительного знака Fz первого включения ДК:
Т -т А^к°р 8Гэ.
70 7ст 2 4 ’
' (13.28)
Ло ~ 2 ’
Для отрицательного знака Fz первого включения ДК:
т - т + А^к°р । .
7о-уст+ 2 4 ’
\ . +8\ (1.3.29)
Ло _ кн + 2 ‘
136
В выражениях (1.3.28) и (1.3.29) АГкор — величина требуемого измене-
ния периода обращения КА без учета эволюции, а 8ГЭ — изменение пери-
ода обращения КА на ВЦ в результате эволюции.
Корректировку базовой СЦД-программы, при которой сохранится суммар-
ное время работы двигателей в цикле , можно осуществить, уменьшив время
работы ДК при 1-м включении на некоторую величину Дт и на эту же ве-
личину увеличив время работы другого двигателя, а именно:
т1 = тб - Дт;
т2=тб + Дт.
(1.3.30)
Величину временного рассогласования Дт можно рассчитать исходя из
среднего значения 8ГЭ и значения трансверсальной составляющей Fz:
6FzaTV
(1.3.31)
где т — масса КА.
Изменения долготы и сидерического периода обращения КА на интерва-
ле управления для СЦД-программы с односуточным ЗВЦ с учетом эволюции
периода обращения КА условно показаны черным пунктиром на рис. 1.3.26.
Из рисунка видно, что предлагаемая СЦД-программа коррекции обеспечи-
вает поддержание долготы точки «стояния» КА в диапазоне
Как и для односуточного цикла, при рассмотрении двухсуточного ЗВЦ с
четырьмя включениями ДК также примем линейный характер ухода перио-
да обращения КА на ВЦ с постоянной скоростью ЬТЭ. Для рассматриваемо-
го ВЦ суммарное время работы двигателей в цикле тЕ можно записать сле-
дующим образом:
4
тх=2л> (1.3.32)
i=i
где т(. — продолжительность работы ДК при z-м включении.
Для базовой программы коррекции наклонения величины т( равны меж-
ду собой и соответствуют величине изменения периода обращения ДТкор.
Корректировка базовой СЦД-программы будет заключаться в соответствую-
щем перераспределении величин изменения периодов обращения для каж-
дого из четырех включений ДК на ВЦ. При этом для организации ЗВЦ не-
обходимо обеспечить определенные знаки трансверсальной составляющей
корректирующих импульсов. С учетом направления трансверсальной состав-
ляющей времена работы ДК для ЗВЦ можно записать в виде
137
Tj = тб - Дт;
т2 = тб + Ат;
\3=тб + Ат; (1.3.33)
т4=тб-Дт.
При этом должны быть изменены и начальные условия (1.3.25), (1.3.26).
Для рассматриваемого ниже варианта их можно записать следующим обра-
зом:
Т =Т + &Т
70 7ст+П7кор 2 ’
8Х+8Х- (1.3.34)
Ло “ 2
Величину 5ХЭ, представляющую собой уход долготы на интервале между
импульсами в результате эволюции, определим как
„ 57ксоч
8А-э = ЧН (1.3.35)
О
На рис. 1.3.27 в качестве примера представлена возможная схема
СЦД-программы коррекции с двухсуточным ЗВЦ с четырьмя включениями
ДК.
Как видно из рис. 1.3.27, скорректированная предлагаемым способом СЦД-
программа коррекции обеспечивает поддержание долготы точки «стояния»
КА в диапазоне ± ——- на рассматриваемом интервале управления.
Поступая аналогичным образом, можно осуществить корректировку ба-
зовой программы коррекции наклонения для организации других много-
суточных ЗВЦ и определения соответствующих СЦД-программ, предназна-
ченных для удержания КА в заданной точке «стояния» ГСО.
Следует отметить, что данные СЦД-программы могут компенсировать толь-
ко эволюцию положения плоскости орбиты и периода обращения КА. В то
же время существенное влияние на амплитуду суточных колебаний КА по
долготе оказывает эволюция эксцентриситета. Для устранения этого факто-
ра необходимо предусмотреть периодическое проведение коррекций эксцен-
триситета орбиты. При этом, для того чтобы не изменять период обраще-
ния КА, коррекцию эксцентриситета следует проводить с помощью двух
транс-версальных импульсов одинаковой величины и противоположного
направ-ления, приложенных в точках орбиты, разнесенных на половину
периода обращения КА. Выбор на орбите точки приложения первого импульса
не имеет принципиального значения. Как показали ЛКИ КА «Купон», пе-
рио-дичность проведения таких коррекций может составлять 2—3 месяца.
138
Рис. 1.3.27. Схема СЦД-программы коррекции долготы с двухсуточным ЗВЦ
В данном разделе было рассмотрено решение задачи поддержания долго-
ты для 2-го варианта постановки общей задачи удержания КА в заданной
точке «стояния» ГСО, а именно для варианта использования для коррекции
наклонения и периода обращения КА только двигателей коррекции (ДК)
ЭРДУ.
Для 7-го варианта, предусматривающего использование для коррекции
наклонения ДК ЭРДУ, а для коррекции периода обращения — ДК химичес-
кой ДУ, решение задачи поддержания долготы может быть рассмотрено от-
носительно независимо от решения задачи поддержания наклонения. Под
относительностью независимого рассмотрения понимается то, что задача
поддержания долготы решается с учетом отработки найденной базовой СИД-
программы коррекции наклонения. При этом влияние этой программы кор-
139
рекций на изменение долготы можно рассматривать как дополнительное
возмущающее воздействие.
Далее рассматривается решение задачи поддержания долготы для 7-го
варианта, причем предлагаемый метод ее решения может быть использован
для управления долготой не только ГСО, но и для других типов геосинхрон-
ных орбит.
1.3.4. Решение задачи удержания трассы КА
на геосинхронных орбитах
Наряду с КС на ГСО в настоящее время существует большое количество
других КС, орбитальные структуры (ОС) которых также построены на гео-
синхронных орбитах. В их число входят высокоорбитальные и низкоорби-
тальные, круговые и эллиптические. Характерной особенностью таких орбит
является то, что их использование позволяет обеспечить в течение длитель-
ного времени постоянную геометрию расположения трассы КА на поверх-
ности Земли относительно районов обслуживания. Это является важным
условием для решения различного рода целевых задач.
Если для КА на ГСО рассматривалась задача удержания КА в заданной
точке «стояния», то для КА, функционирующих на других геосинхронных
орбитах, необходимо решать задачу удержания трассы КА [9]. Удержание
трассы КА так же, как и для ГСО, осуществляется путем проведения перио-
дических коррекций периода обращения КА с целью удержания географии-
ческой долготы восходящего узла (ГДВУ) орбиты в заданном диапазоне дол-
гот или как было сказано ранее в заданной «трубке» долгот. Для этой цели
используется ДК, предназначенный для создания трансверсальных КИ. При
этом ДК может иметь как большую, так и малую величину тяги.
Таким образом, удержание КА в заданной трубке долгот с использовани-
ем ДК, реализующего трансверсальные корректирующие импульсы, являет-
ся общей целью как для 7-го варианта постановки рассматриваемой задачи
удержания геостационарного КА, так и для задачи удержания трассы КА на
других геосинхронных орбитах.
1.3.4.1. Комбинированный метод решения задачи удержания трассы
КА на геосинхронных орбитах
Решение задачи удержания трассы КА заключается в планировании мо-
ментов проведения коррекций на заданном интервале времени и расчете
параметров этих коррекций с учетом характеристик используемых ДУ.
Существует целый ряд приближенных аналитических методов решения
этой задачи, в основе их лежит зависимость скорости дрейфа КА по долготе
от значения драконического периода обращения КА. При этом определяю-
щим фактором при реализации этих методов является допущение о линей-
ном характере изменения периода обращения КА на интервале между кор-
рекциями. Такие методы находят широкое применение при поддержании
геосинхронных КА в допустимых диапазонах по долготе порядка I—3 граду-
сов.
140
Допущение о линейном характере изменения периода обращения КА
обусловлено преобладающим влиянием на эволюцию этого параметра орби-
ты нецентральное™ гравитационного поля Земли. Действительно, постоян-
ное прохождение трассы геосинхронного КА над одними и теми же точками
поверхности Земли обусловливает практачески постоянную скорость изме-
нения периода обращения КА за виток. Однако при уменьшении величин
диапазонов удержания КА по долготе наряду с учетом этого фактора необ-
ходим учет более тонких эффектов от действия возмущающих воздействий и
прежде всего от гравитационного возмущения Луны и Солнца. Кроме того,
при прохождении трассы КА в окрестности особых точек, так называемых
точек «устойчивого» и «неустойчивого» равновесия, использование таких
методов не представляется возможным.
Следует заметить также, что программное обеспечение для расчета пара-
метров коррекций обычно создается с учетом конкретных особенностей ор-
битального построения и конструкции КА. В то же время при проведении
проектных работ требуется производить оценки потребных энергетических
затрат и характеристик двигательных установок для различных типов орбит
и конструкций КА. Существующие приближенные методики для проведения
подобных оценок и расчетов параметров коррекций, как правило, предназ-
начены для конкретных типов геосинхронных орбит, и их использование
проблематично непосредственно для управления КА.
С целью повышения точности расчетов и обеспечения универсальности
использования для различных типов геосинхронных орбит была сделана по-
пытка объединения точных численных методов прогнозирования движения
центра масс КА и приближенных методов, использующих известные анали-
тические зависимости движения геосинхронных КА в фазовой плоскости
таких параметров орбиты, как «долгота — период». Был предложен комби-
нированный метод решения задачи удержания, использующий эти прибли-
женные аналитические зависимости, уточняемые с помощью точных числен-
ных моделей движения КА. В основе метода лежит использование точной
модели прогнозирования движения центра масс КА, реализующей числен-
ное интегрирование с учетом основных возмущающих факторов и управля-
ющих воздействий.
Существующие аналитические методы используют в качестве исходных
данных изменение периода обращения КА за виток А/э и значение стабиль-
ного периода обращения Тст, т.е. значение, при котором отсутствует дрейф
ГДВУ. Эти методы основаны на постоянстве указанных выше параметров в
течение времени удержания КА. Однако Солнце и особенно Луна могут вно-
сить существенные коррективы в характер эволюции А/э и соответственно в
характер изменения периода обращения КА Т и в величину его стабильного
значения Тст. На рис. 1.3.28 и 1.3.29 представлены в качестве примера графи-
ки эволюции Т и Хэ ГДВУ для ГСО на интервале времени 100 суток (вит-
ков).
141
86165.81
Рис. 1.3.28. Эволюция периода обращения КА
Рис. 1.3.29. Эволюция географической долготы восходящего узла Хэ
Кривая 1 соответствует возмущенному движению КА с учетом нецентраль-
ное™ гравитационного поля Земли и гравитационного воздействия Луны и
Солнца. Кривая 2 соответствует возмущенному движению КА с учетом толь-
ко нецентральное™ гравитационного поля Земли.
142
Как видно из этих рисунков, характер эволюции рассматриваемых пара-
метров орбиты существенно зависит от состава учитываемых возмущающих
воздействий. При учете только нецентральности гравитационного поля Зем-
ли (кривая 2) изменение Т имеет линейный характер, а изменение ГДВУ Хэ
можно описать уравнением параболы.
На рис. 1.3.30 для рассматриваемого примера показаны соответствующие
траектории движения КА (кривые 7 и 2) в координатах Т и Лэ.
Рис. 1.3.30. Эволюция географической долготы восходящего узла Хэ
Как видно из этого рисунка, реальная траектория движения 7 с учетом
гравитационного влияния Луны и Солнца имеет весьма сложный характер, в
то время как траектория 2 может быть также достаточно точно описана урав-
нением параболы. В этом случае как раз и можно воспользоваться известны-
ми аналитическими зависимостями для определения моментов пересечения
траектории движения КА по долготе с границами допустимой трубки дол-
гот, а также для определения требуемого изменения периода обращения при
коррекции. Такое определение параметров коррекции позволяет реализовать
так называемую стратегию предельного цикла, при которой траектория дви-
жения КА в трубке долгот на интервале между коррекциями представляет со-
бой параболу, вершина которой касается одной из границ трубки. На рис.
1.3.30 в качестве примера стрелками показана траектория предельного цикла
для трубки долгот шириной 0,05°.
Следует отметить, что применять стратегию предельного цикла можно
только с учетом допущения о постоянстве указанных выше параметров Д/э
и Тст. Так как фактически величины Д/э и ТСТ переменные, то в предлага-
143
емом комбинированном методе рассматриваются для каждого интервала меж-
ду коррекциями их некоторые средние величины. Эти средние значения
можно определить численно, использовав для расчета необходимых пара-
метров орбиты точную модель прогнозирования движения центра масс КА с
учетом всех возмущающих факторов.
Выражения для расчета средних значений А/э и Тст представлены ниже:
т =т. А^вс , (Чи-\) (1-3.36)
- 2 «Лвс ’
где i — номер первого витка интервала осреднения; п — число витков на ин-
тервале осреднения; 7] — драконический период z-го витка; Х(. — географи-
ческая долгота /-го витка; NBC — число витков в одних сутках.
Численно определяется и момент достижения КА какой-либо из границ
трубки долгот, и соответственно определяется виток проведения коррекции.
Момент середины приложения корректирующего импульса на витке с уче-
том минимизации энергетических затрат должен совпадать с перигеем орби-
ты. Найденные таким образом данные позволят определить по аналитичес-
ким зависимостям параметры корректирующего импульса для реализации
стратегии предельного цикла, т.е. движения по параболе.
Так, выражение для определения величины изменения периода при кор-
рекции ДТ7 можно записать следующим образом:
Д7,кор = Гст-^П(А/э).
2 • - sign (Д/э) • ДХ - X,) • Д/э
-7]
(1.3.37)
где 7}, Х(. — значения периода и ГДВУ перед коррекцией на /-м витке;
Д/э, Тст — средние значения соответствующих параметров, полученные по
формулам (1.3.36); Х^, — требуемое значение ГДВУ орбиты; ДХ — допусти-
мое отклонение по долготе; — угловая скорость вращения Земли.
В этом аналитическом выражении (1.3.37) используются параметры, по-
лученные численным способом с применением точной модели прогнозиро-
вания движения центра масс КА.
Следует отметить, что реализовать стратегию предельного цикла пробле-
матично при очень узких трубках удержания и в окрестности особых точек,
поэтому предусматривается еще и другая стратегия. Наименование этой стра-
тегии можно сформулировать как стратегия с ограничением периода обраще-
ния КА по отклонению от стабильного значения. Выражение для определения
144
величины изменения периода при коррекции для этой стратегии можно за-
писать следующим образом:
АГкор = гст - т>+ sign (\. -2^) 5Гст, (1.3.38)
где 5 Тст — задаваемое допустимое отклонение периода обращения КА от ста-
бильного значения.
Выбор варианта стратегии зависит от характера эволюции периода обра-
щения КА. Так, при преобладающем влиянии на эволюцию периода обраще-
ния нецентральное™ гравитационного поля Земли, когда изменение этого
параметра орбиты близко к линейному закону, можно использовать страте-
гию предельного цикла. Применение другого варианта стратегии целесообраз-
но, например, для точек «стояния» ГСО, близких к особым точкам и при
трубках удержания менее 0,05°—0,1°.
Рассматриваемый метод предусматривает следующий порядок действий
при определении программы коррекций удержания.
1) По заданным начальным условиям с помощью численного интегриро-
вания рассчитывается изменение значения ГДВУ для интервала витков
предполагаемой коррекции.
2) Определяется виток проведения 1-й коррекции А, как последний ви-
ток, для которого значение еще лежит в заданной трубке долгот ± АХ .
3) Для принятого интервала осреднения по формулам (1.3.36) рассчиты-
ваются средние значения А/э и Гст.
4) По расчетным средним значениям А/э и Гст соответственно для при-
нятой стратегии по формуле (1.3.37) или (1.3.38) определяется величина из-
менения периода при коррекции АГкор .
5) На основании расчета величины АТкор с учетом конкретных характе-
ри-стик используемого ДК рассчитывается время работы ДК и формируется
соответствующая циклограмма включений ДК.
6) По начальным условиям на (Nx—1)-й виток с помощью численного ин-
тегрирования с учетом отработки сформированной циклограммы включений
ДК рассчитывается изменение значения ГДВУ для интервала витков пред-
полагаемой следующей коррекции.
7) Для определения витка и параметров следующей коррекции повторя-
ются все действия, начиная с п. 2.
Последовательно определяя витки проведения и параметры коррекций на
заданном интервале удержания, можно определить общую программу кор-
рекций удержания и соответствующие энергозатраты для ее реализации.
Предлагаемый комбинированный метод был реализован в виде соответ-
ствующей программы, которая может быть использована как на этапе про-
ектирования КА, так и непосредственно для управления КА при его эксплу-
атации.
145
Особенностью программы является ее универсальность, состоящая в воз-
можности использования для всех типов геосинхронных орбит и для различ-
ных характеристик ДУ КА.
Основой рассматриваемой программы является программный модуль
прогнозирования движения центра масс КА «Prognoz», который представля-
ет собой автономную программу прогнозирования движения центра масс КА
методом численного интегрирования в неособенных переменных.
Все необходимые для его работы данные, а также результаты работы
представляют собой файлы данных. Благодаря этому модуль «Prognoz» мо-
жет быть интегрирован в любой комплекс программ вне зависимости от ис-
пользованных для его разработки языков программирования.
Для работы этого модуля, кроме начальных условий (НУ) движения КА,
необходимо задавать состав учитываемых возмущающих воздействий, а так-
же некоторые характеристики численного интегрирования и циклограмму
работы ДК, представляющую собой расписание включений ДК и их характе-
ристики.
На рис. 1.3.31 приведена макроблок-схема программы расчета коррекций
удержания трассы КА на геосинхронных орбитах. На данной блок-схеме
использованы следующие обозначения:
ИД — исходные данные для расчета;
НУО — файл с начальными условиями движения КА по заданным ИД;
НУ — файл с начальными условиями на витке перед коррекцией;
МПО — файл с массивом параметров орбит на начало витков;
ТЦК — файл с текущей циклограммой коррекций ( n-я коррекция);
СЦК — файл с суммарной циклограммой коррекций ( все коррекции);
п — текущий в цикле порядковый номер коррекции;
t — текущее в цикле время, в сутках;
Тудер — заданное время удержания трассы КА;
А/э> ^ст — средние значения эволюции периода обращения и его стабиль-
ного значения;
PC — результаты счета.
Как видно из этой блок-схемы, в программе организован цикл по номеру
коррекции п, в котором последовательно определяются витки проведения и
параметры коррекций. Выход из этого цикла осуществляется при превыше-
нии текущим временем t заданного значения Тудер. Интервал расчета с по-
мощью модуля «Prognoz» в цикле по п необходимо задавать на время заве-
домо большее, чем максимально возможный интервал между предполагае-
мыми коррекциями.
Под формированием массива параметров орбиты понимается заполнение
соответствующего массива в оперативной памяти данными из файла МПО,
с которым и осуществляются все необходимые расчеты в программе.
После выхода из цикла по п для контроля рассчитанной программы кор-
рекций осуществляется расчет прогноза активного движения КА на весь
146
u = О
Поиск витка
коррекции
НУО
Расчет Л/ ,7\
Параметры
коррекции
Формирование
Файла НУ
Формирование
циклограмм
Prognoz
МПО
♦ Prognoz
Формирование
массива МПО
1>Тудер
Вывод PC
Г рафики
Таблицы
Рис. 1.3.31. Макроблок-схема программы расчета коррекций удержания
интервал удержания с использованием заданных НУ из файла НУО и рассчи-
танной программой включений ДК из файла СЦК.
Результаты счета программы выдаются в виде таблиц с расписанием вклю-
чений ДК и данными по характеристикам коррекций, в том числе и по сум-
марным энергетическим затратам.
Особое внимание при разработке программы было уделено представле-
нию графической информации в виде графиков изменения параметров дви-
147
жения КА на интервале управления. В качестве графических результатов
работы программы могут быть построены графики изменения любых пара-
метров орбиты.
В программе предусмотрено также визуальное отображение процесса по-
иска решения, которое позволяет оперативно проводить анализ получаемого
решения и при необходимости вносить определенные коррективы в исход-
ные данные. Такая корректировка ИД позволяет улучшить по тем или иным
характеристикам получаемое решение. В качестве улучшаемых характерис-
тик могут выступать интервалы между коррекциями, величина амплитуды
колебаний КА по долготе и др. В процессе работы программы на экран вы-
водятся графики изменения ГДВУ в градусах («Долгота») и периода обраще-
ния КА в секундах («Период»), а также номера витков проведения коррек-
ций («Виток») и порядковые номера коррекций («Коррекция»).
На рис. 1.3.32 в качестве примера показана копия экрана, на котором ото-
бражен процесс решения задачи для варианта удержания КА на ГСО в точке
«стояния» КА 76° в.д. ( близкой к точке «устойчивого» равновесия).
Кроме того, для подтверждения универсальности использования данной
программы на рис. 1.3.33, 1.3.34 показаны копии экранов, полученных при
расчете программ коррекции для других характерных вариантов геосинхрон-
ных орбит.
' ДфЩМИб фМСЫ в "6.00 0.03 град на ММГОфММ 180 суюк Л 1
Виток 2 26 56 <М 148
0 и виии IX*
3 4 5
Рис. 1.3.32. Копия экрана для варианта ГСО с точкой «стояния» КА 76° в.д.
148
'• держание тр.тесы к трубке 120.00 -0.20 град нл интервале 180 суток
В кт> г ь ттгах J
Рис. 1.3.33. Копия экрана для варианта высокоэллиптической полусуточной орбиты
Рис. 1.3.34. Копия экрана для варианта низкоорбитальной круговой орбиты
149
Литература
1. Дубошин Г.Н. Небесная механика. Основные задачи и методы. — М.:
Наука, 1968.
2. Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических
аппаратов. — М.: Дрофа, 2004.
3. Лебедев А.А., Красильщиков М.Н., Малышев В.В. Оптимальное управ-
ление движением космического летательного аппарата. —М.: Машиностро-
ение, 1974.
4. Лидов М.Л. О приближенном анализе эволюции орбит искусственных
спутников. Проблемы движения искусственных небесных тел. — М.: АН
СССР, 1963.
5. Лидов М.Л. О приближенном описании эволюции орбиты стационар-
ного ИЗС // Космические исследования. 1973. Вып. 3. С. 347—359.
6. Нариманов Г.С., Тихонравов М.К. и др. Основы теории полета косми-
ческих аппаратов. — М.: Машиностроение, 1972.
7. Назаров А.Е. Повышение точности прогнозирования движения центра
масс КА «Купон» в условиях существенных возмущений от работы ЭРДУ //
Сб. науч. тр. Вып. 2. РАК им. К.Э. Циолковского — НПО им. С.А. Лавоч-
кина, 2001. С. 36-51.
8. Назаров А.Е., Евграфов А.Е., Поль В.Г. Влияние возмущений от воз-
действия струи ЭРДУ на панели солнечных батарей при прогнозировании
движения центра масс КА «Купон» // Сб. науч. тр. Вып. 2. РАК им. К.Э.
Циолковского — НПО им. С.А. Лавочкина, 2001. С.57—72.
9. Назаров А.Е. Комбинированный метод решения задачи удержания трас-
сы КА на геосинхронных орбитах // Актуальные вопросы проектирования
космических систем и комплексов. Сб. науч. тр. Вып. 7. РАК им. К.Э. Циол-
ковского — НПО им. С.А. Лавочкина, 2007.
10. Назаров А.Е. Особенности использования ГСО для космических сис-
тем связи и основные требования к баллистическому обеспечению этих си-
стем // Полет. 2006. № 11. С. 16-20.
11. Назаров А.Е. Использование СЦД-программ коррекций для удержа-
ния КА в заданной точке «стояния» геостационарной орбиты // Полет. 2007.
№ 6.
12. Решетнев М.Ф., Лебедев А.А., Бартенев В.А. и др. Управление и нави-
гация искусственных спутников Земли на околокруговых орбитах. — М.:
Машиностроение, 1988.
13. Салмин В.В. Оптимизация космических перелетов с малой тягой.
Проблемы совместного управления траекторным и угловым движением. —
М.: Машиностроение, 1987.
14. Урличич Ю.М., Ежов С.А., Жодзишский А.И., Круглов А.В., Махнен-
ко Ю.Ю. Современные технологии навигации геостационарных спутников.
— М.: Физматлит, 2006.
150
15. Улыбышев Ю.П., Соколов А.В. Многовитковые маневры с малой тя-
гой в окрестности геостационарной орбиты // Известия Академии наук. Те-
ория и системы управления. 1999. №2. С. 95—100.
16. Чернявский Г.М., Бартенев В.А. Орбиты спутников связи. — М.:
Связь, 1978.
17. Чернявский Г.М., Бартенев В.А., Малышев В.А. Управление орбитой
стационарного спутника. — М.: Машиностроение, 1984.
18. Эльясберг П.Е. Введение в теорию полета искусственных спутников
Земли. — М.: Наука, 1965.
19. Soop М. Introduction to Geostationary Orbits// Paris/ Europen Space
Agency, Special Report SP-1053. — 1983.
20. Soop M. Hand of Geostationary Orbits — Space Technology Library. —
Kluwer Academik Publishers. — 1994.
А.Е.Назаров,
НПО им. С.А. Лавочкина
151
IE] МЕТОДИКА ПРОЕКТИРОВАНИЯ ТРАЕКТОРИЙ
МЕЖПЛАНЕТНЫХ КОСМИЧЕСКИХ АППАРАТОВ
1.4.1. Схемы полета межпланетных КА
1.4.1.1. Методы расчета траекторий межпланетного перелета
Выполнение задачи доставки КА к планете назначения в самом простом
случае состоит из нескольких этапов, из которых главное влияние на энер-
гозатраты полета оказывают:
— выведение на опорную околоземную орбиту;
— разгон с опорной орбиты на гиперболическую отлетную траекторию;
— баллистический полет к планете назначения, для которого, однако, пла-
нируются затраты топлива, связанные с решением навигационных задач по
удержанию траектории КА внутри допустимого множества;
— торможение при подходе к планете назначения, позволяющее выйти
на околопланетную траекторию.
Трудно оценить степень влияния отдельного этапа на проектно-баллис-
тические характеристики и величину массы полезной нагрузки КА — все
этапы взаимосвязаны. Однако каждый этап имеет специфику, связанную с
реализацией маневра, управлением вектором тяги и выполнением конечных
условий этапа полета. Поэтому для предварительных проектных разработок
КА можно найти приближенные методы решения задач, учитывающие спе-
цифику каждого этапа. Взаимосвязи всех отдельно полученных решений
можно добиться методом последовательных приближений. Такой путь удо-
бен и плодотворен еще и потому, что позволяет в полной мере использовать
известный метод аппроксимации истинной межпланетной траектории по-
лета КА участками конического сечения. Кусочно-коническая аппроксима-
ция позволяет определить межпланетную траекторию, представляющую
хорошее приближение к точной траектории для разработок на проектном
уровне. Кроме того, эту кривую удобно рассматривать в качестве первого
приближения для итерационного процесса, применяемого для точных рас-
четов траектории с учетом различного типа возмущений.
Представление в действительности непрерывной межпланетной траекто-
рии в виде кусков конического сечения основывается на допущении о дей-
ствии силы притяжения только центрального тела при движении КА в сфе-
ре действия планеты. В этом случае активный участок разгона заканчивает-
ся выходом на гиперболическую отлетную траекторию, а активному участку
торможения КА в сфере действия планеты назначения предшествует гипер-
болическая орбита подлета. Вне сфер действия планет (в гелиосфере) рас-
сматривается преимущественно пассивный полет КА, происходящий под
воздействием силы притяжения только центрального тела — Солнца. Здесь
в качестве траекторий перелета рассматриваются в основном эллиптические
орбиты.
152
Активный участок выведения КА на опорную орбиту ИСЗ, которая обыч-
но принимается круговой с высотой, равной 200 км, определяется массово-
энергетическими характеристиками ракеты-носителя. При планировании
межпланетных полетов обычно вновь проектируются и создаются только КА,
параметры, компоновка и конструкция которых выбираются с учетом спе-
цифики выполняемой задачи по исследованию планет и межпланетного
пространства. Выведение же осуществляется обычно ракетой-носителем из
серии существующих штатных средств выведения, наиболее экономичных
для доставки заданной массы КА на опорную орбиту. Также часто отлетный
маневр, переводящий КА на заданную отлетную орбиту, реализуется с по-
мощью разгонного блока, составляющего вместе с ракетой-носителем еди-
ный космический комплекс. Иногда с целью максимизации выводимой
массы и из-за ограничений, связанных с максимальной заправкой РБ, этот
активный участок может быть осуществлен не полностью с помощью ДУ РБ,
доразгон на заданную отлетную траекторию выполняется на ДУ КА.
Таким образом, разгон с ОИСЗ, перелет к планете назначения и тормо-
жение на ОИСП определяют задачу выбора проектно-баллистических харак-
теристик КА и величину полезной нагрузки, доставляемой к планете назна-
чения. В зависимости от требуемой точности и количества выбираемых па-
раметров эту задачу можно решить различными методами, в основе кото-
рых лежит кусочно-коническая аппроксимация баллистической траектории
полета. Принципиально эти методы делятся на [4, 7, 23, 24, 29 и др.]: метод
импульсной аппроксимации и методы, учитывающие протяженность и непре-
рывность активных участков, которые можно условно назвать методом ко-
нечных тяг.
В методе импульсной аппроксимации активный участок представляется
в виде мгновенного изменения скорости при неизменном радиус-векторе КА.
Таким образом, предполагается, что вследствие импульсного изменения КА
мгновенно переходит с опорной орбиты ИСЗ на отлетную гиперболическую,
а также с гиперболической орбиты прилета — на заданную околопланетную
орбиту. Благодаря такой импульсной аппроксимации активных участков вся
межпланетная траектория представляется из трех участков конического се-
чения: гиперболической отлетной орбиты (СД Земли), гелиоцентрического
участка межорбитального перелета (орбита Земли — орбита планеты назна-
чения) и гиперболической подлетной орбиты (СД планеты прилета) [29].
Гелиоцентрический участок межпланетного перелета, в свою очередь, мо-
жет состоять из нескольких кеплеровых орбит, если для изменения вектора
скорости КА используются гравитационные маневры у промежуточных пла-
нет или активные участки с участием ДУ КА. Стыковка указанных участков
конических сечений считается выполненной, если асимптота гиперболичес-
кой орбиты отлета параллельна вектору асимптотической отлетной скорос-
ти , определяемого равенством
153
(1.4.1)
а асимптота гиперболической подлетной орбиты параллельна вектору асим-
птотической скорости подлета И,2'
И2 = К2-1Г2, (1-4.2)
где Fj и К2 — векторы начальной и конечной скорости полета КА на гелио-
центрическом участке; — вектор скорости движения Земли в начальный
момент полета КА по гелиоцентрической орбите; W2 — вектор скорости дви-
жения КА в момент окончания полета КА по межпланетной траектории. Тем
самым предполагается, что момент выхода КА из СД Земли и момент входа
его в СД планеты совпадают соответственно с точками пересечения эллип-
тической орбиты перелета с орбитами Земли и планеты назначения. С фи-
зической точки зрения это означает, что планеты рассматриваются в каче-
стве негравитирующих центров, а с геометрической это является следстви-
ем пренебрежения размерами СД планет.
Метод импульсной аппроксимации основывается на рассмотренных до-
пущениях, которые, хотя и приводят к определенной идеализации истинной
картины межпланетного перелета, но позволяют в первом приближении
достаточно простым способом определить энергетические затраты, требуе-
мые для реализации межпланетного полета.
Использование метода импульсной аппроксимации позволяет построить
следующую структурную схему решения задачи по определению проектно-
баллистических характеристик КА.
1) Решается задача по определению гелиоцентрического участка межор-
битального перелета, одним из результатов которой является нахождение
и К.2-
2) Рассчитываются параметры гиперболических орбит отлета и прилета,
асимптоты которых должны быть параллельны и Vm2 > а константы ин-
тегралов энергии равны и КЗг соответственно.
Важной частью этих алгоритмов являются блоки расчета минимальных
значений характеристических скоростей участков разгона и торможе-
ния АК2 , выражающих конечные массы разгонного М{К и тормозного М2К
модулей КА через начальные массы на этих этапах Л/10 и М20 следующим
образом:
М1к=Л/юехР
(1.4.3)
^уд1 &0
154
М2К = Л^20 еХР ”
ди2
^уд2 *0
(1.4.4)
где Руд j и Руд 2 - удельные тяги двигательных установок разгонного и тор-
мозного модулей соответственно; g0 — гравитационное ускорение Земли.
Метод импульсной аппроксимации, привлекающий относительной про-
стотой и наглядностью алгоритма вычисления межпланетной траектории
полета и энергозатрат на ее реализацию, приводит к приближенной оценке
энергозатрат перелета и не позволяет в полной мере выявить проектно-бал-
листические характеристики КА.
Погрешности, вызываемые импульсной аппроксимацией, являются ре-
зультатом неучета гравитационных потерь и изменения ориентации вектора
тяги на активном участке, пренебрежения эффектом параллакса (протяжен-
ности грависферы планет) при расчете гелиоцентрического участка межор-
битального перелета и протяженностью активного участка. Также этот ме-
тод не позволяет определить необходимые для маневра начальные тяговоо-
руженности ступеней КА.
Однако метод импульсной аппроксимации широко используется при
проектных разработках КА, поскольку решения, получаемые с его помощью
вполне можно использовать в качестве первого приближения.
Методу конечных тяг не свойственны многие недостатки метода импуль-
сной аппроксимации. В нем достаточно полно учитываются гравитацион-
ные потери и изменение тяги по времени; он дает возможность определить
оптимальные значения начальных тяговооруженностей ступеней КА. Метод
базируется на приближенных решениях системы дифференциальных урав-
нений управляемого движения КА. Поэтому определение кинематических
параметров конца активных участков разгона или торможения неточно и
приводит к ошибкам, которые существенно меньше ошибок при импульс-
ной аппроксимации, что вполне удовлетворяет требованиям разработок КА
на начальных этапах проектирования.
1.4.1.2. Классификация схем межпланетных перелетов
Выбор проектно-баллистических характеристик межпланетного аппара-
та связан с несколькими критериальными оценками: энергетическими зат-
ратами, общим временем полета, диапазоном окон старта и прилета, чув-
ствительностью номинальной траектории к возможным отклонениям и т.д.
Оптимальные проектно-баллистические характеристики отвечают экстре-
мальному значению одного из критериев при ограничениях на другие. Од-
нако используемые аналитические зависимости, характер поиска оптималь-
ных проектно-баллистических характеристик и результаты решения суще-
ственно зависят от схемы полета аппарата. Выбор схемы полета, выражаю-
щий (без лишних подробностей) профиль межпланетной траектории, позво-
ляет найти принципиальные пути решения конкретной задачи межпланет-
155
ного перелета. Классификация схем полета может явиться составным эле-
ментом алгоритма оптимизации проектно-баллистических характеристик
межпланетного КА, если в ее основу будут положены алгоритмическая бли-
зость схем полета и баллистические требования к конечному маневру и к
маневру при облете промежуточной планеты, базирующиеся на конечной
цели полета.
Большое разнообразие гелиоцентрических участков полета к планетам
может привести в будущем к значительному увеличению числа возможных
профилей полета, которые обычно образуются из различного рода сочета-
ний известных типов гелиоцентрических орбит полета. Все это делает по-
лезным проведение классификации схем полета межпланетных аппаратов.
В основу классификации в [29] положены следующие основные призна-
ки, характеризующие схему полета:
— сложность маршрута перелета;
— возвращение или невозвращение КА к Земле;
— целевое назначение полета;
— баллистические характеристики траекторий полета.
По сложности маршрута схемы можно разбить на схемы полета к одной
планете и схемы полета к нескольким планетам.
Схемы полета к одной планете
По целевому назначению к этой группе относят:
1) пролетные схемы (пролет у планеты с целью ее предварительного изу-
чения);
2) десантные схемы (посадка на поверхность планеты);
3) орбитальные схемы (вывод КА на орбиту ИСП).
По баллистическим признакам схемы делятся на:
1) одноимпульсные:
— старт с Земли с пролетом у планеты на заданном расстоянии;
— старт с Земли с посадкой на планету с использованием аэродинамичес-
кого торможения в атмосфере и парашютного спуска на конечном этапе.
2) двухимпульсные:
— старт с Земли с разделением КА при подлете к планете на посадочный
и пролетный аппараты;
— старт с Земли и посадка на планету без атмосферы с активным тормо-
жением для реализации «мягкой» посадки;
— старт с Земли с дальнейшим выведением активным способом на орби-
ту ИСП;
— старт с Земли с выведением на орбиту ИСП с помощью аэродинами-
ческого торможения.
3) комбинированные:
— пролетно-орбитальные (разделение объекта на пролетный и орбиталь-
ный);
— пролетно-десантные (разделение объекта на пролетный и десантный).
156
Схемы полета к нескольким планетам
Эти схемы можно разбить на два типа: без возвращения к Земле и с воз-
вращением к Земле.
К первому типу относят:
• Схемы полета к нескольким планетам с активно-гравитационным манев-
ром у промежуточных планет.
По количеству сообщаемых импульсов схемы межпланетного перелета КА
разделяют на:
— одноимпульсные;
— многоимпульсные.
Ко второму типу относят:
• Схемы полета КА к одной планете с возвращением к Земле:
— облет планеты с активно-гравитационным маневром для формирова-
ния траектории возвращения к Земле;
— прямые экспедиции к планете:
А десантная схема;
А орбитально-десантная схема;
А облетно-десантная схема.
• Схемы полета к нескольким планетам с возвращением к Земле.
1.4.2. Синтез и оптимизация межпланетных траекторий
Современные требования к повышению общей эффективности научных
исследований объектов Солнечной системы с помощью космических аппа-
ратов предполагают планирование этих исследований. Исходя из существу-
ющего опыта проведения подобных исследований, они обычно делятся на
три этапа:
1) разведывательные (предварительные) исследования,
2) основные (регулярные) исследования,
3) специальные (углубленные) исследования.
Для каждого из этих этапов должны быть определены свои приоритеты
критериев, необходимые для поэтапной оценки качества космической мис-
сии.
Многокритериальный отбор конкурентоспособных миссий из различных
классов, существенно отличающихся схемами полета и составами космичес-
ких комплексов, невозможен в рамках одной процедуры, поскольку имеет
несколько уровней взаимоподчиненных факторов, влияющих на значения
критериев. Поэтому все факторы, существенно влияющие на критерии, раз-
биты на два уровня [17, 19, 20]:
• верхние уровни занимают так называемые внешние факторы, определя-
ющие облик варианта миссии (например, количество и последователь-
ность гравитационных маневров у планет);
• низкие уровни занимают так называемые внутренние факторы, к которым
относятся различные проектно-баллистические параметры, а также уп-
157
равления движением и системами космического комплекса (например,
даты совершения маневров, величины заправок разгонных блоков, управ-
ление вектором тяги электрореактивного двигателя).
Исходя из этого, формирование и оптимизация вариантов ведется в рам-
ках отдельных классов миссий, для которых внешние факторы принимают
конкретные фиксированные значения, а затем осуществляется совместное
ранжирование наилучших представителей классов по выбранным критери-
ям с учетом приоритетов, соответствующих трем этапам исследований (раз-
ведывательному, основному и специальному).
В результате из общего числа синтезированных вариантов миссии, кото-
рые в принципе могут быть реализованы в пределах обозримого будущего,
выделяются три группы конкурентоспособных вариантов миссии (соответ-
ствующие этапам исследований). И на основании такого отбора формиру-
ются рекомендации по эффективной программе исследований заданного
небесного тела.
На предварительном этапе разработки схемы полета прежде всего опре-
деляются общие требования к возможным вариантам космических миссий,
которые должны обеспечить проведение актуальных физических экспери-
ментов. Исходя из них, а также из опыта создания и осуществления подоб-
ных миссий, формируются критерии качества вариантов миссии к заданно-
му объекту исследований.
Кроме того, на базе современных и перспективных возможностей косми-
ческой техники выделяются основные проектные факторы и параметры, с
одной стороны, фиксирующие каждый конкретный вариант миссии, а с
другой — позволяющие их оптимизировать в рамках заданных ограничений.
1.4.2.1. Критерии качества космической миссии
и программа космических исследований
Очевидно, что задача технического обеспечения проведения научных
экспериментов вблизи различных объектов Солнечной системы, хотя и яв-
ляется весьма сложной, но представляет собой лишь часть космической
миссии.
С точки зрения космической миссии как транспортной операции по до-
ставке специальногоКА в ближайшую окрестность заданного небесного тела,
эта миссия относится к числу дальних космических миссий, которые имеют
множество вариантов реализации. Причем эта многовариантность связана
не только с обилием всевозможных схем перелета, но и с множеством воз-
можных вариантов космических комплексов, которые могли бы реализовать
эти варианты миссий.
Далее под космическим комплексом понимается совокупность технических
и целевых систем (в частности научных), обеспечивающих реализацию кон-
кретной космической миссии.
Обычно космический комплекс включает:
• ракетно-космический комплекс;
158
• космический аппарат с целевой полезной нагрузкой на борту (в рассмат-
риваемом случае — это научная аппаратура или специальные зонды, ос-
нащенные научной аппаратурой);
• транспортный комплекс;
• стартовый комплекс;
• наземный комплекс управления.
Для синтеза и определения наилучших вариантов миссий необходимо
ввести критерии (измеряемые показатели качества), позволяющие оценить
степень удовлетворения требований, предъявляемых к космической миссии.
Зарубежный и отечественный опыт исследований Солнечной системы
автоматическими космическими аппаратами (исследования Луны, Венеры,
Марса, Юпитера, Сатурна и др.) показывает, что программы, нацеленные
на проведение глубоких и многоплановых исследований, всегда включают
несколько преемственных этапов. При этом их последовательность дикту-
ется приоритетами четырех главных (генеральных) критериев:
— научная эффективность миссии;
— продолжительность осуществления миссии, включая время на разра-
ботку, производство, испытания и эксплуатацию;
— надежность выполнения миссии;
— суммарная стоимость миссии, включая затраты на разработку, произ-
водство, испытания и эксплуатацию.
Обобщение опыта научных исследований различных объектов Солнечной
системы позволяет сформировать некоторую сбалансированную стратегию
исследований, присущую современным космическим исследованиям. Как
отмечалось, она сводится к разбиению всего процесса исследований на три
характерных этапа:
• этап разведывательных (предварительных) исследований;
• этап регулярных (основных) исследований;
• этапы специальных (углубленных) исследований.
Каждый этап исследований имеет свои отличительные особенности, хотя
основные цели и главные (генеральные) критерии качества исследований
сохраняются. Эти различия проявляются в приоритетах критериев качества.
Например, на этапе разведывательных исследований определяющую роль
играет критерий стоимости миссии, а на этапе специальных исследований
— научной эффективности.
Можно предположить, что в общем случае, в силу различия приоритетов
критериев качества космических миссий, схемы полетов и космические
комплексы, реализующие миссии, будут различаться от этапа к этапу.
На разведывательном (предварительном) этапе исследований главной
целью является получение первичной информации как научного, так и тех-
нического характера с минимальными затратами и высоким уровнем надеж-
ности за сравнительно небольшое время. Количество миссий не должно быть
более одного — двух, поскольку после получения первичных данных о пред-
159
мете исследования и среде проведения экспериментов появляется возмож-
ность существенно скорректировать первоначальные состав и задачу науч-
ной аппаратуры и уточнить условия полета. Вторая миссия может потребо-
ваться в случае неудачной или неуспешной реализации первой миссии (ин-
формация об условиях проведения экспериментов, недостаточная для при-
нятия принципиальных решений).
В соответствии с целью разведывательного этапа исследований наивыс-
ший приоритет (среди критериев качества вариантов миссий этого этапа)
отдан критерию стоимости. Следующий за ним — критерий надежности мис-
сии, затем — критерий научной эффективности миссии; замыкает эту пос-
ледовательность критерий длительности миссии. Если ввести следующие
обозначения критериев: Jx — суммарная стоимость миссии; J2 — надежность
выполнения миссии; </3 — научная эффективность миссии; J4 — продолжи-
тельность осуществления миссии, то приоритеты критериев на разведыва-
тельном этапе исследований могут быть заданы в виде неравенств:
А^)> А^)> АЛ)> АЛ), (1.4.5)
где р(^) — условное обозначение приоритета /-го критерия.
На этапе регулярных (основных) исследований главной целью является
сбор, обработка и систематизация научной информации об исследуемом
небесном теле. Достижение такой цели потребует получения существенно
большего, чем на разведывательном этапе, объема научных данных и рас-
ширения спектра проводимых измерений. Очевидно, что стоимость косми-
ческих миссий, реализующих этот этап исследований, будет выше вариан-
тов миссий предыдущего этапа, поскольку увеличение состава и рост харак-
теристик научной аппаратуры потребуют от соответствующих космических
комплексов более высоких энергетических затрат, т.е. более мощных и до-
рогих ракетно-космических средств. В то же время минимально допустимая
надежность миссий этого этапа не должна быть ниже, чем на разведыватель-
ном этапе.
Поскольку время проведения регулярных исследований обычно не лими-
тируется, то и требования к длительности миссий, реализуемых регулярны-
ми полетами КА, ограничиваются лишь их техническими возможностями
(например, ресурсами систем КА). Кроме того, поскольку в рамках этого
этапа исследований предполагается проведение нескольких экспедиций, то
суммарное время длительности этого этапа может быть снижено за счет
параллельности реализации некоторых миссий.
С учетом этих соображений приоритеты критериев качества вариантов
миссий в рамках рассматриваемого этапа исследований распределятся сле-
дующим образом:
А^)> АЛ)> АЛ)> АЛ)- (1.4.6)
160
Основная цель специального этапа исследований — развитие и углубле-
ние исследований по отдельным направлениям, вызвавшим наибольший
интерес на предыдущих этапах исследований. Можно предположить, что
получение какой-либо специальной информации о физических процессах,
протекающих как на самом Юпитере, так и на его спутниках, может потре-
бовать создания специальных и, возможно, дорогостоящих научных прибо-
ров, создания специальных защитных устройств и служебных подсистем, а
также существенного повышения требований к КА и их системам. В связи
с этим первоочередное внимание должно уделяться достижению максималь-
ной научной эффективности миссии. Что касается стоимости и надежности
миссий, то они на данном этапе исследований уходят на второй план. Од-
нако надежность космических комплексов, реализующих такие миссии, не
должна быть ниже предельно допустимого для такого класса комплексов
уровня. Длительность альтернативных вариантов специальной миссии дол-
жна ограничиваться современными техническими возможностями элемен-
тов и систем космических комплексов. Таким образом, приоритеты крите-
риев качества вариантов космических миссий на специальном этапе иссле-
дований, выраженные неравенствами между приоритетами критериев, дол-
жны быть следующими:
p(J3)> P(J2)> Р(^)> P(J4)- (1.4.7)
В дальнейшем под программой космических исследований (по определен-
ному научному направлению) понимается описание обоснованной последо-
вательности космических миссий по этапам исследований, сформированной
с учетом приоритетов критериев миссии.
Исходя из такого понимания программы космических исследований бли-
жайшего околосолнечного пространства, ее можно представить в виде опи-
сания последовательности космических миссий «привязанной» к определен-
ным датам их старта. В общем случае каждая из космических миссий может
иметь свой собственный облик и существенно различные основные харак-
теристики, включая состав и характеристики научной аппаратуры. При этом
выбор вариантов космических миссий должен соответствовать приоритетам
критериев качества миссий по этапам исследований.
Таким образом, процесс формирования программы космических иссле-
дований по определенному научному направлению, в частности системы
Юпитера, сводится к выбору согласно заданным критериям и приоритетам
оптимальных вариантов космических миссий в рамках каждого этапа иссле-
дований и выстраиванию их по датам предполагаемого старта в соответству-
ющей последовательности.
1.4.2.2. Постановка задачи формирования
и оптимизации межпланетной траектории полета КА
Обычно разработка варианта космической миссии на предварительном
уровне подразумевает решение ряда задач, определяющих облик миссии, т.е.
161
• сценарий осуществления миссии,
• баллистическую схему полета,
• космический комплекс, реализующий сценарий по выбранной баллисти-
ческой схеме.
К таким задачам в первую очередь относятся:
— разработка и создание АМС для проведения конкретных исследований
системы Юпитера;
— целенаправленный синтез существенно разноплановых баллистичес-
ких схем перелета Земля — Юпитер, обеспечивающих высокоэффективное
осуществление миссии;
— моделирование и оптимизация сложных межпланетных траекторий пе-
релета Земля-Юпитер, включающих многократные гравитационные манев-
ры у планет и длительные участки активного полета КА с электрореактив-
ными двигателями, обеспечиваемыми различными типами энергоустановок;
— разработка и создание транспортно-энергетической платформы с при-
менением различных электрореактивных двигателей и различных типов энер-
гоустановок, обеспечивающей длительный перелет КА в существенно раз-
личных условиях Солнечной системы, в том числе на значительном удале-
нии от Солнца;
— разработка и создание вариантов служебных систем АМС, удовлетво-
ряющих всем требованиям реализации перелета и проведения научных эк-
спериментов, способных надежно функционировать длительное время в ус-
ловиях дальнего космоса под действием сильного радиационного фона;
— создание вариантов космической головной части, имеющих различные
составы разгонных ракетных средств (включая электрореактивные двигатель-
ные установки в сочетании с разными энергоустановками) для выведения
КА на широкий спектр межпланетных траекторий и базирующихся на тя-
желых, средних и легких (конверсионных) ракетах-носителях;
— разработка сложных баллистических схем, моделирование и оптими-
зация траекторий выведения КА на различные межпланетные траектории с
использованием промежуточных орбит и разгона электрореактивными дви-
гательными установками.
Конечно, перечисленные задачи не исчерпывают всех задач, связанных
с предварительным проектированием вариантов рассматриваемой космичес-
кой миссии, однако они, в основном, формируют облики альтернатив мис-
сии, а также позволяют — что очень важно — оценить основные характери-
стики вариантов миссии, включая значения критериев качества миссии.
Кроме того, они выявляют новизну и основные особенности рассматривае-
мой миссии, которые необходимо учесть при разработке методического ап-
парата решения этих задач.
Как правило, исследования того или иного небесного тела Солнечной
системы не ограничивается одной миссией, тем более, если это тело или
область космического пространства изучаются в различных аспектах и с
162
учетом новых знаний, появляющихся в процессе исследований. Поэтому для
повышения эффективности исследований целесообразно рассматривать сразу
несколько этапов исследований с учетом меняющихся в процессе изучения
приоритетов критериев.
Исходя из этого, предлагается все задачи, связанные с предварительным
проектированием дальних космических миссий, объединить в рамках одной
проблемы, которая в рассматриваемом приложении формулируется следу-
ющим образом:
разработать и провести оптимизацию вариантов траекторий и космических
миссий для исследований заданного тела Солнечной системы по критериям:
— суммарная стоимость миссии, включая затраты на разработку, произ-
водство, испытания и эксплуатацию;
— надежность выполнения миссии;
— научная эффективность миссии;
— продолжительность осуществления миссии, включая время на разра-
ботку, производство, испытания и эксплуатацию
с учетом различия их приоритетов для трех этапов исследований:
• разведывательных (предварительных);
• регулярных (основных);
• специальных (углубленных).
Очевидно, что многокритериальный выбор (выбор по векторному крите-
рию) в общем случае предполагает многовариантный результат, который
может быть сформулирован в виде рекомендаций для принятия решения
неким ответственным лицом, например главным конструктором проекта.
Ясно также, что для каждого этапа исследований может быть рекомендован
свой собственный ранжированный ряд вариантов, соответствующий приори-
тетам критериев.
Кроме того, важно отметить, что выбор вариантов миссии ответственным
лицом, принимающим решение, на основе рекомендаций, полученных как
результат решения поставленной проблемы, будет иметь относительно стро-
гое обоснование по сравнению с интуитивным выбором, основанным толь-
ко на опыте разработок подобных сложных и, как правило, сугубо индиви-
дуальных «разовых» проектов, с множеством особенностей, присущих толь-
ко этим проектам.
Различие вариантов космической миссии к Солнцу определяется множе-
ством факторов, от которых зависят все составляющие, входящие в это по-
нятие.
1.4.2.3. Факторы, определяющие схему полета межпланетного КА
В соответствии с введённым выше понятием космической миссии конк-
ретный её вариант исчерпывающе характеризуется: сценарием осуществле-
ния миссии, баллистической схемой миссии и их реализующим космичес-
ким комплексом.
163
В то же время каждый из вариантов определяется фиксацией множества
варьируемых факторов, некоторые из которых могли бы стать признаками
классификации вариантов космической миссии. Поскольку согласно постав-
ленной задаче выбор вариантов миссии к заданному небесному телу должен
осуществляться по заданным критериям качества, имеет смысл рассматри-
вать только те варианты миссии, которые будут иметь существенно различ-
ные значения критериев. Из этого следует, что классификацию возможных
вариантов миссий к Юпитеру целесообразно проводить по признакам, су-
щественно влияющим на указанные выше критерии качества.
Для рассмотренной ранее концепции проведения исследований системы
Юпитера такими признаками являются:
Для баллистических схем миссии на этапе выведения КА:
• выведение космической головной части на опорную орбиту «с довыведе-
нием» или «без довыведения»;
• разгон КА на межпланетную орбиту без промежуточных орбит (одноим-
пульсный разгон);
• разгон КА на межпланетную орбиту с промежуточными орбитами (мно-
гоимпульсный разгон);
• разгон КА на межпланетную орбиту с применением движителей малой
тяги (в частности, электрореактивных двигателей).
Для баллистических схем миссии на этапе межпланетного полета КА:
• планеты проведения гравитационных маневров;
• количество и последовательность проведения гравитационных маневров;
• наличие на борту КА маршевых ракетных двигателей химической тяги для
проведения активных маневров;
• количество и точки проведения активных маневров КА с помощью дви-
гателей химической тяги (если они предусмотрены);
• наличие на борту КА движителей малой тяги (электрореактивной двига-
тельной установки или солнечного паруса) для проведения длительных
активных маневров;
• количество и участки включения электрореактивной двигательной уста-
новки (если она предусмотрена).
Для космических комплексов, реализующих миссии:
• тип и модификация ракеты-носителя;
• состав, типы и модификации разгонных блоков;
• тип и модификация маршевых ракетных двигателей химической тяги, ус-
танавливаемых на КА либо на специальную транспортную платформу для
доставки КА к месту проведения основных экспериментов (в частности,
к Юпитеру);
• тип и модификация электрореактивных двигателей, использующихся в
составе двигательной установки малой тяги, устанавливаемой либо непос-
редственно на КА, либо на специальную транспортно-энергетическую
платформу;
164
• тип и мощность энергетической установки, обеспечивающей электроэнер-
гией электрореактивные двигатели.
Что касается других элементов и подсистем космического комплекса, то
считается, что они несущественно влияют на заданные критерии и поэтому
не вошли в число основных признаков классификации вариантов космичес-
ких миссий.
Перечисленные характеристики баллистических схем и космических ком-
плексов являются не только признаками классификации вариантов миссий,
но и факторами, определяющими принадлежность какого-либо варианта
миссии к определенному классу миссий. Другими словами, при задании в
процессе формирования конкретного варианта миссии определенного соче-
тания этих характеристик — факторов миссии однозначно определяется его
принадлежность к конкретному классу вариантов космической миссии.
Внешними (или определяющими) факторами влияния на космическую
миссию в дальнейшем будут называться факторы, определяющие баллисти-
ческую схему миссии и реализующие ее космический комплекс, а также при-
надлежность конкретной миссии к одному из классов космических миссий.
Множество всех возможных вариантов миссии, имеющих различные зна-
чения критериев, не исчерпывается перебором внешних факторов миссии,
определяющих ее классы. Варьирование вариантов миссии может осуществ-
ляться «внутри» класса. Например, при одних и тех же схемах полета и кос-
мическом комплексе могут меняться (в рамках заданных ограничений) не-
которые параметры космического комплекса и траекторий перелета, а так-
же варьироваться стратегии управления различными системами, которые
оказывают существенное влияние на критерии качества миссии.
Внутренними факторами влияния на космическую миссию в дальнейшем
будут называться варьируемые параметры и управления движением КА и
системами космического комплекса, которые без изменения принадлежно-
сти к какому-либо классу миссии могут оказать существенное влияние на
критерии качества миссии.
При самых широких вариациях внешних факторов влияния, определяю-
щих практически все возможные (на современном уровне) классы косми-
ческих миссий в околоюпитерианское пространство, имеют место следую-
щие внутренние факторы влияния на космическую миссию.
На этапе выведения КА:
• параметры промежуточных орбит при разгоне КА с помощью разгонных
блоков с химическими двигательными установками;
• параметры орбиты включения электрореактивной двигательной установки
для осуществления разгона КА до параболической отлетной скорости от
Земли;
• массы топлива (рабочего тела), заправляемого в баки (не более максималь-
ного объема) разгонных блоков с химическими и электрореактивными
двигательными установками;
165
• программы и законы управления выведением ракеты-носителя и разгон-
ных блоков с химическими двигательными установками;
• стратегии управления вектором тяги электрореактивной двигательной ус-
тановки в процессе доразгона КА на межпланетную траекторию.
На этапе межпланетного перелета КА.
• дата старта, асимптотическая отлетная скорость и масса КА, выводимая
из сферы действия Земли;
• даты проведения гравитационных маневров у планет Солнечной систе-
мы;
• дата первого прохождения «картинной» плоскости Юпитера;
• характеристики химических двигательных установок либо специальной
транспортной платформы, располагающей химической двигательной ус-
тановкой;
• моменты времени проведения, величины и направления активных манев-
ров КА с помощью химических двигательных установок (затраты рабо-
чего тела или характеристической скорости);
• характеристики электрореактивных двигательных установок либо специ-
альной транспортной платформы, располагающей электрореактивной
двигательной установкой;
• характеристики энергетической установки, обеспечивающей работу элек-
трореактивной двигательной установки;
• моменты времени включения — выключения электрореактивных двига-
телей;
• стратегия управления вектором суммарной тяги электрореактивных дви-
гателей.
Таким образом, в общем случае на значения критериев качества миссии
оказывают влияние две группы факторов: внешние и внутренние, различ-
ные по своей природе. Одни представляют собой дискретные факторы, оп-
ределяющие схему полета и состав космического комплекса, а другие, как
правило, — непрерывно меняющиеся (в определенных пределах) факторы,
такие, как траекторные параметры миссии (в частности, даты проведения
гравитационных маневров, моменты времени включении/выключения элек-
трореактивных двигателей и др.), параметры космического комплекса (на-
пример, конкретные заправки топливных баков).
1.4.2.4. Основные ограничения, учитываемые
при проектировании схемы полета
Вариации факторов влияния, рассмотренных выше, допустимы лишь в
определенных пределах. Эти предельные значения определяются либо со-
ображениями целесообразности миссий, соответствующих крайним значе-
ниям факторов, либо возможностями науки и техники, существующими и
создаваемыми на ближайшую перспективу.
Допустимые пределы варьирования факторов влияния могут быть зада-
ны непосредственно в виде ограничений значений самих факторов или че-
166
рез ограничения некоторых характеристик миссий, зависящих от варьируе-
мых факторов.
Многие ограничения определяются либо техническими возможностями
современных космических систем, либо физическими характеристиками
небесных тел, «участвующих» в реализации миссии:
• высота опорной околокруговой орбиты космической головной части после
отработки всех ступеней ракеты-носителя или, возможно, первого импуль-
са разгонного блока должна находиться в пределах от 150 до 200 км;
• величины максимальных характеристических скоростей, создаваемых раз-
гонными блоками, не должны рассчитываться из заправок топливом (ра-
бочим телом), превышающих соответствующие предельные возможнос-
ти баков этих блоков;
• общая продолжительность маневрирования КА при выведении с помо-
щью химических разгонных блоков не должна превышать трех суток;
• минимальная высота безопасного включения ядерной энергоустановки не
должна быть менее 800 км (в случае применения на этапе выведения
электрореактивных двигательных установок вместе с ядерными энерго-
установками);
• радиус перицентра проведения гравитационного маневра не должен быть
меньше величины, обеспечивающей невхождение КА в плотные слои ат-
мосферы планеты.
Кроме указанных, имеют место ограничения, которые, как правило, обес-
печиваются при выведении и межпланетном полете КА стандартными сред-
ствами, ставшими обычными для любого полета. Поскольку предполагает-
ся выполнить эти ограничения для всех разрабатываемых альтернатив мис-
сии к Юпитеру (этими же средствами), они не рассматриваются.
1.4.2.5. Формализация и математическая постановка задачи
оптимизации траектории межпланетного КА
Введенные в предыдущих разделах критерии качества вариантов косми-
ческих миссий к исследуемому телу Солнечной системы и основные факто-
ры, оказывающие существенное влияние на эти критерии, позволяют мате-
матически формализовать проблему выбора оптимального варианта косми-
ческой миссии.
То есть сформулировать проблему на математическом языке, используя
современные методы математического моделирования, и в дальнейшем рас-
сматривать ее как задачу синтеза и многокритериальной оптимизации слож-
ной технической системы [10, 16, 17].
Сколь угодно сложный полет КА в дальнем космическом пространстве,
в частности, включающий многократные активные и пассивные гравитаци-
онные маневры у различных планет Солнечной системы и многие длитель-
ные участки движения КА с движителями малой тяги, может быть смодели-
рован с помощью составной динамической системы [2, 16, 19, 29, 30].
167
Пусть траектория межпланетного полета КА в общем случае состоит из
N участков, имеющих существенные отличительные особенности от смеж-
ных участков полета (например, различные гравитационные сферы действия
небесных тел, включение/выключение движителей малой тяги, наличие
атмосферных участков полета и др.). И пусть на каждом /-м участке полета
его траекторное движение описывается (с требуемой точностью) /-й дина-
мической системой вида
dx. .... ....
= q, t‘), t‘k\, z = l,..., N, (1.4.8)
где xl(tl)eEni — вектор фазовых переменных, характеризующий текущее
состояние КА на z-м участке полета; f‘ — /г-мерная функция правых частей
дифференциальных уравнений, которая считается дифференцируемой по
своим аргументам столько раз, сколько потребуется; Ul(tl) — ^.-мер-
ная кусочно-непрерывная функция управления, Ul(tl)(^Eri — ограничен-
ная замкнутая область допустимых вариаций управления; р1 е Р1 — варьи-
руемые параметры, являющиеся факторами влияния на /-м участке полета
КА; Р1 cz Esi — ограниченная замкнутая область допустимых вариаций па-
раметров; qeQ — варьируемые внешние факторы, влияющие на все учас-
тки траектории; Q<^ Es — ограниченная замкнутая область допустимых ва-
риаций внешних факторов; f — независимая переменная.
Моменты времени tlk окончания полета КА на каждом /-м участке траек-
тории определяются из условий
Й*Ч4),Л?Л] = 0, / = 1,...,А, (1.4.9)
где — скалярные функции, обладающие необходимой степенью гладко-
сти.
В самом общем случае в моменты времениi = 1,..., А производятся
преобразования векторов фазового состояния КА при переходе от одной
динамической системы к другой, моделирующих движение КА на смежных
участках траектории полета:
хм^) = ^[х\Рк),р\ q, Рк], / = 1,...,А-1, (1.4.10)
где <pz — ni+}-мерная вектор-функция, обладающая необходимой степенью
гладкости.
В эти же моменты могут изменяться независимые переменные:
=т'[х'(4), />', q, 41’ (1.4.11)
где т' — скалярная функция необходимой гладкости.
168
Если собрать вместе все рассматриваемые факторы влияния, которые
допускают вариации на каждом i-м участке траектории, то они образуют
расширенные векторы управлений —и( ) и факторов влияния р (внешних
—q и внутренних —р*):
«(•) = {«'(•), / = 1,...,м, p = {pi, q, i = 0,...,N };
/ = 0,...,У; qeQ; £]}; (1.4.12)
u()eU&{и‘(Г)еи‘(е), We [Г', 'J, i=l,...,N}.
Качество влияния варьируемых факторов, в частности управлений и па-
раметров составной динамической системы (1.4.8), должно оцениваться по
заданным критериям.
В общем случае любые характеристики космической миссии, в том чис-
ле заданные критерии качества, являются интегротерминальными функци-
оналами факторов влияния р и «(•) , т.е.
<[«( ), />1 =
М
= £|ф^(х',м\р',9,/')Л' + £Дх^(/^),^Л9,/^], у = 1, 2, 3, 4, (1.4.13)
где Ф< и Fj — гладкие скалярные функции; Nj<N — номер последнего уча-
стка полета, на котором вычисляется терминальная часть j-го функционала.
Поскольку любые характеристики миссии, ограниченные определенным
образом, также являются функционалами и зависят от факторов р и «(•), то
они в общем случае могут быть представлены в аналогичном (1.4.13) виде
<[«(•), Р1 =
М
= У, JФ^(х*и',р‘,q,t‘)dt‘ + Fj[x">(t{y),pNj,q,t^j], j = 5,...,m + 5, (1.4.14)
‘=4
где m — количество ограничений, соответствующее каждой конкретной
миссии.
Имея в виду, что каждый из последних функционалов ограничен конк-
ретной величиной, можно записать
р] = 0, j = 5,..., /и, + 5;
/.[«(•), р]<0, j = m{ +6,..., /п + 5, т} <т, (1.4.15)
где т] — количество ограничений типа равенств.
169
Таким образом, с учетом введенных математических моделей для даль-
них космических миссий (1.4.8)—(1.4.15) задача многокритериального вы-
бора оптимального варианта космических миссий для исследований систе-
мы Юпитера, например на этапе разведывательных исследований, может
быть сформулирована следующим образом.
Найти такие и(-)е U и ре Р (используются обозначения (1.4.12)), кото-
рые при условии выполнения соотношений (1.4.8)—(1.4.10),(1.4.15) определят
выбор оптимального варианта миссии по критериям (1.4.13) согласно следу-
ющим приоритетам:
A^)>pU2)>p(^3)>p(A), (1.4.16)
где p(Ji) — условное обозначение приоритета /-го критерия.
При постановке задач для последующих этапов исследований заданного
небесного тела и его ближайшего пространства (основного этапа и специ-
ального этапа) приведенная выше постановка задачи останется такой же, за
исключением других приоритетов (1.4.16), а именно:
для основного этапа исследований (см. (1.4.6)):
рЦ )>£(<,)> A^2)>pU4), (1.4.17)
для специального этапа исследований (см. (1.4.7)):
A^3)>A^2)>P(^i)>P(A), (1.4.18)
Как уже отмечалось, в общем случае следует ожидать, что каждому ре-
шению поставленной задачи на определенном этапе исследований будут
соответствовать свои оптимальные варианты миссий.
Таким образом, на основании троекратного решения задачи (1.4.13)—
(1.4.15) с различными приоритетами (1.4.16)—(1.4.18) можно сформировать
рекомендации к построению эффективной трехэтапной программы иссле-
дований объекта Солнечной системы.
Без указания дат старта конкретных миссий такие рекомендации могут
быть формализованы в следующем виде:
этап разведывательных исследований: Л^1, Л^,..., , всего w1;
этап основных исследований'. Nf, Nj. всего w2; (1.4.19)
этап специальных исследований: Nf, Nj, всего w3,
где N[, N‘j — номера ранжированных вариантов миссий (всего w*) для
приоритетов критериев /- го этапа исследований.
Из-за большого многообразия и сложной иерархии вариантов космичес-
ких миссий к заданному небесному телу (например использование много-
кратных гравитационных маневров) и возможного применения новых кос-
мических технологий (например применение движителей малой тяги) зави-
симости функционалов от варьируемых факторов влияния оказываются весь-
170
ма сложными. Поэтому математическое моделирование полета КА и функ-
ционирования его систем, а вслед за ним численная оптимизация факторов
влияния становятся весьма важными задачами решения поставленной про-
блемы выбора оптимальных вариантов миссий для прямых исследований
ближайшего околосолнечного пространства по нескольким критериям.
1.4.3. Классификация вариантов космических комплексов,
предназначенных для реализации различных схем полета
Основной целью предлагаемой классификации является установление
иерархии и связей между различными факторами, оказывающими существен-
ное влияние на критерии качества космических миссий. Из числа этих фак-
торов выбираются наиболее значимые и определяются как признаки клас-
сификации.
Считается, что ярко выраженный класс космических комплексов, наце-
ленных на выполнение одинаковой цели (например, проведение одинако-
вых научных экспериментов в системе Юпитера), представляет собой сово-
купность вариантов космических комплексов, имеющих:
• один и тот же сценарий научных исследований,
• одинаковый состав космического комплекса,
• одинаковую баллистическую схему миссии.
В связи с этим важно отметить, что каждому реализуемому сочетанию
«внешних» факторов, фиксирующих облик миссии, будет соответствовать оп-
ределенный класс миссии. Из этого следует, что все внешние факторы яв-
ляются признаками классификации. Иерархию таких признаков целесооб-
разно выстраивать по степени влияния внешних факторов (формально, как
правило, дискретных) на критерии качества вариантов миссии.
Наибольшее влияние на заданные критерии качества миссии в систему
Юпитера оказывают две группы факторов:
• факторы, определяющие схемы межпланетного перелета,
• факторы, определяющие варианты ракетно-космического комплекса.
Очевидно, что эти группы факторов разделяются по основным этапам
миссии. В рассматриваемом случае такими этапами являются: этап выведе-
ния и разгона КА на межпланетную траекторию и этап межпланетного по-
лета (в рассматриваемом приложении он продолжается в процессе полета КА
в околоюпитерианском пространстве).
Поскольку значимость влияния указанных групп факторов примерно
одинакова, предлагается в качестве признаков классификации первого уров-
ня назначить факторы, определяющие схемы межпланетного перелета, а в
качестве признаков классификации второго уровня — факторы, определя-
ющие ракетные средства, которые реализуют межпланетный перелет.
Затем в качестве признаков классификации третьего уровня назначить
факторы, определяющие варианты ракетно-космического комплекса, и,
наконец, в качестве признаков классификации четвертого уровня назначить
факторы, определяющие схемы выведения КА на межпланетные траектории.
171
Укрупненная по уровням схема классификации космических комплексов
изображена на рис. 1.4.1.
Рис. 1.4.1. Схема классификации космических комплексов
Из схемы видно, что первые два уровня классификации касаются меж-
планетного перелета к Юпитеру, а вторые два уровня — выведения КА на
межпланетные траектории. В связи с этим более детальную классификацию
космических миссий удобно рассматривать по этапам полета в околоюпи-
терианское простанство: сначала на этапе межпланетного перелета, а затем
на этапе выведения КА на межпланетную траекторию.
1.4.3.1. Классификация вариантов космических комплексов
по факторам межпланетного полета
В общем случае схема межпланетного полета представляет собой опреде-
ленную последовательность пролета КА заданных или выбранных областей
Солнечной системы с указанием примерных дат и принципиально важных
особенностей реализации этих событий.
Сложные межпланетные траектории полета КА условно разбиваются на
ряд характерных участков для упрощения моделирования всей траектории
и последующей оптимизации. При разбиении обычно руководствуются на-
личием на том или ином участке траектории некоторой ярко выраженной
группы факторов, существенно влияющих на характеристики перелета к
месту проведения основных экспериментов, в частности на критерии каче-
ства вариантов космических миссий. В то же время само наличие или от-
сутствие таких участков также является весьма существенным внешним
фактором влияния на эти критерии.
Анализ факторов межпланетного полета, учитываемых на этапе предва-
рительного проектирования, показал, что наиболее влиятельными оказыва-
ются следующие факторы:
172
При выходе КА из сферы действия Земли'.
• значения координат фазового состояния КА в момент отлета от Земли, в
частности: дата старта или дата выхода из сферы действия Земли (в слу-
чае применения при разгоне КА движителей малой тяги),
• вектор скорости отлета КА от Земли в гелиоцентрической системе отсче-
та и полная масса КА, выводимая на межпланетную траекторию.
На участках полета в гравитационном поле Солнца'.
• количество и параметры промежуточных витков, совершаемых КА вок-
руг Солнца между гравитационными маневрами у планет,
• наличие на борту КА химической двигательной установки,
• основные характеристики химической двигательной установки,
• количество, моменты времени включения химической двигательной ус-
тановки КА и приращения гелиоцентрической скорости КА во время та-
ких включений (при предварительном моделировании межпланетных тра-
екторий считается, что активные маневры КА посредством химической
двигательной установки происходят мгновенно),
• суммарная характеристическая скорость, затрачиваемая на создание им-
пульсов тяги химической двигательной установки КА,
• наличие на борту КА электрореактивной двигательной установки,
• состав, типы и основные характеристики электрореактивных двигателей,
• тип, мощность и основные характеристики энергоустановки, обеспечи-
вающей работу электрореактивных двигателей,
• моменты времени включения и выключения электрореактивных двига-
тельных установок,
• стратегия управления вектором суммарной тяги электрореактивных дви-
гателей;
На участках полета КА в сферах действия планет'.
• количество и последовательность проведения гравитационных маневров
у планет,
• моменты времени проведения гравитационных маневров у планет (при
предварительном моделировании межпланетных траекторий считается,
что гравитационные маневры у планет происходят мгновенно),
• вектор фазового состояния КА при его входе и выходе из сферы действия
планеты.
Таким образом, признаками классификации космического комплекса на
этапе межпланетного перелета являются следующие внешние факторы:
— количество промежуточных витков, совершаемых КА вокруг Солнца
между гравитационными маневрами у планет;
— наличие на борту КА химической двигательной установки;
— основные характеристики химической двигательной установки;
— количество и моменты времени включения химической двигательной
установки КА;
— наличие на борту КА электрореактивной двигательной установки;
173
— состав, типы и основные характеристики электрореактивных двигате-
лей;
— тип и мощность энергоустановки;
— моменты времени включения и выключения электрореактивных дви-
гательных установок;
— количество и последовательность проведения гравитационных манев-
ров.
Перечисленные факторы имеют причинно-следственные связи и суще-
ственно различаются по степени влияния на критерии качества миссий,
поэтому они образуют иерархическую структуру, имеющую различные уров-
ни подчинения и значимости факторов, одновременно являющимися при-
знаками классификации вариантов миссий на этапе межпланетного пере-
лета.
На рис. 1.4.2 представлена обобщенная структура возможных вариантов
реализации межпланетного полета как с точки зрения различия в схемах
перелета, так и с точки зрения возможной разницы в составах ракетных
средств, т.е. I и II уровни классификации. В блоках структуры использова-
ны следующие обозначения: ДУ — двигательная установка, ЭРДУ — элек-
трореактивная двигательная установка.
Любой класс космических миссий определяется не только конкретным
сочетанием внешних факторов влияния межпланетной части миссии, но
также факторами, задающими варианты выведения КА на различные меж-
Рис. 1.4.2. Возможные варианты реализации космического полета
174
планетные траектории. Поэтому каждая «ветвь» классификации по призна-
кам межпланетного полета (рис. 1.4.2) замыкается на промежуточный блок:
«варианты выведения», который является условным продолжением струк-
туры (рис. 1.4.3).
Рис. 1.4.3. Возможные варианты реализации выведения
1.4.3.2. Классификация вариантов космических комплексов
по факторам выведения КА на межпланетную траекторию
В общем случае операция выведения КА на межпланетную траекторию
(исходя из возможностей современных космических технологий) может
включать три этапа:
1) выведение космической головной части на опорную орбиту (с высо-
той 150—200 км) либо с помощью только ракеты-носителя, либо с помощью
той же ракеты-носителя и одного импульса разгонного блока, входящего в
состав космической головной части;
2) разгон КА на заданную промежуточную орбиту с помощью космичес-
ких буксиров — разгонных блоков, оснащенных двигательными установка-
ми, работающими на химических компонентах топлива;
3) доразгон КА на межпланетную траекторию с заданными отлетными
характеристиками, с применением движителей малой тяги — электрореак-
тивных двигателей.
175
Более простые варианты операции выведения могут не включать: либо
этапы доразгона движителями малой тяги (разгон КА с помощью только
химических разгонных блоков), либо разгон КА химическими разгонными
блоками (разгон только движителями малой тяги). При этом каждый из
указанных этапов может осуществляться по различным баллистическим схе-
мам.
Выведение на низкую опорную орбиту может осуществляться с так называ-
емым «довыведением» посредством одного импульса первого химического
разгонного блока и «без довыведения», т.е. только с помощью ракеты-но-
сителя.
Разгон КА с помощью химических разгонных блоков может осуществляться
по одноимпульсной или многоимпульсным схемам (с промежуточными ор-
битами).
ДоразгонКА с применением движителей малой тяги может осуществляться
согласно различным стратегиям управления суммарным вектором тяги и, в
частности, с использованием гравитационного поля Луны.
Каждый из указанных факторов схемы выведения оказывает существен-
ное влияния на критерии качества вариантов космических миссий. Причем
при различных сочетаниях этих факторов оценка, например, величины массы
КА, выводимого на межпланетную траекторию на базе одной и той же ра-
кеты-носителя, может изменяться в несколько раз.
Исходя из разумного сочетания факторов ракетно-космического комплек-
са (III уровень классификации) с факторами схемы выведения (IV уровень
классификации), на рис. 1.4.3 представлена иерархическая взаимозависи-
мость этих внешних факторов влияния как продолжение структуры класси-
фикации космических миссий I и II уровней (рис. 1.4.1 и 1.4.2).
Из рис. 1.4.3 видно, что при «отбрасывании» отдельных «ветвей» схемы
можно получать более простые сочетания внешних факторов выведения,
определяющие соответствующие классы космических миссий.
Например, если ограничиться выбором типа и модификации химическо-
го разгонного блока, то это будет означать, что схема выведения на межпла-
нетную траекторию обеспечивается ракетно-космическим комплексом,
включающим только ракету-носитель и определенные (один или два) хими-
ческие разгонные блоки, которые по одноимпульсной или многоимпульс-
ной схеме будут разгонять КА.
Необходимо отметить, что внутренние факторы, с которыми критерии
качества космических миссий связаны, как правило, непрерывными зави-
симостями, в принципе неспособны повлиять на выбор того или иного класса
миссии, однако накладываемые на некоторые из этих факторов условия могут
ограничить выбор внешних факторов влияния, определяющих принадлеж-
ность к тому или иному классу миссии. К таким факторам относятся:
• параметры промежуточных орбит выведения и разгона;
• характеристики двигательных установок разгонных блоков;
176
• размеры топливных баков разгонных блоков (основных и дополнитель-
ных).
Рассмотренная классификация космических комплексов, реализующих
миссию в систему Юпитера, позволяет установить иерархическую связь
между наиболее значимыми факторами влияния и критериями качества
миссий. Это дает возможность проанализировать эти связи и провести де-
композицию поставленной проблемы многокритериального выбора опти-
мального варианта космической миссии для исследований системы Юпи-
тера.
1.4.4. Методики формирования и моделирования вариантов миссий
в ближайшее околосолнечное пространство
На этапе предварительного проектирования миссии требования к точно-
сти моделирования межпланетного полёта относительно невысоки, поэто-
му допущения, упрощающие моделирование реальных условий, позволяют
применить метод «точечных сфер действия».
Согласно этому методу межпланетный полёт, включающий несколько
гравитационных манёвров, представляется последовательностью участков
траектории движения КА в центральном гравитационном поле Солнца между
центрами планет, около которых проводятся активные или пассивные ма-
нёвры в их гравитационном поле, условно сжатые в точку. Все пассивные
эволюции КА моделируются в соответствии с законами Кеплера и представ-
ляют собой фрагменты эллиптических, параболических или гиперболичес-
ких траекторий, в одном из фокусов которых находится планета или Солн-
це.
Полёт КА в сферах действия планет, т.е. гравитационный манёвр КА,
считается мгновенным по отношению к длительности полета по этим учас-
ткам траекторий. Считается, что все изменения вектора состояния КА, дви-
жущегося в сфере действия планеты, происходят только под действием цен-
трального гравитационного поля облетаемой планеты.
Если приращение скорости КА, получаемое после проведения гравита-
ционного маневра в сфере действия планеты, не соответствует требованиям
стыковки с последующим участком траектории полёта к следующей плане-
те, тогда разница компенсируется с помощью включения двигательной ус-
тановки КА. При этом для двигательных установок, работающих на хими-
ческих компонентах топлива, процесс приращения скорости, как и грави-
манёвр, считается мгновенным.
Согласно этим предположениям моделирование движения КА на гелио-
центрическом участке траектории между (Z— 1)-й и /-й планетами может осу-
ществляться путем решения задачи Ламберта [19].
1.4.4.1. Методика решения задачи Ламберта
Уравнение Ламберта позволяет определить кеплерову орбиту КА в цент-
ральном гравитационном поле притягивающего небесного тела при задан-
177
ных начальной rt и г2 конечной точках перелёта, а также при известном вре-
мени перелета т.
Если перелет не превосходит полувитка (рис. 1.4.4,а), то угловая дальность
перелёта Ф определяется по формуле
(гпГ->)
Ф = arccos 1 2
Г]Г2
(1.4.20)
Если же перелёт продолжается больше полувитка (рис. 4.1,6), следует
использовать формулу
(д* г)
Ф = 2л-arccos(1.4.21)
Г\ Г2
Рис. 1.4.4. Изменение угловой дальности перелёта
Ввиду того, что межпланетный перелет целесообразен в направлении
общего движения планет по своим орбитам (против часовой стрелки, если
смотреть со стороны Северного полюса мира), расчет угла Ф должен про-
изводиться по формуле
А* , f \
arccos *’ 2 , (г. хг,, к)>0,
Г1 Г2
2л - arccos *’ 2 , (г х г,, к) < 0,
'i'i
(1.4.22)
где к — орт оси OZ эклиптической декартовой системы координат.
Очевидно, что существует бесконечное множество траекторий перелета
между точками космического пространства, заданными векторами и г2.
Причем, если угловая дальность перелета не превышает 360°, то каждая тра-
ектория определяется единственным параметром — временем перелета.
Время перелета т однозначно связано с большой полуосью а перелёт-
ной орбиты КА, и в случае эллиптической орбиты эта зависимость, называ-
емая формулой Ламберта, имеет вид
178
аз/2
т = —р- [л + sign(tm - т) (е - sin е - л) - sign(sin Ф) (5 - sin 5) + 2лл],
(1.4.23)
где ц — гравитационный параметр притягивающего небесного тела;
5=1^ -г21; л = 0, 1,... — количество полных витков КА на орбите перелёта.
Кроме того, в (1.4.23) использованы следующие обозначения:
(/-] +r2+s)3/2
8-4Г
х
т
[n-sign(sin®)(8m -sin8m) + 2n«];
8m =2 arcsin
0 < 8 < л;
m 1
IГ + Г — S
8 = 2arcsinJ-—-—, 0<8 <л;
V 4a m
If -|- f -|- £
£ = 2arcsinJ-—-—, 0<е<л.
V 4a
В случае гиперболической орбиты перелёта формула Ламберта имеет вид
т = [sha - a - sign(sin Ф) (sh p - P)],
(1.4.24)
где sh —=
2
P r.+r2-s
; sh-= <——±—
2
4|a|
a>P>0.
Если перелёт осуществляется по параболической орбите, то время пере-
лёта определяется по формуле
1
Tnap-6j|I
[(/j +г2+ $)3/2 - (/•] + r2 - $)3/2 sign(sin Ф)].
(1.4.25)
Таким образом, для того чтобы определить параметры участка кеплеро-
вой орбиты перелёта между точками, заданными начальным и конечным
г2 радиус-векторами за заданное время т, т.е. фактически смоделировать со-
ответствующий участок орбиты, следует рассматривать формулу Ламберта как
уравнение относительно большой полуоси этой орбиты, названное уравне-
нием Ламберта{\9].
Однако сначала следует определить тип орбиты перелёта. Для этого по
формуле (1.4.25) находится время перелёта между заданными векторами по
179
параболической орбите, и полученное время тпар сравнивается с заданным
временем т.
Если окажется, что , то перелёт между заданными векторами воз-
можен только по гиперболической орбите. Если т > тпар — перелёт может
быть реализован только по эллиптической орбите. Если же окажется, что
т = тпар, то перелет между заданными точками межпланетного пространства
должен осуществляться только по параболической траектории и большая
полуось такой орбиты а = «>. В случае т Ф тпар формулы (1.4.23) или (1.4.24)
следует рассматривать в качестве трансцендентных уравнений относитель-
но а. Любые остальные параметры кеплеровой орбиты могут быть найдены
по аналитическим формулам.
В частности, после нахождения а можно определить скорость Vx КА в
точке гх (в этом случае будет однозначно определена орбита перелёта) по фор-
муле
И = * р + + U - «71 (1.4.26)
\ 2 >
где A = sign(sin<£)-------—; В = signer - т) ---------—.
у rx+r2-s 2а т у гх + г2 + 5 2а
Однако, если на /-м участке траектории КА, совершив один или несколько
полных витков, должен вернуться в ту же точку для повторного манёвра у
той же планеты, то в данном случае невозможно применить методику ре-
шения задачи Ламберта, так как орбита КА будет не определена из-за кол-
линеарности векторов гх и г2.
1.4.4.2. Методика моделирования гравитационных манёвров КА
Схема межпланетного полёта представляет собой последовательность
целенаправленных событий, приводящих к изменению скорости КА по от-
ношению к такому же движению в космосе при отсутствии этих событий,
т.е. движению КА под действием гравитационного поля Солнца.
Из этого следует, что важнейшими характеристиками любой сложной
межпланетной траектории являются приращения скорости КА, а также точки
и интервалы времени их реализации.
Приращения скорости могут быть реализованы либо с помощью собствен-
ных средств КА (например, реактивных двигателей), либо за счёт использо-
вания внешних сил (в частности, гравитационных полей и атмосфер планет).
Исходя из критерия качества миссии, необходимо стремиться к приме-
нению «естественных» возможностей изменения скорости движения КА и
тем самым — к экономии собственных средств и ресурсов искусственного
изменения скорости. Кроме того, в случае применения реактивных двига-
телей для проведения активных манёвров КА расход рабочего тела (топли-
ва) будет тем больше, чем больше требуемое приращение скорости КА. Это
180
позволяет рассматривать в качестве показателя научной эффективности
миссии не массу научной аппаратуры, а суммарное приращение скорости КА,
экономия которого позволит увеличить массу научной аппаратуры.
В связи с этим решается задача (в первом приближении) построения
последовательности и определения моментов времени проведения гравита-
ционных манёвров у планет, а также определения соответствующих прира-
щений скорости КА (с помощью его ДУ) [18].
1.4.4.3. Варьируемые параметры маневрирования КА
в окрестности пролетаемых планет
Прохождение гравитационных сфер действия ряда планет во время пе-
релёта КА в пространстве Солнечной системы естественным образом порож-
дает последовательность перелётных участков, характеризующихся набором
собственных параметров, которые зависят от условий выведения КА на
межпланетную траекторию, а также от параметров проведения соответству-
ющих гравитационных манёвров. Конкретно основными факторами, опре-
деляющими участки полёта КА между смежными гравитационными манёв-
рами у планет, являются:
• дата старта от Земли и вектор отлётного состояния КА;
• число гравитационных манёвров, порядок и даты прохождения планет;
• число промежуточных между манёврами витков вокруг Солнца.
Приближённые математические модели полёта КА на гелиоцентрических
и планетоцентрических участках траектории последовательно стыкуются на
границах сфер действия этих небесных тел. Согласно гипотезе о точечных
сферах действия планет, считается, что пассивные и активные гравитаци-
онные манёвры КА происходят мгновенно. В результате в точке проведения
гравитационного манёвра, совпадающей с центром планеты проведения
манёвра, скачкообразно меняются параметры гелиоцентрических участк< в
межпланетной траектории полёта КА.
Существенные изменения в межпланетное движение КА вносят импуль-
сы активного маневрирования КА, создаваемые с помощью маршевых дви-
гательных установок КА, работающих на химических компонентах топли-
ва. «Химические» двигательные установки по сравнению с продолжитель-
ными включениями электрореактивных двигательных установок, имеющи-
ми малые суммарные силы тяги, практически мгновенно и существенно
изменяют параметры траектории движения КА, разделяя её на участки «до»
и «после» реализации импульса «химической» тяги.
Математические модели, описывающие участки свободного движения КА
в центральном гравитационном поле либо Солнца, либо планеты «до» и
«после» импульса, будут различаться своими параметрами.
Основными факторами влияния активных манёвров КА с помощью хи-
мических двигателей являются:
• величина и направление создания импульса;
• время или точка проведения манёвра.
181
Таким образом, обобщенная математическая модель межпланетного по-
лёта к Солнцу может в себя включать:
• модели участков пассивного полёта КА в межпланетном пространстве;
• модели участков проведения пассивных и активных гравитационных ма-
нёвров КА, связывающие модели участков пассивного полёта КА «до» и
«после» манёвра;
• модели участков проведения активного манёвра КА посредством хими-
ческой двигательной установки, связывающие модели участков пассив-
ного полёта КА «до» и «после» активного манёвра.
Общая математическая модель движения на межпланетных участках ак-
тивного и пассивного полёта КА может быть представлена в гелиоцентри-
ческой системе отсчёта как динамическая система вида
± = у-
dt
(1-4.27)
dt г3
где r = (rx, г, гг)т — радиус-вектор КА; V = (УХ, Vy, VZ)J — вектор его скоро-
сти; цс — гравитационный параметр Солнца; / — время полёта.
В соответствии с методом точечных сфер действия планет предполагает-
ся, что выведение КА на межпланетную траекторию с помощью «химичес-
ких» РБ осуществляется мгновенно, и начальный радиус-вектор КА г(/0), а
также начальный вектор скорости И(/о) относительно гелиоцентрической си-
стемы определяются по формулам
г(/0) = Л(/0);
И(/о) = ^(/о) + К , (1Л28)
где Л(/о), W(t0) — гелиоцентрические радиус-вектор и вектор скорости Земли
на момент старта; — вектор асимптотической гелиоцентрической отлёт-
ной скорости КА.
Поскольку и /0 допускают вариации и подлежат определению при
оптимизации межпланетного полёта, то они должны рассматриваться как
вектор параметров начального состояния КА:
Р°=№)Т- (1.4.29)
При моделировании полёта КА с помощью уравнения (1.4.27) мгновен-
ный импульс моделируется как переход от одного участка движения к дру-
гому, имеющему начальный вектор состояния КА, отличный от вектора
состояния КА в конце предыдущего участка полёта. Если ti — момент про-
ведения манёвра, тогда условие перехода примет вид
182
/-/z=0. (1.4.30)
Во время манёвра скорость КА скачкообразно меняется на величину A :
K(fz+O) = K(fz-O) + AJ<. (1.4.31)
В общем случае варьируемыми параметрами межпланетного полёта КА
являются как A V.9 так и fz, поэтому [9]
=(AJ<Tfz)T, (1.4.32)
где pf — обобщенный вектор варьируемых параметров на /-м участке полёта
КА.
1.4.4.4. Моделирование пассивных и активных гравитационных
манёвров КА
Активный или пассивный гравитационный (пертурбационный) манёвр КА
в сфере действия небесного тела (планеты) является управляемой возмож-
ностью изменить траекторию движения. Естественно, что она должна быть
изменена с максимальным эффектом для критерия оптимизации.
Гравиманёвр представляет собой полёт КА в сфере действия планеты по
гиперболической пролётной траектории с возможным включением химичес-
кой двигательной установки.
Очевидно, что основные характеристики гравиманёвра в сфере действия
планеты определяются условиями наведения КА на эту планету при его
подлёте по гелиоцентрической межпланетной траектории.
Попадание КА в условную «точечную» сферу действия планеты соответ-
ствует совмещению радиус-вектора КА (г) и планеты (Л), т.е. трёх составля-
ющих этих векторов:
гх-нх = Ъ
ry~Ry=0'’ (1.4.33)
rz~Rz=0-
С точки зрения задачи оптимизации межпланетного полёта эти условия
можно рассматривать как ограничения на промежуточное фазовое состоя-
ние КА.
Момент времени проведения гравиманёвра tl в общем случае может ва-
рьироваться и поэтому должен входить в состав вектора управляемых пара-
метров р'.
Математическая модель преобразования вектора фазового состояния КА
при гравиманёвре определяется относительно простыми соотношениями,
суть которых хорошо видна на схеме плоского гравиманёвра, изображённой
на рис. 1.4.5 (для наглядности сфера действия планеты показана с конеч-
ными размерами).
183
Рис. 1.4.5. Схема плоского гравиманёвра
На рисунке обозначено: Vi(tik) = V(ti -0) и VM(ti^) = V(ti +0) — векторы
гелиоцентрической скорости КА в моменты непосредственно перед и после
гравиманёвра; Wi — скорость планеты в момент проведения гравиманёвра;
Vr = V~ и J<+ = — векторы планетоцентрической скорости КА в моменты его
входа и выхода из сферы действия планеты; — высота перицентра плане-
тоцентрической гиперболы пролёта планеты; у — угол между асимптотами
гиперболы.
Из метода точечных сфер действия известны следующие кинематические
связи:
К; = И«.-0)-Ж;
^(ti+0) = V:+W;
И+ = у-=И .
оо оо оо
(1.4.34)
Угол у поворота планетоцентрической скорости КА определяется вели-
чиной высоты перицентра планетоцентрической гиперболы гравиманёвра /£'
(рис. 1.4.5):
, _ 1
У =2arcsin-;
е
г V1
с = 1+ ——
(1.4.35)
где е — эксцентриситет гиперболы; цп — гравитационный параметр планеты.
184
Максимальный угол ymax поворота планетоцентрической скорости КА оп-
ределяется минимально возможным расстоянием rmin, на которое КА мо-
жет приблизиться к планете (обычно глт1П равен радиусу планеты плюс вы-
сота условной верхней границы атмосферы Латм).
Из рис. 1.4.5 видно, что угол у определяет приращение А И гелиоцент-
рической скорости при отлёте КА из сферы действия планеты по сравнению
с гелиоцентрической скоростью подлёта к планете. То есть, задавая высоту
перицентра гл, можно в определённых пределах варьировать гелиоцентри-
ческую скорость КА после гравиманёвра и, следовательно, гл должна вхо-
дить в состав вектора варьируемых параметров р'.
В общем случае межпланетного полёта КА может потребоваться прове-
дение пространственного гравиманёвра, позволяющего эффективно полу-
чатьтраектории, наклоненные к плоскости эклиптики, что крайне важно для
исследований околосолнечного пространства и Солнца с высоких широт и
даже с полярных околосолнечных орбит.
Пространственный гравиманёвр (относительно плоскости эклиптики)
обеспечивается при наведении подлётной траектории КА в сферу действия
планеты путём смещения вектора гелиоцентрической скорости КА парал-
лельно самому себе над или под плоскость эклиптики в зависимости от тре-
буемого угла наклонения плоскости проведения гравиманёвра к плоскости
эклиптики Q.
В плоскости проведения гравиманёвра, образованной векторами плане-
тоцентрических скоростей V+ и PC", физическая сущность самого манёвра
не меняется. Так же, как при манёвре в плоскости эклиптики («плоский»
манёвр), вектор скорости КА поворачивается в плоскости гравиманёвра на
угол Y. Изменяется лишь наклонение этой плоскости к плоскости эклип-
тики на угол О. Это достигается с помощью пространственного прицелива-
ния в «картинной» плоскости скорости «входа» КА в сферу действия плане-
ты.
Наведение вектора скорости КА в сферу действия планеты, как правило,
осуществляется посредством одной или нескольких коррекций межпланет-
ного участка траектории КА на пути к рассматриваемой планете. Учитывая
также, что на этапе предварительного проектирования космического комп-
лекса вопросы коррекции траекторий не рассматриваются, предполагается,
что при моделировании пространственного или «плоского» гравиманёвра все
необходимые условия точности наведения будут соблюдены.
Таким образом, с точки зрения моделирования межпланетных траекто-
рий и оптимизации варьируемых проектно-баллистических параметров, в
качестве этих необходимых условий на участке плоского или пространствен-
ного гравиманёвра рассматриваются
p'=(r'Q'0T. (1.4.36)
185
Связь между параметрами у, О и отлётной от планеты скоростью КА мож-
но установить с помощью вспомогательной системы координат i, j, к. Век-
тор i совпадает по направлению с вектором V~ подлётной планетоцентри-
ческой скорости. Векторы у, к перпендикулярны V~ и образуют плоскость,
параллельную «картинной» плоскости, т.е.
. У ~ . ixR .
“WJ’J’ <L4-37>
где R — радиус-вектор рассматриваемой планеты в гелиоцентрической сис-
теме координат.
С учётом вновь введенных обозначений вектор V(ti +0) гелиоцентричес-
кой скорости КА от планеты определяется по формуле
K(/z +0) = Bz + H2(/cosy+ysinysinQ + fcsinycosQ), (1.4.38)
где W — вектор гелиоцентрической скорости планеты.
В итоге, зная вектор гелиоцентрической скорости отлёта КА от планеты
V(ti +0) и время проведения гравиманёвра fz, можно продолжить моделиро-
вание траектории межпланетного полёта КА.
При совершении гравиманёвра у планеты со слабым гравитационным
полем часто возникает необходимость в дополнении пассивного гравиманёв-
ра импульсом ДУ КА, т.е. в совершении активного гравиманёвра.
Математическая модель активного гравиманёвра КА с маршевой хими-
ческой ДУ у любого небесного тела Солнечной системы на стадии предва-
рительного проектирования представляет собой последовательное сочетание
модели пассивного гравиманёвра, рассмотренного выше, и модели обычно-
го манёвра КА с химической ДУ. Другими словами, скачкообразные изме-
нения вектора фазового состояния КА, происходящие за счёт гравиманёвра
и кратковременного включения химической ДУ, векторно складываются. В
случае пространственного активного гравиманёвра КА варьируемыми пара-
метрами являются [9]
pz=(r;Qz/zA^T)T, (1.4.39)
где AJ< — вектор приращения скорости КА, который может быть получен
путём включения химической ДУ.
1.4.4.5. Оценка массы КА
Массовые характеристики КА на соответствующем этапе могут быть рас-
считаны для предварительных оценок согласно следующей методике.
1. Конечная масса головного блока (ГБ) после реализации манёвра раз-
гона с опорной орбиты ИСЗ на межпланетную траекторию рассчитывается
согласно формуле Циолковского:
186
А ^разг
тк = то'е с ->
(1.4.40)
где тк — масса ГБ после реализации манёвра; mQ — начальная масса ГБ;
А Гразг — скорость разгона; с — скорость истечения газов из сопла двигате-
ля РБ:
С = РРБ • £,
уд 5 6 * ’
где РуРБ — удельный импульс ДУ РБ; g — ускорение свободного падения на
экваторе, равное 9.80665 м/с2.
2. Масса топлива для реализации первого манёвра представляет собой
разность масс ГБ до и после проведения включения ДУ РБ, при этом она не
должна превышать предельную заправку топливом баков ДУ РБ:
тТ = mQ - тк [тТ < ).
3. После отработки импульса выведения РБ отделяется, и масса КА ста-
новится равной
'ИКА=^-"гРБ>
что представляет собой начальную массу КА на отлётной гиперболической
траектории.
4. Масса КА после его выхода на целевую гелиоцентрическую траекто-
рию рассчитывается также согласно формуле Циолковского, только вместо
АКразг нужно подставить характеристическую скорость КА, направленную
на совершение активного манёвра АКГМ , а вместо удельного импульса ДУ
РБ — аналогичную характеристику ДУ КА:
дИгм
т =т е Р™8
тККА Л"кд е
5. Затраты топлива, необходимого на выполнение активных манёвров,
также вычисляются аналогично пункту 2, и масса этого топлива должна
удовлетворять заправке КА:
/ИГ=/ИКА-^КА (тТ<тТ^л)-
Литература
1. Авдуевский В.С., Успенский Г.Р. Народнохозяйственные и научные
космические комплексы. — М.: Наука, 1985.
2. Беличенко В.В. Оптимальное управление составными системами //
ДАН СССР. 1967. 176. № 4. С. 754-756.
187
3. Гродзовский Г.Л., Иванов Ю.Н., Токарев В.В. Механика космическо-
го полета с малой тягой. — М.: Наука, 1968.
4. Ильин В.А., Кузмак Г.Е.Оптимальные перелеты космических аппара-
тов. — М.: Наука, 1976.
5. Иванов Н.М., Мартынов А.И. Управление движением космических
аппаратов в атмосфере Марса. — М.: Наука, 1977.
6. Иванов Н.М., Лысенко Л.Н., Мартынов А.И. Методы теории систем в
задачах управления космическими аппаратами. — М.: Машиностроение,
1981.
7. Иванов Н.М., Дмитриевский А.А., Лысенко Л.Н. Баллистика и нави-
гация космических аппаратов. — М.: Машиностроение, 1986.
8. Иванов Н.М., Поляков В.С. Наведение автоматических межпланетных
станций. — М.: Машиностроение, 1987.
9. Лебедев А.А. Основы синтеза систем летательных аппаратов. — М.:
Машиностроение, 1987.
10. Лебедев А.А. Введение в анализ и синтез систем. — М.: Изд-во МАИ,
2001.
11. Лебедев А.А., Нестеренко О.П. Космические системы наблюдения. —
М.: Машиностроение, 1991.
12. Лебедев А.А., Красильщиков М.Н., Малышев В.В. Оптимальное уп-
равление движением космических летательных аппаратов. — М.: Машино-
строение, 1974.
13. Лебедев А.А., Бобронников В.Т., Красильщиков М.Н., Малышев В.В.
Статистическая динамика и оптимизация управления летательных аппара-
тов. — М.: Машиностроение, 1985.
14. Малышев В.В. Методы оптимизации сложных систем. — М.: МАИ,
1981.
15. Малышев В.В. Программирование оптимального управления летатель-
ными аппаратами. — М.: МАИ, 1982.
16. Малышев В.В., Усачов В.Е. Математическое моделирование управля-
емого движения космических аппаратов. — М.: Изд-во МАИ, 1994.
17. Малышев В.В., Пичхадзе К.М., Усачов В.Е. Оптимизация космичес-
кой миссии в корону Солнца. — М.: Изд-во МАИ, 2006.
18. Малышев В.В., Пичхадзе К.М., Усачов В.Е. Исследование возможно-
сти управляемого прохождения короны Солнца и создания солнечного зон-
да. — М.: Изд-во МАИ, 2006.
19. Малышев В.В., Пичхадзе К.М., Усачов В.Е., Тычинский Ю.Д. Мето-
ды и алгоритмы синтеза и оптимизации вариантов миссии в ближайшее
околосолнечное пространство. — М.: Изд-во МАИ, 2006.
20. Малышев В.В., Пичхадзе К.М., Усачов В.Е. Системный анализ вари-
антов миссии и синтез программы прямых исследований ближайшего око-
лосолнечного пространства.- М.: Изд-во МАИ, 2006.
188
21. Механика космического полета / Под ред. В.П. Мишина. — М.: Ма-
шиностроение, 1989.
22. Моисеев Н.Н. Математические задачи системного анализа. — М.:
Наука, 1981.
23. Основы теории полета космических аппаратов / Под ред. Г.С. Нари-
манова. — М.: Машиностроение, 1972.
24. Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики космическо-
го полета. — М.: Наука, 1990.
25. Разыграев А.П. Основы управления полетом космических аппаратов.
— М.: Машиностроение, 1990.
26. Сихарулидзе Ю.Г.Баллистика летательных аппаратов. — М.: Наука,
1982.
27. Скляров И.Ф. Основы системного анализа и синтеза. — М., 1983. Деп.
в ВИНИТИ 01.06.83. №2742.
28. Справочник по теории автоматического управления / Под ред. А.А.
Красовского. — М.: Наука, 1987.
29. Соловьев Ц. В., Тарасов Е. В. Прогнозирование межпланетных поле-
тов. — М.: Машиностроение, 1973.
30. Усачов В.Е., Тычинский Ю.Д. Оптимизация составных динамических
систем. Полет солнечного зонда с электрореактивными двигателями и гра-
витационными маневрами у планет. — М., 1999. Деп. в ВИНИТИ 17.06.1999.
№ 1967-В99.
31. Усачов В.Е., Тычинский Ю.Д. Полет к Солнцу с многократными гра-
витационными маневрами у планет Земной группы. — М., 2000. Деп. в
ВИНИТИ 02.08.2000. № 2141-В00.
32. Федоренко Р.П. Приближенное решение задач оптимального управ-
ления. — М.: Наука, 1978.
А. В. Симонов,
НПО им. С.А. Лавочкина
А. С. Ежов,
НПО им. С.А. Лавочкина
189
ЕЕЗ ОБЕСПЕЧЕНИЕ УПРАВЛЕНИЯ ПОЛЕТОМ ПРИ ВЫПОЛНЕНИИ
ЗАДАЧ ИССЛЕДОВАНИЯ ЛУНЫ
1.5.1. Введение
Полет с Земли на Луну является сложной научно-технической задачей. Это
связано со строгими требованиями, предъявляемыми к диапазону дат стар-
та; к навигационным параметрам околоземного и, в особенности, окололун-
ного пространства; к точности автоматики старта и управления полетом кос-
мического аппарата. Достаточно сказать, что ошибка в скорости КА всего на
1 м/с, т.е. на 0,01 процента от величины полной скорости, приводит к от-
клонению точки встречи КА с Луной на ~250 км. Отклонение вектора скоро-
сти от расчетного направления на 1 угл. минуту вызывает смещение точки
встречи на ~200 км. Учитывая, что радиус Луны равен ~ 1738 км, для надеж-
ного попадания в Луну ошибка в скорости КА должна быть не больше не-
скольких метров в секунду, а отклонение вектора скорости от его расчетного
направления не должно превышать 0,1°.
В середине 60-х годов в СССР началась разработка автоматических стан-
ций следующего поколения для продолжения научных исследований Луны.
Эти станции запускались с помощью ракеты-носителя «Протон», имели массу
« 6900 кг и позволяли существенно расширить возможности проведения на
Луне научных исследований, включая автоматическую доставку на Землю
образцов лунного грунта.
Выполнение многоцелевой программы полетов к Луне автоматических
аппаратов нового поколения (луноходы, доставка лунного грунта, искусст-
венных спутников Луны), спроектированных и изготовленных в НПО им. С.А.
Лавочкина совместно с кооперацией, потребовало разработки и практичес-
кой реализации значительного объема новых задач, составивших в целом
уникальный комплекс проектирования и обеспечения управления полетом
лунных аппаратов. Этот комплекс включал задачи навигации, анализа теле-
метрической информации (ТМИ) и выдачи на борт командной информации.
Разработка новых алгоритмов и программ математического обеспечения была
начата в 1968 г., а его развитие и совершенствование продолжались в ходе
реализации лунной программы — вплоть до ее успешного завершения посад-
кой на Землю возвращаемого аппарата КА «Луна-24» в августе 1976 г.
Опыт, накопленный в ходе реализации предыдущих полетов, в определен-
ной степени был использован при подготовке новой лунной программы и
облегчил эту задачу. В частности, известное уточнение параметров гравита-
ционного поля Луны, полученное в результате обработки траекторных изме-
рений с КА «Луна-10», обусловило возможность перехода к полетам на низ-
ких окололунных орбитах. Немалое значение имел и опыт организации ра-
бот по управлению полетом в условиях насыщенности ответственными и
необратимыми динамическими операциями.
Важной особенностью программно-математического комплекса обеспече-
ния лунной программы нового поколения является его многоплановость,
190
обусловленная как разнообразием целевых задач, так и применением в со-
ставе аппаратов новых видов приборного оборудования. Новый аппаратур-
ный состав предназначался для управления движением на различных этапах
полета и включал в себя следующие основные системы:
• бортовой и наземный радиокомплекс;
• система солнечно-земной ориентации;
• система гироскопической стабилизации;
• маршевая двигательная установка;
• двигательная система мягкой посадки;
• система радиоальтиметрирования (радиоизмерения высоты над лунной
поверхностью с борта КА);
• доплеровская система измерений при посадке на Луну;
• стартовый комплекс возвращаемых аппаратов.
Обеспечение работы этих комплексов и систем требовало расчета новых
навигационных данных, соблюдения определенных траекторных ограниче-
ний и более сложных методов управления полетом в целом.
Для каждого конкретного полета формировался детальный операционно-
временной график, который отображал основные операции полета и обмен
различными данными между всеми участниками контура управления полетом.
Следует подчеркнуть, что в рамках созданного навигационного комплек-
са был решен ряд новых задач, в том числе:
— определение и оценка точности расчета орбит КА, выводимых на око-
лолунные траектории с относительно малыми высотами полета в условиях
недостаточного знания параметров гравитационного поля Луны;
— расчет коррекций перелетных траекторий и орбит ИСЛ с целью опти-
мального формирования посадочных орбит при существенных энергетичес-
ких и навигационных ограничениях;
— расчет торможения аппаратов для выведения КА на орбиту ИСЛ и для
посадки на Луну, обеспечение выполнения требований, необходимых для
нормального функционирования систем мягкой посадки;
— определение точек посадок на Луне и на Земле (для возвращаемых ап-
паратов);
— расчет стартов с Луны и поисковых зон на Земле;
— расчет условий радиоизмерений высоты полета для решения задачи гип-
сометрирования (определение формы) поверхности Луны.
Особое место в ходе навигационного обеспечения полетов лунных аппа-
ратов заняло совершенствование алгоритмов обработки траекторных измере-
ний, включая обработку нового вида измерений разностей радиальных ско-
ростей относительно разнесенных наземных антенн, а также юстировку вновь
вводимых наземных радиосистем.
Каждому пуску предшествовала предполетная подготовка, при которой
использовались результаты послеполетного анализа предыдущих объектов и
выводы из проделанной работы.
191
В частности, для успешного навигационного обеспечения управления КА
в предполетную подготовку входили следующие мероприятия.
1. Реализация тех рекомендаций, которые разрабатывались на основе ана-
лиза навигационных данных, полученных в предыдущем полете.
2. Разработка новых или усовершенствование предыдущих методов опре-
деления и прогнозирования параметров орбит, расчета маневров.
3. Реализация усовершенствованных методов и алгоритмов на ЭВМ.
4. С учетом программных материалов, инструкций по навигационному
обеспечению оперативных работ — разработка и утверждение навигацион-
ного временного графика. Этот график определял последовательность при-
ема и обработки траекторной информации, определения и прогнозирования
параметров орбиты КА, расчет маневров и порядок обмена навигационной
информацией между всеми участниками работ по управлению.
5. Согласно программе полета составление сверочного (контрольного)
задания и устанавление сроков тренировки всех навигационных центров (как
правило, два или три центра). Практика работы с КА показала, что такая
тренировка перед пуском КА не только необходима, но и обязательна. В ходе
тренировки происходит настройка всех математических программ на данный
объект и отрабатывается порядок обмена информацией между навигацион-
ными центрами и главной оперативной группой управления (ГОГУ).
6. За несколько дней до пуска КА проведение комплексной тренировки
всех служб для отработки взаимодействия в оперативной работе.
7. При подключении к работе астроизмерительных комплексов (оптичес-
ких обсерваторий) для них рассчитывались целеуказания.
Штатная схема полета объектов выглядит так:
— старт PH и выведение КА на промежуточную орбиту искусственного
спутника Земли;
— активный маневр на ИСЗ с целью перехода на траекторию перелета к
Луне;
— полет по трассе Земля — Луна с проведением активных маневров (кор-
рекции и торможение) для выхода на орбиту искусственного спутника Луны
(ОИСЛ);
— орбитальное движение по ОИСЛ с решением запланированных науч-
ных задач (для ИСЛ) или подготовка КА к посадке в заданный район повер-
хности Луны с проведением активных маневров;
— маневр схода с ОИСЛ, торможение и мягкая посадка на поверхность
Луны;
— в случае доставки лунного грунта на Землю: старт ракеты «Луна — Зем-
ля», полет к Земле по баллистической траектории (без коррекции ее пара-
метров), вход в атмосферу, аэродинамическое торможение, посадка возвра-
щаемого аппарата на Землю и поиск ВА.
192
1.5.2. Проектирование траекторий полета к Луне
1.5.2.1. Теоретические основы расчета и выбора траекторий полета
В литературе [43] обобщен опыт решения задач перелета с околоземной
орбиты на орбиту ИСЛ. Чтобы обеспечить оптимальные условия перелета к
Луне, т.е. близкую к п угловую дальность в любой день месяца, обычно ис-
пользуют промежуточную околоземную орбиту высотой около 200 км. КА с
последней ступенью ракеты-носителя предварительно выводится на орбиту
ИСЗ, плоскость которой проходит через заданную точку прицеливания. За-
тем с помощью последней ступени КА переводится на траекторию перелета
к Луне. Разгон начинается в тот момент, когда угловая дальность от текущей
точки на орбите до упрежденной точки близка к л. Если задан азимут выве-
дения, то запуск через Северное полушарие возможен только один раз в сут-
ки. При ограниченной протяженности второго активного участка старт с ор-
биты должен произойти в то время, когда КА перемещается в северном на-
правлении. Примерно через половину суток появляется возможность запус-
ка по тому же азимуту, но с перелетом через Южное полушарие. В этом слу-
чае старт с орбиты должен проводиться в то время, когда КА перемещается
в южном направлении.
Будем рассматривать двухимпульсные перелеты с околоземной орбиты на
орбиту ИСЛ в предположении, что оба маневра выполняются в плоскости
движения КА.
Если учесть эллиптичность орбиты Луны, то в зависимости от положения
упрежденной точки будет меняться геоцентрический радиус Луны и ее ор-
битальная скорость. Соответственно будет изменяться потребное прираще-
ние скорости для перелета кЛуне. Потребное приращение скорости при старте
с круговой орбиты ИСЗ радиуса 200 км исследовано в [40]. Величина затрат
характеристической скорости у Земли зависит не только от времени пе-
релета, но и от расстояния Земля — Луна. W зависит от времени перелета Т
и скорости Луны в момент встречи с ней КА vM. С погрешностью менее 5 м/с
можно считать величину не зависящей от наклонения орбиты ИСЗ. Ми-
нимум достигается при временах перелета 4.4 < Т < 4.9 суток. При этих вре-
менах реализуются траектории с апогеями, лежащими на орбите Луны. Раз-
брос минимальных значений в зависимости от VM составляет ~ 15 м/с. Рас-
четы, выполненные по приведенной ниже методике, дают следующие раз-
бросы значений затрат характеристической скорости у Земли для Яя - 200 км:
3.124-1.135 км/с.
Результаты расчетов характеристической скорости, необходимые для про-
ведения маневра у Луны в случае перелета с околокруговой орбиты ИСЗ на
околокруговую орбиту ИСЛ, приведены в [40]. В этом случае затраты харак-
теристической скорости зависят от времени перелета Т, угла i наклонения
плоскости траектории перелета к плоскости лунной орбиты и параметра
X = PA/sini3w , где VM— скорость Луны, а — ее оскулирующая истинная
193
аномалия в момент tM маневра у Луны. Расчеты, выполненные для высоты
перицентра Нп = 200 км, наклонения 51°, длительности перелета 4.4 < Т < 4.9
суток, на интервале 28 суток, дают следующие значения диапазона разброса
характеристической скорости у Луны: 0.835—0.875 км/с. Разброс суммарных
затрат характеристической скорости составляет 3.960—4.002 км/с.
При расчете номинальной траектории перелета Земля — Луна задаются:
— время достижения минимального расстояния КА до Луны,
— значение минимального расстояния,
— наклонение орбиты ИСЛ.
Параметрами краевой задачи для достижения заданных параметров явля-
ются:
— время старта ракеты-носителя,
время перехода с орбиты ИСЗ на траекторию перелета Земля —
Луна,
— начальная скорость перелетной траектории.
Основными алгоритмами расчет являются:
— определение начального приближения параметров краевой задачи
— преобразование краевых условий с целью обеспечения их почти линей-
ной зависимости от параметров краевой задачи , И;
— построение по текущей гиперболе такой гиперболы, параметры кото-
рой удовлетворяют заданным краевым условиям.
Решение краевой задачи производится итерационно. Сначала определяются
начальные значения параметров , И • Затем численно выполняется про-
стрел до достижения минимального расстояния от КА до Луны. Вычисляют-
ся параметры картинной плоскости, полученной в результате прогноза ги-
перболической орбиты. Полученная гипербола преобразуется к гиперболе,
которая удовлетворяет заданным краевым условиям, и для нее также вычис-
ляются параметры картинной плоскости. Далее решается краевая задача, обес-
печивающая заданные параметры картинной плоскости, и тем самым опре-
деляются уточненные значения , И . Происходит переход к следующе-
му шагу итерационного процесса.
1.5.2.1.1. Метод долготной привязки. Метод обеспечивает приближенный
расчет номинальной траектории перелета Земля — Луна на основе долгот-
ной привязки ее концов. Основы метода изложены в [40]. Считаются задан-
ными:
tM — время достижения Луны;
— географическая долгота, широта и высота над поверхностью,
определяющие точку начала перелета;
iE — наклонение перелетной траектории.
Задание tM фиксирует сферические координаты окололунного конца тра-
ектории и тем самым определяется — географическая долгота подспут-
194
никовой точки на этом конце траектории. Благодаря тому, что долготы кон-
цов траектории фиксированы, время перелета между ними можно выразить
«с точностью» до целого числа звездных суток через разность долгот концов
траектории и проекцию угловой дальности перелета на плоскость экватора.
Долгота, на которой находится КА в момент /, находится по формуле
Х(г)=Х£+Фэ(г)+ю£(^-г£), (1.5.1)
где Фэ(0 — проекция на плоскость экватора текущей угловой дальности Ф(/);
со£ — угловая скорость суточного вращения Земли; tE — момент начала тра-
ектории перелета.
В конечный момент времени tM имеем
= Хду, (1.5.2)
где п — целое число периодов, которое необходимо прибавить к углу
чтобы привести его к диапазону (-я,л).
Таким образом, время перелета Тх = tM-tE вычисляется по формуле
г (1.5.3)
2л
2л .
так как — = 1 — звездные сутки.
Рассмотрим угол р — проекцию аргумента широты на плоскость эквато-
ра. Этот угол связан с аргументом широты и и широтой подспутниковой точки
<р следующими соотношениями:
• о tg<p „ cosw
sinP = -^-!-, cosp =-----
tgz£ coscp
(1.5.4)
Решение уравнений (1.5.4) при заданных Ф и и обозначим как р(«,ф).
По определению,
фэ(^л/)“Р(4/л/’(Рл/) Р^Е’Фе)-
(1.5.5)
Аргументы широты иЕ и им определяются из соотношений:
sin фг
sinwp =-----—
sinz£
— < и
sin ф az
2<Um
Oil 1 IE
3л
<T‘
(1.5.6)
195
Используя (1.5.3)—(1.5.6), можно определить время перелета. Таким об-
разом, известны положения КА на двух концах траектории и время перелета.
Задача определения начального приближения траектории перелета сведена к
задаче Ламберта. При этом траектория, найденная в результате решения за-
дачи Ламберта, будет иметь заданное наклонение iE.
Рассмотрим теперь особенности метода долготной привязки при расчете
запуска КА к Луне с орбиты ИСЗ. Рассматривается следующая схема. Снача-
ла КА выводится на низкую орбиту ИСЗ (орбита выведения), плоскость ко-
торой содержит упрежденную точку, а затем в результате второго активного
участка — на перелетную траекторию, принадлежащую той же геоцентричес-
кой плоскости.
Орбита выведения имеет фиксированные параметры в гринвичской СК,
замороженной на момент старта. Пусть — долгота восходящего узла в
этой СК Q(yr) связана с широтой <рв и долготой Хв точки старта следующим
соотношением:
ЦГ)=Х/?-₽В’ sin₽/?=^f-- (1.5.7)
Любую наперед заданную долготу Qy узла орбиты ИСЗ в инерциальной
геоцентрической экваториальной СК (системы координат) можно реализо-
вать выбором момента tn запуска КА внутри любой даты. Момент времени
tn определяется из соотношения
(1.5.8)
50 — значение звездного времени в ноль часов всемирного времени даты
старта.
Долгота восходящего узла орбиты ИСЗ задается такой, какой она по-
лучается в ходе решения краевой задачи перелета к Луне. Начальное прибли-
жение находится методом долготной привязки.
При определении начального приближения траектории перелета считаются
заданными:
^г = (хе^Уе^е,Ух ,Vy ,Vz^ — вектор состояния орбиты выведения в
гринвичской СК, фиксированной на момент старта; tM — момент достиже-
ния Луны; п — число суток перелета.
Требуется определить время старта , момент перехода на перелетную
траекторию и начальную скорость на перелетной траектории Иу .
На первом шаге алгоритма определяется долгота восходящего узла Qy пе-
релетной траектории и время старта . Вначале определяются приближен-
ные значения Qy и , которые затем уточняются. При определении при-
ближенных значений полагается, что наклонение орбиты ig в гринвичской
196
СК, фиксированной на момент старта, приближенно равно наклонению iy в
инерциальной СК. В соответствии с определением
йт = «л/('л/Нлр (1 5.9)
где ам (tM) — прямое восхождение Луны на момент tM в инерциальной СК;
₽Л/ — проекция аргумента широты перелетной траектории на момент дос-
тижения Луны на плоскость экватора.
Угол Pw находится с использованием (1.5.4) и (1.5.6) по формуле
= л-arcsin tg8^\ (1.5.10)
Ъм — склонение Луны на момент в инерциальной СК.
С использованием числа суток перелета и даты достижения Луны опреде-
ляем De — дату старта и 50 — звездное время на ноль часов даты стар-
та. Время старта FQ определим с использованием уравнения (1.5.8):
_Q -Уо(4)-^>
(1.5.11)
По найденным значениям даты и времени старта вычисляем вектор со-
стояния и элементы орбиты выведения в инерциальной СК. После этого пос-
ледовательно находим:
□ tg (tM)
= я-arcsin----7—- — проекцию аргумента широты перелетной тра-
1g
ектории на момент достижения Луны на экватор;
£2 = ам )“Рм — уточненную долготу восходящего узла перелетной
траектории;
Q-Q
А/ =-----1 — поправку к времени старта.
Здесь iy — наклонение орбиты выведения в инерциальной СК; — долго-
та восходящего узла орбиты выведения в инерциальной СК.
Используя поправку, определяем дату DE и время старта .
На втором шаге алгоритма определяется — время перехода на перелет-
ную траекторию. Момент ищется перебором от момента старта в пределах
витка. По каждому значению с использованием (1.5.8) определяется вре-
мя перелета и решается задача Ламберта. Левый конец определяется
положением на орбите выведения в момент , а правый — заданным поло-
жением Луны на момент tM. Ищется такой момент при котором минима-
лен модуль разности векторов скорости орбиты выведения и орбиты переле-
197
та. Для околокруговой орбиты это достигается в точке, в которой вектор
скорости орбиты перелета ортогонален вектору геоцентрического положения.
Поиск момента можно выполнять по следующей схеме: перебором с боль-
шим шагом (например, ~30 мин) определить соответствующее минималь-
ному значению, а затем его уточнить методом хорд. Точность определения
для начального приближения составляет ~ 1 мин.
После того, как найдено время перехода на траекторию перелета, на-
чальная скорость И на перелетной траектории определяется по орбите пе-
релета.
Особенностью изложенного алгоритма определения момента является
то, что минимум достигается на углах, близких к я между векторами гео-
центрического положения начальной и конечной точек траектории переле-
та. Это вызывает сложности при использовании классического алгоритма
задачи Ламберта, так как плоскость орбиты определяется с использованием
векторного произведения векторов положения в начальной и конечной точ-
ках. В рассматриваемом случае плоскость орбиты заранее известна, так как
ортогональный ей орт вектора кинетического момента имеет компоненты, ко-
торые выражаются через уже известные наклонение / и долготу восходяще-
го узла Qy по формулам
(sinzysinQy, -sinzycosQy, coszy) . (1.5.12)
Поэтому отмеченную сложность можно избежать, если использовать мо-
дификацию алгоритма решения задачи Ламберта, при которой плоскость
орбиты считается известной.
В работе [40] предложен другой алгоритм построения начального прибли-
жения. Начальные параметры перелетной траектории определяются итераци-
онно. Параметром алгоритма является широта <рв начала траектории пере-
лета. Заданием <рв определяются элементы перелетной траектории при ус-
ловии, что перелетная траектория начинается в перицентре. Тем самым оп-
ределяется время перелета 7^(фд). С другой стороны, методом долготной
привязки определяется время перелета Tk (ф^). Выбором <рв нужно добить-
ся, чтобы тф (фв) = тх (фв).
Рассмотрим алгоритм расчета 7^,(фв) и 7^(фв) в предположении, что
перелет происходит через Северное полушарие.
1) Находим аргументы широты начальной ив и конечной им точек пере-
летной траектории с использованием следующих уравнений и неравенств:
sin фд
sinz/o =---
sinz‘
л „ „ л
-<Ид <-,
2 в 2
ЗШф.,
sinz/v =------
м sin/
Зя
'л/ - 2
(1.5.13)
198
2) Находим углы pg и рм с использованием следующих соотношений:
л
2’
(1.5.14)
п
2
(1.5.15)
о л
Sinp„=-^, --<
В tg/T 2
sin В =W
Рл/ tg/y ’ 2
3) Определяем угловую дальность перелета Ф и проекцию угловой даль-
ности на экватор Фэ:
ф = им ~ ив > ~ Рл/ “ Рд •
4) Находим долготу точки перехода на орбиту перелета:
^ = ЦГ)+₽я- (1.5.16)
5) Определяем время перелета Тк (<рй) методом долготной привязки:
6) Находим геоцентрическое расстояние гв и начальную скорость перелет-
ной траектории V по формулам
rB = rF + HB, Ув=\1$вУп(гв)’
где гЕ — радиус Земли; Нв — высота над поверхностью в момент перехода на
(1.5.17)
(1.5.18)
перелетную траекторию; Vp
— местная параболическая скорость;
гравитационная постоянная Земли.
Рв вычисляется по формуле, связывающей угловую дальность полета с на-
чальной скоростью и углом вектора начальной скорости с трансверсалью,
n J.___________l-cosO________ v=rB_
в 2 vcos20e-cos6Bcos(<I> + 6B) ’ rM ’ (1.5.19)
где GB — угол вектора скорости с трансверсалью (в случае импульсного пе-
рехода точка перехода на перелетную орбиту должна быть ее перицентром и
ев=о).
7) Находим р, а, е — элементы орбиты перелета:
p = 2rBPBcos2eB, о = ~2^_1у e = (1-5.20)
199
8) Определяем истинную аномалию ®в,®м в точках Ви Мпри исполь-
зовании соотношений:
sinOB = ^.e* fT,
(1.5.21)
9) Последовательно находим Ев, Ем — эксцентрические аномалии; Мв,
МЕ — средние аномалии точек В, Ми время перелета Тф по формулам:
On
tgy-,
MB = EB-esinEB, Мм = Ем-esinEM,
(1.5.22)
После того как найдена широта <рв, при которой Тф (срл) = Тх (срл), и оп-
ределены средняя Мв и истинная 0^ аномалии, находим элементы пере-
летной орбиты т, соу, по формулам:
x = tB-MB — , co7=uB-OB, = ам (^и)”Рлг (1.5.23)
Время момента перехода с орбиты выведения на перелетную орбиту оп-
ределяется по формуле
= (1-5.24)
В предложенном методе расчета никак не учитывается, что КА, старто-
вавший в момент 9 должен, двигаясь по орбите выведения, в момент
оказаться в точке В.
1.5.2.1.2. Картинная плоскость. Задачи расчета траекторий сближения с
Луной являются нелинейными. Расстояние рп селеноцентрической траекто-
рии от центра масс Луны есть нелинейная функция модуля вектора прицель-
ной дальности b (вектор, лежащий в плоскости орбиты, направленный из
фокуса ортогонально асимптоте гиперболы, рис. 1.5.1):
<15-25>
200
Рис. 1.5.1. Селеноцентрическая гипербола: радиус вектор рл в периселении, вектор
прицельной дальности b и скорость «на бесконечности» U„
где Цду — гравитационная постоянная Луны; — скорость на бесконечно-
сти селеноцентрической гиперболы.
Вектор Ь линейно зависит от отклонений начальных данных; он принад-
лежит плоскости, ортогональной вектору оскулирующей в периселении ско-
рости на бесконечности (картинная плоскость) [44]. Вектор Ь принадлежит
этой плоскости. Его координаты в картинной плоскости линейно зависят от
начальных данных. Тем самым, краевые задачи полета к Луне можно сводить
к линеаризованным краевым задачам реализации координат картинной плос-
кости, которые соответствуют выполнению заданных у Луны условий. Сна-
чала координаты картинной плоскости вычисляются приближенно, а затем
на каждой итерации происходит их перевычисление.
Вместо координат картинной плоскости можно использовать другие па-
раметры, которые линейно зависят от вариаций начальных данных. При ре-
шении задач проектирования перелетных траекторий удобно в качестве ко-
ординат Н, R принять селеноцентрические координаты вектора с направле-
нием радиуса-вектора рл периселения и с модулем
в плоскости, про-
ходящей через вектор рп ортогонально вектору Un. Здесь рм — радиус Луны;
U — вектор селеноцентрической скорости в периселении.
Орты Я0 и Л° определим по формулам:
я° = / s л° = я°х[70,
(1.5.26)
^°(/л) — орт направления Луна — Земля в момент прохождения периселе-
ния tn.
201
Положим, по определению,
рО — орт направления рк.
При численном интегрировании расчеты целесообразно выполнять по
следующей схеме.
Определить момент прохождения периселения из условия
а-5-28)
, Дэ, — координаты КА в невращающейся селеноцентрической геоэк-
ваториальной СК.
В момент tn находим элементы гиперболической орбиты: ,т'.
Компоненты орта р® = ,т|® определяем по формулам:
=cosa)'cosQ'-sinco sinQ'cos/',
т)° = cosco'sinQ'+sin со'cosQ'cos/',
•л ’
С° = sin со' sinz'.
Компоненты орта вектора скорости U® = ,т|^, ) находим
лам:
sin со'cos Q' - cos со'sin Q' cos /'),
f]0 = (- sin co'sin Q' + cos co'cos Q'cos z'),
t®. = cos co'sinz'.
1.5.2.1.3. Алгоритм построения гиперболы по вектору скорости
нечности», расстоянию перицентра, наклонению и долготе восходящего узла.
Входной информацией являются:
— вектор скорости «на бесконечности»;
ря — расстояние в перицентре;
z — наклонение;
Q — долгота восходящего узла.
Алгоритм обеспечивает построение гиперболической орбиты, плоскость
которой определяется заданными наклонением z и долготой восходящего узла
Q; расстояние в перицентре равно заданному рк; модуль скорости на беско-
нечности равен |Ко|, а направление совпадает с проекцией вектора скорости
«на бесконечности» на плоскость орбиты.
(1.5.29)
по форму-
(1.5.30)
«на беско-
202
1) Из интеграла энергии находим модуль вектора скорости в перицентре:
(1.5.31)
2) Из условия ортогональности векторов положения рп и скорости V* в
перицентре находим модуль векторного интеграла площадей:
(1.5.32)
3) Определяем компоненты векторного интеграла
С = (Сх,Су, Cz по формулам:
площадей
Сх = С sinzsinQ,
С = С sinzcosQ,
Cz = С cosz.
(1.5.33)
4) Находим параметр гиперболы р и эксцентриситет е:
„я,е l+<t
Ил/ v
5) Находим ето1 = (хто, уж )Г проекцию орта вектора скорости «на бесконеч-
ности» на плоскость орбиты по формулам:
(1.5.34)
х
5 К.
0’17П
V
(1.5.35)
Ро = (cosQ, sin Q, Of,
= (- sin Q cos i, cos Q cos z, sin if.
6) Находим =(^оо,т|оо)Г “ °PT вектора скорости «на бесконечности» в
плоскости £,т| (ось £ направлена из фокуса Fx к фокусу Г2) по формулам:
^=71^7. (1.5.36)
7) Аргумент перицентра находим как угол поворота вектора <?„2 к векто-
РУ Li •
8) Вычисляем компоненты векторов рл и Vn по формулам:
203
Хя = Pit (COS tOCOS “ S*n <BS*n COS Z ) ’
yn =Pn (costosinQ + sincocosQcosz),
zn = pnsin cosin i,
хл = | Йл | (- sin cocos Q - cos cosin Q cos i),
Л = |^я | (” sin (DS’n + cos (DCOS cos z) ’
= Kj cos cosin z.
(1.5.37)
1.5.2.2. Схема полета к Луне
Схема полета КА (рис. 1.5.2) состоит из ряда этапов: выведение КА на
траекторию полета к Луне, перелет к Луне, торможение у Луны и выход на
ОИСЛ.
Выведение КА на траекторию полета к Луне осуществлялось с помощью
PH и разгонного блока (РБ). Три ступени PH обеспечивают выведение кос-
мической головной части, состоящей из РБ и КА, на околоземную опорную
орбиту. Затем с помощью одного включения двигательной установки разгон-
ного блока, которое выполнялось на первом витке опорной орбиты, КА пе-
реводится на траекторию полета к Луне. Дата старта внутри выбранного ме-
сяца старта выбиралась из условия максимизации выводимой массы КА на
орбиту спутника Луны. Время полета до Луны выбиралось из условия мини-
мизации импульсов скорости, необходимых для перевода КА на траекторию
полета к Луне и для выхода на ОИСЛ, и составляло примерно 4,5 суток.
Параметры траектории перелета к Луне и момент старта выбирались из ус-
ловия обеспечения выведения КА на круговую орбиту спутника Луны с за-
данными высотой и наклонением в селенографической системе координат.
При отлете от Земли КА движется по высокоэллиптической орбите. При
подлете к Луне КА относительно Луны движется по гиперболической траек-
тории с фокусом в центре Луны.
Для характеристики прохождения КА в окрестностях Луны рассмотрим так
называемую картинную плоскость, под которой будем понимать плоскость,
проходящую через центр Луны и ориентированную ортогонально вектору
скорости сближения КА с Луной, взятому на бесконечности (KJ.
Наряду с приведенным в предыдущем разделе определением картинной
плоскости, возможно и следующее представление , которое может исполь-
зоваться как первое приближение при проведении точных расчетов.
Вектор представляет собой разность скоростей КА относительно Зем-
ли и Луны относительно Земли Им:
V = V — V
~ гка гм •
204
выведение на орбиту спутника луны
выведение на опорную орбиту
1-я коррекция траектории перелета
выведение на траекторию перелета к Луне
Рис. 1.5.2. Схема перелета к Луне и выхода на орбиту ИСЛ
Введем в картинной плоскости прямоугольную систему координат с на-
чалом в центре масс Луны и единичными векторами fj0.
Оси выбранной системы координат выбираются при помощи заданного
единичным вектором TQ направления по формулам:
205
й - Ко - Ко
^о=Пох —, По=—=~,
” / х-=-
z0xK
оо
при этом лежит в плоскости подлетной гиперболической траектории.
При полете к Луне TQ — единичный вектор в направлении Земля — Луна.
Ожидаемое сближение КА с Луной без учета ее притяжения (для приме-
нения линеаризации) можно охарактеризовать вектором прицельной дально-
сти W, который представляет собой перпендикуляр, опущенный из фокуса
гиперболы на ее асимптоту.
При выборе начальных параметров траектории перелета решалась трехпа-
раметрическая краевая задача, в которой варьируемыми параметрами явля-
лись время старта внутри выбранных суток старта, время включения двига-
теля разгонного блока и время его работы. Контролируемыми параметрами
являлись две координаты ц и £ в картинной плоскости и время прилета КА
в картинную плоскость. При этом время прилета КА в картинную плоскость
выбиралось из условия, что после проведения торможения у Луны и выхода
КА на ОИСЛ КА оставется в зоне радиовидимости основной наземной стан-
ции около 2 часов.
На участке перелета к Луне планировалось проведение двух коррекций
траектории полета. Первая коррекция выполнялась через 32—38 часов после
старта на расстоянии 210—260 тысяч км от Земли и устраняла погрешности
при выведении КА на траекторию перелета. Указанное время проведения
первой коррекции определялось из условия проведения нескольких сеансов
траекторных измерений, на основании которых уточнялись параметры тра-
ектории перелета к Луне и вычислялись данные, необходимые для выполне-
ния коррекции. Эта информация в виде радиокоманд (РК) передавалась на
борт КА и закладывалась в бортовую систему управления. После этого, в
расчетное время КА разворачивался в пространстве для ориентации вектора
импульса коррекции нужным образом и включался двигатель коррекции.
При необходимости, в районе 80-го часа полета могла быть проведена
вторая коррекция траектории полета к Луне. Эта коррекция могла понадо-
биться для ликвидации отклонений координат прицельной точки траектории
перелета в картинной плоскости у Луны. Эти отклонения могут быть вызва-
ны погрешностями исполнения первой коррекции и точностью прогнозиро-
вания параметров траектории полета к Луне перед ее проведением.
После каждой коррекции проводилось несколько сеансов траекторных
измерений и уточнение параметров траектории полета. По уточненным зна-
чениям параметров траектории полета проводился расчет командной инфор-
мации, необходимой для выполнения следующей коррекции.
206
При подлете к Луне выполнялся маневр торможения, в результате чего КА
переводился на околокруговую селеноцентрическую орбиту высотой около
100 км.
После выведения КА на ОИСЛ начинался цикл научных исследований.
Более подробно рассмотрим задачу выведения КА на ОИСЛ на примере
полета КА «Луна-17» («Луноход-1»).
Три ступени PH обеспечили выведение космической головной части, со-
стоящей из РБ и КА, на околоземную орбиту с перигеем 187 км, апогеем
205 км и наклонением 51,6°.
По сигналу бортового программно-временного устройства (ПВУ) через
65 мин с момента старта был включен двигатель последней ступени. После
сообщения необходимой скорости двигатель выключился, КА отделился от
последней ступени PH и перешел на траекторию полета к Луне.
Наземные станции слежения осуществляли телеметрический контроль
бортовых систем и обеспечили измерения параметров движения КА.
Обработка результатов траекторных измерений позволила определить па-
раметры фактической траектории движения. Их значения оказались доста-
точно близкими к планируемым, однако для обеспечения выхода автомати-
ческой станции точно в заданный момент времени в расчетный район око-
лолунного пространства 12 ноября 1970 года была намечена и осуществлена
коррекция траектории движения КА.
Исходные данные для проведения коррекции траектории (величина и
направление корректирующего импульса, а также время включения двигате-
ля) были рассчитаны по результатам обработки траекторных измерений. Эти
данные в виде специальных групп радиокоманд были переданы на борт КА
и заложены в блок памяти программно-временного устройства.
В начале сеанса коррекции КА с помощью системы управления и опти-
ческих приборов системы астроориентации был точно сориентирован в про-
странстве относительно Солнца и Земли в заданном направлении. После
завершения всех подготовительных операций по команде системы управле-
ния включился двигатель, сообщивший КА необходимый корректирующий
импульс.
Проведенная коррекция предназначалась для ликвидации незначительных
отклонений траектории движения КА от расчетной. В момент проведения
коррекции КА находился на расстоянии 223 тысячи км от Земли.
На участке движения КА после коррекции проводились траекторные из-
мерения и телеметрический контроль исполнения коррекции.
Для обеспечения условий посадки КА в заданную точку поверхности Луны
14 ноября 1970 года была проведена вторая коррекция траектории полета, на
расстоянии 356 тыс. км от Земли, энергетические затраты при этом были
незначительны. Обработка результатов траекторных измерений, проведенных
после выполнения второй коррекции, подтвердила высокую точность испол-
нения коррекции.
207
Перед подлетом к Луне началась подготовка систем КА к переходу на
ОИСЛ. КА опять был сориентирован в пространстве по Солнцу и Земле и
развернут в требуемое положение.
При достижении КА заданного района окололунного пространства была
произведена подготовка и осуществлено включение двигателя с целью умень-
шения скорости подлета к Луне и перевода КА на ОИСЛ. В результате про-
веденного торможения КА «Луна-17» перешел на селеноцентрическую орби-
ту искусственного спутника Луны со следующими параметрами: высота над
поверхностью Луны — 85 км, наклонение орбиты к плоскости лунного эква-
тора 141°, период обращения вокруг Луны — 1 час 56 мин.
1.5.3. Наземные средства
Наземные средства управления КА лунной программы формировались с
учетом необходимости решения следующих основных задач управления КА:
• планирование работы КА и наземных средств управления;
• определение параметров движения КА и другой навигационной инфор-
мации;
• расчет командной информации для проведения маневров (коррекции, тор-
можения и т.д.) и различных операций управления и научного назначе-
ния;
• передача команд и командно-программной информации (КПИ) на КА с
оперативным контролем закладки;
• прием и обработка телеметрической, фотометрической и другой конт-
рольной информации;
• оперативное управление КА.
Начальный этап реализации лунной программы (вплоть до КА «Луна-13»)
совпал с этапом становления и развития наземного комплекса управления
среднего и дальнего космоса. Кроме того, поскольку для решения целевых
задач на начальном этапе (посадка на поверхность Луны, вывод на ОИСЛ)
использовалась «прямая» попадающая траектория перелета, для управления
этими КА была подготовлена одна наземная станция, работавшая в метро-
вом диапазоне (102/186 МГц) с антенной системой (АС) диаметром 25 м.
Станция размещалась в районе г. Симферополь.
При реализации следующего этапа лунной программы (работы на ОИСЛ,
посадка в заданный район лунной поверхности «Лунохода» и возвращаемой
ракеты, проведение гравитационных и гипсометрических измерений и т.д.)
были предъявлены более высокие требования по точности навигационных
параметров полета и оперативности управления. В связи с этим с целью обес-
печения необходимого энергетического потенциала радиолинии и повыше-
ния точности траекторных измерений для радиолинии управления был выб-
ран дециметровый диапазон (0,77/0,92 ГГц). Этот комплекс был также раз-
мещен в районе г. Симферополь. В его составе были задействованы:
• на прием — антенная система (АС) диаметром 32 м;
• на передачу — АС диаметром 25 м;
208
• дополнительно для повышения надежности командного управления КА
была организована командная радиолиния в метровом диапазоне с исполь-
зованием АС с эффективной площадью ~ 100 м2.
Комплекс обеспечивал:
• выдачу радиокоманд (РК) и КПИ на КА с квитированием;
• прием ТМИ с информативностью 50, 200, 800, 3200 изм/с;
• прием фототелевизионной информации;
• прием информации малокадрового телевидения — при управлении дви-
жением «Лунохода».
При выдаче РК и КПИ применялись передающие устройства мощностью
до 10—20 кВт с регулированием выходной мощности. Принятая с КА теле-
метрическая информация для целей оперативного анализа представлялась в
графическом виде для «ручной» дешифровки, а для целей апостериорного ана-
лиза — передавалась на комплексы обработки ТМИ с выдачей результатов
после окончания сеанса связи.
Фототелевизионная информация, принятая с КА, обрабатывалась назем-
ными специализированными системами, с выдачей результатов обработки на
фотопленку и электрохимическую бумагу или на экраны рабочих мест эки-
пажа управления «Луноходом».
Для обеспечения необходимой точности, особенно на этапе работы КА на
ОИСЛ, предполагалось использование метода измерения разности радиаль-
ных скоростей. Для навигационного обеспечения полета привлекались назем-
ные станции в составе двух «треугольников»: Евпатория (регион Крым) —
Щелково (регион Москва) — Байконур и Уссурийск — Камчатка — Байко-
нур. Эти станции проводили также измерения дальности, радиальной скоро-
сти и, кроме того, могли привлекаться для управления КА как резервные.
В составе этих наземных станций использовались АС с диаметром зеркала 16 м
и 20 м и передающие устройства мощностью 10—20 кВт.
Полученные результаты измерений передавались по выделенным каналам
связи в навигационные центры.
К реализации управления КА лунной программы привлекалось два нави-
гационных центра: Институт прикладной математики им. М.В. Келдыша
Академии наук СССР (ИПМ АН СССР) и Центральный научно-исследова-
тельский институт машиностроения (ЦНИИМАШ). Каждый из центров все
необходимые расчеты делал самостоятельно, результаты расчетов сравнива-
лись, после чего межведомственная навигационная группа принимала реше-
ние об использовании конкретного варианта расчетов.
В процессе управления КА навигационные центры решали следующие
задачи:
— обработка траекторных измерений и определение траектории полета;
— прогнозирование движения КА;
— расчет начальных условий и целеуказаний наземным средствам для ра-
боты с КА;
209
— определение зон видимости КА и видимых частей витков ОИСЛ для
каждой из привлекаемых к работе наземных станций;
— расчет условий ориентации и условий функционирования КА;
— расчет КПИ для ориентации КА при выполнении активных маневров
(коррекция траектории или ОИСЛ, торможение, сход с орбиты для посадки
и т.д.).
Результаты расчетов (после сравнения) передавались по выделенным ка-
налам связи, в виде форм с соответствующими аналоговыми и кодовыми
значениями, потребителям (в группу управления, в наземные станции и др.)
для планирования и проведения работ с КА и реализации заданной целевой
программы функционирования КА.
1.5.4. Зоны радиовидимости
В составе навигационного программного комплекса важное место зани-
мала задача расчета условий видимости КА на различных участках полета. Это
особенно важно при планировании проведения таких операций, как провер-
ка работы бортовых систем при первом их включении после перевода КА на
траекторию перелета к Луне, подготовка и проведение коррекций траекто-
рии перелета и торможения при переводе КА на орбиту спутника Луны.
В нижеследующих таблицах приведены зоны видимости КА «Луна-17» на
участке перелета к Луне и выхода на орбиту спутника Луны из двух назем-
ных станций, участвовавших в управлении полетом — Симферополь и Уссу-
рийск. Зоны видимости соответствуют углу места КА, равному 5°.
Как видно из этих таблиц, интервалы видимости из обоих пунктов доста-
точно большие — около 16—17 часов, причем интервал, когда нет видимос-
ти ни из одного из двух пунктов, составляет не более 1 часа. Важно, что су-
ществует совместная зона радиовидимости с разнесенных станций слежения.
Эти факты существенно облегчают задачу планирования проведения различ-
ных операций с КА, навигационное обеспечение полета, а также надежность
и дублирование наземных средств при возникновении нештатных ситуаций.
Зоны видимости КА «Луна-17» на перелете к Луне для НС Симферополь
Начало видимости Конец видимости Интервал
Дата Время Дата Время Время
число, месяц, год час: мин число, месяц, год час: мин час: мин
10.11.70 19:04 11.11.70 10:30 15:26
11.11.70 16:45 12.11.70 10:24 17:39
12.11.70 17:24 13.11.70 10:18 16:54
13.11.70 17:54 14.11.70 10:12 16:18
14.11.70 17:40 15.11.70 10:11 16:31
15.11.70 18:31 16.11.70 11:09 16:38
210
Зоны видимости КА «Луна-17» на перелете к Луне для НС Уссурийск
Начало видимости Конец видимости Интервал
Дата Время Дата Время Время
число, месяц, год час: мин число, месяц, год час: мин час: мин
10.11.70 19:27 11.11.70 03:42 09:15
11.11.70 09:48 12.11.70 03:42 17:54
12.11.70 10:50 13.11.70 03:42 16:52
13.11.70 11:12 14.11.70 03:30 16:18
14.11.70 11:01 15.11.70 03:17 16:16
15.11.70 11:20 16.11.70 04:18 16:58
1.5.5. Управление траекторией
После выведения космической головной части, состоящей из РБ и КА, на
траекторию полета к Луне и отделения КА от разгонного блока начинается
функционирование самого КА.
Следует подчеркнуть, что на участке перелета к Луне (до операции «тор-
можение») нет необратимых действий, от выполнения которых зависит судьба
проекта. В случае необходимости можно перенести времена проведения кор-
рекций траектории перелета. В номинальном варианте времена проведения
коррекций выбираются из соображений разумного компромисса между точ-
ностью прогнозирования параметров траектории перелета и величиной кор-
ректирующего импульса. Чем раньше будет проведена первая коррекция тра-
ектории перелета, тем меньше будет величина корректирующего импульса
(при одной и той же погрешности выведения), однако из-за худшей точно-
сти прогнозирования параметров траектории перелета увеличится величина
импульса скорости второй коррекции.
Возникновение нештатных ситуаций на участке выведения на траекторию
перелета к Луне может привести к тому, что при проведении первой коррек-
ции в намеченный временной интервал величина корректирующего импуль-
са будет существенно превышать допустимую. В этом случае имеется возмож-
ность провести первую коррекцию траектории перелета в другом интервале
видимости, уменьшив тем самым необходимую величину корректирующего
импульса.
Намеченный цикл проведения траекторных измерений в случае недоста-
точной информации также может быть скорректирован нужным образом.
Для расчета КПИ для проведения коррекции траектории перелета реша-
лась трехпараметрическая краевая задача, в которой варьируемыми парамет-
рами являлись три проекции вектора корректирующего импульса. Контро-
лируемыми параметрами являлись две координаты т| и в картинной плос-
кости и время прилета КА в картинную плоскость (см. раздел 1.5.2.1.2). Ко-
ординаты т| и выбирались из условия выведения КА на круговую орбиту
211
спутника Луны с заданной высотой и наклонением плоскости орбиты к плос-
кости селенографического экватора. При этом время прилета КА в картин-
ную плоскость выбиралось из условия, что после проведения торможения у
Луны и выхода КА на ОИСЛ КА остается в зоне видимости наземной стан-
ции управления не менее 2 часов.
На участке перелета к Луне планировалось проведение двух коррекций
траектории полета. Первая коррекция выполнялась через 32—38 часов после
старта на расстоянии 210—260 тысяч км от Земли и устраняла погрешности
при выведении КА на траекторию перелета. Указанное время проведения
первой коррекции определялось из условия проведения нескольких сеансов
траекторных измерений, на основании которых уточнялись параметры тра-
ектории полета к Луне, и вычислялась КПИ, необходимая для выполнения
коррекции. Эта информация передавалась на борт КА и закладывалась в
бортовую систему управления. После этого в расчетное время КА разворачи-
вался в пространстве для ориентации вектора импульса коррекции нужным
образом и включался двигатель коррекции.
При необходимости, в районе 80-го часа полета, могла быть проведена
вторая коррекция траектории полета к Луне. Эта коррекция могла понадо-
биться для парирования отклонений прицельной точки траектории перелета
в картинной плоскости у Луны от заданной. Эти отклонения, как правило,
обусловлены погрешностями исполнения первой коррекции и точностью
прогнозирования параметров траектории полета к Луне перед ее проведени-
ем.
После каждой коррекции проводилось несколько сеансов траекторных
измерений и уточнение параметров траектории полета. По уточненным зна-
чениям параметров траектории полета проводился расчет КПИ, необходи-
мой для выполнения следующей коррекции.
В отличие от участка перелета к Луне маневр торможения является нео-
братимым и должен произойти строго во времени и пространстве. Невыпол-
нение этого маневра приводит к невыполнению целевой задачи в целом.
Навигационное обеспечение таких критичных операций должно удовлетво-
рять особым требованиям по надежности и устойчивости к возможным не-
штатным ситуациям.
При проведении проектных работ на различных этапах проблемы необра-
тимости решаются в основном методами функционального резервирования
бортовых и наземных систем, подтверждаемых физическим и математичес-
ким моделированием. Кроме того, при выборе номинальной траектории
полета необходимо обеспечить на тех участках траектории, где происходит
работа бортовых систем, отсутствие мешающих факторов, таких как нахож-
дение КА в тени Луны или Земли.
В остальном управление траекторией полета КА на этапе торможения у
Луны и выхода на ОИСЛ не отличается от управления траекторией полета
КА на этапе перелета.
212
1.5.6. Организационные структуры управления полетом
Поскольку в реализации лунной программы КА привлекались техничес-
кие средства и организации различного ведомственного подчинения, для
управления КА была организована межведомственная Главная Оперативная
Группа Управления (ГОГУ).
Основными функциями ГОГУ были:
1. Организация работ персонала по управлению полетом.
2. Координация работы организаций и ведомств по выполнению целевых
задач программы.
3. Принятие решений по реализации конкретной миссии, в том числе и в
случае нештатных ситуаций на КА и /или на Земле.
4. Подведение итогов по выполнению этапов полета и переходу к после-
дующему этапу.
Основные рабочие органы ГОГУ:
• оперативно-техническое руководство (ОТР). Собиралось для принятия
принципиальных решений, влияющих на выполнение задач полета, состо-
яло из руководителей групп ГОГУ и представителей организаций;
• группа управления (ГУ) — персонал специалистов, выполняющий плани-
рование работ и непосредственное управление полетом;
• группа анализа (ГА) — мониторинг бортовых систем КА;
• группа координации и анализа работы наземных средств;
• межведомственная навигационная группа (МНГ).
Техническим руководителем ГОГУ, а также руководителями ОТР, ГУ и
ГА являлись представители НПО им. С.А. Лавочкина.
Область ответственности каждой группы ГОГУ, их взаимодействие опре-
делялись соответствующими Положениями. В частности, порядок работы,
зоны ответственности, обмен информацией и взаимодействие групп, участву-
ющих в управлении КА, определялось «Положением по управлению и взаи-
модействию организаций при управлении КА».
В соответствии с этим «Положением...» основным документом, устанав-
ливающим технический порядок работ с конкретным КА, являлась «Програм-
ма полета КА». Документ выпускался НПО им. С. А. Лавочкина не позднее,
чем за месяц до запуска КА, как организацией, ответственной за управление
КА, и согласовывался со всеми участниками реализации лунной программы.
«Программа полета КА» содержала:
— последовательность и перечень сеансов связи, технических и целевых
операций, проводимых с КА на каждом этапе работ;
— описание типовых сеансов связи и операций управления КА;
— справочная информация по управляющим воздействиям на КА (функ-
ции, реализуемые в системах КА радиокомандами, командами ПВУ и дру-
гими управляющими сигналами, схемы прохождения управляющих и конт-
рольных сигналов, логические алгоритмы и др.);
— алгоритмы расчета РК и КПП;
213
— состав и основные характеристики наземных средств управления;
— анализ возможных нештатных ситуаций, алгоритмы и методы их пари-
рования и устранения.
Группа управления в ЦУПе, на основании ранее согласованной «Програм-
мы полета КА», с учетом конкретного текущего состояния КА и наземных
средств, реальных навигационных данных, рекомендаций разработчиков КА
и бортовых систем разрабатывала суточную программу работы КА и привле-
чения наземных средств, программу конкретных сеансов связи.
Сеансы, реализуемые только радиокомандным управлением, как прави-
ло, расписывались в виде перечня РК с привязкой к времени выдачи, соста-
вом и режимами работы наземных средств в специальном журнале проведе-
ния работ.
Более сложные сеансы с использованием программ программно-времен-
ного устройства (ПВУ), отработкой КПИ и «гибких» программ расписыва-
лись в виде наглядных графических плакатов с указанием управляющих воз-
действий (РК и команд ПВУ), их функций, времени выдачи (или прохожде-
ния на борту КА), моментов выполнения ключевых операций, составом и
режимами работы наземных средств. На КА лунной программы управляю-
щие воздействия ПВУ формировались как «жесткие» программы, и это по-
зволило подобные графические плакаты типовых операций и сеансов гото-
вить заранее с конфигурацией временной привязки и отдельных РК для кон-
кретного КА.
Перечень разработанных сеансов в журнале проведения работ и плакаты
операций (сеансов) управления КА согласовывались с участвующими в уп-
равлении группами и утверждались Руководителем и Техническим руково-
дителем ГОГУ.
В процессе подготовки и разработки сеансов и операций управления КА
осуществлялось взаимодействие между отдельными группами ГОГУ, регла-
ментированное выпущенными до пуска КА документами «Положение по
управлению КА» и «Порядок взаимодействия и обмена информацией между
группами ГОГУ и организациями, участвующими в управлении КА».
Наиболее характерным примером такого взаимодействия может быть под-
готовка к проведению маневра коррекции (или торможения при выходе на
ОИСЛ).
1. ГУ разрабатывает и доводит до всех групп ГОГУ и участвующих в уп-
равлении КА организаций предстоящую суточную программу работы с КА и
конкретной операции управления КА с предварительной привязкой по вре-
мени.
2. Группы ГОГУ и участвующие организации сообщают в ГУ свои пред-
ложения по суточной программе и реализации операции управления, вклю-
чая конкретные параметры.
В частности, Межведомственная навигационная группа (МНГ) сообща-
ет в ГУ:
214
— предложения по проведению траекторных измерений;
— расчетные параметры навигационных условий работы с КА (зоны ви-
димости КА средствами наземных станций, видимые зоны витков ОИСЛ, ин-
тервалы и характеристики видимости Солнца и опорных ориентиров и др.);
— расчетные параметры на проведение маневра;
— условия контроля маневра по данным траекторных измерений;
— расчетные параметры траектории движения КА после проведения ма-
невра.
Все эти данные сообщаются в виде согласованных форм по каналам связи.
Кроме того, специальными формами на наземные станции передаются
целеуказания для работы с КА (до и после проведения маневра).
3. ГУ с учетом этих, а также полученных данных от других групп форми-
рует «окончательный» детальный вариант суточной программы и конкретных
операций управления КА, согласовывает с участвующими в управлении груп-
пами ГОГУ и организациями, утверждает у руководства ГОГУ и доводит до
наземных средств (станций, комплексов обработки информации, служб свя-
зи и др.).
На этапе реализации суточной программы и проведения сеансов связи
• ГУ на основе прямых указаний оперативному персоналу наземных стан-
ций осуществляет управление КА с помощью выдачи соответствующих уп-
равляющих воздействий. Контроль командного управления осуществля-
ется по докладам руководителя оперативной группы наземной станции и
анализу информации, поступающей на отображение в ГУ, а также по док-
ладам группы анализа. Руководитель ГА выдает результаты оперативной
оценки поступающей с КА ТМИ и рекомендации по дальнейшей работе с
КА.
• ГА осуществляет оперативную оценку поведения основных ТМ-парамет-
ров и, соответственно, анализ функционирования бортовых систем КА в
целом, сообщает результаты оценки и анализа в ГУ с рекомендациями по
проведению текущего сеанса связи и с возможной коррекцией планов на
следующие плановые или внеплановые сеансы. ГА также производит за-
каз средств для специализированной обработки ТМИ после сеанса связи.
• МНГ (навигационные центры) осуществляет прием от наземных станций
данных траекторных измерений. По результатам их обработки определя-
ются или уточняются необходимые характеристики полета КА с учетом
проведения маневра, МНГ сообщает результаты расчетов в ГУ и выдает
новые целеуказания для наземных средств.
Такая схема взаимодействия наиболее типична для совместной работы
оперативных групп, технических средств и организаций; она корректирова-
лась от пуска к пуску в зависимости от типа КА, опыта предыдущей работы,
ввода в эксплуатацию новых технических средств, изменения статуса орга-
низаций — участников управления полетом и других организационно-тех-
нических условий.
215
1.5.7. Центр управления полетом
Основные принципы управления полетом и структуры ЦУП определялись:
— необходимостью проведения за короткий период времени достаточно
большого числа динамических операций, определяющих дальнейшее функ-
ционирование КА и решение целевой задачи (маневры и коррекции на тра-
ектории перелета и на ОИСЛ, сход с ОИСЛ и мягкая посадка на поверхность
Луны, забор грунта и старт возвращаемой ракеты, работа «Лунохода» и др.);
— состоянием развития средств управления полетом на тот период време-
ни (вычислительная техника, средства связи, бортовая и наземная аппарату-
ра радиокомплексов, средства автоматизации в целом и др.)
В силу этого:
• основным режимом управления КА являлся «ручной» режим выдачи РК,
когда оператор командного пульта наземной станции осуществляет набор
и выдачу РК и КПИ с «голоса», по указанию руководителя сеанса из ЦУП;
• размещение персонала группы управления полетом КА производилось в
непосредственной близости, практически на территории дислокации на-
земной станции и средств приема и обработки ТМИ.
Поскольку в качестве основной наземной станции для лунной програм-
мы была принята НС в районе г. Симферополь, там же были размещены
средства регионального ЦУП и, соответственно, персонал группы управле-
ния полетом, а также средства пункта управления «Лунохода» и экипаж уп-
равления «Луноходом». Необходимо заметить, что в те годы такого понятия,
как «региональный ЦУП» не было, хотя по существу оно отражало суть дела.
Опыт работы по реализации лунной программы показал, что на тот пери-
од это было правильное решение, обеспечившее оперативное и надежное
управление полетом КА лунной программы на всех этапах работы. Это каса-
ется и наиболее оперативных решений по выходу из различных нештатных
ситуаций как на КА, так и в наземных средствах.
Персонал управления КА, размещаемый в данном «региональном» ЦУПе,
осуществлял решение следующих основных задач:
• планирование работы КА и наземных средств;
• проведение сеансов связи и оперативное управление КА;
• анализ функционирования бортовых систем и КА в целом;
• взаимодействие со службами и организациями, участвующими или обес-
печивающими управление КА;
• управление «Луноходом».
Реализация вышеперечисленных задач осуществлялась конкретными груп-
пами с соответствующим техническим оснащением.
Рабочие места группы управления были оборудованы аппаратурой конт-
роля проведения сеанса связи с КА. В частности:
— аппаратурой контроля выдачи и исполнения РК, КПИ;
— приборами наличия и уровня принимаемого радиосигнала;
216
— выносным блоком контроля приема ТМИ, позволяющим по уровню сиг-
налов определить появление или «срабатывание» выбранных ТМ-параметров.
Отображение информации осуществлялось только от сигналов наземной
станции в районе г. Симферополь.
Были организованы оперативно-командные (голосовые) линии связи как
с внешними, так и с внутренними абонентами, которые назывались «цирку-
лярами». В частности:
— командный «циркуляр» — для взаимодействия с другими наземными
станциями, которые участвовали в работе с КА;
— «циркуляр» ОТР — для взаимодействия со службами наземной станции
и ГОГУ;
— навигационный «циркуляр» — для взаимодействия с навигационными
центрами.
Внешние «циркуляры» использовали специально выделенные каналы связи.
Указанные средства позволили ГУ качественно и оперативно вести управ-
ление КА, выполняя поставленные задачи. Опыт работы с КА лунной про-
граммы показал достаточно высокую функциональную надежность средств
управления НС «Симферополь» в целом (на тот период времени). Резерви-
рование по выдаче командной информации для управления КА (с других
наземных станций) применялось довольно редко, в основном при нештат-
ных ситуациях внешнего характера (увеличение ветровой нагрузки больше
25 м/с, прерывание наземного энергопитания и т.д.).
Работа ГА функционирования бортовых систем КА была обеспечена сле-
дующими техническими средствами:
— для оперативной оценки функционирования бортовых систем и отра-
ботки управляющих воздействий был создан ряд графических устройств для
отображения результатов обработки конкретных телеметрических парамет-
ров (ТМ-параметров) практически в темпе приема ТМИ;
— для апостериорного анализа была применена послесеансная обработка
ТМИ на ЭВМ пункта.
Оперативная работа группы анализа была также обеспечена оперативно-
командными (голосовыми) связями:
— «прямая» связь с группой управления для оперативных сообщений ГА
о работе бортовых систем КА в сеансе приема ТМИ;
— телеметрический «циркуляр» — для управления службами и средства-
ми приема и обработки ТМИ.
1.5.8. Определение орбиты на участке перелета Земля-Луна
и искусственного спутника Луны
1.5.8.1. Состав измерительных средств радиоконтроля орбиты
Наземные средства управления КА (радиотехнические системы и назем-
ные станции), созданные для реализации Лунной программы СССР, описа-
ны в книге [49]. В качестве основных измерительных параметров при опре-
217
делении орбиты КА на участках перелета Земля — Луна и искусственного
спутника Луны применялись измерения дальности и скорости, а также из-
мерение разности радиальных скоростей. Ниже рассмотрены алгоритмы ре-
ализации этих измерений.
Измерение дальности производилось фазовым методом путем измерения
задержки сигнала запроса дальности при его прохождении по трассе Земля
— борт и борт — Земля. Сигнал запроса дальности формировался путем пе-
ремножения меандра с частотой повторения 120 кГц с сигналом PN-после-
довательности с символьной частотой 30 кГц и длиной 1024 символа. Полу-
ченный групповой сигнал манипулировал по фазе несущую частоту запрос-
ного сигнала с индексом ± 60°. Точное измерение дальности проводилось на
частоте 120 кГц, а разрешение неоднозначности велось по корреляционному
пику PN-последовательности. В обратном канале ответный сигнал дально-
сти передавался путем фазовой манипуляции с индексом ± 60° поднесущей
частоты 4.86 кГц, которая использовалась для доплеровских измерений ра-
диальной скорости.
Чтобы обеспечить вхождение в связь бортового приемника, в радиотех-
нической системе КА использовался сигнал «когерентная Земля». В этом
режиме частота сигнала, излучаемая наземной станцией, подстраивается под
частоту принимаемого с борта сигнала. Доплеровские измерения радиальной
скорости проводились по следующей схеме. Исходная несущая частота борта
формируется из частоты задающего генератора. Сигнал с этой частотой
принимается наземной станцией и ретранслируется на борт КА. На борту
частота принятого сигнала (с доплеровским смещением) гетеродинируется до
промежуточной частоты у^б, которая содержит в себе информацию о ради-
альной скорости КА. Частота передается на Землю посредством модуля-
ции ею несущей частоты борта. На борту гетеродинная частота формируется
из той же частоты задающего генератора, что и несущая частота передатчика.
Принятая на Земле частота/^ несет информацию о доплеровском смещении
частоты запросного и ответного сигналов.
Принцип измерения разности радиальных скоростей заключается в том,
что когерентные измерения доплеровской частоты проводятся одновремен-
но в трех измерительных пунктах — главном (ГИП) и двух ведомых (ВИП)
(рис. 1.5.3).
Пункты переизлучают сигнал на КА, а на ГИП принимаются и измеря-
ются частоты переизлученных сигналов.
Информационная ценность измерений разности радиальных скоростей тем
выше, чем больше расстояние между измерительными станциями.
При использовании в качестве сигнала частотной синхронизации станций,
участвующих в измерениях несущей частоты бортового передатчика, база
измерений ограничивается общей зоной видимости КА станциями и может
достигать нескольких тысяч километров. Использовались два «треугольни-
218
Рис. 1.5.3. Схема измерений [49]
ка»: измерительные пункты Евпатория — Щёлково — Байконур, и измери-
тельные пункты Уссурийск — Камчатка — Байконур.
Сигналы, излучаемые бортовым передатчиком, принимаются наземными
станциями ВИП и ретранслируются с разными коэффициентами преобразо-
вания частоты, принимаются бортовым приёмоотвегчиком.
На борту принятые сигналы гетеродинируются, образуя промежуточные
частоты Упб1 и /пб11 • Этими частотами модулируется несущая частота борто-
вого передатчика, которая принимается основной измерительной станцией
(ГИП).
Сигналы, ретранслированные бортовым приёмоотвегчиком и принятые
ГИП, несут информацию о разности радиальных скоростей КА относитель-
но ГИП, ВИПДа^) и ВИПи(а£)2) , которые определяются аппаратурой
ГИП. Одновременно на ГИП обычным способом определяется D и Ь КА,
которые вместе с AZ) передаются в навигационный центр (НЦ) для опреде-
ления траектории полёта.
Точность измерений составляла:
100 м — по наклонной дальности,
0.1 м/с — по радиальной скорости.
1.5.8.2. Требования к точности определения орбиты
на участке перелета
Требования к точности определения орбиты на участке перелета опреде-
лялись требованиями к точности выхода на орбиту ИСЛ с высотой перисе-
ления ~ 100 км. Такую точность можно обеспечить, если иметь предельную
ошибку прогноза в параметрах картинной плоскости не хуже 20 км и по вре-
мени достижения минимального расстояния 20 сек.
1.5.8.3. Фактическая точность определения параметров движения
Точность определения параметров движения на участке между последней
коррекцией и маневрами торможения характеризуется предельной ошибкой
219
прогноза в картинной плоскости, которая не превосходила 15 км, и ошибкой
по времени достижения минимального расстояния, которая не превосходи-
ла 15 сек.
1.5.9. Модели навигационного обеспечения
1.5.9.1. Описание движения Луны и ее гравитационного потенциала
1.5.9.1.1. Общее описание движения Луны. Для изучения поля тяготения
Луны необходимо знать как орбитальное движение Луны, так и движение
вокруг ее центра масс. Ниже приводятся общие сведения об этих движениях.
Движение Луны определяется законом всемирного тяготения
f = Gmmxr~2, (1.5.38)
где G — постоянная тяготения; г — расстояние между центрами масс;
т и /И] — массы материальных частиц.
Согласно второму закону Ньютона между ускорением г частицы и си-
лой, действующей на нее, имеет место соотношение
f = 7m. (1.5.39)
Отметим, что в выражении (1.5.38) масса есть величина, определяющая
силу притяжения, а в выражении (1.5.39) масса определяет пропорциональ-
ность ускорения г силе /, т. е. выполняет функцию меры инертности. Пред-
полагается, что гравитационная и инертная массы эквивалентны друг другу.
Эта эквивалентность подтверждается экспериментальным путем.
Величина постоянной тяготения, согласно [20],
G = (6,6745 ± 0,0008) • 10"11 м3кг’с'2. (1.5.40)
Теория движения Луны — один из сложнейших разделов небесной меха-
ники. Ее разработкой занимались несколько поколений крупнейших мате-
матиков XIX—XX веков. Трудности построение этой теории определяются
как тем, что движение Луны происходит под воздействием гравитационных
сил от различных небесных тел, так и сложностью строения Луны, приводя-
щей к большим неравномерностям распределения масс внутри нее.
Движение Луны вокруг Земли детально описано в соответствующих раз-
делах небесной механики. Здесь это движение рассматривается приближен-
но, качественно, что необходимо для понимания последующего материала.
Согласно методу оскулирующих элементов, часто применяемому в небес-
ной механике, можно считать, что в каждый момент t Луна движется по
эллиптической орбите, лежащей в некоторой мгновенной плоскости. Эту
орбиту, называемую оскулирующей, можно описать шестью оскулирующи-
ми элементами. На рис. 1.5.4 нанесены угловые элементы орбиты, характе-
ризующие положение плоскости орбиты и радиус-вектор г положения цент-
ра Луны в пространстве (центр единичной сферы помещен в центре Земли).
220
Рис. 1.5.4. Положения плоскостей эклиптики и орбиты Луны: — долгота восхо-
дящего узла орбиты, отсчитываемая в плоскости эклиптики от точки весеннего равно-
денствия Y(0 < £1Л < 360°); i — наклонение орбиты к эклиптике (4°59' < i < 5° 17'); со —
аргумент положения перигея (0< со< 360°); О — истинная аномалия (0< О<360°);
А — апогей; П — перигей
В качестве элементов орбиты, определяющих ее форму, часто принимают
большую полуось орбиты а и эксцентриситет е. Нередко вместо а в качестве
элемента рассматривают оскулирующий период обращения Луны 1\ однознач-
но связанный с полуосью а. Иногда вместо элементов а и е используют гп —
перигейное расстояние и гА — апогейное расстояние, т. е. минимальное и мак-
симальное расстояния от центра Земли до центра Луны при движении по
оскулирующей орбите. Еще одним независимым элементом орбиты являет-
ся т — астрономический момент времени прохождения Луной ее перигея при
движении по оскулирующей орбите. В качестве элементов, определяющих
движение Луны по орбите, можно принимать любые шесть независимых
элементов, например: z,Q, со,л,е,т или z,Q,co,rn,rA,T и т. п.
Отметим, что при численных расчетах часто бывает удобно для определе-
ния движения Луны использовать не оскулирующие элементы, а параметры
ее движения в какой-либо момент времени, причем в качестве таких пара-
метров принимаются компоненты радиуса-вектора положения Луны и век-
тора скорости ее движения в какой-нибудь системе прямоугольных коорди-
нат.
Если бы движение Луны происходило в центральном поле тяготения Зем-
ли, то, согласно законам небесной механики, оскулирующие элементы ор-
биты с течением времени не изменялись бы. Однако другие гравитационные
воздействия приводят к значительному отличию реального поля, в котором
движется Луна, от центрального. Это, в свою очередь, приводит к тому, что
с течением времени плоскость орбиты изменяет свое положение в простран-
стве; становятся функциями времени и элементы орбиты. Зависимости эле-
ментов орбиты Луны от времени вычисляются астрономами на основании
221
законов теории ее движения и данных наблюдений ее фактических положе-
ний. Такие зависимости приводятся в астрономических ежегодниках.
Существенную роль в астрономии и науках, связанных с ней, а также в
обыденной жизни людей играет период обращения Луны вокруг Земли —
лунный месяц. Рассмотренный выше оскулирующий период обращения (или
оскулирующий лунный месяц) является сугубо теоретической величиной,
которая прямыми наблюдениями не определяется. Поэтому в практике ос-
кулирующий период применяется редко. В астрономии введен и использует-
ся ряд определений лунного месяца. Звездным, или сидерическим, лунным
месяцем называется промежуток времени между двумя последовательными
прохождениями Луны через плоскость одного и того же эклиптического
меридиана.
Часть Луны, обращенная к Солнцу, освещена им. В зависимости от вза-
имного расположения Солнца, Луны и Земли в процессе орбитального дви-
жения наблюдатель с Земли видит большую или меньшую часть освещенно-
го диска Луны, т. е. различные фазы Луны. Когда Луна находится между
Солнцем и Землей, к наблюдателю обращена темная часть Луны (фаза ново-
луния). В промежуточных положениях освещенная Солнцем часть Луны имеет
вид полудиска или серпа.
Промежуток времени между двумя последовательными новолуниями на-
зывается синодическим месяцем. Драконический месяц — промежуток време-
ни между двумя последовательными прохождениями Луны через восходящий
узел орбиты на эклиптике. Аномалистический месяц — промежуток времени
между двумя последовательными прохождениями Луны через перигей орби-
ты и т. п.
Луна совершает вращение вокруг своей оси. Ось ее вращения наклонена
под некоторым углом к плоскости эклиптики. Известно, что угловая скорость
вращения Луны вокруг своей оси равна средней угловой скорости обраще-
ния Луны вокруг Земли. Поэтому к Земле она всегда обращена одной сторо-
ной. Хотя вращение Луны вокруг своей оси достаточно равномерно, наблю-
дателю на поверхности Земли кажется, что она покачивается относительно
своего среднего положения. Это явление получило название либрации.
Различают либрации двух типов — оптическую (или геометрическую) и
физическую. Физическая либрация отражает реальные колебания угловой
скорости вращения Луны за счет влияния различных факторов. По величине
физическая либрация очень мала. Оптическая либрация — чисто кажущаяся;
возникает вследствие того, что движение Луны вокруг Земли неравномерно,
плоскости лунной орбиты и экватора не совпадают с эклиптикой, наблюда-
тель за счет вращения Земли может перемещаться относительно прямой,
соединяющей центры Луны и Земли.
За счет всех видов либрации с Земли может наблюдаться примерно 60%
общей поверхности Луны.
222
Общие законы вращения Луны, используемые и в настоящее время для
описания вращения Луны в первом приближении, установил на основании
наблюдений французский ученый, директор Парижской обсерватории Доме-
нико Кассини (1625—1712). В 1693 г. он опубликовал «Трактат о начале и ус-
пехах астрономии», в котором сформулировал три следующих закона:
1. Луна вращается равномерно вокруг своей полярной оси, сохраняющей
постоянное положение в теле Луны. Период вращения Луны совпадает с
периодом ее обращения по орбите вокруг Земли и равняется 27,3216609 сред-
них суток.
2. Плоскость лунного экватора сохраняет постоянный угол наклона к эк-
липтике, равный Г32'2(Г (по Тайну [28]).
3. Восходящий узел лунного экватора на эклиптике всегда совпадает с
нисходящим узлом лунной орбиты на эклиптике. Это означает, что пересе-
чение плоскости экватора и лунной орбиты с плоскостью эклиптики проис-
ходит по одной прямой.
Первый закон Кассини устанавливает резонансность движения Луны:
осевая и орбитальная угловые скорости Луны находятся в отношении 1:1.
Второй и третий законы Кассини указывают на то, что векторы: МР, на-
правленный вдоль оси вращения Луны; ML, перпендикулярный к плоскости
лунной орбиты, и МП, перпендикулярный к плоскости эклиптики — лежат
в одной плоскости и не совпадают друг с другом (рис. 1.5.5).
Под влиянием различных возмущений плоскость орбиты Луны изменяет-
ся таким образом, что восходящий узел на эклиптике движется примерно
равномерно в сторону его уменьшения. Согласно третьему закону Кассини
плоскость экватора Луны также должна соответственно изменяться. Соглас-
но первому закону Кассини при движении плоскости экватора должно из-
меняться и положение физической фигуры Луны, с тем чтобы ось вращения
Рис. 1.5.5. Геометрия законов Кассини t = Г32'32',7 (МАС, 1976); / = 5°02'43',4
(по Брауну, 1919)
223
сохраняла неизменное положение в теле Луны. Все эти движения соответ-
ствуют тому, что векторы МР и ML описывают вокруг МП круговой конус
примерно за 18,66 года. Лаланд (1732—1807) подтвердил правильность зако-
нов Кассини на основе наблюдений Луны (1763) и определил /= Г,43.
Начало теории вращения Луны относительно собственной оси было по-
ложено работами Даламбера (1717—1783), Эйлера (1707—1783), Лагранжа
(1736-1813) и Лапласа (1749-1827).
Даламбер (1749) первым рассмотрел вращательное движение свободного
твердого тела. Эйлер (1758) вывел уравнение движения твердого тела с од-
ной неподвижной точкой. Лагранж (1764) доказал, что форма Луны должна
быть эллипсоидом с наибольшей осью, направленной к Земле, и наимень-
шей — полярной — осью и объяснил (1780) совпадение линии узлов лунной
орбиты и экватора Луны. Лаплас разработал метод решения системы уравне-
ний, описывающих вращение Луны, которым пользовалось большинство
последующих исследователей.
Остановимся кратко на основных соотношениях, определяющих враще-
ние Луны.
Для рассмотрения уравнения вращения Луны введем две системы коор-
динат: OXxYxZx — жестко связанную с Луной и OXYZ — оси которой непод-
вижны в пространстве. Начало координат обеих систем совпадает с центром
Луны. В первой системе ось OZX совпадает с осью вращения Луны, ось ОХх
лежит в плоскости лунного экватора и направлена к центру Земли. Ось OYX
дополняет систему до правой. В системе OATZ ось OZ направлена в полюс
эклиптики; ось ОХ направлена в точку весеннего равноденствия; ось OY
дополняет систему до правой.
Положение первой системы координат относительно второй задается с по-
мощью трех углов Эйлера: Д у, <р, где £ — угол нутации; V — угол прецес-
сии; <р — угол собственного вращения (рис. 1.5.6).
Рис. 1.5.6. Схема для определения эйлеровых узлов
224
Если вращение Луны удовлетворяет законам Кассини, то О = 1; = ;
<р = 180° + /л -£1Л , где I — наклон лунного экватора к эклиптике; £1Л — дол-
гота восходящего узла лунной орбиты на эклиптике; /л — средняя долгота
Луны.
Если бы Луна имела сферическую форму с равномерным распределением
плотности, то законы Кассини были бы точными. Но эти условия не выпол-
няются. Еще Ньютон, рассматривая вопрос о фигуре Луны, высказал пред-
положение, что Луна вращается вокруг своей оси неравномерно вследствие
того, что она является эллипсоидальным телом, притягиваемым Землей.
Влияние всех возмущений вызывает нарушение законов Кассини и порож-
дает колебания Луны относительно некоторого среднего положения. Это
составляет суть физической либрации Луны.
Для описания реального движения необходимо учесть возмущения в на-
клоне, узле и долготе Луны. В результате этого реальные углы Эйлера запи-
сываются в форме
0=/ + р; у = Ол+о; <р = 180° + (/л-^2л) + (т-о), (1.5.41)
где р, о, т — соответственно физическая либрация в наклоне, узле и долготе.
Фундаментальные работы по изучению физической либрации Луны на
основе таблиц Ганзена (1795—1874) были выполнены лейпцигским астроно-
мом Тайном с 1902 по 1922 гг. Начав работу по определению селенографи-
ческих координат лунных образований, Гайн убедился, что сначала необхо-
димо определить элементы вращения Луны, для чего потребовалось пересмот-
реть теорию.
Когда Йонссон на основании метода, разработанного Шарлье (1908), опуб-
ликовал в 1917 г. результаты своих исследований, было отмечено, что они
согласуются с результатами Гайна относительно либрации в наклоне и в узле,
но расходятся в либрации по долготе. Позже Гайн подтвердил свои первые
результаты [28].
В 1948 г. анализом этих расхождений занялся польский астроном Козиел,
и его работы на основании таблиц Брауна подтвердили результаты Гайна,
полученные в 1920 г.
Исходными для исследования физической либрации Луны являются ди-
намические и кинематические уравнения Эйлера вращения абсолютно твер-
дого тела [10, 14]:
динамические уравнения Эйлера
Л<йх-(й-С)<ого)г=4;
B<ay-(C-A)^x = fy,-
С^-(А-В)<ах(йу=/г-,
(1.5.42)
225
кинематические уравнения Эйлера
dxy . . dQ = —- sin 0 sin ф cos ф; dt dt
со, dw . n dQ . = 8Ш0СО8ф + БШфГ
У dt dt (1.5.43)
СО Jw . dtp = —-COS0 + —.
Z dt dt
Здесь со^со^со^, — проекции угловой скорости Луны на оси OX, OY, 0Z;
fxJyJz — компоненты момента внешних сил, действующих на Луну; А, В,
С — главные моменты инерции, определяемые по формулам:
A = jcy(x,y,z)[y2 + Z2)dv;
V
В = jv(x,y,z)(z2 +x2)dv;
v
С = jo(x,y,z)(x2 + y2)dv,
V
где о(х,у,г) — плотность Луны; V — объем Луны.
Если в теории вращения Земли чаще всего используется модель сплющен-
ного сфероида инерции (А =В), которая приводит два первых динамических
уравнения Эйлера к линейной системе относительно сох,соу, то в основе те-
ории физической либрации Луны лежит модель трехосного эллипсоида (А * В).
В этом случае уравнения Эйлера нелинейны и в конечном счете не интегри-
руются.
Один из методов решения системы (1.5.42)—(1.5.43), позволяющий опре-
делить о, т, р в функции времени, состоит в введении ряда упрощений, бла-
годаря чему их можно свести к системе линейных уравнений, для которых
могут быть получены интегралы.
Так, решение системы, полученное Тайном, имеет вид
T=(4B+Xa/sinAp
Z=1
/o=(/o)cB+Zz’/sinA;
i=l
(1.5.44)
P = (P)cb+XC/COS,Z/-
Z=1
Здесь (т)св , (/п)св, (p)CB — компоненты свободной физической либрации.
Они зависят от двух произвольных постоянных интегрирования, определяе-
мых из наблюдения. Аргумент hi представляет собой линейную комбинацию
переменных Мл,Мс, со, со', где Мд=£ = Ьл-Г; Mc=g = Lc-F — средние
226
аномалии Луны и Солнца; со' = Г - QJ1; со = Г - QJ1 — соответственно угловые
расстояния лунного и солнечного перигеев от восходящего узла лунной ор-
биты на эклиптике. Средние значения £С,Г, Г', £л и Q являются функция-
ми времени.
Коэффициенты ai9bi9ci9i = \92,...9°° зависят от отношений
а = (С-5)/Л; р = (С-Л)/В; у = (В-Л)/С;
f = a^=B(C-B)/A(C-A),
где а, Р, у — величины, задающие динамическое сжатие эллипсоида инер-
ции соответственно в плоскости, перпендикулярной линии центр Луны —
центр Земли, в плоскости первого меридиана и в плоскости экватора (меха-
ническое сжатие);/— постоянная либрации (функция механической эллип-
тичности Луны).
В настоящее время приняты следующие разложения:
р = -106созМл + 35соз(Л/л +2со')-11со82(Л/л +со) [угл. секунда];
osinZ = — 108sinЛ7л + 35зт(Л/л + 2со')-118т2(Л/л +со) [угл.секунда];
т = —12,9sin Л/л +65,2sinA/c + 9,7sin2co' + (1.5.45)
+7,3sin2(A/c - со' +co) + 7,6sinQc [угл. секунда],
выведенные Тайном и Козиелом при постоянной физической либрации
/=0,73 [6].
Параметр/ играет важную роль в теории вращения Луны. Наряду с углом
наклона экватора Луны к эклиптике I параметр / определяет степень откло-
нения от законов Кассини. Для Луны величина/определялась много раз. Она
находится в пределах 0,5...0,9.
Коэффициенты а., с.,/ = 1,2,...,м были вычислены Тайном (1902, 1923)
при/= 0,5; 0,6; 0,7 и 0,8. Анализ Козиела (1949) показал, что в полученном
решении для т коэффициент при sin2co претерпевает разрыв, если
/ = /* =0,662. При / -> /* (слева или справа) этот коэффициент соответ-
ственно стремится к — °° или к +°°. С.Г. Маковер [16] в 1962 г. выдвинул
гипотезу о том, что имеющиеся затруднения в решении при / -> /* являют-
ся следствием упрощений, сделанных при интегрировании уравнений Эйле-
ра. Этого можно избежать, если уравнения решать точно. В отличие от ли-
нейной теории, нелинейная теория показывает, что в случае резонанса
(/* =0,662 ) вращение Луны будет устойчивым [21].
При решении задач о вращении Луны применяются асимптотические
методы усреднения дифференциальных уравнений по быстрым переменным.
Такой подход был применен М.Д. Полануэром [19], который пытался решить
нелинейную задачу, интегрируя канонические уравнения асимптотическим
227
методом Линдштедта—Пуанкаре. В работе [21] методом Крылова—Боголю-
бова исследуется задача о нелинейных колебаниях во вращении Луны. В работе
[15] применяется метод канонических преобразований Цейпеля. Близкой по
содержанию, но иной по форме является работа [7], в которой используется
метод усреднения в варианте Крылова—Боголюбова.
Значительный вклад в решение системы уравнений Эйлера сделал Экхард,
который первым применил для этих целей ЭВМ. Используя метод числен-
ного интегрирования, ему удалось избежать линеаризации уравнений Эйле-
ра и повысить точность результатов. Были рассчитаны с точностью до 0,1 от-
клонения от законов Кассини для различных значений а, Р, у и f
Более точные таблицы физической либрации Луны получены Ю.А. Чика-
новым [22]. Им составлены два типа таблиц. В таблицах первого типа ком-
поненты физической либрации т, /о, р даются в зависимости от аргумента I
и f Значения наклона I взяты в диапазоне 1°ЗГ2(Г... ГЗЗ'2(Г, аргумента/—в
интервале 0,50...0,85. В таблице второго рода в качестве аргумента взяты ве-
личины динамических сжатий р и у в диапазонах (0,623...0,637) • 10-3 для р
и (0,10...0,35) 10~3 для у.
1.5.9.1.2. Гравитационный потенциал Луны. Найдем соотношение, позво-
ляющее вычислить силу, с которой Луна притягивает некоторую малую мас-
су /и, находящуюся вне Луны (точка Р).
Представим Луну как совокупность элементарных масс dm? . Каждая эле-
ментарная масса dm? осуществляет гравитационное воздействие на массу т.
Суммарное воздействие от всех этих масс и будет представлять собой грави-
тационную силу, действующую со стороны Луны на массу (рис. 1.5.7).
Рис. 1.5.7. Геометрия вывода гравитационного потенциала Луны
Пусть OX{YxZx — селеноцентрическая вращающаяся система координат.
Обозначим через г вектор с компонентами х, у, z9 определяющий положе-
ние массы т вне Луны, а через р (компоненты х ,ур,гр) — вектор, задаю-
щий положение некоторой элементарной массы ат? внутри Луны. Очевид-
но, что
228
(1.5.46)
В соответствии с законом всемирного тяготения на массу т со стороны
dm? будет действовать сила
_ z х Gmdrn
где G — постоянная тяготения;
Аг = г -р; Аг = |Аг| = гл/1 + А2 -2AcosO;
cos0 = (r p(rp)-l); r = |r|; р = |р|.
(1.5.47)
Пусть x(p) — плотность Луны в точке, задаваемой вектором р .
Тогда можно записать:
drn = x(xn,yn,zn}dxdydzn.
р /Ц р’-'р’^р/ р 7р '•р
Несложно проверить справедливость следующего равенства:
(1.5.48)
Ar
Ar3
(1.5.49)
где grad
_Э__1_ _Э_±
Эх Аг ’ Эу Ar ’ dz Аг
Используя (1.5.48) и (1.5.49), соотношение
можно переписать:
f (dmr) = Gm gradr (Ar’1) • % (xp, yp, zp )dxpdypdZp.
Суммарное действие f всех элементарных гравитирующих масс dm на
массу т определится как интеграл по всему объему Луны:
f = Gm J gradr (Ar 1 )d/np =
V
= Gmj J J grad'
хрУр^
1
(х-хр)2+(у-ур)2 + (г-гр)21 2 x(xp,yp,zp)dxpdypdzp.
В данном интеграле х, у, z — постоянные параметры, от которых не зави-
сят пределы интегрирования, что позволяет поменять порядок дифференци-
рования и интегрирования. Поэтому получим
229
f = mgradr
= mgradr^n (r),
где
p ЛР €p
21"2
X
xdxpdypdzp = GjAr-'J/Wp.
T
(1.5.50)
(1.5.51)
Индекс «т» означает интегрирование по всему объему Луны. Скалярная
функция 5Кл (г) называется потенциалом Луны. Компоненты результирую-
щей силы
/х = /п^-91л(г); fy = m^-3i (г)-, /г=т^-^л(г).
Эх у Эу z dz
Интеграл (1.5.51) можно взять в элементарных функциях лишь в ряде
простейших случаев, например, для шара при % = const. Для него потенциал
принимает вид
91л(г) = СЛ/лг-1,
4 з ж
— ягл%; гл — радиус сферичес-
где Мл — масса Луны; Мл = % jjJVvV
кой Луны. *р Ур
Таким образом, очевидно, что потенциал однородного шара равен потен-
циалу точки с массой, равной массе тела и помещенной в центре сферы.
При удалении от гравитирующего тела на большое расстояние его потен-
циал, независимо от формы тела и закона распределения плотности, прибли-
жается как угодно близко к потенциалу шара [11]. Так как форма Луны от-
личается от сферы и плотность ее непостоянна, то интеграл в формуле (1.5.51)
может быть вычислен только приближенно, например, путем представления
его в виде бесконечного ряда. С этой целью разложим функцию
/(A) = (l + A2-2Acos0) 2
в ряд Маклорена:
h h2 h3
(1.5.52)
230
где /(0) = 1; /'(O) = cos0; /'(O) = 3cos0-1; /*,(O) = 3(5cos30 + 3cos0).
Так как коэффициенты полученного ряда
1 , Л ,->3cos20-l 5cos30-3cos0 ,, ,
f(h) = 1 + Acos0 + h1-----+ A3------------+..., (1.5.53)
пропорциональны полиномам Лежандра [8], выражение (1.5.53) можно пе-
реписать в виде
/(A)=£A”Pn(e°s0), (1.5.54)
п=0
где Р (cosG) — полиномы Лежандра.
Область сходимости этого ряда определяется областью сходимости ряда
Маклорена: h< 1. Полином Лежандра определяется формулой Родрига:
Этой формулой можно пользоваться при небольшом значении п. Если п
велико, то удобнее пользоваться следующим рекуррентным соотношением:
pn(^)=w’l[(2w-1k/’„-i (?)-(«-i)^-2(9)]-
Полином Лежандра есть многочлен степени л, содержащий только нечет-
ные степени q, если п нечетное, и только четные степени q, если п четное.
Подставляя (1.5.54) в (1.5.51), получим
' (T)Lw=()v
P„(cos0) dmp.
(1.5.55)
Если гл — есть средний радиус Луны, для которого справедливо неравен-
ство
то можно показать [17], что (1.5.55) при соответствующих условиях сходится
равномерно для любой точки, задаваемой радиусом г, для которой г » гл. По-
этому (1.5.55) допускает почленное интегрирование, т. е. лунный потенциал
можно представить как ’ где ~ компонента потенциала л-го
п=0
порядка. Рассмотрим первые члены этого ряда в отдельности.
231
Очевидно, что
при п = О
при п = 1
(1.5.56)
„ GrpcosS
Г (Т) Г
= § х J xPdmP + У j ypdmp +Z j Zpdmp
L (T) (t) (t)
так как начало принятой системы координат находится в центре масс Луны.
Рассмотрим теперь компоненты потенциала второго порядка (теорема Мак-
Кулло [8, 17]):
х'-'Г Z V2 Z X 2 <
= — JI - I Р2 (cos9)Jmp = — JI - I -(3cos2 6 - l)dmp =
r(T)V ) r(T)V ) 2
Г / \2
G r 3 ^р+ЗУр+^р
r / 2 r2
(т)[ v j
1Хр2+Ур2+гр2
2 r2
dmp =
Г/ 2 \ ( 2 \ ( 2 \
2p- 3^-1 Jxpdmp+ 3^_| lyPdmP+ 3ff-’ hpdmP+
Lv Лт) V J(t) V J(t)
+6^ [ ynZndm +6^ f dm +6^ f x у dm
r2 J ЛР P P r2 J P P P «2 J PZP P
(т) Г (т) r (T)
Все эти шесть интегралов выражаются через моменты инерции Луны.
Обозначим через 7Z момент инерции Луны относительно осей Оа( и Оа}. (где
а\ =х^а2 =^Р’лз = zp )• Очевидно, 1п=А; 122 = В; /33=С. Тогда, если
учесть равенства
= j aiajdmp’ l*j'’
(т)
Ii,J= f (a2j+ak)dmp^
(t)
а также равенство J (xp+Ур+^p)^wp =2 '(/ц+ 72,2 + Л,з)’ можно записать:
(т)
232
(т)
при z,у,к = 1,2,3; jфк.
Использовав данные соотношения, перепишем SR2 в виде
Э19=-Я У (2-7..-Ъ,.;с2+3/,..с с 1
2 3^ 1,1 Э 1,1 О: j,k а- ак Г
Г /=1,2,3к 2 )
/V j*k
х у z
где с = — ; с = —; с =—.
а1 ]• а2 у а3 у
Введем сферические координаты г, у, X (рис. 1.5.8), которые связаны с пря-
моугольными координатами вектора г соотношениями
х = rcosycosX; у = rcos\|AssinX; £ = rsin\|/. (1.5.57)
Рис. 1.5.8. Сферические координаты
Учитывая, что
х , у . , z .
с = — = cos ycosX; с = — = cosysinX; с = — = sin у,
f* у f* f*
и проведя соответствующие преобразования, получим
(1.5.58)
Последующие компоненты потенциала SR3, 9t4,..., порождаются интег-
ралами вида
233
где а + 0 + у = л, поэтому их физическая интерпретация затруднена.
Наиболее широкое распространение получило разложение потенциала тела
произвольных размеров в ряд по сферическим функциям [11].
Пусть р,у ,Х есть сферические координаты вектора р [см. (1.5.47)]. Тогда
для cos0 (1.5.47) можно записать
cos0 = sin у sin ур + cos у cos ур cos(l - Xp).
Пользуясь теоремой сложения сферических функций [11], преобразуем
полиномы Лежандра Pw(cosO), которые входят в разложение потенциала
(1.5.55), к виду
P„(c°se)=£^
где 5^=2, если т = 0, и = 1, если P™(siny) — присоединенные
функции Лежандра, задаваемые соотношением
Р™ (v) = (1 - v2 }т/2 ; v = sin у. (1.5.60)
Присоединенные функции Лежандра вычисляются по формулам:
п-тУ. п п / . \
-----'—Р"1 (Sinу)Р™ (SinW )
(и 4- тУ п ' ' п \ Р /
cos ди
(1.5.59)
к=0
(2л-2*)!
к\(п-к)\(п-т- 2к)\ ’
(1.5.61)
где х = Е[(л-т)/2] — целая часть.
Соотношение вида
Ynm (vA) = Р„ (sin cos/иХ + dnm sin nik) (1.5.62)
есть общая сферическая функция [11].
Подставляя (1.5.59) в (1.5.55) и учитывая (1.5.56), получим разложение
потенциала Луны в ряд по сферическим функциям.
*л=-
л г
°° п (Г 1
1 + УУ — Л"1 (sin V)(c„ т cosnik + d
I *. n \ T / \ w,/n nym
n=2m=0\ r J
sinwXj ►,
(1.5.63)
234
где
<? =-----!----[p"P"'(sinw„)coswX„J/n„;
(гл)"Л/л8^Л + /Я)!т 1 ₽; Р р
dn =-----------^7——7- [ р"Лт (sin w )sin mkdrn ;
(г^млЫ"+™)'1 1 р' р р
гл — средний радиус Луны;
V — селеноцентрическая широта, отсчитываемая от среднего экватора
Луны;
X— селеноцентрическая долгота, отсчитываемая от нулевого меридиана
некоторой эпохи /ф.
Несложно заметить, что коэффициенты сп m, dn т зависят лишь от формы
тела Луны и распределения массы в ней. Сравнивая (1.5.63) с (1.5.58), полу-
чим следующие соотношения для первых коэффициентов разложения (1.5.63):
С2,0 = (2^ЛГЛ ) (jx,x + ^у,у ~ )i
С2,1=(^лгл) Лл’
^2,1=(^лгл) ^y,z"
^,2=(4Л/лгл2)-1 (Л,у - Лл); (1'5’64)
^2,2=(^ЛГл)
откуда
= (1.5.65)
Для интерпретации отдельных слагаемых, входящих в разложение потен-
циала 91 л (1.5.63), рассмотрим общепринятую классификацию сферических
функций (1.5.62) [11]. Положим /и = 0. Тогда
Ул° = Рп° (siny)= (cos0). (1.5.66)
Полином Лежандра есть полином п-й степени, имеющий п неравных ве-
щественных корней [11], значения которых находятся в пределах от —1 до +1
симметрично по отношению к экватору сферы (0 = л/2, cos0 = 0). Иными
словами, функция Кп° обращается в нуль на п параллелях сферы, симметрично
расположенных относительно экватора. Эти параллели делят сферу на п +1
зону, внутри которых функция Уп° принимает попеременно положительные
и отрицательные значения (рис. 1.5.9—1.5.11). Поэтому члены разложения
235
Pz(cos9j
Рис. 1.5.9. Характер изменения зональной сферической функции 2-го порядка
Рис. 1.5.10. Характер изменения зональной сферической функции 3-го порядка
Рис. 1.5.11. Характер изменения зональной сферической функции 4-го порядка
потенциала (1.5.63) при т = 0 носят название зональных гармоник, а соот-
ветствующие им коэффициенты с2 0, с3 0, с4 0,... — зональных гармонических
коэффициентов.
Следует отметить, что каждая зональная гармоника симметрична относи-
тельно полярной оси. Кроме того, четные гармоники симметричны относи-
тельно экватора, а нечетные — асимметричны (см. рис. 1.5.9).
Таким образом, члены разложения, соответствующие зональным гармо-
никам, не зависят от долготы и характеризуют осесимметричную часть гра-
витационного поля. Гармоники, выделяемые значениями индекса п (п = 3,
5, 7,...), определяют асимметрию Северного и Южного полушарий поля Луны.
Учет в разложении потенциала только члена с с2 0 соответствует потенциалу
эллипсоида вращения. Выражение потенциала с членом при с4 0 учитывает
квадрат сжатия эллипсоида, а член с с3 0 учитывает асимметрию Северного и
Южного полушарий Луны.
236
При т = п получаем функции вида
п
Р")!
2"»!
sin"0<
coshX;
sin rik.
(1.5.67)
Первый множитель sin" 0 обращается в нуль, только на полюсах сферы
(6 = 0° и 0 = 180°). Второй множитель обращается в нуль только на меридиа-
нах, для которых
sin«X = 0 или cos«X = 0,
и отстоящих друг от друга на л / п. Поверхность сфе-
ры делится этими меридианами на 2п сферических
сектора (рис. 1.5.12), в которых функции У/7 имеют
один знак, изменяющийся при переходе через мери-
диан. Члены, соответствующие таким функциям, на-
зываемые секториальными гармониками, описывают
чисто долготные эффекты гравитационного потенци-
ала. Так, например, члены разложения потенциала с
с2 2 и d2 2 учитывают трехосность лунного эллип-
соида.
При т/п функции должны принимать нулевые
значения вдоль (л - т) параллелей и 2т меридианов.
Рис. 1.5.12. Характер
изменения секториаль-
ных сферических функ-
ций
Этими линиями вся поверхность сферы разбивается на 2т(п-т + \) криво-
линейных четырехугольников или треугольников. Члены разложения, соот-
ветствующие этим функциям, называются тессеральными гармониками
(tessera — плиточка). Тессеральные гармоники отражают смешанные эффек-
ты гравитационного поля, зависящие как от широты, так и от долготы.
Рассмотрим, например, функцию
>4=Л3 (v)c°s3X. (1.5.68)
Согласно (1.5.61) присоединенная функция Лежандра /^(v) примет вид
P43(v) = 105v(1-v2)3/2;
v = cos0 = sin\|/.
(1.5.69)
Очевидно, что множитель Р43 тождественно обращается в нуль на полю-
сах сферы (0 = 0° и 0 = 180°). Кроме того, этот множитель равен нулю при
cos0 = sin\|/ = 1, т.е. на экваторе сферы. В результате функция (1.5.68) прини-
мает нулевое значение вдоль одной (п-т = 1) параллели, которая совпадает
с экватором. Трафик этой функции представлен на рис. 1.5.13.
Второй множитель функции (1.5.68) обращается в нуль на меридианах, для
которых cos3X = 0 , т. е. функция принимает нулевое значение вдоль 2т = 6
меридианов, отстоящих друг от друга на л/ т = 60°.
237
Рис. 1.5.13. График присоединенной функции Лежандра Р™ (п = 4,т = 3)
Рис. 1.5.14. Характер
изменения тессераль-
ных сферических функ-
ций
Таким образом, поверхность сферы разбивается на
2т (п - т +1) криволинейных треугольников
(рис. 1.5.14).
Отметим, что в системе 2п + 1 основных сферичес-
ких функций степени п имеются одна зональная, две
секториальные и 2п — 2 тессеральных функций. Все
они являются функциями, осциллирующими на сфе-
ре. Повышая степень сферических функций, мы как
бы покрываем сферу системой постепенно уменьша-
ющихся участков, в которых происходит перемена
знака сферических функций [11].
Таким образом, представление потенциала Луны
рядом гармонических коэффициентов cnm,dnm ста-
вит задачу наилучшего приближения путем комбина-
ции сферических функций, осциллирующих на сфере радиуса гл. Сами же
коэффициенты cnm9dnm определяются по наблюдениям за движением ИСЛ,
что дало новые возможности для проверки и уточнения гипотез о строении
Луны.
Отметим еще, что с увеличением п или т количество нулевых корней всех
гармоник возрастает. Поэтому общие закономерности в форме и потенциале
Луны описываются функциями низшего порядка. Локальные же изменения,
наоборот, связаны с функциями высшего порядка. При этом, в отличие от
гравитационного поля Земли, коэффициенты cnm,dnm сферических гармо-
ник лунного потенциала убывают медленно, и их следует рассматривать как
величины одного порядка. В связи с этим в ряде работ был поставлен воп-
рос: является ли разложение по сферическим функциям лучшим способом
представления гравитационного поля Луны. Проблема эта особенно серьез-
на для ИСЛ, летающих на низких высотах, где сказывается влияние гравита-
ционных аномалий Луны.
238
1.5.9.2. Модель движения искусственных спутников Луны
1.5.9.2.1. Дифференциальное уравнение движения ИСЛ. Рассмотрим дви-
жение ИСЛ под влиянием сил, действующих на орбиту, в селеноцентричес-
кой абсолютной экваториальной системе координат OX2Y2Z2. Дифференци-
альное уравнение движения ИСЛ при единичной его массе может быть за-
писано в следующем виде:
d2r/dt2=fi+f2+f3, (1.5.70)
где г = ||х,у,г|| — радиус-вектор, задающий положение ИСЛ относительно
системы OX2Y2Z2\
f\ = Ax’ArAz — гравитационная сила, вызванная притяжением Луны,
отнесенная к единице массы ИСЛ;
Л =||Л,х’А,^’А,г|| — гравитационная сила, вызванная притяжением Зем-
ли, Солнца и планет, отнесенная к единице массы ИСЛ;
Л =||Л,х’Л^’Л,г|| — сила светового давления, отнесенная к единице мас-
сы ИСЛ.
Вектор /j можно представить в виде
7=7,i+7,2> d-5.71)
где 7,2 =||/1,2,х’-А,2,у’Л,2,г|| — сила, вызванная притяжением масконов;
f\,\ =f\
Рассмотрим каждую из перечисленных сил в отдельности.
Самой большой по величине, определяющей в основном движение ИСЛ,
является сила fxx, которую можно представить как градиент силовой функ-
ции SR:
71,1 = 8rad Л = gradr (*о + *нц)’ (1 -5-72)
где
Я0=Цл/г;
И ~ и V (1.5.73)
~7 />„m(sinv)(c„>mcos/MX + JnmsinwIX).
' и=2т=0\ ' 7
239
Первое слагаемое 9i0 равно силовой функции, полученной в предполо-
жении, что Луна есть сфера с равномерной плотностью по всему объему.
Второе слагаемое 5Кнц дает возможность учесть отклонение от этих двух до-
пущений. Поэтому 9iHU называют силовой функцией, учитывающей нецен-
тральность силового поля Луны. Для точного представления 5Кнц необходи-
мо принимать лтах = °°. Однако на практике величину лтах ограничивают не-
которым числом N, что и будет предполагаться в дальнейшем. Обозначим
/0 =gradrSR0; /нц =gradr9iHU. Имеет место следующее неравенство, во мно-
гом определяющее движение ИСЛ:
|Л|»|Лц|+|7,.2|+|Л|+|Л|- (1.5.74)
Оно служит основанием для того, чтобы вектор
А=/нц+А2+/2+/з (1-5.75)
называть возмущающей силой, а вектор /0 — главной гравитационной си-
лой. В соответствии с этим движение, задаваемое дифференциальным урав-
нением
d2r/dt2=f0, (1.5.76)
будем называть невозмущенным — в отличие от возмущенного движения,
описываемого уравнением (1.5.70).
Компоненты /Нцх’ /Нц^’ Ацг вектора /нц по осям ОУ2, OY2, OZ2 запишем
в виде
г) N П Л
-U.3. (1.5,7)
где
ах = х; а2 = у; а3 = z;
рт _ Кп_
1 п „
рп (sin v) (сп т cos тк + dn m sin mX).
7
Дифференцируя F™ no ai и учитывая равенство
dr л, /
получим:
dFm п 4-1 dr
~^ = FZ>i =Нл(б1)" -p^^p„m(sinV)KmcoswX +J„msinwX] +
240
1 aPw”,(siny)
r"+1 3(sin у)
1 эх
+7^Г P»m(sin V)M-c„,m sin mk + dn m cos mA.]— +
Dsinw. , ,
x------ [c cos mk +a
da n,m n,tn
{n + 1
HP„m(sm v)< +
I 1 pm* ^Sin\|Z 1 рл1/с:п..,м1т ,, .
" ( V)P« Ш’ (1.5.78)
где
pm* ---d---pm(sjn ш) = (j - sin2 w)m/2 x
3(sin \|/)
x^ib^k(n-m-2k)sinn~m~2k~l у-m sin \|r cos-2 yPnm (sin у), если ntm;
k=0
Лт'* = ^т——-P„m(sinw) = -/nsinw cos“2wP"'(sinw), если n = m;
n a(smv)
{%-!, если n-m четное;
%, если n-m нечетное;
«"=c„,mcos^+<,msin^;
P?=cn,msin^-^mcoswX-
В системе координат OX2Y2Z2 имеют место равенства:
sinv = zr~' =zH;
sinX = A-1 (ycoss-xsins);
\A.3./ у)
COSX = A-1 (%COS5 + у sin 5),
где
5 = £1л(/-/ф); A = Vx2+y2; (1.5.80)
/ф — момент фиксации абсолютной системы координат OX2Y2Z2; £2Л —
угловая скорость вращения Луны.
Из (1.5.79), (1.5.80) получим
Osin\|//Эх = -xzr~3; Osiny/Dy = -yzr~3; asinv/3z = r_| ~z2r~3;
дк/дх = -у&-2; Ы/ду = хЬг2; dk/dz = 0. (1.5.81)
241
Подставляя (1.5.79) и (1.5.81) в (1.5.78) и используя обозначения
4 = нл (гл)" <(и+2); 4т=^Рптг^;
Dn =«™[(«+0^m(sinv)+M^’];
v^m _ ху/и рт*
1 п пп ">
получим:
4л=4[д’Хт-*Ат]; (1.5.82)
Fnmy-4[д’1^т+^Ат]; (1-5.83)
^=4[г:-гЛт]- (1-5.84)
Рассмотрим теперь гравитационные силы, вызываемые масконами:
/1,2 = ёГа4*м’
где
К =GimkPk(1.5.85)
к=\
q — количество учитываемых масконов;
тк — масса к-т маскона;
рк — радиус-вектор, определяющий положение к-т маскона.
Компоненты /12а (а]=х> а2=У> ai = z) вектора /|2 вычисляются по фор-
мулам
А 2а = —* = 1,2,3.
7|’2’0' Эа,. м Й к |рА-г|3
Гравитационные силы, вызываемые Солнцем и планетами Солнечной
системы, можно представить как градиент силовой функции 9?п [8]:
/2 =grad^,„ (1.5.86)
где
*n = Р - • S )73) (1 -5.87)
7=1 V 7
242
Ну — гравитационная постоянная j-го гравитирующего тела (Солнце, пла-
неты);
— радиус-вектор у-го гравитирующего тела в системе координат
OX2Y2Z2.
Разложим силовую функцию 91п в ряд. Для этого рассмотрим произволь-
ное слагаемое суммы (1.5.87)
*nj } (1-5.88)
Проведем элементарные преобразования первого члена данного выраже-
ния:
|г - Гу| = (г2 + /у - 2/r. costly) 2 = Гу 1 (1 + Л? - 2Ау costly) 2 = Ду,
где cos tl = (г • ^) [n-j) '; hj = rrj}.
Функцию Ду можно записать в виде бесконечного ряда
= МГ = 7'Х hjpn{co^j\ (1.5.89)
и=0
где P^cosi^J — полиномы Лежандра.
Ряд полиномов Лежандра для п = 0, 1, 2, 3 приводится ниже:
Ро (costly ) = 1;
Р{ (cos tly ) = cos tly;
Р2 (costly) = 2_| (3cos2 tly -1);
Р3 (cos tly) = 2~1 (5 cos3 tly - 3 cos -&j);
P4 (costly) = 8_| (35cos4 ftj - 30 cos2 tly + 3).
Подставляя (1.5.89) в (1.5.88) и проводя элементарные преобразования,
получим
^•=Ну7'
1 + £а;ри (coso7.)
п=2
(1.5.90)
Суммарная силовая функция 91п определится соотношением
8 °°
*=2>/;' 1 + X hjpn (cos^)
j=l L n=2
(1.5.91)
243
Компоненты Л,а, (/ — 1, 2, 3) вектора /2 вычисляются по формулам:
aJJ-ai aJJ
(1.5.92)
где
г = ||а1,а2,а3|| = ||х,у, z||;
=Ь’а7,2’^з| = к’Л’^|-
Влияние различных планет на движение ИСЛ в большой степени нерав-
нозначно. Из всех планет заметное влияние имеют два небесных тела: Земля
и Солнце, поэтому рационально ограничиться учетом лишь этих двух тел.
Рассмотрим соотношения, позволяющие приближенно вычислить силы,
возникающие от светового давления. Поскольку эта возмущающая сила мала
по сравнению с другими, то для ее приближенной оценки будем полагать,
что внешняя форма ИСЛ симметрична относительно направления светового
потока, а коэффициенты отражения на разных участках поверхности ИСЛ
одинаковы. Тогда найдем, что солнечный световой поток, попадая на повер-
хность ИСЛ, создает силу, направленную по радиусу-вектору: Солнце-ИСЛ.
Величина данной силы обратно пропорциональна квадрату расстояния ИСЛ
от Солнца и прямо пропорциональна множителю:
где 5СП — площадь поперечного сечения ИСЛ; с0 — скорость света; £сп — ко-
эффициент, характеризующий отражающие свойства поверхности ИСЛ;
Ес — мощность светового потока солнечной радиации на заданном расстоя-
нии /с от Солнца.
Для ИСЛ можно считать, что Ес — мощность потока солнечного излуче-
ния в районе Земли. Тогда /с — средний радиус орбиты Земли:
— ~ 0,465 Дж/м3; к ~ 1... 1,44; -масса ИСЛ.
х» СП и
Если гс -||хс, ус, гс||, г -||х, у, г|| — радиусы-векторы Солнца и ИСЛ в пря-
моугольной системе координат, а т0 — масса ИСЛ, то вектор возмущающей
силы светового давления может быть вычислен по формуле
/3=gradr
= gradr
= gradA.fl’
(1.5.93)
п ц
где 91сд =-. 0 ст]0 =Т]Ц“|; цс — гравитационная постоянная Солнца.
244
Сравнивая 91с д с силовой функцией 9?с, учитывающей возмущения за счет
гравитационных сил Солнца,
*с=Ис
1 г Гс
Jr-rc| Гс
можно записать:
К .=-п,Л '5Q
cos//c,
где
cos Я =(г Г )(дг) r = yjr r=Jr-r.
Особенность сил, вызванных световым давлением, состоит в том, что для
некоторых орбит, которые проходят через область пространства, затененно-
го Луной, силу /3 необходимо учитывать лишь на освещенной части орби-
ты. Чтобы и для этих орбит можно было использовать формулу, аналогич-
ную (1.5.93), необходимо ввести функцию Ч'(Х,Ф), которая равна единице
на освещенной части орбиты ИСЛ и нулю — на затененной ее части. Эту
функцию можно аппроксимировать выражением, полученным для цилинд-
рической тени [80]:
Ч'(Х,Ф) = 1- — - sinM>cosXX,
где X — угол между радиусом г и осью цилиндра; Ф — угол, образованный
прямой, проведенной из начала координат в точку пересечения орбиты ИСЛ
с тенью, и осью цилиндра.
Тогда формула для силовой функции 91сд может быть записана в виде
*с.д =- *(^Ф)По (*с +*о). (1.5.94)
Окончательно, на основании (1.5.72), (1.5.86), (1.5.94) систему дифферен-
циальных уравнений можно записать в виде
d2a. а. *
= + й1=х’ а2 = У’ a3 = Z’ (1.5.95)
245
где
/V п л и
/;=хх/- -
п=2 т=0 ^ai Г
\п
Г I
л
C^COS^X + ^Sin^
N п
+Д*"+Д^ф>Л«<*‘+М+Дч,;
яп = 1н;(|^-^Г-(^л)73
7=1 V
— cos#c;
*м =(dX(|i\ -'Т')*
Решения данной системы в общем виде не существует. Если требуется
получить частное решение без упрощающих допущений, необходимо пользо-
ваться одним из методов численного интегрирования.
1.5.9.3. Метод Лагранжа для интегрирования уравнений
возмущенного движения
Векторное дифференциальное уравнение движения ИСЛ (1.5.95) получе-
но в прямоугольной системе координат. Но такое представление не единствен-
но. Вместо прямоугольной системы можно ввести цилиндрическую, сфери-
ческую и другие системы координат. Для определения движения ИСЛ (при
известной системе действующих сил) достаточно задать систему дифферен-
циальных уравнений и значение каких-то шести независимых переменных
на какой-то момент времени.
В частности, в качестве таковых может быть принят вектор a = ||r,v|| на
момент времени /. Смена системы координат приводит к изменению как
вектора a , так и вида системы дифференциальных уравнений движения. При
этом должен существовать такой оператор A , который позволяет по зна-
чению вектора а на момент времени t определить соответствующий вектор
а в новой системе координат:
a = A{a.t).
Должен существовать и обратный оператор:
a = A~l
Интегрирование системы дифференциальных уравнений в большой сте-
пени зависит от того, в какой системе переменных она записана. В связи с
246
этим возникает задача выбора соответствующих переменных для системы
дифференциальных уравнений движения ИСЛ.
Многими достоинствами обладает запись системы дифференциальных
уравнений, если в качестве новых переменных взять параметры вектора
q = ||а, q)j, (р2, cos z, Q, ||. Получим выражения для системы дифференциальных
уравнений, записанной в этих переменных. При этом будем предполагать,
что все силы, действующие на ИСЛ, могут быть представлены как градиент
некоторой силовой функции.
В традиционном виде дифференциальные уравнения движения в форме
Лагранжа записываются следующим образом:
da = 2а1 3SK .
dt ~ цл 3/Q ’
</ф|
dt
Ф2 •
—cosz----
с dcosi
' с f ч>| ээг ! 1Г с .
Л J О + Фг)2 4мЭф2’
d<p2 (р. . ЭЯ f с f 2 ЭЯ if с )ЭЯ
—*- =—-cosz-------—-------------------—;
dt с dcosz ^цл J 1 + ф2 я^цлр(Р1
• • /
dcosz _ Ф, cosz ЭЯ ф2 cosz ЭЯ 1 ЭЯ с cosz ЭЯ
dt с Эф2 с Эф,+сЭЯ+[цл J (1 + (р2)2Э/п’ (1.5.96)
dQ_ I ЭЯ .
dt с Э cosz’
z \2 z х2
dta _ ф, ЭЯ ! с 2 ЭЯ
dt ) (1 + Ф2)2 Э<Р> ) (1 + Ф2рФ2
f с Y cosz ЭЯ ! 2а2 ЭЯ
J (1 + ф2)2Эсо8/ цл да'
Оскулирующие элементы — параметры а, <рр ф2, cosz, Ф -> относительно
которых записана система дифференциальных уравнений (1.5.96) — оскули-
рующая орбита ИСЛ, определяемая ими на момент времени t (/ — эпоха
оскуляции), имеют простую и наглядную интерпретацию. Возмущенное дви-
жение ИСЛ рассматривается как постоянно и непрерывно изменяющееся
невозмущенное (кеплерово) движение, а истинная орбита — как постоянно
и непрерывно изменяющаяся оскулирующая орбита [11]. Из определения
оскулирующих орбит, в частности, следует, что если эпоха двух оскулирую-
щих орбит отличается на малую величину, то на малые же величины отлича-
ются элементы этих двух орбит.
247
1.5.9.4. Численные методы решения уравнений
возмущенного движения ИСЛ
Одним из факторов, определяющих эффективность исследований движе-
ния ИСЛ, является быстродействие применяемых методов интегрирования
дифференциального уравнения движения, которое в векторном виде, согласно
(1.5.72), (1.5.74), (1.5.95), записывается следующим образом:
= (1-5.97)
где
a - ||а|, а2 j = ||х, у, z, х, у, z|| — вектор-строка (1x6);
^=\\^y^jta^^\\x,y,z\\-,
/а(Й,/) = |а2,/(д,/)|| — вектор-строка (1x6);
7(а,/) = ||/х(о,/),/г(а,/),/г(о,/)|| — вектор-строка (1x3);
9?в — пертурбационная функция возмущающих гравитационных сил;
fa. — возмущение от непотенциальных сил.
В общем случае дифференциальное уравнение (1.5.97) не может быть точно
проинтегрировано аналитически, поэтому приходится искать другие пути
решения. Одним из универсальных методов является метод численного ин-
тегрирования. который использовался в ИПМ им. М.В. Келдыша для нави-
гационного обеспечения различных КА [63].
1.5.9.5. Численно-аналитический метод расчета движения ИСЛ
Проводя анализ работ по теории движения ИСЛ, можно сделать ряд вы-
водов.
1. Полуаналитические методы приводят к численному интегрированию
дифференциальных уравнений возмущенного движения в средних элемен-
тах. Эти методы являются эффективным средством расчета движения спут-
ника на длительном интервале времени. Они позволяют понизить порядок
системы уравнений с помощью канонических преобразований и свести ее к
более простой системе, доступной другим методам исследования. Однако для
задач определения параметров орбиты спутника и нецентральное™ гравита-
ционного поля Луны более эффективным оказался метод повиткового рас-
чета траектории ИСЛ.
248
2. Основная трудность аналитических методов состоит в выражении воз-
мущающих функций через элементы орбиты и необходимости представления
их в виде тригонометрических рядов относительно угловых переменных.
Традиционный подход заключается в вычислении производных от возмуща-
ющих функций по выбранным элементам орбиты, подстановке их в диффе-
ренциальные уравнения и последующем их приближенном интегрировании.
Более рациональным является другой подход: вычисление интегралов от
возмущающих функций и последующее их дифференцирование.
3. Традиционные методы учета возмущений от внешних гравитирующих
тел — разложение возмущающих функций в ряд по полиномам Лежандра и
последующее представление их через элементы орбиты спутника и возмуща-
ющего тела во многих случаях сопряжены с дополнительными трудностями,
поэтому для вычисления возмущений от внешних гравитирующих тел в ка-
честве исходных данных используются табличные значения координат Луны
и Солнца из Дополнений к Астрономическому ежегоднику Института тео-
ретической астрономии (ИТА АН СССР).
1.5.9.5.1. Исходные предпосылки и основные допущения. Дифференциаль-
ные уравнения движения ИСЛ задаются векторным соотношением
(р г
dt2 + (1.5.98)
где 9i — потенциальная функция гравитационных сил; д/ — силы негра-
витационного происхождения.
Для получения аналитического решения системы (1.5.98) необходимо вве-
сти ряд упрощений и допущений. Рассмотрим используемые допущения в
порядке важности.
При разработке аналитической теории движения ИСЛ большое значение
имеет форма, в которой задана система дифференциальных уравнений дви-
жения. Так, характерной особенностью уравнений (1.5.98), записанных в
прямоугольной системе координат, является периодическое изменение век-
тор-функции / = gradr9i в пределах одного витка. Годограф этой вектор-
функции за виток представляет из себя замкнутую кривую, охватывающую
начало координат. Это является препятствием для развития аналитической
теории на базе уравнений, записанных в форме (1.5.98). Поэтому для разра-
ботки аналитической теории движения ИСЛ необходимо выбрать системы
дифференциальных уравнений в таких параметрах, которые по самой своей
природе были бы подвержены меньшим изменениям. Этому условию удов-
летворяет система дифференциальных уравнений в форме Лагранжа, запи-
санная относительно элементов орбиты. Действительно, в нулевом прибли-
жении даже постоянные значения элементов орбиты достаточно хорошо
описывают ИСЛ за виток.
Следует отметить, что параметры я*, е*,..., полученные при решении за-
дачи двух неподвижных центров, еще лучше, чем кеплеровские элементы
249
орбиты, описывают движение на витке. Однако последние все же предпоч-
тительнее, так как связь элементов а . е .... с кинематическими параметра-
ми х, у, z, х, у, z осуществляется через бесконечные ряды, что в конечном
счете снижает эффект от использования данных элементов.
Рассмотрим подробнее те допущения, которые используются в настоящей
главе для построения численно-аналитического метода расчета движения
ИСЛ.
Предположим, что дифференциальные уравнения движения ИСЛ задаются
системой
5 = (1.5.99)
<7 = ||<7, (рр (p2,cosz, Q, || - вектор-строка (1x6); 4^(1,q) — известные функ-
ции от времени и параметров вектора q .
Пусть соответствует начальному моменту (обозначим его д ) прохож-
дения линии узлов. На этот момент задано значение вектора #(ZQ1). Требу-
ется определить вектор q(t) на момент Z, удовлетворяющий неравенству
где п — момент прохождения спутником линии узлов и-го витка; Тп — пе-
риод обращения и-го витка.
Основным приемом приближенного аналитического интегрирования урав-
нений возмущенного движения является метод последовательных приближе-
ний. При этом используются два метода: метод малого параметра Пуанкаре
и метод Пикара [11].
Метод малого параметра предполагает, что правые части каждого уравне-
ния (1.5.99) пропорциональны некоторому параметру |ст|«1, т.е.
dq.
= J = 1,2,...6.
dt J
Тогда решение ищется в виде рядов
qJJc = dj,o + оД^-,1 + °2д^-,2 + - + + (1.5.100)
где okkqjk — возмущения Zc-ro порядка относительно о в элементах qj, a AqJk
определяются по формулам
Н,1 = J
‘а
250
t 6 f д/ . A
4,2 = JX^,1 ТГ ^ит.д.
V=' Г9'Л=0
Решение методом Пикара ищется в виде рекуррентного соотношения
«(-> = «z„)+fv,<z,^'>)</z, (|5|01)
ZQ
где <?(/), — соответственно z-е и (Z—1)-е приближения вектора
q = ||я, ф|, <р29cosh Q j, /' = 1,2,..., N; N — количество итераций.
В каждом приближении под интегралами (1.5.101) стоят известные фун-
кции времени, так что интегралы, по крайней мере формально, могут быть
вычислены.
Допущение 1. Ввиду малости возмущающих факторов ограничимся толь-
ко первым приближением на интервале в один виток. Дальше будем предпо-
лагать, что N= 1, и при вычислении интегралов в (1.5.101) будем считать
вектор q постоянным, не зависящим от времени.
Тогда вычисление элементов орбиты на момент п < t < п + Тп осуще-
ствляем в два этапа.
На первом этапе определяем элементы орбиты ИСД на момент п по ре-
куррентной формуле
fa,n-1 +Тп
= + J +£,„-!> (1.5.102)
где t^n_x = ||0,0,0,0,0,\tn_x ||; \tn_x =Тп Х +SZ2; 8Z2 — поправка на драконический
период обращения ИСЛ; вводится эмпирически при согласовании эталонных
и конкретных методов расчета; q(t^n), ?(^л_1) ~ элементы орбиты л-го и
(п— 1)-го витков.
На втором этапе определяем элементы с оскуляцией на момент времени t
по формуле
t
4(t) = q{tan)+ j Ч^,^,))/*. (1.5.103)
1Я,п
В целом рассмотренный метод расчета вектора q(t) можно считать поша-
говым, при этом в качестве шага принимается один оборот ИСЛ.
251
Допущение 2. Поскольку речь идет о возмущениях первого порядка, мы
можем вычислить их от каждого возмущающего фактора в отдельности, а затем
сложить результаты [39]. Иначе говоря, если \q есть суммарное изменение
вектора q в интервале одного оборота ИСЛ за счет действия несферичности
гравитационного поля Луны, притяжения Земли, Солнца и действия свето-
вого давления, то вычислять его можно по формуле
4
= (1.5.104)
/=1
где Дд4 — изменение в векторе q за счет возмущений от несферичности
Луны; А#] и Д#2 — изменения в векторе q за счет притяжения Земли и
Солнца; Д#3 — изменение в векторе q за счет возмущений, вызываемых све-
товым давлением.
Так как |д^|«|Д<?4|; |Д^2|«|Д^4 и |Д^3 «|д^4|, то при вычислении &q
в интервале времени одного витка (1.5.103) учитываются лишь силы от не-
центральное™ гравитационного поля Луны. При расчете возмущений в век-
торе q через целое число витков учитываются все возмущающие силы по фор-
муле (1.5.102).
Скорость вращения Луны относительно своей оси равна периоду обраще-
ния ее относительно Земли. Эта особенность не может не сказаться на осо-
бенности движения ИСЛ. Действительно, отношение периода обращения
ИСЛ к периоду вращения Луны есть малая величина (Т = 0,003). Каж-
дый оборот спутники Луны проходят в более стационарном гравитационном
поле, чем спутники Земли. Благодаря этому некоторые тригонометрические
функции, входящие в выражение для гравитационного потенциала Луны,
можно упростить. Пусть Г2л — угловая скорость вращения Луны; — мо-
мент прохождения восходящего узла ИСЛ; t — момент времени, удовлетво-
ряющий условию t-t^<T. Тогда, если даны функции sinQ F и со8ИлГ , где
F = , то разложив их в степенной ряд, получим:
sinQj = £(-l)'(Qj)2'+1[(2/ +1)!]-’;
z=0
cosQ/=£(-1)'(Йл/)2'[(2/)!]-'.
/=0
Учитывая малость величины Г2лГ , во многих случаях можно ограничить-
ся лишь первыми членами ряда, допуская при этом ошибку порядка (й J)2.
Допущение 3. В дальнейшем будем принимать следующие приближенные
равенства:
sinf^Z ^Г2л/; cosf^Z ^1.
(1.5.105)
252
Малость значений \qx, &q2, Aq3, а также малость величин ТТ3Х и ТТС1,
где Т, Т3 и Тс — периоды обращения ИСЛ, Земли и Солнца соответственно,
позволяют использовать следующее допущение.
Допущение 4. В пределах одного оборота ИСЛ Земля и Солнце считаются
неподвижными. Изменения же в положении этих небесных тел вносятся лишь
при переходе от одного витка к другому.
Силу светового давления на ИСЛ необходимо учитывать только на тех
участках траектории, где ИСЛ не затенен Луной. В результате этого сила
светового давления является разрывной функцией, что вызывает основные
затруднения при построении аналитической теории возмущений [35]. Чтобы
представить силу светового давления в виде градиента некоторой силовой
функции, необходимо ввести функцию Т(Х,Ф), которая была бы равна еди-
нице на освещенном участке орбиты ИСЛ и нулю — на затененном участке.
Но сила светового давления существенно меньше наименьшей из учитывае-
мых гравитационных сил. К тому же из всех орбит ИСЛ лишь небольшая их
часть расположена таким образом, что проходит через область пространства,
затененную Луной. На основании всего этого принимается следующее допу-
щение.
Допущение 5. Предполагается, что для всех орбит Т(Х,Ф)= 1, а возмуща-
ющее воздействие от силы светового давления не учитывает возможность за-
хода ИСЛ в тень Луны.
Учитывая введенные допущения, выведем некоторые формулы, исполь-
зуемые в дальнейшем. Используя дифференциальные уравнения в форме
Лагранжа, интеграл
Д?“ (1.5.106)
где Aq = ||ая,Acpj ,А<р2 ,Acos/,AQ,AZq||, может быть вычислен по формуле
А^ =
J lq(t,d(tQ))dt
Jn
(1.5.107)
где h
Если обозначить
—91, i-1,2,...,6; 91 — пертурбационная функция.
П/ = Р,('Ж))Л’
(1.5.108)
253
то уравнение (10.5.1.10) в развернутом виде запишется в виде
ДФ1 = Рд2 nc0SZ - ^2,6 - ^2,3 П<р2 ’
Л<Р2 = ^2,3 ПФ1 - Рз,4 ncos, - ^3,6ПГЙ (1.5.109)
Д cosz = -р4 2 ПФ1 + р6 4 П,о + р5 4 пп + Р3 4 Пф2;
Д£2 = -р5 4 ;
д*я = ^2,6 Пф1 + Рз;б Пф2 - Р6 4 ncos/ - рвд Па.
Здесь Pjj, i,j=l,2,...,6 определяются по формулам:
А,1 = Р\,2 = А,3 = ^1,4 = Pl,5 = Pl,6 = 2«2ЦЛ’ ; Z>2,1 = Р2,2 = ^2,5 =
Р2,3 = -^ОЦл)-1 ; р2,4 = -Ч>2 COS/C-1 ; Р2,6 = с2<Р1 [Ил 0 + Ф2 )] 2 ’
Р3,1 = Рз,3 = Рз,5 = °’ Рз,2 = ~Р2^ ’ Рз,4 = С’1(Р1 COSZ’’
Рз,6 = 2с2 [Ил 0 + Ч>2 )]”' J ^4,1 = Р4,4 = °;
р42 =-c_1<p2cosz; />43 = -c“'<p|cos/; р45=-с-1; (1.5.109А)
Р4,б = ~с2 cos/|k 0 + Ф2)] 2 ’ P5,i = Рз,2 = Рз,з = Рз,з = Рз,(, = °;
Pi,4 = ~Р4,5 ’
Рб,5 = Рб,6 = ^6,1 = ~Pl,6 ’ Рб,2 = ~Р2,6 ’ Рб,3 = ~Рз,6 ’
Рб,4 = ~Р4,6 '
Вычисление приращения \q в соответствии с (1.5.107) сводится к вычис-
лению шести интегралов:
—at, i = 1,2,...,6.
'о 1
Однако операцию вычисления этих интегралов можно упростить, если
изменить порядок интегрирования и дифференцирования. Для этого введем
интеграл Ф по формуле
ф=|^- (1.5.110)
254
Продифференцировав его по параметру
Qi(Qx = a,q2=%,q3=q>2 ,q4 = cosi,q5 = Q,?6 =tn),
получим
J, <4 a,, ' a9i
откуда
П,
(1.5.111)
На основании данной формулы можно написать равенство
П9 = grad9 Ф+9?,=,ograd9ZQ - 9i,grad9Z.
(1.5.112)
Перейдем в интеграле (1.5.110) от переменной t к переменной и — аргу-
менту широты. Для этого напишем уравнение, связывающее возмущенное зна-
чение аргумента широты и время [11]:
du е .d£l /1 •
= э-cos/ ; r = p(l + (p. sinw + <p9 cosw) *.
dt r1 dt
(1.5.113)
Получим дифференциальное уравнение, позволяющее определить время
прохождения ИСЛ в возмущенном движении заданного значения аргумента
широты:
dt
du
г1 . '
—yCOSZ ;
CL о COS/
(1.5.114)
Отсюда
.г1 .
l + -r-cos/------
CL о COS/
du.
Представим [l + £] 1 где £ = ^=-cos/--------, степенным рядом
CL dcOSZ
[1 + £]-1 = 1 - £ + +... . Учитывая, что £ «1, ограничимся учетом лишь
первого ряда. Тогда окончательно получим
и 2
Ф = |г ЭМм. (1.5.115)
о с
Очевидно, что Ф есть функция вида Ф = Ф(#,//).
255
Поэтому частные производные от Ф по элементам орбиты определяются
формулой
ЭФ _ ЭФ
э<7, [dtf,.
дФ дм
дм д<?(. ’
(1.5.116)
дФ
где через —
P<7,J
ные по параметрам q/r явным образом входящие в выражение для Ф.
Из свойства первообразной функции следует, что
дФ/дм = г291/с.
здесь и в дальнейшем будут обозначаться частные производ-
(1.5.117)
Определим производные du/dqr Для этого воспользуемся соотношением
Z = rsinMsinz,
откуда
ди , . .ч-1 ( dz дг . . . . л .dcosz
— = (rcosMsinz)-------------sin и sin z + r sin uctgi-
dqt I dqt dqi dqt
(1.5.118)
(1.5.119)
где dr/dq^dr /dq^', er = rr ’.
Производные dr / определяются по формулам:
дг 1Г_
— = — г -
да а
дг
----= -м
дф2
дг
— = а
дф!
L T2+S2 ен + М2ег J
~рт\ -5i \ен~М\ег ;
(1.5.120)
dr Z - дг т dr
------= ч— e ; — = o; —
dcosz sin2Z c dQ dta
где
=2Xj ] cosM + Xj 2 sinM; M2 =X2 j sinM + X22cosM;
5] =2X| j sinM-X12cosM; s2 =X21cosm-X22 sinn;
— S| + (2 + ф2)Х|>2, T2 — s2 (2 + ф2)Х2|,
256
ec=(rxr) rxr eH=ecxer;
^ = ||-y,x,°||;
\i =<pl(l + <p2)-'; X12=(l-<p2)(l + q>2)-1;
^>2,1 = ^2 1,1(1 + ф2) I, ^<2,2 = 1— Чг
Подставляя (1.5.118) в (1.5.120), получим:
Эм с 3 . Зи Т. а ди Т7 а
= - -> (t-tc)', = -,+ S.- =- \- 5,;
да г2 2а п Эф| 1-е2 г Эф2 1-е2 г 2
Эм _ Эм Эм=_с (1.5.121)
dcosi Э£1 ’ dtn г2
п ЭФ Г ЭФ
Для вычисления производных — остается наити —- .
Э?,. [Э?,.
Пертурбационная функция 91 представляется в виде
91 = 91л+9<з+9<с+91с.д = 5Х (1.5.122)
/=1
где 9?4=91л — пертурбационная функция, описывающая несферичность
Луны; 9ij = 9i3 и SR2 = 9ic — пертурбационные функции, соответствующие
гравитационным силам от Земли и Солнца; 5К3=ЭДсд — пертурбационная
функция, соответствующая силам светового давления.
Поэтому вектор \q может быть вычислен по формулам
4
Д? = ХД^’ (1.5.123)
/=1
где
=4i,i
М1пм’пл2’-"’п4
' э (1.5.124)
Пм = I
№
которые отличаются от формул (1.5.107) лишь дополнительным индексом i.
257
То же самое можно сказать относительно всех формул (1.5.108)—(1.5.117),
где при вычислении возмущений в элементах q за счет z-го фактора следует
брать пертурбационную функцию с соответствующим индексом. Поэто-
му в упомянутые формулы необходимо ввести индекс, указывающий на вид
учитываемой пертурбационной функции. Ниже этот индекс может опускаться.
1.5.9.5.2. Преобразование интегралов Ф для возмущающей функции грави-
тационного потенциала Луны. Проведем преобразование интегралов Ф для воз-
мущающей функции гравитационного потенциала Луны к виду, удобному для
расчетов. Представим его как двойную сумму:
W п
п=2 т=0
где
(1.5.125)
(1.5.126)
о
Для представления воспользуемся промежуточным выражением
У. Каула [37]:
-~\п-т четн
С „
и,tn
~dnm
’ _1п-т нечетн
cos[(«-2p)t/ + +
sin [(л - 2р)и + т 1F]
(1.5.127)
где
И/ = £2-Г2л(/-/ф) = Х-Г2лГ;
= Q ~('я “ГФ = * “
В отличие от [37], многочлены F™ вычислим по следующим формулам,
в которых число суммирований на единицу меньше, чем в формулах для F™
В [37]
Fm = Y Ст Вт Ст = sin'7-'”-2*/* /1 с 1эо\
гп,р Z^n,kDn,p,k^ntk ’ (1.5.128)
В"1 к = ^ат DnDk ’ = 4,sin25 / (1 - COS/)'”
п.,р,к tn п,р,к tn '
258
Dn,p,k = Н)^*^ [(я - P - к - $)!(p - к - m + s)!];
% = min(p,n-p,%); x = E _ целая часть от ч исла (л - /я) / 2;
a = max(0,w + &- р); [3= тт(т,п-р-к).
Перепишем выражение (1.5.127) в виде
=Ь
\П п
Г \ п
Л у гт
Г п,Р
Г ) Р=0
с ™ cos
п, т
П -% fin + (п-2р)и + mW +
+ d„m sin
л, т
n-m V z _ х 1J7
-% \ук + (п-2р)и + mW
Воспользуемся формулами тригонометрических функций суммы углов для
cos [...] и sin [...] и скомпонуем члены полученных сумм относительно двух
множителей coswQ;]F и sinwQ;]F. Получим
ц г
мт — £_л_ л
п г г
V
\п п _
^Fnmp{[G™’1cos(n-2p)«-(7™’2sin(n-2p)«]cos/JiQJlF +
I р=о
+[G™’2 cos(n-2p)u + G^’1 sin(n-2p)u] sin тйл/}, (1.5.129)
где
n-m V .
—----х 3n + wXn
Qm,\ _ с cos
п п,т
+ d т sin
п, т
п-т к ,
—------х |Зл + /иХо
Gn'2 = Сл,т Sin tLYL - % ]3п + тЧ
n-m V .
—----х Зл + тХп
~d„m cos
п,т
Используя допущение 3 и формулы (1.5.105), выражение (1.5.129) можно
переписать в виде
/ \п п
II г \ п
г \ г ) р=°
cos(п-2р)и- G^’2 sin (и - 2р)и] +
+[G„’2 cos(n - 2 р)и + (7™’1 sin(« - 2 р)ы] sin т£2л (/ - /п)}. (1.5.130)
Рассмотрим первый сомножитель данного произведения, умноженный на
г2с~1 :
259
г2, Ц (г А 1
— рь =2Л(1 +ecosO)"-1,
с г I г J
где Ап = 2-1с(гл)пр-п; р = а(1-е2).
Используя формулу бинома Ньютона, запишем:
л-1
(1 + ecosO)"-1 =^е5(л-1)! [$!(и-1 -s) !]-1cos50.
5=0
(1.5.131)
Преобразуем cos* О. В соответствии с формулой Эйлера для комплексных
чисел, получим
-|5
1 5
05
L к=0
cos*0 = + = — У
2 V / qs
kl(s-k)'
= 47 X , ./5! /ч. [cos<s~ 2к)Ъ+jsin(s- 2&)е].
2* k^k\(s-k)\
Но
1 л
47 Ё .' м.sin(s-2к)Ь = 0,
2s £о k\(s-k)\
поэтому окончательно выражение принимает вид
cos* й = — У---—---cos Is - 2£| th
2s^k\(s-k)\ 1 1
В результате подстановки имеем
(l + eeosO)”-' =У(£Т (”~1>! »)
SUJ k'(s-ky.
2 п
Фт = АУУ Fm Lm\
п п,р п,р>
/=1 р=0
где
л-1 2
пл,/ - V Р V (_n(2-z)(j-l)/t у*-1 Ч/mJJ •
п,р S ' К^п,р' n,p,s п ’
5=0 7=1
(1.5.132)
(1.5.133)
(1.5.134)
r»,s,* = («-DWO-к)1(п-1 -s)!]-1;
*=о
260
KUk =2Jc°s|n-2p|«cos[|s-2&|(u-(o)]du; (1.5.135)
0
X™’^’2 t = 2 J sin |n - 2p| « cos[|s - 2&| (u - CD>] du J
0
Xn’p’'s,k = J(/-/q)cos|n- 2p|«cos[|s- 2^|(«-(0)] ;
0
J(f-/„)sin|«-2p|MCOs[|s-2fc|(M-co)]dM, (1.5.136)
0
д(/,у) = 3(/-1)-(-1)' j — целочисленная функция, определенная на мно-
жестве значений индексов i, j.
Таким образом, для вычисления интеграла Ф необходимо найти интег-
ралы Х^к .
В дальнейшем достаточно часто будут встречаться следующие конструк-
ции:
asiny+Psin8; acosy+Pcos8; asiny+Pcos8 и т.д.
Для сокращения записи и с целью сделать формулы более обозримыми
введем ряд векторных и скалярных функций:
SS"1 (у, 8) = ||sin у;sin 8||; 5С1 (у, 8) = ||sin у;cos 8||;
СС1 (у, 8) = ||cos у; cos 8||; С51 (у, 8) = ||cos у, sin 8||. (1.5.137)
Пусгь Ч». -°1|-
Тогда
SS2(y,8) = 55' (у, 8)Ё; 5С2(у,8) = SC1 (у, 8)£;
. - (1.5.138)
СС2(у,8) = СС’(у,8)£; С52(у,8) = С5‘(у,8)£.
Обозначим J* = 1,1 — строку (1х2). Тогда каждому вектору
5С'(у,8), 55'(у,8), CS‘(y,8) и СС'(у,8) поставим в соответствие скалярную
функцию 5С'(у,8), 55'(у,8), С5'(у,8) и СС'(у,8) по формулам
5С'(у,8)=5С'(у,8)/г; 55'(у,8) = SS‘(y,8)fT;
(1 5 139)
СС'(у,8)=СС'(у,8)/г; С5'(у,8)= С5'(у,8)/Г.
261
Если у = 8 , то в скобках соответствующих функций будем указывать лишь
один аргумент, т.е.
5С'(у,у)= SC'(y), СС'(у,у) = СС'(у) и т. д. (1.5.140)
Помимо скалярных функций с верхним индексом, введем скалярные фун-
кции с нижним индексом 5С.(у,8), 55z(y,8), CSfaS) и CCz(y,8) по форму-
лам:
SCz(y,8) =
siny, если i = 1; fsiny, если / = 1;
оо(у,8) = л
cos8, если/= 2; ' [sin8, если / = 2;
С5,.(У,8) = -
cosy, если i = 1;
sin 8, если 1 = 2;
СС,.(у,8) =
cosy, если / = 1;
cos 8, если 1 = 2.
(1.5.141)
1.5.9.5.З. Вычисление интегралов X. Интегралы X",l,Jsk (1.5.135) и (1.5.136)
разобьем на две группы: Х™’р'jк , не зависящие явно от времени, и Xnp'j^ —
зависящие явно от времени.
Рассмотрим интегралы первой группы. Используя тригонометрические
функции, которые могут быть записаны в виде
sinnsin/> = 2-1CC2(n-b; а + Ь);
cosncosZ> = 2_|CC1(o-(>; а + Ь); 0 5 142)
sinocosZ> = 2_| SS'(a-b; a + b),
и, выполнив элементарные преобразования, интегралы X„£Jsk можно запи-
сать следующим образом:
и и
к = cosI5“03jСС1 (а1 и,а2 u)du + sin|s-2Л|cojSS2(осj и,a2и)du;
о о
1э "г г 9 (1.5.143)
Xnpsk = cosl5 “ 03J (aiu > a2 U^U + s*n I5 “ CC2(a2 и, u) du,
о о
где az =|л-2р| + (-1)/+1 |5-2Л|.
Выполнив интегрирование, окончательно получим
«-')• (i-5-мо
Целочисленная функция т)(/,у) определена.
Функция Z‘n,jpsk, / = 1,2 определяется по следующему правилу.
262
Если |и-2р|тф-2А:|, то
2
2Л|о; а,« + (-!)' |s-2Л|со);
/=1
2
z^s,k = £(а,)-'СС2(|5-2Л|<о; а,и + (-1)' |s-2Л|со).
i=i
Если |л-2р| = |5-2Л|*0, то
Z»’k^
= (-1)'+1 («j V 551 (|s - 21t| co; |n - 2p|(2« - co) + i~' (u)‘ OS}(|s - 2£| co);
zS,s,* = (“i)”' cc2(|5 - 2^l «>; |« - 2p\ (2u - co) + (w)'5C,.(|s - 2A| co).
Если |л - 2p| = |з- 2Л| = 0, то
^л=0-2/)(«У; Z^k =(/•-!)(«)', /*=1,2.
(1.5.145)
(1.5.146)
(1.5.147)
При вычислении интегралов второй группы X„p'Jk вначале осуществим
интегрирование по частям и, учитывая равенство
J(r-zQ) = A = r2c-1Jw, (1.5.148)
получим
и
• >= ‘-2.
О
(1.5.149)
Здесь yj — функция, вычисляемая по формулам:
если |л-2р|^|5-2Л|, то
2
yj = XC-l/'-^^a/r^C/a/U + (-1У |s - 2Л| ю);
i=i
если |л-2р| = |s-2&| ф0, то
у. = (-l)Ai a-'5Cy (щи - |s - 2Л| со) + uCS^s - 2Л| со);
если |rt-2p| = |s-2A:| = 0, то
У1=2ы; у2=0.
(1.5.150)
(1.5.151)
(1.5.152)
263
Разложим (г2а 2) в ряд по истинной аномалии [39]:
г2а~2 = \l\-e2
= \ll-e2 1 + 2 Vj cos ycocos ju + 2^ v. sin ycosin ju ,
(1.5.153)
где
vy =(1 + jVl -e2(-e)>(14->/l -e2)>. (1.5.154)
Используя (1.5.153), интегралы в выражении (1.5.149) можно преобразо-
вать к виду:
j y/e 'du = Т[(2Л)-' ГД, „ ♦ ГД, „ ], j = I, 2,
О
где Т — период обращения ИСЛ;
и
о
(1.5.155)
(1.5.156)
2
/=1
оо U
jlyjCS^uldu
т=1 Lo
7 = 1,2.
(1.5.157)
1 + 2^vy cos jb
Подставим (1.5.150)—(1.5.152) в (1.5.156) и возьмем интегралы от элемен-
тарных тригонометрических функций. Получим [см. (1.5.145)—(1.5.147)]
^=Z«S (/=2>- о-5-158)
Возьмем интегралы от элементарных тригонометрических функций и
проведем соответствующие преобразования.
Если |и - 2р| |s - 2Л|, то
~ 2
/=1 /=1
если \п- 2р| = -2А;| * 0, то
> + <-D,J*l>2>-1 В,С5/|,-2*|4 7 = 1,2;
1=1
264
если |n-2p| = |s-2A:| = 0, то
Чи-НН. Г«!„Л=°-
/=1
Значения >4^’^Лz(<xz) (у,/ = 1,2) и Bt определяются по формулам:
2
л^л,/(«/) = Х(«/-(- 1)70-'СС2{[|5-2Л| + (-1)п//](о, (а,-
у=1
-(-l)yZ)« + [(-l)/|s-2^| + (-l)y/](o}, если а'^?; 1 = 1,2;
(2а,)-' СС2 {[|s - 2Л| - (-1)' а, ] со, 2а,и + (-1)' (|s - 2Л| - а, )со} +
+ и sin) |л - 2р| со), если a'^i1,1 = 1,2;
Л2,1.л/а/> = Х<а/ - (-W 55'<[1а/ - (-1)т/|]«+К-1/15 - 2/с1+(-1)тЛ<0,
у=1
|js-2&| + (-l)Y+/z]co}, если a'/^i1; 1 = 1,2;
(2а,)-155' {[ 2az« + -(-1)' |s - 2Л| - а, )со], [ |$ - 2Л| - (-1)' а, ]со} +
+ ucos(|/z-2p|co), если а'=/',/ = 1,2;
Bj - usin(u - со) + i~{CC2(i(u - со), /со).
Если при расчете интегралов 2C^JpJsk положить и = 2л, что соответствует
одному полному обороту ИСЛ, то формулы существенно упрощаются и при-
нимают следующий вид:
если |и-2р||s — 2Zc|, то
^=o,' = U2;
r4,s>* =<vai -sign(a уН))5С/(|л-2р|со), z = 1,2;
если |л-2p| = |5-2Л|ф0, то
^^csAn~2p\^;
n,p,s,k
= va|5C(.(|n-2p|co)+(-l)'
2^vysinjco
y=i
CSj (|s-2A:|)co);
265
если |п-2р| = |5-2Л| = 0, то
*Х=4л; ^л=°;
уп\р^ =-4£vysin J(O, Y„2P^=O,
J=i
где Vj=Vj(fr'.
С учетом (1.5.149) получим при и = 2п
Отметим также, что при и = 2л
у2,/ _ у!,/ _ у/и,1,/
^п,р^к ~ П^п,р^к ~ КЛП,р,5,к •
Полученные интегралы ^^’/^,7 = 1,2 внутри витка (и<2п) и за виток
(и = 2л) имеют простую структуру, так как не требуют разложений в какие-
либо ряды при их вычислении.
При вычислении интегралов Х„'р^к, 7 = 1,2 используется разложение в ряд
по истинной аномалии отношения (г/а)2.
Однако при вычислении Х™^к за °ДИН оборот ИСЛ {и = 2л) формулы
имеют достаточно простой вид, так как приходится вычислять ряд вида
£v.sin усо. При малых эксцентриситетах этот ряд сходится быстро. Для
7=1
эксцентриситетов е < 0,1 вместо ряда можно использовать «уравнение цент-
ра» [39]. В этом случае имеем простое соотношение
-2^vy. sin yco=«(/Q -т) + со=Р1 + со,
>1
где т — время прохождения перицентра орбиты ИСЛ, a Р] определяется фор-
мулами
Pj =Eq -esin£2
esin Ea = -ф] (1 + ф2)-’ Vl-e2 = -b; (1.5.159)
ecos£Q =<p2 + <p2(l + <p2)-1 = a.
Для малых эксцентриситетов величины т и со становятся плохо обуслов-
ленными, и полученное соотношение применять не рекомендуется.
При вычислении интегралов X™p'sk внутри витка (и < 2л) можно пренеб-
речь интегралами YJp s k , так как ошибка носит локальный характер и не пре-
266
вышает величины порядка &лесптп~\£1лес1птп~{). В этом случае (1.5.149) для
вычисления примут вид
vmt2J - J f_ J_ Z2’Tl(2,j) I
Лn,p,s,k - 1V 1а'лп,Р^к ~ n,p,s,k Г
1.5.9.5.4. Вычисление функции от несферичности Луны в пределах витка.
Для вычисления изменений в векторе qi за счет гравитационных сил в пре-
делах одного витка, согласно допущению 2, необходимо найти интегралы
лишь от сил, вызванных нецентральностью гравитационного поля Луны. Ис-
комые интегралы (/ = 1,2,...,6), в соответствии с (1.5.111), могут быть за-
писаны в виде
П = - + ^-91 91
dqi dq. 'я dq.
(1.5.160)
где 91,, 91, — значения гравитационного потенциала, учитывающего несфе-
ричность Луны, для моментов t = tn и t <tn + T; Ф — интеграл типа (1.5.110),
соответствующий потенциалу от несферичности Луны.
Из формул (1.5.125) и (1.5.130) следует, что функции Ф и 91 представля-
ются в виде суммы от слагаемых с индексом и. Сгруппируем все слагаемые с
одним значением п, и получившиеся при этом величины обозначим через Фп
и 91л. Тогда интегралы П (/ = 1,2,...,6) можно представить в виде
w
п9,.=Хп9,,П’/=1’2’-’6’ (1.5.161)
п-2
где
(1.5.162)
Так как qx = a; q2 = ф( ; q3 = <р2 J = cosz i Qf, - » то на основании
(1.5.116), (1.5.121), (1.5.162) можно записать:
Эф„
Эф,-
г2 ™ ди . . ~
+—; * = 1,2;
С Эф;
cosz,и
ЭФ„
Ocosz
(1.5.163)
п п п
где Ф„ = ХФ™; ^=о= =
m=Q т=0 m=Q
ЭФ„
, z = l,2,...,6 — част-
ные производные от Фи по параметрам qi, в явном виде входящим в формулу
для Ф„.
267
Получим вначале формулы для вычисления w=0 и .
На основании равенства
X = (a-Q) + |Q-Q(r-/O)|
и тождеств
(а-Q)u=0 = 0; [о-Йл(/-= [q --/ф)] =
можно записать следующее выражение для 9?™ при и = 0:
^=о=4[4>| P„'n(0)[c„mcosmXfi+J„msinWXQ],
\ 7
где г* = г(и)и=0 = <з(1 -е2)(1 + <р2)-’.
Присоединенная функция Лежандра 7^”(sin'P) в точке и = 0 имеет вид
n-m г / \ / \'
/ ч п-т W п + т
(-1) 2 (п + т) 2 —! —21
0, если (п - т) нечетное.
-1
, если (п - т) четное;
(1.5.164)
Окончательно выражение для 9?™w=0 можно записать как
п
(1.5.165)
т=0
где Вп =цл(гл)”(г*)-"-1; функция G™’1 определена ранее.
Преобразуем формулу для вычисления 91 и t к виду, в котором сомножи-
тель [c„ m cos mk + dnm sin /иХ] можно вычислить по рекуррентным соотноше-
ниям. Имеем
91 =МГл
и,/ г г
\
у п
X /’„m(sin'F)[C„,mCOSW’L£i +<,msinw^]>
7 /и=о
где
Pm(sin Т) = (cosT)"1 £ b™k sin
к=0
b^k(-\)k(2n-2ky.[kl(n-к)\(п-т-2к)!2п]~';
_ -(п-т А
X- £ 9 — целая часть числа (п-т)2 1.
(1.5.166)
(1.5.167)
268
Используя соотношения
sinT = sinwsinZ; Х = а-£2л(/-/ф);
sina = X''COSKP)-1; cosa = x(rsinKP)-1,
получим
sin X = cos-1 со8Г2л(/-/ф)-хг-1 sinQ^Z-^)];
cosX = cos-1 T[xr_1 cosQJ1(/-/0)4-iyr_1 8шГ1л(/-/ф)].
На основании этого можно записать следующие рекуррентные соотноше-
ния для вычисления Гш = cos тк Дт = sin тк :
ГИ = Г1ГИ_1-Д1ДИ_1; Дт = Д}Гт_}+Г}Дт_}, (1.5.168)
где
Го = 1; До=О; Г, =x/--|cosQJI(Z-Z<t,) + KlsinQJ|(Z-Z(t));
Д, = KlcosQJ](Z-Z(t,)-x^lsinQj](Z-Z(J)).
Окончательно формулу (1.5.166), с учетом (1.5.167) и (1.5.168), можно
записать:
К'
НЛ[Ч
Г Г
\
b™k sin"-m-2A
ЭФ„
Ч*
^п,тДт ]*
(1.5.169)
Для вычисления
запишем Фл в виде
2
Ф„=1Х>
/=1
(1.5.170)
где каждое слагаемое суммы вычисляется по следующим формулам:
/и=0 [р=0 L-s=O
1,2
П /
У FmGm>2
^п,р п,р п
[_т=0
л-1
Убу12
s n,p,s
5=0
р=0
(1.5.171)
П
269
Л Л Л Л
ф;=4 Е Е F"L"i=4 Е Е 4"х
Л1=О р=0 р=0 Л1=О
л-1
_5=0
^л
л Г ( п У~1 ( s
)4Е 1"'№р1г
р=0|дл7=0 /5=0\ ^=0
n,s,K n,p,s,k
( л Ал-l ( s A
+e„., E™WJ E4 Ег„,Х1.л -
^лг=О Js=O \^A=0 J
О n Г ( n V~1 ( s
Z^^2 ZdZr^zS,s,* +
ri p=0L\w=0 Js=O \^A=0 ?
r л Ал-l f s A
+^P Z*s Zr^z«:L* =^^-^)ф2-'-уф2< (1.5.172)
. /л=0 .5-0 I k=Q .
\ 7 \ /-*
где
(1.5.173)
Формулы (1.5.171) и (1.5.172) можно переписать в виде
- Е4> Ё Ё(-|)<'_|)'4'' ; '=ьг.
/=1 р=0 г=0
Здесь использованы следующие обозначения:
5Й= ЁF",G™IM, i,r=\,-L,
m=Q
л-1
=у В 4,ir ; Z> = 1,2;
Л,р Zu 5 Л,р,5 ’ ’ ’ ’
5=0
5
Ш/,Г = У Г •
т л,р,5 Zj 1 n,s,k n,p,s,к
к=0
rn,s,k =(”- iy.[k'.(s-k)l(n-2-s)!]-’; V = О, л-1;
(1.5.174)
270
^,p = sign(«-2/’);
Ап = 2~'сг"р~п.
ЙФ„
при
Рассмотрим теперь выражения для
z = l,2,...,6 (q}=a; q2=%- ?3=<Р2; 94=cosz; ?5=Q; q6=tn).
Так как большая полуось а входит лишь в формулы для Ап и v, то
ЭФ„] ,А . ,Г,. А . А ЭТТ
___
да
Элементы ср, и <р2 входят в формулы для Ап и Т*г . Следовательно,
ЭФл
Э<ру
где
(1.5.175)
*^«,p Sn,p^n,p,<pj’ (1.5.176)
I-e /=!/=! p=Or=l J
л-1 2
TZr = У В е-2У (-П^’^Гф г A52 * *-zTz’r’z
Л,р,(р,-,5 S f V^T](Z,/) n,p,q:,S
J 5=0 /=1 J
_ wi,r • и/Л/*,2 _ V1 г yMlOz)
ТЛ,р,(р;,5 Я,р,5 ’ Т n,p,(p:,S n,S,K n,p,q :,S,k ’
J J k=o J
= (2 - 0 [<r+J)(2 - 0 + j(i -1)].
Функции Z'’zp ф 5 k задаются следующими соотношениями:
если п-2р s-2k , то
2
= к - 2*1 £(«/)-'(-1УСС2 {|s - 2*1 со[|л - 2р|ы - (-1)' |s - 2*|(м - со)]};
2
Zn2p<fSk=\s- 2*| £(«)“'^ fl5 - 2*|® [Iя - 2р|ы - (-1)' к - 2Л|(« - со)]};
’ ’ J” Z=1
если |«-2р| = |s-2*|ф0, то
= I5 - 2*|{а['СС2(|$ - 2*|со)[|п - 2р|(2м - со)]) - rW5C,.(|s - 2*|со)};
= Is - 2*l К55' (Is - 2/с1 <!« - W" " «>)]) - i~\~u}iCSi (|s - 2*| со)};
271
если |«-2p| = |s-2A:| = 0, то
ZiJ . =0.
n,p,q:,S,k
Параметр cos i входит лишь в сомножитель F™, поэтому
ЭФ„
BeOS/
2 / л 2 i\₽(r-l)
/=1 /=1 р=0 г=1
где
_ п _
m=Q
dFm JL Г- cosz 1
pm ____M_yrm Dm /„ О/Л Rm
n’O acosifa "4 n'p'k { sin2/ ^-4’
s=a
0.5377)
₽
Rm . = У as Dm'\;
n,p,k m n,p,k ’
s=a
Dnlk = (-1)р+Л+5+х {(h - p - к - sy.(p - к - m - $)! }-1;
a = max(0,/n + &-p); P = min(m,n-p-A:);
X = min(p,«-p,x); % = E(n-m/2).
Параметры Q и /Q входят только в , i = 1,2, поэтому
3*^1 = у у At у у 5 l,r 4>i,r .
n,i 2^ ) n,p n,p* (1.5.178)
ЗФИ
a/Q
зф„
BQ
+ Ф2,1
(1.5.179)
где
5 '4= (-l)/+r+l Ym'F„mpG^-^r}, I,r = \,2-
1.5.9.5.5. Вычисление функции П? от несферичности Луны за виток. Фор-
мулы для вычисления возмущений вектора q за виток, вызванных несфе-
272
ричностью Луны, получаются из соответствующих формул для вычисления
Ад в пределах одного витка (1.5.163)—(1.5.179), если положить в них t = t^ + T
или и = 2п; формулы при этом существенно упрощаются, экономится машин-
ное время Это обстоятельство весьма важное, так как согласно (1.5.102) при
интегрировании уравнений движения этими формулами приходится пользо-
ваться многократно. При определении параметров гравитационного поля
Луны по результатам наблюдений за движением ИСЛ приходится вычислять
частные производные типа: -----
оС'
п, т
,6). Эту задачу можно
считать решенной, если формулу для вычисления Ад за виток представить в
виде
N п
(1.5.180)
л=2 т=0
где А^ — вектор-строки (1x6), компоненты которых есть соответ-
ственно:
дс,8> дф"и,8,д(со<8> дс J’8=с’d-
Действительно, в этом случае получается
ЭА# . ЭД<у . -т
(L5I8I)
п,т п,т
Векторы Ад™с и Ag™d могут быть вычислены по формулам (1.5.107)—
(1.5.109), если в них вместо интегралов будут подставлены интегралы
и П™d q , соответствующие коэффициентам сп т и dn т и полученные
при t = tQ + T или и = 2п.
Рассмотрим соотношения, позволяющие вычислить данные интегралы.
Интеграл от потенциала возмущающей функции, учитывающей нецентраль-
ность гравитационного поля Луны, согласно (1.5.125)—(1.5.127), является ли-
нейной функцией от коэффициентов поля сп т и dn т. Поэтому его можно
представить в виде
N п
Ф = X X (Ф",Л,т + Ф£ А,т>- (1.5.182)
п=2 т-0
Тогда, согласно (1.5.163), искомые величины ПРИ ^ = 2л могутбыть
вычислены по формулам:
273
т
п,Ь,а
да
3Та~'Ж”
2
пш
л,5,(р2
Эф,
^8
Эф2
d^5
dcosz
+ b=c,d.
Функции SR”g(8 = c,J) при и = 0 и и = 2п определяются соотношениями
9V” n = BPm(0)a х: 9V”. , = В Pm(Q)a*
п,о,и=и п п ' ' т,о^ п,о,и=2п п п v ' т,сР
где Вп, Р„т(0) вычисляются по формулам (1.5.164) и (1.5.165) соответствен-
но:
am c=coswXfi; <с =coswXfi;
am,</=sinWV
Приведем формулы для вычисления частных производных от интеграла
Ф™§по элементам орбиты. Для этого представим Ф™б(5 = с,^) в виде
2
з=с,</,
л,о л,о ’ ’ ’
/=1
где
2
7=1
v =п£1 Т;
т л
л л
s." J = X F-r L..,SJ = 2~Ч",J + <-l)J X f." ;
л-1
n,p,i,j ^n,p s n,p,s' ’ ’
5=0
^=Srn,s,*z»:U’ >=1’2’ы=2л;
*=0
274
^„4г.Лг >=|’2'и=2’1’
к=0
GZJ =CSj((^--x)^ + mX£i), j = \,2;
GZ/ =SCj((^-x)3n + mkn)(-iy+i, J = 1,2.
Приведенные соотношения позволяют получить производные от Ф™8 по
элементам орбиты.
Большая полуось орбиты ИСЛ входит лишь в коэффициенты Ап и vm. От-
сюда можно написать
п"6>0 = 3(2«)-1 К,82 - ™^=2к] - (2а)-' (2л - 1)Ф"8, 8 = с,d.
Элементы <Pj и <р2 входят в формулу для Ап и Ln .., поэтому
2 ф .
П" = УфХ +(2л-1)—Ц-Ф"'8,8 = с,</; 7 = 1,2,
Л,О,фу Хи Л,О,фу V 1 - £2 Л,О ’ ’ ’ 55
где
2
ф/л,/ =А vO-oyC-l)^1)^. S = c,d;
n,Stfj л m Лиу ' n,i,t^j n,b ’ ’ ’
л
С/л _ V cm j
Lu 1 n,hri,p,\j,q : '
1 p=0 1
=2~4mu<p7
J J p=0 J
1- ..^ ;
J 5=0 /=1
S ». [ Ъ1-' I л - 2рГ14>,(, 1)"-1|<л'1
J 5=0 L/=i J
_ 5
и/ =у г M
n,p,s,t,(p: Ли n,s,k n,p,s,k,t,<p
J k=0 J
Здесь Mnpsklv. определяются по следующему правилу:
если n-2p = s-2k , то
MntPM.=M^SCAn-2p\^,
где Af0 = v*! + sign; v* = (j + Vl-e2](-e)y(1 + Vl-e2) 7;
275
если |«-2p| = |s-2A:|^0, то
2 2 I
МпМ,ъ =i(va1<Pn(y,/)) [^2₽7-(-1)7]<7"/)^С11(у./)(|л-2р|(0, |$-2£|(0),
ЙВ г* Ф ~
где р>=-!-1- = —Е. + -4-6 [см. (1.5.159)];
Э<ру. а 1 е2
Е\ -b~x (2Xj! Е2 =Ь~Х (1-Хн -ф2е-2а);
а и b определяются формулами
г а-гп
а = ecosEn =---— = ф2 + Л, ,
esin Еп - —Ь = ———-71-е2 = -X, ,Х,;
1 + Ф2 1,1 3
если |и-2р| = |.$-2А:| = 0, то
МпМ,Ъ =ф2₽У-(-1)'<Р(3-/)]; Мл,/>,М,2,<Ру =°> 7 = 1,2.
От cos/ зависят только коэффициенты F™9 поэтому
2
л,5,cos/ n,5,cosz ’ ’ ’
>1
2
Фт1 . = A (v У’1 У (- 1)(2-Л('+1)Sm., ,8 = c,d;
w,5,cosz f n,j,t,cosi n,b ’
z=l
n
Sm = У Fm L
cost n,p,cosi
p=0
n _
c/n _ 9-1с/и ziyV Fm I
°«,2/,cos/ °n, 1,/,cos/ ' ' гПтрПтР,!,^
p=0
— r)
[CM. (1.5.177)].
От параметров Q и зависят только G^J 9 поэтому
2
П^,П=ХФХ’б=с’^
;=1
пт =_€) пт -SRm
1 Vs,Q ^,5,0 JXn,b,u=O JXn,b,u=lTt ’
где
2
/=|
276
1.5.9.5.6. Влияние Земли, Солнца и светового давления на движение ИСЛ.
Влияние Земли, Солнца и светового давления на движение ИСЛ значитель-
но меньше того воздействия, которое оказывает на него Луна.
Обозначим эти возмущения соответственно , Дд2, Д^з • Тогда, соглас-
но допущениям 1 и 2, они могут быть рассчитаны по формулам (1.5.124) как
линейные функции частных производных от интегралов Ф. = J 9?ZJ/ (/ = 1,2,3)
_ fa
по параметрам вектора q . Поэтому для вычисления Д . (/ = 1,2,3) необходи-
мо найти интеграл Ф;. и частные производные от него.
Пертурбационная функция 9iz, учитывающая гравитационное воздействие
Земли и Солнца на движение ИСЛ, определяется соотношением
(г1 2 - 2лг. cos yz + г2) 2 - г cos y.rr2
,/ = 1,2,
где pz — гравитационная постоянная /-го возмущающего тела;
r = |r|; 'z =И1’ */ — радиусы-векторы ИСЛ и z-го возмущающего тела;
cosyz=(r г^гг^х.
Учитывая, что h = rr^x малая величина, пертурбационную функцию мож-
но представить в виде ряда Лежандра:
1‘Г p„(cosY/)
п-2
(1.5.183)
Количественные оценки показывают, что для орбит ИСЛ с
а = (2 • 103 + 5 • 103) км достаточно ограничиться тремя первыми слагаемыми:
91 = 1 [1 + A2P2(cos yz) + A3/j(cos v()],
где P2(cosv() = 2 !(3cos2v(-1); /2(cosvJ.) = 2 ‘(Seos3v(.-3cosvz).
Тогда интеграл Ф( можно записать в виде
2
Ф/ = ХФМ’
/=0
где
/ /
ф/,о = J h r,r' dt> ф,,1 = J h ГГ3 '2(3cos2 v(. - V)dt;
fa fa
t
Ф(. 2 = 2_| J |i(. /rV^Scos 3v(. - 3cos v^dt.
‘a
(1.5.184)
(1.5.185)
(1.5.186)
277
Интегрирование, согласно допущению 4, будем проводить на интервале
одного оборота ИСЛ, т.е.
t = t^ + T = t\ (1.5.187)
Поэтому, учитывая малость величины отношения ТТг] (где 7) — период
обращения возмущающего тела), при интегрировании на одном обороте ИСЛ
будем считать возмущающее тело неподвижным (допущение 4), т.е.
a;.(/q) = const в интервале [/Q...f ]. На основании этого запишем
ф/,о=ь<17’; ф,,1 =2’4v3
/* /*
3 J (г cos2 v( )2 dt - J r2 dt
Ф,->2 = 2_|pI/r4
/* /*
5 J (rcosv(.)3£fr-3j (rcosv(.)r2</Z
.fa fa
(1.5.188)
При вычислении Ф( j и Ф( 2 заменим переменную интегрирования t на эк-
сцентрическую аномалию Е, связь которой с временем задается уравнением
Кеплера. Поэтому
dt = п~‘ (1 - с cos E)dE,
(1.5.189)
где й = ^цлйа-2 — среднее положение ИСЛ.
Используем вторую орбитальную систему координат ОХ4 У4 Z4 , в которой
радиус-вектор ИСЛ г04 связан с элементами орбиты соотношением
r0,4 = = |*0,4 ^0,4 >°|’
где
х04 =a(cosE-е); у04 = -71-е2sinЕ. (1.5.190)
Введем единичный вектор
который во второй орбитальной системе обозначим через /}д4 , при этом
^,0,4 = = ||х"о,4’Хд4 ’^"ол||*
Тогда величина rcosy, может быть определена по формуле
rcosy,. =Г0>4 •/}« 4 = ХО,4Х"о,4 +>'о,4>'"о,4- (1.5.191)
278
Подставим (1.5.188) в (1.5.191) и, учитывая следующие равенства:
г = а(1 -ecosE);
^0,4 = 4>2Xfo,3 +(Р1^0,3 = А-
^0,4=<Р2>?Л0>3-<Р1Х"0,3 = 4’
где х"0 з, ^0 з, з — компоненты вектора г.н в первой орбитальной систе-
ме координат
^,3 = W/’£2’°)’
выполним интегрирование в пределах Еа, Еп + 2л. Проведя несложные пре-
образования, получим следующие выражения для Ф, 1 и Ф|2:
ф/,1 = +Х); Ф,.2 = Л,iAiSi, (1.5.192)
где D.
п 51 а
^,2-4
2 2
х/=442-42+(х"о,з) +te,3);
Х = 2 + 3((р2+<р2);
=3(2 + %)-5(3%(.-8Д?).
Величины П/(? =дФ/Э<7( для различных параметров / = 1,2,...,6 опре-
деляются по формулам
П,,а = Ф/,1,а+Ф,.2,0-(2«)-1ЗГ91. ;
% =ф/,1,97 +o,,2,9,. ’ Qj =<P14>2cos/,Q; (1.5.193)
= 0.
Величины Ф, <.„ , к = 1,2,
1 ->4 j
,6 определяются по формулам
(1.5.194)
ф/,1,а=(2«)-|7фм;
фц^ =6Di,\(c/,i - <Р1); ф/,1,Ф2 = 67Ъ(g-,2 - <р2);
279
Ф/.Ucos/ = 67)/,lZ"o,3C/,3 Sin-' ' ’ Ф(,1Л> = 6Z)Z,1CZ,4 5
CZ,1 = 44Л"0,3 + ЛХ"оЗ ; CZ,2 = 44X"o,3 - %,3 ’
Ci,3 = Bi<P2 - 44<P1 - У"о,3 ’ Ci,4 = 44A,I + Bibi,2 + bi,3’
bi,l = 4>2bi,4 - 4>lX"o,3 COS/’ bi,2 = ^bi,4 + Ф2Х"о,3 COSZ';
bi,3 =Xifi^bi,4-y"o,3COSl'^ ^,4 =^COsQ-X"o,3sinQ;
ф,,2,а=9<2й)‘|ф,,2;
Ф/,2,<р. =Л,2(3;Л0>3^+24^1);
Ф/,2,<р2 = ^Z,2^X/\0,3^Z + 24^/,2)’
Ф/,2,с<»/ = ~Di,2Zifi,3 sin-1 'Ш + 104Аз>;
ф/,2,п = /),,2^,1^-104^,4);
£,i = 9ф, - 5(2х»0 2Б,. + с.,); g. 2 = 9<р2 + 5(2^«0 2В,. + с. 2);
g. з = Зе. 3 + 8Д.ср,.; g. 4 = Зе. 4 - 8Д./>. 1.
Приведенные формулы позволяют вычислить эволюцию параметров ор-
биты ИСЛ за виток под действием неподвижного в абсолютной системе ко-
ординат возмущенного тела, положение которого фиксировано на момент
прохождения ИСЛ восходящего узла.
Рассмотрим теперь возмущения в орбите ИСЛ, вызванные наличием све-
тового давления. Согласно допущению 5 будем пренебрегать возможностью
прохождения спутником области, затененной от Солнца Луной. Иначе гово-
ря, будем считать, что функция тени Т(Х,Ф) тождественно равна единице.
Тогда возмущения Д?3, вызванные в векторе q световым давлением, могут
быть вычислены по формуле
Д^3=-т10Д^2+Д^0, (1.5.195)
где вектор Д#о может быть вычислен по формуле
^o = V- <L5-196>
280
Здесь Р — матрица порядка (6x6), элементы которой вычисляются по фор-
мулам (1.5.109А); ^9=||no,a’no,<pl’no,<p2’no,cos/’no,Q’no>/£i||— вектор-строка
(1x6).
Компоненты вектора lG q вычисляются согласно (1.5.111) по формулам
фо _ По J *0 dt - T|0Z>0Л2;
(1.5.197)
П0 = Зя7ф? a2r-2iic;
ц U (г* 1
SR0=^(rcosvc), 9i0/=^ Г- x»0>3.
c c\c J
Применяя (1.5.197) для оскулирующих элементов q , получим все необ-
ходимые формулы для учета влияния светового давления за виток:
по,а =По(2«)-,(5/)оЯ2 +ЗТ9?0/);
% - По^О-УсДЗ ’ Щ,ф2 ” ^оЛ^сДЗ ’
no.cosz^-Vo’PiSi’1"'^^;
П0,я = - cos«p2 <о,з);
%п=°-
1.5.9.5.7. Анализ численно-аналитического метода интегрирования по
точности и быстродействию. Допущения, используемые при построении чис-
ленно-аналитической теории движения, приводят к ошибкам вычисления
параметров движения ИСЛ. Величина этих ошибок оценивается сравнением
результатов расчетов параметров ИСЛ по данной методике с аналогичными
параметрами, вычисленными с помощью другого (эталонного) метода, точ-
ность которого известна. В качестве эталонного метода принимается один из
методов численного интегрирования дифференциальных уравнений движе-
ния, для которого за счет снижения быстродействия при выполнении расче-
тов приняты меры по возможному увеличению точности расчетов.
Здесь даны результаты некоторых численных экспериментов, проводимых
при следующих условиях. Система дифференциальных уравнений интегри-
ровалась восьмиточечным методом Адамса для начальных условий, задавае-
мых векторами а(/.о), j = 1,2. При интегрировании учитывались гармоники
281
гравитационного потенциала Луны (до с40 включительно), а также влияние
притяжения Земли и Солнца. На моменты времени z, / = 1,2,...,Л., соответ-
ствующие началам витков У = 1,2,вычислялись векторы
a(tji = Для этих же условий по численно-аналитическому мето-
ду определялись параметры вектора ^(Zy /), i = Тогда точность чис-
ленно-аналитической теории движения ИСЛ можно характеризовать векто-
рами
A^.)=^.)-aayz), i = \,2,...,kj и
где a{tj (.) — вектор, рассчитанный на момент tj. при условии равенства нулю
возмущений из-за нецентральное™ гравитационного поля Луны и притяже-
ния Земли и Солнца. Тем самым, параметры вектора Да(/.у) характеризуют
величину этих возмущений. Отсюда следует, что максимальное отличие па-
раметров векторов и atf^) мало зависит от протяженности участка
интегрирования и колеблется в пределах 30—50 м по координатам и 0,03—
0,05 м/с по скоростям. Приведенные данные получены для моментов t. ., от-
личающихся друг от друга на целое число витков.
1.5.10. Описание движения спутников
Для описания селеноцентрического движения спутников и движения Луны
около собственного центра масс использована селеноцентрическая система
координат OL¥2K2Z2. Плоскость Х2У2 системы совпадает с плоскостью сред-
него экватора Луны, а плоскость X2Z2 — с плоскостью ее нулевого мериди-
ана фиксированной эпохи /ф. Направления осей системы координат непод-
вижны относительно звезд: ось ОХ2 направлена в момент /ф к Земле, ось
OZ2 — к Северному полюсу Луны, ось OY2 дополняет систему координат до
правой.
Описание движения спутника проводится в элементах его орбиты
а, фр ф2, cos/, Q, (1.5.198)
где = esin со, ф2 = ecosco — компоненты вектора Лапласа.
Отсчет угловых орбитальных элементов /’, со, Q ведется от плоскости сред-
него экватора Луны и ее нулевого меридиана эпохи /ф принятым в небесной
механике способом.
Предполагается, что вращение Луны около собственного центра масс
происходит в соответствии с законами Кассини. Луна вращается равномерно
вокруг собственной оси, которая остается неизменной в теле Луны и совпа-
дает с осью OZ2 введенной системы координат.
Влияние гравитационного поля Луны на движение в нем искусственного
спутника описывается гравитационным потенциалом 9?л . Выражение для гра-
витационного потенциала в селенографической системе координат с началом
282
в центре масс Луны принято в виде разложения в ряд по сферическим фун-
кциям
Рп (Sin *)(Сп,т COS+ dn,m Sin >
(1.5.199)
где цл — гравитационная постоянная Луны; гл — средний радиус Луны; г —
полярный радиус Луны; 4х — селенографическая широта спутника; X — се-
ленографическая долгота спутника; /’/"(sinH') — присоединенная функция
Лежандра.
Величина и характер нецентральное™ гравитационного поля Луны опре-
деляются числовыми значениями коэффициентов
Сп,т'> ^п,т (1.5.200)
в (1.5.199). Осесимметричная часть поля характеризуется коэффициентами сп 0
при зональных гармониках разложения. Коэффициенты, выделяемые нечет-
ными значениями индекса п (п = 3, 5,7,...), определяют асимметрию Север-
ного и Южного полушарий поля тяготения Луны.
Описание орбитального движения центра масс Луны осуществляется в
геоцентрической экваториальной инерциальной системе прямоугольных ко-
ординат OX Y Za со средним равноденствием эпохи 1960.0. Начало системы
координат совпадает с центром масс Земли, плоскость XaYa — с плоскостью
среднего экватора Земли. Ось ОХа направлена в точку весеннего равноден-
ствия указанной эпохи, ось OZa — по оси вращения Земли, ось OYa допол-
няет систему координат до правой. Положение центра масс Луны и его ско-
рость во введенной системе координат задаются в текущий момент времени
t шестью кинематическими параметрами:
(1.5.201)
1.5.10.1. Методика расчетов
Исследования динамики движения искусственных спутников в гравита-
ционном поле Луны являются наиболее эффективным методом изучения этого
поля. Нецентральность поля вызывает возмущения в движении спутника,
которые приводят к эволюции его орбиты. Измерения траектории движения
спутника позволяют выявить эту эволюцию и определить параметры нецен-
тральное™ поля. Таким образом, возникает многопараметрическая задача
совместного определения по данным траекторных измерений спутника эле-
ментов его орбиты (1.5.198), оскулирующих на момент прохождения спут-
ником первого восходящего узла орбиты, коэффициентов (1.5.200), характе-
283
ризующих нецентральность лунного поля тяготения, и коэффициента т|0, ха-
рактеризующего световое давление на поверхность спутника, т. е. парамет-
ров
а, <р„ <р2, cosz, Й, tQ, спт, dnm, т)0. (1.5.202)
Методика, использованная для решения этой задачи, принципиально до-
пускает определение любого количества коэффициентов (1.5.200). Однако при
увеличении числа коэффициентов, определяемых по одной и той же траек-
торной информации, точность их определения ухудшается. Поэтому коли-
чество уточняемых коэффициентов (1.5.200) в каждом конкретном случае
определяется составом и точностью траекторных измерений и величиной
интервала времени, в течение которого эти измерения проведены.
Ранее отмечалось, что надежное выявление вековых и долгопериодичес-
ких возмущений при движении спутника в нецентральном поле тяготения
Луны требует измерений его траектории в течение длительного времени,
исчисляемого несколькими лунными месяцами. Чтобы динамически увязать
эти измерения, необходим точный расчет траектории движения спутника на
всем указанном интервале времени с учетом большого числа гармоник в
разложении (1.5.199) гравитационного потенциала Луны, гравитационного
влияния Земли и Солнца и влияния светового давления на движение спут-
ника. Методы численного интегрирования дифференциальных уравнений
движения спутника не могли быть использованы в 70-е годы для проведения
в обозримое машинное время таких расчетов из-за отсутствия необходимого
быстродействия вычислительных машин. Поэтому в основу метода обработ-
ки траекторных измерений положена численно-аналитическая теория дви-
жения спутника Луны со скоростью расчета траектории на два порядка боль-
шей, чем в методе численного интегрирования дифференциальных уравне-
ний движения. Теория позволяет охватить единым расчетом весь мерный
интервал движения спутника. Быстродействие современных вычислительных
машин более чем на два порядка превосходит быстродействие вычислитель-
ных машин 70-х годов, поэтому в современных условиях более предпочти-
тельным является использование численных методов.
Движение центра масс Луны в геоэкваториальной системе координат со
средним равноденствием эпохи 1960.0 задано теорией Брауна—Эккерта.
Расчет геоцентрического движения в инерциальной системе координат
наземных измерительных пунктов, заданных сферическими координатами на
общеземном эллипсоиде, выполнен с учетом прецессии и нутации оси вра-
щения Земли на всем интервале измерений.
Вычисление изохронных частных производных от измеряемых функций
по параметрам (1.5.202) проводилось по конечным формулам. При вычисле-
нии частных производных от измеряемых функций по начальным элемен-
там орбиты (1.5.198) на длительном интервале времени полета спутников
284
(порядка нескольких лунных месяцев) учтены возмущения в движении спут-
ников, вызванные значительным динамическим сжатии Луны.
1.5.11. Метод «лунная вертикаль» для ориентации
оси тормозного двигателя
При полете к Луне по «центральной» траектории с вертикальной мягкой
посадкой на лунную поверхность, осуществленной КА «Луна-9» и «Луна-13»
проекта Е-6, встает задача ориентации оси тормозного двигателя, чтобы по-
гасить скорость КА.
В проекте Е-6 ориентация двигателя сохранялась при торможении посто-
янной, поэтому отклонение оси двигателя от вектора скорости торможения
на угол 0 приводит к остаточной «боковой» скорости КА, равной (в линей-
ном приближении)
Иб = Итр, (1.5.203)
где Ир (~2,6 км/с) — скорость торможения, закладываемая в интегратор и
примерно равная селеноцентрической скорости КА на поверхности Луны УА:
Kf = ИА + KGR ; VGR (~30 м/с) — гравитационные потери скорости при тормо-
жении,
ИА=(И2 + 2цм/гА)'/2, (1.5.204)
(~1 км/с) — скорость «на бесконечности» для орбиты подлета к Луне;
цм (~ 4902,8 км3/с2) — гравитационная постоянная Луны; гА — расстояние
до центра Луны в точке А торможения у поверхности Луны, гА== Ам (=1738 км);
/?м — средний радиус Луны [3, 4]. Тогда, если взять угол 0 в угловых мину-
тах, то Иб = 0,760'. По проекту Е-6, предельная скорость соударения с Лу-
ной составляет 20 м/с, этому соответствует предельная ошибка ориентации
0 27'. Рассмотрим характеристики двух схем ориентации: «классической» и
новой, примененной в проекте Е-6.
1.5.11.1. Ориентация по расчетному вектору скорости
Пусть расчетная (по данным измерений до коррекции) траектория подле-
та КА к Луне BqAq — центральная (рис. 1.5.15).
Для нее расстояние г от центра Луны в периселении гл = 0, прицельная
дальность b = (гл(2цм /V^ + гл))1/2 = 0, селеноцентрическая скорость нормальна
к поверхности. Примерно вдоль этой расчетной скорости сначала предпола-
галось ориентировать ось тормозного двигателя для фактической траектории
КА и сообщать тормозной импульс Ит.
Вследствие ошибок определения орбиты КА и ошибок коррекции факти-
ческая траектория ВА отличается от этой расчетной и направление факти-
285
Рис. 1.5.15. Схема номинального и отклоненного движения КА у Луны
ческой скорости КА у поверхности Луны КА будет отличаться от расчетной
траектории BqAq, что приведет к остаточной боковой скорости. Главное вли-
яние при этом оказывает величина прицельной дальности Ь. Считая, что век-
тор скорости «на бесконечности» не меняется, получим, что траектории
КА вблизи Луны образуют осесимметрический пучок орбит, ось которого со-
ставляет расчетная орбита BqAq, характеристики орбиты в пучке определя-
ются прицельной дальностью Ь. На рис. 1.5.16 приведены зависимости от-
клонения точки посадки от расчетной AZ и боковая скорость в зависимо-
сти от прицельной дальности Ь. В линейном приближении:
А£-6/?А(ИА-К)И/рм-0,566 [км]; (1.5.205)
₽Ч(И-И)И /цм-К /гАКА)6 = 0,346 [угл. мин]; (1.5.206)
Иб = Итр = 0,266 [м/с]. (1.5.207)
Здесь и далее для численных примеров принято: цм = 4902,8 км3/с2;
И. = 1 км/с; гА = Лм = 1738 км; ИА = 2,577 км/с; прицельная дальность b бе-
рется в км и меняется в пределах 0—1000 км.
Рис. 1.5.16. Изменение боковой скорости V6 и отклонения точки посадки от расчет-
ной А£ в зависимости от прицельной дальности b при ориентации по расчетной
скорости
286
Расчетная точность прогноза в начале проектирования КА Е-6 составляла
b ~ ЗОО-г-5ОО км. Затем навигация стала точнее, ошибки уменьшились до
Ь~ 150 250 км. Но даже при b = 100 км для данного способа ориентации ве-
личина боковой скорости составила бы « 26 м/с, т.е. этот метод ориента-
ции двигателя не подходит для мягкой посадки при такой не очень высокой
точности навигации.
1.5.11.2. Ориентация по методу «лунной вертикали»
При проектировании КА Е-6 для повышения точности ориентации оси
тормозного двигателя были исследованы возможности автономных средств
на основе автономного определения направления на центр Луны и последу-
ющего использования его для ориентации тяги тормозного двигателя. На
рис. 1.5.15 указана схема определения в точке В направления на центр Луны
и скорость VA в точке торможения у поверхности Луны.
На рис. 1.5.17 для кеплеровской модели движения по гиперболической се-
леноцентрической орбите дан угол А [рад] между направлением на центр
Луны в точке В и скоростью в точке торможения А в зависимости от рассто-
яния гв для нескольких значений прицельной дальности Ь. Здесь А = аА - АО,
аА — угол наклона скорости в точке А к направлению на центр Луны в этой
точке, АО = ОА - Ов — угол между радиусами-векторами в точках А и В (ОА, Ов
— истинные аномалии в точках А, В), см. рис. 1.5.15.
Эти зависимости позволили раскрыть замечательное свойство пучка: су-
ществует одно расстояние г* (-8200 км), для которого направление на центр
Луны практически совпадает с направлением скорости торможения для всех
траекторий пучка [7]. Данное свойство лежит в основе метода «лунной вер-
тикали» ориентации тяги КТДУ при торможении: — при подлете к Луне с
помощью оптических датчиков осуществляется слежение за Луной, Землей
Рис. 1.5.17. Изменение с расстоянием до центра Луны гв в точке В угла А между на-
правлением на центр Луны в этой точке и вектором скорости торможения для
значений прицельной дальности b = 0; 200; 400; 600; 800; 1000 км
287
и Солнцем; — при достижении заданного расстояния от центра Луны гв*
(определяемого по угловому размеру Луны) находится направление на центр
Луны (фиксируется «лунная вертикаль»), в этом направлении ориентируется
ось двигателя; эта ориентация КА с помощью визирования Солнца и Земли
сохраняется неизменной в инерциальной системе координат, тем самым за-
поминается нужное направление оси двигателя до начала торможения.
Начало сеанса торможения определяется автономно фиксацией бортовым
радиоальтиметром высоты 75 км, при торможении стабилизация КА осуще-
ствляется бортовой гироскопической системой.
1.5.11.3. Определение расстояния фиксации «лунной вертикали»
Расстояние гв от Луны, для которого угол А = О, определяется из условия,
что на этом расстоянии от центра Луны, в точке В (см. рис. 1.5.15) направ-
ление на центр Луны параллельно вектору селеноцентрической скорости КА
в точке торможения А:
VA||rB, аА=ДО. (1.5.208)
Фиксируем точку А и рассматриваем кеплеровскую модель движения КА,
т.е. без учета возмущений от Земли и Солнца. Тогда, имея в виду, что рас-
стояние в точке В определяется обычным выражением
rB = P/(1 + e c°s^B)
и учитывая соотношения
р = rjyl sin2 аА /рм = VA sin2 аА;
ecosOA = kA sin 2аА;
e sin | i?A |= kA sin aA cos aA,
получим
VVaO + ^a)- (1.5.209)
Здесь безразмерный параметр kA (~ 2,35) от дальности b не зависит, он
определяется расстоянием гА и скоростью УА, в частности энергией движе-
ния ();
‘л ='Л2/Им: (1.5.210)
от прицельной дальности зависит только угол аА :
cosaA = (l-sin2aA)1/2 = 1 — (1/2)sin2 аА —(1 /8)sin4 аА —(1.5.211)
sinaA=(r/гАКА)/>. (1.5.212)
288
При b = 0, т.е. для номинальной траектории, имеем аА = О,
гв(0) = гво = 2кАгА’ /во “ 8200 км- (1.5.213)
При малых отклонениях, 0 < b < 1000 км, угол аА будет мал, sinaA <0,23;
существенны только первые два слагаемых. Тогда, учитывая только эти чле-
ны, получим: cosaA ~ 1 — (1 /2)sin2 aA = 1 -(Кте //-АИА)2/>2 /2. Поэтому с точно-
стью до членов четвертого порядка малости:
'•b=Va(2-(^/^a)2^2/2) = 'bo + a'b; (1-5-214)
Дгв = -*2И/2цм. (1.5.215)
Рис. 1.5.18 показывает зависимость расстояния гв (7, 10) от прицельной
дальности b при цм = 4902,8 км3/с2; Vm = 1 км/с; гА = 7?м = 1738 км. При b = 0
будет гв (0) = 8184 км, при Ь = 1000 км будет гв( 1000) = 8081 км.
Рис. 1.5.18. Зависимость расстояния гв фиксации «лунной вертикали» от прицель-
ной дальности (при — 1 км/с; гА= 1738 км)
Рассмотренная модель движения не учитывает возмущений гравитацион-
ного поля от Земли и Солнца, а также конечности тяги при торможении.
Поэтому для окончательного определения расстояния фиксации «лунной
вертикали» и выставки оси двигателя относительно оптического датчика ви-
зирования Луны производится точное моделирование движения КА и, с уче-
том результатов этого моделирования, вводится небольшая поправка на рас-
стояние гв, а также вводится небольшое отклонение оси двигателя от направ-
ления на Луну в момент достижения расстояния гв. Для КА Луна-9 было при-
нято гв* = 8285 км.
1.5.11.4. Анализ ошибок метода
«Приборное» расстояние фиксации «лунной вертикали» гв* закладывает-
ся в систему на Земле в соответствии с номинальными параметрами полета.
289
При этой настройке прицельная дальность и другие параметры орбиты по-
лета КА после коррекции еще точно не известны. Кроме того, всегда имеют-
ся исполнительные, «приборные» ошибки в работе системы ориентации. В
силу этого система ориентирует двигатель КА вдоль скорости торможения с
некоторыми ошибками. Рассмотрим эти ошибки за счет некоторых основ-
ных факторов.
а) Влияние ошибки расстояния «лунной вертикали». Пусть «лунная верти-
каль» (и направление оси двигателя) определяется и фиксируется в точке В
с расстоянием от Луны г, отличающимся от необходимого расстояния гв на
величину 8гв . Тогда появляется ошибка в ориентации оси двигателя, оцени-
ваемая в линейном приближении величиной
Pr =sinaB8rB/rB = О/гвИв)8гв/гв = С^гв; (1.5.216)
q-K /гв%; Гв^(Г2+2цм//-в)'/г. (1.5.217)
Если гв = 8184 км, то Кв=1,5 км, С, = 0,346 10-4 угл. мин/км2. При
b =1000 км и 8гв = 100 км угловая ошибка будет равна Рг =3,5', остаточная
боковая скорость Иб = 3 м/с. Эти характеристики показывают большие возмож-
ности адаптивности системы.
б) Методическая ошибка по прицельной дальности орбиты. Если за рассто-
яние г* для всего пучка траекторий взять расстояние гво (1.5.214), соответ-
ствующее центральной орбите подлета к Луне при Ь « 0 , то для орбиты с при-
цельной дальностью b в определении расстояния гв будет совершаться ошибка,
оцениваемая величиной Дгв (1.5.215). Это приведет к ошибке в ориентации
тяги по отношению к скорости торможения (методическая ошибка), оцени-
ваемой, в силу (1.5.216), величиной
Pt = C,Z>(ArB) = С^(К2 / 2цм )b2 = (C/j / 2цм )Ь3 = С2Ь\
С2=С]К2/2цм. (1.5.218)
В данном случае С2 ~ 0,353 10-8 угл. мин/км3. Эта методическая ошибка
ориентации пропорциональна третьей степени прицельной дальности и очень
мала. При b = 1000 км ошибка по расстоянию будет Дгв = -103 км, ошибка
по углу Рм =3,5', остаточная боковая скорость Еб = 3 м/с. Для дополнитель-
ного уменьшения этой ошибки можно при выборе расстояния гв отойти от
/вд. Например, если известен диапазон возможных значений b (0<b<bmax),
то можно «располовинить» ошибку, взяв за расстояние гв среднее между гв(0)
И ''в^тах)’
в) Методическая ошибка по скорости на «бесконечности». Изменение кон-
станты энергии орбиты подлета к Луне по сравнению с номинальной ведет к
290
изменению необходимого расстояния фиксации «лунной вертикали», т.е. к
ошибке выставки расстояния , которое оценивается величиной:
5rR = 2гА8£А = (4И г? /цм )8 К = С38 V ;
С3 = 2Г/-в/Иа2. (,-5-2,9)
Обусловленная этим ошибка ориентации тяги двигателя будет равна:
Р^ббг^СДббИ = С468Е ;
С4=СД = 2И/ИвИа2гв. (1-5’220)
При рассмотренных параметрах С3 = 2464 км/км/с; С4 =0,085 [угл. мин/км2/
с]. Если 8К~ = 0.05 км/с; b = 1000 км, то ошибка по расстоянию 8гв = 123 км,
угловая ошибка Ри ~ 4'; боковая скорость Уб ~ 3 м/с.
г) Методическая ошибка по радиусу Луны. Расстояние до Луны при фикса-
ции «лунной вертикали» определяется оптической системой по угловому ра-
диусу Луны ув. Если фактический радиус Луны отличается от расчетного на
величину 8/?м , фактическое расстояние до Луны будет отличаться от задан-
ного на величину 8гв, что вызывает угловую ошибку ориентации тяги Рл
(1.5.216):
8гв ~ 8/?м /sin ув = гв8/?м / RM; (1.5.221)
Рв ~ = (Q'b / *м= ^5^^м’ (1.5.221 а)
С5 =С\ГЪ/RM = /Ивгв/?м. (1.5.221b)
Если 8/?м = 1 км, b = 1000 км, то 8гв =4,7 км; Рл =0,8'; боковая скорость
КА Иб = 0,6 м/с.
д) «Приборная» (инструментальная) ошибка определения углового радиуса
Луны. 8ув. В момент фиксации «лунной вертикали» «приборная» ошибка при-
водит к ошибке расстояния «лунной вертикали» 8гв и угловой ошибке Ру ори-
ентации тяги двигателя (1.5.216):
5гв“-</вСО87в/лм)57в;
ру = С\Ь 18гв |= (С/2 cos ув / RM )68ув = С668ув;
С6 = cos ув / EB7?M.
Угловые ошибки ориентации оптической системы «Юпитер» КА Е-6 по
проекту не превышают ~4,6* [4]. В данном случае sinyB = 0,212; ув = 12,3°;
cosyB = 0,977. Положим 8ув = 5', Z>=1000 км. Тогда С6 = 3,7510^* [1/км];
18гв |= 54,8 км; ру = 1,9'; боковая скорость КА Е6= 1,4 м/с.
291
е) «Приборные» ошибки ориентации по вертикали 5], запоминания верти-
кали 82 и выставки оси двигателя 63. Каждая из этих ошибок приводит к
соответствующему отклонению оси двигателя от скорости торможения (3,- и
боковой скорости . Ошибки 8] по проекту не превышают 4,6*, тогда ско-
рости Иб/<3,5 м/с.
Литература
1. Аким Э.Л., Бажинов И.К., Павлов В.П., Почукаев В.Н.. Поле тяготе-
ния Луны и движение ее искусственных спутников. — М.: Машиностроение,
1984.
2. Аким Э.Л., Энеев Т. М. Определение параметров движения космичес-
кого летательного аппарата по данным траекторных измерений // Космичес-
кие исследования. 1963. Т. I. Вып. 1.
3. Аким Э.Л., Власова З.П. Исследования гравитационного поля Луны по
данным измерений траекторий советских ИСЛ // Космические исследова-
ния. 1983. Т. 21. Вып. 4. С. 499-511.
4. Аким Э.Л. Определение поля тяготения Луны по движению искусствен-
ного спутника Луны «Луна-10» // ДАН СССР. 1966. Т. 170. № 4. С. 799-802.
5. Аким Э.Л., Власова З.П. Модель гравитационного поля Луны по наблю-
дениям за движением ее искусственных спутников «Луна-10, -12, -14, -19,
-22» // ДАН СССР. 1977. Т. 235. № 1. С. 38-41.
6. Абалакин В.К. Основы эфемеридной астрономии. — М.:Наука,1979.
7. Белецкий В.В. О законах Кассини. Препринт №79. — М.: ИПМ АН
СССР, 1971.
8. Брауэр Д., Клеменс Дж. Методы небесной механики. — М.: Мир, 1964.
9. Бровар В.В., Юзефович А.П. Параметры лунных масконов. Современ-
ные проблемы позиционной астрономии. — М.: Изд-во МГУ, 1975. С. 303-
312.
10. Вулард Э. Теория вращения Земли вокруг центра масс. — М.: Физмат-
гиз, 1963.
11. Дубошин Г. Н. Небесная механика. Основные задачи и методы. — М.:
Наука, 1968.
12. Дубровский А.С., Чиканов Ю.А. Гармонический анализ рельефа Луны
// Астрономический вестник. 1979. Т. 13. №2. С. 82-86.
13. Кох К.Р. Использование модели потенциала простого слоя в косми-
ческой геодезии. Использование искусственных спутников для геодезии. —
М.: Мир, 1975. С. 156-162.
14. Куликов К.А., Гуревич В.Б. Основы лунной астрономии. —М.: Наука,
1972.
15. Лидов М.Л., Нейштадт А.И. Метод канонических преобразований в
задачах о вращении небесных тел и законы Кассини // Определение движе-
ния космических аппаратов. — М.: Наука, 1975. С. 74-106.
16. Маковер С. Г. Некоторые вопросы теории физической либрации Луны
Ц Бюлл. ИТА АН СССР. 1962. Т. 8. №4 (97). С. 249.
292
17. Мельхиор П. Физика и динамика планет. — М.: Мир, 1975.
18. Плахов Ю.В. О роли точечного представления внешнего геопотенци-
ала в астродинамике // Исследования по геодезии, аэрофотосъемке и картог-
рафии. 1978. №3/1. С. 51-56.
19. Полануэр М.Л. Теория физической либрации Луны // Бюлл. ИТА. 1964.
Т. 9. №8 (111). С. 550-560.
20. Сагитов М.У. Лунная гравиметрия. — М.: Наука, 1979.
21. Хабибулин Ш.Т. Нелинейная теория физической либрации Луны //
Труды городской АО КГУ. 1966. №34. С. 3-70.
22. Чиканов Ю.А. Численная теория физической либрации, селеноид,
вариации силы тяжести и геометрическая фигура Луны. Автореф. дисс. Ка-
зань, 1970.
23. Юркина М.И. Использование плотности простого слоя при изучении
гравитационного поля небесных тел. — М.: ЦНИИГАИК, 1972.
24. Юри Г.С., Макдональд Г. Дж. Ф. Возникновение и история Луны //
Физика и астрономия Луны. — М.: Мир, 1973. С. 230-316.
25. Campbell M.J., O’Leary В.Т., Sagan С., Moon: two new mascon basins. —
Science, 1969, vol. 165, N 3885, p. 1273-1275.
26. Gapcynski J.P., Blackshear W.T., Compton H.R. Lunar gravitational field
as determined from Lunar Orbiter tracking data. — AJAA J., 1969, vol. 7, N 10, p.
1905-1908.
27. Gillvary J.J. Nature of the lunar mascons. — Nature, 1969, vol. 221, N 5182,
p. 732.
28. Hayn F. Die Rotation des Mondes. Enzyklopadie der Mathem. Wissen, 6,
Part 2, 1923, s. 1020-1043.
29. Kaula W.M. The gravitational field of the Moon. — Science, 1969, vol. 166,
N3913, p. 1581-1588.
30. Lorell J., Sjogren W.L. Lunar gravity: Preliminary estimates from Lunar
Orbiter. - Science, 1968, vol. 159, N 3815, p. 625-627.
31. Muller P.M., Sjogren W.L. Lunar gravimetry and mascons. — Appl. Meeh,
revs., 1969, vol. 22, N 9, p. 955-959.
32. Muller P.M., Sjogren W.L. Mascons: lunar mass concentrations. — Science,
1968, vol. 161, N 3842, p. 680-684.
33. Sjogren W.L., Muller P.M., Gottlieb P., Wong L., Buechler G., Downs W.,
Prislin R. Lunar surface mass distribution from dynamical point — mass solution.
- Moon, 1971, vol. 2, N 3, p. 338-353.
34. Wong L., Buechler G., Downs W., Sjogren W.L., Muller P.M., Gottlieb P.
A surface layer representation of the lunar gravitational field. — J. Geophys. Res.,
1971, vol. 76, N 26, p. 6220-6236.
35. Аксенов Е.П. Теория движения искусственных спутников Земли. — М.:
Наука, 1977.
36. Жданюк Б. В. Основы статистической обработки траекторных измере-
ний. — М.: Сов. радио, 1978.
293
37. Каула У. Спутниковая геодезия. — М.: Мир, 1970.
38. Лидов М.Л., Ляхова В.А., Соловьев А.А. Полуаналитический метод
расчета движения искусственного спутника Луны // Космические исследо-
вания. 1975. Т. 13. Вып. 3. С. 283-310.
39. Субботин М.Ф. Введение в теоретическую астрономию. — М.: Наука,
1968.
40. Егоров В.А., Гусев Л.И. Динамика перелетов между Землей и Луной.
— М.: Наука, 1980.
41. Егоров В.А. Пространственная задача достижения Луны. — М.: Наука,
1965.
42. Субботин И.Ф. Курс небесной механики. Т.2. — ОНТИ, 1937.
43. Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики космического
полета. — М.: Наука, 1990.
44. Лидов М.Л., Охоцимский Д.Е., Тесленко Н.М. Исследование одного
класса траекторий ограниченной задачи трех тел // Космические исследо-
вания. 1964. Т.2. Вып. 6.
45. Гусев Л.И. Метод определения характеристических скоростей при
перелетах космического аппарата с орбиты ИСЗ на орбиту ИСЛ и обратно //
Космические исследования. 1974. Т.12. Вып. 5.
46. Гурман В.И., Гусев Л.И. Оценка оптимальности одного класса траек-
торий перелета между орбитами ИСЗ и ИСЛ // Космические исследования.
1975. Т. 13. Вып. 6.
47. Егоров В.А. Оптимизация одноимпульсного перехода с эллиптической
орбиты на гиперболическую с заданной скоростью «на бесконечности» //
Космические исследования. 1972. Т. 10. Вып. 5.
48. Космические траекторные измерения. Радиотехнические методы из-
мерений и математическая обработка данных / Под ред. П.А. Агаджанова,
В.Е. Дулевича, А.А. Коростелева. — М.: Советское радио, 1969.
49. Молотов Е.П. Наземные радиотехнические системы управления кос-
мическими аппаратрми. — М.: ФИЗМАТЛИТ, 2004.
50. Радиосистемы межпланетных космических аппаратов / Р.В.Бакитько,
М.Б. Васильев, А.С. Виницкий и др. — М.: Радио и связь, 1993.
51. Колосов М.А., Арманд Н.А., Яковлев О.И. Распространение радиоволн
при космической связи. — М.: Связь, 1969.
52. Theodore D. Moyer Formulation forObserved and Computed Values of Deep
Space Network Data Types for Navigation 11 Jet Propulsion Laboratory. California
Institute of Technology. MONOGRAPH 2 DEEP SPACE COMMUNICATIONS
AND NAVIGATION SERIES. October 2000
53. Небесно-механическая интерпретация и первичная обработка измере-
ний КА «Гранат» и «Интербол» / Э.Л. Аким, А.А. Горохова, Н.П. Киселева,
В.А. Степаньянц, А.Г. Тучин // Препринт №83. — М.: ИПМ им. М.В.Кел-
дыша РАН, 1996.
294
54. Небесно-механическая интерпретация измерений радиосистемы меж-
планетных космических аппаратов «Квант-Д» / Э.Л. Аким, А.А. Горохова,
И.П. Киселева, В.А. Степаньянц, А.Г. Тучин // Препринт №2. — М.: ИПМ
им. М.В. Келдыша РАН, 2002.
55. Локальная обработка измерений радиосистемы межпланетных косми-
ческих аппаратов / Э.Л. Аким, А.А. Горохова, И.П. Киселева, В.А. Степань-
янц, А.Г. Тучин И Препринт №11. — М.: ИПМ им. М.В. Келдыша РАН, 2002.
56. Эльясберг П.Е., Ястребов В.Д. Искусственные спутники Земли. Вып. 4.
- М.: АН СССР, I960. С. 18.
57. Энеев Т.М., Платонов А.К., Казакова Р.К. Искусственные спутники
Земли. Вып. 4. - М.: АН СССР, I960. С. 43.
58. Шапиро М. Расчет траекторий баллистических снарядов по данным
радиолокационных наблюдений. — М.: ИЛ, 1961.
59. Линник Ю.В. Метод наименьших квадратов и основы теории обработки
наблюдений. — М.: Физматгиз, 1958.
60. Бажинов И.К., Павлов В.П., Почукаев В.Н. Модель гравитационного
поля Луны по наблюдениям за движением ее спутников «Луна-15-24» //
Научные чтения по космонавтике и авиации, 1981. — М.: Наука, 1983. С. 104-
106.
61. Мещеряков Г.А., Зазуляк П.М., Киричук В.В. О вычислении момен-
тов инерции Луны // Астрономический журнал. 1976. Т. 53. №3. С. 620-625.
62. Lorell J. Lunar Orbiter gravity analysis. — The Moon, 1970, vol. 1, p. 190-
233.
63. Степаньянц B.A., Львов Д.В. Эффективный алгоритм решения систе-
мы дифференциальных уравнений движения // Математическое моделиро-
вание. 2000. Т. 12.№6.
64. Тузов Г.И. Выделение и обработка информации в доплеровских сис-
темах. — М.: Советское радио, 1967.
65. Космонавтика СССР. — М.: Машиностроение, Планета, 1986.
66. Передвижная лаборатория на Луне Луноход-1. — М.: Наука, 1971. Т.1.
67. Алексеев В.А., Алтунин В.И., Молотов Е.П. Длиннобазовая узкопо-
лосная радиоинтерферометрия для космической навигации. Часть 1. Меж-
планетные аппараты: измерения координат АМС «Вега»// Космические ис-
следования. 1989. Т. 27.V 3.C.447-453.
68. Космонавтика: Энциклопедия / Гл. ред. В.П. Глушко. — М.: Сов. эн-
циклопедия, 1985.
69. Инженерный справочник по космической технике / Под ред. А.В.
Солодова. — М.: Воениздат, 1969.
70. Сборник научных трудов НПО им. С.А. Лавочкина. Вып.1.
71. Сборник научных трудов НПО им. С.А. Лавочкина. Вып.2.
72. Сборник научных трудов НПО им. С.А. Лавочкина. Вып.З.
73. Сборник научных трудов НПО им. С.А. Лавочкина. Вып.4.
74. Сборник научных трудов НПО им. С.А. Лавочкина. Вып.5.
295
75. Сборник научных трудов НПО им. С.А.Лавочкина. Вып.б.
76. Тарасов Е.В. Космонавтика. — М.: Машиностроение, 1977.
77. Мещеряков И.В. В мире космонавтики. — Н.Новгород : Русский ку-
пец, 1996.
78. Актуальные проблемы Российской космонавтики / Под ред. А.К.
Медведевой. — М.: Комиссия РАН, 2006.
79. A.V.Labunsky, O.V.Papkov, K.G. Sukhanov. MULTIPLE GRAVITY
ASSIST INTERPLANETARY TRAJECTORIES. ESI Book Series. Published on
behalf of the Earth Space Institute by GORDON AND BREACH SCIENCE
PUBLISHERS.
ISBN: 90-5699-090-X
ISSN: 1026-2660
80. Ferraz-Mello S. Action de la pression de radiation sur le mouvement d’un
satellite artificial de la terre. — XIX.
А.И. Шейхет,
НПО им. С.А. Лавочкина
А.Г. Тучин,
ИПМ им. М.В. Келдыша
296
Часть 2
МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ
ПРОЕКТИРОВАНИЯ СЛУЖЕБНЫХ
И ЦЕЛЕВЫХ СИСТЕМ АВТОМАТИЧЕСКИХ
КОСМИЧЕСКИХ АППАРАТОВ
FBI МЕТОДЫ ПРОЕКТИРОВАНИЯ ОПТИКО-ЭЛЕКТРОННЫХ
КОМПЛЕКСОВ КОСМИЧЕСКИХ АППАРАТОВ
Наблюдение объектов различной физической природы на поверхности
Земли из космоса — одно из самых динамичных направлений развития кос-
мических технологий. Это связано с быстрым ростом спроса потребителей на
получение оперативных космических данных высокого разрешения, эффек-
тивное использование которых обеспечивается современным уровнем ком-
пьютерных технологий. Ключевым звеном современной технологии геоин-
формационного обеспечения является получение космических или аэрофо-
тоснимков объектов в виде цифрового изображения [1—13]. Подготовка ин-
формации может осуществляться орбитальными оптико-электронными
(ОЭК) или радиолокационными комплексами.
Потребители могут предъявлять к снимкам специальные требования. Так,
например, информацию о нефтегазопроводах необходимо формировать так,
чтобы она охватывала полосу вдоль их направления — то есть азимут скани-
рования определен заранее, а не обусловлен трассой полета космического
аппарата. Информация также не должна содержать геометрических искаже-
ний.
На низкой орбите снимаемая полоса не может отклоняться от трассы полета
КА на значительные углы без потери качества изображения. Поэтому боль-
шинство низкоорбитальных КА с ОЭК и РСА реализуют алгоритмы съёмки
с «тангажным отслеживанием» или «тангажным замедлением» только вдоль
трассы полета.
Возможность наблюдать объекты в широком диапазоне зенитных углов при
произвольном направлении сканирования относительно трассы полета КА с
минимальными геометрическими искажениями появляется только при реа-
лизации алгоритмов съемки ОЭК с трехосным сканированием [24].
Реализация трехосного сканирования позволяет расширить возможности
КА при наблюдении. Трехосный алгоритм съёмки дает возможность опти-
мизировать параметры движения изображения в фокальной плоскости для
достижения наилучших показателей качества видеоинформации, повышает
производительность и периодичность системы, дает возможность получать
стереоизображения с использованием только одной съемочной камеры и с
297
одного витка и т.д. Внедрение технологии обработки информации на борту
КА позволит также в кратчайшие сроки готовить информационные продук-
ты в обстоятельствах, требующих максимальной оперативности.
Большинство современных космических систем оптико-электронного
наблюдения (КС ОЭН) используют именно такой алгоритм съемки. К ним
относятся КС: «Аркон-1» (Россия) [24], «КН-11», «IKONOS», «QuickBird»
(США), «EROS» (Израиль), «GeoEye-1».
В Российской Федерации в настоящее время КС ОЭН находится в стадии
восстановления. Согласно концепции развития космических средств ДЗЗ до
2025 и 2040 гг. в космическую систему наблюдения войдут КА оперативного
наблюдения «Ресурс-П» из двух КА с наращиванием до четырех КА к 2020 г.
для решения совокупности природно-хозяйственных задач ДЗЗ с высоким и
средним пространственным разрешением [2, 8].
Тенденция развития зарубежных КС ОЭН в последнее время определя-
ется улучшением их разрешающей способности до 0,5 м и лучше («GeoEye-
1») и увеличением оперативности наблюдения до 1-2 раз в сутки. Опыт
создания и эксплуатации отечественной высокоорбитальной КС ОЭН «Ар-
кон-1» (КА №1 в 1998 и КА №2 в 2003 г.) показал, что для высоты орбиты
1500x1800 км в широтном поясе 30—70 градусов достигается периодичность
наблюдения от 1 до 2 раз в сутки при разрешающей способности от 1,0 м
[19,24].
Космические средства информационного обеспечения также должны об-
ладать высокой производительностью и обеспечивать съёмку заданной пло-
щади с качеством не менее требуемой величины. Концепция развития рос-
сийской КС ДЗЗ предусматривает рост производительности до 4 млн кв.км в
сутки к 2015 г. и до 40 млн кв.км в сутки — до 2040 г. Однако производи-
тельность КС ОЭН зависит не только от характеристик радиоэлектронного
тракта по объёмам передачи информации, но и от линейной разрешающей
способности и периодичности наблюдения. Поэтому показатель производи-
тельности требует дальнейшего уточнения, а методы проектирования долж-
ны учитывать совокупность комплекса факторов, влияющих на показатели
качества КС ОЭН: динамику движения КА в составе орбитальной группи-
ровки (ОГ), условия визирования каждого объекта и распределение объек-
тов наблюдения по поверхности Земли.
Производительность КС ОЭН определяется, главным образом, рациональ-
ностью построения информационного тракта, являющегося сложной дина-
мической системой, включающей аппаратуру наблюдения, орбитальную и
наземную часть.
Под производительностью КС ОЭН принято понимать количество обслу-
живаемых объектов, информация о которых доставлена потребителю с за-
данным качеством по совокупности показателей: линейным разрешением на
местности (ЛРМ), периодичностью наблюдения, оперативностью доставки,
точностью привязки координат, спектральным и радиометрическим разре-
298
шением с учетом ограничений на пропускную способность наземного комп-
лекса.
Таким образом, очевидно, что возникает противоречие между требовани-
ями к информационному обеспечению и предлагаемыми возможностями КС
ОЭН при ограниченных ресурсах и сроках на ее создание. Достижение та-
ких характеристик КС ОЭН возможно только при рациональном выборе
проектных параметров ОЭК.
На стадии предварительного проектирования КС ОЭН разработчики вы-
нуждены пользоваться сложными инженерными моделями, разработанными
поставщиками отдельных узлов информационного тракта. Возникают труд-
ности с наличием и достоверностью исходных данных, входящих в эти мо-
дели, и как следствие — нестыковки и просчеты, снижающие эффективность
системы в целом. В инженерной практике редко применяются оценки ста-
тистических характеристик показателей качества.
В то же время характеристики информационного тракта аппаратуры на-
блюдения в сочетании с орбитальным построением оказывают определяющее
влияние на целевую эффективность функционирования КС ОЭН как дина-
мической системы. Поэтому рациональное согласование элементов инфор-
мационного тракта позволяет определить верхние границы достижимости
отдельных показателей эффективности, существенно сократить количество
варьируемых параметров и вычислительные затраты на моделирование.
Разрешение проблемы повышения информационной эффективности воз-
можно за счет комплексной увязки орбитального построения будущих КС
ОЭН с учетом рациональных проектных параметров ОЭК путем решения
следующих взаимосвязанных задач:
1. Повышение качества ОЭК (коэффициента полезного действия) за счет
увеличения пропускаемой частоты, ширины полосы, а также улучшения
других характеристик путем рационального выбора и согласования проект-
ных параметров.
2. Улучшение точности стабилизации при одновременном повышении
максимальной угловой скорости и ускорения КА во время сканирования,
определение ограничений на высоту орбиты с учетом требований алгорит-
мов съёмки к допустимым систематическим и случайным смазам изображе-
ния и динамическим характеристикам КА.
3. Улучшение углового разрешения ОЭК за счет разумного увеличения
габаритов оптической системы (ОС) с учетом п.1.
Наиболее рационально решать задачи 1,2 и 3 совместно. Решение задачи
3 без решения задачи 1 и 2 нецелесообразно. Кроме того, решение задачи 1
требует учета технических ограничений и дискретности характеристик эле-
ментов ОЭК, выпускаемых отечественной промышленностью.
В итоге успешное решение задач 1-3 дает возможность определить не
только рациональные проектные параметры и их запасы, но и рациональное
орбитальное построение ОГ (параметры орбит и количество КА).
299
2.1.1. Системный анализ проблемы проектирования орбитального
оптико-электронного комплекса
Как было отмечено ранее, информационная эффективность КС ОЭН оп-
ределяется, главным образом, рациональным построением информационного
тракта, включающего ОЭК, орбитальную и наземную часть [6]. Особенно-
сти конкретных ОЭК определяют архитектуру информационных трактов КС
ОЭН. Их сложность зависит от разнообразия целевых задач и значительно-
го числа технических ограничений. Поэтому первым шагом является сис-
темный анализ задачи проектирования ОЭК в условиях действия случай-
ных и неопределенных факторов.
2.1.1.1. Показатели эффективности функционирования КС ОЭН
При проектировании КС ОЭН важнейшей задачей является рациональ-
ный выбор структуры показателей качества. Основная задача анализа каче-
ства — оценка технического уровня создаваемых и разработка рекоменда-
ций для будущих КС ОЭН. Качество КС ОЭН как информационной систе-
мы задается на первом уровне показателей назначения. Определение эф-
фективности проводится тремя способами, образующими следующие уров-
ни иерархии:
— проводится измерение объективных параметров изображения по опре-
деленным показателям: линейному разрешению, периодичности наблюдения,
радиометрической чувствительности и т.д.;
— оценивается вероятность решения потребителем той или иной задачи,
которая и является мерой качества КС ОЭН.
— оценивается результат какой-либо деятельности, проводимой по инфор-
мации, предоставляемой КС ОЭН, тогда мерой качества является более слож-
ный функционал от качества информации.
КС ОЭН является сложной динамической системой и характеризуется
множеством частных показателей качества. Путем комбинации частных
показателей формулируется обобщенный (комплексный) показатель качества.
Проблема анализа эффективности КС ОЭН рассмотрена в [8—13]. В ра-
боте [13] эффективность космической системы наблюдения предлагается оп-
ределять вероятностью решения задач пользователей, а в качестве обобщен-
ного показателя использовать линейную свертку частных показателей, под
которыми понимается вероятность решения задач из заданного списка:
*эф
/=1
"эф
где а, — коэффициент важности /-й задачи, £ а(, = 1; — вероятность
/=1
решения z-й задачи пользователя; — количество задач.
При этом вероятность решения задачи пользователя определяется произ-
ведением вероятностей условий реализации отдельных требований:
300
р =р р р
гзад,. Ч/т^и,’
где Р; — вероятность наблюдения с заданным разрешением; Ру — вероят-
ность наблюдения с заданной периодичностью; Ри — вероятность наблю-
дения в заданном спектральном диапазоне.
Для анализа эффективности КС ОЭН также предлагается использовать
вероятность распознавания целевой обстановки, усредненную за период фун-
кционирования Гф по множеству объектов наблюдения:
1 ^об ^набл
Е =----1----У У Р ,
/V /V " " зад7
7Унабл/Уоб /=1 j=l
где — количество контролируемых объектов; 7VHa6jI — общее количество
наблюдений за интервал функционирования КС ОЭН Тф; Рзад„ — вероят-
ность решения задачи пользователя для z-го объекта в момент наблюдения
тг
Данный показатель определяет усредненное за интервал Гф математичес-
кое ожидание Е количества объектов, информация о которых, имеющаяся на
произвольный текущий момент у потребителя, соответствует их реальным
состояниям.
Недостатком такого подхода является то, что линейная свертка не дает
гарантии высоких значений отдельных показателей по всему множеству.
Кроме того, ЛРМ и периодичности обзора не являются независимыми
случайными величинами.
Особенно существенным данный недостаток становится для КС ОЭН
детального оперативного наблюдения, у которых имеется выраженная зави-
симость качества наблюдения объекта от условий. При этом отличное ка-
чество изображения может быть получено только в небольшом количестве
наблюдений (обычно не более 30%).
Поэтому использование показателей эффективности такого типа оправдано
только в КС ОЭН среднего и низкого разрешения, у которых ЛРМ и каче-
ство информации существенно не изменяются в процессе наблюдения.
Вероятность решения задачи пользователя Рзад.(0 определяется вероят-
ностью правильного отображения состояния /-го объекта на текущий мо-
мент времени t. Она зависит от скорости старения информации, определя-
емой вероятностью сохранения состояния объекта спустя время после наблю-
дения, а также от давности информации об этом объекте, находящейся у по-
требителя на данный момент времени t. В общем случае величина Рзад.
может зависеть от информации, получаемой на множестве снимков, полу-
ченных до момента 7J, включая наблюдения с разнотипной аппаратурой.
301
Вероятность распознавания целевой обстановки более полно учитывает
особенности функционирования КС ОЭН. Однако имеется существенный
недостаток применения вероятности в качестве показателя — необходимость
знания априорной информации о множестве наблюдаемых объектов, боль-
шое количество реализаций и вычислительные затраты на моделирование,
когда Р ->1.
ЭаД
Вероятность Рзад. определяется рядом случайных событий. Чтобы пра-
вильно распознать состояние объекта наблюдения, необходимо выполнение
следующих условий: объект попадает в полосу захвата аппаратуры; над ним
нет сплошной облачности; обеспечивающие системы КА позволяют провес-
ти съемку; качество наблюдения достаточное для решения задачи; инфор-
мация к моменту анализа доставлена в НИК и обработана не позднее задан-
ного срока. Кроме того, необходимо, чтобы состояние объекта не измени-
лось за время, прошедшее от съемки до момента принятия решения, т.е. чтобы
информация была достоверной.
Пользователи задают суммарное число 7Vo6 и расположение объектов на-
блюдения, а также список задач, решаемых для каждого объекта.
Множество объектов наблюдения Q = {0Z} / = 1...Аоб задается географи-
ческими координатами: Xz, (pz и характерным размером /, яркостью объекта
5об и фона 5ф в зависимости от сезонных условий; в случае протяженных
объектов задаются их граничные координаты Xmin z, (pmin z, Xmax z, (pmax z.
Каждый из типов объектов характеризуется интервалом времени измене-
ния ситуации на объекте Гст. Также каждый объект характеризуется крити-
ческим уровнем разрешающей способности £кр. Считается, что при наблю-
дении объекта с меньшим временным и пространственным разрешением ин-
формационного канала, чем Гст и £кр, задача пользователя не может быть
решена.
Вектор основных показателей качества системы в конкретной реализации
наблюдения объекта можно записать в следующем виде:
J = (L ,В ,Т ,Т , Ах, XX, ДХ, ц),
v лрм’ зах’ н’ оп’ ’ ’ ’
где £лрм — линейная разрешающая способность на местности (£лрм > г); Тн —
периодичность наблюдения; Топ — оперативность доставки информации;
Взах — ширина полосы захвата; Дх — точность определения местоположения
объекта; XX — спектральные диапазоны наблюдения; ц — радиометричес-
кая разрешающая способность; ДХ — спектральная разрешающая способ-
ность.
Для современных систем важным является обеспечения заданного линей-
ного разрешения на местности £ , определяющего размеры минимально
различимых деталей на изображении. Радиометрическая и спектральная раз-
решающая способность, так же, как и ЛРМ, является сложной функцией
условий наблюдения.
302
В связи с тем, показатели в каждой реализации являются псевдослучай-
ной величиной, для перехода от статистической задачи к детерминирован-
ной необходимо использовать следующие операторы:
Ф-(Ф|,Ф2,Ф3,Ф4,Ф5),
где Oj — множества распределения параметров (например, гистограмма
«ЛРМ-периодичность») для конкретных объектов или их подмножеств; Ф2 —
математическое ожидание; Ф3 — квантиль; Ф4 — вероятность; Ф5 — мини-
мум или максимум показателя.
Вектор основных показателей эффективности системы можно записать в
следующем виде:
W = (/7a,E),
где Па = <D3(J) — производительность КС ОЭН; Е = Ф4(<1) — вероятность рас-
познавания целевой обстановки.
2.1.1.2. Структура временных показателей
для анализа эффективности КС ОЭН
Ввиду динамических свойств наблюдаемых объектов, вероятность того, что
сведения, полученные в результате последнего наблюдения, будут соответ-
ствовать фактическому состоянию объекта к моменту использования инфор-
мации, уменьшается с течением времени. Поэтому, кроме качества наблю-
дения и полосы обзора, требования пользователей содержат оперативность
— интервал времени, проходящий между постановкой задачи и получением
информации потребителем (рис. 2.1.1).
Т <Т + Т
1 вых — 2 п 1 1 подг
Гсум ^хрКА"^?обр
+ Гхр
Рис. 2.1.1. Соотношения временных показателей
Оперативность доставки информации потребителю Топ определяется двумя
временными слагаемыми — интервалом времени выхода космического ап-
парата на объект с момента постановки задачи и оперативностью доставки
информации пользователю:
Т =Т + Т ,
оп вых сум’
где Твых — интервал времени выхода космического аппарата на объект от
момента постановки задачи; 7сум — суммарный интервал времени доставки
303
информации потребителю от момента съемки до момента ее непосредствен-
ного получения.
Суммарная величина интервала времени обновления информации об
объекте в каталоге пользователя
т = т + т
сум д хр’
где Т* — интервал времени от момента наблюдения до момента доставки
информации потребителю; Гхр — интервал времени хранения и передачи по
линиям связи обработанной информации вплоть до момента ее востребова-
ния.
В случае, если наблюдается выборка объектов, 7хр определяется суммар-
ной длительностью накопления информации по всем объектам.
Целесообразно представить 7Д в виде
Гд = ^хр КА + ^обр’
где Гхр нд — продолжительность хранения результатов наблюдения на борту
КА до момента передачи на наземную станцию приема, Гхр невелика или
равна нулю при непосредственной передаче в реальном масштабе времени;
7, — интервал времени обработки информации на Земле.
В процессе решения задачи непланового наблюдения объектов важное
значение приобретают частные показатели:
— интервал времени первого выхода КА в район наблюдения Гвых, отсчи-
тываемый от момента постановки задачи до получения снимка;
— продолжительность подготовки КА к работе Г , включая наземные
операции по планированию работы бортовой аппаратуры.
Частные показатели Гвых и Гподг также характеризуют способность КС ОЭН
к восстановлению после случайных отказов. В этом случае показатель Гвых
определяет интервал времени, необходимый для замены вышедшего из строя
КА исправным путем перестроения орбитальной структуры или запуска но-
вого КА.
Время выхода КА в район объекта наблюдения Гвых с момента постановки
задачи пользователем обусловлено в основном текущей баллистической си-
туацией и расположением объекта:
т <т + т
вых п подг’
где Гп — периодичность обзора заданного объекта (интервал времени между
последовательными попаданиями объекта в полосу захвата); Гподг — интер-
вал времени, требуемый на планирование работы бортовой аппаратуры и
подготовку КА к наблюдению.
Для современных информационных комплексов интервал времени достав-
ки пользователю Гсум по линиям связи обычно незначительный, и основным
временным слагаемым, ограничивающим непрерывность обслуживания, яв-
ляется время выхода космического аппарата на объект наблюдения.
Периодичность обзора 7П определяется промежутком времени между
двумя повторными выходами космического аппарата в зону, где возможно
наблюдение заданного объекта.
304
Для предварительной оценки необходимо рассматривать случай планово-
го наблюдения при Гподг = 0, тогда интервал времени выхода космического
аппарата на объект с момента постановки задачи пользователем меньше или
равен периодичности получения информации из района с заданной широ-
той:
Т <Т .
вых п
В этом случае оценка максимально возможного времени выхода КА про-
водится моделированием периодичности обзора исходя из баллистического
построения системы и целевой обстановки.
Периодичность наблюдения Тнаб, в свою очередь, хуже периодичности
обзора Тп, так как провести наблюдение удается не на каждом проходе КА
в зоне обзора объекта:
Т > Т
1 наб — 1 п ’
где Гнаб — периодичность наблюдения с учетом метеообстановки и точно-
стных характеристик КА. В то же время периодичность обзора Тп является
удобным показателем для оценки потенциально возможного времени выхо-
да КА на объект и периодичности обзора.
Оценка перечисленных выше частных показателей проводится с помощью
имитационной модели, основанной на численном моделировании движения
группировки КА с учетом условий наблюдения.
На вероятность правильного информационного решения о состоянии
конкретного объекта и, в конечном счете, на эффективность функциониро-
вания КС ОЭН в целом влияет суммарное время, прошедшее с момента
наблюдения до момента использования его результатов, но не величина и
соотношение определенных составляющих этого времени.
Значимость частного показателя Гп возрастает в случае если пользова-
тель принимает решение по результатам наблюдения всех объектов из выбор-
ки. Максимальная периодичность Тп обзора объектов в выборке должна быть
соизмеримой с требуемым временем просмотра Гпр всей выборки, так как за
время Тп завершается цикл наблюдений выборки.
Требования пользователей к качеству наблюдения задаются в виде мно-
жества Aww = {а „}, на котором вероятность успешной дешифровки изображе-
ния Рзад(Аww)>a больше заданной величины а.
Множество требований Aww состоит из векторов = (Л,^обз,Тл,ТЕ), число
которых равно произведению количества решаемых задач i= на каж-
дом объекте и количеству объектов j = заданных пользователями:
а11 а12 ‘ а1л.
А - < Я21 Я22 ’ а2л.- k
J *
а . а п а
т\ m2 mnj
305
Состояние или характеристики /-го объекта 0Z g Q наблюдаются полнос-
тью при условии, что а не хуже некоторого предельного значения а*. Задача
пользователя считается решенной, если ос..
2.1.1.3. Структура вероятностных показателей
эффективности функционирования КС ОЭН
Вероятность решения задачи пользователем можно представить как про-
изведение вероятностей отдельных независимых событий:
P^ = ^)P^La)PB(Tx,L),
где Рст(7^) — вероятность соответствия информации фактическому состоя-
нию объекта на интервале времени Рзад£(£) — вероятность решения
задачи с линейным разрешением L; Рн(7^,£) — вероятность успешного на-
блюдения с качеством Тх , L (учитывает метеообстановку, точностные харак-
теристики и другие факторы).
Между вероятностью решения задачи и вероятностью устаревания инфор-
мации при п наблюдениях и при условии независимости распределений
существует следующая зависимость:
где Р'ад — вероятность решения задачи при п наблюдениях объекта; п — ко-
личество наблюдений объекта; пТъ — суммарный интервал времени наблю-
дения.
С учетом вероятности отсутствия облачности и вероятности захвата объекта
в кадр при п наблюдениях объекта вероятность решения задачи пользовате-
лем определяется выражением
Р (и) = Р (иТт)(1-(1-Р ЛТт,£)Рл (Tv)P (AL,Z Л,б7п_)Р ALY).
задх 7 ctv L7V v набх L’ 7 облv E7 захv ’ об’ прм7 зад!Л 7 7
Существует также возможность повышения вероятности решения задачи
за счет использования нескольких типов аппаратуры наблюдения. Вероят-
ность решения задачи с помощью независимых методов
где k = 1 ...К , К — количество независимых методов получения информации,
например, с помощью оптико-электронной, радиолокационной и других ви-
дов аппаратуры.
Рассмотрим методику расчета вероятностей РСТ(ГЕ), РзаД£(^)> Рн(^’^)
более подробно.
Для вычисления вероятности решения задачи по разрешающей способ-
ности может быть использована эмпирическая зависимость [17]
р
гзал£
= 1 - ехр а
1 _ 1
L L
кр лрм
, если L < L :
’ лрм кр ’
306
Р , = 0, если L > L .
зад£ ’ лрм кр
Здесь L — разрешение оптико-электронного комплекса; а — эмпиричес-
кий коэффициент; £кр — характерный размер распознаваемого элемента или
критическое разрешение.
Вероятность Рст соответствия информации фактическому состоянию объек-
та к моменту наблюдения для динамических объектов может быть определе-
на экспоненциальным законом:
Т
—Т ст
Т
сум
Рст=ехр
где Гст — характерный интервал времени изменения ситуации на объекте;
7сум — интервал времени между двумя последовательными наблюдениями
объекта; т — эмпирический коэффициент.
Вероятность успешного наблюдения с учетом метеообстановки, точност-
ных характеристик и других факторов
р _р р р р
н зах обл набл план ’
где Рзах — вероятность захвата объекта в кадр с учетом погрешности системы
ориентации КА; Робл — вероятность отсутствия облачности в момент наблю-
дения; Рнабл — вероятность обеспечения наблюдения с заданным качеством
TY, L, зависит от текущего состояния атмосферы (дымки, прозрачности) и
баллистической ситуации (реализуемой дальности до наблюдаемого объек-
та), ширины полосы обзора, угла перенацеливания аппаратуры наблюдения
и освещенности; Рпл — вероятность включения объекта в план наблюдения,
определяется выполнением ограничений, связанных с текущим состоянием
бортовых систем КА (энергетика, динамика и др.) и человеческим факто-
ром — экспертной ситуацией при изменении решения о включении объекта
в план.
Одной из характеристик КС ОЭН, которая влияет на эффективность,
является ширина полосы захвата (полосы беспропускного сканирования
земной поверхности полем зрения аппаратуры наблюдения) Взахв и поло-
сы обзора 5обз с учетом максимального угла перенацеливания аппаратуры
В < В R .
захв обз
Для картографических задач и задач коммерческой съемки требования к
полосе захвата задаются дополнительно.
Оценка вероятности захвата объекта в кадр Рзах вычисляется по формуле
/ А
В
зах 2
5
^прм
7
В
зах 2
^прм
р =ф
зах
-ф
307
1 г
где Ф(%) = —== ехр(---) du — интеграл ошибок; 2?захв — полоса захвата ОК;
\/2л Д 2
/об — поперечный размер объекта; опрм — СКО линейного промаха вызван-
ного ошибками системы наведения КА и неточностями навигационного обес-
печения.
Важным фактором, влияющим на функционирование оптико-электрон-
ной аппаратуры КА, является состояние атмосферы. Вероятность отсутствия
облачности Робл зависит от времени планирования съемки объекта. Мо-
дель облачности, основанная на теории случайных марковских процессов
приводится в [13].
2.1.1.4. Производительность КС ОЭН
Эффективность КС ОЭН, выполняющей задачу наблюдения за совокуп-
ностью равнозначных объектов в течение некоторого периода времени,
определяется не только вероятностью распознавания целевой обстановки, но
и количеством объектов, информация о которых, имеющаяся на произволь-
ный текущий момент у потребителя, соответствует их реальным состояниям.
Показателем эффективности КС ОЭН с учетом всех характеристик может
выступать производительность П, определяющая число обслуживаемых объек-
тов (площади района наблюдения), для которых система обеспечивает задан-
ную вероятность решения задач пользователя и, соответственно, требования
пользователей по качеству информации: линейному разрешению на местно-
сти и периодичности наблюдения.
Потенциальная производительность /7тах определяет возможности сис-
темы по количеству обслуживаемых объектов или районов без учета пропус-
кной способности, ограничений по динамике перенацеливания КА и воз-
можностей по включению объектов в план наблюдений.
К числу основных факторов, влияющих на потенциальную производитель-
ность КА, относится высота орбиты. С увеличением высоты орбиты увели-
чивается периодичность наблюдения и площадь просматриваемых районов,
снижаются требования по динамике перенацеливания КА, соответственно
увеличивается и производительность оптико-электронного КА.
В силу ограничений на полосу захвата, объема запоминающего устрой-
ства (ЗУ) и информативности радиолинии, числа наблюдаемых объектов в
единицу времени информационная производительность /7инф также огра-
ниченна:
П = I Т
инф 7ОЭКусв’
где /оэк — скорость передачи информации в радиолинии оптико-электрон-
ного комплекса; 7св — время нахождения КА в связи с наземным информа-
ционным комплексом за планируемый период.
308
Количество и длительность сеансов связи с КА при заданных высоте и
наклонении орбиты определяются геодезической широтой пункта приема
информации и минимальным углом места антенны над горизонтом.
Реальная производительность КА всегда меньше потенциально возможной
и определяется не только информативностью оптико-электронного комплекса,
но и динамическими свойствами КА, ограничениями на возможность пла-
нирования съёмки, ограничениями ресурсов бортовых систем и т.д.:
Па <П. <П<П,
инф р ’
где Па — реализованная производительность; 77HH(J) — информационная
производительность; 77р — запланированная производительность; П — об-
щее количество объектов или общая площадь контролируемой территории.
Рассмотрим оценки производительности КС ОЭН, отражающие зависи-
мость условий наблюдения от времени.
Средняя производительность М[77] за период одного витка или суток
т*
М[П\ = J
О
где Рзад(0 — вероятность распознавания состояния объекта; n(t) — плотность
распределения наблюдаемых объектов (количество наблюдаемых объектов в
единицу времени).
Квантиль Па или минимальная, гарантированная производительность,
вычисленная за период одного витка, суток либо срока активного существо-
вания КА:
Па = min{77,Рзац(ае А) > а},
аеА
где а — заданный уровень вероятности (например, а = 0,8); 77“ — кван-
тиль производительности КС ОЭН, площадь или число объектов, наблюда-
емых системой в единицу времени, для которых выполняются требования по
качеству наблюдения.
2.1.1.5. Показатели качества орбитального ОЭК
Результатом функционирования КС ОЭН для пользователя является ка-
талог изображений наблюдаемых объектов с указанием основных характери-
стик в интересующий момент времени.
На основе полученных данных с требуемой вероятностью пользователь
должен принять соответствующее решение о состоянии наблюдаемого объекта
по дифференцирующим признакам, связанным с пространственным и спек-
тральным распределением интенсивности электромагнитного излучения.
309
Поэтому информационный тракт совместно с орбитальным построением
должен обеспечивать требуемую пропускную способность (объем передавае-
мой информации с учетом характеристик бортовых систем и наземного ра-
диокомплекса) и качество передачи изображения. Качество получаемой
информации определяет в итоге эффективность функционирования и, сле-
довательно, определяется качеством проектирования КС ОЭН.
Большинство пользователей КС ОЭН формулируют требования к качеству
изображения по критерию линейного разрешения на местности, определяю-
щему наименьшие различимые детали, полученные на снимке при различ-
ных условиях наблюдения и освещенности [10, 22].
В результате выбор проектных и баллистических параметров орбиталь-
ного комплекса КС ОЭН непосредственно зависит от следующих показате-
лей качества:
— линейное разрешение на местности £лрм;
— периодичность наблюдения с заданным разрешением 7аб(£< 1^);
— полоса захвата 5зах ;
— радиометрическое разрешение ц (или соотношение сигнал-шум V);
— пропускная способность информационного комплекса (НИК) /оэк;
— угловая разрешающая способность ОЭК у;
— коэффициент полезного действия информационного тракта £н (опре-
деляется нормированной пропускаемой пространственной частотой vH) ;
— контрастная чувствительность приемника ;
— среднеквадратичная ширина полосы пропускания пространственной
частоты Se.
Требования к ЛРМ и высота орбиты совместно определяют частные по-
казатели качества системы стабилизации КА:
— динамический диапазон системы стабилизации по угловой скорости ;
— точность отработки угловой скорости Дсо;
— максимальная угловая скорость прецизионной стабилизации сотах;
— максимальное угловое ускорение прецизионной стабилизации £тах.
Требования пользователей к качеству информации входят в противоречие
с техническими ограничениями на конструкцию КА и аппаратуру наблюде-
ния, полосу захвата, реализацию требуемых условий наблюдения, орбиталь-
ных параметров и законов управления. Поэтому повышение качества про-
ектирования КС ОЭН обеспечивается выбором рациональной архитектуры
их информационных трактов. Взаимосвязь показателей эффективности КС
ОЭН и качества информационного тракта показана на рис. 2.1.2.
2.1.1.6. Постановка задачи проектирования орбитального оптико-
электронного комплекса
Процедура поиска рациональных параметров орбитального ОЭК начина-
ется с этапа формирования ограниченной области поиска, в пределах кото-
рой в полной степени удовлетворяются тактико-технические требования.
Следующим этапом будет нахождение в этой области такого сочетания
310
Линейное разрешение на
местности £лрм
Радиометрическое разреше-
ние /4 или соотношение сигнал-
шум у/
Ширина полосы захвата и
информативность Вэах, /оэк
Показатели качества информации
л:
Угловая разрешающая способность ОЭК /
Динамический диапазон системы стабили-
зации по угловой скорости
Коэффициент полезного действия
информационного тракта /ст
(нормированная распознаваемая про-
странственная частота vH)
Точность отработки
угловой скорости \(О
Контрастная чувствительность
приемника ЯПр
Максимальная угловая скорость преци-
зионной стабилизации бУтах
Среднеквадратичная ширина полосы
пропускания 5е
Максимальное угловое ускорение
прецизионной стабилизации £тах
Показатели качества ОЭК
Показатели качества системы
стабилизации КА
Показатели качества информационного тракта и ОЭК
Рис. 2.1.2. Взаимосвязь показателей эффективности КС ОЭН и качества информа-
ционного тракта
311
проектных параметров КС ОЭН, которое удовлетворяет требованиям пользо-
вателей к качеству (рис. 2.1.3).
I. Формирование исходных данных и технического задания
Illa. Выбор проектных
параметров ОЭК
(пространственное разреше-
ние, резкость и др.)
Па. Выбор структуры
информационного
тракта КС ОЭН
Пб.Выбор орбитальной
структуры КС ОЭН
1116. Выбор параметров орби-
тального построения.
Информационно-временные
показатели (периодичность,
оперативность, пол оса захвата)
IV. Уточнение параметров по показателям эффективности КС ОЭН:
1. Производительности
2. Вероятности распознавания целевой обстановки
Рис. 2.1.3. Этапы проектирования орбитального ОЭК
С учетом рассмотренной совокупности показателей эффективности, струк-
туры и модели информационного тракта КА, параметров орбитальной груп-
пировки сформулируем общую постановку задачи проектирования орбиталь-
ного ОЭК.
Для ОЭК требуется определить рациональные проектные параметры X*,
обеспечивающие максимальное значение производительности П или веро-
ятности распознавания целевой обстановки Е при ограничениях ХеХт:
X* =argmax77a(X);
(2.1.1)
X* = argmax£(X),
ХеХт,£2
(2.1.2)
где ат — заданный уровень вероятности (например ат = 0,8); X — вектор
проектных параметров; Q — заданное множество объектов.
Задача (2.1.1), (2.1.2) является исключительно сложной ввиду ее большой
размерности, стохастичности, нелинейности и целочисленности ряда опре-
312
деляемых параметров. Кроме того, ряд проектных параметров представля-
ет собой сложную функцию многих переменных, некоторые из которых вза-
имосвязаны. Поэтому целесообразно идти по пути выявления этих связей,
упрощения и декомпозиции задачи.
Задачу можно существенно упростить, введя ряд ограничений, уменьша-
ющих число варьируемых параметров и диапазоны изменений их значений.
Для каждого конкретного проектируемого ОЭК существует свой набор
ограничений. Вместе с тем, можно выделить ряд ограничений, принадле-
жащих практически всем космическим системам оптико-электронного на-
блюдения.
К таким ограничениям относятся следующие:
• по условиям наблюдения — ограничения по минимальным величинам
высоты Солнца над горизонтом, коэффициента отражения, контрасту,
при которых КА наблюдения должен обеспечить заданные тактико-тех-
нические характеристики;
• по располагаемым ресурсам — ограничения по габаритам и выводимой
массе, возможностям производственно-испытательной базы, стоимости,
сроку активного существования КА наблюдения;
• по пропускной способности радиолинии передачи информации;
• по максимальным реализуемым угловым скоростям и ускорениям при
перенацеливании.
Выбор базовой системы координат требует построения иерархической
модели частных показателей. На начальной стадии проектирования, когда
детальное построение бортовых систем КА наблюдения отсутствует, целе-
сообразно совокупность параметров, характеризующих подсистему, сводить
к некоторым обобщенным параметрам или коэффициентам, что снижает
число варьируемых параметров.
Кроме того, из числа варьируемых можно исключить те параметры, по
которым производные обобщенного и частных показателей эффективнос-
ти являются малыми величинами, а также те параметры, значения которых
закладываются на самом высоком уровне — уровне теоретического преде-
ла или реальных физических ограничений (например, характеристики при-
емников изображения и др.)
Для КА оптико-электронного наблюдения Земли наиболее существенным
является требование к величине линейного разрешения на местности £лрм и
периодичности наблюдения Гнаб, поскольку при выполнении именно этих
требований имеют смысл все прочие показатели эффективности. Первый из
них характеризует информативность наблюдения единичного объекта, вто-
рой — частоту наблюдения. На предварительных стадиях проектирования
удобнее оценивать потенциальную производительность КС ОЭН без учета
влияния облачности, тогда Гнаб = Гобз.
Соответственно осям базовой системы координат £лрм — £наб следует
сопоставить параметры информационного тракта, реализующие заданное £лрм
313
и параметры орбитального построения, к изменению которых наиболее чув-
ствительны величины 7наб и £лрм.
Линейное разрешение на местности и периодичность обзора определяет-
ся выражением:
L = F.(X,Q,O);
лрм Iх ’ ’ 7 ’
THa6 = F2(X,Q,O),
где X — вектор проектных параметров КА, включая орбитальное построение
и параметры информационного тракта; Q — множество объектов наблюде-
ния; О — множество реализации внешних условий (освещённость, прозрач-
ность).
Основная сложность заключается в том, что Тнаб и £лрм являются псев-
дослучайными величинами, зависят от ряда факторов и вычисляются путем
имитационного моделирования функций и F2.
Пример зависимости линейного разрешения от периодичности обзора для
высокоорбитального и низкоорбитального КА приведен на рис. 2.1.4.
Производительность КС ОЭН также определяется на основе частных
показателей — линейного разрешения на местности и периодичности обзора
с учетом знания априорных данных о множестве наблюдаемых объектов и тре-
бованиях пользователя. Вероятность распознавания целевой обстановки
может быть вычислена, если известно конкретное расположение и характе-
ристик наблюдаемых объектов:
Е = К(£ ,Т ,,£2,А),
3 х лрм’ наб’ ’ 7’
где А — множество требований пользователя (требования соответствуют от-
дельным объектам или их группам).
Рис. 2.1.4. Зависимость линейного разрешения от периодичности обзора
для высокоорбитального и среднеорбитального КА для Р > 0,8
314
Для расчета максимальной производительности знания априорных данных
о множестве наблюдаемых объектов не требуется:
Взаимная зависимость показателей от орбитального построения КС ОЭН
определяет основные проектно-конструкторские параметры ОЭК: диаметр
главного зеркала ОС, количество КА и типы орбит в орбитальной группи-
ровке.
Размер апертуры ОС зависит не только от высоты орбиты КА и требова-
ний к линейному разрешению, но и от ряда конструктивных параметров КА,
определяющих КПД информационного тракта:
^ос = №рм’//каЛ).
Диаметр апертуры ОС ограничен снизу теоретическим пределом разреша-
ющей способности Z)min и сверху — технологическими возможностями из-
готовления:
D < < D .
min ОС max
Количество КА в орбитальной группировке определяется требуемой пе-
риодичностью наблюдения и конструктивными параметрами:
^KA = Wa6>X).
На рис. 2.1.5 показана область существования КС ОЭН с учетом ограни-
чений на количество КА и диаметр ОС.
2.1.2. Модель функционирования орбитального ОЭК
2.1.2.1. Модель функционирования КС ОЭН
Модель функционирования космических систем оптико-электронного
наблюдения основана на совместном использовании численной баллисти-
ческой модели орбитальной структуры, модели объектов наблюдения и
модели информационного тракта аппаратуры наблюдения.
Интервал времени, на котором производится моделирование процесса
наблюдения, составляет не менее I года. Это позволяет оценить зависимость
качества наблюдения от изменения условий освещенности объектов наблю-
дения, прецессии плоскости орбиты КА и других факторов.
Вероятность наблюдения заданного множества объектов с требуемым ка-
чеством вычисляется путем статистического моделирования функциониро-
вания КС ОЭН. Основные показатели качества наблюдения (ЛРМ и пери-
одичность наблюдения) учитываются в зависимости линейного разрешения
на местности от моментов времени и условий наблюдения:
£ _ * ^КА^^Ка)
лрм FcOSZka ’
315
где t — момент времени наблюдения; ^кд(а’\д) — дальность от объекта
до КА в момент наблюдения; F — фокусное расстояние оптической систе-
мы; vp — разрешаемая информационным каналом пространственная часто-
та; hc — угол Солнца над горизонтом на объекте наблюдения; — зенит-
ный угол КА на объекте наблюдения; — контраст объекта наблюдения с
учетом прозрачности атмосферы.
Рис. 2.1.5. Область существования орбитального ОЭК:
1) Диаметр ОС с учетом фактического КПД ОЭК.
2) Теоретическое ограничение углового разрешения ОС.
3) Ограничение на максимальную угловую скорость прецизионной стабилизации.
4) Ограничение размера оптической системы технологией производства и турбулен-
тностью атмосферы.
5) Зависимость количества КА от высоты орбиты для достижения требуемой перио-
дичности и производительности.
6) Ограничение количества КА с данным типом ОЭК в ОГ (стоимость и возможность
производства)
316
Приведенное выше выражение для ЛРМ является базовым при вычисле-
нии показателей эффективности КС ОЭН. Его основные составляющие
йкд) и vp(Ac,^o6) являются динамическими и вычисляются с помо-
щью соответствующих моделей. Они также зависят от проектных парамет-
ров информационного тракта. На рис. 2.1.6 приводится технологическая схема
моделирования функционирования КС ОЭН.
Имитационная модель позволяет моделировать функционирование мно-
госпутниковых КС ОЭН без ограничения на классы их орбит.
В результате вычисляется производительность, вероятность распознава-
ния целевой обстановки и любые частные показатели качества, например пе-
риодичность обзора с заданным разрешением.
Рис. 2.1.6. Технологическая схема алгоритмов моделирования
функционирования КС ОЭН
2.1.2.2. Показатели качества изображения орбитального ОЭК
За основной показатель качества орбитального ОЭК, наряду с временны-
ми показателями оперативности, наиболее часто принимается пространствен-
ная разрешающая способность. Разрешающая способность достаточно удоб-
на, так как характеризуется одним числом. Она непосредственно связана с
областью решаемых пользователями задач и поэтому имеет понятный физи-
ческий смысл минимально разрешаемого расстояния между объектами.
Вместе с тем предельная пространственная частота (разрешающая способ-
ность) не является полной характеристикой качества изображения. Так, на-
пример, считается, что оптические системы, имеющие высокую разрешаю-
317
щую способность, лучше передают мелкие детали и дают более качествен-
ное изображение, чем системы с низкой разрешающей способностью. Одна-
ко на практике системы с высокой разрешающей способностью могут плохо
воспроизводить детали, размеры которых заметно выше предельно разреша-
емых, и наоборот, системы с более низким разрешением могут качественно
воспроизводить без потери контраста более крупные детали.
Кроме того, поскольку существуют разночтения в выражениях для опре-
деления разрешающей способности, требуется уточнить модель и состав по-
казателей качества изображения.
Наиболее удобный метод синтеза оптико-электронных систем предложен
X. Фризером [21] и использует Фурье-преобразование в области простран-
ственных частот. Однако для точного определения показателей качества ОЭК
в частотной области требуется большое количество исходных данных, кото-
рые сложно получить на ранних стадиях проектирования в силу того, что их
значения являются неопределенными или случайными факторами.
Восприятие качества изображения и его измерительные свойства опреде-
ляются в основном тремя факторами: разрешающей способностью, резкос-
тью и динамическим диапазоном (количеством распознаваемых градаций
яркости).
Линейная разрешающая способность. ГОСТ 23935-79 дает следующее оп-
ределение разрешающей способности применительно к аэрофотосистемам:
«Это характеристика аэрофотоаппарата, оптико-фотографической системы,
аэрофотоматериала, определяемая максимальной пространственной частотой
периодической решетки (периодом решетки), штрихи которой визуально
различимы в фотографическом изображении, образованном данной системой,
при использовании в качестве объекта стандартной миры заданного контра-
ста».
Как следует из определения, разрешающая способность является эмпири-
ческой оценкой, получаемой при визуальном наблюдении. Поэтому отсут-
ствуют и методики синтеза сложных оптико-электронных комплексов не-
посредственно по ЛРМ, которые имели бы достаточную для практики точ-
ность.
Резкость (острота) изображения. Резкость характеризует способность на-
блюдателя выделять и извлекать детали из контрастного изображения [1,21].
Термины «разрешение» и «разрешающая способность» часто употребляют как
синонимы резкости, однако это совершенно разные понятия. Четкость и
резкость изображения являются вспомогательными понятиями и характери-
зуют субъективное восприятие изображения человеком.
Количество распознаваемых градаций яркости в изображении. В отношении
изображения очень часто используется термин «тональность изображения».
В ряде источников понятия минимально распознаваемого контраста и ко-
личества градаций яркости употребляются как синонимы, однако, это раз-
318
ные показатели. По сути, тональность изображения определяет впечатле-
ние от распознаваемого количества градаций яркости.
Рассмотренный ряд показателей: число воспроизводимых градаций яр-
кости, визуальная резкость (острота), количество информации в изображе-
нии — более полно характеризуют измерительные свойства получаемого
изображения, способность извлекать из него полезную информацию.
Таким образом, качество изображения формируемого ОЭК характеризу-
ется вектором следующего минимального состава:
R = (/?1,/?2,/?3),
где 7?! — пространственная разрешаемая частота; R2 — резкость изображения;
Я3 — количество разрешаемых градаций яркости.
Рассмотрим способы получения оценок основных показателей качества
оптико-электронной системы.
2.1.2.3. Разрешающая способность оптико-электронной системы
Для расчета разрешающей способности и при ее экспериментальной оценке
используется свойство линейности оптической системы по пространствен-
ной частоте. Тогда изобразительные свойства оптической системы характе-
ризует функция передачи модуляции (ФПМ) системы. ФПМ является фун-
кцией, зависящей от пространственной частоты, ее можно представить как
произведение ФПМ составляющих звеньев оптико-электронного комплекса
[5]:
N
Wv)=nw
/=!
где Tj(y) — зависимости ФПМ всех элементов оптико-электронного тракта
от пространственной частоты, включая остаточную дефокусировку, смазы,
ФПМ дисплея отображения и глаза оператора; v — пространственная час-
тота; N — количество элементов ОЭК.
Следует отметить, что показатель «разрешающая способность» по суще-
ству носит статистический характер, т.к. он получается усреднением несколь-
ких наблюдений изображений тест-объекта, полученных оцениваемой сис-
темой.
Для практического определения величины пространственной разрешаю-
щей способности пользуются тест-объектом, называемым мирой. Исполь-
зование мир с синусоидальным законом отражения на практике связано труд-
ностями в изготовлении. Поэтому используют прямоугольную миру Фуко
[1], состоящую из групп светлых штрихов, разделенных тёмными проме-
жутками (рис. 2.1.7, где 3min — минимальная экспозиция от объекта; Этах —
максимальная экспозиция от объекта; Эср — средняя экспозиция от объекта;
Эш — среднеквадратичное значение шума; £лрм — линейное разрешение
(период решетки); a — полупериод решетки (ширина шпалы миры); b —
319
Рис. 2.1.7. Контраст (коэффициент модуляции) миры
период решетки; ширина штрихов и ориентация миры в пространстве варь-
ируется).
Если имеется возможность оценить или измерить пространственную ча-
- 1
стоту наблюдаемой миры v = — , уверенно разрешаемую в фокальной плос-
р 2а
кости, то согласно ГОСТ 23935-79 линейное разрешение £лрм оптико-элект-
ронной системы в пространстве предметов определяется выражением
т = К ^КА
Лфм f ’ (2.1.3)
р •'ОС
где £т — эмпирический коэффициент; — фокусное расстояние оптичес-
кой системы; — дальность до объекта наблюдения.
Выражение (2.1.3) обычно является основным для расчета линейного
разрешения на местности при моделировании КС ОЭН.
Заметим, что эмпирический коэффициент в различных источниках ука-
зывается разным, и его значение изменяется в диапазоне от 2 до 1. То есть
линейное разрешение в одних источниках определяется периодом решетки,
а в других — полупериодом. Разночтения в задании коэффициента вносят
неопределенность оценок разрешения в исходных данных для технических
заданий различных КС ОЭН. Точное определение кт является самостоятель-
ной проблемой, которой посвящен ряд работ [12].
В практике наблюдения из космоса для расчетов ЛРМ принимается
значение кт < 2 , что лучше соответствует объектам более сложной конфигу-
рации, чем линейная мира. Считается, что £т = 1 реализуется только на вы-
320
сококонтрастном периодическом объекте при определенном его освещении
точечным источником, например, в микроскопии при наложении полос и воз-
никновении характерного муара или при когерентной радиолокации.
В приемнике изображения период решетки и ЛРМ соответствует не ме-
нее чем двум пикселям изображения, а геометрическая проекция пикселя
равна полупериоду. Таким образом, если речь идет о линейном разрешении
на местности, то к^ = 2 согласно определению периода решетки. Если требу-
ется определить геометрическое разрешение как проекцию пикселя на мес-
тность, то к^ = 1. Требования по геометрическому разрешению записывают-
ся в ТЗ для упрощения сдачи системы заказчику.
В реальных условиях наблюдения и с учетом возможностей обработки
изображений ЛРМ несколько лучше и значения Лт лежат в пределах от 1,2
до 1,5.
При регистрации изображения на систему действуют шумы.
В оптико-электронной системе существует много различных видов шума:
шум считывания приемника излучения, дробовый и фликкер — шум усили-
теля, темновой ток и др. Эти шумы могут быть существенно уменьшены путем
рационального конструирования электронного тракта или дальнейшей обра-
боткой сигналов.
Согласно корпускулярно-волновой теории световой поток состоит из от-
дельных квантов энергии, которые при больших энергиях и в видимом диа-
пазоне спектра ведут себя как поток капель дождя. Количество переноси-
мой квантами энергии видимого света подчиняется статистике Пуассона. При
небольших энергиях фотонный шум наглядно описывается суперпозицией
начальных случайных колебаний фазы и амплитуды волны. Данный вид шума,
называемый фотонным, в условиях наблюдения из космоса является основ-
ным. В современных электронных системах собственные шумы намного
меньше квантового шума потока излучения, поэтому собственными шумами
можно пренебречь.
В зависимости от природы наблюдаемых объектов величина вероятности
наблюдения перепада яркости миры РО принимается различной в зависимо-
сти от соотношения сигнал-шум. В связи с тем, что экспозиция от миры Э
является случайной величиной, существуют различные способы учета вли-
яния ее разброса на минимальный распознаваемый контраст. В инженерной
практике используется среднеквадратическое отклонение (СКО) значения
квантового (фотонного шума), вычисленное от средней экспозиции по рас-
пределению Пуассона: оЭш = ^Эср.
В дальнейшем под соотношением сигнал-шум будем понимать отноше-
ние разности максимального и среднего значения яркости (глубины модуля-
ции) к среднеквадратическому отклонению значения шума (рис. 2.1.7):
_ ^шах ~ ^ср _ Длах ~ ^min _
оЭш " 2оЭш "oV
321
Зная ФПМ системы Тоэк, контраст наблюдаемого объекта К& и контра-
стную чувствительность приемника изображения Кр, можно найти разреша-
ющую способность системы из уравнения:
*np=JWvp)^> (2.1.4)
где Кпр — предельно разрешаемый контраст; Ко5 — контраст объекта наблю-
дения.
Рассмотрим способ определения предельного разрешаемого контраста
для соответствующего соотношения сигнал-шум.
Контраст объекта определяется перепадом сигнала от миры и его средним
уровнем:
Г - АЭ
Аоб “ О
Эср
Пороговый разрешаемый контраст определяется отношением минималь-
ного распознаваемого перепада экспозиции к средней экспозиции приемни-
ка изображения:
ЛЭ
г — пр
^пр Q
^ср
(2.1.5)
Требуемое для распознавания миры с заданной вероятностью отношение
сигнал — шум VTp имеет физический смысл коэффициента запаса превы-
шения порогового сигнала над шумом, тогда минимально распознаваемый
перепад экспозиции определяется выражением
Э =вЭ ш .
пр ПН тр
Таким образом, пороговый контраст зависит от отношения сигнал-шум:
Ш ' тр _ ' тр
Э Ш
ср Y сш
— среднеквадратичный перепад экспозиции от шума приемника.
(2.1.6)
пр
где оЭш
В случае если соотношение сигнала к шуму больше 1 оценка вероятности
наблюдения аппроксиммируется простым выражением [5]:
Ро = 1-ехр(-5(^тр-Л)2),
где А = 1, В = 0,15 — эмпирические коэффициенты, в общем случае завися-
щие от формы и размеров объекта.
Для протяженных объектов величину заданной вероятности обнаружения
Ро принимают равной 0,8, для точечных объектов — 0,95. Требуемое при этом
322
отношение сигнал — шум Жтр составляет 4 и 6 соответственно. Таким об-
разом, разрешающая способность — это минимальное измеряемое расстоя-
ние с гарантированной величиной вероятности правильного определения не
менее 0,8.
С учетом выражений (2.1.4)—(2.1.6) уравнение для определения разреше-
ния записывается в величинах экспозиции приемника в следующем виде:
4 т , ч ЛЭ
Vip=-r09K(vp)—.
'Ли
лэ
Заметим, что отношение перепада экспозиции к шуму ЖСш = есть ди-
намический диапазон, регистрируемый на приемнике (количество распозна-
ваемых градаций яркости), или реализованное отношение сигнал-шум на
нулевой пространственной частоте:
4~ , ч VTp
-гоэк<»р) = — (2.1.7)
ТСШ
Суть решения уравнения (2.1.7) состоит в том, чтобы при действующем
(накопленном в приемнике на нулевой пространственной частоте) усш най-
ти пространственную частоту vp , на которой отношение сигнал — шум падает
до фиксированного Жтр, обеспечивающего заданную вероятность распозна-
вания шпал миры.
Очевидно, что разрешающую способность ограничивают два фактора, свя-
занные с корпускулярно-волновыми свойствами света:
1) 7"O3k(v) — функция передачи модуляции оптико-электронной систе-
мой, имеющая свойства фильтра высоких частот. В основном значения час-
тоты среза ФПМ ограничиваются дифракцией в оптической системе, обус-
ловленной волновой природой света;
V
2) предельный разрешаемый контраст Х_п = —, который определяется
пр W
Т сш
корпускулярными свойствами света и ограничивается возможностями по на-
коплению сигнала и шумами информационного тракта.
2.1.2.4. Резкость изображения оптико-электронной системы
Рассмотрим способ расчета резкости изображения. Создаваемое оптичес-
кой системой изображение прямоугольной миры не является идеальным.
Кривая распределения экспозиции от миры на приемнике в районе перепа-
да яркости называется пограничной кривой [1].
Визуальное впечатление от резкости создаваемого изображения определя-
ется формой этой кривой. Перепад экспозиции будет тем более резким, чем
больше крутизна пограничной кривой g.
323
Наиболее интересным с точки зрения оценки резкости изображения яв-
ляется критерий «относительного содержания структуры», который пропор-
ционален среднеквадратичному градиенту пограничной кривой и характери-
зует субъективное восприятие четкости и резкости (остроты) изображения
человеком.
При равномерном распределении плотности спектра объекта «относитель-
ное содержание структуры» изображения также называется эквивалентной
полосой частот [31]:
V
1 max
j
vmax о
где vmax — предельная пространственная частота, на которой ФПМ равна
нулю: ^O3K(vmax) = 0.
Впечатление резкости от изображения пропорционально эквивалентной
полосе частот (по Фризеру и Шаде), пропускаемых системой. Большим зна-
чениям S соответствует более широкая полоса пропускания частот и, соот-
ветственно, визуально более резкое изображение. Глаз человека ощущает
изменение резкости при изменении S на 5—10%.
Величина S — один из лучших показателей оценки резкости изображения,
он характеризует среднеквадратичную ширину полосы пространственных
частот объекта, воспроизводимых оптической системой.
На эквивалентную полосу пропускания системы в основном оказывают
влияние аберрации оптической системы, размер элементов приемника изоб-
ражения и масштаб увеличения изображения при просмотре.
2.1.2.5. Количество распознаваемых градаций яркости в изображении
Рассмотрим способы численной оценки количества градаций яркости,
распознаваемых в изображении. Перепад яркостей изображения в зависи-
мости от пространственной частоты на входе и выходе оптической системы
прямо пропорционален ФПМ [17]:
4
= ~ ^оэк (v) •
п
Количество распознаваемых градаций яркости изображения ц определя-
ется отношением перепада сигнала от миры ЛЭ и минимальным распозна-
ваемым перепадом сигнала ДЭпр на приемнике, который пропорционален
требуемому соотношению сигнал-шум.
С учетом (2.1.4)—(2.1.6), при равномерном распределении яркости дета-
лей объекта по частотам, число градаций определяется выражением
H = (2.1.8)
324
где VTp в данном случае имеет смысл задаваемого коэффициента — отно-
шения сигнал-шум, необходимого для распознавания одной градации яр-
кости и обычно при определении числа градаций яркости задается несколь-
ко меньшим, чем в случае распознавания миры: утр 1 -н2.
Выражение (2.1.8) позволяет определить соотношение между количеством
воспроизводимых системой градаций яркости и отношением сигнал-шум на
изображении на какой-либо пространственной частоте. На предельной про-
странственной частоте число градаций равно нулю. На разрешаемой простран-
ственной частоте vp также невелико.
На низких пространственных частотах, когда v -> 0, 7^3K(v) ~ количе"
ство градаций яркости связано с соотношением сигнал-шум на изображении:
ц=4 Усш
л V™
' тр
Для оценки количества градаций яркости во всем диапазоне простран-
ственных частот обычно используют среднее значение, которое называют
также показателем корреляции:
ц=^сше,
Утр
max
J ТЬэк^)^-
о 4 1
где <> =---
тг V
max О
Показатель корреляции фактически определяет корреляцию или степень
соответствия распределения яркости в изображения и самом объекте.
Для идеальной оптической системы корреляция $ напрямую связана с
разрешающей способностью, определяемой по критерию Котельникова-
Найквиста:
Vp^ = °,5vmax- (2-1.9)
Соотношение (2.1.9) часто используется для предварительной оценки раз-
решающей способности ОЭК.
2.1.3. Методы выбора рациональных проектных параметров
орбитального оптико-электронного комплекса
На этапе эскизного проектирования необходимо произвести обоснован-
ный выбор проектных параметров оптико-электронной системы. В разделе
будут рассмотрены методы, позволяющие по совокупности реальных конст-
руктивных параметров провести оценку максимальной пространственной
частоты, которую может обнаружить приемник изображения совместно с
оптической системой при заданном соотношении сигнал-шум и контрасте
наблюдаемого объекта (рис. 2.1.8).
325
Рис. 2.1.8. Обобщенный метод выбора рациональных конструктивных параметров
оптико-электронного комплекса КС ОЭН
2.1.3.1. Выбор типа и параметров оптической системы
Пространственное разрешение в оптико-электронных комплексах наблю-
дения определяется дальностью наблюдения и угловым разрешением.
Совершенствование КС ДЗЗ идет в направлении улучшения угловой раз-
решающей способности до уровня уос<0,2 угл.сек путем увеличения ди-
аметра ОС («GeoEye-1», «Quick Bird-2»). Это обусловлено тем, что КС ДЗЗ,
326
имеющие ОС большого диаметра, имеют лучшее линейное разрешение на ме-
стности с большей высоты полета и, соответственно, более высокую перио-
дичность наблюдения и оперативность доставки информации. Кроме того,
крупногабаритные ОС позволяют приблизить пространственное разрешение
к ограничению, обусловленному турбулентностью атмосферы.
Уменьшение рабочей длины волны и увеличение апертуры ОС может быть
дорогостоящим либо невозможным по техническим причинам. Поэтому в
ряде работ предлагается применять методы сверхразрешения, позволяющие
преодолевать дифракционный предел разрешения или улучшать качество
изображения без увеличения апертуры ОС (под «сверхразрешением» пони-
мается преодоление теоретического дифракционного предела).
Традиционно считается, что угловое разрешение оптической системы
ограничено рэлеевским пределом [14], зависящим от размера апертуры и
длины волны. Повысить угловое разрешение можно увеличивая диаметр
оптической системы или уменьшая рабочую длину волны. Имеется несколько
направлений исследования возможностей получения улучшенного разреше-
ния без увеличения апертуры ОС.
Первый, наиболее разработанный, способ получения сверхразрешения
основан на математической обработке изображений. Основными причинами
искажений, приводящих к ухудшению четкости, являются: ограниченная
разрешающая способность ОС, расфокусировка, наличие искажающей сре-
ды (например, атмосферы), движение камеры по отношению к регистриру-
емому объекту и т.п. Такая задача относится к задаче восстановления изоб-
ражений.
Второй способ получения сверхразрешения основан на создании ОС, ко-
торые позволяют сфокусировать свет в пятно, много меньшее половины длины
волны. Такие ОС представляют из себя многослойные структуры с различ-
ным коэффициентом преломления слоев. Например, градиентные микролин-
зы Микаэляна и «рыбий глаз» Максвелла могут формировать изображения
со сверхразрешением и разрешают по полуспаду два близких точечных ис-
точника, разделенных расстоянием 0,3 от длины волны в вакууме. Этому факту
легко дать простое физическое объяснение. В прозрачной среде с большим
коэффициентом преломления длина световой волны становится меньше. Этот
эффект давно используют в иммерсионной микроскопии, где достигается
разрешение в 0,5 длины волны в вакууме. Средой с большим коэффициен-
том преломления обычно служит очищенное масло, которое наливают на
исследуемый препарат. Если вместо воды над поверхностью чипа разместить
тонкую серебряную плёнку, то возможно сказать о создании суперлинзы,
позволяющей обходить дифракционный предел. Однако на самом деле эф-
фект примерно тот же, что и с иммерсионной жидкостью. В плёнке серебра
возбуждаются поверхностные волны-плазмоны с меньшей длиной волны,
которые передают информацию об объекте. К сожалению, данный способ
сверхразрешения не реализуем при наблюдении из космоса, так как невоз-
327
можно разместить иммерсионную жидкость между ОС и объектом наблюде-
ния.
В качестве третьего направления достижения сверхразрешения можно
отметить развитие новых теоретических направлений физики, например
применение наноматериалов с отрицательным коэффициентом преломления
или «запутанных» квантовых состояний фотонов. Результаты, достигнутые в
данном направлении, имеют в основном теоретическую направленность, и
действующие установки, демонстрирующие эффект сверхразрешения, отсут-
ствуют. Интерпретация результатов экспериментов в основном носит стати-
стический характер, и конструкции трудно реализовать на практике. Тоже
самое можно сказать и о методах уменьшения квантового шума.
Проведенный обзор методов достижения сверхразрешения показал, что
единственным реализуемым на практике методом является обработка изоб-
ражения (или их серии) с целью повышения разрешения и резкости путем
математического решения обратной задачи.
Более фундаментальное препятствие на пути работы рассматриваемых ал-
горитмов повышения качества связано с ограничениями, накладываемыми
разрешением ОС. Традиционно считается, что при фиксированном размере
пятна рассеивания ОС увеличение разрешения фоточувствительной матри-
цы после достижения некоторого предела не вносит дополнительной инфор-
мации [1].
Таким образом, возникает вопрос: возможно ли преодолеть ограничение
на повышение разрешения конечного изображения, обусловленное ОС? Для
этого рассмотрим метод оценки разрешающей способности ОЭК более под-
робно.
Предельная пространственная частота, в первом приближении, без учета
пропускания информационного тракта, ограничивается угловым разреше-
нием оптической системы.
Радиус дифракционного пятна рассеивания может быть определен раз-
личными способами. По критерию Рэлея, разрешение равно радиусу перво-
го темного кольца в дифракционной картине.
Соответствующий этому разрешению радиус называется также радиусом
диска Эри и содержит 80% энергии пятна. Критерий Рэлея учитывает, что
при таком расстоянии между двумя точечными источниками существует
перепад контраста в 10%, что наилучшим образом подходит для определения
визуального разрешения. Для современных приемников изображения предель-
ный распознаваемый контраст много лучше 10%, поэтому разрешающая спо-
собность, определяемая по критерию Рэлея, оказывается заниженной.
Для оценки предельного разрешения орбитального ОЭК лучше использо-
вать критерий Марешаля, который соответствует нулевому перепаду контра-
ста между двумя точечными источниками и содержит 50% энергии пятна
(табл. 2.1.1):
Д50=Ж (2.1.10)
328
Таблица 2.1.1. Критерии разрешающей способности
где Л50 — диаметр пятна рассеивания изображения точечного объекта;
f
N = -^~ — относительное фокусное расстояние; X — длина волны; D —
D
ос
диаметр оптической системы.
Рассмотренный подход определения разрешения по перепаду контраста
между шпалами миры или точечными источниками предполагает, что вид
наблюдаемого объекта известен заранее, поэтому существует теоретическая
возможность дальнейшего улучшения разрешения более предела (2.1.10) за
счет применения различных алгоритмов распознавания образов.
С точки зрения достижения сверхвысокого разрешения интересной явля-
ется задача разделения двух точечных источников по тонкому виду дифрак-
ционной картины. Например, в результате длительных визуальных наблю-
дений в астрономии определено, что, несмотря на отсутствие перепадов кон-
траста, опытные наблюдатели способны определить двойственность источ-
ника по вытянутости дифракционного пятна (табл. 2.1.1). Предел разреше-
ния при этом определяется эмпирической зависимостью
A25=0,5X7V.
(2.1.11)
329
Заметим, что величина разрешения (2.1.11) соответствует случаю кт= 1 в
выражении (2.1.3). Линейная величина разрешения при этом соответствует
полупериоду-размеру отдельной шпалы миры, а не расстоянию между двумя
одинаковыми шпалами, как в общепринятом случае. Данное значение мож-
но считать пределом разрешения оптико-электронных систем, в случае если
никакой априорной информации о структуре наблюдаемого объекта не име-
ется.
В работе [18] показано, что для случая двух точечных источников разре-
шающая способность ограничена только соотношением сигнал-шум:
где А80 — диаметр диска Эри; 9? = \|Л — коэффициент сверхвысокого разре-
шения; V — отношение сигнал-шум на нулевой пространственной частоте;
г — показатель степени, варьируемый в диапазоне от 0,25 до 1 в зависимости
от структуры наблюдаемого объекта.
В среднем можно считать, что коэффициент сверхвысокого разрешения
определяется зависимостью
9i = y0’5. (2.1.12)
Заметим, что при соотношении сигнал-шум V = 4 выражение (2.1.12) со-
впадает с критерием Рэлея.
Также в работе [18] показано, что если размер пикселя выбран по частоте
Найквиста (четыре пикселя приемника вписанны в диаметр дифракцион-
ного кружка), то пиксельность изображения не ухудшает возможности улуч-
шения разрешения. Этот результат подтверждается и практикой решения
измерительных задач в звездных приборах, где возможно определение ста-
тистического центра изображения звезды с субпиксельной точностью. Точ-
ность определения положения звезды ограничивается соотношением сигнал-
шум и составляет до одной трети пикселя.
Вместе с тем большинство существующих ОЭК не достигает дифракци-
онного предела, и в них имеется значительный запас по дальнейшему повы-
шению разрешения без использования описанных выше методов. Реализовать
его можно путем рационального выбора проектных параметров и улучшения
технологии производства ОС [16] .
Предельно возможная угловая разрешающая способность при идеальном
приемнике изображения, регистрирующем бесконечно малый перепад кон-
траста по критерию Марешаля, равна
X
у= —рад,
^об
где £>об — диаметр апертуры ОС; X — длина волны излучения.
330
Геометрическая разрешающая (проекция пятна рассеивания) способность
равна
Rr=yDKA’
где — наклонная дальность от КА до объекта наблюдения; у — угловая
разрешающая способность.
В случае наблюдения в надир дальность до объекта наблюдения равна
высоте полета КА.
Изображение, построенное идеальной оптической системой (свободной от
всех видов аберрации), содержит пространственные частоты vmax не выше
предельной частоты:
1
Vmax"XA*
Распознаваемая пространственная частота ОС в первом приближении
может оцениваться по частоте Найквиста, которая равна половине частоты
среза оптической системы:
v =0,5v ,
р ’ max ’
где vmax лин-1 — частота среза, на которой пропускаемый ОС контраст равен
нулю.
Практически оценка по частоте Найквиста является слишком заниженной
и не учитывает всех параметров ОЭК. Более точная оценка разрешающей
способности определяется пространственной разрешаемой частотой vp , на
которой ФПМ падает до критического значения пропускаемого контраста .
Требования к угловому разрешению оптико-электронной системы опре-
деляются выражением
Модель оптической системы связывает требуемую разрешающую способ-
ность с фокусным расстоянием, диаметром объектива, а также позволяет
оценить габаритные размеры телескопа, устанавливаемого на КА.
В настоящее время в космических системах наблюдения применяются
различные типы оптических систем (табл. 2.1.2). Для высокоразрешающих
систем типа «GeoEye-1», «Iconos», «Pleiades», «Quick-Bird», как правило,
применяется крупная зеркальная оптика совместно с линзовыми или зеркаль-
ными корректорами. В случае необходимости обеспечить широкое поле зре-
ния применяются классические типы линзовых объективов.
В качестве основных проектных параметров, наиболее полно характери-
зующих качество оптической системы, необходимо выбрать угловое поле зре-
331
Таблица 2.1.2. Анализ характеристик основных типов зеркальных схем оптичес-
ких систем, применяемых в ОЭК
№ Схема Длина Число зеркал(линз) Минимальное относительное фокусное расстояние Центральное экранирование Светопропускание (при коэффициенте отражения от одной поверхности 0,7) Поле зрения,угл. град.
1 Ричи — Кретьена 0,3-0,4/ 2 8 0,3-0,4 0,5 0,2-0,3
2 Ричи — Кретьена с линзовым корректором 0,2-0,25/ 2 8 0,3-0,4 0,5 1,о-1,5
3 Корша 0,3-0,4/ 3-4 4 0,3-0,4 0,25-0,35 1,0-1,5
4 Зеркальный триплет Кука 0,3-0,4/ 3 4 0 0,35 10
5 Четырех- зеркальная 0,15-0,2/ 4 3 0,3-0,4 0,25 1,0-1,5
6 Линзовый апланат 1/ 3-4 3 0 0,8 10
7 Линзовая типа ’’Планар” 1/ 6-7 3 0 0,8 10-20
8 Кассегрена с поверхностями Шварцшильда и линзовым корректором 0,2-0,25/ 2 5 0,3-0,4 0,5 1,0-1,5
9 Зеркально- линзовые системы 0,3-2/ 3 5 0,3-0,4 0,5 5,0-10,0
ния 2р и угловую разрешающую способность у. Ограничениями являются
масса и габариты ОС.
По размеру поля зрения можно различить следующие типы оптических
систем:
длиннофокусные оптические системы с полем зрения 0,5—Г;
системы с малыми полями зрения 1—2°;
332
системы со средними полями 5—6°;
системы с большими полями 25—30° и более.
Рассмотрим основные типы оптических систем, применяемых в КС ОЭН.
Кратко классифицировать зеркальные схемы можно следующим образом
(рис. 2.1.9):
1. Двухзеркальная схема без корректора астигматизма с компенсацией
сферической аберрациии и комы. Выполняется по схеме Ричи—Кретьена с
двумя гиперболическими зеркалами. Схема обеспечивает относительное фо-
кусное расстояние до 8 и поле зрения 2р < 15 ч- 20 угл. минут. Длина системы
составляет от 0,3/до 0,4/
2. Схема Ричи—Кретьена с линзовым корректором астигматизма и кри-
визны поля. Обеспечивает относительное фокусное расстояние до 8 и поле
зрения 2р < 1,5 угл. град. Длина системы составляет 0,25/
3. Трехзеркальная схема типа Корша. В качестве корректора применяется
вогнутое зеркало. Схема обеспечивает относительное фокусное расстояние до
4 и поле зрения до 2р < 1 ч-1,5 угл. град. Длина системы составляет (0,3—0,4)/
4. Трехзеркальная внеосевая схема типа триплет Кука. Обеспечивает от-
носительное фокусное расстояние до 4 и поле зрения до 2р < 10 угл. град.
Длина системы составляет (0,3—0,4)/ Схема крайне трудно реализуется.
5. Четырехзеркальная схема. Обеспечивает относительное фокусное рас-
стояние до 3 и поле зрения до 2р < 1 ч-1,5 угл. град. Длина системы составля-
ет (0,15—0,2)/ Основной недостаток — большое количество поверхностей и
как следствие небольшое светопропускание.
6. Зеркально-линзовые системы с полноапертурным линзовым корректо-
ром. Выполняются по схеме Максутова, Шмидта, Райта или их модифика-
ций. Зеркально-линзовые системы могут иметь широкое поле зрения 5—
10 угл.град и высокую светосилу. Длина системы составляет от 0,3/до 2/ в
зависимости от выбранного типа корректора.
Масса зеркальной оптической системы в общем виде определяется следу-
ющим соотношением:
тос = ^ГЗ + ™вз + тк + ^СЛ ’
OU 1 Э гээ К UJ1
где тгз — масса главного зеркала; — масса вторичного зеркала; тк — мас-
са конструкции, включая бленды, тубус (или ферму), механизмы фокусировки
и юстировки в полете; тсд — масса служебных систем, включая электронные
блоки, кабельную сеть и систему терморегулирования.
На предварительных стадиях проектирования массу ОС зеркального типа
удобно определять с помощью соотношения, полученного по ряду аналогов:
тос =2Poc(l+eo)Di’
где — удельная масса одного квадратного метра зеркала, кг/м3; е0 — ли-
нейное центральное экранирование; — диаметр оптической системы.
333
L Двухзеркальный апланат типа Ричи - Кретьена (обычно применяется с линзовым корректором кривизны поля)
Трехзеркальный анастигмат типа Ричи - Кретьена (схема "Асфар" ГОИ им.Вавилова)
F' Трехзеркальный анастигмат без промежуточного изображения
Четырехзеркальный анастигмат с промежуточным изображением
Трехзеркальный внеосевой анастигмат
Рис. 2.1.9. Основные типы зеркальных оптических систем [12, 14]
334
Удельная плотность рос зависит от материала и типа конструкции зеркала.
К материалам для крупногабаритных космических зеркал предъявляются
жесткие требования стабильности свойств и размеров. Поверхность зеркала
должна соответствовать расчетной форме с допусками порядка 0,01 мкм и
иметь высокую сопротивляемость внешним воздействиям на участке выве-
дения. Один из способов облегчения зеркал показан на рис. 2.1.10.
Рис. 2.1.10. Конструкция облегченного зеркала «GeoEye-1» с перфорированной
тыльной стороной
На сегодняшний день наилучшим материалом для изготовления крупно-
габаритных зеркал является стеклокерамика. Наиболее популярны стеклоке-
рамика «Церодур» производимая фирмой «Шотт» (Германия) и ситалл опти-
ческий СО-115М, производимый фирмой «ЛЗОС» (Россия). Основные не-
достатки этих материалов: низкая теплопроводность, малая механическая
прочность и сравнительно высокая плотность — от 2300 до 2500 кг/м3.
В качестве примера параметры зеркал различного облегчения показаны в
табл. 2.1.3.
Таблица 2.1.3. Коэффициент облегчения различных типов конструкций зеркал
Тип зеркала Коэффи- циент облегчения Удельная масса одного квадратного метра, кг/м2
Монолитное 1,00 1500
Перфорированная тыльная сторона 0,50 750
Зеркало типа ’’сэндвич” 0,35 525
’’Сэндвич” с рациональной структурой облегчения 0,15 200
Металлокерамические сверхтонкие зеркала 0,01...0,02 20...60
335
В среднем для современных космических телескопов удельная масса зер-
кал примерно равна -150...200 кг/м2 (Т-170М, Хаббл и др.) Некоторые из-
готовители предлагают сверхтонкие металлокерамические зеркала с удель-
ной массой 20...60 кг/м2. Стабильность свойств таких зеркал в условиях кос-
мического применения на данный момент требует изучения.
Результаты расчета массы в зависимости от диаметра ОС приводятся на
рис. 2.1.11 ив табл. 2.1.4.
Рис. 2.1.11. Оценка массы оптической системы для различных вариантов удельного
веса главного зеркала
Таблица 2.1.4. Масса оптической системы в зависимости от диаметра и удельной
массы зеркала
Удельная масса, кг/м2 Диаметр оптической системы, м
0,3 0,5 0,8 1,0 1,5 2,0 2,5 3,0 3,5 4,0
200 45 125 320 500 1125 2000 3125 4500 6125 8000
100 23 63 160 250 563 1000 1563 2250 3063 4000
50 11 31 80 125 281 500 781 1125 1531 2000
Проведенный анализ показывает, что ОС, изготовленные традиционным
способом из облегченных ситалловых заготовок, имеют приемлемые массо-
габаритные характеристики только до диаметров не более 2,0...3,0 м, в то же
время данная технология хорошо отработана.
336
Очевидно, что дальнейшее увеличение апертуры ОС космического назна-
чения может быть достигнуто только при существенном снижении удельно-
го веса единицы площади главного зеркала. При диаметре апертуры от 2,0 до
3,0 м желательно облегчение удельной массы до 100 кг/м2. Для диаметра до
4,0 м требуется облегчение удельной массы до 50 кг/м2 и менее. Это воз-
можно только при использовании новых материалов, например металлоке-
рамики.
Сохранность формы таких сверхлегких зеркал возможно обеспечить только
применением адаптивных оптических систем.
Поэтому перспективные крупногабаритные ОС космического назначения
с диаметром более 2,0—3,0 м необходимо разрабатывать с применением сверх-
легких металлокерамических зеркал и адаптивной оптики с целью контроля
и сохранения формы сверхлегкого зеркала в полете.
В настоящее время, наряду с развитием тяжелых КА с крупногабаритной
целевой аппаратурой, осуществляется создание малоразмерных КА. За ру-
бежом создаются КА «TacSat» и ряд других. В Российской Федерации прово-
дится разработка КА «Канопус-В», «Стерх», «Белка» и др. Например, КА
«Канопус-В» имеет массу 350 кг, масса полезной нагрузки — 147 кг. Для
высоты полета 510 км разрешающая способность аппаратуры равна 2,7 м.
Считается, что основным преимуществом малых КА является их небольшая
стоимость и относительная простота изготовления. Это позволит за корот-
кий срок создавать и поддерживать высокую численность орбитальной груп-
пировки КА.
В то же время, по заявлениям разработчиков, малоразмерные КА практи-
чески не уступают по качеству информации тяжелым КА. Разрешающая спо-
собность на местности у малых КА достигает 2 м, а при снижении высоты
орбиты до 300-400 км существенно улучшается. К сожалению, тенденция
такова, что при продвижении проектов малых КА основное внимание уделя-
ется показателю пространственного разрешения; сравнение по другим по-
казателям качества изображения не проводится.
Стоит отметить, что рубеж разрешающей способности в 2 м для тяжелых
оптико-электронных КА пройден ещё в 80—90-х годах прошлого века. Уро-
вень пространственного разрешения современных и вновь создаваемых за-
рубежных КА с крупногабаритной оптикой составляет уже 0,5—0,6 м.
Таким образом, очевидно, что малые КА на сегодняшний день не позво-
ляют достигать передовых рубежей качества информации по разрешающей
способности. В связи с этим возникает вопрос: как отражается миниатюри-
зация оптико-электронной целевой аппаратуры на показателях качества
целевой информации?
Необходимо отметить несколько направлений миниатюризации ОЭК ма-
лых КА. Основным из них является снижение массы и габаритов электрон-
ных компонентов информационного тракта. За счет применения современ-
ной элементной базы удалось существенно улучшить характеристики и умень-
337
шить массу и габариты бортовой вычислительной системы, буферного запо-
минающего устройства и бортового радиокомплекса. Применение новых
алгоритмов сжатия и кодирования позволило повысить пропускную способ-
ность радиолинии. Улучшились возможности логики и алгоритмов управле-
ния КА.
Дальнейшая миниатюризация идет по пути совершенствование оптичес-
кой системы и приемников изображения. Направление миниатюризации
средств бортовой обработки и передачи данных не вызывает сомнений в
дальнейших перспективах. Однако применяемые некоторыми разработчи-
ками способы миниатюризации ОС и приемников изображения вызывают
вопросы.
Рассмотрим направления миниатюризации основных элементов информа-
ционного тракта. Анализ схем ОС показывает, что средняя длина двух —
трехзеркальных схем без бленды практически одинакова и составляет от 0,2
до 0,3 фокусных расстояний. Четырехзеркальные схемы имеют размер до 0,15
фокусного расстояния. Однако применение схем с количеством зеркал бо-
лее трёх, без высококачественных просветляющих покрытий, существенно
снижает светопропускание ОС.
Таким образом, длина ОС без внешней бленды определяется выражением
4)с = ^ОС^^ОС’
где &ос ~ 0,25 — коэффициент уменьшения длины ОС относительно фокус-
ного расстояния.
Внешняя бленда Ричи—Кретьена имеет длину не менее двух диаметров
ОС и может выполняться складной. В некоторых трехзеркальных схемах
внешняя бленда не требуется.
Основным преимуществом применения современных трехзеркальных схем
на малых КА является уменьшение до N= 4 относительного фокусного рас-
стояния. Это позволяет пропорционально уменьшить габариты ОС в два-
три раза по сравнению с двухзеркальными ОС Ричи — Кретьена, у которых
А=8...16. Например, при N=5 /ос<1,5£>ос; при N= 10 /0С<ЗЛ0С.
Существенным ограничением к уменьшению относительного фокусного
расстояния являются квадратично возрастающие требования к точности сбор-
ки ОС. Допустимая продольная дефокусировка /дф определяется искажением
волнового фронта. Для ОС она определяется выражением
'л*4хл,!-
На первый взгляд, кажется, что относительное фокусное расстояние ОС
может варьироваться в широких пределах. Однако абсолютное фокусное рас-
стояние определяет масштаб изображения в фокальной плоскости и связано
с размером элемента приемника изображения.
338
2.1.3.2. Методика согласования относительного размера элемента
приемника изображения и разрешения оптической системы
Пропускание оптической системы в области пространственных частот
v>vmax равно нулю. В реальных системах функция передачи модуляции
(ФПМ) снижается до пренебрежимо малого уровня при частоте, не достига-
ющей Vmax •
Для того чтобы в полной мере использовать возможности оптической
системы по разрешающей способности, необходимо руководствоваться тео-
ремой отсчетов Котельникова—Шеннона [11]. В этой теореме утверждает-
ся, что для сохранения информации о непрерывном процессе при измерени-
ях с дискретным приемником частота отсчетов v5 должна, по крайней мере,
вдвое превосходить максимальную частоту vmax в спектре изображения:
v > 2v
5 max
Радиус, соответствующий разрешающей способности, необходимо вычис-
лять по критерию Марешаля, который не учитывает контрастной чувстви-
тельности приемника:
где N — относительное фокусное расстояние.
Размер пикселя определяется выражением
8 < kAN,
ПО’
где кё — относительный размер пикселя.
В соответствии с теоремой Котельникова—Найквиста
к.=- и 8 <-kN.
on п n
(2.1.13)
]_
2
Условие къ
означает, что в согласованной системе регистрации на
радиусе дифракционного изображения следует расположить не менее двух
пикселей приемника света.
Пример характеристик ОЭК, сравнительные значения относительного
отверстия и размера пикселя для различных КС ОЭН приведены в табл. 2.1.5.
Как видно из таблицы, при разработке КС ОЭН критерий выбора разме-
ра пикселя по сравнению с критерием Котельникова—Найквиста ослаблен
примерно в два раза:
о
(2.1.14)
То есть размер пикселя определяется выражением
8n<X2V.
Некоторые разработчики ошибочно считают, что чем больше фокусное
расстояние ОС и меньше размер элемента приемника изображения, тем луч-
339
Таблица 2.1.5. Параметры оптико-электронной системы различных типов КА
КА Диаметр объектива, м Относи- тельное фокусное расстояние Размер пикселя, мкм Дифракционный радиус кружка рассеивания, мкм Отношение диаметра кружка рассеивания к размеру пикселя къ
Iconos-2 0,70 14,3 12 11,3 0,95
Quick Bird 0,60 14,7 12 11,7 0,95
Orb View-3 0,45 6,7 6 5,3 0,90
Eros-B 0,50 10 7 7,9 1,15
Pleiades 0,65 15,3 13 12,1 0,95
GeoEye-1 1,10 12,1 9 9,5 1,05
Ресурс ДК1 0,5 8 9 6,3 0,70
ше окажется пространственная разрешающая способность. В ряде проектов
предлагается применять къ > 4 . Однако пространственное разрешение ОЭК
физически ограничено корпускулярно-волновыми свойствами света, и уве-
личение масштаба изображения в фокальной плоскости более некоторого пре-
дела не дает новой информации.
Как правило, в процессе проектирования КС ОЭН конкретные значения
относительного фокусного расстояния и размера пикселя заданы некоторым
рядом значений (уже реализованных в конкретных технических аналогах).
Поэтому возникает вопрос, насколько могут ухудшиться показатели каче-
ства системы, если соотношения размеров кружка Эри и пикселя приемника
не будут строго удовлетворять условиям (2.1.13) и (2.1.14)?
Например, для «Iconos», размер пикселя равен 8п = 12 мкм и Х= 0,65 мкм,
тогда согласно (2.1.13) получаем N> 30, в то время как относительное фо-
кусное расстояние «Iconos» равно лишь 14,3. Таким образом, в большинстве
КА при выборе размера пикселя использовалось выражение (2.1.14).
Расположение одного пикселя в радиусе кружка Эри для ОЭК обусловле-
но тем, что для типичного современного приемника изображения с разме-
ром чувствительного элемента 5—10 мкм выполнение условия (2.1.13) ведет
к существенному удлинению эквивалентного фокусного расстояния и соот-
ветственно увеличению массы и габаритов оптической системы.
При дальнейшем увеличении размера пикселя разрешение быстро стано-
вится недопустимо низким по сравнению с достижимым дифракционным
пределом.
Наиболее наглядно влияние увеличения размера пикселя по сравнению с
условием (2.1.13) на ухудшение характеристик системы можно оценить
по эквивалентной полосе пропускания S и нормированной разрешаемой про-
странственной частоте.
340
В простейшем случае ФПМ оптико-электронной системы можно предста-
вить как произведение ФПМ идеального объектива и приемника изображе-
ния:
rO3K(v) = ^(v)Tn3C(v).
На рис. 2.1.12 показаны графики зависимостей ФПМ от количества пик-
селей в кружке рассеивания ОС.
Рис. 2.1.12. Зависимость ФПМ системы объектив-приемник от количества чувстви-
тельных элементов (0,5; 1; 2) приемника в радиусе кружка Эри
Полоса пропускания системы с учетом ФПМ ПЗС матрицы и оптической
системы определяется выражением
V
max
да„)= j 'v.ejj’rfv.
о
На рис. 2.1.13 показана зависимость коэффициента снижения полосы про-
пускания оптико-электронной системы от количества пикселей расположен-
ных в радиусе кружка рассеивания Эри. Из рисунка видно, что при исполь-
зования критерия къ = 0,5 полоса пропускания снижается всего до 0,9 от иде-
ального значения полосы пропускания оптической системы. В случае исполь-
зования критерия къ = 1 полоса пропускания уменьшается до 0,75. Дальней-
шее увеличение размера пикселя до одного пикселя, вписанного в диаметр
кружка Эри, приводит к снижению полосы пропускания в 0,5 раз и более,
что недопустимо.
341
Количество пикселей приемника в радиусе кружка Эри
Рис. 2.1.13. Зависимость коэффициента снижения эквивалентной полосы пропус-
кания ОЭК от количества элементов приемника в радиусе кружка Эри
В результате видно, что для практически полного использования полосы
частот изображения следует расположить не менее одного—двух пикселей
приемника.
2.1.3.3. Метод выбора рационального абсолютного размера
элементов приемника изображения
В предыдущем разделе была рассмотрена методика выбора диаметра объек-
тива оптической системы и относительного размера пикселя приемника изоб-
ражения.
Показано, что размер элемента приемника изображения должен быть со-
гласован с относительным фокусным расстоянием ОС. Диаметр объектива
также определен требованием к разрешающей способности. В результате,
варьируемыми конструктивными параметрами остаются только относитель-
ное фокусное расстояние ОС и физический размер пикселя. Далее приво-
дится метод выбора абсолютного значения размера пикселя и, следователь-
но, фокусного расстояние оптической системы.
В настоящее время наблюдается тенденция миниатюризации электрон-
ных компонентов, в частности уменьшение размера пикселя до нескольких
микронов. Проводятся работы по созданию приборов с зарядовой связью
(ПЗС) видимого диапазона с размером ячеек 2,4 мкм, а в перспективе до 2,0
мкм [20]. Это теоретически могло бы позволить уменьшить габариты ОЭК
за счет уменьшения относительного фокусного расстояния при том же диа-
метре объектива. Однако при этом могут быть ухудшены другие характери-
стики приемника изображения, например контрастная чувствительность.
Пример характеристик современных приборов с зарядовой связью и на-
коплением (ПЗС ВЗН) отечественного производства приводится в табл. 2.1.6
и на рис. 2.1.14, 2.1.15.
342
Таблица 2.1.6. Основные характеристики ПЗС ВЗН производства «НПК Элар» [27]
Тип ПЗС Архитектура Формат Размеры элемента, мкм
ELCT1080vlU 5 секций (8, 16, 32, 64, 128 шагов) 1024x128 9x9
ELCT1080v2U 5 секций (12, 24, 48, 96, 192 шагов) 1536x192 6x6
ELCT1082U Спектрозональный (3 фоточувствительные секции) 756x32x3 18x18
ELCT1086U Стыкуемый по двум сторонам 900x320 20x20
Размер пккесля, мкм
Рис. 2.1.14. Средняя емкость потенциальной ямы на один кв.мкм в зависимости
от размера пикселя для современных ПЗС матриц
Рис. 2.1.15. Средняя емкость потенциальной ямы в зависимости от размера пикселя
для современных ПЗС матриц
343
Рассмотрим более подробно характеристики контрастной чувствительно-
сти приемника изображения в зависимости от размера элемента. Для боль-
шинства современных матриц ПЗС собственные шумы накопления и считы-
вания невелики и основным шумом является квантовый фотонный шум, СКО
которого зависит от количества накопленных матрицей электронов. Кванто-
вое ограничение для соотношения сигнал-шум определяется выражением
Усш
где Qe — количество электронов накопленных в ячейке ПЗС; y[Q^ — сред-
неквадратичное отклонение квантового шума электронов.
С учетом (2.1.4)—(2.1.6) соотношение для контрастной чувствительности
ОЭК принимает вид
к _^тр
К сожалению, максимальное количество электронов Qe, накапливаемых в
пикселе, для большинства современных ПЗС матриц ограничено технологи-
ей изготовления; оно резко сокращается при уменьшении размеров пикселя
ПЗС.
Если нет ограничений на время экспонирования приемника, то максималь-
ное количество накопленных электронов зависит в основном от площади
пикселя. Не исключено, что в будущем будут найдены технологические
способы увеличения глубины потенциальной ямы пикселя, однако в насто-
ящее время при выборе параметров КС ОЭН следует ориентироваться на
существующие типы ПЗС матриц. Время накопления сигнала в пикселе ПЗС,
требуемое для достижения соотношения сигнал-шум усш , определяется вы-
ражением [7]
4 ус2ш he 2
Н П Тпй
об 1 об ср п
где N— относительное фокусное расстояние оптической системы; усш ~ от“
ношение сигнала к шуму; ц — квантовый выход ПЗС ячейки; X — рабочая
длина волны, м; Z?cp — средняя яркость объекта наблюдения, Втм-2ср-1; —
контраст объекта; 8П — размер пикселя, м; тоб — светопропускание оптичес-
кой системы и фильтра; h = 6,626 10-34 — постоянная Планка, Дж с;
с = 2,9979 • 108 — скорость распространения электромагнитного излучения, м/с.
Показателями качества приемника изображения являются:
т| — квантовый выход ПЗС ячейки;
Qmax — максимальное количество накапливаемых в ячейке электронов.
344
Технологическое совершенство ПЗС матрицы характеризуется максималь-
ным количеством накопленных электронов, отнесенных к площади пикселя:
Средняя величина глубины потенциальной ямы у современных ПЗС мат-
риц и соответствующий распознаваемый контраст приводятся в табл. 2.1.7.
Контрастная чувствительность ПЗС для размеров пикселя от 15 до 3,0 мкм
составляет от 1,5 до 5% соответственно.
Таблица 2.1.7. Распознаваемый контраст приемника изображения в зависимости
от размера пикселя и контраста наблюдаемого объекта
Размер пикселя, мкм Средняя глубина потенциальной ямы (электронов) Максимальное отношение сигнал-шум при полном заполнении пикселя с/ш Распознаваемый контраст ПЗС для с/ш =6
3,0 15000 122,5 0,049
6,0 40000 200,0 0,030
9,0 80000 282,8 0,021
12,0 120000 346,4 0,017
15,0 170000 412,3 0,015
Уменьшение размера пикселя приводит к уменьшению количества накап-
ливаемых зарядов примерно пропорционально площади пикселя. Соответ-
ственно уменьшаются и контрастная чувствительность приемника, и коли-
чество градаций яркости в изображении. В то же время уменьшение линей-
ного размера пикселя позволяет сократить габариты ОС за счет уменьшения
относительного фокусного расстояния. Однако при уменьшении относитель-
ного фокусного расстояния квадратично уменьшаются допуски на линейную
точность фокусировки ОС.
В реальных условиях контраст наблюдаемых объектов не является предель-
ным единичным и в среднем равен = 0,2. В табл. 2.1.8 приводится оценка
нормированной разрешаемой пространственной частоты в зависимости от раз-
мера пикселя ПЗС.
Чтобы избежать перенасыщения ячеек в условиях высокого уровня осве-
щённости (при больших углах Солнца), необходимо применять диодные
линейки с непосредственным опросом без накопления сигнала.
Анализ табл. 2.1.8 показывает, что для пикселей среднего размера от 9 до
12 мкм распознаваемая частота равна 0,65—0,67 от предельной частоты сре-
за ОС. Уменьшение размера пикселя до 3—6 мкм приводит к существенному
снижению распознаваемой частоты до 0,46—0,53. Это примерно соответствует
частоте Найквиста для ОС. В то же время увеличение размера пикселя более
345
Таблица 2.1.8. Нормированная разрешаемая пространственная частота в зависи-
мости от размера пикселя
Размер пикселя, мкм Нормированная разрешаемая пространственная частота vH Наилучшее относительное фокусное расстояние для средней длины волны 0,65 мкм Требования к точ- ности линейной фокусировки ±мкм
3,0 0,46 4,62 6,9
6,0 0,53 9,23 27,7
9,0 0,65 13,85 62,3
12,0 0,67 18,46 110,8
15,0 0,69 23,10 173,1
12 мкм не приводит к большому росту разрешающей способности ОЭК,
которая при предельно высокой контрастной чувствительности стремится к
0,80—0,85. Заметим, что это значение примерно соответствует критерию раз-
решения по Рэлею. В результате очевидно, что улучшить разрешаемую про-
странственную частоту путем уменьшения размера пикселя невозможно не
только в силу дифракционного ограничения ОС, но и из-за конструктивно
ограниченного отношения сигнал-шум. Дальнейшее улучшение разрешения
более 0,8 от предельного возможно только путем ужесточения ограничений
на смаз, расфокусировку изображения, качество ОС и других возмущающих
факторов.
Для примера в табл. 2.1.9 приводятся данные оценки линейной разреша-
ющей способности для основных зарубежных КС ОЭН. Полученные оцен-
Таблица 2.1.9. Оценка линейного разрешения на местности для различного типа КА
КА Диаметр объектива, м Размер пикселя ПЗС, мкм Высота полета, км Предельное угловое разрешение ОС по критерию Марешаля, угл. сек Разрешение на местности, м
Геометрическое разрешение (проекция пикселя) Линейное для объекта контраста 0,2
Iconos-2 0,70 12 680 0,19 0,63 0,94
Quick Bird-2 0,60 12 450 0,22 0,49 0,73
Orb View-3 0,45 6 470 0,30 0,68 1,28
Eros-В 0,50 7 500 0,27 0,65 1,23
Pleiades 0,65 13 685 0,21 0,69 1,02
Geo Eye-1 1,10 9 680 0,12 0,40 0,59
346
ки линейного разрешения хуже, чем заявленные для этих КС ОЭН реклам-
ные характеристики, так как учитывают потери в информационном тракте.
Таким образом, наилучшее значение размера пикселя для ОЭК при со-
временном развитии микроэлектроники и достигнутой глубине потенциаль-
ной ямы 9—12 мкм. Уменьшение размера пикселя менее 9 мкм приводит к
снижению разрешения, в то время как увеличение более 12 мкм сильно не
улучшает разрешение при существенном росте габаритов ОС.
2.1.3.4. Метод проектирования ОЭК, основанный на рациональном
согласовании его элементов
Для решения задач оценки показателей эффективности требуется разра-
ботка модели информационного тракта. В сложившейся инженерной прак-
тике моделирование по наиболее полным моделям проводится уже на ран-
них стадиях проектирования ОЭК. Разработчикам приходится проводить
громоздкие расчеты, например величины ЛРМ с точностью до сотых долей
метра. Такой подход вряд ли можно считать рациональным, так как на прак-
тике действует ряд случайных и неопределенных факторов, ограничивающих
точность расчета. Кроме того, зачастую не известны точные значения пара-
метров самого ОЭК.
Учитывая, что проектные параметры ОЭК лежат в определенном диапа-
зоне и связаны между собой рациональными соотношениями (разд. 2.1.3.1—
2.1.3.3), задачу создания модели информационного тракта можно существенно
упростить.
Рассмотрим способ формирования общей модели информационного трак-
та, удобной для использования на стадии предварительного проектирования.
Свойства передавать контраст изображения характеризует функция переда-
чи модуляции системы. Представим ФПМ информационного тракта опти-
ко-электронной системы в виде произведения ФПМ ее основных элементов.
Для удобства дальнейшего анализа аппроксимируем ФПМ некоторых эле-
ментов гауссовой кривой. Тогда ФПМ информационного тракта можно оце-
нивать произведением элементов:
Wv> = ^»)rnJ»)^(v)TJv)7Jv)7;,,(v),
гае ТЛЫ, T^v), 7^(v), T^v), rc,(v), TIIM(v) — функции передачи модуляции
основных элементов информационного тракта:
ФПМ оптической системы с учетом центрального экранирования:
Т^ЧЛ + Я + Оа-г;*);
ФПМ расфокусировки:
ТЛу) = 4
дфу 7
р.
= ехр -2 —
(2.1.15)
(2.1.16)
347
ФПМ приемника изображения:
sin(7iv8) = exp(-232v2); (2.1.17)
tiv8
ФПМ систематического смаза изображения:
Тсс(^ = sin(7tv/CM) 7ГУ/см = exp( 2/2cv2); (2.1.18)
ФПМ случайного смаза изображения:
ехр(-2л2о2 /2v2); ел*'ос 7 ’ (2.1.19)
ФПМ турбулентности атмосферы:
Гатм(у) ~ еХР(-27СЧ™Лсу2)> (2-* -20)
где X — длина волны; N — относительное фокусное расстояние ОС; —
фокусное расстояние ОС; е0 — коэффициент линейного центрального эк-
ранирования; 7Дф — линейное смещение фоточувствительной плоскости от
плоскости наилучшей фокусировки, м; 7СС — линейный смаз, м; осл — сред-
неквадратичная угловая величина случайного смаза, рад; оатм — среднеквад-
ратичная угловая величина турбулентности атмосферы, рад.
На рис. 2.1.16 приводятся зависимости ФПМ элементов информационного
тракта, а также его ФПМ. Зависимость ФПМ для наглядности представле-
ния приведена от нормированной пространственной частоты (частота, отне-
сенная к максимальной частоте среза ОС):
V л
v„ =----= vXN.
н V
max
Перемножив выражения (2.1.15)—(2.1.20) и сложив показатели степени в
экспоненциальных зависимостях, получим удобное выражение для предва-
рительной оценки ФПМ информационного тракта на этапе синтеза КС ОЭН:
7O3K(v) = (А + В + С)(1 - е2)ехр(-2о2 3Kv2), (2.1.21)
где ОдЭК = + ^дф + ^см — среднеквадратичный размер пятна рассеивания с
учетом смаза, дефокусировки и дискретности пикселей приемника;
8см =/сс +7l4Voc +7l2aL/oc — суммарный смаз изображения; 8п — раз-
мер пикселя; 8Дф — поперечный размер пятна дефокусировки (включая абер-
рации ОС); 8см — поперечный размер пятна смаза.
Коэффициенты А, В, С равны:
—(arccos(v)-v Jl-(v )2),0<v <1;
71
0,vH>l;
348
Рис. 2.1.16. Функция передачи модуляции основных элементов ОЭК: 1 — смаз изоб-
ражения; 2 — дефокусировка; 3 — приемник изображения; 4 — оптическая система
с центральным экранированием 0,30; 5 — итоговая ФПМ тракта
2
— Eosin<p +—(1 + E?)-(1 + E?)arctan
л 2
1 + Ел
2e?(1-v ), v >-----—.
О' н'’ н 2
1+е0 tg^
1-Ео g2
Ф -2е2
о Zt0 ’
1-Е0 1 + Ел
----<v <-----
2 н 2
Для дальнейшего анализа удобно в выражении
емые к радиусу идеального кружка рассеивания
(2.1.21) отнести все слага-
(диска Эри). В результате
349
средний размер пятна рассеивания всего информационного тракта оптико-
электронного комплекса определится выражением
ООЭК =(*8W + +<*cmW>
i w t ^дф «
где Kg = — относительный размер пикселя; кдф = — относительный
размер пятна расфокусировки; ксм
-777 — относительный размер попереч-
ного смаза.
Рассмотрим выбор наилучших соотношений для этих коэффициентов.
Как было показано ранее, наилучший относительный размер пикселя
выбирается исходя их радиуса кружка Эри оптической системы [7]:
|хЛГ<8п<^.
Продольная дефокусировка определяется допусками на искажение волно-
вого фронта по критериям качества оптической системы. Для ОЭК ее реко-
мендуется задавать выражением
/. <-х№.
дф 2
Поперечный диаметр пятна дефокусировки
1лЛ, 1
8. <^-<-IUV.
дф W 2
Допустимый смаз изображения определяется особенностями конструкции
ячейки ПЗС и ФПМ смаза. Для большинства ячеек ПЗС с трехфазным пере-
носом смаз менее одной трети пикселя практически не приводит к ухудше-
нию качества изображения по разрешению и резкости:
5 <-8 .
СМ 3 п
Оптико-электронную систему с ограниченными величинами дискретно-
сти приемника, дефокусировкой и смазом изображения будем называть в
дальнейшем согласованной оптико-электронной системой. В таком ОЭК дол-
жны выполняться следующие соотношения относительных размеров пиксе-
ля приемника, дефокусировки и смаза изображения:
к. = 0,5...1, ЛпЖ<-, кс„ <-.
Для такой системы появляется возможность получить ряд простых и на-
глядных выражений оценок ее характеристик, в том числе и разрешающей
способности.
350
Если просуммировать указанные коэффициенты, то средний размер пят-
на рассеивания ОЭК будет равен
стоэк =
где кт = + к^ + к^м =1,16 — коэффициент увеличения пятна рассеивания
в результате действия дискретности приемника, смазов и расфокусировки
изображения. В ряде источников кт [12] называется коэффициентом техно-
логических потерь и по величине соответствует полученному значению
Лт=1,2.
Полученный средний размер пятна рассеивания ооэк с учетом смазов и
расфокусировки позволяет на этапе синтеза КС ОЭН оценивать ФПМ ин-
формационного тракта в зависимости от нормированной пространственной
частоты при помощи выражения
Wv) -(А + В + 0(1 - e2)exp(-2(£vH)2),
которое удобно использовать на этапе предварительного эскизного проек-
тирования для расчета характеристик ОЭК.
Рассмотрим пример результатов расчета разрешаемой пространственной
частоты vH , пропускаемой информационным каналом, на которой ФПМ
падает до критического значения пропускаемого контраста Кпр.
На рис. 2.1.17 показан результат расчета множества возможных реализа-
ций нормированной разрешаемой частоты. Проведенный статистический
Рис. 2.1.17. Разрешаемая нормированная пространственная частота
351
анализ позволил оценить диапазон качества оптико-электронного комплек-
са по пропускаемой пространственной частоте (табл. 2.1.10). В табл. 2.1.11—
2.1.13 представлен перечень проектных параметров оптико-электронной си-
стемы и диапазоны их изменения.
Таблица 2.1.10. Качество оптико-электронного комплекса по нормированной
разрешаемой пространственной частоте
Разрешаемая нормированная пространственная частота Качество ОЭК
<0,5 Неудовлетворительное
От 0,5 до 0,6 Удовлетворительное
От 0,6 до 0,7 Хорошее
>0,7 Отличное
Таблица 2.1.11. Детерминированные проектные параметры
Наименование параметра Обозначение Размерность Среднее
Диаметр апертуры ОС ^об м 1,2
Дальность до объекта наблюдения ^КА км 1200
Угол места Солнца йс угловые градусы 15
Центральное экранирование ^ос б.р. 0,45
Количество шагов накопления ^шн б.р. 32
Размер пикселя приемника Sn мкм 16
Средний коэффициент отражения объекта Роб б.р. 0,3
Коэффициент контрастности объекта б.р. 0,2
Коэффициент пропускания оптической системы ^ос б.р. 0,85
Таблица 2.1.12. Проектные параметры с нормальным распределением
Наименование параметра Обозначение Размерность Среднее ско
Фокусное расстояние foe м 22 0,10
Скорость бега изображения в фокальной плоскости ^сби мм/с 12 0,02
Квантовая эффективность п б.р. 0,4 0,015
Глубина потенциальной ямы Qnax е 90000 10000
Шум считывания ПЗС матрицы °сч е 0 100
Шум квантования АЦП аАЦП е 0 10
352
Таблица 2.1.13. Проектные параметры с равномерным распределением, задаваемые
минимаксным диапазоном
Наименование параметра Обозначение Размерность Минимум Максимум
Длина волны X мкм 0,50 0,80
Коэффициент пропускания атмосферы ^атм б.р. 0,60 0,90
Турбулентность атмосферы Ратм угл. сек 2,0 5,0
Таким образом, линейное разрешение определяется в основном апертурой
ОС — (Doc), дальностью до КА (Dj^) и нормированной пространственной
разрешаемой частотой vH . Для наглядности удобно использовать коэффи-
циент потерь в оптико-электронном тракте Лт, обратную величину нормиро-
ванной пространственной частоты:
1 v
к ~ = тах
т v v
н р
Для ОЭК очень хорошего качества - 1,2; среднего качества — Лт 1,5;
плохого качества — £т~2,0. В системах с рационально подобранными кон-
структивными параметрами ФПМ аберраций, смазов, расфокусировки и раз-
мера пикселя приемника разрешение ухудшается не более чем в Лт=1,2... 1,5
раза. Это соответствует нормированной пространственной частоте от 0,6 до
0,75.
Линейное разрешение с учетом коэффициента технологических потерь оп-
ределяется выражением
Пкд
L.pM=k^D ’ (2.1.22)
/7осСОЪ^кА
которое позволяет на предварительных этапах проектирования оценить тре-
буемый диаметр апертуры ОС. Далее выбирается фокусное расстояние и
конкретная реализация схемы ОС.
Анализ результатов расчета показывает, что в первом приближении сред-
ний диаметр ОС с учетом типовых потерь в информационном тракте к= 1,5
может быть определен с помощью эмпирической зависимости
/>06=0,001-^., м (2.1.23)
лрм
где £лрм — требуемое линейное разрешение на местности, м; — даль-
ность от объекта до КА, м.
353
Суть зависимости (2.1.23) заключается в том, что для достижения линей-
ного разрешения 1 м на каждую 1000 км дальности необходима апертура
ОС не менее 1 м.
2.7.3.5. Методика формирования требований
к динамике орбитального ОЭК
Прежде всего для реализации возможностей ОС по угловому разрешению
необходимо обеспечить требования к точностным характеристикам системы
стабилизации (СС) КА. В зависимости от высоты орбиты меняются и тре-
буемые программные значения угловой скорости КА. Поэтому для форми-
рования качественного изображения СС должна обеспечивать необходимый
диапазон программных значений угловой скорости с заданной точностью
стабилизации угловой скорости КА.
Рассмотрим методику формирования требований к динамическим и точ-
ностным характеристикам СС для КА с ОЭК во время съемки с высоким
разрешением.
Угловые скорости движения КА во время съемки определяются орби-
тальным построением и требованиями к времени накопления сигнала в при-
емнике изображения совместно с параметрами ОС.
Исходя из требуемого соотношения сигнал-шум и времени накопления,
определяют величину номинальной скорости бега Ин в фокальной плоскости
и скорость движения следа приемника по поверхности Земли Иск:
ин=^-, м/с;
у -8п ^КА
кск f г , М/С,
J ос
где /п — время экспонирования одного пикселя; 8П — размер пикселя при-
емника изображения; — дальность от объекта до КА в момент съемки;
— фокусное расстояние оптической системы; Ин — номинальная скорость
бега изображения в фокальной плоскости; Кск — номинальная скорость дви-
жения фокальной плоскости по поверхности Земли.
Для систем с приборами зарядовой связи временной задержки с накопле-
нием время экспонирования одного пикселя меньше чем всего элемента раз-
решения на количество шагов накопления в матрице:
t =!*
П "ш
где tH — время накопления сигнала, характерное для одного элемента разре-
шения; пш — количество шагов накопления в ПЗС ВЗН матрице.
354
Заметим, что геометрическое разрешение определяется выражением
о _ $п^КА
•'ОС
тогда скорость сканирования следа приемника по поверхности Земли
иск=^, м/с. (2.1.24)
Выражение (2.1.24) имеет простой физический смысл: за время накопле-
ния сигнала след пикселя не должен проходить более одного элемента раз-
решения.
В согласованной оптико-электронной регистрирующей системе наилуч-
шее относительное фокусное расстояние однозначно связано с размером
кружка рассеивания. Для оптической системы дифракционного качества
наилучшее относительное отверстие зависит от рабочей длины волны и раз-
мера пикселя:
5
N=k&t- (2.1.25)
Учитывая, что къ = 1, размер пикселя можно исключить из выражений для
времени накопления.
В результате получается, что время накопления для одного элемента раз-
решения в согласованной оптико-электронной системе в первом приближе-
нии зависит только от соотношения сигнал-шум, длины волны и квантового
выхода ПЗС:
_ 4 Усш2 he с
л тоб W’ ’
(2.1.26)
Соотношение (2.1.26) позволяет при проектировании ОЭК в первом при-
ближении не учитывать зависимость времени накопления от размера пик-
селя приемника, относительного фокусного расстояния и других конструк-
тивных параметров ОЭК, которые на предварительных этапах синтеза изве-
стны только приблизительно.
Определим физические величины скоростей сканирования следа прием-
ника по поверхности Земли. Яркость объекта среднего контраста = 0,2
для высоты Солнца над горизонтом 10 угл.град, составляет от 1,5 до
4,9 Вт м-2 ср-1. Диапазон возможных скоростей сканирования для кванто-
вой эффективности приемника от 0,3 до 0,6 показан на рис. 2.1.18.
Скорость бега изображения должна отрабатываться системой стабилиза-
ции КА с требуемой точностью. Величина ее отклонения Л V от номиналь-
ной должна удовлетворять следующим условиям:
355
ДГ<
3500
2500
2000
1500
1000
3000
500
Геометрическое разрешение, м
Рис. 2.1.18. Диапазон скорости сканирования следа приемника по поверхности Земли
в зависимости от геометрического разрешения для объекта средней контрастности
Ко5 = 0,2 и соотношения сигнал-шум 100
^8п , м/с,
— остаточное отклонение скорости бега изображения; Лсм — коэф-
где ДИ
фициент, определяемый влиянием смаза на функцию передачи модуляции
(обычно считается, что допустимое снижение ФПМ в результате смаза изоб-
ражения достигается при к <-).
см
Для систем без отслеживания объекта наблюдения время экспонирова-
ния ограничено орбитальным движением КА:
И* - V
Кск “ п КА’
^КА
Такие системы имеют худшее качество изображения из-за невозможнос-
ти осуществлять необходимое накопление сигнала. Отношение времени на-
копления определяет, во сколько раз будет меньше соотношение сигнал-шум
на изображении. Например, для геометрического разрешения 1,1м отноше-
ние времени накопления для системы с отслеживанием и без него равно
-4 > 8. Соотношение сигнал-шум у системы без отслеживания будет в 2,8 раз
хуже.
356
Для дальнейшего исследования удобнее перейти к угловым величинам.
Скорость вращения КА вокруг центра масс при сканировании по тангажу
8
<0ск=—^, рад/с.
Допустимое отклонение скорости сканирования от номинальной
Дсо < < ^см$п , рад/с.
F 'X
Суммарная угловая скорость движения КА равна сумме скорости скани-
рования и скорости отслеживания заданного района:
8 V
av* = ок. + со = ±—— +
КА ск о + г тт
Woe НКА
Сканирование изображения может производиться не только в направле-
нии полета КА, но и в обратном направлении.
Найдем требуемые угловые скорости при отслеживании визирным лучом
заданного объекта на поверхности Земли.
п ~ « г/ Гй- 9’8ч2
Для круговой орбиты Руд = —— ~ -------— .
V rka N rka
Из геометрических соотношений следуют основные соотношения для уг-
лов:
a = arcsin ——cos(A) ;
, Rka
f R
A = arccos —— sin(a) ;
, л
п + — = л- а-<р,
2
где <Р = Форб + Фск; Форб^) = (0орб^ — изменение угла от времени за счет орби-
И
тального движения КА; фск(0= — изменение угла от времени за счет ска-
нирования.
Рассмотрим геометрию движения КА в процессе съёмки при наблюдении
в надир = Яр-д). Основные геометрические соотношения при наблюде-
нии объекта на поверхности Земли показаны на рис. 2.1.19 (где Р— наблю-
даемый объект на поверхности Земли; О — центр Земли; КА — космический
357
Рис. 2.1. 19. Основные геометрические соотношения при наблюдении объекта
на поверхности Земли
аппарат; 1-1 — линия местного горизонта; — дальность от объекта до
КА, м; — скорость КА, м/с; Уск — скорость сканирования по поверхно-
сти Земли, м/с (может быть направлена как вдоль, так и против скорости ор-
битального движения КА); R^ — радиус орбиты КА, м; R3 — радиус орбиты
КА, м; а — угол перенацеливания КА относительно текущего радиуса-век-
тора, угл. град; h — угол места КА, угл.град; <р — угол КА-объект-центр Зем-
ли, угл.град).
Дальность от объекта наблюдения до КА определяется теоремой косину-
сов:
£>ка =>/^з + Лка _27?KA7?Jcos<p.
Угол перенацеливания КА связан с центральным углом Ф следующей за-
висимостью:
а(0 = arcsin
Угловая скорость и угловое ускорение перенацеливания КА во время съем-
ки приведены на рис. 2.1.20 и 2.1.21. Анализ зависимостей показывает, что
требуемая скорость сканирования и угловое ускорение существенно возрас-
тают при понижении орбиты КА.
358
Рис. 2.1.20. Максимальная угловая скорость при сканировании объекта
в зависимости от высоты орбиты
d&
Рассмотрим влияние угловой скорости со^ = — и углового ускорения
do?
£ка = на требования к точности стабилизации КА.
Для анализа требований к точности системы стабилизации (СС) удобно
использовать два частных показателя, характеризующих совершенство ди-
намических свойств КА:
к^ — отношение угловой скорости к точности ее отработки, определяет
требования к динамическому диапазону по угловой скорости:
k _ ^ка .
“ Дсо ’
к^ — отношение углового ускорения к точности отработки угловой ско-
рости, определяет требования к динамическому диапазону по угловому ус-
корению:
Дсо
359
Рис. 2.1.21. Максимальное угловое ускорение при сканировании объекта
в зависимости от высоты орбиты
Максимум угловой скорости будет наблюдаться при нулевом угле пере-
нацеливания, когда КА при наблюдении объекта находится в зените. Мак-
симальная угловая скорость определяется выражением
С учетом необходимой скорости сканирования выражение для угловой
скорости КА имеет вид
^п^КА Лб
8п
ка>
1 +
к
СМ у
Учитывая соотношение для углового разрешения, получим требования к
точности отработки угловой скорости и динамическому диапазону по угло-
вой скорости КА:
360
к 5 к
Дю< см п <-£^-у
tj Гос
k _ % . УпИКА
“ *см ксЛ '
(2.1.27)
Заметим что Укд — это путь, который проходит след пикселя по орби-
те КА за время накопления сигнала. Для большинства КС ОЭН высокого
и и t V
разрешения выполняется неравенство , и в (2.1.27) можно
СМ см т
пренебречь слагаемым ——. Тогда приближенное выражение для динамичес-
ком
кого диапазона по угловой скорости будет иметь вид
t V
к(Л~~к~*1Г (2.1.28)
Л'см7т
Особенностью зависимости (2.1.28) является то, что требования к дина-
мическому диапазону системы стабилизации зависят только от требований к
относительному смазу изображения и отношения пути, пройденного следом
пикселя по орбите, к геометрическому разрешению (проекции пикселя на
местность).
Путь, который проходит след пикселя по орбите КА за время накопления,
практически не зависит от высоты орбиты, так как в диапазоне высот рабо-
ты КС ОЭН изменения орбитальной скорости невелико. Также невелик и ди-
апазон изменения времени накопления. Для согласованной оптико-электрон-
ной системы он определяется яркостью наблюдаемого объекта и квантовым
выходом приемника.
Требования к динамическому диапазону СС пропорционально зависят от
пройденного пути следом пикселя и обратно пропорционально — от геомет-
рического разрешения. То есть, чем медленнее идет процесс накопления
сигнала или выше разрешение, тем большую точность должна обеспечивать
система стабилизации КА.
На рис. 2.1.22 приведены требования к точности стабилизации угловой
скорости КА в типовых условиях наблюдения. На рис. 2.1.23 приводится
требуемый динамический диапазон по угловой скорости в зависимости от
геометрической разрешающей способности.
Так как проекция пикселя равна произведению дальности наблюдения (в
надир — высоты орбиты) на угловое разрешение, требуемый динамический
диапазон СС возрастает при улучшении геометрического разрешения неза-
висимо от высоты орбиты КА.
361
Разрешающая способность оптической системы, угловые
секунды
Рис. 2.1.22. Требования к точности стабилизации угловой скорости КА
Геометрическая разрешающая способность, м
Рис. 2.1.23. Требования к динамическому диапазону по угловой скорости КА
362
Показано, что время накопления сигнала на приемнике изображения для
типовых условий освещенности одинаково для широкого класса оптико-элек-
тронных комплексов ДЗЗ, у которых размер пикселя приемника изображе-
ния согласован с размером кружка рассеивания.
В связи с этим основное влияние на требования к точности стабилизации
оказывает угловая разрешающая способность ОС. Для современных КА ДЗЗ
высокого разрешения точность стабилизации угловой скорости должна быть
лучше 0,0001 угловых градусов в секунду. Динамический диапазон по угло-
вой скорости должен составлять не менее 1000 раз. Более подробный анализ
требований к динамическим характеристикам СС КА ДЗЗ должен проводиться
с учетом конкретного алгоритма съемки и требований к динамике КА во время
перенацеливания.
2.1.4. Выбор рационального орбитального построения космической
системы оптико-электронного наблюдения с учетом характеристик
оптико-электронного комплекса
Проведенный анализ показал, что основным требованием к КС ОЭН для
оперативного наблюдения за районами Земли является обеспечение регуляр-
ного обновления информации о заданном объекте с линейной разрешающей
способностью не хуже заданной. Производительность КС ОЭН зависит от
времени выхода КА на объект и, следовательно, от периодичности обзора.
Развитие КС ОЭН идет в направлении улучшения пространственной
разрешающей способности и периодичности наблюдения до 1 суток и ме-
нее.
Периодичность наблюдения и линейное разрешение взаимосвязаны через
динамику орбитальной группировки. Периодичность обслуживания опреде-
ляется двумя временными слагаемыми — временем выхода космического
аппарата на объект с момента постановки задачи и оперативностью достав-
ки информации пользователю. Линейная разрешающая способность опре-
деляется предельной пространственной частотой, разрешаемой информаци-
онным каналом ОЭК и высотой полета КА.
Улучшение пространственного разрешения может быть достигнуто двумя
способами:
— понижением высоты орбиты КА, как у «Quick Bird-2»,
— увеличением диаметра и совершенствованием ОС, как у «GeoEye-1».
Заметим, что понижение орбиты КА снижает производительность и опе-
ративность доставки информации, поэтому второй способ улучшения про-
странственного разрешения более предпочтителен.
Оба способа предъявляют повышенные требования к точностным и дина-
мическим характеристикам системы стабилизации КА. При понижении ор-
биты КА возрастают угловые скорости и угловые ускорения при сканирова-
нии изображения. В случае увеличения диаметра ОС повышаются требова-
ния к точности стабилизации угловой скорости КА.
363
Улучшение периодичности наблюдения осуществляется двумя способа-
ми:
— увеличением орбиты КА,
— созданием группировки из нескольких КА.
На увеличение высоты орбиты имеется ряд ограничений. Чем больше
высота, тем выше периодичность наблюдения, меньше динамика изменений
параметров при движении космического аппарата по орбитам, но, с другой
стороны, требуется тяжелая крупногабаритная аппаратура наблюдения, боль-
ший диаметр оптики, энергетика радиолиний. В результате — необходимость
повышения энергопотребления космического аппарата, усложнение систе-
мы управления и т.п., что приводит к увеличению сложности, массы и сто-
имости разработки, изготовления и запуска.
Создание группировки из нескольких КА необходимо для достижения
требуемой периодичности наблюдения в случае использования низких орбит.
Орбитальная структура группировки типа Можаева ( Уолкера [3, 4, 15] за-
дается многогранником, который в случае рассмотрения одной орбитальной
плоскости можно формально описать через относительные положения КА по
аргументу широты (рис. 2.1.24).
Рис. 2.1.24. Схема кинематически правильной орбитальной группировки
в полярных координатах
Рассмотрим метод приближенного определения рациональной численно-
сти КА при условии следующих предположений:
— орбиты всех КА круговые, высотой Н и наклонением /;
— КА группируются в К плоскостях по М КА в каждой плоскости;
— распределение плоскостей по долготе восходящего узла и КА в каждой
плоскости по аргументу широты равномерное;
364
— предельные углы перенацеливания аппаратуры наблюдения у всех КА
одинаковые и равны ± 30 угловых градусов;
Задача определения численности КА распадается на две составляющие:
— определение количества КА в орбитальной плоскости М;
— определение количества орбитальных плоскостей К.
В связи с тем, что координаты КА в разных орбитальных плоскостях так-
же жестко связаны, полную орбитальную группировку математически мож-
но представить в виде единого вектора Хорб:
и2 - их = Д их;
м3-«2 = Ди2;
Xnnfi =
ори
ип+\~ип=^
UN UN-\ ~ &UN-\
Здесь обозначено: и = 1...А — номер космического аппарата; N= КМ — ко-
личество КА в орбитальной группировке; К— количество орбитальных плос-
костей; М — количество КА в орбитальной плоскости; ип — номинальный
аргумент широты n-го КА; Лип=ип+х-ип — разность аргументов широты
между двумя КА. Обычно для всех КА в номинальном случае Д«л = const.
Ограничение на максимальное количество КА в одной орбитальной плос-
кости определяется исходя из требований неразрывности полосы обзора.
Смещение наземной трассы на экваторе Земли за период между следова-
нием соседних КА в одной орбитальной плоскости определяется выражением
ДХ = Л/ндШ-р
где — угловая скорость вращения Земли, рад/с; ДТ^ — разность момен-
тов времени прохождения восходящего узла КА в орбитальной плоскости.
Центральный угол Ф, образуемый половиной полосы захвата, определя-
ется выражением
Таким образом, возможны следующие случаи:
1) ДХ<2ф. В этом случае полосы захвата КА перекрываются с большим
запасом и, следовательно, расстояние между КА слишком мало. В результате
ширина полос захвата аппаратуры используется нерационально. Количество
КА в орбитальной плоскости избыточно.
2) ДХ > 2ф. В этом случае между полосами захвата образуются разрывы.
Количество КА в орбитальной плоскости недостаточно. Перекрытие обра-
365
зующихся разрывов в полосах обзора возможно только с помощью КА из
других орбитальных плоскостей. Численное моделирование показало, что
периодичность наблюдения в данном случае значительно ухудшается.
3) ДХ = 2ср. Все КА в орбитальной плоскости функционируют, обеспечи-
вая единую ширину полосы захвата:
Z?or = 2фЛ/7?3.
Определим рациональную численность КА в орбитальной плоскости. Уг-
ловая орбитальная скорость движения КА определяется выражением
Согласно условию неразрывности наземной трассы период следования КА
в одной плоскости должен составить
ДТКА =--------,
где кх} — коэффициент перекрытия полосы обзора (например, принимается
равным 0,05).
Разность аргументов широты между двумя КА определяется выражением
Одновременно на разность аргументов широты между двумя КА существует
ограничение: Аы<л.
Ограничение на количество КА в орбитальной плоскости:
л-a-arccos —^sin(oc)
М = \\
%
где Ц( ) — целая часть числа.
Для угла перенацеливания ± 30° рациональное количество КА в одной ор-
битальной плоскости в зависимости от высоты полета приводится на
рис. 2.1.25.
В качестве примера на рис. 2.1.25 и 2.1.26 и в табл. 2.1.14 приводится
требуемое количество орбитальных плоскостей и КА, полученное числен-
ным моделированием функционирования ОГ с учетом освещённости.
366
6
Рис. 2.1.25. Рациональное количество КА в одной орбитальной плоскости
при возможном угле перенацеливания ± 30° в зависимости от высоты полета
Высот» орбит КА. км
Рис. 2.1.26. Требуемое количество КА для обеспечения периодичности наблюдения
12—24 часа (на широте более 30°) при возможном угле перенацеливания ± 30°
в зависимости от высоты полета
367
Таблица 2.1.14. Рациональное количество КА в орбитальной группировке при
возможном угле перенацеливания ± 30° в зависимости от высоты полета для
обеспечения периодичности наблюдения 24 часа на географической широте
более 30°
Высота орбиты КА, км Количество КА в орбитальной плоскости Количество орбитальных плоскостей (пусков PH) Количество КА в орбитальной группировке Требуемый диаметр ОС, м (при Vp =0,7 vmax) для ЛРМ=2,0м
400 5 3 15 0,20
600 4 2 8 0,30
800 3 2 6 0,40
1000 2 1 2 0,50
1200 2 1 2 0,60
1400 1 1 1 0,70
1600 1 1 1 0,80
1800 1 1 1 0,90
2000 1 1 1 1,00
Примеры вариантов построения КС ОЭН приводятся в табл. 2.1.15. Для
достижения разрешающей способности в 1,2 м с высоты полета 500 км тре-
буется минимальный диаметр ОС 0,5 м и с высоты полета 800 км — диаметр
ОС 0,80 метра. В случае меньшего диаметра ОС высота полета уменьшается
менее 500 км, где время существования и производительность КА невелики.
В случае варианта высокоорбитального КА с высотой полета 1250—1500
км требуется разработка ОС с диаметром 1,25—1,5 м соответственно.
При высоте орбиты КА более 1500 км в каждой орбитальной плоскости
рационально размещать не более одного КА. При высоте орбиты от 800 до
1500 км — не более двух КА.
В случае варианта высокоорбитального КА с высотой полета 1500-2000 км
требуется ОС с диаметром 1,5—2 м соответственно.
В перспективе реализуемо создание отечественных ОС с адаптивной оп-
тикой диаметром 2,5—3 м, что позволит повысить высоту орбиты КА до 2000—
3000 км.
Приведенные данные по диаметрам ОЭК реализуют требования по линей-
ному разрешению, если пространственная частота, разрешаемая информа-
ционным каналом ОЭК, не менее vH = 0,7 (кт = 1,4). Заметим, что достиже-
ние такой высокой разрешаемой пространственной частоты возможно толь-
ко при высоком совершенстве приемников излучения, характеристик циф-
рового тракта передачи данных, прецизионности конструкции КА и систе-
мы стабилизации.
368
Таблица 2.1.15. Варианты состава орбитальной группировки для наблюдения
с линейным разрешением 1,2 м
Номер варианта 1а 2а За 4а 5а
Диаметр оптической системы 0,25 0,50 0,75 1,25 1,50
Масса КА, кг <400 <2000 <6000 <10000 <15000
Линейное разрешение на местности, м 1,2
Высота орбиты, км 500 1000 1500 2500 3000
Требуемое количество КА для обеспечения периодичности наблюдения 1 сутки 9 2 1 1 1
Требуемое количество КА для обес- печения периодичности наблюдения 12 часов 12 4 2 2 1
Требуемая точность стабилизации угловой скорости, угл. град/с 5104 210'4 ПО'4 7 105 5 105
Максимальное угловое ускорение угл. град /с2 -0,010 -0,005 -0,003 -0,001 -0,001
Максимальная угловая скорость угл. град /с 0,80 0,50 0,30 0,20 0,15
Динамический диапазон по угловой скорости от 1000 до 2000
Литература
1. Августинович К.А. Основы фотографической метрологии. — М: Легп-
ромбытиздат, 1990.
2. Асташкин А.А., Любченко Ф.Н., Мальченко А.Н., Новикова Н.П. Кон-
цепция развития космических средств дистанционного зондирования Земли
до 2040 года // Космонавтика и ракетостроение. 2010. №4(61), С.118-124.
3. Балк М.Б. Элементы динамики космического полета. — М.: Наука, 1965.
4. Баринов К.Н., Бурдаев М.Н., Мамон П.А. Динамика и принципы по-
строения орбитальных систем космических аппаратов. — М.: Машиностро-
ение, 1978.
5. Дж. Ллойд. Системы тепловидения / Пер. с англ. — М.: Мир, 1978.
6. Ефанов В.В., Семункина В.И., Шостак С.В. Особенности баллистичес-
кого проектирования КС ДЗЗ оптико-электронного наблюдения типа Аркон-1
И Вестник ФГУП НПО им.С.АЛавочкина. 2009. №1. С. 46-52.
7. Занин К.А. Выбор параметров оптико-электронной космической сис-
темы наблюдения по качеству изображения // Полет. 2007. №11. — М.: Ма-
шиностроение. С. 30-37.
369
8. Макаров В.П., Самойлов С.Ю., Хайлов М.Н.//Выбор проектных пара-
метров космического сегмента системы ДЗЗ по критериям разрешения и
производительности // Труды XXIV науч, чтений по космонавтике им. С. П.
Королева. — М.: Война и мир, 2000. С. 10-15.
9. Лебедев А.А., Малышев В.В., Нестеренко О.П. и др. Основы синтеза
систем летательных аппаратов. — М.: Машиностроение, 1996.
10. Лебедев А.А., Нестеренко О.П. Космические системы наблюдения.
Синтез и моделирование. — М.: Машиностроение, 1991.
11. Макриденко Л.А., Минаев И.В., Волков С.Н. Особенности разработки
и использования КС ДЗЗ в интересах социально-экономического развития
РФ. Часть 3. Концептуальное обоснование перспективных направлений раз-
вития КС ДЗЗ// Вопросы электромеханики. Т.104. Труды НПП ВНИИ-
ЭМ.2007. С139-149.
12. Маламед Е.Р. Конструирование оптических приборов космического
базирования. - СПб.: СПбГИТМО(ТУ), 2002.
13. Малышев В.В., Красильщиков М.Н., Бобронников В.Т., Нестерен-
ко О.П., Федоров А.В. Спутниковые системы мониторинга. — М.: Изд-во
МАИ, 2000.
14. Михельсон Н.Н. Оптические телескопы: Теория и конструкция. — М.:
Наука, 1976.
15. Можаев Г.В. Синтез орбитальных структур спутниковых систем. — М.:
Машиностроение, 1989.
16. Оптические телескопы будущего/ Под ред. Ф. Пачина, В. Рихтера,
Р. Вильсона. — М.: Мир, 2001.
17. Савиных В.П., Кучко А.С., Стеценко А.Ф. Аэрокосмическая фотосъём-
ка: Учебник. — М.: Картогеоцентр — Геодезиздат, 1997.
18. Теребиж В.Ю. Естественный предел разрешающей силы оптических
систем //Вестник астрономической школы. 2001. Т. 2. №1.
19. Тимофеев В.Н. Основные принципы создания современных информа-
ционных космических систем оптико-электронного наблюдения поверхно-
сти Земли // Космонавтика и ракетостроение. №3(32). ЦНИИМАШ, 2003.
20. Филачев А.М., Таубкин И.И., Тришенков М.А. Современное состоя-
ние и магистральные направления развития современной фотоэлектроники.
— М.: Физматкнига, 2010.
21. Х. Фризер. Фотографическая регистрация информации; Перевод с нем.
- М.: Мир, 1978.
22. Ханцеверов Ф.Р., Остроухое В.В. Моделирование космических систем
для исследования Земли. — М.: Машиностроение, 1989.
23. Цицулин А.К. Телевидение и космос. —СПб.: СПбГЭТУ — ЛЭТИ, 2003.
24. Автоматические космические аппараты для фундаментальных и при-
кладных научных исследований / Под ред. Г.М. Полищука и К.М. Пичхадзе.
- М.: МАИ-ПРИНТ, 2010.
370
25. Шилов А.Е. Состояние и перспективы развития российской космичес-
кой группировки дистанционного зондирования Земли в интересах социаль-
но-экономического развития России. Материалы 4-й Международной кон-
ференции «Земля из космоса — наиболее эффективные решения» 1 -3 декаб-
ря 2009 г.
26. Сайт НПК « ГОИ им С.И. Вавилова»
-http://npkgoi.ru/r_1251/directions/dir2/optsystems/aerofoto_sys/pagel.htm
27. Сайт ЗАО «НПК Элар» — технические характеристики выпускаемых
ПЗС http://www.npk-elar.ru .
К.А.Занин,
НПО им. С.А. Лавочкина
371
Fl 1 ПРОЕКТИРОВАНИЕ УСТРОЙСТВ И СИСТЕМ РАЗДЕЛЕНИЯ
КОСМИЧЕСКИХ АППАРАТОВ
Все космические аппараты, как современные, так и перспективные, име-
ют в своем составе устройства и системы разделения своей конструкции в
полёте. В процессе их летной эксплуатации производится отделение от раке-
ты космического назначения (РКН), отделение отработавших частей, напри-
мер двигательных установок, трансформирование и перевод в рабочее поло-
жение из транспортного отдельных служебных систем (антенны, панели
фотопреобразователей, балки выносных приборов и др.). Необходимость
отделения отработавших частей конструкции обусловлена необходимостью
рационального использования на борту запасов рабочего тела ДУ, обеспечи-
вающих поддержание КА в нужном положении в космосе, и была обоснова-
на ещё в работах основоположников космонавтики [1].
Для осуществления указанных операций чаще всего используются удли-
ненные кумулятивные заряды ВВ, пиротехнические устройства, разрывные
детонационные замки, болты и др. агрегаты. Часто при этом такие устрой-
ства должны осуществлять и функцию крепления.
Выполнение программы полёта автоматических КА в немалой степени
обеспечивается надёжной работой систем разделения их конструкции. Несра-
батывание этих систем приводит к невыполнению программы полёта и, сле-
довательно, вызывает значительные материальные и временные потери: от-
рицательно сказывается на решении социально — экономических вопросов.
Поэтому выбор наиболее рациональных вариантов систем и устройств раз-
деления, а также их корректный расчет весьма важны при проектировании
КА.
2.2.1. Назначение и общие сведения
СР можно определить как совокупность устройств, отдельных деталей,
которые обеспечивают жесткое крепление частей ЛА друг к другу, осуществ-
ляют их разделение с заданными характеристиками и защиту чувствительных
органов ЛА от побочного воздействия входящих в ее состав пиромеханичес-
ких элементов при срабатывании.
Описываемые устройства для срабатывания используют энергию экзотер-
мических химических реакций особой группы веществ, способных под вли-
янием внешних воздействий (удар, трение, тепловой импульс) к быстрым
самопроизвольным превращениям, сопровождающимся выделением тепла и
образованием больших объемов сильно нагретых газов [4].
В составе современных автоматических КА, в частности предназначенных
для научных планетных исследований, насчитывается более Ю систем и ав-
томатических устройств разделения различного назначения.
Например, на автоматических КА «Вега-1, -2», осуществлялись следую-
щие операции по разделению конструкции:
372
— разделение КА и разгонного блока после выведения на межпланетную
трассу перелета;
— разделение пролетного аппарата и двигательной установки;
— отделение верхней полусферы теплозащитной оболочки;
— отделение нижней полусферы теплозащитной оболочки;
— отделение аэростатной системы;
— отделение системы наполнения аэростата;
— отделение (сброс) балласта.
Последовательность операций по разделению на этапе посадки показана
на рис. 2.2.1.
раскрытие
тормозного
парашюта,
сброс
A цЛ
полусферы,
начало
измерений
в атмосфере
Рис. 2.2.1. Последовательность срабатывания систем разделения КА «Вега-1» на этапе
посадки
373
Пиромеханические и детонационные СР широко используются в ракет-
но-космической технике благодаря ряду неоспоримых преимуществ [5].
— простота конструкции;
— высокая надежность срабатывания;
— малые массы и габариты;
— большое количество генерируемой энергии, приходящейся на единицу
массы устройства;
— быстродействие.
Вещества, используемые в описываемых СР и пиротехнических устрой-
ствах, разделяются на три больших класса:
— взрывчатые вещества (ВВ);
— ракетные топлива (РТ) и пороха;
— пиротехнические смеси.
Взрывчатые превращения химического характера обусловлены перестрой-
кой электронных оболочек молекул и характерны для особой группы веществ.
Следовательно, способность химических соединений к взрывчатым пре-
вращениям определяется совокупностью трех главных факторов: экзотермич-
ностью; высокой скоростью превращения и образованием сильно нагретых
газов [6].
ВВ делятся на две группы: инициирующие, возбуждающие детонацию или
горение, и бризантные, предназначенные для совершения механической ра-
боты [7, 8].
Бризантные ВВ обладают повышенной по сравнению с инициирующими
ВВ мощностью и пониженной чувствительностью к внешним воздействиям.
Пороха — пластифицированные системы, способные к воспламенению и
последующему горению параллельными слоями. Они используются для ме-
тания или перемещения элементов пиромеханических устройств под действи-
ем газообразных продуктов горения.
Ракетные топлива предназначены для создания реактивной силы на ак-
тивных участках траекторий ракет и КА.
Пиромеханические смеси применяются для получения того или иного
пироэффекта: воспламенительного; зажигательного; дымового; светового и
т.п. Чаще всего это механическая смесь неорганического окислителя, метал-
лического горючего с добавкой какого-либо органического вещества-цемен-
татора [8].
Для подтверждения важной роли СР в выполнении целевой задачи КА
рассмотрим полет аппарата «Вега-1», начиная со старта ракеты космическо-
го назначения.
После старта, по мере набора скорости, происходит последовательно от-
деление первой, второй, третьей ступеней РКН с помощью пиромеханичес-
ких систем. После перевода КА на межпланетную орбиту отделяется разгон-
ный блок.
374
В процессе выхода КА на орбиту перелета производится, как правило, с
помощью пиромеханических устройств перевод в рабочее состояние транс-
формируемых систем. Раскрываются панели фотопреобразователей, антенны,
штанги с приборами и другие агрегаты. Пироклапаны в значительном коли-
честве входят в состав двигательных установок на жидком топливе [4].
При отделении крупногабаритных блоков с помощью пироножей осуще-
ствляется также разрезание бортовой кабельной сети.
На 175-е сутки полета перед Венерой спускаемый аппарат отделяется от
пролетного модуля, после чего производится коррекция орбиты этого моду-
ля, он направляется к комете Галлея и одновременно служит ретранслято-
ром на Землю информации, посылаемой с Венеры со спускаемого аппарата
и аэростатного зонда по радиолинии.
После входа спускаемого аппарата (СА) в атмосферу Венеры происходит
отделение крышки парашютного отсека и ввод парашюта увода. По заверше-
нии предварительного торможения осуществляется отделение и увод верх-
ней полусферы теплозащитной оболочки СА. В процессе увода верхней по-
лусферы осуществляется ввод аэростатного аппарата, предназначенного для
исследования атмосферы Венеры. После завершения основного торможения
аппарата от СА отделяется нижняя полусфера, сбрасывается парашют и осу-
ществляется мягкая посадка исследовательского модуля на поверхность Ве-
неры.
После ввода аэростатного аппарата производится развертывание и напол-
нение оболочки, затем отделяются парашют, система наполнения и балласт.
Таким образом, этот аппарат выходит на расчетную высоту полета (дрейфа).
Все описанные операции осуществляются детонационными системами и ус-
тройствами разделения.
2.2.2. Классификация систем разделения космических аппаратов
Кроме детонационных СР, на практике для разделения крупногабаритных
частей КА применяются системы на основе пиромеханических устройств,
использующих энергию горения пиросоставов. В них разделение осуществ-
ляется с помощью пиромеханических замков толкателей , к которым рабо-
чий высокоэнергетический газ подается по трубопроводам от пиротехничес-
кого газогенератора или от пиропатронов.
СР отличаются большим разнообразием, которое обусловлено возможно-
стями решать поставленные задачи по разделению принципиально различ-
ными устройствами. Однако, независимо от заложенных в конструкцию СР
принципов, она должна осуществлять надежное крепление частей конструк-
ции КА между собой в процессе эксплуатации и осуществлять разделение их
в определенный момент, обеспечивая заданные характеристики.
Эти характеристики определяются следующими основными требования-
ми, предъявляемыми к СР [9, 10]:
— относительная линейная скорость;
375
— возмущение (угловая скорость), получаемое КА при отделении;
— динамические перегрузки, возникающие в конструкции КА при отде-
лении.
Выполнение первого требования обеспечивает надежное разделение без
соударения отделившихся частей конструкции, выполнение второго — ста-
билизацию КА после отделения, выполнение третьего — целостность конст-
рукции КА, в том числе чувствительной оптической и электронной аппара-
туры.
Указанные требования и величины разделяемых масс являются основны-
ми исходными данными для проектного расчета СР.
Современные методы проектирования требуют выбора рационального
варианта СР из множества возможных. Формирование такого базового мно-
жества вариантов осуществляется в результате поиска аналогов и прототипов.
Известны различные виды классификаций СР и их элементов в зависи-
мости от назначения и условий работы [4]. Так, СР классифицируют на то-
чечные и линейные, на работающие в нормальных и экстремальных услови-
ях и др. Эти классификации либо излишне детализированы и не охватывают
всего множества существующих исполнительных элементов, либо слишком
общие, не отражают особенностей конструктивного выполнения и не вклю-
чают в себя всё многообразие существующих систем.
Поставленной цели в наибольшей степени соответствует классификация
СР по виду используемой энергии, которая определяет конструкцию устрой-
ства и обеспечивает её работоспособность в различных условиях. В извест-
ных СР КА используются следующие виды энергии:
— энергия экзотермических химических реакций;
— энергия механических устройств;
— другие виды энергии (потенциальная энергия гидравлических и пнев-
матических устройств, тепловая, магнитная, электромагнитная энергии).
Все большее распространение получают комбинированные СР, использу-
ющие несколько видов энергии для выполнения различных функций.
Для разделения по сплошному материалу чаще всего используют удлинен-
ные кумулятивные заряды ВВ (УКЗ), иногда удлиненные заряды ВВ (УЗ) и
детонирующие шнуры (ДШ). В детонационных СР для получения газов вы-
сокого давления используют УЗ и ДШ [11].
Создание современных КА привело к появлению разветвленных систем,
осуществляющих одновременное разделение нескольких элементов, часто
далеко отстоящих друг от друга. Решение такой задачи стало возможным
благодаря использованию неразрушаемых трансляторов детонации, срабаты-
вающих от единого инициатора.
В ряде случаев ставится задача безымпульсивного разделения частей кон-
струкции КА. Этот эффект достигается соединением подлежащих разделению
частей конструкции посредством элементов, содержащих термитный пиро-
состав и вставки из легкоплавкого металла.
376
Самыми распространенными устройствами для сообщения разделяемым
элементам конструкции КА относительной скорости являются агрегаты, ис-
пользующие механическую энергию. Это, прежде всего, пружинные толка-
тели. Они имеют три основные модификации в зависимости от типа исполь-
зуемых пружин (сжатия, растяжения и кручения), которые срабатывают при
определенной перегрузке, разрушающей жесткую связь, или после срабаты-
вания других пиромеханических элементов системы [4].
Известны также СР, использующие замки с запирающими поворотными
элементами, которые соединены между собой рычагами, приводимыми в
движение в момент разделения. Они могут применяться для раскрытия про-
тяженных стыков конструкции.
Весьма распространенными являются детонационные СР [11, 12].
В практике конструирования используются и другие типы СР.
Наличие на борту аппарата гидравлической или пневматической системы
позволяет использовать её потенциальную энергию (газ или жидкость высо-
кого давления) для запитывания замков и толкателей.
В отдельных случаях для разделения можно использовать тепловую энер-
гию, получаемую при прохождении электрического тока через соединитель-
ную поволоку либо при аэродинамическом торможении спускаемого аппа-
рата.
Следует отметить и ряд недостатков пиромеханических СР [11]:
— одноразовость срабатывания;
— большие ударные перегрузки в конструкции КА при срабатывании;
— образование при срабатывании продуктов горения или детонации и выб-
рос их в окружающее пространство.
Классификация систем разделения по виду используемой энергии пред-
ставлена на рис. 2.2.2.
Рис. 2.2.2. Классификация систем разделения по виду используемой энергии
377
2.2.3. Выбор рационального варианта системы разделения
при проектировании
Современный уровень проектирования космической техники характери-
зуется системным подходом, который позволяет создать рациональную тех-
ническую систему или устройство. В соответствии с теорией принятия ре-
шений к числу основных этапов решения многокритериальной задачи выбо-
ра наиболее рационального варианта относятся выявление, формирование
множества возможных вариантов систем и выделение из них наиболее эф-
фективно решающих поставленную задачу.
Всякая СР характеризуется векторным показателем эффективности
К = (К,,К2...,К^
где — частные показатели эффективности; i = 1, 2,..., п — номера частных
показателей эффективности.
Под частным показателем понимается количественная или качествен-
ная характеристика СР, которая связана с её эффективностью строго моно-
тонной зависимостью (возрастающей или убывающей): чем меньше (больше)
величина Kt, тем лучше СР при прочих равных условиях.
Выбор вариантов СР, имеющих наилучшие оценки по векторному пока-
зателю эффективности К9 осуществляется из множества возможных вариан-
тов. Формированию этого множества в значительной степени помогает при-
веденная выше классификация СР, т.к. она охватывает все реально существу-
ющие типы рассматриваемых систем.
Построение комплекса показателей эффективности сложной системы
включает в себя иерархическую диаграмму, в которой понижение уровня
отмечено все более детальным описанием ее характеристик. Поэтому в ком-
плекс показателей эффективности входят их группы, характеризующие оп-
ределенные особенности рассматриваемых систем: эксплуатационные пока-
затели (определяют эффективность выполнения системой поставленной за-
дачи); технологические показатели (определяют эффективность конструкции
с точки зрения производства и удобства изготовления); эргономические по-
казатели (определяют возможность проведения доработок системы по резуль-
татам испытаний и удобство в обращении с системой); экономические пока-
затели (оценивают затраты на систему как в процессе проектирования, так и
при изготовлении) [И].
Рассмотрим отдельные частные показатели эффективности. При создании
космической техники, в т.ч. и систем разделения, следует стремиться к ми-
нимизации массы и габаритов систем и агрегатов КА без потери качества. Это
достигается оптимальным их конструированием.
Важным требованием, предъявляемым к пиромеханическим системам,
является надежность.
Анализ особенностей использования пиромеханических систем на борту
КА показывает, что в большинстве случаев несрабатывание того или иного
378
пиромеханического устройства недопустимо. Наиболее распространенным
способом повышения надежности таких устройств является дублирование наи-
более критичных элементов. Например, на КА при отделении блоков долж-
ны разрезаться электрические провода бортовой кабельной сети (БКС). Эта
операция осуществляется с помощью пироножей, которые приводятся в дей-
ствие рабочими газами высокого давления, образующимися при срабатыва-
нии пиропатронов. Пиронож обеспечивает разрезание БКС при срабатыва-
нии одного пиропатрона. Второй (дублирующий) пиропатрон в конструкции
пироножа срабатывает одновременно с первым и является избыточным для
разрезания БКС, расчет корпуса пироножа на прочность при этом выполня-
ется для случая срабатывания двух пиропатронов.
Другим способом повышения надежности выполнения функции по раз-
делению конструкции любыми устройствами является дублирование этих
устройств.
Важным требованием для надежного функционирования КА, предъявля-
емым к параметрам СР, является создаваемый ею импульс развиваемой силы
в процессе разделения. При срабатывании должно обеспечиваться отделение
элементов конструкции КА с определенной скоростью [9].
Импульс развиваемой силы находится по формуле
/ = р -х = м. v ,
разд разд разд разд ’
где £разд — сила разделения; тразд — время разделения; М — отделяемая масса;
уразд — относительная скорость отделения.
Из формулы видно, что этот параметр определяет относительную скорость
отделения какого-либо блока КА, обеспечивающую траекторию безопасного
расхождения разделенных частей конструкции КА. Известно также, что при
отделении в конструкции КА возникает перегрузка, которая может привести
к разрушению некоторых её элементов. Поэтому при расчете силы отделе-
ния следует считать, что перегрузка при разделении в центре масс КА не
должна превышать пятикратной величины. Это значение получено статис-
тической обработкой данных по эксплуатационным перегрузкам, действую-
щим на КА при разделении.
Известно, что одним из важнейших показателей эффективности систем и
агрегатов КА являются масса и габариты, которые должны быть минимизиро-
ваны. Этому требованию в значительной степени отвечают детонационные СР.
Помимо указанных, в число эксплуатационных требований входят также
величина возмущений, накладываемых на движение КА при разделении,
динамическое воздействие на КА и его системы, разброс выходных парамет-
ров, удобство технического обслуживания.
К числу технологических требований относятся: простота конструкции,
многократность использования, количество вспомогательных устройств,
технологичность конструкции, взаимозаменяемость, степень использования
унифицированных узлов.
379
К числу экономических требований относятся: затраты на разработку,
испытания, изготовление, применяемые материалы.
Анализ приведенных требований к СР при проектировании показывает,
что их показатели измеряются как в количественных, так и в качественных
шкалах. Например, масса, надежность, технологичность изготовления, им-
пульс развиваемой силы измеряются количественно, а удобство техническо-
го обслуживания, простота конструкции — качественно.
Создание любой сложной технической системы, в том числе и СР, осу-
ществляется поэтапно, в несколько стадий. Основными этапами являются:
техническое задание; техническое предложение; эскизный проект; разработ-
ка конструкторской документации и наземная отработка; летные испытания.
В процессе разработки СР конструктор на каждом из этапов получает новую
информацию и уточняет имеющуюся об условиях работы, о взаимодействии
с другими системами и агрегатами КА [11].
Таким образом, можно сказать, что выбор наиболее рационального вари-
анта СР происходит в условиях неопределенности и практически целесооб-
разно осуществлять его на основании одного или нескольких основных по-
казателей, переведя остальные в ограничения, а некоторые даже отбросить.
В итоге определяет эффективность выполнения полетного задания систе-
мой разделения векторный показатель К.
Оценивая варианты СР по этому показателю, можно судить, как близко
система подходит к наиболее рациональной; в какой мере эта оценка соот-
ветствует нашим представлениям о её близости к наилучшим (или желаемым)
значениям. Поэтому эффективность систем разделения КА определяется
сформированным выше векторным показателем выполнения полетного за-
дания рассматриваемой системой и показывает степень различия между ре-
альным результатом ее функционирования и желательным.
Исследования многокритериальной задачи выбора наиболее рационального
варианта СР показали, что она характеризуется относительно небольшим
числом (несколько десятков) допустимых решений.
Одним их важных разделов решения многокритериальной задачи выбора
рационального варианта является формирование множества возможных ва-
риантов. В него должны быть включены все СР, известные в мировой практи-
ке проектирования изделий ракетной и космической техники. Это базовое
(исходное) множество следует формировать уже на первой стадии проекти-
рования, когда осуществляется выбор принципиальных путей решения зада-
чи по разделению. Указанная процедура является непростой из-за неопреде-
ленности и расплывчатости информации о компоновке, эксплуатации КА и
др. Упущение какой-либо системы из множества может привести, в конеч-
ном счете, к потере рационального варианта. При выборе вариантов систе-
мы на последующих стадиях возвращаться к упомянутому процессу нецеле-
сообразно, а поиск лучших вариантов следует вести из претендующих на эту
роль и уже выявленных ранее.
380
Приведенное описание показывает, что существенное значение при вы-
боре наиболее рационального варианта СР имеет порядок получения инфор-
мации о предпочтениях. Известно, что по этому признаку методы решения
таких задач делятся на одношаговые и многошаговые. В итеративных (мно-
гошаговых) методах производится получение и обработка информации в
несколько этапов, в соответствии со стадиями проектирования. Результаты
анализа получаемой информации о СР КА на первых этапах показывают, что
в начале целесообразно использовать наиболее простую и достоверную ин-
формацию о предпочтениях. Она обеспечивает наиболее верное упорядоче-
ние возможных вариантов.
Известно, что построение итеративных процедур решения задачи выбора
осуществляется + Способами, и все они должны отвечать следующим тре-
бованиям.
1. Дополнительная информация о предпочтениях, получаемая от экспер-
тов на (/ + 1)-м шаге процедуры, должна позволить установить предпочтения,
по крайней мере, между двумя векторными оценками, несравнимыми на
Z-м шаге:
^с^.+1. (2.2.1)
2. Предпочтение между любыми двумя векторными оценками, выявлен-
ное на Z- м шаге процедуры, не должно изменяться на следующих шагах:
(2.2.2)
где $ — отношение нестрогого предпочтения (предпочтения безразличия),
построенное на Z-м шаге процедуры; Р/ — отношение строгого предпочтения,
построенное на Z-м шаге процедуры.
Из приведенных требований видно, что получаемая информация должна
всесторонне проверяться и сопоставляться с полученной ранее. В результате
такого анализа выявляются противоречия и принимаются меры для их уст-
ранения.
Только после этого информация может использоваться для выявления
отношения предпочтения или безразличия для ранее несравнимых вариан-
тов. В основном для устранения несравнимости вариантов используется ин-
формация о важности показателей и о взаимном влиянии изменения оценок
по различным шкалам. На первом шаге решения стремятся производить срав-
нение вариантов непосредственно по полученным векторным оценкам, в
последующем привлекается постепенно пополняемая информация о важно-
сти критериев.
2.2.4. Метод расчёта и конструкция пиромеханических систем
и устройств разделения космических аппаратов
Проведенный анализ систем и устройств разделения, применявшихся
долгое время в ракетно-космической технике, показал, что большинство их
381
построено на использовании пиромеханических средств. В таких системах
энергия горения зарядов пиропатронов сочеталась с потенциальной энерги-
ей механических устройств. Такие СР, в основном, представляли собой со-
вокупность нескольких автономных пирозамков с пружинными толкателя-
ми [2].
Вероятность безотказной работы системы из четырех пирозамков не пре-
вышала 0,999, т.к. она определялась работой каждого пиропатрона, и выход
из строя любого из них мог привести к аварии. Для перспективных КА тре-
бования по этому показателю сегодня выше, по крайней мере, на 0,9999.
Повышение надежности в дальнейшем потребовало создания СР, обеспе-
чивающих одновременность срабатывания средств разделения в системе, и
независимость от надежности отдельных пиросредств. С этой целью у нас
были созданы устройства, в которые рабочий высокоэнергетический газ по-
давался по одинаковым трубопроводам от общих газогенераторов. Эти эле-
менты выполняли также функции крепления частей конструкции КА в про-
цессе наземной и летной эксплуатации до разделения. По такому принципу
в НПО им. С.А. Лавочкина построено большинство современных пиромеха-
нических СР.
Момент разделения, линейная и угловые скорости обеспечиваются надеж-
ным срабатыванием СР и определяются баллистическими условиями функ-
ционирования КА. Основным требованием при проектировании СР наряду
с надежностью является безопасность разделения, т.е. несоударение разделив-
шихся частей между собой в процессе дальнейшего полёта.
Устройствами разделения такого типа, в частности, являются пирозамки
и пирозамки-толкатели. Конструкция их позволяет воспринимать только
осевые нагрузки, а действующие боковые нагрузки должны восприниматься
дополнительными устройствами, входящими в СР, такими, как, например,
втулки, штифты, шпильки и т.п. Следовательно, в этом случае процесс раз-
деления можно разбить на следующие этапы:
1. Совместный полёт до момента разделения.
2. Движение на направляющих втулках, шпильках и т.п.
3. Движение после схода с направляющих до окончания действия толка-
телей.
4. Свободный полет разделившихся частей до момента их безопасного
расхождения.
Анализ движения КА в процессе разделения показывает, что при переме-
щении по шпилькам относительных угловых скоростей нет. После схода со
шпилек и до момента окончания действия толкателей разделившиеся объек-
ты приобретают некоторые относительные линейные и угловые скорости.
Линейная скорость разделения приобретается в результате преобразования
потенциальной энергии газов высокого давления, генерируемых пиротехни-
ческими средствами, или пневмотолкателей в кинетическую энергию отде-
лившейся части. То же самое касается и пружинных толкателей. Угловые
382
скорости при работе СР приобретаются по тем же причинам и в результате
неравномерности действия толкателей (разнотолкаемости). Исследования
показали, что прирост угловых скоростей относительно продольной оси для
КА массой 1000—2500 кг обычно превышает 0,1 град/с (0, 0017 с-1), а при-
рост угловых скоростей относительно любой поперечной оси может быть
больше чем на порядок.
Знание угловой скорости КА и параметров разделения (относительные
линейная и угловые скорости) позволяет рассчитать траектории движения
разделившихся частей аппарата и других элементов конструкции, определить
вероятность их соударения. Из этих условий задаются линейная относитель-
ная скорость разделения и предел угловых скоростей, получаемых разделив-
шимися частями в процессе работы рассматриваемой СР.
Линейная скорость разделения чаще всего составляет 1,0—1,7 м/с, а угло-
вые скорости: сох < 0,0017 с-1; со^ < 0,045 с-1; ох, < 0,045 с-1. Указанные зна-
чения скоростей получены при анализе КА серий «Венера», «Вега», «Марс»,
«Интербол», «Фобос» и др.
Исходными данными для расчёта основных параметров СР (vora; ®x,y,z>
являются:
— разделяющиеся массы тх, т2;
— моменты инерции разделяющихся частей конструкции КА (Jx, Jy, Jz);
— линейная скорость разделения (уотд ± Дуотд);
— количество пирозамков-толкателей;
— рабочий ход пирозамка-толкателя 5рх;
— угловые скорости (возмущения), приобретаемые частями КА при раз-
делении;
— динамические перегрузки п.
При расчете основных параметров пиромеханических СР ограничениями
ЯВЛЯЮТСЯ I CDX I, I соу I, I С0г I, | п |.
Количество пирозамков-толкателей определяется силовой схемой КА,
величиной эксплуатационной нагрузки, приходящейся на одно устройство
крепления.
По опыту более 40-летнего проектирования СР КА массой от 1000 кг в НПО
им. С.А. Лавочкина, можно сказать, что наиболее распространенными явля-
ются четырех- и восьмиточечные схемы передачи нагрузок. Поэтому коли-
чество пирозамков-толкателей в СР является проектным параметром и оп-
ределяется на начальной стадии проектирования при разработке компоновоч-
ной схемы КА.
На этом же этапе определяется и тип пиромеханической системы. Как сле-
дует из приведенной выше классификации, они могут срабатывать или от
индивидуальных пиросредств, установленных в каждом устройстве разделения,
или же использовать высокоэнергетический газ, подаваемый из общего кол-
лектора трубопроводов. На рис. 2.2.3 представлена конструктивная схема СР,
использующей энергию горения пиротехнических зарядов, на рис. 2.2.4 — схема
расположения пирозамков-толкателей относительно поперечных осей КА.
383
Проведенный анализ существующих конструктивно-силовых схем КА
разработки НПО им. С.АЛавочкина и ряда других организаций, в которых
используется точечная (а не линейная) схема передачи нагрузок, показал, что
наиболее рациональной является схема с восемью точками крепления КА к
Рис. 2.2.3. Конструктивная схема системы разделения, использующей энергию го-
рения пиротехнических зарядов: 1 — пирозамок-толкатель; 2 — пиротехнический га-
зогенератор; 3 — коллектор; 4 — трубопровод
последней ступени (разгонным блоком) ракеты космического назначения.
В пиротехническом газогенераторе для получения рабочих газов высокого дав-
ления используются патроны с пиротехническими зарядами. Воспламенение
их обычно осуществляется пиропатронами, например ПДО (пиротехничес-
кий датчик обтюратор).
Основой расчета таких СР являются положения и законы термодинамики
и тепломассопереноса [13, 14].
Определяем объем СР, который состоит из свободных объемов пиротех-
нических газогенераторов Игг трубопроводов коллектора Икол, пирозам-
ков-толкателей И:
пт
384
Рис. 2.2.4. Схема расположения пирозамков-толкателей относительно поперечных
осей ЛА
y=y+2V-V-iV (2 2 3)
ггг гг св гпп гсеп fnrn’
где Игг св — объем камеры горения пиротехнического газогенератора; Ипп —
объем, высвобождающийся в пиропатроне воспламенения после срабатыва-
ния (обычно в газогенераторе для надежности срабатывания устанавливает-
ся два пиропатрона воспламенения); J^.en — объем, занимаемый сепаратором,
осуществляющим крепление пиротехничесих патронов в корпусе газогенера-
тора; Ип — объем, занятый оболочкой пиротехнического патрона; /п — коли-
чество пиротехнических патронов в газогенераторе.
Определяем объем трубопроводов. По результатам многолетней отработ-
ки описываемых СР КА в НПО им. С.А. Лавочкина целесообразно исполь-
зовать для этого стальные трубы 11x1,4. Длина их Т определяется из конст-
руктивных соображений при проработке конструкции на начальных стадиях
проектирования. Для коллектора целесообразно использовать стальную тру-
бу 12 х 1.6, так как этот элемент более теплонапряженный и обеспечивает
прохождение большей массы рабочего газа. Таким образом,
у - вн г
тр 4 ’
где JBH — внутренний диаметр трубы.
385
Определяем объем пирозамка-толкателя:
V = V + V ,
пт нач хх’
где Инач — свободный объем пирозамка-толкателя до начала движения пор-
шня; V** — объем холостого хода поршня (ход открытия замка).
После открытия замка с шаровыми запирающими элементами снимается
жесткая связь КА с последней ступенью ракеты космического назначения и
при дальнейшем движении поршней пирозамков-толкателей аппарат разго-
няется до заданной скорости.
Определяем объем системы разделения. Свободный объем СР до начала
рабочего поршня:
V = АГ + КГ + И + Г , (2.2.4)
нрх гг пт тр КОЛ’
где N — количество пиротехнических газогенераторов в системе; К — коли-
чество пирозамков-толкателей в системе.
Свободный объем СР в конце рабочего хода поршня
V = V + К V ,
крх нрх птрх’
где Иптрх — объем рабочего хода поршня пирозамка-толкателя.
Определяем давление в пиротехническом газогенераторе. Это давление
создается продуктами горения пиротехнических зарядов пиропатронов вос-
пламенения и патронов.
Из ТУ на пиротехнический патрон известно, что продукты горения его
заряда при воспламенении пиропатроном развивают в объеме манометричес-
кой бомбы ИБ давление
Ри=^+Р2,
где Р, — давление, развиваемое в манометрической бомбе продуктами горе-
ния пиротехнического дополнительного заряда; Р2 — давление, развиваемое
в манометрической бомбе продуктами горения пиропатрона.
Из ТУ на пиротехнический патрон известны также величины свободного
объема манометрической бомбы и развиваемого давления этим патроном при
воспламенении его пиропатроном.
С учетом сказанного действительный свободный объём будет ИБД, а в ре-
зультате срабатывания пиропатрона (выгорание заряда) свободный объем в
манометрической бомбе будет И^д.
Давление в пиротехническом газогенераторе
fi/i Л"
— а р +i р )
I/ "пгп Singlin'’
(2.2.5)
где /пп — количество пиропатронов в газогенераторе; п — показатель полит-
ропы, определяется экспериментально.
Обычно в пиротехническом газогенераторе устанавливают два пиропатрона
(один — основной, второй — дублирующий, работающий в горячем резерве).
386
Возможные предельные значения давления в газогенераторе
ГГ max, min
(2.2.6)
где £ — вероятное значение разброса давления в пиротехническом газогене-
раторе,
£=±
(2.2.7)
где 8П, 8ПП — разброс по ТУ давления, развиваемого патроном и пиропатро-
ном; п = 1,23.
Расчет действительных максимальных значений давления в газогенерато-
ре показывает, что пиротехнические патроны сгорают не одновременно в силу
неоднородности смеси, разного расстояния от средства воспламенения и
других причин. Одновременно с горением зарядов патронов происходит ис-
течение продуктов горения и газогенератора. Поэтому действительное зна-
чение максимального давления в газогенераторе, принимаемое в расчете на
прочность, равно
где и — коэффициент, учитывающий истечение газа из газогенератора в про-
цессе горения патронов, о =0,7 + 0,8.
Давление в пирозамках-толкателях в начале рабочего хода поршней
гг у
I нрх;
(2.2.8)
где nj — показатель политропы процесса расширения газа в системе (газоге-
нератор + коллектор + трубопроводы + холостой ход поршней пирозамков-
толкателей), nt = 1,11 -ь 1, 23 получено по экспериментальным данным.
Процесс расширения газа в корпусах пирозамков-толкателей происходит
в условиях интенсивной теплоотдачи в стенки, что приводит к значительно-
му изменению показателя политропы по ходу поршня.
Экспериментально было получено ипт = 2,83 при отношении диаметра
поршня к рабочему ходу — 1,9 и рабочем ходе 60 мм:
• V
н рх н рх
(2.2.9)
Суммарная работа, совершаемая поршнями пирозамков-толкателей.
\ ~ Ат ’ *пт - Ат ^рх ’ Атт’
(2.2.10)
' у > ^ПТ 1
387
где — работа, совершаемая поршнем одного пирозамка-толкателя; —
количество пирозамков-толкателей в системе.
Относительная скорость разделения определяется для двух разделяемых
масс на основании законов сохранения количества движения и перехода
механической работы в кинетическую энергию
2^(т,+т2)
°™ у т] + т2
(2.2.11)
где <р — коэффициент упругой деформации разделяющихся конструкций;
тх, т2 — массы разделяющихся конструкций.
Максимально возможная скорость разделения
Минимальная относительная скорость разделения
IPrrmin
^отн min - ^отн a I n ' (2.2.12)
V гг
Для расчета перегрузок, действующих на конструкцию КА при разделении,
необходимо рассчитать усилия, развиваемые пирозамками-толкателями:
N -
N^~s -К ’ (2.2.13)
рх пт
где 5рх — рабочий ход поршней пирозамков-толкателей;
Р
V = N гг тах •
ср max ср р '
7 гг
N . = N
ср тт ср р
7 гг
Максимальное усилие, развиваемое каждым пирозамком-толкателем:
N =Р F,
нрх нрх ’
где F — площадь поршня пирозамка-толкателя;
Р
ЛГ АТ гг тах
max ” нрх р * (2.2.14)
7 гг
Полное максимальное усилие, развиваемое системой:
N =К N .
max с пт max
388
Перегрузки, возникающие в конструкции КА и разгонного блока в цент-
ре их масс:
N
^пахс (2.2.15)
х mg v 7
Время разделения определяем на основании закона сохранения импульса
силы:
"V'V'Spx у
V
' нрх
(™,+гс2)Анрх*пт ’
(2.2.16)
Разбросы времени разделения
т
max
т =т —12—.
min л р
у ггтах
Определяем угловые скорости (возмущения) КА, возникающие при раз-
делении.
По статистической обработке результатов испытаний СР КА серий «Ве-
нера», «Марс», «Вега» и др., разброс давлений в пирозамках в коллекторной
системе обычно составляет 6—8 %.
В основу расчёта угловых скоростей при отделении кладется схема распо-
ложения устройств разделения, приведенная на рис. 2.2.4.
Известно, что
(0=£Т
max’
где со — угловая скорость, приобретаемая КА при разделении; е — угловое
ускорение, приобретаемое КА при разделении; ттах — максимальное время
работы СР.
При расчете определяем наибольшие значения угловых скоростей. Для
этого условно принимается следующая расчетная схема (см. рис. 2.2.3):
— пирозамки-толкатели 1,5,6,7,8 развивают наибольшие усилия;
— пирозамки-толкатели (учитывается возможный разброс развиваемого
давления в одной системе);
— угловые ускорения:
Му
ey = J~’’ (2.2.17)
Jy
389
ч
ег=^-’ (2.2.18)
где Му, Mz — моменты сил, действующие на КА при разделении, относительно
осей Y, Z соответственно; Jy, Jz — моменты инерции КА относительно осей
Y, Z соответственно.
В результате совместного действия пирозамков-толкателей получаем уг-
ловые ускорения относительно осей симметрии КА. Эти ускорения склады-
ваются из величин, определяемых действием отдельных рассматриваемых
устройств.
Например, результирующие угловые скорости относительно осей Y, Z
составят
<йу = 7<5+О^-2+(^-3 + <4;
Мг=М5+<8 + <4-
Расчет угловой скорости, приобретаемой КА в процессе разделения, от-
носительно оси X производить нецелесообразно, так как она обычно не пре-
вышает 0,001 с-1, что вполне допустимо для современных систем стабилиза-
ции КА.
Для снижения теплопотерь и температуры стенок на внутренние поверх-
ности пиротехнических газогенераторов, коллекторов и трубопроводов на-
Таблица 2.2.1 Расчетные и экспериментальные значения основных выходных
параметров систем разделения
Наименование КА Расчётные значения Экспериментальные значения
и, м/с <0лг, с-' и, м/с <ом, с-1
Фобос -1,-2 1,6 ±03 tOy < 0,025 (ог < 0,026 1,53±0,22 (Оу <0,014 сог <0,016
Вега -1,-2 1,8±0,4 со,, < 0,026 сог < 0,027 1,7±0,3 (Оу <0,021 (ог < 0,022 (Оу <0,012 (ог < 0,013
Купон 1,3±0,3 со,, <0,021 <0,021 1,25±0,15 (Оу < 0,004 (ог < 0,002
РБ «Фрегат» 1,3±0,3 toy < 0,005 сог < 0,005 1,41±0,13
390
носится теплозащитное покрытие. Его основными компонентами являются
клеевая композиция ВС — ЮТ и пылевидный кварц.
В табл. 2.2.1 приведены расчётные и экспериментальные значения г)отд и
<*yz •
2.2.5. Конструкция исполнительных пиромеханических устройств
систем разделения КА
Обзор современных и перспективных разработок СР КА показал, что для
разделения конструкции аппаратов, помимо систем нового типа, до сих пор
широко используются пиромеханические СР. В эти системы, конечно, по-
стоянно вводятся усовершенствования для снижения динамического воздей-
ствия на аппарат при разделении, массово-габаритных характеристик, повы-
шения несущей способности, надежности и др. Например, на начальных
этапах развития ракетно — космической техники СР чаще всего строились
на пирозамках, в каждом из которых было установлено один или два пиро-
патрона. Необходимая скорость разделения обеспечивалась пружинными тол-
кателями. Эти системы имели значительную массу, высокое электропотреб-
ление, недостаточно высокую надежность и другие недостатки.
Дальнейшее развитие ракетно-космической техники, поиск новых конст-
рукторских решений показали целесообразность совмещения в одном испол-
нительном устройстве функций замка и толкателя. Было также предложено
рабочий газ высокого давления подавать в пирозамки-толкатели от общих
пиротехнических газогенераторов по трубопроводам [15].
В таких системах газ от пиротехнических газогенераторов сначала соби-
рается в общем трубчатом коллекторе, в котором происходит выравнивание
давления газов, получаемых от каждого газогенератора. Подача газа к каж-
дому пирозамку-толкателю осуществляется затем по одинаковым симметрич-
но расположенным трубопроводам. Такое конструкторское решение позво-
ляет максимально возможно выравнивать величины давлений рабочих газов,
подаваемых в исполнительные элементы, тем самым минимизируя разнотол-
каемость и разновременность их срабатывания.
Оптимизация конструктивно-компоновочной схемы КА требует перифе-
рийного расположения пиротехнических газогенераторов. Их обычно быва-
ет два или четыре. Конструктивная схема такой СР показана на рис. 2.2.3.
Основным силовым элементом такой системы является пирозамок-толкатель.
Общий вид его показан на рис. 2.2.5 [16]. Он состоит из цилиндрического
корпуса с круговым пазом трапецеидального сечения под шарики. Шарики
размещены в гильзе-сепараторе; в закрытом положении они удерживаются
от радиального перемещения штоком. Газ высокого давления подается через
штуцер. Срезной штифт удерживает шток от самопроизвольного перемеще-
ния.
На поршне в корпусе имеются уплотнительные (герметизирующие) коль-
ца. На штоке установлены амортизаторы, препятствующие свободному раз-
гону поршня.
391
Рис. 2.2.5. Общий вид пирозамка-толкателя с шаровыми запирающими элементами:
1 — корпус; 2 — поршень; 3 — шток; 4 — комплект шаровых запирающих элемен-
тов; 5 — гильза; 6 — амортизаторы
Под действием газа высокого давления поршень перемещает шток, срезая
штифт. Шарики выходят из зацепления с канавкой корпуса, снимая сило-
вую связь между гильзой и корпусом, соединяющими разделяемые части КА.
При дальнейшем движении поршень через шток и гильзу сообщает необ-
ходимую скорость отделения КА.
В случае когда требуется осуществить безымпульсное разделение, исполь-
зуются пирозамки.
При больших значениях осевой нагрузки величина контактных напряже-
ний становится выше допустимой. Тогда необходимо увеличивать количества
шариков либо их диаметр. Это неизбежно приводит к значительному увели-
чению габаритов и массы устройства. Наиболее рациональным средством
уменьшения контактных напряжений является переход в запирающих эле-
392
ментах от шариков к различным сегментным вкладышам. При этом контакт
осуществляется не по малому пятну (точке), а по линии.
Общий вид пирозамка-толкателя с сегментными вкладышами показан на
рис. 2.2.6. Достоинствами устройств являются отсутствие осколков, образу-
ющихся при срабатывании, возможность проектирования их на восприятие
практически неограниченных реальных осевых нагрузок. Кроме того, выде-
ляющиеся при срабатывании продукты горения зарядов пиросредств удержи-
ваются внутри корпуса замка.
Недостатками рассматриваемых устройств являются: сложность конструк-
ции, возможность восприятия только осевых нагрузок, значительная масса и
др. Значительной проблемой при срабатывании такого рода систем разделе-
Рис. 2.2.6. Общий вид пирозамка-толкателя с сегментными запирающими элемен-
тами: 1 — шток; 2 — корпус; 3 — комплект сегментных запирающих элементов;
4 — поршень силовой; 5 — поршень толкающий
393
ния является динамическое воздействие на конструкцию КА в целом и, осо-
бенно, на его отдельные прецизионные элементы и приборы — в частности.
Это воздействие определяется ударом поршня пирозамка-толкателя через
гильзу-сепаратор по разделяемой конструкции объекта, приводящим к воз-
никновению высококачественной перегрузки.
Волна сжатия, возникающая при срабатывании пирозамков-толкателей в
месте разделения, распространяется по конструкции и достигает чувствитель-
ных элементов полезной нагрузки, в первую очередь научной аппаратуры, ко-
торая при этом может выйти из строя.
Анализ источников ударного воздействия на объект показал, что установ-
ка амортизаторов на штоке пирозамка-толкателя, препятствующих свобод-
ному разгону поршня, значительно уменьшает динамическое высокочастот-
ное воздействие на конструкцию КА. Согласно результатам испытаний СР
на пирозамках-толкателях, по мере распространения действия этого удара по
реальной конструкции его величина затухает тем значительнее, чем меньше
жесткость силовых элементов самой конструкции КА.
Проведенный проектно-конструкторский анализ разделения КА и его
элементов, электрических связей между этими элементами показывает необ-
ходимость создания различных вспомогательных пиротехнических устройств,
обеспечивающих надежное разделение.
К ним, прежде всего, относятся различного рода пироножи, пироприво-
ды, пирофиксаторы (пирочеки) и др.
В процессе полёта КА обычно осуществляется трансформирование его
элементов, перевод их в рабочее положение. Наиболее эффективное выведе-
ние аппарата на рабочую орбиту и ограниченный объём головного обтекате-
ля требуют, чтобы КА устанавливался на ракете космического назначения в
максимально возможном компактном состоянии. Следовательно, такие про-
тяжённые элементы конструкции, как панели фотоэлектрических преобра-
зователей, штанги выноса научных приборов, остронаправленные антенны
и т.п. должны находиться в этот период в сложенном (зачекованном) состо-
янии. После снятия жесткой связи (срабатывание пирофиксаторов) указан-
ные элементы конструкции с помощью пружинных или электромеханичес-
ких приводов занимают рабочее положение.
В ряде случаев, например, разделение створок головного обтекателя осу-
ществляется несколькими десятками замков, расположенных по периметру
более 10 м. В процессе этого разделения сначала получает осевое перемеще-
ние чаша, расположенная в носовой (конической) части головного обтекате-
ля, предотвращающая несанкционированное его раскрытие. Затем перемеща-
ется система тяг, раскрывающих механические поворотные замки продоль-
ного стыка обтекателя. Эти замки жестко соединяют между собой створки в
процессе наземной и летной эксплуатации, а также осуществляют разделение
их в заданный момент времени. Все перемещения обеспечиваются одним сра-
батыванием устройства, расположенного в верхней части обтекателя.
394
Например, головной обтекатель
ракеты космического назначения
«Союз» с разгонным блоком «Фре-
гат» имеет в каждом продольном
стыке 16 поворотных замков. Все
замки соединены между собой пос-
ледовательно системой тяг. Осевое
перемещение тяг приводит к рас-
крытию замков, разделению обтека-
теля на две створки и последующе-
му их сбросу с космической голов-
ной части.
Конструктивная схема СР голов-
ного обтекателя по продольному
стыку показана на рис. 2.2.7.
Проведенный анализ и поиск
возможных вариантов устройств,
приводящих в действие описанную
протяженную СР, показал, что раз-
деление может быть осуществлено
электромеханическим приводом,
пружинным механизмом, пиропро-
водом, пневмотолкателем и другими
устройствами. Для решения постав-
ленной задачи наиболее рациональ-
ной конструкцией является пиро-
провод.
Рассмотрим более подробно кон-
струкцию и принцип действия упо-
Рис. 2.2.7. Конструктивная схема системы
разделения головного обтекателя по про-
дольному стыку: 1 — пиропривод; 2 — за-
мок; 3 — тяга
мянутых выше устройств.
В ракетно-космической технике пироножи в основном используются для
резки бортовой кабельной сети, иногда для резки трубопроводов или волно-
водов. Все пироножи являются устройствами одноразового срабатывания с
индивидуальным срабатыванием от пиропатронов.
На рис. 2.2.8 показан общий вид пироножа. Расчет наибольшего развива-
емого давления с учетом допусков осуществляется на основании PV- диаг-
рамм, приведенных в технической документации на пиропатрон. В этом
случае для инженерных расчётов различием теплофизических характеристик
материалов манометрической бомбы, используемой при определении разви-
ваемого пиропатроном давления, и корпуса пироножа можно пренебречь из-
за быстродействия процесса срабатывания устройства.
Пирофиксаторы (пирочеки) в основном используются для удержания в
транспортном положении различных трансформируемых в полёте элементов
конструкции КА.
395
Рис. 2.2.8 Общий вид пироножа: 1 — корпус; 2 — нож; 3 — чека; 4 — наковальня;
5 — пиропатрон
На рис. 2.2.9 и 2.2.10 показаны общие виды пирофиксаторов. Несрабаты-
вание механизмов раскрытия элементов конструкции КА может привести к
выходу из строя объекта. К таким случаям можно отнести, например, нерас-
крытие панелей фотопреобразователей, остронаправленных антенн и другой
аппаратуры. Поэтому целесообразно еще на земле, при подготовке аппарата
к полёту, проводить технологическое раскрытие указанных элементов кон-
струкции. При этом корректность проведения проверок требует, чтобы пи-
рофиксатор был установлен окончательно и не снимался.
Все пирофиксаторы являются устройствами одноразового срабатывания с
индивидуальным задействованием от пиропатрона. Указанным требованиям
в полной мере отвечают устройства, показанные на рис. 2.2.9 и 2.2.10.
Из приведенных рисунков видно, что основным силовым элементом яв-
ляется шток, воспринимающий силовые нагрузки в транспортном положе-
нии. Для обеспечения надежного срабатывания пирофиксатора необходимо
не допускать деформацию штока, что возможно за счет минимизации боко-
вых нагрузок на него.
396
Рис. 2.2.9. Общий вид пирофиксатора: 1 — корпус; 2 — шток; 3 — фиксатор; 5 — стер-
жень; 6 — пневмоклапан;7 — пиропатрон
Рис. 2.2.10. Общий вид малогабарит-
ного пирофиксатора: 1 — корпус;
2 — поршень; 3 — втулка; 4 — крыш-
ка; 5 — пиропатрон
В ракетно-космической технике в СР
широко используются пироприводы.
Наибольшее распространение они име-
ют в системах, обеспечивающих соеди-
нение протяженных расчленённых сты-
ков.
Крепление элементов конструкции по
такому стыку осуществляется большим
количеством механических замков, со-
единенных между собой тягами. Тяги
приводятся в действие одним пиропри-
водом. Это обеспечивает синхронизацию
функционирования всех замков и высо-
кую надежность срабатывания СР.
Общий вид пиропровода показан на
рис. 2.2.11. Пиропривод состоит из кор-
пуса, силового поршня, разрывной гайки, удерживающей все элементы в
транспортном (неподвижном) положении, газогенерирующего пиротехничес-
кого заряда и двух пиропатронов воспламенения. Второй пиропатрон явля-
ется дублирующим и работает в горячем резерве.
Пиропривод работает следующим образом: по сигналу системы управле-
ния срабатывают пиропатроны, образующийся высокоэнергетический газ дает
начальное перемещение поршня, при котором разрывается шейка гайки и
воспламеняется основной газогенерирующий заряд.
Затем начинается осевое рабочее перемещение поршня со штоком, к ко-
торому присоединены дополнительные элементы рычажно-поворотных уст-
397
Рис. 2.2.11. Общий вид пиропривода: 1 — корпус; 2 — шток; 3 — гайка разрывная;
4 — втулка; 5 — амортизаторы; 6 — пиропатроны; 7 — пиротехнический патрон
ройств системы разделения, например, головного обтекателя. Это движение
вызывает осевое перемещение указанных рычагов, которые открывают меха-
нические поворотные замки.
При проектном расчете пиропровода определяются:
— максимальное и минимальное значения давлений и усилий на штоке;
— линейная скорость перемещения штока;
— максимальная и минимальная величины совершаемой газом работы.
Основные зависимости для расчёта пиропровода аналогичны приведенным
выше для СР.
2.2.6. Расчет детонационных устройств разделения, использующих
кристаллические взрывчатые вещества
Выше отмечалось, что все СР можно подразделить на два класса: точеч-
ные и линейные. Под линейными системами понимаются такие, которые
398
осуществляют разделение протяженных конструкций по сплошному матери-
алу по достаточно большому периметру. Например, таким образом происхо-
дит разделение головных обтекателей ракет-носителей, топливных баков,
корпусов и др. Такие операции наиболее эффективно осуществляются линей-
ными зарядами кумулятивного типа с детонирующим снаряжением [9]. В
отечественной терминологии наиболее распространено их название удлинен-
ные кумулятивные заряды (У КЗ). У КЗ представляет собой заряд высокобри-
зантного ВВ — гексогена или октогена, заключенный в тонкостенную обо-
лочку (из меди или алюминия) с профилированной кумулятивной выемкой
вдоль образующей. Форма выемки может быть различной, однако наиболь-
шее распространение в СР для КА получили УКЗ с полуцилиндрической
выемкой [8].
Исторически сложилось так, что создаваемые для решения конкретных
научно-технических задач конструкции удлиненных кумулятивных зарядов
соответственно получали различные названия. Например: ДУЗ — детониру-
ющий удлиненный заряд, ШКЗ — шнуровой кумулятивный заряд и др. [7].
В ряде случаев используются в СР конструкции КА удлиненные заряды
(УЗ) без профилированной выемки, в основном для получения газа высоко-
го давления [6].
Заряды типа УКЗ обладают при прочих равных условиях более высокой
удельной пробивной способностью / / со (/пр — предельная толщина разре-
заемой преграды; со — масса ВВ на единицу длины зарядов), чем их анало-
ги.
На рис. 2.2.12,д представлен профиль УЗ, на рис. 2.2.12,б,в — УКЗ с по-
луцилиндрической и клиновидной выемками.
Рис. 2.2.12. Типовые схемы удлиненных ВВ: 1 — металлическая оболочка; 2 — взрыв-
чатое вещество; 3 — кумулятивная выемка
При инициировании детонации в заряде ВВ с одного из торцов или боко-
вой поверхности в кумулятивной выемке из высокоэнергетических осколков
оболочки и продуктов детонации образуется кумулятивный нож, который,
внедряясь в преграду, перерезает ее.
Принципиальная схема формирования кумулятивного ножа представле-
на на рис. 2.2.13, на рис. 2.2.14 — рентгенограмма взрыва УКЗ.
399
Рис. 2.2.13. Формирование кумулятивного ножа УКЗ: 1 — элементы кумулятивной
выемки; 2 — кумулятивный нож; 3 — пест; 4 — фрагменты оболочки
Рис. 2.2.14. Рентгенограмма
взрыва УКЗ
В момент прихода фронта детонации
в некоторое сечение заряда элементы
облицовки кумулятивной выемки 1 при-
обретают скорость, направленную при-
мерно по нормали к поверхности, и
начинают сходиться к плоскости сим-
метрии выемки.
В результате «схлопывания» обли-
цовки формируется кумулятивный нож
2, в который постепенно переходят ее
внутренние слои. Поскольку головная
часть ножа формируется из части обли-
цовки, расположенной ближе к верши-
не, ее скорость является наибольшей.
По мере удаления от «головы» ножа к
его «хвосту» скорость движения частиц
убывает. Другими словами, вдоль куму-
лятивного ножа имеет место некоторый градиент скорости.
Поэтому в процессе своего движения этот нож растягивается и в некото-
рый момент времени разрывается на несколько отдельных фрагментов.
Следовательно, в том случае, если преграда удалена от УКЗ на достаточно
большое расстояние, она перерезается эшелонированным потоком элемен-
тов. Наружные слои облицовки также вовлекаются в движение, однако при
«схлопывании» они получают некоторый компонент скорости, направленный
в сторону, противоположную вектору скорости кумулятивного ножа. Поэто-
му результирующая скорости образовавшегося массивного песта значитель-
но меньше скорости ножа и пробивной способностью его можно пренебречь
[7, 8].
Важно подчеркнуть, что максимум пробивной способности УКЗ реализу-
ется не при контактном взрыве, а при расположении его на некотором рас-
стоянии f от преграды, которое принято называть фокусным [9].
Задача о проникновении высокоскоростной кумулятивной струи для осе-
симметричных кумулятивных зарядов в полубесконечную преграду была
400
решена в гидродинамической теории кумуляции М.А. Лаврентьева. Исходи-
ли при этом из следующих допущений:
— прочностью соударяющихся тел (струи и преграды) можно пренебречь;
— сжимаемостью струи в преграде также можно пренебречь.
Корректность этих допущений определяется тем, что на контактной по-
верхности «струя-преграда» развиваются давления порядка 100—200 ГПа, что
значительно превосходит предел прочности любого металла и, следователь-
но, металл испытывает чисто пластические деформации. Что же касается
плотности, то, как известно, даже при таких высоких давлениях она возрас-
тает не более чем на 40 %.
Таким образом, процесс проникания кумулятивной струи в металличес-
кую преграду можно уподобить внедрению несжимаемой жидкой струи в
несжимаемую жидкость.
Согласно этой теории глубина проникания струи в преграду
£=,'Й’ <2-2|9>
где /с — длина струи; рс — плотность металла струи; Рпр — плотность пре-
грады.
Учитывая вышеприведенные допущения, можно сказать, что формула
(2.2.19) справедлива только для высокоскоростных струй, более (8— 10)Ю3 м/с.
Для струй с меньшей скоростью (а скорости кумулятивного ножа дости-
гают 3,5-103 м/с) необходимо вводить поправку, учитывающую прочностное
сопротивление преграды и характеристики ударной сжимаемости материа-
лов струи и преграды. Задача становится еще более сложной, когда речь идет
о разделении конструкции с помощью УКЗ, т.е. когда имеют дело со сквоз-
ным пробиванием преграды конечной толщины.
В этом случае необходимо учитывать откольный эффект, который обус-
ловлен интерференцией ударной волны и волны разгрузки, возникающей на
тыльной поверхности преграды.
Тогда предельная толщина £пр пробития преграды в общем виде будет оп-
ределяться соотношением
L"P=c/e^’ (2-2.20)
где с — некоторый поправочный коэффициент.
Из этого соотношения следует, что предельная глубина пробивания пре-
грады тем больше, чем в большей степени вытянут кумулятивный нож, чем
больше в нем фрагментов. Поэтому в формулу (2.2.20) следует поставить ве-
личину эффективной длины ножа
401
п
U = S//’ (2.2.21)
1
где /z — длина z-ro фрагмента; п — общее число фрагментов, из которых со-
стоит кумулятивный нож.
С увеличением расстояния между УКЗ и преградой можно было бы пред-
полагать увеличение пробивной способности УКЗ, но это противоречит прак-
тическим наблюдениям (рис. 2.2.15).
Рис. 2.2.15. Зависимость толщины пробивания преграды от ее расстояния до УКЗ
Резкое уменьшение пробивной способности кумулятивной струи при
f >/* объясняется, главным образом, так называемым «эффектом намазыва-
ния». Суть этого эффекта состоит в том, что фрагменты разорванной куму-
лятивной струи не следуют строго друг за другом, а имеют некоторое смеще-
ние относительно оси кумулятивной воронки. Поэтому каждый последую-
щий фрагмент ударяет не по дну каверны, подготовленной его предшествен-
ником, а по стенке этой каверны, результатом чего и является уменьшение
общей глубины пробития преграды.
Из рис. 2.2.15 видно, что существует оптимальное расстояние между УКЗ
и преградой, при котором величина £пр является максимальной. Это рассто-
яние /*, как показывают эксперименты, для различных преград и УКЗ нахо-
дится в пределах
/* -(0,5... 1,5) d, (2.2.22)
где d — диаметр УКЗ.
При проектировании СР на основе УКЗ следует иметь в виду, что сраба-
тывание заряда сопровождается не только формированием кумулятивного
ножа, но и образованием высокоэнергетических осколков и ударной волны,
способных привести к нарушению работы аппаратуры и локальным значи-
тельным перегрузкам в конструкции КА. Поэтому вокруг УКЗ необходимо
402
устанавливать специальные защитные экраны для поглощения осколков обо-
лочки или помещать УКЗ в неразрушаемый корпус, а высокочувствительную
аппаратуру помещать на демпфирующие устройства.
УКЗ изготавливаются различными методами: волочением, обкаткой, прес-
сованием и др. При проектировании СР на основе указанных зарядов следу-
ет руководствоваться требованием наиболее высокой удельной пробивной
способности /пр / со.
Этому требованию в наибольшей степени отвечают УКЗ, изготовленные
волочением медных труб, заполненных гексогеном или октогеном, при со-
блюдении следующих условий:
— = 1,4-1,6; - = 0,1-0,16; ^ = 0,42-0,46,
d d0 d
(2.2.23)
где Jo, d — наружные диаметры трубы-заготовки и готового заряда, соответ-
ственно; 80 — толщина стенки трубы-заготовки; dB — диаметр вставки в
фильере, формирующей кумулятивную выемку.
В результате оптимизации параметров УКЗ выяснилось, что максималь-
ной удельной эффективностью обладают заряды, у которых dB/d ~ 0,4. Это
приводит к важному выводу о том, что главным параметром оптимизации УКЗ
является относительная активная масса его снаряжения:
И=^М
Ч $ ’
(2.2.24)
где сой, Sa — масса и площадь сечений активной части ВВ соответственно;
5 — площадь снаряжения (ВВ) УКЗ в поперечном сечении.
На практике такие заряды часто называют УКЗ нормированного ряда.
Многолетний опыт проектирования СР, их опытной отработки и приме-
нения показал, что системы разделения на основе УКЗ наиболее эффектив-
ны по сравнению с другими, если требуется осуществить быстрое разделение
конструкции по большому периметру и по сплошному материалу (оболочке,
шпангоуту и т.п.).
Проектирование таких СР на практике сводится к решению ряда взаимо-
связанных задач. В число основных входят научно обоснованный выбор типа
(калибра) УКЗ и расчет толщины запреградной ловушки, предназначенной
для перехвата фрагментов кумулятивного ножа с тыльной стороны разреза-
емой преграды.
Для определенности остановимся на рассмотрении наиболее простой (в
то же время и наиболее распространенной) конструктивно-компоновочной
схемы СР: инициирование детонации в снаряжении УКЗ осуществляется
штатными электрическими средствами — электродетонаторами (ЭД) без ус-
тановки передаточных зарядов, предназначенных для усиления инициирую-
щего импульса ЭД.
403
На первом этапе проектирования осуществляется распределение показа-
телей надежности между элементами системы разделения с целью установ-
ления надежности Рр разрезания элементов конструкции (преграды) УКЗ и
надежности Рэл перехвата фрагментов кумулятивного ножа запреградной
ловушкой (ЗЛ).
Для расчета показателей надежности сложных систем воспользуемся из-
вестными зависимостями:
— при последовательном сочленении независимых подсистем (узлов)
Р = Рх Р2 Ру... Рк; (2.2.25)
— в случае параллельного сочленения (дублирования) независимых под-
систем (узлов)
Р = 1-(1-Р,) (1-Р2) (1-Р3) „. (1-РД (2.2.26)
где 1, 2, 3,..., к — номер подсистемы (узла).
Выражение показателя Рср надежности системы разделения с учетом
(2.2.25) имеет вид
^СР = Лж • Рр • ^зл- (2-2.27)
где Рпи — показатель надежности подсистемы инициирования детонации у
УКЗ.
Поскольку в каждой конкретной системе разделения всегда используются
только однотипные средства инициирования (ЭД) и с целью повышения
надежности СР КА обязательно применяется их дублирование, выражение
показателя Рпи с учетом (2.2.26) становится таким:
Рпи = 1 - (1 - Рэд)", (2.2.28)
где п — количество электродетонаторов в системе.
Вероятность Рср безотказной работы системы разделения задается разра-
ботчиком изделия и, как правило, бывает не меньшей 0,9999.
Тип и количество электродетонаторов выбираются разработчиком систе-
мы из условий: достаточности энергопотребления от бортовых источников
питания; достаточности инициирующего импульса для взрывания УКЗ; тре-
бований научно-технической документации, ограничивающих номенклату-
ру ЭД, применяемых в изделиях отрасли, и т.д. Значения Рэд ЭД каждого
типа являются паспортными.
Обычно при проектировании систем разделения на основе УКЗ принима-
ется
Рр = Рзл-
Выбрав тип и количество ЭД и рассчитав по (2.2.28) значение Рпи, найдем
показатели Рр и Рзп:
Рр=Рзл=^. (2.2.29)
V пи
404
При определении надежности СР рассматриваемого типа необходимо,
прежде всего, исходить из условия обеспечения устойчивого детонационно-
го процесса по заряду ВВ. Это возможно лишь при определенных условиях.
Пройдет ли детонация по всему заряду или затухнет — в значительной мере
определяется такими факторами, как: состав ВВ, теплота взрывы, диаметр
заряда, плотность заряда, его начальная температура, свойства оболочки и т.п.
Для ВВ существуют определенные концентрационные пределы, вне кото-
рых стационарный детонационный режим невозможен.
Важно также отметить, что в трубках достаточно малого диаметра детона-
ция протекает с пониженной скоростью, а при очень малых диаметрах тру-
бок детонация даже внутри концентрационных пределов невозможна.
Многочисленные экспериментальные данные свидетельствуют, что с уве-
личением диаметра зарядов скорость детонации D монотонно возрастает,
достигая своего максимального (наиболее устойчивого) значения, при неко-
тором предельном диаметре t/np. Если же диаметр заряда меньше некоторой
критической величины t/Kp, то самораспространение стационарного детона-
ционного процесса вообще невозможно (рис. 2.2.16) [7].
Рис. 2.2.16. Зависимость скорости детонации от диаметра заряда
Вторым этапом проектирования системы разделения является предвари-
тельный выбор типа (калибра) УКЗ исходя из материала разрезаемой преграды
и номинального значения ее толщины. Условие надежного разрезания пре-
грады таково:
'пр>3,
где 8 — номинальная толщина преграды.
Для расчета /пр применим полуэмпирическую зависимость
£ = 10(М
пр
Мн’М
paJ
(1+Е),
(2.2.30)
405
ur+ux
где ин = —-— — полусумма скоростей головного и хвостового элементов ку-
мулятивного ножа УКЗ, м/с; р и ов — плотность, кг/м3, и временное со-
противление (предел прочности при растяжении), Па, материала преграды
соответственно; е — относительная глубина откола с тыльной стороны пре-
грады.
Нередко на практике пользуются табличными значениями /пр = /np(d)
применительно к УКЗ нормированного ряда.
По результатам расчета или по таблицам для дальнейшей проработки
выбираются, как правило, два ближайших по значениям d типа УКЗ.
Экспериментальное подтверждение точности расчета по зависимости
(2.2.30) показало, что аналитически полученные значения для пробития чи-
стых металлов или их сплавов отличаются от реальных не более чем на 7%,
что вполне удовлетворяет требованиям инженерных расчетов.
Однако в конструкции изделий современной ракетно-космической техники
все большее применение находят неметаллические волокнистые композици-
онные материалы и различного рода пластмассы, стекло-, карбо-, боро-,
органоволокниты — обширный класс материалов, представляющих объемное
сочетание разнородных компонентов с четко выраженной границей раздела
(упрочнителей или армирующих наполнителей в виде моноволокон, жгутов,
сетки, нитей, лент и др. волокнистых материалов и матриц на основе, как
правило, эпоксидных и полиамидных композиций), придающих материалам
монолитность. К ним же относятся и различного рода теплозащитные ком-
позиции (покрытия).
На практике УКЗ успешно используются и для разделения конструкции
из композиционных материалов. Экспериментально было получено, что эф-
фективность действия (пробивная способность) УКЗ по таким преградам на
15—20 % выше, чем по преградам даже из легких металлических сплавов —
алюминиевых, магниевых, при прочих равных условия. Использовать же для
расчетов приведенную выше зависимость (2.2.30) применительно к прегра-
дам из композиционных материалов не представляется возможным, в основ-
ном, из-за анизотропии свойств (в первую очередь — прочностных характе-
ристик) композитов. В еще большей степени задача усложняется в случаях
когда разрезаемая преграда представляет собой сочетание композиционного
и металлического материалов (например, теплозащитное покрытие и алюми-
ниевый сплав). На практике при проектировании систем разделения на УКЗ
применительно к преградам такого типа целесообразно поступать следующим
образом.
На начальном этапе проектирования при выборе конкурентоспособных
типов УКЗ задаются толщиной преграды, равной суммарной толщине кон-
струкционного материала и металлического сплава, из которых она выпол-
нена.
406
На следующем этапе по результатам лабораторных испытаний на модель-
ных образцах проводится оптимизация калибра УКЗ с целью минимизации
побочных нежелательных воздействий на элементы конструкции, на систе-
мы, агрегаты и аппаратуру КА, расположенные вблизи зоны разделения, а
также для снижения массы защитных экранов и запреградных ловушек.
Третьим этапом проектирования системы разделения является оценка
надежности разрезания преграды выбранным ранее УКЗ исходя из максималь-
ной ее толщины 8тах с учетом класса точности изготовления шпангоута (обе-
чайки, трубопровода и т.д.) по таблицам допусков.
В основу расчета положено известное в теории вероятностей уравнение
Р(х) = J f(x)dx = 1 - F(x) = F0(u), (2.2.31)
где Р(х) — вероятность отсутствия отказа в промежутках О...х;
1 (х-а)2
f(x) =—7=е 2°2 — плотность вероятности нормального закона распре-
деления;
а — математическое ожидание случайной величины;
о — среднее квадратичное отклонение;
X 1Х (х~а)2
F(x) = 1 f(x)dx = —-r= [ е 2°2 dx — интегральная функция нормального
распределения;
Л)(^) — табулированная функция нормированного и центрированного
распределения (а = О, D = о2 = 1);
х-а
и =---- — квантиль нормального закона распределения,
о
В случае проектирования системы разделения на основе УКЗ имеем
'.г»
отсюда
°/
I пр J
Согласно (2.2.32) рассчитываются показатели надежности Р^ и Рр^ двух
отобранных ранее типов УКЗ, причем значение /пр и oz применительно к
заряду каждого калибра являются паспортными (зависят, при прочих равных
407
условиях, от материала разрезаемой преграды). Из двух упомянутых УКЗ к
дальнейшей проработке принимается тот, надежность Рр которого будет по
значению не меньше рассчитанной на первом этапе проектирования.
Четвертый этап проектирования включает в себя оценку толщины запрег-
радной ловушки. В ходе расчета полагается, что материал ЗЛ идентичен ма-
териалу разрезаемой преграды. Следует заметить, что в реальных системах
разделения на базе УКЗ это условие соблюдается практически всегда.
Толщина 8^ запреградной ловушки рассчитывается на основании очевид-
ного неравенства
Son —I - 8 ,
ЗЛ пр min ’
где 8min — минимально возможная толщина разрезаемой преграды (опреде-
ляется так же, как и 8тах, по таблицам допусков, отвечающих данному клас-
су точности изготовления элемента конструкции, по которому осуществля-
ется разделение).
Алгоритм такого расчета 8^ достаточно прост. С одной стороны, опре-
деляется квантиль «зл исходя из Рзл = Рр:
«зл = w(P3J1) = и(Рр).
С другой стороны,
8оп “ (4тп — 8 • )
_ 3J1 v пр min7
«зл - ~ ,
fnp
откуда нетрудно получить выражение для расчета толщины:
5ЗЛ = (4,р - 8min ) + ызл% • (2.2.33)
Завершающим этапом проектирования системы разделения является оцен-
ка минимальных расстояний от плоскости реза конструкции до чувствитель-
ных к ударным нагрузкам ее элементов (блоков, узлов, аппаратуры и т.д.).
Ввиду сложности процессов, происходящих при формировании волн сжа-
тия и последующем их распространении по конструкциям реальных изделий
в результате срабатывания УКЗ, задача определения максимальных перегру-
зок на практике решается в два этапа:
— определение давлений, возникающих в плоскости реза (внедрения ку-
мулятивного ножа в преграду);
— выяснение закономерностей затухания волны сжатия в преграде при уда-
лении от нее.
Выражение для расчета давления р(х), возникающего в плоскости внедре-
ния кумулятивного ножа (КН) в преграду, имеет вид
408
Р(х) =
(2.2.34)
1
Р02
! Р(Х)
Л
Здесь х — координата точки на линии реза, применительно к которой рас-
считывается давление р(х); к — градиент скорости КН; 1р — предельная глу-
бина внедрения КН в полубесконечную преграду из данного материала;
Pop р02 — начальные плотности материалов преграды и КН соответственно;
Л2, mv т2 — константы закона ударной сжимаемости (соответственно
преграды и КН), записываемого в форме Тэта:
Р
р = А
1Р° )
(2.2.35)
Значения констант р0, А, т, приводимые в справочной литературе, отно-
сятся к чистым металлам. Между тем, многие конструкционные материалы,
как правило, являются многокомпонентными. Для инженерных оценок впол-
не приемлем подход, согласно которому числовые значения А и т следует
задавать применительно к базовому компоненту, а наличие добавок учиты-
вать через реальную плотность р0 данного сплава. Правомерность такого под-
хода доказана экспериментально.
Основные геометрические и взрывчато-технические характеристики УКЗ,
необходимые для расчета СР, представлены в табл. 2.2.2.
Таким образом, рассмотрены инженерные аспекты достаточно сложной
задачи проектирования систем разделения на основе УКЗ для оснащения
объектов новой техники — прежде всего ракетной и космической. Назван-
ные системы использовались на космических комплексах для планетных
исследований серий «Марс», «Венера», «Вега» и др. Надежная работа УКЗ
обеспечила успех указанных космических проектов.
Рассмотренные системы разделения широко применяются в ракетно-кос-
мической технике в силу того, что они имеют высокую надежность, хорошие
массовые и габаритно-компоновочные характеристики, просты в изготовле-
нии и эксплуатации. Однако таким устройствам присущи два значительных
недостатка:
— поскольку разрезание преграды с помощью УКЗ всегда должно произ-
водиться с некоторым запасом, то необходимо перехватывать остатки хвос-
товой части кумулятивного ножа, используя те или иные запреградные уст-
ройства (ловушки, экраны и т.п.), которые заметно утяжеляют конструкцию;
— относительная скорость разделения конструкции не очень велика.
409
Таблица 2.2.2. Основные геометрические и взрывчато-технические характеристи-
ки УКЗ
Обозна- чение УКЗ Размеры, мм Масса ВВ на ед. длины заряда, г/м Масса заряда на ед. его длины, г/м Предельная толщина пробиваемой преграды, мм
d н dB Алюми- ниевый сплав Маг- ниевый сплав Сталь Титано- вый сплав
УКЗ-2,75 2,75 2,34 1,2 3,8 25 4,9 6,8 2,7 2,2
УКЗ-3,5 3,5 2,97 1,6 5,2 47 5,3 7,9 2,8 2,6
УКЗ-4,2 4,2 3,57 1,8 8,5 59 8,0 10,8 4,3 4,2
УКЗ-5 5,0 4,25 2,3 12,6 83 10,7 14,8 5,5 5,3
УКЗ-6 6,0 5,4 2,7 19,7 116 12,7 18,5 6,7 6,3
УКЗ-7 7,0 5,95 3,0 29,3 149 15,3 7,9 7,67
УКЗ-9 9,0 7,65 4,0 46,7 245 19,2 9,7 9,3
Примечание, взрывчатое вещество — гексоген; плотность снаряжения (г/см3) — 1,62
... 1,72; — наружный диаметр кумулятивной выемки.
В ряде случаев при проектировании СР на УКЗ требуется оценить импульс
сил, действующий на конструкцию КА при срабатывании заряда.
В общем случае суммарный импульс сил складывается из четырех состав-
ляющих [9]:
1= 1Х + 12 + 13 + /4, (2.2.36)
где — импульс, создаваемый кумулятивным ножом (распорный импульс);
/2 — импульс, сообщаемый разделяемым элементам конструкции осколками
оболочки УКЗ; /3 — импульс, создаваемый продуктами детонации и воздуш-
ной волной; /4 — импульс осколков оболочки и продуктов детонации средств
инициирования взрыва УКЗ.
Импульс определяется типом УКЗ, материалом и толщиной разрезае-
мой преграды.
Значения /2, /3, /4 при прочих равных условиях существенно зависят от
размеров и конфигурации зарядной камеры. Конструктивное исполнение этих
камер может быть разным, но большинство из них сводится к двум эквива-
лентным схемам (рис. 2.2.17).
2.2.6.1. Выбор величины распорного импульса /у
Кумулятивный нож, внедряясь в преграду, создает боковое давление, ко-
торое образует распорный импульс. Аналитическое точное решение такой
задачи затруднено, поскольку кумулятивный нож состоит из фрагментов,
форма которых точно не известна, носит случайный характер, а сам поток
не стационарен. Теоретико-экспериментальными методами было определе-
но, что этот импульс составляет ~ 10 % от полного импульса. Такой оценки
вполне достаточно для инженерных расчетов при проектировании СР на УКЗ.
410
Рис. 2.2.17. Открытая (а) и полузакрытая (б) схемы зарядных камер систем разделе-
ния на основе УКЗ: 1 — разрезаемая преграда; 2 — боковые экраны; 3 — УКЗ;
4 — теплоизоляция; 5 — запреградная ловушка для перехвата остатков кумулятивного
ножа; 6 — запирающаяся пластина; 7 — срезающиеся шпильки
2.2.Б.2. Расчет импульса 12 осколков оболочки УКЗ
Исследования показали, что при взрыве УКЗ боковая часть оболочки раз-
рывается на 10—20 (и более) вытянутых по длине осколков. Поле осколков
является практически круговым за исключением «мертвой зоны» с углом
2<р* = 80°, в которой осколков не образуется. Характер распределения оскол-
ков по углам разлета хорошо виден на рентгенограмме (см. рис. 2.2.14) [8].
Для удобства вычислений дискретную систему осколков представим не-
прерывным потоком. Примем, что внутри элементарного угла d заключе-
ны осколки массой J :
т
d
т <р
и
(2.2.37)
Тогда при расположении УКЗ в зарядной камере по схеме, показанной на
рис. 2.2.17, импульс /2 может быть найден по формуле
п
2 Ф| 92 т
г2= J «((p)sin<pJ/w+ j M((p)cos(pJ/w = ^^-Mo6(cos<p* +sin<p‘), (2.2.38)
<р* -«л.
где — скорость боковых осколков оболочки, осредненная внутри угла
2(л-<р’) ; «об, — приведены в табл. 2.2.2 [2].
411
2.2.6.3. Расчет импульса 13 продуктов детонации
и воздушной ударной волны
При взрыве УКЗ, расположенного в зарядной камере (рис. 2.2.17,я), про-
исходит множество взаимосвязанных процессов. Главными из них являются
следующие:
— формирование кумулятивного ножа, его фрагментирование и внедре-
ние в преграду и ее разрезание;
— проникание неизрасходованных фрагментов кумулятивного ножа и ча-
сти продуктов детонации через образовавшуюся щель в запреградную ловушку;
— образование продуктов детонации и осколков оболочки при взрыве УКЗ,
заполнение ими зарядной камеры;
— образование воздушной ударной волны;
— соударение ударной волны и продуктов детонации со стенками заряд-
ной камеры с образованием системы отраженных волн и т.д.
С точки зрения физико-математического анализа динамики и конечных
результатов всех указанных процессов точное аналитическое решение такой
задачи затруднено.
Рассмотрим частный случай, имеющий для нас практическое значение —
пример разрезания осесимметричного объекта (цилиндра, конуса и т.п.). Ре-
шение будем вести для некоторой произвольной точки А (рис. 2.2.18).
Рис. 2.2.18. Устройства разделения осесимметричных объектов
Пусть в момент времени t0 = 0 камера мгновенно раскрывается, что экви-
валентно началу проникновения волны разрежения в газ, сжатый до Ро. В
момент времени волна разрежения дойдет до точки А, давление в которой
начнет уменьшаться по закону Римана, затем в момент t2 римановская волна
дойдет до дна зарядной камеры, в результате чего наружу начнет двигаться
412
вторая волна разрежения, теперь уже по движущемуся газу переменной плот-
ности. Опуская сложные преобразования, запишем
• Л = J- j J P(t, ч) dtdo,
L3 (о) о
(2.2.39)
где L3 = 2я(/^ + h) — длина заряда; о — поверхность стенки зарядной каме-
ры продуктов детонации; do = 2nrdr.
Проведя некоторые математические преобразования, получим
SEL" 2 IrW , 11%. Г3
V Ко 21 НУ со 3(Н/
(AJ )
(2.2.40)
где % = 2/Я
— объем зарядной камеры на единицу длины УКЗ;
7
К= 1,22-ь 1,25 — показатель адиабаты расширения продуктов детонации;
со — масса ВВ на единицу длины УКЗ.
Экспериментально получены следующие аппроксимирующие соотноше-
ния:
роуо-х[ ю
; ат = 0,19(1-е“7’|2я0) —
lCo J
(2.2.41)
где Q = J—2-2-; х = (3,4 + 3,6)-105.
V со
2.2.6.4. Оценка импульса 14, создаваемого средствами инициирования
Этот импульс теоретически рассчитать невозможно из-за большого раз-
нообразия взрывчато-технических характеристик средств взрывания и схем
подстыковки их к УКЗ.
Опыт показывает, что для реальных СР вклад 14 в общий импульс разде-
ления составляет 8—17 %.
Примеры конструктивного исполнения СР на УКЗ приведены на
рис. 2.2.19 и 2.2.20 [18].
Скорость метания разделяемых конструкций обычно не очень велика,
поскольку для типовых зарядных камер газодинамические потери на истече-
ние продуктов детонации из них весьма значительны.
В связи с этим в ряде конструкций КА для разделения их частей со зна-
чительной относительной скоростью (более 15 м/с) более приемлемыми яв-
413
Рис. 2.2.19. Принципиальная схема системы разделения оболочечной конструкции
КА и УКЗ: 1 — спускаемый аппарат; 2 — УКЗ; 3 — электродетонатор; 4 — кронш-
тейн; 5 — защитные устройства; 6 — войлок
Рис. 2.2.20. Фрагмент системы разделения крышки исследовательского внедряемо-
го зонда КА «Марс-96»: 1 — надувная конструкция; 2 — лента; 3 — защитный кожух;
4 — электрический кабель; 5 — крышка; 6 — УКЗ; 7 — электродетонирующее уст-
ройство
414
ляются СР на УЗ. С учетом предназначения УЗ главным критерием его оп-
тимальности следует выбрать его коэффициент наполнения
со
™об’
(2.2.42)
где со, диоб — масса взрывчатого вещества и оболочки на 1 погонный метр
заряда соответственно.
Основой расчета таких СР является определение взрывчато-технических
параметров УЗ. Проектный расчет выполняется при двух допущениях:
— фронт детонации в снаряжении УЗ является плоским,
— расчет давлений, возникающих в окружающей среде, можно вести с ис-
пользованием гипотезы «мгновенной детонации».
При этом баланс энергии при взрыве УЗ можно представить уравнением
[6]
е = е + в + с + в + с + с , (2.2.43)
вв оск к пд в пд р пд ф у’ V '
где евв — начальная внутренняя энергия снаряжения УЗ; еоск — кинетичес-
кая энергия осколков оболочки; екпд, евпд, ерпд — соответственно кинетичес-
кая энергия разлетающихся продуктов детонации (ПД), внутренняя энергия
ПД и работа расширения ПД в момент разрыва оболочки; — энергия,
затрачиваемая на пластическую деформацию оболочки до ее разрыва и на
разогрев оболочки; еу — энергия, расходуемая на образование ударной вол-
ны в зарядной камере.
Типовая схема СР на УЗ показана на рис. 2.2.21.
Анализ расчета основных характеристик (скорость отделения и давление
в зарядной камере) СР поршневого типа на УЗ показал, что для инженерных
задач следует учитывать работу, совершаемую высокоэнергетическими про-
дуктами детонации при их расшире-
нии. Вклад остальных составляющих
незначителен и находится в преде-
лах допуска на скорость отделения,
задаваемую в техническом задании
на СР.
Рассмотрим методику расчета
скорости отделения конструкции оп-
ределенной массы применительно к
принципиальной схеме, изображен-
ной на рис. 2.2.21.
При детонации УЗ образующиеся
осколки, ударяя по торцу поршня,
сообщают ему некоторую «мгновен-
ную» начальную скорость 1)0 (пор-
шень будет разгоняться продуктами
Рис. 2.2.21. Схема поршневой системы
разделения на УЗ: 1 — корпус; 2 — УЗ;
3 — кольцевой поршень; 4 — уплотнитель-
ные кольца; 5 — штифт
415
детонации УЗ). Начальное давление р0 в зарядной камере является максималь-
ным. По мере выдвижения поршня из зарядной камеры давление монотонно
уменьшается от р0 до «дульного» значения рд, а скорость возрастает от 1)0 до
Чх-
Введем следующие обозначения:
М — масса отделяемой конструкции; — начальный сводный объем
зарядной камеры; 50 — площадь кольцевого поршня; 5а — площадь миделе-
вого сечения отделяемой конструкции; ра и ра — давление и плотность внеш-
ней среды, соответственно; Са — коэффициент аэродинамического сопротив-
ления отделяемой конструкции; g — местное ускорение силы тяжести; р —
угол направления отделения. Величины Л/, И^, 50, 5а относятся к единице
длины УЗ. В этих обозначениях уравнение движения поршня имеет вид
М^ = PWS0 " |СаРaSav2 - М • gSinp,
(2.2.44)
где х = 0 — хд — перемещение поршня; р(х) — давление в зарядной камере,
соответствующее координате х.
ЛЛ dv dv
Учитывая, что — = v —, и введя безразмерные параметры
dt dx
„_сл5Ло. *
с использованием классических методов решения дифференциальных урав-
нений получим формулу для расчета скорости перемещения поршня:
।— IPW
v = jv2+. 0 0 Ф. (а , X, к) - 2gH. sin РФ, (а, к),
v V М 1
(2.2.45)
JOCK m0CK Sin у ,,
где v0 = = м я Ижк — начальная скорость, с которой поршень
начинает двигаться под действием осколков оболочки УЗ; Ф, и Ф2 — функ-
ции перемещения X при различных значениях констант а и к,
2е-сЛ
Ф,(аЛЛ) = ^-
к-\
1-1----—
I а + е™ -1
11 1 _ р-сй
; Ф,(а,Х) = ———
I а
С р 5, Н
_ а 2 а .
м
ра — плотность окружающей среды;
Са — коэффициент аэродинамического сопротивления отделяемого тела
(крышка ПО), Са = 0,8 ;
416
S2 — площадь миделевого сече-
ния метаемого тела;
На — высота зарядной камеры
(рис. 2.2.22);
М — масса отделяемого тела;
х — длина хода поршня;
к — показатель адиабаты про-
дуктов детонации, 1,25.
Для УЗ в медных оболочках
Рис. 2.2.22. Сечение зарядной камеры:
1 — зарядная камера; 2 — УЗ; 3 — поршень
%ск = %б
В физике взрыва предлагаются различные аналитические соотношения для
оценки t/OCK. Наиболее употребительное
U
оск
(2.2.46)
где Го — начальный внутренний радиус оболочки (радиус снаряжения УЗ);
/д — внутренний радиус оболочки в момент ее разрыва на осколки.
При мгновенной детонации оболочка раздувается до некоторого предель-
ного значения своего внутреннего радиуса , затем фрагментируется и об-
разовавшиеся осколки, двигаясь в облаке продуктов детонации, сохраняют
свою скорость t/OCK = ) неизменной (по крайней мере на начальном
этапе разлета).
Поскольку, как показали исследования, вклад Vo в скорость V невелик,
вполне допустимо на этапе инженерных оценок эту поправку не учитывать.
Важно иметь в виду, что при выводе формулы (2.2.45) не учтены такие
эффекты, как теплопотери на нагрев стенок зарядной камеры, провыв газов
через зазоры между поршнем и стенками камеры, а также эффект последей-
ствия — дополнительный разгон отделяемой конструкции продуктами дето-
нации после раскрытия зарядной камеры. Тщательный анализ влияния этих
факторов и на скорость отделения в рассматриваемых СР незначителен
(не превышает несколько процентов от т>), и при инженерных, проектных
расчетах ее можно не учитывать.
В качестве примера приведем результаты испытаний системы отделения
крышки парашютного отсека КА «Венера-8» и «Венера-10» (табл. 2.2.3). Схе-
ма конструкции и системы ввода парашюта показана на рис. 2.2.23.
Проведенные многолетние теоретико-экспериментальные исследования
позволяют дать общую оценку предельных баллистических возможностей
описанных СР на УЗ для летательных аппаратов различных классов. Такая
417
оценка используется для экспресс-анализа принципиальных возможностей СР
рассмотренного класса на начальных стадиях проектирования. Она представ-
лена графически в виде «логарифмического коридора» на рис. 2.2.24.
Рис. 2.2.23. Система ввода парашюта: 1 — парашютный контейнер; 2 — парашют;
3 — КА; 4 — крышка парашютного контейнера; 5 — штифт срезной; 6 — УЗ; 7 — элек-
тродетонатор
Рис. 2.2.24. Зависимость максимально достигаемых скоростей отделения от относи-
тельной массы отделяемых конструкций для СР на УЗ, выполненных по поршневой
схеме
Таблица 2.2.3. Результаты испытаний системы отделения крышки парашютного
отсека
Космический аппарат Масса отделяемой крышки т, кг M=m/L3, кг/м Скорость отде- ления, м/с Vaon /^д.расч
Опыт Расчет
14,12±0,03 6,537 29,7±2,7 30,5 0,97
«Венера-8» 14,37±0,03 6,653 29,6±1,6 30,3 0,98
14,65±0,05 6,782 28,8±3,4 30,0 0,96
9,6±0,2 4,571 35,3±1,3 36,1 0,98
«Венера-10» 11,47±0,33 5,462 33,1±1,3 33,1 1,00
12,60±0,20 6,00 ЗО,5±1,О 31,6 0,97
418
2.2.7. Расчет детонационных систем разделения,
использующих эластичные взрывчатые вещества
Другим большим классом ВВ, используемых в детонационных СР, явля-
ются эластичные ВВ. Эти материалы были разработаны во второй половине
XX века и с 80-х годов достаточно широко применяются в космической тех-
нике в устройствах разделения конструкции КА. Эластичные взрывчатые ве-
щества (ЭВВ) позволяют снизить ударные нагрузки, возникающие при сра-
батывании СР, благодаря миниатюризации исполнения.
Применение ЭВВ позволяет изготавливать монолитные миниатюрные
заряды сложной конфигурации, работающие с высокой надежностью и точ-
ностью, совершенствовать устройства детонационной автоматики, существен-
но уменьшать массу и размеры устройств разделения.
ЭВВ представляют собой сложные высоконаполненные полидисперсные
системы на основе кристаллических бризантных ВВ и полимерных связую-
щих различных классов, содержащие также пластификаторы, структурообра-
зователи, армирующие и вулканизирующие добавки, сенсибилизаторы, ан-
тиоксиданты, пламегасители, красители, поверхностно активные вещества и
другие компоненты. ЭВВ являются типичным представителем смесевых ВВ
[12]. Интерес к ЭВВ со стороны космической техники обусловлен их уни-
кальными структурно-механическими свойствами, возможностью изготовле-
ния из них зарядов любой формы (листы, ленты, диски, профилированные
шнуры, трубки, шары и др.) с требуемыми физико-механическими характе-
ристиками и стабильными параметрами детонации.
Главное требование к ЭВВ для СР и ракетно-космической техники в це-
лом — малый критический диаметр детонации. Его величина определяется
совокупностью кинетических и термодинамических факторов в газодинами-
ке конкретного заряда ЭВВ. Критический диаметр ЭВВ рассчитывается при
максимальной плотности заряда по формуле [12]
dK=dK0/v”H, (2.2.47)
где Jk0 — критический диаметр чистого ВВ при реальной дисперсности и
дефектности кристаллов и пористости ВВ, равной 1—2 %, мм; вн — объем-
ная доля ВВ в композиции; п — параметр, определяемый свойствами как ВВ,
так и добавки.
Критический диаметр детонации ЭВВ, рассчитанный по (2.2.47), приво-
дится к реальной плотности р0 :
dM = dK 1О'’14а-Ро/Ртах)- (2.2.48)
Технологические свойства взрывчатых материалов, характеризующие их
способность к переработке, определяются структурно-механическими харак-
теристиками исходных взрывчатых композиций. Пластические свойства ком-
позиций связаны с вязкостью и надмолекулярной структурой связующего,
419
находящегося в пленочном состоянии между частицами ВВ, с толщиной
пленки и ее соотношением с размером ориентированных граничных (меж-
фазных) слоев.
Проблема физико-химической стабильности ЭВВ включает аспекты тер-
модинамической и химической совместимости компонентов, химической
стойкости и теплового старения ЭВВ.
Разработанные эластичные взрывчатые композиции (ЭВВ-22М, ЭВВ-75В,
ЭВВ «Элае» и др.) обладают необходимым для применения в космической
технике комплексом характеристик: высокой детонационной способностью
(критический диаметр ~0,4 мм), радиационной 2-106 рад и термической до
150 °C стойкостью, а также возможностью формирования из них зарядов ма-
лой массы (0,1—0,5 г) и сложной формы с заданными структурно-механи-
ческими характеристиками и стабильными параметрами детонации [5].
Ниже приведен состав и свойства ЭВВ «Элас-1» и «Элас-2».
Состав (в % масс) «Элас-1» «Элас-2»
ТЭН 85 —
Гексоген — 85
Бутадиеннитрильный каучук 6,5 6,5
Бутадиенстирольный термоэластопласт 6,5 6,5
Политетрафторэтилен 1,5 1,4
Антиоксидант 0,5 0,5
Сажа — 0,1
Свойства «Элас-1» «Элас-2»
Плотность, г/см3 1,57 1,59
Критический диаметр, мм 0,4 3,0
Температура начала интенсивного
разложения, °C 170 210
Температура вспышки (при задержке 5 с), °C 230 280
Скорость детонации, км/с 7,5 7,6
Чувствительность
к удару, % взрывов 52 48
к трению (нп), МПа 168 217
к инициирующей ударной волне, кбар 15 28
Фугасность, см3 400 380
Бризантность (25 г), мм 16 18
Детонационное давление, кбар 210 225
Прочность на разрыв, МПа 4,0 3,0
Химическая стойкость (110°С за 14 ч), мм рт.ст. 10 - 25 10 - 25
Температурный интервал применения, °C -55-+80 -55-+160
420
Применение ЭВВ вместо кристаллических ВВ обеспечивает миниатюри-
зацию СР и разработку безосколочных детонационных устройств разделения
конструкции КА.
При проектировании указанных исполнительных неразрушаемых детона-
ционных устройств, снаряженных ЭВВ, необходимы расчеты зарядов. Эти
заряды должны обеспечивать заданные параметры функционирования уст-
ройств, а также работоспособность СР.
Далее будет представлена методика расчета детонационных устройств
поршневого типа, при действии которых разрывается шейка штока замка или
болта либо осуществляется втягивание штока в корпус (разрывные болты,
детонационные замки и др.). Расчет указанных устройств осуществляется по
надежности и эффективности.
Существенным ограничением при проектировании СР для КА, в частно-
сти научного назначения, является недопустимость образования высокоэнер-
гетических осколков при срабатывании и выход наружу продуктов детона-
ции. При этом чаще всего разделение осуществляется по большому перимет-
ру. Использование в таких случаях традиционных разрывных болтов недо-
пустимо. К такому классу аппаратов относится, например, плавающая в ат-
мосфере Венеры аэростатная станция, созданная в рамках международного
проекта «Венера-комета Галлея». Общий вид КА «Вега-1» и установленного
на нем спускаемого аппарата показаны на рис. 2.2.25,а и б.
В рамках этого и других проектов для фундаментальных космических
исследований были созданы безосколочные детонационные замки и болты.
Рис. 2.2.25,а. Общий вид КА «Вега-1»
421
•Н!»ИИв
Рис. 2.2.25,б. Спускаемый аппарат КА «Вега-1»
Они показаны на рис. 2.2.26—2.2.28. При большом количестве таких замков
(рис. 2.2.29) для повышения надежности и синхронизации срабатывания це-
лесообразно их соединять трансляторами детонации, которые обеспечивают
распространение детонационного импульса со скоростью ~7 км/ч. Общий вид
неразрушаемого транслятора детонации показан на рис. 2.2.30.
Рис. 2.2.26. Общий вид детонационного замка поршневого типа на ЭВВ, срабатыва-
ющего от транслятора детонации: 1 — корпус; 2 — болт разрывной; 3 — поршень;
4 — демпфер; 5 — ЭВВ; 6 — транслятор
422
Рис. 2.2.27. Общий вид детонационного замка поршневого типа: 1 — корпус;
2 — шток; 3 — демпфер; 4 — наполнитель ЭВ; 5 — упор; 6 — транслятор детонации
Наиболее ответственным элемен-
том, обеспечивающим, в первую оче-
редь, срабатывание замков и болтов,
является сплошной заряд ЭВВ сложной
конфигурации. Он имеет малые разме-
ры и массу. Поэтому прежде всего рас-
считываются надежность и полнота де-
тонации зарядов.
Расчет эффективности замков про-
водится по двум критериям: «усилие
разрыва» и «работа разрыва». По пер-
вому критерию заряд ЭВВ должен со-
здавать давление продуктов детонации
в зарядной камере замка и развиваемую
ими силу (в момент начала разрыва
шейки), соответствующие заданному
усилию разрыва шейки с учетом коэф-
фициента запаса.
Рис. 2.2.28. Общий вид детонационно-
го замка поршневого типа на основе
ЭВВ, срабатывающего от электродето-
натора: 1 — корпус; 2 — поршень; 3 —
болт разрывной; 4 — гайка; 5 — ЭВВ;
6 — электродетонатор
По второму критерию продукты детонации при своем расширении долж-
ны производить работу большую, чем механическая работа разрыва шейки
замка.
Заряды ЭВВ в замках имеют сложную конфигурации, включающую сле-
дующие элементы: диск; цилиндр; кольцо.
423
Рис. 2.2.29. Конструктивная схема системы разделения крышки и торового контейнера:
1 — замок детонационный; 2 — замок с детонатором; 3 — транслятор детонации
1
5
7
Л\W4\W
Рис. 2.2.30. Общий вид неразрушаемого транслятора детонации («Транера»):
1 — наружная трубка; 2 — обмотка нитями СВМ; 3 — гайка; 4 — удлиненный заряд;
5 — запирающий конус; 6 — заряд усилитель; 7 — наконечник
Наименьшими размерами этих элементов, определяющими надежность
детонации зарядов, являются:
— толщина диска (Лд « б/д);
— диаметр цилиндра (с?ц << £ц);
— толщина стенки кольца (5К « JK),
где б/д, JK, £ц — диаметры диска, кольца, длина удлиненного цилиндричес-
кого заряда соответственно.
Рассчитаем минимальные значения указанных поперечных размеров за-
рядов ЭВВ, обеспечивающих заданную надежность (вероятность безотказной
работы (ВБР) Ро = 0,9999 при доверительной вероятности у= 0,9). Наибо-
лее приемлемым для такого расчета является метод Босса, основанный на ана-
лизе функции нормального распределения. Согласно ему ВБР корректно
определяется по величине разности между чертежным (реальным) значени-
ем диаметра заряда (2черт и меньшим, но стабильно детонирующим в серии
опытов диаметром заряда Qn. Известно, что с уменьшением диаметра заряда
ВВ его надежность уменьшается в связи с действием волн разрежения в про-
дуктах детонации и приближением к критическому диаметру.
ВБР заряда определяется по формуле
<2-2-«>
где Дг) — нормированная функция нормального распределения; R — мате-
матическое ожидание «прочности» (уровень действующего фактора, соответ-
ствующий 50 % срабатывания); — среднее квадратичное отклонение;
п — количество опытов на уровне Qn; PQ = F(z) находится из табл. 2.2.4.
Таблица 2.2.4. Значения нормированной функции нормального распределения
Z F(Z)
2,33 0,9901
3,1 0,999
3,73 0,9999
4,26 0,99999
4,76 0,999999
5,0 0,9999997
Верхняя доверительная граница среднего квадратичного отклонения
(2-2.50)
где 7?mjn — диаметр заряда (наибольший), при котором происходит 100 %
отказа; Qn — минимальный диаметр заряда, обеспечивающий 100 % сраба-
тывания.
На практике экспериментально определяются близкие к 7?^ и Qn значе-
ния. В первом приближении в качестве принимается критический диа-
метр заряда. Значения х находят из табл. 2.2.5.
Математическое ожидание «прочности» определяется по формуле
R = Qn + X(SR,r (2-2.51)
425
Таблица 2.2.5. Значения х в зависимости от количества опытов
Y Количество опытов No
2 3 4 5 6 7 8 9 10 15 20
0,7 -0,12 -0,44 -0,64 -0,79 -0,92 -1,0 -1,08 -1,14 -1,2 -1,43 -1,57
0,8 0,13 -0,4 -0,44 -0,6 -0,72 -0,84 -0,91 -0,98 -1,04 -1,25 -1,44
0,9 0,48 0,09 -0,15 -0,33 -0,47 -0,58 -0,67 -0,75 -0,82 -1,07 -1,23
Для рассматриваемых ЭВВ в открытом состоянии критический диаметр
составляет 0,5 мм. При помещении ЭВВ в металлическую оболочку, как
показывают эксперименты, критический диаметр уменьшается по крайней
мере в 2—3 раза.
Таким образом, принимаем = 0,2 мм (100% отказов), a Qn = 0,44 (100%
срабатывания)
о = C„-^nin = 0,4-0,2 = о 0473.
3-х 3 + 1,23
Находим из табл. 2.2.5 значения х (при у= 0,9 и No = 20): х = —1,23.
Рассчитываем диаметр заряда, соответствующий 50%-ному срабатыванию
R = 0,4 - 1,23-0,0473 = 0,34 мм.
Вычисляем по формуле (2.2.49) минимальный чертежный диаметр заря-
да, обеспечивающий заданную надежность.
При Ро = 0,9999997 из табл. 2.2.4 выбираем z = 5,0:
5,0 = (бчерт - 0,34)/0,0473 (1 + 0,5-20), 0черт = 0,58-0,6.
Таким образом, для обеспечения заданной надежности цилиндрические
элементы зарядов в детонационных замках должны иметь диаметр не менее
0,6 мм.
При рассмотрении плоскостных частей заряда в виде диска и кольца в
расчет принимается Акр — критическая толщина детонации и тогда = Акр.
Расчет таких зарядов проводится по приведенным выше формулам, в резуль-
тате получаем (2черт = 0,44 мм.
С учетом технологических факторов формирования зарядов в камерах и
принятого коэффициента запаса по надежности рабочая толщина плоских
элементов зарядов должна быть несколько выше расчетного.
В связи с малыми размерами зарядов ЭВВ в детонационных замках воз-
никает вопрос о режиме их детонации. Для столь ответственных изделий
следует проектировать заряды в идеальном (близком к идеальному) режиме
[4]. Это обеспечивает полную реализацию энергетического потенциала ВВ и
максимальные значения его детонации (скорость, давление, плотность про-
дуктов взрыва, теплота и температура взрыва), которые определяют эффек-
тивность действия детонационных замков. Идеальный режим детонации за-
426
рЯДОВ ЭВВ, кроме того, является наиболее стабильным, при котором пара-
метры процесса не зависят от незначительного разброса размеров зарядов,
определяемых допусками в габаритах зарядных камер детонационных замков.
Условиями обеспечения идеального режима детонации является превыше-
ние рабочего чертежного диаметра (для цилиндрических элементов) или
рабочей чертежной толщины (для плоских элементов) над значениями пре-
дельного диаметра (предельной толщины) детонации ВВ:
О > d (h ).
^черт npv пр'
Величина ^пр(Апр) для открытых зарядов определяется зависимостью
£r-
^кр
h
пр пр = f( ft 1 j
' '' ’<7?
^кр >
где JKp, Акр — критический диаметр (критическая толщина) детонации ВВ;
h, q — коэффициенты, определяемые дисперсностью ВВ, степенью его раз-
бавления инертной добавкой и пористостью заряда.
Расчеты показали, что чертежный диаметр (толщина) составляет 1,5 и
1,0 мм соответственно. Проведенные эксперименты подтвердили это и по-
казали, что ЭВВ детонируют с максимальной для него скоростью (7300 м/с
при плотности зарядов 16200 кг/м3).
Теперь можно провести расчет эффективности действия зарядов детона-
ционных замков (болтов) поршневого типа по критерию «усилие разрыва».
Для определения эффективности действия продуктов детонации ЭВВ в
замках необходимо, в первую очередь, рассчитать состав продуктов детона-
ции и теплоту взрыва. Точное определение продуктов взрыва представляет
собой весьма сложную задачу. Для приближенного решения задачи формулу
ВВ записывают в виде CaHgOBNr. Приближенные методы расчета основаны
на принципе последовательного окисления и не учитывают тонкого механизма
физико-химических превращений, протекающих во фронте детонационной
волны.
Экспериментальным путем для этого состава определены теплота взрыва
Q = 4520,8 кДж/кг и температура взрыва Твзр = 3180 К.
Параметры детонационной волны
₽ =^;
1 п+1
(2.2.52)
и =—;
J л + 1
= р0(л + 1)
Pj п ’
7 Ру-
(2.2.53)
(2.2.54)
(2.2.55)
427
где D — скорость детонации; р. — детонационное давление; U. — массовая
скорость продуктов детонации; р0 — плотность продуктов детонации;
п = 3,37 — показатель политропы ВВ; V. — удельный объем продуктов дето-
нации.
Для дальнейшего расчета давлений в детонационных замках необходимо
вычислить изменяющиеся объемы зарядной камеры и плотности продуктов
взрыва ЭВВ в процессе их расширения и разрыва шейки штока.
Отметим при этом четыре основных момента:
а) Начальное состояние. ЭВВ с плотностью р0 = 1620 кг/м3 заполняет
весь объем зарядной камеры. Плотность заряжания р3 при этом равна плот-
ности заряда р0 . Тогда масса рабочей части заряда ЭВВ равна
m = pQVv (2.2.56)
где Vx — начальный объем зарядной камеры.
Под рабочей частью заряда ЭВВ в детонационном замке понимается та
основная его часть, продукты взрыва которой воздействуют непосредствен-
но на поршень (шток) и создают давление, необходимое для разрыва штока
в ослабленном шейкой сечении.
б) Детонация заряда ЭВВ. Начальное давление продуктов взрыва в заряд-
ной камере соответствует как бы мгновенному взрыву всей массы ВВ рвзр.
Величина рвзр в два-три раза меньше давления продуктов взрыва в детонаци-
онной волне Pj.
в) Расширение продуктов взрыва до момента начала разрыва штока в
ослабленном сечении. Под давлением расширяющихся продуктов взрыва
происходит выбор всех зазоров и общая деформация поршня (штока). Осно-
вание поршня при этом перемещается на расстояние 8, = 0,8 * 1,6 мм, а объем
зарядной камеры возрастает на величину APJ.
Объем зарядной камеры в момент начала разрыва шейки V2 составляет
У2=У1+ЛУГ (2.2.57)
Происходит быстрое расширение продуктов взрыва, их давление резко
падает от величины рвзр до значения р2, соответствующего объему И2. Плот-
т
ность продуктов взрыва уменьшается до р2 = гг •
*2
Величина р2 является наиболее важным параметром, который определяет
усилие, развиваемое детонационным замком.
г) Разрыв штока (разделение). Под давлением продуктов взрыва р2 про-
исходит деформация и разрыв шейки замка (болта). Основание поршня при
этом перемещается дополнительно на расстояние 82, а объем зарядной ка-
меры увеличивается на A V2.
В связи с хрупким разрушение штока, выполненного из титанового спла-
ва или высокопрочной стали, 82=0,3-ь0,5 мм.
428
Объем зарядной камеры в момент окончания разрыва шейки И2 состав-
ляет
И3 = И2+ДИ3. (2.2.58)
l-Г т
Плотность продуктов взрыва в этот момент р3 = .
*3
Продукты взрыва при своем расширении в зарядной камере совершают
работу Л3, которая должна превышать величину механической работы, необ-
ходимой для разрыва шейки штока Лр.
Давление продуктов взрыва ЭВВ в зарядной камере детонационного зам-
ка в момент взрыва рвзр рассчитывается по известному уравнению Абеля-
Нобеля
Т
Лзр “ А)^ок т । _ ао ’ (2.2.59)
10 1 иРз
где р0 — атмосферное давление; Ик — объем продуктов взрыва при Ро и тем-
пературе То = 283 К, равный 0,7755 м3/кг; — температура взрыва; р3 —
плотность заряжания, кг/м3, в данном случае р3 = р0 = 1620 кг/м3; а — ко-
волюм* продуктов взрыва, равный 5,0110^ м3/кг.
При решении задач, связанных с расширением продуктов взрыва, необ-
ходимо знание изэнтропы для конкретного ВВ. При отсутствии реальной
изэнтропы она обычно заменяется политропой и адиабатой.
Для расчета рабочего давления р2 применяем уравнение политропы, если
р2 > рк (Рк — плотность в точке к сопряжения политропы и адибаты)
P^v\ = Piv2- (2-2.60)
При достаточно большой степени расширения продуктов взрыва к моменту
начала разрыва шейки детонационного замка и, соответственно, относительно
низкой плотности продуктов взрыва (р2 < Рк ) расчет проводится в две сту-
пени:
— от рюр (75000 кгс/см2) до рк (4500 кгс/см2) давление падает по политро-
пе с показателем степени п = 3,37:
— от рк до р2 давление снижается по адиабате расширения продуктов взрыва
с показателем степени у= 1,3:
= (2.2.61)
где рк — критическое значение давления (в точке сопряжения политропы и
адиабаты) продуктов взрыва.
’ Коволюм — несжимаемая часть объема продуктов взрыва, м3/кг.
429
Рассчитаем усилие F , развиваемое детонационным замком, при дей-
ствии давления р2 на основание s поршня (штока) в момент начала разрыва
шейки:
^расч=Р2 (2.2.62)
Полученная величина должна превосходить заданную в техническом за-
дании с учетом коэффициента запаса механическую осевую силу, действую-
щую на замок в процессе эксплуатации (как летной, так и наземной).
Закончив расчет по усилию разрыва, перейдем к расчету эффективности
действия зарядов детонационных замков (болтов) поршневого типа по кри-
терию «работа взрыва».
Работа продуктов взрыва ЭВВ в детонационном устройстве А3 рассчиты-
вается следующим образом. Удельная работа продуктов взрыва определяется
по формуле Шведова:
А = U] • п/(п-1)[1 -(р3 /рр-1 ], кДж/г, (2.2.63)
где UPj — массовая скорость (1,67 кг/с) и плотность (2,1 г/см3) продуктов
взрыва в ударной волне (точка Жуге); п — показатель политропы (3,37) ;
А3 = А • т, Дж; т — масса рабочей части заряда ЭВВ.
Рассчитанная работа продуктов взрыва заряда ВВ в детонационном уст-
ройстве сравнивается с механической работой, необходимой для совершения
устройством требуемого механического действия, например, разрыва штока
Лр. Величина А3 должна быть больше Ар.
На рис. 2.2.26—2.2.28 представлены конструкции детонационных замков
для разделения конструкции КА [17].
Принцип их работы заключается в следующем. При подаче инициирую-
щего импульса детонирует заряд ЭВВ в зарядной камере, расположенной в
корпусе замка или болта. Воздействие продуктов взрыва на рабочий поршень
вызывает безосколочный разрыв силового элемента по специально выполнен-
ному ослабленному месту. При дальнейшем движении поршня обеспечива-
ется обтюрация, исключающая прорыв газов наружу. В конструкции замков
предусмотрен сминаемый демпфер, который поглощает избыточную энергию
поршня и снижает динамическое воздействие на КА. Снижение уровня удар-
ных нагрузок связано также с тем, что заряд ЭВВ является рассредоточен-
ным, т.е. зона инициирования и рабочая зона удалены друг от друга, но со-
единены между собой узким каналом.
Для разделения конструкции КА и ракет-носителей космического назна-
чения применяются в основном многоточечные системы. Например, для
разделения крышки торового контейнера аэростатного зонда КА «Вега-1» была
создана система, состоящая из 12 разрывных детонационных замков по внеш-
нему периметру и 8 таких замков по внутреннему периметру.
Для выполнения поставленной задачи необходимо было после длительного
космического перелета от Земли до Венеры осуществить безимпульсное раз-
430
деление крышки и крупногабаритного торового отсека для ввода в действие
плавающей в атмосфере планеты аэростатной станции. Обеспечение герме-
тичности отсека в процессе длительного перелета требовало, чтобы расстоя-
ния между устройствами не превышало 400 мм. Эти устройства также долж-
ны иметь наименее возможный разброс выходных параметров, синхронно
срабатывать и не вызывать дополнительных угловых возмущений объекта при
разделении. Схема этой СР показана на рис. 2.2.29.
Рассматриваемая система состоит из набора большого количества устройств
разделения. Синхронизация срабатывания обеспечивается соединением их
трансляторами детонации, что также повышает надежность срабатывания в
целом и значительно уменьшает количество инициирующих устройств (элек-
тродетонаторов) .
Ранее в СР детонационный импульс от блока управления подавался к
исполнительным элементам по линейным зарядам кристаллических ВВ. Эти
заряды, как известно, при срабатывании разрушаются с образованием высо-
коэнергетических осколков, для защиты от которых аппаратуре КА требуют-
ся дополнительные устройства. Это утяжеляет конструкцию в целом.
Для решения указанной задачи созданы неразрушаемые гибкие герметич-
ные трансляторы детонации, исключающие при функционировании выход
газообразных продуктов взрыва в окружающую среду. Основой их является
ЭВВ.
Для удержания продуктов детонации шнуровых зарядов ЭВВ в тонкостен-
ных оболочках (для снижения массы изделия) необходимо, чтобы массы ВВ
было как можно меньше, а это, в свою очередь, требует применения ЭВВ с
очень малым критическим диаметром (~0,2 мм). В неразрушаемых трансля-
торах детонации тонкий шнуровой заряд ЭВВ заключен в металлическую
оболочку, предназначенную для обеспечения прочности заряда и для того
чтобы с ним можно было проводить необходимые технологические операции.
Конструкция гибкого неразрушаемого транслятора представляет собой
упомянутую выше сердцевину из ЭВВ, помещенную в тонкостенную трубку
из мягкого металла (медь) и обрамленную передаточными (усиливающими)
зарядами. На эту трубку наносится оплетка из синтетических высокопроч-
ных нитей. Полученный удлиненный заряд с оплеткой помещается в трубку
из алюминиевого сплава или нержавеющей стали, на которую устанавлива-
ются наконечники с накидными гайками для монтажа в СР.
Общий вид описанной конструкции транслятора детонации (он получил
название «Транер») показан на рис. 2.2.30. Транслятор имеет массу 0,35 и
0,14 кг/м — в зависимости от материала наружной оболочки.
Технология изготовления описанных неразрушаемых трансляторов дето-
нации следующая. Шнуровой заряд из ЭВВ помещается в тонкостенную
медную трубку и вместе с ней протягиваются на протяжном стане через
фильеры нужных диаметров. При этом осуществляется калибровка УЗ. Да-
лее на УЗ на обмоточной машине наносится слой синтетических высокопроч-
431
ных нитей, затем УЗ со слоем волокна на протяжном стане заключается в
металлическую оболочку. Полученные таким образом трансляторы детона-
ции обрезаются до нужного размера, на них наносится резьба и надеваются
наконечники. После этого производится полная сборка устройства. Шарик
и запирающий конус служат для удержания продуктов детонации, образую-
щихся при работе детонационных замков и других исполнительных механиз-
мов СР космических аппаратов.
Представленные методики расчета и конструкции систем и устройств
детонационных СР широко используются при проектировании современных
КА. Они апробированы при создании космических комплексов для фунда-
ментальных планетных и астрофизических космических исследований, таких
как «Марс-2, -3, -4, -5», «Венера-8, -9, -10, -11, -12», «Вега-1, -2», «Интер-
бол-1, -2», «Гранат» и др.
Литература
1. Циолковский К.Э. Космические ракетные поезда. — М., 1961.
2. Колесников К.С., Кокушкин В.В., Борзых С.В., Панкова Н.В.Расчёт и
проектирование систем разделения ступеней ракет. — М: Изд-во МГТУ им.
Н.Э. Баумана, 2006.
3. Ефанов В.В., Моишеев А.А. Основы проектирования детонационных
устройств и систем разделения космических аппаратов: Учебное пособие. —
М.: Изд-во МАИ-ПРИНТ, 2010.
4. Вспомогательные системы ракетно-космической техники: Сб. перево-
дов / Под ред. И.В. Тишунина. — М.: Мир, 1970.
5. Ефанов В.В., Горовцов В.В., Котомин А.А., Душенок С.А. Современ-
ные системы детонационной автоматики космических аппаратов. Проблемы,
решения, основы проектирования // Фундаментальные и прикладные про-
блемы космонавтики. 2002. № 8. С. 12-21.
6. Ефанов В.В., Кузин Е.Н., Пичхадзе К.М., Челышев В.П. Энергобалли-
стические характеристики детонационных систем разделения КА для планет-
ных исследований // Полёт. 2004. №5. С. 16-23.
7. Физика взрыва / Под ред. Л.П. Орленко. — М.: Физматлит, 2002.
8. Челышев В.П. Основы теории взрыва и горения. — М.: МО СССР, 1981.
Ч. 1.
9. Ефанов В.В., Кузин Е.Н., Челышев В.П., Пичхадзе К.М. Основы рас-
чёта импульсов сил, действующих на конструкцию ЛА при разделении удли-
ненными кумулятивными зарядами // Полёт. 2004. №2. С.3-11.
10. Ефанов В.В., Кузин Е.Н., Тимофеев В.Н., Челышев В.П. Устройства и
системы пироавтоматики летательных аппаратов на основе линейных куму-
лятивных зарядов // Полёт. 2003. № 10. С. 42-49.
11. Климов Ю.М., Самойлов Е.А., Ефанов В.В. и др. Детали механизмов
авиационной и космической техники: Учебное пособие. — М.: Изд-во МАИ,
1996.
432
12. Ефанов В.В., Горовцов В.В., Котомин А.А., Душенок С.А. Новое по-
коление детонационных устройств разделения конструкции космических
аппаратов (основы проектирования) // Актуальные проблемы авиационных
аэрокосмических систем. Вып. 3 (25). Т.12. — Казань, 2007. С. 18-31.
13. Тепло- и массообмен между потоками и поверхностями / Под.ред.
В.К. Кошкина. - М.: МАИ, 1976.
14. Термодинамика газов / Под ред. В.С. Зуева. — М.: Машиностроение,
1970.
15. Ефанов В.В., Тимофеев В.Н. и др. Развитие систем разделения авто-
матических космических аппаратов в НПО им. С.А. Лавочкина: Тез. докл.
Международного космического форума « Космос без оружия» — М., 2001.
С. 37-38.
16. Ефанов В.В., Горовцов В.В., Королева Л.П. Замок-толкатель. Пат.РФ
№ 2093435. 1996 г.
17. Ефанов В.В., Королева Т.В., Горовцов В.В., Душенок С.А., Котомин А.А.
Устройство для быстрого разделения частей космического аппарата или ра-
кетного блока. Пат. РФ № 2321527. 2008 г.
18. Ефанов В.В., Селенгинский И.Н., Кузин Е.Н. Балакин А.А. Способ
удаления остатков жидких ракетных топлив из отделяющихся частей средств
выведения. Пат РФ № 2359216. 2009 г.
В.В.Ефанов,
НПО им. С.А. Лавочкина
433
FK ПРОЕКТИРОВАНИЕ УСТРОЙСТВ ГАШЕНИЯ КОЛЕБАНИЙ
КОНСТРУКЦИИ КОСМИЧЕСКИХ АППАРАТОВ
При отработке малосиловой (точностной) динамики упругого космичес-
кого аппарата можно выделить два основных направления, отличающихся как
по частотному диапазону колебаний подконструкций, так и по сущности.
К первому направлению можно отнести проблемы обусловленные колеба-
ниями, упругих элементов конструкции (такими, как панели солнечных ба-
тарей, рефлекторы радиотелескопов штанги выноса научных приборов и тому
подобное), которые действуют на корпус КА и, в некоторых случаях, из-за
своих величин и частотного состава не могут быть полностью парированы
средствами системы управления (СУ), а взаимодействуя с ней, привести к
автоколебаниям аппарата. В результате характеристики выходной информа-
ции могут не соответствовать заданным параметрам (проблема «динамичес-
кой точности»), а это, в свою очередь, скажется на выполнении целевой за-
дачи, то есть на производительности изделия, обеспечении требуемого раз-
решения на местности и ряде других параметров.
Ко второму направлению можно отнести проблемы, связанные с отрица-
тельным вибрационным воздействием внутренних источников возмущений
на высокопрецизионную научную аппаратуру. В процессе работы вентиля-
торов, приводов и других агрегатов, имеющих вращающиеся массы, на кон-
струкцию изделия передаются пространственные вибрации малой амплиту-
ды, лежащие в области средних частот («микровозмущения»), которые отри-
цательно влияют как на работу системы управления, оказывая воздействия
на ее чувствительные элементы, так и на работу прецизионной научной ап-
паратуры (НА), что может привести к ухудшению тактико-технических ха-
рактеристик изделия. Эту задачу также можно отнести к проблеме «динами-
ческой точности КА», но в диапазоне средних частот (5—100 Гц).
До последнего времени учет влияния внутренних источников возмущения
на точность стабилизации и на работу ЦА систематически и целенаправлен-
но не проводился. Поэтому, как правило, на борт КА привода и аппаратура,
имеющая вращающиеся массы, устанавливались без надлежащего контроля
виброактивности. Из-за недопонимания актуальности указанных вопросов для
современных информационных КА проблема не только не разрабатывалась,
но и не была поставлена достаточно полно в научном и практическом пла-
нах.
В НПО им. С.А. Лавочкина для обеспечения заданных требований по
параметрам угловой стабилизации при действии внутренних источников
возмущений (задач динамической точности), решается целый комплекс воп-
росов:
— анализ требований, предъявляемых к КА научного назначения, в зави-
симости от содержания миссии КА и устанавливаемой на них НА, с целью
унификации этих требований;
434
— классификация и анализ внутренних источников возмущений с целью
выделения наиболее виброактивных и выключения их (при необходимости)
в режимах сеансов функционирования НА;
— разработка экспериментальных методов и средств определения воздей-
ствий, создаваемых приводами, исполнительными механизмами и аппарату-
рой на рабочих режимах;
— учет воздействий в динамической модели изделия (для решения задач
«смаза изображения» и проблемы «микровозмущений») на стадии проекти-
рования и изготовления изделий;
— анализ динамической точности неуправляемого КА как в низкочастот-
ной, так и в среднечастотной областях воздействий внутренних источников
возмущений;
— разработка алгоритмов решения задач динамической точности на базе
математических моделей и экспериментально определяемых параметров воз-
мущающих воздействий;
— выработка требований по виброактивности внутренних источников воз-
мущений на основе анализа результатов динамических расчетов и общих
требований по параметрам точности для всего КА;
— согласование этих требований с разработчиками приводов, исполнитель-
ных механизмов и аппаратуры;
— выработка рекомендаций по управлению приводными устройствами с
точки зрения минимизации уровней создаваемых ими механических (вибра-
ционных) воздействий;
— разработка и создание систем виброзащиты, обеспечивающих сниже-
ние амплитуд колебаний агрегатов КА, чувствительных к вибрациям.
Следует подчеркнуть, что лишь при выполнении всех изложенных этапов
работы можно рассчитывать на успех в разработке КА научного назначения
с жесткими требованиями по динамической точности.
2.3.1. Определение воздействий, создаваемых приводами,
исполнительными механизмами и аппаратурой в рабочих режимах
На этапах проектирования прецизионных КА в НПО им. САЛавочкина
механические воздействия от элементов с движущимися и/или вращающи-
мися массами задаются с помощью математических моделей созданных на
основе опыта предыдущих разработок. По мере дальнейшей проработки из-
делия с появлением рабочих образцов этих агрегатов, проводятся их испыта-
ния на «виброактивность» на силоизмерительном стенде (СИС) фирмы «Ки-
стлер». Параметры стенда приведены в табл. 2.3.1.
На рис. 2.3.1,2.3.2 приведены иллюстрации испытаний на виброактивность
привода остронаправленной антенны космического аппарата «Фобос-Грунт»
и многоканального сканирующего устройства изделия «Электро-Л».
Данные, полученные в процессе испытаний, подвергаются специальной
обработке для удаления из сигнала паразитных составляющих, обусловлен-
ных фоновым и промышленным шумом, собственными колебаниями при-
435
Таблица 2.3.1. Параметры силоизмерительного стенда
Параметр Наименование Единица измерения Значение
Масса МИП кг 95
Габариты МИП мм 600x600x174
Температурный диапазон °C 0...70
Измерительные диапазоны Fx, Fy fz кН 10 10...20
Максимальная нагрузка Fx, Fy Fz кН 10 20
Тарируемые диапазоны измерений Fx, Fy Fz кН 0...10 0...20
Тарируемые поддиапазоны измерений Fx, Fy Fz кН 0...1 0...2
Допустимые свободные моменты M\,M'y M'z Нм ±500 ±1000
Порог срабатывания Fx, Fy Fz мН ±5 ±10
Чувствительность (номинальная) N £ X IX пк/Н 8 3,8
Разброс значений чувствительности при приложении силы внутри панели Fx, Fy, Fz % ±1
Линейность % ±0,5
Гистерезис % 0,5
Перекрестное искажение Fz -+ Fx, Fy, Fx ->Fy Fx,y -> Fz % Нм/кН , IA IA IA w 1+ 1+ 1+ (Xj 1—1 1—1
способлений и систем обезвешивания и т.п. После чего, путем анализа полу-
ченных результатов, строятся эмпирические модели, которые и используют-
ся при решении задач «динамической точности».
2.3.2. Математическое моделирование задач динамической точности
Для определения влияния бортовых источников механических возмуще-
ний на качество функционирования научной аппаратуры КА и точность ра-
боты СУ в НПО им. С.А.Лавочкина проводится имитационное моделирова-
ние задач «динамической точности» как с использованием универсальных
программ, так и с помощью программных комплексов собственной разра-
ботки.
436
Рис. 2.3.1. Привод ОНА КА «Фобос-Грунт» на силоизмерительной платформе
Рис. 2.3.2. МСУ-ГС изделия «Электро-Л»
437
Анализ полученных результатов позволяет:
— выработать требования по допустимым уровням виброактивности бор-
товых источников механических возмущений на рассматриваемом аппарате;
— определиться с необходимостью и потребными характеристиками пас-
сивных либо активных систем виброзащиты (ВЗ) и гашения колебаний;
— оценить эффективность различных типов ВЗ;
— выработать рекомендации по модификации закона управления привод-
ными устройствами с точки зрения минимизации их механических воздей-
ствий на ЦА и СУ.
На рис. 2.3.3 в качестве примера приведены расчетные конечно-элемент-
ные модели космических аппаратов «Спектр-Р» и «Спектр-УФ», использо-
ванные при моделировании.
Рис. 2.3.3. Модели КА «Спектр-Р» и «Спектр-УФ»
2.3.3. Разработка и создание систем виброзащиты
Проблемы виброзащиты КА и его технологического оборудования от вне-
шних и внутренних возмущений особенно остро возникли при проектирова-
нии КА нового поколения, таких, как «Аркон-1», «Спектр», «Электро». Тог-
да же исключительно важное значение приобрели научные исследования в
области создания эффективных средств и методов ВЗ и более чувствитель-
ных и дешевых средств регистрации механических возмущений.
Для автоматических КА, предназначенных для передачи больших объёмов
специальной информации, предъявляются особые требования. Так, напри-
мер, для КА «Аркон-1» узел вторичного зеркала (УВЗ) телескопа имеет огра-
ничение по «смазу» не более 510-6 м. Угловое отклонение посадочного мес-
та гиростабилизированной платформы — менее 0,02”, привода остронаправ-
ленной антенны — не более НО-5 град. Механические возмущения от ги-
роскопических исполнительных органов системы управления и вентилято-
ров систем терморегулирования не должны превышать амплитуды 0,01 —
0,001 g. Таких показателей можно достичь только при оснащении приборов
и конструкций КА виброзащитой.
438
Упругие колебания конструкции КА оказывают негативное влияние на
работу системы управления движением КА, на качество (надежность) реше-
ния целевых задач и, в конечном счете, на производительность КА.
При ориентации КА «Аркон-1» угловые перемещения и скорость относи-
тельно центра масс КА должны иметь величины <р < 0,02" и со < Ю-4 рад/с.
Для достижения требуемой производительности системы декременты коле-
баний панелей солнечных батарей (СБ) КА «Аркон-1» при амплитудах ниже
10-3 м должны составлять 5= 0.15-5-0.2, а при амплитудах выше 10-3 м —
0.2 + 0.4 (что связанно с временем затухания переходного процесса после пе-
реориентации КА).
Для выполнения этих требований, необходимо проведение комплекса
мероприятий как системного, так конструктивного плана. К системным ме-
роприятиям можно отнести оптимизацию алгоритмов и настроек контура
управления, выбор соответствующих циклограмм функционирования привод-
ных устройств (обеспечивающих их молчание во время прецизионной ори-
ентации КА), подбор таких законов управления для аппаратуры с вращаю-
щимися массами которые позволят поддерживать наименьший уровень ме-
ханических возмущений и тому подобное. К конструктивным можно отнес-
ти мероприятия направленные на снижение массы упругих элементов, уве-
личение их жесткости (что часто несовместимо с предыдущим), повышение
диссипативных свойств конструкции, разработку пассивных либо активных
систем виброгашения или виброизоляции.
Представленный ниже материал относится именно к конструктивным
путям обеспечения динамической точности КА.
Существующие подходы по обеспечению пространственной устойчивос-
ти и стабилизации упругого КА, применяемые при проектировании, не все-
гда устраняют негативное влияние упругих колебаний подконструкций на
общую динамику КА и его выносных конструкций. Для современных КА
имеющих оптические и микроволновые телескопы, приборы обеспечения
лазерной связи, а также технологические модули, предназначенные для ра-
боты в условиях микрогравитации, потребовались новые решения в систе-
мах виброзащиты.
Основной интерес при исследованиях по применению различных систем
ВЗ представляет рассмотрение динамического взаимодействия между двумя
подсистемами: источником колебаний и объектом ВЗ.
Анализ систем ВЗ, в которые входят источник возмущений, объект ВЗ и
связи между ними, позволяет выявить принципиально возможные способы
уменьшения колебаний объекта:
— уменьшение уровней механических воздействий, возбуждаемых источ-
ником (снижение виброактивности источника);
— изменение конструкции объекта. В измененной конструкции заданные
механические воздействия будут вызывать менее интенсивные колебания
объекта или отдельных его частей (внутренняя ВЗ);
439
— присоединение к объекту дополнительной механической системы, из-
меняющей характер его колебаний (динамическое гашение);
— установка между объектом и источником возмущения дополнительной
системы, защищающей объект от механических воздействий источника (виб-
роизоляция (ВИ) объекта).
Снижение виброактивности источника, как правило, связано с изменением
различных параметров и процессов и может быть достигнуто способами,
специфическими для каждого частного случая.
Виброизоляция — метод виброзащиты, когда две основные подсистемы
механической структуры соединены между собой связями. Этот метод успеш-
но применяется на КА для снижения механических воздействий на приборы
и аппаратуру, устанавливаемую внутри корабля, для ослабления виброудар-
ных нагрузок на КА и его элементы. Виброизоляция оборудования КА может
осуществляться пассивными, активными и комбинированными средствами.
2.3.4. Повышение конструкционного демпфирования
путем нормировки люфтов и зазоров
Была предпринята попытка уменьшить виброактивность подконструкций
КА, в частности панелей СБ (введение в узел подкоса, соединяющий СБ с
корпусом КА, демпфирующих устройств). Применение зазоров в местах за-
чековки панелей СБ между собой после их раскрытия и люфтов в соедине-
нии подкосов с панелями считается наиболее распространенным и дешевым
способом гашения вибраций, поступающих от корпусных конструкций на СБ
(рис. 2.3.4).
Рис. 2.3.4. Способы демпфирования колебаний СБ «Аркон-1»
440
Группа специалистов разработала испытала и установила в узлах подкоса
демпфирующую систему, обеспечив необходимые люфты и зазоры.
Для получения количественных характеристик и изучения возможности
применения этого способа демпфирования колебаний СБ «Аркон-1» прове-
ден цикл экспериментальных исследований
Испытания проводились с зазорами и без них (с защемлением), причем
люфтовые соединения создавались в обоих — верхнем и нижнем — подкосах
(рис. 2.3.4,б) при поочередном отсоединении их от панелей СБ.
На рис. 2.3.4,д приведены зависимости логарифмических коэффициентов
затухания 8 от амплитуд колебаний панели одного из тонов СБ (1 — исход-
ный вариант; 2 — зазоры в замках выбраны, зазоры в стержнях Д5 =±0,5;
3 — зазоры в замках Д,=±2,5, зазоры в стержнях Д5=±0,5), из которых
видно, что при зазорах порядка 0.25Ю-3 м в защелках (рис. 2.3.4,в) соедине-
ний панелей между собой и люфте в подкосе 0.5-10-3 м (рис. 2.3.4,г) возрас-
тает с 0.05 до 0.55.
Демпфирование колебаний с применением люфтов и зазоров на конструк-
циях рассматриваемого типа наиболее эффективно при амплитудах колеба-
ний панелей выше 1.0-10-3 м.
С целью увеличения диссипативных свойств системы на амплитудах ме-
нее 1.0-10-3 м в люфтовом соединении применялась смазка ВНИИ НП-207 с
добавлением порошка дисульфита молибдена, но это не принесло положи-
тельного результата.
2.3.5. Создание систем виброизоляции
Для КА нового поколения «Спектр-УФ», оснащенного ультрафиолетовым
телескопом с высоким разрешением, малые колебания элементов оптичес-
кого тракта (главное зеркало, вторичное зеркало, фотоприемник) могут при-
вести к существенному искажению получаемой информации. Кроме того,
высокие требования к точности ориентации аппарата на объект исследова-
ния обуславливают повышенные требования к чувствительным элементам
системы управления ориентацией и стабилизацией (ГИВУС, датчики гида),
малые колебания которых также могут привести к искажению измеряемой
ими информации и ухудшению качества стабилизации объекта. Проведенные
работы по определению амплитуд колебаний элементов оптического тракта
и чувствительных элементов СУОС, вызванных остаточной несбалансирован-
ностью вращающихся роторов двигателей-маховиков (ДМ), показали нали-
чие существенной вероятности их отрицательного влияния на качество вы-
полнения поставленной задачи. С целью уменьшения влияния указанного
фактора на относительные перемещения оптического тракта разработан ше-
стистепенной виброизолятор двигателя-маховика.
Идею функционирования разрабатываемого устройства продемонстриру-
ем на одностепенном примере, представленном на рис. 2.3.5.
Возмущения, обусловленные остаточным дисбалансом ротора, можно
представить в виде
441
источник
вибровозмущений
упруго-вязкий
виброизопягор
корпус 7777777,
Рис. 2.3.5. Схема функционирования одностепенного виброизолятора
F = >4sin(27t//),
где f — частота вращения маховика в оборотах в секунду, Гц; t — время; А —
амплитуда воздействия.
Амплитуда возмущающей силы, создаваемой ДМ
А = осо2 =о(2тс/)2,
где о — остаточный дисбаланс; со — угловая скорость; f — количество обо-
ротов в секунду.
В модели механических воздействий двигателей маховиком принимаем:
— рабочий диапазон частот от 0 до 90 Гц;
— остаточный дисбаланс 710-6 кг • м.
На рис. 2.3.6 приведен график зависимости амплитуды воздействия рас-
сматриваемого устройства от частоты.
Рис. 2.3.6. Зависимость амплитуды воздействия виброизолятора от частоты
Для разрабатываемого устройства при настройках, обеспечивающих час-
тоту подвеса 10 Гц и эквивалентный декремент колебаний 0.3, получим гра-
фик зависимости коэффициента динамичности от частоты, который приве-
ден на рис. 2.3.7.
442
Рис. 2.3.7. Зависимость коэффициента динамичности виброизолятора от частоты
Таким образом, зависимость амплитуд механического воздействия, при-
ходящих на места крепления (рис. 2.3.8), показывает снижение максималь-
ного уровня практически на порядок; уровень воздействий на резонансной
частоте виброизолятора невысок в силу характера закона возмущающего воз-
действия.
Рис. 2.3.8. Зависимость амплитуд механического воздействия от частоты
Жесткостная схема разработанного шестистепенного виброизолятора при-
ведена на рис. 2.3.9.
Рис. 2.3.9. Жесткостная схема виброизолятора
Геометрические характеристики устройства, материал, количество, распо-
ложение, форма и сечение стоек путем итерационного численного модели-
рования подбирались так, чтобы обеспечить собственные колебания диска
443
(имитирующего двигатель-маховик) по первым шести тонам колебаний, ле-
жащих в области 10 Гц.
Результаты моделирования при выбранных параметрах приведены в
табл. 2.3.2 и на рис. 2.3.10.
Таблица 2.3.2. Результаты моделирования
№ тона Частота, Гц Колебания
1 7.65 в плоскости Y0Z
2 7.65 в плоскости X0Y
3 7.68 крутильные в плоскости X0Z
4 13.27 в плоскости Y0Z
5 13.27 в плоскости X0Y
6 15.90 по оси Y
1-й тон (7.6461О7Гц)
2-й тон (7.646111 Гц)
3-й тон (7.679445 Гц) 4-й тон (13.26972 Гц)
5-й тон (13.26976 Гц)
6-й тон (15.8973 Гц)
Рис. 2.3.10. Результаты моделирования
Схема макетного образца виброизолятора представлена на рис. 2.3.11,
внешний вид опытного образца — на рис. 2.3.12.
Подбор оптимальных параметров демпфирования производился путём
сравнения результатов моделирования реакции конструкции КА на заданное
воздействие при различных уровнях диссипации энергии в упругих элемен-
тах виброизоляции (стойках). Рассмотрим случай влияния воздействия ДМ
на линейные перемещения датчика гида по каналу Y под действием нагруз-
ки при соответствующих значениях конструкционного демпфирования виб-
роизоляторов. Рассмотренные уровни демпфирования приведены в табл. 2.3.3.
444
Рис. 2.3.11. Схема макетного образца виброизолятора: 1 — упругий элемент; 2 — вер-
хнее основание; 3 — мембрана; 4 — магнитная жидкость; 5 — нижнее основание;
6 — магниты
Рис. 2.3.12. Опытный образец виброизолятора
Таблица 2.3.3. Уровни демпфирования
Конструкционное демпфирование Декремент % от критического
0.03 0.094 1.5
0.1 0.314 5
0.21 0.660 10.5
0.32 1.005 16
0.5 1.571 25
Выберем несколько резонансных частот (8.0, 9.1, 14.9, 20.5, 28.0, 45.7 Гц).
На рис. 2.3.13 приведены амплитуды линейных перемещений датчика гида
при различных уровнях демпфирования для выбранных частот возбуждения,
соответствующих резонансным частотам конструкции.
445
Рис. 2.3.13. Линейные перемещения узла по оси У при различном демпфировании
при нагрузке
Сравнительный анализ совокупности полученных результатов позволяет
сделать вывод, что оптимальным для рассматриваемой схемы виброизоляции
является значение конструкционного демпфирования, равное 0.32, что соот-
ветствует декременту колебаний, равному — 1. Все дальнейшие расчеты про-
изводились с полученными параметрами демпфирования.
Оценка эффективности виброизоляции двигателей-маховиков на косми-
ческом аппарате «Спектр-УФ» проводилась путем сравнения значений амп-
литуд колебаний, создаваемых двигателями-маховиками, без виброизолято-
ров (на графиках тонкие линии) и с ними (на графиках толстые линии).
Рассматривались амплитуды линейных перемещений в местах установки
датчиков гида, астродатчиков, угловых скоростей в месте установки гироин-
тегратора вектора угловой скорости (ГИВУС), линейных и угловых переме-
щений ВЗ, угловых перемещений ГЗ и относительных линейных и угловых
перемещений ВЗ относительно ГЗ и датчиков гида относительно ГЗ. Нагруз-
ки характеризуют вид воздействия ДМ в конечно-элементной модели КА
«Спектр-УФ».
Для иллюстрации на рис. 2.3.14—2.3.18 приведены наиболее характерные
из полученных результатов.
Проведенная оценка влияния вибровозмущений на прецизионную аппа-
ратуру по двум направлениям: с виброизоляторами и без них показывает
эффективность разработанной системы и обоснованность ее применения.
Абсолютные линейные перемещения снизились в 5—10 раз, абсолютные
угловые перемещения — в 7—10 раз, абсолютные угловые скорости — в 10—
20 раз в диапазоне от 0 до 55 Гц и в 1,5 раза — в диапазоне от 55 до 90 Гц;
относительные линейные и угловые перемещения — в 5—10 раз. Сравнитель-
ный анализ подтверждает целесообразность использования виброизоляторов
446
Рис. 2.3.14. Линейные перемещения астродатчиков по оси Z
Рис. 2.3.15. Относительные линейные перемещения узлов ВЗ и ГЗ по оси Z
Рис. 2.3.16. Относительные линейные перемещения датчиков гида и ГЗ по оси Z
447
Рис. 2.3.17. Относительные линейные перемещения узлов ВЗ и ГЗ по оси X
Рис. 2.3.18. Относительные угловые перемещения узлов датчиков гида и ГЗ по оси X
как эффективного средства для устранения нежелательных микровозмуще-
ний, создаваемых ДМ.
2.3.6. Управляемые и регулируемые демпфирующие устройства
Для увеличения значений логарифмического декремента колебаний иссле-
довалась активная демпфирующая система разработки СКТБ «Полюс», в
которой использовались управляемые магнитожидкостные демпферы
(УМЖД) с магнитореологической суспензией (МРС) в качестве рабочего тела
(рис. 2.3.19). Демпферы устанавливались в подкос СБ.
При проведении испытаний использовались два режима работы демпфе-
ров УМЖД: пассивный (без подачи напряжения на катушку) и активный (с
подачей напряжения).
В результате испытаний с демпфером 1-го типа без подключения питаю-
щего напряжения частота первого тона снижалась на 13% при амплитудах
менее 1.0-10—3 м и на 47% — при амплитудах более 1.0-10-3 м. Величина дек-
ремента увеличилась примерно в шесть раз для первого тона по сравнению с
448
1 тип
Рис. 2.3.19. Управляемые магнитожидкостные демпферы
2 тип
базовым вариантом без демпфера со штатным подкосом. Изменились и фор-
мы колебаний СБ.
Подача питания на демпфер 1-го типа приводила к увеличению частоты
первого тона колебаний на амплитудах более 1.0-10-3 м на 22%, величина
декремента уменьшалась в два раза по сравнению с вариантом без подачи
напряжения. На амплитудах менее 1.0’10-3 м частота и форма колебаний су-
щественно не менялись.
Испытания с демпфером 2-го типа, разработка НПО им. С.А. Лавочкина
и Белорусского ИТМО им. Лыкова, показали, что частота первого тона ко-
лебаний СБ уменьшилась на 5% при амплитудах менее 1.0-10-3 м, а при ам-
плитудах более 1.0-10—3 м — на 70% по сравнению с базовым вариантом. Форма
колебаний этого тона не изменилась, 5 при амплитудах менее 1.0-10-3 м ос-
тались без изменений, а более 1.0-10-3 м — увеличились в 3.5 раза.
Аналог этой конструкции в дальнейшем был доработан специалистами
отдела динамики НПО им. С.А. Лавочкина и академией РВСН им. Петра
Великого в управляемый амортизатор (рис. 2.3.20) под автомобили «Ока» и
«Volvo». На 3-й Международной выставке-конгрессе «Высокие технологии.
Инновации. Инвестиции 98» (Михайловский манеж, СПб., 16—19 июня
1998 г.) образец магнитожидкостного амортизатора для ВАЗ «Ока» получил
II премию; амортизатор для «Volvo» на VI Московском Международном са-
а) б)
Рис. 2.3.20. Управляемые амортизаторы под автомобили ВАЗ «Ока» (а) и «Volvo» (б)
449
лоне промышленной собственности «Архимед-2003» (18—21 марта 2003 г.,
КВЦ «СОКОЛЬНИКИ») получил серебряную медаль.
Работоспособность амортизаторов была отработана в Московском НАМИ
и в ОАО «Плаза» (Санкт-Петербург), а их характеристики представлены на
рис. 2.3.21.
Рис. 2.3.21. Характеристика магнитожидкостного амортизатора для «Volvo»
2.3.7. Магнитожидкостные гасители колебаний
Частотные испытания панелей СБ КА «Аркон-1» показали низкую эффек-
тивность применения зазоров, люфтов и УМЖД в области амплитуд менее
1.010-3 м, поэтому был рассмотрен метод динамического гашения колеба-
ний, состоящий в присоединении к объекту ВЗ дополнительных устройств
(гасителей), построенных на принципах перераспределения энергии от объек-
та к гасителю (ГК).
Основные преимущества ГК состоит в том, что они могут быть размеще-
ны в тех местах пространственных конструкций, где амплитуды вибраций
максимальны и, следовательно, есть возможность достижения наибольшей
эффективности демпфирования колебаний.
Задача состояла в разработке и создании ГК, чувствительных к силовым
воздействиям от 10-4 Н до одного ньютона и успешно функционирующих в
области амплитуд от 5-Ю-6 м до 1-Ю-2 м при частотах в диапазоне -1...3 Гц,
свойственных СБ КА, которые являются одним из главных источником виб-
роколебаний.
450
Один из возможных способов демпфирования колебаний, сохраняющих
эффективность при таком снижении силовых возмущений и амплитуд коле-
баний, виделся в применении эффекта «динамического гасителя» для преоб-
разования сверхмалых колебаний объекта виброгашения в большие на два
порядка колебания эффективной массы гасителя и жидкостного трения для
диссипации ее энергии колебаний.
Оценим динамический отклик КА на нестационарное воздействие без
гасителей колебаний. К центральной точке корпуса КА приложен момент
относительно оси X в виде двух прямоугольных импульсов общей длитель-
ностью 60 с (рис. 2.3.22). Показанный на рисунке единичный момент умно-
жался на масштабный множитель К, выбранный так, чтобы суммарный угол
поворота КА составил 80° (1.4 рад).
M(t).H м
1 °1-----
0.8 -
0.6 -
0.4 -
0.2 -
° ' ----------------------------------
-0.2 -
— 0.4 -
-0.6 -
-08 -
-101--1-1—___I_I__—।—।---1—।-1--1-1-1—।
0 30 60 90 120 150 t. С
Рис. 2.3.22. Динамический отклик КА на нестационарное воздействие без гасителей
колебаний
Проведен анализ переходного процесса от данного воздействия (время
интегрирования от 0 до 150 с). В расчете принято значение декремента 5 = 0.01
по всем учитываемым формам колебаний.
Из анализа полученных собственных значений видно, что максимальное
влияние на движение КА по каналу оси X оказывает 3-й тон упругих колеба-
ний (f= 1.367 Гц).
Расчет показал, что без установки на панелях СБ гасителей колебаний
угловая скорость в центральной точке корпуса КА относительно оси X зату-
хает до требуемого значения (1.410-3 °/с) за 90 с после снятия воздействия
(рис. 2.3.23). Что превышает заданное значение точности стабилизации КА
(1.010-3 °/с).
Для уменьшения времени затухания колебаний КА по указанному тону
упругих колебаний (/, = 1.367 Гц) на концах каждой из установлены по че-
тыре динамических гасителя. Схема установки приведена на рис. 2.3.24
(поз. 1—8).
Каждый динамический гаситель моделировался консольной невесомой
балкой с сосредоточенной массой на конце. Гасители установлены по оси У
451
ДЛреиеммм»* >ШкОJ£3
Рис. 2.3.23. Время затухания колебаний КА без установки на панелях СБ гасителей
колебаний
КА. Задаемся массой активного тела гасителя тг = 0.051 кг, длиной балки
/г = 0.04 м и ее материалом Е= 71O10 Па. Тогда частота собственных колеба-
ний гасителя:
г _ 1 Ж
г 2лутг/3'
Таким образом, по требуемой частоте можем определить момент инерции
сечения модельной балки имитирующей жесткость гасителя:
(2л/)2тг/г3=1 146 10_,5 м4
г ЗЕ
После введения в конечно-элементную модель балок-гасителей был про-
изведен расчет 25 первых тонов (собственных форм и частот) упругих коле-
баний незакрепленной конструкции. Получено шесть форм движения КА как
452
твердого тела и 19 низших форм собственных упругих колебаний конструк-
ции (тона №1-19). Результаты расчета приведены в табл. 2.3.4.
Таблица 2.3.4. Формы собственных упругих колебаний конструкции КА
№ тона /ГЦ со, рад/с со2, рад2/с2
1 0.73 4.59 21.1
2 1.18 7.41 55.0
3 1.28 8.01 64.2
4 1.29 8.09 65.4
5 1.34 8.42 70.9
6 1.34 8.42 71.0
7 1.34 8.43 71.1
8 1.34 8.43 71.1
9 1.36 8.56 73.3
10 1.40 8.78 77.0
11 1.43 9.00 81.0
12 1.45 9.11 83.0
13 2.58 16.22 263.1
14 3.70 23.23 539.5
15 3.71 23.28 542.0
16 3.99 25.09 629.7
17 5.37 33.74 1138.0
18 5.53 34.75 1208.0
19 6.00 37.70 1421.0
Затем проводился анализ переходного процесса при возмущении приве-
денным выше нестационарным воздействием. В расчетах варьировался ко-
эффициент демпфирования гасителя ег = 25г/г/иг, где 5Г — логарифмичес-
кий декремент колебаний гасителя. По всем учитываемым формам колеба-
ний принято значение декремента 5 =0.01. Определялось время затухания
колебаний КА (после снятия воздействия) по угловой скорости относитель-
но оси Л" до значения стабилизации 1.010-3 ° /с. Результаты отражены на гра-
фиках, рисунках и в таблице.
На рис. 2.3.25—2.3.29 приведено изменение угловой скорости относительно
оси X (°/с) в центральной точке корпуса КА при действии момента Mx(t) по
заданному закону, а также упругие компоненты угловой скорости относитель-
но оси X (исключая движение твердого тела) в той же точке после снятия
нагрузки Mx(t) для различных значений коэффициента демпфирования га-
сителя ег.
Полученные результаты сведены в табл. 2.3.5.
Графики зависимости времени затухания угловой скорости КА г)ф до
1.0-10-3 °/с от коэффициента демпфирования и от собственного декремента
колебаний гасителя приведены на рис. 2.3.30, 2.3.31.
Таким образом, оптимальное значение коэффициента демпфирования
гасителя ег, при котором амплитуда колебаний по угловой скорости дости-
453
Рис. 2.3.25. Момент Mx(f), приложенный в центральной точке корпуса КА
Рис. 2.3.26. ег = 0.03 1/с
Рис. 2.3.27. ег = 0.05 1/с
454
Рис. 2.3.28. er = 0.07 1/с
Рис. 2.3.29. ег =0.1 1/с
Таблица 2.3.5. Результаты расчетов при различных коэффициентах демпфирования
Коэффициент демпфирования гасителя ег, 1/с Время затухания угловой скорости КА до 1.0 • 10“3 ° /с, с
0.030 17.5
0.040 16.7
0.050 12.1
0.055 11.9
0.060 11.6
0.065 11.2
0.070 7.5
0.075 8.2
0.080 9.0
0.085 9.8
0.090 11.3
0.100 13.0
455
200
180
16.0
«5 140
- 120
» 100
I
1 80
!бо
1.0
20
00
0025 0035 0ХМ5 0055 0065 0075 0085 0095 0Ю5
Рис. 2.3.30. Зависимости времени затухания угловой скорости КА до 1.010-3 ° /с
от коэффициента демпфирования
Рис. 2.3.31. Зависимости времени затухания угловой скорости КА до 1.0-10“3 ° /с
от собственного декремента колебаний гасителя
гает заданного значения стабилизации за 7.5 с, составляет 0.07 1/с (декремент
- 0.52).
По результатам серии проведенных экспериментов в качестве рабочего
материала для устройств ГК были выбраны магнитные жидкости (МЖ).
В качестве основных компонентов системы виброзащиты панелей СБ были
выбраны магнитно-жидкостные поглотители колебаний, хорошо зарекомен-
довавшие себя в разрабатываемых ранее аналогичных системах. Этот тип
устройств характеризуется:
— высокой эффективностью,
— малой массой,
— высокими ресурсными показателями,
— хорошими показателями диссипации энергии при малых и сверхмалых
амплитудах колебаний объекта виброзащиты.
456
Для получения характеристик элементов системы виброзащиты КА, по-
лученных при математическом моделировании его динамики, проведена се-
рия макетных экспериментов с целью подбора их конструктивно-технологи-
ческих параметров. Для этого были изготовлены макеты виброгасителей,
позволяющие варьировать определенные параметры, которые приведены в
табл. 2.3.6. Макеты разрабатывались таким образом, чтобы обеспечить сле-
дующие диапазоны изменения собственных параметров.
Таблица 2.3.6. Конструктивно-технологические параметры виброгасителей
Параметр Нижняя граница Верхняя граница
Собственная частота гасителя, Гц 0.9 1.6
Максимальное перемещение рабочего тела, мм 3 10
Масса рабочего тела, г 30 100
Декремент колебаний рабочего тела 0.5 1
Для проведения испытаний была разработана и изготовлена серия макет-
ных образцов магнитожидкостных гасителей колебаний (схема макетного об-
разца приведена на рис. 2.3.32).
В процессе отработки производились многократные испытания по опре-
делению собственных характеристик гасителя (его жесткостных и диссипа-
тивных параметров) при различных величинах:
— вязкости магнитной жидкости,
— намагниченности магнитной жидкости,
— объема заправки,
Рис. 2.3.32. Схема макетного образца МЖ виброгасителя
457
— высоты полости А (рис. 2.3.33),
— формы и намагниченности активного тела (магнита).
Рис. 2.3.33. Макет гасителя
Для отработки необходимых характеристик гасителей была собрана спе-
циальная экспериментальная установка на базе высокочувствительного си-
лоизмерительного стенда фирмы «Кистлер» (рис. 2.3.34).
Отработка проводилась по следующей методике.
На силоизмерительный стенд (СИС) жестко крепилась балка, сечение и
геометрические характеристики которой были подобраны так, чтобы первая
собственная частота колебаний была как минимум на порядок выше рабоче-
го диапазона гасителя. В нашем случае частота системы «балка+гаситель» со-
ставляла 1,56 Гц.
Производилась настройка очередных параметров макета:
— выбор типа магнитной жидкости;
— заправка соответствующим ее объемом;
— задание высоты рабочей полости гасителя А;
— макет гасителя строго горизонтально крепился к свободному концу балки.
Магнитоиндукционным путем проводилось возбуждение собственных
колебаний рабочего тела гасителя.
Рис. 2.3.34. Специальная экспериментальная установка
458
Аппаратурой стенда регистрировался отклик системы, обусловленный
взаимодействием колеблющегося рабочего тела гасителя со стенками, и да-
лее через балку передавался на стенд.
С помощью соответствующих методов цифровой обработки из получен-
ного сигнала выделялась составляющая, обусловленная собственными коле-
баниями гасителя (рис. 2.3.35 и табл. 2.3.7).
Рис. 2.3.35. Метод цифровой обработки из полученного сигнала, обусловленного соб-
ственными колебаниями гасителя
Таблица 2.3.7. Гармонические составляющие сигнала
Гармоника Частота Декремент Амплитуда Фаза Комментарий
1 8.16Е-02 1.00Е-08 4.27Е-03 4.84Е+00
2 9.77Е-01 6.75Е-01 7.32Е-03 6.22Е+00
3 1.37Е+00 7.49Е-01 2.72Е-02 6.28Е+00 Основная состав- ляющая собственных колебаний гасителя
4 2.50Е+00 7.90Е-01 1.33Е-02 4.96Е-10
5 3.60Е+00 4.05Е-01 8.05Е-03 1.16Е+00
По описанной выше методике были проведены испытания нескольких
макетов гасителей. В качестве рабочего тела во всех вариантах использовался
магнит FeBa 030 мм Л= 15,7 мм (#N = 0.116 Тл; Я8 = 0.123 Тл), где и
Hs — магнитная индукция на поверхности магнита с разных полюсов.
Варианты исполнения макетов приведены в табл. 2.3.8.
Результаты проведенных доводочных испытаний для каждого из опытных
образцов при различных высотах рабочей области представлены в виде гра-
фиков на рис. 2.3.36—2.3.43.
Из анализа, полученного в процессе обработки результатов испытаний
макетных гасителей, следует, что наиболее близкие к оптимальным характе-
459
Таблица 2.3.8. Варианты исполнения макетов
№ варианта Тип магнитной жидкости Объем заправки, мл
1 БПИ-МК41 15
2 БПИ-МК41 17.5
3 БПИ-МК41 20
4 БПИ-МК41 21
5 БПИ-МК41 22.5
6 МК-45 20
7 М МТ-38 20
8 М МТ-38 22.5
Рис. 2.3.37. Вариант 2 (БПИ-МК41, заправка 17.5 мл)
Рис. 2.3.38. Вариант 3 (БПИ-МК41, заправка 20 мл)
460
Рис. 2.3.39. Вариант 4 (БПИ-МК41, заправка 21 мл)
Рис. 2.3.40. Вариант 5 (БПИ-МК41, заправка 22.5 мл)
вькоп рабочей помоем мм
Рис. 2.3.41. Вариант 6 (МК45, заправка 20 мл)
Рис. 2.3.42. Вариант 7 (ММТ-38, заправка 20 мл)
461
2 MOO 2*Л90 2«М> SMB SSJSD S-MB JMBO 2ЯЮ0
MM «я мпН «мм «ж мм
**мв рМячей пмогашмм
Рис. 2.3.43. Вариант 8 (ММТ-38, заправка 22.5 мл)
ристики (частота — 1.35 декремент — 0.52) обеспечивает 4-й вариант гасите-
ля (жидкость БПИ-МК41, заправка 21 мл) с высотой рабочей области по-
рядка 27 мм.
Для иллюстрации эффективности разработанных гасителей колебаний на
рис. 2.3.44 приведены два переходных процесса, полученных и зарегистри-
рованных при зачетных испытаниях. Первый показывает колебания исход-
ной конструкции с массоимитатором гасителя колебаний, второй — колеба-
ния той же конструкции с установленным на ней гасителем колебаний.
Рис. 2.3.44. Результаты испытаний конструкции с массоимитатором и гасителем
Рис. 2.3.45. Виброгаситель магнитожидкостной
462
В результате проведенных исследований для гашения колебаний панелей
СБ изделия «Аркон-1» был выбран магнитожидкостной виброгаситель
(МЖВГ), который представлен на рис. 2.3.45.
2.3.8. Сплавы высокого демпфирования
К числу материалов, способных гасить микровозмущения на КА с ампли-
тудами (10-6... 10-4 м), относят сплавы высокого демпфирования (СВД) с тремя
основными типами механизмов повышенного демпфирования:
— взаимодействие скользящих дислокаций с атомами примеси (Mg и спла-
вы на его основе, чугуны);
— движение границ двойников в термоупругом мартенсите (сплавы на ос-
нове Ni-Ti, Mn-Cu, Cu-Al-Ni, Cu-Al-Zn);
— взаимодействие движущихся границ доменов со структурными дефек-
тами (сплавы на основе Fe-Сг, Fe-Cr-Al, Co-Ni, Fe-Co).
Поиск возможных решений по повышению демпфирующих свойств кон-
струкций КА с использованием в них СВД из титановых сплавов проведен
совместно со специалистами Самарского авиационного института на макет-
ных образцах узла вторичного зеркала (УВЗ). Конструкция УВЗ телескопа
показана на рис. 2.3.46.
Рис. 2.3.46. Узел вторичного зеркала телескопа
После расчета динамики УВЗ получены первые два тона колебаний, вли-
яющих на оптическую систему КА: частота 1-го тона — вращение вторично-
го зеркала вокруг оси Xсоставила 17,7 ± 0,15 Гц; частота 2-го тона — колеба-
ний вдоль оси X — 45,0 ± 0,1Гц; также определены детали, представляющие
собой несущие кронштейны оптической системы (спайдеры), которые могут
улучшить вибродинамические характеристики изделия и обеспечить вибро-
защиту вторичного зеркала.
При сравнении различных материалов из которых изготавливались эле-
менты конструкции (спайдеры), лучше всех показал себя кронштейн из ти-
463
танового сплава ВТ9, с последующей специальной термической обработкой,
для которого были проведены вибродинамические испытания.
Результаты эксперимента показали, что изменения статического нагруже-
ния кронштейна (установка элемента конструкции с силой растяжения или
сжатия) и различные уровни возбуждения конструкции при перемещениях
краев макета вторичного зеркала в пределах 0.5...8-10-6 м не влияют на дина-
мические параметры исследуемых конструкций.
Применение СВД в кронштейнах УВЗ приводит к увеличению логариф-
мического декремента колебаний в два раза на первом тоне колебаний
(8 = 0,003) и в 1.6 раза на втором (8 = 0,009) по сравнению со штатными крон-
штейнами, что также является малоэффективным.
2.3.9. Применение пьезоэлектрических материалов
Одно из направлений исследований по применению пьезоэлементов (ПЭ)
в системах виброзащиты (ВЗ) КК связано с пассивным шунтированием ПЭ.
При этом ПЭ соединены с внешним элементом СУ. Сам ПЭ может быть ис-
пользован как исполнительный механизм в СУ, а через электроды ПЭ шун-
тируется некоторым электрическим сопротивлением (ЭС) — шунтированный
ПЭ. ЭС выбирается таким, чтобы произошло поглощение электрической энер-
гии, преобразованной из механической энергии, действующей на ПЭ. Шун-
тированная модель в основном сводится к вариантам с различными схемами
включения резистора и конденсатора. При резистивном шунтировании свой-
ства ПЭ имеют частотную зависимость, схожую с упруговязкими материала-
ми. Шунтирование с помощью резистора вносит электрический резонанс, ко-
торый может быть оптимально настроен на собственную частоту конструк-
ции.
Свойства трансформации энергии ПЭ устанавливаются коэффициентом
электромеханической связи к (КЭС).
При испытаниях в области частот 400—3000 Гц использовались шесть па-
кетов ПЭ ПП-12 (рис. 2.3.47,а), каждый из которых состоял из девяти пла-
стин (материал ЦТС-19).
В результате выявлено влияние сопротивления, подключенного к ПЭ, на
8 и резонансную частоту. При сопротивлении 550 Ом наблюдалось увеличе-
ние 8 в два раза по сравнению с разомкнутой системой; при подаче на ПЭ
синусоидального сигнала произвольной частоты получено увеличение 8 в 2,5
раза. Эти эффекты наблюдались в резонансной зоне, соответствующей соб-
ственной частоте конструкции 2300 Гц, но и применение ПЭ с собственны-
ми частотами ниже 10 Гц приводило к такому же положительному эффекту,
только величина сопротивления в шунтирующем контуре была другой.
Результаты проведенных испытаний показаны на рис. 2.3.47,6, где по оси
абсцисс отложены F (частоты колебаний); по оси ординат — К (коэффици-
енты усиления).
Исследования по применению ПЭ с пассивным шунтированием показали
положительный эффект, что особенно интересно, поскольку при использо-
464
кморум««с фоммаи п монаа»!
Рис. 2.3.47. Схема испытаний пакетов из ПЭ (а) и их результаты испытаний (б)
вании ПЭ в системах активной виброзащиты требуются мощные усилители,
чувствительные датчики и преобразующая электронная аппаратура, что в
контурах системы управления КА проблематично.
Литература
1. Баштовой В.Г., Берковский Б.М., Вислович А.Н. Введение в термоме-
ханику магнитных жидкостей. — М.: ИВТ АН СССР, 1985.
2. Вибрация в технике: Справочник. В 6-ти т. Защита от вибраций и уда-
ров. Т.6 / Под ред. чл.-кор. АН СССР К.В. Фролова. — М.: Машинострое-
ние, 1981.
3. Ермаков В.Ю., Моишеев А.А., Саяпин С.Н., Синев А.В. Эффективный
динамический гаситель // Сб. науч. тр. ФГУП «НПО им. С.А. Лавочкина».
Вып. 3. - М„ 2001. С. 246-248.
4. Клишев О.П., Ермаков В.Ю., Савостьянов А.М., Телепнев П.П. Ими-
тационное моделирование динамики раскрытия солнечного паруса. // Сб.
науч. тр. ФГУП «НПО им. С.А. Лавочкина». Вып. 6. — М., 2005. С. 337-341.
5. Телепнев П.П., Ермаков В.Ю., Бутылкин А.Ф., Штенберг Ш.Е. Мето-
ды гашения вибраций корпуса и панелей СБ КА с помощью исполнитель-
ных устройств его системы ориентации // Сб. науч. тр. ФГУП «НПО им. С.А.
Лавочкина». Вып. 6. — М., 2005. С. 432-437.
П.П.Телепнев,
НПО им. С.А.Лавочкина
В. Ю. Ермаков,
НПО им. С.А. Лавочкина
465
ЯИ ОСНОВЫ ПРОЕКТИРОВАНИЯ НАДУВНЫХ КОСМИЧЕСКИХ
КОНСТРУКЦИЙ
2.4.1. О необходимости и целесообразности использования надувных
элементов конструкции в ракетно-космической технике
Современный этап развития космонавтики характеризуется ярко выражен-
ной тенденцией усложнения решаемых в условиях космического простран-
ства задач, требующих для этих целей применения достаточно громоздких
основных и вспомогательных систем и элементов конструкции, обладающих
большой массой.
Данная тенденция имеет место как применительно к околопланетным
орбитальным космическим аппаратам (КА), так и к автоматическим косми-
ческим станциям (АМС), предназначенным для изучения и освоения планет
Солнечной системы.
В качестве примеров необходимости применения громоздких основных и
вспомогательных систем в конструкциях КА и АМС могут быть названы:
— создание крупногабаритных и легковесных спутников для проведения
специфических научных исследований околоземного и дальнего космичес-
кого пространства;
— разработка систем развертывания солнечных батарей КА и АМС для
межпланетных перелетов, требующих высокого энергопотребления и, следо-
вательно, большой площади поверхности для размещения преобразователей
солнечной энергии в электрическую;
— разработка систем развертывания рабочих поверхностей солнечного па-
руса для перспективных КА и АМС, использующих в качестве разгонной силы
давление солнечного света;
— создание антенн космических радиотелескопов, диаметр принимающей/
отражающей поверхностей которых может достигать десяти и более метров;
— разработка солнцезащитных экранов космических телескопов;
— разработка длинномерных ферменных конструкций, штанг для вынос-
ных элементов КА и других космических конструкций;
— разработка систем аэродинамического торможения орбитальных КА в
разреженных слоях атмосфер планет для обеспечения их входа в плотные слои
атмосферы без использования реактивной системы торможения;
— разработка систем аэродинамического торможения КА в плотных сло-
ях атмосферы для посадки на поверхности планет как тяжеловесных, круп-
ногабаритных пилотируемых станций, так и беспилотных исследовательских
спускаемых аппаратов в условиях воздействия высоких тепловых и механи-
ческих нагрузок.
Очевидно, что такие конструкции не могут быть размещены в разверну-
том виде в объеме под головными обтекателями современных ракет-носите-
лей (PH).
Помимо этого, естественное стремление разработчиков ракетной и кос-
мической техники (РКТ) к сокращению стоимости своих проектов, сниже-
466
нию массы выпускаемой продукции, недопустимости чрезмерного загрязне-
ния околоземного космического пространства, к поиску решения более слож-
ных задач, таких, как спуск в атмосферах планет многотонных пилотируе-
мых посадочных станций, спуск и спасение отработавших ракетных блоков,
спутников, снятие с орбиты крупногабаритных искусственных объектов и др.,
— диктует целесообразность использования новых технологий при проекти-
ровании РКТ.
Решение указанных задач космонавтики может быть осуществлено толь-
ко с появлением принципиально новых «прорывных» технологий, таких,
например, как технология использования надувных элементов конструкции
(НЭК) в изделиях ракетно-космической техники.
По прогнозным оценкам Института мировой экономики и международ-
ных отношений РАН, проанализировавшего в работе [1] результаты и целе-
вое назначение российских и американских научных программ в области
космической деятельности, появление «прорывных космических технологий
можно ожидать лишь к концу следующего десятилетия». При этом отмечает-
ся, что их интеграционный (синергетический) эффект может быть достиг-
нут не ранее 2020—2030 гг. Период до 2030 г. оценивается как «стратегичес-
кая пауза» — период отработки и восприятия новых технологических возмож-
ностей и идей при одновременной интенсивной подготовке к принятию ре-
шений о будущем космонавтики.
В связи с этим разработка технологии применения НЭК в изделиях РКТ,
являющейся одним из эффективных направлений указанных «прорывных
космических технологий», может представить собой опережающий по про-
гнозным срокам продукт деятельности соответствующих специалистов, оп-
ределяющий прогресс в области космической деятельности на ближайшие
десятилетия.
Особенно ярко тенденция усложнения задач космонавтики проявляется
при создании и практическом использовании различного рода транспортных
систем — спускаемых аппаратов (СА), снабженных средствами, обеспечива-
ющими торможение, безопасный спуск в атмосфере и мягкую посадку на
поверхность планеты.
Если полеты транспортных систем между Землей и другими планетами
Солнечной системы достаточно редки, то полеты к долгоживущим станциям
на орбите ИСЗ и доставка грузов с них достаточно регулярны.
Об объеме грузопотоков, курсирующих по трассе орбита — поверхность
Земли, можно судить, в частности, по тому, что за 15 лет существования
орбитального российского комплекса «Мир» суммарная масса доставленных
с него грузов с результатами экспериментов составила примерно 4700 кг.
Весьма значительны по массе и частоте возвращения и грузы, доставляемые
ныне на поверхность Земли с борта МКС и автоматических беспилотных КА
дистанционного зондирования Земли.
467
При реализации этих транспортных задач для эффективного торможения
спускаемых объектов необходимо применять тормозные устройства различ-
ной формы и, в частности, лобовые аэродинамические экраны (ЛАЭ) доста-
точно больших размеров. Принимая во внимание ограниченность попереч-
ных размеров головных обтекателей современных PH, ясно, что эти устрой-
ства должны выполняться раскрывающимися до заданного размера.
Одним из вариантов раскрывающегося ЛАЭ спускаемого в атмосфере
объекта может служить экран надувной конструкции. Такой экран представ-
ляет собой замкнутую герметичную оболочку, образующую после заполнения
ее объема газом заданную форму. Эта оболочка состыковывается с предназ-
наченным для спуска в атмосфере объектом и образует его надувное тормоз-
ное устройство (НТУ). При запусках такое устройство находится под обтека-
телем PH в сложенном в компактный объем положении, а непосредственно
перед фазой аэродинамического торможения приводится в развернутое ра-
бочее положение.
Такое надувное тормозное устройство может быть использовано для ре-
шения ряда перспективных транспортных задач космонавтики:
— возврат и спасение последних ступеней и разгонных блоков PH после
выполнения ими своих функций, что повышает экономическую эффектив-
ность за счет возможности повторного использования этих блоков или неко-
торых их элементов;
— возврат с орбит спутников с ценным оборудованием и исследователь-
ских лабораторий с накопленной научной информацией после выполнения
программы их полета;
— захват и спуск на Землю спутников или орбитальных станций, отрабо-
тавших свой ресурс, что позволяет решить проблему очистки околоземного
пространства от техногенного космического мусора. Такой метод спуска с
орбиты Земли спутников и станций описан в работе [2], где приводится при-
мер возможного снятия с орбиты станции «Мир» массой 140 тонн с высоты
380 км. Для этого достаточно было доставить на орбиту и пристыковать к
станции НТУ, выполненное в виде сферы диаметром 176 м из пленки тол-
щиной 9 мк. Вес такого НТУ составил бы 790 кг, продолжительность тормо-
жения — от одного года до восьми дней — в зависимости от состояния раз-
реженной атмосферы Земли на момент спуска;
— для более дешевой доставки грузов с пилотируемых орбитальных стан-
ций на земную поверхность по сравнению с использованием для этой цели
дорогостоящих космических транспортных систем типа «Союз», «Прогресс»,
«Шатлл» и др.;
— для посадки на планеты с разреженной атмосферой многотонных стан-
ций. Например, для доставки на поверхность Марса жилого модуля пилоти-
руемой экспедиции необходимо затормозить в атмосфере спускаемый аппа-
рат массой около 60 тонн. Для аэродинамического торможения такого СА до
468
скорости, обеспечивающей ввод парашютной системы и его мягкую посад-
ку, необходим ЛАЭ диаметром 23 м;
— для экстренной доставки с обитаемой околоземной станции экипажа
или любого из космонавтов в чрезвычайных ситуациях без использования
транспортного космического корабля. Расчетные оценки [3] свидетельству-
ют о возможной реализуемости использования НТУ для снятия объекта с
орбиты ИСЗ за счет аэродинамического торможения в разреженных слоях ат-
мосферы. Так, например, сход капсулы, оснащенной сферическим НТУ ди-
аметром 25 м, с орбиты высотой 250 км за счет аэроторможения в разрежен-
ной среде в атмосферу может быть осуществлен всего за 8—9 часов, т.е. пос-
ле пяти-шести витков вокруг Земли при массе объекта 200—250 кг.
Как видно из приведенных примеров, для решения перечисленных задач
требуются НТУ, поперечные размеры которых в развернутом положении не
могут быть размещены под головным обтекателем PH.
Реализация технологии КА и АМС с НЭК и СА с НТУ требует решения
ряда новых научно-технических проблем, в качестве основных из которых
можно отметить:
— выбор из ассортимента имеющихся или разработка новых конструкци-
онных материалов для изготовления НЭК и элементов НТУ;
— разработка технологии изготовления НЭК и элементов НТУ;
— разработка методов проектирования оптимальной и надежной системы
наддува НЭК и НТУ с автоматикой управления наддувом;
— разработка методологии исследования динамики развертывания НЭК
и НТУ и устойчивости (неизменяемости) их формы как в космосе, так и в
атмосфере;
— разработка методов теоретического и экспериментального исследова-
ния аэродинамики, аэротермодинамики и прочности упругой конструкции
НТУ под воздействием нагрузок при спуске СА с НТУ и вибрационных на-
грузок на участках транспортировки НЭК и НТУ в сложенном состоянии;
— разработка методов обеспечения жесткости и сохранения формы НЭК и
НТУ в случае нарушения герметичности образующих их надувных оболочек;
— разработка методологии проектирования, производства и отработки теп-
ловой защиты НТУ спускаемого аппарата, не препятствующей его укладке в
компактный объем в транспортном положении и последующему разверты-
ванию в рабочее положение.
Изложенный перечень проблем и составляет отличительные особенности
проектирования надувных космических конструкций.
2.4.2. Достижения в разработке проектов космических и спускаемых
аппаратов с элементами надувной конструкции
2.4.2.1. Космические аппараты с элементами надувной конструкции
Внимание к идее использования НЭК в летательной космической техни-
ке как в России, так и за рубежом (в основном, в США) проявилось в 50-е
469
годы прошлого столетия, когда начались запуски первых ИСЗ. Так, в Langley
Research Center (LRC) по инициативе Национального космического агент-
ства США (NASA) в 1962 году был спроектирован и испытан в аэродинами-
ческих трубах надувной параплан IMP (Inflatable Micrometeoroid Paraglider),
рис. 2.4.1, для запуска в космос с целью определения микрометеороидной
опасности. Детектором провзаимодействовавших с аппаратом метеорных
частиц должны были служить панели дельта-крыла параплана.
Рис, 2.4,1. Общий вид параплана надувной конструкции
Запуск IMP состоялся в 1964 году. Однако из-за того, что тормозной дви-
гатель отделился от IMP раньше запланированного времени, спуск парапла-
на прошел не по штатной траектории, и он был разрушен.
В этом же LRC была разработана и запущена серия ИСЗ надувной конст-
рукции.
Первым в августе 1960 года был запущен спутник Echo I сферической
формы, диаметром 30,5 м и массой 62 кг (рис. 2.4.2), выполненный из алю-
Рис. 2.4.2. Общий вид спутника надувной конструкции Echo I
470
минизированной тонкой пленки майлар. При запуске спутник размещался в
сложенном виде в контейнере. Спутник Echo I был предназначен для отра-
жения радиосигнала на наземные приемники; он просуществовал на орбите
несколько месяцев и разрушился по неизвестной причине.
Следующий спутник, Echo II, из того же материала обладал более громоз-
дкой конструкцией. Он был запущен в январе 1964 года, представлял собой
сферу диаметром 41 м, массой 263 кг и выполнял функции связи [4].
Ранее, в 1961 и 1963гг. запускались более мелкие спутники надувной кон-
струкции — Explorer I и II — диаметром 5,5 м, массой около 16 кг, предназ-
наченные для исследования параметров в сильно разреженных слоях атмос-
феры Земли. Эти спутники функционировали на орбите в течение двух и трех
лет соответственно. Для зондирования Земли также использовался спутник
надувной конструкции PAGEOS I диаметром 30,5 м и массой 67 кг, запущен-
ный в июне 1966 года и просуществовавший на орбите пять лет [5]. Это сви-
детельствует о возможности существования аппаратов надувной конструкции
в космосе в течение довольно продолжительного времени.
Летательный аппарат FIRST (Fabrication of Inflatable Reentry Structures for
Test) на базе IMP для аварийного спасения членов экипажа с пилотируемого
КА также был спроектирован в LRC. Этот аппарат должен был находиться
на борту КА, в случае необходимости наполняться азотом и обеспечивать
управляемый спуск экипажа КА или некоторых его членов с высоты 122 до
36 км в течение получаса. Предусматриваемая зона посадки СА имела длину
2250 и ширину около 750 км [6].
Наряду со спутниками надувной конструкции простейшей сферической
конфигурации разработчики космической техники рассматривают возмож-
ность создания КА с надувными элементами сложнейшей формы.
Так, например, NASA планирует создавать в космосе на орбитах ИСЗ ас-
трономические лаборатории с крупногабаритны-
ми надувными элементами конструкции. В [7]
приведено описание КА ARISE (Advanced Radio
Interferometry between Space and Earth), общий вид
которого приведен на рис. 2.4.3.
КА ARISE несет надувную радиоантенну ди-
аметром 30 м, массой 100 кг, которая укладыва-
ется в объём около одного кубического метра [8].
Динамика раскрытия такой антенны в космосе
была отработана после запуска в мае 1996 г. КА,
содержащего платформу и закрепленные на ней
три надувные штанги длиной 28 м, удерживаю-
щие надувную антенну диаметром 14 м. Эта от-
работка проведена в рамках летного эксперимен-
та, в соответствии с которым развертывание ан-
тенны было начато на вторые сутки после запус-
Рис. 2.4.3. Концептуальный
вид КА-радиоинтерферометра
471
ка и закончено после прохождения КА полутора витков. После выполнения
эксперимента антенна была отсоединена от платформы.
Надувные элементы могут быть использованы также для формирования
ферменных конструкций КА и выносных штанг для удержания удаленных
элементов конструкции КА, аппаратуры и научных приборов. На рис. 2.4.4
из [9] приведен пример ферменной конструкции надувного типа в разверну-
том и уложенном видах. При длине этой фермы, равной 15 м, масса её соста-
вит 1,92 кг, а занимаемый объем в компактно уложенном положении — око-
ло 3 л.
а) б)
Рис. 2.4.4. Общий вид надувной фермы в развернутом (а) и уложенном (б) положении
В последние годы разработка проектов КА с использованием технологии
НЭК включена и в Программу коммерческих работ Федерального космичес-
кого агентства России.
Так, например, в НПО им. С.А. Лавочкина по заказу и при финансовой
поддержке коммерческой организации «Американское планетарное общество»
разработан проект и в 2005 году из акватории Баренцева моря с помощью
конверсионной ракеты «Волна» осуществлен запуск КА «Солнечный парус».
Ввиду того, что двигатели второй ступени ракеты не отработали положенное
время, пуск оказался неудачным и КА был затоплен в водах Северного Ледо-
витого океана.
Космический аппарат «Солнечный парус» [10] был предназначен для ис-
следования возможности использования солнечного давления в качестве
движителя КА. «Солнечный парус» содержал восемь лопастей общей площа-
дью около 635 м2 (рис. 2.4.5,а). Каждая лопасть солнечного паруса состояла
из пневмокаркаса трубчатого сечения диаметром 150 мм, изготовленного из
газонепроницаемой пленки толщиной 20 мкм. Законцовка пневмокаркаса
заведена в ложемент для укладки и снабжена штуцером для подачи газа при
наддувах пневмокаркаса. Оси двух труб пневмокаркаса, каждая длиной 15 м,
разведены от законцовки лопасти к периферии на угол 30°. Трубы удержива-
ют в расправленном положении установленную между ними светоотражаю-
щую мембрану из пленки толщиной 5 мкм.
472
а) б)
Рис. 2.4.5. Космический аппарат «Солнечный парус» в развернутом (а) и сложен-
ном (б) положении
Укладка лопасти в транспортное положение осуществляется по специаль-
но разработанной технологии в рулон длиной 300 мм и диаметром 200 мм
(рис. 2.4.5,6).
Таким образом, надувной каркас КА «Солнечный парус», поддерживаю-
щий светоотражающую мембрану в расправленном рабочем положении, обес-
печивает возможность трансформирования КА из компактно уложенного
положения при запуске в крупногабаритную конструкцию в космосе.
Другим примером применения надувных элементов для создания круп-
ногабаритных конструкций является каркас панелей солнечных батарей (СБ)
экспериментального блока [10], проект которого также выполнен в НПО им.
С.А. Лавочкина по заказу и при финансовой поддержке Европейского кос-
мического агентства (ЕКА).
Каркас панели СБ снабжен двумя торцевыми поперечными складными
жесткими элементами и тремя продольными надувными штангами (рис. 2.4.6).
Рис. 2.4.6. Общий вид надувного каркаса панели солнечной батареи (Россия)
473
Мембрана, несущая преобразователи солнечных батарей, крепится к торце-
вым элементам каркаса. Продольные штанги соединены с системой наддува.
После вывода блока на рабочую орбиту газ из источника давления подается
в полости продольных штанг, и панели СБ разворачиваются в рабочее поло-
жение. Для обеспечения жесткости каркаса в случае разгерметизации его
надувных элементов их оболочки могут быть соответствующим способом
ужесточены.
На рис. 2.4.7 показан общий вид экспериментального блока с двигатель-
ной установкой выведения его на орбиту и с СБ в сложенном и развернутом
положении.
Рис. 2.4.7. Экспериментальный космический блок с надувными каркасами панелей СБ
2.4.2.2. Спускаемые в атмосферах планет аппараты
с элементами надувной конструкции
Широкое применение НЭК находят и при проектировании спускаемых в
атмосферах планет аппаратов.
Как известно, при спуске в атмосфере эти аппараты подвергаются воздей-
ствию значительных силовых и тепловых нагрузок, вызываемых набегающим
потоком газа. Для защиты СА от указанных нагрузок и эффективного его тор-
можения используются ЛАЭ, от поперечных размеров которых зависит уро-
вень этих нагрузок.
Компромиссом между потребностью снижения уровня силовых и тепло-
вых нагрузок на СА за счёт увеличения поперечного размера его ЛАЭ и ог-
раниченностью поперечного сечения головного обтекателя PH может служить
ЛАЭ раскрываемой конструкции.Одним из вариантов такого ЛАЭ может
служить экран надувной конструкции. В общем случае он представляет со-
бой замкнутую герметичную оболочку, или ряд оболочек (рис. 2.4.8), обра-
зующих после заполнения их газом заданную форму. Эта оболочка состыко-
474
вывается с предназначенным для спуска в атмосфере объектом (полезным
грузом) и образует его НТУ. При запусках такое устройство находится под
обтекателем PH в сложенном в компактный объем положении (рис. 2.4.8,а),
а непосредственно перед фазой аэродинамического торможения приводится
в развернутое рабочее положение (рис. 2.4.8,б). При этом НТУ может быть
выполнено двухкаскадным (рис. 2.4.8,в): 1-й каскад — основное НТУ с теп-
лозащитным покрытием (ТЗП) для торможения в атмосфере до дозвуковых
скоростей, 2-й каскад — дополнительное НТУ для обеспечения посадочной
скорости заданной величины.
Рис. 2.4.8. Общий вид СА с НТУ в сложенном положении (л), с развёрнутым 1-м
каскадом (б) и с развёрнутым дополнительным каскадом (в)
К числу первых отечественных работ, освещающих идею применения тех-
нологии СА с НТУ в космической технике, относятся доклады специалистов
НПО им. С.А. Лавочкина [11, 12] на международных конференциях в 1996 и
1997 гг.
К настоящему времени в России в разной степени разработан ряд проек-
тов с использованием технологии СА с НТУ, габаритно-массовые характе-
ристики которых приведены в табл. 2.4.1.
Примером первой в мире производственной реализации этой технологии
служит СА с НТУ «Пенетратор» — зонд в составе КА «Марс-96», который
был предназначен для спуска на поверхность Марса и внедрения в его грунт
[13]. «Пенетратор» был спроектирован, изготовлен и отработан к 1996 году.
Он представлял собой жесткий конус диаметром 0,8 м (угол раствора 90°), к
вершине которого присоединена «игла». К кромке основания конуса присты-
ковано основное НТУ диаметром 2,3 м, к которому подсоединено дополни-
тельное НТУ диаметром 3,8 м с помощью надувных штанг, сообщающих
полости оболочек обоих НТУ.
Схема общего вида СА «Пенетратор» на рис. 2.4.9 представлена в трех его
конфигурациях: а) в транспортном положении на борту КА; б) с раскрытым
основным НТУ; в) с раскрытым дополнительным НТУ. Основное НТУ пред-
назначено для аэродинамического торможения и должно разворачиваться
перед входом в атмосферу Марса путем подачи газа в полость его герметич-
475
Таблица 2.4.1. Характеристики разработанных в России проектов СА с НТУ
Проекты СА с НТУ (годы разработки) Масса СА с НТУ, кг Масса НТУ, кг Диаметр 1 -го каскада НТУ, м Диаметр 2-го каскада НТУ, м
Пенетратор экспедиции «Марс-96» (1990-1996) 130 22,4 2,3 3,8
«Демонстратор-1» (1999-2000) 147 33,3 2,3 3,8
Система спасения РБ «Фрегат» (1999-2000) 1820 673 6,0 14,0
«Демонстратор-2 и 2Р» (2002-2005) 138 33,3 2,3 3,8
Капсула для доставки грузов с МКС (2002-2003) 350 98 2,5 6,0
Малая метеорологическая станция (ММС) (2005-2008) 20 4,8 1,2 2,0
ЛАЭ СА пилотируемой экспедиции на Марс (2003-2004) 70000 8800 23,0 отсутствует
а)
Рис. 2.4.9. Общий вид СА «Пенетратор»: а — в транспортном положении; б — на уча-
стке аэроторможения; в — на предпосадочном участке спуска
ной оболочки в рабочее положение, а дополнительное НТУ, предназначен-
ное для обеспечения заданной скорости соударения СА с поверхностью грунта
— после достижения дозвуковой скорости спуска. Такая трансформация
формы позволила разместить на борту космического аппарата «Марс-96» два
476
СА «Пенетратор» и обеспечила бы в соответствии с проектом снижение ско-
рости аэроторможения в атмосфере Марса до уровня, допускающего надеж-
ный ввод дополнительного НТУ и посадку с заданной скоростью.
К 1996 году СА «Пенетратор» прошел весь объём экспериментальной от-
работки, и в ноябре этого года ракетой «Протон» был осуществлен запуск КА
«Марс-96». Однако запуск оказался неуспешным из-за отказа двигательной
системы блока выведения КА на траекторию полета КА к Марсу.
Дальнейшее развитие технологии СА с НТУ получено при проектирова-
нии и производстве в НПО им. С.А. Лавочкина аппаратов «Демонстратор»,
«Система спасения разгонного блока «Фрегат», прошедших лётные испыта-
ния, СА с НТУ «Малая метеорологическая станция» (ММС) для посадки на
поверхность Марса, а также при проектировании капсулы для доставки гру-
зов с МКС и ЛАЭ в виде НТУ для спуска и посадки на Марс жилого модуля
будущей пилотируемой экспедиции.
СА «Демонстратор-1» был разработан для проведения лётных испытаний
СА с НТУ в условиях входа в атмосферу Земли. Он представлял собой НТУ
СА «Пенетратор», присоединённое к несколько видоизмененной жёсткой но-
совой части его лобового экрана без «иглы» (рис. 2.4.10).
Рис. 2.4.10. СА «Демонстратор-1» с НТУ в сложенном (а) и развернутом (б) положении
Лётные испытания СА «Демонстратор-1» были проведены в 2000 году.
Запуск осуществлялся с космодрома Байконур с помощью PH «Союз» попут-
ным грузом при квалификационных испытаниях разгонного блока «Фрегат»
[14], также разработанного в НПО им. С. А. Лавочкина.
Спуск СА «Демонстратор-1» с орбиты 600 км был осуществлен 9 февраля
2000 года. Уменьшение скорости от орбитальной до выбранного значения
скорости входа в атмосферу осуществлялось торможением с помощью дви-
гательной установки РБФ. Для предотвращения разрушения при посадке РБФ
был оснащен системой спасения, обеспечивающей спуск и посадку его с
безопасной скоростью. Эта система представляла собой ЛАЭ надувной кон-
477
струкции в виде конуса с углом при вершине 120° и со скругленной по сфере
жёсткой носовой частью диаметром 2 м (рис. 2.4.11). Диаметр основного НТУ
составлял 6 м, дополнительного — 14 м.
З'ОйквсжжзНТУ
Рис. 2.4.11. СА «Система спасения РБФ» с НТУ в сложенном (а) и развернутом (б)
положении
Результаты испытаний СА «Демонстратор-1» [15] подтвердили возможность
реализации технологии СА с НТУ при выполнении некоторых доработок
конструкции НТУ и его ТЗП. В частности, для исключения возможности
мгновенной потери формы НТУ в случае его разгерметизации, было приня-
то оболочку НТУ выполнять многосекционной в виде набора торов разного
диаметра. Общий вид такой конструкции СА «Демонстратор-2» представлен
на рис. 2.4.8.
Запуск СА «Демонстратор-2» в 2001 году был осуществлен с борта под-
водной лодки из акватории Баренцева моря с помощью конверсионной ра-
кеты «Волна». Однако, ввиду отказа двигателей третьей ступени ракеты, пуск
оказался неудачным и СА не достиг места посадки на полигоне на полуост-
рове Камчатка.
Также из-за неполадок в работе системы отделения ракеты «Волна» не-
удачным был и повторный пуск этого аппарата в 2002 году.
Более успешным стал запуск этой же ракетой СА «Демонстратор-2Р» на
тот же полигон на Камчатке в 2005 г. На этот раз СА прошёл участок траек-
478
тории спуска с тепловой и аэродинамической нагрузками, зону отсутствия
радиовидимости из-за облака плазмы, образующегося вокруг СА, движуще-
гося с гиперзвуковой скоростью. Однако, спустя 23 секунды после выхода из
этой зоны, на высоте около 46 км, связь с СА по достоверно неустановлен-
ной причине была потеряна [16]. Последнее обстоятельство не позволило
найти СА в сложных ландшафтных условиях полигона посадки.
Несмотря на сложившиеся обстоятельства, работы в НПО им. С.А. Лавоч-
кина по проектированию СА с НТУ для решения ряда технических задач и,
в частности, создание капсулы для системы доставки грузов с МКС, продол-
жались.
На рис. 2.4.12 показана принципиальная схема этой капсулы, НТУ кото-
рой представляет собой конус с углом раствора 120° и радиусом скругления
носовой части, равным 1 м. Диаметр основания конуса составляет 2,5 м. НТУ
набрано из ряда торов сплюснутой формы. При этом отсек полезной нагруз-
ки капсулы пристыковывается непосредственно к НТУ, не имеющему жест-
Рис. 2.4.12. Схема капсулы для доставки грузов с МКС: а — в транспортном
положении (НТУ сложено); б — НТУ в развернутом положении
479
кой носовой части, с помощью гибких связей. Дополнительное НТУ разме-
щается в донной части основного и раскрывается при достижении СА дозву-
ковой скорости спуска. Диаметр НТУ 2-го каскада составляет 6м для капсу-
лы массой 170 кг.
Отделение капсулы от МКС может быть выполнено либо из специально-
го шлюза, либо с использованием ТГК «Прогресс-М». В первом случае кап-
сула должна быть снабжена отделяемым тормозным двигателем. Схема де-
сантирования капсулы с МКС во втором варианте показана на рис. 2.4.13.
Рис. 2.4.13. Схема десантирования капсулы с НТУ с использованием ТГК «Прогресс-М»
В результате проектирования капсул рассматриваемой системы трех масс:
т = 170, 200 и 350 кг определены массовые параметры всех основных элемен-
тов конструкции этих капсул. Это позволило оценить весовую эффективность
СА с НТУ [17], которая определяется отношением массы полезной нагрузки
Л/пн к полной массе М СА. Чем больше эта величина, тем выше весовая отдача
СА. Полная масса СА М складывается из массы Мпн, массы конструкции Л/к
и массы теплозащиты Мтзп.
В табл. 2.4.2 приводятся массы основных элементов конструкции капсул
системы доставки грузов с МКС. Эти данные позволяют исследовать как ка-
чественные, так и количественные зависимости отношения параметров Мпн,
Л/к и Мтзп к суммарной массе СА с НТУ.
На рис. 2.4.14 приведены зависимости массовой доли полезной нагрузки,
конструкции и ТЗП в общей массе СА с НТУ, из которых видно, что масса
480
Таблица 2.4.2. Массовая сводка элементов конструкции капсул с НТУ
Наименование элемента конструкции капсулы Масса, кг
т;=170 /и2=200 /и3=35О
НТУ с системой наполнения 39,0 42,0 63,0
Теплозащитная система НТУ 23,5 26,0 44,0
Конструкция (в т.ч. и НТУ без теплозащиты с системой наполнения) 56,5 56,5 66,0
Полезная нагрузка (груз в капсуле) 90,0 117,5 240,0
Рис. 2.4.14. Зависимости относительной массы полезной нагрузки, конструкции и
теплозащиты от общей массы СА с НТУ
полезной нагрузки СА с НТУ составляет 50...70% и её доля растет с увеличе-
нием полной массы аппарата. Соответственно, доля массы конструкции с
ростом общей массы СА уменьшается, а доля массы ТЗП СА с НТУ рассмат-
риваемых масс составляет около 13% и также уменьшается с ростом общей
481
массы аппарата. Это свидетельствует об эффективной весовой отдаче аппа-
ратов, осуществляющих аэроторможение в атмосфере планет, если лобовой
экран СА или его часть выполнены в виде надувного тормозного устройства.
Доставка грузов с МКС, как показано в [18], может быть осуществлена и
по запатентованной в РФ [19,20] безымпульсной схеме, т.е. за счет аэротор-
можения капсулы в верхних разреженных слоях атмосферы, а не путем тор-
можения реактивным двигателем. Исследования такой возможности спуска
СА с НТУ сферической формы диаметром 20, 30 и 60 м и массой 200, 300 и
400 кг при отделении от МКС на высоте 400 км со скоростью 7,67 км/с и с
углом входа в атмосферу, равным 0,5 град, показали, что СА диаметром 20 м
и массой 200 кг войдет в плотные слои атмосферы (высота 100 км) через 31
час полета в разреженной среде. При этом равновесная температура матери-
ала НТУ достигнет уровня 600 °C. Если же рассматривать СА диаметром 60
м при той же массе, указанные параметры составят соответственно 3,7 часа
и 320 °C.
Дальнейшее развитие технологии СА с НТУ получено при проектирова-
нии в НПО им. С.А. Лавочкина СА «Малая метеорологическая станция»
(ММС) [21] (рис. 2.4.15). Такой аппарат может быть использован в качестве
исследовательского зонда для посадки на различные планеты и их спутники
с атмосферой. ММС в варианте для посадки на поверхность Марса НТУ
аппарата представляет собой один тор, который при надуве расправляет гиб-
кую теплозащиту, охватывающую приборный контейнер и формирующую
аппарат с заданным поперечником. СА ММС прошел весь комплекс аэроди-
намических, тепловых, прочностных и других видов испытаний.
а)
Рис. 2.4.15. Формы ММС в транспортном положении (а), на участке активного
торможения (б) и при посадке (в)
Проектирование ММС для посадки на Марс проведено с учетом ограни-
чения, накладываемого на её массу, величина которой должна быть в диапа-
зоне 15...20 кг.
482
В этом случае ММС будет иметь конструкцию, общий вид которой на
разных этапах полета представлен на рис. 2.4.15. Для увеличения площади
тормозной поверхности СА используется основное НТУ, которое выполнено
в виде надуваемого перед входом в атмосферу Марса тора, прикрепленного к
жесткой части конструкции ММС. Диаметр ММС при развернутом основ-
ном НТУ (рис 2.4.15,6) составляет 1м, дополнительном — 2м (рис. 2.4.15,в).
После развертывания основного НТУ форма ММС, обтекаемая газовым
потоком, образуется за счет натяжения гибкой теплозащиты, охватывающей
всю лобовую поверхность аппарата и закрепляемой при монтаже на жесткой
конструкции ММС в донной её части.
После прохождения участка активного торможения и при достижении
дозвуковой скорости полета основное НТУ может быть сброшено вместе с
его теплозащитой и в действие вводится дополнительное НТУ. Оно выпол-
нено также в виде тора, который после наддува расправляет тканевый мате-
риал, соединяющий тор НТУ с посадочным модулем ММС, в результате чего
образуется посадочная форма ММС, как показано на рис. 2.4.15,в.
В течение 2003—2004 гг. в НПО им. С.А. Лавочкина также разработан про-
ект НТУ посадочного аппарата (ПА) — жилого модуля пилотируемой экспе-
диции на поверхность Марса [22].
По предварительным оценкам, масса такого КА, входящего в атмосферу
Марса, может составлять около 70 тонн, включая массу парашютной систе-
мы спуска ПА и топлива двигательной установки его мягкой посадки,
рис. 2.4.16.
Для эффективного торможения такого КА целесообразно использовать
аэродинамический экран с развитой лобовой поверхностью. Размеры этого
Рис. 2.4.16. Общий вид надувного ЛАЭ ПА пилотируемой экспедиции на Марс:
1 — жесткая носовая часть; 2 — надувное тормозное устройство; 3 — баллоны систе-
мы наддува НТУ; 4 — набор силовых лент; 5 — приборный контейнер; 6 — трубо-
провод системы надува
483
экрана должны быть достаточно большими, чтобы за счет аэродинамическо-
го торможения снизить подлетную к Марсу скорость КА до величины, обес-
печивающей вывод его на орбиту искусственного спутника, а затем до уров-
ня, допускающего ввод тормозных парашютов. Единственным вариантом
лобового экрана, размеры которого удовлетворяли бы требованию размеще-
ния его под головными обтекателями PH, является складывающийся экран.
Аэродинамический лобовой экран надувной конструкции и является при-
мером такого тормозного устройства. При посадке ПА пилотируемой экспе-
диции на Марс с использованием аэродинамического качества и рикошети-
рования в атмосфере для захвата гравитационным полем планеты его целе-
сообразно выполнить в виде 120-градусного конуса с затупленной по сфере
носовой частью. Балансировочный угол атаки обеспечивается смещением
центра тяжести КА относительно оси конуса. Сам конус может быть сфор-
мирован набором надувных торов различного окружного диаметра, как это
показано на рис. 2.4.16.
Основное НТУ должно иметь диаметр около 23 м и присоединяться к
центральной жесткой части лобового экрана диаметром 8 м. При использо-
вании парашютной системы торможения ПА и двигателей мягкой посадки
необходимость в дополнительном НТУ отпадает.
Активная работа специалистов России над проектами спускаемых аппа-
ратов с аэродинамическим экраном надувной конструкции, по-видимому,
побудила интерес к этой теме и специалистов Европы и США.
В 2003 году на 54-м Международном астронавтическом конгрессе (IAC)
специалистами фирмы OHB-System AG (Бремен, Германия) был сделан док-
лад [23] о результатах работы над проектом Inflatable Re-Entry Technology (IRT)
для миссии EXOMARS. Спроектировано НТУ диаметром 3 м. На рис. 2.4.17
показаны СА с НТУ для доставки на поверхность Марса марсохода и его эк-
спериментальный макет. НТУ предназначено для защиты полезной нагруз-
ки от аэротермодинамического воздействия при входе СА в атмосферу Мар-
са со скоростью 4800 м/с под углом минус 13 градусов. Масса посадочного
Рис. 2.4.17. Эскизы посадочного модуля с НТУ проекта EXOMARS и его
экспериментального макета (Германия)
484
модуля составляет 450 кг. Сходство принципиальной конструкции этого СА
с НТУ с российским СА «Демонстратор-2» очевидно.
В 2005 и 2006 годах в [24,25] было заявлено о намерении Национального
космического агентства Америки (НАСА) силами Исследовательского цент-
ра Лэнгли, Аналитического механического общества, фирмы «Дуглас» и дру-
гих партнёров разработать макет СА с НТУ (рис. 2.4.18) для отработки в
проекта IRVE (Inflatable Re-Entry Vehicle Experiment), также конструктивно
похожего на российский СА «Демонстратор-2».
Рис. 2.4.18. Конструкция макета IRVE для отработки технологии СА с НТУ (США)
Специалисты США, так же как и российские, признают, что ЛАЭ надув-
ной конструкции обладают преимуществами над традиционными жесткими
тормозными экранами. Их использование позволяет экономить объем под
обтекателями PH для размещения полезной нагрузки, увеличивать её массу,
не ограничивать размер ЛАЭ имеющимся объёмом под обтекателем и др.
Понимая, что СА с НТУ обладают и определенными недостатками: чув-
ствительностью НТУ к пробоям частицами космического происхождения,
возможной нестабильностью (в силу упругой конструкции НТУ) аэродина-
мических коэффициентов, низкой температуростойкостью материалов обо-
лочки НТУ и системы её теплозащиты и др., НАСА планирует до 2014 года
провести поэтапную отработку СА с НТУ [26].
Программа отработки СА с НТУ включает как расчетные, так и экспери-
ментальные методы. Проведены численные расчеты аэротермодинамики при
обтекании СА с НТУ проекта IRVE на режимах свободномолекулярного и
переходного течений [24]. Для этого использован метод прямого статисти-
ческого моделирования Монте-Карло и решены уравнения Навье—Стокса.
В результате расчетов определены уровни тепловой нагрузки при полете на
485
высотах от 150 до 46 км и аэродинамические коэффициенты на высотах от
150 до 95 км.
Спроектирована конструкция герметичной оболочки НТУ и гибкой теп-
лозащиты СА с НТУ проекта IRVE. Первая выполнена из материала кевлар,
на внутренней поверхности ее для герметичности нанесён слой силикона. На
наружной поверхности оболочки для её упрочнения установлены ещё два слоя
непропитанной ткани кевлар. Гибкая ТЗП содержит несколько слоёв изоля-
ции в виде плёнки каптон (полиамидная плёнка) и теплозащитный пакет из
трёх слоёв температуростойкой ткани Nextel. Ни один из этих слоёв, в отли-
чие от гибкого ТЗП российского производства, не пропитан сублимирующим
веществом. Судя по условиям предполагаемого лётного эксперимента про-
екта IRVE, на данном этапе исследований (скорость движения в атмосфере
Земли не будет превышать числа Маха, равного 5), такой теплозащиты мо-
жет оказаться вполне достаточно. При более высоких скоростях спуска на
эффективности такой ТЗП скажется газопроницаемость ткани Nextel, кото-
рая приведёт к разрушению низкотемпературных плёнок из каптона и, соот-
ветственно, к разрушению герметичной оболочки.
К одному из последних, проведённых к настоящему времени этапов от-
работки по проекту IRVE, относится лётный эксперимент, состоявшийся в
августе 2009 года. Согласно Интернет-информации [26], запуск макета САс
НТУ (рис. 2.4.19) был произведён с полигона NASA Wallops Flight Facility
(штат Джорджия) с помощью ракеты, поднявшей макет на высоту 202 км. На
Рис. 2.4.19. Подготовка макета СА с НТУ проекта IRVE к ракетным испытаниям
(США)
486
этой высоте макет СА с НТУ массой 40 кг был отделён от ракеты и начал
свободное падение. В процессе падения было раскрыто и надуто НТУ. В ат-
мосферу СА с НТУ вошел со скоростью около 1700 м/с (число Маха « 5).
Через 20 минут после запуска СА приводнился в Атлантическом океане.
Спасение приводнившегося аппарата проектом не предусматривалось. Полу-
ченная при лётных испытаниях телеметрическая информация обрабатывает-
ся. По предварительной информации, лётные испытания по проекту IRVE
прошли успешно.
Следующие лётные (ракетные) испытания макета по проекту IRVE наме-
чено провести в 2012 году [26].
Таким образом, из изложенного следует вывод о наличии повышенного
интереса национальных космических агентств ведущих стран к разработке
космических аппаратов с надувными элементами конструкций и технологии
создания спускаемых аппаратов с надувными тормозными устройствами.
2.4.3. Основы проектирования надувных космических конструкций
2.4.3.1. Основные задачи, решаемые при проектировании надувных
космических конструкций
Создание надувных космических конструкций требует решения ряда но-
вых технических и научных проблем, не присущих практике проектирова-
ния космической техники жесткой конструкции. К основным из них следует
отнести:
— выбор имеющихся или разработка новых конструкционных материалов
для изготовления гибких надувных элементов космической техники;
— разработка методов обеспечения жесткости и сохранения формы гиб-
ких надувных элементов космической техники в случае нарушения герметич-
ности образующих их надувных оболочек;
— разработка гибкого теплозащитного покрытия и теплоизоляции оболо-
чек надувных элементов космической техники;
— разработка системы наполнения газом надувных элементов космичес-
кой техники;
— разработка методов расчета проектных параметров систем надувных кос-
мических конструкций;
— разработка методов экспериментальной отработки космической техни-
ки с надувными элементами конструкции.
Надувные элементы КА и СА, как правило, содержат герметичную обо-
лочку, заполняемую газом при ее развертывании, и наружную или внутрен-
нюю системы теплозащиты и теплоизоляции. Надувные элементы конструк-
ции КА работают в жестких условиях воздействия факторов космического
пространства (ФКП) (вакуум, низкие и высокие температуры, радиация,
атомарный кислород, вакуумный ультрафиолет и др.). Надувные тормозные
устройства СА при космическом полете также испытывают воздействие ФКП,
а при спуске в атмосферах планет — высоконапорное и высокотемператур-
487
ное воздействие обтекающего СА газового потока. Поэтому к материалам для
изготовления этих надувных элементов предъявляются требования стойкос-
ти к воздействию ФКП, высоких внутренних и внешних (для СА с НТУ)
силовых нагрузок. Материал герметичной оболочки НТУ спускаемых аппа-
ратов должен быть газонепроницаемым и нерастяжимым при силовом и тем-
пературном воздействии.
При проектировании НЭК КА и НТУ СА следует предусмотреть ужесто-
чение материала герметичной оболочки для предотвращения потери формы
надувных элементов в случае разгерметизации их оболочки. Выбор способа
ужесточения (отверждения) формообразующих НЭК материалов осуществ-
ляется с учетом условий их эксплуатации.
Системы теплозащитного и теплоизоляционного покрытия НЭК КА и НТУ
СА не должны препятствовать укладке этих элементов в компактное транс-
портное положение и развертыванию в рабочее состояние. Поэтому эти си-
стемы изготавливаются из гибких тканевых и пленочных материалов.
Проектирование системы наполнения газом надувного элемента косми-
ческой техники должно проводиться исходя из удовлетворения требованиям
к скорости наполнения НЭК, недопустимости разрушения герметичной обо-
лочки струей втекающего газа и к достаточности давления в оболочке для
сохранения формы при внешнем/внутреннем силовом воздействии на НЭК.
Разрабатываемые методы расчета проектных параметров систем надувных
элементов космической техники должны быть оперативными, обеспечивать
точность получаемых результатов и способствовать минимизации массы про-
ектируемых систем НЭК.
Результаты теоретических расчетов параметров систем НЭК подвергают-
ся в процессе проектирования экспериментальной проверке. Для этого оп-
ределяются способы экспериментальных исследований: на образцах, на мас-
штабированных моделях или полномасштабных макетах НЭК проводится
выбор соответствующих необходимым испытаниям экспериментальных ус-
тановок и разрабатываются методы моделирования или воспроизведения на
этих установках реальных условий функционирования НЭК.
2.4.3.2. Материалы для надувных элементов космической техники
2.4.З.2.1. Материалы для герметичной оболочки надувных элементов. Гер-
метичная оболочка НЭК КА или НТУ СА предназначена для придания со-
ответствующей формы надувному элементу и сохранения ее в течение всего
времени эксплуатации КА или СА в условиях вакуума и спуска в атмосфере.
Формирование НЭК или НТУ производится путем подачи в полость оболочки
газа из системы надува. Поэтому в первую очередь к материалу для изготов-
ления оболочки надувного элемента предъявляются высокие требования к его
газонепроницаемости, а также к нерастяжимости при силовом и температур-
ном воздействии.
На первой стадии освоения технологии СА с НТУ этим требованиям удов-
летворяли прорезиненные ткани (табл. 2.4.3).
488
Таблица 2.4.3. Материалы для изготовления герметичной оболочки НТУ
Марка Номер стандарта Допустимая темпера- тура, °C Толщина, мм Масса, г/м2 Тепло- провод- ность, Вт/(мК) Удельная тепло- емкость, ДжДкг-К)
ТПМ-8 ТУ38-405- 51/3-10- 189-91 150 0,1 160 0,22 1050
ТПМ-8л ТУ38-405- 51/3-10- 189-91 150 о,1 170 0,22 1150
КТМ-1-4(2) ТУ38-405- 51/3-10- 187-85 150 0,1 170 0,25 1400
Так, например, герметичная оболочка СА с НТУ «Демонстратор-1» была
выполнена из прорезиненной ткани марки КТМ-1-4(2). Газопроницаемость
этого материала находится в диапазоне 0,01...0,03 л/(м2 сутки) при перепаде
давления З Ю5 Н/м2. Коэффициент термического удлинения в интервале
температур от минус 60 до 100 °C составляет около 4-10-* 1/град, а удлинение
при разрыве не превышает 3%.
Герметичные оболочки НТУ последующих СА серии «Демонстратор» и
ММС изготавливались из ткани марки ТПМ-8, которая легче КТМ-1-4(2),
но имеет практически те же значения газопроницаемости и удлинения.
Для придания большей прочности конструкции НТУ каждый отдельный
элемент (тор на рис. 2.4.11) герметичой оболочки этих СА помещался в за-
щитную оболочку из ткани СВМ с высоким значением модуля упругости
таким образом, что при надуве тора герметичной оболочки защитная оболочка
воспринимала на себя часть усилия от внутреннего давления в торе. Здесь
следует отметить, что при изготовлении торового элемента НТУ из тканево-
го материала получить геометрически точную форму тора не удается без об-
разования складок на внутренней стороне его образующей. Поэтому каждый
тор НТУ изготавливается из множества коротких цилиндров со скошенным
срезом их торцев. Для образования квазиторового элемента НТУ образующие
его цилиндры соединяются торцами путем прошивки и склеивания.
Очевидно, что основным недостатком использования НЭК в космической
технике является возможность потери их формы из-за утечки газа наддува
при продолжительном пребывании в космическом вакууме как за счет диф-
фундирования газа через тонкую оболочку НЭК, так и из-за появления в ней
отверстий, пробиваемых микрометеоритами.
Поэтому необходим поиск таких материалов для изготовления оболочек
НЭК, которые могут быть ужесточены (отверждены) сразу же после надува
их газом.
489
Исследования, проведенные Московским авиационным технологическим
институтом им. К.Э. Циолковского, показали, что наибольшей способнос-
тью обеспечить это требование, а также требования по минимизации массы
НЭК, компактности укладки, стоимости, технологичности изготовления и
эксплуата-ционным качествам в условиях воздействия ФКП обладают слои-
стые полимерные композиционные материалы (ПКМ). Основой ПКМ явля-
ются тканевые или пленочные армирующие элементы и полимеры (полиме-
робразующие компози-ции), эластичные или вязко-пластичные в исходном
состоянии и упругие и жесткие в отвержденном (ужесточеном) состоянии.
Эти ПКМ обладают также сохранностью физических свойств при длитель-
ном хранении в сложенном состоянии, легко разворачиваются и образуют
изначально заданную и фиксированную форму за счет внутреннего давления.
В табл. 2.4.4, 2.4.5 и 2.4.6 приведены некоторые физико-механические ха-
рактеристики расширенного ассортимента тканей и некоторых ПМК, при-
годных для изготовления герметичных оболочек НЭК.
Таблица 2.4.4. Физико-механические характеристики тканей
Ткани Плотность, г/см2 Модуль упругости, ГПа Прочность, МПа
Стеклянные 0,38 7,3 150
Углеродные 0,47 17,3 118
Органические: Найлон 0,33 1,3 56
Вектра 0,42 0,6 41
Кевлар 0,28 6,6 172
Номекс 0,33 1,5 54
Полиэфир 0,42 0,7 33
Хлопок 0,28 1,7 41
Таблица 2.4.5. Характеристики композиционного материала на основе эпоксид-
ной матрицы и органического волокна
Свойство Направление нитей в ткани Значение
Модуль упругости Основа 57,2
при сжатии, ГПа Уток 61,4
Модуль упругости Основа 64,8
при растяжении, ГПа Уток 74,5
Прочность Основа 600
при сжатии, МПа Уток 059
Прочность Основа 690
при растяжении, МПа Уток 690
Коэффициент термического Основа 3,5 IO 6
расширения в диапазоне минус 7О...7О°С, 1/град Уток 3,6 10’6
490
Таблица 2.4.6. Физико-механические свойства некоторых полимеров
Параметр Полиуретан ТР406 Поли- уретан ТР407 Эпоксидный полимер ТР277 Полиэфир ТР264
Температура стеклования Тс, °C 55 55 65 48
Модуль упругости, ГПа 1,0 1,33 3,1 2,21
Прочность при растяжении, МПа 60,0 - 69,0 53,1
Коэффициент термического расширения, ррм/ °C 70 53,0-75,3 51 70
Плотность, г/см3 1,20 1,20 1,14 1,27
Теплоемкость, Дж/г °C 1,7 0,97 2,1 2,0
Теплопроводность, Вт/м К 0,35-0,58 0,35 0,17-0,25 0,20
Все эти материалы пригодны для изготовления первоначально герметич-
ных оболочек НЭК, однако имеют низкую температуру разрушения. Поэто-
му оболочка НТУ спускаемых в атмосферах планет аппаратов должна иметь
покрытие для защиты от воздействия высокотемпературного потока обтека-
ющего газа при аэродинамическом торможении СА с НТУ в атмосфере.
2.4.3.2.2. Материалы для изготовления теплозащитного покрытия НТУ СА.
Теплозащитное покрытие (ТЗП) НТУ предназначено для обеспечения сохран-
ности герметичной оболочки НТУ при аэродинамическом торможении СА.
Эта оболочка изготавливается из материалов, имеющих, как это видно из
табл. 2.4.3, низкую, до 150 °C, допустимую температуру, и обладающих до-
вольно высокой степенью газонепроницаемости. Кроме того, эти материалы
являются практически нерастяжимыми, что обеспечивает, при определённом
давлении газа в оболочке, неизменяемость формы НТУ в течение некоторо-
го времени нахождения СА с НТУ в вакууме в развернутом и надутом состо-
янии перед входом в атмосферу планеты и в процессе аэроторможения.
Выбор защиты герметичной оболочки (оболочек) НТУ от воздействия вы-
сокоскоростного и высокотемпературного газа при движении СА в атмосфе-
ре является одной из основных и трудных проблем, обеспечивающих возмож-
ность реализации технологии СА с НТУ. Пути поиска решения этой пробле-
мы включают в себя и выбор материалов, пригодных для изготовления ТЗП
НТУ, как из существующего ассортимента материалов, так и из новых мате-
риалов, которые следует разрабатывать для удовлетворения требованиям рас-
сматриваемого вопроса.
Процесс разработки ТЗП НТУ СА должен включать следующие этапы:
— выбор принципиальной схемы конструкции теплозащиты;
— выбор материалов для изготовления теплозащиты;
— определение теплофизических свойств материалов, входящих в конст-
рукцию теплозащиты, и теплозащиты в целом при испытаниях ее образцов;
491
— выявление дефектов, возникающих в структуре теплозащиты при скла-
дывании, длительном хранении, транспортировке и развертывании её при
наполнении НТУ газом;
— экспериментальное определение влияния дефектов теплозащиты на её
работоспособность;
— разработка технологии изготовления теплозащиты НТУ СА;
— проведение трубных или лётных испытаний теплозащиты в составе пол-
номасштабного макета СА с НТУ в условиях одновременного воздействия
аэродинамической и тепловой нагрузок.
Во время эксплуатации ТЗП вместе с НТУ может подвергаться неоднок-
ратной укладке в транспортное положение и развертыванию в рабочее состо-
яние, например, при проверках герметичности оболочки НТУ и других мон-
тажных работах и испытаниях. При межпланетных перелетах теплозащита
НТУ будет длительное время находиться в уложенном положении и подвер-
гаться воздействию ФКП.
В соответствии с этим к теплозащите НТУ СА выдвигается ряд требова-
ний:
— теплозащита должна быть гибкой, не препятствующей укладке НТУ в
транспортное положение и разворачиванию в рабочее;
— гибкое теплозащитное покрытие (ГТЗП) НТУ должно сохранять цело-
стность после многократной укладки НТУ в транспортное положение и раз-
вертывания в рабочее. Появляющиеся в результате этих операций дефекты
ее (изломы, разрывы, трещины и др.) не должны сказываться на её эффек-
тивности и работоспособности;
— в процессе аэроторможения ГТЗП должно обеспечить сохранность гер-
метичной оболочки НТУ до момента посадки СА на поверхность планеты;
— материалы для изготовления ГТЗП не должны изменять своих механи-
ческих и теплофизических свойств под длительным воздействием ФКП;
— ГТЗП должно выполняться из легковесных материалов;
— ГТЗП должно укладываться в минимально возможный объем, т.е. до-
пускать максимально возможную плотность упаковки НТУ;
— после развертывания НТУ СА в рабочее положение ГТЗП не должно
приводить к искажениям формы СА с НТУ;
— термическое разложение и механическое разрушение ГТЗП также не дол-
жно приводить к искажению формы СА с НТУ;
— ГТЗП не должна препятствовать отсоединению НТУ от жесткой части
СА в вариантах СА, предусматривающих сброс НТУ после прохождения уча-
стка траектории со значительными тепловыми нагрузками;
— материалы ГТЗП не должны обладать самостоятельным горением пос-
ле прекращения воздействия внешнего теплового потока.
Изложенные требования принимаются во внимание при выборе матери-
алов для использования в конструкции ГТЗП НТУ СА.
492
Принципиальная конструктивная схема теплозащиты герметичной оболоч-
ки НТУ должна строиться исходя из её назначения, условий функциониро-
вания и предъявляемых к ней конструкторских и эксплуатационных требо-
ваний.
Основываясь на общих известных принципах построения теплозащитных
систем спускаемых в атмосферах планет аппаратов, ГТЗП герметичной обо-
лочки НТУ должна проектироваться как минимум двухслойной, содержащей
теплозащитный слой и расположенный под ним теплоизолирующий. При этом
наружный теплозащитный слой, обращенный к набегающему потоку газа,
должен быть термостойким и включать в свою структуру сублимирующий
материал.
Все соприкасающиеся слои не должны быть связаны друг с другом меха-
нически, с тем чтобы при складывании НТУ они могли перемещаться друг
относительно друга в продольном направлении из-за различия радиуса скруг-
ления по толщине слоя в местах перегиба оболочки НТУ с теплозащитой.
Теплозащитный слой также должен иметь возможность продольного пере-
мещения относительно поверхности теплоизолирующего слоя.
Таким образом, гибкая теплозащита НТУ СА должна выполняться мно-
гослойной из гибких материалов.
В этом случае теплозащита не будет препятствовать развертыванию НТУ
в рабочее положение после длительного нахождения в уложенном состоянии
и приводить к искажениям аэродинамической формы СА после наполнения
газом полости герметичной оболочки НТУ.
Термостойкий материал наружного слоя теплозащиты, также из сообра-
жений необходимой гибкости, должен иметь как можно меньшую толщину.
Поэтому наружный теплозащитный слой также должен быть выполнен мно-
гослойным, если потребная толщина его становится препятствием гибкости
теплозащиты.
Такая конструкция ГТЗП НТУ позволяет минимизировать объем, зани-
маемый НТУ СА в уложенном транспортном положении.
Суммируя изложенное, можно заключить, что принципиальная схема
конструкции гибкой теплозащиты НТУ СА включает в себя теплозащитный
пакет, содержащий один или несколько слоев гибкого термостойкого мате-
риала, и находящийся под ним теплоизолирующий пакет (мат), также содер-
жащий несколько слоев гибкого теплоизоляционного материала. Оба пакета
со свободой перемещения друг относительно друга устанавливаются на по-
верхности оболочки НТУ также со свободой перемещения вдоль наружной
ее поверхности [27].
На рис. 2.4.20 приведена схема ГТЗП и перечислены основные его эле-
менты.
2.4.3.2.3. Материалы для теплозащитного пакета ГТЗП НТУ СА. Матери-
алами, пригодными для изготовления теплозащитного пакета ГТЗП, может
служить ряд выпускаемых отечественной промышленностью термостойких
493
Рис. 2.4.20. Схема ГТЗП герметичной оболочки НТУ С А: 1 — герметичная оболоч-
ка; 2 — теплоизоляционный мат; 3 — чехол мата; 4 — слои теплоизоляционного мата;
5 — прокладки между слоями мата; 6 — теплозащитный пакет; 7 — слои пакета;
8 — слой сублимирующего вещества; 15 — нити прошивки торцевых законцовок теп-
лозащиты
тканей (табл. 2.4.7). Эти материалы характеризуются достаточно высокой тем-
пературостойкостью (700—1500 °C) при кратковременном тепловом воздей-
ствии и свойственной тканям гибкостью.
Таблица 2.4.7. Термостойкие ткани для изготовления теплозащитного пакета
Ткань Марка ткани Номер стандарта Термостойкость, °C
кратковременная (до 3 мин) длительная (более 3 мин)
Углеродная УРАЛТ-22Р ГОСТ 28005-88 1500 900
Кремнеземная КТ-11-Э/0,2 ТУ6-11-224-74 1200 800
Базальтовая ТБСр-750 ГОСТ 6943.2-79 700 700
Кремнеземные и углеродные ткани обладают превосходными высокотем-
пературными, теплоизоляционными и теплозащитными свойствами и при-
меняются во многих отраслях промышленности. Они имеют низкую тепло-
проводность, высокую стойкость к тепловому удару и повышенной радиации,
обладают электроизоляционными свойствами при высоких температурах и по-
вышенной влажности. Однако прочность углеродной ткани к сдвиговым
нагрузкам является низкой.
Изделия из кремнеземной ткани чрезвычайно инертны к большинству
химических реагентов, стойки к органическим и минеральным кислотам
любых концентраций даже при повышенной температуре (за исключением
494
плавиковой, фосфорной, соляной), а также к слабым щелочам, расплавлен-
ным металлам (кроме Mg, Na, Si) и сплавам. Они обладают высокой хими-
ческой стойкостью к воде и пару высокого давления, способны поглощать
влагу, но не расщепляются в присутствии воды, стабильны в вакууме.
Теплофизические и физические характеристики термостойких тканей для
теплозащитного пакета ГТЗП приведены в табл. 2.4.8.
Таблица 2.4.8. Теплофизические характеристики термостойких тканей
Ткань Толщина, мм Удельная теплоемкость, кДж/(кгК) Теплопро- водность, Вт/ (м К) Погонный вес, г/м2 Термо- оптические свойства
е
Углеродная 0,4...0,6 1,46 0,74...0,79 290+30 0,85 0,95
Кремнеземная 0,23+0,003 1,5...1,7 0,35...0,58 180+20 0,78 0,31
Из зарубежных термостойких тканей, исключая аналогичные отечествен-
ным, можно отметить ткани семейства ЗМ™ Nextel™ 312 и 440, рекоменду-
емые для использования в РКТ и, в частности, для изготовления теплозащит
аэродинамических экранов СА [28]. Температура плавления материала этих
тканей около 1800 °C.
Основным недостатком приведенных выше тканевых материалов для ис-
пользования в конструкции ГТЗП является их проницаемость по отношению
к набегающему на НТУ высокотемпературному газу, что снижает эффектив-
ность всей теплозащиты НТУ. Поэтому ткани теплозащитного пакета ГТЗП
необходимо пропитывать веществом-герметиком, сублимирующим при на-
гревании покрытия НТУ внешним потоком газа.
Поскольку температура разрушения приведенных тканей достаточно низ-
ка (при плотности теплового потока около 200 кВт/м2 они нагреваются уже
до 1510 °C, тогда как при аэродинамическом торможении на СА воздейству-
ют тепловые потоки, намного превосходящие указанный), вещество для про-
питки ткани должно обладать температурой сублимации, не превышающей
температуру разрушения ткани, которая одновременно является и армирую-
щим (несущим) элементом теплозащитного пакета. В этом случае сублими-
рующее вещество при нагреве до температуры его испарения дополнительно
будет эффективно снимать значительное количество падающего на НТУ тепла.
Отечественной промышленностью выпускается ряд полимерных матери-
алов, служащих в качестве герметика для решения различного рода техни-
ческих задач, в том числе и в РКТ.
При выборе герметика для пропитки ткани теплозащитного пакета гиб-
кого теплозащитного покрытия надувного тормозного устройства спускаемого
в атмосфере аппарата следует руководствоваться рядом требований к пропи-
тываемой герметиком ткани и к самому герметику:
495
— пропитанная герметиком ткань должна сохранять гибкость, не препят-
ствующую укладке НТУ с теплозащитой в компактный объем;
— пропитанная герметиком ткань должна сохранять газонепроницаемость
до полной сублимации герметика с поверхности ткани;
— пропитанная герметиком ткань должна обладать низким значением ко-
эффициента усадки и удлинения при нагревании;
— герметик должен иметь температуру сублимации на 200-300°С ниже тем-
пературной стойкости пропитываемой ткани;
— герметик должен обладать как можно более низкой плотностью;
— герметик должен обладать низким коэффициентом теплопроводности;
— герметик не должен охрупчиваться при температурах до минус 60°С;
— герметик должен сублимировать, обеспечивая близкий к линейному за-
кон уноса массы при тепловом воздействии;
— герметик не должен приводить к снижению прочности пропитываемой
ткани на разрыв и на сдвиг;
— герметик должен обладать химической и физической совместимостью
с пропитываемой тканью и удовлетворительной адгезией;
— герметик должен быть стоек к воздействию ФКП;
— герметик не должен обладать самогорением после снятия внешней теп-
ловой нагрузки;
— герметик должен обладать как можно более высоким значением эффек-
тивной энтальпии разрушения;
— герметик должен обладать временем жизнеспособности в вязком состо-
янии, достаточным для обеспечения операции по пропитке ткани. Время пол-
ного отверждения (вулканизации) герметика должно быть ограничено не-
сколькими часами.
В табл. 2.4.9 приведено описание некоторых полимерных материалов,
наиболее пригодных для пропитки тканей ГТЗП, а в табл. 2.4.10 — их физи-
ческие характеристики и теплофизические свойства.
Герметики ВИКСИНТ У-1-18 и ВИКСИНТ У-4-21 представляют собой
белую пасту, которая при смешении с катализатором вулканизируется и пре-
вращается в резиноподобный материал. Они применяются для поверхност-
ной герметизации приборов и радиоаппаратуры, клепаных, болтовых, свар-
ных металлических конструкций; обладают высокими диэлектрическими
свойствами, вибро-, влаго- и термостойкостью; не вызывают коррозии алю-
миниевых, магниевых, титановых сплавов, углеродистых и нержавеющих
сталей, латуни, серебряных покрытий. При воздействии на эти герметики
высокотемпературного газового потока их связующее испаряется, а наполни-
тель превращается в порошок и сносится потоком, что в большинстве случа-
ев не годится для пропитки тканей ГТЗП.
Материал ВОКТЗМ-ТС после вулканизации приобретает большую жест-
кость по сравнению с жесткостью герметика группы ВИКСИНТ. Его при-
менение для ГТЗП может быть использовано в случаях когда нет повышен-
496
Таблица 2.4.9. Описание полимерных материалов
Марка материала Условия вулканизации и отверждения Время живучести в вязком состоянии Время полного отверждения (вулканизации) Стойкость к средам
ВИКСИНТ У-1-18 комнатные, температура 15...23°С 0,5...6 ч 24 ч светостоек, озоностоек, влагостоек
ВИКСИНТУ-4-21 комнатные, температура 15...35°С 0,5...6 ч 3 суток светостоек, озоностоек, влагостоек
воктзм-тс комнатные, температура 1О...2О°С З...5ч 1...2 суток светостоек, влагостоек, термостоек
СТИРОСИЛ-А комнатные, температура 1О...25°С не менее 25 мин 24 ч светостоек, озоностоек, радиацион- ностоек, маслостоек, влагостоек
Таблица 2.4.10. Свойства полимерных материалов для пропитки ткани ГТЗП
Марка материала Температура интенсивной сублимации Плот- ность, г/см3 Предел прочности при растя- жении, МПа Теплопро- водность, Вт/(м К) Удельная тепло- емкость, кДж/(кгК)
ВИКСИНТ У-1-18 300°С 2,2±0,05 3,5...0,7 0,35...0,30 0,62...0,59
ВИКСИНТУ-4-21 зоо°с 1,35±0,05 1,5...0,5 0,33 2,05...2,26
ВОКТЗМ-ТС зоо°с 0,7±0,05 6,5...2,2 0,14...0,2 0,85...1,3
СТИРОСИЛ-А 680-700°С 1,1+0,1 9,0...2,1 0,1...0,3 1,45—1,75
ных требований к гибкости теплозащиты, но приобретает значение требова-
ние к весу и толщине теплозащитного пакета.
СТИРОСИЛ-А (стиросил) разработан в 1973 году и используется в про-
мышленности и в РКТ в основном как герметик и для теплозащиты жестких
конструкций путем нанесения на их поверхность слоев различной толщины.
Он является низкомолекулярным полимером и представляет собой белую
сметанообразную массу, которая может храниться в течение нескольких лет
без изменения свойств, но при смешивании с катализатором (продукт №111-
269) вулканизируется в течение суток при комнатных условиях и превраща-
ется в резиноподобный материал.
497
Стиросил обладает высокой адгезией по отношению к кремнезёмной тка-
ни — расслоения полимера с нитками ткани не происходит при полном чис-
ле циклов испытания на стойкость испытуемого образца к перегибам. Поте-
ря стойкости проявляется в возникновении трещин в слое стиросила, когда,
как показали испытания, его толщина превышает толщину ткани на величи-
ну 1,3 мм. Еще одним полезным свойством стиросила как сублимирующего
вещества в конструкции ГТЗП является способность сублимировать только
с поверхности, что предопределяет линейный закон уноса его массы. При этом
тонкий верхний слой стиросила (около 10% всей его толщины) при нагреве
вспухает, в результате чего устраняются все допускаемые дефекты, возника-
ющие при укладке и разворачивании НТУ, т.е. при нагреве происходит сво-
его рода «самолечение» поверхности теплозащитного пакета ГТЗП.
Анализ данных табл. 2.4.9 и 2.4.10 дает возможность, исходя из описан-
ных выше требований, предъявляемых к материалам, пригодным для пропит-
ки ткани ГТЗП НТУ СА, отдать предпочтение герметику СТИРОСИЛ-А.
Пропитка ткани вдавливанием и нанесение на нее слоя стиросила произво-
дится вручную шпателем.
2.4.3.2.4. Материалы для теплоизолирующего пакета гибкой теплозащиты
НТУ. Теплоизолирующий пакет ГТЗП НТУ устанавливается между теплоза-
щитным пакетом и герметичной оболочкой НТУ СА. Этот пакет набирается
из материалов, обладающих высокими теплоизоляционными свойствами. Пе-
речень некоторых таких материалов приведен в табл. 2.4.11.
Материалы, представленные в этой таблице, являются в разной степени
гибкими, обладают различающимися физическими и теплофизическими свой-
Таблица 2.4.11. Теплоизоляционные материалы для теплоизолирующего пакета
Наименование материала Марка материала Номер стандарта Допустимая температура эксплуатации, °C
кратковременное воздействие длительное воздействие
Литофлекс КГ-25 500 500
Ткань СВМ арт.56305 ТУ17 РСФСР 629261-79 300 300
Холст стекло- волокнистый ХСВН-7 ТУ6-48-0578 6904-147-94 500 300
Пленка полиимидная ПМ-1ЭУ-ОА ТУ Л Р-0317046- 01-92 500 300
Т епл оизоляция ATM-10 ТУ 550.2-42-72 1200 200
Теплоизоляция ATM-19 - 430 370
эвти ЭВТИ-В ОСТ92-1380-83 150 150
эвти ЭВТИ-И ОСТ92-1380-83 500 300
эвти ЭВТИ-Е - 1000 1000
498
ствами и широко используются в РКТ в качестве теплоизоляционных мате-
риалов.
Так, например, теплоизоляционные материалы марок ATM-10, АТМ-19,
Литофлекс широко применялись и применяются в НПО имени С.А. Лавоч-
кина для защиты спускаемых аппаратов от высокой температуры в атмосфе-
ре Венеры и низких температур при функционировании СА на поверхности
Луны, Марса.
Литофлекс представляет собой мелкоячеистый, легкосжимаемый и гибкий
материал на основе неорганической связки и асбестовых волокон.
Этот материал обладает низкой теплопроводностью (X = 0,05...0,08 Вт/(м-К))
при изменении температуры от 0 до 500 °C при атмосферных условиях и имеет
малый удельный вес: от 0,016 г/см3 в свободном состоянии до 0,07 г/см3 при
четырехкратном поджатии.
Теплоизоляция ATM-10 изготавливается из штапельного супертонкого ба-
зальтового волокна. Удельный вес его образцов при четырехкратном поджа-
тии составляет 0,16 г/см3 и без поджатия — 0,04 г/см3. Эффективная тепло-
проводность материала ATM-10 с трехкратным поджатием изменяется от
значения 0,06 Вт/(м-К) при температуре 50 °C до 0,09 Вт/(м-К) при темпера-
туре 300 °C.
Волокнистая органическая теплоизоляция АТМ-19 производится по фет-
ровой технологии из смеси органических волокон различного типа и состава
(лола, аримид, терлон). Плотность АТМ-19 составляет в свободном состоя-
нии 0,2 г/см3, теплопроводность при атмосферных условиях изменяется от
0,057 Вт/(м К) при температуре 20 °C до 0,123 Вт/(м-К) при температуре
500 °C.
К другой группе теплоизоляционных материалов можно отнести пленки,
используемые для формирования однородного теплоизолирующего пакета,
например содержащего только капроновую ткань, ткань со сверхвысоким
модулем прочности (СВМ) или холст стекловолокнистый.
Теплоизолирующий пакет также может быть скомбинирован из других
материалов, например, из пленок полихлорвиниловых или полиимидных,
холста стекловолокнистого с образованием экранно-вакуумной теплоизоля-
ции (ЭВТИ).
ЭВТИ из пленок различного типа широко используется в космической
технике для обеспечения контролируемого теплообмена КА с космосом.
Все перечисленные материалы по температуростойкости удовлетворяют
требованиям для использования в теплоизолирующем пакете ГТЗП НТУ СА.
Однако очевидно, что пакеты из таких теплоизоляционных материалов,
как АТМ-10, АТМ-19, литофлекс не смогут выдерживать многократных из-
гибов при укладке НТУ в компактный объем, т.к. базальтовое волокно теп-
лоизоляции АТМ-10, набивка из смеси органических волокон теплоизоля-
ции АТМ-19, асбестовые волокна литофлекса будут испытывать излом в
местах перегибов и сбиваться в отдельные комочки, образуя недопустимые,
499
в соответствии с требованиями к гибким теплозащитам НТУ СА, пустотные
разрывы в пакете. Также в результате многократных изгибов следует ожидать
изломы металлических фольг, из которых сформированы пакеты ЭВТИ-Е.
Ввиду этого перечисленные материалы могут использоваться только в неко-
торых особых случаях применения ГТЗП, например, когда предусматрива-
ется однократная укладка и развертывание НТУ.
В табл. 2.4.12 и 2.4.13 представлены некоторые теплофизические и физи-
ческие свойства ЭВТИ-В и ЭВТИ-И, которые могут использоваться при
расчетах прогрева теплоизолирующего пакета при тепловой нагрузке. Свой-
ства приведены для различной плотности укладки пленок ЭВТИ на единицу
толщины.
Таблица 2.4.12. Физические свойства ЭВТИ
Тип ЭВТИ Масса, г/м2 Толщина, мкм
Пленки ЭВТИ Прокладки ЭВТИ (ХСВН-7) Пленки ЭВТИ Прокладки ЭВТИ (ХСВН-7)
ЭВТИ-В 7,79 7,0 5 50
ЭВТИ-И 25,00 7,0 20 50
Таблица 2.4.13. Теплофизические и физические свойства ЭВТИ
Тип ЭВТИ Плотность укладки, 1/см Температура, Тепло- проводность, Вт/(мК) Удельная теплоемкость, ДжДкгК)
внутреннего слоя пакета наружного слоя пакета
ЭВТИ-В 13 20 50 0,141О’3 1320
13 100 0,1710’3
13 200 0,24-10‘3
ЭВТИ-И 21 150 200 0,21 IO3 840
21 300 0,24103
Из приведенного перечня материалов наиболее подходящим для теплоизо-
лирующего пакета ГТЗП является ЭВТИ-И, слои которой при изготовлении
ГТЗП НТУ упаковываются в чехол из аримидной ткани. Это было подтвер-
ждено в результате многочисленных испытаний образцов ГТЗП различной
конструкции, проведенных на плазменных установках ЦНИИМаш и торце-
вом холловском ускорителе (ТХУ) Института тепло- массообмена (ИТМО)
им. А.В Лыкова в г. Минске [29,30] в обеспечение выбора параметров ГТЗП
СА с НТУ, перечисленных в табл. 2.4.1.
2.4.3.3. О способах ужесточения надувных элементов
космических аппаратов
Надувные элементы КА и НТУ спускаемых из космоса аппаратов должны
сохранять свою работоспособность в течение длительного срока эксплуата-
ции. В связи с этим встает задача предотвращения потери формы НЭК после
500
снижения давления газа в оболочке либо в результате его диффузии через тон-
кую пленку стенки, либо в результате потери герметичности после попада-
ния метеоритов в течение первых часов после разворачивания в космосе.
Постоянная подача газа для поддержания заданного внутреннего давления
требует значительного увеличения массы конструкции за счет обеспечения
ее специальной системой, включающей емкости со сжатым газом или уст-
ройства для его генерации, трубопроводы и элементы управления. Очевид-
ным основным недостатком этого способа поддержания формы НЭК КА или
НТУ СА является утяжеление соответствующего аппарата.
Поэтому в настоящее время разрабатываются различные конструкции
первоначально надуваемой оболочки после ее развертывания. Значимые ре-
зультаты в решении этой проблемы получены в результате исследований,
проведенных Московским авиационным технологическим институтом им.
К.Э. Циолковского. Эти исследования показали, что большая часть способов
ужесточения основана на создании полуфабрикатов (пленочных композит-
ных материалов (ПКМ). Изготовленные из этих материалов НЭК после раз-
вертывания приобретают жесткость под влиянием на ПКМ факторов косми-
ческого пространства (ФКП) либо энергии, поставляемой от дополнитель-
ных источников. При ужесточении под действием ФКП удается резко сни-
зить трудоемкость и энергозатраты на фиксирование формы конструкции.
Другим способом ужесточения НЭК может служить создание заготовок
ПКМ с использованием эффекта памяти формы. В этом случае эффекты
памяти формы и ужесточения конструкции реализуются в результате хими-
ческих или физических превращений податливой полимерной матрицы ПКМ.
Для обеспечения сохранности формы НЭК КА или НТУ СА могут быть
использованы следующие способы ужесточения их материалов:
— химическое ужесточение (отверждение) ПКМ на основе армирующих
волокон (тканей) и каталитически, термо- или УФ-отверждаемых преполи-
мерных и олигомерных композиций, претерпевающих в процессе ужесточе-
ния необратимые химические превращения и сопровождающие их термичес-
кие и изотермические обратимые и необратимые физические (фазовые и ре-
лаксационные) переходы: гелеобразование, стеклование, разделение фаз, кри-
сталлизация или плавление, образование или разрушение жидкокристалли-
ческих фаз, различные мезофазные превращения;
— физическое ужесточение ПКМ за счет удаления из него растворителя
или временного пластификатора на основе армирующих волокон (тканей) и
полимерных матриц, претерпевающих термически необратимые фазовые и
релаксационные переходы (кристаллизация/плавление и стеклование/рас-
стеклование, соответственно) при изменении компонентного состава, тем-
пературы или давления;
— ужесточение ПКМ с эффектом памяти формы за счет стеклования или
кристаллизации матрицы на основе любых армирующих волокон (тканей) и
полимерных матриц, претерпевающих термически обратимые релаксацион-
501
ные (стеклование/расстеклование) или фазовые (кристаллизация/плавление)
переходы при охлаждении и нагреве соответственно;
— ужесточение стенок ПКМ, образующих формы, трансформируемые за
счет вспенивания полимеробразующих композиций или раздувания тонко-
стенных пузырей из них;
— ужесточение ПКМ за счет холодной пластической вытяжки на основе
склеенных слоев пластичной алюминиевой фольги и полимерных пленок.
К химическим превращениям, сопровождаемым необратимым ужесточе-
нием ПКМ и реализуемым в космическом пространстве, относятся реакции
отверждения пре- и форполимеров (прекурсоров) или реакционно-способ-
ных олигомеров, инициируемые: парами катализатора, которые могут быть
использованы в качестве раздувающего газа; внутренним нагревом с помо-
щью встроенных электронагревателей, это могут быть и токопроводящие
армирующие элементы (например, углеродные волокна), и инфракрасные
(ИК) лампы и источники ультрафиолетового (УФ)-излучения. Рассматрива-
емые реакции возможны и в результате воздействия внешнего солнечного или
космического излучения с образованием густосетчатых или полицикличес-
ких молекулярных структур.
Ужесточение с использованием физических процессов основано на исполь-
зовании космического вакуума для удаления из состава редкосетчатой поли-
мерной матрицы ПКМ низкомолекулярного летучего растворителя или вре-
менного пластификатора. Эта матрица ПКМ, насыщенная низкомолекуляр-
ным компонентом находится в податливом эластичном состоянии и обеспе-
чивает укладку заготовки конструкции на Земле. После доставки в космос и
разворачивания в вакууме в процессе удаления летучего компонента проис-
ходит возрастание жесткости матрицы в результате физических превращений
(перехода материала из эластичного в стеклообразное или кристаллическое
состояние) с соответствующим резким увеличением модуля упругости и де-
формационно-прочностных свойств.
Способ ужесточения ПКМ за счет удаления из полимерной матрицы ле-
тучего компонента (временного пластификатора) в вакууме отличается срав-
нительной простотой и отсутствием химических реакций на стадии ужесто-
чения. К его достоинствам можно также отнести:
— возможность выбора воды в качестве нетоксичного и слабо загрязняю-
щего оптические поверхности КА пластификатора полимерной матрицы;
— возможность регулирования кинетики процесса ужесточения за счет ва-
рьирования летучести воды;
— малую зависимость процесса ужесточения от излучения Солнца, вле-
кущую за собой необходимость вращения НЭК для равномерного обогрева;
— возможность испытания натурных заготовок и конструкций перед от-
правлением в космос в цикле разворачивания и ужесточения и в трансфор-
мированном состоянии;
502
— обеспечение длительной и обратимой способности к разворачиванию
заготовок при их хранении в герметичном контейнере.
К основным недостаткам ПКМ, ужесточаемых за счет физических пре-
вращений полимерной матрицы при удалении низкомолекулярных компо-
нентов, можно отнести необходимость вывода на орбиту дополнительной
массы в виде удаляемого летучего компонента и большое выделение низко-
молекулярных веществ с возможностью осаждения на поверхности космичес-
кого аппарата после их удаления из состава заготовки, а также необходимость
обеспечения герметичности контейнера с заготовкой на стадии хранения на
Земле и при доставке в космос во избежание преждевременного удаления
летучего компонента и ужесточения конструкции.
Применение ПКМ с эффектом памяти формы для создания трансформи-
руемых и ужесточаемых конструкций или их элементов базируется на двух
эффектах, проявляющихся в некристаллизующихся и частично кристаллизу-
ющихся полимерных матрицах, обычно с редкосетчатой молекулярной струк-
турой:
— на способности таких матриц резко и обратимо уменьшать и увеличи-
вать модуль упругости в результате физического превращения (релаксацион-
ного или фазового перехода) из жесткого упругого (стеклообразного аморф-
ного или аморфно-кристаллического) в вязко- или пластичноупругое (подат-
ливое) высокоэластическое аморфное состояние и обратно, т.е. при стекло-
вании/размягчении (расстекловании) или кристаллизации/плавлении соот-
ветственно. Эти превращения протекают при нагревании и охлаждении выше
или ниже температур соответствующих переходов;
— на обратимости больших высокоэластических деформаций, фиксируе-
мых или замораживаемых при стекловании или кристаллизации.
Самопроизвольное вспенивание полимеробразующих композиций, поме-
щенных между слоями полимерных пленок или ужесточаемых армирован-
ных ПКМ, позволяет одновременно решать обе основные задачи, возникаю-
щие при создании ужесточаемых НЭК: трансформацию (наддув) сложенной
заготовки за счет вспенивания и ужесточение ее стенок за счет образования
жесткой усиливающей пенопластовой прослойки. Наиболее перспективны-
ми с этой точки зрения являются композиции, используемые для получения
пенополиуретанов. Поскольку процессы вспенивания таких композиций
протекают одновременно с реакциями формирования полимерной основы
пены, то все проблемы, с которыми приходится сталкиваться при создании
химически отверждаемых ПКМ и трансформируемых конструкций из них, в
этом случае проявляются еще более резко. В первую очередь это относится к
летучести компонентов и газовыделению в процессе вспенивания, а также к
проблемам регулирования кинетики протекающих процессов и их энергети-
ческого обеспечения за счет факторов окружающей среды. Одним из путей
решения последней проблемы может быть использование полиэфирного свя-
зующего с добавками, которые разлагаются под действием УФ-излучения
503
Солнца с выделением газообразных продуктов, обеспечивающих вспенива-
ние связующего и инициирующих реакции его отверждения.
Ужесточаемые за счет холодной пластической вытяжки ПКМ, представ-
ляющие собой полимер-алюминиевые слоистые композиты (ламинаты), со-
стоящие из склеенных тонких слоев мягкой пластичной алюминиевой фоль-
ги и полимерных пенок, обычно полиэтилентерефталатных или полиимид-
ных, обеспечивают уникальный подход к созданию крупногабаритных раз-
дуваемых и ужесточаемых НЭК. Слои полимерной пленки и клея обеспечи-
вают износостойкость материала и герметичность конструкций, т.к. алюми-
ний легко образует крошечные отверстия (сквозные поры) в местах изгиба.
В качестве клеев могут использоваться композиции на основе ненасыщен-
ных полиэфиров, отверждение которых инициируется УФ-излучением. Та-
кие материалы используются для получения оболочковых конструкций в виде
сфер или труб, которые способны компактно укладываться с изгибом стенок
и распрямляться под действием внутреннего давления. Для разглаживания
складок и повышения механических свойств слоистого ПКМ используется
дополнительный наддув при повышенном давлении, соответствующем пре-
делу текучести алюминия при деформационном пластическом упрочнении.
Для уменьшения остаточных межслоевых напряжений в раздутой конструк-
ции при получении слоистого композита используют предварительно напря-
женную до предела пропорциональности алюминиевую фольгу. После завер-
шения всех операций наддува газ выпускается, и образовавшаяся жесткая
конструкция сохраняет заданную форму, несущая способность которой оп-
ределяется ее геометрией, напряжениями, возникшими при разглаживании
складок, толщиной слоев компонентов и ламината в целом.
К положительным качествам таких материалов относятся очень простой,
воспроизводимый и контролируемый процесс ужесточения, практически
неограниченный срок хранения в сложенном состоянии и малое влияние
условий и длительности хранения и эксплуатации, в том числе в условиях
космического пространства, на свойства материала, низкое газовыделение и
др.
2.4.3.4. О методе расчета гибкого теплозащитного
покрытия СА с НТУ
Как уже указывалось, ГТЗП НТУ (см. рис. 2.4.20) содержит теплозащит-
ный пакет из нескольких слоев термостойкой несущей ткани с нанесенным
на нее слоем газонепроницаемого сублимирующего вещества определенной
толщины и многослойный теплоизоляционный пакет (мат), помещенный в
чехол также из термостойкой ткани.
Существенной особенностью рассматриваемой теплозащиты является то,
что температура сублимации наносимого на несущую ткань вещества намного
ниже температуры разрушения несущей ткани. В этом случае реализуется ряд
эффектов, несвойственных разрушению традиционных жестких многослой-
ных теплозащит СА: возможность одновременного уноса сублимирующего
504
вещества из верхнего и лежащего под ним слоя теплозащитного пакета в
межслойное пространство между ними, фильтрация газообразных продуктов
разложения материалов нижнего слоя через неразрушаемую в течение неко-
торого времени ткань наружного слоя, поглощение внутренним слоем неко-
торого количества тепла, идущего на термическое разложение сублимирую-
щего вещества этого слоя и др. Все это свидетельствует о необходимости
создания новой специфической математической модели, описывающей про-
цессы прогрева и уноса массы теплозащитного покрытия рассматриваемого
типа.
Такая математическая модель, вычислительный алгоритм и программно-
вычислительный комплекс впервые разработаны в НПО им. С.А. Лавочкина
для расчета прогрева и уноса материала ГТЗП проектируемых предприятием
СА с НТУ.
В силу указанных конструкционных особенностей ГТЗП НТУ, математи-
ческая модель для расчета прогрева и уноса ее массы построена на основе
принципа разбиения области решения на подобласти непрерывности темпе-
ратуры, и задача решается в каждой из подобластей со сшивкой решения на
границах области постановкой соответствующих граничных условий с при-
влечением конкретного механизма разрушения материала и уравнения баланса
тепла.
Внутреннее термическое разрушение (разложение) материала ГТЗП при-
водит к поглощению тепла в его среде Qd, Вт/м3, и к выделению некоторого
количества газа с расходом Gg, кг/(с-м2), пропорционально изменению плот-
ности исходного материала. Газообразные продукты из зоны разрушения,
проходя сквозь поры расположенного ближе к обтекаемой поверхности и более
прогретого материала, отводят от него часть тепла. Количественно тепловой
эффект Qd, и расход газа Gg в процессе физико-химического превращения
исходного теплозащитного материала однозначно связаны с его массой, на-
ходящейся в зоне разложения.
В модели принимается, что температура газообразных продуктов и тепло-
защитного материала в каждой точке исследуемой области одинаковы. Кро-
ме того, пренебрегается гидравлическим сопротивлением ткани верхнего слоя,
что препятствует накоплению газа в межслойном пространстве.
Расчет прогрева и уноса материала проводится в одномерной постановке.
Такое допущение оправдано тем, что температурные градиенты в нормаль-
ном к поверхности ГТЗП НТУ направлении существенно больше, чем в ка-
сательном.
При расчете прогрева материала ГТЗП учитывается внутреннее термохи-
мическое разрушение его компонент, которое происходит в определенном
температурном интервале в некоторой зоне (заранее неизвестной) внутри
материала.
Для определения динамики прогрева ГТЗП вдоль ее поперечного сечения
с учетом описанных выше внутренних процессов термохимического разло-
505
жения используется нестационарное уравнение теплопроводности с подвиж-
ными (свободными) границами, выстраиваемыми в процессе счета,
Ср = A
Рт dt Эх
Х(х) -* -СG -^-Qd,
Эх 8 8 Эх
0<х<8, 0<t<tp
(2.4.1)
где Tm=Tm(x.t) — температура материала; С(х), pw(x),X(x) — соответствен-
но теплоемкость единицы массы, плотность и коэффициент теплопроводно-
сти материала ГТЗП (с учетом газообразных продуктов физико-химических
превращений); Cg — теплоемкость единицы массы газообразных продуктов
разложения; Qd — мощность стока тепла за счет внутреннего разрушения ма-
териала; х — координата, отсчитываемая в направлении, нормальном к по-
верхности стенки, х = 0 соответствует стороне, обтекаемой набегающим по-
током газа; 8 — начальное значение толщины слоя ГТЗП; t и tj— соответ-
ственно текущее и конечное время прогрева.
Для рассматриваемой конструкции ГТЗП и используемых материалов
принята следующая схема разрушения: область термохимического разруше-
ния сосредоточена в узкой зоне, прилегающей к границе раздела двух разно-
родных материалов — несущей ткани и нанесенного на нее сублимирующего
материала. Кроме того, поскольку сублимирующий материал является газо-
непроницаемым, пренебрегается эффектами охлаждения за счет фильтрации
продуктов газовыделения сквозь среду материала к более прогретым слоям
(расположенным ближе к обтекаемой поверхности). Очевидно, что пренеб-
режение этим эффектом дает некоторый запас по прогреву и уносу массы
ГТЗП при ее проектировании.
С учетом принятых допущений из уравнения (2.4.1) исключаются два
последних члена, соответствующие отводу тепла за счет фильтрации продук-
тов газовыделения и распределенному по объему материала стоку тепла за счет
внутреннего термического разложения. Тогда как сток тепла в локальной зоне
возле границы раздела материалов учитывается соответствующим граничным
условием.
В качестве физической модели разрушения материалов ГТЗП принимает-
ся модель, по которой разрушенные частицы материала, расположенные
между слоями под влиянием сжимающих усилий со стороны набегающего
потока газа и соседних слоев ГТЗП, вытесняются с поверхности, на которой
происходит разрушение материала, и затем сносятся вдоль образующей к
периферии, где ГТЗП НТУ с некоторой степенью негерметичности крепит-
ся к контуру жесткой части ЛАЭ СА.
(В дальнейшем нижний индекс «т», обозначающий принадлежность фи-
зической величины материалу слоя ГТЗП, для простоты опускается.)
В рассматриваемом случае теплофизические характеристики материала —
коэффициенты уравнения теплопроводности (2.4.1): С(х), р(х), Х(х) являются
разрывными функциями. В исследуемой задаче они терпят сильный разрыв
506
на стыке материалов с различными теплофизическими свойствами. В точке
разрыва коэффициентов выполняются естественные условия сопряжения —
непрерывности температуры Т\х, f) и теплового потока 'кдТ/Эх. Таким об-
разом, предполагается, что контакт разнородных материалов внутри тепло-
защиты идеален. Условия сопряжения записываются в виде
Г(х,0] = 0,
k—1
Эх
-о,
где символом [ ] обозначен скачок функции при переходе контакта двух
материалов.
Начальное распределение температуры по толщине теплозащиты в момент
времени t = 0 задается функцией Ть(х)
Т(0,х) = Ть(х), 0<х<5, / = 0. (2.4.2)
Граничные условия 1-го типа моделируют унос материала ГТЗП. При этом
используется модель, по которой унос материала начинается при достиже-
нии температуры поверхности значения, равного температуре разрушения
материала Td:
Т(/,х) = 7;0, x = xrf0(/); 0<xd0<5, (2.4.3)
где xJ0(Z) — положение разрушаемой (внешней) границы, определяемое в
процессе решения. Скорость движения границы, определяемая соотношением
находится из уравнения баланса тепла по формуле
’° Рт^
(2.4.4)
где qQ — суммарный тепловой поток к поверхности; индекс «О» относится к
внешней поверхности ГТЗП. В формулировке условия (2.4.4) пренебрегает-
ся тепловым потоком за счет теплопроводности, это допущение приводит к
незначительному завышению уноса материала с поверхности.
При отсутствии уноса с поверхности, когда ее температура не превышает
температуры разрушения материала I\t, х) < TJ0, вместо (2.4.3) задается ус-
ловие, которое записывается в виде
"Х^ = 9о_^°аГ4’ x = xd,v (2.4.5)
На внутренней поверхности теплозащиты температура Д/,х) всегда мень-
ше ее температуры разрушения Tdl. Здесь граничное условие имеет вид
507
X— = q}-£wlcT4,x = ?>,0<t<tf, (2.4.6)
где <7, — суммарный тепловой поток к поверхности; индекс «1» относится к
внутренней поверхности х = 8.
Разрушение и унос материала внутри ГТЗП могут возникнуть на границе
контакта двух различных материалов. Причем начинается унос в материале с
меньшей температурой разрушения. В точке контакта xd t (/), разделяющей два
материала — (/-1)-й и i-й, ставится условие 1-го типа с температурой разру-
шения материала с меньшим значением Tdi. Скорость уноса внутри матери-
ала в отличие от (2.2.4) определяется по формуле (условие сопряжения)
у
(2.4.7)
где [<?], означает скачок теплового потока, расходуемого на разрушение ма-
териала при температуре Tdj с энтальпией разрушения 1е^. На этой границе
контакта по-прежнему выполняется условие непрерывности температуры
[Дх, 01 = 0.
Задача об определении температуры в поперечном сечении ГТЗП форму-
лируется следующим образом: найти решение уравнения (2.4.1) при задан-
ных начальных (2.4.2) и граничных условиях на внешней поверхности (2.4.3)
или (2.4.5), и на внутренней — при условии (2.4.6) с учетом соотношений
(2.4.4) на внешней и на внутренней (2.4.7) поверхностях.
С учетом существования сильных разрывов коэффициентов уравнения
теплопроводности (2.4.1) на стыках различных материалов ГТЗП для числен-
ного решения задачи прогрева и уноса материала ГТЗП НТУ разработана
однородная консервативная разностная схема, подробно описанная в рабо-
тах [31, 32], которая позволяет проводить вычисления без явного выделения
точек разрыва.
Точность получаемых результатов расчета по представленной математи-
ческой модели проверена сравнением с результатами испытаний образцов
ГТЗП различной конструкции для СА, проектируемых в НПО им. С.А. Ла-
вочкина.
Здесь в качестве примера приводятся результаты сравнения расчетных
данных с данными испытаний образцов различной конструкции ГТЗП НТУ
СА на ТХУ в Институте тепломассообмена им А.В. Лыкова (Беларусь,
Минск). Испытываемые образцы диаметром 80 мм содержали теплозащит-
ный пакет, состоящий из двух или трех слоев кремнеземной ткани (темпера-
тура разрушения 1200 °C), пропитанной стиросилом; теплоизолирующий мат
из девяти пленок ЭВТИ-И и слой защищаемой газонепроницаемой оболоч-
ки НТУ из ткани ТПМ-8. При испытаниях замерены изменения температу-
ры по времени на внешней, обращенной к набегающему потоку, и внутрен-
508
ней, примыкающей к оболочке НТУ, поверхностях мата ЭВТИ, и определен
путем взвешивания образцов до и после испытания их линейный унос.
В табл. 2.4.14 указаны номера и конструкционные параметры образцов
(812 з — толщина стиросила на соответствующем слое кремнеземной ткани),
тепловая нагрузка (плотность теплового потока q, полная энтальпия потока
), максимальные значения температуры Ттах на соответствующих поверх-
ностях мата ЭВТИ. Два образца с номерами 2-1 и 2-2, являющиеся фрагмен-
тами ГТЗП СА с НТУ «Демонстратор», выполнены идентичными по конст-
рукции и испытаны при одинаковых условиях. Здесь также приведены ре-
зультаты испытаний на ТХУ и расчета прогрева и уноса массы ГТЗП образ-
цов №№ 12, 16 и 21, теплоизолирующий мат которых состоит из 13-ти пле-
нок ЭВТИ-И.
Таблица 2.4.14. Сравнение результатов расчета и испытаний образцов ГТЗП НТУ
Номер образца Толщина стиросила на ткани, мм q, кВт/м2 L, МДж/кг Время теплового воздействия, с Т °C 1 max? Линейный унос, м
Экспе- римент Расчет Экспе- римент Расчет
2-1 in in —Г сГ II II СО 100 5,13 54 над ЭВТИ 350 под ЭВТИ 124 над ЭВТИ 355 под ЭВТИ 129 - 0,605
2-2 над ЭВТИ 376 под ЭВТИ 142
12 8, = 1,8 82 = 0,5 140 5,66 50 под ЭВТИ 60 под ЭВТИ 70 0,837 0,9354
16 8, = 1,3 82 = 0,8 83 = 0,4 250 7,64 50 под ЭВТИ 40 под ЭВТИ 57 1,217 1,392
21 ОО ~ сГ сГ II II II сх5" схэ4 cxfp 400 10,7 50 под ЭВТИ 60 под ЭВТИ 65 1,278 1,455
Приведенные результаты сравнения свидетельствуют о хорошем совпаде-
нии экспериментальных и расчетных данных, полученных как по прогреву,
так и по уносу ГТЗП герметичных оболочек НТУ, что удовлетворяет прак-
509
тике проектирования СА с НТУ. Так, результаты по прогреву газонепрони-
цаемой оболочки НТУ отличаются не более, чем на 8%; а по линейному уносу
материалов теплозащиты — не более чем на 15%. При этом следует заметить,
что расчетные значения температуры и уноса массы теплозащиты превыша-
ют экспериментальные, что говорит об определенном даваемом расчетной
методикой запасе, необходимом при проектировании тепловой защиты спус-
каемых аппаратов с надувными тормозными устройствами.
2.4.3.5. Системы наполнения газом надувных элементов
космической техники
Развертывание НЭК КА и НТУ СА осуществляется с помощью системы
наполнения. Она представляет собой разветвленную сеть гибких трубопро-
водов, подводящих газ от источника высокого давления к элементам оболочки
НЭК и НТУ через дроссельные устройства, понижающие давление и темпе-
ратуру (в случае применения газогенератора) газа на входе в полость оболоч-
ки. Если для НЭК КА внутреннее давление ограничивается только усилием,
достаточным для раскрытия оболочки и ее прочностью, то неизменность
формы НТУ СА должна быть обеспечена и при спуске, когда на НТУ воз-
действует аэродинамическая нагрузка. В этом случае давление внутри обо-
лочки НТУ выбирается исходя из скоростного напора набегающего потока
газа. Величина давления зависит от формы и геометрических размеров как
НТУ в целом, так и формирующих его элементов (торов). Например, для СА
серии «Демонстратор» в результате испытаний полномасштабного макета его
НТУ в аэродинамической трубе давление наддува было выбрано превышаю-
щим в четыре раза максимальное значение скоростного напора по траекто-
рии спуска.
Конструкция и параметры системы наполнения газом НТУ выбираются
исходя из требования к заданной скорости наполнения НЭК и недопустимо-
сти разрушения герметичной оболочки струей втекающего газа. Математи-
ческая модель для расчета проходных сечений трубопроводов системы напол-
нения и дроссельных устройств, величины необходимого давления в балло-
не сжатого газа на борту СА и времени наполнения НТУ в космосе представ-
ляет собой систему уравнений газовой динамики, включающих значения
гидравлического сопротивления каждого из характерных участков и элемен-
тов системы наполнения.
Важную роль при проектировании системы наполнения НТУ играет точ-
ное определение величины начального давления в источнике сжатого газа.
Поскольку заправка баллона сжатого газа может проводиться при различной
температуре газа, то необходимо для каждого конкретного СА с НТУ опре-
делять номограмму заправки.
Исходными величинами для определения номограммы заправки баллона
вместимостью V(м3), являются: давление в конце заправки Р (Па), темпера-
тура подаваемого в баллон газа Т (К) и масса т (кг), необходимого для под-
510
держания в НТУ при спуске в атмосфере давления, обеспечивающего неиз-
менность формы НТУ.
Для давления заправки справедливо соотношение
PV = KmRT,
где к — коэффициент сжимаемости газа, зависящий от давления и темпера-
туры; R = 296.9 Дж/(кг-К) — газовая постоянная для заправляемого газа (азо-
та).
Отсюда для зависимости давления заправки от температуры заправляемо-
го газа получаем
р _ mR
кТ~~'
Коэффициент сжимаемости к определяется на основании данных работы
[33] из соотношения
Pv = kRT,
где v (м3/кг) — удельный объем заправляемого газа.
Проверка функционирования выбранной системы наполнения НТУ, так
же, как и всех систем СА с НТУ, проводится на соответствующих установках
и стендах наземной экспериментальной базы.
2.4.3.6. Методы экспериментальной отработки космической техники
с надувными элементами конструкции
2.4.З.6.1. Существующая экспериментальная база для отработки космичес-
кой техники с надувными элементами конструкции. Успешная реализация тех-
нологии НЭК КА и СА с НТУ возможна только вследствие тщательной от-
работки перед летными испытаниями всех их систем в наземных условиях.
Для этого на предприятиях космической отрасли в России существует соот-
ветствующая экспериментальная база.
В НПО им. С.А. Лавочкина в обеспечение проектирования НЭК и НТУ
вновь созданы и частично модернизированы следующие установки:
— вакуумная камера для исследования процесса разворачивания НЭК
(рис. 2.4.21);
— стенд для проведения вибропрочностных испытаний НЭК и НТУ
(рис. 2.4.22);
— гидробассейн для исследования устойчивости конической формы НТУ
в развернутом положении под действием внешней силовой нагрузки
(рис. 2.4.23);
— гидравлический стенд для отработки систем наддува НЭК и НТУ в кос-
мосе и дополнительного наддува НТУ при спуске СА в атмосфере (рис. 2.4.24);
— комбинированный аэростатно-машинный стенд для исследования ди-
намики СА с НТУ в атмосфере при различных скоростях посадки. Заданная
скорость спуска при посадке СА обеспечивается транспортным средством,
511
Рис. 2.4.21. Исследование процесса развертывания НТУ СА «Демонстратор»
Рис. 2.4.22. Вибропрочностные испытания СА с НТУ ММС
которое соединено тросом с СА через блок, поднимаемый с помощью аэро-
стата на определенную высоту.
Московский государственный авиационный институт (МАИ) располага-
ет модернизированным тепловакуумным стендом ТВС-1 кафедры 601 для
моделирования условий испытаний образцов многослойного ГТЗП НТУ с
температурой контактного нагрева до 2000 °C.
512
Рис. 2.4.23. Испытания СА с НТУ «Демонстратор» в гидробассейне
В ЦНИИМаш имеются установки (У-6, У-ЗМ, ПГУ-7 и 11 и др.) для
определения аэродинамических характеристик моделей СА с НТУ различной
формы. На стенде У-23М может быть исследована аэродинамика полномас-
штабного макета СА с НТУ при низких дозвуковых скоростях. Для испыта-
ний образцов ГТЗП пригодны высокочастотный плазмотрон У-13 ВЧП, до-
оснащенный специально разработанным оборудованием в условиях тепловой
нагрузки до 6 МВт/м2 при низких давлениях, а также щелевым соплом для
образования плоской струи плазмы и специальной державкой для размеще-
ния образцов, и электродуговая установка ТТ-1, обеспечивающая тепловую
нагрузку до 15 МВт/м2 при низких и средних значениях давления.
В Институте тепломассообмена (ИТМО) им. А.В. Лыкова в Минске для
испытаний образцов ГТЗП может быть использован торцевой холловский
ускоритель (ТХУ), моделирующий реальные условия тепловой нагрузки (фи-
зико-химические превращения в ударном слое, лучистую и конвективную
составляющие теплового потока) при обтекании разреженным газом.
В Научно-исследовательском центре ЦИАМ (пос. Тураево, Моск, обл.) на
газодинамическом стенде Ц-9Н при разработке соответствующих методик [34]
определения параметров режима работы стенда и спецоборудования возможно
проведение испытаний ГТЗП, установленного на полномасштабном макете
СА с НТУ диаметром до 5 м.
Стендовое оборудование аэродинамических труб Т-101иТ-105в ЦАГИ,
дооснащенное элементами и системами, обеспечивающими проведение ис-
следований динамики развертывания полномасштабного макета НТУ при
движении СА в атмосфере, позволит отработать процессы предпосадочного
участка траектории спуска аппарата.
513
NB
Рис. 2.4.24. Гидравлический
с НТУ «Демонстратор»:
1. Шар-баллоны секции 1
2. Шар-баллоны секции 2
3. Зарядный клапан У24-3610
4. Зарядный клапан
5. Коллектор секции 1
6. Коллектор секции 2
7. Электропневмоклапан АЭ-058
8. Редукционный клапан
9. Стендовая барокамера РК
10. Вентиль вакуумирования
стенд для отработки системы наддува
11. Распределительный шланг
12. Имитатор тора 1
13. Имитатор тора 2
14. Имитатор тора 3
15. Имитатор тора 4
16. Имитатор тора 5
17. Имитатор тора 6
18. Дроссельные шайбы
Д1 — Д19 — датчики давления
СА
514
Перечисленная совокупность элементов экспериментальной базы позво-
ляет провести весь комплекс испытаний, сопровождающих процесс проекти-
рования НЭК КА и СА с НТУ, результаты которых могут служить верифика-
цией расчетных параметров всех систем СА с НТУ перед летными испытани-
ями всех основных проблем, связанных с технологией создания СА с НТУ.
2.4.3.6.2. О некоторых методах моделирования условий функционирования
космической техники с надувными элементами конструкции. При проектиро-
вании КА с НЭК и СА с НТУ в НПО им. С.А. Лавочкина разработаны неко-
торые методы моделирования условий их функционирования для экспери-
ментальной отработки этих изделий, основные из которых и описаны ниже.
Спуск в атмосфере сопровождается кратковременным (до нескольких де-
сятков секунд) монотонно возрастающим, а затем также монотонно спадаю-
щим тепловым воздействием газа на поверхность теплозащиты СА. Существу-
ющие экспериментальные энергоустановки не могут воспроизвести такое
течение процесса. Поэтому обычно тепловые испытания образцов теплоза-
щиты проводят при постоянной или ступенчато изменяющейся величине
плотности теплового потока <?(/), а время теплового воздействия t выбирают
таким, чтобы образец воспринял то же количество тепла Q, что и поверхность
теплозащиты СА в полете: t = Q/q. Число же переходов со ступеньки на сту-
пеньку циклограммы теплового воздействия в силу его кратковременности
ограничено техническими возможностями установки по смене режима ее
работы. При этом нужно помнить, что выбираемое значение q(t) влияет на
скорость уноса массы теплозащиты, а от времени t зависит нагрев и динами-
ка прогрева образца. Поэтому при испытаниях необходимо выбирать комп-
ромисс между этими двумя параметрами.
Метод выбора этого компромисса, а следовательно, и методика тепловых
испытаний образцов теплозащиты, в том числе и ГТЗП, заключается в сле-
дующем.
В результате расчетов спуска СА с НТУ в атмосфере получают полетные
величины тепловой нагрузки qr(t), Qr, уноса массы теплозащиты 8г(/) и вре-
мени теплового воздействия tr, вызывающего прогрев теплозащиты и тем-
пературу Тг (/) нагрева оболочки НТУ. Затем назначают несколько ступенча-
тых циклограмм теплового воздействия q. (/), подводящего к образцу одно и
то же количества тепла Qr, и для каждой из них рассчитывают унос массы 8Z
и температуру 7) имитатора герметичной оболочки у образца.
После сравнения зависимостей 8z(0 и 7](Z) выбирают для испытаний ту
циклограмму, которая одновременно дает наилучшее совпадение с суммар-
ной величиной уноса массы 8rmax и динамикой прогрева теплозащиты Tr(t),
т.е. величинами, соответствующими графику тепловой нагрузки при спуске
аппарата по расчетной траектории [35].
При этом давление в рабочей камере плазмотрона в течение испытания
поддерживается на уровне, соответствующем максимальному скоростному
напору при реальном полете СА с НТУ.
515
Например, для испытаний образцов ГТЗП НТУ СА «Демонстратор-2» на
У-13 ВЧП в ЦНИИМаш исследовались три возможные циклограммы удель-
ного теплового потока, генерируемого плазмотрона — ^(0, <72^’
Первая циклограмма qx(t) соответствовала вводу образца в установившийся
поток плазмы с параметрами режима, обусловливающими постоянную вели-
чину плотности теплового потока к поверхности образца 400 кВт/м2. При
второй циклограмме — q2(t) = 200 кВт/м2. Третья циклограмма предусмат-
ривала ступенчатое изменение параметров режима, обеспечивающего пере-
ход плотности теплового потока в определенный момент времени с началь-
ного уровня, равного q3(t) = 200 кВт/м2, на уровень q3(t) = 400 кВт/м2. Эти
циклограммы моделировали график рассчитанного изменения плотности теп-
лового потока qr(t) при спуске СА «Демонстратор-2», воспринимающего сум-
марное количество тепла Qr = 14 МДж/м2 в течение 80 секунд интенсивного
нагрева набегающим потоком газа.
Продолжительность воздействия теплового потока на образец при каждой
циклограмме выбиралась из условия tt = Q/qt. Продолжительность испыта-
ний по первой циклограмме составила 35 с, по второй — 70 с. По третьей
циклограмме переход с <73(О = 200 кВт/м2 на уровень <73(О= 400 кВт/м2 про-
изводится на 30-й, а заканчивался тепловой обдув образца на 50-й секунде.
Сравнение результатов расчета показало, что наиболее близкое значение
унесенной толщины ГТЗП к ее значению при траекторном изменении удель-
ного теплового потока qr(t), 5rmax =1,38 мм, имеет образец, испытанный по
более продолжительной циклограмме q2(f) — 52max =1,26 мм. При этом из-
менение температуры герметичной оболочки и внешней поверхности пакета
ЭВТИ-И при нагреве по циклограмме q2(t) также наиболее близко к дина-
мике изменения этих температур при траекторной тепловой нагрузке, чем по
циклограммам qx(t) и q3(t). Эта циклограмма и была выбрана для испыта-
ний ГТЗП НТУ СА «Демонстратор-2».
Однако отработка ГТЗП НТУ СА не может быть ограничена испытания-
ми образцов на плазмотронах. Это следует из того, что одной из основных
особенностей ГТЗП НТУ СА является влияние масштабного фактора на ее
эффективность и работоспособность, проявляющееся в разрушении кремне-
земной ткани теплозащитного пакета после выгорания сублимирующего ве-
щества под действием аэродинамической нагрузки, чего не происходит при
испытаниях мелкомасштабных образцов теплозащиты. Целесообразность и
необходимость испытаний полноразмерных макетов теплозащиты оправды-
вается также тем, что в этом случае испытаниям подвергается реальная кон-
струкция теплозащиты, включающая швы, стыки, соединительные элемен-
ты и т.п., определяющие её работоспособность при одновременном воздей-
ствии тепловой и механической нагрузок.
Крупные габариты (до нескольких метров) СА с НТУ являются обычно
препятствием для испытаний их полноразмерной ГТЗП на плазмотронах и
ускорителях плазмы.
516
Подходящей тепловой установкой для испытаний полномасштабных ма-
кетов теплозащиты НТУ является газодинамический стенд Ц-9Н НИЦ
ЦИАМ.
На этом стенде проводятся тепловые и теплопрочностные испытания
аппаратов (или их крупногабаритных фрагментов), летящих в атмосфере
Земли или других планет. Нагрев газа осуществляется за счет сжигания ке-
росина в камере сгорания прямоточного типа. Максимальная температура
газового потока около 2000 °C при расходе воздуха 100 кг/с. Давление в ра-
бочей части стенда (охлаждаемая водой термобарокамера (ТБК) диаметром 5
м) от 105 до 0,05-105 Па, в зависимости от расхода воздуха. Для наблюдения
за объектом испытания и проведения оптических измерений в стенках ТБК
имеется четыре иллюминатора. Испытания объектов размером в поперечни-
ке от 1 до 5 м проводятся в дозвуковой струе, истекающей из сопла диамет-
ром 1,36 м. Для этого объект устанавливается на стыкуемой с донной частью
объекта горизонтальной державке вдоль оси струи газового потока.
При выборе режима испытаний должны учитываться следующие особен-
ности условий стенда Ц-9Н: дозвуковое обтекание объекта испытаний, по-
вышенное по сравнению с реальным при спуске СА с НТУ давление в газо-
вом потоке, пониженная температура и, соответственно, энтальпия тормо-
жения газового потока.
При испытаниях полномасштабных макетов СА с НТУ серии «Демонст-
ратор» и ММС разработана соответствующая методика. Вывод ее базируется
на использовании результатов аэротермодинамических расчетов тепловых и
силовых параметров, сопровождающих спуск СА с НТУ в атмосфере, а так-
же результатов ряда методологических и калориметрических экспериментов.
В соответствии с этой методикой работы ведутся в следующем порядке.
На начальном этапе проводятся аэротермодинамические расчеты спуска
СА с НТУ с заданными массой, аэродинамическими характеристиками фор-
мы СА и условиями входа в атмосферу — скоростью v и углом входа 0.
В результате расчетов определяются зависимости высоты Н и скорости
полета у, скоростного напора q, параметров торможения газового потока:
энтальпии /о, температуры То и давления Ро, а также удельного теплового
потока q^ от времени т. При этом значения теплового потока q^ интегри-
руются по времени и определяется суммарное количество тепла Qnj}, прихо-
дящееся на единицу поверхности НТУ.
С использованием значений qnj} (т) и Qnj] проводится оценка необходимых
параметров теплозащиты и выбор её конструкции. Изготавливаются образ-
цы для испытаний на плазмотронах и в условиях стенда Ц-9Н.
Одновременно с этим проводятся расчеты динамики прогрева теплозащиты
НТУ — Тр(х, т), в том числе и изменения по времени температуры поверх-
ности теплозащиты Tw = 7^(0, т), уноса массы — 8р(т) и суммарной потери
массы теплозащиты — Лтр в условиях реального спуска СА с НТУ в атмос-
фере. При этом, по мере определения (уточнения) зависимости эффектив-
517
ной энтальпии разрушения материалов теплозащиты выбранной конструк-
ции /Эф пл от энтальпии набегающего потока /о в плазмотронах, может произ-
водиться уточнение результатов аэротермодинамических расчетов и расче-
тов динамики изменения температуры Тр(х, т) по толщине теплозащиты и
унос её массы 5р(т).
По результатам уточненного расчета (при необходимости, с учетом соот-
ветствующего уточнения конструкции теплозащиты) определяются времен-
ные границы начала Tj и конца т2 интенсивной сублимации материала теп-
лозащиты и соответствующие ей уровни плотности тепловых потоков q{ Tj)
и <?(т2). Это связано с тем, что на стенде Ц-9Н из-за низкой температуры
газового потока по отношению к температуре при реальном полете СА не уда-
ется воспроизвести при давлениях в рабочей камере ниже атмосферного вы-
сокие удельные тепловые потоки, соответствующие их уровню при сублима-
ции материала теплозащиты в полете.
Далее, при методических испытаниях образцов теплозащиты выбранной
конструкции на модельной установке стенда Ц-9Н в условиях, максимально
приближенных к условиям испытания полноразмерного НТУ с теплозащи-
той на самом стенде Ц-9Н, определяется значение энтальпии разрушения
материалов гибкой теплозащиты НТУ /эф ст при температурах газового пото-
ка, превышающих температуру сублимации вещества, нанесенного на повер-
хность наружного слоя теплозащитного пакета.
Для выбора параметров режима работы стенда Ц-9Н на нем проводятся
калометрические испытания, в результате которых определяются величины
стендового коэффициента теплообмена аст^ост’^ на поверхности полнораз-
мерного методического макета НТУ, где Z — координата вдоль образующей
макета.
Во время реального аэроторможения СА с НТУ температура поверхности
теплозащиты и её прогрев увеличиваются по мере роста теплового потока,
обусловленного увеличением плотности и давления атмосферы при спуске
СА. При этом температура поверхности теплозащиты достигает уровня, со-
ответствующего температуре интенсивной сублимации материала, нанесен-
ного на наружный слой теплозащитного пакета, уже при удельных тепловых
потоках около 100 кВт/м2. После достижения этой температуры (момент
времени Tj) начинается унос массы сублимирующего вещества, продолжаю-
щийся до момента времени т2, когда удельный тепловой поток к поверхно-
сти НТУ станет ниже 100 кВт/м2.
В соответствии с этим в стендовых условиях до начала и после прекраще-
ния интенсивного уноса массы теплозащиты необходимо воспроизводить
реальное (полетное) изменение удельного потока. На участке же траектории
с интенсивным уносом теплозащиты удельный тепловой поток может быть
выбран из условия реализации полетного уноса массы теплозащиты. Продол-
жительность этого участка составляет (т2 — Tj).
518
Равенство полетных и стендовых тепловых потоков можно записать в виде:
®ст (^ОСТ ^И’СТ) °0£
(2.4.8)
где Тепл — температура восстановления газового потока в полете; Ткпл —
температура поверхности ГТЗП НТУ в полете; Тн — температура окружаю-
щей среды в полете; — температура газового потока на стенде; TWCT —
температура поверхности ГТЗП НТУ на стенде; Тнст — температура стенок
термобарокамеры стенда Ц-9Н; — коэффициент конвективного тепло-
обмена в полете; аст — коэффициент конвективного теплообмена на стенде;
о — постоянная Стефана—Больцмана; е — интегральная степень черноты
поверхности ГТЗП НТУ.
При соблюдении равенства полетного и стендового конвективных тепло-
вых потоков будет соблюдаться и одинаковый темп нагрева поверхности теп-
лозащиты. Тогда при близких значениях начальной температуры поверхно-
сти теплозащиты в полете и на стенде к моменту начала воздействия замет-
ного конвективного теплового потока в полете будет соблюдаться равенство
7^ ~ TWCT при дальнейшем нагреве ГТЗП.
Многочисленные расчеты разогрева наружной поверхности теплозащит СА
за счет воздействия теплового потока на участке свободномолекулярного и
переходного режимов обтекания показывают, что при достижении СА высо-
ты около 100 км над поверхностью Земли наружная поверхность теплозащи-
ты имеет температуру 10—30 °C.
Поэтому из равенства (2.4.8), при пренебрежении лучистыми тепловыми
потоками, падающими на поверхность ГТЗП со стороны окружающей среды
в полете СА и от стенок рабочей камеры стенда, вследствие низких значений
температур Тн и Гнст, можно получить закон изменения температуры стен-
дового газового потока на участке нагрева ГТЗП полномасштабного макета
НТУ в виде
гу
Г _ГГ | ПЛ /GT _ГГ
ост w '7епл w
ист
(2.4.9)
Выбор параметров стендового режима, моделирующего участок полета СА
с интенсивным уносом материала теплозащиты, осуществляется из условия
равенства стендового и полетного уноса массы стиросила за промежуток
времени (т2—Т]).
519
Полетный унос массы стиросила из слоев теплозащитного пакета опреде-
ляется формулой
Зпл
= J gnjl dx,
?! Г эф.пл
(2.4.10)
где р — плотность сублимирующего вещества.
Аналогичный вид имеет и формула для определения стендового уноса
массы теплозащиты за тот же промежуток времени:
8 = f gcT
ст J рЪ,
Tj г эф.ст
</т.
(2.4.11)
В условиях стенда испытания ГТЗП на участке интенсивного уноса ее
массы следует проводить при постоянных уровнях теплового потока <?ст и,
соответственно температуры газового потока. Тогда из (2.4.11) опреде-
лится
8СТ = «ст <т2 - Ti >/Р7эф.ст ’ (2-4.12)
где эффективная энтальпия разрушения /эф определяется при постоянном
значении энтальпии /ст газового потока, соответствующей температуре Т^.
Приравнивая стендовые (2.4.12) и полетные (2.4.10) значения величины
уноса массы стиросила, получаем формулу для определения стендовой плот-
ности теплового потока
7 ^.ст^ост)^
(2.4.13)
Интегрирование выражения (2.4.6) позволяет найти соответствующее зна-
чение температуры стендового газового потока:
7’оСТ = ^+«ст/«ст- (2.4.14)
В итоге, по формулам (2.4.9) и (2.4.14) рассчитывается стендовый режим
испытания ГТЗП полномасштабного макета НТУ, обеспечивающий воспро-
изведение рассчитанного полетного нагрева конструкции ГТЗП и уноса массы
стиросила из слоев теплозащитного пакета при одновременном воспроизве-
дении динамического давления потока газа на ее поверхность, равного или
близкого к реальному его изменению при спуске аппарата в атмосфере.
На рис. 2.4.25 приведены видеокадры тепловых испытаний полномасш-
табного макета СА с НТУ «Демонстратор» на стенде Ц-9Н в различные мо-
менты времени [35].
520
Рис. 2.4.25. Кадры видеосъемки тепловых испытаний ГТЗП полномасштабного
макета НТУ СА «Демонстратор-2»
Для испытаний устойчивости формы НТУ СА может быть использован
гидробассейн НПО им. С.А. Лавочкина, схема которого приведена на
рис. 2.4.26. Испытания проводятся по методике, устанавливающей такую пос-
ледовательность выполнения операций:
— заполнение водой полости кольца 4 бассейна;
— установка на стенд СА с НТУ с опорой на кольцо 4;
— покрытие НТУ тканепленочным газонепроницаемым чехлом 7 и укладка
его хвостовой части на дне кольцевой емкости 5;
Рис. 2.4.26. Схема испытаний в гидробассейне для исследования устойчивости фор-
мы СА с НТУ «Демонстратор»: 1 — ОНТУ; 10 — манометр; 2 — корпус приборного
отсека; 11 — вакуумметр; 3 — подставка под ОНТУ; 12 — датчик давления «Сапфир»;
4, 5 — металлические кольца; 13 — прибор цифровой индикации; 6, 7 — тканепле-
ночный чехол; 14 — вакуумный насос; 8 — веревочный бандаж; 15 — пульт высоко-
го давления; 9 — вентиль; 16 — бобышки
521
— заполнение водой емкости 5;
— вакуумирование объема между донной поверхностью СА и зеркалом
воды в емкости кольца 4\
— регистрация давления под НТУ в момент потери устойчивости формы
НТУ.
В случае недостаточности внешней нагрузки на НТУ, она может быть
увеличена путем навешивания на ее поверхность дополнительной распреде-
ленной нагрузки.
Анализ изложенного материала, раскрывающего достижения в разработке
технологии использования надувных элементов в космической технике, по-
зволяет сделать вывод о необходимости ее дальнейшего развития.
Литература
1. Панкова Л.В. Перспективные технологические возможности в космосе:
синергетический эффект. Актуальные проблемы развития отечественной
космонавтики. Материалы XXVHI академических чтений по космонавтике.
— М.: Война и мир, 2004. С.173-174.
2. Kerry Т. Nock. Gossamer Orbit Lovering Device, a Lightweight, Low-cost
and Simple De-Orbit System. Presentation to Advance Space Propulsion Workshop.
April 16, 2003. Global Aerospace Corporation.
3. Дерюгин B.A., Пичхадзе K.M., Финченко B.C., Шматов С.И. Оценка
возможности безымпульсного спуска объектов с орбит ИСЗ на поверхность
Земли // Российская академия космонавтики им. К.Э. Циолковского, НПО
им. С.А. Лавочкина. Сб. науч. тр. Вып. 2.-М.:Блок-Информ-Экспресс, 2000.
С. 9-11.
4. Cassapakis, Dr. Costa and Dr. Mitch Thomas. Iflatable Struktures Technolojy
Development Overview, AIAA 01-1264, 2001.
5. Thomas Lee Philley Jr. Development, Fabrication, and Ground Test of an
Inflatable Structure Space -Flight Experiment. AFIT/GA/ENY/03-3, pp. 1-152,
2003.
6. James Oberght. They’re Coming to Bring You Safely Back to Earth. Maybe.
Air & Space, October / November, 2003, pp. 58-63.
7. Ulvestad, James S., et al. ARISE: A Space VLBI Mission Using an Inflatable
Antenna Structure, AIAA 95-3794, 1995.
8. Veal, Gordon and Robert Freeland. In-Step Inflatable Antenna Discription,
AIAA 95-1193b, 1995.
9. Guidanen, Dr.Koorosh and Geofrey t. Williams. An Inflatable Rigidizable Truss
Strukture With Complex Joints. AiAA 98-2105, 1998.
10. Полищук Г.М., Пичхадзе K.M., Моишеев A.A., Финченко В.С. Исполь-
зование надувных элементов в конструкциях космических аппаратов — пе-
редовая технология в космической технике. Тез. доклада. Материалы XXX
академических чтений по космонавтике «Актуальные проблемы российской
космонавтики». — М., 2006.
522
11. Bogdanov V.V., Kremnev R.S., Rodimov R.Yu., Pitchkhadze K.M.,
Terterashvili A.V., Finchenko V.S. On the Use of Ballute-equipped Vechicles for
Landing on the Surface of Planets Having Atmosphere. Proceeding of 4-th Ukraine-
Russia-China Symposium of Space Science and Technology, vol.l,1996.pp.253-254.
12. Bogdanov V., Rodimov R., Pichkhadze K., Terterashvili A., Finchenko V.,
Kouznetsov V. Inflatable Ballutes to Provide Aerodynamic Shape to the Payload Bus
Enabling its Atmosphere Entry. 48-th International Aeronautical Congress, 6-10 Oct.
1997, Turin, Italy, IAF-97-I.6.03.
13. Внедряемый исследовательский зонд. Эксперимент «Визит». Эскизный
проект. -НПО им. С.А.Лавочкина, 1991.
14. Карпенко С., Афанасьев И. Первое плавание «Фрегата» // Новости
космонавтики. Т.10. №4(207). 1-29 февр. 2000.
15. К. Pichkhadze, V. Finchenko, L. Marraffa, D. Kassing, P. Baglioni, D. Wilde.
Inflatable Re-Entry Technologies: Flight Demonstration and Future Prospects //
ESA Bulletin 103, August, 2000, p. p. 78-85.
16. Алексашкин C.H., Иванков A.A., Финченко B.C. Анализ температур-
ного состояния надувного тормозного устройства по результатам лётно-кон-
структорских испытаний спускаемого аппарата «Демонстратор-2Р» для оп-
ределения версии его нештатного полёта //Тепловые процессы в технике.
2009.Т. 1. № 6. С. 253-258.
17. Богданов В.П., Пичхадзе К.М., Финченко В.С. Анализ параметров
эффективности использования спускаемых аппаратов с надувным тормозным
устройством//Российская академия космонавтики им. К.Э. Циолковского,
НПО им. С.А. Лавочкина. Сб. науч. тр. Вып. 4. -М.: Блок-Информ-Экспресс,
2002. С. 63-70.
18. Иванков А.А., Пичхадзе К.М., Финченко В.С.. Аэротермодинамика
спускаемого контейнера надувной конструкции для доставки грузов с Меж-
дународной космической станции //Тепловые процессы в технике. Т. 1. № 5.
2009. С. 204-207.
19. Финченко В.С., Пичхадзе К.М., Иванков А.А. Патент РФ № 2381967
на изобретение «Способ доставки грузов с пилотируемых орбитальных стан-
ций на поверхность Земли». Приоритет 25 декабря 2008г. Зарегистрировано
в Государственном реестре изобретений РФ 20.02 2010г.
20. Финченко В.С., Пичхадзе К.М., Иванков А.А. Патент РФ № 82679 на
полезную модель «Спускаемый аппарат для доставки грузов с пилотируемой
орбитальной станции на поверхность Земли». Приоритет 25 декабря 2008г.
Зарегистрировано в Государственном реестре полезных моделей РФ 10.05
2009г.
21. Воронцов В.А., Пичхадзе К.М., Поляков А.Б. Малая марсианская
метеорологическая станция //Труды XXIX академических чтений по космо-
навтике. Январь, 2005. -М: Война и мир, 2005.
523
22. V.Finchenko, K.Pitchkhadze, A.Ivankov, N.Voron. Inflatable Re-Entry
Technology for Manned Martian Mission. Report on the 55-th International
Astronautically Congress, 4-8 Oct. 2004, Vancouver, Canada.
23. Detlef Wilde, Matthias Taushe, Matthias Orth. Inflatable Re-Entry
Technologies - IRT. 54-th IAC. Bremen. 29.9 - 3.10.2003. IAC-03-U.2.a.03.
24. Stephen J. Hughes, Robert A. Dillman, Brett R. Starr, Ryan A. Stephan,
Michael C. Lindell, Charles J. Player, and Dr. F. McNeil Cheatwood. Inflatable
Re-Entry Vehicle Experiment (IRVE) Design Overview. AIAA Paper 2005-1636,
May 2005.
25. James N. Moss, Christopher E. Glass, Brian R. Hollis, John W. Van Norman.
Low-Density Aerodynamics of the Inflatable Re-entry Vehicle Experiment (IRVE).
Journal AIAA, paper 2006-1189.
26. The Program to Advance Inflatable Decelerators for Atmospheric Entry
(PAIDE). Интернет-информация на сайте www.nasa.gov.
27. Финченко В.С., Пичхадзе К.М., Алексашкин С.Н., Поляков А.Б. Па-
тент РФ № 2383476 на изобретение «Гибкая система тепловой защиты спус-
каемого космического аппарата». Приоритет 25 декабря 2008г. Зарегистри-
ровано в Государственном реестре изобретений РФ 10.03. 2010г.
28. ЗМ Nextel TM. Ceramic Textiles Technical Notebook, 2002.
29. Богданов B.B., Залогин Г.Н., Землянский Б.А., Кнотько В.Б. Мари-
нин В.П., Румынский А.Н., Финченко В.С. Экспериментальные исследова-
ния эффективности гибкой теплозащиты надувных тормозных устройств //
Космонавтика и ракетостроение. 2001. № 22. С. 22-32.
30. Аношко И.А., Ермаченко В.С., Жданок С.А., Залогин Г.Н., Катасонов
А.А., Пугачёв В.А., Румынский А.Н., Смольский А.А., Устинов С.Н., Фин-
ченко В.С. Экспериментальные исследования эффективности гибкой тепло-
защиты спускаемых аппаратов с надувным тормозным устройством. Третий
Белорусский космический конгресс. 23-25 октября 2007 года, Минск. Мате-
риалы конгресса. -Минск, ОИПИ НАН Беларуси, 2007. С. 100-105.
31. Иванков А.А. О численном решении задачи прогрева многослойной
теплозащиты спускаемого аппарата с учетом уноса массы внешних и внут-
ренних слоев покрытия // Журн. вычислит, математики и мат. физики. 2005.
Т. 45. № 7. С. 1279-1288.
32. Иванков А.А. Метод расчета параметров гибкой многослойной тепло-
защиты спускаемого аппарата с надувным тормозным устройством //Тепло-
вые процессы в технике. Т. 2. 2010. № 7. С. 320-328.
33. Варгафтик Н.Б. Справочник по теплофизическим свойствам газов и
жидкостей. — М.: Наука, 1972.
34. Финченко В.С. Аэротермодинамические исследования тепловой защиты
надувных тормозных устройств спускаемых аппаратов // Полет. 2004. №7.
С.56-60.
524
35. Финченко В.С., Богданов В.В., Бондаренко В.А., Иванков А.А., Пич-
хадзе К.М., Калашник В.Н., Красников Ю.Д. Теоретико-экспериментальная
проверка эффективности и работоспособности гибкой теплозащиты надув-
ного тормозного устройства на полномасштабном макете спускаемого аппа-
рата «Демонстратор — Солнечный парус». НПО им. С.А. Лавочкина. Сб. науч,
тр. 2001. Вып. 3. С. 364-371.
В.С.Финченко,
НПО им. С.А. Лавочкина
К.М.Пичхадзе,
НПО им. С.А. Лавочкина
525
Научное издание
ПРОЕКТИРОВАНИЕ АВТОМАТИЧЕСКИХ
КОСМИЧЕСКИХ АППАРАТОВ
для фундаментальных научных исследований
Сдано в набор 20.02.12. Подписано в печать 29.03.12.
Бумага мелованная. Формат 70x100 1/16. Печать офсетная.
Усл. печ. л. 42,9. Тираж 1000 экз.
Изд. № 480.
Издательство МАИ-ПРИНТ
(МАИ), Волоколамское ш., д. 4, Москва, А-80, ГСП-3 125993
Отпечатано ООО «ОСТ-ПРИНТ»
(МАИ), Волоколамское ш., д. 4, Москва, А-80, ГСП-3 125993
526
527
528
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ им. С.А. ЛУЧКИН А
в 2012 году выпускает книгу
УНИВЕРСАЛЬНЫЙ КОСМИЧЕСКИЙ БУКСИР < ФРЕГАТ».
Авторами разделов книги являются разработчики этого космического буксира
и его основных служебных систем, представляющие ведущие предприятия Роскосмоса
В кн1 те изложс-на концепция его проектирования и приведено
научно-техническое описание входящих служебных систем.
Книга представляв! интерес как для создателей ракетно-космической техники
так и для потенциальных заказчиков по запуску различных космических аппаратов
на высокоэнергетические орбиты с помощью универсальной) кос минского буксира«Ф^гат»,
уже успешно осуществившего б е 30 запусков
Тираж книги -10ОО экз.
J"a’* /1 ВЕСТНИК Za
Научно-техническии журнал < Вестник ФГУП «НПО им. С.А. Лавочкина» выходит пять раз ь год.
В нем представлены статьи по актуальным вопросам
проектирования автоматических космических аппаратов.
Авторами статей являются ведущие ученые сотрудники космической отрасли,
институтов РАН и технических университетов а также аспиранты.
Журнал «лнется р иензиру». мым издакк м, включен в перемене ВАК
и в базу данных «Российский индекс научного цитирования»
размещаемую на платформе Научной электронной библиотеки.
Избранные статьи выходят на английском языке
в журнале «Solar System Research».
Подписной индекс 37156 в каталоге «Газеты и журналы Рек печати.
http://vestnik.laspace.ru
vestnik-ftlaspace.ru
SOLAR SYSTEM
RESEARCH
НПО им. СА Лавочкина, созданное в 1937 г., сегодня является головным предприятием
ракетно-космической отрасли по со зданию космических комплексов
для фундаментальных научных исследований и одним из ведущих предприятий в Н ссии
по ра работке и изготовлению космических информационных систем.
Направления деятельности:
- Проектирование, изготовление и исльпания автоматических космических комплексов
для планетных (в том числе лунных) и астрофизических исследовании;
- Разработка и и зготовление гидрометеорологических космических аппаратов*
- Подготовка космических аппаратов (КА) к полету, включая
электрические испытания и подготовку на космодроме;
- Наземные испытания агрегатов и систем КА;
- Разработка и создание аппаратно-программных комплексов
для исльпаний и управления полетом;
- Проектирование, изготовление и исльпания средств выведения
(разгонных клоков, головных обтекателей и переходных отсеков);
- Баллистическое обеспечение и управление полетом
межпланетных экспедиций и околоземных КА.
С1965 года коллектив НПО активно включился в создание
автоматических космических комплексов для исследования
Луны, В<нсры Марса. Созданные аппараты впервые осуществили
мягкую посадку на Луну (Луна-9), Венеру (Венера-7) и Марс (Марс-3).
Впервые автоматическими средствами произведен забор
образцов лунного грунта и доставка его на Землю (Луна-16);
впервые «Луноход» совершил многокилометровый маршрут
по поверхности Луны (Луна-17);
впервые получены снимки поверхности Венеры (Венера-9)
и картографирование ее северного полушария с использованием
бортового радиолокатора (Венера-15); КА «Вега» провел комплексные исследования
кометы Галлея. Эти многочисленные экспедиции обеспечили нашей стране
ряд миров: lx приоритетов в освоении космического пространств?
В 2011 году запущены орбитальные КА нового поколения:
мет^ор^гъгич*схий аппарат «Электро Л»;
астрофи uvhx кая обл ериаг >рия «Сгъ ктр-Р» (Радиоле трон).
Ведется проектирование новых КА для исследования Луны («Луна-Ресурс/, «Луна-Глоб»),
пп.якт(<Марс М. tr,et>,<Mapr. Грузи»,«Юпитер-Ганмм»д»,<-венера-Д»идь.),
и малых ил Солнечной системы (чх^ос, астероид «Апофис >),
для изучения звезд и галактик («Спектр-РГ , «Спектр-УФ и др.),
а также для социально-экономического развития страны («Электро-М», «Арктика» и др.).
Создаются также малоразмерные н ручные КА на базе унифицированной платформы «Карат».
К настоящему времени нашими космическими разгонными блоками типа «Фрегат»
осуществлено более 30успешных запусков ИСЗ на высоко энергетические орбиты
с космодромов Байконур, Плесецк и Куру (Гвианский космический центр).
В будущее коллектив НПО им. С.А. Лавочкина» смотрите оптимизмом
-------- — - I
Россия, 141400,
Московская обл., г. Химки,
ул. Ленинградская, д. 24
тел.: +7(495)251-67-44,
факс: +7(495)573-35-95
npol@laspace.ru
www.laspace.ru