/


















































































































































































































































Text
ВАРИАЦИОННЫЕ ЗАДАЧИ
МЕХАНИКИ И УПРАВЛЕНИЯ
АКАДЕМИЯ НАУК СССР
Институт проблем механики
Ф. Л. ЧЕРНОУСЬКО
Н. В. БАНИЧУК
ВАРИАЦИОННЫЕ ЗАДАЧИ
МЕХАНИКИ И УПРАВЛЕНИЯ
Численные методы
Издательство « Наука у.
Москва
1973
УДК E.19 : 5.31/534] : 681
Вариационные задачи механики и управления (Численные методы)
Черноусько Ф. Л., Баничук Н. В. М., «Наука»,1973,
рис. 73, табл. 11, библ. назв. 107.
Методы локальных вариаций и последовательных приближений
применимы для решения на ЭВМ широкого класса вариационных
задач. В монографии приводятся описание алгоритмов, данные
об их сходимости, результаты решения при помощи этих методов
ряда новых задач механики сплошных сред и оптимизации
управляемых Сдвижений. Даны универсальные стандартные программы
изложенных методов на языке АЛГОЛ-60. Монография основана
на исследованиях авторов и рассчитана на инженеров |и научных
работников] в области механики, вычислительной математики
и теории управления, а также на аспирантов,
специализирующихся в этих областях.
0242—0361
4 042@2)—73 106*-7д
© Издательство «Наука» 1973 г.
ПРЕДИСЛОВИЕ
Вариационные принципы и вариационные методы играют важную
роль во многих разделах механики, математической физики и
прикладной математики. Интерес к вариационным задачам в
последнее время объясняется рядом причип: многие фундаментальные
законы механики и физики имеют характер вариационных
принципов; в теории управления вариационпые формулировки
возникают при требовании оптимальности управляемого процесса;
вариационные методы часто оказываются эффективным средством
численного решения разнообразных задач.
Авторы ограничились лишь теми численными методами и теми
приложениями этих методов, которыми они занимались сами.
Многие из задач того типа, которые рассмотрены в этой книге,
могут решаться и другими численными методами: классическими
вариационными, конечно-разностными, различными методами
оптимизации.
Основное место в данной монографии уделено методу
локальных вариаций и его приложениям. Этот метод применим к
широкому классу вариационных задач с ограничениями общего вида,
прост по своей логике и легко стандартизуется, что делает его
удобным для практического решения на ЭВМ многих
вариационных задач. Метод применялся для решения ряда задач механики
сплошной среды и задач оптимизации движения управляемых
объектов. В книге изложен и метод последовательных приближений
для задач оптимального управления.
Изложенные в монографии численные методы реализованы в
виде программ на языке АЛГОЛ-60, которые могут быть
применены для решения многих вариационных задач с обыкновенными
и частными производными и задач оптимального управления.
В основу монографии положены опубликованные работы,
выполненные авторами в 1962—1972 гг. Часть результатов,
приведенных в книге (в главах 1, 2, 4, 5), публикуется впервые.
В период работы над вопросами, составившими предмет
монографии, авторы сотрудничали с И. А. Крыловым и В. М.
Петровым при разработке и реализации методов, а также с Ю. Н. Ба-
киным, Р. А. Ведерниковым, В. М. Картвелишвили, Б. Н
Соколовым, А. И. Соляпиком, применявшими эти методы для решения
на ЭВМ конкретных задач.
Авторы выражают глубокую благодарность А. А.
Дородницыну, А Ю. Ишлинскому и Н. Н. Моисееву за ценные
обсуждения и поддержку исследований, изложенных в данной книге,
а также Л. И. Балабуху, Л. А Галину, С. С. Григоряну,
В. Н. Кукуджанову, Ж. Лионсу, Я. Рыхлевскому, В. И. Феодо-
сьеву, Л. А. Чудову, Г. С. Шапиро, Н. Н. Яненко за полезные
обсуждения отдельных вопросов.
Авторы признательны А. Г. Мишиной и Р. П. Солдатовой за
большую "помощь в оформлении книги.
МЕТОД ЛОКАЛЬНЫХ ВАРИАЦИЙ
ГЛАВА 1 • МЕТОД ЛОКАЛЬНЫХ ВАРИАЦИЙ ДЛЯ
ЧИСЛЕННОГО РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
§ 1. Описание метода для простейшей вариационной задачи
Ниже излагается метод локальных вариаций для численного
решения вариационных задач. Метод был впервые предложен в
работе [92]. В последующих работах [47, 10—12] алгоритм метода
локальных вариаций был подробно разработан применительно
к разным типам вариационных задач.
Рассмотрим простейшую одномерную вариационную задачу.
Пусть требуется найти функцию и (ж), заданную па интервале
[а, Ь] вещественной оси, удовлетворяющую ограничениям
и~ (х) С и (х) <; и+ (х), а ^ х < Ь A.1.1)
и доставляющую минимум функционалу
1>
\f(x,u,ux)dx. A.1.2)
а
Здесь и~, и+, f — заданные функции своих аргументов, через их
обозначена производная duldx.. Одно или оба ограничения A.1.1)
в некоторых частях интервала [а, Ь] могут отсутствовать. Если
в некоторой точке х отсутствует ограничение и (х) > и~ (х),
то будем полагать и~ (х) = — оо, а если отсутствует ограничение
и (х) ^ и+ (х), то будем полагать и+ (х) — + оо в соответствующих
точках. Таким образом, функции W (х), и+ (х) могут формально
принимать неограниченные значения. Заметим, что ограничения
A.1.1) включают как частный случай краевые условия. В самом
деле, пусть на функцию и (х) наложены условия
и (а) = А, и (Ъ) = В. A.1.3)
Тогда положим:
иг (а) = и+ (а) - А, иГ (Ь) = и+ (Ь) = В A.1.4)
и ограничения A.1.1) при условиях A.1.4) будут автоматически
включать краевые условия A.1.3).
Метод локальны* вариаций
8
Перейдем к описанию простейшего варианта метода локальных
вариаций для решения задачи A.1.1), A.1.2). Разобьем интервал
[а, 6] на N равных частей точками:
а* = а + iAx, Ах = (Ь — a)IN, i = О, 1, . . ., АГ. A.1.5)
Введем обозначение
1Л (и', и") = / (хг + Даг/2, (ы' + и")/2, (и" - и')/Д*) Ах. A.1.6)
Очевидно, выражение It {и, и")—есть приближенное
значение интеграла
/, (и', и")« 5 / (ж, и (*), «я (*)) da; A.1.7)
X.
»
при условиях и (xt) = и , и (х{+1) = и".
Обозначим и (xi) = wj при i = 0, 1, . . ., N. Функции и (х)
будем аппроксимировать ломаными, соединяющими точки (xi, и,)
в плоскости х, и, а функционал A.1.2), пользуясь соотношением
A.1.7), приближенно заменим суммой
JV-1
/^/= 2ак%)' A.1.8)
1=0
Здесь использовано обозначение A.1.6). Через J обозначаем
точное, а через / приближенное значение функционала,
определенное равенством A.1.8).
Вместо решения исходной задачи о нахождении функции и (х),
доставляющей минимум функционалу / из A.1.2) при условиях
A.1.1), рассмотрим задачу об определении таких чисел ut при i =
= 0, 1, . . ., N, которые удовлетворяют ограничениям
и-(*0<"i<«+ (*i), i = 0,l,...,N A.1.9)
и доставляют минимум сумме / из A.1.8). Ограничения A.1.9)
вытекают из A.1.1). Таким образом, вместо решения непрерывной
вариационной задачи A.1.1), A.1.2) будем решать дискретную
(конечно-мерную) задачу A.1.8), A.1.9), в которой функция и (х)
заменяется ломаной с вершинами в точках (жг, ut).
РешениезадачиA.1.8), A.1.9) будем строить последовательными
приближениями. Номер приближения обозначаем верхним
индексом. В качестве нулевого приближения и?> i = 0, 1, . . ., N
возьмем любой набор чисел, удовлетворяющий ограничениям A.1.9):
При выборе нулевого приближения желательно учесть
имеющуюся априорную информацию о предполагаемом решении: различ-
Решение вариационных задач
9
ные качественные, физические и иные соображения. Удачный
выбор нулевого приближения может значительно ускорить
сходимость метода.
Опишем рекуррентный процесс построения последовательных
приближений. Зададимся некоторым достаточно малым
положительным числом h, которое будем называть шагом варьирования.
Пусть ге-е приближение уже построено, т. е. известны числа иц
при i = 0, 1, . . ., N при каком-то целом п > 0. Пусть уже
найдены первые i чисел (п + 1)-го приближения, т. е. величины и?+1,
uj*1, . . ., uf-l при некотором i, 1 ^ i <^ N. Предполагаем, что
все эти величины и" при / = 0, i,...,N и u"+1 при / = 0,1,...,
i— 1 удовлетворяют ограничениям A.1.9). Для нахождения w"+1
поступим так. Рассмотрим в качестве возможных значений и?*1
три величины;
иГ, и? + h, i%-h. A.1.10)
Первая, по предположению, удовлетворяет ограничениям A.1.9).
Проверим для остальных двух величин вынолпение ограничений
A.1.9) и подсчитаем суммы:
ф{ = /ц да, ut) + /,««r+i)f
Ф} = ^ («?_?, И? + к) + J, («[• + h, uf+1), (l.l.H)
фг = /w да1, uT - а) + /i («г - a, «r+i).
Суммы A.1.11) представляют собой суммы тех двух членов в
A.1.8), которые зависят от величины щ и соответствуют трем воз-
можнымзначениям ut изA.1.10).При ?= Ои i = .W суммы "A.1.11)
состоят лишь из одного слагаемого (первого при i = N и второго
при i=0). Суммы Фг* (или Ф^~) не нужно подсчитывать, если и™ +
4- h (или щ — h) не удовлетворяет ограничениям A.1.9). Теперь
полагаем искомую величину u"+1 равной тому из трех чисел A.1.10)
(т. е. и^, Ui + h или щ — h), которое, во-первых, удовлетворяет
ограничениям A.1.9), и, во-вторых, которому отвечает
наименьшая из сумм A.1.11). Другими словами, положим:
'V при Ф{<ФТ, Ф{<ФГ,
и? + h при Ф^<Ф{, <&t<G>7, A.1.12)
Ui— h При ФГ<ФЬ ФгГ<ФГ
и, =
Здесь принято, что Ф* = оо, если u" -f- h не удовлетворяет
ограничениям A.1.9), и Ф{"= оо, если им пе удовлетворяет u"—h'
Метод локальных вариаций
10
В случае равенства двух величин A.1.11) предпочтение в
A.1.12) отдается величине и?, отвечающей решению n-го
приближения; величины же u™ -f- h и ы? — h равноправны, и
предпочтение в случае равенства Ф{+ = Фгг < Ф* можно оказать любой из
них. После определения щ+1, согласно A.1.12), переходим к
нахождению uui, которое осуществляется аналогично. Такой
процесс проделывается до тех пор, пока не будет найдено uj}+1. После
этого новое (п + 1)-е приближение будет полностью построено.
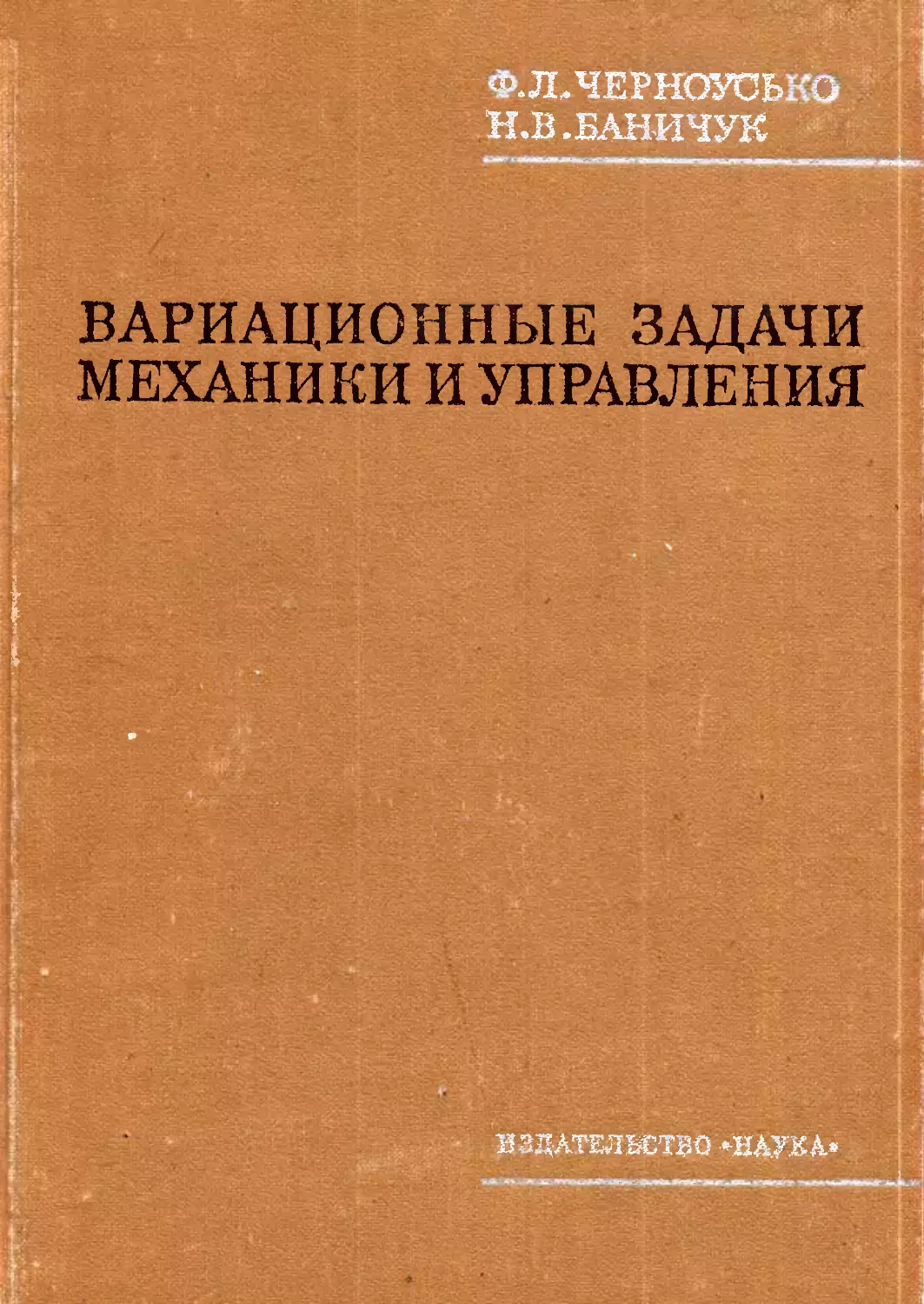
b х
Фиг. 1.1
На каждом шаге описанного процесса новое значепие ы,-
выбирается так, чтобы, не нарушая ограничений A.1.9), уменьшить
сумму тех двух слагаемых в сумме A.1.8), которые зависят от ut.
На фиг. 1.1 изображена ломаная, проведенная через точки (xt,
и(), и пунктиром показаны вариации, которые перебираются в
процессе решения: из трех путей выбирается тот, который
удовлетворяет ограничениям A.1.9) и дает минимальпое значение
функционалу /в A.1.8) — этим и определяется новое значение ut.
В ходе процесса итераций функционал / не возрастает, т. е.
/n+i ^ /») Где верхний индекс соответствует номеру итерации.
При этом равенство In+1 = In возможно тогда и только тогда,
когда и"+1 = Щ при всех i = 0, 1, ...,7V; это следует из
описания алгоритма [см. A.1.12)]. Итерации по описанной схеме
продолжаем до полной сходимости, т. е. до выполнения равенств
и"* = щ, i — О, 1, . ., N, In+1 = In. Если область изменения
ut, определяемая неравенствами A.1.9), ограничена (или если
область, в которой I <^ с ограничена при каком-нибудь с), то
итерации при фиксированных Ах и h сойдутся полностью за
конечное число шагов. Это вытекает из того, что в ограниченной области
Решение вариационных задач
11
изменения ut существует лишь конечное число траекторий типа
ломаных с данными Ах, h.
После полной сходимости итераций с данными Ах и h уменьшим
шаг варьирования h, например, вдвое и снова будем проводить
итерации описанным выше способом. В качестве начального
приближения для итераций с новым значением h используем решение
щ, полученное после полной сходимости при предыдущем
значении h. Такой процесс постепенного уменьшения h продолжаем до
тех пор, пока не будет достигнута полная сходимость при
некотором достаточно малом значении h = ht.
Затем уменьшим число Ах, например, вдвое, одновременно
удвоив число N. Значения ut во вновь образовавшихся точках xt
получим интерполяцией решения, найденного при предыдущих
значениях Да:, N, т. е. получим начальное приближение, начиная
с которого, будем снова проводить описанный процесс итераций.
Шаг варьирования h снова будем постепенно уменьшать, как
описано выше, от некоторого начального значения h0 до заданной
малой величины.
Процесс решения заканчивается при полной сходимости
итераций для некоторых достаточно малых Ах и h. Полученная в
результате ломаная с вершинами в точках хи ut является
приближенным решением поставленной задачи. Значения функции и (х)
при любом х из интервала [а, Ь] можно получить из нее
интерполяцией. V
Таким образом, метод локальных вариаций включает
несколько вложенных друг в друга итерационных процессов: процесс
уменьшения Ах, процесс уменьшения шага варьирования h и
процесс итераций с фиксированными Ах, h. Пока Дх пе меняется,
функционал / в ходе итераций не возрастает. При уменьшении Да;
может произойти увеличение функционала, обусловленное
интерполяцией, но затем функционал снова начнет монотонно
убывать.
Ясно, что метод локальных вариаций в общем случае может
позволить найти лишь локальный (а не абсолютный) минимум
функционала. Но даже и в том случае, когда функционал имеет
единственный минимум, для сходимости метода требуется еще
выполнение дополнительных условий типа:
Да:-* 0, h/(Axf-*0, (p > 2), A.1.13)
где р — число, не меньшее 2. Подробно вопросы сходимости и
точности метода локальных вариаций будут рассмотрены в гл. 2.
Метод локальных вариаций
12
§ 2. О машинной реализации метода
Описанный выше алгоритм может быть распространен на более
широкие классы вариационных задач. Здесь на примере задачи § 1
рассмотрим метод локальных вариаций с точки зрения его
реализации на ЭВМ.
Число операции. Сначала оценим число операций,
выполняемых при использовании метода. В качестве основной
элементарной операции будем рассматривать вычисление подынтегральной
функции/, входящей в A.1.2). Сложность этой операции зависит
от конкретной задачи; остальные операции, выполняемые при
реализации алгоритма (сложение, умножение, деление, сравнение
и прочие), не зависят от функции / и их сравнительно немного,
поэтому время счета определяется в основном числом выполнений
элементарной операции (т. е. числом обращений к подпрограмме,
вычисляющей функцию /). Заметим, что вычисление величины
/j из A.1.6) при одном наборе аргументов требует одной
элементарной операции. Для вычисления величин Ф,-, Ф4, Ф» из A.1.11)
нужно выполнить шесть операций. Однако функция /,_! (и?**»
и™)> входящая в A.1.11), подсчитывается при варьировании (i —
— 1)-й точки, т. е. при определении ип?.\, если i^> 1. Поэтому,
запоминая эту величину, можно ограничиться пятью операциями.
Далее необязательно находить наименьшую из трех величин
Фг, Ф}, Ф|, т. е. перебирать все три пути на фиг. 1.1, как
предусмотрено формулами A.1.12). Достаточно убедиться в том, что
Ф4 < Ф,- или Ф4 •< Ф4, так как это уже даст возможность
уменьшить функционал /. Случаи, когда одновременно выполнены
неравенства Ф{ ^ Фг, Ф, < Фь будут на участках,
представляющих собой приближенно отрезок максимали функционала /,
и при достаточно большом N будут встречаться сравнительно
редко. Так как при применении метода локальных вариаций можно
рассчитывать лишь на нахождение локального минимума, то
следует сначала пробовать вариацию в том направлении
(прибавлять или вычитать К), которое привело к уменьшению
функционала в предыдущей точке. Если окажется, то данная вариация ведет
к уменьшению функционала, то пробовать вариацию в
противоположном направлении уже не нужно. Поэтому полагаем вместо
A.1.12):
uf + A при Фг<Ф4;
иГ1 = {и" + h при Фг > Фи Ф? < Фь A-2Л)
и? при Фг>Фь Ф,^>Ф{.
Решение вариационных задач
13
Здесь верхние знаки берутся в случае щ!± !> Щ-г, а нижние
знаки — при 11**1 <С u?-i- Ири ' — ^ можно брать в A.2.1) любые
знаки, например, верхние. Учитывая, что значение /|_г (u?!J,
и-1) известно на предыдущем шаге, заключаем, что для
определения u?+1 по формулам A.2.1), A.1.11) требуются либо три
операции (при выполнении первого неравенства в A.2.1)), либо
пять операций.
Суммарное число операций для определения нового
приближения составит от 3N до 5N и будет ближе к 3N, так как число
точек, в которых изменяется направление варьирования, будет
невелико. Заметим, что учет ограничений A.1.9) приведет лишь
к уменьшению числа операций, так как некоторые из вариаций
будут запретными, и подсчет функционала для них не нужно
будет производить.
Укажем простой способ, позволяющий добиться дальнейшего
уменьшения числа операций. Если на некотором участке
траектории в ходе итерации ни одна точка не проварьировалась, то на
следующей итерации эти точки вообще не следует варьировать,
сохранив в них прежние значения ut. Тем самым мы будем
просматривать лишь те точки, в которых вариации действительно
эффективны. Однако после сходимости итераций в варьируемых
точках следует снова испробовать вариации во всех точках, так
как изменение одной частитраекторииможет повлечь за собой и
изменение других частей. Указанные приемы реализованы в
алгоритмах и программах метода локальных вариаций.
Получим грубую приближенную оценку числа операций,
потребных для нахождения минимума функционала по методу
локальных вариаций при фиксированных Ах, h. Пусть искомая
экстремаль отстоит от ломаной нулевого приближения на
расстоянии (по переменной и) не более rh, где г — некоторое целое
число, h — фиксированный шаг варьирования. Тогда для
приближенного определения экстремали по методу локальных вариаций
при фиксированных N, h потребуется сделать порядка г итераций,
т. е. выполнить от 3Nr до 5Nr элементарных операций (ближе
к 3Nr).
Память. Важно отметить, что в течение всего решения
в памяти ЭВМ требуется, помимо программы, хранить лишь
решение в текущем приближении, т. е. порядка N чисел щ. После
того как в некоторой i-й точке по способу A.2.1) найдено новое
приближение ир, предыдущее значение \Д может быть забыто,
и на его место записано значение и?*1.
Таким образом, в памяти ЭВМ хранится все время одна
таблица чисел щ, которая непрерывно улучшается. В любой момент
процесс счета может быть остановлен, и вся полученная к этому
Метод локальных вариаций
14
моменту информация хранится в этой таблице, которую можно
вывести из машины или перевести во внешнюю намять. При
возобновлении счета эта таблица может служить в качестве
начального приближения. Но существу, хранимая в памяти машины
информация здесь минимально возможная: при меньшем объеме
невозможно было бы даже удержать в памяти ЭВМ полученное
окончательное решение, что позволяет решать методом локальных
вариаций сложные задачи даже на ЭВМ с небольшим объемом
оперативной памяти. При решении обычно стремятся разместить всю
информацию в оперативной памяти и пе обращаться к внешним
запоминающим устройствам. Однако нетрудно выйти из
положения, если вся таблица все же не помещается в оперативной памяти.
Часть таблицы переводится во внешнюю память, и вариации
сначала проводятся на участке, помещающемся в оперативной
памяти. После их сходимости в оперативную память помещается
другой участок траектории, имеющий хотя бы две общие точки с
прежним, и процесс вариаций идет на этом участке и т. д.
Логика. Алгоритм метода локальных вариаций сравнительно
прост и легко стандартизуется. Структура программ для задачи
A.1.1), A.1.2) при этом следующая. Вся логика просмотра и
варьирования траектории, проверки ограничений й пересчета
функционала может быть реализована в виде универсальной стандартной
программы или процедуры на языке АЛГОЛ-60. Все конкретные
данные о задаче могут быть сведены к набору чисел и двум под
программам или процедурам: к подпрограмме, вычисляющей
функции и+ (х), и~ (х) и служащей для проверки ограничений A.1.9)
в процессе работы алгоритма, и к подпрограмме вычисления под-
ыптегральпой функции / в A.1.2).
Остановимся еще на вопросе об уменьшении интервала Ах
и шага варьирования h. Как указывалось в § 1, при
фиксированных Ах, h итерации следует, как правило, продолжать до полной
сходимости. Заметим, что оценки погрешности, которые будут
дапы ниже, предполагают именно полную сходимость во всех
точках при фиксированных Ах, h, т. е. выполнение равенств
щ+1 = щ при всех i — 0, 1, . . ., N и некотором п.
Очевидно, что уменьшение шага h, в отличие от уменьшения
Ah, не приводит к увеличению числа операций на итерации или
к увеличению объема хранимой информации. Поэтому при
фиксированных N, Ах имеет смысл постепенно дробить h до очень
малых значений, что требуется также и но условиям A.1.13).
Обычно вначале полагают N небольшим, чтобы итерации шли
быстро (N ~ 5 -=- 10), и начальный шаг к — h0 ~ Ах. Затем по
алгоритму § 1 уменьшают после полной сходимости шаг h до тех
пор, пока второе неравенство A.1.13) не будет удовлетворено.
После этого увеличивают N вдвое, проводят линейную интерпо-
Решение вариационных задач 15
ляцию и снова изменяют^ от h ~ Ах до удовлетворения
неравенства A.1.13). Заметим, что брать h ]> Да: смысла не имеет, так как
полученное после сходимости с таким h решение будет обладать
большой погрешностью. В некоторых случаях целесообразно
использовать церемонный шаг Аж и переменную величину шага h.
Это оправдано, когда искомое решение и (х) и его производные
имеют разные порядки на разпых участках интервала [а, Ь].
§ 3. Дополнительные замечания
Сопоставим метод локальных вариаций с точки зрения его
машинной реализации с некоторыми другими известными методами
решения задачи A.1.1), A.1.2).
Методы, приводящие к краевым задачам. Вариационную
задачу A.1.1), A.1.2) можно свести к краевой задаче, используя
необходимые условия экстремума, например, уравнения Эйлера.
При этом трудности представляют ограничения A.1.1), так как
заранее неизвестны точки входа и схода с ограничений, а также
число участков экстремали, лежащих на этих ограничениях.
Поэтому здесь возникает сложная многоточечная краевая задача.
Пусть ограничения A.1.1) имеют вид A.1.3), A.1.4), а во
внутренних точках интервала [а, Ь] эти ограничения отсутствуют. Тогда
соответствующая краевая задача будет простейшей двухточечной
задачей. Для ее решения можно применить различные методы,
основанные на подборе начального условия, недостающего на
одном из концов интервала [а, Ь]. Подбор обычно осуществляют
методом Ньютона или другими способами. Основная трудность
решения подобных нелинейных краевых задач, проявляющаяся
в случае, когда и (х) — многомерная вектор-функция, состоит в
том, что трудно подобрать такое начальное приближение, при
котором метод Ньютона или другой алгоритм подбора начальных
значений будет сходиться. Здесь мы не имеем возможности
подробно характеризовать эти методы; подробно они изложены,
например, в книге [28]. Заметим, что подобные методы просты по
логике и быстро сходятся при удачном выборе начального
приближения, но проблема выбора начального приближения, а также
трудность учета ограничений A.1.1) существенно снижают
возможности этих методов. При применении метода локальпых
вариаций учет ограничений A.1.1) не только не усложняет, но даже
упрощает задачу, сокращая число возможных вариаций. Кроме
того, как уже отмечалось, при применении метода локальных
вариаций получается мопотоино убывающая последовательность
значений функционала, и при определенных условиях метод
сходится к локальному минимуму функционала.
Метод локальных вариация
16
Методы нелинейного программирования. Задача о минимуме
функции / из A.1.8) от переменных ut при ограничениях A.1.9)
является задачей нелинейного программирования с {N + 1)
переменными щ. Поэтому для ее решения могут быть применены
многие известные методы [33, 98], в частности различные
варианты градиентных методов. Заметим, что при использовании
простейшего градиентного метода в процессе решения на каждом шаге
нужно хранить таблицу решения ut и вектор градиента, т. е.
значения частных производных dlldut. Следовательно, общий
объем хранимой информации здесь составит порядка 2 N чисел, т. е.
вдвое больше, чем в методе локальных вариаций.
Следует подчеркнуть, что применение общих методов
нелинейного программирования к задаче A.1.8), A.1.9) может оказаться
невыгодным, так как эта задача (как задача нелинейного
программирования) обладает определенной спецификой.
Во-первых, каждая переменная ut входит пе более чем в два
слагаемых суммы A.1.8), поэтому при варьировании одной
величины ut нет необходимости пересчитывать все слагаемые этой
суммы.
Во-вторых, величины и,- с близкими номерами индексов
(например, Uj и И|+1) должны быть близки друг к другу по
величине, так как они суть значения некоторой непрерывной функции
и (х) в близких точках. Этого, конечно, нет в общей задаче
нелинейного программирования. Из отмеченного свойства задачи
следует, что если при варьировании некоторой величины ut на h
произошло уменьшение функционала, то естественно испробовать
аналогичную вариацию и в соседней точке ui+1. Направление
варьирования переменных, которое должно приводить к
уменьшению функционала, будет обычно одним и тем же для переменных
с близкими номерами индексов, а величина шагов варьирования
по этим переменным будет одного порядка.
В-третьих, неравенства A.1.9) ограничивают в (N + 1)-мер-
ном пространстве переменпых ut прямоугольный параллелепипед,
грани которого параллельны координатным плоскостям.
Все это делает выгодным применение метода покоординатного
спзгска к задаче A.1.1), A.1.2). Метод локальных вариаций в его
простейшем варианте § 1 можно рассматривать как сочетание
метода покоординатного спуска в пространстве ut при
фиксированных Дж, h с последовательным уменьшением чисел h и Аж. С точки
зрения потребной памяти этот метод оказывается экономичнее,
чем градиентный, примерно вдвое, хотя и будет несколько
уступать градиентным методам по скорости счета.|
Метод динамического программирования. Методы этого типа
[14, 15, 57], в отличие от всех рассмотренных выше методов,
позволяют найти абсолютный минимум функционала. Однако реали-
Решение вариационных задач
17
эация метода, когда и (х) — многомерный вектор, практически
очень трудно осуществима из-за огромных потребностей в памяти.
В работах [61, 62] была предложена модификация этого метода,
сводящаяся к перебору в «трубке» траекторий.
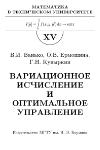
Пусть имеется некоторое начальное приближение и?,
i = 0, 1, . . ., N, удовлетворяющее ограничениям A.1.9). Числа
Лж, h снова предполагаем фиксированными. Будем производить
полный перебор с фиксированными Дх, h по методу динамического
программирования в «трубке», ограниченной ломаными к? — sh
и
Фиг. 1.2
Т^\
1
'+—
1
1 ^"
1 /
1 Xs4
ui-l\/
- - 1 , ..
f
'1
^y&l
i
x4
X
¦&Щ -f sh, где s — заданное целое число (s > 1), i = 0, 1, . . ., N.
На фиг. 1. 2 показан перебор на одном шаге, требующийся для
построения следующего приближения. Предположим, что для
каждой из Bs + 1) точек с координатами
(*,,ц? + /А), / = 0,±1,... ,±s
A.3.1)
уже построены траектории на интервале [а, ж,], обладающие
такими свойствами:
а) каждая из этих траекторий есть ломаная с вершинами в
точках
(x,,u? + kh), 0<Z<i, & = 0,±1,...,+ж,
A.3.2)
т. е. лежит внутри введенной «трубки»;
б) каждая из траекторий удовлетворяет ограничениям A.1.9)
при всех 1 = 0, I, . . ., i. Если некоторые из точек A.3.1)
нарушают ограничения A.1.9), то число рассматриваемых траекторий
будет меньше, чем 2s -f- l;
Me тод локальных вариаций
18
в) каждая из траекторий является абсолютной минималью
функционала
г—1
/i* = 2№,"m), A-3.3)
г=о
представляющего собой «усеченный» функционал A.1.8) в классе
ломаных, удовлетворяющих ограничениям A.1.9), проходящих
через точки трубки A.3.2) и удовлетворяющих условию
прохождения через одну из точек A.3.1).
Для продолжения рассмотрения Bs + 1) траекторий на
интервале [xt, Хц-t] возьмем точки с координатами
(*м, и?+1 + mh),m = 0,±i,...,±s. A.3.4)
Для каждой из 2s -f- 1 точек A.3.4), удовлетворяющих
ограничениям A.1.9), найдем минимум
min [/yj+ h (и? + jh, itf+i -|- mh)}, (m = 0, +1,..., + s).
A.3.5)
Здесь /у — значение фупкционала A.3.3) для /-й из
траекторий на интервале la, xt], проходящей через точку (хг,
и°г + ]Щ из A-3.1); h определено формулой A.1.6). Определив
для любого целого т из иптервала [—s, s] минимум A.3.5), найдем
число /, доставляющее этот минимум, и тем самым для каждой
из точек A.3.4) найдем соответствующую ей точку A.3.1).
Соединяя соответствующие точки, получим траектории в трубке на
интервале [а, жг+1]. Напоминаем, что число этих траекторий будет
меньше, чем 2s-j- 1, если некоторые из точек A.3.4) нарушают
ограничения A.1.9). Продолжая этот процесс, при г = N получим
Bs -f- 1) траекторию для интервала [а, Ь] па классе ломаных,
лежащих в трубке. Отобрав из пих ту, которая дает наименьшее
значение функционалу A.1.8), получим оптимальную ломаную
траекторию внутри трубки. Взяв ее за исходное приближение,
повторяем описанный процесс, строя трубку вокруг полученной
траектории. Так продолжаем до полной сходимости, т. е. до
тех пор, пока перебор в трубке не приведет к сохранению
исходной траектории. При большом s этот метод превращается в метод
полного перебора, если трубка охватывает все траектории,
удовлетворяющие ограничениям A.1.9). Тогда метод по существу
состоит из одной итерации и находит абсолютный минимум
функционала A.1.8). В противном случае метод перебора в трубке
позволяет находить лишь локальный минимум. Чем больше число s,
Решение вариационных задач
19
тем шире просматриваемая трубка и тем больше надежда па
получение абсолютного минимума.
Метод перебора в трубке за одну итерацию позволяет сместить
траекторию ut на величину sh, где h — шаг варьирования.
Поэтому, если искомая экстремаль отстоит от начального приближения
на расстоянии (по и) порядка rh, то метод потребует ~ r/s
итераций. В каждой точке xt для полного перебора согласно формуле
A.3.5) требуется Bs -f- IJ раз подсчитать величины 1г при разных
значениях аргументов, т. е. выполнить Bs -f- 1J элементарных
операций подсчета функции /. Число элементарных операций за
всю итерацию составит Bs -f- iJN, а для решепия задачи нри
фиксированных N, Ах, h потребуется
г Bs + lJ s-1 N A.3.6)
операций. Минимум величины A.3.6) по целым положительным s
достигается нри s = 1 и равен 9rN. Следовательно, наиболее
экономичным будет перебор в трубке из трех траекторий. Но и он
потребует 9rN операций, в то время как для метода локальных
вариаций (§ 2) нужно лишь от 3rN до 5rN операций (причем это
число ближе к 3WV). Легко понять, чем обусловлены «лишние»
операции в методе перебора. Нри смещении трубки сохраняются
общие точки с трубкой предыдущего приближения, поэтому
некоторые операции при переборе в новой трубке здесь дублируются.
Объем информации, которую нужно хранить при реализации
метода перебора в трубке, составляет Bs + 1) N чисел, т. е.
2s -(- 1 траекторию. Метод же локальных вариаций нуждается
в хранении одной траектории или N чисел.
Таким образом, метод локальных вариаций экономичнее, чем
метод перебора, как но числу операций, так и по объему хранимой
информации.
Перспективно сочетание обоих методов: сначала методом
перебора с большими Ах и h грубо определяется абсолютная
экстремаль, которая затем уточняется методом локальных вариаций
при дроблении h и Ах. При этом используются преимущества
обоих методов: способность метода перебора находить абсолютный
минимум и простота и экономичность метода локальных вариаций.
Забегая несколько вперед и основываясь на имеющемся опыте
решения вариационных задач (как в обыкновенных, так и в
частных производных) при помощи метода локальных вариаций,
можно дать следующую оценку метода. Метод прост по логике, легко
стандартизуется, применим к широким классам задач
(нелинейным, с ограничениями), не требует большой памяти ЭВМ.
Недостатком его является сходимость лишь к локальным экстремумам.
Кроме того, при решении некоторых классов задач (например,
вариационных, сводящихся к линейным краевым задачам) метод
Метод локальных вариаций
20
локальных вариаций требует большего времени счета для
достижения заданной точности, чем конечно-разностные методы,
вариационные методы тина Ритца и другие известные численные
методы [18, 21, 26, 38, 58-60, 80, 99].
§ 4. Задачи с частными производными
Разберем применение метода локальных вариаций к
вариационным задачам с частными производными [11, 92]. Пусть требуется
найти функцию двух независимых переменных и (ж, у),
определенную в области D с границей С, удовлетворяющую ограничениям
и~ (*> У)< и (z, У) < »+ (ж, У) A.4.1)
и минимизирующую функционал
J = J J f(x* У-> и> ди/дх, дФУ) dxciy. A.4.2)
D
Здесь х, у — независимые переменные, и+, и~ — функции,
заданные в D + С, причем и+ > и- всюду в D -f- С, а / — заданная
функция своих аргументов. Одно или оба ограничения могут
отсутствовать для некоторых точек области D + С, в этом случае
будем полагать и+ = оо или и- = —оо в этих точках.
Для функции и на контуре С может быть задано граничное
условие
ы = g (ж, у), (ж, у) <= С, A.4.3)
которое будем предполагать включенным в ограничения A.4.1)
посредством задания функций и+, и- в виде
и+ (х, у) = и- (ж, у) = g (x, у) при (х, к)еС.
Разобьем плоскость х, у на равные прямоугольные ячейки
параллельными прямыми х = х0 + гДж, у = у0 -j- jAy. Здесь
Ах ^> 0, Ау ^> 0 — достаточно малые числа, i, /= 0, ±1, ±2, ....
Пусть величины ж0, у0 и натуральные числа т, п выбраны так,
что при заданных значениях Ах, Ау область D + С содержится
в прямоугольнике Q, определяемом неравенствами: х0 ^ ж ^ хт =
= ж0 + тАх, у0 ^ у ^ уп = у0 + пАу. Обозначим через Р1}
точки пересечения прямых (вершины ячеек) с координатами х% =
= ж0 + iAx, у, = у0 + /Ау. Точку Ptj назовем внутренней, если
она вместе с четырьмя ячейками, вершиной которых она является,
лежит в замкнутой области D -\- С. Остальные точки Ptj, лежащие
в области D + С, назовем граничными, а точки вне области D +
-)- С — внешними. На фиг. 1.3 граничные точки помечены
крестиком, а внутренние кружочком.
Решение вариационных задач
21
Введем обозначения и,ц = и (Xi, yj). Условие A.4.3) перенесем
с контура С в граничные точки, полагая для них ui]=g(l>i, f\j).
Здесь (|j, x\j) —точка контура С, в некотором смысле близкая
к fa, y^. В качестве (|j, т|;) можно взять, например, ближайшую
к (xi, yj) точку контура С либо определить ее условием %i=xt
или i\j = yj (снос по одной из координатных осей). Возможны,
конечно, и другие определения граничных точек и правил
переноса в них граничных условий.
Фиг. 1.3
о о
в
о о
Интеграл A.4.2) приближенно заменим суммой интегралов
по ячейкам, целиком принадлежащим области D -f- С:
/^/ = 2/i;. A.4.4)
Здесь 1ц — приближенное значение интеграла по ячейке с
вершинами Ри, Р1+1ф Pt,J+1 , Pi+lt J+1.
1ц = AxAyf(x*, у}, щ, (их)'ц, (uv)lj).
A.4.5)
Здесь введены обозначения для средних значений функций
в ячейке:
ah = fa + *i+i)/2, у] = (yj + W/2>
"У = ("U + ui+i, з + uit i+1 + щ+1, i+1)/4,
("*)*;' = («i+i, i+i + ui+1, j — иц — щ, j+JfiAx,
(uv)lj = (щ, ,+1 -j- ui+1, j+1 — иу — и1+1, ,-)/2Лу. A.4.6)
Значения Mi7- в граничных точках считаем заданными при
помощи переноса в эти точки граничного условия A.4.3). Для
внутренних точек (ж*, yj) области D ограничение A.4.1) заменим
Метод локальных вариаций
22
условиями
«" (*», Уз) < иИ < и+Ихи\'Л)- (I-4-7)
Поставим задачу об отыскании таких значений utj для всех
внутренних точек Ptj, которые удовлетворяют ограничению A.4.7)
во всех внутренних точках Ptj области D и доставляют минимум
сумме A.4.4). При некоторых условиях решение поставленной
задачи будет близко к решению исходной вариационной
задачи A.4.1), A.4.2).
Будем искать значения и^ во внутренних точках,
минимизирующие сумму A.4.4) и удовлетворяющие ограничениям A.4.7)
(значения utj в граничных точках заданы). Зададимся для всех
внутренних точек начальным приближением и\у, удовлетворяющим
условиям A.4.7) и достаточно малым числом h. Затем в каком-либо
порядке будем последовательно варьировать значения иЬ1 во всех
внутренних точках, нрибавляя к ним и вычитая величину h.
Изменение utj в одной внутренней точке Рц вызывает изменение
четырех слагаемых типа A.4.5), входящих в сумму A.4.4). Эти
слагаемые соответствуют ячейкам, имеющим вершиной точку Рц
(на фиг. 1.3 эти ячейки заштрихованы). Обозначим сумму этих
слагаемых через Фц
Фи - 4 + 4-1, i + 4 i-i г 4 -i. j-ь AА8)
а через Ф;'д Ф^ обозначим значения, принимаемые суммой A.4.8),
при подстановке в нее вместо иц соответственно величин и,ц -f- h,
utj — h. Если при замене иц па и^ + h окажется, что
ограничение A.4.7) нри этом не нарушается и что уменьшается сумма тех
слагаемых в A.4.4), которые зависят от utj, т. е. Ф? <С Ф^,
то функцию и в точке Pi}- в новом приближении полагаем равной
и — иц -j- h- В противном случае, если хотя бы одно из этих
условий не выполнено, аналогично проверяется значение иц — h.
Если обе вариации нарушают ограничение A.4.7) или не
уменьшают суммы A.4.8), (Ф/; ;> Ф^, Фу >= Фи, то сохраняем старое
значение и = utj. Для уменьшения числа операций сначала
пробуется вариация в том нанравлении (прибавляется или
вычитается h), которое привело к уменьшению функционала J в
предыдущей точке. Перебрав все внутренние точки по одному разу,
заканчиваем итерацию. К этому моменту в таблице иц будет
храниться повое приближение, удовлетворяющее ограничениям
A.4.7). Соответствующее этому приближению значение
функционала будет, как следует из процесса вариаций, не больше, чем
функционал начального приближения.
Выполнив одну итерацию, переходим к следующей, которая
выполняется аналогично, и т. д. Если от итерации к итерации
Решение вариационных задач
23
функционал почти не уменьшается, а решение utj меняется в
небольшом числе точек (или вовсе пе изменяется), то шаг h
уменьшается, например, вдвое, и процесс итераций продолжается.
Если же шаг h достаточно мал (порядка желаемой точности
решения) и дальнейшее его уменьшение пе приводит к уменьшению
функционала, то уменьшаются вдвое числа Ах, Ау (одно из них
или сразу оба). Одновременно удваиваются числа т, п так, что
прямоугольник Q не меняется. Функция и^- во вновь
образовавшихся точках Рц получается интерполяцией по соседним точкам.
Для получепного решения проверяются условия A.4.7), после
чего итерации продолжаются. Процесс итераций можно окончить,
когда числа Ах, Ау будут достаточно малы и дальнейшее их
уменьшение не будет приводить к заметному умепьшепию фупкционала,
причем при этих Ах, Ау достигнута полпая сходимость итераций
при некотором малом шаге h. Приближенное решепие к (х, у)
задачи A.4.1) — A.4.2) определяется интерполяцией по
найденным зпачениям utj. При каждых значепиях Ах, Ау шаг h в ходе
итераций необходимо устремлять к пулю, добиваясь выполнения
условий:
max (Ах, Ау) -> 0, h/Ap -> О, Д = min (Да:, Ay), p > 2. A.4.9)
Условия A.4.9) аналогичны условиям A.1.13) и требуются
для сходимости метода (подробпее см. в главе 2).
Если на функцию и пе наложено краевое условие A.4.3), то
при отыскании решения задачи A.4.1), A.4.2) следует варьировать
также значения и в граничных точках. Варьирование в этих
точках осуществляется аналогично, но при вариациях требуется
проверять измепепие не четырех, а мепьшего числа слагаемых в
сумме A.4.4).
В отличие от методов типа Ритца и Галеркипа [59], метод
локальных вариаций не связан с выбором базисной системы
функций и поэтому применим для областей произвольной формы.
Метод локальных вариаций легко учитывает ограничения типа A.4.1),
которые представляют трудности при использовании ряда других
методов. Отметим, что, как и в случае вариационных задач с
одной независимой переменной (§ 1 и 2), метод локальных вариаций
требует хранить в памяти машины лишь решение в текущем
приближении, т. е. один набор чисел и,-;.
§ 5. Алгоритм метода для общей задачи^с'неаддитивным
функционалом в случае одной независимой переменной
Перейдем к подробному описанию алгоритма метода локальных
вариаций для более общих классов вариационпых задач, чем
рассмотренные в § 1—4. Опишем алгоритм метода для следующей
задачи, являющейся обобщением задачи A.1.1), A.1.2) [12, 10].
Метод локальных вариации
24
Требуется определить на отрезке [а, Ь] вектор-функцию и =
= (в1 (ж), . . ., ип (х)), которая удовлетворяет ограничениям
(*.»)e=ff, A.5.1)
(i.k.kJgC при а^х^Ь, A.5.2)
(/ь/«,...,/.)€=#; A.5.3)
ь
А = ,\ /i (ж, и, их) dx, (i = 1, 2,..., s) A.5.4)
а
и доставляет минимум функционалу
J = F{JU /2, ..., /s). A.5.5)
Здесь U — заданное множество в (га + 1)-мерном
пространстве х, и; G — заданное множество в Bга + 1)-мерном пространстве
х, и, их\ Е — заданное множество в s-мерном пространстве; F,
/i— заданные функции; их — векторная производная duldx.
Ограничения A.5.1), A.5.2) могут, в частности, включать и краевые
условия, наложенные на функции и, их. В условие A.5.2) можно
включить и условие A.5.1), однако мы этого не делаем из
соображений удобства численного счета. Ограничение A.5.1) является
обобщением ограничений A.1.1), а ограничение A.5.2),
включающее производную их, имеет уже принципиально иной характер.
Ограничения вида A.5.3) возникают при решении задач с изопе-
риметрическими условиями типа равенств или неравенств. Если
решается задача о нахождении минимума обычного интегрального
функционала, то можно считать, что минимизируемый
функционал равен J = F Gi, /2, . . ., Js) = J1.
Предполагается, что сформулированная задача A.5.1) —, A.5.5)
имеет решение.
Разобьем отрезок [а, Ь] на N равных частей точками xk = а -\-
+ к Ах, где Ах = (b — a)IN. Введем обозначения:
uk= и (xk), ukj = v? (xh); Iik = Axf (xk + Дж/2, (uk +
+ «fe+i)/2, (иь+1 — uh)/Ax),
i=l,2, ...,*; ft = 0,1,..., N — l;j = i, 2, . . ., ra. A.5.6)
Здесь Iik — приближенное значение интеграла Ji по отрезку
[#ь-1, Xkl. Функционалы A.5.4) представим в виде
ЛГ—1
/|«Л=2'«, i = l,%...,s. A.5.7)
fc=0
Решение вариационных задач
25
Условия A.5.1), A.5.2) приближенно заменим ограничениями
(xh, uh)EEU, /c = 0, 1 N, A.5.8)
(хк + Ах/2, (ик + ws+1)/2, (uk+1 -икIАх) <= G. A.5.9)
Таким образом, приходим к задаче об отыскании значений uh,
удовлетворяющих условиям A.5.8), A.5.9), A.5.3) и доставляющих
минимум функционалу A.5.5) [в формулах A.5.3), A.5.5) J%
заменяется приближенным выражением 1% из A.5.7)].
Перейдем к описанию вычислительного алгоритма решения
вариационной задачи A.5.3), A.5.5) — A.5.9). Алгоритм описан
в том виде, в котором он реализован в имеющихся стандартных
программах метода локальных вариаций (см. главу 8). Сначала
в таблицу из (N + 1) га чисел uhj, где /= 1, 2, . . ., га, к =
= 0, 1, . . ., N, которая хранится в памяти ЭВМ во время
работы алгоритма, помещается начальное приближение для ик].
Далее проводится контрольный просмотр начального
приближения. Цель просмотра — проверка ограничений и подсчет
функционала для начального приближения. Здесь же можно
производить и исправление начального приближения. Бели при
просмотре начального приближения окажется, что для какого-либо /с,
О ^ к <; N, вектор и (хк) не удовлетворяет ограничению A.5.8)
или не выполняется ограничение A.5.9), то начальное
приближение не пригодно. В этом случае производится его исправление.
Это исправление состоит в том, что к одному из компонентов и> (хъ)
вектора и (хк) добавляется величина Uij, и числа /, / пробегают
значения /'= 1, 2, . . ., га; I = ±1, ±2, . . ., ±М. Здесь А, —
заданные величины шагов исправления по компонентам вектора и,
М — заданное целое число. Если указанный способ позволяет
исправить значение и (xh), т. е. добиться выполнения ограничений
A.5.8), A.5.9), то продолжается просмотр последующих точек.
В противном случае требуется задать новое начальное
приближение. Одновременно с проверкой ограничений A.5.8), A.5.9)
производится подсчет интегралов Jt по формулам A.5.6), A.5.7).
Когда просмотр начального приближения окончен, то
проверяется интегральное ограничение A.5.3). Если ограничение A.5.3)
не выполнено, то нужно задать другое начальное приближение.
Если же условие A.5.3) выполнено, то по формуле A.5.5) подсчи-
тывается функционал / от начального приближения и начинается
процесс варьирования.
Варьирование производится последовательно для каждого из
компонентов вектора и: сначала для первого, затем для второго
и т. д. Для каждого из компонентов uj задается свой шаг
варьирования hj >• 0. При варьировании /-го компонента значения всех
Метод локальных вариаций
26
остальных компонентов вектора и остаются фиксированными.
Варьирование /-го компонента производится во всех точках хк,
где кц ^ к <^ k2j. Значения kxj и k2j получаются при варьировании
/-го компонента в предыдущий раз; к1} — это номер первой точки,
в которой в предыдущий раз произошло изменение значения
компонента и/, k2j — это номер точки, стоящей перед первой точкой,
в которой локальные вариации в предыдущий раз не привели к
изменению значения и,- @ ^ ktj ^ k2j ^ N). Если варьирование по
данному компоненту происходит впервые, то ktj = 0, а к2]- = N.
Если окажется, что на участке от kxi до A2J- компонент и} не
изменяется, то в процессе дальнейшего варьирования данная координата
пропускается. Если для всех /= 1, 2, . . ., и па участках от
А17- до к2] не оказалось проварьировапных точек, то всем kxj
присваивается значение 0, a k2i — значение iV, и процесс
варьирования повторяется заново. Таким образом, здесь реализован прием,
описанный в § 2 и позволяющий значительно сократить число
операций за счет варьирования лишь тех кусков траектории,
которые существенно изменяются.
Процесс варьирования компонента и> в точке хк (т. е. значения
uhi) заключается в следующем. Значение uki заменяется на ukj -f-
-f- hj, после чего проверяются ограничения A.5.8), A.5.9). Если
они удовлетворены, то по формуле A.5.6) для всех i = 1, 2, . . ., s
вычисляются /i>fc-i, /j, д. По формулам A.5.7) пересчитываются
Jt ^ It и проверяется ограничение A.5.3), после чего
вычисляется новое значение функционала согласно A.5.5).
Пусть при замене ukj па uhj + hy. а) не нарушается
ограничение A.5.8) в точке хк; б) не нарушается ограничение
A.5.9) в интервалах [хк-г, хк], \xh, xk+1] (для граничных
точек х0, xn ограничение A.5.9) проверяется лишь в одном из этих
интервалов); в) выполняется ограничение A.5.3); г) уменьшается
значение функционала J из A.5.5). Тогда в таблицу, где хранится
решение, вместо uhi записывается uhi + hj. После этого
переходим к варьированию значения ик+1, j. Если хотя бы одно из
перечисленных условий не выполнено, то аналогично проверяется
значение uhj — hj. Когда и для этой вариации хотя бы одно из
перечисленных выше условий не выполнено, то в таблице
сохраняется старое значение ukj. При переходе к следующей точке
xh+1, чтобы сократить число операций (времени счета), прежде
рассматривается вариация в том направлении (т. е. прибавляется
или вычитается hj), которое привело к уменьшению функционала /
в предыдущей точке хк. Процесс варьирования заканчивается,
когда для всех / = 1, 2, . . ., п при А1у- = 0 и к2] = N общее
число проварьировапных точек по всем координатам меньше или
равно какому-нибудь наперед заданному числу, которое, в
частности, может быть и нулем. К этому моменту в таблице ик1 будет
Решение вариационных задач
27
храниться новое приближение, удовлетворяющее ограничениям
A.5.3), A.5.8), A.5.9). Функционал / этого приближения не
больше, чем функционал пачальпого приближения. Затем шаги
варьирования hj уменьшаются, например, половипным делением, и
процесс варьирования продолжается.
Заметим, что можно уменьшать лишь некоторые из шагов hj,
оставив остальные прежними. Если при решепии задачи шаги
варьирования стали малыми и дальнейшее их уменьшение пе
приводит к уменьшению фупкционала /, то число Ах уменьшается
вдвое и одновремеппоудваиваетсячисло^
(измельчается разбиение иптервала [а, Ь]).
Функция ик]- во вповь образовавшихся
точках получается интерполяцией по
соседним точкам. Затем полученпое
решение подвергается контрольному
просмотру. Если оно удовлетворяет условиям
A.5.8), A.5.9), A.5.3), то аналогично
осуществляется процесс варьирования.
Решение можно закончить, когда Ах, /г,-
достаточно малы [max (hu h2, . . ., hn) <C
<^ Axp; относительно выбора числа р, см.
§ 1] и дальнейшее их уменьшение не
приводит к уменьшению фупкциопала /. Приближенное решение задачи
определяется интерполированием по найденным значениям uh;.
Из приведенного выше описания следует, что алгоритм
решения задачи A.5.1) — A.5.5) распадается па две основные части,
выполняемые блоками контрольного просмотра и варьирования.
Для наглядности взаимодействие блоков показано на фиг. A.4).
Блоки контрольного просмотра и варьирования являются
стандартными и не зависят от конкретного вида функций /,-, F ж
ограничений A.5.1) — A.5.3). В блоках используются элементарные
операции, учитывающие копкретные свойства решаемой задачи.
В вычислительных программах для ЭВМ (глава 8) эти операции
реализованы в виде вспомогательных процедур.
A. Операция проверки ограпичепия A.5.1). Для любых
совокупностей (х, и) она дает ответ «да», если (х, и) GE U и «нет» —
в противном случае.
Б. Операция проверки ограничения A.5.2) и вычисления
функциопалов It,, (i =1, . . ., s). Для пары точек (xh, uh) и (a;fe+i,
Bft+i) эта операция дает ответ «да», если выполнено условие A.5.9),
и «пет» — в противном случае. В случае выполнения" условия
A.5.9) вычисляются фупкциопалы Iih при ?= 1,. . ., s согласно
формулам A.5.6).
B. Операция проверки условия A.5.3) и вычисления
функционала /по'формуле A.5.5). Для пабора чисел Ii,(i = 1, . . ., s)
пщр/шышгр
npoctiggipa
Блок
варьирования
Метод локальных вариаций
28
операция дает ответ «нет», если условие A.5.3) не выполнено,
а в случае удовлетворения этого условия дает ответ «да» и
вычисляет значение J — F (Iu /2, . . ., /8).
Используя эти элементарные операции, блок контрольного
просмотра для данного приближения осуществляет проверку
условий A.5.1) — A.5.3) и, в случае их выполнения, вычисляет
функционалы 1и . . ., /я и функцию F Aи . . ., /,). Если в
какой-либо точке нарушаются условия A.5.1), A.5.2), то значение
uk = м (xk) функции и в точке х = хк подвергается «исправлению»
описанным выше способом. Если исправить приближение не
удается или не выполняется условие A.5.3), то алгоритм
заканчивает работу, выдавая информацию о нарушении тех или иных
ограничений. При этом нужно задавать другое начальное
приближение. В противном случае начинает работать блок варьирования,
который последовательно осуществляет итерации решения, как
это описано выше. Если в результате очередной итерации при
к1} = 0, k2j = N, j = 1, . . ., п оказалось, что число а точекrxh,
в которых вариации привели к изменению решения и (xh), стало
меньше или равно заданному числу d, т. е. а ^ d, то процесс
итераций с данными Ах, hj заканчивается. При выходе из блока
варьирования проверяются условия, контролирующие изменение
величин Ах, hj, j = 1, . . ., п сравнением их с заданными
минимальными значениями Ах^., hj, j = 1, . . ., п. Далее либо
производится уменьшение некоторых из hj с обращением вновь к
блоку варьирования,глибо уменьшение Да; и одновременно
увеличение hj (при этом производится интерполяция и вновь обращение
сначала к блоку контрольного просмотра, а затем к блоку
варьирования), либо алгоритм вообще заканчивает работу (если
одновременно hj ^ hj при / = 1, • . ., п, Ах ^ Axt и а <^ d). Одна
из подобных программ на языке АЛГОЛ—60 приведена в главе 8.
В заключение опишем применение метода локальных вариаций
к вариационным задачам, содержащим высшие производные.
Рассмотрим задачу определения на интервале [а, Ь] скалярной
функции и (х), доставляющей минимум функционалу
ь
J = )f (x,u, их, и^) dx A.5.10)
а
при ограничениях типа A.1.1).
Разобьем интервал [а, Ь] точками хк согласно A.1.5) и
представим интервал A.5.10) приближенно в виде суммы:
i=i N
Решение вариационных задач
29
'-~,чаг+ч*)+Ч/(*+-?-. 4s-•
Ш — Ио «2 — 2щ + "о \ if/ Ах "лг-х + «jv
Дя ' 2Д^ ) +' V^ 2~' 2 '
B»-»*-i »;v-2»Jv-1 + »;v_2\] МЧШ
Д* ', 2(Дх)з /J- A.0.11)
Здесь произведена разностная аппроксимация производных в
интеграле A.5.10), причем для второй производной применена во
внутренних интервалах симметричная разностная формула, использую-
щаячетыре точки, а в крайних интервалах — формула, использую-
щаятри точки. Решение задачи далее может проводиться аналогично
описанному в § 1 или 5. Будем последовательно варьировать
значения щ с некоторым шагом h, учитывая ограничения A.1.1)
в виде A.1.9) и подсчитывая изменение функционала A.5.11).
Разница по сравнению с § 1 состоит в том, что при варьировании
щ в одной точке в сумме A.5.11) изменяются не два слагаемых
[как в сумме A.1.8)], а четыре, которые нужно пересчитывать.
Поэтому объем вычислений здесь возрастает. Следует отметить,
что наличие второй производной в интеграле A.5.10) предъявляет
более жесткие требования к уменьшению величины h для
достижения сходимости: число р в условии A.1.13) здесь должно быть
больше (глава 2). В остальном алгоритм решения по методу
локальных вариаций остается таким же, как и выше.
После сделанного замечания очевидно, что метод локальных
вариаций без существенных изменений переносится на случай,
когда минимизируемый функционал зависит и от более высоких,
чем вторая, производных от искомой функции. Искомая функция
и (х) может быть вектор-функцией, а функционал / может иметь
вид*]A.5.5), где каждый из функционалов J\ зависит от высших
производных искомой функции и (х). Ограничения A.5.2) также
можно считать содержащими высшие производные. Эти
ограничения могут включать и краевые условия, положенные на искомую
функцию и ее производные (см. § 1). На всех этих обобщениях мы
подробно не останавливаемся, так как те модификации, которые
претерпевает алгоритм, очевидны.
§ 6. Алгоритм метода для общей вариационной задачи
в частных производных с неаддитивным функционалом
Перейдем теперь к подробному изложению метода локальных
вариаций для вариационных задач с частными производными,
более общих, чем в § 4. Рассмотрим сначала следующую задачу.
Требуется найти функцию и {х, у), определенную в прямоугольпи-
Метод локальных вариаций
30
Кб D
ах^х^а2, h < у < Ь2, A.6.1)
удовлетворяющую ограничениям
(х, у, и) GE U, (х, y)^D A.6.2)
и доставляющую минимум неаддитивному функционалу
J = F (Ju J2, . . ., /.) -> min, A.6.3)
в котором
Ji = ))f(x,y,u,du/dx,du/dy)dxdy, i = i,2,...,s, A.6Л)
где х, у — независимые переменные; alf а2, bx, Ь2 — постоянные;
U — заданное множество в трехмерном пространстве х, у, и;
F и ft — заданные функции своих аргументов.
Хотя здесь рассматривается случай скалярной функции и
и прямоугольной области, ниже будет показано, как решаются
задачи с искомой вектор-функцией, сложной формой области и
прочими усложнениями.
Отметим, что условие A.6.2) является непосредственным
обобщением условия A.4.1).
Разобьем прямоугольник D на равные ячейки прямыми (фиг. 1.5):
х = xj = ах -f- jAx; у = yk = Ъх + кАу; Ах = (а2 — ах)/т,
&У~='(Ъ, - h)ln, j = 0,1, . .. ,т; к = 0,1, .. . ,п, A.6.5)
где т, п — натуральные числа. Будем разыскивать приближенные
зпачепия'к'в^узлах сетки, т. е. величины ujk — и (xj, yk). Ограни-
г~~1
1
1
1
1
1
1
1
1
1
г
1
1
1
"
'-
м
1
н
-"
—1
1
1
1
1
1
1
1
1
1
1
1
1
1
А I Фиг. 1.5
а, аг х
Решение вариационных задач
31
чепия A.6.2) для этих величин примут вид
(xj, у к, Щк) е U. A.6.6)
Интегралы A.6.4) приближенно заменим суммами
т—1 п—1
;=0 ft=o
(Л)Л=Д«А»Л (я!,-+Дя:/2, ук+Ау/2, (ий+"м, *+»i, »+i+»M. ft+iV4'
A.6.7)
(Mi+i> fc+i + wm. ft Mi> fc+i ыл)/2Аа;, (mj+i, *+i + uj, ft+i —
— uM> k — ujk)/2Ay).
Вместо исходной вариационной задачи A.6.1) — A.6.4)
рассмотрим задачу об отыскании величин щк, удовлетворяющих
ограничениям A.6.6) и доставляющих минимум функции A.6.3), в
которой Ji заменено на /г из A.6.7). Задача A.6.3), A.6.6.), A.6.7)
является задачей нелинейного программирования с (п + 1)(те + 1)
переменными.
Опишем алгоритм решения данной задачи по методу
локальных вариаций. Для простоты описания доопределим функции ft
вне прямоугольника D, положив
/i = 0 вне D, i - 1, 2, . . ., s, A.6.8)
и введем вспомогательные ячейки, окаймляющие прямоугольник
D (на фиг. 1.5 внешние их границы показаны пунктиром).
Границы изменения индексов в A.6.5), A.6.7) теперь имеют
вид —1 «^ j ^ т + 1, —1 <; к <; п + 1, причем сумма A.6.7)
от этого не изменится, согласно условию A.6.8). На внешней
границе вспомогательных ячеек положим для определенности
U-U ft — ит+1, к — uh -1 — uj, n+1 = 0,
-1</<т + 1, —1<&<и + 1. A.6.9)
Для начала работы алгоритма требуется задать некоторое
начальное приближение, т. е. таблицу чисел Ujh при 0 <^ j ^ т,
1^ к ^ п. Алгоритм вначале проводит контрольный просмотр
этого приближения, нроверяя выполнение условий A.6.6) и
подсчитывая функционалы A.6.7), A.6.3). Для работы алгоритма
должны быть заданы подпрограммы вычисления функций fi, F
и проверки условия A.6.6). Если в результате контрольного
просмотра все ограничения A.6.6) окажутся выполненными, то
начинает работать блок варьирования; в противном случае выдается
информация о нарушении ограничений, и нужно изменить
начальное приближение.
Метод локальных вариации
32
Опишем работу блока варьирования при заданных Ах, Ау
(т. е. заданных т и п) и шаге варьирования. Алгоритм
варьирования состоит из последовательности итераций. Дадим описание
одной итерации.
К началу итерации в таблице ujk находится решение,
полученное в результате предыдущей итерации (для первой итерации —
заданное начальное приближение). Для этого решения хранятся
подсчитанные ранее значения функционалов J± из A.6.7) и / из
A.6.3). Алгоритм просматривает последовательно все узлы сетки
в каком-либо порядке, пробегая каждый узел по одному разу в
течение итерации. Например, пусть индекс /' пробегает значения от
1 до т, а при каждом фиксированном j индекс к изменяется от
1 до п. Для каждого узла сетки в качестве возможного нового
значения ujk рассматриваются старое значение щк и значения Ujh +
+ h, ujh — h.
Чтобы подсчитать функционал / для каждого из этих
возможных значений, нужно в каждой сумме A.6.7) для Ii при i = 1,
2, . . ., s пересчитать четыре слагаемых, содержащих ujh. Эти
слагаемые соответствуют ячейкам, имеющим вершиной точку
(xj, yh): среди этих ячеек могут быть и вспомогательные, для
которых соответствующие слагаемые сумм A.6.7) равны нулю в силу
A.6.8). Если замена щк на ujh -j- h (или Ujk — h) не нарушает
ограничений A.6.6) и приводит к уменьшению функционала /, то
в таблице решения величина Ujh заменяется на щк + h (или на
Ujh — h), и алгоритм переходит к следующему узлу сетки. Если
же каждая из испробованных вариаций либо приводит к
нарушению ограничений A.6.6), либо не дает уменьшения функционала J,
то в таблице сохраняется старое значение Ujh.
В каждом узле сетки сначала испытывается вариация в том
направлении (т. е. берется ujh + h или Ujh — h), для которого
получено уменьшение функционала в предыдущем из
просмотренных узлов: это дает экономию числа операций. Дополнительную
экономию числа операций получим, запоминая для каждого
просмотренного узла те два слагаемых суммы A.6.7), которые
потребуется подсчитать и для следующего узла. В результате сделанной
итерации в таблице ujk оказывается новое приближение,
удовлетворяющее ограничениям A.6.6). Для него попутно подсчитаны
суммы It при ? = 1, . . ., s и функционал /, значение которого
меньше, чем для решения перед началом интерации. После
выполнения итерации переходим к следующей и так продолжаем до тех
пор, пока не будет достигнута полная сходимость при заданных Ах,
Ay, h, т. е. пока не окажется, что ни одно из чисел Ujh не
изменилось в результате очередной итерации (или изменение Ujk
произошло в числе точек, меньшем некоторого наперед заданного числа,
см. § 5).
Решейие вариационных задач
33
Затем уменьшим шаг h, например, вдвое, и будем производить
описанные итерации до достижения полной сходимости, после чего
опять уменьшим h и т. д. Когда получена полная сходимость
итераций при заданном достаточно малом шаге варьирования h,
удовлетворяющем условию
й<тт[(Да:J, (Дг/J], A.6.10)
то приближенное1 решение на данной сетке можно считать
построенным.
После этого следует перейти к решению на более мелкой сетке,
увеличив (например, вдвое) числа т, п и уменьшив Да;, Ау,
согласно A.6.5). В качестве начального приближения на новой сетке
следует взять решение, полученное из решения для старой сетки
путем интерполяции. Его нужно подвергнуть контрольному
просмотру.
Отметим, что при измельчении сетки функционал может
увеличиться из-за погрешностей интерполяции и разностной
аппроксимации. Затем снова производится описанный процесс
варьирования, в котором шаг h опять постепенно уменьшается от
некоторого начального значения, как описано выше.
Численное решение можно считать полученным после
достижения полной сходимости итераций с минимальными заданными
Да:, Ау и с минимальным h, удовлетворяющим условию A.6.10).
Отметим, что количество операций, необходимое для
выполнения одной итерации, не зависит от шага h, но зависит от чисел т,
га. Поэтому измельчение сетки следует производить лишь тогда,
когда исчерпаны все возможности метода на более крупной сетке,
т. е. достигнута полная сходимость при очень малом h.
Остановимся кратко на возможных модификациях метода.
Прежде всего можно разными способами аппроксимировать
интеграл A.6.4), используя вместо A.6.7) более точные разностно-
квадратурные формулы. В некоторых случаях, учитывая
специфику задачи, целесообразно применять неравномерную,
треугольную и другие типы сеток [9]. Шаг варьирования h не обязательно
брать одним и тем же для всех узлов сетки. Наконец, при
варьировании можно на каждой итерации просматривать не все узлы,
а лишь те, для которых в предыдущей итерации изменились
величины ujh (см. § 5). Это требует хранения некоторой
дополнительной информации, но зато позволяет сократить время счета.
Отметим некоторые видоизменения и обобщения постановки
задачи A.6.1) — A.6.4), для которых также можно применить
описанный алгоритм локальных вариаций.
1. Если на искомую функцию и (х, у) наложено краевое
условие вида и = g (х, у) на границе С прямоугольника D, то его
можно учесть в A.6.2) подобно тому, как это делалось в § 4. Аналогич-
2 Ф. Л. Черноусько и H. В. Баничук
Метод локальных вариаций
34
но можно, не изменяя постановки задачи, учесть и другие краевые
условия на границах и во внутренних точках области D.
2. Часто встречаются вариационные задачи, в которых
минимизируемый функционал содержит интегралы не только по всей
области, но и по ее границе. Пусть, например, интеграл J±,
входящий в функционал A.6.3), представляет собой интеграл по
отрезку границы С:
аг
J--= ) (f\x,u,-^,-~\dx, B/ = Ь,,а1<ж<а2). A.6.11)
о, '
Здесь ф — заданная функция. Интеграл A.6.11) можно
аппроксимировать, например, следующей суммой:
т—1
"j+i. о ~~ "j. о Mj+i, 1 + иj. 1 ~ "j+i, о ~ "jo \
Ах ' 2Ау Г
При варьировании величин щк для подсчета интеграла Jl
нужно использовать выражение A.6.12) вместо A.6.7); в остальном
алгоритм решения остается прежним. Если же функция ср не
зависит от ди/ву, то можно формально пользоваться прежним
выражением A.6.7), беря в нем сумму по к от —1 до п — 1 и полагая
/1 = -^-ф(а;,2м,2-^-)при 2/<Ьъ Д = 0 при у>Ъг. A.6.13)
Очевидно, что соотношение A.6.7) с учетом равенств A.6.13)
и A.6.9) сведется к сумме A.6.11), что можно использовать, решая
задачи с функционалами типа A.6.11) при помощи программы
(приведенной в главе 9), реализующей алгоритм, описанный в
данном параграфе и предназначенный для задач вида A.6.1) —
A.6.7).
Заметим, что вариационные задачи с функционалами,
содержащими интегралы по границе вида A.6.11), часто встречаются
в математической физике [59, 74].
3. Области интегрирования для интегралов A.6.4) могут быть
различными при разных i и не прямоугольными, т. е.
Ji = J J h (х> У> "' ди/дх> ди/дУ) dxdV, t = 1,. .., s.
Тогда в качестве D возьмем наименьший прямоугольник вида
A.6.1), содержащий все эти области Dt. Каждую область Dt
A.6.12)
Решение вариационных задач
35
аппроксимируем областью, состоящей из целого числа ячеек,
и положим ft =-- О вне этих ячеек. После этого можно формально
считать, что интегрирование в A.6.4) при всех i проводится по
одной и той же области D, и применять описанный выше алгоритм.
4. Если все области интегрирования в A.6.4) одинаковы, хотя
и не прямоугольны, или если s = 1 в A.6.4), то можно и другим
способом свести D к прямоугольнику. Сделаем преобразование
независимых переменных х, у, отображающее область D на
прямоугольник или на другую область, границы которой состоят
из отрезков, параллельных координатным осям. Это
преобразование может быть произвольным, но достаточно гладким. После
преобразования изменится вид функций /* в A.6.4), однако
алгоритм будет применим по-прежнему.
Удобство этого приема состоит в том, что отпадает
необходимость аппроксимировать криволинейную область
прямоугольными ячейками, так как область после преобразования будет состоять
из целого числа ячеек. Этот прием неоднократно применялся при
решении конкретных задач.
5. Искомая функция и (х, у) в соотношениях A.6.1) — A.6.4)
может быть вектор-функцией с компонентами и1, . . ., нк.В этом
случае при варьировании в каждом узле сетки следует поочередно
варьировать все компоненты и1 вектор-функции, каждую со своим
шагом kt, i = 1, . . ., К. Начальные величины шагов ht следует
брать пропорциональными характерным масштабам функций и',
а уменьшение каждого шага ht следует производить тогда, когда
функция и{ (х, у) перестала изменяться после полной итерации
(см. § 5). В остальном алгоритм решения остается прежним.
Примеры решения подобных задач имеются в работах [8, 9] (см. также
главы 4, 5).
6. Метод локальных вариаций применим и к вариационным
задачам, в которых интегралы A.6.4) зависят от высших
производных искомой функции. При этом в выражении A.6.7) будут
входить разностные аппроксимации этих производных, и при
варьировании функции и в одном узле сетки потребуется подсчитать
более четырех слагаемых суммы A.6.7) (см. аналогичное замечание
о задачах с высшими производными в конце § 5). Задачи с
высшими производными решались методом локальных вариаций в
работе [7].
7. Рассмотрим задачу отыскания в области D функций и (х, у),
минимизирующей A.6.3), A.6.4) при дополнительных условиях:
Т(/х, /2, . . ., Л) - р, р<0 A.6.14)
и = О, (х, у) ЕЕ С, A.6.15)
где Р — постоянная; Ч!" — заданная функция своих аргументов.
2*
Метод локальных вариаций
36
Предположим, что F, Y — однородные функции переменных Jx,...
. . ., /g, причем степень однородности функции W равна р, а
функции /j однородны по переменным и, их, и со степенью q. Задача
A.6.3), A.6.4), A.6.14), A.6.15) является, очевидно,
вариационной задачей с изопериметрическим условием.
Укажем прием, позволяющий сводить задачу A.6.3), A.6.4),
A.6.14), A.6.15) к задаче без изопериметрического условия и тем.
самым применять для ее решения алгоритм, описанный в данном
параграфе. Пусть и0 (х, у) — есть функция, дающая решение
вариационной задачи A.6.4), A.6.15) при дополнительном условии
и°(х',у') = 1, A.6.16)
но без учета изопериметрического условия A.6.14). Здесь х\
у — координаты некоторой произвольной фиксированной точки
области D. Поставленная вариационная задача, очевидно,' есть
задача типа A.6.1) — A.6.4).
В силу однородности функций ft, F и граничных условий A.6.15)
функция 1и° (х, у), где I — постоянная, является решением
задачи с функционалом /' = F/Ч?, с условиями при любых других
условиях нормировки вместо A.6.16). Далее константу I выберем
так, чтобы удовлетворить условию A.6.14). Подставляя 1и° в
A.6.14), получим
I = pi/ре [Y (Jx (u°), ...,JS (u°))]-i/P9 A.6.17)
Функция 1и° с постоянной I, определяемой по формуле A.6.17),
очевидно, является решением исходной задачи A.6.3), A.6.4),
A.6.14), A.6.15). Указанное замечание полезно при решении
некоторых задач на собственные значения.
8. Метод локальных вариаций применим и к задачам, в
которых искомая функция зависит от трех и более переменных, а
интегралы A.6.4) берутся по областям соответствующей размерности.
Формула A.6.7) и алгоритм решения при этом видоизменяются:
элементарные ячейки будут параллелепипедами соответствующей
размерности, и варьирование функции и в одном узле сетки
приводит к изменению интегралов по восьми (или более)
близлежащим ячейкам.
§ 7. Схемы метода с переменным шагом варьирования
Одним из способов ускорения сходимости метода локальных
вариаций является использование вариантов метода с переменными
шагами ht. Варьирование решения с переменными шагами
особенно эффективно, когда искомые величины на различных участках
области определения имеют разный порядок. Схемы метода,
описанные в предыдущих параграфах, основывались на сопоставлении
Решение вариационных задач
37
допустимых вариаций' функции и вызываемых ими приращений
функционала. Шаг h считался известным и постоянным для всех
точек, и исследовался знак приращения функционала. Можно
рассмотреть схему метода, основанную на минимизации этого
приращения. Для этого откажемся от предположения о постоянстве
шага варьирования и будем выбирать для каждой точки х ¦— xt
свой шаг h -— ht из условия минимума приращения А/ — A/ (h).
Опишем более подробно эту схему. Для этого рассмотрим опять
вариационную задачу A.1.1) — A.1.3) и ее конечно-разпостный
аналог A.1.6), A.1.8), A.1.9). Сначала будем предполагать, что
ограничения A.1.1), A.1.9) либо отсутствуют, либо не влияют на
решение рассматриваемой задачи. Вычислим приращепие
функционала А/, обусловленное заменой значения и( функции и в
точке х = Xi на н,- -j- ht,
М =- /{_! (щ_и щ^+Ц (щ+hi, ui+1)—/i_! (щ-!, ut) - I (щ, uin)
A.7.1)
Подставляя далее в A.7.1) выражения для It согласно A.1.6)
и разлагая полученные выражения в ряд Тейлора по переменной
hi с точностью до членов 0 (/г3), будем иметь
+ "* [ 8 \\ ди* /ц "Г \ ди* )i) Г 2Дх (Д дид„г J^
Здесь обозначение (...)i указывает, что величина, стоящая в
скобках, вычисляется при значениях аргументов, равных х =
= xt + Дх/2, и = (ut + ui+1)/2, ux =,(«*+! — ut)/Ax. При
фиксированных значениях сеточной функции ut, i — О, 1, ..., N
выражение для А/ A.7.2) является квадратичной функцией
переменной hi- Выбирая величину шага варьирования из условий
минимума приращения А/ по ht: d (AI)/dhi = О, d? (AI)/dkl > 0,
получим
°i - 4 ^0и« ji-i _t W»2 ji) ^ ^ \\ <Ъ'дих li-i
Метод локальных вариаций
38
Если в A.7.4) o*j < 0, то имеет место максимум А/ при h,
определяемом согласно A.7.3), а при at = О экстремума в A.7.2) вообще
нет. Заметим, что формула A.7.3) для ht содержит в квадратных
скобках конечно-разностную аппроксимацию уравнения Эйлера
EL-1.1 df \ = Q A.7.5)
ди дх\ дих I
для функционала A.1.2). Поэтому равенство ht = 0 возможно
для некоторой точки х --= xt лишь в том случае, если для данного
приближения ut (i — О, 1, ..., N) на интервале [жц, xi+1]
локально удовлетворяется разностный аналог уравнения 'A.7.5)
Следовательно, если ui (i = О, ..., N) является решением системы
разностных уравнений то для всех х = xt из A.7.3) получим ht = 0.
Алгоритм локальных вариаций с указанным выше способом
вычисления шага ht для решения задачи A.1.2), A.1.3)
заключается в следующем. Пусть п-е приближение уже получено, т. е.
определены числа и) . Тогда (п + 1)е приближение определим
следующим образом:
(щ + hi, если а* ^> 0,
«Г1- » <гп A-7-6)
{ щ , если a* <; U.
Величины ht и at в A.7.6) вычисляются по формулам A.7.3),
A.7.4) с н,_1 = иЙ1, Ui = щ, Mj+i = «Гц. Итерации на
фиксированной сетке, т. е. при фиксированном Ах, продолжаются до
тех пор, пока не будет выполнено условие
max hi < e, (i = 0, ..., TV). A.7.7)
По выполнении условий A.7.7) величина Ах дробится, и итерации
продолжаются аналогично на измельченной сетке. Решение
заканчивается, если величина Ах мала и выполнено неравенство
е<С As. Из A.7.3), A.7.4), A.7.7) нетрудно видеть, что для
полученного решения разностные уравнения Эйлера удовлетворяются
с погрешностью е/(АхJ. Заметим, что описанная схема
аналогична релаксационным конечно-разностным методам [21], но, в
отличие от пих, она использует не аппроксимацию уравнения, а
аппроксимацию минимизируемого функционала.
Описанный выше алгоритм легко обобщается на случай
ограничений A.1.2), A.1.9). Пусть при решении задачи A.1.6), A.1.8),
A.1.9) по алгоритму A.7.6) в некоторой точке х = xt получаем
Щ + hi ^> щ или щн —ht < щ . Тогда в качестве нового
значения для ut в п + 1-м приближении соответственно берем иГ+1 =
«= ut и к™+1 = иГ> т. е. осуществляем вариацию решения в этой
Решение вариационных задач 39
точке с максимально возможным шагом ht — ut — и™, hi =
= Kt — ш. Правомерность этой операции является следствием
монотонного убывания А/ при изменении h от 0 до значения /г,-,
определяемого формулой A.7.3). Таким образом, формула
последовательных приближений в задаче A.1.6), A.1.8), A.1.9) примет вид
и"^«Г + К, если щ <; и" + К <; ut и аг ^> 0; м", если 3j ^ 0,
u?~*=ut, если wf-f^^ui1" и 5{>0;мГ, е°ли иГ-г/^<иГ и <з{>0.
A.7.8)
Для вариационных задач с неаддитивным функционалом
A.5.5), A.5.4) величина шага варьирования ht выбирается
из условия минимума F (ht). He вдаваясь здесь в подробности
вычислений, которые проводятся аналогично описанному выше
случаю, вместо A.7.3), A.7.4), приведем формулы, определяющие
величину шага ht:
h = — 2л TTHk'
г (с=1 (с
s
В остальном описанный алгоритм остается неизменным.
Отметим, что схемы с переменными шагами варьирования,
основанные на минимизации приращения Д/, могут применяться и
к решению вариационных задач с частными производными вида
A.4.1) — A.4.4), и их обобщениями на случай функционалов
более общего вида (§ 5—6).
При решении вариационных задач с векторной искомой
функцией и описанную схему можно применять при варьировании по
каждому из компонентов вектора и.
В заключение заметим, что разобранная выше схема метода
решения основана на приближенной формуле A.7.2), поэтому из-за
погрешности этой формулы, вообще говоря, может не происходить
Метод локальных вариаций
40
мопотонного убывания функционала от итерации к итерации
(функционал может иногда незначительно возрастать). В этом
случае следует перейти на алгоритм с малым постоянным h.
§ 8. Примеры
В качестве иллюстрации приведем результаты численного решения
на ЭВМ ряда вариационных задач по методу локальных вариаций.
Решение получено с помощью программ, реализующих алгоритм
метода, описанный в §§ 1—6, для указанных классов задач.
Пример 1 взят из работы [47], примеры 2—4— из работы [12], примеры
5—7 — из работы [11].
1. Устойчивые формы упругого стержня. Рассматривается
известная (см. например, [77]) задача об определении устойчивой
формы равновесия упругого стержня. Пусть нижний конец
стержня единичной длины защемлен, к верхнему приложена постоянная
сила, направленная вертикально вниз. Потенциальная энергия
деформированного стержня с точностью до размерного множителя
может быть занисана в виде
J=\ -г(^Т + РсоН^ d-8.1)
о
Здесь ds — элемент длины дуги стержня; ф — угол между
касательной к стержню и вертикальной осью у, Р — безразмерная
величина силы (см. фиг. 1.6).
Определение устойчивой формы равновесия сводится к
нахождению функции ф (s), О ^ s^ 1, удовлетворяющей условию
защемления ф @) = 0 и доставляющей минимум функционалу
A.8.1). Форма стержня определяется по функции ф (s) в
параметрическом виде формулами:
х (.у) — ^ sin ф (s) ds; у (s) = j cos ф (s) ds, 0 ^ s ^ 1. A.8.2)
о о
Сформулированная вариационная задача имеет точное решение
в эллиптических функциях [77]. При Р ^ я2/4 минимум
интеграла A.8.1) достигается при ф = 0, т. е. стержень занимает
вертикальное положение (ж = 0), Если же Р ^> я2/4, то в устойчивом
положении равновесия стержень имеет изогнутую форму (форма
Ф — 0 неустойчива).
Данная задача является частным случаем задачи A.1.1) A.1.2).
Здесь s — аргумент, ф — искомая функция, на которую
наложено одно ограничение ф @) =0.
Решение вариационных задач
41
Задача решалась численно по схеме, изложенной в § 5. В
качестве начального приближения задавалась функция ф = s,
т. е. стержень изогнут по дуге единичного радиуса. Число
отрезков N, на которые разбивался интервал [0, 1] изменения
аргумента s, увеличивалось (путем удвоения) от 4 до 512. При каждом
значении N шаг h варьирования по координате ф уменьшался до
20, а при N = 512 — до 2*. При каждых фиксированных N и
h итерации продолжались до полной сходимости. Расчеты
проводились для Р = 1 и Р = 20. Значения функционалов,
полученные после полной сходимости итераций при некоторых N и А,,
приведены в табл. 1.1 (первый столбец таблицы соответствует
начальному приближению).
Таблица 1.1
JP = 1
N
h
J
п
—
1.3415
1
4
г-3
1.1761
2
4
2-4
1.0685
3
4
2-5
1.0170
4
4
2-е
1.0042
5
4
2-8
1.0002
6
8
2-ю
1.0000
7
Р = 20
16
2-ю
-2.082
12
512
2-ы
—2.120
13
N
h
J
п
—
17.33
1
4
2-2
—2459
8
4
2-ю
—1.520
9
8
2-3
-т1.941
10
8
2-ю
—1.965
И
Число п в табл. 1.1 указывает номер соответствующей кривой
на фиг. 1.7, где изображены формы стержня, полученные по
формулам A.8.2). Кривая 1 на фиг. 1.7 изображает начальное
приближение.
Итерации сходятся к точному решению как по функционалу,
так и по форме стержня. Для случая Р = 1 это очевидно. При
Р = 20 точному решению, как легко определить при помощи
формул, данных в [77], соответствуют координаты свободного конца
стержня х A) = 0.4470, у A) = — 0.5509.
Соответствующие значения для полученного численного
решения равны х A) = 0.4456, у A) = — 0.5490. Как видно из табл.
1.1 и фиг. 1.7, характер сходимости итераций для Р — 1 и Р — 20
различен. В случае Р — 1 практически точное решение получает-
Метод локальных вариаций
42
ся уже при N = 4, в то время как
для Р = 20 потребовалось
многократное удвоение N. Отметим, что
применяемый метод решения позволяет
находить именно устойчивые формы
равновесия, соответствующие
минимуму потенциальной энергии
системы.
Приведем теперь результаты
численного решения на ЭВМ по
алгоритму § 5 некоторых одномерных
неаддитивных вариационных задач
вида A.5.1)—A.5.5). В начале
решения этих задач число интервалов N
и шаг варьирования h имели
значения N0 = 20, k0 — 0.1. В процессе
решения при каждых
фиксированных N, h итерации всегда
проводились до полной сходимости, т. е. до
тех пор, пока значения й во всех
точках не переставали меняться. После
этого либо уменьшался шаг h (если
он не достиг заданной малой
величины 1г% ~ 10~6), либо увеличивалось
число N (если оно пе достигло
заданного значения N^ = 80), после чего
шаг h снова пачипал уменьшаться
от начального значения h0.
Уменьшалось h половинным делением, а
N увеличивалось удвоепием.
Итерации оканчивались после полной
сходимости при заданных N = N% и
h — h.%.
2. Задача на собственные
значения. Рассмотрим задачу об
определении на отрезке [0,1] функции и (х),
удовлетворяющей однородным
граничным условиям, а также условию
нормировки в середине интервала
в @) - в A) = 0, и @.5) = 1 A.8.3)
и минимизирующей функционал
1 1
Л
/2
ЩЩ^' A.8.4,
Решение вариационных задач
43
Задача A.8.3), A.8.4) эквивалентна отысканию наименьшего
собственного значения X и соответствующей собственной функции
краевой задачи с условиями A.8.3) для уравнения d2u/dx2 + Ки =
= 0, причем % = J.
Начальное приближение задавалось в виде и — 0 при xh Ф
Ф 0,5, и = 1 при xh = 0.5, к = 0, 1, ..., N. Сходимость метода
иллюстрируется табл. 1.2,
Таблица 1.2
N
h
J
20
0.1
11.241
20
1.977-Ю-4
9.910
40
0.1
9.895
40
1.977 -10-*
9.879
80
0.1
9.876
80
0.305-КГ5
9.872
где приведены значения функционала J для решений, полученных
после подпой сходимости итераций при некоторых N и h.
Начальному приближению отвечает значение / — 1600. Из
табл. 1.2 видно, что численное решепие уже при небольших N
сходится к точному решению по функционалу (для точного
решения / = я2 = 9.8696). В табл. 1.3 даны при различных значениях
аргумента точное решение и = sin лх и численное решение и (х),
полученное после сходимости итераций при N — 80, h ~ 10_6.
Численное решение, полученное по методу локальных вариаций,
отличается от точного не более чем на 0,1 %.
Таблица 1.3
(
sin nt
u(t)
0
0
0
0.1
0.3090
0.3087
0.2
0.5878
0.5876
0.3
0,8090
0.8088
0.4
0.9511
0.9509
0.5
1
1
3. Другой пример задачи иа собственные значения.
Рассмотрим еще один пример задачи на собственные значения. Требуется
найти функцию и (х), заданную на отрезке [0, 1],
удовлетворяющую граничному условию
и A) = 0
A.8.5)
Метод локальных вариации
и доставляющую минимум функционалу
о о
при условии нормировки
и A/2) - 1. A.8.7)
Точное решение сформулированной задачи A.8.5)—A.8.7) имеет
вид:
и (х) - Л {\ilX)IJ @.5цх); / = ц? = 14.682. A.8.8)
где/i — функция Бесс ля первого рода, a Uj — ее первый
положительный корень. Начальное приближение в данной задаче
задавалось то же, что и в примере 2, но здесь значение функции и
в граничной точке ж=0не фиксировано в процессе решения.
Решение, полученное после полной сходимости итераций, оказалось
близким к точному решению A.8.8) с погрешностью того же
порядка, что и в примере 2. Значение функционала для численного реше-
пия равно / = 14.685, что также близко к точному значению
A.8.8).
4. Центр тяжести. Рассмотрим задачу о нахождении функции
и (х), определенной при 0 <Г х sgC 1, удовлетворяющей
ограничениям
0.5 (х + 1)< и < 2 - (х - 0.5J A.8.9)
и доставляющей минимум функционалу
1 1
/ = ( §xudx\ ttudxY1. A.8.10)
Задача A.8.9), A.8.10) — это задача об определении такой
фигуры, ограниченной прямыми и = 0, а: = 0, ж = 1 и графиком
функции и (х) при условиях A.8.9), центр тяжести которой лежит как
можно ближе к оси и. Функционал / — абсцисса центра тяжести
фигуры. Начальное приближение задавалось в виде и = 1,
причем для пего J — 0.5. После полной сходимости итераций получено
решение и (х), которое является разрывной функцией х;
функционал для него равен / = 0.4106. На фиг. 1.8 это решение показано
сплошной линией, а штрихом нанесены ограничения A.8.9) и
начальное приближение и = 1.
Перейдем к изложению результатов численного решения на
ЭВМ по алгоритму § 6 вариационных задач с частными производ
Решение вариационных задач
45
ными. Во всех этих задачах область D либо совпадает с квадратом
Q, определяемым неравенствами 0 ^ ж ^ 1, O^y^l, либо
содержится в нем. Принимается также в обозначениях § 4, 6, что х0=
= у0 = 0, т = /г, Ах = Ау = 1/п (ячейки квадратные). При
каждых фиксированных п, h итерации всегда проводились до полной
сходимости, т. е. до тех пор, пока значения иц во всех
внутренних точках переставали мепяться. После этого либо уменьшался
шаг h (если он не достиг заданной малой величины), либо
увеличивалось число интервалов п (если оно не достигло заданного
предельного значения), после чего шаг h снова начинал уменьшаться
от некоторого начального значения. Процесс итераций
оканчивался после полной сходимости при заданных достаточно
большом п и достаточно малом h.
5. Мембрана, стесненная ограничениями.
Рассматривается задача об определении в
квадрате Q функции и (х, у),
удовлетворяющей граничному условию и
ограничению:
и (х, 0) = и @, у) = и (х, 1) =
= иA,у) = 0, A.8 11)
и(х, у)<а в <?, а>0. A.8.12)
и минимизирующей функционал
J=-№[^№ + 4)--u]dxdy. A.8,13)
t
J
О
Фиг. 1.8
Поставленная задача эквивалентна задаче о прогибе
равномерно нагруженной квадратной мембраны, закрепленной по краю.
Условие A.8.12) означает ограничение деформации мембраны
жесткой плоской стенкой,параллельной контуру мембраны йот-
стоящей от него на расстоянии а. Функционал A.8.13) —есть
потенциальная энергия деформированной мембраны.
При отсутствии ограничения A.8.12) задача A.8.11), A.8.13)
эквивалентна задаче Дирихле для уравнения Пуассона д2и/дж2 +
+ д2к/дг/2 — — 1 с условием A.8.11). Решение этой задачи
легко получить методом Фурье. Суммируя численно полученные
ряды, нетрудно определить максимальный прогиб и функционал
A.8.13) в этом случае:
и @.5, 0.5) = а0 = 0.07367; / = /0 = - 0.01753. A.8.14)
Численное решение задачи A.8.11)—A.8.13) при различных а
проводилось по схеме § 6. Начальное приближение задавалось в
Метод Локальных вариаций
46
виде и = а/8. Число интервалов п изменялось удвоением от 8 до
32, а шаг варьирования h при каждом п уменьшался от 0.01а до
10"8. Сходимость метода иллюстрируется табл. 1.4.
В ней приведены значения функционала в случае отсутствия
ограничения A.8.12) для решений, полученных после полной
сходимости итераций при некоторых и, h. Первый столбец чисел
соответствует начальному приближению и = 0.01 (на границе и = 0).
Из табл. 1.4 видно, что численное решение уже при небольших п
Фиг. 1.9
Ц5 х
Фиг. 1.10
Ц5 X
сходится к точному решению по функционалу [см. A.8.14)].
Максимальный прогиб для численного решения после полной
сходимости составил и A/2, 1/2) — 0.07410, что также близко к точному
значению а0 из A.8.14).
Очевидно, что при а > а0 решение задачи A.8.11)—A.8.13) не
отличается от решения при отсутствии ограничения A.8.12).
Характерное решение для а <С а0 приведено на фиг. 1.9. Здесь
показаны сечения поверхности и (х, у), полученной после полной схо-
димостипри a—0.04,nnocKocTHMHy=const. Из фиг. 1.9 видно, что
решение и (х, у) в средней части квадрата Q выходит на ограничение
Таблица 1.4
п
h
—100./
1.441
8
1.6-10-»
1.738
5-10-s
1.740
16
1.6-10-3
1.750
5-Ю-5
1.752
32
4-10-*
1.753
6.1-Ю-9
1.7538
Решение вариационных задач
47
A.8.12). Поверхность и (х, у) симметрична относительно
плоскостей х = 1/2 и у = 1/2.
На фиг. 1.10 даны сечения поверхностей и (х, у) плоскостью
у = 1/2 для различных а. На фиг. 1.11 приведена зависимость
минимального значения функционала / от параметра а для
рассчитанных экстремалей. С увеличением а от 0 до а0 минимальное
значение функционала убывает от 0 до /0, а при а > а0 оно остается
равным /0.
Фиг. 1.11
0
0,01
I
1о
¦*
OJJ7
*\ав
а
6. Минимальная поверхность. Рассмотрим задачу об
отыскании функции и (х, у), определенной в квадрате Q,
удовлетворяющей граничным условиям (Ь — постоянная):
и (х, 0) = b A — х), и @, у) — Ъ A — у), и (х, 1) =
- и A, у) = 0, A.8.15)
и минимизирующей функционал (площадь поверхности)
J = llVi+ul + i^dxdy. A.8.16)
Q
Поставленная задача является задачей об определении
поверхности минимальной площади, проходящей через заданный
пространственный контур (задача Плато). Она эквивалентна задаче
Дирихле с краевыми условиями A.8.15) для нелинейного уравнения
минимальных поверхностей A + иу) ихх — 2ихиуиху + A +
+ ul) йуу = 0.
Численное решение задачи проводилось по схеме § 6 для
значений параметра Ъ = 1, 2, 3, 4, 5. Начальное приближение для
Метод локальных вариаций
48
внутренних точек задавалось в виде bsO, число га изменялось от
3 до 24, а шаг h уменьшался от Ю-2 до Ю-6. Некоторые данные о
сходимости приведены в табл. 1.5, где указаны значения
функционала /, полученные после полной сходимости итераций при
некоторых га, h для вариантов с Ь = 1, 2, 3. Первый столбец чисел
соответствует начальному приближению.
На фиг. 1.12 показаны сечения поверхностей и (х, у),
полученных в результате сходимости итераций, плоскостями у = 0, 1/6,
1/3, 1/2, 2/3, 5/6, причем меньшим значениям у отвечают кривые,
Фиг. 1.1
расположенные выше. Первые три графика фиг. 1.12
соответствуют вариантам с Ь = 1, 3, 5.
Заметим, что если функция и и ее производные достаточно
малы, то уравнение минимальных поверхностей можно
линеаризовать, после чего оно перейдет в уравнение Лапласа д2и/дх2 -|-
+ дЧ1дуъ = 0.
Таблица 1.5
п
h
6 = 1
6 = 2
Ъ =3
3
1.35
2.75
4.21
6
Ю-2
1.27523
2.48430
3.84013
4.10-е
1.27514
2.48422
3.84005
12
4-Ю-2
1.27511
2.48415
3.84002
4-10-е
1.27502
2.48400
3.83998
24
Ю-2
1.27499
2.48393
3.83987
4.10-е
1.27476
2.48375
3.83975
Решение вариационных задач
49
Решение задачи Дирихле с граничными условиями A.8.15) для
уравнения Лапласа имеет вид и = Ь A — х) A — у).
Сечения этой поверхности плоскостями у = const — суть
прямые линии. Из фиг. 1.12 видно, что если 6 достаточно мало F = 1,
первый график фиг. 1.12), то минимальная поверхность мало
отличается от решения уравнения Лапласа. Для 6 = 3, 5 становится
заметной нелинейность, которая возрастает с увеличением 6.
Задача минимизации функционала
/ = $JKl+i4 + uJ dxdy
п
решалась и для более сложной L-образной области D (квадрата Q
с выброшенной четвертью, определяемой неравенствами 0 ^ х ^
< 1 при 0 < у <; 1/2, 0 < х < 1/2 при 1/2 < у < 1). Функция
и {х, у) подчинялась граничным условиям: и (х, 0) = 5 A — х),
и @, у) = 5 A — у), а на остальной части граничного контура
принималось и = 0.
Начальное приближение для внутренних точек задавалось в
виде и = 0. Число п изменялось от 4 до 32, а /г — от 10~2 до 10 *.
В этой задаче сходимость также была достаточно быстрой. На
четвертом (правом) графике фиг. 1.12 представлены сечения
минимальной поверхности и (х, у), полученной после сходимости
итераций, плоскостями у ~ 0, 1/4, 1/2, 3/4. Меньшим значениям у
отвечают кривые, расположенные на графике выше.
7. Задача теплопроводности. Стационарное распределение
температуры в неоднородной среде описывается уравнением
д (рих)/дх + д {риуIду = 0. A.8.17)
Здесь и (х, у) — искомая функция (температура), р (х, у) —
заданный переменный коэффициент теплопроводности, который
может быть и разрывной функцией х, у. Если на границе С области
D задана температура и (условие Дирихле), то краевая задача
для уравнения A.8.17) об определении функции и (х, у) в D
эквивалентна вариационной задаче о минимизации функционала:
/ = J J p (х, у) {и\ + u2v)]dxdy (I 8.18)
D
при заданных граничных условиях.
Задача об отыскании функции и (х, у), доставляющей минимум
функционалу A.8.18), решалась численно для области в виде
единичного квадрата Q при граничных условиях: и @, у) ¦-— 2у,
0<г/<1/2; и @, у) - 2 A - у), 1/2 < у < 1; и (х, 0) =
= и {х, 1) -= и A, у) = 0.
Метод локальных вариаций
50
Функция р (ж, у) в двух вариантах расчетов принималась
разрывной и равной: а) р = 1 при х < 1/2, р — 2 при х > 1/2;
б) /> = 2 при я < 1/2, р = 1 при ж > 1/2. Сходимость итераций
проходила аналогично примерам 5, 6. Полученные решения
удовлетворяют условию непрерывности величины (рих) па прямой
х = 1/2, где терпит разрыв функция р (х, у). Это условие
физически означает непрерывность потока тепла на границе двух сред.
Решение симметрично относительно прямой у= 1/2. На фиг. 1.13
представлены сечения поверхностей и (х, у), полученных в
результате решения, плоскостью у = 1/2. Случаю
«а» соответствует нижняя, а случаю «б» —
верхняя кривая фиг. 1.13. На фиг. 1.13
видны изломы функции и,
удовлетворяющие условию непрерывности величины
(рих).
8. Электрические поля в неоднородных
средах. Некоторые «прямые» задачи
электроразведки [4, 90] сводятся к
определению потенциала электрического поля при
заданном распределении
электропроводности среды и источников тока. Потенциал
и (г, z) стационарного электрического
поля в неоднородной сплошной среде удовлетворяет уравнению
д
дг
ди
dz
dz
+ т-(-?-1-о.
A.8.19)
которое записано в цилиндрической системе координат г, гг, z в
предположении, что функция проводимости а обладает осевой
симметрией, среда заполняет все пространство, а точечный
источник расположен в начале координат. В рассматриваемых ниже
примерах проводимость а при г <^ г0 предполагалась
постоянной и равной о* = а0, где о*0, г0 — заданные константы. Для
однородной среды (/•„ — оо) уравнение A.8.19) переходит в
уравнение Лапласа, решение которого соответствует точечному
источнику тока i и имеет вид: и = и0 (г, z) — i/ina0 (r2 + z2)°>5,
j=const.
В случае конечных г0 < оо потенциал и (г, z) можно
представить в виде и (г, z) = и0 (г, z) + v (r, z), где v (r, z) —функция,
ограниченная в нуле и регулярная на бесконечности. С
использованием указанного представления в дипломной раборе Р. А.
Ведерникова (Московский физико-технический институт, 1970 г.)
сформулирована вариационная задача для определения функции
v (r, z), которая после приближенной замены бесконечной
области г > 0, z ;> 0 на область D {0 ^ г *s^ R, 0^z^2} сводится
Решение вариационных задач
51
к минимизации функционала
x{r-7T + !1TS-)}rdrd* f1-8-20»
на классе функций, удовлетворяющих краевому условию:
и = 0 при /• =-- Л, 0<z<Zhz=Z, 0 < r < Д. A.8.21)
Условия на других участках границы области: dvldr = 0 при г =
= 0, 0 <; z <^ Z, dvldz — 0 при z =^ О, O^r^i? являются
«естественными» для функционала A.8.20) и не накладываются
заранее на класс функций и, среди которых ищется минималь задачи
A.8.20), A.8.21).
Основной искомой характеристикой в рассматриваемой задаче
является кажущееся сопротивление среды рк, определяемое
формулой
Р ft = р о + 4я | z | v @, z)li, Po=з-1. A.8.22)
Вариационная задача A.8.20), A.8.21) решалась по методу
локальных вариаций, причем для расчетов отдельных вариантов
использовались как алгоритм метода, приведенный в § 6, так и схема
с переменными шагами, описанная для случая одной независимой
переменной в § 7. Разбиение области осуществлялось переменной
сеткой с прямоугольными ячейками, размеры которых
задавались в виде: (Ar)j — (Дг)^^;— (Дг), — (Дг),.^, / — 1, ..., т,
1 = 1, ..., п. Параметры (ДгH, (ДгH, du d2, m, n выбирались в
соответствии с размерами области D, т. е. величинами R, Z.
Расчеты проводились в безразмерных переменных г' = r/r0, z' = zlr0,
v' = 4no0r0v/i, а' = о7о*0 (штрих у безразмерных величин далее
опускаем) для сред с различными распределениями
электрической проводимости. Приведем ниже некоторые из задач, решение
которых методом локальных вариаций получено в упомянутой
дипломной работе.
Для среды с электропроводностью а = а0 = 1 при г<1 и
а = 0.1 при г ^> 1 расчеты проводились по алгоритму,
описанному в § 6. Шаг варьирования h уменьшался последовательным
делением на четыре от своего начального значения h <^ 10~2 до тех пор,
пока не выполнялось неравенство h <^ 10-4. При фиксированном h
итерации проводилось до полной сходимости. Параметры сетки
полагались равными: (ДгH = 0.7, (ДгH — 0.2, dx = 1.15; d2 =
= 1.1, то = п = 26. Для полученпого в результате расчетов
решения vtj по формуле A.8.22) (записанной в безразмерных
переменных) определялось кажущееся сопротивление pft, представлен-
Метод локальных вариации
52
ное кривой 1 на фиг. 1.14. Полученные результаты находятся в
соответствии с данными работы [4].
Расчет другого варианта, когда а — сг0 = 1 при г <С 1 и а =
= 0.1 при г^>гг = 3.36, а на участке 1 < г < гх
электропроводность убывает по линейпому закону от а = 1 при г = 1 до с =
= 0.1 при /• = ги проводился по алгоритму с переменным шагом
варьирования, представляющему собой непосредственное
обобщение алгоритма § 7 па случай двух независимых переменных.
Параметры сетки полагались равными т — п = 32, а значения пара-
к
JZ
10
В
6
4
^ _ . . _ _ _
Фиг. 1.14
4 6 в /О 20 40 ВО ВО 100
метров (AzH, (АгH, с?15 с?2 оставались прежними. Решение
заканчивалось, когда на некоторой итерации шаги варьирования htj
для всех узловых точек, в которых ищется решение vtj, не
превышали величины h* = 10"*, т. е. кц <^ /ц. Рассчитанная
зависимость р h показана на фиг. 1.14 кривой 2.
§ 9. О приложениях метода к задачам математической физики
и другим краевым задачам
Общие замечания. С помощью рассмотренного метода можно
решать как классические линейные задачи эллиптического типа,
так и нелинейные задачи, допускающие вариационную
формулировку. Метод позволяет легко учитывать ограничения па искомые
функции, произвольность формы области и другие усложнения.
Заметим, что задачи с ограничениями типа неравенств на
искомые функции нередко возникает, в частности, в механике сплошных
сред. Подобный пример был приведен в § 8 (пример 5). Как будет
показано далее, контактные задачи теории упругости и
пластичности также приводят к таким ограничениям: па поверхности кон-
Решение вариационных задач
53
такта двух сред смещения точек этих сред ограничены
неравенствами, выражающими факт невозможности проникновения одной
среды внутрь другой.
Конечно, многие из рассматриваемых задач могут быть
успешно решены и другими методами. Вариационные задачи с
квадратичным функционалом эффективно решаются при помощи
классических вариационных методов [58, 59]. Быстрый прогресс
конечно-разностных методов сделал их универсальным и экономным
способом решения задач математической физики [18, 21, 26, 80,
99]. Наконец, методы нелинейного программирования [33, 98]
применимы и к решению ряда вариационных задач.
Положительными чертами метода локальных вариаций
являются, на наш взгляд, его сравнительная простота и возможность
единым способом (по одной стандартной программе) решать
довольно широкий круг вариационных задач с ограничениями типа
неравенств на искомые функции. При этом не требуется сводить
вариационную задачу к краевой, что иногда нежелательно,
например, при наличии упомянутых выше ограничений, так как при
этом необходимо было бы сшивать решения двух типов на
неизвестных границах, на которых решение выходит на эти ограничения
(см. пример 5, § 8). Метод практически не накладывает
ограничений на форму области, и здесь не возникает известных трудностей
выбора системы координатных функций.
Для линейных краевых задач эллиптического типа без
ограничений типа неравенств на искомые функции можно утверждать,
что метод локальных вариаций будет менее экономичным в смысле
времени счета, чем современные конечно-разностные или
вариационные методы.
Стационарные задачи теплопроводности. Задача о
стационарном распределении температуры в теплопроводящей среде
сводится к решению краевой задачи для уравнения
div (к grad Т) + g = 0. A.9.1)
Здесь Т (х, у) — температура как функция координат х, у
(для определенности рассматриваем двумерную задачу), к —
коэффициент теплопроводности, g — количество тепла, выделяемое
в единице площади за счет внутренних источников тепла.
Величины к, g — суть заданные функции от Т, х, у, т. е. к •= к (Т, х,
у)' S = S (Г, х, у). На границах области D, в которой имеет
место уравнение A.9.1), зададим граничные условия:
дТ/дп + А (Т, х, у) = 0, (х, у) 6С„ Т= U (х, у),
(i,j)ec„ c = d + ct. A.9.2)
Здесь Си С2 — две части контура С, ограничивающего область
D,fi, /г — заданные функции, п — внутренняя нормаль к контуру
Метод локальных вариаций
54
С. Условие A.9.2) на Сг выражает закон теплоотдачи: тепловой
поток кдТ/дп на границе может быть некоторой заданной
функцией от точки границы и от температуры. Условие A.9.2) на контуре
Сг задает температуру в некоторых точках границы. Нелинейная
краевая задача A.9.1), A.9.2) включает (как частный случай)
обычные задачи линейной теплопроводности. Сделаем в A.9.1),
A.9.2) замену искомой функции по формуле
т
и=$ k(T1,x,y)dT1, A.9.3)
То
где и — новая искомая функция, Т0 — произвольная постоянная.
Так как к ^> 0, то зависимость и от Г в A.9.3) взаимно однозначна
при любых х, у. После замены A.9.3) краевая задача A.9.1), A.9.2)
примет вид:
Ди + gj. (и, х, у) = 0, в D; ди/дп + /3 (и, х, у) = О,
(х, у) е d; и = U (х, у), (х, у)еСг. A.9.4)
Здесь А — оператор Лапласа, gt, /3, ft — функции, полученные
после замены A.9.3) в A.9.1), A.9.2). Краевая задача A.9.4)
представляет собой необходимые условия экстремума для
вариационной задачи о минимуме функционала:
J = \ \[— ferad uf + G К х, У)\ dxdV +\F (">х' У) ^ A.9 5)
D С,
и и
G (и, x,y)^—)g1 (ии х, у) duu\F (и, х,у) = — $ /з К, х, у) dux
при условии
и = /4 (х, у), (х, у) е Сг. A.9.6)
Здесь и0 — произвольная постоянная.
Для доказательства вычислим первую вариацию функционала
/ согласно известным [25, 51] формулам вариационного
исчисления:
6/ = S S (-^г - Аи)8udxdy + §[^r - -1т] ш$-
D С
Здесь би — вариация функции и. Чтобы вариация б/ равнялась
нулю при любой функции бм, удовлетворяющей условию бм = О
на С2, следующему из A.9.6), необходимо и достаточно:
dG/du --= Аи в D; dFidu = ди/дп на С,,. A.9.7)
Решение вариационных задач
55
Условия A.9.7) с учетом обозначений A.9.5) и условия A.9.6)
эквивалентны соотношениям A.9.4). Условие A.9.4) на части
границы Сх является естественным для функционала A.9.5).
Следовательно, вариационная задача A.9.5), A.9.6) эквивалентна (в
случае существования у нее единственного решения) краевой задаче
A.9.4К Поэтому решение стационарной задачи теплопроводности
вида A.9.1), A.9.2) или A.9.4) с произвольными нелинейностями
в уравнении и краевых условиях сводится к решению
вариационной задачи A.9.5), A.9.6). Для решения последней задачи
непосредственно применим метод локальных вариаций в форме,
описанной в § 4 и 6. Пример решения подобной задачи был дан в § 8
(пример 7). Некоторые задачи стационарного распределения
температуры решались методом локальных вариаций в работе [2].
Нестационарные задачи. Пусть требуется решить уравнение
duldt = L (и) A.9.8)
с начальным условием
и (t0) = и0 A.9.9)
и некоторыми краевыми условиями. Здесь t — время; и —
скалярная или векторная функция времени t и пространственных
координат, число которых может быть различно и которые
принимают значения из некоторой области D; L — дифференциальный
оператор, содержащий производные только по пространственным
переменным; и0 — заданная в D функция пространственных
переменных; t0 — начальный момент времени. На границах
области D заданы некоторые краевые условия.
Воспользуемся простейшей неявной разностной схемой [18]
по времени с шагом т и запишем уравнение A.9.8) в виде
(и" - и')/т = L (и"). A.9.10)
Здесь и" — значение функции и при некотором t; и' — ее значение
при t — т, которое можно считать известным (предыдущий слой).
Расчет функции и в момент t сводится к решению стационарной
задачи A.9.10) в области D для функции и", зависящей только от
пространственных переменных, при соответствующих краевых
условиях на границе области D. Краевая задача для уравнения
A.9.10) часто может быть сведена к вариационной, и тогда ее
можно решать по методу локальных вариаций. Таким образом
получаем неявную схему расчета, в которой на каждом слое по
времени должна решаться вариационная задача.
В качестве примера рассмотрим нестационарную задачу
нелинейной теплопроводности для уравнения
дЕШ = div (к grad T) + g A.9.11)
Метод локальных вариаций
56
с начальным условием
Т (х, у, t0) = T0 (х, у). A.9.12)
Здесь Е (Т, х, у, t) — заданная функция, характеризующая
внутреннюю энергию среды; Т0 (х, у) — заданное начальное
распределение температуры Т (х, у, t); остальные обозначения — те же,
что и в A.9.1). Краевые условия возьмем в виде A.9.2), причем
функции /х, /2, к, g могут зависеть также от t. После замены
A.9.3) соотношения A.9.2), A.9.11), A.9.12) примут вид:
0ф («, х, у, t) /dt = Аи + gx (и, х, у, t) в D;
A.9.13)
" (#, У, t0) = Щ (х, у); ди/дп + /3 (и, х, y,t) = 0 па Сц
u = h (x, у, t) на С2,
где ф, gu /3, Д, и0 — заданные функции. После применения
неявной по t схемы с шагом т, согласно A.9.10), получим из A.9.13)!
[ф (и", х, y,t)-q> (и' ,x,y,t — т)] /т = An" + gt (и", х, у, I),
A.9.14)
"" (*> У) = и (х, у, t); и' (х, у) = и (х, у, t — т),
причем и' — заданная в D функция, и" — искомая в D функция,
удовлетворяющая краевым условиям A.9.13). Составляя
аналогично A.9.5) функционал, придем к вариационной задаче для
функции и" с функционалом
/, = jjj Г-L (grad u"f + Gt (u%x, у, t)] dxdy + jj Fx (и", х, у, t) ds,
D L C,
A.9.15)
где обозначено:
и
n 1 ., ГГ / ,ч , Ф (Ui,X,y,t) — ф (u'tx,y),X,1/,t—Т)~|,
G (и, х, у, t) = j[— ft («i, *, У, t) + — \ fun
A.9.16)
Fx (u, x, y, t) = — $ f3 (ulf x, y, t) dut.
В каждый момент времени t = t0 + т, t0 + 2т и т. д. для
определения функции и (х, у, t) — и" нужно найти минимум по
и" (х, у) функционала A.9.15), A.9.16) при условии
и' = h (*, У, t) на Сг A.9.17)
Решение вариационных задач
57
и при известной с предыдущего слоя функции и' (х, у). Тем самым
решепие нестационарной задачи сводится к решению
последовательности вариационных задач. Так как применяется неявная
схема, то шаг т может быть взят достаточно большим.
Аналогично можно рассматривать нестационарные задачи о
колебаниях сплошных сред, описываемых уравнениями вида
d2u/dt2 = Lu A.9.18)
с начальными условиями:
и (t0) = и0, ди (t0)/dt = и1 A.9.19)
и некоторыми краевыми условиями. Здесь через L снова обозначен
дифференциальный оператор по пространственным координатам,
которые изменяются в области/), а через и0, и1 обозначены
заданные в D функции.
Применяя к задаче A.9.18), A.9.19) известный прием,
заключающийся во введении дополнительной искомой функции v =
= duldt, получим новую задачу для системы уравнений duldt = v,
dvldt = Lu с начальными условиями и (t0) = и0, v (t0) = и1,
которая аналогична задаче A.9.8), A.9.9). Подобное сведение может
быть выполнено и для других нестационарных задач с высшими
производными по t.
О решении краевых задач. Как известно, краевые задачи
можно формально сводить к вариационным задачам при помощи
следующего приема. Пусть нужно решить уравнение
Lu = 0, A.9.20)
где L — некоторый дифференциальный оператор (содержащий
обыкновенные или частные производные); и — искомая функция
(скалярная или векторная) одной или нескольких переменных.
Пусть уравнение A.9.20) должно быть удовлетворено в некоторой
области D, на границах которой поставлены некоторые краевые
условия. Вместо решепия уравнения A.9.20) рассмотрим задачу
минимизации функционала (интеграл берется по всей области D)
/ = j (LuJ dx -> min A.9.21)
D
при соответствующих краевых условиях. Ясно, что решение
уравнения A.9.20) эквивалентно нахождению нулевого (абсолютного)
минимума интеграла A.9.21) (при одних и тех же краевых
условиях). Для решения задачи минимизации функционала A.9.20)
можпо применить различные методы, в частности метод
локальных вариаций [3J.
Метод локальных вариаций
58
Вид функционала A.9.21) можно изменять в широких пределах;
важно лишь, чтобы он достигал абсолютного минимума при
выполнении условия A.9.20).
В § 5—6 описан алгоритм метода локальных вариаций
применительно к вариационным задачам общего типа. Для этих типов
задач составлены и стандартные программы, реализующие
алгоритмы § 5 и 6 и приведенные в главах 8, 9. Следует, конечно, иметь
в виду, что для столь общих типов задач нельзя, утверж-
жать сходимость метода локальных вариаций. Доказать
сходимость удается лишь при значительно более узких предположениях.
Поэтому при решении конкретных задач приходится
использовать различные косвенные проверки сходимости, а также
применять дополнительные приемы. Некоторые приемы будут указаны
при описании решения конкретных задач.
ГЛАВА 2 • ВОПРОСЫ СХОДИМОСТИ МЕТОДА ЛОКАЛЬНЫХ
ВАРИАЦИЙ
§ 1. Исследование необходимых условий экстремума
Исследование сходимости решения, получаемого по методу
локальных вариаций, к точной экстремали вариационной задачи,
начнем с проверки для указанного решения необходимых условий
экстремума — уравнений Эйлера и условий трансверсальности.
Рассмотрим сначала одномерную вариационную задачу о
минимуме интегрального функционала
ь
J = \f(x,u,ux)dx B.1.1)
а
при краевых условиях па искомую функцию
и(а) = А, и(Ь) = В, B.1.2)
и ее конечно-разностный аналог о минимизации выражения
JV-1
/= %f(xi,u;,(ux)l)Ax, B.1.3)
i=0
u0 = A, uN = В, B.1.4)
Вопросы сходимости
59
где
х* = х4 + Ах/2, ц* = (щ + wi+1) /2, (их)* = (и{+1 — щ) /Ах;
х4 = а + ?Ах, Ах = (Ь — a) /N, и (х{) = щ.
Пусть совокупность ui с i — \, ..., N — 1 представляет собой
приближенное решение задачи о минимуме / из B.1.3) при
условиях B.1.4), полученное методом локальных вариаций после
полной сходимости при фиксированных Ах и h. Тогда тот факт, что
локальные вариации в любой внутренней точке xt — at -\- iAx,
i = 1, ..., N — 1 уже не приводят к уменьшению функционала
J tszI, можно, с учетом обозначений A.1.11), записать в виде:
Ф* < Ф?; Ф> <фГ' i = 1, ..., N -1, или подробнее
/ (х^, иЦ + ft/2, (ux)ti ± h/ Ax) + f (xl, щ ± h/2, (их)* + h/ Ax) >
> / (х'и щ-и (u*)!-i) + / (х,*, щ, (ux)*). B.1.5)
Разлагая выражения левой части неравенства B.1.5) в ряд
Тейлора по А и выполняя элементарные преобразования, получим
± {O.bh w/du)U + (df/du)U - hi Ax \{dfidux)l - (а//а«я)Ц]} +
+0 [max (h\ A2/Ax, A2/ (AxJ)] > 0. B.1.6)
Здесь обозначение ( )i указывает, что в качестве аргументов
функции, стоящей в скобках, взяты соответственно Xi, щ, (ux)i. Так
как Ах — малая величина, то из неравенства B.1.6) вытекает
следующая оценка
| 0.5 №ldu)U + (df/du)*] - 1/Дх \{дЦдихI -
- {dfldux)U\ | <0 (hi (AxJ). B.1.7)
Правая часть неравенства B.1.7) стремится к нулю при h -*¦ 0,
а в левой части стоит конечно-разностная аппроксимация
уравнения Эйлера
dfldu — dldx (df/dux) = 0 B.1.8)
для функционала B.1.1). Таким образом полученное решение ut
при А —>¦ 0 удовлетворяет системе конечно-разностных уравнений.
Решение же этой системы при определенных условиях будет
близко к решению краевой задачи B.1.8), B.1.2), если величина Ах
достаточно мала. Поэтому, если экстремаль функционала B.1.1),
т. е. решение краевой задачи для уравнения Эйлера B.1.8) с
условием B.1.2), единственна и соответствует минимуму
функционала B.1.1), то численное решение будет близко к этой экстре-
Метод локальных вариаций
60
мали. Необходимо, конечно, чтобы итерации сошлись при
достаточно малых Да; и А, и А <^ (Да:J.
Исследуем теперь случай вариационной задачи B.1.1), B.1.2),
когда одно или оба краевых условия B.1.2) отсутствуют, т. е.
случай незакрепленных концов. Для определенности будем
считать свободным правый конец экстремали и (х). Тогда при
минимизации суммы B.1.3) следует подвергать варьированию и значение
Wjv функции и в граничной точке un = Ь. Изменение величины
Ujv приводит к изменению только одного слагаемого в сумме B.1.3),
соответствующего последнему интервалу разбиения [x^-i, xjvl-
Поэтому условие B.1.5) для точки х^ примет вид / (xjv_i>
Ыдг-1±А/2), (ы*)^-! ± А/Да:) > / (x*N^, uN_u (ux)n^). Откуда
после разложения левой части неравенства в ряд Тейлора
получаем | dfldux + dfldu Дх | ^ О [max (АДа;, А, А/Да:)].
Правая часть этого неравенства при таком Да; имеет порядок
А/Да;. Выражение, записанное в левой части, отличается от dfldux
на величину порядка Да:. Отсюда заключаем
| дЦдих |< О [ max (Да:, А/Да:)]. B.1.9)
Из B.1.9) вытекает, что при А -*- 0 решение, получаемое методом
локальных вариаций, удовлетворяет на правом конце условию
трансверсальности dfldux = 0 с погрешностью порядка величины
Да:. При Да; -*¦ 0, А/Да;2 -> 0 условие трансверсальности будет в
пределе выполнено точно.
Рассмотрим обобщение задачи B.1.1), B.1.2)г когда искомой
величиной является вектор-функция и (а;) = (и1 (х), ..., ип (х)).
Выписывая для этого случая условия окончания итераций по
каждому компоненту и1 при варьировании его с шагом Аь получим
систему неравенств типа B.1.5). Аналогичными выкладками из этих
неравенств можно получить систему из и конечно-разностных
уравнений, которые на решении, полученном данным методом,
удовлетворяются с некоторой погрешностью. Причем погрешность для
i-то уравнения получается порядка htl( Да:J. Отметим, что
полученные конечно-разностные уравнения будут разностными
аппроксимациями уравнений Эйлера df/ди1 —dldx (df/dux) = 0, i'. — 1, ...
..., п.
Рассмотрим теперь двумерную вариационную задачу о
минимуме неаддитивного функционала
/ = F (Л, /2, ...,/,) B.1.10)
при условии:
Ji = Ц /i (*•»» и> "Й-. Iff) йЫУ' * = 1, • • •. s; B.1.11)
и = 8{х,У), i*,V)^C. B.1.12)
Вопросы сходимости
61
Здесь и — скалярная функция двух независимых переменных х,
у, a D — область изменения этих переменных, ограниченная
контуром С. Для задачи B.1.10)—B.1.12) предварительно выведем
уравнение Эйлера. Наряду с функцией и (х, у) рассмотрим
функцию и (х, у) + би (х, у) (8и (х, у) = 0 на С) и вычислим
вариацию 8J функционала B.1.10), соответствующую вариации би.
Для этого, используя известные формулы [25, 51], связывающие
первые вариации интегралов S/j с вариацией 8и функции и,
&Ji = U^-i^-i^:)8udxdy <2Л13>
D х у
и разлагая функцию F в ряд по б/$ с удержанием только членов
первого порядка малости, получим
w-au«A-§[siiH?-±?-??)b*
Приравнивая затем б/ к нулю и учитывая произвольность
функции 8и (х, у), получаем необходимые условия экстремума
2 W~\dU~~l^~d^r~l^'dir)==:0- , B.1.14)
Производные dFldJt = Fji (Jt, ..., Js) вычислены при зпачепиях
функционалов Jx, ..., /s, соответствующих экстремали
вариационной задачи B.1.10)—B.1.12), поэтому B.1.14) есть интегрально-
дифференциальное уравнение. Из уравнения B.1.14) как частный
случай вытекают уравнения Эйлера для аддитивного интеграль-
иого функционала F = Jx. ^ --|-(|^) --|-(|JL.) = 0
dfjdu — д/дх (д^/дщ) — д/ду (dfjdiiy) = 0
и для функционалов вида F = /i/J2
an д ад a dk j/ dft d dft д a/g \0 x= —
du dx dux dy du 1 du dx dux dy du J ' J%'
возникающих в задачах на собственные значения и в изоперимет-
рических вариационных задачах с квадратичными функционалами.
Пусть utj — приближенное решение задачи B.1.10)—B.1.12),
полученное методом локальных вариаций (см. § 6 первой главы)
при фиксированных Ах, Ay, h Заметим, что при замене значения
иц функции и в одной внутренней точке Рц на и^ + h величины
Метод локальных вариаций
62
It A.6.7) получают приращения 81,, равные
2д^ 1Л <ч^ ^ i а»ж /^_х i эих )._1к [ эих ;Mi k_j
+0[max(h*,h2/8,h*/82)]. B.1.15)
Звездочками обозначены те же величины, что и в § 6 главы 1.
Через б обозначена длина меньшей стороны ячейки, т. е. б =
= min (Ax, Ау). Выражения B.1.15) для б/г получены аналогично
тому, как это делалось в случае одномерной задачи.
Так как из условия полной сходимости итераций при
фиксированных Ах, Ау следует, что вариации в точке Рц не приводят к
уменьшению функционала J, то
F (I, + 81ъ ...,/.+ б/,) -F(IU..., /,) > 0.
Разлагая далее функцию F в точке 1г, ..., Is в ряд Тейлора и
подставляя в эти разложения величины B.1.15), будем иметь
у jM_*_I7JM* ,AГ +(lhX +(HlY 1
dux/jk \dux'i,k-i \duxh-i,k \ dux /}-i. f-i-1
^_ [fity+f^y _(Af _№f 1)
h
2Дх
2A»
+o[m&x(h28\h\-^- ,-?)]>0
+
Выполняя в последнем неравенстве элементарные
преобразования и учитывая малость б, окончательно получим оценку
У 1L Ц. 17 AV 4- ЗТ 4- f АУ 4- Ш* 1 -
^J dJ. \ 4 L\ дм /,-й "Г" V Зи /,-t,fc ^ I Эй /,-,»_! "f" V du A-i.it-iJ
1=1 1
L_rfAy+fA.y _fiiy _№У 1_
~ W [\'d^ljk+ U?w_ \*%h.*-x~~ \*Zh-i. k-J)| <0 W'
B.1.16)
Вопросы сходимости
63
Величины dFldJi в B.1.16) следует рассматривать как
функционалы от искомой экстремали.
Таким образом показано, что решение Uij удовлетворяет ко-
нечно-разпостному аналогу интегрально-дифференциального
уравнения Эйлера B.1.16) с погрешностью порядка ft/62. Из
оценки B.1.16) вытекает, что при дроблении сетки (уменьшении
величины б) в качестве конечного значения шага варьирования h
следует выбирать величины более высокого порядка малости, чем
б2, т.е. h = О (б2) приб->0,
Для аддитивных вариационных задач с частными
производными этот результат был доказан в [11]. Для неаддитивного
функционала вида / = Ji/Ja соответствующая оценка получена в
работе [12].
Исследуем случай наличия в функционале высших производных.
Для простоты рассмотрим одномерную вариационную задачу,
содержащую производные второго порядка (см. § 5)
ь
J = y(x,u, их, uxx)dx-> min.
а
при краевых условиях:
и (а) = А0; их (а) = Аг; и (Ь) = В0; их (Ь) = Вг. B.1.18)
Для задачи B.1.17), B.1.18) примем следующую
конечно-разностную аппроксимацию (аналогично § 5):
2 1 X. А- X. , U. + U. , U. , — U. U. „ — U. , — Ц. + И. ,\
/ _!___1±1 г г+1 1+1 г г+2 i+l г ' г-1 ] д д.
'\ 2 ' 2 ' Дж ' 2Дж2 / '
г=0 ч
B.1.19)
и0 — А0, их = AQ + АгАх, uN — В0, Ujv-i = В0 — ВхАх, B.1.20)
где xt = a -\- iAx, ut — и (xt), Ах = (b — a)IN, i = 0, 1, ..., N.
Фигурирующие в B.1.19) величины и_г, и^+1 доопределим
согласно условиям B.1.18) экстраполяцией и_г = А0—АгАх,
uN+1 = В0 + ВгАх.
Здесь принята иная, чем в § 5 главы 1, аппроксимация интеграла
для граничных интервалов, учитывающая краевые условия
B.1.18). При изменении значения иц в одной точке Pi} здесь будут
изменяться четыре слагаемых в сумме B.1.19), а не два, как в
сумме B.1.3) для задачи B.1.1), B.1.2). Поэтому после полной
B.1.17)
Метод локальных вариации
и
сходимости итераций придем к следующему условию:
/ ( #i , Ui + -jj- , {Ux)i + ~д^Г i \uxx)i + 2 (ДжJ / ~"~ ' (Х'+1' Ui+1'
(ыхI+1) (мяж)-+1 + 2 (lx)i ) + / («I-i, "i-i ± \, Ю* ± -jj-,
(»яI-1 + -2д?г) + /(*Ь-«. "i-2, ("*)i-2, (UXX)U ± 2(L)«) ^ /?-
Здесь через i? обозначено выражение, стоящее в левой части
неравенства при значении h = 0, а через (u^i обозначена
аппроксимация второй производной, принятая в B.1.19). После
выполнения необходимых преобразований получим аналогично B.1.7)
WW*+("ftT/i-J ~ ^Ifei ~ TOi-J+
B.1.21)
Выражение, стоящее под знаком модуля в B.1.21),
аппроксимирует уравнение Эйлера для функционала B.1.17)
Л д ( df )\ d4df\- р.
ди дх \дих ) дхъ \дихх)
Из оценки B.1.21) следует, что для того чтобы найденное
решение ut удовлетворяло уравнению Эйлера, необходимо
устремить Ах ->• 0,h -*- 0 с соблюдением соотношения
/1 = о((ДжL).
Аналогично для функционалов, содержащих производные q-то
порядка, решение, полученное после полной сходимости метода
локальных вариаций (при фиксированных Ах, h), удовлетворяет
разностному аналогу уравнения Эйлера с погрешностью порядка
h/(Ax)*«.
Могут быть рассмотрены и более общие классы задач,
перечисленные в главе 1. Для всех случаев при отсутствии ограничений
на искомую функцию вида A.1.1), A.4.1), A.5.1), A.6.2) метод
локальных вариаций приводит после полной сходимости к решению,
удовлетворяющему приближенно конечно-разностному аналогу
уравнений Эйлера. Если же имеются ограничения на искомую
функцию вида и €= U, то аналогично доказывается, что решепие,
полученное после полной сходимости метода локальных вариаций,
будет удовлетворять приближенно конечно-разностному аналогу
уравнений Эйлера в тех точках, для которых полученное решение
и вместе со своей А-окрестностью лежит в области U, т. е. если
Войросы сходимости
65
в + А Е Р, и — h Ez U для случая скалярной функции и и
и, + ht Е= U, Ui — hi ЕЕ U, i — 1, ..., п для векторной функции
и. Погрешность удовлетворения конечно-разностных уравнений
Эйлера будет такой же, как в указанных выше случаях.
Во всех случаях необходимые условия экстремума
приближенно будут выполнены для решения, полученного после полной
сходимости метода.
§ 2. Сходимость метода локальных вариаций для задач с
квадратичным функционалом
Рассмотрим задачу о нахождении в области D с границей С
функции и (х, у), доставляющей минимум функционалу
J = §{P{i-J+ Q{-%rJ + ™ + 2Tu}dxdy B.2.1)
и удовлетворяющей граничному условию:
u = g(x,y); (x,y)(=C. B.2.2)
Р (я, у), Q (х, у), R (х, у), Т (х, у), g (х, у) — заданные
непрерывно-дифференцируемые функции независимых переменных х, у.
Уравнение Эйлера для функционала B.2.1) имеет вид
L (и) =д/дх (Рди/дх) + д/ду (Qdu/ду) — Ru = T. B.2.3)
Решение задачи B.2.2), B.2.3) при некоторых дополнительных
условиях реализует минимум функционала B.2.1),
рассматриваемого на классе дважды непрерывно дифференцируемых функций,
удовлетворяющих условию B.2.2). Для сформулированной
вариационной задачи ниже покажем, что решение иу, полученное
методом локальных вариаций (см. § 4 главы 1) при фиксированных
h и б = Ах = Ау, сходится к точной экстремали и* (х, у) при
S^-0 иА-о (б2), т. е.
Ит|и»*-«'|Ов = 0, (в-»0, Л = о(б2)), B.2.4)
где Z?8 — совокупность внутренних узлов разбиения области
квадратной сеткой со сторонами элементарных ячеек, равными
Ах = Ау = б. Для нормы функций, заданных в узлах сетки,
принято определение
H/>s = maxH*i.2/j)|, fatW)efl». B-2-5)
Теорема 2.1. Решение ийН сходится к экстремали и* в смысле
B.2.4), B.2.5), если всюду в D
р > О, Q > О, R > 0. B.2.6)
3 Ф. Л. Черноусько и Н. В. Баничук
Метод локальных вариаций
66
Заметим, что из предположения о гладкости функций Р и Q
(в D + С) вытекает существование положительных констант р
и у, таких, что
Р + Q > У > 0, | дР/дх | < рР. | dQIdy | < f>Q.
Доказательство. Получим сначала конечно-разностные
уравнения, которым удовлетворяют величины ity . Для этого,
используя обозначения § 4 (см. A.4.8)), запишем для каждой внутренней
точки (xt, yj) условие окончания итераций в методе локальных
вариаций при фиксированных /гиб:
Далее, подставляя в B.2.7) выражения для Ф,;, Фу, Фу,
согласно A.4.8), A.4.5), A.4.6), и выполняя элементарные
преобразования, получим для каждой внутренней точки (xh г/;) неравенства
| ?»(««*)-2$ |<i|#, B.2.8)
где Ьъ (и) — конечно-разностный оператор, определяемый
формулой
Ls (и) = [Pi*- {ux)\j + Pi.j-i (ux)u-i — P*-i,j (ux)'-i,j —
— Pl-u-г (ux)U.i-i] /28 + [Q\j (uy)'j + Ql-Uj (uv)*i-ltj —
— Qi,j-l(uv)i,3-l — Qi-l,i-l(uv)i-l,i-l] /26 — [RijUij + Ri^jUi-^j +
+ Ru-гЩ,^ + RUj-tulu-d /4, B.2.9)
а через Тц, г|)у обозначены величины:
Ф« = h [Ру + Р11ш} + P\.hl + Plu-i + Qlj + Qli, i + Qli-i +
+ Qtu-Л /8S2 + h [Rl, + RU j + R'u-i + #U.,-i]/32; B.2.10)
Тц = — (Тц + ^t-i,j + A,j-i + ^i-i.j-i);
Plj = P (x', y*),..., Rlj = R (x-, y'j).
Величины х\, г/J, (ujy, (иу)ц, входящие в выражения B.2.9),
B.2.10), определяются формулами A.4.6). Заметим, что величина
Тц является средним значением функции Т по четырем ячейкам
сетки, общей вершиной которых является точка (xt, yj).
Исследуем аппроксимационные свойства оператора Ьъ. Для
этого подставим формулы A.4.6) для х\, j/,-, (их)ц, {иу)ц в B.2.9).
Полученное в результате подстановки выражение для Ьъ (и)
будет содержать значения искомой функции и коэффициентов
Вопросы сходимости
67
Р, Q, R, вычисленные в точке {xt, у,) и близлежащих узлах сетки
(xh, yt), к = i — 1, г, i -f 1; I = / — 1, /, / + 1. Предполагая, что
искомое решение и коэффициенты Р, Q, R являются достаточно
гладкими функциями, и разлагая эти величины в ряд Тейлора в
точке (xt, i/j), получим
Z8 (и) = L(u) +0 (б2), B.2.11)
где выражение L (и), определяемое формулой B.2.3), вычислено
при х = xt, у — i/j, и = и (xt, у;). Таким образом, порядок
аппроксимации разностным оператором Lb непрерывного оператора
L равен двум.
Выполняя аналогичные разложения в выражении B.2.10)
для Тц, получим:
Tb = Ti} + О (б*), Ти = Т (хи у}). B.2.12)
Учитывая B.2.12), придадим условию B.2.8) следующий вид:
?>'*) = *« +ФО. B.2.13)
где функция ф;;- удовлетворяет условию
|ЧЧ/|<^+0(б»), B.2.14)
и, следовательно, из формулы B.2.10) для гру вытекает
lim | ф \\Ds = 6> при б -> 0, h = о (б2). B.2.15)
Введенную таким образом величину ф можно назвать функцией
невязки в удовлетворении уравнения
Ьъ{иь) = Тц. B.2.16)
Здесь иъ — точное решение разностного уравнения B.2.16) с
граничными условиями
u*i=*gi(*i,Vi) ПРИ (Щ,У})^Съ- B.2.17)
Через Съ обозначена совокупность граничных узлов разбиения
множества D + С, а через g1 — функция, получающаяся из g
непрерывным продолжением на всю область D. Относительно
разностных граничных условий B.2.17) предполагается, что они
аппроксимируют точное краевое условие B.2.2).
Докажем сходимость решения и5 задачи B.2.16), B.2.17) к
точному решению и* задачи B.2.2), B.2.3) при б —»- 0. Для этого
воспользуемся теоремой о сходимости корректных разностных
схем [18], аппроксимирующих непрерывную задачу. Исследуем
3*
Метод локальных вариаций
68
корректность данной схемы. Напомним, что линейная разностная
схема корректна, если ее решение существует при любых g1 и
Г „[18].
При доказательстве корректности будем следовать [18, стр.
544—545]. Введем в рассмотрение вспомогательную функцию
v (х, у) = ев<г*+1) — е*<-*+*\ а = (В2 + 1)/4, где г— радиус
области, содержащей в себе D, т. е. D с {х2, + Уг <С г2}- Оценим
величину LV^"*). Для этого с равенством B.2.11) и условиями
теоремы 2.1 проводим выкладки
&&&**> = L e'^'+w1) +0 (б2) = haP A + 2аж2) +
+ 2а<? A + 2ау2; + 2хх -g- + 2ajr -^ - я} е«<*2^> +
+ 0(б2) > {2аРA + 2cur2) + 2а<?A + 2ш/2) - 2а$Р\х\ —
— 2ра<? | у | — Д} *&**> + 0 (б2) = а {Р [1 + (Р | х \ — IJ + ж2] +
+ ? [1 + (?| J/I - IJ + У2] - Л}е^+«г> + 0(б2) > а(/> + (?) -
—Дв«о«чл + 0 (б2) > ау — Re°W> + 0 (б).
Для достаточно малых б будет выполнено неравенство
Х^сл-л ^ о,5ат — RtfW*>. B.2.18)
Используя неравенства B.2.18), B.2.6), оценим величину Lbv
Lsv = Ьъе* ("«> — LW+M ^
B.2.19)
<^ _ Д (еа"(гч-1) _ еа(Ж«+у«)) _ ат/2 <^ _ ат/2.
Для самой же функции v имеем
v = е0"" (е* — еа(ж!+«*-'-2)) > е* — 1. B.2.20)
Предполагая что к5 есть решение разностной задачи B.2.16),
B.2.17) при | Г К 2ау1, | ft К («* — 1) Л * > 0 и учитывая
неравенства" B.2.19), B.2.20), получим:
Lb(ub-vl)>0 в D&; ц8-р/<0на С8. B.2.21)
,х— Применение к B.2.21) разностного принципа максимума дает
*> иь — vl <^ 0 в 2?8 + Съ- Аналогично приходим к оценке иъ -f
i. + uZ <[ 0 в Z?5 + Съ- Из этих неравенств вытекает:
4, |u8|<^: |»»|<fc"(r4',>- B.2.22)
Учитывая далее произвольность числа 1^> 0 в B.2.22),
заключаем, что однородная разностная краевая задача, соответствую-
Вопросы сходимости
69
щая задаче B.2.16), B.2.17) при Т = О, ?, = 0, имеет только
тривиальное решение. Поэтому определитель системы разностных
уравнений B.2.16), B.2.17) отличен от нуля, и разностная схема
B.2.16), B.2.17) имеет решение для любых gt и Т. Таким образом,
рассматриваемая схема корректна, и по указанной выше
теореме ее решение и& равномерно сходится к и*, т. е. для любого
е ^> 0 существует бх ^> О, такое, что для всех б <^ бх
||«*-usf<e/2. B.2.23)
Рассмотрим теперь разностные краевые задачи для уравнений
B.2.13), B.2.16) с одним и тем же граничным условием B.2.17).
Разностные операторы, стоящие в левых частях этих уравнений,
совпадают, а различие правых частей, выраженное функцией ф,
мало для достаточно малых б [см. B.2.15)]. Но так как доказано,
что разностная схема B.2.16), B.2.17) корректна, то малое
изменение правой части B.2.16) приводит к малому изменению решения.
Применяя сказанное к схемам B.2.13), B.2.17) иB.2.16), B.2.17),
получаем, что для любого е^> 0 существует б2 ^> 0 такое, что
\и*-и«Ч<в/2 B.2.24)
для всех ф, удовлетворяющих неравенству
1ф|<62. B.2.25)
Свойство B.2.15) обеспечивает существование числа б3, такого, что
для всех б <^ б3 выполняются B.2.25). Поэтому для всех б,
удовлетворяющих условию б <^ б0 = min (б1? б3), выполняются нера~
венства B.2.23), B.2.24) и, следовательно,
1 и* - иъЦ<||и* - ц51 +1и8- и«Ч<8.
Равномерная сходимость иъГ> к и* доказана.
§ 3. Теорема о сходимости метода покоординатного спуска
Исследование сходимости метода локальных вариаций в задачах
с ограничениями и с неквадратичным функционалом начнем с
доказательства вспомогательной теоремы о сходимости метода
покоординатного спуска.
Сходимость покоординатного спуска изучалась во многих
работах, например [27]. В дальнейшем нам потребуются конкретные
оценки погрешности метода, даваемые нижеследующей теоремой.
Пусть отыскивается минимум непрерывной функции v
переменных
W {и) = W К .... ич), и = (ult ..., «v).
B.3.1)
Метод локальных вариаций
70
заданной в v-мерном параллелепипеде Q
uJ^Ui^ut, i = l,..., v. B.3.2)
Здесь и*, щ — заданные числа. Некоторые из них могут быть и
неограниченными (ut — -)- оо или щ — — со), что означает
отсутствие некоторых из ограничений B.3.2) и неограниченность
области Q.
Пусть для отыскания приближенного минимума функции W в
области Q применяется метод покоординатного спуска с
фиксированными шагамиht по координатам ut,i= 1, ..., v. Это означает,
что на каждом шаге спуска изменяется поочередно одна из
координат Ui точки и на величину ht или — ht так, чтобы не нарушались
условия B.3.2) и произошло уменьшение функции W. Если обе
вариации либо нарушают условия B.3.2), либо не приводят к
уменьшению функции W, то координата ut на данном шаге не
изменяется. Процесс заканчивается в такой точке и0, для которой
варьирование всех координат иь с шагами + ht не приводит к
уменьшению Y.
Полученную точку и0 и значение функции 4го = W (и0)
будем называть приближенным решением задачи. Если
обозначить через и4 начальное приближение (произвольную точку
области Q), то описанный метод спуска будет просматривать лишь
те точки, которые лежат в Q и имеют координаты вида ut =
= щ + rht, i = 1, ..., v, r = 0, ± 1, ± 2, ...
Очевидно, в процессе поиска на фиксированной сетке могут
представиться две возможности: либо процесс поиска
заканчивается за конечное число шагов и определяется приближенное
решение и0, 4го, либо процесс поиска идет неограниченно долго, тогда
координаты точки принимают неограниченные значения. Будем
предполагать, что осуществляется первая из этих возможностей.
Для этого достаточно потребовать выполнения одного из
следующих условий: 1) область Q ограничена, т. е. все числа щ, щ в
B.3.2) конечны; 2) область G, определяемая неравенством W (и) ^
<; W (иИ), где ив — начальная точка, ограничена; 3) пересечение
областей Q и G ограничено. •
Введем еще ряд определений и обозначений. Кординаты ы°
точки приближенного решения и0, для которых выполнены
неравенства щ — ht ^ щ, ui -\- ht ^ u+, будем называть
внутренними, а соответствующие им индексы i образуют индексное множе*
ство Q0. Если же м? — ht <^щ или ы? + ht ^> щ, то данпые
координаты назовем граничными, а соответствующие индексы \
образуют индексные множества Q_ и Q+,
Ёопросы сходимости
li
Если для некоторого i выполнены сразу оба неравенства, то
это означает вообще невозможность варьирования s-й координаты
с шагом hh т. е. uf + ht ]> щ, щ — ht <[ щ .
Этот случай не будем рассматривать, так как для него можно
считать щ фиксированным и уменьшить число v на 1. Вся
совокупность ипдексов i — 1, ..., v таким образом представляется в
виде суммы множеств QQ, Q_, Q+. Введем в рассмотрение точку и1,
которую будем называть уточненным решением и определим
равенствами:
и\ = u°, i<= Q0; и\ ==щ, i e Q_; и* = ut; i ЕЕ Q+. B.3.3)
Точка и1 получена из и0 путем сноса граничных координат v>\
на границу области Q. Из определения и1 следует:
» ,.
\и°-ц}\^Н, Я = (ЗА?)''. B.3.4)
4=1 '
Здесь и далее знаком | ... j обозначаем обычную эвклидову длину
вектора
l»l = B»?f •
4=1 '
Значение функции ? (и) для и = и1 обозначим 4я = Y (и1);
через Л (и) — матрицу вторых производных функции W (и), Л (и) =
= {d^/dujduj}, i, j = 1, ..., N; M, m, К — заданные константы,
причем М ;> т ;> О, К ~^> 0; (и, v) — скалярное произведение
векторов и, v; и* — какая-либо из точек, в которой достигается
абсолютный минимум непрерывной функции W в области Q; W* —
значепие этого минимума W* — W(u*).
Ниже доказывается теорема, в которой исследуется сходимость
приближенного решения {и0, 4го} и уточненного решения {и1,
У1} к точному решению {и*, W*} при стремлении шагов ht к нулю
(при фиксированных ht решения и0, 4го и и1, Ч1-1 получаются
покоординатным спуском). Как оказывается, в некоторых случаях
уточненное решение {и1, W1} ближе к точному, чем {и0, 4го}, чем
и объясняется его название.
Теорема 2.2. Пусть функция W (и) дважды непрерывно
дифференцируема и удовлетворяет условиям:
\дЧГ/дщ\<К, i=l, ..., v, B.3.5)
т (р, v) < (Л (и) v,v)^M (v, v), и <= Q B.3.6)
всюду в области Q. Здесь v— произвольный v-мерный вектор.
Справедливы следующие утверждения.
Метод локальных вариации
-92
а) Пусть т ^> 0. Тогда минимум Ч?* функции \Р (и) в Q
достигается в единственной точке и*. Метод покоординатного спуска
при фиксированных ht сходится за конечное число шагов. При
Н -*¦ 0 приближенное решение {u°, W} и уточненное решение
{u1, W1} стремятся к точному решению {и*, W*}, причем имеют
место следующие оценки:
K-B.,<*[i + ?D- + l^)], (*-(|*?f).
0<Y°--Yt^^-[l + ~-(-^-+V^)]-hKVvH, B.3.7)
\и* —и1 \^2МН @,5 +У\)/т, B.3.8)
0 < Y1 - *Г < 2МЧР @,5 + Y4flm.
Если же и0 — внутренняя точка, т. е. и0 = и1, то справедливы
оценки:
\и'-и°\^МН/т, 0<Y°-Y*<M2tf2/2m. B.3.9)
б) Пусть т ^ 0. Будем дополнительно предполагать, что
выполнено одно из' условий 1—3 па стр. 70, и d-диаметр
пересечения областей Q, G. Тогда метод покоординатного спуска
при фиксированных &,• снова сходится за конечное число шагов.
Близость решений {и0, 4го}, {и1, Y1} к точному решению {и*, У*}
оценивается неравенствами:
|u*-u°|<d, 0^m-° — T*^H(Md/2 + K\^v), B.3.10)
|и*-их|<й + Я, О^Т1 -W<M(d + H)H @,5 + Vv)
B.3.11)
(точка и* здесь может быть неединственна). Для случая
внутренней точки, т. е. при ы° = и1, оценка сходимости имеет вид
0 < 4го - W* < MdH/2. B.3.12)
Доказательство. Условие B.3.6) гарантирует выпуклость
функции Y, а при т ]> 0 — строгую выпуклость. Отсюда выте
кает единственность точки и* в случае (а). В самом деле, пусть
абсолютный минимум W* достигается в двух точках — и* ЕЕ Q,
и** Ez Q, т. е. ? (и*) — Ч? (и**) = Y*. Тогда на отрезке,
соединяющем точки и*, и**, при т ^> 0, согласно строгой выпуклости,
будем иметь W (и) <^ W*, что противоречит тому, что W* —
абсолютный минимум W. Единственность и* в случае (а) доказана.
Вопросы сходимости
73
Для дважды непрерывно-дифференцируемой функции ? (и),
удовлетворяющей условию B.3.6), справедливы неравенства
? (»') + (V^ ("'), (и - "')) + « I и - "'|2/2 < ? (и) <
<? (и') + (VV (и'). (« - "')) + М | » — и' | 2/2. B.3.13)
Здесь и, и' — произвольные точки области (?,\7? — вектор
градиента ? с компонентами V^ = {дФ/дщ, ..., ffVldiu,}.
Докажем, что при т ~^> 0 область G, определяемая неравенством
? (и) :gC ? (ин), ограничена. Предположим противное: пусть
существуют такие точки и, для которых \ и — uw \ сколь угодно
велико, но ? (и) ^ ? (ин). Подставим в левое неравенство B.3.13)
и' = ын. Тогда при | и — ын| -> оо левая часть неравенства
B.3.13) будет стремиться к + °°> если ттГ> 0, в то время как
? (и) г?^? (wH) в области G, т. е. ? (и) ограничено. Следовательно,
левое неравенство B.3.13) будет нарушено. Противоречие
доказывает ограниченность области G.
Тогда из условий теоремы следует, что как в случае (а), так и
в случае (б) метод покоординатного спуска сходится за конечное
число шагов при фиксированных ht.
Перейдем к доказательству неравенств B.3.7)—B.3.12).
Предварительно оценим частные производные функции ? (и) в точках
и = и0 и и — и1. Воспользуемся условиями окончания процесса
поиска минимума в точке и = и0:
? (и0 ± etht) > ? (и0), i еЕ Q0;
? (и0 - eth,) > ? (и°), i <= Й+; ? (и0 + eth,) > ? (u°), i ЕЕ Q_,
где et— орты, соответствующие координатам ыг. Из первого
условия и неравенства B.3.13) вытекает ? (и0) <; ? (и0 + е,-А,-) <;
< ? (и0) ± (d? (u°)/dut)hi + Mh\l2.
Откуда следует
| дЧ (и°Iдщ | < Mhtl2, i ЕЕ Q0. B.3.14)
Аналогично из условий окончания поиска минимума в точке
и --= и0 и неравенства B.3.13) получаем оценки для частных
производных функции ? по граничным координатам
dW (u°)/dUi < Mhill при i?Q4 и <9? (и^/дщ > — Мйг-/2,
ieS_. B.3.15)
Оценим теперь частные производные dW/diii в точке и = и1.
Для этого используем разложения
д-Ч^ - Ч^ + 2 ^^Ц = -^ + 'Л <»+*>*'"
B.3.16)
Метод локальных вариаций
74
где и и и + s — произвольные точки области Q, нижним
индексом i у квадратных скобок отмечен ?-й компонент вектора, аО^
^ Э <; 1. Матрица Л (и) симметрична, следовательно,
соответствующий линейный оператор Л—самосопряженный, и все его
собственные числа вещественны.
Из неравенств B.3.6) и известных свойств самосопряженных
операторов [89] вытекают оценки для собственных чисел А,
матрицы Л
т *С min —,—'—— = ^min ^ ^ ^ ^тах = ЫШХ
=М^о С.»)
(Ар, у)
7\То (v>v)
\М. B.3.17)
Заметим, что оператор Л2 = ЛЛ также будет
самосопряженным, и его собственные числа равны квадратам собственных чисел
оператора Л. Учитывая сделанные замечания, получим из B.3.16),
B.3.17)
|д"? (и + s)/dui - dY(и)/дщ\ = | (As)i|< | As | =
= У {As, As) = У{Щ~8) < /й5шж|*|< M\s\. B.3.18)
Исходя из тождества
8Y (и^/дщ = дУ (и°)/дщ + [дУ (и^/дщ — 9Т (и°)/дщ]
и используя неравенства B.3.14), B.3.15), B.3.18), получим
оценки производных в точке и = и1:
SYfu1)
д«{
<
ди.
+
дЧ^и1) дЧГ(ип)
ди.
ди.
Mh
^- + M\U^-U°\, 1ЕЙ„;
B.3.19)
ачПиУ) дчг(и<>)
ди.
г
Mh.
ди.
+
ди.
дЧГ(и°)
ди.
1- + М | и1 - и01, ieO+;
ди.
Л/А,
ЭУ(ц°)
ди.
+
дчг к
ди.
<-^- + M|u1-w°|, iefi..
ат (И1)
ди.
^
Оценим снизу разность W (и) — W (и1) для произвольного вектора
ие().С этой целью применим к левой части неравенства B.3.13)
(в котором положим и' = и1) полученные выше оценки
производных B.3.19). Воспользуемся также условиями B.3.3). В результа-
Ёопросы сходимости
%
те будем иметь
дУ(и')
Y{u)~Y^)>^i2^±{Ui-u\)-1-^-\u-v}\->
>-2
fen»
ат(«1)
аы.
| U{ — и\ ,
ien+ *
3T(Mi)
+ 2 ^FLiui-«ri-b-^-i«-«1i*>
du.
m
~2~
ien_
V
i=l Х /
Полученное неравенство преобразуем с помощью неравенства
Коши-Буняковского
Т(м)-У(и1)>-М|ц-и1|Г2 (^- + \и1~и°\)'
Li=l X '
-("-Г I»"
+
B.3.20)
Левая часть неравенства B.3.20) является неположительной
величиной при и = и*. Учитывая это, из B.3.20) получаем при т ^>
> 0 оценку
11 ^ ш
1 т.
2 (^- +к1-»0!)* Г- B.3.21)
Если все координаты вектора и0 внутренние, т. е. и1 = и0, то
полученное неравенство B.3.21) перейдет в первое из неравенств
B.3.9),
Отметим неравенство, вытекающее из условия B.3.4) и
неравенства Коши-Буняковского
2D+К-»°|У«2D + "У = т+<ч +
+ НН < -|1 + Я2 Vv + #2v = Я2 \~ + Vvf . B.3.22)
Из соотношений B.3.21), B.3.22) сразу следует первое из
неравенств B.3.8) для \и* — и1\. Используя тождество и*— и0 =
= (и* — и1) + (и1 — и0) и неравенства B.3.4), B.3.8), получим
непосредственно! формулу B.3.7) для | и* — и0 |. Из полученных
неравенств B.3.7)—B.3.9) вытекает, что и0 -*¦ и*, и1 -*- и* при
Метод локальных вариаций
%
Н -*¦ О, причем разности \и° — и* |, 1м1 — и* \ суть малые
порядка Н.
Применим полученные неравенства для оценки разностей
W1 — Y*, 4го—W*. Для этого предварительно преобразуем
неравенство B.3.20), записанное для случая и = и*
Yi-Y'^Mlu* - ul\\2 L^- + \и1-и°\У V'. B.3.
23)
Для случая внутренней точки и0 (и0 = и1) подстановка в B.3.23)
первого неравенства B.3.9) приводит к оценке разности Dго —
— Y*), выражаемой вторым условием B.3.9). Оценка B.3.8)
разности (Y1 — Y*) непосредственно вытекает из неравенств
B.3.21)-B.3.23).
Таким образом, как для случая «внутренней» точки и0, так и
для точки и = и1 оценки B.3.9), B.3.8) гарантируют
квадратичную по h сходимость F д ?' к ЛР*. Исследуем теперь разность
уо _ у* при ио ф ui
Из неравенств B.3.13), B.3.14) получим
>- 2i -Tf-I»i —«i|+ 2i aJ (»t -"°). B.3.24)
Рассмотрим одно из слагаемых последней суммы B.3.24) при
i €= ?2+. Если Ui !> и?, то используем для оценки этого слагаемого
неравенство B.3.5) и условие щ — и\ ^ ht, имеющее место при
i Е= й+. Если же и*. <^ и0., то воспользуемся неравенством B.3.15).
Аналогично оценим слагаемые при i EE&_- В итоге получим,
применяя еще неравенство Коши-Буняковского,
-f- 2 max 2 ' Iй* — U' I' ^»
i=l i=l
B.3.25)
Применим к неравенству B.3.25) оценку B.3.7) для величины
' — и* \. В результате получим второе неравенство B.3.7),
Вопросы Сходимости
и
гарантирующее, в отличие от B.3.8), B.3.9), только линейную
сходимость 4го к W* по шагу h. Отсюда следует, что три решении
задачи \2.3.1), B.3.2) методом покоординатного спуска для
повышения точности следует «грапичные» координаты полученной
точки и = и0 снести на ограничения (грани параллелепипеда Q),
т. е. в качестве решения выгоднее брать не приближенное решение
и0, а уточненное решение и1.
В случае (а) теорема доказана. Перейдем к доказательству
неравенств B.3.10)—B.3.12) для случая (б). Так как и*, и°
принадлежат пересечению областей Q, G, диаметр которого равен d,
то имеем \ и* — и0 | ^ d. При помощи неравенства B.3.4) отсюда
получим | и* — и1 | <1 d -f- H. Первые из неравенств B.3.10),
B.3.11) доказаны.
Положим сначала и1 = и0. Тогда из неравенств \ и* — и0 | ^
<йи B.3.23) вытекает оценка B.3.12). В общем случае и1 =f= u°
подставим в неравенство B.3.25) оценку \ и* — u° | < d, а в
неравенство B.3.23) — оценки B.3.22) и | и* — и1 | ^ d + Н.
После этого получим оценки разностей 4го — W* и W1 — 4е*,
выражаемые вторыми из неравенств B.3.10), B.3.11). В случае (б)
все соотношения B.3.10)—B.3.12) гарантируют линейную по Н
сходимость 4го и W1 к W* при Н -> 0.
Теорема доказана полностью.
§ 4. Оценки сходимости в задачах с ограничениями
Применим теорему 2.2 к исследованию сходимости метода
локальных вариаций для задач §1,4 главы 1 и их обобщений.
.1. Рассмотрим сначала задачу A.1.1), A.1.2), в которой
функцию и будем считать w-мерной вектор-функцией и = (и1, ..., ип),
а ограничение A.1.1) будем рассматривать как систему перавепств,
наложенных на компоненты функции и. Концы искомой
экстремали могут быть как свободными, так и фиксированными; тогда
и* (а) = и~ (а) = А, и+ F) = и" (Ь) = В (См. § 1 главы 1).
Запишем конечно-разностный аналог задачи A.1.1), A.1.2).
Требуется найти минимум функции A.1.6), A.1.8):
N-1
1{щ,..., uN) = 2 А*/''; Я = /fo + &xl2, (щ + щ+1)/2,
(щ+1 — щ)/Ах); Ах =•¦ (Ь — a)/N; Xj = a + iAx, i = 1,..., N
B.4.1)
при ограничениях:
иЦ (хг) < uf < ut (Xi), i = 0,...,N, к = 1,..., п. B.4.2)
Метод локальных вариации
п
Здесь нижний индекс у щ указывает номер точки, а верхний —
номер компонента вектора и. Через иг- будем обозначать вектор
(iA, ¦¦¦, к?), через щ, щ обозначены компоненты вектор-функций
и' (х), и+ (х). Задача B.4.1), B.4.2) является, очевидно, задачей
типа B.3.1), B.3.2). Функцию / в B.4.1) считаем дважды
непрерывно-дифференцируемой по компонентам и1, ..., и™, и*, ..., и™
векторов и, их в некоторой области Ф изменения своих
аргументов, включающей все значения х, и, их, при которых ее придется
подсчитывать при решении задачи по методу локальных вариаций.
В качестве области Ф можно взять область: а <^ х ^ Ь; и~ (х) <^
^ и1 <Г щ (х); | их | ^ (щ (х) — щ (х))/Ах, i — 1, ..., п.
Получим сначала условия, которым должна удовлетворять
функция /, чтобы частные производные функции Ч? — I
удовлетворяли неравенствам B.3.5). Для этого оценим производные
dl/diii, пользуясь B.4.1):
д!
К
Ы
du%
81
duf
—
1
|
Ах df°
2
дик
= \ Ах df"-1
df»
dul
df
dut
Ах
ЛГ-1
Ах ( df'-1 , ЭР \
2 \ ди* дик )
о / Ах \ df \ ,
<тах2(_ М- +
df
dul
df»
duK
Ax
+
df<>
dul
df
JV-l
du*
T
+ df'-1 df
du* dul
df
JV-l
dul
B.4.3)
f = l,...,N — l; k = l,
., n.
Максимум в последнем из неравенств B.4.3) вычисляется по
всем аргументам х, и, их из области Ф. Сравнивая правые части
неравенств B.4.3), получаем, что для всех i — 0, 1, ..., ./V
абсолютные значения производных dl/duf ограничены сверху величиной,
стоящей в правой части последнего из неравенств B.4.3).
Следовательно, неравенства B.3.5), записанные для величин д1/дг4,
будут выполнены, если функция / удовлетворяет условиям (К —
некоторая константа)
L s max ( Ах
ф \
df
\дик
+ 2
JL
dul
^К, к = !,...,«.
B.4.4)
Вопросы сходимости
79
Вычислим теперь скалярное произведение (Аг?, v), входящее в
условия B.3.6),
г=з=о (с=г=1 1 '
= 2 дм a„ р* vi) ' у = {ио, • • -, »дг}, Щ = {wj,..., у?}.
i=y=o V * > >
B.4.5)
Здесь д21/дигдщ — квадратные матрицы п X п с элементами
[dillduiduj\kl — d2I/dufduj. Круглые скобки в B.4.5)
использованы для обозначения скалярного произведения, а выражение,
заключенное в них, представляет собой билинейную форму от
векторных переменных г?,-, Vj. Каждое слагаемое /* в B.4.1) зависит
только от двух векторов нг, M;+1, поэтому все матрицы д2/Чдщдщ,
j =j= i, i -f- 1 являются нулевыми. Учитывая это и группируя
слагаемые, относящиеся к одним и тем же интервалам [xt, ж;+1],
получим
N—1
г=0
+ (l^*) + (^^' **«)}• B.4.6)
Вычислим при помощи B.4.1) матричные производные,
фигурирующие в выражении B.4.6):
A-v-2 Л » Я„ Я„ Лт2 ¦* ' Я./ Я»/ Л-^2 * '
ям? Дя2 ' ди. dui+1 Да:2 ' 3«i+1 ди. Д*2
92/J * см.
э»?+1 д*2
j2/ Дж / а2/ ^ д2/ \ , Дх2 а2/
/? = J2L _ -*?. / а2/ , а2/ \
4 3 '
Э2/
««?
Аг / Э2/ Э2/ \ А*2 ЭУ , ,
"*" 2 \дидих duxdu)~t~ 4 Эй2 ' К*-1*'1)
0и2 2 \дидих*~дихди)^~~Т^ди?
Здесь R, T, S — функции от х, и, их; индекс i у этих величии
означает, что они взяты при тех же аргументах, что и р в B.4.1).
Метод локальных вариаций
80
Штрих означает транспонированную матрицу. Заметим, что
матрицы d2fldu2 и d2f/dux симметричны, а матрицы d2f/dudux и d2f/duj)u
взаимно сопряжены; следовательно, матрицы R, S в B.4.7)
симметричны. Условие B.3.6), с учетом соотношений B.4.6), B.4.7),
можно записать в виде
N N-1
тАх 2 (vt, i>i)< S К#Ч Щ) + 2G,li?i+i, Щ) + Л+i, vi+1)] <
!=0 t=0
JV
^MAx^(Vi,Vi). B.4.8)
1=0
Чтобы выполнялись условия B.4.8), достаточно потребовать,
чтобы при любых аргументах х, и, их из Ф функций R, T, S и для
любых пар n-мерных векторов w, z выполнялось неравенство
Axm[\w\2 + \z\2]^(Rw, w) + 2(Tz, w) + (Sz, z)<
<0,5AfAa;[|u>|2-f|z|2]. B.4.9)
В самом деле, если B.4.9) имеет место, то, беря w — г?,-, z = г>;+1
и суммируя неравенства B.4.9) при соответствующих значениях
аргументов, придем к B.4.8).
Если концы и (а), и F) фиксированы, то все члены, содержащие
v0, vN в B.4.8), можно опустить, и тогда достаточно вместо B.4.9)
потребовать
-^ (\и> |2 + | z |2) < (Rw, w) + 2 (Tz, w) -f
+ (Sz,z)^^-(\w\2 + \z\2). B.4.10)
Формулы B.4.9), B.4.10) отличаются коэффициентом У а при in.
Будем проводить выкладки для общего случая B.4.9), а затем в
полученных результатах заменим пг на т/2 и будем иметь
результаты для случая фиксированных концов. Неравенства B.4.9)
можно переписать в виде
((R - mAxE) w, w) + 2 (Tz, w) + ((S - mAxE) z, z) > 0;
B.4.11)
(@,5MAxE — R) w, w) — 2 (Tz,w) + (@.5MAxE — S) z, z) >
> 0,
где E — единичная матрица. Неравенства B.4.11) должны иметь
место при любых векторах w, z. Эти неравенства сводятся к тре-
Вопросы сходимости
81
бованию неотрицательной определенности матриц:
R — тАхЕ Г
Г S — тАхЕ
\0.5MAxE-R —Г
I - Г О.ЬМАхЕ - S
B.4.12)
Если условия неотрицательной определенности матриц B.4.12)
имеют место при любых аргументах х, и, их из области Ф и при
некоторых неотрицательных числах т, М, то будут выполняться
условия B 3.6) теоремы 2.2. Придадим этим условиям более наглядный
и легко проверяемый вид. Полагая w = О или z = О, получим, что
симметричные матрицы
R — тАхЕ; S — тАхЕ; О.ЪМАхЕ -г- R; О.ЬМАхЕ — S,
B.4.13)
должны быть неотрицательно-определенны. Потребуем, чтобы из
первой пары матриц B.4.13) хотя бы одна была положительно-
определенна, например, пусть это матрица R — тАхЕ.
Аналогично, пусть первая из второй пары матриц B.4.13) также
положительно-определенна. Тогда, вводя квадратные корни из
положительно-определенных матриц [89], приведем неравенства
B.4.11) к виду:
\{R — тАхЕI'* w + (R — mAxE)-'b Tz]2 +
+ (IS — rhAxE — Г (R - mAxE)lT] z, z) > 0;
[(O.bMAxE — RY>'* w — @.5 MAxE — j?)-v. Tz]2 + B.4.14)
+ ([@.571/AxE — S) — T' @.5MAxE - Л) Г] z, z) > 0.
Для выполнения неравенств B.4.14) при любых w, z
необходимо и достаточно потребовать, чтобы матрицы квадратичных форм
от вектора z, входящие в B.4.14), были
неотрицательно-определенны. Таким образом, для выполнения первого неравенства B.4.11)
или B.4.14) достаточно, чтобы были неотрицательно-определенны
матрицы:
R — mAxE; S — тАхЕ — Г (R — тАхЕ)'1 Т B.4.15)
или матрицы:
S - mAxE; R — тАхЕ — Т (S — тАхЕ^Т', B.4.16)
причем первая из матриц B.4.15) или B.4.16) должпа быть
положительно-определенна. Для выполнения второго неравенства
B.4.11) или B.4.13) достаточно, чтобы была неотрицательно-оп-
Метод локальных вариаций
82
ределенпа одна из двух пар матриц:
0.5МАхЕ — R; 0.5MAxE-S—Т'@.5МАхЕ - R)~1T; B.4.17)
д.ЪМАхЕ — S; 0.5АхЕ - R — Т (О.ЬМАхЕ — 5)-»Г, B.4.18)
причем первая матрица в каждой паре B.4.17), B.4.18) должна
быть положительно-определенна. Для случая фиксированных
концов в матрицах B.4.15), B.4.16) нужно заменить тп на т/2.
Условия, наложенные на матрицы B.4.15)—B.4.18), должны быть
выполнены при некоторых постоянных тп, М и при любых
аргументах (из области Ф) функций R, S, Т, определенных
равенствами B.4.7). Так как числа М, m входят в оценки сходимости
теоремы 2.2, то важно выяснить, при каких условиях существуют
такие числа, обеспечивающие выполнение неравенств B.3.6), и как
они зависят от Ах при Ах —> 0.
Рассмотрим сначала матрицы B.4.17), B.4.18). Положим в них
М - сг (Ах)'1, B.4.19)
где с2 — достаточно большая положительная константа.
Подставляя в B.4.17), B.4.18) функции R, S, Т из B.4.7) и М из B.4.19),
видим, что за счет выбора достаточно большого сх при
ограниченных R, S, Т можно добиться того, чтобы все матрицы B.4.17),
B.4.18) были сколь угодно близки к положительной константе,
умноженной на Е, т. е. были бы положительно-определенны.
Соотношение B.4.19) определяет зависимость М от Ах при Ах —* 0.
Обратимся теперь к матрицам B.4.15), B.4.16). Так как 0 <Г
^ тп ki М, то при Ах —> 0, согласно B.4.19), произведение тпАх
должно быть ограничено. Пусть при Ах —> 0 имеем mAx—> eg,
где с2 > 0. Подставляя B.4.7) в B.4.15) и переходя к пределу при
Ах —>0, получим, что матрицы
А = —т — с*Е, с2 > 0,
должны быть одновременно неотрицательно-определенны.
Следовательно, матрица d2f/dux — положительно-определенна; пусть
Я1, ..., Я," — ее собственные числа (все они положительны),
а г;*1*, ..., v(n>—собственные векторы. Нетрудно проверить, что
векторы г>A\ ..., »<"> будут собственными векторами также и для
матрицы Лц для Лх1 и для Л2 из B.4.20). Непосредственное
вычисление показывает, что собственные числа матриц Av Л2 из B.4.20),
сгЕ
Г
а2/
dul
B.4.20)
Вопросы сходимости
83
соответствующие собственному вектору »('\ равны:
Я,* _ с2; К - с, - (КУ/(к1 - с2) = [(X, - с2J - (*,')*]/(*.* - сг),
i = 1,..., п. B.4.21)
Из получеппых соотношений ясно, что число с2 ^> 0 нельзя
выбрать так, чтобы все собственные числа B.4.21) матриц B.4.20)
были неотрицательны. Следовательно, предположение с2 ^> 0
неверно, и при Ах —> 0 должно быть (/гаДа:) —>- 0.
Предполагая величины Дх, тАх малыми, подставим B.4.7) в
B.4.15) и разложим матрицы B.4.15) в ряды по Ах и тАх. При
этом потребуется, в частности, разложить в ряд по Ах, тАх
обратную матрицу, фигурирующую в B.4.15). После громоздких,
но элементарных выкладок и' приведения подобных членов
получим с точпостью до выписанных членов:
R — тАхЕ — d2f/dux -\-0 (тАх, Ах);
S - тАхЕ -Г (В — тАхЕ)-1 Т^ — ImAxE + B.4.22)
+ Ax-\^L--^(-^-Y-^L-1 +0{Ах\ тАх2, т2Ах\
I ди2 ди дих у ди2х дихВи \
Разложение матриц B.4.16) приводит к таким же соотношениям.
Чтобы первая матрица B.4.22) была положительно-определенной
при достаточно малых Ах, необходимо и достаточно, чтобы
матрица d2f/dux была положительно-определенна. Из
рассмотрения второй матрицы B.4.22) видно, что если тАх ^> Ах2 при
Ах -*- 0, то эта матрица отрицательно-определенна, так как т ^>
^> 0. Следовательно, для выполнения наложенных условий
необходимо, чтобы т ~ Ах или т <§^ Да: при Да; -*- 0. Поэтому можно
положить т — с3Ах при Да; —> 0, где с3 > 0, после чего вторая из
матриц B.4.22) примет вид
S — тАхЕ — T'{R — mAxE)~l Т = Да;2 |Г^- -
д*1 I a2/ \-i а2/
№
ди дих \ д„2 ) ди_ ди
2с3Е\ +0(Ax% m - с3Ах. B.4.23)
Для неотрицательной определенности матрицы B.4.23) при
Да; —> 0 необходимо и достаточно, чтобы число 2с3 не превосходило
наименьшего из собственных чисел матрицы, заключенной в
квадратные скобки в B.4.23). Итак, для выполнения условий B.3.6)
при достаточно малых Да; достаточно, чтобы первая из матриц
ЛУ- • J!L _ d*f [JHY1 d*f B 4 24)
dul ' dui диди I dul I диди V • • /
Метод Локальных вариаций
84
была положительно-определенна, а вторая — неотрицательно-
определенна всюду в области Ф. Числа М, т при этом задаются
соотношениями B.4.19), B.4.23), причем ct^> 0 всегда, а с3 > О,
если вторая матрица B.4.24) также положительно-определенна.
Для задачи с фиксированными копцами справедливо аналогичное
утверждение (значение т здесь можно взять вдвое большим).
Для применения теоремы 2.2 сделаем еще некоторые
замечания. Область Q, определяемая условиями B.4.2), будет
ограничена, если при любом х из интервала [а, Ь] ограничен
параллелепипед
щ (х) <; щ (х) <; ut (х), i — 1,..., п. B.4.25)
Обозначим через dt максимальный по х диаметр гс-мерного
параллелепипеда B.4.25). Тогда диаметр d параллелепипеда Q,
определяемого неравенствами B.4.2) в (N + 1) /г-мерном
пространстве, ограничен условием
d < ^ (N + IH-5. B.4.26)
Число переменных v и величина Н, определенная равенством
B.3.4), здесь равны:
п п
v = (N +1)п, н - VW+l[ 2 hi) '=,VnTTK, hi =2 л?.
^ 1=1 ' t=l
B.4.27)
где hi — шаг варьирования по t-й координате. В качестве нормы
(N -\- 1) re-мерного вектора и введем величину
1-1 = [тът 2 Wrf = у=Г|и|- BЛ28)
Норма B.4.28) при Ах —.> О, N —> оо переходит в интегральную
норму в пространстве L2- Для задачи с фиксированными концами
в формулах B.4.26)—B.4.28) нужно заменить N + 1 на N — 1.
При достаточно малых Дх в формулах B.4.26)—B.4.28) для задач
со свободным и с фиксированным концом можно положить:
yV-j-l—TV — I — TV, N = (b — a)/Ax. B.4.29)
Теперь, принимая во внимание соотношения B.4.4), B.4.12),
B.4.19), B.4.23), B.4.24), B.4.26)—B.4.29) и применяя теорему 2.2,
сформулируем теоремы о сходимости и погрешности решения для
задачи B.4.1), B.4.2). Предполагается, что эта задача решается
методом локальных вариаций с фиксированными Ах, hi, причем итерации
идут до полной сходимости. Полученное решение обозначаем, ана-
вопросы сходимости
85
логично § 3, через и<0), уточненное решение, получаемое путем
сноса на ограничения — через м<1), точное решение задачи B.4.1),
B.4.2) при заданном Да; — через и*, а соответствующие этим
решениям значения функции / — через /<°>, I1 I*.
Теорема 2.3. Пусть всюду в области Ф функция / дважды
непрерывно дифференцируема по и, их, выполнено неравенство
B.4.4) и условие неотрицательной определенности матриц B.4.12)
при некоторых М > т ;> 0. Справедливы следующие
утверждения.
а) Если т ^> 0, то минимум функции / существует и
единственен. Тогда метод локальных вариаций для задачи B.4.1),
B.4.2) при фиксированных Да:, ht сходится за конечное число
шагов, а решения и<0), 1° и цA), I1 стремятся к и*, I* при ht —> 0,
i = 1, ..., п. Имеют место оценки:
II и- - «и») l<A,ji+^ [4- -г УнйП)]};
о</»-/»< M^2+1)fe!{1+^[4-+^^rTi)]} +
+ K(N + l) Vnh,;
II "*-"A) II < ^ [4- + Vn(N + i)] ; B.4.30)
о<л-г<—m '[4- + ^"(^ + i)] •
Когда и@) = uW, имеют место оценки:
|К-и@)|КМй,/т, 0</°-/*<^2(^ + 1)^/2т B.4.31)
б) Если т = 0 и область B.4.25) ограничена при всех а ^ а; ^
^ Ь, то метод также сходится за конечное число шагов, причем
1° -*-1*, I1 —> I* при h# —s. 0. Справедливы оценки:
| «•-««» К di; O^P-r^iN + Vhi^-^ + KVn);
0</i-/*<M(dt + h,)К(N + 1) [4 + VW+Щ]¦ B.4.32)
При м<°> = и*1' имеем
0 < 1° - Г < М djh, {N + 1)/2. B.4.33)
Для задачи с фиксированными концами нужно заменить т на
т/2 в B.4.12) и W + 1 на JV — 1в оценках B.4.30)-B.4.33).
Метод локальных вариаций
Теорема 2.4. Пусть в области Ф функция / дважды
непрерывно-дифференцируема по и, их, а число Ах достаточно мало.
Справедливы следующие утверждения:
а) Если обе матрицы B.4.24) положительно-определенны, то
имеют место утверждения п. а) теоремы 2.3. Оценки B.4.30)
примут вид:
Iи* — и<°>||< AxhtAx^, 0 < Р — /*< Л max (h^Ax-''', h.Ax'1),
B.4.34)
II "* - "A) II < Л^Ля-Ч 0 < 71 - Г < Л3птх'ъ,
а оценки B.4.31) для случая м(°> = ш запишутся в виде:
II "* - w@)IK ЛАДаГ2; 0 < Р - Г < Аък\Ах^. B.4.35)
б) Если первая из матриц B.4.24)
положительно-определенна, а вторая — неотрицательно-определенна и область B.4.25)
ограничена, то имеют место утверждения п. б) теоремы 2.3.
Оценки B.4.32), B.4.33) для /°, Iх запишутся в виде:
0</°-Г<Л6/г,Дх-2, 0^Il-P^A7htAx-s*. B.4.36)
Здесь Аг, А2, . . ., А7 — постоянные. Соотношения B.4.34)—
B.4.36) справеделивы для задач как со свободными, так и с
фиксированными концами.
2. Более подробно рассмотрим скалярный случай (п = 1),
для которого получим явные выражения чисел М, т,
фигурирующих в теореме 2.3. Подставляя соотношения B.4.7) в B.4.12),
запишем условия неотрицательной определенности матриц B.4.12)
в случае п = 1. Условиям неотрицательности обоих диагональ-
пых элементов этих матриц можно придать вид:
ди%
^1-Ах
d*f
ди ди
х
&1
диди„
. Ах* Э2/ МАх /0 , „„.
а условия неотрицательности их определителей имеют вид:
ау _ Джз а2/ \а
\ди%+ 4 ди* тАХ) Ах[Эидих)>(
B.4.38)
(мах __ау__ Аз?_ ау \2_ 2/_ау у / ay Ax* ay \г
(г aft2 4 a«2J лж (^J >(^u2
4 au2
Вопросы сходимости
87
Из соотношений B.4.37) следует, что выражения в первых
скобках обоих неравенств B.4.38) неотрицательны.
Следовательно, этим неравенствам после извлечения корпя можпо придать
форму:
д2/
тАх <Г
Э2/
i-
Аз:2
/&
Дх2 д2/ у
4 аи2
+ Ля2
B.4.39)
МАх
>
д2/
+
Ах* д2/
+
/
д2/
aZ
Да;2 с*2/
4 Зи2
Г+-Ш
Если удовлетворены неравенства B.4.39), то будут
удовлетворены также и неравенства B.4.37), так что условия B.4.39)
необходимы и достаточны для неотрицательной определенности
матриц B.4.12).
Для дальнейшего упрощения условий B.4.39) обозпачим
правые части неравенств B.4.39) через <р1? <р2:
Э2/ , Д*2 Э2/
чх = в1-Ув\-в* b.-^^L^
dul
Да:2
4 du2
Фг
^ + УЖ=ъ »,'=^[|S-(A)!]
B.4.40)
Так так необходимо, чтобы q)j > 0, то из B.4.40) вытекает Вг ]> 0,
В2 > 0. При этих условиях имеет место неравенство {В\ — В2I'' ^
<^ Вх — 0.5 B^Bl1, Вг > 0, В2 > 0, с помощью которого для
функций фх, ф2 из B.4.40) получим:
Ъ>-гВлВ1\ ф,<251.
Введем следующие обозначения:
B.4.41)
Lx -= max № +
Дх»
д2/
ди*
\ г . Г 92/ в2/ / д2/ V
B.4.42)
где минимум и максимум взяты по ж, и, их из области Ф. Из
неравенств B.4.39), B.4.41) и обозначений B.4.40), B.4.42) вытекает,
что для выполнения неравенств B.4.39) достаточно выбрать числа
т, М так, чтобы
m<,L%Axj2L%; М^Щ/Ах, Lx > 0, Z,?>0.
B.4.43)
Метод локальных вариаций
88
Полученные результаты подытожим в виде следующего
утверждения.
Теорема 2.5. В случае п = 1 условия теоремы 2.3 о
неотрицательной определенности матриц B.4.12) при некоторых М !> т > О
будут выполнены, если во всей области Ф при некоторых
М > т >0 выполняются условия B.4.39). Эти условия заведомо
выполнены, если выполнены неравенства Lx ]> О, L2 > 0, где
Lj_, Ьг определены формулами B.4.42); в этом случае числа М, т
определены соотношениями B.4.43). Для задачи с
фиксированными концами в соотношениях B.4.39), B.4.43) нужно заменить
т на т/2.
Отметим, что соотношения B.4.43) позволяют для скалярного
случаяконкретизироватькопстантыс],с2вформулахB.4.19) ,B.4.23).
Теорема 2.5 позволяет в явном виде проверить пекоторые из
условий теоремы B.3). При выполнении этих условий оценки
погрешности решения задаются общими формулами B.4.30)—
B.4.36) теорем 2.3, 2.4. Вместо М и т в соотношения B.4.30)—
B.4.33) нужно подставить их выражения B.4.43), а связь между
N и Ах определяется равенством B.4.29).
3. Перейдем к оценкам погрешности метода локальных
вариаций для задач с частными производными. Пусть отыскивается
минимум интегрального функционала A.4.1), заданного на классе
скалярных функций и (х, у), определенных в прямоугольнике
D: а1 ^ х «С а2; Ьг ^ у <; Ь2 и удовлетворяющих в D
ограничениям A.4.1). Введем в области D прямоугольную сетку с
координатами узлов:
Ч = «1 + iA*; У) = h + jAy, Ax = (а2 — а,)/^; 2 ^ 44
Ау = (Ь, - ЬО/ЛГ,; * = 0, 1 ЛГ1; / = 0, 1,..., Nt.
Пусть решение для фиксированной сетки B.4.44) и при
фиксированном шаге варьирования h строится согласно алгоритму,
описанному в § 4 главы 1 с применением формул A.4.4)—A.4.7).
Функцию /, входящую в A.4.2), считаем дважды непрерывно-
дифференцируемой по и, их, иу в некоторой области Ф изменения
своих аргументов, включающей все значения х, у, и, их, иу, при
которых ее придется подсчитывать при решении задачи. В
качестве Ф можно Припять область, задаваемую неравенствами:
ах <; х <; а2; ?>i < у < Ь2; и~ (х, у) <; и (х, у) < и+ (х, у);
I Их К ["+ (*> у) — и~ (х, у)]/Ах; | иу |< [и+ (х, у) — и~ (х, у)]/Ау.
Выведем условия на функцию /, при которых функция /,
определяемая равенствами A.4.4)^A.4.6), будет удовлетворять
условиям B.3.5), B.3.6) теоремы 2.2. Оценивая производные
Вопросы сходимости
функции I, получим для внутренних узлов сетки B.4.44),
аналогично B.4.3):
?0- <"*>
д!
*"«
^ max (Ах Ay —- + 2Ау
¦Р-1 + 2АХ
ди '
Здесь максимум взят по всем х, у, и, их, щ, из области Ф. Можно
показать, что для граничпых узлов сетки также справедливы
неравенства B.4.45). Условия B.3.5) для функции / будут
выполнены, если для некоторой константы К имеет место
неравенство, аналогичное B.4.4):
9f ' 0А~1 9/ )<Х. B.4.46)
т*х(ДаН-|-
+ 2Ау
du„
2\х\
JL
ди..
Перейдем к рассмотрению условий B.3.6). Запишем
квадратичную форму (Av, v) для функции /, пользуясь выражениями
A.4.4)-A.4.6):
N, N, N, N,
дЧ
(Л^)=2222
ди.Яи"ыЩ> -
i=o J'=0fc=0 1=0 г3 *'
W» Л'г ЛГ,—1JV,—1
= АхАу 2 2 2 2 dtVsu V*VU-
i,fc=Oj, /=0 р=0 «=0 iJ *'
B.4.47)
Здесь i>i;- — двухипдексная величина, границы изменения ее
ипдексов указаны в B.4.47). Верхние индексы у функции /
указывают номер ячейки, т. е.
/Р9 = / (Хр + Дя/2, yq + Ay 12, (upq + Up+1, q + Up- q+1 + Up+1, ,+i)/4),
B.4.48)
\UP+l, Q ~T "p+1, q+1 — Upq — WPl g+1)/2 Дх,
(up.g+i "T" wp+i, «+i — wp,a — ир+1,ч)/2Д2/).
Подставляя B.4.48) в B.4.47), заметим, что отличными от нуля
будут лишь те слагаемые суммы B.4.47), у которых индексы р
и i, р и к, q и /, q и I либо равны, либо отличаются на единицу.
После упрощения получим:
JV,—1 JV,—1 г+1 3+1
(Av, p)= 2 2 ni^ Щ = АхАу 2 2 а„ Эц "м"*'-
г=0 j=0 fc,p=i (,<j=j PQ ft!
d%fi
B.4.49)
Здесь квадратичная форма Пг^ зависит лишь от четырех
переменных: Vtj, vi+1, j, Vi,j+1, vi+1, 7+1, соответствующих вершинам ячейки
Метод Локальных вариаций
90
с номером ij. Условия B.3.6) заведомо будут выполнены, если
для всех Hij будут выполнены неравенства:
т (vfj + vt+1j + v\ j+1 + vf+1, ,+i) < Щ} <
< M D + via, l + vl hi + vlh ,-+i)/4 B.4.50)
при некоторых постоянных М ]> т !> 0 и любых Vij, r,-+i j, vt, j+1,
vi+i,j+i- Если граничные значения функции и на границе
прямоугольника D фиксированы и не варьируются, то в B.4.50) можно
заменить т па т/4 [см. аналогичные рассуждения по поводу
формул B.4.8)—B.4.10I.
Условия B.4.50) с учетом равенств B.4.49) можно записать
в виде требований неотрицательной определенности следующих
матриц размера 4x4:
Р - тАхАуЕ; МАхАуЕ/4 - Р. B.4.51)
Здесь Р — симметричная матрица размера 4x4, отвечающая
квадратичной форме П,7- из B.4.49). Вычисляя ее элементы при
помощи соотношений B.4.48), получим
Ри = Pi + Рг + Ps — Pi — Ръ + Ре! Pia = — Pi + Рз — Ps + Pel
Pis = Pi — Ps — Pi + Pe!
Pu = — Pi — Pi — Ps + Pal P22 = Pi — P% + Рз + Pi — Ps + Pei
P23 = —Pi+Pi — P3 + Pe; B.4.52)
P24 = Pi — Рз + Pi + Pa', Рзз = Pi — Pa + Pz — Pi + Рь + Рв,
Psi = — Pi + Ps + Ps + Ре! Р44 = P1 + P2 + P3 + Pi + Pa + Pe.
Здесь обозначено:
_ A;ya d2/ _ АхД.у d2/ _ Дх2 Э2/
Pi — ~1Г ТТ » Pa 9 й„ й„ ' Ps
ди2х > ™- 2 дихдиу ' « " 4 ди2у '
B.4.53)
_ ДжДуЗ д2/ _ __ Дж2Ду д2/ _ _ Да;2Дг/2 д2/
Pi 4 дивих » Рз — 4 a«aU]/ ; pe — —Гб "ай2"-
Для применения теоремы 2.2 положим, аналогично B.4.26)—
B.4.29):
v = (ЛГ1 + 1)(ЛГ1 + 1); d<d1/v;
dx = max [и+ (ж, у) — ы~(ж, у)];
D
|и| = Г4 Е4Г = -^=-|; B.4.54)
L i=0 J=0 ' V
Вопросы сходимости
91
Принимая во внимание выражения B.4.44), B.4.46), B.4.51)—
B.4.54) и применяя теорему 2.2, получим теорему сходимости
для рассматриваемой задачи, аналогичную теореме 2.3.
Теорема 2.6. Пусть всюду в области Ф функция / дважды
непрерывно-дифференцируема по и, их, uv и выполнены неравенства
B.4.46), а матрицы B.4.51) неотрицательно определенны
при некоторых М > т > 0. Тогда справедливы утверждения
теоремы 2.2, в которых нужно сделать замены B.4.54). Оценки
погрешности решения будут иметь вид неравенств B.4.30)—
B.4.33), в которых нужно положить га = 1, га* = га, и заменить
N + 1 на (TVj + 1)(N2 + 1). Для задачи с фиксированными
граничными значениями нужно в матрицах B.4.51) заменить
т на гаг/4, а в полученных оценках заменить Nx + 1 на N1 — 1
и iV2 + 1 на N2 - 1.
4. Случай наличия в функциопале вторых производных
разберем аналогично предыдущему па примере задачи B.1.17),
B.1.18) при ограничениях вида A.1.1). Как и в предыдущих
пунктах, будем предполагать функцию / (х, и, их, ихх) дважды
непрерывно-дифференцируемой по переменным и, их, ихх в
некоторой области Ф, включающей все значения х, и, их, ихх, при
которых функция / подсчитывается в процессе решения задачи
по методу локальных вариаций. Оценивая для задачи B.1.17),
B.1.18) частные производные dljdui как для внутренних (г =
= 1, 2, . .., N — 1), так и для граничпых точек (t = 0, N), получим
д!
ди.
<Г max [ Ах
df
ди
+ 2
df
ди_
+ Ах
df
д«
Следовательно,
пах [
ф V
max I Ax
df
ди
если функция / удовлетворяет
df | , 2 ) df
ди
+ 2
+ —
Зи_
<#
неравенству
B.4.55)
с некоторой константой К, то выполняются условия B.3.5)-
Вычислим теперь скалярное произведение (Ли, и). Для этого,
используя выражение для / B.1.19), выполняя
дифференцирование и группировку слагаемых, получим
i, J=N—l JV—1
(Ли, и) = 2j ~д1Пы. щи> = 2i Пь
П* = А* 2 аЙт"Л- BА56)
k,l=i—1 Ь '
Здесь /* отвечает значению функции / для s-ro интервала разбиения,
а каждая из величин Пг- является квадратичной формой от четырех
переменных щ-г, и<, ttj-щ, и«+2>
Метод локальных вариаций
92
Чтобы выполнялось условие B.3.6), достаточпо соблюдения
неравенств (для определенности предполагаем, что значения
функции и и ее производной на концах интервала фиксированы)
т (uti + и\ + hJh. + "?+а)/2 < П{ < М (u?_i + и\ + uf+1 + и?+2)/4.
B.4.57)
Здесь М, т — постоянные"; М > т > 0. Аналогично B.4.50),
условие B.4.57) будет выполнено, если матрицы
Р - ^- АхЕ, -^ МАхЕ - Р B.4.58)
будут неотрицательно-определенны в области Ф. Здесь Р —
симметричная матрица размера 4x4, соответствующая
квадратичной форме Пг из B.4.56). Вычисляя ее элементы при помощи
соотношения B.4.56) и B.1.19) для /, получим
Ри = Pi, Ри = — Pi — Рг + Pi, Pia = — Pi + Pi + Pi,
Pit = Pi;
P22 = Pi + 2p2 + Рз — 2P4 — Рв + p»;
Ргъ = Pi~P3 — 2p4 + Ре! Pu = — Pi — Рг + Pi,
Рзз = Л — 2p2 + Рг — 2p4 + p5 + Pe;
P34 = — Pi + Pa + P45 Pa = Pi,
XX x xx X
_ i a*f _ ay __ Аж эа/
^* ~~ 4Д* ЭиЭи * P5 ~ dudu ' Pe ~ 4 dua '
XX X
Для рассматриваемой задачи [с ограничениями A.1.1) и с
фиксированными значениями функции и ее производной на
концах интервала] нужно в обозначениях теоремы 2.2 положить:
v = Ar —3; d^.dxYv; dt = max [u+(x) — u~(x)];
a<x<b
lu^-jL-lul; H^Y~vh; N = ^-. B.4.60)
Тогда из теоремы 2.2 вытекает следующая теорема сходимости
для рассматриваемой задачи, аналогичная теоремам 2.3, 2.6.
Теорема 2.7. Пусть всюду в области Ф функция / дважды нет
прерывно-дифференцируема по и, их, ихх, выполнено неравенство
B.4.55), а матрицы B.4.58) неотрицательно-определенны
Вопросы сходимости
93
при некоторых М > т ^> 0. Тогда справедливы утверждения
теоремы 2.2, в которых нужно сделать замены B.4.60). Оценки
погрешности решения имеют вид неравенств B.4.30)—B.4.33),
в которых нужно положить п = 1, h% = h и заменить N + 1
на N-3.
5. Аналогично рассмотренным выше случаям можно
исследовать сходимости и оценить погрешность метода локальных
вариаций и для других классов задач, описанных в главе 1.
Исследование всюду основано на применении теоремы 2.2, которая при
определенных условиях гарантирует сходимость метода за
конечное число шагов (при фиксированных размерах сетки и шагах
варьирования), а также сходимость полученных решений к
точному решению на данной сетке при стремлении к нулю шагов
варьирования. Соотношения B.4.34)—B.4.36) теоремы 2.4
показывают, что шаги варьирования следует брать достаточно
малыми по сравнению с размерами сетки. Аналогичные оценки
можно получить и для других классов задач. Из этих оценок
следует, что для сходимости должны.выполняться условия типа
А/бг->0, B.4.61)
где К — шаги варьирования; б — характерный размер ячейки
сетки; г — некоторое целое число. Практически условиям типа
B.4.61) легко удовлетворить, устремляя h к нулю; при этом
величина г не очень существенна, так как условие B.4.61) обычно можпо
выполнить с большим запасом. Помимо условий B.4.61), для
сходимости числепного решения к точному решению вариационной
задачи нужно еще наложить условие б—у0, которому
удовлетворить труднее, так как минимальное значение б лимитируется
возможностями ЭВМ. В данном параграфе рассматривалась
сходимость приближенного решепия, полученного по методу
локальных вариаций, к точному решению дискретной задачи (при
фиксированной сетке). Исследованию сходимости решения дискрет*
ного аналога вариационной задачи к ее точному решению при
б -*¦ 0 в случае наличия ограничений посвящены работы [19, 32].
ЧИСЛЕННОЕ РЕШЕНИЕ ВАРИАЦИОННЫХ ЗАДАЧ
МЕХАНИКИ СПЛОШНЫХ СРЕД
ГЛАВА 3 • ВАРИАЦИОННЫЕ ЗАДАЧИ РАВНОВЕСИЯ
ЖИДКОСТИ
§ 1. Постановка задачи об определении формы равновесия
жидкости под действием массовых сил и сил поверхностного
натяжения
Начнем с общей задачи гидростатики.
Пусть масса несжимаемой жидкости подвержена действию
двух типов сил: потенциальных массовых сил и сил
поверхностного натяжения. Силы поверхностного натяжения действуют
на свободной поверхности жидкости, а также на границе сред
с различными свойствами (в частности, если жидкость
неоднородна, то на границе, разделяющей две несмешивающиеся жидкости
с разными свойствами).
Необходимо определить формы равновесия жидкости, т. е.
определить равповеспую свободную поверхность жидкости, а
также (в случае неоднородной жидкости) поверхности,
разделяющие различные жидкости. Сформулированная задача
гидростатики может быть поставлена как вариационная задача о
нахождении минимума потенциальной энергии системы, причем
потенциальная энергия слагается из потенциальной энергии внешних
массовых сил и потенциальной энергии поверхностных сил.
Даже без конкретизации вида массовых сил и геометрии задачи
ясно, что поставленная задача относится к числу вариационных
задач, к которым можно применить алгоритмы, изложенные
выше.
Для определенности будет рассматриваться задача
гидростатики для двух несжимаемых несмешивающихся жидкостей
разной плотности, находящихся в неподвижном сосуде в поле сил
тяжести (или других массовых сил постоянной интенсивности).
Если плотность одной из жидкостей положить равной нулю, то
придем к задаче равновесия однородной жидкости в неподвижном
сосуде при наличии сил тяжести и поверхностного натяжения.
Подобные задачи вызывают в последнее время большой интерес
в связи с изучением поведения жидкости на борту космических
и других летательных аппаратов. Дело в том, что массы топлива
и других жидкостей, находящихся на борту аппаратов, в течение
вариационные задачи равновесия жидкости
95
полета часто находятся в условиях, близких к невесомости, когда
силы поверхностного натяжения оказываются сравнимы по
величине с массовыми силами, обусловленными действующими
перегрузками. Ряд вопросов механики жидкости в условиях, близких
к невесомости, рассмотрен в [64, 82], где имеется библиография
по данному вопросу.
Одной из основных задач гидромеханики жидкости в условиях,
близких к невесомости, является задача об определении формы
равновесия жидкости в сосуде, т. е. задача гидростатики.
Количество работ в этой области довольно
велико [16, 17, 64-66,73,81,82,93,94].
Подробная библиография работ по этим
вопросам содержится в книге [82]. Здесь
будут рассмотрены лишь вариационный
подход к задаче гидростатики и ее
численное решение на основе методов,
изложенных выше. Эти методы позволяют
производить расчет равновесия жидкости в
сосудах практически произвольной формы.
Изложение данной главы основано на
работе [74], где впервые получено
решение, задачи гидростатики при отсутствии
осевой симметрии, и на работах [94, 12].
Пусть неподвижный сосуд содержит
две различные несмешивающиеся
несжимаемые жидкости с плотностями р±, р2 и
находится в однородном постоянном поле
массовых сил (например, сил тяжести) с ускорением g. Пусть
at — коэффициент поверхностного натяжения на границе St
стенок сосуда с г'-й жидкостью (i — 1,2), а — коэффициент
поверхностного натяжения на поверхности раздела двух жидкостей
(фиг. 3.1). При отсутствии поверхностного натяжения (осх — а2 —
= а = 0) поверхность раздела жидкостей в состоянии
равновесия будет плоской. Примем эту плоскость за плоскость ху
декартовой системы координат xyz, ось z направим против поля
массовых сил.
Потенциальную энергию системы можно записать в виде
[64, 821
U = -~ ?(P2-Pi) $ *dx ЛУ + «Л + a*S* + aS- C-1-1)
Фиг. 3.1
Здесь z (x, у)— возвышение поверхности раздела S над
плоскостью ху; D — проекция поверхности S на эту плоскость.
Жидкость 2 предполагается лежащей ниже поверхности S. Опре-
Численное решение вариационных Задач механики
96
деление устойчивой формы равновесия жидкости z (х, у) сводится
к нахождению минимума функционала C.1.1) при изопериметри-
ческом условии, выражающем равенство объемов одной и той
же жидкости при наличии и при отсутствии поверхностного
натяжения.
Примем для простоты, что степки сосуда (по крайней мере,
вблизи поверхности S раздела жидкостей) представляют собой
цилиндрическую поверхность с вертикальными образующими.
Тогда проекция D поверхности S на плоскость ху совпадает с
сечением сосуда плоскостью ху и не зависит от функции z (х, у).
Функционал C.1.1) с точностью до постоянного слагаемого можно
записать в виде
u=S В"(рг ~"pi) gz2+a ]/i+z'+z«]х
D
Xdxdy+ (a2 — a1)Szdl. C.1.2)
Здесь Г — граница области D; индексы х, у обозначают частные
производные. Перейдем к безразмерным переменным и введем
обозначения:
х' = х/1; у' = у/1; и -= z/l; П = U/al2;
cos т = (ах — а2)/а; В --= (р2 — рх) gP/a. C.1.3)
Через I обозначен характерный размер сосуда; у — краевой
угол [64, 82] (фиг. 3.1); В — безразмерное число Бонда. В
переменных C.1.3) функционал C.1.2) перепишется в виде:
П(и) "= ^(Vrl + ul + ul-\--^-uAdxdy-- cost Sudl. C.1.4)
Здесь переменные х', у' снова обозначены через х, у, а для
сечения сосуда плоскостью х, у и для границы этого сечения сохранены
прежние обозначения D, Г. Итак, задача сводится к нахождению
функции и (х, у), определенной и непрерывно дифференцируемой
в области D, удовлетворяющей изопериметрическому условию
V(u)~ $udxdy = 0 C.1.5)
D
и минимизирующей функционал П из C.1.4).
Условие C.1.5) выражает равенство объемов жидкости 2
(а следовательно, и жидкости 1) при наличии и при отсутствии
поверхностного натяжения. Функция и, удовлетворяющая
перечисленным условиям, будет, как известно [64, 82], автоматически
Вариационные задачи равновесия жидкости
97
удовлетворять условию равенства краевого угла на стенке
заданному значению^. Напомним, что краевым углом у
называется угол, образованный нормалью к стенке сосуда и нормалью
к поверхности раздела жидкостей в точках контакта поверхности
раздела со стенками сосуда (или, что то же самое, у—двугранный
угол между касательными плоскостями к стенке и к
поверхности раздела <S в точке контакта).
Сформулированная изопериметрическая вариационная задача
может быть сведена к нелинейной краевой задаче для уравнения
Эйлера, выписанного для функционала C.1.4). Это уравнение
приведено, например, в работе [94]. Для численного решения
удобнее пользоваться непосредственно вариационной
формулировкой задачи. Это позволит находить минимум (а не стационарное
значение) функционала C.1.4), т. е. определять сразу лишь
устойчивые формы равновесия.
§ 2. Исследование свойств вариационной задачи
Изучим некоторые свойства поставленной вариационной задачи,
существенные для ее численного решения. Составим функционал
(X -~ const)
/(») = ПA;) + Я,УA;) =
= Ц lVl+vl + i?v+ ^г + *») dxdy - cos т ф v dl. C.2.1)
D Г
Пусть функция v (х, у) доставляет безусловный минимум
функционалу / (г;). Условие C.1.5) для функции v, вообще
говоря, не выполнено: V (v) = V0 =j= 0. Функция v, доставляющая
функционалу / безусловный минимум, доставляет ему минимум
также и при условии V (v) = V0. Следовательно, она доставляет
минимум при этом же условии V (v) = V0 также и функционалу
П (v). Поэтому, минимизируя функционал / при различных
фиксированных К, можно подобрать число Я, так, чтобы было
выполнено условие V =* V 0 (А,) = 0 и тем самым решить исходную
изонериметрическую задачу. Этот прием целесообразно применять
в случае, когда стенки сосуда не вертикальны. В рассматриваемом
случае вертикальных стенок сосуда можно избежать перебора
по параметру К. Это следует из теоремы 3.1.
Теорема 3.1. Чтобы функция и (х, у) доставляла функционалу
П (и) из C.1.4) минимум при условии C.1.5) в случае В > 0,
необходимо и достаточно, чтобы функция v (х, у) -— и + с, где
с = (Г cos у — i.D)/(BD), доставляла безусловный минимум
функционалу J (v) из C.2.1) при любом постоянном Я. Здесь Г — длина
контура Г; D — площадь области D.
4 Ф. Л. Черноусько и Н. В. Баничук
Численное решение вариационных задач механики
98
Доказательство. Очевидно, каждой функции v, определенной
в D, можно поставить во взаимно однозначное соответствие
функцию и, для которой V (и) — О и число с выбрано так, что v =
= и -\- с. При этом нужно положить с — V (v)lD. Поэтому имеем
min J (v) = min min / (и -\- с).
V U О
Подставляя сюда выражение C.2.1), после элементарных
преобразований с использованием равенств C.1.4), C.1.5),
получим
min / (v) = min min Гп (и) + BcV (и) + -LВсЮ + kv («*) +
v и с L *
+ KcD — сТ cos у] = min П (и) + min F-i-?c2Z> + с (№ — Г cos y)l.
При условии В ^> О вычислим минимум квадратичной формы:
. т , ч • гт / \ №> — Г cos ТJ Г cos Г — kD ,0 0 <)Ч
mm/(у) = ттП(м)- -^ ^— ' с " Ш • C-2-2)
Первая формула C.2.2) показывает, что при В ^> 0 безусловный
минимум функционала J no v достигается одновременно с
минимумом П по и. Теорема 3.1 доказана.
Таким образом, достаточно один раз (при любом Я) решить
задачу минимизации/ (г;), после чего решение исходной изопери-
метрической задачи определится формулой и — v — с, где с
определено второй формулой C.2.2). Если 'же принять
К = Г cos y/D, то получим с — 0, и = v. Отметим, что
при В <^ 0 соотношение C.2.2) не имеет места и
описанный прием [минимизации функционала / без учета условия C.1.5)]
неприменим. Смысл этого приема весьма прост: в цилиндрических
сосудах равновесную форму поверхности раздела жидкостей
можно передвигать по вертикали на постоянную величину.
Теорема 3.2. При любых постоянных В ^> 0, у и Я функционал
J (v) ограничен снизу константой, зависящей лишь от этих
постоянных и от области D.
Доказательство. Будем проводить доказательство в
предположении, что граница Г области D достаточно гладкая (для
контура с угловыми точками доказательство усложняется).
Пусть а (ж, у)— непрерывно дифференцируемая в области D
двумерная вектор-функция, удовлетворяющая неравенству и
граничному условию:
|а|<;1 в D, a=ncosif па Г. C.2.3)
Здесь п — единичный вектор впешней нормали к контуру Г.
Вариационные задачи равновесия жидкости
99
Условия C.2.3) определяют функцию а не единственным
образом; докажем существование хотя бы одной такой функции.
Для этого положим:
Да = 0 в Д а = ncosт на Г. C.2.4)
Функция а тогда определяется однозначно как гармоническая
в D вектор-фупкция, удовлетворяющая условию Дирихле на
контуре Г [второе условие C.2.3I. Докажем, что функция а,
определенная таким образом, удовлетворяет также первому
условию C.2.3). Для этого вычислим, пользуясь формулами
векторного анализа и уравнениями Аах = Аау = 0 для компонентов
ах, ау вектора а, выражение Да2 — Д (а| + а2.) = 2 div (аЛЛ7аж+
+ ay\Jay) = 2 (ахАах + а Да ) + 2 [ VO2 + (V^J! =
= 2f(V«ocJ + (V««Jl>0.
Следовательно, а2 (х, у) — субгармоническая в D функция
(Да2 !> 0). Согласно свойствам субгармонических функций [83],
ее максимум достигается на границе Г области D. Но, согласно
C.2.4), имеем а2 = cos2y ^ 1 на Г, и поэтому а2 ^ 1 и"| а\ <^ 1
всюду в D-
Таким.образом, доказано, что вектор-фупкция а,
определяемая как решение краевой задачи C.2.4), удовлетворяет условиям
C.2.3).
Теперь, учитывая неравенство C.2.3), для любой функции v
имеем
Vl+vx + vl>\Vv\>aVv-
Подставим это неравепство в C.2.1) и выполним
преобразования, пользуясь теоремами векторного анализа и вторым
условием C.2.3):
/ (v) > ЭД (aV^+ -у 5у2 + ^vj &х йу — cos Т § v dl =
'd ^ ' г
='\\ div'(ay) — v div a -f- -я- Bv* + Xv dxdy —
'd
-"cost $ vdl = jj F-L Др« + (X - div a) pi dxdy + <3-2-5)
г о J
+ (у (any — cos yv)dl = \^ -y 5t>2 -f- (A, — div a) t> dzdz/ .
г d
Так как а — непрерывно-дифференцируемая функция, то
| div a | ^ M в D, где постоянная "Ж" зависит лишь от угла у
4*
Численное решение вариационных задач механики
100
и области D. Поэтому неравенство C.2.5) перепишется в виде
J {v) > Ж [~г5у2 - (ix i+м) iv i] ^=
-§[(%L-1^),-4i,in^>
>"(IAJ_fWD>_0o,
Теорема 3.2. доказана. Эта теорема обеспечивает существование
нижней грапи функционала C.2.1) и служит обоснованием для
возможности применения прямых методов минимизации.
Итак, исходная изопериметрическая задача C.1.4), C.1.5)
при В ^> 0 может быть заменена задачей определения безуслов-
нопГминимума (при любом Я) функциопала C.2.1), что облегчает
ее численное решение. Случай В ^> 0, как следует из C.1.3),
означает р2 ^> рх, т. е. сверху находится более легкая жидкость,
в частности, при р1 = 0 имеем одпу жидкость, над поверхностью
которой находится газ пренебрежимо малой плотности. В случае
невесомости имеем В — 0.
§ 3. Численное решение задачи гидростатики при положитель
ных числах Бонда
Минимизация функционала C.2.1) при В ^> 0 и любом
фиксированном к может проводиться по методу локальных вариаций,
описанному в § 4,6 главы 1. Опишем схему алгоритма для области D
в виде единичного квадрата: 0 <; а: <^ 1, 0 ^ г/ <; 1. Разобьем
область D на квадратные ячейки прямыми х = г'Д, у — /Д, где
А = UN, N — целое число, a i, j = 0, 1, . . ., N. Обозначим
через Рц точку с координатами х% ~= ?А, У} = /А и положим
vtj =\ (xi, у)). Функционал C.2.1) замепим суммой
/ ='2/0 + 2/^. C.3.1)
Здесь J и — интегралы по всем ячейкам, лежащим в области D,
a Ki) — интегралы по отрезкам, на которые разбит контур.
Величины 1ц, Ktj приближенно равны:
JiS =1A +'»l + vT5 + Bv*/2 + Xv] A2, *, / = 0, 1, . . ., N - 1;
v = (Vij + vMtj + Щ, j+i + »i+i. j+i)/4;
Vx = (fi+i, ,41 + *>i+l. j — Щ, j+i — ^ii)/BA)'
У» =- 0>i+i, ;ti + Vi. M — Wi+i.; — ^j)/BA);
7^= — cos т (»„ + i;1+lt j) A/2, / = 0, N; i ¦= 0, 1, . . ., iV — 1;
Ki3= - cos r (^+Ч ,+i) A/2, i = 0, N; j = 0, 1, . . ., W - 1.
Вариационные задачи равновесия жидкости
101
В
Сумма слагаемых /,-,- в сумме C.3.1) аппроксимирует интеграл
по области D из C.2.1), а сумма слагаемых Ktj — интеграл по
контуру Г из C.2.1).
Зададимся некоторым начальным приближением для чисел
vi} при i — 0, 1, . . ., N; j = 0, 1, . . ., N (в расчетах обычно
принималось vu — 0) и шагом варьирования h ]> 0. Затем,
согласно методу локальных вариаций (см. ?4, 6 главы 1), будем
последовательно варьировать значения vtj во всех точках области D + Г,
прибавляя к ним и вычитая величину h (т. е. рассматриваем,
наряду с vu, также значения
vu -f- fo и vij — h). Изменение v
в одной внутренней точке области
/Г(при r0 < i < N, 0 < / < N)
приводит к изменению четырех
слагаемых Jtj в сумме C.3.1),
соответствующих ячейкам, вершиной
которых является данная точка
(см. заштрихованные ячейки
'вокруг точки А на фиг. 3.2). При
изменении v в граничной точке
(точка В на фиг. 3.2) изменяются
два слагаемых Jt] и два1 слагаемых
Кц в сумме C.3.1), а при
изменении тц в угловой точке (точка С
на фиг. 3.2) изменяется одно
слагаемое Jtj и два слагаемых Кц.
Если при замене vtj на vtj + h
сумма слагаемых в C.3.1), зависящих от vtj
полагаем v = vi} -f- h в точке Ptj. В противном случае проверяем
также значение юц — h. Если обе вариации не уменьшают суммы
C.3.1), то оставляем старое значение v = vi}. Как "уже
отмечалось в § 4, б, сначала пробуется вариация в том направлении
(прибавляется или вычитается К), которое привело к уменьшению
функционала в предыдущей из просмотренных точек. Одна
итерация заканчивается, когда по одному разу просмотрены
все точки Pij. После этого переходим к следующей итерации.
Итерации продолжаем до тех пор, пока функционал / не перестает
убывать. Затем уменьшаем шаг варьирования h (обычно вдвое)
и продолжаем итерации. Наконец, если h достаточно мало, а
дальнейшее варьирование не приводит к уменьшению
функционала, увеличим (например, вдвое) число N, одновременно уменьшив
размеры ячеек А — 1/JV. Значения функции v во вновь
образовавшихся точках P,j находим интерполяцией по соседним точкам,
поело чего снова продолжаем итерации, постепеппо уменьшая h.
Варьирование оканчивается, когда числа А и h станут достаточно
щ
_Г
i
Ш
т
ш
ж
pi
Ш
Фиг. 3.2
уменьшается, то
Численное решение вариационных задач механики
102
малы, причем /k^J А2, а дальнейшее варьирование уже не изменяет
функционал. Подробное описание алгоритма и структуры
программы было дано в § 4, 6 главы 1. Стандартная программа
приведена в главе 9.
По указанному алгоритму были проведены расчеты форм
равновесия жидкости для некоторых сосудов. Ниже будут даны
некоторые результаты решения из работы [74] для области D
в виде квадрата и прямоугольника. В функционале C.2.1)
принималось К — 0, а искомое решение и выражалось через v по
формуле и = v — с, где с определено
второй формулой C.2.2). Минимальный шаг
варьирования составлял ~ Ю-7, а
максимальное число N для квадрата равнялось
20 (область D делилась на 400 ячеек).
Пробные расчеты с большими значениями
N показали, что дальнейшее увеличение N
приводит лишь к некоторому уточнению
решения.
Прежде чем приводить результаты
расчетов, остановимся па поведении решения
вблизи угловых точек коптура Г.
Рассмотрим сосуд (не обязательно
цилиндрической формы) с кусочпо-гладкой
поверхностью стенок.
Пусть вдоль некоторой кривой L,
лежащей на поверхности сосуда 21, нормаль к
этой поверхности испытывает разрыв первого рода:касательные
плоскости к поверхности 2 слева и справа от L не совпадают и
образуют двугранный угол гр. Пусть свободная поверхность (или
поверхность раздела двух жидкостей) S пересекает кривую L
в точке Р. Тогда в этой точке можно построить трехграпный угол,
образованный касательной плоскостью к S и касательными
плоскостями к 2 слева и справа от кривой L. Из трех
двугранных углов, составляющих этот трехграпный угол, один равен г|з,
а два других равны у (см. фиг. 3.3), так что трехгранный угол имеет
плоскость симметрии. Простое геометрическое рассмотрение
показывает, что угол у в трехгранном угле может изменяться в
пределах
Фиг. 3.3
я/2 — ф/2 < у < я/2 + ф/2,
C.3.2)
причем в случаях равенств в C.3.2) трехгранный угол вырождается
(точка Р уходит на бесконечность). Если угол у не лежит в
пределах C.3.2), то свободная поверхность жидкости не может
пересекать кривую L.
Вариационные задачи равновесия жидкости
103
В рассматриваемом случае стенки сосуда представляют
цилиндрическую поверхность, образующие которой параллельны
вертикальной оси z, а направляющей служит плоский контур Г,
граница квадрата или прямоугольника. Двугранные углы,
образованные стенками сосуда, здесь равны \р — я/2, и необходимое
условие C.3.2) пересечения поверхности раздела S с ребрами
этих двугранных углов имеет вид я/4 «^ у ^ Зя/4. Если же
0 < У К л/4 (или я > у > Зя/4), то решение и (х, у) будет
неограниченным вблизи угловых точек контура Г.
о .. „„. /
Фиг. 3.4
Заметим еще, что если в функционал*? C.2.1) положить X — 0,
то он не будет меняться при одновременной замене и на —и и у
на я — у. Следовательно, достаточно решить задачу равновесия
для краевых углов у ^ я/2. Решение при у ^> я/2 получится
путем зеркального отображения решения для угла у' = я — у
относительно горизонтальной плоскости.
Приведем сначала некоторые результаты расчетов для
области D в виде единичного квадрата 0 <^ ж <^ 1, O^y^l.
Решение зависит от двух безразмерных параметров {В и у),
которые варьировались в пределах В > 0, 0 <^ у <^ я/2.
При В — 10 расчет для квадрата был проведен при различных
значениях краевого угла. 11а фиг. 3.4 представлены сечения
полученных поверхностей и (х, у) плоскостью симметрии х — 0.5.
Для наглядности эти кривые смещены но вертикали так, чтобы
их концы совпадали.
При у <^ 45°, как показано выше, точное решение имеет
особенность: оно пеограпичепо вблизи углов контура Г. Числепное
решение ограничено, но приближенно передает характер
особенностей. Значение и,ц в ;угловых точках (точка С па фиг. 3.2)
на один-два порядка превышает значения функции в остальных
точках. При увеличении размеров сетки, т. е. при увеличении
числа N, значение ui7- в угловых точках растет. Так, для у =40°,
В — 10 при N — 5 имеем и00 — 0.62, при N = 10 имеем и00 =
— 1.66, а при N ~ 20 и00 = 10,7, в то время как в остальных
-у=ои-
Численное решение вариационных задач механики
104
точках сетки, кроме угловых, | u,j | ^ 0.35. На фиг. 3.5 даны
сечения плоскостями х = 0, 0.1, 0.2. 0.3, 0.5 одной и той же
свободной поверхности, рассчитанной для квадрата при В = 2
и v = 60°-
Зависимость решения и (х, у) от числа Бонда иллюстрируется
фиг. 3.6 и 3.7, где даны сечения полученных поверхностей
плоскостью х = 0.5. Для всех кривых фиг. 3.6 и 3.7 краевой угол
у равен 60°, а концы этих кривых снова совмещены за счет сдвига
по вертикали. Фиг. 3.6 соответствует области D в виде единичного
Фиг. 3.5
~и
V 3=200 У
Ч^^ /J.Q yS
>*~_ 4 .L-^
Фиг. 3.6
Фиг. 3.7
квадрата, а фиг. 3.7— области D в виде прямоугольника 0 *^х <11,
0 ^ у <; 2. Из фиг. 3.6 и 3.7 видно, что при В ^> 1 решение
вблизи стенок носит характер функций типа пограничного слоя.
Функция и (х, у) отличается от постоянной только в некоторой
узкой области, прилегающей к контуру Г. Этот факт согласуется
с результатами асимптотического решения, полученного в работе
[65]. Численное сравнение показало также количественное
согласие результатов расчетов с результатами работы [65] при В^>1.
При уменьшении числа В прогиб свободной поверхности
растет, причем при В=1 и В—0Л (фиг. 3.6) свободные поверхности
Вариационные задачи равновесия жидкости
105
очень близки одна к другой. Это означает, что с уменьшением
В равновесная свободная поверхность довольно быстро стремится
к форме равновесия в условиях невесомости E = 0) и мало
отличается от нее даже при относительно больших В, сравнимых
с 1.
Как уже отмечалось, алгоритм метода локальных вариаций
может быть применен при В ^> 0 для расчетов равновесия
жидкости в сосуде практически произвольной формы.
При этом в случае цилиндрических сосудов с вертикальными
стенками и произвольным поперечным сечением D в плоскости ху
удобно применить следующий прием, описанный » § 6 главы 1.
Сделав преобразование независимых переменных х, у, отобразим
область D на прямоугольник или на любую другую область,
граница которой состоит из отрезков прямых, параллельных
координатным осям. При этом вид функционала C.2.1) изменится,
что несущественно для применяемого метода, но зато будут
исключены погрешности, связанные с аппроксимацией формы области
совокупностью прямоугольных ячеек [эти погрешности могут быть
особенно велики при вычислении иптеграла по контуру в C.2.1)].
После применения указанного преобразования процесс решения
будет почти таким же, как для области D в виде квадрата.
§ 4. Численное решение задачи гидростатики при
отрицательных числах Бонда
Отрицательным числам Бонда В < 0 отвечает тот случай, когда
тяжелая жидкость находится выше легкой, т. е. р2 < рх в
обозначениях § 1. В этом случае также имеются устойчивые формы
равновесия ь некотором диапазоне параметров задачи; для осе-
симметричного случая эти формы равновесия изучались в работах
[16, 17, 88]. Подход, примененный в § 2, 3, не пригоден для
решения задач равновесия с отрицательными числами Бонда.
Здесь уже не имеет места теорема 3.1, сводящая задачу с изопе-
риметрическим условием к задаче о безусловном минимуме
функционала C.2.1). Поэтому для решения задачи равновесия
при отрицательных числах Бонда" будет использован другой
подход.
Пусть и (ж, у)— функция, доставляющая минимум
функционалу C.1.4) при условии C.1.5). Поставим ей в соответствие
функцию v, такую, что и = v + с, где постоянная с выбирается
из условия C.1.5)
с = — -^-^vdxdy.
D
Численное решение вариационных задач механики
106
Тогда
u(x,y) = v + cr=v(x, У) — -^-)у (*> У)dxdV- C.4.1)
D
Подставив выражение C.4.1) для и в функционал C.1.4),
получим новый функционал, зависящий от v. Обозначим его
через F.
После небольшого преобразования получим
F (v) = g [yi + i? + vl + -f- »' + Bvc + -|- с2) dx dy -
D
-CoS^vdl-ccoStr = ^[Vi + vl + vl + ^f + ^pv)x
Г D
X dxdy — cos у <? у d? —^- (\\ vdxdy j . C.4.2)
Здесь применяются те же обозначения, что и в § 1 данной главы.
Если функция v доставляет минимум функционалу C.4.2),
то функция и, определяемая равенством C.4.1), будет, очевидно,
доставлять минимум фупкционалу C.1.4) при условии C.1.5).
Поэтому для решения поставленной задачи равновесия (т. е.
задачи определения функции и) достаточно решить задачу
минимизации функционала F (v). Легко проверить, что функционал
F не изменится, если к функции v прибавить произвольную
константу. Поэтому задачу о минимуме F из C.4.2) можно решать,
задав условие нормировки в виде v (х0, у0) — v0, где v0 — любое
число, х0, г/0 — произвольная точка области D. Функционал
C.4.2) является пелинейной функцией интегральных
функционалов, и для его минимизации применим метод локальных вариаций,
описанный в § 5—6 главы 1. После решения этой задачи и
определения функции v нетрудно восстановить по формуле C.4.1)
решение и исходной изопериметрической вариационной задачи C.1.4),
C.1.5). Таким способом можно решать задачи равновесия при
отрицательных числах Бонда для сосудов цилиндрической формы
с произвольным поперечным сечением. При этом можно
использовать стандартную программу, приведенную в главе 9.
Приведем пример решения осесимметричной задачи из [12].
Пусть поперечное сечение сосуда плоскостью ху есть круг г ^ 1,
т. е. сосуд представляет собой круговой цилиндр. Функции
и, v зависят здесь лишь от расстояния г до оси симметрии. Тогда
функционал C.4.2), с точностью до постоянного множителя 2л,
Вариационные задачи равновесия жидкости
107
принимает вид:
1
F (у> = \ [у1 + [?)* + х Bv2 +2v cos T)rdr -
о
1 2
— vA)cosy — В {[ vrdA , » = i7(r), 0^r<l. C.4.3)
о
Расчет форм равновесия жидкости в осесимметричпом случае
производился по алгоритму метода локальных вариаций для
О 1
~0,5
Фиг. 3.8 -и
неаддитивных функционалов с одной независимой переменной
(§ 5 главы 1) при помощи стандартной программы, приведенной
в главе 8.
Условие нормировки задавалось в виде v A) = 0. Численное
решение для случая В — 0 сравнивалось с точным решением
v (г) = [sin у —A — г2 cos2 yH'5]/cos y> соответствующим
сферической поверхности. Расхождение между численным и точным
решением не превышало 0,1%. Результаты расчета форм
равновесия жидкости для у = 60° при различных отрицательных числах
Бонда приведены на фиг. 3.8. Здесь представлены сечения
полученных поверхностей плоскостью, проходящей через ось симметрии
сосуда.
При больших по модулю отрицательных числах Бонда
равновесное состояние жидкости, если оно и существует, оказывается
неустойчивым. Критическое число Бонда В*, при котором
нарушается устойчивость равновесия, зависит (для случая
цилиндрического сосуда) лишь от угла у [17, 88].
Как показали расчеты, метод локальных вариаций не позволяет
надежно определять критические числа Бонда. Это связано
с тем, что данный метод обеспечивает удовлетворение лишь
локальных условий экстремума, а потеря устойчивости связана
ь-
~^-
-и
в=
0,5
i,o\
-3
2,0 ^^^'^
Численное решение вариационных Задач механики 108
с нарушением условий, относящихся к экстремали в целом
(условия типа Якоби). Однако метод локальных вариаций может
быть использован для расчета форм равновесия жидкости при
докритических числах Бонда В ^> В* (в том числе и при
отрицательных), причем в сосудах не только осесимметричной, но
и произвольной формы. Излагаемый подход, сводящийся к
минимизации неаддитивного функционала C.4.2), может быть применен
не только при отрицательных, но и при положительных числах
Бонда. Однако при положительных числах Бонда несколько
проще использовать подход § 2, 3, в котором требуется искать
минимум интегрального (аддитивного) функционала C.2.1).
Б заключение отметим, что аналогичным способом на основе
вариационного принципа и метода локальных вариаций могут
решаться и другие задачи гидростатики в потенциальных силовых
полях (например, в поле центробежных сил для задачи
относительного равновесия жидкости во вращающемся сосуде).
ГЛАВА 4 • ВАРИАЦИОННЫЕ ЗАДАЧИ РАВНОВЕСИЯ
УПРУГИХ ТЕЛ
§ 1. Равновесие стержней и пластинок
Равновесие упругих тел, находящихся под действием внешних
массовых и поверхностных потенциальных сил, характеризуется
принципом минимума потенциальной энергии системы 156]. Это
позволяет свести широкий класс краевых задач статики упругих
тел к вариационным задачам, в которых в качество
минимизируемого функционала выступает потенциальная энергия системы,
равная разности энергии упругих деформаций тела и работы
внешних сил, а в качестве искомых функций — перемещения
упругого тела. Для отыскания минимума функционала и
перемещений, реализующих этот минимум и удовлетворяющих
соответствующим краевым условиям, могут быть использованы
прямые методы минимизации и, в частности, метод локальных
вариаций. Сказанное относится и к задачам статики упругих стержней
и пластин, рассматриваемым в данном параграфе.
1. Упругие стержни. Для стержня, расположенного вдоль
оси х в плоскости ху, жестко закрепленного на концах х = а,
х = Ъ и нагруженного внешними распределенными нагрузками
р (х), нормальными к поверхности стержня, потенциальная энер-
Вариационные задача равновесия упругих тел
109
гия имеет вид [59]
ь
J =* J [EIoulx ~ 2p(x) и] dx, D.1.1)
а
где Е — модуль Юнга материала стержня; 10 — момент инерции
поперечного сечения стержня; и (х) — прогиб стержня по
направлению оси у, т. е. у--и (ж)—уравнение равповеспой формы стержня.
Функция и (х) определяется из условия минимума функционала
/, рассматриваемого на множестве всех дважды непрерывно
дифференцируемых функций и (х), удовлетворяющих краевым
условиям:
и (а) = Аг; их(а) = А2; и(Ь) — Bx; их{Ь) = 52. D.1.2)
Здесь Ах, А2, В и В2 — заданные числа. Условия D.1.2) выражают
жесткое закрепление обоих концов стержня.
Если деформируемый стержень находится между абсолютно
жесткими поверхностями у = и+ {х), у --= и~ (х), то на прогибы
накладываются дополнительные условия:
и" (ж)< и (х)< и+ (х). D.1.3)
В положении равновесия стержень может иметь участки
контакта с заданными поверхностями, для которых либо и = и+(х),
либо и = и~(х).
В случае неоднородных стержней переменного сечения
величины Е и /„из D.1.1) являются заданными функциями переменного
х, т. е. Е — Е (ж), /0 — /0 (ж). Вариационные принципы
позволяют учесть действие на стержень сосредоточенных сил и моментов
[50], а также могут формулироваться для задач с другими
условиями закрепления концов стержня. Исследование равновесия
стержней в случае больших деформаций также может быть сведено
к решению экстремальной задачи, для которой подынтегральное
выражение в минимизируемом функционале уже не будет
квадратичной функцией от и и ее производных, как это имеет место для
задачи с функционалом D.1.1). Наконец, вариационные задачи
вида D.1.1)—D.1.3) могут быть сформулированы для случая
пространственных деформаций криволинейных стержней. Это
непосредственно достигается введением дополнительной искомой
функции, характеризующей отклонение точек стержня от
плоскости ху, и обобщением функционала / на этот случай.
Во всех перечисленных случаях для эффективного
численного решения вариационных задач может применяться метод
локальных вариаций. При этом наличие ограничений D.1.3)
сужает мшшество допустимых функций и(х), среди которых
Численное решение вариационных задач механики
«О
Фиг. 4.1
разыскивается решение задачи D.1.1)—D.1.3), что, как
отмечалось в главе 1, приводит к сокращению числа вычислительных
операций, необходимых для получения решения с требуемой
точностью, и тем самым повышает эффективность метода. Рйшепие
некоторых нелинейных задач равповесия упругих стержней в
случае больших прогибов приведено в § 8 главы 1 (см. работу [47]).
2. Упругие пластинки. Более подробно остановимся па
задачах равновесия упругих пластин. Рассмотрим, следуя работе [7],
задачу об изгибе тонкой упругой
пластины, жестко закрепленной па
контуре С0. Контур С0 служит границей
области D0 (фиг. 4.1), распологкенной
в плоскости ху.
Пусть р (х, у) — интенсивность
нормальной нагрузки, приложенной
к пластине, а и — нормальный
прогиб пластины (отсчитываются вдоль
оси z). Для простоты предполагаем,
что интенсивность р постоянна.
Прогиб пластины ограничен сверху
некоторой абсолютно жесткой
поверхностью z = а (х, у). Проекции на
плоскость ху областей контакта
поверхности z = а (х, у) с
деформированной пластиной обозначим через Dt (Ct — границы областей Di,
г=1, . . ., s). Предполагается, что на участках контакта
поверхности а (х, у) с пластиной силы трепия отсутствуют (условие
равенства пулю тангенциальных напряжений). При указанных
предположениях задача об отыскапии прогиба пластины и (х, у)
сводится к решению бигармопического уравнения (вне областей
копта кта):
Д2и = p/d в D0 - {D1 + D2 -f ... + Ds), (d = EIIs/12A - v2)).
D.1.4)
Здесь 2Н — толщина пластины; E, v — модуль Юнга и
постоянная Пуассона материала; А — оператор Ланласа. В областях
контакта Dt должно выполняться условие и (х, у) = а (х, у).
При решении уравнения D.1.4) требуется удовлетворить краевым
условиям жесткого закрепления:
и = ди/дп = 0 на С0, D.1.5)
а также условиям непрерывности функции и ее первых и вторых
производных на Ct. Производная в D.1.5) берется по направлению
нормали п к контуру С0. Решение задачи в рассматриваемой
постановке существенно затрудняется тем, что границы Сг, а также
Вариационные задачи равновесия упругих тел
111
число s областей коптакта заранее неизвестны. Нетрудно
убедиться, что исходная краевая задача эквивалентна следующей
вариационной задаче. Требуется найти функцию и (х),
удовлетворяющую неравенству
и (ж, ?/)< а (х, у) в D0, D.1.6)
условию D.1.5) на границе С0 области D0 и доставляющую
минимум функционалу [59]— потенциальпой энергии пластины
J = §\(Au)*-?f\dxdy. D.1.7)
А,
Введем безразмерные переменные (I — характерный размер
пластипы в плоскости ху):
х = х/1; у' = у/1; и' = ud/pP; J' = JcP/pHe; " а' (х, у) =
= а (х, у) dlplk.
В дальнейшем штрихи опускаем. В новых переменных
функционал D.1.7) примет вид
/ = Д [(AuJ — 2и] dxdy, D.1.8)
а соотношения D.1.5), D.1.6) останутся прежними. Через D0
в D.1.8) обозначена область изменения безразмерных
независимых переменных х, у.
Численное решение вариационпых задач вида D.1.5), D.1.6),
D.1.8) проводилось по методу локальпых вариаций.
В § 8 главы 1 было дано численное решение аналогичной
контактной задачи для упругой мембраны.
3. Алгоритм решения задачи равновесия пластинки. Опишем
алгоритм решения задачи D.1.5), D.1.6), D.1.8) на примере
области D0 в виде прямоугольника. Разобьем прямоугольник
D0 па равные прямоугольные ячейки прямыми х = iAx, у =
= jAy, где Ах ^> 0, Ау ^> 0 — достаточно малые числа, a i =
= 0, 1, . . ., т; / = 0, 1, . . ., п. Через Pi} обозначим точки
с координатами х,- = iAx, yj = j'Ay, а через utj — значение
фупкции и (х, у) в точке Pi}: Для граничных точек Рц, т. е.
для точек P0j, Pmj, Pi0, Pin при i = 0, 1, . . ., m; / = 0, 1, . . .
. . ., тг, согласно грапичпому условию D.1.5), имеем ггг7- = 0.
Для точек Pij с индексами Р1}, Рт-и h Piu jP,-,„_!, где i =
= 1, 2, ..., т — 1; j = 1, 2, ..., п — 1 также имеем иц = 0
в силу второго грапичпого условия D.1.5). Эти точки назовем
точками окаймления. Иптеграл D.1.8), зависящий от вторых
производных, заменим следующей суммой по ячейкам (когда
область D0 имеет сложную форму, сумма распространяется лишь
Численное решение вариационных задач механики
112
на те ячейки, которые лежат в D0):
/«/--= 2 I if, hi = A* Ay {[((и,+1,у - 2иц + ми. у)/As2J +
+ 2 ((щ+1, у — 2м{у + uM, у)/Аж2) ((«{, у+1 — 2ui} + щ, y_i)/A?/4) -f
+ (К ,+i - 2иу + щ, у_,)/Аг/2J] - 2иу}. D.1.9)
Ограничение D.1.6) заменим ограничением:
Щ} <; а (хи у}), i = 2, . . ., т — 2; / = 2, . . ., п — 2. D.1.10)
Ограничение D.1.10) для граничных точек и точек окаймления
предполагается выполненным, т. е. а ^> 0 для этих точек.
Таким образом, приходим к задаче отыскания чисел иц
во всех точках Р;у, кроме граничных точек и точек окаймления,
удовлетворяющих ограничениям D.1.10) и минимизирующих
сумму D.1.9).
Сначала задается некоторое начальное приближение н?у при
i = 2, 3, . . ., т — 2, / = 2, 3,. . ., п — 2, удовлетворяющее
ограничениям D.1.10). Затем выбирается шаг варьирования h
и начинается процесс локальных вариаций решения с шагом h
во всех точках, кроме граничных точек и точек окаймления.
Подробно алгоритм метода описан в главе 1. Здесь мы остановимся
лишь на некоторых особенностях решения данной задачи [7].
При варьировании решения в точке (%{, yj) при i = 2, ..., т—2,
/=2, . . ., п — 2 контролируется справедливость неравенства
D.1.10) и проверяются условия
Фу<Ф« или Фу<Ф{у. D.1.11)
Здесь величина Ф;у— сумма тех слагаемых в D.1.9), которые
зависят от utj, а величины Фу, Фу являются соответственно
значениями суммы Фгу, которые она принимает для и.. = иц -f- h
и иц = Щ] — h. Непосредственная проверка условий D.1.11)
требует выполнения большого числа операций при подсчете
каждой из величии Фгу, Фу, Фу К сокращению числа операций
(и тем самым машинного времепи при счете па ЭВМ) приводило
использование вместо условия Фу < Фгу следующего условия:
(Щ+2,} — 4и;+1, у + 6и{у — Ыг-г, у + Ui-2, j + Щ/(Ах)* +
+ 2 (щ-!, у-1 — 2ц{_!, у + щ^, yfl — 2и{, у_х -f 4к{у — 2м{, i+1 +
+ ui+1> у_х - 2и,+1, у + «1+,. i+i + 2Л)/(До:)» (А?/J + D.1.12)
+ (щ. j+2 — 4м{, у+1 + 6и0 — 4м{, у_! -f- Ui, y_2 + Щ/(Ау)* — 1 < 0,
получающегося подстановкой в D.1.11) формул для Ф;у из D.1.9)
и выполнением элементарных преобразований. Аналогично вместо
Вариационные задачи равновесия упругих тел 113
Xj . _
\
проверки условия Ф„, <С Фц из D.1.11) проверялось условие,
получающееся из D.1.12) заменой А па (— А).
Таким образом, для всех точек Рц, кроме граничных точек
и точек\окаймления, производилось варьирование значений и^
с шагом А, причем сначала испытывалась вариация в том
направлении, которое привело к уменьшению функционала в предыдущей
из просмотренных точек. Процесс варьирования с данным шагом
заканчивается, когда для всех точек вариации значений Uij с
шагом + А приводят либо к нарушению условий D.1.10), либо
к увеличению функционала /. После этого уменьшается шаг А
вдвое, а когда шаг А достигал заданного малого значения,
уменьшались вдвое числа Ах, Дг/ и т. д. по схеме, описанной в главе 1.
Можно показать, аналогично рассмотрениям в гл. 2, что для
сходимости необходимо выполнение условий: max (Ах, Дг/) -*- 0;
А/б4 -*- 0; б = min (Да;, Дг/).
4. Численные примеры. По описанному выше алгоритму
проводился расчет контактных задач для пластин в
предположении, что абсолютпо жесткая поверхность z = а (х, у) является
плоскостью z = а, а область D0 — квадратом: 0 ^ х <J 2,
0^2/^2. Квадрат D0 разбивался сеткой с т= п= 20,
Да; = Ау = 0Л. Начальное приближение для внутренних узлов
сетки (за исключением точек окаймления, где utj = 0) задавалось
в виде: ui} = <?[(iAx - IJ - I]2 [(/Дг/ - IJ - l]2, i, j =
= 2, . . ., т — 2. 'fB качестве начального шага варьирования
бралось А0 = 0.001. Варьирование заканчивалось, когда после
очередного дробления (деления пополам) шаг А становился
меньше, чем А.,. = 10-в.
Вычисления проводились при а = 1; 0.012; 0.006. При а = 1
поверхность а (х, у) = а не достигается пластинкой, и
рассчитываемая контактная задача эквивалента задаче о свободном прогибе
квадратной пластины, жестко закрепленной на всем контуре.
Максимальное значение прогиба, полученное в результате расчета
и A,1) = 0.0165. Значение максимального прогиба, вычисленное
по точному решению [53], есть и A,1) = 0.0162, т. е.
погрешность решения здесь не превышает 2%.
На фиг. 4.2 кривыми 1—5 показано полученное в результате
расчетов при а = 1 распределение прогибов соответственно
в плоскостях у = Vs, V5, 3Д, 4/б, 1 (прогибы на фиг. 4.2
показаны лишь при 0 <С х ^ 1, так как при 1 <^ х ^ 2 кривые
симметричны полученным относительно прямой х = 1). При а = 0.012,
0.006 поверхность а (х, у) = а ограничивает прогибытпластипы,
появляются участки контакта. На фиг. 4.3 кривыми 1, 2 показано
распределение, прогибов в плоскости у = 1 соответственно для
а = 0.012, 0.006.
Численное решение вариационных задач механики / 114
/
По аналогичной схеме решалась статическая задача о
сдавливании абсолютно жесткого тела в форме параболоида в кваДратную
пластину 0^х<^2,0^.у^2, жестко закрепленную па контуре.
Уравнение параболоида имело вид z =а (х, у) = О.ОЩх!— IJ +
-J- (у — IJ—0,25]. Эта задача определения формы прогибов
пластины приводит к минимизации функционала
/= \\(AuJdxdy
фиг. 4.2 Фиг. 4.3
при условии и <1 а (х, у). При вычислениях по-прежнему
полагалось т = п = 20, Ах = Ау = 0.1, а шаг варьирования
изменялся половинным делением от А0 = 0.1 до А* як Ю-7.
Начальное приближение задавалось в виде н^-=0.025[(г'Ах—IJ +
+ (jAy — IJ — 0.5]. На фиг. 4.4 кривая2—расчетное
распределение прогибов в плоскости у= 1, кривые 2, 3 — соответственно
сечения параболоида и начального приближения для фупк-
ции и плоскостью у = 1.
5. Некоторые обобщения. Описанный алгоритм может
применяться для расчета равновесия непрямоугольных пластин, так
как все рассуждения п. 3 остаются справедливыми и для областей
D0 более сложной формы, с той лишь разницей, что фупкционал
J приближенно представляется в виде суммы функционалов
Itj только по ячейкам, целиком принадлежащим области ZH + С0.
В случае пенрямоугольных пластин можно также пользоваться
различными преобразованиями независимых переменных,
отображающими исходную область D0 в прямоугольник. Конформные
ционные задачи равновесия упругих тел
115
преобразования здесь более удобны, так как они переводят
производные по нормали к границе С0 из D.1.5) в производные,
берущиеся но нормалям к сторонам прямоугольника, получаемого
в результате преобразования. Могут применяться, вообще говоря,
и неконформные преобразования (§ 6 главы 1). При расчете
аналогичных задач для свободно опертых пластин следует
учитывать только краевое условие и = 0на С0. Второе краевое условие,
соответствующее свободному опиранию, будет естественным для
минимизируемого функционала [59, 60], поэтому нет необходимости
удовлетворять ему заранее.Следовательно,
минимизацию функционала
(потенциальной энергии системы) можно осуществлять
но описанной схеме с тем лишь отличием,
что функция иц теперь варьируется во
всех точках, за исключением граничных.
Алгоритм расчета равновесия упругих
пластин непосредственно обобщается и на
случай различных смешанных краевых
условий. Например, для пластины, жестко
Z
1,8
0,8
Oft
0
-Of
-0,8
-ц
иЛ
1
\
\
V
г\
i
V4
т
—
—
7
закрепленной только на части Сог
контура С0 и свободной на части С02 (С01 -(-
-(- С02 = С0), при минимизации функцио-
пала / следует варьировать значения
функции прогиба и (xt, yj) в граничных фиг ^ 4
точках, принадлежащих контуру С02.
Подобно могут решаться и задачи равновесия пластин при более
общих краевых условиях и в нелинейной постановке.
Аналогично можно рассматривать задачу о встречном прогибе
двух нластин, жестко закрепленных в параллельных плоскостях
(z = 0, z = а). Отличие от рассмотренной задачи будет
заключаться в том, что здесь уже нужно рассматривать два массива
чиеел utj, vtj— соответственно координаты прогибов первой и
второй нластин иод действием распределенных нагрузок. Схема
варьирования будет отличаться тем, что при варьировании нужпо
следить за выполнением неравенств и^- ^ vtj и уменьшением
суммы функционалов первой и второй пластин (потенциальной
энергией всей системы).
Метод локальпых вариаций может применяться для
эффективного решения других задач статики упругих пластин,
возникающих при исследовании сжатых пластинок на устойчивость. Эти
задачи обычно формулируются как задачи на собственные
значения, в которых в качестве собственного значения выступает
параметр нагрузки. Известно [41, 59], что для этих задач можно
использовать вариационные подходы и сводить исходную краевую
задачу к проблеме минимизации неаддитивного функционала
Численное решение вариационных задач механики
/ 116
вида J = F (/i, J2) = JJJ21 гДе A» J2 — некоторые
квадратичные функционалы. Для решения возникающих вариационных
задач с неаддитивными функционалами может быть использован
алгоритм (§ 6 главы 1), который уже применялся в § 8/главы 1
для решения некоторых простейших задач указанного вида.
§ 2. Двумерные задачи теории упругости
1. Плоские задачи. В данном параграфе метод локальных
вариаций применяется для решения двумерных задач статики упругого
тела. Рассмотрения начнем с плоских задач теории упругости,
т. е. с задач о плоском напряженном и плоском деформированном
состояниях упругих тел. Постановка этих задач содержится,
например, в монографии [69]. Основными искомыми величинами
являются поля перемещений и (х, у), v (x, у). Функции и (х, у),
v (х, у) при фиксированных х, у представляют собой проекции
вектора перемещения точки (х, у) па оси х, у. Компоненты е^-
тензора деформации выражаются через и, v из геометрических
связей гх = ди/дх, гу — ди/ду, еху == (ди/ду -\- dv/dx)/2, а
компоненты otj тензора напряжений — из уравнений закона Гука,
связывающих линейными зависимостями тензоры папряжений
и деформаций в упругом теле. Учитывая, что как в случае плоской
деформации (ег = 0), так и для плоского напряженного
состояния (oz = 0) тождественно выполняются равенства azsz = 0,
rxz = xyz = 0, запишем принцип минимума потенциальной
энергии системы:
J = -jrU {3x?x + 2txvsxy 4- Оугу — Gxu — Gvv) dx dy —
+ it {w + И")' ~ GxU ~ M dxdy ~ S{FxU + FyV) ds- D'2Л)
Здесь Е — модуль Юнга, D — область в плоскости х, у,
занимаемая упругим телом и ограниченная контуром С, на части
которого Сх заданы перемещения, а на части С2 приложены впеш-
ние поверхностные силы F = (Fx, Fv). Объемные силы,
действующие на тело D, обозначены через G — (Gx, Gy). Безразмерные
постоянные а, Ь, с выражаются через коэффициент Пуассона v
по формулам:
а = A - v)/[(l + v)(l - 2v)], b = v/[(l + v)(i - 2v)],
с = A -I- v)-1, D.2.2)
Вариационные задачи равновесия упругих тел
117
справедливым для случая плоской деформации, и равны
а -= A - v2)-1, b -= v/(l - v2), с = A + v)'1 D.2.3)
в случае плоского напряженного состояния. Согласно
вариационному принципу действительные перемещения и, v реализуют
минимум функционала D.2.1), рассматриваемого на множестве
кинематически возможных перемещений, т. е. на классе функций
и (х, у), v (х, у), ^удовлетворяющих краевым условиям для
перемещений на С±.
Для решения сформулированной вариационной задачи можно
применить алгоритм, описанный в § 6 главы 1, и стандартную
программу для ЭВМ, приведенную в главе 9. С использованием
указанного алгоритма в § 3 данной главы дается численное
решение плоской задачи равновесия тела с трещиной. Другие
расчеты плоских задач (в случае плоского деформированного
состояния) приводятся в § 2 главы 5 при отыскании напряженного
и деформированного состояний непосредственно перед появлением
в теле пластических зон (нри решении упруго-пластических
задач). Некоторые подробности применения методалк расчету
плоских задач упругости можно извлечь из соответствующих
параграфов.
Заметим, что вариационную постановку можно придать и
задачам об упругом контактном взаимодействии двух и более плоских
тел при условии, что трение между контактирующими
поверхностями отсутствует. Принцип минимума потенциальной^энергии
системы, записанный для этого случая, приводит к вариационной
задаче о минимуме функционала /, представляющего собой
сумму функционалов /йвида D.2.1) по областям Dh (к = 1,. . ., К),
занимаемым каждым из тел. На контакных поверхностях требуется
удовлетворить некоторым дополнительным условиям типа
неравенств для перемещений (контактные условия), выполнение
которых обеспечивает непроникновение одного тела в другое.
На фиг. 4.5 показаны две упруго-контактирующие части тел
Dt и />2. Для простоты предположим, что соответствующие
контактирующие участки границ Сг, С% вертикальны, причем область
Dx находится слева от D2 (см. фиг. 4.5). Контактное условие
в этом случае примет, вид и1 (xl, yj)m<^ и2 (ж2, г/f), где через и1,
и2 обозначены горизонтальные компоненты векторов перемещений
точек (х), у)) ?Е Clt {х\, у2) ЕЕ С2. Задача рассматривается в
рамках линейной теории упругости, поэтому х\ = х\ = xt, yj =
= у* = yj. На вертикальные перемещения v1, v2 точек границы
никаких ограничений не накладывается, так как вследствие
предположения об отсутствии трепия вдоль контактных
поверхностей реализуется свободное скольжение соприкасающихся тел.
Численное решение вариационных задач механики
118
Для решения рассматриваемой задачи методом локальных
вариаций разобьем область D = Dt + D2 единой, вообще говоря
переменной, сеткой xt = х0 + i (Ax)h yj = у0 + / (Ay)j.
Параметры сетки — числа х0, у0, (Аж)г, (Ау)} желательно подобрать
так, чтобы контактные поверхности лежали на линиях х — xt
или у = у, (как на фиг. 4.5). Функционал / аппроксимируем
суммой интегралов по ячейкам сетки
/ ж / - I, ¦ |- /2 -- Щ + Z/y. D.2.4)
Каждая из сумм Ти /2 отвечает одному из упругих тел Du D2.
Алгоритм определения величин
щ = ик (xt, yj), vfj=vk(xi, yj) нри
к = 1, 2 по методу локальных
вариаций во внутреппих (для каждой
из областей Du D2) узлах сетки и
в граничных*точках,
соответствующих свободным участкам границ,
остается прежним.
В каждом узле сетки,
расположенном на «контактной линии»
сетки, определены четыре
величины u}j, v\j, щ, v\j. Опишем
процесс варьирования этих величин
в рассматриваемых узлах. Пусть
в точке (xt, yj) приближенно
выполнено равенство и1 = и2. Тогда
при варьировании горизонтальных
перемещений следует сначала рассматривать одновременные
вариации вида ву + ^> иЬ + А и щ — А, щ — А.
Если при одновременной замене величин щ, щ на щ -J- А,
иЬ + h уменьшается сумма тех слагаемых в сумме D.2.4), которые
зависят от значений этих величин (соответствующие этим
слагаемым ячейки заштрихованы на фиг. 4.5, нричем ячейки,
обозначенные индексом 1, соответствуют слагаемым, зависящим от
величины щ, а ячейки с индексом 2 соответствуют слагаемым в сумме
D.2.4), зависящим от щ), то в качестве новых значений для
перемещений иу, ufj принимаем щ -\- А, щ -\- А.
Если для указанной вариации функционал / не уменьшается,
т. е. не уменьшается сумма слагаемых по заштрихованным
ячейкам (фиг. 4.5), то аналогичпо рассматривается вариация
и\] — А, ку — А. Если и эта вариация не приводит к уменьшению
функционала, то следует последовательно рассмотреть зпачения
перемещений иц — А, и% и и},, иу -f- А, соответствующие образо-
Вариационные задачи равновесия упругих тел
119
ванию зазора между рассматриваемыми участками границ.
Для каждой из указанных вариаций требуется вычислять
изменение уже не четырех, а только двух слагаемых в сумме D.2.4).
Например, при перемещениях и], — h, щ следует проверить,
уменьшается ли сумма тех двух слагаемых, которые зависят от
величины u}j и соответствуют заштрихованным ячейкам с цифрой 1.
Если в рассматриваемой граничной точке (хг-, yj) в текущем
приближении выполнялось условие и*, < и%, то при
варьировании и замене величины щ на щ + h следует проверять
неравенство иц-\-к<.щ. Если последнее неравенство нарушается,
то пробуется одновременная вариация иц -\- h, иц -\- h и т. д.
Варьирование величин vjy, v% в рассматриваемых точках
аналогично варьированию этих же величин в узловых точках, лежащих
на свободных границах. Аналогично можно учесть в алгоритме
и другие случаи, встречающиеся при варьировании перемещений
точек контакных поверхностей.
Заметим, что вариационную постановку можно придать
некоторым задачам статики нелинейно-упругих тел, а также задачам,
в которых учитывается неоднородность и анизотропия среды.
Поэтому для решения упомянутых задач можно использовать
различные алгоритмы метода локальных вариаций.
2. Осесимметричные задачи. Метод локальных вариаций может
применяться для численного решения осссимметричных задач
статики упругих тел. Для этих задач также известны
экстремальные принципы, сводящие решение краевых задач к проблеме
отыскания минимума некоторого квадратичного функционала
/ (и, v) от двух искомых функций u, v при некоторых краевых
условиях. Функции и (г, z), v (r, z), описывающие радиальные
и осевые перемещения точек тела, определены в плоской области,
являющейся сечением упругого тела плоскостью, проходящей
через ось симметрии. Здесь г — расстояние от оси симметрии,
z — координата, отсчитываемая вдоль этой оси. Поэтому
возникающие вариационные задачи являются двумерными и по
своей сложности (с точки зрения получения числепного решения
рассматриваемыми методами) эквивалентны плоским задачам из
п. 1.
Для решения вариационных задач о равновесии осесиммет-
ричных упругих тел на основе метода локальных вариаций
разработаны специальные алгоритмы и программы, позволяющие
учитывать при расчетах неоднородность упругих свойств среды,
неоднородность поля температур, неограниченность области D,
а также алгоритмы, приспособленные к расчету равновесия
составных контактирующих тел с заранее неизвестными участками
Численное решение вариационных задач механики
120
контакта. Для расчета указанных задач также можно применять
стандартную программу, приведенную в главе 9.
Метод локальных вариаций применялся для расчета прочности
вращающегося диска, находящегося под действием центробежных
сил и изгибаемого равномерно распределенными нормальными
нагрузками, приложенными к плоскости диска. Для дисков
переменной толщины численно исследовалось влияние резких
изменений толщин на концентрацию напряжений в дисках. При
расчетах учитывалось влияние па прочность неоднородного поля
температур. Указанным задачам посвящена работа [42].
Решение пекоторых контактных задач теории упругости для
осесимметричного штампа приведено в работе [9] и дано в § 3
главы 5, где рассчитаны напряжепное и деформированное
состояния сплошной упруго-пластической среды. Решепие упругой
задачи здесь получено как первый этап решения
упруго-пластической задачи. Там же обсуждаются некоторые особенности
используемой численной схемы и указывается способ решения
вариационных задач с бесконечными областями.
Таким образом, разнообразные двумерные задачи статической
теории упругости (линейные и нелинейные, с произвольными
граничными условиями и поверхностями контакта) могут решаться
на основе методов главы 1. Аналогичный подход применим,
конечно, и к трехмерным задачам, и здесь возможности
практического решения лимитируются лишь объемом памяти ЭВМ.
§ 3. Некоторые задачи теории трещин
Вариационные подходы могут применяться к задачам равновесия
упругих тел с трещинами, а также для описания процесса
квазистатического роста трещин в хрупких средах. Для задач, в
которых рост трещин носит неустойчивый скачкообразный характер,
вариационные принципы позволяют определить критические
значения параметров, при которых наступает динамический процесс
разрушения.
1. Вариационный подход. Сформулируем задачу о хрупком
разрушении тела с прямолинейной трещиной. Пусть плоское
упругое тело D имеет прямолинейную трещину. Область D
ограничена контуром С, на части которого Сх заданы перемещения
и, v, а к части С2 приложены внешние поверхностные силы
F = ( Fx, Fy). Через и, v здесь, как и в § 2, обозначены
перемещения соответственно вдоль осей х, у. Объемные силы,
прикладываемые к телу, обозначим через G = (Gx, Gy). Предполагается,
что внешние нагрузки являются заданпыми фупкциями точки
приложения х, г/и параметра нагружения/?. Также предполагается
симметричность формы тела, прикладываемых к нему сил и задан-
Вариационные задачи равновесия упругих тел
121
пых на Ci перемещений относительно разреза, что обеспечивает
прямолинейность распространения трещины в процессе нагруже-
пия. Для простоты считаем, что к поверхностям трещины усилия
не прикладываются. Поэтому формально будем включать
поверхность трещины в границу Сг и полагать на соответствующем
участке F x = Fy — 0.
Для определения зависимости между текущей длиной трещины
I и параметром нагрузки р воспользуемся вариационным
принципом [101], которому в стандартных обозначениях можно придать
вид
dW (I, p)/dl + v = 0, D.3.1)
W {I, p) = min / (I, р, и, v), D.3.2)
Ц, V
J = ~T§{[а (и* + vl) + 2Ьих"у + -§- ("у + ^J) E — Gxu —
— Gyv\ dxdy — \ (Fxu + Fyv) ds. D.3.3)
Здесь через у обозначена плотность поверхностной энергии,
затрачиваемой на образование единицы поверхности трещины,
величины их, иу, vx, vy, a, b, с имеют тот же смысл, что и в
формулах D.2.1), D.2.3). Формула D.3.2) выражает известный
вариационный принцип теории упругости, согласно которому
действительные перемещения и, v минимизируют функционал D.3.3),
рассматриваемый на классе всех кинематически возможных
перемещений и, v (т. е. перемещений и, v, для которых
удовлетворяются краевые условия на d).
Для случая пропорционального пагружения, когда W {I, р)=
= p2W° (О, (W° (I) = W (I, 1)), уравнение D.3.1) примет более
простой вид:
р" = -yUWo/dl]'1. D.3.4)
Соотношения D.3.1.), D.3.4) являются алгебраическими
уравнениями, связывающими р и I, а искомая зависимость I = I (р)
будет их решением. При квазистатическом нагружении тела
и плавном распространении трещины (со скоростью, много мепь-
шей скорости звука в данной среде), когда можно пренебречь
динамическими эффектами, зависимость I (р) должна быть
монотонно возрастающей функцией параметра р [13]. Если трещина
распространяется скачком, то принцип D.3.1)—D.3.3) позволяет
определять только критические значения параметров, при
которых наступает динамический режим неустойчивого распростра-
Численное решение вариационных задач механики
122
нения трещин. Зависимость I (р) в этом случае изображается
монотонно убывающей функцией и показывает, что для более
длинных трещин пеустойчивое разрушение начинается при
меньших значениях параметра нагрузки.
Ограничимся далее случаем пропорционального нагружения.
При этом, как видно из D.3.4), отыскание искомой зависимости
I = I (р) сводится к вычислению производной dW°/dl в
рассматриваемых пределах. Для определения величины W0 (I) требуется
решить некоторую плоскую задачу теории упругости, для чего
воспользуемся алгоритмом метода локальных вариаций, подробно
Фиг. 4.6 Фиг. 4.7
описанным в § 6 главы 1. Подробности численного решения и
дальнейшие рассуждения приведем для следующего примера.
2. Вращение хрупкого цилиндра с трещиной. Рассмотрим
задачу хрупкого разрушения вращающегося ротора (или топкого
диска), при наличии в нем начальной трещины. Обозначим через D
кольцевую область поперечного сечения ротора плоскостью ху
(фиг. 4.6), а через JiQ, Hi — внутренний и внешний радиусы
ротора. Начальная трещина длиной I расположена вдоль оси х.
Предполагается, что к боковым поверхностям ротора и берегам
разреза силы не прикладываются, а деформирование объекта
полностью обусловлено действием центробежных сил.
Данная задача исследовалась ранее приближенными и
экспериментальными методами в работе [107], где было показано,
что разрушение роторов наступает при некоторых критических
значениях угловой скорости со = со* и носит неустойчивый
характер (т. е. имеет место мгновенное раскалывание).
Неустойчивость развития трещин при со>со* приводит задачу исследования
Вариационные задачи равновесия упругих тел
123
разрушения и определения песущей способности роторов к задаче
определения критического значения угловой скорости.
Учитывая симметричность задачи относительно оси х (фиг. 4.6),
рассмотрим только верхнюю половину области D. В полярных
координатах эта часть D изобразится в виде прямоугольника D*.
Для данной задачи через и, v обозначим соответственно
радиальное и угловое перемещения и введем безразмерные переменные
следующим образом:
, Ей , Ev , г ,, I ,
U — , V = — , Г — -jj- , I — -б- , ф = ф,
Яв. . Евт Ее.
Сю _ , t-7-CD п 1 ^Г
рш«Д* ' Ф рш»Л* ' * " рш»Л* ' . Рш*Я2 '
рсо*/?2 ' Гф рщад*
D.3.5)
гдер — постоянная плотность среды, а через вг, . . . , тгф
обозначены соответствующие компоненты тензоров напряжений и
деформаций. Штрихи у безразмерных перемеппых в дальнейшем для
удобства записи опускаем. Переходя далее в D.3.3) к новым
независимым переменным г, ф и используя безразмерные величины
D.3.5), запишем принцип D.3.1) — D.3.3) следующим образом
(в безразмерных переменных):
а = p2Rh?/rE =-- {dW«ldl)~\l D.3.6)
W° ¦¦=-- min ~y U \аиг -f -^ (y* + u) u* + 73- К — иJ +
+ -т(т- + »г ?-)*-2ur\rdrdq>. D.3.7)
Здесь а — безразмерный параметр, пропорциональный квадрату
параметра нагрузки р, роль которого, в свою очередь, играет
квадрат угловой скорости (р = со2).
Область D% в плоскости г, ф представляет собой в
безразмерных переменных прямоугольник 0 sgC'<p ^ я, R0/Ri ^ г ^ !• ^т_
резок стороны ф — 0 при RJRi <! г <[ RJRi + J соответствует
начальной трещине, а отрезок этой стороны при R0/R! + / <!
^ г ^ 1 отвечает продолжению трещины (оси ж на фиг. 4.7).
3. Описание расчетов. Определепие величины W0 и функций
к (/•, ф), у (/•, ф), для которых реализуется минимум в D.3.7),
проводилось численно. При этом параметрам задачи придавались
значения: v = 0.3, /?0//?х — 0.1. Расчеты величины W0 (I)
проводились для значений: I = кАг, к = 0,1, . . .,10, Аг = 0,05. Об-
Численное решение вариационных задач механики
124
ласть D* разбивалась прямоугольной сеткой с вершинами г,- =
^ г'Аг, ф7- ¦-= /Аф, где Аг = 0.05, Аф ^ л/10, i --= 2,3, . . ., 20;
/ — 0,1, . . . ,10. Из соображений симметрии на границе области
D* имеем v — 0 при ф — 0, (I + 0.1) </<1, а также при
Ф = я, 0.1 <; г ^ 1. Отсюда для величин vtj вытекают краевые
условия: vi0 —- 0 при 2 + к ^ i еС 20; v(,i0 — 0 при 2 ^ i <; 20.
В остальных точках области D* (как внутренних, так и
граничных) функция vtj не фиксируется и может свободно варьироваться.
Сеточпая функция utj является искомой для всех внутренних и
граничных точек (rt, ф^) (она пигде не фиксирована). Начальное
приближение для искомых величии u,j, vi} задавалось в виде
uij = vtj = 0. В качестве начальных
значений для тагов варьирования
hu, hv бралось hu — hv = 10. Если
по окопчании итерации выполнялось
равенство ри + Р,. ='0,"то'гааги
варьирования одновременно уменьшались
путем половинного деления. Через
P,t, P„ здесь обозначены количества
точек, в которых на данной итерации
поменялись значения соответственно
~щ ~gz ~Цг~ для и,], Vij. Варьирование
закапчивалось по выполнению условия hu =
Фиг. 4.8 "--- К < 10.
Через полученные в результате
расчетов значения величины W°
для I — 0, 0.05, 0.1, . . .,0.5 при помощи интерполяции
восстанавливалась функция W° (Z), которая затем использовалась
в формуле D.3.6) для опретеления зависимости а — а, (I).
Полученная зависимость а — а (Г) изображена па фиг. 4.8. Отсюда
видно, что с увеличением длины I начального разреза критическое
состояние достигается при меньших зпачениях параметра
нагрузки (угловой скорости), т. е. распространение трещины, как
отмечалось выше, является неустойчивым.
Заметим, что вблизи конца трещины решение задачи теории
упругости имеет особенность известного вида, которая,
естественно, не улавливается равномерной и довольно крупной сеткой.
Поэтому изложенные расчеты могут служить для оценок
интегральных характеристик поведения тела, но не для детального
описания напряженного и деформированного состояний в окрестности
трещины. Для повышения точности этого описания, помимо
измельчения сетки, нужно применить переменную сетку,
согласованную с известной асимптотикой в окрестности особенности.
Подобный подход будет применен в следующей главе для
исследования решения в бесконечной области, где будет учтена
асимптотика решения задачи теории упругости на бесконечности.
S0
30
I I I
Решение вариационных задач для упруго-пластических сред 125
глава 5 • решение вариационных задач для
Упруго-пластических и вязко-пластических сред
§ 1. Кручение yupyro-пластических стержней
1. Постановка вариационной задачи. Рассмотрим задачу упруго-
пластического кручения призматического стержня [23, 24, 70,
76, 85, 86]. Расположим прямоугольную систему координат Oxyz
так, чтобы ось Oz была параллельна оси стержня. Пусть кручение
происходит вокруг оси Oz; D — область поперечного сечения
стержня плоскостью ху. Компоненты тангенциального напряжения,
лежащего в плоскости ху, выражаются через функцию
напряжений и (х, у) соотношениями: txz = ди/ду, xyz = — ди/дх.
В области D функция напряжений удовлетворяет неравенству
(ди/дх)* + (ди/ду?:<-й E.1.1)
где т0 — константа пластичности для материала стержня.
Заметим, что в упругой области выполняется знак строгого неравенства,
а знак равенства справедлив для пластической зоны.
В области упругости функция напряжений и (х, у) должна
также удовлетворять уравнению Пуассона
д2и/дх2 + дги/дуг --= — 2GQ, E.1.2)
где G — модуль сдвига; Э — угол закручивания, приходящийся
на единицу длины стержня. Функция и (х, у) непрерывна и
непрерывно дифференцируема всюду в области D, в том числе и на
заранее неизвестной границе упругой и пластической зон. На
границе С области D функция напряжений должна удовлетворять
условию
и = 0 на С. E.1.3)
Скручивающий момент М на единицу длины стержня дается
формулой
M = 2Jj{ju(z, y)dxdy. E.1.4)
D
Перейдем в соотношениях E.1.1) — E.1.4) к безразмерным
переменным:
х' = х/1, у' = у/1, и' - u/BGm), a = 2GZ6/t0, ц, = М/Bт0Р).
E.1.5)
Здесь I — характерный поперечный размер стержня; и', а, \л> —
Численное решение вариационных задач механики
126
безразмерные функция напряжений, угол закручивания и
крутящий момент соответственно. Безразмерные переменные х', ?/',
и будем снова обозначать через х, у, и, а под D и С будем
понимать поперечное сечение стержня и его границу в
безразмерных координатах. В новых переменных соотношения E.1.1) —
E.1.4) запишутся следующим образом:
(ди/дхJ + (ди/дуJ < сг2, E.1.6)
и-0 на С, E.1.8)
ц --- а\\udxdy. E.1.9)
D
Задача сводится к определению в области D функции и (х, ?/),
непрерывной вместо со своими первыми производными,
удовлетворяющей неравенству (ди/дхJ -j (ди/дуJ < а и уравнению
E.1.7) в упругой области, равенству (ди/дхJ + (ди/дуJ ~- а'2 в
пластической области, а также краевому условию E.1.8).
Безразмерный крутящий момент и, (жесткость стержня на кручение)
определяется равенством E.1.9).
Нетрудно убедиться, что исходная краевая задача
эквивалентна следующей вариационной задаче. Требуется пайти функцию
и (х, у), удовлетворяющую во всей области D неравенству E.1.6),
на границе области — условию E.1.8) и доставляющую минимум
функционалу
Заметим, что эквивалентная вариационная постановка задачи при
ведена в работе [39].
2. Особенности численной схемы и результаты расчетов.
Численное решение поставленной вариационной задачи E.1.6),
E.1.8), E.1.10) проведем по методу локальных вариаций [6, 11] с
применением алгоритма, описанного в § 6 главы 1. Заметим, что
ограничение E.1.6) содержит производные искомой функции и
поэтому отличает задачу E.1.6), E.1.8), E.1.10) от вариационных
задач, рассматриваемых в § 6 главы 1. Однако нетрудно обобщить
указанный алгоритм и при варьировании решения и.ц в каждой
внутренней точке (ж,-, ]jj) [в граничных точках значения иц
полагаются равными нулю, согласно E.1.8), и не подлежат
варьированию в процессе решения задачи] проверять выполнение пера-
Решение вариационных задач для упруго-пластических сред 127
венств
[К)«]2 + 1Ыи12<сг2, E.1.11)
/„ ч* _ "i+l.jH"' "г+1, ; '
\uxni —
2Дя
Юу
и
i+1, л-1
2Д</
для каждой из четырех ячеек, общей вершиной которых является
точка (xt, у}). Здесь Ах, Ау — размеры ячеек вдоль осей х, у;
все обозначения здесь те же, что и в § 6 главы 1.
Ограничение на производные E.1.11) приводит к некоторым
особенностям численного решения задачи. Во-первых, в
результате интерполяции при удвоении чисел т, п может нарушаться
условие E.1.11). Поэтому числа т, п выбирались достаточно
большими и не менялись в процессе решения задачи. Во-вторых, в
некоторых случаях функция и (х, у), полученная после
сходимости итераций, имела в пластической области колебания с
амплитудой порядка начального шага варьирования h0. Эти колебания
не сглаживались при дальнейшем уменьшении h и связаны с
«застреванием» процесса локального варьирования на ограничении
E.1.11). Описанное явление устранялось при помощи простого
приема. Вначале в ограничении E.1.11) вместо а подставлялось
число а ~\- Да, где Да > 0 — величина порядка h0 (ограничение
делалось более жестким). После сходимости итераций число Да
уменьшалось параллельно с уменьшением шага h и при
достаточно малых к (в расчетах нри к ~ 10) принималось Да = 0, что
приводило к решению задачи с исходным значением а. Такой
прием постепенного смягчения ограничения в процессе итераций
позволяет получить гладкие решения и может применяться также
и в других задачах. Смысл его состоит в том, что при каждом
новом значении к нроцесс варьирования начинается с
приближения, не лежащего на ограничениях.
Расчеты упруго-пластического кручения проводились для
стержней прямоугольного поперечного сечения со сторонами
а — 1, Ь --¦ к, где к принимает значепия к = 1, 1.5, 2, 3, 5. Для
расчетов использовалась сетка с т — п — 20, Ах — 1/207 Лу —
= к/20. Начальное приближение задавалось в виде и = 0, а в
качестве начального шага варьирования выбиралось h0 = 10.
Когда варьирование с начальным шагом не давало уменьшения
функционала, то шаг уменьшался вдвое, и варьирование
продолжалось. Когда после очередного дробления шаг варьирования
достигал значепия h* ^ 10~7, то варьирование прекращалось, и
по полученному решению по формуле E.1.9) просчитывался
закручивающий момент.
Численное решение вариационных задач механики 128
Граница между упругой и пластической областями
определялась после решения задачи [в упругой области справедливо
строгое неравенство E.1.11), а в пластической зоне, в пределах
точности расчета, в E.1.11) имеет место знак равенства].
Для стержней с прямоугольными областями поперечного
сечения вычисления проводились при следующих значениях угла
закручивания: а - 20/3, 10, 20, .40, 80.
Дадим сначала качественное описание решений. При
достаточно малых углах а ограничение E.1.6) нигде в области D не
достигается. Решение и — и0 (х, у) при этом не зависит от а и
соответствует чисто упругому кручению. Пластические зоны
возникают на границе области D при угле а, равном
а0 - [max((dujdxf -f- (ди0%)я)Г'\ E.1.12)
и
Этот угол может быть найден из решения упругой задачи. В
интервале 0 <^ а <; а0, как следует из E.1.9), имеем:
ц, =-- u0n/u0, [i0 -- \х, (а0) - ••= а0 j\ u^dxdy. E.1.13)
При а ^> а0 пластические зоны растут с ростом а, проникая
внутрь области, и при достаточно больших а заполняют
практически всю область D. Крутящий момент ц, при этом монотонно
возрастает по пелинейпому закону, быстро стремясь к некоторому
значению ц*, соответствующему чисто пластическому кручению.
На фиг. 5.1 для
прямоугольников с отношением сторон к — 1,
1.5, 3 для значений а — 20/3, 10,
20 кривыми 1,2,3 показаны
границы зон пластических и упругих
деформаций. Границы зон
занумерованы в том порядке, в каком
указаны значения параметра а.
Для дапных прямоугольных
областей зоны пластичности возникают
па серединах стороп и
распространяются к диагоналям в полном
согласии с результатами
экспериментов [70] и решений,
полученных другими методами [39, 40,
70, 76, 86, 105].
На фиг. 5.2 показана
зависимость закручивающего момента ц
фиг. 5.1 от угла закручивания а для квад-
Решение вариационных задач для упруго-пластических сред 129
ратной области поперечного сечения. На этом графике имеется
область линейной зависимости ц от а при а<^ а0, где кручение
стержня подчиняется закону Гука. Числа а0, \i0 для квадрата
можно получить путем простого подсчета по формулам E.1.5),
E.1.12), E.1.4) из известного решения и0 (х, у) задачи упругого
кручения стержня квадратного сечения [87]. В результате
пересчета известных решений найдем для квадрата а0 = 2.963, р0 =
= 0.104. Значения этих же параметров, рассчитанные по методу
локальных вариаций с учетом формул E.1.12), E.1.13), равны
а0 = 2.994, ц,0 = 0.105.
Фиг. 5.2
30 ос
При а > а0 момент кручения, изображаемый
рассматриваемой кривой, зависит от угла закручивания нелинейным образом
и при достаточно больших значениях угла закручивания
асимптотически стремится к пределу ц^., что соответствует чисто плас-
тическому решению. Значение щ, полученное из известного
точного чисто пластического решения для квадрата [86], равно
щ = 0.1667. Значение ц%, полученное по методу локальных
вариаций, равно ц9 = 0.1662.
Таблица 5.1
к
1
1.5
2
3
5
а0
2.9629
2.3585
2.1505
2.0305
2.002
v*
0.1040
0.1155
0.1230
0.1335
0.1455
а = 20/3
0.1558
0.2778
0.3989
0.6403
1.1188
а = 10
0.1620
0.2855
0.4096
0.6548
1.1375
а = 20
0.1660
0.2897
0.4136
0.6606
1.1508
а = 40
0.1662
0.2904
0.4150
0.6627
1.1560
а = 80
0.1622
0.2904
0.4150
0.6630
1.1560
а = оо
0.1667
0.2917
0.4166
0.6667
1.1667
5 Ф. Л. Черноусько и Н. В. Баничук
Численное решение вариационных задач механики
130
В табл. 5.1 для прямоугольных областей поперечного сечения
с отношением сторон к = 1, 1.5, 2, 3.5 приведены значения
безразмерного момента {*, рассчитанные при различных а. Во втором
и третьем столбцах таблицы приведены значения а0, при которых
впервые появляются пластические деформации, и соответствующие
им значения и0, подсчитанные согласно решению упругой задачи
[87]. В последнем столбце приведены значения закручивающего
момента, соответствующего чисто пластическому кручению, которые
Фиг. 5.3 Фнг. 5.4
получены из известного [86] точного чисто пластического решения
н, = х^_а)а2 + -б"а3-
Здесь Ь, а — стороны прямоугольника (а = 1, Ь = к).
Данные расчетов для квадратной области совпадают с
результатами, полученными численно при помощи релаксационных
методов [79, 105].
По аналогичной схеме проводились расчеты
упруго-пластического кручения стержней с поперечными сечениями сложных
профилей (фиг. 5.3—5.7). Каждая из приведенных областей
целиком вписана в единичный квадрат. При вычислениях
по-прежнему полагалось т = п = 20, Ах = Ау = 1/20. Для указанных
областей вычисления проводились при .а = 20/3, i0, 20, 40, 80,
100. Для значений а = 20/3, 10, 20 соответственно кривыми 1, 2, 3
нанесены границы, зон пластических и упругих деформаций.
Видно, что число и характер зон пластичности меняются с
ростом а.
На фиг. 5.8 показана зависимость ц от а для форм областей,
указанных на фиг. 5.3—5.7, причем нумерация кривых на фиг.
Решение вариационных задач для упруго-пластических сред 131
5.8 соответствует последовательности областей на фиг. 5.3—5.7.
Отметим, что для областей, приведенных на фиг. 5.3—5.7,
производные dujdx, dujdy для чисто упругого решения неограни-
чены вблизи входящих углов контура С [87]. Поэтому для этих
областей, в силу формул E.1.12), E.1.13), имеем а0 = \i0 — 0, и
зависимость fi (а), строго говоря, -не имеет линейного участка.
Практически эта зависимость при малых а оказывается линейной,
так как области пластических деформаций малы, и
соответствующий вклад этих областей в момент мал.
В табл. 5.2 для рассматриваемых областей (номера областей,
приведенные в первой колонке, соответствуют
последовательности фиг. 5.3—5.7) приведены значения безразмерного момента ц в
зависимости от угла закручивания а.
По описанному алгоритму могут быть проведены расчеты
упруго-пластического кручения стержней практически любой
5*
Фиг. 5.5
Фиг. 5.7
Численное решение вариационных задач механики
132
формы. При этом можно использовать преобразования,
переводящие область сложной формы в прямоугольник (этот прием
описан в § 6 главы 1). Метод локальных вариаций может быть
применен и для задач кручения неоднородных стержней, упруго-
пластических стержней с упрочнением и при других
усложнениях постановки задачи. Так, в работе [30] с применением этого
метода получено численное решение задачи кручения упруго-
пластического стержня, составленного из двух частей с различ-
р
0J
0fi5
1
/ ?-
1 /^ *
ш ^— 5
v i i i
3
—1
1
70
20
30
Фиг. 5.8
ными упругими и пластическими свойствами. Некоторые из этих
вопросов рассмотрены в обзорной статье [102], где изложен ряд
последних результатов по задачам кручения упруго-пластических
стержней, в частности по кручению стержней из неоднородного
материала. В статье [102] можно найти также библиографию
последних работ по кручению.
3. Другой подход к решению задач об упруго-пластическом
кручении стержней. В п. 1 данного параграфа решение краевой
упруго-пластической задачи E.1.1)—E.1.3) сводилось к задаче
минимизации функционала E.1.10) на классе функций,
удовлетворяющих дифференциальному неравенству E.1.6) во всей об-
т
N
1
2
3
4
5
а б л и ц а
а = 20/3
0.1131
0.1079
0.0732
0.0713
0.0362
5.2
а = 10
0.1154
0.0875
0.0804
0.0780
0.0426
а = 20
0.1254
0.0Э36
0.0849
0.0833
0.0478
а = 40
0.1268
0.0953
0.0859
0.0844
0.0484
а = 80
0.1268
0.0953
0.0859
0.0844
0.0484
а = 100
0.1268
0.0953
0.0860
0,0844
0,0484
Решение вариационных задач для упруго-пластических сред 133
ласти D и краевому условию E.1.8) на С. Поэтому в процессе
минимизации функционала по методу локальных вариаций при
варьировании зпачения искомой функции иц = и (хг-, г/j) в узле
сетки (xt, ijj) требовалось для всех четырех ячеек, общей
вершиной которых является точка (xt, yj), проверять выполнимость
условия E.1.6), точнее, его конечно-разпостного аналога E.1.11),
с чем были связаны некоторые особенности численного решения
(см. п. 2).
Фиг. 6.9
Можно указать другой прием, позволяющий заменить
проверку дифференциального неравенства E.1.6) проверкой
неравенств, наложенных на саму функцию и. Это упрощает процедуру
решения, но требует некоторых предварительных расчетов, а
именно решения задачи чисто пластического кручения. Получим
решение уравнения {dvldxf + (dvldyJ = а при краевом
условии v = 0 на С. Как известно (см., например, [40]), решение
v (х, у) представляет собой поверхность постоянного угла ската и
является функцией напряжений в случае чисто пластического
кручения. Используя аналогию Надаи (см. [40]) и полученную
функцию v (х, у), условие E.1.6) можно заменить неравенством
вида
и (х, г/)< v (х, у), E.1.14)
В тех точках области D, для которых в E.1.14) реализуется
строгое неравенство, среда находится в упругом состоянии. Для
пластических зон в E.1.14) выполняется равенство.
Таким образом, приходим к задаче минимизации
функционала E.1.10) на классе функций, удовлетворяющих в D
неравенству E.1.14) и краевому условию E.1.8) на С.
Численное решение вариационных задач механики
134
Учитывая аналогию Надаи, нетрудно заметить, что искомое
решение может быть получено, если минимизировать функционал
E.1.10) на более широком классе функций, удовлетворяющих
только условию E.1.14). Однако это обстоятельство здесь не
используется, так как не приводит к дополнительным упрощениям
при численном решении.
Заметим также, что для задач вида E.1.10), E.1.14), E.1.8) в
главе 2 проведено исследование некоторых вопросов сходимости
метода локальных вариаций.
Применим данный подход к решению упруго-пластической
задачи о кручении цилиндрического стержня круглого
поперечного сечения с продольным радиальным разрезом (фиг. 5.9).
Пусть выбрана цилиндрическая система координат г, ф, z, ось
z которой параллельна оси стержня. Вокруг этой оси происходит
кручение. Область D поперечного сечения стержня плоскостью,
перпендикулярной оси z, показанная на фиг. 5.9, представляет
собой круг радиуса R с разрезом О^г^Л, ф = 0. Граница С
области D состоит из окружности и берегов разреза.
Рассматривая задачу кручения в безразмерных переменных E.1.5) с I — R
и переходя в соотношениях E.1.6) — E.1.9) к цилиндрическим
координатам, получим:
и (г, ф) = 0 на С, E.1.17)
|i = a U urdrd<p. E.1.18)
"В
Функция напряжений v (г, ф), удовлетворяющая уравнению
и краевому условию v (г, ф) = 0 на С, как нетрудно убедиться,
имеет вид (эта функция определяет поверхность постоянного угла
ската для рассматриваемой формы области)
¦г|8Н1ф|/а при 0<г<[1 +|ви1ф|Г\ 0<ф<я/2,
Зя/2<ф<2я,
A — г)/а при [1 +|8Шф|Г1<г<1, 0<ф<я/2,
Зя/2 < ф < 2я,
г/а при 0<r<Va, я/2<ф<Зя/2,
A —г)/а при V.<r<i, я/2<ф<Зя/2.
E.1.19)
v (г, ф)
Решение вариационных зада^ для упруго-пластических сред 135
Приходим к вариационной задаче о минимизации
функционала E.1.10), записанного в полярных координатах
'-§fH(?),+(-f?)'H'** <5-'-2°>
на классе функций, удовлетворяющих краевому условию E.1.8)
на С и неравенству E.1.14) в D с функцией v, определяемой
согласно E.1.19).
Для численного решения вариационной задачи E.1.8), E.1.14),
E.1.19), E.1.20) использовалась стандартная программа, при-
ИВ
х
иг
Фиг. 5.10
о г * в в w
веденная в главе 9, которая реализует алгоритм метода
локальных вариаций, описанный в § 6 первой главы. При этом
область D (O^r^l, 0 <; ф <; 2я) разбивалась на 625
ячеек концентрическими окружностями rt = iAr, i = 0, 1, ... ,
25, Ar = 0.04 и радиусами ф7- = /Дф, / = 0,1, . . ., 25, Дф =
= 2я/25. Расчеты проводились для безразмерных углов
закручивания а, равных 0.5, 1, 1.1, 1.25, 1.42, 2, 4, 4.34, 5, 6.66, 10.
Шаг варьирования изменялся путем половинного деления от
своего начального значения h0 = 10 до тех пор, пока не
выполнялось условие h < ht = 10~8.
На фиг. 5.9 показано расположение пластических зон,
полученных в результате расчетов при различных значениях
безразмерного угла закрутки а. Кривыми с номерами 1, 2, 3, 4
показаны границы, разделяющие упругие и пластические зоны для
а = 1.25, 2, 4.34, 5. При малых углах закрутки пластические
зоны располагаются у конца разреза в центре круга. Для
больших значений углов а, наряду с пластической зоной у кончика
разреза, появляются пластические области, прилегающие к
берегам разреза, и пластическая зона вдоль внешнего контура. С рос-
Численное решение вариационных задач механики
136
том а происходит слияние пластических областей, примыкающих
к разрезу, а при Дальнейшем увеличении угла закрутки
пластические зоны, охватывающие разрез и внешний контур, асимпто-
тически приближаются с обеих сторон к линии
J (l + lsincpl)-1 при 0<<р<л/2, Зл/2<ф<2я
Г = { V. при я/2<ф<Зл/2,
показанной на фиг. 5.9 штрих-пунктирной кривой. Над этой
линией расположено ребро «пластической крыши», на ней
испытывает разрыв градиент функции v, определяемой соотношениями
E.1.19).
Полученная в результате расчетов зависимость u. = jj, (а)
приведена на фиг. 5.10.
§ 2. Решение плоских задач для упруго-пластических сред
1. Основные уравнения плоской упруго-пластической задачи.
Рассмотрим, следуя работе [8], в рамках теории
упруго-пластического течения задачу о плоской деформации цилиндрического
тела, образующая боковой поверхности которого параллельна оси
z прямоугольной системы координат xyz. Как известно,
деформации являются плоскими (е2 = 0), если внешние напряжения,
прикладываемые к боковой поверхности, а также задаваемые смещения
точек боковой поверхности параллельны плоскости ху и не
зависят от координаты z. При этом отличными от нуля
компонентами вектора перемещения, тензора деформации и напряжений
являются, соответственно, и, v, гх, гху, еу, ах, тхУ, ау, az. Здесь
использованы общепринятые обозначения указанных величин.
Обозначим через D сечение тела плоскостью ху, а через С —
границу области D. Материал тела характеризуется следующими
тремя физическими константами: модулем Юпга Е,
коэффициентом Пуассона v, пределом текучести т0 при простом сдвиге. Для
удобства все рассмотрения проведем в безразмерных переменных:
х' ~ х/1, у' = у/1, и' = Eu/h0, v' — Ev/lx0, e'x = Еех/х0,
&ху = bjZxvjX0, Ej, — fa&y/X0, Ох ~ бх/Т-О* ®у — syl^0i
Фг = Oz/To, Хху = Хху/Х0, @.2.1)
где I — характерный размер области D. Штрихи в дальнейшем
будем опускать. В безразмерных переменных E.2.1) уравнения
равновесия и условие пластичности Мизеса запишутся в виде
dsjdx + дхху/ду = 0, дхх„/дх + дзу/ду = 0, E.2.2)
g~± [(о,-• avf + (о„ - ozJ -f (az - eg2] + %lv -- 1. E.2.3)
Решение вариационных задач для упруго-пластических сред 137
Заметим, что в упругой области g<l, а знак равенства
справедлив для пластической зоны. Уравнения состояния Пранд-
тля — Рейсса в переменных E.2.1) примут вид:
е* = ах — v (а у + hz) + I (ах — о), гху = A + v) xxy + %хху,
Bv = ёц — v (сзх + oJ + XCViT-<i), az — v (з„ + б*) +
+ ^(az-s) = 0; E.2.4)
1 0.5 [(з* — о)ёх + (а„ — a) е„ + 2тху^.у] g - 1.
Здесь, ex = ди/дх, еи = ди/ду, гху = 0,5 (ди/ду -\- ди/дх), а — (зл. -f-
+ av + аг)/3,
а точка означает частную производную по времени. Процесс
деформирования считаем медленным (квазистатическим), и
динамические эффекты пе учитываем. Отметим, что соотношения Пранд-
тля-Рейсса E.2.4) справедливы при предположении малости
деформаций. Если же это предположение не выполняется, то вместо
частных производных нужно написать полные производные по
времени, а при дифференцировании тензора напряжений следует
пользоваться определением производной тензора по Яуманну.
При X = 0 соотношения E.2.4), как нетрудно видеть, переходят
в уравнения закона Гука. Отметим также, что в E.2.4) выражение
для X не учитывает случай разгрузки тела из пластического
состояния (см. п. 6 данного параграфа). Пусть на части d контура
С заданы (как функции точки границы и времени t) перемещения
и, v, а на части С2 — поверхностные нагрузки р, q (p, q —
соответственно, проекции внешних сил на оси х, у). Предполагается,
что в начальный момент времени тело находится в недеформиро-
ванном состоянии. Таким образом, граничные условия имеют
следующий вид:
и = U (х, у, t), v = V (х, у, t) при (х, у) е Си E.2.5)
р = Р (х, у, t), q = Q (х, у, t) при (х, у) е С2,
U (х, у, 0) = V (х, у,0)=Р (х, у, 0) = Q (х, у, 0) = 0.
Здесь U, V, Р, Q — непрерывные функции точек контура и
времени t ЕЕ [0, Т]. Задание этих функций полиостью определяет
процесс деформирования и нагружения. Считая заданными
граничные условия E.2.5), поставим задачу отыскания неизвестных
и, v, вх, гу, гхУ, ах, тхУ, av, az в области D + С,
удовлетворяющих соотношениям E.2.2)—E.2.5) для моментов t Gr [0, Т].
Численное решение вариационных задач механики
138
2. Вариационный подход. Для решения сформулированной
упруго-пластической задачи применим вариационный принцип
теории пластического течения [100, 104]. Предварительно
разобьем отрезок времени [0, Т] точками tk на равные интервалы
At = tit+i — tk = TIL, где L — достаточно большое число. За
время At заданные на контуре Сх перемещения и приложенные
на контуре Сг нагрузки получили приращения:
би = 8U, 8v = 8V, 8р = 8Р, 8q = 8Q. E.2.6)
Здесь 8U = U (ж, у, t^) — U (х, у, th), аналогичные выражения
имеют место для 8V, 8Р, 8Q.
Тогда, согласно [100, 104], действительные приращения
перемещений
би = и (х, у, tk+1) — и (х, у, th), 8v — v (х, у, tk+1) — v (х, y,th)
реализуют минимум функционала (энергии приращений)
/ (би, 8v) = -у у^ (8зх 8sx + 8ау 8гу + 28rxy8ixy) dx dy —
D
— \ (8p 8u + 8q 8v) ds, E.2.7)
Сг
рассматриваемого на классе функций 8и, 8v, удовлетворяющих
краевым условиям для би, 8v из E.2.6). Для отыскания минимума
функционала E.2.7) требуется предварительно в
подынтегральное выражение подставить вместо приращений напряжений и
деформаций их выражения через приращения перемещений. Введем
обозначения: би = ф, 8v = ijj, д<р/дх — у'х, ду/ду = фи, drlp/dx =
= tyx, dty/ду = ф„. Тогда для приращений деформаций,
очевидно, имеем:
бех = фя, 8гу = %, бе^ = 0,5 (ф„ + Фх) E.2.8)
и из уравнений E.2.4), записанных в приращениях и
разрешенных относительно приращений напряжений, следует:
8зх = афх + Ь% — сАк (о* — а*), 8ау = Ырх + а% — сАк (<зу— о*),
E.2.9)
8хху = с [(фу + фя)/2 — Лкх^,], 8з2 = v (8зх + бз„) — Ак (з*— ак),
где
a = (l-v)/[(l + v)(l-2v)], 6 = v/[(l+v)(l~2v)], c=(l+v).
Решение вариационных задач для упруго-пластических сред 139
Здесь верхним индексом к обозначены значения напряжений в
момент t = tk. Выражение для Лй = XAt получается из формул
E.2.4) для к и имеет вид
Afc _ \ ° ПРИ 8 < 1.
0.5 [(а* - ак) <рх + (ак - ак) фу + хку (ф„ + ifc)] при g = 1,
-{
E.2.10)
где функция g вычисляется для ах = акх, . . ., az = а*. После
подстановки E.2.8), E.2.9) в E.2.7) и выполнения простых
преобразований получим следующее выражение для функционала
/ через функции ф, ф
/ (Ф, ф) = 0.5 JJ {a (Ф2 + ф2ы) + 26фхфи + 0.5с (Фи+Ф*J -2сЛЛ2} х
и
X dxdy — J (фбР + #<?) ds. E.2.11)
с»
Таким образом, приходим к следующей вариационной задаче.
Требуется найти функции ф (х, у), ф (х, у), удовлетворяющие на
С\ краевому условию:
ф = бг/, ф = 8V, E.2.12)
и доставляющие минимум функционалу E.2.11), в котором А.к
вычисляется согласно E.2.10).
Функции о**, . . . , ixy, входящие в выражение E.2.10) для
Ак и тем самым в функционал E.2.11), предполагаются
известными из решения аналогичной вариационной задачи на предыдущем
временном слое. Для к = 0 из граничных условий E.2.5) следует,
что тело свободно от напряжений и, следовательно, <х° = . . . =
= *%у = 0. Поэтому единственными искомыми величинами в
функционале E.2.11) являются функции ф, ф, относительно которых
функционал будет квадратичным.
Если получено решение вариационной задачи E.2.10) —
E.2.12), т. е. определены функции ф = 6ц (х, у), ф = bv (x, у),
минимизирующие функционал E.2.10), E.2.11) и
удовлетворяющие граничным условиям E.2.12), то величины приращений
деформаций и напряжений легко нодсчитываются по формулам
E.2.8), E.2.9). Значения перемещений, деформаций и
напряжений для момента t = tk+1 определяются формулами:
ик+1 = ик + 6и, vk+1 = vk + bv, e*+1 = 4 + 6 •„ .. ., о**1 =
= ок + 6зг. E.2.13)
Численное решение вариационных задач механики 140
Граница упругой и пластической зоны для момента времени
t = tk+1 находится при помощи критерия Мизеса E.2.3), согласно
которому пластическая зона выделяется условием
g (х, y) = g (okx+l (х, у), .. ., of1 (х, у)) = 1. ( E.2.14)
Если для указанных моментов времени t = th, к = 0,1, . . ., L
решепие задачи E.2.10)—E.2.14) найдено, то значения искомых
величин для промежуточных моментов времени t: tk<it<i tk+1
определяются интерполяцией по известным значениям этих величин в
узловых точках t = th. Таким образом, последовательно решая
задачи E.2.10)—E.2.14), можно построить решение
упруго-пластической задачи E.2.2)—E.2.5).
Замечание 1. При фиксированном At, для того чтобы
определить напряженное и деформированное состояние
упруго-пластического тела в момент t = Т, требуется решить L вариационных
задач вида E.2.10)—E.2.14). В некоторых случаях это число
может быть уменьшено. Рассмотрим случай активного нагруже-
ния, когда краевые условия E.2.5) имеют вид:
u=--f(t)U (x, y),v = f (t) V (х, y),p=f (t) P (х, у),
q = f{t)Q (x, у), E.2.15)
где / (t) — неубывающая функция, / @) = 0. Тогда, чтобы
проследить процесс нагружения вплоть до момента времени t*, когда
впервые в некоторой точке области D + С достигается
пластическое состояние, достаточно решить одну вариационную задачу
для t = tx — At, где 0 < h < t%. Пусть и1, v1, &lx, . . . , а\ —
решение этой задачи. Тогда очевидно, что для любого момента
времени th @ < th <^ t%) решение будет иметь вид (в силу
линейности упругой задачи):
ик = он/, vk = avx, е* = ае?, ..., а* = аа], а = /(у//(^). E.2.16)
Момент t# определяется из решения уравнения
/(О = /(*i)( max g)-1'*. E.2.17)
(х, y)ei)+c
Максимум g ищется по напряженному состоянию в момент
/ = tx. Поэтому, для того чтобы определить искомые величины
для момента t = Т > t^, нужно определить решение чисто
упругой задачи, соответствующее моменту, t = tx<C ?*, выполнить
растяжение по формулам E.2.16), E.2.17) и продолжить расчеты
для моментов th — t^ + kAt, к = 1,2, . . ., N, где N = [(Т —
— t+)/At-\-1]. Квадратными скобками обозначена целая частьчис-
Решение вариационных задач для упруго-пластических сред 141
ла. Такой способ сокращает число L = TIAt решаемых
вариационных задач до Lt = 1 + N.
Замечание 2. Если краевые условия имеют вид E.2.15), то
удобно сделать замену времени t' = / (t) (далее штрих опускаем).
При этом граничные условия E.2.15) примут вид и = tU,
v — tV, p — tP, q = tQ. Остальные соотношения при указанной
замене, как легко проверить, не меняют вида.
3. Алгоритм решения вариационной задачи. Таким
образом расчет деформирования упруго-пластического тела сведен
Фиг. 5.11
к решению серии вариационных задач вида E.2.10)—E.2.12).
Изложим алгоритм метода локальных вариаций применительно к этим
задачам. Все рассуждения проведем для случая, когда граница
С'2 — отрезок прямой (фиг. 5.11). Разобьем плоскость ху на
равные прямоугольные ячейки прямыми xt = х0 + iAx, у] = у0 +
+ /Ау, где Ах > 0, Ау > 0 — Достаточно малые числа, a i =
= 0,1,.. ,,т; / = 0,1, ... , п. Через Stj обозначим точки
пересечения прямых с координатами xt = х0 + iAx, yj = y0 + /Ау.
Назовем, как обычно, точку S^ внутренней, если она вместе с
четырьмя ячейками, вершинами которых она является, лежит в
области D + С (па фиг. 5.11 обозначена кружочком). Остальные
точки, лежащие в области D -\- С, назовем граничными (отмечены
крестиками). Значения функций ф, а|), о^, хху, <уу, az, о*, g в точке
Stj при t = th обозначим соответственно через щ, г|);}, о"ху,- . . ,
,..., gij. Функционал / из E.2.11) приближенно заменим суммой
/ = XI и + 2Ki}. E.2.18)
Первая сумма в E.2.18) аппроксимирует интеграл по области D,
а вторая — интеграл по контуру С2 в формуле E.2.11). Здесь
It] — приближенное выражение для интеграла по ячейке (с
вершинами Stj, Si+1,j, Si,j+i, Si+i,м), целиком принадлежащей об-
Численное решение вариационных задач механики 142
ласти D + С, определяемое по формуле
/у = 0.5Д* Ay \а ((Фж)?3- + (%)Ь) + 2Ъ (Ф:сЬ (^у)у +
+ -^((ъ)а + ШиJ-2еЩ. E.2.19)
Слагаемые Кц в E.2.18) приближенно представляют
интегралы по отрезкам, принадлежащим границе С%:
Ki} = - 0.5Д* [(fa (8P)i} + ач+1. у FP)i+1,, + ih, F?)у +
+ ^+1,;(б0Н1,Л. E.2.20)
Здесь приняты следующие обозначения:
(фх)« = (ф*+1, 3+1 + фг+1, j — фг, j+1 — ф«)/2Дх,
D>v)ij = (фi+l, 3+1 + ф!. 3+1 — ф1+1, 3 — Фа)/2Ду,
H>*)«j = (Чч+i. i+i + Чя+i. з - *. J+i - *fj)/2A*, E.2.21)
0l>v)ij = N>i+1, J+1 + *. 3+1 — %+l, 3 — Ы) 2ЛУ.
0 при gij < 1
Лу =
0.5 [(<&/ - 4) (фя)у + (ojy - 4) (ФуЬ +
I +-t*im ((ф»)и + №Jij)l при gy = 1,
a (8P)ij, (SQ)ij — значения функций 8Р, 8Q в точках Sij на
контуре С2.
Значения искомых функций ф^-, tytj в граничных точках,
прилежащих к части границы Сх, считаем заданными при помощи
переноса в эти точки граничного условия E.2.12), т. е.
Vij = 8U, qi} = 6F. E.2.22)
Здесь ф^- = ф (xi, yj), tyu = я|> (a;,-, yj), а величины 6Z7, 8F
вычисляются в точке (it, r\j) 6Е Си в некотором смысле близкой к
точке (xt, у}).
Таким образом, приходим к задаче E.2.18)—E.2.22) об
отыскании значений фгу, 1|>,7- для всех точек S^ в области D + С,
которые доставляют минимум сумме E.2.18) при условиях E.2.19)—
E.2.21) и удовлетворяют граничному условию E.2.22).
Алгоритм решения сформулированной вариационной задачи
по методу локальных вариаций заключается в следующем.
Зададим начальное приближение для искомых функций ф^-, Vpij,
удовлетворяющее граничному условию E.2.22) и равное ф^ =
= уц = 0 для всех внутренних точек и для части граничных
точек, принадлежащих С2. Выберем достаточно малые шаги вар ьи-
Решение вариационных задач для упруго-пластических сред 143
рования hf > 0, h^s> 0. Затем переходим к варьированию во
всех внутренних точках и части граничных точек, принадлежащих
С2, значений <рц, i|)i7- с Заданными шагами /г,, }ц. Процесс
варьирования осуществляется поочередно для каждой из функций ф, ф.
Рассмотрим варьирование значения ф;7- функции ф в точке
Sij. Предварительно отметим, что изменение ф,7- в одной
внутренней точке А (фиг. 5.11) области D + С приводит к изменению
четырех слагаемых 1г1 в сумме E.2.18), соответствующих
ячейкам, вершиной которых будет данная точка (см. заштрихованные
ячейки вокруг точки А на фиг. 5.11).
При изменении ц>ц в граничной точке Б изменяются два
слагаемых Iij и два слагаемых Kt) в сумме E.2.18), а при изменении
(fij в точке 0 изменяется одно слагаемое Ii} и одно слагаемое Ktj.
Если при замене ф^ на ф^ + hf уменьшается сумма тех
слагаемых в E.2.18), которые зависят от фг;-, то полагаем ф = фг7- + h-p.
После этого переходим к следующей точке. Если вариация
ф«; + ^ф не приводит к уменьшению функционала E.2.18), то
аналогично проверяется значение ц>и — 1ц. Если же окажется,
что вариации в обоих направлениях не уменьшают суммы E.2.18),
то оставляем старое значение для ф = ф^-.
Как указано в главе 1, для сокращения числа операций
(времени счета на ЭВМ) сначала пробуется вариация в том
направлении, в-котором она привела к успешному исходу в предыдущей
точке. Одна итерация по функции ф будет закончена, когда таким
образом будут просмотрены все точки. К моменту окончания
итераций в таблице будет храниться новое приближение для ф!у-.
Значение функционала E.2.18) для этого приближения, очевидно,
будет не больше, чем значение функционала для начального
приближения'. Отметим, что при проведений итерации по ф^ значения
tyij остаются неизменными. Окончив одну итерацию для ф^,
переходим к итерации для фг7-, которая выполняется аналогичным
образом. Пусть lvs, l^s соответственно числа проварьированных
точек Stj (точек, в которых итерации привели к успешному
исходу) для ф, ф на s-й итерации. Если по окончании s-й итерации по ф
и ф окажется, что /„,, + 1$* = 0, то шаги варьирования
уменьшаются, и итерации продолжаются. Если к некоторому моменту
шаги варьирования стали меньше некоторых достаточно малых
чисел /ц,, /гф, то варьирование прекращается.
По окончании итераций по полученному решению ц>ц, ф^- под-
считываются [по формулам E.2.8)—E.2.10), E.2.13)] перемещения,
деформации и напряжения для t = tk. Значения искомых
величине вне узловых точек получаем путем интерполяции по
значениям этих величин в узловых точках.
Обсудим некоторые вопросы использования памяти ЭВМ. Для
удобства проведем рассуждения на примере прямоугольной о§-
Численное решение вариационных задач механики
144
ласти D {0 <; х <; dlt 0 <; у ^ d2}, разбитой на прямоугольные
ячейки сеткой xi = iAx, у} = /Ay, Ax = djm, Ay = djm,
i = 0,1, . . ., m; / = 0, . . .,n.
При реализации указанного алгоритма требуется хранить в
памяти ЭВМ массивы чисел utj, vtj, ф^-, tytj, exij, гуц, гху11,
oXij, вуц, <*zu, txvih Su- Числа ии, vtJ, фг;, i|),v сопоставляются
узлам сетки и, следовательно, размерности массивов, где
хранятся эти числа, равны (иг+ 1) (п + 1). Величины ежг7-, гуц,
&xyih Gxih o*3/ij> Qzih rxyij относятся к ячейкам сетки, и поэтому
соответствующие массивы имеют размерность т х п. Элементы
массивов utj, vtj, exij, eyij, exyij, в которых хранятся суммарные
перемещения узлов сетки и деформации ячеек, не используются
непосредственно при решении задачи E.2.10)—E.2.12), и поэтому
эти массивы могут храниться во внешних запоминающих
устройствах, обращение к которым происходит только по окончании
решения задачи E.2.10)—E.2.12). Таким образом, при решении
задач на мелких сетках или при использовании ЭВМ с малой
оперативной памятью можно ограничиться хранением в оперативной
памяти только массивов <р0-, уг], axiJ, (Syii, azij, xxyij, gtj, всего
2(m + i)(n -\- 1) -f- Ьтп чисел. Некоторые способы
рационального использования машинной памяти обсуждаются в § 2 (п. 2)
главы 1.
4. Решение модельной задачи и проверка точности
численной схемы. Для проверки метода рассмотрим сначала следующую
простейшую задачу. Прямоугольный брусок с краями,
параллельными осям координат х, у, z, сжимается двумя абсолютно
жесткими плитами (штампами) у = 0, у = 1 в направлении оси у.
Удлинение бруска допускается только в направлении оси х и
предотвращается в направлении z путем подпорки жесткими
плитами. Все поверхности контакта предполагаются идеально
смазанными, т. о. деформация бруска будет плоской и однородной.
Процесс деформирования бруска рассматривается в плоскости
ху, причем для поперечного сечения бруска плоскостью ху име-
ем — 1 <; х <; 1, 0 <Г у <; 1. Предполагается, что все
переменные приведены к безразмерной форме, а значение постоянной
Пуассона материала бруска равно v — 0.3 (типичное для
металлов). Учитывая симметрию рассматриваемой задачи относительно
оси у. будем разыскивать решение в области D @*^x^1,
O^y^l). При этом краевые условия E.2.5) примут вид:
и @, у, t) = v{x, 0, t) = 0, v (х, 1, t) = — t, р (х, 0, t) = р (х, 1, t) =
= р A, y,t) = q @, у, t) = q¦ A, у, t) = 0,
а контурный интеграл в E.2.11) обратится в ноль.
Точное решение этой задачи при t <Г t^ (t^ — момент настуш
Решение вариационных задач для упруго-пластических сред 145
лепия текучести), как нетрудно проверить; имеет вид (чисто
упругая деформация):
и = btx/a, v = — ty, гх = bt/а, еу = — t, гху = <зх = хху = О,
<sv = t(b*-a2)/a. E.2.23)
Здесь а, Ъ — постоянные (см. обозначения п. 2 пастоящего
параграфа), а значения величип E.2.23) в момент t%, определяемые при
помощи условия пластичности, равны:
4 = - (rdW'W 1-9497'
4 = (v2 - 1) A_;'+va)'/'^ - 1.V74, t, = - гу. E.2.24)
С наступлением пластической текучести при t ;> t% зависимость
a,, (t) перестает быть линейной. Нахождение ее сводится к
интегрированию нолипейного обыкновенного дифференциального
уравнения
dey 1 . 1 [. За
dt [фBг-1)-1] ' 2 L |А12_3а:
Ф = ±-\\- /Sy 1 E.2.25)
2 L l/l0.4„2 J
V
при начальном условии 'аи (t%) — oy. К уравнению ^5.2.25) легко
прийти путем подстановки в уравнения Прандтля — Рейсса
E.2.4) величин: еж = е* (t), гХ!1 = О, еу = — t, ах — хху — 0,
а у = оу (t) и выполнения элементарных преобразований.
Решение уравнения E.2.25) для i > ?* находилось путем численного
интегрирования по методу Эйлера (это решение будем считать
точным), затем вычислялась безразмерная сила давления на
штамп F (f)
1
F = 2 J av (х, 1, t) dx = 2зу E.2.26)
о
и тем самым определялась зависимость F = F (t). Полученная
.зависимость приведена на фиг. 5.12 штрих-пунктирной линией.
Очевидно, что эта кривая выражает также зависимость силы
давления F от глубины вдавливания штампа, так как из краевого
условия следует, что в данном примере v = — t. На этом
графике имеется область линейной зависимости от t, что
соответствует тому, что при t ^ t% еще не достигнуто пластическое
состояние, и материал подчиняется закону Гука. При t !> t+ сила
давлепия, изображаемая рассматриваемой кривой, зависит от t
нелинейно и при достаточно больших значениях t асимптотически
стремится к пределу, точное значение которого равно F = 4,
Численное решение вариационных задач механики
146
Для сравнения результатов и контроля сходимости метода
локальных вариаций численное решение рассматриваемой задачи
проводилось также по схеме, описанной в пунктах 2, 3 этого
параграфа. При этом разбиение области D осуществлялось
квадратной сеткой с Ах=Ау = 0.1, т =га=10 на 100 ячеек. Шаг по
времени полагался равным At = 0.02. Шаги варьирования Аф,
Аф в процессе решения изменялись от своих первоначальных
значений h% = h% = 10_3 до конечных Аф = hi = Ю-5.
Уменьшение шагов варьирования йф, Аф осуществлялось путем
одновременного половинного деления, когда при
данных Аф, Аф итерации доводились до
полной сходимости, т. е. до тех пор, пока
значения <pi;-, ty^ переставали меняться во
всех точках (?ф -j- /ф =0). Когда после
очередного дробления выполнялось
неравенство Лф <J Аф, Аф <:/гф, то
варьирование прекращалось. Использовалось
замечание 1, согласно которому в
рассматриваемом случае при t^t# достаточно
решения одпой вариационной задачи для того,
чтобы рассчитать весь процесс
деформирования при 0 ^ t ^ tt. Вариационная
задача решалась по методу локальных
вариаций для t = tx = 0.02, а затем по
формулам E.2.16), E.2.17) находились
момент t^ появления текучести и решение,
соответствующее этому моменту.
Дальнейший расчет осуществлялся от tt
последовательно для моментов времени tk=tm-\-kAt, At = 0.02, к = 1.2,...
. . ., 25.
Численное решение задачи по методу локальных вариаций
приводит к значениям искомых величин, близким к точным. Так,
полученное в результате расчетов по методу локальных вариаций
значение ау при t = 0.02, равно ау = —0.0222, а
соответствующее точное значение ау = —0.0218 [получено по формулам,
аналогичным E.2.24)]. Для сравнения в табл. 5.3 приводим точные
F
S
Z
1
1
/1 1
/1 1
1 1
/1 \^—
/' /1
/ /l I
" I / 1 1
// 1 1
И , 1 !..
о
J t* t2
Фиг. 5.12
Таблица 5.3
У
(—100) v
(—100) v'
0
0
0
0.2
0.4
0.394
0.4
0.8
0.791
0.6
1.2
1.194
0.8
1.6
1.597
1
2
2
Решение Ьарйап,ионных задач для упруго-пластических сред 147
v и приближенные г/ значения перемещений при t = 0.02 для
перечисленных в первой строке значений у.
Рассчитанные значения искомых величин в момент перехода
среды из упругого состояния в пластическое: а'у = —1.982,
гу = —1.786, t^ = 1.786 [для сравнения см. точные
значения этих величин E.2.24)].
Зависимость F (t) определялась путем последовательного
вычисления для моментов th = t+ + kAt интегралов E.2.26). На
фиг. 5.12 эта зависимость представлена кривой 1. Как видно из
фиг. 5.12, значения F, полученные по
методу локальных варигций, близки к
точным (пунктирная кривая).
5.Решение плоской задачи о штампе.
Рассмотрим теперь аналогичную задачу о
сжатии бруска той же формы в случае,
когда один из штампов (верхний на
фиг. 5.13) имеет форму у = 1, |ж| г^0.5.
Нижний штамп, как и прежде,
перекрывает всю боковую поверхность у = 0.
Предположение об отсутствии трения на
поверхностях контакта остается прежним.
Использование симметрии относительно
оси у приводит к краевой задаче для
области D @ <С х <: 1, 0 sg; J/<1)-
Граничные условия на поверхностях бруска
ж = 0. х = 1, у = 0, очевидно, остаются
теми же, что и в п. 4, а при у — 1
имеем: v (х, 1, t) = — t для 0 < х ^ 0.5, Фиг 5 13
р (х, 1, t) = 0 для 0<:л;<; 1, q(x, 1, t) = 0
для 0.5 <; х <; 1.
Численное решение рассматриваемой задачи проводилось
аналогично расчетам в модельном примере (см. п. 4 данного параграфа).
При расчетах полагалось Ах = Ау = 0.1, At = 0.02, h% = h% =
= 10_3, Аф = кф = 10~5. При t ^ t# решалась одна
вариационная задача для tx = 0.02. Полученная в результате расчетов
интенсивность касательных напряжений достигает своего
максимального значения в окрестности точки А (х = 0.5, у = 1) (фиг.
5.15). С использованием формул E.2.16), E.2.17) вычислялся
момент перехода ячейки, прилежащей к углу штампа, в
пластическое состояние (который получился равным t% = 1.197), и
решение в этот момент времени. Дальнейшие расчеты проводились для
моментов: th = t+ + kAt, At = 0.02, к = 1, 2, . . .,42.
На фиг. 5.13 кривыми с номерами к = 5, 10, 20, 25, 30, 35, 42
показаны границы зон пластических и упругих деформаций со-
Численное решение вариационных задач механики
14$
ответственно для моментов времени th. Видно, что с увеличением
к зоны пластичности, соответствующие этим номерам, все больше
проникают в глубь области D, а при к ^ 20 сливаются с
симметричными им\относительно оси у пластическими зонами,
образовавшимися у другого конца штампа (х = —0.5, у — 1), и
проходят насквозь область D. Суммарная сила давления на верхний
штамп, подсчитанная по формуле вида E.2.26) с верхним
пределом интегрирования, равным 0.5, показана в зависимости от t (или,
что то же, от — v) кривой 2 па фиг. 5.12.
6. Некоторые обобщения и модификации.Рассмотренный в дан-
пом параграфе подход к решению плоских задач
упруго-пластического течения без существенных изменений обобщается на
случай упрочняющихся сред и наличия потенциальных массовых
сил.
Описанный подход может быть непосредственно
распространен на решение задач о плоском напряженном состоянии в
упруго-пластических пластипках, когда az = 0, a ez ф 0. В этом
случае опять агег = 0, и минимизируемый функционал энергии
приращений имеет тот же вид, что и для плоской деформации [см.
E.2.7)]. При переходе в функционале E.2.7) от приращений
напряжений и деформаций к приращениям перемещений аналогично
тому, как это уже делалось в случае плоской деформации, но с
применением формул, связывающих напряжения и деформации
при плоском напряженном состоянии, снова получим
квадратичный по ф игр функционал, отличающийся от E.2.11) только
коэффициентами. В рамках рассматриваемого подхода можно учесть
явление разгрузки среды из пластического состояния.
Пусть в процессе деформирования и нагружепия тела в
пластической зоне появляются области, где g = 1, a g <. 0 (области
разгрузки). В этом случае схема решения остается прежней, с той
лишь разницей, что теперь Я. = 0, если g< 1, или, если g = 1,
но g < 0, и к = 0.5 [(ох — a) кх + (ау — о)гу + 2хху еху] при
g= 1, g = 0.
Отметим теперь некоторые возможные модификации
использованной в данном параграфе численной схемы. Во-первых, можно
воспользоваться неявной аппроксимацией напряжений в
формулах E.2.9), E.2.10) и заменить фигурирующие в этих
соотношениях величины ах , . . ., тху на ах+1, . . • , т^1. При этом в
процессе решения задачи E.2.10)—E.2.12) возникает необходимость
устраивать дополнительные итерациоппые процессы по
определению величин ах+1, . . ., т^1, что увеличивает время счета каждой
отдельной задачи E.2.10)—E.2.12). Однако появляется
возможность увеличить шаги At и тем самым уменьшить общее
количество решаемых задач E.2.10)—E.2.12).
Решение вариационных задач для упруго-пластических сред 149
Во-вторых, можно предложить модифицированную численную
схему, в которой шаги по времени уже не фиксируются заранее,
а выбираются в процессе решения задачи. Выбор шага (At)k
производится из условия, что при переходе с временного слоя t = t^
на слой t = tk+l из упругого состояния в пластическое переходит
одна (по крайней мере одна) ячейка.
Опишем один шаг по времени в данной схеме. Пусть для
момента времени t — tk известно напряженное и деформированное
состояние сплошной среды, в частности, известны напряжения
ох, . . .,%%. Определим поля скоростей перемещений йк — й (х.
у, th), 1к = Ь (х, у, /h) для момента t = tk из условия [76]
минимума интеграла
/ (и, v) = 0,5 ЭД {зхгх + 2ххигху + бие„} dxdy — )(Ри + Qv) dS,
Ъ Сг
E.2.27)
рассматриваемого па классе кинематически возможных й, v.
Граничные условия для скоростей, й, v на Сх
получаются из условий E.2.5) дифференцированием по времени.
Выражая из соотношений E.2.4) (записанных с ах = ах , . . .
¦••,txy=txv) компоненты тензоров скоростей деформаций и скоро"
стей напряжений через скорости й, v и подставляя полученные
выражения в E.2.27), получим квадратичный функционал
относительно переменных й, v, в который также входят известные
значения напряжений ах, . . ¦,%%•
В результате минимизации этого функционала ^точнее, его
разностной аппроксимации), которая проводится по методу
локальных вариаций аналогично тому, как это делалось в п. 3,
получим поле скоростей йу, Уу, определенных в узлах сетки.
Далее по конечпо-разнрстным аналогам формулE.2.8),E.2.9)вычис-
' к ' к ** г\
ляются величины 8у, ау для всех ячеек области и и затем по
формулам:
Щ] = Щ] ~t~ {AfyxUij, . . ., Xxyij = Xxyij + (A^)ft tXyij E.2.^o)
вычисляются все искомые величины при t = th+1.
Определим шаг (At)h, фигурирующий в E.2.28), при котором
одна из упругих ячеек перейдет в пластическое состояние. Для
этого подставим E.2.28) в условие пластичности E.2.3). В
результате получим
гц №% + da (At)ki} + «у = 0, E.2.29)
Численное решение вариационных Задач механики
150
где
г» = i К°*ц ~ °и* + (<& ~ #у)* + @ц - ?ц)*] + (х%гй\
&Ц = "J [F*ij — Gyii) (flxij — Oyij) + (Syij — Ozij) (<Syij — Ozy) +
"T" ("zij 3-су) EZу Gxij)J -f- diXxyijtxyijt
Решая все уравнения E.2.29) (а их ровно столько, сколько ячеек
в области D) относительно (At)hij, в качестве искомого (At)k
выберем минимальный положительный корень (At)hij, т. е. (At)h =
= min (At)kij. Если указанный минимум неединственен, т. е.
У
достигается для нескольких пар индексов (г, у), то в пластическое
состояние при шаге KAt)h перейдут сразу несколько ячеек,
соответствующих этим индексам. Следующий шаг по времени
выполняется аналогично.
Предложенная модификация удобна тем, что позволяет
следить за переходом отдельных ячеек в пластическое состояние.
§ 3. Осесимметричные упруго-пластические задачи
1. Постановка задачи. Осесимметричные задачи
упруго-пластического течения могут решаться методом локальных вариаций [9]
вполне аналогично плоским задачам. Здесь будет изложено
решение одной задачи о штампе.
Рассмотрим осесимметричную задачу о вдавливании абсолютно
жесткого цилиндра радиуса г% с плоским идеально гладким
основанием в упруго-пластическую среду, заполняющую
полупространство z ^> 0 цилиндрической системы координат г, О, z.
Вдавливание происходит параллельно оси z. Задача обладает
осевой симметрией, вследствие чего отличными от пуля
компонентами вектора перемещения, тензоров деформации и напряжений
соответственно будут: и, w, вг, ev, ez, erz, о>, av, аг, хгг. Через
и, w обозначены перемещения вдоль осей г, z.
Предполагая процесс вдавливания штампа достаточно
медленным, т. е. квазистатическим, и переходя к безразмерным
переменным так же, как и в § 2 (с / = г^), запишем основные уравнения
рассматриваемой упруго-пластической задачи — уравнения
равновесия:
дзг/дг + dxrz/dz + (ог — а»)/г = 0, dxrz/dr -|- dsjdz + т„/г = 0,
E.3.1)
Решение вариационных задач для упруго-пластических сред 151
условие пластичности Мизеса
g = т [(«г - а*J + (бв - б2)* + (о, - агJ] + т*г = 1, E.3.2)
уравнения состояния среды Пранцтля — Рейсса
ег = зг — v (зв + б2) + А,(бг — а), ев = б» — v(az + ar) +
+ Я(ах-а), E.3.3)
е2 = бг — v (бг + б») + к (б2 — б), гГ2 = A + v) xrz + ЯтР2,
J 0 при g < 1
10.5 [(бг — б) гг + (бв — б) ё« + (аг — б) ё2+2тГ2еГг] при g=i.
Здесь
еГ = ди/дг, ?& — u/r, ez = dw/dz, еГ2 = 0.5 (ди/dz -f- dwjdr),
а = (ar + б* + бг)/3.
Граничные условия на поверхности среды имеют вид:
тг2 = 0, w = t, z = 0, г < 1; б2 = тГ2 = О, 2=0, г > 1. E.3.4)
Условия E.3.4) записаны в предположении, что между
поверхностями среды и штампа отсутствует трение.
Если решение задачи ч5.3.1)—E.3.4) для некоторого момента t
найдено, т. е. определены величины и (г, z, t), w (г, z, t), . . .
• ••» xn(ri z> 0'то сила, действующая на штамп в данный момент,
может быть подсчитана по формуле
1
F = - 2я J б2 (г, 0, t) rdr. E.3.5)
о
В задаче ;5.3.1)—E.3.4) область D изменения независимых
переменных г, z пеограничена (г ]> 0, z > 0), что затрудняет
использование для ее решения экстремальных принципов и
численных методов. Поэтому воспользуемся следующим приемом:
заменим исходную областьDобластью D* конечных размеров0^г^
<^ i?, 0 ^ z ^ Н, где R, Н достаточно велики. На прямых г = R,
z = Н граничные условия для перемещений зададим из
известного решения задачи о действии сосредоточенной силы на
упругое полупространство
и - FW, lr z) W, (r z)-- A + v)r f(l-2v)V^+? _
' "ОТ]' • <^>
V^FWt{r, z), W2(r, z)=_i+^[2(l-v) + |472].
Численное решение вариационных задач механики
152
Сила F, входящая в формулы E.3.6), подсчитывается по
формуле E.3.5). Возможность использования данного приема в
рассматриваемой задаче следует из того, что на достаточно большом
расстоянии от штампа среда находится в упругом состоянии, а
величины смещений и, w при удалении от области контакта
асимптотически стремятся к значениям смещений в задаче о действии
сосредоточенной силы на упругое полупространство (задача Бус-
синеска). Таким образом, приходим к задаче решения уравнений
E.3.1)—E.3.3) в области D* при граничных условиях E.3.4),
E.3.6).
Решение рассматриваемой задачи E.3.1)—E.3.6) в области D*
проведем по схеме, изложенной в § 2, с использованием
вариационного принципа [100, 104], согласно которому действительные
приращения перемещений 8и, 8w за время At = ?m — tk = TIL
(Т — длина временного интервала, на котором рассматривается
процесс вдавливапия штампа в упруго-пластическую среду\
обеспечивают минимум функционала
/ = я \^ (8агбег + бзобев. + 8sz8zz -f 2бтГ2бзгг) rdrdz, E.3.7)
рассматриваемого на классе функций 8и, 8w, удовлетворяющих
краевым условиям:
би? = At при z = 0, г <; 1 и бм = 0 при г — 0, 0<; z «^ Я,
8и = WjSF, 8w = W28F при z = Н, 0<r < R
и 0 < z < Н, r = R. E.3.8)
Здесь приращение силы 8F подсчитывается по формуле
1
8F = - 2я J 8ezrdr, 8az = з2 (г, 0, tM) - з2 (r, 0, tk). E.3.9)
о
В подынтегральное выражение E.3.7) нужно подставить
приращения компонент тензоров деформации и напряжений,
выраженные через приращения перемещений по формулам,
вытекающим из E.3.3)
бзг = абег -f- b (бг* + бгг) — сЛ (з* — ок), бзв = абев + Ъ (бег +
-f бе,) — сЛ (<з* — зк),
бзг = абг2 + Ъ Fег -\- 8г») — сЛ (з* — ак), бтГг = с8ггг — сЛтГ2;
E.3.10)
Л = 9 при g< 1;
Решение вариационных Задач для упруго-пластических сред 153
Л = 0.5 [(а* - о*) бег + (ба* - а*) бев + (а* - з») бег + 2т*г6бГ2]:
при g = 1,
бег = д фиIдг, бе» = Ьи/r, 6е2 = a (Щ/dz, бегг = 0.5 C (8u)jdz +
+ а(вм?)/ат).
Здесь через а, 6, с обозначены те же величины, что и в формулах
E.2.9). Верхним индексом к в E.3.10) отмечены значения
величин, относящихся к моменту времени t — tk.
Таким образом, определение искомых величин би, бы> в
области D* сводится к решению вариационной задачи E.3.7)—
О
Фиг. 5.14
5.3.10). Заметим, что в граничные условия E.3.8) входит
величина 8F чприращепие силы за время At= tk+1—th), которая
также является искомой величиной и должна быть определена в
процессе решения задачи E.3.7)—E.3.10). Если решение данной
вариационной задачи найдено, т. е. определены функции би, 8w
переменных г, z, минимизирующие функционал E.3.7) и
удовлетворяющие граничным условиям E.3.8), то величины
приращений деформаций и напряжений легко подсчитываются по
формулам E.3.10).
2. Алгоритм решения. Алгоритм решения вариационной
задачи E.3.7)—E.3.10) заключается в следующем (см. [9]). Область
D* разбивается на треугольные ячейки неравномерной сеткой
с узлами в точках Sif (фиг. 5.14). Координаты ru z} точки Su
определяются формулами
74 = iAr, Zj = jAz, i = 0,1, ..., тп; / = 0,1,. .., re,
74 = г4_! + (i — m) Ar, zj = zj-x + (/ — re) Az, i = m + 1,..., M;
j = n + l,...,N.
Численное решение вариационных задач механики
154
Две треугольные ячейки данной сетки с вершинами в точках
SU> SU1,}J St,Ul и SttUl, SUl,Uu Si+Uj' составляют одну
прямоугольную ячейку с вершинами в точках Stj, Si+lt*, Sl+ltj+l, Sitj+1.
Предполагается, что параметры сетки подобраны так, что линии
г = т~м, z = zN совпадают с соответствующими границами области
D*, т. е. rM = R, zN = Н.
Вводя обозначения q>i7- = 8и (гг, zj)* ф,-; — 8w (rt, zj),
воспользуемся следующими конечно-разпостными формулами для
аппроксимации производных:
(<РгЬ = (фнъ j — <Pii)/(ri+1 — /4), (Мрг)и = (t|>i+1) j — tii)/(ri+1 — r4),
E.3.11)
(<Pz)ij = (ф{, j+1 — 9ij)/(Zi+i — Zj), (qjn = (fy, j+1 — l|)ij)/(Zj+i — Zj)
для треугольников с вершинами в точках Stj, Si+1,j, Su j+1
(обозначены цифрой 1 на фиг. 5.14) и формулами
(фг)у = (ф{+1, j+i — ф», ,+i)/(ri+1 — г4), (г|зг)у = (tk+1, j+1 —
-^.мИгт-гД E.3.12)
(фг)« = (ф{+1, j+1 — Фг+1, i)/(zi+l — ZJ')> (ФЛ; = (Ф1+1, >+1 —
— 44+i,i)/(*i+x — *i)
для треугольников с вершинами в точках Si+1j, 5j+i.j+i> Stj+1
(обозначены цифрой 2 па фиг. 5.14).
Минимизируемый функционал J приближенно заменим суммой
/ = 2(/iy + /2ii), E.3.13)
где через IUj- и I2ij соответственно обозначены аппроксимации
интегралов по треугольным ячейкам с вершинами в точках Stj,
Si+bj, Sijj+1 и Suui, SUhJil, Sit}+1. Для получения явных
выражений для 1ц], 1щ подставим конечно-разностные аналоги
формул E.3.10) в E.3.7). Будем иметь:
ha = у { 1а Ыц + Ьуи/п + ъ ($2)ц\ (фгL> + [Ъ (Фг)^ + офц/п +
+ * Ши) фцЛЧ + [Ь (фгЬ + Ьф«/Г| + a (l|3z)i;] (Ург)ц +
+ i [(Ф*)« + №а\2 ~ 2еЛЦ г* (ri+1 - п) (*,+1 - 2,), E.3.14)
f 0 при g{j < 1,
kij = \ 0.5 {[(<зг)?, - <$1 (9rLi + [(б*)?,- - о?,] ф„/г4 + [(згM -
- 4] (ФгЬ + (*«).* l(<Pz)ij + Ши\} ПРИ ?« = 1,
Решение вариационных задач для унруго-пластических сред 155
А8у=
ha = -J {[а Ми + Ьфнь j+i/rm Ч Ь (ф*Ы (Фг)« + № Ши +
+ «яч+ь i+i/ri+x + 6 (ф2)и] <pi+1, i+i/ri+1 + [Ь (фг)у + fapi+1> 3+1/ri+1 +
+ а (яШ (%)« + | [(ф2)у + (фг)у]г - 2сЛ2й)} ri+1 (ri+1 - 74) X
X V^j+l 2j),
О ПРИ ftn,j+1<l,
0-5 {[Fr)f+i, <+i — af+1,,+1] (фг)у + [(cs»)f+1, y+1 — 0?+!,,+1] x
X ф{+1, j+i/ri+l + [(<3z)i+1>J+i — 5t+1,y+1] (l|}z)ij + (Trz)f+1, ,+1 X
VX [(фг)^ + OMij]} при gi+1,i+1 = 1.
Конечно-разностные выражения для производных, входящих в
формулы для Ijjj, I2ij, берутся соответственно из E.3.11), E.3.12).
При i = 0 величина г{, фигурирующая в знаменателе соотношений
E.3.14), заменяется достаточно малым числом. Граничные
значения сеточных функций фг^ф,-/ определяются разностными
аналогами краевых условий E.3.8):
Фо,- = 0, г^о = At при 0 < / < N, О < i < s, E.3.15)
Фу = WufiF, ifo = W2ifiF при 0 < i < M, j = N, i = M,
где Wltj = Wt (rt, Zj), W2ij = W2 (rt, z;). Значение i = s
соответствует краю штампа, т. е. rs = 1. Величина bF^ входящая в
условия E.3.15), вычисляется по формуле
в
6^ = -2я2Fз,){0г4(г|-г4-1), E.3.16)
i=l
которая вытекает из E.3.9) и в которой (S0z)jO определяются
разностными аналогами соотношений E.3.10).
Приходим к следующей разностной вариационной задаче:
найти значения ф^-, ф^, доставляющие минимум сумме E.3.13),
E.3.14) и удовлетворяющие граничным условиям E.3.15). Заметим,
что приращение E.3.16)силы 6F, входящее в условия E.3.15),
зависит посредством бз2 от искомых величин фг7-, ф,^ и потому должно
определяться одновременно с ними. Первоначально полагается
(б^)] =0, и с заданной величиной приращения силы в граничных
условиях E.3.15) решается вариационная задача E.3.13)—E.3.15).
Решение этой задачи проводится по методу локальных вариаций.
По найденным ф*/,%,; по формулеE.3.16) подсчитывается новое зна-
Численное решенне вариационных задач механики
156
чение приращения силы 8F = FFJ. Далее в граничные условия
E.3.15) подставляется новое значение 8F = (б^J, и снова по
методу локальных вариаций решается вариационная задача
E.3.13) — E.3.15) и т. д. Итерационный процесс оканчивается при
выполнении на некотором 1-м шаге условия
Кб/?),-F^1-1 |<е, E.3.17)
где Р ^> 0 — заданное достаточно малое число. В качестве
искомого решения рассматриваемой вариационной задачи
принимается решение фг7-, tyij, полученное на 1-м шаге итерационного
процесса, т. е. при 8F = FF),.
Схема решения вариационной задачи E.3.13) — E.3.15) с
заданным 8F по методу локальных вариаций аналогична схеме,
описанной в § 6 первой главы и примененной для решения
плоской упруго-пластической задачи в § 2 данной главы. Разница
состоит в том, что здесь применяется треугольная сетка, и поэтому
при варьировании величин tptj, ^ц, определенных в какой-либо
точке Sij, производится подсчет и сравнение шести слагаемых в
сумме E.3.13) (соответствующие ячейки заштрихованы на
фиг. 5.14).
Таким образом, в целом алгоритм решения
упруго-пластической задачи E.3.1)—E.3.6) заключается в следующем. Проводится
разбиение отрезка времени [О, Т] достаточно близко
расположенными друг к другу точками th. Состояние среды в моменты t = th,
к = 1, . . ., L определяется путем последовательного решения
вариационных задач E.3.13)—E.3.16). Для решения к-й вариа-
ционпой задачи E.3.13)—E.3.16) об определении перемещений,
деформаций, напряжений и силы, действующей на штамп в мо
мент th, по известным значениям этих величин при t = tk-x
осуществляется итерационный процесс подбора величины 8F. На
каждом шаге этого итерационного процесса (при
фиксированном значении величины 8F) решается по методу локальных
вариаций задача E.3.13)—E.3.15) и подсчитываемая новое
значение 8F.
3. Результаты расчетов. Описанный выше вычислительный
алгоритм реализован в виде стандартной программы, с
применением которой на ЭВМ БЭСМ-6 проводились расчеты. Отметим,
что объем вычислений, необходимых для решения задачи, очень
велик из-за наличия нескольких вложенных друг в друга
итерационных процессов и громоздкости формул E.3.14). Приведем
некоторые результаты расчетов при следующих значениях
параметров среды и сетки: v = 0.25, R = 2, Н = 2, Ar = Az = 0.25,
m = п = 5, М = N = 7. При варьировании решения по методу
лок шьных вариаций начальные значения шагов варьирования
Решение вариационных задач для упруго-пластических сред 157
выбирались равными hi = 10~3, h% = 5-Ю, а в качестве
конечных шагов варьирования брались /г* — 2.25-Ю-4, hi = 7.8-
• Ю-4. Изменение шагов варьирования в процессе решепия
вариационной задачи осуществлялось путем половинного деления после
полной сходимости при дапных шагах. Значение параметра е в
формуле E.3.17) равнялось е — 0.001. Расчеты проводились
следующим образом. Сначала по схеме п. 2 для t — tj — 0.1 решалась
вариационная задача E.3.13)—E.3.16). Полученная в результате
расчетов при t =tt = 0.1 интенсивность касательных напряжений,
т. е. фупкция g, достигает максимума для ячейки, прилегающей к
краю штампа (точке А, см. фиг. .5.15). При этом для всех ячеек
Фиг.5.15 z\
Фиг. 5.16 3
справедливо неравенство g< 1, т. е. вся среда находится в
упругом состоянии. Далее использовался прием, описанный в
замечании 1 к п. 2 § 2, и по формулам E.2.16), E.2.17) вычислялся
момент t#, который оказался равным tt = 2.540, и решение,
соответствующее этому моменту. Дальнейшие расчеты проводились для
моментов: th = t# + kAt, к — 1,2, . . ., 40; At = 0.1.
Данные расчетов позволяют проследить развитие
пластической зоны, возникающей у краев штампа. На фиг. 5.15 кривыми с
индексами к = 1, 15, 30, 35 показапы границы упругой и
пластической областей, соответствующие моментам времени th — tm-\-
+ kAt.
Рассчитанная суммарная сила давления на штамп в
зависимости от t (или, что то же, от глубины внедрения штампа v)
показана сплошной кривой на фиг. 5.16. Штрих-пунктирной прямой
на фиг. 5.16 показана зависимость силы от глубины вдавливания
для соответствующей чисто упругой задачи.
Численное решение вариационных задач механики
158
Эта зависимость, согласно точному решению [84] в принятых
обозначениях, имеет вид
F = 2*/A - v2) = 2.133* (v = 0.25). E.3.18)
Сравнение точного решения E.3.18) с численным решением для
силы в чисто упругой задаче (при t<C t%. — 2.540) показывает,
что отличие не превышает 2.5%. Численное решение данной
задачи проводилось для контроля и на более мелкой сетке (М — N =
= 11). При этом погрешность определения силы в упругой
области не превышала 1%.
Описанный в § 2, 3 алгоритм может быть применен для
решения различных двумерных упруго-пластических задач, для
которых существует вариациопный принцип (как в рамках теории
пластического течения, так и для деформационных теорий
пластичности).
§ 4. Стационарное течение вязко-пластической среды
1. Вариационная задача. Деформируемая среда называется
вязко-пластической, если ее вязкое течение наступает тогда, когда
интенсивность касательных напряжений сдвига превосходит
предел текучести т0. Установившееся течение этой среды
характеризуется вариационным принципом [34,67], согласно которому
действительное движение отличается от любого кинематически
возможного движения тем, что для действительных движений функционал
/ = СС (ф + т0Г - Gu\ dco - ^ FudS E.4.1)
?2 S
имеет минимальное значение. Здесь и. — коэффициент вязкости
среды, Г — интенсивность тензора скоростей деформаций сдвига,
и — вектор скорости, G, F — соответственно векторы массовых и
поверхностных сил, прикладываемых к среде.
Вязко-пластическая среда заполняет область Q, к части
поверхности которой S приложены силы F, и предполагается
несжимаемой. Как показано в [67], вариационная постановка задач
о течениях вязко-пластических сред обладает большей общностью
по сравнению с формулировкой этих же задач в терминах
дифференциальных уравнений. В частности, при решении указанных
задач на основе вариационных принципов не требуется
дополнительных предположений о характере движения, форме и
количестве областей, где среда находится в жестком состоянии
(застойные зоны и ядра течения). Ниже, на основе вариационного
подхода и использования метода локальных вариаций дается
эффективное решение ряда экстремальных задач об одномерных
течениях вязко-пластических сред.
Решение вариационных Задач дли упруго-пластических сред 159
2. Расчет течений вязко-пластической среды в трубах.
Рассмотрим, следуя работе [5], задачу о стационарном течении вязко-
пластической среды в цилиндрической трубе (фиг. 5.17).
Расположим прямоугольную систему координат Oxyz так, чтобы ось Oz
была параллельна оси цилиндра. Обозначим через D область
поперечного сечения трубы плоскостью хОу, а через С — границу
области D. В направлении оси Oz действует постоянный перепад
давления Ар. Через и обозначим скорость течения жидкости вдоль
оси Oz.
^ т;
Фиг. 5.17
шшт
'т
Используя результаты работы [67], можем утверждать, что
реализуется течение, удовлетворяющее краевому условию
прилипания
и = 0 на С E.4.2)
и доставляющее минимум функционалу / из E.4.1), который для
рассматриваемой задачи имеет вид:
E.4.3)
Для расхода среды через поперечное сечение D имеем
выражение
Q = §udxdy. E.4.4)
D
Введем безразмерную скорость, безразмерный расход среды и
безразмерный функционал формулами:
и' = (ш/Тр, <?' = ц<?/т0, /' = U.//T-J, E.4.5)
Численное решение вариационных задач механики
160
а отношение Ар/х0 обозначим через а (будем в дальнейшем штрихи
опускать). В новых переменных функциопал E.4.3) примет
вид
/ = ff{0.5 [(ди/дхJ + (ди/дуJ] +[(ди/дх)* + (ди/ду)*)Чг- аи} dxdy,
d E.4.6)
а соотношения E.4.2), E.4.4) останутся прежними.
Вариационная задача E.4.2), E.4.6) не относится к числу
классических вариационных задач (см. [67]) и не может быть
непосредственно сведена к краевой задаче для уравнения Эйлера. Тем
Фиг. 5.18 Фиг. 5.19
не менее, как будет показано ниже, метод локальных вариаций
позволяет получить эффективное численное решение задачи.
По методу локальных вариаций рассчитывалось течение вязко-
пластической среды в трубе с поперечным сечением D в виде
единичного квадрата @ <; я < 1, 0 < »/ < 1). Квадрат
первоначально разбивался сеткой с т = п = 2, Ах = Ау = 0.5.
Начальное приближение задавалось в виде и = 0, а в качестве
начального шага варьирования выбиралось h0 = 0.1. Когда
варьирование с начальным шагом не давало уменьшения функционала,
то шаг уменьшался вдвое, и варьирование продолжалось. Когда
после очередного дробления шаг варьирования достигал
значения h# <; Ю-7, то числа Да;, Ау уменьшались вдвое, а числа т, п
соответственно увеличивались вдвое. После этого шагу варь*-
ирования придавалось его начальное значение h0, и процесс
варьирования продолжался аналогичным образом на удвоенной
сетке. Варьирование оканчивалось, когда Ах = Ау = 4SS,
т = п = 32, h = h*, а затем по полученному решению рас-
Решение вариационных задач для упруго-пластических сред 161
считывался расход среды через поперечное сечение D по формуле
E.4.4).
Точения рассчитывались при следующих значениях
параметра а : а = 6, 7, 8, 10, 14, 20, 30. На фиг. 5.18 кривыми 1, 2, 3, 4
показано полученное в результате расчетов при а — 10
распределение скоростей соответственно в плоскостях у = 1/8, 1/4, 3/8,
1/2. На кривых 2, 3, 4 имеются участки, где скорость постоянна
и где среда движется как твердое тело. Области, где
вязко-пластическая среда движется с постоянной скоростью, называются
ядрами течений.
Фиг. 5.21
Фиг. 5.20
Деформация границы ядра течения в плоскости ху при
увеличении перепада давления а показана на фиг. 5.19. На ней
замкнутыми кривыми 1,2,3, 4, 5, 6 показаны границы ядер
соответственно при а — 6, 7, 8, 10, 14, 20. На фиг. 5.20 даны
распределения скоростей в плоскости у — 0.5 при различных значениях
параметра ос, указанных цифрами у кривых. Видно, что при
увеличении параметра а (это соответствует увеличению перепада
давления или уменьшению предельного напряжения сдвига)
размеры ядер уменьшаются. Распределение скоростей при этом
приближается к распределению скоростей при течении вязкой
жидкости в трубе квадратного сечения.
В табл. 5.4 приведены расчетные значения расхода Q и
скорости движения ядра и* при различных значениях перепада
давления а. Зависимость расхода Qot: параметра а представлена кривой 2
на фиг. 5.21. Область а^а*, где расход Q-^0, соответствует
отсутствию течения вязко-пластической среды при перепадах давления,
б Ф. Л. Черноусьно и II. В. Баничук
Чшслевное решение вариационных задач механики
162
меньших критического. Выражение для а„. в зависимости от
размеров и конфигурации области поперечного сечения трубы
поучено в [67], причем в случае квадратного сечения (со стороной,
равной единице) имеем а* = 2 + Vл- При а ]> а* зависимость
Q (а) является нелинейной, а при дальнейшем увеличении а
производная dQIda стремится к константе. При а = 20 тангенс угла
наклона кривой Q (а) к оси а равен
dQ/da = 0.034.
E.4.7)
Фиг. 5.22
Как отмечено в работе [68], в окрестности угловых точек при
течении вязко-пластической среды образуются застойные зоны,
где скорость течения равна нулю. Однако для тех значений а,
при которых производились расчеты течений, эти зоны малы,, а
их влияние на характеристики течения незначительно.
Рассмотрим для сравнения течение вязкой жидкости,
подчиняющейся уравнениям Навье—Стокса. Для нее задача о стационарном
течении в трубе сводится к задаче Дирихле для уравнения
Пуассона. Уравнение Пуассона для течения жидкости с вязкостью ц
по трубе с поперечным сечением D (O^x^l, 0 ^ у ^ 1) с уче-
Таблица 5.4
ее
Q
в
0.0198
0.0258
7
0.0602
0.0873
8
0.0943
0.144
10
0.159
0.260
20
0.518
0.998
so
0.856
1.70
Решение вариационных задач для упруго-пластических сред 163
том действия постоянного перепада давления па единицу длины
Ар имеет вид
д2и/дх2 + д2и/ду2 = —Ap/\i. E.4.8)
На границе поперечного сечепия трубы вязкая жидкость
удовлетворяет краевому условию прилипания и (О, у) — и (х, 0) =
= и A, у) = и (х, 1) = 0. Переходя в уравнении E.4.8) к
безразмерной скорости v = \Lu/Ap, получим краевую задачу
дН1дхг + Pv/dy* = — 1 в D, v = 0 на С. E.4.9)
Вводя обозначение
1i
к — \ \vdxdy,
о о
где v — решение краевой задачи E.4.9), получим следующую
зависимость безразмерного расхода жидкости Q' от безразмерного
перепада давления а (здесь использованы прежние обозначения
E.4.5) и а = Ар/ти):
11 11
Q' = -^Q = -^[{udxdy = ^-[ivdxdy = ka. E.4.10)
0 0 0 0
Для определения постоянной к воспользуемся известным [59]
решением задачи E.4.9)
оо
16 -^1 sin (тях) sin (rnty)
lb -ст
тп (т2 + л2)
т. п=1, 3, 5,...
Проводя далее интегрирование по х, у и суммируя численно
получающийся двойной ряд, найдем для к приближенное
значение
к = ((vdxdy=? 2 (cos^-;hcos^-d = 0 036
J J а я6 ?-i т*п2 (т? + я2)
0 J m,n=l, 3,5...
E.4.11)
Зависимость безразмерного расхода вязкой жидкости от
перепада давления для трубы квадратного сечения представлена
прямой 1 на фиг. 5.21, уравнение которой Q' —- 0.036а. Из
сравнения формул E.4.7), E.4.11) и фиг. 5.21 видно, что при
достаточно больших перепадах давления а значения тангенсов углов
наклона прямой 1 и кривой 2 к оси а близки по величине, т. е.
6*
Численное решение вариационных задач механики
164
вязко-пластическая среда приближается по своим свойствам
к вязкой жидкости.
3. Численное решение задачи о течении вязко-пластической
среды в наклонном канале. Рассмотрим стационарное течение
вязко-пластической среды в открытом наклонном канале под
действием силы тяжести. Давление атмосферы над свободной
поверхностью среды предполагается постоянным. Пусть ось Oz
параллельна образующей стенок канала и расположена под углом
Ф к горизонту. Через D обозначим поперечное сечение канала
Фиг. 5.23
плоскостью, перпендикулярной оси Oz (фиг. 5.22); границы
области D — кривая Сх (сечение стенок канала) и прямая С2
(сечение свободной поверхности). Используя общий вариационный
принцип медленных движений вязко-пластической среды [34],
можем утверждать, что реализуется течение, которое удовлетворяет
краевому условию
и = 0 на С1
и доставляет минимум функционалу
6
— pgusincpl dxdy,
E.4.12)
(ди/ду)*]!г -
E.4.13)
вытекающему из E.4.1). Здесь через g обозначено ускорение силы
тяжести. Величина скорости на свободной поверхности не
фиксирована. Поэтому при решении задачи по методу локальных
вариаций величины скоростей и,ц в граничных точках,
соответствующих свободной поверхности среды С2, варьируются
аналогично тому, как это делается для внутренних точек.
В работе [5] использовался другой простой прием, сводящий
указанную задачу к расчету течения в трубе. Пусть область D
симметрична области D' относительно прямой С2. Рассмотрим
Решение вариационных задач для упруго-пластических сред 165
область D + D', ограниченную кривыми Сх и С/ (С/
симметрична Cj). Пусть решена задача о течении вязко-пластической
среды в трубе с поперечным сечением D + D' при граничном
условии и = 0 на С1 + С1. Тогда полученное решение
удовлетворяет условию прилипания па кривой С^ и в силу аддитивности
функционала E.4.13) реализует его минимум в области D. Таким
образом, решение задачи о течении вязко-пластической среды в
трубе с поперечным сечением D -)- D', рассматриваемое в области
D, является решением задачи о движении среды по каналу
поперечного сечения D. Следовательно, полученное выше
численное решение задачи о течении в трубе с поперечным сечением в
виде единичного квадрата (О^х-^1, 0 <^ у <^ 1) можно
рассматривать как решение соответствующей задачи для канала с
поперечным сечением в виде прямоугольника: 0^х^1,0^у^
<^V2. Здесь отрезок прямой у = Va — свободная поверхность
среды, а отрезки прямых у = 0, х = О, х = 1 — стенки капала.
На фиг. 5.23 дается сравнение расхода Q для течений
вязко-пластической среды по каналу с поперечным сечением O^x^l,
О ^ У ^ 1U (гДе отрезок у — V2 представляет свободную
поверхность) и течепием этой же среды по трубе с тем же поперечным
сечением. Зависимость Q (а) для канала представлена кривой 1, а
для трубы — кривой 2. Расчет течения в трубе с указанным
прямоугольным сечением проводился аналогично расчету для трубы
с квадратным сечением. На фиг. 5.23 видно, что наличие
свободной поверхности (при той же форме сечения) приводит, как и
следовало ожидать, к увеличению расхода среды.
НЕКОТОРЫЕ ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ
ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Теория оптимального управления в настоящее время является
быстро и широко развивающимся научным направлением,
имеющим глубокий математический фундамент и важные практические
приложения. Первые задачи, относящиеся к теории оптимизации
динамических систем, были поставлены и решены в связи с
проблемами оптимального управления реактивным движением; в этом
отношении следует отметить работу [72]. Впоследствии задачи
управления и оптимизации движения летательных аппаратов
играли важную роль в развитии методов исследования и численного
решения задач оптимального управления.
Наиболее общими математическими подходами, на которых
базируется современная теория оптимальных процессов, являются
принцип максимума Л. С. Поптрягина [75] и метод динамического
программирования [14, 15].
Развитию, обобщению и применению этих подходов посвящено
большое число работ. Более всего разработаны и изучены в
настоящее время задачи оптимального управления линейными
системами (см., например, [43, 54, 55]). Для задач оптимизации
линейных систем был предложен и обоснован целый ряд
вычислительных методов их решения). Обзор современного состояния
теории оптимального управления можно найти, например, в
статье [44].
Что касается существенно нелинейных систем, то для них,
в отличие от линейных объектов, пока не существует
универсальных и строго обоснованных численных алгоритмов решения.
Однако нелинейные управляемые системы часто встречаются в
задачах механики и техники и представляют большой интерес для
приложений. Поэтому разработка численных методов решения
задач оптимального управления нелинейными системами
является важной задачей, привлекавшей внимание многих
исследователей. Не давая здесь обзора многочисленных работ по этому
вопросу (обзоры и библиографию можно найти, например, в
книге [28] и статьях [29. 44]), отметим здесь лишь основные
направления, в которых развивались численные методы решения
задач оптимального управления нелинейньши системами.
Первая группа методов основана па сведении задачи
оптимального управления к краевой задаче (при помощи принципа
максимума или классического вариационного исчисления). Решение
Метод локальных вариаций
167
краевой задачи может проводиться различными способами,
например, при помощи метода Ньютона и его модификаций [36].
Таким способом был решен, в частности, целый ряд сложных
задач механики космического полета (см., например, их
изложение в [28]). Преимущество методов этого типа состоит в их
простоте, а также в быстрой сходимости при удачном выборе
начального приближения. Основной недостаток этих методов —
трудность выбора хорошего начального приближения (особенно для
многомерных задач). Возникают трудности также при учете
ограничений на фазовые координаты.
Ко второй группе методов относятся градиентные и другие
методы спуска в пространстве управляющих функций.
Градиентные методы, предложенные в работах [96, 97], основаны на
непосредственном вычислении первой вариации функционала и
восходят к работе [72]. К этой же группе методов относится и метод
последовательных приближений, предложенный в работе [46] и
связанный с принципом максимума [75].
Ряд других работ в этом направлении освещен в книгах [28,
31]. Для сходимости рассматриваемых методов уже не столь
существенным является выбор начального приближения. Методы
[96, 97] позволяют в принципе учесть различные краевые
условия и ограничения па управляющие функции и фазовые
координаты, хотя для учета всех этих ограничений приходится
прибегать к некоторым вспомогательным приемам, усложняющим
процедуру решения.
К третьей группе методов можно отнести численные
алгоритмы, связанные с методом динамического программирования и с
варьированием в пространстве фазовых координат (см. работы
[61, 62, 63, 92, 47] и др.). Специфической трудностью этих методов
является построение так называемой элементарной операции, а к
их достоинствам следует отнести простоту решения задач с
ограничениями на фазовые координаты. Наконец, ряд методов
численного решения задач оптимального управления, предложенных
в различное время, основан па идеях нелинейного
программирования, на достаточных условиях оптимальности и других
подхода?.
Авторы не ставили своей целью изложить в данной книге
разнообразные численные методы решения задач оптимального
управления. Ряд сведений, обзоры и библиография по этим
вопросам могут быть найдены в цитированной литературе.
В данном разделе будут изложены два численных метода
решения задач оптимального управления: метод локальных
вариаций (в главе 6) и метод последовательных приближений (в главе 7).
Первый из этих методов основан на варьировании в
пространстве фазовых координат и поэтому относится к третьей из пере-
Численные методы решения задач оптимального управления
168
численных выше групп методов. Материал главы 6 тесно связан
с главой 1. Другой метод, метод последовательных приближений в
пространстве управлений, можно отнести ко второй группе
методов. Оба метода в известном смысле дополняют друг друга.
Метод главы 6 легко учитывает различные краевые условия и
ограничения на фазовые координаты, но требует построения
элементарной операции, что встречает трудности для систем
определенного вида с ограничениями на управляющие функции.
Метод главы 7, наоборот, применим при произвольных
уравнениях движения и ограничениях на управляющие функции, но
требует некоторых усложнений для учета краевых условий и
ограничений на фазовые координаты. Поэтому, в зависимости от
конкретных особенностей решаемой задачи, для ее численного
решения следует выбирать тот или другой метод.
Основное внимание при изложении методов в главах 6, 7
уделено их практической реализации. Подробно описаны
алгоритмы методов, указаны различные их модификации и обобщения, а
также приемы, упрощающие программирование и счет на ЭВМ.
ГЛАВА 6 • МЕТОД ЛОКАЛЬНЫХ ВАРИАЦИЙ ДЛЯ
ЧИСЛЕННОГО РЕШЕНИЯ ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
§ 1. Постановка задачи. Элементарная операция
Изложим алгоритм метода локальных вариаций [92]
применительно к задачам оптимального управления [47, 10].
Пусть управляемый процесс описывается системой
дифференциальных уравнений
х = f(t, х, и). F.1.1)
Здесьt — независимая переменная (время), х~ (х1,...,хп) — га-
мерный вектор фазовых координат, и —- (щ, . . . , ит) — то-мерный
вектор управляющих функций, / = (Д, . . .,/„) — /г-мерная
вектор-функция, а точка всюду означает производную по времепи.
Время процесса считаем фиксированным, причем за начало его,
не нарушая общности, примем момент t = 0, а за конец — момент
t = Т. На фазовые координаты и управляющие функции
наложены ограничения
i(/)eG (t), n(()el/ (t, x) @ < t < T).
F.1.2)
Метод локальных вариаций
169
Здесь G, U — вообще говоря, переменные, замкнутые области
п- и w-мерпого пространств соответственно. Начальные и
конечные условия для вектора х (t) учитываются путем задания
областей G @) и G (Т). Требуется найти такую фазовую траекторию
х (t) и соответствующее ей управление и (t) на интервале [0, Т],
чтобы удовлетворить системе F.1.1), ограничениям F.1.2) и
минимизировать функционал
т
J —- J /0 («, х, u)dt, F.1.3)
о
где /0 — заданная скалярная функция.
Прежде чем переходить к описанию алгоритма численного
решения поставленной задачи, сформулируем понятие
элементарной операции, введенное в работе [61]. Пусть t', t" — два
достаточно близких момента времени, а х', х" — две достаточно
близкие точки фазового пространства, причем 0 ^ t' ^ t" <^ Т,
х ЕЕ G (?'), х" ЕЕ G (t"). Поставим вспомогательную
вариационную задачу: найти управление и (t) на интервале W, t"\,
переводящее систему F.1.1) из точки t', х в точку t", x" с
минимальным значением функционала
г
AJ -^ f0(t,x,u)dt F.1.4)
с
при выполнении ограничений F.1.2) на интервале It', t"\.
Под элементарной операцией понимается операция
приближенного решения вспомогательной вариационной задачи.
Другими словами, элементарная операция должна любой паре
близких точек t', х и t", x" расширенного фазового пространства,
удовлетворяющих условиям 0 ^ t' «^ t" <; Т, х' ЕЕ G (t'), x" ЕЕ
EEG (t"), ставить в соответствие:
а) ответ на вопрос о том, существует ли управление,
переводящее систему из точки t', х в точку t"', х" и удовлетворяющее
ограничениям F.1.2) (ответ в форме «да» или «нет»);
б) в случае утвердительного ответа — оптимальное
управление и (t), решающее вспомогательную вариационную задачу,
и соответствующее ему минимальное зпачение функционала А/
из F.1.4).
Элементарная операция может выполняться приближенно,
причем погрешность определения минимального значения А/
должна быть о (Л/) для любых достаточно близких точек t', х'
и t", х"/.
Численные методы решения задач оптимального управления
170
Близость точек t', х и t", х" и возможность приближенного
выполнения элементарной операции позволяют ее значительно
упростить и свести в большом числе случаев к алгебраической
задаче. Укажем некоторые приемы, позволяющие упростить
построение элементарной операции (подробпее см. в [61]).
Прежде всего множество G (t) обычно представляет собой
область и-мерного пространства, непрерывно меняющуюся по
времени. Так как концы траектории t', х и t", x" достаточно
близки друг к другу и лежат в этой области, то можно в
элементарной операции не проверять первое ограничение F.1.2),
считая его приближенно выполненным. Множество U (t, x) можно
приближенно считать фиксированным при выполнении
элементарной операции, полагая U (t, x) ^ U ((t' + t")l2, {х + х")/2).
После этого к вспомогательной вариациопной задаче
непосредственно применим принцип максимума Л. С. Понтрягина.
Дальнейших упрощений можно достигнуть, полагая для
некоторых или для всех/ : fj (t, x, и) zsfj ((t' + t")l2, (x' + х")/2, и),
@</< п).
Кроме того, близость точек t', х и t", x" может быть
использована и для других упрощений системы F.1.1) (например, ее
линеаризации). После этого в ряде случаев можно получить
аналитическое решение вспомогательной вариационной задачи,
например, при помощи принципа максимума.
В некоторых случаях управление и (t) па иптервале W, t"\
можно задавать при помощи подходящего аппроксимирующего
выражения и —- ф (t, cl7 . . .,с,), где сх, . . .,с, — постоянные, а
I > п. Подставим это выражение в систему F.1.1) и, если это
возможно, либо приближенно ее проиптегрируем в явном виде на
интервале It', t"\, либо заменим систему F.1.1) конечпо-разност-
ными соотношениями. Тогда условия прохождепия фазовой
траектории через точки t', х и f, x" дадут п алгебраических
уравнений для определения параметров Cj, . . .,с,. При I >> n
недостающие уравнения для нахождения этих параметров получаются
из условия минимизации функционала Д/. Следует, конечно,
проверить, принадлежит ли найденное управление к области U.
Отметим, что как при I — п, так и при I > n дальнейшая
минимизация суммарного функционала / производится в процессе
варьирования траектории независимо от элементарной операции.
Простейшую аппроксимацию управления получим, полагая
все компоненты вектора и постоянными на интервале It', t").
Заменим систему F.1.1) конечно-разностной формулой
х" _ х' = / ((t' + t")/2, (x' + х")/2, и) (t" - t'). F.1.5)
Равенство F.1.5) представляет собой алгебраическую систему
для определения вектора и. Если размерности векторов х и и
Метод локальных вариаций
171
одинаковы (т = п), то из системы F.1.5) можно определить и.
В частности, это возможно, когда система F.1.1) имеет вид х = и,
и задача сводится к минимизации функционала (простейшая за-
т
дача вариационпого исчисления): / — \ /0 (t, x, x)dt.
о
Здесь предположение о постоянстве вектора и на интервале W, t"\
эквивалентно замене траектории х (t) на этом интервале прямой.
Элементарная операция в этом случае задается формулами:
и = х = (х" - x')i{t" - О. F-1.6)
Д/ = (/0 (*' + t")/2, (х' + х"I2, и) (Г - О- F-1.7)
При наличии ограничений на х формула F.1.6) служит для
проверки выполнимости элементарной операции.
При т > п часть компонент вектора и остается свободной
и определяется из условия минимизации функционала F.1.7), а
при т <С п такой упрощенный подход невозможеп.
Если т <С п, то можно воспользоваться другим приемом,
указанным, в частности, в работе [63] и основанным на введении
дробных шагов но времени. Пусть для определенности
размерность вектора и вдвое меньше размерности вектора х, т. е. п = 2т.
Разобьем интервал It', t"\ точкой t* = t' + т/2, % — t" — t' на
два равных отрезка W, t*], [t*, t"\, а на каждом из этих отрезков
будем предполагать вектор управления и постоянным и равным
соответственно и1, и2. Значение фазового вектора х в точке t = t*
обозначим через х*. Аппроксимируем дифференциальное
уравнение F.1.1) конечно-разностными уравнениями вида:
х*—х' = 0.5т/ (*', х', и1), х" — х* =0.5 т/ (**, х*, и2). F.1.8)
В результате получим систему из 2п алгебраических
уравнений F.1.8) относительно неизвестных компонентов фазового
вектора х* и компонент векторов управления и1, к2, т. е.
относительно п + п12 -f- и/2 — 2п искомых величин. Исключая далее
вектор х* из уравнений F.1.8), получим систему п трансцендентных
уравнений
*»-*'= 0.5т {/(*',*', и1) +f(t' + ^, x' + ~f(t',x', u»), u2)}
F.1.9)
относительно п неизвестных: п/2 — компонент векторов и1 и га/2 —
компонент вектора и2. Таким образом, если вычисление
векторов и1, и2 из F.1.9) не является трудоемкой процедурой, то
элементарная операция может быть эффективно реализована.
Заметим, что случай п — 2т характерен для некоторых задач
Численные методы решения задач оптимального управления
172
динамики управляемых движений, когда^число т управляющих
сил равно числу степеней свободы и вдвое меньше порядка
системы. Описанный прием естественным образом обобщается на
случай, когда Я = nlm\—произвольное целое положительное число.
Разбивая в этом случае интервал It', t"\ на Я частей и
проводя аналогичные преобразования, получаем систему из п
уравнений, являющуюся аналогом системы F.1.9), относительно п
неизвестных и1, . . .,и* (n = km).
В случае, когда Я = п/т не целое число, деление интервала
It', t"] следует проводить на а частей, где а — целая часть от
(Я + 1), а соответствующее обобщение уравнения F.1.9) на этот
случай приводит к системе из п уравнений относительно а X т
неизвестных и1, . . .,иа, причем am > п. Для отыскания п
компонент искомых векторов можно использовать эти уравнения.
Остальные am — п искомых величин следует определить путем
минимизации величины А/ из F.1.4).
Отметим, что в работе [22] описан один способ решения задач
оптимального управления путем варьирования в пространстве
состояний, родственный изложенному выше методу локальных
вариаций. Авторы работы рассматривают случай т <С п и
приводят численный пример.
§ 2. Описание алгоритма
Предполагается, что элементарная операция, удовлетворяющая
сформулированным выше условиям, для данной задачи построена.
Элементарная операция должна быть реализована в виде
подпрограммы, которая для любой пары близких точек t', х' и t",
х", удовлетворяющих условиям 0 ^ t' <^ t" ^ Т, х' ?= G (t'),
х" ?Е G (t"), дает ответ («да» или «нет») о существовании
допустимого управления, переводящего систему из t', х , в t", х".
В случае положительного ответа подпрограмма элементарной опе-
•рации выдает также минимальное значение функционала А/ и
совокупность параметров, определяющих оптимальное
управление (назовем их параметрами управления).
Кроме того, должна существовать подпрограмма, которая для
произвольной точки t, х дает ответ (в форме «да» или «нет») на
вопрос, выполнено ли фазовое ограничение х (t) ЕЕ G (t). Пусть
интервал [О, Т] разбит на N равных интервалов точками tk = кт,
где т = TIN достаточно мало, а к = 0,1, . . . , N. В'дальнейшем
значения фазовых координат х (t) будут рассматриваться лишь в
моменты tk. Фазовая траектория может восстанавливаться по
х (tk) при помощи интерполяции.
Таблица значений х (th), т. е. чисел xj (tk) [где ;" = 1, . . ., п,
к = 0, 1, . . ., N, всего (N + 1)га чисел], во время работы алго-
Метод локальных вариаций
173
ритма должна храниться в памяти машины. Начальное
приближение для х (tk), т. е. х° (tk), к — 0, 1, . . ., N предполагается
заданным. Оно может выбираться произвольно, например, из
физических соображений.
В процессе работы алгоритма значения х (th) при к = 0, 1, . .
...,N изменяются так, что в конце концов они приближенно будут
определять оптимальную траекторию.
Работа алгоритма распадается на две части, выполняемые
двумя независимыми блоками. Первый из них играет
вспомогательную роль и осуществляет контрольный просмотр начального
приближения. Этот блок последовательно для всех к = 0, 1,...
...,N, обращаясь к подпрограмме проверки фазовых
ограничений, определяет, находятся ли точки х° (<ft) в допустимой
области. Одновременно для к > 1 при помощи подпрограммы
элементарной операции устапавливается ее выполнимость для точек
tk-i, x° (tis-i) и th, x° (th). При этом подсчитывается функционал J0
для просматриваемой траектории как сумма функционалов AJ
для отдельных интервалов. Кроме того, для каждого интервала
ltk-i, ffc], fo = 1, . . ., N, получаются параметры,
характеризующие управление. Знание значений управляющих функций для
дальнейшей работы алгоритма не требуется.
Если для какого-либо к, О <; к ^ N точка х° (th) не находится
в допустимой области или же элементарная операция для точек
?ft_i> x° (tk-i) и th, x° (tb) не выполнима, то начальное
приближение непригодно. В этом случае блок контрольного просмотра
автоматически «подправляет» начальное приближение, изменяя
неудовлетворительное значение х° (th). Это изменение состоит в
том, что к одной из компонент х\ (th) вектора х° {th) добавляется
величина rhj, и числа /, г пробегают значения j =1, . . .,п;
г — ± 1, . . ., ± s. Здесь hj > О — заданные величины шагов
по координатам, s — заданное целое число.
Если указанный способ варьирования позволяет исправить
значение х° (th), т. е. добиться выполнения фазового ограничения
и элементарной операции, то продолжается просмотр
последующих точек.
В результате работы блока контрольного просмотра может
быть два исхода. Первый (неудачный) исход означает, что
начальное приближение не является допустимым и не может быть
исправлено указанным способом. В этом случае следует задать
другое начальное приближение. Второй (удачный) исход означает
наличие допустимого начального приближения х° (t). При этом
известно значение функционала 7°, соответствующего х° (t).
В случае удачного исхода контрольного просмотра может
начать работать второй (основной) блок алгоритма. Этот блок
варьирует имеющееся начальное приближение х° (t) по методу ло-
Численные методы решения задач оптимального управления 174
кальных вариаций [92]. Варьирование производится
последовательно по каждой из компонент вектора х (t): сначала по
первой, затем по второй и т. д. Для каждой из компонент xj должен
быть задан свой шаг варьирования hj > 0. При варьировании jf-й
компоненты все остальные считаются фиксированными. К началу
варьирования /-й компоненты вектора все предыдущие уже про-
варьированы, т. е. xr (t) = х* (t) при 1 ^г^/' — 1, хт (t) = x°r (t)
при / ^ г <Г п. Верхний индекс указывает номер приближения.
Фиг. 6.1
Процесс варьирования заключается в том, что наряду с Xj (th)
рассматриваются также значения x°j (th) ± hj (последовательно
для всехк = 0, 1, . . ., N). Если точка х{ (th),..., xj-i (th), ж° (th) +
+ hj, ж°+1 (tk), . . ., Xn (tk) лежит в допустимой области,
достижима «слева» и «справа» (т. е. при помощи элементарной
операции в нее можно перейти из (к — 1)-й точки, а из нее — в (к + 1)-ю
точку траектории) и соответствует меньшему суммарному
значению функционала, чем непроварьированное значение х,- (<ft),
то полагаем xj (th) = я° (tk) + hj и переходим к (к + 1)-й
точке. В противном случае аналогичной проверке
подвергается вариация «вниз», т. е. проверяется значение Xj (th) — hj.
Если ни одна из вариаций не приводит к уменьшению
функционала, то полагаем xj (tk) = Xj (th). Схема варьирования
изображена на фиг. 6.1. Для уменьшения потребного числа операций
сначала делается вариация в том направлении (вверх или вниз
на фиг. 6.1), которое привело к уменьшению функционала на
предыдущем, (к — 1)-м шаге. Отметим, что значение
функционала А/ между (к — 1)-й и к-й точками непроварьированной
траектории известно с предыдущего шага. Тогда при варьировании
к-й точки требуется 3 или 5 раз обратиться к подпрограмме эле-
Метод локальных вариаций
175
ментарной операции (в зависимости от того, уменьшился ли
функционал в результате первой из испробованных вариаций или нет)
и 1—2 раза к подпрограмме фазовых ограничений (подробнее см.
главу 1, § 5).
Варьирование начальной и конечной точек отличается лишь
тем, что элементарные операции выполняются только «влево» или
«вправо» (см. фиг. 6.1). Множества G @) и G (Т) следует задавать
такими, чтобы при принятом покоординатном способе
варьирования возможно было перемещение начала и конца траектории по
этим множествам. Такому требованию удовлетворяют, во-первых,
л-мерные области в пространстве координат, а также множества,
задаваемые некоторым числом равенств вида х, = а/, где а,- —
постоянная. Если же, например, множество G @) [или С?(Г)]
задается равенством <р (х) = 0, то при реализации
вычислительного процесса его следует заменить неравенством | ф (х) | < е.
Число г^> 0 должно быть достаточно мало для получения
нужной точности, но в то же время достаточно велико, чтобы
неравенство | ф (ж) | < е не нарушалось при изменении компонент xj
на + hj или —hj.
Итерация считается выполненной, когда все компоненты
вектора х проварьированы во всех точках. Для этого требуется
выполнить от SNn до bNn элементарных операций и от Nn до 2Nn
раз проверить фазовые ограничения.
После выполнения итерации получим новую траекторию xl (t)
и соответствующий ей функционал J1, причем, очевидно, J1 ^ /°.
Отметим, что вычислительный процесс можно остановить в
любой момент (например, после варьирования одной из
компонент), вывести траекторию х (t) (она будет заведомо допустимой)
и соответствующий ей функционал /, а также изменить некоторые
из шагов hj.
Выполнив одну итерацию, можно переходить к следующей
и т. д. Если же от итерации к итерации функционал уменьшается
незначительно и число точек, в которых изменились значения
х (i), также невелико, то следует уменьшить, например, вдвое,
некоторые или все шаги hj и продолжать процесс. Когда шаги
станут достаточно малы (т. е. порядка желаемой точности
получения оптимальной траектории) и дальнейшее их уменьшение не
приводит к уменьшению функционала, то нужно уменьшить вдвое
шаг т (удвоить число N). Значения х {t) во вновь образовавшихся
при этом точках деления получаются линейной интерполяцией
по соседним точкам. Так как из-за погрешностей интерполяции
вновь полученная траектория может не удовлетворять
ограничениям, то ее следует подвергнут^ контрольному просмотру, а
затем снова продолжать итерации. Когда т станет достаточно мало
и при всех hj ->- 0 не происходит существенного уменьшения функ-
Численные методы решения задач оптимального управления
176
ционала, процесс определения оптимальной траектории можно
считать оконченным.
Условия hjlx2 -v 0 при 7 = 1, - . ., п, наряду с т ->- 0 являются
важными необходимыми условиями сходимости процесса к
минимуму [в ряде случаев нужно потребовать hjhr -*¦ 0, где г ^> 2,
число г зависит от порядка системы (см. главу 2) и элементарной
операции]. Не давая общих условий сходимости, отметим, что в
случае классической вариационной задачи о минимизации функ-
г
ционала J = \ /0 (t, х, x)dt сходимость метода подробно иссле-
о
дована в главе 2.
Описанпый алгоритм может быть применен и к задачам, в
которых время начала и конца процесса не задано.
Пусть, например, начальные условия задаются тем, что точка
t, х должна принадлежать множеству Н в (п + 1)-мерном
пространстве. Специальная подпрограмма, аналогичная подпрограмме
проверки фазовых ограничений, должна устанавливать
принадлежность точки t, х множеству Н. В этом случае алгоритм
усложняется тем, что нужно предусмотреть возможность начала
процесса в любой точке траектории, если это является допустимым
и приводит к уменьшению функционала. Кроме того, нужно
пробовать увеличить время процесса сдвигом его начала на т
«влево». Аналогично рассматривается тот случай, когда время Т
окончания процесса не задано.
Описанный выше алгоритм реализован в виде стандартной
программы на языке АЛГОЛ-60 в работе [47]. Более общая
стандартная программа [10] решения вариационных задач с одной
независимой переменной, позволяющая, в частпости, решать и
задачи вида F.1.1)—F.1.3), приводится в главе 8.
Для решения конкретной вариационной задачи при помощи
этих программ необходимо задать пулевое приближение для
фазовой траектории, составить подпрограммы проверки фазовых
ограничений, начальных и конечных условий, а также подпрограмму
элементарпой операции. Стандартная программа автоматически
производит контрольный просмотр нулевого приближения, если
нужно, исправляет его и покоординатно варьирует. При этом
шаги hj (j = 1, . . .,п) по фазовым переменным стремятся к нулю
при заданном значении т. Допускается возможность уменьшения
т вдвое, и повторения процесса варьирования сначала.
По описанной выше схеме с применением стандартной
программы [47] был решен ряд вариационных задач. В их числе были
классические вариационные задачи, задачи^с различными|огра-
ничениями, задачи с подвижными концами. Ниже в § 3, 4 в
качестве примеров приведены результаты^численного решения на
Метод локальных вариаций
177
ЭВМ двух задач оптимального управления: задачи о полете
самолета на максимальную дальность [47] и задачи об оптимальной
стабилизации спутника [45].
Как показали расчеты на ЭВМ, метод локальных вариаций
позволяет эффективно решать задачи оптимального управления
с разнообразными краевыми условиями и ограничениями па
фазовые координаты и управляющие функции в тех случаях, для
которых построена элементарная операция.
§ 3. Задача о полете самолета на максимальную дальность
Рассмотрим задачу о полете на максимальную дальность самолета
с турбореактивным двигателем [47].
Уравнения плоского квазистациопарпого полета имеют вид
[71]:
х = v0M, у = v0M"(, G=-cP, se-vl"M2cv - G,
Р = 3e-vi«M*cx{cw М) + <?т, о = (PoSvl)/BG0).
Здесь х, у — соответственно горизонтальная дальность и высота
полета (в км), v0 — скорость звука, М — число Маха (отношение
скорости полета самолета к скорости звука), у — угол наклона
траектории в радианах, G, Р — соответственно вес самолета и
тяга двигателя, отнесенные к начальному весу G0, с — удельный
расход топлива, S — площадь крыльев, сх, су — безразмерные
аэродинамические коэффициенты. Постоянные р0 и а
характеризуют распределение плотности атмосферы р, которое задается
известным соотношением р -- р0е~у/а.
В дальнейшем рассматривается полет при условиях 9 ^ у ^
<^ 17, 0.5 ^ М ^ 0.98. В этом диапазоне можно положить [71]:
р0 = 0.2117 кГ-сек2/м*, а — 6.318 км, v0 — 1062 км/час.
Аэродинамические и тяговые характеристики были взяты из
книги [71], где они приведены на стр. 76—84, 127—132 в качестве
примера данных самолета с турбореактивным двигателем. Для
выполнения расчетов эти характеристики, а также ограничения
на су и Р были аппроксимированы в указанном диапазоне
следующим образом:
с = 1.06 час-1, S = 180 м\ G0 = 66 500 кГ, сх (с„, М) = с° + bc*y,
cl^lA^AtMil-M))-!,
у<* =Bt + B2M A - М), А1==- 4.6, А2 = 318, Вх = 0.9,
Численные методы решения задач оптимального управления 178
В2 = 21.7, | с„К<? (АО = 1.7 - М, F.3.2)
0<P<Pm(Af, y) = a(v0M-w)* + % а = аг + агу, р = fc +
+ р2г/, 0l = 9.173-Ю"8,
а2 = -1.504-10-9, Рх = 0.1624, р2 = -6.203-Ю"8, v = 500,
0.5 <Л/< 0.98.
При приведенных значениях постоянных для безразмерного
параметра о* из F.3.1) получим а = 25.
Итак, движение самолета определяется системой F.3.1). Роль
управляющих функций играют величины у, М, су, Р, на
которые наложены ограничения в виде равенств [последние два
уравнения F.3.1)] и в виде неравенств [ограничения на М, су,
Р из F.3.2)]. Переменные у, G будем рассматривать в качестве
фазовых координат, а дальность х в конце полета играет роль
максимизируемого функционала (х@) = 0).
Начальные условия и ограничения на фазовые координаты
задавались в виде:
у = у0, G = 1 при t = 0; 9 < у < ух, G > и при 0 < t < Т.
F.3.3)
Время Т окончания процесса считалось фиксированным, а на
фазовые координаты в момент Т никаких ограничений, кроме
F.3.3), не накладывалось. Ограничение G > х лимитирует
расход топлива в полете. В расчетах принималось у0 — 11, х = 0.6,
Т — Ъ (время измеряется в часах).
В различных вариантах расчетов постоянная уг
(максимальная разрешенная высота полета) принимала значения от 12 до 17.
Для построения элементарной операции разрешим 2, 3 и 4
уравнения F.3.1) относительно у, Р и су:
Т = yl(v0M), Р = - G/c, су = Ge^lipM2). F.3.4)
Подставляя F.3.4) в последнее уравнение F.3.1) и используя
аппроксимацию функции сх (су, М) из F.3.2), получим
уравнение относительно М:
М* + агМ3 + а2Мг + а3М + а4 = 0,
«х = A^vl* (f - f) «,, о, = #» (| Л, - ? в«* Я2 +1 уА2) аъ,
F.3.5)
а, = ev/a J^2 ey/og2 + l^) а5, а4 = GW^cT1^,
Метод локальных вариаций
179
Элементарная операция выполняется следующим образом.
По заданной паре точек (t', у', G'), (t", у", G") сначала
определяются
„ У' + У" г О' + С" ,, У"-У' г С-С
У 2—' ь г—» У — f-t" ь== f — v
и коэффициенты уравнения F.3.5). Затем вычисляются
вещественные корни уравнения F.3.5), лежащие в интервале 0.5 ^ М «^
^0.98. Если таких корней нет, то элементарная операция считается
невыполнимой. В противном случае для каждого из допустимых
корней вычисляются управления по формулам F.3.4). Бели
значения управлений не удовлетворяют ограничениям на су и Р,
указанным в F.3.2), то соответствующий корень отбрасывается.
Среди оставшихся корней выбирается наибольший, так как он
дает максимальное значение функционалу Ах = v0 M (t" — t')-
При отсутствии корней, удовлетворяющих всем ограничениям,
элементарная операция считается невыполнимой.
В качестве начального приближения задавался
горизонтальный полет с постоянной тягой
у = Уо = И, G = 1 - 0.075с?, F.3.6)
которому соответствовала дальность х E) = 4094. Итерации
проводились до полной сходимости, причем шаги т и hj изменялись
по общей схеме § 2. Сходимость была достаточно быстрой и
практически наступала уже при числе интервалов по времени N = 28
и при достаточно малых hj.
В табл. 6.1 приведены значения функционала х E) (дальности
в конце полета) для рассчитанных оптимальных траекторий.
Номер варианта обозпачеп через п, причем п = 1 соответствует
начальному приближению F.3.6). Остальные варианты суть
оптимальные траектории, различающиеся значениями максимальной
разрешенной высоты полета уг (см. 6.3.3).
Таблица 6.1
п
2/1
х E)
1
4094
2
12
4225
3
13
4285
4
14
4327
5
15
4348
в
16
4360
7
17
4363
Отметим, что при расчете некоторых вариантов в качестве
начального приближения принималась оптимальная траектория,
полученная для меньшего значения yv Из табл. 6.1 видно, что
Численные методы решения задач оптимального управления 180
увеличение разрешенной высоты полета приводит к увеличению
максимальной дальности.
На фиг. 6.2—6.6 изображены зависимости у (t), G (t), Р (t),
М (t), cu (t) для некоторых из полученных оптимальных
траекторий, причем номера кривых обозначают номера вариантов п.
Кривые G (t) для различных вариантов практически совпадают.
Из фиг. 6.2 видно, что часть фазовых траекторий проходит по
ограничениям у = у1. В конце полета оптимальные траектории
выходят па ограничение по весу G = 0.6 (расходуется весь запас
топлива, фиг. 6.3). При этом самолет снижается до минимально
допустимой высоты у — 9.
В начале полета происходит набор высоты с максимально
возможным значением тяги Р —¦ Рт. Это видно из фиг. 6.4, где
запрещенные области Р > Рт(М, у) для оптимальных
траекторий заштрихованы, а графики зависимости Рт (М (t), у (t)) для
различных вариантов отмечены номером варианта п со штрихом.
§ 4. Задача об оптимальной стабилизации спутника
В качестве другого примера использования метода локальных
вариаций приведем, следуя работе [45], численное решение
задачи о торможении вращательного движения спутника при
помощи установленных на нем двигателей. Минимизируемой
величиной в рассматриваемой задаче является тормозной импульс.
Движение спутника относительно его центра инерции в
некоторых случаях можно рассматривать как вращение твердого
тела вокруг неподвижной точки и описывать это вращение
динамическими уравнениями Эйлера^
A^ + (C~B)qr = агии В^ + (А — С)гр = а2щ,
C^t + (B-A)pq~= a3u3. F.4.1)
Здесь А, В, С — главные центральные моменты инерции (считаем
А ;> В ]> С), р, q, r — проекции угловой скорости на главные
центральные оси инерции. В правых частях системы стоят мо-
мепты сил относительно этих осей.
Предполагается, что моменты создаются тремя двигателями,
закрепленными на теле. Двигатели создают тяги uv и2, и3; плечи
приложения сил а1? а2, as.
Предполагая, что в начальный момент тело вращается,
запишем начальные условия для системы F.4.1):
Р = Ро> Я = ?о> г ^ г0 при t = 0. F.4.2)
Метод локальных вариации
15
13
л-;
j 1 1 \~
Фиг. 6.2
St
Е
Ц8
0,6
Lwttw
^\n[
/7=7\^;
иии\тгн"т\тттт
1 1
i I
1
!
i
1
i
i
(
i St
Фиг. 6.3
Фиг. 6.4
/ г J * st
Фиг. 6.5
— Фиг. 6.6
Численные методы решения задач оптимального управления 182
Задача заключается в определении управлений щ, иг, и3,
затормаживающих к фиксированному моменту t = Т вращение
спутника
р = 0, q = 0, г = 0 при t = Т F.4.3)
и минимизирующих функционал (суммарный импульс)
г
J =$(К1 + |и.| + К1)Л. F.4.4)
о
Введем безразмерные переменные по формулам:
р' = рТ, д' = qT, г' = гТ, V = ЦТ, Г = ЦТ, % = СI A, \i = B/A,
a\ = atTVA (i = 1, 2, 3), p'0 = рлТ, q'Q = q0T, r'0 = r0T A > ц >
>X>0, ц + Я > 1).
В новых переменных соотношения F.4.1)—F.4.4) примут вид
(штрихи у безразмерных переменных опускаем)
dp/dt + (X — u) qr — axult \idq/dt -f A — К) rp = а2ы2, Ыг/dt +
+ (p, — 1) pq = a3w3, F.4.5)
P = Po- 9 = ^o. г = r„ при * = 0, F.4.6)
p = q = r = 0 при * = 1, F.4.7)
i
J = l(\ul\ + \ut\ + \ut\)dt. F.4.8)
о
•
Для решения задачи F.4.5)—F.4.8) методом локальных
вариаций построим элементарную операцию, т. е. определим
управление, переводящее систему из точки (t', р', q , г') в близкую
точку (t", р", q", г") и соответствующее этому управлению
приращение функционала F.4.8). Выражения для искомого
управления непосредственно вытекают из конечно-разностных
аналогов уравнений F.4.5) (элементарная операция строится в
соответствии с § 1 для m = п):
Щ. = ((Р" - P'W" - П 4- (X - ц) (?" + ?') (г" + r')/4)/alf
«• = О* (<?" ~ ?')/(«" ~ ?) + A - Л) (г" + г') (р" + р')/4)/а2, F.4.9)
«з = (X (г" - г')/(Г - Г) + (ц - 1) (р" + р') (?" + g')/4)/a3.
Выражения F.4.9) для управлений, реализующих
элементарную операцию, справедливы с точностью до членов порядка
Метод локальных вариаций
183
О {{t" — t'J). Соответствующее приращение функционала
А/ = (| их | + | и21 + | и31) (Г - V). F.4.10)
Непосредственные расчеты, проведенные по методу локальных
вариаций с использованием элементарной операции F.4.9), F.4.10),
показали, что в задаче F.4.5)—F.4.8) имеется ряд локальных
экстремумов (подробнее см. [45]). Поэтому в работе [45]
использовался регуляризирующии прием, заключающийся в замене
Фиг. 6.7 Фиг. 6.8
функционала F.4.8) интегралом
J' - J [| 1 + I 1 + I «з | + в (и* + и\ + ир] А. F.4.11)
о
Здесь е — малый параметр, который в процессе вычислений
стремится к нулю. Получающаяся при этом задача F.4.5.)—F.4.7),
F.4.11) при каждом фиксированном 8 имеет единственное решение.
Итак, вместо решения исходной задачи F.4.5)—F.4.8)
решалась задача F.4.5)—F.4.7), F.4.11) с фиксированным числом е.
После решения этой задачи уменьшалось е и повторялся
процесс сначала, причем в качестве первого приближения бралось
полученное решение. Окончательное решение получалось при
е-*-0.
Приведем результаты численного решения рассматриваемой
задачи для двух вариантов. В обоих вариантах е уменьшалось от
0.1 до нуля.
Первому варианту соответствуют следующие значения
параметров и начальных данных: Я = \i = 5/e, abx — ab3 = Ve, аЪг =
= 5/в, Т = 1, р0 = 24, д0 = г0 = 16. Это' случай симметричного
тела Я, = ц., у которого один из двигателей, создающих момент
относительно осей инерции, лежащих в плоскости симметрии,
имеет значительно большее плечо, чем другой (ab2 = 6/e, ab3 = Ve).
Численные методы решепия задач оптимального управления
184
Поэтому должно реализоваться движение, при котором
неэффективный двигатель не включается (и3 = 0). Оптимальное
значение функционала, полученное аналитически в работе [35] для
данного варианта, равно
i*>i . vVil+rt
а\
= 166.56.
На фиг. 6.7 представлены оптимальные управления,
полученные в результате численного решения задачи.
Фиг. 6.9
Фиг. 6.10
Расчетное значение функционала равно / = 169.42, т. е.
отличается от теоретического менее чем па 2%.
На фиг. 6.8 представлены оптимальные траектории. Заметим,
что для траектории, соответствующей первому приближению
(линейное изменение р, q, r от р0, q0, r0 до нуля), значение
функционала J = 370.16, т.^е. функционал уменьшился в 2.18 раза.
Метод локальных вариаций
185
В табл. 6.2 показана зависимость оптимального значения
функционала J* от числа е. Даже первоначальное е -- 0.1 дает
значение J*, достаточно близкое к оптимальному, в то время как
непосредственное решение задачи при е^-0 не приводило к
существенному уменьшению начального значения фупкционала / —
= = 370.16.
Таблица 6.2
С
J*
0.1 0.05
1
1
171.88 1 170.36
2-ю
169.55
2-1»
169.43
0
169.42
Второму варианту соответствуют следующие значения
параметров и начальных данных: X — 1/i), u. — 2/3, ах -- 100, а2 —-
- 16 2/3, а3 -- 33 Ч3, Т = 10, р0 =- 200, д0 - 30, г0 - 40.
На фиг. 6.9, 6.10 представлены расчетные оптимальные
управления и соответствующие им оптимальные траектории.
Управление и2 не включается, т. е. н2 = 0. Полученный управляющий
процесс заключается в том, что сначала большими импульсными
значениями их и и3 угловые скорости тела почти полностью
гасятся. Затем малыми импульсами их и иа достигаются значения
р --- q —- г — 0. В случае нефиксированного времени
регулирования Т теоретическое значение функционала для этого варианта
равно 3.5. В результате расчетов получено J -— 3.55. Заметим,
что на траектории первого приближения (она выбиралась так же,
как и в первом варианте) значение функционала / -- 129.3. В
результате итерационного процесса величина / уменьшилась в
36 раз.
Предлагаемый метод, несмотря на плохое первое
приближение, дал возможность получить оптимальную траекторию.
Численные методы решения задач оптимального управления
186
ГЛАВА 7 • МЕТОД ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ
ДЛЯ РЕШЕНИЯ ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
§ 1. Простейший вариант метода
Пусть управляемая система описывается уравнениями с
начальными условиями и ограничениями
dxldt = / (t, x, и), x(t0) = x°, u(t)<=U, t^t0. G.1.1)
Здесь х = (xu . . ., xn) — л-мерный вектор фазовых координат,
и = (»!, . . ., ит) — m-мерный вектор управляющих функций,
t — время, / = (/ц . . ., /„) — заданная вектор-функция, х° —
постоянный вектор, t0 — начальный момент времени, U —
замкнутое множество /га-мерного пространства. Допустимыми
управлениями будем называть кусочно-непрерывные функции и (t),
удовлетворяющие ограничению G.1.1).
Поставим задачу об определении допустимого управления и (t),
минимизирующего функционал
J = (c,x(T)), Г>г0. G.1.2)
Здесь Т — заданный момент времени, с = (d, . . ., с„) —
ненулевой постоянный вектор. Скобками обозначено скалярное
произведение векторов. Будем предполагать, что поставленная задача
имеет решение в классе допустимых управлений и (t), это решение
будем называть оптимальным управлением. Введением
дополнительных фазовых координат широкий класс функционалов
приводится к виду G.1.2).
Введем и-мерный вектор р = (ри . . ., рп) сопряженных
переменных (импульсов) и функцию Гамильтона Н; запишем
сопряженную систему и условия трансверсальности:
Н (t, х, р, и) = (р, f (t, x, и)), G.1.3)
п
dpi/dt => — дН/dXi = — 2 Pjdfi ('» ж» и)№хь Р СО = — с-
G.1.4)
Согласно принципу максимума [75,], искомое оптимальное
управление доставляет функции Н из G.1.3) максимум по и ?= U
при любом t ?E [t0, T], если х и р удовлетворяют уравнениям и
граничным условиям G.1.1), G.1.4).
Для решения поставленной задачи оптимального управления
в работе [46] был предложен метод последовательных
приближений, простейший вариант которого состоит в следующем. В каче-
Метод последовательных приближений
187
стве начального приближения и^ (t) зададим некоторое
допустимое управление; при его выборе обычно используются различные
физические соображения. Метод состоит из последовательных
итераций; к-я итерация заключается в следующем (к = 1, 2, . . .):
1) решая задачу Коши G.1.1) с управлением и = и^ (t),
определяем траекторию х = aKfc) (t) на интервале [t0, T\;
2) решая задачу Коши G.1.4) «справа налево» от момента
t = Т до t = t0 при и = и(к) (t), х = a*fc) (t), определяем
сопряженные переменные pW (t) на интервале [t0, T];
3) определяем управление u(fe+1> (t) на интервале [t0, T] из
условия
H(t, xW(t),pW(t),uW(t)) = maixH(t, x<«(t), pW(t), и). G.1.5)
net/
Если это условие определяет ц№+1> (t) неединственным
образом, то выбираем любое из возможных значений. После этого
переходим к следующей итерации и т. д.
Если процесс последовательных приближений сходится, то
продолжаем его до тех пор, пока последующие приближения не
будут отличаться друг от друга в пределах заданной точности.
Полученное после сходимости решение будет удовлетворять
принципу максимума.
Описанный простейший вариант итерационного процесса,
конечно, далеко не всегда сходится. Если функции /г линейны
по X] и имеют вид
п
к = 2 ац V)X) + bi(t,u), i = 1,..., п
(где ац, bt — заданные функции), то метод уже на второй итерации
дает оптимальную траекторию при любом начальном
приближении.
В самом деле, здесь х и и не войдут в сопряженную систему
G.1.4). Поэтому решение задачи Коши G.1.4) для р (t) не будет
зависеть от выбора начального приближения, и первое
приближение р^ (t) будет совпадать с искомым вектором сопряженных
переменных р (t) вдоль оптимальной траектории. Далее, в
рассматриваемом случае функция Н из G.1.3) представится в виде
И = Нг \- Н2, где Нх не зависит от и, а Н2 не зависит от а; и
зависит лишь от t, p, и. Следовательно, при максимизации Н по и,
согласно G.1.5), полученное управление нB) (t) будет искомым
оптимальным управлением (это управление может быть и
неединственным). Таким образом, доказано, что в рассматриваемом
случае метод сходится уже на второй итерации.
Сходимость изложенного метода для одного класса линейных
задач с квадратичным функционалом была показана в работе [11.
Численные методы решения задач оптимального управления
188
Некоторые итерационные методы, отличные от описанного выше,
но близкие по идеям, рассмотрены в книге [31].
Прежде чем переходить к приемам улучшения сходимости,
отметим некоторые достоинства описанного алгоритма, которые
желательно по возможности сохранить при его модификациях.
1. Метод сравнительно прост для программирования и не
требует большой памяти машины. В процессе счета достаточно
хранить лишь таблицу значений управляющей функции и (i) и
траекторию х (t) для текущего приближения. Сопряженные
переменные запоминать не нужно, так как они используются лишь при
вычислении нового управления, согласно G.1.5). Это вычисление
можно проводить на каждом шаге интегрирования сопряженной
системы. Вообще говоря, можно не хранить в памяти и
траекторию х (t), запоминая лишь конечное значение х (Т) и интегрируя
затем систему G.1.1) одновременно с G.1.4) от t — Т до t = t0.
При этом, однако, увеличивается объем вычислений. Таким
образом, с точки зрения потребной памяти и времени счета, одна
итерация метода последовательных приближений соответствует
одной итерации градиентных методов (см. [96, 97], обзор этих
методов см. в [28]). Отличие состоит в операции G.1.5), но она обычно
сводится к вычислению по замкнутым формулам, так как
зависимость функции / от и и область U имеют достаточно простой вид
во многих реальных задачах.
2. При применении описанного метода на каждой итерации
главная часть приращения функционала отрицательна и
максимальна по абсолютной величине среди главных частей приращений,
получаемых при всевозможных допустимых вариациях
управления [46]. Это следует из формулы 178] для приращения б/
функционала G.1.2), которое он получает, если допустимое управление
и (t) заменить на другое допустимое управление и (t) + би (t);
формула для б/ имеет вид
т
б/ = бх/ + ср, бх/ = — J [Я (t, х (t), p (t), u + 8u) — H (t, x (t),
h
p(t), u)]dt. G.1.6)
Здесь 6x/ — главная часть приращения. Для остаточного члена
справедлива оценка [78]
Т m
| ф | < А18и |р, || Ьи | = I 2 | Ьик (t) | dt, G.1.7)
(о Т=1
где постоянная А зависит от констант Липшица для функций ft
и их производных. Функции //, х (t), p (t) в формуле G.1.6)
определены соотношениями G.1.3), G.1.1), G.1.4) для и = и (t).
Метод последовательных приближений
189
Из формул G.1.6), G.1.7) сразу следует сформулированное
выше свойство алгоритма: главная часть приращения 8tJ
отрицательна и максимальна по абсолютной величине. При этом, если
остаточный члеп ф мал по4сравнению с бх/, то бх/ < 0, а
функционал в ходе итераций будет убывать. Отметим, что в отличие от
градиентных методов [28, 96, 97], основанных на формулах
классического вариационного исчисления, описанный метод на
принципе максимума и формулах G.1.6), G.1.7) включает игольчатые
вариации (малость ср не требует малости абсолютной величины
8и (*)).
3. Пусть функции ft и множество U таковы, что максимум Н
по и достигается всегда на границе множества U. Это будет так,
например, если / линейно по к, a U — закнутая ограниченная
область. Тогда, если исключить особые управления, оптимальное
управление будет граничным (в частности, сюда относятся
разрывные релейные управления). Очевидно, что при применении
описанного метода на каждой итерации будет получаться
граничное управление, т. е. приближение к оптимальному управлению
будет идти в классе разрывных граничных или релейных
управлений, что представляется удобным. При использовании
градиентных методов [28, 96, 97] картина, вообще говоря, будет иной:
релейное управление будет аппроксимироваться непрерывными
управлениями.
§ 2. Способы улучшения сходимости
Рассмотрим некоторые приемы [48], позволяющие добиться
сходимости итераций или ускорить их сходимость в тех случаях,
когда простейший вариант метода из § 1 расходится или сходится
медленно. Для простоты будем по-прежнему иметь в виду задачу
со свободным правым концом G.1.1) — G.1.2).
Обозначим через Ф оператор, который каждому допустимому
управлению и (t) ставит в соответствие новое приближение для
управления по схеме § 1. Вычисление этого оператора сводится
к решению двух задач Коши для систем G.1.1), G.1.4) и к
определению управления из условия G.1.5). Тогда простейший вариант
итерационного процесса из § 1 можно записать в виде
u<*+i)(t) = Ф («<«(«)), к -.= 1, 2, ... G.2.1)
1. Первый способ улучшения сходимости состоит в том, что
в систему G.1.1) вводится некоторый параметр е так, чтобы при
е = 1 получалась исходная система, а при е -> 0 итерационный
процесс G.2.1) быстро сходился. Например, можно ввести
параметр одним из следующих способов:
dxldt = e/ (t, х, и), dxldt = f {t, х, ей), 0 < е < 1. G.2.2)
Численные методы решения задач оптимального управления
190
При е ->- 0 системы G.2.2) становятся слабо управляемыми, и
поэтому итерационный процесс G.2.1) будет быстро сходиться
[при тех же начальных условиях, ограничениях и функционале
G.1.1), G.1.2)]. Это следует из того, что в обозначениях G.1.6),
G.1.7) будем иметь по порядку величин | 8^ | ~ е, | <р | ~ е2, т. е.
| ф К | 6J | и 6/ ~ 6J.
Получив сходимость при некотором е, будем затем постепенно
увеличивать е, беря каждый раз в качестве начального
приближения для итерационного процесса оптимальное управление для
предыдущего значения е. Дойдя таким образом шагами по е до
значения е = 1, получим решение исходной задачи. Отметим, что
при достаточно малом е в уравнениях G.2.2) приближенное
решение задачи оптимального управления можно получить и не
прибегая к процессу итераций. Задачи оптимального управления для
систем с малым параметром, подобных G.2.2), были рассмотрены
в работе 195], где дан способ их приближенного аналитического
решения. Возможны, конечно, и другие способы введения
параметра, помимо G.2.2). Например, в задачах управляемого полета
с аэродинамическим управлением параметр е вводился обычно
в виде коэффициента при аэродинамических силах.
2. Вторая группа способов состоит в том, что на основе
итерационного процесса G.2.1) строятся другие процессы, в
которых новое приближение для управления в каждый момент
времени выражается через две или более предыдущие итерации.
Простейшим вариантом является следующая схема итераций:
M«m)(f) = A - а)ц«(t) + аФ(ц(*>(*)), *0 < * < 7\ 0 < а < 1,
к = 1, 2,..., G.2.3)
применяемая в случае выпуклого множества U. Здесь постоянную
а можно выбирать из условия минимума функционала по а на
данной итерации, как в методе скорейшего спуска, а можно
ограничиться требованием монотонного убывания функционала на
каждой итерации. При подборе а требуется пересчитывать только
систему G.1.1) для вычисления функционала. Неплохие
результаты давал описанный здесь способ, в котором а на каждой
итерации последовательно принимало значения 1, 1/2, V4, . . .,
и т. д., пока не наступало уменьшение функционала. Применялся
в расчетах также метод Эйткена (см. [18], т. II, стр. 146—148),
в котором каждая четвертая итерация строится на основе трех
предыдущих. Однако при этом нужно хранить в памяти машины
больше информации — таблицы значений управляющих функций
для нескольких приближений.
Отметим, что при применении этой группы способов
приближение к релейному оптимальному управлению не будет идти в
Метод последовательных приближений 191
классе релейных управлений, так что свойство 3 из § 1 здесь не
имеет места.
3. В соотношении G.2.3) величину а можно считать функцией
времени, ограниченной неравенством 0 <; а (?) ^ 1 на интервале
[t0, T]. Наиболее простой способ, обладающий к тому же
свойством 3 из § 1 и не требующий выпуклости множества U, получится,
если считать a (t) кусочно-постоянной функцией, принимающей
значения 0 и 1. Так приходим к третьему способу улучшения
сходимости, который описывается итерационным процессом
w<<m> (f) = ф (ц(«(*)), 16 [Г, Г], G.2.4)
«<*+«(*) = u<«(t), *ё= [*',*•], A; = 1,2,,...
Здесь интервал W, f], входящий в интервал [t0, T], выбирается
так, чтобы обеспечить условие
/(*+D</<« G25)
где /(*>, /(s+1> — значения функционала, отвечающие
управлениям u(W, u(*fl>. Подбор чисел t', t" на каждой итерации
происходит методом проб с проверкой условия G.2.5). Вначале
полагаем t' = t0, t" = Т. Если на какой-то итерации условие G.2.5)
нарушено, сокращаем интервал, пока оно не будет выполнено.
Если при некоторых значениях t', t" изменение функционала
несущественно, т. е. | JW — j(i+i) | < goj Где go — малое число,
характеризующее точность решения, то можно испробовать
увеличение интервала W, f]. Процесс итераций заканчивается либо
когда на полном интервале (?' = t0, t" = Т) получено
несущественное (менее чем на е0) изменение функционала, либо когда даже
при малом интервале [t', t"], длина которого равна шагу таблицы
управляющих функций, получается увеличение функционала.
Первый случай означает сходимость, а второй случай означает,
что шаг таблицы слишком велик, и счет надо производить с более
мелким шагом. Изменение величин [t', t"] в процессе их подбора
можно проводить по различным алгоритмам. Проще и
экономичнее всего положить t" = Т и управлять одним числом t', изменяя
его в соответствии с описанной выше логикой. При этом пересчет
траектории, т. е. интегрирование системы G.1.1), достаточно
проводить лишь на интервале [t'', Т], на котором происходит
изменение управления согласно G.2.4).
4. Все три способа улучшения сходимости содержат
некоторые параметры (е, a, t', t"), регулировкой которых можно
добиваться сходимости. Если устремить е —*¦ О, а —*¦ О, f — i' —*¦ О,
то все три способа будут обеспечивать малость остаточного члена <р
из формулы G.1.7). В другом предельном случае (е = 1, а = 1,
t' = t0, f = Т) все эти способы переходят в простейший вариант
Численные методы решения задач оптимального управления
192
метода из § 1, который будет наиболее эффективным вблизи
минимума. Процесс итераций во всех случаях следует оканчивать
тогда, когда две последующие итерации простейшего варианта
G.2.1) будут практически совпадать.
Расчеты многих конкретных задач показали, что с помощью
каждого из описанных способов часто удается добиться
сходимости в тех случаях, когда простейший вариант метода расходится.
По-видимому, наиболее простым и общим является третий способ,
который сочетается с методом последовательных приближений,
не нарушая свойства 3 из § 1.
Описанные способы улучшения сходимости можно сочетать
друг с другом. В приводимой в главе 10 программе, взятой из
работы [48], применяются второй и третий способы, т. е. полагается
„(.«>(»)= KW. °<*<*'> G.2.6)
\ A - «) и^ (t) -J- аФ (и(*> (*)), V < ta < Г.
Числа а и г' подбираются на каждой итерации так, чтобы
обеспечить условие G.2.5). Если оно не выполняется при каких-то a, t', то
сначала а уменьшается делением пополам до заданного
предельного значепия. Если это не приводит к выполнению условия G.2.5),
то интервал It', T\ сокращается вдвое, и снова а пачинает
последовательно принимать значения 1, V2 и т. д. В случае выполнения
условия G.2.5) на следующей итерации принимается сначала
а = 1, а интервал [t', Т] либо сохраняется прежним, либо
увеличивается по определенному правилу (если уменьшение функционала
не превосходило заданной точности е0).
Программа главы 10 реализует, таким образом, довольно
гибкий алгоритм, в котором сочетаются вложенные друг в друга
второй и третий способы улучшения сходимости. При этом второй
способ может быть вообще отключен по желанию программиста
(см. главу 10).
Первый способ также нетрудно применять, используя
программу главы 10 для решения задачи для системы типа G.2.2) при
каждом фиксированном е.
§ 3. Некоторые обобщения
1. Метод последовательных приближений вместе с его
модификациями может быть применен для более широкого класса задач,
чем те, что рассмотрены выше. Пусть управляемая система по-
прежпему описывается соотношениями G.1.1), а условия в конце
процесса и минимизируемый функционал имеют вид
h (Т, х (Т)) - 0, gi (Т, х (Т)) = 0, i --= 1, . . ., г; G.3.1)
/ =F(T,x(T)), 0 <г<в.
Метод последовательных приближений
193
Здесь h, gt, F — заданные функции. Первое равенство G.3.1)
служит условием, определяющим момент Т окончания процесса,
причем в качестве Т берется первый момент времени Т ]> tof
при котором удовлетворяется это условие. Равенства gi = О из
G.3.1) представляют собой дополнительные краевые условия,
которые могут и отсутствовать (если г = 0). Случай интегрального
функционала легко сводится к задаче G.3.1) путем введения
дополнительной фазовой координаты (см., например, t75]).
Для задачи оптимального управления G.1.1), G.3.1)
сопряжённые переменные по-прежнему удовлетворяют системе G.1.4),
функция Гамильтопа имеет прежний вид G.1.3), а искомое
оптимальное управление доставляет максимум по и GE U функции
Гамильтона II при всех «6 lt0, T]. Вместо условия G.1.4) для
р (t) будем иметь следующие условия трансверсальпости при t = Т
-г г
р(Т) = IdF/dt — ^Xiigi/dtydh/dtym/dx + ^i\idgi/dx — dF/дх,
G.3.2)
d/dt = djdt -|- (/, д./дх), которые легко выводятся из общих
условий (см. [25, 75, 78]). Здесь д/дх — оператор градиента по
фазовым координатам х, d/dt - полная производная вдоль
траекторий системы G.1.1). Момент Т и параметры %t в G.3.2)
неизвестны и должны определяться при помощи краевых
условий G.3.1). Предполагается, что полная производная dli'dt в
нуль пе обращается.
2. Если г ~ 0, то суммы, содержащие множители А.,-, в
соотношении G.3.2) пужно опустить. В этом случае метод
последовательных приближений применяется почти без изменений.
Интегрирование системы G.1.1) идет до выполнения условия h — 0,
определяющего момент Т в данном приближении. После этого
вычисляется р (Г) по формуле G.3.2), причем производные d/dt в точке Т
проще всего определять через конечно-разностные отношения
по последнему шагу интегрирования системы G.1.1). Затем
интегрируется система G.1.4) от момента Т до t0 и определяется повое
управление из условия G.1.5). При счете следует лишь иметь
в виду, что длительность процесса от итерации к итерации может
возрастать, поэтому нужно на этот случай доопределять
управление при t^> Т, полагая, например, и (t) = и (Т) при t > Т.
Именно такое доопределение предусмотрено в программе,
приводимой в главе 10.
3. Если г ^> 0, то простейший способ учета краевых условий
заключается в применении метода штрафных функций, который
широко используется в градиентных методах (см. 128, 96]).
7 Ф. Л. Черноусько и Н. В. Баничук
Численные методы решения задач оптимального управления
194
Вводим новый функционал /', полагая
г
J' = F (Т, х (Т)) + 2 «г Ht (Т, х {Т))]\ а, > 0, i = 1, ..., г
G.3.3)
и опуская краевые условия gt = 0. Задача о минимуме
функционала G.3.3) при единственном условии h — 0 в конце процесса
будет задачей с г = 0, которая решается по описанной выше
схеме. После сходимости итераций каждый раз увеличиваем
постепенно коэффициенты штрафов а,-, пока краевые условия не будут
удовлетворены с требуемой точностью.
4. Другой способ учета краевых условий также родственен
тому, что применяется в градиентных методах (см. [28, 97]),
но основан на формуле G.1.6) для вариации функционала. Пусть
и (t) — некоторое допустимое управление, х (t) — соответствую^
щая ему, согласно системе G.1.1), траектория, момент Т определен
из первого уравнения G.3.1). Обозначим через q (t), qt (t) решения
сопряженной системы G.1.4) при выбрапных и (t) и х (t),
удовлетворяющие следующим начальным условиям в момент Т:
,т dF ldh\-^dh dF T
qV>-~7t\dt)~d~x'te'1-1'
„ <Т\ - d^ ldhV dh 4- dgi i - \ r G'3'4>
'liVl- dt [dtj to"+~ dx ' l ~ l'- •' Г-
Запишем главную часть приращения функционалов
/ = F (Т, х (Т)) и gi (T, х (Т)), которую они получат при замене
управления и (t) на другое допустимое управление и (') -|- 8и (t).
Эти вариации, как нетрудно проверить, будут задаваться
формулами, аналогичными G.1.6):
т
8LJ = — \ (q, / (t, х, и + 8и) — / (t, x, и)) dt,
'• G.3.5)
т
б^г ¦-= — \ {Чг, 1 (t, X, U + 8и) — / (t, X, U)) dt, I = 1, . . ., Г,
и
в которых функции q (t) и qt (t) удовлетворяют сопряженной
системе G.1.4) и условиям G.3.4). Из формул G.3.2), G.3.4) вытекает,
в силу линейности системы G.1.4),
г
p(t) = q (t) + 2 Kqi @. *o < * < z\ G.3.6>
i=l
Метод последовательных приближений
195
Сопоставляя равенства G.3.5), G.3.6) и G.1.3), получим
г Т
°V + 2 6i?i = — J \Н& ¦*¦» Р. и -f- бы) — # (*, *, Р, и)} dt.
i —1 /о
G.3.7)
Теперь можно предложить следующий алгоритм. Пусть и (I) —
некоторое допустимое управление. Опишем одну итерацию метода.
1. Решаем задачу Коши G.1.1) с управлением и (I), определяем
траекториюx(t), момент Т из первого условия G.3.1) и величины
gl(T,x(T)), F(T,x(T)).
2. Интегрируем ;• + 1 раз «справа налево» сопряженную
систему G.1.4) с начальными условиями G.3.4). Получим /• -{- 1
вектор-функций q (/,), qf (t) на интервале \t0, T\.
3. Задаемся желаемыми значениями вариаций Аг — б^,-,
i -¦- 1, . . ., ;-. Проще всего положить А,- — —gt, стремясь уже в
следующей итерации компенсировать ошибку удовлетворергия
краевых условий, или задать Аг -- —а-igi, где числа а,- лежат в
пределах О < а, <; 1, i --¦ 1, . . ., г.
/i. Подбираем постоянные Я,- так, чтобы б^ —- А,- при
i ~- 1, . . ., г, одновременно определяя новое управление и -'•¦ би.
Для этого, задавшись набором Я,-, по формуле G.3.6) определяем
р (t), затем находим и -j- би из условия максимума 7/ из G.1.3)
по и -f- би Е= U в каждый момент t, после чего вычисляем
квадратуры G.3.5) для b\gi- Таким образом, 6xgt есть в конечном счете
нелинейные функции от К-,, и определение А.; из условий б^; -— А{
сводится к решению системы трансцендентных уравнений.
Подбор %i можно производить, например, по методу Ньютона или
другим численным способом. На каждом шаге этого способа
определяется управление и |- би и пересчитываются квадратуры
G.3.5). Определив А;, найдем тем самым также и повое управление
и + би, после чего переходим к п. 1 и так продолжаем до
сходимости итераций.
Если на каком-то шаге все краевые условия удовлетворены,
то постоянные Я, будут определяться из уловий б,^ — Аг — О
при i — 1, . . ., г. Подынтегральное выражение в G.3.7)
неотрицательно, так как и -\- бы максимизирует Н в каждый момент t.
Тогда из G.3.7) следует бх/ ^ 0. Описанный метод в этом случае
обладает всеми свойствами 1—3 простейшего варианта из § 1 и
является его непосредственным обобщением. Если норма G.1.7)
приращения би достаточно мала, то метод будет обеспечивать
уменьшение функционала при сохранении краевых условий, т. е.
б/ ж 6j/ < 0, 8gt ж Sigi = 0 с точностью до малых высшего
порядка относительно | би ||.
7*
Численные методы решения задач оптимального управления
196
Если метод не сходится (функционал возрастает или краевые
условия не выполняются), то можно применить, например,
третий способ улучшения сходимости из § 2. Введя интервал [t', t"\ cr
cz [t0, T], будем производить варьирование управления только на
этом интервале, полагая 6и = 0 вне интервала \t', t"]. Если же
на какой-то итерации не сходится процесс подбора чисел А,,- (см.
п. 4 описанного алгоритма), можно уменьшить коэффициенты at
в п. 3.
Так как описанный способ включает на каждой итерации
дополнительный итерационный процесс подбора А,г, то он может
быть рациональным лишь при небольших г. В программе главы 10
для удовлетворения краевых условий использован метод
штрафных функций, который обладает большей простотой.
5. Если задача оптимального управления содержит фазовые
ограничения, то их можно учесть обычным методом штрафных
функций (см., например, [28, 96]). Так, пусть оптимальная
траектория х (/) должна удовлетворять неравенству
G(x(t), *)<0, *<,<?< Г G.3.8)
на всем интервале движения. Здесь G (х, I) — заданная скалярная
функция. Вводим новую фазовую координату соотношениями:
dxn+Jit = X(G(x, t)), хп+1 (g = 0. G.3.9)
Здесь х (G) — функция, обладающая следующими свойствами:
она достаточно гладкая при всех G; % (G) равно или близко к нулю
npuG <; 0; X (G) принимает большие значения npnG ^> 0 и быстро
растет с ростом С Например, можно принять
X(G)-,-AebG, G.3.10)
где A,- b — достаточно большие положительные постоянные.
Нетрудно видеть, что величина фазовой координаты xnil в
конечный момент Т будет, согласно G.3.9), некоторой интегральной
мерой нарушения условия G.3.8): чем сильнее нарушено это
условие и чем больше интервал нарушения, том больше величина
xn+i (T). Вместо минимизации исходного функционала / будем
минимизировать функционал вида /" J + хпАЛ (Г), причем
после сходимости итераций будем постепенно изменять параметры
функции X (G) [например, увеличивать числа А, Ь в соотношении
G.3.10I. пока условие G.3.8) не будет выполнено с требуемой
точностью на всем интервале.
6. Метод последовательных приближений применим и к
некоторым задачам онтимального управления, в которых
минимизируемый функционал представляет собой экстремум (но времени)
некоторой заданной функции \|з (t, x) от фазовых координат и вре-
Метод последовательных приближений
197
иени. Рассмотрим решепие подобных задач, следуя работе [49].
Пусть управляемая система по-прежнему описывается
соотношениями G.1.1), а минимизируемый функционал задан в виде
/ = min ib(/, x(t)), G.3.11)
где tj, t2 — заданные числа (t0 ^ tx <^ t2), ib — заданная
скалярная непрерывно-дифференцируемая функция. Осногная трудность
задач с функционалами типа G.3.11) состоит в том, что функция
ib (t, x (t)) может иметь при различпых допустимых
управлениях, вообще говоря, различное и притом сколь угодно большое
число экстремумов на заданном иптервале [<,, t2\.
Отметим частные случаи этой задачи, когда экстремум
функции ib на интервале [tt, t2\ заведомо единственен. Если при любых
допустимых унравлепиях функция ib (t, x (/)) монотонна на
интервале [tu t2\, то минимум^ по t достигается при t — tx или при
t = t2, и задача становится обычной задачей оптимального
управления со свободным концом и фиксированным временем (см. п. 2
данного параграфа).
Рассмотрим несколько более интересный случай единственного
минимума функции ib внутри интервала [/1; t2]. Введем функцию
/0 (t, х, и) = Ab (t, x)ldt = Ц/dt + (<Ц/дх, / (/, з\ и)). G.3.12)
Здесь использовано обозначение G.3.2) для полной производной.
Сделаем два допущения:
1) функция/0 из G.3.12) явно не зависит от управления и, т.е.
dfjdiii = О, I -- 1, . . ., т G.3.13)
или
/о = /о (t, x) G.3.14)
при всех х и и FE U;
2) при всех допустимых и (t) функция /0 {t, x (/)) на интервале
[tx, t2] строго возрастает и один раз проходит через нуль.
При сделанных допущениях функция ib (/, х (I)) при любом
допустимом управлении имеет на иптервале [?,, t2] один эк-тремум
и притом минимум. Обозначая точку минимума через Г, получим,
согласно G.3.11), G.3.12), G.3.14),
/0(Т,х (Т)) = 0, / - ib (Т, х (Т)). G.3.15)
Таким образом, задача свелась к задаче, описанной в п. 2
данного параграфа. В обозначениях G.3.1), G.3.2) получим, учи-
Численные методы решения задач оптимального управления
198
тывая соотношения G.3.15),
г = О, h (t, х) --¦ /0 (t, х) — d'tyldt, F (t, x) — \j? (t, x), J =
~F(T,X (T)) « * (Г, х (Г)), р (Г) _ ^ ($)- f - g „p„ * = Г.
G.3.16)
Дальнейший ход решения задачи при условиях G.3.16) будет
таким, какой описан в п. 2 данного параграфа. Аналогично может
быть рассмотрена задача о максимизации функционала G.3.11),
а также задачи о минимизации или максимизации функционала
тина G.3.11), в котором min заменен на max. Кроме того, в момент
t — Т могут быть заданы дополнительные краевые условия типа
G.3.1); тогда будем иметь г ^> 0, и условия G.3.16) также
изменятся в соответствии с G.3.2).
Заметим, что второе из сделанных выше допущений можно
ослабить, потребовав, чтобы-функция/0 (t, x (t)) строго возрастала
и проходила через нуль на интервале \t,, t2\ не при всех допустимых
управлениях, а лишь при оптимальном управлении и при близких
к нему (в смысле метрики L2) управлениях. При численном
решении задач, когда это условие трудно проверить, можно в ряде
случаев поступить следующим образом. Предположив, что
минимум if; достигается при Т --- tlt при Т — t2 или при ty < Т <^ t2,
и решив три задачи оптимального управления, соответствующие
этим предположениям, нужно затем отобрать решение, дающее
меньшее значение функционала.
Допущения 1, 2, конечно, существенно упрощают
рассматриваемые задачи. Отметим, однако, что допущение 1 довольно часто
выполняется в задачах механики управляемых движений. Если
функция г|> зависит только от обобщенных координат движущегося
объекта и не зависит от его скоростей, а управление
осуществляется при помощи действующих на объект сил, то функция /0 из
G.3.12) не будет зависеть от и, и условие G.3.13) будет выполнено.
Примером подобной задачи является задача о минимизации
минимального расстояния между управляемой точкой и неуправляемой
целью (задача о минимизации промаха). Простейшая задача о
минимизации промаха была решена в работе [49]. Другой пример
будет дан в § 5.
7. Описанный метод формально может быть применен и дтя
численного определения траекторий дифференциальных игр.
В этом случае вместо операции максимума G.1.5) нужно вычислять
мипимакс по управлениям противников.
8. Наконец, метод последовательных приближений можно
использовать и для оптимизации некоторых процессов с
распределенными параметрами, описываемых уравнениями в частных
Метод последовательных приближений
199
производных. Для возможности применения метода существенно
лишь, чтобы для решаемой задачи можно было сформулировать
принцип максимума или записать первую вариацию функционала
в форме, аналогичной G.1.6). При этом можно идти двумя путями:
либо записать алгоритм метода для задачи с частными
производными и затем решать полученные краевые задачи теми или иными
методами, либо сразу применить дискретизацию и свести задачу
к системе обыкновенных уравнений (например, при помощи
метода прямых), после чего она будет решаться в точности так же,
как и рассмотренные выше задачи. Таким образом можно численно
решать задачи оптимизации управления линейными и
нелинейными колебательными, тепловыми и другими процессами. О
постановке задач оптимального управления для систем с
распределенными параметрами см., например, книгу [20].
§ 4. Задача о максимальной дальности планирования в
сопротивляющейся среде
Б качестве первой задачи, решенной при помощи метода
последовательных приближений, изложим решенную в работе [46]
модельную задачу о достижении максимальной дальности планирования
аппарата в сопротивляющей среде.
Рассмотрим плоское движение материальной точки под
действием силы тяжести и аэродинамических сил: подъемной силы и
силы сопротивления. Процесс управления осуществляется при
помощи двух функций, одна из которых непрерывна, а другая —
релейного типа; эти функции будут введены ниже. Уравнения
движения имеют вид:
dxldt — v cos Э, drjldt = v sin 0, m-dvldt = — R — mgs'mQ,
mvdQIdt = Y — mg cos 0. G.4.1)
Здесь t — время, x, y, v, 0 — соответственно дальность,
высота, скорость точки и угол наклона траектории точки к
горизонтальной оси х, т — масса тела, g — ускорение силы тяжести,
R и У — сила сопротивления и подъемная сила (фиг. 7.1). Как
обычно, принимаем R — 0.5pv2Scx, Y — 0.5pv2Scy, где р, S,
сх и су — плотность среды (постоянная), характерная площадь
тела и аэродинамические коэффициенты (сж — коэффициент
сопротивления, су — коэффициент подъемной силы). Вудем считать,
что тело симметрично относительно продольной и поперечной осей.
Тогда, очевидно, сх является четной, а су — нечетной
периодической функцией угла атаки а с периодом я (угол атаки — угол
между вектором скорости и продольной осью тела). Для простоты
положим сх — А — В cos 2а, А ^> В ^> 0, су — С sin 2x, С ^> О,
что означает аппроксимацию поляры (зависимости между сх и су)
Численные методы решения задач оптимального управления 20О
эллипсом. При малых значениях угла атаки а эти формулы
переходят в общепринятые (clt с2, с3 — постоянные) сх = сх + с2а2,
су --= с3а.
Вместо трех постоянных А, В, С введем максимальное
качество К = таха \су (а)/сж (а)] и угол атаки а0, при котором оно
достигается. Включая третью постоянную множителем в S,
окончательно получим после элементарных преобразований:
сх = 1 — cos 2a0 cos 2а, су = К sin 2а0 sin 2а. G.4.2)
Пусть в процессе движения можно изменять характерную
площадь S, придавая ей одно из двух значений (в зависимости от
величины г)): S — SQ A + ЦЬ),
S0>0, Ь>0,ц =0;1.
Изменение S означает, что тело
может изменять свою геометрию
в процессе полета (например,
увеличивать характерную площадь
крыльев).
Угол атаки а и параметр п
считаем управляющими функциями,
причем первая из них может
принимать произвольные значения, а
вторая — одно из двух
допустимых значений.
Начальные условия берем в
виде: t = О, х — у —- 0, v — v0,
О = 60 ^> 0. Вариационная задача
заключается в определении такого
Фиг. 7.1 закона управления a (t) и ц (<),
при котором величина дальности
полета х (Т) была бы максимальной в момент Т, когда тело снова
пересечет ось абсцисс (т. е. при у (Т) = 0). Таким образом, это —
вариационная задача со свободным правым концом и
нефиксированным временем.
Перейдем к безразмерным переменным, выбрав в качестве
единицы скорости начальную скорость v0, единицы времени —
величину v0/g и единицы массы — т. Тогда система уравнений G.4.1)
примет следующий вид (безразмерные переменные обозначены
теми же буквами, что и соответствующие им размерные):
dxldt = v cos 0, dyldt — v sin 0, dvldt = —av\x A -\- r\h)—sinO,
dQIdt = avcy A + i\b) — (cos Q)lv. G.4.3)
Начальные условия при этом преобразуются в следующие:
/-0, х = 0, у = 0, v = 1,6 = в0. G.4.4)
Метод последовательных приб-шженпй
20Г
Здесь а — безразмерный параметр, характеризующий отношение
аэродинамической силы к весу, о" = р Svl/2mg.
Запишем функцию Гамильтона G.1.3) для поставленной
вариационной задачи
Н — pxv cos 9 -f pyv sin 9 — pvov2cx A -f• r\b) — pv sin 9 -f
¦f- ръысу A -h rib) - рэ ~ . G.4.5)
Максимизируется функционал / = x(T) при условии у G1)= 0.
В обозначениях G.3.1) имеем г = 0, h = у, F = —х. Условия
трансверсальности G.3.2) здесь примут вид:
рх(Т) = 1, РЛТ) = 0, Pt(T) = 0, Ру(Т) = - (gg)T =
= -ctg6(f).
Так как Н из G.4.5) не зависит явно от х и у, то рх — ру = 0,
поэтому рх== I, ру =5. — ctg 9 (Г). Для импульсов р„ и рэ
остаются два уравнения:
dpjdt = — cos 9 + ctg 0 (Т) sin 9 -f 2pvacx A -f т]Ь) —
_pe3c„(l-i-Tib)-Pe^r, G.4.6)
dpeldt = и sin 9 ~f- p cos 0 ctg 9 (Г) -f- p„cos9 —pe(sin8)/i>
с начальными условиями
t= T, рв = 0, ро = 0. G.4.7)
Система уравнений G.4.3), G.4.6) при условиях G.4.4), G.4.7)
решалась описанным в § 1 методом с использованием первого и
второго способов улучшения сходимости, описанных в § 2 данной
главы. На каждом шаге процесса управляющие функции а, г]
находились из условия максимальности выражения
A + ч\Ь) (р9су — vpvcx), G.4.8)
полученпого из Н G.4.5) отбрасыванием слагаемых и множителей,
не зависящих от управления. Однако при t = Т, в силу
граничных условий, имеем р„ — р0 = 0, и непосредственное
определение о и г) из условия G.4.8) невозможно. Заметим, что из
уравнений G.4.6), с учетом естественного условия 0 ^> 9 (Т) >
> (—я)/2, следует для момента t — Т: dpjdt = 0, dpjdt —
= iVsin 9 <^ 0. Следовательно, при малых отрицательных
значениях разности t — Т величина рв отрицательна, и по порядку
величины много больше, чем р„. Поэтому при малых t — Т условие
Численные методы решения задач оптимального управления
202
0,1 0,2 0,3 0/t Oft
Фиг. 7.2
Фиг. 7.3
Фиг. 7.4
Ц6 t
Фиг. 7.5
Метод последовательных приближений
203
максимальности G.4.8) приводится с точностью до малых высшего
порядка к условиям п — 1 и су (а) — cymax, что, в силу G.4.2),
соответствует значению а (Т) — л/4. Эти условия вполне понятны
физически: для достижения максимальной дальности в последний
момент выгоднее увеличить максимально подъемную силу, не
заботясь о сопротивлении.
Ниже приводятся результаты численного решения
поставленной задачи на ЭВМ для значений параметров: Ь — 0.2, ссо — 10°,
00 -- 10°.
Параметры К и а варьировались в широких пределах, причем
в качестве первого приближения для какого-либо варианта
задавалось оптимальное управление,
найденное для предыдущего
варианта с близкими значениями
К и в.
На фиг. 7.2 изображен
типичный пример сходимости
процесса последовательных
приближений. На ней представлены
зависимости управления а (I) для
одного из вариантов, причем
номер кривой указывает номер ^
приближения. Пятое И ПОСЛе- д др gq gff f
дующие приближения
практически не отличались от четвер- Фиг. 7.6
того. Значения
максимизируемого функционала (дальности) для последовательных итераций
были следующими: xt -- 0.426, х2 -- 0.441, х3.-— 0.450, х4 — 0.451.
На фиг. 7.3 представлены оптимальные траектории при
различных значениях а, указанных на графике, и фиксированном
значении максимального качества К — 1. Оптимальные управления
¦а (/) для этой серии вариантов даны на фиг. 7.4. С увеличением а
(отношения аэродинамических сил к весу) оказывается выгодным
уменьшать углы атаки, проигрывая в подъемной силе, но зато
добиваясь уменьшения лобового сопротивления. Дальность
полета возрастает с увеличением а. Для всех приведенных здесь
вариантов оказалось и (t) = 1, что соответствует наибольшему из двух
возможных значений характерной площади.
Серия оптимальных траекторий при фиксированном значении
<у = 0.5 и различных значениях максимального качества К,
указанных цифрами на графике, изображена на фиг. 7.5. Дальность
полета, естественно, возрастает с увеличением качества. На
фиг. 7.6 представлены соответствующие оптимальные управления.
При малых значениях качества К движение происходит на малых
углах атаки. Кроме того, здесь на начальной части траектории
Численные методы решения задач оптимального управления
204
(до точек, указанных звездочкой для К = 0.1 и К = 0.2)
управляющая функция п = 0 (характерная площадь минимальна).
Оба этих фактора уменьшают силу сопротивления (они
одновременно умепьшают и подъемную силу, но она несущественна при
малых К). Для больших К, паоборот, сила сопротивления
становится менее существенной по сравнению с подъемной силой.
Поэтому здесь движение по оптимальной траектории происходит при
больших углах атаки и с т) = 1.
Отметим, что приближенные решения этой задачи при малых сг
были построены методом малого параметра [95], причем получено
хорошее совпадение численпого и аналитического решений при
малом о*.
§ 5. Одна задача об оптимальном маневре в центральном поле
В качестве второго численного примера применения метода
последовательных приближений приведем задачу, решенную в
работе [491.
Рассмотрим плоское движение спутника (материальной точки)
под действием силы притяжения Земли и управляющей
реактивной силы. Уравнения движения спутника имеют вид
г — vs'mQ, ф = — cosO, v = j- sin 9 -f a cos Y, б = — cos 8 —
cos Of— sin Y. G.5.1)
Здесь r, <p — полярные координаты спутника в плоскости орбиты
(расстояние от центра Земли и полярный угол), v — модуль еп>
скорости, 0 — угол между вектором скорости и перпендикуляром
к радиусу-вектору, а — реактивное ускорение, у — угол между
вектором тяги и вектором скорости. Величину а считаем
постоянной, а у — управляющая функция, которая может принимать
любые значения. Все величины безразмерны. Соответствующие
размерные величины, отмеченные звездочкой, можно получить
по формулам:
-Л-
г* = rr*0, v* = v КрТГ;, t' = frv./nV.f a* = a^'irj,
где r0 — расстояние от центра Земли до спутника в начальный
момент, a fi — произведение массы Земли на постоянную
всемирного тяготения.
Известно, что время существования неуправляемого спутника
зависит главным образом от высоты его перигея: чем выше
перигей орбиты, тем меньше влияние торможения в верхних слоях
атмосферы. Поэтому естественно поставить вариационную задачу
Метод последовательных приближений
205
о максимальном увеличении высоты перигея за время маневра.
Считаем, что время маневра (управляемого движения) не
превышает одного оборота, и пренебрегаем изменением массы спутника
и влиянием атмосферы за это время. Поскольку перигей — это
точка орбиты, где г (t) минимально, то поставлеппая задача
сводится к определению оптимального управления у (t), доставляю-
Фиг. 7.7
3 ср
Фиг. 7.8
7
1,5
1
/->
/^
1,/УУ
Зу/^У^
^4^Г^
щего максимум функционалу
/ = minr (t).
Задача свелась к постановке, описанной в п. 6 § 3, причем в
обозначениях § 3 имеем ф = г, и допущение 1 [условие G.3.13) или
G.3.14)] здесь выполнопо. Допущение 2 из п. 6 § 3 также
выполняется, если реактивное ускорение а достаточно мало. Начальная
орбита считается эллиптической, и максимизации подлежит высота
первого перигея, т. е. первого минимума функции г (t).
Начальные условия задавались в виде:
г @) = 1, <р @) = 0, v @) = г;0, 0 @) = 80.
G.5.2)
Численные методы решения задач оптимального управления
206
Поставленная задача решалась числепно па ЭВМ по методу
последовательных приближений [46], описанному в § 1, с
использованием подхода из п. 6 § 3.
В начальном приближении задавалось у = 0. На каждой
итерации решалась численно задача Коши G.5.1), G.5.2) и
определялись фазовые координаты. Конец процесса Т находился из первого
условия G.3.15), которое здесь принимает вид 0 — 0. Затем
решалась справа налево (от t = Т до t — 0) задача Коши для
сопряженных переменных. Отметим, что здесь функция 77 имеет вид
Н —. prv sin в — pv —— -f- apv cos y + Po — cos 0 —
cos 9 , я sin т . v cos 0 ._ r оч.
Одновременно с определением сопряженных переменных
находилось новое приближение для управления у (t) из условия
максимальности функции 77 из G.5.3) но у. Это условие здесь
приводится к виду:
sin у = , sign (cos у) — sign pr.
У v*pl i- p%
После этого выполнялась следующая итерация и т. д. (см. § 1).
Сходимость практически наступала, как правило, после трех-
четырех итераций. На фиг. 7.7, 7.8 показаны результаты расчетов
функций г (t) и у (t) для значений параметров г0 — 1.09, 60 — 1.556,
соответствующих начальному эксцентриситету орбиты е - 0.2,
и для а — 0.16. Помер кривой указывает номер итерации.
Отметим, что в дипломной работе В. Н. Васильевой (механико-
математический факультет МГУ) при помощи метода
последовательных приближений с использованием третьего способа
улучшения сходимости из § 2 решались некоторые другие задачи
оптимального управления движением точки в центральном поле.
По описанному методу был решен и ряд других задач
оптимального управления движением.
ПРОГРАММЫ ЧИСЛЕННЫХ .МЕТОДОВ РЕШЕНИЯ
ВАРИАЦИОННЫХ ЗАДАЧ
ГЛАВА 8 • ПРОГРАММА МЕТОДА ЛОКАЛЬНЫХ ВАРИАЦИЙ
ДЛЯ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ С ОДНОЙ
НЕЗАВИСИМОЙ ПЕРЕМЕННОЙ
В дайной главе приводится реализация алгоритма метода
локальных вариаций, описанного в § 5 главы 1, в виде стандартной
процедуры MLV1 на языке АЛГОЛ-60. Эта процедура позволяет
решать вариационные задачи с одной независимой переменной и
функционалами довольно общего вида (как интегральными, так
и неаддитивными) и пригодна, в частности, для решения задач
оптимального управления, рассмотренных в главе 6. В качестве
примера использования данной процедуры дается решение одной
простой вариационной задачи. Изложение следует работе НО].
§ 1. Описание процедуры
Процедура MLVI, реализующая алгоритм метода локальных
вариаций для вариационных задач с одной независимой перемепной
(§ 5 главы 1), производит контрольный просмотр заданного
начального приближения uhj (j ¦-- 1, 2, . . ., п; к ~ 0, 1, . . ., N) и
осуществляет варьирование компонент и3 вектор-функции и с
заданными шагами hj до полной сходимости. Поясним смысл
формальных параметров процедуры.
Через Т обозначен задаваемый шаг дробления интервала [а, Ь\
изменения аргумента (в § 5 главы 1 он обозначался через Аз).
Процедура составлена так, что число а из A.5.1) — A.5.4)
принято равным нулю, т. е. исходная задача рассматривается на
отрезке [0, 6]. Заметим, что в дальнейшем в данной главе под а
будем понимать формальный параметр процедуры MLVi (а не
границу интервала изменения аргумента х, как в § 5 главы 1).
Смысл параметра а описан ниже,
X [0 : N, 1 : п] — двумерный массив значений uhj вектор-
функции и в текущем приближении. Элемент массива X [к, j] —
есть значение /-й компоненты вектора и в точке х = кАх = кТ,
причем 0 sg: к <^ N, 1 <; / ^ п.
N — натуральное число, определяющее длипу интервала, на
котором ищется решение: Ъ ¦—- TN.
Программы численных методов решения вариационных задач 208
п — натуральное число, определяющее размерность вектор-
функции и.
U [1 : N, 1 : т] — двумерный массив значепий производных
функции и. Элемент массива U [к, q] — есть значение
производной q-vo компонента вектор-функции и на к-ом интервале разбиения
отрезка [О, Ь], т. е. на интервале (к — 1)Г <; х <: кТ A ^ к <; N,
1 < q < /г).
Таким образом, U [к, q] = (ukq — uk_bq)/N.
\m — натуральное число, равное п для вариационных задач,
рассмотренных в § 5 главы 1. Для задач оптимального
управления, рассматриваемых в главе G, m равно количеству
управляющих функций (размерности вектора управления).
J [1 : г] — одномерный массив значений интегральных
функционалов A.5.4), вычисляемых по формулам A.5.6), A.5.7).
•Элемент / [i] есть значение г-го интеграла (i — 1, 2, . . ., г).
г — натуральное число, задающее количество интегралов в
A.5.4).
Число р является результатом просмотра начального
приближения. Значение аргумента х = рТ соответствует точке, в
которой впервые нарушается ограничение A.5.1) или ограничение
A.5.2). Если же во всех точках xh ограничения A.5.1), A.5.2)
выполнены, то р = —1. Когда для начального приближения не
выполнено интегральное ограничение (i.5.3), то р = —2.
/ — значение минимизируемого функционала A.5.5).
Натуральное число а означает количество элементов массива X,
которые измепяют свои значения в результате варьирования
при /с17- = 0; k2j = N для всех /' — 1, 2, . . ., п (см. § 5 главы 1).
d — формальный параметр, служащий для определения
момента окончания процесса варьирования. Варьирование
оканчивается, когда выполняется неравенство а ^ d.
h [1 : п] — одномерный массив шагов варьирования, причем
элемент h \j] есть шаг варьирования /-й компоненты
вектор-функции и.
М — целое число, ограничивающее число шагов при
исправлении начального приближения (см. § 5 главы 1).
w [1 : п] — одномерный массив шагов для исправления
начального приближения. Элемент этого массива w [j] есть шаг для
исправления у'-й компоиепты вектор-функции и (в § 5 главы 1
величина w [j] обозначалась через hj). При обращении к процедуре
MLV1 должны быть заданы еще три процедуры: Boolean procedure
L (х, и), procedure Е (х, у, ui, и2, Z, v, z) и procedure F (J, f, g).
Процедура L (x, и) — есть процедура проверки фазового
ограничения A.5.1). Если точка х, и удовлетворяет этому ограничению,
то i в результате работы процедуры принимает значение true,
в противном случае — false.
Программа метода локальных вариаций
209
Процедура Е выполняет следующую операцию. Паре точек
х, и1 и у, и2, где х =- xh, у =- xk+1, u\ = и (хк), к2 =-- и (хкп),
процедура Е ставит в соответствие булевскую переменную z,
одномерный массив Z [1 : г] из г элементов и одномерный массив
v [1 : т] из т элементов. В случае выполнимости ограничения
A.5.2) переменная z принимает значение true, элементам Z li]
массива Z приписываются значения интегральных функционалов
Iih, i — 1, 2, . . ., г (в обозначениях § 5 главы 1), а
элементам v [j] массива v — значения производных для компонент
и> (] — 1, . . ., m; m — п) искомой функции на рассматриваемом
интервале [xh, xk+1]. В случае невыполнимости ограничения
A.5.2) переменная z принимает значение false, а значения Z и v
могут быть произвольными.
Подсчет минимизируемого функционала / A.5.5) производит
процедура F [в § 5 главы 1 минимизируемый функционал
обозначался через / и подсчитывался по формуле A.5.5)]. Если
ограничение A.5.3) выполнено, то процедура F присваивает булевской
переменной g значение true и вычисляет значение / по формуле
A.5.5). В противном случае g принимает значение false.
Приведем заголовки процедур
Boolean procedure L (х, и); real ж; array и;
procedure Е (х, у, и1, м2, Z, v, z); real х, у; array wl, и2, Z, v;
Boolean z;
procedure F (J, f, g); real /; array /; Boolean g.
Итак, при обращении к процедуре MLV1 должны быть заданы
Т, X, N, n, m, r, L, E, F, d, h, M, w. В качестве результатов
работы процедуры MLVi получаются р, a, U, X, J, /. Заметим,
если после работы MLVi р =/= — 1, то заданное начальное
приближение пе является допустимым, т. е. либо нарушается
ограничение A.5.3), либо ограничения A.5.1), A.5.2) и заданное
приближение не удается исправить с помощью приема, описанпого в § 5
главы 1. В этом случае следует задать новое начальное
приближение.
При необходимости вывести некоторые данные сразу после
просмотра начального приближения следует обратиться к MLVi
при d = —1.
По окончании работы процедуры MLV1 можно уменьшить
шаги варьирования h и снова обратиться к этой процедуре.
Заметим, что, как уже указывалось выше, процедура MLVi
является обобщением процедур, приведенных в [47], при помощи
которых был решен ряд конкретных задач (см. [3, 12, 45, 47]).
Ниже приводится описание процедуры MLVi на языке
АЛГОЛ-60.
8 Ф. Л. Черноусыю и П. В. Баничук
Программы численных методов решения вариационных задач 210
§ 2. Процедура на языке АЛГОЛ-60
procedure MLVi (Т, X, N, п, U, m, J, r, p, L, Е, F, /, a, d,
h, М, w); value Т, N, п, m, г, d, М; real Т, f; integer
N, n, m, r, p, a, d, M; array X, U, J, h, w; procedure E, F;
Boolean procedure L;
begin real t, s, xi, v; integer q, k, j, b, i, ii, i2, ai, Ы; Boolean
z, g, zi; array x, у [1 : nV, Z, Zi, Z2, Z3, H [1 : г], и [i : m];
integer array I, di, d2 [1 : n\; procedure R (k, t, x); integer k;
real t; array x; begin for q: = 1 step 1 until n do x [q] : =
X[k,q\; t : =. к х Т end;
procedure Variation; begin I [j\ : = 0; ai : = Ы : = —1;
b : = i : = 1; if di [/] = N then go to K5 else if dl [/] ф 0
then go to K2; R @, t, x)\ R A, s, y); E (t, s, x, y, Z2, u, z);
xi : = x [/];
Kh x [/] : = xi + i X h [/]; if L (t, x) then
begin E (t, s, x, y, Z, u, z); if z then begin for q : = 1 step 1
until r do H[q\: = Z lq] - Z2 [q] + J [q]; F (#, v, g); if g
then begin if v < / then begin X [0, /] : = x [/]; Z [/1: =
И/1 + 1; ai : = 0; f : = v; lot q : = i step 1 until r do
begin Z2 [q] : = Z [^]; / [5] : = Я [g] end; Ь : = i; if
d2 [/] = 0 then go to K8 else go to K2 end end end
end; if i = 1 then begin i : = — 1; go to Ki end; if d2[j] = 0
then go to Kl\
K2: if di [j] ф 0 then begin ii : = di [/];
R (ii, t, x); R (ii — 1, s, y); E (s, t, y, x, Z2, и, z) end else
il : = 1; if dl [/] < N then i2 : = d2 [/] else И : = N — 1;
for к : = il step 1 until i2 do begin R (k, t, x); R (k + 1, s, y);
E (t, s, x, y, Zi, u, z); for q : = 1 step 1 until r do begin
Z[q]:= Zi [q] + Z2 lq]; Z2 [q] : = Zi [q] end; xi : =
x [/']; i : = b;
КЗ: ж [/] : = xi + i X h [/]; if Z, (f, x) then begin Я (fc + 1, s, y);
E (t, s, x, y, Zi, u, z); if z then begin R (k — 1, s, ?/);
?¦ (s, t, y, x, Z3, u, z); if z then begin for g : = 1 step 1 until r
do Я [g] :=Zl[q]+Z3lq]-Z lq] + J lq]; F (H, v, g);
if g then begin if v < / then begin X [fc, j] : — x [/]; Z [/]: =
Z [/] + 1; if al = — 1 then el : = ft; if ft = г2 Д d2 [/]
Программа метода локальных вариаций
211
Ф N then Ы : = к; f : — v; b : = i; for q : = 1 step 1 until
r do begin / [q] : --- H [q\\ Zl \q] : = Zl [q] end; go to Ki end
end end end end; if i = b then begin i : — — b; go to КЗ end;
if ai ф — 1 Д Ы = — 1 then 61 : --- A — 1;
#4: end ft; if 32 [/] =? TV then go to Kl;
K5\ R (N - 1, *, ж); /? (TV, s, ?/); E (t, s, x, y, Zl, и, z); ж1 : - у [/].
J
Я6: г/ [/] : =^ ж1 + г X ft [/'1; if Л (s, y) then begin ? (*, s, x, y,
Z. u, z); if z then begin for q : = 1 step 1 until r do
Hlq]: = Z lq] - Zl [9] + J lq]; F (#, v, g); if g then begin
if v< f then begin X IN, j] : -= у [/]; Z [/] : = I [j] -|- 1; if
al = — 1 then al : = N; if M - — 1 then M : = /V; for
<7 : = 1 step 1 until r do / fq] : — H lq]; / : = v; go to 7G end end
end end; if i — 6 then begin г : = — 6; go to #6 end; if
ац_1ДМ = -1 then M : - AT - 1;
K7: d2 \j] : = M; Л [/] : = al;
iYS: a : = a + I \j] end Variation;
о : = 3 X d + 1;
jJ//_7: /с : =0; for g : = 1 step 1 until r do / lq] : =-- 0;
Д/2: zl : =- false; 7? (k, t, x); p : = k;
M3: if L (t, x) then begin if к = 0 then go to Mi; R (k — 1, s, ?/);
? (s, f, ?/, ж, Z, и, z); if z then begin for q : — 1 step 1 until яг
do ?/ [A;, g]: = и lq]; ior q : = 1 step 1 until г do 7[gj: =
/ lq] + Z [#]; go to v?4 end end; if ~| zl then begin zl : —
true; ? : = 1; / : = 1 end else begin x [/1 : = a;l; if /< re then
/ : = / + 1 else begin if i =j= — M then begin if i > 0 then
z : = — i else ?: = — ? + l;/: = l end else go to Mb; end
end; xi : = x Г/]; ж \j] : = ad + i X if [/]; go to M3;
M4: H zl then X Ik, J]: = x [/]; if к ф N then begin к : --= к + l;
go to M2 end else F (J, f, g); if g then /> : = —1 else p : = —2;
M5\ if J» =?= — 1 V a < d then go to MS;
M6: a ¦ '-= 0; for / : = 1 step 1 until re do begin dl [/] : ¦= 0;
dl [/]": = /V; Variation end; if a ^ d then go to Afl;
8*
Программы численных методов решения вариационных задач 212
М7: а : - 0; for / : = 1 stepl until n do if I f/]=/=0 then Variation;
if a =f= 0 then go to Ml else go to Mr,
M8: end MLVI.
§ 3. Пример
С использованием процедуры MLVI проводился расчет ряда
задач. Приведем один контрольный пример.
Требуется определить вектор-функцию и = (и1 (х), и2 (ж)) на
отрезке [0, 1], удовлетворяющую ограничениям: и1 (х) > 0,
и2(х)>0, в1 (я) < 0.4, 0 < к2 (z)< 0.6, |Mi(z)|<l,
| и| (ж) | ^ 1 при 0 ^ х ^ 1 и краевым условиям и1 @) = 0,
и2 A) — 0 и доставляющую минимум функционалу
] 1
/-=—/! — (/2J = — J U1^ — (J lAk) .
о \ '
Решение этой задачи проводилось численно с применением
описанной выше процедуры MLV1. Начальное приближение
задавалось в виде и1 (х) = х при 0 ^ х ^ 0.45, и1 (х) — 0.45 при
0.45 < х < 1, и2 (х) = 0 при 0 < х < 1.
Шаги варьирования и исправления полагались равными
h [1] = h [2] = 0.05, w [1] = w [2] = 0.1, а величина Т = 0.2.
Начальное приближение для и1 (х) не удовлетворяет фазовому
ограничению и является недопустимым. В результате работы
процедуры MLVI начальное приближение для и1 (х) было
исправлено па следующее:
х 0.0, 0.2, 0.4, 0.6, 0.8, 1
иЦх) 0.0, 0.2, 0.4, 0.35, 0.35, .0.35
Для исправленного начального приближения Jx = 0.295,
/, = 0, / - - 0.295.
После варьирования начального приближения до полной
сходимости получено решение в виде
х 0.0, 0.2, 0.4, 0.6, 0.8, 1
и\х) 0.0, 0.2, 0.4, 0.4, 0.4, 0.4
иЦх) 0.6, 0.6, 0.6, 0.4, 0.2, 0
Для этого решения Jt =- 0.32, /2 = 0.42, / = —0.4964.
Нетрудно проверить, что полученное решение является
решением поставленной вариационной задачи, так как оно
максимизирует площади под кривыми и1, и2 при указанных выше
фазовых ограничениях.
Программа метода локальных вариаций
213
§ 4. Использование процедуры для решения задач оптимального
управления
Как отмечалось выше, с помощью процедуры MLV1 можно также
решать задачи оптимального управления из главы 6. Сделаем
некоторые пояснения, касающиеся использования MLV1 для
решения задач вида F.1.1) — F.1.3). Прежде всего, заметим,
что так как в F.1.1) — F.1.3) решается задача о нахождении
минимума обычного интегрального функционала, то можно считать,
что минимизируемый функционал F (/1? J2, . . ., Jr) sf J1, где Jx
совпадает с / из F.1.3), а формальный параметр г процедуры
MLV1 равен 1. Поэтому для рассматриваемых задач одномерный
массив / [1 : г] — J [1 : 1] состоит из одного элемента / [1].
Формальному параметру / должно быть присвоено значение
элемента / [1] массива / (см. ниже процедуру F).
Поясним смысл остальных формальных параметров процедуры
MLVl: T — задаваемый шаг по времени (в § 2 главы 6 он
обозначался через т), X [0 : N, 1 : п] — двумерный массив, задающий
значения xkj = xj (th), (X Ik, j] есть значение /-й компоненты xj
вектор-функции х в момент времени t — кх = кТ, причем
О < к < N; 1 < / < п).
Через U [1 : N, 1 : тп] обозначен двумерпый массив для записи
параметров управления, причем U [к, q] есть значение q-ro
параметра управления на к-м интервале времени: (к — \)Т ^
Kt^kT, где 1 < к < N, 1 < q < m.
Здесь формальный параметр тп — размерность вектора
управления.
Boolean procedure L (t, x) проверяет фазовое ограничение
х (t) €= G (t) из F.1.2). Если точка t, x удовлетворяет этому
ограничению, то L, как и прежде, принимает значение trne, в
противном случае — false.
procedure E (t, s, х, у, Z, и, z) реализует для задач
оптимального управления F.1.1) — F.1.3) элементарную операцию,
описанную в § 1 главы 6. Паре точек t, х и s, у, где t — th, s = ?ь+1,
х — х (th), у = х (th+i), процедура Е ставит в соответствие
булевскую переменную z, одномерный массив Z [1 : г], который в данном
случае состоит из одпого элемента Z [1] (г = 1), и одномерный
массив к [1 : пг]. В случае выполнимости элементарной операции
переменной z приписывается значение trne, массиву и — значение
параметров управления, а элементу Z [1] присваивается значение
величины А/, подсчитываемой по разностному аналогу формулы
<6. 1.4. ).
/ Процедура F (/, /, g) с учетом того обстоятельства, что для
задачи F.1.1) — F.1.3) ограничение вида A.5.3) отсутствует,
принимает следующий вид: procedure F (J, f, g); real /; array /;
Boolean g; begin /: = / [1]; g : = true end.
Смысл остальных параметров процедуры MLVl остается прежним.
Программы численных методов решения вариационных задач 214
ГЛАВА 9 • ПРОГРАММА МЕТОДА ЛОКАЛЬНЫХ ВАРИАЦИЙ
ДЛЯ ЗАДАЧ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
§ 1. Описание программы
Алгоритм метода, описанный в § 6 главы 1, реализован в виде
процедуры MLV2 (X, У, М, N, К, г, d, U, h, J, L, E, F),
которая производит контрольный просмотр заданного начального
приближения для вектор-функции и — (и1, . . ., ик) и
осуществляет варьирование компонент и" с заданными шагами варьирования
hh (к — 1, . . ., К) до полной сходимости. Поясним смысл
формальных параметров процедуры MLV2.
Через X, Y обозначены размеры ячеек, на которые разбита
область D (в § 6 главы 1 эти величины обозначались соответственно
через Ах, Ау). Отметим, что процедура составлена так, что
параметры at, b1 из A.6.5) приняты равными нулю.
М, N — натуральные числа, обозначаемые в § 6 главы 1 через
т, п. Параметры М, N имеют также и другое назначение. Если
начальное приближение не удовлетворяет ограничению A.6.6),
то в процедуре этим параметрам присваиваются значения
индексов той точки, в которой впервые нарушилось ограничение
A.6.2).
К — размерность вектор-функции и, г — число интегралов
A.6.4), входящих в формулу A.6.3), d — формальный параметр,
имеющий следующее назначение.
При обращении к процедуре MLV2 с d = —1 осуществляется
контрольный просмотр начального приближения и в случае
удовлетворения всех условий A.6.6) проводится подсчет интегралов
A.6.4) и функционала A.6.3) от пачальпого приближения. При
этом в результате работы процедуры параметр d остается равным
своему первоначальному значению, т. е. d = — 1. Если же
начальное приближение не удовлетворяет условиям A.6.6) в
некоторой точке Xi = iAx, y3 — jAy, то параметрам d, M, N
присваиваются в результате работы процедуры значения d — —2, М — i,
N = /.
При обращении к MLV2 с d !> О процедура осуществляет
процесс варьирования. При этом итерации проводятся до тех пор, пока
количество проварьированных на данной итерации точек не
станет меньше или равно d. В частности, при d = 0 итерации
проводятся до полной сходимости.
U [1 : К, —1 : М-\-1, —1 : 7V + 1] — трехмерный массив
значений вектор-функции и в точках сетки. Элемент массива U [к, i, j]
при заданных к, i, j — есть значение А-й компоненты
вектор-функции и в точке с координатами х = iAx, у = j Ay. Значения ин-
Программа метода локальных вариации
215
дексов к, i, j меняются в пределах к — 1, . . ., К; i = —1, 0, . . .
. . ., М + 1; j = —1, 0, . . ., N + 1- Точки х = iAx, у = /Дг/
при i — —1, М + 1; j; = — 1, N -)- 1 не принадлежат области D,
и значения элементов массива U [к, i, /] для указанных i, / могут
быть заданы произвольно: например, равными нулю.
h [1 : К] — одномерный массив шагов варьирования. Элемент
данного массива h [к] есть шаг варьирования для к-й компоненты
вектор-функции и.
J [i : г] — одномерный массив значений интегралов A.6.4),
вычисляемых по формуле A.6.7).
Boolean procedure L (xi, г/1, ui) служит для проверки фазового
ограничения A.6.6) в точке с координатами х = xi — iAx,
у — yl — /Дг/. В одномерном массиве и1 [1 : К] содержатся
значения компонент вектор-функции и. Элемент данного массива
определяется следующим образом: и\ [к] —- U [к, i, j]. Если
фазовое ограничение A.6.6) в точке (xi, yi) удовлетворено, то L
принимает значение true, в противном случае — false.
procedure E (х, у, и, v, w, Z) производит подсчет для
фиксированной ячейки (т. е. при фиксированных /', к) слагаемых (Jt )jk
(i = 1, . . ., г), согласно формуле A.6.7), а значения этих величин
приписываются элементам массива Z, т. е. Z [i] = (/г);й.
Формальные параметры х, у являются координатами центра
данной ячейки. Осредненные значения компонент вектор-функции
и и ее частных производных их, иу содержатся соответственно
в массивах и, v, w И : К].
real procedure F (J) подсчитывает значения функции F по
формуле A.6.3).
Приведем ниже заголовки процедур L, E, F.
Boolean procedure L (xityi,ui); real xi, yi; array ui;
procedure E(x, y, u, v, w, Z); real x, y; array u, v, w, Z;
real procedure F (J); array /.
Процедура MLV2 составлена таким образом, что для
контрольного просмотра и для варьирования к ней необходимо обращаться
отдельно (с разными значениями параметра d). Сначала следует
обратиться к процедуре MLV2 с d — —1 с целью контрольного
просмотра начального приближения. При этом обращении, кроме
d= —1, должны быть заданы X, Y, M, N, К, г, U, h, L, E, F.
Если после работы MLV2 получится d =/= —1, то заданное
начальное приближение не является допустимым, т. е. в некоторой точке
нарушается ограничение A.6.6). В этом случае следует задать
новое начальное приближение, которое, в частности, может быть
получено путем исправления начального приближения в той
точке (х = MX, у — NY), где впервые нарушилось ограничение
A.6.6). Затем следует восстановить исходные значения для М, N
и снова обратиться к MLV2 с d = —1.
Программы численных методов решения вариационных задач 216
Если по окончании работы процедуры MLV2 окажется d = —1,
то начальное приближение удовлетворяет ограничениям A.6.6).
Получаемой информацией на данном этапе является также массив /
значений интегралов A.6.4) от начального приближения,
подсчитываемых по формуле A.6.7).
Далее следует обратиться к процедуре MLV2 с d > 0 и тем
самым реализовать процесс варьирования по схеме § 6 главы 1
с фиксированными шагами варьирования h [к]. При этом должны
быть заданы X, Y, M, N, К, г, U, h, L, E, F, кроме того,
массив /, вычисляемый в результате работы MLV2 cd — —1. По
окончании работы процедуры MLV2 шаги варьирования могут быть
уменьшены, например, путем половинного деления, и снова
осуществлен процесс варьирования (путем обращения к MLV2
с d ]> 0). Если к некоторому моменту выполнено условие
max (h [1], .... А [К]) < min [(Axf, (AyJ], (9.1.1)
то можно уменьшить размеры ячеек (измельчить сетку), и во вновь
образовавшихся точках сетки определить функцию и путем
интерполяции, а затем последовательно осуществить контрольный
просмотр и варьирование. Процесс решения может быть закончен,
когда Ах, Ay, h станут достаточно малыми и между ними будет
выполнено условие (9.1.1).
Приведем описание процедуры MLV2 на языке АЛГОЛ-60.
§ 2. Процедура на языке АЛГОЛ-60
procedure MLV2 (X, Y, M, N, К, г, d, U, h, J, L, E, F);
value X, Y, K, r; integer M, N, K, r, d; real X, Y; array
U, h, J; procedure E; real procedure F; Boolean procedure L;
begin real x, xi, x2, y, yl, г/2, /; integer a, i, j, I, q, s, t, p, pi;
array u, v, w, ul, u2, иЪ, и4 [1 : К], Z, Zl, Z2, H [1 : r];
procedure R (?, /); integer i, j; begin xl : = i X X; x2 : —
xl + X; yl : = j X Y; г/2 : = yl + Y; ior q : = 1 step 1
until К do begin ul [q] : = U [q, i, /]; «2 [q]: = U [q, i + 1, /];
кЗ [q]: = U [q, i + 1, / + 1]; к4 [q]: = U [q, i, j + 1] end end;
procedure S (i, j, H); integer i, j; array H; begin for q : = 1
step 1 until r do H [q] : = 0; for s : = i — 1 step 1 until i do
for t : = / — 1 step 1 until / do begin R (s, t); for q : = 1 step
1 until К do begin и [q] : = 0.25 X (ul [q] + u2 [q\ +
M3 [q] + u4 [q]); v [q] : = 0.5 X (ггЗ [q] + ul [q] - ul [q] -
B4 [q])/X; w [q] : = 0.5 X (нЗ [q\ + «4 [q] - ul [q] -
Программа метода локальных вариаций
217
и2 [q\)JY end; x : = 0.5 X (xi + х2); у : = 0.5 X
(?/1 + г/2); 2? (х, г/, и, г?, и>, Z); tor q : = 1 step 1 until
r do Я [q] : ^11 \q] -f Z2 Гд1 end end; if d = — 1 then
begin for q : = 1 step 1 until г do / [q] : = 0; for i : = 0 step 1
until Tkf do for / : = 0 step 1 until JV do begin R (i. j);
if L (zl, г/l, ul) then begin for q : = 1 step 1 until К
do begin и [?] : = 0,25 X (к1 [gl + w2 [q] + нЗ [q] + uA [q]);
v[q]:= 0.5x(u3 [q] + «2 [q] - ui [q] - uA [q])/X; w [q] : =
0.5 X (b4 fa] + «3 [q] — и1 fa] — н2 fa])/F end; x : =
0.5 x (xl + ж2); г/ : = 0.5 X (г/1 + г/2); ? (ж, г/, и, г?, u?, Z);
for q : = 1 step 1 until r do / [q] : = J [q] + Z fa]; go to K\
end; d : = — 2; ikf : = i; N : = /;
TO; end; go to УХ5 end;
Я2: p : =- pi : = 1; a : = 0; for Z : = 1 step 1 until К do for
i: = 0 step 1 until M do for / : = 0 step 1 until N do begin
R (i, /); S (i, /, Z);
ЯЗ: г/ [г, i, /]: = с/ [г, t, j] + P x h uv, r (t,/); if l {x\, yi, Bi)
then begin 5 (i, /, Zl); for q : = 1 step 1 until r do Я fa]: =
Zl fal-Zfa] +/fal; f_: = F(H); if / > F (J) then
begin if p — pi then begin U 11. i- fi : = U U. г, Я — p X
fe [Z]; p : = — pi; go to /f3 end; f/ [Z i. f1 : = U \l, i. /1 —
p X h [I]; p : — pi; go to A^i end: я : — n '¦ 1; for 7 : — 1
step 1 until r do / [q] : — II fal; go to K'\ end: if p -- pi then
begin U [I, i, j) : = U [Z, i. /1 — p X h \l); p : = — pi;
go to #3 end; U [Z, i, /] : = U [I, i, j] — p X h [Zl; p : = pi;
X4: j°l : = P ena; if a > d then go to #2;
A5: end MXF2.
§ 3. Пример
Требуется отыскать вектор-фупкцию и(х, у) = (гг1 (х, у), и2 (х, у)),
минимизирующую функционал
Г - '. -', - $[(?)" + {^)]«, - grtW». (9.3.1)
Программы численных методов решения вариационных задач
218
Скалярные функции и1 (х, у), и2 (х, у) определены соответственно
в областях ?I@<ж<0.5, 0 < у < 1) и ?2@<ж<1,
О < у <С 1). Границы областей Dt, D2 обозначим через Сг, Сг.
Ограничения, накладываемые на искомые функции, имеют вид:
к1 = 0 (х, у) е Сг; и1 < 1 (х, у) е Da (9.3.2)
и2 = жу (х, у) е С2.
Приведем точное решение сформулированной задачи:
и1 = 1 для (я, г/) ? fl't и й'= 0 для (х, у) е= Си и2 = ху для
(я, У) е?2 + С,. (9.3.3)
При проведении расчетов полагалось Ах — Ау — 0.1,
Af = iV = 10. Шаги варьирования /г2, fe2 уменьшались путем по-
ловинпого деления от начального значения fet = h2 — 0.1 до
конечного /^ = h2 = 0.1 ¦ 2-7. Начальные приближения для функций
и1, и2 задавались в виде:
цх = 0 (x,y)^D1+C1;u* =
1°
[ху
(х, y)<=D2,
(х, у)^С2.
При реализации процесса варьирования обращение к
процедуре MLV2 проводилось с d = 0, т. е. при каждом обращении
к MLV2 процесс варьирования проводился до полной сходимости.
Граничные условия в примере (т. е. фазовые ограничения типа
равенств) удовлетворялись с точностью е = 10~4. Получепное
с помощью ЭВМ численное решепие задачи (9.3.1), (9.3.2) в
пределах требуемой точности совпало с точным решением (9.3.3).
Приведем программу решения данной задачи.
begin integer M, N, К, г, d; real X, Y, f, e; M : = N : = 10;
X : = Y : = 0.1; r : = 2; К : = 2; e : = 0.0001; begin
array UH: K, -1: M + 1, -1 : N + 11, Л И : #1; / [1 : г];
h [1] : = h [21 : = 0.1; begin integer i, /; for i : = —1 step 1
until Af + 1 do for/ : = —1 step 1 until N + IdoUH, i, /]
:= tf [2, i, j] : =0; for i : =0 step 1 until MdoU [2, i, ЛП : =
i X X; for / : = 0 step 1 until N do U [2, Af, /] : = / X Y
end; begin Boolean procedure L (xi, yi, wl); real xi, yl;
array «1; L : = ((a;l < e \f xi > A — e) V 2/1 < e V 2/1 >
A - e)) Д (» ПК е Л «1 HI > "- e Д в* f2l > (a* X
yl - e) Д »1 [21 < (si X yl + e))) V (a* > @-5 —. e) Д
art < @.5 + e) Д ?/l > e/\ т/К A - e) /\ н1 [1] < e Д
Программа метода локальных вариаций
219
в1 [1] > - е) V № > е Д xl < @.5 - е) Д yl > е Д
yl< A - е) Д ul [1] < 1) V И > (°-5 + е) /\ xl <
A-е) /\yi > e/\yl < A-е)Лв1[1КеЛ в1Ш>
-в);
procedure Е (х, у, и, v, w, Z); real x, у, array и, v, w, Z;
begin if ж>0Дх<0.5Дг/>0Дг/<1 then begin
Z [I]: =.- м [1] X X X Y; Z [2] : = (» [2] t 2 + w [2] f 2)x
X X У; go to Ml end; if a; > 0.5 Д a; < 1 Д г/ > 0 Д y<
1 then begin Z [11 : - 0; Z [21 : = (» [21 f 2 +
U7 [2] f 2) x X x Y; go to Ml end; Z [1] : = 7. [21 : = 0;
Ж7: end;
real procedure F (/); array /; begin F : = J [2] — J [1] end;
procedure MLV2 (X, Y, M, N, K, r, d, U, h, J, L, E, F); value
X, Y, K, r; integer M, N, K, r, d; real X, Y; array U, h, J;
procedure E; real procedure F; Boolean procedure L; begin 1...
end; MLV2 (X, Y, M, N, K, r, — 1, U, h, J, L, E, F); if
d = — 2 then begin вывод (M, N); go to M3; end; /: = F (/)$
вывод (/, /);
M2: MLV2 (X, Y, M, N, K, r, 0, U, h, J, L, E, F); f: = F (J);
вывод (/, /, U); if h [11 > 0.001 then begin h [1]: =0.5 xh [11;
h [2]: = 0.5 X h [2]; go to M2 end;
M3: end end end
1 Точками обозначено тело процедуры MLV2.
Программы численных методов решения вариационных Задач 220
ГЛАВА 10 • ПРОГРАММА МЕТОДА ПОСЛЕДОВАТЕЛЬНЫХ
ПРИБЛИЖЕНИЙ ДЛЯ ЗАДАЧ ОПТИМАЛЬНОГО
УПРАВЛЕНИЯ
§ 1. Описание программы
Приводимая ниже программа [48J в виде процедуры на языке
АЛГОЛ-60 предназначена для решения задач оптимального
управления типа G.1.1), G.3.1). Решение проводится по методу
последовательных приближений (см. главу 7) с применением второго
и третьего способов улучшения сходимости, описанных в § 2
главы 7. Возможно также использование программы при
применении первого способа улучшения сходимости (см. § 2 главы 7).
Все обозначения данной главы, если это специально пе оговорено,
соответствуют обозначениям главы 7. Число а в формуле G.2.6)
изменяется, как описано в § 2 главы 7, путем деления пополам от 1
до значения
а = 2-г2, A0.1.1)
где г2 — заданное целое число дроблений.
Интегрирование исходной и сопряженной систем проводится
усовершенствованным методом Эйлера с постоянным шагом hp.
Погрешность интегрирования на одном шаге составляет величину
порядка (hpK. Так как момент Т окончания процесса может
оказаться произвольным, то последний шаг интегрирования hk
является нестандартным @ ^ hk ^ hp) и определяется для
каждой траектории при помощи специального итерационного
процесса, предусмотренного программой. Момент Т подсчитывается по
формуле
Т = t0 + (к — l)hp +hk, к > 1, 0 < hk < hp, A0.1.2)
где к — число шагов интегрирования для данной траектории.
В момент Т должны быть удовлетворены условия:
| h (Т, х (I)) | < е [0], | gt (Т, х (Т)) | < е li], i = 1, . . ., г.
A0.1.3)
Здесь h, gi — фупкции, фигурирующие в соотношениях G.3.1),
е — массив заданных точностей выполнения краевых условий.
Предполагается, что функция h такова, что h (t0, x (t0)) ^> 0;
в противном случае нужно просто изменить знак h. Для каждой
траектории программа находит приближенно наименьший корень
Т ^> t0 первого уравнения G.3.1); при этом предполагается,
Программа метода последовательных приближении
221
что следующий за ним корень, если он существует, отстоит от
наименьшего по крайней мере на длину шага hp. Первое условие
A0.1.3) удовлетворяется всегда путем подбора чисел к и hk, т. е.
момента Т из A0.1.2).
Остальные условия A0.1.3), т.е. собственно краевые условия,
удовлетворяются методом штрафных функций (см. п. 3 § 3 главы 7).
При каждых фиксированных значениях коэффициентов
штрафов at в формуле G.3.3) итерации идут с применением всех
предусмотренных способов улучшения сходимости до достижения
сходимости по функционалу У. Под сходимостью понимается такая
ситуация, когда при осуществлении итерации простейшего
варианта метода на полном интервале, т. е. при t' — t0, a —¦ i
в G.2.6), получено изменение функционала /' из G.3.3), не
превышающее по модулю заданной величины е0. Если при этом все
условия A0.1.3) выполнены, то задача считается решенпой.
В противном случае коэффициенты штрафов at для тех i, для
которых нарушены условия A0.1.3), умножаются на заданную
константу cl > 1, и начинается процесс минимизации функционала /'
с новыми коэффициентами штрафов. В качестве начального
приближения для управления при новых коэффициентах штрафов
берется оптимальное управление, полученное при прежних
коэффициентах штрафов. Начальные значения коэффициентов
штрафов задаются при обращении к программе. После того как в
результате описанного процесса увеличения коэффициентов at
какой-либо из них достиг заданного предельного значения с2,
он больше не увеличивается. Такова в общих чертах логика
программы.
Программа оформлена в виде процедуры procedure Optimal
Control (...), зависящей от 26 параметров. Тип параметров указан
в спецификациях. Ниже объясняется смысл этих параметров и
даются рекомендации по их выбору:
п — число фазовых координат (п > 1);
тп — число управляющих функций (ш > 1);
г — число краевых условий в соотношениях G.3.1), г > 0;
ДО — начальный момент времени t0 в соотношениях G.1.1);
хО — массив хО [1 : п] начальных значений фазовых координат
в момент t0, т. е. компоненты вектора х° в G.1.1);
hp — постоянный шаг интегрирования (hp > 0), равный также
шагу таблиц, в которых содержатся значения управляющих
функций и фазовых координат;
И — заданное максимальное число шагов интегрирования (II ;> 1)
определяющее также границу массивов ut, xt управления и тра-
Программы численных методов решения вариационных задач 222
ектории (см. ниже); длительность процесса должна быть
ограничена неравенством
Т - t0 < (//) X (hp), A0.1.4)
г 2 — заданное максимальное число делений пополам для
коэффициента а в формуле G.2.6). Минимальное нределыюе значение а
определяется формулой A0.1.1). Полагая г2 = 0, можно вообще
отключить второй способ улучшения сходимости (см. § 2 главы 7);
еО — положительная константа для сравнения значений
функционала в двух итерациях (обозначена через е0 в н. 3 § 2 главы 7),
см. также пояснения в п. 4 § 2 главы 7. Эта константа
характеризует желаемую точность решения задачи по минимизируемому
функционалу. По порядку величины ее следует задавать во
всяком случае не меньшей, чем погрешность интегрирования системы
на всем интервале, которая составляет величину порядка
A1) X (hp)';
е — массив е [0 : г], в котором размещены задаваемые точности
удовлетворения условия окончания процесса и краевых условий
в G.3.1), см. условия A0.1.3). Величину е [0] можно задавать
очень малой (порядка погрешности одного шага интегрирования),
а величины е [г] при ?^>0, как и еО, следует задавать не меньшими
по норядку величины, чем погрешность интегрирования системы
на всем интервале;
cl — заданное число (cl ~^> 1), на которое умножается коэффициент
штрафа после сходимости итерации, если соответствующее ему
краевое условие не удовлетворено с требуемой точностью. Это
число желательно задавать небольшим (cl <^ 2), чтобы не
наступала расходимость итераций при увеличении коэффициентов
штрафов;
с2 — максимальное предельное значение коэффициентов штрафов
at в формуле G.3.3). Это число введено для исключения возможных
АВОСТов и других трудностей, связанных с очень большими
коэффициентами штрафов. Оно должно допускать возможность
несколько раз увеличить начальные значения коэффициентов
штрафов в cl раз. Отметим, что при отсутствии краевых условий
(г = 0) все операции, связанные с коэффициентами штрафов, не
производятся, и значения параметров cl, с2 можно задавать
произвольными;
а\ — массив а\ [0 : г], в котором помещаются вспомогательный
функционал /' из G.3.3) и коэффициенты штрафов, т. е.
el [0] = /', el [i] = аи i - 1, . . ., r. A0.1.5)
Программа метода последовательных приближений
223
При обращении к процедуре значение переменной al [0] может
быть произвольным, а переменные al [г] должны равняться
задаваемым начальным значениям коэффициентов штрафов. После
работы процедуры элементы массива al принимают значения
A0.1.5) для траектории, полученной в результате работы
процедуры (о том, какая это траектория, см. ниже);
Ш — массив at [0 : 11,1 : те], содержащий таблицы значений
управляющих функций. Первый индекс массива соответствует
номеру шага по времени: значению этого индекса i отвечает момент
t :~- /0 -j- i X hp при i < к, а значению к — конечный момепт Т
из A0.1.2). Второй индекс массива ut указывает номер
управляющей функции. При обращении к процедуре массив ut должен быть
заполнен начальным приближением для управления. После
работы процедуры в этом массиве находится таблица значений
управления, полученного в результате работы процедуры.
При обращении к процедуре всем перечисленным выше
параметрам должны быть присвоены пекоторые значения.
Результатами работы процедуры являются, помимо массивов al и ut, еще
следующие ее параметры:
к — номер последнего шага интегрирования для управления,
полученного в массиве ut, 1 «^ к <^ И;
hk — последний нестандартный шаг интегрирования для
управления ut. Момент Т окончания процесса, соответствующий
управлению ut, определен формулой A0.1.2);
xt — двумерный массив xt [0 : II, 1 : п], в котором получаются
значения фазовых координат для траектории, соответствующей
полученному управлению ut- Первый индекс массива, как и у
массива ut, указывает номер шага по времени, а второй — номер
фазовой координаты. В частности, элемент массива xt [0, i]
совпадает с элементом массива жО [г], в котором находятся начальные
данные, а элемент xt [к, i] содержит ?-й компонент вектора х(Т).
Элементы массивов ut и xt при значениях второго" индекса,
больших к, смысла не имеют;
g — массив g [0 : г], содержащий величину функционала / и
невязки в удовлетворении краевых условий G.3.1) для полученной
траектории xt, а именно g [0] — / — F (T, x (T)), g [i] =
= gi (T, x (T));
rl — целое число, которое в результате работы процедуры
принимает значение от 0 до 3 и указывает тип полученпого
результата. Значения rl имеют следующий смысл: rl = 0 означает, что
процесс итераций сошелся, и задача оптимального управления
решена с заданной точностью. Это значит, что получено такое
Программы численных методов решения вариационных задач 224
управление, что дальнейшие итерации простейшего варианта
метода (при t' — t0, a = 1) приводят к изменениям вспомогательного
функционала /', не превышающим по модулю величины еО.
Краевые условия при этом удовлетворены с требуемой точностью, т. е.
неравенства A0.1.3) выполнены. Полученное в результате
оптимальное управление находится в массиве ut, соответствующая
оптимальная траектория — в массиве xt, остальные результаты
решения представлены переменными ai, hk, к, g.
/•1 = 1 означает, что процесс итераций сошелся, но не все краевые
условия удовлетворены с требуемой точностью, т. е. нарушено
хотя бы одно из неравенств A0.1.3) при i — 1, . . ., г.
Коэффициенты штрафа, соответствующие невыполненным краевым
условиям, достигли предельного значения с2, и их больше нельзя
увеличивать.
При выходе с rl = 1 параметрам ut, а\, к, hk, xt, g
присваиваются значения, соответствующие траектории, полученной после
сходимости итераций. Первое условие A0.1.3) для нее выполнено.
В случае г\ = 1 следует либо увеличить предельное значение
коэффициентов штрафов с2, если это возможно, либо
удовлетвориться достигнутой точностью выполнения краевых условий.
При г = 0 выход rl = 1 не может иметь места, rl = 2 означает,
что пе удалось добиться сходимости итераций при каких-то
значениях коэффициентов штрафов. В ходе итераций получено такое
управление, что следующая итерация по формуле G.2.6) приводит
к увеличению функционала, даже если иптервал [t', Т] содержит
одну точку таблицы ut, а величина а в G.2.6) имеет предельно
малую величину A0.1.1). В этом случае испробованы все
предусмотренные способы улучшения сходимости. Параметрам ut, ai,
к, hk, xt, g при выходе с Л =-- 2 процедура присваивает значения,
отвечающие лучшей из полученпых траекторий, т. е. траектории
с наименьшим значепием функционала / из G.3.3), после которой
оказалось невозможным добиться уменьшения функционала.
Первое условие A0.1.3) при этом выходе выполнено. Получив выход
с rl =2, можно рекомендовать обратиться к процедуре, изменив
некоторые ее параметры, а именно: либо уменьшить шаг
интегрирования hp, либо увеличить число г2 в A0.1.1) (эти изменения
сделают более эффективной работу третьего и второго способов
улучшения сходимости), либо уменьшить число cl, приближая его
к единице (если расходимость итераций паступила после
увеличения коэффициентов штрафов), либо увеличить число еО,
удовлетворяясь меньшей точностью решения. Наконец, можно применить
первый способ улучшения сходимости итераций из § 2 главы 7.
/•1=3 означает, что на какой-то итерации получено условие
к ^> И, т. е. нарушено неравенство A0.1.4). При этом не хватает
таблиц для размещения управления и траектории, момепт Т для
Программа метода последовательных приближений 225
данной итерации не найден, и условия A0.1.3) не выполнены.
При выходе с rl = 3 в массивах ut, xt находятся управление и
траектория для этой итерации, на которой к ^> И, значения
переменных ai \i\ равны коэффициентам штрафов для этой итерации
(i = 1, . . ., г), а значения переменных к, hk, a\ [0] и массива g
при этом выходе несущественны. Получив результат И = 3,
следует обратиться к процедуре, увеличив число И или шаг hp.
Выше перечислены параметры процедуры типов integer, real
и real array, которым при обращении должны быть присвоены
некоторые значения или которые представляют собой результаты
процедуры. Помимо этих параметров, процедура Optimal
Control содержит в качестве формальных параметров следующие
идентификаторы процедур: fin, fin ж, fg, gx, fx, fp, ham. При
обращении к процедуре Optimal Control тем фактическим параметрам,
которые отвечают перечисленным формальным параметрам,
должны соответствовать процедуры, описанные в том блоке, в котором
происходит это обращение. Заголовки этих процедур должны
иметь вид:
1) real procedure fin (t, x); real t; array x;
2) procedure fin x (t, x, zl); real t; array x, zl;
3) procedure fg (t, x, z'2); real t; array x, z2;
4) procedure gx (t, x, z3); real t; array x, z3;
5) procedure fx (t, x, u, z4); real t; array x, u, z4;
6) procedure fp (t, x, p, u, z5); real t; array x, p, u, zr,
7) procedure ham (t, x, p, u); real t; array x, p, u.
Перечисленные вспомогательные процедуры служат для
вычисления правых частей дифференциальных уравнений, краевых
условий и других функций, соответствующих конкретной
решаемой задаче. Параметры этих процедур имеют следующий смысл:
t — время;
х — массив х [1 : ге] значений фазовых координат;
и — массив и [1 : тп] значений управляющих функций;
р — массив р [1 : ге] значений сопряженных переменных;
zl — массив zl [1 : ге] значений частных производных по х}
функции h из G.3.1);
z2 — массив z2 [0 : г] значений функций F и gt из G.3.1);
z3 — массив z3 [0 : г, 1 : ге] значений частных производных по xj
функций F и gt из G.3.1);
z4 — массив z4 [1 : ге] значений функций /г из G.1.1);
z5 — массив z5 [1 : ге] значений правых частей сопряженной
системы G.1.4).
Программы численных методов решения вариационных задач 226
Эти массивы должны содержать следующие величины:
zl [Л = dh(t, х)/дх}, zl [0] - F(t, х), zl Щ -= gi(t, х), 23 [0, j] =
= OF (t, x)ldxh z3 [i, j] = dgi (t, x)/dxjt A0.1.6)
z4 [/] =-- j, (t, x, u), zb [j] =-- — dli (t, x, p, u)/dxj, j = 1, . .., n;
i =-- 1, ..., r.
Предполагается, что при обращении ко всем вспомогательным
процедурам заданы значения переменных t, x, для процедур fp
и ham — также и переменной р, а для процедур fx, fp — еще и
переменной и. Процедура-функция fin должна вычислять
значение функции h (t, x) из G.3.1) при заданных зпачениях
аргументов t, х. Процедуры fin x, fg, gx, fx, fp должпы по заданным
значениям их аргументов t, х, и, р вычислять, согласно
формулам A0.1.6), значения массивов zl, z2, z3, z4, z5, являющихся
результатами этих процедур. Процедура ham должна по заданным
значениям аргументов t, x, p вычислять массив управлений и из
условия максимальности функции Гамильтона, а именно, находить
такое и, что
Н (t, х, р, и) = max II (t, x, p, v).
Процедура Optimal Control в процессе работы многократно
обращается к перечисленным вспомогательным процедурам,
поэтому желательно, чтобы они были экономно составлены.
В § 3 главы 10 содержится пример программы, использующий
процедуру Optimal Control. Приводим текст самой процедуры.
§ 2. Процедура на языке АЛГОЛ-60
procedure Optimal Control (т, г, п, к, II, rl, r2, hp, hk, ДО, ol,
еО, с2, cl, e, xt, xO, ut, g, fin, fx, fp, /g,ham, finx, gx); value
m, r, n, 11, hp, ДО, еО, c2, cl, e, xO, r2; real hp, hk, ДО, еО, cl, cl;
integer m, r, n, k, 11, rl, r2; array e, xt, xO, al, ut, g; procedure
fx, fp, fg, ham, finx, gx; real procedure fin;
begin real s, h, t, a, b, t\, jj, /)'l, q, qO, qi, ql; integer i, I, Zl,
11, 13, j, M, k2; Boolean Ы, b2; array x, xi, z, zl, p [1 : n],
и [1 : m], gtl [0 : r], grad [0 : r, 1 : n\, uti [0 : 11, 1 : ml;
qi:= 2f r2; q2: =ql — \;q0:=-- 1.5/gl;rl: --=0; for i : = l step 1
until r do if a\ Ш > c2 then ol \i]: - c2; Z: -- Zl : = Z3: = 0;
Z2 : — 11 + 1; 62 : — true; for i: -= 1 step 1 until n do ,x/[0,?]: —
xO [i];
Программа метода последовательных приближений
22?
т2: Ь\ : — true; s: — hk: = h: = /г/?; for i: = 1 step 1 until /г do
x [Z]: = xZ [Z3, Z]; Z: -= ZO -|- /3 x A; a: -= /Zra (Z, ж); /с: = 12 -\- 1;
if Z = 0 then begin for i: = 1 step 1 until /и do гг [г]: = ut [0, Z]
end else for г: = 1 step 1 until m do и [i] : = utl [13, i];
m3: Hk = 12 then begin rl : = 3; go to тЪ end; /ж (t, x, u, z)\
t:= t -\- h; for i: •— 1 step 1 until и do ж1 [Z] : — ж [Zl \- h X
z [Zl; for i: --= 1 step 1 until mdo и [i]: — ut [k, Zl; fx (Z, xl,
u, zl); for Z: — 1 step 1 until n do x [i]: — x [Z] + 0.5 X h X
(z [Z] •]- zl [Zl); & : = /m(f, x); iiabs F) > e Г0] then begin
if b ^> 0 then begin if 61 then begin for Z: — 1 step 1 until n
do xt [k, i\: — ж [Z]; Zl: — t; a : — 6; A;: = A; -|- 1; go to m3 end;
s: =0.5 X s;hk: =hk \-s end else begin 61 : ^false;s: =0.5xs;
hk: = hk — send; h: — M; /:=/<; — 1; t: = Zl; for i: = 1 step
1 until и do x Ml: — xi [/, Z]; for Z: = lstep 1 until m do
и [Zl: = uZ [/, Zl; go to m3end; for Z: = 1 step 1 until n do
xt Ik, i]: —- x [Zl; /g (Z, x, g); if rl — 3 then begin Z: — Zl : -=
Z3: = 0; rl : = —1; go to mi end;
ml: Л : = g [01; for i: = 1 step 1 until r do //: = // + g [Zl x
al [Zl X g [Zl; if rl — 2 then go to mb; if rl =1 then begin
rl: = 0; goto mb end; if 62 then begin62 : = false; //1 : -- // +
2 X eO end; if//¦<//1 then begin fori: = Zstep 1 until 11
do for/ : = 1 step 1 until m do utl [Z, /]: = ut [Z, /1; if// ]>//l —
eO then begin if Z = 0 Д ?: > 0.9 then
m6: begin 61: = 62 : = true; for i: = 1 step 1 until r do if abs
(g [ф > e [Z] then begin 6: = cl X al [Z]; 61: = false; if
6 < c2 then begin al [Z]: = 6; 62: = false end end; if 62 then
begin rl : = if 61 then Oelse 1; go to тЪ end; 62: — true; go to
ml end; if g> 0.9 then begin if Z = Zl then I: = Zl: =0else
I : = (I + 11) X 0.5—0.1 end end; Z3: -= if Z -= 0 then 0 else
l-Ujjl : =//;M: = k;rl: = 0;
/гг4: g: = 1; ga; (Z, ж, grad); jinx (Z, ж, z);s: — t — hk;j: = к — 1;
for Z: = 1 step 1 until n do ж [Z]: = жZ Г/, Z]; fg (s, x, gtl); s: = 0;
for Z: = 0 step 1 until rdogZl [Zl: = gtl [Zl — g [Z|;for Z: = 1
step 1 until r do s: = s + al [i] X gZl [Z] X g [Z]; s: = (s X 2 +
gZl [0])/a; for /: = 1 step 1 until д do begin 6 : = 0; for
Программы численных методов решения вариационных Задач 228
i : = 1 step 1 until r do b: = b + al [i] x grad [i, /] x g [i];
p[j]: — s x z [/] — grad [0, /] — 2 x 6; x [/]: = xt Ik, /] end;
f or i: =1 step 1 until /ndouU]: = utl Ik, i]; t: =$ + (к—I) X
hp + hk; h: = hk; for / : = к step — 1 until 1 do begin
//> (*, x, p, u, z); ham (t, x, p, u); for i: = 1 step 1 until m do
hZ [/, i]: = и [i]; for i: =1 step 1 until /i do xl [i]: = p [i] —
h X z [i]; t: — t — h;k2:^=i — 1; for i: = 1 step 1 until
n do x[i]: — xt [k2, i]; for i: = 1 step 1 until m do к [i]: =
ий [Ar2, t]; fp(t,x,xl, u, z\); for ?: = 1 step 1 until n do
jd [i]: = p [i] — 0.5 x h x (z [i] + zl [t]); h: =^hp
end; Aam (f, ж, /?, и); for i: = 1 step 1 until m do ut [0, i]: =
и [i\; for ;': = 1 step 1 until иг do begin b: = ut [k,j]; for
i: = к -{- 1 step 1 until ZZ do ut [i, /']: = b end end else if
Л >//l+e0\//^0\/?<0.9 then begin if q < q0 then
begin if Z < M then begin g: = 1; Zl: = Z; Z3: = if Zl = 0
then 0 else Zl — 1; Z: = (Z + M) x 0.5 + 0.1; for /: = 1 step
1 until m do begin for i: = Zl step 1 until I — 1 do ut [i,j]: =
utl [i, j]; for i: = Z step 1 until ZZ do uZ [Z, /] : = ql X
ut [i, j\ — ql X utl [i, j] end end else begin for i: = 1 step
1 untilmdoitf[M,/]: = b*1[M,/J; Z3: =M —1; rl : = rl + 3
end end else begin q: = 0.5 Xg; Z3: = if Z = 0 then 0 else
Z — 1; for i: = Z step 1 until ZZ do for/: = 1 step 1 until m do
«Z [i, /]: = (ut [i, j] + utl [i, j]) X 0.5 end end else begin
rl :• = 1; for Z: — 0 step 1 until 11 do for/ : = 1 step 1 until m do
ut [i, /]: = hZI [i, j] end; go to ml;
m5: al [0]: = // end
§ 3. Пример
Как указывалось, метод последовательных приближений успешно
применялся для решения различных задач оптимального
управления. Поэтому приводимый здесь пример играет роль
свидетельства отсутствия ошибок в procedure Optimal Control из § 2 и
иллюстрирует обращение к ней.
Задачи о выборе оптимальных управлений и (t) и v (t) ставились
для следующей системы уравнений для х, у, z: х = у, у = — х +
+ и + v, z = — v2. Начальные значения фазовых координат:
t0 = я/2, х0 = 1.5, у0 = 1 + л/4, z0 — Зя/4.
Программа метода последовательных приближений
т
В момент времени Т = 2я нужно получить решение следующих
четырех задач минимизации функционалов:
_ Краевые условия на правом
Функционал „„'„це
2х (Т) — z (T) Нет
— *»(Г)/2-B+я/2)*(Г) + у«B') нег
— **(Г)/2-B + я/2)*(Г) У(Т)--0
— z(T) *(Г)--D+я), »(Г) = 0.
Для указанных задач система уравнений для сопряженных
переменных имеет вид: рх = ру, ру = —рх, р\ = 0.
Оптимальные управления в соответствии с принципом
максимума равны: и = sign py, v -- pyl2pz. Нетрудно убедиться в том,
что для всех четырех задач оптимальное управление и — sign sint,
v = sint, а интегрирование исходной системы уравнений дает при
Т = 2п:х{Г) = - D + я), у (Т) - 0, z (Т) = 0.
Точности удовлетворения краевых условий задавались
равными 0.05, точность выполнения условия окончания интегрирования
—10~4, еО = Ю, шаг интегрирования hp = Зл/200, начальное
приближение для управления и (t) = v (t) = 1. В результате
решения всех этих задач практически точно найдены оптимальное
управление и оптимальная траектория (ошибки составляют доли
процента и обусловлены в основном погрешностями выбранной
схемы интегрирования).
Ниже приводится программа для решения третьей задачи
из приведенной таблицы. Здесь опущены (заменены точками)
спецификации и тело процедуры Optimal Control.
begin integer m, г, n, 11;
m: =2; r: = 1; n : = 3; 11: = 100;
begin procedure Optimal Control (m, r, n, k, 11, ri, r2, hp, hk,
ДО, al, eO, c2, cl, e, xt, xO, ut, g, fin, fx, fp, fg, ham, fin x, gx);
real procedure fin (t, x); real t; array x; fin: = 6.28319 — t;
procedure fx(t, x,u,z); real t; array x, u, z; begin z[l]: =
as [2]; z[2]: = -xlll] + ull] + и [2]; z [3]: = - и [2] X
и [2] end;
procedure fp (t, x, p, u, z); real t; array x, p, u, z; begin
z [3]: = 0; zll]:=p [2]; z[2]:= — p [1] end;
procedure /srea; (J, ж, g); real ?; array ж, g; g[l]: = g [2]: =
g [3]: = 0;
procedure /jam (i, x, />, a); real ?; array я, p, u; begin к [1]: =
sigw (p 12]); и [2] : = p [2]/ B X p [3]) end; procedure
Программы численных методов решения вариационных задач 230
fg (t, x, g); real t; array x, g; begin g [0]: = — x [1] X x Ш/2—
3.5708 X x [3]; g [1]: = x [2] end; procedure gx (t, x, g); real
t; array x, g; begin g [0,1]: = — x [1]; g [0,3]: = — 3.5708;
g [1, 2]: = 1; g [0,2]: = g [1,1] : = g [1,3]: = 0 end;
real hk; integer k, rl; array xt [0 : 11, 1 : n], mZ [0 : ZZ, 1 : m],
zO [1 : n], g, e, al [0 : rl; xO [1] : = 1.5; xO [2]: = 1.785398;
xO [31: =-- 2.356194; e [0]: =0.001; e[l] : =0.05; al [11: =1; for
к: = 0 step 1 until ZZ do ut [k, 1]: = mZ Ifc, 2]: = 1; Optimal
Control (m, r, n, k, 11, rl, 5, 0.0471239, hk, 1.5708, al, 0.001,
40, 2, e, xt, xO, ut, g, fin, fx, fp, fg, ham, finx, gx); вывод
(rl, ut, xt, al, g, k, hk) end end
ЛИТЕРАТУРА
1. В. В. Александров. О накоплении возмущений в линейных системах
по двум координатам.—Вестн. МГУ, 1968, № 3.
2. В. В. Александров. Течение излучающего водорода в осесимметричпых
соплах.—Изв. АН СССР, Мех. жидкости и газа, 1967, № 4.
3. В. В. Александров, В. В. Щенников. Об одном подходе к численному
решению задач математической физики.—Ж. вычисл. матем. и матем.
физ., 1967, т. 7, № 4.
4. Л. М. Альпин. К теории электрического каротажа буровых скважин.
М.—Л., 011ТИ,1938.
5. Н. В. Баничук. Расчет течений вязко-пластической среды в трубах
методом локальных вариаций.—Изв. АН СССР, Механика жидкости и
газа, 1966, № 6.
6. Н. В. Баничук. Расчет упруго-нластического кручения стержней
методом локальных вариаций.—Инж. ж., Механика твердого тела, 1967,
№ 1.
7. Н. В. Баничук. Численпое решение задачи о прогибе упругой
пластины, стесненной ограничениями.—Инж. ж., Механика твердого тела,
1967, № 4.
8. Н. В. Баничук. Расчет нагружения упруго-нластического тела.—Изв.
АН СССР, Механика твердого тела, 1969, JV» 1.
9. Н. В. Баничук. В. М. Картвелишвили, Ф. Л. Черноусько. Численное
решение осесимметричной задачи о вдавливании штампа в упруго-
пластическую среду.—Изв. АН СССР, Механика твердого тела, 1972,
№ 1.
10. П. В. Баничук, И. А. Крылов, В. М. Петров, Ф. Л. Черноусько.
Алгоритм метода локальных вариаций для решения вариационных задач
с одной независимой переменной. Алгоритмы и алгоритмические языки.
М., ВЦ АН СССР, 1969, вып. 4.
11. Н. В. Баничук, В. М. Петров, Ф. Л. Черноусько. Численное решение
;" вариационных и краевых задач методом локальных вариаций.— Ж.
вычислит, матем. и матем. физ., 1966, т. 6, № 6.
12. Я. В. Баничук, В. М. Петров, Ф. Л. Черноусъко. Метод локальных
вариаций для вариациопных задач с неаддитивными функционалами.—
Ж. вычислит, матем. и матем. физ., 1969, т. 9, № 3.
13. Г. И. Баренблатт. О некоторых общих представлениях
математической теории хрупкого разрушения.— Прикл. математ. и мох., 1964,
вып. 4.
14. Р. Беллман. Динамическое программирование. М., ИЛ, 1963.
15. Р. Беллман, С. Дрейфус. Прикладные задачи динамического
программирования. М., «Наука», 1965.
16. М. А. Беляева, А. Д. Мышкис, А. Д. Тюпцов. Гидростатика в слабых
гравитационных полях. Равновесные формы поверхности жидкости.—
Изв. АН СССР, Мех. и машиностр., 1964, № 5.
17. М. А. Беляева, Л. А. Слобожанин, А. Д. Тюпцов. Гидростатика в ела
Литература
232
бых силовых полях. Сб. «Введение в динамику тела с жидкостью в
условиях невесомости». М., ВЦ АН СССР, 1968.
18. И. С. Березин, И. П. Жидков. Методы вычислений. Т. 1,2. М., Физ-
матгиз, 1962.
19. Б. М. Будак, Е. М. Беркович, Е. Н. Соловьева. О сходимости
разностных аппроксимаций для задач оптимального управления.— Ж.
вычислит, матем. и матем. физ., 1969, т. 9, № 3.
20. А. Г. Бутковский. Теория оптимального управления системами с
распределенными параметрами. М., «Наука», 1965.
21. В. Вазов, Дж. Форсайт. Разностные методы решения
дифференциальных уравнений в частных призводных. М., ИЛ, 1963.
22. И. А. Вателъ, А. Ф. Кононенко. Об одной численной схеме решения
задач оптимального управления.— Ж. вычислит, матем. и матем.
физ., 1970, т. 10, № 1.
23. Л. А. Галин. Упруго-пластическое кручение призматических
стержней полигонального сечепия.—Прикл. математ. и мех., 1944, т. 8, вып. 4,
24. Л. А. Галин. Упруго-пластическое кручение призматических стержней.—
Прикл. математ. и мех., 1949, т. 13, вып. 3.
25.»И. М. Гельфанд, С. В. Фомин. Вариационное исчисление. М., Физмат
гиз, 1961.
26*С. К. Годунов, В. С. Рябенький. Введение в теорию разностных схем.
М., Физматгиз, 1962.
27. Е. Г. Голъдштейн, Д. Б. Юдин. Методы расчета и синтеза
импульсных автоматических систем.— Автоматика и телемеханика, 1963,
т. XXIV, № 12.
28. Г. Л. Гродзовский, Ю. Н. Иванов, В. В. Токарев. Механика
космического полета с малой тягой. М., «Наука», 1966.
29. Г. Л. Гродзовский, Д. Е. Охоцимский, В. В. Белецкий и др.
Механика космического полета. Механика в СССР за 50 лет. Т. 1. М., «Наука»,
1968.
30. А. Дембская, А. Медуховский. Упруго-пластическое кручение
составных стержней.— Изв. АН СССР, Механика твердого тела, 1969,
№ 6.
31. В. Ф. Демьянов, А. М. Рубинов. Приближенные методы решения
экстремальных задач. Изд-во Ленингр. ун-та, 1968.
32. Ю. М. Ермольев, В. П. Гуленко. Конечно-разностный метод в зада
чах оптимального управления.— Кибернетика, 1967, № 3.
33. Г. Зойтендейк. Методы возможпых направлений. М., ИЛ, 1963.
34. А. А. Ильюшин. Деформация вязко-пластического тела.— Уч. зап,
МГУ, Механика, 1940, вып. 39.
35. И. В. Иослович, М. 3. Борщевский. Некоторые задачи
оптимальной стабилизации осесимметричного спутника.— Космич. иссл., 1966,
вып. 3.
36. В. К. Исаев, В. В. Сонин. Об одной модификации метода Ньютона
численного решения краевых задач.—Ж. вычисл. матем. и матем.
физ., 1963, т. 3, № 6.
37. А. Ю. Ишлинский. Осесимметричная задача пластичности и проба
Бринеля.— ПММ, 1955, т. 8, вып. 3.
38. Л. В. Канторович, В. И. Крылов. Приближенные методы высшего
анализа. М., Физматгиз, 1962.
39. Л. М- Качанов. Пример решения вариационным методом задачи упру-
Литература
233
го-пластического кручения.— Сб. «Исследования но упругости и
пластичности». Изд-во Ленипгр. ун-та, 1961.
40. Л. М. Качанов. Основы теории пластичности. М., «Наука», 1969.
41. Л. Коллатц. Задачи на собственные значения. М., «Наука», 1968.
42. В. Л. Колмогоров, Э. В. Дубровских, А. Я. Соболева. Применение
метода локальных вариаций к расчету асимметричных дисков.— Изв.
вузов, Машиностроение, 1970, Л» 11.
43. Н. И. Красоеский. Теория управления движением. М., «Наука», 1968.
44. Н. Н. Красоеский. Теория оптимальных управляемых систем.
Механика в СССР за 50 лет. Т. 1, М., «Наука», 1968.
45. И.А.Крылов. Численное решение задачи об онтимальпой
стабилизации спутника.— Ж. вычислит, матем. и матем. физ., 1968, т. 8,
№ 1.
46. И. А. Крылов, Ф.Л. Черноусъко. О методе последовательных
приближений для решения задач оптимального управления.— Ж. вычислит,
матем. и матем. физ., 1962, т. 2, № 6.
47. И. А. Крылов, Ф. Л. Черноусъко. Решение задач оптимального
управления методом локальных вариаций.— Ж. вычисл. матем. и матем. физ.,
1966, т. 6, № 2.
48. И.А.Крылов, Ф. Л. Черноусъко. Алгоритм метода последовательных
приближений для задач оптимального управления.— Ж. вычисл. матем.
и матем. физ., 1972, т. 11, № 1.
49. А. Г. Кузнецов, Ф. Л. Черноусъко. Об оптимальном управлении,
минимизирующем экстремум функции фазовых координат.—
Кибернетика, 1968, № 3.
50. Р. Курант, Д. Гильберт. Методы математической физики. М., Гостех-
издат, 1951.
51. М. А. Лаврентьев, Л. А. Люстерник. Вариационное исчисление. М.,
Гостехиздат, 1951.
52. В. Н. Лебедев. Расчет движения космического аппарата с малой тягой.
М., ВЦ АН СССР, 1967.
53. Л. С. Лейбензон. Вариационные методы решения задач теории
упругости. М., Гостехиздат, 1943.
54. А. М. Летов. Аналитическое конструирование регуляторов.— А и Т,
1960, т. 21, № 4, 5, 6; 1961, т. 22, № 4.
55. А. М. Летов. Аналитическое конструирование регуляторов.
Дальнейшее развитие проблемы.— А и Т, 1962, т. 23, № 11.
56. А. И. Лурье. Теория упругости. М., «Наука», 1970.
57. В. С. Михалевич, И. 3. Шор. О численных методах решения много-
вариаптных плановых и технико-экономических задач.
Научно-методические материалы экономико-математического семинара. Киев, ВЦ
АН УССР, 1962.
58. С. Г. Михлин. Численная реализация вариационных методов. М.,
«Наука», 1966.
59. С. Г. Михлин. Вариационные методы в математической физике.
М., «Наука», 1970.
60. С. Г. Михлин, X. Л. Смолицкий. Приближенные методы решения
дифференциальных уравнений. М., «Наука», 1965.
61. Н. Н. Моисеев. Методы динамического программирования в теории
оптимальных управлений. Ж. вычисл. матем. и матем. физ., 1964,
т. 4, № 3;'1965, т. 5, № 1.
Литература
234
62. Н. Н. Моисеев. Численные методы теории онтимальных управлений,
использующие вариации в пространстве состояний.— Кибернетика,
1966, № 3.
63. //. Н. Моисеев. Численные методы, использующие вариацию в
пространстве состояпий.— В кн. «Труды Международного конгресса
математиков». М., «Мир», 1968.
64. Н. Н. Моисеев, В. В. Румянцев. Динамика тела с полостями,
содержащими жидкость. М., «Наука», 1965.
65. Н. II. Моисеев, Ф. Л. Че/ноусько. Задачи колебаний жидкости,
подверженной силам поверхностного патяжения.— Ж. вычислит, матем.
и матем. физ., 1965, т. 5, № 6.
66. N. N. Moiseyev, A. D. Myshkis, A. A. Petrov. On the problems of
hydrodynamics in cosmonautics.— Proc. of XVth International Astro-
nautical Congress, Warszawa, v. 1.
67. П. П. Мосолов, В. П. Мясников. Вариационные методы в теории
течений вязко-пластической среды.— Прикл. матем. имех., 1965, т. 29, вып. 3.
68. П. П. Мосолов, В. П. Мясников. О застойных зонах течения вязко-
пластической среды в трубах.— Прикл. матем. и мех., 1966, т. 30,
вып. 4.
69. Н. И. Мусхелишвили. Некоторые основные задачи математической
теории упругости. М., «Наука», 1966.
70. А. Падай. Пластичность и разрушение твердых тел. М., ИЛ,
1954.
71. И. В. Остославский. Аэродинамика самолета. М., Оборонгиз,.
1957.
72. Д. Е. Охоцимский. Некоторые вариационные задачи, связанные с
запуском ракет.— Прикл. матем. и мех., 1964, т. 10, вып. 2.
73. А. А. Петров. Вариационная формулировка задачи о движении
жидкости в сосуде конечных размеров..— Прикл. матем. и мех., 1964, т. 28,
вып. 4.
74. В. М. Петров, Ф. Л. Черноусъко. Об определении формы равповесия
жидкости под действием сил тяжести и поверхностного натяжения. —
Изв. АН СССР, Механика жидкости и газа, 1966, JV» 5.
75. Л. С. Понтрягин, В. Г. Болтянский, Р. В. Гамкрелидзе, Е. Ф.
Мищенко. Математическая теория оптимальных процессов. М., «Наука»,
1969.
76. В. Прагер, Ф. Г. Ходж. Теория идеально-пластических тел. ИЛ,
1956.
77. А. Р. Ржаницын. Устойчивость равповесия упругих систем. М., Гос-
техтеоретиздат, 1955.
78. Л. И. Розоноэр. Принцип максимума Л. С. Поптрягина в теории
оптимальных систем.— Автоматика и телемеханика, 1959, т. 20, № 10,
11.
79. М. Дж. Салъвадори. Численные методы в технике. М., ИЛ, 1955.
80. А. А. Самарский. Введение в теорию разностных схем. М., «Наука»,
1971.
81. В. А. Самсонов. О некоторых задачах минимума в теории
устойчивости движения тела с жидкостью.— Сб. «Введение в динамику тела
с жидкостью в условиях невесомости». М., ВЦ АН СССР, 1968.
82. Введение в динамику тела с жидкостью в условиях невесомости.
Сборник статей. М., ВЦ АН СССР, 1968.
83. В. И. Смирнов. Курс высшей математики. Т. 4. М., Физматгиз, 1958.
Литература
235
84. И. Снеддон. Преобразования Фурье. М., ИЛ, 1955.
85. В.В.Соколовский. Об одной задаче упруго-пластического кручения.—
Прикл. матем. и мех., 1942, т. 6, вып. 2, 3.
86. В. В. Соколовский. Теория пластичности. М., «Высшая школа», 1969.
87. С. П. Тимошенко. Теория упругости. М., ОНТИ, 1937.
88. А. Д. Тюпцов. Гидростатика в слабых силовых полях. Устойчивость
равновеспых форм поверхности жидкости.— Изв. АН СССР,
Механика жидкости и газа, 1966, № 2.
89. Д. К. Фаддеев, В. Н. Фаддеева. Вычислительные методы линейной
алгебры. М., Физматгиз, 1960.
90. В. А. Фок. Теория определения сопротивления горных пород по
способу каротажа. М., Гостехтеоретиздат, 1933.
91. Р. Хилл. Математическая теория пластичности. М.,
Гостехтеоретиздат, 1956.
92. Ф. Л. Черноусъко. Метод локальных вариаций для численного решения
вариационных задач.— Ж. вычисл. матем. и матем. физ., 1965, т. 5,
№ 4.
93. Ф. Л. Черноусъко. Движение тонкого слоя жидкости под действием сил
тяжести и поверхностного натяжения.— Прикл. матем. и мех., 1965,
т. 29, вып. 5.
94. Ф. Л. Черноусъко. Задача о равповесии жидкости, подверженной
действию сил тяжести и поверхностного натяжения.— Сб. «Введение в
динамику тела с жидкостью в условиях невесомости». М., ВЦ АН СССР,
1968.
95. Ф. Л. Черноусъко. Некоторые задачи оптимального управления с
малым параметром.— Прикл. матем. и мех., 1968, т. 32, вып. 1.
96. Л. И. Шатровский. Об одпом численном методе решения задачи
оптимального управления.— Ж. вычисл. матем. и матем. физ., 1962, т. 2,
№ 3.
97. Т. М. Энеев. О применении градиентного метода в задачах теории
оптимальпого рагулирования.— Космические исслед., 1966, т. 4,
№ 5.
98. К. Дж. Эрроу, Л. Гурвиц, X. Удзава. Исследования по
линейному и нелинейному программированию. М., ИЛ, 1962.
99. Н. Н. Яненко. Метод дробных шагов решения многомерных задач
математической физики. М., «Наука», Сиб. отд. Новосибирск,
1967.
100. Н. Т. Greenberg. Complementary minimum principles for an elastic
plastic material.— Quart. App. Math., 1949, v. 7.
101. A. A. Griffith. The phenomenon of rupture and flow in solids.— Phil.
Trans. Roy. Soc. London, Ser. A, 1920, v. 221.
102. A. Mioduchowski. Plastyczne skrecanie pretow. Rozprawy inzynierskie.
Warszawa, 1971, t. 19, Z. 1.
103. B. Hill, E. H. Lee, S. T. Tupper. A method of numerical analysis of
plastic flow in plane strain and its application to the compression of
a ductile material between rough plates.— J. App. Mech., 1951,
v. 18.
104. P. Hodge, W. Prager. A variational principle for plastic materials with
strain-hardening.— J. Math, vind Phys., 1948, v. 27.
105 . R. Southwell. Relaxation methods in theoretical physics.— Oxford
University Press, 1946, v. 1, 1956, v. 2.
Литература
236
106. R. V. Southwell, D. N. Allen de G. Relaxation methods applied to
engineering problems.— Phil. Trans. Roy. Soc, 1950, v. 242.
107. D. H. Winne, В. М. Windt. Application of the Griffith-Irwin theory
of crack propagation of the bursting behavior of disks, including
analytical and experimental studies.— Trans. ASME, 1958, v. 80, N 8.
108. H. H. Моисеев. Численные методы в теории оптимальных систем. М.,
«Наука», 1971.
109. А. Брайссн, Хо Ю-Ши. Прикладная теория оптимального управления.
М., «Мир», 1972.
110. Ж.— Л. Лионе. Оптимальное управление системами, описываемыми
уравнениями с частными производными. М., «Мир», 1972.
СОДЕРЖАНИЕ
Предисловие 5
МЕТОД ЛОКАЛЬНЫХ ВАРИАЦИИ
Глава 1. Метод локальных вариаций для численного решения
вариационных задач 7
§ 1. Описание метода для простейшей вариационной задачи 7
§ 2. О машинной реализации метода 12
§ 3. Дополнительные замечания 15
§ 4. Задачи с частными производными 20
§ 5. Алгоритм метода для общей задачи с неаддитивным
функционалом в случае одной независимой переменной ... 23
§ 6. Алгоритм метода для общей вариационной задачи в
частных ироизводных с неаддитивным функционалом .... 29
§ 7. Схемы метода с переменным шагом варьирования ... 36
§ 8. Примеры 40
§ 9. О приложениях метода к задачам математической физики
и другим краевым задачам 52
Глава 2. Вопросы сходимости метода локальных вариаций
§1. Исследование необходимых условий экстремума .... 58
§ 2. Сходимость метода локальных вариаций для задач с
квадратичным функционалом 65
§ 3. Теорема о сходимости метода покоординатного спуска 69
§ 4. Оценки сходимости в задачах с ограничениями .... 77
ЧИСЛЕННОЕ РЕШЕНИЕ ВАРИАЦИОННЫХ ЗАДАЧ
МЕХАНИКИ СПЛОШНЫХ СРЕД
Глава 3. Вариационные задачи равновесия жиднеои 94
§ 1. Постановка задачи об определении формы равновесия
жидкости под действием массовых сил и сил поверхностного
натяжепия 94
§ 2. Исследование свойств вариационной задачи 97
§ 3. Численное решение задачи гидростатики при
положительных числах Бонда 100
§ 4. Численное решение задачи гидростатики при
отрицательных числах Бонда Ю5
Глава 4. Вариационные задачи равновесия упругих тел *08
§ 1. Равновесие стержней и пластинок
§ 2. Двумерные задачи теории упругости
§ 3. Некоторые задачи теории трещин
Глава 5. Решение вариационных задач для упруго-пластических
и вязко-пластических сред 125
§ 1. Кручение упруго-нластических стержней 125
§ 2. Решение плоских задач для упруго-пластических сред 136
§ 3. Осесимметричпые упруго-пластические задачи 150
§ 4. Стационарное течение вязко-пластической среды . . . . 158
НЕКОТОРЫЕ ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ОПТИМАЛЬНОГО
УПРАВЛЕНИЯ
Глава 6. Метод локальных вариаций для численного решения задач
оптимального управления 168
§ 1. Постановка задачи. Элементарная операция 168
§ 2. Описание алгоритма 172
§ 3. Задача о полете самолета па максимальпую дальпость 177
"* § 4. Задача об оптимальной стабилизации спутника .... 180
Глава 7. Метод последовательных приближений для решения задач
оптимального управления 186
§ 1. Простейший вариант метода 186
§ 2. Способы улучшения сходимости 189
§ 3. Некоторые обобщения 192
§ 4. Задача о максимальной дальности планирования в
сопротивляющейся среде 199
§ 5. Одна задача об оптимальном мапевре в центральном поле 204
ПРОГРАММЫ ЧИСЛЕННЫХ МЕТОДОВ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
Глава 8. Программа метода локальных вариаций для решения
вариационных задач с одной независимой переменпой .... 207
§ 1. Описание процедуры 207
§ 2. Процедура па языке АЛГОЛ-60 210
§ 3. Пример 212
§ 4. Использование процедуры для решения задач оптимального
управления ... 213
Глава 9. Программа метода локальных вариаций для задач с
частными производными 214
§ 1. Описапие программы 214
§ 2. Процедура па языке АЛГОЛ-60 216
§ 3. Пример 217
Глава 10. Программа метода последовательных приближений для
задач оптимального управления 220
§ 1. Описание программы 220
§ 2. Процедура на языке АЛГОЛ-60 226
§ 3. Пример 228
Литература
231
ФЕЛИКС ЛЕОНИДОВИЧ ЧЕРНОУСЬКО, НИКОЛАЙ ВЛАДИМИРОВИЧ БАНИЧУК
ВАРИАЦИОННЫЕ ЗАДАЧИ МЕХАНИКИ И УПРАВЛЕНИЯ
ЧИСЛЕННЫЕ МЕТОДЫ
Утверждено к печати Институтом проблем механики
Редактор Г. В. Горшков. Художник В. Ф. Соболев
Технический редактор О. Г. Ульянова.
Сдано в набор 7/Ш 1973 г. Подписано к печати 4/VI 1973 г. Формат 60х90'/ц.
Бумага № 2 Условн. печ. л. 15. Уч.-изд. л. 13,5. Т-04897. Тираж 3400 экз. Заказ 1879.
Цена 1 р. 04 к.
Издательство «Наука» 103717 ГСП Москва, К-62, Подсосенский пер., 21
2-я типография издательства «Наука». 121099. Москва, Шубинокий пер., 10
ОПЕЧАТКИ
Стр.
7
35
36
36
64
171
227
Строка
ф-ла A.1.2)
ф-ла A.6.4)
11 св.
19 св.
13 св.
ф-ла F.1.7)
13 сп.
Напечатано
а
Э<о
задачи A.6.4)
задачи с функционалом...
du »x^ftr.JT 0х^\дихх)
= (МГ+...
*:>
Следует читать
Ь
J
а
0>О
задачи с функционалом
Г = F/ЧГ, с условием, A.6.4)
задачи ири любых
= /<>((*' + ...
я>
Ф. Д. Черноусько, Н. В. Ваяичук