/

































































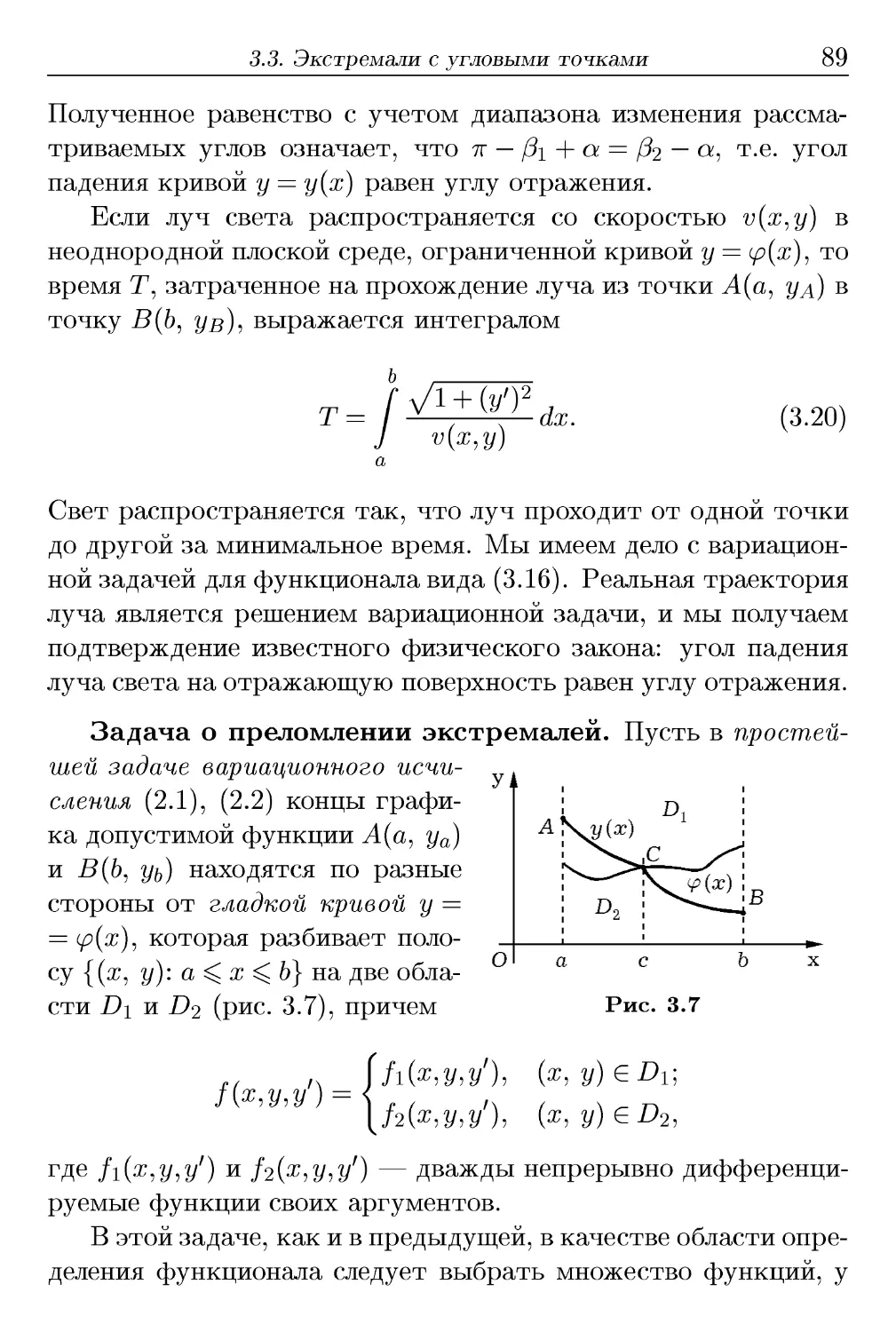























































































































































































































































































































Author: Кувыркин Г.Н. Ванько В.И. Ермошина О.В.
Tags: анализ геометрия топология высшая математика прикладная математика математическое моделирование
ISBN: 5-7038-2627-6
Year: 2006




Text
МАТЕМАТИКА
В ТЕХНИЧЕСКОМ УНИВЕРСИТЕТЕ
ъ
![у] = / f(x,y,y')dx -> extr
В.И. Ванько, О.В. Ермошина,
Г.Н. Кувыркин
ВАРИАЦИОННОЕ
ИСЧИСЛЕНИЕ
И
ОПТИМАЛЬНОЕ
УПРАВЛЕНИЕ
Издательство МГТУ им. Н. Э. Баумана
Математика в техническом
университете
Выпуск XV
Серил удостоена
Премии Правительства
Российской Федерации
в области науки и техники
за 2003 год
... Мне казалось, что лучше пересказать
удовлетворившие меня изложения различных вопросов
механики, чем в погоне за ложной
оригинальностью ставить себя в странное положение не
повторять умных формулировок лишь на том
основании, что они были кем-то до тебя
сказаны.
Н.Г. Четаев. Теоретическая механика
Комплекс учебников из 21 выпуска
Под редакцией B.C. Зарубина и А.П. Крищенко
I. Введение в анализ
П. Дифференциальное исчисление функций
одного переменного
III. Аналитическая геометрия
IV. Линейная алгебра
V. Дифференциальное исчисление функций
многих переменных
VI. Интегральное исчисление функций
одного переменного
VII. Кратные и криволинейные интегралы.
Элементы теории поля
VIII. Дифференциальные уравнения
IX. Ряды
X. Теория функций комплексного переменного
XI. Интегральные преобразования
и операционное исчисление
XII. Дифференциальные уравнения
математической физики
XIII. Приближенные методы математической физики
XIV. Методы оптимизации
XV. Вариационное исчисление и оптимальное управление
XVI. Теория вероятностей
XVII. Математическая статистика
XVIII. Случайные процессы
XIX. Дискретная математика
XX. Исследование операций
XXI. Математическое моделирование в технике
В.И. Ванько, О.В. Ермошина, Г.Н. Кувыркин
ВАРИАЦИОННОЕ
ИСЧИСЛЕНИЕ
И
ОПТИМАЛЬНОЕ
УПРАВЛЕНИЕ
Под редакцией
д-ра техн. наук, профессора B.C. Зарубина
и д-ра физ.-мат. наук, профессора А.П. Крищенко
Издание третье, исправленное
Рекомендовано
Министерством образования
Российской Федерации
в качестве учебника для студентов
высших технических учебных заведений
Москва
Издательство МГТУ им. Н. Э. Баумана
2006
УДК 517.1@75.8)
ББК 22.151.5
В17
Рецензенты: проф. Бобылев Н.А., проф. Васин Р.А.
Ванько В.И., Ермошина О.В., Кувыркин Г.Н.
В17 Вариационное исчисление и оптимальное управление: Учеб.
для вузов / Под ред. B.C. Зарубина, А.П. Крищенко. - 3-е изд.,
исправл. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. -488 с.
(Сер. Математика в техническом университете; Вып. XV).
ISBN 5-7038-2627-6 (Вып. XV)
ISBN 5-7038-2484-2
Наряду с изложением основ классического вариационного исчисления
и элементов теории оптимального управления рассмотрены прямые
методы вариационного исчисления и методы преобразования вариационных
задач, приводящие, в частности, к двойственным вариационным
принципам. Учебник завершают примеры из физики, механики и техники, в
которых показана эффективность методов вариационного исчисления и
оптимального управления для решения прикладных задач.
Содержание учебника соответствует курсу лекций, который авторы
читают в МГТУ им. Н.Э. Баумана.
Для студентов и аспирантов технических университетов, а также
для инженеров и научных работников, специализирующихся в области
прикладной математики и математического моделирования.
Ил. 52. Библиогр. 77 назв.
УДК 517.1@75.8)
ББК 22.151.5
© В.И. Ванько, О.В. Ермошина,
Г.Н. Кувыркин, 1999;
2006, с изменениями
© Московский государственный
технический университет
им. Н.Э. Баумана, 1999;
2006, с изменениями
ISBN 5-7038-2627-6 (Вып. XV) © Издательство МГТУ
ISBN 5-7038-2484-2 им- Н-Э- Баумана, 1999;
2006, с изменениями
ПРЕДИСЛОВИЕ
В истории развития естественных наук четко
прослеживается стремление свести количество исходных положений данной
науки к минимуму, и лучше всего к одному
основополагающему принципу, который, как в зерне, заключал бы в себе все
содержание рассматриваемой области знаний. Например, из
принципа возможных перемещений Лагранжа вытекают
уравнения равновесия системы материальных точек и абсолютно
твердых тел. Соединив принцип Лагранжа с принципом
Даламбера, получим более общий принцип механики, следствиями
из которого являются уравнения движения.
Упомянутые принципы естественным образом обобщаются
на сплошные среды — деформируемые твердые тела, жидкости
и газы.
Одна из трудностей вычислительного характера,
возникающих при реализации решения задачи, например, о нахождении
напряженно-деформированного состояния сплошной среды
либо некоторой конструкции, — высокий порядок производных
искомых величин в уравнении движения (равновесия). Кроме
того, вывод самих уравнений движения и постановка краевых
условий зачастую являются самостоятельной проблемой.
В настоящее время достаточно распространена следующая
схема постановки задач о состоянии деформируемых тел. На
основе подходящего (в части IV мы обсуждаем этот вопрос)
вариационного принципа выписывают функционал (чаще
всего некоторое интегральное соотношение). С помощью правил
и приемов вариационного исчисления получают уравнения
движения и естественные краевые условия. Последнее
обстоятельство является замечательным фактом: "хороший"
вариационный принцип содержит всю информацию о природе изучаемого
явления. Однако, если получен функционал и известны его
экстремальные свойства, до уравнений движения (равновесия)
6
ПРЕДИСЛОВИЕ
дело не доводят, а строят последовательность функций,
предел которой доставляет функционалу стационарное или
экстремальное значение, например, минимизирует значение
функционала. Этот способ получения приближенного решения является
наиболее простым и экономичным.
Авторы выпуска XV серии „Математика в техническом
университете" ставят перед собой следующие задачи:
- изложить основы классического вариационного
исчисления, подчеркнув при этом особенности и специфику
вариационных задач как задач, обобщающих проблему поиска
экстремумов функций многих переменных без ограничений и с
таковыми;
- обсудить основные идеи и методологию теории
оптимального управления Понтрягина и метода динамического
программирования Беллмана;
- изложить основную идею преобразования вариационных
задач (выявление двойственных вариационных задач) и
построения на их основе аппроксимаций искомого решения.
В части IV приведены некоторые примеры применения
вариационных принципов при постановке и решении различных
научно-технических проблем. Известные уравнения
математической физики, уравнения движения идеальной жидкости
получены на основе принципа Гамильтона. Обсуждены
знаменитая аэродинамическая задача Ньютона, вариационные аспекты
проблемы собственных чисел и в этой связи проблема
устойчивости конструкций. Рассмотрены динамические и
нестационарные задачи термомеханики.
Основные источники, использованные при написании этого
выпуска серии, включены также в список рекомендуемой
литературы в конце книги.
Мы считаем своим долгом выразить признательность
доцентам А.Н. Канатникову, чья критика во многом
способствовала совершенствованию изложения, и А.Д. Герман, которая
любезно предоставила нам записи своих лекций по
вариационному исчислению. Авторы будут благодарны каждому, кто
выскажет по книге свои замечания.
7
Задания для самопроверки
1. Какие множества называют: а) замкнутыми; б)
открытыми; в) ограниченными; г) компактными? Что
называют диаметром множества? [I]
2. Дайте определение точной верхней (нижней)
грани числового множества. В чем различие между minf(x)
и 'mif(x) для действительной функции f(x) одного
действительного переменного, определенной на некотором
промежутке числовой прямой? [I]
3. Напишите формулу Тейлора: а) для функции одного
действительного переменного; б) для функции многих
переменных. [II], [V]
4. Как проверить, является ли функция одного
действительного переменного выпуклой вверх (вниз)? [II]
5. Что такое: а) линейное пространство; б) евклидово
пространство; в) нормированное пространство?
Приведите пример нормы в линейном пространстве. Как вводят в
W1 стандартное скалярное умножение? [IV]
6. Как найти собственные значения и собственные
векторы: а) линейного оператора в конечномерном
линейном пространстве; б) квадратной матрицы? Что
такое характеристическое уравнение матрицы? [IV]
7. Какую квадратичную форму называют
положительно (отрицательно) определенной? Сформулируйте
критерий Сильвестра. [IV]
8. Какую функцию многих переменных называют: а)
непрерывной по совокупности переменных; б) непрерывной по части
переменных?
9. Что называют условным экстремумом функции
многих переменных? Как можно найти точки условного
экстремума? Что такое множители Лагранжа? [V]
10. При каких условиях интеграл, зависящий от
параметра, есть дифференцируемая функция? [VI]
8
ПРЕДИСЛОВИЕ
11. Что называют: а) кратным интегралом; б)
криволинейным интегралом; в) поверхностным интегралом?
Напишите: а) формулу Грина; б) формулу
Остроградского — Гаусса; в) формулу Стокса. В каком случае значение
криволинейного интеграла не зависит от пути
интегрирования? [VII]
12. Пусть дано обыкновенное дифференциальное
уравнение (ОДУ) гг-го порядка. Что называют его: а) частным
решением; б) общим решением? Как для этого уравнения
ставится задача Коши? [VIII]
13. Что такое первый интеграл системы ОДУ? Как
ОДУ n-го порядка можно преобразовать в систему п ОДУ
первого порядка? [VIII]
14. Что называют нормальной системой ОДУ? Как
для однородной нормальной системы линейных ОДУ
построить фундаментальную систему решений? [VIII]
15. Пусть дана нормальная система ОДУ. Что называют ее:
а) решением; б) фазовой траекторией; в) интегральной
кривой? При каких условиях фазовые траектории системы не
пересекаются? [VIII]
16. Что такое сходящийся числовой ряд? При каких
условиях данный функциональный ряд сходится на данном
множестве точек: а) поточечно; б) равномерно? [IX]
17. При каких условиях на периодическую функцию
можно утверждать, что ее ряд Фурье сходится к ней: а) в
данной точке; б) на данном промежутке? [I], [IX]
18. Дайте определение: а) банахова пространства;
в) гильбертова пространства. Что называют рядом
Фурье элемента гильбертова пространства? Напишите
неравенство Бесселя и равенство Парсеваля. [IX]
19. Сформулируйте задачу Штурма — Лиувилля.
Найдите собственные значения и собственные функции
оператора Штурма — Лиувилля в случае граничных условий в
виде линейной комбинации функции и ее производной. [XI],
[XII]
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
^ и > — начало и окончание доказательства
Ф — окончание примера, замечания
а Е А, А Э а — элемент а принадлежит множеству А
(множество А содержит элемент а) 1-1.1
А С В, В D А — множество А является подмножеством В
(множество В содержит в себе множество А) 1-1.2
V — замыкание множества V в нормированном или
метрическом пространстве XIII
dV — граница множества V в нормированном или
метрическом пространстве 1-185, XIII
N — множество натуральных чисел 1-1.2
Ш — множество действительных чисел 1-1.3
С — множество комплексных чисел 1-4.3, X
W1 — линейное арифметическое пространство IV
АВ, \АВ\ — отрезок, соединяющий точки АиВ, и его длина
III
а, а — вектор (элемент линейного пространства) и столбец
его координат IV
\а\ — длина (модуль) вектора а III, IV
||а|| — норма вектора а в нормированном пространстве
IV
О — нулевой вектор III, IV
(а, Ь) — скалярное произведение векторов а и Ъ III, IV
10
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
А — матрица, транспонированная к А III
det А — определитель матрицы А III
п
^2 ак — сумма п слагаемых ai, ..., a&, ..., ап 1-2.6
k=i
к = 1, п — число к принимает последовательно все значения из
множества N от 1 до п включительно 1-2.6
/(a),/(ж)| _ — значение функции f(x) в точке а 1-2.1
x(t) — вектор-функция скалярного аргумента t II
/(ж) — векторная функция векторного аргумента (функция
многих переменных) V
grad/(#) — градиент скалярной функции /(ж) векторного
аргумента х V
ж(?), x'(t) — производная вектор-функции скалярного
аргумента t II
^(Ж,У)? /ж5 fx(xiV) — частная производная функции /(ж,у) по
переменному х V
J [у] — функционал, определенный на некотором множестве
функций у(х); значение функционала на функции (в
точке) у(х) 1.2
II'11с II'11с1 — нормы в нормированном пространстве С1 [а, Ь]
1.2
КС[а,Ь] — линейное пространство кусочно непрерывных на
отрезке [а, Ь] функций 6.5
Сп[а,Ь] — нормированное пространство функций, имеющих
непрерывную п-ю производную IV, 1.2
L2(Q) — гильбертово пространство функций, суммируемых
на множестве О С M.N с квадратом IX
11
<%, Sy(x) — вариация аргумента функционала, значение
вариации в точке х 1.2
8у' = FуУ — производная от вариации 5у
5J[y,5y] — (первая) вариация функционала J в точке у 1.2
52J[y,Sy] — вторая вариация функционала J в точке у 5.2
/*[ж,гх] — вспомогательный функционал, соответствующий
функционалу /[ж, г/] 7.2
H(t,x,p) и Н(Ф,х,и) — функция Гамильтона и функция Пон-
трягина 7.2, 7.3
V — оператор Гамильтона VII
А — оператор Лапласа VII
D(A) и R(A) — область определения и область значений
оператора А 10.2
12
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
Буквы латинского алфавита
Начертание
А а
В ъ
С с
D d
Е е
F f
G g
Н h
I i
J.i
К k
L 1
M m
A a
В b
С с
D d
E e
F f
G g
H h
I i
J j
К к
L I
M m
Произношение
a
бэ
ЦЭ
ДЭ
e
эф
же
аш
и
йот
ка
эль
эм
Начер
N п
О о
Р р
Q q
R г
S s
Т t
U и
V v
W w
X х
Yy
Z z
тание
N п
О о
Р р
Q q
R г
S s
Т t
U и
V v
W w
X х
Y у
Z z
Произношение
эн
0
пэ
ку
эр
эс
тэ
У
вэ
дубль-вэ
икс
игрек
зэт
Буквы греческого алфавита
Начертание
А а
В /3
Г 7
А 8
Е е
z С
Н 7/
в де
Произношение
альфа
бета
гамма
дельта
эпсилон
дзета
эта
тэта
Начертание
I L
К К
Л А
М fJL
N v
Е z
О о
П 7Г
Произношение
йота
каппа
ламбда
ми
ни
кси
омикрон
пи
Начертание
Р р
S о
Т т
Т v
Ф ср
X х
ф ф
О L0
Произношение
ро
сигма
тау
ипсилон
фи
хи
пси
омега
Представлен наиболее употребительный (но не
единственный) вариант произношения (в частности, вместо „йот" иногда
говорят „жи").
ЧАСТЬ I
Классическое
вариационное
исчисление
Вариационное исчисление в широком
смысле — это учение об изменении функций,
и в качестве такового оно оказывается
продолжением дифференциального и
интегрального исчислений.
При таком понимании, например,
исследования Пуанкаре о проблеме трех тел
образуют главу вариационного
исчисления, поскольку в них Пуанкаре из
известных траекторий, обладающих некоторым
свойством, с помощью принципа
варьирования получил новые траектории,
обладающие нужными свойствами.
Д. Гильберт
1. ОСНОВНЫЕ ПОНЯТИЯ
Разнообразие задач, приводящих к поиску максимума или
минимума некоторой интегральной величины, весьма велико.
Это отражает мудрое высказывание великого Эйлера: „ В мире
нет ничего, в чем не был бы виден смысл какого-либо
максимума или минимума".
1.1. Задачи, приводящие
к вариационным проблемам
Примеры успешного решения экстремальных проблем
можно найти уже в древней истории.
Пример 1.1 (задача Д и доны). В IX в. до н.э.
финикийская царевна Дидона и несколько ее спутников, спасаясь от
преследования тирской знати, бежали из г. Тира и высадились
на африканском берегу Средиземного моря. Решив
поселиться именно здесь, Дидона упросила местных жителей отдать в
ее распоряжение участок земли, который можно охватить
шкурой быка (чувствуете двусмысленность постановки вопроса?).
Простодушный правитель тех мест не понял всей глубины
замысла и согласился отдать беглецам участок земли, который,
по его разумению, должен был по площади быть равным
площади расправленной шкуры быка. Дидона же после заключения
соглашения разрезала шкуру быка на тонкие полоски, связала
их в длинный ремень и ограничила им довольно значительную
территорию на берегу моря. Так был заложен город Карфаген,
который впоследствии был-таки разрушен римлянами.
Задача, которую поставила Дидона, может быть
сформулирована следующим образом. Найти такую кривую заданной
длины L (L в упомянутой выше истории — длина ремня из
16
1. ОСНОВНЫЕ ПОНЯТИЯ
шкуры быка), которая ограничивает на плоскости фигуру
наибольшей площади.
Формализуем задачу. Считая берег моря прямолинейным,
расположим прямоугольную систему координат Оху так,
чтобы ось Ох совпала с берегом моря. Предположим, что
прямолинейная (морская) часть
границы участка земли есть
отрезок [а, Ь] оси Ox, а
криволинейная часть является
графиком гладкой (т.е.
непрерывно дифференцируемой)
функции у = у(х), определенной на
Рис. 1.1 отрезке [а, Ь] (рис. 1.1). При
этом
у(а)=у(Ь)=0. A.1)
При сделанных предположениях длина L криволинейной части
границы вычисляется по формуле [VI]
ъ
L= f у/1 + у'(х)Чх, A.2)
а
а площадь S земельного участка — по формуле
ь
S= [y(x)dx. A.3)
а
Итак, требуется найти такую гладкую функцию у = у (ж),
которая удовлетворяет условиям A.1) и A.2) (L фиксировано)
и обеспечивает интегралу A.3) максимальное значение. #
Задачи подобного рода ставили и решали (своими,
оригинальными, способами) еще Аристотель и Архимед. Так,
Архимед установил замечательное свойство окружности: из всех
1.1. Задачи, приводящие к вариационным проблемам 17
замкнутых кривых, длины которых равны некоторому
заданному значению, окружность охватывает наибольшую площадь;
из всех замкнутых кривых, которые охватывают заданную
площадь, окружность имеет наименьшую длину.
Несмотря на наличие древних прецедентов, моментом
рождения вариационного исчисления как математической
дисциплины принято считать 1696 год, когда в июньском номере
журнала „Acta Eruditorium" появилось письмо И. Бернулли, в
котором он писал: „Остроумнейших математиков всего мира
приветствую я, Иоганн Бернулли! Людей высокого ума нельзя
ничем более привлечь к работе, как указать им трудную и
вместе с тем полезную задачу, решением которой возможно и славу
приобрести, и оставить по себе вечный памятник. Я надеюсь,
что заслужу благодарность ученого мира, если я, по примеру
Паскаля, Ферма и других великих, предложу лучшим
математикам нашего времени задачу, которая даст им возможность
испробовать, хороши ли те методы, которыми они владеют, и
как велика сила их ума. Если кто-нибудь найдет решение
предложенной задачи и сообщит об этом мне, то я объявлю ему
публично заслуженную хвалу".
Вскоре были даны три решения задачи И. Бернулли: первое
принадлежало Якову Бернулли, второе — Лопиталю, третье
появилось в английском научном журнале без подписи автора,
но И. Бернулли без труда узнал в авторе Исаака Ньютона по
его „львиным когтям".
Вот задача, предложенная И. Бернулли.
Пример 1.2 (задача о брахистохроне). В
вертикальной плоскости через две данные точки О и В, не лежащие на
одной вертикали, провести кривую (т.е. найти ее уравнение),
двигаясь по которой, материальная точка под действием силы
тяжести переместится из верхней точки в нижнюю за
кратчайшее время (рис. 1.2). Ту же задачу можно сформулировать и
так: как спроектировать крышу дома, чтобы капли дождя
скатывались с конька крыши за наименьший промежуток времени.
18
1. ОСНОВНЫЕ ПОНЯТИЯ
Предположим, что начальная
скорость падающей точки равна
нулю, а силы трения
отсутствуют. К моменту, когда расстояние
от начального положения точки
О по вертикальной оси Оу
прямоугольной системы координат
Оху будет равно у, точка
потеряет потенциальную энергию,
которая уменьшится на гаду (га — масса точки, д — ускорение
свободного падения). Кинетическая энергия при этом
увеличится на rav2/2 (v — скорость точки). В силу закона
сохранения энергии (ведь трение отсутствует) имеем
rav2
— гаду = О,
откуда
Далее, предполагая, что траектория движения есть кривая
у = у (ж), причем у(х) — гладкая функция, определенная на
отрезке [а, ft], получаем
_ ds _ ^/l + (y'Jdx
dt dt
где ds — дифференциал длины дуги кривой; t — время.
Поэтому
^ydt = y/l + (y'Jdx,
и мы приходим к уравнению
1.1. Задачи, приводящие к вариационным проблемам 19
Из этого уравнения находим время, необходимое для перехода
из точки О в точку В:
t=[^tWdx. A.4)
о
Известные координаты начальной и конечной точек дают
краевые условия для функции у(х):
3/@) = 0, у(Ъ)=ув. A.5)
Таким образом, нужно найти гладкую функцию у (ж), для
которой t —>> min при краевых условиях A.5).
Пример 1.3 (задача о преломлении света). Согласно
принципу Ферма, луч света, выходящий из точки А и
попадающий в точку 5, избирает путь, время перехода по которому
является наименьшим. В однородной среде скорость света
постоянна, а свет распространяется по прямым. Если же среда
неоднородна, то скорость света изменяется от точки к точке, а
траектории лучей света уже не будут прямыми. Пусть средой
является атмосфера. Поскольку плотность воздуха зависит от
высоты у над уровнем моря, то правомерно предположить, что
и скорость света v зависит от у и выражается с помощью
известной функции v(y). Определим траекторию луча света из
данной точки А в данную точку В. В вертикальной
плоскости, проходящей через точки А и i?, выберем прямоугольную
систему координат так, что ось Ох горизонтальна и
расположена на уровне моря. Нам известны координаты А(а, у а) и
В{Ъ, у в)- Считаем, что луч света распространяется по кривой,
являющейся графиком гладкой функции у (ж), определенной на
отрезке [a, ft] (рис. 1.3).
При сделанных предположениях имеем v(y) = —, где ds =
= y/l + (y'Jdx — дифференциал длины дуги кривой у = у(х).
20
1. ОСНОВНЫЕ ПОНЯТИЯ
Рис. 1.3
Рис. 1.4
Поэтому
dt-
ds
v(y)'
и время, необходимое для перехода света из точки А в точку
В, выражается интегралом:
о
-I
л/1 + (^2
v{y)
¦dx.
A.6)
Задача состоит в определении такой гладкой функции у = у (ж),
удовлетворяющей условиям у (а) = ул, у(Ь) = у в, что интеграл
A.6) получает наименьшее значение.
Сравнив A.6) и A.4), отметим, что задача о
брахистохроне — частный случай задачи о преломлении света. Этот факт,
подмеченный впервые И. Бернулли, представляет собой так
называемую оптико-механическую аналогию*.
Пример 1.4 (задача о минимальной поверхности
вращения). Пусть требуется в плоскости хОу соединить точки
А(а, уа) и В{Ъ, ув) кривой так, чтобы боковая поверхность
тела, полученного от вращения этой кривой вокруг оси Ох, имела
наименьшую площадь (рис. 1.4).
*См.: Курант Р., Гильберт Д. (Здесь и далее в подстрочных
библиографических ссылках указаны фамилии авторов работ, приведенных в списке
литературы в конце книги.)
1.1. Задачи, приводящие к вариационным проблемам 21
Как и выше, предполагаем, что искомая кривая является
графиком гладкой функции у (ж), определенной на отрезке [а, Ь].
Вспомнив формулу для площади S боковой поверхности тела
вращения [IV], получим задачу
ь ъ
S = 2тг / yds = 2тг / y^/l + (yfJdx ->> min A.7)
a a
с краевыми условиями у (а) —уа-> у(Ь) =Ув-
Пример 1.5 (задача о геодезических линиях). На
поверхности, заданной в прямоугольной системе координат
Oxyz уравнением (p(x,y,z) = 0, проведем кривую, соединяющую
две точки А и В этой поверхности и имеющую наименьшую
длину (рис. 1.5).
Наименьшие по длине линии между двумя точками
некоторой поверхности являются геодезическими линиями этой
поверхности. Например, геодезическими линиями плоскости
являются прямые, геодезическими линиями на сфере — дуги
большого круга.
22
1. ОСНОВНЫЕ ПОНЯТИЯ
Предположим, что поверхность (p(x,y,z) =0 является
гладкой, а искомая кривая может быть задана уравнениями у = у (ж),
z = z(x), х е [а, Ь], с помощью гладких функций у(х) я z(x).
Тогда ее длина L равна:
в
L = f^+V + «> = fvi + W + W*. A.8)
Задача свелась к определению таких гладких на отрезке [а, Ь]
функций у = у(х) и z = г(ж), что
<р(ж, у (ж), г(ж)) = 0, у(х0) = уо, уЫ) = уь
г(ж0) = ^о, z(xi) =гъ
а интеграл A.8) принимает минимальное значение. #
Оригинальность сформулированных задач — в том, что
неизвестными в них являются функции, которые должны сделать
значение интеграла наименьшим.
1.2. Основные определения
Пусть задано некоторое множество М функций.
Функционалом J на М называют отображение J: М —>> М множества
М в множество Ш действительных чисел. Функции из области
определения М данного функционала будем называть
допустимыми функциями.
Приведем некоторые типичные примеры функционалов:
- на множестве М всех функций, определенных на отрезке
[0, 1], можно задать функционал формулой J [у] = у@);
- на множестве М = С1\а,Ь\, интеграл
о
J[y] = j ^l+y'{xJdx,
1.2. Основные определения
23
представляющий собой длину кривой у = у (ж), х Е [а, Ь], задает
функционал;
- на том же множестве М = С1 [а, 6] можно определить
функционал с помощью формулы
ь
/ \/l + y'(xJdx
а
(отношение интегралов представляет собой абсциссу центра
масс кривой у = у(х) [VI]).
Замечание 1.1. Уже по приведенным примерам видно, что
интеграл, с помощью которого задается функционал, может
быть достаточно сложным. Упрощая запись, в таких
интегралах в подынтегральном выражении опускают аргументы
неизвестной функции. Так, например, один из указанных выше
интегралов записывают следующим образом:
ь
fy/l + Wdx.
а
Мы и в дальнейшем будем придерживаться этого правила, а
подробную запись будем использовать лишь в отдельных
случаях, когда требуется подчеркнуть характер функциональной
зависимости.
Область определения М функционала может иметь
различную структуру. Будем предполагать, что М — нормированное
пространство, норму произвольного элемента х в нем будем
обозначать ||ж||. Если в данном нормированном пространстве
рассматриваются различные нормы, то их будем различать
добавлением индекса, например ||ж|| . Приведем примеры.
24
1. ОСНОВНЫЕ ПОНЯТИЯ
Пример 1.6. а. Банахово пространство С[а,Ь] функций
/(ж), непрерывных на отрезке [а, Ь], норма в котором
определяется формулой
||/||c = max|/(x)|.
[а,Ь]
б. Банахово пространство С1^,^] функций, непрерывно
дифференцируемых на отрезке [а, ft]. Норму в этом
пространстве можно определить так:
\\f\\ci=™*{\f(x)\ + \f'(x)\}.
[а,Ь]
в. Гильбертово пространство L2[a,ft] функций,
суммируемых с квадратом на отрезке [а, ft]. Нормой в этом пространстве
является
ь2
Jp(x)dx. #
\ а
При изучении функционалов вводят ряд понятий,
аналогичных соответствующим понятиям для функций: непрерывность,
дифференцируемость, экстремум и др.
Если функционал J[y] задан на линейном пространстве L и
представляет собой линейную форму (линейную функцию) на
этом пространстве, т.е. для любых yi, у2 Е L и любых ai, а2 Е К
«/[«12/1 + «22/2] = <*i«/[yi] + «2«/[У2],
то функционал называют линейным.
Пример 1.7. Функционалы
ь
Му] = / y(x)dx, J2[y]=y@)
1.2. Основные определения
25
линейные, а функционал
ь
Ш = J{l + y(x)Jdx
а
таковым не является, ф
Сложность вариационного исчисления, да и ряда других
примыкающих математических дисициплин, состоит в том, что
функции, сопоставляющие аргументу некоторое значение, сами
рассматриваются как аргументы других отображений —
функционалов. При этом характер зависимости, которую функция
представляет, не является существенным. Учитывая эту
сложность, мы в дальнейшем будем называть точками функции,
рассматриваемые как элементы некоторого множества (как
правило, нормированного пространства) и как аргументы
некоторого функционала. Это аналогично тому, как мы часто
называем точкой аргумент действительной функции
действительного переменного.
В нормированном пространстве можно ввести понятия
окрестности точки и непрерывности отображения [IX], которые
аналогичны соответствующим понятиям для числовых
функций [I]. Так, ^-окрестностью точки у о нормированного
пространства N называют множество 0?(уо) = {у ?N: \\у — Уо\\ < s}•
Если в данном нормированном пространстве рассматриваются
несколько норм, то каждой норме соответствует своя ?-окрест-
ность фиксированной точки пространства.
Рассмотрим банахово пространство С1 [а, 6], введенное в
примере 1.6, б. Наряду с ранее указанной нормой ||-||^i в этом
пространстве часто используют и другую норму:
[а,Ь]
Отметим, что с нормой ||-||^ линейное пространство С1^,^] уже
не является банаховым.
26
1. ОСНОВНЫЕ ПОНЯТИЯ
Пусть е — положительное число. Сильной е-окрестно-
стъю функции уо Е С1 [а, Ь] назовем множество функций у Е
Е С1 [а, Ь], для которых
lll/-I/o|lc = niax|y(rz:)-yo(^)| <е.
[а,Ь]
Слабой е-окрестностью той же функции назовем
множество функций у Е С1 [а, Ь], для которых
Нз/-3/о|1с1 =П1ах{|у(ж)-у0(ж)| + |у/(ж)-Уо(жI} <?•
[а,Ь]
Из определений ясно, что функция у (ж), попавшая в слабую
^-окрестность функции уо(х), попадает и в сильную ?-окрест-
ность этой же функции. Другими словами, слабая ?-окрест-
ность всегда содержится в сильной 6-окрестности.
Функционал J [у], определенный на нормированном
пространстве М, называют непрерывным в точке у о Е М, если
для всякого числа S > 0 существует такая ^-окрестность
точки у о, что для любой точки у из этой окрестности выполнено
неравенство
\J[y]-J[yo]\<S.
В нормированном пространстве М функций выберем
некоторую функцию уо(х) и пусть у(х) — произвольная функция из
М. Разность у{х) — уо(х) = 5у(х) называют вариацией
функции уо(х). Сразу подчеркнем отличие понятия вариации от
приращения функции в точке. Приращение функции в
точке xq есть число, равное разности двух значений функции,
а вариация — это функция, равная разности двух функций,
рассматриваемых в качестве аргумента функционала. Для
данного функционала J[y] с областью определения М и данной
функции у Е М будем называть вариацию 6у этой функции
допустимой вариацией, если у + 5у Е М. Для
дифференцируемых функций следует различать производную вариации
5у' = Fу)' и вариацию производной 6(у'). Значением первого
1.2. Основные определения
27
понятия может быть лишь функция, являющаяся производной
допустимой вариации, а значением второго — любая
допустимая вариация.
Рассмотрим приращение функционала J [у], определенного
на нормированном пространстве С1 [а, Ь], в точке у,
соответствующее вариации (приращению аргумента) 5у:
AJ[y] = J[y + 5y]-J[y]. A.9)
Пусть его можно представить как сумму
AJ[y] = J[y + 8у] - J[y] = Ji[y,Sy] + o(Sy), A.10)
где Ji[y,Sy] — функционал, линейный относительно Sy, а
о{5у) — функционал, являющийся бесконечно малой более
высокого порядка по сравнению с \\Sy\\ при Sy —} 0 относительно
нормы ||• H^i в С1 [а,6], т.е.
|0(*У)| -+0 при ||*„|Н0.
\\Ы
с1
Тогда функционал J [у] называют дифференцируемым в
точке у, а линейный функционал J\[y,8y\ — сильным
дифференциалом {дифференциалом Фреше).
Понятие дифференцируемости функционалов аналогично
понятию дифференцируемости функций. Функция f(x) одного
действительного переменного дифференцируема в точке ж,
если ее приращение А/ (х) в этой точке можно представить в
виде [II]
Af(x) = ААх + о(Ах),
где А не зависит от Дж, а о(Ах)/Ах —>> 0 при Ах —>> 0. Обратим
внимание на то, что в этом представлении первое слагаемое
А Ах линейно относительно приращения Ах. Коэффициент
А первого слагаемого представляет собой производную ff(x)
функции в точке х.
28
1. ОСНОВНЫЕ ПОНЯТИЯ
Первой вариацией 5J[y,5y] функционала J в точке у
называют предел
SJ[y,Sy] = lim
J[y + aSy] - J[y] d
a
^J[y + aSy]
A.11)
a=0
Этот предел представляет собой функционал, который каждой
вариации 5у (при фиксированном у) ставит в соответствие
число. Если этот функционал линеен (по Sy), то его называют
слабым дифференциалом (дифференциалом Гато) в
точке у.
Замечание 1.2. В вариационном исчислении часто под
первой вариацией понимают то, что мы назвали дифференциалом
Гато. Другими словами, считают, что первая вариация
функционала линейна относительно вариации функции.
Теорема 1.1. Если функционал J [у] дифференцируем в
точке у, то его дифференциал Гато в точке у существует и
совпадает с дифференциалом Фреше.
-4 Выберем некоторую вариацию 6у в точке у и вычислим
предел
5J[yM = Пт Jh+°8V\-JM = Ит МУ,а8у} + о(а8у) =
а^О а а^О а
а^О а
Здесь второе равенство справедливо в силу дифференцируемо-
сти J [у], третье — в силу линейности J\ относительно 6у. При
этом следует учесть, что
lim
о(а5у)
а
\\6у\\ lim
а->-0
o(aSy)
так как при а —>> О
\\аду\\
||afy|| = |a|||<*y||-X).
11^2/11-0 = 0,
1.2. Основные определения
29
Доказанное равенство показывает, что первая вариация
SJ[y,Sy] дифференцируемого функционала представляет собой
функционал, линейный по 5у. Поэтому, согласно определению,
этот функционал и есть дифференциал Гато, который оказался
равным дифференциалу Фреше. >
Утверждение, обратное теореме 1.1, неверно:
дифференциал Гато может существовать и у недифференцируемого
функционала. Чтобы показать это, обратим внимание на следующее.
Понятия дифференциала Фреше и дифференциала Гато не
связаны с конкретным видом нормированного пространства, и
их можно рассматривать, например, в конечномерном
линейном арифметическом пространстве. В этом случае функционал
есть просто функция многих переменных, а дифференцируе-
мость такого функционала совпадает с дифференцируемостью
его как функции многих переменных [V]. Первая вариация
функционала в конечномерном случае соответствует
производной по направлению. Действительно, если задан „функционал"
/: W1 —>> IR, то „вариацией" аргумента х является произвольный
вектор Sx. Если этот вектор имеет единичную норму \\6х\\ = 1,
то значением первой вариации „функционала" на этом
приращении будет
.ггп r f(x + aSx)-f(x) df
fi[x,5x] = lim = —,
a->>0 a on
т.е. производная функции / по направлению n = Sx. В общем
случае
h[x,5x\ = \\5x\\ZL,
где п = ... Линейность первой вариации относительно Sx
\\дх\\
означает, что первая вариация представляется через скалярное
произведение
f1[x,Sx] = (a,6x), A.12)
30
1. ОСНОВНЫЕ ПОНЯТИЯ
где а — некоторый вектор. Отметим, что для
дифференцируемой функции / вектор а совпадает с градиентом этой функции.
Функция двух переменных
fl, xi=x\, (хъ ж2)^@, 0);
f{Xi,X2) = \
[О, х\ ф х\ или (^1, х%) = @, 0)
имеет производную в точке @, 0) по любому направлению,
равную нулю, и, следовательно, имеет в этой точке „дифференциал
Гато", так как производную по направлению можно
представить в виде A.12), если в качестве а взять нулевой вектор.
В то же время эта функция не является непрерывной в
точке @, 0), а потому не дифференцируема в этой точке, т.е. не
имеет „дифференциала Фреше".
В вариационном исчислении важнейшими являются
функционалы, заданные с помощью интегралов, например
b b
/ f(x,y,y')dx, / f{x,y,y',...^n))dx, \\ f(x,y,z,z'x,z'y)dxdy
a a D
и т.д. Такой функционал будем называть интегральным
функционалом, а подынтегральную функцию
соответствующего интеграла — интегрантом.
Выясним достаточные условия для существования сильного
и слабого дифференциалов у функционала
ъ
J[y] = Jf(x,y,yf)dx, A.13)
а
заданного на нормированном пространстве С1 [а, Ь] с нормой
||• H^i. Пусть / — дважды непрерывно дифференцируемая
функция трех переменных. Запишем приращение функционала
на некоторой функции у(х) Е С1[а^Ь\^ соответствующее некото-
1.2. Основные определения
31
рому приращению 5у(х) аргумента:
ь ь
AJ = J[y + Sy]-J[y]= f(x,y + 5y,y' + 5y')dx- f(x,y,y')dx =
а а
b
= \J(x,y + 6y,y' + 6y')-f(x,y,y'))dx.
а
Применим к подынтегральной функции формулу Тейлора:
ъ
AJ = J(fy&y,y,)Sy + fy>(x,y,y,)Sy,+
а
+ \^y{x,y+d8y,y, + d8y,){8yf + f'y,{x,y + d8y,y, + d8y,)8y8y,+
+ l-f^y,{x,y + №y,y' + {>8y'){8y,J)dx, A.14)
где $ G @, 1), вообще говоря, зависит от переменного х.
Отметим, что первые два слагаемых подынтегральной функции в
A.14) представляют собой непрерывную функцию переменного
х. Значит, оставшиеся слагаемые в совокупности образуют
непрерывную функцию, которую можно интегрировать. Оценим
соответствующий интеграл*:
filthy2 + -C"W + \fy'y> (VJ) dx
a
b
<^J{\Sy\2 + 2\6y\\Sy'\ + \Sy'\2)dx
^2N(b-a)\\Sy\\2cl=o(Sy).
* Векторный аргумент функции /иее производных не выходит за
пределы некоторого замкнутого ограниченного множества G в Ш . Поэтому
из непрерывности функции /иее производных следует их ограниченность
на G [V].
32
1. ОСНОВНЫЕ ПОНЯТИЯ
Здесь
N = ™A\fyy\Afyy>Wy>y>\}-
Так как Sy'dx = (8y)fdx = dEy), то, интегрируя по частям
ъ ъ
J fy>(x,y,y'My'dx= / fy,(x,y,y')dEy) =
а а
b
= {fy>(x,y,y'My)\a- / —(fy,(x,y,y'))Sydx,
а
находим, что приращение функционала можно представить в
виде
ъ
AJ = J^(x,y,y')-^/(x,y,y')Mydx +
а
+ (f^(x,y,y')8y)\ba + oEy), A.15)
т.е. в виде суммы функционала, линейного относительно 5у
(первые два слагаемых) и бесконечно малой высшего
порядка относительно 5у при 5у ^ 0 (третье слагаемое). Значит,
дифференцируемость функционала доказана и найден его
дифференциал Фреше, который можно представить в виде
ъ
Ji[y,5y] = J(f^y + f^Syf)dx, A.16)
а
поскольку первые два слагаемых в A.15) получены
преобразованием интеграла A.16) интегрированием по частям.
Для существования дифференциала Гато достаточными
являются более слабые условия непрерывности функции / и ее
частных производных /' и /',. Действительно, вычисление
1.2. Основные определения
33
первой вариации сводится к дифференцированию интеграла по
параметру:
ь
а=0
д Г |
5J[y, 6у] = — f(x,y + а5у, у' + aSy') dx |
а
Ь Ъ
= / -^f{x,y + a8y,y' + a8y')dx^ = \ (fy8y + fy,8y')dx.
а а
Для законности такого дифференцирования достаточно
непрерывности подынтегральной функции и ее частной производной
по параметру [VI], что обеспечивается поставленными
условиями. Полученная первая вариация является линейным
функционалом относительно ду, т.е. представляет собой дифференциал
Гато.
Говорят, что функционал J [у], определенный на линейном
пространстве С1 [а,Ь], достигает сильного (слабого)
минимума на функции (в точке) у* Е С1 [а, Ь] (или у* доставляет
соответствующий минимум функционалу J[y]), если
найдется такая сильная (слабая) ^-окрестность функции у*(ж), что
для любой функции у(х) из этой окрестности выполнено
неравенство J [у] ^ J [у*]- Если для любой функции из этой
окрестности, отличной от у*(ж), указанное неравенство
является строгим, то такой минимум называют строгим. Сильный
(слабый) максимум вводят аналогичным образом. Сильные
(слабые) максимумы и минимумы объединяют под общим
названием сильный (слабый) экстремум. Функцию у*(ж),
доставляющую сильный или слабый экстремум функционалу
J [у], будем называть точкой соответствующего
экстремума функционала.
Поскольку всякая функция, принадлежащая слабой
е-окрестности функции у*(ж), заведомо входит в ее же сильную ?-ок-
рестность, то всякий сильный экстремум одновременно
является и слабым. Действительно, пусть, например, у*(х) есть
точка сильного минимума функционала J [у]. Это значит,
34
1. ОСНОВНЫЕ ПОНЯТИЯ
что для некоторого е > 0 для любой функции у (ж), для
которой ||у — у*\\с < 6, выполняется неравенство J[y] ^ J[y*\- Если
||у — y*\\ci < е, то также и ||у — у*||^ < е. Поэтому неравенство
J[y] ^ J[y*] верно для любой функции у(х) из слабой ?-окрест-
ности функции у*(ж), т.е. у*(х) является точкой слабого
минимума ДЛЯ J [у].
Однако слабый экстремум функционала не обязательно
является его сильным экстремумом. Это объясняется тем, что
функции, близкие по своим значениям (попадающие в сильную
e-окрестность), могут иметь значительные расхождения в
производных, а это, в свою очередь, может повлиять на значения
функционала.
Рассмотрим функционал
ь
J[(y'J-(yy]dx.
а
Функция f(t) = t2 — t4 при t = 0 имеет локальный минимум,
равный нулю. Этот минимум является строгим на интервале
— 1 < t < 1. Значит, если функция у(х) Е С1^,^]
подчиняется неравенству ||y||^i < 1, то интегрант нашего функционала
на отрезке [а, Ь] неотрицателен, а функционал имеет
неотрицательное значение. Из этого следует, что функция у* (ж) = О
является слабым минимумом функционала. Нетрудно, однако,
придумать функцию, которая удовлетворяет условию ||у||с < s
для произвольного, наперед заданного е > 0, но значение
функционала на которой будет отрицательным (например, можно
взять у(х) = 0,56sin(A;x), выбрав подходящий параметр к).
Следовательно, у* не является сильным экстремумом функционала.
Отметим, что, как правило, нахождение слабых
экстремумов функционала является более простой задачей по
сравнению с нахождением сильных экстремумов. Это объясняется, в
частности, тем, что функционалы, обычно рассматриваемые в
вариационном исчислении, непрерывны относительно „слабой"
1.2. Основные определения
35
нормы IHI^i пространства С1 [а,Ь], но далеко не всегда
непрерывны относительно „сильной" нормы \\-\\с. Таким, например,
является функционал, рассмотренный выше.
Замечание 1.3. Поиск экстремумов функционала
базируется, как и в случае поиска экстремумов действительной
функции действительного переменного, на различных
необходимых и достаточных условиях. Из изложенного выше
вытекает, что любое необходимое условие слабого экстремума
является в то же время и необходимым условием сильного
экстремума, а любое достаточное условие сильного экстремума
является достаточным условием и слабого экстремума.
Поэтому доказываемая ниже теорема для слабых экстремумов
названа необходимым условием экстремума функционала, так
как может использоваться и для слабых, и для сильных
экстремумов.
Теорема 1.2 (необходимое условие экстремума
функционала). Если функционал A.13) достигает слабого
экстремума во внутренней точке у* (х) своей области определения,
причем в этой точке существует дифференциал Гато, то этот
дифференциал (первая вариация) в точке у* (х) обращается в
нуль:
6J[y*,8y]=0- A-17)
-4 Пусть, например, функционал J [у] на функции у* (х)
достигает слабого минимума. Рассмотрим функцию (f(a) = J[y* + aSy],
имея в виду, что вариация 5у фиксирована. Из условий
теоремы вытекает, что эта функция имеет экстремум в точке а = 0.
Действительно, существует такое е > 0, что в слабой ?-окрест-
ности выполняется неравенство J [у] ^ J[y*]. Если у = у* + сх.8у,
то при \а\ < е/ \\$у\\с\ имеем
\\у-Уо\\С1 = IMS/He* = lalll^llci <е^
т.е. функция у(х) попадает в слабую ^-окрестность функции
у*(х). Следовательно, J [у] ^ J[y*], или (р(а) ^ Ц>@).
36
1. ОСНОВНЫЕ ПОНЯТИЯ
Из существования дифференциала Гато функционала J [у] в
точке у* следует дифференцируемость функции ip(a) при а = 0.
В самом деле, зафиксируем произвольную вариацию 5у. Тогда
существует предел
?>+И = 1ппп = Щу*,т-
\а=о а-^+о а
В силу линейности JJ[y*, Jy] по 8у существует и производная
J[y* + а^у] - J [у*] _
у/_(а)
= lim
а=0 а-»-0 а
Ит «%*-/%]-«/[у*] = «/[у*+/3(-^у)]-«/[у*
= -5J[y*,-5y] = EJ[y*,Ey].
Односторонние производные совпадают. Следовательно,
существует производная ^'@) [II].
Так как (f(a) имеет минимум в точке а = 0 и
дифференцируема в этой точке, то (ff@) = 0 (необходимое условие локального
экстремума для функции одного переменного [II]). Но это
равносильно тому, что 5J[y*,5y] =0. Поскольку вариацию 5у
можно выбирать произвольно, заключаем, что дифференциал
Гато равен нулю. >
1.3. Основные леммы вариационного исчисления
Докажем несколько утверждений (часто называемых
основными леммами вариационного исчисления), которые
будем активно использовать в дальнейшем.
Лемма 1.1 (лемма Лагранжа). Если функция f(x)
непрерывна на отрезке [а, Ь] и для любой бесконечно
дифференцируемой на [а, Ь] функции т\(ж), для которой г/(а) = г/F) = 0,
1.3. Основные леммы вариационного исчисления 37
выполнено равенство
ь
/ f(x)rj(x)dx = 0,
a
то f(x) = 0 на [а, Ь].
М Предположим, что в некоторой точке xq Е [а, b] функция f(x)
отлична от нуля. Не теряя общности, мы можем предполагать,
что f(xo) > 0. Тогда, в силу непрерывности функции /(ж),
можно выбрать интервал (с, d), окружающий точку жо, ЗД Е
Е (с, d) С [а, Ь], на котором функция f(x) положительна.
Нетрудно показать, что функция
, х /в-1/ж, *>0;
^ = 1 п <г п
10, ж ^ 0
имеет производную любого порядка в каждой точке числовой
оси. Поэтому функция т\{х) = (р(х — c)(p(d — х) бесконечно
дифференцируема и при этом отлична от нуля только в интервале
(с, d). Значит,
b d
I f(x)rj(x)dx= / f(x)r](x)dx>0,
a с
так как подынтегральная функция непрерывна и положительна
на (с, d).
Итак, предположение, что f(x) отлична от нуля хотя бы
в одной точке, ведет к нарушению условий леммы.
Следовательно, если для функции f(x) выполняются условия леммы, то
/(х) = 0. >
Замечание 1.4. а. Назначение доказанной леммы —
обеспечить достаточные условия интегрального типа, при
выполнении которых заданная функция обращается в нуль. Она может
38
1. ОСНОВНЫЕ ПОНЯТИЯ
формулироваться для различных классов пробных функций
т](х). При этом, чем уже класс этих функций, тем сильнее
утверждение леммы и тем проще проверка достаточных
условий. Класс С°°, используемый в приведенной формулировке
леммы, выбран из практических соображений.
б. Доказанная лемма легко обобщается на общий случай
функций многих переменных. Например, в двумерном случае
верно следующее утверждение. Если функция f(x,y) двух
действительных переменных непрерывна в ограниченной области
GgI2 и для любой функции г/(ж,у), бесконечно
дифференцируемой в области G, непрерывной в замыкании G = G + dG
области и равной нулю на границе dG области G, верно
равенство
/ / f(x,y)r](x,y)dxdy = 0,
G
то f(x,y) = 0 в G. Доказательство этого утверждения
повторяет доказательство леммы отличаясь лишь тем, что в качестве
пробной следует взять функцию г/(ж,у) = (р(г2—х2—у2I
обращающуюся в нуль вне круга х2 + у2 =г2.
Лемма 1.2 (лемма Дюбуа-Реймона). Пусть функции
f(x) и д(х) непрерывны на отрезке [а, Ь] и для любой бесконечно
дифференцируемой на [а, Ь] функции г/(ж), для которой г](а) =
= т](Ь) =0, выполнено равенство
ъ
f{f(x)rf(x) + д(х)ф)) dx = 0. A.18)
а
Тогда функция f(x) непрерывно дифференцируема на [а, Ь] и
f,(x)-g(x)=0udi [а, Ь]. A.19)
-4 Непрерывная функция д(х) имеет первообразную на отрезке
[а, 6], которая определяется с точностью до постоянной. Суще-
1.3. Основные леммы вариационного исчисления 39
ствует такая первообразная G(x) функции д(х), что
ь
f(f(x)-G(x))dx = 0. A.20)
a
Действительно, если Gq (х) — некоторая фиксированная
первообразная функции д(х), то любая первообразная G(x) может
быть представлена в виде G(x) = Go(x) + С. Подставляя это в
равенство A.20), получаем условие на постоянную С:
b b
f(f(x)-G0(x))dx- fcdx = 0.
a a
Отсюда находим
b
C=-^J(f(x)-G0(x))dx.
a
Итак, пусть G(x) — первообразная функции g(x),
удовлетворяющая равенству A.20). Тогда для любой пробной
функции tj(x) Е C°°[a,b], r](a) = г](Ь) = 0, имеем, согласно формуле
интегрирования по частям:
ъ ъ
\ g{x)r\{x)dx = / G'(x)r](x)dx =
а а
b b
= G(x)rj(x)\ — / G(x)f]'(x)dx = — / G(x)f]'(x)dx.
a a
Поэтому равенство A.18) равносильно следующему:
b
f(f(x) - G{x))rf{x) dx = 0. A.21)
40
1. ОСНОВНЫЕ ПОНЯТИЯ
Рассмотрим произвольную пробную функцию т\{х\
удовлетворяющую условиям леммы. Обозначим
Сп~1
/ rj(x)dx.
Функция
X
является бесконечно дифференцируемой, и при этом ((а) =
= С(Ь) = 0- Согласно условию леммы, для такой функции верно
равенство A.18) и, следовательно, равенство A.21), т.е.
ь
J(f(x)-G(x))(f(x)dx = 0.
а
В силу соотношения (f(x) =tj(x) — Сц получаем
ь ъ
J(f(x)-G(x))r](x)dx-Cr]j(f(x)-G(x))dx = 0.
а а
Следовательно, согласно A.20),
ь
(f(x) - G(x))ri(x)dx = 0.
/<
Так как пробная функция т\(х) выбиралась произвольным
образом, по лемме 1.1 Лагранжа заключаем, что f(x) — G(x) = 0.
Но функция G(x) дифференцируема и G'{x) = д(х). Поэтому и
функция f(x) дифференцируема и f'(x) =д(х). Так как д(х)
непрерывна, то f(x) непрерывно дифференцируема. >
1.4. Некоторые замечания о задачах вариационного исчисления 41
1.4. Некоторые замечания
о задачах вариационного исчисления
Приведенные выше примеры иллюстрируют тот круг задач,
которые изучает вариационное исчисление. Можно сказать,
что задача вариационного исчисления (или просто
вариационная задача) — это задача поиска экстремума
функционала, заданного на некотором множестве М функций, которые
удовлетворяют определенным ограничениям. К
вариационным задачам также относят задачи поиска точек в области
определения функционала, в которых выполняется
необходимое условие экстремума функционала, т.е. первая вариация
функционала обращается в нуль (такие точки называют
стационарными точками функционала).
В вариационном исчислении трудность при нахождении
экстремума может возникнуть вследствие того, что область
определения рассматриваемого функционала не является
замкнутым множеством. В этом случае задача может не иметь
решения. Такая трудность, естественно, не исключается и в
конечномерном случае, когда ищется экстремум функции
многих переменных. Но в бесконечномерном случае, когда область
определения функционала есть бесконечномерное линейное
пространство, условие замкнутости множества проверить гораздо
труднее. Впрочем, вариационная задача может не иметь
решения даже в том случае, когда область определения функционала
является замкнутым множеством. В бесконечномерном
нормированном пространстве не для всякого замкнутого
ограниченного множества можно утверждать, что функция, непрерывная
на этом множестве, ограничена и достигает максимального и
минимального значений.
Рассмотрим вариационную задачу
ь
J[y] = / \/l + (yfJdx —>> min
a
42
1. ОСНОВНЫЕ ПОНЯТИЯ
в классе функций, дважды непрерывно дифференцируемых на
(а, 6), непрерывных на [а, Ь], имеющих в концевых точках а
и 6 нулевые значения (у(а) = у(Ь) = 0) и вертикальную
касательную (у1 (а) = у'(Ь) = оо). Это задача поиска кратчайшего
пути из точки (а, 0) в точку F, 0) при условии, что в
концевых точках пути задано вертикальное направление движения.
На рис. 1.6 видно, что функцию из рассматриваемого класса
можно выбрать так, что длина ее графика будет сколь угодно
мало отличаться от длины отрезка оси Ох, соединяющего
точки (а, 0) и (Ь, 0), который имеет наименьшую длину среди всех
кривых, соединяющих его концы. Однако сам отрезок
является графиком функции, тождественно равной нулю, которая
не относится к множеству допустимых функций. Таким
образом, функционал не достигает минимума на рассматриваемом
множестве функций.
У*
Рис. 1.6
В вариационном исчислении существование решения
заданной задачи поиска экстремума требует отдельного
доказательства, и это составляет существенную трудность при решении
многих задач вариационного исчисления.
Как будет показано в 2, задача поиска стационарных точек
некоторого функционала сводится к решению
дифференциального уравнения или системы дифференциальных уравнений (в
зависимости от рассматриваемого функционала уравнения
могут быть как обыкновенные, так и в частных производных).
Например, вариационная задача
ь
J[y]= f(x,y,y')dx ^exti, у(а)=уа, у(Ь)=Уь
а
1.4. Некоторые замечания о задачах вариационного исчисления 43
при некоторых предположениях сводится к решению
обыкновенного дифференциального уравнения вида у" = (p(x,y,yf) с
дополнительными условиями y(a) = уа, у(Ь) = уь и к
последующему анализу полученного решения. Задачу у" = ip(x,y,y'),
у (а) =уа, у{Ъ) —Уь в теории дифференциальных уравнений
называют краевой [VIII].
Чтобы краевая задача для обыкновенного
дифференциального уравнения (ОДУ) n-го порядка была правильно
поставлена, необходимо, чтобы количество краевых условий равнялось
порядку уравнения п, так как общее решение ОДУ n-го
порядка зависит от п произвольных постоянных. Даже если задача
поставлена правильно, решение может не существовать, а если
существует, то может быть не единственным.
Пример 1.8. Рассмотрим краевую задачу
\ (\ (к\ (L22)
\У\Р)=Уа, У{Ь)=Уъ-
Общее решение дифференциального уравнения в этой
задаче имеет вид
у(х) = Cicosx + C^sinx.
Краевые условия приводят к следующей системе линейных
алгебраических уравнений (СЛАУ) относительно неизвестных
постоянных С\ и С2'-
{Cicosa + C^sina = ya,
Cicos6 + C2sin& = уь.
Определитель матрицы этой СЛАУ равен:
= cosasinfr — cos&sina = sinF — a).
cos a sin a
cos b sin b
Система совместна и имеет единственное решение, если Ь — аф
ф П7Г, ПЕМ.
44
1. ОСНОВНЫЕ ПОНЯТИЯ
Пусть b — а = 7г. Тогда получаем систему
{Cicosa + C^sina = ya,
Ci cos(a + 7г) + C2 sin(a + 7r) = y&.
В силу формул приведения для тригонометрических функций
второе уравнение системы эквивалентно уравнению
—Cicosa — C^sina = у&,
и мы видим, что решение СЛАУ существует лишь при уа = —уь-
Если это равенство верно, СЛАУ будет иметь бесконечно много
решений, так как второе уравнение системы будет следовать из
первого, а первое уравнение имеет бесконечно много решений
вида С\ = yacosa + tsina, С2 = yasina — tcosa, t E К.
Вопросы и задачи
1.1. Найдите расстояние между функциями у\(х) = х1 и
У2(ж) =ж3 по норме пространства: а) С[0,1]; б) С1 [0,1].
1.2. Покажите, что функционал
1
Лу]= (y-y')dx,
о
определенный на C^fO, 1] с нормой ||-||^i, является непрерывным
на функции уо(х) = х3.
1.3. Покажите, что функционал
1
I[y] = f(v'Jdx,
о
определенный на С1 [0,1], разрывен на функции уо(х) =0 в
случае нормы ||-||^, но непрерывен на этой функции в случае
нормы ||• H^i.
Вопросы и задачи
45
1.4. Функционал
1
I[y] = JVl + (y'Jdx,
о
определенный на С1 [0, 1], исследуйте на непрерывность на
функции уо(х) = 0 по норме: а) \\-\\с] б) IHI^i.
1.5. Покажите, что функционал
1
I[y]=Jx3v^l + ^dx,
о
определенный на пространстве С[0,1], непрерывен на функции
Уо(х) = х2 по норме ||-||^.
1.6. Докажите, что любой линейный непрерывный
функционал в нормированном пространстве является
дифференцируемым. Запишите его дифференциал.
ъ
1.7. Докажите, что функционал J [у] = f у2 dx, определенный
a
в G[а,Ь], является всюду дифференцируемым. Запишите его
дифференциал.
1.8. Проверьте, являются ли дифференцируемыми
следующие функционалы: a) J [у] = у (а) в С[а,Ь\; б) J [у] = у (а) в
С1[а,Щ- B)J[y] = \y(a)\BC[a,b}; г) J[y] = у/\ + у'(а) в С1[а,Щ-
1.9. Найдите первую вариацию функционала,
определенного на нормированном пространстве непрерывно
дифференцируемых функций:
1 1
a) I[y] = Jx2^/l + ^dx; б) I[y] = J(y'ey + xy2) dx;
о -1
7Г 1
в) I[y} = jysmydx; г) 1[у] = у2@) + Г (ху + (у'J) dx.
2. ВАРИАЦИОННЫЕ ЗАДАЧИ
С ФИКСИРОВАННЫМИ
ГРАНИЦАМИ
2.1. Простейшая задача
вариационного исчисления
Рассмотрим задачу об экстремуме функционала
ь
J[y} = jf(x,y,y')dx, B.1)
а
определенного на множестве функций у(х) Е С1 [а, Ь],
удовлетворяющих условиям
у(о) = уь у(Ь)=г/2. B.2)
Предполагаем, что интегрант функционала /(ж,у,у') —
дважды непрерывно дифференцируемая функция трех
переменных.
Сформулированную задачу называют простейшей
задачей вариационного исчисления. Именно на этой задаче
отрабатывались основные приемы данной дисциплины.
Первую вариацию функционала B.1) при указанных
условиях на функцию f(x,y,yf) можно записать в виде A.16):
ъ
SJ[yM = f(fy8y + fW)dx. B.3)
а
Здесь 6у Е С1 [а, Ь] и 5у' — допустимая вариация функции
у(х) и ее производная. При этом 8у\ = Sy\h = 0, поскольку
2.1. Простейшая задача вариационного исчисления 47
условия B.2) фиксируют значения допустимых функций на
концах отрезка и, значит, вариация функции в этих точках
должна иметь нулевое значение.
Теорема 2.1. Для того чтобы функция у*(х) доставляла
слабый экстремум функционалу B.1), необходимо, чтобы она
удовлетворяла уравнению
А Используя необходимое условие экстремума для
дифференцируемого функционала (см. теорему 1.2) и вид B.3) первой
вариации функционала, получаем
ъ
f(fySy + tyv')dx = 0.
а
Это соотношение верно для любой допустимой вариации
Sy, т.е. для функции 6у Е С1\а,Ь\, удовлетворяющей краевым
условиям 8у(а) = 6у(Ь) =0. В частности, оно верно для
любой бесконечно дифференцируемой функции, удовлетворяющей
тем же краевым условиям. Поэтому, согласно лемме Дюбуа-
Реймона, для любого х Е [а, Ь] выполняется равенство B.4). >
Согласно замечанию 1.3, уравнение B.4) дает необходимое
условие и для сильного экстремума функционала B.1). Это
уравнение называют уравнением Эйлера для функционала
B.1), а гладкие решения этого уравнения — экстремалями
функционала. В дальнейшем для упрощения изложения мы
под экстремалью будем понимать не только функцию у (ж),
являющуюся решением уравнения Эйлера, но и график этой
функции, т.е. кривую на плоскости хОу, которая описывается
уравнением у = у(х).
Так как условие B.4) является необходимым, точки
экстремума функционала следует искать среди экстремалей этого
48 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
функционала. Это является обобщением ситуации для
дифференцируемых функций одного переменного, точки экстремума
которых находятся среди их стационарных точек [II].
Зачастую уравнение Эйлера способно дать исчерпывающий
ответ на поставленную задачу об экстремуме функционала.
Если из содержательного смысла задачи вытекает, что задача
имеет решение, а функционал имеет лишь одну экстремаль,
удовлетворяющую краевым условиям, то эта экстремаль и
будет решением задачи.
Пример 2.1. Найдем экстремали функционала
2
J[y} = J{x(y'K-My'J)dx,
О
удовлетворяющие краевым условиям у@)=4, уB)=6.
Интегрант f{x1y1y') = x(yfK — 3y(yfJ рассматриваемого
функционала является дважды непрерывно дифференцируемой
функцией своих аргументов (даже бесконечно
дифференцируемой). Поэтому можно применить теорему 2.1. Поскольку
f^ = 3x(y'J-6yy', fy = -Z{y')\
уравнение Эйлера для данного функционала имеет вид Ъху'у" —
— буу" = 0, или у"{ху' — у) = 0. Это дифференциальное
уравнение второго порядка, которое распадается на два уравнения
у" = 0 и ху' — у = 0. Общее решение первого из них имеет вид
у = С\х -\- С2, а общее решение второго — у = Сх. Все функции
только второго семейства у = Сх входят в первое семейство.
Поэтому все экстремали рассматриваемого функционала
имеют вид у = С\Х + С2-
Постоянные интегрирования С\ и С2 находим из краевых
условий. Полагая х = 0 и х = 2, приходим к системе линейных
алгебраических уравнений относительно Ci, С2:
Ci-0 + C2=4,
Ci-2 + C2 = 6.
2.1. Простейшая задача вариационного исчисления 49
Из этой системы находим С\ — 1, С^ — 4. Итак, поставленным
краевым условиям удовлетворяет лишь одна экстремаль
рассматриваемого функционала: у — х + 4. ф
Предполагая, что функция у(х) является дважды
дифференцируемой, и используя правило дифференцирования сложной
функции, преобразуем первое слагаемое в левой части B.4):
faJy' -Jy'x + Jy'yy +1у'у'У '
С учетом этого запишем уравнение Эйлера B.4) в следующей
форме:
?11 II , ?11 / , ?ll ?l п
Jy'y'V -I" Jy'yV ^ Jy'x~ Jy — V-
Видно, что если выполняется неравенство /'' , ф 0, то
уравнение Эйлера представляет собой обыкновенное
дифференциальное уравнение (ОДУ) второго порядка, удовлетворяющее
теореме Коши существования и единственности решения ОДУ.
При /'', , = 0 оно уже не является уравнением второго
порядка; оно либо ОДУ первого порядка, либо алгебраическое, т.е.
не содержащее производных неизвестной функции. Повторим,
что эти умозаключения основаны на предположении, что
решения уравнения Эйлера дважды дифференцируемы. Возникает
вопрос: при каких условиях на функцию / это предположение
выполняется?
Теорема 2.2. Пусть у(х) — решение уравнения B.4). Если
интегрант /(ж,у,у') имеет непрерывные частные производные
до второго порядка включительно, то во всех точках плоскости
хОу, в которых /'' , ф 0, функция у{х) имеет непрерывную
вторую производную. #
Уравнение Эйлера далеко не всегда интегрируется в
квадратурах. Поэтому важно выявить такие случаи, когда
интегрирование в квадратурах возможно. Рассмотрим некоторые из
них.
50 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
1. Интегрант не зависит от у1'. В этом случае /', = 0 и
уравнение Эйлера имеет вид fy(x,y) = 0, т.е. является
алгебраическим уравнением относительно неизвестной функции у(х).
Решения этого уравнения, т.е. экстремали функционала, могут
и не удовлетворять поставленным краевым условиям.
Пример 2.2. Найдем экстремали функционала
ь
J[y}= I y3dx,
удовлетворяющие краевым условиям у (а) =уг, у{Ь) =У2-
Уравнение Эйлера Зу2 = 0 рассматриваемого функционала
имеет единственное решение у(х) = 0. Если хотя бы одно из
чисел у\ и у^ отлично от нуля, то в множестве С1^,^]
функционал не имеет экстремалей, удовлетворяющих поставленным
краевым условиям.
2. Интегрант линейно зависит от у'. Этот случай,
включающий в себя и предыдущий, охватывает те
функционалы, интегранты которых удовлетворяют условию /'' , = 0.
Такие функционалы называют вырожденными. Если
f(x,y,y') = Р{х,у) + Q{x,y)y',
то уравнение Эйлера принимает вид
dQ
dx
P^-Q'yy' = 0.
Раскрывая производную -^ по правилу дифференцирования
сложной функции, получаем Q'x + Q'yy' — Ру — Q' у' = 0, или
Q'x-Pl = 0.
Это уравнение, как и в предыдущем случае, алгебраическое.
Его решения могут не удовлетворять краевым условиям.
Отметим, что если выражение Pdx + Qdy представляет собой полный
2.1. Простейшая задача, вариационного исчисления 51
дифференциал, то уравнение Ру — Q'x = 0 является тождеством
относительно х и у. В этом случае любая функция у(х) (Е С1 [а, Ь]
является решением уравнения Ру — Q'x = 0 и, следовательно,
экстремалью функционала.
Пример 2.3. Найдем экстремали функционала
ь
J (У2 +yy')dx,
а
удовлетворяющие краевым условиям у (а) = yi, у (Ь) = у2-
Уравнение Эйлера — 2у = 0 данного функционала имеет
единственное решение у(х) = 0. Если одно из чисел yi, у2
ненулевое, экстремалей, удовлетворяющих заданным краевым
условиям, нет.
3. Интегрант зависит только от у7. В этом случае он
имеет вид f(yf), а уравнение Эйлера для функционала —
Нетрудно увидеть, что это уравнение допускает понижение
порядка [VIII]: /', = С. Мы получили алгебраическое урав-
нение относительно у . Все его решения можно записать в виде
у1 = Ci, гДе С\ — произвольная постоянная. Таким образом,
экстремалями функционала с интегрантом рассматриваемого
типа является семейство линейных функций у = С\х + С2 с
произвольными постоянными Ci и G2-
Пример 2.4. Найдем экстремали функционала
ь
j{y'-y«)dx,
а
удовлетворяющие краевым условиям у (а) = yi, у (Ь) = у2-
52 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
Так как интегрант функционала зависит только от у1', то
решениями уравнения Эйлера для этой задачи являются линейные
функции у(х) = С\х + С2 (С\ и С2 — произвольные
постоянные). Два краевых условия позволяют выбрать единственную
функцию
у(х' = ъ-а ^ ~ а' У1' ^
4. Интегрант не зависит от у. Этот случай включает
в себя предыдущий. Интегрант имеет вид /(ж,у'), а уравнение
Эйлера сводится к следующему:
и оно, как и выше, допускает понижение порядка: /', = С\.
Последнее уравнение есть ОДУ первого порядка или
алгебраическое уравнение (например, в предыдущем случае).
Пример 2.5. Найдем экстремали функционала
ь
J[V] = J(y,2 + 2xy')dx,
а
удовлетворяющие краевым условиям у (а) = yi, у (Ь) = у2-
Уравнение Эйлера
^B,42x1=0
этого функционала после понижения порядка сводится к
уравнению у' -\-х = С\. Решая его, получаем семейство экстремалей
у(х) = С\х + С^ — х2/2. Постоянные С\ и С2 однозначно
находятся из краевых условий при любых у\ и у2-
5. Интегрант не зависит явно от х. В этом случае
он имеет вид f{y,y'), а уравнение Эйлера при дополнительном
2.1. Простейшая задача вариационного исчисления 53
предположении, что /'' , ф 0 (см. теорему 2.2) сводится к
следующему:
Jy'yV +}у>у>У -Jy = 0-
Умножив его на у1', получим
Таким образом, и в этом случае уравнение Эйлера допускает
понижение порядка:
y'fy>-f = Ci.
Пример 2.6. Найдем экстремали функционала
ь
/2
J[y] = f(yyf
+ y'z)dx.
Уравнение Эйлера после понижения порядка сведется к
уравнению первого порядка у'{у + 2у') — уу' — у'2 = С, или
{у'J = С. Отсюда у' = ±VC = Сь и экстремалями
рассматриваемого функционала будут линейные функции у(х) = С\х + С2-
Пример 2.7. Найдем экстремали функционала в задаче
И. Бернулли о брахистохроне (см. пример 1.2):
о
I
dx ->> min, у@) = 0, у(Ь) =ув>0-
Яду
В данном случае интегрант не зависит от ж и является
дважды непрерывно дифференцируемой функцией в области у > О
на плоскости хОу. В этой области можно использовать теорему
2.1, и мы заключаем, что уравнение Эйлера для
рассматриваемого функционала допускает понижение порядка:
54 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
Отсюда находим
v^v/y(l + (y'J
Возводя в квадрат и учитывая константу 2д в постоянной С,
получаем
уA + у'2) = С1>0.
Мы получили уравнение первого порядка, не разрешенное
относительно производной [VIII]. Его удобно решать
методом введения параметра. Положим у' = ctg^. Тогда 1 -\-у'2 =
= l/sin2/0 и
у=-^ = С18т2ф. B.5)
1 + у
Мы выразили переменное у через параметр.
Далее, равенство у' = ctg^ означает, что dx = tg^ dy.
Подставляем в это равенство выражение dy через Л/>, которое
получается дифференцированием B.5):
dx = tg?/> • С\ • 2sin?/?cos?/>&/> = 2Cism2ipdip.
Интегрируя, выразим переменное х через параметр:
х = С1Bф-Бт2ф) + С2,
где Сг = Ci/2 > 0.
Заменив параметр на $ = 2ф и объединив выражения х и
у через новый параметр, получим параметрические уравнения
циклоид
x = C1($-sm$) + C2,
y = Ci(l-COS0).
Эти уравнения описывают все экстремали функционала в
области у > 0. Посмотрим, как из всего семейства указанных
функций выделить те, которые удовлетворяют краевым
условиям у@) = 0, у(Ь) = у в- Но при этом отметим, что точка @, 0)
2.1. Простейшая задача вариационного исчисления 55
не входит в рассматриваемую область у > 0 на плоскости хОу
и выделенные функции, строго говоря, нельзя считать
экстремалями на всем отрезке [О, Ь].
Условие у@) = 0 равносильно двум условиям: х($) = О,
у(#) = 0. Из второго получаем # = 2п7г, п Е Л/", а из первого —
2ti7tCi + С2 = 0. Подставляя в параметрические уравнения
вместо С% найденное выражение, получаем
Jz = Ci((#-2n7r)-sin#),
\y = Ci(l-costf).
Заменяем параметр $ — 2п7г = в и учитываем периодичность
тригонометрических функций:
(x = C1(@-sm@),
1 ~ х B'6)
U = Ci(l-cose),
где 0 = 0 соответствует начальной точке х = 0, у = 0. Остается
учесть второе краевое условие:
Г 6 = CiF-sin6),
~ B-7)
Ub = CiA-cosO).
Делим первое уравнение на второе (в предположении у в т^ 0),
избавляясь от неизвестной постоянной С\\
6 — sin6 Ъ
~Л ^ = — = А>0. 2.8
1 — cos В у в
Отметим, что для циклоид из рассматриваемого семейства
точки, соответствующие значениям параметра в = 2п7г,
являются точками возврата. Но экстремали не должны содержать
таких точек. Поэтому в нашем случае параметр в должен
меняться в пределах интервала @, 27г). Можно показать, что
56 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
, в-sine
функция у = — на этом интервале монотонно возрастает.
Значит, уравнение B.8) на этом интервале имеет единственное
решение во- Это решение позволяет определить постоянную
С\ по формуле С\ — -— . Найденное значение С\
выделяет из семейства экстремалей B.6) ту единственную экстремаль,
которая удовлетворяет краевым условиям.
Пример 2.8. Рассмотрим вариационную задачу
1
J[y} = J(y2 + y'2)dx^extr, i/@) = 1, уA) = е.
о
Уравнение Эйлера для функционала в поставленной задаче
имеет вид 2у" — 2у = 0. Это однородное линейное
дифференциальное уравнение с постоянными коэффициентами, решая
которое, находим единственную экстремаль, удовлетворяющую
краевым условиям: у(х) = ех.
Убедимся, что найденная экстремаль является точкой
локального экстремума функционала и тем самым дает решение
вариационной задачи. Вычислим приращение функционала в
точке у = ех для произвольной допустимой вариации 6у в
нормированном пространстве С1\а,Ь\, которая, напомним, должна
удовлетворять условиям 6у@) = Sy(l) =0:
1
AJ = J[y + Sy]-J[y} = J((y + SyL(y' + Sy'J-y2-y'2yx =
о
1
= J Bу5у + EуJ + 2у'5у' + {5у'J) dx =
о
1
= j BеЧу + EуJ + 2еЧу' + {8у'J) dx.
2.2. Функционалы от нескольких функций 57
Так как
1
то
[2ex5yfdx = Bex5y)\l- I2exSydx,
о о
1
AJ = J(<EyJ + E1/J)dx>0,
о
если ||5у||^1 ф 0. Значит, на функции у(х) = ех заданный
функционал достигает строгого слабого минимума.
2.2. Функционалы от нескольких функций
Пусть интегрант функционала зависит от двух функций
переменного ж, т.е. функционал имеет вид
ь
АуъУ2] = / f(x,yi,y2,y[,y2)dx, B.9)
а
где / — дважды непрерывно дифференцируемая функция
пяти переменных. В качестве области определения функционала
рассмотрим пары функций у\ и у2 из класса С1 [а, Ь],
удовлетворяющие краевым условиям
У1(а)=у1Ъ yi(b)=yi2, У2(а)=у2ъ У2(Ь)=у22. B.10)
Допустимые вариации 5у\ и 5у2 для функций у\ и у2 должны
быть класса С1 [а,Ь] и удовлетворять краевым условиям 8у\(а) =
= 5у2(а) = Syi(b) = Sy2(b) = 0, так как допустимые функции
У\{х) и у2{х) имеют на концах отрезка [а, Ь] фиксированные
значения. Для произвольных допустимых вариаций 8у\ и 5у2
положим
ср(аъа2) = J[yi + ai5yi,y2 + а25у2].
Очевидно, что если пара функций у\ и у2 доставляет экстремум
функционалу J[yi,y2], то функция (p(ai,a2) двух переменных
58 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
имеет экстремум в точке @, 0). В этом случае должны
выполняться необходимые условия экстремума:
дер
да\
dip
0.1=0.2=0
да2
0.
<^1=<^2=0
Используя формулу Лейбница дифференцирования
определенного интеграла по параметру [VI], получаем
dip
dip
да2
<^1=<^2=0
а±=а2=0
о
f{fyM+fy'M)dx = °>
а
Ъ
Эти соотношения выполняются в том числе и для
произвольных бесконечно дифференцируемых функций 8у\ и 5у2 с
нулевыми значениями в точках а и Ь. Согласно лемме Дюбуа-
Реймона, получаем следующие необходимые условия
экстремума функционала:
( d
ax Bn)
Эти необходимые условия экстремума функционала
нетрудно обобщить на случай интегранта, зависящего от п функций.
Теорема 2.3. Если функционал
о
J[yi,...,yn]= / 1{х,уъ...,уп,у'ъ...,у'п
dx,
B.12)
где / — дважды непрерывно дифференцируемая функция,
достигает экстремума на системе функций yi, ..., уп Е С1\а,Ь\, то
2.2. Функционалы от нескольких функций
59
эта система функций является решением системы
дифференциальных уравнений
dx
—К'-1уг=^ « = !,»• # B.13)
Любое гладкое решение системы уравнений B.13)
(системы уравнений Эйлера) называют экстремалями
функционала B.12). Как и выше, термином „экстремаль" мы будем
называть не только систему функций у\(х), ..., Уп{%)->
являющуюся решением системы уравнений Эйлера, но и кривую в Rn+1,
которая описывается уравнениями y\=yi(x), ..., уп = уп(х)
(т.е. график вектор-функции).
Пример 2.9. Найдем экстремали функционала
ь
J[yiM = У Bj/ii/2 - 2у? + (у[J - Ш2) dx.
а
В соответствии с теоремой 2.3 записываем систему
уравнений Эйлера:
Bу'{-2у2 + 4У1 = 0,
\-2у%-2У1=0.
Из второго уравнения находим у\ = —у" и подставляем это
выражение для у\ в первое:
у? + 2у% + у2 = 0.
Это однородное линейное дифференциальное уравнение с
постоянными коэффициентами. Его общее решение имеет вид
2/2 (ж) = Cisinx + С^жвтж-Ь C3COSX + C^xcosx. B.15)
Значит,
У\(х) = —{С\ H-C^siiix-h BС2 — Сз)со8ж —
— С2ХШ1Х — C2XCOSX. B.16)
Соотношения B.15) и B.16) описывают все экстремали
рассматриваемого функционала.
60 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
2.3. Функционалы
с производными высшего порядка
Пусть функция f(x,y,y',y",...,y(n)) непрерывно
дифференцируема п + 2 раза. Рассмотрим функционал
ъ
J[y] = Jf(x,y,y',y",...,y^)dx B.17)
а
на множестве функций у(х) ? Сп[а,Ъ], удовлетворяющих
краевым условиям
Ыа) = ухо, у (а) =у1Ъ ..., y(n_1) (а) = yi,n_i;
Ь(&) = У20, 2/F) = 3/21, • • • , У(П_1) (Ь) = У2,п-1-
В этом случае допустимой вариацией является любая
функция ду G Cn[a,fr], удовлетворяющая однородным краевым
условиям
Ша)=0, 5у'(а) = 0, ..., ^)(а) = 0;
\М6)=0, Sy'(b) = 0, ..., Eу^-1)F)=0.
Пусть функция у(х) доставляет экстремум функционалу
J [у]. Выбрав произвольно допустимую вариацию 6у и
зафиксировав ее, рассмотрим функцию
<р(а) = J[y + a5y] =
ъ
= f f(x,y + a5y,yf + a6yfy + a6y",...,y^+a6y^)dx,
а
где 5y(k) = (Sy)(k> — к-я производная вариации 5у. Функция
(р(а) в точке а = 0 имеет экстремум, и поскольку она
дифференцируема в этой точке, то (р'(а) = 0 при а = 0 [II]. Но
ь
7 /»
р'(а) = — f(x,y + a5y,y' + a5y',y" + a5y",...,yW+a5yW)dx,
2.3. Функционалы с производными высшего порядка 61
где частные производные функции / под интегралом справа
вычисляются в точке
ж, у(х) + а5у(х), у1(х) + абу1(х), ..., у^п\х) + а8у^п\х)
Поэтому
ь
^0) = |(№ + /^<^ B.20)
а
где частные производные функции / вычисляются в точке
(х, у(х), у'(х), у"(х), ...,у(п)(Ж)).
Предположим, что у(х) Е С2п[а,6]. Тогда, используя
интегрирование по частям и краевые условия, получаем
Ъ b
/ fy,5y'dx = - / [—fy,)Sydx,
а а
Ъ b
/ fy„6y"dx= / y-^fy,,)8ydx,
а а
b b
f fy{nMn)dx = {-lT f(?^fy{n))8ydx.
a a
Подставляем полученные соотношения в B.20):
ъ
Kb -i!'^ &Л'+-+(-1>"^-»)*<te=°-
62 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
Это равенство верно, в частности, для любой бесконечно
дифференцируемой функции 5у(х) с нулевыми значениями на
концах отрезка [а, Ь]. Поэтому, согласно лемме Лагранжа,
d сР dn
откуда, меняя порядок слагаемых, получаем
dn dn~l
dxnJy( ' v ' dxr
+{-1)icfy'+fy=0- B-21)
Уравнение B.21) называют уравнением Эйлера —
Пуассона, а его 2п раз непрерывно дифференцируемые решения —
экстремалями функционала J [у].
Итак, доказано следующее утверждение.
Теорема 2.4. Если функционал J [у] вида B.17),
определенный на множестве функций из Gп[а,6], удовлетворяющих
краевым условиям B.18), достигает экстремума на некоторой
функции у(х) Е С2п[а,6], то эта функция является экстремалью
функционала J [у].
Замечание 2.1. Теорема 2.4 в частном случае п = 1
отличается от доказанной ранее теоремы 2.1 тем, что на функцию
у (ж), на которой функционал достигает экстремума,
накладывается дополнительное требование гладкости у(х) Е G2[а,6].
Ослабления требований в теореме 2.1 удается достичь с
помощью леммы Дюбуа-Реймона, которая в доказательстве теоремы
2.4 не используется.
Пример 2.10. Найдем экстремали функционала
ъ
J[y] = J{(y'"J+y2-2yx3)dx.
2.4. Функционалы от функций многих переменных 63
Записываем уравнение Эйлера — Пуассона
-2yVI + 2y-2x3 = 0.
Это неоднородное линейное дифференциальное уравнение с
постоянными коэффициентами и специальной правой частью
[VIII]. Решая его, получаем
у(х) = х3 + dex + С2е~х + [Съех12 + CAe~xl2) cos ^-х +
+ (C5e-/2 + C6e--/2)sin^.
Каждая функция этого семейства является экстремалью
данного функционала.
2.4. Функционалы от
функций многих переменных
Перейдем к обсуждению функционалов, определенных на
множествах функций многих переменных. Рассмотрим,
например, множество М функций z(x,y) от двух переменных,
которые дважды непрерывно дифференцируемы в некоторой
области GcR2. Исследуем задачу об экстремуме функционала
J[z] = / / f(x,y,z,z'x,z'y)dxdy, B.22)
D
где D — область, удовлетворяющая условию (D U dD) CG; / —
дважды непрерывно дифференцируемая функция своих
аргументов. В качестве области определения этого функционала
возьмем подмножество тех функций из М, которые на границе
области D имеют заданное значение:
z(x,y)
= Ф,У). B.23)
dD
64 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
Допустимыми вариациями в этом случае будут функции
5z(x,y) ? C2(G), обращающиеся в нуль на границе dD
области D.
Как и для функционала B.1), необходимое условие
экстремума можно записать в форме
6J[z,6z] = 0. B.24)
В данном случае первая вариация
д
SJ[z,5z] = — J[z + a5z]
да
а=0
функционала записывается в форме
SJ[zM= JJ{ffzSz + f^p + ffq6q)dxdy,
D
где р и q обозначают соответственно z'x и zf. Так как
ТО
/ / {fpSp + f'q6q)dxdy =
D
- //(l(/>2)+l«fe)) *•*-//(*+§ )'•**¦
D D
Используя формулу Грина
dD D
получаем
д_
<дхУ
D 3D
:{f'p8z) + ^(f'gSzj) dxdy= J 5z (fpdy- f'qdx) = 0,
2.4. Функционалы от функций многих переменных 65
так как Sz = 0 на границе dD области D в силу фиксированных
значений функции z(x,y). Значит,
(f^p + f^q)dxdy = - ff{^ + ^)Szdxdy
//U^ ' ^47—» JJ Кдх ¦ ^
и необходимое условие экстремума принимает вид
Поскольку первый сомножитель под знаком интеграла
непрерывен, а вариация произвольна, то, согласно замечанию 1.4,
функция z(x,y) является решением дифференциального
уравнения в частных производных
которое называют уравнением Остроградского, а любое
гладкое решение этого уравнения — экстремалью
функционала B.22).
Пример 2.11. Напишем уравнение Остроградского для
функционала Дирихле
J[z} = \IJ((z'xJ + (z'yJ)dxdy.
D
В этом случае f{x1y1z1p1q) =р2 -\-q2. Поэтому f'p = 2p = 2z'xl
fq = 2q = 2z'y, fz = 0, и мы приходим к уравнению Лапласа
d2z d2z _
дх2 ду2
Таким образом, экстремалями функционала Дирихле являются
гармонические в области D функции [XII].
66 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
2.5. Канонический вид уравнении Эйлера
Функционалу
ъ
J[y] = Jf(x,y,y')dx, B.26)
а
где у(х) = (yi(x), ..., уп(х)) — гладкая вектор-функция, а
функция / дважды непрерывно дифференцируема, отвечает
система уравнений Эйлера
тА-1'ш=^ г=1^- B-27)
Эта система, вообще говоря, представляет собой систему
обыкновенных дифференциальных уравнений (ОДУ) второго
порядка. Такую систему можно свести к системе ОДУ первого
порядка введением дополнительных переменных.
Введем новые переменные Z{ = у[, г = 1, п. Тогда /', = ffz., и
мы получаем следующую систему 2п уравнений первого
порядка, эквивалентную исходной системе B.27):
йХ B.28)
dyi . -—
— =Zi, г = 1,гс.
к ах
Полученная система ОДУ не является нормальной, и
поэтому с ней неудобно работать. Пусть
Pi = fy? г = Т^- B.29)
Определитель матрицы Гессе (матрицы частных производных
второго порядка) интегранта f по переменным у\ совпадает с
якобианом
Д(Р1,...,Рп)
П(у{,...,у'пУ
2.5. Канонический вид уравнений Эйлера
67
Если этот определитель отличен от нуля, то, согласно теореме
об обратной функции [V], система уравнений pi = /^., г = 1, п,
определяет совокупность старых переменных у[ как функцию
новых Pi'.
Vi = Л»(а;,у,р), г = ±7п. B.30)
Рассмотрим функцию
п
Н(х,у,р) = -f(x,yMxiViP)) +^hi(x,y,p)pi, B.31)
где h = (/ii, ..., /in). Эту функцию называют функцией
Гамильтона данного функционала B.26), а переменные ж, у, р,
связанные со старыми переменными ж, у, у7 соотношениями
B.29) или B.30), — каноническими переменными данного
функционала.
Из определения функции Гамильтона следует, что
dH = -df + ^Pidy'i + ^2 У^ =
г=1 г=1
гг n n n
= - Д da: - ^ 4 % - Y, fy[ dv'i + 5>d^ + EЛ*- B-32)
г=1 г=1 г=1 г=1
В силу равенств B.29) третье и четвертое слагаемые в правой
части равенства B.32) взаимно уничтожаются. Поэтому
п п
dH = ~fxdX -^2?Ш ^ + ^2yidPi' ^2-33)
г=1 г=1
Значит, для частных производных функции Гамильтона по ее
переменным ж, у, р справедливы следующие равенства:
ttI __ ft Tjl __ ft Tjl __ I
nx Jx-) пу1 Jyi-) ^pi Уг-
Отсюда fy = —Hf, y\ = H' Так как, согласно введенным
обозначениям, f'z. = f, =pi и z\ = у[, из системы ОДУ B.28) по-
лучаем следующую нормальную систему ОДУ, эквивалентную
68 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
системе уравнений Эйлера B.27):
dyi дН . _—
-j-=q—> г = 1,п;
ах dpi
B.34)
г = 1, п.
Систему B.34) называют канонической формой
уравнений Эйлера функционала B.26).
Как известно, первым интегралом системы ОДУ
называют функцию, сохраняющую постоянное значение вдоль каждой
интегральной кривой этой системы. Для того чтобы данная
гладкая функция была первым интегралом системы ОДУ,
необходимо и достаточно, чтобы полная производная этой функции
в силу системы ОДУ тождественно равнялась нулю [VIII]. В
некоторых частных случаях можно указать первые интегралы
системы B.34), а значит, и системы B.28).
Пусть интегрант / = f(y,yf) не зависит от х явно. Тогда и
функция Гамильтона не зависит от х явно. Значит,
^ = ±Н'у.^. + ±Н'р.^., B.35)
dx ^ Уг dx ^ Рг dx v ;
г=1 г=1
ВН
так как —— = 0. Подставляя выражения для производных Н'
и Н' из системы B.34) в соотношение B.35), получим, что
dH/dx = 0. Значит, вдоль каждой экстремали Н постоянна.
Таким образом, если интегрант явно не зависит от
независимого переменного ж, то функция Гамильтона является первым
интегралом системы уравнений Эйлера.
Замечание 2.2. В общем случае верно тождество
dH _ дН
dx дх '
где слева стоит полная производная функции Гамильтона в силу
системы B.34).
Вопросы и задачи
69
Теперь поставим вопрос о том, при каких условиях данная
функция Ф(у,р), не зависящая явно от ж, является первым
интегралом системы B.34). Вычислим полную производную
функции Ф по х в силу системы B.34):
dX ^\ VidX Pidx) 2^^У*К ^Рг^Уг)-
г=1 г=1
Выражение
п
г=1
называют скобкой Пуассона функций Ф и Н. Таким
образом,
§=^
и мы доказали следующее утверждение.
Теорема 2.5. Дифференцируемая функция Ф(у,р)
является первым интегралом системы B.34) тогда и только тогда,
когда [Ф, Я] = 0.
Вопросы и задачи
2.1. Найдите все экстремали функционала /[у],
удовлетворяющие заданным краевым условиям:
тг/2
0
1
A) = 1;
а) /&/] = f{{y'J-y2)dx, i/@)= 0, i/(^
о
1
б) /[у] = У ((У'J + 12жу) dx, у@) = 0, уA
о
%] = У W? - 7УУ' ~ У2) dx, у(тг) = 0, уBтг) = 0;
в/
7Г
70 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
1
ПУ] = f(y'Jecosy'dx, 1,@) = 0, 1,A) = -4;
о
тг/8
Д) /[l/] = J (l%2 + (У7J + 2s,(sin2s + 16s)) <fe, у@) = О,
о
/7Г\ 7Г
y(g)=-8;
тг/2
е) %]= / Cx2y2 + cosy + y'Bx3y-xsmy)^dx, у (J) = О,
тг/4
»ф = 1;
4
ж) /[у] = | (x(i/L + 2y{y'f) dx, уB) = 1, уD) = 5;
2
1
з) /Ь] = У ((l/J " *V - 2ху) <fe, у@) = 0, уA) = -|;
О
1
жI[у] = ftgy'dx, 1,@) =0,1,A) =2;
о
1
к) /[У] = |((У'J + jffs) da;' У(°) = °' */(!) = -2-
О
2.2. Среди плоских кривых, соединяющих две точки (жх, ух)
и (ж27 2/2 M найдите ту, которая при вращении вокруг оси Ох
образует поверхность наименьшей площади (см. пример 1.4).
2.3. Покажите, что функционал
ъ
1Ы= / (р(х)у'+ q(x)y + r(x))dx,
а
где р(х) Е Сх[а,Ь], д(ж), r(x) Е С[а,6], не имеет экстремумов.
Вопросы и задачи
71
2.4. Покажите, что для всякого дифференциального
уравнения у" = (p(x,y,yf) с дважды непрерывно
дифференцируемой правой частью (p(x,y,yf) можно найти такую функцию
/(ж,у,у'), что решения этого уравнения будут экстремалями
ь
функционала f f(x,y,yf)dx.
a
2.5. Найдите функции yi(#), У2{х) ? Cl[a,b\, на которых
может достигаться экстремум заданного функционала при
заданных краевых условиях:
тг/2
а) "_,_]
о
S/2@)=0,tfcGr/2) = -l;
з
1
I/i C) =ЬЗ +1,1/2A)= 0, 1/2C) =0;
тг/2
В) "_,_'
0
У1Gг/2) = 1,у2@)=0, 1/2(тг/2) = -1;
тг/4
0
У1(тг/4) = 1, у2@)=0, 1/2(тг/4) = 1;
1
Д) 1[УЪУ2] = j\{y'if' + Ш2: + 2yi)dx, yi@) = l,yi(l)=3/2,
о
j/2@) = 1, y2(l) = 1;
0 ЛуъЫ = / {y'ly'2-yiy2)dx} yi@) =0, yi(V2) = 1,
3
6) /[yi,2/2] = / {x{ylJ{y2f ^xyiy2)dx, yi(
/l / Z,
%Ы/2]= l{(y'1J + (y'2J + Sy1y2)dx, yi@) = 0,
¦) /[yi,y2] = /Byi-4y22 + (^J-(yiJ)^, ш@)=0,
72 2. ЗАДАЧИ С ФИКСИРОВАННЫМИ ГРАНИЦАМИ
3
2
j/iC)=ln3, iftB)=ln2, i/2C) =0.
Лш,У2] = У (ж(у!J + (у2J + ху'1у'2) dx, Ш B) = 1пЗ,
2.6. Найдите все экстремали заданного функционала,
удовлетворяющие заданным краевым условиям:
1
а) I[y] = JA20xy-y")dx, у@)=0, уA) = 1, у'@) = 0,
2/A) = 6;
тг/2
б) /[У] = У ((У"J - У2 + х2) dx, у@) = 1, у(тг/2) = 0, у'@) = 0,
о
у'(тг/2) = -1;
ь
в) I[y} = J{{y"J + {y'J)dx, у@)=0,уF) = 0,у'@)=0,
о
у'(Ь)=0;
1
г) Пу] = j({y"J + y2-2yx2)dx, у@) = 0, уA) = 1, у'@) = 0,
y'(i) = 1;
1
Д) I[y] = f((y'"J-(y"J)dx, у@)=у"@)=0,
о
уA) =у"A) =shl, у'@) = 1, у'A) =chl;
1
е) I[y] = J(y'"Jdx, У@) = у'@)=у"@) = 0,уA) = 1,
у'A) = 4,у"A) = 12;
Вопросы и задачи
73
7Г
ж) Щ = J {{у'"J - {y'J)dX) 3,@) = у'@) = у"@) = 0,
О
уGг) = у"(тг) = sh7T, у'Gг) = СП7Г + 1.
2.7. Напишите уравнение Остроградского для следующих
функционалов:
dz \ 2 (dz\
-дх) \ду)
dxdy, D С
а)^] = //[(
D
Г Г Г г / ?^ \ 2 / 01д \ 2 / ?^ \ 2 и
б) J[u] = JJJ[[—) + (—J +(—j +2«/(ar,y,^)Jda:dyd^
DC»3.
2.8. Пусть функции Ф(ж,у,р) и Н(х,у,р) таковы, что
Ф^ т^ 0, ijj. т^ 0- Докажите, что если Н — функция Гамильтона
вариационной задачи, то вдоль любой интегральной кривой
системы уравнений Эйлера выполняется равенство
^Ф _ дФ
dx дх
+ [Ф, Щ
3. ВАРИАЦИОННЫЕ ЗАДАЧИ
С ПОДВИЖНЫМИ ГРАНИЦАМИ
Наряду с рассмотренными вариационными задачами, в
которых допустимые функции были определены на
фиксированном отрезке [а, Ь], причем концевые точки А(а, уд) и В(Ь, у в)
графика функции были закреплены, часто необходимо решать
и иные задачи, в которых экстремум функционала, заданного
интегралом, ищется среди функций, определенных на разных
промежутках, причем значения этих функций на концах
промежутка не являются фиксированными. Для таких задач можно
использовать ранее полученные результаты (см. 2).
3.1. Задача с подвижными концами
Рассмотрим задачу об экстремуме функционала
и
Ау}= / f(x,y,y')dx,
C.1)
У4
областью определения которого является класс функций G1[а,6].
Она отличается от задач, рассмотренных ранее, тем, что на
допустимые функции нет
ограничений в виде краевых условий.
С геометрической точки зрения
такая задача состоит в
определении кривой, являющейся
графиком функции, концы которой
—*- расположены на вертикальных
прямых х = а, х = b (рис. 3.1)
Рис. 3.1 и для которой соответствующее
О
3.1. Задача с подвижными концами
75
значение функционала является экстремальным. Такого рода
задачу мы будем называть вариационной задачей с
подвижными концами.
Будем считать, что интегрант рассматриваемого
функционала — дважды непрерывно дифференцируемая функция.
Отметим, что допустимой вариацией в данном случае является
любая функция 5у(х) Е Cl[a, ft]. Как и выше, используя формулу
Тейлора, убеждаемся, что первая вариация функционала C.1)
может быть представлена следующим образом (см. B.3)):
ъ
SJ[yM = f(fy8y + fW)dx. C.2)
а
Если функция у (х) доставляет экстремум функционалу J [у],
то первая вариация функционала на этой функции равна нулю
(см. теорему 1.2). Значит, для любой функции 6у Е С1 [a,ft]
b
f{fy8y + fW)dx = 0. C.3)
а
Отметим, что это равенство верно в том числе и для
бесконечно дифференцируемых функций с нулевыми значениями на
концах отрезка [a, ft]. Значит, согласно лемме Дюбуа-Р еймона,
функция у(х) является решением уравнения Эйлера
ify'-fy=0' C-4)
т.е. является экстремалью рассматриваемого функционала.
Однако условие C.3) в задаче с подвижными концами
сильнее условий леммы Дюбуа-Реймона и позволяет получить
дополнительные необходимые условия на функцию, доставляющую
экстремум функционалу. Если функционал J[y] не является
вырожденным, т.е. его интегрант удовлетворяет условию /'' , ^ О,
76 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
то, согласно теореме 2.2, экстремаль является дважды
непрерывно дифференцируемой функцией. В этом случае в силу
правила интегрирования по частям
~dxJV
SJ[yM= l(fy--f«>)Sydx + U5y
= l{fy-^ry)8ydx + f'y\xJy{b)-ryl\xJy{a). C.5)
Интеграл в правой части C.5) на экстремали обращается в
нуль. Поэтому, если у(х) доставляет экстремум функционалу
J[y]> то
f'A Mb)-ti>\ Ы*) = о.
I у' \ , ^tfX^J J у'
у \х=Ь у \х=а
C.6)
Так как 6у(а) и 5у{Ъ) в рассматриваемой задаче могут меняться
совершенно независимо, заключаем, что последнее равенство
равносильно следующим двум:
Л/ , _ 0' fyl
= 0.
C.7)
Итак, точки экстремума функционала J [у] в задаче с
подвижными концами удовлетворяют уравнению Эйлера C.4) и,
кроме того, двум дополнительным условиям C.7), которые
называют естественными краевыми условиями. Чтобы
найти эти точки, нужно среди решений уравнения Эйлера
(экстремалей функционала) выделить те, которые удовлетворяют
естественным краевым условиям.
Для функционала вида C.1) можно поставить и
^смешанную" задачу, в которой, например, левый конец графика
решения — точка А(а, у а) — является фиксированным, а правый
конец свободно перемещается вдоль прямой х = Ь. В этом
случае есть одно краевое условие, сужающее множество
допустимых функций. Допустимая вариация должна удовлетворять
3.1. Задача с подвижными концами
77
условию 6у(а) = 0, так как все допустимые функции имеют
одинаковое значение при х = а. В равенстве C.6) обнуляется одно
слагаемое, и это равенство сводится к первому условию C.7).
Значит, среди экстремалей следует искать такие функции у (ж),
которые удовлетворяют краевым условиям
у(а)=УА, fy'\x=b = °- C-8)
Пример 3.1. Найдем экстремали функционала в
следующей вариационной задаче с правым подвижным концом:
тг/4
J[y]= / {{у1J -у2 + 4ycosx)dx -»extr, у@) = 0.
Данная постановка задачи означает, что среди экстремалей
функционала нужно выделить те, которые удовлетворяют
поставленному краевому условию на левом конце и естественному
краевому условию на правом конце.
Уравнение Эйлера рассматриваемого функционала имеет
вид у" -\- у = 2 cos ж. Его общее решение можно записать
следующим образом:
у = C\cosx + C2sin-X + xsmx.
Из краевого условия на левом конце находим С\ = 0. На
правом конце естественное краевое условие имеет вид
B*/)
= 0,
ж=7г/4
или у'(тт/А) = 0. Используя его, определяем постоянную С^
С^2 = — 1 — -. Таким образом, поставленным условиям
удовлетворяет единственная экстремаль функционала
у = ( х — 1 — — ] sinx.
78 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
Пример 3.2. Найдем в вертикальной плоскости хОу
кривую, скатываясь по которой без трения, тяжелая точка
достигнет данной вертикальной
прямой за кратчайшее время.
Предполагаем, что начальное
положение точки — начало
координат, а вертикальная
прямая задается уравнением х = Ъ
(рис. 3.2).
Эту задачу можно
трактовать как модификацию задачи
о брахистохроне (см. пример 2.7). Отличие состоит в том, что
правый конец искомой кривой пересекает прямую х = b в
некоторой, заранее не известной точке.
Экстремалями рассматриваемого функционала является
семейство циклоид (см. B.6)):
О
У
Ув
У ]
х Ъ
г
в
X
Рис. 3.2
Ja; = CiF-sin6),
\y = Ci(l-cos0),
где значение в = 0 параметра соответствует начальной точке
ж = 0, з/ = 0.
Чтобы определить С\, воспользуемся вторым краевым
условием C.8):
Л/
У
х—Ь
/2^1 +(У'J
= 0.
Отсюда находим, что у'(Ь) = 0, т.е. правый конец искомой
кривой пересекает вертикальную прямую под прямым углом.
Так как, согласно правилу дифференцирования функции,
заданной параметрически [II],
CisinO
х'е Ci(l-cosO)
= 0,
3.2. Задача с подвижными границами
79
а параметр в может меняться лишь в пределах интервала
(О, 27г), то либо в = 0, либо в = 7г. Первое значение
соответствует левому концу графика функции, поэтому для правого
конца G = 7г. Из условия х(в) = Ъ получаем С\ъ — 6, откуда
С\ — b/тг. Таким образом, необходимым условиям экстремума
функционала удовлетворяет единственная функция, имеющая
параметрическое представление
( Ь
х = —(G — sinG),
I 7Г
<
у = —A — cos6).
V 7Г
Как и в примере 2.7, мы пока не можем утверждать, что
найденная функция действительно доставляет рассматриваемому
функционалу наименьшее значение, т.е. движение по циклоиде
происходит за наименьшее время.
3.2. Задача с подвижными границами
Задача с подвижными концами, рассмотренная выше, легко
обобщается. Действительно, если вернуться на
геометрическую точку зрения, то легко сформулировать вариационную
задачу, в которой концы графика функции лежат не на
вертикальных прямых, а на произвольных кривых или вообще не
подчиняются каким-либо ограничениям, т.е. являются
свободными. Особенность подобных задач состоит в том, что область
определения допустимых функций не фиксирована и меняется
от функции к функции. Такие задачи мы объединим общим
названием: вариационные задачи с подвижными
границами.
Как корректно сформулировать задачу, если функционал
ь
Ш = f f(W!/)dx, C.9)
a
80 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
порождаемый дважды непрерывно дифференцируемой
функцией /, рассматривается на множестве функций у(х) с разными
областями определения [а, 6]? Отметим следующее. Если
функция у(х) непрерывно дифференцируема на отрезке [а, Ь],
причем в концевых точках существуют односторонние
производные, то эту функцию можно продолжить на больший отрезок
[ао, Ьо] так5 что продолженная функция у(х) будет непрерывно
дифференцируемой на отрезке [ао,Ьо]- Учитывая это, можно
сформулировать задачу следующим образом: найти экстремум
функционала
ь
J[y>aM = / f{?,y,y')dx
а
на классе функций G1[ао,&о] и ПРИ значениях параметров ао ^
^ а ^ Ь ^ Ьо-
Нам удалось сформулировать вариационную задачу так,
что областью определения функционала, как и ранее, является
линейное пространство. Однако это пространство не является
нормированным, так как „естественная" норма пространства
G1[ао,&о] не отражает действительную степень близости
функций, которая должна отражать степень близости концов
графиков функций. Близость функций в данном случае можно задать
при помощи расстояния. Для произвольных функций у(х) и
у(х) с концевыми точками А(а, у (а)), 5(Ь, у (Ь)) и А(а, у (а)),
В(Ь, у(Ь)) положим
р(у,у) = тах(|у(Ж) - у(х)\ + \у'(х) - у'(я;)|) + \АА\ + \ВВ\,
где Т = [а, Ь] П [а, Ь] (рис. 3.3). Окрестностью данной
функции у(х) с концевыми точками (а, у (а)), F, у (Ь)) в данном
случае является множество функций у(х) с концевыми
точками (а, у (а)), (b, y(b)), удовлетворяющих неравенству р(у,у) < ?,
где ? > 0.
3.2. Задача с подвижными границами
81
у\ЪMЪ
Рис. 3.3
Несмотря на то что
поставленная задача не вписывается
в рамки теоремы 1.2 и мы не
можем напрямую использовать
введенные ранее понятия
дифференциала Фреше или
дифференциала Гато, основная схема
получения необходимых условий
экстремума функционала
применима и в этом случае. Приращение функционала будет
зависеть не только от вариации функции 8у = у — у, но и от вариаций
подвижных границ 6а = а — а и 8b = b — b. Отметим, что если
8у, 8а, 8Ъ — тройка допустимых вариаций для функционала
J[y,a,b], то существует такое достаточно малое число а > О,
что при \а\ < а тройка вариаций а8у, а8а, а8Ь является
допустимой. Следовательно, для фиксированной тройки 8у, 8а, 8Ъ в
окрестности точки 0 определена функция
(p(ot) = J[y + aSy, a + а8а, b + aSb].
Если функция у(x) является точкой экстремума функционала
J[y,a,b], то функция (р(а) будет иметь экстремум при а = 0.
Если при этом функция (f(a) дифференцируема в точке 0,
то, согласно необходимому условию экстремума для функции
одного переменного, выполняется равенство (р'(®) =0.
Применим изложенную схему к функционалу J[y,a,b]
конкретного вида C.9), предполагая, что интегрант f
функционала — дважды непрерывно дифференцируемая функция. Пусть
функция у(х) с концевыми точками (а, у(а)), F, у{Ь))
доставляет экстремум функционалу J[y,a,b]. Запишем функцию <р(а),
задавшись некоторыми вариациями 8у, 8а, Sb:
b+adb
(р(а)= / f(x,y + a8y,y' + a8y')dx.
а-\-а5а
82 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
Дифференцирование функции (f(a) — это дифференцирование
интеграла по параметру, причем в данном случае от параметра
зависят и пределы интегрирования. При сделанных
предположениях относительно интегранта функционала такое
дифференцирование возможно, и мы имеем [VI]
Ь+аёЬ
4>'(<х)= / —f(x,y + a5y,yf + a5yf)dx
+
а-\-ада
а-\-а5а
8а,
+ f(x,y + aSy,yf + aSy')\ Sb- f(x,y + aSy,y' + aSy')
где у = у (ж), 8у = 5у(х). Значит,
ъ
<pf@) = f{fySy + fy>Sy)dx +
+ /(aM/,S/')| 5b-f{x,y,y')\ 5а. C.10)
\х=Ь \х=а
Первое слагаемое в C.10) справа преобразуем, как и ранее
(см. 3.1), с помощью интегрирования по частям:
ъ ъ
f{fySy + fy>Syf)dx = J^-^f^^ C.11)
Далее, полагая 5уь = y(b-\-5Ь) — уF), находим
Syb = y(b+Sb)-y(b) + y(b)-y(b)-y'(b)8b + Sy(b)^y'(b)8b + Sy(b).
Проведя аналогичные рассуждения для левого конца и
выполнив в C.11) соответствующие замены, из C.10) получаем
'^=J(fy-YjyMydx + fy'
х—Ь
$УЬ +
+ (f-fy'y')\ „Sb-fy'\ Sya-{f-fyiy')\ Sa- (ЗЛ2)
\x=b \x=a \x=a
3.2. Задача с подвижными границами
83
Получили формулу, в которую вариации 5у, 5а, 5уа, 5Ь, 5уь
входят линейно. Как и в случае задач с фиксированными
концами, величину 5J[y,5y,5a,5ya,5b,буь] = ^'(О) назовем
вариацией функционала J[y,a,ft] в задаче с подвижными границами.
Формула C.12) вариации функционала как частные случаи
содержит:
- формулу для первой вариации функционала в
вариационной задаче с подвижными концами — при 8а = 8Ь = 0;
- формулу для первой вариации функционала в простейшей
задаче вариационного исчисления — при Sya = буь = Sa = Sb = 0.
По аналогии с выводом формулы C.12) можно получить
вывод формулы в более общем случае функционала, зависящего
от нескольких функций, определенных на общем подвижном
отрезке [a, ft]:
ъ
J[y] = Jf(x,y,yf)dx, C.13)
а
где у = (yi, г/2, ..., Уп) ? Сг[а,Ь], а функция f(x,y,y') дважды
непрерывно дифференцируема. В этом случае для вариации
функционала имеем
6 п
/ 7
a *=1 Х
п п
+E#>.*+(/-E/J^
г=1 г=1
п
-Е^>.*-(/-Е/^)
л-
ж=6
г=1 г=1
Eа. C.14)
Рассмотрим еще одну задачу. Пусть функционал J [у]
определен на гладких функциях, концы графиков которых лежат на
двух фиксированных кривых у = <р(х) и у = ф(х), определенных
84 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
У = Ф(х)
на [ао,Ьо] (рис- 3.4). Пример
вариационной задачи с такой
областью определения функционала
дает задача вычисления
расстояния между двумя кривыми.
Если некоторая функция у(х)
доставляет экстремум
функционалу J [у], то она является точкой
экстремума среди всех функций,
графики которых имеют с графиком у(х) общие концевые
точки. Значит, указанная функция у(х) удовлетворяет уравнению
Эйлера, т.е. является экстремалью рассматриваемого
функционала. Следовательно, в общей формуле C.12) для вариации
функционала первое слагаемое равно нулю. Поэтому в данном
случае необходимое условие экстремума принимает вид
Рис. 3.4
fy\ Syb+{f-fy>y')\ M-fy\ 5ya-(f-fyly')
y \x=b y \x=b y \x=a y
5a = 0.
Поскольку концы графиков допустимых функций лежат на
фиксированных кривых, то
8уь = ф'(ЬMЬ, 6уа = (р'(аNа.
Поэтому
8J[y,Sy,Sa,Sb] = {1 + (Ф'-у')/уМ 8Ь-
у \х=Ь
-{f + (<p'-y')fy>)\ Sa = 0.
* \х=а
В силу независимости вариаций 5а и 5Ь
A + (Ф'-у'Iу>)\ =0, (/ + (?>'-уЭД| =0, C.15)
у \х=Ь у \х=а
что дает краевые условия в данной задаче.
3.2. Задача с подвижными границами
85
Краевые условия C.15) называют условиями
трансверсальности. О кривой у = у (ж), удовлетворяющей
условиям трансверсальности C.15), говорят, что она трансверсальна
кривым у = (р(х) и у = ф(х).
Пример 3.3. Выясним геометрический смысл условий
трансверсальности для часто встречающихся в приложениях
функционалов вида
ь
J[y] = j A{x,y)y/1 + Wdx, C.16)
а
где А(х,у) — дважды непрерывно дифференцируемая функция
(см. примеры 1.1-1.5). Пусть этот функционал исследуется на
экстремум в классе гладких функций, концы графиков которых
лежат на кривых у = (р(х) и у = ф(х), где функции (р(х) и ф(х)
непрерывно дифференцируемы.
В данном случае /(ж, у, у') = А(х,у) л/1 + {у'J и
&=А(х,у)- У' ~ ^
л/Г+FF i + (!/02'
Поэтому
f+m'-y')=f+Y^(Tp'-y')=
"'Ч1+ 1 + (у'J >*" i + (v02 ' ( ]
Видим, что для функционалов данного типа условия
трансверсальности выражаются особенно просто: у'(Ь) = —1/ф'(Ь) в
точке b и аналогично у'{а) = —1/(р'(а) в точке а.
Таким образом, условия трансверсальности экстремалей
рассматриваемого функционала к кривым у = <р(х) и у = ф(х)
в данной задаче с подвижными границами есть условия их
ортогональности этим кривым.
86 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
3.3. Экстремали с угловыми точками
В вариационном исчислении есть задачи, в которых область
определения функционала не может ограничиваться классом
С1^,^. Из самой постановки задачи может вытекать, что
функция, доставляющая экстремум функционалу, в некоторых
точках теряет дифференцируемость, и если она и имеет
односторонние производные в такой точке, то эти производные
различаются. К числу таких задач принадлежат задачи на
отражение и преломление экстремалей, являющиеся обобщением
задач на отражение и преломление световых лучей.
Задача об отражении экстремалей. Эта задача
ставится следующим образом. Найти кривую у = у(х) (рис. 3.5),
которая соединяет фиксированные точки А(а, уд) и В(Ь, у в) и
имеет одну угловую точку С(с, ус)-,
В расположенную на кривой у =
= (f(x), причем функция у(х)
доставляет экстремум
функционалу
О
у(х)
Ф(х)
Рис. 3.5
Ау]
о
x,y,y')dx.
В этом случае область определения функционала J[y] есть
множество функций, непрерывно дифференцируемых на [а, Ь]
всюду, кроме, возможно, одной точки, являющейся угловой
точкой, т.е. в этой точке существуют односторонние
производные. Отметим, что если функция у(х) доставляет экстремум
функционалу J [у], а ее угловая точка есть (с, у(с)), то
сужения функции на отрезки [а, с] и [с, Ь] являются экстремалями
функционала. Действительно, зафиксировав точку с и значения
функции на отрезке [с, 6], мы можем рассмотреть функционал
с
JaЫ = / f(x,y,y')dx
3.3. Экстремали с угловыми точками
87
на классе функций С1 [а,с], который отличается от исходного
постоянным значением (значением интеграла по отрезку [с, Ь])
и достигает минимума на функции у(х). Значит, функция
у(х) является решением уравнения Эйлера на отрезке [а, с].
Аналогичные рассуждения можно провести и для отрезка [с, Ь].
Удобно представить функционал J [у] в виде суммы двух
интегралов:
с Ь
Ау] = / f{x,y,y')dx+ / f(x,y,y')dx = Ji[y\ + J2[y].
а с
Тогда необходимое условие экстремума функционала
принимает вид
5^[у,5у] + 5^[у,5у]=0.
По существу, мы имеем две вариационные задачи: первая —
на отрезке [а, с] с фиксированным левым концом и правым,
движущимся вдоль кривой у = (р(х); вторая — на отрезке [с, Ь]
с движущимся вдоль кривой левым концом и фиксированным
правым. Мы можем на отрезках [а, с] и [с, Ь] рассматривать
только экстремали исследуемого функционала. В этом случае
первые вариации функционалов J\[y\ и J2[y] имеют вид (см. 3.2)
SJi[vM = {f + (<P'-v')ftf)\c_QSc,
8МуМ = -{1 + (<р'-уУу>)\с+0*с.
Тогда необходимое условие экстремума 5J\ [у, 5у] + 5J2 [у, 5у] = О
в силу произвольности 6с принимает вид
(f+(<pf-y')mc.0-(f+^-y')mc+0=o,
или
(/ + У - У')ГУ.) |с_о = (/ + У ~ УУу>) U- C-18)
Условие C.18) будем называть условием отражения.
88 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
Выясним физический смысл условия отражения для
функционалов вида C.16). Так как, согласно C.17), при ф = (р
f + f'y^'-y') =
/•A + 2/V) Л.A + уУ)
i + (y'J vT+W'
то получаем (при А(х,у) ф 0)
1 + If'у' I 1 + if/у'
yfiMy
Л2
_0 у/т+Ш
C.19)
с+0
Пусть /?i, /?2 — углы
наклона односторонних касательных
(слева и справа) к кривой у =
= у(х) в точке G, а — угол
наклона касательной к кривой у =
= (f(x) в той же точке (рис. 3.6).
Тогда угол падения, т.е. острый
а ох угол между дугой АС и кри-
Рис з 6 вой у = (р(х), равен 7г - ft + а,
а угол отражения, т.е. острый
угол между дугой С В и кривой у = (р(х), равен fy — ol. Так
как
tg/3i=j/(c-0), tg/32 = y'(c + 0), tga = ?j'(c),
условие C.19) можно записать следующим образом:
l + tgatg/?i l + tgatg/32
| sec /?i
| sec /?2
Учитывая, что косинусы углов /3i и /?2 имеют разные знаки
(один из этих углов острый, а другой тупой), получаем
cos/3i(l + tgatg/?i) + cos/32(l + tgatg/32) =0,
или после преобразования —
cos(/?i — а) + cos(/?2 — a) = 0.
3.3. Экстремали с угловыми точками
89
Полученное равенство с учетом диапазона изменения
рассматриваемых углов означает, что 7г — fa + a = fa — ol, т.е. угол
падения кривой у = у(х) равен углу отражения.
Если луч света распространяется со скоростью v(x,y) в
неоднородной плоской среде, ограниченной кривой у = (р(х), то
время Т, затраченное на прохождение луча из точки А(а, у а) в
точку В(Ь, у в), выражается интегралом
v{x,y)
C.20)
Свет распространяется так, что луч проходит от одной точки
до другой за минимальное время. Мы имеем дело с
вариационной задачей для функционала вида C.16). Реальная траектория
луча является решением вариационной задачи, и мы получаем
подтверждение известного физического закона: угол падения
луча света на отражающую поверхность равен углу отражения.
Задача о преломлении экстремалей. Пусть в
простейшей задаче вариационного
исчисления B.1), B.2) концы
графика допустимой функции А (а, уа)
и В F, уъ) находятся по разные
стороны от гладкой кривой у =
= <р(ж), которая разбивает
полосу {(ж, у): а ^ х ^ Ъ] на две
области D\ и D% (рис. 3.7), причем
У;
О
1 ,
А\
а
Di :
с b
X
Рис. 3.7
f{x,y,y') =
h(x,y,y'), (ж, у) GDi;
/2(ж,у,у')> (xi У) ^D2,
где fi(x,y,y') и f2(x,y,yf) — дважды непрерывно
дифференцируемые функции своих аргументов.
В этой задаче, как и в предыдущей, в качестве области
определения функционала следует выбрать множество функций, у
90 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
которых график в точках пересечения с кривой у = <р(х)
может иметь излом. Мы предполагаем, что допустимая функция
непрерывна, а в указанных точках имеет конечные
односторонние производные. Точки экстремума функционала нужно
искать среди таких функций, которые на участках гладкости
являются экстремалями этого функционала. Точка С (с, у с)
является подвижной, а ее координаты связаны соотношением
Ус = ?>(с)- Поэтому, как и в случае отражения экстремалей,
имеем
SJ=(h + (<p'-y')(hyy,)
Необходимое условие экстремума SJ = 0 на функциях
указанного вида записывается следующим образом:
(A + ^-i/K/iW
(условие преломления). В развернутом виде его можно
записать так:
fi(cMc),l/(c-0)) + Ис) -y'(C-0))(/i)^c,p(c)Y(c-0)) =
= h(cMc),y'(c+0)) + (^(С)-у'(С+0))(/2);,(с,^(с),у,(с+0)).
Чтобы решить задачу о преломлении, нужно найти
экстремали исследуемого функционала в областях D\ и Л>2? решая два
уравнения Эйлера для интегрантов Д и Д. Среди этих
экстремалей в областях D\ и D2 надо выбрать те пары у\(х) и у2(х)^
которые удовлетворяют краевым условиям
yi(a)=yA, yi(c) = <p(c), у2(с) = <р(с), у2(Ь)=ув
и условию преломления C.21). Экстремум функционала может
достигаться только на таких функциях.
Выясним физический смысл условия преломления,
рассмотрев функционал вида C.16), в котором функция А(х,у) имеет
5c-(f2 + (<p'-y')(f2)',)
г.+0
6с.
\с-0
= {/2 + (<р'-у')Ш'у>)
г.+0
C.21)
3.3. Экстремали с угловыми точками
91
линию разрыва у = (р(х). Обозначив А(х,у) = А\(х,у) в D\ и
А(х,у) = А2(х,у) в Z?2 и использовав C.17), можем записать
условие преломления в виде
*<*,»>1+л
л/i+Iif
¦Л2
М[х,у)-
с_0 v/r+W
с+0
ИЛИ
Вводя, как и в случае отражения экстремалей, обозначения /?i,
/?2, OL и проводя аналогичные преобразования, получаем
cos(a-/?i) _ А2(с,<р(с))
cos(a-/32) Ai(c,<p(c))'
sinGr/2-(g-i9i)) = А2(с,<р(с))
sinGr/2-(a-^)) " Ai(cMc))'
Распространение света описывается функционалом C.20), для
которого
1 1
Аг(х,у) = — -, А2(х,у) =
i;i (ж, у)' ' v2(x,yY
и условие преломления в этом случае преобразуется к
следующему:
sinGr/2-(a-/3i)) _ vi(c,<p(c))
sinGr/2 - (a - C2)) v2 (c, <p(c)) '
Это соотношение представляет собой закон Снеллиуса
преломления света, согласно которому отношение синуса угла падения
к синусу угла преломления равно отношению скоростей
распространения света в двух средах.
В задачах на отражение и преломление экстремалей
наличие точки излома у графика функции, на которой достигается
экстремум, вытекает из постановки задачи. Но даже в задачах
с гладким интегрантом в отсутствие каких-либо
дополнительных условий функционал может не иметь экстремумов в классе
92 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
непрерывно дифференцируемых функций, а решение
вариационной задачи следует искать в более широком классе функций,
например среди функций, графики которых могут иметь точки
излома.
Пример 3.4. Исследуем на экстремум функционал
2
J[y] = f(y'J{l-y'Jdx C.22)
О
при краевых условиях у@) = 0, уB) = 1.
Так как интегрант неотрицателен, то J[y] ^ О на любой
допустимой функции у(х). Любая функция у (ж), для
которой J [у] = 0, может рассматриваться как точка экстремума
функционала, даже если она не является непрерывно
дифференцируемой на отрезке [0, 2]. В качестве такой функции можно
взять, например,
(ж, О^ж^ 1;
у Ах) = <
V } [1, 1<ж^2.
Такая функция не является единственной. Подходит любая
кусочно линейная функция, производная которой принимает лишь
два значения — 0 и 1 (за исключением одной или нескольких
точек излома).
Если функция у(х) непрерывно дифференцируема на
отрезке [0,2], то функция у'(х) непрерывна на этом отрезке и
поэтому не может принимать лишь два значения: 0 и 1.
Следовательно, в интеграле C.22) непрерывная неотрицательная
подынтегральная функция отлична от нуля хотя бы в одной
точке. Значит, для непрерывно дифференцируемой функции
у(х) имеем J[y] > 0. В то же время можно показать, что в
любой окрестности функции у*(х) (по норме ||-||^i) имеются
гладкие функции, значение функционала на которых, в силу его
непрерывности, мало отличается от значения функционала на
3.3. Экстремали с угловыми точками
93
функции у* (ж), т.е. от значения 0. Таким образом, значение 0
является точной нижней гранью значений функционала, и это
значение не достигается в классе непрерывно
дифференцируемых функций, ф
Укажем условия, которым должны удовлетворять точки
экстремума функционала C.1), если его область определения —
множество кусочно гладких функций на отрезке [а, ft]. Мы
называем функцию кусочно гладкой на промежутке Т, если она
непрерывна на этом промежутке, имеет на нем непрерывную
производную всюду, кроме, возможно, конечного числа точек, в
которых функция имеет конечные непрерывные односторонние
производные. Во-первых, каждый гладкий участок функции,
являющейся точкой экстремума, должен удовлетворять
уравнению Эйлера (т.е. быть экстремалью). Во-вторых, исходя
из необходимого условия экстремума функционала, можно
заключить, что в каждой угловой точке х* функции, являющейся
точкой экстремума, выполняются следующие условия Вейер-
штпрасса — Эрдмана:
(f-y'fy')L-0 = (f-y'fy>)\
Эти условия в совокупности с требованием непрерывности
функции у(х* — 0) = у(х* + 0) позволяют найти координаты
угловых точек, если они есть.
Пример 3.5. Рассмотрим функционал
ъ
J[y}=J((y'J-y2)dx
а
и условия Вейерштрасса — Эрдмана для него. Второе условие
fy'l п = fy'
у 1с-0 у 1с+0
принимает вид 2у'(с — 0) =2у7(с + 0), т.е. означает равенство
односторонних производных в любой точке. Значит, все
точки экстремума функционала, даже в классе кусочно гладких
94 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
функций, не имеют угловых точек и являются непрерывно
дифференцируемыми функциями. Напомним, что условие /'' , ф О
является достаточным для того, чтобы экстремали
функционала были дважды дифференцируемыми (см. теорему 2.2). В
этом случае экстремаль не имеет угловых точек, и
рассмотренный функционал — тому пример (для него /'' , = 2 для любых
значений аргументов функции /).
Вопросы и задачи
3.1. Запишите условия трансверсальности на правом конце
в вариационной задаче
ь
J[y] = / A(x,y)y/l + (y'Jdx -+ extr, у (а) = уа, у(Ь) = <р(Ь),
а
функционал которой определен на множестве непрерывно
дифференцируемых функций. Предполагается, что значения а, уа
фиксированы, А(х,(р(х)) Ф 0, а (р(х) непрерывно
дифференцируема.
3.2. Докажите общую формулу C.14) вариации
функционала, зависящего от нескольких функций, в задаче с подвижными
границами.
3.3. Запишите условие трансверсальности на левом конце в
вариационной задаче
ь
I[y,z] = [A(x,y,z)y/l + (у'J + {z'Ydx -> extr,
a
z(a)=<p(a,y(a)), y(b)=yb, z(b) = zb,
функционал которой определен на множестве кусочно гладких
функций, 6, уь, Zb фиксированы, (р(х,у) непрерывно
дифференцируема и А(х,у,(р(х,у)) Ф 0.
Вопросы и задачи
95
3.4. Выведите формулу для первой вариации функционала
ь
I[y] = Jf(x,y,y',y")dx
в задаче со свободными концами (предполагается, что у Е
eC2[a,b\).
3.5. Получите условия трансверсальности на правом конце
в вариационной задаче
ъ
1[у^] = J F(x,y,z,y',z)dx^e*tT,
a
y(a)=ya, z(a)=za, z(b) = <p(b,y(b)),
функционал которой определен на множестве пар кусочно
гладких функций, а, уа, za фиксированы.
3.6. Получите условия трансверсальности на правом конце
в вариационной задаче
ъ
![У}= / F(x,y,y')dx -^extr, y(a)=ya, (p(b,y(b)) = О,
a
функционал которой определен на множестве кусочно гладких
вектор-функций, a, ya Е W1 фиксированы.
3.7. Найдите экстремали в следующих вариационных
задачах с правым подвижным концом:
ъ
I {y'fdx ->> extr, у @) = 0, у(Ь) + 6+1 = 0;
aj
о
ь
б) /Vi + U/) efo^exfa, у(о)=0, у(Ь) = Ь-5;
J У
о
96 3. ВАРИАЦИОННЫЕ ЗАДАЧИ С ПОДВИЖНЫМИ ГРАНИЦАМИ
е
) fBy-x\y'J)dx^extr, уA) = е;
е
в"
1
тг/4
г]
О
) f {{У'? -V + l)dx^ extr, i/@) = 0;
о
ь
Л) У (l/l/ + О/J +1) <fe -> extr, i/@) = 1, i/F) = -3;
о
b
е) / лД+У л/Г + W^ -> extr, у@) = 0, у(Ь) + 6 + 1 = 0.
о
3.8. Используя методы вариационного исчисления, найдите
расстояние от начала координат до плоской кривой х2у = 1.
3.9. Используя методы вариационного исчисления, найдите
кратчайшее расстояние между двумя кривыми на плоскости:
а) у = х2 и у = х — 5; б) у = х2 + 2 и у = ж.
3.10. Выясните, имеет ли функционал задачи
ь
J[y\ = / Bжу -у2 - (уJ) dx, у{°) = Уа, у(ь) = Уб
экстремали с угловыми точками.
3.11. В вариационной задаче
ь
J[y] = Jy2{l-(y,J)dx, 1/(-1) = 0, уA) = 1
найдите экстремали функционала с угловыми точками.
4. ЗАДАЧИ НА УСЛОВНЫЙ
ЭКСТРЕМУМ
4.1. Основные типы задач
на условный экстремум
Рассмотренные ранее задачи характеризовались тем, что их
решения должны были удовлетворять некоторым условиям на
границе области интегрирования (краевым условиям).
Однако во многих важных приложениях вариационного исчисления
на решение задачи накладываются некоторые дополнительные
условия. В этой связи вспомним задачу Дидоны (см. пример
1.1). Контур (т.е. ремень из бычьей шкуры), которым
охватывался участок земли, имел вполне определенную длину. Это
значит, что функция, дающая решение задачи Дидоны, должна
удовлетворять не только краевым условиям, но и
дополнительному условию: длина графика функции фиксирована.
Приведем общую формулировку задачи, в которой на допустимые
функции накладываются дополнительные условия — так
называемые условия связи.
Пусть требуется найти экстремум функционала
ъ
J[y}= / f(x,y,y')dx, у = (уи У2, ..., Уп), D.1)
а
который мы будем называть целевым функционалом, на
множестве функций у(х) из класса G1([a,6],Rn) непрерывно
дифференцируемых вектор-функций, удовлетворяющих
краевым условиям
у(а)=уи у(Ь)=у2 D.2)
98 4. ЗАДАЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
и некоторым соотношениям (условиям связи), которые могут
выражаться дифференциальными уравнениями
gj(x,y,y') = Q, 3 = 1, к (к<п), xe[a,b], D.3)
или интегральными
ь
hi(x,y,y')dx = Li, i=T^s. D.4)
а
Здесь везде предполагается, что функции /, gj, j = 1, к,
hi, г = 1, s, дважды непрерывно дифференцируемы и краевые
условия D.2) не противоречат условиям связи D.3).
Дифференциальные соотношения D.3) называют
дифференциальными связями, а соотношения D.4) —
интегральными (изопериметрическими) связями. Особо отметим
частный случай, когда в соотношениях D.3) функции gj не
зависят от yf. В вариационном исчислении такие связи называют
фазовыми ограничениями, а в теоретической механике —
голономными связями.
Сформулированная задача общего вида представляет собой
вариационную задачу на условный экстремум. Частный
случай задачи, в которой наложены только
дифференциальные связи D.3), а также различные ее модификации,
отличающиеся краевыми условиями (а иногда с дополнительными
интегральными связями D.4)), называют задачей Лагран-
жа. Эта задача была опубликована Ж.Л. Лагранжем в 1788 г.
в его ^Аналитической механике". Задачу D.1), D.2), D.4)
с интегральными связями называют изопериметрической
задачей, рассматривая ее как обобщение классической
задачи определения среди плоских фигур одинакового периметра
(изопериметрических фигур) той, которая имеет наибольшую
площадь (см. 4.4).
4.1. Основные типы задач на условный экстремум 99
Отметим, что изопериметрическую задачу D.1), D.2), D.4)
можно свести к задаче Лагранжа, введя новые функции
X
фг(х) = / hi(x,y,y')dx, г = 1, s. D.5)
a
Тогда вместо интегральных соотношений D.4) получим
дифференциальные соотношения
ф[(х) = Ы(х,у,у'), г = T^s. D.6)
При этом, согласно D.4),
фг(а)=0, фг(Ь)=Ьг, i = M. D.7)
Таким образом, изопериметрическая задача эквивалентна
следующей задаче Лагранжа: найти систему n + s функций
г/i, ..., уп, ф\, ..., ф3, связанных соотношениями D.6) и
удовлетворяющих краевым условиям D.2) для функций у^, г = 1, п,
и условиям D.7) для функций ф^ г = 1, «s, которая доставляет
экстремум функционалу D.1).
К задаче Лагранжа сводится и задача об экстремуме
функционала, зависящего от высших производных. Для
функционала
ь
J[y] = Jf(x,y,y,,...,y^)dx
а
нужно ввести новые функции
уо = у, у\ = у', У2 = у", ..., уп = у{п).
Тогда исходный функционал заменяется функционалом
b
АУо,Уи---,Уп] = / 1(х,Уо,У1т--,Уп)Aх,
а
100 4. ЗАДАЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
неизвестные функции в котором связаны уравнениями
ГУо
у[
,Уп-
= У1,
= У2,
-1=Уп
4.2. Необходимые условия в задаче Лагранжа
Задачи на условный экстремум встречаются и в
конечномерных задачах, когда аргументы функции многих переменных,
экстремум которой нужно найти, связаны некоторыми
функциональными соотношениями. Для решения этих задач обычно
используют метод множителей Лагранжа [V]. Этот
универсальный метод, основанный на введении множителей Лагранжа
и составлении функции Лагранжа, применим и для
функционалов.
Сформулируем необходимые условия экстремума
функционала в задаче Лагранжа D.1)-D.3). Будем предполагать, что
функции gj(x,y,yf), j = 1, /с, непрерывно дифференцируемы по
переменным у' и ранг матрицы Якоби по этим переменным
/ dgi dgi dgi \
ду[ ду2 '" ду'п
д{дъ 92, -.., 9к)
дд2
ду[
дд2
ду'2
д(у[, У*» ••••> Уп)
ддк ддк
\ ду[ ду'2
максимален и равен к. Мы можем считать, что
ддл_ ддл_ ддл_
ду[ ду'2 '¦¦ ду'к
дд2 дд2 дд2
Щ W2 '" Щ\^^
од2
ду'п
ддк
ду'п J
ддк ддк ддк
ду[ ду'2 '" ду'к
D.8)
4.2. Необходимые условия в задаче Лагранжа 101
так как при необходимости можно изменить соответствующим
образом порядок переменных yi и функций gj.
Теорема 4.1. Если вектор-функция у*(х) = (уI(ж), ...,у*(ж))
из С1([а,Ь],Мп) является решением задачи D.1)-D.3) и при
этом выполнено условие D.8), то существуют такие функции
Ai(rr), ..., Afc(rz;), что у*(ж) является экстремалью функционала
а ^
Функционал 7* [у] будем называть вспомогательным
функционалом задачи D.1)-D.3). Интегрант
вспомогательного функционала, т.е. функцию
к
г = /+ЕА^ DЛ°)
называют функцией Лагранжа (лагранжианом) задачи
D.1)-D.3). В функцию Лагранжа входят левые части
дифференциальных связей с коэффициентами А^-(ж), которые
называют множителями Лагранжа.
Будем называть экстремалями задачи Лагранжа
экстремали функционала D.1), удовлетворяющие краевым
условиям D.2) и дифференциальным связям D.3) (в частности,
фазовым ограничениям). Теорема 4.1 фактически утверждает, что
все экстремали задачи Лагранжа содержатся в множестве
экстремалей вспомогательного функционала /*[у]. Значит, чтобы
найти их, нужно из экстремалей вспомогательного
функционала выбрать те, которые удовлетворяют условиям D.2), D.3).
Другими словами, экстремали вспомогательного функционала,
удовлетворяющие краевым условиям D.2) и
дифференциальным связям D.3), являются экстремалями задачи Лагранжа.
Учитывая сказанное, из теоремы D.1) легко получить
полную систему условий для экстремалей задачи Лагранжа, т.е.
102 4. ЗАДАЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
систему, в которой количество неизвестных равно числу
уравнений. Действительно, для п + к неизвестных функций у*(х)
(г = 1, п) и Xj(x) (j = 1, к) мы имеем п уравнений Эйлера
для функционала 1*[у] и А; условий связи D.3). Среди решений
этой системы выбирают те, которые удовлетворяют краевым
условиям D.2), причем эти условия не должны противоречить
условиям связей.
Замечание 4.1. Иногда в качестве лагранжиана вместо
функции D.10) используют функцию вида
к
где Ао = const. При этом полагают Ао ^ 0, если в задаче
D.1)-D.3) ищется минимум, и Ао ^ 0, если ищется максимум.
Добавление в лагранжиан еще одного множителя Ао на самом
деле не оказывает существенного влияния, так как фактически
равносильно умножению лагранжиана на некоторое число.
Такое умножение, если Ао ф 0, не изменяет множества решений
системы уравнений Эйлера. А значение Ао = 0 есть вырожденный
случай, в котором задача поиска экстремалей
вспомогательного функционала теряет смысл, так как эти экстремали никак
не будут связаны с целевым функционалом. #
Для иллюстрации задачи Лагранжа остановимся на
двумерном случае (п = 2), когда задано одно фазовое ограничение
(к = 1), т.е. будем решать задачу
b
J[y^z]= / f(x,y,z,y',z')dx ^extr, D.12)
а
у(а)=уа, у(Ъ)=уь, z(a)=za, z(b) = zbl D.13)
g(x,y,z)=0. D.14)
4.2. Необходимые условия в задаче Лагранжа 103
Частным случаем этой задачи является задача о
геодезических линиях, в которой требуется на заданной поверхности
найти кривую наименьшей длины (см. 4.4).
В задаче D.12)-D.14) допустимыми функциям являются
пары функций у (ж), z(x) Е С1 [а, Ь], для которых кривая у = у (ж),
2 = 2(ж) лежит на поверхности g(x,y,z) = 0. Мы предполагаем,
что эта поверхность не имеет особых точек (т.е. (gfxJ + (gfyJ +
+ (gfzJ ф 0). Теорема 4.1 в этом случае сводится к следующему.
Теорема 4.2. Если пара функций у*(ж), z*(x) Е Cl[a, Ь]
является решением задачи D.12)-D.14), причем {g'yJ + (g'zJ ф 0,
то существует такая функция А (ж), что пара функций у* (ж),
z*(x) является экстремалью функционала
b
J*[y,z] = / (f{x,y,z,y',z') + \g(x,y,z))dx.
а
А Сначала рассмотрим частный случай, когда уравнение
связи g(x,y,z) = 0 разрешимо относительно одной из переменных,
например z. Тогда это уравнение равносильно уравнению z =
= (р(х,у), где функция (р(х,у) дважды непрерывно
дифференцируема, так как, по предположению, дважды непрерывно
дифференцируема функция g(x,y,z). Условие непротиворечивости
уравнения связи краевым условиям в данном случае означает,
что za = (р{а,уа) и zb = (р{Ъ,уь).
Уравнение z = (р(х,у) позволяет свести рассматриваемую
задачу к задаче с одной неизвестной функцией. Действительно,
если у*(ж), z*(x) — решение задачи D.12)-D.14), то функция
у*(ж) является решением простейшей задачи вариационного
исчисления
b
ffayws/Wx + Vyy^dx-^extT, у(а)=уа, y(b)=yb. D.15)
а
104 4. ЗАДАЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
Поэтому, согласно теореме 2.1, функция у(х) удовлетворяет
уравнению Эйлера для функционала этой задачи, которое
имеет вид
^ (#+fWy) -fy- fWy - & №+<У) = о. D.16)
Так как
то уравнение D.16) равносильно следующему:
?(M-fv-My + ±(f'M = o,
или
iW-S>{i(M-f,)^0. D.17)
Частную производную ср' можно выразить через частные
производные функции д следующим образом: (pf = —gf/gfz.
Сделаем соответствующую замену в уравнении D.17):
?ы-п-(?ш-г$гь ,4.18)
Уравнение D.18) заменой
л4(й№>-л
приводится к виду
d
^№)-/J-4 = 0, D-19)
а формулу замены можно записать следующим образом:
±(f'z,)-f'z-Xg'z = 0. D.20)
4.3. Необходимые условия в изопериметрической задаче 105
Соотношения D.19), D.20) представляют собой уравнения
Эйлера для вспомогательного функционала
ь
I*[y,z]= / (f{x,y,z,y',z') + \(x)g(x,y,z))dx.
a
Итак, если у*(ж), z*(x) есть решение задачи D.12)—D.14),
то у* (х) является решением задачи D.15), а следовательно,
и уравнения D.16). Но тогда пара функций у* (х) и z*(x) =
= (р(х,у*(х)) удовлетворяет системе уравнений D.19), D.20),
т.е. системе уравнений Эйлера вспомогательного функционала.
Теорема доказана в частном случае, когда уравнение связи
g(x,y,z) = 0 разрешимо относительно переменного z.
Отметим, что доказательство теоремы 2.1, базирующееся
на лемме Дюбуа-Реймона, которая в свою очередь
опирается на лемму Лагранжа, в конечном счете использует только
локальные вариации, т.е. вариации, малые по норме ||-||^ и
отличные от нуля лишь в малой окрестности заданной точки
xq Е [а, Ь]. График такой вариации 5у(х) отличается от
графика варьируемой функции у* (ж) лишь в малой окрестности точки
(жо, У*(жо))- Эту окрестность можно выбрать настолько малой,
что в ней при grz^0 уравнение g(x,y,z) = 0, согласно теореме о
неявной функции, разрешимо относительно переменного z.
Если в точке (жо, У*(жо)? 2*(жо)) имеем g'z = 0, то в этой точке и в
некоторой ее окрестности g' т^ 0, так что мы можем уравнение
g(x,y,z) = 0 разрешить относительно переменного у. >
4.3. Необходимые условия
в изопериметрической задаче
Как было показано в 4.1, изопериметрическую задачу
можно свести к задаче Лагранжа. Основываясь на таком
преобразовании, получим необходимые условия экстремума
функционала для этой задачи.
106 4. ЗАДАЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
Согласно D.5)-D.7), изопериметрическая задача D.1), D.2),
D.4) эквивалентна задаче Лагранжа с целевым функционалом
D.1), дифференциальными связями D.6) и краевыми условиями
D.2), D.7). Заметим, что в такой задаче ранг матрицы Якоби
дифференциальных связей по переменным у{ максимален, так
как, например,
det-
Щи-
д(ф[,.
т, .т,/\
¦,9s)
-Ф'ь)
-1
0
0
/\
0
-1
0
/ /
0
... 0
... -1
/о,
где ^•(ж,у,у,,Ф,Ф/) = hj(x,y,y') - ф1-, j = 1, s. Следовательно,
можно применить теорему 4.1.
Запишем вспомогательный функционал
ЛУ,Ф] = У (f(x,y,y') + Yi\j{hj(x,y,y')-tf))dx =
I
/(х,у,у',Ф,Ф')^, D.21)
где Ф = (^ь -.., ips),
S
f(x,y,y',4>,q>,) = f(x,y,y,) + Y/^{hj(x,y,y')-ip,j),
i=i
и его уравнения Эйлера:
( d ~ ~
u^-4=0' ^ = 1'n-
D.22)
Так как fL=0, fL, = -Aj, получим
AjOzO=0, J = M-
4.3. Необходимые условия в изопериметрической задаче 107
Таким образом, в изопериметрической задаче множители
Лагранжа постоянны, а оставшиеся уравнения системы D.22)
можно записать следующим образом:
^(/%"(/%=0, i = I^, D-23)
где/* = /+ЕАЛ-.
i=i
Система D.23) является системой уравнений Эйлера для
функционала
?г * 1
/*[У]=/ / + ЕЛА- ^ D-24)
и поэтому функции у*, ..., у*, удовлетворяющие системе
уравнений D.22), являются экстремалями функционала D.24). Ин-
тегрант функционала D.24) называют функцией Лагранжа
изопериметрической задачи.
Теорема 4.3. Если функции у*(ж), ..., у^{х) из С1 [а,Ъ]
доставляют экстремум функционалу в задаче D.1), D.2), D.4),
то существуют такие числа Ai, ..., As, что функции у*(ж), ...,
у* (ж) являются экстремалями функционала D.24). #
Теоремы 4.1 и 4.3 представляют собой обобщение правила
множителей Лагранжа, применяемого для исследования
функций многих переменных [V], на случай гладких
бесконечномерных задач вариационного исчисления. Поэтому и в
вариационном исчислении метод решения задачи Лагранжа и
изопериметрической задачи, базирующийся на определении функций
Xj(x) и коэффициентов Aj, часто называют методом
множителей Лагранжа. При этом экстремум, который нужно
найти в указанных задачах, называют условным
экстремумом. Уравнения D.11) называют уравнениями Эйлера
задачи Лагранжа D.1)-D.3), а уравнения D.23) —
уравнениями Эйлера изопериметрической задачи D.1), D.2), D.4).
108 4. ЗАДАЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
В заключение отметим, что в рассмотренных
вариационных задачах на условный экстремум правило множителей Ла-
гранжа распространяется и на условия трансверсальности
(см. 3.1). Эти условия записываются так же, как и для
задачи на безусловный экстремум, но при этом роль интегранта
/ играет функция Лагранжа соответствующей задачи.
Пример 4.1. Рассмотрим изопериметрическую задачу с
правой подвижной границей
т-
у@)--
Х2
= / (yfJdx ->> extr,
0
= о,
У{Х2) -
-х2 + 2
Х2
/ \2ydx =
0
= 0.
= 0.
Запишем функцию Лагранжа /* = {у'J + АA2у). Уравнение
Эйлера
?(/%-(/•>;,=о
для вспомогательного функционала будет иметь вид у" = 6А.
Интегрируя его, получаем
у = 3\х2 + dx + C2.
Из краевого условия у@) =0 получаем С2 = 0. Чтобы найти
оставшиеся неизвестные A, Ci, Ж2, составим систему из трех
уравнений. Первое уравнение — это изопериметрическая связь,
которая с учетом вида функции у такова:
Х2
12(ЗАж^ + dx) dx = 0. D.25)
о
Второе уравнение — это краевое условие на правом конце,
принимающее вид
Ъ\х22 + Схх2 = х2-2. D.26)
4.4. Некоторые примеры
109
Наконец, третье уравнение — это условие трансверсальности
на правом конце (см. 3.2)
(Г + (<р'-у')(/%
о,
Х=Х2
которое в данном случае при /* = {у'J + А • 12у и (р(х) = х — 2
имеет вид
((у'J + Л • 12у + A - у') ¦ 2у') \х=х2 = 0. D.27)
Система трех уравнений D.25)-D.27) имеет два решения.
Первое у = 0 (для него %2 = 2, J = 0), второе у = — Зх2 — 4ж (для
него Х2 = —2, J = 32).
4.4. Некоторые примеры
Пример 4.2. Вернемся к задаче Дидоны (см. пример 1.1).
Она представляет собой изопериметрическую задачу:
а
J[y] = / ycte-nnax, у(-а)=0, у(а) = 0,
—а
а
К[у]= (\jl + {y'Jdx = L (L>2a).
—а
В соответствии с теоремой 4.3 составляем вспомогательный
функционал
а
J*[y] = f{y + Wl + (y'J)dx
—а
и записываем для него уравнение Эйлера:
110 4. ЗАДАЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
Видно, что это уравнение допускает понижение порядка:
X—=J^=-x = Ci,
л/TTW
ИЛИ
AVJ _ , | с ,2
Из этого уравнения найдем у':
x + d
у' = ±-
v/A2-(^ + C1J'
Решал это обыкновенное дифференциальное уравнение первого
порядка с разделяющимися переменными, получаем
у = ±у/Х2-(х + С1J + С2,
что равносильно
(х + С1J + (у-С2J = Х2.
Из краевых условий
(-a + CiJ + C22 = A2, (a + CiJ + C| = A2
находим:
Ci=0, A2 = C22 + a2.
Таким образом, уравнение кривой сводится к следующему:
Длина дуги окружности может быть вычислена
непосредственно, и мы получим еще одно уравнение*
2\/С? + a2 arcsin —. ^ = L,
*При этом следует учесть, что из двух дуг окружности, соединяющих
точки (—а, 0) и (а, 0), графиком функции является только меньшая.
4.4. Некоторые примеры
111
которое заменой
приводится к трансцендентному уравнению Ls'mt = 2at.
Решение этого уравнения из промежутка @,7г/2] позволит
определить постоянную С2 при L ^ 7га.
Пример 4.3. Рассмотрим задачу выбора кривой
наименьшей длины среди кривых на сфере х2 + у2 + z2 = а2, проходящих
через две данные точки (ж1? у1? zi) и (ж2, з/2? ^)-
Предположим, что в качестве параметра кривой можно
выбрать координату х (это возможно только при определенных
положениях концевых точек). Тогда кривая описывается парой
функций у (ж), z (ж), а длину кривой можно выразить
интегралом
Х2
J[y, z] = J v/l + (y'J + @2<fe-
XI
Мы приходим к вариационной задаче поиска минимума
функционала J [у, z] с краевыми условиями
y(zi)=yi, z(x1) = zu у{х2)=У2, z(x2)=z2 D.28)
и фазовым ограничением
д{х, у, z) = х2 + у2 + z2 — а2 = 0.
Составляем вспомогательный функционал
.%*] = J (v/l+FFTW + Х(х) (х2 + у2 + z2 - a2)) dx.
XI
112 4. ЗАДА ЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
Два уравнения Эйлера для вспомогательного функционала и
условие связи в совокупности составляют систему трех
уравнений относительно трех неизвестных функций у(х), z(x), \(х):
( d v'
-f- , У 2\{х)у = О,
dx yrr^F+FF
J d z' == _ =
dx yrrw+FF
[y2 + z2 + x2 -a2 = 0.
Решение задачи следует искать среди решений этой системы,
удовлетворяющих краевым условиям D.28). Однако решить
указанную систему весьма непросто.
4.5. Принцип взаимности
в изопериметрических задачах
Постоянство множителей Лагранжа в изопериметриче-
ской задаче приводит к так называемому принципу
взаимности, или принципу двойственности.
В изопериметрической задаче D.1), D.2), D.4) мы
искали экстремум функционала D.1) при условии, что другие s
функционалов принимают заданные значения Lj, j = 1, s.
Заметим, что уравнение D.24) для вспомогательного функционала
в методе множителей Лагранжа не изменится, если
подынтегральное выражение умножить на некоторое постоянное число
/jLq. Вводя обозначения
/о = /? fj = hji /ij = /ioAj, ,7 = 1,5,
получаем
г s
a J=0
4.5. Принцип взаимности в изопериметрических задачах 113
В это выражение все функции fj входят симметричным
образом. Это означает, что в качестве подынтегральной
функции целевого функционала можно выбрать любую из функций
/j, а остальные отнести к изопериметрическим связям D.4).
Другими словами, экстремали в задаче на экстремум, в
которой интегрантом целевого функционала является функция
/о •> а остальные функции fj отнесены к интегральным связям
D.4) (задача А), совпадают с экстремалями в задаче на
экстремум (задача В), в которой интегрантом целевого функционала
является функция /т, а остальные функции fj определяют изо-
периметрические условия
ъ
/ fj(x,y,yf)dx = Lj, j = 0, 1, ...,m-l,m + l, ...,s.
a
При этом постоянная Lq равна экстремальному значению
функционала в задаче (А), а остальные Lj те же, что и в
интегральных связях D.4). В качестве fm можно выбрать любую
из функций /ь ..., fs.
Описанное совпадение экстремалей и называют принципом
взаимности (принципом двойственности). Например, задача
Дидоны (см. пример 4.2), состоящая в определении
максимальной площади фигуры при заданном периметре, двойственна
другой вариационной задаче, которая состоит в определении
минимального периметра при заданной площади. Обе эти
задачи имеют одни и те же экстремали, если максимум площади
в первой задаче задается как ограничение во второй.
Можно показать, что дуга окружности у* = л/а2 — ж2,
найденная в примере 4.2 как экстремаль функционала
а
J[y] = ydx
—а
114 4. ЗАДА ЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
при заданной длине
а
К[у] = 1^/1 + (у')Чх = тга,
—а
доставляет максимум этому функционалу. При этом J [у*] =
= 7га2/2. Эта же функция у* = \/а? — х1 доставляет минимум
функционалу длины К [у] при заданной площади J [у] = 7га2/2.
4.6. Задача Больца и задача Майера
Анализ вариационных задач в зависимости от типа
уравнений связи (см. 4.1, 4.2) показывает, что задача Лагранжа
является наиболее общей. Другие задачи либо представляют
собой частные случаи задачи Лагранжа, либо сводятся к ней.
Проведем классификацию вариационных задач по типу
целевого функционала. Задача D.1)-D.3) с интегральным
целевым функционалом
ъ
J[y}= / f(x,y,y')dx
а
представляет собой, как уже говорилось, задачу Лагранжа.
Если в задаче Лагранжа интегральный целевой функционал
заменить терминальным целевым функционалом
Т[у] = Т(у(а),у(Ъ)),
который определяется дважды непрерывно дифференцируемой
функцией Т(у1,у2)? то получим задачу Майера. Задачу со
смешанным целевым функционалом
B[y] = J[y]+T[y]
4.6. Задача Больца и задача Майера
115
называют задачей Больца. Во всех трех типах задач
предполагается, что условия связи имеют вид D.3), а краевые условия
в самом общем виде записываются следующим образом:
фг(а,у(а),Ъ,у(Ъ)) =0, i=T^s,
где количество s уравнений связано с размерностью п фазового
пространства неравенством s ^ 2п + 2.
Иногда задачу со смешанным целевым функционалом без
ограничений (т.е. без условий связи) называют элементарной
задачей Больца.
Задача Больца, так же как и задача Майера, может быть
сведена к задаче Лагранжа. Покажем это на примере задачи
Больца для целевого функционала вида
ь
В[у] = Jf(x,y,y,)dx + T(y(b)) D.29)
а
с дифференциальными связями D.3) и краевыми условиями
У(а)=у1. D.30)
Отрезок [а, Ь] считаем фиксированным, а функцию Т(у) —
дважды непрерывно дифференцируемой.
Для рассматриваемой задачи
о — а о — а
так как а, Ь, у1 в данной задаче фиксированы. Учитывая это,
терминальное слагаемое Т(уF)) в правой части D.29) можно
преобразовать к виду
ь
гТ(и(а)) d . .1
dx.
ТШ=1Г-Ш+<.ТЫ<
116 4. ЗАДА ЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
Это позволяет переписать целевой функционал D.29) в
интегральной форме:
ь
ВЫ = J[/(*, V, у') + ^^ + ^Т{у(х))] dx. D.31)
а
Видим, что задача Больца D.29), D.3), D.30) эквивалентна
задаче Лагранжа для функционала D.31) с теми же условиями
связи и краевыми условиями. Опираясь на эту
эквивалентность, докажем следующее утверждение.
Теорема 4.4. Если допустимая функция у*(х) ЕС1 ([а,6],Rn)
доставляет экстремум функционалу D.29) с
дифференциальными связями D.3) и краевыми условиями D.30), то существует
система из к функций А]_(ж), ..., А&(ж), при которых у*(ж)
удовлетворяет системе уравнений Эйлера
±L>y,-L>yt=0, г = 1^,
к
где L = / + Y2 ^j9j — лагранжиан задачи D.3), D.29), D.30), и
условиям трансверсальности
l'a
= -TL
x=b у*
, г = 1, п.
х=Ь
<4 Пусть вектор-функция у* (ж) есть точка экстремума в
задаче Больца D.29), D.3), D.30). Тогда эта функция является
точкой экстремума и в задаче Лагранжа D.31), D.3), D.30).
Применим к задаче Лагранжа теорему 4.1. Согласно этой
теореме, найдутся такие функции Aj(x), j = 1, /с, что у*(ж)
является точкой экстремума для вспомогательного функционала
ь
4.6. Задача Больца и задача Майера
117
к
где L = / + Y2 ^j9j- Запишем систему уравнений Эйлера для
функционала D.32):
^(/*Х4-(/%=0' « = ^> D-33)
где
Преобразуем уравнения этой системы. Имеем
^Уш=Ь'ш + ТхТ^ V%=L'y't+Tyo г = 1^- D34)
Здесь при вычислении (/*)'/ использовано равенство
"г
±тш)=1:туЛ-
г=1
Выражения для (f*)fyi и (/*)'/ подставим в уравнения
системы D.33):
L'vi--tL'ui=0> г = ^ D35)
которые в совокупности с дифференциальными связями D.3)
составляют систему из п + к уравнений относительно п + к
неизвестных функций yi{x), г = 1, п, и Aj(x), j = 1,к. Остается
записать условия трансверсальности на правом конце. Так как
b известно, а меняться может лишь значение уF), приходим к
задаче с естественными краевыми условиями (см. 3.1)
Учитывая D.34), получаем
* = Т~п. > D.36)
4f
= -Т'
х=Ь Vi
x=b
118 4. ЗАДА ЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
Замечание 4.2. Для функционала вида
ь
В[у] = J f(x,y,yf)dx + f[y(a)]+T[y(b)]
а
в случае фиксированного отрезка [а, Ь] и произвольных
значений у (а) и у(Ъ) (концы экстремали скользят по
гиперплоскостям х = а и х = Ь) к условиям трансверсальности на правом
конце, т.е. при х = 6, в теореме 4.4 следует добавить и условия
трансверсальности на левом конце:
ч
Т
1,п. D.37)
Замечание 4.3. Если в функционале D.29) отсутствует
интегральное слагаемое (т.е. рассматривается задача Майера),
к
то лагранжиан L в теореме 4.4 имеет вид L = ^ ^j9j-
j=i
Пример 4.4. Найдем экстремали функционала
2
В[у} = Jx2(yfJdx-2y(l)+y2B)
1
в классе функций С1 [1,2].
Это элементарная задача Больца без условий связи и
краевых условий. В этом случае функция Лагранжа совпадает с ин-
тпегрантпом целевого функционала и имеет вид L = / = х2{у'J.
Запишем для заданного функционала уравнение Эйлера:
ABlV)=o,
откуда 2х2у' = С = const. Из этого уравнения получим
Вопросы и задачи
119
где С\ — произвольная постоянная. Решая последнее уравнение
и учитывая, что х Е [1, 2], получаем общее решение уравнения
Эйлера:
y=9l + c2. D.38)
X
Чтобы определить постоянные С\ и С2, используем условия
трансверсальности D.36) и D.37):
2'
Подставляя в эти уравнения представление D.38) и решая
систему относительно С\ и С2, получаем Ci = 1, С2 = 1/2.
Таким образом, рассматриваемый функционал имеет
единственную экстремаль
11
*(*) = " +а"
Вопросы и задачи
4.1. Определите гладкие функции, на которых может
достигаться экстремум функционала в следующих вариационных
задачах:
1
а) I[y,z] = J((y'J + (z'J-zy')dx, y = z + ex, j/@) = 2,
о
y(l)=e,z@) = l,z(l)=0;
тг/2
б) I[y,z]= ((yfJ + (z'J-2zcosx-2y2)dx, y = z-2smx,
y@) = l,y(|)= 0,*@) = !,*(!) =2;
120 4. ЗАДА ЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
i) I[y,z]= / ((yfJ + (zfJ— 2zf smx)dx, yf = z — cos ж,
о
y@) = 0,y(|) = |,*@) = l,*(|)=0;
1
?) I[y,z] = JBxy-(z'J)dx, y'-z + 2 = 0, y@)=0,
y(l) = -,*@) = 2,*(l) = 3;
7Г 7Г
A) I[y] = j{y?dx, Jy2dx = l, y@)=0, у(тг)=0;
о 0
1
е) I[y,z] = jy'z'dx, 1/@) = y(l) = ^r(O) = 0, ^r(l) = 1,
0
1 1
JXydx = 0, fXzdx = 0;
0 0
1
ж) I[y,z] = J{(y'J + (z'f) dx, y@) = y(l) = z@) = *A) = 0,
0
1
/ yzdx = —2;
о
l
з) I[y,z] = fx(y-z)dx, y@)=s@)=s(l)=0,y(l)=2,
0
1
4
5'
Вопросы и задачи
121
4.2. Найдите геодезические линии кругового цилиндра
радиуса R.
4.3. Найдите кратчайшее расстояние между двумя точками
А@, 2, 4) и В[—1, д/3, 2) на круговом цилиндре, ось которого
совпадает с одной из координатных осей.
4.4. Для следующих вариационных задач укажите тип, к
которому они относятся, и запишите полную систему
необходимых условий экстремума функционала:
ъ
а) 1[у]= [f(x,y')dx + T[y(b)]^extT, 9j(x,y) = 0, j = ТД
a
(к < гс), у (а) = уа, а, 6, уа = (у?, ---,Уп) фиксированы;
ъ
б) /[у] = / f{x,y)dx + T[y{a)] ^extr, #(ж,у') = 0, j = ТД,
У(Ь) = У6? а, ъ-> УЬ = (у\, ••••> Уп) фиксированы;
в) T[y(a)]+f[y(b)]->extr, g3{x,y,yl) = 0, j = ТД (А; < п), а,
6 фиксированы.
4.5. Найдите экстремали следующих функционалов,
определенных на множестве гладких функций:
1
*) Щ = f(b/J + v)d*-v4i), у@) = 1;
о
1
б) I[y} = J(yfJdx + y2@)-2y2(l);
о
1
в)/Ы = У((|/'J + У2)^-28Ы.уA);
122 4. ЗАДА ЧИ НА УСЛОВНЫЙ ЭКСТРЕМУМ
/M = /4(y')V^ + y4@)-8yC);
О
тг/2
д) Щ = J'((y'J-y2)dx + y2(o)-y2(l)+b(l
О
4.6. Обобщить утверждение и доказательство теоремы 4.2
на случай функционала, зависящего от п функций при к
фазовых ограничениях.
5. ДОСТАТОЧНЫЕ
УСЛОВИЯ ЭКСТРЕМУМА
Необходимое условие экстремума функционала состоит в
том, что первая вариация этого функционала обращается в
нуль. Это обобщает необходимое условие экстремума функции
многих (в том числе одного) переменных. Достаточное условие
экстремума функции многих переменных базируется на
поведении второго дифференциала функции в исследуемой точке.
Аналогичная ситуация и в вариационном исчислении:
вводится понятие второй вариации, обобщающее понятие второго
дифференциала, достаточные условия экстремума строятся на
поведении этой вариации вблизи исследуемой экстремали.
Напомним, что в вариационном исчислении различают
сильный экстремум, при котором рассматриваются произвольные
непрерывные функции, и слабый экстремум, который
формулируется в классе непрерывно дифференцируемых функций.
5.1. Слабый экстремум
Квадратичный функционал и вторая вариация.
Отображение /: ?72 —)> R, которое каждой паре х и у элементов
линейного пространства Е ставит в соответствие число /(ж,у),
называют билинейной формой, если это отображение линейно
по каждому аргументу, т.е. для любых значений аргументов
выполняются равенства
f{aixi + a2x2ly) = a1f(x1,y) + a2f(x2,y),
f{x,aiyi+a2y2) =a1f(x,y1)+a2f(x,y2).
В функциональном анализе, изучающем бесконечномерные
линейные пространства, и, в частности, в вариационном
исчислении билинейные формы принято называть билинейными
124 5. ДОСТА ТО ЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
функционалами. Если в билинейном функционале J[y,z]
приравнять аргументы, мы получим функцию G[y] = J[y,y] на
линейном пространстве, которую называют квадратичным
функционалом. Квадратичный функционал G[y]
положительно определен, если G[y] > 0 при любом у ф 0 и
неотрицательно определен, если G[y] > 0 при любом у ф 0.
Пример 5.1. В линейном пространстве С[а, 6] для любой
непрерывной на отрезке [а, Ь] функции А(х) функционал
ь
J[y,z] = / A(x)y(x)z(x)dx
а
является билинейным, а функционал
ь
G[y] = J[y,y} = JA(x)(y(x)Jdx
a
является квадратичным. Функционал G[y] положительно
определен, если А{х) > 0 на отрезке [а, Ь].
Пример 5.2. В линейном пространстве С1^,^] функционал
ь
G[y] = J{А(х)у2 + 2B(x)yyf + C(x){y'J) dx,
a
где А, В, С — непрерывные функции, является квадратичным,
так как он соответствует билинейному функционалу
ь
J[y, z] = I (A(x)yz + В(x) (yz' + y'z) + C{x)y'z') dx. #
a
Говорят, что функционал J [у], определенный на
некотором нормированном пространстве, дважды
дифференцируем в точке у, если его приращение A J = J[y + Sy] — J [у]
5.1. Слабый экстремум
125
представимо в виде
AJ = 8J[y,8y} + 82J[y,8y] + o(\\8y\\2), E.1)
где 52J[y,5y] — квадратичный функционал по переменной ёу,
называемый второй вариацией функционала J [у] в точке
у, ао(||<%||2)/||Л/||2^0при<%^0.
Если представление E.1) для функционала J [у] существует,
то оно единственно и, значит, вторая вариация определена
однозначно.
Теорема 5.1. Если функционал J [у] в точке у дважды
дифференцируем и имеет минимум (максимум), то ё2 J [у, 6у] ^ О
(ё2 J[y, ёу] ^ 0) при любом ёу.
А Доказательство теоремы проведем лишь в случае минимума,
так как для случая максимума доказательство аналогично.
Если функция у является точкой минимума функционала
J [у], то, согласно необходимому условию экстремума
функционала, на функции у первая вариация функционала равна нулю:
SJ[y,Sy] =0. Поэтому представление E.1) в этой точке имеет
вид
AJ = e2J[y,ey} + o(\\ey\\2)^0.
Зафиксируем вариацию ёу и рассмотрим приращение
функционала, соответствующее вариации tey, где t — положительное
число. Для этого приращения верно неравенство
82J[y,tSy] + о(||%||2) = t282J[y,Sy] + o(t2 \\8у\\2) > 0,
ИЛИ
82J[y,8y] о(||%||2)>0
\\Ы\2 WtSyf ' '
Первое слагаемое в последнем неравенстве не зависит от ?, в
то время как второе выбором досточно малого t может быть
сделано менее наперед заданного числа е > 0. Значит, для
любого ? > 0
S2J[y,Sy]> .
?у\\2 '
126 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
откуда следует, что
Pall2
И
S2J[y,Sy]>0.
Так как 5у можно выбирать произвольно, заключаем, что
квадратичный функционал 52J[y,5y] неотрицательно определен:
S2J[y}Sy}>0. >
Замечание 5.1. Неотрицательная определенность второй
вариации является условием необходимым, но не достаточным
для экстремума функционала. Это верно даже в случае
функций одного переменного [II].
Говорят, что квадратичный функционал G[y],
определенный в нормированном пространстве, сильно
положителен, если можно указать такое число К > 0, что для любого у
выполняется неравенство G[y] ^ ^|М| • В конечномерном
случае квадратичный функционал представляет собой
квадратичную форму, а сильная положительность квадратичного
функционала равносильна его положительной определенности (в
качестве К можно взять наименьшее из собственных значений
матрицы квадратичной формы). Но в бесконечномерном
случае это уже не так.
Теорема 5.2. Если у дважды дифференцируемого
функционала J [у], определенного в нормированном пространстве,
первая вариация в точке у* равна нулю, а вторая вариация в
этой точке сильно положительна, то функционал J [у] имеет в
точке у* минимум. #
Обсудим приведенные результаты в случае простейшей
задачи вариационного исчисления. Вычислим вторую вариацию
функционала
J[y] = / f(x,y,y')dx,
5.1. Слабый экстремум
127
заданного на множестве функций у Е С1 [а, Ь], удовлетворяющих
краевым условиям у (а) = yi, у F) = j/2- Вариация функции 8у для
такого функционала удовлетворяет однородным краевым
условиям <%(а) = &/(Ь) = 0. Считаем, что интегрант / функционала
J [у] является дважды непрерывно дифференцируемой
функцией. Тогда, согласно формуле Тейлора, имеем
' +
J[y + 8y]-J[y} = f{fy5y + fyl5y,)dx-
а
Ъ
+ 11Aуу^УJ + Ууу^уёу' + ^у1(8у'J)ёх + о(\\8у\\2с1), E.2)
где о(\\6у\\2с1)/\\6у\\2с1^0щ>ъ \\8у\\с1 -Ю.
Представление E.2) показывает, что
ь
S2J[vM = \l{f^y(SyJ + 2f^SySy, + f^yf(Sy,J)dx. E.3)
а
Используя интегрирование по частям и краевые условия для
вариации &/, получаем
b b
2jf^SySyfdx = Jf^d((SyJ) =
а а
b b
= №(^J)[-/(?/^)(^J^ = -/(?/^)(^J^
а а
что позволяет записать соотношение E.3) в следующем виде:
ь
52J[y,Sy] = J(Q(SyJ + P(SyfJ)dx, E.4)
128 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
где
2 V уу dx yyf)' 2 у'у''
Замечание 5.2. Если мала функция (%', то мала и #у, так
как, с учетом краевого условия 5у(а) = О,
Sy(x) = j8y'(t)dt
а
и, в силу теоремы об оценке интеграла,
X
Ых)\^ f\8y\t)\dt^^\8y'{t)\{b-a).
J [a,b]
а
Обратное неверно, так как малость функции не означает, что
мала производная (пример: h(x) = ?sin(x/?)). Это говорит о
том, что в представлении E.4) второй вариации основную роль
играет слагаемое PFyfJ. Знак второй вариации зависит от
знака указанного слагаемого.
Теорема 5.3. Если квадратичный функционал
ъ
G[h]= f(Q(x)h2 + P(x)(tiJ)dx,
а
заданный на линейном пространстве функций h Е С1 [а, 6],
удовлетворяющих однородным краевым условиям h(a) = h(b) = О,
неотрицательно определен, а функция Р непрерывна, то Р(х) ^
^ 0 всюду на отрезке [а, Ь].
-4 Предположим, что непрерывная функция Р(х) не является
неотрицательной на всем отрезке [а, Ь]. Тогда можно выбрать
точку хо Е (а, Ь) и некоторую ее окрестность (xq — т, xq + т) Е
Е [а, Ь], в которой выполняется неравенство Р(х) ^ P(xq)/2 < 0.
5.1. Слабый экстремум
129
Если функция h (Е С1 [а, Ь] тождественно не равна нулю, но равна
нулю вне интервала (xq — т, xq + т), то
fpwr*«>.
так как функция /г/ непрерывна и отлична от нуля хотя бы в
одной точке. Выберем функцию h указанного типа так, чтобы
этот интеграл оставался
отрицательным, а первое слагаемое у f
Qh? в подынтегральном
выражении функционала G[h] давало
как можно меньший интеграл. О
Пусть h'(x) = 1 при xq + 5/3 ^
^ х ^ хо -\- 25/3 при общем
ограничении |/г/(ж)| ^ 1 (рис. 5.1).
Тогда
Рис. 5.1
хо+5
\h(x)\^ f\ti(t)\dt= f \ti(t)\dt^ f \ti(t)\dt^25
xq-8
xo+5
xq-5
[Qh2dx\^ J |Q|,
^ / \Q\hzdx^8M66,
xq-5
где M — максимальное значение функции Q на отрезке [a, b].
Но в то же время
Ь xq-\-5
f РШ?Лх= f РШ?Лх
<.
xo-S
хо+25/3
?
I P{x){tifdx^ j ?W-dx = -C8,
x0+S/3
xq+5/З
130 5. ДОСТА ТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
где С = —Р(жо)/6 > 0 не зависит от 5. В результате получаем,
что G[h] ^ —CS + 8MS3. Нетрудно увидеть, что независимо от
значений МиС при достаточно малом 5 будет выполняться
неравенство G[h] < 0, которое противоречит условию теоремы. >
Теорема 5.4. Если функционал J [у] в простейшей задаче
вариационного исчисления достигает на функции у (х)
минимума, то выполняется условие Лежандра
f?y,(x,y(x),y'(x))>0. E.5)
А Согласно теореме 5.1, для точки экстремума у выполняется
соотношение 52J[y,Sy] ^ 0, которое в силу представления E.4)
можно записать в виде
ь
J{Q(SyJ + P(SyfJ)dx^0.
а
Согласно теореме 5.3, Р(х) ^ 0 всюду на отрезке [а, Ь].
Учитывая вид функции Р(ж), получаем E.5). >
Итак, при исследовании функционала на экстремум
важнейшую роль играет поведение его второй вариации,
являющейся квадратичным функционалом. Рассмотрим квадратичный
функционал E.4) на функциях /г, для которых h(a) = h(b) =
= 0. Как было показано, необходимым условием
неотрицательной определенности этого функционала является неравенство
Р(ж)>0, хе[а,Ь].
Запишем для функционала E.4) уравнение Эйлера. В
совокупности с краевыми условиями получим краевую задачу для
обыкновенного дифференциального уравнения:
^(Pti) - Qh = 0, h(a) = h(b) = 0. E.6)
ах
Эта задача имеет очевидное решение h(x) = 0, но могут
существовать и нетривиальные решения.
5.1. Слабый экстремум
131
Рассмотрим ненулевое решение h(x) краевой задачи E.6).
Если точка х Е (а, Ь] такова, что h(x) = 0, в то время как h(x) ф О
при a < х < ж, то точку х назовем сопряженной точке а.
Итак, точки аиЬ сопряженные, если краевая задача E.6) имеет
решение, не обращающееся в нуль на (а, Ь). Отсутствие на
полуинтервале (а, Ь] точек, сопряженных точке а, означает, что
задача E.6) не имеет ненулевых решений.
Теорема 5.5. Пусть функции Р(х) и Q(x) непрерывны на
отрезке [а, Ь] и Р(х) > 0, х Е [а, Ь]. Тогда для положительной
определенности функционала
ь
f(Qh2 + P(tiJ)dx,
a
определенного на множестве функций h Е С1\а,Ь\, для которых
h(a) = h(b) = 0, необходимо и достаточно, чтобы на этом
отрезке не было точек, сопряженных точке а. #
Итак, чтобы проверить квадратичный функционал на
положительную определенность, нужно исследовать краевую задачу
E.6) и выяснить, имеет ли она нетривиальные решения.
Отсутствие нетривиальных решений означает, что квадратичный
функционал положительно определен.
Вернемся к простейшей задаче вариационного исчисления
ъ
J[y]= f(x,y,y')dx, у(а)=уа, y(b)=yb, E.7)
а
где / — дважды дифференцируемая функция; у Е С1 [а,Ь].
После выявления функций, удовлетворяющих необходимому
условию экстремума функционала, т.е. экстремалей, дальнейшее
исследование этих функций связано с анализом на них второй
вариации
ъ
^J[yM = f{Q(SyJ + P(Sy,J)dx, E.8)
а
132 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
являющейся квадратичным функционалом. Здесь
Р = Р{х) = ±%у,(х,у{х),у'{х)),
Q = Q(x) = -[f{jy(x,y(x),y'(x))- — fy,y(x,y(x),y'(x))j.
Уравнение Эйлера
±(P8y')-Qey = 0
квадратичного функционала S2 J [у, Sy] E.8) называют
уравнением Якоби исходного функционала J [у] задачи E.7). Точку
х Е (а, Ъ) называют сопряженной точке а в смысле
функционала J [у], если эта точка является сопряженной точке а в смысле
квадратичного функционала S2J[y,Sy].
Теорема 5.6 (достаточные условия слабого
минимума). Функция у Е С1 [а, Ь] доставляет слабый экстремум
функционалу J [у] в простейшей задаче вариационного
исчисления E.7), если одновременно выполняются условия:
1) функция у (х) является экстремалью функционала J [у];
2) для этой функции выполняется усиленное условие Ле-
жандра
Р(х) = -fyfyf (х,у(х),у'(х)) > О, ЖЕ (а, 6);
3) на интервале (а, Ь) нет точек, сопряженных точке а в
смысле функционала J [у] (усиленное условие Якоби). #
Функционалы от нескольких функций. Все
сказанное выше естественным образом переносится на общий случай
функционалов, зависящих от нескольких функций. На
линейном пространстве С1([а,Ь],Мп) непрерывно дифференцируемых
вектор-функций рассмотрим функционал
b
J[y] = Jf(x,y,y')dx, E.9)
а
5.1. Слабый экстремум
133
где функция / дважды непрерывно дифференцируема; у(х) =
= (yi(x), У2{х), ..., Уп{х))- Если приращение AJ[y,Sy]
рассматриваемого функционала J [у], соответствующее вариации
функции 8у = Eуъ ..., <Jyn), имеет вид
AJ[y,6y} = J[y + 5y}-J[y} = 5J[y,5y] + 52J[y,5y} + o(\\5y\\l1),
где 52J[y,5y] — квадратичный функционал на пространстве
вектор-функций 8у, то функционал J [у] будем называть
дважды дифференцируемым, а функционал S2J[y,Sy] — второй
вариацией функционала J [у] в точке у.
При фиксированных концах вариация 6у должна
удовлетворять условиям Sy(a) = Sy(b) = 0. Будем также считать, что
интегрант / является дважды дифференцируемой функцией.
Используя, как и в одномерном случае, формулу Тейлора,
получаем выражение для второй вариации функционала:
ь
82J[vM = \ j\syf^SyT + 26y''fyffySyT+ <V'fZy>(8y')T)dx,
a
где /'' fL^ fyfvf — матрицы Гессе интегранта /, отвечающие
соответствующим переменным.
Как и в одномерном случае, можно применить правило
интегрирования по частям. В результате получим
ь
S2J[y,Sy} = J(Sy'P(Sy')T + SyQSyT)dx, E.10)
a
где
^ = 2 y'v'' 2 \yy ~ dx y'y)'
В общем случае основную роль во второй вариации также
играет слагаемое 5у'РEу') . Запишем систему уравнений
134 5. ДОСТА ТО ЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
Эйлера для квадратичного функционала, используя матричную
запись:
?(P(h')T)-QhT = 0 E.11)
(в правой части уравнения стоит нулевой столбец
соответствующей высоты). Систему E.11) называют системой Якоби
функционала J [у].
При фиксированной вектор-функции у элементы матриц Р
и Q в представлении E.10) зависят только от ж, так как они
не зависят от компонент вектор-функции 5у. Поэтому система
Якоби E.11) — это система линейных дифференциальных
уравнений порядка не выше двух относительно компонент вектор-
функции h, удовлетворяющая теореме существования и
единственности в каждой точке ж, для которой detP(x) ф 0.
Рассмотрим решения h{ системы E.11), удовлетворяющие
начальным условиям hi(a) = 0, hf(a) = е^, где ei, е2, ..., еп —
стандартный базис в W1 (т.е. у вектора е^ отлична от нуля
лишь i-я компонента, которая равна единице). Значения этих
решений в точке х линейно независимы, если эта точка доста-
т
точно близка к точке а, т.е. А^(ж) = det (hi (ж), ..., hn(x)) ф0.
Здесь использована блочная структура записи:
/ /in (ж) h12(x) ... hln(x)\
h2i(x) h22(x) ... h2n(x)
I I i
\hni(x) hn2(x) ... hnn(x) J
где hi = (Нц, hi2, ..., hin).
Если точка x такова, что A^B?) = 0, в то время как А^(ж) Ф 0
при а < х < ж, то точку х назовем сопряженной точке а в
смысле функционала J [у]-
Достаточные условия скалярного случая без изменений
обобщаются на векторный случай.
5.2. Условие Якоби
135
Теорема 5.7. Пусть функционал
ь
J[y]= / f(x,y,y')dx,
а
где / — дважды непрерывно дифференцируемая функция,
определен на множестве вектор-функций у Е G1([а,6],Мп),
удовлетворяющих краевым условиям
у{о)=Уъ У(Ь)=У2-
Функция у* доставляет минимум функционалу J [у], если
одновременно выполняются условия:
1) функция у* является экстремалью функционала J [у]]
2) функция у* удовлетворяет усиленному условию Лежан-
дра
fy'y'{x,y{x),y'{x)) >0, жЕ (а, Ъ)
(т.е. матрица f', , положительно определена при указанных
значениях х);
3) отрезок [а, Ь] не содержит точек, сопряженных точке а в
смысле функцонала J [у]-
5.2. Условие Якоби
Рассмотрим функционал
ъ
J[y]= / ffay,y')dy
а
с дважды непрерывно дифференцируемым интегрантом /,
определенный на линейном пространстве С1 [а, Ь]. Если
функционал J [у], не является вырожденным, множество его
экстремалей, проходящих через фиксированную точку (а, уа), образует
однопараметрическое семейство, при этом в качестве
параметра можно взять угол наклона экстремали в точке (а, уа). Если
136 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
это семейство заполняет сплошь некоторую область Bel2,
причем через каждую точку области D проходит ровно одна
экстремаль, то мы будем говорить, что в области D задано
поле экстремалей.
Поле экстремалей, заданное в области D, позволяет в этой
области определить функцию р(х,у), значением которой
является значение тангенса угла наклона экстремали в точке (ж, у),
т.е. р(х,у) есть производная той экстремали у (ж), значение
которой в точке х равно у. Функцию р(х, у) называют наклоном
поля экстремалей.
Рассмотрим экстремаль у*(ж), которая проходит через
точку (а, у а). Будем говорить, что эта экстремаль
включена в поле экстремалей на отрезке [а, 6], если можно
указать такую область Del2,
которая содержит график
функции у*(ж), ж Е (о, (>], и в которой
можно задать поле экстремалей
рассматриваемого функционала
Рис. 5.2 (рис. 5.2).
Теорема 5.8 {условие Якоби). Для того чтобы
экстремаль у*(х) функционала J [у] можно было включить на отрезке
[а, Ь] в поле экстремалей, достаточно, чтобы на интервале (а, Ь)
не было точек, сопряженных точке а в смысле
функционала J[y]. #
Напомним, что отсутствие точек, сопряженных точке а,
равносильно отсутствию у краевой задачи E.6) нетривиальных
решений.
Пример 5.3. Проверим выполнение условия Якоби для
экстремалей функционала J[y] в вариационной задаче
ь
J[y] = J{(y,J-y2)dx^extT, i/@) = 0, 1/F) =0.
У'
Уа
О
1
Г"^^
а
^Z^- у*(х)
X
5.2. Условие Якоби
137
Уравнение Эйлера рассматриваемого функционала имеет
вид
;|(V)-(-*>=C
или у" + у = 0. Единственным решением этого уравнения,
удовлетворяющим поставленным краевым условиям, является
функция у(х) = 0. Вычисляем коэффициенты Р(х) и Q(x) для
второй вариации функционала:
Р(*) = \fy>y> = 1,
Q(x) - 2 \fyy ~ faf'v'v) - ~1'
2Vyy dx"
Краевая задача E.6) для уравнения Якоби в данном случае
имеет вид
Г/г"+ /i = 0,
|/i@)=0, ВД = 0,
где х Е @, Ъ].
Общее решение обыкновенного дифференциального
уравнения в краевой задаче имеет вид
h(x) = Cicosx + C^sinx.
Из краевого условия h@) = 0 находим С\ = 0. А второе краевое
условие приводит к уравнению C^sinx = 0, или, так как h(x)
должно быть нетривиальным, sin2? = 0.
Полученное уравнение имеет решения х = &7Г, k Е N.
Поставленная краевая задача не будет иметь нетривиальных
решений, если ни одно из значений ктг не попадет на промежуток
@, 6], т.е. при b < 7г. Таким образом, условие Якоби для
рассматриваемого функционала выполнено, если b < 7г, и не выполнено
при b ^ 7г. При b < тг экстремаль у* (ж) = 0 включается в поле
экстремалей у(ж,С2) = C^sinx на отрезке [0, Ь].
Обратим внимание на то, что экстремаль у* (ж) = 0
доставляет слабый минимум функционалу в рассматриваемой задаче,
так как выполняются все условия теоремы 5.6.
138 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
5.3. Инвариантный интеграл Гильберта
Пусть в простейшей задаче вариационного исчисления E.7)
экстремаль у*(х) (Е С1 [а, Ь] включается в поле экстремалей,
определенное в некоторой области D. Тогда в D определена
функция р(х,у) наклона поля экстремалей. Выберем такую
допустимую функцию у(х), график которой, за исключением
начальной точки (а, уа), попадает в область D. Интеграл
о
/ f(x,y(x),y'(x))dx,
задающий значение функционала J[y] рассматриваемой
вариационной задачи на функции у (ж), можно интерпретировать как
криволинейный интеграл
/
f{x,y,y')dx,
вычисляемый вдоль кривой Г (у), которая параметрически
записывается в виде
' х = ?,
V = y(t), E.12)
yy' = y'{t).
Поэтому приращение AJ[y*,Sy] функционала J[y] можно
записать как разность криволинейных интегралов,
соответствующих функциям у* ж у = у* -\- 8у:
AJ[y*,5y]= / f(x,y,y')dx- / f(x,y,y')dx.
ГЫ г(г)
Криволинейный интеграл
G(y)= / \j(x,y,p(x,y)) + (y' -p(x,y))fyl(x,y,p(x,y))\dx,
Пу)
5.3. Инвариантный интеграл Гильберта
139
где кривая Г (у) соответствует функции у (ж), график которой
попадает в область D, называют инвариантным
интегралом Гильберта.
Учитывая специфику кривой Г (у), которая параметрически
описывается системой E.12), подынтегральное выражение
интеграла Гильберта можно преобразовать следующим образом:
f(x,y,p(x,y)) + (yf-p(x,y))fy,(x,y,p(x,y))
dx =
f(x,y,p(x,y)) -p(x,y)fy,(x,y,p(x,y))
dx +
+ fy\x,y,p(x,y))dy = R(x,y)dx + Q(x,y)dy,
где
R{x,y) = f(x,y,p(x,y)) -p{x,y)fy,(x,y,p{x,y)),
Q{x,y) =fy>{x,y,p{x,y)).
Поэтому инвариантный интеграл Гильберта равен:
G(y) = J R(x,y)dx + Q(x,y)dy. E.13)
г(»)
Но в этой форме в интеграл не входит третья координата у'.
Значит, его можно рассматривать как криволинейный
интеграл в плоскости хОу, взятый вдоль графика Го (у) функции
у(х):
G(y)= J R(x,y)dx + Q(x,y)dy. E.14)
ГоЫ
Отметим, что интеграл Гильберта, взятый вдоль
экстремали, совпадает со значением функционала на этой экстремали:
/ [f(x,y,p(x,y)) + (у' -р(х,у))%(х,у,р(х,уЩ
ь
= J f(x,y,y')dx = Jf{x,y*(x),(y*)'(x))dx = J[y*
г(у)
Г(!Г) о.
так как р(х,у) = (у*)'(х) на кривой Г(у*
140 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
Оказывается, что интеграл E.14), как и E.13), не
зависит от пути интегрирования, т.е. подынтегральное выражение
является полным дифференциалом. Действительно, область D,
охватывающую график экстремали у*(ж), можно считать од-
носвязной. Поэтому подынтегральное выражение R(x,y)dx +
+ Q(x,y)dy будет полным дифференциалом, если В! — Q'x = 0.
Убедимся в выполнении этого равенства в каждой точке
области D. Имеем
Ry~Qx = fy + fy'Py ~Pyfy' —P\fy'y + fy'y'Py) ~
~ fy'x ~ fy'y'Px = fy~ fy'x ~ fy'yP ~ fy'y' \Px +PPy) • E.15)
Предполагая, что функционал J [у] не является вырожденным,
раскроем уравнение Эйлера этого функционала:
?# ~Гу = fy'x + Гу'уУ' + Гу'у'У" - f'y = 0- E-16)
Отметим, что
р(х,у(х)) = у'(х) E.17)
для экстремали у (ж), откуда, дифференцируя, получаем
р'х+р'уУ' = у"- E-18)
Соотношения E.17) и E.18) позволяют исключить из уравнения
E.16) производные у' и у":
fy'x + fy'yP + fy'y' {Р'х +РуР) -fy = 0'
Полученное уравнение в совокупности с E.15) приводит к
тождеству R'y — Qx = 0.
5.4. Сильный экстремум
Итак, если в области D задано поле экстремалей, то
инвариантный интеграл Гильберта не зависит от кривой,
соединяющей в D точки (а, у а) и F, уь), а на экстремали у = у* (ж),
5.4. Сильный экстремум
141
включенной в это поле, совпадает со значением функционала
J[y*]. Значит, изучал приращение функционала,
соответствующее вариации &/, можно заменить значение функционала на
экстремали значением интеграла Гильберта, взятого вдоль
графика функции у = у* + 8у (если 8у достаточно мало по норме
||• 11G? то эта функция попадает в область D, в которой
определено поле экстремалей). В результате получаем
AJ[y*,8y] = J[v]-J[y*]= J f(x,yrf)dx- J f(x,y,yf)dx =
ГЫ r(r)
= / f(x,y,yf)dx-G(y*) = / f(x,y,yf)dx-G(y) =
= / [f(x,y,y')-f(x,y,p)-(y'-p)fyf(x,y,p)jdx.
Пу)
Функцию
Щх,у,р,у') = /(ж,у,у') -f(x,y,p) - (у' -p)fy>{x,y,p),
являющуюся подынтегральной для последнего интеграла,
называют функцией Вейерштпрасса. С помощью этой функции
приращение функционала можно записать следующим образом:
AJ[y*,5y]= / E(x,y,p(x,y),y')dx,
где у = у* + 5у. Отметим, что при у = у*(ж), у' = (у*(ж)) (короче
говоря, на экстремали) функция Вейерштрасса равна нулю, так
как при этом р(х,у*(х)) = (у*(ж)) .
Функция Вейерштрасса позволяет анализировать
приращение функционала. Если E(x,y,p,yf) ^Ов окрестности графика
данной функции у*(ж), то эта функция — точка минимума
142 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
функционала. Если же E(x,y,p,yf) ^ 0 в окрестности графика
данной функции у*(ж), то у*(х) — точка максимума
функционала.
Функция Вейерштрасса оказывается весьма эффективным
инструментом исследования конкретных функций на
экстремум для данного функционала. При этом такое исследование
возможно с точки зрения как сильного экстремума, так и
слабого экстремума. При исследовании на слабый экстремум
фиксированной функции у* (х) необходимо проверить на знак
функцию Вейерштрасса в точках, близких к точкам кривой
Г(у*), т.е. определять знак E(x,y,p(x,y),yf) для таких троек
(ж, у, у'), которые близки к тройке чисел (ж, у*(ж), (у*O(ж)).
Если в таких точках E(x,y,p(x,y),yf) сохраняет знак, то
функция у* (х) — слабый экстремум.
При исследовании вопроса, является ли функция у* (ж)
точкой сильного экстремума функционала, изучают знак функции
Вейерштрасса для таких троек (ж, у, у7), для которых у близко
к у*(ж). Функция Вейерштрасса должна сохранять свой знак
при любых изменениях аргумента у7, так как величина у'{х) не
влияет на степень близости функций у* (ж) и у(х) по норме ||-||^.
Известно*, что если функция Вейерштрасса, будучи
непрерывной, в каких-либо точках (ж, у*(ж), р(ж,у*(ж)), у') меняет
знак, т.е. при некоторых значениях у1 она положительна, а
при некоторых значениях отрицательна, то у* (ж) не является
точкой экстремума функционала. Если такое изменение
знака приходится на точки (ж, у*(ж), р(ж,у*(ж)), (у*O(ж)), т.е. на
точки графика исследуемой функции, то эта функция не
доставляет и слабый экстремум.
Пример 5.4. Исследуем на экстремум функционал
ъ
J[y] = J(yfKdx,
о
*См., например: Гелъфанд И.М., Фомин СВ.
5.4. Сильный экстремум
143
определенный на множестве функций у Е С1 [0,6],
удовлетворяющих краевым условиям у@) = 0, у(Ь) —уь (Ь> О, уь > 0).
Уравнение Эйлера исследуемого функционала J [у] имеет
вид (З(у'J) = 0, или у'у" = 0. Оно распадается на два
дифференциальных уравнения у' = 0 и у" = 0, которые несложно
решить. Общее решение уравнения можно записать в виде
у = С\х + С2- Выбрав среди экстремалей те, которые
удовлетворяют левому краевому условию у@) =0, получим однопара-
метрическое семейство у(х,С) = Сх функций, среди которых
единственная функция у* (х) = (уь/Ь)х удовлетворяет и правому
краевому условию.
Выясним, является ли функция у* (ж) точкой экстремума для
функционала J [у]. Отметим, что эта функция включается в
поле экстремалей, так как через любую точку (ж, у) из первого
квадранта плоскости проходит единственная экстремаль
семейства у = Сх. В качестве области Z?, в которой задано поле
экстремалей, можно взять область {(ж, у): х > 0, у > 0}.
Через точку (ж, у) из области D проходит экстремаль у(х) =
= (у/ж)ж, для которой у7B?) =у/х. Значит, функция наклона
поля экстремалей имеет вид р(х,у) = у/ж. Составим функцию
Вейерштрасса, учитывая вид интегранта f{x1y1y') = (yfK:
Е{х,у,р,у') = f{x,y,y') - f{x,y,p) - {у1 -p)fyi{x,y,p) =
= (у^-р3-(у'-р)(Ь2) = (у'-р){(у'J + у'р+р2-Зр2) =
= (у'-рJ(у' + 2р).
Первый сомножитель (yf — рJ в функции Вейерштрасса на
знак не влияет, так что нужно проверить на знак функцию
(р(х,у,уг) = у' + 2р(х,у) = у' + 2у/х. На исследуемой функции
У = (Уь/Ь)х имеем (р(х,у,у') = (уъ/Ь) + 2(уь/Ь) > 0. Это же
неравенство сохраняется и в ближайшей окрестности графика этой
функции, например, при у > 0 и у7 > 0. Значит, функция у* (ж)
доставляет функционалу слабый экстремум. В то же время
видно, что, каковы бы ни были ж и у, выбором переменного
144 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
у' функции Вейерштрасса можно придать как положительное,
так и отрицательное значение. Следовательно, функция у* (ж)
не является точкой сильного экстремума функционала J [у], ф
Приведенный пример достаточно прост, и исследование
функции Вейерштрасса не потребовало особых усилий. В более
сложных случаях задача исследования функции Вейерштрасса
может оказаться не такой элементарной. Тогда могут быть
полезны другие, более простые достаточные условия, из которых
вытекает знакопостоянство функции Вейерштрасса.
Если функция /(ж,у,у;) дважды непрерывно
дифференцируема, то к ней можно применить формулу Тейлора
(у1 -рJ
Дж,у,у') = f(x,y,p) + {у' -p)fyi{x,y,p) + fyiyi{x,y,q),
где q = p + v(y' — p), 0 < v < 1. Значит,
Ы -pJ
Е{?,У,Р,У') = g fy'y'^V^)^
и знак функции Вейерштрасса определяется величиной /'' , в
некоторой точке (ж,у,д).
Таким образом, если /', , > 0 всюду в области определения
функции /, то функция Вейерштрасса сохраняет знак и любая
экстремаль, удовлетворяющая краевым условиям, является
точкой сильного экстремума функционала. В более сложных
случаях необходимо проверять знак /'' , в таких точках (ж, у, у7),
для которых точка (ж, у) близка к графику исследуемой
функции у*(ж), а у' произвольно. Если при указанных условиях /'' ,
сохраняет знак, то у* (ж) является точкой сильного экстремума.
Наконец, если /", , сохраняет знак в точках (ж, у, у7), близких к
(ж, у*(ж), (у*)'(ж)), т.е. для функций, близких к у*(ж) по норме
||• ||^1, то у*(ж) будет точкой слабого экстремума функционала.
Условие
fy'4'{x,y,y') > 0 или f"fyf(x,y,y) < О
5.4. Сильный экстремум
145
знакопостоянства производной /'' , называют усиленным
условием Лежандра.
Пример 5.5. Исследуем на экстремум функционал
m=f
dx,
определенный на множестве функций у(х) ? С1 [0,6],
удовлетворяющих краевым условиям у@) = 0, у(Ь) = уь (Ь, уь > 0).
Рассматриваемый функционал отличается лишь
постоянным множителем от функционала задачи о брахистохроне (см.
пример 1.2). Его экстремали параметрически задаются в
следующем виде (см. пример 2.7):
(a; = Ci@-smO),
\ „ E.19)
[2/ = С1A-С08в),
причем, каковы бы ни были значения b > 0 и уь > 0, через
точку F, уь) проходит единственная экстремаль (см. пример 2.7).
Это значит, что в области D = {(ж, у): х > 0, у > 0} задано поле
экстремалей, а любая экстремаль рассматриваемого семейства
оказывается включенной в это поле. Однако записать функцию
наклона аналитическим выражением не удается, так как
нужно решать трансцендентное уравнение. Но можно проверить
усиленное условие Лежандра. Имеем
Гу, = VyvTTWF f"'y' = VyV(^?W>0'
Таким образом, единственная функция, которая
параметрически задается системой E.19) и удовлетворяет поставленным
краевым условиям, доставляет сильный минимум
рассматриваемому функционалу.
146 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
Вопросы и задачи
5.1. Проверьте, выполнено ли условие Якоби для экстремали
функционала
о
J[y} = J{ex2-4y2 + (y'J)dx,
проходящей через точки А@, 0) и В(Ь, 0). Предполагается, что
5.2. Покажите, что для функционала
и
J[y] = / f(x,y')dx,
где / дважды непрерывно дифференцируема; /'' , ф 0; у(х) Е
Е С1 [а, 6], каждая экстремаль может быть включена в поле
экстремалей.
5.3. Для следующих функционалов проверьте, включены ли
экстремали, удовлетворяющие заданным краевым условиям, в
поле экстремалей:
1
а) У (G/J - у{у'?) dx, i/@) = 0, i/(l) = 0;
о
1
б) j{y'fdx, у@)=0, s/(b)=c(c>0);
о
1
JhiyWl + WFdx, у@) = ув, з/(Ь) = у6 (%) > 0);
о
Вопросы и задачи
147
1
JW? - О/L) dx, i/@) = 0, 1/F) = с (с > 0).
1
в)
о
5.4. Докажите, что для функционала
5тг/4
<%] = / (У2 - (У'J) dx
0
при краевых условиях у@) =0, У (-т-) =0 экстремаль у (ж) = 0
не является точкой экстремума.
5.5. Исследуйте на экстремум следующие функционалы,
определенные на множестве непрерывно дифференцируемых
функций, удовлетворяющих заданным краевым условиям:
a
а) f{{y? + 2т/ - 16у2) dx, у@) = 0, у(а) = 0 (а > 0);
о
2
б) Jy'(l + x2y')dx, 1/A) = 3,1/B) = 5;
1
тг/4
в) J (V - (у7J + 8j/) <fe, 1/@) = -1, i/(tt/4) = 0;
о
1
|(G/J + у2 + 2уе2*) <fe, у@) = 1/3, уA) = A/3)е:
о
тг/4
Д) f {У2 - {У? + 6у sin2x) <fe, i/@) = 0, i/(tt/4) = 1;
о
2
У (У2 + (У'J - 2яу) ds, у @) = 0, у B) = 3.
о
148 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА
5.6. Исследуйте на экстремум функционал
1
J[y] = J{x2 + s(y'J + y2)dx, i/@)= 0, 1/A) = 1
о
в зависимости от значения параметра е.
5.7. Покажите, что в вариационной задаче
1
J[y] = f((y'J - Viy'f) dx -»• extr, y@) = y(l) = 0
экстремаль y(x) = 0 доставляет слабый минимум функционалу
J [у]. Доставляет ли эта экстремаль сильный минимум
функционалу J[y]l
ЧАСТЬ II
Оптимальное
управление
Лучшее — враг хорошего.
Народная поговорка
6. ВАРИАЦИОННЫЕ МЕТОДЫ
В ОПТИМАЛЬНОМ УПРАВЛЕНИИ
Аппарат классического вариационного исчисления при всей
своей фундаментальности не позволяет найти решения
целого ряда вариационных задач, важных в различных отраслях
техники. Вторая часть книги посвящена методам решения
вариационных задач неклассического типа. Начнем с описания
основных классов таких задач, которые будем называть
задачами оптимального управления.
6.1. Постановка задачи оптимального управления
1. Управляемый объект (управляемая система) —
это некоторая машина, модель, прибор, процесс, конструкция и
т.п., снабженная „рулями". Манипулируя „рулями" (в
допустимых пределах, т.е. с учетом имеющихся ресурсов управления),
мы тем самым определяем поведение, движение объекта,
управляем им.
Слово „руль" взято в кавычки, поскольку под „рулем"
понимается не обязательно устройство, соответствующее
общепринятому значению этого слова, а любой фактор, дающий нам
возможность влиять на движение объекта. Так у автомобиля
два „руля": „баранка" и акселератор, а ресурсы управления
характеризуются максимально возможным углом поворота колес
и мощностью двигателя. Если в качестве управляемого
объекта рассматривать технологический процесс проведения
химической реакции, то роль „рулей" могут играть состав
ингредиентов, количество катализатора, поддерживаемая температура
и другие факторы, от которых зависит течение реакции.
152
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Будем считать, что управляемый объект нам дан, так что
известны и ресурсы управления, и закон движения,
устанавливающий для выбранного правила манипулирования
„рулями" эволюцию состояния объекта. Речь идет только об
объектах, движение которых (при заданых начальных условиях)
вполне точно и однозначно определяется выбором положения
„рулей" в каждый момент времени. Такие объекты называют
детерминированными, при их изучении никакие
„случайности" во внимание не принимаются.
Следует учитывать, что часто наши возможности
управлять объектом лимитируются не только ресурсами
управления, но и тем, что в процессе движения объект не должен
попадать в состояние, физически недоступное или
недопустимое с точки зрения конкретных условий эксплутации объекта.
Например, при работе электрической системы нельзя
допускать перегрева мотора; осуществляя маневр судна, необходимо
учитывать ширину фарватера и т.д. Подчеркнем, что такого
рода ограничения на состояние объекта совершенно не
зависят от свойств самого объекта и являются дополнительными,
диктуются условиями конкретной задачи.
Имея дело с управляемым объектом, мы всегда стремимся
так манипулировать „рулями", чтобы, исходя из определенного
начального состояния, достичь некоторого желаемого
состояния, т.е. реализовать стоящую перед нами цель управления.
Если, скажем, речь идет о запуске спутника, то нужно
рассчитать режим работы двигателей ракеты-носителя, который
обеспечит доставку спутника на желаемую орбиту. Как
начальное состояние объекта, так и цель управления зависят от
рассматриваемой прикладной задачи.
Как правило, существует бесконечное число способов
управлять объектом так, чтобы добиться желаемого результата.
В связи с этим и возникает задача не просто как-то
реализовать цель управления, а найти тот способ управления, который
в определенном смысле является наилучшим, оптимальным.
Конечно, для этого мы должны располагать критерием ка-
6.1. Постановка, задачи оптимального управления 153
чества, позволяющим судить о том, какой способ управления
лучше, а какой хуже. Этот критерий также свой в каждой
конкретной задаче. Так, при управлении электроприводом
естественно стараться обеспечить отработку искомых величин за
минимальное время, расчет графика полета самолета из одного
пункта в другой преследует достижение наименьшей
себестоимости и т.д.
Такова в общих чертах задача оптимального
управления. Перейдем к ее математическому описанию.
2. Будем рассматривать объект, состояние которого в
фиксированный момент времени описывается набором из п чисел
#1, ..., хп — фазовых координат (или фазовых переменных
[VIII]). Эти числа удобно считать компонентами фазового
т
вектора {фазового состояния) х = (жх, ..., хп) . Таким
образом, состояние объекта в каждый момент времени
можно изобразить точкой (элементом) n-мерного арифметического
пространства Rn, называемого фазовым пространством
объекта [VIII]. Например, в случае механического объекта
с конечным числом степеней свободы фазовый вектор х
составляют из обобщенных координат q\, ..., q^ и обобщенных
импульсов pi, ..., pk.
Движение объекта проявляется в том, что его
фазовые координаты меняются с течением времени ?, т.е. фазовый
вектор является вектор-функцией независимого переменного t.
При движении объекта фазовая (изображающая) точка
x(t) = (x\(t), • • • •> %n{t)) описывает в фазовом пространстве
кривую — фазовую траекторию (фазовую кривую). Обычно
фазовые координаты объекта являются „инерционными"
переменными. Это значит, что они непрерывно зависят от времени.
Пусть, далее, в фазовом пространстве W1 задано некоторое
множество ?, представляющее собой совокупность всех
фазовых состояний, в которых управляемому объекту разрешается
находиться. Тогда при движении объекта его состояние x(t) в
154
6. ВАРИАЦИОННЫЕ МЕТОДЫ
каждый момент времени t должно подчиняться условию
x(t)eScRn, F.1)
которое называют ограничением на фазовые координаты
(фазовым ограничением). В ряде задач интерес вызывает
случай, когда множество S замкнуто, а фазовая траектория
может проходить по его границе.
Предположим, что положение имеющихся у управляемого
объекта „рулей" описывается в каждый момент времени
набором из г чисел щ, ..., иТ — управляющих параметров,
составляющих вектор управления и = (щ, ..., иг) .
Положение „рулей" объекта в каждый момент времени можно
изобразить точкой r-мерного арифметического пространства W.
Манипулирование „рулями" означает выбор вектор-функции u(t),
называемой управлением (управляющим воздействием).
Существенным моментом, характеризующим управляемую
систему, является описание множества допустимых
управлений, т.е. совокупности таких функций u(t), которые исходя
из реальных обстоятельств рассматриваемой задачи
разрешается выбирать в качестве управлений и среди которых мы
будем в дальнейшем искать, например, оптимальное
управление. Это множество задают, как правило, с помощью
„геометрических" условий, накладываемых на возможные значения
функции u(t), и требований к ее функциональным свойствам.
В любом реальном объекте „рули" не могут занимать
совершенно произвольные положения либо из-за конструктивных
особенностей объекта и ограниченности ресурсов, либо из-за
условий эксплуатации объекта, опасности нарушения его
нормальной работы. Это значит, что в пространстве W
управляющих параметров выделено некоторое множество J7, называемое
областью управления. В любой момент времени точка u(t)
должна принадлежать этому множеству. Иначе говоря, для
любого t верно соотношение
u(t)eUcW,
F.2)
6.1. Постановка задачи оптимального управления 155
называемое ограничением на управление. Самым
типичным является случай, когда область управления U —
ограниченное замкнутое множество (последнее означает, что, грубо
говоря, „рули" могут занимать и свои „крайние" положения).
Помимо ограничения на значение управляющего вектора в
каждый момент времени необходимо также выяснить
допустимый характер изменения этого вектора с течением
времени. Обычно в качестве управлений рассматривают кусочно
непрерывные вектор-функции, т.е. вектор-функции, у
которых каждая координатная функция Ui(t) имеет на любом
конечном интервале конечное число точек разрыва, причем все
точки разрыва первого рода [I]. Значение управления в точке
разрыва не играет сколько-нибудь существенной роли в задачах
управления. Но для определенности удобно считать, что оно
совпадает с левосторонним пределом вектор-функции в точке
разрыва:
и(т) = и(т — 0) = lim u(t).
V ' V ' t-и—0
Также будем считать, что управление u(t) непрерывно на
концах рассматриваемого отрезка [ti, ?2].
Если ограничение F.2) на область значений управления
выглядит достаточно естественно, то выбор в качестве
управлений кусочно непрерывных функций нуждается в пояснениях.
Наиболее реалистично выглядит требование, чтобы
управление u(t) было непрерывной функцией. Оно соответствует
представлению о том, что управляющее воздействие, обладая
определенной инерционностью, не может изменяться скачком.
Но такое требование оказывается весьма неудобным. Как
свидетельствуют даже простейшие примеры линейных задач
(см. 7.4), в классе непрерывных функций решение задачи
оптимального управления может не существовать. Кроме того,
более внимательный анализ реальных управляемых объектов
показывает, что почти всегда в качестве управляющих
можно выбрать такие параметры, которые в пределах разумной
точности можно считать безинерционными. Поэтому класс
156
6. ВАРИАЦИОННЫЕ МЕТОДЫ
кусочно непрерывных функций оказывается выгодным с
теоретической точки зрения и приемлемым с точки зрения
практических приложений.
Кусочно непрерывные управления со значениями,
попадающими в область управления С/, будем называть допустимыми.
В дальнейшем, говоря об управлениях, будем иметь в виду
допустимые управления, не оговаривая это каждый раз.
Чтобы указать, как именно фазовая траектория объекта
определяется по выбранному управлению, нужно иметь закон
движения объекта, описывающий динамические свойства
рассматриваемой управляемой системы. Будем предполагать, что
закон движения представляет собой соотношение
x = f(t,x,u), F.3)
т
где /(?,ж,гх) = (/]_(?,ж,гх), ..., fn(t,x,u)) —известная вектор-
функция, конкретный вид которой определяется
конструктивными особенностями объекта или условиями рассматриваемой
задачи. Далее будем полагать, что функции fi(t,x,u), г = 1, п,
неперерывны по всей совокупности переменных и непрерывно
дифференцируемы по совокупности переменных ж [V].
Объект, математическая модель которого задается
системой уравнений F.3), является управляемым, что выражается
в следующем. Если выбрано (допустимое) управление гх(?),
t Е [^1,^2], то подстановка его в F.3) приводит к нормальной
системе обыкновенных дифференциральных уравнений (ОДУ)
[VIII], записанной в векторной форме:
x = f(t,x,u(t))- F-4)
При заданных условиях на вектор-функцию / эта система
удовлетворяет теореме существования и единственности для зада-
т
чи Коши, т.е. при начальном условии x(t\) = х1 = (х\, ..., ж*)
она имеет решение, и притом единственное, в окрестности
точки ж1. Другими словами, при выбранном управляющем
воздействии u(t) на отрезке [ti, ?2] движение объекта описывается
6.1. Постановка задачи оптимального управления 157
вектор-функцией, которая представляет собой решение
задачи Коши для системы ОДУ [VIII]. Очевидно, что движение
объекта будет меняться в зависимости от управляющего
воздействия. Решение системы F.4) при заданном управлении
ix(i), как и определяемую этим решением кривую в фазовом
пространстве, называют фазовой траекторией,
соответствующей этому управлению. Начальное условие ж1 в
задачах оптимального управления часто называют начальным
состоянием.
Заметим, что именно к виду F.3) обычно сводятся
уравнения движения для механических управляемых объектов с
конечным числом степеней свободы. Далее везде под
управляемым объектом будем понимать систему ОДУ вида F.3).
Детерминированность управляемого объекта означает, что
выбор управления u(t), ?Е [^ь^], должен однозначно
определять (при заданном начальном условии) траекторию ж(?), t Е
Е [ti, ?2]. Чтобы это было так, достаточно считать, что вектор-
функция /(?,ж,гл) удовлетворяет ранее оговоренным условиям
(непрерывность по совокупности переменных (?, ж, гх),
непрерывная дифференцируемость по совокупности переменных ж).
Тогда на каждом участке непрерывности управления u(t)
система F.4) удовлетворяет теореме существования и
единственности для задачи Коши. В точках разрыва какой-либо из
координатных функций управления надо производить
стыковку решений системы F.4), обеспечивающую непрерывность
фазовой траектории. На рис. 6.1
показан пример фазовой
траектории на плоскости, которая
отвечает управлению,
имеющему разрывы первого рода в
моменты времени т\ и Т2. Таким
образом, траектория x(t) при
кусочно непрерывном
управлении является непрерывной
кривой, а ее производная x(t) ку- Рис. 6.1
158
6. ВАРИАЦИОННЫЕ МЕТОДЫ
сочно непрерывна на рассматриваемом отрезке времени (такие
кривые называют кусочно гладкими [V]). Если u(t) —
допустимое управление, a x(t) — соответствующая фазовая
траектория, удовлетворяющая ограничению F.1), то пару функций
(ж(?), u(t)) будем называть допустимым процессом.
Полезно иметь в виду следующую геометрическую
интерпретацию системы F.3). Пусть в некоторый момент времени t
управляемый объект находится в фазовом состоянии x(t).
Вектор x(t) представляет собой вектор фазовой скорости и
является касательным вектором к кривой х = x(t) в
соответствующей точке. Если в фазовом пространстве W1 построить
при фиксированном х всевозможные векторы /(?,ж,гх) для
всевозможных допустимых управляющих воздействий и (момент
времени t фиксирован), то получим, согласно F.3), множество
допустимых (возможных) фазовых
скоростей в точке х (на рис. 6.2 пунктиром
изображено множество концов всех
таких векторов). Другими словами,
выбор управляющего воздействия u(t) EU
в момент времени ?, когда
изображающая точка находится в состоянии ж,
равнозначен выбору допустимой фазовой скорости, с которой
изображающая точка выходит из этого состояния.
3. При рассмотрении реальных управляемых объектов
прежде всего возникает задача управления движением. Для ее
формулирования нужно задать в фазовом пространстве
некоторое множество М (цель управления) тех состояний, которые
являются желательными. При этом должно быть выполнено
включение М С S.
Говорят, что управление u(t), t Е [?i, ?2], переводит объект
F.3) из состояния ж1 в состояние ж2, если соответствующая
этому допустимому управлению фазовая траектория x(t)
(решение задачи Коши для системы F.4) с начальным условием
x(t\) = ж1) определена на том же отрезке времени [ti, ?2], УД о-
6.1. Постановка задачи оптимального управления 159
влетворяет ограничению F.1) и в момент времени t^ попадает
в фазовое состояние ж2 (т.е. ж(^) = ж2). Обратим внимание на
то, что отрезок [*i, ^2] — это конечный промежуток числовой
прямой. Если управление u(t) переводит объект F.3) из
начального состояния ж1 в некоторое состояние ж2 Е М, то будем
говорить, что управление u(t) реализует цель управления М.
Задача управления движением состоит в том, чтобы найти
какое-нибудь допустимое управление, реализующее цель.
Другими словами, для объекта F.3) требуется отыскать такую
кусочно непрерывную функцию u(t) со значениями в С/,
определенную на отрезке [ti, ?2] (^2^ вообще говоря, заранее не
известно), чтобы система F.4) имела решение ж(?), удовлетворяющее
начальному условию x(t\) = ж1, ограничению F.1) и конечному
условию ж(?2) Е М. Следовательно, задача управления
сводится к решению краевой задачи для системы n-го порядка F.3)
[VIII] при ограничениях F.1) и F.2). Однако общей теории
решения подобных задач нет. Доказательство разрешимости
задачи управления и фактическое отыскание управления,
реализующего цель, наталкиваются на серьезные трудности.
Мы не будем рассматривать вопросы разрешимости задачи
управления, предполагая, что цель управления, поставленная
для изучаемого объекта, может быть реализована. Отметим,
что во многих прикладных задачах разрешимость задачи
управления вытекает „из физических соображений".
4. В задачах управления движением возникают различные
по количеству и характеру краевые условия. Если множество
М, характеризующее цель управления, совпадает со всем
фазовым пространством W1, то такую задачу называют задачей со
свободным концом траектории. В этом случае роль краевых
играют начальные условия x(t\) = ж1.
Более сложные задачи — так называемые двухточечные
задачи, или задачи с фиксированными концами. Эти
задачи в качестве краевых условий имеют как начальное x(t\) =
= ж1, так и конечное ж(^) = ж2. При этом интервал времени
160
6. ВАРИАЦИОННЫЕ МЕТОДЫ
управления t^ —t\ может быть как заданным, так и
подлежащим определению. В этом случае множество М цели
управления состоит из единственной точки ж2.
В классе многоточечных задач управления для
нескольких фиксированных моментов времени ?i, ?2, •••? tm
заданы значения некоторых координат вектора состояния.
Наконец, в классе задач с подвижными (скользящими)
концами требуется найти управление, переводящее объект из
некоторого (заранее не известного) состояния ж1,
принадлежащего известному множеству Mi, в некоторое состояние ж2 из
известного множества М2. Часто эти множества представляют
собой гиперповерхности в арифметическом пространстве W1.
Если М\ и М.2 вырождаются в точки, то приходим к задаче с
закрепленными концами.
5. Предположим, что задача управления разрешима.
Наиболее типичной является ситуация, когда задача управления
имеет бесконечно много решений, т.е. существует бесконечно
много управлений, реализующих цель, и все они с этой точки
зрения совершенно равноправны. В таком случае может быть
поставлена задача оптимального выбора: среди допустимых
управлений выбрать такое, при котором управляемый процесс
будет наилучшим в каком-то определенном смысле. Другими
словами, если качество процесса оценивается некоторой
числовой характеристикой, то задача заключается в том, чтобы
выбором управления обеспечить ее максимальное или
минимальное значение. Эту числовую характеристику называют
критерием качества.
Значение критерия качества определяется управлением,
динамикой управляемого процесса (временем управления,
фазовой траекторией). Поэтому критерий качества представляет
собой функционал того или иного вида, и задача оптимального
управления состоит в отыскании управлений, обеспечивающих
минимум или максимум этого функционала. Случай, когда
требуется максимизировать функционал, сводится к задаче ми-
6.1. Постановка, задачи оптимального управления 161
нимизации заменой исходного функционала / функционалом
—/. Поэтому этот случай отдельно не рассматривают.
Таким образом, задача оптимального управления состоит
в том, чтобы найти такое управление u(t), реализующее цель,
для которого функционал принимает наименьшее возможное
значение. При этом управление u(t) называют оптимальным
управлением, соответствующую фазовую траекторию x(t) —
оптимальной траекторией, а процесс (ж(?), u(t)) —
оптимальным процессом.
Для управляемых процессов с законом движения F.3)
наиболее широко используют так называемые интегральные
критерии качества — функционалы вида
I = Jf(t,x(t)Mt))dt. F.5)
h
К этому классу критериев относятся:
а) критерий оптимального быстродействия с
подынтегральной функцией
/°(t,aj,u) = l,
который сводится к представлению / = t^ — t\. Такой
критерий используется в теории автоматического управления (в
следящих системах) для выбора параметров, обеспечивающих
наименьший по длительности процесс при отработке входного
сигнала. Оптимальное управление в задачах с критерием
оптимального быстродействия называют управлением,
оптимальным по быстродействию.
б) интегральный квадратичный критерий с
подынтегральной функцией
п
г=1
162
6. ВАРИАЦИОННЫЕ МЕТОДЫ
где х = (#1, #2, ..., #п), а среди коэффициентов с^ есть хотя бы
один ненулевой. В представлении F.5) могут рассматриваться
как конечный (?2 < +оо)? так и бесконечный (*2 = +оо)
интервалы времени. Такой критерий дает косвенное представление
о точности работы системы, рассматриваемой в фазовом
пространстве. Его также используют в теории автоматического
управления.
в) энергетические критерии качества с
подынтегральными функциями
г г
где и = (глх, г^2, ..., глг), а среди коэффициентов ^ есть хотя
бы один ненулевой. Эти критерии характеризуют затраты
энергии, например, в задачах ориентации спутника с помощью
газореактивных двигателей;
г) смешанный интегральный критерий с
подынтегральной функцией
п г
г=1 j=l
дающий отклонения по фазовым координатам пв среднем" и
общие энергетические затраты.
Наряду с интегральными критериями качества в теории
оптимального управления часто встречаются терминальные
функционалы, т.е. функционалы вида / = Т (ж (?]_), #(?2)) • К
этому классу неинтегральных критериев относится, например,
критерий конечного состояния / = Т(ж(^2)). Его обычно
используют в тех случаях, когда систему необходимо привести
в заданное конечное состояние а = (ai, ..., ап) в момент
времени ^2 с наименьшей ошибкой. В такой постановке критерий
6.1. Постановка, задачи оптимального управления 163
имеет вид
п
T(aj(*i),a(t2)) = Y1 Ы^) - ^f = 1№) " «||2 •
г=1
6. Неклассический характер задачи оптимального
управления особенно ярко проявляется в случае поиска управления,
оптимального по быстродействию, для системы F.3), у
которой правые части — линейные функции относительно х и и
с постоянными коэффициентами, а множество U
представляет собой замкнутый выпуклый многогранник, определяемый,
например, неравенствами |г^(?)| ^ 1, j = 1, г. Оказывается,
что оптимальное управление осуществляется скачкообразной
вектор-функцией гх(?), у которой точка u{t) поочередно
находится в вершинах многогранника U. Закон управления
сводится к последовательности скачкообразных переходов от одной
вершины к другой.
Эта линейная вариационная задача, играющая важную роль
в технических приложениях, решена в 7.4. Классические
методы для ее решения не применимы (см. 6.4). Указанный
скачкообразный характер оптимального управления не позволяет
ограничить класс допустимых управлений только
непрерывными функциями. Если же ввести такое ограничение, то задача
станет неразрешимой. То же будет и в случае, если условиться,
что множество управлений U — открытое множество.
Для отыскания оптимального управления можно
использовать два подхода. Первый заключается в том, что оптимальное
управление строится как функция времени t. В результате
получают программное управление, которое известно наперед
на весь интервал времени и не зависит от возможного поведения
системы. Система управляется без обратной связи (по
разомкнутому циклу). С прикладной точки зрения такой подход
несовершенен, так как подразумевает точное знание динамики
объекта, но любая математическая модель движения объекта
приближенна и не учитывает влияния всех внешних факторов.
164
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Второй подход состоит в том, что оптимальное управление
строится как функция фазовых координат. Такую функцию
называют синтезирующей функцией, а задачу построения
синтезирующей функции — задачей синтеза
оптимальных управлений (см. 7.5). Этот подход ближе к
практическим приложениям, так как при управлении учитывают
текущее состояние системы (управление с обратной связью), но
синтезировать управление значительно сложнее, чем строить
программное управление. Однако можно сочетать оба подхода
(например, в методе аналитического конструирования).
7. Проиллюстрируем на примере, как ставится задача
оптимального управления.
Пример 6.1. Рассмотрим
математический маятник (т.е. груз малых размеров
на невесомом стержне), который
находится вблизи верхнего (неустойчивого)
положения равновесия (рис. 6.3).
Для простоты будем предполагать, что
трение отсутствует. Если угол (р
отклонения маятника отсчитывать против хода
часовой стрелки от направления на верхнее
положение равновесия, то уравнение движения маятника имеет
вид
ml -—г = mglsimp,
at1
где т — масса маятника; / — его длина; g — ускорение
свободного падения. Ограничиваясь областью, достаточно
близкой к положению равновесия, мы можем заменить sirup на
<р, так как sirup « (р при малых значениях (р. Введя обозначение
ш2 = g/l, ио > 0, получим линейное дифференциальное уравнение
второго порядка
d2
———и; (р = О,
F.6)
6.1. Постановка задачи оптимального управления 165
описывающее движение маятника при малых значениях (р, т.е.
при \(р\ < Ф для некоторого Ф (уравнение линейного
приближения).
Известно (это, впрочем, очевидно), что верхнее положение
равновесия маятника неустойчиво. Каково бы ни было
начальное положение (р@) = щ, Ф{®) = Фо> отличное от положения
равновесия (ср = 0, cpf = 0), маятник начинает движение,
согласно дифференциальному уравнению, по закону
ф) = Сге^ + С2е-"\ F.7)
где Ci, C<i — постоянные интегрирования. Из соотношения
F.7) вытекает, что маятник в конечном счете удаляется от
положения равновесия. Правда, следует отметить так
называемое лимигпационное движение, возникающее, например,
в линейной модели F.6) при фо = — илро; при таком движении
маятник приближается к положению равновесия с убывающей
скоростью, но не достигает его ни за какой конечный
промежуток времени.
Допустим теперь, что к маятнику приложена некоторая
внешняя сила -F(t), линия действия которой в каждый момент
времени t перпендикулярна оси маятника. Величину и
направление силы можно выбирать по своему усмотрению, меняя
во времени, но при этом должны соблюдаться ограничение
|.F(?)| ^ i^o, которое отражает лимиты на имеющиеся ресурсы,
и требование, чтобы функция F(t) была кусочно непрерывной.
Будем описывать силу скалярной величиной F положительной,
когда сила направлена в сторону увеличения угла <р, и
отрицательной, когда сила направлена в сторону уменьшения (р.
Тогда уравнение линейного приближения вынужденного
движения маятника будет таково:
^ "«Л» = /(*), F-8)
vAef{t) = F(t)/(ml).
166
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Спрашивается: можно ли подобрать функцию F(t)
внешнего воздействия так, чтобы маятник из начального состояния
<ро? Фо за конечное время достиг положения равновесия? Если
это возможно, то как привести маятник в верхнее положение
равновесия за наименьшее время? Отметим, что ответ на эти
вопросы связан с решением задачи Коши для
дифференциального уравнения F.8) второго порядка. Однако требуется не
просто решить задачу Коши с заданными начальными
условиями, а подобрать вид правой части уравнения так, чтобы
решение соответствующей задачи Коши в некоторый конечный
момент времени проходило через положение равновесия. При
этом выбор правой части должен удовлетворять ограничениям
(кусочная непрерывность F(t) и неравенство \F(t)\ ^Fq). Пусть
такая функция существует (что, конечно, совсем неочевидно),
причем не единственная. Тогда возникает задача оптимального
выбора, т.е. выбора такой функции, которая обеспечивает
наименьшее время перехода из начального состояния в положение
равновесия.
Используем ранее введенные обозначения. В каждый
момент времени t состояние маятника описывается двумя
параметрами (фазовыми координатами): углом отклонения х\ = tp
и скоростью ф = Х2- Значит, фазовое пространство
рассматриваемого объекта является двумерным (представляет собой
фазовую плоскость). Ограничение на фазовые координаты
имеет вид
|Ж1|^Ф F.9)
и диктуется размерами области, в которой применима линейная
модель движения маятника. Роль управляющего параметра
играет „сила" /, введенная в F.8). Обозначим его буквой и.
Согласно условию задачи, область управления U описывается
неравенством
|«|</о. F-10)
Множество допустимых управлений — это множество кусочно
непрерывных функций u(t), в каждый момент времени
подчиняющихся ограничению F.10).
6.2. Задача, Лагранжа в форме Понтрягина 167
Уравнение F.8) в принятых обозначениях сводится к
системе дифференциальных уравнений
которая относится к законам движения управляемого объекта
вида F.3). Предполагаем, что в начальный момент времени
t = ti=0 задано начальное состояние объекта
¦'-(З)-Й)-
а цель управления состоит из единственной точки на фазовой
плоскости, соответствующей положению равновесия:
За критерий качества / берем, как условились, время.
Нужно выяснить, какое допустимое управление переводит объект,
описываемый системой F.11), из начального состояния F.12) в
нужное состояние F.13) за наименьшее время.
Решение поставленной задачи оптимального управления
дано в 7.5 при дополнительных предположениях lo = 1, /о — 1?
которые несущественны, но упрощают выкладки. Вопрос о
применимости линейной модели для описания реального
объекта (маятника), т.е. вопрос об описании области F.9), не
обсуждается.
6.2. Задача Лагранжа в форме Понтрягина
Из предыдущего параграфа ясно, что задача оптимального
управления очень близка в своей постановке задаче Лагранжа
(см. 4). Поэтому мы начнем с обсуждения вариационных
методов решения этой задачи.
168
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Для задачи Лагранжа (см. 4.1)
1[х] = / f°(t,x,x)dt->mm, х = (хъ х2, ..., хт),
#(*,ж,±)=0, j = ^n (п<га), F.14)
рассмотрим частный случай, когда дифференциальные
уравнения F.14) разрешены относительно производных:
Х\ = / (^,#1, . . . ,Хп,Хп-\-\, . . . ,Хт),
F-15)
Переменные #i, ..., хп, соответствующие производным в левой
части системы F.15), можно рассматривать как фазовые
переменные, а остальные жп+1, ..., хт — как управления. Для
управлений введем обозначения Uj, j = 1, г, где г = т — п. В
таких задачах принято независимую переменную обозначать
буквой ? (она ассоциируется с временем), а не ж как в
классическом вариационном исчислении. Введенное деление переменных
на фазовые переменные и управления позволяет записать
дифференциальные связи F.15) в виде
x = f(t,x,u), F.16)
гдеж = (жь ..., xnf; и = {иъ ..., urf; f= (Д...,/71) ; x = x't.
Будем рассматривать задачи, в которых целевой
функционал с учетом введенных обозначений имеет вид
= Г f°(t,x,u)dt. F.17)
h
Заметим, что он является вырожденным функционалом, так
как его интегрант fQ(t,x,u) не зависит от производных
искомых функций. Предполагается, что отрезок [ti, t2] фиксирован
6.2. Задача, Лагранжа в форме Понтрягина 169
и на его концах поставлены следующие краевые условия:
Ф(*(*1)) = 0, в(ж(?2)) = 0, F.18)
гдеФ=(^, ..., ф8)Т, ©= {$\ ••-, ^)Т' *> К га-
Задачу F.16)—F.18) называют задачей Лагранжа в
форме Понтрягина. Предполагаем, что все функции fl (г = 0, п),
а также функции Ф, в дважды непрерывно дифференцируемы,
x{t)eC\[ti,t2],W), u(t)eC([tut2lW)- В такой постановке
задача Лагранжа отличается от задач оптимального управления
только классом допустимых функций (в задачах
оптимального управления фазовые траектории x(t) кусочно гладкие, а
управления u(t) кусочно непрерывные), а также отсутствием
ограничений на фазовые координаты и управления.
Для решения задачи F.16)—F.18) применим подход
Лагранжа, основанный на введении множителей Лагранжа и уже
использовавшийся ранее (см. 4.2). Составим вспомогательный
функционал задачи F.16)—F.18):
t2
1*[х,и]= /ь^ + /хтФ(ж(^)) + 1/тв(ж(^2)). F.19)
ti
Здесь
п
L(t,x,x,u) = f°(t,x,u) + ^2Xi(t)(±i - f(t,x,u)) =
г=1
= f + \T(x-f) - F.20)
т т
лагранжиан задачи; A(t) = (Ai(t), ...,An(t)) ,/i=(/ii,/i2, ...,/is) ,
т
i/ = (z^i, ..., v\) — множители Лагранжа. Множители Xi(t)
учитывают дифференциальные связи F.16) (как и в 4.2), а
множители \ii^Vi — ограничения вида F.18).
Теорему 4.1 можно обобщить на случай краевых условий
вида F.18). Такое обобщение означает, что экстремали задачи
Лагранжа F.16)—F.18) являются экстремалями
вспомогательного функционала /* [ж, и]. Чтобы найти экстремали задачи Ла-
170
6. ВАРИАЦИОННЫЕ МЕТОДЫ
гранжа, нужно из экстремалей вспомогательного функционала
выбрать те, которые удовлетворяют краевым условиям F.18)
и дифференциальным связям F.16). Иначе говоря,
экстремали вспомогательного функционала, удовлетворяющие краевым
условиям и дифференциальным связям, являются экстремалями
задачи Лагранжа.
Выпишем, имея в виду сказанное, уравнения для
экстремалей задачи F.16)—F.18). Уравнения Эйлера вспомогательного
функционала, с учетом разделения переменных на фазовые
переменные и управления, имеют вид
<
dt i{ Xi
d-a
l:
0, г = 1, n;
о, j = T7F,
(dt Ui
или для данного вида лагранжиана F.20)
F.21)
Т Ml
^г — (/ )Xi — ^ fxi
1,П,
iT Ml
(/%.-*/;,.=о, j = i,r,
F.22)
F.23)
где /= (J1, /2, ..., /n) . Уравнения F.23) алгебраические, так
как производные й не входят в лагранжиан. К системе F.22),
F.23) нужно добавить условия трансверсальности на левом и
правом концах (см. замечание 4.2):
Х{
ilj
Х{
ilj
t=tl
t=h
t=t2
t=t9,
T -r /
T т /
t=
1
1
\t=tl
= -uTQ[
4
i
t=t2
\t=t2
i = 1, n;
з = i^;
г = 1, n;
j = hr,
F.24)
6.2. Задача Лагранжа в форме Понтрягина 171
из которых лишь первая и третья группы уравнении не
являются тривиальными. Они дают соотношения
А*(<1) = **ТФ^ (*(*))! , * = 1~^, F.25)
\t=tl
\(t2) = -vTQ'Xi{x{t))\ , i = T^i. F.26)
Чтобы определить экстремали задачи Лагранжа F.16)—F.18)
в форме Понтрягина, нужно к системе уравнений F.22)-F.26)
добавить уравнения дифференциальных связей F.16) и краевые
условия F.18). В результате получим систему 2п + г уравнений,
среди которых 2п уравнений — дифференциальные первого
порядка (уравнения F.16) и F.22)) и г уравнений —
алгебраические (уравнения F.23)). Решение этой системы зависит от
2п постоянных интегрирования и s + I неопределенных
множителей Лагранжа /^ и щ. Для определения всех 2n + s + I
неизвестных имеются 2п условий трансверсальности F.25), F.26) и
s + I краевых условий F.18).
Рассмотрим другую задачу, заменив в задаче F.16)—F.18)
интегральный функционал F.17) смешанным целевым
функционалом
t2
В[х,и]= //°(*,ж,гх)сг* + Т[ж(*1)]+Т[ж(*2)].
h
Эту задачу часто также называют задачей Лагранжа в форме
Понтрягина. Вспомогательный функционал для нее будет
иметь вид
t2
Б*[ж,г*] = /Ldt + /xT*(^(ti)) + i/Te(^(t2))+f[^(ti)]+T[^(t2)]
с тем же лагранжианом, что и в предыдущей задаче. Поэтому
уравнения Эйлера будут такими же, как и в предыдущей задаче,
172
6. ВАРИАЦИОННЫЕ МЕТОДЫ
т.е. будут иметь вид F.22), F.23). Условия
трансверсальности изменятся за счет терминальных слагаемых функционала
В[х,и]:
\i(t1) = (»T*'x.{x(t))+Tx.[x(t)])
\{h) = -{f@'Xi{x(i))+T'Xi[x(t)})
t=tl
t=t2
i = 1, n,
г = 1, n.
Если же ограничений F.18) нет, то получаем задачу F.16),
F.21) со свободными концами — третью формулировку задачи
Лагранжа в форме Понтрягина. Условия трансверсальности в
этой задаче имеют вид
\i(h)=rxi[x(t)]
Xi(h) = -Тх. [x(t)
t=h
t=t2
l,n,
= 1, n.
Мы рассмотрели три задачи, в которых отрезок [ti, ?2]
фиксирован. Однако подход Лагранжа позволяет получить
необходимые условия в задаче Лагранжа в форме Понтрягина
и в случае переменных концов t\ и ?2. Рассмотрим это на
примере первой из ранее сформулированных задач — задачи
F.16)—F.18). Оказывается, что и при изменяющихся концах
t\ и ^2 экстремали задачи Лагранжа являются экстремалями
вспомогательного функционала F.19). Но при этом
вспомогательный функционал F.19) зависит не только от функций x(t)
и n(t), но и от переменных t\ и ?2, т.е. имеет вид
Г[ж,и,*1,*2]= f Ldt + ^T^(x(ti)) + ^Te(x(t2)). F.27)
Найдем вариацию функционала /*[sc,iz,?i,?2]5 повторяя
рассуждения из 3.2. Зафиксировав допустимые вариации Sx(t),
6.2. Задача, Лагранжа в форме Понтрягина 173
5u(t), 8t\, 5t2, составим функцию
t2-\-a5t2
(p(a) = / L(t,x + a5x,x + a5x,u + a5u) dt +
t\-\-a5ti
+ f/Щх1 + aSx1] + i/@[x2 + a8x2],
где x1 = x(ti); x2 = ж(^); Sx1 = Ex\, ..., Sx^) ; Sx2 =
T
= (J^f, ..., Sx^) . Согласно определению вариации
функционала,
SI[x,u,ti,t2,Sx,5u,Sti,St2,Sx1,Sx2] = (р'@) =
= fit{L*i-JtL*iMxidt+ [Y,L'Uj8ujdt +
n I n
+ ?D,+"Х) ^-sD4-^X)
г=1 \t=-t2 i-\
П I n
(fa- +
5*1.
t=ti
г=1 1Г=Г2 г=1
Приравнивая вариацию к нулю, получаем необходимые условия
экстремума для функционала вида F.27). При этом системы
уравнений F.21) и F.24) дополняются уравнениями
п
(?-5>4<)
г=1
п
= о,
г=1
t=ti
t=t2
F.28)
0.
Значит, экстремали функционала F.27) удовлетворяют тем же
уравнениям, что и экстремали функционала F.19). Но
кроме того, они подчиняются и дополнительным условиям F.28),
которые можно рассматривать как замену условий
фиксированных концов.
174
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Чтобы теперь определить экстремали задачи Лагранжа
F.16)—F.18) в случае переменных концов t\ и ?2, нужно к
системе условий F.22), F.23), F.25), F.26) и F.28) добавить
уравнение дифференциальных связей F.16) и краевые условия
F.18). При этом, учитывая соотношения L'±. = А^, г — 1,п,
уравнения F.28) можно преобразовать к виду
п
L(x(tk),x(tk)Mh)) - 5>*(**)Л*(**) = 0. к = 1,2. F.29)
г=1
Это соотношение и есть то недостающее условие, которое
позволяет определить параметры t\ и ?2-
Для дальнейшего обсуждения задачи Лагранжа в форме
Понтрягина нам удобно использовать каноническую форму
уравнений Эйлера, которые в задаче Лагранжа D.1)-D.3)
имеют вид D.11). Введем канонические переменные
Рг = (/%., * = М, F.30)
к
где f* = f-\- ^2 Xjgj — лагранжиан задачи, и запишем функцию
3=1
Гамильтона
п
г=1
в которой переменные у[ находятся из системы уравнений
F.30). Уравнения Эйлера D.11) эквивалентны системе
уравнений
( dpi
<
dx=-H'«' ? = 1'n;
dyi „I ¦ 1—
-^ = НРг, « = l,n.
Вернемся к задаче F.16)—F.18). Ее лагранжиан имеет вид
п
L = /°(<,aj,ti) + ^Ai(<)(i;i-/i(<,aj,ti)).
6.2. Задача Лагранжа в форме Понтрягина 175
Поэтому
Pi
¦Ь^=\г, Я(*,ж,р,«) = -? + ^ж5
Pi
5>/г-/°, i=1>n- F-31)
Функцию Гамильтона Н для задачи Лагранжа в форме
Понтрягина часто называют функцией Понтрягина.
В канонических переменных дифференциальные связи F.16)
и уравнения Эйлера F.22) можно записать в виде нормальной
системы ОДУ
— =Нр., i = l,n;
т F.32)
К dt
-H'Xi, г
1,п,
которую называют гамильтоновои системой.
Чтобы получить полную систему условий, к F.32) нужно
добавить вторую группу уравнений Эйлера — алгебраические
уравнения F.23), которые с учетом F.31) можно преобразовать
к виду
#;. =0, j = l,r. F.33)
Кроме того, нужно добавить краевые условия F.18) и условия
трансверсальности F.25), F.26), которые в канонических
переменных имеют вид
pi(t1) = i*T*'x.(x(t))
pt(t2) = -vTe'Xi{x(t))
t=tl
t=t2
l,n,
i = l.n.
F.34)
F.35)
Итак, метод Лагранжа, широко используемый в решении
вариационных задач, позволяет получить необходимые
условия экстремума для задачи Лагранжа в форме Понтрягина.
176
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Эти условия дают возможность найти решение задачи в классе
гладких функций Xi(t), г = 1, п, и непрерывных функций Uj(t),
j = 1,г. Подвести итог раздела можно так: если функции,
входящие в постановку экстремальной задачи, обладают
достаточной гладкостью, то для решения задачи можно использовать
подход, основанный на введении множителей Лагранжа.
6.3. Некоторые задачи с ограничениями
в классическом вариационном исчислении
Для задач оптимального управления характерно наличие
ограничений на допустимые функции, т.е. фазовых
ограничений и ограничений на управление. Некоторые задачи с такими
ограничениями удается решать с помощью методов
вариационного исчисления.
Рассмотрим задачу
XI
с дважды непрерывно дифференцируемым интегрантом / в
классе непрерывно дифференцируемых функций у (ж),
удовлетворяющих условию
y(x)^ip(x), xe[xi,x2], F.37)
где (р G С1^!, Х2[. Введением функции и(х) = у'{х) эту задачу
можно свести к задаче Лагранжа в форме Понтрягина с
фазовыми ограничениями F.37):
Х2
1[уМ= f(x,y,u)dx ^exti, yf = u.
XI
Однако для наглядности вариационного подхода остановимся
на исходной формулировке F.36), F.37).
6.3. Некоторые задачи с ограничениями
177
УА
О
А
\У = У(х) ___^
; х^ _^<г^^§>^^
; .<$#т1Г= ?>(ж):
|#"' : :
хх а Ъ
/В
^М
i
1
1
х2
Равенство у = (р(х)
определяет границу множества,
внутри которого не могут
находиться значения функции,
доставляющей экстремум
функционалу (рис. 6.4). Наличие
ограничений F.37) приводит к
необходимости некоторой кор- Рис- 6-4
ректировки вывода необходимых условий экстремума
функционала.
Основное условие — уравнение Эйлера — выводилось в
предположении, что функции могут свободно варьироваться,
т.е. если у — допустимая функция, то допустимыми
являются также любые функции у + 5у при 5у, достаточно малых
по норме. Для вариаций функции у (ж), удовлетворяющих
неравенству 5у > 0 на отрезке [х\, х^ допустимыми функциями
являются и функция у -\- 8у, и функция у — 6у. При наличии
ограничений F.37) в случае функции у (ж), выходящей на
границу множества возможных значений (см. рис. 6.4), допустимой
является любая функция у(х) + 5у(х) при 5у(х) > 0 на отрезке
[а, 6], но функция у(х) — Sy(x) уже не будет допустимой, так как
будет принимать значения, не удовлетворяющие
ограничениям. Значит, при наличии ограничений указанного типа вместо
произвольной вариации надо рассмотреть односторонние
вариации, которые определяются функциями 6у(х) одного знака на
интервале (а, Ъ). Такие вариации позволяют получить решение
задачи в случае, когда экстремум достигается на функции, не
являющейся экстремалью.
Заменим в задаче F.36), F.37) зависимое переменное у на
переменное z согласно уравнению у = z2 + <р{х). Тогда у' =
= 2zz' -\- (ff(x) и функционал относительно z принимает вид
Х2 Х2
J[z]= f(x,z2 + (p(x),2zz' + (p'(x))dx= <fr(x,z,z')dx.
XI
XI
178
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Функция z{x) уже не подчиняется каким-либо ограничениям, а
границе области в исходной задаче соответствует z = 0.
Так как в задаче для функции z(x) ограничений нет, эта
функция, будучи точкой экстремума функционала, должна
удовлетворять уравнению Эйлера
4-&z,-&z=o-
dx z z
Но
b'z = fyy'z + fyl{y')'z = 1zf'y + 2z'fy4
<S>'z, = fy,(y'yz, = 2zfy,,
±Ф>, = 2г%+2^>,
Следовательно,
Уравнение Эйлера для переменного z свелось к следующему
уравнению для переменного у:
т.е. распадается на два уравнения: первое — z = 0, которому
удовлетворяет функция у = (f(x); второе — уравнение Эйлера
для исходного функционала F.36).
Итак, экстремум функционала F.36) при наличии
ограничений F.37) может достигаться на функциях, график которых
состоит из участков границы множества допустимых значений
и дуг экстремалей (в частном случае участок границы может
стянуться в точку).
Для полного решения задачи нужно также найти условия
сопряжения участков экстремалей с участками границы
множества допустимых значений. Пусть экстремум функционала
6.3. Некоторые задачи с ограничениями
179
F.36) достигается на
составной функции у{х) и точка a у|
есть точка сопряжения
экстремали с функцией у = (р(х),
график которой ограничивает
множество допустимых значений
(рис. 6.5). Для определенности ~^
считаем, что экстремали
соответствует участок слева от
точки а. Тогда
a Х2
![у]= / f{x,y(x),y'(x))dx + J f(x,<p(x),<p'(x))dx.
х\ a
Приращение функционала, соответствующее вариации Sy(x),
будет состоять из двух частей: приращения на экстремали
a+5a a
Л/1= / f(x,y + Sy,y' + Sy')dx-f(x,y,y')dx
Х\ Х\
и приращения на участке функции у = ср(х)
Х2 Х2
А/2= / f(x,(p(x),(p'(x))dx- / f(x,(p(x),(p'(x))dx =
a-\-6a a
a-\-5a
= — / f(x,(p(x),(pf(x)) dx = — f{a,ip(a),ip\a))8a + o(8a).
a
Вариация функционала также распадается на два слагаемых,
соответствующих вариации экстремали и пограничной
функции. Слагаемое 51\, соответствующее экстремали, можно
вычислить по обычной формуле вариации с подвижным правым
концом, перемещающимся вдоль кривой у = <р(х) (см. 3.2):
5Il = {f-{y'-^)fyl)
8а,
180
6. ВАРИАЦИОННЫЕ МЕТОДЫ
а слагаемое 81^, соответствующее пограничной функции,
равно:
812 = -f(a,(p(a),(pf(a))8a.
Так как на функции у(х) достигается экстремум, то сумма
81\ + 81% должна равняться нулю, откуда, в силу
произвольности 8а и с учетом равенства у (а) = (^(а), получаем
{f{x,y,y')-f{x}y,<p')-{y'-v')f'yi)
Преобразуем разность f(x,y,yf) — f(x,y,(pf)
теоремы (формулы) Лагранжа [II]:
0.
F.38)
с помощью
f(x,y,y')-f(x,y,<p')
(У1'-<p')fy>(x,y,q)
где q — некоторое число между (р'(а) и у'(а). Подставляя
преобразованное выражение в F.38), получаем
(V - Ч>') {fy>(x,y,<l) ~ fy> (ж,У,У7)))
Снова применим теорему Лагранжа:
((У* -<p')(Q-y')fy'y'(x,y,qi))
= 0.
= 0,
F.39)
где q\ — некоторое число между q и у1 {а). Если fyfvf(a>,y(a>),q) ф
Ф 0 для значений q между у'(а) и (р'(а), то из равенства F.39)
вытекает, что у'{а) = ^'(а), так как равенство q = у'(а) в силу
теоремы Лагранжа невозможно при у'(а) ф ф'{о).
Таким образом, при достаточно общих предположениях
об интегранте функционала (/", ,(x,(p(x),q) ф0 при любом q)
график функции у(х) в точках сопряжения касается графика
функции (f(x), или, другими словами, производная функции
у(х) должна быть непрерывной.
Условие непрерывности производной функции дает
дополнительные уравнения, необходимые для определения
экстремалей. Пусть, например, решается задача F.36), F.37) в
классе функций у(х) Е G1[ж1,Ж2] с фиксированными значениями на
6.3. Некоторые задачи с ограничениями
181
концах у{х\) = yi, у(х2) = У2- Предположим, что график
искомого решения включает в себя один участок границы у = (р(х)
(см. рис. 6.4). Если найдено общее решение уравнения
Эйлера и тем самым получено уравнение семейства экстремалей для
функционала задачи, то для построения решения нужно
определить:
- абсциссы а и b точек сопряжения графиков экстремалей с
границей множества допустимых значений;
- две постоянные интегрирования на левом участке,
соответствующем экстремали;
- две постоянные интегрирования на правом участке,
соответствующем экстремали.
Всего имеются шесть неизвестных, для определения
которых нужны шесть уравнений. Два уравнения — это
краевые условия у{х\) = yi, у{х2) = У2- Два уравнения
вытекают из непрерывности искомой функции в точках сопряжения:
у (а) = <р(а), у(Ь) = (р(Ь). И два уравнения — это условия
непрерывности производной функции у(х) в точках сопряжения:
у'(а) = ср'(а),у'(Ъ)=1р'(Ь).
Пример 6.2. Найдем
кривую наименьшей длины,
соединяющую точки А(а, у а) и В(Ь,ув)
и не заходящую внутрь круга D
(рис. 6.6).
Формально ограничение в
поставленной задаче не относится
к тому типу ограничения F.37),
которое мы рассмотрели. Однако отметим, что в приведенных
выше рассуждениях, главным в которых был анализ точек
сопряжения, используются только локальные свойства функции
<р{х). Поэтому все полученные результаты будут верны и в
данной задаче.
В поставленной задаче в предположении, что искомая
кривая является графиком функции, функционал можно записать
У;
О
1
А/
М
_, - -
N
-~~"" 1^^^
Г м' iV'
i
i
а
\
Рис. 6.6
В
э х
182
6. ВАРИАЦИОННЫЕ МЕТОДЫ
следующим образом:
ь
J[y] = JVl + (y'Jdx.
а
Так как интегрант рассматриваемого функционала зависит
только от у', его экстремалями являются прямые у = С\х + С<2
(это, впрочем, очевидно). Если круг D не пересекается с
отрезком АВ, то решение задачи — функция, графиком
которой является указанный отрезок АВ. Если же круг D
пересекается с отрезком АВ, то решение задачи следует
искать в виде кривой, составленной из отрезков, сопряженных
с дугой окружности 8D, ограничивающей круг D. Посколь-
ку f', , = (l + (yfJ) 7^ 0? кривая должна быть гладкой в
точках сопряжения, т.е. отрезки, стыкующиеся с дугой
окружности сШ, являются отрезками касательных к этой окружности
(см. рис. 6.6). Имеются два кандидата в кривые наименьшей
длины: один — кривая, расположенная выше отрезка АВ
(кривая AMNB на рис. 6.6), другой — ниже (кривая AM'N'B на
рис. 6.6). Выбор из двух кандидатов зависит от расположения
центра круга D по отношению к отрезку АВ: центр и искомая
кривая наименьшей длины располагаются по разные стороны
от прямой АВ. Отметим, что обе кривые соответствуют двум
точкам минимума рассматриваемого функционала,
определенного на множестве кусочно гладких функций, графики которых
не пересекают круг D.
Эта задача была решена в 1871 г. Тодхантером. #
Метод, примененный нами в задаче с ограничениями на
значения допустимых функций, можно использовать и в задачах
другого рода — задачах с управлением. Рассмотрим задачу о
минимизации функционала
1[х,и] = J f°(t,x,u)dt F.40)
6.3. Некоторые задачи с ограничениями
183
в классе непрерывных функций #(*), удовлетворяющих
краевым условиям
x(ti) =хъ x(t2) =х2,
и в классе непрерывных функций u(t) (управлений),
подчиняющихся ограничению
u(t) < ?;, к = const. F.41)
Предложенная задача может быть сведена к задаче с
ограничениями в виде равенств. Для этого нужно ввести
вспомогательную функцию z(t) по формуле
z = к — и
и заменить ограничение F.41) эквивалентным ему
ограничением
z2 + u-k = 0. F.42)
Тогда исходная задача будет эквивалентна задаче Лагранжа с
целевым функционалом
I[x,u,z]= / f°(t,x,u)dt
h
и уравнением связи F.42) (см. 4.1).
Этот подход может использоваться и в случае, когда вместо
ограничения вида F.41) в задаче ставится ограничение в виде
двойного неравенства
h ^u(t)^k2. F.43)
Введя вспомогательную функцию z, такое ограничение можно
заменить эквивалентным ограничением в виде равенства
(u-k1)(k2-u)-z2 = 0.
184
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Рассмотренный подход фактически исчерпывает
возможности классического вариационного исчисления в задачах с
ограничениями, приводящими к поиску экстремума в
замкнутой области. Успех здесь в основном определяется тем, удается
ли с помощью некоторых искусственных приемов заменить в
ограничениях неравенства равенствами. Иногда способ такой
замены подсказывается самой постановкой задачи. Но даже
если такое преобразование в задаче удалось осуществить,
преобразованная задача может не иметь решения в классе гладких
(и даже непрерывных) функций. Показательной в этом смысле
является линейная задача, к изучению которой мы переходим.
6.4. Линейные задачи оптимального управления
Среди управляемых систем, пожалуй, самое широкое
применение в различных областях техники находят так
называемые линейные управляемые системы, т.е. автономные
системы с линейным законом движения
х = Ах + Ви, F.44)
т т
где х = (хъ ..., хп) ; и = (щ, ..., иг) ; А= (а^) и В = (bik) —
числовые матрицы типов пхп и пхг соответственно.
Наиболее популярной в классе линейных управляемых
систем является задача оптимального быстродействия,
т.е. задача оптимального управления, в которой в качестве
целевого функционала взято время достижения системой
некоторого состояния ж(?2) = ж2. Это иллюстрируют системы
автоматического управления, которые поддерживают заданный
режим (или заданное движение) объекта, преодолевая действие
различного рода возмущающих сил. Для таких систем
обычно составляют уравнения возмущенного движения [VIII]
вида
х = f(x,u),
6.4. Линейные задачи оптимального управления 185
в которых фазовые координаты Х{ представляют собой
отклонения координат объекта от их значений в заданном режиме
(возмущения), причем в начальный момент времени t\
полагают, что
x(t1) = x1^0. F.45)
Задачей системы управления является обеспечение таких
управляющих воздействий, которые в кратчайший срок
возвращают систему в заданный режим, т.е.
x(t2) = 0. F.46)
Так как отклонения системы от установившегося режима
обычно малы, то правые части уравнений возмущенного движения
можно приближенно заменить линейными выражениями,
используя формулу Тейлора. Полученные линейные уравнения
вида F.44) обычно называют уравнениями первого
приближения [VIII] для возмущенного движения.
Рассмотрим частный случай системы F.44), когда
управление одно, т.е. u(t) =u(t) — скалярная функция, г = 1. Такая
система имеет вид
/ п
х\ = 2_\ aijxj + Ъ\и,
F.47)
п
В качестве целевого функционала возьмем время t2
достижения системой положения равновесия Xi(t2) = 0, г = 1, п, т.е.
1[х,и] = / dt^ min, F.48)
h
а на управление u(t) наложим ограничение
\и\ ^ 1. F.49)
186
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Попробуем с помощью вариационных методов решить
линейную задачу оптимального управления, которая
определяется соотношениями F.45)-F.49). Полагаем, что x(t) Е
eCl([tiM№n),u(t)eC[tut2].
Задача F.45)-F.49) является частным случаем задачи F.40),
F.43). Как было установлено (см. 6.3), экстремум может
достигаться лишь на функциях, составленных из участков
экстремалей и участков границы области управления F.49).
Чтобы найти экстремали задачи, являющейся задачей Лагранжа в
форме Понтрягина, запишем лагранжиан
п п
L(x,x,u) = l + ^Aj(i)fij ~^2aijxj — biu).
i=l j=l
Необходимое условие экстремума вне границы области F.49)
есть уравнения Эйлера F.22), F.23). В линейном случае
система F.22) преобразуется к виду
\ — —Х\ац — Ma>2i — ... — Anan^, г = 1, n,
в матричной форме она имееет вид А = —А А, или
Лт = -АТА, F.50)
т
где А = (Ai, ..., Хп) ; А = (а^) — матрица системы F.47) типа
пх п. Второе уравнение F.23) примет вид
п
г=1
ИЛИ
Л(?)ТБ = 0, F.51)
т
где В = {Ъ\, ..., Ъп) — столбец коэффициентов при управлении
и в F.47).
Продифференцируем равенство F.51):
ХТВ = 0. F.52)
6.4. Линейные задачи оптимального управления 187
Исключим из этого равенства Л , используя соотношение F.50)
и свойства операции транспонирования. В результате получим
ХТАВ = 0. F.53)
Снова продифференцируем F.53) и затем исключим Л ,
используя F.50). Получим
\ТА2В = 0.
Повторяя операцию дифференцирования п — 1 раз с
последующим исключением Л , приходим к следующей системе алгебра-
ических уравнении относительно А :
(\ТВ = 0,
\ТАВ = 0,
\\тА2В = 0, F.54)
[ХтАп-1В = 0.
Эта система имеет единственное нулевое решение в том
случае, когда ранг матрицы системы равен количеству
неизвестных п, т.е.
Rg (В, АВ, ..., А71'1 В) = п. F.55)
Случай, когда выполняется соотношение F.55), является
основным в теории линейных управляемых систем (без фазовых
ограничений). Это соотношение — необходимое и достаточное
условие управляемости такой системы. Систему называют
управляемой*, если для любых начального и конечного
состояний системы существует хотя бы один допустимый процесс,
*В литературе термин „управляемая система" имеет различное
толкование.
188
6. ВАРИАЦИОННЫЕ МЕТОДЫ
переводящий систему из заданного начального состояния в
заданное конечное состояние. Свойство управляемости системы
означает, что задача управления для этой системы имеет
решение при любых краевых условиях.
Таким образом, в случае выполнения соотношения F.55)
уравнение Эйлера имеет единственное решение А(?) = 0.
Этому решению соответствует лагранжиан L(x,x,u) = 1, который
совпадает с лагранжианом задачи, получающейся из исходной
отбрасыванием дифференциальных связей F.47). Однако
линейная задача F.45)-F.49) без дифференциальных связей F.47)
бессодержательна и экстремалей не имеет.
Но если экстремалей не существует, то экстремум может
достигаться лишь на функции, график которой целиком
находится на границе области, т.е. либо и = 1, либо и = — 1. Таким
образом, либо оптимальное решение соответствует
постоянному управлению, либо его можно найти, только если считать
допустимыми разрывные управления u(t) (далее мы покажем,
что задача имеет решение в классе кусочно непрерывных
управлений). Как видим, вариационные методы, работающие в
классе непрерывных функций, в случае линейной задачи не
позволяют, вообще говоря, найти решение. Расширение класса
допустимых функций требует изменить и методы решения
задач.
Даже если рассматривать кусочно непрерывные
управления и использовать напрашивающееся допущение, что
оптимальное управление принимает
xi лишь два значения =Ы, мы
решения задачи все-таки не полу-
I ; ! ; ! чим. Чтобы полностью опреде-
—\—|т—h;—1—j—!—п; "г лить кусочно постоянное упра-
¦ h ! Ч ! I ! I t-m tj.\
; ; !_| ! ¦ вление u{t), нужно указать
точки tk-i в которых управление
меняет значение на противополож-
Рис. 6.7 ное (рис. 6.7).
6.5. Обсуждение методов вариационного исчисления 189
6.5. Обсуждение методов
вариационного исчисления
Из изложенного в 6.3 и 6.4 ясно, что применение методов
вариационного исчисления в задачах оптимального управления
приводит к различного рода трудностям. Проанализируем
причины этих трудностей.
Задача Лагранжа в форме Понтпрягина наиболее близка к
задаче оптимального управления. С помощью метода
Лагранжа для нее удалось получить полную систему необходимых
условий и тем самым решить задачу в классе гладких функций
x(t) и непрерывных управлений u(t). Но при этом
уравнения Эйлера для управлений вырождаются в алгебраические
соотношения (F.23) или F.33)). Эти алгебраические
соотношения представляют собой необходимые условия экстремума
функционала и могут и не иметь решений, как, например, в
линейных задачах. В этом случае задача оказывается
неразрешимой: функционал не достигает экстремумов в
рассматриваемом классе функций.
Что может дать расширение класса допустимых функций?
В связи с этим интересно сравнить задачу Лагранжа и задачу
оптимального управления в случае, когда в последней нет
ограничений на управление и фазовые координаты, т.е. когда
U = W и S = Wl. В этом случае каждый допустимый процесс
(ж(?), u(t)) задачи Лагранжа является таковым и для задачи
оптимального управления.
Обозначим через Л функционал F.17) в задаче Лагранжа
F.16)-F.18), т.е. А[х,и]=1[х,и], х Е С1^,^], и е C[tut2],
а через О — этот же функционал в задаче оптимального
управления*: 0[ж,гх] = /[ж,u], х Е C\t\,t<2\, и Е KC\ti,t<2\.
Очевидно, что функционал Л является сужением функционала О.
Пусть в обеих задачах ищется наименьшее значение целевого
* Обозначение KC[ti,t2] относится к классу функций, кусочно
непрерывных на отрезке [ti, ?2].
190
6. ВАРИАЦИОННЫЕ МЕТОДЫ
функционала по всему классу допустимых управляемых
процессов, т.е. не локальный, а глобальный минимум. Так как Л есть
сужение О, то inf Л [ж, г/] ^ inf 0[ж,гх]. При определенных
дополнительных предположениях относительно функций fl (г = 0, п),
в, Ф, достаточно естественных в постановке задачи, можно
утверждать, что на самом деле inf Л [ж, г/] = inf О [ж,-м].
Например, в простейшем случае дифференциальных связей х — и
указанное равенство будет выполняться, если лагранжиан
задачи непрерывен по совокупности переменных**.
Если в рассматриваемой задаче inf Л [ж, гх] > inf О [ж, гх], то
очевидно, что существование решения в одной задаче не
связано с существованием решения в другой. Если пп^Л[ж,гх] =
= inf 0[ж,гх], то возможна одна из трех ситуаций:
а) задача Лагранжа имеет решение. Тогда это решение
одновременно является решением и задачи оптимального
управления (правда, возможно, не единственным), так как решение
задачи Лагранжа является допустимым процессом для задачи
оптимального управления, дающим минимальное значение
целевого функционала;
б) задача Лагранжа не имеет решения, а задача
оптимального управления имеет, т.е. точная нижняя грань значений
функционала достигается на управляемом процессе, в котором
либо x(t) не является непрерывно дифференцируемой, либо u(t)
не является непрерывной;
в) ни задача Лагранжа, ни задача оптимального управления
не имеют решения, т.е. точная нижняя грань значений целевого
функционала не достигается и на более широком классе
допустимых процессов.
Пример 6.3. Следующая задача иллюстрирует ситуацию б):
1
о
**Доказательство см. в книге: Алексеев В.М., Тихомиров В.М.,
Фомин СВ.
6.5. Обсуждение методов вариационного исчисления 191
Точная нижняя грань значений функционала достигается на
кусочно гладкой функции x*(t) с соответствующим ей
оптимальным управлением u*(t):
x*(t) =
•U
u*(t) = {
1,
-1,
В классе гладких функций точная нижняя грань
функционала, равная нулю, не достигается, так как нулевое значение
функционала возможно лишь при u(t) = 1 или при u(t) = — 1. Но
при этом x(t) = ±? + С, что противоречит краевым условиям.
В этой задаче переход от класса гладких к классу
кусочно гладких функций означает переход от задачи Лагранжа к
задаче оптимального управления. Заметим, что в
рассматриваемом случае inf Л = inf О = 0. Действительно, так как значения
целевого функционала неотрицательны, то в силу неравенства
inf Л ^ inf О достаточно показать, что inf Л = 0. Рассмотрим
последовательность кусочно гладких управлений
Unit) = <
1,
п
(I
°^<\-ь
п 2 п
1
2 + ^*<i,
где п = 2, 3,
Каждому из этих управлений соответствует
допустимая функция xn(t) = fun(t)dt, которая удовлетворяет
о
условию хпA) = 0 в силу симметричности графика функции
un(t) относительно точки A/2, 0). При этом
1+7 1 2\'
In = I[xn,un}= f(l-u2nJdt= j f1-™2^-*J)
0 i_l
2 п
dtC
п
Таким образом, 1п —>> 0 при п —>> оо.
192
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Пример 6.4. Ситуацию в) иллюстрирует следующий
пример Больца:
1
/М =/(A-„')' +х»)*^^ * = «. *<0)=*A) = 0.
О
В этой задаче решения не существует. Действительно,
точная нижняя грань значений
функционала в классе
кусочно гладких функций равна
нулю, так как значения
целевого функционала
неотрицательны, а нулевое
значение достигается в пределе по
следующей
последовательности кусочно гладких
функций (рис. 6.8):
Рис. 6.8
г
xn(t) = / sign si
sin27rnrrfT, n = 1, 2, ...
Последовательность функций {xn(t)} равномерно сходится
к нулю, при этом Un(t) = ?n(t) = 1 ВСЮДУ на [0? 1]? кроме
конечного числа точек. Значит,
1 1
I[xmun] = I((l - u2n(t)f + ж2(?)) dt = fxl(t)dt^0.
о о
Однако нулевое значение не достигается функционалом ни
на одной кусочно гладкой функции. Для x(t) = 0 u(t) = 0 и
/[ж,гл] = 1. А если x(t) ^ 0 хотя бы в одной точке, то в силу
непрерывности этой функции
1
I[x,u] > x2(t)dt>0. #
6.5. Обсуждение методов вариационного исчисления 193
Мы сравнили задачу Лагранжа и задачу оптимального
управления с точки зрения глобального экстремума целевого
функционала. Чтобы провести такое сравнение для локальных
экстремумов, нужно ввести соответствующее понятие для
задачи оптимального управления.
Допустимый процесс (ж*(?), u*(t)) будем называть
локально оптимальным в задаче с фиксированным отрезком [?i, ?2],
если найдется такое е > О, что для всякого допустимого
процесса (ж(?), u(t)), удовлетворяющего условию
\x(t)-x*(t)\ <?, tE[ti,t2], F.56)
верно неравенство
1[х,и]^1[х*,и*].
Если отрезок [ti, ?2] не является фиксированным, то
каждому допустимому процессу соответствуют свои моменты
времени t\ и ?2. В этом случае локально оптимальным процессом
будем называть допустимый процесс (ж*(?), u*(t)) с
промежутком времени [?*,#!>], Для котоРого найдется такое е > 0, что
для любого процесса (ж(?), u{t)) с промежутком времени [ti, ?2],
удовлетворяющего условиям
|tj-*i|<e, |*2-*2|<е, |ж*(*)-ж(*)|<епри*е[<ь<2]П[*5;,^],
выполнено неравенство
/[ж,гх]^/[ж*,гх*].
Отметим, что в задаче Лагранжа, как и в любой другой
задаче вариационного исчисления, различают сильный экстремум
и слабый экстремум. Точка слабого экстремума (x*(t), u*(t))
доставляет экстремум целевому функционалу среди всех
допустимых процессов (ж(?), u{t)), для которых x(t) попадает
в некоторую слабую s-окрестностъ ж*(?), a u{t) попадает в
некоторую сильную s-окрестностъ u*(t). Локально
оптимальный процесс в задаче оптимального управления ограничивает
194
6. ВАРИАЦИОННЫЕ МЕТОДЫ
сравнение некоторой сильной окрестностью ж*(?), а на
управления ограничения не накладываются вообще. Это соответствует
сильному экстремуму в задаче Лагранжа. Поэтому могут
возникать ситуации, когда локальное решение задачи Лагранжа
не является оптимальным процессом соответствующей
задачи оптимального управления. Если же в задаче оптимального
управления найден оптимальный процесс с непрерывным
управлением, то (в рамках предположений относительно функций,
входящих в задачу) этот процесс будет являться сильным
минимумом в задаче Лагранжа, т.е. давать ее локальное решение.
Итак, задача оптимального управления является в
указанном смысле расширением задачи вариационного исчисления.
Однако если область U допустимых управлений открыта, то
ничего нового в действительности мы не получим.
По-настоящему новой задача оптимального управления становится, если
в ней присутствуют ограничения в виде нестрогих неравенств
(например, \uj\ ^ М, j = 1, г), когда область управления U
является замкнутой. Именно этот дополнительный элемент делает
задачу оптимального управления существенно отличной от
вариационной и приводит к необходимости нового подхода к ее
решению, связанного с изменением понятия допустимой
вариации. Не углубляясь в детали такого подхода (об этом речь
далее), отметим лишь очевидные факты, вытекающие из
замкнутости области управления.
Вернемся к задаче Лагранжа F.16)—F.18). Введение
множителей Лагранжа позволяет рассматривать переменные
вспомогательного функционала F.19) как независимые
(множители Лагранжа при этом считаем фиксированными функциями).
При таком подходе задаче об экстремуме функционала /*[ж,гх]
можно поставить в соответствие две задачи
{/*[ж,г?*1 —>> extr,
Г[х ,и\ —>> extr.
Другими словами, если ж*(?), u*(t) — решение задачи 1*[х,и] —>>
—>> extr, то x*(t) — решение первой задачи в F.57), a u*(t) —
6.5. Обсуждение методов вариационного исчисления 195
решение второй задачи в F.57). Поэтому можно объединить
необходимые условия двух этих задач, чтобы получить
необходимые условия в задаче об экстремуме функционала /*[ж,гх].
Однако в рамках задачи оптимального управления с
замкнутой областью управления U система необходимых условий
F.23) уже не является полной, так как не учтено ограничение
u(t) G С/ (множители Лагранжа позволяют учесть ограничения
только в виде равенств). Изменяется характер второй из двух
задач F.57). Она формулируется следующим образом:
L(t,x*,x*,u)dt^min, ueKC[tut2], u(t)eU, te[tut2]. F.58)
h
Необходимое и достаточное условие экстремума в
сформулированной задаче состоит в следующем. Кусочно непрерывная
функция u*(t) со значениями в замкнутой области U
доставляет минимум в задаче F.58) тогда и только тогда, когда всюду
на отрезке [ti, t2], кроме точек разрыва u*(t), выполнено
соотношение
min L(t,x*(t),x*(t),u(t)) =L(t,x*(t),x*(t),u*(t)).
U(t)?U
В канонических переменных то же соотношение выглядит
следующим образом:
max ff(t,a*(t),p*(t),u(t)) = Я (t,a*(t),p*(t),u*(t)). F.59)
u(t)eu
Для получения полной системы условий к F.59) нужно
добавить необходимые условия экстремума для задачи
/*[ж,гх*] —>> min, х Е C[ti,t2],
которые в канонических переменных имеют вид F.32).
196
6. ВАРИАЦИОННЫЕ МЕТОДЫ
Условия F.32) и F.59) фактически представляют собой
основные соотношения в принципе максимума Понтрягина.
Полная формулировка этого принципа будет изложена далее
(см. 7).
Если на управление u(t) нет никаких ограничений, то
необходимым условием максимума функции Понтрягина Н
является обращение в нуль производных этой функции по
управлениям, что и отражено в уравнениях F.33). Но если на управление
и наложены нестрогие ограничения (т.е. U замкнуто), то
максимум функции Понтрягина может достигаться как внутри U
(тогда выполняются равенства F.33)), так и с выходом на
границу. Это значит, что уравнения F.33) в случае замкнутой
области U следует заменить более общим условием —
условием максимума функции Н по управлениям. Именно эта идея,
высказанная в 1956 г. Л.С. Понтрягиным*, и послужила
основой всех дальнейших работ, связанных с развитием принципа
максимума. Обоснование этой идеи было дано много позже**.
Вопросы и задачи
6.1. Запишите полную систему необходимых условий для
задачи Лагранжа в форме Понтрягина с подвижными концами
/ >~^ж| 6Й—»extr, х = <р(х) + G(x)u, x(ti) = x1, ж(^)=ж2.
I г=1
Здесь х = (хъ...,хп) ; и = (ии...,иг) ; ср(х) = ((р1(х),...,(рп(х)) ;
G(x) — матрица типа п х г; ж1, х1 — известные векторы
начального и конечного состояний.
*См.: Болтянский В.Г., Гамкрелидзе Р.В., Понтрягин Л.С.
**См.: Понтрягин Л.С, Болтянский В.Г., Гамкрелидзе Р.В., Мищенко
Е.Ф.
Вопросы и задачи
197
6.2. Найдите экстремали в следующих задачах Лагранжа:
тг/2
а) / u2dt —> extr, х\ = х^ Х2 = —х\ +и, х\@) = 1;
о
тг/2
б) u2dt+[xi@)] —»> extr, ii = Ж2, ^2 = — #i +Щ
о
1
в) / u2dt + [#2@)] —^ extr, Ai =^2? ^2 = ^i+гл, жх(О) = 1;
о
1
J2 , 2\
г) / (ж^ + uz)dt —>> extr, ж = ж + гл, жA) = 1.
о
6.3. Найдите кратчайший путь между точками А(—3, 0)
и i?C, 2) на плоскости при условии, что вдоль этого пути
выполняется неравенство х2 + у2 ^4.
7. ПРИНЦИП МАКСИМУМА
В 1956 г. Л.С. Понтрягин, В.Г. Болтянский, Р.В. Гамкре-
лидзе и Е.Ф. Мищенко предложили метод, который обобщил
методы классического вариационного исчисления в случае
задач, в которых управляющие воздействия описываются кусочно
непрерывными функциями, а множество значений этих
функций принадлежит замкнутому ограниченному множеству. В
основу этого метода был положен так называемый принцип
максимума.
Принцип максимума дает необходимые условия
оптимальности, которые позволяют выделить из множества допустимых
процессов некоторое подмножество процессов,
^подозрительных" на оптимальность. В этом смысле метод решения задач
оптимального управления на основе принципа максимума
аналогичен методам исследования функций одного или нескольких
переменных, при которых отбираются точки,
удовлетворяющие необходимым условиям, а затем каждая из отобранных
точек анализируется, например, с помощью достаточных
условий. В рамках теории оптимального управления необходимые
условия хороши тогда, когда с их помощью удается выделить
небольшое количество процессов, которые могут быть
оптимальными. Принцип максимума для широкого круга задач дает
возможность определить единственную траекторию, которая
может быть оптимальной. Если в конкретной задаче из каких-
либо соображений (например, из содержательного смысла этой
задачи) известно, что оптимальное управление существует,
то выделение единственной траектории, „подозрительной" на
оптимальность, дает решение задачи.
Первое доказательство принципа максимума дал Р.В. Гам-
крелидзе для линейных задач оптимального управления. Он
построил полную теорию линейных систем управления и до-
7.1. Автономная система управления
199
казал достаточность принципа максимума для таких систем.
Таким образом, для линейных задач оптимального
управления принцип максимума — необходимое и достаточное условие
оптимальности.
В общем нелинейном случае принцип максимума доказал
В.Г. Болтянский, который построил и основы нелинейной
теории оптимального управления.
7.1. Автономная система управления.
Формулировка принципа максимума
В этом разделе мы сформулируем принцип максимума для
задачи оптимального управления в предположении, что
фазовые ограничения отсутствуют, т.е. для системы с законом
движения
ж = /(ж,гх), G.1)
т
где фазовый вектор x(t) = (xi(t), ..., xn(t)) может принимать
любые значения из W1.
т
Считаем, что на вектор управления u(t) = (ui(t), ...,ur(t))
наложены ограничения
и е KC[tut2], u(t) eu, te [tu t2], G.2)
где U — произвольное множество в W (в частности, оно
может быть замкнутым и ограниченным), а вектор-функция
т
f{x1u) = (/х(ж,гб), ..., fn{x1u)) непрерывна по совокупности
всех переменных и непрерывно дифференцируема по части
переменных х [V]. Как и раньше, управления, удовлетворяющие
G.2), будем называть допустимыми, а пару (ж(?), u(t)), в
которой x(t) есть решение системы G.1) при заданном гх(?), —
допустимым процессом.
Краевые условия задачи зададим следующим образом:
x(ti) = x1 = (х\, ..., xln) , x(t2) = x2 = (х2ъ ..., х2п) . G.3)
200
7. ПРИНЦИП МАКСИМУМА
Требуется найти такое допустимое управление гх(?), которое
переводит систему (объект) из фазового состояния x{t\) = ж1
в фазовое состояние ж (?2) = ж2, причем соответствующий
допустимый процесс (ж(?), u(t)) доставляет минимум функционалу
I[x,u] = Jf(x(t)Mt))dt, G.4)
где функция /° удовлетворяет тем же условиям, что и вектор-
функция /.
Будем предполагать, что интервал времени управления
#2 — t\ произвольный. Это предположение означает, что
каждому допустимому процессу, при котором система переходит из
состояния х1 в состояние ж2, соответствуют свои моменты
времени t\ И #2-
Поставленная таким образом задача — это задача с
фиксированными концами (точки х1 и ж2 фиксированы) и
свободным временем. Как и ранее, управление гх*(?), дающее
решение поставленной задачи, будем называть оптимальным
управлением, соответствующую траекторию x*(t) —
оптимальной траекторией, а процесс (ж*(?), u*(t)) — оптимальным
процессом.
Экстремальная задача G.1)-G.4) по форме похожа на
задачу Лагранжа F.16)—F.18), но отличается от нее наличием
ограничения на управление u{t) Е U и расширением класса
допустимых функций. При этом не требуется, чтобы
существовали частные производные функций /°, ..., fn по переменным Uj.
Остановимся на некоторых простейших свойствах
оптимальных управлений и траекторий, непосредственно
вытекающих из постановки задачи. Прежде всего, из автономности
системы G.1) и интегранта функционала G.4) следует, что
свойства управлений не изменяются при сдвиге вдоль оси t
(рис. 7.1). Другими словами, если управление u(t), ?Е [ti,^],
переводит систему из состояния ж1 в состояние ж2, а целевой
7.1. Автономная система управления
201
uA
О
u{t)S
ч
г-""^
г * *
t,+h
г1
* 1
* * 1
l.,u(t-h)
1 ^v * t
1 ^w *
1 \ *\
t2 t2+/l
t
Рис. 7.1
функционал на
соответствующем допустимом процессе
принимает значение /, то при
любом h управление u(t — /i), t Е
Е [t\ + /г, ^2 + /г], также
переводит систему из состояния ж1 в
состояние ж2, а целевой
функционал при этом также будет
иметь значение /. Это
означает, что решение задачи не единственно. Но мы можем из
оптимальных управлений выбирать такое, для которого t\
имеет фиксированное положение, а точка ?2 свободно перемещается
по оси времени. Далее будем считать, что t\ фиксировано, а ?2
свободно меняется.
Пусть ж1, ..., хк — конечный набор точек фазового
пространства, для которых существует набор таких управлений
U2(t), ..., Uk(t), что управление Ui(t) переводит систему из
состояния жг_1 в состояние жг и дает целевому функционалу
значение 1^ г = 2, к. Тогда существует управление гх(?),
переводящее систему из состояния ж1 в состояние хк и дающее
целевому функционалу значение / = 1% + • • • + Ik •
Действительно, так как управления можно сдвигать вдоль оси времени, то
можно считать, что интервалы времени управлений Ui(t)
примыкают друг к другу, так что управление г^(?), г = 2, /с, задано
на отрезке [t^_i,^], причем t\ < ?2 < ••• < tk (рис. 7.2).
Тогда управление u(i), на интервале [?г-ъ ^г] совпадающее с ui{t)
Рис. 7.2
202
7. ПРИНЦИП МАКСИМУМА
и в целом заданное на отрезке [?i,?fc], переводит систему из
состояния ж1 в состояние ж и придает функционалу значение
/2 + ... + Ik- Отметим, что указанная операция „объединения"
управлений невозможна в классе непрерывных управлений, так
как в точках стыка t{ объединенное управление u(t) может
иметь точки разрыва первого рода (см. рис. 7.2).
Если гх*(?), ? (Е [?i, ?2], — оптимальное управление, то любой
его участок [тх, Т2], ?1 ^ ti < Т2 ^ ?2, также является
оптимальным управлением. То же верно для оптимальных траекторий.
Пусть x*(t) — соответствующая г^*(?) оптимальная
траектория, x*(ti) = ж1, ж*(?2) = ж2. Рассмотрим произвольный
участок [ti, т<2[ С [?i, ?2], и пусть ж3 = ж*(т1), ж4 = ж*(т2).
Утверждается, что интеграл
jf°{x*(t),u*(t))dt
имеет наименьшее значение среди всех допустимых
управлений, переводящих систему из положения ж3 в положение ж4.
Пусть значения целевого функционала для управления t?*(?) на
участках [?i,ti], [тх,Т2], [т, ?2] есть соответственно Д, /2, /з-
Тогда управление г^*(?) на всем отрезке [?i, ?2] придает
целевому функционалу значение / = 1\ +1% + /з- Если управление и* (?)
не является оптимальным на [тх, Т2], то существует управление
/у(?), переводящее систему из положения ж3 в положение ж4 и
придающее целевому функционалу значение Iv < /2- Но тогда
управление, составленное из управления и на участках [?х,тх],
[т2, ?2] и управления v(t) на участке [тх, Т2], переводит систему
из положения ж1 в положение ж2 и придает целевому
функционалу значение I\+Iv + I% < /, т.е. t?*(?) не является оптимальным
управлением. Аналогичные рассуждения можно провести для
фазовых траекторий.
Перейдем теперь к основным соотношениям,
необходимым для того, чтобы сформулировать принцип максимума.
7.1. Автономная система управления
203
Включим фазовое пространство W1 в (п+1)-мерное
пространство Rn+1, присоединив к координатам х\, ..., хп
дополнительную координату хо- При этом потребуем, чтобы функция xo(t)
удовлетворяла соотношению
t
Mt)= ff°(x,u)dt.
h
Тогда функция xo(t) будет решением уравнения
? = /•<..«)•
Присоединим это уравнение к системе G.1):
^ = ?(*,и), G.5)
где х = (ж0, xf = (ж0, xi, ..., жп)Т; / = (/°, Д ..., /п) .
Заметим, что правые части системы G.5) не зависят от xq.
Целевой функционал / G.4) рассматриваемой задачи теперь
можно записать в виде /[ж,гх] = жо(^), т.е. он оказался равным
конечному значению координаты xq. Рассматриваемая
задача тем самым свелась к задаче выбора такого допустимого
управления u(t), которое осуществляет переход точки x(t) в
т
(п+1)-мерном пространстве из положения х1 = @, ж1) в бли-
жаюшую точку х2 = (жд, ж2) на прямой, параллельной оси Oxq
и проходящей через точку @, ж2) (ближайшая точка в смысле
минимума координаты жо, рис. 7.3).
Рассмотрим вспомогательную систему
<hl>i ^dfa(x,u) . -—
-Ж = -22—^—^ г = 0'п' G-6)
относительно неизвестных функций i/ji(t). Эту систему иногда
называют сопряженной системой к системе G.5), а
переменные фг — сопряженными переменными.
204
7. ПРИНЦИП МАКСИМУМА
Рис. 7.3
Если u(t) — некоторое допустимое управление, x(t) —
соответствующая этому управлению фазовая траектория, то,
подставляя эти функции в правые части уравнений G.6), получим
линейную однородную систему дифференциальных уравнений с
известными кусочно непрерывными коэффициентами. Поэтому
при любых начальных условиях эта система имеет единственное
решение [VIII]. Так как функции fa(x,u), а = 0, п, не зависят
от жо, то первое уравнение системы G.6) имеет простой вид
dt
= 0,
из него получаем ^о = const.
Составим функцию Понтрягина
п
Н(Ф,х,и) = ^ФаГ(^и) = ($, }{х,и)) , G.7)
а=0
где \Р = (^о, • • •, фп) — вектор сопряженных переменных. При
фиксированных значениях \Р и х функция Понтрягина есть
функция от и Е U. Точную верхнюю грань значений этой
функции обозначим через М(Ф,х):
М(!Р,ж)
sup Н(\Р, ж, и)
иеи
7.1. Автономная система управления
205
Если точная верхняя грань значений непрерывной функции
Н достигается в некоторой точке области управления С/, то
М(Ф,х) является максимумом значений функции Н при
фиксированных !?иж.
Теорема 7.1 (принцип максимума). Если управление
ia*(?), t G [ti, ^2] ? и соответствующая ему фазовая
траектория x*(t) оптимальны, то найдется такая ненулевая вектор-
функция !^*(?), соответствующая функциям x*(t) и u*(t) (т.е.
удовлетворяющая сопряженной системе G.6) при подстановке
в нее x*(t) и u*(t)), что:
1° при каждом значении t Е [?i, ?2] функция Н(Ф* (?), ж* (?), гх)
от переменных гб достигает максимума в точке u = ix*(t):
H(**(t),x*(t),u*(t))=M(**(t),x*(t));
2° в конечный момент времени t^ выполнены соотношения
Vo(*2)<0, M(**(t2),aj*(t2))=0. #
В заключение отметим, что системы G.5) и G.6) с помощью
функции Понтрягина могут быть записаны как гамильтонова
система следующим образом:
dxj _ дН_ . _ _—
dt дфг' ' ,
^1 7.8
с1фг дН .
К at oxi
Очевидно, что если вектор-функция x(t) удовлетворяет системе
G.1), то она удовлетворяет и первой подсистеме в системе G.8),
поскольку все уравнения, кроме первого, в этой подсистеме как
раз и образуют систему G.1).
Замечание 7.1. Если #(?), ж(?), u(t) удовлетворяют
системе G.8) и условию 1°, то функции ipo(t) и M(&(t),x(t))
206
7. ПРИНЦИП МАКСИМУМА
переменного t являются постоянными. Действительно, как уже
было отмечено, из системы G.6) следует, что ^о = const.
Покажем, что функция M(lPr(t),x(t)) постоянна, предполагая, что
она имеет производную*, которую можно вычислять по
правилу дифференцирования сложной функции. Зафиксируем #(?) и
x(t) и рассмотрим функцию М(#(?),ж(?)) переменного t.
Вычислим производную этой функции в силу системы G.8):
п
^_^дМ_Aян у^ дМ d%l)j _
~dt ~ ^ ~дх~ ~dt + ^ &du ~dt ~
г=1 г j=0 YJ
~ f-' dxi дфг f-f дф, dXj' ^ ' '
1 = 1 J = l J J
При дифференцировании учтено, что функции Н(Ф,х,и) и
М(Ф,х) не зависят от xq. Так как
дМ _дН дМ _ дН
dxi dxi' d^j d^j'
то из G.9) получаем
^М- V— — - V— — -О
dt ^ дх{ дфг ^ дфп dxj
г=\ j=i j j
Из условия постоянства функций i/jo(t) и M(&(t),x(t))
следует, что условие 2° в теореме G.1) можно проверять в любой
момент времени t Е [ti, ?2]-
7.2. Обсуждение принципа максимума
Остановимся на достаточности соотношений принципа
максимума для решения поставленной задачи оптимального
управления. Набор условий теоремы 7.1 в некотором смысле явля-
* Доказательство существования у функции M(\P(t),x(t)) производной
почти всюду см.: Понтрягин Л.С, Болтянский В.Г., Гамкрелидзе Р.В.,
Мищенко Е.Ф.
7.2. Обсуждение принципа максимума
207
ется полным. Он позволяет из всех траекторий, проходящих
через две заданные точки ж1 и ж2, выделить отдельные (или
одну) траектории, среди которых находится оптимальная
траектория, если, конечно, она существует.
Действительно, вся совокупность траекторий определяется
2п + 1 дифференциальными уравнениями G.8) (если опустить
первое уравнение —— = /°(ж,гл)) и г алгебраическими
уравнениями, которые дает условие 1° теоремы 7.1. Например,
если максимум функции Н достигается во внутренней
точке, то необходимым является обращение в нуль г частных
производных. Если максимум достигается на (г—1)-мерной
поверхности, лежащей на границе области управления U, то по
методу Лагранжа для поиска условного экстремума функции
многих переменных [V] получаем г уравнений, приравнивая
нулю частные производные функции Лагранжа, и одно
уравнение связи при дополнительном неизвестном — множителе
Лагранжа. После исключения множителя Лагранжа остается
г алгебраических уравнений. Аналогичен общий случай, когда
максимум достигается на fc-мерной поверхности,
расположенной на границе U.
Итак, всего имеется 2п + 1 + г уравнений, связывающих
2п + 1 -\-г переменных Ф', ж, и. Так как из этих соотношений
г — алгебраические уравнения, решения зависят от 2п + 1
параметров — начальных условий. Один из параметров является
несущественным, поскольку функция Н однородна
относительно переменных фа, а все функции ipa(t) определены лишь с
точностью до общего множителя. Кроме того, один из
параметров определяется условием в момент времени t\ (или в любой
другой момент):
maxff(fl*(?i),a5(?i),tz) = 0.
uEU
Таким образом, все многообразие решений зависит от 2п — 1
параметров. Время #2 также является параметром.
Следовательно, искомая оптимальная траектория, если она существует,
208
7. ПРИНЦИП МАКСИМУМА
определяется 2п параметрами. Чтобы определить эти
параметры, мы имеем п начальных условий x(t\) = х1 и п конечных
условий x(t2) = х2. Значит, есть полная система условий,
которая позволяет найти одну или несколько потенциально
оптимальных траекторий.
Однако пока нельзя утверждать, что траектории,
найденные в результате решения упомянутой системы соотношений,
являются оптимальными: использованные условия являются
необходимыми, но не достаточными. Требуется проверка
найденных траекторий на оптимальность. В простейшем случае,
когда выявлена только одна траектория, а из каких-либо
соображений известно, что оптимум существует, можно
утверждать, что найденная траектория и есть оптимальная.
Если принципу максимума удовлетворяют несколько
траекторий, то для выявления среди них оптимальной нужны
дополнительные условия. Иногда удается отделить посторонние
траектории, сравнивая значения целевого функционала.
Заметим при этом, что оптимальная траектория может быть не
единственной, а отброшенные траектории, не являясь
оптимальными, могут оказаться локально оптимальными.
Сравним принцип максимума с условиями оптимальности,
вытекающими из классического вариационного исчисления.
Для этого вернемся к задаче Лагранжа в форме Понтрягина
F.16)—F.18). Остановимся на частном случае, когда правые
части уравнений F.16) и интегрант целевого функционала
F.17) не зависят от ?, правый конец t2 отрезка [ti, ?2] свободен,
а краевые условия F.18) имеют вид G.3), т.е.
4(x(t1))=x(t1)-x\
G.10)
е(ж(*2)) =x(t2)-x2.
В этом случае задача F.16)—F.18) преобразуется к виду G.1),
G.3), G.4).
7.2. Обсуждение принципа максимума
209
Запишем вспомогательный функционал F.19). С учетом
G.10) имеем
/t2 п п
Ь^ + ^Ыи)-х})^г + ^ЫЬ)-х1)щ, G.11)
tl г=1 г=1
где L(x,x,u) = f°(x,u) + Ат(ж — f(x,u)).
В канонических переменных необходимые условия
оптимальности, полученные с помощью метода Лагранжа, имеют
вид F.32), F.33). К ним следует добавить условия
трансверсальности F.34), F.35):
Pi{ti)=/Ji, Pi{t2) = -Vi, i = l,n, G.12)
и, учитывая свободное изменение t2, соотношение F.29) для
к = 2, которое с учетом равенств щ = А^, г = 1, п (см. F.31) ), в
канонических переменных принимает вид
п
L{x(t2),x(t2),u(t2)) - ^2pi(t2)xi(t2) = 0,
г=1
где (ж(?), u(t)) — точка экстремума функционала. Переходя
по формулам F.31) к функции Понтрягина Н, находим
Н(х(Ь)МЬ)МЬ))=0. G.13)
Здесь p(t) — вектор канонических переменных,
соответствующих точке экстремума (ж(?), u(t)).
Соотношения F.32), F.33), G.12), G.13) представляют
собой необходимые условия экстремума функционала в задаче
Лагранжа, полученные вариационными методами. Отметим,
что в рамках рассматриваемой задачи условия G.12)
являются бессодержательными и для полного решения задачи G.1),
G.3), G.4) достаточно систему дифференциальных уравнений
первого порядка F.32) относительно 2п неизвестных функций
210
7. ПРИНЦИП МАКСИМУМА
дополнить 2п краевыми условиями G.3). Таким образом,
получаем полную систему необходимых условий F.32), F.33), G.3),
G.13) для решения задачи Лагранжа в форме Понтрягина с
дифференциальной связью G.1) и целевым функционалом G.4).
Сравним эти условия с условиями принципа максимума в
рамках теории оптимального управления. Очевидно, что
функция Понтрягина F.31) совпадает с аналогичной функцией G.7),
если в последней положить фо = —1. Это всегда можно сделать
согласно условию 2° теоремы 7.1, поскольку сопряженные
переменные, как уже было отмечено, определены лишь с точностью
до общего множителя, а значение ^о = 0 соответствует
вырожденной задаче, в которой поиск экстремума теряет смысл,
ибо построение решения никак не зависит от целевого
функционала. С учетом этого система F.32) полностью
эквивалентна системе G.8), если в последней отбросить два очевидных
уравнения -^ = f°(x,u) и -^ = 0. Вектор сопряженных пе-
Т
ременных \Р = (^i, ..., фп) имеет здесь тот же смысл, что и
канонические переменные р = (р\, ..., рп) .
Указанное совпадение уравнений для фазовых координат
полностью соответствует выводам в 6.5. В рассматриваемой
задаче оптимального управления отсутствуют фазовые
ограничения, а фазовые координаты Xi(t) описываются непрерывными
функциями. Поэтому для них естественно ожидать
выполнения уравнений Эйлера, даже если управляющие воздействия
достигают ограничений и претерпевают разрывы. В последнем
случае координаты могут иметь угловые точки, а уравнения
Эйлера должны выполняться на каждой из дуг экстремали.
Сходство уравнений для фазовых координат не
распространяется на управления. В вариационной задаче (задаче
Лагранжа) управления не ограничиваются и описываются
непрерывными функциями. Поэтому гамилътонова система F.32) до
полной расширяется системой F.33), которая также является
Эйлеровой. Уравнения F.33) представляют собой необходимые
условия максимума для функции Понтрягина Н. В задачах
7.2. Обсуждение принципа максимума
211
оптимального управления функции Uj(t), вообще говоря,
разрывны и могут достигать ограничений на управления. Поэтому
уравнения Эйлера F.33) не применимы. Однако условие
максимума функции Понтрягина как необходимое условие
оптимальности сохраняется и в этом случае. При этом условие 2°
теоремы 7.1 согласуется с условием G.13) на правом конце,
которое получено вариационными методами.
Таким образом, условие максимизации функции
Понтрягина в принципе максимума является более общим по сравнению
с уравнениями Эйлера. Очевидно, что в случае, когда область
управления U есть открытое множество (тогда условие F.33)
необходимо для максимума функции i7), из принципа
максимума следуют условия оптимальности F.32) F.33), полученные
методами классического вариационного исчисления.
Итак, принцип максимума выглядит, по крайней мере,
достаточно закономерной гипотезой, непосредственно
вытекающей из задач вариационного исчисления. Однако, несмотря
на то что эта гипотеза почти очевидна, она долгое время не
была обоснована. Дело в том, что при выводе необходимых
условий принципа максимума в соответствии с определением
оптимального процесса приходится сравнивать не только
близкие одно к другому управления. В этом отличие этих условий
от условий классического вариационного исчисления, в этом
их сила и сложность в обосновании. Коснемся основной идеи
доказательства*.
Сначала принцип максимума был доказан для линейных
систем. Идея этого доказательства следующая. Пусть некоторое
оптимальное управление переводит точку ж1 в точку ж2.
Если вместо оптимального управления взять другое допустимое
управление на том же отрезке [ti,^], то точка х1 перейдет в
некоторую точку ж (?2). В силу свойства линейности
совокупность всех построенных таким образом точек xfo) образует
* Полное доказательство принципа максимума см. в книге: Понтря-
гин Л.С, Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф.
212
7. ПРИНЦИП МАКСИМУМА
выпуклое множество М. Из оптимальности исходного
управления вытекает, что точка ж2 лежит на границе этого множества.
Через любую граничную точку, в том числе и через точку
ж2, выпуклого множества М можно провести так называемую
опорную гиперплоскость, т.е. гиперплоскость, которая
проходит через эту граничную точку так, что множество М целиком
лежит по одну сторону от этой гиперплоскости. Вектор Ф',
ортогональный к этой плоскости и направленный во внешнюю
сторону множества М, и является тем вектором, который
используется при построении функции Н.
Для нелинейной системы множество всех точек ж (?2),
получаемых с помощью всевозможных допустимых управлений, не
является выпуклым. Использование линеаризации невозможно,
так как она позволяет сравнивать лишь близкие управления, а
это не соответствует характеру задач оптимального
управления. Успех определил выбор класса управлений для сравнения
с оптимальным. При построении этого класса использовались
так называемые вариации Макшейна (игольчатые вариации).
При таких вариациях управление изменяется на небольшом
промежутке времени. В пределе этот промежуток
стягивается в точку, но изменение управления остается конечным.
Таким образом, с игольчатыми вариациями в рассмотрение
вводятся управления с разрывами первого рода. С помощью
нескольких игольчатых вариаций строится допустимое
управление, отклоняющееся от оптимального лишь на конечном
числе малых интервалов времени. Несмотря на конечность
изменения управления в каждом таком интервале, общее
изменение функционала будет мало, так как мало время изменения
управления. Если такое изменение берется относительно
оптимального управления, приращение целевого функционала
будет неотрицательным. Таким образом, хотя множество точек
ж (?2), получаемых по всевозможным управлениям, и не
является выпуклым, некоторое его подмножество выпукло, так что
возникает возможность построения опорной гиперплоскости и
ортогонального к ней вектора.
7.3. Задача быстродействия
213
7.3. Задача быстродействия
Частным случаем функционала вида G.4) является
функционал
I[x,u]= / dt = t2-*i, G.14)
h
который приводит к задаче оптимального быстродействия.
Здесь /°(?,ж,г/) = 1, и функция iJ имеет вид
п
tf = ^0 + ?>a/a(*,ti).
a=l
Так как первое слагаемое не зависит от и, максимум
функции Н по и реализуется одновременно с максимумом функции
п
а=1
где Ф = (ф\, ..., фп). Отбрасывая первые уравнения систем
G.8), соответствующие г = 0 (жо = /°(ж,гх), ^о = 0), перепишем
гамилътонову систему в виде
dxi ~ . -—
— = Щг, г = 1,п;
°* G.15)
d^i Ь ' л
—— = —пх.. г = 1,п.
- dt
Так как Н = Н — ф$, то
М(#,ж) = supff(!P,a5,i/) = М(#,ж) -^о-
Значит, из условий ^о^Ои М(Й*,ж) = 0 следует, что М(Ф,х) ^
^ 0. Предположим теперь, что функции ф*^), ..., Фп{1)-> СУ~
ществование которых утверждает теорема 7.1, в некоторый
214
7. ПРИНЦИП МАКСИМУМА
момент времени t обращаются в нуль: Фг*(?)=0. Тогда
Я(Ф*(*),ж*(*),гх*(t)) = 0 и, значит, Я ($*( ? ),ж*( t ),u*( t)) =
= $5(t). Из условий М(#*,ж*) = 0 и М(#*(?),ж*(?)) = const
(см. замечание 7.1) получаем ^(t) = 0. А это противоречит
теореме 7.1, так как !?*(t)=0n, следовательно, функция \P*(t)
тождественно равна нулю как решение линейной системы
дифференциальных уравнений с нулевыми начальными условиями.
Значит, и вектор-функция \P*(t) = (V>i(*)? •••? Фп^))-> и вектор-
функция #*(?) = (^о(*)? ^*(*)) не обращаются в нуль ни в одной
точке отрезка [?]_, ^].
Итак, из теоремы 7.1 вытекают следующие необходимые
условия оптимальности по быстродействию.
Теорема 7.2. Если (ж*(?), гх*(^)), ?Е [ti,^], —
оптимальный процесс, то найдется ненулевое частное решение #*(?)
сопряженной системы
такое, что:
1° при каждом значении tE [tifa] функция Я(#*(?),ж*(?),г?)
переменного и достигает в точке и = и* (?) максимума:
H(<P*(t),x*(t),u*(t)) =M{#*(t),x*(t));
2° в конечный момент времени #2 выполняется соотношение
М(**(*2),а?*(*2))^0. #
Замечание 7.2. Как и в случае теоремы 7.1, проверку
условия 2° можно проводить в любой момент времени tE [?i, ?2].
Пример 7.1. Рассмотрим задачу оптимального
быстродействия для системы
{Х\ = Хо + 1,
G.16)
ж2 = —#1 +г^
7.3. Задача быстродействия
215
с областью управления
[/ = {«Gl: |м|<1}, G.17)
начальным состоянием
xi{t1)=x2{t1) = 0 G.18)
и конечным состоянием
xi(t2)=0, x2(t2) = -4. G.19)
Запишем для поставленной задачи функцию Н:
2
Н{Ф,х,и) = ^ФаГ(х,и) = ф1(х2 + 1)+ф2(-Х1+и). G.20)
Для сопряженных переменных ф\ и ф2 с учетом G.8) получаем
систему
|^2' G.21)
[Фэ = -фг.
Согласно принципу максимума, оптимальное управление u*(t)
должно доставлять максимум функции Н. Из G.20) с учетом
G.17) имеем
М(#*,ж*) = тахЯ(#*,ж*^) = ф\{х2 + 1) - ф2х{ + ф2 ъ'щпф^
и
причем u*(t) = sign^^t).
Найдем ip2{t). Из G.21) получаем ф2 + ф2 = 0.
Интегрирование этого уравнения дает [VIII]
V>2 = Cisin(?-C2), G.22)
где С\ > 0, С2 — постоянные интегрирования. Значит,
оптимальное управление имеет вид
u*(t) =sign^2(*) = signsin(?-C2). G.23)
216
7. ПРИНЦИП МАКСИМУМА
Из представления G.23) вытекает следующее:
1) при оптимальном процессе управление в любой момент
времени принимает одно из своих предельных значений: 1
или —1;
2) переход от одного значения к другому, или, как говорят,
переключение, происходит через интервал времени, равный
7г. Исключение может составлять только первый участок
движения: первое переключение определяется значением
постоянной C<i и может произойти через интервал времени, меньший тт.
Эти выводы фактически исчерпывают ту информацию,
которую можно получить о структуре оптимального управления
из принципа максимума. Для полного решения задачи
необходимо найти постоянные С\ и С2, а для этого нужны, например,
начальные условия для функции #(?). Но эти условия не могут
задаваться произвольно, так как однозначно определяют
функцию ip2(t), следовательно, управление u(t) = signфъ(t) и фазовую
траекторию x{t). Но процесс (ж(?), u(t)) должен
удовлетворять краевым условиям задачи, которые еще не были учтены.
Таким образом, начальные условия для &(t) должны вытекать
из краевых условий задачи.
Завершить решение задачи можно следующим образом.
Найдем совокупность траекторий, соответствующих
постоянным управлениям, равным предельным значениям ±1.
Очевидно, что искомая траектория состоит из дуг траекторий,
соответствующих этим постоянным управлениям. При этом
дуги траекторий стыкуются так, чтобы удовлетворялись
краевые условия G.18), G.19). Тогда все параметры оптимального
процесса будут полностью определены.
Итак, найдем траектории, соответствующие управлению
и = 1. Для этого в систему G.16) подставим и = 1:
G.24)
7.3. Задача быстродействия
217
Полученную систему записываем в симметричной форме [VIII]:
dx\ _ dx2
или {—х\ + \)dx\ = (х2 + l)dx2. Интегрируя, приходим к
уравнениям окружностей с центром в точке Oi(l, —1):
(x1-lJ + (x2 + lJ = R2. G.25)
Движение фазовой точки вдоль любой из этих окружностей
происходит по часовой стрелке, так как по часовой стрелке
направлен вектор фазовой скорости (?]_, х2) = (#2 + 1, —х\ + 1).
При этом движение происходит с постоянной угловой
скоростью, равной единице, так как угловая скорость ш и линейная
скорость v при движении по окружности радиуса R связаны
соотношением
Значит, полный оборот по окружности совершается за время
27Г, а за время 7г фазовая точка пройдет половину окружности.
Аналогичным образом выглядит семейство интегральных
кривых системы G.16) при и = — 1. Это окружности с центром
в точке 02{—1, —1):
0п + 1J + 0г2 + 1J = ?2. G.26)
Движение и в этом случае совершается по часовой стрелке с
постоянной угловой скоростью 1.
Искомая траектория строится из дуг окружностей G.25),
G.26). Обратимся к начальным условиям G.18). Отметим, что
через данную точку проходят только две окружности, одна
из первого семейства, другая — из второго. Для заданной
начальной точки — начала координат — первая окружность
описывается уравнением
0п-1J + (Ж2 + 1J = 2, G.27)
218
7. ПРИНЦИП МАКСИМУМА
а вторая — уравнением
{х1 + 1J + {х2 + 1J = 2. G.28)
Фазовая точка может начать движение из начала координат
только по одной из этих окружностей (рис. 7.4).
2Г
и=-1 и=1
I \г \ ^1^ | ^4j | ^
^3У-2 -1 Д^ 2V 3 xj
I * _1г I •
V °2 V У °i У
Рис. 7.4
Предположим, что стартовое управление равно —1 и
оптимальная траектория на начальном отрезке времени идет по
окружности G.28). В некоторый момент времени to = С% + тг Е
Е @,7г] в соответствующей этому моменту времени точке Pi на
полуокружности О А (рис. 7.5) происходит переключение
управления и движение продолжается по дуге другой окружности,
относящейся к семейству G.25). По этой, второй окружности
фазовая точка пройдет пол-оборота, и если она не
достигнет за это время конечной точки, то ровно через пол-оборота
снова произойдет переключение управления в момент времени
to + 7г, соответствующий фазовой точке Ръ^ и фазовая точка
продолжит движение по дуге окружности из семейства G.26).
Так как переключение происходит через пол-оборота, то
точка Р2 является симметричной точке Р\ относительно центра
7.3. Задача быстродействия
219
0\. Значит, Р2 находится на полуокружности MN,
симметричной полуокружности О А относительно 0\, то есть на половине
окружности
(х1-3J + (х2 + 1J = 2.
Рис. 7.5
Из построения видно, что дуга Р\Р2^ какой бы ни была
точка Р\ на дуге (ЗА, не проходит через конечную точку
К@, —4), так как наименьшее значение ординаты точки на
этой дуге равно — 1 — у/2 > — 4. Поэтому конечный участок
траектории не может лежать на дуге Р\Р2- Фазовая точка
достигнет Р2, и произойдет переключение управления, после
которого фазовая точка начнет движение по дуге окружности
220
7. ПРИНЦИП МАКСИМУМА
из семейства G.26). Окружность
On + IJ + (?2 + IJ = Ю, G.29)
которая относится к этому семейству, пересекает дугу MN и
проходит через точку К@, —4). Поэтому, если переключение
произошло в соответствующей точке дуги M7V, то, двигаясь по
этой окружности, фазовая точка попадет в конечную точку К.
Обратим внимание на то, что если после второго
переключения движение пойдет по дуге окружности, отличной от G.29),
то далее фазовая точка пройдет мимо конечной точки X, а
при последующих переключениях траектория разворачивается
по спирали и фазовая точка уже никогда не попадет в нужную
точку К: при каждом переключении радиус окружности
возрастает и уже после третьего переключения будет превышать
л/10 — расстояние от каждой из точек Oi, О2 до точки К.
Итак, если стартовое управление равно —1, то искомая
траектория должна содержать дугу окружности G.29) и точку
Р% переключения на дуге MN. Оказывается, что
окружность G.29) пересекает дугу MN в двух точках МB, —2) и
GB, 0) (см. рис. 7.5). Каждой из них соответствует
траектория, удовлетворяющая первому условию принципа максимума,
т.е. управление, соответствующее такой траектории,
доставляет максимум функции Н. Отметим, что если Р2 = М, то Pi,
будучи симметричной Р2 относительно 0\, совпадает с началом
координат. Это означает, что первое переключение
происходит в стартовый момент времени. Другими словами, эта
траектория соответствует стартовому управлению и = 1, а
наше исходное предположение, что стартовое управление равно
— 1, на самом деле не является существенным. Указанная
траектория фактически содержит не три, а две дуги окружности,
так как дуга первой окружности выродилась в точку.
Второй вариант с переключением в точке С содержит три
дуги. Первое переключение происходит в точке Д@, —2).
7.3. Задача быстродействия
221
Дальнейшее движение от D к С идет по дуге окружности
(Ж1-1J + (ж2 + 1J = 2,
на которой лежит начало координат, т.е. в процессе
перемещения от D к С фазовая точка возвращается в начало координат.
Значит, на самом деле есть еще одна, третья траектория,
которая представляет собой участок второй траектории от начала
координат до точки переключения в точке С и далее до
точки К. Эта траектория также удовлетворяет первому условию
принципа максимума, но, в отличие от первых двух,
соответствует начальному управлению и = 1. Очевидно, что время
движения по третьей траектории заведомо меньше времени
движения по второй траектории, потому что какое-то время
затрачивается на движение по петле. Поэтому далее вторую
траекторию можно не рассматривать. Анализ случая с
начальным управлением и = 1 показывает, что других траекторий,
удовлетворяющих первому условию принципа максимума и
заданным краевым условиям, нет.
Итак, использование принципа максимума выявило две
траектории, которые удовлетворяют краевым условиям
поставленной задачи. Первая ж*(?) заключается в движении по дуге ОМ
окружности G.27) и последующем после переключения
движении по дуге МК окружности G.29). Вторая траектория ж**(?)
представляет собой движение по дуге ОС окружности G.27)
с переходом на дугу С К окружности G.29) (рис. 7.6).
Поскольку движение по окружностям происходит с постоянной
угловой скоростью 1, время, затрачиваемое на движение по
общим участкам двух траекторий, одинаково. Время различается
лишь на прохождении от точки С до точки М, так как
движение происходит по дугам разных окружностей. Наилучший
вариант соответствует дуге, имеющей наименьшее угловое
расстояние, и на рис. 7.6 видно, что это дуга окружности G.29),
так как угол СО^М меньше угла СО\М. Таким образом,
траектория ж**(?) более предпочтительна. Тот же вывод можно
сделать, используя условие 2° принципа максимума.
222
7. ПРИНЦИП МАКСИМУМА
1
-5
i
-4
i
-3
i
-2
,
-1
°2
х21
2
1
О
0
-1
-2
-з
-4'
-5
1
К
i
1
•
/
X
"^^iC
2\
1\
1 1
1 /
//
у
Mf
/
/
/
/
1
3
1
4
i ^
5 х1
Рис. 7.6
Проверим выполнение условия 2° теоремы 7.2 для
траекторий x*(t) и x**(t). Это условие на самом деле можно проверять
в любой момент времени, и в данном случае в качестве такого
момента удобнее всего взять начальный. Имеем
M(**(t1),x*(t1))=ri(t1)(x*2(t1) + l)-
- ^(ti)sl(ti) + №(h)\ = 4>l(h) + №(h)\-
Учитывая, что, согласно G.21), ф* = —ф^ и используя G.22),
получаем
M(^*(ti),^*(ti))=-Cicos(ti-C2) + Ci|sin(ti-C2)|.
Точка переключения С траектории x**(t) соответствует
моменту времени t = t\+ 7г/2, так как угловая длина дуги ОС
7.3. Задача быстродействия
223
окружности G.27) равна 7г/2 (угол 00\С равен 90°). В то
же время, согласно G.23), переключение с и — \ на и — — 1
происходит при t — C<i = B/с + 1Oг, т.е. можно считать, что
С2 = t\ — 7г/2. Тогда М = С\ > 0, т.е. условие 2° теоремы 7.2
выполнено.
Для траектории x*(t) точка переключения М соответствует
моменту времени t = t\ + тт. В этом случае C^ — t\ иМ = —С\<
0. Условие 2° теоремы 7.2 нарушено.
Найдем время движения по траектории ж**(?). Для этого
нужно подсчитать угловые длины двух дуг окружностей. Дуга
ОС, как уже отмечалось, имеет угловую длину 7г/2. Дуга С К
окружности G.29) также имеет угловую длину тг/2: эта длина
измеряется углом между векторами О2С и 02^v, а они, как
нетрудно увидеть, ортогональны. Значит, общее время равно:
7Г 7Г
7Г.
Движению по траектории x**(t) соответствует управление
u**(t) =signsin(t —ti + ^) = sign cos (t-ti) (рис. 7.7).
Задача G.16)-G.19) имеет
единственный допустимый
процесс (ж**(<), г/**(*)),
удовлетворяющий принципу максимума.
Однако нельзя утверждать, что
этот процесс на самом деле
оптимален. Такое утверждение
обоснованно, если известно, что
и,
О
1
Ч
h+ 2
^+7Г
t
поставленная задача имеет
решение. #
Рис. 7.7
Приведенный пример показывает, какие трудности
возникают в случае применения метода, базирующегося на принципе
максимума. Главная трудность состоит в том, что при
использовании принципа максимума возникает краевая задача для
системы обыкновенных дифференциальных уравнений G.15),
224
7. ПРИНЦИП МАКСИМУМА
причем краевые условия задаются только для фазовых
переменных. Отсутствие краевых условий для функции #(?)
существенно осложняет задачу. Ясно, что оптимальное управление
и оптимальная траектория, выходящая из точки ж1, зависят от
начального вектора #(?i), но, к сожалению, условия максимума
для функции Н явно не указывают, как выбирать этот вектор.
Численный поиск начального условия для #(?) можно
организовывать, опираясь на условие 2° теоремы 7.2. Однако одного
этого условия недостаточно, чтобы организовать сходящийся
итерационный процесс последовательного уточнения вектора
Успех аналитического решения задачи, рассмотренной в
примере 7.1, во многом объясняется тем, что система G.16)
линейна. Именно в линейных задачах проявляются преимущества
принципа максимума.
7.4. Линейная задача
оптимального быстродействия
Вернемся к линейной задаче оптимального быстродействия
(см. 6.4), к которой неприменимы методы классического
вариационного исчисления. Проанализируем эту задачу, используя
принцип максимума. Но прежде всего уточним ее постановку.
Пусть закон движения рассматриваемой системы имеет вид
Апг*
— = Ах + Ви, G.30)
где х = (ж1, ..., хп) ERn; и = (и\, ..., ur) ERr; А = (а^-) —
числовая квадратная матрица порядка п; В = (Ь^) — числовая
матрица типа п х г. В качестве области управления U
рассмотрим множество, описываемое системой нестрогих неравенств
г
^aijUj^fii, i = l,«s, G.31)
7.4. Линейная задача оптимального быстродействия 225
и представляющее собой замкнутый ограниченный
многогранник в W. В качестве целевого функционала возьмем время
перехода объекта из положения ж1 в положение ж2, т.е. I = t2 — t\.
Кроме того, предполагаем (не оговаривая это каждый раз), что
многогранник U удовлетворяет условию общности
положения по отношению к системе G.30), т.е. для любого вектора
vGKf, параллельного какому-либо ребру многогранника С/,
система векторов
Bv, ABv, ..., An~1Bv G.32)
линейно независима.
Напомним, что система векторов v\, V2, • • •, vn в W1
линейно независима тогда и только тогда, когда матрица, столбцами
которой являются столбцы координат этих векторов, не
вырождена, т.е.
det(t>i, ..., vn) т^О.
Пример 7.2. Рассмотрим систему
(&i =X2+Ui,
< ±2 =Хз +U2,
[х3 = Х1+Щ,
для которой
/0 1 0\ /1 о\
А= о о 1 , в= о 1 ,
\1 о о/ \i °/
многогранник J7 описывается неравенствами |?ii| ^ 1, \и2\ ^ 1
и на плоскости ui(9u2 представляет собой квадрат. Проверим
для этого многогранника (многоугольника) условие общности
положения по отношению к заданной системе.
Поскольку четыре ребра квадрата U разделяются на две
пары паралельных ребер, для проверки общности нужно рас-
т т
смотреть только два вектора v\ = A, 0) и V2 = @, 1) . Для
226
7. ПРИНЦИП МАКСИМУМА
первого из них имеем
Bv-i =
ABvx =
A2Bv1 = 1
Так как
1
0
1
0
1
1
1
1
0
= -2^0,
то система векторов Bv\, ABv±, A?Bv\ линейно независима.
Аналогично для второго вектора v2 получаем
Bv2 =
ABv2 =
Так как
0
1
0
1
0
0
0
0
1
= -1^0,
то и система векторов Bv2, ABv2, A2Bv2 линейно независима.
Таким образом, заданный многогранник удовлетворяет
условию общности положения относительно заданной системы
дифференциальных уравнений. #
Для линейной задачи оптимального быстродействия G.30),
G.31) запишем функцию Понтрягина Н(\Р,х,и):
Н = ФтАх + фТВи = 5Z5Z ФЫзхз + Yl Yl fahiui • G.33)
i=l j=l k=l 1=1
Сопряженная система в данном случае имеет вид
dt
= -^2aij^ J = 1i
n,
г=1
7.4. Линейная задача оптимального быстродействия 227
или в векторной форме
^ = -АТФ. G.34)
Согласно G.33), функция Н, как функция переменного -м,
достигает максимума одновременно с функцией F(u) = Ф Ви.
Обозначим через Р(Ф) максимум функции F(u) на множестве
U. Из теоремы 7.2 следует, что если u*(t) — оптимальное
управление, то найдется такое ненулевое решение #*(?)
системы G.34), что
{&*{t))TBu*{t) = P(#*(t)). G.35)
Так как система G.34) с постоянными коэффициентами не
содержит неизвестных функций ж(?), гх(?), то все ее решения
можно найти, после чего легко определить соответствующие
управления u*(t) как решения уравнения G.35). Решение
последнего сводится к поиску наибольшего значения линейной
функции F(u) на замкнутом ограниченном множестве U.
Правда, возникает вопрос, имеет ли задача поиска и, при котором
F(u) максимально на J7, единственное решение. Ответ на это
дает следующее утверждение.
Теорема 7.3. Для любого нетривиального решения &(t)
системы G.34) соотношение G.35) однозначно определяет
управление u(t), причем это управление кусочно постоянно, а
значениями управления в точках непрерывности являются вершины
многогранника U.
А Пусть fl^(t) — произвольное нетривиальное решение системы
G.34). Так как функция Ф(?,гх) = &(t) Ви линейна по и, то
она имеет максимум на границе многогранника U [XIV]. При
этом максимум может достигаться либо в вершине
многогранника, либо во всех точках некоторой грани. Покажем, что в
силу общности положения многогранника последняя ситуация
реализуется лишь для конечного числа значений времени t.
228
7. ПРИНЦИП МАКСИМУМА
Предположим, что для некоторого бесконечного множества
М С [*i, *2] ПРИ t Е М функция Ф(?,гх) достигает максимума на
целой грани 1\ многогранника U. Тогда при и Е 1\ она
постоянна. Поскольку множество М бесконечно, а количество граней
U конечно, в М можно выделить бесконечное подмножество
My значений, которым соответствует одна грань Г
многогранника U.
Пусть wo и ^1 — концы ребра грани 1\. Тогда вектор
v = гх 1 — гхо определяет направление этого ребра. При этом для
teMT
*(t)TBv = ip(t)TB(ui - и0) =
= &(t)TBui - *(t)TBu0 = Ф(*,г*1) - Ф(<,гх0) = 0.
Итак, функция \Р Bv при t Е My обращается в нуль.
Матрица В является числовой, и мы можем считать вектор v также
постоянным, так как он один и тот же для всех t Е Мр. А
теперь отметим следующее. Поскольку функции i/ii(t)
являются решениями линейной системы дифференциальных
уравнений с постоянными коэффициентами, они представляют собой
аналитические функции [X]: в этом контексте t можно
рассматривать как комплексный аргумент и аналитичность будет
иметь место во всей комплексной плоскости. Значит, и
функция \Р Bv является аналитической. Но так как она обращается
в нуль на бесконечном подмножестве М отрезка [ti, ?2], то?
согласно теореме единственности [X], \Р Bv = 0 при любом t.
Последовательно дифференцируя тождество ПО Ъ
в силу системы G.34), получаем
(A T*(t)fBv = 0,
((ATJ*(t))TBv = 0,
((AI)n-1V(t))'IBv = 0,
7.4. Линейная задача оптимального быстродействия 229
или, учитывая известное матричное тождество (АВ) —В А ,
(&(t)TBv = 0,
\&(t)TABv = 0,
\&(t)TA2Bv = 0, G.36)
(&(t)TAn-1Bv = 0.
Так как, по предположению, выполняется условие общности
положения многогранника J7, система векторов Bv, ABv, ...,
An~1Bv линейно независима, а потому образует базис в W1.
Из соотношений G.36) вытекает, что при любом t вектор &(t)
ортогонален каждому вектору базиса, а потому равен нулю.
Это противоречит предположению о том, что решение &(t)
системы G.34) нетривиально.
Итак, противоречие показывает, что для всех ?, кроме разве
лишь конечного числа, функция Ф(?,гх) достигает максимума
только в одной точке — вершине многогранника. Значит,
всюду, кроме конечного числа точек, определено однозначно
управление u(t).
Выколов конечное число точек неоднозначной
разрешимости уравнения G.34), мы тем самым разобьем отрезок [ti,^]
на конечное число частичных интервалов. Выберем один из
таких интервалов А = (ti,T2). Пусть гхх, ..., us — вершины
многогранника U. Тогда А разделится на s непересекающихся
множеств Mi, М2, ..., Ms, где Mi — множество значений t Е А,
в которых максимум Ф(?,1?) достигается в вершине U{.
Оказывается, что все множества М{ являются открытыми (см. ниже).
Но интервал А можно представить как объединение открытых
непересекающихся множеств только в том случае, когда лишь
одно из этих множеств непусто. Отсюда следует, что на
интервале А функция u(t) постоянна, а потому непрерывна.
Покажем, что множество Mi открытое, т.е. если то Е М^,
то и целая окрестность tq также принадлежит Mi. Другими
230
7. ПРИНЦИП МАКСИМУМА
словами, если в точке то функция Ф(?,гх) достигает
максимума в вершине щ, то и при всех ?, достаточно близких к то,
функция Ф(?,1?) достигает максимума в вершине U{. Итак, при
j ф г имеем Ф(то,щ) < Ф(то,щ) = Р(Ф(то)). Функция Ф(?,гх) =
непрерывна по t. Поэтому конечный набор
неравенств <$>(t,Uj) < Ф(?,г^), j ф г, выполняющихся в точке t = то,
останется в силе и в некоторой окрестности точки то. Но это
как раз и значит, что точка максимума функции остается
неизменной в некоторой окрестности то. >
Согласно доказанной теореме, каждое оптимальное
управление является кусочно постоянной функцией со значениями
в вершинах многогранника U. Точки разрыва соответствуют
смене значения управления, и мы будем называть их точками
переключения. Если т — точка переключения, то слева от нее
управление имеет одно значение, скажем щ, а справа другое —
Uj. В этом случае говорят, что в т происходит переключение
оптимального управления u*(t) из вершины щ в вершину Uj.
Теорему 7.3 можно было бы охарактеризовать как теорему
о конечности числа переключений. В каждой конкретной
ситуации число переключений зависит от закона движения G.30),
вида области управления (многогранника) U и краевых
условий ж1, ж2. Оказывается, что есть класс линейных задач, в
которых при любых краевых условиях можно указать оценку
сверху для числа переключений. Характерным признаком этих
задач является отсутствие комплексных корней у
характеристического уравнения матрицы А. Об этом говорит следующая
теорема, в своем первоначальном виде доказанная А.А. Фельд-
баумом.
В своей формулировке мы ограничимся лишь частным
случаем многогранника — г-мерным параллелепипедом, т.е.
множеством в W вида
U = {и = (г/1, ..., ur): ak^uk^ Ck, k = l,r}. G.37)
При такой структуре области управления каждое отдельное
управление щ представляет собой самостоятельный параметр,
7.4. Линейная задача оптимального быстродействия 231
область изменения которого не зависит от значений других
управлений. По-прежнему предполагаем выполненным условие
общности положения.
Теорема 7.4. Если U — параллелепипед G.37), а все
корни характеристического уравнения матрицы А в законе
движения G.30) действительны, то у любого решения u(t) =
т
= (^i(t), ..., ur{t)) уравнения G.35) каждая из координатных
функций щ(€) кусочно постоянна и имеет не более п — 1
переключений (п — порядок системы G.30)).
А Пусть u(t) — решение уравнения G.35), т.е. в каждый момент
t вектор u{t) доставляет максимум функции Ф(?,1?) = &(t) Bu.
Согласно теореме 7.3, для любой нетривиальной функции &(t)
такое решение существует и единственно. Функцию Ф(?,1?)
можно записать следующим образом:
г п
Ф(*,и) = &(t)TBu = Х)(ЕЬ*^(<))^, G-38)
к=1 1=1
где &(t) = (V>i(<), ..., V>n(*))T; u = (uu • •-, urf; B = (bik).
Так как область изменения каждой из переменных щ не
зависит от остальных, функция Ф достигает максимума при
фиксированном t в том и только в том случае, когда
максимума достигает каждое слагаемое f 5^ ftifcV'iW )ЗД в G.38). Но
это слагаемое достигает максимума при щ = а& в случае
отрицательного коэффициента при нем и при щ = /3^ в случае
положительного коэффициента. Таким образом, компоненты
вектора и, доставляющего максимум функции Ф,
определяются соотношениями
( п
«/с, 5^Ьг/Ь^г(*) <0;
I г=1
Uk = \
| п
\Рк, 5^<Ш>о.
I г=1
232
7. ПРИНЦИП МАКСИМУМА
п
Функция Y2 bik^i{t) как функция комплексного переменного
г=1
t является аналитической функцией. Выбрав единичный вектор
т
v = @, ..., 1, ..., 0) (единица стоит на k-м месте),
направленный вдоль к-го ребра многогранника G.37), получим
п
г=1
п
Предположим, что сумма J^ b^^(t) тождественно равна нулю.
г=1
Тогда с помощью рассуждений, аналогичных тем, что
приведены в доказательстве теоремы 7.3, заключаем, что &(t) = 0, а это
противоречит предположению о том, что вектор &*(t) ненуле-
п
вой. Значит, Yl^ik^i{t) непостоянна и, будучи аналитической,
г=1
может обращаться в нуль лишь в конечном числе точек. Нам
нужно показать, что число нулей этой функции не превосходит
п — 1, так как каждый такой нуль соответствует
неоднозначности u*(t) и является точкой переключения.
Поскольку коэффициенты Ь^ могут иметь произвольные
значения, то ясно, что фактически надо доказывать: любая
линейная комбинация функций ф\ (?), ^2 (^) ? ..., фп (t) имеет не
более чем п — 1 действительный нуль. Согласно структуре
общего решения линейной системы обыкновенных
дифференциальных уравнений с постоянными коэффициентами, каждая
из функций ipi(t), в совокупности составляющих решение
системы G.34), имеет вид
/i(*)eAli + /2(*)eA2i + ... + fm{t)ex™\ G.39)
где Ai, ..., Аш — совокупность всех различных
действительных корней характеристического уравнения матрицы —А ,
/i(t), ...; fm(t) — многочлены, причем степень многочлена fi(t)
меньше кратности Т{ корня А^ [VIII]. Любая линейная
комбинация функций i/ii(t) также имеет вид G.39). Согласно следующей
7.4. Линейная задача оптимального быстродействия 233
ниже лемме, общее число действительных нулей функции вида
G.39) не превосходит
(П - 1) + (г2 - 1) + ... + (rm - 1) + m - 1 =
= (ri + r2 + ... + rm) - 1 = n - 1. >
Лемма 7.1. Пусть Ai, A2, ..., Am — действительные
попарно различные числа, /i(i), ..., /m(*) — многочлены с
действительными коэффициентами, имеющие степени fci, ...,
km соответственно. Тогда функция G.39) имеет не более чем
к\ + ... + кт + т — 1 действительных корней**. #
В приведенных выше теоремах речь шла о структуре
оптимального управления в линейных задачах оптимального
быстродействия. Для этих задач принцип максимума позволяет
не только определить вид оптимальных управлений, но и
получить условия единственности оптимального управления.
Управление u(t) называют экстремальным
управлением, если оно удовлетворяет принципу максимума. Для
линейной задачи оптимального быстродействия с областью
управления — многогранником управление u(t) является
экстремальным, если существует такое нетривиальное решение &(t)
системы G.34), что для него будет выполняться соотношение
G.35). Это соотношение равносильно условию 1° теоремы 7.2,
а условие 2° этой теоремы, как показано ниже,
выполняется автоматически. Ясно, что всякое оптимальное управление
является экстремальным. Поэтому, чтобы найти оптимальное
управление, переводящее фазовую точку из положения ж1 в
положение ж2, нужно найти все экстремальные управления с теми
же краевыми условиями, а затем среди них выбрать то, которое
осуществляет перевод за наименьшее время. Возникает вопрос:
могут ли существовать несколько экстремальных управлений,
** Доказательство леммы см. в книге: Понтрягин Л. С, Болтянский В.Г.,
Гамкрелидзе Р.В., Мищенко Е.Ф.
234
7. ПРИНЦИП МАКСИМУМА
переводящих фазовую точку из положения ж1 в положение ж2?
Вообще говоря, да. Но если начало координат в пространстве
управлений является внутренней точкой многогранника ?7, то
экстремальное управление единственно.
Теорема 7.5. Пусть в пространстве управлений начало
координат 0 есть внутренняя точка многогранника U. Если
u(t) и u{t) — два экстремальных управления, переводящие
фазовую точку из положения ж1 в положение ж2 = 0 за время
*2 — ti и *2 — ti соответственно, то t<i — t<i и и(?) = и(?), t ? [t\, ?2] •
^ Получим формулу для частного решения системы G.30) при
произвольном управлении u(t) и начальном условии x{t\) = ж1.
Для этого обозначим через y>l(t), (f2(t), ..., (fn(t)
фундаментальную систему решений однородной системы
dx
которая определяется начальными условиями
%i4.\ f1' * = •?'; • - 1—
где <^ = (yjj, v?|, ..., <^)Т, а через ^(t), &2(t), ..., #n(?)
фундаментальную систему решений однородной системы G.34)
с аналогичными начальными условиями:
[0, «^j,
Для всех t имеет место соотношение
(^(t),^(t)) = ll; l=r: G.40)
0, гфз-
7.4. Линейная задача оптимального быстродействия 235
Действительно, это условие, в силу выбора начальных условий,
выполнено при t = t\. Далее,
= (-/*'"(!), *>¦(')) + (*'@, VW) = о.
Таким образом, функция (в^'(?), ^(t)) постоянна и ее значение
при любом t совпадает со значением при t = t\.
В соответствии с методом Лагранжа вариации постоянных
[VIII] общее решение системы G.30) можно искать в виде
x{t) = ^Ck(t)<pk(t).
k=i
Подставляя это выражение в систему G.30), получаем
fe=i
Умножаем последнее уравнение скалярно на SP3 (t) и учитываем
G.40):
Решение системы G.30) с произвольным управлением u(t) и
начальным условием х1 = (х\, х\, ..., ж*) теперь можно записать
в следующем виде:
x(t) = J2<Pk(t)U+ [{*к(т),Ви(т))с1т). G.41)
Обозначим через x(t) и x(t) траектории, соответствующие
управлениям u(t) и u(t) и выходящие из точки ж1 в момент
236
7. ПРИНЦИП МАКСИМУМА
времени t\. По условиям теоремы ж(^) = ж(^) = 0, или,
согласно G.41),
п t2
? Vk(h) D + / (**(т), Ви(т)) dr) = О,
k=1 h
п ^2
5>*(*2) D + / (**(т), Bu(r)) rfr) = 0.
* = 1 t!
Так как векторы tpl(t), г = 1, п, линейно независимы, из
последних двух соотношений вытекает, что
t2 t2
¦ч
tl
12 12
i = f (V(r), Bu(t)) dr = J (V(t), Bu(t)) dr. G.42)
Пусть ^2 > ^2 и #(?) — решение сопряженной системы G.34),
для которого на отрезке [ti, ?2] выполняется соотношение
(*(*), В«(*)) = Р(#(*)), G.43)
определяющее функцию гх(?). Разложим функцию &(t) по
базису ^(t), ..., &n(t):
п
ад = ?>**(*).
Умножая G.42) на А^ и суммируя по /с, получаем
t2 %
[ (Ф(т), Ви{т)) dr= I (#(т), Ви{т)) dr. G.44)
Заметим, что для любого решения &(t) сопряженной
системы G.34) справедливо неравенство
Р (#(*)) >0. G.45)
7.4. Линейная задача оптимального быстродействия 237
Действительно,
(Ф, Ви) = (втф, и
Поэтому
Р(ф(г)) = max (#(?), Ви) = max (втФП), и) .
Поскольку начало координат является внутренней точкой
многогранника ?7, то функция F(t,u) = (Б #(?),гх) при
фиксированном t может принимать как положительные, так и
отрицательные значения, либо тождественно равна нулю. Если
она не тождественный нуль, то P(l^(t)) > 0, а в противном
случае P(&(t)) = 0.
Учитывая G.43), G.45) и предположение ?2 > h, из G.44)
получаем
t2 t2
h
t2 t2
[(Ф(т),Ви(т))Aт = [р(Ф(т))Aт:
h
t2
^ Гр(Ф(т))Aт = I\ф{т),Ви{т))<1т.
Итак,
t2 t2
f Р(ф(т)) dr^ Г (Ф(т), Bu(r)) dr. G.46)
Но, согласно определению, Р(Ф^)) = max (#(?), Ви). Поэтому
uEU
(*(*), Bu{t)) = P(*(t)) > (#(*), Вй(*)), * G [ti Д2].
Значит, с учетом G.46) имеем
(*(<), Bu(t)) = {*(t), Bu(t)), t € [<i, T2].
238
7. ПРИНЦИП МАКСИМУМА
Но тогда в силу теоремы 7.3 оба управления u(t) и й(?),
удовлетворяющие G.35) с одной и той же функцией #(?),
тождественно равны: u(t) = й(?), ? G [?i, ?2]-
Из совпадения управлений и равенства G.44) следует, что
Ъ
[(Ф(т),Ви(т))Aт = 0,
ИЛИ
%
[Р(Ф(т))Aт = 0. G.47)
Рассмотрим равенство Р (#(?)) =0. Выполнение этого
равенства, как отмечено выше, означает, что при фиксированном
? функция F(t,u) тождественно равна нулю. Если
предположить, что равенство Р (#(?)) =0 выполняется на некотором
бесконечном множестве значений ?, то, как и в
доказательстве теоремы 7.3, можно показать, что аналитическая функция
#(?) тождественно равна нулю. А это противоречит принципу
максимума. Поэтому указанное равенство может быть верным
лишь для конечного числа значений ?. Но тогда равенство G.47)
при условии G.45) может выполняться только при ?2 = ?2- >
До сих пор мы пользовались только условием 1° теоремы 7.2.
Покажем, что в рамках предположений теоремы 7.5 условие 2°
теоремы 7.2 выполняется автоматически:
М(#(?2),ж(?2)) =Я(^(?2),Ж(?2),и(?2)) =
= (#(?2), Ax(t2)) + (#(?2), Bu(t2)) = Р(#(?2)) > 0,
так как ж(?2) = ж2 = 0.
В заключение сформулируем теорему существования для
линейных систем оптимального быстродействия (условие
общности положения многогранника U считается выполненным).
7.5. Задача синтеза управления
239
Теорема 7.6*. Если существует хотя бы одно управление,
переводящее фазовую точку системы G.30) из положения ж1
в положение ж2, то существует и оптимальное по
быстродействию управление, также переводящее фазовую точку из ж1
вх2. #
Задача управления состоит в построении допустимого
управления, реализующего цель. В рамках сформулированной
теоремы целью является состояние ж2. Поэтому теорему 7.6
можно было бы сформулировать так: если для линейной
системы решена задача управления, то для нее можно построить
управление, оптимальное по быстродействию.
Итак, теорема 7.6 утверждает, что оптимальное решение
в линейной задаче быстродействия существует. Любое
оптимальное решение является экстремальным, а по теореме 7.5
экстремальное управление единственно. Следовательно, в рамках
теоремы 7.5 существует единственное экстремальное
управление, которое является оптимальным. В этом случае принцип
максимума является не только необходимым условием
оптимальности, но и достаточным. С его помощью линейная задача
быстродействия может быть решена полностью.
7.5. Задача синтеза управления
Выше, применяя принцип максимума, мы отыскивали
оптимальное управление в виде функции времени t. Такое
управление называют программным управлением. Однако во
многих случаях удобнее управление рассматривать как
функцию текущего состояния системы, т.е. как функцию фазовых
координат. Это позволяет при построении управления
учитывать возмущенное движение. Отклонение состояния
системы от расчетного фиксируется и учитывается в последующем
управлении.
* Доказательство теоремы см. в книге: Понтрягин Л. С, Болтянский
В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф.
240
7. ПРИНЦИП МАКСИМУМА
Можно представить некоторый технический объект,
который снабжен прибором, фиксирующим его текущее состояние
путем измерения фазовых координат, и исполнительным
механизмом, который по текущим фазовым координатам х
реализует управление и(х). В этой ситуации мы имеем систему с
обратной связью
— = Ах + Ви(х).
Фазовая траектория такого управляемого объекта зависит
от выбора функции гх(ж), которую называют синтезирующей
функцией (или обратной связью). Определение
синтезирующей функции, позволяющей реализовывать цель управления,
называют синтезом управления.
Синтез оптимального управления в линейных системах
осуществлялся задолго до появления принципа максимума. Одним
из первых среди советских ученых результаты в этой
области получил А.А. Фельдбаум, который ввел общее понятие
оптимального процесса в n-мерном фазовом пространстве".
Впоследствии А.А. Фельдбаум разработал метод фазового
пространства, с помощью которого была решена задача синтеза
управления для линейных систем второго порядка с одним
управляющим параметром и с действительными
собственными значениями матрицы системы**. Позже эта задача была
решена для систем второго порядка с комплексными
собственными значениями. Появление принципа максимума упростило
процедуру решения задачи. Использование этого принципа
позволило решить задачу для систем второго порядка с двумя
управляющими параметрами.
Отметим, что сама постановка задачи синтеза и методы ее
решения характерны для теории оптимального управления и
гораздо хуже согласуются с методами вариационного
исчисления. В этом разделе мы обсудим некоторые задачи,
относящиеся к задачам синтеза.
*См.: Фельдбаум А.А. A953 г.)
**См.: Фельдбаум А.А. A955 г.)
7.5. Задача синтеза управления
241
Быстрейшая остановка движущейся точки в
заданном месте. Пусть материальная точка движется по инерции
вдоль прямой. Задача состоит в том, чтобы наискорейшим
образом остановить движение этой точки в заданном месте,
которое мы примем за начало координат на прямой, с
помощью ограниченной по величине силы.
Закон движения рассматриваемой системы имеет вид
В качестве области управления возьмем U = {и: \и\ ^ 1}.
Преобразуем уравнение движения второго порядка
введением дополнительных координат в систему дифференциальных
уравнений первого порядка:
G.48)
где х\ = х, Х2= х.
Мы имеем дело с задачей быстрейшего попадания в начало
координат ж2 = @, 0) из заданного начального состояния х1 =
= (х\, х%) • Функция Понтрягина Н для этой задачи имеет
вид
Я = ф\Х2 +lp2U-
Учитывая ограничение \и\^1 на управление, получаем
тахН(Ф,х,и) = ф\Х2 + ^2 sign ф2-
\и\^1
Согласно теореме 7.3, экстремальное управление u*(t) имеет
вид
u*(t)=sigMl>2(t). G.49)
Из сопряженной системы
242
7. ПРИНЦИП МАКСИМУМА
находим ф\{Ь) = Ci, i/i2(t) = С2 — Cii, где G\, G<i — постоянные
интегрирования. Значит, экстремальное управление
u*(t) = signV>2(t) = sign(C2 - Ci«)
является кусочно постоянной функцией с двумя значениями 1 и
— 1, имеющей не более одного переключения, так как линейная
функция С\ — С<$ на отрезке [?i, ?2] меняет знак не более одного
раза (это полностью согласуется с теоремой 7.3).
Для интервала времени, на котором и — 1, имеем
Записав систему в симметричной форме [VIII]
dx\ dx2
Х2 1
получаем уравнение с разделяющимися переменными dx\ =
= X2dx2- Его интегрирование дает
Xl = ^ + S. G.50)
Аналогично поступаем в случае и = — 1. Система в
симметричной форме имеет вид
dx\ dx2
= —г = dt,
Х2 -1
откуда
Xl = -^ + S. G.51)
Семейство фазовых кривых для рассмотренных случаев
показано на рис. 7.8, а (и = 1) и рис. 7.8, б (и = — 1). Так как для
первой системы dt = dx2-> то движение по параболам в случае
7.5. Задача синтеза управления
243
Рис. 7.8
u = 1 снизу вверх. Для второй системы dt = —dx% и движение
по параболам при и = — 1 сверху вниз.
Нас интересуют те дуги парабол, которые приводят в
начало координат. Учитывая направление движения, заключаем,
что такими дугами могут быть дуга О А параболы х\ = -х\ (см.
рис. 7.8, а) либо дуга О В параболы х\ = — -х\ (см. рис. 7.8, б).
Управление u*(t) имеет не более одного переключения и
максимум два интервала постоянства. На первом интервале
постоянства нужно выбрать такое из двух значений 1 или — 1,
которое привело бы фазовую точку из начального положения
ж1 на одну из дуг О А или ОВ. На дугу О А, соответствующую
управлению и = 1, можно попасть по траекториям с и = — 1, т.е.
двигаясь сверху вниз. А на дугу О В можно попасть лишь при
движении снизу вверх (рис. 7.9). Таким образом, плоскость
разделяется на две области.
Если х1 расположена выше
кривой АО В, то, двигаясь
сверху вниз по кривым
семейства G.51), мы выходим
на дугу О А и по этой дуге
после переключения попадаем в
начало координат. Если же
х1 расположена ниже кривой
АО В, то начальное движение
Рис. 7.9
244 7. ПРИНЦИП МАКСИМУМА
снизу вверх по кривой семейства G.50) выводит фазовую
точку на дугу ОВ, по которой после переключения фазовая точка
попадает в начало координат. Наконец, отметим, ситуацию,
когда начальное положение ж1 оказыватся на кривой АО В. В
этом случае переход в начало координат не требует
переключения.
Как видим, для любого начального состояния ж1 существует
ровно одна экстремальная траектория, ведущая в начало
координат (что согласуется с теоремой 7.5). Если оптимальная
траектория существует, то она совпадает с экстремальной,
т.е. построенная нами траектория обеспечит наименьшее время
движения. Существование оптимальной траектории вытекает
из теоремы 7.6. Эта теорема показывает, что в
рассматриваемой задаче при любых начальных условиях ж1 оптимальная
траектория существует, так как существует хотя бы одно
управление, реализующее цель. Итак, найденные траектории
оптимальны по быстродействию и других оптимальных траекторий,
ведущих в начало координат, нет.
Как построить в решенной задаче синтезирующую
функцию? Поскольку для оптимального движения в каждый момент
времени нужно выбирать между двумя значениями 1 и — 1, то
оптимальное по быстродействию управление равно:
I 1, (ж1,Ж2) ниже АО В или на О А]
U (Ж1,Ж2) = <
I — 1, (жх,Ж2) выше АО В или на ОВ.
Тогда система
XI = х2,
Х2 =U*(X\,X2)
при любых начальных условиях в качестве решения дает
оптимальную траекторию. Нам удалось решить задачу синтеза для
рассматриваемой системы. Отметим, что кривую АОВ
называют линией переключений.
7.5. Задача синтеза управления
245
Приведение маятника в верхнее положение
равновесия. Применим принцип максимума к задаче о приведении
математического маятника в верхнее положение равновесия
(см. 6.1). Эта задача сводится к задаче наискорейшего
перехода в начало координат с законом движения
[х\ = Х2,
[х2 =uj2xi +щ
начальными условиями х1 = (щ, фо) и ограничением на
управление \и\ ^ /о- Для упрощения выкладок будем считать, что
ш2 = 1, /о = 1.
Запишем функцию Н:
Н{Ф,Х,и) = ф\Х2 + ф2{х\ +и).
Сопряженная система имеет вид
(ipi = -ф2,
[Ф2 = ~Фъ
Несложно найти ее общее решение [VIII]:
фхA) = -С1ег + С2е~\ ф2{Ь) = Схе1 + С2е~\
где Ci, С2 — постоянные интегрирования, не равные нулю
одновременно (Ф не должно быть тривиальным решением). Из
условия максимума для функции Н находим управление:
u*(t) =8'щпф2(г).
Управление оказывается кусочно постоянной функцией, а
так как функция ф2{1) имеет не более одного нуля, то
управление имеет лишь одно переключение и два интервала
постоянства значения. Для интервала, на котором и = 1, имеем систему
246
7. ПРИНЦИП МАКСИМУМА
из которой получаем уравнение с разделяющимися
переменными (х\ + l)dx\ = X2dx2- После интегрирования получаем
(Xl + lJ-x22 = Sb
где Si — произвольная постоянная. Это семейство гипербол с
единым центром в точке (—1, 0). Так как dt = dxi/x^, движение
по гиперболам будет слева направо в верхней полуплоскости
Х2 > 0 и справа налево в нижней (рис. 7.10, а).
Для интервала времени, на котором и = — 1, поступаем
аналогично и приходим к другому семейству гипербол с центром
в точке A, 0):
(xi - IJ -х\ = ?2.
Движение по этим гиперболам будет слева направо в верхней
полуплоскости и справа налево в нижней (рис. 7.10, б).
а б
Рис. 7.10
Как и ранее, нас интересуют дуги тех гипербол,
которые приводят в начало координат. Это дуга О А гиперболы
(xi + IJ — х\ = 1 и дуга ОВ гиперболы (xi — IJ — х\ = 1. Так
как управление кусочно постоянно и имеет не более одного
переключения, то оно имеет не более двух интервалов
постоянства, а соответствующая фазовая траектория имеет не более
7.5. Задача синтеза управления
247
двух дуг гипербол, причем вторая дуга (может быть,
единственная) есть часть дуги О А, если переключение с — 1 на 1,
или часть дуги 05, если переключение с 1 на —1. Первая
дуга траектории должна привести фазовую точку из начального
положения равновесия на дугу О А при управлении и = — 1 или
на дугу О В при управлении и = 1. Состыкованная из двух дуг
траектория будет оптимальной.
Анализ изображений на рис. 7.10 показывает, что на
плоскости xi 0x2 выделяется область Q, которая представляет собой
полосу между прямыми х\ + x<i — — 1 и х\ + x<i — 1, не
содержащую указанных прямых (рис. 7.11). Если точка х1
находится в этой области, то по
некоторой гиперболе из этой
точки можно перейти на
кривую АО В, и в результате для
такого начального состояния
оптимальная траектория
существует. Если же точка х1
находится вне области Q, то
попасть на кривую АОВ не
удается, так что для
такого положения оптимального
решения не существует.
Учитывая это, область Q можно
назвать областью управляемости данной системы.
Напомним, что, согласно теореме 7.6, оптимальная траектория
существует, если существует хотя бы одна допустимая
траектория, переводящая фазовую точку из заданного положения в
начало координат. Отсутствие оптимальной траектории для
начального положения фазовой точки вне области Q на
самом деле свидетельствует о том, что из точек вне Q вообще
ни при каком допустимом управлении попасть в начало
координат нельзя. Теорема 7.6 говорит о том, что задачу поиска
оптимального управления имеет смысл решать только в
области управляемости объекта.
Рис. 7.11
248
7. ПРИНЦИП МАКСИМУМА
Итак, из любого состояния х Е Q можно наискорейшим
образом попасть в начало координат. Оптимальная траектория
состоит из двух участков, на которых управление постоянно.
Как и в предыдущей задаче, здесь можно записать
синтезирующую функцию:
A, (xi,x2) ? Q ниже АОВ или на ОА;
U (xi,X2) = \
1—1, {xi,x2) ? Q выше АОВ или на ОВ.
7.6. Задача с подвижными концами
В задаче с подвижными концами или начальная точка ж1,
или конечная точка ж2, или обе эти точки не известны. Заданы
лишь множества М\ и М2, содержащие эти точки.
Чтобы прийти к формулировке необходимых условий,
желательно использовать геометрические представления. В
дальнейшем под гиперповерхностью мы понимаем множество
всех точек х = (#]_, ..., хп) в Rn, которые подчиняются
соотношению /(#!,...,жп) = 0, где / — скалярная дифференцируемая
функция многих переменных. В частном случае, когда / —
линейная функция, гиперповерхность описывается уравнением
а\х\ + а2х2 + ... + апхп + 6 = 0 G.52)
и ее называют гиперплоскостью. При 6 = 0 гиперплоскость
G.52) является (п—1)-мерным линейным подпространством в
W1 [IV]. Любое (п — /с)-мерное подпространство Н С W1 может
быть задано как множество решений линейной однородной
системы к уравнений с п неизвестными, матрица которой имеет
ранг к:
( anxi + ai2^2 + ... + ainxn = 0,
J a2ixi + a22x2 + ... + a2nxn = 0, ( .
[ afcizi + ak2x2 + ... + a/,nxn = 0,
7.6. Задача с подвижными концами
249
Такое линейное подпространство будем называть (п—/с)-мерной
плоскостью. Множество решений системы нелинейных
уравнений
( fi{xi,...,xn) = 0,
I /2(Ж1,...,ЖП)=0,
[ fk{xu...,xn) = 0,
где функции /i, ..., fk дифференцируемы и ранг матрицы
Якоби этой системы функций равен /с, представляет собой
(п—/с)-мерное гладкое многообразие [V].
Используем эти геометрические понятия для того, чтобы
сформулировать задачу оптимального управления с
подвижными концами. Эта задача состоит в том, чтобы найти такое
допустимое управление u(t) для системы с законом движения
x = f(x,u), жеГ, иеШг,
которое переводит фазовую точку из некоторого, заранее
неизвестного, положения х1 на гi-мерном многообразии М\
[т\ < п) в некоторое положение х1 на Г2-мерном многообразии
М2 (г2 < п) и при этом придает функционалу
/[ж,гх]= [ f°(x,u)dt
h
минимальное значение.
Ранее рассмотренную задачу оптимального управления с
фиксированными концами можно интерпретировать как
частный случай этой задачи при г\ = Г2 = 0, т.е. когда многообразия
М\ и M<i вырождаются в точку. Возможен и промежуточный
вариант, когда лишь одно из этих многообразий вырождается
в точку, и тогда в задаче один конец фиксированный, а другой
подвижный.
Как и в классическом вариационном исчислении,
управление, оптимальное в задаче с подвижными концами, является
250
7. ПРИНЦИП МАКСИМУМА
оптимальным и в задаче с фиксированными концами. Поэтому
принцип максимума (см. теоремы 7.1 и 7.2), рассмотренный
нами для задачи с фиксированными концами, дает необходимые
условия и в этой задаче, имеющей более общую постановку.
Но отсутствие уравнений, указывающих начальное и конечное
состояния, приводит к тому, что система необходимых
условий перестает быть полной. Недостающие уравнения, как и в
вариационном исчислении, получают из условий
трансверсальности. Будем говорить, что вектор сопряженных переменных
&(t) = (^о(^)? •••? ФпA)), существование которого
утверждается в приципе максимума, удовлетворяет условию
трансверсальности на левом конце траектории ж(?), если вектор
^(^l) = (^i(?i)? •••> VVi(?i)) ортогонален касательной плоскости
к многообразию М\ в точке #(?i), т.е.
(*(*!),*) = 0, G-53)
где z — произвольный вектор, лежащий в касательной
плоскости. Аналогично формулируется условие на правом конце.
Условие трансверсальности на левом конце равносильно
ортогональности &{t\) каждому из г\ векторов базиса в
касательной плоскости, т.е. дает г\ уравнений. В совокупности с
условием принадлежности точки x{t\) многообразию М\ (это
условие определяется п — г\ уравнениями) мы имеем ровно п
уравнений, как и в задаче с фиксированным левым концом.
Аналогичная ситуация возникает и на правом конце.
Теорема 7.7. Если (ж*(?), г/*(?)), ?е[?ь?2], —
оптимальный процесс в задаче с подвижными концами x{t\) Е Mi,
ж (?2) Е М2, то ненулевая вектор-функция #*(?), существующая
согласно теореме 7.1, удовлетворяет на каждом из концов
траектории условиям трансверсальности. #
Замечание 7.3. В случае задачи оптимального
быстродействия с подвижными концами в сформулированном
утверждении ссылку на теорему 7.1 нужно заменить ссылкой на
теорему 7.2.
7.6. Задача с подвижными концами
251
Отметим частный случай задачи с подвижными концами,
когда, например, правый конец траектории свободен (это
означает, что M<i = W1). Тогда условия трансверсальности сводятся
к соотношению Ф^) = (V>i(*2M • • • 5 Фп^)) = 0. Полный вектор
сопряженных переменных Ф&) = (фо&), Ф&)) определяется
с точностью до произвольной постоянной. Поэтому в
данном случае можно полагать ipofo) = — 1 (согласно принципу
максимума, фо ^ 0) и Ф^) = (—1, 0, ..., 0). Это облегчает
применение принципа максимума, так как обеспечивает
недостающее начальное условие для вектора сопряженных
переменных. Как отмечено выше (см. 7.3), именно отсутствие краевых
условий для сопряженных переменных — главная трудность в
использовании принципа максимума. Как видим, в задачах с
подвижными (и, в частности, со свободными) концами можно
ожидать, что процедура решения будет более простой.
Пример 7.3. Вернемся к задаче о быстрейшей остановке
движущейся точки в заданном месте (см. 7.5) и изменим ее
постановку. Потребуем, чтобы точка не останавливалась в начале
координат, а достигала его за наименьшее время. Значение
скорости в конечный момент времени нас теперь не интересует.
В фазовых координатах х\ = ж, Х2 = х закон движения
системы имеет вид G.48)
XI =Х2,
Х2 =U.
Начальное состояние x(t\) = х1 считаем заданным, а про
конечное состояние xfe) известно лишь, что оно находится на
оси 0x2, так как xifa) = 0. Пусть \и\ ^ 1 — ограничение на
управление.
Итак, поставлена задача с правым подвижным концом.
Многообразие М2 описывается уравнением х\ = 0. Это
одномерное многообразие, в каждой его точке касательное
пространство одномерно, а любой касательный вектор в точке
@, Х2) имеет вид z = @, ?2), С2 ? №• Условие трансверсально-
252
7. ПРИНЦИП МАКСИМУМА
сти на правом конце можно записать следующим образом:
О • -01 (*2) + С2^2(*2) = О,
откуда ф2^2) — 0. Функция Н и сопряженная система имеют
тот же вид, что и выше (см. 7.5). Поэтому функция ip2(t)
линейна. Из условия ^2(^2) = 0 следует, что она на интервале
(*1, *2) сохраняет знак. Значит, оптимальное управление u*(t) =
= signФ2 (t) не имеет переключений и постоянно в течение всего
движения, т.е. или u*(t) = 1, или u*(t) = — 1. Материальная
точка движется по параболе семейства G.50) в первом случае
и по параболе семейства G.51) во втором.
Пусть точка х1 начального состояния находится в правой
полуплоскости х\ > 0. Через эту точку проходят две
траектории, удовлетворяющие первому условию принципа
максимума — по одной из каждого семейства траекторий. По параболе
семейства G.50) движение направлено снизу вверх. Если
точка х1 расположена выше дуги О А параболы семейства G.50),
проходящей через начало
координат (рис. 7.12), то по
параболе семейства G.50)
точка не достигает оси 0x2, так
что оптимальным может быть
только движение по параболе
семейства G.51). Если же
точка ж1 расположена на дуге О А
или ниже, то достичь оси 0x2
можно по любой из двух
парабол. Однако из этих двух траекторий только одна
удовлетворяет второму условию принципа максимума. Покажем это. Для
задачи оптимального быстродействия второе условие принципа
Понтрягина выглядит следующим образом:
Учитывая, что в нашем случае
M(**(t2),X*(t2))=^l(*2)^(t2) + |^2(*2)|
Рис. 7.12
7.7. Неавтономные системы
253
и ф\ (t2) = 0, получаем ^i (?2)^2(^2) ^ ^' или' согласно ВИДУ Ре~
шения сопряженной системы (ф* — С\— const), С 1x^2) ^ 0.
Из построений следует (см. рис. 7.12), что в случае, когда
начальная точка х1 расположена в правой полуплоскости,
выполняется неравенство x\(t2) ^ 0. Поэтому С\ ^ 0. Равенство
С\ — 0 невозможно, так как тогда ф\ — С2 = const и, в силу
условия ф2^2) — 0, решение Ф является тривиальным.
Остается случай С\ < 0. Из решения сопряженной системы имеем
ф*{1) = С2- Cit. Так как d < 0 и ф^2) = С2 - Cxt2 = 0, то
ф2^) ^0 на отрезке [ti, ^2]. Следовательно, единственное
допустимое управление, удовлетворяющее принципу максимума,
имеет вид u*(t) = sign ф\ (t) = — 1.
Таким образом, если х1 находится правее оси 0x2, то
оптимальным будет управление ?/*(?) = —1. Аналогично рассуждая,
заключаем, что при начальном состоянии левее оси 0x2
оптимальным будет управление u*(t) = 1. Конечно, рассмотренная
задача элементарна и не имеет большого практического
значения. Ответ в ней просматривается в содержательной
постановке задачи: чтобы из пункта А попасть в пункт В за кратчайшее
время, нужно двигаться с максимально возможным ускорением.
Жми на педаль — и все!
Найденное решение позволяет определить синтезирующую
функцию:
, ч xi Г 1, Ж1<0;
U(Xi,Xo) = — г = <
v ; Ы \-i, Ж1>о.
7.7. Неавтономные системы
В общем случае неавтономной системы правая часть закона
движения и подынтегральная функция целевого функционала
зависят явно от времени ?, т.е. закон движения имеет вид
х = f(t,x,u),
G.54)
254
7. ПРИНЦИП МАКСИМУМА
т т
где х = (xi, ..., хп) , и = (г*!, ..., г^г) , а целевой функционал
записывается следующим образом:
J[a>,u] = f f°(t,x,u)dt. G.55)
Как и выше, считаем, что функции /°(?,ж,гх) и f(t,x,u) =
= (J1, ..., /п) непрерывны по совокупности переменных и
непрерывно дифференцируемы по части переменных ж.
Также полагаем, что момент времени t\ прохождения через точку
начального состояния х1 известен, а момент времени t^
прохождения через конечную точку х2 не задан и должен быть
найден. Область управления U не зависит от времени.
Как и в случае систем обыкновенных дифференциальных
уравнений, поставленная задача может быть сведена к
автономной задаче введением дополнительного переменного жп+ь
К закону движения добавим уравнение хп+1 = 1, а к начальным
условиям — соотношение xn+i(ti) = t\. Эти два условия
равносильны тождеству xn-\-\(t) = t. Теперь в расширенном составе
фазовых переменных система G.54) принимает вид
[xi = fl(xn+i,x,u),
Х2 = f2{xn+i,X,u),
G.56)
[in+i = fn+1(xn+1,x,u),
а функционал /[ж,гх] — вид
*2
/[ж,и] = / f(xn+i,x,u)dt, G.57)
h
где /n+1 = 1. Мы преобразовали неавтономную n-мерную
задачу в автономную, но с расширенным фазовым пространством.
7.7. Неавтономные системы
255
В новой задаче требуется найти оптимальную траекторию,
соединяющую точку (?1, х\, ..., х^) расширенного фазового
пространства с некоторой прямой, проходящей через точку
(О, ж2, ..., ж2) параллельно оси Oxn+i (конечное значение t<2
переменного хп+\ нам не известно). Таким образом,
преобразованная задача — это задача с фиксированным левым и
подвижным правым концами.
Если в задаче оптимального управления G.54), G.55), G.2),
G.3) (в частности, в задаче G.1)-G.4)) известны и
начальный момент времени ?i, и конечный момент времени ?2, то
такую задачу называют задачей с фиксированным
временем. Преобразование такой задачи введением
дополнительного переменного приводит к задаче с фиксированными
концами в следующей формулировке. Требуется найти
управление u(t), которое переводит фазовую точку системы G.56)
из положения (?i, ж{, ..., ж^) в момент времени t\ в положение
(^2, ж2, ..., ж2) в момент времени ?2, причем функционал G.57)
принимает наименьшее значение. Мы можем не считать
фиксированным момент времени ?2 попадания в точку (ж2, ?2M так
как в силу тождества хп+\ = ? попадание в точку (ж2, ?2)
может произойти только в момент времени ?2. С учетом этого
мы можем к данной задаче применить теорему 7.1. Согласно
этой теореме, для получения необходимых условий экстремума
функционала мы должны составить функцию Понтрлгина
п
Н* = ^2фа/а(хп+ъх,и)+фп+1=Н + фп+ъ G.58)
где
п
Я(?,?, Ж,^) = ^2*pafa(t,X,u) —
а=0
прежнее выражение функции Понтрягина, не учитывающее
дополнительную, (п+1)-ю переменную, в котором за этой
переменной оставлено старое обозначение ?. Сопряженная система
256
7. ПРИНЦИП МАКСИМУМА
записывается следующим образом:
G.59)
• дН
Соотношения в условиях 1° и 2° теоремы 7.1 принимают
вид:
H{t^(t),x*{t),u*{t))+rn+i(t)=M{t^*{t),x*(t))+rn+i(t),
да2) < 0, M(t,**(t),x*(t)) + C+i(*) = 0. G.60)
Сократим в первом условии на V'n+iW1
Я(*,?*(*),ж*(*),гх*(*)) = М(*,?*(*),ж*(*)). G.61)
Если бы функции ipQ (t), ?/>* (?), ..., фп (t) в некоторый момент
времени to обращались в нуль, то мы имели бы
H(t0,**(to),x*(to),u*(to))=0,
откуда, согласно G.60) и G.61), V'n+i^o) — 0- Но тогда ipi(t) = 0,
г = 0, п+1, как решение линейной системы дифференциальных
уравнений с нулевыми начальными условиями. А это
противоречит теореме 7.1. Таким образом, #*(?) = (V>o(?M •••? Фп{^))
есть ненулевое решение системы G.59). Это позволяет
уменьшить размерность задачи и не рассматривать функцию фп+\
и второе из соотношений G.60). Мы приходим к следующему
утверждению.
Теорема 7.8. Пусть (ж*(?), u*(t)), t Е [ti, ?2], —
оптимальный процесс для задачи с фиксированным временем. Тогда
существует ненулевая вектор-функция &*(t) = (^о(^), ..., ^n(t)),
соответствующая этому процессу, такая, что:
7.7. Неавтономные системы
257
1° для любого tE [ii,*2] функция H(t,}P*(t),x*(t),u)
переменного и достигает при u = u* (t) максимума
H(t,9*(t),x*(t),u)=M{t,9*(t),x*(t));
2°^(*K0,*e[*i,*2]. #
Как и выше, ^о = const. Поэтому условие 2° теоремы
достаточно проверить в какой-то одной точке отрезка.
Эта теорема в такой же степени позволяет решить задачу
с фиксированным временем, в какой теорема 7.2 позволяет
решить задачу со свободным временем. Уменьшение количества
условий на одно (отсутствует условие М(^,Фг*(^2),ж*(^)) = 0)
компенсируется уменьшением количества неизвестных на одно
(задан момент времени ^).
Обратимся к случаю, когда при фиксированном моменте
времени t2 правый конец свободен. Это задача о том, как из
данного положения ж1 за данное время t2 —1\ пройти по
траектории с произвольным конечным положением при минимуме
данного функционала. Условия трансверсальности тогда
имеют вид ipi(t2) = ^2{t2) = ... = ipn(h) = 0. Следовательно, ф0 Ф 0,
и мы можем принять фо = — 1. Тогда при t = ?2 должно
выполняться условие
?(t2) = (-l, 0, ...,0). G.62)
Для рассматриваемого случая необходимое условие
оптимальности состоит в том, что функция Н достигает максимума при
любом t на оптимальном управлении u{t) и выполняется G.62).
Отметим, что в задаче с фиксированным временем и
свободным правым концом часто целевой функционал является не
интегральным, а смешанным:
1[х,и] = Г f°(t,x,u)dt + T[x(t2)]. G.63)
h
258
7. ПРИНЦИП МАКСИМУМА
В этом случае смешанный функционал необходимо
преобразовать в интегральную форму (см. 4.5):
t2
I[x,u] = J (j°(t,x,u) + ^^ + jT[x{t)]} dt. G.64)
Пример 7.4. Рассмотрим систему с законом движения
{#1 = #25 /
G.65)
Х2 = —xi +2и.
Пусть даны: ограничение на управление —1/2 ^ и ^ 1,
начальное состояние Ж]_@) = — 1, #2@) = 1 в момент времени ti = О,
целевой функционал
I[xi,X2,u] = / исИ + Х2&), G.66)
о
где #2 — 27Г известно.
Поставленная задача — это задача с фиксированным
временем и свободным правым концом, функционал в этой задаче
смешанный. Преобразуем функционал в интегральный
согласно G.64):
/[*ь*2,«] = /(« + ^ + ^К G.67)
О
Третье слагаемое в подынтегральной функции можно
заменить, используя закон движения:
7.7. Неавтономные системы
259
С учетом краевых условий и заданного конечного времени
*2 = 27Г приходим к следующему виду целевого функционала:
2тг 2тг
I[xi,X2,u]= / fЗгл + — x\\dt= I Cu — x\)dt + l. G.68)
о о
Появившееся постоянное слагаемое 1 никак не влияет на
выбор оптимального решения, и его можно отбросить, заменив
исходный функционал другим:
2тг
I[xi,X2,u]= Cu — xi)dt.
о
К данной задаче применима теорема 7.8. Запишем функцию
Понтрягина:
Я = фо(Зи - Xi) + ф\Х2 + ф2{-х\ + 2u) =
= (-фо - Ф2)Х\ + ф\Х2 + C^0 + 2^2 К
Эта функция является линейной по управлению и и поэтому
достигает максимального значения либо при и = —1/2, либо при
и = 1 в зависимости от знака выражения З^о + 2^2, т.е.
f-i 3^o(t) + 2^2(t)<0;
u*(t) = J 2' ^' ^v; ' G.69)
[ 1, 3^o(t) + 2^2(t)>0.
Запишем систему для сопряженных переменных:
(Фо = 0,
< ^1=^0 + ^2, G.70)
1.^2 = ~Ф\-
Общее решение системы имеет вид
>о(*) = С3,
Ф\{1) — —Cicost + C^sint,
V>2(?) = Cisint + C^cost — Сз,
260
7. ПРИНЦИП МАКСИМУМА
а учитывая краевые условия ^оBтг) = — 1, ^iBtt) = ^2B^) = 0
для сопряженных переменных на правом конце, находим С\ — 0,
С2 = -1, С3 = -1, т.е.
^о = — 1? Фг = — sini, /02 = 1 — cost.
Итак, З^о + 2-02 = — 1 — 2cost, и мы можем записать
экстремальное управление, анализируя знаки функции — 1 — 2cost
(рис. 7.13):
_1
2'
1
27Г
3
47Ti
3
2тг' t
1,
1
2'
0 < t < |тг;
з7Г<^з7г;
G.71)
|тг < t ^ 2тг.
Рис. 7.13
Поскольку найдено лишь одно
управление, удовлетворяющее
принципу максимума, оно и будет оптимальным при условии, что
оптимальное управление в данной задаче существует.
Определим экстремальную траекторию, соответствующую
найденному управлению. Для этого необходимо решить систему G.65)
при двух возможных значениях и. На промежутке [0, -7г] при
и = —1/2 имеем систему
G.72)
Х2 = —Х\ — 1,
решая которую, получим
xi(t) = С\cost + С2sint — 1, X2(t) = —Cisint + C^cost. G.73)
Из начальных условий х\@) = —1, #2@) — 1 определяем
постоянные интегрирования Ci и С2. С учетом этих постоянных
имеем
xi(t) =sint-l, x2(t) = cost. G.74)
7.7. Неавтономные системы
261
Очевидно, что при движении по найденной траектории в мо-
2
мент времени t = -тг фазовая точка будет находиться в
состоянии
Х1(Ь) = -?-1> Х2{
!(г) = 4
(Ь
:7Г
оптимальная траектория опреде-
На промежутке
ляется системой
Общее решение этой системы имеет вид
Xl(t) = Cxcos? + C2sin? + 2, x2(t) = -Cxsin? + C2cos?. G.75)
Подставляя в общее решение найденные значения жх, ж2 при t =
2
= -7г, получим систему относительно неизвестных постоянных
2 2 2 2 2 2
о о /*э
Решая эту систему, находим С\ = -, С2 = 1 — —г—. Следователь-
/2 4 '
но, на промежутке ( -7г, -7г
' 3
x\{t) = -cost +
оптимальной будет траектория
x2(t)
¦sint +
(l-2|5)Smt + 2,
(l-^)cos,
G.76)
На промежутке ( -7г, 27Г
оптимальная траектория
удовлетворяет той же системе G.72), что и на первом участке, и,
следовательно, имеет вид G.73). Согласно G.76), при t = -тг
имеем
XI
(г)
7-^3
Ж2
/4
(*)
Зл/3-1
262
7. ПРИНЦИП МАКСИМУМА
Как и выше, составляем систему относительно неизвестных
постоянных С\ и С<1'-
fW3 1
Зл/3-1 л/3
\/3
С2-1,
2 2 Cl " 2°2-
Решая ее, находим С\ — О, С2 = 1 — Зл/3. Таким образом,
последний участок траектории описывается системой
Xl(t) = A -3\/3)sint- 1, x2{t) = A - Зл/3)соз*. G.77)
Из соотношений G.74), G.76), G.77) следует, что
оптимальная траектория состоит из дуг трех окружностей (рис. 7.14).
Рис. 7.14
2
На первом участке 0 ^ t ^ -тг оптимальная фазовая кривая
описывается уравнением
(ж! + 1J+^ = 1,
7.8. Понятие особого управления
263
на втором участке -7г < t ^ -ж — уравнением
(ж! - 2J + х\ = 10 - 3^3,
4
на третьем участке -7г < ? ^ 27Г — уравнением
о
(хг + 1J + х1 = A-Зл/3J.
Движение по дугам фазовой кривой осуществляется
согласно направлению вектора фазовой скорости, т.е. по часовой
стрелке.
7.8. Понятие особого управления
Принцип максимума Понтрягина не позволяет однозначно
выделить оптимальное управление, если максимум функции
Понтрягина Н по управлению достигается более чем в одной
точке на целом промежутке времени. В большинстве случаев
подобная ситуация говорит о наличии особых управлений.
На практике нередко встречаются задачи оптимального
управления, в которых функция Понтрягина линейно зависит
от всех управлений или хотя бы от некоторых из них.
Таковы, например, линейные задачи оптимального
быстродействия. В примерах линейных задач, рассмотренных выше
(см. 7.5), коэффициент при управлении зависел только от
решения сопряженной системы и мог обращаться в нуль лишь в
изолированные моменты времени. Благодаря этому
оптимальное управление однозначно определялось из условия максимума
функции Понтрягина. Эта ситуация типична для линейных
задач оптимального управления.
Однако в нелинейных задачах оптимального управления
(например, если функция Понтрягина является нелинейной по
одной или нескольким фазовым переменным) возможна
ситуация, когда на оптимальной траектории коэффициент при
одной из компонент вектора управления и обращается в нуль
264
7. ПРИНЦИП МАКСИМУМА
на целом промежутке времени, и тогда условие максимума
функции Н по управлениям не позволяет однозначно
определить оптимальное управление.
Пример 7.5. Рассмотрим задачу оптимального управления
с законом движения
(*1=Ж2' G.78)
[Х2 =Щ
целевым функционалом
1[х,и] = / (x2Jdt,
h
краевыми условиями
xi(ti)=x\, x2{ti)=x\, xi(t2) = x2(t2) =0 G.79)
и ограничением на управление \и\ ^ 1. Начальный момент
времени t\ считаем фиксированным.
Поставленная задача отличается от рассмотренной в 7.5
лишь целевым функционалом. Посмотрим, к чему это
приводит. Составляем функцию Понтрягина
Н = фо(х2J + ф\х2 + ф2и
и записываем сопряженную систему
Г^о = 0,
< Ф\ = 0, G.80)
[ф2 = -2ф0х2-ф1.
В каждой точке ?, в которой ф2^) ^ 0, функция Понтрягина
имеет по управлению единственную точку максимума, и в этом
случае u*(i) =sign/02(t), т.е. ситуация здесь такая же, как и в
задаче оптимального быстродействия (см. 7.5). Значит, на
7.8. Понятие особого управления
265
интервалах времени, на которых ip2(t) ф О, оптимальные
фазовые кривые являются дугами парабол вида G.50) или G.51).
Однако возможна ситуация, когда ip2(t) = 0 на некотором
отрезке [?', t"] С [?]_, *2]- Покажем это.
Из первых двух уравнений системы G.80) имеем ^о(^) —
= Со = const, ipi(t) — С\— const. Подставляем найденные
функции в третье уравнение:
^2 = -С1-2С0ж2. G.81)
Предположим, что принципу максимума удовлетворяет
траектория ж*(?), на которой X2{t') = 0 для некоторого момента
времени t' Е [^ъ^]- Такую траекторию можно построить из
дуг парабол семейств G.50) и G.51). Если этой траектории
соответствует вектор сопряженных переменных &(tf) с ^\{t') =
= С\ = 0 и ip2(tr) =0, то в точке tf выполнены соотношения
[VIII]:
Это и может означать существование некоторого отрезка [?' tff],
на котором ip2(t) =0. #
Ситуация, описанная в примере, получила название
особого режима. Опишем такую ситуацию в общем случае.
Рассмотрим автономную задачу оптимального управления
G.1)-G.4), в которой функция Понтрягина Н линейна по части
компонент управляющего вектора. Выделим из этих компонент
группу из г\ управлений и обозначим ее через и, а остальные
Г2 = г — г\ управлений соберем в вектор v, он может включать
и часть управлений, по которым функция Н линейна. Удобство
такого разделения управлений будет видно ниже при
формулировании определений. При таких обозначениях закон движения
системы можно записать в следующем виде:
х = f(x,u,v),
266
7. ПРИНЦИП МАКСИМУМА
а функцию Понтрягина — в виде
п
H(\l/,x,u,v) = У~]щ(Ф,х,у)щ + ао(Ф,х,у)
г=1
Так как
— = а*($,ж,«), г = ±7п, G.82)
то, вводя обозначение
<9Я _ /ЭЯ дН
ди \ди\' '"' <9и
п
запишем функцию Я в виде
тт дН
Я= —— и + ао.
ои
Предположим, что область управления задачи есть
декартово произведение U х V, где U С W1 — область допустимых
значений вектора и, а V Е КГ2 — область допустимых значений
вектора v.
Пусть процесс (ж(?), ix(?), «(?)) совместно с решением &(t) =
= (^0(^M •••? Фп{Ъ)) сопряженной системы
^ = —^1 i = 0ji, G.83)
удовлетворяет принципу максимума и при этом во всех точках
некоторого промежутка [?', t"] С [?i, ?2] выполняется равенство
— {?(t),x(t)Mt))=0, G.84)
или, учитывая G.82),
a($(t),x(t),v(t)) =0, G.85)
где а = (ai, ..., аГ1). В этом случае вектор управлений u(t)
называют особым управлением в промежутке [?', t"\, процесс
7.8. Понятие особого управления
267
(ж(?), гх(*), v(t)) — особым режимом, траекторию x(t) —
траекторией особого режима, а промежуток времени [?7, t"] —
участком особого управления (режима).
Из формулы G.85) вытекает, что на участке особого
режима
H(*{t),x{t)w)=H(*(t),x(t),v),
т.е. функция Понтрягина не зависит от и и условие максимума
по и не дает никакой информации о конкретных значениях
управлений в этом векторе.
Поскольку на участке особого режима верно тождество
вн
G.84), то ^— как вектор-функция времени тождественно равна
нулю, а потому равна нулю и ее производная по времени.
Значит, вектор-функции #(?), x(t), u(t) могут принимать
только такие значения, которые удовлетворяют соотношению
в котором производная по времени есть полная производная в
силу систем G.1) и G.83). Если левая часть этого равенства
не зависит от 16, то для определения особого управления можно
взять следующую производную и приравнять нулю:
dt2 V ди ) ~ '
и т.д. Эти соотношения совместно с условием G.84) позволяют
выделить все особые режимы.
Пример 7.6. Продолжим обсуждение задачи из примера
7.5 и найдем в этой задаче особые режимы. Так как
Я(ФГ, Ж, и) = ^0^2 + Ф\Х2 + Ф2Щ
то —— = -02, и производные по времени этой функции в силу
систем G.78) и G.80) равны
d (дН\ , о , d2 (дН\
Jt ^ J= ~ф1 ~2^ *р [к)= -2ф°и-
268
7. ПРИНЦИП МАКСИМУМА
Поэтому на участке особого режима должны выполняться
равенства
ф2{1) = 0, -^i(t) - 2ф0(t)x2(t) = 0, -2ф0(t)u(t) = О,
или, с учетом фо^) = Со, ф\^) = Ci, что следует из сопряженной
системы,
ф2A) = О, d + 2C0x2(t) = 0, u(t) = 0. G.87)
Согласно условию 2° теоремы 7.1,
maxH($(t),x(t),u) = М($(*),ж(*)) =0, te [*i, t2].
Значит, на участке особого режима выполняется равенство
ll>0(t)xl(t)+ll>1(t)x2(t)=0,
или, с учетом фо^) = Со, V'lW = Ci,
C0^(t) + Ci^2(t)=0. G.88)
Из условия &(t) ^ О следует, что Со и Ci одновременно не
обращаются в нуль. Тогда, согласно G.87) и G.88), на участке
особого режима
Ci = 0, x2(t)=0. G.89)
Из системы G.78) вытекает, что x\(t) =0. Поэтому x\(t) =
= const, te [*',*"].
Итак, на участке особого управления обе фазовые
координаты остаются постоянными. Фазовая точка на таком участке,
попадая на ось Oxi, остается на этой оси неподвижной на весь
период особого режима. Фазовой траектории особого режима
соответствует единственная точка на указанной оси. Обратим
внимание, что такое „стояние" в точке оси не влияет на
значение целевого функционала, так как в течение всего времени
особого режима подынтегральная функция х\ целевого
функционала равна нулю.
7.8. Понятие особого управления
269
Теперь мы можем полностью описать все допустимые
процессы, удовлетворяющие принципу максимума. Оптимальное
управление может принимать лишь значения 1 и —1 на обычных
(неособых) участках, а также значение 0 на участке
особого режима. Если, двигаясь по оптимальной траектории, мы
достигнем оси Oxi (тогда х% = 0), то в достигнутой точке
можем устроить стоянку, причем любой длительности, так как
участок особого режима может быть произвольным. Эта
стоянка и ее длительность не отразятся на значении целевого
функционала. Для описанного процесса существует ненулевой
сопряженный вектор #(?), удовлетворяющий принципу
максимума.
Выясним, сколько нулей может иметь функция ip2(t), для
чего используем второе соотношение в условии 2° теоремы 7.1.
Согласно этому соотношению, ^о ^ 0 и, значит, Со ^ 0. Из
равенств
Х2 = U = Sgn^2(t), ф2 = —С\ - 2CqX2
вытекает, что
^2 + 2C0sign^2 = 0. G.90)
Покажем, что при Со ^ 0 решение такого уравнения может
менять знак при t Е [?i, ?2] не более одного раза. Предположим,
что ip2(t) обращается в нуль в точках ?7, t". Умножим уравнение
G.90) на tp2(t), учтем, что
^2^2 = ^7(^2^2) - (^2) ,
и проинтегрируем уравнение G.90) на отрезке [?', t"\.
t" t"
- f{ip2Jdt + 2C() [\il>2(t)\dt = 0. G.91)
a f
При Co ^0 в левой части полученного равенства — сумма
двух неположительных слагаемых. Поэтому равенство верно,
270
7. ПРИНЦИП МАКСИМУМА
когда каждое из этих слагаемых равно нулю, и мы приходим к
выводу, что t/j2(t) — 0 на всем отрезке [?', t"].
Итак, функция ip2(t) обращается в нуль либо в единственной
изолированной точке, либо на одном отрезке [t',t"]. Так как
u*(t) = sign ^2(^M т0 управление u*(t) имеет не более одной
перемены знака. Такое управление относится к одному из двух
следующих типов:
«*(*)
1, h<t<t';
0, t' <t< t";
-1, t"<t<t2,
или
"*(*)
-1, ?i <?<?';
0, t' < t < t";
1, t"<t<t2.
Значение t' соответствует моменту времени, когда X2(t)
обращается в нуль, а значение t" — любое на отрезке [?7, ^].
Теперь уже не составляет труда найти оптимальное
управление и оптимальные траектории для конкретных начальных
условий (х\, х^)- Наличие участка особого управления не
изменит вид фазовых кривых, так как на таком участке фазовая
точка не перемещается, а стоит на месте. Фазовые кривые
будут те же, что и на рис. 7.9 (см. 7.5). Но оптимальным
фазовым кривым, пересекающим ось Oxi, соответствует
бесконечно много оптимальных процессов, каждый из которых
получается „вклеиванием" участка особого управления в
момент достижения указанной оси. Длина участка может быть
произвольной. Такое „вклеивание" не меняет значение
целевого функционала. Существование особого режима приводит
к тому, что рассматриваемая задача при некоторых краевых
условиях имеет бесконечно много решений.
Вопросы и задачи
271
Понятие особого управления впервые ввел Л.И. Розоноэр*,
и это послужило началом целого направления в теории
оптимального управления.
Вопросы и задачи
7.1. Решите следующие задачи оптимального
быстродействия:
а) Г XI = х2 - 2, ^h) = ^h) = ^ ^h) = _1} ^{h) = ^
{ Х>2 — ^
б) Г xi = Х2 + 2, ^{h) = ^{h) = ^ ^{h) = _^ ^{h) = ^
|«|<2;
в) Г xi = х2 - 1, = = ^ = =
г) Г xi = х2 + щ, a,i(ti) = я2(<1) = ^ ж1(<2) = ^ ж2(<2) = _2?
[ Х2 = ^1 +1^2,
|^i| < 2, |ii2| < 2;
д){t1 = ntМь Xl(tl) = _2' X2{tl) = 2' Xl(t2) = 2'
[ Ж2 = ^1 +1^2,
7.2. Решите задачу оптимального быстродействия с правым
подвижным концом
Г1=Ж2' zi(<i)=4,a;2(ti) = -3, h(i2)]2+h(i2)]2 = 4,
[ж2 = -Ж1+г*,
*См. Розоноэр Л.И. A959 г.), а также: Габасов Р., Кириллова М.Ф.
272
7. ПРИНЦИП МАКСИМУМА
7.3. Решите следующие задачи оптимального управления с
фиксированным временем:
7Г
а) / xsintdt —> min, х — и^ х(тг) = х(—тг) = 0, \и\ < 1;
— 7Г
4
о
7.4. С помощью принципа максимума запишите полную
систему необходимых условий в следующих задачах
оптимального управления (ж}, х\, х\, х?>, Т заданы):
т
а) Judt+[x2(T)]2^ mm, {** I ~f+2u> *i@) =*1,
0
^2@) = x\, \u\ ^ 1;
т
б) Judt+[Xl@)]2^mm, {f22X_^i+UjXi(T)=xl
0
ж2(Т)=ж|, |u| ^1.
7.5. Исследуйте на наличие особого режима задачу
оптимального управления (х\, х\, ?2 заданы):
о
xi(t2) = ж2(?2) = 0, \и\ ^ 1.
7.6. В задаче о быстрейшей остановке движущейся точки
аданно
эизволь
(о, о)т.
в заданном месте вычислите минимальное время движения из
произвольной точки х1 = (х\, х^) в начало координат х2 =
Вопросы и задачи
273
7.7. Найдите оптимальное управление u*(t), оптимальную
траекторию x*(t) и время Т в задаче
т
|A + М)(Й-ипш, [%1Х^ Ж1(°) = 12'
о
ж2@) = жх(Т) = ж2(Т) = 0, |u| ^ 1.
7.8. Найдите оптимальное управление u*(t) и оптимальную
траекторию х* (?) в следующих задачах оптимального
управления:
1
а)
о
/якй-ишп, {Ж1 Ж2' a;i@) + xi(l)=0,
J { ж2 = и,
ж2@) + ж2A) = 0, |«|<2;
б) ж2(тг)->тш, |Ж1 = Ж2' ^i(O) = ж2@) =0, |п| < 1,
[ Ж2 = —Ж1 +«,
<€[0,27г].
8. МЕТОД ДИНАМИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
Одновременно с принципом максимума Понтрягина и
независимо от него в теории оптимального управления коллективом
американских ученых во главе с Р. Беллманом был разработан
метод динамического программирования. Этот метод
более универсален, чем метод, использующий принцип
максимума. Он был разработан для нужд оптимального управления
процессами более общего характера, чем процессы,
описываемые системами дифференциальных уравнений, и позволяет
решать большой круг задач оптимального управления
дискретными системами, т.е. системами которые описываются
разностными уравнениями. В этой главе мы обсудим основные
идеи динамического программирования.
8.1. Принцип оптимальности
В основе метода динамического программирования лежит
сформулированный Р. Беллманом принцип
оптимальности. Этот принцип верен для тех систем, последующее
движение которых полностью определяется их состоянием в текущий
момент времени. К таким системам относятся, например,
управляемые системы, т.е. системы, которые описываются
системой дифференциальных уравнений
* = /(*, и), (8.1)
где х = (хъ ..., хп) ; / = (Д, ..., fn) ; и= (иъ ..., иг) .
Состояние такой системы описывается точкой х фазового
пространства, а движение — это некоторая траектория x(t) в
8.1. Принцип оптимальности
275
фазовом пространстве (фазовая траектория). Принцип
оптимальности также распространяется на дискретные системы,
которые описываются конечно-разностными уравнениями. В
таких системах роль времени играет дискретный параметр.
Принцип оптимальности отражает важнейшие особенности
задач оптимального управления. Его суть можно объяснять
по-разному. Ввиду его важности приведем несколько
формулировок.
Первая формулировка. Если управление оптимально, то,
каковы бы ни были первоначальное состояние системы и
управление системой в начальный момент времени, последующее
управление оптимально относительно состояния, которое
система примет в результате начального управления.
Указанное свойство — одно из основных для процессов
марковского типа, т.е. процессов, будущее поведение которых
полностью определяется состоянием и управлением в настоящее
время.
Вторая формулировка. Оптимальное управление в
любой момент времени не зависит от предыстории системы и
определяется только состоянием системы в этот момент и
целью управления.
Под целью управления в данном случае понимается
требование, которому должна удовлетворять система, движение
которой определяется управлением. Это может быть приведение
системы в заданное состояние или обеспечение определенных
условий движения в течение заданного периода времени.
Еще один вариант принципа оптимальности дадим для
задачи оптимального управления с фиксированным временем и
свободным правым концом. Пусть закон движения
описывается автономной системой дифференциальных уравнений (8.1),
причем заданы начальный t\ и конечный ?2 моменты времени,
а также начальное состояние x{t\) = ж1. Целевой функционал
276 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
определим следующим образом:
*2
I[x,u]= ff°(x,u)dt. (8.2)
Третья формулировка. Начиная с любого момента
времени t' Е [*i, *г] ? участок оптимальной траектории ж*(?), t Е
Е [ii, ?2] от точки ж*(?7) до точки
ж* (?2) также является оптималь-
нои траекторией (рис. 8.1).
Другими словами, каково бы
ни было положение точки ж*(?7)
xi = x*(t )
на оптимальной фазовой траек-
t тории, ее участок от точки ж*(?7)
^ _ (участок 2 на рис. 8.1) тоже явля-
Рис. 8.1 u о
ется оптимальной траекторией.
Что же касается участка 1 оптимальной траектории до точки
ж*(?7), то можно утверждать, что этот участок есть
оптимальная траектория, когда точка ж*(?7) = х' является
фиксированной (как, например, в многоточечных задачах управления), т.е.
когда по условию задачи допустимая траектория
обязательно должна проходить через точку х'. Если же задана только
начальная точка x*(ti) = ж1, то участок 1 оптимальной
траектории сам по себе может и не быть оптимальной траекторией,
т.е. может не доставлять максимум функционалу
О
Ji[x,u] = / f°(x,u)
h
в задаче со свободным правым концом.
Таким образом, важно иметь в виду, что принцип
оптимальности относится к последующему за данным состоянием
движению системы, но может нарушаться для движения,
предшествующего данному состоянию.
8.1. Принцип оптимальности
277
Принцип оптимальности в третьей формулировке для
некоторого класса задач уже обсуждался в качестве свойства
оптимальных траекторий (см. 7.1). Отметим еще одну
особенность оптимального управления, вытекающую из принципа
оптимальности: выбор оптимального управления определяется
лишь состоянием системы в текущий момент времени. Если в
какой-то период времени управление было неоптимальным, то
последствия этого в будущем исправить уже нельзя.
Пример 8.1. Рассмотрим простейший вариант
дискретной задачи распределения ресурсов и покажем, как можно
использовать принцип оптимальности.
Производственно-экономический процесс состоит в следующем. Некоторая начальная
сумма денег s = х\ затрачивается на приобретение
оборудования двух типов А и i?, с помощью которого организуется
производство. Пусть на оборудование типа А выделена сумма
?ii, 0 ^ щ ^ Ж1, тогда за определенное время его
эксплуатации будет получен экономический эффект д{и\). Оставшаяся
сумма х\ — щ пойдет на приобретение оборудования типа Б,
которое за тот же период времени даст экономический эффект
h{x\ —щ). К концу срока эксплуатации суммарный
экономический эффект составит
Ri(xi,ui) = g(u1) + h(x1 -щ).
По истечении срока эксплуатации оборудование реализуют, за
оборудование типа А выручают сумму au\, 0 < a < 1, а за
оборудование типа В — сумму Ь{х\ — и\), 0 < b < 1. Этим завершается
первый цикл производства. Вырученную от продажи
оборудования сумму
Х2 = au\ + Ъ(х\ — щ)
используют как стартовую для организации второго цикла
производства. Из нее на оборудование типа А выделяется сумма
Щ, 0 ^ U2 ^ Ж2, а оставшаяся сумма Х2 — U2 идет на
приобретение оборудования типа В. Следующий цикл эксплуатации
278 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
оборудования даст экономический эффект 3(^2) + h(x2 —щ) и
остаточную сумму х% = ащ + Ь(х2 — г^) за проданное
оборудование. Описанный цикл производства многократно повторяется.
Считая известными функции #(?), /&(?) и постоянные s, а,
6, найдем такую стратегию распределения средств при
покупке обрудования типов А и В, чтобы обеспечить наибольший
экономический эффект за фиксированное количество п
производственных циклов. Другими словами, надо так выбрать
значения щ, ..., ип в допустимых пределах, чтобы получить
максимум величины
п
Rn(s,uuu2,...,ип) = ^2(д(ик) + h(xk -ик)), (8.3)
к=1
где
x1=s, xm+i=aum + b(xm-um), 0^um^xm, m = l,n.
Мы пришли к дискретной задаче оптимального управления.
Параметры г^х, U2, • ••, %, которые нужно определить, решая
задачу, есть управление, неравенства 0 ^ ит ^ жш, га = 1, п,
описывают область допустимого управления, а суммарная
величина (8.3) есть целевой функционал. Отметим, что для
планирования процесса на к-м цикле необходимо знать лишь
величину хк и число п — к оставшихся циклов. Процесс планирования в
предыдущие циклы никак не влияет на планирование в текущем
цикле, т.е. 55история" процесса не имеет значения. Основной
интерес в этой задаче представляет не значение
максимального экономического эффекта, а процедура его достижения,
или, другими словами, оптимальная стратегия распределения
средств.
Принцип оптимальности предполагает использование
хорошо известного приема, состоящего в планировании от конца
к началу. Рассматривая последний n-й цикл, найдем значение
оптимального управления ип как функцию состояния процесса
8.1. Принцип оптимальности
279
на начало этого цикла. Это позволит распределять средства на
этом цикле в зависимости от их количества хп. Затем,
используя оптимум последнего цикла, найдем оптимальную
стратегию на двух последних циклах как функцию состояния процесса
на начало предпоследнего цикла. Для этого достаточно найти
величину un-i как функцию хп-\. Процедуру повторяем для
трех последних циклов, четырех и так далее до тех пор,
пока не охватим все циклы. На последнем шаге, найдя щ как
функцию х\ и зная фактическое значение х\ — s, мы сможем
вычислить всю серию значений щ, и^^ ..., ип, т.е. определить
оптимальную стратегию.
Итак, на n-м цикле в зависимости от хп максимальный
экономический эффект равен:
Гп(хп) = max (g(un) + h(xn-un)),
а значение гл*(жп), на котором достигается этот максимум,
является искомым оптимальным значением в зависимости от
хп. Считая, что на последнем цикле ип = и^{хп) и достигаемый
экономический эффект равен гп(жп), ищем максимум:
rn-i(xn-i)= max [g(un-i) + h(xn-i-un-i)+rn(xn)] =
- max
g(un-i) + h(xn-i-un-i) +
+ rn (aun-i + h(xn-i - un-i))
Найденный максимум rn-\(xn-i) и соответствующее значение
i/*_1, при котором он достигается, позволяют перейти к
следующему этапу.
Продолжая продвигаться к началу процесса, мы на к-м
этапе ищем максимальный экономический эффект гт(жт), m =
= п — к -\-1, за последние к производственных циклов в зависи-
280 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
мости от средств хт на начало m-го цикла по формуле
гт(хт) = „max \д(ит) + h(xm - ит) +
+ rm+i(aum + b(xm-um))\, т = п-к + 1, к = 1,п. (8.4)
Соотношение (8.4) — это рекуррентное соотношение
Беллмана для рассматриваемой задачи. Оно сводит задачу
оптимизации на к последних циклах к оптимизации на первом
из них с учетом уже найденной оптимизации на к — 1
последних циклах. Величина r\(xi) представляет собой суммарный
экономический эффект за все п производственных циклов в
зависимости от стартового значения х\. Задача отыскания
максимума функции п переменных с очень сложной
зависимостью свелась к п последовательным задачам поиска максимума
функции одного переменного.
Изложенный метод решения дискретных задач
оптимального управления можно использовать в непрерывных задачах
оптимального управления, но для этого непрерывную задачу
нужно заменить близкой ей дискретной задачей (эту замену
называют дискретизацией исходной задачи). Пусть система
имеет закон движения
x = f(x,u), xeR, wGl, (8.5)
и задано начальное состояние х@) = х° системы. Для
управления u(t) (как и выше, это кусочно непрерывная функция) введем
ограничение \и\ ^ 1. Время движения Т = t2 — t\ считаем
фиксированным. Так как система автономна, можно считать, что
t\ = 0. В качестве целевого функционала возьмем
т
1[х,и]= Г f°(x,u)dt. (8.6)
о
Для замены поставленной непрерывной задачи
оптимального управления близкой ей дискретной выберем некоторое
8.1. Принцип оптимальности
281
натуральное число N и разобьем отрезок [О, Т] на N участков
одинаковой длины 5 = T/N. Будем искать значения функций
лишь в дискретные моменты времени t = Ы, к = О, N. Вместо
х(к5) и u(kS) будем писать хк и ик соответственно.
Дифференциальное уравнение (8.5) заменим разностным, аппроксимируя
первую производную в дискретные моменты времени согласно
формуле
dx ^ хк+1 -хк
dt~ S
В результате получим
xk+i=xk + f(xk,ukM, к = О, N-1. (8.7)
Заменим также целевой функционал (8.6) интегрального
типа соответствующей интегральной суммой
N-1
I(x°,...,xN-i,u0,...,uN-i) = ^2f°(xk,ukN. (8.8)
к=0
Итак, мы пришли к дискретной задаче, в которой нужно
найти такое управление (зд, щ, ..., un-\), которое
удовлетворяет ограничению \ик\ ^ 1, А; = О, 7V— 1, и минимизирует
функционал (8.8) при начальном условии xq = х°. Эта задача тем
лучше аппроксимирует исходную задачу (8.5), (8.6), чем
больше число N.
Так как функционал (8.8) рассматривается только при
значениях хк и ик, удовлетворяющих закону движения (8.7), мы
можем опустить в его аргументах жх, ..., ждг_х, т.е. будем
писать I(x®,U$,...,U]S[-l). Положим, что
N-1
lN-m(xN-m,UN-m,---'>UN-l)= ^2 f°(xkiuk)8, Ш = 1, TV,
k=N-m
где ждг-ш+х7 •••? xn-i определяются согласно рекуррентным
формулам (8.7). Другими словами, In-ш — это часть
интегральной суммы в представлении целевого функционала (8.8),
282 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
относящаяся к моментам времени t = Ы, /c = 7V — m, 7V — 1,и
вычисленная в зависимости от состояния хн-т системы в момент
времени t = (N — тM.
Обозначим
I^N—m
\UN-m\^
Применим описанный выше прием оптимизации от конца к
началу в рассматриваемой дискретной задаче. Согласно
принципу оптимальности, управляющее воздействие u*N_1 должно
быть выбрано так, что
Vn-i(xn-i) = IN-i(xN-i,u:"N_1) = min In_i(xn-i,un-i)-
\uN-i\^l
Для простоты считаем, что указанный минимум достигается
в единственной точке и значение u*N_1 определено однозначно,
т.е. тем самым определена функция u*n_1(xn-i).
На следующем этапе рассматриваем оптимизацию In-2,
захватывая два отрезка времени от (N — 2N до N6. Так как
lN-2(xN-2,UN-2,UN-l) = f° (xN-2,UN-2)$ + In-1 (xN-1, UN-l),
задача сводится к определению u*N_2, для которого
HN-2{xN-2) = lN-2(xN-2,U*N-2iu*N-l) =
= min [f°(xN-2,UN-2N + iN-iixN-iiUx^)],
где xn-i выражается через x^-2 и uN-2, согласно закону
движения (8.7) при к = N — 2, a u*N_r = u*n_1(xn-i). Тем самым
найдено оптимальное управление на двух последних отрезках
времени в зависимости от того, какое состояние х^-2 получит
система на момент времени (N — 2N.
Повторяем процедуру, последовательно добавляя частичные
отрезки времени. На к-м этапе нам необходимо определить
8.2. Уравнение Беллмана
283
оптимальное управление uN_k из условия
^N-k(xN-h) = lN-k(%N-k,V>N-kiu*N-k+li- • -iu*N-l) =
= mm
|WiV_fc|^l
f0(xN-k,uN-k) +
+ lN-k+l(xN-k+UU*N-k+l>- • • >4/V-l) I 5 k = 2,N, (8.9)
где значение xjy-k+i выражается через xjy-k и ujsr-k, согласно
(8.7), следующим образом:
%N-k+l = XN-k + f(xN-k,UN-kN.
Определив на последнем этапе величину /j,q(xq) и управление
г^о, можно по известному начальному состоянию xq = ж0 найти
последовательно жх, гл*, ..., ждт_х, ^дт_х- Значение /io(x°) дает
минимальное значение функционала (8.8). Соотношения (8.9)
представляют собой рекуррентные соотношения
Беллмана для данной задачи.
Приведенный алгоритм решения задачи оптимального
управления (алгоритм динамического программирования) можно
перенести на общий случай задачи оптимального управления
с векторным законом движения (8.1). При этом на каждом
шаге нужно будет искать минимум функции г переменных,
зависящей от r-мерного вектора управления. Это приводит к
существенному возрастанию объема обрабатываемой
информации. Р. Беллман* предложил некоторые способы преодоления
подобных трудностей.
8.2. Уравнение Беллмана
Хотя метод динамического программирования
ориентирован на решение дискретных задач оптимального управления,
его идею, которая на основе принципа оптимальности дает
рекуррентные соотношения, можно использовать при изучении
*См.: Беллман Р., Дрейфус С.
284 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
непрерывных задач. Непрерывные задачи также подчиняются
принципу оптимальности. Поэтому для них можно получить
уравнение, аналогичное рекурретным соотношениям Беллмана.
Пусть система имеет закон движения (8.1), критерий
оптимальности задается целевым функционалом
т
I[x,u]= ff°(x,u)dt, (8.10)
о
где /°(ж,гх) — непрерывная функция по совокупности
аргументов, а начальное состояние равно:
ж@)=ж°. (8.11)
Время движения Т известно, а конечное состояние х(Т) —
нет. Мы имеем задачу с фиксированным временем и свободным
правым концом.
Пусть ж*(?), tE [0, Т], — оптимальная траектория,
соответствующая оптимальному управлению u*(t). Выберем
некоторый момент времени г Е [0, Т] и соответствующую точку
? = ж*(т) на оптимальной траектории. Согласно принципу
оптимальности, участок траектории x*(t) от точки ? до
точки х*(Т) является оптимальной траекторией. Это значит, что
этот участок доставляет наименьшее значение функционалу
т
1т[х,и] = / f°(x,u)dt
т
среди всех допустимых процессов (ж(?), u(t)) на отрезке
времени [т,Т] с начальным состоянием х(т) = ?.
Положим
т
Тогда при ? = х° и т = 0 мы получим величину /л(ж°,0),
представляющую собой наименьшее значение функционала (8.10).
8.2. Уравнение Беллмана
285
Будем предполагать, что для любой точки ? фазового
пространства и любого момента времени т Е [О, Т] существует
оптимальная траектория (т.е. доставляющая наименьшее
значение функционалу /т(ж,гх)) с начальным условием ж(т) = ?.
Тем самым функция /i(?,r) определена всюду на декартовом
произведении М71 х [О, Т]. Обозначив аргументы этой функции
через ж и ?, будем называть /л(ж,?) функцией Беллмана.
Согласно данному определению, функция Беллмана в точке
(ж, ?), 0 ^ t ^ Г, равна наименьшему значению функционала
It[x,u] на всех допустимых процессах с начальным состоянием
x(t) = ж.
Пусть (ж*(?), 1б*(?)), 0 ^ ? ^ Т, — оптимальный процесс
и оптимальная траектория ж*(?) удовлетворяет начальному
условию ж*@) = ж0. Тогда
т т
/Дж°,0)= jnin /"f°(x(t),u(t))dt= ff°(x*(t),u*(t))dt.
(o^t^T) о 0
Для произвольного момента времени г Е [О, Т] участок
оптимальной траектории от точки ж*(т) до точки ж*(Т) сам по себе,
согласно принципу оптимальности, является оптимальным, т.е.
т т
»(х*(т),т) = mm Jf°{x(t)Mt))dt = Jf°{x*(t),u*(t))dt.
Рассмотрим приращение Ат и соответствующий этому
приращению момент времени т + Ат. В силу аддитивности
определенного интеграла имеем
г
ц(х*(т),т) = J f°{x*(t),u*(t))dt =
т
т+Ат Т
= | /0(**(*),«*(*))<** + | f°(x*(t),u*(t))dt. (8.12)
т т+Ат
286 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Согласно принципу оптимальности, участок оптимальной
траектории от точки ж*(т +Ат) до точки х*(Т) сам является
оптимальной траекторией, т.е.
т
J f(x*(t),u*(t))dt =
т+Ат
Т
min / f(x(t),u(t))dt = fi(x* (т + Ат),т + Ат).
(т+Аг^^Т)т+Дт
Учитывая последнее равенство, соотношение (8.12) можно
преобразовать к виду
т+Ат
/Дж*(т),т) = /,/0(^*(t),u*(t))rft + /i(^*(T+AT),T+Ar). (8.13)
т
Второе слагаемое в (8.13) зависит от состояния системы
ж*(т+Ат). В это состояние, в свою очередь, система попала под
действием управления гх*(?), действовавшего на интервале
времени [т, т + Ат]. Следовательно, значение /л(ж*(т+Дт),т + Ат)
определяется выбором управления на отрезке [т, т + Ат].
Чтобы представить это, рассмотрим различные допустимые
управления u(t) на отрезке [т, т + Ат]. Им будет соответствовать
пучок траекторий ж(?), исходящих из точки х*(т) на
оптимальной траектории (рис. 8.2).
На каждой траектории из этого пучка фазовая точка
займет в момент времени т + Ат некоторое положение ж(т +Ат).
Выберем управление u(t) на отрезке [т + Ат, Т] так, чтобы
траектория x(t) на этом участке была оптимальной, т.е. выбранное
управление обеспечивает минимум функционалу
т
1Т+Ат[х,и}= J f°{x(t)Mt))dt. (8.14)
т+Ат
8.2. Уравнение Беллмана
287
о
•^а:*(т+Ат)
**@)
**(Т)
Рис. 8.2
Такой выбор управления определяет дальнейшее продолжение
каждой траектории рассматриваемого пучка (см. рис. 8.2). При
этом минимальные значения функционала /т+дт[ж,гх] вдоль
траекторий пучка различны и зависят от точки х(т + Ат):
т
min / f0(x(t),u(t))dt = Li(x(T + AT),T + AT).
(г+Ат^<Т) Т+Дт
Положение точки ж(т +Ат) определяется выбором управления
u(t) на отрезке [т, т+Ат]. Поэтому значение //(ж(т+Ат),т+Ат)
зависит от управления гх(?), ? Е [т, т + Ат].
Рассмотрим значения функционала /т[ж,гх] на траекториях
пучка, построенного выше. Учитывая, что участок каждой
траектории x(t) пучка от точки х(т + Ат) до точки х(Т)
оптимален, т.е. доставляет наименьшее значение функционалу
/т+дт[ж,гх], получаем
т+Ат
IT[x,u]= Г f°(x(t),u(t))dt + v(x(T + AT),T + AT). (8.15)
Выберем минимальное из значений /т[ж,гх]. Так как оба
слагаемых в (8.15) справа зависят только от выбора управления u(t)
288 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
на интервале [т, т + Ат], то и минимальное значение /*
определяется выбором управления на этом интервале, т.е.
/* = min IT\x.u].
1 u(t)eu L J
(т^^г+Ат)
Построенный пучок траекторий является подмножеством более
широкого множества всех допустимых функций, на которых
ищется наименьшее значение функционала 1Т. Поэтому верно
неравенство
1*^ min It[x,u]=It[x*,u*]=ijl(x*(t),t). (8.16)
U[t) ? U
Но оптимальная траектория x*(t) содержится в пучке. Поэтому
в неравенстве (8.16) на самом деле имеет место равенство, т.е.
min Ir\x,u] = ц(х*(т),т),
u(t)eu L J v v у у
(r^^r + Ar)
откуда с учетом (8.15) получаем
. т+Ат
„П / , ч , ч\
и(х*(т),т) = min
I f°(x(t),u(t))dt
+ /л(х(т + Ат),т + Ат)
3.17)
Заметим, что в соответствии с (8.1)
х(т + Ат) = х(т) + х(т) Ат + о(Ат) =
= х(т) + f (х(т),и(т)) Ат + о(Ат). (8.18)
Предположим, что функция Беллмана /Ji(x,t) непрерывно
дифференцируема по всем своим аргументам. Тогда, согласно
(8.18), имеем
/л(х(т + Ат),т + Ат) =/л(х(т),т) +
П
d/j
d/j
+ 5"тгЧ /*(х(г),и(г))Дг + ^ Ат + о(Ат). (8.19)
г=1
0(т),т) V dt 1(ж(т),т)
8.2. Уравнение Беллмана
289
Введем обозначение
(gradM,/) = ?|^f
г=1
и перепишем (8.19) в виде
//(ж(г + Ат),т + Ат) = //(ж(т),т) +
+ (gradJ /(ж(г),и(г)))Дг + ^| Аг + о(Аг).
Учитывая последнее соотношение, а также то, что для
траекторий x(t) пучка имеет место равенство х(т) = ж*(т), перепишем
равенство (8.17) в виде
ll(x*(t),t) = min
v х J ' u(t)eu
. т+Ат
| /°(*(i),u(i))<ft
+
+ /i(^*(T),r) + (grad/i| /(ж*(т),г*(т))]Дт +
(ж*(т),т)
+
at
(ж*(т),т)
Ат + о(Ат)
3.20)
Согласно определению, функция /л(ж*(т),т) получена в
результате минимизации функционала /т[ж,гх] по всем
допустимым управлениям гх(?), t Е [т, Т], т.е. эта функция уже не
зависит от и. Поэтому слагаемые /л(ж*(т),т) и -^-(ж*(т),т) в правой
части равенства (8.20) можно вынести за знак минимума.
После сокращений получим
.т+Ат
~dt
At = min
(тЧт)т) u{r)eu
+ grad/i
(ж*(т),т)'
I f(x(t)Mt))dt-
T
/(х*(т)Мт)))ат + о(Ат)
290 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Предположим, что u(t) непрерывна на отрезке [т, т + Дт].
Тогда, разделив это равенство на Ат и перейдя к пределу при
Ат —> 0 (при этом lim °\ т) = 0), приходим к уравнению
Дт->-0 Ат
Беллмана
d\i
—
m
— min
(х*(т),т) <T)^U
Г(х*(т),и(т)) +
П
г=1
dxi
(х*(т),т)
f{x*(r)Mr))
, (8.21)
или
-— = mm
ot u(r)eu
/°(x(r),u(r)) + (grad/i, f(x(r)Mr)) , (8.22)
где для удобства оптимальная траектория обозначена просто
x(t). К уравнению Беллмана можно добавить краевые условия
/ДЖ,Т)=0,
(8.23)
вытекающие непосредственно из определения функции
Беллмана.
Функция /л(ж,?) в данном случае играет ту же роль, что и
функция /LtN-m(x]sr-m) в дискретном варианте динамического
программирования, а уравнение Беллмана аналогично
рекуррентным соотношениям Беллмана.
Уравнение Беллмана представляет собой
дифференциальное уравнение в частных производных относительно функции
/л(ж,?). Но это уравнение не является линейным из-за наличия
в выражении справа в (8.22) операции взятия минимума. Эта
операция фактически означает подстановку в уравнение
значения гх*, на котором достигается минимум и которое меняется в
зависимости от значений х и grad/i, т.е. фактически является
нелинейной функцией этих переменных.
Уравнение Беллмана можно использовать для решения
задачи (8.1), (8.10), (8.11) следующим образом. Если
сделанные выше преположения выполняются и /л*(ж,?) — решение
8.2. Уравнение Беллмана
291
задачи (8.22), (8.23), то сразу же получаем наименьшее
значение целевого функционала (оно равно /л*(ж°,0)). Чтобы
найти оптимальную траекторию, нужно определить оптимальное
управление и* как функцию текущего положения и
градиента grad/i*: и = й(ж, grad/i*). В результате из закона
движения при и = и (ж, grad/i*) с начальными условиями ж@) = ж0
мы получаем задачу Коши, решением которой и будет
оптимальная траектория. Зная оптимальную траекторию, мы уже
можем найти оптимальное управление как функцию времени:
г6*(t) = й(ж*(t),grad/i*(ж(t),t)).
Рассмотрим другую задачу, а именно добавим к условиям
(8.1), (8.10), (8.11) условие закрепления на правом конце
ж(Т)=жг, (8.24)
где значение хт задано, а Т заранее не известно.
В этом случае функция Беллмана зависит только от
текущего состояния ж: /i = /л(ж). Действительно, по определению
1
n(x,T) = jf°(x*(t),u*(t))dt.
Но согласно свойствам автономного процесса значение
интеграла
т
f°(x*(t),u*(t))dt
Т
при фиксированных x*(t) и u*(t) зависит только от длины
Т — т интервала интегрирования, который можно определить
из автономной системы (8.1), зная точки ж* = ж*(т) и ж*(Т) на
траектории. Значит, Т — т есть функция от этих двух точек, а
/i явно не зависит от t. Для задачи (8.1), (8.10), (8.11), (8.24) с
помощью аналогичных рассуждений можно получить уравнение
Беллмана, которое в этом случае имеет вид
mm
и(т)еи\-
f(x(r)Mr)) + (grad/i, f(x(r)Mr))
= 0.
292 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Практическая реализация предложенного метода
наталкивается на определенные трудности. Например, вид правой
части уравнения Беллмана нельзя назвать простым, так как туда
входит операция взятия минимума. Но самая главная
трудность состоит в том, что функция n(x,t) может не быть всюду
дифференцируемой (например, для линейных систем диффе-
ренцируемость нарушается в точках, принадлежащих линии
переключений). Однако дифференцируемость функции
Беллмана — одно из предположений, на которые опирался вывод
уравнения Белламана.
Пример 8.2. Рассмотрим задачу оптимальной одноосной
стабилизации космического аппарата с помощью маховика*.
Пусть космический аппарат, управляемый
гироскопом-маховиком, имеет одну степень свободы, связанную с угловым
движением аппарата вокруг неподвижной оси, проходящей
через его центр масс. Обозначим через (р угол отклонения
аппарата от заданного направления, а через ои угловую скорость
вращения маховика относительно аппарата. Тогда при
определенных допущениях движение системы космический аппарат —
маховик относительно неподвижной оси можно описать
системой уравнений
1м(и; + (р) = -га,
где /а, /м — моменты инерции соответственно аппарата и
маховика относительно неподвижной оси; га — момент двигателя
маховика.
К системе (8.25) следует добавить уравнение
электрического двигателя маховика. Если это двигатель постоянного тока,
то при некоторых допущениях момент га, развиваемый
двигателем, может быть выражен уравнением
m = k(u + lu), (8.26)
*См.: Д.8.1, а также: Летов A.M.
8.2. Уравнение Беллмана
293
где и — управляющее напряжение; к ж I — постоянные,
характеризующие данный двигатель. Будем считать, что на
управление и нет никаких ограничений.
Система (8.25) совместно с уравнением (8.26) приводится к
уравнению
1д,ф = к(и-сф).
Коэффициент с определяется из условия, что момент
количества движения всей системы космический аппарат — маховик
равен нулю:
D + ^м)^ + ^м^ = о.
Отсюда
¦^а ~г J-M . -^а ~г J-M -,
ш = <р, с=— /.
Введя фазовые переменные х\ = <р, х2 = ф, получим
стандартную форму уравнений движения:
Ь=ХЪ (8.27)
1^2 = ах2 + Ъи,
где а = --^ Ь=т.
Зададим начальное состояние системы ж@) = ж0. В
качестве целевого функционала выберем
+оо
I[x,u]= (a1x21 + a2xl + Cu'2)dt, (8.28)
о
где ai, a2, /3 — некоторые положительные постоянные.
Рассмотрим задачу нахождения управления, переводящего систему из
начального состояния ж0 в конечное ж(оо) = 0 и
доставляющего минимум целевому функционалу (8.28). Сформулированная
задача — один из вариантов задачи оптимальной стабилизации
(см. Д.8.1).
294 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Рассматриваемую задачу можно интерпретировать как
задачу с фиксированными концами и фиксированным временем
Т = оо процесса. Задача автономна, и функция Беллмана
зависит только от состояния х. Уравнение Беллмана в данном
случае имеет вид
mm
и
m(a1xl + a2xl + f3u2 + -^x2 + -^L(ax2 + bu)) = 0. (8.29)
i V ОХ\ ОХ2 /
Поскольку на управление и нет ограничений, для определения
значения й, при котором достигается указанный минимум,
приравняем нулю производную по и выражения в скобках.
Получим
~ b да
U = - — -JL. 8.30
2/3 дх2 V }
Подставив найденную функцию в уравнение (8.29), получим
нелинейное уравнение в частных производных первого порядка:
а1Ж? + «2Ж| + Ж2^ + а,2^-|(^J = 0. (8.31)
Краевые условия для функции Беллмана /j,(x(oo)) = 0 с учетом
конечного состояния ж(оо) =0 принимают вид /i@) =0.
Решение будем искать в виде квадратичной формы:
ц(хъх2) = Ах\ + 2Вхгх2 + Сх\ (8.32)
с неизвестными коэффициентами.
Подставим (8.32) в дифференциальное уравнение (8.31) и,
пользуясь независимостью переменных жх, х2^ приравняем
нулю коэффициенты при различных произведениях переменных.
Из системы трех уравнений с тремя неизвестными А, В, С
получим
А = -у a2aiC + Ъ2а2а\ -\-2baiy/aiC, В = —-—,
8.3. Уравнение Беллмана в задаче быстродействия 295
Если теперь для найденной функции \i вычислить -^- и
воспользоваться формулой (8.30), то мы получим явное выражение
для оптимального управления:
а у р V р
ъ+ ъ
V У
х2.
Оптимальное управление найдено в зависимости от фазовых
координат, т.е. решена задача синтеза. Отметим, что
синтезирующая функция линейна.
8.3. Уравнение Беллмана
в задаче быстродействия
Рассмотрим задачу оптимального быстродействия с
законом движения
x = f(x,u), ueU, (8.33)
начальным состоянием х@)=х1 и конечным состоянием х(Т) =
= х2 .
Для этой задачи с фиксированными концами и свободным
временем Т процесса функция Беллмана зависит только от
текущего состояния: /i = /i(#). Если допустить, что выполнены
оба предположения (см. 8.2) о функции /i, то необходимое
условие оптимальности сведется к уравнению Беллмана
min(l + (grad/i, f(x,u))) = 0,
uEU
ИЛИ
min(grad/i, f(x,u)) = —1. (8.34)
Краевое условие имеет вид 1л(х2) = 0.
296 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Очевидно, что если (ж*(?), u*(t)) — оптимальный процесс
с временем Т, то на отрезке [О, Т] выполняется тождество
(gradMa^)), f(x*(t),u*(t))) = -1. (8.35)
Функция 1л{х) имеет в этом случае простой смысл: ее
значение в точке х равно времени оптимального по быстродействию
перехода фазовой точки из положения х в фиксированное
положение ж2. Наглядную геометрическую интерпретацию
допускает и уравнение Беллмана. Пусть объект находится в
состоянии х. Рассмотрим в фазовом пространстве поверхность
уровня 1л(х) = ц(х) = const, проходящую через эту точку х. Эта
поверхность представляет собой множество всех точек, из
которых фазовая точка переходит в точку х2 за одно и то же
время /iBJ). Из соотношения (8.34) следует, что
max(— grad/i(af), f(x,u)) = 1.
иеи
Воспользуемся тем, что максимум в левой части равенства
достигается при значении и = и* оптимального управления,
соответствующем состоянию х. Это означает, что
^оптимальный вектор фазовой скорости" /(ж,гх*) образует с вектором
— grad/i(x) острый угол (оптимальный вектор направлен в
сторону убывания функции /i). Другими словами, фазовая точка
x(t) на оптимальной траектории перемещается в сторону
поверхности уровня функции \i с меньшим временем перехода
ц{х).
Заметим, что минимизация по и выражения в левой
части (8.34) позволяет определить оптимальное управление и*
как функцию от grad/i. При подстановке указанного
значения и* в тождество (8.35) получим не содержащее и уравнение
в частных производных первого порядка. Решение этого
уравнения должно удовлетворять краевому условию 1л(х2) =0. Если
это решение удастся найти, то будет решена задача синтеза,
так как будет найдена синтезирующая функция, или, другими
8.3. Уравнение Беллмана в задаче быстродействия 297
словами, оптимальное управление как функция фазовых
координат г?* = г/*(ж). К сожалению, получить решение уравнения
(8.35) удается лишь в простейших случаях.
Пример 8.3. Рассмотрим задачу оптимального
быстродействия с законом движения
с ограничением \и\ ^ 1 на скалярное управление u(t), с перехо-
т
дом из начального состояния х = (жх, Х2) в начало координат
(см. 7.5).
В этом случае уравнение Беллмана имеет вид
min(!^2 + !^V)=-l, (8.36)
а краевое условие таково:
//@,0) =0. (8.37)
Предположим, что функция \i непрерывна и имеет
непрерывные частные производные по х\ и Х2- Поскольку из
постановки задачи выполнение этих условий не следует, дальнейшее
решение носит эвристический характер.
Из уравнения (8.36) вытекает, что оптимальным является
управление
^ = -sign|^. (8.38)
ОХ2
Учтем это в уравнении Беллмана:
дх\
дх<2
+ 1 = 0. (8.39)
Согласно (8.38), оптимальное управление и* может
принимать значения 1 и —1. Рассмотрим на фазовой плоскости
область L-x, в которой и* = — 1, и область L\, в которой и* = 1.
298 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
В области L-i уравнение (8.39) имеет вид
а в области L\
S^-H+i=°- <-»>
!^2+*+1 = 0. (8.41)
ОХ\ ОХ<2
Решение неоднородного уравнения (8.40) будем искать в
неявном виде У(ц,х\,Х2) = 0 [VIII]. Используя правило
дифференцирования неявно заданной функции [V], находим
d\i
дх\
dV
дх\
dV '
dfi
d\i
дх2
dV
дх2
dV '
dfi
Подставляя эти выражения в уравнение (8.40), получаем
ЗУ ЗУ ЗУ _
дх\ дх2 dfi
Записываем уравнение характеристик [VIII]:
dxi dx2 d/j
^-^\--\ (8-42)
Отсюда, решая уравнение с разделяющимися переменными
dx2 dx\
-1 х2
находим уравнение для оптимальных фазовых кривых в области
L_i (т.е. при и* = —1):
хг + ^ = Съ (8.43)
8.3. Уравнение Беллмана в задаче быстродействия 299
где С\ — постоянная интегрирования. Это уравнение дает
первый интеграл системы (8.42):
х2
Несложно найти еще один первый интеграл, так как в этой
системе еще одно уравнение имеет разделяющиеся переменные:
Зная два первых интеграла, мы можем записать общее решение
уравнения в частных производных:
ф(/Х-Я2,Я1 + ^)=0,
где Ф((pi,(f2) — произвольная непрерывно дифференцируемая
функция. Предположим, что уравнение Ф (^1,^2) — 0 можно
разрешить относительно первого аргумента в виде (р\ = Н{чр2)-
Тогда мы можем записать
(м = х2 + н(х1 + Щ, (8.44)
т.е. получим вид выражения для функции Беллмана в области
L-i.
Аналогично рассматривается ситуация в области L\. Мы
получаем уравнение оптимальных фазовых кривых в виде
х2
х\ = С2 = const (8.45)
и вид выражения для функции Беллмана
/i = _a;2 + e(-a;i + ^). (8.46)
Формулы (8.44) и (8.46) дают лишь представление о
структуре решения уравнения Беллмана, так как в них входит
неизвестная функция. Но, зная уравнения (8.43), (8.45) для
оптимальных фазовых кривых, мы можем найти и функцию
Беллмана. Для этого на плоскости xi(9x2 строим оптимальную
300 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
траекторию, составляя ее из
дуг двух парабол из семейств
(8.43), (8.45), как это
делалось ранее (см. 7.5).
Построенная траектория должна
соединять начальную точку х с
началом координат (рис. 8.3).
Теперь можно вычислить
время движения вдоль
построенной оптимальной траектории
и получить конкретный вид функции Беллмана (см. задачу 7.6).
Для точки х выше линии переключений АОВ имеем
В -
V
>
,
и=1
х2 J
О
х2
X
и =
-1
I | Xj
"" ' А
Рис. 8.3
х%
fj,(xi,x2) = 2\/х1 + ^-+х2.
(8.47)
а для точки х ниже линии переключения
Х2
fj,(xi,x2) =2\ -xi + ^--x2.
(8.48)
Непосредственной подстановкой можно убедиться, что
функции (8.47) и (8.48) являются решениями уравнений (8.40) и (8.41)
соответственно.
Покажем, что ни в одной точке линии переключений АОВ
функция Беллмана 1л{х\,х2) не имеет частных производных.
Возьмем на дуге О А произвольную точку С(ж^, х^)-) т.е. х^ —
= -(х^J- Так как функция \i выше линии АОВ (или правее,
что то же самое) задается формулой (8.47), то для вычисления
правосторонней производной по х\ мы должны использовать
именно эту формулу:
8.4. Связь с принципом максимума
301
А левосторонняя производная вычисляется с использованием
представления (8.48). Но при этом
ц(хъхс2) = 2 J-xi + &У- -х% = 2^хс1-х1- х\,
и мы видим, что левосторонней конечной производной в точке
х\— х\ не существует, так как функция у = у/х не
дифференцируема в точке 0. Можно так же показать, что частная
производная по х2 имеет в точках линии переключения
аналогичный разрыв.
Приведенный пример показывает, что условия Беллмана
о существовании у функции Беллмана непрерывных частных
производных нарушаются даже в простейших ситуациях.
Поэтому вопрос о применимости метода динамического
программирования к задачам оптимального управления с
ограничениями на управление требует дополнительного обоснования.
8.4. Связь метода
динамического программирования
с принципом максимума
В 8.2 уравнение Беллмана получено как необходимое
условие оптимальности управления и, значит, в определенном
смысле перекликается с принципом максимума. Покажем, каким
образом на основе метода динамического программирования
можно получить условия принципа максимума.
Рассмотрим задачу оптимального управления с законом
движения (8.1), целевым функционалом (8.10),
фиксированными начальным (8.11) и конечным (8.24) состояниями. Время
Т процесса считаем неизвестным. В качестве вектора u(t)
управлений выбираем кусочно непрерывные вектор-функции со
значениями из области управления U Е Кг, являющейся
замкнутым выпуклым множеством.
302 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Согласно принципу динамического управления Беллмана,
для оптимального процесса (ж*(?),гх*(?)) найдется такое
решение 1л(х) уравнения Беллмана
п я
mm\f(x,u) + Y,^r{^u)} =°> (8-49)
что u*(t) = u(sc*(?),grad/i (ж* (?))), где u(x,grad/i) — значение,
при котором достигается минимум в правой части уравнения
(8.49). Покажем, что из уравнения (8.49) следует
существование некоторого вектора \Р, который удовлетворяет
соотношениям принципа максимума.
Пусть ц(х) — функция Беллмана, которая соответствует
оптимальному процессу (x*(t),u*(t)). Введем следующие
обозначения:
t
хо= f°(x,u)dt, х = (ж0, ж), Д(ж) =х0 + /л(х).
о
Используя эти обозначения, преобразуем уравнение Беллмана:
или, с учетом очевидного тождества — mmF = max(—F),
г=0
Заметим, что функции /г(х,и) не зависят от xq. Введем
обозначения
^ = -|р г = 0^. (8.51)
8.4. Связь с принципом максимума
303
Полагая
п
Н(Ф,Х,и) = ^ФаГ(х,и) = (*, /(*,«)) ,
a=0
где Ф = (ф0, фъ ..., фп)Т; /= (/°, Д ..., fn) , можно
записать уравнение Беллмана в следующем виде:
max (V, / ) = тахЯ(^,ж,п) = 0.
мег/ V ) иеи
Введенные нами сопряженные переменные ipi и функция
Понтрягина Н (ср. с G.7)) получены пока чисто формальным
преобразованием из уравнения Беллмана. Покажем, что \Р
удовлетворяет сопряженной системе
~ж = -^ г=0'п' (8'52)
Потребуем, чтобы функция Беллмана /j,(x) имела
непрерывные производные второго порядка. Тогда функция
g(x,u) = JT (-Л (?)/*(*,«)) (8-53)
имеет непрерывные производные первого порядка.
Оказывается, что для оптимального процесса (ж(?), u(t))
при фиксированном t Е [0, Т] функция g(x,u(t)) переменного ж
достигает в точке х = x(t) максимального значения, равного
нулю. Это следует из уравнения Беллмана (8.50). При этом
под равенством х = x(t) мы понимаем выполнение двух
соотношений
X = X
(t), х0 = Jf°(x(t),u(t))dt.
304 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Так как функция g(x,u(t)) достигает максимума в точке ж(?),
то
дд(х,и)
дхк
Учитывая, что
дд
x=x(t)
u=u(t)
¦ 0, k = 0,n, t?[0,T]. (8.54)
d2ix j dji df\
О / Л Я Я J Я Я Ь Ai — U, ЛА,
dxk f-(V dxidxk oxi dxkJ
=E(-
из (8.54) получаем соотношение
d2Ji(x)
г=0
dxidxk
/*(*,«) =
п
-и-
d/j(x)\df(x,u)
г=0
<9ж?;
дхк
, ?; = 0,п, (8.55)
которое выполняется на оптимальном процессе (ж(?), u(t)).
Так как
d ( дц
=Е
д2[л \ dx
d2ji
х dxjdxk J dt ^—' V dxjdxk
г=0 ч * ft/ г=0 \ л л
E
то соотношение (8.55) преобразуется к виду
f (х,и),
d ( д/j,
dt \ дхк
г=0
д]ЛдГ_
dxi J дхк'
E(-^)^-. A = 0,n,
или, с учетом обозначений (8.51),
Д.8.1. Оптимальная стабилизация
305
Итак,
dt dxk'
Уравнения (8.52) были получены в предположении, что
функция Беллмана \i имеет непрерывные производные второго
порядка. Это, конечно, не всегда так. Поэтому проведенные
рассуждения носят иллюстративный характер и не могут
всерьез рассматриваться как обоснования принципа максимума.
Скорее они говорят о том, что принцип максимума и
принцип динамического программирования имеют пересекающиеся
„сферы влияния". При отсутствии ограничений на управление,
когда все функции являются гладкими, оба принципа
работают. Но каждый принцип имеет область, в которой соперник
конкурировать не может: уравнение Беллмана получено при
дополнительных предположениях, а принцип максимума хуже
приспособлен для решения задач дискретного характера.
Дополнение 8.1. Оптимальная стабилизация
Пусть для исходной системы
y = f(t,y,u) (8.56)
при заданном управлении u = u{t) и заданном начальном
условии y(ti) = у1 построена траектория у = (p(t), т.е. решена
соответствующая задача Коши. Такое движение назовем
невозмущенным движением. Рассмотрим еще одно управление
и = v(t) и соответствующую этому управлению траекторию
y = i/)(t), которую назовем возмущенным движением.
Задача стабилизации невозмущенного движения y = cp(t)
состоит в выборе такой поправки Au(t) = v(t) — u(t), при
которой движение i/?(t) устойчиво.
Положим x(t) = i/)(t) — cp(t) и вместе с Au(t) подставим в
уравнения движения (8.56):
х = ф-ф = /(?, (р + х,и + Аи) - /(*, (р,и).
306 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Считая траекторию <p(t) и управление u(t) фиксированными,
получаем уравнения
x = F(t,x,Au), (8.57)
которые называют уравнениями возмущенного движения.
Предположим, что выполняются следующие условия:
1) все компоненты вектора состояния х в любой момент
времени известны;
2) по траектории x(t) можно восстановить вектор
управления Агх(^), который можно рассматривать как функцию
времени и текущего состояния Au(t,x);
3) управление Au(t,x) должно обеспечивать
асимптотическую устойчивость невозмущенного движения x(t) =0;
4) Ди(*,0) = 0;
5) вектор-функция u{t,x) определена и непрерывна в
области D: t ^ 0, \xj\ < L, j = 1, п, где х = (жх, Ж2, • ••, жп);
6) правые части уравнений (8.57) удовлетворяют условиям
теоремы Коши о существовании и единственности решения
системы обыкновенных дифференциальных уравнений [VIII]
при любых начальных условиях в области D;
7) на вектор управления и нет ограничений, т.е. его
компоненты могут принимать любые сколь угодно большие значения,
вектор-функция F(t,x,u) определена при любом значении и.
Задача оптимальной стабилизации невозмущенного
движения состоит в следующем. Пусть выбран критерий
качества стабилизации, который может отражать такие требования
к процессу стабилизации, как его монотонность, минимизация
объема используемых ресурсов и т.п. Этот критерий будем
представлять как некоторый функционал вида
+оо
I[x,Au]= j F°(t,x,Au)dt. (8.58)
Д.8.1. Оптимальная стабилизация
307
Требуется найти такое управление Аи = гх*(*,ж), которое
обеспечивает асимптотическую устойчивость невозмущенного
движения x(t) = 0 в силу уравнения
х = F(t,x,Au(t,x))
и которое среди всех управлений, также обеспечивающих
асимптотическую устойчивость невозмущенного движения,
придает целевому функционалу (8.58) наименьшее значение, т.е. для
любого управления Дгх(?,ж), решающего задачу стабилизации,
неравенство
1[х*,Аи*]^1[х,Аи] (8.59)
выполняется при любых начальных условиях из области
Д,= {(?, хъ ..., xn): ?>0, |^| ^?,J = l,n},
где x*(t) иж(!) — траектории системы при заданных
начальных условиях и управлениях Аи* и Аи соответственно.
Начальные условия x(t\) = х1 играют роль начального
возмущения, а асимптотическая устойчивость означает, что
начальное возмущение в процессе движения компенсируется за
счет управления. Если неравенство (8.59) выполняется при
любых, необязательно малых, начальных возмущениях, то говорят
об оптимальной стабилизации в целом.
Задача оптимальной стабилизации — это задача
оптимального управления для системы с законом движения (8.57),
целевым функционалом (8.58), фиксированным временем процесса
Т = оо, фиксированным левым концом x(t\) = х1 и
фиксированным правым концом ж(оо) = 0. Ее можно полностью решить в
случае, когда управление скалярно (и = и Е К), уравнения
возмущенного движения являются линейными автономными, т.е.
имеют вид х = Ах + ВАи (матрицы А, В постоянны), а ин-
тегрант целевого функционала FQ(t,x,Au) есть квадратичная
308 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
форма с постоянной симметрической матрицей N и
константой q:
F° (?, ж, Аи) = xTNx + q(AuJ.
Решение задачи в этом частном случае составляет основное
содержание метода аналитического конструирования
регулятора*. Оно строится с помощью метода динамического
программирования Беллмана.
Так как эта задача представляет собой автономную задачу
оптимального управления с фиксированными концами, функция
Беллмана зависит только от фазовых координат: \i = 1л{х).
Уравнение Беллмана в данном случае имеет вид
mm[xTNx + qAu2 + (grad/i, Ах + ВАи)] = 0. (8.60)
Здесь оно используется как достаточное условие
оптимальности**. Из уравнения (8.60) получаем управление Аи*,
доставляющее минимум левой части:
Au* = -^ (grades). (8.61)
Подставив найденное управление Аи* в уравнение (8.60),
получаем нелинейное уравнение в частных производных первого
порядка относительно функции Беллмана (л{х)
xTNx + (grad/i, Ах) - — ((grad/i, В)J = 0 (8.62)
с краевым условием
/Дж(ос)) =/i@) =0.
*См.: Летов A.M.
**По поводу обоснования уравнения Беллмана как необходимого и
достаточного условия оптимальности см.: Болтянский В.Г. A964 г.)
Вопросы и задачи
309
Решение уравнения (8.62) следует искать в виде
квадратичной формы 1л(х) = х Рх с неизвестной симметрической
матрицей Р порядка п (неизвестных элементов п(п + 1)/2).
Подставив это представление в уравнение, получим
хт (N + 2РА - -РВВТР) х = 0,
откуда вытекает матричное уравнение*
N + 2PA--PBBTP = 0.
Q
Решив это матричное уравнение, мы можем найти функцию
Беллмана, а затем управление Аи* как функцию фазовых
координат:
Аи* = --ВТРх.
Я
Таким образом, метод аналитического конструирования
позволяет решить задачу синтеза, при этом синтезирующая
функция линейна.
Приведенный пример использования уравнения Беллмана —
один из немногих, так как решить его удается редко. В этой
связи упомянем линейные автономные системы с критерием
обобщенной работы**.
Вопросы и задачи
8.1. Используя метод динамического программирования,
решите задачу оптимального быстродействия
х = ах + и, x{t\)=xi, ж(^)=0, \и\ ^ 1.
* Уравнение такого типа в литературе называют матричным уравнением
Риккати.
**См.: Красовский А.А.
310 8. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
8.2. Составьте уравнение Беллмана в следующих задачах
оптимального управления:
т г .
Xi = UX\ +Х2,
/\Xi= UX\ -\-Х2,
f (t,xi,x2)dt^mm, < zi@)=zl5
0 [x2 = u ,
x2@) =x\;
T r •
/J X\ — U\X\ +X2,
f (t,xi,x2)dt —>> min, < xi@) = x1,
o [X2 = U2,
x2@) =x\, \u\\ ^ 1, \u2\ ^ 1.
Учитывая вид области управления J7, запишите
соответствующее уравнение в частных производных для функции Беллмана
(х\, х\-) Т заданы).
8.3. Составьте уравнение Беллмана для линейной задачи
оптимального быстродействия с законом движения G.30) и
областью управления U вида G.37). Учитывая вид J7,
запишите соответствующее уравнение в частных производных для
функции Беллмана.
ЧАСТЬ III
Прямые методы
вариационного
исчисления
...Часто бывает очень трудно найти
выражение, которое было бы
максимумом или минимумом.
Леонард Эйлер
9. ФОРМУЛИРОВКА
ВАРИАЦИОННЫХ ЗАДАЧ
Первые две части книги посвящены изучению задач,
связанных с поиском экстремума функционала, определенного на
некотором множестве функций. Как мы видели, во многих
случаях решение такой задачи сводится к решению системы
обыкновенных дифференциальных уравнений (ОДУ) или
уравнений в частных производных. Систему дифференциальных
уравнений можно рассматривать как операторное уравнение.
Таким образом, задача поиска экстремума функционала
сводится (при определенных ограничениях) к решению некоторого
операторного уравнения. Это аналогично тому, что задача
поиска минимума функции многих переменных с помощью
необходимого условия экстремума может быть сведена к задаче
решения системы нелинейных уравнений.
Однако есть и обратная связь, когда решение
операторного уравнения (и аналогично системы нелинейных уравнений)
можно заменить решением некоторой вариационной задачи
(соответственно задачи поиска минимума функции многих
переменных). Можно также интерпретировать рассматриваемое
операторное уравнение как уравнение на определение
стационарных точек функционала, специальным образом
подобранного.
Построение математических моделей на основе
вариационных задач в современной науке используется весьма широко.
Это объясняется тем обстоятельством, что многие
фундаментальные принципы в самых различных предметных областях
наиболее естественно формулируются как вариационные
принципы. Достаточно в этой связи упомянуть закон сохранения
энергии, который естественно сформулировать как равенство
нулю вариации функционала энергии системы.
314 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
Сведение вариационной задачи (т.е. задачи поиска либо
точек экстремума функционала, либо его стационарных точек) к
операторному уравнению — далеко не всегда хороший способ
решения задачи. Это обстоятельство привело к разработке
ряда методов, в которых решение вариационной задачи можно
найти без использования систем дифференциальных
уравнений. Такие методы решения вариационных задач называют
прямыми методами. Эти методы, как правило,
сводятся к построению последовательности приближений к точному
решению задачи, а каждое приближение находится как
решение системы функциональных уравнений, в которую не входят
производные неизвестных функций. Зачастую система
функциональных уравнений представляет собой систему линейных
алгебраических уравнений (СЛАУ), а решение СЛАУ найти
существенно проще, чем решение операторного уравнения.
9.1. Операторное уравнение
Любое отображение A: D(A) —>> R(A) из некоторого
множества D(A) функций в некоторое множество R(A) функций
называют оператором.
Во многих случаях в качестве математической модели
исследуемого объекта, описываемого векторной функцией и,
можно рассматривать уравнение вида
A(u) = f, ueD(A), (9.1)
содержащее оператор А с некоторой областью определения
D(A). Этот оператор отражает свойства объекта и действует
на искомую функцию и (вообще говоря, векторную), и
заданную функцию / (в общем случае тоже векторную),
характеризующую внешнее воздействие на этот объект.
Мы ограничимся случаем, когда область определения D(A)
оператора А является подмножеством некоторого линейного
пространства. Линейное пространство, как правило
бесконечномерное, элементами которого являются функции, часто
9.1. Операторное уравнение
315
называют функциональным пространством.
Функциональное пространство наделяют какой-либо структурой,
позволяющей оперировать с понятием непрерывности. В
частности, функциональное пространство может быть
нормированным (определена норма) или евклидовым (задано скалярное
произведение). Евклидово пространство можно рассматривать
как частный случай нормированного пространства,
поскольку скалярное произведение естественным образом индуцирует
норму, называемую евклидовой нормой. В нормированных
пространствах можно рассматривать сходящиеся
последовательности [IX]. Критерий Коши верен не для всякого нормированного
пространства, т.е. в нормированном пространстве могут
существовать фундаментальные последовательности, не имеющие
предела. Если в данном нормированном (евклидовом с
евклидовой нормой) пространстве любая фундаментальная
последовательность сходится, то такое пространство называют полным.
Полное бесконечномерное евклидово пространство
традиционно называют гильбертовым*.
Пример 9.1. Множество L2(Q) функций, суммируемых с
квадратом на измеримом множестве О С Rn, представляет
собой гильбертово пространство со скалярным произведением
(f,g) = Jf(x)g(x)dx. (9.2)
п
Элементами этого пространства являются функции /: О —>> R,
для которых конечен интеграл Лебега
\\ff = J\f(x)\2dx (9.3)
п
* Д. Гильберт A862-1943) — великий немецкий математик, оказавший
большое влияние на развитие современной математики. Внес
значительный вклад в развитие как функционального анализа, так и вариационного
исчисления. Положил начало развитию прямых методов в вариационном
исчислении.
316 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДА Ч
(в скалярном произведении также предполагается интеграл
Лебега). Интеграл (9.3) определяет евклидову норму ||/|| = ||/||2
в этом пространстве, сходимость по которой называют
сходимостью в среднем квадратичном.
Пример 9.2. Рассмотрим множество L^^t^cr) функций
/: О —)> К, определенных на измеримом множестве О Е Мп, для
которых конечен интеграл Лебега
\\f\\2,a = f\f{x)\2o{x)dx,
п
где а — неотрицательная измеримая на О функция. Это
множество представляет собой гильбертово пространство функций,
интегрируемых с квадратом и весом о. Скалярное
произведение в этом пространстве имеет вид
(f,g) = Jf(x)g(x)a(x)dx. (9.4)
п
Отметим, что в функциональных пространствах, в которых
скалярное произведение вводится с помощью интеграла Лебега,
считают равными любые функции /ид, для которых
множество {жЕЙп:/(ж)/^(ж)} есть множество (лебеговой) меры
нуль. Это гарантирует выполнение аксиомы скалярного
произведения (и соответственно нормы), согласно которой (/, /) = О
только для нулевого элемента линейного пространства.
Пример 9.3. Гильбертовым также является линейное
пространство L^ (О) векторных функций /: О —>> Rm, f]cRn,
для которых конечен интеграл
ц/ц2 = /(/(Ж),/(Ж))^.
Здесь (ж, у) обозначает стандартное скалярное произведение
векторов х и у га-мерного евклидова арифметического
пространства. Скалярное произведение в L,™ (О) определяется
9.1. Операторное уравнение
317
формулой
(f,g) = J(f(x),g(x))dx. #
Если бесконечномерное нормированное пространство С не
является полным, то его можно пополнить, т.е. построить
такое полное нормированное пространство ?, которое включает
в себя нормированное пространство ?, причем С является
множеством, всюду плотным в С. Расширение нормированного
(евклидова) пространства С до полного С называют
пополнением нормированного (евклидова) пространства С.
Пример 9.4. Рассмотрим линейное пространство С[а,6]
функций, непрерывных на отрезке [а, Ь]. Введем в этом
пространстве скалярное произведение согласно формуле
и
(f,g)= / f{x)g{x)dx.
(9.5)
Получим евклидово пространство [IV]. Однако это
пространство не является полным, и потому оно не гильбертово.
Действительно, рассмотрим последовательность функций
-1, -1^ж^--;
пж,
1,
п п
-<х^1.
п
?п{х) = {
Эта функциональная последовательность сходится на отрезке
[—1, 1] поточечно к функции
(р(х) = {
V
(т.е. <рп(х) —>¦ tp(x) при п —> оо для любого х € [—1, 1]).
-1, -1<ж<0;
0, х = 0;
1, 0<ж<1
318 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДА Ч
Непосредственным вычислением убеждаемся, что
1 1/п
/ ((рп{х) — tp(x)) dx = 2 / A — nxJdx = > О
-1 о
при п —> оо. Значит, y?n —>> у? по норме, порожденной введенным
скалярным произведением. Нетрудно, однако, заметить, что
функция (р(х) не является непрерывной на [—1,1] и не станет
непрерывной, даже если ее изменить на множестве меры нуль,
так как она имеет точку разрыва первого рода.
Линейное пространство С[—1,1] с заданным на нем
скалярным произведением представляет собой линейное многообразие
в гильбертовом пространстве Z^f—1,1], т.е. множество,
замкнутое относительно линейных операций, но не замкнутое в
топологическом смысле, так как содержит не все свои предельные
точки (например, описанную функцию <р(х)). Можно показать,
что для произвольного отрезка [а, Ь] множество G[а,6] всюду
плотно в L2[&,&], т.е. любая функция из ^2[а,Ь] является
пределом сходящейся в среднем квадратичном последовательности
непрерывных функций. Таким образом, при рассматриваемом
скалярном произведении пополнением С [а, Ь] является ^2[а,Ь].
Пример 9.5. Множество Ст{0) функций, т раз
непрерывно дифференцируемых на замкнутом ограниченном
множестве ОсКп, относительно скалярного произведения (9.5) также
является нормированным, но не полным, пространством.
Пополнением этого пространства является L2(fi). #
Говорят, что оператор А действует в линейном
пространстве ?, если и область определения D(A), и область
значений R(A) этого оператора являются подмножествами в С.
Пусть D(A) — линейное многообразие в С. Оператор А
называют линейным оператором, если
А(аи + f3v) = аА(и) + /3A(v)
9.1. Операторное уравнение
319
для любых элементов w,vG D(A) и любых чисел а, /3. В
частном случае, когда линейное пространство С конечномерное, а
D(A) = ?, приведенное определение равносильно определению
линейного оператора в конечномерном пространстве [IV]. В
конечномерном линейном пространстве С любой линейный
оператор А с областью определения D(A) можно продолжить на
все линейное пространство ?, т.е. построить такой оператор А
с областью определения D(A) = ?, который на D(A) совпадает
с А. В бесконечномерном случае это уже неверно.
Пусть А — оператор, действующий в нормированном
пространстве С. Уравнение
А(и) = /,
где / G С — заданный элемент нормированного пространства
?, называют операторным уравнением.
Пример 9.6. Если С — конечномерное линейное
пространство, а А — линейный оператор с областью определения
D{A) = ?, то операторное уравнение Аи = / в координатной
записи в некотором базисе линейного пространства представляет
собой систему линейных алгебраических уравнений с
квадратной матрицей.
Если нелинейный оператор А действует в конечномерном
линейном пространстве ?, то в координатной записи получаем
систему нелинейных функциональных уравнений.
Пример 9.7. Рассмотрим краевую задачу для
обыкновенного дифференциального уравнения (ОДУ)
d2u(x) , ч _
-Y- + си(х) = 1, хе о, 1, сек,
dxz
с краевыми условиями и@) =иA) =0. Дифференциальное
уравнение этой задачи можно интерпретировать как операторное
уравнение, определяемое линейным оператором
Аи = — и" + си.
(9.6)
320 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
В качестве области определения этого оператора можно
выбрать множество С2 [0,1] дважды непрерывно
дифференцируемых функций, являющееся линейным многообразием в
нормированном пространстве С[0,1] с нормой Ц-Ц^, причем всюду
плотным в С[0,1]. Но тогда найденные решения
операторного уравнения придется проверять на соответствие краевым
условиям. Поэтому в данном случае в качестве области
определения оператора удобнее выбрать множество Cq[0, 1] функций,
дважды непрерывно дифференцируемых на отрезке [0, 1] и
удовлетворяющих краевым условиям. Так как заданные краевые
условия однородны, указанное множество является линейным
многообразием в С[0,1].
Линейный оператор А представляет собой частный случай
линейного дифференциального оператора, поскольку в него
входит операция дифференцирования. Обозначив через Мс
линейный оператор умножения на число с (т.е. Мси = си), мы
можем записать линейный оператор А в виде
d2 ™
где -—- — общепринятое обозначение оператора двойного
дифференцирования.
Пример 9.8. Рассмотрим краевую задачу для уравнения
Пуассона
-Au(x) = f(x), xeV, (9.7)
с краевым условием
u(x)=g(x), xeS, (9.8)
где А — оператор Лапласа; Fcl3 — заданная область;
f(x) — заданная функция, непрерывная в области V; д(х) —
заданная функция, определенная на поверхности S,
ограничивающей V.
9.1. Операторное уравнение
321
Как и в предыдущем примере, мы имеем дело с линейным
дифференциальным оператором А = — А. В качестве области
определения оператора А можно взять множество C2(V) П C(V)
функций, непрерывно дифференцируемых в области V и
непрерывных на ее замыкании V = V U S. Рассматриваемое
множество является линейным многообразием в нормированном
пространстве C(V). Однако если в качестве области
определения оператора А взять множество функций из C2(V) П C(V),
удовлетворяющих заданным краевым условиям, то оператор
теряет свойство линейности, так как при неоднородных краевых
условиях указанное множество не будет линейным
многообразием. В самом деле, пусть функции u,vG C2(V) П C(V)
удовлетворяют условию (9.8), т.е. и(х) = v(x) = д(х), х Е 5, но
их линейная комбинация w = аи + /3v при произвольных
значениях а,/?ЕМ уже не удовлетворяет этому условию, поскольку
w(x) = (а + C)д(х), х Е S.
Отмеченное обстоятельство объясняет, почему, решая
подобные краевые задачи, обычно стремятся преобразовать их
так, чтобы получить однородные краевые условия.
Пример 9.9. Рассмотрим нелинейную краевую задачу с
операторным уравнением
-^Р+ ?(«) =/0*0, хе(а,Ь), (9.9)
и краевыми условиями
и(а)=а, u'(b) + s(u(b)) = Д, й, /ЗеМ, (9.10)
в классе дважды непрерывно дифференцируемых на [а, Ь]
функций. Предположим, что функция f(x) в правой части уравнения
(9.9) и функция q(u) в его левой части являются непрерывными
в своей области определения. В качестве области определения
322 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
оператора возьмем множество С?9 10\[а,Ь] С С2 [а, Ь] таких
функций и(х), для которых выполняются краевые условия (9.10),
причем функция s(u(x)) во втором краевом условии
непрерывна, ф
Пусть линейный оператор А действует в гильбертовом
пространстве % и его область определения D(A) является
множеством, всюду плотным в %. Если для произвольных элементов
и, v Е D(A) выполнено равенство
(Au,v) = (u,Av), (9.11)
то оператор А называют симметрическим оператором.
Напомним, что в случае конечномерного евклидова
пространства оператор, удовлетворяющий соотношению (9.11),
называют самосопряженным. Матрица самосопряженного
оператора в ортонормированном базисе является симметрической.
Поэтому понятие симметрического оператора можно
трактовать как обобщение понятия самосопряженного оператора в
конечномерном евклидовом пространстве. Отметим, что
условие симметричности оператора в гильбертовом пространстве
зависит не только от вида этого оператора (т.е. от формулы,
которой он описан), но и от его области определения.
Расширение области определения может привести к потере условия
симметричности.
Линейный оператор А называют положительным
оператором*, если
(Аи, и) > 0, ие D(A), \\и\\ ф 0.
Для положительного оператора А из равенства (Аи, и) = 0
следует равенство ||гх|| =0, или и = 0.
* Обычно термин „положительный" распространяют только на
симметрические операторы, но для дальнейшего изложения удобно
рассматривать эти два понятия независимо.
9.1. Операторное уравнение
323
Симметрический оператор А называют положительно
определенным оператором, если для некоторого числа 7 > О
верно неравенство
(Аи, и) > 72 IMI2, и Е D(A). (9.12)
Положительно определенный оператор является
положительным, но обратное утверждение, вообще говоря, неверно даже в
случае, когда положительный оператор одновременно является
и симметрическим.
Пример 9.10. Убедимся, что линейный
дифференциальный оператор А, рассмотренный в примере 9.7 и
определенный на линейном многообразии D(A) =Cq[0,1], является
симметрическим. Действительно, для произвольных функций
u(x),v(x) Е Cq[0,1] последовательным интегрированием по
частям с учетом краевых условий и@) = иA) = v@) = v(l) = О
получаем
^.,./(-и(„+-«.,)^.
0 i 1 1
= — u'(x)v(x)\ + / и'(x)v'(х) dx-\-с / u(x)v(x)dx =
0 о
1 1
= u{x)V>{x)l-fu{x)V"{x)dx + cfu{x)v{x)dx =
/•
Если считать, что областью определения рассматриваемого
оператора А является линейное многообразие С2 [0, 1], то этот
оператор уже не будет симметрическим, так как, повторяя те
324 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
же выкладки, получим
(Ащ v) = (u(x)v'(x) - u'(x)v(x)) I + (щ Av). (9.13)
Отсюда заключаем, что (Аи, v) ф (гл, Av) для некоторых
функций и и v из С2[0, 1].
При с ^ 0 рассматриваемый линейный оператор (с областью
определения Cq[0, 1]) является и положительным, так как для
произвольной функции и(х) ? Cq [0,1] с учетом краевых условий
и@) = иA) =0 интегрированием по частям получаем
о
1 1
= -и'м,.(,)|Ч/К(х)J^+с/^ил=
о о
1
= f(u'(x)Jdx + c\\u\\l2 >0. (9.14)
о
В случае с > 0 равенство (Ам, гл) = 0 возможно лишь при \\u\\L =
= 0, откуда следует, что и(х) есть нулевой элемент гильбертова
пространства L2[0,l]. Если с = 0, то из равенства (Аи,и)=0
следует, что v!{x) = 0 в интервале @, 1). Значит, в этом
интервале и(х) = С = const, а в силу однородных краевых условий
С = 0 и и(х) = 0.
При с > 0 оператор А является и положительно
определенным, так как, согласно (9.14),
(Ащи) ^c\\u\\2L2.
Пример 9.11. Рассмотрим линейный оператор А = — А из
примера 9.8. Используя вторую формулу Грина
/ (uAv - vAu) dV = / (uVv - vVu)ndS,
v s
9.1. Операторное уравнение
325
верную для любых дважды непрерывно дифференцируемых
функций гл(ж), v(x) Е C2(V), получаем
(Ащ v) - (u, Av) = / (uAv - vAu) dV =
= /\uVv-vVu)ndS, (9.15)
s
где V — оператор Гамильтона; n — единичный вектор
внешней нормали к кусочно гладкой поверхности 5,
ограничивающей пространственную область V. Отметим, что Vu равно
градиенту действительной функции и, a (Vu) п = ди/дп —
производной этой функции по направлению п внешней нормали к S.
Из (9.15) следует, что равенство (Аи, v) = (гл, Av) не
выполняется для произвольных функций и и г>, т.е. оператор А = — А
с областью определения С2(У)ПС(У) не является
симметрическим. Но если ограничить действие оператора только на
функции, удовлетворяющие однородным краевым условиям,
положив в (9.8) д(х) = 0 на S, то интеграл в правой части (9.15)
обратится в нуль, а оператор А станет симметрическим.
Согласно первой формуле Грина
/ v{Vu)ndS= (vAu + VuVv)dV,
S V
находим
(Ащи) = - fuAudV = - fu(Vu)ndS+ f(VuJdV. (9.16)
V S V
Видим, что при однородных краевых условиях (т.е. при д(х) =
= 0) оператор А будет положительным, если его действие
ограничить на функции и Е C2(V) П C(V), удовлетворяющие
этим краевым условиям. Действительно, в этом случае,
согласно (9.16),
(Ащи)= [(VufdV^O.
v
326 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
Из равенства (Аи, и) = 0 следует равенство Vu = 0. Но тогда
и = const, а с учетом однородных краевых условий и = 0. Можно
показать, что при однородных краевых условиях оператор А
будет и положительно определенным [XIII].
Однако оператор А не является положительным, а
значит, и положительно определенным, если в качестве его
области определения рассматривать все линейное многообразие
C2(V) П С{V). Оказывается, что в этом случае существуют
такие функции гд, для которых поверхностный интеграл в правой
части (9.16) больше тройного интеграла. #
Рассмотрим операторное уравнение Аи = /, для которого
оператор А является линейным.
Теорема 9.1. Если оператор А, действующий в
гильбертовом пространстве %, является положительным, а уравнение
Аи = / имеет решение, то это решение единственное.
< Пусть одновременно Аи\ = / и Аи2 = /. Тогда, обозначив
и = и\ — г^2, получим
Аи = А{и\ — u<i) = Аи\ — Аи2 = / — / = 0.
Следовательно, (Агх, гх) = @, гх) = 0. В силу положительности
оператора А заключаем, что и = 0 и и\ = и%. Таким образом,
любые два решения уравнения Аи = / совпадают. >
Теорема 9.2 (теорема о квадратичном
функционале). Если А — симметрический положительный оператор с
областью определения D(A), a гхо Е D(A) — решение
уравнения Аи = /, то это решение доставляет наименьшее значение
квадратичному функционалу
J[u] = (Au,u)-2(u,f).
Наоборот, если элемент гхо Е D(A) доставляет наименьшее
значение функционалу «/[гх], то этот элемент является решением
уравнения Аи = /.
9.1. Операторное уравнение
327
Ч Пусть Ащ = /. Тогда для любого элемента u Е D(A)
J[u] = (Аи, и)-2(/, и) = (Аи, и)-2(Ащ, и) +
+ (Аи0, щ) - (Аи0, и0) = (А(и - и0), и-и0)-
- (Аи0, и0) = (Аи, и) - (Аи0, и0), (9.17)
где и = и — щ. Видно, что функционал достигает своего
наименьшего значения J[uq] = — (Auq, щ) при (Аи, и) = 0, т.е.
при и = гхо Е D(A).
Пусть теперь элемент uq Е ^)(^4) доставляет наименьшее
значение функционалу J[u]. Выберем произвольный элемент
Аи Е D(A) так, чтобы и = uq-\- Аи Е D(A). Тогда
J [и] — J[uq] = J[uq + Агх] — J[uq] =
= (А(г/0 + Аи), и0 + Аи) - 2 (/, <и0 + Аи) - (Аи0, и0) +
+ 2 (/, г*0) = (ААи, Аи) + 2 (Аи0 - /, Аи) > 0.
Записанное неравенство верно для любого элемента Аи.
Выбрав Аи = tv, где элемент -у Е ?*(^4) фиксирован, a ? Е R
принимает произвольные значения, получим
t2 (Av, v) + 2t (Au0 - /, «) > 0, tGR
Но это неравенство верно для любого t Е Ш только в том случае,
когда (Аио -/,«) = 0. Так как элемент v Е D(A) произволен,
то заключаем, что Auq — f = 0, или Auq = /. >
Теорема о квадратичном функционале устанавливает связь
между операторным уравнением и некоторой вариационной
задачей. Вместо того чтобы решать операторное уравнение,
можно искать наименьшее значение соответствующего
функционала. Однако недостаток указанной теоремы состоит в
том, что далеко не всегда удается поставить математическую
задачу так, чтобы это было операторное уравнение с
симметрическим положительным оператором. Круг таких задач
328 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
весьма ограничен. Поэтому важно установить и другие
условия, при которых возможен переход от операторного уравнения
к поиску наименьшего значения соответствующего
функционала и которые не содержат требования симметричности или
положительности оператора. Если прикладная задача,
сводящаяся к решению операторного уравнения, допускает
указанный переход к некоторой вариационной задаче, то последнюю
мы будем называть вариационной формулировкой
исходной прикладной задачи.
9.2. Вариационное уравнение
Вернемся к операторному уравнению Аи = / с оператором
А, действующим в гильбертовом пространстве %. Допустим,
что область определения D(A) этого оператора есть всюду
плотное множество в %. Рассмотрим уравнение вида
F(u,5u)=0, (9.18)
определяемое некоторым функционалом F[u,5u] с областью
определения D(F) =Dux D5ui где D(A) С Du CW, DSu С Ч.
Если это уравнение эквивалентно операторному уравнению Аи =
= /, то его называют вариационным уравнением,
соответствующим этому операторному уравнению. Условие
равносильности уравнений Аи = / и F(u,5u) = 0 означает, что любое
решение операторного уравнения удовлетворяет
вариационному уравнению при любой вариации ди Е D§u, а любой элемент
и Е D(A), превращающий вариационное уравнение в тождество,
есть решение операторного уравнения.
Вариационное уравнение называют голономным, если его
левая часть является первой вариацией SJ[u, 6и] некоторого
функционала J[u] с областью определения D(J) = Du. Если
такой функционал J [и] удается найти, то операторное уравнение
Аи = / будет равносильно уравнению 5J[u,5u] = 0, т.е.
решение операторного уравнения равносильно поиску стационарных
9.2. Вариационное уравнение
329
точек функционала J[u]. Таким образом, переход к
вариационной формулировке прикладной задачи может быть реализован
построением голономного вариационного уравнения.
В некоторых ситуациях голономное вариационное
уравнение, эквивалентное операторному, построить не удается, но
можно построить такое вариационное уравнение, которое
среди своих решений содержит все решения операторного
уравнения. Тогда, решив такое вариационное уравнение, нужно
выделить среди найденных решений те, которые имеют
отношение к операторному уравнению.
В качестве вариационного уравнения, соответствующего
операторному уравнению Аи = /, можно взять следующее:
(Аи - /, 5и) = О, 5и Е D5u с U, (9.19)
где Dsu ВСЮДУ плотно в гильбертовом пространстве %.
Нетрудно убедиться, что все решения операторного уравнения
удовлетворяют уравнению (9.19). Верно и обратное. Если
для заданного элемента и Е D(A) равенство (9.19) выполняется
для всех элементов 8и из всюду плотного в Ц множества, то
Аи — f = О [IX], т.е. в этом случае и является решением
операторного уравнения Аи = /.
Выясним, при каких условиях вариационное уравнение (9.19),
соответствующее линейному оператору А, является голоном-
ным, т.е. его левая часть представляет собой первую вариацию
некоторого функционала J[u]. Сначала разберемся, как ответ
на этот вопрос выглядит в конечномерном случае. Пусть А —
линейный оператор в TV-мерном евклидовом пространстве ?.
В некотором ортонормированном базисе действие этого
оператора сводится к умножению столбца координат и\, щ, •••, un
вектора и на некоторую квадратную матрицу А = (a^j), а
уравнение (9.19) можно записать следующим образом:
N , N ч
Е(Еа^^-^)^=0- (9-20)
330 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
В данном случае вариационное уравнение голономное тогда и
только тогда, когда левая часть этого уравнения представляет
собой полный дифференциал некоторой функции J(u\,... ,адО
многих переменных. Поэтому
Я N Я N
(^CLkjUj - fkj = — \^amjUj - fmj, к, m = 1, TV,
dum \^ J дик V
.7=1 J
или
a>km = a>mk, к, га = 1,7V.
Итак, условие голономности вариационного уравнения (9.19)
равносильно условию, что матрица оператора А в ортонорми-
рованном базисе симметрическая. Но последнее значит, что
оператор А является самосопряженным. Нетрудно показать,
что в случае самосопряженного оператора А в качестве
функционала J можно взять J (и) = - (Аи, и) — (гх, /).
Перейдем к бесконечномерному случаю. Естественно
предположить, что в гильбертовом пространстве голономность
вариационного уравнения для линейного оператора также связана
с условием симметричности этого оператора. Убедимся в этом.
Предположим, что для заданного линейного оператора А в
гильбертовом пространстве 7/, имеющего всюду плотную в Ц
область определения D(A), существует функционал J[ix], для
которого 6J[u,5u] = (Аи — /, 5и). Выбрав произвольные
функции h, g Е D(A), рассмотрим функцию
Ч>{а,Р) = J[u + ah + Cg], а, /3 Е R (9.21)
Тогда
(ра{а,р)= lim =
а Аа^О Аа
_ у J[u + (a+Aa)h + Cg]-J[u+ah+Cg]_
Аа^О Аа
= 5J[u + ah + Cg, h] = (A(u + ah + Cg) - f,h) =
= (A(u + ah)-f,h)+P(Ag,h). (9.22)
9.2. Вариационное уравнение
331
Мы видим, что функция (p'a(a,C) дифференцируема по
параметру /3 и
4>*pi<*,P) = (Ag,h).
Аналогично можно показать, что существует вторая смешанная
производная
^a(a,f3) = (Ah,g).
Две смешанные производные tp'^o и (p'L существуют и
непрерывны (они попросту постоянны). Поэтому они равны, т.е.
Фав = Фва- Следовательно, для любых функций h,g ? D(A)
выполняется равенство
(Ад, h) = (Ah, д) = (д, Ah),
т.е. оператор А, имеющий всюду плотную в Ц область
определения, является симметрическим. Нетрудно показать, что
если оператор А симметрический, то левая часть
вариационного уравнения (9.19) представляет собой первую вариацию
функционала J[u] = - (Au, u) — (f, и). Действительно,
J[u + tSu] - J[u] = -(A(u + tSu), u + tSu) -
-(f,u + tSu) - - (Au, u) + (/, u) =
= ~(t (Au, Su) +1 (ASu, u) +t2 (ASu, Su)} -1 (f, Su) =
t2
= (Au - f, Su) t + (ASu, Su) —,
откуда SJ[u,Su] = (Au — f, Su).
Замечание 9.1. Мы рассмотрели случай операторного
уравнения Au = / с линейным оператором А. Однако
вариационное уравнение (9.19) можно использовать и в нелинейном
случае, но условия голономности вариационного уравнения в
нелинейном случае более сложные, а восстановление функционала
по голономному уравнению требует значительных усилий.
332 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
9.3. Примеры построения функционала
по вариационному уравнению
В 9.2 показано, что квадратичный функционал вида
J8[u] = {Au,u)-2{f,u), (9.23)
соответствующий операторному уравнению Аи — /, где
оператор А действует в гильбертовом пространстве Н, можно
построить в случае, когда оператор А симметрический.
Если этот оператор положительный и уравнение Аи = / имеет
решение гхо Е D(A), то это решение единственное (см.
теорему 9.1). Если же оператор А и симметрический и
положительный и уравнение Аи = / имеет решение гхо, то, согласно
теореме 9.2, функционал Js[u] (9.23) достигает на этом
решении своего наименьшего значения Js[^o] = —(Auo, uq).
Из примеров 9.10 и 9.11 видно, что симметричность и
положительность оператора, рассматриваемого на множестве
функций, удовлетворяющих краевым условиям конкретной краевой
задачи, существенным образом зависит от вида этих условий.
В краевых задачах прикладного характера эти условия обычно
неоднородны, и поэтому на таком множестве функций свойства
симметричности и положительности оператора утрачиваются.
Тем не менее и в такой ситуации в некоторых случаях можно
построить функционал, соответствующий операторному
уравнению краевой задачи, если использовать вариационное
уравнение, равносильное этому операторному уравнению. Поясним
эту процедуру на конкретных примерах.
Пример 9.12. Рассмотрим краевую задачу для
обыкновенного дифференциального уравнения
-^гф- + си{х) = !{х), я €[0,1], (9.24)
9.3. Примеры построения функционала
333
с краевыми условиями
г/@) - сш@) = й, г/A) + 0иA) = Д, (9.25)
где с, а, й, Д Д Е К; /(ж) Е С[0,1].
Как и в примере 9.10, можно показать, что в случае
однородных краевых условий (й = 0 = 0) линейный оператор
А = — -—г + Мс. действующий в гильбертовом пространстве
ах2
L2[0,1], будет симметрическим, если в качестве его области
определения взять всюду плотное в L^ [0,1] множество дважды
непрерывно дифференцируемых функций, удовлетворяющих
таким краевым условиям. Действительно, для произвольных
функций^, v Е С2[0, 1], удовлетворяющих (9.25),
последовательным интегрированием по частям получаем
^.,./(-и(„+-«.,)^.
о
= (u(x)v'(x) — u(x)v(x)) + (u, Av) =
= u(l)@-0v(l))-v(l)@-0u(l))-
- u@) (S + av@)) + v@) E + au@)) + (г/, Лг;) =
= 0(u(l) - v(l)) - йЦО) - v@)) + (щ Av).
Таким образом, при однородных краевых условиях (й = /3 =
= 0) оператор А является симметрическим: (Ам, г>) = (гл, Аг>).
Но в общем случае этот оператор перестает быть
симметрическим (он даже не является линейным).
Построим в рассматриваемом случае вариационное
уравнение (Au — f,8u) =0 вида (9.19). Учитывая выражение для
оператора в (9.24), получаем
1
(Аи- /, 6и) = J (-и'(х) + си(х) - f{xj) 6и(х)dx = 0. (9.26)
334 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
Интегрируем по частям и учитываем краевые условия (9.25):
1
0 1
= — и'{х)8и(х)\ + / u'(x)8u'(x)dx + / (си(х) — f(x)) 8u(x)dx =
° о о г
0
+ f(cu(x)-f(x))Su(x)dx. (9.27)
о
Учитывая общий вид первой вариации функционала
интегрального вида C.3), можем записать:
1 2 1
s fjME}]_dx= fu'(x)Su'(x)dx, ueC^O,!], (9.28)
о о
1
0 i
= J (cu(x)-f(x)Mu(x)dx, ueL2[0,l]. (9.29)
о
Для терминального функционала T[u] = и2(а) (а фиксировано)
непосредственным подсчетом находим
АТ[и]=Т[и + 5и]-Т[и] =
= (и(а) + ёи(а)) —и (а) = 2и(а)ёи(а) + (ёи(а)) ,
откуда
8Т[и,6и]=2и(аNи(а). (9.30)
9.3. Примеры построения функционала
335
Приведенные представления первых вариаций
функционалов показывают, что правую часть (9.27) можно представить в
виде
сга2@) + /3и2A)'
(Au-f, Su) = 8(au{0) - Cu{l) +
2
+
+Л{ш?+:ш?_!{хНх))<1х.
О
Видно, что это выражение является первой вариацией
функционала
J[u] = au@) - Cu(l) + ——+ / (^Ч^ fujdx.
о
В качестве области определения D(J) функционала J [и] можно
взять D(J) = С1[0,1]. Из (9.26) следует, что каждое решение
рассматриваемой краевой задачи является стационарной
точкой этого функционала.
Аналогично можно построить функционал
ар(а)и(а) /3p(b)u(b) ар(а)и2(а) Cp(b)u2(b)
oi\ /?i 2а\ 2/3i
Ь — - \2 , / ч/ / ч\2
+
j (р{х){и<{х)) +Ф0Н*)) _f{x)u{x)yx (9в31)
с областью определения D(J) = С1\а,Ь\, стационарной точкой
которого является решение краевой задачи для операторного
уравнения
d / du(x)y
dx V dx
с краевыми условиями
а\и(а) — аи(а) = S, C\и(Ъ) + /?гл(Ь) = /3, (9.33)
_^И^)+ФЖ=/(:С)' х€[а,Ь], (9.32)
336 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
где с, / G С[а, &]; р G С1 [а, ft]; р(а)р(Ъ) ф 0; а, ai, а, /3, /?i, /3 G М;
<^i/?i Ф 0. Убедимся в этом следующим образом. Используя
представления (9.28)-(9.30), находим вариацию функционала
(9.31):
SJ\u 8и] = ^(а)^ц(а) _ Ф(^) Su(b)
Ct\
А
+ ар(а)и(аMи(а) + Pp(b)u(b)Su(b) + . p(g)u,(a;)^(a;)(fa +
ai
а
+/(.(ФИ-,М)(,(#.
Первый интеграл в правой части этого равенства преобразуем
интегрированием по частям:
ъ ъ
\ p(x)uf (х) Suf (х) dx = p(x)uf (х) 5и(х)\ — / {р{х)и'{х)) 5u(x)dx
а а
и после подстановки преобразованного интеграла в выражение
для 5J[u, 8и] получим
_ тГ _ п аби(а) C5и(Ь)
+
аи(а) Su(a) Cu(b) Su(b)
QL\
+
A
+ p(x)u(x) Su(x)
и и
-l(P(X)u'(X)y8u(X)dx + l(c(X)u(X)-f(X))8u(X)dx
a a
, .a + au(a)-aiuf(a) c , ч n'C - /3u(b) - /3iuf(b) c /74
= p(a) — v } Su(a) -p(b) -— 0 Su(b) +
A
+
0
/(-<*,УМ)' + е<х)«м-/<х))ад«ь. <•¦*>
9.3. Примеры построения функционала
337
Если некоторая функция щ(х) Е С2[а, Ь] является решением
краевой задачи (9.32), (9.33), то эта функция обращает правую
часть (9.34) в нуль, т.е. будет стационарной точкой
функционала (9.31).
Пример 9.13. Рассмотрим краевую задачу для уравнения
Пуассона
-Au(x) = f(x), x?V, (9.35)
где V Е М3 — пространственная область, ограниченная кусочно
гладкой поверхностью S; f(x) Е C(V) (см. примеры 9.8 и
9.11). Краевые условия задачи определим следующим образом.
На участках Sg поверхности S известны значения искомой
функции и(х):
и(х) = д(х), х Е Sg, (9.36)
а на остальных участках Sh = S\Sg краевое условие имеет вид
Vu(x)n(x)+au(x)=h(x), х Е Sh, «ЕМ, (9.37)
где V — оператор Гамильтона, а п(х) — единичный вектор
внешней нормали к поверхности S в точке х. Предполагаем,
что g(x)eC(Sg) ж h(x)eC(Sh).
Рассмотрим линейный дифференциальный оператор А = — А,
область определения D(A) которого состоит из функций и(х)
линейного многообразия Су = C2(V) П C(V U Sg) ПС^Уи Sh),
удовлетворяющих краевым условиям (9.36) и (9.37). Область
определения оператора всюду плотна в гильбертовом
пространстве 7^2 (V), а если g и h тождественно равны нулю, является
линейным многообразием в L/2(V). В этом случае оператор А
является симметрическим. Действительно, при g = 0 и h = О
оператор А линейный. Кроме того, для произвольных
функций и и v из области определения оператора, используя равен-
338 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
ство (9.15), получаем
(Ащу)-(щАу)= / (uAv-vAu)dV = / (uVv-vVu)ndS =
v s
= /g{Vv-Vu)ndS+ J h(u-v)dS = 0.
Sg Sh
В общем случае для вариационного уравнения,
соответствующего заданной краевой задаче, имеем
(Аи - /, 6и) = Г(-Аи - /) SudV = 0. (9.38)
v
Используя первую формулу Грина и краевые условия и учитывая
представления
6 i^2~dV= [VuSVudVi S [^rdS= [auSudS, (9-39)
v v sh sh
аналогичные (9.28), (9.29), находим
f(-Au-fMudV = - fvun5udS+ fvuVFu)dV-
V S V
- ffSudV = - [(h-auMudS+ fvuVFu)dV-S f fudV =
V Sh V V
= 6 f(^f-hu)dS + S j(^L-fu)dV = Q. (9.40)
2 / J V 2
sh v
Обратим внимание на то, что поверхностный интеграл на
участках Sg поверхности S исчезает, поскольку на Sg заданы
значения искомой функции и, следовательно, ди = 0 на Sg.
Кроме того, мы использовали и краевое условие (9.37).
9.3. Примеры построения функционала
339
Предпоследняя часть равенства (9.40) является вариацией
функционала
Л«] = /(^-/«)«^ + /(^- -*»)<». (9.41)
v sh
В качестве области определения этого функционала можно
взять линейное многообразие Cl(V) П C(V U 5), всюду плотное
в L2(V). Согласно проведенным выкладкам, первая вариация
этого функционала на множестве D(A) совпадает с (Аи — /, 5и).
Аналогично можно построить функционал
JH = J {k^f -rfdV + JJLJSff- hu) dS (9.42)
v sh
с областью определения D{J) = Cl{V) П C(V U S),
соответствующий операторному уравнению
-V(k(x)Vu(x))=f(x), xeV, (9.43)
с краевыми условиями
(и(х)=д(х), x<ESg,
ai(x)Vu(x)n(x) + a(x)u(x) = h(x), x € Sh,
(9.44)
где / G C(V); к G Cl{V) П C7EA); A; ^ 0 на 5A; au a, h G C7EA);
a\ 7^ 0 на S^.
Убедимся в том, что вариация функционала J [и] в области
определения D(A) оператора А, состоящей из функций
линейного многообразия ?у, удовлетворяющих краевым условиям
(9.44), совпадает с выражением (Au — f,8u). Для этого
вычислим вариацию функционала, учитывая представления (9.39):
6J[u, Su] = / kVu SVu dV - f5udV+ / — (au-h) Su dS.
v v sh
340 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
Первый интеграл в правой части этого равенства преобразуем
с помощью формулы Остроградского — Гаусса:
/ kVuSVudV = / kVuVEi
kVunSudS- I V(kVuMudV.
Ju)dV =
V V
Подставляя преобразованный интеграл в выражение для 5 J [и, 5 и]
и учитывая, что 5и = 0 на Sg, находим
6J[u,5u]= kVunSudS- V(kVu)SudV -
s v
- I f8udV+ Г — (au-hMudS = - I\v{kVu) + /) SudV +
V Sh V
/k
— (ai Vim + au - h) SudS. (9.45)
ai
sh
Проведенные выкладки показывают, что первая вариация
этого функционала на множестве D(A) совпадает с (Au — f,5u).
Если некоторая функция щ является решением краевой задачи
(9.43), (9.44), то правая часть (9.45) обращается в нуль, т.е. эта
функция будет стационарной точкой функционала (9.42).
Пример 9.14. Попытаемся для краевой задачи (9.9), (9.10)
построить по вариационному уравнению (9.19) функционал,
соответствующий операторному уравнению этой задачи.
Вариационное уравнение (9.19) в данном случае имеет вид
ъ
/(-«•М + *0-/<»))*Ф>* = 0. (9.46)
а
9.3. Примеры построения функционала
341
Левую часть (9.46) представим суммой двух интегралов:
ъ ь
-fVV + m)№ + f««W*)to = 0. (9.4Т,
a a
Для первого интеграла в (9.47), так же как в примере 9.12,
принимая во внимание то, что 5u(a) = 0, и учитывая второе
краевое условие (9.10), находим
+
(u"(x) + f(x)) Su(x) dx = -u'(x)8u(x) +
b
a a
b b u(b)
u(x)8u(x)dx—5(f(x)u(x))dx = —5{Cu(b)— / s(u)du
+
+ 6
b
/(
(u'(x)f
f(x)u(x))dx. (9.48)
Второй интеграл в (9.47) представим в виде
ь ь и(х)
f^wto-ffto /««о*. (m
a a 0
В итоге из (9.47)-(9.49) получаем
и(Ъ)
-б(/Зи(Ь)- / s(u)du ) +
b u(x)
+ j Г(^иу' -f(x)u(x))dx + S J dx I q(u)du = 0.
a 0
342 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
Левая часть этого равенства есть первая вариация функционала
Ь , ч 9 b
Г Ы(х)У Г
J[u] = -Cu(b)+ / v v п dx- j f(x)u(x)dx +
a a
b u(x) u(b)
+ dx q(u)du+ I s(u)du, (9.50)
a 0 0
в качестве области определения D(J) которого возьмем
линейное многообразие С1 [а, Ь]. На множестве функций и(х) из D(J),
удовлетворяющих краевому условию и(а) = S, вариация
функционала совпадает с левой частью (Аи — /, 5и) вариационного
уравнения.
9.4. Исследование выпуклости функционала
Для каждого из построенных в примерах 9.12-9.14
функционалов пока удалось лишь установить, что если
соответствующая ему краевая задача имеет решение, то это решение
является стационарной точкой этого функционала.
Естественно, возникают вопросы: будет ли у такого функционала эта
точка единственной и будет ли в этой точке функционал
достигать наименьшего или наибольшего значения? Ответы на эти
вопросы можно получить путем проверки свойства выпуклости
функционала.
Подмножество М линейного пространства С называют
выпуклым множеством, если для любых элементов u,v Е М
и любого числа а Е [0, 1] элемент аи + (l — a)v также
принадлежит М. Простейшим примером выпуклого множества является
само линейное пространство ?, а также любое его линейное
многообразие. Функционал J[ix], определенный на выпуклом
множестве М = D(J), называют выпуклым функционалом,
если для любых и\, и2 Е М и а Е [0, 1]
J[am + A - а)и2] ^ aJim] + A - a)J[u2]. (9.51)
9.4. Исследование выпуклости функционала 343
Если при любых и\ ф u<i и a Е (О, 1) в (9.51) выполнено строгое
неравенство, т.е.
R(ui,U2) = aJ[u1] + (l-a)J[u2]-J[au1 + (l-a)u2\>0, (9.52)
то функционал J[u] называют строго выпуклым
функционалом. Отметим, что в линейном пространстве IR1 понятие
функционала сводится к понятию действительной функции
одного действительного переменного. В этом случае понятие
выпуклого (строго выпуклого) функционала равнозначно
понятию выпуклой вниз (строго выпуклой вниз) функции [II].
Пример 9.15. Выпуклым функционалом является
линейный функционал. В нормированном пространстве N выпуклым
функционалом является норма ||гх||, так как из неравенства
треугольника следует, что
||сггх + A — cr)v\\ ^ ||GU|| + ||A — сг)г71| =
= сг||гх|| + A — ст) ||v||, w,v? ЛЛ
Взяв неубывающую строго выпуклую вниз функцию f(x)
действительного х (например, f(x) =ж2), получим строго
выпуклый функционал J [и] = /(||u||). Действительно,
f{\\au + (l-a)v\\)^f{a\\u\\ + (l-a)\\v\\)<
<af{\\u\\) + (l-a)f{\\v\\), u,veM.
В частности, \\u\\ — строго выпуклый функционал в
нормированном пространстве.
Замечание 9.2. Непосредственно из определений
вытекает, что сумма выпуклых функционалов является выпуклым
функционалом, а сумма выпуклого и строго выпуклого
функционалов является строго выпуклым функционалом. В частности,
если F[u] — линейный функционал и функционалы J [и] и J\[u\
связаны соотношением J [и] = J\[u\ + F[u], то они выпуклые
344 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
(строго выпуклые) одновременно. Это означает, что при
исследовании функционала J [и] на выпуклость в его представлении
можно опускать линейные относительно элемента и слагаемые.
Например, квадратичный функционал J [и] = (Аи, и) — 2(/, и)
будет выпуклым (строго выпуклым) тогда и только тогда,
когда выпуклым (строго выпуклым) является функционал J2 [и] =
= (Аи, и).
Пример 9.16. Выясним, при каких условиях функционал
J2[u] = (Аи, гх), построенный по линейному оператору А, будет
строго выпуклым. Для этого необходимо проверить
неравенство (9.52). Для произвольных элементов u,v? D(A) имеем
R(u\,U2) =a(Aui,ui) + (l — (j)(Au2, и2) -
- {A{aui + A - cr)u2), ou\ + A - сг)и2) =
= a(l-(j)((Aui,ui) + (Au2,U2)-(Aui,U2)-(Au2,ui)) =
= cr(l - a) (A(ui - г/2), ui - U2) •
Так как <j(l — a) > 0 при a E @, 1), заключаем, что функционал
J2[u] = (Au, и) будет строго выпуклым, если А —
положительный оператор.
Выпуклые функционалы имеют несколько важных свойств.
Свойство 9.1. Ограничение выпуклого (строго
выпуклого) функционала на выпуклое множество является выпуклым
(строго выпуклым) функционалом.
-4 Пусть J [и] — выпуклый функционал иМс D(J) — выпуклое
множество. Тогда функционал JmM? определенный на
множестве М и совпадающий на этом множестве с функционалом
J [и] (т.е. Jm[u\ есть ограничение J [и] на М), будет выпуклым
функционалом. Действительно, для любых элементов u,v Е М
и любого а Е @, 1) элемент аи + A — <j)v принадлежит М и
при этом, в силу выпуклости функционала J [и], верно
неравенство (9.51). А это и значит, что функционал JmM выпуклый.
9.4. Исследование выпуклости функционала 345
Рассуждения в случае строго выпуклого функционала
аналогичны. >
Свойство 9.2. Если функционал J [и] выпуклый (строго
выпуклый), то при с ^ 0 (с > 0) функционал cJ[u] тоже
выпуклый (строго выпуклый).
-4 Свойство выпуклости функционала J [и] означает выполнение
неравенства (9.51). Умножив это неравенство на с, получим
утверждение о выпуклости функционала cJ[ix]. В случае строго
выпуклого функционала рассуждения аналогичны. >
Свойство 9.3. Если J [и] — выпуклый функционал, а
f(x) — выпуклая (вниз) неубывающая функция
действительного переменного ж, определенная на всей числовой оси, то
композиция f(J[u\) — выпуклый функционал. В частности,
если J [и] — линейный функционал, то J2[u] — выпуклый
функционал.
А Для выпуклой функции при любых ж,уЕКиаЕ@, 1) верно
неравенство
f{ax+{l-G)y) ^Gf{x) + {l-G)f{y).
Рассматривая в качестве хжу значения функционала, получаем
/ (j[aUl + A - a)u2}) ^ f (aJ[ui] + A - a)J[u2]) <
<t7/(j[ui]) + (l-a)/(j[u2]),
где г/i, u2 E D(J); a E @, 1).
Если J [и] — линейный функционал, то |J[ix]| — выпуклый
функционал, так как
\j[aui + (l-a)u2]\ = |aJ[ui] + (l-a)J[u2]| ^
^a|j[ui]| + (l-a)|j[u2]|,
где ixi, и2 Е D(J), a Е @, 1). Выбрав выпуклую неубывающую
функцию /(ж), равную х2 при ж^Ои нулю при х < 0,
заключаем, что функционал J2[u] = f {\J[u]\) является выпуклым. >
346 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
Свойство 9.4. Непрерывный выпуклый (в частности,
непрерывный строго выпуклый) функционал J [и] достигает
наименьшего значения на любом замкнутом ограниченном
множестве в гильбертовом пространстве %. Если J [и] —> +оо при
||гх|| —>> оо, то выпуклый функционал J [и] достигает
наименьшего значения на любом замкнутом в % множестве*. ф
Свойство 9.5. Если строго выпуклый функционал J [и]
достигает на выпуклом множестве М своего наименьшего
значения J*, то элемент гх*, на котором достигается это значение,
единственный.
<4 Пусть J[u\] = J* = J[u2]. Тогда, полагая а = 1/2 в (9.52),
получаем
R(uuu2) = -J[ui] + -J[u2] -
J
rl 1
2 Ul + 2U2.
— t/^ и
U\ +u2
>0,
т.е. J[(ixi +г^2)/2] < J*, а это противоречит тому, что J*
является наименьшим значением функционала на множестве М. >
Свойство 9.6. Если строго выпуклый функционал J[u], у
которого всюду в области определения существует
дифференциал Гато, имеет стационарную точку, то эта точка
единственная и в ней функционал достигает наименьшего значения.
-4 Покажем, что стационарная точка строго выпуклого
функционала является его точкой минимума. Тогда, согласно
свойству 9.5, эта точка является единственной.
Пусть uq Е D(J) — стационарная точка функционала J [и].
Выберем произвольную точку и Е D(J). Тогда, согласно
свойству строгой выпуклости функционала J [и], для любого числа
а € @, 1)
aJ[u] + A — a) J[uq] > J[au + A — сг)гхо].
*См.: Экланд if., Темам Р.
9.4. Исследование выпуклости функционала, 347
Вычитая из обеих частей неравенства J[uo] и деля на сг,
получаем
J[au + A - a)uo] - J[uo] J[uq + a8u] - J[uq]
J[u\ — J [ixoJ > = ,
a a
где 8u = u — uq. Так как функционал J [г/] имеет дифференциал
Гато, то существует предел
VmJ[uo + aSu]-J[uo]=5J[uoM.
Этот предел равен нулю, потому что uq — стационарная точка.
Но тогда
J\u — J\uq > lim — —- = О,
т.е. J[u] ^ J[ixo] и> в силу произвольного выбора и Е ?)(^4), ^о
является точкой минимума функционала J [и]. >
Пример 9.17. Выясним, при каких условиях функционал
J [и], определяемый соотношением (9.31), является выпуклым.
Область определения D(J) = С1^,^] этого функционала
является линейным многообразием, т.е. представляет собой выпуклое
множество. Согласно замечанию 9.2, линейные слагаемые
можно опустить, поскольку они не влияют на выпуклость
функционала. Функционал будет выпуклым, если каждое из оставшихся
слагаемых определяет выпуклый функционал на D(J). При
этом, если одно из этих слагаемых определяет строго выпуклый
функционал, то и функционал J [и] является строго выпуклым.
Интеграл
ь
/*к,№|*
a
в случае с(х) > 0, х Е [а, 6], можно трактовать как скалярное
произведение функций и(х) и v(x) в линейном пространстве
348 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
С1[а,Ъ]. Поэтому слагаемое
ь
- с(х)(и(х))
dx
в (9.31) справа определяет строго выпуклый функционал как
половина квадрата нормы (см. пример 9.15 и свойство 9.2).
Слагаемое
1 / , ч/ „ чЧ2
ь
p(x)(uf(x)) dx
при р{х) ^ 0, х Е [а, Ь], определяет выпуклый функционал,
поскольку для любых функций и(х), v(x) Е С1 [а, Ъ\ и любого
а Е @, 1) и /i = 1 — сг имеем
R(u,v) —°\ р(х)(и (х)Jdx + fi / р(ж
а а
6 Ъ
— р(х)(аи*\х) + /jLv'(ж)) dx = a/j, p(x)(u'(x)—v'(x)) dx^O.
а а
Отметим, что при построении функционала было
использовано условие р(а)р(Ь) ^ 0 (см. пример 9.12), что вместе с
условием неотрицательности функции р(х) дает р(а) > 0 и р(Ь) > 0.
Поэтому слагаемые
ар(а)и2 (a) Cp(b)u2 (Ь)
2аг ' 2C~i
определяют выпуклые функционалы, если а/а\ ^0и /?//?i ^ 0.
Это вытекает из свойств 9.2 и 9.3.
Итак, если р(х) ^ 0 при х Е [а, 6], с(ж) > 0 при х Е [а, 6],
р(а)р(Ь) т^ 0, а/«1 ^ 0, /?//?i ^ 0, то функционал (9.31) строго
выпуклый.
9.4. Исследование выпуклости функционала, 349
Пример 9.18. При исследовании выпуклости функционала
J [и] (9.42), область определения которого D(J) = Cl(V) C\C(V)
есть выпуклое множество, можно не рассматривать линейные
слагаемые. Этот функционал является выпуклым, если
слагаемые
\[k{x) {Vuf dV, l [ ^Ща(х)и2 dS
2 J 2 J ai{x)
v sh
определяют выпуклые функционалы. Можно показать, что
достаточным условием выпуклости первого из них является
неотрицательность функции к(х) в У, т.е. к(х) ^ О, х Е V.
Предполагая, что эта функция непрерывна, заключаем, что она
неотрицательна и на границе области и, в частности, к(х) ^ 0,
х Е Sh- С учетом этого нетрудно показать, что выпуклость
второго функционала, определяемого интегралом по Sh, будет
следовать из соотношения а(х)/а\(х) ^ 0, х Е Sh-
Итак, рассматриваемый функционал выпуклый при к(х) ^ 0,
х Е V, и а{х)/а\{х) ^ 0, х Е Sh- Можно показать, что если
к(х) > 0, х Е V, то функционал (9.42) является строго
выпуклым.
Пример 9.19. Функционал (9.50) будет выпуклым, если
выпуклы функционалы
Ъ и(х) и(Ь)
JdxJq{Z)<%, J s(?)dZ, (9.53)
а 0 0
поскольку первое и третье слагаемые в правой части (9.50)
линейные и не влияют на выпуклость функционала J [и], а
второе слагаемое определяет выпуклый функционал.
Обозначив через Q(x) и S(x) первообразные функций q(x)
и s(ж), принимающие значение 0 в точке х = 0, можем записать
Ъ и(х) Ь и(Ь)
Jq[u]=jdxf q{i)di = JQ{u{x))dXj Js[u} = J' s(Z)d? = S(u(b)).
350 9. ФОРМУЛИРОВКА ВАРИАЦИОННЫХ ЗАДАЧ
Выпуклость функционала Js[u] означает выполнение
неравенства
S(au1(b) + tiu2(b))^(TS(u1(b))+tJLS(u2(b)),
где ui(x), и2(х) Е С1 [а,6]; а Е @, 1), /i = 1 — а, а это равносильно
выпуклости (вниз) функции ?(#). Как известно [II], критерием
выпуклости дифференцируемой функции является неубывание
ее производной. Поэтому функционал Js[u] выпуклый, если
функция s(x) не убывает на [а, Ь].
Аналогично условием, достаточным для выпуклости
функционала Jgl/u], является выпуклость функции Q(x), или
неубывание функции q(x). Действительно, в случае выпуклой функции
Q(x) имеем
^
Jq[(JUi + /Ш2] = / Q(aU\(x) + /Ш2(ж)) dx
a
b b
< / (aQ(ui(x)) + /jQ(u2(x)))dx = a / Q(ui(x))dx +
a a
b
¦V / Q(u2(x)) dx = aJq[ui]+ fjiJq[u2\,
+ 1
где u\{x), U2{x) E C^fa,??]; a E @, 1); /i = 1 — a.
Итак, функционал (9.50) является выпуклым при условии,
что функции q(u) и s(u) не убывают. Нетрудно убедиться,
что этот функционал будет строго выпуклым, если функция
q(x) является монотонно возрастающей. Отметим, что строгая
монотонность s (х) не обеспечивает строгой выпуклости
функционала Js[u], так как
Js[aui + A - cr)u2] = crJs[ui] + A - cf)Js[u2]
для любых функций щ(х) и и2{х), имеющих одинаковые
значения в точке Ь.
Вопросы и задачи
351
Вопросы и задачи
9.1. Убедитесь, что соотношения (9.2) и (9.3) удовлетворяют
всем аксиомам скалярного произведения и нормы
соответственно.
9.2. Постройте функционал, соответствующий краевой
задаче для обыкновенного дифференциального уравнения (ОДУ)
(9.32) с краевыми условиями
и'(о) — au(a) = 5, и(Ъ) = /3,
где а, й, f3 Е М. Исследуйте этот функционал на выпуклость и
укажите для него множество допустимых функций.
9.3. Для ОДУ
р(х)и"(х) -\- q(x)u(x) + с(х)и(х) = /(ж), х Е [а, 6],
с краевыми условиями u(a) = и(Ь) = О укажите требования к
функциям р(х), q(x) и с(ж), выполнение которых позволит
построить соответствующий этой краевой задаче строго
выпуклый функционал. На каком множестве функций допустимо
рассматривать этот функционал?
9.4. Постройте функционал, соответствующий краевой
задаче для дифференциального уравнения
—Аи(х) + с(х)и(х) = /(ж), х Е V,
где с(ж), /(ж) Е С(У), с краевыми условиями (9.36), (9.44).
Укажите множество функций, на которых допустимо
рассматривать этот функционал.
10. МЕТОДЫ РЕШЕНИЯ
ВАРИАЦИОННЫХ ЗАДАЧ
10.1. Минимизирующие последовательности
Рассмотрим некоторый функционал J[u] в гильбертовом
пространстве %, ограниченный снизу, т.е.
inf J\u] = а > —оо.
ueD(j)
Бесконечную последовательность элементов ип Е D(J), п Е N,
для которой
lim J[un] = а,
71—ЮО
называют минимизирующей последовательностью
функционала J [и].
Построение минимизирующей последовательности
позволяет найти наименьшее значение рассматриваемого
функционала. При некоторых дополнительных свойствах функционала
можно утверждать, что минимизирующая последовательность
является фундаментальной в заданном функциональном
пространстве. В случае полного функционального пространства
это означает, что минимизирующая последовательность {ип}
сходится по норме пространства к некоторому элементу гхо,
который будет точкой минимума функционала, если функционал
непрерывен.
Квадратичный функционал Js[u] = (Агх, гх) — 2(/, гх),
соответствующий операторному уравнению Аи = / с
симметрическим оператором А, определен лишь в области определения
D(A) этого оператора. Всюду в D(A) этот функционал
имеет первую вариацию SJ[u] = 2(Агх, 8и) — 2(/, 8и). Если А —
10.1. Минимизирующие последовательности 353
положительный оператор, то функционал J [и] строго
выпуклый. Если он достигает своего минимума в некоторой точке
г/*, то эта точка единственная и является стационарной точкой
функционала, т.е. 5J[u*,5u] =0 (см. свойства 9.5 и 9.6).
Если оператор А, действующий в гильбертовом
пространстве 1-L, является положительно определенным, т.е. для
некоторого числа 7 > 0 выполняется неравенство (Аи, и) ^ 72||'ul|2>
и Е D(A), то можно ввести энергетическое скалярное
произведение
(u,v)A = (Au,v), A0.1)
индуцирующее энергетическую норму
\\u\\A = yJ(u,u)A. A0.2)
При этом
IML^tIMI- (ю.з)
Несложно проверить, что введенное таким образом умножение
удовлетворяет всем аксиомам скалярного умножения. С
помощью энергетического скалярного произведения квадратичный
функционал можно записать в виде
Js[u] = (и, и)А - 2 (/, и) = \\и\\\ - 2 (/, и). A0.4)
Его обычно называют функционалом энергии.
Отметим, что из сходимости последовательности ип Е D(A)
по энергетической норме* к некоторому элементу и Е D(A)
следует сходимость ип —>> и по норме гильбертова пространства,
поскольку для положительно определенного оператора А,
согласно A0.3),
||г/п-г/|| ^7_1 ll^n-^IU- A0.5)
Поэтому если D(A) — полное евклидово пространство
относительно энергетического скалярного произведения, то оно
* Такую сходимость иногда кратко называют сходимостью по
энергии.
354 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
является линейным подпространством гильбертова
пространства И (т.е. замкнутым линейным многообразием). Если же
D(A) относительно энергетического скалярного произведения
не является полным, то его можно пополнить, т.е. расширить до
полного евклидова пространства На, причем такое пополнение
можно провести в рамках гильбертова пространства Н.
Полное евклидово пространство На называют энергетическим
пространством. Нетрудно видеть, что функционал
энергии Js[u] естественным образом продолжается на все линейное
пространство На с помощью той же формулы A0.4).
Теорема 10.1. Если А — положительно определенный
оператор в Н и ио — решение операторного уравнения Аи = /,
то любая минимизирующая последовательность функционала
энергии сходится к гхо-
< Пусть Аио = / и и Е D(A). Тогда, используя свойства
скалярного умножения и учитывая симметричность и
положительность оператора А, получаем
Js[u] = (и, и)А - 2 (Аи0, и) + (и0, ио)А - (и0, и0)А =
= (и-ио,и- ио)А - (г/о, ио)А =
= \\u-uo\\\- \\ио\\\ > — II^oIIa- (Ю.6)
Из этих преобразований видно, что элемент ио является точкой
минимума функционала Js[u] и значение Js[izo] = — H^olU Для
функционала наименьшее. При этом
Цгх-г/olU = Js[u] + \\ио\\А = Js[u] - Js[uo].
Если последовательность {ип} является минимизирующей для
функционала Js[i/], то Js[un] — Js[uo] —> 0 при п —>> оо. Значит,
и ||гхп — ио\\А —>> 0 при п —>> оо, т.е. минимизирующая
последовательность сходится к г^о по энергии. Согласно A0.5), эта
последовательность сходится к ио также по норме гильбертова
пространства Н. >
10.1. Минимизирующие последовательности 355
Напомним, что в случае положительного (в частности,
положительно определенного) симметрического оператора А любое
решение операторного уравнения Аи = / является точкой
минимума функционала энергии и наоборот (см. теорему 9.2), а
согласно теореме 9.1, такая точка единственная. Но вопрос,
существует ли такая точка и при каких условиях, пока открыт.
Теорема 10.2. Функционал энергии имеет в
энергетическом пространстве точку минимума, и притом единственную.
-4 Согласно представлению A0.4), функционал энергии Js[u]
является строго выпуклым, так как в этом представлении
слагаемое 2(/, и) является линейным функционалом и его можно
не учитывать (см. замечание 9.2), а другое слагаемое —
квадрат нормы — является строго выпуклым функционалом (см.
пример 9.15). При этом, согласно неравенствам Коши — Буня-
ковского и A0.3),
Je[u] = ||ti||^-2(/,u)^||u||^-2||/||||u||^ Н|^-^||/||Л||и||Л =
\и\\Л [\\и\\А о или) -^+°°, \\и\\ -> °°-
7"
Нетрудно убедиться, что относительно энергетической нормы
функционал энергии — непрерывный функционал.
Действительно, с учетом неравенства A0.5) имеем
| Js [и + Su] — Js [и] | =
\-2(f,u + 6u)-\\ufA + 2(f,u)\^
|2 и i|2 '
<
\u + Su\\2A - \\u\\2A\ +2|(/, Su)\ ^ 2|(u, Su)A\ + ||HIa +
-l-2||^|| II^^M ^ 2||тх||^||**с||^-|- ||*^||^Ч- -% 11^11^11*^11^ ^^0
при ||<faz||^ —> 0. А это и означает, что функционал Js[u]
непрерывен в произвольно взятой точке и Е D(JS).
356 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
Итак, функционал энергии непрерывен. Поэтому в силу
свойства 9.4 он достигает наименьшего значения в
энергетическом пространстве. Согласно свойству 9.5, точка минимума
у строго выпуклого функционала единственная. >
Как утверждается в доказанной теореме, функционал
энергии достигает наименьшего значения на некотором элементе
г/*, причем наименьшее значение функционала равно — Цг^Ц^.
Если и* ? ^(^4)? то этот элемент, согласно теореме 9.2, является
решением операторного уравнения Аи — f'. Но это выполняется
не всегда, и если и* (fc D(A), то операторное уравнение не
имеет решений, так как любое решение uq операторного уравнения
есть точка минимума функционала Js[ix]. Нетрудно показать,
что тогда uq есть точка минимума функционала энергии и в
На, т«е. должна совпадать с и*.
Если операторное уравнение Аи = / имеет решение, то его
называют классическим решением. В случае
симметрического положительно определенного оператора А, если
операторное уравнение не имеет решений, интерес представляет точка
минимума и* функционала энергии, ее называют
обобщенным решением уравнения Аи = /.
Напомним, что % = L2^l) есть сепарабелъное
гильбертово пространство. Можно показать*, что и соответствующее
энергетическое пространство На ^ 7~L-> будучи линейным
подпространством гильбертова пространства %, также является
сепарабельным. В таком линейном пространстве существует
счетный базис {ит}. При этом, так как, по предположению,
D(A) всюду плотно в 7/, счетный базис можно построить
только из элементов этого множества [IX]. При заданном счетном
базисе обобщенное решение можно представить в виде
ОО
и*=^2атит, aTOER, (Ю.7)
m=l
*См.: Треногий В.А.
10.1. Минимизирующие последовательности 357
где сходимость ряда рассматривается относительно
энергетической нормы.
Если последовательность {um} является
ортонормированной системой функций гильбертова пространства На, то ряд
A0.7) будет рядом Фурье по этой системе и его коэффициенты
ат можно найти по формулам Эйлера — Фурье:
ат = (и*,ит)А = (/,гбш), теК A0.8)
Последовательность функций
N
uN = Y^ amUm, N е N, A0.9)
m=l
представляющая собой последовательность частичных сумм
ряда A0.7), сходится по энергетической норме к обобщенному
(или классическому) решению и*. В силу непрерывности
функционала энергии эта последовательность является
минимизирующей для функционала Js[ix]. Элемент йдг при
фиксированном N называют приближенным решением операторного
уравнения Аи = /.
Если счетный базис является ортонормированным, то для
частичных сумм ряда A0.7), являющегося в этом случае
рядом Фурье, верно соотношение ||гх^+1 — u*\\a ^ \\UN — u*\\a->
TV = 1, 2, ..., т.е. последовательность {Цг^дт — ^*||^} монотонно
убывает. Значит, с ростом числа N функций гхт,
используемых в приближенном решении A0.9), точность приближенного
решения (в смысле энергетической нормы) уравнения Аи = /
возрастает.
Однако сходимость минимизирующей последовательности
еще не означает, что
lim \\AuN-f\\ =0, A0.10)
N-teo
т.е. стремится к нулевому элементу невязка в уравнении Аи =
= / при подстановке в него приближенного решения йдг.
Соотношение A0.10) имеет смысл лишь в том случае, когда
ит ED(A), га = 1,7V.
358 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
Отметим, что установленные для случал положительно
определенного оператора результаты имеют, главным образом,
теоретическое значение, поскольку на практике этот случай
встречается достаточно редко. Однако возможность построить
минимизирующую последовательность в некотором сепарабель-
ном гильбертовом пространстве лежит в основе методов
приближенного решения широкого круга прикладных
вариационных задач. При этом важно предварительно убедиться, что это
пространство совпадает с множеством допустимых функций
для функционала, входящего в вариационную формулировку
конкретной краевой задачи. В качестве такого пространства
обычно можно выбрать множество функций, интегрируемых с
квадратом и с весом вместе со своими производными
определенного порядка.
Пример 10.1. Рассмотрим функционал J[u], определяемый
соотношением (9.31), в котором р(х) ^ 0, с(х) > 0 на отрезке
[а, Ь] и ol/oli ^ 0, /?//?i ^ 0. Областью определения этого
функционала является линейное многообразие С1^,^] в гильбертовом
пространстве L2[a,b]. Введем в С1^,^] скалярное произведение
по формуле
ap(a)u(a)v(a) /3p(b)u(b)v(b)
b
+ /«,VW,)+*W,M.))d,. (io.il)
a
Можно показать, что выполняются все аксиомы скалярного
умножения. Пополненное относительно этого скалярного
умножения линейное многообразие С1^,^] становится сепарабель-
ным гильбертовым пространством, в котором функционал J [и]
можно записать в виде
ь _ _
тГ п 1 и и9 f п, ч / ч 7 ар(а)и(а) вр(Ь)и(Ь) ,_ _ч
Л« =о Н - f{x)u{x)dx+ РК ' К } -KL К \ (Ю.12)
2 J «i Pi
10.1. Минимизирующие последовательности 359
а сходимость минимизирующей последовательности этого
функционала рассматривать по норме, индуцированной скалярным
произведением A0.11).
Пример 10.2. Функционал J [и] (9.42) определен на
линейном многообразии D(J) = Cl(V) П C(V) в гильбертовом
пространстве L^iV). Он является выпуклым при к(х) ^ 0, х Е V, и
a(x)/ai(x) ^ 0, х Е Sh (см. пример 9.18). В D(J) можно ввести
скалярное произведение
(u,v)= fkVuVvdV + f—uvdS. A0.13)
v sh
После пополнения относительно введенного скалярного
умножения получаем сепарабельное гильбертово пространство, в
котором функционал можно записать в виде
j[u] = h\u\\2- ГfudV- [ —hudS. A0.14)
2 J J ai
v sh
Сходимость минимизирующей последовательности этого
функционала удобно рассматривать относительно нормы,
индуцированной введенным скалярным произведением. #
Характерной особенностью записи функционалов в виде
A0.12) и A0.14) является то, что в них как слагаемое
входит квадрат нормы. Именно это слагаемое определяет
строгую выпуклость функционала и тем самым единственность его
стационарной точки. Такая запись оказалась возможной
благодаря введению соответствующего скалярного произведения.
Однако в случае функционала (9.50), соответствующего
нелинейной краевой задаче, не удается ввести подобное скалярное
произведение. Поэтому сходимость минимизирующей
последовательности этого функционала приходится рассматривать
относительно нормы, индуцированной исходным скалярным
произведением в гильбертовом пространстве L2(fi).
360 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
10.2. Методы приближенного
решения вариационных задач
Пусть линейный оператор А, действующий в сепарабелъ-
ном гильбертовом пространстве Н, является положительно
определенным с областью определения D(A), всюду плотной
в Н. Тогда D(A) можно пополнить до энергетического
пространства На- Последовательность приближенных решений
UN операторного уравнения Аи — f будем искать в виде
последовательности частичных сумм ряда A0.7):
N
uN=^amum, 7V = 1,2, ..., A0.15)
т=1
где {ит} — счетный базис в На- В 10.1 показано, что {йдг}
является минимизирующей последовательностью функционала,
сходящейся к обобщенному решению по энергетической норме.
В силу введенной в %а энергетической нормы для элемента
U]Sf вычислим
N N
\\Un\\a = ^2ап ^2 ат(ит^ Un)A- A0.16)
п=1 т=1
Если счетный базис {ит} является ортонор мир о ванной
системой функций в %а-> то A0.16) можно упростить:
N
11^11а=5>п1К11а- (ю.17)
т=1
В этом случае коэффициенты ат можно найти по формулам
Эйлера — Фурье A0.8). Однако построение ортонормирован-
ной системы (например, с помощью процесса ортогонализации
Грама — Шмидта из некоторого исходного счетного базиса) —
достаточно трудоемкий процесс. Способ нахождения
коэффициентов ат для произвольного счетного базиса в %а называют
методом Ритца. Суть метода состоит в следующем.
10.2. Методы приближенного решения вариационных задач 361
Если подставить A0.15) вместо и в квадратичный
функционал Js[u] = \\и\\А — 2(/, гх), достигающий на обобщенном
решении и* (Е Wa своего наименьшего значения, то, учитывая
A0.16), получим многочлен 7V переменных второй степени
Js[uN] = \\uN\\\-2(f,uN) =
N N N
n—1 m—1 m—1
относительно коэффициентов am, га = 1, TV, определяющий
дифференцируемую функцию в R^. Поскольку квадратичный
функционал ограничен снизу, то эта функция также
ограничена снизу и достигает минимума при некотором наборе значений
коэффициентов ат. Для нахождения этих значений можно
использовать необходимые условия минимума функции многих
переменных:
— = 0, га = 1,7V.
дат
В результате получим систему линейных алгебраических
уравнений (СЛАУ)
N
^2(um,un)Aan = (f,um), га = 1,7V. A0.18)
п=1
Матрицей СЛАУ A0.18) является матрица Грама для
системы функций ит, га = 1,7V, относительно энергетического
скалярного произведения. Эта матрица не вырождена,
поскольку элементы гхт, га = 1, 7V, линейно независимы [IV]. Поэтому
СЛАУ A0.18) имеет единственное решение ап^-> п = 1, 7V.
Второй индекс в обозначении коэффициентов ап^ показывает, что
они, вообще говоря, зависят от 7V.
Пример 10.3. Из курса сопротивления материалов
известно, что зависимость от продольной координаты х прогиба
362 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
w(x) упругой балки, нагруженной распределенной по ее
длине поперечной нагрузкой q(x), удовлетворяет обыкновенному
дифференциальному уравнению (ОДУ)
d2 (EJd2w(
dx2 V dx1
(EJ^j^)=q(x), *G[<M],
A0.19)
где E — модуль упругости материала балки; J — момент
инерции поперечного сечения балки; / — длина балки. Произведение
EJ характеризует жесткость балки на изгиб. Примем, что
EJ = const, q(x) = q = const, a
концы балки имеют
шарнирные опоры (рис. 10.1), т.е. в
точках х = 0 и х = / равны
нулю прогиб и кривизна
изогнутой продольной оси балки:
w@) = w(l) = w"@) = w"(l) = 0.
A0.20)
Для принятых предположений дифференциальное уравнение
A0.19) является операторным уравнением Aw(x) = g,
определяемым линейным дифференциальным оператором А = —— и
граничными условиями A0.20). Функцию w(x) можно найти,
последовательно интегрируя уравнение wlv = g, где q = qj{EJ\
и учитывая граничные условия:
w'"(x)=qx + Ci, w"(x) = lx2 + ClX + C2, С2=0, d = -f,
w'(x) = I x3
C4
ql
6
o, c3
4
qP
24
ж2 + Сз, w(x) =
24'
12
ж3 + С3ж + С4,
В итоге получаем уравнение изогнутой продольной оси балки:
ql'
w(x) = ^—(xl-2xi + x)
v ' 24
е [0, l].
A0.21)
10.2. Методы приближенного решения вариационных задач 363
Из симметрии условий закрепления и нагружения балки
следует, что максимальный прогиб wm&x балки будет в ее середине,
т.е. при х = 1/2. В этом можно убедиться и формальным
путем, если исследовать на экстремум функцию w(x). Из A0.21)
при х — 1/2 следует хорошо известный из курса сопротивления
материалов результат
™max-384<Z/ ~Ш'Е j
7774
0,013021gP.
Располагая точным решением краевой задачи для уравнения
wIV(x) =q с граничными условиями A0.20), применим для ее
решения метод Ритца. Для этого предварительно выясним
область определения оператора А = ? и его свойства.
В качестве области определения оператора А примем
множество Cq [0,1] четырежды непрерывно дифференцируемых
функций, удовлетворяющих однородным граничным условиям
A0.20). Это множество является линейным всюду плотным
многообразием в гильбертовом пространстве L2[0, /].
Убедимся, что оператор А с заданной областью определения является
симметрическим. В самом деле, для произвольных функций
w,v? D(A), последовательно интегрируя по частям, получаем
(Aw, v)
/ Ф)
wlY (x)dx = v(x)w'"(x)
- [v'(x)w'"(x)dx = -v'(x)w"(x)\l + Iv"(x)w"(x)dx
= v"x)w'(x)\l - fv,"(x)w,(x)dx = -v'"(x)w(x)\l +
0
I I
+ / vlv(x)w(x)dx = / vlv(x)w(x)dx = (Av, w).
364 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
Также последовательным интегрированием по частям для
произвольной функции w Е D(A) находим
1
(Aw, w) = I w(x)ww (х) dx =
о
i
= w(x)w,,f(x)\ — I w'(x)w'"(x)dx = — w'(x)w"(x)\
о
I
+
0
Из равенства (Aw,w) = 0 следует, что w"(x) = 0, т.е. w(x) =
= С\х-\-С%- Но из граничных условий A0.20) получаем С\ =
= С^2 = 0. Поэтому w(x) = 0 и оператор А является
положительным.
Можно доказать*, что оператор А с заданной областью
определения является и положительно определенным, т.е. для
некоторого числа 7 > 0 верно неравенство (Aw, w) ^ 72 IIHI •>
weD(A).
Поскольку операторное уравнение с симметрическим и
положительным оператором А имеет в D(A) решение A0.21), то
квадратичный функционал Js[w] = (Aw,w) — 2(q,w) на этом
решении, согласно теореме 9.2 о квадратичном функционале,
достигает своего наименьшего значения. Приближенное
решение этого операторного уравнения представим в виде
N
wn = /] ап shin7n?, ж = —Е[0, 1], A0.22)
и отметим, что Wn удовлетворяет всем граничным условиям
A0.20). Подставляя A0.22) в функционал Js[w] и учитывая вид
*См.: Ректорис К.
10.2. Методы приближенного решения вариационных задач 365
скалярного произведения в гильбертовом пространстве i^fO, 1],
получаем функцию N переменных
Js[wn] = (Awn, wN) - 2 (q, wN) =
N N I N
= \]an2_lam (sinm7ra:)IVsinn7ra;^~2 V flm / qs'mm7rxdx =
n=l m=l q m=l q
N 4 N }
= V^ an ( — j 2_\ am / sinm7nr sinnirx dx —
r 1 ^ 1 J
n=l m=l q
,2i^L_LiTam A0.23)
m=l
относительно коэффициентов am, га = 1, TV, являющуюся
многочленом второй степени.
Система функций {бшптгх} на отрезке [0, 1] ортогональная
(но не ортонормированная):
1
/
smrriTrx smnnxdx = \
Поэтому в данном случае необходимое условие минимума
функции A0.23) приводит к СЛАУ с диагональной матрицей, что
позволяет записать явное выражение для каждого
коэффициента:
\п
1 — (-1Y
an = 2 / J ql\ n?N. A0.24)
{П7Г)Ь
Отметим, что коэффициенты ап не зависят от количества
N рассматриваемых функций счетного базиса, что является
следствием ортогональности счетного базиса. Это означает,
что формулы A0.24) дают точные, а не приближенные значения
коэффициентов.
366 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
Если в A0.22) ограничиться лишь одним первым слагаемым,
то получим
/1 nl Y1ПТТ*
w\ = ais'mTTX = ^qlA smnx « 0,013071—— sin ——.
7ГЙ EJ I
Это приближенное решение для максимального прогиба балки
при х = 1/2 дает значение wmax ~ 0,013071 ql^/(EJ), которое
отличается от значения wmdiX, полученного из точного решения
A0.21), менее чем на 0,5%.
Характерно, что при п = 2 имеем а^ — 0, т.е. функция
sin27nr, будучи нечетной при переносе начала координат на
рис. 10.1 в точку х = //2, „не участвует" в формировании
приближенного решения задачи, симметричной относительно
этой точки. Из A0.24) видно, что такая же „участь" постигнет
в A0.21) все слагаемые с четными номерами.
Для п = 3 имеем а3 = 4д/4/(ЗтгM « 0,000054 g/4/(^J) и
ws = aism-KX + азъ'тЗтгх = —^qlA sin7nr + 7—rr^/4sin37n? =
7ГЙ C7Г)Й
4б// / 7ГЖ 1 37ГЖ
= ^j(SinT + 243Sm —
В точке ж = //2 получаем значение гйз ~ 0,013017, с пятью
верными знаками после запятой совпадающее со значением
^тах? вычисленным по точному решению. #
Метод Ритца можно использовать для нахождения
приближенного решения не только в случае квадратичного
функционала. Процедура этого метода применима и тогда, когда не
удается построить строго выпуклый функционал по
вариационному уравнению, соответствующему заданному операторному
уравнению А(и) = /. Пусть в этом случае область
определения D(A) оператора А(-) (не обязательно линейного) является
всюду плотной в сепарабельном гильбертовом пространстве И
и известна такая система {ит} функций ит Е D(A), m Е N,
образующая счетный базис в %, что система {vm} функций
10.2. Методы приближенного решения вариационных задач 367
vm = A(um) также образует счетный базис в %. Это означает,
что любой элемент f (ЕН можно представить в виде ряда
оо
m=l
Рассмотрим функционал
F[u] = \\A(u)-f\\\ A0.26)
который достигает наименьшего (нулевого) значения на
элементе i?* Е D(A) (если он существует), удовлетворяющем
операторному уравнению, т.е. Аи* = /. Приближение к этому
элементу будем искать в виде
N
Ч/V = X) b™Urm Ь™ ^ ^ N ^ N. A0.27)
т=1
Подставив A0.27) в A0.26), получим неотрицательную
функцию N переменных Ь]_, 62, ..., bjy
<p(bu...M)=F[u*N] = \\A(u*N)-f\\2 =
N
A[^bmUrn) - f
т=1
. A0.28)
Значения переменных в точке минимума можно найти одним из
методов конечномерной оптимизации [XIV] исходя из условия
lp(bu...,bN) = \\A(u*N)-f\\2^mi. A0.29)
При этом в общем случае выполнение условия A0.29) не
гарантирует существование единственного элемента u*N.
Если оператор А линейный, то функция <p(fti,... ,ft/v) будет
многочленом второй степени от переменных Ь]_, ..., бдг и,
следовательно, дифференцируемой в J$LN. Значения переменных,
368 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
обеспечивающих минимум этой функции, должны
удовлетворять необходимым условиям минимума
дер
dbm
Отсюда получаем СЛАУ
N
= 0, га = 1,7V.
^2(vm,vn)bn = (f,vm), га = 1,7V, A0.30)
п=1
имеющую единственное решение, поскольку ее матрица
является матрицей Грама относительно скалярного произведения
в % для системы линейно независимых элементов vm Е %,
га = 1, N. В случае положительно определенного оператора
А можно доказать*, что последовательность элементов u*N
A0.27), для которых коэффициенты Ът являются решением
СЛАУ A0.30), сходится в Нд по энергетической норме, а
значит, и по норме гильбертова пространства, к обобщенному
решению и* уравнения Аи = /. При этом, согласно A0.29),
Au*N —)> / при N ->> оо.
Описанная процедура приближенного решения
операторного уравнения характерна для метода наименьших квадратов.
Несложно убедиться, что при использовании метода
наименьших квадратов для нахождения коэффициентов ап (п Е N) в
приближенном решении A0.22) краевой задачи, рассмотренной
в примере 10.3, придем к тому же выражению A0.24).
Если известно, что обобщенное решение и* операторного
уравнения Аи = / с положительно определенным оператором
А совпадает с классическим решением этого уравнения, т.е.
и* Е D(A) и Аи* = /, то функционал
Ф[и] = (Аи, и) - 2(/, и) + \\Аи - /||2, и Е D(A),
*См.: Ректорис К.
10.3. Собственные значения симметрического оператора, 369
достигнет своего наименьшего значения именно на элементе и*
(см. 10.1). Применение метода Ритца для построения
минимизирующей последовательности {йп} функционала Ф[и] из
элементов вида A0.15) при произвольном счетном базисе в И
приводит к методу Куранта*. Для метода Куранта сохраняет
силу соотношение A0.10) без использования ортогонального
базиса из собственных элементов оператора А. Применение этого
метода для вычисления коэффициентов an (n ? N) в
приближенном решении вида A0.22) краевой задачи из примера 10.3 снова
приведет к A0.24).
Отметим, что метод Ритца позволяет использовать счетный
базис, элементами которого могут быть функции,
принимающие ненулевые значения лишь в отдельных подмножествах
области определения оператора. Такая возможность
реализована, например, в методе конечных элементов.
10.3. Собственные значения
симметрического оператора
Одной из распространенных прикладных задач является
так называемая проблема собственных значений линейного
оператора, входящего в формулировку краевой задачи. Эта задача
состоит в нахождении ненулевых решений однородного
операторного уравнения с однородными граничными условиями. Ее
решение может быть получено вариационными методами.
Напомним, что ненулевой вектор х произвольного
линейного пространства С называют собственным вектором линейного
оператора (иногда собственным элементом оператора) А,
действующего в ?, если для некоторого числа А верно равенство
Ах = Лж. При этом число А называют собственным значением
(или собственным числом) линейного оператора А.
В случае конечномерного линейного пространства С
собственные значения А — это все такие числа, для которых
*Р. Курант A888-1972) — математик, родившийся в Польше и
работавший до 1933 г. в Германии, а затем в США.
370 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
оператор А — XI (I — тождественный оператор) не
имеет обратного (т.е. необратим). В случае бесконечномерного
пространства оператор А — XI может не иметь ограниченного
обратного оператора* хотя бы по одной из двух причин:
а) оператор А — XI не является инъективным (взаимно
однозначным). Это равносильно тому, что уравнение (А — Х1)х = О
имеет ненулевое решение, или, другими словами, число Л
является собственным значением оператора;
б) образ оператора А — XI не совпадает со всем
пространством С.
Совокупность всех тех А, при которых оператор А — XI не
имеет ограниченного обратного, называют спектром
линейного оператора А. Спектр естественно разделяется на две
части в соответствии с двумя причинами нарушения
обратимости. Множество собственных значений (причина „а")
составляет дискретный спектр линейного оператора, а
остальная часть спектра (причина „б") — непрерывный спектр.
В ряде случаев линейный оператор не имеет непрерывного
спектра, а дискретный спектр можно представить как
некоторую последовательность значений An, п Е N. Отметим, что
собственные векторы действующего в евклидовом
пространстве ? симметрического оператора А, отвечающие различным
собственным значениям, ортогональны. В конечномерном
случае (тогда А является самосопряженным оператором) это
доказано в [IV], но доказательство на самом деле не связано с
размерностью линейного пространства и проходит в
произвольном евклидовом пространстве. Естественно, возникает вопрос,
можно ли из собственных векторов линейного оператора
составить базис линейного пространства. В бесконечномерном сепа-
рабельном гильбертовом пространстве под базисом понимают
* Линейный оператор А в нормированном пространстве С называют
ограниченным оператором, если для некоторого числа К > 0 верно
неравенство \\Ах\\ ^К\\х\\, х Е С. Наименьшее из таких чисел называют
нормой оператора.
10.3. Собственные значения симметрического оператора 371
любую полную (или замкнутую, что одно и то же) линейно
независимую систему [IX].
Задача определения собственных значений линейного
оператора возникает во многих прикладных задачах. В [XI]
рассмотрена задача поиска собственных значений и собственных
функций оператора Штурма — Лиувилля, играющая большую
роль в решении многих уравнений математической физики
[XII]. К аналогичной задаче приводит изучение собственных
(свободных) колебаний механических систем. С проблемой
собственных значений сталкиваются и при изучении вопросов
устойчивости механических систем.
Проблему собственных значений можно свести к решению
некоторой вариационной задачи. Если симметрический
оператор А, действующий в евклидовом пространстве ?,
удовлетворяет неравенству (Аи, и) ^ k\\u\\ (k Е Щ для любого вектора
wG^, то его называют оператором, ограниченным
снизу. Ясно, что при к > 0 этот оператор является положительно
определенным, а при к = 0 — положительным. Число
. (Аи, и)
а = mi — — ^ к
ифО [U, и)
тесно связано с собственными значениями симметрического
оператора. Для любого собственного значения А имеем А ^ а,
так как
а = inf (Ащ и"> < (Аи^и>д = (ЛцА, и\) = \(и\,и\) =
u^o (щи) ^ (их, их) (их, их) (их, их)
где их — собственный вектор, отвечающий собственному
значению А.
Теорема 10.3. Если симметрический оператор А
ограничен снизу и для некоторого вектора uq
(Auq^uq) . (Au,u)
— = a=mf -, ueD(A),
(Uo,U0) ифО (U,U)
372 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
то а есть наименьшее собственное значение оператора А, а
указанный вектор и$ — собственный вектор А, отвечающий
собственному значению а.
< Рассмотрим оператор В — A — al. Тогда
(Ви, и) = [(А — al)u, и) = (Аи, и) — а (и, и) > О,
т.е. В — неотрицательный оператор. При этом
(Ви0, щ) = (Аг/о, щ) - ol (щ, щ) = 0.
Пусть v — произвольный вектор. Используя свойство
симметричности оператора В, вытекающее из симметричности А,
получаем в силу неотрицательности В, что
(В(ио + tv), Uo + tv) = (Buq, Uq) +
+ 2t(Bu0, v) +t2 \\v\\2A = t2 \\v\\2A + 2t (Bu0, v) > 0.
Но такое неравенство будет верным при любых t только в
случае, когда (Вио, v) = 0.
Итак, (Buq, v)=0 для любого вектора v. Взяв, в частности,
v = Вио, получим \\Buo = 0, откуда Buq = 0. Переходя
к оператору А, приходим к выводу, что (А — aI)uo = 0 или
Auq = аио, т.е. вектор uq является собственным для А и
отвечает собственному значению а. Как уже показано, все
собственные числа А удовлетворяют неравенству А ^ а. Значит,
а — наименьшее собственное значение. >
Доказанная теорема позволяет переформулировать задачу
определения наименьшего собственного значения
ограниченного снизу симметрического оператора как задачу поиска
наименьшего значения функционала:
j[u]=(^i^)_>inf. (Ю.31)
10.3. Собственные значения симметрического оператора, 373
Этой задаче можно придать другую формулировку. Очевидно,
что
ифО (гх, и) \\и\\=\ (гх, гх)
Но
(Агх, гх) (Агх, гх) / / гх \ гх \
(гх,гх) \\и\\2 V VIMI/ IMI/
где вектор гхо = гх/||гх|| удовлетворяет соотношению ||гхо|| = 1.
Поэтому на самом деле
. (Ащ гх) .
mf ^-—Ц-^ = mf Мгх, гх).
и^О (гх, гх) ||м||=1
Таким образом, наименьшее собственное значение
симметрического оператора А можно найти, решал вариационную
задачу для функционала J[x] = (Ах, ж):
(Аж, ж)-> inf, ||ж|| = 1. A0.32)
Пусть спектр симметрического ограниченного снизу
оператора А состоит из последовательности Ai, ..., Ап, ...
собственных значений, причем все они простые, т.е. соответствующее
собственное подпространство оператора одномерно.
Предположим, что наименьшее собственное значение Ai и
отвечающий ему собственный вектор х\ найдены, например, как
решение задачи A0.32). Тогда ортогональное дополнение Н^
к собственному подпространству Н = span^i} оператора А
является инвариантным подпространством этого оператора.
Значит, можно рассмотреть ограничение оператора А на
подпространство Н и поставить задачу вида A0.32), но с
дополнительным ограничением:
(Ах, ж) ->> inf, ||ж|| = 1, (ж, жх) = 0. A0.33)
У ограничения оператора А на Н спектр будет состоять из
последовательности собственных значений А2, Аз, ...
Поэтому если задача A0.33) имеет решение, то это решение даст
374 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
собственное значение Л2 и соответствующий ему собственный
вектор Х2- Так как поиск наименьшего значения в A0.33)
происходит на подмножестве множества, определяемого в A0.32)
равенством ||ж|| = 1, то Л2 ^ Ai.
Описанный процесс можно продолжить. На п-м шаге, зная
собственные значения Ai, ..., An_i и соответствующие им
собственные векторы х\, ..., xn-i, решаем задачу
(Ах, х) —>> inf, ||ж|| = 1, (х, х\) = ... = (ж, хп-\) = 0.
Если эта задача имеет решение, то оно даст собственное
значение \п и соответствующий ему собственный вектор хп. Ясно,
что \п ^ An_i. Если симметрический оператор А
положительно определенный, т.е. (Ах, х) ^ 72 11ж11 ПРИ х 7^ 0, то все его
собственные значения положительны (не меньше гJ).
Замечание 10.1. Множество X в сепарабельном
гильбертовом пространстве И компактно, если любая
последовательность {хп} С X содержит сходящуюся (по норме пространства)
подпоследовательность. Аналогично, используя сходимость по
энергии, можно ввести понятие множества, компактного
по энергии. Компактное множество является ограниченным
и замкнутым. В конечномерном пространстве эти два условия
являются и достаточными, но в бесконечномерном
пространстве это уже не так. Множество, имеющее компактное
замыкание, называют предкомпактным.
Линейный оператор А называют компактным (вполне
непрерывным), если он любое ограниченное множество
отображает в предкомпактное. Вполне непрерывный оператор
непрерывен, но не всякий непрерывный оператор является вполне
непрерывным. В гильбертовом пространстве 1-L = L2[a,b]
компактным является оператор вида
ъ
А[у(х)] = fK(x,t)y(t)dt, х е [а, Ъ],
а
10.3. Собственные значения симметрического оператора 375
где K(x,t) — непрерывная функция на множестве [а,6]х[а,&].
Если K(x,t) = K(t,x), то указанный оператор симметрический,
а его спектр представляет собой последовательность {Ап},
сходящуюся к нулю. При этом каждому значению Лп ф 0
соответствует конечномерное собственное подпространство.
Линейные дифференциальные операторы, как правило, не
являются непрерывными, а тем более вполне непрерывными.
Однако в ряде случаев линейный дифференциальный оператор
А имеет обратный оператор, являющийся вполне непрерывным.
Тогда оператор А имеет спектр из последовательности
собственных значений, стремящейся к оо [XI]. Примером такого
дифференциального оператора является оператор Штурма —
Лиувиллл.
Пример 10.4. Рассмотрим задачу на собственные
значения
-— = хщ хе [о, 1], 1л(о) = i4(i) = о.
Эта задача представляет собой задачу Штурма —
Лиувиллл. Ее операторное уравнение Аи = \и определяется линейным
дифференциальным оператором А = — -—, который действует
ах1
в Z^fO, 1], определен на множестве Cq[0,1] функций, дважды
непрерывно дифференцируемых на [0, 1] и удовлетворяющих
граничным условиям задачи. Этот оператор симметрический и
положительно определенный (см. примеры 9.7 и 9.10).
Положительная определенность оператора означает, что он ограничен
снизу, причем в качестве константы к можно взять нуль.
Задача Штурма — Лиувилля решается аналитически.
Собственными значениями оператора А являются числа Ап = п27г2,
а ортонормированная система собственных функций имеет
вид [XI]
фп(%) = v2sin(n7rx), п = 1, 2, . . .
376 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
Выясним, как выглядит вариационная формулировка
задачи Штурма — Лиувилля. Для произвольной функции и Е С$ [О,1],
согласно (9.14) с учетом с = О, имеем
(Аи,и)= / (uf(x)) dx.
Поэтому наименьшее собственное значение Ai = 7г2 является
решением вариационной задачи
1 1
/И*))'*-юшц /(«(,))'*= 1, »@)=-.A)=0. #
Отметим, что в прикладных задачах возникает
необходимость находить ненулевые решения операторного уравнения
вида
Аи-ХВи = 0 A0.34)
с однородными граничными условиями, где А —
симметрический оператор, аВ — положительно определенный, причем
D(A) С D{B). Если в области определения D(B) оператора В
с помощью соотношения \\и\\в = (Ви, иI'2 ввести
энергетическую норму || • ||б, то наименьшее собственное значение Ai и
соответствующий ему собственный элемент и\ будут
решением вариационной задачи
(Аи, и) -+ inf, \\и\\в = 1. A0.35)
Это можно показать, незначительно модифицировав
доказательство теоремы 10.3. Аналогично A0.33) для следующего по
возрастанию собственного значения и соответствующего ему
собственного элемента получим задачу
(Аи, и) —>> inf, \\и\\в = 1? (-Вгх, гхх) = 0,
10.4. Приближенное решение задачи на собственные значения 377
так как векторы и\ и U2-, отвечающие различным значениям
Ai и Л2, ортогональны относительно энергетического
скалярного произведения, порожденного оператором В
(доказательство этого аналогично доказательству ортогональности
собственных векторов, отвечающих различным собственным
значениям). Последовательно можно найти собственные значения
Ai, ..., An_i и отвечающие им собственные элементы и\, ...,
ип-\. Тогда собственное значение А^ и соответствующий ему
собственный элемент ип будут решением задачи
(Аи, и) —>> inf, \\и\\в = 1, (Ви, и\) = ... = (Ви, ип-\) = 0.
10.4. Приближенное решение
задачи на собственные значения
Задачу на собственные значения ограниченного снизу
симметрического оператора А\ можно свести к задаче на
собственные значения для положительно определенного
оператора А. Действительно, если выполнено неравенство (Ах, х) ^
^ к \\х\\ , то оператор А\ = А — к'1, где к' < к, а / —
тождественный оператор, является положительно определенным,
так как
(Агх, х) = (Ах - к'х, х) = (Ах, х) - к' (ж, х) > (к - к') \\х\\2 > 0.
При этом, если А — собственное значение оператора А, а х —
соответствующий собственный вектор, то А\х = Ах — к!х =
= Аж — к'х = (А — к')х. Значит, х является и собственным
вектором оператора А\, а соответствующее этому вектору
собственное значение оператора А\ равно \ — к'.
Итак, можно ограничиться рассмотрением лишь
положительно определенного оператора А, все собственные значения
которого положительны. Покажем, как вариационная задача
A0.32) нахождения наименьшего собственного значения
такого оператора А может быть решена методом Ритца.
378 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДАЧ
Рассмотрим последовательность {еп} векторов из области
D(A) определения оператора А, линейно независимую и полную
относительно энергетической нормы, порожденной оператором
А. Образуем линейную комбинацию ждг = а\е\ + ... + адгвдг,
коэффициенты в которой подберем так, чтобы
(Axjy, Xn) = ЦждгЦ^ —»> inf, (Ждг, Ждг) = ||ждг||2 = 1, A0.36)
т.е. наименьшее значение энергетической нормы ЦждгЩ будем
искать в линейной оболочке конечной системы векторов ei, ...,
едг. Это приводит к поиску наименьшего значения
действительной функции N переменных ai, a2, ..., адг, имеющей вид
N N
/(ai,...,aiv) = {AxNlxN) = ^^ {Aen,em)anami A0.37)
n=lm=l
при ограничении
N N
(xN, xN) = ^2 ^2 (вп' е™)an0jm = 1' (Ю.38)
п=1т=1
Поставленная задача имеет решение, поскольку
непрерывная функция N переменных достигает своего наименьшего
значения на замкнутом ограниченном множестве [V].
Воспользуемся методом множителей Лагранжа. Функция Лагранжа
имеет вид Ф = (Аждг, ждг) — А(ждг, ждг). Необходимое условие
экстремума этой функции дает
-— = 2^1 (Aenjem)-X(en,em))an = 0, m = 1,7V. A0.39)
аат n=i \ J
Согласно ограничению A0.38), искомое решение однородной
системы A0.39) линейных алгебраических уравнений должно
10.4. Приближенное решение задачи на собственные значения 379
быть ненулевым, т.е. определитель ее матрицы должен
равняться нулю:
(Aei3ei)-A(ebei) ... (AeN,ei)-\(eN,ei) I
(Аеье2)-А(еье2) ... (AeN,e2)-\(eN,e2) | Q п q 40)
(Aei,eN)-\(ei,eN) ... (AeN,eN)-\(eN,eN)
Так как система {en}, n = 1, TV, линейно независима, то
матрица Грама для векторов ei, ..., едг невырождена. Значит, в
A0.40) коэффициент при А^, равный по абсолютному значению
определителю матрицы Грама, не равен нулю.
Пусть Ао — один из корней алгебраического уравнения
A0.40) N-ik степени. Подставим Ао в систему A0.39) и
найдем ее ненулевое решение (а^, а[], ..., а%), определяемое с
точностью до числового множителя. Этот числовой множитель
позволяет выбрать решение так, что будет выполнено условие
нормировки, т.е. можно считать, что
N N
^^(en,em)a>^ = l. A0.41)
n=lm=l
Подставив значения a^, n = 1, TV, и Ао в A0.39), получим
тождества
N N
^2 (Ает ет) а° = А0 ^2 (е^' ет) аш га = 1, 7V.
71=1 П = 1
Умножим их на а^ и просуммируем по га:
N N N N
Yl Y1 (Аеп' е™) апат = хо^2^2(ет ет) а°па°т.
т=1п=1 т=1п=1
Вследствие A0.41) правая часть этого соотношения равна Ао-
Поэтому для вектора xQN = а\е\ + ... + o>%bn имеем
N N
\AxN, xN) = 2_^ /_^ (Аеп, ет) апат = Ао-
т=1п=1
380 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
Чтобы найти решение задачи, необходимо выбрать
наименьший корень Лдг алгебраического уравнения A0.40) и
вычислить соответствующий этому значению вектор ждг.
Увеличивая 7V, получим последовательность {Х%} значений X°N
(N Е N) и последовательность {x°N} соответствующих им
векторов. Так как при возрастании N множество, на котором идет
поиск наименьшего значения в A0.36), расширяется,
последовательность {Х%} не возрастает, причем X°N ^ су, где а —
наименьшее значение функционала в вариационной задаче A0.32).
Значит, существует предел lim Х% ^ а. Можно показать, что
TV-юо
на самом деле этот предел равен а, т.е. последовательность
{x°N} является минимизирующей.
Чтобы найти следующее по возрастанию после Ад^
собственное значение оператора А, решаем вариационную задачу
(AxN, xN) -+ inf, (xN,xN) = l, (x°N,xN)=0
на линейной оболочке системы векторов ei, ..., едг, что
приводит к поиску наименьшего значения той же функции A0.37) N
переменных при ограничениях
N N N N
/ J / J \€-п-> ^т) &п&т = J-? / J / J \^п-) €т) ^n^rn = U,
п=1т=1 п=1т=1
которые вытекают из формулировки задачи A0.33).
Пример 10.5. В задаче Штурма — Лиувилля найдем
приближенные значения двух младших собственных чисел, выбрав
в качестве счетного базиса последовательность
ик(х) = A-х)хк, кеК
Взяв первые две функции счетного базиса, вычислим
элементы определителя второго порядка в характеристическом
10.4. Приближенное решение задачи на собственные значения 381
уравнении A0.40). Для этого последовательно находим
Ы, ui) = —, (иъ щ) = —, (и2, щ) = —,
112
(АиЪ Щ) = -, (AuU U2) = -, (Al42, 142) = Y^«
Таким образом, в данном случае уравнение A0.40) имеет вид
1_Л. J_ I_\.J-
3 30 б 60
--Х-- --А —
6 60 15 105
= 0.
Раскрывая в этом уравнении определитель, получаем
квадратное уравнение второго порядка:
Его решениями являются Ai = 10hA2 = 42. Точные значения
первых двух собственных чисел равны Ах = тг2 « 9,8696, А2 =
= 47Г2 ~ 39,4784. Нетрудно убедиться, что точность полученных
приближений находится в пределах 1,5% для первого
собственного значения и в пределах 2,6% для второго собственного
значения. Отметим избыточный характер приближений. #
Применение метода Ритца для нахождения любого
собственного значения положительно определенного оператора А
обеспечивает приближение сверху. Однако на практике наряду
с оценкой собственного значения сверху не менее важно иметь
его оценку снизу. Наличие двусторонней оценки собственного
значения позволяет контролировать сходимость
приближенного решения и иметь представление о возможной погрешности
этого решения.
Оценку сверху собственного значения Ai симметрического
оператора А можно получить, используя произвольный
ненулевой элемент и (\\и\\ > 0) из области определения D(A) этого
382 10. МЕТОДЫ РЕШЕНИЯ ВАРИАЦИОННЫХ ЗАДА Ч
оператора. Действительно, в силу теоремы 10.3
Л1 = у^> inf У ' /, ueD(A).
(и, и) ифО (и, и)
Если оператор А положительный, то оценку снизу для Ai
можно найти, располагая такой гарантированной оценкой А2
снизу следующего собственного значения А2, что Ai < А2 <
< А2. Тогда, вычислив предварительно по указанному выше
ненулевому элементу и ? D(A) значение
_ (Аи, Аи)
(Аи, и)
придем в итоге к неравенству [XIII]
к— X
Ai
(l-f4)<A^Ab (Ю-42)
v А2 — М'
которое имеет смысл при условии Ai ^ ус. Это условие
выполняется, поскольку в силу неравенства Коти — Бунлковского
\(Аи, и)\ ^ ||^4^|| • ||ix||. Так как для положительного оператора
Ai > 0, то применение A0.42) эффективно лишь в случае,
если гарантированная оценка снизу для А2 такова, что к < А2. В
противном случае левая часть в A0.42) будет неположительной.
Вопросы и задачи
10.1. Исследуйте свойства оператора
определенного на множестве Cq[0,1] функций и(х), дважды
непрерывно дифференцируемых на [0, 1] и удовлетворяющих
краевым условиям и@) = иA) =0.
Вопросы и задачи
383
10.2. В задаче на собственные значения
u@)=u(l)=0
найдите методом Ритца два первых приближения для
наименьшего собственного значения Х\. В качестве двух первых
функций счетного базиса используйте функции и\{х) и щ{х) из
примера 10.5.
10.3. Выясните, является ли заданный оператор
симметрическим при заданных краевых условиях, и решите задачу на
собственные значения:
а)у" = Лу', у@) = j/@ = 0, х€[0,1];
б)-у" = Ху, з/@)=у'@)=0,же[0,оо);
в) yIV = -Ay", у@) = у"@) = у"A) = у"'A) = 0, х € [0, 1].
11. ДВОЙСТВЕННЫЕ
ВАРИАЦИОННЫЕ ЗАДАЧИ
11.1. Альтернативные функционалы
Существенным преимуществом вариационной
формулировки прикладной задачи, функционал которой имеет
определенные экстремальные свойства, является не только возможность
применения эффективных прямых методов, но и удобные
способы оценки погрешности приближенного решения.
Действительно, из двух приближенных решений и\ и U2 в задаче на
минимум функционала J [и] разумно отдать предпочтение
тому из них, на котором значение функционала J [и] меньше,
т.е. ближе к минимальному значению. В этом случае
значение функционала выполняет роль обобщенного критерия для
сравнения двух и более приближенных решений.
Для количественной оценки погрешности приближенного
решения и можно использовать разность A J = J [и] — J[u*\
значений функционала (гх* — точное решение задачи на
минимум функционала). Эту разность можно связать со
значением ||гх — гх*||, отражающим близость точного и приближенного
решений. Но элемент и* не известен в процессе
приближенного решения задачи, поэтому не известно и значение «/[гх*].
Следовательно, необходимо направить усилия на поиск
оценки значения J[u*\ снизу, чтобы получить оценку разности A J
сверху.
Оценка неизвестного значения J[u*\ может быть получена,
если построить дополнительную вариационную задачу на
максимум некоторого функционала I[v], удовлетворяющего
условию
I[v*\ = max/[v] ^ min J [и] = J[iz*]. A1.1)
11.1. Альтернативные функционалы
385
Тогда для любой пары элементов u Е D(J) и v Е D(I) имеем
/[«] ^/[«*] ^ J[u*]< J[u]. A1.2)
Таким образом, получаем оценку сверху приближенного
решения и: A J = J[u] — J[u*\ < J [и] — I[v].
Функционал I[v], который связан с функционалом J [и]
условием A1.1), будем называть альтернативным
(двойственным) функционалом по отношению к функционалу J[г/], а
вариационную задачу на максимум функционала I[v] —
двойственной вариационной задачей по отношению к
вариационной задаче на минимум J[u].
Отметим, что оценка приближенного решения разностью
J [и] — I[v] имеет нижнюю границу, равную J[u*\ — I[v*\.
Поэтому при построении двойственной задачи желательно, чтобы
эта граница была как можно меньшей. Лучше всего, когда она
равняется нулю. Однако это условие лишь необходимое и
имеет в основном теоретическое значение, так как в практических
вычислениях эта граница не известна. Совпадение решений у
двойственных задач еще не гарантирует хорошей оценки
приближенного решения.
В прикладных задачах значение функционала обычно имеет
определенный содержательный смысл и определяет некоторую
усредненную характеристику исследуемого объекта или
процесса. Поэтому двусторонняя оценка вида A1.2) дает
возможность оценить, насколько точным является найденное
приближенное значение указанной характеристики. Таким образом,
весьма важно выяснить, при каких условиях для данной
вариационной задачи, представляющей собой вариационную
формулировку некоторого операторного уравнения, можно построить
двойственную вариационную задачу.
Построение двойственной задачи — неоднозначный
процесс, оно может приводить к различным вариантам в
зависимости от выбранного способа построения. Наиболее
распространенным подходом к построению двойственной задачи
386 11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДА ЧИ
является следующий. Рассмотрим задачу на минимум
функционала J [г/], определенного на некотором множестве U = D(J).
Предположим, что имеется такой функционал Ф[гх,?;],
заданный на множестве UxV, что исходный функционал J [и] можно
представить в виде
J [и] = sup<I>[iz,v].
vev
Тогда поставленную вариационную задачу можно
интерпретировать как минимаксную:
J* = inf J [и] = inf зирФ[гх, v]. A1.3)
иеи иеи vev
При этом оказывается, что функционал
I[v] = inf Ф[г/,г;]
иеи
является альтернативным по отношению к функционалу J [и].
Это вытекает из следующего утверждения.
Теорема 11.1. Если функционал Ф[гх,ю] определен на
множестве UxV, то
sup inf Ф[гх, v] ^ inf зирФ[гх, v]. (И-4)
vevueu ueiivev
А Неравенство A1.4) очевидно, если его правая часть равна +оо
(это соответствует случаю, когда при любом uGU функционал
Ф[гх,ю] не ограничен по v). Поэтому будем считать, что мини-
макс в правой части неравенства равен некоторому числу М.
Для любых и Е U и v Е V имеем
Ф[гх, v] ^ 8ирФ[гх, v].
vev
Значит, и точные нижние грани по и связаны таким же
неравенством:
inf Ф[гх, v] ^ inf зирФ[гх, v].
и^и ueuvev
11.2. Построение альтернативного функционала 387
Отсюда следует, что функционал I[v] = inf Ф[гх, v] ограни-
чен сверху числом М— inf sup Ф[г/, v], т.е. число М является
верхней гранью функционала I[v]. Поэтому sup/[v] ^ М, так
как точная верхняя грань — это наименьшая верхняя грань.
Последнее неравенство эквивалентно неравенству A1.4). >
11.2. Построение альтернативного функционала
До сих пор краевые условия, входящие в формулировку
вариационной задачи, рассматривались как ограничения на
область определения функционала. Однако иногда удобно
трактовать вариационную задачу как задачу на условный
экстремум, которая в самом общем виде формулируется
следующим образом.
Пусть в гильбертовом пространстве rl задан функционал
J [и] с областью определения D(J), а оператор Ф[гх]
отображает D(J) в некоторое полное евклидово (гильбертово или
конечномерное евклидово) пространство V. Требуется найти
минимум функционала J [и] при условии Ф[гх] = 0 @ в данном
случае обозначает нулевой элемент евклидова пространства V).
Другими словами, ищется минимум функционала J [и] на
множестве {и е D(J): Ф[и] = 0}.
В случае гладкой задачи, т.е. если множество D(J) открыто,
а функционал и оператор дифференцируемы*, решение этой
задачи можно искать с помощью метода множителей Лагранжа.
Если и* — решение задачи, то при некоторых дополнительных
предположениях** существует такой элемент vGV, что элемент
и* является стационарной точкой функционала Лагранжа
L[u,v] = J[u] + (<S>[u],v). A1.5)
* Понятия дифференциала Фреше и дифференциала Гато для оператора
аналогичны соответствующим понятиям для функционала, введенным в
1.2.
**См.: Алексеев В.М., Тихомиров В.М., Фомин СВ..
388 11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДА ЧИ
Оказывается, что функционал Лагранжа позволяет
сформулировать задачу, двойственную к исходной. Действительно,
вариационную задачу
J[u]-> inf; Ф[и] = 0 A1.6)
поиска точки минимума и* функционала J [и] можно
представить как минимаксную задачу
J[iz*] = inf supL[ix,i;] (И-7)
ueUvev
для функционала Лагранжа L[u,v]. При этом, если Ф[гх] Ф О, то
supLfifc,-*;] = +ос. Значит, решение минимаксной задачи A1.7)
не может достигаться на элементе гх*, для которого Ф[гх*] ф 0.
Но если Ф[и] = 0, то L[ix,v] = J [и] и решение минимаксной
задачи A1.7) совпадает с решением вариационной задачи.
Функционал Лагранжа L[ix,v] A1.5) по отношению к
функционалу J [и] иногда называют полным, а функционал J [и] по
отношению к функционалу Лагранжа — частным. Если J [и] —
выпуклый функционал, удовлетворяющий условию J [и] —>> +оо
при | |г? || —>> оо, то в A1.7) можно изменить порядок точных
верхней и нижней граней*:
J[u*\ = inf supL[iz,v] = sup inf L[ix,v] = sup/|/y] = /[«*], A1.8)
ueUvev veVueu vev
где
I[v]= m?L[u,v]. A1.9)
ueu
Отметим, что правая часть в формуле A1.9) может
принимать значение — оо. Разумно ограничиться теми значениями
-у, для которых I[v] конечно. Это приводит к естественному
сужению области определения функционала I[v] до некоторого
подмножества D(I) С V.
*См.: Экланд И., Темам Р.
11.2. Построение альтернативного функционала 389
Предположим, что функционал L[ix,v] при любом v Е D(I)
достигает минимума в единственной точке uv Е U = D(J).
Тогда, по существу, на множестве D(I) определено отображение
ф, которое элементу v ставит в соответствие элемент uv Е U.
С помощью этого отображения мы можем записать
I[v] = inf L[u,v] = Lty(v),v] = J№(v)] + (Ф(^И)> v),
ueu
т.е. при известном отображении ф альтернативный
функционал I[v] легко восстанавливается. Однако отображение ф
далеко не всегда удается получить в явном виде. Чаще всего оно
определяется некоторым уравнением, да и условие
единственности точки минимума при фиксированном v выполняется не
всегда. Тем не менее связь v и uv можно учесть в выражении
для функционала Лагранжа и тем самым упростить задачу
построения альтернативного функционала I[v].
Если функционал J [и] является дифференцируемым, то
уравнение для отображения ф можно искать с помощью метода
множителей Лагранжа:
8J[u,6u] + FФ[и,6и], v) = 0, Ф(и) = 0.
Пример 11.1. Рассмотрим краевую задачу для уравнения
Лапласа
Au(x) = 0, xeV, u(x)=g(x), х Е S, A1.10)
где д(х) — известная функция, заданная на поверхности S,
ограничивающей область V.
Эта краевая задача является частным случаем задачи,
рассмотренной в примере 9.13. В этом примере для краевой задачи
построен функционал (9.41), который в данном случае сводится
к функционалу Дирихле
J[u} = ^ [{VufdV A1.11)
v
с областью определения Cl(V) П C(V).
390 11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДА ЧИ
Краевое условие и — д = 0 на S можно трактовать как
условие Ф(и) = 0, причем отображение Ф переводит функцию
и Е С1 {V) П С{V) в вектор-функцию (и — д)п на поверхности
S (здесь п — вектор внешней нормали к поверхности).
Таким образом, в качестве полного евклидова пространства V в
данном случае можно взять гильбертово пространство вектор-
функций на S с интегрируемым скалярным квадратом. С
учетом этого полный функционал можно записать в виде
L[u,v] = J[u] + (<f>(u),v) = ^- !{VuJdV+ f(u-g)vndS =
V s
/ uvndS — / gvndS. A1.12)
v s s
Найдем вариацию функционала L[u,v]:
8L[u,v,8u,8v] = / Vu8VudV + / (u — gMvndS + / vnSudS.
V s s
Отсюда, используя первую формулу Грина и полагая, что SWu =
= V(Su), получаем
8L[u,v,8u,8v\ = — / Au8udV +
v
+ (u-g)8vndS + (v + Vu)n8udS.
s s
Из условия стационарности 8L[u, 8u,v, 8v] = 0 полного
функционала при произвольных вариациях 8и в V и 8v на S следует,
что Аи = 0bV wu — g = 0 на 5, т.е. в стационарной точке
полного функционала должны быть выполнены равенства A1.10). Но
помимо этого получаем дополнительное условие связи между и
и v: v -\- \7и = 0 на 5, или
Vu(x) = -v(x), xeS. A1.13)
11.2. Построение альтернативного функционала 391
Условие A1.13) позволяет построить непрерывное
продолжение вектор-функции v(x), определенной на поверхности 5,
в область V согласно формуле v(x) = — Угл(ж), х ?V.
Учитывая это продолжение, находим по формуле Остроградского —
Гаусса
dS = Jdiv(uv)dV = JvVudV + JuVvdV.
S V V V
Используя это равенство, а также условие связи Wu = — v в
представлении полного функционала A1.12), получаем
L[u,v] = ^ f(VuJdV + fvVudV+ fuVvdV- f gvndS =
V V V s
= ^ fv2dV- fv2dV + IuVvdV- IgvndS =
V V s
]- fv2dV + fuVvdV- IgvndS. A1.14)
V V V
2
V V s
В данном случае видно, что точная нижняя грань по и
конечна лишь при выполнении условия
Vv(x) = divv(a;) =0, xeV. A1.15)
С учетом этого условия из A1.14) получаем представление
альтернативного функционала I[v]:
I[v]= inf L[u,v] = -- [v2dV- [gvndS. A1.16)
ueD(j) 2 J J
392 11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДА ЧИ
Его областью определения D(I) является множество
непрерывно дифференцируемых в области V функций,
удовлетворяющих условию A1.15).
Пример 11.2. Построим функционал, альтернативный
функционалу J[u] (9.50) из примера 9.14.
Областью определения функционала J [и] является линейное
многообразие С1[а, Ь] в гильбертовом пространстве L<^\a, b]. Его
минимум ищется при краевом условии и(а) = а (второе условие
учтено в самом виде функционала). Таким образом, в данном
случае Ф[и] =и(а) — 5, причем оператор Ф переводит функцию
и(х) в число и{а) — S, т.е. является функционалом. Значит, в
качестве евклидова пространства V следует взять одномерное
арифметическое пространство R1 со скалярным произведением
(ж, у) = ху. Используя условие связи, можем записать
Цщу] = J[u] + №[u],v) =
+
-Ри(Ъ)
Ь г
/ dx
*/<
i(x)
/ q(u
и'(х)У
2
1
)du +
>
-dx -
•Kb)
[si
b
-Jf(X)u(X)dX +
u) du + (ь
i(a) — a)f<
Найдем первую вариацию функционала A1.17) при
произвольных вариациях 6и(х) и 6v:
ь
а
b b
-//WfaW^+/<K»M)M*)<fc+
а а
+ s(u(b)) Su(b) + (u(a) — a)Sv + v5u(a).
11.2. Построение альтернативного функционала 393
Отсюда, интегрируя по частям, находим
ь
5L[u,v,Su,5v] = —C8u(b) + uf(x)Su(x)\ — / u"\x)Su(x)dx -
la J
a
b b
-//(»)Л(«)Л + /,(«(»))М*)* + .(«(«)АЦ») +
a a
+ (u(a)-a)Sv + vSu(a) = [u'(b) + s(u(b)) -fi]8u(b) +
ь
' +
+ (u(a) —a)Sv+(v — u(a)) Su(a).
Из необходимого условия экстремума 8L[u,v,8u,8v] = О,
которое должно выполняться при произвольных вариациях ди(х)
и 8v, следует, что в стационарной точке полного
функционала верны все равенства (9.9), (9.10). Но помимо этого имеет
место равенство v = u'(а). Рассмотрим функцию v(x) = и'{х),
которую можно интерпретировать как продолжение значения
v = v(a) на отрезок [a, Ь]. Согласно правилу интегрирования по
частям,
ъ ъ
u(aHa) = u(b)v(b) - /«'(*)„(*) dX - J'«(*)•(*) dx,
a a
u(x) u(x)
Jq{»)du = q{u(x))u(x)-Jr4(«)du,
о 0
u(b) u(b)
/ s(u)du = s(u(b))u(b) — / us(u)du.
394 11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДА ЧИ
Используя эти тождества, а также равенство v(x) =u'(x), из
A1.17) получаем
Ъ < ¦ ч2 Ь
г (u'(x)Y Г
L[u,v] = -Cu(b)+ / v у' dx- j f(x)u(x)dx +
a a
b b u(x)
+ /яШФ)ь-1<ь J V(«)«*.+.(«№))«D-
a a 0
u(b) b b
- J us'(u)du + u(b)V(b)- Ju'(X)V(X)dX- Ju(X)V'(X)dX-
0 a a
b b
— av(a) = —- v2(x)dx+ / [—v'(x)+q(u(x))—f(x)'\u(x)dx +
b u(x)
+ [v(b) + s(u(b))-J3]u(b)- dx uq'(u)du-
a 0
u(b)
— / us'(u)du — av(a). A1.18)
0
Точная нижняя грань полного функционала A1.18) конечна,
если выполняются условия
(-v'(x)+q(u(x))-f(x)=0, хе[а,Ъ],
\v(b) + s(u(b))-P = 0.
В этом случае функционал Ь[гл,г;] можно записать в виде
b b u(x)
L[u,v] = — - / v2(x)dx— dx uq'(u)du —
a a 0
u(b)
— / us'(u)du — av(a), A1.20)
11.3. Оценка, погрешности приближенного решения 395
а альтернативный функционал J[v] — в виде
b
J[v] =inf( -- / v2(x)dx-
a
b u(x) u(b)
-/«Ь/ц/МА-/«-(«)*,-«(.)). #
a 0
11.3. Оценка погрешности
приближенного решения
Пусть {йдг} — минимизирующая последовательность
квадратичного функционала
Js[u] = \\u\\2A-2(f,u), A1.21)
соответствующего краевой задаче для операторного уравнения
Аи = / с положительно определенным оператором А.
Различие между приближенным решением йдг и обобщенным
решением и* операторного уравнения, на котором этот функционал
достигает своего наименьшего значения Js[i?*] = —1|^*||^ = d
(см. 10.1), можно оценить по разности значений функционала
на этих решениях:
AJ[uN] = Js[uN] - Js[u*\ = J[uN] - d. A1.22)
Если обобщенное решение и* принадлежит области
определения оператора А, т.е. является классическим решением, то
мерой погрешности приближенного решения йдг может служить
норма ||Au/v — /||а его невязки. Так как для классического
решения Аи* = /, то, полагая и = йдг — и*, согласно теореме 10.3
396 11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДА ЧИ
и неравенству Коши — Буняковского, можно написать
(Аи. и) \\Аи\\ \\и\\
(и, и)
\и\
|2
\\A(uN-u*)\\ _ \\AuN-f\\
ll~ II — 11~ II ' V-L-L-^^J
\\U]sf — гх*|| \\U]sf — гх*||
где Л — наименьшее собственное значение оператора А.
Отсюда
п^ д, и ^ \\A(uN-u*)\\
\\un — и*\\ ^ , A1.24)
Л
т.е. норму разности между приближенным и обобщенным
решениями на самом деле можно оценить с помощью нормы невязки.
В гильбертовом пространстве L2(fi) неравенство A1.24)
принимает вид
[[uN(x)-u*(x)]2dto^j [[A(HN(x)-f)]2dtt, A1.25)
т.е. речь идет об оценке среднеквадратичной погрешности
приближенного решения в области О. Отметим, что для
гарантированной оценки сверху этой погрешности необходимо
использовать оценку наименьшего собственного значения снизу
(см. 10.4).
Отметим, что при построении минимизирующей
последовательности для функционала Js[u] с помощью метода Ритца
условие ЦАйдг — /|| —^0 при N —>> оо выполняется лишь тогда,
когда все функции ит в представлении A0.15) являются
собственными элементами оператора А. В противном случае
оценка A1.25) может оказаться слишком грубой.
Применение методов наименьших квадратов или Куранта для
построения минимизирующей последовательности обеспечивает
Ц^-йдг — /)|| —^0 при N —>> оо в случае произвольного счетного
базиса в энергетическом пространстве Иа-> составленного из
функций ит Е D(A), что делает оценку A1.25) более точной.
11.3. Оценка погрешности приближенного решения 397
В более общем случае погрешность приближенного решения,
построенного с использованием счетного базиса, включающего
функции um не только из D(A), приходится оценивать по
значению разности A1.22). Так как в энергетическом пространстве
г1а для положительно определенного оператора (Аи, и) = ||гх||^,
то вместо A1.23) с учетом A0.6) при и = йдт — и* запишем
\и\\\ _ \\uN -и*\\\ _ Js[uN] — Js[u*\
0<Л<
\и\\2 \\un — u*\\2 \\un-u*
Отсюда получаем
Js[uN]- Js[u*] Js[uN]-d /-,io^
\\uN-u4 < W—- '— -—- ^ у J . A1.26)
Это верно, в частности, и для пространства rl = L2(fi).
Точно определить минимальное значение d квадратичного
функционала удается редко. Однако если построена
неубывающая последовательность {dm}, сходящаяся к с/, то Js[ujsf] —d^
^ Js[Utv] — dm и вместо A1.26) можно использовать более
грубую оценку
и~ м^ IJs[uN]-dm
\\uN-u*\\ ^ у—-—^ . A1.27)
Как и в случае A1.25), из A1.27) следует, что для
количественной оценки погрешности необходимо располагать оценкой
снизу значения Л.
Строить последовательность {dm} можно различными
способами. Один из способов состоит в построении функционала
I[v], двойственного функционалу Js[u] и достигающего на
некотором элементе v* своего наибольшего значения I[v*\ = d.
Тогда можно построить последовательность {dm}
приближенных решений dm вариационной задачи для функционала I[v],
которая сходится к d снизу, не убывая.
Пример 11.3. В примере 11.1 построен функционал
I[v] = -^ fv2dV- fgvndS, A1.28)
V s
398 11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДА ЧИ
двойственный функционалу Дирихле
J[u} = ^ [{VufdV. A1.29)
v
Оператор А = —А в краевой задаче A1.10) не является
симметрическим (см. пример 9.13). Тем не менее в этом случае
для оценки погрешности приближенного решения краевой
задачи A1.10) можно применить оценку, аналогичную A1.26).
Действительно, используя первую формулу Грина и полагая и —
= un — и*, преобразуем разность:
J[uN] - J[u*\ = \ Г [(VuNJ - (Vu*J] dV =
V
= - / (VuN - Vu*) VudV + - / (VuN - Vu*) Vu* dV =
V V
= - / VuVudV + - / VuVu*dV = - / uVundS-
V V s
/ uAudV + / uS7u*ndS — I uAu*dV = — / uAudV,
V S V V
поскольку и = 0 на S и Ащ = 0 в V.
Пусть оператор А есть оператор —А, рассматриваемый
на множестве функций и(х) Е C2(V) П C(V), удовлетворяющих
краевому условию и = 0 на S. Тогда этот оператор будет
симметрическим и
-- / uAudV = - (Ащ и), йе D(A).
v
В силу теоремы 10.3 имеем
(Ащ
0 < Ai ^ V ' = 2
(и, и) \\un-u*
12
11.3. Оценка погрешности приближенного решения 399
где Ai — наименьшее собственное значение симметрического
оператора А. Отсюда получаем
UJ[uN]-d
V А!
Если {dm} строить как минимизирующую последовательность
функционала — I[v], обратного по знаку функционалу A1.28),
то для гарантированной оценки погрешности приближенного
решения краевой задачи A1.10) можно использовать оценку
и _ LJ[uN]-dn
V Ах
которая аналогична оценке A1.27).
Пример 11.4. При некоторых дополнительных
предположениях оценку погрешности приближенного решения йдг,
аналогичную A1.27), можно использовать и в нелинейных задачах.
В примере 9.14 построен функционал (9.50)
Г (u'(x)Y Г
J[u] = -Pu(b)+ / V У n dx- \ f(x)u(x)dx +
a
b u(x) u(b)
dx q(u)du+ / s(u)du.
a 0 0
соответствующий нелинейной краевой задаче (9.9), (9.10).
Условием выпуклости этого функционала является неубывание
функций q(u) и s(u) (см. пример 9.19).
Пусть этот функционал достигает своего наименьшего
значения J[u*\ на элементе щ(х) Е D(A), удовлетворяющем (9.9),
(9.10), т.е.
Г -u"(x) + q(u*(x)) =/(ж), ЖЕ [а, 6],
<^ ^ „ A1.30)
400 11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДА ЧИ
Обозначив u(x) = un(x) — u*(x), запишем разность
функционалов:
и
J[uN]- J[u*] = -J3(uN(b) -щ(х)) + j
{u'N{x)f-{u'MY
dx —
b uN(x)
~ / f(x){uN(%) — u*(x)) dx+ I dx I q(u)du+ / s(u)du =
a a u*(x) u*(b)
b b
= — Cu(b) + - / (u'(x)) dx+ u(x)u^(x)dx —
a a
b b uN(x) uN(b)
"/'*|4+/* / ,(")A,+ /Mu)du-
it* (ж)
u*(b)
Заменим в двух последних интегралах q(u) и s(u)
соответственно на q(u*(x)) и s(u*(b)). Для неубывающих функций q{u) и
s{u) это не приведет к возрастанию правой части последнего
соотношения. Тогда, интегрируя по частям и учитывая
соотношения A1.30) и равенство и(а) = 0, находим
ь
J[un] — J[u*\ > —/3u(b) + - / (u'(x)) dx + u(x)uf^(x)
a
b b b
+ / u(x)u'l(x)dx— I f(x)u(x)dx+ / q(u*(x))udx + s(u*(b))u(b) =
a a a
b b
= 2 (u(x)Jdx+ H-ufl(x)+q(u*(x))-f(x)^u(x)dx +
a a
b
+ (<(&) + s(u*{b)) -Д)й(Ь) =l-f{u'{x)fdx.
Вопросы и задачи
401
Выпуклый функционал
ь
FW=f &(*))***¦¦
I /II2
\и
достигает некоторого наименьшего значения Л° на замкнутом
ограниченном множестве U функций u(x) Е Cl[a,b],
удовлетворяющих краевому условию u(a) = 0 и условию \\u\\L = 1, так как
этот функционал непрерывен по норме ||-||^. Этот минимум
является решением задачи на условный минимум функционала
F[u] при условии ||^||^2 — 1. Решая эту вариационную задачу
методом множителей Лагранжа (см. теорему 4.3), заключаем,
что функция ад (ж), являющаяся точкой условного минимума,
удовлетворяет дифференциальному уравнению Uq = Аад
(уравнение Эйлера для лагранжиана задачи) и краевым условиям
u (а) = 0, u'(b) = 0 (условие трансверсальности). Другими
словами, А° есть собственное значение симметрического
положительного оператора А[и] = — и", определенного на множестве
функций и(х) Е С1\а,Ь\, удовлетворяющих краевым условиям
и(а) = и'(Ъ) = 0. Ясно, что А° — это наименьшее собственное
значение оператора А, которое нетрудно определить: А° = 7г2/4
[XI]. Таким образом,
и /112 11 ~/112 т г~ л т г 1
^г п . \\и \\ \\и \\ Jты\ — J\u*\
А° = min F[u] = min^l^- ^ IL3IV ^ 2"
IN|=i u^o \\u\\z \\u\\z \\un-u*\\
где минимумы ищутся на множестве функций и(х) Е С1\а,Ь\,
для которых ii(a) = 0. В итоге получаем
к^-м* = А/2 77 •
Вопросы и задачи
11.1. Построить функционал, двойственный функционалу
(9.31), переходом к полному функционалу.
402 11. ДВОЙСТВЕННЫЕ ВАРИАЦИОННЫЕ ЗАДА ЧИ
11.2. Сформулировать задачу на собственные значения для
нахождения числа Л в A1.27) при использовании вместо Js[u]
функционала (9.31).
11.3. Построить функционал, двойственный функционалу
(9.42), переходом к полному функционалу.
11.4. Сформулировать задачу на собственные значения для
нахождения числа Л в A1.27) при использовании вместо Js[u]
функционала (9.42).
ЧАСТЬ IV
Приложения
вариационных методов
С тех пор, как существует
научная физика, высшей целью,
мерцавшей перед нею, было разрешение
задачи — как обобщить все явления
природы, наблюдавшиеся в прошлом
и могущие быть наблюдаемыми в
будущем, в одном простом принципе...
Эта цель и сегодня не
достигнута; она не будет достигнута
полностью и в будущем, что лежит в
природе вещей, но все более и более
приближаться к ней — вполне
возможно.
М. Планк
12. ПРИНЦИП ГАМИЛЬТОНА
Механической системой называют множество
материальных точек, в которых положение каждой точки зависит от
положения и движения остальных точек этого множества. Условия,
ограничивающие движение точек системы, называют связями.
Связи могут записываться в виде уравнений или неравенств,
которым подчиняются координаты положения и скорости
точек системы.
Рассмотрим механическую систему из п материальных
точек с массами mi, Ш2, ..., тп и координатами положения
Т{ = (х{, yi, Zi), i = 1,п, заданными в некоторой декартовой
прямоугольной системе координат. Предполагаем, что связи
в рассматриваемой механической системе имеют вид
/j(rb...,rn,fi,...,fn) =0, j = l, к. A2.1)
Если функции fj на самом деле от скоростей Г{ материальных
точек не зависят, то соответствующие связи называют голо-
номными.
Кинетической энергией механической системы из п точек
называют величину
1 п
T=-Y,mlvl A2.2)
г=1
где V{ = vi = {ii, {л, Z{) — вектор скорости г-ж материальной
точки.
Движение механической системы вызывается
совокупностью сил. Пусть на г-ю материальную точку системы из п
точек действует сила i^. Если существует такая функция
U(г) = U(x,y,z), что сила Fi может быть представлена в виде
Fi = grad?7(n), то ЭТУ функцию называют потенциалом сил, а
противоположную ей функцию V(r) = — U(r) — потенциальной
406
12. ПРИНЦИП ГАМИЛЬТОНА
энергией механической системы. Сумма кинетической и
потенциальной энергий механической системы представляет собой
полную энергию этой системы. Если в процессе движения
механической системы ее полная энергия не изменяется, т.е.
Т + V = Т — U = const, то такую механическую систему
называют консервативной.
Если связи A2.1), наложенные на систему, являются голо-
номными, причем функции fj функционально независимы, или,
другими словами, ранг матрицы Якоби системы функций /j,
j = 1, &, максимален и равен /с, то система уравнений A2.1)
может быть локально разрешена относительно каких-либо к
переменных. Тогда остальные Зп — к переменных могут
свободно меняться, полностью определяя положение механической
системы. В этом случае говорят, что механическая система
имеет Ъп — к степеней свободы. Эти m = Зп — к свободно
меняющихся переменных могут рассматриваться как обобщенные
(лагранжевы) координаты gi, (/2? •••? Qm механической
системы. Конкретное положение механической системы будет
описываться набором значений обобщенных координат и может
интерпретироваться как точка в некотором m-мерном фазовом
пространстве Е. При этом движение механической системы
будет изображаться некоторой кривой, которая параметрически
описывается вектор-функцией (qi(t), ..., qm(t)). Производные
qi(t) лагранжевых координат по времени называют
обобщенными скоростями механической системы.
Итак, механическая система из п материальных точек
изображается точкой в m-мерном арифметическом пространстве,
которое мы будем считать евклидовым со стандартным
скалярным произведением. Любому движению системы из положения
A(qio, ..., qmo) в положение B(qn, ..., qm\) соответствует
кривая q(t) = (qi(t), ..., gm(*)), * Е [t0, *i], для которой %(t0) = qio,
qi(ti) — qui i — 1? m- Все гладкие кривые в пространстве
обобщенных координат, проходящие через данные точки А и i?,
будем называть возможными траекториями, а ту из них, по
которой происходит движение системы под действием
приложенных сил, — действительной траекторией.
407
Пусть механическая система потенциальна и, вообще
говоря, неконсервативна. Функцией Лагранжа механической
системы называют функцию
L = L(t,q,q)=T + U,
а действием по Гамильтону для рассматриваемой
механической системы — функционал
h
S[q]=JL(t,q,q)dt,
to
заданный на всех возможных траекториях системы.
Согласно принципу Гамильтона, среди возможных
траекторий движения системы действительной является та, на
которой вариация действия по Гамильтону равна нулю:
h
SS[q]=s(J L(t,q,q)dt\ =0.
to
Другими словами, действительная траектория является
стационарной точкой действия по Гамильтону.
Итак, для того чтобы найти траекторию движения
механической системы, вызванного приложенными к системе
внешними силами, нужно определить стационарные точки
функционала, называемого действием по Гамильтону. Но точно так же
решается простейшая задача вариационного исчисления
ч
L(<,g?q)dt->extr, q(to)=qo, q{h) = qu A2-3)
to
где qo = (дю, ..., qmo); Qi = (911, •••, Qmi); q(t) GC^tcti],!).
Экстремали вариационной задачи A2.3) ищутся как решения
системы уравнений Эйлера
!Ll'.-L'=0, i = I~m, A2.4)
dt
408
12. ПРИНЦИП ГАМИЛЬТОНА
удовлетворяющие краевым условиям вариационной задачи.
Система уравнений A2.4) в теоретической механике известна как
система уравнений движения в форме Лагранжа.
Замечание 12.1. Изложенный прицип был опубликован
В. Гамильтоном в 1834-1835 гг. в случае стационарных, т.е.
не зависящих от времени связей. Независимо от него и в
более общем случае нестационарных неголономных связей этот
принцип был сформулирован М.В. Остроградским в 1848 г.
Поэтому иногда в литературе принцип Гамильтона называют
принципом Гамильтона — Остроградского. #
Хотя в принципе Гамильтона действительная траектория
характеризуется как стационарная точка функционала
(действия по Гамильтону), заданного на множестве возможных
траекторий на общем промежутке времени [to, t\] с общими
концами АиВ,в ряде случаев по смыслу рассматриваемой
прикладной задачи ясно, что действительная траектория является
и точкой минимума рассматриваемого функционала, а поиск
действительной траектории фактически эквивалентен
решению простейшей задачи вариационного исчисления A2.3). В
таких случаях принцип Гамильтона сводится к принципу
наименьшего действия.
Пример 12.1. Рассмотрим механическую систему,
состоящую из единственной точки, движение которой подчиняется
голономной связи х2 + у2 + z2 = i?2, где ж, у, z — текущие
координаты этой точки. В этой системе точка перемещается по
сфере. Если внешние силы отсутствуют, то потенциал сил U
можно считать равным нулю и действие по Гамильтону имеет
вид
to
409
где т — масса материальной точки; v — вектор скорости
точки в текущий момент времени. Можно показать*, что при
отсутствии внешних сил движение идет с постоянной по
модулю скоростью (\v\ = v = vq = const), а траекториями движения
будут дуги больших кругов на сфере. Значит, действие по
Гамильтону можно записать в виде
s = ==*(«.-*>).
Для любых фиксированных точек А и В на сфере можно
указать две дуги большого круга, соединяющие эти точки.
Каждая из них, как отмечено, является действительной
траекторией. Меньшая из них дает минимум действия по Гамильтону, а
большая — максимум, так как при фиксированном промежутке
времени однозначно определена постоянная скорость, с которой
материальная точка должна двигаться по траектории, причем
эта скорость пропорциональна длине траектории. Итак, не
всякая действительная траектория обеспечивает минимум
действия по Гамильтону.
Отметим частный случай, когда точки АжВ диаметрально
противоположны. В этом случае существует бесконечно много
действительных траекторий, соединяющих эти точки, причем
среди таких траекторий можно выбрать сколь угодно близкую
к некоторой заданной. В теоретической механике такие точки
называют сопряженными кинематическими фокусами.
Если движение на сфере ограничить некоторой областью D,
не содержащей диаметрально противоположных точек
(сопряженных кинематических фокусов), то любая экстремаль будет
давать минимум действия по Гамильтону. Значит, принцип
Гамильтона в малом (т.е. локально) становится принципом
наименьшего действия.
*См., например: Бухголъц Н.Н.
13. КОЛЕБАНИЯ СТРУНЫ
Простейший пример механической системы с
распределенной массой — струна или стержень. Струной (нитью)
называют тело, у которого поперечное сечение намного меньше
длины (одномерное тело) и которое сопротивляется только
натяжению. Струна однородна, если плотность материала, из
которого она изготовлена, постоянна.
Пусть в некоторый начальный момент времени струна под
действием натяжения N приобрела длину / и располагается в
прямоугольной системе координат Оху вдоль оси Ох, х Е @, /),
концы ее закреплены в точках @, 0) и (/, 0). Поперечные
малые колебания струны можно описать функцией и = u(x,t),
значение которой u(x,t) есть отклонение вдоль оси Oj точки,
имеющей в положении равновесия координаты (ж, 0). При этом
|гл(ж,?)| <С /, |г4(ж,?)| <С 1 при t > to и х Е @, /). Кинетическая
энергия элемента длины струны равна dT = -p(u'tJ dx, где р —
линейная плотность материала. Поэтому кинетическая энергия
колеблющейся струны выражается формулой
l
Т=х / p(uJxA)Jdx.
l-jp(uft{x1t)Y
о
При колебаниях длина струны меняется на величину
l l
А1= Г y/l + (u'xJdx-ltt^- f(u'xJdx.
о о
Сила натяжения совершает работу на этом приращении
длины. Согласно теореме Клапейрона*, вклад внешней силы
*См.: Работное Ю.Н.
411
N в потенциальную энергию с учетом ее постоянства равен:
= т/<«У5
V=^ I {u'Sdx.
о
Согласно принципу Гамильтона, ищем стационарные точки
функционала
t\ h l
S[u] = J(T-V)dt = ydtJ{p(u'tJ-N(u'xJ)dx =
to t0 0
= / / f{t,u,v!x,v!t)dxdt,
n
где f = f{x,t,u,v!x,v!t) = -(p(u'tJ-N(u'xJ) — интегрант
функционала; 0 = [0,/] x [to, ti]. В качестве допустимых
рассматриваются все непрерывно дифференцируемые функции u(x,t),
обращающиеся в нуль при х = 0 и х = /, а при t = to и t = t\
совпадающие с заданными функциями u(x,to) и u{x,t\)
соответственно (эти функции описывают форму струны в начальный
и конечный моменты времени).
Уравнение свободных колебаний — это уравнение
Остроградского для функционала S[u], которое в данном случае
имеет вид
д , д
Подставляя в него конкретный интегрант, находим
pu';t-NU'lx = 0. A3.1)
Пусть на струну действует поперечная нагрузка интенстив-
ности p(x,t). Ее работа на поперечных перемещениях точек
струны равна:
А= p(x,t)u(x,t)dx.
412
13. КОЛЕБАНИЯ СТРУНЫ
Струна, распрямляясь, совершит работу, отличающуюся
знаком от работы А внешней нагрузки. Следовательно,
дополнительная потенциальная энергия равна:
!>
p(x,t)u(x,t)dx.
о
Записав действие по Гамильтону
h h l
to t0 0
находим уравнение Остроградского этого функционала:
pu'(t-Nulx=P{x,t), A3.2)
которое представляет собой уравнение вынужденных
колебаний струны.
Положение устойчивого равновесия* под действием
статической нагрузки получим, решив вариационную задачу
V[u] = J[-^N(u'xJ-p(x)u)dx
mm.
Соответствующее уравнение Остроградского, представляющее
собой уравнение равновесия, имеет вид
Nu^x+p(x) = 0.
Это уравнение является частным случаем уравнения A3.2)
при условии, что ускорение u'lt тождественно равно нулю,
а распределение внешней нагрузки не зависит от времени:
p{x,t) =р(х).
*См.: Волъмир А.С.
14. КОЛЕБАНИЯ МЕМБРАНЫ
Мембрана — это материальная поверхность (пленка),
которая не сопротивляется изгибу и сдвигу. Пусть мембрана
натянута на плоский контур Г, охватывающий область G в
плоскости хОу. Рассмотрим поперечные колебания мембраны,
в которых перемещение u(x,y,t) каждой точки (ж, у) ? G
перпендикулярно плоскости хОу.
Пусть dl — элемент некоторого контура на поверхности
деформированной мембраны. На этот элемент действует усилие
Той, где вектор Т вследствие отсутствия сопротивления изгибу
и сдвигу лежит в касательной к поверхности плоскости и
перпендикулярен ей, а его модуль Т представляет собой величину
натяжения мембраны. Предполагая, что мембрана подвержена
малым колебаниям, т.е. \u(x,y,t)\ намного меньше размеров G,
а \и'х\, \и'\ много меньше единицы, мы можем пренебречь
вторыми и более высокими степенями частных производных, так
как, например, |^|2 <С \их\, \и' \2 <С \и' |.
Натяжение Т(ж,у,?) во всех частях мембраны одинаково, т.е.
Т(ж,у,?) = Tq = const. Считаем, что материал мембраны
обладает линейно упругими свойствами. Тогда потенциальная
энергия деформирования мембраны пропорциональна приращению
площади ее поверхности, причем коэффициент
пропорциональности равен натяжению. Это можно показать, выделив
дифференциальный элемент площади и подсчитав элементарную
работу сил натяжения, затраченную на его деформирование.
Площадь S поверхности деформированной мембраны
вычисляется по формуле
S = Л y/l + (u'x)* + (u'y)*dxdy,
G
414
14. КОЛЕБАНИЯ МЕМБРАНЫ
значит, приращение площади равно:
AS= / / (\Л + КJ + КJ - г) dxdy ~
G
*\[[((<J + (UyJ)dxdy.
G
Отсюда находим величину потенциальной энергии
деформированной мембраны:
V = Т0AS = ^ /У(«J + (u'yJ)dxdy. A4.1)
Пусть на мембрану действует поперечное давление /(ж,у).
Тогда элементарная работа, затраченная на перемещение
элемента поверхности dxdy на расстояние u(x,y,t), равна: 5А =
= f и dxdy, а вся работа выражается интегралом:
А= f и dxdy.
G
Предположим, что контур Г мембраны удерживается линейно
упругими пружинами с модулем упругости с и может
перемещаться только вдоль оси Oz. На контур действует внешняя
распределенная нагрузка p(Z), направленная вдоль Oz и
стремящаяся удержать контур в положении равновесия. Тогда
суммарная работа упругих пружин равна:
Апр = — - ф си2 dl,
г
а работа распределенной нагрузки р{1) есть
А(р) = - (bp(l)udl
415
Рис. 14.1
Кроме перечисленных
внешних сил на контур действуют
силы натяжения Tdl. Их
составляющая Tz вдоль оси Оъ совершает
работу по перемещению контура
(рис. 14.1). Вычислим эту
составляющую:
ди
Tz = Ts'ma « Ttga = Т—,
on
ди
где — — производная и по направлению внешней нормали п к
контуру Г.
Таким образом, потенциальная энергия V упругой системы
мембрана — контурные пружины может быть записана в виде
V = jj(^({u'xf + {u'yf)-fu)dxdy +
+ <Ь (p(l)u+ -c(l)u2 +Т0-^-и
Если пренебречь массой контурных пружин, кинетическую
энергию мембраны можно записать в виде
К
= Щ м
J dxdy,
G
где р = ро = const — поверхностная плотность мембраны.
Для вывода уравнений движения мембраны используем
принцип Гамильтона, согласно которому действие по
Гамильтону на функции u(x,y,t), описывающей реальное движение
мембраны, т.е. функционал
«4
S[u] = J
Ldt,
L = K-V}
to
416
14. КОЛЕБАНИЯ МЕМБРАНЫ
имеет нулевую первую вариацию: 5S[u,5u] = 0. Другими
словами, функция u(x,y,t) является стационарной точкой
функционала
h
to G
^2-у((<J + КJ)-^)^Ф-
- I(p(l)u+^c(l)u2 +T^u\dl\dt. A4.2)
г
Вычисляя вариацию этого функционала (см. 2.4) и
приравнивая ее нулю, получаем уравнение колебаний мембраны
2 {"¦хх ' ™yyj
¦ «х + и'уу) + ЯЖ>У) = Pu"t A4-3)
и естественные краевые условия
:0. A4.4)
m ди
Т0—+р + си
on
Если речь идет о закрепленной по контуру мембране, то
контурный интеграл в A4.2) равен нулю и естественное краевое
условие A4.4) заменяется заданным краевым условием и\г = 0.
При использовании принципа Гамильтона мы считаем, что
допустимые функции имеют заданные значения в моменты
времени to и t\. Однако в задачах динамики задают только
начальное состояние, т.е. считают известными u(x,y,to) и uft(x,y,to).
Таким образом, эти задачи относятся к задачам смешанного
типа: ставятся и краевые, и начальные условия.
Поставим задачу о статическом нагружении мембраны. Из
уравнений A4.3) и A4.4), приравнивая нулю производные по
времени, получаем
2
-Д^=—/(ж,у), (ж, у) <EG;
ди с Р < \ тл
дп Т0 Т0' v ' У)
A4.5)
417
Эта задача представляет собой краевую задачу III рода для
уравнения Пуассона [XII]. Если с велико (это соответствует
высокой жесткости пружин), то во втором уравнении можно
пренебречь производной по направлению нормали. В этом
случае получаем краевую задачу I рода (задачу Дирихле). Если
же с мало, так что можно считать, что с = 0, получаем
условия свободной границы. Это краевая задача II рода (задача
Неймана). Задача Неймана имеет не единственное решение,
решение будет зависеть от аддитивной постоянной, отражающей
начальное состояние мембраны. Кроме того, в случае краевых
условий II рода равновесие возможно только тогда, когда
суммарная сила, действующая на мембрану, равна нулю:
/ / f(x,y)dxdy+ Ф p(l)dl = 0.
G г
О способах интегрирования уравнений движения
(равновесия) мембраны см. в [XII].
15. УРАВНЕНИЯ ДВИЖЕНИЯ
ИДЕАЛЬНОЙ ЖИДКОСТИ
Рассмотренный ранее принцип Гамильтона можно
обобщить на случай неконсервативной и неголономной системы.
Функция Лагранжа определяется равенством L — T — V = T + U,
где Т и V — соответственно кинетическая и потенциальная
энергии механической системы. Принцип Гамильтона можно
записать следующим образом:
h
SS= fET + 5U)dt = 0. A5.1)
to
Если в подынтегральном выражении A5.1) второе
слагаемое 8U, представляющее собой вариацию потенциала
действующих на систему сил, заменить величиной
п
г=1
выражающей элементарную работу непотенциальных сил через
обобщенные силы Qi и возможные обобщенные перемещения
Sqi, то получим обобщение принципа Гамильтона на
неконсервативные системы*. Вычислим интеграл от вариации
кинетической энергии:
5T(t,qi,...,qn,qi,...,qn)dt= I (^Г^ + ^я-Sqi +
to to l~l
tl
n
:I**)*-/(?S'*+?l;'*)*' <152»
to
так как в данном случае вариации изохронны и St = 0.
*См.: Бухголъц Н.Н.
419
Преобразуем второе слагаемое в A5.2) с помощью
интегрирования по частям:
]±ж®^ = -]±ж®^
to L~L t0
учитывая, что начальное q(to) и конечное q{t\) положения
механической системы фиксированы и вследствие этого Sq(to) =
= Sq(ti) = 0. Поэтому
/Eds-sdHO***-0- <153)
to г_1
Из уравнения A5.3) вытекают уравнения движения
неконсервативной системы с п степенями свободы, если учесть, что
промежуток интегрирования произволен, а вариации Sqi
независимы.
Оказывается, что принцип Гамильтона в форме A5.3)
справедлив и для систем с линейными неголономными связями. При
этом из вариационного принципа можно получить не только
уравнения движения, но и краевые условия.
Пусть жидкость несжимаема. При движении такой
жидкости любой выделенный ее объем не изменяет своей величины
(хотя и меняет форму). Выберем некоторый объем АО и
рассмотрим возможные перемещения дг его точек. Перемещения
должны быть таковы, что выполняется условие
несжимаемости: (р = ——— = 0, где ДО7 — величина объема АО
жидкости после перемещения. Так как ср = divr, то
Sep = 6 divr = divSr = 0. A5.4)
420 15. УРАВНЕНИЯ ДВИЖЕНИЯ ИДЕАЛЬНОЙ ЖИДКОСТИ
Рассмотрим идеальную несжимаемую жидкость, на
которую, возможно, воздействуют неконсервативные силы.
Принцип Гамильтона можно записать в виде
h
Idt [ET + 5A)dn = 0, A5.5)
t0 О
где 5Т и SА — вариации кинетической энергии Т и работы А,
приходящихся на единицу объема. Так как работа внутренних
сил в любом объеме жидкости равна нулю (вследствие того, что
она идеальна), то 6А есть работа только внешних, например
массовых, сил К, т.е. 6А = К6г.
Итак, ставится задача о стационарности действия по
Гамильтону при дополнительном условии A5.4).
Используя метод множителей Лагранжа, получаем
[dt [ET + 5A + \5cp)dn = 0. A5.6)
to П
Здесь все подынтегральные величины отнесены к единице
объема. Так как Т = -pvv, то 6Т = pvSv. Действительная
скорость есть полная производная по времени от вектора
перемещения г. Поэтому
r cdr dEr)
ov = о— = —-—.
dt dt
Учитывая это, находим
h ti
f с f d(Sr) 1
\ pov -vdt = / pv - —-— dt =
to to
= pv •Sr
так как Sr(to) = Sr(ti) = 0.
ti
to
1
-fpd^.8rdt = -fP<ft-8rdt,
to to
421
Далее, учитывал формулы связи между
дифференциальными операциями векторного анализа, находим
\5(р = Adiv^r = div(XSr) — gradA- Sr.
По теореме Остроградского — Гаусса
Г AdivSrdft = f(div(XSr) - gradA • Sr) dVt =
= — grad A • Sr dft + (b XSr -ndT,.
Используя проведенные выкладки, получим
; + SA + \S(p)dn =
t0 П
dt j (-p-j- + К - gradA) Srdtt +
/
t0 Q
Idt(b\Sr-ndZ = 0. A5.7)
+
to S
Чтобы это равенство было верным, достаточно, чтобы
обращалось в нуль каждое слагаемое.
Смысл множителей Лагранжа в случае механических систем
состоит в том, что эти дополнительные неизвестные заменяют
уравнения связей и на самом деле отражают ответные
воздействия связей на систему, т.е. характеризуют реакцию связей.
При выделении объема идеальной жидкости связи
проявляются как воздействие на выделенный объем ^остальной" среды.
А это есть нормальные давления на поверхность выделенного
объема, т.е. А = р. После введения множителя А
перемещения Sr становятся свободными. Поэтому, приравнивая в A5.7)
422 15. УРАВНЕНИЯ ДВИЖЕНИЯ ИДЕАЛЬНОЙ ЖИДКОСТИ
первое слагаемое нулю, заключаем, что подынтегральное
выражение равно нулю, и получаем уравнение движения в векторной
форме*:
dv
p-— + grdidp = K. A5.8)
Второе слагаемое в уравнении A5.7) после приравнивания
нулю порождает краевые условия, выраженные через давление
и перемещения точек границы:
pnSr\^ = 0. A5.9)
Если часть границы Si области соприкасается с
неподвижной стенкой, то из A5.9) с учетом р ф 0 получим условие
отсутствия перемещений на этой части границы в направлении
вектора нормали п, называемое условием непротекания
(непроницаемости границы):
nSr\^ = 0.
*См.: Лойцянский Л.Г.
16. АЭРОДИНАМИЧЕСКАЯ
ЗАДАЧА НЬЮТОНА
В 1687 г. вышел в свет исторический труд И. Ньютона
„Математические начала натуральной философии". В разделе 7 „О
движении жидкостей и сопротивлении брошенных тел"
Ньютон рассматривает задачу о сопротивлении движению шара и
круглого цилиндра в „редкой" среде (идеальный газ,
являющийся моделью воздуха, либо слабо сопротивляющаяся жидкость).
Затем он исследует вопрос о движении усеченного тела
вращения в этой же среде и ставит проблему поиска уравнения
образующей тела вращения, для которого сила сопротивления
была бы наименьшей.
Ньютон приводит решение задачи об усеченном теле
вращения: „ Когда же кривая FNG будет такова, что если из любой ее
точки N опустить на ось AD перпендикуляр NM и из
„конечной" точки G провести прямую GP параллельно касательной
TVt, то имеет место пропорция MN : GP = GP3 : (АВР • GB2)".
Итак, верна формула (рис. 16.1)
MN _ GP3
~GP~ 4BP-GB*' ( '
однако Ньютон не дает
объяснения тому, как он пришел к _
этой формуле. Впоследствии А
он передает комментаторам Рис. 16.1
своих трудов наброски вывода, которые были опубликованы
только в 1727-1729 гг., когда уже завершался первый этап
создания вариационного исчисления. Подготовительные
материалы Ньютона были переведены с латыни А.Н. Крыловым и
опубликованы уже в наше время*. Из опубликованного видно,
*См.: Крылов А.Н.
424 16. АЭРОДИНАМИЧЕСКАЯ ЗАДАЧА НЬЮТОНА
г,
(
Ь'
1
i
1
г?
Л
~ 1
"* п
1*
Xr(l)
Г X
что Ньютон владел многими элементами вариационного
исчисления, которые впоследствии разрабатывались Эйлером и
Лагранжем.
Формализуем
аэродинамическую задачу Ньютона,
используя современный аппарат
вариационного исчисления. Пусть
тело вращения с осью вращения
Ох (рис. 16.2) движется со
скоростью v (v = \v\= const) в
ньютоновской среде и сталкивается
с распределенными в среде
шариками. Ньютоновской
называют редкую среду с распределенными в ней неподвижными
абсолютно упругими шариками. Задача состоит в том, чтобы
определить форму носовой части тела вращения, обладающего
минимальным сопротивлением.
Будем предполагать, что ось Ох жестко связана с телом
и направлена по вектору скорости v. Сила Q сопротивления
среды, действующая на тело, равна*:
l
Q = 2тгд(гA)J - 2тгд I%C{&)r{x)rk\x)dx, A6.2)
Рис. 16.2
где q = 0,5рг> — динамическое давление; р — плотность среды;
v = \v\ — абсолютная величина скорости; г = г(х) — радиус
сечения тела на расстоянии х от точки максимального
радиуса тела вращения (от миделева сечения радиуса а = г@)); # —
угол наклона образующей на расстоянии х от миделева сечения
(угол между касательной к образующей и осью Ох,
отсчитываемый по часовой стрелке); / — длина тела; С{$) — местный
*Вывод этой формулы имеется, например, в книге: Алексеев В.М.,
Тихомиров В.М., Фомин СВ.
425
коэффициент сопротивления среды, равный
, ч Bsin2#, #>0;
[О, #<0.
В выражении A6.2) для силы сопротивления Q первое
слагаемое 27гд(г(/)) включено, чтобы учесть возможное плоское
затупление в носовой части тела (см. рис. 16.2).
Требуется найти такой профиль г (х) тела вращения, при
котором для заданных значений д, / и а функционал Q принимает
минимальное значение.
Преобразуем интеграл в выражении A6.2) для Q, используя
представление С{д) = 2sin2??, тождество г'(х) = — tg# и
тригонометрическую формулу sin2 $ = —-—^— •> а затем введем в него
управление u = tg'&:
l l
/г ти
C('&)r(x)r'(x)dx = 4:7rq / ^dx.
о о
С учетом этого преобразования исходная задача сводится к
задаче Лагранжа в форме Понтрягина для функционала
l
I[rM = ^q=\(ril)? + j{^ix A6.3)
О
с дифференциальной связью
г' = -и. A6.4)
На левом конце задано условие закрепления г@) = а, а правый
конец свободен.
Введем канонические переменные х^т^рж функцию
Гамильтона
TU
Н(х,г,щр) = -ри - ——2 • A6.5)
1 + гг
426 16. АЭРОДИНАМИЧЕСКАЯ ЗАДАЧА НЬЮТОНА
Каноническая система дифференциальных уравнений
записывается в данном случае так:
р' = -Н'г.
A6.6)
Первое уравнение этой системы эквивалентно уравнению
связи г' = — и, а второе сводится к следующему соотношению:
р' = ут—2- Систему A6.6) нужно дополнить алгебраическим
уравнением Н'и = 0 (см. 8.2), которое в данном случае имеет
вид
-р-
ги2C + и2
0.
A + и2J
К системе дифференциальных уравнений также добавим
краевое условие на левом конце г @) = а и условие трансверсальности
на правом, которое для задачи со смешанным функционалом
Х2
T[r(x2)]+ f f°(x,r,u)dx
XI
имеет вид р(х2) = —ТДг(ж2)], а в данном случае с учетом A6.3)
записывается следующим образом: р{1) = —гA).
Итак, получена полная система уравнений
|У =
р'=
-р
г@)
[рA)
-и,
и3
1 + и2'
ги2C + и2)
{1 + и2J
= а,
= -гA).
= о,
A6.7)
Однако не будем напрямую интегрировать систему A6.7),
а воспользуемся тем, что функция Гамильтона не зависит явно
от независимого переменного х. В таком случае сама функция
427
Гамильтона является первым интегралом системы, т.е. Н =
= const на решениях системы. С помощью третьего уравнения
системы A6.7) исключим из представления A6.5) для функции
Гамильтона Н переменное р. Тогда соотношение Н = const
можно записать в виде
2та3
const.
A + г^2J
Далее, третье уравнение системы A6.7) верно при любом
ж G [0, /], в том числе и при х — 1. Значит,
r(Qti2@C + ti2(Q)
~р{1) (i+«w—-°' A6'8)
или, с учетом пятого уравнения системы,
/7Ч / и2C + и2)\ | Л /.Л Лч
Г* A- П-L 2^2 ) =0. 16.9
V A + uz)z J \x=l
Но это возможно только в случае* гA) =0 или иA) = 1.
В первом случае, когда гA) =0, из равенства A6.8)
вытекает, что НA) = 0, т.е.
2ги3 _
A+^2J =0'
откуда либо г = 0, либо и = tg$ = 0. Это указывает на
вырожденную ситуацию, при которой профиль тела совпадает с
осью вращения Ох.
Во втором случае, когда иA) = 1, из A6.8) и A6.5) получаем
равенство НA) = г(/)/2, с учетом которого само соотношение
A6.8) можно записать в виде
2га3 _ гA)
A + ^2J- 2
*Есть также симметричный случай иA) = — 1, который приводит к
уравнению нижней, симметричной части профиля тела и, в сущности, не
дает ничего нового.
428 16. АЭРОДИНАМИЧЕСКАЯ ЗАДАЧА НЬЮТОНА
откуда находим
г(х) = гA)
2\2
A + и2)
4и3
A6.10)
Эту связь учтем в первом уравнении системы A6.7):
d f{l + u2J^
или
dx _ 1 / 3 2 1\
г (I) 4v w5 и3 и)
Мы пришли к дифференциальному уравнению с
разделяющимися переменными, которое можно проинтегрировать:
_ Г dx _ 1
3 2 !\л
f ъ+ — )аи,
и°
и°
откуда
I
¦х 1/ 3 1 ,
= -I —г + — + 1пи-
ь
r{l) 4V4^4 ' и2 ' ш" 4У A6'П)
Объединяя A6.10) и A6.11), получаем параметрические
уравнения функции г (ж), определяющей искомый контур
обтекаемого тела:
A + и2J
г(х) = гA)
X = i
4г*3
@/_3
1
+ 1гш
A6.12)
4 \4г^4 и2 4/
Из этого параметрического представления с помощью
краевого условия г@) = а на левом конце можно найти значение гA)
и коэффициент наклона щ = tg$o ПРИ х = 0. Это приводит к
системе трансцендентных уравнений
а
i
A+ǤJ
н
-i(
Ч
+
+ \пщ
D-
429
Сопоставим найденное решение задачи с решением, которое
предложил Ньютон. Вернемся к рис. 16.1. Имеем |MiV| = г,
\ВМ\ =l-x, \BG\ = r(l), ZBPG = д. Согласно построению
Ньютона,
\BG\
откуда, учитывая вид управления и = tg#, получаем \ВР\ =
\BG\ IDDI КО ТД
= L, или l-oi^l = -^. Из соотношении в прямоугольном
треугольнике GBP имеем
|GP|2 = \BG\2 + \ВР\2 = r2(l) (l + 4)•
Из пропорции Ньютона A6.1) в введенных обозначениях
находим
3/2
Г
r»m(i+?)!
Т 4г@
т.е.
и
тA + Ц2J
Мы получили первое уравнение в параметрическом
представлении A6.12) функции г(х). Значит, Ньютон действительно
решил поставленную им задачу, но смысл найденного им
решения раскрылся гораздо позже, когда стал достаточно развитым
аппарат вариационного исчисления.
17. ВОПРОСЫ УСТОЙЧИВОСТИ
КОНСТРУКЦИЙ
К проблеме собственных значений приводят задачи о
собственных (свободных) колебаниях механических систем,
например, задача о пмалых" колебаниях струны или мембраны.
Другой важный класс задач механики, связанный с проблемой
собственных значений, — класс задач об устойчивости
механических систем.
Оказывается, что при определенных внешних нагрузках
упругая или упругопластическая система может иметь
несколько положений равновесия, причем одни из этих положений
устойчивы, а другие нет.
Рассмотрим прямолинейный
р стержень, сжатый продольной
| -=>-* силой Р, направленной строго по
оси стержня (рис. 17.1). В этом
случае начальное положение (без
изгиба) является положением равновесия. Для суждения об
устойчивости этого положения равновесия сообщим
рассматриваемой механической системе некоторое возмущение в виде
поперечной нагрузки, вызывающей прогиб у(х). При отсутствии
сжимающей силы Р малая поперечная сила вызовет малый
прогиб. Если сила Р присутствует, но мала, то малая поперечная
сила также вызовет малый прогиб. Равновесие стержня в
этом случае является устойчивым. Это равновесие перестанет
быть устойчивым, если сжимающая сила Р превысит некоторое
пороговое значение. Тогда даже незначительная поперечная
нагрузка вызовет большой прогиб.
Пусть сжатый стержень имеет переменное поперечное
сечение и сжат с двух сторон равными по величине продольными
431
силами (рис. 17.2). Тогда профиль у(х) его изогнутой оси
описывается дифференциальным уравнением*
Здесь Е — модуль Юнга для
материала, из которого изгото- у|
влен стержень; 1(х) — осевой р
у(х)
момент инерции поперечного се- о I
чения, соответствующего коор- р 17 2
динате ж, х Е @, /).
К уравнению A7.1) следует присоединить краевые условия,
вид которых зависит от того, каким образом закреплены концы
стержня. Ограничимся рассмотрением двух типов
закрепления:
1) оба конца жестко заделаны:
у@) = уA)=0, у'@)=у'A)=0; A7.2)
2) оба конца шарнирно оперты:
у@) = уA) = 0, у"@)=у"A) = 0.
Задача об устойчивости положения равновесия сжатого
стержня состоит в определении критических нагрузок, т.е.
таких значений продольной силы, при которых возникает
несколько положений равновесия. При этом особый интерес
представляет значение наименьшей критической нагрузки.
Дифференциальное уравнение A7.1) можно привести к виду
Ах — ХВх = 0, если положить
^ d2 {т, ч d2 \ т/ ч d4 ., ч d3 т/// ч d2
*См.: Феодосъев В.И.
432 17. ВОПРОСЫ УСТОЙЧИВОСТИ КОНСТРУКЦИЙ
Энергетические нормы прогиба у (х) относительно этих
операторов имеют вид
\ = (Ау, у) =EJ{l(x)y"(x))"y(x)dx,
О
I
\\y\\2B = (By,y) = -Jy"(x)y(x)dx.
Интегрируя по частям, можно убедиться, что независимо от
типа краевых условий эти нормы равны:
l l
\\у\\2А = Ejl(x)(y"(x)Jdx, \\y\\l = f{yl{x)fdx.
о о
Оба оператора АжВ при рассматриваемых краевых
условиях являются положительно определенными. Поэтому
существует бесконечное число собственных значений, т.е. критических
нагрузок*. Наименьшая из них Р\ равна:
Jl(x){y"(x))
I
dx
II II2
Pi = min-^%-= ?min-—; , A7.3)
dx
где минимум функционала ищется при соответствующих
краевых условиях.
В случае шарнирно закрепленных концов задачу можно
свести к исследованию обыкновенного дифференциального
уравнения (ОДУ) второго порядка, так как условия у@) = у{1) = О
*См.: Коллатц Л.
433
являются предварительными, а условия со вторыми
производными — это естественные условия. Полагая для простоты, что
I(x) = const, обозначим и = 1у". Тогда функция и(х)
удовлетворяет краевым условиям
и@)=иA) = 0 A7.4)
и дифференциальному уравнению
Eu" + ju = 0. A7.5)
Задача о наименьшем собственном числе (о наименьшей
критической нагрузке) сводится к экстремальной задаче
)«
dx
Ь— > mm,
/-<
lu2 dx
о
или, что равносильно,
1
Е \ {иJdx —>> min при условии / / lu2dx = 1. A7.6)
о о
Из сравнения краевых условий видно, что условия A7.4)
приводят к классу функций более широкому, чем условия A7.2).
Поэтому при шарнирном закреплении первая критическая
нагрузка меньше, чем при жестком закреплении. С точки зрения
механики это объясняется тем, что при жестком закреплении
увеличивается количество внешних связей, т.е. вводится
дополнительная поддержка конструкции, и для ее „раскачки" нужна
большая сила.
Рассмотренный подход, связанный с вычислением
наименьшей критической нагрузки, в литературе называют
статическим подходом к решению задач устойчивости. Развитый выше
434 17. ВОПРОСЫ УСТОЙЧИВОСТИ КОНСТРУКЦИЙ
метод находится в рамках статического подхода и, по сути,
является методом энергетическим.
Безусловно, наиболее общий метод решения задач
устойчивости механических систем состоит в исследовании движения
системы при малых возмущениях. Такой метод естественным
образом приводит к понятию устойчивости решений
системы уравнений движения по Ляпунову [VIII]. На этой основе
строят динамические критерии устойчивости. В случае
консервативных систем оба подхода, статический и динамический,
приводят к совпадающим результатам*.
Пример 17.1. Обратимся к задаче об устойчивости
положения равновесия прямолинейного стержня, один конец
которого свободен, а другой жестко заделан. Предположим, что
сечение стержня постоянно: I(x) = const = /.
Рассмотрим статический подход. Пусть стержень
получил малое боковое отклонение у(х). Это отклонение будет
подчиняться дифференциальному уравнению A7.1). С учетом
/ = const находим
ylv + k2y" = 0, A7.7)
где к2 = Р/ (EI).
Условия на левом, закрепленном конце очевидны:
у@)=у'@)=0. A7.8)
Чтобы получить краевые условия на свободном конце,
разложим вертикальную силу на две составляющие, одна из
которых — поперечная сила — выражается через приложенную силу
в виде
Q = Ptga = P-^.
ах
Поперечная сила, в свою очередь, есть производная от
изгибающего момента** М = EIyn', т.е. Q = —(EIy")f. Так как
изгибающий момент на свободном конце равен нулю, имеем упA) = 0.
*См.: Волъмир А.С.
**См.: Феодосъев В.И.
435
Сопоставляя представления для силы Q, приходим к следующим
краевым условиям на правом, свободном конце:
у"@ = 0, -y"'@ = *V@- A7.9)
Задачу A7.7)—A7.9) можно решить точно, используя
методы решения линейных ОДУ с постоянными коэффициентами
[VIII]. Общее решение ОДУ A7.7) имеет вид
у(х) = As'mkx + Bcoskx + Cx + D.
Краевые условия A7.8), A7.9) приводят к системе уравнений
относительно постоянных интегрирования A, i?, С, D:
B + D = 0,
Ak + C = 0,
Ак2 sin kl + Bk2coskl = О,
С = 0.
Решая эту систему, находим А = С = 0, В = —D. Система имеет
ненулевое решение, согласно третьему уравнению, лишь при
cosfc/ = 0. Следовательно,
Ы = Bп + 1) J, п = 0,1,2,... A7.10)
Зная возможные значения коэффициента /с, находим
наименьшую критическую нагрузку:
PKp = k2miQEI=^f. A7.11)
Решим ту же задачу с помощью энергетического
метода. При исследовании равновесных состояний консервативных
систем вместо вариаций работы внутренних и внешних сил
рассматривают вариацию полной потенциальной энергии П
системы, которая записывается следующим образом:
l l
II=±ElJ(y"fdx-±pJ(y'Jdx. A7.12)
436 17. ВОПРОСЫ УСТОЙЧИВОСТИ КОНСТРУКЦИЙ
1 9
Сравним эту формулу с A7.3): первое слагаемое есть -||у||^,
а второе слагаемое равно (—-Р) \\у\\в. Для равновесия
консервативной системы со связями, не зависящими от времени,
необходимо и достаточно, чтобы первая вариация
потенциальной энергии системы обращалась в нуль: 5П = 0.
Чтобы найти минимальную критическую нагрузку,
используем идею метода Ритца в следующей интерпретации. Пусть
изогнутая ось стержня при возможном отклонении от
первоначальной прямолинейной формы может быть представлена в
виде
п
У(х) = $^ЗДг(ж). A7.13)
г=1
В этом представлении каждая из функций г/(х)
удовлетворяет кинематическим краевым условиям, так как статические
условия (при х = I) являются естественными и их заранее
фиксировать не требуется.
Подставляем представление A7.13) в выражение для полной
потенциальной энергии. Получим, что П является функцией
от коэффициентов af 77 = 77(ai,a2,... ,ап). Вариацию П можно
представить как сумму вариаций, соответствующих
независимым вариациям параметров af
Отсюда, приравнивая первую вариацию нулю, получаем
систему уравнений относительно af
8П
75- = 0, i = l,n. A7.14)
ощ
Так как полная энергия является квадратичной формой
параметров щ, система A7.14) представляет собой однородную
систему линейных алгебраических уравнений относительно ai, ...,
437
ап. Нас интересуют ненулевые решения этой системы.
Поэтому значения критических нагрузок получаем, приравнивая
нулю определитель системы.
Вычислим несколько приближений к точному значению
критической нагрузки. Отметим, что в силу условий задачи
функции гц{х) должны быть четными.
1. Первое приближение. Пусть у(х) = а^х2, 0 ^ х ^ /.
Тогда кинематические краевые условия при х = 0 выполняются.
После интегрирования имеем
/3
II = 2EIall-2Pal-.
Из условия дП/да2 = 0 находим
рA) = з—
± кр /2 •
Погрешность по сравнению с точным значением составляет
примерно 20%.
2. Второе приближение. Полагаем у(х) = а2х2 + сцж4.
Тогда
П = 2EII (а% + 4а2а4/2 + ^W4) - 2Р13 0-а22 + \а2а^ + ^a\f\.
Система уравнений
дП
да2
дП
= о,
= 0
принимает следующий вид:
(EI - ^-12\ а2 + BЕП2 - ^/4) а4 = 0,
2Р.
[ (EI - Y)a2 + (fEIl2 - Ц-1*)щ = 0.
438 17. ВОПРОСЫ УСТОЙЧИВОСТИ КОНСТРУКЦИЙ
pi2
Обозначая Р* = ——, приравниваем нулю определитель системы:
р*
2-
18 _
5
2Р*
5
2Р*
7
= 0,
откуда (Р*J - 45Р* + 105 = 0. Определив Р*, найдем
^кр = 2,50—2".
Здесь погрешность по сравнению с точным решением
составляет 1,2%.
2. Третье приближение. Взяв у(х
+ а$х6 и повторив вычисления, получим
CL2X2 + СЦЖ4 +
р(з)_2 48 —
кр
что дает погрешность 0,4%.
Обратим внимание на то, что в рассмотренном примере
приближенные значения минимальной критической нагрузки
завышены по сравнению с точным решением. С механической
точки зрения это объясняется тем, что деформируемое твердое
тело представляет собой механическую систему с бесконечным
числом степеней свободы. Подчиняя решение лишь конечному
числу координатных функций rji(x), мы ограничиваем число
степеней свободы, т.е. накладываем на систему
дополнительные связи. Жесткость системы повышается, и критическая
нагрузка возрастает.
18. ВАРИАЦИОННЫЕ
ПРИНЦИПЫ ЛАГРАНЖА,
РЕЙССНЕРА И КАСТИЛЬЯНО
Прежде чем рассматривать вариационные принципы Ла-
гранжа, Рейсснера и Кастильяно применительно к задачам для
линейных упругих тел, сформулируем закон сохранения
энергии для тела, находящегося в равновесии:
SU = SW + SQ,
где U — внутренняя энергия тела объемом V и ограниченного
поверхностью S:
U= IudV-
v
и — объемная плотность внутренней энергии, т.е. количество
энергии, приходящееся на единицу объема;
5W = biSui dV+ piSui dS —
V s
работа объемных (с компонентами bi) и поверхностных (с
компонентами р^ сил на возможных перемещениях 8щ\ щ —
компоненты вектора перемещения; Q — количество теплоты,
приобретенной телом. Здесь и далее мы опускаем знаки
суммирования, предполагая по умолчанию, что в формулах при
наличии одинаковых индексов выполняется суммирование от 1
до 3.
Положим, что граничная поверхность S рассматриваемого
тела разделена на две части: *SW, на которой заданы
компоненты вектора перемещения
щ = щ, г = 1,2,3, A8.1)
440 18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
и 5<7, на которой заданы поверхностные силы щ. При этом
S = SUU Sa и SunSa = 0. Очевидно, что 5щ = 0 на
поверхности Su.
В дальнейшем полагаем, что деформации малы и
компоненты тензора деформаций ец определяются соотношениями Коши
Так как компоненты векторов объемных Ь{ и поверхностных
Pi сил являются заданными функциями декартовых координат
Xk (к = 1, 2, 3), то работа #VK внешних сил на возможных
перемещениях равна:
SW = s(f biUi dV + Ipiui dS
V sa
Вариацию количества теплоты, приобретенного изучаемым
телом, зададим в виде
SQ= fTShdV,
v
где Т — абсолютная температура; h — энтропия единицы
объема тела.
В дальнейшем будем рассматривать два случая
деформирования: адиабатическое и изотермическое. В первом случае
h = /&(ж1,Ж25жз) — известная функция и Sh = 0. Во втором
случае известна абсолютная температура Т = Т(жх,Ж2,жз) и ST = 0.
Только для этих двух случаев
SQ = S frhdV.
v
При изотермическом деформировании вместо u = u(eij,h)
нужно использовать объемную плотность свободной энергии
441
A(sij,T) и переход от первой функции ко второй
осуществляется с помощью преобразования Юнга — Фенхеля*:
А(е^,Т)=змр[и(е^,Н)-Тк].
При Sij = 0 массовые плотности свободной и внутренней
энергий равны: А@,Т) = В(Т) и u@,h) = H(h). Функции В(Т)
и H(h) при Т фТ§ (То = const — начальная температура тела)
отличны от нуля, и их учет необходим при изучении процессов
деформирования, протекающих при переменных температурах
и сопровождающихся рассеянием энергии. Так как процессы
рассеяния энергии мы не рассматриваем, то в дальнейшем
полагаем, что В(Т) = 0 и H(h) = 0.
Таким образом, условие стационарности функционала
J[u] = U[u]-L[u],
где
U[u] = / u(eij)dV, L[u] = / biUidV+ I pmdS,
V V sa
определяет компоненты щ (г = 1, 2, 3) векторного поля и
истинных перемещений при адиабатическом деформировании на
множестве допустимых функций щ, непрерывно
дифференцируемых в V и принимающих заданные значения на Su.
Функционал A8.3) называется функционалом энергии. Отметим,
что при изотермическом деформировании первое слагаемое в
правой части соотношения A8.3) должно быть заменено на
fA(eij,T)dV.
v
Рассмотрим условия, при которых задача поиска
стационарных точек функционала энергии сводится к задаче о его
минимуме. Первый вопрос, который необходимо в этом случае
выяснить, — это вопрос об ограниченности снизу функционала
энергии A8.3).
*См.: Бердичевский В.Л.
A8.3)
442 18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
Пусть кинематические ограничения отсутствуют, т.е. Su =
= 0. Тогда объемная плотность внутренней энергии u(sij)
равна нулю на векторных полях перемещений, соответствующих
малым перемещениям упругого тела как абсолютно твердого,
т.е. при
щ = Ci + eijku;jXk, A8.4)
где Ci = const, Ui = const — компоненты вектора поворота;
eijk — символ Леви — Чивиты, представляющий собой
тензор ранга 3 (eijk = 1? если индексы г, j, к различны и следуют
в порядке A,2,3), B,3,1) или C,1,2), е^к = —1, если этот
порядок нарушен, и ець = 0, если среди индексов есть одинаковые).
При таких векторных полях перемещений имеем вц = 0.
Необходимым условием ограниченности снизу функционала J [и]
является равенство нулю его значений на векторных полях
перемещений вида A8.4). Поясним это условие.
Функционал U[и] неотрицателен и, следовательно,
ограничен снизу нулем. Функционал L[u] линеен, и поэтому
множество его значений не ограничено. Сумма функционалов
U[и] — L[u] может оказаться ограниченной снизу только за счет
того, что с увеличением L[u] растет и U[u], причем отметим,
что последний, будучи квадратичным функционалом, растет
быстрее. Однако ясно, что рост функционала U[u] не
сможет компенсировать рост L[u] на тех функциях щ, на которых
U[и] = 0, т.е. на векторных полях перемещений вида A8.4).
Указанное условие ограниченности снизу функционала J [и]
дает соотношение
/ bi(ci + eijkUJjXk)dV+ pi(ci + eijkUJjXk)dS = 0,
V s
откуда при Ci ^ 0 и uoj ^ 0 в общем случае следуют шесть
равенств:
fbidV+ fpidS = 0,
V s
443
eijki / bjXkdV+ / pjXkdS\ = 0. A8.5)
v s
Равенства A8.5) означают, что суммарные внешние сила
и момент, действующие на тело, должны быть равны нулю.
Если равенства A8.5) выполняются, то функционал J [и]
инвариантен относительно движений упругого тела как абсолютно
твердого. В этом случае задача поиска стационарных точек
функционала J[u] не имеет единственного решения. Чтобы
решение было единственным, на поля перемещений надо наложить
ограничения. Например, можно положить, что
/ щ dV = 0 и / eijhUiXj dV = 0,
v v
т.е. приравнять нулю среднее перемещение и средний поворот
тела.
Если упругие свойства рассматриваемого тела не
вырождаются, т.е. u{eij) > 0 при ?ij т^ 0, то, как оказывается, условия
A8.5) при Su = 0 являются достаточными для ограниченности
снизу функционала J[u]. Функции Ь{ и pi при этом должны
быть суммируемыми с квадратом.
Если на части Su граничной поверхности тела заданы
компоненты вектора перемещения, то можно доказать, что
функционал энергии также ограничен снизу для любых
суммируемых с квадратом функций Ъ{ и^, в том числе и для имеющих
ненулевые суммарные силу и момент*.
Ограниченность снизу функционала энергии позволяет
поставить задачу об определении для него минимизирующего
элемента. Эта задача может быть сформулирована в
форме вариационного принципа Лагранжа: среди всех возможных
перемещений действительные перемещения сообщают
функционалу энергии минимум.
*См.: Бердичевский В. Л.
444 18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
Уравнения Эйлера для функционала J [и] можно получить,
приравняв нулю его первую вариацию:
5J[u, 5и]
v
ди
——SsijdV— I biSuidV — I PiSuidS = 0.
OSij
v
s
Из теории упругости известно, что компоненты ац
симметрического тензора напряжений о связаны с компонентами ец
тензора деформаций соотношениями**
о а
ди
дец
Поэтому, согласно теореме Остроградского — Гаусса,
ди
Je-iV=I "ч6Щ+^Уу
Г ди [
Jo^S?-dv = Jc
V
= -f\—С
2 J Lav
V
(JijSui) + -^—((TijSuj) - -^-Зщ - -w^Suj
dx
v
j
dxi
dV
= / (TijrijSuidS — I
doj
dx.
SmdV.
Отсюда
SJ[u] = -
дхп
v
iyUidv+ I
+ bi)SuidV + ((JijUj —pi)8uidS = 0.
Так как вариации 8щ произвольны в объеме V и на
поверхности Sa, то в силу леммы Лагранжа
да.
V
дх3
+ Ь{ = 0 в V и aijfij=pi на Sa.
A8.6)
**См.: Работное Ю.Н.
445
Уравнения A8.6) представляют собой уравнения равновесия в
объеме V и граничные условия на поверхности Sa. Они были
получены с учетом того, что бщ = 0 на поверхности Su.
Пример 18.1. Пусть задана объемная плотность свободной
энергии
А(ец,Т) = \ст(еш ~ е^)(ец - еФ) - \сте{^е^\
где Cijki — симметрический тензор четвертого ранга
независимых от координат коэффициентов упругости, С^ы = Cjiki —
(Т) (Т)
= Cijik = Ckiij; ?\j = ?ji — тензор температурных
деформаций. Используя вариационный принцип Лагранжа, получим
уравнения Эйлера для соответствующего функционала и
запишем эти уравнения через компоненты вектора перемещения.
Функционал энергии для заданной объемной плотности
свободной энергии будет равен:
7м = 2] [ciM?ki - 4Т})(^- - 4Т)) -
V
- ^^(-4Т})(-4Т))] dV - fbiUidV - fpluldS,
V sa
и условия A8.5) ограниченности функционала 1[и] снизу
выполняются. Тогда
— / Ьгбщ dV — / р{6щ dS = О,
v
V sa
(T)
так как бе)- = 0.
446 18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
Преобразуем первое слагаемое в правой части этого
равенства с помощью теоремы Остроградского — Гаусса:
v v
= 2 J \faT. {ст(еы - 4Р)^) + ^т (pw(?ki - 4!))<ч
V
д
д
~ о^г [Cijki(?ki - 4Г)Mui ~ -fa. (стЫ - е
4?))*«.
Cijkl{?k
S V
4Г))ч
dV =
?ы )nj8uidS- I Cijki
/'
дЫ~^ы)
дхп
- 5т dV.
Окончательно условие равенства нулю первой вариации
функционала I[u] примет вид
61(щ) = / \Cijki(?ki-effl)nj -pijSuidS-
- а
yijkl
д{еы - е
ы )
дхп
+ bi)SuidV = 0.
v
Уравнения Эйлера в данном случае таковы:
Cijkl ~
д{?к1-^})+Ьг = 0 в V,
dxj
(Т) ~
Cijki(?ki ~ ?ы )nj-Pi = Q на Sa.
Воспользовавшись соотношениями Коши A8.2), получим
yijkl
д2щ
дх^дх
де
(Т)
Ciikl~ ^ \~Щ — Cijkl —
в К
jUXi
п дик п (т) ел
jkl~dxUi = ijkl kl j +Pi на а' ^
447
Преобразование Юнга — Фенхеля функции u(eij) по ец
u*(aij) = sup(aij?ij - u{?ij)) A8.7)
называют объемной плотностью дополнительной работы. Здесь
и далее полагаем, что компоненты щ вектора перемещения
непрерывно дифференцируемы в V, а на поверхности Su (при
Su Ф 0) удовлетворяют граничным условиям. Кроме того,
считаем, что компоненты <т^- тензора напряжений Э непрерывно
дифференцируемы в V. Плотность внутренней энергии можно
выразить через дополнительную работу:
ufaj) = sup(crij?ij -u*(aij)). A8.8)
Используя соотношение A8.8), можем записать
inf J [и] = infsup/[a,u], A8.9)
где
1[Э,и] = / ((TijEij - и* ((Jij)) dV - I biUidV - / piUidS.
V V sa
Решение минимаксной задачи A8.9) при указанных
требованиях к -м и а является стационарной точкой функционала /[а, и]
на множестве всех а и w, удовлетворяющих граничным
условиям A8.1). Вычисляя первую вариацию этого функционала
по компонентам тензора напряжений, находим ец = -—. Если
же варьируем функции щ, то получаем уравнение равновесия в
объеме V и граничные условия на Sa (см. A8.6)).
Сведение задачи равновесия упругого тела к задаче поиска
стационарной точки функционала /|/7,гх] называют смешанным
вариационным принципом или вариационным принципом Рей-
сснера. Стационарная точка функционала /|/7,гх] является сед-
ловой, так как она обеспечивает максимум /|/7,гх] по функциям
Gij и минимум по функциям щ.
448 18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
Пример 18.2. Используя вариационный принцип Рейс-
снера, получим уравнения A8.6) и соотношения, связывающие
компоненты тензоров напряжений и деформаций в
изотермическом процессе деформирования. Объемная плотность
дополнительной работы для изотропного однородного тела имеет
вид*
Л
A*(aij,T) = -?-(°ij°ij ~ ox \.Glk) +e(TW,
ЗЛ + 2/i
где A, /i — коэффициенты упругости; Okk — сумма
диагональных элементов матрицы а {у
В данном примере
1[Э,и} = 1
V
ч-ч ^{ЪзЪз ЗА+ 2//
CjjSi
2
°kk
¦^T)(?kk
dV — l Ь{Щ dV — I piUi dS.
v sa
Вычислим вариацию функционала /[a,u] по ац и приравняем
ее нулю:
61[Э,и] = J [eij - — Bai3 - зЛ + 2 <7kkSij) ~ e{T)Si:
v
5(Tij dV = 0,
где Sij — символ Кронекера. Отсюда следует, что при
произвольных функциях 8(Jij
?ij
h(at-
А
2ц
ЗА + 2ц
<?kk$ij) +е(т>5ц.
Если же вычислим вариацию функционала 7[ст,«] по щ, то
из условия SI\a,u,8u] = 0 получим A8.6). ф
'См.: Работное Ю.Н.
449
Вариационный принцип, двойственный принципу Лагран-
жа, можно ввести следующим образом. Сначала проверяем
допустимость перестановки порядка вычисления максимума и
минимума в соотношении A8.9). Эта перестановка дает
8щ>ш?(Ф[а,и] + Г[а,и]) </0, A8.10)
^ и
а
где /о — минимум функционала J [и]]
Ф[а,и] = - / \bi + -^-JuidV ~ {Pi~ crijrij)uidS,
V sa
1*\Э,и] = / GijUjUidS — I u*(aij)dV.
su v
Очевидно, что для тензорных полей а, удовлетворяющих
условиям равновесия и граничным условиям A8.6), Ф[а,гх] = 0,
а для тензорных полей а, не удовлетворяющих граничным
условиям, inf Ф[а,гб] = — оо в силу линейности этого функционала по
и
щ.
Предположим, что функции и*, минимизирующие
функционал J [и], непрерывно дифференцируемы. Введем обозначения:
* - 1 ( дщ диэ
SlJ~ 2\dXl дх7
Uj KJO,%
* = du(eij)
13 deXJ
Из уравнений Эйлера исходной вариационной задачи для
функционала J [и] при заданных условиях на поверхности Su следует,
что компоненты g\- тензора а* удовлетворяют соотношениям
A8.6) и, следовательно, являются допустимыми функциями:
supJ*[*]^J*[a*]. A8.11)
450 18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
С другой стороны, так как S = Su U Sa,
I*[a*]= fa^rijU^dS- fu*{a*J)dV =
su v
= J (g^: НО - и*(аЩ dV - J о\3щи\ dS =
v J sa
Л да*- fin* \ С
a^+ff«#~u*{<])dV~ a>^dS =
3 3 s„
1 /du* du*\-\
/ piit*dS = / u(e*j)dV — / biU*dV — / p{u\dS = Iq.
I
v
V V
Из последнего равенства и неравенств A8.10), A8.11)
следует, что
inf J [u] = sup/* [а],
и а
где минимум и максимум берутся по всем непрерывно
дифференцируемым в V функциям (jij, щ, причем щ = щ на
поверхности Su и aij удовлетворяют соотношениям A8.6).
Вариационная задача поиска максимума функционала /* (а)
по всем тензорным полям а, подчиняющимся условиям A8.6),
представляет собой математическую формулировку принципа
стационарности дополнительной работы, или вариационного
принципа Кастильяно: дополнительная работа 1*(а) достигает
максимума, если тензор напряжений а с компонентами а^
удовлетворяет уравнениям A8.6).
Пример 18.3. Получим уравнения Эйлера функционала,
соответствующего вариационному принципу Кастильяно,
записав их через компоненты тензора деформаций.
451
При выводе требуемых уравнений будем полагать, что
поверхность Sa совпадает с поверхностью 5, ограничивающей
рассматриваемое тело объемом V. В этом случае
v
Также полагаем, что объемные Ь{ и поверхностные щ силы
являются заданными функциями координат. Тогда из уравнений
A8.6) получаем
or
—^=0 в V и 6(ТгМ = 0 на S. A8.12)
OXj
Вместо шести компонентов тензора малых деформаций
введем в рассмотрение шесть новых функций fi = /г(жьЖ25#з) и
Fij = Fji = Fij(xi,X2,xz), приняв Fij = 0 при г = j, определяемых
из условий:
Далее, используя соотношение вц = ди*jdaij^ полученное
ранее, запишем условие стационарности функционала 1*\Э] в
вариационном принципе Кастильяно в виде
¦и=-/'
5Г\а} = - I BijSaijdV = 0,
которое после подстановки в него соотношений A8.13) примет
вид
1 [ {dfr + дЩ ^ dv + Г р^6^ dv =
v
= - I ^Sai:j dV + IРц8ац dV = 0. A8.14)
2 J V dxj dx
V V
452 18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
Преобразуя отдельно / -^-SaijdV, получим, используя ра-
J dxj
v
венства A8.12) и теорему Остроградского — Гаусса,
V V V
dS<jj
V
= I fMijrijdS- J fi^ldV = 0.
В силу этого равенства соотношение A8.14) эквивалентно
следующему:
/ify&7ijdy = 0. A8.15)
v
Введем в рассмотрение три произвольные функции
координат oti = аг(жъж2?#з). Умножим вторую группу уравнений из
A8.12) на oti и проинтегрируем полученный результат по
поверхности:
/
ai6aijTijdS = 0.
Применяя к последнему соотношению теорему
Остроградского — Гаусса, получаем
v
и после дифференцирования (с учетом симметрии тензора
напряжений а) имеем
/дбсгц пг 1 f/daj 9а,л,
a>i^dv+2m+i45°»dv=0-
V V
453
С учетом первой группы равенств из A8.12) последнее
соотношение можно переписать в виде
dai daj
5a a dV = 0.
A8.16)
v
Так как функции а.{ могут быть произвольными, потребуем,
чтобы dai/dxj = 0 при г = j. Тогда последнее равенство имеет
смысл только при г Ф j. Сравнивая соотношения A8.15) и
A8.16), можно записать следующие равенства:
'да? да
„ ^fuaj oolj\ . , .
V dxj dxi
где В ф 0 — некоторая постоянная. Из этих равенств следует,
что
d2F
23
дх2дх3
d2F13
дх\дх%
d2F12
д3а2 д3а3
= в(
Удх^дхз ' дх2дх\
/ d3ai д3а3
\дх2дхъ дхлдх1
= 0,
= 0,
В
д3
«1 д3
+
а2 \
Iдх\дх2 \дх2дх2 дх\дх\)
а также
( д / dF23 | dF13 | dF12\=2B д3аг =Q
| дх\ V дх\ дх2 дх3 ) дх\дх2дх3
_д_ /dF23 _ 0Fi3 dFu\ = ^ д3а2 =
дх2 V дх\ дх2 дх3 ) дх\дх2дх3
д /dF23 0Fi3 _ dFu\ = ^ д3а3 =
^ дх3 V дх\ дх2 дх3 ) дх\дх2дх3
A8.17)
A8.18)
454 18. ПРИНЦИПЫ ЛАГРАНЖА, РЕЙССНЕРА, КАСТИЛЬЯНО
Определяя ?ц из A8.13), учитывая равенства
df1 + df1
dxj dxj
2е
ч
при % = j и подставляя их в A8.18), получаем
д /<9s23 ^?13
дх\ V дх\ дх2
д / де2з
дх2 v 9жх
_d_fd?23_
{ дхз V 9ж1
+
<9ж2
5б13
ctei2\ _ д2ец
9^з / дх^дхз
деи де12 \ d2e22
+
дх3
dei2
дх2 дхз ) дх\дх2
)
dxidxs
52?3з
= 0,
0.
A8.19)
Система уравнений A8.19) содержит три из шести условий
совместности деформаций (условий Сен-Венана).
Другие три условия совместности деформаций получим,
подставив Fij из A8.13) в A8.17):
02F
23
дх2дх2
fdf2 , dfs
+
д2823 { 1 д2
дх2дх% 2 8x28x3^8x3 дх<±
<Э2?23
дх2дх% 2 дх\ дх2 2 дх\ дх%
д2?2Ъ
\д2е22 1<Э2б3з
2 <9ж2
дх2дх3
и так далее. Окончательно эти условия примут вид
2 дх\
(д2е22 д2е33 _ д2е2ъ
&Г2.
&г|
<Э2?зз 52ец
дх\
д2?1
I <9ж2 <Эж2
дх\
1 52?22
дх2дх3'
jjp?l3_
^Жх^Жз'
дх\дх2
A8.20)
455
Таким образом, мы установили, что условие
стационарности функционала дополнительной работы эквивалентно
условиям совместности деформаций A8.19) и A8.20). При этом
необходимыми условиями существования стационарной точки
функционала /*[сг^] являются уравнения A8.6).
Если на части Su граничной поверхности S заданы
компоненты вектора перемещения (щ — щ на Su), то, представив
fi в виде суммы fi(xux2,x3) = gi(xux2,x3) + /^Ж1,ж2,ж3), где
функции Qi известны, причем gi —щ на Su, fi = 0 на Su, и
проделав аналогичные преобразования, также получим условия
совместности деформаций, следующие из условия
стационарности функционала
1*\?] — / crijfijUidS — / u*((Tij)dV.
su v
19. ВАРИАЦИОННЫЕ
ПРИНЦИПЫ ТЕРМОУПРУГОСТИ
Термоупругостью называют раздел механики
деформируемого твердого тела, в котором изучаются процессы упругого
деформирования и распространения теплоты с учетом
взаимодействия этих процессов.
В дальнейшем будем полагать, что компоненты ец (г, j =
= 1, 2, 3) тензора деформаций е связаны с компонентами щ
вектора перемещений и соотношениями Коши A8.2),
компоненты Gij симметрического тензора напряжений а связаны с
Sij и абсолютной температурой Т соотношениями Дюамеля —
Неймана
°ii = CijkiSki ~ Pijfi, A9.1)
где Cijki = Ckiij = Cjiri — компоненты тензора коэффициентов
(Т) (Т)
упругости материала тела; fyj = Cijkiorkl ; аук1 J — компоненты
тензора температурных коэффициентов линейного
расширения; # = Т — Tq; Tq = const > 0 — температура естественного
состояния тела, т.е. та температура, при которой тело может
находиться сколь угодно долго без взаимодействия с
окружающей средой и для которой |#|/То <С 1. Как и в 18, используем
неявное суммирование по повторяющимся индексам.
Вектор плотности q теплового потока с компонентами qi
связан с градиентом температуры законом Фурье [XII]
* = ЧГ)|^ A9-2)
где \\- = А^ — компоненты тензора теплопроводности.
Закон сохранения энергии имеет вид
дг] dqi
рт«т=~^Л^ A9-3)
457
где р — плотность материала тела; t — время; Х{, г = 1, 2, 3, —
декартовы прямоугольные координаты; т\ — массовая
плотность энтропии; qv — плотность мощности источников
энерговыделения. При этом
pT()r) = pc?<& + T()l3ij?ij,
A9.4)
где с? — удельная массовая теплоемкость материала тела при
постоянных деформациях.
Запишем уравнения движения среды
дхп
+ к
д\
dt2
A9.5)
где Ъ{ — компоненты вектора плотности объемных сил.
В постановку задачи термоупругости вводят краевые
условия:
начальное условие при t = О
дщ |
\t=o
и?
и
\t=o v' dt
граничные условия
,0
t=0
#° в V;
Щ\ а — Щ
1 ^и
((Ji3n3)\ = ри $\St=$
ЩЩ\
<L
где SUU Sa = S — граничная поверхность рассматриваемого
тела объемом V, причем Su П Sa = 0; rij — координаты
единичного вектора нормали к поверхности S; StUSq = S, St^Sq = 0;
и®, v®, #о5 ^Ь Й, #, (f— заданные функции.
Полагаем, что все введенные функции и участки
поверхности S обладают необходимой гладкостью (т.е. имеют
необходимое количество непрерывных частных производных).
При формулировании вариационных принципов
термоупругости будем использовать свертку двух функций по времени,
которую определяют следующим образом [XI]:
t
(f*g)(t) = Jf(T)g(t-T)dT.
458 19. ВАРИАЦИОННЫЕ ПРИНЦИПЫ ТЕРМОУПРУГОСТИ
Для включения начальных условий в вариационную
формулировку соответствующей краевой задачи используем
преобразование Лапласа [XI]
оо
r(p)=L\f(t)](p) = f №e-*dt,
где f(t) — функция-оригинал; f*(p) = L[f(t)](p) — изображение
по Лапласу функции /(?).
Перейдем к изображениям в уравнениях движения A9.5):
^- + b;-p(p2u;-pu°i-v?)=o
и в уравнении A9.3):
дд*
Так как
pToP7]*-pT0rl@) = -^ + q*.
?гЛЩ~ 2\dXj + дхг)-
A9.6)
A9.7)
то, согласно A9.4), учитывая симметрию fyj и очевидное
тождество
получим
13 V dxj dxj J
О,
рТ0Г]@) = ръдо + ToPijEijiO) = РС?$0 +
l~1 /rhfi
IfM+M,)+I(rM_M>)
2 V dxj dxi J 2 V dxj dxi J
Поэтому закон сохранения энергии A9.3) в изображениях
можно записать в виде
ди9
м
dXi
¦pc?$o-T0Ci:)gx
+ ррТ07]* =q*v.
A9.8)
459
Решаем уравнения A9.6) и A9.8) относительно и* и ij*:
„ 1 д< 1 L+ 1 и 1 о
1 1 dry* 1 1 difi
p p OXi p p OXj
Так как
± = L[t], l = L[l],
PZ P
то, применяя теорему о свертке [XI], находим
d(Jij , - т . dqi
РЩ=9* -т^г + Л, pToV = w-g* —,
где #(?)=?; ff(t) = l;
0u?
fi=g*bi+ p(tVi +!/•); w = g*qv + pc?<&0 + T0AJ
<9ж/
Чтобы получить обобщение вариационного принципа Ла-
гранжа, введем понятие кинематически и термически
допустимого состояния, т.е. такого состояния, которое удовлетворяет
соотношениям Коши A8.2), закону Фурье A9.2), уравнениям
A9.1), A9.3), A9.4), а также граничным условиям на участках
Su и St поверхности S. Тогда обобщение принципа Лагран-
жа можно сформулировать следующим образом. Рассмотрим
функционал
V
1 /7 Се а а 1 • л 9$ 9$ 1 а\ кг
2J Vra Т0 Т0^ * Jdxj dxi То )
v
- I {g*Pi*ui)dS-Y I {9*g*q*$)dS,
460 19. ВАРИАЦИОННЫЕ ПРИНЦИПЫ ТЕРМОУПРУГОСТИ
который для любого t ^ 0 определен на множестве
кинематически и термически допустимых состояний.
Вычислим первую вариацию функционала J[ia,#] и
приравняем ее нулю:
8J[u,$,8u,8$] = д* {{Cijkieki -Pijti) *Ssij - fajSij *5&)dV-
v
- / p(g*Y'&*Sv)dV+2 / P{ui*Sui)
dV +
V
V
To
Iff <9# <9# \ f
V V
— / (g*w*8$) dV — \ (g*Pi*Sui)dS+— / (gxgxqxSfl) dS =
- j (g* -q — (Cijkieki - Pijti) + fi- puij * ёщ dV -
v
— \p(g*ceti + —g* Cij?ij) ~
П.
-9*9*
dd
d
dxj V J dx
(Аг^)
+ g*w
*8$dV +
+ [g* (Cijkieki - fytynj -g*Pij* Sui dS +
If / d$ \
+ —Jg*g*(\ij— ni-q)*6#dS = 0. A9.9)
sq
Из уравнения A9.9) в силу произвольности 8щ и 8$ на
участках Sa, Sq поверхности S и внутри объема V', а также равенства
нулю вариаций 8щ на Su и 8$ на St следуют уравнения
движения и теплопроводности с соответствующими граничными
условиями.
461
Вариационный принцип для компонентов а^ тензора
напряжений а и координат qi вектора q плотности теплового
потока, аналогичный вариационному принципу Кастильяно, можно
сформулировать следующим образом. Пусть тензор а и
вектор q образуют динамически и энергетически допустимое поле
напряжений и теплового потока, т.е. поле, которое
удовлетворяет граничным условиям на Sa и Sq. На таком поле определим
функционал
J[?> Я\ = 2 J (Sijklaij * °ki) dV +
V
v v
J р V oxj / 2 J oxj охк
V V
1 Г 1 . . dqi dqk 1 Г 1 (. dqk\
~7^7" / #*#*т;—*т;—dV + — / g*w*-—)dV—
2T0 J pca dxi dxk T0 J pca V dxk J
V V
- щ* (JijUj dS-— g*&* qifii dS,
Su St
где a^ = Тоа\у/(рса); ca = c? +Т0/3^а^/р — удельная
массовая теплоемкость при постоянных напряжениях; S'-ki = Sijki —
~ aij aw Sijkl = Sklij = Sjikl — компоненты тензора
коэффициентов податливости материала тела, связанные с
компонентами Cijki тензора коэффициентов упругости соотношениями
CijkiSkimn = 6imSjn; kij = kji — компоненты тензора
термического сопротивления, kij\jm = 5im.
Вариация функционала /рт,*/] равна нулю, если компоненты
тензора а и координаты вектора q являются решениями
краевой задачи термоупругости.
462 19. ВАРИАЦИОННЫЕ ПРИНЦИПЫ ТЕРМОУПРУГОСТИ
Вычислим первую вариацию функционала I[a,q] и
приравняем ее нулю:
I[a, q, 6а, Sq]= \ Sfijklaki + —с1ц (w - g * -^ J * 5а^ dV +
v
+ Y / g~~ (aijaij) *g*5qkdV ~ 7jT aij9 * °ij * <%n/c dS -
V s
- — I hjg * qj *6qidV+ -[g* -^J * Sa^rijdS -
v s
- / ¦^[-9*-p^)*SaijdV-— / (g*g*^-L)*5qinidS +
J dxj\p dxkJ T0 J pca\ dxjJ
+
д ( 1 . . dqj
dxj
J dxi \pca
9*9*
¦¦8qidV-
f-(-fi)
J dxj \p V
v
* бац dV +
+ / -fi*S(?ijnjdS+— / g*w*5qknkdS-
J P T0 J pca
s s
- / tj— (g * w)\ * Sqk dV - щ* Saijfij dS -
J uxk \-pca J J
?>u
- — g*-d* SqiHi dS =
ST V
Qi , l i ( . dqk
hi*
V
— (- :|: d°ik 1 A
dxj \p дхк p V
д ( , 1 /. dq
* бац dV +
дхк \ lJ lJ pca V dx
¦ f\l( da^ , Л ~
~~ Г *dJ~~ J I ~kikq>
*SqkdV +
* SajnfindS —
4/И^+^('
°^ + ~ [9 * ^ - w)
St
J--w)-0
pca \ OXj
* $<lknkdS = 0.
463
Так как вариации 5<Jij и 8qi произвольны, то из полученного
равенства следует, что если функции а^ и qi удовлетворяют
граничным условиям на участках Sa и Sq поверхности 5, то эти
функции являются решением краевой задачи термоупругости.
Необходимо отметить, что рассмотренные функционалы
J[iz,#] и I\3,q\ не обладают экстремальными свойствами. В
этом состоит их существенное отличие от функционалов,
которые входят в формулировки принципов Лагранжа и Кастилья-
но.
Если не учитывать процессы деформирования, т.е. eij = О,
ац¦ = 0 и Sa = Su = 0, то сформулированные вариационные
принципы приводят к краевой задаче нестационарной
теплопроводности с соответствующими краевыми условиями.
Для получения соотношений, определяющих статическое
распределение деформаций и напряжений, а также
стационарную теплопроводность в рассматриваемом упругом теле,
можно воспользоваться предельным переходом р —>> 0. В этом
случае функции, содержащие в качестве сомножителя параметр
р преобразования Лапласа, исчезают, а каждый из
функционалов <7[гх,#] и /[сг,д] преобразуется в сумму двух функционалов:
J [г/, т?] = J\[u] + 7г[#], I\5,q] = h[a] + h [я\- При этом
функционалы J\[u\ и 1\\5\ будут эквивалентны тем функционалам,
которые входят в формулировки принципов Лагранжа и Ка-
стильяно. Условия стационарности функционалов J2[#] и /2 И
эквивалентны краевой задаче стационарной теплопроводности,
сформулированной соответственно для $ и q.
20. ДВУСТОРОННИЕ ОЦЕНКИ
В ТЕПЛОПРОВОДНОСТИ
Построенные в 19 функционалы в частном случае
соответствуют двойственной вариационной формулировке линейной
краевой задачи стационарной теплопроводности. Помимо
решения такой задачи, т.е. нахождения температурного поля в
некоторой (в общем случае) пространственной области V',
ограниченной поверхностью S, двойственная формулировка
позволяет получить двусторонние оценки ряда важных
интегральных параметров, характеризующих процесс передачи теплоты.
Пусть распределение температуры Т(М), зависящее от
положения точки М Е V на замыкании V = V U S области V',
удовлетворяет дифференциальному уравнению
V(A(M)VT(M)) + qv(M) = О, М Е V, B0.1)
с граничными условиями
T(P) = fr(P), PeSu B0.2)
\(P)\7T(P)n(P) + a(P)T(P)=f2(P), PeS2. B0.3)
Здесь A — коэффициент
теплопроводности; qv — объемная
мощность энерговыделения; Д и
$2 — заданные функции
положения точки Р на участках S\
и а§2 = S \ S\ поверхности S
соответственно; п — единичный
вектор внешней нормали к
поверхности S; а — коэффициент
теплообмена (рис. 20.1).
Рис. 20.1
465
Краевой задаче B0.1)—B0.3) соответствуют двойственные
функционалы*
т=/(^(VTJ -^т)dv+J(f т2 - hT) dS> B0-4)
v s2
I[T,q] = - J^dV - J hqndS - j|т2^, B0.5)
V Si S2
где q = q(M) — вектор плотности теплового потока,
зависящий от положения точки М Е V. Функционал B0.4)
определен на распределениях температуры Т(М), непрерывных на V,
удовлетворяющих граничному условию B0.2) и имеющих
кусочно непрерывные производные в области V, а функционал
B0.5) — на непрерывно дифференцируемых в области V
функциях q(M), удовлетворяющих условиям
(divq(M)=qv(M), MeV;
\q(P)n(P)=a(P)T(P)-f2(P), PeS2.
B0.6)
Справедливы неравенства
I[T,q]^J[T*]^J[T\, B0.7)
где Т*(М), М Е F, — распределение температуры, на котором
функционал J[T] достигает своего наименьшего значения. Для
этого значения с учетом B0.1)—B0.3) имеем
2J[T*] = - fqvT*dV+ f fi\VT*ndS- If2T*dS. B0.8)
V Si s2
Выделим несколько характерных случаев оценки
интегральных параметров.
*См.: Зарубин B.C. A983 г.)
466 20. ДВУСТОРОННИЕ ОЦЕНКИ В ТЕПЛОПРОВОДНОСТИ
1. В области V действуют источники энерговыделения с
постоянной объемной мощностью qy, а поверхность S
состоит из участка Si с заданным постоянным значением
температуры, которое можно принять
за нуль отсчета, т.е. fi(P) = О,
Р Е Si, и участка $2, на которых
/2(Р) = 0, PeS2 (рис. 20.2). В
частном случае участок $2
может быть идеально
теплоизолированным и теплообмен на нем
будет отсутствовать (а(Р) = 0,
Р Е S2). Ясно, что поверхность
5 может состоять лишь из
одного участка: либо Si, либо $2.
При указанных условиях второй и третий интегралы в
правой части B0.8) исчезают, и мы получаем формулу для
температуры, осредненной по объему V области:
Рис. 20.2
V
T*dV = -2
J[T*}
B0.9)
Используя B0.7) и B0.9), запишем двустороннюю оценку для
этой температуры в виде
qvV
<Т<Т^ = -2
qvV
B0.10)
2. Пусть в области V отсутствуют внутренние источники
теплоты (qv(M) =0, М Е У), участок S2 поверхности S
идеально теплоизолирован (f2(P) = 0 и а(Р) = 0 при Р Е S2), а на
остальной части поверхности S имеются два не граничащих
между собой изотермических участка S[ и S" с заданными
значениями температур Т[ и Т" соответственно (рис. 20.3).
В этом случае вместо B0.8) получаем
2J[T*]=T1/Qi+T1//Qi/,
B0.11)
467
где Q[ и Q'{ — суммарные
тепловые потоки, поступающие
в область V через участки S[
и S" ее поверхности
соответственно, причем
Q[= Г \VT*ndS,
S[
Q'(= f\VT*ndS.
J
s?
a(P) = 0_ /2(P) = 0
T[= const \f /%^ Sl
Q/ / Ч Г
<1 / \ T(M) \-
S; qv(M) = 0 JT" = const
1 ^^N^ Q"
\ y<^
a(P)-0 ¦¦¦• J(Р)-0
Рис. 20.3
Согласно условию сохранения тепловой энергии при
стационарном процессе теплопроводности, Q[ + Q" = 0. Поэтому,
учитывая B0.11), получаем
Q'1 = -Q'( = 2
J[T*
Т{
¦Т[г
Отсюда вытекает формула для термического сопротивления
Т[-Т[' _ (Т[-Т['J
R
Q\
2J[T*
B0.12)
области V между изотермическими участками S[ и S"
поверхности S. Из B0.7) и B0.12) следует двусторонняя оценка для
термического сопротивления:
¦//\2
(т{-т{>)
2J[T]
^R^
2I[T, д]
B0.13)
3. В области V отсутствуют внутренние источники
теплоты (qy(M) = 0, М ? V), участок S\ поверхности S является
изотермическим (/i(-P) =Т\ = const, Р G Si), а на участках S2
происходит теплообмен с внешней средой, температуру
которой принимаем за нуль отсчета, т.е. /г(-Р) = 0, Р € S2 (рис. 20.4).
468 20. ДВУСТОРОННИЕ ОЦЕНКИ В ТЕПЛОПРОВОДНОСТИ
Рис. 20.4
При таких условиях от участка Si через участок *§2 к
внешней среде будет проходить, согласно B0.8), тепловой поток
Q
-I
Si
\VT*ndS = 2
J[T*
B0.14)
а суммарное термическое сопротивление теплопередаче между
участком S\ с температурой Т\ и внешней средой с нулевой
температурой будет равно:
дЕ = ^ = Ti2
Q 2J[T*}'
B0.15)
Используя B0.7), B0.14) и B0.15), запишем двусторонние
оценки для теплового потока
Tt ^v " Ti
и для суммарного термического сопротивления
Г2
2J[T]
<ЛЕ =
Г2
2/[Г, q]
4. Пусть по-прежнему в области V отсутствуют внутренние
источники тепла (qy(M) =0, М Е V), но отсутствует также и
469
участок Si поверхности 5, а участок S^, на котором, согласно
B0.3), происходит теплообмен с коэффициентом теплообмена
а(Р), состоит из двух частей: на части S2 теплообмен
происходит с внешней средой, температуру которой примем за нуль
отсчета, т.е. /2СР) = 0, Р Е S2; на остальной части S2 = S'2 \ S^
имеем /2(Р) =qf2 = const (рис. 20.5).
м
Т(М) )
/s\
Рис. 20.5
/V
|а(Р)
f2(P)-=
^Q'2
-=о
При указанных условиях из B0.8) можно найти среднюю
температуру участка S2:
*2 = ^JT*dS = -2J-^. B0.16)
2s>
Из B0.7) и B0.16) следует двусторонняя оценка для этой
температуры:
~2^Т2<~2^р
Если на участке S2 происходит теплообмен со средой,
имеющей температуру Тс7, т.е. q2 = ol'T'c, где а1 — постоянный на
этом участке коэффициент теплообмена, то, используя B0.16),
можно найти передаваемый через S2 суммарный тепловой
поток
Q'2 = а\Т'с - T2)S'2 = a%S'2 + 2^1 B0.17)
470 20. ДВУСТОРОННИЕ ОЦЕНКИ В ТЕПЛОПРОВОДНОСТИ
и суммарное термическое сопротивление
Т'
Т?' — с
т'
a'Tc'^ + 2J[T*]/Tc'*
B0.18)
Отсюда, учитывая B0.7), получаем двусторонние оценки для
суммарного теплового потока
2 у/ + « Тс^2 < Ц?2 < 2 т, + а TcS2
и для суммарного термического сопротивления теплопередачи
Т'
а'Тс'^ + 2J[T\/Tl ^ Ле ^ а'Тс'^ + 2I[T, q]/Tl'
Пример 20.1. Рассмотрим тепловыделяющий элемент,
представляющий собой стержень с поперечным сечением в
виде правильного шестиугольника
(рис. 20.6). Построим
двустороннюю оценку средней по
сечению температуры Т при
условии, что коэффициент
теплопроводности А материала
стержня и мощность qy
энерговыделения постоянны в поперечном
сечении такого шестигранного
стержня. Заданное значение Тп
температуры поверхности этого
стержня примем за нуль отсчета
температуры.
В силу симметрии сечения стержня относительно прямых,
проходящих через противоположные вершины
шестиугольника и через середины его противоположных сторон
достаточно рассмотреть один из 12 треугольников, заштрихованный
на рис. 20.6. Площадь этого треугольника F = Б2/B\/3), где
В — радиус окружности, вписанной в шестиугольник. Для
Аз
-В
А4
2ВУ
О
2В^>
1
\.А
/<<\\\
аГ\ \ \ \ \
в
^
X
А,
Рис. 20.6
471
функционала B0.4) в качестве допустимого распределения
температуры сначала возьмем следующее:
Т1(М) = С1(В2-х2), М{х, y)eF. B0.19)
Постоянную С\ определим из необходимого условия минимума
функционала B0.4) после подстановки в него B0.19):
в x/V3
J[T1] = f(^{VTlJ-qvTl)dF = 2\C2fx2dx J dy -
F 0 0
В x/Vs
qyC\ -^-^ + / x2 dx / dy = C\B r-
2^3 J J 4^3
о о
Bi , [ju„ f л.._^о4 2ЛС1-(?У
Отсюда следует, что
dJ[Tx] В4
dd 4V3
DACi-gv) = 0,
(а В2J
или C\ = gv/DA), что соответствует значению J\ = —
32уЗЛ
функционала B0.4) и, согласно B0.10), нижней оценке средней
температуры
Несложно проверить, что распределение
q(M) = ^V(x2+y2), М(х,у)еМ,
вектора плотности теплового потока с проекциями qx = qyx/2
и Чу — 4vy/% на оси координат Ох и Оу соответственно
удовлетворяет первому из условий B0.6) и поэтому может быть
472 20. ДВУСТОРОННИЕ ОЦЕНКИ В ТЕПЛОПРОВОДНОСТИ
использовано в качестве допустимого для функционала вида
B0.5):
Этому значению, согласно B0.10), отвечает верхняя оценка
средней температуры
Т+ = -2 А- = %^ « 0,138888^ < 0,139^. B0.21)
qyb Зол Л Л
Таким образом, учитывая B0.20) и B0.21), получаем
двустороннюю оценку для средней температуры поперечного сечения
шестигранного тепловыделяющего элемента в виде
0,125^- ^ Т < 0,139^-. B0.22)
Л Л
Отметим, что замена шестигранного стержня круглым
с равновеликой площадью поперечного сечения радиуса го =
7г приводит к значению средней
температуры
г Qvr20 л/3 qvB2 _ qvB2
лежащему в найденных пределах B0.22) довольно близко к
верхней границе.
Распределение температуры B0.19) является достаточно
грубым. Следует ожидать, что его уточнение уменьшит
вилку", определяемую двусторонними оценками средней
температуры Т. Для уточнения допустимого распределения
температуры в поперечном сечении шестигранного стержня построим
уравнение гр(х,у) =0 контура этого сечения в виде произведе-
473
ния уравнений сторон шестиугольника (см. рис. 20.6):
AiA2 2В - х - V3y = 0,
А2А3 2В + х-лДу = 0,
А3АА 2В + х =0,
А4А5 2В + х + лДу = 0,
А5А6 2В-х + л/Зу = 0,
MM 2В-х =0,
так что в итоге получим
ф(х,у) = (В2 -х2)(BВ + хJ -Зу2)(BВ-хJ -Зу2) =0. B0.23)
Уравнения сторон записаны таким образом, что при смещении
точки внутрь шестиугольника левая часть уравнений
становится положительной. Поэтому для любой внутренней точки
шестиугольника ф(х, у) > 0.
Примем допустимое распределение температуры в виде
Т2(М) = С2ф{х,у), М(ж, у) Е F, и после его подстановки с
учетом B0.23) в функционал B0.4) вычислим
J[T2] = J[T2] = f(±(VT2J -qVT2) dF =
F
Г\(дф(х,у)у /дф(х,у)у
AC?
2
F
dxdy -
qvC2 [ф(х, у) dxdy « 42,72С22АБ12 - l,809C2qvB8 = J2.
Из условия 3J[T2]/dC2 = 0 найдем C2 « 0,0212<?У/(АБ4) и
затем J2 = —0,0192(gyi?2J/A. Тогда, согласно B0.10), получим
уточненную нижнюю границу Т_ « 0,133gyi?2/A для средней
температуры Т. Таким образом, „вилка", определяемая
двусторонними оценками, стала более узкой.
474 20. ДВУСТОРОННИЕ ОЦЕНКИ В ТЕПЛОПРОВОДНОСТИ
Дальнейшее уточнение нижней границы для средней
температуры можно получить, если представить распределение
температуры в виде ряда
Т(М)=гр(х,у)(ао + Ь1х + с1у + а11ху + Ъ2х2 + С2у2 + ...). B0.24)
Степени х и у и их произведения образуют в данном случае
полную систему функций, а наличие сомножителя ф(х, у)
обеспечивает равенство нулю температуры по контуру поперечного
сечения, т.е. распределение B0.24) является допустимым для
функционала B0.4) при любых значениях коэффициентов ао,
&1, с\ и т.д. Вместо степенного ряда в B0.24) можно
использовать тригонометрический ряд.
СПИСОК РЕКОМЕНДУЕМОЙ
ЛИТЕРАТУРЫ
Учебники и учебные пособил
Алексеев В.М., Тихомиров В.М., Фомин СВ. Оптимальное управление.
М.: Наука, 1979. 429 с.
Ахиезер Н.Н. Лекции по вариационному исчислению. М.: Гостехтеоре-
тиздат, 1955. 248 с.
Березин Н.С, Жидков Н.П. Методы вычислений. Т. 2. М.: Физматгиз,
1962. 639 с.
Блисс Г.А. Лекции по вариационному исчислению. М.: Изд-во иностр.
лит., 1950. 347 с.
Буслаев B.C. Вариационное исчисление. Л.: Изд-во Ленингр. ун-та,
1980. 288 с.
Бухголъц Н.Н. Основной курс теоретической механики. Ч. 1. М.:
Наука, 1965. 467 с; Ч. 2. М.: Наука, 1966. 332 с.
Гелъфанд И.М., Фомин СВ. Вариационное исчисление. М.:
Физматгиз, 1961. 228 с.
Гюнтер Н.М. Курс вариационного исчисления. М.: Гостехтеоретиз-
дат, 1941. 308 с.
Зарубин B.C., Селиванов С.С. Вариационные и численные методы
механики сплошной среды. М.: Изд-во МГТУ, 1993. 358 с.
Колмогоров А.Н., Фомин СВ. Элементы теории функций и
функционального анализа. М.: Наука, 1989. 623 с.
Коша А. Вариационное исчисление: Пер. с венгер. М.: Высш. пек.,
1983. 280 с.
Кротов В.Ф., Лагота Б.А., Лобанов СМ., Данилина Н.И., Сергеев
С.И. Основы теории оптимального управления. М.: Высш. пек., 1990. 429 с.
Лаврентьев М.А., Люстерник Л.А. Курс вариационного исчисления.
М.; Л.: Гостехтеоретиздат, 1950. 296 с.
Михлин С.Г. Вариационные методы в математической физике. М.:
ГТТИ, 1957. 476 с.
Понтрягин Л.С, Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф.
Математическая теория оптимальных процессов. М.: Наука, 1983. 392 с.
Ройтенберг Я.Н. Автоматическое управление. М.: Наука, 1978. 551 с.
476 СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРА ТУРЫ
Смирнов В.И. Курс высшей математики. Т. 4. 4.1. М.: Наука, 1974.
336 с.
Смирнов В.И., Крылов В.И., Канторович Л.В. Вариационное
исчисление. Л.: КУБУЧ, 1933. 204 с.
Тихонов А.Н., Самарский А.А. Уравнения математической физики. М.:
Наука, 1966. 724 с.
Треногий В.А. Функциональный анализ. М.: Наука, 1980. 496 с.
Элъсголъц Л.Э. Дифференциальные уравнения и вариационное
исчисление. М.: Наука, 1969. 424 с.
Янг Л. Лекции по вариационному исчислению и оптимальному
управлению: Пер. с англ. М.: Мир, 1974. 488 с.
Дополнительная литература
Бобылев Н.А., Емельянов СВ., Коровин СК. Геометрические методы
в вариационных задачах. М.: Магистр, 1998. 658 с.
Брайсон А., Хо Ю-Ши. Прикладная теория оптимального управления:
Пер. с англ. М.: Мир, 1972. 544 с.
Вариационные принципы механики: Сб. / Под ред. Л.С Полака. М.:
Физматгиз, 1959. 932 с.
Волъмир А.С Устойчивость упругих систем. М.: Физматгиз, 1963.
879 с.
Галеев Э.М., Тихомиров В.М. Краткий курс теории экстремальных
задач. М.: Изд-во МГУ, 1985. 201 с.
Зарубин B.C. Инженерные методы решения задач теплопроводности.
М.: Энергоатомиздат, 1983. 328 с.
Зарубин B.C. Прикладные задачи термопрочности элементов
конструкций. М.: Машиностроение, 1985. 296 с.
Красовский А.А. Системы автоматического управления полетом и их
аналитическое конструирование. М.: Наука, 1973. 558 с.
Крылов А.Н. Собрание трудов. Т. 7. М.; Л.: Изд-во АН СССР, 1936.
696 с.
Лойцянский Л.Г. Механика жидкости и газа. М.: Наука, 1970. 903 с.
Михлин С.Г. Численная реализация вариационных методов. М.: Наука,
1966. 432 с.
Проблемы Гильберта: Сб. / Под ред. П.С Александрова. М.: Наука,
1969. 239 с.
Рокафеллар Р.Т. Выпуклый анализ. М.: Мир, 1973. 468 с.
Формалъский A.M. Управляемость и устойчивость систем с
ограниченными ресурсами. М.: Наука, 1973.
477
Четаев Н.П. Теоретическая механика. М.: Наука, 1987. 367 с.
Экланд И., Темам Р. Выпуклый анализ и вариационные проблемы:
Пер. с англ. М.: Мир, 1979. 400 с.
Элъсголъц Л.Э. Вариационное исчисление. М.: Гостехтеоретиздат,
1958. 164 с.
Справочные издания и монографии
Абовский Н.П., Андреев Н.П., Деруга А.П. Вариационные принципы
теории упругости и теории оболочек. М.: Наука, 1978. 287 с.
Александрова Н.В. Математические термины: Справочник. М.: Высш.
шк., 1978. 190 с.
Атанс М., Фалб П. Оптимальное управление. М.: Машиностроение,
1968. 764 с.
Беллман Р. Динамическое программирование. М.: Изд-во иностр. лит.,
1960. 400 с.
Беллман Р., Дрейфус С. Прикладные задачи динамического
программирования: Пер. с англ. М.: Наука, 1965. 458 с.
Бердичевский В.Л. Вариационные принципы механики сплошной
среды. М.: Наука, 1983. 448 с.
Био М. Вариационные принципы в теории теплообмена: Пер. с англ.
М.: Энергия, 1975. 208 с.
Бронштейн И.Н., Семендяев К.А. Справочник по математике для
инженеров и учащихся втузов. 13-е изд., испр. М.: Наука, 1986. 544 с.
Габасов Р., Кириллова М.Ф. Особые оптимальные управления. М.:
Наука, 1973. 256 с.
Грибанов В.Ф., Паничкин Н.Г. Связанные и динамические задачи
термоупругости. М.: Машиностроение, 1984. 184 с.
Коллатц Л. Задачи на собственные значения: Пер. с нем. М.: Наука,
1968. 503 с.
Корн Р., Корн Т. Справочник по математике: Для научных работников
и инженеров: Пер. с англ. М.: Наука, 1973. 832 с.
Курант Р., Гильберт Д. Методы математической физики: Пер. с англ.
Т. 1. М.; Л.: ГТТИ, 1934. 532 с.
Ланцош К. Вариационные принципы механики: Пер. с англ. М.: Мир,
1965. 408 с.
Лернер А.Л., Розенман Е.А. Оптимальное управление. М.: Энергия,
1970. 358 с.
Летов A.M. Динамика полета и управление. М.: Наука, 1969. 360 с.
478 СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРА ТУРЫ
Математический энциклопедический словарь / Гл. ред. Ю.В. Прохоров.
М.: Сов. энцикл., 1988. 848 с.
Петров Ю.П. Вариационные методы теории оптимального управления.
Л.: Энергия, 1977. 280 с.
Полак Л. С. Вариационные принципы механики, их развитие и
применение в физике. М.: Физматгиз, 1960. 599 с.
Работное Ю.П. Механика деформируемого твердого тела. М.: Наука,
1979. 745 с.
Ректорис К. Вариационные методы в математической физике: Пер. с
англ. М.: Мир, 1985. 590 с.
Справочник по теории автоматического управления / Под ред.
А.А. Красовского. М.: Наука, 1987. 712 с.
Тимошенко СП., Гудъер Дж. Теория упругости: Пер. с англ. М.:
Наука, 1975. 576 с.
Феодосъев В.И. Сопротивление материалов. М.: Наука, 1979. 559 с.
Цлаф Л.Я. Вариационное исчисление и интегральные уравнения:
Справочное руководство. 2-е изд., перераб. М.: Наука, 1970. 192 с.
Черноусъко Ф.Л., Баничук П.В. Вариационные задачи механики и
управления (Численные методы). М.: Наука, 1973. 238 с.
Задачники
Алексеев В.М., Галеев Э.М., Тихомиров В.М. Сборник задач по
оптимизации. М.: Наука, 1984. 287 с.
Ефимов А.В., Золотарев Ю.Г., Терпигорева В.М. Математический
анализ (спец. разделы). Ч. 2. М.: Высш. шк., 1980. 290 с.
Краснов М.Л., Макаренко Т.П., Киселев А.И. Вариационное
исчисление (Задачи и упражнения). М.: Наука, 1973. 192 с.
Сборник задач по математике для втузов. Ч. 4. Методы оптимизации.
Уравнения в частных производных. Интегральные уравнения: Учеб.
пособие / Под ред. А.В. Ефимова. 2-е изд., перераб. М.: Наука, 1990.
304 с.
Периодические издания
Бернштейн П. С. Об уравнениях вариационного исчисления // Успехи
матем. наук. 1941. Вып. 8. С. 32-74.
Болтянский В.Г. Достаточные условия оптимальности и обоснование
метода динамического программирования // Изв. АН СССР. Сер. матем.
1964. Т. 28. №3. С. 481-514.
479
Болтянский В.Г.У Гамкрелидзе Р.В., Понтрягин Л.С. К теории
оптимальных процессов // ДАН СССР. 1956. ТЛЮ. №1. С. 7-10.
Красносельский М.А. Некоторые задачи нелинейного анализа //
Успехи матем. наук. 1954. Т. 9. Вып. 3F1). С. 57-114.
Розоноэр Л.И. Принцип Л.С. Понтрягина в теории оптимальных
систем // Автоматика и телемеханика, 1959, №10, С. 1320-1334; №11, С. 1441-
1458; №12, С. 1561-1579.
Слободянский М.Г. Оценка погрешности приближенного решения в
линейных задачах, сводящихся к вариационным, и их применение к
определению двусторонних приближений в статических задачах теории упругости
// Прикл. математика и механика. 1952. Т. 16. Вып. 4. С. 449-464.
Фельдбаум А.А. Оптимальные процессы в системах автоматического
регулирования//Автоматика и телемеханика. 1953. 14. №6. С Л 561-1580.
Фельдбаум А.А. О синтезе оптимальных систем с помощью фазового
пространства // Автоматика и телемеханика. 1955. 16. №2. С. 129-149.
предметный указатель
Аксиомы скалярного умножения
IV , 353
Базис стандартный IV , 134
- счетный IX , 356
Брахистохрона II , 17
Вариация допустимая 26
- функции 26
- функционала 83
- вторая 125
- первая 28
Вектор ненулевой III- 14 , 369
- управления 154
- фазовой скорости 158
- фазовый 153
Вектор-функция кусочно
непрерывная 155
Воздействие управляющее 154
Возмущение 185
Время свободное 200
Гиперплоскость 248
Гиперповерхность 248
Градиент функции V , 325
Движение возмущенное 305
- лимитационное 165
- невозмущенное 305
- объекта 153
Действие по Гамильтону 407
Дифференциал полный VII , 50
- сильный (Фреше) 27
Дифференциал слабый (Гато) 28
Дополнение ортогональное IV , 373
Задача Больца 115
- элементарная 115
- вариационная 41
- на условный экстремум 98
- с подвижными границами 79
концами 75
- вариационного исчисления 41
простейшая 46
- двухточечная 159
- изопериметрическая 98
- Лагранжа 98
- в форме Понтрягина 169
- Майера 114
- о геодезических линиях 103
- оптимального управления 151 ,
153
линейная 186
- оптимальной стабилизации 306
- синтеза оптимальных управлений
164
- со свободным концом 159
- с подвижными (скользящими)
концами 160
- стабилизации 305
- с фиксированным временем 255
- фиксированными концами 159
- управления 158
- многоточечная 160
- Штурма — Лиувилля XI , XII , 375
Закон движения 152 , 156
Значение собственное IV , 126
481
Интеграл Гильберта
инвариантный 139
- Лебега IX
- первый системы ОДУ VIII , 68
Интегрант 30
Интервал времени управления 159
.Комбинация линейная векторов
III , IV
Координаты фазовые 153
Кривая гладкая II , 89
- интегральная VIII , 68
- фазовая 153
Критерий интегральный
квадратичный 161
- смешанный 162
- качества 152 , 160
- интегральный 161
- энергетический 162
- конечного состояния 162
- оптимального быстродействия
161
Лагранжиан 101
Лемма вариационного исчисления
основная 36
- Дюбуа-Реймона 38
- Лагранжа 36
Линия геодезическая V , 21
- переключений 244
Максимум сильный 33
- слабый 33
Матрица Гессе V , 66
- Грама IV , 379
- диагональная IV , 365
- невырожденная III
Метод динамического
программирования 274
- конечных элементов XIII , 369
Метод Куранта 369
- множителей Лагранжа 107
- наименьших квадратов XIII , 368
- Ритца XIII , 360
Методы прямые XIII , 314
Минимум сильный 33
- слабый 33
- строгий 33
Многообразие линейное IX , 318
Множество всюду плотное IX , 317
- выпуклое XIV , 342
- замкнутое 1- 186 , 374
- измеримое IX , XIII , 315
- компактное 1- 189 , XIII , 374
- по энергии 374
- (лебеговой) меры нуль IX , 316
- ограниченное 1- 183 , 374
- предкомпактное 374
- управлений допустимых 154
Множители Лагранжа 101
Модель математическая XX , 156
Наклон поля экстремалей 136
Невязка 357
Неравенство треугольника IV , 343
Норма IV , IX , 23
- евклидова IV , 315
- ограниченного оператора 370
- энергетическая XIII , 353
Нормаль внешняя V , 325
Область определения оператора
XIII , 314
- управления 154
- управляемости 247
Оболочка линейная системы
векторов IV , 378
Объект детерминированный 152
- управляемый 151
482
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Ограничение на управление 155
- фазовые координаты 154
- фазовое 154
Ограничения фазовые 98
Оператор XIII , 314
- Гамильтона VII , 325
- действующий в линейном
пространстве 318
- компактный (вполне
непрерывный) 374
- Лапласа XII , 320
- линейный IV , XIII , 318
- дифференциальный XI , 320
- неотрицательный 372
- ограниченный 370
- снизу 371
- положительно определенный XIII ,
323
- положительный XIII , 322
- самосопряженный IV
- симметрический XIII , 322
- тождественный IV , 377
- Штурма — Лиувилля XI , 375
Определитель матрицы III
Отображение (функция) 1- 70
Параллелепипед г-мерный 230
Параметр управляющий 154
Переключение 216
Переменные канонические 67
- сопряженные 203
Поверхность V , 22
- гладкая V , 22
- кусочно гладкая V , 325
Подпоследовательность 1- 243 , 374
Подпространство собственное
оператора IV , 373
Поле экстремалей 136
Пополнение нормированного
(евклидова) пространства XIII ,
317
Последовательность
минимизирующая 352
- сходящаяся поточечно IX , 317
- фундаментальная 1- 232 , IX , 315
Принцип взаимности 112
- Гамильтона 407
- двойственности 112
- максимума 198 , 205
- оптимальности 274
Произведение скалярное
энергетическое XIII , 353
Производная функции полная в
силу системы VIII , 68
- по направлению V , 325
Пространство банахово IX , 24
- гильбертово IX , 24
-- сепарабельное IX , 356
- евклидово арифметическое IV
- нормированное IV , IX , 23
- полное IX , 315
- фазовое 153
- функциональное 315
- энергетическое XIII , 354
Процесс допустимый 158
- локально оптимальный 193
- оптимальный 161
- ортогонализации Грама —
Шмидта IV
Режим особый 265 , 267
Решение операторного уравнения
классическое 356
обобщенное 356
приближенное 357
Ряд Фурье IX , 357
Связи голономные 98
- дифференциальные 98
483
Связи интегральные
(изопериметрические) 98
Связь обратная 240
Синтез управления 240
Система векторов линейно
независимая IV
- гамильтонова 175
- (ОДУ) автономная VIII , 184
- сопряженная 203
- управляемая 151 , 187 , 187
- линейная 184
- уравнений Эйлера 59
- условий полная 101
- функций ортонормированная IX ,
357
- Якоби 134
Скобка Пуассона 69
Соотношение Беллмана
рекуррентное 280 , 283
Состояние начальное 157
- фазовое 153
Стабилизация оптимальная в целом
307
Сужение функционала
(отображения) 1- 73 , 189
Сходимость в среднем
квадратичном IX , 316
- по энергии 353
Теорема о квадратичном
функционале XIII , 326
- неявной функции V
Точка переключения 230
- сопряженная 131 , 132 , 134
- стационарная функционала 41
- угловая I , 86
- фазовая (изображающая) 153
- экстремума функционала 33
Траектория оптимальная 161
Траектория фазовая 153
- соответствующая управлению
157
Управление 154
- допустимое 156
- оптимальное 152 , 161
- по быстродействию 161
- особое 266
- программное 163 , 239
- экстремальное 233
Управляемость системы 187
Уравнение Беллмана 290
- вариационное 328
- голономное 328
- Лапласа XII , 65
- линейного приближения VIII
- операторное XIII , 319
- Остроградского 65
- Пуассона XII , 320
- Эйлера 47
- Эйлера — Пуассона 62
- Якоби 132
Уравнения возмущенного движения
184 , 306
- первого приближения 185
- Эйлера задачи Лагранжа 107
- изопериметрической задачи 107
Условие краевое естественное 76
- Лежандра 130
- усиленное 132 , 145
- начальное VIII , 156
- общности положения 225
- отражения 87
- преломления 90
- слабого минимума достаточное
132
- трансверсальности 85 , 250
- экстремума функционала
необходимое 35 , 58 , 87
484
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Условие Якоби 136
- усиленное 132
Условия Вейерштрасса — Эрдмана
93
- связи 97
Участок особого управления
(режима) 267
Форма билинейная IV , 123
- каноническая уравнений Эйлера
68
Формула Грина VII , 64
-- вторая VII , 324
-- первая VII , 325
- Остроградского — Гаусса VII ,
340
Формулировка прикладной задачи
вариационная 328
Функционал альтернативный 385
- билинейный 123
- вспомогательный 101
- выпуклый 342
-- строго 343
- вырожденный 50
- дважды дифференцируемый в
точке 124
- Дирихле 389
- дифференцируемый в точке 27
- квадратичный 124 , 326
- неотрицательно определенный
124
- положительно определенный 124
- сильно положительный 126
- Лагранжа 387
- линейный 24
- непрерывный в точке 26
- терминальный 162
- целевой 97
Функционал целевой интегральный
114
- смешанный 114
- терминальный 114
- энергии XIII , 353
Функция аналитическая X , 232
- Беллмана 285
- Вейерштрасса 141
- Гамильтона 67
- гладкая 16
- допустимая 22
- измеримая IX , XIII , 316
- комплексного переменного X , 232
- кусочно гладкая 93
- Лагранжа 101 , 107
- Понтрягина 175 , 204
- пробная 38
- синтезирующая 164 , 240
- суммируемая с квадратом IX , 24 ,
315
и весом IX , 316
Цель управления 152
Экстремаль 47 , 59 , 62 , 65
- включенная в поле экстремалей
136
- задачи Лагранжа 101
Экстремум сильный 33
- слабый 33
- условный V , 107
Элемент оператора собственный
XIII , 369
S-окрестность сильная 26
- слабая 26
ОГЛАВЛЕНИЕ
Предисловие 5
Основные обозначения 9
ЧАСТЬ I. КЛАССИЧЕСКОЕ
ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ 13
1. Основные понятия 15
1.1. Задачи , приводящие к вариационным проблемам . . 15
1.2. Основные определения 22
1.3. Основные леммы вариационного исчисления 36
1.4. Некоторые замечания о задачах вариационного
исчисления 41
Вопросы и задачи 44
2. Вариационные задачи с фиксированными
границами 46
2.1. Простейшая задача вариационного исчисления .... 46
2.2. Функционалы от нескольких функций 57
2.3. Функционалы с производными высшего порядка . . 60
2.4. Функционалы от функций многих переменных ... 63
2.5. Канонический вид уравнений Эйлера 66
Вопросы и задачи 69
3. Вариационные задачи с подвижными границами 74
3.1. Задача с подвижными концами 74
3.2. Задача с подвижными границами 79
3.3. Экстремали с угловыми точками 86
Вопросы и задачи 94
4. Задачи на условный экстремум 97
4.1. Основные типы задач на условный экстремум .... 97
4.2. Необходимые условия в задаче Лагранжа 100
4.3. Необходимые условия в изопериметрической задаче . 105
4.4. Некоторые примеры 109
4.5. Принцип взаимности в изопериметрических задачах 112
486
ОГЛАВЛЕНИЕ
4.6. Задача Больца и задача Майера 114
Вопросы и задачи 119
5. Достаточные условия экстремума 123
5.1. Слабый экстремум 123
5.2. Условие Якоби 135
5.3. Инвариантный интеграл Гильберта 138
5.4. Сильный экстремум 140
Вопросы и задачи 146
ЧАСТЬ II. ОПТИМАЛЬНОЕ
УПРАВЛЕНИЕ 149
6. Вариационные методы в оптимальном управлении 151
6.1. Постановка задачи оптимального управления .... 151
6.2. Задача Лагранжа в форме Понтрягина 167
6.3. Некоторые задачи с ограничениями в классическом
вариационном исчислении 176
6.4. Линейные задачи оптимального управления 184
6.5. Обсуждение методов вариационного исчисления . . . 189
Вопросы и задачи 196
7. Принцип максимума 198
7.1. Автономная система управления. Формулировка
принципа максимума 199
7.2. Обсуждение принципа максимума 206
7.3. Задача быстродействия 213
7.4. Линейная задача оптимального быстродействия . . . 224
7.5. Задача синтеза управления 239
7.6. Задача с подвижными концами 248
7.7. Неавтономные системы 253
7.8. Понятие особого управления 263
Вопросы и задачи 271
8. Метод динамического программирования 274
8.1. Принцип оптимальности 274
8.2. Уравнение Беллмана 283
8.3. Уравнение Беллмана в задаче быстродействия .... 295
8.4. Связь метода динамического программирования с
принципом максимума 301
Д.8.1. Оптимальная стабилизация 305
Вопросы и задачи 309
487
ЧАСТЬ III. ПРЯМЫЕ МЕТОДЫ
ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ 311
9. Формулировка вариационных задач 313
9.1. Операторное уравнение 314
9.2. Вариационное уравнение 328
9.3. Примеры построения функционала по вариационному
уравнению 332
9.4. Исследование выпуклости функционала 342
Вопросы и задачи 351
10. Методы решения вариационных задач 352
10.1. Минимизирующие последовательности 352
10.2. Методы приближенного решения вариационных задач 360
10.3. Собственные значения симметрического оператора . 369
10.4. Приближенное решение задачи на собственные
значения 377
Вопросы и задачи 382
11. Двойственные вариационные задачи 384
11.1. Альтернативные функционалы 384
11.2. Построение альтернативного функционала 387
11.3. Оценка погрешности приближенного решения .... 395
Вопросы и задачи 401
ЧАСТЬ IV. ПРИЛОЖЕНИЯ
ВАРИАЦИОННЫХ МЕТОДОВ 403
12. Принцип Гамильтона 405
13. Колебания струны 410
14. Колебания мембраны 413
15. Уравнения движения идеальной жидкости 418
16. Аэродинамическая задача Ньютона 423
17. Вопросы устойчивости конструкции 430
18. Вариационные принципы Лагранжа , Реисснера и Ка-
стильяно 439
19. Вариационные принципы термоупругости 456
20. Двусторонние оценки в теплопроводности 464
Список рекомендуемой литературы 475
Предметный указатель 480
Учебное издание
Математика в техническом университете
Выпуск XV
Ванько Вячеслав Иванович
Ермошина Олеся Владимировна
Кувыркин Георгий Николаевич
ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ
И ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ
Редактор Е.В. Авалова
Художник С. С. Водчиц
Оригинал-макет подготовлен в издательстве
МГТУ им. Н.Э. Баумана
под руководством А. Н. Канатников а
Санитарно-эпидемиологическое заключение
№ 77.99.02.953.Д.008880.09.06 от 29.09.2006 г.
Подписано в печать 27.10.2006. Формат 60x88 1/16.
Печать офсетная. Бумага офсетная.
Усл. печ. л. 30 , 5. Уч.-изд. л. 30 , 34.
Тираж 1000 экз. Заказ №
Издательство МГТУ им. Н.Э. Баумана ,
105005 , Москва , 2-я Бауманская , 5.
Отпечатано с готовых диапозитивов
Издательской группой «Логос»
на базе ООО «Печатный Дом «Современник»
105318 , Москва , Измайловское ш. , 4.
445043 , г. Тольятти , Южное шоссе , 30.
J 5-7038-2627-6
O03N826270'