/






















































































































































































































































































































































































































































































































































































Author: Мордвинов Б.Г.
Tags: техника средств транспорта водный транспорт справочник судостроение
Year: 1987




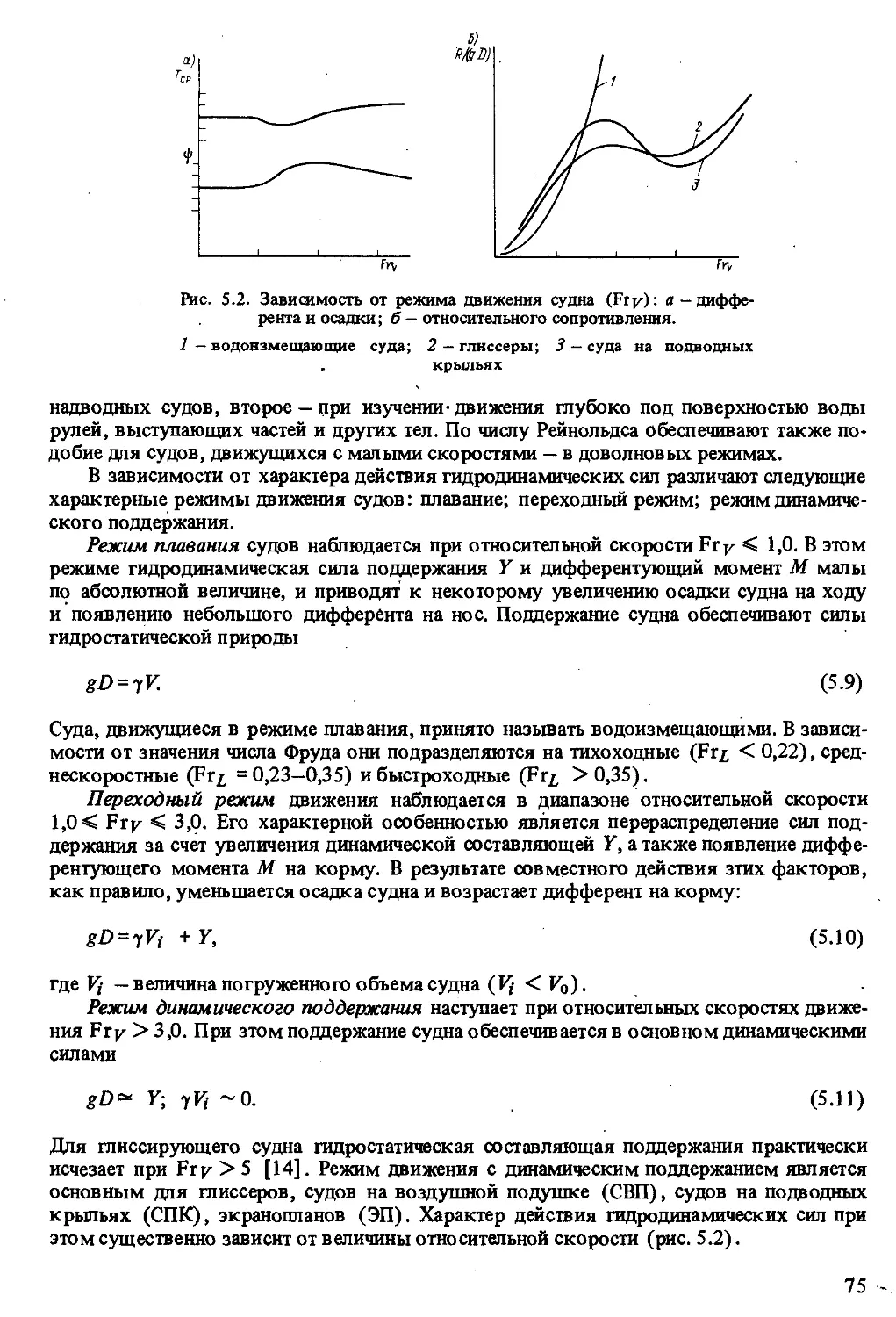
Text
Справочник
шло мало-
малотоннажному
судостроению
Составитель Б. Г. МОРДВИНОВ
{ НЕ БОЛЕЕ iH КНИГИ В
\ ОДНИ РУКИ И 2ХВДВЕ ]
КОЛОХ2А
Ленинград
„Судостроение"
1987
ББК 39.427
С74
УДК629.12*@83.72)
Авторы: М. М. Алнвагабов, Д. Л. Бирюкович, К. Л. Бнрюкович, Ю. Л. Бн-
рюкович, В. И. Васильев, Л. Г. Махаринский, Э. Ф. Мирошниченко, Б. Г. Мордвинов,
А. И. Немзер, А. И. Павлов, И. А. Разгоняева, Д. И. Сквирскмй, А. Р. Скубко,
В. П. Соколов, Е. И. Фишбейн, Л. Л. Хейфец, П. С Якшаров
Составитель Б. Г. Мордвинов
Рецензенты: В. В. Кучер, Н. Н. Мокеев, А. А. Мядзюта, А. И. Павлов,
И. Ю. Подкользин, В. Д. Поплавский,
канд. техн. наук Я. Ф. Фарберов, Л. Л. Хейфец, В. Л. Чупайло, Г. М. Шеенок
Научный редактор В. П. Гудкмовнч
Справочник по малотоннажному судостроению. / [Сост. Б. Г. Мордвинов].—
С74 Л.: Судостроение, 1987. - 576 с, ил.
ИСБН
Приведены сведения, необходимые для постройки, ремонта и эксплуатации судов широ-
широкого потребления: мотолодок, катеров, парусных яхт и многокорпусных судов, гребных
и портативных лодок, а также данные для расчета их ходкости и мореходных качеств, гребных
винтов, водометных движителей и парусного вооружения. Приведены основные сведения
о двигательных установках и навигационных приборах. Справочник снабжен чертежами конст-
конструкций корпусов малых судов из древесных материалов, легких сплавов, стали, стеклопласти-
стеклопластика, армо- и стеклоцемента.
Для проектировщиков, технологов и строителей малых судов, а также широкого круга
владельцев яхт и катеров.
3605030000-073
С 71-87 ББК 39427
048 @1)-87
©Издательство „Судостроение", 1987г.
ПРЕДИСЛОВИЕ
Настоящий справочник содержит материалы по широкому кругу вопросов, воз-
возникающих при проектировании и постройке малотоннажных судов, предназначенных
прежде всего для водного туризма, прогулок и отдыха на воде. Представленные расчет-
расчетные методики, сведения о конструкции, формах обводов, материалах, двигателях и
движителях могут использоваться проектировщиками и строителями судов народно-
народнохозяйственного назначения.
Справочник состоит из шести разделов. Раздел I содержит общие характеристики
основных типов малых судов широкого потребления: катеров, мотолодок, яхт, шверт-
швертботов, многокорпусных судов, гребных, разборных и надувных лодок, демонстра-
демонстрационные чертежи лучших проектов, которые взяты за основу промышленностью или
по которым построены единичные экземпляры судостроителями-любителями.
В разделе II приведены данные о ходовых качествах и мореходности малых судов,
а также для расчета сопротивления воды движению водоизмещающих и глиссирующих
судов, их управляемости. Отдельная глава посвящена гидроазродинамике парусных
судов. Даны примеры расчета ходовых качеств конкретных судов.
В разделе III собраны сведения, необходимые для выбора и расчета движителей:
гребного винта и водомета.
В разделе IV рассмотрены обводы корпуса водоизмещающих, глиссирующих судов
и судов на подводных крыльях, приведены расчетные формулы и графики, позволяю-
позволяющие оценить ходовые качества малого судна на ранних стадиях разработки проекта.
Конструкция корпуса малых судов проанализирована в разделе V. В нем изложены
методы определения размеров основных связей корпуса из древесины, фанеры, легких
сплавов, стали, пластмасс, армо-и стеклоцемента; даны чертежи деталей и конструктив-
конструктивных узлов.
В разделе VI содержатся сведения о применяемых на малых судах стационарных
дизельных и карбюраторных двигателях, о судовых конверсиях транспортных двига-
двигателей, о подвесных моторах.
В приложении кратко охарактеризовано навигационное оборудование, необходи-
необходимое для обеспечения безопасности плавания малого судна.
При подготовке справочника использовались материалы, публиковавшиеся в жур-
журнале „Катера и яхты". Авторский коллектив выражает глубокую признательность
редакции журнала за помощь в работе над рукописью.
В написании справочника принимали участие специалисты разных областей судо-
судостроения. Гл. 1-4, 7, 10 написаны В. И. Васильевым; гл. 5 - В. П. Соколовым; гл. 6 -
А. И. Немзером; 8,9, 12 - Л. Л. Хейфецем; гл. 11 - Л. Г. Махаринским; гл. 13,14 -
А. И. Павловым, И. А. Разгоняевой; гл. 15 — П. С. Якшаровым; гл. 16 — Э. Ф. Мирош-
Мирошниченко; гл. 17 — Д. Л. Бирюковичем, К. Л. Бирюковичем, Ю. Л". Бйрюковичем
и Д. И. Сквирским совместно; гл. 18 — М. М. Аливагабовым; гл. 19 — Е. И. Фиш-
бейном; приложение подготовлено Б. Г. Мордвиновым и А. Р. Скубко.
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
А - проекция погруженных частей кор-
корпуса на диаметральную плоскость
(ДП); суммарная площадь ло-
лопастей гребного винта (ГВ); сто-
сторона ячейки стержневой арма-
арматуры
Ad- площадь диска, ометаемого ГВ
AR - „ руля
а — ширина ячейки тканой арматуры;
„ трапециевидного профиля
внизу
' В - ширина судна; ширина несущей
поверхности
? мид - ширина судна на миделе
В ск - „ „ по скуле
Дтр - „ „ на транце
b — „ сечения лопасти ГВ; хорда
подводного крыла (ПК); ширина
трапециевидного профиля вверху
Ьн -ширина надстройки на миделе
br - „ лопасти ГВ на радиусе г
Са — коэффициент воздушного сопро-
сопротивления
Сь - то же динамической нагрузки
Сх — „ лобового сопротивления
Су - „ подъемной силы
С д - „ статической нагрузки
с — поперечный , клиренс катамарана
Д - сила дрейфа
D - диаметр ГВ; диаметр циркуляции
судна; масса судна ,
gD - вес судна
Е - модуль нормальной упругости
Яд - динамический модуль упругости
добавки
Ем - то же матриц
^ст — » » стекловолокна
^ц.к — » » цементного камня
е — наибольшая толщина крыльевого
профиля
е с - наибольшая стрелка прогиба сред-
средней- линии крыльевого профиля
F — коэффициент, учитывающий кри-
кривизну обшивки
Fск -площадьсклеивания
Fd — приведенная площадь ДП судна
Fix, - число Фруда по длине
Fry - „ „ „ водоизмещению
FrS - >. ,. .. ширине
Fr& - „ „ „ хорде крыла
Fr# - „ ,, „ глубине бассейна
Gs - масса стальной проволоки в ар-
моцементе
Я - высота борта судна; геометриче-
геометрический шаг ГВ
Ну - углубление скулы у миделя; шаг
ГВ нулевого упора
#а — шаг ГВ нулевого момента
Ны - высота борта у миделя
h — высота элемента набора; попереч-
поперечная метацентрическая высота
h — глубина погружения ПК; высота
стойки
h B — высота волны
ЛД- .. руля (по баллеру)
h s — глубина погружения оси ГВ
i p — передаточное отношение редук-
редуктора
/ - момент инерции сечения
К — аэрогидродинамическое качество
крыла
Kt — коэффициент упора ГВ
Кг - „ момента ГВ
Кч - „ пропульсивного
качества
/ =
L -длинасудна
L ВЛ - .. .. по ватерлинии
L ск ~ .. .. .. скуле
L н - длина носового заострения
L к — длина кормового заострения
?ц — » цилиндрической вставки
вл/Я - удлинение судна
/ —длина лопасти ГВ; размах
крыла
/ =L вл/v^ — относительное удлинение судна
/ см - смоченная длина судна
/ цд - отстояние центра давления от
транца
М — момент гидродинамических сил
т - параль ГВ
Nf, — мощность на гребном валу
Ne - эффективная мощность двига-
двигателя
Mr — буксировочная мощность
Р — упор движителя; сила давле-
давления ветра на парус
Ре - полезная тяга движителя
Q — результирующая аэрогидроди-
аэрогидродинамических сил
R — полное сопротивление воды
движению судна; радиус ГВ
R а — аэрогидродинамическое сопро-
сопротивление воды движению судна
R т — сопротивление трения движе-
движению судна
R ф — сопротивление формы дви-
движению судна
RB —волновое сопротивление воды
движению судна
Ro — остаточное сопротивление воды
движению судна
ЛГ-К — сопротивление воды движению
голого корпуса
г — текущий радиус ГВ
S - площадь крыла; площадь па-
паруса; смоченная площадь несу-
несущей поверхности глиссера; раз-
размер шпации; толщина деталей
из стеклопластика и металлов;
расстояние между ДП корпу-
корпусов катамарана
s - скольжение относительно гео-
геометрического шага ГВ
5мид - площадь миделевого сечения
Т — осадка у миделя
7"ср - >> средняя
t - толщина армоцемента; коэф-
коэффициент засасывания ГВ
fB - коэффициент засасывания во-
водометного движителя
V — объемное водоизмещение судна
v - коэффициент кинематической
вязкости жидкости
v - скорость судна
v и - „ истинного ветра
v в (v к) — » вымпельного (ка-
(кажущегося) ветра
W - момент сопротивления площа-
площади поперечного сечения
w — коэффициент попутного по-
потока
X — сила лобового сопротивления
Xf — индуктивное сопротивление
xg'— отстояние центра масс: для
глиссирующих судов — от тран-
транца; для водоизмещающих су-
судов - от мидель-шпангоута (в
нос — положительное, в кор-
корму - отрицательное)
Y - подъемная сила крыла
z — число лопастей ГВ
г — отстояние центра масс от
основной плоскости
а — коэффициент полноты ватерли-
ватерлинии; угол атаки; подъем ску-
скулы у миделя
ан — угол носового заострения
C — коэффициент полноты мидель-
шпангоута; угол килеватости;
курсовой угол на вымпельный
ветер
у — курсовой угол иа истинный
ветер; объемная масса пресной
(9810 Н/м') и морской
A0 000 Н/м*) воды
6 - коэффициент полноты водоиз-
водоизмещения (общей полноты);
относительная толщина крылье-
крыльевого профиля; толщина дета-
деталей из доски и фанеры
е -коэффициент глиссирования,
или обратное качество
• а - Угол аэродинамического сопро-
сопротивления
«г - Угол гидродинамического со-
сопротивления
i - коэффициент полного сопро-
сопротивления
?т-то же сопротивления трения
?ф - » » формы
?в - ,. „ волнового сопротив-
сопротивления
е - дисковое отношение
к - число кавитации
\в - длина волны
цп - коэффициент армирования
конструкций из армоцемента
ткаными сетками
nt - коэффициент армирования
конструкций из армоцемента
сетчатой и стержневой арма-
арматурой
р - плотность
ав —предел прочности при растя-
растяжении или сжатии
ор — прочность при растяжении
аэ - критические эйлеровы напря-
напряжения
гв —предел прочности при сдвиге
if — коэффициент продольной пол-
полноты
Ф - угол дифферента
П - площадь смоченной поверх-
поверхности
ш— угловая скорость
- площадь погруженной части
мнделевого сечения
РАЗДЕЛ I
ТИПЫ МАЛЫХ СУДОВ
1. СУДА С МЕХАНИЧЕСКИМ ДВИГАТЕЛЕМ
В основу предлагаемой типизации положены „Типаж прогулочных судов"
№ 035-14.058*и ГОСТ 19105-79 „Суда прогулочные гребные и моторные. Типы, основ-
основные параметры и общие технические требования". В этих документах малые суда народ-
народного потребления, предназначенные для прогулок и туризма, разделяются в зависимо-
зависимости от вида двигателя-движителя (весла, подвесной мотор, стационарный двигатель)
на гребные лодки, моторные лодки и катера.
В справочнике дополнительно выделены парусные суда, интерес к которым особо
возрос после подорожания бензина и закрытия рыбоохраной многих акваторий для
судов с механическим двигателем.
Отдельно рассмотрены также портативные лодки, которые независимо от рода при-
примененного движителя (весла, парус, подвесной мотор малой мощности) пользуются
наивысшим спросом у любителей водного туризма и выпускаются крупными сериями.
Некоторые суда, проекты которых будут рассмотрены, построены в единичных
экземплярах, однако идеи, заложенные в них, представляют интерес для специалистов,
разрабатывающих конструкции судов для серийной постройки либо занимающихся
перспективными проработками.
При классификации судов в справочнике кроме требований „Типажа" и
ГОСТ 19105—79 учитывался ряд дополнительных критериев, которые позволяют
уточнить требования к проекту, а именно:
назначение судна; по этому критерию могут быть выделены группы судов для
кратковременных прогулок, суда для дальнего туризма, спортивные суда и подгруп-
подгруппы судов для рыбной ловли, семейных плаваний, буксировки воднолыжников и др.;
способк транспортировки и хранения; в соответствии с этим критерием можно
выделить суда для смешанных водно-сухопутных путешествий, рассчитанные на пере-
перевозку автомашиной или другим видом транспорта (лодки-картоп, разборные, надув-
надувные) , для постоянного хранения на берегу и поднимаемые на берег только для прове-
проведения ремонта и на зимнюю стоянку;
характер эксплуатации; в зависимости от расчетного режима движения разли-
различают водоизмещающие суда, у которых плавучесть обеспечивается архимедовой силой
поддержания; суда переходного режима, частично использующие гидродинамическую
силу поддержания, и глиссирующие суда, сила тяжести которых на ходу в основном
уравновешивается гидродинамической силой поддержания;
обводы корпуса; из двух основных разновидностей обводов - круглоскулых
и остроскулых*— наибольшее распространение, особенно у судов с механическим дви-
двигателем, получили последние, что объясняется не столько стремлением достичь гидро-
гидродинамически наиболее эффективной формы корпуса, сколько сложностью изготов-
изготовления поверхностей с двойной погибью из листов легкого сплава и фанеры.
1.1. Мотолодки
Мотолодки - наиболее распространенный тип малотоннажных судов, выпускают-
выпускаются большими сериями и находят разнообразное применение. По назначению, размере-
ниям, способам транспортировки и хранения их можно разделить на четыре рассматри-
рассматриваемые ниже группы.
* Далее в тексте сокращено - „Типаж".
Таблица 1. 1.
Характеристика
Длина наибольшая, м
Ширина наибольшая, м
Высота борта, м
Масса, кг
Пассажиров мести-
мость, чел.
Допустимая мощность
мотора, кВт (л. с.)
Трех-
точка
2
1
0,325
20
2
1,5 B)
Характеристики микромотолодок
„Онега"
2,63
1,3
0,4
60
3
3,7 E)
„Дункан"
2,7
1,55
0,5
55
3
18,4 B5)
Морские
сани
2,8
1,25
0,52
45
'2
8,8 A2)
„Вега"
2,75
1,28
0,52
60
2
18,4 B5)
„Пчелка"
2,9
1,25
0,4
80
2
8,8 A2)
Микромотолодкн (табл. 1 Л). Большая часть микромотолодок проекти-
проектируется так, чтобы их можно было перевозить на крыше автомобиля (лодки-картоп).
В соответствии с этим устанавливаются основные предельные размерення, так как
правилами дорожного движения не разрешается перевозить на крыше машины багаж,
выходящий за ее габариты по длине не более чем на 0,5 м. Поставленная на крьпиевои
багажник микромотолодка, кроме того, не должна нависать над лобовым стеклом,
иначе она будет мешать водителю вндеть сигналы светофора. Поэтому для перевозки
вверх килем пригодны лодки длиной не более 2,5—2,6 м, при перевозке килем вниз,
когда обзор водителю ухудшается в меньшей степени, — длиной до 3 м. В случае
установки дополнительной поддерживающей стойки на заднем бампере автомобиля
к перевозке допускаются лодки длиной 3,4 м. Длина байдарок ограничивается 4 м.
Ширина лодок практически не лимитируется, так как она может быть заведомо боль-
большей, чем допускаемая по соотношению размерений корпуса. Высота борта, чтобы не
слишком ухудшить аэродинамику автомобиля, как правило, ограничивается значе-
значениями, которые, согласно ГОСТ 19105—79, допускают эксплуатацию судна при высоте
волны в пределах 0,5 м. Масса ограничивается 60 кг.
Большинство мнкромотолодок рассчитываются для движения на веслах, некото-
некоторые из них приспособлены
и для плавания под парусом.
На судах этой группы устанав-
устанавливается минимально необходи-
необходимое оборудование. Большин-
Большинство из них не имеют палубы.
Мотолодка-трехтонка (рис.
1.1) имеет обводы днища с тун-
туннелем в диаметральной плоско-
плоскости (ДП) и поперечным реда-
реданом, близкие к применяемым
на гоночных скутерах. На
полном ходу лодка глиссирует
на трех точках — бортовых
спонсонах и подпорном клине,
образованном отгибом днища
туннеля в корме. Для облег-
облегчения выхода на режим глисси-
глиссирования опорная площадь спон-
сонов увеличена благодаря уста-
Рис. Ы.Мотолодка-трехточка « новке бортОВЫХ пластин.
Рис. 1.2. Мотолодка „Онега"
Проект лодки разработан
Г. В. Махоткиным для люби-
любительской постройки. Благодаря
высокому гидродинамическому
качеству и малой' массе она раз-
развивает с одним водителем ско-
скорость 22—25 км/ч. Выполнена
из листов фанеры толщиной
4 мм и сосновых реек; борто-
бортовые гидродинамические пласти-
пластины—из дюралюминия.
Экипаж размещается на двух
низких банках, которые можно
перемещать вдоль кокпита для
обеспечения оптимального диф-
дифферента*.
„Онега" (рис. 1.2) — серий-
серийная лодка, удовлетворяющая
требованиям к судам, которые
можно перевозить на крыше
легкового автомобиля. Лодку
с подвесным мотором исполь-
используют для прогулок, рыбной лов-
ловли и охоты на реках и в прибрежных зонах озер при высоте волны до 0,25 м. Трехкиле-
вые обводы и относительно большая ширина стеклопластикового корпуса, состоя-
состоящего из наружной и внутренней оболочек толщиной 2,2 мм, склеенных между собой
по фланцам, создают высокую поперечную остойчивость. Жесткость конструкции
обеспечивается гофрами и уступами, а также пенопластовыми блоками, уложенными
между оболочками и создающими необходимый запас плавучести. Полностью затоплен-
затопленная лодка остается на плаву, поддерживая при этом 3 чел., находящихся в воде.
Лодка оборудована еланями и поперечной банкой, которую можно установить
в одно из трех положений по длине корпуса для получения оптимального дифферента.
Рекомендованный 2-сильный подвесной мотор не обеспечивает движения лодки с пол-
полным грузом против сильного течения или свежего ветра. С подвесным мотором мощно-
мощностью 3,7 кВт E л. с.) и с полной нагрузкой „Онега" развивает скорость 8 км/ч, а с гребным
винтом уменьшенного диаметра и 1 чел. на борту глиссирует со скоростью до 25 км/ч.
На штатных веслах-гребках при оптимальной дифферентовке лодка с полной на-
нагрузкой идет со скоростью 3,5 км/ч. Складные весла позволяют добиться большей
скорости.
На „Онеге" при слабом ветре на спокойной воде возможна установка подвесного
паруса площадью 3,5 м2. На волне 0,25 м при небольшом крене из-за отсутствия седло-
ватости и подъема борта в носу наблюдается сильное забрызгавшие кокпита. Обводы
корпуса с погруженным транцем не позволяют лодке под парусом развивать скорость,
доступную для швертботов.
Катамаран ,Дункан"** (рис. 1.3), проект которого разработан Б. Е. Синипыцико-
вым, по размерениям и массе полностью удовлетворяет требованиям, предъявляемым
к лодкам-картоп, и представляет собой судно универсального назначения, рассчитанное
на использование подвесных моторов в широком диапазоне мощностей, установку
парусного вооружения и плавания, на веслах. Катамаранная форма корпуса обеспечи-
обеспечивает высокую остойчивость, а размещение пассажиров на продольной банке, образо-
* Более подробные сведения о приводимых в разделе I судах содержатся в журнале „Катера
и яхты".
•*Проект реализован в единичных экземплярах.
Рис 1.3. Катамаран'„Дункан"
I I
I Г
Рис. 1.4. „Сани Фокса"
ванной соединяющим корпуса мостом, позволяет в зависимости от условий плавания
в широких пределах менять продольную центровку.
Катамаран устойчив на курсе, способен преодолевать волну высотой до 0,5 м.
Благодаря высокой остойчивости он удобен для ловли рыбы, а с подвесным мотором
мощностью 14,7 кВт B0 л. с.) может быть использован для буксировки воднолыжника.
Стеклопластиковый корпус лодки имеет толщину 1,5-2,5 мм. Жесткость днища
обеспечивается заданной кривизной обводов, продольными реданами и самовспениваю-
щнмся пенопластом, заполняющим пространство под еланью, под носовой и кормовой
палубами, что делает лодку непотопляемой.
Картон — „сани Фокса" (рис. 1.4) — лодка, основное назначение которой рыбная
ловля в удалении до 50—100 км от места стоянки. -Дня компенсации недостаточной
высоты надводного борта при-
применены съемные комингсы вы-
высотой 0,14 м, установленные
вдоль бортов и по носовой
оконечности. Оборудование
включает передвижное кресло
и носовой багажник, который
используется также как си-
сиденье, v»
Высокое гидродинамиче-
гидродинамическое качество корпуса позво-
позволяет лодке с 12-сильным под-
подвесным мотором и 2 чел.
на борту развивать скорость
30 км/ч. Для улучшения вы-
выхода на глиссирование и сни-
снижения ходового дифферента
до ' 2—3° на лодке установ-
установлены транцевые плиты, являю-
являющиеся продолжением лыж. Не-
Непотопляемость обеспечивается
Рис. 1.5. Тримаран блоками пенопласта, укреплен-
„Вега" ными вдоль бортов.
10
Лодка спроектирована М. К. Качеевым в расчету на индивидуальную постройку. -
В качестве основных материалов рекомендованы фанера и сосновые рейки.
Тримаран ,Дега" (рис. 1.5) - мотолодка с высокими мореходными качествами
и уровнем комфорта. Корпус имеет тримаранные обводы с углом килеватостн на транце
16° и продольным реданом, проходящим до 5-го шп. Спонсоны отделены по высоте от
борта брызгоотбойниками. Острые ватерлинии спонсонов в носу не препятствуют
плавному прохождению волны высотой 0,3-0,4 м, а плоские участки в кормовой част
способствуют быстрому выходу на глиссирование. Лодка имеет незначительный крен
на циркуляции и при ходе на косой волне. Благодаря тримаранныМ обводам удалось
получить достаточно просторный для 2 чел. кокпит A,6 X 1,1 м) и, кроме того, пре-
предусмотреть носовой багажник, объем которого увеличен за~счет невысокой, вписываю-
вписывающейся в общий силуэт лодки, надстройки с ветровым стеклом.
Топливный бак между 3-м и 4-м шп. наполовину утапливается под пайол, опираясь
на его обрешетник своей отбортовкой. В кокпите установлены два мягких сиденья.
С подвесным мотором мощностью 14,7 кВт B0 л. с.) и 2 чел. на борту лодка раз-
вивает скорость 45 км/ч, а с одним водителем - до 50 км/ч.
„Вега" спроектирована В. А. Мосоловым для индивидуальной постройки. Набор
ее выполнен из сосновых реек, обшивка - из фанеры толщиной 4 мм, ,
.Дчелка" (рис. 1.6) - лодка с подвесным мотором мощностью 8,8 кВт A2 л. с.)
и плоскокилеватыми обводами, позволяющими ей развивать скорость с одним води-
водителем до 39 км/ч, с двумя - до 34 км/ч. Отформованные из стеклопластика корпус .
и палуба склеиваются по фланцу, который затем закрывается алюминиевым профилем.
Днище усилено коробчатым пенопластовым стрингером, одновременно выполняющем ;
роль блока плавучести. Дополнительные пенопластовые блоки установлены под носо-
носовой палубой и в корме. Полностью затопленная лодка остается иа плаву, поддерживая
3 чел., находящихся в воде. ¦
- В мотолодке установлены два мягких сиденья и откидывающийся столик, слу-
служащий также переборкой между кокпитом и моторным отсосом. „Пчелке" разрешён
выход на воду при высоте волны до 0,5 м. Масса мотолодки, построенной на ЛениНг
градском экспериментальном заводе спортивного судостроения, превосходит уста-
установленные для картопов пределы, однако за счет отказа от некоторых элементов обо-'
рудования она может быть снижена До 55 кг. • .
Мотолодки для туриз ма в ыхо дног о дня (табл. 1.2). Суда этого-
типа рассчитаны на плавание продолжительностью не более 2—3 дн. Однако в целях
расширения области их применения во многих проектах допущены отклонения от
характеристик, регламентированных „
*. Путем
убливания корпуса в носу
и корме образованы объемы для храйения минимально необходимого багажа и одно-
одновременно уменьшена заливаемость кокпита. Обводы с высоким гидродинамическим
-Рис. 1.6. Мотолодка „Пчвлк»"
Та 6л и ц а 1.
Характеристика
Длина наиболь-
наибольшая, м
Ширина наи-
наибольшая, м
Высота борта, м
Масса, т
Пассажир овме-
стимость, чел.
Допустимая
мощность мото-
мотора, кВт (л. с.)
„Джои-
бот"
3,8
1,32
0,38
0,55
3
5,9 (8)
2. Характеристики мотолодок для туризма выходного дня
„Мини-
Бастер"
3,6
1,5
0,5
0,1
4
11 A5)
„Неман-
2"
3,8
1,4
0,75
0,13
4
18,4B5)
„Афали-
„Афалина"
3,74
1,37
0,7
0,13
3
18,4 B5)
„Радуга-
39К"
3,9
1,65
0,58
0,085
3
22 C0)
„Скат"
3,6
1,45
0,59
0,105
4
18,4 B5)
КСП-1
4
1,5
0,59
0,12
4
18,4 B5)
„Морской
дротик"
4
2,2
0,61
0,113
3
29,4 D0)
качеством дают возможность эксплуатировать лодки на волне до 0,5 м с моторами
мощностью 18,4 кВт B5 л. с.) и более. При этом они имеют небольшую массу.
Лодки данной группы кроме основного назначения применяют в дальних скорост-
скоростных спортивных плаваниях, гонках, для буксировок воднолыжников. Основным
материалом при серийном производстве их корпусов служат листы легкого сплава.
Корпуса сложной формы с двойной погибью выклеиваются из стеклопластика.
.Доконбот" (рис. 1.7) - лодка, получившая большое распространение за рубежом
в качестве рыболовной. Прямоугольный в плане корпус обладает остойчивостью, до-
достаточной при забрасывании удочки или спиннинга человеком, стоящим в лодке в пол-
полный рост.
Скорость лодки с 8-сильным подвесным мотором при одном водителе составляет
35 км/ч, с 2 чел. — 25 км/ч. „Джонбот" пригоден для эксплуатации на волне высотой
до 0,3 м. Плоское с продольными рейками днище позволяет подходить к отмелому
берегу. В отличие от остроносой лодки „Джонбот", коснувшись грунта, не валится
на борт, высадка людей через носовую оконечность не представляет обычных в таких
случаях затруднений.
„Мини-Бастер" (рис. 1.8) —серийновыпускаемая финляндской фирмой „Фискарс"
мотолодка. Корпус изготовлен из 2-миллиметрового листа легкого сплава, устойчи-
устойчивого против коррозии в морской воде. Конструкция исключительно проста и техноло-
технологична. Шпангоутов нет. Их роль выполняют три банки и планшири-накладки по верх-
верхним кромкам носового и кормового транцев. Продольный набор заменяют гофры
Рис. 1.7. „Джонбот"
12
Рис. 1.8. „Мини-Бастер"
на днище и слом по бортам. Применены 2-скуловые „граненые" обводы. „Мини-Бастер"
рассчитан на установку подвесного мотора мощностью от 3,7 до 11 кВт (от 5 до
15 л. с). При собственной массе 100 кг лодка имеет грузоподъемность более 300 кг.
Фирма выпускает также однотипную с „Мини-Бастер" 5-местную лодку „Бастер"
массой 145 кг с мотором мощностью 11—14,7 кВт A5-20 л. с.) в вариантах прогу-
лочно-рыболовном, патрульном и рабочей шлюпки. 5—6-местный „Ворк-Бастер" имеет
усиленный корпус (масса 200 кг) и релинг по периметру палубы. На него устанавли-
устанавливается подвесной мотор мощностью 11—26 кВт A5—35 л. с.).
РИс. 1.9. Мотолодка „Неман-2"
13
Лодки типа „Бастер" эксплуатируются и с водометными движителями, удобными
для плавания на мелководных водоемах.
„Неман-2" (рис. 1.9) - серийная мотолодка, по вместительности, оборудованию
и мореходности приближающаяся к уровню судов для дальнего туризма. Применение
высоких бортовых комингсов позволило не только увеличить высоту борта с 530 до
750 мм, но и за счет отказа от бортовых потопчин сделать более просторным кокпит,
его площадь A,8 X 1,25) лишь немного меньше, чем на „Крыме", „Ладоге" и других
лодках третьей группы.
Для размещения багажа можно использовать рундук под кормовой банкой, про-
пространства под носовой палубой и носовой банкой. Штампованные жесткие банки-
сиденья свидетельствуют о том, что конструкторам пришлось жертвовать комфортом
для уменьшения массы.
Корпус мотолодки имеет плоскокилеватые обводы с килеватостью на миделе 16,
на транце 8°. Продольных реданов нет. Для предотвращения поперечного растекания
потока за днище выпущена нижняя часть стрингера, на котором выполнен стык секций.
Корпус штампованно-сварной конструкции выполнен из сплава АМг5; толщина об-
обшивки днища 2 мм, бортов и палубы — 1,5 мм. Днище подкреплено продольными
стрингерами, опирающимися на навесные флоры. Непотопляемость обеспечивается
блоками пенопласта, закрепленными в носу под палубой и в корме в районе подмо
торной ниши.
Значительная килеватость днища позволяет преодолевать волну до 0,5 м без суще-
существенного снижения скорости при умеренных ударных перегрузках. С 14-сильным
подвесным мотором „Нептун-23" при полной нагрузке лодка развивает скорость до
40 км/ч. С неполной нагрузкой B чел.) ее можно эксплуатировать и с 12-сильным
мотором, при этом достигается скорость 20—25 км/ч.
„Афалина" (рис. 1.10) - мотолодка повышенной мореходности, пригодная для
дальних скоростных спортивных плаваний. Выпущена небольшой серией. Корпус имеет
постоянный от миделя до транца
угол килеватости A7°) и продоль-
продольные реданы. Носовая палуба, про-
продолженная бортовыми комингса-
комингсами до кормы, уменьшает зали-
ванне и забрызгивание кокпита
при ходе на волне. Предусмот-
Предусмотрен тент.
Пластмассовый корпус состоит
из двух секций, которые соеди-
соединены по пинии привального бру-
бруса болтами через отверстия во
фланце. Снаружи соединение за-
закрыто полиэтиленовым П-образ-
ным профилем. Жесткость безна-
безнаборного корпуса обеспечивается
формой обводов, наличием палубы
и вклеенного на уровне второго
редана фанерного пайола. Секция
корпуса выклеена из пяти слоев
стеклоткани и слоя стеклосетки;
толщина обшивки 3,5 мм. Палуба
выполнена из трех слоев ткани
и слоя сетки; ее толщина 2,5 мм.
В кокпите размерами 1,76 X 1,2 м
установлены три жестких кресла
из стеклопластика, однако опти-
оптимальный состав экипажа — 2 чел.
Рис. 1.10. Мотолодка „Афалина"
14
Непотопляемость обеспечена блоками пенопласта, закрепленными в юсу под ;
палубой, в районе подмоторнои ниши и в комингсах кокпита. При высоте волны 0 Дм, '
до которой разрешена эксплуатация мотолодки, кокпит остается сухим, однако на
полной скорости корпус испытывает значительные динамические нагрузки.
Максимальная скорость, которую „Афалина" развивает с мотором „Нептун", имея
на борту 3 чел., составляет около 50 км/ч, и при уменьшенном до 280 мм ша-
шаге ГВ- 42 км/ч. . ' v
Недостаток „Афалины", как и всех лодок с повышенной килеватостью днища, - "
валкость на стоянке. На ходу лодка достаточно остойчива. Даже при резкой перекладке
руля она входит в поворот с незначительным внутренним креном.
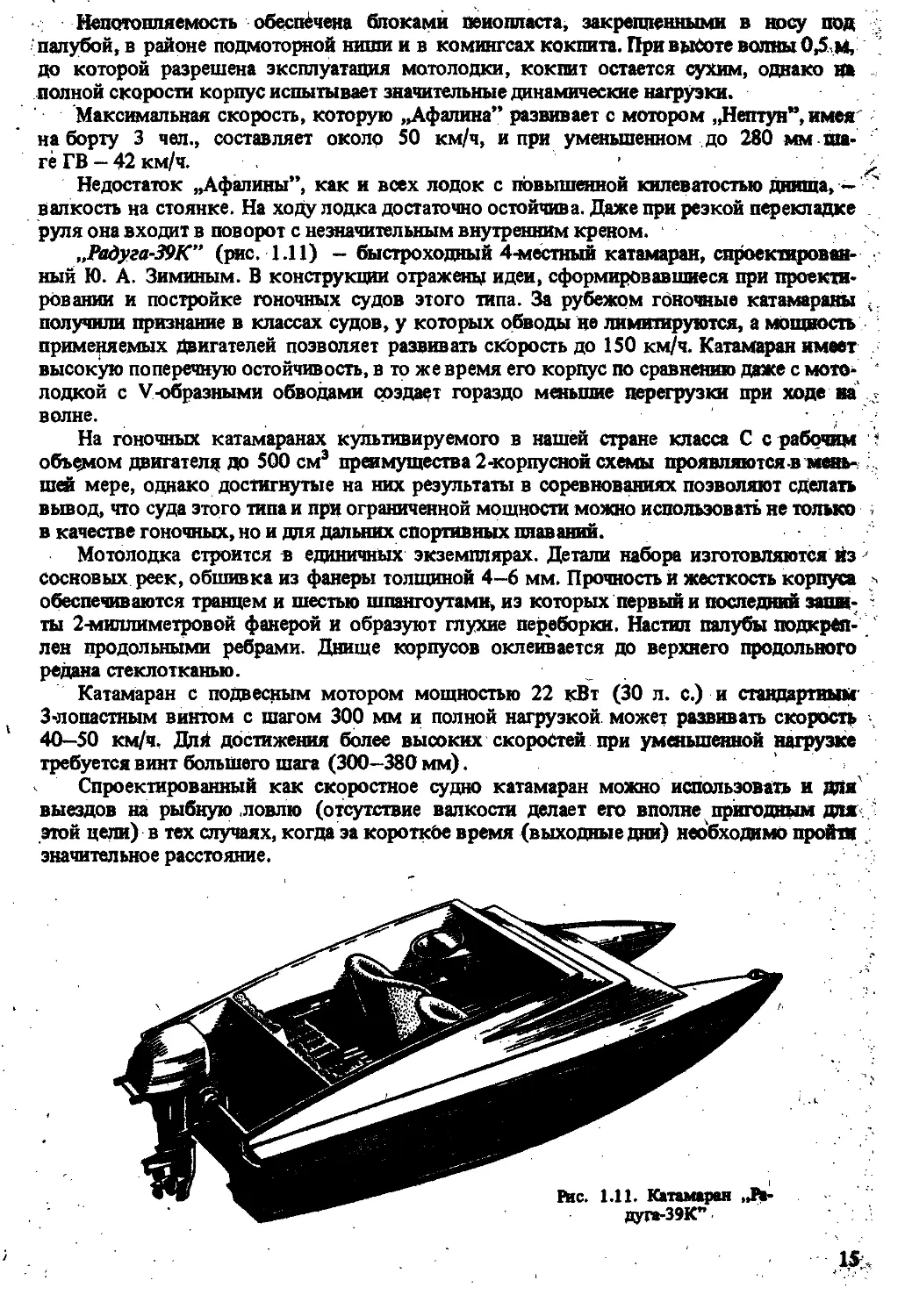
„Радуга-39К" (рис. 1.11) - быстроходный 4-местный катамаран, спроектирован-
спроектированный Ю. А. Зиминым. В конструкции отражены идеи, сформировавшиеся при проекти-
проектировании и постройке гоночных судов этого типа. За рубежом гоночные катамараны ,
получили признание в классах судов, у которых обводы не лимитируются, а мощность
применяемых двигателей позволяет развивать скорость до 150 км/ч. Катамаран имеет
высокую поперечную остойчивость, в то же время его корпус по сравнению даже с мото-
лодкой с V образными обводами создает гораздо меньшие перегрузки при ходе на -,:
волне. ¦'••.'
На гоночных катамаранах культивируемого в нашей стране класса С с рабочим *
объемом двигателя до 500 см3 преимущества 2-корпусной схемы проявляются в мень- ;..
шей мере, однако достигнутые на них результаты в соревнованиях позволяют сделать
вывод, что суда этого типа и при ограниченной мощности можно использовать не только <
в качестве гоночных, но и для дальних спортивных плаваний. -
Мотолодка строится в единичных экземплярах. Детали набора изготовляются из
сосновых реек, обшивка из фанеры толщиной 4-6 мм. Прочность и жесткость корпуса -¦
обеспечиваются транцем и шестью шпангоутами, из которых первый и последний зашв- ~
ты 2-миллиметровой фанерой и образуют глухие переборки. Настил палубы подкреп-
подкреплен продольными ребрами. Днище корпусов оклеивается до верхнего продольного
редана стеклотканью.
Катамаран с подвесным мотором мощностью 22 кВт C0 л. с.) и стандартным'
3-лопастным винтом с шагом 300 мм и полной нагрузкой может развивать скорость
40—50 км/ч. Дли достижения более высоких скоростей при уменьшенной нагрузке
требуется винт большего шага C00—380 мм).
Спроектированный как скоростное судно катамаран можно использовать и для
выездов на рыбную .ловлю (отсутствие валкости делает его вполне пригодным для
этой цели) в тех случаях, когда эа короткое время (выходные дни) необходимо пройти
значительное расстояние. .
Рйс. 1.11. Катамаран „Ра-
дуга-39К"
„Скат" (рис. 1.12) — тримаран, способный преодолевать значительное волнение
(до 0,7 м) и обладающий достаточной статической остойчивостью. Проект, разработан-
разработанный Д. А. Курбатовым, отвечает требованиям к лодкам для прогулок и рыбной ловли.
Обводы днища выполнены по аналогии с получившими широкую известность судами
типа „Бостонский китобой". На стоянке в лодку можно входить через борт, не опасаясь
опрокинуть ее или залить водой. Тримаран обладает хорошей приемистостью и способен
сохранять ходовые качества при увеличении нагрузки.
При серийной постройке лодка собирается из двух секций — корпуса и палубы,
отформованных из стеклопластика. При индивидуальной постройке криволинейные
поверхности задаются уложенными между шпангоутами блокамипенопласта.Пенопласто-
вые блоки (при серийной постройке они также укладываются по днищу, в корме и в носу)
обеспечивают тримарану непотопляемость — в аварийном состоянии он будет поддер-
поддерживать на плаву всех четырех пассажиров. Для защиты от заливания на большой волне,
особенно на тихом ходу, когда лодка не имеет обычного Дифферента на корму, кок-
кокпит прикрыт волнорезом из оргстекла, окантованного трубчатым релингом. В корме
корпус имеет самоотливную подмоторную нишу и закрыт палубой. Для оптимальной
центровки при неполной нагрузке A-2 чел.) сиденье рулевого смещено к миделю.
Спасательная лодка КСП-1 (рис. 1.13) — предназначена в основном для проведения
спасательных операций и патрулирования. При относительно небольших размерениях и
массе она обладает мореходными качествами и грузоподъемностью на уровне более круп-
крупных судов. Тримаранные обводы позволили получить начальную остойчивость, доста-
достаточную для подъема спасаемых людей через борт, и просторный кокпит, необходимый
для оказания им первой помощи.
Корпус изготовлен из стеклопластика. Вдоль бортов с внутренней стороны при-
формованы листы пенопласта, благодаря чему залитая водой лодка может поддержи-
поддерживать на плаву весь экипаж и сохранять положение на ровный киль. Максимальная ско-
скорость с 25-сильным мотором и специально подобранным отполированным ГВ состав-
составляет: с одним водителем 52 км/ч, с 2 чел. - 48 км/ч, при полной нагрузке 44 км/ч.
„Морской дротик" (рис. 1.14) - мотолодка, выпускаемая английской фирмой
„Нува". Основное назначение — прогулки, рыбная ловля, буксировка воднолыжников
и обеспечение работы аквалангистов. Имеет высокие ходовые качества и остойчивость,
некомфортабельна. Кокпит заменен сплошной палубой, огражденной комингсом, уве-
увеличивающим высоту борта до 0,9 м на миделе. Все оборудование, включая бензобак,
размещено под палубой, где установлены также емкости плавучести, заполненные
пенополиуретаном. На палубе предусмотрено только штатное место для водителя,
пассажиры размещаются прямо на ее настиле. Корпус отформован из стеклопластика,
палуба — фанерная.
Днище имеет сложную конфигурацию. По килевой линии проходит полого подни-
поднимающаяся к носу лыжа. По бортам от нее находятся реданы, два из которых идут до
транца, а два других обрываются у миделя. На расстоянии 0,4 длины корпуса от носа
начинаются продолженные до транца спонсоны. Своды туннелей за короткими редана-
реданами образуют у транца отгиб днища вниз. Такие обводы предотвращают стартовый
дифферент на корму, благодаря чему обеспечивается быстрый выход на глиссирова-
глиссирование. С увеличением скорости лодка идет на центральной гидролыже, что позволяет
значительно снизить сопротивление воды. С 15-сильным мотором лодка буксирует
воднолыжника со скоростью 45 км/ч.
Мотолодки для дальнего ту ри з м а (табл. 1.3). Увеличенный объем
корпуса этих мотолодок по сравнению с судами предыдущей группы используется
главным образом для размещения оборудования и снабжения, необходимых при про-
продолжительных плаваниях. При грузоподъемности 400 кг и собственной массе мото-
мотолодки 150 кг для движения в глиссирующем режиме требуется мотор мощностью
не менее 22 кВт C0 л. с). Только в тех случаях, когда плавание совершается ограни-
ограниченным экипажем, на лодках данных размерений может быть установлен мотор мощ-
мощностью 18,4 кВт B5 л. с.).
16
Рис. 1.12. Тримаран „Скат"
Рис. 1.13. Спасательная лодка КСП-1
Рис. 1.14. Мотолодка „Морской дротик"
Та 6л и ца
Характеристика
Длина наибольшая, м
Ширина наибольшая, м
Высота борта, м
Масса, т
Пассажировместимость,
чел.
Допустимая мощность
подвесного мотора, кВт
(л. с.)
1. 3. Характеристики мотолодок для дальнего туризма
„Гамма"
4
1,6
0,65
0,16
4
36,8 E0)
„Крым-М"
4,2
1,55
0,65
0,19
5
22 C0)
„Лещ"
4,3
хл
0,59
0,12
4
18,4 B5)
„Аква-
джип"
4,27.
1,93
0,9
0,31
6
58,8 (80)
„Дельта"
4,63
1,84
0,68
0,22
5
44 F0)
, .Шторм"
' 5
1,8
0,875
0,3
6
110,3 A50)
По мореходности лодки этой группы значительно превосходят суда предыдущей.
Они рассчитаны на плавания по озерам и водохранилищам с удалением от берега до
3 км. Лодки этой группы оборудованы тентом. Кроме дальних плаваний, их можно
использовать для рыбной ловли, буксировки воднолыжников и др.
„Гамма" (рис. 1.15) - выпущенная небольшой серией мотолодка. Проектирова-
Проектировалась как судно для обслуживания водноспортивных соревнований, прежде всего по
гребле. В ее характеристиках в связи с этим нашел отражение ряд специфических тре-
требований: малое волнообразование в пределах скоростей от 15 до 45 км/ч, хорошие
приемистость и управляемость, позволяющие маневрировать на ограниченных аквато-
акваториях. Вместе с тем по оборудованию, наличию мест для багажа она в полной мере
подходит для туризма.
Корпус мотолодки имеет в носовой части тримаранные обводы, переходящие в ки-
леватые с отгибом типа „крыла чайки" в корме. При движении в переходном режиме
носовая волна гасится спонсонами. Тримаранные обводы обеспечивают вместе с разва-
развалом бортов требуемую остойчивость на ходу и на стоянке.
Рис. 1.15. Мотолодка „Гамма"
18
Конструктивно лодка состоит из двух секций, отформованных из стеклопластика
и склеенных между собой по бортовому фланцу. Толщина оболочки секции корпуса
3—4 мм, палубы 2—3 мм. Днищевой набор выполнен в виде стеклопластиковых короб-
коробчатых стрингеров, приформованных с помощью „мокрых" угольников.
Четыре кресла, состыкованные по два, установлены с расчетом на носовую центров-
центровку, предпочтительную для выбранных обводов. Между двумя парами кресел оставлен
свободный проход вдоль всего кокпита. В разложенном виде кресла образуют два ди-
дивана. В основании кресел устроены рундуки общим объемом 032 мэ. В подмоторной
нише размещен стационарный топливный бак на 50 л, горловина которого выведена
на палубу.
С 30-сильным мотором и одним водителем лодка развивает скорость 52,5 км/ч,
с 2 чел. — 48 км/ч, с 3 чел. — 42 км/ч. Разгон до полной скорости занимает в зависи-
зависимости от нагрузки от 4 до 10 с. Радиус циркуляции на малом ходу 3—4 м. На волне вы-
высотой 0,5 м кокпит остается сухим.
,JCpbiM-M" (рис. 1.16) — модернизированная модель популярной серийной мото-
мотолодки. Она отличается от прототипа повышенной прочностью корпуса. Оборудование
в большей мере отвечает требованиям, предъявляемым к оборудованию судов для
дальнего туризма. Смешанная система набора со стрингерами и шпангоутами заменена
штампованными шпангоутами П-образного профиля. Материал — легкий сплав АМг5
повышенной коррозийной стойкости позволяет эксплуатировать лодку в морской
воде. Толщина обшивки днища 2 мм, бортов и палубы 1,5 мм.
Выпукло-килеватые обводы днища с умеренной килеватостью и скуловыми брыз-
гоотбойниками обеспечивают высокое гидродинамическое качество. Скорость с мото-
мотором мощностью 22 кВт C0 л. с.) при полном водоизмещении составляет 38 км/ч.
В кокпите размерами 2,05 X 1,3 м установлены мягкие съемные сиденья с откид-
откидными спинками. Уложенные на пайолы сиденья образуют спальное место на 3 чел.
За спинкой кормового сиденья оборудован багажник. Водонепроницаемая переборка,
ограждающая моторный отсек, не допускает проникновение в кокпит воды, загряз-
загрязненной горючим. В моторном отсеке может храниться подвесной мотор „Вихрь", уло-
уложенный поперек лодки, и бензобак. В форпике оборудован багажник для походного
снаряжения, а над ним — небольшой рундук с крышкой.
Рис. 1.16. Мотолодка
„Крым-М"
19
Непотопляемость лодки
обеспечивается блоками пено-
пенопласта, закрепленными за
кормовым сиденьем и в фор-
форпике. Полностью залитая во-
водой лодка остается на пла-
плаву и в положении на ров-
ровный киль.
Ветровое стекло с бор-
бортовыми щитками защищает
кокпит от забрызгивания.
Предусмотрен тент, устанав-
устанавливаемый наглухо или с от-
открытыми боковинами.
,Лещ" (рис. 1.17) - мо-
мотолодка, проект которой раз-
Рис. 1.17.
Мотолодка ,Д1ещ" работай Д. А. Курбатовым.
Предусмотрена ее постройка
в двух вариантах: рыболовно-
туристском и чисто рыбо-'
ловном. В обоих случаях она пригодна для эксплуатации на озерах и водохранилищах,
хотя ее обводы и не рассчитаны на длительное плавание на волнении более 0,25 м, так
как малокилеватое днище A2° на миделе, 7° на транце) будет испытывать сильные
удары. Основное внимание обращено на обеспечение остойчивости, что достигается
благодаря большой площади ватерлинии. Подъем линии борта в носу и большой развал
бортов у форштевня предотвращают заливание лодки волной на якорной стоянке.
При неполной нагрузке лодка глиссирует на участке днища шириной 1,1 м — между
продольными реданами, выполненными как излом обшивки, что позволяет в этом слу-
случае форсировать скорость. Непотопляемость „Леща" обеспечивается пенопластом,
закрепленным по бортам под планширем. В аварийных случаях он будет не только
поддерживать лодку на плаву, но и позволит сохранить остойчивость. Пассажиры при
этом могут оставаться в кокпите и подгребать к берегу.
В смешанном рыболовно-туристском варианте предусмотрены две продольные
банки-рундуки в носовой части кокпита, которые могут использоваться в качестве
спальных мест. Над ними устанавливается тент. В чисто рыболовном варианте носовая
часть оставлена свободной, здесь установлено одно кресло, пайол поднят немного выше
ватерлинии, кокпит сделан самоотливным. Подвесной мотор размещен в колодце,
что уменьшает опасность его заливания водой на якорной стоянке и исключает зацепле-
зацепление рыболовных снастей за его подводную часть. Предусмотрен кормовой рундук
под банками.
С 12-сильным мотором „Лещ" развивает скорость 20 км/ч. Более мощные моторы
устанавливают, если к месту рыбной ловли нужно идти против сильного течения.
С 30-сильным мотором при шаге ГВ 320 мм лодка, имеющая на борту 2 чел., запас
топлива и снаряжение, разовьет скорость 50 км/ч.
Проект рассчитан на индивидуальную постройку, изготовление набора из дерева,
а обшивки из фанеры. Носовая оконечность имеет двойную диагональную обшивку
из поставленных крест-накрест полос 2—3 миллиметровой фанеры. Снаружи корпус
оклеивается стеклотканью. При серийном производстве корпус может быть выклеен
из стеклопластика после незначительной с учетом технологии доводки обводов. Мас-
Масса стеклопластикового варианта несколько больше.
„Акваджип" (рис. 1.18) - катамаран, серийно выпускаемый английской фирмой
„Чартермарк". Многоцелевое судно применяется как для туризма, так и в качестве
20
Рис. 1.18. „Акваджип"
служебного. Лодка пригод-
пригодна для эксплуатации с под-
подвесными моторами мощно-
мощностью от 5,5 до 58,8 кВт
(от 7,5 до 80 л.С). С мо-
моторами мощностью менее
22 кВт C0 л. с.) катамаран
эксплуатируется в водоиз-
мещающем и переходном
режимах и используется для
рыбной ловли или в ка-
качестве рабочей лодки. С 30-
сильным мотором „Аква-
„Акваджип" глиссирует со ско-
скоростью 32 км/ч и наиболее
подходит для многодневных
походов. При максимальной
мощности моторов лодка
развивает скорость более
50 км/ч и используется в ка-
качестве спасательного или пат-
патрульного судна.
Корпуса „Акваджипа"
имеют характерную для мо-
моторных катамаранов асим-
асимметричную в поперечном сечении форму с плоскими внутренними и выпуклыми на-
наружными бортами. Кроме двух пар продольных реданов, в носовой части каждого
корпуса отформовано по два широких брызгоотбойника. В сочетании с килеватостью
туннеля в носовой части зто обеспечивает хорошую всхожесть на волну. Просторный
C,15 м2) кокпит спланирован так, что в нем могут разместиться до 8 чел., хотя обыч-
обычно в лодку садятся не более шестерых. Подмоторная ниша отгорожена от кокпита
внутренним транцем, доходящим по высоте до продольных комингсов кокпита. Под
сиденьями размещены рундуки. В корме предусмотрено штатное место для двух вклад-
вкладных топливных баков емкостью по 23 л.
Корпус выклеен из стеклопластика. Во флоры, транцы, настил палубы, кницы
заформована для жесткости фанера. Кокпит и рундуки выполнены самоосушающи-
самоосушающимися. Непотопляемость обеспечена самовспенивающимся заполнителем, введенным
между оболочками корпуса и палубы, под дно кокпита.
.Дельта" (рис. 1.19) — мотолодка, предназначавшаяся для обеспечения соревно-
соревнований по водным видам спорта, но в полной мере отвечающая требованиям, предъяв-
предъявляемым к судам для дальнего туризма. Днище умеренно-килеватое A2° на транце).
Горизонтальная площадка по скуле в носовой части работает как брызгоотбойник,
а в корме, где ее ширина увеличена до 100 мм, обеспечивает повышение гидродинами-
гидродинамического качества при разгоне и динамическую остойчивость при маневрировании. На
днище по батоксам отформованы продольные реданы — по три на борт.
Конструктивно судно состоит из трех частей: корпуса, палубы и внутренней секции,
которая заменяет набор и служит основой для монтажа оборудования. Все части от-
отформованы из стеклопластика. Толщина обшивки на днище — 4—5 мм, на палубе
и внутренней секции — 2—3 мм.
Для увеличения полезной площади кокпита палуба не имеет бортовых потопчин.
Два носовых кресла и трехместный кормовой диван легко переоборудуются в спаль-
спальные места благодаря большой длине кокпита B,1 м). В основаниях кресел устроены
рундуки, а под диваном размещен топливный бак на 100 л с выведенной на
палубу горловиной.
21
Рис. 1.19. Мотолодка „Дельта"
Со спаренными моторами „Нептун-23" скорость составила с одним водителем
48,2 км/ч, с экипажем из 5 чел. — 43,2 км/ч (с двумя „Вихрями-30" соответственно
50,5 и 45,5 км/ч). Ударные нагрузки при полной скорости становятся ощутимыми
при волне 0,6 м. Кокпит при этом не забрызгивается.
Лодка имеет высокую начальную остойчивость; при скоплении 5 чел. на одном
борту привальный брус не погружается в воду.
,?1торм" (рис. 1.20) — тримаран, спроектированный В. Л. и А. Л. Богдановыми
как многоцелевое судно. Благодаря высокой остойчивости, хорошей мореходности
и просторному F м ) кокпиту особенно удобен для спортивной рыбной ловли, рабо-
работы с аквалангистами, обслуживания водноспортивных соревнований. Конструкция
Рис. 1.20. Тримаран „Шторм''
22
позволяет эксплуатировать ее с подвесными моторами в широком диапазоне мощно-
мощностей - от 14,7 до 110,3 кВт (от 20 до 150 л. с). Не исключена возможность установки
стационарного двигателя. С 20-сильным мотором тримаран выходит на глиссирование
с 3-4 чел. на борту, а при двух 20-сильных - с 6-7 пассажирами. Обводы с повышенной
кипеватостью позволяют поддерживать полную скорость на волне высотой до 1,25 м.
На скорости 40-45 км/ч начинает пррявляться эффект от уменьшения смоченной
поверхности в результате возникновения воздушной каверны за поперечным реданом.
Высокий борт, слом при переходе его в спонсон и сам спонсон надежно защищают
кокпит от забрызгивания.
Остутствие носовой палубы позволило выделить перед постом рулевого участок
кокпита площадью 1,5 м2. При непродолжительных прогулках здесь оборудуются
дополнительные пассажирские места, а в туристском плавании размещается багаж.
В основной части кокпита установлены четыре кресла, по два спинка к спинке, и кормо-
кормовой диван. Сиденья легко переоборудуются в спальные места.
Конструкция лодки разработана для индивидуальной постройки с использованием
в качестве основных материалов водостойкой фанеры и сосновых реек. Снаружи кор-
корпус оклеивается стеклотканью.
Каютные мотолодки (табл. 1.4). По условиям обитаемости в этой группе
можно выделить лодки с изолированной каютой, позволяющей обеспечить наибольший
уровень комфорта, и с рубкой-убежищем, в которой можно укрыться от непогоды,
но полноценные условия для ночлега обеспечиваются только после установки тента.
При ограниченных размерениях второй вариант имеет то преимущество, что допускает
перепланировку всего внутреннего объема корпуса в1 зависимости от конкретных
условий эксплуатации. '
По мореходности эта группа судов находится на уровне открытых мотолодок
для дальнего туризма, однако благодаря большей высоте борта они могут эксплуати-
эксплуатироваться в более тяжелых погодных условиях.
Получить возможность выхода на глиссирование при полном водоизмещении
1 т обычно удается только при установке моторов суммарной мощностью более 36,8 кВт
E0 л. с), поэтому при выборе обводов судов этой группы обращается внимание на
возможность эксплуатации их в переходном режиме.
,Арго" (рис. 1.21) - судно небольших раэмерений с повышенной обитаемостью.
Проект разработан В. Б. Осипчуком. Основной объем корпуса занят носовой рубкой
с двумя постоянными спальными местами и столиком,, за которым размещается
до 4 чел. В кокпите, несмотря на его небольшие размеры (длина 1,2 м), может одно-
одновременно находиться весь экипаж: двое на откидных креслах в носу (одно водитель-
водительское) и двое на кормовом диване. На ночь здесь при необходимости оборудуются
два спальных места под тентом.
Высокая удельная нагрузка C0 кг/л, с.) обусловила применение обводов с малой
килеватостью днища и плавным подъемом килевой линии к транцу. Предусмотрена
установка регулируемых транцевых плит, что дает возможность регулировать ходовой
Таблица 1.4. Характеристики каютных мотолодок
Характеристика
Длина наибольшая, м
Ширина наибольшая, м
Высота борта, м
Масса, т
Грузоподъемность, кг
Пассажировместимость, чел.
Мощность подвесного мотора,
кВт (л. с.)
„Арго"
4,36
1.8
0,78
0,24
500
4
18,4 B5)
„Сарепта"
4,6
1,6
0,65
0,24
450
6
36,8 E0)
„Ладога-2И
4,65
1,95
0,88
0,4
400
5
44 F0)
„Москва-2"
5,11
1,98
0,86
0,39
400
4 .
44 F0)
„Белуха"
4,8
1,8
0,77
0,24
450
6
18,4 B5)
23
Рис. 1.21. Мото-
Мотолодка „Арго"
дифферент при различных вариантах на-
нагрузки. С полным экипажем „Арго" раз-
развивает скорость около 20 км/ч, с умень-
уменьшенной до 250 кг нагрузкой - до 30 км/ч.
На полном ходу при волне до 1 м лодка
испытывает сильные удары в днище, как
и всякое судно с малой килеватостью.
Конструкция „Арго" рассчитана на
индивидуальную постройку с использова-
использованием в качестве основных материалов
сосновых реек и фанеры. Снаружи кор-
корпус оклеивается двумя слоями стекло-
стеклоткани. Толщина обшивки при этом умень-
уменьшается с 5 до 4 мм.
„Сарепта" (рис. 1.22) — серийная
мотолодка, оборудованная сдвижной съем-
съемной рубкой-убежищем, эксплуатируется
в различных вариантах. В просторном,
не разгороженном переборкой кокпите
установлены шесть сидений, которые транс-
трансформируются в три спальных места. Открытая часть кокпита закрывается при этом
тентом. В таком варианте с экипажем 3 чел. мотолодка по условиям обитаемости
и количеству снабжения пригодна для длительных туристских плаваний. Сдвинув
рубку в корму, при плохой видимости и на волнении можно управлять лодкой стоя,
что бывает необходимо при шлюзовании. Со снятой рубкой лодка может использо-
использоваться для прогулок, буксировки воднолыжников.
Пост управления расположен у лобового панорамного стекла. В корму от него
и второго носового сиденья размещены бортовые диваны-рундуки. У переборки под-
моторной ниши под поперечным диваном предусмотрен отсек для бензобака^ Имеется
и носовой багажник с люком на палубе. Для хранения инструментов и мелких пред-
предметов служат четыре шкафчика-ниши в планширях и приборной доске.
Тримаранные обводы обеспечивают повышенную остойчивость. Лодке разрешен
выход в водохранилища и морские заливы при высоте волны до 0,75 м. С моторами
суммарной мощностью 36,8 кВт E0 л. с.) „Сарепта" развивает скорость до 50 км/ч.
С 20-сильным мотором и одним водителем скорость составляет 38 км/ч, с 4
чел. — 28 км/ч.
Обшивка лодки изготовлена из листов легкого сплава толщиной 2 мм на днище
и 1,5 мм на палубе и бортах. Продольный набор предусмотрен только на днище,
в остальных местах его заменяют выштампованные гофры.
„Ладога-2" (рис. 1.23) - серийное многоцелевое судно. Тримаранные обводы
лодки рассчитаны на эксплуатацию в режиме глиссирования. С полной нагрузкой, имея
на борту 8 чел., она при установке двух 30-сильных моторов развивает скорость более
30 км/ч и может использоваться для прогулок и выходов на рыбную ловлю. Та же
скорость достижима с одним 30-сильным мотором при экипаже 2 чел. В таком варианте
лодка пригодна для двух-, трехнедельных плаваний. Максимальная скорость при нагруз-
нагрузке 200 кг составляет с одним 30-сильным мотором — 36 км/ч, с двумя — 52 км/ч.
В рубке-убежище на продольных рундуках-диванах могут разместиться 4 чел.
На ночлег средний проход закрывается диванными подушками, и здесь образуется
спальное место для троих. В кормовой части открытого кокпита установлен трехмест-
трехместный диван, под которым находится багажник, используемый на стбянке для хранения
подвесных моторов.
Повышенная килеватость днища способствует мягкому ходу на волне. В то же
время благодаря спонсонам в носовой половине корпуса обеспечивается высокая
24
to
Рис. 1.22. Мотолодка „Сарепта"
РИс. 1.23. Мотолодка ,,Ладога-2''
Рис. 1.24. Мотолодка
„Москва-2"
статическая остойчивость: на стоянке 2 чел., стоя на борту, закренивают лодку в пре-
пределах 20-23°. Для облегчения выхода на глиссирование и устойчивое движение при
большой нагрузке по всей длине скулы предусмотрен широкий уступ-брызгоотбойник.
На бортах в кормовой половине корпуса отформован слом, на днище - по одному
продольному редану с обеих сторон от киля.
Корпус отформован иэ стеклопластика. Толщина днища и транца 4 мм, бортов
3 мм. Для обеспечения прочности на случай удара о препятствие обшивка усилена
в районе ДП и килей спонсонов двумя дополнительными слоями стеклоткани, в носу
между 1-ми 3-м шп. — шестью слоями. Набор состоит из двух днищевых стрингеров
и нескольких шпангоутов из сосновых реек, оклеенных стеклопластиком. Между
обшивкойхкорпуса и секцией внутреннего дна вклеены блоки плавучести из пенопласта,
благодаря которым полностью залитая водой лодка остается на плаву. Соединение
секций корпуса и палубы-рубки выполнено на фланцах по привальному брусу и закры-
закрыто снаружи полиэтиленовым профилем.
,Москва-2" (рис. 1.24) — самая крупная иэ серийных отечественных мотолодок
для туризма. По оборудованию и мореходности рассчитана на продолжительное пла-
плавание с выходом в прибрежные зоны морей и крупных водохранилищ. Основной режим
движения — глиссирование со скоростью свыше 30 км/ч, для чего необходима мощ-
мощность не менее 26 кВт C5 л. с.).
Обводы днища типа моногедрон с углом килеватости 14° позволяют преодолевать
волны высотой до 1 м, однако на стоянке лодка проявляет валкость. Обшивка кор-
корпуса, рубка, переборки изготовлены из легкого сплава АМг5М. Толщина обшивки
днища 2 мм, палубы и рубки 1,5 мм.
Непотопляемость лодки обеспечена блоками плавучести, закрепленными с внутрен-
внутренней стороны палубы. При затоплении всех отсеков лодка остается на плаву, на ров-
ровном киле и может удерживать находящихся в воде людей.
РИс. 1.25. Мотолодка „Белуха"
26
По длине корпус разбит на три отсека: форпик, каюту и кокпит. В каюте преду-
предусмотрены мягкие диваны и столик. При устройстве на ночлег столик убирается в рун-
рундук, в проход укладываются подушки кормового дивана из кокпита и таким образом
оборудуется спальное место для 3—4 чел.
В крыше рубки имеется люк, через который обеспечивается нормальная вентиля-
вентиляция помещения. Люк в переборке форпика позволяет использовать этот отсек в каче-
качестве багажника. В кокпите размещаются два складных кресла, пульт управления и кор-
кормовой диван. Здесь могут расположиться на ночлег 2 чел. на надувных матрасах; кресла
при этом убираются в бортовые ниши. В случае непогоды кокпит закрывается тентом.
„Белуха" (рис. 1.25) — мотолодка, в проекте которой нашли отражение черты
судов народной постройки, а также мореходных лодок, строящихся в скандинавских
странах. Проект разработан Д. А. Курбатовым. Обводы мотолодки рассчитаны на
переходный режим движения в диапазоне скоростей 12—30 км/ч. На „Белухе" допу-
допускается установка практически всех выпускаемых в стране подвесных моторов, но
предпочтителен „Ветерок-12" с удлиненным дейдвудом.
- Благодаря высокому надводному борту в носу @,7 м) лодка легко всходит на
крутую волну. Носовая палуба и рубка-убежище прикрывают кокпит от заливания
и брызг. Киль-стабилиэатор облегчает управление при ходе под углом к волне, а также
защищает днище и мотор от ударов при подходе к отмелому берегу.
В рубке установлены два дивана, служащие и спальными местами. Еще два спаль-
спальных места могут быть устроены в кокпите, который в случае непогоды закрывается
тентом.
1.2. Катера \
Мореходные качества большинства катеров допускают их эксплуатацию на от-
открытых акваториях на волне до 1,2 м. По сравнению с мотолодками катера имеют
меньший расход топлива на единицу мощности, особенно при установке дизелей.
Суда этого типа в зависимости от уровня обитаемости делятся на две группы:
катера открытые или с рубкой-убежищем; каютные катера повышенной комфорта-
комфортабельности.
Таблица
Характеристика
Длина наиболь-
наибольшая, м
Ширина наи-
наибольшая, м
Высоте борта, м
Водоизмеще-
Водоизмещение, т
Грузоподъем-
Грузоподъемность, т
Пассажировме-
стимость, чел.
Допустимая
мощность, кВт
(л. с.)
1. 5. Характеристики катаров с открытым кокпитом или рубкой-убеи
„Ритм"
5,04
2,2
0,95
1
5
66,2
(90)
C-S4
5,32
2,3
0,96
1,4
0,4
5
Р*5
A00)
„Амур-
5,5
1,84
0,82
0,63
5
44F0)
„Амур-
2"
5,62
1,83
0,93
0,72
0,5
5
44 F0)
„Восток"
5,5
1,83
0,98
0,67
5
44 F0)
„Борей"
5,45
2,1
0,785
0,92
3
66-235
(90-320)
Водоизме-
щающий
турист-
туристский катер
6,34
1,87
0,7
1
7
9,9 A3,5)
пишем
.Струйка"
6,5
1.2
0,65
0,95
6
8,8A2)'
27
Рис. 1.26. Катер „Ритм'
Катера с открытым кок-
кокпитом или рубкой-убежищем
(табл. 1.5). ГОСТом длина су-
судов этой группы установлена в
пределах 4,5—5,5 м, однако вы-
высокие массогабаритные характе-
характеристики серийных двигателей
предопределили тенденцию к ис-
использованию преимущественно
верхнего предела указанных раз-
мерений, а у водоизмещающих
судов и превышать его. Как
правило, применяется кормовое
расположение двигателя с угло-
угловым реверс-редуктором или по-
поворотно-откидной колонкой.
Прямые передачи используются
только на тихоходных судах с
маломощными двигателями.
„Ритм" (рис. 1.26) — катер,
имеющий небольшие размеры,
но обладающий достаточной мо-
мореходностью для преодоления
волнения высотой до 1,2 м
при удалении от берега до 3 км.
Используется в качестве служебно-разъездного и для обслуживания парусных сорев-
соревнований в условиях морских заливов. Повышенная килеватость днища (до 17й на тран-
транце) обеспечивает мягкий ход на волне без заметного снижения скорости, а высокий
борт и рубка-убежище, закрывающая носовую часть судна, хорошо защищают кокпит
от брызг.
Корпус имеет плоскокилеватые обводы со скуловыми брызгоотбойниками и че-
четырьмя продольными реданами. Значительный развал бортов в носовой части увели-
увеличивает площадь палубы и объем форпика, заполненного пенопластом. Форма транца
рассчитана на установку двигателя с угловой поворотно-откидной колонкой (в ос-
основном варианте катера используется передача с угловым реверс-редуктором).
Корпус формуется из стеклопластика; толщина наружной обшивки днища 5—6 мм,
бортов 4—5 мм. Палуба с рубкой также цельноформованной конструкции из стекло-
стеклопластика. Днище, подкреплено коробчатыми стрингерами из пенопласта, оклеенного
стеклопластиком.
В кокпите предусмотрены три сиденья: два в корме по обе стороны от капота
двигателя и одно для водителя — впереди. Рубка-убежище оборудована мягкими ди-
диванами с рундуками под ними.
С серийным двигателем М8ЧСПУ-100-1 максимальная скорость катера 45 км/ч,
при полной нагрузке — 42 км/ч.
Тримаран С-54 (рис. 1.27) предназначен для обслуживания водноспортивных
соревнований, несения спасательной службы. Рассчитанный на высокую скорость,
он обладает ограниченной мореходностью. Корпус имеет тримаранные обводы со спон-
сонами, доходящими до транца. Помимо обеспечения статической и динамической
остойчивости, зто позволило получить полезную площадь, достаточную для оборудова-
оборудования рубки-убежища, не слишком просторной, но обеспечивающей всему экипажу укры-
укрытие от непогоды и надежно защищающей кокпит от забрызгивают. Кормовая от миделя
часть корпуса занята двигателем с угловым реверс-редуктором, поэтому в кокпите
на диване могут разместиться лишь 3 чел.
28
Днище имеет умеренную килеватость, уменьшающуюся от 20° на миделе до 12°
на транце. Корпус собран из двух стеклопластиковых блоков — собственно корпуса
и палубы. Фланцы на стыке облицованы резиновым профилем, образующим приваль-
привальный брус по всему периметру корпуса. Толщина обшивки составляет 7-10 мм, что обе-
обеспечивает высокую прочность корпуса, но вместе с тем делает его массу выше, чем у со-
сопоставимых по размерениям судов с обшивкой из легких сплавов или фанеры. Шпан-
гоутные рамки из шести слоев стеклоткани формуются прямо в корпусе. Продольным
набором служат два днищевых и два бортовых стрингера из пенопласта, оклеенного
стеклотканью:'
Конвертированный автомобильный двигатель М8ЧСПУ-100-1 мощностью 73,5 кВт
A00 л. с.) позволяет катеру с одним водителем развивать скорость 50 км/ч, с 5 чел. —
40 км/ч.
,Лмур" (рис. 1.28) — прогулочно-туристский катер, который во всех вариантах
(„Амур", „Амур-М", „Амур-2", „Амур-3" и „Восток") находит также применение
в качестве буксировщика воднолыжников, спасательного и патрульного судна. Вогнуто-
килеватые обводы корпуса характеризуются умеренной килеватостью у транца
и подъемом скулы у форштевня. Допускается эксплуатация катера с удалением от
берега до 5 км при волне высотой до 0,75 м. Корпус клепажхварной конструкции
изготовлен иэ дюралюминия Д16АТ. На „Амуре-2" и „Амуре-3" для корпуса применен
сплав АМг5М.
На катерах серии .„Амур" устанавливается конвертированный двигатель авто-
автомобиля „Москвич-412". На „Амуре" и „Амуре-М" передача на винт осуществляется
Й1С. 1.27. Тримаран С-54
29
о
Рис. 1.28. Катер „Амур-2"
Рис,
. 1.29. Воднолыжный буксировщик „Борей"
Рис. 1.30. Водоизмещающий туристский катер
Рис. 1.31. Катер „Струйка"
через угловой реверс-редуктор. На „Амуре-2" и „Амуре-3" размещаются поворотно-
откидные угловые колонки. На базе „Амура-3" разработан вариант водометного катера
„Восток". Скорость катеров с полной нагрузкой и гребным винтом составляет 40 км/ч,
водометного катера — 37 км/ч.
„Борей" (рис." 1.29) — катер, предназначенный для обеспечения тренировок и со-
соревнований по воднолыжному спорту. Места для экипажа из 2—3 чел., кресло рулевого
и диван, на котором тренер и судья сидят лицом в корму, — оборудованы^ носовой
части кокпита, а объем в районе миделя занят двигателем. Такая планировка позво-
позволяет применять наиболее простую — прямую передачу мощности на гребной винт.
Предусмотрена установка двигателей широкого мощностного ряда. Серийные суда
в основном оснащены двигателями М8ЧСПУ-100 и М100ВС, обеспечивающими ско-
скорость 50—52 км/ч. С конвертированным двигателем ГАЗ-13 катер развивает скорость
60 км/ч.
Конструктивно судно состоит из корпуса, палубы и днищевого коробчатого стрин-
стрингера, отформованных из стеклопластика. Толщина обшивки днища 5 мм, палубы 4 мм.
Водоизмещающий туристский катер (рис. 1.30) имеет круглоскулые обводы
(теоретический чертеж судна приводится в гл. 10), рассчитанные на плавание с полным
грузом со скоростью 11—17 км/ч.при установке' двигателей мощностью 4,4—9,9 кВт
F—13,5 л. с.). Размещение моторного отсека в корме позволило применить планиров-
планировку, отвечающую основному назначению судна. Большая часть полезного объема занята
просторным кокпитом с продольными банками-рундуками. Установка в его носовой
части съемной рубки позволяет оборудовать здесь спальные места. Катер можно ис-
использовать и для хозяйственных целей — в этом случае корпус остается полностью
открытым, что удобно для размещения грузов. Кроме рундуков под банками для
хранения снаряжения используется герметически закрытый форпик с доступом через
люк на палубе. Такой же водонепроницаемый отсек в ахтерпике предусмотрен для
бензобака и канистр.
Корпус катера представляет собой цельноформовэнную оболочку из стеклопласти-
стеклопластика с вклеенными в нее переборками, фундаментом под двигатель и банками-рундука-
банками-рундуками. Палуба формуется отдельно. Набор практически отсутствует. Прочность и жесткость
корпуса обеспечиваются переборками, стенками рундуков и соответствующей про-
профилировкой пластмассовой оболочки. Толщина обшивки корпуса 5 мм, палубы
и рубки 9 мм.
„Струйка" (рис. 1.31) — катер (теоретический чертеж помещен в гл.! 10) любитель-
любительской постройки. Рассчитан на плавание по рекам с быстрым течением. Корпус с боль-
большим удлинением {LIB =5,4) вследствие применения комбинированных обводов с ок-
округлыми килеватыми образованиями днища в носовой части и почти плоскими остро-
скулыми — в кормовой обеспечивают экономичную эксплуатацию как в водоизме-
щающем, так и в переходном режимах в диапазоне скоростей 10—18 км/ч с мотора-
моторами мощностью 2—8,8 кВт C—12 л. с.). Высоко поднятая в носу скула с плавным пере-
переходом днищевых ветвей шпангоутов в бортовые позволяет катеру легко всходить
на волну, хотя из-за малой ширины и низких бортов его нельзя рекомендовать для
эксплуатации на открытых водохранилищах с большим удалением от берега.
Моторный отсек делит корпус на кормовой и носовой участки. Носовая часть
запалублена. Внутренняя планировка выбирается в зависимости от назначения катера,
который можно использовать для продолжительных плаваний, рыбной ловли и хо-
хозяйственных перевозок. Водитель обычно размещается в кормовом кокпите.
Конструкция разработана с расчетом на мелкосерийную постройку на верфях
местной промышленности или индивидуальную — любителями. Основным материалом
для изготовления набора и обшивки служит, сосна, часть шпангоутов D-й и 10-й) -? из
стального угольника. Обшивка устанавливается внакрой.
Катера повышенной комфортабельности (табл. 1.6). Суда этой
группы имеют длину более 5,5 м. В зависимости от назначения они могут быть обору -
31
дованы как для дальних туристских походов, так и для обслуживания спортивных
соревнований с выходом на открытую акваторию в 5-балльный ветер.
Таблица 1.6.
Характеристика
Длина наибольшая, м
Ширина наибольшая, м
Высота борта, м
Водоизмещение, т
Пассажировместимость, чел.
Допустимая мощность, кВт
(л. с.)
Характеристики катеров повышенной комфортабельности
ЛМ4-87МК
6,96
2,07
0,95
2,15
6
66,2 (90)
„Викинг"
7,1
2,3
1.3
2,1
8
95,6 A30)
„Баклан"
7,2
2,2
0,9
3
6
9,9 A3,5)
Проект Бича
7,46
2,62
1,7
3,1
4
63,2 (86)
„Максим"
7,6
3
1,3
2,1
6
44,8 F1)
ЛМ4-87МК (рис. 1.32) — модификация базовой модели 87М. По сравнению с ней
в новом проекте изменены размерения и архитектура, установлен более мощный дви-
двигатель М8ЧСПУ-100-1. Поперечными переборками корпус разделен на форпик, каюту,
кокпит и моторный отсек. В форпике хранится шкиперский инвентарь. В каюте раз-
размещены откидной столик, диван и кресло, которые могут быть преобразованы в че-
четыре спальных места. Предусмотрена естественная приточная вентиляция через козырь-
козырьки и воздухораспределители. В кокпите расположены пост управления, два кресла
и кормовой диван. По бортам между 8-м и 9-м шп. размещены две топливные цистерны.
Передача мощности на гребной винт осуществляется через угловой реверс-редуктор,
который вместе с двигателем размещен в моторном отсеке.
Корпус имеет остроскулые обводы с малой килеватостью днища и отгибом его
в районе скулы. Набор выполнен из древесины хвойных пород, обшивка — из фанеры
ФСФ и БС-1 толщиной 5 и 7 мм.
Рис. 1.32. Катер ЛМ4-87МК
32
Катер обладает достаточной мореходностью и пригоден для эксплуатации на волне
высотой до 1,2 м, однако из-за малой килеватости корпуса при этом приходится огра-
ограничивать скорость.
„Викинг" (рис. 1.33) имеет две модификации: судно с небольшой каютой и про-
просторным кокпитом и полностью открытым корпусом со смотровой площадкой 3-метро-
3-метровой высоты. Основное назначение катера — обслуживание соревнований по парусному
спорту, может также использоваться в качестве туристского и разъездного.
Корпус имеет обводы типа моногедрон с углом килеватости днища на транце 18",
что позволяет развивать полную скорость на волне до 0,5 м. На днище катера по обе
стороны от киля установлено по два продольных редана, а на скуле — брызгоотбойник.
Корпус собран из трех секций: собственно корпуса, палубы и козырька ходового
мостика вместе с мачтой, отформованных из стеклопластика. Продольными связями
служат шесть днищевых стрингеров из пенопласта, оклеенного стеклотканью. Роль
поперечного набора выполняют переборки.
Своеобразный внешний вид катеру придает расположенный на крыше рубки ходо-
ходовой мостик, боковые плоскости которого переходят в П-образную мачту, одновремен-
одновременно служащую каркасом для стояночного тента. Каюта, занимающая большую часть
судна, разделена полупереборкой на спальный отсек для 3—4 чел. и (ближе к корме)
кают-компанию на 6—8 чел. Бортовые диваны кают-компании преобразуются в два
спальных места. Каюта вентилируется через установленные на крыше вентиляционные
головки.
Пульт управления катером вынесен на ходовой мостик, куда ведут два трапа,
установленные по обе стороны от входа в каюту. Площадь кокпита достаточна, чтобы
здесь разместился весь экипаж.
НЕ БОЛЕЕ »И КИНГИ В
ОДНИ РУКИ И 2ХВДВЕ
КОЛОХ2А
Рис. 1.33. Катер „Викинг"
2 Зак. 738
33
Рис. 1.34. Катер „Баклан"
На катерах „Викинг" устанавливаются угловые колонки шведской фирмы „Вольво-
Пента" с дизелем мощностью 95,6 кВт A30 л. с.) или бензиновым двигателем мощно-
мощностью 165 кВт B25 л. с). С первым они развивают скорость 50 км/ч, со вто-
вторым — 60 км/ч.
„Баклан" (рис. 1.34) — водоизмещающий круглоскулый катер (теоретический
чертеж приведен в гл. 10) для дальнего туризма по рекам и водохранилищам. Рас-
Рассчитан на установку двигателя малой мощности. Оригинальная компоновка судна раз-
разработана Ю. Н. Бирюковым на основе деревянных катеров, строившихся на Соломбаль-
ской верфи. Обводы этих катеров воспроизводят форму карбасов поморов, но кон-
конструкция облегчена и усовершенствована.
По сравнению с соломбальскими катерами „Баклан" имеет более комфортабель-
комфортабельную планировку. Экипаж размещается в двух изолированных каютах, что делает катер
особенно удобным для семейных путешествий. В каждой каюте по два спальных места.
В носовой каюте оборудованы также два платяных шкафа, конструкция которых
служит одновременно подкреплением крышки рубки, необходимого в случае установ-
установки предусмотренного парусного вооружения. Под диванами в каюте, а также под си-
сиденьями в кокпите устроены рундуки для хранения снаряжения.
Двигатель мощностью 9,9 кВт A3,5 л. с.) устанавливается в кокпите и закрывает-
закрывается капотом, который в хорошую погоду используется в качестве обеденного стола.
Мощность на гребной вал передается на прямую через шарнир Гука.
Набор, переборки и транец изготовлены из дуба. Обшивка клинкерная из полос
7-миллиметровой бакелизированной фанеры. Допустима обшивка и из сосновых досок,
как зто' делается на соломбальских катерах.
Катер проекта Д. Бича (рис. 1.35) — обладает такими качествами, как. высокая
мореходность, надежность и долговечность при относительно экономичной эксплуата-
эксплуатации. Конструкция выполнена в соответствии с правилами Регистра Ллойда для построй-
постройки деревянных яхт. Расстояние между гнутыми шпангоутами 240 мм. Киль и дейдвуд-
ные брусья выполнены из сосны. Обшивка из красного дерева двойная с толщинами
внутреннего слоя 19 мм и наружного 13 мм. Снаружи корпус оклеивается стеклопла-
стеклопластиком.
Круглоскулые обводы катера с заметным подъемом днища к широкому транцу
рассчитаны на плавание в широком диапазоне скоростей, с двигателями мощностью
от 15'до 73,5 кВт (от 20 до 100 л. с.). С 86-сильным двигателем скорость катера состав-
составляет 22,5 км/ч. Острые ватерлинии и развал бортов в носовой части обеспечивают
хорошую всхожесть на волну.
34 .
Рис. 1.35. Катер по проекту Д. Бича
Рис. 1.36. Катер „Максим"
35
Просторная C,0 X 2,5 м) каюта размещена в наиболее широкой — кормовой части
корпуса, а двигатель смещен в нос от миделя. В каюте установлены два дивана, служа-
служащие спальными местами , с выдвижными ящиками под ними. Предусмотрены уби-
убирающийся обеденный стол, шкаф и бюро-этажерка. В помещении, расположенном перед
кокпитом, находятся туалет, раковина-умывальник и шкаф для одежды. Форпик с лю-
люком на палубе и сдвижной дверцей в таранной переборке используется для шкипер-
шкиперского имущества. В кокпите установлены два сиденья — для рулевого и его напарни-
напарника по вахте. От брызг и ветра их защищает высокое стекло, в дождь, может быть по-
поставлен тент. Малая площадь кокпита компенсируется крышей кормовой надстройки,
с которой идет трап на транцевую площадку.
„Максим" (рис. 1.36) — катер шведской постройки. Имеет остроскулые обводы
малой килеватости G° на транце). Рассчитан на плавание в переходном режиме в диа-
диапазоне скоростей 20—24 км/ч. Корпус отформован из стеклопластика методом напы-
напыления, поэтому обшивка имеет большие толщины, чем у сопоставимых судов, корпуса
которых изготовлены ручной формовкой. Развитый плавник способствует уменьшению
дрейфа в свежий ветер и устойчивости катера на курсе, а также предохраняет от повре-
повреждений винт и дейдвуд угловой неповоротной и неоткидывающейся колонки. Скомпо-
Скомпонованный с колонкой двигатель размещен близ миделя и занимает минимум полезного
объема. При относительно небольших размерениях катер располагает достаточно ком-
комфортабельными помещениями для 5—6 чел.
На судне три каюты. Носовая — двухместная, с V-образным расположением дива-
диванов, преобразуемых в двухспальную койку. В средней каюте полутораспальная койка
размещена по-яхтенному — под палубой с просветом до подволока 0,7 м. Наиболее
удобна кормовая каюта высотой 1,6 м, в которой размещены двухспальная койка
и платяной шкаф. Для размещения снаряжения используются пространства под дива-
диванами и в форпике.
При наличии столь значительных объемов жилых помещений на катере оборудован
просторный кокпит, в котором одновременно может разместиться весь экипаж.
К недостаткам проекта следует отнести повышенный дифферент при максималь-
максимальной скорости и значительную парусность корпуса с надстройками.
1.3. Плавучие дачи
К судам этого типа (табл. 1.7) в основном относятся комфортабельные сооруже-
сооружения с помещениями высотой в полный рост человека, просторной палубой, с оборудо-
оборудованием, необходимым для длительного отдыха. Преимущественно это тихоходные
суда, что обусловлено их значительной парусностью и сравнительно малой мощностью
Таблица 1.7.
Характеристика
Длина наибольшая, м
Ширина наибольшая, м
Высота борта, м
Осадка, м
Водоизмещение, т
Пассажировместимость, чел.
Мощность двигателя, кВт
(л. с.)
„Золушка"
4,07
2,04
0,75
0,27
0,75
3
5,9 (8)
Характеристики плавучих дач
„Дон"
в сборе
5,06
1,8
0,54
0,21
0,7
5
22 C0)
носовая
секция
3,02
1,75
0,5
0,21
0,3
3
22 C0)
Проект
Д. Бича
6,05
л 2,43
0,98
0,32
1,3
4
11-103
A5-140)
„Аленушка"
5,05
2,4
0,6
0,24
2,1
4
14,7 B0)
36
Рис. 1.37. Плавучая дача „Золушка"
устанавливаемых двигателей.
Район плавания плавучих дач
обычно ограничивается внутрен-
внутренними водными путями с вы-
выходом на открытые акватории в
тихую погоду. Плавучие дачи
используются для плаваний на
небольшие расстояния с длитель-
длительными стоянками в укрытых
от волн бухтах.
Намечается расширение об-
области использования плавучих
дач за счет повышения их море-
мореходности, создания облегченных
конструкций, позволяющих при
определенных условиях разви-
развивать скорости, соответствующие
режиму глиссирования. За ру-
рубежом особый интерес к судам
такого типа проявляется в стра-
странах, где водный туризм связан
с выходом в прибрежные рай-
районы морей.
Для обеспечения необходимой по условиям эксплуатации остойчивости плавучие
дачи имеют большую ширину, плоское или малой килеватости днище; нередко при-
применяются катамаранные конструкции.
„Золушка" (рис. 1.37) — плавдача-катамаран, спроектированная В. Б. Осипчуком
с расчетом на индивидуальную постройку. Несмотря на минимальные для данного типа
судов размерения, в полной мере соответствует своему назначению. В каюте, рассчи-
рассчитанной на экипаж из 2—3 чел. (семейный вариант), установлены два дивана. Третье
спальное место — подвесная койка. Диван по левому борту преобразуется в обеденный
уголок, состоящий из складного столика и двух мягких сидений. Высота каюты от
настила до подволока 1,73 м. В носу по правому борту размещается рулевое управле-
управление. Место рулевого образуется путем переноса передней подушки дивана на среднюю.
Над кормовой частью правого дивана подвешена газовая плита, в хорошую погоду
она выносится в кокпит.
Малая площадь в оконечностях плавучей дачи компенсируется крышей, удлинен-
удлиненной носовым козырьком, которая на стоянке может использоваться в качестве солярия.
Плавучая дача разбирается, что облегчает перевозку ее железнодорожным транспор-
транспортом. В собранном виде „Золушку" можно перевозить на грузовой машине.
В качестве основных материалов использована фанера, сосновые бруски и рейки.
По мореходным качествам плавучая дача пригодна для эксплуатации только на
реках и малых озерах. Скорость с подвесным мотором мощностью 4—6 кВт E—8 л. с.)
составляет 10—12 км/ч.
,Мон" (рис. 1.38) — серийно строящаяся плавучая дача оригинальной конструкции.
Транспортировка осуществляется на прицепе за автомобилем. Дачу можно использо-
использовать и в качестве домика, а также для буксировки воднолыжника. Для уменьшения
массы жесткая надстройка заменена тентом, который устанавливается только на стоян-
стоянке, ограничены размерения — особенно высота борта и безнаборной конструкции корпу-
корпуса из легкого сплава Д16. Корпус состоит из двух легко расстыковываемых секций:
кормовой, имеющей днище малой килеватости с продольными реданами, и носовой
с катамаранными обводами. В месте перехода катамаранных обводов в плоскокиле-
ватые в туннеле между корпусами установлен гидрощиток.
В кормовой секции вдоль бортов размещены два дивана с рундуками под ними,
перед транцем выделен моторный отсек, в котором достаточно места для хранения
37
бензобака и канистр. Имеется
мягкое сиденье для водителя,
предусмотрен откидной сто-
столик. Носовая секция отде-
отделяется от кормовой поло-
пологом и представляет собой
изолированное помещение, в
котором могут быть обору-
оборудованы два спальных места.
В ее кормовой части выде-
выделен моторный отсек, который
используется при эксплуата-
эксплуатации секции в качестве мото-
мотолодки. Предусмотрен, кроме
того, средний багажник. При
перевозке за автомобилем но-
носовая секция укладывается вверх дном на кормовую и вместе они образуют компакт-
компактный прицеп с одноосной, снабженной дышлом тележкой. Нормальная загрузка плаву-
плавучей дачи 4 чел. Она может вместить и шестерых, но скорость при этом падает с 37 до
20 км/ч. Используемая в качестве мотолодки носовая секция вмещает до 3 чел. и с 30-
сильным мотором легко выходит на глиссирование.
Рис. 1.38. Плавучая дача „Дон"
Рис.
1.39. Проект
Д. Бича
38
Дача проекта Д. Бича (рис. 139) развивает идеи, положенные в основу так назы-
называемых „палубных лодок", пользующихся большой популярностью в США. Их отли-
отличают прямоугольная в плане палуба, предоставляющая простор для любого рода пла-
планировки, и мореходные — тримаранные или килеватые — обводы днища. Близким
аналогом палубной лодки может служить мотолодка „Шторм", описание которой при-
приведено выше.
Д. Бич разрабатывал свой проект с расчетом на индивидуальную постройку. Для
обшивки предусмотрена водостойкая фанера — авиационная толщиной 8 мм или баке-
лизированная толщиной 6—7 мм. Натесные шпангоуты со шпацией 600 мм и стрингеры
изготовляются из сосновых реек. Предусмотрена возможность использования мото-
моторов широкого мощностного ряда. Упрощенные плоскокилеватые обводы рассчитаны
на экономичное плавание в водоизмещающем режиме, чему способствует подъем дни-
днища к транцу, с мотором мощностью 11—18,4 кВт A5—25 л. с.). Плоское в корме днище
позволяет без значительного дифферента выходить на глиссирование при установке
мотора мощностью более 44 кВт F0 л. с). Развитый килевой плавник предохраняет
гребной винт от поломок при посадках на мель и уменьшает дрейф при боковом ветре.
Основную часть площади палубы занимает самоотливной кокпит площадью 2,08 X
X 1,54 м, дно которого поднято над КВЛ на 200 мм. Здесь по мере необходимости
либо устраиваются спальные места, либо устанавливаются раскладные стулья и обе-
обеденный стол. Пассажиры в кокпите надежно защищены от ветра , брызг с носа и кормы
надстройками, а с бортов — фальшбортами. Тент с матерчатыми боковинами превра-
превращает кокпит в каюту с высотой подволока 1,9 м. На ночлег в ней могут располо-
расположиться 3—4 чел.
Надстройки выполняют роль подсобных помещений. В кормовой установлены
раковина-умывальник, газовая плита, унитаз. Высота помещения 1,83 м, вход в него
предусмотрен через сдвижные двери с палубы и из кокпита. В носовой надстройке
оборудованы шкафы для одежды и походного снаряжения. Вместительной кладовой
служит форпик. Такая же кладовая в ахтерпике используется под моторный отсек,
где кроме двигателя размещаются цистерны с горючим.
„Аленушка" (рис. 1.40) — плавучая дача, выпускавшаяся небольшой серией Свир-
ской судоверфью. Предназначена для продолжительного отдыха на реках, озерах и водо-
водохранилищах с удалением от берега до 1 км при волне до 0,5 м. Скорость на тихой воде
Рис. 1.40. Плавучая дача
„Аленушка"
39
при полной нагрузке с подвесным мотором мощностью 15 кВт B0 л.с.) составляет
10 км/ч.
Плоскодонный с носовым подрезом корпус в виде понтона собран из стальных
листов толщиной 2 мм. Надстройка деревянная с каркасом из брусков, обшитым
фанерой снаружи и изнутри. Жилые помещения высотой в полный рост человека состоят
из двух кают, разделенных шкафами для одежды и снаряжения. Мягкие диваны в обеих
каютах раскладываются, образуя двухспальные места. Под ними предусмотрены рунду-
рундуки. В носовой каюте выделен обеденный уголок с мягкими сиденьями и складным
столом. На камбузе по правому борту кормовой каюты размещены газовая плита,
раковина-мойка с бачком, для пресной воды, разделочный стол с ящиками для продук-
продуктов и посуды. На кормовой площадке с левого борта находится место рулевого. Места
для отдыха на открытом воздухе предусмотрены под тентом на носовой палубе, а также
на просторной G,6 мО крыше надстройки.
2. ПАРУСНЫЕ СУДА
По назначению парусные суда для туризма и спорта делятся на гоночные, крейсер-
ско-гоночные, крейсерские (туристские) и прогулочные.
По способу противодействия крену и дрейфу при ходе под парусами различают
три основных типа судов: килевые яхты (далее — яхты), у которых восстанавливаю-
восстанавливающий момент создает главным образом балласт, апротиводействие дрейфу — развитый
киль-плавник; швертботы, у которых противодействие крену обеспечивается за счет
остойчивости формы и перемещения на наветренный борт экипажа, а поперечная сила —
подъемным швертом; многокорпусные суда, обладающие высокой начальной остой-
остойчивостью за счет разнесенных по ширине корпусов; поперечная сила создается у них
либо самими корпусами, либо швертами или шверцами.
По оснастке в зависимости от числа мачт и парусов различают: кзт — одномачтовое
судно с одним парусом — гротом; шлюп — одномачтовое судно с двумя парусами —
гротом и стакселем; тендер — одномачтовое судно с тремя парусами — гротом, стак-
стакселем и кливером; иол — двухмачтовое судно с задней мачтой бизанью, устанавливае-
устанавливаемой в корму от головки баллера руля и несущей парус площадью 10—12 % общей
парусности; кеч — двухмачтовое судно с бизанью площадью 20—25 % общей парусности,
устанавливаемой в нос от баллера руля; шхуна — двух- и более мачтовое судно с косым
вооружением, у двухмачтовой шхуны парус на передней мачте — фок — по площади
больше заднего — грота.
Паруса по форме и способу их постановки делятся на прямые и косые. Первые
в настоящее' время находят применение как вспомогательные, вторые используются
в качестве основных практически на всех парусных судах, предназначенных для спорта
и туризма. Косые паруса подразделяются на следующие основные типы: бермудские —
паруса треугольной формы, передняя шкаторина которых крепится к мачте или штагу,
а нижняя — к гику или остается свободной; гафельные — паруса в форме трапеции,
верхняя шкаторина которых крепится к гафелю, а передняя и нижняя, как у бермуд-
бермудских; рейковые паруса, у которых верхняя шкаторина крепится к наклонному рейку,
поднимаемому на мачту, а остальные свободные; шпринтовые — по форме близкие
к прямоугольнику, растягиваемые за верхний задний угол с помощью шпринтова —
рейка. Наиболее эффективны из парусов названных типов бермудские.
Суда, предназначенные только для гонок, делятся на классы, согласно правилам
спортивной классификации, которой они объединяются в группы судов, близких или
сопоставимых по своим ходовым качествам.
Большинство современных гоночных яхт и швертботов относятся к классу судов-
монотипов. Они строятся по одинаковым чертежам при строгом соблюдении правил
40
постройки и обмера, обеспечивающих идентичность формы корпуса, размеров парусов
и весовых характеристик для каждого класса. С расширением применения стеклопла-
стеклопластика принцип монотипизации получил дальнейшее развитие в виде так называемых
„продукционных классов", идентичность характеристик которых обеспечивается приме-
применением эталонной оснастки для формования корпуса, поставляемой головным пред-
предприятием, строго одинакового материала для корпуса и дельных вещей, раскроя пару-
парусов по стандартным шаблонам и т. п.
Менее строгие ограничения имеют суда свободных классов. Обычно для них лими-
лимитируются главные размерения, площадь парусности, иногда некоторые элементы плани-
планировки корпуса и кают, размеры основных деталей набора. В то же время конструктору
предоставляется свобода в выборе обводов и некоторых других важных для ходкости
элементов.
Для крейсерско-гоночных яхт разработаны правила обмера, позволяющие с учетом
основных характеристик, влияющих на ходовые качества судна, дать ему гандикап
в гонках. По принятым в СССР международным правилам для яхт открытого моря
IOR (International Offshore Rule) обмерный балл вычисляется по формуле MR =
= [@.13Z, SC/y/BD) + 0,25L + 0,20SC + DC+ FQDLF.
Полученный результат с учетом штрафных поправок и бонусов пересчитывается
в гоночный баллЯ =MR-EPFCGFMAF-SMF-LRPCBF, где L — гоночная длина, полу-
получаемая замером расстояния между поперечными сечениями корпуса в носу и корме,
где длина цепного охвата корпуса в плоскости шпангоута равна соответственно 0,5
и 0,75 обмерной величины В, и вычетом из этого расстояния поправок на полноту но-
носового и кормового свесов яхты; SC — условная величина парусности, представляю-,
щая собой квадратный корень из обмерной площади парусности, откорректирован-
откорректированной с учетом соотношения площади парусности и раэмерений корпуса яхты (на шлюпке
и тендере обмерная площадь парусности состоит из площади переднего парусного
треугольника и площади грота; получается расчетом по замерам высоты и основания
переднего парусного треугольника, высоты мачты и длины гика, на которые может
растягиваться парус); D — условная глубина трюма, рассчитываемая по замерам внут-
внутренней глубины корпуса от ватерлинии в трех точках по ширине на миделе и в одной
точке в определенном сечении в носу; DC — поправка на осадку, рассчитываемая в за-
зависимости от разности между фактической осадкой яхты и базовой DB =0,146/, +
+ 0,61 м; FC — поправка на высоту надводного борта в зависимости от разности между
фактической высотой борта и базовой FB =0,057/, + 0,366 м; DLF — фактор „водо-
„водоизмещение — длина", учитывающий полноту подводной части корпуса яхты относитель-
относительно ее обмерной длины; EPF — поправка на стационарный двигатель и гребной винт,
определяется в зависимости от массы двигателя, его места от миделя, диаметра винта
и типа его установки; CGF — поправка на остойчивость яхты, определяемая по опыту
ее кренования; MAF — поправка на подвижные подводные части, которые придают
килю несимметричный профиль; SMF — поправка на материал рангоута; LRP — штраф
за низкое расположение оснастки, который учитывается, если какая-либо снасть стоя-
стоячего такелажа крепится на мачте ниже, чем на 1/4 высоты, измеренной от уровня борта
Та бп ица
Класс
яхты
Минитонник
1/4-тонник
Полутонник
3/4-тонник
Однотонник
Двухтонник
2. 1. Ориентировочные размерения крейсерско-гоночных яхт тонных классов
Гоночный балл IOR
футы
16,5
18
21,7
24,5
27,5
32
м
5,03
5,5
6,6
7,47
8,38
9,75
Наи-
Наибольшая
длина, м
6,5
7,6
9,2
10,4
11,4
12,8
Длина
по
КВЛ.м
5
5,8
6,9
7,8
8,7
10,2
Ширина,
м
2,3
2,6
2,9
3,2
3,5
3,8
Водоизме-
Водоизмещение, т
1,2
1,8
3,3
4,8
6,8
9,5
Площадь
парус-
парусности, м2
18
24
35
45
58
73
41
до блока фала генуэзского стакселя; CBF — фактор шверта (для килевых яхт —
единица).
Величина гоночного балла получается близкой к длине яхты по ватерлинии и яв-
является основанием для разбивки яхт на классы по IOR.
В связи со сложностью проведения гандикапных гонок имеется тенденция преиму-
преимущественного строительства яхт с фиксированной величиной гоночного балла — так на-
называемых тонников (табл. 2.1).
В СССР получили распространение яхты мини-, четверть-, полу-, и однотонного
классов.
Комитет по физической культуре и спорту при СМ СССР каждые пять лет ут-
утверждает Правила классификации, постройки и обмера спортивных яхт, принятых
в СССР. Они состоят из трех частей:
I. Общие правила классификации, постройки и обмера.
П. Частные правила для гоночных яхт международных классов.
III. Международные правила и инструкции по обмеру крейсерско-гоночных яхт
по формуле IOR.
2.1. Яхты
По расположению и способу крепления киля яхты делятся на три группы: с одним
килем, закрепленным в ДП; с двумя скуловыми килями; компромиссы, у которых
нижняя часть киля подъемная.
Однокилевые яхты (табл. 2.1—2.5). Эти яхты получили наибольшее распро-
распространение. К ним относятся все гоночные и крейсерско-гоночные суда.
Масса балластного киля однокилевой яхты составляет 25—45 % водоизмещения
судна. При длинной килевой линии для обеспечения эффективного противодействия
дрейфу площадь погруженной части ДП составляет 1/5 площади парусности, при плавни-
плавниковом киле — 1/12.
„Револьвер" (рис. 2.1) — яхта, спроектированная И. Сиденко в рамках требований
минитонного класса (табл. 2.2). Помимо гоночного балла E,03 м), этими требования-
требованиями оговариваются: максимальная ширина — 2,5 м, минимальная масса с оборудованием
и парусами, но без подвесного мотора, запасов и снабжения — 800 кг; масса балласт-
балластного киля - в пределах 30-40 % водоизмещения; поправка на остойчивость CGF =
=0,98; минимум комфорта — две постоянные койки длиной 1,9 м и шириной
0,55 м в голове и 0,35 м в ногах, высота от пайолов до бимсов 1,25 м при длине про-
прохода 1,2 м и ширине 035 м, высота над диванами 0,9 м при длине сиденья 1,2 м и шири-
ширине 0,4 м, наличие камбуза — газовой плиты на карданном подвесе.
Корпус яхты формуется в матрице, сначала один борт, потом другой. Соединение
по ДП усилено приформовкой полос стеклоткани. Секции борта и палубы и соответ-
соответственно бимсы и шпангоуты соединены на винтах. Плавник прикреплен к днищу на
шпильках. Чтобы выдержать массу корпуса в пределах 300—320 кг, толщина стекло-
пластиковой обшивки принята минимальной для судов таких размерений — 4 мм для
бортов, днища и палубы и 3—3,5 мм для рубки.
Парусное вооружение сконструировано на базе гоночной яхты „Солинг". Для
рангоута применен цельнотянутый алюминиевый профиль. Обводы яхты выбраны из
расчета на участие в гонках прежде всего при слабом и умеренном ветрах. Лучшие
ходовые качества она имеет при скорости ветра 7 м/с, однако и в более свежий (до
14 м/с) ветер яхта достаточно конкурентоспособна. Лавировочный угол около 70 .
На ночлег в рубке могут разместиться 3 чел. (третья койка образуется путем закла-
закладывания прохода между диванами).
,^Сонрад-24" (,Дюфур-24") - яхты (рис. 2.2), строящиеся по лицензии француз-
французской фирмы „Дюфур" на верфи им. Конрада-Коженевского в ПНР. По раэмерениям
яхта соответствует судам 1/4-тонного класса (табл. 2.3). Все в ее конструкции подчи-
42
Таблица 2,2. Характеристики яхт
минитонного класса
Характеристика
Длина наиболь-
наибольшая/по КВЛ, м
Ширина наиболь-
наибольшая, м
Осадка, м
Водоизмещение, т
Масса балласта, т •
Площадь парусно-
парусности, м*
„Револь-
„Револьвер"
(Ленин-
(Ленинградская
верфь)
6,43/5,23
2,47
1,43
0,9
0,4
25
„Соната-7"
(Англия)
6,9/5,5
2,5
1,4
1,115
0,44
24,1
„Боут"
(Англия)
6,74/5,5
2,78
1,38
0,95
0,318
20,5
Рис. 2.1. Яхта-минитонник
„Револьвер"
нено главной цели — успешному выступлению в морских гонках. Пластмассовый кор-
корпус предельно облегчен. Для обеспечения прочности и жесткости корпуса использова-
использованы детали внутреннего оборудования — продольные стенки рундуков, выгородки
шкафов и др. Обшивка подкреплена стрингерами, отформованными из стеклопластика
на пенопластовом заполнителе. Чугунный фальшкиль крепится к стальным флорам,
заформованным в обшивку днища. Палуба выполнена трехслойной с заполнителем
из гофрированного пластика.
43
Рис. 2.2. Яхта 1/4-тонного класса
„Конрад-24" („Дюфур-24")
Таблица 2.3. Характеристики яхт
четвертьтонного класса
•LJJ
Характеристика
Длина наиболь-
наибольшая/по КВЛ, м
Ширина наиболь-
наибольшая, м
Осадка, м
Водоизмещение, т
Масса балласта, т
Площадь парусно-
парусности, м2
„Конрад-
24"
(ПНР)
7,26/5,5
2,64
1,5
1,3
0,57
25,3
1/4-тон-
иик (Тал-
(Таллинская
верфь)
7,5/6
2,5
1,2
1,77
0,88
27
„Фес1^
22"
(Фран-
(Франция)
6,58/5,8
2,5
1,Н
1,79
0,43
26,05
Яхта не рассчитана на длительные крейсерские плавания, поэтому оборудования
на ней немного. Рубка образована небольшой выпуклостью палубы, позволяющей
получить предписываемую правилами высоту в каюте — 1,32 м. Вентиляционные устрой-
устройства и иллюминаторы не предусмотрены. Имеются четыре койки и портативный камбуз.
Достаточно большой объем имеет ахтерпик, в котором хранятся запасные паруса и шки-
шкиперское имущество.
Обводы корпуса с укороченным носовым свесом и сравнительно плоским в корме
днищем обеспечивают яхте хорошие ходовые качества в широком диапазоне силы вет-
ветра, чему способствует и оснащение высокоэффективным набором передних парусов.
Благодаря установке киля большого удлинения яхта идет чрезвычайно круто к ветру.
Рангоут изготовлен из алюминиевого профиля. Все фалы проведены внутри мачты.
Стоячий такелаж выполнен из нержавеющей стали. Работу со шкотами облегчают двух-
Та б л и ца ,2.4. Характеристика яхт
полутонного класса
Характеристика
Длина наиболь-
наибольшая/по КВЛ, м
Ширина наиболь-
наибольшая/по КВЛ, м
Осадка, м
Водоизмещение, т
Масса балласта, т
Площадь парусно-
парусности, м2
„Фест-
30"
(Фран-
(Франция)
9,26/7,62
3,23/2,58
1,79
3,86
1,237
37,52
„Картер-
30"
(ПНР)
9,07/-
3,08/-
1,52
3,32
_
34
СТ-31
(Ленин-
(Ленинградская
верфь)
8,88/-
3,1/-
1,7
2,55
_
51
Рис. 2.3. Полутонник „Фест-30"
44
скоростные лебедки. Предусмотрены также лебедки для фалов грота и стакселя, сна-
снастей бегучего такелажа спинакера.
В свежий ветер и на попутной волне яхта легко выходит на режим серфинга, раз-
развивая под спинакером скорость более 10 уз. Полную парусность яхта способна нести
при ветре до 6 баллов.
„Фест-30" (рис. 2.3) - яхта-полутонник постройки французской верфи „Бенето".
По ходовым качествам одно-из лучших в мире судов этого класса (табл. 2.4). Для
обводов корпуса характерны плоское днище в корме, позволяющее выходить на режим
серфинга при попутных ветрах, большое заострение ватерлиний в носу и предельно
большая для яхт подобных размерений ширина. Профилированный плавниковый киль
и балансирный руль позволяют вести яхту очень круто к ветру (до 25°).
Мачта по бортам раскреплена всего одной парой вант, крепление которых сдвину-
сдвинуто к ДП — вант-путенсы прикреплены к комингсу рубки и далее к поперечной пере-
переборке. С некоторым ущербом для надежности такая проводка позволяет с помощью
устройства для натяжения ахтерштага в широких пределах регулировать профиль
грота и центровку яхты, а также нести генуэзский стаксель на самых крутых курсах.,
В планировке „Фест-30" отражены современные требования к комфортабельности
яхт, рассчитанных на длительные плавания. Это прежде всего нашло отражение в обору-
Га блица 2.5. Характеристики ихт однотонного класса
Характеристика
Длина наибольшая/по КВЛ,
м
Ширина наибольшая/по
КВЛ, м
Осадка, м
Водоизмещение, т
Масса балласта, т
Площадь парусности, м*
„Балтик-37"
(Финляндия)
11,3/8,8
3,66/3,12
2,06
6,155
2,775
59,2
Однотонник
(Таллинская
верфь)
11/8
3/2.6
1,8
6,25
2,8
41,9
„Форвард"
(Ленинград-
(Ленинградская верфь)
11,02/9,2
3,68/2,8
1,96
5,9
1.7
64,22
„Жуэ-37"
(Франция)
10,96/9,15
3,85/3,06
1,97
7,02
3
60,82
довании двух изолированных кают — носовой
и кормовой, в каждой из которых имеется
по двуспальной койке. Просторная кают-
компания в средней части корпуса исполь-
используется в качестве обеденного салона и места
кратковременного отдыха; при необходимо-
необходимости на ее диванах могут быть устроены еще
два спальных места. В пространстве между
кают-компанией и носовой каютой разме-
размещен туалет с умывальником. В кормовой
каюте по правому борту оборудован камбуз.
Корпус яхты отформован из стекло-
стеклопластика, как и отдельные блоки его насы-
насыщения. Применение предварительно изготов-
изготовленных деталей оборудования является шагом
вперед в организации серийно-поточной по-
постройки яхт.
„Балтик-37" (рис. 2.4) — яхтаоднотон-
ник (табл. 2.5) постройки финляндской
верфи „Баптик Ётс". По ходовым качествам,
Рис. 2.4. Однотонник „Балтик-37"
45
мореходности и оборудованию пригодна как для гонок, так и для крейсерских похо-
походов с неограниченным районом плавания. Для обводов корпуса характерны глубоко
опущенный острый форштевень, достаточно полные кормовые образования. Это обес-
обеспечивает судну хорошую устойчивость на курсе, мягкий без ударов ход на волне. Вы-
Высокие с развалом борта позволяют держать палубу сухой при предельно допустимых
углах крена. Увеличивающаяся при этом остойчивость формы в сочетании с большой
массой балластного фальшкиля D5 % водоизмещения) дают возможность нести полную
парусность в свежий ветер. При попутном ветре силой 5 баллов и более яхта выходит
на режим серфинга, развивая скорость до 16 уэ. Наиболее высокие ходовые качества
яхта проявляет, однако, в слабый ветер, когда волна плавно без завихрений обтекает
корпуса. Киль-плавник большого удлинения и высокоэффективное парусное воору-
вооружение с системой регулировки профиля грота и положения центрального паруса поз-
позволяют устойчиво держать курс под углом 25—30" к ветру.
Рангоут выполнен из легкого сплава. Для основных вант использованы цельно-
цельнотянутые струны из нержавеющей стали. Все фалы проведены внутри мачты. Основная
часть бегучего такелажа выведена через блоки в кокпит, перед которым на крыше
рубки установлена система стопоров. Низкая, незначительно выступающая над палубой
рубка не создает помех в работе с парусами. Благодаря большой высоте бортов высота
каюты позволяет стоять во весь рост.
В корме оборудована комфортабельная изолированная каюта с двуспальной кой-
койкой, креслом и шкафом. В центральной каюте размещены стол и четыре спальных
места — два на диванах и два подвесных. Еще два спальных места предусмотрены в фор*-
пиковой каюте. В районе миделя по правому борту оборудовано место штурмана,
куда выведены показания всех приборов (лага, эхолота, указателей курса, силы и на-
направления ветра и др.). По левому борту напротив штурманского стола размещен
камбуз. В пространстве между центральной и носовой каютами по правому борту вы-
выгорожен туалет с умывальником и душем, в ДП над двигателем — место для штор-
штормовой одежды, по левому борту -•- шкаф для одежды и продуктовая кладовая.
Корпус яхты имеет сандвичевую конструкцию из стеклопластиковых оболочек
с заполнителем из поперечных срезов бальсового дерева.
Яхты-компромиссы и яхты со скуловыми килями
(табл. 2.6). Компромиссы, а также яхты со скуловыми килями представляют проме-
промежуточную группу между однокилевыми яхтами и швертботами и культивируются
преимущественно в странах, расположенных у открытых морей и океанов. Перемен-
Переменные глубины в районах с приливно-отливными течениями,' высокая балльность ветра
и волнения предопределяют необходимость иметь здесь суда с ограниченной осадкой
и достаточно высокими мореходными качествами. Кроме того, двухскуловые яхты
можно поставить на грунт при отливах для проведения мелкого ремонта, очистки
Таблица 2.6. Характеристики яхты-компромисс и яхт с двумя килями
Характеристика
Длина наибольшая/по КВЛ,
м
Ширина наибольшая/по
КВЛ, м
Осадка корпусом/швертом,
м
Водоизмещение, т
Масса балласта, т
Площадь парусности, м2
„Ассоль" (СССР)
компромисс
5,53/4,49
1,96/1,64
0,6/1,2
0,63
0,15
13,66
с бульбокилем
5,53/4,9
1,96/1,64
0,85
0,63
0,16
13,66
„Этап-23"
(Бельгия)
6,85/6,22
2,45/2,15
0,8/1,55
1,925
0,47
22,2
„Идиллия-83"
(Франция)
8,42/7,1
3/2,68
1,12
2,935
1,16
32
46
корпуса и т. п. Суда названных
типов находят также примене-
применение в мелководных районах,
когда требуется обеспечить бо-
более высокую, чем у шверт-
швертботов, остойчивость.
.Ассоль" (рис. 2.5) —яхта-
компромисс, предназначенная
для туристических плаваний
и прогулок. Серийно строится
по проекту ЦКБ „Нептун".
Судно имеет круглоскулые об-
обводы, удлиненную надстрой-
надстройку — бак, самоотливной кок-
кокпит. Яхту собирают из отдель-
отдельно сформованных секций кор-
корпуса (толщина обшивки
4,5 мм) и палубы с рубкой
(толщина обшивки 3,2 мм).
На бортах для повышения жест-
жесткости обшивки сделаны зиги.
Сквозь стальной фальшкиль
массой 150 кг проходит сектор
металлического шверта. Руль
с подъемным пером подвешен
на транце. Для установки под-
подвесного мотора на транце
предусмотрен кронштейн, поз-
позволяющий поднимать мотор
над водой при ходе под пару-
парусами. Водонепроницаемыми
переборками выделены ахтер-
пик и форпик, используемые
первый для хранения подвес-
подвесного мотора, второй - иму-
имущества. Каюта отделена от кок-
кокпита переборкой. Поверх фло-
ров укладывают щиты с мата-
матами, служащие спальными местами для 2 чел. Пиллерс, поддерживающий крышу рубки
в месте установки мачты, служит одновременно опорой дли откидного стола. Под
сиденьями в кокпите устроены рундуки.
Яхта вооружена бермудским шлюпом с небольшим стакселем и гротом, обору-
оборудованным патент-рифом. Мачта из легкого сплава установлена шарнирно в степсе на
крыше рубки.
Непотопляемость яхты кроме двух герметичных отсеков обеспечивается за счет
пенопласта, который заполняет носовую часть корпуса ниже ватерлинии, а также при-
применен в качестве заполнителя элементов набора и палубы. Яхта остаётся на плаву
и на ровном киле, сохраняя остойчивость, при полном затоплении каюты. Допускает-
Допускается плавание при ветре до 4—5 баллов. Скорость с 12-сильным подвесным мо-
мотором 12 км/ч.
Более высокие ходовые качества и остойчивость имеет килевой вариант „Ассоли".
„Этап-23" (рис. 2.6) — яхта бельгийской постройки. Имеет стеклопластиковый
корпус, обводы, рассчитанные на достижение режима серфинга при попутных ветрах, —
Рис. 2.5- Компромисс „Ассоль"
47
Рис. 2.6. Яхта с подъемным
бульбокилем „Этап-23"
Рис. 2.7. Двухкилевая яхта
„Идиллия-83"
широкую плоскую корму и транец, опущенный ниже ватерлинии. В то же время благо-
благодаря значительной ширине и применению балластного подъемного бульбкиля, масса
которого составляет около 25 % водоизмещения, ее остойчивость позволяет с основ-
основными парусами в галфвинд выдерживать ветер до 6 баллов.
Яхта предназначена для не слишком продолжительных плаваний в прибрежных
районах морей. Планировка — типичная для судов подобных размерений: спальные
места — два в носовой каюте и два в кают-компании — имеют нормальную длину за
счет частичного использования пространства под банками кокпита. Предусмотрены
просторный камбуз, отделенный от основного помещения стенкой колодца выдвижно-
выдвижного киля, прокачной гальюн. Вместе с тем яхта не располагает достаточными объемами
для хранения запасов воды и продуктов для многодневного плавания. Значительные
пространства в носу и в корме заполнены пенопластом, обеспечивающим судну не-
непотопляемость.
„Идиллия-83" (рис. 2.7) - двухкилевая яхта, построенная на французской верфи
„Бенето", -представляет собой типичное судно для отдыха, не слишком быстроходное,
но надежное и комфортабельное. Обводы корпуса умеренной ширины с вертикаль-
вертикальными бортами близки к классическим. Лучшие ходовые качества яхта имеет при ходе
с креном, когда один из скуловых килей принимает положение, близкое к вертикаль-
вертикальному. При посадке на ровный киль в слабый ветер из-за увеличенной смоченной по-
поверхности „Идиллия-83" заметно уступает в скорости сопоставимым килевым яхтам
и швертботам.
Большой протяженности и высоты рубка предоставляет хорошие возможности
для удобной планировки. Спальные места в форпике, каюте и „гробу" рассчитаны
на 5 чел. Просторная каюта с камбузом по правому борту оборудована газовой плитой,
мойкой, холодильным шкафом и столиком с диваном — по левому. Кормовая часть
рубки по правому борту занята туалетом с умывальником и платяным шкафом.
25-сильный дизель компенсирует слабый ход яхты в штилевую погоду и дает осно-
основание отнести ее к парусно-моторным судам.
2.2. Швертботы
По конструкции и назначению суда этого типа разделяются на гоночные, крейсер-
крейсерские и прогулочные. Большинство гоночных швертботов относится к классам моно-
монотипов. Крейсерские швертботы (табл. 2.7) представляют собой суда, рассчитанные
на длительное плавание, и по уровню комфорта мало уступают сопоставимым по раз-
мерениям килевым яхтам. Прогулочные швертботы имеют открытый или запалублен-
ный в носу корпус без рубки. По массе и размерениям они относятся к судам, пригод-
пригодным для транспортировки за автомобилем или даже на его крышевом багажнике.
Таблица 2.7. Характеристики швертботов
Характеристика
Длина наибольшая/по К6Л, м
Ширина наибольшая/по КВЛ, м
Осадка корпусом/швертом, м
Высота борта, м:
в носу
на миделе
. в корме
Водоизмещение, т
Площадь парусности, м2
Т-69
7/6
2,4/2
0,25/1,5
0,83
0,71
0,6
1,07
—
„Скат"
6,995/6
2,7/1,95
0,25/1,35
0,82
0,7
0,6
0,885
20
„Мирор-динги"
3,3/2,7
•1,4/-
0,2/1
-
—
—
0,6
6,1
49
В зависимости от размерений швертботы имеют различную мореходность, но в це-
целом район плавания судов этого типа ограничивается внутренними акваториями с вы-
выходом в прибрежные районы морей.
По конструкции швертового устройства различают швертботы с кинжальными —
втыкающимися швертами и со швертами поворотно-откидными. Первые проще по
конструкции, но менее надежны, удар о мель может привести к повреждению не только
шверта, но и корпуса судна. Вращающиеся шверты с этой точки зрения более безопас-
безопасны, но сложнее по конструкции и занимают больше свободного объема в корпусе,
поэтому их применяют в основном на крейсерских швертботах, где швертовый коло-
колодец удается встроить в дехали оборудования.
Средняя площадь шверта обычно принимается равной 1/25 площади парусности S.
Площадь профилированных швертов может быть уменьшена до 1/40 S, а секторных
Рис. 2.8. Швертбот класса Т
„Скат"
50
из металлического листа, наоборот, должна быть увеличена до 1/20 S. Масса шверта
не оказывает заметного влияния на остойчивость судна, поэтому при выборе материа-
материала принимается во внимание прежде всего обеспечение прочности самого Шверта. Швер-
ты делают из стали, легких сплавов и дерева. Применять вместо обычного шверта тяже-
тяжелый подъемный киль имеет смысл, если только его масса составляет более 25 % водо-
водоизмещения.
Крейсерские швертботы класса Т строят на Ленинградской экспе-
экспериментальной судоверфи с 1963 г. По размерениям и оборудованию они отвечают тре-
требованиям, предъявляемым к судам, рассчитанным на длительные походы. Опыт эксплу-
эксплуатации швертботов показал, что они обладают мореходностью, которая при квалифи-
квалифицированном управлении позволяет совершать плавания по таким сложным аквато-
акваториям, как Финский залив и Ладожское озеро. Модификации швертбота позволили
отработать технологию постройки судов с кругло- и остроскулыми обводами с приме-
применением реечной и фанерной обшивки.
„Скат" (рис. 2.8) - пдтый по счету вариант швертбота, построен в 1984 г. При
сохранении размерен™ предыдущих значительно отличается от них обводами и плани-
планировкой. Трапецеидальная форма поперечных сечений с двумя скулами позволила в пол-
полной мере использовать увеличенный развал бортов для повышения остойчивости. Кон-
Конструкция в то же время технологична не только в условиях верфи, но и при любитель-
любительской постройке. Статическая остойчивость дополнительно увеличивается балластом
из металлических пластин, закрепленных внутри корпуса у киля между шпангоутами.
Обшивка из водостойкой фанеры подкреплена продольным набором из сосновых
реек, которые опираются на восемь поперечных рам, являющихся элементами внут-
внутреннего оборудования. Продольным набором служат также киль и усиленные стрингеры
по линии скул. Кокпит сделан самоотливным.
Рациональная планировка помещений (в частности, использование пространства
под банками кокпита) позволила оборудовать на швертботе пять постоянных спаль-
спальных мест: одно двуспальное в форпике и три — двуспальное и односпальное — в каюте.
Высвобождению полезных объемов способствует смещение большей части швертового
колодца под кокпит.
Швертбот оснащен шлюпом с топовым вооружением, обслуживаемым малочислен-
малочисленным экипажем в длительном плавании. Предусмотрено устройство для закрутки стак-
стакселя вокруг штага.
Vac. 2.9. Швертбот „Мирор-динги"
51
„Мирор-динги" (рис. 2.9) - швертбот, благодаря большой ширине и притуплённым
носовым образованиям с форшпигелем отличающийся хорошей остойчивостью и вме-
вместительностью, что позволяет использовать его для семейных прогулок. Высоко под-
поднятая в носу скула и увеличенная по сравнению с судами таких обводов килеватость
обеспечивают швертботу хорошую всхожесть на волну. Кроме паруса он легко идет
на веслах и с подвесным мотором мощностью до 2 кВт C л. с.).
Особый интерес представляет технология постройки швертбота. Обшивка корпуса
собирается из вырезанных в размер заготовок бортов, днища и транцев, которые соеди-
соединяются проволочными скрепками с последующим проклеиванием по стыкам полоска-
полосками стеклоткани. В готовую скорлупу вставляют две поперечных переборки и переборки
бортовых воздушных ящиков, которые также по стыкам проклеиваются лентами
стеклоткани.
Парусное вооружение — шшоп-гуари с гафелем, почти параллельным мачте. Такая
конструкция удобна для перевозки автомашиной — уложенная в корпус мачта лишь
немного выступает за транец.
23. Многокорпусные суда
Три типа парусников, объединенных в эту группу,'различаются количеством кор-
корпусов, соотношением размерений и вытекающими из этих особенностей способами экс-
эксплуатации. Наибольшее распространение получили катамараны — суда с двумя соединен-
соединенными поперечными связями, идентичными по размерениям и обводам корпусами,
и тримараны, состоящие из главного корпуса и двух боковых поплавков — аутригеров.
Менее известны проа — суда с аутригером, который постоянно располагается либо с на-
наветренной стороны главного корпуса, либо с подветренной. Проа с наветренным поплав-
поплавком называются тихоокеанскими или летучими проа. Аутригер у них играет роль про-
противовеса, обеспечивающего открениванне судна в свежий ветер. При установке аутри-
аутригера с подветренной стороны главного корпуса восстанавливающий момент создается
за счет сил поддержания, возникающих при погружении поплавка в воду.
Проа этого типа получили название атлантических.
Многокорпусные парусники всех трех типов находят применение как в качестве
спортивных.судов, так и для прогулок и дальних плаваний, хотя для каждого из них
имеются предпочтительные области использования.
Многокорпусные парусные суда Малых и средних размеров нередко делают раз-
разборными, что облегчает их транспортировку. Любителями разработаны конструкции
катамаранов и тримаранов на базе байдарок и с надувными корпусами. Подробнее об
этих судах рассказано на с. 72.
Катамараны (табл. 2.8). Меньшая, чем у тримаранов масса,и лучшая по
сравнению с проа маневренность обеспечили катамаранам неоспоримое преимущество
Таблица 2.8.
характеристики катамаранов
Характеристика
Длина наибольшая/по КВЛ,
м
Ширина общая, м
Ширина корпуса по КВЛ, м
Осадка корпусом/швертом,
м
Водоизмещение, т
Площадь парусности, м3
„Хевкэт"
(Дания)
5,4/5
3,4 ¦"
0,58
0,25/1
0,8
22
„Гауя"
8,5/-
5,6
0,7
0.6
2,5
36
„Лебедь"
15,2/12,5
6,0
0,78
0,62
5.7
106
„Капитан
Виллис"
11/9,05
4,3
0,56
0,49
2,2
54,4
52
на олимпийской гоночной дистанции. Как крейсерские суда они уступают тримаранам
по уровню обитаемости.
„Хевкэт-18" (рис. 2.10) — это судно в ряду однотипных катамаранов, спроекти-
спроектированных датчанином Л. Аудропом. Имеет наименьшие размеренна, однако при длине
корпусов 5,4 м на нем предусмотрено оборудование, необходимое для достаточно про-
продолжительных плаваний экипажу из 2—3 чел. (в семейном варианте — двое взрослых
и двое детей). Мореходные качества позволяют эксплуатировать катамаран на внутрен-
внутренних акваториях. На среднем мостике оборудованы спальное место шириной 1,62 ивы-
сотой 0,8 м, камбуз с газовой плиткой и мойкой, доступ к которым открыт из правого
корпуса. В правом корпусе расположен обеденный уголок с откидным столиком и тре-
тремя сиденьями, однако ограниченные размеры помещения шириной всего 0,75 м дают
основание считать, что используется оно только в ненастную погоду. В кормовой части
левого корпуса находится полноразмерное спальное место. В нос от него размещен
туалет с умывальником, а в форпике еще одно спальное место, пригодное по размерам
для детей.
Обтекаемой формы надстройка не создает значительного аэродинамического со-
сопротивления, однако малый вертикальный клиренс — просвет между днищем мостика
и поверхностью воды — не уберегает от замывания и ударов волн в обшивку. Корпуса,
отформованы из стеклопластика. Носовой балкой служит трубчатый обтекаемого се-
сечения профиль, остальные поперечные связи изготовлены из фанеры и оклеены стекло-
стеклопластиком.
На катамаране установлено эффективное парусное вооружение, аналогичное приме-
применяемому на катамаране олимпийского класса „Торнадо". Сила бокового сопротивле-
сопротивления создается швертами, установленными в колодцах у наружных бортрв обоих кор-
4
Рис. 2.10. Катамаран „Хевкэт-18"
Рис. 2.11. Катамаран „Гауя"
53
Рис. 2.12. Катамаран М пусов. При ветре 5 баллов и не
„Лебедь" I/ \ \ слишком сильном волнении
„Хевкэт-18" способен разви-
развивать скорость до 10 уз.
„Гауя" (рис. 2.11) — ката-
катамаран, строящийся небольшой
серией на верфи рыболовец-
рыболовецкого колхоза „Царникава" по
проекту А. Эглайса. Впервые на
судах подобного типа на нем
для обеспечения поперечной
связи корпусов использована
расчалка из четырех штагов и
вант. Впоследствии аналогичная
конструкция была применена
на катамаранах более крупных
размерений — „Вента" и ,Ден-
таурус", построенных на той
же верфи. Такое решение поз-
позволило разгрузить поперечный
мост, оставив только две лег-
легкие балки в оконечностях и
подмачтовую балку, выполнен-
выполненную в виде пространственной
фермы из деревянного бруса
и стальных прутков. Палуба
моста полностью открыта, в ее
кормовую часть выведены хо-
ходовые концы снастей и ру-
рулевое управление. Поперечная
балка для крепления стаксель-шкотов и лебедки делит мостик на два кокпита. За пре-
пределами мостика натянута капроновая сетка.
Дня жилых помещений использованы корпуса, в которых оборудованы четыре
двухместные каюты (на модернизированной „Гауе-2" носовые каюты одноместные).
Предусмотрены штурманское оборудование,, необходимое для дальних морских плава-
плаваний, камбуз, туалет.
Дня упрощения конструкции судна и уменьшения его массы не предусмотрена
установка швертов. Поперечная сила создается погруженной частью корпусов и рулями
большого удлинения. Клиновидным корпусам с этой целью придана асимметричная
в плане форма.
„Лебедь" (рис. 2.12) - катамаран, проект которого разработан В. И. Лапиным.
Реализован в уменьшенном варианте под названием „Капитан Виллис" с заменой кон-
конструкций из легких сплавов фанерно-деревянными. Судно имеет неограниченный район
плавания при экипаже 6 чел. Конструкция выполнена по классической для судов этого
типа схеме. Корпуса большого удлинения соединены силовыми поперечными связями,
состоящими из коробчатых балок и переборок моста и балки обтекаемого профиля
в носу. Основные помещения расположены в рубке на мосту. В носовой части оборудо-
оборудованы две двухместные каюты, в средней — салон с диванами, столом и двумя одно-
односпальными койками по бортам, в корме — по левому борту расположен штурманский
стол, по правому — камбуз с доступом из правого корпуса. По одной одноместной
каюте предусмотрено в средней части правого и левого корпусов; Остальное простран-
пространство в них использовано для размещения парусов, снаряжения, припасов.
54
Таблица 2.9. Основные характеристики тримаранов и проа
Характеристика
Длина корпуса наиболь-
наибольшая/по КВЛ, м
Длина поплавка наиболь-
наибольшая, м
Ширина тримарана, м
Осадка корпусом/швер-
том, м
Водоизмещение, т
Площадь парусности, м1
„Супернови"
4,55/4,15
3,25
3,2
0,12/-
0,14
7-12
„Тритон"
7,15/6,5
5,58
4,2
0,5/-
0,98
24
„Байда"
12/11
10,4
7,5
0,9/1,6
5
84
Проа „Мечта"
11/10,2
11
5,7
0,65
3,2
40
Узкие, крыловидные в плане корпуса с плоским внешним и вьшуклым внутренним
бортами создают поперечную, силу, обеспечивающую без применения швертов лави-
ровку под углом до 35' к ветру. Эффективное парусное вооружение типа бермудский
шлюп дает возможность катамарану в свежий ветер достигать расчетной скорости
20 уз (на „Капитане Виллисе" была зарегистрирована скорость 17 уз).
Тримараны и проа (табл. 2.9). Большой объем среднего корпуса тримара-
тримарана дает возможность оборудовать здесь комфортабельные жилые помещения. Благода-
Благодаря этому наибольшее распространение получили крейсерские и крейсерско-гоночные
суда этого типа. '
Проа строятся в основном для достижения рекордных, скоростей на специальных
дистанциях. Известны единичные конструкции проа, на которых совершались даль-
дальние плавания, в том числе и трансокеанские.
Рис. 2.13. Тримаран „Суперновн"
Рис. 2.14. Тримаран „Тритон"
55
„Супернови" (рис. 2.13) — тримаран, спроектированный датским конструктором
П. Нильсеном. Предназначен для прогулок на внутренних водоемах, обладает хоро-
хорошими спортивными качествами и может использоваться для тренировок и обучения
парусному спорту детей. Конструкция судна предельно упрощена. Швертовое устрой-
устройство не предусмотрено. Пластмассовые корпус и поплавки соединены двумя труб-
трубчатыми балками на быстроразъемных креплениях. В разобранном виде тримаран может
перевозиться на крышевом багажнике автомобиля.
Парусное вооружение с гротом большого удлинения, имеющим свободную нижнюю
шкаторину и сквозные латы, позволяет ходить круто к ветру и развивать высокую
скорость. При размещении экипажа на наветренном поплавке тримаран откренивается
даже в свежий ветер.
„Тритон" (рис. 2.14) — судно построено по проекту В. И. Лапина рядом любителей,
которые применяли различные виды парусного вооружения, включая чисто стаксель-
стаксельное. Тримаран предназначен для прогулок и туристических плаваний на внутренних
акваториях и в прибрежных районах морей. Поперечная сила сопротивления дрейфу
обеспечивается поплавками, несимметричными в плане профиля. Поплавки,установле-
Поплавки,установлены наклонно относительно среднего корпуса с таким расчетом, чтобы при крене 15°
они принимали вертикальное положение. Для постройки применяют фанеру и сосновые
бруски. Основными поперечными связями корпуса и поплавков служат балки-перебор-
балки-переборки, установленные на 3-м и 5-м шп.
На тримаране можно разместить все необходимое для экипажа из 3-4 чел. Спаль-
Спальные места оборудованы на крыльях мостика, в форпике и в каюте. По левому борту
каюты размещены камбуз и обеденный стол, шкафы для продуктов и посуды. Дня
хранения снаряжения используются ахтерпик, пространство под кокпитом, а также от-
отсеки в крыльях мостика и поплавки.
Рис. 2.15. Тримаран „Байда"
56
Рис. 2.16. Проа „Мечта"
„Банда" (рис. 2.15) — тримаран,
спроектированный и построенный группой
киевских яхтсменов. По мореходным каче-
качествам и оборудованию он относится к
судам, предназначенным для дальних
спортивных плаваний. Дня уменьшения
смоченной поверхности среднего корпуса
его поперечным сечениям приданы ра-
радиальные обводы, образованные плоскими,
поясьями, установленными между килем и
тремя скулами с каждого борта. Такие
обводы позволили применить для обшивки
листы легкого сплава АМг. Остроскулые
поплавки большого объема обеспечивают
эффективное откренивание судна — при
полном погружении их объем составляет
более 80 % полного водоизмещения три-
тримарана. Поплавки установлены с наклоном
к среднему корпусу с таким расчетом,
чтобы при кренах эффективно использовать
J площадь их бокового сопротивления и
подъемную силу.
Дня понижения центра парусности и
возможности в широких пределах варьи-
варьировать площадь парусов на тримаране установлено двухмачтовое вооружение типа
бермудский кеч. Дня гика-шкотов грота и бизани предусмотрены радиальные погоны.
На тримаране оборудованы одноместная носовая каюта, салон с четырьмя спаль-
спальными местами и каюта капитана в ахтерпике. В кормовой части рубки размещены
по левому борту камбуз, по правому штурманский стол. В нос от салона расположены
платяные шкафы и туалет.
Все корпусные конструкции и рангоут изготовлены из листов сплава АМг-58.
Толщина обшивки двух главных поперечных балок коробчатого профиля 5 мм, кор-
корпуса и поплавков 3 мм, палубы рубки и крыльев — 2 мм.
„Мечта" (рис. 2.16) — проа атлантического типа. Судно по обводами конструкции
имеет много общего с тримараном. Объем поплавка, необходимый для обеспечения
остойчивости при ходовом крене в пределах 15-17°, получен за счет большого удли-
удлинения {LJB =20), что положительно сказывается на уменьшении волновой составляю-
составляющей сопротивления. Симметричные относительно миделя обводы корпуса и поплавка
благодаря подъему в оконечностях уменьшают заливание при встрече с волной.
Проа рассчитано на долговременное плавание в открытом море с экипажем 2—3 чел.
при минимальном уровне комфорта. Спальные места (две койки) размещены на крыле
мостика. В средней части корпуса имеются два одноместных кокпита, из которых
осуществляется управление судном и парусами. Поворотная мачта и дугообразный
погон гика-шкота позволяют быстро переносить гик с одной оконечности на другую,
когда при смене галса проа разворачивается на 180°. Кроме грота предусмотрены
стаксель и кливер, поднимаемые на штагах.
3. ГРЕБНЫЕ ЛОДКИ
Гребные лодки (табл. 3.1) в силу своей тихоходности используются главным обра-
образом для прогулок и рыбной ловли. Стремление расширить область их применения
привело к тому, что почти все серийно выпускаемые суда этого типа одновременно
Характеристика
Длина наиболь-
наибольшая, м
Ширина наиболь-
наибольшая, м
Высота борта на
миделе, м
Масса, кг
Вместимость,
чел.
Т а б л и ц а 3.
,Джек
шпрот"
2,3
1,34
0,4
20
2
„Ерш"
2,66
1,24
0,44
40
2
„Язь"
3,14
1,42
0,47
46
3
1. Характеристики гребных лодок
ШПШ-ЗМ
3,98
1,16
0,49
80
3
„Фо-
„Форель"
3,78
1,25
0,47
80
4
„Пелла"
1971 г.
4,1
1,4
0,5
89
4
1978 г.
4,1
1,46
0,5
100
4
„Тай-
„Таймыр"
4,5
1,06
0,33
47
3
Дори
5,6
1,5
0,64
—
4
Гдовка
7
2,1
0,7
_
4
рассчитаны на установку подвесного мотора малой мощности. В этом случае, как
правило, на веслах лодка „тянет" воду кормой, а под мотором из-за кормового диф-
дифферента не выходит на глиссирование.
При движении лодок длиной 6—7 м в пределах водоизмещающего режима весельно-
моторный вариант более перспективен, как зто можно видеть на примере лодок народ-
народной постройки.
,Лжек шпрот" (рис. 3.1) — лодка-тузик минимальных размеров, пользующаяся
большой популярностью в Англии. Ее применяют в основном в качестве бортовой
шлюпки на крейсерских яхтах и больших катерах, что определило как выбор разме-
рений, так и характер обводов. „Джек шпрот" (шпрот — плоскодонное судно) имеет
притуплённую с форшпигелем носовую оконечность и широкую ватерлинию. На спо-
спокойной воде в тузике могут одновременно переправляться с яхты на берег до 5 чел.
При неполной нагрузке благо-
благодаря наличию второй скулы
ватерлиния сужается и лодка
идет быстрее.
Популярности тузика спо-
способствовала разработанная ее
конструктором Д. Холтом ори-
оригинальная технология построй-
постройки лодки, которая может быть
применена как в условиях
верфи, так и любителями:
листы обшивки, раскроенные
из фанерного листа, сшивают-
сшиваются проволочными скрепками,
после чего стыки склеивают-
склеиваются стеклопластиком. Жесткость
конструкции' обеспечивается
кницами и банками-сиденьями.
Рис. 3.1. Тузик „Джек „Язь" (рис. 3.2),как ипро-
шпрот" тотип — металлическая гребная
58
Рис. 3.2. Металлическая гребная лодка „Язь"
Рис. 3.3. Шпоновая лодка „Форель"
Рис. 3.4. Стеклопластиковая лодка „Пелла"
59
V
Рис. 3.5. Каноэ „Таймыр"
лодка „Ерш", имевшая меньшие размерения, проектировался с учетом технологии
постройки малых судов из легкого сплава. Обводы" корпуса обеспечивают раз-
развертывание листов обшивки на плоскость, что позволило отказаться от слож-
сложных штампов и вытяжки. Масштабно увеличив размерения „Ерша", конструк-
конструкторы вынуждены были вместе с тем повысить и отношение LIB с 1,84 до 2,21,
чтобы улучшить ходовые качества новой лодки на веслах. Лодка доста-
достаточно остойчива при забрасывании с нее снастей человеком, стоящим в полный рост.
По габаритам и массе она не выходит за пределы, установленные для лодок, пригодных
для перевозки на крыше автомобиля. На „Язе" допускается установка подвесного
мотора мощностью до 6 кВт (8 л. с.).
Корпус лодки собран из четырех листов обшивки — двух днищевых с выштампо-
ванными гофрами и двух бортовых, а также носового и кормового отсека с транцем.
Кроме гофров и планширя прочность и жесткость корпуса обеспечивают скуловые
стрингеры Г-образного профиля. Вертикальные стенки их приклепаны к корпусу,
Рис. З.б. Морская гребная лодка-Дори
60
Рис. 3.7. Гдовка — лодка народной постройки
горизонтальные служат опорой попереч-
поперечных балок. Кормовой и носовой отсеки
используют как багажники. Непотопляе-
Непотопляемость обеспечивается блоками пено-
пенопласта, размещенными под банками.
Лодка, залитая водой, остается на плаву
и поддерживает 3 чел., держащихся
за ее борта.
„Форель" (рис. 3.3) — лодка,исполь-
лодка,используемая в качестве прогулочной на про-
прокатных станциях. Автор проекта —
конструкторы ЦКБ „Нептун" — учли
недостатки прототипа — гребной лод-
лодки ШПШ-ЗМ, не обладающей достаточ-
достаточными остойчивостью и запасом пла-
плавучести. Новая лодка более надежна.
Увеличенная ширина корпуса повысила
ее остойчивость. Пенопластовые блоки
плавучести, закрепленные под банками,
позволяют при затоплении лодки под-
поддерживать оказавшихся в воде людей. Предусмотрена установка подвесного мотора
мощностью до 6 кВт (8 л. с.) .
„Форели" присущи, однако, все недостатки весельно-моторного компромисса.
Скорость на веслах не превышает 5 км/ч, а с 8-сильным мотором — 10,5 км/ч. Только
после удифферентовки за счет смещения водотепя в нос скорость может повыситься
до 13 км/ч.
Корпус безнаборный, обшивка выклеена из березового шпона. При малой массе
такой корпус не обладает, однако, достаточной прочностью, особенно если лодку часто
выводят на галечный берег. Элементами, обеспечивающими жесткость, служат киль,
привальный брус и три банки. Мореходные качества и обитаемость лодки могут быть
повышены за счет запалублённого носового отсека.
„Пелла" (рис. 3.4) — модернизированный вариант лодки (теоретический чертеж
помещен в гл. 10), серийно выпускавшейся с 1971 по 1978 г. Конструкторы стреми-
стремились прежде всего повысить ее надежность, учитывая, что на прокатных станциях лод-
лодкой будут пользоваться люди, не имеющие необходимых навыков гребли. Увеличение
ширины лодки, снижение высоты банок позволили заметно улучшить остойчивость.
Лодка на веслах легко разгоняется до 6 км/ч и благодаря килю-плавнику и продоль-
продольным гофрам хорошо удерживается на курсе. Для повышения ходкости возможен
вариант с двумя парами весел. С 8-сильным подвесным мотором „Пелла" развивает
скорость (в зависимости от дифферента при перемещении водителя) от 9,2 до
11,2 км/ч.
Безнаборный корпус лодки выклеен из стеклопластика. Толщина обшивки 3,5 мм.
Планширь, выполненный в виде фланца, закрыт поливинилхлоридным профилем.
Жесткость обшивки обеспечивается уступами на бортах и гофрами на скулах. Попереч-
Поперечную жесткость создают четыре банки. Блоки пенопласта под банками обеспечивают
непотопляемость. На „Пелле" возможна установка подвесного паруса, а при дообору-
дооборудовании ее швертом — и другого парусного вооружения.
„Таймыр" (рис. 3.5) — каноз. Гребные лодки этого типа происходят от индей-
индейских челнов. Получили распространение в Северной Америке и во многих странах
Европы. По сравнению с байдарками каноэ при сравнимой массе имеют большую грузо-
грузоподъемность. Гребцы сидят на каноэ лицом вперед, размещаясь в оконечностях корпу-
корпуса, благодаря чему отпадает необходимость в установке руля — любые маневры легко
выполняются при помощи весел «гребков.
61
Каноэ имеют симметричные относительно миделя обводы с одинаково заострен-
заостренными носом и кормой. Днище сравнительно плоское с незначительным подъемом
к оконечностям. Борта имеют характерный завал внутрь, линия борта — ярко выражен-
выраженную седловатость.
Спроектированное ЦКБ „Нептун" каноэ „Таймыр" имеет стеклопластиковый кор-
корпус, собранный на фланцах из двух секций — собственно корпуса и палубы. Для увели-
увеличения жесткости вдоль килевой линии отформован гофр, вклеены два стрингера с за-
заполнителем в виде сосновой рейки. Толщина обшивки увеличивается от оконечностей
к миделю, где она достигает 4—5 мм.
Запас плавучести составляет не менее 30 кг и обеспечивается размещенными под
палубой по бортам лодки блоками пенополистирола. Затопленное каноэ сохраняет
остойчивость при приложении к борту груза массой до 12,5 кг.
Длина лодки выбрана с расчетом возможности перевозки ее на крышевом багаж-
багажнике автомобиля. Ширина по сравнению с зарубежными аналогами принята максималь-
максимальной, как на наиболее безопасных каноэ, предназначенных для семейных плаваний..
Грузоподъемность „Таймыра" составляет 250 кг. Гребцы размещаются на носовой
и кормовой банках, отформованных как единое целое с палубой. Для третьего пасса-
пассажира предусмотрена съемная банка. Для увеличения остойчивости все сиденья установ-
установлены ниже, чем на зарубежных лодках.
Дори (рис. 3.6) — морская гребная лодка. Этот тип лодок пользуется популяр-
популярностью у рыбаков бассейна Атлантического океана. На весельных дори совершено не-
немало дальних плаваний, в том числе и трансатлантических. Суда этого типа обычно
строят пяти типоразмеров, различающихся длиной, измеренной по днищу: 12,13,14,15,
16 футов. Дори имеют узкий, лишь слегка расширяющийся кверху транец и симмет-
симметричные относительно миделя обводы. Судно обладает исключительной устойчивостью
на курсе. На лодках самых крупных размерений устанавливают две пары весел. На
всех типоразмерах предусматривается резервная банка, чтобы гребцу можно было
выбрать наиболее удобное место.
При серийной постройке корпуса дори собирают из заранее вырезанных деталей.
Собранное в виде щита днище устанавливают так, чтобы получить требующийся про-
прогиб линии киля. На днище выставляют шпангоуты, транец и форштевень. Затем
корпус обшивают досками внакрой. Крепления выполняют железными оцинкованными
гвоздями в загиб. Для набора применяют дуб, для обшивки — сосну. В настоящее вре-
время дори строят и из стеклопластика.
Обводы дори не рассчитаны на применение механического двигателя. В отдельных
случаях на них устанавливают подвесные моторы мощностью 3—4 кВт.D—6 л. с.)ус рас-
расчетом на скорость в пределах 10 км/ч.
Гдовка (рис. 3.7) — рыбачья лодка, появившаяся впервые на берегах Чудского
озера. Получила распространение в северо-западных и северных районах страны, лодки
этого типа появились даже на Каспийском море. Гдовка достаточно мореходна, хорошо
держится на курсе. Обводы характеризуются большим развалом бортов, плоским
днищем и прямыми штевнями, что роднит ее с другими лодками народной построй-
постройки, такими как волжские великовражки или астраханские бударки.
Набор лодки — шпангоуты, штевни и киль вырезают из дуба, обшивка — сосновая
либо из бакелизированной фанеры — устанавливается вгладь или внакрой. Основное
назначение гдовки — рыбный промысел.
4. ПОРТАТИВНЫЕ ЛОДКИ
Главная характеристика судов этого типа — транспортабельность, т. е. возможность
переноски и перевозки любым видом транспорта. Вытекающие отсюда ограничения
по размерениям и массе заставляют отдавать предпочтение гребным лодкам, однако
выпускают и более крупные суда, рассчитанные на установку подвесного мотора, ко-
которые в разобранном виде помещаются в багажнике или на крыше машины.
4.1. Разборные лодки
Ио конструкции разборные лодки (табл. 4.1) можно разделить на секционные,
складные и каркасные. Секционные суда, изготовленные из фанеры, легких сплавов
или стеклопластика, обладают качествами неразборных судов аналогичных размере-
Характеристика
Длина наиболь-
наибольшая, м
Ширина наиболь-
наибольшая, м
Высота борта на
миделе, м
Масса, кг
Грузоподъем-
Грузоподъемность, кг
Пассажировме-
стимость, чел.
Та
бл и ц а- 4.
„Малютка"
1-й
1,97
0,8
0,3
20
100
1
2-й
2,41
1,11
0,4
36
180
2
3-й
2
0,84
0,38
23
100
1
1. Характеристики |
зазборных лодок
Варианты
„Романтика"
1-й
2,63
1,1
0,45
45
200
2
2-й
3,5
1,1
0,45
61
300
3
]
1-
местн
4,05
0,75
0,25
• 19
150
1
Байдарка
Таймень"
2-
местн.
5
0,85
0,27
24
250
2-3
3-
местн.
5,7
0,88
0,27
29
375
3-4
ЛР-01
3,6
1,27
0,45
35
250
2
Каноэ
5,15
1
0,385
50
410
4
Лодка
для
охотни-
ников
2,2
0,9
0,35
22
100
1
ний. Их масса и габариты, однако, существенно превышают эти характеристики у двух
других типов разборных судов. На большинстве секционных судов предусматривается
установка подвесного мотора, на веслах они идут тяжело.
У складных лодок жесткие элементы корпуса соединяются эластичными проклад-
прокладками из прорезиненной ткани.
В разобранном виде они уклады-
укладываются в плоский пакет, пригод-
пригодный для перевозки любым транс-
транспортом. Эластичные соединения,
однако, не обеспечивают кон-
конструкции достаточной жестко-
жесткости, подвержены истиранию
и быстрому старению.
Лодки каркасной конструк-
конструкции являются наиболее тради-
традиционными и опробированными
на практике разборными судами.
Особой популярностью у тури-
туристов пользуются каркасные бай- \| |/О^2Ы/ Рис. 4.1. Секционная лод-
дарки с мягкой обшивкой. Не- —'—J^s^t^""^ ка „Малютка"
63
большая масса и компактная упаковка делают их пригодными для переноски силами
экипажа, не говоря уже о возможности перевозки любым видом транспорта. Легкий
ажурный каркас и, особенно, тонкая прорезиненная оболочка, однако, легко могут быть
повреждены при ударе о подводное препятствие, поэтому при эксплуатации байдарок
требуется повышенная осторожность.
„Малютка" (рис. 4.1) — разборная секционная лодка, первый вариант которой
по своим характеристикам полностью удовлетворяет требованиям транспортабель-
транспортабельности. Она предназначена в основном для любительской рыбной ловли на озерах и ре-
реках, куда может быть доставлена в автобусе, электричке и т. п. Лодка собирается
из трех секций длиной по 0,65 м. При упаковке носовая секция вкладывается в кор-
кормовую и вместе с ней — в среднюю. Обшивка из легкого сплава АМг5 толщиной 1,5 мм
подкреплена гофрами полукруглого сечения, выштампованными на днище и бортах.
Поперечным набором служат фланцы иэ толстой полосы сплава АМг, приваренные
к торцам каждой секции. При сборке фланцы соединяются болтами с уплотнениями
из резиновых полос, укладываемых по периметру.
Лодка легко идет на веслах. Две пары уключин позволяют человеку грести, сидя
по ходу лодки лицом или спиной. Пристегнутый ремнем к днищу пенопластовый блок
служит сиденьем и одновременно обеспечивает непотопляемость залитой водой и пере-
перевернутой вверх дном лодки. Для стабилизации движения лодки средняя секция снаб-
снабжена двумя скуловыми килями.
По результатам многолетней эксплуатации „Малютки-1" были разработаны две
ее модернизации. „Малютка-2" по размерениям заметно превосходит прототип; у нее
увеличена грузоподъемность (новая лодка по паспортным данным двухместная), что
дает возможность эксплуатировать ее с подвесным мотором мощностью 1 кВт B л. с.).
Конструкция не претерпела заметных изменений, если не считать увеличенной до 2 мм
толщины транца и установки второго пластмассового блока для гребца. Конструктора-
Конструкторами-любителями разработано несколько удачных вариантов парусного вооружения
для „Малютки-2". По транспортабельности второй вариант лодки уступает первому —
ее перевозят на крышевом багажнике автомобиля.
При разработке третьего варианта „Малютки" конструкторы вернулись к
размерениям первого, что лишний раз свидетельствует о значении транспорта-
транспортабельности для лодок этого типа. Основное внимание было уделено отработке
обводов. Приполненная с подъемом скулы носовая оконечность улучшила всхо-
Рис. 4.2. Секционная лодка „Ро-
„Романтика"
64
Рис. 4.3. Складная охотничья лодка
жесть лодки на волну. Благодаря
подъему днища в корме она не „тя-
„тянет" за собой воду, заметно прибавила
ходу на веслах. Увеличение коэффициента
полноты ватерлинии повысило остой-
остойчивость. Коцртрукторы отказались от уста-
установки скуловых килей, затрудняющих
плавание на мелководье и в акваториях,
заросших водорослями.
„Романтика" (рис. 4.2) — секционная
моторно-весельная лодка. Такому назначе-
назначению соответствуют как принятые обводы
корпуса, так и запалубленные участки в носу и по бортам, уменьшающие забрызги-
ваемость кокпита на быстром ходу.
Обшивка лодки изготовлена из листов легкого сплава АМгбБ толщиной 1,2 мм.
Корпус по длине состоит из трех штампованных секций, которые, в свою очередь,
могут быть разобраны: носовая — на две, средняя и кормовая — на три части. Секции
стыкуются на болтах. На горизонтальный фланец ставятся носовая палуба и верхние
части корпуса, крепятся подмоторная доска, сиденья. При разборке части корпуса
вкладываются одна в другую и упаковываются в чехол. В неразобранном виде лодку
можно перевозить на крышевом багажнике машины.
В кокпите предусмотрены переносное сиденье для водителя — в корме — и пере-
передвижная продольная банка для пассажира - в носу. В носовом отсеке оборудован
небольшой багажник.
Непотопляемость обеспечена блоками пенопласта, размещенными под носовой
палубой и в кормовой секции. С лодки удобно ловить рыбу спиннингом стоя, ее без
труда можно спускать на воду и поднимать на берег. Максимальная скорость с 5-силь-
5-сильным подвесным мотором — до 20 км/ч.
С учетом преимущественной эксплуатации под мотором была разработана моди-
модификация лодки — ,,Романтика-2" — с увеличенной за счет введения четвертой секции
длиной. На этой лодке с 8-сильным подвесным мотором достигнута скорость 32 км/ч.
Транспортировку „Романтики-2" осуществляют автомобилем при размещении одного
пакета на крыше, а второго — в багажнике.
Рис. 4.4. Байдарка „Таймень"
3 Зак. 738
65
Рис. 4.5. Моторно-весельная каркасная лодка ЛР-01
Складная охотничья лодка (рис. 43) — одна из самых простых по конструкции
разборных лодок. Рассчитана на рыболова-одиночку. С нее можно стоя забрасывать
спиннинг. Корпус этой складной лодки изготовлен из листов дюралюминия толщиной
1,5 мм, соединенных между собой с помощью прорезиненного ремня толщиной 2—4 мм
на заклепках. В готовом для эксплуатации виде корма лодки удерживается двумя
распорками из дюралевых труб.
„Таймень" (рис. 4.4) — серийно выпускаемая байдарка. Одно-, двух- и трехмест-
трехместные „Таймени" предназначены для туристских плаваний по маршрутам высокой слож-
Рис. 4.6. Секционное каноэ
66
ности. Обводы с плавно подрезанными штевнями, большим развалом шпангоутов
обеспечивают, необходимые для этого качества. Все элементы разборного каркаса
выполнены иэ дюралюминия. Непотопляемость обеспечивается шестью термоупаковка-
термоупаковками — по одной в носу и в корме и четыре по бортам суммарным объемом 130—140 л,
что достаточно для поддержания на плаву полностью затопленной байдарки с одним
гребцом. Места гребцов на двух- и трехместных байдарках удалены от миделя, что
значительно повышает маневренные возможности .лодки. В середине корпуса выделен
специальный грузовой отсек, в который на кратковременные выходы можно посадить
еще одного человека.
ЛР-01 (рис. 4.5) — моторно-весельная лодка, имеющая, как и разборные байдарки,
разборный каркас и мягкую прорезиненную оболочку. Транец из дюралюминиевого
листа с фанерной накладкой рассчитан на установку подвесного мотора мощностью
1 кВт B л. с.). Поперечные банки из фанеры и пенопласта увеличивают жесткость кор-
корпуса, а вместе с термоупаковками, размещенными в носу и по бортам, обеспечивают
аварийную плавучесть.
Лодка по мореходности не уступает нераэборным судам тех же размерений, имеет
хороший ход на веслах и с мотором.
Секционное каноэ (рис. 4.6) можно использовать для дальних туристических
плаваний и прогулок в вариантах с веслами, подвесным мотором или парусом. Проект
лодки удостоен 1 -й премии на конкурсе НТО им. акад. А. Н. Крылова. Габариты и мас-
масса лодки допускают ее перевозку на верхнем багажнике любого автомобиля.
Относительно узкий корпус каноэ имеет почти плоское днище со скулами мало-
малого радиуса, что обеспечивает хорошую остойчивость и удовлетворительные ходовые
качества под мотором. Подъем линии киля в оконечностях улучшает поворотливость,
что особенно важно при прохождении стремнин. Смещение наибольшей ширины в кор-
корму уменьшает дифферент, возникающий при плавании под мотором в одиночку.
Корпус представляет собой безнаборную стеклопластиковую конструкцию, разде-
разделенную на три секции с парными водонепроницаемыми переборками на стыках. От-
Отформованные в средней части лодки на плоском днище два гофра служат ребрами
жесткости и одновременно предохраняют корпус от истирания. Разбивка корпуса
на три секции неравной длины и несимметричность его относительно миделя не только
упрощают упаковку (носовая секция вкладывается в кормовую и вместе с ней —
в среднюю), но и позволяет собирать его в нескольких вариантах. Из носовой и сред-
средней секции, например, образуется глиссирующая мотолодка под мотор мощностью
до 15 кВт B0 л. с).
4.2. Надувные лодки
Надводные лодки (табл. 4.2) имеют хорошую транспортабельность, что сразу снис-
снискало признание у любителей рыбной ловли и охоты. В результате усовершенствования
конструкции, позволившего кроме весел применять.подвесные моторы широкого
диапазона мощностей, а также парусное вооружение, надувные лодки приобрели уни-
универсальное назначение и стали использоваться для туризма, спорта, в качестве разъезд-
разъездных и спасательных судов.
Небольшие одно- и двухместные гребные лодки обычно имеют Ообразную форму
с плоским днищем и надувными камерами по периметру. Для лодок, рассчитанных
на установку подвесного мотора мощностью более 4 кВт E л. с), предпочтение от-
отдается подковообразной форме с жестким фанерным транцем, который крепится
между бортовыми камерами на расстоянии примерно 1/5 L от их кормовых оконеч-
оконечностей. Эти выступающие эа транец части камер уменьшают действие дифферентую-
щего момента от массы мотора и упора гребного винта, повышают устойчивость
на курсе, а также, подобно транцевым плитам, улучшают условия выхода судна на
глиссирование.
3* 67
Характеристика
Длина наиболь-
наибольшая, м
Ширина наи-
наибольшая, м
Высота на ми-
миделе, м
Масса, кг
Грузоподъем-
Грузоподъемность, кг
Таблица 4.
„Нырок-1"
2,1
1,09
0,29
12
150
„Айгуль"
2,6
1,2
0,32
16
250
2. Характеристики надувных лодок
„Турист"
3,2
1,4
0,4
20
300
„Ласточ-
„Ласточка"
4
0,72
0,36
19
240
„Орион-
8"
3,2
1,45
0,36
50
250
„Сирай-
дер"
5,43
2,03
0,95
286
800
„Альба-
„Альбатрос"
4,5
2,2
0,8
60
320
„Мева"
3,5
1,3
0,45
72
280
Для повышения продольной жесткости надувной моторной лодки на днище устанав-
устанавливается пайол, который воспринимает упор винта, передаваемый транцем. Для улуч-
улучшения мореходных качеств днищу надувной мотолодки придают килеватость за счет
устанавливаемого между мягким днищем и пайолом внутреннего киля, который в кор-
корме жестко соединяется с транцем и таким образом работает как составная часть карка-
каркаса. Дальнейшие работы по повышению надежности и мореходных качеств надувных мо-
мотолодок привели к созданию судов комбинированного типа с цельным жестким дни-
днищем, обычно выклеиваемым из стеклопластика и имеющим килеватые обводы, к ко-
которому крепятся надувные камеры подковообразной формы. Кокпит с носа прикры-
прикрывается козырьком-тентом, который иногда дополняется ветровым стеклом.
Оболочки современных надувных лодок изготовляют из синтетических материалов.
Их основой служит капрон или нейлон, для покрытия используются полимеры синте-
синтетического каучука — неопрен и хайполон. Такие материалы стойки к воздействию
атмосферы, масел и химикалиев, имеют хорошее сопротивление трению.
Разработаны варианты парусного вооружения для серийных надувных лодок,
а также проекты оригинальных надувных парусных судов, которые с успехом исполь-
используются для туристических плаваний и даже на гонках.
„Нырок-1" (рис. 4.7) — наиболее удачный вариант среди одноместных, серийно вы-
выпускаемых надувных лодок. Незначительное увеличение размерений и массы позволило
сделать грузоподъемность лодки в полтора раза большей, чем у однотипных лодок. Благо-
Благодаря наличию резиновых уключин применены распашные весла, более эффективные, чем
весла-гребки. Гребец располагается в носовой *части на надувном сиденье. Лодка из-
изготовляется из каландрованной хлопчатобумажной ткани, прорезиненной смесью на
основе натурального и синтетического каучука. Аналогичную конструкцию имеют двух-
двухместные „Нырок-2" и „Нырок-4" (последняя — с надувным днищем).
Рис. 4.7. Надувная одноместная
лодка „Нырок-1"
Рис. 4.8. Двухместная надувная
лодка „Айгуль"
68
Рис. 4.9. Надувная байдарка „Ласточка"
ггАйгуль" (рис. 4.8) - самая
легкая из однотипных серийных
двухместных лодок. Отличается
продуманностью конструкции и об-
обводов. Два бортовых баллона в но-
носу заострены, сближены и припод-
приподняты, что обеспечивает плавное об-
обтекание корпуса водой и хорошую
всхожесть на волну. Кормовая око-
оконечность образована поперечным
баллоном, на который с помощью
несложного приспособления воз-
возможна установка легкого подвес-
подвесного мотора. Для крепления жест-
жестких сидений-банок на баллонах пре-
предусмотрены резиновые опоры-крон-
опоры-кронштейны. Применены жесткие
(съемные) полиэтиленовые уключины, вращающиеся в специальных резиновых ушках.
Носовая часть прикрыта козырьком, уменьшающим забрызгивание кокпита и служа-
служащим укрытием для минимального багажа. В носу предусмотрена швартовная скоба.
На базе „Айгули" сконструирована лодка „Турист", рассчитанная на 3—4 чел.
Увеличенные размерения и диаметр баллонов, высоко поднятая носовая оконечность,
прикрытая фартуком-декой, дают основание считать „Турист" пригодным для плаваний
по маршруту повышенной сложности.
.расточка" (рис. 4.9) — байдарка, которая при сохранении основных достоинств
надувных лодок — малой массы и транспортабельности — несравненно быстроходнее
их. Она рассчитана на туристические походы и спортивные плавания I и I категории
сложности. В отличие от аналогичных лодок, выпускаемых за рубежом, „Ласточка"
имеет килеватое днище, что положительно сказывается на ее ходовых качествах, однако
по сравнению с разборными байдарками типа „Таймень" она проявляет большую вал-
валкость порожнем. Достаточная остойчивость обеспечивается только с полной загрузкой.
Байдарка склеивается из двух полотнищ, каждое из которых включает два бортовых
Рис. 4.10.
Надувная мотолодка
„Орион-8"
69
Рис. 4.12. Швертбот „Мева"
Рис. 4.11. Надувная мотолодка
„Сирайдер" („Морскойвсадник")
баллона и три днищевых. Отдельно изготовляются три секции надувной деки, закры-
закрывающие лодку сверху и придающие ей поперечную жесткость.
„Орион-8" (рис. 4.10). Среди надувных лодок, специально проектировавшихся
для эксплуатации с подвесным мотором — это вариант с минимальными размерениями.
Вместе с тем по условиям
транспортировки увеличение
размерен™ надувной мотор-
моторной лодки приведет к тому, что
в разобранном виде, но с
полным оборудованием, вклю-
включающим подвесной мотор и
бензобак, ее уже нельзя будет
разместить в багажнике авто-
автомобиля.
Лодка имеет подковооб-
подковообразную форму и состоит из
трехкамерного баллона, одно-
однослойного днища, носового
козырька и кормового фарту-
фартука, изготовленных из проре-
прорезиненной ткани на основе кап-
капрона с защитным покрытием.
Жесткость конструкции обес-
обеспечивают деревянные киль,
поддон, елани и транец из
водостойкой фанеры, рассчи-
рассчитанный на установку подвесно-
подвесного мотора мощностью 6 кВт
(8 л. с).
Скорость мотолодки с 8-
сильным мотором составляет с
одним водителем 26 км/ч, с
70
водителем и пассажиром - 22 км/ч, однако в первом случае лодку приходится удиф-
удифферентовывать переносом бензобака в нос, а во втором при встрече с крупной волной
скорость необходимо снижать, чтобы уменьшить силу ударов в днище и забрызгивае-
мость кокпита.
„Сирайдер" (рис. 4.11) — надувная лодка с жестким днищем, выпускаемая англий-
английской фирмой „Авон". Используется для спасательной службы в прибрежных морских
районах, обслуживания подводных пловцов, спортивной рыбной ловли в море. Ниж-
Нижняя часть корпуса до уровня скулы изготовлена из стеклопластика и имеет V-образные
обводы с продольными реданами. Эта часть корпуса обладает самостоятельной плаву-
плавучестью и имеет два водонепроницаемых отсека. На ее палубе размещено приспособ-
приспособление для крепления сидений и бензобака. Прикрепленный к жесткому корпусу тра-
транец боковыми стенками входит в литые резиновые фитинги, наклеенные на надувную
камеру.
Надувная камера, изготовленная из пропитанной хайполоном нейлоновой ткани,
разделена на три изолированных отсека и приклеена к стеклопластиковому корпусу.
Предусмотрена балластная цистерна, которая уменьшает валкость лодки на стоянке
и улучшает приемистость за счет смещения центра тяжести в нос. После выхода на глис-
глиссирование цистерна автоматически опорожняется через шпигаты в транце.
„Сирайдер" рассчитан на эксплуатацию с подвесными моторами мощностью до
88 кВт A20 л. с), с которыми он, имея на борту 2 чел., развивает скорость до 70 км/ч.
На глиссирование с полным грузом G50 кг) лодка выходит с 40-сильным мотором.
Рис. 4.13. Надувной катамаран „Альбатрос"
71
,Мева" (рис. 4.12) — надувной швертбот, выпускаемый в Польской Народной
Республике, и получивший распространение у наших любителей водного туризма; по
сочетанию мореходности, ходовых качеств, транспортабельности до сих пор представ-
представляется одним из наиболее удачных образцов судов этого типа. Дня перевозки „Мева"
упаковывается в три мешка с габаритами, обеспечивающими возможность ее погрузки
в автомашину.
>гАльбатрос" (рис; 4.13) — парусный катамаран с надувными корпусами, проект
которого разработан для серийного выпуска на базе судна, спроектированного и по-
построенного В. М. Перегудовым. Катамаран можно использовать как для кратковремен-
кратковременных, так и для продолжительных плаваний с экипажем из 2—3 чел. Судно можно также
эксплуатировать на веслах и с 2-сильным подвесным мотором.
Корпуса „Альбатроса" состоят из трех раздельно заполняемых воздухом секций.
Поверх корпусов закреплено по два стрингера, при помощи которых они крепятся
к мосту катамарана, имеющему пять поперечных балок и одну продольную — централь-
центральную. Для противодействия дрейфу при ходе под парусами снаружи поплавков на второй
поперечной балке навешены шверцы.
Оригинальное парусное вооружение площадью 8 м2, разработанное В. М. Пере-
Перегудовым, позволяет идти к ветру под углом до 50°. „Альбатрос" хорошо ходит под
парусом и мотором на волне до 0,8 м. Благодаря эластичной конструкции мостика
корпуса не испытывают чрезмерных ударов. Весла-гребки применяются для коротких
переходов и при швартовке.
Разобранный катамаран укладывается в две упаковки: рюкзак размерами 750 X
X 430 X 250 мм и мешок длиной 1900 мм и диаметром 300 мм.
РАЗДЕЛ II
ХОДОВЫЕ КАЧЕСТВА МАЛОГО СУДНА
5. СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ МАЛОГО СУДНА
5.1. Основные понятия и определения
Ходкостью называется способность судна двигаться с заданной скоростью при опре-
определенной затрате энергии.
Ходкость зависит от главных размерений, обводов и состояния наружной поверх-
поверхности судна, а также от условий движения. Оценку ходкости принято производить при-
применительно к случаю, когда судно движется вперед равномерно и прямолинейно со ско-
скоростью v. Поскольку судно симметрично относительно его ДП, то действие азро-и гидро-
гидродинамических сил в этом случае может быть сведено к результирующей Q и моменту М,
действующим в ДП (рис. 5.1).
Сопротивлением воды движению судна R называется проекция результирующей
азро- и гидродинамических сил на направление движения.
Гидродинамической силой поддержания Y называется вертикальная проекция
результирующей азро- и гидродинамических сил.
Дифферентующим моментом называется момент азро-и гидродинамических сил М.
Действие силы Y и момента М вызывает при движении судна изменение его осад-
осадки и дифферента, причем с увеличением скорости влияние этих факторов возрастает.
Для поддержания движения к судну необходимо приложить в направлении
движения силу. Эта движущая сила создается у самоходных судов движителя-
движителями и называется упором движителей Р. В случае равномерного прямолинейного дви-
движения Р =R.
Буксировочной мощностью Nr называется наименьшая мощность, необходимая для
преодоления силы сопротивления движению судна со скоростью v,
NR =Rv.
E.1)
При описании физических процессов, обусловливающих сопротивление воды дви-
движению судна, и в практических расчетах ходкости, основанных на результатах испы-
испытаний моделей и натурных судов, возникает необходимость использования критери-
критериев подобия. Для обеспечения механического подобия судна и его модели необходи-
необходимо выполнение трех видов подобия — геометрического, кинематического и динами-
динамического.
Геометрическое подобие соблюдается, когда соответствующие линей-
линейные размеры модели (Z,M, Вм, Тм) и натурного судна (LH, Вн, ТИ) находятся в посто-
постоянном соотношении
E.2)
где к — геометрический масштаб.
Для соответствующих площадей натуры
и модели отношение равно квадрату масшта-
масштаба, а для соответствующих объемов — кубу
масштаба:
vjvM=k*.
E.3) - Рис. 5.1. Схема сил в задачах ходкости судна
73
Кинематическое подобие соблюдается в том случае, когда сходствен-
сходственные точки геометрически подобных судна и модели проходят подобные отрезки траек-
траекторий в течение промежутков времени At, находящихся в постоянном отношении
AtJAtM=T, E.4)
где т — масштаб времени.
Соотношение скоростей в сходственных точках при кинематическом подобии посто-
постоянно: --
|
vJvM=k/r. E.5)
Динамическое подобие соблюдается, когда при наличии кинематическо-
кинематического подобия отношение масс сходственных объемов постоянно:
DJDM=X. ¦¦ E.6)
Для описания основных закономерностей сопротивления воды движению судов исполь-
используются безразмерные критерии динамического подобия потоков жидкости — число
Фруда Fr и число Рейнольдса Re.
Число Фруда характеризует отношение инерционных сил к силам тяжести. В дина-
динамически подобных случаях движения числа Фруда равны между собой. Это означает, что
картины волнообразования двух судов при равных числах Фруда будут геометрически
подобны, силы, вызванные волнообразованием, будут относиться как к3, а моменты,
как к* . Число Фруда является также мерой относительной скорости судна, которая
выражается соотношением скорости v набегающего потока на значительном удалении
впереди тела или скорости движения тела и одного из характерных размеров судна.
Для водоизмещающих судов таким размером является длина по ватерлинии; для су-
судов с динамическим поддержанием, у которых в процессе движения длина по ватерли-
ватерлинии изменяется, используют значение ширины В (преимущественно для глиссеров) и,
в наиболее универсальной форме, корень кубический из объемного водоизмещения
•^ТГ При исследовании движения на мелководье характерной величиной является глу-
глубина воды Я. Исходя из конкретной ситуации используют различные формы записи
числа Фруда:
Fr? = v/s/gl; FrB = v/^Щ FrK - v/sfeW; Fr# = v/y?IT. E.7)
Число Рейнольдса характеризует отношение инерционных сил к силам вязкостной
природы:
Re=vL/v, E.8)
где v — скорость судна, м/с; L — длина, м; v — кинематическая вязкость жидкости,
м2/с
В динамически подобных системах числа Рейнольдса равны между собой. При этом
картины вихреобразования и пограничные слои будут геометрически подобны. Вместе
с тем необходимо учитывать, что в реальных условиях помимо числа Рейнольдса на
картине обтекания существенно сказываются шероховатость поверхности тела и началь-
начальная турбулентность потока. Полное динамическое подобие явлений ходкости достигает-
ся-для рассматриваемых надводных судов при условии одновременного равенства чисел
Фруда и чисел Рейнольдса. Однако это достижимо только в случае полного равенства
модели и натуры, т. е. к = 1. Поэтому обычно ограничиваются частичным подобием —
по числу Фруда или по числу Рейнольдса. Первое обеспечивают при определении ходкости
74
Frv
Рис. 5.2. Зависимость от режима движения судна (Fry): а - диффе-
дифферента и осадки; б — относительного сопротивления.
1 — водонзмещающие суда; 2 — глиссеры; 3 — суда на подводных
крыльях
надводных судов, второе —при изучении-движения глубоко под поверхностью воды
рулей, выступающих частей и других тел. По числу Рейнольдса обеспечивают также по-
подобие для судов, движущихся с малыми скоростями — в доволновых режимах.
В зависимости от характера действия гидродинамических сил различают следующие
характерные режимы движения судов: плавание; переходный режим; режим динамиче-
динамического поддержания.
Режим плавания судов наблюдается при относительной скорости Fr^ < 1,0. В этом
режиме гидродинамическая сила поддержания Y и дифферентующий момент М малы
по абсолютной величине, и приводят к некоторому увеличению осадки судна на ходу
и появлению небольшого дифферента на нос. Поддержание судна обеспечивают силы
гидростатической природы
gD = yV. E.9)
Суда, движущиеся в режиме плавания, принято называть водоизмещающими. В зависи-
зависимости от значения числа Фруда они подразделяются на тихоходные (Fr? < 0,22), сред-
нескоростные (Fr^ =0,23—0,35) и быстроходные (Fr^ >0,35).
Переходный режим движения наблюдается в диапазоне относительной скорости
1,0 < Fry < 3,0. Его характерной особенностью является перераспределение сил под-
поддержания за счет увеличения динамической составляющей Y, а также появление диффе-
рентующего момента М на корму. В результате совместного действия этих факторов,
как правило, уменьшается осадка судна и возрастает дифферент на корму:
gD = yVt +Y, E.10)
где Vj —величина погруженного объема судна (FJ- < Vo).
Режим динамического поддержания наступает при относительных скоростях движе-
движения Fry > 3,0. При этом поддержание судна обеспечивается в основном динамическими
силами
Y;
E.11)
Для глиссирующего судна гидростатическая составляющая поддержания практически
исчезает при Fiy> 5 [14]. Режим движения с динамическим поддержанием является
основным для глиссеров, судов на воздушной подушке (СВП), судов на подводных
крыльях (СПК), экранопланов (ЭП). Характер действия гидродинамических сил при
этом существенно зависит от величины относительной скорости (рис. 5.2).
75
5.2. Составляющие сопротивления движению судна
В теории корабля сопротивление воды движению судна рассматривают как сумму
составляющих:
Д=Дт + Дф+Дв, E.12)
где RT — сопротивление трения; R$ — сопротивление формы (неточное название —
вихревое сопротивление); RB — волновое сопротивление.
Составляющие Лт иЛф обусловлены силами вязкостной природы, &RB —волнообра-
—волнообразованием судна. Основной гипотезой при изучении сопротивления является предположе-
предположение о независимости вязкостной и волновой составляющих. На самом деле наблюдается
их некоторое взаимовлияние. Оно чрезвычайно мало, поэтому на практике успешно
используют методы отдельного расчета вязкостного и волнового сопротивлений [15,
30, 31]. Расчет сопротивления реального судна включает в себя также учет влияния
рулей, кронштейнов, гребных валов, скуловых килей, которые создают так называемое
сопротивление выступающих частей RBM. Часть силы сопротивления при движении суд-
судна определяется также его надводной частью и учитывается как аэродинамическое со-
сопротивление Ra. У водоизмещающих малотоннажных судов величина Ra составляет
весьма небольшую часть полного сопротивления и в ряде случаев ее можно не учи-
учитывать. Для судов в переходном режиме и глиссирующих воздушное сопротивление
составляет уже заметную долю. Особенно важен учет Ra для скоростных глиссеров,
СВП, СПК и ЭП. Таким образом, полное сопротивление
R-RJ+Rф+Rв+Rвл+Rа. E.13)
Для практического расчета полного сопротивления судов сумму составляющих RT,R$
и RB часто представляют как
RT+Rb+RB=R± +RO, E.14)
где RT — сопротивление трения прямоугольной гладкой пластины, имеющей площадь
и длину, равные соответственно площади и длине смоченной поверхности судна (такую
пластину принято называть эквивалентной); Ro — остаточное сопротивление. Оно вклю-
включает в себя сопротивление формы, волновое, а также ту часть сопротивления трения,
которая обусловлена отличием плоской эквивалентной пластины от реальной формы
корпуса судна. Такой подход, несмотря на некоторую некорректность, позволяет
удовлетворить условиям гидродинамического подобия. При этом используемые зависи-
зависимости tfT=/i(Re); Ло =/2(Fr) соответствуют реальным RT~fi(Re); RB +
+ Rф ~/a(Fr) и обеспечивают достаточную точность расчета. Указанный метод получил
широкое распространение также вследствие удобства расчета сопротивления трения
судна как сопротивления эквивалентной пластины по хорошо известным зависимостям
и остаточного сопротивления на основе модельных испытаний. На рис. 5.3 показана
схема разделения полного сопротивления судна на составляющие.
Величина прямоугольников иллюстрирует взаимное соответствие величин состав-
составляющих, характерное для переходного режима движения.
Безразмерные коэффициенты сопротивления. Для расчета сопротивления использу-
используют формулы, структура которых соответствует принципам гидромеханического подо-
подобия. Принимая в качестве характерного размера величину смоченной поверхности ?2,
получаем общую формулу
pv2
R=S—?l, E.15)
76
где f — безразмерный коэффициент полного
сопротивления, который является функци-
функцией чисел Фруда и Рейнольдса и представля-
представляет собой сумму сопротивления коэффици-
коэффициентов трения, формы и волнового
Г = Гт + Гф+Гв- E.16)
Для того чтобы определить смоченную
поверхность судна Д, используют теорети-
теоретический чертеж. На проекции „корпус" тео-
теоретического чертежа измеряют половины
периметров смоченной части шпангоутов
судна. Схема замеров показана на рис. 5.4.
Удобнее всего указанную операцию произ-
производить с помощью курвиметра. Дальнейшие
вычисления производят согласно табл. 5.1.
В большинстве случаев можно также
использовать приближенные формулы.
1. Формула Тейлора
Полное сопротивление судна
R голого корпуса
R вязкостное
1
RT *ф
Rволновое
j
RT ( Ro
¦"в.ч "i
E.17)
Рис. 5.3. Схема разделения полного сопро-
сопротивления движению судна на составляю-
составляющие
где с = 2,52 для круглых обводов [11];
с = 2,75 — для эллиптической формул погруженной части [121] и с = 3,00 для U-образ-
ных обводов [121].
2.ФормулаМумфорда [11] при5« 0,7; 5/Г = 2 + 3
E.18)
E.19)
E.20)
П =/-E5
3. Формула Бенге [121]
?2=Z- (В +27) @,765 +0,28).
4. ФормулаМурагина [11] при 5 = 0,4 + 0,5; В/Т= 2,5 + 3,5
?2 = /-A,3674 1,1355).
5 4 J 2 1 О
П7/2
Рис. 5.4. Схема замеров для определения смоченной поверхности судна по теорети-
теоретическому чертежу
77
И"
шп.
0
1
2
3
Го
Таблица 5.
Замер
курвимег-
Масш-
Масштаб
черте-
чертежа
Смоченные
. полупериметры
шпангоутов
Сумма смоченных
полупериметров
двух соседних
шпангоутов
сти корпуса судка
Шпация
Д?/, м
Смоченная поверх-
поверхность ОДНОЙ ИППЦЦШ
п
S. Формула для транцевых судов
¦9,75+0,78) [121]
П =/,'D5+ 0,257)-
(i4 = 0,85) и судов с острой кормой (А
E.21)
Примеры. 1. Вычислить смоченную поверхность моторного бота с I = 6,00 м, В = 1,8 м, Г=
= 0,5 м. Выбираем формулу E.21) с коэффициентом А = 0,85 для транцевых супов ¦
Я =6,0@,85 1,8 + 0,25
«93 м».
2. Вычислить смоченную поверхность катера с I = 9,2 м; К= 4,6 м' и U-обраэными обво-
обводами. Применяем формулу Тейлора с коэффициентом с = 3,0:
П = 3.0V4,6 • 9,2 »194 ма.
Сопротивление трения. Сцепление отдельных частиц вязкой жидкости между собой
и обшивкой судна приводит к возникновению сил, проекция1 которых на направление
движения называется сопротивлением тренияRr.
Применяемая в настоящее время схема расчета основана на следующих допущениях
131]:
сопротивление трения гладкого корпуса Rr равно сопротивлению трения эквива-
эквивалентной пластины Лт;
обшивка судна считается гидродинамически гладкой, а влияние ее шероховатости
учитывается путем надбавки иа шероховатость.
' При обтекании тела на начальном участке пограничного слоя устанавливается лами-
ламинарный режим, который затем теряет устойчивость и переходит в турбулентный. С уве-
увеличением скорости протяженность ламинарного участка уменьшается и при больших
числах Re становится пренебрежимо малой. Для практических целей можно считать, что
начиная с величины числа Re = 1 • 107 пограничный слой иа корпусе судна турбулентный.
Для подавляющего большинства малотоннажных судов с механическим двигателем это
соответствует практически всем режимам эксплуатации. Для определения числа Рей-
нольдса необходима знать смоченную длину судна и скорость движения. Затем, задав-
задавшись значением температуры t° воды (пусть даже ориентировочно), определить по
'Графику (рис. 5.5) величину коэффициента' кинематической вязкости v, м*/с, и вычи-
вычислить Re по формуле E.8). При этом необходимо следить за соблюдением размерности.
78
1,6
1,2
0,8
\
\
\
N
0
10
20
30 t/C
Рис. S.S. Зависимость коэффициента
кинематической вязкости воды от
температуры
Рис. 5.6. Коэффициенты турбулеит*
ного трения гидродинамически
гладкой пластины
; з
5 7 Re-10
Примеры. 1. Судно имеет смоченную длину 6 м и скорость v = 2 м/с; температура воды 13 ° <
По рис. 5.5 v = 1,2 • 10"' ма/с Тогда
6-2
2. Катер имеет длину по ватерлинии L = 9,2 м, v = 6,9 м/с, температура воды 4 ° С; v =
= 1,6-КГ6 м2/с. Тогда
Re= 16.10-б »4,СЫ07.
Величина сопротивления трения эквивалентной пластины определяется формулой
^т = Гт-^г", E-22)
где
E.23)
где fTo — коэффициент трения гидродинамически гладкой поверхности; AfT — надбав-
надбавка на шероховатость. Функции зависимости коэффициента fTo от числа Рейнольдса
называют экстраполяторами турбулентного трения. Наиболее употребительной в отече-
отечественной практике является формула Прандтля—Шлихтинга
Гт =0,455/(]g ReJ^8.
E.24)
В графической форме указанная зависимость представлена на рис. 5.6.
Влияние продольной и поперечной кривизны поверхности судна на сопротивление
трения сравнительно невелико. Суда с отношением L/B = 5 имеют Rr на 8 %, лсЬ/В =
= 10 — на 2 % больше, чем эквивалентная пластина. Обычно эта разница учитывается при
расчете других составляющих сопротивления. Весьма существенным фактором оказыва-
оказывается отличие степени шероховатости корпуса судна от гидродинамически гладкой пла-
пластины. На практике дополнительное сопротивление, вызванное шероховатостью
79
поверхности судна, учитывают надбавкой Д?т к величине fT(p для эквивалентной глад-
гладкой пластины. Основная часть надбавки Д?т обусловлена влиянием шероховатости на-
наружной обшивки D0—60 %), а также наличием вырезов и ниш B0—30 %) [14]. Экспе-
Эксперименты показывают, что величина Д?т может быть принята постоянной при всех числах
> Re для данного судна. Численные значения Д?т зависят от конструктивных и технологи-
технологических особенностей корпуса, состояния наружной обшивки.
Значения надбавки на шероховатость Д?т [ 15]:
Для судов со сварной обшивкой — @,3 -^ 0,5) • 10;
для судов с клепаной обшивкой либо со сварной обшивкой при наличии ниш и вы-
вырезов - @,7 v 1,0) • 10; n
для судов с деревянной обшивкой — A,8 -г2,3) • 10;
для железобетонных судов — A,3-5-1,9) • 103;
для судов с пластмассовым корпусом, полученным методом формования в матри-
матрице, - @,1 -0,3) • 10.
Для судов с меньшими размерами рекомендуется принимать большие значения Д?т.
Для некоторых типов малотоннажных судов, которые в процессе зксплуатации под-
подвергаются обрастанию, надбавка на шероховатость должна приниматься по верхнему
значению Д?т.
Примеры. 1. Моторный бот имеет L = 6 м, В = 1,8 м, Т=0,5 м, деревянную обшивку, v =2 м/с;
Re = l • 107, П= 9,9 м*,р = 1000 кг/м3.
По графику иа рис. 5.6 ?т = 3 • 10~3. Надбавка на шероховатость с учетом обрастания Д ?т =
= 2,3-1(Г3. Тогда °
V2
#r =<?т0 + Д?т) *• ^" п = Ю5 Н ( ~ 10,7 кгс).
2. Разъездной катер имеет L = 9,2 м, стальную сварную обшивку с противообрастаюшим по-
покрытием; Re=4,0-107, П =19,5 м\р= 1000кг/м3.
По графику иа рис. 5.6 ?т =2,4-10. Надбавку на шероховатость принимаем Д ?т = 0,4-10~3.
Тогда/?; =1300Н (~ 132,5 кгс).
Основные пути снижения сопротивления трения [15] приведены ниже.
При проектировании судна:
все имеющиеся в корпусе вырезы должны быть закрыты решетками или крыш-
крышками;
отдельные выступы на обшивке должны быть размещены как можно дальше от но-
носа судна или в гидродинамической тени от других выступов.
При постройке судна:
нельзя допускать волнистости наружной обшивки, грубых сварных швов; головки
болтов и заклепок выполнять по возможности впотай;
следует тщательно удалять ржавчину и окалину перед окраской корпуса;
следует применять краску с высокими антикоррозионными свойствами, препятст-
препятствующую обрастанию.
В процессе зксплуатации необходимо периодически очищать подводную часть судна
от водорослей и ракушек.
Все зти мероприятия дают возможность снизить сопротивление трения судна на
10-20 %.
Сопротивление формы. Сопротивление формы возникает вследствие влияния вяз-
вязкости на распределение давлений по поверхности тела. Приближенно можно считать, что
волнообразование не влияет на вязкостное сопротивление, в том числе и на сопротивле-
сопротивление формы. Поэтому для расчета используют общую формулу
pv
*Ф=?Ф^-", E25)
80
где ?ф — коэффициент сопротивления формы, который для данного тела является
функцией числа Re.
При экспериментальном измерении полного сопротивления модели пользуются
способом разделения его на/?'т эквивалентной пластины и остаточное Ro. Сопротивле-
Сопротивление формы входит в остаточное вместе с волновым сопротивлением RB и той частью
сопротивления трения, которая обусловлена разницей между ^т криволинейного кор-
корпуса судна и R'T эквивалентной пластины. Разность между/?т и/?т для судов традицион-
традиционных обводов невелика. Поэтому для скоростей, на которых судно не вызывает волнооб-
волнообразования, Ro «* /?ф.
Результаты теоретических и экспериментальных исследований позволяют считать,
что при увеличении скорости хорошо обтекаемых тел сопротивление формы возрастает
по тому же закону, что и сопротивление эквивалентной пластины. Это означает, что со-
сопротивление формы для этих тел можно рассчитать по формуле
/гф=*ф/г;, • E.26)
где коэффициент ?<ь не зависит от числа Рейнольдса и является постоянным для данной
формы корпуса [31].
Все тела можно разделить на хорошообтекаемые и плохообтекаемые. К хорошооб-
текаемым можно отнести водоизмещающие суда, имеющие отношение L/B > 6. Суда с
отношением L/B < 6, к которым относятся буксиры, баржи, суда других назначений,
обтекаются менее благоприятно и обычно предназначены для движения с небольшими
значениями числа Фруда. В практике малотоннажного судостроения формы корпуса
с L/B < 6 встречаются наиболее часто. Из этого следует, что отработке обводов малого
судна должно быть уделено особенно серьезное внимание.
Для снижения Rj> водоиэмещающего судна наряду с определением рациональных
значений L/ В и Z,/vF~ необходимо правильно выбрать величину кормового заостре-
заострения LK, отсчитываемого от кормового конца цилиндрической вставки. Наиболее благо-
благоприятное обтекание обеспечивается при LK > 4,1\Д«>мид ('^мид —площадь погру-
погруженной части миделевого сечения).
Помимо соотношений главных размерений на величину сопротивления формы
существенно влияет также конфигурация подводной части судна. Наличие острых скул
и сломов обшивки, характерных для упрощенных обводов, может вызвать отрывы по-
потока, резко увеличивающие сопротивление. Поэтому надо всегда тщательно взвешивать
целесообразность применения упрощенных обводов на водоизмещающем судне. Постро-
Построение теоретического чертежа в этом случае требует особенно большого опыта проекти-
проектировщика. Сломы обшивки, острые скулы и другие подобные конструктивные особенно-
особенности нужно сориентировать вдоль линий тока жидкости. Окончательная доводка обводов
при этом должна быть произведена экспериментально.
Следует отметить некоторые особенности сопротивления формы глиссирующих
судов. При движении в водоизмещающем режиме остроскулый корпус обтекается пото-
потоком с отрывом у скул и на транце. Сопротивление формы в этом случае очень велико.
Оно гораздо больше, чем у судна тех же размеров, но рассчитанного на водоизмещаю-
щий режим движения. Именно по этой причине эксплуатация глиссирующего судна
в водоизмещающем режиме нецелесообразна.
При движении глиссирующего судна с относительной скоростью Fry > 3 составля-
составляющая сопротивления формы отсутствует. В этом случае остаточное сопротивление суд-
судна полностью состоит иэ волновой составляющей.
Для расчета сопротивления формы необходимо энать величину ?ф, которую опреде-
определяют путем испытаний моделей в опытовом бассейне. Возможно также использование
?ф, взятого по близкому прототипу или вычисленного по приближенной формуле.
При этом следует помнить, что незначительные отклонения формы корпуса, шерохова-
шероховатости обшивки, конфигурации выступающих частей могут вызвать существенное изме-
изменение в еличины ?ф.
81
Коэффициент сопротивления формы приближенно определяют:
по формуле Папмеля
?Ф=0,09
п
E.27)
из уравнения E.26)
E.28)
коэффициент кф при числах Фруда Fr/, < 0,15 находят по графику (рте. 5.7) в зависи-
зависимости от L/В судна [15];
наиболее точно влияние главных размерении и особенностей формы корпуса учиты-
учитывает методика, изложенная в [30]. По ней определяется вязкостное сопротивление суд-
иа,т. е.Лт+Лф:
Ят+Яф -JiR't; E.29)
?т + ?ФяЧ?т; E.30)
V = Чо^в/ Т^Ь„1 Lt E.31)
где jj — множитель коэффициента вязкостного сопротивления; т?0 — составляющая мно-
множителя, зависящая от относительного удлинения судна / и коэффициента продольной
полноты у, kg/х~коэффициент, учитывающий влияние отношения В/Т; ki /i —
коэффициент, учитывающий влияние относительной протяженности цилиндрической
вставки [31]. На рис. 5.8 приведены значения щ, построенные для судов без цилиндри-
цилиндрической вставки (Z.a/L =0) с отношением В/ Т = 3; рис. 5.9, 5.10 дают значения попра-
поправочных коэффициентов kB/xnkL-/i.
1,8
1,6
s
ч
~ ~
=0,75 0J0 0,65 0,60 0,55
V-
д 9 ю т/в
Рис. S.7. Коэффициент сопротивления
формы в зависимости от удлинения
судна
6 7 8 9 10
Рис. S.8. Значения коэффициента ¦%
из
1,0
2,5
3,0
3,5 В/Т
Рис. 5.9. Поправочный коэффи-
коэффициент на изменение В/ Т
/
.—'
———
о
0,1
0,2
0,3 LJL
Рис. S.10. Поправочный коэффи-
коэффициент на относительную протяжен-
протяженность цилиндрической вставки
82
Примеры. 1. Моторный бот имеет L = 6 м, В = 1,8 м, Г=0,5 м, v =2 м/с, ш,™ = 0,72 м*, П =
= 9,9м*,1к = 2м.
Используй формулу (S.27), получим
0,72
Г ф = 0,09 -jj
По общей формуле E.25) получим
1000-4
Лф = 0,0030 j -9,9*60Н F,1кгс).
2. Катер безцилиндрическойвставкиимеет! = 9,2м,В = 2,2 м, Т= 0,6m,v= 6,9 м/с, F=4,6m3,
шмид = 1.06 mj. Вычисляем: 1/УТ^= 5,5; В = УЦ1ВГ)-0,38; 0 = ",^ E7) = 0,80; ^=6/C = 0,48;
В/Г = 3,67; ?ц/1 = 0, #т=1300Н A32 кгс). По формуле E.31) играфикам (рис. 5.8-5.10) нахо-
находим: тH =1,17; *в/г=1,03; *ln/i=l,0; т)=1,17-1,03-1,0*1,21.
По формуле E.29)/?T + /?|i=ij/?T = 1.21-1300 = 1573 Н A60кгс); Яф = 273Н B8 кгс).
Основные способы снижения сопротивления формы в процессе проектирования
судна:
увеличение отношения L/ В;
уменьшение углов притыкания батоксов или ватерлиний в корме (желательно,
чтобы зти углы не превышали значений 18—20°);
размещение сломов обшивки, скуловых килей и прочего вдоль линий тока жид-
жидкости.
Волновое сопротивление. Волновое сопротивление является частью сопротивления
давления, которая возникает вследствие волнообразования при движении судна. При от-
отсутствии волнообразования волновое сопротивление равно нулю. Это наблюдается
у надводных судов при движении с малыми скоростями и у подводных лодок, движу-
движущихся глубоко под водой [31 ].
Для расчета волнового сопротивления пользуются общей формулой
pv2
Яв=Гв—П, E-32)
где ?в — коэффициент волнового сопротивления, который является функцией числа
Фруда.
У геометрически подобных судов 1 и 2 при равных числах Фруда коэффи-
коэффициенты волнового сопротивления равны. Следствием этого является соотноше-
соотношение
Лв,/(?А)=Лв2/(?А). E.33)
Характер изменения волнового сопротивления в зависимости от скорости судна тесно
связан с картиной волнообразования. Основными волнообразующими участками явля-
являются нос и корма судна, вызывающие при движении появление резко выраженных пи-
пиков гидродинамического давления. В носовой и кормовой группах волн можно выде-
выделить расходящиеся и поперечные волны. Изменение скорости движения судна незначи-
незначительно сказывается на структуре расходящихся волн, так как между носовой и кормо-
кормовой группами зтих волн практически не происходит взаимодействия. В противополож-
противоположность этому характер интерференции поперечных волн носовой и кормовой групп су-
существенно зависит от скарости судна. Результатом этого является наличие местных гор-
горбов и впадин на кривой волнового сопротивления по скорости. Характер зависимости
коэффициента волнового сопротивления от числа Фруда показан на рис. 5.11. У водоиз-
мещающих судов ?в имеет максимумы при значениях Fr/, ^ 0,22; 0,25; 0,30; 0,50.
83
f
J
\
j
/1
•
1
0 0,2 ftJ
0,4 0.5 FrL
Рис. 5.11. Характерная кривая
волнового сопротивления схе-
схематизированной модели судна
Рис. 5.12. График для определения
коэффициента волнового сопротивле-
сопротивления С„
У судов с острыми обводами корпуса местные горбы и впадины на кривой сопротивле-
сопротивления сглажены, заметно выделяется лишь один максимум при Fr/, = 0,50. При малых
значениях числа Фруда волновое сопротивление очень невелико. Его практически можно
считать равным нулю для полных тихоходных судов при Fr/, < 0,10-5-0,15, а для быст-
быстроходных — при Vxi < 0,15 -г 0,20.
Абсолютные значения коэффициента fB в большей степени зависят от формы обво-
обводов судна, поэтому для практических целей его определение производят эксперимен-
экспериментально. Приближенно величину RB можно вычислить по формулам Папмеля [121]. Для
этого определяют скорости
E.34)
rpfiL*=xL.
Коэффициент х находят в зависимости от характеристики судна
= 105
к . .
X . .
к . .
В
L
¦'¦
0
1,100
0,8
0,790
0,1
1,100
0,9
0,750
0,2
1,095
1,0
0,730
0,3
1,090
1,1
0,715
0,4
1,063
1,2
0,710
0,5
1,000
1,3
0,700
0,6
0,920
1,4
0,700
0,7
0,840
1,5
0,700
E.35)-
Если скорость судна меньше vltto RB =0; если v i < v < v2, то
L -103
¦v2,
E.36)
где Съ — коэффициент, определяемый в зависимости от числа Fr^ (рис. 5.12). Если ско-
скорость судна больше v2> то
E.37)
Изложенный способ применим только для судов, движущихся в водоизмещающем
режиме гаи в самом начале переходного режима движения. Расчеты волнового сопро-
сопротивления быстроходных катеров на таких скоростях не производят, а в случае необхо-
необходимости определяют экспериментально.
84
Существуют и широко используются также различные методики, в которых опреде-
определяется сразу сумма составляющих сопротивления: R. , /?в и (R —R') (остаточное сопро-
сопротивление Ro). Обычно ^акие материалы обобщают результаты систематических испыта-
испытаний серии моделей. Одним из примеров может служить диаграмма Неймана для букси-
буксиров и траулеров (рис. 5.13). Этот график позволяет приближенно определить значение
остаточного сопротивления для судов с соотношениями L/$ F = 4-r7 и <р = 0,5-г0,7
[31].
Примеры. 1. Моторный бот имеет L = 6 м, В = 1,8 м, Т= 0,50 м, v = 2 м/с, 6 = 0,50.
Используя способ Папмеля, получаем к =10-0,50
1,8
= 1,50; Fi? = 0,26. Находим х= 0,7.
Вычисляем v, = 0,6 V 6 • 0,7 «1,2 м/с; vt = 1,6 V 6 • 0,7 « 3,3 м/с.
Для v, < v < v2 по рис. 5.12 находим Св = 2. Тогда
2700-9,81
(~5,4кгс).
«--"•^ 6.103 •
2. Катер имеет I =9,2 м,В=2,2м, Г=0,6м, v =6,9 м/с, К=4,6м3, 6 =0,42 при
В 2,2
Находимх=0,73, v, = 1,6 м/с, v2 =4,15 м/с, v > v2. Определяем
= 20к
i-103
= 2712 Н (~276кгс).
При выборе главных размерений и формы корпуса судна следует учитывать следую-
следующие особенности волнового сопротивления:
существует ряд значений относительной скорости Fr^, благоприятных в отношении
волнообразования;
величина волнового сопротивления уменьшается при увеличении L/B, L/^f V и при
уменьшении В/Т,Ь;
положение наибольшей ширины судна по длине,
относительная величина цилиндрической вставки, фор-
форма и углы притыкания носовых ветвей ватерлиний
должны соответствовать относительной скорости Fr/,.
Сопротивление выступающих частей. К выступаю-
выступающим частям относят скуловые кили, рули, кронштей-
кронштейны гребных валов, гребные валы и т. д. Сопротивление
движителей учитывается в расчете их характеристик
и в состав сопротивления выступающих частей не вхо-
входит.
Сопротивление выступающих частей состоит в ос-
основном из вязкостных составляющих — сопротивления
трения и формы; обтекание корруса влияет на харак-
характер обтекания выступающих частей. В свою очередь,
наличие выступающих частей может существенно изме-
изменить сопротивление самого корпуса судна.
Сопротивление выступающих частей можно опре-
определять либо экспериментально, либо расчетным путем.
При испытании моделей судов в опытовом бассейне
обычно сопоставляют модель судна с выступающими
частями и без них (голый корпус). Коэффициент
сопротивления выступающих частей
20
10
6
ч
2
1
0,6
ол
0,2
0,1
/7
G
7
*
/
0,1
0Л 0,J
Рис. 5.13. График для опреде-
определения остаточного сопротивле-
сопротивления буксиров и траулеров
(диаграмма Неймана)
85
Ьв.ч
pv
E.38)
При этом fB -ч по сути представляет собой условную надбавку к величине сопротивления
голого корпуса RT.K. В зависимости от числа и расположения выступающих частей обыч-
обычно ?в.ч = @,25-5-0,3) • 10~3. Для судов с сильно развитыми выступающими частями
?в.ч = @,4-^0,5) • 10. Для быстроходных катеров сопротивление выступающих частей
можно учитывать как надбавку к сопротивлению голого корпуса, определяемую по
экспериментальным данным: RB ч = кв 4RT K.
Величины коэффициента для учета сопротивления выступающих частей кв ч приве-
приведены в табл. 5.2.
Таблица 5.2. Надбавка на сопротивление выступающих частей квм
Число
гребных
валов
1
2
3
Круглоскуяые суда при Fr/,
до 0,5
0,03-0,05
0,08-1,0
0,12-0,15
0,5-1,0
0,06-0,08
0,10-0,12
0,15-0,20
Остроскулые суда при Ftp-
1,0
0,02
0,02
1,5
0,03
0,06
2,0
0,04
0,08
2,5
0,07
0,10
3,0
0,11
0,12
3,5
0,15
0,18
4,0
0,19
0,20
Наряду с указанными способами учета /?в.ч применяют расчетный метод определе-
определения величины сопротивления выступающих частей. Этот метод сводится к вычислению
сопротивления каждой из таких частей и отдельности на основании экспериментальных
данных для геометрических тел соответствующей формы и последующему суммирова-
суммированию результатов.
Для определения /?в.ч, Н, судов с угловыми колонками или подвесными моторами
рекомендуются данные, полученные экспериментально: RB -ч = г в л
pv'
[28].
Коэффициенты гвч =?в.ч • ?мнд принимаются для подвесных моторов (при за-
заглублении антикавитационной плиты на 20 мм ниже среза транца): „Ветерок" — 14-10"*;
„Москва-25" и „Москва-30" - 20 • 10; „Нептун" - 21 • 10; „Нептун-23" - 20,5 X
X 10; „Привет-22"- 17,5 • 10; „Вихрь-М" - 22.S • 10.
Для угловой колонки катера „Амур-2" RB ч = 0,93v 2, Н.
Необходимо помнить, что значения упора винтов подвесных моторов по скорости,
приводимые в справочных изданиях, учитывают также и влияние сопротивления их под-
подводной части. Поэтому при использовании этих данных сопротивление выступающих
частей моторов добавлять к сопротивлению корпуса судна не нужно.
Примеры. 1. Моторный бот имеет L = 6 м, v =2 м/с, Л =9,9 м*.
Принимаем ?в>ч = 0,25 • 10~3, тогда
р» ¦
¦П=О,25-1О-3
1000- 2*
•9,9 «5 Н (-0,5 кгс).
2. Разъездной катер с L = 9,2 м, v = 6,9 м/с, П = 19,5 м» имеет открытый наклонный гребной
вал с кронштейном и подвесной руль за винтом, Fr^ = 0,73. Для этого случая принимаем по
табл. 5.2 квч = 0,07. Тогда
Яв.ч =*в.ч (Ят f Я<р + Яв) = 0,07 • A573 + 2712) и 300 Н (^ 30 кгс).
3. Глиссирующая лодка с подвесным мотором „Вихрь-М" имеет v = 9,4 м/с. Получаем
р» ¦
= 22,5-10'4
1000- 9,4*
«99Н (~10кгс).
86
Для снижения RB ,ч рекомендуется:
уменьшение числа выступающих частей путем объединения конструктивно совме-
совместимых элементов;
придание выступающим частям хорошообтекаемой формы;
расположение выступающих частей по направлениям линий тока и в тех местах суд-
судна, где они не вызывают возрастания сопротивления голого корпуса и сами имеют мини-
минимальное сопротивление;
установка однопалого кронштейна вместо двухлапого;.
крепление двухлапых кронштейнов таким образом, чтобы оси следа их протыкания
к корпусу были параллельны;
установка гребного вала с наклоном не более 10-12°.
Воздушное сопротивление. Сопротивление надводной части судна имеет вязкостный
характер, т. е. само состоит из сопротивлений трения и формы. Надводная часть многих
судов является плохообтекаемым телом, поэтому основную роль в ее воздушном со-
сопротивлении играет сопротивление формы [31].
Величина воздушного сопротивления вычисляется по формуле
E.39)
где Сд — безразмерный коэффициент воздушного сопротивления; рв — плотность
воздуха, кг/м3; vB -скорость воздуха, обтекающего судно, м/с; 5МИД — проекция
надводной части судна на плоскость мидель-шпангоута, м2. Вычисление vB производится
с учетом скорости истинного ветра vH. При этом следует принимать наиболее небла-
неблагоприятный встречный ветер: vB =v +vH.
Значения коэффициента Сд определяют экспериментальным путем. Его величина
для судов с малыми L/B и плохообтекаемыми надстройками может доходить до Сд - 1 ¦
Обычно С а - 0,6 -J-0,9; для судов, при проектировании которых приняты меры по сни-
снижению аэродинамического сопротивления, Сд = 0,4-^0,6.-Следует отметить, что созда-
создание хорошообтекаемых надстроек часто нерационально из-за удорожания постройки
и ухудшения эксплуатационных условий на судне, однако устранение угловатых форм,
особенно углов передних стенок, размещение надстроек и рубок с учетом их взаимного
экранирования полезны.
Примеры. 1. Моторный бот имеет L = 6 м, v = 2 м/с, В = 1,8 м, ?мид = 1,5 м*, р = 1,293 кг/м3.
Учитывая отсутствие надстроек, принимаем Сд = 0,6. Считаем % * 5 м/с, следовательно,
Рв"в 1,293B + 5)*
= CA 5мид = 0>б~ \ —•1,5*'29Н(~Зкгс).
2. Катер имеет L =9,2 м, В =2,2 м, v =6,9M/c,SMsfa = 5,S ма и хорошо обтекаемые надстрой-
надстройки vH = 8 м/с.
Принимаем Сд = 0,5, тогда
1,293 F,9 + 8) г
Да = 0,5—' 1 — '5>5 й395Н (~40кгс).
Основываясь на выполненных расчетах, получим значения полного сопротивления для рассматри-
рассматриваемых судов.
1. Моторный бот имеет// = 6 м, В =1,8 м, Г=0,5 м, 5 =0,5,П =9,9 ма, v =2 м/с.
SRt =R'T +Яф + RB + Дв.ч + Яа= 105 + 60 + 53 + 5 + 29 =252 Н ( -26 кгс).
2. Катер имеет/. =9,2 м, В =2,2 м, Г=0,6 м, 6 =0,42, F=4,6 м3, О =19,5 ма, ымид= 1,06 ма,
v = 6,9 м/с.
Отсюда
+ Лв.ч + Да = 1300+273+2712+300+395=4980Н (~480кгс).
87
5.3. Сопротивление водоизмещающих судов
Для правильного выбора формы корпуса необходимо учитывать весомость каждой
из составляющих полного сопротивления воды движению судна. У разных типов водоиз-
водоизмещающих судов соотношение этих составляющих различно. Оно зависит прежде всего
от относительной скорости и главных элементов судна. На рис. 5.14 представлены
кривые, хорошо отражающие качественную сторону этого явления [15]. Здесь состав-
составляющие сопротивления трения и остаточного сопротивления выражены в долях от пол-
полного. Кривая 1 характерна для пассажирских судов (Frx < 0,4; L/tfV = 7,5-^9,0)
и водоизмещающих катеров (Frx > 0,5); кривая 2 - для грузовых судов (Frx <
< 0,30; L/$ V = 5,5 т 7,0); кривая 3 — для буксирных, ледокольных, рыбопромысло-
рыбопромысловых судов (Frx < 0,4; L/\/V = 4,0 -е- 5,5).
Изменение сопротивления при движении на волнении. При движении судна на волне-
волнении скорость снижается вследствие увеличения сопротивления воды, нарушения режима
работы движителей и увеличения рыскливости судна. Наибольшее влияние оказывает
изменение сопротивления воды движению судна.
Результаты исследований позволяют установить несколько общих свойств дополни-
дополнительного сопротивления /?доп- На встречном волнении при постоянных значениях числа
Фруда и относительной высоты волны hBl\ наблюдается зависимость дополнительного
сопротивления от отношения длины волны к длине судна Хв/?. Максимум ЛДОп соот-
соответствует значениям АВД, близким к единице [31] (рис. 5.15). При движении судна на
попутном волнении значение имеет отношение скорости судна к скорости распростране-
распространения волн св [30]. При v/cB < 1 сопротивление судна близко к своему значению на
тихой воде. При v/cB, близких к единице, когда судно оказывается неподвижным отно-
относительно системы волн, оно „захватывается" волной и устойчиво движется во впадине
между гребнями. В этом случае сопротивление существенно уменьшается. При дальней-
дальнейшем увеличении скорости движения судна сопротивление резко возрастает (рис. 5.16).
Помимо указанных соотношений на величину /?доп серьезное влияние оказывают
элементы теоретического чертежа и форма обводов судна. Опыт показывает, что увели-
увеличение коэффициента общей полноты 5 свыше 0,7 приводит к возрастанию сопротивле-
сопротивления на волнении. Неблагоприятно также сказывается чрезмерная величина В/ Т.
При разработке проекта можно рекомендовать выполнение шпангоутов в носовой
части с достаточным развалом, а ватерлиний - острыми по всей высоте форштевня.
Это достигается применением наклонного форштевня с плавным подрезом. Целесооб-
Целесообразно также предусмотреть достаточный запас.мощности. Вместе с тем следует помнить,
ом
1,0 "
ofi
Ofi
OA
°>l -,1
Рис. 5.14. Соотношение между основ-
основными составляющими сопротивления.
/ - пассажирские суда и водоизмещаю-
щие катера; 2 — транспортные суда;
3 — буксирные, ледокольные, промысло-
промысловые суда
0,005
0,5
1,0
Рис. 5.15. Кривые дополнительного со-
сопротивления модели танкера на регу-
регулярном встречном волнении
88
ff,H
mi
in
20
10
/
jl
0,8
1,0
. o/cB
Рис. 5.16. Сопротивление судна
при движении на попутном ре-
регулярном волнении.
1 — тихая вода; 2 — волнение
l/W
9
q
7
6
Т
ж
0,1 0,2
0,3
0,5 frL
Рис. 5.17. Рекомендуемые значения отно-
относительной длины
что „ограничителем скорости на волнении зачастую является не повышенное сопротив-
сопротивление движению, а неблагоприятные перегрузки, действующие на экипаж при ударах
и качке, а также прочность корпуса судна.
Влияние основных характеристик корпуса на сопротивление. На величину сопротив-
сопротивления воды движению судна влияет очень большое число параметров, характеризующих
форму его корпуса. Можно однако, выделить наиболее характерные зависимости ходко-
ходкости и соотношений теоретического чертежа судна.
Удлинение с у_д на и относительное удлинение. Увеличение отно-
относительного удлинения / =L/$ V приводит к уменьшению составляющей остаточного
сопротивления. При этом с увеличением относительной скорости — числа Фруда — это
явление становится более выраженным. Одновременно с уменьшением Ro происходит
возрастание составляющей трения /?т. При этом для каждого значения Fr существует
величина /, при которой полное сопротивление судна будет минимальным. Рекомендуе-
Рекомендуемые значения 7~приведены на рис. 5.17. Для однокорпусных судов зти оптимальные
с точки зрения обеспечения ходкости значения / часто оказываются неприемлемыми по
соображениям остойчивости, общего расположения и т. п. Однако для многокорпусных
судов целесообразно ориентироваться на рекомендуемые значения. Удлинение судна
L/B менее точно характеризует остроту обводов судна, но с качественной стороны вли-
влияет на величину основных составляющих сопротивления так же, как и относительное
удлинение/.
Отношение ширины к осадке судна В/Т. Существует общая тен-
тенденция возрастания волновой составляющей сопротивления судна с увеличением В/Т
при постоянных значениях /. Смоченная поверхность, а следовательно, и составляющая
трения, при этом также возрастает. Однако в пределах значений В/ Т, характерных
для каждого типа судна, полное сопротивление воды R и его основные составляющие
изменяются мало. Поэтому при разработке проекта величину В/ Г выбирают из условий
обеспечения остойчивости судна и ограничений по осадке.
Коэффициенты полноты судна. Увеличение коэффициента общей пол-
полноты 5 незначительно влияет на сопротивление трения RT, но приводит к возрастанию
остаточного сопротивления Ro. Это особенно сказывается при Fr^ > 0,3. Поэтому для
судов, рассчитанных на скорости Fr^ > 0,3, желательно уменьшение б до значений, при
89
которых увеличение массы корпуса еще не очень существенно. Ориентиром могут слу-
служить значения б, рекомендованные Эйром [31]:
0,300
0,575
0,325
0,560
0,350
0,545
0,375
0,538
0,400
0,533
0,500
0,516
0,600
0,500
Изменение коэффициента продольной полноты <р оказывает существенное влияние
на величину волнового сопротивления RB. Выбор рационального значения <р особенно
важен для быстроходных судов, у которых волновая составляющая сопротивления
относительно велика. При Fr/, > 0,45 рекомендуется принимать величины у в пределах
0,6-0,65, причем большие значения относятся к более высоким числам Фруда.
Изменение коэффициента полноты мидель-шпангоута /3 в широких пределах не ока-
оказывают значительного влияния ни на волновое сопротивление, ни на сопротивление фор-
формы [31]. Величину/3 можно принимать равной 0,75—0,85 для Fr/, > 0,45.
Форма корпуса судн.а. Характер обтекания судовой поверхности пото-
потоком жидкости, определяющий величину остаточного сопротивления Ro, зависит от фор-
формы корпуса. Для носовой оконечности важна форма ватерлиний. В основном она опре-
определяется величиной утла носового заострения ан, который составляет ветвь ватерлинии
с ДП. Для судов с относительной скоростью Fr/, > 0,32 рекомендуется принимать
прямые ветви ватерлиний с углами ан = 10 -г 14°. В целях обеспечения малых значений
Ян рационально некоторое смещение максимального; поперечного сечения судна в корму
от миделя.
Качество кормовых обводов в значительной мере определяется тем, насколько
обеспечиваются безотрывное обтекание и равномерность поля скоростей в районе распо-
расположения движителей. С этой точки зрения стремятся к уменьшению углов протыкания
ватерлиний в корме а,,, до величин меньше 20 /Для судов с относительными скоростями
Fr/, > 0,4 целесообразно применение транцевой кормы. Такое решение позволяет по-
получить наиболее пологие ветви батоксов. При этом допустимо увеличить о^ до 35—45°.
Форма шпангоутов судна в ряду параметров, определяющих сопротивление воды,
имеет второстепенное значение. Гораздо более существенное влияние она оказывает
на работу движителей и. мореходность судна.
Способы снижения сопротивления движению судна. Все способы снижения сопро-
сопротивления движению судна разделяются на способы снижения вязкостного сопротивле-
сопротивления и способы снижения волнового сопротивления.
Снижение вязкостного сопротивления возможно путем управления пограничным
слоем тела. К этим способам относятся: применение ламинаризованных тел; отсасыва-
отсасывание жидкости из пограничного слоя; применение демпфирующих покрытий; использо-
использование слабых растворов полимеров; применение воздушных пленок.
В настоящее время большинство указанных методов снижения вязкостного сопро-
сопротивления разработано только на лабораторном уровне. Это не позволяет дать конкрет-
конкретных рекомендаций по их применению на натурном судне. Наиболее реальным способом
следует считать применение воздушных пленок, создаваемых при помощи подачи воз-
воздуха под днище. Результаты модельных и натурных испытаний показывают, что это поз-
позволяет снизить сопротивление движению речного транспортного судна на 12—20 % при
затратах мощности на подачу воздуха, не превышающих 1-1,5 % мощности энергетиче-
энергетической установки [61]. Однако для малотоннажных судов трудно рассчитывать на серьез-
серьезный эффект от применения воздушной смазки. Прежде всего это связано с тем, что
корпус малого судна либо вовсе не имеет плоского участка днища, либо этот участок
относительно мал, и создание воздушной прослойки под ним весьма сложно. Вторым
и наиболее важным обстоятельством является то, что режимы движения малых судов,
как правило, характеризуются высокими значениями относительной скорости Fr. Это
определяет превалирование волновой составляющей в общей величине сопротивления.
Отсюда и снижение полного сопротивления в результате применения указанных мер
будет существенно меньше (вероятнее всего, единицы процентов). Вместе с тем
90
практическое применение способов снижения вязкостного сопротивления неизбежно
вызывает усложнение конструкции судна и удорожение его эксплуатации. Поэтому
целесообразно использовать для уменьшения вязкостной составляющей сопротивления
малотоннажного судна те возможности, которые дает грамотный выбор формы корпуса
и расположения его выступающих частей.
Снижение волнового сопротивления достигается следующими основными спо-
способами:
переходом к движению судов со скоростями, при которых волновое сопротивление
снижается (малые и большие числа Фруда);
использованием благоприятной зоны скоростей (Fr/, < 0,35) со впадинами на
кривой волнового сопротивления;
приданием корпусу обводов и соотношений главных размерений, соответствующих
минимуму волнового сопротивления;
применением устройств для гашения волновых систем;
созданием судов с уменьшенной площадью ватерлинии;
созданием многокорпусных судов;
переходом от водоизмещающего режима к динамическим принципам поддержания.
Первые три способа относятся к методам оптимизации формы судов традиционных
форм. Последние четыре способа являются новыми направлениями в развитии судостро-
судостроения [14, 30, 61,141].
Под устройствами для гашения волновых систем подразумеваются носовые надел-
наделки, носовые крылья, бортовые були [30]. При рациональном выборе формы, размеров
и расположения бульба можно получить благоприятное взаимодействие волновых си-
систем корпуса и бульба, приводящее к уменьшению волновой составляющей сопротивле-
сопротивления. Однако нужно иметь в виду, что при изменении посадки судна эффект от применения
бульба снижается и даже может быть отрицательным. Этот эффект уменьшается также при
пониженных эксплуатационных скоростях. Поэтому в каждом отдельном случае реше-
решение о применении указанных форм обводов должно приниматься на основе анализа всех
составляющих сопротивления, весовых и прочностных характеристик судна.
Суда с малой площадью ватерлинии (СМПВ) привлекают все большее внимание
судостроителей. В настоящее время в мире эксплуатируется уже ряд судов подобного
типа.
Уменьшение волнового сопротивления достигается за счет того, что подводная
часть судна состоит из двух торпедообразных корпусов, заглубленных под поверхность
воды и вертикальных стоек, соединяющих их с подводным корпусом. Стойки, пересе-
пересекающие поверхность воды, имеют минималь-
минимальное сечение, определяемое соображениями
продольной и поперечной остойчивости. Это и
определяет эффект снижения волновой со-
составляющей сопротивления. При этом нельзя
забывать, что вязкостные составляющие
полного сопротивления такого судна воз-
возрастают. Необходимо учитывать также и то,
что главные элементы и характеристики
СМПВ существенно отличаются от таковых у
традиционных судов. Например, при сравне-
сравнении с обычным судном одинакового водоиз-
водоизмещения у СМПВ осадка будет большена 70-
100%, масса корпуса-на 60-150%; СМПВ
будет иметь также пониженную продольную и °'3
поперечную остойчивость. При всем этом
преимущества СМПВ по ходкости проявятся р„с. 5.18. Влияние взаимного отстояния корпу-
только при числах Фруда Fr/, > 0,5. сов катамарана на его волновое сопротивление
91
Рис. 5.19. Влияние взаимного расположения корпусов три-
тримарана на его волновое сопротивление
Значительного эффекта от
применения указанного принци-
принципа можно достичь в том случае,
если стоит задача создания
судна с большой площадью па-
палубы, большой вместимостью
или особо высокой мореход-
мореходностью. Однако, учитывая слож-
сложность и непроработанность ряда
вопросов проектирования та-
таких судов, можно рекомендо-
рекомендовать создание СМПВ только
после тщательного общепроект-
общепроектного анализа, детальной гидро-
гидродинамической и конструктив-
конструктивной проработки.
Многокорпусные суда уже
завоевали широкую популяр-
популярность. Основное достоинство гидродинамики такого судна состоит в возможности
придания каждому из корпусов большого (до 12-15) удлинения, что ограничено у
обычных однокорпусных судов требованиями остойчивости. Кроме того, результаты
исследований показывают, что при некоторых числах Фруда и значениях отстояния
корпусов у катамарана возможны благоприятная интерференция волновых систем и
выигрыш в волновом сопротивлении. При больших числах Фруда взаимное влияние
корпусов катамаранов неблагоприятно сказывается на сопротивлении воды движению
[14, 84]. На рис. 5.18 показаны схема двухкорпусного судна и кривые зависимости его
волнового сопротивления от относительного отстояния корпусов. Перспективными
можно считать трехкорпусные суда, у которых средний корпус выдвинут вперед относи-
относительно двух других.
Испытания моделей показывают, что величина выдвига существенно влияет на со-
сопротивление. Это позволяет при помощи правильного выбора взаимного расположения
корпусов тримарана обеспечить на расчетной скорости или в выбранном диапазоне ско-
скоростей минимальное сопротивление. На рис. 5.19 показаны схема трехкорпусного судна
и кривые его остаточного сопротивления (Ro = R - R'T) в зависимости от относительно-
относительного выдвига среднего корпуса.
Суда с динамическим поддержанием - зто быстроразвивающиеся в настоящее
времй группы судов, к которым относятся глиссеры, суда на подводных крыльях, суда
на воздушной подушке, суда-зкранопланы и их возможные модификации. Разделы тео-
теории и проектирования каждого из этих типов судов весьма специфичны. Общей харак-
характерной чертой является то, что они могут двигаться при высоких значениях относитель-
относительной скорости (числа Фруда), недостижимой для водоизмещающих судов.
5.4. Сопротивление глиссирующих судов
Силы и моменты, действующие на глиссирующую пластину. Сила поддержания соз-
создается при движении глиссера в результате взаимодействия днища с набегающим пото-
потоком жидкости. На всех режимах установившегося движения она равна весу судна
Y=gD.
E.40)
В общем случае величина силы поддержания слагается из гидростатической и гидродина-
гидродинамической составляющих. При относительных скоростях движения глиссера Fiy>3
гидростатическая составляющая для глиссеров невелика.
92
Сила сопротивления R движению глиссера слагается из касательных и нормальных
составляющих. Касательные силы при чистом глиссировании создаются сопротивлением
трения Rr. Сопротивление от нормальных сил Лд (его часто называют сопротивлением
нормальных давлений) представляет собой проекцию результирующего вектора гидро-
гидродинамических давлений Q на направление движения. Следует оговориться, что равнодей-
равнодействующая касательных сил в общем случае не совпадает с направлением движения, одна-
однако в расчетах ходкости этим пренебрегают.
Гидродинамическим моментом М называют момент сил поддержания относительно
нижней кромки транца (плечо этих сил определяется положением центра давления
и обозначается /ц.д )
Щ
ц-д-
E.41)
Моментом сил веса Mg называют момент от сил веса судна на плече, равном рассто-
расстоянию от центра масс судна д© транца, которое обозначается xg. Момент сил весаЛ/g из-
изменяется при изменении дифферента судна, а также зависит от положения центра масс
по высоте z r:
Mg
ф
ф).
E.42)
Поскольку при движении глиссеров углы дифферента невелики, без особого ущерба
для точности расчетов полагают
Mg =Dgxg.
E.43)
Момент Мр от упора движителя Р определяется относительно нижней кромки тран-
транца. В ряде случаев его величина мала и может не учитываться при определении посадки
судна. Это относится к глиссерам малой и средней быстроходности. Для высокоско-
высокоскоростных, в том числе спортивных, глиссирующих судов Мр имеет очень большое зна-
значение.
При всех режимах установившегося движения глиссирующих судов
\М\ = \Mg +Мр\
E.44)
Угол дифферента ф глиссера определяют относительно его расчетного положения
на плаву. При этом угол атаки а несущей поверхности в общем случае не совпадает
с углом дифферента судна.
Схема сил, действующих на глиссер, приведена на рис. 5.20.
В литературе по глиссированию встречаются также термины волновое сопротивле-
сопротивление и брызговое сопротивление. По своей природе волно- и брызгообразование является
Рис. 5.20. Схема сил, действующих на глиссирующее судно
93
следствием действия систему давлений на днище судна. В режиме чистого глиссирова-
глиссирования волновое и брызговое сопротивления представляют собой составные части сопро-
сопротивления нормальных давлений (как уже говорилось, сопротивление, формы у глисси-
глиссирующей пластины отсутствует). Поэтому о брызговом сопротивлении можно говорить
лишь в том смысле, в каком замыв частей корпуса брызговои струей увеличивает (или
уменьшает) сопротивление трения.
В расчетах ходкости глиссеров используют безразмерные характеристики:
удлинение корпуса судна / =LCK/B;
смоченное удлинение \ = 1^М/В;
относительное удлинение I -L ск/$ V;
относительная центровкаXg =xg/LCK;
коэффициент момента гад = М/ (gDB);
шд *** Xg/B> и™ строго
= _l^_ = ^cos*zgsin*
5cos а В
коэффициент Статической нагрузки Сд = V/B3;
коэффициент динамической нагрузки
F 2,
E46)
гидродинамическое качество К - Y/R;
коэффициент глиссирования, или обратное качество, е = 1/К.
Для удобства пользования материалами, в которых употреблены различные формы
выражения числа Фруда, приводим формулы перевода:
Ft в tv
= E-47)
Fr5 = Ftl vT= Fr v$~Cl; E.48)
E.49)
В режиме чистого глиссирования сопротивление воды движению судна складывает-
складывается из сопротивления трения и сопротивления нормальных давлений.
Сопротивление трения глиссера RT прямо зависит' от величины смоченной поверх-
поверхности, которая меняется с изменением v, тд, Сд. Величину смоченной поверхности
определяют либо по графикам, полученным в результате испытания систематических
серий моделей, либо экспериментально. Для катеров, имеющих сложную форму кор-
корпуса, определение величины fi возможно только экспериментально. То же самое следует
сказать относительно глиссеров, рассчитанных на переходный режим движения. Для
плоской пластины [31]
П=ХД2; Х=/(Рг5)тд). . E.50)
Полный коэффициент трения определяют по формуле E.23). Основная его часть
fT() зависит помимо числа Рейнольдса еще от угла атаки а. Режим пограничного слоя
у глиссеров практически всегда турбулентный.
94
Экспериментальные исследования подтверждают справедливость использования
формулы Прандтля—Шлихтинга E.24) для определения fT(). При углах а < 3° результа-
результаты расчета и эксперимента совпадают. При 3° < а < 6° происходит небольшая ошибка
в безопасную сторону. Для а > 6 формула E.24) дает большое завышение ?Т(). Боль-
Большинство глиссеров имеют оптимальные углы атаки а = 5 -г 6°. В этом случае для
Re ~107 можно принимать fT(j = 3 • 10~3.
Величина полного коэффициента трения включает в себя также надбавку на шеро-
шероховатость Д?т E.23). Для стальных судов рекомендуют принимать [42] AfT =0,40 • 10~3,
для деревянных Д?т = @,10^ 0,15) • КГ*.
Рассмотрим величину fi для глиссирующих катеров, предназначенных для разъезд-
разъездных и туристических целей. Диапазон водоизмещении зтих судов колеблется в пределах
0,6—6 т. Скорость полного хода — 10—15 м/с Диапазон чисел Рейнольдса при этом со-
составляет A,3-=-3,2)-10*. Соответствующие им значения fT равны B,9 -5-2,6)-10~3
(большие величины fT() — у судов меньшего водоизмещения,"меньшие — у больших ка-
катеров). При этом для "малых глиссеров, имеющих, как правило, высококачественную
поверхность днища, надбавка на шероховатость составляет AfT = @,10-г0,15)-10~3.
Для судов большего водоизмещения рекомендуемые значения надбавки Д?т ~ 0,4 • 10~3.
В результате суммарный коэффициент fj колеблется для катеров разного водоизмеще-
водоизмещения в небольших пределах. На практике в расчетах ходкости разъездных и туристских
катеров с относительной скоростью Fr^= 3 4-3,5 можно принимать величину f'T =
= 3 • 10~3. Погрешность при этом составляет не более 5 % и лежит в пределах точности
определения смоченной поверхности.
Существенное влияние на величину сопротивления трения глиссера оказывают
направление и интенсивность брызговои струи, возникающей на передней кромке смо-
смоченной поверхности. Замыв этой струей части днища приводит к образованию силы вяз-
вязкостной природы, которая может приводить и к увеличению, и к уменьшению вязкост-
вязкостной составляющей сопротивления. Результаты экспериментального исследования [43]
позволяют сделать следующие выводы:
при углах килеватости 0 > 12 практически для всех углов ходового дифферента
сопротивление трения в зоне брызговои струи приводит к увеличению сопротивления
трения плоскок ил еватой пластины;
при Р < 1° зта составляющая уменьшает сопротивление трения пластины;
в диапазоне 7° < 0 < 12° при углах ходового дифферента 3—6° влияние брызговои
струи на сопротивление плоскокилеватой пластины незначительно.
Сопротивление нормальных давлений представляет собой по существу остаточное
сопротивление. Для режима чистого глиссирования
Ra=gDtga. E.51)
Величина угла атаки несущей поверхности глиссера (в режиме чистого глиссирова-
глиссирования) является функцией числа Фруда и коэффициентов нагрузки Сд и момента гад.
Взаимосвязь зтих характеристик можно определить экспериментально. Для глиссеров,
имеющих несложные гаГоскокилеватые обводы, с успехом используют результаты ис-
испытаний систематических серий схематизированных моделей. В отечественном судостро-
судостроении наиболее широко применяют материалы Л. И. Седова и А. С. Перельмутра [14,15,
24, 30, 31]. Эти материалы представляют собой эмпирические зависимости для гидроди-
гидродинамических характеристик плоских пластин.
Ниже приведены формулы, справедливые при Л. > 0,3 -г 0,4:
Сд0,7тгХ ,Х2*-0.4 1
j"'
а 1 + 1.4Х ATM Frj
0,7тгХ X0-865 3 Х-0,8
___ о,75 + 0,08^ + X
0,7*Х Х-0,4Г
+ 1,4Х+ Х + 0,4 Frj
E-53)
95
Рис. 5.21. Гидродинамические характеристики плоской
глиссирующей пластины Сд/ а =/, (\ , Frj3>
Рис. 5.22. Гидродинамические характеристики
плоской глиссирующей пластины тд =/, (\, F)
10
20
30
В графической форме эти
зависимости представлены на
рис. 5.21 и 5.22.
Сопротивление .глиссера зави-
зависит от угла атаки несущей поверх-
поверхности. У каждой пластины суще-
существует для данных Сд, Frjj такой
угол ofopj, при котором ее сопро-
сопротивление минимально. С увеличе-
увеличением a >aopt быстро растет со-
составляющая сопротивления /?д;
при уменьшении a < aopt сущест-
существенно возрастает RT.
Величина aopt меняется в зави-
зависимости от коэффициента нагруз-
нагрузки Св, связанной с величинами
Сд и Fr [см. формулу E.46)].
Величина aopt также существенно
зависит от килеватости днища
(рис. 5.23).
На величину aopt влияет шеро-
шероховатость поверхности пластины.
СС.opt
о
6
к
——
10
15
20
is p;
Рис. 5.23. Оптимальные углы атаки килеватых
пластин
5
4
J
?
/
/
—
_ ¦—
10
20
40 1/В
Рис. 5.24. Влияние килеватости глиссирующих
пластин на гидродинамическое качество
Рис. 5.25. Зависимость скорости начала чистого
глиссирования от удлинения судна
96
Если увеличить ?т, возрастет вязкостная составляющая и а<,р4 переместится в область
больших значений. Именно вследствие этого явления оптимальный угол дифферента
модели судна в общем случае не равен оптимальному углу дифферента самого натурно-
натурного судна, что нужно всегда учитывать. Для отыскания aopt натуры следует на расчетных
числах Фруда измерить зависимость полного сопротивления модели от угла атаки вбли-
вблизи его оптимального значения. Затем, пересчитав сопротивление на натурное судно по
законам подобия, нужно построить кривую его полного сопротивления от угла атаки
днища; aopt определится в точкеRmm-
Сопротивление движению глиссирующего судна зависит от числа Фруда и коэффи-
коэффициента статической нагрузки. Однако если для каждого случая движения выбрана наи-
наилучшая центровка, увеличение коэффициента глиссирования с ростом Сд невелико.
Значение же коэффициента момента гад при этом изменяется весьма значительно.
Существует также зависимость безразмерного коэффициента б от удлинения смочен-
смоченной поверхности глиссера. Однако само удлинение является функцией нагрузки, цент-
центровки и числа Фруда, и в оптимальных режимах (гадорг) увеличение удлинения одно-
однозначно соответствует увеличению коэффициента Сд.
Влияние килеватости пластин на гидродинамическое качество показано на рис. 5.24.
При расчетах ходкости глиссирующих судов важно также знать момент наступления
режима чистого глиссирования. Для центровок, близких к оптимальным, может быть
использована зависимость скорости начала чистого глиссирования от величины удлине-
удлинения днища (рис. 5.25). Весьма важным вопросом ходкости глиссеров является нахожде-
нахождение границ устойчивости движения. Известно, что неустойчивость движения судна
наблюдается при определенных сочетаниях скорости и углов атаки несущей поверх-
поверхности. Положение зон устойчивости обычно описывают для какого-либо конкретного
случая в координатах a, v, а в обобщенном виде — в координатах a, Cg (рис. 5.26, а, б).
Первая граница зоны неустойчивости характерна возникновением преимущественно
вертикальных колебаний. Для плоской пластины ее положение определяют по формуле
[153]:
aT=RTCB,
E.54)
\
10
11
v,m/c
0,12 0,16 0,20
Рис. 5.26. Типичные зоны устойчивости (зоны неустойчивости заштри-
заштрихованы) плоских глиссирующих пластин: а - в координатах а я v (Сд =
=0,05); б - в координатах а и Св (Сд =0,37)
4 Зак.738
97
где Rj — коэффициент пропорциональности для границы I; а\ — угол атаки, соответ-
соответствующий границе I, рад.
Значение R\ при изменении продольного момента инерции масс относительно центра
масс судна меняется незначительно. При Сд > 0,2
Rl =3,015; E.55)
aj « ЗСВ. E.56)
В диапазоне Сд = 0,02 + 0,2
0,4
Rl = 2,1 + ¦ . E.57)
Сд + 0,1 V '
Однако можно полагать R\ постоянным для всех Сд. В этом случае ошибка при расчете
режимов устойчивости произойдет в безопасную сторону, т. е. образует некоторый запас
устойчивости.
Область устойчивого глиссирования между границами I и II относится к режимам
движения реданных глиссеров, зкранопланов и гидросамолетов.
Вторая граница зоны неустойчивости характеризуется возникновением в основном
угловых колебаний. Величина коэффициента пропорциональности для границы II R\\ за-
зависит от угла поперечной килеватости корпуса. Влиянием нагрузки и массы судна мож-
можно пренебречь [64] :
Дц =1,26+1,530, E.58)
где 0 — угол килеватости, рад. В соответствии с этим участки границы II с движением
на полной ширине описываются формулой
АН = A,26+ 1,530) Св. E.59)
Третья граница характеризует пределы устойчивости движения безреданных глисси-
глиссирующих судов. На положение границы устойчивости III влияют число Фруда, киле-
ватость несущей поверхности и безразмерные коэффициенты массы и продольного
момента инерции. Безразмерным коэффициентом массы в общем случае (глиссер без
разгрузки) является коэффициент статической нагрузки Сд. Для вычисления коэффи-
коэффициента продольного момента инерции сначала определяют сам момент инерции масс
судна относительно поперечной оси, проходящей через центр масс. На практике пользу-
пользуются формулой
п
I =AL 2 х(т{,
где AL — величина шпации, принятой при построении кривой распределения масс; Щ —
абсцисса центра масс каждой шпации относительно общего центра масс; щ — ордината
кривой распределения масс по длине судна.
Далее вычисляют безразмерный коэффициент продольного момента инерции / по
формуле
Формула для границы III [64]
/54/74/ 2,5 \ / 5 \ з/4
Ш = 0>15\+47\1+ 125У \+с^+2У \ + 2Fib) Св ' E'60)
98
При использовании этой формулы в случае Frjj > 3 влиянием относительной скорости
следует пренебречь, тогда
«Ш =0,15
E.61)
Для практических целей целесообразно использовать змпирическую формулу, получен-
полученную в результате испытания серии моделей Клемента и Блаунта [43],
= 1,80/Fr^. E.62)
В более удобном виде зта формула может быть представлена следующим образом:
E.63)
Указанные зависимости получены для остроскулых катеров с плоскокилеватыми
обводами, скорости которых в процессе испытаний не превышали Fr^ ~7. Решение
вопроса об устойчивости глиссеров других форм и с другими скоростями движения
(Fry >7) требует специального исследования.
Особенности гидродинамики глиссирующих катамаранов. Глиссирующий катамаран
обычно представляет собой систему из двух остроскулых корпусов и соединительного
моста. С гидродинамической точки зрения глиссирующими катамаранами являются
и суда на гидролыжах. Особенности гидродинамики таких судов определяются наличием
взаимовлияния корпусов в процессе движения, а также существенно большим, нежели
у однокорпусных глиссеров, удлинением несущих поверхностей.
Взаимодействие двух корпусов приводит к изменению картины волно- и брызгооб-
разования. Оно начинает проявляться, как только поперечное отстояние корпусов с ста-
становится меньше удвоенной ширины одного корпуса (с<2В или с = с/В < 2, где с —
относительное отстояние корпусов).
По мере сближения корпусов между ними образуется волновой „петух", который
при с < 1 может начать замывать соединительную конструкцию. При с = 0,5 брызговые
усы от несущих поверхностей могут начать замывать борта судна. В этих случаях сопро-
сопротивление катамарана превышает удвоенное сопротивление одного изолированного кор-
корпуса.
Если же при проектировании формы глиссирующего катамарана приняты меры про-
против замывания корпуса и моста, сопротивление судна по сравнению с удвоенным сопро-
сопротивлением одного изолированного корпуса снижается (рис. 5.27).
Величина оптимального угла атаки с уменьшением с также уменьшается. Однако ве-
величина коэффициента момента тд при этом остается такой же, как и для одного изоли-
изолированного корпуса. '
Килеватость несущих поверхностей при отсут-
отсутствии замывов на изменение сопротивления не
влияет (см. рис. 5.27). Указанная зависимость по-
получена для серии остроскулых катамаранов с по-
постоянной килеватостью по длине (моногедрон),
имеющих углы килеватости C от 0 до 15°, Сд ~0,8,
на скорости Fry = 3,1 при наивыгоднейших углах
атаки (-5°) [36].
Характер изменения кривой сопротив-
сопротивления от скорости в зависимости от отно- _ , „„ „
Рис. 5.27. Влияние относительного от-
сительного отстояния корпусов показан на стояшм корпусов моделей n^p^
рис. 5.28 для модели с 0 =0 и на рис. 5.29 для щего катамарана на полное сопротивле-
моделис0 = 15°. ние(о - /3=0°; Д - /3 = 10°; + - 0 = 15°)
99
5
Ч
3
0,20
0.16
\\
\
\\
с=2,0
ч
4=2,0/
lFr/Ф
,*~~10
7-0,5
f—o
иг
6 U,M/C
б V, М/С
Рис. 5.28. Кривые сопротивления модели
катамарана (/3 = 0°; тд оптимальный)
Рис. 5.29. Кривые сопротивления модели
катамарана с обводами моногедрон @ =
= 15° ; Ид оптимальный)
Сопоставление кривых сопротивления катамарана и однокорпусного глиссера,
рассчитанных на одинаковые скорости движения, показывает заметное преимущество
двухкорпусного судна по сопротивлению в районе горба. Это объясняется значительным
влиянием на переходном режиме сопротивления формы, которое имеет меньшие значе-
значения для корпусов с большим удлинением. Позтому можно считать целесообразным при-
применение двухкорпусных компоновок при проектировании судов переходного режима
движения.
На высоких скоростях применение катамаранной схемы также дает известные пре-
преимущества. Они обусловлены тем, что однокорпусные глиссеры при больших числах
Фруда движутся с углами дифферента, существенно меньшими A—2°) оптимальных.
Увеличение углов до ~5° возможно без потери устойчивости лишь за счет сужения несу-
несущей поверхности и зачастую неприемлемо по соображениям остойчивости. Поэтому
скоростной глиссер-катамаран может оказаться быстроходнее однокорпусного глиссера.
На рис. 5.30 показаны кривые сопротивления моделей с однотипными обводами, имею-
имеющими симметричную и асимметричную формы корпусов [159].
иго
Sfi
QMS
№
и
1,0
г А
У
г
1,5
2,0
10
15
°
Рис. 5.30. Кривые сопротивления мо-
моделей катамарана с симметричными
A) и асимметричными B) корпусами
Рис. 5.31. Зависимость величин макси-
максимальных вертикальных перегрузок
катамаранов равного сопротивления
от их килейатости (с = 2,0; Fr у = 3,1)
100
К особенностям гидродинамики катамаранов следует отнести также их повышен-
повышенные мореходные качества. Сравнительное экспериментальное исследование остроску-
лых одно- и двухкорпусной модели одинаковой килеватости на регулярном волнении
показало существенное преимущество катамарана по величинам вертикальных уско-
ускорений. Так, на скорости Fry =3 перегрузки катамарана были меньше в 1,44 раза в носу
и в^1,2 раза в центре масс. При скоростях Fr у = 3,8 соотношение перегрузок достигает
1,74 в носу н 1,68 в центре масс [37].
Следует отметить, что отстояние корпусов влияет на величины максимальных пере-
перегрузок катамарана. Если вертикальные ускорения двухкорпусной модели с с = 2,0
принять за единицу, то для случая с с = 1,0 они составят 1,15, а для с = 0,5-1,20 {37].
Весьма своеобразно на величины перегрузок катамарана влияет килеватость кор-
корпусов. Если сравнивать модели с разной килеватостью, но имеющие одинаковое сопро-
сопротивление на тихой воде, то килеватые корпуса должны будут иметь большую ширину.
Вследствие этого на волнении, несмотря на благоприятное влияние килеватости, пере-
перегрузки моделей с большой килеватостью оказываются большими, чем у более узких
плоских пластин. В качестве примера на рис. 5.31 приведен график изменения величин
максимальных перегрузок призматических моделей при оптимальных центровках.
Практика подтверждает целесообразность принятия для глиссирующих катамаранов
минимальных значений килеватости на транце и на миделе.
Все сказанное относится к судам с коэффициентами статической нагрузки 0,6—0,8
и более, рассчитанными на скорости переходного режима и начала чистого глиссирова-
глиссирования.
5.5. Приближенные способы расчета сопротивления движению малого судна*
Применяемые методы приближенного расчета сопротивления движению судов мож-
можно разделить на следующие группы.
1. Методы непосредственного расчета полного сопротивления/? или буксировочной
мощности Nr по обобщенным эмпирическим зависимостям, а также средней достижи-
достижимой скорости движения v в функции энерговооруженности судна N/D по статистиче-
статистическим данным для данного типа судна.
2. Методы пересчета остаточного сопротивления по данному прототипу.
3. Методы расчета остаточного сопротивления Ro по результатам буксировочных ис-
испытаний систематических серий моделей судов в опытовом бассейне.
Наименее точны методы первой группы из-за несоблюдения геометрического подо-
подобия и из-за ошибок, связанных с неточным определением сопротивления трения Rr>
составляющего обычно значительную часть полного сопротивления. Неточность методов
второй и третьей группы определяется невозможностью обеспечения полного геометри-
геометрического соответствия элементов судна либо прототипу, либо моделям систематической
серии. Частично эта неточность может быть скорректирована в расчете применением
ряда поправочных коэффициентов [31].
ЕсЛи определены составляющие полного сопротивления движению судна, то букси-
буксировочная мощность
NR= .ZRiV. E.64)
При этом потребная эффективная мощность двигателя
E.65)
* Способы расчета сопротивления катеров на подводных крыльях приведены в гл. 12.
101
где 17 = 0,50 т 0,70 — коэффициент полезного действия движителя; tfe =0,95-^0,98 —
коэффициент полезного действия валопровода; т}р — коэффициент полезного дей-
действия редуктора. Его можно принимать равным 0,97-0,98 при одной паре шесте-
шестерен; 0,96—0,97 — при цепной передаче и 0,95—0,97 — при клиноременной пере-
передаче.
При выборе метода следует исходить из условия предпочтительности использования
материалов, полученных для судов или моделей, наиболее близких к рассматрива-
рассматриваемому.
Наиболее обоснованным следует считать применение зависимостей, структура кото-
которых соответствует законам гидродинамического подобия, например формула E.32).
При зтом роль характерной площади может играть смоченная поверхность судна Л или
его объемное водоизмещение в степени B/3) — V2/3.
Для получения большей достоверности целесообразно использовать зависимости
для пересчета только величины остаточного сопротивления Ro, а сопротивление трения
RT рассчитывать по методике, приведенной в п. 5.3.
Расчет сопротивления водоизмещающего судна. При предварительной оценке скоро-
скорости и полной мощности малых судов допустимо использовать обобщенные эмпириче-
эмпирические зависимости, связывающие скорость, мощность и размеры судна. При этом нужно
помнить о статистической природе формул, приводящей к заметным погрешностям (фор-
(формулы первой группы). Для малых водоизмещающих судов с удельной энерговооружен-
энерговооруженностью Лу/Х 10 кВт/т используют формулу [121]
v,M/cl =0,9vZ[m] -N3[kBt]/B[m], E.66)
где N3 — эффективная мощность двигателя, т. е. формула включает в себя и среднее зна-
значение общего пропульсивного коэффициента. Результат расчета скорости для судов
длиной L = 3-5 м может оказаться заниженным на 15-20%, при ?> 6м скорость за-
завышается на ~ 10 %.
Если *у проектируемого судна есть близкий прототип, можно применить формулу
адмиралтейских коэффициентов (вторая группа методов). Выражение имеет вид
E.67)
где Се — адмиралтейский коэффициент.
Вычисления производят следующим образом:
по данным прототипа вычисляют значение Се;
подставляя найденный адмиралтейский коэффициент в формулу для проектируе-
проектируемого судна, находят Afo.
При использовании метода адмиралтейских коэффициентов необходимо обеспечить
равенство чисел Фруда и соответствие углов дифферента одного и другого судна.
Формула адмиралтейских коэффициентов имеет следствием зависимость, которая поз-
позволяет найти для судна, имеющего скорость v0 и мощность двигателя No, новую ско-
скорость v с другим двигателем ./Упри том же водоизмещении V [121]
v/v0 = $7Щ. E.68)
Формула E.68) справедлива в том случае, когда изменение мощности ие приводит к из-
изменению режима движения судна.
Более точные результаты получают при определении сопротивления корпуса судна
по отдельным составляющим (третья группа методов). Сопротивление трения опреде-
определяют как сопротивление трения эквивалентной пластины, а остаточное сопротивление
находят по результатам экспериментальных исследований. Форма представления этих
102
результатов может быть графической или аналитической в виде аппроксимирующей
формулы). При этом в качестве аргументов обычно фигурируют число Фруда и относи-
относительное удлинение. В некоторых случаях, когда испытывались суда близкой или геомет-
геометрически подобной формы, ограничиваются одним аргументом — числом Фруда. Расчет
сопротивления голого корпуса производят в указанной ниже последовательности.
По заданным Д L,B,T,b,v,t° воды определяют:
1) Fr/, [см. формулу E.7)];
2) gD ;
3) RjgD [см. формулы E.25), E.27), E.34)-E.37), E.69) или графики (рис. 5.13,
5.32,5.33)];
4)ДО = C)B)Н;
5) v (см. рис. 5.5);
6) Re [см. формулу E.8)];
7) St. [см. формулу E.24), рис. 5.6];
8) Д?т см. с. 119, а также [14,15,31,83};
9) Гт'= G) + (8) [см. формулу E.23)];
10) П [см. формулу E.17)—E.21)];
11)Д; [см. формулу E.22)];
12) R =R0+R'T= D) + A1) [15].
Полученное значение сопротивления голого корпуса используют с учетом добавок
на сопротивление выступающих частей и аэродинамическое сопротивление в расчете
буксировочной мощности. Ниже приведены материалы, которые можно использовать
в расчетах по приведенной методике.
Формула остаточного сопротивления шлюпок. Для спасательных шлюпок, имеющих
вместимость 20-99 чел., скорость Fr/, < 0,4, L/В =2,25+3,2, В/Т = 3?+5,0, 8= '
= 0,485 т 0,570 и симметричных относительно миделя, получена формула остаточного
сопротивления на единицу веса судна [31]
RjgD = 30 (Frx /0,4) 2 [ 0,25 + 0,76 (Fr^ /0,4) 7 ]. E.69)
При расчете RT смоченная поверхность может быть подсчитана по формуле С. П. Му-
рагина. Надбавка на шероховатость и сопротивление выступающих частей для деревян-
деревянных шлюпок с обшивкой внакрой составляет A.0 -г-1,2) • 10, для шлюпок с металли-
металлической обшивкой и деревянной вгладь @,7 "=,8) • 10~3 [31].
Диаграмма Неймана [15] может быть использована для определения величины оста-
остаточного сопротивления буксиров, рыболовных или близких к ним по форме судов
(см. рис. 5.13) [15, 31]. На вертикальной оси диаграммы отложены значения отноше-
отношения Ro, H, к весовому водоизмещению судна gD, кг.
Формулы Папмеля [43] позволяют определить остаточное сопротивление как сум-
сумму сопротивления формы и волнового сопротивления. Для этого нужно дополнительно
вычислить площадь погруженной части мидель-шпангоута, длину кормового заострения,
а также произвести промежуточные вычисления по формулам E.34), E.35). Сопротив-
Сопротивление формы рассчитывают с использованием формул E.27), E.25), а волновое —
по формуле E.36) или E.37). Полученные результаты суммируют и используют как
значение Ro. Дальнейший расчет производится как и в предыдущих случаях по приве-
приведенной схеме.
Методика В. А. Дубровского может быть использована для расчета остаточного со-
сопротивления водоизмещающих катамаранов. Она основана на применении коэффициен-
коэффициентов, учитывающих взаимодействие корпусов. Исходной величиной для расчета коэффи-
коэффициента остаточного сопротивления катамарана с отстоянием корпусов с является коэф-
коэффициент остаточного сопротивления f, одного изолированного корпуса. Он может быть
найден экспериментально или, например, по графику (рис. 5.32), где построены кривые
удельного остаточного сопротивления судов с большим относительным удлинением
Г в зависимости от числа Фруда.
103
...
0,03
0,02
0,01
i
1,
/у
'\У
у
рУ
-к
0,В 1,0
1.2
2,0 2.2Гг,
Для расчета предварительно опреде-
определяют относительное удлинение одного
корпуса и число Фруда по объемному во-
водоизмещению Ft у. Затем используя гра-
график (рис. 5.32), определяют Ro одного
корпуса. Остаточное сопротивление ката-
катамарана Ло.кат находят по формуле [14]
Ло.кат = 2ЛЛо, E.70)
где к — коэффициент, учитывающий взаи-
взаимовлияние корпусов (рис. 5.33).
Расчет сопротивления судна, движуще-
движущегося в переходном режиме. Для предвари-
предварительной оценки скорости судов в переход-
переходном режиме можно использовать форму-
формулу, пригодную в диапазоне относительной
энерговооруженности NJD = lO-i-ЗО кВт/т
[121],
Рис. 5.32. Кривые остаточного сопротивления
корпусов большого удлинения
v [м/с] =
]
E.71)
Скорость более легких судов с V-об-
разными плоскокилеватыми обводами водоизмещением до 5 т в конце переходного
режима и начале глиссирования (при Fr/, =0,8^-2,7) можно вычислить по формуле
Ю. В. Емельянова
E.72)
v[m/c] =1,9V?V[kBt]/Z>[t].
Точность формулы ± 10 %.
Формула адмиралтейских коэффициентов для малого судна, движущегося в конце
переходного режима и начале глиссирования, имеет вид B-я группа методов)
Ce = V2l*v2/NR. E.73)
Последовательность вычислений та же, что и для формулы E.67).
0,02 0,04- 0,06 Ofib 0,10 . 0,12 0,14- с/1
Рис. 5.33. Коэффициент учета взаимодействия корпусов катамарана: а
в диапазоне Fr у = 0,8 -г 1,6;' б - в диапазоне Fr у = 1,6 •*¦ 2,2
104
При использовании метода адмиралтейских коэффициентов следует особое внима-
внимание уделить помимо равенства чисел Фруда соответствию центровки прототипа и проек-
проектируемого судна. При этом для судов указанного режима движения ходовой дифферент
определяется не столько отношением*g-/?, сколько величиной ?Ид.
В тех случаях, когда необходимо пересчитать скорость данного судна при изменении
мощности или вычислить мощность для другого значения скорости при условии посто-
постоянства водоизмещения, применяют формулу
v /v0 = y/N/N0. E.74)
Справедливость указанного выражения обеспечивается только при равенстве углов диф-
дифферента судна на скоростях v и v0.
Поэтому для новой скорости дви-
движения должно быть найдено соот-
в етствующее значение тд.
Указанные методы могут быть
употреблены только для получения
результата в первом приближении.
Более точные способы основаны на
определении сопротивления судна
по составляющим с использованием
экспериментальных данных (по
остаточному сопротивлению). Рас-
чет производят в указанной ниже
последовательности.
По даннымД V,L,B, T,S,v,t°
воды определяют:
2)
4) Rol(gD) (см. рис. 5.34-
5.42);
6) v (см. рис. 5.5);
б)
0,10
0,08
0,06
ом
ппо
^^
~-
¦
-—-»
——.
^—.
—_
—— ¦ —
Ч,д 5,0 5,2 5,4 5,6 5,8 6,0 6,2 6Л 6,6 } 6,8
L/YV
Рис. 5.34. Диаграмма Брауна для судов с U-образными (в) и V-образными
(б) обводами
105
о
0,02
6,0
Рис. 5.35. Диаграмма Н. С. Володина для
определения остаточного сопротивления
быстроходных круглоскулых катеров
L* 1219мм
*№)
0JJ9
0,08
0,07
0,0В
005
0,03
0,02
0,01
О
-Frv-
16
1,^
\
Jfi-
i
c/Vv
Рис. 5.36. Кривые остаточного сопротивления
моделей серии Нордстрема
Корпус серии Нордстрема Корпус серии Гроота
0,02
Рис. 5.38. Кривые остаточного сопротивления
моделей серии Гроота
Рис. 5.37. Теоретические чертежи моделей Гроота и
— Нордстрема
7) Re [см. формулу E.8)];
8)?т. (см. рис. 5.6);
9) At (см. с. 119, 147,148, а также [ 14,15,31,83];
Ю)?;= (8)+ (9);
11) О [по теоретическому чертежу, табл. 5.1 или по формулам E.17—5.21)];
12) R'T [см. формулу E.22)];
13) R=R0+RrT= E)+ A2).
Далее к сопротивлению голого корпуса добавляют сопротивление выступающих частей
и аэродинамическое сопротивление.
В расчетах по данной методике можно с успехом использовать приведенные ниже
материалы.
Диаграммы Брауна применяют для определения остаточного сопротивления судов,
имеющих L/B - 3,5 + 7,4, В/ Т= 3,1 +4,4, 5 =- 0,29 +0,54 и движущихся в конце режима
плавания и переходном режиме. На рис. 5.34 приведены диаграммы дли судов с U- и
V-образными обводами. Для использования кривых необходимо предварительно вычи-
вычислить величины / я Ft у. На каждой кривой обозначено соответствующее ей значение'
числа Фруда; промежуточные величины получают методами графической интерполяции.
Вдоль вертикальной оси диаграмм отложены значения относительного остаточного со-
сопротивления Ro на единицу весового водоизмещения.
Диаграмма Н. С. Володина, построенная на основании большого экспериментально-
экспериментального материала, позволяет определить остаточное сопротивление круглоскулых быстро-
• ходных катеров в зависимости от / для ряда значений Frp (рис. 5.35). Величина Ro,
отнесенная к весу судна gD, т. м/с2, отложена вдоль вертикальной оси диаграммы.
Для промежуточных величин числа Фруда результат получают методом графической
интерполяции. Расчет сопротивления трения производят по смоченной поверхности кор-
корпуса, соответствующей статическому положению судна.
Систематическая серия Нордстрема опубликована автором в 1936 г. по результатам
испытаний 14 круглоскулых моделей, характеристики которых имели следующие зна-
значения: L/B =4,83 +6,94; В/Т = 3,16 + 3,57; 5=0,373+0,410; <р = 0,576 +0,599; хс =
= -1,79 + 2,88 %; Sl/s/VL= 2,67 + 2,70; о,, = 15,1 + 22,5°. ;
Значения безразмерного коэффициента Ro/(Dg) в зависимости от относительного
удлинения и числа, Фруда по объемному водоизмещению представлены на рис. 5.36
(см. примечание 1). В настоящее время результаты серии Нордстрема применяются
в основном для катеров водоизмещением 10—30 т. Теоретический чертеж модели Норд-
Нордстрема показан на рис. 5.37.
Систематическая серия Гроота опубликована в 1951 г. по данным испытаний 31 мо-
модели круглоскулых быстроходных катеров. Геометрические характеристики корпусов
следующие: L/B= 3,53 + 10,09; В/Т = 2,72 +6,58; 5=0,293+0,560; <р = 0,463 + 0,791;
хс = -11,5 + 3,09 %; п/y/VL = 2,75.
Материалы испытаний Гроота (рис. 5.38) широко используются в настоящее время
как образцовые при разработке новых форм быстроходных катеров. Теоретический
чертеж модели Гроота приведен на рис. 5.37 (см. примечание 1).
Серия 63. Результаты испытаний пяти моделей 15-метроврго катера многоцелевого
назначения были опубликованы в 1963 г. Это систематическая серия, в которой у теоре-
теоретических чертежей всех моделей проекции „корпус" геометрически подобны. Модели
имеют расчетные значения L/В =2,5; 3,0; 4,0; 5,0; 6,0 (рис. 5.39). Поскольку каждая
модель испытывапась с разными значениями нагрузки, величиныL/B,B/ T, 5 и <р в про-
процессе опытов несколько изменялись (табл. 5.3).
Данные серии 63 наглядно иллюстрируют влияние основных характеристик корпуса
на сопротивление и поэтому могут быть с пользой- применены при выборе главных раз-
мерений судна.
Серия 64. Результаты испытаний 27 моделей быстроходных круглоскулых катеров
в Тейлоровском бассейне опубликованы в 1965 г. Это систематическая серия моделей,
107
о
00
а)
0,12
0,10
0,08
0,06
I
0,0^
0,02
о
в)
\
\
\
N
ч
4
ч
Frv
/2,0
^1,0
=op-
0,12
0,10
0,08
0,06
0,0k
0,02
0
ч
\
>
>
\
ч
4
ч
.4
4.
>-
^^
*—¦ —
Fry
^$
^^*"te IT
^ 1,1
"*¦* 1,1
1.0
0,9
0,12
0,10
0,08
0,06
0,0»
0,02
0
Ч^
\
—¦—.
Ч
^-—,
—
Fry
п п
¦18
1.6
4 U
&
\г
V
1.0
у,у —
Рис. 5.39. Кривые остаточного сопротивления
моделей серии 63 с расчетными значениями
ЦВ: а -2,5; 6-3,0; в -4,0; г -5,0; д - 6,0
в процессе испытаний которой варьировались относительное удлинение, отношение ши-
ширины к осадке и коэффициент общей полноты. Модели имеют L/B =8,454-г 18,264;
Я/Г = 2,0-f 4,0; 5 = 0,35-0,55; <р = 0,63; 5^=6,56; ан =3,7*7,8; П/у/VL =2,6+3,0.
Кривые коэффициента остаточного сопротивления в функции от числа Фруда и относи-
относительного удлинения представлены на рис. 5.40 (см. примечание 1).
Данные по серии 64 часто используют для целей проектного исследования. Они так-
также с успехом могут быть, применены в расчетах ходкости двухкорпусного судна. При
этом необходимо дополнительно учесть взаимодействия корпусов по методике, изло-
изложенной на с. 163,164.
Серия Шведского опытового бассейна (SSPA). В 1968 г. Линдгрен и Вильяме полу-
получили результаты систематической серии из девяти моделей быстроходных круглоску-
лых катеров. Параметры формы корпуса имели следующие значения: L/ F1/3 = 6, 7, 8;
Я/Г = 3,0; 3,5; 4,0; 5-0,4; <р = 0,68; д:^ =4,15; он =8,2-14,4°; <W^X~= 2,9-г3,0.
Результирующие значения L/B составляли от 4.62 до 8,20 в зависимости от номера
модели и ее загрузки. Кривые безразмерного коэффициента остаточного сопротивления
приведены на рис. 5.41 (см. примечание 2).
Серия Британской национальной физической лаборатории (NPL). Данные, опубли-
опубликованные Мэрвудом и Бэйли в 1969 г. и Бэйли в 1976 г., представляют собой результа-
результаты испытаний систематической серии из 22 моделей с различными значениями L/B и
В/Т. Величины L/B составляли: 3,33; 4,54; 5,41; 6,25; 7,50. Значения В/ Т изменялись
от 1,72 до 6.87. Все остальные параметры формы корпуса поддерживались постоянны-
постоянными: 5 =0,397, v> = 0,693, хс =—6,4%. Результаты приведены на рис. 5.42 (см. примеча-
примечание 2).
Помимо приведенных материалов существуют широко известные графики Хеншке.
Они представляют собой диаграммы изменения буксировочной мощности в функции
скорости для разных значений относительного удлинения. Графики построены на осно-
основании анализа большого числа судов и отображают средние значения буксировочной
мощности хорошо выполненных судов. Поскольку эти данные относятся к судам с уста-
устаревшими формами обводов, графики Хеншке здесь не приводятся. Подробное описание
указанных материалов с расчетными таблицами и диаграммами приведено в [4]. Резуль-
Результаты, полученные по данным Хеншке, нужно рассматривать только как ориентировоч-
ориентировочные.
Примечание 1. Экспериментальные данные обработаны с применением принятой в американ-
американском судостроении кривой Шенхерра, которая может быть выражена формулой вида
Коэффициенты ?То, полученные по формуле Шенхерра незначительно отличаются от принятой
в отечественном судостроении формулы Прандтля-Шлихтинга.
Примечание 2. Экспериментальные данные обработаны с применением формулы коэффициен-
коэффициента турбулентного трения, рекомендованного Международной конференцией опытовых бассейнов
(Мадрид, 1957 г.):
rTo = O,O75/(lgRe-2)'.
Расчет сопротивления судна, движущегося в режиме чистого глиссирования. Для
предварительной оценки скорости глиссирующих остроскулых катеров с плоскокилева-
тыми обводами, имеющими L/B =2,8-5-3,5, Сд =0,10-г0,25 и энерговооруженность
N/D = 15 -i-90 кВт/т, можно пользоваться формулой, разработанной Л. Л. Романенко и
Л. С. Щербаковым на основании статистических данных [121]
E.75)
109
Модель
(см. рис.
5.39)
а
б
в
г
д
Та бл и ца
L/B
2,52-2,70
2,95-3,31
3,76-4,10
4,62-4,92
5,48-5,75
В/Т
6,64-9,20
5,44-9,50
3,76-7,14
3,21-5,59
2,89-4,34
5. 3. Характеристики моделей серии 63
S
0,383-0,464
0,393-0,520
0,462-0,586
0,512-0,623
0,549-0,636
0,577-0,642
0,591-0,690
0,647-0,734
0,690-0,764
0,740-0,744
Xg
0,30-3,4
0,0-4,63
3,11-4,95
3,55-4,94
5,33-5,80
ан, °
22,6-27,9
18,8-27,5
17,2-28,6
16,9-27,7
17,4-25,3
n/s/VL
3,21-3,65
2,91-3,81
2,64-3,25
2,57-2,93
2,57-2,77
0JD5
0,0k
0,03
0,02
0,01
^$
^-—
——.
1
— —i
—
i
—_—
—.
—.—
—
—.—
—— .
,
——
———_
-
—¦
—¦
— —
-' i 1—1.
¦ ' »¦¦
— |. ¦
-
—
— —1
ш.
¦1-
-
3D
Ян
-1,0 '"
8' 9 -10 11 П
Рис. 5.40. Кривые остаточного сопротивления серии 64
\
\
\
\
N
>
-1.1
0,06
0,05
Ofit
0,03
0,02
0,01
о
Рис. 5.41. Кривые остаточного сопротивления
моделей Шведского опытового бассейна (SSPA)
ПО
6)
0,°10
0,09
0,08
0,07
0,06
0,05
0,04
0,03
0,01
0,01
\
\
-
V
\
\
ч
4
1 ""•»•.
\
\\
4
\
4
- -
"' —
¦—¦ 1 1
\
\
ЧХ
4
— ¦—.
'
s
\
\
Лч
—.
*¦ 1.
^ч
'2,6
•14
•2,2
•2,0
43
¦f.2
•0,9_
8)
0,09
O,Dd
0,07
0,06
0,05
0,04
0,03
0,01
0,01
0
ЧЛ
\|
V
\
s.
'
^ ¦
\
4,
\
-—~
— -
— —
ч
4
——
-¦¦И
*¦ I-
- ,
-' 1
\
4
——-
~ —
— .1—
==
^ 2,8
^ 2,5
*ч \\l
"^ 1,1
"- 1,0
-. 0,9 _
— 0,8
7 .3 8
l/Vy
0,07
0,06
0,05
0,03
Ofii
0,01
0
Рис. 5.42. Кривые остаточного сопротивления моделей серии Британской национальной физи-
физической лаборатории (ЫРЬ):д-1/Д = 3,3; В/Т = 3,194-10,21; б-1/Д = 4,54; Д/Г = 1,72-г6,87;
'' = 1,94 4-4,86; г -1/Д = 6,25; Д/Г = 1,93 4-5,80; д - 1/Д =7,50;
В/Т = 2,014-4,02
\
ч
>
>
\
N
— —
—^,
— —
ч^
— —
V
$Й
ч^чд
^$
f
111
Хорошие результаты можно получить при использовании формулы Л. М. Кривоносова
v [м/с] = ск лД[кВт]/?>[т], E.76)
где ск — коэффициент:
для малых безреданных гаиссеров ск = 1,7}-
для однореданных глиссеров с # =2,0;
для трехточечных гоночных глиссеров ск =2,3.
Скорость реданных глиссеров при Fr^ >3 можно оценить по формуле А. И. Мар-
Мартынова
/ЛПкВтЛ0'454
V[m/c]=3>2(~D[t] ) E>77)
Формула адмиралтейских коэффициентов для глиссеров, движущихся с большими
числами Фруда (Fr у > 4), имеет следующий вид:
Vv
Се = —- • E.78)
NR
Если известны v0 nN0 глиссера, то новая скорость v с другим двигаталемА^при том
же водоизмещении может быть определена по формуле [121]
v/vo = (iV/iVo)o>67. E.79)
Формулы адмиралтейских коэффициентов с повышением скорости судна дают все
менее надежный результат, так как при этом возрастает влияние неучитываемых момен-
моментов гидродинамических и аэродинамических сил, аэродинамической составляющей сил
сопротивления и поддержания, а также изменения сопротивления выступающих частей.
Поэтому для получения более достоверных значений сопротивления следует использо-
использовать методы третьей группы — расчеты по данным испытаний систематических серий схе-
схематизированных моделей.
При расчете гидродинамических характеристик и сопротивления возможны две
основных схемы решения задачи: первый — когда для выбранных водоизмещения, ши-
ширины, центровки и скорости требуется определить сопротивление движению и второй —
когда для выбранного режима движения нужно вычислить необходимое значение цент-
центровки.
Схема I. Известны D, В, xg судна и скорость v. Требуется определить углы диффе-
дифферента и сопротивление движению.
Находят Frg по формуле E.7), шд по формуле E.45), X по графику на рис. 5.22.
По найденному значению X с учетом Frg определяют по графику на рис. 5.21 величину
Св/а. Находят С в, вычисляют а.
Далее определяют сопротивление нормальных давлений Ra [см. формулу E.51)]
и сопротивление трения RT [см. E.22)] (точнее, сопротивление трения эквивалентной
пластины -Ят). При этом число Re вычисляют по смоченной ддине 1СМ =ХВ, смоченную
поверхность судна — по формуле E.50). Надбавки на шероховатость принимают с уче-
учетом рекомендаций на с. 80, 94-95. Полное сопротивление голого корпуса глиссера
составит
Лг.к=Лд+Дт. E.80)
К нему необходимо прибавить аэродинамическое сопротивление и добавки на
сопротивление выступающих частей согласно соответствующим рекомендациям.
112
В случае если судно имеет несущую поверхность, значительно отличающуюся от
плоской пластины, в процессе расчета величин X и а необходимо ввести поправки на ки-
леватость по формулам И. П. Любомирова:
1 + 1,35 (sin 0o)°>44X
E.81)
/Зо=О,5ОЗмид+0тр);
E.82)
Схема П. Известны D, В, скорость v и принятое проектантом значение а. Требуется
определить необходимое для этого xg.
Находят ?тд по формуле E.7), Сд по формуле E.46). Вычисляют Cg/o. По графи-
графику на рис. 5.21 находят смоченное удлинение X. По графику на рис. 5.22 для известных
X и Ргд определяют тд. Вычисляют xg по формуле E.45).
В процессе проектирования судна часто ставится задача нахождения гидродинамиче-
гидродинамически наивыгоднейших значений ширины и относительной центровки. В этом случае расчет
производят по схеме I для ряда значений В и xg. По результатам расчета строят график
е=/E, Xg) и определяют искомые величины методами графической интерполяции.
Однако такой подход требует большого объема вычислений.
Графики на рис. 5.43, построенные на основе формул E.52) и E.53) в безразмер-
безразмерном виде, позволяют не только найти нужные сочетания ширины и центровки, но и
выбрать желаемый характер изменения сопротивления по скорости судна. Эти графики
наглядно иллюстрируют влияние коэффициентов момента и статической нагрузки,
а также числа Фруда на углы атаки и сопротивление глиссирующих пластин. В случае
непосредственного использования предлагаемых кривых для определения сопротивле-
сопротивления глиссера следует учитывать, что при их построении принят суммарный коэффициент
трения ^т= 3 • 10~3.
За рубежом при проектировании глиссеров широко используются материалы
Е. П. Клемента [157,158]. Наиболее интересны графики, построенные им для определе-
определения параметров глиссирования в гидродинамически наивыгоднейших режимах. Кривая
гидродинамического качества на этих графиках — огибающая максимумов гидродина-
гидродинамического качества пластин с систематически изменяющимися параметрами (рис. 5.44,
5.45).
Материалы получены численным расчетом по эмпирическим формулам для судна
водоизмещением 4 т. Пренебрегая незначительными погрешностями, их можно исполь-
использовать на стадии эскизного проектирования для судов водоизмещением от 0,4 до 40 т.
В некоторых случаях удобно пользоваться аппроксимирующими формулами, пост-
построенными по данным Клемента для наивыгоднейших режимов.
Предлагаем уравнение оптимальных центровок:
wAo.pt = 28,6СВ - 0,57 E.83)
и уравнения гидродинамического качества:
для/3=0°
113
0,3
0,2
0,1
Неустойчивое
движение
7 Frv
0,1
О 1 2 "~3 U " S" 6 7Frv 0 1 2 3 * 5 6 7Frv 0 1 2 3 Ь 5 6 7 Frv
Рис. 5.43. Коэффициенты глиссирования и углы атаки плоских пластин при коэффициентах статической нагрузки от Сд=0,1 (а) до Сд=0,9 (а)
7Frv
Рис. 5.43. (продолжетие)
a)
тй
3,2
3,0
2.S
2,6
2,4
2,г
2.0
1.8
1,6
1,4
иг
1.0
0,6
o.s
ол
л; ос
.44
10
¦9
в -
¦7
б
5
¦4
I I
I I
\
И
и\
I 1
ч \
\\
W
\\ '
V
\
/;
г
\
V
ч
п
\
5,-
к
/r-
-а-
т
"i
^/
»ч
MB
-6
7
Г
ME
¦«¦.
Л"
—:
/
0 0.2 0,4 Ofi 0,8 1,0 1,2 1,4- 1,6 1,6 A"'
О 0.Z ty Ofi OjS 1,0 1,2 0 1JB
0,2 O,if 0,6 0# 1,0 1,2 1,Ь 1,6 1,8 2,0 ТС'-
Рис. 5.44. Огибающая максимумов гидроданамического качества и кривые Сд , /ид, а в функции А. для плоскокилев атых пластин при /3 = 5 (а),
10F), 15° (и) (\ = 0,5-М0,0)
00
a)
28
26
2<t
22
20
16
п
12
10
ft
a
2
0
•s
¦7
¦6
¦S
¦t
|
I
I
-
w
u
u
\
1
V
4,
\
\
\
{*
\
\
\
1
4
V.
*
Ц
?
¦<
^-
•.
,—¦
—.
A
f
—¦
л
-a-
Ml
y*
к:
--,
a
0,04
0.03
0,02
0,01
0 .
1A
1.3
иг
Ui
1Л
0,9
0,7
OJS
0,5
0.3
0.2
0.1
f)
"h
20
26
2U
22
20
18
IS
П
'12
10
в
6
it
2
0
¦ «
-7
•l?
•J
¦4
¦3
1
1
h
i
u
III
+r
n
1\
JV
\
l\
1
\
\
1
\
\
s
t
4
s
4,
<
-4
1
--
—«
m
-K -
f
4
—
/
Л
-в
Г*
„--
-—
¦as
ftOT
-дог
ftO?
r,J
?,2
7,Г .
1.0
0,9
OS
0,7
0.S
0,5
O.k
0,3
0.2
O.I
0
"i
28
2B
24
22
20
18
16
14
12
10
S
2
n
- s
- 7
-6
- 5
-4
- J
I
1
1
ftl
m>
III!
Ur
IT
\
\
V
V
\\
r
\
\
t
n
s
*--
<
s
4
r-
<
¦*.
s
¦*-
¦--
Z
A
y_
t
ES
=
r^
в
•4 ~
'б"
4-
o,on
0,03
0,02
0,01
4
1,1
из
1.2
1,1
1,0
0,9
0,8
0,7
0,S
0,5
0,1
0,3
0,2
0,1
0
0,1
0,2 0,3
Рис. 5,45. Огибающая максимумов гидродинамического качества и кривые Сд , и.д. а в функции \~' для плоских и плоскокилеватых пластин боль-
большого удлинения при/3 = 0 («), 5 (б), 10° (в) (X. = 2,5 * 50,0)
для |3 = 5 -г 10° (осредненная кривая, ± 2 %)
*' св?о',оз
E-85)
При проектировании глиссирующего судна, имеющего сложные обводы, а также
в тех случаях, когда по скорости судно не достигает режима чистого глиссирования,
использование представленных материалов приведет к большим погрешностям.
Поэтому в указанной ситуации неизбежны испытания модели судна в опытовом бассей-
бассейне. Перенос результатов эксперимента на натурное судно производят по законам гидро-
гидродинамического подобия.
Следует помнить, что характер обтекания моделей небольших размеров определяет-
определяется дополнительно еще и силами поверхностного натяжения. Это не только увеличивает
масштабный эффект, но и меняет картину волно- и брызгообразования. Поэтому реко-
рекомендуется испытывать модели шириной не менее 0,3 м.
При обработке результатов эксперимента иногда трудно бывает выделить составля-
составляющую трения из полного сопротивления модели судна. Это происходит, когда модель
имеет сложную конфигурацию днища, либо когда в процессе замеров невозможно точно
зафиксировать площадь смоченной поверхности. В этих случаях при равенстве чисел
Фруда модели и натуры пересчитывают полное сопротивление по кубу масштаба. Возни-
Возникающая при этом неточность часто бывает вполне допустима, тем более что она направ-
направлена в безопасную сторону.
Помимо приведенных материалов полезно также использовать графики Клемента,
позволяющие определить сопротивление глиссера при любых углах дифферента. Указан-
Указанные материалы достаточно полно описаны в [43]. В этой монографии также приводится
основное содержание методики по расчету сопротивления глиссеров, разработанной на
основе испытания серии моделей больших (БК) и малых (МБК) глиссирующих кате-
катеров. Данную методику можно использовать в тех случаях, когда проектируемое судно
имеет коэффициенты нагрузки и центровки, не выходящие за границы, оговоренные
в работе, а также весьма близко по конфигурации корпуса к испытанным моделям.
При применении указанных материалов необходимо помнить, что параметры движения
моделей серии определялись рядом заранее заданных значений нагрузки и центровки
и только в отдельных случаях близки к оптимальным.
*•' V .-«ПННГ.МС": |Ь МАЛОГО Г.УДЧА
Управляемостью называется способность судна двигаться по прямолинейной или
криволинейной траектории при обеспечении возможности ее целенаправленного измене-
изменения. Два наиболее важных свойства определяют управляемость судна: устойчивость пря-
прямолинейного движения (устойчивость на курсе) к поворотливость.
Устойчивость на курсе определяется возможностью сохранения заданного
прямолинейного движения, а поворотливость — возможностью изменения направ-
направления вплоть до движения по криволинейной траектории наперед заданной кривиз-
кривизны [31].
Траектория, которая описывается центром тяжести судна при перекладке органа
управления на постоянный угол, называется циркуляцией. Принято различать три пери-
периода циркуляции: маневренный, эволюционный и установившийся.
119
Маневренный период соответствует времени перекладки органа управления (руля,
подвесного мотора и т. д.), эволюционный определяется интервалом времени с момента
окончания перекладки до момента, начиная с которого элементы движения судна
перестают зависеть от времени, установившийся период (установившаяся циркуляция)
соответствует времени выдерживания органа управления на борту, отсчитываемому
с момента окончания эволюционного периода.
Из перечисленных периодов циркуляции наиболее простое математическое описание
в соответствии с разработанной в настоящее время теорией управляемости [14,31, 130]
имеет установившаяся циркуляция. Вместе с тем данные по этому периоду достаточно
полно характеризуют управляемость судна.
Движение судна и, в частности, движение на установившейся циркуляции характери-
характеризует следующие кинематические параметры (рис. 6.1):
радиус (диаметр) циркуляции R (D) (для установившейся циркуляции — радиус
окружности, описываемой центром масс судна);
угол дрейфа Cg между ДП судна и вектором скорости при центре масс;
линейная скорость движения центра масс'судна v0;
угловая скорость вращения судна со, в режиме установившейся циркуляции
со = vo/R;
F.1)
относительная кривизна траектории (безразмерная угловая скорость) со — вели-
величина, обратная безразмерному радиусу R -R/L,
ZJ=L/R
F.2)
(в режиме глиссирования соответствующие параметры имеют следующий вид: cog =
= B/R;RB=R/B);
курс <р° — угол между ДП судна и направлением его движения до перекладки руле-
рулевого органа (если в качестве первоначального направления движения принять земной
меридиан, то понятие курса будет аналогично используемому в навигации [59]);
угол перекладки рулевого органа §я;
угол крена 0;
угол дифферента ф.
Угловая скорость движения со помимо фор-
формулы F.1) может быть определена посредством
замера изменения курса судна во времени
и = Ay/At,
F.3)
где At — время изменения курса на угол Д<р°.
Время, за которое судно совершает поворот
на 360°, называется периодом циркуляции
Гц=27гЛ/у0. F.4)
Угол дрейфа, радиус циркуляции, линейная
скорость произвольной точки по длине судна
с координатой х определяются через соответст-
соответствующие характеристики движения центра масс
Pg,RHV0 (см. рис. 6.1)
Рис. 6.1. Схема установившейся цирку-
циркуляции судна
ftc=arctg \tgPg-
R cos Cg
F.5)
120
cos Bg
RX=R — F.6)
cosBgx
Vx'-^rRx- F-7)
С учетом того, что движение на циркуляции происходит с небольшими углами дрей-
дрейфа, формулу F.1) приводят к виду
0gx=Pg-x/R. ' F.8)
Количественные данные о характеристиках управляемости (диаметр и относитель-
относительная кривизна циркуляции, угол крена и т. д.) получают экспериментальным или расчет-
расчетным путем.
В целом, наиболее достоверным является экспериментальный способ, при котором
производятся полунатурные или натурные испытания судна. Как правило, этим спосо-
способом пользуются на заключительных стадиях проектирования (полунатурные испыта-
испытания) либо уже после постройки головного образца.
Однако данные по управляемости требуются уже на ранних стадиях проектирования
с целью оценки эффективности установленных средств управления и выбранных форм
обводов — в этом случае используют расчетный способ.
Кроме того, расчетный способ удобен для пересчета данных испытаний судна на
близкое к нему по обводам, относительным размерениям и средствам управления.
Для выполнения расчета необходимо энать силы и моменты, действующие на кор-
корпус судна и средства управления.
6.2. Гидродинамика органов управления малых судов
Руль. Криволинейное движение судна происходит под действием силы, возникаю-
возникающей на переложенных органах управления, в качестве которых для малых судов исполь-
используются руль, подвесной мотор или поворотная колонка, реверсивно-рулевые устройства
водометного движителя*.
Выбор площади руля, типы рулей. Руль характеризуют следующие
геометр1 ческие параметры:
площадь пера AR (часть площади, находящаяся впереди от оси баллера, называется
площадью балансирной части руля);
высота руля hR — расстояние, измеренное по оси баллера, между верхней и нижней
кромками руля;
хорда (средняя) руля
bR=AR/hR; F.9)
профиль руля (рис. 6.2) — контур сечения пера, перпендикулярный к оси баллера;
расстояние между передней и задней точками профиля соответствует хорде руля в дан-
данном сечении;
относительная толщина Т, равная отношению максимальной толщины профиля
'max к хорде, 7~= tmaK/bR; _
положение максимальной толщины с — отношение расстояния от носика профиля
до максимальной ординаты к хорде руля, с"= с/ bR;
* Здесь не упомянута поворотная насадка на гребной винт, поскольку этот тип органа управле-
управления не нашел широкого распространения в малом судостроении.
121
so
20
m
——-
-—¦—'
^>-
'
^-—'
¦
15 20
25
35 40
Рис. 6.2. Профиль руля
относительное удлинение руля
Рис. 6.3. К определению площади руля
судна, движущегося в переходном ре-
режиме.
/ — руль под днищем; 2 — руль за
кормой
F.10)
коэффициент компенсации KbR— отношение площади балансирной части руля
ко всей его площади.
Профили рулей задаются таблицей ординат (табл. 6.1).
Таблица 6.1. Относительные толщины профилей (% максимальной толщины)
0
0
0
1,25
31,6
12
2,5
,
43,6
20
Отстояние
5
59,2
32
10
78
48
сечения от передней кромки,',
20
30
40
50
{
Профиль NASA
95,6
100
96,7
88
Клиновидный профиль
88
96
100
% хордь
60
76,1
100
70
61
98
80
43,7
94
90
'
24,1
90
.100
2,1
84
Площадь пера руля назначается в долях площади погруженной части ДП судна без
хода
AR =LT/K.
F.11)
На основании статистических данных и опыта эксплуатации для судов, двигающихся
в водоизмещающем режиме, принимается К = 10 -Ы5.
Для судов, движущихся в переходном режиме, коэффициент К задается графически
(рис. 6.3) в зависимости от максимальной скорости судна и места установки руля
(под днищем или за кормой) [121]. Для глиссирующих судов площадь пера руля опре-
определяется из соотношения Лц =¦ @,01-^0,015I, [12].
Выбранная таким ангобом площадь руля может быть откорректирована на основа-
основании данных расчета ч.'.к эксперимента.
По способу соединения с корпусом [31] рули делятся на простые — с несколькими
опорами на корпусе или ахтерштевне; полуподвесные — висящие на баллере и опертые
на корпус или специальный кронштейн в одной или нескольких точках по высоте пера;
122
подвесные — полностью висящие на баллере (рис. 6.4). Кроме того, в зависимости от
положения оси баллера они подразделяются на небалансирные — с осью баллера, разме-
размещенной непосредственно у передней кромки, и балансирные — с осью баллера, располо-
расположенной на некотором удалении от нее.
Рули классифицируют также по форме в плане и профилю. Форма руля в плане
тесно связана с приведенной выше классификацией.
По форме профиля рули подразделяются на пластинчатые и телесные (или обтека-
обтекаемые) ; среди последних различают рули со скругленной передней кромкой и заострен-
заостренной задней, а также с заостренной передней и тупой задней (суперкавитирующие)
(рис. 6.5). Наиболее распространенным профилем обтекаемых рулей со скругленной
передней кромкой и заостренной задней является профиль NASA (см. табл. 6.1).
Эти рули- используются на судах, движущихся в водоизмещающем и переходном
режимах.
Суперкавитирующий профиль имеет, как правило, клиновидную форму. При этом
контур профиля может быть параболическим или иметь постоянный угол расширения,
не превышающий 10—12°. Безразмерные толщины клиновидного профиля с параболи-
параболическим контуром приведены в табл. 6.1. Рули с суперкавитирующим профилем исполь-
используются на глиссирующих судах.
Разновидность простых небалансирных рулей представляют рули за рудерпостом
(или стойкой) (рис. 6.6). В непереложенном состоянии руль и рудерпост имеют общий
профиль. Хорда рудерпоста, как правило, не превышает 0,4 хорды комплекса руль-
рудерпост.
При перекладке руля на угол бд относительно вектора скорости набегающего пото-
потока на его поверхности возникают нормальные и касательные гидродинамические силы,
равнодействующая которых Р может быть разложена (рис. 6.7) на подъемную силу Y
и лобовое, сопротивление X, направленные соответственно перпендикулярно и парал-
параллельно набегающему потоку. Проекция силы Р на ось, перпендикулярную к хорде руля,
называется нормальной силой N. Перечисленные составляющие и сила Р связаны соот-
соотношениями
N=
F.12)
F.13)
Рули
Простые
ПолуподВесные
Подвесные
НеЬ~алансирные
Балансирные
Рис. 6.4. Классификация рулей
123
о)
-E
Vcp
Рис. 6.5. Суперкавитирую-
щий профиль: а - клин
с параболическим конту-
контуром; б — клин с постоян-
постоянным углом расширения
Рис. 6.6. Руль за
рудерпостом (стой-
(стойкой).
1 — перо руля; 2 —
рудерпост (стойка)
Рис. 6.7. Gxeiua составляю-
составляющих гидродинамических
сил, действующих на руль
Точка пересечения равнодействующей силы Р с плоскостью симметрии руля назы-
называется центром давления. Отстояние центра давления от передней кромки называется
абсциссой центра давления хр. Момент силы Р относительно баллера руля называется
моментом на баллере, который для прямоугольного в плане руля определяется по фор-
формуле
M=N(xp-ap),
F.14)
где ар— отстояние оси баллера от передней кромки руля. Для руля, отличного от пря-
прямоугольного, передняя кромка является фиктивным понятием, она определяется исхо-
исходя из пересчета площади реального руля на равновеликий прямоугольный руль той же
высоты [см. формулу F.9) ].
Гидродинамические силы X, Y, N, момент М, а также координату точки хр принято
представлять через безразмерные коэффициенты
AR;N=CNR
F.15)
где CxR, CyR, Cnr, CmR, CpR — безразмерные коэффициенты сопротивления, подъем-
подъемной силы, нормальной силы, момента и центра давления соответственно, совокупность
этих коэффициентов называется безразмерными гидродинамическими характеристика-
характеристиками (ГДХ) руля; vcp - скорость потока, обтекающего руль.
Формула FЛ 4) в безразмерном виде записывается следующим образом:
~ CNR
F.16)
д — коэффициент компенсации руля.
Гидродинамические характеристики " изолированного
руля. Систематические данные по безразмерным ГДХ рулей при изменении удли-
.нения, относительной толщины, формы в плане, типа профиля приводятся в специаль-
специальных изданиях, называемых атласами [8].
В качестве примера на рис. 6.8 приведены графики зависимостей коэффициента
подъемной силы прямоугольных рулей (профиль NASA, F = 0,09) в функции удлинения
и угла перекладки. Наиболее существенным образом безразмерные ГДХ изменяются
124
в зависимости от удлинения, а также при
переходе от подвесного руля к полупод-
полуподвесному.
Для выполнения расчетов управляе-
управляемости, а также для суждения об эффек-
эффективности выбранного рулевого устройст-
устройства наиболее важна информация о подъ-
подъемной силе руля. Подъемная сила руля
при X > 0,8 линейно зависит от угла пе-
перекладки вплоть до критического, при
котором происходит срыв потока, приво-
приводящий к резкому падению подъемной
силы.
В зоне линейной зависимости коэф-
коэффициент подъемной силы представляют
в виде
F.17)
—-
—с
1 ' —
25°
•20° „
*и°—i
1,0
1,5 2,0 К
Рис. 6.8. Зависимость коэффициента подъемной
силы от угла перекладки для рулей с различным
относительным удлинением
где Суц — производная коэффициента подъемной силы по углу атаки [тангенс угла
наклона кривой Суп =/E/?)].
Величина CYR определяется по формуле [3.1,89]
С а _
YR ~
2тг
1 +2/X
F.18)
CYR>
где А'о = 0,88 — для подвесного руля; Ко = 0,64 — для полуподвесного руля.
С ростом удлинения руля возрастает его эффективность — увеличивается значение
однако одновременно с этим уменьшается критический угол перекладки
(рис. 6.8), поэтому реальный диапазон изменения удлинения судовых рулей составляет
1-2.
Применительно к быстроходному судну, если руль находится вблизи свободной по-
поверхности или пересекает ее, в формулу F.18) подставляется фиктивное удлинение
[130]
Хф, =0,8Х,
а для руля, расположенного под плоским или слабокилеватым днищем,
Хфа = 1,25 А.
F.19)
F.20)
Чем тоньше руль, тем большим значением CYR он обладает и тем раньше наступает
срыв потока с его пера. Однако количественно влияние относительной толщины сказы-
сказывается незначительно, поэтому CYR "для рулей различной толщины определяется по
формуле F.18).
В том случае если руль расположен за рудерпостом, производная коэффициента
подъемной силы комплекса руль—рудерпост при условии / b
v >0,6 KoR + Rp-
хорда комплекса руль—рудерпост) может быть приближенно определена следующим
образом:
CY{R+R } =l,lCyR, F.21)
где CYR — определяется по формуле F.18) для значения X руля, работающего в составе
комплекса руль—рудерпост.
125
2,0
Рис. 6.9. Торцевые шайбы руля
Рис. 6.10. Зависимость коэффи-
коэффициента Кт от удлинения руля
Для увеличения подъемной
силы руля с его торцов могут
быть установлены шайбы
(рис. 6.9) шириной B,5 -г
-г-3,5)?тах руля. Производная
коэффициента подъемной силы
руля с шайбой составляет
LYRm
F.22)
где CyR определяется по фор-
.муле F.18); Кш ~коэф-
[8],-по рис. 6.10.
руля. При выполнении расчетов уп-
фициент, учитывающий влияние шайб
Влияние ГВ и корпуса на ГДХ
равляемости необходимо знать боковую силу, обусловленную органами управления и
направленную перпендикулярно к ДП судна. В случае руля приближенно полагается,
что боковая сила равна подъемной, которая с учетом влияния ГВ и корпуса определяет-
определяется по формуле [90] J
F.23)
где C^R - производная коэффициента подъемной силы руля, расположенного за ГВ
и корпусом; а — угол атаки руля; vcp — средняя скорость обтекания руля.
Перечисленные выше параметры определяются следующим образом:
таеКи - коэффициент индукции ГВ,
6 VI + CTv - 1
F.24)
F.25)
удлинение части руля, находящейся в струе ГВ,
— высота части руля, находящейся в струе ГВ;
В C
F.26)
t — площадь части руля, находя-
щейся в струе ГВ; Cjv — коэффициент нагрузки гребного винта по упору, определяе-
определяемый по данным ходкости либо по формуле
8
О-
F.27)
F.28)
v0 — скорость судна; ф ~ коэффициент попутного потока (определяется по данным
ходкости); Dp — диаметр ГВ; Ту — упор ГВ (при расчете Cjv значения v, фр и Ту соот-
соответствуют прямому курсу судна); пх — коэффициент, учитывающий положение руля
относительно винта по высоте и определяемый по рис. 6.11.
126
1,0
¦ Рис. 6.11. Зависимость коэффициента л, от взаимного
расположения и соотношений руля и гребного винта
Рис. 6.12. Схема распределения
давления по поверхности руля
Угол атаки руля на циркуляции определяется по формуле [31]
а=8к-кЕф+ТкЩ, F.29)
где lR *lR/L — безразмерное отстояние баллера руля от центра масс; «?• — эффектив-
эффективный коэффициент влияния корпуса и винта на руль,
— коэффициент влияния гребного винта [31],
ARo+ARD
F.30)
F.31)
AR о — площадь части руля, находящейся вне струи ГВ; кк — коэффициент влияния
корпуса, для круглоскулых судов, у которых руль расположен за дейдвудом кк =0,5,
в остальных случаях кк = 1.
Средняя скорость обтекания руля определяется по формуле
F.32)
где
Ar
CTv.
F.33)
Момент от руля относительно центра масс судна определяется по формуле
Mo=YolR. F.34)
Аэрация и кавитация руля. На верхней по отношению к набегающему
потоку поверхности переложенного руля возникает разрежение; на нижней — зона поло-
положительных давлений (рис. 6.12).
127
Из-за разрежения, которое может быть значительным при увеличении скорости или
угла перекладки руля, возникают явления, приводящие к уменьшению подъемной силы
руля даже при докритических углах перекладки.
Одно из таких явлений — аэрация руля, при которой происходит подсос атмосфер-
атмосферного воздуха на сторону разрежения руля.
Для рулей, пересекающих свободную поверхность или расположенных под днищем
водоизмещающих или сильнокилеватых глиссирующих судов (например, с обводами
„глубокое V"), наступление аэрации определяется следующим условием [130, 153]:
2hr/dR + 6
Pi
F.35)
где hr — заглубление нижнего торца руля от уреза воды; dR — условный поперечный
размер руля,
п 6д; F.36)
Pi = /(йт/^#) — коэффициент, определяемый по рис. 6.13.
В случае расположения руля под плоским или слабокилеватым днищем быстроход-
быстроходного судна (рис. 6.14) условие наступления аэрации имеет следующий вид [130]:
«*.
g [Л„ + C,577 vcp
¦0,lv2p
аэр
F.37)
где hH — заглубление нижнего торца руля от днища; Т— осадка судна без хода; xSr —
отстояние руля от транца.
В качестве конструктивных мер, позволяющих избежать или уменьшить влияние
аэрации, используются установка руля прд днищем судна или установка антикавитаци-
онной пластины над рулем, расположенным за транцем.
Другой причиной падения подъемной силы руля может быть кавитация, возникаю-
возникающая, так же как и на гребном винте, при увеличении скорости обтекания.
Основным критерием, количественно определяющим степень развития кавитации,
является число кавитации [31,130]
200/v2cp[M/c].
F.38)
Данные по гидродинамическим характеристикам рул ей при различных числах кавита-
кавитации приводятся в [31, 136], а также в атласах. На рис. 6.15 приведены графики зависи-
зависимости коэффициента подъемной силы CyR от угла перекладки при различных числах
кавитации для трапециевидных рулей Х=1,5 с профилем NASA и клиновидным,
9 1
i
—^
—
\
ч
ч
ч
ч
Е
Xff
.www
Pi
0,5
Рис. 6.13. Зависимость Pt от
отношения А т/
Рис. 6.14. Схема расположения руля
под днищем глиссирующего судна
128
Рис. 6.15. Зависимость коэффициента подъемной силы от угла перекладки квитирующего
руля: а — руль трапециевидной формы в плане, профиль NASA; б - руль трапециевидной формы
в плане, клиновидный профиль; в — руль овальной формы в плане, профиль NASA
а также овального в плане руля X = 1,5 с профилеу NASA. Видно, что последний из пере-
перечисленных рулей традиционно применявшийся продолжительное время на быстроход-
быстроходных судах, обладает меньшим значением Суя, нежели рули трапециевидной формы
в плане, особенно в режиме кавитации.
Руль с клиновидной формой профиля обладает большим значением подъемной силы
во всех режимах обтекания, включая безкавитационный, по сравнению с другими типа-
типами рулей. Еще одно преимущество руля с клиновидным профилем состоит в том, что
влияние кавитации у него проявляется при больших углах атаки и сказывается в мень-
меньшей степени на величине подъемной силы, нежели на рулях с острой задней кромкой.
Кроме формы профиля наиболее существенными параметрами, определяющими
ГДХ руля в кавитационном режиме, являются относительная толщина и удлинение:
увеличение указанных геометрических характеристик приводит к более раннему и су-
существенному влиянию кавитации [31,136].
Для руля, расположенного за ГВ, коэффициент подъемной силы в режиме кавита-
кавитации определяется следующим образом:
для всех углов перекладки определяется поправка
АСГк =-
F.39)
где CyR определяют по формуле F.18), а Ки — по формуле F.25).
x=const.
h
Рис. 6.16. Схема получения
зависимости С yr _ =
=/(вд) ДЛЯ кавитирую-
щего руля
5 Зак. 738
1,0,
0,5
Рис. 6.17. Зависимость Кс от C-pv Рис- 6-18- Съемный руль
подвесного мотора
129
\
\
~-—,
К значениям CyR изолированного руля при заданном к (данные атласа) прибавля-
прибавляются значения ДСук (рис. 6.16): ,
Cyr = Cyr + ACyK. F.40)
Подвесной мотор (поворотная колонка). Боковая сипа, возника-
возникающая при перекладке подвесного мотора или подвесной колонки и направленная
перпендикулярно к ДП определяется по формуле [14, 38]
[8R - кЕъ {fig
где
-Кс)
cTv -
1
"Вш
+ CTv
F.41)
F.42)
F.43)
vp определяют по формуле F.28); 8л — угол перекладки подвесного мотора или по-
поворотной колонки; 1ц =Ir/L —безразмерное плечо оси поворота подвесного мотора
или поворотной колонки относительно центра масс; Кс — коэффициент, учитывающий
спрямляющее действие набегающего потока на струю ГВ (рис. 6.17) [38].
Момент поперечной силы Yo относительно центра масс определяют по формуле
Мо = YD
F.44)
¦ Для улучшения управляемости при ходе по инерции на подвесном моторе рекомен-
рекомендуется устанавливать пластину - аналог руля (рис. 6.18) [142]. Влияние этой пластины,
равно как и ноги подвесного мотора или колонки, при расчете управляемости можно не
учитывать, поскольку это приводит к появлению безопасной ошибки.
Та 0лища 6.2. Производная подъемной сияы РРУ
ТипРРУ
Отношения основных
характеристик РРУ
hid.
b/dQ
Парные рули
0,68
0,68
0,68
1,46
1,46
1,46
1
0,8
0,6
Коробчатые рули
Поворотное сопло
0,8
1,05
О;87
0,65
0,916
1,37
ДЗР
Водометный движитель. Боковую силу, возникающую при работе реверсивно-руле-
вого устройства (РРУ) водомета, определяют по формуле [18]
У„ = СaYPfy 8R -^~ dc - O,8pvsv -^-(Pg +TrZ), F.45)
где dc — диаметр трубы выходного отверстия водомета; vs — скорость истечения из вы-
выходного отверстия водомета; Ir =Ir/L —безразмерное отстояние баллера РРУ от цент-
центра масс судна; Ьц -^-угол перекладки РРУ; СуРРУ —производная коэффициента подъ-
подъемной силы РРУ (табл/6.2)*.
Связь между скоростью судна v и скоростью выброса струи vs определяется по дан-
данным расчета ходкости, ее можно представить в виде [см. формулу (9.9)]
F.46)
где qs — коэффициент, зависящий от геометрических характеристик водомета
(см. рис. 9.3,9.4).
Момент поперечной силы Уо относительно центра масс определяется по формуле
Mo = Y0Ir. F.47)
6.3. Гидродинамические характеристики корпуса судна
При движении в режиме установившейся циркуляции все силы и моменты, дейст-
действующие на корпус судна, за исключением центробежной сипы массы корпуса, гидродина-
гидродинамического происхождения, т. е. являются результатом действия нормальных и касатель-
касательных гидродинамических сил, распределенных по поверхности корпуса. ГДХ корпуса за-
зависят от формы обводов, соотношения главных размерений, кинематических парамет-
параметров движения — дрейфа, кривизны траектории, крена, скорости и т. д..
ГДХ корпуса включает в себя составляющие, обусловленные как вязкостью, так
и инерционностью воды.
Инерционные составляющие определяются расчетным способом. Вязкостные состав-
составляющие наиболее достоверно могут быть найдены путем проведения испытаний в опы-
товом бассейне. Причем в зависимости от размеров судна испытаниям могут быть под-
подвергнуты либо модель, либо натурное судно. Как правило, при определении ГДХ корпу-
корпуса используются 2—3-метровые модели, однако имеющиеся в настоящее время экспери-
экспериментальные установки позволяют провести испытания и с 8-метровыми моделями
[124].
Другим способом определения вязкостных составляющих является расчетный,
который, в свою очередь, может быть основан как на теоретической схеме обтекания
корпуса [130], так и на результатах систематических испытаний серии моделей [10, 31,
38].
Для выполнения расчетов по определению характеристики управляемости необхо-
необходимо знать следующие ГДХ корпуса:
боковую силу;
момент, действующий в плоскости ватерлинии (момент рыскания), или точку при-
приложения боковой силы (плечо) по длине;
момент, действующий в плоскости шпангоута (момент крена), или точку приложе-
приложения боковой силы (плечо) по высоте. При установившейся циркуляции для всех судов
* Соответствующие данные приведены по материалам О. В. Яковлевой.
5" 131
независимо от режима плавания боковая сила, обусловленная инерционностью корпуса
(т. е. центробежная сила), определяется по формуле
YK=pVvoj. F.48)
ГДХ корпуса судна, движущегося в водоизмещающем режиме. При выполнении
расчетов управляемости водоизмещающих судов боковая сила и момент рыскания
представляются следующим образом:
Pvo
Yk=CYk-^-Fd; F.49)
Kj F.50)
где v — скорость движения центра масс судна; Fq — приведенная площадь погруженной
части ДП судна,
FD=LToD; F.51)
аи — приведенный коэффициент погруженной части ДП судна [см. формулу F.59)];
Сук, Стк — безразмерные коэффициенты боковой силы и момента рыскания, опреде-
определяемые при Fr/, < 0,3 по формулам
Сук = Су/3 + С2ЦI/31 - C/ZJ; F.52)
Стк=С^-С^п. F.53)
Величины Су, С? называются позиционными производными, а Су и С^ — демпфи-
демпфирующими производными боковой силы и момента рыскания. Эти параметры, а также
Сг определяются по формулам [ 31,130]
*) [)
= 0,72 (— I \~~) +1,25 (aD-0,95); F.55)
7 "; F.56)
L aD
T
= 1,8 — + 0,06@,7 - ф) + @,97 - aD); F.57)
,O5 + O,58 |j; . F.58)
3 Fn 0,054
b"T-17+iyr^ + ^' ¦ F-59)
* Демпфирующая производная Су обусловленая инерционной составляющей корпуса У , опре-
определяемой по формуле F.48).
132
о)
квл\
у
***** *^*. ^^
/9
IWWV
20
f9
18
П
.ъ-17
Рис. 6.19. К определению площади Fn кормового подзора: а — судно
с дейдвудом; б — судно без дейдвуда
где Fn — площадь кормового подзора, т. е. площадь фигуры, дополняющей контур кор-
кормовой погруженной части до прямоугольника (рис. 6.19); величина Fn определяется
планиметрированием; i — номер теоретического шпангоута, соответствующего для
судов с кормовым дейдвудом пограничному между шпангоутами U-образной и V-образ-
ной формы (рис. 6.19, а), для судов без дейдвуда первому с кормы шпангоуту, касаю-
касающемуся основной линии (рис. 6.19, б); tyi —построечный (стояночный) угол диффе-
дифферента судна, определяемый по формуле
Т — Т
'к ¦'н
F.60)
^1 > 0 — при дифференте на корму; ф i < 0 — при дифференте на нос [формула F.60)
учитывает случай, при котором судно имеет уклон килевой линии (рис. 6.20) ]; 02 —
угол ходового дифферента (npnFr?, < 0,3; ф2 = 0).
В случае отсутствия у судна кормового подзора (глиссирующие суда) oD — опреде-
определяется по формуле
0,054
@1+02).
F.61)
Рис. 6.20. Осадки носом и кормой
судна с наклонной основной ли-
линией
Рис. 6.21. К определению точки
приложения боковой силы корпу-
корпуса по высоте для круглоскулых
судов
Zr/Г
2
\
\
в
в/т
133
Трчка приложения боковой силы по высоте (ордината), выраженная в долях осад-
осадки гг/ Т, определяется по графику в зависимости от отношения В/Т (рис. 6.21). При по-
посадке судна с дифферентом или при наличии уклона килевой линии под параметром Т
понимается
F.62)
Формулы F.52)—F.59), а также зависимость для zr/T (см. рис. 6.21) получены
для круглоскулых судов [31]. Они могут быть использованы и для приближенного рас-
расчета ГДХ корпуса остроскулых (глиссирующих) судов, движущихся в водоизмещаю-
щем режиме.
При движении с Fr^ > 0,3 у судна появляется угол ходового дифферента, который
может быть найден по данным расчета ходкости. При отсутствии таковых величина ф2
определяется По формуле [31,130]
= 0,13@,01 -х}) + 0,028sin E,2Frz, - 1,9),
F.63)
где xg =xglL — безразмерное отстояние центра масс от миделя; xg >0 —смещение
центра масс в нос от миделя; x~g < 0 — смещение центра масс в корму от миделя.
Область применения формул F.52)-F.59) и F.63) ограничивается Fr^ <0,6,
ориентировочно соответствующим началу переходного режима движения.
При 0,6 < ?ti < 1 ГДХ корпуса становятся существенно нелинейными функциями
Fr? . Причем влияние Fr^ на ГДХ корпуса сложным образом связано с влиянием таких
геометрических характеристик, как удлинение корпуса, угол килеватости, соотношение
максимальной ширины корпуса к ширине на транце, положение центра тяжести по длине
(центровки),Сдельной .нагрузки и т. д. В связи с этим в настоящее время для судов,
движущихся в переходном режиме, отсутствуют аналитические зависимости, связываю-
связывающие безразмерные ГДХ корпуса с геометрическими характеристиками и кинематиче-
кинематическими параметрами и аналогичные F.52) - F.59). »
ГДХ корпуса судна, движущегося в режиме глиссирования. В качестве основных ис-
исходных геометрических характеристик корпуса.при расчете управляемости судна, дви-
движущегося в режиме глиссирования, принимаются угол.ходового дифферента ф2, смочен-
смоченная длина /см, осадка на транце Ттр, ширина на транце Втр, угол килеватости J3 и поло-
положение центра масс относительно транца хтр (рис. 6.22). Параметры ф2 и /см должны
быть определены либо на основании расчета ходкости, либо замерены экспериментально.
Осадка на транце определяется из соотношения
'тр
F.64)
При движении судна в режиме глиссирования с Fr^ > 1 составляющие ГДХ корпу-
корпуса, необходимые для расчета управляемости, в соответствии с методикой, предложенной
С. Б. Соловьем, определяются следующим образом [130]:
ТТР
134
Рис. 6.22. К описанию управляемости глиссирующих судов
позиционная производная боковой пч,тч
силы 1>6
(Гтр/5трJсо8 ф2, F.65)
F.66)
демпфирующая производная инерцион-
инерционной (центробежной) силы корпуса
'!р
Vt ¦
где и^ — коэффициент, учитывающий влия-
влияние угла килеватости, (рис. 6.23);
плечо позиционной составляющей силы
по длине 1,0
0,8
0,6
¦50 —г
10 .
к
-—-
—
О 10 20 30 40 50 C
Рис. 6.23. Зависимость коэффициентов
F67) "v , mv , 4v от Угла килеватости
плечо демпфирующей составляющей силы по длине
1и - 1/5ТрB^т + l/2T"Tpctg ф2); F.68)
плечи позиционных составляющих сил, обусловленных дрейфом и креном соответ-
соответственно,
h = 1/Ятр
12sin2/3 тр 7
где mv — коэффициент, учитывающий влияние килеватости (см. рис. 6.23);
тр " \ Н , / тр
В формулах F.66) и F.68) величина хт< 0.
F.69)
F.70)
6.4. Расчет поворотливости и крена судна на циркуляции
Расчет поворотливости судна — определение зависимостей безразмерной угловой
скорости, диаметра установившейся циркуляции и угла дрейфа от угла перекладки
рулевого органа — основывается на решении системы алгебраических уравнений, пред-
представляющих собой условия равновесия гидродинамических сил и моментов, действую-
действующих на корпус судна и органы управления.
Водоизмещающий режим. Угол дрейфа судна на установившейся циркуляции и без-
безразмерную угловую скорость определяют по формулам [31]
+4C2r3lsSR
2C2r31
со = —
F.71)
F.72)
135
Величины, входящие в эти формулы, определяются соответственно для каждого типа
органов управления.
Руль:
«а 1 = Су* п"Е *lP -=rnR+CpY; F.73)
s2 = -C% v* —-nK; F.75)
«3i = CaYR кЕ TRv2cp ^rnR- Ct F.76)
nR
F.77)
где nR —число рулей; CyR , кЕ,Тср определяют по формулам F.24), F.30), F.33)
соответственно. р
Подвесной мотор (поворотная колонка):
тг D2
Яг 1 = С?в кЕв A - фрJ - -? пв + С$ ; F.79)
^ "в ~ С^; F-80)
F.81)
F.82)
2 ~а ^ «» + С^; F.83)
в^^ ^в> ' F.84)
где ^ — число подвесных моторов (поворотных колонок); Су и KgB определяют по
формулам F.42), F.43) соответственно.
Водометный движитель:
1 й
-— + С§; F.85)
136
г21 = 0,4тг lRqs-^r- C$\ F.86)
ГО
s-?--C&; F.88)
= 0,4 пЦ q^ + CX; F.89)
«?-^,- F.90)
где Су определяют по данным табл. 6.2; коэффициент qs по рис. 9.3, 9.4 либо по
данным ходкости. Для всех типов органов управления параметры q к s рассчитывают
по формулам
q=qn Г31 - «З1Г21; . F.91)
s = гц s3i -Г31 s2b F.92)
а безразмерные ГДХ корпуса Су, С2, Су", С|ь Ст. вычисляют по формулам
F.54)-F.58).
Значение безразмерного радиуса (диаметра) установившейся циркуляции определя-
определяют по формуле
Л = 1/ы; E = 2/со). . ' F.93)
На циркуляции происходит падение скорости судна по сравнению с прямолинейным
движением. При R > 1 связь между скоростью на циркуляции v0 и скоростью на пря-
прямом курсе v определяется формулой [31]
F-94)
Приведенная формула справедлива для расчета скорости судна на циркуляции в лю-
любом режиме движения.
Судно, движущееся в водоизмещающем режиме на установившейся циркуляции,
имеет наружный крен по отношению круга циркуляции, определяемый по формуле
[31]
в
1
Doh
-xP) , ,
F.95)
где Yo — боковая сила органа управления, определяемая по формулам 6.23, 6.41, 6.45.
Значения /3 и со, входящие в указанные формулы, находят из выражений F.71),
F.72); значение v0, по которому рассчитывается Y, определяют по формуле F.94) ;
zr — ордината точки приложения боковой силы на корпусе (рис. 6.24); гр — ордината
точки приложения боковой силы органа управления, отсчитываемая от основной плос-
плоскости (см. рис. 6.24) и соответствующая: для руля — центру тяжести площади боковой
137
«a
л
N
1 1
J
V
i *
1
LY I
проекции; для подвесного мотора (поворотной колон-
колонки) — оси Г В; для водометного движителя — центру
тяжести площади боковой проекции РРУ.
.В том случае, если точка приложения боковой
силы органа управления находится ниже основной
плоскости, zp < 0.
У остроскулых (глиссирующих) судов при 0,3 <
< Fr^ < 0,6 угол крена на циркуляции с увеличением
скорости уменьшается, изменяясь от наружного по
отношению круга циркуляции к внутреннему. В этом
Рис. 6.24. К расчету крена на «^У4" Расчет У1™ кРена по Ф°Рмуле F.95) произво-
циркуляции круглоскулого судна дить нельзя.
, В отдельных случаях у остроскулых судов наблю-
наблюдается увеличение наружного крена с ростом Fr (особенно зто характерно при удлине-
удлинении корпуса LIB > 5). Тогда в диапазоне Fr^ < 0,6 определение угла крена можно
произвести по формуле F.95), если известно, например по данным судна-прототипа, что
в этом режиме имеет место наружный крен по отношению круга циркуляции.
Переходной режим. Аналитических зависимостей, связывающих ГДХ корпуса с гео-
геометрическими характеристиками и кинематическими параметрами при 0,6< Fr^ < 1, не
существует; методика расчета поворотливости судов в указанном диапазоне изменения
Fr? [ 10] основывается на использовании специального атласа характеристик управляемо-
управляемости, по материалам которого составляется система из шести-восьми уравнений, соответст-
соответствующая линейным приближениям между данными атласа и геометрическими характери-
характеристиками судна. Естественно, изложение этого метода выходит за рамки настоящего из-
издания.
Данные по ГДХ корпусов, полученные А. Ш. Афремовым,' Н. А. Смолиной,
П. К. Соболевым, позволяют качественно оценить влияние различных параметров кор-
корпуса на характеристики управляемости.
Глиссирующий режим. При Fr^ > 1 безразмерную угловую скорость и угол крена
на циркуляции определяют по формулам [130]
i!f
F.97)
где Гр = z'p/BTp — безразмерное отстояние точки приложения боковой силы органа уп-
управления от центра масс судна (о положении точки приложения боковой силы для раз-
различных органов управления см. с. 137 и рис. 6.22); Зстр =хТр/В~Тр - безразмерное от-
отстояние транца от центра масс судна; Утр < 0 (см. рис. 6.22); Fr^ =v/y/gBTp —число
Фруда по ширине судна на транце; qv - коэффициент, учитывающий влияние угла киле-
ватости (см. рис. 6.23); Су — приведенная призводная коэффициента боковой силы
органа управления по углу перекладки, определяемая по формулам:
для руля
рр F.98)
138
для подвесного мотора (поворотная колонка)
Су = СУв j ^-«в; F.99)
для водометного движителя
i1 ЦТ. F-100)
где СуЛ ; vcp, Су определяются соответственно по формулам F.24), F.33), F.42) ;
Су -рпо табл. б\ коэффициент qs — по рис. 9.3, 9.4.
Знак ..-" в формуле F.97) указывает на то, что судно на циркуляции в режиме
глиссирования имеет внутренний крен по отношению круга циркуляции. Связь между
безразмерными угловыми скоростями сод и со определяется формулой
L
со = со5—. t F.101)
Расчет угла крена можно произвести также по следующим формулам.
Формула Г. А. Фирсова для определения максимального угла крена на циркуляции
при движении судна в водоизмещающем режиме [31]
F.102)
где v — скорость на прямом курсе.
Угол крена на циркуляции при изменении метацентрической высоты, положения
центра тяжести и скорости судна, двигающегося в водоизмещающем режиме, определя-
определяется по формуле
— —) hHv
F.103)
где йи, zgl/l, vH — исходные параметры судна; 0И — угол крена при значениях
йи, zgyi, v'n, полученный расчетным или экспериментальным путем; zg,h,v —изменен-
—измененные параметры судна, для которых определяется угол крена 0. Значения v и vH в фор-
формуле F.103) соответствуют прямому курсу. Расчет по формуле F.103) допустим, если
изменение метацентрической высоты находится в пределах 50 %, а изменение скорости
в пределах 20 % по сравнению с исходными.
Формула А. Ш. Афремова для расчета угла крена в переходном и глиссирующем ре-
режимах движения судна при условии предварительного замера крена при двух значениях
метацентрической высоты [10]
0 = со——¦*¦ '—; . ' F.104)
/2+02
- 0^2@2 -
139
- h2)-®1h1
0, -
F.106)
где ©! - угол крена при h = ht; 02 - угол крена при h = h2. Определение углов крена
©1, ©2 и расчет по формуле F.104) ведется для одного и того же значения со.
Угол крена при движении судна на прямом курсе, вызванный гидродинамическим
моментом ГВ (ГВ — в случае нескольких движителей одного вращения), определяется
по формуле
Doh
«2,
F.107)
— коэффициент момента ГВ; п — число оборотов ГВ A/с) ;
{0 — при двух ГВ разного вращения;
1 — при одном ГВ;
2 — при двух ГВ одного вращения.
Знак угла @р противоположен направлению вращения движителя.
Оценку угла крена @р необходимо производить для судов, движущихся в переход-
переходном или глиссирующем режимах (при движении в водоизмещаюшем режиме величина
@р близка к 0).
6.5. Устойчивость прямолинейного движения судна
Результаты расчета, выполненного в соответствии с п. 6.4, принято представлять
в виде зависимостей C^=/E^), со =/Eд), ?>=/Eд), ©=/Eд). Зависимости Cj =
=/Eд) исо=/EЛ) (рис. 6.25), получившие название диаграммы управляемости [31],
дают информацию как о поворотливости судна, так и об устойчивости прямолинейного
движения.
Различают теоретическую (автоматическую) и эксплуатационную устойчивость дви-
движения. В первом случае устойчивость определяется способностью судна восстановить
свое прямолинейное движение после прекращения действия возмущения авто-
автоматически, без перекладки рулевого органа. Поддержание прямолинейного движения
Рис. 6.25. Диаграмма управляемости судна: а - в осях fig =/F^); б - в осях
"=/FЛ).
1 — устойчивое судно; 2 — неустойчивое судно
140
с помощью перекладок рулевого органа характеризует эксплуатационную устой-
устойчивость.
Диаграмма управляемости вида ) (см. рис; 6.25) свидетельствует о наличии ав-
автоматической устойчивости прямолинейного движения. Диаграмма управляемости
вида 2 показыва'ет, что при неп ер вложенном органе управления судно входит в цирку-
циркуляцию с относительной кривизной соо и углом дрейфа C^о> вывести из которой суд-
судно можно, переложив, рулевой орган на борт, противоположный направлению цирку-
циркуляции, на угол, превышающий величину 5дк_. Последний получил название крити-
критического угла перекладки [31].
В переходном и глиссирующих режимах суда обладают устойчивостью прямоли-
прямолинейного движения. Отсутствие автоматической устойчивости движения проявляет-
проявляется в водоизмещающем режиме и выражается условием q < 0 [31]. В этом случае при
COo =
F.108)
F.109)
Критический угол перекладки руля, а также значения безразмерной угловой ско-
скойф 0 ф
рости сокр и угла дрейфа PgKp, соответствующие
6Лкр 4С2г31
кр-
2С2г31
, определяют по формулам
F.110)
F.111)
F.112)
31
Таблица 6.3. Изменение параметров управляемости при увеличении значений характеристик
водоизмещающаго судна
Характеристика судна
Отношение L/B
Коэффициент общей полноты 5Д
Площадь кормового дейдвуда
Полнота кормы .
Дифферент на корму
Эффективность органов управления (за счет
увеличения площади руля, удлинения, выз-
вызванных скоростей гребного винта, при усло-
условии отсутствия кавитации и т. д.)
Отстояние руля от корпуса при сохранении
его геометрии (опускание руля)
Скорость
Метацентрическая высота (понижение центра
тяжести)
Улучшение
устойчивости
Дач
Нет
Да
Нет
Да
w
t*
поворотли-
поворотливости
Нет
Да
Нет
Да
Нет
Да
Нет
(незначительно)
Да
Нет
Нет
1*
(незначительно)
Уменьшение
крснн ни
циркуляции
Да
Нет
Да
Нет
Да
Нет
(как правило, влия-
влияние противоречиво)
Да
Нет
Да
141
Таблица 6.4. - Изменение параметров управляемости при увеличении значений характеристик
судна, движущегося в переходном режиме
Характеристика судна
Отношение L/B
Угол килеватости
Центровка (смешениев нос) хт
Эффективность органов управления
Отстояние руля от корпуса при
сохранении его геометрии (опу-
(опускание руля)
Скорость*
Метацентрическая высота (пониже-
(понижение центра тижести)
Улучшение поворотливости
Нет
(для круглоскулых судов)
Да
(для остроскулых судов)
• Да
(как правило, влияние
противоречиво)
Да
Да
Нет
(незначительно)
Нет
(для круглоскулых судов)
Нет
(для остроскулых судов)
Нет
(незначительно)
Уменьшение крена
на циркуляции
Да
(наружный крен)
Нет
(наружный крен)
Да
(внутренний крен)
Нет
(наружный крен)
Да
(внутренний крен)
Нет
(наружный крен)
Да
(внутренний крен)
Нет
(наружный крен, как правило,
влияние противоречиво)
Да
(внутренний крен)
Да
(внутренний крен)
Нет
(внутренний крен)
Нет
(наружный крен)
Нет
(наружный и внутренний крен,
как'правило, влияние противо-
противоречиво)
Да
(наружный крен)
Нет
(внутренний крен)
*Для судов, движущихся в переходном режиме, рост скорости может привести к уменьшению
крена на циркуляции. Это наблюдается в том случае, если исходный крен был наружным, и увеличе-
увеличение скорости переводит его во внутренний.
Таблица 6.S. Изменение параметров управляемости в зависимости от характеристик глисси-
глиссирующего судна
Характеристика судна
Отношение L/B
Угол килеватости
Центровка (смещение в нос) а,
Эффективность органов управления
Скорость
Метацентрическая высота (понижение центра тя-
тяжести)
Улучшение
пов о ро тлив о сти
Да
Нет
(как правило,
»»
Да
Нет
Да
Уменьшение крена
на циркуляции
Нет
Да
влияние противоречиво)
Нет
**
*»
142
Отсутствие автоматической устойчивости прямолинейного движения приводит
к ухудшению эксплуатационной устойчивости, поскольку при этом возрастают ампли-
амплитуда и частота перекладки рулевого органа. В соответствии с рекомендацией Е. Б. Юди-
Юдина допустимую степень неустойчивости, обеспечивающую приемлемую эксплуатацион-
эксплуатационную устойчивость, определяют из условия [31]
,-ГГ < 0,2, ¦ ' F.113)
где шзо — безразмерная угловая скорость при б == 30°.
При выполнении расчетов управляемости в случае q < 0 необходимо, кроме опредег
ления величин соо, Cg0, 5дкр, со^р (|3^кр) найти по формуле F.93) угол крена прибд =01
О зависимости параметров управляемости от изменения некоторых основных ха-
характеристик судна дают представление табл. 6.3—6.5.
6.6. Частные случаи расчета управляемости судна
Расчет поворотливости при кавитации руля. В случае возникновения кавитации на
руле судна расчет поворотливости может быть произведен по формулам, приведенным
в п. 6.4. Только в этом случае производная коэффициента подъемной силы изолирован-
изолированного руля Суд, на основании которой вычисляется боковая сила на руле, определяется
не по формуле F.18), а по данным атласа для соответствующего значения к.
Кроме этого, для судов, движущихся в водоизмещающем режиме (Fr < 0,6), учет
кавитации можно произвести по способу, предложенному М. П. Лебедевой. В соответ-
соответствии с этим способом расчет управляемости, т. е. получение зависимостей j3 =/Eд) и
¦Б7=/Eд), производят без учета кавитации по формулам F.71), F.72). Затем угол
перекладки руля корректируется на влияние кавитации по формуле
[Для использования формулы F.114) графики зависимости Суд =/Eд) приводятся
к условному виду, показанному на рис. 6.26].
В формуле F.114) 8д — угол перекладки изолированного руля, при котором кри-
кривая зависимости Суд =/Eд), соответствующая кавитационному режиму, „отваливает-
„отваливается" от кривой Cyr =/(бд) при отсутствии кавитации (см. рис. 6.26, б); Суд - про-
производная коэффициента подъемной силы (тангенс угла наклона) на участке 5*д > 8$
(см. рис. 6.26, б), для случая 8д* = 0, Суд определяется так же, как для кривой, исхо-
исходящей из начала координат (рис. 6.26, а); Суд определяется по формуле F.18);
бд - углы перекладки руля, для которых производился расчет 0 =/(бд),ш=/(бд) без
учета кавитации; при 5д Ф 0 в формулу F.113) подставляются значения 5д > 8j|; Kg
определяется по формуле F.30).
По результатам расчета 5Дк строят зависимости S3 =/Eдк) viD/L =/Eд), а также
перестраивают зависимость угла крена на установившейся циркуляции © =/(8д ), кото-
которая приводится к виду © =/(8дк).
а.)
¦Сук
Рис. 6.26. К расчету управляемости судиа
с учетом кавитации руля: а, б — различный
вид зависимостей Cyr =/Fд) кавитирующих
рулей.
1 - зависимость Cyr =/(8д) некавитирующе-
го руля; 2 — зависимость Cyr=/(&R) кави-
тмрующего руля; 3 — условная зависимость
=/(8д) кавитирующего руля, по ко-
которой определяется
Б)
143
Управляемость на заднем ходу и при движении по инерции. Суда, оборудованные
подвесным мотором (поворотной колонкой) или РРУ водометного движителя, управ-
управляются иа заднем ходу, т. е. судно способно входить в циркуляцию и выходить из нее
при соответствующих перекладках рулевого органа, а прямолинейное движение обеспе-
обеспечивается даже при наличии неустойчивости на курсе.
Суда, оборудованные рулевым устройством, как правило, на заднем ходу не управ-
управляются. При этом могут встретиться несколько случаев [31]:
одновинтовое судно циркулирует только в сторону, противоположную направлению
вращения ГВ (например, влево при винте правого вращения), прямолинейное движение
поддерживать невозможно;
судно входит в циркуляцию любого борта при перекладке руля (рулей) на соответ-
соответствующий борт, однако вывести его из циркуляции с помощью перекладок не удается,
прямолинейное движение поддерживать невозможно; это свойство судна называется
частичной управляемостью [31];
судно входит и выходит из циркуляции, однако прямолинейное движение поддер-
поддерживать затруднительно из-за необходимости перекладывать руль на большие углы;
судно входит (выходит) в циркуляцию при перекладке рулей на борт, противопо-
противоположный направлению циркуляции, зто свойство судна называется обратной управляе-
управляемостью [31];
судно (как правило, двухвинтовое) обнаруживает тенденцию к входу в циркуля-
циркуляцию с очень большим диаметром, прямолинейное движение обеспечивается.
Наиболее часто на практике встречается случай частичной управляемости судов на
заднем ходу.
При движении по инерции (с выключенным движителем) управляемостью обладают
суда, оборудованные рулями. Суда с водометами и подвесными моторами (поворот-
(поворотными колонками) таким свойством не обладают. Именно с целью улучшения управля-
управляемости при движении по инерции предложены конструкции, аналогичные показанной
на рис. 6.18.
Влияние ветра на управляемость судна. Управляемость судна при действии ветра
оценивается по его способности сохранять прямолинейное движение на заданном курсе
[31].
Действие ветра на надводную часть судна приводит к появлению аэродинамической
силы и момента, которые определяются по следующим формулам
F.115)
F.116)
где Суа, COTg — аэродинамические коэффициенты нормальной силы и момента относи-
относительно миделя, определяемые соответственно следующими выражениями:
= l,O5sinyK; F.117)
F.118)
у° — угол кажущегося ветра*, т. е. угол между вектором результирующей скорости
* Применительно к парусным судам кажущийся ветер называют вымпельным, скорость его
обозначают vB, а курсовой угол — 0 (см. гл. 7).
144
обтекания надводной части vK и ДП судна (рис. 6.27) [вектор
скорости кажущегося ветра vK образуется в результате сложения
вектора скорости истинного ветра vH, определяемого в осях,
связанных с Землей (угол у„), и скорости судна v]; Ьцл -Ъпл/Ь —
безразмерное отстояние центра парусности от мидель-шпангоута;
^ц.п > 0» если центр парусности расположён к носу от миделя;
^ц.п < 0— если центр парусности расположен к корме от миделя;
Q у — площадь парусности надводной части судна в проекции на
ДП; Рх — плотность воздуха.
Из решения системы уравнений, включающей аэродинамиче-
аэродинамические компоненты, а также гидродинамические силы на корпусе и
органах управления, определяются угол перекладки рулевого
органа, необходимый для поддержания прямолинейного движения,
и угол дрейфа судна.
Анализ сил, действующих на судно, показывает, что наиболее
опасный ветер, для компенсации которого требуется максимальная
боковая сила рулевого органа, соответствует направлению
7К = 120 т 130°. Максимальный угол дрейфа судна наблюдается при
ук = 50*60° [31].
Ниже приведены формулы для судна с водометом, позволяющие определить угол
дрейфа, возникающий при движении судна
Рис. 6.27. Схеме ско-
скоростей истинного и
кажущегося ветра
где
=
21R C2
1 Pi Qy
F.120)
F.121)
и потребную боковую силу РРУ
F.122)
i
На основании расчета боковой силы Уоп может быть произведен выбор конструк-
конструкции РРУ с учетом того, что
F.123)
Угол перекладки РРУ бд в формуле F.123) не должен превышать половины от макси-
максимального. Расчет выполняется для ук = 130° при варьировании соотношения vK/v, ко-
коэффициент <? 3 1 ДЛЯ судна с водометом определяется по формуле F.88), а Су —
по табл. 6.2. Переход от значения кажущейся к истинной скорости ветра осуществляется
по формуле
F.124)
vjv = VI + (ydv)'1 -2(vK/v)cos CyK
При выполнении расчетов с использованием шкалы Бофорта (табл. 6.6) необходимо
брать значение скорости, соответствующее верхней границе для данной балльности [31].
145
Таблица 6.6. Шкала Бофорта
Балл
0
1
2
3
4
5
6
Характер ветра
Штиль
ТИХИЙ
Легкий
Слабый
Умеренный
Свежий
Сильный
Средняя скорость,
м/с
0-0,5
0,6-1,7
1,8-3,3
3,4-5,2
5,3-7,4
7,5-9,8
9,9-12,4
Балл
7
8
9
10
И
12
Характер ветра
Крепкий
Очень крепкий
Шторм
Сильный шторм
Жестокий
Ураган
Средняя скорость,
м/с
12,5-15.2
15,3-18.2
18,3-21,5
21,6-25,1
25,2-29
29,0 и более
Влияние волнения на управляемость судна. При движении малых судов на попутном
волнении часто наблюдается явление захвата, при котором судиб, увлекаемое попутной
волной теряет устойчивость прямолинейного движения, разворачивается, становясь
лагом к волне, и получает значительный крен, в результате которого оно может опроки-
опрокинуться. Перекладка рулевого органа, даже на максимальный угол не выравнивает за-
рыскнувшее судно; т. е. происходит потеря управляемости [2,160,162].
Захват судна волной происходит при углах набегания волн к ДП 0—30°, при отно-
отношении длины волны и длины судна Лв/L = 1 -г 2 [2,160,162]. При этом скорость судна
на тихой воде близка к фазовой скорости волны Со. Соотношение между ними в соот-
соответствии с работами [160,162]
vcosx = C0, ' F.125)
где х — угол набегания фронта волны по отношению ДП.
Кроме того, захват судна волной возможен при указанном выше соотношении длин
волны и судна и при условии, что скорость* судна в узлах определяется из соотношения
[2]
v > 1,35\?Т F.126)
Чтобы избежать захвата скорость судна должны быть меньше величины, подсчитан-
подсчитанной по формуле F.126).
Явление захвата и возможного опрокидывания у глиссирующих судов усугубляется
резким сужением носовой части и возникающей в связи с этим дифферентов кой на нос.
Конструктивные меры, способствующие нейтрализации действия попутного волнения,
в этом случае сводятся, как правило, к приполнению носовой оконечности или'созда-
или'созданию специальных форм обводов, обладающих стабилизирующим свойством при ходе
на волнении. К последним относятся обводы типа „морские сани" [60].
Влияние течения на управляемость судна. При движении судна на прямолинейном
участке реки влияние течения сводится к сносу судна, т. е. к изменению его траектории
при совершении циркуляции. Характеристики управляемости (угол дрейфа, безразмер-
безразмерная угловая скорость) в относительном движении остаются такими же, как и на спокой-
спокойной воде. Однако изменение скорости относительно воды (уменьшение при ходе вниз
по течению и увеличение при ходе вверх) приводит к тому, что при движении вниз
судно хуже слушается рулевого органа и более подвержено влиянию ветра. Кроме того,
рост абсолютной скорости движения (относительно берега) при движении вниз увеличи-
увеличивает площадь, ометаемую судном при повороте. Вследствие этого маневры, связанные
с подходом к причалу и швартовкой, выполняются против течения [59].
При движении на повороте реки изменяется характер силового взаимодействия
между жидкостью и судном [94, 110], в результате чего изменяютсявеличины f}g и CJ,
146
а в случае необходимости совершения циркуляции с той же со, что и на спокойной воде,
изменяется величина угла перекладки рулевого органа бд. Это изменение особенно за-
заметно, если скорость течения соизмерима со скоростью судна в относительном движении.
При движении по повороту реки наибольшую сложность представляет движение
вверх, поскольку при этом возрастает потребный угол перекладки рулевого органа
и уменьшается угол дрейфа по сравнению со спокойной водой. При движении вниз по
течению, наоборот, возрастает угол дрейфа и уменьшается угол перекладки рулевого
органа (последний может быть даже переложен на одерживание) [94,110].
6.7. Примеры расчета управляемости малых судов
Расчет характеристик управляемрсти круглоскулого судна с рулем, установленным
за гребным винтом.
1. Главные размерения и характеристики: L = 15,1 м, В =3,14 м, Г=0,78 м, V =
= 24,0 мэ,/)=24600кг, 5 = 0,65, <р = 0,72, h =0,5 м, xg =0,zg = 1,15 м, фх = 0. Эскиз
кормовой оконечности приведен на рис. 6.28.
2. Максимальная скорость v = 20 км/ч E.56 м/с).
3. Данные по рулю: Ar =0,216 м2, А/г =0,57 м, Ьд =0,38 м, X = 1,5; профиль NASA,
Г=0,15, tmax =0,057 м, riR =1, по чертежу расположения руля относительно винта оп-
определяются Ardp =0,172 м, Ar0 =0,044 м, й„ =0,47 м, zp =0,45 м и отстояние оси
баллера от миделя судна Ir = 7,24 м.
4. Данные по ходкости (берутся либо из расчета ходкости, либо из эксперимента)
= 0,6 м (Rp = 0,3 м) для скоростей 20 и 10 км/ч E,56 и 2,78 м/с):
20E,5 6) 10B,78)
0,456
2
0,14
0,228
2,5
0,17
5. Определение средней скорости обтекания руля по формулам F.32), F.33):
при v = 20 км/ч
/ 0,172
vcp = (l-0,14)/\/ 1 + п„^ 2 * 1,385; vcp =5,56 -1,385 =7,7 м/с;
ч /0Л72
-0,14)Д / 1 +
\/ 0,216-
при v = 10 км/ч
V0 172
1+ ±—- 2,5 «1,435; vcp=2,78- 1,435 «3,99 м/с
0,216
6. Проверка руля на аэрацию при v = 20 км/ч и бд = 30°. По формуле F.36) нахо-
находим dR =0,057 + 0^8sin 30° =0.247:.
*dR = vcp/s/gd~R~ = 7,7/^81- 0,247 *
4,95. Для заглубления нижнего торца ру-
руля Лт = 0,65 м по рис. 6.13 находим значение
коэффициента i*i = 0,85.
Значение числа Fitf,-, , при котором
наступает аэрация, определяем по формуле ол
F.35) 20 19 -f8 17 15 IS
t-fiff
2 • 0,65 6 • 10
,-s
0 2472 ^KCi 6.28. Кормовая оконечность кругло-
— rs 2,49. скупого судна (к примеру расчета характе-
0,85 ристик управляемости)
147
Поскольку Рг^Л > ^TdR у аэрация на руле отсутствует.
7. Проверка руля на кавитацию: находим число кавитации
p = 200/7.72 = 3,37.
Поскольку к > 2,5 то руль не кавитирует.
8. Определение гидродинамических характеристик корпуса.
По чертежу кормовой оконечности (рис. 6.28) определяем площадь Fn =0,57 м2,
шпангоут с номером i =15.5. По формуле F.63) находим угол ходового дифферента
при v = 20 км/ч
ф2 = 0,13 • 0,01 + O,O28sin E,2 • 0,456 - 1,9) «0,014.
Прив.еденный коэффициент погруженной части ДП для случая ф i = 0 [см. формулу
F.59)]:
при v = 10 км/ч
3 Fn 3 0,57
= 1 !
20-i LT 20-15,5 15,1-0,78
3 Fn 3 0,57
aD = 1 = 1 ! «0,968;
Ui 20i LT 20155 151078
при v0 = 20 км/ч
3 Fn 0,054 0,054
o =1- + ф = 0,968 + - -0,014*0,983.
°г 20-i LT T/L 0,78/15,1
Безразмерные ГДХ корпуса определяем по формулам F.54) — F.58):
„ 0,78 /0,65 У'2 / 15,1 \ 1/3
2
CCJ _
Y -
3-0,78\1/2/0,7
3,14 ) \o,i:
3,14 0,65 0,271
414 / \n-r> I +1.25 (Од-0,95) =0,596+1,25 (ад-0,95);
15,1 aD aD
Cm = 1,8 ^j-j- + 0,06@,7-0,72) + 0,97- oD = 1,062- aD;
°'°5 + °>58 7T7 = °>05 lSaD-
/-iCJ _ _4
\
Приведенная площадь ДП
FD =LToD = 15,1 • 0.78СТД * 11,780^.
Значения Су, С2, Су, Ст, Cm и Fq определяют для скоростей 10 и 20 км/ч:
10 20
0,968 0,983 Су
an. и,УЬ8 и,У»3 Ly
С§- 0,125 0,14 Си,
С2 0,618 0,637 "-'
10
0,28
0,094
0,0452
U.4
20
0,276
0,079
0,0481
11,58
148
9. Определение боковой силы на руле.
Производная коэффициента подъемной силы изолированного руля по формуле
F.18) для подвесного руля
2-3,14
Суд = 0,88 — * 2,37.
1+
1,5
Определяем по чертежу a JRp = 0,17/0,3 * 0,567; hR/Rp = 0,57/0,3 = 1,9 и находим
по рис. 6.11 «1 = 0,465.
Удлинение части руля, расположенной в струе ГВ
Хв = hl/ARDp = 0,472/0,172 * 1,28.
Коэффициент индукции по формуле F.25) составит
при v = 20 км/ч
6 vT+2- 1
К„ = • 0,465 = 0,256;
1,28 + 6 / O7f72
\ 1+ —* -2
V 0,216
приу = 10 км/ч
к = —Ё :_ ^ : 0,465 = 0,284.
1,28 + 6 0,172
1 + /,э
0,216
Производная коэффгщиента подъемной силы руля с учетом влияния гребного винта
определится по формуле F.24):
при v = 20 км/ч
Суд = 2,37A - 0,256) = 1,763;
при v = 10 км/ч
C$R =2,37A-0,284) = 1,697.
Коэффициент влияния корпуса и винта на руль при кк = 1 по формулам F.30) и
F.31) составит:
при v = 20 км/ч
0,044+0,172 VTTT
kf = к„ = = 0,61;
ь в 0,044 + 0,172A + 2)
приу = 10 км/ч
0,044+ 0,172 VI+ 2,5
кЕ = Кв = — : = 0,566.
0,044 + 0,172A + 2,5)
149
10. Расчет коэффициентов вида #гу, гг/-, s,y производится по формулам F.73) —F.78):
при v =20 км/ч
, 0,216
q2! = 1,763 • 0,61 • 1,3852 + 0,14 = 0,178;
при v = 10 км/ч
, 0,216
<?21 = 1,697 - 0,566 • 1,4352 ~Г7Т + 0,125 =0,162;
11,4
при v = 20 км/ч
0,216
г2! = 1,763 • 0,61 • 0,48 • 1.3852 со - 0,276 = -0,258;
11,58
при v = 10 км/ч
, 0,216
г2! = 1,697 • 0,566 • 0,48 • 1,4352 - 0,28 = -0,262;
1 X 1 )^о
при v = 20 км/ч
, 0,216
«21 = 1,763 • 1,3852 ~—¦ =-0,0631;
11,Эо
при v =10 км/ч
, 0,216
s = -1,697 • 1.4352 ——- = -0,0662;
11,4
при v = 20 км/ч
, 0,216
q31 = 1,763 • 0,61 • 0,48 • 1.3852 со - 0,079 = -0,0605;
11,58
при v = 10 км/ч
q3, = 1,697 • 0,566 • 0,48 • 1.4352 ~-- - 0,094 = -0,0766;
11,4
при v = 20 км/ч
г3! = 1,763 - 0,61 • 0,482 • 1.3852 -7ГТГ + 0,0481 = 0,057;
11,58
при v = 10 км/ч
, 0,216
г3! = 1,697 ¦ 0,566 • 0,482 • 1,4352 •— + 0,0452 = 0,0538;
11,4
150
при v = 20 км/ч
, 0,216
j3i = -1,763 • 0,48 • 1.3852 —- =-0,0303;
11,58
при v = 10 км/ч
, 0,216
s3, =-1,697-0,48- 1,435* —-—- =-0,0318.
11,4
11. Расчет поворотливости.
При определении зависимостейсо=/(бд); fa =/E/?); D/L =/Eд) полагается,что
судно одинаково поворачивается на правый и левый борта, поэтому расчет ведется толь-
только при перекладке рулевого органа на один борт прибд > 0. Для неустойчивого судна
значения бд < 0 означают перекладку рулевого органа на борт, противоположный на-
направлению циркуляции.
Расчет коэффициентов q и s осуществляется по формулам F.91) и F.92):
при v = 20 км/ч
q =0,178 • 0,057 - (-0,0605) -(-0,258) = -0,00546;
при v = 10 км/ч
q = 0,162 • 0,0538 - (-0,0766) (-0,262) = -0,0114;
при v = 20 км/ч
s = (-0,258) (-0,0303)-0,057(-0,0631) =0,0114;
при v = 10 км/ч
s = (-0,262) (-0,0318) - 0,0538 (-0,0662) = 0,012.
Результаты расчета параметров Eg [по формуле F.71)], со по [формуле F.72)],
а также 7F= 1/пи. D/L = 2/сЗ"в зависимости от бд приведены в табл. 6.7 и представлены
графически на рис. 6.29,6.30.
Таблица 6.7. Расчет поворотливости судна, движущегося в водоизмещающем режиме
"в.
км/ч
10
20
Элемент
П1М1ЛпЛТП11>
паиара тли
вости
& •
R
D/L
/3
R
D/L
v, м/с
У„,кг
®,°
Угол перекладки руля, град/рад
0/0
0,343
' 0,488
2,05
4,1
0,151
0,16
6,25
12,5
5,3
-145,4
3,64
5/0,0873
0,418
0,647
1,54
3,08
0,257
0,319
3,14
6,28
4,66
-131,75
5,8
10/0,174
0,475
0,779
1,28
2,56
0,321
0,433
2,31
4,62
4,1.
-93,04
Л19
15/0,262
0,524
0,901
1,11
2,22
0,372
0,534
1,87
3,74
3,6
-58,55
5,94
20/0,349
0,566
1,012
0,99
1,98
0,415
0,626
1,6
3,2
3,2
-33,35
5,55
25/0,436
0,604
1,118
0,9
1,8
0,453
0,712
1,4
2,8
2,82
-14,46
4,93
30/0,523
0,639
1,22
0,82
1,64
0,488
0,796
1,26
2,52
2,53
-1,85
4,5
35/0,611
0,671
1,316
0,76
1,52
0,52
0,876
1,14
2,28
2,26
7,1
3,94
151
-1,0-
г
к
ж
-ю-
/
X
У
-—
¦
л-
ш.Ш/1
-5 0 5 10 15 20 25 6,,°
1,0
0,5
(
-/0—1
\
-<
5 /0 15 20 25 S,,°
Рис. 6.29. Результаты расчета зави-
зависимостей w =/ Eд), (% =/ Eд), D/L =
=f(fiR) круглоскулого судна (у =
= 10 км/ч)
Рис. 6.30. Результаты расчета зави-
зависимостей ш =/(8д),% =/(8^), D/L =
/ круглоскулого судна О =
=20 км/ч)
12. Определение характеристик устойчивости.
Поскольку <7<0, производится расчет 5дкр, j3gKp> ^кр по формулам F.110)-
F.112):
при v = 20 км/ч
(-0,00546)а
4-0,637-0,057-0,0114
«-0,018 (~-1в);
при v = 10 км/ч
5
(-0,0114J
4-0,618-0,0538-0,0122
= -0,0814 (-4,66°);
при v = 20 км/ч
(-0,00546)
$g кр —
2 ¦ 0,637 • 0,057
= 0,0752;
при v = 10 км/ч
(-0,0114)
*кр 2-0,618-0,0538
при v = 20 км/ч
= 0,171;
152
(-0,0303) (-0,018) + (-0,0605) 0,0752
S 0,057
• при v = 10 км/ч
(-0,0318) (-0,0814)+ (-0,0766) -0,71
U>KP~~ 0,0538
= 0,195.
Соответствующие значения показаны на рис. 6.29, 6.30.
13. Оценка устойчивости прямолинейного движения и поворотливости.
По результатам расчета можно сделать вывод, что спроектированное судно имеет
хорошую поворотливость, характеризующуюся минимальным диаметром B,5 длин
корпуса) при v0 = 20 км/ч. Устойчивость прямолинейного движения, определяемая
по формуле F.13), при^ = 20 км/ч близка к требуемой: соо/со3о= 0,160/0,796 = 0,201
и хуже при v = 10 км/ч: сЗо/со3о = 0,488/1,22 = 0,4.
С целью улучшения устойчивости можно рекомендовать либо увеличить площадь
дейдвуда, либо дать судну незначительный, в пределах 0,5°, дифферент на корму.
14. Расчёт крена на циркуляции при максимальной скорости v = 20 км/ч.
Скорость на циркуляции вычисляют по формуле F.94)
R2
" R2 + 1,9
Боковая сила руля
v = —
R2 + 1,9
о= cYRp\ vSrivAR [«Л -«
p\
• 5,56 м/с (данные расчета в табл. 6.7).
+ 7д S3)] =1,763—• 1.3852- 0,216 [5Л -
- 0,61 @, + 0,48со)К =37,25[BR - 0,61 @, + 0,48cS)] v20 (данные расчета в табл. 6.7).
По рис. 6.21 определяется точка приложения боковой силы на корпусе В/Т =
= 3,14/0,78 « 4; zr » 0 и по формуле F.95) рассчитывается зависимость 0=/Eд):
57,3
"^"В@,140,+0,63701) X
24600 • 0,5
X 1,15-Уо A,15-0,45)] = 0,00466[679,17v§ X
X @,140,+Ot6370j)-O,71ro].
Результаты расчета приведены в табл. 6.7 и на '
рис. 6.31.
Расчет характеристик управляемости остроскулого 2,5
судна с двумя подвесными моторами (поворотными ко-
колонками) .
1. Главные размерения и характеристики: L = 6 м,
BTJ= 2 М, 7^= 0,25 м, F= 1,5 м3, Д> = 1501^КГ, BR = 0,5, Рис. 6.31. Результат расчета крена
*р — 0,77, п — 0,55 м, хт 3 м {Xg — 0), Zg — 0,7 м, ф i = на циркуляции круглоскулого суд-
= -1°, |3 = 12°. на (v =20 км/ч)
10 15 20 25 В,:
153
Эскиз кормовой оконечности соответствует рис. 6.22.
2. Максимальная скорость v = 35 км/ч.
3. Данные по подвесным моторам и ходкости при nB =2,Dp = 0,25 м, zp = —0,2,
z'p =0,9 м для скоростей 8,14,35 км/ч B,22; 3,89; 9,72 м/с):
8 B,22) 14 C,89) 35 (9,72)
Fr^ 0,29 0,51 1,27
Fry 0,66 1,16 2,9
Ctv 1,2 0,9 0,6
Фр. 0 0 0
4. Определение характеристик переложенного подвесного мотора.
По рис. 6.17 определяют коэффициентКс:
сп 1;2 0,9 0,6
Ас 0,73 0,78 0,85
По формлуам F.42) и F.43) находят параметры С^в, кев
при v = 8 км/ч:
? _ 1,2 V1 + 1,2A-0,73)
в л/1. + 1,2-1
1
приv = 14км/ч Су =0,722; к* =0,725;
В В
при v = 35 км/ч CfB = 0,43; к^в = 0,83.
5. Определение характеристик управляемости при движении в водоизмещающем
(v0 - 8 и 14 км/ч) режиме*.
Этот расчет принципиально ничем не отличается от примера расчета, изложенного
ранее, только вместо формул, относящихся к случаю расположения на судне руля,
нужно использовать выражения, соответствующие установке подвесных моторов.
При этом приведенный коэффициент полноты диаметрали aD определяется по формуле:
при v = 8 км/ч
0,054 0,054
^=^@0174) =0,977;
при v = 14 км/ч
0,054 0,054
(ф2 - угол ходового дифферента, при Fr^ = 0,51, ф2 = 0,0204).
Результаты расчета в виде зависимостей oJ=f(8R) и D/L =/E^) при v =8 км/ч
и v = 14 км/ч приведены на рис. 632,6.33.
*Расчет характеристик управляемости при v0 = 14 км/ч представляет интерес, поскольку соот-
соответствует движению судна, физически близкому к переходному режиму.
154
ш
1,0
0,5
—
— —
10 15 20 25
Рис. 6.32. Результаты расчета зависи-
зависимости ьо=/(8#) остроскулого судна.
1 — водоизмещающий режим (v =
= 8 км/ч); 2 — то же (v =14 км/ч);
3 - глиссирующий режим (v =35 км/ч)
S/L
75
50
25
10 15 20 25 V
Рис. 6.33. Результаты расчета зависи-
зависимости D/L =/(8я) остроскулого судна.
1 — водоизмещающий режим (v =
= 8 км/ч); 2 — то же (v =14 км/ч);
•? — глиссирующий режим (v =35 км/ч)
\
V
1
\
ч
^—
¦•"—
-—-.
1
1
6. Определение исходных данных для расчета характеристик управляемости в глис-
глиссирующем режиме (у =35 км/ч): по рис. 6.23 для C = 12° щ =\,72,Щ =0,91,qv =39;
по данным ходкости для v =35 км/ч ф2 = 2,5° @,0436), смоченная длина /см =
= 4,1 м, осадка на транце Ттр = /см ф2 = 4,1 • 0,0436 = 0,178 м;
число Fr по ширине на транце:
9,72
9,81 -2
= 2,195;
3,0
В
= -1,5;
тр
0,9
тр
приведенная производная боковой силы подвесных моторов по формуле F.99)
0,43 —
4 22
2 = 0,0106.
7. Расчет составляющих ГДХ корпуса при движении в режиме глиссирования по
формулам F.65)-F.70):
С^ = 3,14 • 1,22@,178/2) 2cos 2,5° = 0,0303;
lfi = 1/2(-3 + 1/3 • 0,178ctg 2,5°) = -0,9;
C? = 2 — 0,375;
/«= 1 (-2 ¦ 3 + - • O,178ctg 2,5°) = -2,101;
155
Таблица 6.8. Расчет поворотливости судна, движущегося в глиссирующем режиме
Элемент
поворот-
поворотливости
«Я
О)
D/L
в
Угол перекладки руля, град
0
0
0
0
0
0
5
0,087 3
0,007 79
0,023 4
85,5
-1.W
10
0,174
0,015 5
0,046 5
43
-3,82
15
0,262
0,023 4
0,070 2
28,5
-5,73
20
0,349
0,031 1
0,093 3
21,4
-7,64
25
0,436
0,038 9
0,117
17,1
-9,55
30
0,523
0,046 6
0,14
14,3
-11,46
/<=, = -
3,142-0,91
12sin2 12°
0,178-0,7
= 1,191;
0,178 3,14-57,3
2 4-12
8. Расчет поворотливости и определение крена на циркуляции при движении в глис-
глиссирующем режиме по формулам F.96) и F.97):
/-1,5 0,45 \ 0,375 /1,82 \ .,
) — + 0,0303 • 39 • 0,0439 ( -L~ -1 X
1,01064-0,9 1,191' 2.1952 41,191 /
0,0106
0,0303
0,375 /1,82 \
[-^9-(-2,101)]— *39-0,043б(—Г1)Х
(—-О
\-0,9 /
X [о,375+О,ОЗОЗ[~О,9-2,1О1]}
0,0106-0,118
R ~ 0,0303 -0,463
0°=-
8R = 0,08925я;
0,45
ОрЗОЗ
0,463
0.05
0
-5
-10
г п
? Л.
1 2
^*
0 2
Щ
5 К
0,0106 • 0,506
0,0303 ¦ 0,463
S°R= -0,3826^;
___ _L_ = __ А_ч-
Результаты расчета приведены в табл. 6.8 и на
рис. 6.32—6.34 в виде зависимостей шв =/E/г),
в=/FЛ), со =f(SR),D/L =/FЛ).
Иэ результатов расчета следует очевид-
очевидный вывод о том, что для совершения кру-
крутой циркуляции необходимо перед пере-
перекладкой рулевого органа снизить скорость,
- е перейти из глиссирующего режима
Рис. 6.34. Результаты расчета зависи-
мостей сов=/F^), е=/Fо) остро-
скулого судна, движущегося в глисси- Движения в переходный или водоиэмеща-
рующем режиме (v =35 км/ч) ющий.
156
6.8. Определение гидродинамических сил и моментов, действующих на судовой руль
Расчет ГДХ руля необходим для выбора прочностных размеров рулевого устройст-
устройства и определения мощности рулевого привода (рулевой машины). В этом случае наи-
наиболее важной является информация о нормальной силе N, действующей на руль, и мо-
моменте относительно балл ера М.
Момент, преодолеваемый рулевым приводом, состоит из двух компонентов:
момента гидродинамической природы и момента трения в подшипниках опор. Для при-
приближенной оценки момент трения можно принимать как 20 % гидродинамического мо-
момента, более точно он может быть рассчитан в соответствии с формулами теории прочно-
прочности [133].
Методика расчета гидродинамических усилий для общего случая расположения руля
за гребным винтом и корпусом судна имеет сложный характер [31, 136], и ее изложе-
изложение выходит за рамки настоящего издания. Однако для маломерных судов, для кото-
которых характерно использование относительно простой конструктивной схемы движи-
тельно-рулевого комплекса, указанная методика может быть упрощена. Ниже приводит-
приводится приближенная методика, использование которой возможно при следующих допуще-
допущениях: руль — подвесной (простой), близкий к прямоугольному, расположен по оси вра-
вращения гребного винта; значения высоты руля и диаметра ГВ близки друг другу; отсто-
отстояние нижней кромки руля от продольной оси ГВ составляет a i > 0,SRp, кавитация руля
отсутствует (к > 2,5).
Методика расчета. Гидродинамические усилия, действующие на руль, рассчитывают-
рассчитываются для следующего условного маневра: судно движется прямолинейно передним ходом
с рулем, переложенным на постоянный угол. При расчете последовательно определяются
безразмерные гидродинамические характеристики изолированного руля, руля с учетом
влияния корпуса, руля с учетом влияния ГВ и корпуса; вычисляются силы и моменты,
действующие на руль.
1. Безразмерные ГДХ изолированного руля: производная коэффициента нормаль-
нормальной силы Суд полагается равной производной коэффициента подъемной силы CyR и оп-
определяется по формуле F.18)
С
C
Ж "* CYR >
коэффициент центра давления
F.127)
F.128)
где Срх - зависимость коэффициента центра давления
от удлинения (рис. 6.35); Kt — поправочный коэффи-
коэффициент, учитывающий значение относительной толщины
руля (рис. 6.36).
0.2
0,1
Рис. 6.35. Зависимость коэффи- Рис. 6.36. Зависимость,
циента центра давления от удли- коэффициента Kt от отно-
нения и угла перекладки руля сительной толщины руля
Рис. 6.37. Зависимость коэффи-
коэффициентов К и и ДС/>Н от коэффи-
коэффициента обшей полноты
157
2. Безразмерные ГДХ руля с учетом влияния корпуса определяются только в тех
случаях, когда руль расположен в кормовом подзоре судна, движущегося в водоиэме-
щающем или переходном режиме. Для рулей, установленных под днищем судов, движу-
движущихся в глиссирующем или переходном режимах, безразмерные ГДХ с учетом влияния
корпуса соответствуют безразмерным ГДХ изолированного руля.
Производная коэффициента нормальной силы ^Шн определяется по формуле
* F.129)
F.130)
гдеАТ# — коэффициент влияния корпуса (рис. 6.37).
Коэффициент центра давлениячО>дя определяется по формуле
CpRH=CPR+ACpH,
где &Срн — поправка к коэффициенту центра давления, обусловленная корпусом судна
(см. рис. 6.37).
3. Безразмерные ГДХ руля с учетом влияния ГВ и корпуса.
Производная коэффициента нормальной силы CfiRf{ определяется по формуле
где Кя — коэффициент индукции ГВ [см. формулу F.25) ].
Коэффициент центра давления CpRHp определяют по формуле
F.131)
FЛ32>
где ACpr — поправка к коэффициенту центра давления, обусловленная влиянием ГВ.
Для определения поправки АСрл вычисляют эффективное удлинение руля
F.133)
где CyR — производная коэффициента подъемной силы руля, расположенного за ГВ
и корпусом [см. формулу F.24) ].
Для полученных значений Хэ определяют величины CpR09 и О>я0 (рис. 6.38) и
далее их разность
\Спп — CpR л — CpR . F.134)
По найденным значениям СшНр и CpRHp определяются коэффициенты нор-
нормальной силы и момента на баллдэе
F.135)
), F.136)
0,1
CmRHp = CNRHp (CPRHp ~ KSr )»
где KSR — коэффициент компенсации.
4. Гидродинамические сипы и моменты, дей-
действующие на руль, определяются следующими
0,5
1,0
^20—Л выражениями:
Рис. 6.38. Зависимость
нения руля
от удли-
удлиF.137)
158
¦ AR bR,
F.138)
где vcp -средняя скорость обтекания руля, определяемая формулами F.32), F.33).
Величина момента на баллере может регулироваться выбором коэффициента ком-
компенсации руля. При назначении коэффициента компенсации чрезмерно большим по срав-
сравнению с коэффициентом центра давления руль получается перебалансированным, при
противоположном соотношении коэффициента компенсации и коэффициента центра
давления — недобалансированным (рис. 6.39). Естественно, удовлетворительный вид
зависимости М =/(&д ) соответствует промежуточному положению.
При изменении коэффициента компенсации или при необходимости пересчета ГДХ
с одного руля на другой однотипный компенсации коэффициент момента определяется
по следующей формуле:
CmRHp ~C
mRHp
F.139)
где К* —измененный коэффициент компенсации. При расчете по формуле F.139)
коэффициент нормальной силы Cnrh считается неизменным.
При рассмотрении вопросов управляемости данные по сопротивлению руля являют-
являются второстепенными по сравнению с другими гидродинамическими характеристиками.
Определенную практическую полезность с учетом ходкости имеет информация о со-
сопротивлении иепереложенного руля. Для рулей с закругленной передней кромкой и за-
заостренной задней (например, профиль NASA) оно пренебрежимо мало по сравнению
с сопротивлением корпуса. Однако для руля с клиновидным профилем указанная вели-
величина в 3—4 раза превышает сопротивление непереложенного руля с профилем NASA
(рис. 6.40), что, естественно, должно учитываться в расчетах ходкости.
Пример расчета. Расчет выполняется для круглоскулого судна, размерения и харак-
характеристики которого даны в п. 6.8; коэффициент компенсации руля KSR =0,29.
1. Безразмерные ГДХ изолированного руля:
производная коэффициента нормальной силы С/уд = Сук - 2,37;
ОЛ
0,3
0,2
0,1
-
/
к/
/
/
//
у
/
10
20
JO
Vac. 6.39. Зависимость вида
cmRHp =/(8 л).
1 — перебалансированный руль;
2 — иедобалансированный руль;
3 — удовлетворительный вид
кривой СтцНр =/Fя)
Рис. 6.40. Зависимость коэффи-
коэффициента сопротивления руля
CxR 0T У1713 перекладки руля.
/ - профиль NASA; 2 - клино-
клиновидный профиль
159
коэффициент центра давления 0>д =ЛГгО>^ — по рис. 6.35, 6.36 для X = 1,5 и t
¦Q,l5,Kt = 1,09, результаты расчета Срц приведены в табл. 6.9.
Та бл и ца
SR
0
5
10
15
20
25
30
35
40
«Я
0,087 3
0,174
0,262
0,349
0,436
0,524
0,611
0,698
6. 9. Результаты расчета величин нормальной силы и момента на баллере руля
0,192
0,204
0,22
0,234
0,258
0,287
0,312
0,348
CPR
0,209
0,222
0,24
0,255
0,281
0,313
0,34
0,379
CPRH
0,246
0,259
0,277
0,292
0,318
0,34
0,377
0,416
CPRHP
0,224
0,237
0,255
0,27
0,296
0,328
0,355
0,394
cNRHp
0,166
0,331
0,49
0,665
0,83
0,998
1,164
1,33
cmRHp
-0,011
-0,017 5
-0,017 2
-0,013 3
0,005
0,038
0,075 7
0,138
N,kt
108
216
320
434
542
652
760
868
M, кГм
-2,73
-4,34
-4,27
-3,3
1,24
9,4
, 18,77
34,2
2. Безразмерные ГДХ руля с учетом влияния корпуса:
коэффициентКд — по рис. 6.37 для 5 = 0,65; Кд = 1,08;
производная коэффициента нормальной силы C^Rff =KjjC$r = 2,56;
поправка ДО>Я - по рис. 6.37 для 5 = 0,65 АСр„ = 0,037;
коэффициент центра давления Cprh -Cpr + АСря; результаты расчета приведены
в табл. 6.9.
3. Безразмерные ГДХ руля с учетом влияния гребного винта и корпуса:
коэффициент индукции (см. с. 149) Кя =0,256;
производная коэффициента нормальной силы C^R^ =C$rhA — АГИ) = 1,905;
м,
кг-м Мха
25
-0,029
-25
¦500 -
/
Л
/
/
V
)/ 30 8,
Рис. 6.41. Зависимости коэффи-
коэффициентов нормальной силы и мо-
момента на баллере от угла пере-
перекладки руля
Рис. 6.42. Зависимости нормаль-
нормальной сипы и момента на баллере
от угла перекладки руля
160
производная коэффициента подъемной силы с учетом влияния ГВ Сул = 1,763
(см. с. 149); р
эффективное удлинение
л - 2Cyrp _
коэффициенты 0>л0э и.С>д — по рис. 6.38 для Хэ = 0,936 и X = 1,5; Срд Оэ = 0,18;
CPRo =0,202; ACpR = С/>*Оэ - CPr0 =-0,022;
коэффициент центра давления Cprh = Cprh + ACpr; результаты расчета приведе-
приведены в табл. 6.9;
коэффициент нормальной силы C^rh ~CnrJ>r'> результаты расчета приведены в
табл. 6.9 и на рис. 6.41;
коэффициент момента CmRH ~CnRhp№prHp— Ksr)> результаты расчета приве-
приведены в табл. 6.9 и на рис. 6.41.
4. Гидродинамические силы и моменты, действующие на руль:
средняя скорость обтекания руля vcp =7,7 м/с (см. с. 147);
нормальная сила
результаты расчета приведены в табл. 6.9 и на рис. 6.42;
момент на баллере
PVcp
М = CmRHp —^ ARbR = 248CmRHp
(Br = 0,38 м) — результаты расчета приведены в табл. 6.9 и на рис. 6.42.
Таким образом, из результатов расчета следует, что при максимальной скорости пе-
переднего хода 20 км/ч на руле, переложенном на максимальный угол перекладки C5°),
возникают следующие гидродинамические усилия: нормальная сила — 760 кг; момент
на баллере ~ 18,8 кг • м.
7. ГИДРОАЭРОДИНАМИКА ПАРУСНОГО СУДНА
7.1. Основные понятия и определения
Современное описание физической картины движения судна под парусом строится на
основе теории крыла [91]. Принципиальная схема (рис. 7.1) представляется в виде систе-
системы вертикальных гидро-и аэродинамических крыльев. Воздушное (парус) и подводное
(киль, шверт) крылья преобразуют энергию ветра в силу,движущую судно. На практике
для уравновешивания направленной вниз силы тяжести необходима эквивалентная сила
поддержания — плавучесть. Водоизмещающий корпус, обладающий необходимой плаву-
плавучестью, сам по себе практически не имеет значения для преобразования силы ветра.
Скорость воздушного потока, действующего на парус (вымпельный ветер vB), оп-
определяется суммой векторов истинного vH и индуцированного движением судна встреч-
встречного ветра v, что в геометрической форме выражается парусным треугольником
(рис. 7.2). Согласно теореме синусов, отношение стороны треугольника к синусу про-
противолежащего угла является постоянной величиной
6 Зак. 738 161
Рис. 7.1. Система
гидроаэрокрыльев
Рис. 7.2. Парусный
треугольник
Рис. 7.3. Схема сил, действующих
парусное судно
sin 0 sin A80° - 7) sin G - 0)
G.1)
Для отношения величин скорости индуцированного ветра,- или, что то же самое,
скорости судна, к скорости истинного ветра, получаем
sin G — j3)
sin |3
sin tcos 0 — cos y sin j3
sin
= sin у ctg j3 — cos y.
G.2)
Скорость судна v и направление истинного ветра у могут быть определены, поэтому
скорость движения судна зависит от |3. Чтобы выявить физический смысл угла j3, вер-
вернемся к рассмотрению принципа движения парусного судна. Поток воды, обтекающий
подводное крыло со скоростью v, и воздушный поток, движущийся относительно пару-
паруса со скоростью vB, создают гидродинамическую силу R и силу давления Р ветра на па-
парус соответственно. При равномерном (без ускорения) движении/? =Р.
Гидродинамическую силу R можно разложить на силу лобового сопротивления Rx,
направленную противоположно движению судна, и перпендикулярную к ней подъемную
силу Ry (рис. 7.3). Отношение этих составляющих представляет собой гидродинамиче-
гидродинамическое качество Kr =Ry/Rx и может быть выражено через угол гидродинамического со-
сопротивления ег = arctg Ry/Rx. Аэродинамическую силу Р можно разложить на пару со-
составляющих — параллельную и перпендикулярную направлению движения судна: силу
тяги Г и силу дрейфа Д. Вторую пару составляющих силы Р, параллельной и перпенди-
перпендикулярной направлению вымпельного ветра vB, представляют собой сила лобового со-
сопротивления А'и аэродинамическая подъемная сила У. Отношение этих последних харак-
характеризует аэродинамическое качество К = Y/X, или угол аэродинамического сопротивле-
сопротивления е, = arcctg Y/X.
В связи с тем что гидродинамическое сопротивлениеRx равно силе тяги Т, aRv =Д,
угол между Р и Д равен ег, а вследствие перпендикулярности Y kvb и Д к v можно
записать
Это выражение известно под названием теоремы курсов, а равенства
ег = arcctg Ry/Rx; ea = arcctg Y/X.
являются математическим описанием парусного судна.
162
G.3)
G.4)
Из формулы G.2) видно, что для значений угла у, не слишком близких к 180°,
ctg р* должен иметь возможно большую величину, чтобы обеспечить возможно большее
отношение v/ vH. Иными словами, для быстроходного судна характерны малые значения
угла Р, что достигается при высоких значениях отношения подъемной силы к сопротив-
сопротивлению.
На рис. 7.4 и 7.5 представлены графики изменения углов гидро- и аэродинамическо-
аэродинамического сопротивления в зависимости от курсового угла относительно истинного ветра для
отдельных типов парусных судов и буеров с жесткими парусами. Они дают наглядное
представление о ходовом преимуществе, которое обеспечивается высокоэффективным
парусным вооружением и минимальной величиной сопротивления движению, характер-
характерных для ледовой яхты.
60
w
20
sssas
¦шшмм
—¦=
У,
1/
W 60 80 100 120 ПО 160 у°
Рис. 7.4. Зависимость угла аэроди-
аэродинамического сопротивления.
1 — швертбот; 2 — яхта; 3 — буер
1
Г"
V
ч
\
I
J
60
20
60 80 100 120 110 160 180
V
Рис. 7.5. Зависимость угла гидродина-
гидродинамического сопротивления.
1 — швертбот; 2 — яхта; 3 — катамаран;
4 - буер
180
160
140
120
100
80
60
40
W
о
40 60 80 100 ПО ПО 160 180
V
Рис. 7.6. Соотношения курсовых углов
0ит-
1 — швертбот; 2 — яхта; 3 — катамаран;
4 — буер
8,0
5,0
Рис. 7.7. Полярные диаграммы скоростей.
/ —швертбот; 2 — яхта; 3 — катамаран; 4 —
буер
163
Суммируя значения ег и еа можно построить график (рис. 7.6) зависимости непо-
непосредственно C от у, а затем, используя формулу G.2), рассчитать полярную диаграмму
скоростей (рис. 7.7). Как видно, ни швертбот, ни килевая яхта не могут превзойти ско-
скорости истинного ветра (v/vH < 1). Полярные диаграммы свидетельствуют о неоспори-
неоспоримых преимуществах в скорости, которыми обладают многокорпусные парусники и
о фантастических возможностях буеров, способных при истинном ветре vH = 5 м/с раз-
развивать скорость v = 40 м/с.
7.2. Аэродинамика паруса
Составляющие силы давления Р ветра на парус — подъемная сила Y и сила сопротив-
сопротивления X, ориентированные вдоль и поперек воздушного потока, — определяются по фор-
формулам
G.5)
где Су и Сх — коэффициенты подъемной силы и лобового сопротивления; рв =
= 1,293 кг/м3 — плотность воздуха; S — площадь паруса; vB — скорость вымпельного
ветра, м/с.
Аналогичный вид имеют формулы для сил тяги и дрейфа:
G.6)
где Ст и Сд — коэффициенты сил тяги и дрейфа.
Коэффициент силы сопротивления и подъемной силы паруса определяются его про-
профилем,формой в плане, соотношением высоты и ширины и задаются полярами (рис.7.8),
на которых они представляются в функции от угла атаки а. С увеличением а значения
этих коэффициентов изменяются неодинаково. Су достигает наибольшей величины при
некотором критическом угле атаки акр, который для бермудских парусов лежит в пре-
пределах 12—20 . Сх возрастает сравнительно равномерно и достигает максимума при
а = 90°.
Коэффициенты Ст и Ся можно также определить с помощью поляры паруса. Для
этого нужно проложить из начала координат
под углом к направлению вымпельного ветра
(ось абсцисс) курс яхты, затем разложить
относительно него коэффициент Ср пол-
полного давления ветра на парус на составляющие
тяги Ст и дрейфа Ся. Можно определить угол
атаки а, при котором на данном курсе величи-
величина тяги Ст будет максимальной. Этот угол,
очевидно, укажет составляющая Сд, проведен-
проведенная по касательной к кривой поляры [70].
На острых к ветру курсах, включая галф-
галфвинд, сила тяги Т создается исключительно
подъемной силой Y. На попутных курсах на-
начинает играть роль и сила сопротивления.
6 полный бакштаг сила тяги, примерно в рав-
равной мере создается силами Yи X. Естественно,
при чисто кормовом ветре движущая сила
Рис. 7.8. Поляра паруса и схема определе-
определения коэффициентов тяги Ст и дрейфа Сд
164
на парусе полностью создается его сопротивлением. Для установки паруса полезно ис-
использовать зависимость ф = j3 — а, где ф — угол установки паруса к ДП судна.
Более 2/3 суммарной силы давления ветра на парус создается за счет разрежения на
его подветренной стороне. Величина разрежения в основном определяется полнотой про-
профиля, или „пузом", паруса, которое измеряется в долях или процентах стрелки погиби
.от хорды. Наименьшее аэродинамическое качество имеет плоский парус — пластина.
Даже при минимальном угле атаки воздушный поток срьшается с его подветренной сто-
стороны. Здесь образуется вихревая полость, давление в которой в 2—2,5 раза больше, чем
при безотрывном обтекании паруса, имеющего аэродинамический профиль.
С увеличением „пуза" подъемная сила паруса увеличивается, однако при этом растет
и его сопротивление. На лавировке предпочтение отдается более плоским парусам,
которые создают меньший кренящий момент и могут устанавливаться под более ост-
острым углом атаки, чем полные [77,, 161]. Например, парус 2 (рис. 7.9) на курсе j3 = 30°
лишь немного проигрывает по силе тяги Т парусу 5, но при этом создает значительно
меньшие дрейф и крен и может быть установлен под меньшим углом атаки. Однако
в слабый B—3 балла) ветер, когда абсолютная величина силы дрейфа невелика и не со-
создает заметного крена, пузатые паруса благодаря значительной подъемной силе обеспе-
обеспечивают яхте наибольшую скорость. При этом они устанавливаются под меньшим углом
атаки, чем плоские, чтобы, по возможности, уменьшить лобовое сопротивление. В сов-
совсем слабый, до штилевого, ветер вновь становятся предпочтительными более плоские
паруса, так как слабый воздушный поток оказывается не в силах обогнуть профиль
с большим „пузом" и срывается с подветренной стороны паруса.
0 0,2 0,4- 0,6 0,8 1,0 1,1 Сх
Рис. 7.9. Поляры парусов равного удлинения А. =5 и различной вели-
величиной „пуза".
1 - 0,05; 2-0,1; 3 - 0,14
165
Лавировочные паруса на ветер 2—3 балла обычно имеют „пуэо" 8—10%, для
4—5-балльного — 6—8 % и для более сильного — 4—6 %. На современных яхтах величина
„пуза" одного и того же паруса может изменяться с помощью такелажа и рангоута.
Например, чтобы сделать более плоским грот, мачте придают изгиб, увеличивая натяже-
натяжение ахтерштага (при оснастке 3/4 или 7/8) либо регулируя натяжение промежуточного
штага и бакштагов (при топовой оснастке). Излишек „пуза" при этом убирается в обра-
образующийся у передней шкаторины серп.
Для полных курсов, начиная с пологого бейденвинда, применяются паруса с „пу-
„пузом" до 25 %. Особенно эффективно они работают в слабый и умеренный ветер, в пол-
полной мере используя свои высокие тяговые характеристики при практическом отсутст-
отсутствии крена. На гонках в таких ситуациях прибегают к установке легких передних пару-
парусов — дрифтер-генуи, блупера, спинакера. В свежий ветер, когда яхта гидродинамически
исчерпывает свои ходовые возможности, применение полных парусов не дает такого
эффекта. Однако если судно способно выходить на режим серфинга, спинакер и блупер
несут и в 5—6-балльный ветер [152].
Помимо глубины „пуза" имеет значение его положение по ширине паруса. На лави-
ровочных парусах наибольшая выпуклость обычно находится на расстоянии 40 % хорды
профиля от передней шкаторины. Практика, однако, свидетельствует, что для каждых
силы ветра и курса существует положение „пуза", при котором парус работает с наи-
наибольшей отдачей. Так, в слабый и умеренный ветер парус с „пузом" посредине хорды
обеспечивает движение с минимальным лавировочным углом. В сильный ветер для лави-
ровки предпочтительнее парус с максимумом прогиба на 1/3 ширины от мачты. Это
обеспечивает оптимальное распределение сил разрежения, максимум которых при этом
имеет наклон от перпендикуляра к хорде паруса в сторону движения судна.
Парус со сдвинутым к задней шкаторине на 2/3 ширины „пузом" имеет благоприят-
благоприятную форму для безотрывного обтекания подветренной стороны, однако на лавировке
при таком расположении „пуза" максимум разрежения сдвигается к задней шкаторине,
где его вектор имеет наклон против движения яхты. Такие паруса применяются только
на галфвинде и более полных курсах.
Аэродинамическое качество паруса в значительной мере зависит от его удлинения.
Для прямоугольного паруса удлинение равно отношению его сторон \ = l/b, для треу-
треугольного — удвоенному отношению передней и нижней шкаторин Х = 21/Ь, для парусов
более сложной формы Х = /2/5 E — площадь паруса).
Паруса с большим удлинением наиболее эффективны при лавировке. Благодаря
большой длине передней шкаторины, у которой расположена зона максимального дав-
давления ветра на парус, они создают большую подъемную силу при высоком аэродинами-
аэродинамическом качестве. За счет относительно небольшой ширины снижается индуктивное со-
сопротивление, вызываемое перетеканием воздуха с наветренной стороны на подветрен-
подветренную через верх и низ паруса.
Из всех типов парусного вооружения наиболее эффектными являются бермудские
. паруса. Они имеют наименьший критический угол атаки и создают наибольшую тягу при
курсовых углах j3 < 70°. Бермудскими парусами с удлинением X = 3 -j- 6 вооружаются
все современные гоночные и крейсерско-гоночные парусные суда.
На более полных курсах эффективнее работают гафельные или рейковые паруса.
При удлинении, близком к единице, они имеют критический угол атаки окр = 35 т 40°
и не могут конкурировать с бермудскими в качестве лавировочных, но в галфвинд и
бакштаг нередко превосходят их.
Теоретическая форма паруса, заданная его профилем, удлинением и конфигурацией
в плане, под действием ветра искажается. Выбирая шкоты, регулируют по сути дела
только положение нижней трети паруса; верхняя его часть выгибается нод ветер, за счет
чего уменьшается угол атаки и полотнище начинает заполаскивать. При добирании шко-
шкотов возможен срыв потока на нижней части паруса, установленной с избыточным углом
атаки. Скручивание паруса по высоте особенно заметно проявляется в свежий ветер
166
на полных курсах, когда шкоты потравлены и нок гика задирается вверх. В связи
с этим паруса, в частности гафельные, у которых скручивание проявляется наиболее ин-
интенсивно, утрачивают свои преимущества на этом курсе перед бермудскими.
Для уменьшения скручивания применяются оттяжки гика, проводка гика-шкотов
с поперечными погонами от борта до борта. В известных пределах скручивание дает по-
положительный эффект, компенсируя изменение угла атаки эа счет увеличения скорости
ветра по мере удаления от поверхности воды (рис. 7.10) и отклонения воздушного по-
потока вихрями, образующимися при перетекании воздуха через верх паруса. В зависимо-
зависимости от высоты паруса и силы ветра эта разность углов атаки по высоте паруса составляет
3-5° в бейдевинд и до 10-12° на курсе бакштаг.
Значительным резервом повышения эффективности парусного вооружения, особен-
особенно его лавировочных качеств, может служить снижение лобового сопротивления ранго-
рангоута и такелажа. С этой целью практикуются проводка фалов внутри мачты, применение
цельнонатянутых стальных струн вместо тросов для вант, установка обтекателей на
штагах.
Наибольшие потери аэродинамического качества вызывает мачта. Ее влияние тем
более чувствительно, что искажение обтекающего парус воздушного потока она создает
у передней шкаторины, где находится максимум эпюры давления. Вихревой след мачты
уменьшает разрежение, вследствие чего существенно снижается подъемная сила. При
слишком большом удлинении бермудские паруса теряют эффективность, когда диаметр
мачты становится сопоставимым с глубиной „пуза".
Чтобы уменьшить влияние мачты, ее сечению придают овальный или крыловидный
профиль, имеющий меньшее лобовое сопротивление и более высокое аэродинамическое
качество. Эффект, однако, достигается только на вращающейся мачте (рис. 7.11),при-
7.11),причем наименьшее завихрение создает не самонастраивающаяся по ветру мачта, а та, кото-
которую можно принудительно установить под действительным углом набегания воздушно-
воздушного потока на парус [161].
Резко увеличивает сопротивление щель между шкаториной и мачтой, поэтому на
современных яхтах грот поднимают не по рельсу, а в ликпаэе. На небольших яхтах и
швертботах хороший результат дает способ крепления паруса, применяемый на винд-
виндсерферах — мачта вставляется в карман, прошитый у передней шкаторины.
/
1
1
1
1
1
~л
~л
~л
т
т
т
0 0,5
Рис. 7.10. Изменение силы ветра
в зависимости от высоты над
уровнем моря
а,
1 1,5
Рис. 7.11. Влияние мачты на
работу паруса: а, б — круглая
' и профилированная мачта с креп-
креплением паруса на ползунах;
в — профилированная мачта с
принудительно устанавливаемым
углом атаки и креплением пару-
паруса ликтросом
167
На наиболее быстроходных парусных судах - катамаранах и тримаранах - находят
применение двухслойные паруса, полотнища которых огибают парус и образуют несим-
несимметричный крыловидный профиль, с высоким аэродинамическим качеством. Еще более
эффективно работают жесткие паруса, устанавливаемые на буерах. Парусное вооруже-
вооружение подобных конструкций позволяет .развивать скорости, в несколько раз превышаю-
превышающие скорость истинного ветра. Как видно на полярной диаграмме (см. рис. 7.7), такие
скорости достигаются при направлении истинного ветра 7 = 90 ¦=- 120°, когда значение
курсового угла к вымпельному ветру составляют от C = 45° при v/vH = 1 до 0 = 7° при
v/vH = 8. Любой выигрыш в сопротивлении или величине подъемной силы в таких усло-
условиях приобретает огромное значение.
Условия обтекания грота воздушным потоком могут улучшиться при его совмест-
совместной работе со стакселем. Механизм взаимодействия парусов объясняется по-разному:
и как действие щели — сопла между гротом и стакселем, и как результат циркуляции
потоков вокруг парусов. В наиболее общей форме его можно представить как устране-
устранение вихрей и соответственно увеличение разрежения на подветренной стороне парусов
благодаря проходящему между гротом и стакселем с увеличенной скоростью воздушно-
воздушному потоку (рис. 7.12). Получаемый эффект зависит от формы и размеров парусов, их
взаимного расположения, курса яхты относительно ветра. Например, излишне выбран-
выбранный или со слишком большим „пузом" стаксель будет „задувать" в грот. Вектор ско-
скоростей проходящего между парусами потока получит составляющую, направленную
перпендикулярно к полотнищу грота. Ее действие может снизить разрежение настолько,
что давление с обеих сторон паруса уравняется, и профиль его деформируется.
Эффективная совместная работа парусов обеспечивается только в том случае, когда
воздушный поток, проходящий в щель между ними, направлен по касательной к
поверхности грота. Это условие в большинстве случаев выполняется за счет увеличения
угла установки стакселя, т. е. уменьшения угла его атаки. Необходимо также, чтобы
форма щели выдерживалась по всем сечениям парусов от нижней шкаторины до верха.
В частности, следует учитывать возможность скручивания парусов, уменьшающего угол
их атаки в верхней части до 20°.
На форму грота в нижней части оказывает влияние гик. Чтобы уменьшить вызыва-
вызываемое им искажение профиля, применяют независимую Проводку нижней шкаторины.
Известна конструкция гика типа так называемого „парк-авеню",который предоставляет
возможность поперечных перемещений нижней шкаторины и служит аэродинамической
шайбой, уменьшающей перетекание воздуха с наветренной стороны на подветренную.
В последнее время получила распространение конструкция гика-уишбона, который
с парусных досок перешел на яхты.
Площадь парусности обычно выбирают по близкому прототипу (см. гл. 2), руко-
руководствуясь безразмерными величинами \^/Хквл или \^S/^ V. По среднестатистиче-
среднестатистическим данным принимается, как правило, и значение центровки — расстояния по гори-
горизонтали между центрами парусности (ЦП) и бокового сопротивления судна (ЦБС).
Положения ЦП и ЦБС могут быть определены геометрически соответственно как
Рис. 7.12. Обтекание воздушным потоком одиночного паруса (в) и системы из грота
и стакселя (б)
168
центры тяжести площади паруса и проекции погруженной части судна на его ДП. Геомет-
Геометрические ЦП и ЦБС, однако, далеко не всегда совпадают точками приложения аэро- и
гидродинамических сил. Центровка изменяется в зависимости от курсового угла и хо-
ходового крена.
По данным продувки изолированного паруса центр давления (ЦД) ветра в зависи-
зависимости от угла атаки располагается при а = 15 -f- 25° на расстоянии 34—38 % хорды от пе-
передней шкаторины, а при а = 90° посередине хорды [39]. На шлюпе можно принимать,
что ЦД находится на линии, соединяющей геометрические ЦП грота и стакселя, и сме-
смещен в нос от суммарного геометрического ЦП на величину Зёцд, равную в зависимости
от соотношения площадей стакселя и грота от 0,1 при SjSr = 0,5 до 0,05 при Sc/Sr =
= 2,5.
Положение гидродинамического ЦД определяется в основном площадью и располо-
расположением плавника и руля, создающих главную долю поперечной силы. Исходная величи-
величина суммарной площади плавника и руля, которая может быть принята при эскизном
проектировании, для яхт с отдельно стоящим рулем составляет 5—7 % максимальной
площади лавировочных парусов, а для яхт с рулем на ахтерштевне — 8—11%. Площадь
руля принимается 24 ± 5 % суммарной площади руля и плавника и не менее 1,2—1,5 %
парусности. Гидродинамический ЦД плавника у яхт с отдельно стоящим рулем должен
находиться на расстоянии 43 ± 3 %Z Квл от носа по КВЛ, а у яхт с рулем на ахтерштев-
ахтерштевне -на 48 ± 1%ZKBJI.
Приближенно центровка может быть определена по формуле, полученной путем об-
обработки данных по хорошо отцентрованным яхтам [39],
*цп =Яп/[?квл (knS/Snn +Sp + 7,5)].
где Хцп — горизонтальное расстояние между геометрическими ЦП и ЦБС, % Z/квл^
Нп — габаритная высота парусов над КВЛ, м; S — фактическая площадь парусности, для
которой определяется положение ЦП, м2; кп — коэффициент центровки; Snn, Sp —
площади плавника (шверта) и руля, м2.
Для катамаранов расчет можно выполнить по формуле
/ В Нп
5Г 185i
где S - расстояние между ДП корпусов, м.
В зависимости от типа вооружения и компоновки подводной части яхты рекоменду-
рекомендуются следующие значения коэффициента центровки кц:
Шлюпы:
швертботы +0,06 ± 0,01
яхты с рулем на ахтерштевне +0,25 ±0,03
яхты с отдельно стоящем рулем +0,21 ± 0,03
Кечи и иолы:
с рулем на ахтерштевне +0,03 ± 0,01
с отдельно стоящим рулем -0,03 ± 0,01
7.3. Гидродинамика парусного судна
Парусные суда эксплуатируются в основном в водоиэмещающем режиме. Только
при 'благоприятных сочетаниях силы и направления ветра некоторые из них способны
выходить на частичное глиссирование. Соответственно основными составляющими со-
v противления воды, как и у других судов, рассчитанных на подобные скорости, для па-
парусников будут сопротивление трения, формы и волновое. Характер зависимости этих
169
составляющих от скорости, размерений и обводов судна изложен в гл. 5. Специфика
движения парусников вызывает два дополнительных вида соцротивления, создаваемых
дрейфом и креном.
При вызванном дрейфом косом обтекании корпуса судна встречным потоком воды
возникает гидродинамическая сила R. Ее составляющая, ориентированная поперек на-
направления движения судна, представляет собой поперечную силу Ry, противодейству-
противодействующую дрейфу. При увеличении угла дрейфа б величина/?у возрастает, но одновременно
растет и сила сопротивления Rx за счет возникающего при поперечном перетекании по-
потока воды под корпусом судна индуктивного сопротивления /?,- (рис. 7.13).
Рис. 7.13. Образование индуктивной состав-
составляющей сопротивления при косом обтекании
корпуса яхты
10
го
30
'50
¦V
\\
\.
\
_ \
-
-
\ V
ч\
. у
X
с» -
о, г
ом
0,6
0,8
1,0
Рис. 7.14. Зависимость коэффициента
Су от удлинения киля
1.0
0,8
0,6
ом
о,г
8\
7
б°/
1
\
тоу*
5)
1,0
0,8
0,6
0,4
0,2
-у
г г
I
I
ь°
I
I
18°
^2Г"
О 0,1 0,2 0,3 Сх 0 0,1 ОХ 0,3 Сх
Рис. 7.15. Поляры плоского (а) и профилированного (б) швертов (А. = 5)
170
Голый корпус современных яхт и швертботов с плоским днищем лишь в малой мере
участвует в создании поперечной силыRy, являясь в то же время как гидрокрыло мало-
малого удлинения основным источником индуктивного сопротивления. Поперечную силу
создают главным образом плавниковый киль (или шверт) и перо руля, имеющие
для этой цели наиболее подходящие характеристики. Вместе с тем следует учитывать,
что не проявляя активности в создании Ry, корпус способствует повышению ее величи-
величины на киле, играя роль шайбы, исключающей перетекание потока воды через верхнюю
кромку. По этой причине в гидродинамических расчетах для киля используется так на-
называемое эффективное удлинение, равное удвоенному геометрическому удлинению,
Хк = 2Г2/Лк С*4К — площадь проекции киля на ДП). Для пера руля в зависимости от
способа его установки Хк = 0,8 -г 1,25Г2/Ле- Увеличивая удлинение киля, можно полу-
получить требующуюся Ry при меньшем угле дрейфа (рис. 7.14) и за счет этого снизить
индуктивное сопротивление. Дополнительное преимущество дает обтекаемый профиль,
который при равной с плоским для одинаковых углов дрейфа величине Ry имеет
заметно меньшее сопротивление (рис. 7.15).
На многокорпусных судах, а иногда и на швертботах, применяют парные шверты не-
несимметричного профиля, либо устанавливаемые под углом к ДП, которые работают по-
очередно с подветренной стороны. Поперечная сила в этом случае создается при нулевом
угле атаки, т. е. и при отсутствии дрейфа, что обеспечивает выигрыш в сопротивлении.
Несимметричный в плане профиль придается иногда корпусам катамаранов и тримара-
тримаранов. Расчет при этом основывается на том, что при лавировке подветренный корпус при-
всплывает или даже отрывается от воды, а подветренный, притапливаясь, создает попе-
поперечную силу при нулевом дрейфе. С этой же целью на тримаранах боковые поплавки
устанавливают под углом к ДП среднего корпуса [91].
Прирост индуктивного сопротивления происходит в основном на острых курсах
и усугубляется в свежий ветер креном судна. Заметную долю в общем сопротивлении
(до 15 %) зта добавка проявляется при крене порядка 30°.
7.4. Ходкость парусного судна
В отличие от судов с механическими двигателями о ходкости парусника нельзя су-
судить по его экстремальным возможностям. Хорошая яхта должна обладать высокими
ходовыми качествами при любом ветре и на любом курсе, чтобы выиграть гонку или хотя
бы выдержать приемлемую среднюю скорость в дальнем плавании. Соответственно по-
поставленной цели формулируются и задачи, например: определить при заданной парус-
парусности S и силе истинного ветра vH скорость судна v на всех возможных курсовых углах;
определить оптимальную площадь парусов при заданных курсе и скорости истинного
ветра; найти предельную скорость ветра, которую может выдержать яхта с заданной па-
парусностью и т. п.
Рассмотрим решение первой из названных задач, имеющей наиболее широкий инте-
интерес.
1. Задавшись несколькими значениями скорости судна v по возможности, наиболее
близкими к реальным для известной скорости истинного ветра va, находим скорости
вымпельного ветра vB при курсовых углах /3 от 30 до 180°. Расчеты выполняются гра-
графически — построением для каждой скорости v и каждого курсового угла 0 парусного
треугольника (см. рис. 7.2) или по зависимостям, выведенным из формулы G.1):
v sin/3
sin (r-0) = ;
= arcsin G-0) + 0;
\ 171
1,6
1,4
X о,в
\ 06
V
X. 0.2
Р/ \
Я'
.ГА
щЬ.
Л
\\
5"
Л
11°
А
<J
N
29'
\
V» =
sin A80-'
sin /3
VH=-
sin 7
sin |3
Пример. Яхта 1/4-тонного класса (описание и чер-
чертеж см. на с. 44) имеет вооружение шлюпа; площадь
грота Sr= 10 mj , площадь стакселя Sc = 17м2; удлине-
удлинение обоих парусов \ = 4; скорость истинного ветра
vH = 6,5 м/с.
Коэффициенты сил тяги Ст и дрейфа С„ снимаем
по рис. 7.16 отдельно для грота и стакселя. Расчетные
значения скоростей v = 1, 2, 3, 4 м/с; курсовых углов
0= 30,60,90,120,180°.
1-0,5
Для /3 = 30°; v = 1 м/с sin G - /3) =—7; * 0,077;
7 = arcsin 0,077 + /3= 34,4°; vB =
сд.с = 1.38;
6,5
sin 34,4
6,5 « 7,3 м/с;
ОЦ 0,5
С
Рис. 7.16. Поляры стакселя (/) и грота
B) равного удлинения X. = 4
sin 30
,г = 0,43; Сд.г = 1,2;
0,52.0,6465-17. 7,32 = 304,6 Н;
Тт = 0,43 • 0,6465 • 10 • 7,32 « 148 Н;
Последующие вычисления производятся аналогично,
результаты записываются в табличной форме (табл. 7.1).
2. Сопротвление воды движению яхты в по-
положении на ровный киль без дрейфа определяется
Таблица 7.1. Скорость вымпельного ветра vB, сила тяги Т и сила дрейфа Д в зависимости
от курсового углв 0 и скорости судна v
v, м/с
1
2
3
4
/3 = 30°
vb,m/c
7,3
8,2
8,8
9.4
Г.Н
452
569
654
748
ДН
1215
1536
1765
2017
0 = 60°
vb,m/c
6,9
7,3
7,4
7,5
Г,Н
897
990
1028
1047
ДН
828
915
950
967
"b.m/c
6,4
6,2
5,8
5Д
/3 = 9Oe
Г.Н
1008
934
836
639
ДН
201
187
173
167
/3=120°
Vb.m/c
5,9
5,2
4,5
3,5
T, H
770
594
440
264
0 = 180°
vB, м/с
5,5
4,5
3,5
2,5
Г.Н
655
437
262
131
как для любого водоизмещающего судна. Раздельно находятся сопротивление трения
Rr и остаточное сопротивление Ro с помощью формул и графиков гл. 5.
Пример. Рассматривавшаяся в предыдущем примере яхта 1/4-тонного класса имеет длину по
КВЛ ?вл = 6,0 м, водоизмещениеD = yV = 1,77 т, площадь смоченной поверхности П = 11,6 м2.
Расчет приведен в табл. 7.2.
3. Поперечная сила/fy, создаваемая голым корпусом, определяется по формуле
2
G.7)
где Атк — погруженная площадь ДП голого корпуса.
Значение коэффициента подъемной силы Сугк корпуса как крыла малого удлине-
удлинения можно найти по приближенной формуле К. К. Федяевского [70]
+ Q) sin2 5 cos 5,
G.8)
172
Таблица 7.2. Расчет сопротивления корпуса яхты в поло-
положении на ровный киль
Рассчитываемая величина
V
?Тв.1О (по рис. 5.6) •
?т = ?т, +Д?ш (см. п. 5.2)
*T=rTp/2nv2
Fri
FrF
Ro/(gD) (го рис. 5.13 и 5.33, в)
Ro=[Ro/gD]gD
*г.к=*т + *о
V, м/с
1
5
3,35
3,65
21
0,13
0,29
0,15
2
23
2
10
"з,о
3,3
77'
0,26
0,58
1,6
27
104
3
15
2,8
3,1
162
0,39
0,87
16
279
441
4
20"
2,7
3,0
278
0,52
1,16
65
1128
1406
ю
1.5
1,0
0,5
/
к
/
/
А
III!
/
/
1 1 1 1
0,5 1,0 1,5 А 2,0
Рис. 7.17. График для определе-
определения коэффициентов Сдги к
где Cff определяется по графику на рис. 7.17; Сд = 2приХ = 2(Т2/А) < 0,15. Индуктив-
Индуктивное сопротивление, возникающее в результате перетекания потока воды под корпусом
судна, выразится формулой
где Q гк = CyTKtg 5 — коэффициент индуктивного сопротивления.
Пример. У рассматриваемой яхты TTiK = 0,4 м; AriK = 2,08 м2. Таким образом, \ = 2
« 0,154. Результаты расчета RyT.K и Rir.K приведены в табл. 7.3.
Таблица 7.3. Поперечная сила Ryr,K, И, и индуктивное сопротивление Rjr,K, H
корпуса яхты 1/4-тонного класса
0,4'
8,°
4
6
8
10
tg8
0,07
0,105
0,14
0,18
'-J'r.K
0,021
0,039
0,062
0,089
Qr.K
0,001 5
0,004 1
0,008 7
0,016 0
v, м/с
1
Ry
22
41
«4
93
Ri
2
4
9
17
Ry
88
164
256
372
2
Ri
8
16
36
68
3
Ry
198
369
576
837
Ri
18
36
81
153
Ry
352
656
1024
1488
Ri
32
64
144
in
4. Гидродинамические характеристики плавникового киля и пера руля определяют-
определяются так же, как для гидрокрыла, обекаемого потоком воды под углом атаки, равным
углу дрейфа. Для определения коэффициента подъемной силы Су и сопротивления Сх
173
используются подходящие поляры, приведенные в справочнике либо других изда-
изданиях [70,77].
0,7 V 0,752
Пример. Для рассматриваемой яхты удлинение киля Хк = 2 . . _ *» 1, пера руля X^j = „ «
* 1; Ак + Лд = 1,75 м2. Результаты расчета приведены в табл. 7.4. Коэффициенты Су и Сх находим
по рис. 7.18 для \=1 и 8 =4, 6, 8,10°.
Та б л и ц а 7.4. Подъемная сила и сопротивление киля и руля яхты, Н
8,°
4
6
8
' 10
Су
0,13
0,19
0,26
0,30
Сх
аозо
0,035
0,042
0,050
1
Ry
114
166
227
280
26
31
37
43
Ry ¦
456
664
908
1120
V
г
Rx
104
124
148
172
, м/с
Ry
1026
1494
2043
2520
3
Rx
234
279
333
387
t
Ry
1824
2656
3632
4480
\
Rx
416
496
592
688
5. Определяя скорость и дрейф яхты при заданной силе ветра, можно вычислить
ожидаемый крен. Для этого находят кренящий момент
Мкр=Д1кр,
G.10)
гдеД — сила дрейфа; /кр — плечо кренящего момента, равное расстоянию от ЦП до ЦБС.
По метацентрической формуле остойчивости восстанавливающий момент
Мв =Dhsin@,
G.11)
где?>— водоизмещение судна; Л — метацентрическая высота, равная для крейсерско-го-
ночных яхт 0,75— 1,2 м.
1,0
30
15
15
го>^
8=5
> ^^^^^
о
>
-—
^-»
Рис. 7.18. Коэффициенты Су и Сх
крыла малого удлинения
0,5
-н;
т
v—
н-—¦—
—- —
-
1,0 1,5
2,0 Л
0UL=
1,0 1,5
2,0 Л
174
Величина крена
sine =MKp/Dh. G.12)
Пример. Для рассматриваемой яхты 7,^, = 4 м; Л =0,8 м; D = 1,77 т. Определим углы крена
на курсе 0 = 30°:
v, м/с 1 2 3 4
Д, Н 1215 1536 1765 2017
в, град 20 26 31 35
Заметного увеличения сопротивления, следовательно, на этом курсе можно ожидать при v >
> 3 м/с. Принимаем его равным 0,3 Л;.
6. Полное сопротивление яхты
Полная поперечная сила определится суммой Яу корпуса, киля и руля.
Пример. Полное сопротивление и поперечная сила яхты, полученные суммированием состав-
составляющих, вычисленных в предыдущих примерах, приведены в табл. 7.5 и 7.6.
Таблица 7.5. Полное сопротивление
с °
6,
4
6
8
10.
яхты Ки,
Н
V, М/С
1
51
57
70
86
2
216
240
293
357
3
693
756
866
1010
4
1854
1966
2162
2428
Та бли ц а
7. 6. Полная поперечная
сила яхты Ry, H
_ о
4
6
8
10
V, М/С
1
136
207
291
373
2
544
828
1164
1492
3
1224
1863
2619
3357
4
2176
3312
4656
5968
6. Для определения скорости строится график сопротивления, на который нано-
наносятся кривые силы тяги для заданных курсовых углов E. В связи с тем, что на по-
попутных курсах, начиная от галфвинда, крен и дрейф практически отсутству-
отсутствуют, на графике строится также кривая сопротивления голого корпуса. Величи-
Величина дрейфа для найденной скорости определится из условия Ry ~> Д.
R;T.H
1500
Рис. 7.19. График сопротивления и силы
тяги яхты 1/4-тонного класса
Рис. 7.20. Поляра скоростей яхты 1/4-тон-
1/4-тонного класса
/22
№
и, м/с
м/с 6 5 Ч 3 2 10
175
7. Наглядное представление о ходовых качествах яхты дает полярная диаграмма
скоростей. Для ее построения определяют курсовые углы у к истинному ветру и откла-
откладывают на них векторы скорости v.
Пример. Для рассматриваемой яхты иа курсе /3 = 30° условие Ry > Д выполняется при v =
= 3 м/с, 8=6°. Строим графики сопротивления для 8=6° и 8 = 0 (рис. 7.19). Наносим на график
кривые тяги по табл. 7.2. Для полученных значений скорости яхты определяем курсовые углы у
к направлению истинного ветра и строим поляриую диаграмму скоростей (рис. 7.20).
Раздел III
ДВИЖИТЕЛИ
8. ГРЕБНЫЕ ВИНТЫ
8.1. Основные понятия и определения
8 зависимости от назначения катеров и моторных лодок, формы их обводов, мощ-
мощности двигателей и развиваемых скоростей условия работы ГВ могут сильно изменять-
изменяться, что существенно отражается на конструктивных особенностях винтов и методах
их проектирования. При этом наибольшее влияние на выбор основных элементов
проектируемых ГВ оказывают следующие обстоятельства:
недостаточная точность расчетных методов определения сопротивления катеров
и моторных лодок и отсутствие данных по буксировочным испытаниям моделей для
большинства малотоннажных судов;
сложное взаимодействие между винтом и корпусом у многих типов быстроходных
катеров, обусловленное наличием косого обтекания и развитой кавитацией;
сильно развитая кавитация ГВ, возникающая при достаточно высоких скоростях
и приводящая к уменьшению упора и КПД винтов;
относительно жесткие характеристики двигателей внутреннего сгорания, не до-
допускающие практически никакой перегрузки ни по мощности, ни по частоте вращения;
наличие горба сопротивления у глиссирующих и крылатых судов, требующее по-
повышенных запасов мощности двигателей на промежуточных режимах движения.
Указанные особенности проектирования и эксплуатации катеров и моторных лодок
во многих случаях не позволяют расчетным путем установить окончательные элементы
оптимального ГВ. С целью обеспечения заданных режимов работы двигателей и полу-
получения наибольших скоростей на ходовых испытаниях обычно производится доводка ГВ,
в результате которой уточняются его основные элементы — диаметр, шаг и дисковое
отношение. Для облегчения и ускорения процесса доводки ГВ иногда принимают реше-
решение об изготовлении и испытании двух или даже трех вариантов винтов с различными
элементами, изменяющимися по определенному закону.
Геометрические характеристики ГВ. Действие гребного винта определяют сле-
следующие основные геометрические элементы и характеристики.
Диаметр винта D = 2R, представляющий собой диаметр окружности, описываемой
самой удаленной от оси винта точкой лопасти.
Радиус винта R =0,5.D — расстояние от оси винта до наиболее удаленной точки,
называемой краем лопасти.
Геометрический, или конструктивный, шаг Н, характеризующий возможное пере-
перемещение винта за один оборот при движении без скольжения. Конструктивный шаг
сечения лопасти, расположенного на радиусе г , находится по формуле
Я = 2ъг Xgv, (8.1)
где tg v — тангенс шагового угла на радиусе г .
Отношение шага винта к его диаметру называют шаговым отношением. Различают
винты постоянного шага Н = const и переменного, у которых шаг вдоль радиуса изме-
изменяется по какому-либо закону Н =f(r).
Дисковое отношение в, представляющее отношение суммарной площади А всех
z лопастей к площади диска, ометаемого винтом, Ad = 0,257т/J,
9 = = ??^- ^ . (8.2)
Ad nD2 K '
177
Поскольку винтовая поверхность не совмещается с плоскостью без искажения, то
под площадью попасти Afz понимается величина поверхности, ограниченная спрямлен-
спрямленным контуром лопасти, который соединяет кромки развернутых на плоскость и затем
спрямленных сечений лопасти, расположенных на различных радиусах.
Средняя ширина лопасти, равная отношению площади лопасти к ее длине,
А
zl
2А
z(R-re) z(D-de)
(8.3)
где dc = 2 rc — диаметр ступицы ГВ.
Приведенный, или относительный, радиус лопасти, представляющий собой отно-
отношение радиуса центра давления (ЦЦ) лопасти Ro к наибольшему радиусу гребного
винта R. Обычно принимается, что ЦД, характеризующий точку приложения к лопасти
равнодействующей всех гидродинамических сил, совпадает с центром тяжести спрям-
спрямленной площади лопасти. При нормальных образованиях лопасти приведенный радиус
находится в пределах
1Г= 0,59-0,61.
к
(8.4)
Профиль сечения лопасти, под которым понимается спрямленный на плоскость
след сечения лопасти винта соосным с ним круговым цилиндром на заданном радиусе.
Правильный выбор формы лопастных сечений имеет большое значение для повышения
эффективности катерных гребных винтов. На практике чаще всего применяют профили
авиационного и сегментного типа (рис. 8.1). У профилей авиационного типа максималь-
максимальная толщина находится на расстоянии ~1/3 хорды от входящей кромки, которая обыч-
обычно имеет скругленную форму. У сегментных профилей наибольшая толщина распо-
расположена преимущественно посредине хорды и кромки заострены. Прямая линия, про-
проходящая через входящую кромку профиля (носик) и выходящую (хвостик), назы-
Рис. 8.1. Крыльевые профили, применяемые при проектировании гребных винтов
и подводных крыльев: а - плоско-выпуклый сегментный профиль; б -вогнуто-
выпуклый профиль; в — двояковыпуклый профиль; г — плоско-выпуклый остро-
острокромочный профиль с пряполненной входящей кромкой; д - профиль Вальхнера
(со скругленной приполненной и приподнятой входящей кромкой); е — авиа-
авиационный профиль
178
вается кромочной линией. Длина профиля Ъ, измеренная вдоль кромочной линии и ха-
характеризующая ширину лопасти на радиусе г, представляет собой хорду профиля.
Наибольшая толщина профиля е определяется как алгебраическая сумма отложенных
от кромочной линии максимальных ординат ех и е2 верхнего и нижнего контуров
профиля. Ордината' е2 принимается положительной при вогнутом нижнем контуре
и отрицательной — при выпуклом. Отношение наибольшей толщины профиля к его
хорде называют относительной толщиной
S = —— = = — - — = S - S (8 5)
где 5i =el/b —относительная кривизна засасьгаающей стороны профиля; 52 =е2/Ь —
относительная кривизна нагнетающей стороны.
Форма профиля характеризуется его средней линией, определяемой как геометри-
геометрическое место центров окружностей, вписанных в профиль (см. рис. 8.1). Отношение
наибольшей стрелки прогиба средней линии ес к хорде Ь профиля называют относи-
относительной кривизной средней линии
ес 1 / е, еЛ 1
Гидродинамические характеристики ГВ. Упор и момент, развиваемые вращаю-
вращающимся гребным винтом, обычно представляют в следующем виде:
P=KlPn2D* и M = K2pn2Ds, . (8.7)
где Ki — коэффициент упора ГВ; К2 — коэффициент момента; и — частота вращения
винта, с; р —плотность воды (плотность пресной воды р = 1000 кг/м3, морской
р = 1015-1025 кг/м3).
Упор и момент не являются постоянными величинами, а зависят от режима работы
винта т. е. от частоты его вращения п и осевой скорости перемещения vp, определяю-
определяющих углы атаки элементов лопастей винта на различных радиусах.
Если бы винт двигался' не в жидкости, а в твердой среде, то за один оборот он
перемещался бы вдоль собственной оси на расстояние, равное его шагу Я. При частоте
вращения винта п окружная скорость его любого соосного сечения была бы u = 2irrn,
а скорость осевого перемещения Нп. Однако при движении в воде реальная скорость
перемещения винта vp меньше скорости Нп. Отношение
Нп— vD
представляет собой скольжение относительно геометрического шага.
В качестве безразмерной кинематической характеристики гребного винта при-
принимают относительную поступь
\p=vpl(nD). (8.9)
Относительная поступь определяет режим работы гребного винта и оказьгаает решающее
влияние на углы атаки различных сечений лопастей. Изображенная на рис. 8.2 диаграмма
скоростей элемента лопасти винта, расположенного на радиусе г , характеризует соот-
соотношение между осевой и окружной составляющими скорости w на различных режимах
движения без учета вызванных скоростей. Диаграмма показывает, что с уменьшением
расчетной скорости натекания воды на винт vp, т. е. с уменьшением поступи винта
углы атаки элемента лопасти будут возрастать. Это, в свою очередь, будет приводить
179
dl
Рис. 8.2. Диаграмма скоростей и сил элемента лопасти винта
к увеличению подъемной силы каждого элемента лопасти dY и, следовательно, к уве-
увеличению упора винта Р и его момента М. Наибольших значений углы атаки, а также
упор и момент винта достигнут при поступи, равной нулю, т. е. при работе винта на
швартовах
Хр=
= 0.
(8.10)
С другой стороны, при увеличении скорости vp и поступи винта \р будут умень-
уменьшаться углы атаки элементов сечений при одновременном уменьшении упора и момента
винта в целом. Такое уменьшение будет происходить до тех пор, пока при некотором
значении линейной поступи Нх =vPi/n, называемом поступью или шагом нулевого
упора, упор винта не обратится в нуль и гребной винт перестанет быть движителем.
Вращающий момент становится равным нулю при еще большем значении поступи
#2 ~vp I n> называемом шагом нулевого момента (рис. 8.3). При поступи, превы-
превышающей #2, винт начнет сам создавать вращающий момент, т. е. будет работать как
турбина. В диапазоне между поступями нулевого упора Hi и нулевого момента Н2
винт не может быть использован ни как движитель, ни как турбина. Отношение
Н2~Н1
= т
(8.11)
определяет область бездействия (или парализации) ГВ и называется паралью. Величина
парали характеризует профильные потери лопастей ГВ.
Отношение шага нулевого упора Н\ к диаметру винта D называется шаговым
отношением нулевого упора
D
nD
= хг
(8.12)
При этом скольжение винта относительно цйга нулевого упора, обозначаемое s x,
будет равно нулю. Относительная поступь и скольжение винта связаны между собой
следующими зависимостями:
(8.13)
Хр tfj
Si — I — ; ИЛИ \п = A —Si).
HJD p D K 1J
При изучении действия ГВ и их проектировании принято рассматривать главным
образом коэффициенты упора и момента, являющиеся важнейшими безразмерными
динамическими характеристиками,
180
2nrn
•
af
Рис. 8.З. Диаграмма скоростей эле-
элемента лопасти винта на радиусе г
Рис. 8.4. Кривые действия гребного
винта в свободной воде
Кг =
М
pn2Ds
(8.14)
Переход к безразмерным характеристикам позволяет использовать имеющиеся
зависимости и закономерности независимо от абсолютных размеров ГВ. Обычно вели-
величины коэффициентов упора и момента винта изображают в виде функций относительной
поступи A^i=/i(Xp) и K2=f2(\p).
Совместно с кривыми Кх и К2 строят также кривую изменения коэффициента
полезного действия (КПД) винта, представляющего собой отношение полезной мощ-
мощности ГВ Pvp к мощности затраченной NB. Необходимая для вращения винта с заданной
частотой мощность определяется по формуле
(8.15)
(8.16)
ЛГВ = озМ = 2ппМ = 2пК2 рп D .
КПД винта при различных значениях поступи
Pv
p
К22п
Типичный характер изменения зависимостей K1=f1(\p), K2-f2(\p) и т?р-
=/з(Хр), называемых иначе кривыми действия ГВ в свободной Воде, представлен
на рис. 8.4.
Важной характеристикой режима работы ГВ является коэффициент нагрузки
по упору
2Р
= 2,55
(8.17)
Действие ГВ полностью характеризуется тремя независимыми параметрами: коэф-
коэффициентом упора К1, коэффициентом момента К2 и относительной поступью \р. С их
помощью однозначно определяются КПД винта г)р (8.16), коэффициент нагрузки ар
(8.17) и другие необходимые параметры. Это обстоятельство также используется
при построении расчетных диаграмм для проектирования ГВ.
8.2. Диаграммы для расчета ГВ
Наибольшее распространение для определения элементов ГВ в отечественной прак-
практике получили диаграммы, на которых в совмещенном виде представлены кривые
действия целой серии ГВ в свободной воде, т. е. при отсутствии корпуса судна. Все
181
элементы и характеристики ГВ, входящих в серию (дисковое отношение, число лопа-
лопастей, профилировка сечений и т. д.), полностью одинаковы, за исключением шагового
отношения, которое изменяется с определенным интервалом. Диаграммы, построенные
в координатных осях Ki — Xp, состоят из двух основных семейств кривых. Первое
семейство составляют кривые коэффициентов упора ГВ К^ -/(Хр), которые для
винтов, отличающихся только шаговым отношением, располагаются эквидистантно.
Второе семейство образуют кривые r)p=f(\p,H/D), отвечающие одинаковым зна-
значениям КПД этой же серии винтов. Такие диаграммы позволяют относительно просто
находить значения шагового отношения H/D и КПД г}р любого винта серии, а также
определять необходимую мощность двигателя по заданному упору ГВ iP, скорости
его поступательного движения v p, частоте вращения п или диаметру D.
Аналогичным образом при совмещении семейств кривых коэффициентов момента
К2 =/(Хр) и КПД г}р =/'(Хр, H/D) строятся диаграммы в осях К2 —\р. Эти даиграммы
удобны при определении элементов ГВ по заданной мощности двигателей, в силу чего
их иногда называют „машинными". Для сокращения размеров „машинную" диаграмму
часто строят в виде зависимостей ЮК2 =/(Хр) или у К2 =/(Хр).
В конечном итоге оба типа диаграмм приводят к одним и тем же результатам
как по элементам проектируемых ГВ, так и по величине наибольшей достижимой
скорости судна. Однако следует отметить, что в зависимости от величин диаметра
и частоты вращения по каждой диаграмме может быть подобрано бесконечное коли-
количество ГВ, нормально загружающих двигатель, но имеющих различные значения КПД
и обеспечивающих различную скорость. С целью достижения наибольшей скорости
необходимо стремиться выбирать оптимальный ГВ, т. е. винт, обладающий наивысшим
для заданных условий КПД.. Для ускорения определения элементов оптимальных
винтов на диаграммах построены линии оптимальных частот вращения nopt и оптималь-
оптимальных диаметров Dopt, образующих на каждой диаграмме область оптимальных ГВ.
На этих линиях нанесены шкалы, отвечающие определенным значениям вспомогатель-
вспомогательных расчетных коэффициентов К^ и Кп. Данные коэффициенты в системе координат
Кх — Хр выражаются формулами
(8.18)
(8.19)
Р
Аналогичные коэффициенты для диаграмм К2 —\р имеют вид
(8.20)
В этих формулах iVB — мощность на гребном валу, кВт.
В настоящее время имеется много таких диаграмм для широкого диапазона диско-
дисковых отношений, числа лопастей и профилировки их сечений. Часть из них получена
Э. Э. Папмелем расчетным путем. Другие построены на основании экспериментальных
материалов. Принципиальной особенностью диаграмм Папмеля, отличающей их от всех
других диаграмм такого типа, является то, что в них в качестве одной из независимых
переменных выбрано не геометрическое шаговое отношение H/D, а шаговое отношение
182
нулевого упора #1/D, являющееся важнейшей гидродинамической' характе-
характеристикой.
Связь шагового отношения нулевого упора с геометрическим шаговым отношением
достаточно хорошо выражается формулой
(8.22)
где 5 о — относительная кривизна средней линии профиля сечения, расположенного
на приведенном радиусе лопасти Ro.
Для возможности практического проектирования ГВ и вьшолнения расчетов ход-
ходкости на рис. 8.5—8.11 приведены наиболее употребительные расчетные диаграммы
двух- и трехлопастных винтов с различными дисковыми отношениями. Каждая диа-
диаграмма соответствует указанным на ней основным характеристикам ГВ. Винты с диско-
дисковыми отношениями 0,3-^0,5 предназначены для катеров и моторных лодок с уме-
умеренными скоростями, т. е. до 50 км/ч. Эти винты являются некавитирующими. До
радиуса г =0,6Л они имеют авиационный профиль сечений лопастей, который далее
переходит в сегментный.
ГВ с дисковыми отношениями 0=0,8-5- 1,0 применяются на быстроходных судах
и имеют сегментную вогнуто-выпуклую профилировку сечений лопастей, которая
позволяет отдалить наступление кавитации винтов или ослабить ее влияние.
Диаграммы для винтов с 0 = 1 построены по шаговому отношению нулевого упора
#i / D. Все остальные диаграммы — по геометрическому шаговому отношению. Это
обязательно следует учитывать при проектировании ГВ.
Более широко подобные диаграммы для расчета ГВ представлены в работах
[16,50,51,105,144].
0,5
2,0
0,1
0 Of 0,2 0,3 at 0,5 Ц6 0,1 0,8 OS 1,0 1,1 1,1 1,3 Ш JLP
Рис. 8.5. .Диаграмма >/*7 - \р (г =2; в =0,30; dc/D=0,18; Ro/R=0,S8; 8=0,072)
183
Рис. 8.6. Диаграмма Kl-\p (z=3;
0=0,35; djD=0,l8; R0/R=0,S&;
5 =0,084)
W
0,9 1,0 V U 7,3 1,4
Рис. 8.7. Диаграмма Кх - \р (z=3;
0=0,50; dc/Z) = 0,18; rJr
5 =0,059)
1,0
0.1
0 0,1 Q2 0,3 0,4 0,5 0,6 0,1 0,8 0,9 1,0 1,1 1,2 1,3 1,4 Лв
184
Рис. 8.8. Диаграмма Kl - Хг'р
(г=3; 0=0,65; dc/?»=0,18;
Л./Л=0,59; 8=0,048; 8,=
=0,058)
0,5 0.6
0,9 1,0 1.1 1,1 1,3 1,4 1,5 1,6 1,7 1,8 1.9 Лр
2,0 Рис. 8.9. Диаграмма К, - \р
' (г=3; 0=0,80; c?c/D = 0,18;
Ло/Л=0,59; 8=0,039; 8, =
jv =0,049)
0,6 0,7 0,8 0,9 1,0 1,1 U 1,3 1,4 1,5 1,6 1,1 1,8 1,9 Лр
185
186
7 в
О 0,1 0,2 0,J 0,* 0,5 0,6 0,7 0,д 0,9 1,0 1,1 1,2- 1,3 1,4 1,5 1,6 1,7 1,8
Рис. 8.11. Диаграмма s/K2 - Хр (z =3; в =1,0; djD = 0,20; Ro/R =0,61; S =0,03; S, =0,045)
8.3. Коэффициенты вэеимодействия винте и корпуса
Между корпусом катера и работающим ГВ возникает сложное гидромеханическое
взаимодействие. По мере движения катера, в пространство, освобождаемое его кормой,
устремляется вода, которая вместе с прилегающей к корпусу массой жидкости увле-
увлекается катером в сторону своего движения и создает так называемый попутный поток.
Попутный поток, набегая на ГВ, изменяет условия его работы. Наличие попутного
потока, направленного в основном в сторону движения катера, уменьшает скорость
натекания воды на винт:
vp=v(l-w), (8.23)
где w — коэффициент попутного потока.
В свою очередь, ГВ, воздействуя на поток впереди себя, изменяет характер обте-
обтекания судна. В результате такого взаимодействия основные характеристики ГВ —
упор, момент и КПД —при работе за корпусом катера, как правило, отличаются от
соответствующих характеристик этого же винта в свободной воде. Работающий за кор-
корпусом катера ГВ понижает давление впереди себя и вызывает увеличение скорости
обтекания кормовой оконечности. Возникающая при этом дополнительная сила, назы-
называемая силой засасывания, повышает сопротивление катера и должна быть уравнове-
уравновешена дополнительным упором ГВ. Влияние силы засасывания учитывается безразмер-
безразмерным коэффициентом засасывания
АР Р-Ре Ki-Ke
где Р —полный упор винта, передаваемый на упорный подшипник; Ре =Р A — t) —
полезная тяга одного винта, равная доле приходящегося на него сопротивления; Ке =
=Ki (I — t) — коэффициент тяги винта.
Значения коэффициентов попутного потока и засасывания, называемых иначе
коэффициентами взаимодействия винта и корпуса, определяют по результатам анализа
испытаний самоходных моделей или близких катеров-прототипов. При отсутствии
таких материалов можно пользоваться приближенными формулами. Для неглиссирую-
щих одновинтовых катеров со стационарными двигателями коэффициент попутного
потока
w= 0,5 5-0,10, (8.25)
где 5 — коэффициент общей полноты.
Для двухвинтовых катеров коэффициент попутного потока несколько уменьшается:
w = 0,5 5 -0,16. (8.26)
Коэффициент засасывания на рабочем режиме зависит от коэффициента попутного
потока:
f=0,8w + 0,05. (8.27)
Можно также, по предложению Э. Э. Папмеля, определять вначале коэффициент
засасывания на швартовах
Го= @,4- 0,6) w , (8.28)
а затем на любых промежуточных режимах работы винта
t=to/s1 = [tol(H1/D-\p)]H1/D. (8.29)
188
В среднем для относительно тихоходных водоизмещающих катеров коэффициент
попутного потока достигает значений w=0,15 -J-0,20. Для катеров переходного режима
При использовании подвесных моторов коэффициенты взаимодействия находятся
в пределах
w = 0,02 + 0,03; t = 0,04 *0,06 . (8.30)
Угловая колонка имеет значительно большие габариты, чем нога подвесного мото-
мотора. Это приводит к увеличению коэффициентов взаимодействия. При отношении диа-
диаметра винта к диаметру гондолы D/dm = l,5 + 2? и удлинении гондолы bT/dm=4 + 6
для кормового расположения винта коэффициенты взаимодействия принимают
w = 0,03 + 0,05 и t =0,05+0,10. (8.31)
При носовом расположении ГВ гондола находится полностью в потоке от винта,
что приводит к возрастанию ее сопротивления и увеличению коэффициента засасы-
засасывания.
На быстроходных катерах с наклонными гребными валами, ГВ, находящиеся
под плоским глиссирующим днищем или кормовым крылом, обтекаются почти невоз-
невозмущенным потоком. При наличии достаточных зазоров пограничный слой не попадает
на диск винта. Попутный же поток от кронштейнов и гребного вала настолько мал,
что его можно не учитывать. Таким образом, у глиссирующих моторных лодок и ка-
катеров на подводных крыльях попутный поток и сила засасывания практически отсут-
отсутствуют. Однако при проектировании ГВ в зтом случае необходимо учитывать влияние
косого обтекания винтов, которое является следствием наклонного расположения
гребных валов и изменения дифферента на ходу. При отсутствии кавитации можно
принять, что наклонное положение ГВ к потоку будет приводить к уменьшению расчет-
расчетной скорости обтекания до величины v cos # и к снижению упора до Р cos ¦&, что, по
аналогии, принято учитывать при помощи условных коэффициентов попутного потока
w и засасывания t:
vp = v cos # = v A - w); (8.32)
Pe =i>cos? =PA -0- (8.33)
Значения коэффициентов w и t находят по формуле
w=t =l-cos#°«0,5sina#o«0,5#a, (8.34)
где #° -573 # — угол скоса потока в градусах и радианах.
Обычно при определении условного коэффициента попутного потока под скосом
потока # понимается угол между осью валопровода и днищем (кормовым крылом)
катера, а при определении коэффициента засасывания — угол между валопроводом
и направлением движения катера.
Для нахождения условных коэффициентов взаимодействия винта и корпуса при
косом обтекании винтов быстроходных катеров и моторных лодок могут быть также
использованы рекомендации, приведенные в работах [ 15,16,43,144].
Наличие коэффициентов попутного потока и засасывания приводит к изменению
пропульсивного коэффициента, под которым понимается отношение буксировочной
мощности катера или лодки на заданной скорости движения Nr =Rv =Pev к мощно-
мощности, подводимой к винту, NB =2япМ:
V = NR /NB =Pev/2irnM. (8.35)
189
Заменив в данном выражении скорость судна v и тягу винта Ре их значениями
с учетом влияния корпуса, получим
-¦ '*»•> - К^A') -„-^Ч,,.. (8.36)
2nnM(l-w) K22n(l-w) , 1-w
Входящее в пропульсивный коэффициент отношение
(8.37)
принято называть коэффициентом влияния корпуса.
3.4. Кавитация ГВ
Неизбежным спутником роста скоростей судов различного назначения является
кавитация ГВ, под которой понимается образование разрывов сплошности в капельной
жидкости, происходящих вследствие понижения давления до некоторого критического
значения. Область разрыва, называемая каверной, представляет собой полость, запол-
заполненную парогазовой смесью. В качестве основного критерия подобия кавитации как
при моделировании условной работы кавитирующих ГВ, так и при их проектировании
используется безразмерная характеристика, называемая числом кавитации
-"! (8.38)
где рв =101300 Па - атмосферное давление; hs -глубина погружения оси винта, м;
Pd —давление насыщенных паров воды, Па (для температуры воды 12°С принимают
Pd = 1300 Па); у — объемный вес воды (для пресной воды у =9810 Н/м3, для морской
у = 10000 Н/м3); vp — расчетная скорость натекания воды на винт, м/с.
В отечественной практике кавитацию ГВ условно разделяют на две стадии. Первая
стадия кавитации характеризуется тем, что полости, образующиеся на засасывающей
поверхности лопастей, невелики и замыкаются на самих лопастях. Гидродинамические
характеристики ГВ — его упор и момент — при этом практически не изменяются. Вред-
Вредным последствием первой стадии кавитации часто является эрозия винта — разрушение
металла лопастей в местах замыкания кавитационных каверн. Особенно интенсивно
развивается эрозия при неравномерном обтекании ГВ.
По мере увеличения скорости потока vp и уменьшения числа кавитации к первая
стадия кавитации переходит во вторую, при которой происходит изменение гидро-
гидродинамических характеристик ГВ, в связи с чем его упор, момент и КПД уменьшают
свои значения. Размеры кавитационных каверн при этом увеличиваются и замыкание
их происходит за пределами лопастей. Сильно развитую вторую стадию кавитации,
когда обтекание лопастей происходит со срывом струй и каверна уходит далеко за
профиль, называют суперкавитацией.
Режим работы кавитирующего ГВ, под которым обычно понимается винт, кави-
тирующий во второй стадии, определяется двумя независимыми параметрами — отно-
относительной поступью Хр и числом кавитации к. Действие кавитирующего винта на раз-
различных режимах его работы характеризуется безразмерными коэффициентами упора
К\ у > момента K2ip я КПД rjP9, учитывающими влияние кавитации. Примерный вид
кривых действия кавитирующего винта, иллюстрирующий эти зависимости при раз-
190 г
личных числах кавитации, показан на
рис. 8.12. Коэффициенты упора и полез-
ного действия кавитирующего винта на
любом режиме работы могут быть пред-
представлены в виде
Kiip =
и
(8.39)
Рис. 8.12. Кривые действия кавитирующего ГВ
где ?>1 и t}v — коэффициенты, характе-
характеризующие уменьшение упора и КПД винта
вследствие кавитации.
Практическое проектирование кавити-
рующих гребных винтов всегда вызывало
большие трудности. Разработанный в
30-х годах метод Папмеля имеет недо-
недостаточную точность. Методы расчета ка-
витирующих винтов, основанные на вих-
вихревой теории, в силу своей сложности
и громоздкости, не могут применяться для
практического проектирования винтов
быстроходных катеров и моторных лодок
[16, 12S]. Предлагаемый ниже- метод
разработан на основании анализа и обоб-
обобщения многочисленных экспериментальных
материалов по испытаниям моделей ГВ
в кавитационной трубе. Для облегчения
учета влияния конкретных конструктивных особенностей ГВ на его действие при
обработке и систематизации материалов испытаний было использовано известное допу-
допущение о возможности замены реальной лопасти гребного винта эквивалентным крылье-
крыльевым профилем, на котором все явления развиваются точно так же, как и ha всей ло-
лопасти винта в целом. Размеры и форма этого профиля выбираются таким образом,
чтобы его действие, отнесенное к суммарной площади всех лопастей винта как при
отсутствии кавитации, так и при ее наличии, было эквивалентно действию самого ГВ. В
качестве эквивалентного профиля в данном методе принято сечение, проходящее через
ЦЦ лопасти винта и наилучшим образом характеризующее как основные геометрические
элементы лопасти, так и ее гидродинамические особенности. Более подробно, с необхо-
необходимыми обоснованиями и выводами, данный метод изложен в книге [ 144].
В результате исследований и анализа были установлены следующие, общие для
большинства трехлопастных винтов, закономерности наступления и развития второй
стадии кавитации.
1. Уменьшение упора и КПД ГВ вследствие влияния кавитации начинается всегда
при вполне определенном критическом значении его относительной поступи \рк, зави-
зависящем в основном от величин шагового отношения нулевого упора #i/?>, дискового
отношения 0, числа кавитации к и относительной толщины эквивалентного профиля 5.
2. Уменьшение коэффициентов \f>\ и т?^ после возникновения второй стадии кави-
кавитации у всех ГВ происходит по одним и тем же законам, которые определяются сле-
следующими основными параметрами:
отношением действующей относительной поступи гребного винта на данном режиме
работы Хр к его критической поступи Хр&;
значением числа кавитации к;
относительной кривизной засасывающей стенки эквивалентного профиля 51.
Таким образом, в общем случае коэффициенты <рх и 77^ могут быть выражены
следующими функциональными зависимостями:
191
И T?.. =
\ Лр* /
(8.40)
Влияние же остальных эле-
элементов ГВ (шагового отноше-
отношения H/D, дискового отношения
0, формы чконтура лопасти
и т. д.) на характер и степень
развития кавитации настолько
мало, что при практическом
расчете кавитационных харак-
характеристик винтов им можно пре-
пренебречь. Отсутствие влияния
указанных параметров на ка-
витационные характеристики
винтов свидетельствует о до-
достаточной универсальности по-
полученных зависимостей и рас-
расчетных диаграмм.
3. Уменьшение числа кави-
кавитации к сдвигает момент на-
наступления второй стадии кавитации в сторону увеличения критической относительной
поступи при одновременном более интенсивном падении гидродинамических характе-
характеристик винта для данного отношения поступей \р/Хрк-
4. Увеличение относительной толщины S =е/Ь при прочих равных условиях также
увеличивает значение критической относительной поступи Xpjt, при которой начинается
уменьшение упора винта.
5. Увеличение относительной кривизны засасывающей стороны эквивалентного
профиля лопасти 6t =ei/b при числах кавитации к< 1,5 и прочих равных условиях
уменьшает интенсивность падения коэффициента ^, при кавитации ГВ.
Критическая относительная поступь ГВ с достаточной для проектных расчетов
точностью может быть определена по формуле
Рис. 8.13. Зависимость uKg =/(к ,6)
= Р
°*тг*т
(8.41)
Коэффициент р = 1,05 -ИДО учитывает ускорение момента наступления второй
стадии кавитации вследствие увеличения чисел Рейнольдса и усиления неравномерности
обтекания натурных винтов по сравнению с модельными. Зависимость иК 5 =/(к| S),
учитывающая влияние числа кавитации к и относительной толщины эквивалентного
профиля 6 на критическую поступь ГВ Хрк, приведена на рис. 8.13. Приближенное
значение критической относительной поступи может быть также найдено по фбрмуле
~
м
0
A + 7,2 к) [1 + 46A-к)]
16к
(8.42)
Коэффициенты i^i и т?^ при проектировании кавитирующих винтов находятся
по специальным диаграммам кавитационных характеристик. На этих диаграммах пред-
представлены зависимости коэффициентов уменьшения упора >р1 и КПД tj^ от отношения
192
0,5 0,6 0,1 0,8 0,9 1,0
Рис. 8.14. Диаграмма кавитациоиных характеристик ГВ при«, =0,032
0,5
0.В
0,7
0,8
0,9 , 1,0
, Ар/Ар*
0,1
0,8
0,5
0,4
0,3
0,2
0J
1 Зак. 738
Рис. 8.15. Диаграмма кавитационных характеристик ГВ при 6, =0,040
193
0,5 0,6 0,1 0,5 0,9 1,0
Рис. 8.16. Диаграмма навигационных характеристик ГВ при 6, =0,048
расчетной относительной поступи ГВ, имеющего определенные параметры, к его кри-
критической поступи \р/\Рк при различных числах кавитации к =0,2 -г 1,4. Такой диапазон
чисел кавитации охватывает практически все наиболее интересные режимы движения
быстроходных моторных лодок и катеров в пределах от 40 до 130 км/ч. При этом,
однако, следует иметь в виду, что значения коэффициентов ч>1 для числа кавитации
к =0,2 получены экстраполяцией.
Определяющей характеристикой при выборе расчетной диаграммы является отно-
относительная кривизна засасывающей стороны эквивалентного профиля 5t =et/b, неза-
независимо от величин шагового и дискового отношений ГВ в реальных пределах их
изменения. Всего построено восемь диаграмм для различных значений относительной
кривизны, изменяющихся от St =0,024 до 8г =0,052 с интервалом Дб! =0,004 [ 144].
Диаграммы для винтов с кривизной 8t =0,032, 0,040 и 0,048 приведены на
рис. 8.14-8.16.
Для определения кавитационных характеристик ГВ по приведенным диаграммам
необходимо для всего диапазона скоростей судна найти числа кавитации к и отиошения
расчетных относительных поступей \р к критическим \Рк. Далее по значению кривиз-
кривизны лопасти bu=ei/b на приведенном радиусе рассматриваемого винта выбирается
расчетная диаграмма >р1 — \pf\pk, с помощью которой находят значения коэффициента
уменьшения упора ^ =/(Хр/Хр&, к) и КПД V»=fQbfKpk, «) от влияния
кавитации, а также значения коэффициента упора Klip=Klvi и КПД Щ,^ =г)рП^>
в заданных условиях кавитации. При несовпадении относительной кривизны эквивалент-
эквивалентного профиля проектируемого винта 8Х с диаграммой, коэффициенты ^ и т»^ находят
по диаграммам, имеющим наиболее близкие значения 6 и или путем интерполяции.
Все элементы и характеристики ГВ при отсутствии кавитации, используемые для
расчета по приведенным формулам и диаграммам его гидродинамических характери-
характеристик в условиях кавитации, считаются известными или определяются одним из обще-
194
принятых способов, например по расчетным диаграммам Кх —\р. Необходимо отме-
отметить, что предлагаемые кавитационные диаграммы и методы их использования пол-
полностью применимы при проектировании и анализе действия кавитирующих ГВ, имею-
имеющих нормальные образования, наиболее распространенные в современной практике —
эллиптический контур лопасти при сегментном плоско-выпуклом или вогнуто-выпук-
вогнуто-выпуклом профиле сечений с максимальной толщиной, находящейся посередине сечения
или на некотором расстоянии от нее. Пределы изменения относительной толщины
эквивалентного профиля этих винтов составляют 6 =0,024-5-0,06, дискового отношения
0=0,6-И ,2, шагового отношения (постоянного или переменного вдоль радиуса)
H/D = 1,0 *2А
Кавитационные диаграммы </>i - Хр/Хр* дают полную возможность спроектиро-
спроектировать ГВ, работающие в условиях кавитации, т. е. позволяют выполнить все необходимые
расчеты по определению элементов кавитирующих винтов, а также их гидродинами-
гидродинамических и ходовых характеристик для построения паспортных диаграмм и анализа
действия на различных режимах работы. Кроме того, данный метод позволяет осу-
осуществлять проверку отсутствия кавитации и выбирать оптимальную величину диско-
дискового отношения при проектировании некавитирующих ГВ. С его помощью можно
также производить расчет кавитационных характеристик винтов для любых чисел
кавитации и любых элементов эквивалентного профиля по результатам испытаний
в кавитационной трубе относительно близкого винта-прототипа [ 144].
8-5. Проектировлние ГВ
Выбор исходных данных. Настоящий раздел относится в основном к моторным лод-
лодкам и катерам со стационарными двигателями, так как подвесные моторы обычно постав-
поставляются с готовыми ГВ. Однако приведенные рекомендации полностью пригодны и для
проектирования новых ГВ для различных подвесных моторов.
В начале проектирования ГВ должны быть известны или установлены предвари-
предварительным расчетом следующие исходные данные:
теоретический чертеж катера или лодки с главными размерениями и коэффициен-
коэффициентами, с расчетными значениями водоизмещении и осадок;
кривые сопротивления и эффективной мощности корпуса с выступающими частя-
частями в зависимости от скорости R =f(y K) и Nr =/(v K); чертежи, характеризующие рас-
расположение ГВ, корпуса катера, подводного крыла и выступающих частей, со сведения-
сведениями о наибольшем допустимом диаметре винта и глубине его погружения на максималь-
максимальной скорости, об углах наклона гребных валов, об углах ходового дифферента и т. д.;
коэффициенты взаимодействия винта и корпуса;
количество двигателей или гребных валов гв;
номинальная или располагаемая мощность двигателей Ne, кВт, и соответствующая
частота их вращения идв, об/мин (с "');
внешняя и ограничительная характеристики двигателей NBH =/(идв) и Л^огр =
Желательно также иметь универсальную характеристику, позволяющую на ходовых
испытаниях определять мощность двигателя в зависимости от частоты вращения и часо-
часового расхода топлива. При наличии редуктора или вертикальной колонки должно быть
указано их передаточное отношение i p.
Практика показывает, что для обеспечения достаточного запаса мощности на ухуд-
ухудшение состояния корпуса и увеличение высоты волнения выбор элементов ГВ целесооб-
целесообразно производить для полного водоизмещения при условии использования около
90% располагаемой мощности на номинальной частоте вращения двигателей. У катеров
на подводных крыльях (КПК) запас мощности может достигать даже 20%, так как
он должен обеспечивать преодоление горба сопротивления и выход на крылья в усло-
7* 195
виях волнения. При назначении расчетной мощности двигателя следует учитывать
также потери мощности на трение валопровода в упорном и опорном подшипниках
и в дейдвуде. КПД валопровода в среднем составляет т?в =0,96-5-0,98. Угловые верти-
вертикальные колонки имеют т?м «0,90.
Для головных катеров и моторных лодок, в особенности быстроходных, целе-
целесообразно проектировать два-три варианта гребных винтов, обеспечивающих различ-
различную загрузку двигателей при заданной частоте вращения. Наличие нескольких вариан-
вариантов винтов позволяет в процессе ходовых испытаний выбрать для последующего се-
серийного изготовления винты с наиболее оптимальными элементами как по скорости
катера, так и по загрузке двигателей даже в случае недостаточной достоверности неко-
некоторых исходных данных, использованных при их проектировании.
Выбор числа лопастей, дискового отношения и элементов эквивалентного профиля.
С уменьшением количества лопастей КПД ГВ на рабочих режимах возрастает. Наиболь-
Наибольшим КПД обладают двухлопастные винты (на 6—12% выше, чем трехлопастные).
Широкое применение двухлопастных винтов ограничивается сильной вибрацией,
возникающей вследствие резкого уменьшения частоты и увеличения амплитуды им-
импульсных давлений, создаваемых на днище катера каждой лопастью. Кроме того, двух-
двухлопастным винтам свойственна в большей мере, чем трехлопастным, так называемая
гидродинамическая неуравновешенность, при которой из-за различий в шаге, профили-
профилировке или площади лопасти винта развивают неодинаковый, а в косом потоке даже
периодически изменяющийся упор. При этом равнодействующая сил упора обеих ло-
лопастей не совпадает с осью винта. Внеосевые переменные нагрузки вызывают изгиб
гребного вала и дополнительно усиливают вибрацию концевого кронштейна и корпуса
катера.
Применение двухлопастных ГВ на быстроходных катерах с двигателями значитель-
значительной мощности связано с осуществлением ряда конструктивных мер — специального
подкрепления кронштейна и днища в районе действия винта, увеличения зазоров между
винтом и корпусом, повышения частоты вращения винта и т. д. Одновременно должны
быть повышены требования к изготовлению двухлопастных винтов с целью достижения
близких значений шага обеих лопастей и хорошей их балансировки.
Указанные трудности использования двухлопастных винтов привели к тому, что
несмотря на некоторое снижение КПД, наибольшее распространение в малом катеро-
катеростроении получили трехлопастные ГВ, менее опасные в отношении вибрации и пульси-
пульсирующих давлений. Кавитирующие ГВ обычно проектируют также трехлопастными.
Дисковое отношение некавитирующих ГВ следует выбирать таким образом, чтобы
при обеспечении необходимой прочности лопастей оно не снижало бы гидродинамиче-
гидродинамических качеств винтов. При этом на наиболее длительных эксплуатационных режимах
должно быть исключено возникновение кавитации и появление эрозии ГВ.
Ориентировочная величина дискового отношения, удовлетворяющего данным
условиям, находится с помощью рис. 8.17 или по формуле
>
Ad 50D2
(8.43)
где Р — упор ГВ на режиме полного хода, кН; D — ожидаемый диаметр ГВ, м.
Предварительная оценка оптимального диаметра ГВ может быть произведена по
частоте его вращения и мощности двигателя (рис. 8.18). Если найденный диаметр
винта окажется больше максимально допустимого по условиям его размещения, то
дисковое отношение определяют по максимально допустимой величине D. В дальней-
дальнейшем диаметр винта и дисковое отношение уточняют во втором приближении, определяя
их оптимальные значения, обеспечивающие наивысший КПД. Однако, независимо
от результатов расчета, принимать дисковое отношение менее 0 = 0,3 не следует, так
196
f)
W
48
0.B
0.5
о,ч
0.3
0.1
/
/
/
/
/
/
uZ ^
r
/
/
/
A
л
У
7
i ~
/
*
t
/
/
/
/
-\
>
/
/
—
/--
-p -
/
/
у
и
/
/
/
/
/
У
r
/
J
/
'1
—
—.
z
РГ
/
У
Рис. 8.17. Зависимость диско-
дискового отношения ГВ от ожи-
ожидаемых значений его диамет-
диаметра и упора
0,5 1.0 2,0
6,0 1,0 piHH 20
Рис. 8.18. Зависимость диа-
диаметра ГВ от частоты его
вращения и мощности дви-
двигателя D =/ (л, Ne)
1.C
50
Ц0
30
20
15
10
9
В
-1
I 1
-—^
*¦ у-
y*
^y^
^y/r
Ж-
1—W
^-
^y
-py^-
У
^у<
^y
У
С
у4
'
Г
с
у*
У
у
-.
у
[у
у
^у
-
г
^у
у
уУ
у
•"Li1
*
И
у
у
МИ N
'Л
|А
\?
у
У *
у '
У
у '
.? —
уУ
у
у
-
н
s
¦у
У-
yt
у-
3 4
20 30 40 60
100
200 300 400
Ne, кВт
как это будет приводить к снижению КПД винта из-за увеличения толщин лопастей
и ухудшения их гидродинамических качеств. С другой стороны, излишнее увеличение
дискового отношения также нежелательно, так как одновременно с повышением упора
и момента, винта вследствие возрастания профильных потерь снижается его КПД. Кроме
того, при больших дисковых отношениях становится заметным стеснение потока,
увеличиваются скорости обтекания лопастей и усиливается их взаимодействие. Это
способствует появлению и углублению кавитации.
В тех случаях, когда не удается избежать наступления кавитации даже при увели-
увеличении дискового отношения до 0 = 1,0 т 1,2, следует проектировать кавитирующие
винты. Дисковое отношение кавитирующих ГВ обычно находится в пределах 0 =
=0,9-И ,2. Верхний предел дисковых отношений принимают для винтов с большими
шаговыми отношениями (HID-1,4-г 1,8), у которых неблагоприятное влияние гидро-
гидродинамической решетки менее заметно. Практика показывает, что выбор дисковых
отношений в указанных пределах приводит к умеренным потерям пропульсивных
качеств ГВ от кавитации и не вызывает значительных трудностей при их изготовлении.
197
При проектировании суперкавитирующих ГВ нет необходимости в значительном
увеличении дискового отношения и его принимают A/Ad =0,5 -г 0,8.
С дисковым отношением ГВ непосредственно связаны основные элементы экви-
эквивалентного профиля, С увеличением дискового отношения возрастает ширина лопастей
и соответственно уменьшаются их относительные характеристики. Относительная
тодщина эквивалентного профиля может быть найдена по простой эмпирической зави-
зависимости
« = 0,01 -|- . (8.44)
Полученная по данной формуле толщина эквивалентного профиля обычно удовлет-
удовлетворяет условию прочности и обеспечивает приемлемые кавитационные характеристи-
характеристики ГВ.
Бели проектируемый винт является кавитирующим или работает вблизи кавита-
ционного режима, то для уменьшения влияния кавитации или отдаления момента ее
наступления необходимо стремиться к обеспечению безударной работы сечений лопа-
лопастей. Увеличение диапазона углов безударного входа, при которых сглаживается пик
разрежения у входящей кромки, достигается сегментной вогнуто-выпуклой профили-
профилировкой лопастных сечений с плавно изменяющейся вдоль радиуса кривизной. Увели-
Увеличение относительной кривизны влияет на гидродинамические характеристики ГВ по-
подобно увеличению его шагового отношения. Близкое к оптимальному распределение
вогнутости лопасти вдоль ее радиуса получается, если относительная кривизна средней
линии эквивалентного профиля соответствует
«о «0,1 Су, (8.45)
где Су — коэффициент подъемной силы, который находится по формуле Папмеля
?^. , (8.46)
По полученным значениям ( и St легко определяется относительная кривизна
засасывающей стенки профиля, необходимая для выбора расчетной кавитационной
диаграммы:
6ia5« + 0,56. (8.47)
В начальной стадии проектирования винта, когда отсутствуют значения коэффи-
коэффициентов Kt и Су, относительную кривизну в первом приближении можно найти по
формуле
S1=d + S3, (8.48)
в которой относительная вогнутость нагнетающей стенки эквивалентного профиля
«2 = 0,01*0,015. , (8.49)
В дальнейшем при уточнении величины дискового отношения могут быть также
уточнены и элементы эквивалентного профиля.
Определение наибольшей скорости судна и элементов некавитирующих ГВ. Опре-
Определение величин диаметра и шага ГВ, обеспечивающих его согласование с механической
установкой и оказывающих решающее влияние на КПД винта и скорость судна, осу-
осуществляется по расчетной диаграмме, выбранной в соответствии с установленными
значениями дискового отношения и числа лопастей винта.
Увеличение диаметра винта в реально допустимых пределах повышает его КПД.
При этом необходимо учитывать возможность размещения ГВ за корпусом катера
198
или лодки. У водоизмешающих малых судов диаметр винта ограничивается Осадкой,
так как приближение кромок лопастей к свободной поверхности воды связано с опас-
опасностью прорыва к ним воздуха. У быстроходных глиссирующих катеров и КПК из-
излишнее увеличение диаметра винта, расположенного под днищем или крылом, будет
ухудшать условия его работы вследствие увеличения угла наклона гребного вала и уси-
усиления влияния косого потока.
Большое влияние на диаметр винта оказывает частота его вращения. Уменьшение
частоты вращения винта требует соответствующего увеличения диаметра. Для каждой
частоты вращения в зависимости от сопротивления корпуса и скорости судна можно
с помощью коэффициента К'п найти оптимальную величину диаметра винта, при кото-
которой его КПД достигает максимального значения. И наоборот, каждому значению диамет-
диаметра винта соответствует оптимальная частота вращения, определяемая при помощи
коэффициента К а. Гидродинамическая связь диаметра винта с частотой вращения
осуществляется через шаговое отношение H/D и относительную поступь \р, опреде-
определяющую режим работы винта.
Шаговое отношение весьма сильно влияет на характеристики коэффициентов упора
и момента винта. Зависимость КПД от шагового отношения более сложна. Наиболь-
Наибольшие значения КПД по мере увеличения шагового отношения до H/D «2,0 -5- 2,2 также
возрастают, а затем начинают убывать. Рабочие значения КПД винта определяются
величинами H/D и \р и могут колебаться в значительных пределах, поэтому правиль-
правильный выбор шагового отношения и других элементов винта имеет чрезвычайно важное
значение.
В зависимости от заданных расчетных условий при проектировании некавитирую-
щих ГВ и определении скорости катеров и лодок можно выделить следующие наиболее
типичные случаи.
1. Определение наибольшей скорости катера и оптимального диаметра гребного
винта при заданной частоте его вращения.
2. Определение наибольшей скорости катера и оптимальной частоты вращения
при заданной (ограниченной) величине диаметра винта.
3. Определение наибольшей скорости катера или лодки при заданных значениях
диаметра и частоты вращения ГВ.
Во всех случаях расчета мощность двигателей считается известной. Расчет удобнее
всего производить в табличной форме. Перед таблицей приводят известные постоянные
величины — мощность двигателей 2>Ne, кВт, частоту вращения п, с, или диаметр
винта D, м, коэффициенты взаимодействия w и t, количество гребных валов zB и т. д.
Для первого случая задания можно использовать таблицу, составленную по следующей
схеме:
1. Vk.km/ч 7.Хр
2. vp = 0,278 vK (I - w), м/с 8. Dopt =
3.R=f(vK) =zBPe,кН 9. H/D
4.NR =/(vk),kBt ' 10.i7p =
5. P = , \ , kH 11.tj =
6.Kb=-i=. \/ \ 12. БЛГв = —,кВт.
Данную схему можно применить также и для второго случая задания, т. е. для
Определения оптимальной частоты вращения по заданному диаметру винта. При этом
199
в п. 6 схемы и далее вместо коэффициента К'п используется коэффициент Кд [ см. фор-
формулы (8.18) и (8.19)], а в п. 8 вычисляется искомое значение nOpt = vp/Z)Xp.
Полученные значения мощности двигателей ~LNe, диаметра винта D, шагового
отношения H/D и КПД винта tjp откладывают на графике в зависимости от скорости
судна 1>к- Наибольшая скорость катера, а также все элементы и характеристики греб-
гребного винта определяются абсциссой точки пересечения кривой необходимой мощности
двигателей со значением располагаемой мощности. Для полученной скорости целе-
целесообразно произвести контрольный расчет. Если полученный диаметр винта Dopt будет
превышать максимально допустимый, т. е. величина диаметра окажется ограниченной,
то расчет следует производить по несколько измененной схеме для заданных значений
диаметра D и частоты вращения ГВ и. При этом основные характеристики гребного
винта — его шаговое отношение и КПД — находятся по соответствующей диаграмме
Ki —\ръ точке действия винта, определяемой значениями его поступи Лр и коэффи-
коэффициента упора Ki, полученными для каждой заданной скорости судна. Последователь-
Последовательность расчета видна из приведенной схемы и дополнительных пояснений не требует:
1.vk,km/4 6. Xp = vp/(nD)
2. vp =0,278 vK A - w), м/с 7. H/D =f(K,, Xp )
R
;^ kH 9. tj =
1 t
ШЗ р г Р II
5- ^i = ГТй Ю- 2Ле = —Т7 . кВт.
Элементы проектируемого винта соответствуют скорости, при которой необходи-
необходимая мощность двигателей совпадает с располагаемой.
С помощью приведенных расчетных схем по диаграммам К1 — Хр можно также
найти мощность двигателей, требующуюся для достижения заданной скорости катера.
При этом достаточно ограничиться лишь столбцом первого приближения, поскольку
добиваться совпадения необходимой мощности с располагаемой уже не нужно.
При использовании диаграмм К2 — Хр определение оптимального диаметра винта
по известным значениям мощности Ne, кВт, и частоты вращения двигателя к, с,
производят по следующей схеме:
1. vk,km/4
2. Vp =0,278vK(l -w),m/c
4
Vn
3
V7T \l 13,33Ne7iM ' 2 pn3Ds
4.Xp=f(K'r!) Э.К^^-КгГ
5. D = Vp/(nXp),M 10. zBPe = 10~3/
Оптимальная частота вращения винта находится по аналогичной схеме с помощью
коэффициента K'j . Коэффициенты взаимодействия w и t в данных схемах также
предполагаются известными. Наибольшая скорость катера и основные элементы ГВ
определяются графически в точке пересечения суммарной тяги винтов zBPe =/(vK)
с кривой сопротивления R =/(vK) и проверяются контрольным расчетом.
200
Если диаметр и частота вращения ГВ заданы, то схема определения его элементов
по диаграммам Кг — \р еще более упрощается:
1.vk,km/4 S.H/D=f(Kt,\p)
2.vp=0,278vkA-w),m/c 6.т?р =f(K2, Хр)
3. \p=
4.К2 = f =159>зУМ 8. zBPe =10-3^ A -Г)Р«2^в,кН.
рп2 ?г ри3?г
Проверка отсутствия кавитации ГВ и уточнение отимальной величины дискового
отношения. После определения основных элементов ГВ необходимо проверить их на
отсутствие второй стадии кавитации. Такая проверка с достаточной надежностью и
простотой производится по формуле
которая показывает, что для отсутствия кавитации необходимо, чтобы рабочая отно-
относительная поступь проектируемого винта Хр всегда была больше его критической
поступи Apk при действующем числе кавитации к. При практической проверке ГВ
на кавитацию следует по формулам (8.41) или (8.42) вычислить значения его крити-
критической поступи на различных режимах работы, включая максимальный, и сравнить
их с величинами действительной поступи винта на тех же режимах:
l.Ap=vpl(nD)
2A01300 + yhs - pd)
2. к = —* i
pvp
3. wK6 =/(к, 6) (см. рис. 8.13)
( И\ 0
4. лрк = Р\0,5 ~^~+~
При значениях поступей Хр < Xpk для исключения кавитации дисковое отношение
винта следует увеличить. Если же рабочая поступь винта будет существенно превышать
критическую, то для повышения КПД дисковое отношение целесообразно уменьшить.
Уточнить оптимальное дисковое отношение винта можно по формулам
0 > -JLjii (8.51)
Хр - 0,5 (Hi/D)pullS
или
16кХр - -^ A+7,2к)[1 + 46A-к)]р
201
При пользовании формулой (8.51) значения функции uKs =/(к, 6) снимаются
с рис. 8.13. Формула (8.52) позволяет непосредственно определять дисковое отношение
винта, не пользуясь указанным графиком.
Поскольку данные формулы получены из условия, характеризующего начало
уменьшения упора при кавитации, то для предохранения от эрозии винта, возникающей
в первой стадии кавитации, дисковое отношение, особенно в косом потоке при большой
неравномерности обтекания винта, принимают с некоторым запасом. Достаточный
запас дискового отношения обеспечивает коэффициент ускорения кавитации в форму-
формулах (8.51) и (8.52), близкий к р = 1,2. При равномерном осевом обтекании ГВ этот
коэффициент может быть уменьшен.
Определение наибольшей скорости катера и элементов кавитирующих ГВ*. Если
в результате попыток спроектировать некавитирующий ГВ окажется, что необходимая
для этой цели величина дискового отношения будет превышать значение © = 1,0 -г 1,2,
то, очевидно, следует перейти к проектированию кавитирующего винта. При этом
для определения основных характеристик проектируемого винта при отсутствии кави-
кавитации используется одна из диаграмм Kt — \p. Учет же влияния кавитации на действие
этого винта производится по универсальной диаграмме i^i — Хр/Хр?, выбранной в зави-
зависимости от элементов принятого эквивалентного профиля. Относительную толщину
эквивалентного профиля кавитирующего винта устанавливают в соответствии с ранее
приведенными рекомендациями. Дисковое отношение для уменьшения влияния кави-
кавитации на действие винта, как уже указывалось, целесообразно принимать близким
к © = 1. Число лопастей по тем же соображениям принимают z =3. В результате расчета
должны быть определены наибольшая скорость катера или моторной лодки при полном
использовании мощности двигателей, а также наивыгоднейшие элементы кавитирую-
кавитирующего ГВ, включая оптимальные значения его диаметра, частоты вращения, шагового
отношения и КПД. При зтом следует иметь в виду, что одним из самых существенных
требований к проектируемому ГВ является условие согласования его элементов с меха-
механической установкой и сопротивлением катера. Это означает, что из бесконечного
количества винтов необходимо найти винт с такой комбинацией элементов, которая
в условиях кавитации сможет обеспечить достижение наибольшей скорости катера
при заданных значениях мощности и частоты вращения двигателей. Поскольку гидро-
гидродинамические характеристики ГВ при появлении кавитации сильно изменяются, то
решение данной задачи сопряжено с определенными трудностями.
При проектировании кавитирующего ГВ необходимо иметь возможность опреде-
определять ожидаемое уменьшение упора и КПД винта от влияния кавитации на любом за-
заданном режиме работы с тем, чтобы заранее предусмотреть соответствующее увели-
увеличение его шага для компенсации этого уменьшения. Неточность в определении элемен-
элементов кавитирующего винта приведет к тому, что он будет не согласован с двигателем.
Для расчета элементов кавитирующего винта может быть использована схема,
представленная в табл. 8.1. Схема позволяет определить скорость судна и шаговое
отношение винта в условиях кавитации при заданных величинах его диаметра и частоты
вращения. Если оптимальные значения диаметра или частоты вращения винта должны
быть найдены, то расчет по аналогичной схеме производят для нескольких вариаций
искомого параметра при постоянной ожидаемой скорости. Порядок расчета ясен из
таблицы и не требует пояснений. Задаются тремя значениями скорости, близкими
к ожидаемой ее величине, и находят соответствующие им значения сопротивления R,
поступи винта Хр, числа кавитации к и т. д. Далее в строке 8 для каждой принятой
скорости судна задаются тремя коэффициентами упора К^, позволяющими в условиях
кавитации обеспечить тягу Ре, близкую к необходимой, и по диаграмме Ki — Хр,
имеющей выбранное дисковое отношение, определяют значения шаговых отношений
* Численный пример расчета см. в гл. 12.
202
Таблица 8.1. Расчет скорости и элементов кааитирующего ГВ
гв; Дм; 0; рг, 6; 8„; W; t; гад А,)
, кВт; и, с;
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
"к, км/4
Vp = 0,278vK A - н>), м/с
Л=/(Ук)=?вРе,кН
Л5г=0,278УкЛ, кВт
*р=*р/("?)
2 (Рд + тй j — pd)
л:,
Hl/D=f(K1,*p)
Vp ~f (^j i Ар)
/ Я, 0,2 \
«рк-р\0,5 D + @ ^««6
У^рк
^/(УХрк.к.б.)
Ре =1(Г3/:, A - О рпгО*^-, кН
fiVe = , л„ ", кВт
3,6ч
нулевого упора Нх/ D и КПД винта i?p при отсутствии кавитации. Если расчетная
диаграмма построена не по Hi/D,z по геометрическому шаговому отношениюH/D,
то шаговое отношение H1/D находят на пересечении кривой H/D с осью \р. Для учета
влияния кавитации на характеристики винта вычисляют величины \рк и отношения
поступей \p/\pk. Затем по соответствующей диаграмме <fii — Xp/Xpt находят коэффи-
коэффициенты уменьшения упора <Pi и КПД ц^ кавитируюшего винта. С помощью этих
коэффициентов определяют развиваемую ГВ тягу на каждом режиме и потребляемую
при этом мощность двигателей. Значения коэффициентов упора Kt и потребной мощ-
мощности 2iVe, при которых тяга винтов будет равна сопротивлению катера, находят
путем построения полученных для каждой скорости судна зависимостей Ре -f{K{)
и TiNe =f(Kx) совместно с кривой сопротивления. Для проверки этих значений Ki
и 2iVe производят контрольные расчеты в дополнительных столбцах табл. 8.1. Зависи-
Зависимости Ki =/(vK)> Pe ~f(vK) и 2Л? =/(j>k)> построенные по результатам контроль-
контрольных расчетов, позволяют определить наибольшую достижимую скорость катера, а также
необходимые значения тяги и коэффициента упора винта. Эти величины соответствуют
точке, в которой необходимая мощность двигателей становится равной располагаемой
мощности. Исходя из найденных значений наибольшей скорости и коэффициента упора
в последнем столбце табл. 8.1 также производят контрольный расчет, позволяющий
203
окончательно уточнить основные элементы и характеристики проектируемого кавити-
рующего ГВ для заданных условий эксплуатации. При этом следует обратить внимание
на правильный выбор величины коэффициента ускорения наступления кавитации р
в натурных условиях. Для кавитирующих ГВ, работающих при относительно равномер-
равномерном осевом обтекании, а также при небольших (до 6—8°) углах скоса потока этот
коэффициент составляет около р = 1,05 -М,10. При увеличении углов наклона гребных
валов и усилении неравномерности потока у быстроходных глиссирующих и крылатых
катеров коэффициент ускорения кавитации может возрасти до значения р = 1,20.
Помимо изложенных методов при проектировании некавитирующих и кавитирую-
кавитирующих ГВ для катеров и моторных лодок различной быстроходности могут быть исполь-
использованы рекомендации работ [ 14,16,31,43,68,75,105,110,125,144].
Особенности определения наибольшей скорости и элементов ГВ катеров на под-
подводных крыльях*. Для преодоления горба сопротивления и обеспечения выхода катера
на крылья необходимо при скорости, равной @,4-5-0,6) vm, приложить значительную
мощность. Однако вследствие ограничений, накладываемых внешними характеристи-
характеристиками двигателей внутреннего сгорания, эта мощность не всегда может быть развита
на промежуточном режиме работы при неполных оборотах ГВ фиксированного шага,
спроектированного на режим максимальной скорости, в особенности при наличии
кавитации. При движении на волнении данное явление еще более усугубляется вследст-
вследствие увеличения сопротивления и дополнительного возрастания мощности, необходимой
для выхода катера на глиссирование или на крылья, поэтому необходимо стремиться
к созданию возможно большего запаса мощности. Обычно это достигается рациональ-
рациональным выбором расчетного режима и проектированием так называемого легкого ГВ
за счет неполного использования мощности двигателя на режиме наибольшей скорости
при заданной частоте вращения винта, т. е. практически за счет снижения максимальной
скорости катера. Запас мощности двигателей на режиме наибольшей скорости у КПК,
например, принимают в пределах 10—20%. Конкретная величина необходимого запаса
мощности определяется типом внешней характеристики двигателя, величиной горба
сопротивления и ожидаемым его увеличением на волнении. Выбирая элементы ГВ
для КПК из условия получения наибольшей скорости, всегда необходимо проверять
их на режиме выхода на крылья. Такая проверка осуществляется при построении
паспортной диаграммы. Желательно, чтобы запас мощности на горбе сопротивления
КПК составлял не менее 20%.
Применение вертикальных колонок в силу отсутствия наклонных валов исключает
косое обтекание ГВ, что улучшает условия их работы, а также уменьшает опасность
появления кавитации винтов или их эрозии. Вне корпуса катера колонка состоит из
вертикальных валов, находящихся в стойке хорошо обтекаемой формы, и нижнего
редуктора с гребным валом, заключенных в обтекаемую гондолу (рис. 8.19). Верхняя
часть стойки, пересекающая свободную поверхность воды, для улучшения волнообра-
волнообразования и уменьшения опасности прорыва воздуха, имеет заостренный сегментный
профиль. Под ватерлинией для уменьшения сопротивления профиль стойки плавно
скругляется и переходит в симметричный авиационный.
Возникновение кавитации элементов колонки приводит к резкому возрастанию
ее сопротивления и ухудшению условий работы винта. Поэтому профили стойки и гон-
гондолы должны обладать увеличенным диапазоном углов безударного входа и высокими
антикавитационными качествами. Относительные ординаты профилей стойкий гондолы,
удовлетворяющие указанным условиям, приведены в табл. 8.2. Отношение длины
гондолы к ее наибольшему диаметру следует принимать в пределах b/dm =4-5-6. При
этом ступица винта должна плавно сопрягаться с обводами гондолы. Критическое
число начала кавитации колонок, разработанных в соответствии с данными рекоменда-
* Численный пример расчета ГВ для КПК приведен в гл. 12.
204
циями, при осевом обтекании
приближенно определяют в за-
зависимости от относительной
толщины профиля:
кк «2,5 5.
(8.53)
Рис. 8.19. Обводы угловой вертикальной колонки
При движении с дрейфом кри-
критическое число кавитации
быстро возрастает.
При создании вертикаль-
вертикальных угловых колонок прихо-
приходится учитывать ряд противо-
противоречивых требований. Для сни-
снижения сопротивления самой
колонки необходимо умень-
уменьшать ее габариты, что воз-
возможно при повышении частоты
вращения ГВ. Повышение же
частоты вращения винта пони-
понижает его КПД и увеличивает
опасность появления кавитации. Выбор оптимальных соотношений между размерами
колонки и характеристиками ГВ производится путем сравнительного анализа эффек-
эффективности винта при различной частоте вращения с учетом кавитации, если она имеет
место, и соответствующего изменения сопротивления колонки. Для приближенного
определения сопротивления колонки в ньютонах рекомендуется формула
RK<*>5 v2SK*>0, 4vKSK, (8.54)
где SK —площадь смоченной поверхности колонки, м2; v и vK — скорость в метрах
в секунду и километрах в час соответственно.
Указанные особенности необходимо учитывать- при определении наибольшей ско-
скорости и проектировании ГВ для КПК как с наклонными гребными валами, так и с угло-
угловыми вертикальными колонками. При зтом проектирование некавитирующих винтов
в зависимости от условий задания производится по одной из приведенных выше схем.
Для кавитирующих ГВ используется табл. 8.1.
Таблица 8.2. Относительные ординаты профилей гондолы и стойки
угловой колонки
№
орди-
ординаты
1
2
3
4
5
6
7
8
9
10
Абсцисса
профиля
Х/О
0
0,012 5
0,025
0,050
0,075
0,100
0,150
0,200
0,250
0,300
Относи-
Относительный
диаметр
гондолы
d/dm
0
0,216
0,328
0,480
0,582
0,662
0,781
0,863
0,920
0,958
Относительные
ординаты профиля
стойки
ниже ВЛ
yhm
0
0,206
0,320
0,464
0,561
0,650
0,775
0,859
0,917
0,956
выше ВЛ
yhm
0
0,050
0,097 5
0,190
0,277 5
0,360
0,510
0,640
6,750
0,840
№
орди-
ординаты
И
12
13
14
15
16
17
18
19
Абсцисса
профиля
„/«,
Х/О
0,350
0,425
0,500
0,600
0,700
0,800
0,900
0,950
1,0
Относи-
Относительный
диаметр
гондолы
d/dm
0,983
1,0
0,987
0,920
0,785
0,595
0,350
0,192
0
Относительные
ординаты
профиля
стойки
ниже ВЛ
У/ет
0,982
1.0
0,990
0,930
0,820
0,650
0,420
0,250
0
выше ВЛ
0,910
0,977
1,0
0,960
0,840
0,640
0,360
0,190
0
205
Как правило, ГВ, работающий в составе угловой колонки, является толкающим
и располагается в хвостовой части гондолы. Однако возможно применение и тянущего
винта, находящегося впереди гондолы. Возможно также распределение мощности
двигателя на два винта, расположенных в начале гондолы и в ее конце. Это позволяет
уменьшить габариты колонки и диаметр гондолы. Рекомендации по проектированию
таких винтов изложены в книгах [ 16, 75,123].
8.6. Расчет гидродинамических характеристик ГВ
и построение паспортных диаграмм
После выбора основных элементов ГВ для проверки их соответствия сопротивле-
сопротивлению катера и его механической установке определяют кривые действия проектируемого
винта в свободной воде в виде зависимостей коэффициента упора К\, коэффициента
момента К2 и КПД т?р от относительной поступи Хр, а также производят расчет и по-
построение паспортной диаграммы. Для расчета кривых действия ГВ используют один
из наиболее распространенных способов — серийные диаграммы Ki — \р, по которым
выбирались элементы винтов и производился расчет ходкости, или паральный метод
Папмеля. При использовании серийных диаграмм значения Ki и т?р снимают непосред-
непосредственно с расчетной диаграммы в зависимости от относительной поступи винта Хр
и его шагового отношения H/D или #i/?>. Соответствующие значения коэффициента
момента К2 находят расчетом по следующей схеме:
1. Хр ' 3. пР =f(H/D, Хр)
2.^=/(Я/Д Хр) 4.Кг=К1\р1Bппр).
При проектировании ГВ и расчете их кривых действия по серийным диаграммам
необходимо стремиться к тому, чтобы выбранные элементы и характеристики проекти-
проектируемых винтов возможно больше соответствовали диаграммным. Однако во многих
слунаях полного совпадения всех элементов винтов обеспечить не удается, что снижает
надежность расчета. Для повышения достоверности определения гидродинамических
характеристик и возможности учета влияния конкретных конструктивных особенностей
проектируемого винта на его работу Э. Э. Папмель разработал специальный эмпири-
эмпирический метод расчета кривых действия ГВ, названный .паральным. Паральный метод
позволяет при небольшой затрате времени получить с практически достаточной точ-
точностью кривые действия некавитирующих ГВ по их основным конструктивным эле-
элементам, которые считаются известными, т. е. должны быть заданы или предварительно
определены. К числу этих элементов относятся диаметр винта, шаг, дисковое отноше-
отношение, количество лопастей, элементы эквивалентного профиля и т. д. Паральным мето-
методом целесообразно пользоваться также при отсутствии необходимых расчетных
диаграмм, особенно в процессе доводки винтов при проведении натурных ходовых
испытаний, когда элементы винтов вследствие их обрезки по диаметру претерпевают
существенные изменения.
В основе парального метода находится та же идея, что и у изложенного ранее метода
проектирования кавитирующих винтов, т. е. что реальная лопасть каждого ГВ может
быть заменена условным эквивалентным крыльевым профилем, полностью характе-
характеризующим действие всей лопасти винта. Кривые действия такого профиля будут по-
подобны кривым действия всего винта в целом. Если площадь условного элемента rio-
пасти bdr увеличить до суммарной площади всех лопастей, то его безразмерные характе-
характеристики dK\ и dK.2 будут эквивалентны характеристикам всего винта и могут рассмат-
рассматриваться как изображенные в масштабе коэффициенты упора Kt и момента Кг.
Важнейшей характеристикой для расчета кривых действия винта по паральному
методу является условная относительная толщина эквивалентного профиля 5', вы-
206
числяемая не по действительной ширине лопасти на приведенном радиусе Ь, как это
имело место в изложенном методе расчета кавитационных характеристик, а по средней
ширине лопасти Ьср, определяемой формулой (8.3):
5' е ez(R-rc) ezl
bCp A A
где е — наибольшая толщина лопасти на приведенном радиусе 70.
В результате анализа большого количества экспериментальных материалов Пап-
мель установил, что зависимость коэффициента упора винта Ki от скольжения отно-
относительно шага нулевого упора st изменяется почти по линейному закону, а тангенс
угла наклона прямой К^ пропорционален шаговому отношению нулевого упора
Кх =cls1H1/D. ' (8.55)
Коэффициент момента К2 выражается аналогичной зависимостью
К2 = с2 (s j + т) (Я, /D)г. (8.56)
Коэффициенты пропорциональности с[ и с{ могут быть представлены в виде
следующих эмпирических зависимостей:
raero; (8.57)
с'г =0,125 с2п®70. ¦ (8.58)
Согласно приведенным выражениям КПД винта
Т?р 2-ппМ' К22т с2
где
' '
' (8.60)
Коэффициенты X. Я', F и р' определяют графически по рис. 8.20—8.23 или находят
по формулам
Ц7 (tg У! -0,1275) п
tgv1Vl,12+(tgv1+0,1275J
= l+O,O2(/32-IJ <1,15; ' ч (8.63)
р' = 0,78 + 2,05 \/S' +0,002. (8.64)
Для трехлопастных винтов принимают
Pi =Рг =2,02SRb V'oO-fo), (8.65)
где Rb =R/bCp —характеристика удлинения лопасти.
207
1.0
no
ЦУ
0.8
m
/
/
j
f
—i
s.
x 1ЛШ-,-0,1275)
N
s
4
0.5 1,0 1.5 tgv,
Рис. 8.20. Зависимость Л =/(tg p, )
J
0.5
Рис. 8.21. Зависимость ?'=/(/3,)
A
F
115
V0
1.05
wio To
Рис. 8.22. Зависимость F=/(/J2)
Для двухлопастных ГВ:
|3i =2,54Ль V^o A - ^о);
—*
***
/
У
1/
r
j32 =1,22K! =3,lRb y/F0(l-F0).
Для определения парали т рекомендуется
выражение
т =0,21 @,03 + 5') (tgyi + ctg v[J. (8.66)
Величины
tg v[ =0,94 tg^O- 0,11|32)V^7 (8.67)
и
й = (tg V\ т Ctg V\ ) ^o.Oo^
могут быть вычислены или найдены по рис. 8.24
как функции tg Vi и 02.
Далее вычисляют вспомогательные коэффи-
коэффициенты
я2 Л Др #!
X X?'
/
A
p'~0J8+2,O5W+0№
1.2
''"пЬТЩоТ ОМ~0,ОВ 0,10 0,12 Ь'
Рис. 8.23. Зависимость р' =/(«')
(8.69)
Рис. 8.24. Диаграмма для определения
зависимостей tg u[ и а '.
Ключ: /3, -> tg у, -> tg i/, ->-e '
1,34'-* 0,8 -* 0,74 ->¦ 4,38
208-
A-, =
8 Ad R
D
-^ = Т-ТГ- ТГ- (8-70)
Рациональная форма для расчета кривых действия ГВ по паральному методу
представлена в табл. 8.3. Задаваемый в строке 33 ряд значений скольжения Si должен
охватывать все необходимые режимы поступи ГВ.
Для определения параметра
(8.71)
R~b+ 0,5
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15*
16
33
34
35
36
37
38
39
Таблица 8.3.
Дм
Я, м
z
dc, м
Д«,м
А, м2
е,,м
е,.м
е =е, —е.а, м
6 наЛ0, м
8=е/Ь
6, по формуле (8.6)
ЬСр по формуле (8.3)
6' =е/Ьср
HID
~„ =«, /R
«1
st + m
а по формуле (8.71)
\р по формуле (8.13)
Я, =4, as,
/Г2 =yl, a(s, + m)
tip по формуле (8.59)
Расчет кривых действия ГВ по паральному методу
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
в = A/Ad
R/bCp
0, по формуле (8.65)
0, по формуле (8.65)
H1/D=H/D+4SI)
tgft по формуле (8.1)
tgv'j по формуле (8.67)
в' по формуле (8.68)
т по формуле (8.66)
X по формуле (8.61)
q' по формуле (8.62)
F по формуле (8.63)
р' по формуле (8.64)
К=Р' F
Аг по формуле (8.69)
Аг по формуле (8.70)
209
на рис. 8.25 приведена разработанная Папмелем специальная диаграмма. Полученные
в результате расчета кривые действия винта в свободной воде обычно представляют
графически в зависимости от относительной поступи Хр. Примерный вид таких кривых
показан на рис. 8.4.
Рекомендуемый порядок расчета в основном соответствует схеме Папмеля с неболь-
небольшими изменениями в части определения шагового отношения нулевого упора H^/D
и парали т [ 144].
Кривые действия позволяют произвести проверку согласованности спроектирован-
спроектированных ГВ с сопротивлением корпуса катера и характеристиками его механической уста-
установки. Такая проверка осуществляется при помощи расчета и графического построения
ходовых характеристик, совокупность которых называют паспортной диаграммой.
Паспортная диаграмма показывает, правильно ли подобраны ГВ и позволяют ли они
обеспечить катеру необходимую скорость при заданных значениях мощности и частоты
вращения двигателей. Кроме того, паспортная диаграмма позволяет проанализировать
действие спроектированных гребных винтов при изменении тех или иных условий
эксплуатации судна.
Для построения паспортной диаграммы необходимо иметь следующие зависимости.
1. Кривые изменения полезной тяги ГВ Ре =/(vK) и мощности двигателей Ne =
=/( "к) в зависимости от скорости судна при различных постоянных значениях частоты
вращения двигателей идв = const.
ЦБ5 0,70 0,15
0,80 0,85
о
«I"
1
4
i
ч
i
[4
.--
p—
1
7Д
—•
n
ч
Ч
ч,
.-
Ц-г
¦ | .
1
У
-*
=»•
-~-
=1
•^
*¦
4
Ч
ч,
•а.
¦»>
¦ч
ч,
,
7,26
^Р1
,
•**
"*8
ч
ч
ч
4s
¦z
~ч
-ч.
¦^.
а
1?
ч
Ч
-в
•Л
э
=;
^.
•».
S
?ч
ч
ч
г"
-
I
ч.
7,20
ч
ч
-—
ч
4
чгч
S
ч
ч
ч
ч.
им
=
Ц" ]
"ч
ч^
Г
У*
~?
Т
~?
"?•
ч
ч
у
--
¦ч
¦ч
<
ч
ч^
ч
ч
¦¦
<"
/
АЛ
XV
1,15
1
\
\
Ч
Ч
ч
п
\
Ч
ч
4
s
ч
**
7
U,i
»-
1
у*
">
>
=
^.
ч.
>
/
/
/
V
г
,ч
ч
ч,
>
ч
ч
¦-"
•в.
—,
<;
X
s
s
><
ч
-N
—¦
/
/
^^
. *
ч
s
X,
ч.
—
/
1,10
\
<
ч
ч
ч
ч
я
у"
'fi
/
*•
<
S
8
mm
I/
/<
Ч
у'
\
— -
у.
\
л
S
7,05
д
0^
У
\
а
|
К.
ч^
ч
7
ч.
-
О,1-
Л
j
й
lii
Ч
[ч.
Ч
7,
7
**
\
\_
Г
-
*>
ч
0,90
0,95
1,0а
Рис. 8.25. Диаграммадля определения коэффициента о.
*R/bep -* 1g v, -»¦ а
0,924
Ключ: S,
0,562
8 -¦ 1,00
210
2, Кривые сопротивления корпуса судна R=f(vK) при различных водоизмещениях
и условиях плавания.
3. Внешнюю, или ограничительную, характеристику двигателя Ne =/(идв) •
Совместное построение данных кривых позволяет увязать характеристики ГВ
с Характеристиками двигателя и корпуса судна. Расчет ходовых характеристик, входя-
входящих в состав паспортной диаграммы, производят в табличной форме для трех-четырех
значений относительной поступи винта \р и нескольких значений частоты вращения
двигателей, охватывающих необходимый диапазон их изменения. Форма расчета паспорт-
Га б л и ц а 8.4. Расчет паспортной диаграммы ГВ (Д м; И, м; ®; z; qM; in)
w, t
Ида , Об/МИН
и, с"
rip,t
"к" 0,278A-w)>KM/4
Таблица 8.5. Расчет паспортной диаграммы кавитирутцаго ГВ (Д м.Ну/D.
t
Чм
'Р
Пцв,об/мин
Лр
"Р
ЧрПкЧм
0,06 D
1-W
-WI
A,=f
к =
Ре = 10Г*К, (l-t)pn*D*4>ltkH
3,6Ч
-,кВг
211
ных диаграмм для одного значения поступи винта при отсутствии кавитации представ-
представлена в табл. 8.4, при наличии кавитации — в табл. 8.5.
Скорость катера или лодки vK> км/ч, полезную тягу одного винта Ре, кН, и соот-
соответствующую мощность двигателя Ne, кВт, для выбранных значений Хр и идв при
отсутствии кавитации определяют по следующим формулам:
Ре = lO-'HTiO -t)pn2D4; (8.73)
*е=-^— --?*-. (8.74)
36
При расчете паспортной диаграммы кавйтирующего ГВ дополнительно для каждого
значения скорости определяют:
число кавитации
2(ра +Jhs -Pd) 26(pa +yhs - Pd) AA
х = : * " Г = —Г ; (8.75.)
?J ?
критическую относительную поступь ГВ
и 0 2
отношение расчетной поступи винта к его критической поступи
Хр Хр
Л Hi 0,2 \
@,5 — + — 1 мк6 AsukS
\ U 49 I
(8.76)
(8.77)
коэффициенты уменьшения упора и КПД винта от влияния кавитации
, к, 5t) и 7?^, =/(Хр/Хр* , к, 5Х).
Тягу ГВ и необходимую мощность с учетом действия кавитации вычисляют по
формулам
Ре =10-3Kl(l-t)pn2D*vi; (8-78)
Ре v Ре vK
Ne = = -ТТ"*-. (8-79)
ПП'П'П 36т?
По результатам расчета производят построение паспортной диаграммы в виде
суммарных или отнесенных к одному винту характеристик тяги Ре -f(vK) и потребной
мощности Ne =/(vK) при постоянных значениях частоты вращения двигателей. При
зтом характеристики тяги и мощности строят в одинаковом масштабе скорости судна
vK (рис. 8.26).
Точки пересечения тяговых характеристик с кривой сопротивления R=f(vK),
приходящегося на один винт, построенной в тех же координатах, определяют скорости
212
кВт
ZOO
100
R,
Ре,
кн
6
3
-
^~2
/t
1
Г
?n
?
f
_^
'/
y,
•*'
A
%
><
r
—I
я
«Й-
w
.1
——
¦'
^-,
't
\
Л1
F
0
i
3
r^
2
1
У
J
JL
\
— •
S
Л
Й
/
<^
0
^?
л
Л
7
^ф
e1-
5
\
4
катера при соответствующих
значениях частоты вращения
двигателей. Мощность двига-
двигателей, необходимую для обеспе-
обеспечения полученных скоростей
судна, определяют по характе-
характеристикам Ne =/(vK) при тех
же частотах вращения. Соеди-
Соединив эти точки плавной кривой,
можно построить винтовую ха-
характеристику Ne =f(vK, ЯдВ),
выражающую зависимость мощ-
мощности двигателя от частоты его
вращения и скорости движения
катера при заданных условиях
эксплуатации. Каждой кривой
сопротивления катера соот-
соответствует своя винтовая ха-
характеристика, поэтому с изме-
изменением по тем или иным при-
причинам кривой сопротивления
изменяется и винтовая харак-
характеристика. При наличии внеш-
внешней или ограничительной ха-
характеристики, определяющей
возможные режимы работы
двигателя при эксплуатации
катера, целесообразно по-
построить ее на паспортной
диаграмме совместно с винтовой характеристикой. Соответственно в координатах
Ре — у* строят предельную тяговую характеристику Ре -f(i>K- "дв)-
Паспортная диаграмма позволяет решать следующие задачи, связанные с проекти-
проектированием ГВ и анализом их действия в различных условиях эксплуатации катеров
и моторных лодок.
1. Устанавливать соответствие гребного винта заданным условиям проектирования
и проверять достижение максимальной скорости катера при заданных значениях мощ-
мощности и частоты вращения двигателя. При этом паспортная диаграмма наглядно пока-
показывает, что если винт при номинальной частоте вращения не расходует всей заданной
мощности двигателя, то он является гидродинамически легким и должен быть утяжелен
путем увеличения диаметра или шага. Если же винт использует всю заданную мощность
при уменьшенной частоте вращения, то он является гидродинамически тяжелым и его
необходимо облегчить.
2. Определять режимы работы двигателей и скорости катеров и моторных лодок
при изменении в процессе эксплуатации их водоизмещения, центровки, состояния
обшивки корпуса, состояния погоды и т. д. Принципиально все указанные изменения
приводят к изменению величин сопротивления на различных скоростях. Поэтому для
решения возникающих задач и построения новых винтовых характеристик достаточно
нанести на паспортную диаграмму в координатах R - vK измененную кривую сопро-
сопротивления, приходящегося на один винт, и точки пересечения ее с кривыми тяги Ре
перенести при тех же скоростях на соответствующие характеристики мощности Ne =
=/(vK). При этом точки пересечения винтовых характеристик с заданной внешней
или ограничительной характеристикой мощности будут определять наибольшие скорости
судна и возможные режимы работы двигателей.
Рис. 8.26. Паспортная диаграмма КПК при различных услог
виях эксплуатации: а — тяжелый винт; б — согласованный
винт; в - легкий винт.
/ —кривые сопротивления КПК; 2 — предельная тяговая
характеристика; 3 — винтовые характеристики; 4 — внеш-
внешняя характеристика двигателя
213
3. Устанавливать зависимость скорости катера или лодки от частоты вращения
двигателей при различных водоизмещениях и изменении условий плавания. Возмож-
Возможность определения величин скорости судна и необходимой для их достижения мощности
на любом промежуточном режиме работы двигателей позволяет производить проектные
расчеты дальности плавания и решать другие эксплуатационные задачи.
4. Определять запасы мощности двигателей КПК как на горбе сопротивления,
так и на максимальной скорости, а также осуществлять проверку возможности выхода
их на крылья при различных водоизмещениях и различных состояниях погода. Данные
задачи также решаются с помощью построения на паспортной диаграмме соответствую-
соответствующей винтовой характеристики. Для обеспечения выхода катера на крылья необходимо,
чтобы винтовая характеристика в районе горба сопротивления всегда была ниже внеш-
внешней характеристики. При пересечении винтовой характеристики с внешней катер на
крыльях не выйдет, так как необходимая для этого мощность будет больше распола-
располагаемой. Запас мощности на любом режиме движения КПК определяется величиной
превышения внешней характеристики над винтовой.
5. Исследовать ходкость двух- или трехвальных судов на парциальных режимах,
т. е. при ходе под одним или двумя винтами. Для этого на паспортной диаграмме строят
кривые увеличенного сопротивления катера или лодки, приходящегося на один ра-
работающий ГВ, и соответствующие винтовые характеристики, по которым определяют
скорость судна, а также мощность и частоту вращения работающих двигателей. При
этом необходимо следить, чтобы не возникала их перегрузка. Сопротивление воды
при движении на парциальных режимах складывается из полного сопротивления судна
и сопротивления неработающих винтов.
Сопротивление застопоренных ГВ, Н,
R3,B=400D2v?@ « 30D2vi@. (8.80)
При свободном вращении неработающих винтов их сопротивление уменьшается
примерно в два раза.
При применении подвесных двигателей неработающие моторы следует вытаскивать
из воды.
Если полученный в результате анализа паспортной диаграммы ГВ удовлетворяет
всем необходимым требованиям задания, то на этом выбор его основных гидродинами-
гидродинамических элементов можно считать законченным. На основании произведенных расчетов
определяют конструктивные элементы винта и разрабатывают его рабочие чертежи.
8.7. Спрямленный контур и прочный профиль лопасти
Для выполнения рабочих чертежей ГВ помимо его основных элементов — диаметра,
шага, числа лопастей и дискового отношения - необходимы также контур спрямленной,
поверхности и продольный профиль лопасти. Ординаты контура спрямленной поверх-
поверхности с заданными величинами дискового отношения 0 и приведенного радиуса Ro *
<* 0,6/? могут быть получены по формуле
ЪГ =^, (8.81)
где Ьг =/(Г) -ширина лопасти на заданном радиусе г =RT; b=fG) -относитель-
-относительная ширина лопасти, определяемая по рис. 8.27 или по табл. 8.6.
На рис. 8.27 приведено три типа наиболее употребительных контуров спрямленной
поверхности лопасти. Симметричный контур, близкий по форме к эллиптическому,
может быть получен по кривой 1. Применение данного контура для широколопастных
ГВ несколько улучшает их антикавитационные качества.
214
i
\
\
\
\
to
V
\
\
\
OJS
\
\
0,6
-ч
1
ОМ
а
V
2
г
Щ
0.9
0.1
0.6
Iff
0.4
0.2
п
и
ч
п
\
1
s
2
ч
/
0,4
Д-
1
{_
У
/
пб
7'
2-
>
г
7
г
0.8
V
у
\
\
1
\L
1
*
W
уг
\
Т
т
А
т
>
~7_
j
\
\
/
хг
Рис. 8.27. Относительные ординаты трех типов спрямленного контура ло-
лопасти гребного винта
Несимметричный саблевидный контур, применяемый для получения плавного
безударного входа лопасти в воду с целью уменьшения вибрации при работе винта
вблизи свободной поверхности, может быть построен по кривой 2. Относительные
отстояния входящей и выходящей кромок1 от осевой линии лопасти 0-0 харак-
характеризуются ветвями *i и Ь2, а положение линии максимальных толщин - кри-
кривой Тт.
Кривая 3 рекомендуется для построения спрямленного контура лопастей ГВ,
работающих в направляющих насадках и водометах.
Значения расчетных ординат всех указанных кривых в зависимости от относитель-
относительного радиуса приведены в табл. 8.6.
Таблица 8.6.
Относительные ординаты для расчета контура спрямленной поверхности
лопасти ГВ
Y
r=~R
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0,90
0,95
1,0
Кривая 1
brz
1 D®
1,32
1,65
1,92
2,12
2,28
2,32
2,25
1,96
1,62
0
Кривая 2
Ь~ DQ
1,72
1,94
2,12
2,26
2,30
2,24
2,06
1,62
1,18
0
М
Ь' D®
1,06
1,19
1,28
1,33
1,30
1,18
0,96
0,56
0,26
-0,45
0,66
0,75
0,84
0,93
1,00
1,06 '
1,10
1,06
0,92
0,45
xmz
Хт~ DQ
6,47
0,53
0,56
0,54
0,40
0,20
-0,01
-0,22
-0,33
-0,45
Кривая 3
brz
h- DQ
1,16
1,42
1,68
1,90
2,10
2,24
2,32
2,32
—
2,28
215
Распределение наибольших толщин вдоль радиуса лопасти называют продольным
или прочным профилем лопасти. Для его построения определяют толщины в трех
точках — у корня лопасти вблизи ступицы, на приведенном радиусе Ro и у края на
радиусе R.
Толщина лопасти у корня может быть вычислена по приближенной эмпирической
формуле
Г~Т~
(8.82)
ап0
где Р — упор ГВ, Н; ап — предел прочности материала ГВ, МПа.
Принятое значение ек, мм, должно быть проверено специальным расчетом на проч-
прочность. При этом, во избежание чрезмерного увеличения профильного сопротивления,
толщина лопасти у корня не должна превышать значения
ек =@,15- 0,20) Ьк. (8.83)
где Ьк — ширина лопасти у корня.
Толщину лопасти на приведенном радиусе принимают
е=0,5ек. (8.84)
Толщина края лопасти устанавливается по конструктивным соображениям и обыч-
обычно составляет
eR «0,01 R. (8.85)
Полученные значения толщин позволяют построить прочный профиль лопасти
в виде зависимости е =f(r ).
Параллельно с выбором прочного профиля решается вопрос о профилировке сече-
сечений лопастей. Авиационные профили, благодаря увеличенной кривизне засасывающей
стороны и хорошо скругленному носику, имеют более широкий диапазон углов безудар-
безударного входа, при котором профильное сопротивление является наименьшим. Выбор
той или иной формы сечений лопастей определяется относительной толщиной лопасти
на приведенном радиусе Ro. Для некавитирующих винтов при 5 > 0,05 следует прини-
принимать авиационный профиль. При 5 < 0,05 профиль сечений имеет меньшее значение
и может быть принят сегментным. Поэтому для многих ГВ применяют комбинирован-
комбинированную профилировку лопастей, при которой сечения на радиусах 7 < 0,6 имеют авиа-
авиационный профиль, а на радиусах Г > 0,6 — сегментный.
При наличии кавитации ГВ или опасности ее возникновения профилировка лопаст-
лопастных сечений производится с учетом приведенных в п. 8.5 рекомендаций. Для опреде-
определения стрелки прогиба средней линии сегментного вогнуто-выпуклого эквивалент-
эквивалентного профиля используется формула (8.45)
ес ~ 0,1 Су Ъ. (8.86)
8.8. Выбор количестве ГВ, направления их вращения
и расположения относительно корпуса
С точки зрения использования мощности двигателя и повышения пропульсивного
КПД установка одного ГВ как правило эффективнее, чем двух или трех. Однако в неко-
некоторых случаях не удается избежать многовальных установок. Основной причиной
этого является отсутствие двигателей и, в частности, подвесных моторов необходимой
мощности. Правда, установка нескольких ГВ имеет и положительные стороны —
216
Рис. 8.28. Расположение гребных винтов относительно кор-
корпуса катера.
а = @,14^0,20) D; Ь = @,16 +0,26) D; С = @,12 * 0,24) D
улучшается маневрен-
маневренность и при парциальной
работе повышается эко-
экономичность и увеличи-
увеличивается дальность плавания
судна.
Направление враще-
вращения ГВ также может ока-
оказать влияние на поведение
судна. Известно, что ра-
работающие ГВ при одно-
одностороннем вращении
вызывают занос кормы
в сторону вращения вин-
винтов и способствуют появ-
появлению крена судна. При
этом судно начинает со-
совершать циркуляцию.
Величины углов крена за-
зависят от характеристик
остойчивости судна и от
его скорости. С увеличением скорости углы крена обычно возрастают, так как при
числах Fr^ =3-^4 характеристики остойчивости во многих случаях ухудшаются, а
кренящие моменты растут. Значительных размеров углы крена достигают на отно-
относительно узких и легких судах, в особенности с малооборотными винтами большого
диаметра. При увеличении относительной ширины судна действие реактивного момента
становится менее заметным.
Кроме того, необходимо иметь в виду, что на многих глиссирующих судах ГВ
обтекаются неравномерным и, в частности, сильно скошенным потоком. Косое обте-
обтекание винта смещает точку приложения суммарного упора всех лопастей на некоторое
расстояние от оси винта в сторону его вращения, что усугубляет влияние заноса кормы.
Для поддержания прямого курса судна с ГВ одностороннего вращения приходится
постоянно перекладывать рули, что увеличивает сопротивление и снижает скорость
судна. Кардинальным средством устранения крена и обеспечения устойчивости хода
является установка на судне двигателей и движителей противоположного вращения.
В этом случае благодаря симметричности все боковые силы и моменты будут взаимно
уравновешиваться. С целью уменьшения опасности засасывания атмосферного воздуха
и захвата винтами плавающих в воде предметов направление вращения ГВ целесооб-
целесообразно принимать наружным, т. е. через верх к бортам.
Для повышения пропульсивных качеств и уменьшения вибрации корпуса следует
обратить внимание на рациональное расположение ГВ относительно корпуса судна
и других выступающих частей. При этом необходимо стремиться к обеспечению воз-
возможно более свободного обтекания ГВ. Различные варианты размещения ГВ за корпу-
корпусом судна и размеры рекомендуемых зазоров представлены на рис. 8.28. Нижние преде-
пределы указанных величин могут быть допущены только для тихоходных малых судов.
Для быстроходных катеров и лодок, а также при опасности возникновения вибрации,
зазоры следует по возможности увеличивать. При этом необходимо также иметь в виду
следующие рекомендации.
1. Для уменьшения вредного влияния косого обтекания на работу винта линия
гребного вала должна иметь возможно меньший угол наклона.
2. Кронштейны гребных валов лучше делать однопалыми. Сечения лап кронштей-
кронштейнов должны иметь хорошообтекаемую форму и входить в поток с нулевым углом
атаки. Благодаря этому уменьшаются сопротивление и вихреобразование лап крон-
кронштейнов.
217
3. Для увеличения отстояния ГВ от концевого кронштейна целесообразно несколь-
несколько откидывать лопасти в корму. Экспериментальная проверка показывает, что наклон
лопастей в пределах 10—15° практически не отражается на эффективности ГВ. .
4. Для получения контрпропеллерного эффекта и повышения пропульсивного
коэффициента рули следует устанавливать в непосредственной близости за ГВ. Это
улучшает и работу самих рулей. Эффективность рулей быстроходных глиссирующих
катеров и лодок значительно повышается, если их располагать под антикавитационной
плитой или под днищем. Благодаря этому удается существенно уменьшить площадь
рулей без ухудшения маневренных качеств судна.
5. Перекрытие дисков ГВ в осевом направлении совершенно недопустимо, так как
в этом случае возмущенный поток от переднего винта будет создавать большую нерав-
неравномерность скоростей в диске заднего винта и условия его работы резко ухудшатся.
Применительно к подвесным моторам последняя рекомендация имеет дополнитель-
дополнительную особенность, связанную с тем, что при перекладке моторов расстояние между
осями ГВ и их дисками начинает уменьшаться. Для компенсации этого уменьшения
подвесные моторы надо располагать дальше друг от друга, чем стационарные двигатели.
Необходимое расстояние между осями ГВ подвесных моторов в прямом положении
может быть найдено по формуле
(8.87)-
cosonM
/
где оп#м — максимальный угол перекладки моторов.
Расставлять моторы шире, чем зто требуется по формуле (8.87), не следует, так как
ГВ могут оказаться расположенными слишком близко к бортам и появится опасность
их оголения при кренах судна на поворотах.
6. Устанавливая подвесные моторы, необходимо следить, чтобы расположенная
над ГВ антикавитационная плита всегда находилась ниже продолжения линии днища
не менее чем на 10-20 мм.
8.9. Рекомендации по подбору и доводке ГВ
Скоростные испытания судна и их анализ являются основным средством контроля
методов расчета ходкости и их дальнейшего совершенствования.
При проведении натурных скоростных испытаний на каждом режиме работы дви-
двигателей обычно измеряют следующие характеристики:
частоту вращения двигателей или гребных валов;
скорость и ходовой дифферент судна;
расход топлива (для определения мощности дизелей).
При подготовке к испытаниям подводная часть корпуса должна быть приведена
в хорошее состояние, очищена и окрашена. При проведении испытаний необходимо
тщательно определять водоизмещение судна, используя для этого взвешивание, замеры
осадок носом и кормой, а также сравнение элементов расчетной и фактической нагру-
нагрузок. ГВ должны быть обмерены на специальных приборах. Если на судне имеются
подводные крылья, то их установочные углы замеряют при каждом подъеме судна.
В результате скоростных испытаний должны быть выбраны ГВ, которые при заданных
значениях водоизмещения судна и мощности механической установки имели бы но-
номинальную частоту вращения, обеспечивая при этом достижение наибольшей скорости.
ГВ, удовлетворяющие указанным условиям, считаются согласованными с сопротивле-
сопротивлением судна и мощностью двигателей. При приведении элементов ГВ в соответствие
с мощностью двигателя и сопротивлением корпуса судна необходимо учитывать сле-
следующие соображения.
218
Внешняя и винтовая характеристики двигателей внутреннего сгорания имеют
различные законы изменения мощности в зависимости от частоты вращения и могут
пересекаться только в одной точке.
Виешняя характеристика представляет зависимость между мощностью и частотой
вращения двигателя при наибольшей подаче топлива. Эта характеристика не зависит
от особенностей потребителя мощности. ,
Зависимость мощности двигателя от частоты его вращения при различной подаче
топлива и работе на ГВ фиксированного шага называют винтовой характеристикой.
Эта характеристика определяется сопротивлением судна при тех или иных условиях
его плавания и элементами ГВ. Для водоиэмещающих судов она близка к кубической
параболе
7.
"ном
Для глиссирующих катеров и КПК показатель степени параболы часто снижается
и достигает значений 2 и менее.
Наилучшее согласование ГВ с двигателем достигается при пересечении винтовой
и внешней характеристик в точке, соответствующей номинальным или другим задан-
заданным значениям мощности и частоты вращения. Однако при часто изменяющихся усло-
условиях эксплуатации судна обеспечить постоянную работу двигателя на номинальном
режиме не удается. Задачей доводки винта на скоростных испытаниях является выбор
таких его элементов и характеристик, которьде создавали бы некоторый запас мощ-
мощности и обеспечивали работу двигателя преимущественно на расчетном режиме, приня-
принятом при проектировании ГВ. Обычно этот режим
близок к 90% номинальной мощности, что позво-
позволяет обеспечить отсутствие перегрузки двигателей
при различных колебаниях водоизмещения судна,
увеличении волнения и ветра и т. д. В связи с этим,
чтобы избежать снижения проектной скорости,
целесообразно ходовые испытания нового судна на
тихой воде проводить при увеличенной частоте
вращения двигателей и = 1,06 я н0 м.
Выбор необходимых элементов ГВ осущест-
осуществляется главным образом путем сравнения его
расчетной винтовой характеристики с действитель-
действительной, полученной на основании измерений скорости
судна и, по возможности, мощности на различных
режимах работы двигателя. При этом может ока-
оказаться, что ГВ будет снимать с двигателя всю распо-
располагаемую мощность, не развивая номинальной или
заданной частоты вращения. Такой ГВ перегружает
двигатель и его, как уже указывалось, называют
гидродинамически тяжелым. Если же ГВ развивает
заданную частоту вращения, ие расходуя всей
располагаемой мощности двигателя, то ои будет
гидродинамически легким (рис. 8.29).
Приведение ГВ в соответствие с механической
установкой судна, т. е. повышение или понижение
фактически расходуемой мощности двигателя до
совпадения ее с заданной или располагаемой, может
достигаться двумя путями — изменением сопро-
сопротивления судна и изменением характеристик ГВ.
Изменение сопротивления полиостью построенных
Me.
100
90
80
60
50
30
го
60
/
//,
'//
/
/
/,
//
'/
70
/
/ t
V
'/
гч
1
/
/
/
80
1
/
/
/ ,
/
/
,--
/
Л
V
/
5/
/
90 „7
/
/
/
/
100
Рис. 8.29. Внешняя и винтовые
характеристики двигателя.
/ — внешняя характеристика дви-
двигателя; 2 — виитовая характеристи-
характеристика тяжелого виита; 3 — теорети-
теоретическая винтовая характеристика
Ne =кп3 ; 4 — рекомеидуемая ха-
характеристика согласованного греб-
иого виита; 5 — виитовая харак-
характеристика легкого виита
219
катеров и мотолодок может быть достигнуто изменением их нагрузки и центровки,
т. е. увеличением или уменьшением количества пассажиров и перевозимых грузов,
а также места их расположения.
Необходимые значения диаметра или шага ГВ могут быть определены проверочным
расчетом паспортной диаграммы. С целью ускорения работ величину ожидаемой коррек-
корректировки диаметра или шага ГВ в процессе его доводки можно определять по прибли-
приближенной формуле (с учетом знака)
АН =Н A--2йЛ mAD, (8.89)
\ «1 /
где Н — исходный конструктивный шаг ГВ; nQ — требуемая или номинальная частота
вращения ГВ или двигателя; щ — соответствующая частота вращения, достигнутая
на ходовых испытаниях.
Увеличение или уменьшение шага металлических — бронзовых, латунных и сталь-
стальных — ГВ малых судов осуществляется соответствующим поворотом каждой лопасти
на нужный угол в горячем состоянии. Предварительно для нагнетающей поверхности
лопастей изготовляют новые шаговые угольники для контроля изменения шага ГВ.
Облегчение ГВ чаще производят обрезкой концов лопастей, т. е. уменьшением
его диаметра. Однако при этом следует считаться с возможным снижением КПД винта
вследствие изменения режима его работы и с опасностью возникновения кавитации
из-за утолщения концевых сечений лопастей. Кромки лопастей при обрезке аккуратно
заваливают. Новый контур лопасти должен плавно сопрягаться со старым.
Относительная простота подъема малых судов и спуска их на воду позволяет для
более тщательного выбора диаметра ГВ осуществлять обрезку лопастей в процессе
двух, а то и трех приближений. После каждой обрезки кромок лопастей следует обя-
обязательно произвести статическую балансировку ГВ. Утяжеление ГВ малых судов путем
наварки лопастей не практикуется, так как помимо технологических трудностей это
ведет к уменьшению зазоров между винтом и днищем и может вызвать вибрацию.
Если по каким-либо причинам диаметр или шаг ГВ невозможно довести до необхо-
необходимых значений, то может встать вопрос о замене винта. Этот вопрос также возникает
при поломке или сильном повреждении ГВ. Для быстрого подбора более или менее
равноценных ГВ, позволяющих нормально загрузить двигатель и развить достаточную
скорость, можно руководствоваться известной эмпирической рекомендацией о взаимо-
взаимозаменяемости ГВ в случае близости их суммарных значений диаметра и шага
Н +D = const. (8.90)
Данная рекомендация относится в основном к некавитирующим ГВ малых судов.
При наличии кавитации должны быть близкими также дисковые отношения винтов
и профилировка лопастных сечений.
В общем случае при практическом применении формул (8.89) и (8.90) следует
иметь в виду, что во избежание существенного уменьшения КПД винта отклонения
величин диаметра и шага в ту или иную сторону не должны превышать ~10%.
9. ВОДОМЕТНЫЕ ДВИЖИТЕЛИ
9.1. Основные понятия и определения.
Водометным движителем (ВД) или водометом называют движительный комплекс,
состоящий из водопроточных труб и рабочих колес, которь!е засасывают воду через
приемное отверстие в днище и выбрасывают ее с повышенной скоростью через спе-
специальное выходное сопло в кормовой части судна. Реакция отбрасываемой струи дви-
220
жет судно в противоположную сторону. ВД отличается от всех других типов движителей
тем, что он полностью расположен внутри корпуса судна.
На водометный движитель существуют две точки зрения. Согласно одной из них
ВД представляет собой центробежный или осевой пропеллерный насос. В этом случае
расчет и проектирование ВД производят по насосным справочникам и диаграммам.
Согласно другой точке зрения ВД рассматривается как ГВ, работающий в трубе. Проек-
Проектирование такого ГВ производится с помощью теории эквивалентного движителя
по расчетным диаграммам изолированных ГВ. Этот метод проектирования ВД,
вследствие своей простоты и надежности, является более предпочтительным для малых
судов. Достоверность этого метода многократно подтверждена на натурных ходовых
испытаниях катеров различного водоизмещения и назначения.
Пропульсивный коэффициент ВД на малых и средних скоростях не превышает
значений 17=0,35 т 0,45, что является существенным недостатком. Для повышения
эффективности ВД и уменьшения потерь на закручивание струи за движителем в трубе
обычно устанавливается спрямляющий аппарат — контрпропеллер.
Необходимо отметить следующие достоинства ВД:
отсутствие выступающих частей вне корпуса судна, благодаря чему значительно
уменьшается габаритная осадка судна и повышается живучесть движительного комп-
комплекса (для уменьшения опасности засасывания в трубу находящихся в воде предметов
приемное отверстие обычно защищается решеткой из хорошо обтекаемых профилей);
более широкий, чем у открытых ГВ, диапазон бескавитационных режимов работы
вследствие обеспечения большей равномерности осевого обтекания винта и возмож-
возможности осуществления конструктивного поджатия, замедляющего скорость потока
в трубе;
возможность изменения характеристик и направления отходящего потока путем
установки поворотных насадок, заслонок и дефлекторов, а также воздушных клапанов.
Благодаря этому обеспечиваются высокие маневренные качества судна на переднем
и заднем ходу, а также его реверсирование при отсутствии реверсивной муфты. Оста-
Остановка судна — режим „стоп" — при этом достигается подачей атмосферного воздуха
в водометную трубу перед ГВ.
Общий вид ВД схематически представлен на рис. 9.1. Элементы трубы ВД выбирают
из условия обеспечения наиболее высоких гидромеханических качеств. С целью умень-
уменьшения потерь на подъем воды применяют полуподводный выброс струи. Для обеспе-
обеспечения захвата воды лопастями ГВ в момент начала движения ось гребного вала при
самой малой осадке судна Т не должна быть выше уровня свободной поверхности
воды. Основные элементы водометной трубы обычно принимают в следующих пре-
пределах:
Рис. 9.1. Схема водометного движителя.
1 —выходное сопло; 2 — концевой обтекатель;
3 — контрпропеллер; 4 — ГВ водомета; 5 - ио-
совой обтекатель; 6 — гребиой вал
«.„
Рис. 9.2. Продольное сечение водозаборной
части водометной трубы
221
общая длина прямого участка водометной
трубы
Таблица 9.1. Расчет ординат
продольного сечения водозаборной
части водометной трубы
/т= B,0-3,0) D;
(9.1)
входная часть трубы — от всасывающего от-
отверстия до ГВ
1е =@,8-4,0) D;
(9.2)
рабочая часть трубы для размещения ГВ
и контрпропеллера
Is = @,6-1,0) D;
(9.3)
X
0
ОД
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
У
0
0,04
0,14
0,27
0,42
as 7
0,72
0,84
0,93
0,98
1,00
x=xlBX
y=yDr
выходная часть трубы — от контрпропеллера
до выходного среза
U=h~le - U = @,6-1,0) D.
(9.4)
Типичное продольное сечение водозаборной части трубы ВД для водоизмещающих
и глиссирующих малых судов представлено на рис. 9.2. Ординаты этого сечения, отне-
отнесенные к диаметру цилиндрической части трубы DT, приведены в табл. 9.1. При опре-
определении натурных ординат данного водозаборника, его длины и положения по высоте
применительно к проектируемому судну необходимо стремиться к тому, чтобы угол
подъема воды на входе не превышал значений
•вх
30-35'
(9.5)
Водометную трубу малого судна можно формировать из стеклопластика, а также
сваривать из легкого сплава или стали. При зтом для уменьшения сопротивления про-
проточная часть трубы должна быть гладкой. Конструкция ВД должна предусматривать
удобство монтажа и демонтажа элементов движителя, а также свободный доступ для
осмотра ГВ и спрямляющего аппарата.
.Водометно-движительный комплекс имеет следующие основные характеристики,
определяющие его эффективность на различных режимах работы:
площадь рабочего сечения трубы водомета
? =О,25тг(?>+2ДJ« 0,25тг?>2 =
(9.6)
где Dj — диаметр трубы водомета; D — диаметр ГВ водомета (зазор между кромками
лопастей ГВ и трубой Д на малых судах практически не превышает 1-2 мм, И им
обычно пренебрегают);
коэффициент поджатая /Зв , представляющий собой отношение площади выход-
выходного среза сопла Лд к площади рабочего сечения,
=Аа /Ат * Аа /Ad ;
(9-7)
поступательная скорость ВД при работе за корпусом судна, движущегося со ско-
скоростью v,
v e =
- w),
где w — коэффициент попутного потока;
(9.8)
222
средняя скорость протекания жидкости через диск ГВ
(9.9)
где коэффициент qs характеризует соотношение между скоростью судна и средней
скоростью потока в диске ГВ;
коэффициент засасывания ВД, учитывающий влияние корпуса судна и трубы водо-
водомета на работу комплекса,
Гв = Аг-^> (9-Ю)
где Р — упор ГВ водомета; Ре — полезная тяга комплекса;
коэффициент нагрузки ГВ водомета по упору
ор-
2?
(9.11)
коэффициент нагрузки водометного комплекса по полезной тяге
_pv2Ad
(9.12)
отношение расчетной скорости поступательного перемещения ГВ водомета vp
к скорости судна, v, при котором обеспечивается условие эквивалентности работы
ГВ в свободной воде и в водометной трубе,
v
Ое
4A
Значения коэффициентов
(9.13)
1
Т
D
J
O'e
q* vs
находят по графикам, представленным на рис. 9.3 и 9.4.
0,1 0,2
0Л 0,5 1/б'в
Рис, 9.3. График для определения коэффи-
коэффициента засасывания водометного комп-
комплекса /в
WV+tJ/ei
Рис. 9.4. График для определения относитель-
относительной скорости протекания воды через диск
водометного движителя
223
9.2. Определение наибольшей скорости судна
и основных элементов ГВ водомета
Проектирование ГВ водомета производится на основе тех же исходных данных,
что и проектирование открытого ГВ.
Число лопастей принимают обычно z =3 или z =4. Дисковое отношение, найденное
по рис. 8.17 или по формуле (8.43), не должно превышать значений 0 = 1,0 -г 1,2.
Дальнейший расчет по определению наибольшей скорости малого водоизмещающе-
го судна и основных элементов ГВ водомета выполняют по приводимой ниже схеме.
Расчет производится по диаграмме Кх - Лр для изолированных ГВ в свободной воде,
имеющей выбранное дисковое . отношение. При этом следует только иметь в виду,
что при работе ГВ в водометной трубе уменьшаются концевые потери. Соответствую-
Соответствующую поправку, учитывающую уменьшение концевых потерь винта, находят по рис. 9.5
и с ее помощью определяют необходимое значение коэффициента упора ГВ водомета
(гш:12и13):
1. vK, км/ч
2. v =0,278 v,o м/с
3./>e=/(vK),H
4. D =
1,45
,м
5. (Те =
6. T/D
$ре
e. T/D)
1О.ХР =
11. Op =
а'е
12. киор =/(Хр, ор)
1,0 2,0
Рис. 9.5. График для определения уменьшения
концевых потерь водомета
14.HID =/(*,, Ар)
15. ifp = /(*i, Ар)
16.т?р =0,S
17.JCa =
Элементы ГВ и наибольшая скорость
судна, как и ранее, соответствует точке,
в которой необходимая мощность двигате-
двигателя будет равна располагаемой. Эта точка
находится по графической зависимости
Ne -f(vK), построенной по результатам
224
расчета, произведенного для нескольких скоростей судна vK, близких к ожидаемому ее
значению. Для найденной точки целесообразно произвести контрольный расчет. Бели
диаметр ГВ водомета, полученный в п. 4 схемы, окажется больше допустимого по
конструктивным соображениям, то расчет по приведенной схеме повторяется для
заданного значения диаметра ГВ.
Данная схема расчета в основном соответствует рекомендациям [14, 15] с неболь-
небольшими уточнениями в части определения необходимой мощности двигателя Ne, КПД
т?р и шага Н ГВ. Практика показывает, что рекомендация об уменьшении шага ГВ
водомета на 6% не подтверждается результатами натурных ходовых испытаний малых
судов, и поэтому она исключена из схемы. При этом следует иметь в виду, что приве-
приведенная схема расчета не предусматривает поджатая отходящей струи. Решение о необ-
необходимости поджатая струи для обеспечения нормальной загрузки двигателей и полу-
получения расчетной скорости судна может быть принято по результатам доводки ВД на
ходовых испытаниях Малого судна.
9.3. Расчет кривых действия ГВ водомета и паспортной диаграммы
Расчет кривых действия ГВ водомета производится с помощью выбранных диаграмм
Кх — Хр и рис. 9.5, позволяющего учесть уменьшение концевых потерь ГВ при его ра-
работе в водометной трубе. Вначале находят характеристики ГВ без учета влияния
корпуса судна:
1. Хр
2.Kl=f{\p,H/D)
З.тТр =/)
6. KH Op — "~2—
4. Цр =0,94Щр
7. (Тр =/(Хр, кн^р).
По результатам данного расчета строят вспомогательные зависимости ар
Vp=f(^p) и К2 =/(Хр), с помощью которых определяют кривые действия водомет-
водометного комплекса на различных режимах работы с учетом влияния корпуса судна. Расчет
кривых действия с учетом влияния корпуса производят для ряда коэффициентов
нагрузки комплекса по полезной тяге а'е , близких к его рабочему значению на макси-
максимальной скорости судна, в следующей последовательности:
1. а'е
2.tB=f(T/D, Ца'е)
.J—!-., (-lift)
o'e
5. Ор =
6. Хр = Vp/nD =/(ffp)
8 Зак. 738 225
9.Ke = 0,393 а; ( —
V Ур
Кривые действия водометного комплекса с учетом влияния корпуса строят в виде
зависимостей Ке =/(Х), К2 =/(Х) и г)р =/(Х). Далее для нескольких значений поступи
X и необходимого диапазона частот вращения двигателя производят расчет паспортной
диаграммы по следующим формулам:
скорость, км/ч,
vK =3,6 \nD =0,06 Хпдв?
тяга ВД, кН,
Pe=l0-3Kepn2D4;
мощность двигателя, кВт,
K2pn3Ds
Ne~ 159,2т?м '
(9.14)
(9.15)
(9.16)
Таблица для расчета паспортной диаграммы ВД имеет форму, аналогичную табл. 8.4.
Построение и анализ паспортной диаграммы судна с ВД производят обычным образом
в соответствии с п. 8.6.
Конструктивные элементы ГВ водомета - спрямленный контур лопасти, прочный
профиль и другие характеристики — определяют в соответствии с п. 8.7.
Контрпропеллер (КП), или спрямляющий аппарат (СА), позволяет использовать
для получения дополнительной тяги часть энергии, затраченной ГВ на закручивание
струи. КП устанавливается непосредственно за ГВ водомета (рис. 9.6), и его целесооб-
целесообразно использовать в качестве кормового кронштейна, что упрощает и удешевляет
конструкцию и способствует повышению пропульсивного коэффициента ВД.
Количество лопастей СА
zKn =* +1.
(9.17)
U5 2,0 2,5 t
КП
Рис. 9.6. Схема установки контрпропеллера Рис. 9.7. К определению коэффициента влияния
решетки лопастей КП
226
Ширина спрямленного сечения лопасти КП, постоянная вдоль радиуса, прини-
принимается равной примерно половине наибольшей ширины сечения лопасти ГВ
Ькп^О,5Ьт. ¦ ¦-
Определение элементов КП производят по окончании расчета ходкости для ряда
относительных радиусов Т = г /R =0,4; 0,6; 0,8 и 1,0 в следующем порядке.
1. Определяют окружную вызванную скорость
— Rco
г - -ч / F2 -
(9.18)
Радиусы ступиц гс ГВ и СА принимают одинаковыми. Угловую скорость вычисляют
для максимальной частоты вращения ГВ со =2w«.
2. Находят циркуляцию скорости вокруг лопасти КП
2nrwt
Гкп = — • (9.19)
zKn
3. Вычисляют скорость vKII и угол |3КП натекдния воды на лопасть КП:
; (9.20)
ctgj3Kn = wt/2vs. (9.21)
4. Для обеспечение безударности входа лопасти КП ее угол установки должен быть
«кп~|ЗкП. ' (9.22)
5. Определяют относительный шаг решетки КП
Гк„=7^- ' (9.23)
и по рис. 9.7 находят коэффициент влияния решетки
«кп =/(*кп. '«и). . (9.24)
6. Вычисляют угол нулевой подъемной силы данного сечения лопасти КП
57,3 Гкп
«°окп=- . (9.25)
-Z VKn 0КП Ккп
7. Определяют стрелку прогиба и радиус дужки сечения лопасти КП
(9.26)
-. . (9.27)
~" l-cos2a0Kn
8. Выбирают толщину сечения лопасти КП екп, мм по приближенной формуле
«ки* 0,01 D + 2. (9.28)
9. Для наименьшего расчетного радиуса КП производят проверку отсутствия кави-
кавитации по формуле
' 227
где b'Kn —ширина сечения КП,
минимально допустимая из
условия отсутствия кавитации.
Если принятая ширина Ькп
не удовлетворяет данному
условию, то расчет элемен-
элементов КП повторяют для ширины
лопасти .
-1,25&кп-
(9.30)
Таблица 9.2. 1
'асчет продольного профиля выходного
сопла (ft,; rKC=RrS/fa; /B.c; Rr- rKC)
X
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
У
1,00
0,95
0,87
0,74
0,58
0,42
0,28
0,16
0,06
0,02
0
г=гк.с+У
На основа!ши произве-
произведенных расчетов ГВ и КП
разрабатываются их теорети-
теоретические и рабочие чертежи. Ра-
Рабочие чертежи ГВ водомета и
КП ничем не отличаются от рабочих чертежей ГВ и выполняются также в соответствии с
существующими нормативными документами.
9.5. Определение формы выходного сопла
Профиль выходного сопла, формирующего струю ВД, должен обеспечивать плав-
плавный безотрывный поток жидкости при заданной площади концевого сечения и мини-
минимальных гидравлических потерях. Радиус концевого сечения сопла гКтС определяют
исходя из принятого коэффициента поджатия |За . При известных размерах длины
сопла /в.с и входного радиуса RT = 0,5DT форма образующей выходного сопла может
быть получена по формуле
-гк.с),
(9.31)
где г — текущее значение радиуса сопла на расстоянии хот входного сечения (рис. 9.8);
У =y/(Rт —гк.с) ~относительные ординаты продольного сечения выходного сопла,1
определяемые по табл. 9.2.
Следует иметь в виду, что иногда для уменьшения длины ВД контрпропеллер
совмещают с выходным соплом. В этом случае площади живого сечения выходного
сопла должны быть увеличены на величину площади поперечного сечения ступицы
КП и обтекателя.
Кроме того, в некоторых случаях вместо наружного поджатия струи применяют
внутреннее путем помещения в сопло расширяющегося центрального тела, являющегося
продолжением ступицы КП (рис. 9.9). Это также позволяет несколько сократить длину
выходного сопла.
ftic. 9.8. Профиль выходного сопла
ftic. 9.9. Схема внутреннего поджатия струи
водомета
228
Поскольку окончательная величина коэффициента поджатия сопла обычно уста-
устанавливается на ходовых испытаниях, то для облегчения доводки ВД целесообразно
предусмотреть возможность изменения площади выходного отверстия сопла. Это
можно достичь применением различных внутренних или наружных фигурных вставок,
допускающих дополнительную расточку для выбора необходимого коэффициента
поджатия, или изготовлением нескольких вариантов выходного сопла.
Обводы водоизмещаюших судов отрабатывались многовековой практикой судо-
судостроения. Старое правило волжских корабелов: строить лодки „подпиньше и по-
прогонистей", как и немецкое „lange lauft" („длина бежит") отразили объективную
зависимость скоростных возможностей судна от его размерений.
Определяя водоизмещающий режим как движение при Fr/, й 0,4, следует сразу
отметить, что для малых судов это очень жесткие лимиты. Так, 3-метровая лодка
при скорости 10 км/ч уже превысит указанный предел и, следовательно, с мотором
любой мощности ее движение будет осуществляться в режимах частичного или полно-
полного глиссирования. По этой причине среди малых судов с механическим двигателем
водоизмещающие составляют лишь незначительную часть.
В большей мере водоизмещающему режиму соответствуют условия плавания
парусных судов. Эмпирически установленный [77] предел скорости килевых яхт/
v =2,43 y/L. уз, при пересчете в точности соответствует Fr/, =0,4. В определенных
условиях большинство современных парусных судов, впрочем, способно преодоле-
преодолевать этот рубеж, используя динамические силы поддержания (например, на попутной
волне в режиме серфинга). Таким образом, и их нельзя безоговорочно отнести к водо-
измещающим, а выбор их обводов представляет большие трудности, так как в отли-
отличие от моторных судов приходится учитывать широкий диапазон скоростей, завися-
зависящих от силы и направления ветра.
Наиболее полно соответствуют водоизмещающему режиму условия эксплуатации
гребных лодок. Даже самые быстроходные из них — академические восьмерки, разви-
развивающие на дистанции скорость 20 км/ч не выйдут за его пределы (при Z-в Л = 18,625 м
Fr/, =0,41). Оптимальные условия для движения гребных лодок лежат в пределах
до горба волнового сопротивления при Fr/ =0,3. Этим объясняется легкость хода
5—6-метровых ,лодок народной постройки, которые, не требуя особых усилий, раз-
развивают скорость на веслах 7—9 км/ч.
В узких границах водоизмещающего режима не может быть того разнообразия
форм, которым отличаются современные малые суда с динамическими способами
поддержания. Отработка обводов здесь ограничивается оптимизацией и комбиниро-
комбинированием известных вариантов с целью повышения ходкости, мореходных качеств,
технологичности конструкции.
Влияние обводов на ходовые качества водоизмещаюших судов оценивается вели-
величиной энергозатрат, необходимых для плавания в ограниченном диапазоне скоростей.
Гидродинамическая форма корпуса должна обеспечивать наименьшее сопротивление
воды движению судна в установленном режиме.
Мореходность водоизмещающего судна определяется прежде всего хорошим
всплытием на волну, устойчивостью на курсе, остойчивостью, а также малыми забрыз-
гиваемостыо и заливаемостью, умеренной величиной ударных перегрузок на волне.
Большинство водоизмещаюших судов имеют круглоскулые обводы, однако
не исключается применение и остроскулых. Решение в каждом случае принимается
с учетом поставленной задачи и качеств, присущих корпусам той или другой формы.
Круглоскулые суда отличает более высокая мореходиость и мягкий ход. Остроскулые
выигрывают в остойчивости, имеют меньшую осадку.
230
Среди упрощенных V-образных обводов, применяемых как на быстрЬходных,
так и на тихоходных судах, распространены обводы, поверхность которых разверты-
развертывается на плоскость, что допускает постройку корпусов с обшивкой из листов фанеры
и других материалов, не поддающихся изгибу в двух плоскостях. Дополнительное
преимущество остроскулых судов заключается в более удобной планировке помеще-
помещений, особенно за счет увеличенного-объема носовой части корпуса. Важно, чтобы у ло-
лодок с такими обводами острые кромки скул пересекали ватерлинию под минималь-
минимальными углами к горизонтали (как в носовой части, так и в корме), иначе они могут
стать причиной завихрений, значительно увеличивающих сопротивление воды. Лучшие
результаты в этом смысле достигаются на корпусах с несколькими скулами, особенно
если они располагаются так, что вообще не пересекают поверхность воды. У односкуло-
го корпуса линия скулы должна подниматься у форштевня на такую высоту, чтобы
днище здесь имело возможно большую килеватость, а угол входа ватерлиний состав-
составлял 12—20°. У корпусов, рассчитанных на плавание при Fr^ < 0,3, скула выходит из
воды на некотором расстоянии от кормы.при Fr i =0,4 она касается ватерлинии у тран-
транца, при больших скоростях остается погруженной [111] .
Таким образом, V-образные обводы вполне применимы для водоизмещающих
судов, однако спроектированные на этот режим движения они не могут применяться
на глиссирующих судах, а V-образные обводы для высоких скоростей невыгодны
для низких.
Форма корпуса малого туристского судна во многом определяется абсолютной
величиной и соотношением его размерений. Длина, ширина, а также водоизмещение
входят в формулы для вычисления относительных скоростей. С увеличением отноше-
отношения L/B уменьшается высота создаваемых движением судна поперечных волн, а.следо-
а.следовательно, и величина волнового сопротивления. 6 общем балансе сопротивления движе-
движению академической восьмерки волновое сопротивление составляет только 20—30 %,
в то время как у „нормального" водоизмещающего корпуса при том же числе Fr^ =
= 0,4 оно превышает 50 %. Еще более впечатляющие результаты достигнуты за счет
максимального увеличения отношения L/В на многокорпусных парусниках. Корпус
проа „Кроссбау", развивающего скорость 30 уз, имеет отношение Ь/В = 27. Соответ-
Соответствующая этой скорости величина Fr^ =1,26 является рекордной для любого водо-
водоизмещающего судна.
Подобные экстремальные значения размерений и их соотношений, конечно, не-
неприемлемы для обычных туристских лодок. Минимальная ширина, необходимая для
обеспечения их остойчивости, устанавливает предел L/B =3,5 + 5 для судов длиной
6-12 м (рис. 10.1) [44] . Корпуса типа дори с большим развалом бортов могут иметь
L/B =5 -г 7. У лодок длиной 2,5-3 м LIB =2,0-г 2,2. Исключение представляют катама-
катамараны и тримараны. Отношение LIB их корпусов, практически не влияющее на остой-
остойчивость судна, может приниматься в широком диапазоне — LIB =5 -г 20 [70,91] .
Хотя водоизмещающие суда не так чувствительны к нагрузке, как глиссирующие,
величина водоизмещения существенно влияет на их ходовые качества и должна поэтому
учитываться при проектировании обводов (рис. 10.2). Тяжелое судно вовлекает в дви-
движение большую массу воды, чем более легкое при равной длине ватерлиний, поэтому
его волновое сопротивление больше. Для уточненного определения режима, в котором
будет эксплуатироваться судно, целесообразно вычислить и сопоставить чиста Фруда
по длине и водоизмещению. Для водоизмещающих судов принимается Fr у *
~2,4Fr? [44].
На ходовые качества водоизмещающих судов, особенно наиболее тихоходных
из них, таких как плавучие дачи, существенное4 влияние оказывает сопротивление
трения. При выборе обводов необходимо учитывать, что эта составляющая сопротивле-
сопротивления в значительной мере зависит от площади смоченной поверхности $2 корпуса, величи-
величина которой также определяется приня!ыми размерениями и водоизмещением [см.
формулы [E.17)— E.21)] . Величина волнового сопротивления в известной мере
зависит от распределения водоизмещения по длине судна, характеризующегося строе-
231
to
to
B,m
5
-*
-
•<*
-**
***
10
15
L,m
W
Рис. 10.1. Рекомендованные значения
ширины катера в зависимости от его
длины.
1 — катера нормальной ширины; 2 —
удлиненные катера
Рис. 10.2. Зависимость водоизмещения
от наибольшей длины катера.
10
7
б
5
J.S
J
2,5
2
1,6
1,2
1
0,8
0,8
0,5
——
ч
-А
/
1/
/ /
/ гУ
/ А у
/ //
/ //
/ /
/ /
X .
X /
/ /
х
х
10
15Lu,m
1 — тяжелые катера; 2 - катера нормального водоизмещения; 3 — легкие катера
Рис. 10.3. Строевые по шпангоутам.
1 — фангсбот с вельботной кормой; 2 — морской катер с транцевой кормой;
3 — французский однотонник „Фест-35"; 4 — модернизированная яхта
класса Л-6 „Былина" постройки Ленинградской экспериментальной судо-
судостроительной верфи
Рис. 10.4. Заостренные кормовые оконечности водоизме-
щающих катеров: а -типа каноэ; б - крейсерская с плос-
плоским участком днища
Рис. 10.5. Транцевые кормовые оконечности: а — транец'
выше ГВЛ; б - погруженный транец
вой по шпангоутам (рис. 10.3) и коэффициентом продольной полноты, или призма-
призматическим ф = 5/0 [12,70] .
При малых значениях Fr высота волн, образующихся при движении судна, зависит
от полноты его оконечностей: чем больше объемы, сосредоточенные у носа и кормы,
тем выше гребни поперечных волн. На тихоходных водоизмещающих судах оконеч-
оконечности делают острыми, сосредоточивая основной подводный объем корпуса близ ми-
миделя. Строевые по шпангоутам таких корпусов в начале и конце имеют вогнутую фор-
форму. С ростом скорости, когда для предотвращения дифферента корму приходится
приполнять, кормовая ветвь строевой по шпангоутам становится притуплённой.
Равномерное распределение объема подводной части по длине корпуса при более
высоких числах Фруда способствует уменьшению продольных перепадов давления
и снижению высоты волн. Испытания моделей показали, что каждому значению
относительной скорости соответствует некоторая оптимальная величина <р:
Fr/....
Особое значение для водоизмещающих судов имеет форма кормовых обводов корпуса.
На скоростях Fr/, <0,3 наиболее плавный без завихрений сход потока наблюдается
при заостренной корме типа вельботной или каноз. Такая корма (рис. 10.4,л) позво-
позволяет не терять ход на волнении, способствует смягчению килевой качки при попутной
и встречной волне, обеспечивает хорошую устойчивость на курсе при косом направле-
направлении волн. Вместе с тем она существенно снижает остойчивость судна, уменьшает полез-
полезный объем, недостаточно защищает от брызг при попутной волне. Вельботные обводы
имеют спасательные шлюпки, малые рыболовные суда.
Притуплённая транцевая корма по сравнению с заостренной обеспечивает большую
остойчивость, более удобное для планировки и просторное помещение, меньшую за-
брызгиваемость на попутной волне. При транце, поднятом выше ватерлинии (рис.
10.5, а), ходовые качества судна мало отличаются от присущих корпусам с вельбот-
0,297
0,53
0,327
0,54
0,357
0,58
0,386
0,62
0,426
0,64
0,446
0,66
0,475
0,68
0,505
0,69
80
10
60
50
40
30
10
10
\\
\
\
\
\
у
\
<*тр 1 ^v.
л
\
\
ч
¦—
Рис. 10.6. Рекомендованная килеватость
кормовой оконечности в зависимости
от режима движения
11
11
10
9
\
\
\
\
{
ч
ч*
I
11
0,1 0,2 0,3 0,4
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0$ 1,0
Рис. 10.7. Рекомендованная осадка тран-
транцем в зависимости от режима движения
233
ной кормой. Такую форму кормовой оконечности часто применяют на гребных и па-
парусных судах. Уменьшение высоты подъема транца или его заглубление (рис. 10.5,6)
создают условия для достижения более высокой относительной скорости. Несколько
ухудшаются при этом способность судна поддерживать ход на крутой волне, устойчи-
устойчивость на курсе при встречно-боковой и особенно попутной волне. Такие обводы при-
применяются на прогулочных и служебных судах, парусных швертботах и яхтах.
На морских водоизмещающих катерах обводы с широким транцем применяют
неохотно, так как на волнении возникает дисбаланс между погруженными объемами
носа и кормы. Волна легко поднимает широкую корму, а узкий нос при этом глубоко
погружается в воду. Судно резко эарыскивает, сходит с попутной волны, может развер-
развернуться к ней лагом, трудно управляется. При ходе против волны транцевые катера
обладают неприятной качкой, шлепают кормой о воду.
Для речных катеров применение транцевой кормы оправдано повышением остой-
остойчивости за счет более полной ватерлинии, хотя это и связано с увеличением площади
смоченной поверхности.
Между шириной ватерлинии в корме, углом килеватости и осадкой на транце
существует неразрывная связь. Графики, построенные по данным эксплуатации боль-
'шого числа судов, позволяют определять величину этих характеристик в зависимости
от относительной скорости судна (рис. 10.6, 10.7). Применение заостренной кормы
(вельботной, типа каноэ) или кормы с транцем, поднятым выше ватерлинии, допустимо
до Fr/, =0,3, причем по мере приближения к этому пределу ширина кормовых ветвей
ватерлиний увеличивается,' а угол действительной килеватости днища уменьшается.
Крейсерская корма, показанная на рис. 10.4, б, с острой кромкой скулы и плоским
участком днища уже представляет собой шаг к „несущей" оконечности, способной
создать подъемную силу для предотвращения дифферента при Fr i <0,4. Действитель-
Действительный угол ее килеватости составляет около 5°:
Приполнение кормы у быстроходных водоизмещающих судов хорошо согласуется
с выбором формы носовой оконечности. Если при малых скоростях (Fr/, =0,20)
угол входа ватерлиний не имеет существенного значения для ходкости и может быть
довольно большим (до 25°), то уже при Fr =0,25 величину его желательно выдержи-
выдерживать в пределах 18°, а при FrL =0,3 - 10-12° [12, 111] . Сдвиг наибольшей ширины
корпуса в корму позволяет получить такое заострение, не прибегая к слишком впалым
S -образным очертаниям носовых ветвей ватерлиний, которые вызывают подъем носо-
носового буруна и „прилипание" его к-обшивке.
Имеет значение и форма сечения форштевня. Увеличение высоты носового буруна
происходит, если форштевень скруглен по слишком большому радиусу или имеет
прямоугольную форму.
Острота носовых обводов в подводной части компенсируется развалом бортов
у палубы, установкой брызгоотбойников, отсекающих бурун от бортов.
Наклон форштевня обеспечивает плавное нарастание момента, демпфирующего
килевую качку, при этом уменьшается торможение движения судна.
10.2. Суда с (v.ex&M *ческим дви
Характерной особенностью водоизмещающего катера является большая грузо-
грузоподъемность. Реальные минимальные раэмерения такого судна можно представить
из следующих соображений. Если принять среднюю скорость 10 км/ч как предел, ниже
которого использовать двигатель вообще нецелесообразно, то при Fr^ =0,35 длина
по ватерлинии составит Z-вл = 6,4 м, а при рекомендованном LIB =3,5 — В =1,8 м.
Приняв Г = 0,45 м и 6=0,4, получим водризмещение D=8LBT = 2 т. Корпус такого
судна должен иметь заостренные в носу и корме обводы и стянутый к середине длины
погруженный объем, что на строевой по шпангоутам выразится прогибом кбнцевых
ветвей. Призматический коэффициент не превышает <^=0,55.
234
Примером судна с такими размерениями и формой обводов может служить катер
„Эврика", в проекте которого отражены обводы лодок народной постройки, распро-
распространенных на северо-западе страны. Корпус „Эврики" (рис. 10.8) отличает идентич-
идентичность носовых и кормовых ватерлиний, имеющих вплоть до ГВЛ заострение поряд-
порядка 10-15°. В то же время значительный развал бортов в бконечностях создает надеж-
надежное укрытие от заливания и брызг, обеспечивает нормальную остойчивость и доста-
достаточно большую площадь палубы на всей длине судна. При скорости 10 км/ч (Fr^ =
= 0,36) вторая вершина волны находится у кормы и приподнимает ее. Возможный
при этом дифферент на нос гасится достаточно большим развалом носовых шпан-
шпангоутов .
Незначительное повышение хода, однако, может разом лишить „Эврику" всех
этих положительных качеств. Уже при v = 14 км/ч катер, оказавшись на половине
поперечной волны (Fr/, =0,5), глубоко сядет, кормой, что приведет к уменьшению
эффективной длины ватерлинии и образованию завихрений.
Для скоростей на верхней границе водоизмещающего режима возникает необхо-
необходимость противодействовать тенденции к кормовой дифферентовке судна. При за-
заостренной вельботной корме это достигается за счет расширения ватерлиний в корме,
обеспечивающего снижение килеватости днища в этом районе до 5°. Рекомендуется
также удлинять ватерлинии, чтобы скомпенсировать потерю опорной поверхности
у бортов. Более естественно в таких случаях, однако, применение транцевой кормы.
Высоко поднятый над водой небольших размеров транец катера, теоретический
чертеж которого показан на рис. 10.9, сам по себе не может влиять на гидродинамику
судна (функционально он подчинен архитектурно-планировочным требованиям), одна-
однако его присутствие упростило приполнение кормовых ватерлиний (характеристики
катера см. на с. 31). Диапазон скоростей катера 11,5—15 км/ч с двигателями мощ-
мощностью соответственно 4—10 кВт F—13,5 л. c.)(Fr/, =0,43-5-0,56). Смещение в корму
центра величины позволило выполнить заострение ватерлиний в носу под углами 11—
14°, что в сочетании с достаточным развалом бортов обеспечивает катеру хорошую
всхожесть на волну. Этому качеству, а также укрытию от воды и брызг способствует
выраженная седловатость линии борта с большим подъемом в носовой оконечности.
Катер „Баклан" (его характеристики см. на с. 34) имеет в два с лишним раза
большее водоизмещение, чем предыдущий, однако это не мешает ему с двигателем
той же мощности развивать ту же скорость A5 км/ч). Его относительная скорость по
длине (Fr/,=,0,5) и водоизмещению (Fr/j = l,15) соответствует начальной стадии
переходного режима. С учетом этого кормовая часть имеет повышенную полноту, а тра-
транец при полном водоизмещении касается поверхности воды (рис. 10.10). Можно пред-
предположить, что для лучшей удифферентовки судна конструктор предусмотрел размеще-
размещение кокпита в районе миделя, между носовой и кормовой каютами.
6 QULL
ВЛ6
14 13 12 11 10 9 8 7 6 5 it J 2 1
Рис. 10.8. Теоретический чертеж катера „Эврика"
235
Тр Ю
98765432
Рис. 10.9. Теоретический чертеж пластмассового катера
Все рассмотренные катерные корпуса отличают хорошие мореходные качества,
устойчивое движение по курсу, незаливаемость и незабрызгиваемость, малая чувстви-
чувствительность к увеличению нагрузки.
В целом можно сказать, что относительная скорость Fr/, =0,5 является предельной
для судов с заостренной или округлой кормовой оконечностью. Только очень легкие
суда (L/^D^ 6) могут преодолевать этот рубеж [12] .
Обводы, обеспечивающие экономичную эксплуатацию в водоизмещающем и пере-
переходном режимах, имеет лодка „Струйка" (рис. 10.11). Ее характеристики приведены на
с.31. Построенная для плавания по Ангаре, она копирует форму лодок местных типов,
рассчитанных на преодоление сильного течения. Округлые шпангоуты в носовой части
и высоко поднятая над ватерлинией скула позволяют лодке легко всходить на волну,
не испытывая сильных ударов. В корме при осадке по ВЛ2 обводы типично водоиз-
мещающие с характерной впалой (синусоидальной) формой строевой по шпангоутам.
С неполной нагрузкой (? = 0,45 т) лодка без заметного волнообразования идет со
скоростью 10 км/ч (Fr =0,36) с двигателем мощностью 2 кВт C л. с). При установке
двигателя мощностью 4 кВт F л. с.) скорость возрастает до 17—18 км/ч (Fr/, =0,65).
Возникающий при этом дифферент выравнивается при погружении в воду плоского
транца. С полной нагрузкой (Z)=0,95 т) при осадке по ВИЗ благодаря несущей корме
скорость падает незначительно — до 15 км/ч.
Для удифферентовки катеров нормального водоизмещения {L /¦$0 = 5—5,2)', рас-
рассчитанных на достижение скоростей переходного режима, в корме необходима опорная
площадка больших размеров. Эффект, достигаемый за счет правильно спроектирован-
спроектированной широкой кормы, на скоростях Fr?>0,5 эквивалентен снижению волнового
сопротивления в результате удлинения дей-
действующей ватерлинии (рис. 10.12). Транец,
таким образом, является результатом согласо-
согласования обводов корпуса и длины волны при
расчетной скорости [12] . Более или менее
умеренный изгиб линии шпунта возникает естест-
естественным образом, когда подводная часть судна
гармонично вписывается в углубление, образо-
образованное системой волн. Имея равное волновое
сопротивление с остроконечным корпусом уве-
увеличенной длины, катер с „отрезанной" кормой
выигрывает в сопротивлении трения.
Рис. 10.10. Теоретический корпус ка-
катера „Баклан"
236
Рис. 10.11. Теоретический чертеж катера „Струйка"
Рис. 10.12. Удлинение действующей ватерлинии за счет правильно спроек-
спроектированной кормовой оконечности катера, рассчитанного на переходный
режим движения
1 П
Рис. 10.13. Теоретический чертеж катера „Тюлень", рассчитанного на переходный режим
движения
237
Полученные подобным образом обводы поз-
позволяют эксплуатировать судно в достаточно ши-
широком диапазоне скоростей. Форма корпуса
катера „Тюлень" (рис. 10.13) рассчитана на
движение при Fr/, =0,5 -ь 0,9. Плавный подъем
днища к корме и незначительная осадк,а транцем
дают основание считать, что даже в водоизме-
щающем режиме движение не будет сопрово-
сопровождаться заметными завихрениями (отношение
осадок корпуса и транца Гтр/Г = 5,7 по графи-
графику на рис. 7.1 соответствует Fr/, =0,38). В то
же время широкое плоское днище в корме
обеспечивает нормальный ходовой дифферент
в пределах 1—1,5° при движении в переходном
режиме.
Для катеров, рассчитанных на достижение скоростей переходного режима, эффек-
эффективно используются остроскулые обводы. Линии теоретического чертежа такого судна,
как можно судить по рис. 10.14, мало отличаются от рассмотренного круглоскулого.
В то же время подъем днища и уменьшающаяся к корме килеватость получаются в этом
случае более естественным образом. Скула не создает дополнительного сопротивления,
так как она пересекает ватерлинию под очень малым углом, а дальше к корме идет
параллельно потоку воды, обтекающему корпус. Эксплуатационные скорости этого
судна 15-20 км/ч соответствуют относительным скоростям Fr i - 0,48 т 0,64.
Рис. 10.14. Теоретический корпус остро-
скулого катера, рассчитанного на пере-
переходный режим движения
i-.-..'л,
с/аз
При выборе обводов парусных судов учитывают следующие особенности их эксплу-
эксплуатации: широкий диапазон эксплуатационных скоростей, движение с ходовым креном,
наличие дрейфа.
Формы поперечных сечений корпуса яхт можно отнести к двум основным типам:
Sобразным, присущим судам традиционной конструкции с длинной килевой линией,
и различного рода округлым, применяющимся на современных яхтах и швертбо-
швертботах (рис. 10.15).
Рис. 10.15. Формы обводов шпангоутов
парусных яхт: а - S-образная; б - V-
образная; в — U-об^азная;. г — трапеце-
трапецеидальная
Рис. 10.16. Теоретический корпус и силуэт яхты
традиционных обводов с длинной килевой линией
238
'ивл
5 4 3 2 1 О
Рис. 10.17. Теоретический чертеж однотонника постройки Таллинской верфи эксперимен-
экспериментального судостроения
Корпуса с S-образными шпангоутами (рис. 10.16) имеют большую смоченную по-
поверхность, которая дает прибавку до 30 % сопротивления трения по сравнению с округ-
округлыми сечениями. Это особенно сказывается в слабый ветер, когда движение яхты
не сопровождается заметным волнообразованием [120]. ,
Другим недостатком этой формы поперечных сечений является глубокое распо-
расположение ЦВ, а в некоторых случаях и высоко поднятый ЦТ. Эти качества обуслов-
обусловливают малую метацентрическую высоту, а следовательно, и пониженную остойчивость,
что отражается на ходкости судна в свежий ветер — с увеличением крена уменьшается
эффективность работы парусного вооружения, возрастает дрейф.
Ю
8
Рис. 10.18. Теоретический чертеж 1/4-тонника постройки Таллинской верфи эксперимен-
экспериментального судостроения
239
Рис. 10.19. Теоретический
чертеж французского 1/4-
тонника „Фест-25"
На корпусах яхт с S-образными шпангоутами значительная часть погруженного
объема приходится на фальшкиль. Чрезмерная концентрация водоизмещения у миделя
неблагоприятна для высоких скоростей. Коэффициент /3 у современных яхт в 1,2-1,5
раза меньше, чем у старых с длинным фальшкилем, а коэффициент у соответственно
больше.
V-образные обводы шпангоутов пришли на смену S-образным при модернизации
проектов старых яхт и переходе к швертботным формам корпусов. Они позволили
уменьшить смоченную поверхность, повысить расположение ЦВ, выровнять распреде-
Рис. 10.20. Теоретический чертеж французского однотонника „Жуэ-37"
240
ление водоизмещения по длине корпуса. Выявились и недостатки такого рода обводов,
отмечавшиеся в частности, на первых однотонниках (рис. 10.17) постройки Таллин-
Таллинской верфи экспериментального судостроения A968 г.). Поток воды, устремляясь
по крутой дуге в пространство между плавниковым килем и установленным изолиро-
изолированно от него в корме пером руля, срывается на острой кромке в ДП и создает тормо-
тормозящий движение яхты вихревой шнур. Яхты с V-образными шпангоутами проявляют
тенденцию к эарыскиванию в наветренную сторону при сильном ветре. Эти недостатки
в известной мере устранены на яхтах 1/4-тонного класса (рис. 10.18) постройки той же
верфи A972 г.). Уменьшенная килеватость и развитый плавник перед пером руля
способствовали уменьшению индуктивного сопротивления и устойчивости яхты на курсе.
Шпангоуты с радиальными обводами, образованными ниже ГВЛ дугой окружно-
окружности, обеспечивают минимальную смоченную поверхность. В чистом виде они, однако,
находят применение только на многокорпусных судах, так как не обеспечивают остой-
остойчивость [70, 120] . На яхтах хороший результат дают их комбинации с U-обраэными
шпангоутами, которые придают корпусу наибольшую остойчивость. Легкие яхты (рис.
10.19) и швертботы с U-образной формой поперечных сечений кормовой части при
благоприятных условиях могут выходить на глиссирование.
Трапецеидальные шпангоуты сочетают в себе качества радиальных и U-образных
шпангоутов. Корпуса с такой формой поперечных сечений (рис. 10.20) имеют умерен-
умеренную смоченную поверхность, большую метацентрическую высоту. Распределение водо-
водоизмещения по длине у них не изменяется при крене до 30°. Благодаря этому яхта
хорошо держит курс и не зарыскивает при внезапных усилениях ветра.
Практически все перечисленные формы шпангоутов могут быть воспроизведены
в вариантах с одной или несколькими острыми скулами (рис. 10.21). В большинстве
случаев такие обводы применяются по технологическим соображениям дри построй-
постройке судов с обшивкой из фанеры или легких сплавов. По ходовым качествам они не
уступают круглоскулым при условии, что скулы пересекают действующую ватерлинию,
в том числе и креновую, под малым углом.
Комбинируя шпангоуты с различными обводами, можно получить заданные экс-
эксплуатационные качества яхты с учетом ее назначения, района плавания и т. п.
Особо важное значение имеет выбор формы оконечностей судна. Большие кор-
кормовые и носовые свесы отошли в прошлое. Корма типа показанной на рис. 10.15 лишь
увеличивает сопротивление, когда свес замывается водой. V-образные шпангоуты и ки-
леватое днище в корме характерны для яхты, рассчитанной на тихоходное плавание.
Обрезная корма современной яхты отличается от рассмотренной, в принципе,
только тем, что у нее нет свеса (он „обрезан"). Такие обводы образуются V-образными
или трапецеидальными шпангоутами. Для улучшения обтекания практикуется образо-
образование приполненного более полого поднимающегося киля (см. рис. 10. 20).
Для быстроходных яхт, рассчитанных на достижение скоростей v = 3\/L, уз, харак-
характерна корма с подъемом батоксов, не превыщающим 20°. Она сочетается с более плос-
а)
Рис. 10.21. Теоретические чертежи остроскулых парусных судов: а — трапецеидальный корпус
швертбота класса Т „Скат"; б — плоскокилеватый корпус моторно-парусного бота
241
Рис. 10.22. Форма и расположение киля
ким, чем у обрезной кормы, днищем, образован-
образованным U-образными, приближающимися к радиаль-
радиальным шпангоутами (см. рис. 10.18).
Наиболее плоские кормовые оконечности
(угол схода батоксов менее 15°), как правило
с широким, начинающимся от ГВЛ или даже
погруженным в воду транцем имеют яхты (см.
рис. 10.19) малого водоизмещения и швертботы,
рассчитанные на активное использование режима
серфинга. Для многих из них скорость v =4\ДГ
не предел. На малых скоростях, однако, яхты с та-
такой кормой, вследствие увеличенной смоченной
поверхности и вихреобразования уступают в ско-
скорости яхтам с более острыми V-образными об-
обводами.
Носовые оконечности современных яхт раз-
различаются в основном глубиной погружения фор-
форштевня. Классический глубокий вход форштев-
^ с острыми обводами ниже ГВЛ (см. рис. 10.17)
^ J5 обеспечивает лучшее поведение на волне. Плоские
ционных обводов; б - плавниковый очертания носовой оконечности применяются в со-
киль с триммером и руль, подвешенный четании с U-образными шпангоутами на яхтах,
на скеге; в - балансирный руль; г - рассчитанных на достижение высоких скоростей
подвесной руль (см рнс# ш 19> 10 20) ^y^ при крене в кон.
такт с водой скулой малого радиуса, плоская
носовая оконечность уменьшает волнообразование и смягчает удары волны. В сочета-
сочетании с трапецеидальными шпангоутами она уменьшает приводящий к ветру момент
даже у широких судов [120] .
Прогресс в постройке быстроходных яхт в значительной мере достигнут в резуль-
результате эволюции формы и расположения киля (рис. 10.22). Плавниковые кили позволили
не только уменьшить сопротивление трения, но и улучшили лавировочные качества яхт.
На яхтах типа таллинского однотонника (см. рис. 10.17) применение вынесен-
вынесенного к корме пера руля привело к снижению устойчивости на курсе. Для устране-
устранения этого недостатка на задней кромке киля был установлен закрылок — триммер,
однако присущий яхтам с V-образными шпангоутами срыв потока в пространстве
между килем и рулем не позволил устранить свойственное этим судам зарыскива-
ние на ветер.
Хорошую устойчивость на курсе яхт с раздельной компоновкой киля и руля удает-
удается получить при U-образных и особенно трапецеидальных шпангоутах. Отнесенный на
значительное расстояние от ЦБС (до 50 % ?вл) РУЛЬ в то же время значительно по-
повышает эффективность управления судном.
Руль, подвешенный на плавнике, обеспечивает более спокойное управление, чем
балансирный. На быстроходных судах особенно среднего водоизмещения (типа полу-
тонников) предпочтение отдается, однако, последнему как более эффективному и соз-
создающему меньшее сопротивление.
На малых яхтах (от 1/4-тонника и ниже) и швертботах применяются навесные
рули наиболее простые по конструкции, создающие за счет максимально возможного
удаления от ЦБС значительный вращающий момент, хотя и теряющие эффективность
при возможных порывах воздуха на стороне разрежения.4
При выборе формы яхтенного киля прежде всего учитьшается его гидродинамиче-
гидродинамическое качество. Плавниковый киль с большим геометрическим удлинением X =/ 2/S
(! — высота киля от подошвы до днища; S — его площадь) обладает минимальным
индуктивным сопротивлением, однако при чрезмерном удлинении это преимущество
242
не компенсирует дополнительного сопротивления от изменения углов атаки при борто-
бортовой, качке на курсах галфвинд — бакштаг. Максимальное удлинение имеют подъемные
кили и шверты гоночных швертботов¦, минимальную — тихоходные туристские суда,
нередко ограниченные по осадке условиями эксплуатации. На последних нередко
применяют скуловые кили (рис. 10.23), обеспечивающие ряд эксплуатационных пре-
преимуществ (малая осадка, удобная постановка на суше и др.), однако не отличающиеся
эффективностью в связи с малым гидродинамическим удлинением.
ftjc. 10.23. Теоретический чертеж
яхты со скуловыми килями
а)
Ш50 „, S)
650 -, . 800 ^|
Рйе. 10.24. Формы килей: а - полутонника „Картер-30"; Рис. 10.25. Теоретический корпус
б- 1/4-тонника „Дюфур-24"; в-серийного полутонника; поплавка гоночного катамарана
. г — подъемный киль минитонника „Этап-23"
243
В плане плавниковые кили выполняются прямоугольной формы или со скошен-
скошенными одной либо обеими кромками (рис. 10.24). К первым относятся в основном
подъемные кили и кинжальные шве рты.
Скос киля благоприятно влияет на центровку яхты при ходе с креном. Когда зна-
значительная часть плавника оказывается в теневой стороне потока за корпусом, центр
гидродинамической подъемной силы смещается вниз, а благодаря скосу еще и назад.
В результате уменьшается приводящий к ветру момент.
Для профиля киля с учетом реально возможных скоростей обычно отношение
толщины поперечного сечения к хорде принимается в пределах 10—12 %. Применяя
переменную по высоте киля профилировку, добиваются смещения в нужную сторону
центра приложения подъемной силы. Увеличение толщины профиля в нижних сечениях
позволяет сконцентрировать здесь большую часть балласта и за счет этого увеличить
остойчивость. С той же целью применяется бульбокиль. При плавании на спокойной
воде обтекаемая наделка на пятке киля не создает заметной прибавки сопротивления.
Работая как шайба, она даже способствует уменьшению сопротивления, точнее его ин-
индуктивной составляющей. Эти преимущества, однако, не компенсируют дополнитель-
дополнительное сопротивление, возникающее в результате срыва потока на верхней и нижней сторо-
сторонах бульба при килевой качке.
Более эффективно работают устанавливаемые на пятке киля шайбы-закрылки.
Такая конструкция способствовала победе яхты „Австралия" на гонках Кубка Амери-
Америки в 1984 г. Применение подобных закрылков требует каждый раз проведения спе-
специальных исследований, поэтому в обычной практике яхтостроения к ним прибегают
редко.
При проектировании обводов многокорпусных парусных судов в целом руковод-
руководствуются теми же закономерностями, что и для яхт. Принципиальным отличием являет-
является способ обеспечения поперечной остойчивости, которая практически не зависит от
обводов и размерений корпусов, а определяется общей шириной судна.
Предпочтительны для корпусов катамаранов радиальные шпангоуты, обеспечиваю-
обеспечивающие наименьшее сопротивление трения, однако в связи с тем, что для уменьшения
волнообразования при высоких скоростях необходима очень большая величина от-
отношения LIB, прибегают к меньшему, чем у полукруглых корпусов, отношению BIT,
учитывая, что на волновое сопротивление зто не оказывает влияния. При этим при-
применяются U- и V-образные шпангоуты (рис. 10.25). При отрыве наветренного корпуса
от поверхности воды такие обводы смягчают силу его ударов о волны [70] .
Для повышения боковой подъемной силы, противодействующей дрейфу, корпу-
корпусам катамаранов, особенно тех, на которых не предусмотрены кили или шверты, при-
придают асимметричный профиль с выпуклым внутренним и плоским наружным бортами
(рис. 10.26). При этом, однако, несколько увеличивается смоченная поверхность.
Катамараны относятся к судам, имеющим наибольшую относительную длину по
водоизмещению, которая для них определяется формулой L/^D/2. Для крейсерских
судов эта характеристика находится в пределах 6—10; для гоночных достигает 16.
Малая масса и большая длина корпусов — основные критерии, определяющие ско-
скорость многокорпусных судов.
Для уменьшения волнообразования выгодны высокие значения призматического
коэффициента. Особенно это имеет значение для тяжелых крейсерских катамаранов,
для которых ?>=0,6-5-0,75. У легких судов зависимость сопротивления от распреде-
распределения водоизмещения по длине корпусов меньше (для них обычно <р = 0,55 -s- 0,6).
Для уменьшения вихреобразования ватерлинии в корме заостряют под углом
10—12°. Длину кормового заострения LK рекомендуется принимать равной 4у/$ВТ.
Оно может быть образовано как сужением бортов, так и подъемом днища. В послед-
последнем случае корма заканчивается транцем. Носовые ватерлинии должны быть слегка
выпуклыми и иметь примерно то же заострение, что и кормовые.
244
Рис. 10.26. Теоретический чертеж катамарана
„Лебедь" (характеристики см. иа с. 54)
Рис. 10.27. Схема обводов
крейсерско-гоночного трима-
тримарана A.=19Д м, ?>=3,2 т)
Рис. 10.28. Теоретический чертеж малого крейсерского тримарана с остроскулыми обво-
обводами (характеристики см. на с. 56)
245
На тримаранах основная нагрузка сосредоточена в среднем корпусе. Обычно он
имеет радиальные (рис. 10.27) или многоскуловые (рис. 10.28) обводы в средней
части, переходящие в U-образные к корме и V-образные — к носу. В связи с тем, что
его относительная по водоизмещению длина меньше, чем у корпусов катамарана, более
естественна транцевая корма. Борта выше ГВЛ для увеличения полезного объема
нередко делают с значительным развалом.
Объем каждого поплавка-аутригера рассчитывают так, чтобы при его погружении
обеспечивалась поперечная остойчивость при любой ветровой нагрузке. Вместе с тем,
чтобы не допустить резкого повышения в этом случае сопротивления, необходимый
объем получают за счет максимально возможного увеличения длины. На быстроходных
тримаранах поплавки нередко дпинее среднего корпуса. Для улучшения всхожести на
волну носовые оконечности аутригера выполняют с подъемом, для этой же цели уста-
устанавливаются бортовые плиты-брызгоотбойники.
Для уменьшения дрейфа поплавкам тримарана, как и корпусам катамарана, неред-
нередко придают асимметричную в плане форму и, кроме того, устанавливают под углом
до 5 к ДП среднего корпуса. Благодаря этому погруженный подветренный поплавок
создает значительную поперечную силу, препятствующую сносу. По высоте поплавки
устанавливаются так, чтобы их килевая линия была на уровне или немного выше ГВЛ
среднего корпуса. Это уменьшает замывание наветренного поплавка на острых курсах
и позволяет снизить сопротивление за счет движения на одном среднем корпусе при
умеренном попутном ветре.
У проа атлантического типа постоянно находящийся под ветром поплавок должен,
как и аутригер тримарана, обеспечивать остойчивость при любой ветровой нагрузке.
Обводы проа этого типа проектируются по аналогии с тримаранными с той разницей,
что корпус и поплавок должны быть симметричными относительно миделя, так как
при поворотах корма и нос меняются местами.
У летучего проа аутригер, играющий роль противовеса, значительно короче основ-
основного корпуса. Форма его обводов не имеет существенного значения (на микронезий-
ских проа в качестве аутригера часто использовалось бревно), однако для уменьшения
силы ударов о волны оконечности заостряются, а днищу придается килеватость.
10.4. Г>:':- .!, ¦ ¦:,:
\
Все гребные лодки относятся к водоизмещающим, для которых режим плавания
ограничивается Fr/, =0,35 и редко (у специальных спортивных судов) поднимается
до Fr i = 0,4 т 0,45. В связи с этим различия в обводах этого типа судов объясняются
не столько требованиями гидродинамики, сколько необходимостью обеспечения опре-
определенных мореходных качеств, а также способами постройки и применяемыми мате-
материалами.
Классические обводы гребных судов, сохранившиеся у лодок народной построй-
постройки, корабельных шлюпок, парусно-весельных ялов, характеризуются заостренными
в носу и корме ватерлиниями, плавным подъемом батоксов, значительной седлова-
тостью бортов. Такие обводы в полной мере соответствуют технологии изготовления
корпуса с деревянной обшивкой, устанавливаемой в гладь или внакрой. Благодаря
приподнятым оконечностям лодки хорошо преодолевают волну, а большой протяжен-
протяженности киль, переходящий в корме в плавник, способствует устойчивости на курсе.
Круглоскулые обводы характерны для корабельных шлюпок, ялов, баркасов, про-
прогулочных лодок, шлюпка скорлупной конструкции (рис. 10.29) представляет собой
судно минимальных размерений с подобными обводами [45]. Большая ширина кор-
корпуса (?/2? =2,35), обусловленная требованиями остойчивости, привела к необходи-
необходимости приполнить обводы в оконечностях. Большой угол входа ватерлиний не может
не сказаться на ходкости — перед форштевнем будет неизбежно подниматься крутой
246
U I
10 9
S
' 6
-j
_
r ^
f :
2
0
N
1
\\
0
Рис. 10.29. Теоретический чертеж шлюпки скорлупной конструкции
бурун уже при скорости 6 км/ч (Fr^ =0,33). Широкий транец, начинающийся от ВЛ1,
по мере увеличения осадки шлюпки с полным грузом создает завихрения, увеличиваю-
увеличивающие сопротивление формы.
Основное назначение шлюпки, используемой в качестве бортовой, в том числе
и на крупных катерах и яхтах позволяет, однако, пренебречь этими недостатками
ради ее высоких мореходных качеств. Все же при подобных размерениях более целе-
целесообразно применение обводов с одной или двумя острыми скулами и носовым тран-
транцем — форшпигелем. Благодаря увеличенному объему носовой оконечности и большой
площади ГВЛ тузик „Джек Шпрот" (рис. 10.30) достаточно остойчив, не раскачивается
при гребле. Высоко поднятый нос @,6 м от О Л) позволяет легко всплывать на встреч-
встречную волну, несмотря на установленный форшпигель. Главной причиной, побудившей
конструктора применить остроскулые обводы, является, однако, не обеспечение море-
мореходности, а использование для постройки тузика фанеры, не поддающейся изгибу
в двух плоскостях.
Большинство серийных прогулочных гребных лодок строится с обводами, которые
должны обеспечивать их нормальную эксплуатацию не только на веслах, но и с под-
подвесными моторами малой мощности. О сложности выбора таких „компромиссных"
обводов свидетельствует опыт постройки и модернизации пластмассовой лодки
„Пелла". Первоначально принятые обводы (рис. 10.31, д) характеризуют ее прежде
всего как гребное судно. Форма кормы с зауженными ватерлиниями и плавно подни-
поднимающимися батоксами обеспечивает об-
обтекание без завихрений. Эксплуатация
лодки с мотором, однако, показала,
что из-за сильного дифферента на корму
заставить ее глиссировать практически
невозможно.
Второй вариант „Пеллы" (рис. 10.31,
б) отличается прежде всего увеличен-
увеличенной шириной (по ГВЛ на миделе пример-
примерно на 250 мм). Транец не только при-
полнен, но и опущен ниже ГВЛ. Модер-
Модернизированные обводы явно тяготеют
к форме моторных судов. И все же
Ф
Рис. 10.30. Схема обводов тузика „Джек шпрот"
247
получить ощутимый прирост в скорости по сравнению с первым вариантом не удалось,
так как дифферент на корму при ходе под мотором уменьшился незаметно. Не полу-
получив ощутимого преимущества в моторном варианте, модернизированная ,Делла",
конечно, не выиграла и в гребном. Приемлемый ход на веслах достигается только при
незагруженной корме и расположении гребца на средней банке, когда транец полностью
выходит из воды и обтекание становится плавным.
a)
¦«—
^——
1—-^
—н
/
Й
w
Y
ж)
—л
V4\ \
\
Д
к
/
/
i //
/ /уУ
13 Ю „
Рис. 10.31. Обводы гребных лодок: а, б - „Пелла", первый
и второй варианты; в - фофан; г - 10-весельная шлюпка;
д - 6-веселышй вельбот; е - лодка народной постройки
гдовка; ж - „Мах-4"
248
Достоинством обоих вариантов лодки является хорошая устойчивость на курсе,
которой способствуют продолженный до кормы киль, а на модернизированной „Пелле"
также расположенные параллельно ДП гофры на днище. Форма обводов, а также повы-
повышенная ширина второго варианта повысили остойчивость лодки, уменьшили ее
валкость.
В обводах „Пеллы", особенно ее первого варианта, отразились черты, присущие
формам классических деревянных лодок, к числу которых относится лодка, спроек-
спроектированная еще в начале века Фан-дер-Флитом, известная и по сей день под названием
фофан (рис. 10.31, в). Размерения и обводы лодки как нельзя лучше соответствуют
ее прямому назначению — плаванию на веслах. Полого поднимающийся форштевень
и заостренные ватерлинии, плавный подъем батоксов в корме и поднятый над водой
транец способствуют легкому ходу, мягкому всплытию на волну. Значительная ширина
и развал бортов обеспечивают уровень остойчивости, который делает безопасной эксп-
эксплуатацию лодки на прокатных станциях. С одним гребцом лодка легко развивает ско-
скорость 6-7 км/ч.
Для многовесельных судов — морских ялов и баркасов наиболее эффективное
использование энергии гребцов достигается за счет максимального удлинения и за-
заострения ватерлиний. Свесы оконечностей принимаются минимальными, благодаря
чему действующая ватерлиния немногим короче габаритной длины корпуса. S-образные
очертания ватерлиний в носу позволяют получить угол заострения 10—12°, что предель-
предельно снижает затраты энергии на образование носового буруна. Пологий подъем батоксов
и поднятый выше ГВЛ транец снижают завихрения за кормой. 10-весельная шлюпка
(рис. 10.31, г) длиной 7,8 м легко развивает скорость 11—12 км/ч, что соответствует
?rL =0,35^-0,38.
Отдельный класс мореходных гребных судов представляют вельботы (рис.
10.31, д), которым обязана своим названием корма заостренной формы (вельботная).
В пределах водоизмещающего режима вельботные обводы обеспечивают легкий эко-
экономичный ход как на тихой воде, так и при волнении. Они способствуют смягчению
килевой качки при встречной и попутной волне, обеспечивают хорошую устойчивость
движения при косой волне. Дополнительным преимуществом острых кормовых обра-
образований является возможность движения вперед носом либо кормой с примерно равной
скоростью, что особенно ценно для спасательных вельботов. К недостаткам вельбот-
ных обводов можно отнести уменьшенный за счет заостренной кормы момент инерции
ГВЛ, что ухудшает остойчивость.
Среди туристских гребных судов форма корпуса с заостренной кормой приме-
применяется главным образом на байдарках, остойчивость которых в необходимых преде-
пределах обеспечивается за счет низкого расположения ЦТ. Такие обводы применяются также
практически на всех типах спортивных гребных судов, рассчитанных на достижение
высоких скоростей — байдарках, каноэ, академических двойках, четверках, вось-
восьмерках.
Лодки народной постройки с заостренной кормой (рис. 10.31, е) обычно имеют
прямую без подъема килевую линию, что обеспечивает в условиях относительно спо-
спокойных акваторий устойчивое движение, а кроме того, значительно упрощает техно-
технологию постройки. Заострение ватерлиний при этом достигается за счет сужения бортов,
что делает возможным применять упрощенные остроскулые обводы, пригодные для
воспроизведения в любом материале, в том числе из широких досок, а в современном
варианте — из фанеры. Большой развал бортов (рис. 10.31, ё) компенсирует снижение
остойчивости.
Предельно упрощенные вельботные обводы использованы на лодке» „Мах-4"
Е. П. Смургиса (рис. 10.31, ж). По обводам близкая к байдарке, лодка значительно
превосходит ее по мореходности. Большая длина корпуса позволила получить от-
отношение L/B и углы заострения ватерлиний на уровне спортивных гребных судов.
С одним гребцом лодка развивает скорость 10 км/ч, а с двумя — более 12 км/ч, что
соответствует Fг/, =0,4.
249
Физическая сущность режима глиссирования состоит в уменьшении сопротивления
воды движению судна за счет всплытия его корпуса под действием гидродинамической
подъемной силы, образующейся на днище от скоростного напора воды.
Происходящее при этом уменьшение погруженного объема и площади смоченной
поверхности корпуса позволяет резко уменьшить волновое сопротивление и сопротив-
сопротивление трения и соответственно увеличить скорость судна.
При глиссировании смоченная поверхность обычно уменьшается в 2—4 раза (у го-
гоночных судов она может уменьшаться более чем в 10 раз), а погруженный объем —
не превышает 10—15 % первоначального. За счет этого скорость судна даже в началь-
начальной стадии режима глиссирования в 3—4 раза превышает скорость его движения в водо-
измещающем режиме.
Физическая сущность режима глиссирования предопределяет не только его до-
достоинства, но и принципиальные недостатки. Наиболее существенным из них является
снижение мореходности судна.
Уменьшение смоченной поверхности после выхода судна на глиссирование пред-
предопределяет возможность ее резкого увеличения при встрече даже с относительно неболь-
небольшой волной и соответствующего увеличения подъемной силы.
Резкое увеличение подъемной силы вызывает значительную продольную качку
глиссирующего судна. Так, прогулочное судно водоизмещением ~ 0,5 т при глисси-
глиссировании со скоростью ~ 35 км/ч на волнении силой 1—2 балла испытывает ускоре-
ускорения ~ 1,5—3g в районе центра тяжести и 5— 8 g — в районе носовой оконечности:
Такие перегрузки оказывают неблагоприятное воздействие на экипаж и конструк-
конструкцию судна и практически не позволяют сохранять движение в режиме глиссирова-
глиссирования при волнении более 3 баллов. Суда со специальной формой обводов, а также со
значительно большим водоизмещением могут глиссировать при волнении до 4—5
баллов.
Удары волн в находящиеся над воДой участки днища вызывают значительное
забрызгивание, бортовую качку и рыскание глиссирующего судна на курсе, что су-
существенно ограничивает его мореходность. Поэтому обеспечение сочетания хоро-
хорошей ходкости и необходимой мореходности является основной задачей при проек-
проектировании глиссирующих судов и основным направлением их совершенствова-
совершенствования.
Главным признаком обводов глиссирующих судов является наличие поверх-
поверхностей днища, располагающихся с положительным углом атаки к встречному пото-
потоку воды и имеющих площадь, достаточную для создания гидродинамической подъем-
подъемной силы поддержания, приближающейся по величине к весовому водоизмещению
судна. '
Так, для выхода на глиссирование днище судна обычно имеет ширину, при ко-
которой коэффициент его статической нагрузки Сд * 0,15 ^0,50 (в большинстве слу-
случаев Сд * 0,2 т 0,3), и близкую к прямолинейной форму батоксов в кормовой
части. .
Вторым наиболее существенным признаком обводов глиссирующих судов являют-
являются острые скулы (или заменяющие их элементы обводов), обеспечивающие отрыв
250
Основные формы обводов
глиссирующих судов
Простые
Круглоскулые
Плоскокилеватые
\ }
Плоскодонные
Лекальные
Вогнутокилеватые
Сложные
Кафедрал
Триклин
Обводы Блегга
V7
„Морской иож"
Выпуклокилеватые
Выпукло-вогнутые
Реданные
Туннельные
„Морские, сани"
Тримаран
„Сани Фокса"
<н>
Трехточка
Катамаран
Рис. 11.1. Схема классификации обводов глиссирующих
судов
251
Рис. 11.2. Углы кипеватости простых форм обводов: в - плоскокилеватых; б-вогнутокилеватых;
в - выпуклокилеватых; г - выпукло-вогнутых
выходящего иэ-под днища потока воды от бортов с целью уменьшения смоченной
поверхности корпуса.
Практически обшим их признаком является также форма кормовой части днища
(или несущей поверхности), обеспечивающая отрыв выходящего позади него потока
воды.
Разнообразие требований к эксплуатационно-техническим характеристикам
глиссирующих судов различных типов и назначений и большое влияние формы и па-
параметров обводов на эти характеристики породило их исключительное (по сравне-
сравнению с обводами для других режимов движения) разнообразие — свыше 70 существенно
различных форм и их модификаций. Наиболее характерные из них приведены
на рис. 11.1.
Корпуса с простыми формами обводов имеют один килеватый или плоский участок
днища, на котором при глиссировании создается гидродинамическая подъемная сила.
Разновидностью простых обводов являются и круглоскулые обводы с брызгоотбой-
никами или другими вспомогательными элементами, выполняющими функции
острых скул.
В зависимости от угла килеватости J3 обводам даются следующие качественные
определения:
Плоскодонные 0 < 5 °
Малокилеватые 5° < C < 10°
Умереннокилеватые 10° < 0 < 15°
.' -Повышенной килеватости 15° < 0 < 20°
„Глубокое V" fi > 20°
Величина угла J3 позволяет однозначно характеризовать сечения плоскокилеватых
обводов (рис. 11.2, а). Сечения вогнутокилеватых и выпуклокилеватых обводов при-
принято характеризовать углами внешней и внутренней килеватости J3 и |3; (рис. 11.2,
бив). Угол внешней килеватости J3 определяется между горизонтом и прямой, про-
проходящей через точки сечения на киле и скуле, а угол Р' — между горизонтом и каса-
касательной к линии сечения на киле. Килеватость выпукло-вогнутых форм условно (и весь-
весьма приближенно) характеризуется углом внешней килеватости /3 (рис. И.2,г).Оценка
гидродинамических характеристик лекальных форм обводов по килеватости днища
(даже по внешней и внутренней) не может быть вполне определенной.
У большинства глиссирующих судов спростымиобво-
дами килеватость днища увеличивается в направлении от
транца к форштевню. Это изменение килеватости называ-
называют закруткой днища (рис. 11.3). Днище с закрученной
поверхностью принято характеризовать углами килева-
килеватости на миделе &шд и на транце - |Зтр. Обычно 0мид>
W =^1,4 /3Тр, а разность этих углов не превышает 7— 8°. Су-
— ществует лишь один тип простых обводов — моногедрон,
у которых угол килеватости днища на миделе равен или
Рис. 11.3. Закрутка днища незначительно превышает угол килеватости транца.
252
Сложные формы обводов отличаются многими признаками, среди которых основ-
основные — наличие, число и форма туннелей, реданов, несущих участков днища, спонсонов
и других образований корпуса. Степень килеватости днища имеет для них меньшее
значение.
11.? Влияние формы обводов на мореходные Качества и общепроекткые
характеристики глиссирующих судов
Плавучесть зависит от формы обводов лишь косвенно: при заданных размерениях
суда с различной формой обводов могут иметь существенно различное водоизмещение,
поскольку для каждой формы обводов характерны определенные пределы изменения
соотношения размерений, а также коэффициента общей полноты 8. Так, при среднем
для большинства форм обводов значении 5 » 0,50 ±0,10 у плоскодонных обводов
(лодки типа „Джонбот") значения 5 могут достигать 0,80, а у катамаранов — сни-
снижаться до ~ 0,25.
Начальная остойчивость зависит от момента инерции площади ватерлинии, вели-
величина которого в существенной мере определяется формой обводов. Так, для килева-
тых, плоскодонных корпусов и для „морских саней" даже при одинаковой ширине
и равной площади ватерлинии соотношение моментов инерции 1Х составит 1 : 1,15 : 1,30.
Начальная Поперечная остойчивость большинства глиссирующих судов близка
к оптимальной, если их метацентрическая высота находится в пределах h 0 = 0,3 -г 1,0 м.
При h 0 < 0,3 м суда чрезмерно валки, а при h 0 > 1,0 м — могут иметь резкую качку от
действия волн. В обоих случаях увеличивается опасность смещения грузов и падения
пассажиров. Пониженная остойчивость часто встречается у лодок с шириной по ватер-
ватерлинии 2?вл < 1,2 м при килеватости E> 10°.
Остойчивость на больших углах крена, как правило, больше у судов с обводами,
обеспечивающими высокую начальную остойчивость. Исключение составляют выпукло-
килеватые обводы, у которых поперечный восстанавливающий момент при крене
увеличивается в наименьшей степени, а также формы обводов со спонсонами, у кото-
которых при крене восстанавливающий момент резко возрастает. В ряде случаев применение
форм обводов с повышенной остойчивостью (например, тримаранных) позволяет
уменьшить высоту надводного борта на 10—30 % по сравнению с простыми килеватыми
формами.
Динамическая остойчивость судов с различными формами обводов в еще большей
степени, чем остойчивость при больших углах крена, подобна их начальной остойчи-
остойчивости.
Ходовая остойчивость глиссирующего судна характеризует его способность про-
противостоять кренящему действию внешних сил при движении в режиме глиссирования.
Она зависит от ширины и формы смоченной поверхности, а также характера ее изме-
изменения при крене. Методика расчета ходовой остойчивости глиссирующего судна до
настоящего времени не разработана.
Хорошую ходовую остойчивость имеют суда, у которых выход на глиссирование
не вызывает существенного уменьшения ширины смоченной поверхности днища
(плоскодонные и малокилеватые, „морские сани", катамараны) либо при крене про-
происходит значительное смещение гидродинамической подъемной силы в сторону накре-
накрененного борта (вогнутокилеватыеобводы).
Пониженную ходовую остойчивость имеют суда с большой килеватостью днища
(„глубокое V") или его участков, расположенных вдоль несущей поверхности („мор-
(„морской нож").
Остойчивость на циркуляции в значительной степени определяет безопасность
эксплуатации глиссирующего судна и непосредственно зависит от формы его обводов.
Методика расчета остойчивости глиссирующего судна на циркуляции до настоящего
253
времени не разработана, а сам характер действующих, при этом гидродинамических
сил изучен недостаточно.
Наибольшей безопасности на циркуляции способствует применение обводов» соз-
создающих устойчивый внутренний крен. Он уменьшает плечо опрокидывающей пары
сил — центробежной Fn и равной ей силы дрейфа Fa (рис. 11.4) — и создает равный
противоположный момент, увеличивая плечо между силой тяжести D (равной- весо-
весовому водоизмещению Vy) и гидродинамической силой поддержания У (также равной
по величине Vy). К таким обводам относятся простые формы с умеренной или боль-
большей килеватостью, а также обводы типа кафедрал.
Суда с малокилеватыми, плоскодонными обводами и особенно „морские сани"
на циркуляции могут иметь крен на внешний борт, что затрудняет обеспечение их
остойчивости. .
Непотопляемость даже косвенно слабо связана с формой обводов глиссирующего
судна. Эта зависимость проявляется лишь в том, что отдельные формы обводов облег-
облегчают конструктивное обеспечение непотопляемости судна (например, катамаран),
борьбу с поступлением и распространением воды в корпусе, ее удаление из судна.
Ходкость непосредственно зависит от формы обводов глиссирующего судна, и ее
повышение составляет одну из главных задач совершенствования существующих и раз-
разработки новых форм обводов.
Для уверенного выхода на глиссирование судно должно иметь характеристики
и форму обводов, способствующие уменьшению сопротивления и одновременному
росту подъемной силы в районе горба сопротивления (Fr у =1,8—2,3). .
Наиболее эффективны вогнутокилеватые, выпукло-вогнутые и плоскокилеватые
формы обводов, а к наименее эффективным могут быть отнесены выпуклокилеватые,
плоскодонные и туннельные формы, а также триклин и „морской нож". Положительный
результат дает применение различных вспомогательных элементов обводов и специ-
специальных устройств, способствующих уменьшению ходового дифферента и повышению
гидродинамической подъемной силы.
В начальной стадии глиссирования (Fr у = 3,0-^3,5) суда обычно имеют близкий
к оптимальному ходовой дифферент (ф *» 3 -5-4M°) и наиболее высокое гидродинами-
гидродинамическое качество. Форма обводов в этом диапазоне оказывает меньшее влияние на ход-
ходкость, чем в районе горба сопротивления или при развитом глиссировании. Сущест-
Существенно различные формы обводов при одинаковых значениях С& и относительной цент-
центровке могут быть близки по гидродинамическому качеству (рис. 11.5). Это объясняет-
объясняется примерным равенством сопротивления трения и остаточного сопротивления в началь-
начальной стадии глиссирования. При изменении формы обводов увеличение одной из со-
составляющих сопротивления компенсируется уменьшением другой.
Дрейф
1,5
2.0
3,0
3.5
Fr,
Рис. 11.4. Действующие силы
при крене на циркуляции
Рис. 11.5. Кривые обратного качества различных форм обводов
при сд =0,25; Xg =0,4? ск.
1 — тримаранного типа; 2-е поперечным реданом; 3 — кругло-
скулые; 4 - вогнутокилеватые; 5 - комбинированные; 6 -
„морские сани"
254
По мере увеличения относительной скорости возрастает роль сопротивления тре-
трения, сопротивления выступающих частей и воздушного сопротивления (особенно
при встречном ветре), постепенно уменьшается ходовой дифферент судна, что препят-
препятствует уменьшению смоченной поверхности днища и дальнейшему увеличению ско-
скорости судна. С приближением к относительной скорости Fr у » 5 более высокое гидро-
гидродинамическое качество имеют обводы, форма которых препятствует быстрому умень-
уменьшению ходового дифферента и способствует уменьшению ширины смоченной поверх-
поверхности днища. К ним могут быть отнесены реданные, выпуклокилеватые и выпукло-
вогнутые обводы, катамараны, тримараны типа кафедрал. Менее эффективны вогнуто-
килеватые, туннельные, плоскокилеватые и малокипеватые формы обводов.
Для повышения гидродинамического качества при движении судна в режиме раз-
развитого глиссирования широко применяются различные вспомогательные элементы об-
обводов и специальные устройства, способствующие непосредственному уменьшению
смоченной поверхности корпуса или ее уменьшению за счет оптимизации ходового
дифферента судна.
Устойчивость на курсе при ходе на тихой воде у глиссирующих судов, как правило,
выше, чем у судов других режимов движения. Это объясняется расположением центра
сил сопротивления корпуса и выступающих частей глиссирующего судна позади его
ЦТ. На тихой воде глиссирующие суда обычно могут длительное время сохранять
свой курс даже без воздействия органов управления. Малые катера и моторные лодки
при глиссировании без нагрузки часто имеют крен на левый борт от реакции ГВ право-
правого вращения или из-за расположения водителя слева от ДП судна. Такой крен вызывает
постепенное отклонение судна влево от курса.
Устойчивость на курсе глиссирующих судов при воздействии волн и ветра снижает-
снижается в большей степени, чем движущихся в водоизмещающем или переходном режимах.
Всплытие корпуса глиссирующего судна над водой обычно вызывает уменьшение
его смоченной длины примерно в 2 раза, а проекции площади погруженной части кор-
корпуса на ДП — в 5—10 раз и более, что снижает способность судна противостоять уводя-
уводящим его с курса силам. В то же время величина и скорость изменения гидродинами-
гидродинамических сил, уводящих с курса глиссирующее на волнении судно, значительно выше,
чем у движущихся в переходном или водоизмещающем режиме.
Различные формы обводов глиссирующих судов существенно отличаются как спо-
способностью противостоять действию уводящих с курса сил, так и самому их образова-
образованию при ходе судна на волнении. При этом форма носовой оконечности в значитель-
значительной мере определяет величину уводящих с курса сил, а от формы кормовой оконеч-
оконечности зависит способность судна противодействовать им.
Повышению устойчивости судна на курсе способствуют увеличение килеватости
днища у транца, туннельная форма кормовой оконечности, расположение на ней про-
продольных реданов или других равноценных по действию элементов.
Форма носовой оконечности может способствовать уменьшению уводящих с курса
сил, если на встречно-боковом волнении она предотвращает глубокое погружение
судна в волну. Среди простых форм в зтом отношении наиболее эффективны выпукло-
выпуклокилеватые и выпукловогнутые обводы. Вогнутокилеватая носовая оконечность, глу-
глубоко зарываясь в волну, способствует увеличению силы дрейфа Fa и плеча h д этой
силы относительно ЦТ судна (рис. 11.6, а, б). Обводы катамаранов могут не только
препятствовать развороту судна лагом к встречно-боковой волне, но и способство-
способствовать повороту на волну, так как равнодействующая RT гидродинамических сил дрейфа
FR и сопротивления R проходит мимо ЦТ судна со стороны обращенного к волне
борта-(рис. 11.6, в).
Поворотливости способствуют обводы, которые на циркуляции оказывают большее
сопротивление дрейфу судна и меньшее — его повороту вокруг вертикальной оси, а так-
также обеспечивают при зтом сохранение необходимой для безопасного маневрирования
остойчивости.
255
Среди простых форм этим требованиям в наибольшей степени отвечают вогнуто-
и плоскокилеватые обводы с повышенной килеватостью, уменьшающейся к транцу.
Плоскодонные и малокилеватые формы на циркуляции оказьшают наименьшее со-
сопротивление при дрейфе и могут иметь опасный крен на внешний борт.
Среди сложных форм наиболее высокой поворотливости способствуют обводы
кафедрал ,и триклин. Наименьшее сопротивление дрейфу оказывают обводы гоноч-
гоночных трехточек, а наименее безопасны из-за снижения остойчивости на циркуляции
„морские сани".
Улучшению поворотливости глиссирующего судна способствует характерный для
большинства форм обводов внутренний крен на циркуляции. Он повышает безопасность
выполнения поворота, уменьшает дрейф судна, позволяет увеличить крутизну поворо-
поворота, так как вызывает смещение центра сил сопротивления в сторону внутреннего борта
судна, а сил тяги — в сторону внешнего борта. Однако у судов с несколькими ГВ боль-
большой внутренний крен может затруднять выполнение поворота, способствовать кави-
кавитации ГВ внешнего борта'.
Приведенные оценки характеризуют поворотливость судов с различной формой
обводов при сохранении режима глиссирования.
Качка и сопутствующие ей явления непосредственно зависят от формы обводов
глиссирующего судна и в значительной степени определяют общий уровень его экс-
эксплуатационных качеств.
Наибольшее влияние на эксплуатационные качества глиссирующего судна оказы-
оказывает килевая и вертикальная качка. Бортовая качка играет меньшую роль, так как
большая ширина и остроскулые обводы глиссирующих судов способствуют ее быстро-
быстрому затуханию, а возникающие при этом ускорения относительно невелики.
Увеличение подъемной силы при встрече корпуса глиссирующего судна с волной
вызывает вертикальную качку судна, а при скоростях порядка 40 км/ч и более — его
взлет над водой. Применительно к глиссированию плоскокилеватых пластин или кор-
корпусов величина возникающих при этом ударных нагрузок вплоть до погружения скул
в районе удара связана квадратичной зависимостью со скоростью соударения, а верти-
вертикальные перегрузки в районах носовой оконечности и ЦТ практически линейно из-
изменяются в зависимости от килеватости (с увеличением K от 10 до 30° уменьшаются
вдвое), ходового дифферента (в пределах i/>=3-i-8o) и коэффициента динамической
нагрузки (с увеличением С„ от 0,05 до 0,15 снижаются на 20—25 %). С увеличением
высоты и крутизны волны увеличивается высота замывания надводной части корпуса.
Соответственно возрастает роль формы шпангоута вблизи скулы и снижается значение
его остроты в прикилевой части. Например, вогнутокилеватая форма шпангоутов
может иметь преимущество перед плоскокилеватой на небольшой волне и уступать
Рис. 11.6. Схема действия уводящих с курса сил (заштрихованы смоченные
поверхности корпусов) для выпуклокилеватого (в) и вогнутокилеватого
{б) корпусов и для катамарана (в)
256
ей на крупной, так как в большей степени препятствует выходу брызг из-под скул
и воспринимает энергию их удара (рис. 11.7). Оптимальной считается выпукло-вогну-
выпукло-вогнутая форма шпангоутов в носовой оконечности судна (рис. 11.8).
При встречном волнении меньшие ударные нагрузки обеспечивает применение
однокилевых форм обводов, при встречно-боковом волнении преимущество могут
иметь суда с туннельными образованиями. В ряде случаев уровень ударных нагрузок
зависит от формы обводов судна в большей степени, чем от его скорости и высоты
волйы.
Забрызгивание на тихой воде может быть уменьшено или устранено за счет умень-
уменьшения выходящего из-под скул потока воды (например, установкой продольных
реданов), уменьшения угла его выхода к горизонту (например, за счет отгиба скул) и к
ДП (например, за счет снижения динамической нагрузки днища) или смещения к транцу
зоны выхода брызг (например, за счет увеличения ходового дифферента).
Уменьшению забрызгивания способствует форма шпангоутов, обеспечивающая
плавный вход носовой оконечности в волну, свободный проход брызг к корме и их
отражение. Наименьшему забрызгиванию подвержены корпуса с обводами туннельно-
туннельного типа, выпукловогнутые и кафедрал. Однако туннельные образования при боль-
большой крутизне волны могут способствовать выбросу брызг перед носовой оконечностью.
При встречно-боковом волнении наибольшее брызгообразование наблюдается
в случаях близкого совпадения угла волнового склона с углом килеватости встречаю-
встречающего волну участка днища. Наибольшему забрызгиванию в этих условиях подвержены
плоскокилеватые формы обводов, а также выпуклокилеватые, поскольку они не спо-
способствуют отражению брызг. В наименьшей степени забрызгиваются суда с туннельны-
туннельными формами обводов и типа кафедрал, поскольку у них брызги отбрасываются не
к внешнему борту, а к ДП судна. Среди простых форм предпочтительны выпукло-
вогнутые обводы с плавным подъемом скул к носовой оконечности.
Снижение скорости судна на волнении происходит у глиссирующих судов с любы-
любыми обводами и является следствием увеличения смоченной поверхности и отклонения
угла атаки от оптимального. Даже при высоте волны, равной всего 0,05 длины судна,
прирост сопротивления может составлять 5—20 %. Он зависит в основном от увели-
увеличения смоченной поверхности и в наибольшей степени проявляется при обводах, не
препятствующих глубокому погружению носовой оконечности в воду при встречном
или попутном волнении. Этот недостаток наиболее часто проявляется у судов с вогнуто-
килеватыми и туннельными обводами. Значительный прирост сопротивления при ходе
на волнении характерен для корпусов с поперечными реданами. Полное погружение
редана в волну вызывает образование за ним замкнутой каверны, сопровождающееся
Р«с. 11.8. Характер изменения пере-
перегрузки на волне для выпуклых
СО, вогнутых B) и выпукло-вог-
выпукло-вогнутых С?) обводов
Рис. 11.7. Изменение характера и силы удара вогнуто- и выпуклокилеватого корпусов на мелкой
(в) и крупной (б) волне
9 Зак. 738
257
замыванием зареданного участка днища и значительным вихреобразованием. Сопротив-
Сопротивление при этом может увеличиваться более чем на 1/3.
В определенных ситуациях волнение может способствовать уменьшению сопротив-
сопротивления глиссирующего судна. Кратковременное, но резкое уменьшение сопротивления
при сходе судна с гребня волны (за счет выхода корпуса из воды и близкого к опти-
оптимальному дифферента) часто используется водителями глиссирующих судов с низкой
энерговооруженностью или с „тяжелым" ГВ для выхода на глиссирование. Устойчи-
Устойчивое снижение сопротивления иногда происходит на встречном волнении у глиссирующих
судов с неоптимально уменьшенным ходовым дифферентом и относительно плоско-
плоскодонной носовой оконечностью.
Минимальному снижению скорости на волнении способствуют формы обводов
с умеренной полнотой носовой оконечности, не вызывающей как глубокого погру-
погружения в волну, так и резкой качки: выпуклокилеватые, выпукло-вогнутые, типа кафед-
рал и ряд других. Эффективным средством уменьшения замывания и качки глисси-
глиссирующего судна на волнении являются продольные реданы и другие равноценные эле-
элементы обводов, а также специальные устройства, позволяющие оптимизировать хо-
ходовой дифферент судна и уменьшить его качку.
Рыскание на курсе затрудняет управление глиссирующим судном, и снижает уро-
уровень комфорта на нем. Особенно большие и резкие отклонения от курса могут проис-
происходить на встречно- или попутно-боковом волнении при резонансном воздействии
на судно двух или нескольких пройденных волн. Опасным следствием такого рыскания
может быть разворот судна лагом к гребню очередной волны с креном на обращенный,
к ней или противоположный борт. В первом случае создается опасность .затопления,
а во втором — опрокидывания судна. Формы обводов, способствующие повышению
остойчивости судна (например, тримаранные), повышают его безопасность в подобных
условиях.
Оголение ГВ при ходе глиссирующего судна на волнении является следствием,
прежде всего, вертикальной качки. Число оборотов двигателя при этом резко возра-
возрастает, вызывая его тепловую перегрузку. Вход ГВ в воду после оголения носит ха-
характер удара, создающего угрозу поломки лопастей и инерционные перегрузки двига-
двигателя. Некоторое время после погружения ГВ кавитируют и не развивают нормальной
тяги, в то время как обороты двигателей и их тепловая нагрузка остаются повышен-
повышенными.
Причиной оголения ГВ является повышенный уровень ударных нагрузок из-за
недостаточной (для данных условий движения) килеватости днища, в особенности
его кормовой части.
Заливание подвесного мотора обычно происходит из-за резкого погружения тран-
транца глиссирующего судна при прохождении волны, захлестывании волной при резком
повороте или захлестывании собственной спутной волной при резком сбрасывании
хода.
Основной причиной заливания подвесных моторов является недостаточная плаву-
плавучесть кормовой оконечности судна, например из-за большой килеватости днища у тран-
транца. Ее уменьшение снизит опасность заливания мотора, но увеличит частоту оголения
ГВ и может ухудшить другие характеристики судна. Поэтому для уменьшения зали-
ваемости подвесного мотора целесообразно не изменение формы обводов, а улучше-
улучшение его водозащищенности (например, установка мотора с большей длиной дейдвуда).
Заливание палубы глиссирующего судна через носовую оконечность может проис-
происходить из-за его пониженной всхожести на волну, значительного уменьшения ходового
дифферента (например, при сходе с режима глиссирования), чрезмерной силы или
неблагоприятных характеристик волнения. При этом для судов с низким ограждением
кокпита и для беспалубных создается угроза затопления.
Среди простых обводов наибольшую защищенность от заливания обеспечивают
выпукло-вогнутые, а наименьшую — вогнутокилеватые.
258
Большинство сложных форм обводов, исключая реданные, обеспечивают повышен-
повышенную всхожесть на волну и защищенность от заливания палубы. Наиболее эффектив-
эффективные среди них обводы типа кафе драл а. Одна из новых форм обводов — „морской
нож" — имеет преднамеренно пониженную для уменьшения ударных нагрузок всхо-
всхожесть на волну, но обеспечивает хорошую защиту от заливания за счет большой высоты
и специальной формы носовой оконечности.
Опрокидывание глиссирующего судна, спроектированного, построенного и эксплу-
эксплуатируемого с учетом действующих норм и практического опыта, представляет доста-
достаточно редкое явление. Его причинами могут быть: превышение допустимой мощности
двигателей (подвесных моторов), снижение остойчивости судна из-за перегрузки, рез-
резкое маневрирование, эксплуатация при чрезмерном волнении.
Успешно противостоять воздействию этих факторов может судно, обладающее
одновременно хорошей остойчивостью, управляемостью и всхожестью на волну, чему
в наибольшей мере соответствуют обводы кафедрал, „сани Фокса", Блегга, триклин.
Простота формы обводов в значительной степени предопределяет выбор основного
материала и конструкции корпуса судна, целесообразной технологии его постройки.
Обводы с разворачивающимися на плоскость поверхностями позволяют обшивать
корпус листовыми материалами, тогда как сложная форма тримарана кафедрал с двой-
двойной кривизной поверхностей при изготовлении корпуса из металла требует приме-
применения штамповки.
Удобство использования объема повышается с приближением формы обводов
в плане к прямоугольной. В этом отношении преимущество имеют обводы лодок типа
„Джонбот", тримаран, „морские сани" и им подобные.
Жесткость формы зависит от числа, кривизны и размеров образующих ее поверх-
поверхностей, а также от наличия высадок, уступов и других дополнительных элементов.
Усложнение формы обводов пластмассового корпуса нередко позволяет одновремен-
одновременно упростить конструкцию (например, выполнить ее беэнаборной), уменьшить ее
массу.
11.3. Эксплуатационно-технические качества глиссирующих судов
Внешние признаки формы в той или иной степени определяют близость или раз-
различие эксплуатационно-технических качеств отдельных форм обводов глиссирующих
судов. Приведенная на рис. 11.1 схема классификации выделяет ряд групп обводов,
имеющих один или несколько общих признаков формы и соответственно ряд общих
достоинств и недостатков. В тоже время каждая из основных форм имеет существенные
отличия и обладает своими специфическими качествами.
Рассматриваемые формы обводов приведены в виде схематизированных чертежей
корпусов, содержащих сечение по четырем из десяти теоретических шпангоутов: перво-
первому, третьему, пятому и десятому (или транцу). Такой выбор сделан на основании
условного допущения о том, что форма этих шпангоутов в значительной степени оп-
определяет следующие качества глиссирующих судов:
1-й шп. — всхожесть на волну и забрызгивание;
3-й шп. — величину ударных нагрузок при ходе на волнении;
5-й шп. — ходкость в режиме глиссирования;
10-й шп. (или транец) — устойчивость на курсе.
Простые формы обводов. Диапазон возможного изменения мореходных и проект-
проектных качеств глиссирующих судов с простыми формами обводов достаточно широк
и практически позволяет удовлетворить большинство эксплуатационно-технических
требований, предъявляемых к судам этого типа.
Плоскокилеватые обводы характеризуются прямолинейными днищевыми ветвями
шпангоутов (рис. 11.9). Такая форма днища не препятствует потоку воды свободно
9* 259
растекаться в поперечном направлении, что способствует
уменьшению ударных нагрузок и килевой качке при ходе
на волнении, но вызывает увеличение смоченной поверх-
поверхности днища, забрызгивания и заливания судна. Чтобы
"J- эти недостатки проявлялись в меньшей мере, на днище
устанавливаются продольные реданы или равноценные
им по действию вспомогательные элементы обводов.
Рис. 11.9. Плоскокилеватые Эффект их применения (например, снижение сопротив-
обводы ления на 5—10 %) может проявиться при умеренной киле-
ватости (|3 3*10°) и возрастает по мере ее увеличения.
Основными характеристиками данных обводов являются угол килеватости днища
и его изменение по длине. Плоскокилеватые формы обводов относятся к числу наибо-
наиболее изученных, к ним в наибольшей степени применимы результаты обширных иссле-
исследований пластин и схематизированных моделей в части ходкости и ударных нагрузок.
Наиболее простые обводы имеют корпуса типа моногедрон, у которых угол киле-
килеватости днища на участке от миделя до транца постоянен. Такая форма способствует
повышению гидродинамического качества судна в режиме развитого глиссирования
и снижению ударных нагрузок при ходе на волне, сопровождающемся взлетами судна
над водой.
В переходном режиме и в начальной стадии глиссирования повышению гидродина-
гидродинамического качества плоскокилеватого корпуса может способствовать закрутка по-
поверхности днища. Она применяется в большинстве проектов судов с плоскокилеваты-
ми обводами.
Одной из наиболее распространенных разновидностей плоскокилеватых форм
являются обводы типа „глубокое V". Они широко применяются для судов, рассчитан-
рассчитанных на движение в режиме развитого глиссирования (Frg =3,5 -5-7) на волнении более
двух баллов. В этих условиях их достоинствами являются относительно высокая ход-
ходкость, хорошая устойчивость на курсе, небольшие ударные нагрузки (за исключением
случаев сильных ударов судна о волну плоскими поверхностями днища при крене
на обращенный к ней борт).
Наиболее существенными недостатками обводов „глубокое V" являются повы-
повышенное сопротивление при выходе на глиссирование и движении в начальной его стадии,
валкость на стоянке и пониженная ходовая остойчивость, неудобный для использования
объем прикилевой части корпуса. Для устранения этих недостатков применяются раз-
различные вспомогательные элементы обводов (например, брызгоотбойники увеличен-
увеличенной ширины) и специальные устройства (например, балластные цистерны).
Плоскодонные обводы по своим качествам значительно отличаются даже от имею-
имеющих небольшую килеватость.
Плоское днище (в носовой оконечности) способствует увеличению ходового диф-
дифферента и соответствующему росту сопротивления при выходе судна на глиссирование,
но в дальнейшем позволяет получить высокое гидродинамическое качество вплоть до
Fr у * 5. При этом плоскодонное судно обычно теряет продольную устойчивость
движения и переходит в режим рикошетирования, поскольку ширина несущей поверх-
поверхности плоского днища при всплытии корпуса не уменьшается. Его движению на боль-
большой скорости препятствуют также неустойчивость на курсе, значительный дрейф на
циркуляции, чрезвычайно большие ударные нагрузки даже при небольшом волнении.
В настоящее время плоскодонные обводы широко применяются в основном для
мотолодок типа „Джонбот", имеющих предельно упрощенную форму корпуса (рис.
11.10) и рассчитанных на движение в начальной стадии режима глиссирования. Их
корпус имеет плоское днище постоянной ширины, поднимающегося в носовой око-
оконечности к носовому транцу (форшпигелю), и борта со значительным постоянным
развалом.
260
тр.
Рис. 11.10.
Плоскодонные об-
обводы
Тр.
Рис. 11.11. Вогнутокилева-
тые обводы
Тр.
Рис.
11.12. Выпуклокилева-
тые обводы
Форма, конструкция и технология производства „Джонботов" предельно взаимо-
взаимосвязаны и позволяют обеспечить их массовое высокомеханизированное производство
из легких сплавов при очень низкой (для этого материала) трудоемкости изготовле-
изготовления судна.
Модификацией „Джонбота" является корпус, у которого носовая треть днища
имеет килеватость, что позволяет несколько улучшить мореходность, но одновремен-
одновременно усложняет конструкцию и технологию изготовления корпуса.
Лекальные формы обводов — вогнутые, выпуклые или выпукловогнутые — за
счет изменения степени криволинейное™ сечений днища по длине корпуса обеспечивают
широкий диапазон изменения мореходных качеств.
Вогнутокилеватые обводы (рис. 11.11) имеют шпангоуты, кривизна (вогнутость)
которых обычно увеличивается в направлении от киля к скулам, а килеватость — от
кормовой к носовой оконечности судна.
Вогнутая форма шпангоутов препятствует поперечному растеканию воды по днищу.
При выходе на глиссирование зто способствует увеличению гидродинамической подъем-
подъемной силы в средней и кормовой частях корпуса, тогда как острая носовая оконечность
не создает чрезмерного ходового дифферента. Вогнутокилеватая форма обводов обес-
обеспечивает судну наиболее восокое гидродинамическое качество в районе горба сопро-
сопротивления и в начальной стадии режима глиссирования. С увеличением скорости глис-
глиссирования дифферент фогнутокилеватого корпуса быстра уменьшается, а днище про-
продолжает замываться по всей ширине, поэтому его гидродинамическое качество сни-
снижается быстрее, чем при других лекальных обводах.
Вогнутокилеватые обводы благодаря отгибам скул и остроте килевой линии обес-
обеспечивают хорошую устойчивость судна на курсе при глиссировании на тихой воде, а так-
также создают значительное сопротивление дрейфу на поворотах. Однако встречно-боковое
волнение может вызывать большее рыскание такого судна на курсе, чем с выпукло-
килеватыми обводами (см. рис. 11.12).
Существенным недостатком вогнутокилеватых обводов является резкое снижение
мореходности судна при высоте волнения, превышающей ~ 0,1—0,15 длины его корпуса
(значительно возрастают ударные нагрузки и забрызгивание, увеличивается опасность
заливания носовой оконечности).
Комплекс мореходных качеств вогнутокилеватых обводов предопределяет целе-
целесообразность их применения для глиссирующих судов с пониженной энерговооружен-
энерговооруженностью, предназначенных для эксплуатации на относительно спокойных водоемах.
Постройка вогнутокилеватого корпуса требует значительной деформации листов
обшивки' практически по всей поверхности днища, а следовательно, и применения
штамповочно-прессового оборудования.
Выпуклокилеватые обводы (рис. 11.12) как по форме, так и по большинству своих
эксплуатационно-технических характеристик прямо противоположны вогнутокилева-
тым. В отличие от последних они не препятствуют поперечному растеканию потока воды
по днищу, имеют более низкое гидродинамическое качество в районе горба сопротивле-
сопротивления и в начальной стадии глиссирования, но более высокое на повышенной скорости;
261
10
Рис. 11.13. Корпус катера с разворачивающейся
на плоскость обшивкой
Устойчивость на курсе при глиссировании на тихой воде и при небольшом волнении
у судна с выпуклокилеватыми обводами ниже, чем у вогнутокилеватого, а дрейф на
циркуляции значительно больше. Полнота выпуклокилеватой носовой оконечности
обеспечивает судну хорошую всхожесть на волну, но не препятствует его за-
брызгиванию.
Комплекс мореходных качеств выпуклокилеватых обводов позволяет исполь-
использовать их для глиссирующих судов с повышенными энерговооруженностью и ско-
скоростью, рассчитанных на эксплуатацию при умеренном волнении.
Для повышения мореходных качеств судов с этими обводами с большим эффек-
эффектом используются вспомогательные элементы и специальные устройства (продольные
реданы, брызгоотбойники,.балластные и дифферентовочные цистерны и т. п.).
широкому применению выпуклокилеватых обводов способствует их близость
к разворачивающимся на плоскость, т. е. состоящих из плавно сопряженных кони-
конических, цилиндрических и плоских поверхностей (рис. 11.13), не имеющих двойной
кривизны, и благодаря этому позволяющих использовать листовой материал без его
предварительной деформации.
Рис. 11.14. Выпукло-вогнутые
обводы
Рис. 11.15. Кругпоскулые об-
обводы
262
Выпукло-вогнутые обводы (рис. 11.14) имеют днищевые ветви шпангоутов с вы-
выпуклостью вблизи киля и вогнутостью у скул. Они обладают достоинствами вогнуто-
и выпуклокилеватых обводов и лишены большинства их недостатков.
По гидродинамическому качеству в районе горба сопротивления выпукло-вогнутые
обводы занимают промежуточное положение между вогнутыми и выпуклыми, а с уве-
увеличением скорости глиссирования нередко превосходят те и другие. Суда с выпукло-
вогнутыми обводами обладают хорошими устойчивостью на курсе и поворотливостью. _
Уровень ударных нагрузок у них в среднем ниже и меньше зависит от высоты волн,
чем у других, лекальных форм. Выпукло-вогнутые обводы обеспечивают глиссирую-
глиссирующему судну плавный вход на волну, позволяют исключить забрызгивание и замывание
корпуса.
Комплекс мореходных качеств выпукло-вогнутых обводов позволяет использо-
использовать их для глиссирующих судов как с пониженными, так и с высокими энергово-
энерговооруженностью и скоростью, и делает более эффективными для эксплуатации на водо-
водоемах со значительным волнением.
Повышению мореходных качеств этих обводов может способствовать применение
продольных реданов. j
Недостатками корпусов с выпукло-вогнутыми обводами являются сложность
их проектирования и изготовления из листовых материалов. В то же время построй-
постройка таких корпусов из пластмасс не вызывает существенных затруднений, при этом фор-
форма обводов обеспечивает высокую жесткость судна.
Круглоскулые обводы сами по себе практически неприменимы для глиссирующего
судна, поскольку круглая скула не способствует созданию на днище гидродинамиче-
гидродинамической подъемной силы, необходимой для выхода на глиссирование, и не препятствует
замыванию корпуса. Однако установка вдоль скул брызгоотбойников (рис. 11.15)
или других равноценных элементов может существенно изменить гидродинамические
характеристики круглоскулого корпуса, приблизив их к характеристикам выпукло-
килеватого. При равных размерениях и одинаковой килеватости днища различия в мо-
мореходных качествах глиссирующих судов с такой формой обводов могут ограничить-
ограничиться несколько большим сопротивлением круглоскулых в районе горба сопротивления
и при глиссировании на волнении, меньшей устойчивостью на курсе и большим дрей-
дрейфом на поворотах. Эти различия уменьшатся при установке на днище круглоскулого
корпуса продольных реданов или других равноценных им по действию вспомогатель-
вспомогательных элементов.
При массовом производстве небольших мотолодок из легкого сплава в условиях
высокомеханизированного производства применение круглоскулых обводов позволяет
штамповать их корпуса из одного листа, что значительно снижает трудоемкость про-
производства. Аналогичным образом могут формоваться корпуса круглоскулых мотоло-
мотолодок из шпона. В ряде случаев круглоскулые обводы применяются для гоночных судов,
поскольку отсутствие узла соединения обшивки вдоль скул позволяет повысить проч-
прочность и снизить вес их корпусов.
Сложные формы обводов. Применение и развитие сложных форм обводов стиму-
стимулируется необходимостью повышения одного или нескольких качеств в соответствии
с назначением, условиями эксплуатации, технологией производства и другими опреде-
определяющими для конкретного судна факторами. Повышение этих качеств нередко до-
достигается за счет значительного, но допустимого ухудшения других качеств и, как
правило, за счет значительного усложнения проектирования и трудоемкости постройки.
Туннельные обводы, несмотря на значительное разнообразие форм, обладают рядом
характерных достоинств и недостатков. К первым относятся повышенная остойчи-
остойчивость, хорошая устойчивость на курсе, незначительная забрызгиваемость, большая по-
полезная площадь корпуса, ко вторым — повышенные сложность проектирования и тру-
трудоемкость постройки (особенно — из листовых материалов), а также затруднения
с использованием внутреннего объема корпуса из-за наличия туннелей.
263
a)
Рис. 11.16. Сечения „саней Хикмана" (в), „саней Тила" (б) и допол-
' нительные участки днища (в)
„Морские сани" являются наиболее простой из туннельных форм обводов. Для
„морских саней" характерны практически прямоугольная в плане форма корпуса
и вертикальные борта.
„Морские сани" имеют две основные модификации. У первой из них, известной
как „еани Хикмана" (рис 11.16, я), свод туннеля образован двумя смыкающимися
вдоль ДП плоскокилеватыми поверхностями. У более современной модификации,
местной как „сани Тила" (рис. 11.16, б), свод туннеля образован одной вогнутой
Поверхностью.
Вогнутость несущей поверхности увеличивает гидродинамическую подъемную
силу на днище „морских саней", но ограничение поперечного растекания потока воды
в носовой оконечности вызывает значительное увеличение ходового дифферента и сни-
снижение гидродинамического подъемного качества в районе горба сопротивления. Для
его повышения „морские сани" обычно имеют большую закрутку днища и более носо-
носовую центровку, чем килеватое судно. Это, в свою очередь,, вызывает более раннюю
потерю' продольной устойчивости движения и снижение ходкости в режиме развитого
глиссирования [ 93, 106].
-Принципиальным недостатком схематизированных форм обводов обеих модифи-
модификаций „морских саней" является неудовлетворительная остойчивость на циркуляции.
Создающиеся при этом на вогнутом днище гидродинамические силы способствуют
опрокидыванию судна на внешний борт, поэтому современные модификации обводов
„морских саней" имеют участки днища с положительной килеватостью, расположенные
снаружи килевых линий (рис. 11.16, в).
Специфическим недостатком „саней Хикмана" являются опасные напряжения
при ударах волн в соединение поверхностей днища вдоль ДП. „Сани Тила" не имеют
этого недостатка, но лекальная форма туннели затрудняет изготовление корпуса с об-
обшивкой из листовых материалов.
У „морских саней" при движении в носовой части туннеля образуются воздушные
пузыри, которые проходят к кормовой оконечности и ухудшают работу гребных вин-
то» (если они не являются суперкавитирующими), в особенности — при расположении
ГВ в ДП судна.
В настоящее время обводы типа „морских саней" не находят широкого применения
для глиссирующих судов, поскольку по большинству своих качеств уступают новым
сложным формам, прежде всего — тримаранным.
Туннельный тримаран — форма обводов, имеющая ряд модификаций, появившихся
в процессе ее совершенствования.
Первая из модификаций внешне отличалась от „морских саней" лишь наличием
двух туннелей вместо одного. Однако это позволило устранить опасность опрокиды-
опрокидывания при повороте из-за внешнего крена, повысить остойчивость и устойчивость на
курсе, улучшить всхожесть на волну и уменьшить ударные нагрузки, повысить проч-
прочность днища, улучшить условия размещения в корпусе судна. В то же время несколько
увеличилась смоченная поверхность днища, сохранилась необходимость носовой
центровки (Xg = 0,40—0,45/, ск) для уменьшения дифферента в районе горба сопротив-
сопротивления и повышения продольной устойчивости движения при глиссировании.
264
Рис. 11.17. Туннельный тримаран
с бортовыми наклонными по-
поверхностями
L3,
Рис. 11.18. „Сани Фокса"
В последующих модификациях бортовые килевые линии были подняты выше
центральной. Это позволило значительно повысить гидродинамическое качество три-
тримарана в районе горба сопротивления (благодаря уменьшению ходового дифферента)
и в режиме глиссирования (за счет уменьшения смоченной поверхности) как на тихой
воде, так и на волнении, а также повысить продольную устойчивость движения. Одно-
Одновременно снизились ударные' нагрузки при ходе тримарана на волнении, повысилась
его поворотливость.
Наиболее высоким уровнем комплекса мореходных качеств обладает модифика-
модификация тримаранных обводов, у которой подъем боковых килевых линий к носовой око-
оконечности начинается раньше, чем у центральной, а снаружи от них расположены наклон-
наклонные участки днища (рис. 11.17). Создающаяся на них подъемная сила уменьшает ходо-
ходовой дифферент и повышает гидродинамическое качество тримарана в. районе горба
сопротивления. После выхода на глиссирование эти поверхности практически не участ-
участвуют в создании подъемной силы — несущая поверхность ограничивается шириной
днища между боковыми килями. Уменьшение смоченной ширины днища способствует
сохранению высокого гидродинамического качества и продольной устойчивости дви-
движения тримарана в режиме развитого глиссирования, уменьшает ударные нагрузки
при ходе на волнении. При поворотах наклонные поверхности днища вдоль бортов
уменьшают дрейф и повышают безопасность маневрирования.
Сложность обводов туннельных тримаранов, в особенности последней из рассмот-
рассмотренных модификаций, значительно затрудняет их применение.
Необоснованный выбор одного или нескольких параметров обводов может сни-
снизить мореходные качества проектируемого тримарана до уровня, при котором при-
применение столь сложных обводов будет неоправданным.
„Сани Фокса" — разновидность двухтуннельных обводов с расположенными на
одном уровне килеватыми образованиями днища в виде гидролыж; разработана англий-
английским конструктором У. Фоксом [66] .
У оригинальных обводов (рис. 11.18) ширина лыж составляет ~ 1/10 ширины
днища.
По ходкости и управляемости на тихой воде „сани Фокса" принципиально не отли-
отличаются от аналогичных туннельных тримаранов, а на волнении могут иметь преиму-
преимущество перед ними как по скорости, так и по устойчивости на курсе при встречно-
и попутно-боковом волнении.
Основным достоинством „саней Фокса" является хорошая всхожесть на волну
при любых курсовых углах к ней. На встречно- и попутно-боковую волну они входят
мягче большинства других форм обводов. На встречном волнении при малой нагрузке
судна сила ударов у „саней Фокса" относительно высока, а при большой — резко снижа-
снижается. Гидролыжи практически исключают заливание „саней Фокса" при любом режиме
движения, но их плоские поверхности образуют брызги и на встречном волнении могут
выбрасывать их перед носовой оконечностью.
265
Большая глубина туннелей „саней Фокса" способствует устойчивому движению
вдоль них воздушных пузырей, образующихся в носовой оконечности судна. Это ухуд-
ухудшает работу гребных винтов, если они располагаются за туннелями и не являются
суперкавитирующими.
Комплекс мореходных качеств „саней Фокса" предопределяет целесообразность
их применения для глиссирующих судов, которым необходима повышенная безопас-
безопасность в эксплуатации, например для микромотолодок.
„Сани Фокса", как и другие тримараны, имеют форму, соответствующую техноло-
технологии изготовления судов из пластмасс.
Трехточка - форма обводов с тремя несущими Поверхностями, одна из которых
образуется в кормовой части, а две других - на бортовых спонсонах (рис. 11.19, а).
Смысл схемы трехточки заключается в том, что три разнесенные в горизонтальной
плоскости несущие поверхности при глиссировании достаточно жестко определяют
его положение относительно воды. Это позволяет расположить несущие поверхности
с оптимальными для обеспечения высокого гидродинамического качества углами атаки,
обеспечить судну высокую остойчивость, уменьшить неблагоприятную волновую интер-
интерференцию несущих поверхностей, а также замывание и забрызгивание корпуса. Однако
свойство трехточки жестко следовать за поверхностью воды превращается в большой
недостаток при глиссировании даже на незначительном волнении: судно подвергается
сильным ударам, резкой качке, снижает скорость, рыскает на курсе.
Обводы трехточки применяются только для гоночных судов, рассчитанных на дви-
движение по достаточно тихой воде.
Наиболее распространенная модификация этих обводов для гоночных судов -
скеговая трехточка (рис. 11.19, б). Скеги располагаются за спонсонами вдоль бортовых
поверхностей днища. Вместе с днищем и внутренними бортами спонсонов они образуют
туннель, в котором при глиссировании создается воздушная подушка с давлением,
близким к величине полного скоростного напора воздуха. Значительная подъемная
сила создается на верхней поверхности корпуса (моста), если он в продольном сече-
сечении имеет форму аэродинамического профиля.
Коэффициент подъемной силы такого корпуса, отнесенный к площади днища,
может достигать су « 1,5. Это позволяет обеспечить значительную аэродинамическую
разгрузку судна. Так, у гоночных мотолодок классов SB и SC с шириной туннеля
10-13 м при скорости более 20 м/с гидродинамические силы поддержания могут
полностью замениться аэродинамическими. Сопротивление такой скеговой трехточки
может быть на 20-40 % меньше сопротивления трехточки, не имеющей скегов. Од-
Однако по мореходности скеговая трехточка значительно уступает обыкновенной. Уве-
Увеличение аэродинамической разгрузки снижает продольную устойчивость движения
трехточки, увеличивает опасность, ее взлета и опрокидывания из-за быстрого изменения
азро- и гидродинамических сил при порывах ветра или ударах волн.
Тр.
Cues
Рис. 11.19. Трехточка (а), скеговая трехточка (б), ее модифи-
модификация, разрез по ДП (в)
Заштрихованы несущие поверхности
Рис. 11.20. Катамаран
266
Для повышения продольной устойчивости движения новейшая модификация скего-
вой трехточки имеет в кормовой части днища у бортов две небольшие несущие поверх-
поверхности (рис. 11.19, в). На высоких скоростях такое судно становится четырехточкой.
Это позволяет несколько повысить не только продольную устойчивость движения, но и
скорость за счет уменьшения замывания кормовой части днища мелкой волной.
В последние годы в связи с ростом скоростей гоночных судов на смену скеговым
трехточкам приходят более безопасные, катамараны с аэродинамической разгрузкой.
Катамаран — тип обводов глиссирующих судов, отличающийся наличием двух про-
продольных образований днища, или корпусов, разделенных туннелем (рис. 11.20).
Практически общим для катамаранов признаком является асимметрия корпусов
относительно килевых линий, позволяющая устранить или уменьшить волновую интер-
интерференцию в туннеле. Наиболее распространенными у катамаранов являются простые
лекальные или гоюскокилеватые формы обводов с плоским обращенным к туннелю
бортом.
От других туннельных форм катамараны отличаются несколько пониженным
гидродинамическим качеством в районе горба сопротивления и в начальной стадии
режима глиссирования из-за малой ширины корпусов и замывания поверхностей тун-
туннеля. В режиме развитого глиссирования они могут иметь высокое, гидродинамиче-
гидродинамическое качество и повышенную продольную устойчивость движения. Их достоинствами
являются также высокая ходовая поперечная остойчивость, хорошая устойчивость
на курсе и достаточная поворотливость.
Меньшая, чем у однокилевого судна, ширина корпусов позволяет снизить уровень
ударных нагрузок при ходе катамарана на волнении, особенно на встречно- и попутно-
боковом. Для улучшения всхожести на волну носовые оконечности катамаранов обыч-
обычно имеют меньшую закрутку днища (и меньшую килеватость), чем однокилевые суда.
Ширина туннеля (горизонтальный клиренс) обычно составляет 0,4—0,7 В, а его вы-
высота (вертикальный клиренс) у транца изменяется в широких пределах, но обычно
не превышает 0,15 L. С увеличением высоты и уменьшением ширины туннеля умень-
уменьшается вероятность сильных ударов волн в его свод.
Наиболее широко обводы катамаранов применяются для гоночных судов. Кон-
Конструкция судна обычно состоит из двух бортовых корпусов (именуемых также спон-
сонами) и собственно корпуса (моста), соединяющего их. Гоночные катамараны имеют
большую относительную ширину и малую высоту туннеля, поскольку этим обеспечи-
обеспечивается увеличение аэродинамической разгрузки судна за счет образования в туннеле
воздушной подушки. Коэффициент аэродинамической подъемной силы у катамаранов
значительно меньше, чем у скеговой трехточки (обычно не превышает Су =0,6 т 0,9),
а их азрогидродинамическое качество с увеличением аэродинамической разгрузки
уравнивается (достигает К-& + 9).
При обоснованном выборе параметров формы катамараны более безопасны как
гоночные суда, чем скеговые трехточки. Однако их проектирование представляет
сложную задачу.
тр.
Тр.
Рис. 11.21. Тримаран кафедрал
Рис. 11.22. Триклин
267
Тр.
Рис. 11.23. Обводы Блегга
Рис. 11.24. „Мор-
„Морской нож"
Для постройки катамаранов
применимы многие материалы,
так как их поверхности имеют
меньшую кривизну, чем у одно-
корпусных судов. Однако слож-
сложность конструкции, большое
число поверхностей и соединений
между ними увеличивает трудо-
трудоемкость постройки катамаранов
с обшивкой из листрвых мате-
материалов .
Тримаран кафедрал — форма
трехкилевых обводов с борто-
бортовыми спонсонами, у которых
килевые линии расположены значительно выше центральной и обрываются на расстоя-
расстоянии 0,25-0,40 L от транца (рис. 11.21).
Кафедрал по форме обводов и своим качествам близок к модификации туннель-
туннельного тримарана.
Он несколько уступает ему в начальной остойчивости, но мало отличается в остой-
остойчивости на больших углах крена. В районе горба сопротивления ходовой дифферент
у него несколько выше, а гидродинамическое качество — ниже, хотя и может быть
достаточно высоким (К « 6). В режиме развитого глиссирования как на тихой воде,
так и на волнении кафедрал имеет преимущество. Он несколько менее устойчив на
курсе, но обладает значительно лучшей поворотливостью.
Уровень ударных нагрузок на встречном и попутном волнении у кафедрала ниже,
а на встречно- или попутно-боковом волнении — выше, чем у туннельного тримарана.
Благодаря обрыву спонсонов образующиеся в туннелях кафедрала воздушные
пузыри могут выходить из-под днища, не достигая ГВ.
Применение обводов типа кафедрала целесообразно для судов с повышенной
энерговооруженностью.
Триклин — форма обводов, сочетающая туннельные образования носовой части
корпуса и лекальные — кормовой (рис. 11.22), разработанная А. Г. Чукавиным.
Подобно другим туннельным формам корпус с такими обводами обладает хо-
хорошей остойчивостью, защищен от забрызгивания, имеет большую площадь палубы.
Его обводы способствуют значительному увеличению ходового дифферента в райо-
районе горба сопротивления, но обеспечивают хорошую ходкость в режиме развитого глис-
глиссирования.
Триклин обладает высокой устойчивостью на курсе при любом направлении бега
волн и хорошо маневрирует. Он не испытывает больших ударных нагрузок на встречно-
и попутно-боковом волнении, достаточно мягко идет на встречному попутном волнении.
Суда с повышенной энерговооруженностью, имеющие обводы триклина, обладают
высокой скоростью и мореходностью.
Проектирование судов с обводами триклина затрудняется малым опытом их при-
применения и сложностью гидродинамики. В то же время сама форма (схема) обводов
имеет потенциальные возможности для совершенствования и разработки модификаций.
Обводы Блегга — форма трехкилевых обводов со смещенными к кормовой оконеч-
оконечности спонсонами, у которых килевые линии расположены на одном уровне с централь-
центральной (рис. 11.23). Обводы Блегга разработаны с целью обеспечения глиссирующему
судну высокой мореходности [ 19]. Их достоинствами являются высокие статическая
и ходовая остойчивость, продольная устойчивость движения в режиме глиссирования
и возможность его сохранения на значительном волнении, высокая остойчивость на кур-
курсе и малый диаметр циркуляции, небольшие ударные нагрузки и хорошая всхожесть
на волну любых направлений.
268
Недостатки этих обводов проявляются в малой плавучести при заданных размере-
ниях судна, низком гидродинамическом качестве из-за большого ходового дифферента
в районе горба сопротивления и значительной смоченной поверхности при глиссирова-
глиссировании, малом полезном объеме центрального корпуса.
. Комплекс мореходных качеств предопределяет целесообразность применения
обводов Блегга для быстроходных глиссирующих судов с высокой энерговооружен-
энерговооруженностью, предназначенных для эксплуатации на значительном волнении при небольшой
нагрузке.
„Морской нож" — форма обводов с плоским клиновидным днищем, вертикаль-
вертикальным у скул и расширяющимися к палубе бортами, с носовым транцем (рис. 11.24),
разработанная американским конструктором П. Пейном [107] .
Целью разработки было обеспечение глиссирующему судну высокой мореходности
за счет уменьшения гидродинамических сил и моментов, возникающих на корпусе
при прохождении волн.
Так, малая площадь днища (коэффициент статической нагрузки днища Сд у „мор-
„морского ножа" в несколько раз больше обычного) не допускает существенного уменьше-
уменьшения его смоченной поверхности даже при достижении режима развитого глиссирования.
Наряду с остротой носовой части клиновидного днища это исключает образование
больших гидродинамических сил и моментов при входе судна на волну. „Морской нож"
может прорезать ее, не испытывая при этом значительных ударных нагрузок и килевой
качки. Большой свес носовой оконечности корпуса практически' исключает зарывание
даже в высокую и крутую волну.
Однако способность „морского ножа" глиссировать на значительном волнении
достигнута ценой резкого снижения большинства его эксплуатационно-технических
качеств. Судно имеет пониженную плавучесть (при заданных размерениях), отличается
исключительной валкостью на стоянке и пониженной ходовой остойчивостью. Его
гидродинамическое качество из-за неоптимальной формы несущей поверхности и спе-
специально предусмотренного замывания бортов является крайне низким — А"<4,5.
Лишь при минимальной нагрузке и глиссировании судна на кормовой части днища
оно может несколько превысить К =5. Одновременно, однако, возрастает и уровень
ударных нагрузок.
Прорезая волны, „морской нож" из-за большого увеличения смоченной поверх-
поверхности бортов испытывает резкие торможенця (при этом горизонтальные перегрузки
могут приближаться по уровню к вертикальным), затрудняющие сохранение режима
глиссирования. Поэтому для „морского ножа" необходима высокая энерговооружен-
энерговооруженность, обеспечивающая удельную нагрузку не более 3,7—7,5 кг/кВт, тогда как при дру-
других обводах она может достигать 18—25 кг/кВт. Соответственно повышенная доля
веса двигателей и топлива в водоизмещении уменьшает полезную нагрузку „морского
ножа" в 2—3 раза по сравнению с обычным судном.
Рис. 11.25. Реданные формы обво-
обводов: а - однореданная; б - много -
редаиная
Рис. 11.26. Формы реданов в плане
(заштрихованы несущие поверхности):
прямая (в), стреловидная (б), криво-
криволинейная (в)
269
В усовершенствованных обводах „морского ножа" применены продольные бор-
бортовые уступы — „реверсоры", которые несколько повышают его ходкость, остойчи-
остойчивость и управляемость.
Комплекс мореходных и других эксплуатационных качеств „морского ножа"
позволяет применять его обводы только для судов специфического назначения. В то
же время схема обводов „морского ножа", в которой наглядно воплощен ряд прин-
принципов повышения мореходности глиссирующего судна, может творчески использовать-
использоваться для разработки модификаций этих либо других форм обводов, представляющих
большой практический интерес.
Реданные формы обводов имеют на днище один или несколько поперечных усту-
уступов (рис. 11.25), которые в плане могут быть прямыми, стреловидными или криволи-
криволинейными (рис. 11.26).
Разделение несущей поверхности на последовательно расположенные участки поз-
позволяет обеспечить им при глиссировании оптимальные углы атаки C—5° вместо 1—2°,
которые практически имеют при глиссировании безреданные суда) и более оптималь-
оптимальное соотношение их длины и ширины. За счет этого удается уменьшить общую смочен-
смоченную поверхность днища и повысить гидродинамическое качество в ~ 1,5 раза (в отдель-
отдельных случаях К > 9).
Наибольший эффект поперечные реданы дают на малокилеватых корпусах ф < 8° )
при небольшой динамической нагрузке днища Св ^0,04-^0,06. Высота редана обычно
ие превышает 0,01 Вск, а длина волновой впадины за ним может превышать высоту
редана в десятки раз. Условием эффективной работы редана является свободный доступ
воздуха к зареданной части днища. Образование замкнутой невентилируемой каверны
резко увеличивает площадь смоченной поверхности и может повысить сопротивление
судна на 1/3.
Обычно большая часть подъемной силы (иногда до 90 %) создается на поверхности
редана, тогда как кормовой участок днища несет небольшую нагрузку и обеспечивает
поддержание судном оптимального ходового дифферента,. Строительный угол атаки
кормового участка днища целесообразно принимать меньшим, чем редана, поскольку
при глиссировании он находится на склоне поднимающейся за реданом волны.
Существенными недостатками реданных обводов являются пониженное гидро-
гидродинамическое качество в районе горба сопротивления, большие ударные нагрузки
и значительное снижение скорости на волнении, пониженная прочность корпуса в районе
реданов, большая сложность проектирования и постройки судна.
Повышение килеватости днища позволяет снизить ударные нагрузки реданного
судна, но при Р> 12° значительно снижается и его гидродинамическое качество. Умень-
Уменьшению ударных нагрузок способствует и применение многореданных обводов (см.
рис. 11.25, б). Однако при этом практически также снижается гидродинамическое ка-
качество судна, значительно усложняются его проектирование и конструкция, затрудняет-
затрудняется обеспечение прочности. Наименьшее снижение прочности обеспечивает применение
криволинейной в плане формы редана (см. рис. 11.26, в), которая легко выполнима
на корпусе из пластмассы.
Повышению ходкости и мореходности судов с реданными обводами способствует
применение вспомогательных элементов обводов и специальных устройств. Так, уста-
установка продольных реданов позволяет уменьшить ширину смоченных участков днища
после выхода судна на глиссирование, увеличить их килеватость без существенного
снижения гидродинамического качества. Большой эффект дает устройство вентиляции
зареданной части днища сжатым воздухом или выхлопными газами двигателей.
Однако недостатки реданных форм обводов в настоящее время практически огра-
ограничивают область их применения спортивными гоночными судами.
270
Сравнительная оценка форм обводов глиссирующих судов. Выбор формы обводов
вновь проектируемого глиссирующего судна, обеспечивающего наиболее полное удовлет-
удовлетворение предъявляемых к нему требований, предполагает сравнение его эксплуата-
эксплуатационно-технических характеристик при использовании различных форм обводов.
В большинстве случаев возможность такого выбора затрудняется отсутствием
количественных или сопоставимых качественных данных о характеристиках различ-
различных форм обводов и отсутствием в начальной стадии проектирования сведений о ряде
параметров судна.
Поэтому в начальной стадии проектирования целесообразно выбирать для даль-
дальнейшей проработки одну или несколько форм обводов на основе сравнительной оценки
ряд их эксплуатационно-технических характеристик.
Сравнительная оценка рассмотренных выше форм обводов, определяющая порядок
их предпочтения по общепроектным качествам приведена в табл. 11.1, по отдельным
показателям мореходных качеств —в табл. 11.2, и по применимости их для судов
различных назначений—в табл. 11.3. Приведенные в этих таблицах сравнительные
оценки даны для наиболее распространенных параметров рассматриваемых форм об-
обводов при их применении для глиссирующих судов.
Таблица 11.1. Сравнительная оценка общепроектных качеств различных форм обводов
Форма обводов
Плоскокилеватые:
малокипеватые
умереннокилеватые
повышенной килева-
тосги
„глубокое V"
Плоскодонные
Лекальные:
вогнутокилеватые
выпуклокилеватые
выпукло-вогнутые
Сложные:
реданные
„морские сани"
катамаран
трех точка
туннельный тримаран
кафедрал
триклин
„сани Фокса"
Блегга
„морской иож"
Про-
Простота
фор-
формы
2-5
2-5
2-5
2-5
1
7
6
9
13
8
11
17
12
16
14
15
18
10
Удобст-
Удобство ис-
пользо-
вания
объема
2
3-4
6-8
13
1
6-8
3-4
5
9-10
14
16-18
16-18
9-10
6-8
11-12
11-12
15
16-18
Жест-
Жесткость
фор-
формы
17
12-13
11
9-10
18
7
8
5
12-13
14-15
14-15
16
2
3
4
1
6
9-10
Приме-
Применимость
мате-
материалов*
Ф.Д.А
Д, А, С,
ДА, С,
ф
С, ДА,
Ф
А.ДФ
А, С
Д.А.Ф,
С
С, А
Ф.А.С
С.А.Ф
Ф,С,А
Ф,Д
С.А.Т
С,А,Т
С, А
С,А,Т
С, А
С.ДА,
Ф
Необхо-
Необходимый
объем
штам-
штамповки
6
5
4
3
1
13
2
14
10
7
12-13
12-13
17
18
8
16
15
9
Просто-
Простота проек-
тирова-
тирования
2
1
4
5
3
6
7
11-13
11-13
8
11-13
16-18
9-10
14-15
16-18
9-10
16-18
14-15
Примеры
применения
(номер
рисунка)
11.5, 11.6, 11.17
11.28
11.24
11.33
11.7
11.27
11.10
11.16
Гоночные суда
Любительские суда
11.2,11.11,11.18
Гоночные суда
1.12,1.22,1.26
1.23
Экспериментальные
суда
1.3
1.14
Экспериментальные
суда
*Ф — фанера, Д — дюралюминий, С — стеклопластик, А — алюминиевомагниевый сплав.
271
га
§
f
о
s
3
№
t
t I
mm
I
1 -
ч 8
1S.II
S »
I -J I
to to
OS ^ О
I os с* I
» »L 2 ,L ? >L i, JL p '
tO 00 СЛ
I I I tO
O J
I I
Ov tototoos-j
i ш"i i 151 IS
¦-^ н* н* н* *^ h- 00
III
tO СЛ tO
OS I I VO
1Л 00
> 1 *-• OS H* Cri h- Lri
|hL 1 1 J^5 1 ¦ 1
'°* IS 5 E 5
f E wos
H- I I 00 I I Ю
00 1
Остойчивость
Переходный
режим
Глиссирование
Развитое глис-
глиссирование
Переходный
режим
Глиссирование
Развитое глис-
глиссирование
ч
Ot
с
с
§
X
м os totototoosutou
I i-^ososisosi-^osi-
|2 00
1
00
40
0
1
*•*
Ю OS
1
00
(Si
1
OS
Устойчивость на
курсе
Поворотливость
?
s.
>- 1 1 1 1 ' !
*> 00 00 00 p
tomwH
too * W
I 1 to 1 <л I
Ui >— OS
OSOSf
I I I
Ударные нагрузки
I
2
Всхожесть иа волну
Забрызгав аемость
to
1
Форма обводов
Плоско килеватые:
малокилеватые
умереннокилеватые
повышенной
килеватости
„глубокое V"
Плоскодонные
Лекальные:
вогнуто килеватые
выпуклокилеватые
выпукло-вогнутые
Сложные:
реданные
„морские сани"
катамаран
трехточка
туннельные тримаран
кафедрал
трнюшн
„сани Фокса"
Блегга
„морской нож"
Таблица 11.3.
Сравнительная оценка
применимости различных форм обводов
Мотолодки
прогу-
прогулочные
8
1-5
6-7
13-15
-
1-5
1-5
1-5
13-15
10-12
10-12
-
6-7
1-5
10-12
9
13-15
турист-
туристские
13-14
6-7
1-5
8
15
1-5
1-5
1-5
11-12
9-10
-
6-7
1-5
11-12
13-14
9-10
рыбо-
рыболовные
9-14
2-5
2-5
12-13
12-13
2-5
2-5
1
_
9-11
6-8
—
6-8
6-8
14-15
9-11
14-15
хозяйст-
хозяйственные
1-4
5-7
11
-
1-4
1-4
1-4
8-10
.
8-10
5-7
-
8-10
_
_
5-7
_
полуспор-
полуспортивные
11-13
1-4
1-4
5-9
-
11-13
1-4
1-4
11-13
—
5-9
14-16
5-9
5-9
10
14-16
5-9
14-16
картоп
4-6
1-3
10-14
15-16
4-6
10-14
' 7-9
7-9
15-16
10-14
1-3
—
1-3
7-9
10-14
4-6
10-14
Катера
прогу-
прогулочные
7-9
4-6
4-6
7-9
-
1-3
1-3
1-3
15
10-12
13-14
—
7-9
4-6
10—12
10-12
13-14
турист-
туристские
7-9
4-6
4-6
7-9
-
1-3
1-3
1-3
10-13
14
—
7-9
4-6
10-13
10-13
10-13
Суда
спор-
спортивные
5
6-8
4
9-12
-
13
6-8
6-8
1-3
16
1-3
1-3
9-12
9-12
14
15
9-12
разъезд-
разъездные
14
4-5
1-3
8-11
15
4-5
1-3
1-3
16
12-13
8-11
-
6-7
6-7
8-11
12-13
8-11
17
спаса-
спасательные
9-11
2-5
2-5
12-13
12-13
2-5
2-5
1
9-11
6-8
-
6-8
6-8
14-15
9-11
14-15
11.4. Вспомогательные элементы обводов и устройстве, способствующие повышению
мореходных качеств глиссирующих судов
Вспомогательные элементы обводов. Эти элементы представляют собой выделяю-
выделяющиеся своей формой участки поверхности корпуса, предназначенные для целесооб-
целесообразного изменения характера образования подъемной силы с изменением положения
корпуса относительно поверхности воды.
Отгибы скул (рис. 11.27) повышают давление потока воды вблизи бортов. Это
позволяет уменьшить потери гидродинамической подъемной силы от поперечного
растекания потока по днищу и соответственно его смоченную поверхность, а также
замывание бортов. Отрицательным эффектом отгиба скул является увеличение ударных
нагрузок при ходе судна на волнении.
Длина отгибов скул в поперечном сечении обычно не превышает ВОТ<0,1ВСК,
а оптимальный наклон их поверхностей находится в пределах от 0 до 10° к горизонту.
Брызгоотбойники (рис. 11.28) действуют подобно отгибам скул, отличаясь от них
лишь конструктивным исполнением, так как приформовываются к корпусу вдоль
скул. Брызгоотбойники эффективнее, чем отгибы скул, уменьшают замывание бортов.
Применение брызгоотбойников позволяет проектировать корпуса глиссирующих судов
без ярко выраженных скул, например круглоскулые.
Ширина брызгоотбойников обычно не превышает 0,03 Вск, а их нижние поверх-
поверхности в большинстве случаев располагаются перпендикулярно к борту.
Продольные реданы (рис. 11.29) представляют собой выступы треугольного
(близкого к треугольному) сечения, расположенные на днище попарно симметрично
относительно ДП судна. Работая аналогично отгибам скул и брызгоотбойникам, они
обеспечивают уменьшение смоченной ширины днища при достижении глиссирующим
судном соответствующей скорости. Установка реданов может увеличивать ходовой
дифферент судна и уменьшать его смоченную длину.
Размеры сечений принимаются в зависимости от ширины, килеватости и динами-
динамической нагрузки несущего участка днища. Для глиссирующих судов длиной от 3 до
6 м высота реданов обычно принимается в пределах Яр = 15 -^ 50 мм, а ширина опреде-
определяется горизонтальным (или близким к горизонтальному) участком. Расстояние между
наружными кромками пары реданов (определяющее ширину смоченной поверхности
днища) целесообразно принимать с учетом коэффициента динамической нагрузки С% для
днища равной ширины при той же килеватости /3 и одинаковой относительной центров-
центровке xg судна [27] .
Обычно на днище устанавливается не более трех пар реданов. Их кормо-
кормовые участки чаще не доводятся до транца с тем, чтобы смоченная ширина дни-
днища в корме оставалась достаточной для сохранения судном ходовой остойчи-
остойчивости.
Рис. 11.27. Отгиб скулы Рис. 11.28. Брызгоотбойник
274
Рис. 11.29. Продольные реданы
Рис. 11.30. Транцевые наделки
Рис. 11.31. Гидродинамические шайбы
(в) и продольные гофры (в)
Рис. 11.32. Отгиб днища
Рис. 11.33. Подпорные клинья
"чГ
Рис. 11.34. Отгиб килевой линии
у транца
Рис. 11.35. Бортовые були
Применение продольных реданов позволяет повысить ходкость глиссирующего
судна (в отдельных случаях повышение гидродинамического качества может дости-
достигать ~ 20 %), а также его мореходность: снизить ударные нагрузки, и качку, забрыз-
гиваемость и заливаемость, повысить устойчивость на курсе. Наибольший эффект
продольные реданы дают на обводах с большой килеватостью днища при движении
судна в режиме развитого глиссирования. Они могут способствовать повышению гидро-
гидродинамического качества при движении судна в районе горба сопротивления.
Практика применения продольных реданов позволяет считать их самым простым
и эффективным средством повышения ходкости и мореходности глиссирующих судов.
Однако характер их взаимодействия с обводами корпуса изучен недостаточно и в от-
отдельных случаях их применение может давать отрицательные результаты.
Поперечные реданы используются не только в качестве основных элементов об-
обводов, но и в качестве их вспомогательных элементов. В некоторых проектах они при-
применяются в виде небольших образований носовой части корпуса для улучшения всхо-
всхожести судна на волну или в виде транцевых наделок (рис. 11.30) для разгона, умень-
уменьшения продольной качки и крена при поворотах. Известны также обводы типа зйрслот
[3] с реданами малой высоты для повышения ходкости и предотвращения „дельфини-
рования" судна, не получившие, однако, широкого распространения.
Гидродинамические шайбы и продольные гофры могут играть ту же роль, что и про-
продольные реданы.
Замена в ряде проектов глиссирующих судов (по технологическим соображениям)
продольных реданов шайбами той же высоты в виде угольников (рис. 11.31) не выз-
вызвала отличий в гидродинамическом качестве судна.
275
Продольные гофры на днище судна, как правило, заменяют элементы набора,
а также являются эффективным средством повышения устойчивости на курсе и умень-
уменьшения дрейфа на поворотах, особенно при малокилеватых или плоскодонных обводах.
При этом они могут существенно повышать и гидродинамическое качество судна,
несмотря на увеличение смоченной поверхности днища.
Отгиб днища у транца, подпорные клинья и неподвижные транцевые плиты позво-
позволяют за счет повышенного давления на своей поверхности уменьшить ходовой диффе-
дифферент судна. Они применяются на глиссирующих судах для повышения гидродинами-
гидродинамического качества в переходном режиме.
Отгиб днища {рис. 11.32) предусматривается при проектировании обводов, тогда
как подпорные клинья (рис. 11.33) и транцевые плиты обычно служат средством ис-
исправления ходового дифферента, превышающего расчетный.
Длина отгиба днища обычно не превышает 0,15 L, а угол отгиба — нескольких
градусов. Подпорные клинья и транцевые плиты, как правило, имеют меньшую про-
протяженность — ~ OJZ. и больший угол наклона поверхностей к днищу — 6—8°.
Отгиб (изгиб) килевой линии у транца, т. е. только узкого прикилевого участка
днища (рис. 11.34), способствует повышению продольной устойчивости при движении
судна в режиме развитого глиссирования и уменьшению амплитуды его килевой качки
при прохождении гребней крупных волн. Длина отгиба обычно не превышает 0,10—
.0,15^, а угол отгиба — 3—6°. Как правило, отгибу предшествует подъем килевой линии
и у транца она не опускается ниже основной линии.
Бортовые були (рис. 11.35) устанавливаются для повышения статической и ходо-
ходовой остойчивости глиссирующих мотолодок. Их применение позволяет уменьшить
ширину днища у транца и за счет этого повысить ходкость судна. При соответствую-
соответствующей форме нижних поверхностей були могут способствовать повышению гидродинами-
гидродинамического качества в переходном режиме. Однако для этого необходимо расположить
нижние поверхности булей на небольшой высоте над скулами, что вызывает замывание
булей при глиссировании на волнении.
,вторые скулы" (рис. 11.36) в кормовой части корпуса служат тем же целям,
что и бортовые були. Отличие заключается лишь в конструкции корпуса судна, ширина
поверхностей между бортом и второй скулой не превышает 0,08—0,12 Вск. Испытания
моделей и мотолодок с такими обводами дали положительные результаты, позволив-
позволившие назвать эти обводы двухрежимными [78] . Вторые скулы имеют те же недостатки,
что и бортовые були.
„Жабры " — одна или несколько пар пластин, прикрепленных к корпусу судна для
увеличения гидродинамической подъемной силы при разгоне. Они могут крепиться
к скулам так, что служат продолжением поверхности днища,,либо располагаются выше
скул и при зтом имеют увеличенный угол атаки. „Жабры" весьма эффективны на тихой
воде при разгоне, но применяются редко из-за ненадежности и ряда неудобств в экс-
эксплуатации.
Спонсоны как вспомогательные элементы применяются в обводах глиссирующих
судов с целью повышения их статической и ходовой остойчивости, а также ходкости
в режиме развитого глиссирования, для улучшения всхожести судна на волну и повы-
повышения его устойчивости на курсе.
Примерами их применения с этими целями могут служить обводы Блегга (рис.
11.23) икафедралов (см. рис. 11.21).
Лыжа (гидролыжа) — плоский или малокилеватый участок днища вдоль килевой
линии корпуса или спонсона судна (рис. 11.37). Ее применение позволяет создать на
небольшом участке днища значительную подъемную силу и повысить мореходность
корпусов с большой килеватостью днища („глубокое V", обводы Блегга, „сани Фок-
Фокса"). При глиссировании на тихой воде лыжа способствует уменьшению смоченной по-
поверхности днища как за счет собственной формы, так и за счет повышения ходового
дифферента. На небольшом волнении лыжа заставляет судно жестко отслеживать вод-
276
ную поверхность, что уменьшает замывание его корпуса. При значительном волнении
лыжа улучшает всхожесть судна на волну и может способствовать уменьшению ударных
нагрузок, если не имеет чрезмерной ширины [ 143].
Отрицательное влияние лыжи проявляется в увеличении ударных нагрузок при
небольшом волнении и малой динамической нагрузке днища (поэтому ее ширина в но-
носовой части судна не должна превышать 0,1 Вск), увеличении брызгообразования,
уменьшения устойчивости судна на курсе и увеличении его дрейфа на поворотах.
Антикавитационные наделки и каналы (рис. 11.38) применяются для уменьшения
вероятности попадания пузырьков воздуха из зоны брызгообразования в носовой
части судов с туннельными образованиями корпуса или со спонсонами к ГВ.
Специальные устройства. Эти приспособления позволяют за счет изменения своего
состояния изменять характер образования подъемной силы. Принципиальным пре-
преимуществом специальных устройств перед вспомогательными элементами обводов
является определенная степень их управляемости, а недостатками — большая сложность
и меньшая надежность и т. п.
Балластно-дифферентовочные цистерны (рис. 11.39) — это эффективное средство
изменения статического и ходового дифферента глиссирующего судна. Объем цистерн
обычно не превышает 15—20 % водоизмещения судна. Цистерна располагается в носовой
оконечности корпуса (в отдельных случаях применяется одновременно и цистерна в но-
носовой оконечности) возможно дальше от ЦТ судна. К ней подведены приемный и слив-
Рис 11.36. „Вторые скулы"
В)
Рис. 11.37. Лыжа (гидролыжа)
Рис. 11.38. Антикавитационные наделки (а) и кана-
каналы (б)
Рис. 11.39. Балластно-диффереитовочная
цистерна.
/ — цистерна; 2 — вентиляционный тру-
трубопровод; 3 — запорные краны; 4 —
приемный трубопровод; 5 — водозабор-
ник; б - сливной трубопровод
' 3
Рис. 11.40. Балластная самоотливиая
цистерна.
1 — цистерна; 2 — вентиляционный тру-
трубопровод; 3 — отверстие для поступле-
поступления и слива воды
Рис. 11.41. Автоматическая дифферентовоч-
ная цистерна.
1 — цистерна; 2 — отверстия для поступления
и слива воды; 3 — вентиляционные отверстия
277
ной трубопроводы, снабженные запорными клапанами, а также вентиляционный трубо-
трубопровод. Вода поступает в цистерну по трубопроводу от водозаборника, расположенного
ниже ходовой ватерлинии, под действием скоростного напора при движении судна.
Выход воздуха из цистерны при ее заполнении происходит через вентиляционный
трубопровод. Слив воды осуществляется самотеком.
Заполнение носовой балластно-дифферентовочной цистерны, вызывая уменьшение
ходового дифферента, может способствовать значительному уменьшению сопротивле-
сопротивления в переходном режиме, уменьшению качки, ударных нагрузок, повышению устой-
устойчивости на курсе при ходе на волнении.
Балластные самоотливные цистерны (рис. 11.40) применяются для уменьшения
на стоянке валкости судов с обводами типа „глубокое V", уменьшения их качки н
дрейфа на волнении. Цистерна располагается в междудонном пространстве вдоль ДП
судна ниже ватерлинии. Она заполняется и опорожняется через вырез в транце. Венти-
Вентиляция цистерны осуществляется через трубопровод, расположенный в ее носовой части.
Автоматическая дифферентовочная цистерна (рис. 11.41) предназначена для умень-
уменьшения ходового дифферента судна во время его разгона перед выходом на глиссиро-
глиссирование.
Цистерна расположена в носовой оконечности корпуса и выполнена в виде емкости,
ограниченной снизу днищевой обшивкой. В нижней части цистерна имеет от-
отверстия для поступления и слива воды, в верхней — отверстия для вентиля-
вентиляции. При остановке судна она самотеком наполняется водой, а при разгоне
вода из нее постепенно вытекает. Необходимое для эффективной работы при
разгоне судна время опорожнения обеспечивается за счет соответствующих раз-
размеров сливных отверстий.
Объем цистерны составляет около 10 % полного водоизмещения судна. Ее заполне-
заполнение вызывает смещение ЦТ судна в сторону носовой оконечности-на 0,05—0,08 X. и в оп-
определенных случаях позволяет повысить гидродинамическое качество судна в районе
горба сопротивления более чем на 30 %. На стоянке заполненная цистерна, подобно
балластной, повышает статическую остойчивость судна.
Рис. 11.42. Регулируемые
транцевые плиты
Рис. 11.43. Автоматические
транцевые плиты
Рис. 11.44. Управляемые
транцевые плиты
Рис. 11.45. Стабилизатор
Рис. 11.46. Гибкий интерцептор на транце
лодки: а — общий вид; б — сечение по ДП.
1 — положение на стоянке; 2 — при разго-
разгоне; 3 - при глиссировании
278
Транцевые плиты с изменяемым углом атаки (регулируемые, автоматические
и управляемые) действуют также как и неподвижные, но, соответственно своей разно-
разновидности и особенностям конструкции, предоставляют большие возможности изме-
изменения гидродинамических характеристик судна.
Регулируемые транцевые плиты (рис. 11.42) изменяют угол атаки за счет непосред-
непосредственного изменения положения фиксирующих плиты элементов (обычно - талрепов
или нажимных винтов). Выполнение этой операции требует остановки судна либо
даже его подъема на берег.
Автоматические транцевые плиты сами изменяют угол атаки в зависимости от
скорости набегающего потока и своего положения в нем. Например, плиты фирмы
„Аква стабс" (рис. 11.43) после разгона резко уменьшают свой угол атаки из-за сме-
смещения центра давления воды за ось их вращения. Недостатками таких плит следует
считать замывание их поверхностей после выхода судна на глиссирование.
Управляемые транцевые плиты (рис. 11.44) изменяют угол атаки с помощью спе-
специального привода (механического, электрического, гидравлического или пневматиче-
пневматического) . Это позволяет управлять ими во время движения судна. После выхода на
глиссирование плиты могут быть установлены с отрицательным углом атаки для
предотвращения их замывания. Быстрота перекладки транцевых плит позволяет исполь-
использовать их как средство торможения при маневрировании или остановке судна. При
раздельном управлении плиты могут использоваться для уменьшения не только ходо-
ходового дифферента, но и крена судна от реакции ГВ, смещения груза, выполнения пово-
поворотов и т. п.
Размеры транцевых плит (независимо от их разновидности) принимают с учетом
быстроходности и степени изменения ходового дифферента судна [12] . Для самых
быстроходных судов, незначительно изменяющих дифферент, рекомендуется прини-
принимать их длину не более 2 %^вл> а ширину - не более 20 %2?вл- Дл* сУД°в с невысокой
скоростью глиссирования и большим изменением ходового дифферента рекомендуются
плиты длиной 3 % ?вл и шириной во весь транец. Предельный угол отклонения транце-
транцевых плит от плоскости днища обычно не превышает 10°.
Применение и учет положительного эффекта работы транцевых плит при проекти-
проектировании судна позволяет принимать его характеристики, форму обводов и параметры
движения, обеспечивающими повышение ходкости и мореходности: более кормовую
центровку судна и больший шаг ГВ для повышения скорости, увеличенную килеватость
днища для повышения мореходности и т. п.
Положительный эффект применения транцевых плит зависит от характеристик
судна и может быть весьма значительным — известны случаи уменьшения сопротивления
и расхода топлива на 30 %, но в зарубежной практике считается достаточным, если полу-
получен прирост скорости „легкого" судна на 10 % и „тяжелого" на 5 % [12] .
Основными факторами, ограничивающими применение устройства с транцевыми
плитами, являются усложнение конструкции и увеличение длины судна, усложнение
его эксплуатации, а также отсутствие простой и надежной методики расчета этих
устройств. В то же время разнообразие типов и конструкций, постоянное совершенство-
совершенствование (например, появление встроенных плит, или „тримаранов", не выступающих
в убранном состоянии за днище судна) позволяет считать их одним из наиболее перспек-
перспективных средств повышения ходкости и мореходности быстроходных судов.
Стабилизатор (рис. 11.45) - зто расположенная в кормовой части днища плоская
пластина, которая подобно встроенным плитам может с помощью специального привода
изменять свой угол атаки, позволяя этим оптимизировать ходовой дифферент
судна [117] .
Интерцепторы — устройства, содержащие пластины, расположенные поперек днища
судна, примерно перпендикулярно к его поверхности. Интерцепторы повышают давле-
давление набегающего потока воды на расположенном перед ними участке днища. Это поз-
позволяет использовать их как одно из средств изменения ходового дифферента судна
279
для повышения его ходкости и мореходности. Высоту пластин интерцепторов прини-
принимают равной 0,5—1 % от ширины днища. Известные в технической литературе устрой-
устройства интерцепторов значительно отличаются по своей сложности. К наиболее простым
можно отнести, например, интерцептор, который представляет собой резиновую пласти-
пластину, расположенную на днище вдоль транца. При разгоне судна пластина способствует
уменьшению его ходового дифферента и сопротивления, а при глиссировании она под
действием возросшего давления воды отгибается назад, что уменьшает ее тормозящее
действие (рис. 11.46).
Системы вентиляции зареданного пространства — это устройства, использующие
воздух для поддержания или увеличения полостей (каверн), образующихся за реда-
реданами либо интерцепторами глиссирующего судна. Этим они принципиально отличаются
от систем для воздушной смазки днища или для создания на нем подъемной силы
(у СВП). Вентиляция зареданного пространства может быть как естественной,
так и искусственной. Примером системы естественной вентиляции могут слу-
служить воздухопроводы, соединяющие зареданное пространство с атмосферой. Та-
Такая система не создает собственного эффекта повышения ходкости, а лишь обес-
обеспечивает устойчивую работу редана, например на волнении. Примером системы
искусственного поддержания и увеличения каверны за реданами за счет вы-
выхлопных газов двигателя может служить примененная на катере „Динаплан"
[117].
11.5. Теоретические чертежи глиссирующих судов
Обводы судна длиной 2,6 м (рис. 11.47, табл. 11.4) предназначены для мотолодки
минимальных размерений, например, лодки-картоп с корпусом из термопласта. Трех-
килевая форма обводов применена с целью повышения безопасности эксплуатации.
Расчетное водоизмещение — не более 300 кг, вместимость — 2—3 чел., мощность
двигателя — не более 7 кВт A0 л. с.).
Обводы могут быть применены для более крупной мотолодки с пониженной энерго-
энерговооруженностью.
Обводы судна длиной 4,2 м с разворачивающейся на плоскость обшивкой
(рис. 11.48, табл. 11.5) предназначены для беспалубной мотолодки универсального
назначения (рыболовной, прогулочной, хозяйственной и т. п.) с пониженной энерго-
энерговооруженностью. Расчетное водоизмещение 450 кг, вместимость — 3—4 чел., мощность
двигателя — не более 15 кВт B0 л.с.).
Обводы могут быть применены для более крупных мотолодок и катеров, экс-
эксплуатирующихся на относительно спокойных водоемах.
Обводы судна длиной 6,0 м (рис. 11.49, табл. 11.5) предназначены для мотолодок
и катеров широкого назначения, прежде всего — туристских с повышенной мореход-
мореходностью и умеренной энерговооруженностью. В связи со сложной формой поверхностей
корпус целесообразно изготовлять из стеклопластика. Расчетное водоизмещение 1,5 т,
мощность двигателей 37—74 кВт E0—100 л. с.).
Обводы могут применяться также для более крупных катеров (табл. 11.6),
Обводы судна длиной 9,0 м (рис. 11.50, табл. 11.7) предназначены для быстро-
быстроходного мореходного катера, например патрульного.
Расчетное водоизмещение — 5,2 т, мощность двигателей — 220—440 кВт C00—
600 л. с.).
Обводы можно применить для катера или мотолодки меньших размерений.
280
Корпус
Борт
8 7/6 S U-
Киль спонсона
Полуширота
Борт
Свод туннеля ^им спонсона
Рис. 11.47. Теоретический чер-
чертеж микромотолодки
№
шп.
1/2
1
2
3
4
5
6
7
8
9
Тр.
Таблица 11.4. Таблица плазовых ординат микромотолодки (ем.
Полуширота от ДП
Борт
380
490
563
608
635
648
650
650
650
650
650
Скула
302
460
514
554
586
603
607
608
609
610
610
Отгиб
скупы
302
460
514
550
572
577
579
580
580
580
580
ВЛ1
_
36
87
126
18$
510
558
611
615
615
615
ВЛ2
_
105
190
475
586
611
. 623
625
626
627
627
влз
85
212
488
570
611
631
638
639
640
641
641
рис. 11.47)
Расстояние от ОЛ
Борт
440
430
420
410
405
400
396
394
392
390
390
Кнль
240
82
14
г
0
0
0
0
0
0
0
Киль
спонсо-
спонсона
380
362
256
185
ПО
60
28
13
5
2
0
Свод
туннеля
380
345
258
182
126
92
70
56
50
50
50
Скула
380
370
329
266
205
154
120
98
. 88
82
80
БОН
Борт
Рис. 11.48. Теоретический
чертеж мотолодки с раз-
разворачивающейся на пло-
плоскость .обшивкой
281
бон
Борт
Хоспис
111 1
12 11
Рис. 11.49. Теоретический
чертеж крупной мото-
мотолодки (катера)
№
тип.
1/2
1
2
3
4
5
6
7
8
9
Тр.
Таблица 11.
Борт
210
372
583
694
739
750
742
732
721
710
700
Скула
79
223
393
493
560
606
635
648
650
650
650
5. Таблица
плаэовых ординат моторной лодки (см.
Полуширота от ДП
ВЛ1
_
22
174
291
395
487
554
595
545
460
387
ВЛ2
_
125
310
456
567
627
659
671
668
664
660
ВЛЗ
46
203
407
535
619
668
689
695
688
681
674
ВЛ4
100
261
465
593
667
704
716
713
704
595
686
ВЛ5
151
314
523
648
708
732
635
726
716
706
696
рис. 1
1.49,11.
50)
Расстояние от О Л
Борт
616
612
603
596
587
680
574
569
565
563
560
Скула
360
330
275
227
186
152
127
129
129
121
129
1Б
_
379
162
80
48
42
51
60
69
78
85
II Б
_
._
459
239
151
105
86
87
96
105
112
Киль
234
85
14
0
6
15
24
33
42
51
58
Бон
Борт
10 9 8 7 6 5 Ч J
Полушцрота
Верхняя снула
~i~ifTo-
, Корпус
1/21
Рис. 11.50. Теоретический
чертеж быстроходного ка-
катера
282
№
шп.
1/2
1
2
3
4
5
б
7
8
9
10
И
Тр.
Та
блица 11.6. Таблица плазовых ординат туристской мотолодки (катера)
Полуширота от ДП
Борт
310
522
794
946
1041
1073
1092
1091
1087
1077
1069
1060
1050
Верх-
Верхняя
скула
90
351
690
883
991
1052
1080
1088
1087
1077
1069
1060
1050
Скула
_
32
335
588
763
865
921
946
951
949
948
941
938
Отгиб
скулы
_
26
314
546
704
798
848
870
872
870
862
850
840
ВЛ1
_
_
84
268
422
549
648
721
785
821
839
841
838
ВЛ2
_
_
261
531
782
896
953
991
987
981
972
970
961
влз
81
429
) 702
/ 820
966
1012
1032
1081
1027
1020
1014
1010
Расстояние от ОЛ
Борт
1010
1010
1010
1010
1010
1010
1010
1010
1010
952
951
950
949
Верх-
Верхняя
скула
892
879
857
825
803
786
774
764
760
754
750
750
750
Скула
и ее
отгиб
526
468
412
361
319
279
249
227
213
206
202
200
1Б
_
946
552
295
183
134
105
94
86
75
69
68
66
IIБ
_
-
-
724
442
318
257
221
290
191 ,
184
175
167
Киль
781
482
124
30
4
0
0
0
0
0
0
0
0
Та
№
шп.
0
1/2
1
17,
. 2
3
4
5
6
7
8
9
Тр.
№
шп.
0
1/2
1
IV,
3
4
%
6
7
8
9
Тр.
блица
11. 7. Таблица плазовых ординат быстроходного катера (см. рис.
11.
30)
Полуширота от ДП
Борт
196
548
450
1094
1280
1496
1580
1600
1594
1588
1572
1556
1540
Верхняя
скула
_
362
668
902
1124 -
1368
1472
1504
1502
1498
1488
1474
1462
Скула
70
312
516
728
1014
1176
1264 •
1305
1318
1322
1324
1324
Отгиб
скулы
64
278
476
650
918
1080
1166
1202
1218
1222
1224
1224
ВЛ1
_
_
_
140
336
442
500
532
552
576
608
640
ВЛ2
_
_
_
154
312
572
728
816
880
932
982
1048
1106
ВЛЗ
—
86
280
460
758
952
1086
1180
1322
1332
1338
1340
ВЛ4
_
_
186
404
600
,1018
1206
1302
1346
1368
1374
1380
1380
Полуширота от ДП
ВЛ5
44
314
560
776
1098
1276
1362
1398-
1416
1420
1420
1422
ВЛ6
144
422
1 680
904
1220
1386
1450
1476
1484
1486
1484
1480
ВЛ7
_
316
640
926
1132
1390
1500
1524
1530
1524
1416
1502
1500
Расстояние от ОЛ
Борт
1540
1542
1548
1554
1562
1568
1568
1562
1552
1536
1520
1500
1480
Верх-
Верхняя
скула
1304
1282
1268
1252
1240
1214
1182
1156
1128
1104
1076
1040
1022
Скула
и отгиб
скулы
_
942
894
848
802
722
650
596
552
512
472
436
402
1Б
_
1430
1142
848
570
286
200
170
158
150
140
130
122
II Б
_
_
_
1118
1140
720
550
450
406
372
348
320
300
Киль
1304
862
430
194
76
6
0
0
0
0
0
0
0
283
12. СУДА НА ПОДВОДНЫХ КРЫЛЬЯХ
12-1. Основные понятия и определения
Геометрические характеристики подводных крыльев. Подводное крыло (ПК)
по принципу своего действия не отличается от воздушного крыла и представляет собой
хорошо спрофилированную несущую поверхность, подъемная сила которой при движе-
движении в воде во много раз превосходит силу сопротивления. Как абсолютные значения
развивающихся на крыле сил, так и их соотношения зависят от совокупности геометри-
геометрических элементов крыла — его площади, профилировки сечений, размаха и т. д. Наибо-
Наиболее существенную роль в создании гидродинамических сил играют элементы ПК, приве-
приведенные на рис. 12.1.
Хорда крыла b — отрезок прямой, соединяющий самые удаленные точки входящей
и выходящей кромок продольного профиля крыла. Для крыла произвольной в плане
формы вычисляется средняя хорда, равная отношению площади проекции крыла S
к его размаху/ : bcp =S/l.
Размах крыла / — расстояние, измеренное между крайними точками крыла в на-
направлении, перпендикулярном его движению.
Удлинение крыла, или относительный размах, — отношение размаха крыла к его
средней хорде: X =//Ьср =/ 2/S.
Крыло, имеющее бесконечно большой размах по сравнению с хордой, называется
крылом бесконечного удлинения: X =°°.
Абсолютные и относительные значения толщины профиля крыла и кривизны его
средней линии определяются точно так же, как и для профиля радиального сечения
лопасти ГВ (см. п. 8.1).
Кромочный угол атаки а — угол между направлением движения крыла и его хордой
(рис. 12.2).
Угол килеватости /3 (см. рис. 12.1) — угол между горизонтальной плоскостью
и нагнетающей поверхностью крыла в плоскости шпангоута.
Угол стреловидности х — угол между плоскостью шпангоута и вертикальной плос-
плоскостью, проходящей через входящую кромку крыла.
Площадь крыла S — площадь самого крыла, если оно плоское, или площадь проек-
проекции крыла в плане, если оно килеватое: S =/ Ьср.
Рис. 12.1. Геометрические элементы
подводных крыльев, имеющих различ-
различную форму в плане
Рис. 12.2. Схема сип, действующих
на подводное крыло
284
Погружение крыла h — отстояние какой-либо условной точки крыла от уровня
невозмущенной свободной поверхности воды. При изучении и проектировании ПК
пользуются не абсолютным погружением, а относительным Л -h\b.
Гидродинамические характеристики подводных крыльев. Подъемная сила Y пред-
представляет собой проекцию равнодействующей R всех возникающих на крыле гидроди-
гидродинамических сил на плоскость, перпендикулярную к направлению движения крыла.
Проекцию этой же равнодействующей на направление движения называют силой лобо-
лобового сопротивления X. Эти силы, схематически показанные на рис. 12.2, обычно выра-
выражают следующим образом:
5, A2.1)
где С,, - коэффициент подъемной силы (КПС); Сх - коэффициент сопротивления;
v — скорость движения крыла, м/с. I
Отношение подъемной силы крыла к величине его сопротивления называется
гидродинамическим качеством:
Гидродинамическое качество показывает, во сколько раз подъемная сила крыла
больше его сопротивления. Иногда пользуются коэффициентом обратного качества,
или удельным сопротивлением, е =X/Y = Cx/Cy.
Наиболее сильное влияние на качество изолированного ПК (без стоек) оказы-
оказывают его конструктивные элементы (форма профиля, удлинение, относительная тол-
толщина и т. д.), угол атаки и глубина погружения. Наличие стоек увеличивает сопро-
сопротивление крыла и снижает его качество. Максимальных значений гидродинамическое
качество крыла достигает в узком диапазоне малых положительных углов атаки —
а « 1 -г 3°. За пределами этого диапазона, как в одну сторону, так и в другую, качество
крыла довольно резко падает. Типичный график зависимости коэффициентов Су =
=/(а), Cx=f(a) и K=f(a) от угла атаки представлен на рис. 12.3. При малых углах
атаки (примерно до а» 10°) наблюдается линейное изменение коэффициента Су.
Затем рост Су =/(а) замедляется, и после появления срыва потока с верхней поверх-
поверхности крыла значения Су резко уменьшаются.
Рис. 12.3. Зависимость коэф-
коэффициентов Су ,СХ и К сег-
сегментного профиля от угла
атаки
Рис. 12.4. Влияние скоса по-
потока на действие подводного
крыла
V
1
У
4 П
1
o,s
1
L
г
—м*
t
0,2
К,100 Сх
г
1
?п
-16-
¦ 19-
•ч-
\
\
\
/
к
\
\
У
у
\
/
\
s
J
/
т
\
1
f
ч
* 8 12 ее'
285
0,2
0,1
i
I
у*
/
f
/
F
/
/
/
При уменьшении углов атаки крыла а можно найти
такое его значение, при котором величина Су будет
равна нулю. Этот угол обозначается а0 и называется
углом нулевой подъемной силы (УНПС). У ПК с не-
несимметричным профилем угол а0 имеет отрицатель-
отрицательное значение. УНПС является своеобразной характе-
характеристикой относительной кривизны средней линии
профиля 50. В идеальной жидкости в радианах и граду-
градусах соответственно
а0 = —25О
-1156О.
В реальной жидкости при наличии вязкости УНПС
несколько меньше теоретических:
•ао=-1,746оилиа5 *-100б0.
A2.2)
2 4 В 8 Л
» ,. . _ При известном угле а0 на прямолинейном участке
Рис. 12.5. Зависимость коэффи- ,-, f/ -> .
циентов ^ и т от относись- значение Cy=f(a) можно определить по формуле
ного удлинения
Cy=(dCyldd)(a-a0),
A2.3)
где производная dCylda=a<x> представляет собой тангенс угла наклона Су к оси а.
Для тонкого крыла в идеальной жидкости а «> = 2тг.
В вязкой жидкости производная Су по а уменьшается до значения а „ «5,5 или
а о, «* 0,096 (при а в радианах и градусах соответственно).
Все приведенные формулы в основном относятся к крыльям бесконечного удли-
удлинения. Если удлинение крыла уменьшить до конечной величины, то при его обтекании
безграничным потоком жидкости вследствие разности давлений на верхней и нижней
поверхностях у концов крыла будут наблюдаться перетекание жидкости снизу вверх
и образование свободных или концевых вихрей. Сбегающие с концов крыла вихри
вызовут вблизи крыла дополнительные скорости w, перпендикулярные к направлению
скорости набегающего потока. Вследствие этого крыло будет обтекаться скошенным
на угол Да потоком, имеющим направление и скорость v i (рис. 12.4). Наличие скоса
потока уменьшает фактический угол атаки крыла на величину Да. В результате подъем-
подъемная сила, направление которой должно быть перпендикулярным к скорости v i, также
отклонится на угол Да Проекция этой силы на направление скорости v даст состав-
составляющую Xj называемую индуктивным сопротивлением. Вторая составляющая будет
представлять собой истинное значение подъемной силы крыла Y относительно потока
со скоростью v .
Индуктивное сопротивление выражается обычно ЛГ, = 0,5 CXipv2S. Коэффициент
индуктивного сопротивления находится по формуле
Влияние формы крыла в плане на индуктивное сопротивление учитывается коэф-
коэффициентом ц. Формула показывает, что увеличение удлинения крыла уменьшает его
индуктивное сопротивление.
Угол скоса потока Да определяется по выражению Да=[A + г)/я]Су/Х. Величи-
Величина т учитывает влияние на Аа формы крыла в плане.
286
Для эллиптических крыльев, обладающих наименьшими индуктивными потерями,
коэффициенты д и т равны нулю. Для реальных крыльев, имеющих производную а ™ *
«» 5,5, значения коэффициентов цит могут быть определены по рис. 12.5.
12.2. Основные особенности работы подводных крыльев
Плотность среды. Плотность воды более чем в 800 раз превышает плотность воздуха,
находящегося на уровне моря. При этом вода практически несжимаема и плотность ее
почти не подвержена изменениям. Плотность же воздуха с увеличением высоты, т. е.
с- уменьшением давления, быстро падает и на высоте около 10 000 м она уже будет
меньше плотности воды в 1500 раз. Само по себе различие в плотности воздуха и воды
на докавитационных режимах движения ПК не создает каких-либо дополнительных
гидродинамических проблем. Необходимо только учитывать, что в силу указанного
различия в плотности для создания одинаковой подъемной силы при той же скорости
движения площадь ПК должна быть примерно в 800—1000 раз меныйе площади воз-
воздушного крыла. Это обстоятельство приводит к весьма большой нагруженности ПК
и создает трудности при обеспечении его прочности, а также резко повышает требо-
требования к точности изготовления крыла и чистоте обработки его несущих поверхностей.
По этой же причине в процессе эксплуатации крылатых судов необходимо постоянно
следить, чтобы состояние поверхностей и кромок ПК не ухудшалось из-за появления
коррозии, отложения различных осадков или наличия забоин. В противном случае
будут снижаться гидродинамическое качество ПК и возрастать сопротивление воды,
что затруднит выход судна на крылья и приведет к уменьшению его скорости.
Свободная поверхность воды. Гидродинамические характеристики ПК, движуще-
движущегося вблизи свободной поверхности воды при глубине погружения, меньшей его хорды,
весьма сильно отличаются от характеристик крыла, обтекаемого безграничным потоком,
Слой воды, находящийся над малопогруженным крылом, деформируется, и средняя
скорость обтекания засасывающей поверхности становится меньше, чем при обтекании
этой же поверхности глубокопогруженного крыла. Вследствие этого как разреже-
разрежение на засасывающей поверхности, так и подъемная сила всего крыла не достигает тех
значений, какие они имели бы в безграничном потоке. При этом близость свободной
поверхности воды изменяет обе характеристики, определяющие значение КПС крыла, —
dCy
как величину его производной по углу атаки , так и величину УНПС а0.
da
Влияние свободной поверхности воды начинает сказываться с глубин погружения,
примерно равных хорде крыла, и с уменьшением их изменение этих характеристик
усиливается, вызывая значительное уменьшение подъемной силы. Зависимость подъем-
подъемной силы от глубины^логружения крыла широко используется при практическом проек-
проектировании ПК, так как благодаря ей осуществляется саморегулирование подъемной
силы при изменении погружения крыла вследствие изменения скорости его обтекания
или появления крена. Изменение величин подъемной силы на концах малопогруженного
крыла, происходящее при его крене, создает восстанавливающий момент, стремящийся
выровнить крыло. Это свойство используется как одно из средств обеспечения остой-
остойчивости крылатых судов на ходу. Примерный характер изменения коэффициентов
подъемной силы и сопротивления крыла при различных углах атаки в зависимости
от глубины его погружения представлен на рис. 12.6.
Значение КПС малопогруженного крыла может быть найдено по формуле
Сук = * \к [а - (в0 + Дао)] , A2.4)
287
0,8
о,г
1 +
V*'
A2.5)
A+г)?
орЬ
Ofit
0fl2
Ш
Ш
ш
m
%
s
И
представляет собой производную КПС кры-
ла конечного удлинения X, движущегося
под свободной поверхностью воды _на
относительной глубине погружения h =
=h/b.
Зависимость кц, =а h °о1а <*> учитывает
влияние свободной поверхности воды на
Рис. 12.6. Влияние относительного погруже- производную КПС при бесконечном раз-
ния подводного крыла на изменение коэффи- махе КрЬша. Эта зависимость, представ-
циентов Су и Сх ленная на рис. 12.7, может быть вы-
выражена формулой
-*
-z
чс°
которая действительна при погружениях крыла h ** 0,04 ¦?¦ 4,0.
Функция f =/(Л /X) определяется по рис. 12.8 и учитывает влияние глубины погру-
погружения на индуктивный угол скоса потока.
Кривые зависимости производной
da
от удлинения плоского или малокиле-
ватого (|3 < 8 ) прямоугольного крыла при различных относительных глубинах погру-
погружения, полученные по формуле A2.5), приведены на рис. 12.9.
Влияние свободной поверхности воды на изменение угла нулевой подъемной силы
ПК зависит от глубины погружения h и относительной толщины крыла 5 :
A2.6)
Аа°0 =57,3
Зависимость к/, =/(А ) представлена на рис. 12.10.
Для ПК, имеющих килеватость /3 = 15-=- 30°, КПС находится по формуле
'-у кил
"У кип
da
¦(«-
cos K
— пиокип)
A2.7)
dC,
где
'У КИЛ
da
=/(Х) — производная КПС килеватого крыла, определяемая по рис.
12.11. Влияние глубины погружения килеватого крыла на УНПС Даокил =f(h) показа-
показано на рис. 12.12.
Рассмотренное влияние свободной поверхности воды на гидродинамические харак-
характеристики ПК относится только к их устойчивому обтеканию. В действительности сле-
288
1,0
0,9
0,8
0,7
0,6
0,5
1
1
1
1
1
(
/
/
***
¦MS
—
——
—;
0
3h
Рис. 12.7. Зависимость к^ от относитель-
относительной глубины погружения
О 0,1 0,1 0,3 ' Ofi 0,5 0,6 0,7%/Л
Рис. 12.8. Зависимость ? влияния глу-
глубины погружения на индуктивный угол
скоса потока
10
15 \
Рис. 12.9. Зависимость dCy^/da от удлинения прямоугольного подводного
крыла при различных погружениях
0,2
0.1
\
\
\
>
Рис. ]
от
2.
ГЛ)
10. Зависимость kh
^бины погружения
dCy,
0,06
0,04
0,02
/
(
/
0 1
10 Зак. 738
0 5 10Х
Рис. 12.11. Зависимость
dCyKHJI/da V-образного крыла
при углах килеватости C = 15-5-
-j-300 от относительного удли-
удлинения
289
0,008
0,006
0,004
0,001
\
\
—~-
4
<^.
1
3h
Рис. 12.12. Зависимость поправки к углу
нулевой подъемной силы килеватого кры-
крыла от относительной глубины погружения
АаОкм дует считаться с возможностью неустойчивого
обтекания, являющегося следствием проникно-
проникновения атмосферного воздуха на засасывающую
поверхность крыла. При этом разрежение на ней
снимается и устанавливается атмосферное дав-
давление. Это явление обычно сопровождается
срывом потока с засасывающей поверхности и
ее оголением. Поскольку большая часть подъем-
подъемной силы крыла создается именно засасываю-
засасывающей стороной, то при попадании на нее воздуха
подъемная сила крыла мгновенно уменьшает-
уменьшается почти в два раза, и оно проваливается.После
погружения в воду подъемная сила крыла вос-
восстанавливается, и оно опять начинает всплывать,
приближаясь к свободной поверхности воды.
И если своевременно не будут предприняты спе-
специальные меры, то описанное явление будет
периодически повторяться, вызывая неустой-
неустойчивость движения судна.
Атмосферный воздух может попадать на крылья различными путями: непосред-
непосредственно со свободной поверхности воды при недостаточном заглублении крыла, по
вихревым шнурам, сбегающим с крыла и замыкающимся на свободную поверхность, по
наклонным стабилизаторам и стойкам, пересекающим свободную поверхность воды
и крепящим крылья к корпусу судна. При проектировании ПК стремятся обеспечить
такое их погружение, при котором атмосферный воздух не проникал бы к крыльям
и не изменял бы их гидродинамических характеристик. На наклонных стабилизаторах
для этой же цели устанавливают специальные шайбы, препятствующие доступу воз-
воздуха на засасывающую поверхность, стойки делают по возможности тонкими и т. д.
Взаимодействие крыльев. Носовое крыло оказывает существенное влияние на
гидродинамические характеристики кормового. Создаваемый носовым крылом поток
имеет форму корытообразной впадины с плоским основанием и крутыми стенками.
Продольное сечение этой впадины имеет характер полуволны. По мере удаления от
носового крыла впадина постепенно сужается и ее стенки смыкаются. Однако про-
происходит это на расстоянии, значительно превышающем расстояние между крыльями,
и кормовое крыло обычно находится в развитой части впадины, вследствие чего оно
погружено глубже относительно невозмущенной свободной поверхности воды, чем
носовое. Такое положение кормового крыла создает дополнительный дифферент,
увеличивающий углы атаки обоих крыльев, что должно учитываться при их проекти-
проектировании. Вместе с тем о'тходящий от носового крыла скошенный поток обычно умень-
уменьшает угол атаки кормового крыла. Учет угла скоса потока за носовым крылом приво-
приводит к уменьшению' КПС кормового крыла Сукл в системе тандем и к увеличению
сопротивления Схкт:
dC,
¦у к
^у к. т ^-у к
Чкк.т
A2.8)
A2.9)
где С_уК, Схк — коэффициенты подъемной силы и сопротивления изолированного
кормового крыла.
Величина Дог представляет собой угол скоса потока за носовым крылом в месте
расположения кормового крыла. Максимальная величина этого угла при больших
числах Фруда
2Суя/(п\).
A2.10)
290
во
20
?
1
L.*b.
///
///
//
/
//
w
У*
/
V
0.5
О
Рис. 1-2.13. Зависимость длины волновой
впадины от размаха крыла и соответ-
соответствующего ему числа Фруда
*=0,5Cyh(Fr+1)
¦—-
>
**•
У
у
У
у
ЪУ
У
У
'
---
0,1
0,2 Cyh
Рис. 12.14. Зависимость наибольшей -
относительной ординаты волновой впа-
впадины от коэффициента подъемной силы
и числа Фруда по размаху крыла
Влияние угла скоса необходимо учитывать главным образом в том случае, когда
расстояние между крыльями меньше половины длины волновой впадины. Если это
расстояние превышает половину длины впадины, влияние угла скоса потока будет
положительным, и при расчете сопротивления крыла, допуская погрешность в безопас-
безопасную сторону, его можно не учитывать. При положении крыла посредине волновой впа-
впадины или на ее конце угол атаки кормового крыла вообще изменяться не будет. Для
определения длины волновой впадины, измеряемой от передней кромки носового кры-
крыла, можно пользоваться рис, 12.13 или приближенной формулой
где Fr ь =v l\/gb и Fr/ =v /y/gl - числа Фруда по хорде Ъ и по размаху носового
крыла / соответственно. ч
Приближенное значение наибольшей ординаты волновой впадины, отнесенной
к хорде носового крыла, может быть найдено по рис. 12.14 или по формуле уа/Ья =
05С(Р +1)
12.3. Кавитация подводных крыльев
Прямоугольные крылья. При проектировании ПК должно быть обращено особое
внимание на обеспечение отсутствия кавитации, возникающей при увеличении скоро-
скорости обтекания крыла и понижении давления на его засасывающей поверхности. Как
и у ГВ, критерием подобия кавитации ПК является безразмерное число кавитации,
выражаемое формулой (8.38), в которой глубина погружения оси винта заменена
глубиной погружения крыла. Число кавитации, соответствующее моменту наступления
кавитации ПК, называют критическим числом кавитации ккр. При развитой, так назы-
называемой второй стадии кавитации, давление на всей засасывающей поверхности крыла
достигает своего наименьшего значения, равного давлению насыщенных паров воды
10*
291
Pd. Дальнейшее увеличение разрежения на крыле становится невозможным. По этой
причине рост подъемной силы при увеличении скорости обтекания крыла будет проис-
происходить только за счет повышения давления на его нагнетающей поверхности, т. е. зна-
значительно медленнее. Сопротивление же кавитирующего ПК, несмотря на некоторое
снижение сопротивления трения, будет увеличиваться по-прежнему пропорционально
квадрату скорости движения, так как в целом коэффициент профильного сопротив-
сопротивления крыла из-за наличия кавитационных каверн несколько возрастает. В результате
действия обоих указанных факторов гидродинамическое качество кавитирующего
ПК будет заметно ниже, чем некавитирующего.
У крыльев, движущихся вблизи свободной поверхности воды, помимо снижения
качества -кавитация облегчает прорыв воздуха на засасывающую поверхность, вызы-
вызывая провалы крыльев и неустойчивость движения судна. К тому же кавитирующие
малопогружеиные ПК теряют свое самое главное положительное качество - возмож-
возможность автоматической стабилизации положения относительно уровня воды, так как
при приближении к свободной поверхности подъемная сила крыльев не будет умень-
уменьшаться. Таким'образом, проектирование кавитирующих ПК не может быть признано
целесообразным. В связи с этим весьма важным является изыскание способов предот-
предотвращения кавитации, а также определение моментов ее наступления для различных
типов крыльев.
Приближенное значение критического числа кавитации для глубокопогруженного
крыла бесконечного размаха можно найти по формуле
A2.11)
*кр =Су+8 .
Для малопогруженного крыла конечного удлинения с неравномерным распределе-
распределением подъемной силы по размаху данная формула примет вид
A2.12)
Коэффициент <р характеризует изменение разрежения на засасывающей поверхности
крыла %h при уменьшении глубины его погружения по сравнению с разрежением в той
же точке крыла %«, при его обтекании безграничным потоком. Значение коэффициента
?> определяют по рис. 12.15 или находят по формуле v = Ia/|o= ^y/2hl(l + 1,75 А).
Поскольку при приближении к свободной поверхности давление на засасывающей
стороне ПК повышается, антикавитационные качества малопогруженных крыльев улуч-
улучшаются и кавитация наступает на более высоких скоростях судна.
0.5
3%
Икр
150
130
110
90
км/ч
\
\
N
Ч
\
\
ч
0,1
ч^
0,2 ¦"*"
"S
0,8
ч.
-->
-~-
"^.^
=:
0.03
0,05
0,07
5
Рис' 12.15. Зависимость коэффициента
от относительной глубины погружения
Рис. 12.16. Зависимость скорости начала
кавитации прямоугольного подводного
крыла от относительной толщины при
различной относительной глубине погру-
погружения
292
Скорость потока v кр, при которой начинается кавитация на засасывающей поверх-
поверхности ПК, называется критической. Для ее определения при известных основных харак-
характеристиках прямоугольного ПК, движущегося на глубине h под свободной поверх-
поверхностью воды, могут быть использованы приближенные формулы
или
м/с * 20/>/^б км/ч A2.13)
lW(l,2Cyh +5)*> м/с * 50ly/(l,2Cyh +5)^км/ч. A2.14)
Формула A2.13) и соответствующий ей рис. 12.16 дают несколько меньшее значе-
значение критической скорости, так как они получены для Су =0,25. При уменьшении Су
критическая скорость возрастает. Увеличение скорости бескавитационного обтекания
ПК может быть также достигнуто уменьшением относительной толщины профиля
крыла 5 и относительной глубины погружения h .
Относительная толщина некавитирующих прямоугольных ПК чаще всего состав-
составляет 5 «« 0,06 ¦=¦ 0,08. С повышением скорости во избежание появления кавитации 5
приходится понижать до «* 0,04 ¦*¦ 0,05. Допустимую по условию отсутствия кавитации
относительную толщину профиля крыла при известной скорости судна v можно полу-
получить на основании формул A2.13) и A2.14) или по рис. 12.16. Полученная толщина
ПК должна быть обязательно проверена на прочность. Имеющиеся в настоящее время
материалы позволяют обеспечить необходимую прочность крыльев при 5 «* 0,04. Это
обстоятельство ограничивает возможность применения глубокопогруженных некави-
некавитирующих прямоугольных ПК до скоростей около 110 км/ч.
Вместе с этим не следует уменьшать толщину крыльев более, чем это требуется
по условию отсутствия кавитации, так как тонкие крылья имеют уменьшенный.диа-
уменьшенный.диапазон углов бескавитационного обтекания и соответственно худшую мореходность.
Уменьшением глубины погружения для предотвращения кавитации ПК также
следует пользоваться с осторожностью, так как при этом резко возрастает вероятность
прорыва атмосферного воздуха на задасывающую поверхность крыльев, в особенности
при волнении. Поэтому принимать погружение крыльев меньше чем 0,2 Ъ не рекомен-
рекомендуется. Обычно же глубина погружения плоских малопогруженных ПК h =@,2-5-
При дальнейшем увеличении погружения влияние свободной поверхности воды на
подъемную силу ПК будет ослабевать, что может затруднить обеспечение поперечной
и продольной устойчивости хода судна.
Малопогруженные ПК могут применяться до скоростей движения судна ~ 150 км/ч,
т.е. уменьшение глубины погружения крыльев позволяет отодвинуть границу наступле-
наступления кавитации примерно на 40 км/ч [43] .
Условие отсутствия кавитации ПК на всех режимах движения катера накладывает
серьезные ограничения на Су, поскольку его значения непосредственно связаны с вели-
величиной разрежения на засасывающей поверхности крыла. При умеренных скоростях
50-60 км/ч для малопогруженных ПК принимают Су =0,2-г 0,3. При этих значениях
Су, соответствующих углам атаки крыльев около 2—3°, гидродинамическое качество
ПК становится близким к максимальному. С увеличением скорости до 100-150 км/ч
допустимые значения КПС снижаются до Су * 0,1 -^0,2, а углы атаки - до 0,5-1°.
Вместе с тем, устанавливая рабочие значения КПС и углов атаки ПК, необходимо иметь
в виду, что их чрезмерное уменьшение сопряжено с отрицательными последствиями,
так как делает крылья слишком чувствительными к изменениям глубины погружения
или угла атаки. Как показывают исследования, изменения углов атаки ПК в условиях
волнения могут превышать ± 1,5°. Вследствие этого при углах атаки порядка 1°
подъемная сила крыла на ходу будет изменяться в 1,5—2 раза и поведение судна резко
293
Рис. 12.17. Схема обтекания стре-
стреловидного крыла
ухудшится. Очевидно, такие же изменения углов атаки
крыла при больших значениях коэффициента Су будут
отражаться на поведении судна не так сильно.
Стреловидные крылья. Приведенные способы от-
отдаления момента наступления кавитации путем умень-
уменьшения КПС, относительных толщин и глубин по-
погружений прямоугольных ПК влекут за собой не-
некоторое ухудшение мореходности судна. Поэтому
в качестве весьма эффективного средства предотвра-
предотвращения кавитации, не только не снижающего, а даже
повышающего мореходность судов, можно рекомен-
рекомендовать применение стреловидных крыльев, схема
обтекания которых представлена на рис. 12.17. Каж^
дую половину стреловидного крыла можно рассматри-
рассматривать как скользящее крыло, число кавитации и критическая скорость которого опре-
определяются на основании соотношений кх = к cos*x и v Kpx=v кр/cos х- Формулы пока-
показывают, что по сравнению с прямоугольным крылом скорость бескавитационного
обтекания скользящего крыла возрастает.
У стреловидного крыла указанное свойство используется неполностью, так как
в месте соединения двух половинок крыла эффект скольжения заметно ослабевает.
Поэтому при расчете характеристик стреловидного крыла обычно исходят из средней
скорости обтекания v cp = 0,5v (I + cos х.) ¦
При практическом проектировании ПК углы стреловидности чаще всего находятся
в пределах 25—45°, что позволяет повысить скорость бескавитационного обтекания
крыльев иа 10—15 %.
Благоприятное влияние стреловидности на характеристики ПК не исчерпывается
отдалением момента возникновения кавитации. Исследования показывают, что нали-
наличие стреловидности позволяет улучшить маневренные качества КПК. При совершении
циркуляции вследствие Появления дрейфа обтекание стреловидного крыла становится
несимметричным — угол скольжения внутренней половины крыла возрастает, а на-
наружной половины уменьшается. Благодаря этому изменяется подъемная сила каждой
половины крыла, и возникают моменты, способствующие образованию внутренних
кренов и улучшению остойчивости крылатых судов на циркуляции.
Придание крыльям стреловидности несколько улучшает также мореходные ка-
качества КПК. Производные КПС стреловидного крыла и соответствующего прямоуголь-
прямоугольного крыла, имеющего одинаковый с ним профиль нормального сечения, связаны
между собой зависимостью
dCv
da
dCv
da
-cosx,
A2.15)
из которой следует, что с увеличением угла стреловидности наклон кривой Су умень-
уменьшается, вследствие чего стреловидное крыло становится менее чувствительным к из-
изменениям углов атаки, происходящим при движении на волнении. Кроме того, боль-
большая протяженность стреловидного крыла в направлении движения увеличивает время
прохождения крыла через волну, что снижает ударные перегрузки КПК в целом.
Отдаление момента наступления кавитации стреловидных крыльев позволяет
сделать их относительно более толстыми, что дает возможность увеличить диапазон
углов их бескавитационного обтекания и положительно отражается на мореходных
качествах КПК. Дополнительно, в качестве одного из эксплуатационных преимуществ,
следует отметить, что наличие стреловидности позволяет смягчать удары крыла о*раз-
личные плавающие предметы и способствует их соскальзыванию с крыльев.
294
Стойки крыльев. Кавитация стоек, соединяющих крылья с корпусом судна, также
весьма нежелательна, так как она приводит к увеличению общего сопротивления
крыльевого устройства и облегчает проникновение атмосферного воздуха к засасываю-
засасывающей поверхности крыльев. Для стоек ПК обычно используются тонкие симметричные
профили, критическое число кавитации которых может быть определено по формуле
(8.53) по известной относительной толщине стойки 5. Соответствующая критическая
скорость начала кавитации стоек крыльев находится по выражению
кр.с
=9/>/1м/с * 32/л/5"км/ч.
A2.16)
Критическая скорость стоек весьма чувствительна к несимметричному обтеканию.
При движении стоек с углом атаки всего 1° (вследствие неправильной установки
или дрейфа) критическая скорость начала кавитации уменьшается на ~ 10 %.
12.4. Определение основных элементов крыльевого устройства
Классификация подводных крыльев может производиться по различным призна-
признакам. Наиболее общей и целесообразной представляется классификация ПК по принципу
сохранения постоянства подъемной силы при различных скоростях судна. Постоянство
подъемной силы является необходимым условием обеспечения устойчивого движения
КПК, так как при любой установившейся скорости подъемная сила, возникающая
на крыльях, должна быть равна весу катера. Рассмотрение общей формулы подъемной
силы ПК A2.1) показывает, что с увеличением скорости она будет возрастать и в опре-
определенный момент, если не принять специальных конструктивных мер, превысит вес
катера. Вследствие этого крылья начнут всплывать и глубина их погружения умень-
уменьшится. При этом корпус катера, жестко связанный с крыльями, будет подниматься
над водой до тех пор, пока из-за прорыва воздуха на засасывающую поверхность крыль-
крыльев не произойдет резкого падения подъемной силы и движение перестанет быть устой-
устойчивым.
ж)
Рис. 12.18. Основные конструктивные схе-
схемы крыльевых устройств: а, б - плоское
малопогруженное; в, г — V-обраэное; д, е —
раздельно стоящее; ж - к - комбиниро-
комбинированное
Рис. 12.19. Вид различных крыльев
в плане: а — эллиптическое; б - прямо-
прямоугольное; в - стреловидное; г - стрело-
стреловидное разрезное; д -трапециевидное
В)
J С
295
В зависимости от способа поддержания постоянства подъемной силы при различ-
различных скоростях обтекания все ПК, не имеющие автоматического управления, могут
быть разделены на следующие конструктивные типы: I — плоские малопогруженные
крылья; II — килеватые V-образные и трапециевидные крылья, пересекающие свобод-
свободную поверхность воды; III — этажерочные крылья, имеющие несколько несущих пло-
плоскостей, расположенных одна над другой, часто с различными углами атаки.
Постоянство подъемной силы у ПК I типа поддерживается за счет влияния свобод-
свободной поверхности воды, так как с изменением скорости катера будет изменяться глу-
глубина погружения крыльев и подъемная сила автоматически сохранит свою величину.
У II и III типов крыльев необходимая величина подъемной силы при увеличении ско-
скорости судна обеспечивается за счет выхода из воды излишних площадей крыльев.
Однако приведенная классификация ПК весьма условна*так как в чистом виде ни один
тип крыльев практического применения почти не находит. Обычно при проектировании
реальных крыльевых устройств с целью более оптимального решения поставленных
задач используется та или иная комбинация, составленная из различных плоских, на-
наклонных и этажерочных элементов крыльев. На рис. 12.18 и 12.19 приведено несколько
наиболее распространенных крыльевых схем, в том числе и комбинированных.
В процессе проектирования ПК должны быть решены следующие задачи:
• установлена целесообразность применения на судне ПК и выбрана принципиальная
схема крыльевого устройства;
определены необходимые площади ПК и места их расположения;
разработана конструктивная схема крыльев и выбраны размеры всех плоскостей
и стоек;
выбрана профилировка ПК, стабилизаторов и стоек;
произведены необходимые гидродинамические расчеты, связанные с определе-
определением нагрузки на крылья, с определением сопротивления воды и скорости КПК на
различных режимах работы двигателя и т. д.;
выбран материал ПК и разработаны их рабочие чертежи с учетом обеспечения не-
необходимой прочности.
Целесообразность применения ПК определяется главным образом величиной макси-
максимальной скорости катера при заданных значениях его водоизмещения и мощности дви-
двигателя. ПК следует устанавливать, если ожидаемая скорость катера будет не менее
m/4, A2.17)
где V — объемное водоизмещение катера, м3. При меньших скоростях ПК существен-
существенной пользы принести не могут, так как гидродинамические силы на них будут малы
и катер на крылья полностью не выйдет..
В начальной стадии проектирования ориентировочное значение наибольшей скоро-
скорости КПК, м/с, при заданном его водоизмещении Vy и располагаемой мощности двига-
двигателя Ne может быть определено по формуле
v =NenlR =NeKVl (Vy), A2.18)
или, км/ч,
vK=3,6NeKV/Vy. A2.19)
Поскольку в начале проектирования сопротивление судна R = Vy/K очень редко
бывает известно, то для оценки ожидаемой скорости КПК пользуются так называе-
называемым коэффициентом пропульсивного качества, представляющим собой произведение
гидродинамического качества судна K = Vy/R на . пропульсивный коэффициент т? =
=PevlNe:
Кг, =КП = Vyv /Ne =VyvKlC,6Ne)- .A2.20)
Среднестатистические кривые пропульсивного качества крылатых катеров (двукрылых
и однокрылых) и глиссирующих (реданных и безреданных) в зависимости от числа
Фруда по водоизмещению Fr у приведены на рис. 12.20. С их помощью, определив
число Fr у, а также соответствующее ему значение пропульсивного качества Кп редан-
ного или безреданного катера и переходя с исходной кривой 3 или 4 на кривые 1 или
296
2 (параллельно пунктирной линии а-а), можно ориентировочно оценить увеличение
скорости и пропульсивного качества глиссирующих катеров при установке на них одно-
одного или двух ПК.
Вместе с этим следует иметь в виду, что при определении наибольшей скорости
КПК по формулам A2.18) —A2.20) значения пропульсивного коэффициента у и коэф-
коэффициента гидродинамического качества К, входящие в пропульсивное качество, могут
быть найдены независимо друг от друга. Кривые изменения гидродинамического каче-
12
10
Ч'
42j
ч,
К
^2 ^
Ч
'—-~.
а"
4s
ч
—
чч
—
"-** .
- —
4—
1
-» и:
*¦
—
Р~-—
.
— —
'—~»
~ -
¦
- ¦—
- —
¦
*
' ——
—"—.
— -
J * 5 ?гу 6
Рис. 12.20. Зависимость коэффициентов К и Кп быстроходных катеров
и моторных лодок от числа Фруда по водоизмещению.
/ — двукрылых; 2 — однокрылых; 3 — реданных; 4 — безреданиых
200
В =-
ч
ч
ч
—.
^,
1—
—ч
-~*
Т
3
—•
——
——
•»-
100
50
60
vJVT
Рис. 12.21. Зависимость коэффициента К
быстроходных катеров от относительной
скорости.
1—4 — то же, что на рис. 12.20
•**
/
/
/
У
А
у
/
А
/
/
/
/
/
/
/
/
4-0 60 80 100 120 W)
Рис. 12.22. Пределы изменения удельной
мощности крылатых катеров в зави-
мости от их скорости
297
ства К одно- и двукрылых катеров в зависимости от числа Fr у Также представлены на
рис. 12.20. Для определения гидродинамического качества в зависимости от водоиз-
водоизмещения катера и его скорости может быть также использован рис. 12.21. Кривые
K=f(vK/$v) выражают физически очевидное обстоятельство неизбежного умень-
уменьшения гидродинамического качества глиссирующих и крылатых катеров с ростом
их скорости. Происходит это потому, что в отношении Vf/R, характеризующем каче-
качество быстроходного судна, числитель (подъемная сила днища или крыльев, равная
водоизмещению судна) для обеспечения устойчивого движения с увеличением скоро-
скорости не должен изменяться, а знаменатель (сопротивление корпуса или крыльев с высту-
выступающими частями) постепенно возрастает.
Пропульсивный коэффициент г?, характеризующий эффективность использования
мощности двигателей, установленных на судне, при оценке наибольшей скорости
по формулам A2.18) —A2.20) принимают равным 0,55-0,60. Более точно значение
17 может быть установлено на основании предварительных расчетов ходкости судна,
выполненных в соответствии с рекомендациями гл. 8 или [42, 50,142] .
Показателем эффективности использования мощности двигателей при проектиро-
проектировании КПК служит величина удельной мощности на 1 т водоизмещения Ne =Ne)V.
Чем меньше удельная мощность на заданной скорости, тем лучше спроектировано
судно, тем меньше оно будет расходовать топлива. Статистические кривые, охватываю-
охватывающие разброс значений удельной мощности многих построенных КПК, приведены на
рис. 12.22. Данные кривые показывают, что при скорости КПК, превышающей 80 км/ч,
удельная мощность начинает резко возрастать.
Для предварительного приближенного' определения мощности двигателя, необхо-
необходимой для достижения КПК заданной скорости, может быть использована формула
Ne = Vyv \Kr\ = Vyv K/C,6*1?),
а также кривыеЛ^ =/(v K), приведенные на рис. 12.22:
Ne =Ne V.
Для непосредственного определения наибольшей достижимой скорости проекти-
проектируемого КПК по заданным значениям его водоизмещения и мощности двигателя может
быть использована диаграмма, представленная на рис. 12.23. Диаграмма построена
на основании анализа и осреднения результатов скоростных испытаний многих отече-
отечественных и зарубежных КПК и в большинстве случаев обеспечивает достаточную схо-
сходимость при оценке достижимой скорости катера. Однако следует иметь в виду, что
отсутствие необходимой сходимости еще не является следствием недостатков проекта
КПК или диаграммы. На величину максимальной скорости существенное влияние ока-
оказывают особенности крыльевой системы и состояние поверхностей крыльев, согла-
согласованность выбранных углов установки крыльев и элементов движителя, состояние
погоды и т. д.
Если произведенный расчет подтвердит целесообразность установки на катере
ПК, следует выбрать принципиальную схему крыльевого устройства. Для установки
на катерах и моторных лодках применяются крыльевые системы с различным числом
ПК и с разным распределением нагрузки между ними. Наибольшее распространение
в настоящее время получила двукрылая система — система тандем. При этом как ио-
совое крыло, так и кормовое могут состоять из одного или двух отдельно стоящих
крыльев. Величина нагрузки, приходящейся на носовое и, соответственно, на кормовое
крыло, обычно'колеблется в диапазоне 60—40 % водоизмещения катера.
Двукрылая схема обладает высоким гидродинамическим качеством, весьма эко-
экономична и компактна. Иногда для облегчения выхода катера на крылья и улучшения
его мореходности применяют третье крыло, называемое стартовым. Установленное
в носовой части катера, оно создает дополнительный дифферент и позволяет увеличить
углы атаки носового и кормового крыльев. В ряде случаев его устанавливают в средней
298
О 1,0 2,0 3,0 4,0 5,0 6,0
8,0 9.0 К*»'
Рис. 12.23. Диаграмма зависимости ско-
скорости крылатого катера от его водоизме-
водоизмещения и расходуемой мощности двигателя
части КПК для создания дополнительной
подъемной силы на малых скоростях
судна. Стартовое: крыло действует лишь
до выхода катера на крылья, а также при
провалах крыльев. На больших скоростях
КПК оно находится над водой.
Применение дву- или трехкрылой си-
системы имеет и отрицательные стороны,
связанные с необходимостью преодоления
большого горба сопротивления, с увели-
увеличением углов наклона гребных валов
и ухудшением условий работы ГВ, с неко-
некоторым ухудшением мореходности катеров
при х провалах, носового крыла и т. д. Слож-
Сложность увязки винторулевого комплекса
с кормовым крылом затрудняет довод-
доводку винтов и крыльев на ходовых испыта-
испытаниях.
Для многих проектируемых КПК мож-
можно вообще отказаться от кормового крыла
и перейти к однокрылой схеме. В этом
случае н$сущее ПК устанавливается в но-
носовой части катера и принимает на себя
около 50 % его веса. На ходу, когда динамические силы на крыле достигают значитель-
значительных величин, носовая оконечность катера приподнимается над водой, и он движется
только на крыле и на небольшом участке глиссирующего днища. Поскольку качест-
качество К глиссирующей пластины, разновидностью которой является кормовая часть днища,
не превышает 10, то очевидно, что гидродинамическое качество однокрылого катера
на некоторых режимах может оказаться несколько ниже, чем у двукрылого.
Несмотря на снижение качества, применение однокрылой схемы имеет ряд зна-
значительных преимуществ, которые позволяют ей успешно конкурировать с двукрылой
схемой: упрощение конструкции крыльевого устройства в целом и удешевление в два
раза его проектирования и изготовления; существенное упрощение конструкции кор-
кормового комплекса (кронштейна, ГВ, руля), уменьшение угла наклона линии гребного
вала и улучшение условий работы движителя; возможность использования подвесных
моторов без каких-либо переделок; уменьшение массы крыльевого устройства и,
следовательно, всего однокрылого катера в целом; повышение Мореходности катера
вследствие отсутствия провалов кормового крыла, уменьшения размахов колебаний
носа и лучшего обеспечения совместной работы на волнении носового ПК и корпуса
катера; облегчение совместной доводки на ходовых испытаниях крыльевого устрой-
устройства и ГВ с целью выбора оптимальных значений углов установки носового ПК и полу-
получения полностью согласованных величин диаметра и шага винта, позволяющих катеру
развить наибольшую скорость при заданных значениях частоты вращения и мощности
механической установки; обеспечение возможности эксплуатации катера со снятым
носовым ПК, а также облегчение установки убирающегося, поворотного или авто-
автоматически управляемого носового ПК; уменьшение габаритной осадки катера по ГВ
в корме; облегчение преодоления горба сопротивления и уменьшение перегрузок дви-
двигателя при выходе катера на носовое крыло как на тихой воде, так и на волнении;
возможность оборудования одним носовым ПК с целью повышения скорости и море-
мореходности уже спроектированных и построенных бескрылых глиссирующих катеров
и моторных лодок без какой-либо переделки их валовых линий и выступающих частей.
Проектирование носового ПК и производство необходимых гидродинамических
расчетов для однокрылого и двукрылого вариантов катера практически не отличаются
299
друг от друга, если не считать некоторого уменьшения высот стоек однокрылого ва-
варианта, производимого с целью уменьшения ходового дифферента. Поэтому в дальней-
дальнейшем специальных оговорок при выборе элементов носового крыла однокрылого катера
почти не делается.
Приведенная краткая характеристика применяемых в отечественной практике
крыльевых схем позволяет осуществить первоначальный выбор принципиальной схемы
в зависимости от условий эксплуатации катера и от требований, предъявляемых к его
ходкости и мореходности.
Для быстроходных катеров и моторных лодок, эксплуатирующихся преимуще-
преимущественно на спокойной воде, наиболее целесообразна схема, состоящая из двух мало-
погруженных ПК. При повышенных требованиях к мореходности катера и ограничен-
ограниченной мощности двигателя более рациональной и простой представляется однокрылая
схема. Часто применяют комбинированные трапециевидные схемы, состоящие из
плоских крыльев различного погружения и наклонных стабилизаторов, пересекающих
свободную поверхность воды.
Для облегчения выхода катера на крылья на относительно малой скорости, а также
на волнении применяют дополнительные стартовые крылья, устанавливаемые в носо-
носовой или средней части катера.
В дальнейшем принципиальная схема крыльевого устройства уточняется в зави-
зависимости от диапазона скоростей катера, от нагрузки, приходящейся на каждое крыло,
места крепления ПК и т. д. Поскольку строгого разграничения условий применения
той или иной схемы ПК не существует, на ее выбор могут оказать влияние также и
субъективные обстоятельства (наличие средств и необходимых материалов и т. п.).
Определение площади подводных крыльев. Выбор места крепления кормового
крыла обычно не представляет затруднений — его устанавливают в районе транца или
непосредственно за ним. Установка кормового крыла за транцем катера или мотор-
моторной лодки является даже предпочтительной, так как при таком расположении ослаб-
ослабляется взаимное влияние глиссирующего днища и ПК, а также увеличивается расстоя-
расстояние" между крыльями, что иногда бывает целесообразно. Условно, для упрощения рас-
расчетов, можно принять, что линия действия подъемной силы кормового крыла прохо-
проходит через транец, так что если начало координат совместить с транцем, то абсцисса
точки приложения подъемной силы кормового крыла будет л:к =0 (рис. 12.24).
Задавшись долей нагрузки катера, приходящейся на носовое крыло YH, и имея
отстояние центра тяжести катера от транца Xg, из уравнений равновесия можно найти
абсциссу точки приложения подъемной силы носового крыла хн, определяющую место
его крепления,
*н = xgVy/YH .
A2.21)
ТА
\т /м2
Рис. 12.24. Схема расположения крыльев
Рис. 12.25. Изменение удельной на-
нагрузки крыльев от скорости
у
/
/
/
Г
1
1
50
300
Носовое крыло следует располагать в относительно широком и наиболее удобном
для крепления месте корпуса катера или моторной лодки.
С помощью этого же уравнения A2.21), при известном положении обоих крыльев,
может быть определена величина подъемной силы, которую должно развивать носовое
крыло,
Подъемная сила кормового крыла находится как разность YK = Vy — YH.
Рабочая несущая площадь ПК зависит от скорости движения и с увеличением ско-
скорости катера заметно уменьшается. Анализ большого количества КПК показывает, что
для максимальных скоростей v = 40 -г- 100 км/ч отношение водоизмещения катера
к площади его крыльев - так называемая удельная нагрузка крыльев — достаточно
хорошо выражается эмпирической зависимостью (при v в м/с)
Vy/S * (v/10J. A2.22)
При v > 100 км/ч рост удельной нагрузки замедляется. Ориентировочная зави-
зависимость изменения удельной нагрузки крыльев от максимальной скорости катера
представлена на рис. 12.25. Формула A2.22) и рис. 12.25 позволяют определить пло-
площадь ПК в первом приближении. Более точно несущие площади носового и кормово-
кормового крыльев для заданной максимальной скорости катера v определяют из соотношений
SH = 2Yj(CyHpv 2) и5к =2YKl(CyKpv 2). A2.23)
При назначении величин КПС проектируемых крыльев Суи и Сук, входящих в фор-
формулы A2.23) , исходят из совокупности многих обстоятельств, оказывающих влияние
на действие ПК, с целью обеспечения высокого гидродинамического качества крыльев
на режиме максимальной скорости, отсутствия кавитации на всех режимах движения
и необходимой прочности ПК.
Гидродинамическое качество и кавитационная устойчивость ПК в значительной
степени определяются их углами атаки, глубиной погружения и относительной тол-
толщиной основных несущих плоскостей. Как уже указывалось, наибольших значений
гидродинамическое качество ПК достигает при малых положительных углах атаки.
Уменьшение глубины погружения понижает величину максимального качества крыла
и несколько повышает оптимальные углы атаки (до 2-^-4°). Величины КПС, отвечаю-
отвечающие достаточно высоким значениям гидродинамического качества ПК, как правило,
не превышают значений Су =0,30-5-0,35. Это относится и к увеличенным углам атаки
крыльев, соответствующим малым глубинам погружения, так как с уменьшением
глубины величина Су также уменьшается. Поэтому для скоростей судна порядка
50—80 км/ч, когда нет опасности возникновения кавитации, величины КПС принимают
равными 0,2—0,3.
При возрастании максимальной скорости катера до 90 км/ч и более следует счи-
считаться с возможностью появления кавитации. Для повышения кавитационной устой-
устойчивости ПК при больших скоростях катера рабочие значения КПС следует уменьшать.
Уменьшение коэффициентов Су будет приводить к снижению гидродинамического
качества ПК, поэтому нижний предел для обеспечения бескавитационного обтекания
ПК таких судов составляет Су =0,1. Дальнейшее уменьшение Су не рекомендуется,
так как оно сопряжено с ухудшением мореходности и существенным снижением гидро-
гидродинамического качества ПК.
При назначении КПС носового и кормового крыльев необходимо учитывать также
следующие обстоятельства. При увеличении глубины погружения носового крыла
его подъемная сила увеличивается как за счет уменьшения влияния свободной по-
301
0.2
0,1
S
s
Cy.
ч
Сун
4
l^
s
N
4
50
100
Рис. 12.26. Ориентировочные зависимо-
зависимости значений КПС подводных крыльев
от максимальной скорости судна
верхности воды, так и за счет вхождения в воду
дополнительных площадей, если это предусмотре-
предусмотрено конструкцией крыльевого устройства. Однако
из-за происходящего одновременно уменьшения
угла ходового дифферента уменьшаются углы
атаки обоих ПК и рост их подъемной силы замед-
замедляется, что неблагоприятно сказывается на по-
поведении катера. При увеличении глубины погру-
погружения кормового крыла его угол атаки (вслед-
(вследствие увеличения угла ходового дифферента
катера) также возрастает и способствует быстрей-
быстрейшему восстановлению потерянной подъемной силы
крыла: Благодаря этому провалы кормового
крыла имеют небольшую величину и их влияние
.на продольную устойчивость движения КПК
представляет значительно меньшую опасность,
чем провалы носового крыла.
Данное соображение позволяет рекомендовать
увеличение расчетных значений KFIG кормового
крыла Сук по сравнению со значениями КПС носового крыла примерно в 1,3—1,4
раза. Увеличение Сук дает возможность несколько уменьшить площадь кормового
крыла и повысить его гидродинамическое качество. В соответствии с данной рекомен-
рекомендацией на рис. 12.26 построены примерные зависимости для назначения КПС носовых
и кормовых ПК на максимальной скорости проектируемых катеров и моторных лодок.
С помощью этих зависимостей можно находить ориентировочные значения Сун и Сук,
обеспечивающие необходимую площадь ПК при достаточно высоком гидродинамиче-
гидродинамическом качестве для катеров различной быстроходности. Однако во многих случаях
с целью увеличения площади крыла и его хорды КПС приходится уменьшать против
их значений, полученных по рис. 12.26. Благодаря этому, несмотря на некоторое по-
понижение качества, увеличивается абсолютное погружение крыла и улучшается мореход-
мореходность катера, а также повышается прочность крыла. Вместе с тем при назначении КПС
носового крыла необходимо следить, чтобы его величина на максимальной скорости
не превосходила значений,полученных по формуле A2.11).
Выбор конструктивной схемы крыльев. Для правильного выбора типа и конкрет-
конкретной конструктивной схемы ПК, обеспечивающих определенные гидродинамические
характеристики, следует оценить необходимые величины Су носового и кормового
крыльев не только на максимальной скорости судна, но и на промежуточных режимах
движения. Условие сохранения постоянства подъемной силы, развиваемой крыльевой
системой при ходе катера на крыльях, требует, чтобы на всех скоростях хода соблюда-
соблюдалось равенство
0,5CymSmpv2m=0,5CySpv
A2.24)
где Сут и Sm — значения КПС и погруженной площади крыла на максимальной ско-
скорости катера vm; Су и S — значения тех же параметров на промежуточной скорости v .
Данное равенство показывает, что при постоянной погруженной площади ПК коэф-
коэффициент Су должен изменяться обратно пропорционально квадрату скорости и, следо-
следовательно, с уменьшением, скорости должен резко возрастать. В частности, при скоро-
скорости выхода катера на крылья, которая обычно составляет около половины максималь-
максимальной его скорости, величина КПС крыла Су должна возрасти в 4 раза по сравнению
с расчетным значением этого коэффициента на максимальной скорости. Обеспечить
изменение коэффициента Су в столь большом диапазоне очень сложно, так как влияние
изменения погружения и угла атаки ПК, жестко связанного с корпусом катера, может
302
привести к увеличению Су только в 2—2,5 раза. Недостающая часть подъемной силы
должна быть компенсирована путем рационального выбора конструктивной схемы
крыльевого устройства. Из основной формулы A2.1) следует, что необходимое допол-
дополнительное увеличение подъемной силы ПК на промежуточных скоростях катера может
достигаться главным образом за счет входа в воду дополнительных площадей.
Увеличение погруженных площадей крыльев на малых скоростях судна может
быть обеспечено применением различных комбинированных схем, включающих в себя
помимо всегда находящихся в воде основных несущих плоскостей также наклонные,
этажерочные, стартовые и другие крыльевые элементы, создающие добавочную подъем-
подъемную силу и облегчающие как выход катера на ПК, так и его устойчивый ход на них
при различных условиях эксплуатации. Особенно большое значение имеет правильный
выбор конструктивного типа ПК для быстроходных катеров, имеющих скорость вы-
выхода на крылья v в х 0,4v'm и большой диапазон изменения скоростей на крыльях.
Необходимая несущая площадь ПК с ростом максимальной скорости у этих катеров
уменьшается, и если не предусмотреть специальных конструктивных мер по увеличе-
увеличению площадей крыльев или их подъемных сил на промежуточных режимах движения,
то выход катера на крылья будет затруднен. Для относительно тихоходных катеров
скорость выхода на крылья составляет ~ 0,6v m. В этом случае требуемое изменение
коэффициента Су может быть обеспечено в основном за счет влияния свободной по-
поверхности воды и применения различного вида стартовых крыльев.
Предложен еще один довольно простой способ улучшения саморегулирования
подъемной силы ПК [24, 54] . Стойки ПК крепятся на одной оси вращения, располо-
расположенной немного впереди, линий действия подъемной силы (рис. 12.27). Подъемная
сила и сила сопротивления воды будут стремиться отклонить крыло в корму, благо-
благодаря чему его угол атаки уменьшается. Для ограничения угла поворота крыла его
стойки опираются на пружины. Система будет находиться в равновесии до тех пор,
пока момент от гидродинамических сил уравновешивается реактивным моментом
упругих бил пружин. При нарушении равновесия в ту или другую сторону происходит
соответствующее изменение угла атаки крыла и его подъемной силы. Например, при
разгоне КПК ввиду малых скоростей движения подъемная сила крыльев и их сопро-
сопротивление значительно меньше упругих сил пружин и крылья поворачиваются в сторону
увеличения углов атаки, что облегчает преодоление горба сопротивления. По мере
увеличения скорости катера (после выхода его на крылья) подъемная сила и сопротив-
сопротивление крыльев также будут расти, отклоняя крылья в корму и уменьшая их угол
атаки. При уменьшении скорости катера сопротивление крыльев и их подъемная сила
будут уменьшаться, а углы атаки крыльев - увеличиваться, поддерживая равно-
равновесие между гидродинамическими силами и упругими силами пружин, действующими
на ПК.
Рассмотренные примеры показывают, что крепление ПК вообще и главным обра-
образом носового крыла с помощью пружин должно приводить к значительному улучше-
улучшению поведения катера. Можно отметить следующие дополнительные особенно-
особенности предлагаемого способа крепления ПК на катере или моторной лодке:
наиболее эффективна установка пружин на крыльях, переоекающих свободную
поверхность воды; в этом случае действие свободной поверхности, действие наклонных
стабилизаторов и действие пружин будет взаимно усиливать и дополнять друг друга;
наличие пружин будет улучшать поведение крылатого катера на волнении и умень-
уменьшать его ударные перегрузки;
разделение носового крыла на два независимых крыла левого и правого бортов
позволит раздельно регулировать подъемную силу с каждого борта, что также обеспе-
обеспечит повышение мореходных и маневренных качеств КПК;
диапазон изменения углов атаки ПК может быть ограничен специальными стопор-
стопорными устройствами.
303
При выборе конкретной конструктивной схемы
подводного крыльевого устройства можно ориенти-
ориентироваться на рис. 12.18 и 12.19, на которых приве-
приведены наиболее рациональные и широко применяемые
в современном катеростроении схемы ПК.
Плоские малопогруженные крылья, изображен-
изображенные на рис. 12.18, а я б, могут использоваться только
для катеров, эксплуатирующихся на реках и озерах,
Рис. 12.27. Схема установки крыла т. е. в основном на спокойной воде. Поскольку
с пружинными элементами. кавитационная устойчивость ПК с уменьшением
1 -ПК; 2-ось поворота; 3- погружения повышается, то такие крылья целе-
пружина; 4 - регулировочное уст- сообразно применять также на катерах, имеющих
роиство большую скорость, сопряженную с опасностью по-
появления кавитации на крыльях.
В чистом виде плоские малопогруженные ПК применяют весьма редко из-за их
недостаточной остойчивости и мореходности. »
Для повышения мореходных качеств и остойчивости КПК используют килеватые
V-образные и различного вида отдельно стоящие ПК (см. рис. 12.18, в-е). Наличие
килеватости крыльев несколько снижает их гидродинамическое качество (при углах
килеватости, близких к 30°, на 10—15 %). Одновременно увеличивается вероятность
появления кавитации на глубоко погруженном носике крыла. Поэтому применение
таких крыльев возможно при скорости катеров и лодок, не превышающей 80 км/ч.
Отдельно стоящие носовые и кормовые' ПК, обеспечивающие хорошую остойчи-
остойчивость, применяют при разработке конструкций убирающихся крыльев —поднимающих-
—поднимающихся или поворачивающихся.
В целях возможности использования положительных качеств как плоских мало-
погруженных крыльев, так и килеватых V-образных, имеющих повышенную море-
мореходность, применяют так называемые комбинированные схемы (см. рис. 12.18, ж-к) .
Наиболее распространены в настоящее время комбинированные трапециевидные схемы,
состоящие из основного несущего, чаще всего плоского малопогруженного крыла,
наклонных стабилизаторов и различного рода дополнительных элементов (стартовых
и глубокопогруженных).
Основное несущее ПК для большинства представленных схем выбирается таким
образом, чтобы на максимальной скорости судна его-погружение находилось бы в пре-
пределах h - @,2 ¦*¦ 1,0) Ъ. При этом с увеличением скоростей погружения крыльев должны
уменьшаться.
Удлинение ПК следует принимать не менее \ = l/b<* 5. Такое удлинение соответ-
соответствует относительно высокому гидродинамическому качеству крыла при небольших
концевых потерях.
Размах основной несущей, плоской или малокилеватой,части носового крыла
принимают по возможности наибольшим и равным примерно максимальной ширине
катера по палубе. Увеличение размаха основной плоскости ПК улучшает остойчивость
КПК на ходу. Размах носового ПК с наклонными стабилизаторами, если они устанавли-
устанавливаются, может в 1,5—2 раза превышать ширину катера или моторной лодки. Размах
кормового трапециевидного крыла обычно составляет около 0,7—0,8 размаха
носового.
Наклонные стабилизаторы представляют собой крыльевые элементы, установлен-
установленные на концах основного несущего ПК таким образом, чтобы на максимальной ско-
скорости катера их большая часть находилась над водой. При провалах крыльев, имеющих
наклонные стабилизаторы, увеличение подъемной силы происходит не только за счет
увеличения погружения ПК под свободную поверхность воды, но и за счет увеличения
погруженной площади стабилизаторов. Наклонные стабилизаторы увеличивают также
эффективную площадь ПК на малых скоростях судна и облегчают преодоление горба
304
сопротивления. Кроме того, они создают большие восстанавливающие моменты при
кренах, что улучшает остойчивость и мореходность катеров в крыльевом режиме.
Наиболее простые в технологическом отношении наклонные стабилизаторы имеют
плосковыпуклый сегментный профиль сечений с постоянной хордой и одинаковым
углом атаки по всему размаху. Для повышения эффективности действия стабилизато-
стабилизаторов их следует проектировать расширяющимися к внешним концам с постепенно увели-
увеличивающимся углом атаки и нарастающей вогнутостью нагнетающей поверхности. Уста-
Устанавливать наклонные стабилизаторы следует с тем же углом атаки, какой имеет основ-
основная плоскость, или с небольшим плюсовым углом по отношению к ней (Да=0°30' -S-'
-М°30').
Несмотря на значительное усложнение технологии изготовления стабилизаторов,
осуществление всех перечисленных рекомендаций или некоторых из них представ-
представляется весьма целесообразным. Благодаря им рост подъемной силы при погружении
всего крыла или одного его края происходит более стремительно, что благоприятно
отражается на мореходности катера и ускоряет выход его на крылья. Погружение
основной несущей плоскости ПК со стабилизаторами определяется величиной макси-
максимальной скорости катера. При скорости до 80 км/ч, когда опасность появления кавита-
кавитации невелика, погружение основной части крыла может быть увеличено почти до хорды,
что уменьшает вероятность срыва потока и повышает как гидродинамическое качество
крыла, так и мореходность катера. При этом размах основной плоской или малокилева-
той части крыла может быть несколько уменьшен, а размах стабилизаторов увеличен.
С возрастанием максимальной скорости катера погружение трапециевидного крыла
должно быть уменьшено и при скорости порядка 100 км/ч и выше оно достигает значе-
значений h =» 0,2Z>.
Углы наклона стабилизаторов в плоскости шпангоутов, т. е. углы килеватости,
обычно принимают равными 0 =25 -г 35°. Уменьшение этих углов является нежелатель-
нежелательным из-эа облегчения прорыва воздуха к основной плоскости. Увеличение же угла |3
уменьшает эффективность действия стабилизаторов и их гидродинамическое качество.
Дополнительные элементы в этих схемах ПК ставятся в различных сочетаниях
в зависимости от их назначения: одни в качестве стартовых, помогающих катеру выйти
на крылья, — в этом случае после отрыва корпуса они выходят иэ воды (рис. 12.18, и),
другие являются глубокопогруженными и предназначены для повышения стабилиза-
стабилизации хода катера на волнении (рис. 12.18, к).
Придание ПК и их стабилизаторам стреловидности порядка 25—45° также позволит
улучшить мореходность катера. При этом одновременно будут повышаться ан-
тикавитационные и эксплуатационные характеристики ПК.
Увеличение подъемной силы при преодолении горба со-
сопротивления может быть достигнуто также применением
устройств, позволяющих изменять угол атаки крыльев путем
поворота их вокруг поперечной оси.
Конструкция привода для поворота всего крыла является
довольно сложной и применяется относительно редко. Не-
Несколько проще поворачивать не все крыло, а только его
заднюю часть, так называемый закрылок. Конструктивно
закрылок соединяется с передней частью крыла при помощи
шарниров (рис. 12.28). Площадь закрылка обычно состав-
ляет около 30 % площади всего крыла. При опускании закрыл-
ка увеличивается кривизна профиля крыла и его подъем- j
ная сила возрастает. Перекладка закрылков позволяет в слу- р .... „
чае необходимости получить значительное увеличение подъем- с закрылком
ной силы. Правда, при этом из-за наличия приводов, обтекате- , ,
r r r I — крыло; / — ось пово-
леи шарниров и щелей между основным крылом и закрыл- рОта; 3- закрылок; 4-
ком гидродинамическое качество ПК несколько снижается. тяга
305
Особенности обводов корпуса крылатого катера. Крыльевая система катера должна
составлять с его корпусом единый архитектурный и гидродинамический комплекс.
Поэтому при выборе формы обводов корпуса необходимо учитывать специфические
особенности движения КПК на разных режимах работы двигателей и при различных
условиях его эксплуатации. На режимах малых скоростей обводы корпуса должны
способствовать уменьшению горба сопротивления для рблегчения выхода катера на
крылья как на спокойной воде, так и на волнении. При ходе на волнении форма обво-
обводов корпуса, должна обеспечивать общее улучшение поведения катера, ослабление его
ударов о воду, снижение сопротивления и т. д. Лучше всего этим требованиям удовлет-'
воряют остроскулые глиссирующие обводы с переменной килеватостью и с одним или
несколькими реданами.
Угол килеватостй |3 у транца для повышения гидродинамического качества глисси-
глиссирующего днища должен находиться в пределах 0—5°. В особенности это важно для одно-
однокрылых катеров и моторных лодок. В районе миделя углы j3 обычно достигают значе-
значений 10—15° и по мере приближения к носовой оконечности увеличиваются до 50°
и более^Повышение углов килеватостй носовой оконечности катера приводит к смягче-
смягчению ударов корпуса о воду при ходе с большой скоростью на волнении. При выборе
углов килеватостй следует иметь в виду, что гидродинамическое качество К килева-
тых корпусов по сравнению с плоской пластиной, у которой оно составляет около 10,
уменьшается: при килеватостй 10° до 8,5, при 20° — до 6,5 и при 30° — до 5 [24,42] .
Наличие реданов позволяет увеличить ходовые углы атаки днища, уменьшить
замываемую водой поверхность корпуса и ускорить выход катера на глиссирование
и крылья. Если предусматривается один редан, то он располагается обычно вблизи ми-
миделя таким образом, чтобы на него приходилась большая часть нагрузки катера —
70-80 %.
Чтобы обеспечивался доступ воздуха под днище в межреданное пространство,
благодаря чему уменьшается сопротивление катера, необходимо иметь реданы высотой
hp * @,03 т 0,04Mр, где Вр — ширина катера по скуле в месте расположения редана.
Для уменьшения горба сопротивления при выходе катера на крылья длину меж-
реданной части днища Z,p, т. е. расстояние между реданом и транцем, не следует прини-
принимать более Lp « 2,1В р.
Увеличение количества реданов существенно усложняет конструкцию корпуса.
Поскольку четких рекомендаций по проектированию обводов многореданного корпуса
в настоящее время нет, то для определения положения реданов и их размеров необ-
необходимо проводить тщательные буксировочные и мореходные испытания моделей КПК
в опытовом бассейне или на открытом водоеме.
Коэффициент полноты мидель-шпангоута КПК обычно принимают равным Рмиа =
= 0,55 -г 0,65, а коэффициент общей полноты 5 =0,3 * 0,4. Главные размерения корпуса
крылатого катера или моторной лодки определяются в основном требованиями общего
расположения. Длину корпуса КПК обычно принимают в пределах L = D т 6)В.
При таких-соотношениях, являющихся типичными для глиссирующих катеров,
ширина корпуса получается достаточной для удобного крепления крыльевого устрой-
устройства, размещения пассажиров, главных двигателей и различного оборудования, а уме-
умеренная длина позволяет обеспечить необходимые прочность и жесткость корпуса при
небольшой его массе. Следует подчеркнуть, что, поскольку при ходе на ПК катер пред-
представляет собой балку на двух опорах, появление больших стрелок прогиба корпуса,
приводящих к существенным изменениям углов атаки закрепленных на нем крыльев,
недопустимо. Обеспечение же надлежащих прочности и жесткости длинного корпуса
вызовет излишнее увеличение его массы.
Моторные лодки на крыльях обычно имеют несколько меньшую длину корпуса:
L * B,5-^ 3,0M. Дальнейшее уменьшение длины корпуса крылатых катеров и мото-
мотолодок представляется нежелательным, так как при этом значительно возрастает со-
сопротивление воды на режимах плавания и будет затруднен выход на крылья. Кроме
306
того, дня двукрылых катеров и лодок в этом случае будет уменьшаться расстояние
между крыльями и их взаимодействие может стать отрицательным.
Ширина транца КПК выбирается из условий удобства крепления кормового крыла
и снижения сопротивления воды при выходе катера на крылья. Наиболее часто отно-
отношение ширины транца к наибольшей ширине катера или редана принимают равным
Ятр/Яр«* 0,6 v 0,8.
На выход крылатого катера на крылья и его мореходность так же положительно
влияет установка в носовой части брызгоотражателей шириной 50—100 мм.
Более подробные рекомендации по проектированию обводов корпуса крылатых
катеров и моторных лодок можно найти в работах [20, 24, 60, 65, 132 и др.] .
12-5. Разработка формы профилей крыльев и стоек
Выбор формы профилей крыльевых сечений определяется необходимостью обеспе-
обеспечения на максимальной скорости катера высокого гидродинамического качества,
отсутствия кавитации и срывов потока при достаточной прочности. Наилучшим образом
этим требованиям удовлетворяют сегментные профили с острыми кромками и профили
типа Вальхнера с приполненной и слегка приподнятой скругленной входящей кромкой.
Благодаря указанным особенностям профили Вальхнера имеют более полную, чем у сег-
сегментных профилей, и более равномерную, чем у авиационных профилей, эпюру давле-
давления на засасывающей стороне.
Сегментные профили применяют при проектировании крыльев, движущихся вблизи
свободной поверхности воды или пересекающих ее. Во многих случаях для увеличе-
увеличения диапазона углов бессрывного обтекания ПК быстроходных катеров входящую
кромку сегментных профилей также несколько приполняют или смещают максималь-
максимальную толщину профиля от середины хорды на 10—15 % в нос. Кроме того, для умень-
уменьшения вероятности срыва потока при увеличении углов атаки крыла можно рекомен-
рекомендовать небольшой отгиб входящей кромки сегментного профиля вниз.
При проектировании ПК, имеющих постоянное расчетное погружение не менее
хорды, можно применять профили Вальхнера, гидродинамическое качество которых
несколько выше. Использование профилей Вальхнера для малопогруженных крыльев
не представляется возможным, так как наличшГскругленных и приподнятых входя-
входящих кромок приводит к увеличению местных углов атаки, облегчающему срывы
потока с крыла.
Нижняя поверхность ПК делается обычно плоской. Придавая ей небольшую вогну-
вогнутость A—2 %), можно несколько увеличить гидродинамическое качество крыла. Нали-
Наличие вогнутости приводит также к увеличению КПС крыла при том же самом геометри-
геометрическом угле атаки, так как у вогнутого крыла возрастает'давление на нагнетающей
поверхности и, вследствие увеличения кривизны, повышается разрежение на засасываю-
засасывающей поверхности. Применение крыльев с вогнутой нагнетающей поверхностью не всегда
целесообразно. При Су < 0,2 геометрические углы атаки вогнуто-выпуклого профиля
становятся отрицательными, и на нагнетающей стороне может возникнуть разрежение,
из-за чего гидродинамическое качество будет снижаться. Следует также считаться с ус-
усложнением технологии изготовления крыла.
Относительные ординаты острокромочных плоско-выпуклых сегментных профилей
и профилей Вальхнера, применяемых для изготовления ПК, представлены в табл. 12.1.
Обозначения ординат профилей, принятые в таблице, увязаны с рис. 12.29. Ординаты
симметричного плоско-выпуклого сегментного профиля, образованного по дуге круга,
могут быть получены также по формуле
у/ет=?=4х/Ь-4х21Ь2=Щ1-*). - A2.25)
307
№
ординаты
0
1
2
3
4
5
б
7
8
9
10
11
12
13
14
15
16
Та бл и ц а
относительная
абсцисса
ординаты
х/Ь
0
0,012 5
0,025
0,050
0,075
0,100
0,150
0,200
0,300
0,400
0,500
0,600
0,700
0,800
0,900
0,950
1,0
12.1. Относительные ординаты крыльевых профилей
Плоский сегментный профиль
симметричный
круговой
Ув/ет
0
0,049
0,098
0,190
0,278
0,360
0,510
0,640
0,840
0,960
1,0
0,960
0,840
0,640
0,360
0,190
0
с приполненной
входящей
кромкой
Уъ1ет
0
0,088
0,162
0,286
0,386
0,470
0,605
0,721
0,881
0,972
1,0
0,960
0,840
0,640
0,360
0,190
0
Профиль Вальхнера
засасывающая
сторона
Ув1ет
0,144
0,280
0,351
0,451
0,530
0,599
0,710
0,795
0,920
0,985
1,0
0,967
0,856
0,676
0,415
0,252
0,033
нагнетающая
сторона
Уц/ет
0,144
0,062
0,047
0,032
0,023
0,015
0,005
0
0
0
0
0
¦ 0
0
0
0
0,033
По этой же формуле можно найти ординаты вогнутости профиля ПК или его стабилиза-
стабилизатора, если принять максимальную стрелку вогнутости нагнетающей стороны профиля
равной е.т.
Для получения абсолютных ординат и построения профиля крыла необходимо
относительные ординаты у и х, полученные по табл. 12.1 или по формуле A2.25),
умножить на принятые значения максимальной толщины и хорды крыльевого профиля.
Стойки крыльев делают симметричными, с плавно обтекаемым двояковыпуклым
профилем и острой входящей кромкой. Выходящую кромку стоек с целью смещения
в корму максимальной толщины и уменьшения сопротивления обычно срезают, так
что она получается тупой. Вследствие попадания в эту зону воздуха разрежение за стой-
стойкой снимается, и давление становится равным атмосферному. Рекомендуемые для
изготовления таких стоек профили приведены на рис. 12.30 и в табл. 12.2.
Наличие стоек снижает гидродинамическое качество ПК, поэтому следует стремить-
стремиться к тому, чтобы их количество, определяемое условиями прочности крыла, было
наименьшим. Иногда часть стоек размещают на наклонных стабилизаторах, чтобы
на повышенных скоростях судна они вместе со стабилизаторами выходили из воды.
Располагая стойки, необходимо следить, чтобы наибольшие толщины стоек и крыла
были как можно дальше разнесены друг относительно друга. В этом случае максималь-
максимальные разрежения, возникающие на стойках, не будут накладываться на максимальные
разрежения засасывающей поверхности крыла и вероятность появления преждевре-
a) g
X
-¦«
b
Рис. 12.29. Обозначение ординат крыльевых профилей: а - сегментный профиль;
б - профиль Вальхнера
308
Таблица 12.2. Относительные орди-
ординаты профилей стоек
Относи-
Относительная
абсцисса
х/Ь
0
0,075
0,150
0,300
0,450
0,600
0,750
1,000
Круговой
сегмент
У/ет
0
0,190
0,360
0,640
0,840
0,960
1,000
0,890
Параболи-
Параболический
сегмент
У/ет
0
0,286
0,470
0,721
0,881
0,972
1,000
0,900
Рис. 12.30. Обозначение ординат профи-
профилей стоек крыла
1.0V
0.8
0,6-
0.5 -
0.4-
о.з-
0.2
0.1
**
—
. I-
—¦
y^
—
0,4 1
2 3 4 5 10 20 304OV1.T
Рис. 12.31. Ориентировочная зависимость от-
отстояния носового крыла от ОЛ для катеров
и моторных лодок различного водоизмещения
менных срывов потока и кавитации значительно уменьшится. Толщины стоек прини-
принимаются минимальными и определяются в основном нагрузками, которые они .воспри-
.воспринимают.
Весьма существенное влияние на работу крыльевого устройства и поведение КПК
оказывают высоты стоек, определяемые в зависимости от размеров катера и от ожидае-
ожидаемой его мореходности. Наиболее надежно высоты стоек могут быть определены при
помощи модельных буксировочных и мореходных испытаний. Ориентировочные значе-
значения отстояния носового крыла от ОЛ в зависимости от водоизмещения КПК приведены
на рис. 12.31. Высоты стоек кормового крыла определяются углом желательного диф-
дифферента катера. При этом необходимо учитывать, что кормовое крыло на ходу распо-
располагается по впадине, создаваемой носовым крылом. При проектировании однокрылых
катеров и моторных лодок высоты стоек носового крыла могут быть несколь-
несколько уменьшены.
12.6. Определение буксировочного сопротивления катеров на подводных крыльях
До выхода КПК на крылья его буксировочное сопротивление, как и сопротивление
обычного судна, в основном состоит из сопротивления корпуса и его выступающих
частей. К последним в данном случае следует отнести и крыльевое устройство. Горб
сопротивления по этой причине имеет большую величину, чем у глиссирующих судов.
После выхода корпуса катера из воды его сопротивление быстро снижается и при
Fr у «* 3,0-гЗ,5 достигает своего наименьшего значения. При дальнейшем повышении
скорости судна его сопротивление плавно возрастает по закону, близкому к квадра-
квадратичному. В этот момент в воде находятся'и создают сопротивление только крылья,
их стойки, гребные валы с кронштейнами и рули.
Полное буксировочное сопротивление КПК может быть представлено в виде суммы
составляющих
A2.26)
309
Рис. 12.32. Составляющие сопротивления
катера на подводных крыльях.
1 — корпуса катера; 2 —ПК; 3 — высту-
выступающих частей и стоек крыльев; 4— воз-
воздушное сопротивление; 5 — полное сопро-
сопротивление; б — катера без крыльев
где/?кор - сопротивление корпуса катера
на режимах, предшествующих его отрыву
от воды (при движении на крыльях Лкор =
=0); i?Kp — сопротивление погруженных
частей крыльев и стоек; /?в.ч — сопротив-
сопротивление всех выступающих частей, находя-
находящихся в воде; Ra — воздушное сопротив-
сопротивление.
Типичный характер изменения отдель-
отдельных составляющих полного сопротивления
КПК в зависимости от скорости представ-
представлен на рис. 12.32. Для сравнения там же
нанесена кривая сопротивления катера без
крыльев. Следует заметить, что сопро-
сопротивление корпуса КПК полностью исче-
исчезает при Fry =2,0 -i- 2,5. При дальнейшем
[увеличении скорости сопротивление крыльев со стойками составит около 60—65- %,
сопротивление выступающих частей - 25—30 %, сопротивление воздуха - 5—10 % пол-
полного сопротивления судна.
Определение сопротивления КПК по результатам ходовых испытаний прототипа.
Оценка сопротивления, а также скоростных и мореходных качеств проектируемого
КПК, произведенная на основании гидродинамического анализа результатов скоростных
испытаний катера-прототипа, во многих случаях обеспечивает достаточную надежность.
Для проведения анализа необходимо по диаграммам или расчетным путем (см.
п. 8.6) по формулам (8.14) и (8.16) определить кривые действия ГВ, установленногб
на катере-прототипе, в виде зависимостей коэффициентов.К\ ,Кг и rip от относительной
поступи винта в свободной воде.
Сопротивление катера-прототипа на различных скоростях движения, равное тяге
гребного винта/? =Ре~ ^i A — t)pn2lf, может быть найдено с помощью характеристик
винта по следующей схеме:
1.vk,km/4.
2. v =0,278 v к, м/с.
3. vp=v A -и),м/с.
4. идв, об/мин. ,
5.и=идвгр/60, с
6.Xp=Vp/(nD).
8.т»р=/(Хр).
9.R=Ki(l -t)pn2I?,H,
10.Ne =
, Вт
Расчет сопротивления выполняется для скоростей катера-прототипа, полученных
на различных режимах работы двигателя, указанных в начале схемы (пп. 1—5). В п. 10
вычисляется необходимая мощность двигателя Ne, которая может быть использована
для контроля произведенного анализа, в особенности на максимальном режиме работы.
Коэффициенты взаимодействия винта и корпуса катера-прототипа и>и г-находят
в соответствии с рекомендациями п. 8.3.
Такая схема анализа полностью применима только к. катерам-прототипам, имею-
имеющим некавитирующие ГВ. При наличии кавитации ГВ прототипа анализ его действия
существенно усложняется, а точность снижается. В этом случае анализ производят с уче-
учетом рекомендаций пп. 8.4 и 8.5 по расчету кавитационных характеристик ГВ. Пример-
Примерная схема анализа имеет следующий вид:
310
-Pa)
1. у к,км/ч. 9.н=
2.у =0,278 у к,м/с. 1О.икв«/(к,8).
З.Ур=у A -w),m/c. П.ХрЛ„=р@,5Я1/?»+0,2/©)мк6.
4.ИдВ, об/мин. . 12.Хр
6.Хр=ур/и0.
8. т?р =/(Хр). 16. We =Лу /т?рт?м1?кт??, Вт.
Приведенные схемы анализа позволяют определить кривую сопротивления только
для одного случая нагрузки катера-прототипа, одного состояния погоды, одних углов
установки крыльев и т. п. При изменении любого из названных параметров расчет надо
повторять.
С целью обобщения анализа такого типа и уменьшения количества вычислений
целесообразно произвести в соответствии с рекомендациями п.8.6 расчет и построе-
построение паспортной диаграммы — в виде характеристик изменения тяги ГВ катера-прото-
катера-прототипа и мощности двигателя в зависимости от скорости при различных частотах враще-
вращения двигателя. Если на построенные характеристики тяги Ре =/(у к) нанести замерен-
замеренные в процессе ходовых испытаний скорости катера^рототипа при соответствующих
частотах вращения двигателя и соединить полученные точки плавной кривой, то можно
получить приближенную кривую сопротивления при тех или иных условиях эксплуата-
эксплуатации, характеризующих водоизмещение и центровку катера, состояние погоды, углы
установки крыльев и т. д.
Перенос точек пересечения кривой сопротивления R =/(у к) с характеристиками
тяги Pe=f(vK) иа характеристики мощности Ре =f(y к) при тех же режимах работы
двигателя позволяет получить винтовую характеристику Ne =/(ук, и). Она представ-
представляет собой зависимость между частотой вращения и мощностью двигателя, необходи-
необходимой для обеспечения данного изменения скорости катера-прототипа при определен-
определенных условиях его испытаний. Бели полученная винтовая характеристика будет про-
проходить на паспортной диаграмме через точку, соответствующую максимальной или
другой заданной мощности установленного на катере двигателя при той же самой часто-
частоте вращения, что и на испытаниях, то это будет свидетельствовать об удовлетворитель-
удовлетворительной сходимости результатов анализа. В таком случае полученная кривая сопротивле-
сопротивления близкого катера-прототипа с некоторым приближением может рассматриваться
как исходная для пересчета на проектируемый катер по приведенным выше соотно-
соотношениям, т. е. по условному кубу масштаба k3 = VJ VM.
Определение сопротивления КПК расчетно-теоретическим путем. Сопротивление
проектируемого катера при ходе его на ПК может быть получено также чисто расчетным
путем на основе методики, предложенной В. Т. Соколовым [43] . Этот способ целе-
целесообразно использовать при отсутствии модельных буксировочных испытаний в бассей-
бассейне, а также для контроля результатов расчета сопротивления КПК, полученных с по-
помощью других методов.
311
Согласно данной методике отдельные составляющие полного сопротивления катера
после выхода его на крылья
R —R
Kp
.ч
A2.27)
в основном определяются выбранными элементами ПК, их погружениями и скоро-
скоростью катера.
1. Сопротивление системы, состоящей иэ носового и кормового ПК, может быть
представлено как сумма ¦
к =0,5CXHpv 2SH + 0,5CXKpv 2SK.
A2.28)
Коэффициент сопротивления носового крыла Схн слагается из коэффициентов
профильного сопротивления Схпр, индуктивного сопротивления Cxt и волнового сопро-
сопротивления Схв:
^xi г ^хв ¦
Коэффициент профильного сопротивления находится по формуле
= 2?пл {!+[("*+ 0,5) (ф„) - 0,5] Сук } ,
A2.29)
A2.30)
гДе ?гш ~ коэффициент сопротивления трения эквивалентной плоской шероховатой
пластины, определяемый по кривым Прандтля — Шлихтинга (рис. 12.33) в зависимости
от значений lg Re», =.\g(v-b/v) и отношения хорды крыла к высоте бугорков шерохо-
шероховатости Ь/еш; т =0,5 при Суи =0,15 т 0,20 и т' =0,7$ при Суи =0,5 -г 0,6. Значения
коэффициентов к^, и у находятся по рис. 12.7 и 12.15.
Коэффициент индуктивного сопротивления малопогруженного крыла
Cxi=[Cyh
A2.31)
У
V
^
V
•
N
———
*-—
5-10 г
ЫО3
5-»'
1-10*
2-10"
5-Ю* 0,6
\
-\
\
~~—.
= ,
"
1 _
^^
\
| :
1 —
—.
——
- i
— —
1 .
F -
-
.
1
~-—
- _=
¦ «.
-—ч
—
¦
-—-
7,0
0,/ ft2 ff.J «« 0,5 0,6 0.7 0,8 0,9 1,0 1,1 k
.2
'5.0 5,5 6,0
Рис. 12.33. Кривые коэффициентов со- Рис. 12.34. Вспомогательные зависимости e~2h I * от
противления трения шероховатых глубины погружения при различных числах Фруда
пластин (по формулам Прандтля -
Шлихтинга).
й-хорда крыла; еш— высота бугор-
бугорков шероховатости
312
Коэффициент волнового сопротивления
-2А -2А
2я
С*в~ '——-e 1- —e A2.32)
Fr,2
Для облегчения практических расчетов волнового сопротивления на рис. 12.34
-2А
приведены вспомогательные зависимости е при различных числах Фруда по хорде
крылаFrъ-
Коэффициент сопротивления кормового крыла определяют аналогичным образом,
но с дополнительным учетом имеющего место влияния на него скоса потока, вызванно-
вызванного носовым крылом. Это влияние, как указывалось [см. формулы A2.9) и A2.10)] ,
учитывается коэффициентом
СхскъАа?Сукк. A2.33)
При проектировании сложных комбинированных крыльев расчет ведется для сред-
средних величин удлинения и погружения.
2. Формула для определения сопротивления выступающих частей имеет вид
Дв.ч =0>5(Освал*пр.в + Схкрн^крн + CXCTSCT + CXpSp)pv 2, A2.34)
где Схвап * 0>2 - коэффициент сопротивления валопровода; ?Пр.в - площадь проек-
проекции гребного вала на плоскость шпангоута; ?Крн» ^ст> ^р ~ площади боковых проек-
проекций кронштейнов гребного вала, стоек ПК и рулей соответственно.
Коэффициенты сопротивления кронштейнов Схкрн, стоек крыльев СХст и рулей
Схр вычисляются по однотипной формуле
Схв.ч =2ks$nn + Схбр + Схклв. A2.35)
Коэффициент kg учитывает кривизну поверхности и принимается для стоек, рулей
и кронштейнов ?$=1,1*1,2. Коэффициент брызгового сопротивления зависит от
смоченного удлинения стойки или руля Хсм =h/b и относительной толщины 5:
Схбр«0,24e2l(bh)= 0,2452Дсм- ' A2-36)
Увеличение сопротивления кавитирующих или клиновидных стоек (рулей) при
срывном обтекании учитывается коэффициентом
С*кав =0,125тг52 A + XCM/Fr 2b) . A2.37)
При безотрывном обтекании принимается, что СХКЛв =0.
3. Воздушное сопротивление КПК вычисляется по формуле
. A2.38)
где ?Мид — площадь проекции КПК на плоскость миделя.
313
Коэффициент воздушного сопротивления в соответствии с экспериментальными
данными составляет Схл = 0,5 -г 0,8.
Дополнительно необходимо сделать следующие замечания.
Относительные глубины погружения носового и кормового крыльев могут быть
установлены в соответствии с расчетом посадки катера на различных скоростях, произ-
произведенным по методике, предложенной в работе [43] , или приближенно назначены
применительно к выбранным элементам крыльевой системы. При этом погружение
кормового крыла отсчитывается от уровня волновой впадины, образованной носовым
крылом.
Значения коэффициентов подъемной силы носового и кормового крыльев на раз-
различных скоростях катера определяются исходя иэ принятых величин этих коэффициен-
коэффициентов для его расчетной скорости.
Высота бугорков шероховатости при расчете коэффициентов трения крыльев
и стоек при достаточно гладкой и чистой поверхности принимается еш =0,01 + 0,02 мм.
При ухудшении поверхности крыльев высота бугорков шероховатости может быть
увеличена до еш =0,03 + 0,06 мм.
При определении коэффициентов индуктивного сопротивления необходимо учи-
учитывать расположение стоек крыльев и наличие на нижней поверхности у концов
крыльев направляющих вертикальных кильков. Стойки и кильки, находящиеся у краев
крыла, играют роль шайб и затрудняют перетекание жидкости в область пониженного
давления. Вследствие этого увеличивается эффективное удлинение крыла и значитель-
значительно уменьшается его Индуктивное сопротивление.
Приближенное определение сопротивления КПК. В некоторых случаях при необхо-
необходимости быстрой оценки величин буксировочного сопротивления КПК в значительном
диапазоне скоростей может быть использован следующий приближенный прием.
Статистические модельные и натурные экспериментальные данные показывают,
что гидродинамическое качество реально построенных и испытанных КПК колеблется
в относительно небольших пределах. В частности, на горбе сопротивления при Fr у =
= 1,5 + 2,0 коэффициент качества достигает в среднем АГ=7 + 9. После полного выхо-
выхода катера на крылья при Fr у =3,0 + 3,5 гидродинамическое качество возрастает до
своего максимума и становится АГ = 10 -^ 12. При дальнейшем увеличении скорости
КПК до Fr у =4 + 5 качество опять начинает снижаться до /Г = 8 -г-6. Соответствую-
Соответствующие осредненные кривые изменения гидродинамического качества дву- и однокрылых
КПК в зависимости от чисел Фруда по водоизмещению Fr у приведены на рис. 12.20.
На основании этих кривых, задаваясь ожидаемым качеством проектируемого КПК,
можно приближенно определить его сопротивление на различных скоростях. Порядок
расчета представлен следующей схемой:
1.vk,km/4. 4.tf
2.v =0,278vk,m/c. ' 5.R=Vy/K,H.
3. Fr у -v /V* -ЗПГ 6.NR=Rv, Вт.
Данная схема может быть также использована при наличии кривой гидродинами-
гидродинамического качества близкого прототипа. В этом случае точность определения сопротив-
сопротивления и буксировочной мощности КПК значительно повысится.
12.7. Пример ресчета элементов крыльевого устройства и ГВ
Учитывая относительную сложность методов проектирования подводных крыльев,
определения сопротивления воды при ходе на крыльях и выбора основных элементов
гребных винтов, в особенности кавитирующих, представляется целесообразным по-
314
яснить последовательность выполнения всего комплекса необходимых расчетов числен-
численным примером применительно к быстроходному КПК,
Исходные данные
Длина катера L, м 9,6
Наибольшая ширина В, м 2,4
Водоизмещение катера с крыльями V, м3 2,8
Отстояние ЦТ катера от транца xg, м 3,6
Мощность двигателя Ne, кВт 140
Частота вращения двигателя пда, об/мин • 2400
Частота вращения ГВ п, с . ." 40
Наибольшая скорость vK, км/ч 70
Допустимый диаметр ГВ Д м 0,36
Угол наклона линии гребного вала и, град , 13
Глубина погружения оси ГВ hs, м 0,4
Угол ходового дифферента ф, град ' 3
Выбор элементов крыльевого устройства. Принимаем крыльевую систему тандем, состоя-
состоящую из носового и кормового крыльев. Каждое крыло будет воспринимать около 1/2 нагрузки
катера, т.е. около 1,4 т. В соответствии с рекомендациями кормовое ПК располагаем у транца
(см. рис. 12.24), а носовое-на расстоянии 7,2 мот него [см. формулу A2.21)].
С помощью рис. 12.25 находим необходимую площадь ПК ?s *> 0,7 м .
Принимая значения коэффициентов подъемной силы для носового и кормового ПК в соот-
соответствии с рис. 12.26 Сун «0,18 и Сук« 0,24, по формулам A2.23) находим площадь каждого
крыла
SH = 2rH/ .Суи/я>2 = 2-1,4-9810/@I8-1000-19,52)=0Dм2;
SK=2YK/ Сук(й>2 =2-1,4-9810/@.24-1000-19.52 «0,3м2.
- В связи с большим диапазоном скоростей проектируемого катера (Fr у > 5) представляется
целесообразным принять для него комбинированную схему крыльевого устройства, состоящую
из основной несущей плоскости и наклонных стабилизаторов. Основную несущую плоскость носово-
носового ПК для повышения ходовых, маневренных и мореходных качеств принимаем стреловидной
(X « 16е ) и с небольшой килеватостью @ « 9е ) . Размах ее равен 1,6 м, а вместе со стабилизаторами
на максимальной скорости ~2 м. Для получения площади носового крыла SH «0,4 м1 хорда его
должна быть Ьн = 0,2 м. Удлинение носового крыла при этом составит \=1 Н/Ьн = 2/0,2 = 10.
Кормовое крыло делаем трапециевидным (см. рис. 12.18, ж). Основная несущая плоскость
имеет размах / к = 1 м. Недостающая часть площади кормового крыла и, следовательно, его подъем-
подъемной силы приГ хорде Ьк = 0,2 м будут обеспечиваться наклонными стабилизаторами, рабочий раз-
размах которых на скорости 70 км/ч составит около / « 1,5 м, а удлинение X = 7,5.
Для получения наибольшего эффекта при выходе катера на крылья при обеспечении его остой-
остойчивости и мореходности наклонные стабилизаторы носового и кормового ПК принимаются расши-
расширяющимися к краям с одновременно нарастающими углами атаки и увеличивающейся вогнутостью
продольных профильных сечений. Угол наклона стабилизаторов в плоскости шпангоутов принимаем
~28°. Полный размах носового ПК по стабилизаторам принят равным 3,2 м, кормового - 2,6 м.
Для уменьшения опасности прорыва воздуха к крылу на засасывающей поверхности наклонных
стабилизаторов устанавливаются небольшие шайбы. На нагнетающей поверхности ПК для повыше-
повышения устойчивости хода и противодействия дрейфу применяются вертикальные кильки. Крепление
крыльев к корпусу катера осуществляется при помощи обтекаемых хорошо спрофилированных
стоек и наклонных кронштейнов.
Среднее отстояние несущей части носового ПК от корпуса на максимальной скорости катера
водоизмещением 2,8 т в соответствии с рис. 12.31 должно составлять h «0,3 м. Полученные ПК
схематически представлены на рис. 12.35.
Профилировка ПК производится в соответствии с рекомендациями раздела 12.4 (рис. 12.29,
табл. 12.1). Для основной несущей плоскости носового крыла принимается острокр.омочный плос-
плоско-выпуклый сегментный профиль с приполненной входящей кромкой.
Наклонные стабилизаторы имеют острокромочиый вогнуто-выпуклый сегментный профиль.
У внешнего края стабилизатора вогнутость нагнетающей поверхности составляет 3 %. Для основ-
основной несущей плоскости кормового крыла может быть принят профиль Вальхнера.
Толщина профиля несущих плоскостей носового и кормового ПК принимается равной е =
= 16 мм. В этом случае относительная толщина профиля составите =0,016/0,200 = 0,08."
Далее находим относительную кривизну средней линии профиля 60 =0,56 =0,5-0,08 = 0,04
и по формуле A2.2) угол нулевой подъемной силы профиля крыла ав = —1006в = —100• 0,04 =-4°.
315
Расчет коэффициента подъемной силы носового
крыла на наибольшей скорости производим по форму-
формулам килеватого крыла A2.7).
Производная КПС килеватого крыла находится
С
по рис. 12.11 при удлинении V=10 :
da
0,061.
Учитывая большую величину угла нулевой подъем-
подъемной силы крыла а„ = —4°, угол атаки принимаем рав-
равным а=-0° 30'=-0,5° .
Влияние глубины погружения на изменение угла
„ ¦ „ нулевой подъемной силы килеватого крыла находим
Рис. 12.35. Схема крыльевого устройства с помощыо рис. 12Л2: Да, =57,30,0073 = 0,42° .
(нормальные, проекции > вид в плане) Таким РобразоМ) y^**, ,то cos p = cos 9° - 0,99,
носового (в) и кормового (б) крыльев получим С;икиРл = 0Hб;(.0;5 + 4/0>99 _ о,42) «0,19,
что свидетельств-ует о достаточной сходимости расчета.
Расчет КПС кормового крыла ведем для относительной глубины погружения^ =0,5, при кото-
которой его площадь с учетом погруженных частей стабилизаторов составляет около SK <* 0,3 м:
CyflK =
da
[a- (a0 +Да„)].
Для определения производной
находим входящие в нее параметры:
*у=/(Л)=0,86;
r=fW =0,208;
da
согласно формуле A2.5) по рис. 12.5, 12.7 и 12.8
а «,=5,5;
?=/(АД) =1,54;
0,86-5,5
da
I"'-' 0,86-5,:
1+
3,14-7,:
A + 0,208) -1,54
1
J
< 0,06;
kh -f(h) =0,082 -по рис. 12.10;
Да' = 57,3fy 8=57,3-0,082-0,08 «0,38.
Принимая угол атаки кормового крыла на максимальной скорости a =0,5° и подставляя все
известные величины в формулу A2.4), получим Суцк = 0,06 [0,5 - (-4 + 0,38)] «0,247.
Дальнейшее уточнение характеристик носового и кормового ПК — углов атаки, глубин погру-
погружений, значений КПС и т. д. — производится в процессе ходовых испытаний катера.
Произведем расчет сопротивления данного катера при ходе его на крыльях с максимальной
скоростью v =70 км/ч « 19,5 м/с. Расчет выполняется в соответствии с рекомендациями и форму-
формулами п. 12.6 для средних значений относительной глубины погружения, которая для обоих крыльев
составляет h «0,5.
Вначале иахЬдим одинаковые для обоих ПК параметры, необходимые для определения сопро-
сопротивления крыльев по формулам A2.28- A2.33) :
V=f(F) =0,74 -порис'12.15;
^=/(>О =0,86 -по рис. 12.7;
1 g 0>b/iO=lg [19.5-0,2/A,57-10-в)] =6,395;
Ь/еш= 0,2/@,4 -Ю-4) =5- 103;
fnn=/[lg("ft/f). F/еш)] =5,3-10 -порис. 12.33;
Fr ъ =v Is/gb =19,5/s/9,81 0,2 = 13,9; m' = 0,5;
e -2."/Flb =/(й, Frft) « 1 - по рис. 12.34.
316
Таблица 12.3. Расчет сопротивления крыльев
Расчетный параметр
Cyh
\ = b/b
М=/(Ю -рнс. 12.5
i=f{hl\) -рис. 12.8
Су*. "Сук I**
Qmp - Формула A2.30)
Се - „ A2.31)
С№ - „ A2.32)
Дат*2СуАн/(я\)
Осек * Д °-тсук к - Фор-
Формула B1.33)
cx=cxnp + cxi + cXB +
+ Осек
Якр, Н-формула A2.28)
Численное значение
Носовое
крыло
0,19
10,00
0,09
1,58
0,22
11,3 10"'
1,98-10-'
0,12 • 10''
-
-
13,4-10-'
1020
Кормовое
крыло
0,247
7,500
0,068
1,540
0,290
11,55-10-'
4,27 ¦ 10"'
0,21 • 10-'
0,012
2,97 ¦ 10"'
19-Ю"'
1080
7Ч
2
ч
ч
2 3 4 5 Frv
Рис. 12.36. Кривые коэффициентов гид-
гидродинамического качества К.
/—катер-прототип; 2 — проект; 3 —
теоретический расчет
Таблица
12. 4. Приближенный
(F=2,8m';
1вт сопротивления КПК
м/с)
Расчетный параметр
v =3.72FrK, м/с
vK = 3,6v , км/ч
K=f(Ftv) -
R = vy /к, h
NR =Rv , кВт
Численное значение
3,0
11,2
40,3
8,4
3250
36,3
3,5
13,03
46,9
3340
43,5
4,0
14,9
53,6
7,8
3490
52,0
4,5
16,8
60,3
7,5
3680
61,9
5,0
18,6
67,0
7,0
3890
72,6
5,5
20,45
73,6
6,7
4Н0
84,1
Дальнейший расчет сопротивления носового и кормового крыльев произведен в табл. 12.3
для полученных новых значений Су/,.
Сопротивление выступающих частей определяем по формулам A2.34)-A2.38). Суммарная
смоченная площадь стоек крыльев, килькой, противовоздушных шайб, кронштейна и руля SSb.4
составляет ~ 0,32 м2.
Средний коэффициент брызгового сопротив-
сопротивления находим по формуле A2.36): Схбр«0,24Х R к
ХО,О15а/(О,2'О,15) «1,8-10 3. Поскольку С^щ = '
=0, то коэффициент сопротивления всех выступаю-
выступающих частей без гребного
A2.35)
X 10~?
ед ч
2-1,1-5,3-10
вала согласно формуле
)~3+ 1,8-10~3 = 13,45 X
При площади проекции гребного вала на плос-
плоскость шпангоута ~0,016 м2 и коэффициенте сопро-
сопротивления СХввл « 0,2 общее сопротивление всех вы-
выступающих частей катера составит ДвЛ=0,5р|> 2 X
Х^хвчЯвч + Схвал$прв) =0,5-1000-19,5» X
X @,01345-0,32 + 0,2 -0,016) = 1420 Н.
Воздушное сопротивление находим по фор-
формуле A2.38), приняв коэффициент воздушного
сопротивления Са = 0,6, плотность воздуха рд =
= 1,26 кг/м3 и площадь проекции КПК на плос-
плоскость миделя ^мид^З^ м1: Ла = 0,6 ¦ 0,5-1,26 X
Х19.52 -3,2 «460 Н.
чп
—-—
0
¦—
NR=f(oK) _
^—
—
,—¦"
^*
^-
<^
50
ВО
70
Рис. 12.37. Кривые сопротивления и букси-
ровочной мощности КПК в зависимости от
скорости катера
317
ы
00
Таблица 12.5. Расчет скорости и элементов кавитирующего гребного винта
(ЛГе = 122кВт; ида =2400 мин1; и=40с'; 0 = 0,36 м; и> =0,03; /=0.04; т)к=0.99; т)м=0,97;
4 = 0,0168 м4; р=1000кг/м3; ри2©4 A-f) = 25,8 кН; в =1,0; г =3; 8 =0,03; 5, =0,045; р=1,20}
№
п.п.
1
2
3
4
5
6
7
8
9
ю
11
12
13
14
15
16
Расчетный параметр
vK, км/ч, - задаемся
v =0,278i>K(l -w),m/c
Я=/0-к),кН
\p=vp/nD
к=2Aъ +7As-W)/(pvp
«Кб =/(*,«>
Kt - задаемся
HjD=f{Kl,\p)
Чр=/^,\р)
\pk =p @,5 (Я, /О + 0,2/в) мк 6
V*i =У [ (^-p/^pJt) » * , б j J
ч=чрчм ч« Ч
0,150
U80
0,700
1,390
0,916
0,912
0,976
0,657
3,530
102,0
68,000
18,360
3,920
1,275
0,616
1,170
0,200
1,680
0,708
1,460
0,872
0,830
0,964
0,656
4,280
123,5
0,250
1,790
0,701
1,540
0,827
0,740
0,950
0,639
4,770
141,0
0,174
1,630
0,707
1,425
0,895
0,875
0,972
0,657
3,930
112,6
0,150
1,620
0,701
1,440
0,912
0,906
0,976
0,656
3,500
104,0
Численное значение
70,000
18,900
3,980
1,313
0,582
1,190
0,200
1,720
0,711
1,515
0,867
0,820
0,962
0,657
4,230
125,0
0,250
1,830
0,703
1,590
0,825
0,730
0,950
0,641
4,710
143,0
0,181
1,680
0,710
1,485
0,884
0,852
0,968
0,658
3,980
117,5
0,150
1,660
0,703
1,490
0,905
0,894
0,975
0,657
3,460
105,3
72,00
19,44
4,05
1,35
0,55
1,21
0,200
1,760
0,712
1,565
0,862"
0,808
0,960
0,655
4,170
127,5
0,250
1,870
0,706
1,650
0,817
0,710
0,947
0,642
4,580
143,0
0,191
1,750
0,712
1,560
0,866
0,822
0,960
0,656
4,050
123,5
71,500
19,300
4,030
1,340
0,558
1,200
0,188
1,730
0,712
1,530
0,875
0,832
0,962
0,658
4,030
122,9
Й..КН-
5,0
4,0
/
/
,
/
У
/-
у
У
Iе--
к
i
i
i ¦
i
i
У
л
>
***
Ж?
Ш
120
110
4,/
0,15
0,20
0.15
100
Рис. 12.38. Пример построения зави-
зависимостей Ре и Ne от коэффициента
упора для скорости катера 72 км/ч
к,
0,13
0,17
кВт
130
110 рв
68 70 ¦ 72%}шН
Рис. 12.39. Определение наибольшей
скорости катера vK и необходимых
значений коэффициентов упора ЛГ, и тя-
тяги гребного винта Ре
Полное сопротивление КПК при ходе на крыльях со скоростью 70 км/ч определяем по формуле
A2.27):
R -1020 + 1080 + 1420 + 460 = 3980 Н.
Скорости 70 км/ч соответствует Frp=5,2. Гидродинамическое качество КПК при этом дости-
достигает К = 6,9. Как видно из рис. 12.36, данное значение качества лежит практически на продолжении
кривой коэффициента гидродинамического качества быстроходного КПК типа „Невка" [92].
Таблица 12.6. Расчет кривых действия грешного винта по паральному методу
№
П.П.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Расчетный
параметр
Дм
Н, м
z
dc, м
Я., м
Л,м2
е,,м
е,,м
е =е, — е,, м
й наЯв, м
S =е/Ь .
8„ -формула (8.6)
bfp - „ (8.3)
HID °Р
гв=я„/я
Численное
значение
0,360
0,580
3
0,064
0,108
0,102
; 0,012 3
0,004 1
0,008 2
0,273
0,030
0,030
о;2зо
0,035 7
1,61
0,60
П.П.
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Расчетный
параметр ,
© =A/Ad
Rib со
0, - формула (8.65)
C, -формула (8.65)
H,/D=H/D + 4lit
1g vt -формула (8.1)
1gK, - „ (8.67)
а' „ (8.68)
m „ (8.66)
х „ (8.61)
Я' -. (8.62)
F . „ (8.63)
L „ (8.64)
K=iiF
Xy -формула (8.69)
Аг „ (8.70)
Численное
значение
1,000
0,783
0,778
0,778
1,730
0,918
0,693
4,630
0,063
0,965
0,336
1,000
1,180
1,180
0,812
0,190
п.п.
Расчетный параметр
Численное значение
33
34
35
36
37
38
39
а-формула (8.71)
^p „ (8.13)
Л, —Ах off]
Kt =Ala^St +tn)
Лр - формула (8.59)
0,100
0,163
1,000
1,556
0,081 2
0,031 0
0,652
0,200
0,263
1,004
1,384
0,163
0,0501
0,718
0,300
0,363
1,009
1,210
0,246
0,069 6
0,683
0,400
0,463
1,015
1,037
0,330
0,089 4
0,612
0,500
' 0,563
1,023 5
0,865
0,415
0,109 4
0,524
319
0,6
0,2
О
у
—.j
\
Ns,kBt
1,0 1,2 7,4 1,6 Х„
Рис. 12.40. Кривые действия про-
проектируемого гребного винта
Рис. 12.41. Паспортная диаграмма
проектируемого КПК.
'to
1 — кривая сопротивления КПК; 2—предельная тяговая характеристика;
3 — винтовая характеристика; 4 — внешняя характеристика двигателя
В силу этого пунктирная кривая, проведенная через указанную точку, с достаточной достоверностью
может быть использована для расчета сопротивления проектируемого КПК во всем диапазоне ско-
скоростей при ходе на крыльях. Расчет произведен в табл. 12.4 по схеме, указанной на с. 314. Получен-
Полученные зависимости сопротивления R =/ (v к) и буксировочной мощности Nr =/ (у к) от скорости пред-
представлены на рис. 12.37 и используются в расчете ходкости КПК.
Таблица 12. 7. Расчет паспортной диаграммы
(Z) = 0,36m; #,/Я=1,73; 0=1,0; г=3;
Постоянный коэффициент
w =0,03; t =0,04
т1М=о.97; чк=0>"
/р = 1,0; р = 1,20
\р= 1,300; К1 =0,200
Z)
3 0,278A-w) 60 U'UZZi
26<pn+yhs-Pa)
А. — ' ,, .1 — ^830
/ Я, 0,2 \
Л, =Ш,5 —~ + ) = 1,277
\ /
Расчетный параметр
ида, об/мин
и, с
10"W?4 A -Г),кН
Ук = 0,0223хрйда>км/ч
к =2850/v?.
\,Л = 1,277ижв
1ЪвЛ
lP" ^ -?)?>,,кН
ль=рву(з^);квт
кевитирующего гребного винта
6 =0,03; 6, =0,045)
Численное значение
1800
30,00
14,50
52,20
1,04
1,29
1,00
1,00
1,00
2,90
62,20
2000
33,330
17,900
58,000
0,850
1,366
0,950
0,968
0,988
3,460
83,300
2200
36,700
21,660
63,700
0,700
1,443
0,900
0,890
0,973
3,850
103,6
2400
40,000
25,800
69,600
0,590
1,500
0,866
0,820
0,960
4,230
126,500
320
Расчет элементов гребного вннта н скорости катера. Для облегчения условий эксплуатации
двигателя и обеспечения выхода КПК на крылья в условиях волнения расчет скорости и элементов
ГВ производится для режима работы двигателя Ne = 122 кВт при 2400 об/мин, что создает 15%-ный
запас мощности. Диаметр ГВ принимаем равным максимально допустимому Z)=0,36 м, так как
согласно рис. 8.18 он должен превышать 0,4 м. Поскольку предварительный расчет показал, что
винт является кавитирующим, то дисковое отношение 0=1.
Условные коэффициенты взаимодействия винта и корпуса определяем по формулам (8.34)
с учетом угла наклона гребного вала Л =13° и угла ходового дифферента Ф * 3°:
w= 1 - cos l» <* 0,03; f = 1 - cos (i> + ф) « 0,04.
Расчет скорости и элементов ГВ произведен в табл. 12.5 в соответствии с рекомендациями
пп. 8.4 и 8.5. При этом использована расчетная диаграмма трехлопастных ГВ с дисковым отноше-
отношением 0=1, относительной толщиной эквивалентного профиля S =0,03 и кривизной засасывающей
стороны ?, =0,045. Кавитационные характеристики определены с помощью рис. 8.13 и 8.16.В силу
весьма большого угла скоса потока коэффициент ускорения кавитации р = 1,2.
Для определения необходимых значений коэффициентов упора Л:, для каждой скорости произ-
производилось построение зависимостей Ре =/(?,) и Ne =f(Kt). Пример такого построения для ско-
скорости 72 км/ч приведен на рис. 12-38. С целью проверки полученных значений в дополнительных
четвертых столбцах таблицы для каждой заданной скорости произведены контрольные расчеты.
Графические зависимости Ре =f(y к). Ne ~fb> к) и ^i -fb> к)> построенные на рис. 12.39 по ре-
результатам контрольных расчетов, показывают, что при мощности двигателя 122 кВт наибольшая
скорость катера составляет около 71,5 км/ч. Необходимое шаговое отношение ГВ находится анало-
аналогичным построением или проверочным расчетом в последнем столбце табл. 12.5.
В целях уточнения всех характеристик и элементов ГВ в табл. 12.6 произведен расчет его кри-
кривых действия по паральному методу. Полученные кривые действия представлены на рис. 12.40
и используются при расчете паспортной диаграммы.
Расчет и построение паспортной диаграммы выполняются в соответствии с рекомендациями
п. 8.6 для нескольких значений поступи ГВ \р= 1,2-г 1,4 при различных частотах его вращения.
Пример такого расчета для Хр = 1,3 приведен в табл. 12.7. По результатам расчета на рис. 12.41
построена паспортная диаграмма, с помощью которой можно установить, что уточненная скорость
КПК составит около 71,2 км/ч. Таким образом, расчет показывает, что заданная скорость проекти-
проектируемого КПК vK = 70 км/ч при располагаемой мощности двигателя Ne =140 кВт будет обеспече-
обеспечена с достаточным запасом на состояние погоды и изменение нагрузки.
Спроектированный ГВ имеет следующие основные элементы:
Диаметр Дм 0,36
Шаг Н, м ; 0,58
Шаговое отношение H/D 1,61
Дисковое отношение 0 1,00
Число лопастей z 3
Профиль сечений лопасти - вогнуто-выпуклый сегмент.
Далее определяются необходимые конструктивные элементы ГВ и строятся его рабо-
рабочие чертежи.
11 Зак.738
РАЗДЕЛ V
КОНСТРУКЦИЯ КОРПУСА МАЛЫХ СУДОВ
13. СУДА ИЗ древесины И ФАНЕРЫ
13.1. Характеристика материалов и соединений
Древесина. В малотоннажном и малом судостроении древесина применяется для
постройки малых рыбопромысловых судов, служебных и разъездных катеров, судов
для туризма, отдыха и спорта и многих других.
Внедрение водостойких клеев в деревянное судостроение позволило создать каче-
качественно новые конструкции. Корпус судна, изготовленный с использованием склеива-
склеивания, на 15—25 % легче корпуса, сделанного с помощью механических средств крепле-
крепления — шурупов, болтов, нагелей.
При постройке малых деревянных судов их наружная обшивка, детали набора
(киль, днищевые и скуловые стрингеры, внутренние и наружные привальные брусья,
натесные и гнутые шпангоуты, бимсы, карлингсы, штевни), а также рубки изготовляют
из, сосны, ели, лиственницы, кедра, ясеня и древесины других пород. Для гнутых криво-
криволинейных деталей (шпангоутов, штевней и пр.) целесообразнее использовать ясень
и дуб. Трещины, сучки, гниль, синеву, косослой и другие пороки материала необходимо
устранить при раскрое заготовок.
В зависимости от ширины пори плотности древесины (рис. 13.1) различают мягкие
(с широкими порами) породы — ель, сосна — и твердые (с узкими порами) — дуб,
бук [25] .
Механические свойства древесины обусловлены направлениями воспринимаемых
ею усилий по отношению к ее волокнам: продольным, поперечным, тангенциальным
и радиальным (рис. 13.1, б). Поэтому при изучении свойств древесины ее рассматри-
рассматривают как анизотропный материал (материал с неодинаковыми свойствами по различ-
различным направлениям).
При заготовке деталей для судна следует учитывать, что твердость и прочность
древесины несколько меняются в зависимости от того, из какой части ствола взяты
детали; так, сердцевинная и заболонная части ствола дерева (см. рис. 13.1, б) более
рыхлые и менее прочные, чем деловая часть — ядро.
Разрушение целого бруса происходит при определенном соотношении нормальных
и скалывающих напряжений ав/тв, возникающих в нем; характер разрушения обуслов-
обусловливается этим отношением. В месте разрушения бруса наблюдаются разрывы с отно-
отношением сторон а/1 1:10, 1:15 (рис. 13.1, в), зависящим от качества древесины. При
этом чем выше качество материала, тем в большей степени характер разрыва образца
соответствует разрушению, изображенному на рис. 13.1, в. Всевозможные пороки
(сучки, косослой, свилеватость) искажают изображенный характер разрушения дре-
древесины [40] .
Ниже рассмотрены конструкционные и эксплуатационные качества древесины,
определившие ее долгую жизнь в малом судостроении:
Положительные Отрицательные
Простота изготовления и ремонта Относительно низкие прочностные характе-
конструкций - ристики материала
Малая масса конструкций Сравнительно малые сроки службы судов
Безвредность при обработке деталей Горючесть древесины
из древесины и при нахождении на Зависимость качеств конструкций от де-
деревянном судне фектов материалов
322
Хороший внешний вид конструкций Намокание
и судна
Возможность придания корпусу судна Подверженность гниению и разрушению
достаточно сложных обводов организмами, обитающими в воде, осо
Доступность использования и простота ' бенно морской
обработки
Физико-механические свойства древесины — пиломатериалов лиственных и хвой-
хвойных пород (дуба и сосны) — основных пород, используемых в малом судостроении, —
характеризуются следующими значениями:
Лиственные Хвойные
(ГОСТ 2695-83) (ГОСТ 8486-66)
Плотность, кг/м3 700 500
Влажность, % 14-18 14-18
Предел прочности при растя-
растяжении, МПа 50-60A60)* 40-50A26)
Основные технологические особенности древесины обусловлены ее гигроскопич-
гигроскопичностью — она сравнительно легко может увлажняться и высыхать. Содержание влаги
Рис. 13.1. Древесина: а - строение древесины сосны; б - сечения по кругляку;
в — характер разрыва волокон при разрушении целой древесины; г — коробле-
коробление заготовок пиломатериала, расположенных в различных частях бревна.
1 — поперечное сечение; 2 — тангенциальное; 3 — радиальное; 4 — сердцевинная
часть; 5 — заболонная; 6 — деловая часть ствола (ядро)
*В скобках указан предел прочности при растяжении небольших стандартных образцов.
И*
323
в древесине в процентном отношении к ее плотности — влажность древесины — опре-
определяет не только технологические особенности материала, но и прочность, а также
долговечность и сохранение заданной формы конструкциями.
Детали конструкций необходимо изготовлять из пиломатериала, имеющего влаж-
влажность 12—18 %, так как при большей влажности древесины снижается прочность клее-
клеевых соединений и ухудшается обработка деталей (особенно строгание); при мень-
меньшей влажности происходит набухание древесины в готовых конструкциях — увели-
увеличение линейных размеров деталей, возникновение больших внутренних напряжений,
которые могут вызвать вырывание шурупов, срыв головок заклепок, разрушение
клеевых соединений [40] .
Примерно оценить состояние древесины в отношении ее влажности можно исходя
из следующего: у только что снятой стружки, обладающей хорошей гибкостью, влаж-
влажность ощущается на ощупь; если стружка ломается в руках — пиломатериал пересушен;
при нормальной влажности древесины на строганой поверхности не остается черниль-
чернильного следа от химического карандаша.
При подборе заготовок для деталей из пиломатериала необходимо учитывать изме-
изменение размеров при усушке (разбухании): в тангенциальном направлении — до 10 %,
в радиальном — на 3—5 %, в продольном (вдоль волокон) — 0,1—0,3 %. Неодинаковое
изменение размеров в поперечном сечении деталей при усушке (разбухании) вызывает
значительное их коробление (рис. 13.1,г), обусловливающее потерю плоской формы,
а иногда даже растрескивание детали.
Ответственные связи и детали корпуса — обшивку, настил палубы, полотно пере-
переборок, киль, скуловые и привальные брусья — следует заготавливать из досок радиаль-
радиальной распиловки из частей бревна, расположенных ближе к его сердцевине; доски тан-
тангенциальной распиловки, имеющие угол направления годовых слоев к пласти менее
60°, для указанных деталей применять не следует. С учетом изменения размеров при
сушке нужно задавать припуск (с каждой стороны) на чистовую обработку детали:
при строгании вручную — 1,5—2 мм, при строгании на станке — 2—3 мм.
Следует также учитывать, что средняя влажность отдельных частей корпуса при
эксплуатации судна неодинакова и может достигать: в надстройке — 20 %, в настиле
палубы — 30, обшивке днища — 80, обшивке борта — 20, шпангоутах — 65 %.
На способность древесины сильно увлажняться необходимо также обращать внима-
внимание при производстве ремонтных работ — особенно обшивки в подводной части кор-
корпуса.
Фанера и шпон. При постройке малых судов широкое применение находит бакели-
зированная и авиационная фанера, особенно первая, так как она характеризуется хоро-
хорошей водостойкостью и более высокой прочностью (табл. 13.1).
Бакелизированная фанера может применяться при изготовлении обшивки, настила
палубы, шпангоутов, поясков днищевых стрингеров и вертикального киля, внутрен-
внутренних привальных брусьев и др. Поверхности деталей из бакелизированной фанеры,
на которые будет наноситься клей или краска, должны быть очищены от ба-
бакелита.
При конструировании деталей из этого материала необходимо учитывать, что фане-
фанера марок БФС изготовляется с использованием спирторастворимых смол, БФВ-1 —
имеет средние слои, склеенные водорастворимыми смолами (слои рубашки пропитаны
спирторастворимыми смолами), БФВ-2 — полностью выклеивается на водораство-
водорастворимых смолах. В связи с этим детали из фанеры марки БФВ рекомендуется склеивать
только по пласти, применяя стыковые накладки или соединение внакрой. Детали из
фанеры марки БФС можно склеивать как „на ус", так и по пласти.
Авиационная березовая фанера (пятислойная) обладает хорошей водостойкостью
и прочностью, изготовляется на бакелитовой пленке и смоле С-1.
Строительная фанера [41] может быть использована для постройки небольших
324
Та 6л и ца 13. 1
Характеристика
материала
Плотность, кг/мэ
Влажность, %
Предел прочности при
растяжении, МПа
Толщина листов или
заготовок, мм
Длина и ширина
листов, мм
Физико-механические свойства фанеры и шпона. Размеры листов
Фанера бакелизиро-
ванная марок ФБС
(ГОСТ 5.899-71),
БФС и БФВ
(ГОСТ 11.509-65)
Около 1000
8
Вдоль волокон
80
5-16
7700 х 2000
5600x1200
Фанера березо-
березовая авиацион-
авиационная
(ГОСТ 102-75)
500-650
8
Рубашки
65-80
2-12
3100x1525
750x750
Шпон лущеный
(ГОСТ 99-75)
500-650
6-10
Шпон строганый
(ГОСТ 2977-82)
500-650
6-10
Вдоль волокон
150
0,5-5-1,5
(800 + 900) х
х A50 + 800)
150
—
-
моторных и гребных судов при обязательном условии тщательной защиты корпуса
от увлажнения смолой, лаком, а лучше путем оклейки стеклотканью.
Можно использовать и декоративную фанеру, расположив листы обшивки окрашен-
окрашенной стороной внутрь корпуса. Если марка фанеры неизвестна, возможность ее примене-
применения для ответственных связей корпуса можно проверить следующим образом: обра-
образец, вырезанный из листа фанеры, замачивается на сутки в воде, затем кипятится в тече-
течение 1 ч. После таких процедур прочность соединения слоев образца на отрыв не должна
существенно снижаться.
Шпои (сосновый или березовый) применяется для выклеивания обшивки, рубки,
изготовления оборудования. Для отделочных работ используют шпон кленовый, орехо-
ореховый и древесины других пород.
К листовым материалам, изготовленным из шпона и других материалов (ткани,
металлической сетки), относятся: балинит, дельта-древесина, арктилит и др. В связи
с высокой стоимостью и сложностью обработки зти пластики не получили достаточного
применения в судовых конструкциях. Так, например, арктилит был использован при
опытном изготовлении обшивки относительно небольшой серии судов.
Картой. Водонепроницаемый и каркасный картон могут найти применение при
изготовлении обшивки, настила палубы, переборок байдарок, лодок для охотников
и других малых судов, предназначенных для сравнительно безопасных условий эксплуа-
эксплуатации. Детали из картона, так же как из обычной фанеры, должны быть надежно за-
защищены от воздействия влаги. Физико-механические свойства картонов:
Картон водонепрони-
водонепроницаемый
(ГОСТ 6659-63)
Плотность, кг/м3 Около 100
Влажность, % 7
Предел прочности при
растяжении, МПа: •'
в продольном направ-
направлении Около 35
в среднем по 2 направ-
направлениям Не менее 20
Толщина листов, мм 1—4
Длина и ширина 1580x1000
листов, мм 75Ох 750 и др.
Картон каркасный
(ГОСТ 7270-54)
1000
7
3,5
1300x1000
325
Таблица 13.2. Основные характеристики клеев
Марка
клея
ВИАМ Б-3
ЭД-5
БФ-2
Казеино-
Казеиновый
ПВА-М
Состав клея, часть
по массе
Фенольно-баритовая
смола ВИАМ Б - 100;
технический ацетон - 10;
керосиновый контакт
(контакт Петрова) -
16-20
Эпоксидная смола
ЭД-5 - 100; отвердитель
(полиэтиленполиамин) -
6,5
Готовый к применению
Казеин (порошок) -
100; чистая питьевая во-
вода комнатной температу-
температуры - 170-120
Готовый к применению
Склеиваемые
материалы
Древесина, фанера
Древесина, фанера,
металлы
Ткани, кожа, стекло,
керамика
Древесина
Древесина, ткань,
стекло, керамика
Давление при
Запрессовке
деталей, МП а
0,2-0,4
0,05
0,03
0,07-0,10
-
Стойкость
Водо-, масло-, бензо-
и кислотостойкий
Водо-, маслостойкий
-
-
Клеи. Употребляемые при постройке малых судов клеи (табл. 13.2) делятся на две
группы: водостойкие (марок ВИАМ Б-3, ЭД-5, К-153, БФ-2) и недостаточно водостой-
водостойкие (К-17, казеиновые, казеиново-цементные, ПВА); последние находят применение
для изготовления неответственных и не соприкасающихся с влагой конструкций и внут-
внутреннего оборудования [101] .
Водостойкость казеинового и некоторых других клеев может быть повышена
путем введения в него портландцемента и антисептика: ни 100 частей по массе клея
марки В-107 (в порошке) добавляется 75 частей по массе цемента марки 200 (и выше)
и 3 части по массе динитрофенола или оксидифенола. Цемент должен быть самого тонко-
тонкого помола, без посторонних примесей.
Для большей гарантии водостойкости склеенных деталей их поверхность, особен-
особенно в районе клеевого соединения, пропитывают горячей олифой или покрывают лаком
марок 6с либо 6т.
Строительную или другую недостаточно водостойкую фанеру можно защитить
от воздействия влаги путем пропитки олифой: на поверхность фанеры наносят слой
натуральной олифы, затем ее проглаживают утюгом (температура 150—200 °С); эти
процедуры повторяют еще дважды — пока фанера не перестанет впитывать олифу.
Для большей гарантии фанеру следует оклеить тонкой стеклотканью (либо марлей)
на эпоксидном связующем или на лаке 6с либо 6т.
Шпаклевки и порозаполнители. Эти материалы применяют для работ по дереву
под окраску, при устранении дефектов древесины и укрытии пор, при защите клеевых
соединений от увлажнения. Некоторые готовые шпаклевки приведены в табл. 13.3,
а компоненты порозаполнителей для дерева, %, даны в зависимости от времени вы-
высыхания:
326
Мел отмученный или тальк
Охра
Умбра
Канифоль
Олифа (оксоль)
5-10 мин
42,5
3,6
6
-
_
2-4 ч
40
5
_
-
15-18ч
55
_
12
8
Скипидар или уайт-спирит —
Сиккатив —
Нитролак № 930
Растворитель № 646 -
Дибутилфталат -
Канифоль A0%-ный раствор в ацетоне) . . . 23,7
Целлулоид A0%-ный раствор в ацетоне
и амилацетате в пропорции 6:4) 23,7
20
-
15
15
5
23,5
1,5
_
_
_
Основной крепеж - гвозди и шурупы. В малом судостроении обычно используют
красномедные гвозди-заклепки и латунные шурупы или оцинкованный крепеж. Гвозди
диаметром более 2,5 мм следует забивать в заранее просверленные отверстия, при этом
сверло должно быть диаметром на 0,1 мм меньше гвоздя. Латунные гвозди (сапожные)
2X16 мм могут использоваться при запрессовке клеевых соединений — при приклеива-
приклеивании книц, накладок, соединительных планок и т. п.
Обычные стальные шурупы и гвозди следует подвергать оцинковке. Неоцин-
кованный крепеж рекомендуется накалить до вишневого цвета и опустить в олифу.
Необходимо учитывать, что использование бронзового, латунного и медного кре-
крепежа сделает конструкции более долговечными, чем конструкции на стальном оцинко-
оцинкованном крепеже. Применять одновременно крепеж из черного и цветного металла
нельзя, так как при этом будет интенсивно корродировать стальной крепеж. Сталь-
Стальные детали, закрепленные с помощью крепежа, необходимо также оцинковать. Для
красномедных гвоздей-заклепок должны использоваться только красномедные шайбы.
Размеры гвоздей, рекомендуемые для крепления фанерной обшивки к набору, при-
приведены в табл. 13.4.
Под шурупы отверстия также высверливаются; совершенно недопустимо забивать
шурупы молотком. Размеры шурупов и их шаг, рекомендуемые в соединениях корпуса
Та б л и ц а 13. 3. Основные характеристики шпаклевок
Наименование
Пентаф талевая
Перхлорвиниловая
Эмульсионно-глифталевая
Нитроцеллюлозная
Марка
ПФ-002
ХВ-004, ХВ-005
№201
НЦ-007, НЦ-008,
НЦ-009
Время высыха-
высыхания слоя
в 1 мм при
18-20 °С,ч
24
3
1
3
Растворитель,
разбавитель
Сольвент
Р^
Скипидар
№,646
Расход, г/м*
400-1000
400-900
400-1000
300-800
Таблица 13.
Толщина
фанеры
4
6
8
12
16
размеры
Размер
гвоздя
2x22
2,5 х 22
3,0x30
. 3,5x40
4,5 х50
4. Рекомендуемые
гвоздей, мм
Шаг
по кром-
кромкам
30-40
35-50
60-80
80-100
100
по шпан-
шпангоутам
и бимсам
100
100-125
125-150
150
150
Таблица 13.5. Рекомендуемые
размеры шурупов, мм
Толщина
фанеры
4
6
10
12
По килю и ску-
скуловому брусу
Шуруп
4x20
4x20
4x25
4x40
Шаг
,60
75
75
75
По транцу
и форштевню
Шуруп
4,0 х 20
4,0 х 25
4,0 х 30
4,5x50
Шаг
40 .
50
50
50
327
с фанерной обшивкой для судов длиной до 4—5 м, даны в табл. 13.5. Для крепления
обшивки по стрингерам применяются такие же шурупы, как По килю и скуле, а шаг
принимается в два раза большим.
Диаметр отверстия под шурупы должен составлять под нарезную часть шурупа
80 % его диаметра для дуба и 60 % - для сосны, под гладкую часть - 90-95 %; под
потайную головку делается зенковка с углом 90°. Длина шурупа должна быть на
3—5 мм меньше суммарной толщины соединяемых деталей.
Болты применяются в основном для соединения отдельных деталей корпуса. Диа-
Диаметр болта d должен составлять около 15 % его длины. При установке болтов вдоль
волокон расстояние между их осями должно быть не менее 6d, при размещении поперек
волокон — 3d, от оси болта до кромки доски — 2,5d, от оси болта до торца — не менее
В болтовом или заклепочном соединениях следует применять болты, гайки, шайбы,
заклепки из однородного материала. Лучше изготовлять конструкции на крепеже из
меди, латуни, нержавеющей стали, при его отсутствии — из оцинкованной или кадми-
рованной стали либо стали, имеющей другие покрытия.
Головки шурупов, гвоздей и болтов необходимо утапливать ниже поверхности
наружной обшивки на 1,5—2 мм; углубление над поверхностью головки следует за-
зашпаклевывать древесной мукой (опилками) на клее ВИАМ Б-3 или эпоксидной смоле.
При достаточной толщине обшивки зти углубления можно заделать деревянными
пробками.
Типы соединений. В конструкциях малых судов из древесины и фанеры для сращи-
сращивания деталей по длине используются соединения: усовое, зубчатое (гребенчатое),
на одной накладке, на двух накладках; для соединения деталей под углом: внакрой,
нарезное, кничное [101].
Усовое соединение — одно из наиболее часто применяющихся в малом судострое-
судостроении. Отличается простотой выполнения и большой прочностью, обусловленной равно-
равномерностью распределения напряжений по площади клеевого соединения.
Прочность усового соединения прежде всего зависит от его длины /, выраженной
через толщину склеиваемых деталей 5: / =?5, где к — коэффициент, являющийся
характеристикой усового соединения: к = ав/тв; ав — предел прочности древесины
при разрыве вдоль волокон, МПа; гв — предел прочности древесины при скалывании
вдоль волокон, МПа. Значение коэффициента к рекомендуется принимать для деталей:
из ели и сосны с низким пределом прочности — 10—12, из сосны и дуба, имеющих вы-
высокий предел прочности, — 12—15, из бакелизированной фанеры — 15—20.
Усовые соединения, к которым не предъявляется требование равнопрочное™
с целым сечением, могут иметь меньшую длину: для соединения бруса киля с фор-
форштевнем к = 3 ¦=¦ 5; в многослойных клееных деталях, работающих преимущественно
на изгиб, для соединения досок в срединных слоях балок к=4 т 6.
Номограмма [101] , выражающая зависимость между нормальными напряжениями,
возникающими в детали, подвергнутой растяжению, и длиной усового соединения,
приведена на рис. 13.2.
Прочность усового соединения в значительной мере зависит от качества древесины,
ее влажности в момент склеивания, толщины клеевой пленки, характера обработки
склеиваемых поверхностей, удельного давления запрессовки.
Усовые соединения следует применять для деталей, работающих на растяжение:
досок обшивки и настила палубы (рис. 13.3, а), целых или клееных брусьев (рис.
13.3,6, в), досок в деталях, состоящих из нескольких слоев (рис. 13.3,г).
Клеевое соединение длиной / =D-5-6M следует по возможности располагать так,
как указано на рис. 13.4, а, — в этом положении оно выдержит нагрузку на 30—40 %
большую, чем в положении, соответствующем рис. 13.4, б [101] .
Зубчатые (гребенчатые) соединения (рис. 13.3, д, е) применяют в тех случаях,
когда приходится экономить качественный материал, так как длину этих соединений
328
бр,
too
so
во
40
20
МПа
i.
/ /
/ н
'-*
V
У>
V
А
/ у
4
¦
/
/
/
г/
/
/
\
a)
S)
B)
г)
%
14 "k
1 1
1
б} \
1
! i
1
\
____———'
1
I
I
1
Рис. 13.4. Расположение усового сое-
соединения по отношению к действую-
действующим усилиям в плоскости: а —
близкой к плоскости действующих
усилий; б - перпендикулярной к
плоскости действующих усилий
Рис. 13.2. Зависимость предела прочности
усового соединения при растяжении от отно-
отношения длины соединения к толщине образца
сечением
1 — 9 х 20 мм; 2 — 40 X 100 мм
Рис. 13.3. Соединения на „ус": а - досок;
б —целых брусьев; в - клееных брусьев;
г — досок (реек) в клееном брусе; д -
зубчатое (гребенчатое) соединение с ост-
острым зубом; е — зубчатое соединение с
тупым зубом
Рис. 13.5. Соединения на накладках:
а - на одной; б-на. двух
SO
можно уменьшить до 30—50 мм. Длина стыкуемых короткомерных пиломатериалов
не должна быть менее 300 мм. В зону соединения не должны попадать свилеватость,
косослой, сучки и другие пороки древесины, трещины, заколы и т. п.
Соединение с острым зубом (см. рис. 1Э.З, д) применяют в сильно нагруженных
связях корпуса — форштевне, киле, шпангоутах, бимсах, стрингерах и т. п.; соединение
с тупым зубом (см. рис.13.3, е) — в менее нагруженных связях и конструкциях: в де-
деталях обвязки рубки и кокпитов, палубного настила, буртиках и др. В зубчатом соеди-
соединении не требуется ставить болты и заклепки. При его выполнении приходится исполь-
использовать специальные приспособления, а обработку деталей осуществлять особенно тща-
тщательно и точно.
Соединение на одной (односторонней) или двух накладках (рис. 13.5) используется
для сращивания фанерных листов или досок обшивки и настила палубы, отдельных
элементов балок продольного и поперечного набора и в других случаях. При выполне-
выполнении соединений из древесины и древесных материалов соединяемые детали достаточно
подогнать и прострогать, у деталей из бакелизированной фанеры необходимо удалить
снаружи слой смолы — бакелитового лака.
К недостаткам этого типа соединений следует отнести то, что накладки выходят
за габариты деталей, а усилия, вызывающие работу на отрыв, намного снижают проч-
прочность, особенно соединений с односторонней накладкой.
К конструированию соединений на накладках предъявляются следующие требова-
требования. Длина накладки принимается равной 30 ее толщинам. Двусторонние накладки,
изготовленные из того же материала, что и соединяемые детали, должны иметь толщину,
равную половине толщины соединяемых деталей. При использовании накладок из ба-
бакелизированной фанеры для соединения листов конструкций из того же материала
толщина накладок принимается равной толщине склеиваемых листов, а перекрой
накладкой каждого листа равен 15 его толщинам. В стыках с накладками нельзя ис-
использовать полностью несущую способность соединяемых деталей, работающих на
растяжение, так как максимально допустимое напряжение в стыке с накладками не
превышает 7,5 МПа [101] . В коробчатых балках роль накладок следует отводить
заполнителю, введенному между тонкими стенками балки. '
Замковые соединения из-за малого предела прочности древесины на смятие и пло-
плохой сопротивляемости болтов изгибу (рис. 13.6, я) могут выдержать лишь небольшую
Рис. 13.6. Замковые соединения: а -деформации болтов и древесины; б - косой замок
с коксами;в — косой замок без коксов; г — комбинированное соединение
1 — болт; 2 — шайба увеличенных размеров; 3 — гайка; 4 — кокс; 5 — киль; 6 — фор-
форштевень
330
нагрузку, составляющую 10—20 %
предела прочности древесины на
разрыв [47] . В судовых конструк-
конструкциях наибольшее распространение
получили косой замок с коксами
(рис. 13.6, б) и без коксов (рис.
13.6, в).
При восприятии замковым со-
соединением растягивающих усилий
древесина у болтов и коксов
работает, на смятие, болты — на
S)
Рис. 13.7. Соединение деталей под прямым (в) и ост-
острым (б) углами
изгиб, а коксы — на срез. Сжимающие усилия кроме указанных деталей замкового
соединения будут воспринимать и торцовые срезы зуба замка.
Комбинированное замковое соединение, например для крепления киля с фор-
форштевнем, включает клеевое усовое соединение (/ =3-^5 высот бруса киля) и болтовое
(рис. 13.6, г); болты здесь используются в основном для создания давления запрес-
запрессовки.
Угловое соединение, выполняемое внакрой под прямым ах или острым а2 углами
(рис. 13.7, а, б) просто в выполнении, но недостаточно надежно в работе: усилия, при-
приложенные к соединяемым деталям, действуют в разных плоскостях — чем толще соеди-
соединяемые детали, тем больше расстояние между этими плоскостями и тем большими
будут усилия, а следовательно, и напряжения отрыва.
Нарезное угловое соединение отличается тем, что в нем детали нарезаны одна на
другую вполдерева или в шип (рис. 13.8,я, б), и тем самым уменьшен указанный выше
недостаток простого углового соединения. Однако сами соединяемые детали при этом
ослаблены. Изготовление такого соединения довольно сложно, а площадь склеивания
небольшая.
Кничное соединение чаще выполняется на двух кницах (рис. 13.9), но в малонагру-
женных сопряжениях может быть выполнено и на одной книце. Оно удобно в изготов-
изготовлении - работа сводится к наклеиванию книц на соединяемые связи, обеспечивает
наибольшую прочность по сравнению с другими типами соединений.
Соединения на накладках и кничные в основном работают на скалывание при кру-
кручении. Необходимая площадь склеивания может быть определена по приближенному
выражению F =w1AfK/16, где F — площадь склеивания, см2; »ii =2-^4— коэффициент
запаса, принимаемый в зависимости от типа конструкции, ее назначения, качества
изготовления; Мк — крутящий момент, приложенный к клеевому соединению, Н-м.
Соединения на болтах используют для крепления штевней к килю, перевязки по-
поперечного и продольного набора, соединения брештуков со связями набора и т. д.
Требования в отношении конструктивных параметров болтового соединения сле-
следующие: диаметр болта d должен быть равен 10—15 % его длины; шаг болтового соеди-
соедини б) л--л . В
а 5
Кис. 13.8. Нарезное угловое соединение: а - впол-
вполдерева; б — в шип
ч /
Ч
N
V
Ал
/
1
Рис. 13.9. Кничное соеди-
соединение.
1 — кница; 2 — соединяе-
соединяемые детали
331
нения принимается не метнее 6с? вдоль волокон и 3d поперек волокон; расстояние
от оси болта до кромки детали — не менее 2,5d, до торца — F-5-8) d; в случае креп-
крепления досок обшивки к набору расстояние до торца доски уменьшают до C-5-5)d.
Надежность болтовых соединений в значительной мере зависит от размеров шайб,
которые ставятся под головки и гайки болтов. Для обеспечения меньшего сминания
древесины и древесных материалов под головкой и гайкой наружный диаметр шайб
должен быть увеличен по сравнению с обычным их размером на 30—50 % и более —
в зависимости от твердости материала соединяемых деталей.
Соединения на заклепках в конструкциях из фанеры выполняются с расстоянием
между рядами заклепок: при их цепном расположении — не менее F^8)d, при шах-
шахматном - не менее C т 4)d; расстояние от края детали - не менее D т 6)d.
В конструкциях из древесины за основу принимается отношение меньшей из тол-
толщин S соединяемых деталей к диаметру заклепки d. Расстояние вдоль волокон между
осями заклепок: при 6/с? «« 10 - не менее 10d, при bid ** 4 — не менее 20d. При других
соотношениях б/d расстояние между заклепками находится простым интерполирова-
интерполированием. Расстояние от оси заклепки до торца детали принимается не менее 10с?, при не-
невозможности разместить требующееся количество заклепок оно может быть умень-
уменьшено до 6с?.
Соединения на шурупах и гвоздях используются для запрессовки как с помощью
склеивания, так и без клея. При их конструировании необходимо исходить из следую-
следующих требований: длина шурупа (гвоздя) — 2,5 толщины прикрепляемой детали; шаг
размещения шурупов — не менее A0-J-12)rf; диаметр отверстия, высверливаемого
под шуруп, — не более O,Sd.
Влияние различных факторов на состояние клеевого соединения. Прочность и на-
надежность клеевого соединения зависят от многих физико-механических и технологи-
технологических факторов: прочности клеевой пленки как связующего элемента, влажности
древесины и воздуха в помещении при склеивании, продолжительности вымачивания
в воде склеиваемых деталей, тщательности обработки склеиваемых поверхностей,
давления запрессовки при склеивании, толщины клеевой пленки в соединениях дета-
деталей, качества древесины в районе соединения.
Влажность древесины и воздуха в помещении в момент склеивания клеем
ВИАМ Б-3, как следует из экспериментов, должна быть не больше 12—18%
(рис. 13.10).
Продолжительность вымачивания: длительное нахождение деталей в воде сказы-
сказывается отрицательно на клеевом соединении, но это влияние уменьшается за счет пони-
понижения прочности самой древесины по мере ее намокания (рис. 13.11). Кривая, соот-
соответствующая склеенным образцам, проходит практически параллельно кривым из целой
древесины.
Тщательность обработки склеиваемых поверхностей оказывает влияние на толщину
клеевой пленки. Наибольшую прочность имеют клеевые соединения из строганых
образцов, при шлифовке (полировке) прочность уменьшается (рис. 13.12).
Давление запрессовки при склеивании деталей необходимо создавать такое, при
котором обеспечиваются полное прилегание склеиваемых поверхностей, хорошо по-
подогнанных одна к другой, удаление избытка жидкого клея и пузырьков воздуха, а так-
также получение клеевой пленки требующейся толщины. Наибольшее сопротивление
скалыванию образцов, склеенных клеем ВИАМ Б-3 (рис. 13.13), наблюдается при
удельном давлении 0,2—0,4 МПа. Эпоксидные клеи требуют существенно меньшего дав-
давления — около 0,05 МПа.
При изготовлении криволинейных деталей и деталей из толстых досок или исполь-
использовании клея повышенной вязкости необходимо создавать большее давление — 0,3—0,4
и даже 0,5 МПа (для клея ВИАМ Б-3). Следует выдерживать указанные пределы дав-
332
т,МПа
12
N
\
\
\
20 JO 40
%
— -
/
\
, L
2
\
J
\
я —
Рис. 13.10. Влияние
влажности древеси-
древесины в момент склеи-
склеивания на величину
предела прочности
клеевого соедине-
соединения при скалывании
О 40 80 120
Т,сут
Рис. 13.11. Изменение проч-
прочности клееных образцов
и образцов из целой дре-
древесины от продолжитель-
продолжительности вымачивания.
1 — дуб; 2 — клееный дуб;
3 — сосна
т,МПа
24
22
20
18
250 500 75010001250
Р,Н
Рис. 13.12. Зависимость
предела прочности клее-
клеевого соединения при
скалывании от видов об-
обработки склеиваемых по-
поверхностей.
/ — строганая поверх-
поверхность; 2 — пиленая;
3 — шлифованная
лений, так как при избыточном давлении создается слишком тонкая клеевая пленка,
а при малом давлении — излишне толстая; и в том и в другом случае прочность клее-
клеевого соединения уменьшается.
При оценке величины давления запрессовки кроме кривизны и толщины склеивае-
склеиваемых деталей необходимо учитывать вязкость клея, ширину склеиваемых досок и по-
породу древесины; повышение рабочей вязкости клея и средней ширины досок, а также
переход к изготовлению деталей из более твердых пород требуют увеличения давления
запрессовки.
Толщина клеевой пленки также влияет на прочность склеивания, которая резко
снижается с ее увеличением свыше 0,4 мм (рис. 13.14). При увеличении толщины клее-
клеевой пленки свыше 0,8 мм прочность клеевого соединения имеет постоянное, но более
низкое значение. Однако по абсолютной величине она значительно превосходит допусти-
допустимые напряжения при работе на скалывание образцов из дуба и сосны — пород древеси-
древесины, чаще всего применяемых в судостроении.
т.МПа
22
0 0,2 0,4 0,6 0,8 1,0
Р, МПа
Рис. 13.13. Влияние удельного дав-
давления запрессовки на величину
предела прочности клеевого соеди-
соединения при скалывании
18
\
\
0,2 0,6
1,0
8, мм
Рис. 13.14. Влияние тол-
толщины клеевой пленки на
величину предела проч-
прочности клеевого соедине-
соединения при скалывании
333
Z3
6 7
59
Рис. 13.15. Конструкция корпуса и устройство деревянного катера.
1 — настил палубы; 2 — швартовная утка; 3 — фальшборт; 4 — ступенька трапа; 5 — поручень трапа; 6 — поручень леерного ограждения; 7 —
стойка-контрфорс; 8 — леер; 9 — настил палубы (крыша) рубки; 70-карлингс палубы рубки; 11 -бимс палубы рубки; 12 — сдвижная
крышка лвдка; 13 — шельф (опорный брус бимсов); 14 — поперечный комингс люка; 75 — продольный комингс люка; 16 — съемный леер;
17 — обшивка; 18 — иллюминатор; 19 — лобовое стекло; 20 — стойка топового огня; 21 — носовой релинг; 22 — форлюк; 23 — киповая планка:
24 — кнехт; 25 — форштевень; 26 — карлингс палубы форпика; 27 — бимс палубы форпика; 28 — наружный привальный брус; 29 — продоль-
продольный комингс рубки; 30 - переборка форпика; 31 - бортовой стрингер; 32 — вентиляционный раструб; 33 - платформа носовой рубки; 34 -
внутренний привальный брус; 35 — скуловой стрингер; 36 — фундаментная балка; 37 — переборка моторного отделения; 38 — продольный
комингс кормовой рубки; 39 - днищевой стрингер; 40 — стойка окна; 41 -мортира гребного вала (дейдвудная труба) ; 42 - шпангоут;
43 — флор; 44 — киль; 45 — дейдвуд (кормовой плавник) ; 46 — переборка ахтерпика; 47 — платформа ахтерпика; 48 — подошва ахтерштев-
ня (дейдвуда) ; 49 — обвязка транца; 50 — пятка ахтерштевня; 5/ — стойка транца; 52 — руль; 53 — топливный бак; 54 — карлингс палубы
ахтерпика; 55 — шельф транца; 56 — диаметральная стойка транца; 57 — бимс палубы ахтерпика; 58 — диаметральный карлингс палубы ахтер-
ахтерпика; 59 — тетива трапа; 60 — площадка (забортная платформа) ; 61 — обшивка транца; 62 — буртик транца
Рис. 13.16. Системы набора корпуса:
а- /\ЗЯ ^ ^\ V "^в&^5^§2-&'^^^ ^ а—смешанная; б — поперечная; в — по-
' ' ^^?*°^*<gs<^ -^ перечная с промежуточными шпангоу-
шпангоутами; г —продольная с усиленными
пазовыми рейками; д - продольная
со стрингерами таврового профиля; е — продольная с часто поставленными стрингерами; ж — безнаборная сшивная.
1 ~ киль; 2 — днищевые стрингеры; 3 — обшивка днища; 4 — скуловой стрингер; 5 — обшивка борта; 6 — внутренний привальный брус; 7 — бимсовая
кница; 8 — шпангоут; 9 — скуловая кница; 10 — флор; 11 — килевая кница; 12 — бортовая ветвь промежуточного шпангоута; 13 — днищевая ветвь
промежуточного шпангоута; 14 — доски обшивки; 75 — пазовые рейки; 16— стрингеры таврового профиля; 1 7 — металлический шпангоут; 18 —
шпангоутная рамка; 19 — обшивка борта; 20 — кормовой транец; 21 — кормовая водонепроницаемая переборка-, 22 — рейка поддегарса; 23 — стенка
"* воздушного отсека; 24 — носовая поперечная водонепроницаемая переборка; 25 — носовой транец
Наличие сучков, косослоя и других дефектов в районе клеевого соединения (ка-
(качество древесины) резко снижает его прочность [101] .
13.2. Конструирование корпуса и определение размеров связей
Выбор материала. Оценку материала (табл. 13.6) можно получить, пользуясь „ха-
„характеристикой легкости", предложенной академиком В. Л. Поздюниным." Ам = (y/(fB)X
X 100 %, где у — плотность материала, кг/м3; ав — предел прочности материала при
растяжении, МПа.
Основываясь на „характеристике легкости", наиболее рациональными материалами
для корпуса малого судна считают стеклопластики, дюралюминий, сосну, водостой-
водостойкую фанеру. Однако при оценке материала следует учитывать и другие факторы. Суда
из металлов и пластмасс долговечнее деревянных, не имеют или почти не имеют водо-
течности, огнестойки; наряду с этим металлические корпуса отпотевают, стоимость
затрат и трудоемкость их постройки примерно в 2 раза выше, чем деревянных. К тому
же нельзя не учитывать, что пребывание на деревянном судне неизмеримо приятнее, чем
на судне, построенном из любых других материалов.
Системы набора корпуса. Корпус малого судна из древесины и древесных материа-
материалов (рис. 13.15) чаще выполняется по смешанной или поперечной системе набора,
реже по продольной.
При смешанной системе набора (рис. 13.16, а) со шпацией 300-500 мм наряду
с мощными поперечными связями (шпангоутные рамки, поперечные переборки) ста-
ставятся днищевые и бортовые стрингеры (либо пазовые рейки), имеющие сравнительно
небольшие размеры в поперечном сечении.
При поперечной системе набора продольные рейки-стрингеры отсутствуют (рис.
13.16, б). Шпангоутные рамки приходится ставить чаще, принимая шпацию равной
250—400 мм. Для того чтобы избежать использования днищевых и бортовых стрин-
стрингеров и одновременно увеличить поперечную шпацию, в ряде случаев используют си-
систему набора с промежуточными шпангоутами (рис. 13.16, в).
При продольной системе набора поперечные связи корпуса (шпангоутные рамки,
поперечные переборки) ставятся на расстояниях существенно больших (800—1000 мм),
часть днищевых стрингеров и палубных реек заменяется мощными продольными связя-
связями — стрингерами, карлингсами. Набор по продольной системе может выполняться с па-
пазовыми рейками увеличенных размеров (рис. 13.16, г), не врезанными в шпангоуты;
флоры и поперечные переборки при этом ставятся в ограниченном количестве. Если
на судне обшивка диагональная или из фанеры, стрингеры могут быть клееными тавро-
таврового профиля (рис. 13.16, в); опорами для них служат шпангоуты и переборки. На
некоторых типах малых судов, корпуса которых подвержены значительным ударным
нагрузкам, например на скутерах, применение продольной системы набора (рис. 13.16,е)
Таблица 13.6. Физико-механические характеристики материалов
Материал
Сосна вдоль волокон
Бакелизнрованная фанера
Стеклопластик на основе
стеклоткани
Листы из дюралюминия
Листовая сталь Ст. 3
у, кг/м
600
800
1750
2800
7850
Предел прочности
°в
60-80
80
275
340-380
400-500
°из
50-60
70
420
340-380
400-500
МПА
°сж
30-35
-
245
340-380
400-500
7,5-10,0
10,0
6,0
7,4-8,2
15,7-19,0
336
Таблица 13. 7. Размеры связей корпуса, изготовленных без применения склеивании, мм
Связи корпуса
Киль
Скуловой стрингер
Бортовые и днищевые
продольные рейки
Привальный брус
Планширь (толщина)
Днищевая ветвь
шпангоута (флортимберс)
Бортовая ветвь
шпангоута (топтимберс)
Бимсы
Обшивка (толщина) :
борт
днище
Длина корпуса, м
3-5
20x90 + 30x100
20x20 + 40x40
18x35 + 20x40
18x35+20x40
10
16x60
16x50
16x40 + 20x40
7-10
8-10
5-7
40x100+50x120
45x45+50x50
18x50 + 20x60
18x50 + 20x60
12
18x60 + 25x65
18x55+22x60
18x45+20x50
10-12
12-14
7-10
50x110+60x140
50x50+60x60
20-х 60+40x70
20x60+40x70
14
22x65+25x75
22x60 + 25x70
20x50 + 22x50
11-14
13-16
Примечание. Шпация соответственно приведенной длине корпуса составляет 300—500,
400-500 и 400-600 мм.
обеспечивает существенное снижение массы корпуса при тех же прочности и жест-
жесткости.
В последние годы все большее распространение получают безнаборные сшивные
конструкции корпуса (рис. 13.16, ж). Их продольная и поперечная прочность обеспе-
обеспечивается фанерной обшивкой, а жесткость — поперечными переборками, выгородками,
стенками банок или воздушных отсеков и др. Такая конструкция может успешно
применяться при постройке швертботов, небольших яхт, моторных лодок, гребных
судов.
Конструирование корпуса и определение размеров связей. При широком исполь-
использовании фанеры — для обшивки, настила палубы, при изготовлении переборок и шпан-
гоутных рамок - целесообразным следует считать применение склеивания. Ориенти-
Ориентируясь на пиломатериал, особенно с высокой влажностью, правильнее нацелиться на
широкое использование крепежа. При наличии достаточно сухого пиломатериала, но
Таблица 13.8. Размеры клееных связей набора и обшивки из фанеры, мм
Связи набора и обшивки
Киль
Скуловой стрингер
Привальный брус
Бортовые и днищевые
рейки
Подпалубные рейки
Флортимберс
Топтимберс, бимсы
Фанерная обшивка
(толщина):
борт
днище
20
20
18
10
10
15
15
3-S
х 75 + 25
Х20-
хЗО-
х25-
х20-
х55-
х40-
-40
-20
-12
-12
-16
16
3-4
4-5
х90
х40
х40
хЗО
хЗО
хбО
х50
Длина корпуса, м
6-8
30x100 + 40x110
45x45+50x50
20x45+25 х55
12x35 + 15x40
12x35 + 15x30
18x65+20x70
18x55+20x60
4-5
7-8
9-12
45x120 + 60
55x55*60
30x60 + 40
15x50 + 20
15x40 + 20
22x75+25
22x65+25
5-6
8-10
х140
хбО
х80
хбО
х50
х80
х75
Примечание. Шпация
300-500 и 400-600 мм.
соответственно приведенной длине корпуса составляет 250—400,
337
№
п.п.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
Та 6 л и ц с
Тип судна и название
Малый туристский катер „Бемби"
Катер с водометом „Кама"
Мотолодка ПК-5
Катер с водометом „Саламандра"
Мотолодка „Касатка"'
„ „Суперкасатка"
Моторно-гребная лодка „Утка-2"
Мотолодка-тримаран „Микро-2"
Прогулочно-спортивная мотолодка
„Радуга-46"
То же, „Радуга-41"
„ „ , „Радуга-51"
Парусно-гребная лодка „Чижик"
Моторно-парусная лори „Палтус"
Прогулочный катамаран ,,Радуга-39к"
Прогулочпо-туристская мини-яхта
,,Каравелла"
Лодка по типу джонбота
11 рогулочно-туристский швертбот
„Трепанг"
Катер для семейных путешествий
„Морж"
Рыболовная лодка „Окунь"
Мини-яхта „Корсар"
Полутонник СТ-28
Крейсерский швертбот „Морской еж"
Мотолодка с упрощенными обвода-
обводами - сампан
Мотолодка для рыболовов
„Радуга-34"
Универсальная мотолодка
Картоп с обводами джонбота
Мотолодка с обводами „сани Фокса"
Двухкаюшый катер
Мини-катер „Арго-73"
Швертбот „Карапуз"
Каноэ-тримаран
Туристский катер „Сивуч"
Мотолодка „Лещ"
„ „Налим"
Парусно-гребная лодка дори
Гребная лодка „Скиф"
( 13.9. Основные данные по конструкции
.
Главные размерения
L х В х И. м
4,70 х 1,80x0,62
4,70x1,80x0,67
4,20x1,45x0,55
4,50x1,66 х 0,80
4,20 х 1,60 х 0,64
5,2 х 2,0x0,9 -
4,30 х 1,33 х0,51
3,85 х 1,59 х0,60
4,60x1,77x0,70
4,10 х 1,98 х 0,78
5,10x2,10 х0,83
3,47 х 1,47x0,50
5,70 х 1,91 хО,87
3,90x1,65x0,58
4,60x1,78 х0,85
3*80 х 1,32 х0,38
3,40 х 1,45. х 0,48
6.60x2.24x1,29
3,40 х 1,50 х 0,49
5,50 х 1,90x0,72
8,7 х 3.2 х 1,6
6,8 х 2,5 х 1,0
5,3x2,0x0,7
3,4 х 1,7 хО,7
4,6x1,7x0,5
2,5x1,2x0,4
4,1 х 1,5x0,6
5,8 х2,5 х 1,1
4,4 х 1,8 х 0,8
2,6 х 1,2 хО,5
5,2x1,0x0,3/
7,8 х 2,9x1,2
4,3 х 1,7 хО,6
4,6 х 1,7x0,5
5,5 х 1,5 хО,4
. 4,0x1,3x0,4
Система набора
Поперечная
Смешанная
Комбинированная
Смешанная
„
„
Смешанная — днища,
поперечная - борта
То же
Смешанная
Смешанная - днища,
поперечная - борта
Смешанная
„
Поперечная
Смешанная
Поперечная
Смешанная
„
п
Поперечная
,5
,;
Смешанная
Поперечная
Смешанная
„
Поперечная
Смешанная
Поперечная
Смешанная
>)
Поперечная
>>
имеющего в большом количестве сучки, косослой и другие дефекты, необходимо при-
применение склеивания(для изготовления клееных связей набора.
Поскольку подобрать бруски для продольных связей на всю длину корпуса без
сучков и косослоя очень трудно, эти связи следует склеивать из более короткого, но
высококачественного материала. Длина усового перекроя должна быть равна 12—15
толщинам заготовки.
338
корпуса судов различных типов
Шпация, мм
(нос/кор-
(нос/корма)
450
480
820
560
690
600
650
500/600
525
600/700
700
715
930
500
960/1040
760
470/870
900
600x960
500
460-660
925
340; 680
900
555; 605
600
600
570
720
600
600
600
900
700
650
Толщина обшивки.
мм
днища
4
5
4-5
6
6
8
5-6
4
5
4
5
4
7
6
8
6
6
8
4
8
борта
4
5
3
5
4
6
4-5
4
4
3
4
4
7
4
8
4-6
6
6
4
8
Многослойная 5-18
6
12
-
8
4
6; 4
5
4
6
14
5
8
30
20
6
10
-
8
3
4
5
4
6
12
5
8
7-10
20
Настил
палубы,
мм
3
'3
4
5
4
6
4-5
4
4
3
4.
4
6
з
8 ¦
6
6
4
6
8
6
10
4
3
4
!
5
4
4
-.
Размеры
чиншевые!
шплп- 1
гоуты
20x50
20x50
15x50
18 х 50
20 х 60
22 х 00
18 ч 50
Фанера
S---10
15x50
15 х50
¦8x60
s = 20
22x40
15x40
и фанеро-
фанерованные
25 х50
20 х 50
s - 18
'22x30
_
21 х40
30 х 35
20 х 40
' 18 х 90
15 х45
22 х 75
25x37
16 л: 20
! 22 \ .Г.О
20 х 10
-.
11 х 50
22 х 70
16 х 70
22 х 75
| - 1 28x55
связей к
кигирсчном 1 Источник информа-
сечении, мм
ПрОДОЛh
HbIbJ I
р ей ки
1
20 х 20
20 х 20 ;
18 х 30
1 5 х 30
15 к 3>
15 х 30
20 х 20
10 х 30
10 х 40
10 х40
18 >: 30
Нет
10 х 20
Нет
20 х ?.О
20 х 40
15 \ 30
10 х40
-
_.
19 х 40
JS n 2 5
10;: :>;;
1 ?0 у "V.!
i 7.2 ¦¦ J,0
L
j 10 .•; 50
j
j 2.0 х 30
j
1
киль 1
1
25 х 90
30 х 70
/.о \50
30 л 120
25 х 70
25 \ 100
25 х75
30 х 40
30 х 50
30x40
40 х 60
25 х 80
30 \ ! -
20 х 20
25 х 50
15 \ 100
(фальшкиль)
30 х ЗС
25 х 100
30 х !40
20 х 40
40 \ 150
35 х 1 ?G
..
-¦,'> х 40
1 .:2 :> 80
20 х50
20 х 30
Клееный
30 л й0
10 х 60
-
40 \ 5 80
25 х 75
2? х НО
20 х 1{Ю
пин (КиЯ
Порядко-
Порядковый №
журнала
3
И
14
19
22
28 •
У,
39
52
61
67
71
72
74
75
76
77
78
80
83
87
90
94
¦
97
102
102
| 103
107
47
47
V)
и 172])
Стр. жур-
журнала
76
22
22
41
2
28
89
26
88
90
82
92
86
88
90
88
84
86
84
38
86
86
84
76
1
72
75
82
86
84
93
95
G2]
.,
,,
Продольные связи
следует выклеивать из
В этом случае против какого-либо дефект* одноь
другой рейки, компенсирующий ослабление связи. Каждую из реек тоже можно склеи-
склеивать из отдельных частей, при этом дугина усовего перекроя может быть уменьшена
до 8—10 толщин рейки.
с большим аоле.рьчным сечением и значительной кривизной
двух или большйго <шела реек по месту лиГю в кондукторе.
рейки располагают хороший участок
Для изготовления клееных связей набора и применения клеевых соединений в уз-
узлах конструкций требуется помещение, температура воздуха в котором не должна
быть ниже 18—16 °С как во время производства работ, так и при выдерживании дета-
деталей после склеивания.
У малых судов из древесины и древесных материалов общая продольная прочность,
как правило, гарантируется тем, что для обеспечения требующегося срока службы
конструкций и судна в целом размеры связей корпуса задаются с определенным за-
запасом на износ, а также с необходимостью соблюдения определенного технологиче-
технологического процесса. В связи с этим расчет общей прочности корпуса обычно не делают,
ограничиваясь проверкой элементов наружной обшивки на устойчивость и расчетом
местной прочности для основных связей набора.
Размеры деталей набора и обшивки могут быть заданы в зависимости от длины
судна (табл. 13.7 и 13.8) с последующим уточнением по близкому прототипу
(табл. 13.9).
В случае создания судна массовой заводской постройки целесообразнее исходить
из результатов натурных испытаний как отдельных конструкций, так и головного
судна. На основании этих испытаний в конструкцию головного образца вносятся изме-
изменения, и он вводится в серийное производство.
13.3. Детали набора корпуса
Продольный набор. К продольным связям малых судов относятся: киль, фальш-
фальшкиль, резен-киль, скуловые днищевые и бортовые стрингеры, привальные брусья,
карлингсы, планшири, ватервейсбвые брусья.
Киль сплошной (рис. 13.17, а) может быть изготовлен в виде бруса, имеющего
сложное поперечное сечение, со шпунтами для обшивки. В случае недостаточного ка-
качества материала бруса он может быть усилен фанерной накладкой (рис. 13.17, б).
Более технологичную конструкцию имеет составной киль (рис. 13.17, в), который
состоит из двух деталей: наружного бруса — фальшкиля и внутреннего бруса — резен-
киля. При такой конструкции киля создается шпунт для обшивки днища.
Рис. 13.17. Киль: а - сплошной; б - сплошной, усиленный накладкой; в - составной; г - внут-
внутренний; д — сплошной клееный; е — составной из доски.
1 — киль; 2 — обшивка днища; 3 — полоса усиления (фанерная); 4 — резенкиль; 5 — фальшкиль;
6 - рейки; 7 — доска; 8 — оковка (металлическая полоса)
340
Применение киля и фальшкиля (рис. 13.17, г) кроме упрощения технологии обе-
обеспечивает надежную защиту наружной обшивки от повреждений. Такая конструкция
позволяет обеспечить непроницаемость наружной обшивки по пазу, расположенному
в ДП, но при этом усложняется ремонт, поскольку паз закрыт фальшкилем. На судах
небольших размерений со стационарным двигателем киль должен иметь на 10—15 %
большие размеры в поперечном сечении, чем указано на с. 337, и делать его следует
из дуба или ясеня. В месте прохода дейдвудной трубы киль следует усилить стальной
полосой или накладкой из бакелизированной фанеры.
Киль можно выклеить из досок, положенных в пакет в несколько слоев (рис.
13.17, д) . Длина усового соединения, с помощью которого сращиваются доски в слое,
принимается равной 4—6 толщинам доски; эти соединения должны быть разнесены
по длине бруса киля. Аналогичные требования относятся к конструкции фальшкиля
и резен-киля.
Киль, показанный на рис. 13.17, е, состоит из вертикально поставленной доски
и прикрепленных к ней с помощью шурупов двух реек. При изготовлении киля такой
конструкции необходимо тщательно подгонять рейки к доске либо ставить их на смолу
(мастику), чтобы не допустить водотечности по этим пазовым соединениям.
Скуловые брусья (стрингеры) можно сделать прямоугольного сечения (с малко-
ванной кромкой) сплошными (рис. 13.18, а), клееными в два слоя (рис. 13.18, б)
или многослойными. При выборе конструктивного варианта скулового стрингера
следует учитывать, что он относительно прост только в средней части корпуса. В носо-
носовой оконечности, где приходится делать большую (в двух направлениях) малку, проек-
проектант вынужден тщательно оценить принимаемую конструкцию. Стрингеры сплошные —
из целого бруса — при значительном изгибе линии скулы в носовой оконечности слож-
сложно подтягивать к шпангоутам. Для упрощения этой работы в носовой части корпуса
у стрингера делают один-два продольных пропила, которые промазывают клеем. После
этого стрингер легко изгибается и запрессовывается.
Несколько проще собирать корпус со стрингером, изображенным на рис. 13.18, в,
однако, такой стрингер сложнее врезать, в шпангоуты. Лучшие непроницаемость кор-
корпуса и защита кромок обшивки обеспечиваются при скуловых брусьях со шпунтами
для обшивки (рис. 13.18, г), но приходится затрачивать время на выборку шпунтов.
Избежать этих недостатков позволяют применение стрингера с врезной рейкой (рис.
13.18, д) или использование накладки — брызгоотбойника (рис. 13.18,е). Если брызго-
отбойнику придать форму, изображенную на рис. 13.18, ж, то он заменит, в определен-
определенной мере, отгиб днища у скулы.
з)
Рис. 13.18. Скуловой стрингер: а - сплошной пря-
прямоугольный; б -клееный; в - сплошной трапецие-
трапециевидный; г — сплошной со шпунтами; д — с врезной
рейкой; е - с простой накладкой - брызгоотбой-
ником; ж — с профилированной накладкой; з —
крепление к стрингеру досок обшивки
341
Для любой из рассмотренных конструкций стрингера минимальные его размеры
в поперечном сечении должны быть такими, чтобы к нему можно было надежно при-
прикрепить шурупами обшивку днища и борта (рис. 13.18, з).
Скуловые стрингеры и привальные брусья идут по всей длине корпуса, имеют
криволинейную форму и являются не только продольными связями, но и перевязкой
днища с бортом и борта с палубой.
Привальные брусья могут располагаться снаружи корпуса (рис. 13.19, а); в этом
случае они выполняют главное свое назначение — воспринимают ударные нагрузки,
действующие на корпус. В конструкции с внутренним привальным брусом (рис.
13.19, б) стрингер выполняет прежде всего роль связи, перевязывающей обшивку борта
и настил палубы. Часто используются и наружный, и внутренний привальные брусья
(рис. 13,19, в).
Рассматриваемые связи на судах длиной 5 м и более могут изготовляться из целых
брусьев либо их, как и киль, можно выклеить из сравнительно коротких досок, поло-
положенных в пакет в несколько слоев ч (привальные брусья обычно делают цельными).
Для некоторых судов, например шлюпок, привальный брус целесообразно делать
в виде доски, расположенной вертикально (рис. 13.19, г). У шлюпок и некоторых
других судов с большой полнотой палубы в носу привальные брусья приходится гнуть
и соединять металлическим брештуком (рис. 13.19, д). Носовую часть привального
бруса можно сделать из двух половин фанеры толщиной 6—12 мм, которые соединяют-
соединяются через форштевень с помощью металлических угольников (рис. 13.19, е).
Буртики ставятся для зашиты наружной обшивки. Это небольших размеров наруж-
наружный привальный брус (рис. 13.197ж) .Ставят также обделочный буртик, закрывающий
планширь и верхнюю кромку ширстрека; он, может идти только в средней части
корпуса.
На шлюпках по всей средней части; а на моторных судах, имеющих завал борта
в кормовой оконечности, — в корму от миделя выше ГВЛ, у нижней кромки ширстрека
(см. рис. 13.19, ж), ставят второй буртик — обносной брус. Буртики делают из дуба,
они имеют полукруглое A5X20^20X40 мм) или полукругловытянутое сечение
B0 X 30 -ь 35 X 50 мм). Иногда из декоративных соображений и для некоторого уве-
увеличения прочности по буртику на шурупах ставят полосу из латуни, нержавеющей стали
или пластика.
У некоторых байдарок, которые в средней части обычно открыты, внутренний
привальный брус и буртик используются для крепления и защиты парусиновой об-
обшивки от ударов (см. рис. 13.19, ы).
Планширь (см. рис. 13.19, ж) закрывает торцы шпангоутов и служит для перевяз-
перевязки ширстрека и внутреннего привального бруса или обшивки.
Днищевые и бортовые стрингеры (рис. 13.20) обычно имеют одинаковые сечения
и ставятся по днищу (бортам) в количестве одного — трех. Размеры стрингеров должны
не только назначаться с учетом возможных действующих нагрузок, но и согласовывать-
согласовываться с высотой профиля флора или шпангоута — в случае, когда поперечные связи наре-
нарезаются на стрингеры. Для обеспечения большей прочности стрингера его профиль дол-
должен иметь большую в ысоту а (толщину рейки), но при этом он сильнее ослабит попереч-
поперечную связь, высота которой Ъ сравнительно невелика. Стрингеры должны быть надежно
прикреплены шурупами к флорам (см. рис. 13.20, а).
На байдарках, каноэ, малых лодках с обшивкой из прорезиненной ткани стрингеры
можно делать круглыми; они соединяются между собой с помощью муфт и втулок
(рис. 13.20, в); для оценки допусков на рисунке приведены размеры втулок.
берхние углы у стрингеров лодок и катеров целесообразно делать скругленными
по радиусу 5—8 мм (см. рис. 13.20, а). Такой же радиус должны иметь прорези для
стрингеров, сделанные в ветвях шпангоутных рамок. Это позволит уменьшить концен-
концентрацию напряжений и предотвратить поломки флоров и шпангоутов.
342
; с ! ьидо
ча-..i7- Г1ри)?алыг5!.\
б-'ртлк й
Рис. !3 19. Привальный брус: с -- наружный; о- йнутренннь -.- — ):^|,-уж;:!>ш и
доски; i) соединение /фмиал:~;ых брусьев мечалличоски:-! '.if^n; i \ ком;. е-¦
брусьев; ж - рачме.цаше пчргнг.он; з -- ]:,?а!;л!чрь-в;:герое>'.< ; и --прива.тьныЧ
7 - iiaciu:. иалубы; 2 - бимс; J. 11 шпангоуты; 4 наружный лривальныГ: бр\с; Ь - М:.тщ7'п-чсс:<ая n;v;rva; 6 - ">6)"чн;:г
рождай привальный брус; 8 обделочный буртик; 9 - •luci;!.! i ил у бы ич досок. 10 - >ои-лвка борг, из i.ocok JJ — Bio-'тре,
аз доски; J 3 — шанширь; /4 доски наружной oGiM.fiKif; j5 - металлический брату к; /б - фориггоаень; 1? - носок
бруса; 18 — металлический угольник; 19 - буртик; 2С Dr«ii.;rpcK; 2i —Kiu.ua; 22- обшивка — прорезпнеишл гкчнь;
•циклическая к.чнца; 2'> - подлегарс
ЕЙ И
; ч
.ч _
призплъ
¦лсть при
вал;
2V
о
рус
ого
ме-
a)
1500
Рис. 13.20. Стрингеры: а - из прямоугольной рейки; б - из бруска; в - из круглой рейки (байдарочный).
1 -шуруп; 2-рейка; 3 - флор; 4 - брусок; 5, 11 -заклепки; 6 - обшивка днища; 7, 8 - неподвижная и подвижная
соединительные втулки соответственно; 9 — муфта; 10 — проволока
Если обшивка делается на пазовых рейках, то последние, в определенной мере,
будут выполнять функции стрингеров. ,
На судах значительных размерений некоторые днищевые стрингеры в моторном
отделении переходят в фундаментные балки, служащие опорами для двигателя. Они
могут быть: монолитными (рис. 13.21, а), выклеенными из брусьев или досок и оклеен-
оклеенными с боков листами бакелизированной фанеры; коробчатыми (рис. 13.21,6) -состоя-
-состоящими из двух фанерных стенок, верхнего и нижнего брусковых поясков (для увели-
увеличения устойчивости стенки между брусками поясов ставят стойки и раскосы); дву-
двутавровыми (рис. 13.21, в) - состоящими из фанерной стенки и поясков из досок,
приклеенных к стенке.
Карлингсы — палубные продольные рейки — на малых судах выполняются из брус-
брусков; их размеры в поперечном сечении часто принимаются равными размерам днище-
днищевых стрингеров.
Карлингсы на судах с кокпитом (L =8 м и более) целесообразно выполнять моно-
монолитными (рис. 13.22, а) или коробчатыми (рис. 13.22, б). В обоих случаях целесообраз-
целесообразно применить склеивание. При изготовлении карлингсов значительных размеров можно
использовать короткомерный пиломатериал.
На судах длиной 8 м и более в ряде случаев целесообразно ставить планшири и
ватервейсовые брусья. Например, на больших гребных шлюпках планшири прикрывают
верхние концы шпангоутов (см. рис. 13.19, г, ж) и служат дополнительной продоль-
продольной связью в верхней части борта. Ватервейсы на судах ставятся обычно тогда, когда
настил палубы делается из досок; они представляют собой брусья, идущие по бортам
вдоль всего судна; их размеры в поперечном сечении часто принимают большими
(на 10—20 %), чем соответствующие размеры досок палубного настила. В случае когда
налил палубы и обшивка борта сделаны из фанеры, внутренний привальный брус
используется для крепления настила палубы (см. рис. 13.19, а), а также обшивки
борта.
Подлегарс (см. рис. 13.19, к) вводится в конструкцию тогда, когда отсутствуют
другие мощные продольные связи, расположенные в верхней части борта (наружный
и внутренний привальные брусья, усиленный планширь). На него удобно опирать доску
банки или озды (поперечные связи корпуса, на которые ие кладется настил палубы,
служат для обеспечения поперечной прочности корпуса}
Поперечный набор. Его составляют шпангоутные
рамки, состоящие (на остроскулых судах) из днище-
днищевых ветвей — флоров (флортимберсов), бортовых
ветвей — шпангоутов (топтимберсов) и бимсов.
а)
Рис. 13.21. Днищевые стрин-
стрингеры: а - клееный монолит-
монолитный; б-коробчатый; в —
двутавровый.
1 -доска; 2 -лист фанеры;
3 — брус; 4 — стойка (раскос)
Рис. 13.22. Карлингсы: в-монолитный; б - коробчатый.
7—настил падубы; 2 — бимс; 3 — заполнитель; 4 — балка
карлингса; 5v— фанерные накладки
345
Эти детали шпангоутной рамки соединяются между собой килевыми, скуловыми
и бимсонымм кницами или крепежом. Из круглоскулых судах флор и шпангоут или
представляют собой единую связь, идущую ох киля до'привального бруса, или делаются
составными- Конструктивный тип элементов шшшгоутных рамок определяется не
только обводам*! корпуса., но и размерами суут.
Натесные шпангоуты остроскулых суцоп дойной до 4 м выполняются обычно из
сосны и имеют незначительную разницу в размерах днищевой и бортовой ветвей (см.
табл. 13.7). На судах длиной не более Л м в узлах соединений ветвей шпангоутной
рамки можно допустить т.ряменение бескяячных соединений — внакрой без врезки
или с врезкой зполдерева. На судах длиной более 5 м с целью некоторой экономии
массы корпуса рекомендуется принимать переменное сечение этих ветвей шпангоут-
шпангоутной рамки, выдерживая требующиеся размеры у килевой кницы — для флора, и у верх-
верхней кромки скуловой кницы •- для -инашоуга; у противоположных концов этих дета-
деталей их высота может быть уменьшена на ГЛ—15 %.
Натесные футоксивые шпангоуты (рис. 13.23, а) применяют на круглоскулых
судах длиной 15 м и более. Их набирают из футоксов — криволинейных брусьев соот-
соответствующей формы, поставленных в два слоя с разогнанными стыками. Торцы футок-
футоксов срезают углом, в образовавшиеся полости' ставят чаки. Между собой футоксы
скрепляют болтами и нагелями, а с чэками - болтами.
Натесные клееные шпангоуты (рис.13.23, б) изготовляют аналогично футоксовым,
но число слоев у них может достигать 6—8. Стыки досок при этом равномерно раз-
разгоняют. Доски, кромкам которых придала соответствующая криволинейная форма,
а концы точно оторцованы, склеивают по нласти и в торцах.
Гнутые сплошные шпангоуты (рис. 13.23, е) при сравнительно небольших разме-
размерах поперечного сечения обеспечивают большие прочность и жесткость, чем натесные.
Для изготовления этих шпангоутов может применяться только высококачественный
пиломатериал (дуб), поскольку при наличии дефектов (сучков, косослоя, свилева-
свилеватости) сложно осуществлять гиску шпангоутов даже при тщательном распари-
Гнутые клееные шпангоуты вы-
выполняются многослойными (рис,
13.23, г). При изготовлении шпан-
шпангоута доски изгибают в соответст-
соответствии с его обводом. Число досок
принимается в зависимости от вы-
высоты профиля шпангоута и кри-
кривизны его обводов. Толщина досок
при этом должна назначаться в
соответствии с приведенными тре-
требованиями (см. табл. 13.10).
Составные шпангоуты делаются
из трех частей — двух бортовых
и одной днищевой. Между собой
ветви соединяются с помощью кре-
цежа или крепежа и клея; соеди-
соединения выполняются внакрой (рис.
13.23, д) или в замок (рис.
13.23, с). Такие шпангоуты целе-
целесообразно делать из заготовок,
имеющих соответствующую криво-
криволинейную форму, ИЛИ ИЗ КОКОр;
ного лесоматериала. Если обеспе-
обеспечить необходимую прочность в со-
совании.
tin
ПпА
Рис. 13.23. Шлз1ис>ты: а - накч'НоГ! ф^.гоксовый: С -
натссной к.ге_н:ый; я - гнутый сплошной; г щутый
клееный; д - гостапяой с соедиклшем деталей внакрой;
." - составной к' соединением в замок.
/ -- футок г
- чека; .) -
¦- ЗЭК.ИЯ1-
346
единениях ветвей, шпангоуты при незначительной массе будут иметь большую проч-
прочность.
Флоры — днищевые ветви шпангоутов (флортимберсы) — в зависимости от раз-
размеров судна и характера обводов днища выполняют натесными, выпиливая из доски,
или гнуто-клееными. Их конструкция и технология изготовления аналогичны рассмот-
рассмотренным для соответствующих шпангоутов.
Бимсы на малых судах имеют прямоугольное сечение; они изготовляются путем
выпиливания из доски, ширина которой задается с учетом погиби бимса (если она пре-
предусмотрена). На более крупных судах бимсы, как и криволинейные шпангоуты, целе-
целесообразнее делать клееными. Для упрощения процесса их изготовления следует сначала
выклеить широкий криволинейный брус, а затем распилить его на части толщиной, соот-
соответствующей бимсу.
Размеры рассмотренных связей поперечного набора указаны в табл. 13.7 и 13.8.
Усиленный поперечный набор. На деревянных быстроходных судах значительных
размерений для усиления днищевого и бортового набора в районе моторного отделения,
топливного отсека, а иногда и в носовой оконечности применяют усиленные флоры
и рамные шпангоуты.
Усиленные флоры имеют закрытое коробчатое сечение и состоят из верхнего и
нижнего брусков, вклеенных между двумя стенками из бакелизированной фанеры.
Верхнему бруску придают форму, удобную для крепления механизмов, цистерн или
других деталей оборудования. На рис. 13.24 изображен флор с верхним бруском, ко-
которому придана форма, соответствующая форме дна топливных баков. Нижним брус-
бруском является днищевая ветвь шпангоута.
Рамные шпангоуты применяются, если необходимо усилить не только днищевой,
но и бортовой набор. Нащечины флора — наружные листы из фанеры - выводят вверх
по бортовой ветви шпангоута, как показано на рис. 13.24. Это позволяет увеличить
прочность шпангоутной рамки, так как флор и рамный шпангоут образуют попереч-
поперечную связь набора, обладающую большой прочностью. Конструктивно рамный шпан-
шпангоут выполняют (как и флор) из фанерных стенок и бруска по свободной их кромке
и ветви шпангоута.
Рациональное использование древесины
в клееных связях поперечного набора.
Прочность деталей набора из цельной дре-
древесины, работающих на изгиб и растяже-
23233
<^Т'~.ук
Рис. 13.24. Усиленные флор и рамный
шпангоут.
1 —цистерны; 2 — верхний поясок флора;
3 — нижний брус флора; 4 -ветвь шпан-
шпангоута; 5 — стенка шпангоутной рамки;
6 — брусок по свободной кромке шпан-
шпангоута
Рис. 13.25. Распределение пород древесины
в клееных связях набора.
/ — дуб; 2 — сосна; 3 — ясень
347
ние, существенно уменьшается при наличии в них свилевдтости, косослоя, сучков.
Клееные элементы набора, например флоры, этого недостатка не имеют, поскольку
выклеиваются из большого числа тонких досок, расположенных параллельно линии
обвода [101].
Применение склеивания при изготовлении криволинейных элементов набора соз-
создает возможность рационально использовать древесину различной прочности. Для уве-
увеличения прочности флора, шпангоута, бимса у, свободной кромки или для обеспечения
большей держащей силы шурупов у кромки, прилегающей к обшивке или настилу
палубы, ставят по 3—4 слоя досок из дуба, а в середине высоты детали у ее нейтраль-
нейтральной оси — из сосны (рис. 13.25, а). Учитывая высокую стоимость дуба, можно огра-
ограничиться установкой его только у кромки, прилегающей к обшивке (рис. 13.25, б).
В случае возможности использования разнообразных пород древесины может оказать-
оказаться целесообразным следующий вариант: по свободной кромке поставлен прочный
материал (дуб, красное дерево); слои, пригающие к обшивке, выклеены из грибо-
стойкой и слабонамокающей древесины — ясеня, дуба, лиственницы; в районе нейтраль-
нейтральной оси поставлена древесина, имеющая малую прочность на растяжение и незначитель-
незначительную массу, — сосна, сибирский кедр (рис. 13.25, в).
Такое комбинированное использование древесины с различными физико-механи-
физико-механическими качествами себя оправдывает и не приводит к существенному увеличению
стоимости клееных конструкций; так, например, может выклеиваться не один шпан-
шпангоут или иная криволинейная деталь, а сразу несколько — широкий криволинейный
брус, который затем разрезается на несколько заготовок для соответствующих деталей.
Конструирование клееных связей поперечного и продольного набора [100] . Дета-
Детали набора выклеивают на пласть из досок одинаковой ширины (рис. 13.26, а); на
пласть и кромку из широких и узких досок (рис. 13.26, б); на пласть с наклейкой
фанерных накладок на наружные кромки досок пакета (рис. 13.26, в); из досок,
склеенных по кромкам (рис. 13.26, г).
Детали коробчатого профиля изготовляют из склеенных на кромку (рис. 13.26,д)
или на пласть (рис. 13.26, е) досок либо из отдельных брусков с обклейкой их фанерой
(рис. 13.26, ж). Число слоев досок в слойчатой клееной детали обусловливается в ос-
основном размерами ее поперечного сечения, так как максимально допустимая толщина
досок, применяемых при склеивании судовых деталей в современных технологиче-
технологических условиях, не превышает 40—50 мм. Соединение досок по длине в слойчатых де-
деталях, работающих на растяжение, рекомендуется выполнять „на ус", а не в торец.
В слойчатых деталях набора расстояние между концами усовых соединений в смеж-
смежных слоях должно быть не менее длины усового соединения / плюс 50 мм (рис. 13.27,
а). Данное расстояние может быть уменьшено до 100 мм, но при этом следует при-
принять обратное направление усовых соединений. Совпадение стыков в одном сечении
детали допускается не менее чем через два слоя (рис. 13.27, б). При склеивании досок
в детали не только по длине и толщине, но и по ширине соединения по кромкам должны
быть разогнаны так, чтобы расстояние между ними было не менее 25 мм (рис. 13.27, в).
Слойчатые детали следует конструировать таким образом, чтобы без ущерба для
их прочности низкосортные материалы были использованы в менее нагруженных участ-
участках клееных деталей.
Для обеспечения высокого качества клееных деталей судового набора у смежных
досок, соприкасающихся пластями, рекомендуется применять такое расположение
годовых слоев, при котором заболонь склеивается с заболонью, а ядро с ядром (рис.
13.27, г, д). В случае применения досок тангенциальной распиловки минимальный
угол между направлениями годовых колец (см. рис. 13.27, г) должен быть более 15°,
а при использовании досок радиальной распиловки он может колебаться от 15 до 75°
(см. рис, 13.27,д).
Слойчатые клееные детали, имеющие значительную кривизну, например форштевни,
шпангоуты, после снятия их с пресса несколько распрямляются вследствие упругих
348
Рис. 13.26. Поперечные сечения сплошных и коробчатых клееных деталей:
а -на гшасть (доски одинаковой ширины); б - на пласть и кромку (доски
разной ширины); в - на пласть с фанерными накладками; г - из досок, скле-
склеенных по кромкам; д, е — коробчатые детали с досками на кромку и на пласть;
ж - двухслойная деталь (полотно переборки)
а)
"r~
S)
z
т
-4-
Яг л»е//ее 100 ми
Рис. 13.27. Требования по конструированию многослойных клееных связей набора: а - усовые
соединения в смежных слоях; б - минимальные расстояния между усовыми соединениями;
в - разгон кромок досок; г, д - подбор досок в зависимости от расположения годовых слоев
Рис. 13.28. Нормирование предельно
допустимых радиуса кривизны пресса
и толщины досок многослойных
клееных деталей: a - распрямление
В)
2.S
2,2
1,0
0,2
(
4.
J
A
1
У
/
/
/
/
10
78 22 26т,мм
криволинейной детали после ее распрессовки; б — номограмма для определения
* толщины досок.
1 — клееная деталь; 2 — основание пресса; А — сосна; Б — дуб
349
свойств древесины и, следовательно, изменяют приданную им форму (рис. 13.28, а).
Поэтому радиус рабочей поверхности основания пресса1 Ro следует сделать меньшим,
чем радиус детали RK, и определять его по опытным данным или по формуле Ro =
= ЛДA -- TJJI), г tie Tfi - сумма моментов инерции сечений отдельных досок дета-
детали, входящих в е.е поперечное сечение; I — момент инерции сечения целой детали после
склеивания.
Вместо подсчета Ro по приведенной формуле его можно определить по номограмме
[121 j (рис. 13.28, б) или по т:;бл. 13.9. В случае когда доска не будет гнуться по приня-
принятому радиусу основания пресса, необходимо увеличить число досок в пакете, уменьшив
соответственно чх толщину.
Переборки ма.1Ь'х судоо делают ся однослойными. Толщину их полотна принимают
равной 0,20—0,25 толщины шпангоута. Шлангоутная рамка (флор, шпангоуты, бимс),
стоящая в плоскости переборки и служащая се обвязкой, имеет кницы только с одной
стороны; с другой стороны на нее ставился полотно переборки, которое целесообраз-
целесообразно подкреплять двумя -гремя стойками (рис. 13.29} или одним-двумя горизонтальными
ребрами-шельфами. Па малых судах концы стоек достаточно довести до флора и бимса
(рис. 13.29, а) или же затем нарезать эти св.ои на брусья обпязки переборки; в обоих
случаях применяется кренеж. На суда;- сгзодних размерений стойки закрепляют у шпан-
шпангоута и у бимса накладными кницлум (ряс. 13,29, б). На судах значительных размере-
ний стойки следует ставит!) в плоскости днищевого стрингера и карлингса; в этом
случае стойка крепится кницами, наложенными на стойку и продольные связи.
Транцы имеют конструкцию (рис. 13.30) аналогичную конструкции переборок.
Они состоят из шнангоутиой рамки-обвязки и полотна. Бруски обвязки имеют тол-
толщину 25—30 мм — большую, чем холодина птаигоутов, полотно из фанеры — толщину
6—8 мм для судов с подвесными моторами (мотолодок), равную толщине обшивки
или 4—5 мм (что больше). - для судов со стационарными двигателями.
Все свя'зи продольного набора корпуса должны быть надежно перевязаны с тран-
транцем: киль - мощной сварной кшшей (старн-кницей), выполненной из легкого сплава
или из стали; продольные рейки днища и палубы врезаются в брусья обвязки и закреп-
закрепляются крепежом; скуловые и внутренние привальные брусья присоединяются к обвяз-
обвязке коротышами-угольниками размерами около 50 X 50 X 3 мм; эти брусья можно
закрепить и горизонтальными кницами-брештуками. На сравнительно небольших судах
стойки транца должны быть перевязаны с его обвязкой накладными кницами из фанеры
толщиной 6-8 мм (рис. J3.30, а). Днищевые стрингеры и карлингсы крепят к стойкам
транца кницами из фанер».; толщиной 4--6 мм (рис. 13.30, б).
* з
А-А
ь
-С:" ^^~*т-
Рис. !3.29. Переборки, а - малого судна; б - судна средних размерений.
/-шпангоут обвязки; ? - б»м-- оОвязки: i - стойка; 4 - полотно переборки; 5 - заполни-
заполнитель: 6 - кница обр.р ;ки; 7 - каши» стойки; 8 - шурупы (гвочди) для запрессовки при склеи-
isaiuuj; 9 - ф;к>р обвяжи ' '
350
a)
15
Рис. 13.30. Транцы: а - со стойками и накладными кницами; б - с продольными связями, закрепленными на стойках транца:
в - с широкой стойкой; г - транец из доски.
/ — шпангоут обвязки; 2 — кница обвнзки; 3 — бимс обвязки; 4 — кница стойки; 5 — стойка; 6 - полотно транца; 7 — коро-
коротыш-угольник; 8 — металлическая сварная старн-кница; 9 — заполнитель; 10 — карлингс; 11 - кница карлингса; 12 — днищевой
стрингер; 13 — кница днищевого стрингера; 14 — флор обвязки; 15 — обвязка транца; 16 — полотно (обшивка) транца; 17 —
стойка-подкрепление под мотор; 18 - горизонтальная кница; 19 — привальный брус; ^О^^бортовой стрингер; 21 — скуловой
брус; 22 — киль; 23 — вертикальная книиа; 24 — доска транца; 25 — стойка-кница
На небольших мотолодках конструкция транца может быть упрощена (рис. 13.30,
в) — в ДП он усиливается широкой стойкой, соединенной с килем старн-кницей. По
привальным брусьям могут быть поставлены брештуки.
На судах с подвесным мотором транцы часто усиливают мощной связью — доской,
идущей от борта до борта на уровне струбцины мотора. При наличии мощного мотора
в корме часто создают нишу-рецесс, которая также увеличивает прочность и жесткость
транца. На байдарках и очень малых лодках транец может не иметь обвязки (рис.
13.30, г); его изготавливают из доски толщиной около 20 мм, к которой крепят об-
обшивку и настил палубы. После завершения работ по корпусу необходимо по периметру
транца поставить оковку из латуни или стали в виде угольника размерами около
30 X 30 X 1,5 мм.
Форштевни — их конструкция определяется в основном размерами и характером
обводов судна. На небольших лодках или байдарках его делают из бруска (рис.
13.31, а, 6), который нарезают на киль и крепят к нему на клею и гвоздях или шу-
шурупах. Форштевни, имеющие плавный дугообразный изгиб, выклеивают из листов фа-
фанеры (рис. 13.31, в) либо применяют кривослойное дерево — кокору (рис. 13.31, г).
Составной форштевень повышенной прочности может быть изготовлен с помощью
применения носовой кницы — кнопа, имеющего криволинейную внутреннюю поверх-
поверхность (риС. 13.31, д) либо прямолинейную — для упрощения конструкции
(рис. 13.31, е). Деревянный кноп иногда заменяют металлическим (рис, 13.31, ж).
Кноп к форштевню и брусу киля крепится болтами.
Для сравнительно крупных лодок и катеров, строящихся серийно, целесообраз-
целесообразно изготовлять гнуто-клееные форштевни из тонких реек (рис. 13.31, з). В связи с тем
что радиус кривизны форштевня, как правило, небольшой, толщина реек должна быть
равна 4—7 мм (табл. 13.10); ширину заготовок следует брать на 4—6 мм больше шири-
ширины штевня после окончательной его обработки [101].
Трудоемкость изготовления клееных форштевней при серийном производстве
ниже, а прочность значительно выше натесных — собранных с использованием болтов
и коксов.
о) В) я) , 4 ,i Л
2
В)
Рис. 13.31. Форштевни: а - из криволинейного бруска; б -из прямого бруска; в - выклеенный
из водостойкой фанеры; г - кокора; д - брусок и криволинейный кноп; е - брусок и прямо-
прямолинейный кноп; ж - брусок и металлический кноп (кница); з - выклеенный из реек.
1 —киль; 2 — брусок форштевня; 3 — листы фанеры; 4 — обшивка; 5 — оковка; 6 — болты;
7 —кокора; 8 — криволинейный кноп; 9 — прямолинейный кноп; 10 — нагели; // —металли-
—металлический кноп; 12 — клееный форштевень
352
Суда с полными обводами и плоским (рис. 13.32, а) Таблица 13. 10.
ИЛИ поднимающимся В НОСу (рис. 13.32,6) Днищем Минимально допустимые
, в - радиусы изгиба заготовок, мм
могут иметь форштевень более простои конструкции —
выполненный из досок (рис. 13.32, в). Ширина наруж-
наружной доски (фальшивый нос) задается с учетом двух
толщин обшивки, наружная ее поверхность скруглена.
Внутренняя доска имеет в поперечном сечении тра-
трапециевидную форму. Эти доски, соединенные крепе-
крепежом или клеем, образуют форштевень со шпунтом.
Натесной форштевень с накладками изготовляется
из нижней и верхней досок (рис. 13.32, г), которым
придается криволинейная форма в соответствии с об-
обводом форштевня. В углу сопряжения досок ставится
небольшой кноп. С боков на доски и кноп приклеивают-
приклеиваются накладки (щеки), вырезанные из водостойкой фа-
фанеры толщиной 4—6- мм. Форштевень такой конструкции целесообразно соединять
с набором корпуса путем нарезания на шпангоут и на киль, выполненный из доски;
крепление осуществляется вертикальными болтами.
Толщина
доски.
мм
5
8
10
12
15
20
25
30
Сосиа,
ель
500
800
1100
1300
1600
2200
2800
3400
Дуб
450
650
900
1000
1300
1900
2200
2700
а)
А-А (поВернута)
12
Рис. 13.32. Форштевни и крепление обшивки к форштевням: а -нос судна с плоским днищем;
б — нос судна с поднимающимся днищем; в — форштевень из двух досок; г - натесной форштевень
с накладками; д,е- шпунты для обшивки.
1 —форштевень; 2, 9 — киль, 3 — обшивка; 4 -накладка — „фальшивый" нос; 5 — доска фор-
форштевня; 6 — шпангоут; 7 — нижняя и верхняя доски форштевня; 8 — брештуки; 10 — накладкн
(фанера) ; // - брус форштевня; 12 - металлическая накладка - водорез
12 Зак. 738
353
«л
Рйс. 13.33. Ахтерштевни и дейдвуды: а - клееный ахтерштевень;
6 — клееный дейдвуд; в - дейдвуд из брусьев; г — ахтерштевень
с транцем.
1 — ахтерштевень; 2 — обшивка; 3 — клиновой заполнитель; 4 —
кнль; 5 — фальшкиль; 6 — болты; 7 — дейдвуд; 8 — обшивка транца;
9 — стойка; 10 — кница; // — кноп; 12 — гвозди; 13 — дейдвуд
из брусьев; 14 — флоры; 15 — обвязка транца; 16 — привальный
брус; 17 — бортовой стрингер; 18 — заполнитель сложной формы;
19 — оковка (шнна) — стальная полоса; 20 — стопватер
Для надежного крепления обшивки к форштевню делают шпунт; его ширина
(рис. 13.32, д) должна быть не менее 4—5 толщин обшивки из фанеры и не менее
2 толщин обшивки из досок. Шпунт может быть заменен скошенными передними кром-
кромками форштевня (рис. 1332, е). Для зашиты кромок обшивки и форштевня ставится
на шурупах металлический профиль или деревянный брусок (накладка) — водорез.
Примерные размеры поперечного сечения форштевня, мм: мотолодки длиной
3,5—4,5 м — 40 X D0-г 50), катера длиной 5—6 м — 50 X E0 -г- 60). Размеры заготов-
заготовки для форштевня в поперечном ее сечении для малых судов и байдарок несложно
задать по чертежу, сообразуясь с характером обводов судна.
Ахтерштевни, дейдвуды — на малых деревянных судах с транцем ахтерштевни, как
правило, отсутствуют. Более крупные деревянные суда обычно имеют сложные обводы
кормы и кормового подзора; ахтерштевням таких судов приходится придавать слож-
сложную форму (рис. 13.33, а). На рис. 13.33, б показан клееный дейдвуд моторного судна
средних размерений (L = 10 -М 5 м); пунктиром изображено отверстие для дейдвудной
трубы. Дейдвуды такой конструкции можно выклеивать из досок толщиной 20—30 мм.
Дейдвуды более крупных деревянных судов (L = 12 -г 18 м) могут быть набраны из
брусьев, скрепленных болтами и гвоздями (рис. 13.33, в). У судов, имеющих в корме
особо сложные обводы — заостренные ватерлинии в подводной части корпуса, а в над-
надводной — близкие к обводам с крейсерской кормой, приходится вводить в корпус
ахтерштевень с транцем (рис. 13.33, г); кноп в этой конструкции может быть деревян-
деревянный или металлический.
13.4. Обшивка. Настил палубы
Обшивка деревянных судов может быть изготовлена из досок, реек, фанеры или
шпона. Дощатая обшивка устанавливается: вгладь; вгладь на пазовых рейках; кромка
на кромку (клинкер, внакрой); может быть двух- или трехслойной — диагонально-
продольной и комбинированной.
Обшивка вгладь из реек показана на рис. 13.34, а. Сечение реек примерно 10-5-
v 20 X 20-^-35 мм (при такой ширине они почти не коробятся), длина желательна
на всю длину корпуса. Короткие рейки стыкуют по возможности на шпангоутах. Ста-
Рис. 13.34. Обшивка вгладь из реек: а - поперечное
сечение по обшивке; б—крепление реек между
собой; в - обшивка со снятой малкой; г — обшивка
с рейками, простроганными по радиусу; д - обшив-
обшивка, уплотненная по.пазам связующим с наполнителем.
У - рейки; 2 - флор (днищевой шпангоут); 3-
шурупы; 4 — гвоздь
Рис. 13.35. Обшивки вгладь из досок
и внакрой: а - обшивка вгладь; б -
обшивка внакрой; в - разделка кромок
у форштевня и транца; г - крепление
досок обшивки к транцу.
/ — доски обшивки; 2 — флор (днище-
(днищевой шпангоут) ; 3 — шпангоут; 4 —
транец
355
вятся рейки от ДП к ск>ле симметрично на оба борта и крепятся на клею и крепежом:
шурупами — к набору и гвоздями или шурупами — к ранее поставленным рейкам
(рис. 13.34, б). Гвозди забивают в устанавливаемую рейку со стороны ее свободной
кромки. Шаг для гвоздей 150-200 мм, длина их должна быть такой, чтобы они входили
в уже поставленную рейку не менее чем на 15—25 мм.
Кривизна шпангоутов может быть значительной, в таком случае рейки плотно
одна на другую не лягут — между ними могут образоваться щели. Для обеспечения
ровного прилегания реек необходимо снять малку (рис. 13.34, в) или воспользовать-
воспользоваться одним из способов обшивки рейками, не требующими снятия малки. При „швед-
„шведском" методе кромки реек прострагивают (фрезеруют) по радиусу — при установке
рейки на корпусе выпуклость верхней рейки входит в вогнутость нижней
(рис. 13.34, г). Второй способ основан на использовании заполнителя на клее, вводи-
вводимого в щели между кромками реек (рис. 13.34, д). Лучшим заполнителем, имеющим
малую массу и хорошую адгезию, являются микросферы — полные сферические гра-
гранулы диаметром менее 1 мм. Их можно заменить древесной мукой или мелкими опил-
опилками, однако эти заполнители приводят к понижению прочности соединения.
К шпангоутам и продольному набору рейки крепят шурупами либо гвоздями,
утапливая их шляпки на 1,5-2,5 мм, чтобы они не мещали строжке. Обшивку простра-
прострагивают вдоль реек или под некоторым углом так, чтобы было меньше задиров. У доста-
достаточно широких реек по внутренней их стороне должны быть предусмотрены пазы -
для предотвращения коробления при набухании обшивки.
Обшивка из реек на парусных яхтах длиной 7—10 м имеет толщину 16—20 мм
в средней части судна, в оконечностях она может быть уменьшена на 3 мм. Для крепле-
крепления обшивки яхт примеьяют водостойкий клей или смолы типа ЭД-20 и ПО-300 и крас-
номедные заклепки.
Обшивка вгладь из досок показана на рис. 13.35, д. Размеры досок: толщина 10-
20 мм, ширина 40-100 мм, длина — на всю длину корпуса; при необходимости доски
склеивают по длине „на ус" или соединяют с помощью накладок, минимальная тол-
толщина обшивки вгладь под конопатку — 18—15 мм; если сделать обшивку тоньше, коно-
конопатка не будет держаться в пазах; при склеивании по пазам толщина досок может
быть существенно уменьшена, а следовательно, и снижена масса корпуса. Доски об-
обшивки крепят к натесным шпангоутам шурупами диаметром 3,5—4,0 мм, длиной не
менее 2,25 толщины обшивки. К гнутым шпангоутам обшивку прикрепляют красно-
медными заклепками. Необходима тщательная подгонка досок к шпангоутам, про-
продольным связям и по пазам (одной доски к другой). Работа усложняется тем, что
доски имеют криволинейные кромки.
Короткие доски, не перекрывающие всей длины корпуса, склеивают заранее, при-
применяя усовое соединение, или сращивают непосредственно на стапеле с помощью на-
накладки. У корпусов с гнутыми шпангоутами и небольшой шпацией B00-300 мм)
накладка имеет длину, равную расстоянию между шпангоутами, толщину - на 5—10 мм
большую, чем толщина досок обшивки. Стыки соседних поясов следует разносить
так, чтобы расстояние между ними было не менее 1,5 м.
Обшивка вгладь из досок имеет существенный недостаток: доски шириной 50—
60 мм и более весьма сильно коробятся.
Обшивка внакрой (кромка на кромку) изображена на рис. 13.35, б. Для лучшего
прилегания друг к другу доски делают со скошенными кромками. В носу выполняют
клиновые срезы (рис. 13.35, в), чтобы обеспечить расположение досок вгладь. При
подходе к транцу поверхность обшивки также должна быть ровной (рис. 13.35, г).
При обшивке внакрой можно использовать доски на 15—20 % меньшей толщины, чем
при установке их вгладь, либо увеличить шпацию поперечного набора.
Доски обшивки сшпают по их перекрою медными или алюминиевыми заклепка-
заклепками диаметром 2—3 мм, допустимый шаг заклепок 100 мм, наружный диаметр шайб
8-10 мм. К шпангоутам доски крепятся шурупами или заклепками. Для обеспечения
356
водонепроницаемости обшивки по пазам между досками прокладывают ленту из
стеклосетки, картона, парусины, пропитанную эпоксидным или другим водостойким
клеем.
Обшивка вгладь и внакрой требует особо тщательного ухода в процессе эксплуата-
эксплуатации судна — необходимо своевременно производить ошкрабку, конопачение, шпакле-
шпаклевание, грунтовку, окраску.
Обшивка на пазовых рейках (рис. 13.36) применяется в основном на остроскулых
судах и делается из досок сечением 10-^15X40-^60 мм. Толщину пазовых реек
из сосны принимают равной толщине досок обшивки, из дуба - 0,8 толщины обшивки.
Пазовые рейки обеспечивают герметизацию пазов и перевязывают смежные поясья
обшивки между собой.
Конструкция обшивки на пазовых рейках имеет ряд разновидностей. Пазовые
рейки ставят на шпангоуты не врезая (рис. 13.36, а). В этом случае наружный обвод
конструктивных шпангоутов (шпангоутных рамок) размечают с отступлением от тео-
теоретической линии на размер, равный толщинам обшивки и пазовой рейки. Необходимо
учесть недостаток этой конструкции — при намокании доски могут сильно коробиться,
поскольку не прилегают к шпангоутам.
При варианте с пазовыми рейками, врезанными в шпангоуты (рис 13.36, б), для
уменьшения концентрации напряжений во флоре и упрощения постановки реек вы-
вырез в шпангоуте делается на 10—15 мм больше их ширины (рис. 13.36, в). Доски об-
обшивки опираются на шпангоуты, они присоединяются крепежом к рейкам
(рис. 13.36, г) и шпангоутам.
Наиболее простой способ — делать пазовые рейки разрезными на шпангоутах и
ставить после установки досок обшивки. При этом, однако, уменьшается продоль-
продольная прочность корпуса и в районе шпангоута может образоваться трудноустранимая
течь. Доски обшивки соединяют с пазовыми рейками заклепками или гвоздями диа-
диаметром 1,5—3 мм, поставленными взагиб с шагом 60—70 мм (рис. 13.36, д).
Обшивка из фанеры (рис. 13.37, а) — самый простой вариант обшивки. Однако
• необходимо учитывать, что фанеру нельзя изгибать одновременно в двух плоскостях.
Обводы лодок в этом случае должны разворачиваться на плоскость, поэтому построение
г)
10
Рис. 13.36. Обшивка на пазовых рейках: а —пазовые рейки не врезаны в набор; б, в -
пазовые рейки врезаны в набор; г — крепление пазовых реек к обшивке; д — крепление
обшивки к скуловому стрингеру и пазовым рейкам.
/ -доски обшивки; 2 - пазовая рейка; 3 — флор (шпангоут); 4 — заклепка; 5 - гвоздь
крепления шпангоутов; б - шпангоут; 7 - обшивка борта; 8 - скуловой стрингер;
9 — шуруп; 10 — гвоздь крепления рейки
357
теоретического чертежа судна с такими обводами имеет ряд особенностей (см. гл. 11).
Обшивать фанерой круглоскулые суда не удается. Вогнутые или спрямленные очерта-
очертания шпангоутов остроскулых судов приходится заменять слегка выпуклыми. На такие
шпангоуты листы фанеры ложатся достаточно хорошо.
Листы обшивки склеивают „на ус" с шириной перекроя не менее 15 толщин об-
обшивки. Хорошее усовое соединение получится только при тщательной подгонке и об-
обработке склеиваемых поверхностей. Можно соединять листы обшивки и на стыковой
планке, применив для запрессовки заклепки или шурупы.
В качестве материала для обшивки обычно используют водостойкую фанеру тол-
толщиной 3-10 мм (с градацией 3, 4, 5, 6, 8 и 10 мм) марок БС-1 или ФСФ (размеры
листов 1525 X 1525 мм) и бакелизированную фанеру толщиной 5 и 7 мм (размеры
листов 1200 X 4850,1200 X 5600 мм).
Листы обшивки ставят на мастику, лак 6с (хуже на густотертую краску) и крепят
к набору шурупами, гвоздями, винтами. На быстроходных судах в связи с действием
динамических нагрузок большой интенсивности не рекомендуется ставить шурупы по
продольным рейкам и скуловому брусу (особенно в носовой оконечности), лучше
использовать заклепки. Защита торцов листов от влаги и обеспечение водонепрони-
водонепроницаемости в местах соединения листов по стыкам или пазам, по килевому, скуловому
и привальному брусьям, по переборкам обеспечивается путем прокрашивания — про-
пропитки несколько раз лаком 6с или покрытием эпоксидной либо полизфирной смолой.
Места присоединения листов обшивки к килю, скуловым и привальным брусьям сле-
следует также оклеить стеклотканью либо парусиной на клее, смоле или лаке. Малопроч-
Малопрочные ткани (марля, бязь) употреблять не следует — они рвутся.
а)
В)
Ю
г)
10
Рис. 13.37. Обшивка из фанеры: а - поперечное сечение по обшивке; б - листы обшивки,
обрезанные в чистый размер; в — скрепленные листы обшивки; г - соединение обшивки
из досок и фанеры.
1 — флор (днищевой шпангоут) ; 2 — обшивка; 3 — носовой транец; 4 — стыковая планка;
5 - бортовая обшивка; 6 - кормовой транец; 7-днищевая обшивка; 8 - поперечные
распорки; 9 — обшивка из досок; 10 — обшивка из фанеры
358
Технология постройки судна с фанерной обшивкой намного упрощается, если при-
применить сшивную конструкцию корпуса (см. рис. 13.16, <?). В этом случае все листы
обшивки размечают и обрезают по кромкам точно в чистый размер (рис. 13.37, б).
Соединение листов между собой проволочными скрепками начинают с днищевыхлистов,
к ним пришивают кормовой и носовой транцы, затем бортовые листы. После этого
сшитые листы раздвигают поперечными распорками до нужной ширины (рис. 13.37, в),
подтягивают скрепки и оклеивают все соединения лентами стеклоткани на эпоксидном
клее.
При использовании для обшивки бакелизированной фанеры с ее поверхности
должен быть удален слой лака. Это позволит улучшить адгезию краски, смолы, клея
к фанере. Удалить лак можно с помощью абразивного круга или путем нагревания
поверхности фанеры паяльной лампой и соскабливанием его скребками.
В случае когда, судно имеет такие обводы, при которых применение фанеры для
обшивки в том или ином районе корпуса невозможно, но весь остальной корпус целе-
целесообразно обшивать фанерой, обшивку делают комбинированной, выполняя ее в районе
со сложными обводами из реек или досок. Некоторые трудности возникают при соеди-
соединении между собой досок и фанеры. Наиболее просто соединить их в шпунт (рис. 13.37,
г). Для большей надежности соединения в некоторых случаях увеличивают ширину
шпангоута, на котором стыкуют обшивку.
Двойная диагональная, продольно-диагональная и многослойная обшивки
(рис. 1338) применяются на судах длиной 7—8 м и более. Диагональная обшивка вы-
выполняется из двух-трех слоев сосновых досок сечением 6-МО*60-МОО мм. Доски
внутреннего слоя устанавливаются с зазором 0,5—1,0 мм под углом 45—60° к ДП
и закрепляются на киле, шпангоутах, скуловом брусе, форштевне (транце) гвоздями,
шляпки которых должны быть утоплены в древесину на 1,0—1,5 мм. На наружную по-
поверхность досок первого слоя после их прострожки наносят слой связующего на эпок-
эпоксидной основе или лака 6с Fт); менее желательно использовать для этой цели густо-
густотертую масляную краску. После нанесения покрытия на него укладывают стеклоткань
или мешковину (миткаль), также пропитанную связующим. Перпендикулярно к пер-
первому слою ставится наружный слой досок (рис. 13.38, а); общая толщина двухслой-
двухслойной обшивки составляет 12—14 мм и более. Если требуется, ставят третий слой.
Доски наружного слоя могут быть расположены вдоль киля (рис. 13.38, б).
В местах пересечения досок разных слоев их соединяют между собой 4—5 заклейками.
Многослойная обшивка имеет большую жесткость, и поэтому число продольных связей
днища может быть существенно сокращено.
На парусных яхтах многослойная обшивка может иметь до четырех слоев
(рис. 13.38, в). Первый (внутренний) слой обшивки делается из сосновых реек, по-
поставленных на клей; толщина реек 6—10 мм. На него под углом 45—60° к ДП наклеи-
наклеивают два слоя полос из фанеры толщиной 3 мм. Полосы запрессовывают к первому
слою гвоздями „на мухах". Наружный слой обшивки может быть выполнен из авиа-
авиафанеры толщиной 3 мм или корпус оклеивается стеклотканью в несколько слоев
общей толщиной 3 мм. Диагональное расположение полос фанеры увеличивает жест-
жесткость и прочность корпуса, его водонепроницаемость, а также стойкость к колебаниям
температуры и влажности.
Обшивка из полос фанеры (многослойная) в последние годы получила широкое
распространение, особенно в зарубежной практике. Она не имеет недостатков, харак-
характерных для обшивки, выполненной из листов фанеры. Полосы фанеры шириной около
100 мм нарезаются из листов и используются для изготовления обшивки аналогично
вариантам многослойной обшивки из досок (см. рис. 13.38, а, б) или обшивке яхт
(см. рис. 13.38, в). При применении полос из бакелизированной фанеры со склеивае-
склеиваемых поверхностей слой бакелита должен быть полностью удален.
Для усиления кормовой оконечности корпуса водометного катера длиной около
5-6 м может быть применена конструкция, показанная на рис. 13.38, г. Горизонтальный
359
о
a)
10
n
Рис. 13.38. Диагональная обшивка из полос
фанеры и шпона: а - двойная диагональная;
б - продольно-диагональная; в - многослойная;
г - подкрепление обшивки днища; д - одно-
однородная обшивка из шпона; е — комбинирован-
комбинированная обшивка из шпона.
/ —доски наружного слоя; 2 — ткань; 3 — доски внутреннего слоя; 4 — привальный брус; 5 — рейки; 6 — полосы
фанеры; 7 — стеклоткань; 8 — стрингеры; 9 — шпангоутная рамка; 10— киль; //—накладка; 12 — обшивка днища;
13 — транец; /4—обшивка судна; 15 — шпангоут; 16 — продольная переборка; 17 — днищевые стрингеры (подслане-
вые рейки) ; 18 — швертовыи колодец
киль сечением 25 X 100 мм, в котором прорезано отверстие для водозаборника, под-
подкреплен боковыми накладками толщиной 25 мм, приклеенными к днищу.
Обшивка из шпона (рис. 13.38, д) изготавливается так же просто, как и из полос
фанеры. Она чаще всего применяется в конструкциях легких круглоскулых спортив-
спортивных судов (академических, байдарок, каноэ, швертботов), а также на некоторых слу-
служебных и спасательных судах. Ыпоновую обшивку выклеивают в виде скорлупы из
полос шпона в три слоя и более. На байдарках и других самых малых судах попереч-
поперечный набор обычно сведен до минимума; в ряде случаев шпангоуты предстафяют
собой приклеиваемые по месту сравнительно узкие полосы из шпона или авиационной
фанеры (см. рис. 13.38, д), что существенно усиливает весьма тонкую обшивку.
Обшивка более крупных швертботов (рис. 13.38, е), как правило, подкрепляет-
подкрепляется не поперечным набором, а такими связями и конструкциями, как швертовый коло-
колодец, продольные переборки, подсланевые продольные рейки и т. п. Иногда обшивку
швертботов выполняют трехслойной — „сандвичевой" конструкции: между наружны-
наружными слоями из тонкой фанеры или шпона помещается средний слой из тонких реек
(см. рис. 13.38, е).
Для обеспечения долговечности корпуса особое внимание необходимо обращать
на заделку торцов досок: по килю их торцы защищаются шпунтом и клеем или густо-
густотертой краской, по скуле — клеем или краской и отбойным бруском. На киль, фор-
форштевень и привальные брусья следует поставить металлические полосы.
Настил палубы из фанеры (рис. 13.39) имеет гораздо меньшую массу, чем из до-
досок; сделать его проще, легче обеспечить водонепроницаемость. Однако фанерный
настил можно ставить при таких обводах надводной части корпуса, когда фанеру надо
будет изгибать лишь в одном направлении.
Толщина листов фанеры принимается в зависимости от размеров судна - 3-5 мм.
К бимсам фанерный настил крепят шурупами, а к привальному брусу для улучшения
герметичности - на шурупах и водостойком клее. Листы фанеры следует соединять
между собой на бимсах или поперечных переборках (выгородках) и карлингсах. У
Рис. 13.39. Настил палубы из фанеры.
1 —настил палубы; 2 — поперечные переборки; 3 — карлингсы; * — вырезы в палубе;
5 — соединительная планка; 6 — полотно переборки; 7 — бимс обвязки переборки;
8 — шурупы; 9 — заклепки
361
листов делается замок (см. рис. 13.39, сечение а-а) и ставится соединительная планка.
К карлингсу листы крепятся шурупами, а с планкой соединяются заклепками (см.
рис. 13.39, видЛ).
Сопряжение фанерного настила палубы с фанерной обшивкой борта легко выпол-
выполняется не только во внутреннем привальном брусе (рис. 13.40, а), но и на наружном
привальном брусе, служащем одновременно буртиком (рис. 13.40, б), а также на ватер-
ватервейсе (рис. 13.40, в).
^ia крупных судах (L = 16 м и более) часто поверх фанерного настила приклеивают
тонкие тиковые или сосновые рейки. Такая конструкция имеет вид классической
наборной палубы и в то же время менее чувствительна к воздействию солнца. Наиболее
практична оклейка фанерных палуб стеклопластиком.
Настил палубы из реек выполняется аналогично реечной обшивке вгладь.
Дощатый настил палубы делают чаще из досок таких же размеров, как и для об-
обшивки вгладь (см. рис. 13.35, а). Однако нужно учитывать, что более узкие доски
меньше коробятся при переменном воздействии воздуха и воды.
Доска ватервейса крепится к бимсам и верхней доске обшивки борта - ширстреку
шурупами (рис. 13.41, а); доски настила соединяются между собой гвоздями и при-
прикрепляются к бимсам. Крепление концов досок настила палубы удобнее производить
с использованием бруса ватервейса, при этом доска врезается в ватервейс (рис. 13.41, б,
сечение А-А).
В ДП судна следует поставить более широкую доску — забойную; ее забивают по-
последней, по возможности более плотно сжимая доски настила.
Толстый настил (более 20 мм) конопатят ватой или пенькой и шпаклюют пеком
с мелом и шпаклевкой, приготовленной на водостойком клее. Дощатый настил малой
толщины рекомендуется покрыть стеклотканью или парусиной на шпаклевке. При
отсутствии комингсов целесообразно положить ткань от борта до борта, загнуть на
кромку ватервейса и ширстрек и прижать буртиком (рис. 13.41, в). В районе комингса
край ткани следует загнуть на комингс и прижать штапиком и фальшбортом (рис.
13.41, г) или загнуть на комингс и на борт, прижав штапиком и буртиком (рис.
13.41, д).
В ряде случаев, независимо от конструкции настила палубы, приходится увели-
увеличивать ее ширину путем создания свеса (рис. 13.41, е, ж) .При этом настил палубы вы-
выходит наружу за обшивку борта и заканчивается на наружном привальном брусе. В этих
конструктивных решениях лучше обеспечивается непроницаемость палубы по узлу ее
перевязки с бортом.
Исправление дефектов. В процессе постройки корпуса судна, особенно при из-
изготовлении наружной- обшивки, настила палубы, а также деталей набора, возникают
дефекты: сколы кромок листов и досок, трещины, выколы сучков и т. п. Замена
Рис. 13.40. Соединение настила палубы и обшивки борта: а — на внутреннем при-
привальном брусе; б — на наружном привальном брусе; в — на ватервейсе.
/ —буртик; 2 — настил палубы; 3 — внутренний привальный брус; 4 — обшивка
борта; 5 — наружный привальный брус; б — ватервейс
362
a) 3
A-A
Рис. 13.41. Настил палубы из досок: а - крепление досок настила к бимсу, ширстреку и между собой; 6 — крепление настила в носовой оконеч-
оконечности; в — крепление края стеклоткани буртиком; г - крепление краев стеклоткани штапиком и фальшбортом; д — крепление ткани штапиком
и буртиком; е, ж - свесы палубы.
1 — шнрстрек; 2 — доска ватервейса; 3 — шуруп крепления ватервейса к ширстреку; 4 — то же, к бимсу; 5 — доска настила; 6 — гвоздь крепления
доски настила к ватервейсу; 7 — то же, к соседней доеке; 8 — то же, к бимсу; 9 — бимс; 10 — внутренний привальный брус; // — забойная доска;
12 — комингс; 13 — штапик; 14 — ткань; 15 — фальшборт; 16 — буртик; 17 — настил палубы из фанеры; 18 — наружный привальный брус; 19 —
фанерная обшивка; 20 — шпангоут
целых листов или досок в ряде случаев бывает невозможна или дорога, поэтому для
восстановления прочностных характеристик деталей, а также их внешнего вида допу-
допускается прибегать к бужеровке — исправлению дефектов шпаклевкой из эпоксидной
смолы и опилок древесины или шпаклевкой, составленной из других компонентов.
13.5. Соединение деталей набора
В корпусе судна из древесины и фанеры особенно сложно и ответственно выполне-
выполнение соединений деталей набора в узлах сопряжений перекрытий корпуса, а также в пере-
пересечениях поперечного и продольного набора. Объясняется это тем, что в указанных
местах намного сложнее, чем в конструкциях из других материалов, обеспечить не-
непрерывность связей. На проектирование и выполнение рассматриваемых узлов соеди-
соединений необходимо обращать особое внимание.
Перевязка связей поперечного и продольного набора. Чтобы не допускать ослабле-
ослабления связей в местах пересечения, их делают различной высоты, например высокие фло-
флоры, шпангоуты и бимсы (см. рис. 13.16) и низкие продольные связи — стрингеры,
пазовые рейки, идущие по днищу, борту и палубе.
Не менее важно устранение очагов концентрации напряжений в местах перевязки
связей. Нельзя допускать, например, надрезов во флоре, делая вырезы для продоль-
продольных ребер (рис. 13.42, а), так как они могут привести к образованию трещин и вызвать
разрушение конструкции. В нагруженных конструкциях указанные углы (у вырезов
ребер) целесообразно скруглять (рис. 13.42,6).
Перевязка продольных связей с переборками. На малых и средних судах для
низких продольных связей в обвязке переборок обычно делаются прорези соответ-
соответствующих размеров — такие же, как в шпангоутных рамках. При этом не должна нару-
нарушаться целостность обвязки переборки.
На судах L > 8 м в случае размещения двигателя в среднем отсеке для его крепле-
крепления обычно используют днищевые стрингеры (см. рис. 13.21),являющиеся фундамент-
фундаментными балками. Эти стрингеры должны проходить через переборку, отделяющую сред-
средний отсек от кормового. Для обеспечения их непрерывности применяют специальные
крепления, выполненные с применением металлических угольников или накладных
листов. Угольники ставят с обеих сторон переборки и стягивают сквозными болтами.
Для упрощения подгонки допускается применять заполнители и фанерные накладки
(рис. 13.43, а). Приклееные к брускам стрингера накладки и прокладки, поставленные
на переборке в месте прохода стрингеров, значительно увеличивают прочность крепле-
крепления, так как предохраняют стрингеры от раскалывания, принимая на себя нагрузку,
и обеспечивают повышение сопротивляемости древесины на смятие у болтов.
Рис. 13.42. Вырезы в поперечном наборе
для продольных связей: а - с надрезом;
б — со скругленными углами
Б 5
Рис. 13.43. Соединение стрингера с попереч-
поперечной переборкой: а — крепление посредством
металлических угольников; б — соединение
с помощью металлических накладок.
/ — стрингер; 2 — переборка; 3 — угольник;
4 - накладка на стрингере; 5 - накладка иа
переборке; б — заполнитель; 7 - металли-
металлическая накладка; 8 — фланец; 9 — накладка
из бакелизированной фанеры
364
Рассмотренное крепление стрингеров у переборок просто в выполнении, но не обес-
обеспечивает непрерывности стрингеров на переборках, поэтому чаще находит применение
другой тип соединения. В переборке делают узкие вертикальные вырезы, в которые
пропускают металлические листы, накладывающиеся с боков на стрингер
(рис. 13.43, б). С одной стороны переборки к листам приваривают поперечные листы,
образующие фланец. С противоположной стороны на переборку ставят фанерные на-
накладки. Под металлический фланец и фанерные накладки кладут парусину на водо-
водостойкой мастике; их проклепывают заклепками или стягивают болтами, проходящими
сквозь переборку. Мастикой также заполняют вырезы в листах переборки, сквозь ко-
которые проходят металлические листы. Для упрощения подгонки стрингера между
торцом стрингера й металлическим фланцем забивают клин из древесины или из фа-
фанеры.
Соединения деталей набора в скуловом узле. Скуловой узел соединения элементов
корпуса является наиболее ответственным, особенно в открытых районах судна, напри-
например в отсеке с кокпитом. Тип соединения деталей в этом узле предопределяется
принятой конструкцией днищевой и бортовой ветвей шпангоутов. При их изготовле-
изготовлении из целых или клееных брусков (рис. 13.44, а) наиболее простой вариант — соеди-
соединение внакрой с креплением брусков между собой болтами, заклепками, гвоздями.
Этот тип соединения, однако, не отличается большой прочностью и надежностью, даже
если применить склеивание по поверхности соприкосновения брусков. Объясняется
это тем, что клеевой шов будет работать на косой срез и отрыв, а площадь его мала.
Большая прочность обеспечивается, если бруски нарезать вполдерева и поставить
одностороннюю кницу из фанеры или древеснослоистых пластиков (ДСП)
(рис. 13.44, б). В этом варианте отсутствует механический крепеж, который лишь незна-
незначительно увеличивает прочность соединения, но может вызывать раскол соединяемых
деталей при деформациях корпуса.
Соединение на двух кницах обеспечивает большую прочность. Оно может иметь
различную конструкцию. Соединение на двух кницах с вклеенным между ними суха-
сухарем (рис. 13.44, в) выполняется следующим образом. Бортовая ветвь шпангоута дово-
доводится до верхней кромки днищевой обшивки или обе ветви срезаются косо
(рис. 13.44, г); с обеих сторон на них наклеиваются кницы, между которыми вклеи-
вклеивается сухарь. После выклеивания всей шпангоутной рамки в ее углах у скулы, если
требуется, делают срезы для прохода скуловых брусьев. Рассматриваемый узел полу-
получается монолитным, без пустот, что приводит к увеличению прочности и долговечности
конструкции. Кроме того, в этом соединении болты, обеспечивающие соединение шпан-
Рис. 13.44. Типы соединений в скуловом узле: а - крепе-
крепежом; б - вполдерева и одной кницей; в, г - двумя кницами
с монолитным заполнителем; д — двумя кницами с бруском
у кромок.
1 — флор; 2 — шпангоут; 3 — болт (заклепка); 4 — кница;
5 — заполнитель; б — стяжной болт; 7 — скуловой стрингер;
8 — коротыш-угольник; 9 — брусок; 10 — угольник с фи-
фигурными полками
365
Рис. 13.45. Соединение киля со шпангоутнои
рамкой: а, б - стяжным болтом; в - коро-
коротышом-угольником.
/ - днищевая ветвь шпангоута; 2 — кница;
3 — стяжной болт; 4 — заполнитель; 5 — киль;
б - обшивка днища; 7 - вырез в книце;
8 — коротыш-угольник; 9 — шурупы; 10 —
оковка киля
гоутных рамок со скуловыми брусьями, пропускаются через скуловой брус и сухарь.
Другой вариант (рис. 13.44, д) — между кницами по их кромкам вклеивается
брусок. Этот тип конструкции несколько проще в изготовлении и имеет меньшую
массу, чем предыдущий. Однако стяжной болт ставить нельзя, поэтому соединение
шпангоутнои рамки со скуловым брусом осуществляется с помощью коротыша-уголь-
коротыша-угольника, поставленного на шурупы по скуловой книце — бортовой ветви шпангоута — и по
скуловому брусу.
Аналогичный вариант конструкции скулового узла используется в случае приме-
применения рамных шпангоутов с целью усиления бортового набора. При этом обеспечивают-
обеспечиваются непрерывность шпангоутнои рамки у скулового узла и усиленная перевязка бортово-
бортового и днищевого набора, что требуется, например, в районе (отсеке) размещения топ-
топливных цистерн (см. рис. 13.24).
На малых судах вместо указанных коротышей-угольников целесообразно приме-
применять угольники, сделанные из листового материала и имеющие фигурные полки, позво-
позволяющие разнести шурупы по большей площади (см. рис. 13.44, д).
а)
E*0.
Рис. 13.46. Кницы килевого (в)
и скулового (б) узлов.
/- днищевая ветвь шпангоута; 2 — килевая кница; 3 - заполнитель; 4 — киль; 5 — ску-
скуловая кница; б — шпангоут; 7 — скуловой брус
366
Соединение деталей набора в килевом узле. Килевой узел соединения связей днище-
днищевого набора на большей части типов судов должен быть сконструирован из расчета
восприятия значительных нагрузок, возникающих в случаях посадки на мель, удара
о грунт, плавания на волнении и пр.
Конструкция соединения связей набора в килевом узле обусловливается размерами
судна, характером обводов, конструкцией киля. Чаще днищевые ветви шпангоутных
рамок — флоры — соединяются между собой у киля с помощью книц, поставленных
с обеих сторон днищевых ветвей шпангоутных рамок.
На судах небольших размерений (L =3-5- 3,5 м) возможно использование простых
вариантов конструкций, аналогичных скуловому узлу (см. рис. 13.44).
Если высота профиля днищевой ветви шпангоута h (рис. 13.45, а) не превышает
100 мм, килевые кницы имеют небольшие высоту и длину и приклеиваются к соеди-
соединяемым ветвям днищевых шпангоутов с обеих сторон. Между кницами над верхними
кромками ветвей шпангоутов вклеивается заполнитель. Нижние углы книц и днище-
днищевых шпангоутов срезаются, с тем чтобы создать водопроток у киля.
Если килевые кницы имеют значительные размеры, как по высоте, так и по длине,
то в них необходимо сделать отверстия диаметром около 30 мм для вытекания избыт-
избытков клея, нанесенного на ветви шпангоутов и на наклеиваемые кницы (рис. 14.45, б).
В рассматриваемом варианте килевого узла соединение килевого бруса со шпаи-
гоутной рамкой проще осуществлять стяжным болтом (см. рис. 13.45,а, б). Если киль
расположен внутри корпуса (отсутствует фальшкиль), тогда соединение киля со шпан-
гоутными рамками обеспечивается коротышом-угольником (рис. 13.45, в).
Размеры книц в зависимости от высоты профиля днищевой ветви шпангоута (фло-
(флора) приведены для килевого узла на рис. 13.46, а, для скулового - на рис. 13.46, б.
При использовании гнутого поперечного набора и резеи-киля клеевые соединения
в таком узле обычно не применяют (см. рис. 13.23, д, е).
Соединения деталей набора в узле сопряжения палубы с бортом. Сопряжение между
собой элементов палубного и бортового набора относится к ответственным и сильно
нагруженным узлам. Конструкция этого узла в основном определяется размерами
и назначением судна.
- На очень малых судах возможно осуществить крепление продольных связей с верх-
верхним концом шпангоута шурупами (рис. 13.47, а) или фигурным угольником
(рис. 13.47, б). На судах средних и больших размерений бимс и шпангоут соединяются
кницами, наклеенными с двух сторон, между ними вклеивается заполнитель (рис. 13.48,
а) или брусок (рис. 13.48, б). Детали конструкции этого узла аналогичны деталям
скулового узла.
В том случае когда шпангоут и бимс имеют значительные пролеты, требуется уси-
усиление перевязки соединяемых деталей в рассматриваемом узле. Это достигается введе-
введением в конструкцию кроме бимсовой кницы несколько уменьшенных размеров под-
подкоса (рис. 13.48, в), например из бакелизированной фанеры. По его кромкам при-
приклеиваются бруски, чем создается пустотелая связь, обладающая хорошей устойчи-
устойчивостью и большой прочностью.
Концы холостых бимсов (в плоскости которых иет шпангоутов) крепят к борту
специально установленными „висячими" полушпангоутами (рис. 13.49, а) или метал-
металлическими кницами (рис. 13.49, б) либо просто нарезают иа внутренний привальный
брус, если он есть.
Перевязка фундамента со связями набора и конструкция фундамента. Фундамент
для катера обычно выполняют из двух балок, надежно перевязанных с поперечными
переборками и набором корпуса. Балки фундамента лучше изготовлять из бакелизиро-
бакелизированной или авиационной фанеры толщиной 6— 1Q мм; по верхней кромке балок ста-
ставится металлический угольник, к которому привариваются или наклёпываются планки,
служащие опорными площадками для двигателя. С противоположной стороны стенки
балки для увеличения ее прочности приклепывается полоса или угольник.
367
a)
Рис. 13.47. Крепление внутреннего при- Рис. 13.49. Крепление концов холостых бимсов:
вального бруса со шпангоутом: а — шуру- а — висячим полушпангоутом; б — металлической
пами; б - фигурным угольником. кницей.
i
/ — шпангоут; 2 — внутренний привальный 1 — полушпангоут; 2 — обшивка борта; 3 — наруж-
брус; 3 — шуруп; 4 — карлингс; 5 — фн- ный привальный брус; 4 — буртик; 5 — настил па-
гурный угольник лубы; 6 — бимс; 7 - болты (заклепки); 8 — кница
Рис. 13.48. Типы соединений в узле сопряжения борта с палубой: а - двумя кницами
с монолитным заполнителем; б-двумя кницами с бруском у кромок; в - кницами
и подкосом.
/—шпангоут; 2 — кница; 3 — стяжной болт; 4 — заполнитель; 5 — бимс; 6 — брусок;
7 — коротыш-угольник; 8 — бруски подкоса; 9 — накладка подкоса (фанера)
Для более простой и надежной перевязки фундаментной балки с днищевыми вет-
ветвями шпангоутов в ее стенке делаются вырезы, размеры и форма которых должны
соответствовать поперечному сечению ветви (рис. 13.50). Балка, имеющая длину,
равную расстоянию от переборки до транца или между переборками, ставится на по-
поперечные связи. Перевязка балки с этими связями осуществляется путем постановки
с двух сторон вертикальных угольников. Полки угольников, расположенные в попереч-
поперечных вертикальных плоскостях, проклёпываются заклепками или стягиваются болтами,
пропущенными через днищевую ветвь шпангоута, а другие полки угольников при-
приклепываются к стенке балки. По нижней кромке балки прикрепляются болтами или
заклепками бруски, длина которых подогнана по месту; обшивка днища крепится
к брускам шурупами, поставленными снаружи корпуса.
На рис. 13.50 приведена конструкция фундамента, предназначенного для установки
стационарного двигателя мощностью до 88,3 кВт A20 л. с), массой около 350 кг.
Двигатель крепится к опорным площадкам толщиной 5 мм, приваренным к уголь-
угольнику размерами 50 X 50 X 5 мм. С целью уменьшения вибрационных нагрузок, пере-
передаваемых фундаментом на набор и обшивку, а также для более простого размещения
368
Б-Б
А-А
19
Рис. 13.50. Фундамент под двигатель и соединение его со связями набора: а - общий вид фундамента; б - соединение днищевой ветвн шпан-
шпангоута с фундаментной балкой.
1 — обшивка днища; 2 — окантовка транца; 3 — обвязка транца; 4 — стойка транц*} 5 — обшивка транца; б - старн-кница; 7-коротыш-
угольиик; 8 - стенка фундаментной балки; 9 - угольник фундаментной балки; 10 - угольник крепления; 11 - двигатель; 12 - опоры -
лапы двигателя; 13 - опорные площадки; 14 - днищевые ветви шпангоутной рамки; 15 - днищевой стрингер; 16 - фундамент углового
реверс-редуктора; 17 - поперечная переборка; 18 - угловой реверс-редуктор; 19 -диван; 20 - заклепки
10
to
12
Рис. 13.51. Соединение киля с транцем: а — металлической кницей; б— металлической кницей,
поставленной на подушку; в - деревянной кницей.
х / — угольник из металлической полосы; 2 — обвязка транца; 3 — стойка транца; 4 — обшивка
транца; 5 — металлическая кница — стари-кница; б — киль; 7 — обшивка днища; 8 — коротыш-
угольник; 9 — шпангоут; 10 — стойка транца, переходящая в его обшивку; И — обшивка тран-
транца; 12 - болты; 13 — деревянная подушка; 14 — деревянная кница — кноп
двигателя по высоте между его лапами и опорной площадкой следует поставить про-
прокладки-амортизаторы из пластика или твердой древесины.
Для крепления углового реверс-редуктора балка имеет подъем к носовой пере-
переборке моторного отсека. К транцу и поперечной переборке фундаментную балку сле-
следует крепить кницами и коротышами-угольниками.
Фундамент под стационарный двигатель имеет большое количество металлических
деталей; с целью снижения массы катера их следует делать из легких сплавов. Соеди-
Соединение киля с транцем должно быть прочным я надежным — особенно у судов с под-
подвесными моторами. Оно осуществляется с использованием мощной кницы — старн-
кницы или кнопа. При сравнительно плоском днище и значительной полноте обвода
транца старн-кница ставится на брус киля и на нижний брус обвязки транца
(рис. 13.51, а). В случае острых обводов в корме, при которых обшивка транца плав-
плавно переходит в широкую его стойку, в рассматриваемом соединении применяется
металлическая кница (рис. 13.51, б). С целью более свободного разноса вертикальных
болтов крепления по ширине киля старн-кницу целесообразно ставить на деревянную
подкладку — подушку; в варианте конструкции с кнопом (рис. 13.51, в)- подушка
не поставлена.
13.6. Конструкции корпуса судов из древесины и фанеры
Среди малых судов любительской постройки наиболее массовыми являются суда из древе-
древесины и фанеры; их конструкция весьма разнообразна. При разработке конструкций корпуса судов
применены оригинальные решения, В качестве примеров рассмотрены корпуса гребных и мотор-
моторных лодок и других судов различных назначений.
Каютная мотолодка/- „Арго-73" (см. табл. 13.9, поз. 29). Поперечный набор корпуса
(рис. 13.52) состоит из шести шпангоутных рамок, две из которых правильнее отнести к полу-
полупереборкам. При этом обеспечена поперечная прочность корпуса при бескничной конструкции
в скуловом и палубном узлах. Последнее обстоятельство позволило наиболее эффективно исполь-
использовать внутренний объем катера. . ' ,
На полотне полупереборки, размещенной на четвертом шпангоуте, для удобства сборки кор-
корпуса днищевой брусок ее обвязки расположен в нос, а бортовой - в корму. Для усиления килево-
килевого узла поставлена килевая кница из фанеры 6=5 мм. Жесткость полотна полупереборки обеспе-
обеспечивается горизонтальными брусками сечением 20 X 30 мм: нижний служит опорным бруском пайо-
ла, а верхний - для крепления оборудования.
Шпангоутная рамка на 3-м шп. с целью упрощения конструкции и отказа от книц больших
размеров по днищу имеет флор, выполненный из брусков толщиной 20 мм; высота его
в ДП 260 мм.
Чтобы при наличии глубокого выреза для подвесного мотора обеспечить транцу достаточные
прочность и жесткость, предусмотрены обвязка из брусков сечением 30 X 60 мм с горизонтальным
370
sat
7 3
ISO
0Л
Рис. 13.52. Конструктивный продольный разрез и сечения по шпангоутам и транцу каютной мотолодки „Арго-73".
1 - форштевень, SO х 50 мм; 2 - киль, 30 х 80; 3 — скуловой стрингер, 20 х 40; 4 - угольник, 3 х 30 х 30; 5 — зашивка подмо-
торной ниши, фанера 6=5 мм; б — бортовой стрингер и привальный брус, 20 х 40; 7 — иастил палубы, фанера 6=5; 8 — обшивка
борта (днища), фанера 6 = 5; 9 — брештук, 40 х 120; 10 — попубимс, 20 х 40; 11 — бортовой шпангоут, 20 х 40; 12 — днищевой
шпангоут, 20 х 40; 13 —опорный брусок, 20 х 30; 14 — килевая кница, фанера 6=5; 15 — полотно переборки, фанера 6 =5;
16 — шергень-планка, 20x40; 17— бимсовая (скуловая) кница, фанера 6=5; 18 — накладка, фанера 6=5 мм; 19 - брусок
^- обвязки транца, 30 х 60 мм
брусом такого же сечения на середине высоты кницы из фанеры 5=5 мм по килевому, скулово-
скуловому и палубному узлам и накладки (фанера 6=5 мм) по горизонтальному бруску. Все бруски по
транцу, поперечные связи шпангоутных рамок и бруски креплений следует делать из сосны 1-го
сорта. Продольные связи набора также изготовлены из сосновых брусков и реек.
Автор этого проекта применил при постройке катера простой и оригинальный вариант сборки
корпуса - бортовые ветви шпангоутных рамок делаются несколько большей длины и их концы
соединяются бруском - шергень-планкой. Такие шпангоутные\рамки удобно ставить на простом
стапеле: они оказываются расположенными иа высоте, необходимой для работы по сборке корпу-
корпуса в положении вверх килем.
Лодка типа джонбота (см. табл. 13.9, поз. 16). Обводы лодки позволяют максимально упро-
упростить конструкцию корпуса, который имеет четыре шпангоута; из них 2-, 3- и 4-й совершенно одина-
одинаковы.
Днищевые и бортовые ветви шпангоутных рамок (рис. 13.53) из брусков 20 X 50 мм перевя-
перевязаны между собой в скуловом узле двусторонними кницами из фанеры 5=4 мм.
Кормовой транец из фанеры 6=6 + 8 мм в верхней части усилен для установки подвесного
мотора фанерой сечением 20 X 150 мм. По верхней части бортовых ветвей обвязки транца постав-
поставлены кницы из фанеры 5=4 + 6 мм. В ДП по обшивке транца сдедана накладка из фанеры сечением
20 X 150 мм. Днищевая и бортовые ветви обвязки транца перевязаны в скуловом .узле кницами
из фанеры 5=4 мм.
Носовой транец конструктивно аналогичен кормовому с той разницей, что по верхней кромке
его обшивки поставлен бимс из сосны сечением 20 X 75 мм, а в ДП - стойка, также из соснового
бруска, 20 X 30 мм.
Продольный набор по днищу состоит из скуловых стрингеров (сосна, 30 X 35 мм), трех фальш-
фальшкилей (сосна, 30 X 30 мм), приклеенных к днищевой обшивке снаружи; по внутренней поверх-
поверхности бортовой обшивки идет бортовой стрингер (сосна, 20 X 30 мм) и снаружи - наружный при-
привальный брус (сосна, 15 X 30 мм). Для усиления верхнего пояска эквивалентного бруса корпуса
у внутренней кромки бортовых шпангоутов врезаны две рейки — внутренний привальный брус
и подлегарс (сосна, 15 X 30 и 15 X 20 мм).
Обшивка днища и борта, а также планширь выполнены из фанеры (авиационной водостойкой)
толщиной на днище — 6, бортах — 4-6, планшире — 6 мм.
Лодка может быть построена с применением в качестве набора штампованных профилей или
цельнометаллической. В последнем случае для обеспечения непотопляемости должны быть преду-
предусмотрены блоки плавучести под банками (рис. 13.54) или под планширем вдоль всего борта.
Мореходная моторная лодка — сампаи (см. табл. 13.9, поз. 23). Наиболее популярна в морях
Дальнего Востока. Характерной особенностью их корпусов являются сравнительно узкое плоское
днище и наклонные борта (рис. 13.55). Кроме того, корпус лодки характеризуется большим полез-
полезным объемом, а конструкция — простотой и надежностью, что исключительно важно в суровых
условиях эксплуаташш. Упрощенные обводы позволяют использовать для обшивки фанеру.
Шп.2-4
Норма
Транец
230 13 п 15
к?
гЧ
636
ШП.1
17
\
-ол
w ш w Ш1Р--
Рис. 13.53. Конструктивный продольный разрез и сечения по шпангоутам и транцам джонбота.
1 — носовой транец, 5=6 мм; 2 — комингс, 6 х 75 мм; 3 — бортовой стрингер, 20 х 30; 4 —
скуловой стрингер, 30 х 35; 5 — фальшкиль, 30 х 30; 6 — днищевая ветвь шпангоута, 20 х 50;
7 — кница, 5=4 (с двух сторон); 8 — бортовая ветвь шпангоута, 20x50; 9 — привальный
брус, 15 х 30; 10 — планширь, 6 х 75; // — брусок комингса, 15 х 30; 12 — подлегарс, 15 х 20;
13 — кница, фанера 8=4 + 6; 14 — подмоторная доска, 20х 150; 15 - транец, фанера 5 =6 + 8;
/6-обшивка борта, фанера 8=4тб; / 7 - обшивка днища, фанера 6=6 мм; 18 — бимс,
20 х 75; 19 — стойка, 20 х 30 мм
372
Рис. 13.54. Конструкция кормовой око-
оконечности и крепление блока плавучести.
/ — привальный брус; 2 — скоба — дер-
держатель удочки; 3 — кормовая банка;
4 — кница; 5 - алюминиевая накладка
под струбцины мотора; 6 - лист фане-
фанеры; 7 — фанерная прокладка; 8 —
шпигат; 9 - подкос транца; 10 -блок
плавучести из пенопласта; // — штампо-
штампованный шпангоут
Ю
Транец и шпангоуты собираются из сосновых или еловых реек (еще лучше дуб) с использова-
использованием фанерных книц. Транец выполнен из двух слоев водостойкой фанеры S по 19 мм, во внутрен-
внутреннем слое для облегчения сделаны вырезы (в стороне от подмоторной ниши).
Для изготовления форштевня рекомендуется подобрать цельный дубовый или ясеневый брус
подходящего сечения либо склеить его из нескольких тонких реек по шаблону. Все рейки продольно-
продольного набора, за исключением днищевых накладок — фальшкилей, устанавливаемых снаружи корпуса
и подверженных усиленному износу, можно изготовить из древесины хвойных пород; для фальшки-
фальшкилей лучше применить дуб или ясень, так же как и для брызгоотбойников и буртиков по верхней
кромке борта.
ВазоЗая линия
I |1 I KTS1JH- IU
Рис. 13.55. Конструктивный продольный разрез и сечения по шпангоутам и транцу сампана.
/ — рейка, 35 х 35 мм; 2 — траиец, два слоя фанеры 5 =19 мм; 3 — утка; 4 — боковые стен-
стенки моторного колодца, фанера 6=10; 5 — носовая стенка колодца, фанера 5=10; 6 - кницы
шпангоутов, фанера 5=10; 7 — обшивка борта, фанера 5=10; 8 - шпангоут, 18x90; 9 —
стойки шпангоутов, 20 х 140; 10 — комиигс, 19x40; // — стыковая планка обшивки, 10x150;
12 — оргстекло 6=6; 13— пульт управления, фанера 5=10; 14 - скуловой стрингер (верх-
(верхний), 19x40; 15 — бимс, 19x88; 16 — лобовой комингс, 38x38; 17— палубный настил,
фанера 8 = 10; 18 — иакладка из твердого дерева; 19— водорез, 13x19; 20 — форштевень,
65 х 65; 21 — брызгоотбойник, 19 х 40; 22 — обшивка днища, фанера 5=12; 23 - скуловой
стрингер (нижний), 30x45; 24 — днищевой полоз, 19x40; 25 — настил елани, 12x90;
26 — днище подмоториой ниши, фанера 5=12; 27 — внутренний привальный брус, 19x40;
28 — палубный стрингер, 19 х 25 мм; 29 — подкрепление, фанера 5 = 12 мм; 30 — водопрото-
водопротоки (в каждом шпангоуте)
373
Рис. 13.56. Конструктивный чертеж дори - продольный разрез, вид сверху и сечения по шпангоутам и транцу.
1 —обвязка транца, S =20 мм; 2 — обшивка борта, фанера 6 =7т 10; 3 — уключина; 4 — подуключина; 5 — привальный брус,
18 х 30 мм; 6 — форштевень; 7 — скуловой стрингер, 18 х 30; 8 — опорный брусок банки, 18 х 30; 9 — бруски для закладной
доски — упор для йог, 18x30; 10 -шурупы; 11 — плавник . (дейдвуд), 18x75 мм; 12 — обшивка транца, фанера 6 =7-г 10;
13 — обшивка днища, фанера 6 = 10-=-12; 14 — стеклоткань; 15 — шурупы крепления обшивки; 16 — банки в оконечностях,
фанера 8 =10; 17 — банка у миделя, фанера 8 = 10; 18 — шпангоут, 25 х 55; 19 — флор, 2S х 140 мм
Процесс сборки корпуса мотолодки обычен для остроскулых лодок с фанерной обшивкой -
он проводится в положении вверх килем; для этого все высоты на теоретическом чертеже указы-
указываются от базовой плоскости стапеля. Поэтому, изготовляя шпангоутные рамки, необходимо борто-
бортовые ветви шпангоутов заготовить длиннее, как это было сделано в проекте „Арго-73" (см. рис.
13.52) или их следует наростить до уровня базовой плоскости соединитьшергень-планками, кото-
которые затем будут ложится на стапель.
Парусно-гребная лодка - дори (см. табл. 13.9, поз. 35). Обводы лодки - сильно заостренные
в оконечностях с небольшим подъемом днища в носу и в корме — не только обеспечивают ей хоро-
хорошие ходовые и маневренные качества, но и позволяют максимально упростить конструкцию: весь
поперечный набор сведен к одной шпангоутной рамке (без бимса) и двум флорам (рис. 13.56).
Лодка „Скиф" (см. табл. 13.9, поз. 36). Конструкция этих лодок применительно к местным
условиям совершенствовалась десятилетиями мастерами-умельцами как отечественными, так и за-
зарубежными. Родина лодки-прототипа - восточные побережья Канады и США, где она широко ис-
использовалась в низовьях больших рек.
Лодка имеет плоское дно (рис. 13.57), в ней отсутствуют бимсы, днищевые ветви и шпангоуты.
Все это существенно упрощает как конструкцию, так и постройку лодки. Поперечное расположе-
расположение досок обшивки на днище облегчает их установку, а также заготовку качественного материала.
Обшивка борта выполняется из продольных досок, идущих от форштевня до транца, либо
из фанеры. Отсутствие поперечных связей по днищу позволяет избежать врезок, кничных соеди-
соединений и пр.
Моторная лодка „Радуга-34" (см. табл. 13.9, поз. 24) оказалась наиболее массовой из семей-
семейства „Радуга". Она предназначена для использования рыболовами и любителями ближнего
туризма.
Корпус имеет килеватую форму с плоским участком - лыжней (в ДП, кормовая оконечность)
и реданы (рис. 13. 58). Это обеспечивает плавный ход на волне и снижает динамические нагрузки
на корпус.
Транец
230
/
п
\
' I
f8
А
1
13
I
Г
20
10
/ я
ц
\ /¦
21 S
1S
Рис. 13.57. Конструкция гребной лодки „Скиф"
1 — форштевень. 75 х 90 мм; 2 — защитная полоса, 2 х 16; 3 — брештук, S =30 мм; 4 — приваль-
привальный брус, 20 х 45; 5 — скуловой стрингер, 25 х 50; 6 — кормовой плавник, 20 х 90; 7 — кница
транца, 6 =30; 8 — носовая байка, 20 х 250; 9 - подлегарс. 20 х 45; 10 — гребная банка, 20 х 350;
11— подушка подуключины; 12 - кормовая банка, 20x400; 13 — кница, 6 =30; 14 — транец
из двух досок, 6 =25; 15 — бортопая ветвь обвязки транца, 25 х 50; 16 — пазовая планка, 20 х 40;
17 — обшивка борта, доска 20 х 150; 18 - шпангоут, 25 х 50; 19 — днищевая обшивка, доска
20x150; 20 — киль, 20x1 00; 21 — пиллерс,. 30 х 30; 22 — буртик, 20 х 30 мм
375
Рис. 13.58. Конструктивный продольный разрез и сечения по шпангоутами транцу „Радуги-34".
1 — бимс, брусок, 30 х 40 мм; 2 — подушка спинки кормового сиденья; 3 — подушки
для диванов; 4 — кормовое сиденье, 6=4 мм; 5 — комингс кокпита, 6=6; 6 - дуга теита;
7 — подушка спинки носового сиденья; 8 — настил палубы, фанера 6=4; 9 — органическое
стекло, s =4; 10 — лобовой лист кокпита, 6 = 4; 11 — бимс, 6 =15; 12 — внутренний приваль-
привальный брус, 10 х 20; 13 — киль, 20 х 40; 14 — бортовой стрингер, 15 х 30; 15 - скуловой стрин-
стрингер, 15x25; 16 — днищевые стрингеры, 10x30; 17 — носовое сиденье, 6 =4; 18 — бортовая
опора для сидений; 19— рецесс, 6=2; 20 — карлингс, 10x20; 21 - бимс, 15x30; 22-
карлингс, 15x20; 23 — бортовая ветвь шпангоута, 15x40; 24 — планка, 24x40x150;
25 — днищевая ветвь шпангоута, 15x45; 26 — заполнитель, -6 = 15; 27 — килевая кница,
6=4; 28 - буртик, 15x15; 29 - полубимс, 6=15; 30 — обшивка борта, фанера 6=3-=-4:
31 - обшивка днища — верхний пояс, фанера 6=4; 32 — обшивка днища - нижний пояс,
фанера 6 =6; 33 — лист 6 =4; 34 — зашивка транца, 6=4; 35 — бортовая и палубная ветви
транца, 20 х 30; 36 — доска, 20 х 125; 37 — днищевая ветвь транца, 20 х 45 мм;- 38 — кница,
6=4; 39 — заполнитель, 6 =20 мм
8 конструкции мотолодки удачно решены перевязка продольных и поперечных связей, а также
соединение ветвей шпангоутных рамок наклеенными кницами. При этом принятые небольшие
размеры связей позволили снизить массу корпуса. Бортовые рундуки дают корпусу дополнительные
жесткость и прочность, а также служат емким хранилищем рыболовного снаряжения.
Особенности конструкции основных деталей и размеры представлены на приведенном рисунке.
Постройка Корпуса этой лодки подробно рассмотрена в журнале (см. табл. 9). При этом автор
Проекта умышленно описал вариант постройки без стапеля, так как в этом случае экономится
время, затрачиваемое на изготовление оснастки.
Мотолодки, сшитые из фанеры, - „Краб" и „Сом" [72]. Конструкция мотолодок отличается
от обычной тем, что необходимые обводы корпуса образуются при его сборке благодаря заранее
размеченным и выпиленным из водостойкой фанеры 6=6 мм в чистый размер листам обшивки
(см. рис. 13.16, ж); при этом изготовление оболочки корпуса сводится к соединению листов по
кромкам скрепками, сделанными из медной проволоки диаметром около 2 мм. После установки
переборки и шпангоутных рамок корпус приобретает заданную ему форму.
376
Конструкция поперечных связей корпуса проста. Шпангоутная рамка состоит из днищевых
{id X 55 мм) и бортовых A6 X 22 мм) ветвей, бимс сечением 16 X 55 мм выклеивается из девя-
девяти реек 16x6 мм. В углах ветви шпангоутной рамки соединены кницами из фанеры 6=6 мм;
у днища эта рамка имеет флор из фанеры 5=6 мм. Для обеспечения большей жесткости днища
в кормовой оконечности корпуса поставлены два стрингера 20 X 25 мм (рис. 13.59, а, б) и флор
20 X 135 мм. Переборка (рис. 13.59, в) имеет также стойку и полотно, идущее от стойки до борта;
жесткость полотна обеспечивается ребрами из бруска размерами 16 X 25 мм.
При постройке такого судна нет необходимости сооружать стапель; можно обойтись ровным
полом или площадкой на открытом свободном участке.
Мотолодка „Суперкасатка" (см. табл. 13.9, поз. б). Конструкция мотолодки проверена не
только на десятках судов, построенных по этому проекту, но и отрабатывалась также на мотолодке
а)
10 11
Рис. 13.59. Конструктивный, чертеж лодок „Краб" и „Сом": а - конструктивный продольный
разрез; б - шпангоутная рамка; в - переборка.
1 — внутренняя зашивка комингса и рецесса, фанера 8 = 6 мм; 2 - облицовочная рейка,
15 х 2S мм; 3 — брусок подмоторной ниши, 25 х 25; 4 - шпангоут, 16 х 32; 5 — ниши для хра-
хранения инструмента, снаряжения; 6 — опорный брусок рулевого сиденья, 25 х 30; 7 — переборка;
8 — оргстекло! — 5 т 6; 9 — шпангоутная рамка; 10 — брештук 6=20; 11 — форштевень 8=24;
12 — брусок-подушка 8 =100; 13 — настнл койки, фанера 6 =4; 14 — флор 8 =20; 15 — полотно
полупереборки, фанера 6=4; 16 - обвязка полупереборки, 25x30; 17 — днищевой стрингер,
20x25; 18 - транец; 19 - бимс, 16x55; 20 - верхняя часть шпангоута, 16x32; 21 - кница
6=6; 22 — нижняя часть шпангоута, 16x32; 23 — полотно переборки, фанера 6=4 + 6; 24 —
нижний брусфс переборки, 16 х 55; 25 — стенка флора, фанера 8=6 мм; 26 — верхний брусок
флора, 16 х 32; 27 — стойка-наличник, 15 х 55 мм
377
Рис. 13.60. Конструктивный продольный разрез, сечения по шпангоутам и переборке.
I - брус форштевня, 60 х 340'х 4S0 мм; 2 - форштевень, 70 х 75; 3 — киль, 25 х 100; 4 — скуловой стрингер, 30 х 60; 5 — бортовой стрингер, IS x 35;
6 — боковые наклонные стенкн рецесса, фанера 8=6 мм; 7 - старн-кница, фанера 8=6; 8 — дно рецесса, фанера 6=6; 9 - поперечная стенка рецесса,
фанера 8 =4; 10 — декоративная накладка, -7 х 30; 11 — комингс, 8 х 70; 12 — внутренняя зашивка комингса, фанера 6 =3; 13 — накладка, 8x22;
14 — рейка, 13 х 40; 15 — наружный комингс рубки, фанера, 6 х 280; 16 — стойка, 25 х 40; 17 — бимс рубки, 30 JT 35; 18 — передняя стенка рубки,
фанера 8 =6; 19 — клин, 40 х 70 х 750; 20 - настил палубы, фанера 6=6; 21 — внутренний привальный брус, 22 х 50; 22 — обшивка борта, фанера
5=6; 23 — брештук скуловых стрингеров, фанера 6=6; 24 — килевая кница, фанера, 6=6; 25 — обшивка днища, фанера 6=8 F) ; 26 — реданы,
25x50; 27-днищевой шпангоут, 22 х 60; 28 - днищевые стрингеры, 15 х S5; 29 — угольник, 3 х 40 х 40; 30 - скуловая кница, фанера 6 =6; 31 —
бортовой шпангоут, 22 х 60; 32 — полубимс, 22 х 110 х 210; 33 — обшивка борта, фанера 6 =6; 34 — наружный привальный брус, 30 х 30; 35 — шта-
пик, 15x15; 36 — бруски обвязки дна рецесса, 30 х 40; 37 — подмоторная доска, 30 х 130; 38 — обшивка транца, фанера 6 =8; 39 — бруски обвязки
стенки рецесса, 25x70; 40 — полотно переборки, фанера 6 =4; 41 — бимс переборки, 20 х 40; 42 — стойка, 15x35; 43 — шельф, 25 х 35; 44 — кар-
лингс, 30 х 40; 45 — опорный брусок, 22 х 35; 46 — комингс, 22 х 1 30; 47 — угольник из полосы, латунь s =2 мм; 48 — наличник двери, 12 х 55 мм
22
,7'
ШпЗ{ш. В нос)
ШпЛ{си 6корми)
Планы
20 21
Шп. 2 (см. S корму)
Транец (см. 6 корму)
Рис. 13.61. Конструктивные чертежи корпуса швербота „Карапуз" — набор палубы,
набор днища, сечения по шпангоутам.
/ — бимс, 15x30x95 0 мм; 2-- карлиигс, 20 х 30 х 360;" 3 — пол у бимс, 20х30х 130;
4 — подкрепление под уключину, 20x100x130; 5 - комингс кокпита, 1 0 х 60 х
х 1500; 6 -обделка кокпита, 8 х 30, / =1500 мм, /, =700 мм; 7 - скуловой стрин-
стрингер, 20 х 30 х 275 0; 8— бимс, 15 х 30 х 800; 9 - бимс, 15 х 3 0 х 600; 10 - карлингс,
20 х 30 х 800; 11 - банка, 20 х 39 х 540; 12 - съемная кормовая банка, 20 х 130 х
хИОО; 13 - подлегарс, 30x65x900; 14 - елань по днищу в кокпите, 10х50х
х 1300; 15 - стенка колодца, фанера 6 =5; 16 - верхняя и нижняя обвязки колодца,
25x60x780; 17 - привальный брус, дуб, 15x20x2700; 18 - обшивка, оргалит
S=4; 19 -обвязка переборок и транца, 15x20; 20 - резен-киль, 15x70x2600;
21 — киль, 10 х 60 х 2600; 22 — носовой транец, 6 =30; 23 — настил палубы, фанера
5=4 мм; 24 — подкрепление под вант-путенс, 20 х 30 х 120 мм
380
a) I:
600 ¦ 600 , 600 ,
Рис. 13.62. Корпус швербота на стапеле
Рис. 13.63. Конструкция каноэ-тримарана: а-поперечная балка; б- г - шпангоуты; д-
общий вид каноэ ; е - размещение шпангоутов.
/ -днище, 6=6 мм; 2 - борт, 6=6; 3 - наружный киль (фальшкиль), 20x25 мм- 4-
скуловой стрингер, 18 х 2S; 5 - форштевень, SO x 7S; 6 - водорез; 7 - металлическая оков-
оковка; 8- нижний брештук, 6=18; 9 - наружный привальный брус (буртик), 18x25; 10 -
носовая палуба, 6=6; // -носовая шпангоутная рамка - бруски, 12x50; 12 - шпангоут
&~12' /5-°«°Ра банки из реек, 2S х 2S; 14 - банка, 2S х 250; 15 - холостой флор, 50 х 12-
/6-стыковая планка, 6 х 120; 17 - мидель-шпангоут; 18 - Накладка, 6 =6; 19 - дно короб-
коробки, 6-6; 20 - поперечная балка коробки - направляющая, 50x50; 21 - балка поплавка
50x75x1244; 22 - подбалочная бобышка, 50x50x150; 23 - болт; 24 - болт Мб х 130-
25-болт фиксатора поплавка Мб х 75; 26 - прокладки; 27 - деревянная шпилька; 28-
транец, доска 6=18; 29 - обделка (планширь) транца, 6=10 мм
00
„Касатка" (см. табл. 13.9, поз. 5). Она имеет гнуто-клееный, набранный из восьми реек, форште-
форштевень (рис. 13.60, а). Верхнюю трапециевидную доску тоже лучше склеить из двух-трех досок, это
гарантирует ее от растрескивания и деформаций в процессе эксплуатации катера. Наружную доску
целесообразно сделать из дуба или ясеня.
Бортовые ветви 1-го шпангоута выпиливаются из широких досок; на них с обеих сторон на-
наклеиваются листы фанеры, между которыми в соответствующих Местах вклеиваются заполнители.
В результате создается флор требующейся прочности и конфигурации.
На шп. 3-6-м (рис. 13.60, б)) поставлены „полубимсы" из доски 6 =22 мм. Кница на шпан-
шпангоуте 2 поставлена между шпангоутом и бимсом. Конструкция шпангоута 7 разработана с учетом
размещения в бортовых нишах бензобаков. Жесткость конструкции обеспечивается продольными
стенками рецесса и.мощной кницей на киле. Обшивка транца вырезается из 8-миллиметровой или
склеивается из двух слоев 4-миллиметровой бакелизированной фанеры. Подмоториая доска надеж-
надежно соединена с обвязкой транца при помощи фанерных книц.
Швертбот „Карапуз" (см. табл. 13,9, поз. 30). Привлекает внимание простотой конструкции
и тем, что удобен в использовании как с веслами, так и под парусом, с которым могут совладать
даже дети; удобен также для перевозки на багажнике легкового автомобиля.
Конструкция корпуса максимально упрощена - шпангоуты отсутствуют. Поперечная прочность
и жесткость корпуса обеспечиваются двумя водонепроницаемыми переборками и транцем (рис.
13.61, 13.62). В использовании связей корпуса оригинальна постановка продольных реек елани не-
непосредственно на обшивку. Этим обеспечиваются местная прочность и жесткость днищевой обшивки.
Для обшивки днища и борта наиболее приемлемым оказался материал оргалит, причем наи-
наиболее водостойким - оргалит коричневого цвета. Его можно ничем не оклеивать снаружи; обшив-
обшивка после небольших повреждений и царапин не разбухает, а следовательно, не требует особой акку-
аккуратности в обращении. Однако поскольку плотность оргалита около единицы, масса обшивки полу-
получается примерно вдвое больше, чем фанерной.
Канозтримаран (см. табл. 13.9, поз. 31). Эта плоскодонная лодка из фанеры (рис. 13.63)
имеет простейшую конструкцию; ее постройка может быть осуществлена начинающим любителем-
судостроителем. Благодаря наличию поплавков по бортам лодки в ней можно вставать во весь рост
(для забрасывания спиннинга) или ее возможно загрузить вещами, грузом, пассажирами (любого
возраста) без опасения опрокинуться. Корпус лодки обшит фанерой и имеет простую конструкцию.
Конструкция корпуса весьма оригинальна. Днищевой набор усилен путем использования проме-
промежуточных (холостых) флоров. В шпангоутных рамках флор со шпангоутом соединены внакрой,
для чего последний существенно расширен внизу.
Последовательность работ при постройке корпуса разобрана в статье, опубликованной в жур-
журнале „Катера и яхты" - КиЯ (см. табл. 13.9, поз. 31).
14. СУДА ИЗ АЛЮМИНИЕВЫХ СПЛАВОВ
14.1. Характеристика сплавов. Полуфабрикаты. Защита от коррозии
Характеристика сплавов. Алюминиевые сплавы обладают малой плотностью, высо-
высокой коррозионной стойкостью, ряд сплавов по механическим свойствам лишь немного
уступает углеродистым сталям.
Алюминиевые сплавы делятся на две основные группы: деформируемые и литейные
[122].
Деформируемые сплавы применяются для изготовления листов, полос, лент, труб,
профилей, проволоки и прутков (путем прессования, прокатки или волочения). Хими-
Химический состав основных деформируемых сплавов, применяемых в судостроении, приве-
приведен в табл. 14.1. Деформируемые алюминиевые сплавы подразделяются на термически
не упрочняемые и термически упрочняемые.
Высокие механические свойства термически упрочняемых сплавов не сохраняются
в местах, подвергаемых повторному нагреву. Прочность сварных соединений деталей
из этих сплавов составляет не более 40—60 % прочности основного металла. В связи
с этим термически не упрочняемые сплавы применяют для сварных конструкций, а тер-
термически упрочняемые — в основном для клепаных.
382
К термически упрочняемым относятся алюминиево-медные сплавы (дюралюми-
(дюралюминий). В их состав кроме меди, магния и кремния — добавок, упрочняющих сплав,
входит марганец, способствующий измельчению структуры сплава. Серьезные недостат-
недостатки дюралюминия — низкая коррозионная стойкость, незначительная прочность и ма-
малая надежность сварных соединений. В настоящее время дюралюминий находит огра-
ограниченное применение в судостроении, особенно в морском.
Термически не упрочняемые сплавы по сравнению с упрочняемыми обладают
меньшей прочностью, но гораздо более высокими коррозионной стойкостью и пластич-
пластичностью, хорошей свариваемостью. К ним относятся: алюминиево-марганцевые сплавы
АМц, которые имеют низкую прочность, но высокую коррозионную стойкость и боль-
большую пластичность в отожженном состоянии, хорошо свариваются; алюминиево-магние-
вые сплавы АМг2, АМгЗ, АМгб, АМг61 и другие с высокими антикоррозионными
свойствами; при содержании магния менее 3 % (по массе) прочность сплавов незна-
незначительна, при большем (выше 5,5 %) прочность увеличивается, но снижаются сопротив-
сопротивление коррозии и пластичность; эти сплавы хорошо свариваются контактной и аргон-
но-дуговой сваркой и удовлетворительно — атомно-водородной и газовой.
Высокопрочный сплав АМг61, полученный на основе алюминия, цинка и магния,
интенсивно упрочняется при термической обработке; полуфабрикаты из него обычно
применяются после закалки и искусственного старения. Его коррозионная стойкость
несколько выше, чем дюралюминия.
Литейные алюминиевые сплавы используют в корпусостроении менее широко,
чем алюминиевые сплавы, обрабатываемые давлением; в них сохраняются основные
положительные физико-химические свойства чистого алюминия. Основные присадки,
вводимые в алюминий, - кремний, магний, медь и цинк — улучшают его литейные
свойства, повышают прочность и твердость, но одновременно уменьшают пластичность,
коррозионную стойкость, тепло- и электропроводность. В судостроении эти сплавы
применяют для отливки деталей любой конфигурации: дельных вещей, деталей судовых
устройств, каютного оборудования и т. п.
Алюминиево-кремниевые сплавы (силумины) АЛ2, АЛ4 и другие широко исполь-
используются для фасонного литья. Алюминиево-магниевые сплавы, по сравнению с силуми-
силуминами обладающие более высокой коррозионной стойкостью и лучшими механическими
свойствами (сплав АЛ8 — магналий - наиболее высокопрочный), имеют намного
худшие литейные свойства.
Механические свойства алюминиевых сплавов (табл. 14.2) зависят не только от
их состава, но в значительной степени и от вида обработки.
Предел прочности на растяжение и предел пропорциональности многих сплавов
достаточно высоки, но относительное удлинение при разрыве по сравнению со сталью
несколько ниже. Недостаток алюминиевых сплавов, обусловленный более низким
(в семь раз) по сравнению со сталью модулем нормальной упругости, компенсируется
лучшим восприятием упругих деформаций. Область упругих деформаций конструкции
из алюминиевых сплавов при одинаковом по сравнению со стальной конструкцией
нагружении поглощает энергии в 3 раза больше (энергия, поглощаемая материалом,
обратно пропорциональна модулю упругости). Поэтому конструкции из алюминие-
алюминиевых сплавов хорошо воспринимают ударные нагрузки.
Низкий модуль упругости алюминиевых сплавов при изгибе балок можно сравни-
сравнительно легко компенсировать, используя балки набора с большим моментом инерции.
Это, как правило, не приводит к усложению конструкции и позволяет обеспечить
экономию в массе до 50 %.
Пределы усталости сплавов АМг5,.АМг6 и дюралюминия Д16АТ при 10-Ю6 цик-
циклах близки по величине и составляют для гладких образцов 122 и 137 МПа соответ-
соответственно несмотря на значительно большую разницу в пределах текучести. Пределы
усталости сварных соединений несколько ниже.
383
Таблица 14.1.
Обозначение марок
буквенное
АМг2
АМгЗ
АМг4
АМг5
Амгб
АМг61*
АМг61Н* *
Д1
Д16
В 65
В 95
цифровое
1520
1530
1540
1550
1560
-
-
1110
1160
1165
1915
1925
1950
медь
0,1
0,1
0,1
од
0,1
-
-
3,8-4,8
3,8-4,9
3,9-4,5
0,1
0,1
1,4-2,0
магний
1,8-2,6
3,2-3,8
3,8-4,5
4,8-5,8
5,8-6,8
5,5-6,5
5,5-6,5
0,4-0,8
1,2-1,8
0,15-0,30
0,3-1,8
1,3-1,8
1,8-2,8
Химически!
марганец
0,2-0,6
0,3-0,6
0,65-0,8
0,3-0,8
0,5-0,8
0,8—1,1
0,6-0,8
0,4-0,8
0,3-0,9
0,3-0,5
0,2-0,6
0,2-0,7
0,2-0,6
[состав
цинк
0,2
0,2
0,2
0,2
0,2
-
-
0,3
0,3
0,1
3,4-4,0
3,4-4,0
5,0-7,0
* Содержание циркония 0,02—0,12%.
"""Содержание циркония 0,01-0,15%.
Примечание. Сумма прочих примесей в каждом из сплавов составляет 0,1 %•
Алюминиевые сплавы хорошо выдерживают вибрационную нагрузку, поэтому
они могут быть с успехом применены для изготовления корпусных конструкций, под-
подверженных действию периодических усилий. Они обладают несколько большей чувстви-
чувствительностью к концентрации напряжений; сплав АМг5 менее, чем АМгб и АМгЗ, скло-
склонен к хрупким разрушениям и не уступает в этом отношении корпусным сталям. Плот-
Плотность сплавов в зависимости от марки сплава меняется незначительно — от 2640 до
2700 кг/м3.
Полуфабрикаты — профили, листы, трубы, прутки, проволока, фольга, изготовляе-
изготовляемые из алюминиевых сплавов, обрабатываемых давлением, находят в малом судо-
судостроении все более широкое применение.
Профили в виде угольников, полособульбов, тавров, двутавров, зетовые профили
и т. д. (рис. 14.1) поставляются по сортаментам. При этом изготовляют полособульбы
симметричного и несимметричного профилей. Их стенки в зависимости от способа
присоединения профиля к обшивке имеют различное очертание: профили, применяемые
для сварных конструкций, имеют форму поперечного сечения, аналогичную стальным;
профили, применяемые в клепаных конструкциях, имеют широкую полку у основа-
основания [102].
Профили из алюминиевых сплавов изготовляют в основном путем прессования,
поэтому им можно придавать любую достаточно сложную форму. Благодаря этому
резко сокращается, а в ряде случаев совершенно отпадает необходимость клепки
и сварки. Кроме профилей — угольника, полособульба и других, поставляемых по
384
Химический состав алюминиевых сплавов
(добавки к алюминию), % по массе
железо
0,4
0,5
0,4
0,5
0,4
-
-
0,7
0,5
0,2
0,4
0,7
0,5
кремний
0,4
0,5-0,8
0,4
0,5
0,4
-
-
0,7
0,5
0,25
0,3
0,7
0,5
никель
—
-
-
-
-
-
-
0,1
0,1
-
-
-
0,1
титан
0,1
ОД
0,02-0,1
0,02-0,1
0,02-0,1
-
-
0,1
0,1
0,1
0,1
0,1
-
хром
0,05
0,05
0,05-0,025
-
-
-
-
-
-
-
0,08-0,2
0,2
,0,10-0,25
бериллий
_
-
0,000 2-0,005
0,000 2-0,005
0,000 2-0,005
0,000 1-0,003
0,000 1-0,003
-
-
-
-
-
-
ГОСТу, — используют профили, нормализованные ведомственными документами и по-
поставляемые заводами авиационной промышленности по договоренности. Длина профи-
профилей всех сечений и размеров — от 6000 до 9000 мм. Наибольшая ширина листового
проката может достигать 2000, длина — 7000 мм. Рифленые листы, изготовляемые
путем рифления гладких листов с одной стороны, выпускают толщиной 2—6 мм при
ширине 400—600 и длине до 2000 мм.
Трубы могут быть холоднотянутые и горячепрессованные. Способ изготовления
зависит от наружного диаметра трубы. Наименьший наружный диаметр труб из алю-
алюминиевых сплавов 6, наибольший — 280 мм, толщина стенки колеблется от 0,5 до
32,5 мм.
Прутки круглые, шестигранные, квадратного и прямоугольного сечений предназ-
предназначены для изготовления деталей механической обработкой, ковкой и штамповкой.
По способу изготовления различают прессованные, тянутые и катаные прутки. Диаметр
круглых прутков (или диаметр описанной окружности для квадратных и шестигранных
прутков) изменяется от 5 до 200—300 мм.
Проволока в зависимости от назначения может быть двух видов: сварочная и для
холодной высадки. Диаметр сварочной проволоки в нагартованном состоянии 1-12 мм,
диаметр проволоки для холодной высадки, согласно ТУ, — от 1,6 до 11,76 мм. Алюми-
Алюминиевая фольга может иметь толщину 0,005—0,200 мм.
Все рассмотренные выше полуфабрикаты поставляют в отожженном, нагартован-
нагартованном или полунагартованном состояниях.
13 Зак. 738
385
/лблице /4. 2» Мвхвнмчоскиб свойстве основных явиболвв рвспрострвинвиых си левов
Марка сплава
1520
(АМг2)
1530 -
(АМгЗ)
ГОСТ, ТУ
21631-76
8617-81
21488-76
21631-76
8617-81
21488-76
Вид полуфабриката Состояние поставки, маркировка
f
Листы иеплакиро-
ванные
Профили
Прутки
Листы неплакиро-
ванные
Профили
Прутки
•
Без термической обработки,
1520 (АМг2)
Отожженные, 1520М (АМг2М)
Полунагартованные,
15201/2Н(АМг2)
Нагартованные,
1520Н (АМг2Н)
Горяче прессованные,
1520 (АМг2)
Без термической обработки,
1520(АМг2)
Без термической обработки,
1530 (АМгЗ)
Отожженные, 153ОМ (АМгЗМ)
Полунагартованные,
15301/2Н
(АМгЗ 1/2Н)
Горячепрессованные,
1530 (АМгЗ)
Без термической обработки,
1530 (АМгЗ), и отожженные, 1530М
(АМгЗМ)
Толщина,
диаметр, мм
5-10,5
1,0-10,5
0,5-1,0
1,0-5,0
5,0-10,5
1,0-10,5
4>даЗОО
5,0-6,0
6,0-10,5
0,5-0,6
0,6-4,5
4,5-10,5
0,5-1,0
1,0-5,0
5,0-10,5
«до 300
Временное
сопротивле-
ние разрыв]
<Ъ, МПа
(кгс/мм1)
176,4A8
166,6 A7)
235,2B4)
235,2B4)
225,4B3)
264,6B7)
Не более
147A5)
176,4A8)
186,2A9)
186,2A9)
196,0B0)
196,0B0)
186,2 A9)
245,0B5)
245,0B5)
295,0B4)
176,4A8)
176,4A8)
Предел
текучести
,2 > МПа
(кгс/мм*)
—
147A5
147A5)
137,2A4)
215,6B2)
58,8F)
—
78,4(8)
78,4(8)
88,2(9)
98,0A0)
78,4(8)
196,0B0)
196,0B0)
176,4A8)
78,4(8)
78,4(8)
Относительное
удлинение S, %
«5
—
-
—
—
-
19
13
—
—
—
-
-
—
-
12
12
8,,
7,0
16
5
6
6
3
—
12
15
15
15
15
7
7
6
—
-
Продолжение табл. 14. 2.
Марка сплава
1540
(АМг4)
1550
(АМг5)
1551
(АМг5Н)
1560
(АМгб)
1561
(АМг61)
ГОСТ, ТУ
1
ТУ 1-1-81-81
21631-76
8617-81
21488-76
14838-78
21488-76
8617-81
21631-76
ОСТ 1-92073-78
ОСТ 1.92059-78
ОСТ 1.92058-78
ТУ 12-61-81
Вид полуфабриката
Листы неплакиро-
ванные
Тоже
Профили
Прутки
Проволока
для заклепок
Прутки
прессованные
Профили
прессованные
Листы плакирован-
плакированные
Листы с технологи-
технологической плакиров-
плакировкой
Профили
Прутки
Листы с технологи-
технологической плакиров-
плакировкой
Состояние поставки, маркировка
Отожженные, 1540М(АМг4М)
Без термической обработки,
1150(АМг5)
Отожженные, 1550М (АМг5М)
Горячепрессованные, 1550 (АМг5) ,и
отожженные, 1550М(АМг5М)
Без термической обработки,
1550 (АМг5)
Нагартованная, 1551Н (АМгЗПН)
Без термической обработки,
1560 (АМгб)
Отожженные, 1560М(АМг6М)
Без термической обработки,
1560 (АМгб)
Отожженные, 1560М(АМг6М)
Без термической обработки,
1560Б(АМг6Б)
Отожженные, 1560БМ(АМг6БМ)
Без термической обработки,
1561Б(АМг61Б)
Отожженные,
1561БМ(АМг61БМ)
Горячепрессованные, 1561 (АМг61)
Отожженные, 1561М(АМг61М)
Нагартованные с последующим от-
отпуском, 1561НБН(АМгб1НБН)
Толщина,
диаметр, мм
1,0
1.5-4,0
5,0-6,0
6,0-10,5
0,5-0,6
6-4,5
4,5-10,5
ф 5,0- 300,0
«1,4-10,0
ф 5-300
Ф5-30О
—
—
5,0-10,5
0,5-0,6
0,6-10,5
5,0-10,0
0,8-3,5
3,5-4,5
05,0-300,0
2,0-12,0
14,0-16,0
Временное
сопротивле-
Ов, МПа
(кгс/мм1)
235,2B4)
235,2B4)
274,4 B8)
274,4 B8)
274,4 B8)
274,4B8)
274,4 B8)
254,8 B6)
264,6B7)
Предел
текучести
"о 2' **^а
(кгс/мм*)
98,0A0)
117,6A2)
127,4A3)
127,4A3)
137,2A4)
147,0A5)
127,4A3)
127,4A3)
117,6A2)
Сопротивление срезу
156,3A6)
313,6C2)
313,6C2)
313,6C2)
313,6C2)
303,8 C1)
313,6C2)
333,2C4)
313,6C2)
333,2C4)
333,2 C4)
333,2C4)
352,8 C6)
333,2 C4)
156,8 A6)
156,8A6)
156,8A6)
156,8 A6)
147,0A5)
156,8 A6)
176,4 A8)
156,8 A6)
176,4A8)
205,8 B1)
_
205,8 B1)
245,0B5)
225,4B3)
Относительное
удлинение 6,%
«5
15
15
-
-
—
—
—
13
15
-
15
15
15
-
—
_
_
—
_
11
_
11
10
12
.6.0
-
12
15
15
15
15
-
-
-,
-
—
—
15
15
15
12
12
15
_
_
_
_
-
Примечание. Площадь поперечного сечения до 200 см1..
a)
1
„ ъ
В). Ъ
Рис. 14.1. Профили из алюминиевых сплавов, применяемые в судовых конструкциях: а -
равнобокий угольник F =12 + 140, s =1,3 -ь 10,0, гг =13 + 2,0, г , =0,65 -5-6,50); б-равно-
бокий угольник E=16 + 200, й=13 + Г20, s =1,5 +14,0, гг =1,6 + 14,0, /•, =0,8 -5-5,5); в-
симметричный полособульб (А =40 + 200, 6=15-5-58, s=2,5-r8, /-=2 + 10, г =2 + 10); г —
несимметричный полособульб (А =40 + 160, 6 = 10 + 38, s=2,5+7,0, /•=/-, =3+9); д -
тавровый профиль с тонким пояском (А =40 + 200, 6=30 + 60, s =2,5+5,0, s, =4 + 8, rl =
= 2 + 6); е -тавровый профиль с толстым пояском (А =50 + 330, 6=18 + 160, s=3 + 12,
s, =7 + 18, г =0,5 + 2, г, =4 + 20); х - двутавровый профиль с тонким пояском (А =100 +
+ 200, 6 = 38 + 80, 6, =38,+40, s =1,8 + 5, s, =2+6, г =0,2 + 2,0, rl =3); з -двутавровый
профиль с толстым пояском (А =150; 230,6=54; 80,6, =40; 54; s =3; 6,5, s, =2,5; 9, s, =
= 3; 8,/- =2,г, =3,4); и - равнобокий угольник с толстой полкой (А =25+65,6= 20 + 50,$ =
= 4 + 12, J, =2 + 5,/- =/•, =0,5 + 3, г, =2 + 6); к - углобульбовый профиль (А =20; 25; 75,
В =15; 20; 30,6=5; 6; 14, s =1,5; 2; 4, /-, =2,5; 3; 13,г, =2; 2; 4, /•,, =0,75; 1; 2);л-
углобульбовый профиль (А =40 + 155, В=25 + 65, 6 = 10 + 20, ^=2,5 + 6,5, г =3 + 9, /-, =
= 3 + 5, г, =3,0 + 6,5); м -зетовый профиль (А =20 + 100, 6=15+60, s =s, =jj =1,2 + 5,0,
2 60)
Состояние полуфабрикатов и деталей, а также вид их обработки обозначаются
буквами, прибавляемыми к маркам сплава (например, АМг5П; АМгбТ; АМг61Н):
Закалка и естественное старение. . * - • Т
" " искусственное старение Т1
Нагартованное состояние Н
Полунагартованное состояние П
Отожженное состояние М
Плакировка А
Технологическая плакировка Б
Из алюминиевых сплавов изготовляют следующие виды корпусных конструк-
конструкций, судовых устройств и систем:
388
АД1 — резервуары и трубопроводы пресной воды, масла и топлива;
АМг2 - детали и конструкции, изготовляемые из полуфабриката (прокат и прессованные
изделия), не рассчитываемые на прочность, подвергающиеся сварке, работающие
при температуре не более 100 °С: переборки; сварные резервуары для жидкостей
(кроме щелочей и кислот); детали, изготовляемые штамповкой с глубокой вы-
вытяжкой; вентиляционные трубы; зашивки; декоративные изделия;
АМгЗ — детали и сварные конструкции, изготовляемые из проката и прессованных полу-
полуфабрикатов, работающие при температуре до 150 °С; переборки и выгородки; труб-
трубчатые подогреватели; трубы вентиляции; дельные веши; трубопроводы пресной
воды, масла и топлива;
АМг5 — корпусные сварные конструкции: обшивка и набор судового корпуса; рубки;
мачты; иллюминаторы; дельные вещи; каналы системы вентиляции; фланцы трубо-
трубопроводов из алюминиевых сплавов; корпуса редукторов; фундаменты; мебель;
крепежные и другие детали, работающие при температуре не более 100 ° С;
АМг5П - проволока для заклепок диаметром до 10 мм, применяемых для соединения кон-
конструкций из алюминиевых сплавов как между собой, так и со стальными конструк-
конструкциями;
АМгб — набор корпусов судов; детали, изготовляемые из поковок и штамповок, работаю-
работающие при температуре не более 80 ° С;
АМг61 - обшивка; сварной набор корпуса и другие детали, работающие при температуре
не более 80 ° С; крепежные детали; '
АМг61Н -корпусные сварные конструкции быстроходных судов, прочность которых должна
быть выше прочности конструкций из сплава марки АМгб1; детали, работающие
при температуре не более 80 ° С;
Д16 - клепаные корпуса, при этом используют дюралюминий марок Д16АТ - для листо-
листового материала и Д16Т - для профильного (применяют только плакированные
листы);
В65 — заклепки для конструкций из сплава Д16;
АЛ2, АЛ4 — детали, не соприкасающиеся с морской водой, работающие при обычных темпера-
температурах в сухих внутренних помещениях: кожухи, кронштейны, рукоятки, крышки
подшипников;
АЛ8 — детали, работающие при нормальной температуре, не подвергающиеся длительным
нагревам более 40 °С, не имеющие резких переходов в поперечных сечениях и не
испытывающие ударные нагрузки: арматура трубопроводов пресной воды, масла
и топлива.
Защита конструкций от коррозии. Алюминий обладает высокой коррозионной
стойкостью в различных корродирующих средах благодаря тому, что окисная пленка
на его поверхности повышает нормальный потенциал от —1,66 до 0,5 В. Такая же за-
защитная окисная пленка образуется и на поверхности алюминиево-магниевых спла-
сплавов. Присадки и различные включения Несколько уменьшают коррозионную стойкость
алюминиевых сплавов. Сварные соединения алюминиево-магниевых сплавов обладают
достаточно хорошей коррозионной стойкостью.
Коррозионная стойкость дюралюминия намного ниже коррозионной стойкости
чистого алюминия, алюминиево-магниевых и алюминиево-марганцевых сплавов.
Наиболее эффективным и надежным из многочисленных способов защиты алюми-
алюминиевых сплавов от коррозии является электрохимическое оксидирование. Окисные
(оксидные) пленки, образующиеся при оксидировании, отличаются от естественных
значительно большими толщинами и плотностью. Благодаря окисной пленке, которая
в большинстве случаев оказывается весьма пористой, увеличивается сила сцепления
с поверхностью металла красок и лаков, наносимых после оксидирования.
Большое влияние на.коррозионную стойкость литейных сплавов оказывают процес-
процессы плавки и литья. Некачественные отливки склонны к коррозии даже после электро-
электролитического оксидирования их поверхности. Следует избегать контакта алюминиевых
сплавов с другими материалами. Напряжения и деформации, возникающие в конструк-
конструкциях при их эксплуатации, увеличивают скорость коррозии.
Электрохимическое оксидирование сводится к анодовой обработке деталей в ванне
с соответствующим электролитом. В процессе электрохимического оксидирования —
анодирования при прохождении тока через электролит — на аноде выделяется кисло-
389
род, который, взаимодействуя с алюминием, находящимся в сплаве, образует пленку,
состоящую из окиси алюминия.
Сернокислотный способ оксидирования находит широкое применение вследствие
его простоты. Обработанные по этому способу алюминиевые сплавы обладают весьма
высокой коррозионной стойкостью, окисные пленки — хорошей адгезионной способ-
способностью. Кроме того, это способ более экономичен по сравнению с другими.
Пленки, полученные сернокислотным способом на изделиях, не подлежащих ад-
адсорбционной окраске, перед нанесением лакокрасочных покрытий необходимо допол-
дополнительно обрабатывать (наполнять) в растворе двухромокислого калия; наполнение
производят сразу после оксидирования.
Выбор способа оксидирования прежде всего зависит от назначения покрытия.
Если создают защитно-декоративное покрытие, то можно применить сернокислот-
сернокислотное анодное оксидирование с последующей адсорбционной окраской. Если необходимо
получить защитное покрытие и одновременно обеспечить хорошую адгезию лакокрасоч-
лакокрасочных покрытий, то следует использовать сернокислотное анодное оксидирование с по-
последующими уплотнением и грунтовкой. Защитно-декоративное покрытие с высокими
защитными свойствами и повышенной износостойкостью получают, используя хромо-
вокислотное зматалирование с последующими уплотнением и адсорбционной окраской.
Для защиты от коррозии изделия и конструкции окрашивают — грунтуют, а затем
наносят лакокрасочное покрытие: сварные корпуса из алюминиево-магниевых сплавов
окрашивают после их изготовления, клепаные корпуса из дюралюминия — после окси-
оксидирования и уплотнения пленки на их поверхностях. При необходимости рекомендуется
применять протекторную защиту корпуса из сплава.
Следует также учитывать, что у корпусов судов из сплавов сильная коррозия
, возникает при воздействии на них влажной морской атмосферы. В связи с этим перед
сравнительно длительным хранением судов на морском берегу на их металлические
поверхности необходимо нанести солидол, тавот или другое „жировое" покрытие.
14.2. Соединения в конструкциях из алюминиевых сплавов
Виды соединений деталей из алюминиевых сплавов. Детали и заготовки судовых
конструкций из алюминиевых сплавов соединяют между собой при помощи электро-
электродуговой, газовой, контактной и холодной сварки, клепки и пайки (начинают применять
клеесварные соединения, склеивание) и присоединяют к деталям из других материалов
(дерево, пластические материалы, стекло и др.) при помощи клепки.
В судостроении все шире применяют хорошо сваривающиеся алюминиевые сплавы.
Поэтому наиболее часто детали соединяют при помощи электродуговой сварки непла-
вящимися или плавящимися электродами в среде защитного газа.
Клепку используют лишь при изготовлении конструкций из алюминиевых сплавов,
не допускающих сварку (например, из сплавов типа дюралюминия), тонкостенных
конструкций, в которых возникают большие деформации после сварки, а также в слу-
случаях соединения деталей из алюминиевых сплавов с другими материалами и для введения
в сварную конструкцию более податливых заклепочных соединений.
С начала 70-х гг. осваивают клеесварные соединения (склеивание и контактная
сварка) Деталей судовых конструкций из алюминиевых сплавов. Применение новых
клеев, приготовленных на основе искусственных смол, позволяет получать достаточно
совершенные соединения, которые при необходимой прочности обеспечивают высокую
коррозионную стойкость конструкций.
Болтовые соединения применяют сравнительно редко и используют в основном
для монтажных и разъемных соединений, а также для крепления двигателей, вспомога-
вспомогательных механизмов, съемных листов, легких изделий. Болты изготовляют из прочных
сплавов.
390
В разъемных соединениях широко применяют стальные болты. При сборке деталей
в секции перед клепкой болты ставят в каждом втором — пятом отверстии для закле-
заклепок, в зависимости от размеров деталей и конфигурации конструкции.
Заклепочные соединения. Заклепочные соединения деталей из алюминиевых спла-
сплавов, аналогично заклепочным соединениям стальных конструкций, 'делят:
по виду склепываемых деталей (соединения листов, профилей, профилей с листами,
листов и профилей с поковками и отливками); ¦
у по назначению шва (прочные, плотные и прочноплотные; к прочным швам
предъявляют требования прочности без обеспечения непроницаемости или герметично-
герметичности, к плотным — только требования непроницаемости, к прочноплотным — требования
прочности н плотности);
по типу закладных головок заклепок (с полукруглой - рис. 14.2, а, с плоской -
рис. 14.2, б\ с потайной 90° - рис. 14.2, в;с потайной 120° - рис. 14.2, г; с плоско-
плосковыпуклой — рис. 14.2, д; с трубчатой — рис. 14.2, е). Эти заклепки могут изготовлять-
изготовляться под развальцовку — с отверстием у конца заклепки (см. рис. 14.2, д). Кроме того,
выпускают трубчатые заклепки (см. рис. 14.2, ё).
Тип заклепки выбирают в зависимости от требований, предъявляемых к заклепоч-
заклепочному соединению: по расположению заклепок (однорядные и многорядные, шахмат-
шахматные или цепные); по виду соединения (внакрой, встык с односторонней планкой,
встык с двусторонней планкой).
Основные элементы заклепочных соединений (рис. 14.3, л, б): диаметр заклепок
d, число рядов п, расстояние между рядами заклепок с, шаг заклепок t - расстояние
между центрами заклепок в одном ряду, отстояние центра заклепок от кромки листа
e, перекрой Ъ, отстояние центра заклепки от угла профиля е t.
Рис. 14.2. Типы заклепок в зависимости от формы заклад- Рис. 14.3. Элементы заклепочных
них головок: а — полукруглая; б — плоская; в, г —потай- соединений: в — при склепыва-
ная; д - плоско-выпуклая; е - трубчатая нии деталей внакрой; б - в слу-
случае присоединения профиля
391
Элементы, заклепочного соединения определяют исходя из расчетной толщины
соединяемых деталей: при склепывании листов за расчетную принимают, как правило,
толщину более тонкого листа, при склепывании листов е профилями — среднеарифме-
среднеарифметическое из толщин склепываемых деталей.
Параметры заклепочного соединения назначают в долях от номинального диаметра
d заклепки до ее расклепывания. Диаметр заклепок для судовых конструкций толщи-
толщиной до 4 мм рекомендуется принимать равным двойной толщине склепываемых дета-
деталей; для более толстого материала диаметр постепенно меняется: от величины, равной
двум толщинам детали, до одной ее толщины (например, для деталей толщиной 6 мм —
d = 10 мм, для деталей толщиной 11—15 мм — d = 16 мм). При этом суммарная толщи-
толщина нескольких склепываемых листов или деталей не должна превышать 4d заклепок.
Длина заклепки равна суммарной толщине склепываемых листов плюс величина d,
принимаемая в зависимости от типа замыкающей головки заклепки; 0,9с? — для по-
потайной, 1 ,Ы - полупотайной, 1,2d - плоской, 1 $d - дня полукруглой.
Для соединения деталей из алюминиевых сплавов часто применяют однорядные
и двухрядные соединения: однорядными выполняют прочные швы (клепка обшивки
к набору), двухрядными — водонепроницаемые швы (пазы и стыки обшивки, пере-
переборок, палуб). Трехрядные швы применяют только для бензо- и газонепроницаемых
соединений. В сильно нагруженных конструкциях число рядов заклепок в прочных
швах устанавливается расчетом и может быть более трех.
Расстояние между рядами заклепок обусловливает прочность и плотность закле-
заклепочного соединения; его принимают в зависимости от требований, предъявляемых
к соединению: для прочно-плотных и прочных швов — 2d\ для прочных швов — B т
Шаг заклепок в соединениях элементов корпуса судна назначают в зависимости
от требований к заклепочному соединению: например, в прочноплотных и плотных
швах по пазам наружной обшивки — D,5 -r 5,5)d, в нефте- и газонепроницаемых швах
с применением герметиков — C -M)d.
Заклепки от кромки листа или накладной планки располагают на таком расстоянии,
чтобы при действии на заклепочное соединение разрушающих нагрузок более слабым
элементом оказались заклепки, работающие на срез, (рис. 14,4,а), а не лист, работаю-
работающий у заклепок на смятие и вырыв кромок (рис. 14.4, б). Поэтому отстояние заклеп-
заклепки от кромки листа или накладной планки должно быть равно 2d (см. рис. 14.4,я),
как исключение допускается 1,5 d.
Соединения листов на стыковых планках по расположению заклепок конструи-
конструируют аналогично рассмотренным соединениям листов. Размеры соединительных пла-
планок принимают следующими:
ширина односторонней планки должна быть равна удвоенной величине перекроя,
толщина равна меньшей из толщин склепываемых листов;
толщина двусторонней планки без зенкования отверстий должна быть равна поло-
половине толщины меньшего из склепываемых листов, округленной в большую сторону
до ближайшего целого числа; ,
толщина планок с зенкованием отверстий принимается по таблице нормали и при-
примерно равна половине диаметра заклепок данного соединения.
Диаметр отверстий под заклепки должен быть несколько больше диаметра за-
заклепок, мм:
Диаметр заклепок... 3,0 4,0 5,0 6,0 7,0 8,0 10,0 13,0 16,0 19,0 22,0
Диаметр отверстий... 3,1 4,1 5,1 6,2 7,2 8,2 10,2 13,2 16,25 19,25 22,5
v Заклепки изготовляют из различных материалов. Материал заклепки указывается
маркировочными знаками на ее головке — выпуклыми (конусыдочки, черточки)
или утопленными (рис. 14.5).
392
Рис. 14.4. Характер разрушения заклепочного
Соединения:а - срез заклепок; б - вырыв
кромок
Клепаные судовые конструкции в ос-
основном изготовляют из термически уп-
упрочняемых сплавов марок Д1 и Д16 в за-
закаленном и состаренном состоянии и ре-
реже из термически не упрочняемых спла-
сплавов марок АД, АД1, АМгЗ, АМг5 и др.
Марку материала для заклепок необхо-
необходимо выбирать в зависимости от материа-
материала соединяемых деталей: для соединения
деталей из сплавов Д1 и Д16 следует
применять заклепки из сплавов В 65 и
Д18П; для деталей из сплавов АД, АД1 и
АМгЗ, соединяемых между собой, а также со сталью, следует применять: заклепки из
сплава АМг5П, если диаметр заклепок менее 10 мм, и из сплава АМг5 — при большем
диаметре.
Во избежание контактной коррозии в соединениях алюминиевых деталей со стальны-
стальными заклепки должны быть сделаны из материала, однородного материалу детали,постав-
ленной со стороны действия агрессивной среды. Для заклепок следует использовать
сплавы Д18П и B6S в закаленном и состаренном состоянии без ограничения времени,
сплавы АМг и АМг5П в отожженном состоянии без ограничения времени, сталь — с пред-
предварительным отжигом.
Детали клепаных конструкций судов из термически упрочняемых сплавов должны
быть оксидированы перед сборкой и загрунтованы сначала грунтом ВЛ-02, а потом —
двумя слоями грунта ФЛ-03Ж. Допускается клепка по сырому грунту.
Места сопряжения деталей из алюминиевого сплава со сталью следует до сборки
покрыть с обеих сторон грунтом ВЛ-02, а затем слоем эпоксидной краски ЭП-755
(ЭШЭЛ) или разбавленной шпаклевки ЭП-00-10.
Для обеспечения плотного соединения склепываемых деталей перед началом клепки
их обжимают сборочными болтами, установленными через каждые 2—4 отверстия;
болты снимаются при клепке по мере постановки заклепок. Заклепки нефте-, масло-
и газонепроницаемых швов, поставленные в соединениях конструкций из листов толщи-
толщиной до 3 мм, должны иметь под закладной и замыкающей головками шайбы из алюми-
алюминиевых сплавов.
При соединении деталей узлов или секций из материалов различной толщины или
прочности клепку выполняют со стороны более толстого или более прочного материала.
Сварные соединения. При постройке корпусов судов из сваривающихся алюминие-
алюминиевых сплавов используют главным образом электродуговую сварку неплавящимися
или плавящимися электродами в среде защитных газов, которая может быть автома-
автоматической, полуавтоматической и ручной.
в)
Рис. 14.5. Обозначение марки сплава маркировочными знаками: а — Д18П —
одна точка; б - АМг5 - две точки; в - АМц - три точки; г - АД1 - черта
393
Автоматическую и полуавтоматическую сварку плавящимся электродом выпол-
выполняют на постоянном токе обратной полярности; сварку неплавящимся электродом
ведут на переменном токе. При автоматической сварке в защитном газе плавящимся
электродом автомат должен обеспечивать равномерную подачу сварочной проволоки,
необходимую скорость ее движения и надежную защиту шва и сварочной ванны. Для
полуавтоматической сварки в защитном газе плавящимся электродом могут быть
использованы полуавтоматы, обеспечивающие равномерную передачу сварочной про-
проволоки и хорошую защиту металла шва и сварочной ванны. Ручную аргонно-дуговую
сварку алюминиевых сплавов неплавяшимся электродом выполняют на переменном
токе при помощи установок УДАР-300-5, УДАР-500-5 или ИПК-350. Сварочный пост
должен быть смонтирован по схеме, приведенной на рис. 14.6. ,
Выбор вида сварки обусловлен положением сварочного шва в пространстве, его
протяженностью и конфигурацией. Автоматическую сварку применяют при выполнении
прямолинейных швов в нижнем положении. В судостроении детали толщиной от 1,5—2,0
до 4 мм обычно сваривают неплавящимся электродом; детали толщиной 0,5-2,0 мм
сваривают газовой сваркой, производительность которой сравнительно низка, или
применяют микроплазменную сварку. Полуавтоматическую сварку используют при
выполнении криволинейных и коротких' швов, потолочных и вертикальных швов,
т. е. в тех случаях, когда автоматическая сварка нецелесообразна или невыполнима.
Ручную сварку можно применять для выполнения швов, расположенных в любом
пространственном положении.
Качество выполнения сварных конструкций из алюминиевых сплавов и прочность
соединений в значительной степени зависят от правильности выбора конструктивных
элементов сварных швов. ГОСТ 14806-69 предусмотрены различные виды подготовки
кромок под сварку и приведены конструктивные элементы швов основных сварных
соединений. '
Клеесваряые соединения. Выполнение клеесварных соединений производят сочета-
сочетанием склеивания и контактной точечной (роликовой) сварки. Эти соединения можно
использовать при изготовлении как небольших, так и крупногабаритных элементов
конструкций из алюминиевых сплавов АМг2, АМгЗ, АМг5, АМгб, АМг61, АМц и Д16,
i
Рис. 14.6. Электрическая схема установки для ручной сварки неплавящимся
электродом.
1 - трансформатор; 2 - балластные реостаты; 3 - трансформатор тока; 4 -
шунт; 5-батарея аккумуляторов; 6 — амперметр постоянного тока; 7-
амперметр переменного тока; 8 — осциллятор; 9 — вольтметр переменного
тока; 10 — сварочная горелка
394
б)
Рис. 14.7. Типы клеесварных соединений листов и присоединения профилей: в —
внакрой; б — внакрой с отфланцовкой; в - на планке; г - в замок; д - с отбор-
товкой одного листа; е - с отбортовкой обоих листов; ж - с отбортовкой листов
под 45°; з — соединение профилей с листами обшивки
а также из углеродистых и высококачественных сталей. В отечественной практике
контактную сварку широко применяют при изготовлении конструкций, толщина эле-
элементов которых 0,5-4,0 мм, и реже, когда она достигает 6-8 мм.
В клеесварных соединениях клей повышает статическую и вибрационную прочность
шва, защищает шов от коррозии, обеспечивает герметичность соединения и создает воз-
возможность химической обработки (оксидирование, кадмирование и т. п.) изделий после
сварки, а также эксплуатацию в различных климатических условиях в интервале тем-
температур от -40 до + 80 °С.
Клеесварные соединения целесообразно применять в тех случаях, когда надо полу-
получить соединение, обладающее значительной прочностью, например, для присоединения
ребер жесткости к листам и соединения листов между собой. Листы проще соединять
Рис. 14.8. Профили, применяемые при контактной сварке: а - прессован-
прессованные: б - штампованные
395
внакрой, на стыковой планке, с отфланцовкой одного листа или в замок (рис. 14.7).
В таких соединениях могут использоваться однорядные или двухрядные (многоряд-
(многорядные) цепные либо шахматные швы. Наиболее целесообразно соединение внакрой с двух-
двухрядным шахматным расположением сварных точек. Такие соединения отличаются
высокой прочностью и герметичностью (при сварке в элементах конструкций не возни-
возникают большие внутренние напряжения). Соединения внахлестку с отбортовкой или
с отгибом кромок, а также соединения профилей с листами обшивки либо со стенками
набора обычно выполняют точечными однорядными (см. рис. 14.7). В клеесварных
конструкциях для обеспечения жесткости листов применяют различные прессованные
и штампованные профили (рис. 14.8).
При выполнении клеесварных соединений применяются прежде всего клеи холод-
холодного отверждения. Клей КС-609 имеет хорошую адгезию к алюминиевым сплавам
и сталям, обеспечивает защиту деталей в местах их соединения — сварную точку и на-
нахлестку — от попадания кислот и щелочей, например при электрохимическом оксиди-
оксидировании, а также от коррозии в процессе эксплуатации судов. Этот клей стоек в интер-
интервале температур от —40 до +80 °С, в тропических условиях, в пресной и морской воде,
в кислотах и щелочах, применяемых при оксидировании, но не стоек в бензине, керо-
керосине и соляровом масле. Клей КЛН-1 стоек в интервале температур от —40 до +80 С
и при отсутствии контакта с водой: в спирте, керосине, бензине, допускает оксидирова-
оксидирование деталей после сварки. Жизнеспособность клея КС-609 при температуре +20 С —
3—4 ч, клея КЛН-1 — 1,5—2 ч. Перед нанесением клея поверхности должны быть за-
зачищены. После сварки при необходимости в шов вводят дополнительное количество
клея с помощью кисти или шпателя.
При выполнении клеесварных соединений необходимо не только тщательно сле-
следить за качеством склеивания, но и обеспечивать соответствующий режим сварки.
Для достижения наибольшей прочности клеесварных соединений при их оптималь-
оптимальных размерах необходимо обращать особое внимание на обеспечение совместной работы
клеевой пленки и сварных точек.
При испытаниях на статический изгиб разрушения имеют следующий характер:
образцы с однорядным швом срезаются по плоскости соединения; клеесварные об-
образцы с двухрядным швом разрушаются по листу в зоне термического влияния сварки;
клееные образцы срезаются по плоскости соприкосновения листов. Испытания показа-
показали, что клеесварные. соединения прочнее остальных. Однако необходимо учитывать,
что прочность пленки в клеесварном соединении намного ниже ее прочности в ана-
аналогичном клеевом соединении. Поэтому прочность клеесварного соединения не может
быть определена как сумма разрушающих нагрузок сварной точки и клеевой пленки,
приходящейся на соответствующую площадь перекроя соединяемых деталей. Это
объясняется действием усилий отрыва, возникающих у кромок соединяемых деталей,
и значительной толщиной клеевой пленки, а также разностью модулей упругости клея
и металла.
При оценке прочности клеесварных, сварных, а также клеевых соединений обяза-
обязательному учету должен подлежать характер распределения напряжений, возникающих
в соединении (рис. 14.9).
Клеевые соединения. Одним из первых примеров применения в судостроении
склеивания деталей конструкций из сплавов является постройка катера типа „Ленин-
„Ленинград" с главными размерениями L ХВХНХ 7 = 9,98 X 3,15 X 1,1 X 0,6 м. Обшивка
и набор катера соединялись эпоксидным клеем без применения клепки и сварки. Ка-
Катер демонстрировался на Выставке достижений народного хозяйства СССР. С помо-
помощью склеивания соединялись внакрой листы толщиной 0,5—1,5 мм (рис. 14. 10, а).
Более широко клей применяют для обеспечения герметичности и предохранения
конструкций от щелевой коррозии. Например, с помощью клея достигается герметич-
герметичность воздушных ящиков (рис. 14.10, б); это соединение внакрой выполнялось с ис-
использованием точечной сварки, а клей между соединяемыми поверхностями вводился
396
i-H-
Рис. 14.9. Распределение напряжений при статическом срезе в сварном (а), клее-
клеевом (б) н клеесварном (в) соединениях
а)
Г/////////7.
TSS
жж
\Уч\\\\Т
Рис. 14.10. Клеевые соединения: а — соединения
листов; б - обеспечение герметичности
после сварки. Клей, введенный между
поверхностью обшивки и полкой уголь-
угольника — ребра жесткости, присоединен-
присоединенного точечной сваркой к обшивке, не
столько увеличивает прочность соеди-
соединения, сколько предохраняет его от
щелевой коррозии, обеспечивая долго-
долговечность конструкции.
Рассмотренные типы соединений
могут применяться в конструкциях
катеров и лодок из сплавов.
В зависимости от температуры воздуха, при которой происходит склеивание,
различают клеи холодного отверждения (ЭД-5, ЭД-6, К-150, К-153 — эпоксидные и
88Н, К-17 и др.) и клеи горячего отверждения (БФ-2, БФ-4, ВС-10Т, ФЛ-4, ВК-32-ЭМ,
карбинольный и др.)- В судостроении более перспективны клеи холодного отверж-
отверждения.
Для склеивания деталей из алюминиевых сплавов между собой, а также с деталя-
деталями из стали или других материалов можно использовать многие из клеев перечислен-
перечисленных марок, например клеи К-153 и К-150 — для склеивания алюминиевого сплава
(стали) с полиэфирным стеклопластиком.
Склеивание следует использовать при изготовлении пайолов, внутреннего оборудо-
оборудования судов, при креплении деталей, например для присоединения к обшивке ребер
жесткости, оконных рам и оборудования помещений, а также при изготовлении судовой
мебели.
14.3. Трехслойные конструкции
Особенности трехслойных конструкций. Трехслойные конструкции представляют
собой сочетание двух оболочек rf заполнителя между ними, прочно скрепленных в одно
целое.
Трехслойная панель аналогична двутавровой балке: роль поясков, воспринимающих
растягивающие и сжимающие усилия, вьшолняют несущие слои, а роль стенки, работаю-
работающей на срез, — заполнитель. При таком сочетании удается наиболее полно использовать
свойства каждого из применяемых материалов — легкого заполнителя и прочных
обшивок — и получить легкую, прочную и жесткую конструкцию, которая служит,
кроме того, хорошим виброгасителем, тепло- и звукоизолятором.
397
Рис. 14.11. Типы заполнителей: а - сотовый; б -ребристый; в - пористый -
монолитный; г — волнистый (гофровый); д — пористый, армированный ребрами
жесткости; е - пористый в виде отдельных элементов - брусков
Оболочка может воспринимать изгибающие, растягивающие, сжимающие и скручи-
скручивающие усилия. От качества оболочки зависят несущая способность и долговечность
трехслойных конструкций. Чтобы обеспечить наибольший выигрыш в массе, обычно
применяют тонкие оболочки из высококачественных материалов: стали, алюминиево-
магниевых сплавов, пластмассы.
Заполнители — к материалу заполнителей судовых трехслойных конструкций
предъявляются следующие основные требования: обеспечение совместной работы
оболочек конструкции, малая объемная масса, достаточно высокая прочность, одно-
однородность механических качеств и физических свойств материала по различным направ-
направлениям, малая гигроскопичность, простота механической обработки заполнителей,
хорошая адгезия к оболочке, негорючесть, хорошие тепло- и звукоизоляционные каче-
качества, высокая коррозионная стойкость, обеспечение технологичности изготовления
конструкции.
! Типы заполнителей трехслойных элементов представлены на рис. 14.11. Сотовые
заполнители (рис. 14.11, а) получили широкое использование в самолетостроении
Рис. 14.12. Конструктивные схемы сотовых заполнителей: а-с шестигранными ячейками; б-
рифленые полосы - с гофрами по несклеенным сторонам; в - с полосами усиления
398
a)
6)
г)
з)
Рис. 14.13. Обеспечение жесткости кромок трехслойных
панелей: а - прочным заполнителем - бруском; б-
профилем из полосы; в - накладками; г - прочным
заполнителем - полосой; д, е - угольником; ж - зето-
зетовым профилем; з - Специальным прессовым профилем
Рис. 14.14. Соединения трехслойных панелей: а — дни-
днища; б— палубного узла; в - скулового узла
Рис. 14.15. Соединение пане-
панелей с другими конструкция-
конструкциями с помощью механических
средств крепления: а> б-
втулки; в - заполнителя; г —
швеллеров; д — прессован-
прессованных профилей
и начинают применяться в судостроении. Ребристые (рис. 14:11,6) и волнистые (рис.
14.11, г) заполнители имеют значительную массу. Прочность пористых заполнителей
(рис. 14.11, в, д, е) определяется прочностью материала заполнителя. Наибольшее
распространение получил сотовый заполнитель с шестигранными ячейками (рис.
14.12, а). Прочность заполнителя с гофрами по несклеенным сторонам шестигранни-
шестигранника (рис Hi 4.12, б) примерно на 20 % выше прочности заполнителя без гофров при вос-
восприятии усилий, приложенных перпендикулярно к обшивке, или усилий сдвига, дей-
действующих в плоскости соединения заполнителя с наружными оболочками. У заполни-
заполнителей с полосами усиления (рис. 14.12, в) между стенками ячеек вклеены параллель-
параллельные полосы фольги. Это усиление увеличивает прочность и жесткость заполнителя
в направлении полос фольги.
399
Результаты многочисленных испытаний опытных образцов и наблюдения за натур-
натурными конструкциями показьшают, что прочность склеивания заполнителя с оболочками
трехслойных конструкций зависит в основном от качества клея. В отечественной
промышленности для изготовления конструкций с сотовыми заполнителями приме-
применяют как жидкие, так и пленочные клеи марок БФ-2, ВС-10Т, ВК-32-ЭМ и др. Наиболь-
Наибольшую прочность обеспечивает клей ВК-32-ЭМ.
При выборе марки клея необходимо учитывать следующее.
Если поверхность прилегания заполнителя к обшивке имеет криволинейную фор-
форму, нужно применить клей, обеспечивающий большую прочность на отрыв. Если полосы
сот не подвергаются при эксплуатации конструкций действию значительных усилий,
для их соединения можно использовать клеи, обеспечивающие меньшую прочность,
но более технологичные.
Соединение трехслойных панелей. Элементы судовых трехслойных конструкций
(панелей) не нуждаются в часто поставленном наборе — ребрах жесткости, что суще-
существенно упрощает их изготовление. Кромки элементов с заполнителями подкрепляют
планками или профилями (рис. 14.13). Конструкция планок и их крепление с трех-
трехслойными элементами должны обеспечивать восприятие напряжений, возникающих
в соединении элементов, исключать попадание в заполнитель влаги и грязи.
Соединение трехслойных панелей между собой по днищу и бортам, а также в уз-
узлах осуществляют путем вклеивания по кромкам панелей угольников и поясков
(рис. 14.14); соединение панелей с другими конструкциями можно выполнять с по-
помощью механических средств крепления или сварки. В местах присоединения конструк-
конструкций необходимо поставить втулки, прочный заполнитель или профили (рис. 14.15).
14.4. Клепаные конструкции
Система набора корпуса. Система набора клепаного корпуса малого металли-
металлического судна определяется в основном типом судна.
На днище водоизмещающего судна действуют незначительные нагрузки, для него
может быть принята поперечная система набора.
Для глиссирующих судов, испытывающих сильные ударные нагрузки, особенно
в носовой оконечности, кроме мощных поперечных связей целесообразно поставить
по днищу продольные ребра жесткости, разрезанные на флорах (рис. 14.16, а). Основ-
Основное назначение этих ребер — обеспечить устойчивость сравнительно тонких днищевых
листов обшивки. При таком сочетании связей система набора становится смешанной.
Как поперечная, так и смешанная системы набора клепаного корпуса имеют опре-
определенные преимущества и недостатки, аналогичные в основном сварным конструкциям.
Клепаный корпус при поперечной системе набора, также как и сварной, должен быть
подкреплен в корме короткими продольными ребрами (рис. 14.16, б).
Разбивка корпуса на секции. С целью сокращения времени постройки судна корпус
разбивается на отдельные блоки и секции — объемные и плоскостные (рис. 14.17),
из которых он собирается на соответствующей позиции. Каждая секция изготовляется
на своем участке и по завершении всех работ, включая и грунтовку (в некоторых слу-
случаях и окраску), подается на место сборки корпуса.
Корпуса клепаных судов, особенно при индивидуальной и мелкосерийной построй-
постройке, собираются подетально. На стапель доставляются и собираются форштевень, киль,
ахтерштевень или транец. Эти элементы корпуса составляют его закладку. Затем ставят-
ставятся переборки, шпангоутные рамки, обшивка, палуба, оборудование. *
Связи продольного днищевого набора. К продольным днищевым связям клепаного
корпуса относятся киль, днищевые и бортовые стрингеры, скуловой стрингер, комингс.
На судах, имеющих значительную килеватость A0° и более), киль как самостоя-
самостоятельная деталь может отсутствовать или изготовляться из широкой полосы
400
—
~~ ...-с
(рис. 14.18, a). Когда обшивку
днища изготовляют из двух
половин — шириной от ДП
до борта, в ДП листы обшивки
соединяют двусторонними на-
накладками (рис. 14.18, б),
которые образуют днищевую
продольную балку, выполняю-
выполняющую, в определенной мере,
роль киля.
У судов со значительной
килеватостью мощную киле-
килевую балку удобно создавать,
используя профиль сим-
симметричного полособульба (рис.
14.19, а). Существенный недо-
недостаток этого конструктивного
решения — отгибка фланцев
листов обшивки днища — ис-
исключается при достаточно простом варианте изготовления киля из равнобокового
угольника (рйс. 14.19,6).
Килевую балку повышенной прочности дает комбинированный вариант: два раз-
малкованных угольника снаружи и полоса по внутренней поверхности обшивки (рис.
14.19, в), изогнутая в поперечном направлении в соответствии с характером обводов
корпуса.
Конструкция киля может стать более оптимальной, если применить специальный
прессованный профиль (рис. 14.20, л). Такой профиль может быть использован в корпу-
корпусе с обшивкой, не стыкующейся в ДП, а также если обшивка выполнена из двух ли-
листов; в последнем случае к профилю достаточно дополнить полосу шириной, обе-
обеспечивающей двухрядную клепку (рис. 14.20, б).
Рис. 14.16. Системы набора: а - смешанная; б-попе-
б-поперечная
Рис. 14.17. Блоки и секции корпуса катера: а — палуба ноеовой оконечности; б— правый
борт; в — форпик; г — моторный отсек; д — палуба ахтерпика; е — левый борт
401
Рис. 14.18. Кили из полос: а — широкой; б — полос-накладок.
/—полоса киля; 2 — обшивка днища; 3 — накладки; 4 - заклепки; 5 — полотно пере-
переборки (флор)
Тис. 14.19» Кили из катаных профилей: а - полособульб; б- угольник; в - два угольника
и полоса.
1 — полособульб; 2 — заклепки; 3 — обшивка днища; 4 — угольник; 5 — полоса
Рис. 14.20. Кили прессованные: а - прессованный профиль; б - прессованный
профиль и полоса.
1 — обшивка; 2 — заклепки; 3 — профиль кипя; 4 — полоса
¦402
a)
Рис. 14.21. Днищевые стрингеры и их присоединение к флорам: а - иеравиобокий
угольник; 6" - равнобокий угольник; e-углобульб; г-зетовый профиль; д, е -
прессованные профили; ж - присоединение стрингера к флору с помощью коротыша-
угольника; з - соединение кницы с флором.
/ — обшивка днища; 2 — флор; 3 — неравиобокий угольник; 4 — равиобокий уголь-
угольник; 5 — углобульб; б — зетовый профиль; 7 — прессованный профиль; 8— заклеп-
заклепки; 9 — коротыш-угольник; 10 — кница с фланцем
Стрингеры, идущие по днищу и бортам, проще изготовлять из неравнобоких
угольников (рис. 14.21, а), а иногда, при стремлении уменьшить высоту вер-
вертикальной полки или при ограниченности сортамента, — из равнобоких угольников
(рис. 14.21, б), углобульбового (рис. 14.21, в) или зетового профилей (рис.
14.21, г).
а)
Рис. 14.22. Размещение днище-
днищевых и бортовых стрингеров в
секциях (панелях) днища и бор-
борта: а - секция борта; б - днище-
днищевые секции; в - секции борта
и угольник бортового стрингера
403
Рис. 14.23. Реданы: а - неравнобокий
угольник; б - прессованный профиль.
1 — обшивка днища; 2 — неравнобокий
угольник; 3 — прессованный профиль;
4 — заклепки
Рис. 14.24. Скуловой стрингер: а — одна полоса;
б, в — две полосы; г — угольник; д - отогнутые
фланцы.
1 —обшивка борта; 2 — обшивка днища; 3 —
заклепки; 4 — полоса; 5 — внутренняя полоса;
6 - наружная полоса; 7 - мастика — наполнитель
на смоле; 8 — лист обшивки; 9 — угольник
5 4
Рис. 14.25. Соединение настила палубы с обшив-
обшивкой борта: а-внутренним угольником из по-
полосы; б - г - наружным угольником; д - угло-
бульбом; е - фланцами.
1 —настил палубы — палубный стрингер; 2 —
обшивка борта; 3 — угольник из полосы; 4 —
привальный брус — полособульб; 5 — прессо-
прессованный угольник; 6 — заклепка; 7 — привальный
брус из полосы с фланцем; 8 — углобульб; 9 —
комингс
404
Тонкие листы обшивки будут работать в намного лучших условиях, если и для
стрингеров использовать специальный прессованный профиль (рис. 14.21, д, е).
При нарезном днищевом наборе, когда днищевые стрингеры пропускаются через
стенку флоров, ставятся коротыши-угольники (рис. 14.21, ж) или кницы с фланца-
фланцами (рис. 14.21, з), обеспечивающие перевязку стрингера с флором. При такой кон-
конструкции существенно увеличивается объем клепки.
Следует обращать внимание на размещение днищевых стрингеров пр ширине
корпуса и на их протяженность по длине. В средней и кормовой частях корпуса они
должны быть поставлены чаще (рис. 14.22), а в носовой оконечности обеспечивается
их постепенный обрыв — они заканчиваются на соответствующих флорах и дальше
не идут.
Реданы могут быть выполнены аналогично днищевым стрингерам — из обычных
(рис. 14.23, а) или специальных прессованных профилей (рис. 14.23,6).
Скуловой стрингер является основной деталью скулового узла, обеспечивающего
перевязку днища с бортом. Он выполняется из одной (рис. 14.24, а), чаще двух полос
(рис. 14.24, б), поставленных в сопряжении обшивки днища и борта. Аналогично кон-
конструкция выполняется и в том случае, когда у скулы обшивка днища переходит в об-
обшивку борта по радиусу скругления (рис. 14.24, в). При этом полосы-накладки пред-
предназначены увеличивать жесткость скулового узла.
Более простой вариант конструкции обеспечивается путем использования для
скулового стрингера равнобокого угольника (рис. 14.24, г), обладающего большей
жёсткостью, чем полосы. Жесткость корпуса в районе скулы и соединение листов днища
и борта могут обеспечиваться просто отгибкой фланца (рис. 14.24, д).
Продольные связи палубного узла. Соединение обшивки борта с палубным стрин-
стрингером или настилом палубы производится в палубном узле. Наиболее простое выполне-
выполнение этого узла осуществляется с использованием согнутой полосы (рис. 14.25, а),
поставленной внутри корпуса. Перепущенный за линию борта палубный стрингер с ото-
отогнутым фланцем небольшой ширины выполняет роль привального бруса. Последний
можно сделать в виде самостоятельной детали, поставленной сверху палубного настила
(рис. 14.25, б). В носовой оконечности, где лист настила палубы идет от борта до борта,
полоса-угольник ставится по наружной поверхности обшивки (рис. 14.25, в); палуб-
палубный стрингер превращается в самостоятельную деталь, выполняющую роль приваль-
привального бруса.
Соединение обшивки борта и настила палубы может быть осуществлено с помощью
угольника, поставленного снаружи обшивки (рис. 14.25, г); на его горизонтальную
полку накладывается профиль полособульба, а сверху — лист настила палубы. В этом
случае обеспечивается большая жесткость привального бруса и всего узла. С целью
сокращения числа деталей вместо полособульба и угольника следует поставить угло-
бульбовый профиль (рис. 14.25, д); последний может быть успешно применен в кон-
конструкции с отогнутыми фланцами (рис. 14.25, е). Этот достаточно распространенный
вариант конструкции палубного узла с использованием отогнутых фланцев обшивки
введен в конструкцию судов, имеющих местный подъем палубы в носовой оконечно-
оконечности или отштампованный в одну фигурную деталь кокпит с участком палубы и верхней
частью борта (рис. 14.26).
Многие суда имеют вырез в палубе, идущий на 1/4 — 1/3 их длины, иногда на боль-
большую величину. В этом случае комингсы будут принимать участие в обеспечении про-
продольной прочности, и их необходимо отнести к продольным связям.
С целью увеличения прочности комингса и отказа от острых кромок его целе-
целесообразно делать из двух углобульбовых профилей (рис. 14.27, а), поставленных
сверху и снизу настила палубы. Размер верхнего профиля определяется обеспечением
необходимой прочности комингсу, а нижнего — размещением заклепки, крепя-
крепящей бимс.
405
Может быть применен ко-
комингс более лростой конструк-
конструкции (рис. 14.27, б). Палубный
стрингер имеет два фланца: один
составляет нижнюю часть ко-
комингса, второй выполняет роль
привального бруса. Верхняя
часть комингса образована угло-
бульбовым профилем.
Поперечный набор. На
конструкции и размерах эле-
элементов поперечного набора ска-
сказывается необходимость созда-
создания фундаментов и подкрепле-
подкреплений, выделения замкнутых про-
пространств, рундуков и др.
Флоры часто делаются из
листа толщиной 1-2 мм. По
верхней и нижней их кром-
кромкам отгибаются фланцы шири-
шириной 15—20 мм (рис. 14.28, а), нижний служит для крепления флора к обшивке днища,
верхний — свободный поясок. Для обеспечения большей жесткости флора по его стенке
(полотну — при большой его высоте) штампуют высадки. Флоры небольшой высоты
(рис. 14.28, б), являющиеся днищевыми ветвями шпангоутов, удобно выполнять
из углобульбового или зетового профилей. В ДП эти ветви соединяются киле-
килевой кницей.
При необходимости вьщелить замкнутые пространства ставятся продольные связи,
от которых до борта над флорами размещают диафрагму (см. рис. 14.28, а). Такой
флор проще выполнять в виде листа с отогнутыми фланцами: нижний приклепывается
к обшивке днища, к верхнему присоединяется диафрагма.
Шпангоуты, аналогично флорам, могут быть отштампованы из листа толщиной
1—2 мм. По кромкам, прилегающим к обшивке борта и к листу палубного стрингера,
а также по свободной кромке отгибаются фланцы шириной 15—20 мм. Для облегчения
Рис. 14.26. Соединение листов обшивки в скуловом и па-
палубном узлах отогнутыми фланцами.
1 — обшивка днища; 2 - обшивка борта; 3 — комингс;
4 — угольник; S — скоба из полосы
Рис. 14.27. Комингс: а - два углобульба; б - углобульб и фланец палубного стрингера.
/-настил палубы; 2 -верхний углобульб; 3 -заклепки; 4 - нижний углобульб;
5 - рамный полубимс; б - палубный стрингер; 7 - угольник из полосы; 8 - обшивка
борта
406
a)
Рис. 14.28. Флоры: а -лист; б - катаный (прессованный) профиль.
флор из листа; 2 — продольный лист; 3 — диафрагма; 4 — высадка (гофр) ; 5 — шпангоут;
6 — скуловая кница; 7 — флор из профиля; 8 — килевая кница
-11
1 L
-10
9
Рис. 14.29. Шпангоуты и соединение их с флорами: а - катаный (прессованный) профиль;
б — лист; в - бракета; г. - лист, перепущенный на флор.
1 — шпангоут из профили; 2 — скуловая кница; 3 — флор из листа; 4 — шпангоут из листа;
J—днищевые стрингеры, разрезанные иа флорах; б — шпангоут-бракета; 7— коротыш-
угольник; # ~ угольник флора; 9 — заклепки; 10 — Обшивка; 11 -г Обшивка буля; 12 —
бракета буля
407
шпангоута при значительной высоте его профиля в стенке — посередине ее высоты —
делаются круглые вырезы.
Бортовые ветви шпангоутных рамок могут выполняться из различных прессован-
прессованных профилей: неравнобокого и равнобокого угольников, углобульбового или зетово-
зетового профилей (рис. 14.29, а) или из листа (рис, 14.29, б, в). Соединение бортовой и дни-
днищевой ветвей шпангоута выполняется с помощью скуловой кницы (см. рис. 14.29, а)
или внакрой (см. рис. 14.29, б-г), соединение внакрой упрощает сборку. Если в плос-
плоскости флора стоит диафрагма, то соединение шпангоута с флором осуществляется
ею (см.рис. 14.28,а).
На выборе типа конструкций флора и шпангоута, а также варианта перевязки
этих связей в районе скулы сказываются характер обводов корпуса и условия размеще-
размещения внутри судна; характерный пример конструкции приведен на рис. 14.29,г. Значи-
Значительный развал бортов и стремление увеличить внутреннюю ширину судна привели
к неестественному соотношению в размерах ширины шпангоута в районе скулы и у па-
палубы. Ослабление шпангоута у нижнего конца вынуждает перепускать шпангоут на
флор. Для большей надежности скулового узла следовало бы и угольник, идущий по
верхней кромке флора, перепустить на шпангоут (см. рис. 14.29, г).
В узле сопряжения флора со шпангоутом внутренние кромки этих связей образуют
прямой угол. На судах открытого типа — с кокпитом, идущим на большей части длины
судна, эксплуатирующихся в достаточно тяжелых условиях, в отмеченном углу возни-
возникают большие местные напряжения, приводящие к разрушению конструкций, что
наблюдалось на первых вариантах широко известной „Казанки" (см. рис. 14.29, в).
В последующих модификациях лодки внутренняя кромка шпангоута, имеющая фла-
фланец, скругляется и плавно подходит к верхнему пояску флора (рис. 14.30); шпангоут
перепускается вниз и внакрой и соединяется с флором, образуя как бы скуловую
кницу. Верхний конец шпангоута по внутренней кромке имеет аналогичное — плавное —
скругление. Это конструктивное мероприятие обеспечивает плавность напряжений
по внутренним пояскам шпангоутной рамки — снижение концентрации напряжений
в ее углах. Конструкция флора, как видно из рис. 14.29, в и рис. 14.30, тоже претер-
претерпела изменения — для обеспечения жесткости во флоре делаются большие высадки.
Обшивка. Клепаные корпуса малых судов обычно выполняют из высокопрочно-
высокопрочного сплава — дюралюмина. Это позволяет несколько снизить стоимость материала кор-
корпуса, но возникают трудности, вызванные большой трудоемкостью работ, обусловлен-
обусловленных клепкой обшивки.
Обшивка малых судов обычно выполняется из двух поясов днища (левого и пра-
правого) и бортовых поясов. По длине поясья обшивки присоединяются к килевому
и скуловому профилям, а также связям в палубном узле. Соединение отдельных листов
между собой по длине (по стыкам) осуществляется двух- или трехрядными швами.
В связи с перекроями листов обшивки в клепаных конструкциях существенно
усложняется присоединение к корпусу наружных килей, реданов и т. п. (рис. 14.31).
Палубный настил. Как верхняя связь корпуса, идущая от борта до борта, палубный
настил ставится на малых судах только в носовой части на длине A/4 -5- 1/3I.. Этот
размер существенно уменьшается в случае, когда рубка сильно смещена в нос. При
этом жесткость листа настила наиболее просто обейтечить гофрами (рис. 14.32). Для
снижения массы корпуса уменьшают толщину настила; в этом случае одних гофров
оказывается недостаточно для обеспечения устойчивости листов, и приходится при-
приклепывать продольные ребра (рис. 14.32, а).
При незначительном смещении рубки в нос на палубе размещается люк для доступа
в форпик. У продольных комингсов люка ставятся угольники из полосы или из ката-
катаного профиля, идущие между ближайшими к люку бимсами. Бимсы изготавливаются
из катаного профиля или в виде зетового профиля, согнутого из листа (полосы).
Листы настила могут перекрывать палубу от борта до борта (см. рис. 14.32, а)
или стыковаться на карлингсе, стоящем в ДП (рис. 14.32, б). При достаточно часто
408
поставленных продольных ребрах жестко- j ^ а ~а
сти — шпация 100—150 мм — можно
отказаться от гофров (см. рис. 14.32, б).
Переборки. Прочность и жесткость
переборок и транца обеспечивают с помо-
помощью гофров-высадок, стоек или ребер
жесткости. Располагают гофры наклонно,
вертикально или горизонтально, стойки —
вертикально, ребра жесткости — гори-
горизонтально.
С целью снижения стоимости построй-
постройки судна элементы гофров по перебор-
переборкам и транцу принимают такими же,
как и по наружной обшивке. Профиль
и размеры стоек и ребер жесткости также
стараются унифицировать с профилями
основного набора корпуса.
Жесткость полотна переборки (рис.
14.33) в нижней ее части обычно обеспе-
обеспечивается угольниками для крепления ела-
елани и диванов; жесткость большей части
полотна переборки - верхней ее части —
достигается использованием высадок.
Ребро жесткости — угольник — 20 X
X 20 X 20 мм — часто приклепывают
к полотну переборки заклепками 3 мм с шагом 30—60 мм (рис. 14.33, а). Стойка
переборки (рис. 14.33, б) может быть выполнена из такого же угольника или
другого профиля.
,г
Рис. 14.30. Конструкция шпангоута и соеди-
соединение его с фпором.
1 — шпангоут; 2 — флор
А-А
Рис. 14.31. Наружный киль - плавник.
1 — листы обшивки; 2 — прокладка для герметизации; 3 — заклепка; 4 — киль — плавник
409
6)
Рис. 14.32. Настил палубы в но-
носовой оконечности: а - подкреп-
подкрепленный набором и гофрами;
б - только набором.
1 — настил палубы; 2 - комингс
люка; 3 — гофры; . 4 - ребра
жесткости; 5 — карлингс; 6 —
крышка люка
410
a.)
Рис. 14.33. Переборки: а - подкрепленная гофрами и ребром;
б -с гофрами и стойками; в — с высадками.
/ — полотно; 2 — гофры; 3 — ребро — угольник; 4 — стойка; 5 -
комингс; б —высадки; 7—фланец полотна переборки; 8 —
заклепки
Рис. 14.34. Транец. . Рис. 14.35. Ниша.
i-обшивка (полотно); 2 - гофры; 3 - профиль, I ; _ обшивка транца. 2 - подмотор-
согнутый нз полосы; 4 - подмоторная доска (по- ,/1 ная доска (подушка) . 5_кница;
душка); 5 - зетовый профиль; 6 - старн-кннца \ 4_ носовая стенка ниши; 5-вы-
садка; б — дно нншн
К обшивке днища и бортов переборка приклепьшается малой полкой неравнобоко-
го угольника, 50 X 30 X 3 мм; к полотну переборки этот угольник приклепан заклеп-
заклепками ф 3 мм с шагом 40 мм, в шахматном порядке. Переборки могут не иметь ни ребер
жесткости, ни стоек; в этом случае жесткость их полотна обеспечивается только вы-
высадками (рис. 14.33, в), которые располагают равномерно по всему полотну переборки.
Транец. В отличие от переборок он подвержен воздействию усилий большой ин-
интенсивности от веса подвесного мотора; инерционных и вибрационных нагрузок, удара
волн. Это вызывает необходимость не только обеспечить жесткость полотна транца,
но и выполнить подкрепление в виде подмоторной доски, служащей для навешивания
мотора. Для крепления подмоторной доски к транцу следует использовать болты и зе-
зетовые профили.
Чтобы обеспечить прочность и жесткость транца, по его периметру отогнут фланец
шириной около 25 мм, а по верхней его кромке присоединен профиль, согнутый из
полосы толщиной 1,5 мм. На большей части площади полотна транца (к бортам от ДП)
его жесткость обеспечена гофрами-высадками, равномерно размещенными по площади
полотна транца (рис. 14.34); в нижней части транца приклепан брусок (профиль),
служащий опорой для елани. ч
Мотор должен не только надежно закрепляться на транце, но его винт необходимо
погрузить на вполне определенную глубину от уровня воды. Это вызывает необходи-
необходимость создавать нишу (рис. 14.35), дно и стенки которой препятствуют проникновению
забортной воды в кокпит. Жесткость листов дна и стенок ниши обеспечивается высадка-
высадками (см. рис. 14.35).
14.5. Сварные конструкции
Сварка позволяет обеспечить в местах соединений отдельных связей набора или
листов обшивки прочность, равную или близкую к прочности в целом сечении связи.
Однако, поскольку при постройке корпусов малых судов используется тонколистовой
материал (толщина 1—3 мм), конструкции при сварке подвергаются сильному коробле-
короблению. Более рациональным средством уменьшения коробления конструкций является
сокращение объема сварки. Такой путь вынуждает прибегать к широкому использо-
использованию гофров, зигов, высадок, позволяющих обеспечить устойчивость листов обшивки
палубного настила, полотна переборок, отдельных связей набора. Одновременно с этим
решается задача максимально использовать возможности легкого сплава для обеспе-
412
чения наименьшей трудоемкости изготовления корпуса и наиболее высокого качества
конструкций. Изготовление корпуса упрощается при применении секционного метода
постройки и широкого использования штампованных деталей (рис. 14.36).
Выбор системы набора приходится производить раздельно, для днища и бортов,
так как они подвергаются воздействию нагрузок различной интенсивности. Часто
с целью сохранения однородной системы набора по всему корпусу при выборе системы
набора для борта и палубы ориентируются на принятую систему набора по днищу.
Из различных вариантов систем набора днища целесообразно рассмотреть три:
поперечную систему набора с коробчатыми флорами; смешанную систему набора
с навесными флорами на стрингерах; смешанную систему набора с гофрами по об-
обшивке днища:
Преимущества Недостатки
Поперечная система набора
Увеличение доли машинной контактной Образование деформаций обшивки
сварки днища, направленных поперек линий
тока воды
Сокращение (более чем в 2 раза) числа Увеличение (до 5%) массы корпуса по срав-
деталей корпуса иению со смешанной системой
Отсутствие узлов пересечения набора Сложность ремонта в случае пробойны
повышает качество корпуса обшивки под коробчатым фпором (яв-
(явление чрезвычайно редкое)
Смешанная система набора с навесными флорами
Простая конструкция флора, не требующая Большое число пересечений продольных и
сложных штампов поперечных связей - в их узлах возникают
значительные перенапряжения
Набор днища лучше (мягче) реагирует на Снижение напряжений требует специальных
ударные нагрузки, сглаживая пере- конструктивных мер и особо качествен-
напряжения ного выполнения сварки в узлах
Деформации обшивки, образующиеся Большое количество деталей корпуса
между стрингерами, ориентирован-
ориентированные примерно по направлению тока
воды
Смешанная система набора с гофрами по обшивке
Все преимущества набора с навесными Сложные штампы для прессования обшивки
флорами
Упрощение ухода за судном при его
использовании
Связи продольного набора. Киль может иметь различную конструкцию, обуслов-
обусловленную прежде всего формой корпуса, размерами и назначением судна. На плоско-
плоскодонных судах, у которых для обеспечения жесткости обшивки служат продольные
гофры, киль и днищевые стрингеры отсутствуют. Примером таких судов являются
суда типа джонбота (рис. 14.37, а).
В случае сравнительно небольшого подъема днища килевая балка может быть
выполнена из двух полособульбов (рис. 14.37, б). При такой конструкции кроме
увеличения прочности корпуса обеспечиваются сосредоточение металла в месте наиболь-
наибольшего истирания и защита обшивки от ударов.
По аналогии с клепаными корпусами в сварных киль может быть изготовлен из
согнутой полосы (рис. 14.38, а) или равнобокого угольника (рис. 14.38,6). Соответ-
Соответствующая малковка этих деталей позволяет вьщержать требующиеся углы положения
днищевой обшивки к основной плоскости.
413
Рис. 14.36. Детали и секции сварного корпуса: а - носовая секция и детали палубы; б - транец,
поперечная переборка и детали поперечного набора; в - секции днища и борта
414
Бели судно имеет значительную килеватость и необходимо создать мощную киле-
килевую балку, киль следует выполнять из симметричного полособульба (рис. 14.39, а),
бруска (рис. 14.39, б) или полосы (рис. 1439, в). Как и в клепаных конструкциях,
оптимальная килевая балка требующейся прочности может быть изготовлена из спе-
специального прессованного профиля (рис. 14.40).
Днищевые и бортовые стрингеры на малых судах как продольные связи корпуса
могут быть заменены соответствующими гофрами (см. рис. 14.37, а), имеющими за-
заданные размеры и соответствующее расположение по днищу и борту.
На быстроходных судах днищевым набором воспринимаются значительные дина-
динамические нагрузки, поэтому при проектировании сварных конструкций особое вни-
внимание должно быть обращено на перевязку днищевых стрингеров с флорами. На рис.
14.41 изображена конструкция этого узла, успешно использованная на моторной лодке
„Крым".
Скуловой стрингер может быть выполнен из равнобокого угольника. Листы об-
обшивки днища и борта присоединяются к нему стыковой сваркой (рис. 14.42, а) или
внакрой (рис. 14.42, б). Предпочтительнее соединение встык, так как в соединениях
внакрой сложнее обнаружить дефекты сварки — водотечность.
Для создания брызгоотбойника необходимо воспользоваться неравнобоким уголь-
угольником (рис. 14.42, в); при этом обшивку борта следует приварить контактной сваркой
внакрой с внутренней стороны к меньшей полке, днищевую — шовной сваркой к боль-
большей полке. Такой брызгоотбойник повысит гидродинамические качества судна. Он
может быть создан также при отгибке фланцев обшивки днища и борта (рис. 14.42, г).
Конструктивный тип скулового узла определяется в значительной мере требова-
требованиями к закреплению флора. Если флор выполняется, как свободно опертая балка,
то его конец закрепляется на скуловом угольнике с помощью планки (рис. 14.43, а).
Со шпангоутом коробчатого профиля флор соединяется коробчатой кницей (рис.
14.43, б), с рамным шпангоутом — непосредственной сваркой сплошным швом
(рис. 14.43, в).
Изготовление скулового стрингера в виде специального прессованного профиля
(рис. 14.44) позволяет создать конструкцию, включающую брызгоотбойник. В профиле
отпрессована канавка — углубление; она позволяет упростить подгибку верхней кром-
кромки профиля при сборке корпуса и тем самым менять взаимное положение бортовой
и днищевой обшивки.
Соединение деталей сварного корпуса в узле палубы на судах длиной более 5 м мо-
может быть выполнено с помощью полосы (рис. 14.45, а) или угольника (рис. 14.45, б).
Использование этих типов соединений с помощью сварки делает весь палубный узел
аналогичным клепаному. Более того, достаточно часто в цельносварных корпусах
основные соединения рассматриваемого узла выполняют клепаными.
С целью повышения надежности конструкции и снижения трудоемкости ее из-
изготовления на судах длиной 5—7 м, запускаемых в крупносерийное производство, сле-
следует рекомендовать использование для палубного узла прессованных профилей (рис.
14.46). В профиле, изображенном на рис. 14.46, а, предусмотрен паз для амортизатора —
привального бруса и вертикальное ребро — фальшборт; это ребро может отсутствовать,
а верхняя полка профиля — иметь уклон к борту (рис. 14.46,6), что обеспечит хороший
сток воды за борт. Размеры профиля существенно-уменьшаются (рис. 14.46,в), если ои
не выполняет функции привального бруса.
С помощью прессованных профилей осуществляется не только надежная пере-
перевязка палубы с бортом, но и увеличение прочности и надежности корпуса.
На судах, строящихся большими сериями, целесообразно применять прессованные
профили (рис. 14.47) для изготовления комингсов. При этом обеспечиваются хоро-
хороший внешний вид и прочность при минимальной массе конструкции, удобство ходьбы
по потопчине вдоль кокпита.
415
V
. г
A-A Повернуто
Рис. 14.37. Кили на плоскодонном
судне и с малой килеватостью:
а — гофр в ДП, заменяющий киль;
б — киль из двух полособульбов.
1 —обшивка днища; 2 — флор; 3 —
полособульбы; 4 — водопроток; 5 —
транец
Рис. 14.38. Кили из полосы или
угольника: а - из согнутой полосы;
б - размалкованного угольника.
1 — обшивка днища; 2 — полоса; 3 —
угольник
Рис. 14.39. Брусковый киль: а - из полособульба; б - бруска; в - полосы.
1 — обшивка днища; 2 — полособульб; 3 — флор; 4 — брусок; 5 — полоса
Вид А
Рис. 14.40. Киль из прессованных профи-
профилей: а - с фланцами для приварки обшив-
обшивки; б-с вертикальным килем; в -двой-
-двойная килевая балка.
1 — киль; 2 — обшивка днища; 3 — соеди-
соединительная часть; 4 — фланец с прорезью
для обшивки
Рис. 14.41. Соединение днищевого стрингера
с флором.
1 —обшивка днища; 2 — флор; 3 — кница; 4 —
фланец кницы; 5 — днищевой стрингер
416
Рис. 14.42. Скуловые стрингеры: а, б -
равнобокие угольники; в - скуловой стрин-
стрингер - брызгоотбойник; г - отогнутый фла-
фланец.
/-обшивка борта; 2 - угольник; 3-
обшивка днища; 4 - угольник-брызгоот-
бойник; 5 - фланец-брызгоотбойник; 6 -
флор; 7 - диафрагма; 8 - шпангоут
Рис. 14.43. Крепление флора у скулового
стрингера: а - накладной планкой; б - ко-
коробчатой кницей; в - сваркой с рамным
шпангоутом.
1 — обшивка борта; 2 — угольник скулового
стрингера; 3 — накладная планка; 4 — флор;
5 - обшивка днища; 6 - однородный шпан-
шпангоут; 7-коробчатая кница; 8 — рамный
шпангоут
В сварных корпусах специальные прессованные профили для стрингеров, а также
и для других продольных связей применяются сравнительно редко, так как приварка
этих связей, расположенных друг от друга на небольших расстояниях, вызывает силь-
сильное коробление конструкции.
Примером конструкции с максимально широким использованием прессованных
профилей (рис. 14.48) может служить мореходный катер длиной 6 м, построенный
в Японии. Киль представляет собой, тавровый профиль; к кромкам его пояска привари-
привариваются листы обшивки днища. Днищевые стрингеры 4 (рис. 14.48, б) служат одно-
одновременно продольными реданами; в связи с этим их нижние поверхности спрофили-
спрофилированы с учетом обвода (килеватости) днища. Профиль палубного узла 2 (рис. 14.48,
в) для соединения борта с палубой имеет в поперечном сечении сложную форму, так
как включает фальшборт, наклонный участок, обеспечивающий плавный переход от
палубы к борту, и паз для мягкого привального бруса. Профиль продольного коминг-
комингса кокпита 1 (рис. 14.48, г) позволяет удачно оформить вырез кокпита. Благодаря
а)
Рис. 14.44. Прессованные скуловые
стрингеры с брызгоотбойником: а -
со стороны борта; б — со стороны
днища.
1 — обшивка днища; 2 — стрингер; 3 —
брызгоотбойник; 4 - обшивка борта
В)
Рис. 14.45. Соединение обшивки борта с насти-
настилом палубы: а - с помощью листа - палубного
стрингера; б - с помощью угольника.
1 — ширстрек; 2 — палубный стрингер; 3 —
настил палубы; 4 — бимс; 5 — шпангоут; 6 —
привальный брус (полутруба); 7 - угольник
14 Зак. 738
417
ю
Рис. 14.46. Палубный узел из прессованных профилей:
а - с ребром (фальшбортом) по верхней стороне; б -
с покатой верхней стороной; в - профиль малых размеров.
1 — мягкий привальный брус; 2 — ребро (фальшборт) ;
3 — прессованный профиль; 4 — настил . палубы; 5 — об-
обшивка борта
Рис. 14.47. Комбинированный узел
из прессованных профилей.
1 — комингс кокпита; 2 — палуб-
палубный узел; 3 — привальный брус
Рис. 14.48. Прессованные профили для сварных корпусов: а — размещение профилей в корпусе;
б-днищевой стрингер; в-профиль палубного узла; г - комингс; д - скуловой стрингер; е-
панель настила палубы
418
Рис. 14.49. Флор с отогнутыми флан-
фланцами.
1 — флор; 2 — днищевой стрингер;
3 — рамиый шпангоут; 4 — палубный
стрингер; 5 — углобульбовые профи-
профили, образующие комингс; 6 — под»
сланевый брусок; 7 — угольники
киля
Рис. 14.50. Шпангоутные рамки: а - с рам-
рамным шпангоутом; б — с однородным шпан-
шпангоутом.
1 — вертикальный киль; 2 — обшивка дни-
днища; 3 - рамиый шпангоут; 4 - пояс об-
обшивки борта; 5 - ширстрек; 6 - палубный
стрингер; 7-иастил палубы; 8 - рамный
бимс; 9 - карлиигс; 10 - пиллерс; 11 -
днищевой стрингер; 12 - флор; 13 - одно-
однородный шпангоут; 14 - бортовой стрингер;
15 — однородный бимс -
его верхнему фланцу и фланцу у профиля палубного узла палуба на участке между
указанными профилями выполняется из одного листа.
Скуловой стрингер 3 имеет брызгоотбойник (рис. 14.48, д), нижняя поверхность
которого задана по радиусу, соответствующему характеру обвода днища. Для облег-
облегчения отгибания при подгонке профиля к бортовой обшивке в верхней полке стрин-
стрингера сделано углубление треугольной формы. Панели палубы 5 в носовой оконечности
катера (рис. 14.48, е) имеют по два ребра жесткости, а верхняя (лицевая) поверхность
панелей — специальное рифление.
Широкое использование рассмотренных профилей позволило отказаться от уста-
установки продольных ребер, обеспечить качественную стыковую сварку с листами об-
обшивки (толщиной 2,5—3,0 мм и шириной 200—250 мм) поясков киля и других профи-
профилей, имеющих толщину кромок 4 мм, улучшить качество сварки и уменьшить коробле-
коробление конструкций за счет интенсивного отвода тепла профилями. В результате объем сва-
сварочных работ сведен до минимума и обеспечена постройка корпуса высокого каче-
качества — без значительных деформаций, обычных для сварных корпусов из алюминие-
алюминиевых сплавов.
Поперечный набор. Флоры изготовляют из листа толщиной 1—2 мм, у кеторого
по верхней и нижней кромкам отгибают фланцы (рис. 14.49) шириной 15—20 мм.
Верхний фланец является свободным пояском, нижний служит для присоединения
флора контактной сваркой к листам днища. Такие коробчатые флоры имеют неболь-
небольшую массу, их изготовление несложно, соединение с обшивкой и другими связями
набора достаточно просто. Использование флоров рассмотренной конструкции удобно
также при наличии продольных гофров на обшивке, обеспечивающих ее жесткость.
Находит применение конструкция с навесными флорами, но она менее удачна
не только для клепаных, но и для сварных корпусов (см. с. 414).
Шпангоуты — на судах значительных размерений (длиной 5 м и более) поперечную
прочность обеспечивают в основном мощными шпангоутными рамками, в состав ко-
которых входят рамные шпангоуты (рис. 14.50, а), имеющие тавровый профиль. В оконеч-
оконечностях при применении смешанной системы набора рамные шпангоуты заменяют одно-
однородными (рис. 14.50, б) из катаного профиля, нарезанными на бортовые стрингеры.
14*
419
Рис. 14.51. Лодка с гофри-
гофрированной обшивкой
Шпангоуты сварных корпусов, аналогично рассмотренным флорам и шпангоутам
в клепаных конструкциях, чаще штампуют из листа толщиной 1—2 мм, образуя фланцы
шириной 15—20 мм; последние нужны для присоединения к обшивке днища и к дру-
другим связям, а также в качестве свободного пояска. При значительной высоте профиля
флора в его стенке следует делать вырезы для облегчения (см. рис. 14.37).
В процессе разработки конструкций корпуса, выбора их элементов, назначения
размеров связей корпуса и толщин элементов оболочки важно сопоставлять принимае-
принимаемые размеры с соответствующими размерами элементов корпуса и оболочки на суще-
существующих судах, хорошо себя зарекомендовавших. С зтой целью ниже приведены
толщины элементов оболочки и набора корпуса, мм, выполненных из сплава АМг5М,
при различной длине корпуса:
Палубный настал
Обшивка:
борта
днища ....
транца....
Набор:
палубный . .
бортовой . .
днищевой. .
транцевый. .
4-5 м
1,5
1,5
2
2
2
2
2; 3
2
5-6 м
2
2
2,5; 3
3
2
2
3
2; 3
Обшивка. Настил палубы. В сварных корпусах малых судов, выполняемых из
сплавов, обладающих достаточно высокой пластичностью и позволяющих широко ис-
использовать штамповку заготовок, об- I 1 2
шивка становится основным элементом ; / / л^
корпуса. Конструкция и метод ее из-
изготовления, как правило, изменяют об-
общую компоновку связей набора, а в ряде
¦1 2 7
Рис. 14.53. Поперечная переборка.
1 - полотно переборки; 2 - гофр; 3 ¦
фланец
Рис. 14.52. Носовая часть палубы.
1 - настил палубы; 2 - комингс рубки;
3 - угловая стойка рубки; 4 - крыша
рубки; 5 - лобовое стекло; б - люк;
7 — гофр
420
случаев и роль отдельных связей в обеспечении ими общей и местной прочности кор-
корпуса.
Для мотолодок длиной около 3,5 м обшивка штампуется из листа толщиной 2 мм.
Заготовка обшивки включает днище на всю длину судна и борта — в районе средней
и кормовой частей лодки. Часто необходимая жесткость днища обеспечивается про-
продольными гофрами, образующимися при штамповке обшивки и идущими почти по всей
длине лодки (рис. 14.51). Эти гофры выполняют роль продольных ребер днища и
бортов. Форма гофров-ребер, их число и расположение по ширине задаются с учетом
требований обеспечения необходимой жесткости обшивки.
При использовании по днищу навесного набора обшивку проще изготовить из
штампованных листов. Требующаяся форма корпуса — его обводы — фиксируется
в районе днища приваркой днищевых стрингеров, скулового угольника, форштевня.
Листы обшивки днища и эти связи набора образуют днищевую секцию, к которой
(к скуловым угольникам) контактной сваркой привариваются бортовые- секции.
Дополнительно жесткость бортов может быть обеспечена карманами, служащими для
установки сидений, и другими связями корпуса и деталями.
На рассматриваемых судах палубный настил в обычном его конструктивном испол-
исполнении ставится в носовой части корпуса и идет по длине A/4 -з- 1/3)/-, являясь носовой
частью палубной секции, штампуемой из одного листа (рис. 14.52). В состав этой сек-
секции могут быть введены также декоративные ребра жесткости, бортовые объемные
панели, часть палубы, расположенная к корме (см. рис. 14.36). Соединение деталей
палубной секции между собой осуществляется в основном контактной сваркой.
Переборки. Транец. Назначение переборок и транца сварных корпусов, а также
обеспечение их прочности и жесткости аналогичны этим элементам клепаных корпусов.
Переборки сварных корпусов имеют простую конструкцию. Их жесткость обеспе-
обеспечивается вертикальными гофрами. При толщине полотна переборки 1,0—1,5 мм высота
элементов гофров 15—30, ширина 20—35 мм. Для соединения переборки с обшивкой
и настилом палубы по ее периметру отгибается фланец шириной около 15 мм
(рис. 14.53) .Соединение осуществляется контактной сваркой.Конструкция транца анало-
аналогична конструкции переборок; его соединение с обшивкой осуществляется контакт-
контактной сваркой с помощью отогнутого фланца. Для обеспечения жесткости листа транца
прибегают к вертикальным (рис. 14.54) или горизонтальным гофрам. В ряде случаев
последние считаются более предпочтительными — удобнее крепить транцевую доску.
А-А '
1 2
¦Г1"—V"
Рис. 14.54. Транец.
1— обшивка транца; 2 - гофр; 3 - подушка; 4 - болты крепления подушки; 5 - под-
моторная ниша
421
14.6. Особенности конструкций разборных судов
За последние годы появился большой интерес к малым разборным судам, которые
отличаются большим разнообразием по своему устройству и Конструкции корпуса.
В качестве примеров рассмотрим конструкции разборных лодок „Малютка", „Роман-
„Романтика" (описание лодок см. в гл. 4) и „Кулик".
Гребная разборная лодка „Малютка-2" (описание см. с. 64-65). Корпус лодки состоит нзтрех
секций, размеры которых заданы с таким расчетом, что кормовая секция вкладывается в среднюю,
а носовая - в кормовую. При этом не образуется существенных „пустот" и пакет имеет минималь-
минимальные размеры. Поперечная прочность корпуса обеспечивается двумя шпангоутами.
Корпус имеет подъем днища около 10° и развал бортов. Это способствует общей жесткости
корпуса, выполненного из ластового материала AMrSM толщиной 1,5 мм. Местная жесткость дости-
достигается наличием гофров высотой 10 мм (рис. 14.SS, В-В)~, продольных1 по обшивке днища и вер-
вертикальных по транцу (рис. 14.55, б, в). Для бортовых листов оказалось достаточным выполнение
слома (высадки) с радиусами 2 мм (рис. 14.55, Б-Б), идущего почти по всей длине корпуса
(рис. 14.55, в). .
Рис. 14.55. Конструктивный чертеж „Ма-
лютки-2": а - продольный разрез; б — вид
сверху; в - транец.
1- обшивка s=l,5 мм; 2 - палуба s =
= 1,5; 3— прокладка S =10; 4 — шпангоут
s =4; 5 - ремень S =2; б - сиденье; 7-
труба, 18x3 мм;. 8 - транец S =2 мм;
9 - гайка-барашек; 10 — шпилька
В-Б
Г-Г
В-В
10
422
Рис. 14.56. Соединение носовой и средней
секций.
1 — носовая секция; 2 — стяжной болт;
3 - прижимная накладка; 4 - фланец1; 5 -
опорный брусок реечного пайола; 6 —
средняя секция; 7 — сиденье
1 2 3
Рис. 14.S7. Конструкция транца.
1 — обшивка днища; 2 — рейка елани; 3 —
опорный брусок елани; -/ — обшивка тран-
транца; 5 - блок плавучести; 6 — подмоторная
доска; 7 - болт; 8 - кница
Рис. 14.58. Конструкция флора.
1 — листовая часть флора; 2 — обшивка
днища; 3 - опорный брусок елани;
4 — полособульбы свободного пояска
флора
55
кАААААЛЛЖЯДЛАААААААЬААААЛЛЛ?
V 1
во
Рис. 14.59. Соединения секций листов на прорезиненной ткани: а -днищевой и бортовой; б —
днищевых; в - бортовых.
1 — днище; 2 — заклепка; 3 — накладка; 4 - соединительная полоса; 5 — борт; б —лист кор-
кормовой секции; 7 — лист носовой секции
423
У верхней кромки обшивки борта отогнут
фланец с горизонтальным участком шириной
20 мм и вертикальным - 15 мм. Это позволило не
только увеличить жесткость обшивки, но и удачно
вварить трубки, служащие гнездами для уключин
(рис. 14.55, Г-Г). Транец (см. рис. 14.55, в)
имеет толщину 2 мм; его допускается выполнять
из сплавов АМг2 @,5 Н).
Настил палубы практически отсутствует, его
заменяют в носу брештук, а в корме — две кницы,
поставленные по бортам (см. рис. 14,-55, б); их
поперечные сечения изображены на рис. 14.55,
Б-Б). Жесткость кромок косынок обеспечи-
обеспечивается фланцами: по наружной кромке - 15, по
внутренней -10 мм.
Средняя секция по концам ограничена
шпангоутами (см. рис. 14.55, А-~А), носовая и
кормовая имеют по одному шпангоуту (их тол-
шина 4 мм). При сборке корпуса между шпан-
шпангоутами вводят прокладки нз губчатой резины,
секции соединяются шпильками с гайками-барашками (см. рис. 14.55, Г) - по 9 на шпангоут.
Гребная лодка „Романтика" (описание см. с. 65). По длине корпус лодки состоит из трех
секций, каждая из которых, в свою очередь, может быть разобрана на части (носовая - на две,
средняя и кормовая - на три). Неразборные днищевые секции корпуса кончаются переборками,
высота которых равна высоте борта до фланца; на переборках, как и на транце, выштампованы
Рис. 14.60. Конструкция опоры распорного
бимса.
1 — обшивка борта; 2 - заклепка; 3 - наклад-
накладка; 4 — опора бимса; 5 — распорный бимс
7 6
A
, \ 4 ,
^ T
f
3100
1b ^^\
ДП
ООН
В-В
16
¦/
7
58
90
03,2
15
Рис. 14.61. Оболочка лодки.
1 — бортовой носовой лист; 2 — бортовой средний лист; 3 - бортовой кормовой лист;
4 — днищевой носовой лист; 5 — днищевой средний лист; б—днищевой кормовой
лист; 7 — стыковая лента; 8 — накладка; 9 — заклепка
424
ю
Рис. 14.62. Устройство корпуса и размещение оборудования в лодке.
/ — обшивка; 2 — кронштейн для подвесного лодочного мотора; 3 — замок; 4 - шпангоут;
5 — блоки плавучести; б—весло; 7 —черпак; 8 — кормовой брештук; 9 — банка; 10 —
носовой брештук
гофры. Эти секции соединяются между собой болтами, после чего на горизонтальный фланец ста-
ставятся носовая палуба и верхние части корпуса, крепится подмоторная доска, укладываются решет-
решетчатые елани и сиденье.
Секции и детали корпуса лодки изготовлены из сплава АМгбБ с широким применением штам-
штамповки и сварки. Это позволило добиться уменьшения массы лодки и удобства ее сборки и разборки.
„Романтика" приспособлена для установки подвесного мотора мощностью 1,5—3,7 кВт
B—S л. с.), который крепится к деревянной транцевой доске толщиной 32 мм. Носовая часть лодки
запалублена. Фланцы соединения верхних и нижних частей, имеющие ширину 25 мм, при движении
на волне служат своеобразным брызгоотбойником. Жесткая „притуплённая" палуба в носу поз-
позволяет пассажирам выходить по ней на берег. Вариант соединения носовой и средней секций изобра-
изображен на рис. 14.56. Конструкция транца, примененная на „Романтике" (рис. 14.57), может быть ре-
рекомендована для судов подобного типа.
Средняя или другая секция разборного судна, в которую вкладываются остальные секции
и детали, имеет значительные размеры. Поэтому может возникнуть необходимость в усилении дни-
днищевого набора - в увеличении поперечной прочности путем введения флоров. Оригинальная кон-
конструкция этой связи приведена на рис. 14.58. Для того чтобы секции разборных судов можно было
удобно и быстро складывать и разбирать, в ряде случаев используют соединения секций на про-
прорезиненной ткани (рис. 14.59).
В связи с тем что на разборных судах поперечные переборки, как правило, отсутствуют, иногда
приходится применять распорные бимсы (рис. 14.60).
Складная двухместная лодка „Кулик". На лодке может быть установлен подвесной мотор
мощностью 1,5 кВт B л. с.). Оболочка корпуса (рис. 14.61) выполнена из листов толщиной 1мм-
сплав дюралюмин марки Д16АТ. Предусмотренная криволинейная форма носовых и кормовых
обводов обеспечивается заданием соответствующих размеров листов. Соединение листов между
собой осуществляется на стыковой ленте путем клепки (см. рис. 14.61, сечения А -А, Б-Б, В—В).
Для удобства складирования предусмотрены два поперечных и три продольных стыка. Общее пред-
представление о конструкции корпуса в целом дает рис. 14.62.
Заданную форму корпуса лодки позволяют сохранить три трубчатых шпангоута, на которых
сделаны замки для крепления к обшивке. В носу и корме жесткость корпуса обеспечивают гори-
горизонтальные кницы-брештуки. Поперечные банки крепятся к обшивке и шпангоутам. Съемные
детали соединяются с обшивкой при помощи замков и болтов с гайками-барашками. Шпангоуты,
поставленные по стыкам днищевой обшивки, снабжены специальными поворотными упорами,
которые передают нагрузку на листы обшивки и защищают прорезиненную ткань от повреждения.
425
IS СТАЛЬНЫЕ СУДА
15.1. Характеристика материала
Судостроительная сталь обладает высокими прочностью и пластичностью, благо-
благодаря чему стальной корпус надежен в эксплуатации. Он выдерживает большие нагруз-
нагрузки при посадке на мель, при столкновении с другими судами и плавающими предмета-
предметами. Пластические деформации, возникающие при чрезмерных местных нагрузках,
легко устраняются во время ремонта путем правки или вырезки деформированного
участка конструкции с последующей вваркой нового.
Корпуса малых стальных судов несколько легче армоцементных, но тяжелее дере-
--вянных, стеклопластиковых и алюминиевых. Однако масса стального корпуса длиной
12—15 м приближается к массе деревянного и пластмассового корпусов [4] .
Для постройки судов длиной менее 8—10 м сталь используется редко, так как
толщина обшивки, назначенная с учетом устойчивости листов, местной прочности
и коррозионного износа, получается не менее 1,5—2,0 мм. Деревянная обшивка таких
судов при толщине, обеспечивающей местную прочность, будет легче.
Соотношение масс корпусов из различных материалов примерно пропорционально
соотношениям характеристик легкости (табл. 15.1).
Сталь является рациональным материалом для постройки крейсерско-гоночных
яхт длиной 10—12 м и более. Некоторое увеличение массы корпуса по сравнению с яхта-
яхтами из других материалов не имеет практического значения, так как более тяжелые
яхты, согласно международным Правилам обмера крейсерско-гоночных яхт, полу-
получают меньший гоночный балл, что уравнивает их шансы на выигрыш гандикапной гон-
гонки с другими яхтами.
Сталь применяют для постройки быстроходных судов с водоизмещающим режи-
режимом движения [4] . \
Снизить массу стального корпуса можно за счет применения для наиболее напряжен-
напряженных связей сталей повышенной прочности, а также уменьшения или ликвидации запа-
запасов на коррозионный износ при условии, что корпус будет хорошо обслуживаться
во время эксплуатации. Для этой же цели можно использовать нержавеющие, плакиро-
плакированные или оцинкованные стали.
Коэффициент использования стальных листов и профилей при рациональном рас-
раскрое материала достигает 0,85—0,90, в то время как коэффициент использования
досок и брусьев при постройке деревянного судна примерно в 3 раза меньше.
Постройка малых стальных судов возможна на любом судостроительном, судо-
судоремонтном или другом предприятии, имеющем оборудование для резки, гнутья и
сварки стали.
Таблица 15. 1. Характеристики легкости материала по допускаемым напряжениям
Материал
Сталь:
ВСГЗсп
10ХСНД
Алюминиево-магниевый сплав:
АМг5
АМг61
Сосна рудовая
Стеклопластик средней прочности
Плотность у,
г/см3
7,85
7,85
2,65
2,65
0,51
1,64
Допускаемое на-
напряжение для бор-
бортовой обшивки
"доп> МПа
192
320
115
139
13
58
4,09
2,45
2,30
1,91
392,00
2,85
426
Стоимость стали для постройки корпусов малого судна меньше, чем алюминие-
алюминиевых сплавов или компонентов стеклопластика, но несколько выше, чем дерева и ма-
материалов для постройки армоцементного судна. Полная себестоимость стального корпу-
корпуса при единичной и мелкосерийной постройке ниже, чем из других материалов, за
исключением армоцементных. В малом стальном судостроении для изготовления неко-
некоторых элементов корпуса, например палубного настила, рубок и других конструкций,
широко применяются дерево, бакелизированная фанера, пластмасса и другие материалы.
За основную чхарактеристику стали в расчетах прочности принимается предел теку-
текучести. Отношение предела пластической прочности к пределу текучести характеризует
способность сталей к статическим перенапряжениям. Пластичность стали способствует
выравниванию напряжений в конструкциях, позволяет избежать трещин в местах
концентрации напряжений и в районах действия больших местных нагрузок.
При сварке элементов корпуса в районе сварных швов возникают большие уса-
усадочные напряжения, которые при достаточной пластичности частично или полностью
снимаются в процессе действия на корпус эксплуатационных нагрузок. Пластичность
необходима при гибке листов профилей, загибке фланцев, штамповке, резке, прокол-
проколке отверстий и других технологических операциях. Работоспособность корпусных
конструкций зависит и от предела усталости, который в значительной степени зависит
от предела прочности, а также от цикла переменной нагрузки и частоты нагружения.
Сталь хуже переносит нагрузку большой (вибрационной) частоты, т. е. разрушается
при меньших экстремальных напряжениях или при меньшем числе циклов, чем при
действии переменных нагрузок низкой частоты.
Усталостные трещины, появляющиеся прежде всего в районах резкого изменения
сечений связей корпуса, в неблагоприятных условиях становятся началом хрупких
разрушений. На тонких стальных листах, а также если эксплуатация не связана с низ-
низкими температурами, развитие хрупких трещин происходит медленнее. Благодаря этим
свойствам опасность хрупкого разрушения обшивки малых судов меньше, чем у боль-
больших.
По химическому составу судокорпусная сталь подразделяется на обыкновенную
углеродистую сталь (ОУС) и низколегированную сталь повышенной прочности (СПП).
По степени раскисления в процессе выплавки сталь подразделяется на кипящую, полу-
полуспокойную и спокойную. Для судовых корпусов применяется главным образом спокой-
спокойная сталь, так как кипящая сталь плохо сваривается, более чувствительная к концен-
концентрации напряжения, чем спокойная или полуспокойная сталь. Механические свойства
судостроительных сталей, используемых в малом судостроении, определяются
ГОСТ 5521-76.
Можно применять и некоторые марки углеродистых и низколегированных сталей,
не предусмотренные упомянутым ГОСТом, если по механическим качествам и хими-
химическому составу они удовлетворяют прочностным и технологическим требованиям
и, в частности, свариваемости. Удовлетворительно свариваемыми считаются стали,
у которых при сварке без подогрева не появляются трещины, а сварные швы и кон-
конструкции отвечают требованиям прочности. При сварке плохо свариваемых сталей,
содержащих более 0,22-0,24% углерода, появляются локализированная закалка и боль-
большие остаточные напряжения в зоне сварного шва, что способствует возникновению
внутренних дефектов в виде трещин. С увеличением содержания марганца сталь стано-
становится прочнее, но при сварке несколько возрастает размер зерен, поэтому общее со-
содержание углерода и марганца в корпусных сталях должно соответствовать условию
С + A/6) Мп < 0,4 % . Пригодность сталей для механической обработки можно прове-
проверить путем изгиба широких образцов в холодном или горячем состоянии. В месте из-
изгиба не должны появляться трещины и другие повреждения. Свариваемость сталей,
качество электродов и принятый режим сварки тоже проверяются сваркой образцов
с последующей проверкой качества соединений.
427
При назначении толщин листов и профилей
учитывается запас на коррозию. Средняя скорость
коррозии в воде для сталей, приведенных в-
ГОСТ 5521—76, примерно одинаковая, но она су-
существенно зависит от окраски и условий эксплуа-
эксплуатации. На скорость коррозии влияет выбор элект-
электродов для сварки или материала заклепок.
Детали корпуса, изготовляемые с примене-
Рис. 15.1. Профили балок набора: а, б- ™ем литья> свободной ковки или прессовой
несимметричный и симметричный поло- штамповки, тоже должны делаться из свариваемой
собульбы соответственно; в - угловой стали (форштевни, кронштейны, мортиры и т. п.).
профиль; г - сварной тавр В малом судостроении в основном исполь-
используются достаточно прочные обыкновенные угле-
углеродистые стали, которые не содержат дефицитных легирующих присадок, хорошо
обрабатываются и свариваются. Существенного снижения массы корпуса за счет исполь-
использования низколегированных сталей получить нельзя по ряду причин. Во-первых, раз-
размеры многих связей, определяемые по Правилам Регистра СССР, не зависят от предела
текучести стали (штевни, брусковый киль, днищевой набор, пиллерсы). Во-вторых,
уменьшение размеров связей может ограничиваться требованиями к их устойчивости,
жесткости конструкции и коррозионному износу. Для наиболее напряженных связей
можно, однако, рекомендовать сталь марки О9Г2.
Для постройки корпусов малых судов применяется листовой и профильный про-
прокат. Число типоразмеров проката следует при проектировании судна по возможности
ограничивать.
Для балок набора используются полосы, несимметричные и симметричные поло-
собульбы, угловые профили и сварные тавры (рис. 15.1). Полособульбы выпускаются
специально для судостроения. В постройке лучше несимметричный полособульб, имею-
имеющий плоскую часть стенки, удобную при сборке рам и позволяющую производить при-
приварку к ней книц, бракет и других конструкций внахлестку. Использование угольников
(особенно равнобоких) приводит к уменьшению высоты балок по сравнению с полосо-
бульбами при некотором увеличении массы балок. При меньшей высоте профилей
повышаются деформационная сопротивляемость перекрытий корпуса и их энерго-
энергоемкость при соударении. Неравнобокие полособульбы и особенно угольники изгибают-
изгибаются с присоединенным пояском обшивки, приваренным нормально к их стенке, с неко-
некоторым перекосом. Симметричные полособульбы лишены этого недостатка, но они
менее технологичны в постройке и в малом судостроении применяются редко. Исполь-
Использование полос приводит к упрощению сборки и сварки, к упрощению узлов пересече-
пересечения балок с другими конструкциями, к меньшей стоимости единицы массы проката,
но они тяжелее полособульбов.
Рамный набор малых судов обычно выполняют из тавров, которые свариваются
из листов и полос при постройке судов. Их главное преимущество по сравнению с про-
прокатными профилями заключается в возможности выбора оптимальных толщин, ширины
стенки и пояска с учетом всех требований, предъявляемых к конструкции. Тавры
обходятся дороже прокатных профилей.
15.2. Расчет связей небора.
Расчетные нагрузки на палубу (в м вод. ст. — 1 м вод. ст. примерно равен
10 кН/м2) принимаются следующими: в средней части и в корме — 0,5, в районе над-
надстроек и рубок — 0,3, в носовой части — 0,5—1,5.
Расчетная нагрузка для связей борта и днища определяется по формуле
A5.1)
428
где h ! — вертикальное расстояние от рассчитываемой связи до палубы; А — расчетная
нагрузка на палубу.
При расчете прочности непроницаемых переборок предполагают, что уровень воды
при затоплении отсека доходит до верхней кромки переборки у борта. Расчет проч-
прочности переборок топливных и других цистерн, постоянно заполненных жидким грузом,
нужно выполнять на несколько большую нагрузку, принятую с учетом возможных
гидравлических ударов жидкости о стенки цистерны во время качки.
Выбрать толщину обшивки или других листов можно по формуле
s= 0,244a VMffflon. A5.2)
где а — ширина пластины (шпация балок главного направления), см; р — интенсивность
равномерно распределенной нагрузки, м вод. ст.; стдоп - допускаемые напряже-
напряжения, МПа.
Значение коэффициента к принимается в зависимости от отношения длины пла-
пластины Ъ к ее ширине а :
Ь/а ..
к...
./ 1,0 ,
/0,0517 /
1 1,2
0,0612
1,4
0,0714
1,6
0,0784
1,8
0,0821
2,0
0,0829
3,0
0,0832
4 н более
0,0833
Пластина предполагается прямоугольной, жесткой и, в силу симметрии конструк-
конструкции и нагрузки, жестко защемленной на опорном контуре.
Подавляющее число балок набора рассчитывается на поперечный изгиб. Эти балки
целесообразно замыкать в раму, так как в ее составе они становятся прочнее благо-
благодаря разгружающему действию угловых моментов. Стержни рамы в узлах должны быть
сварены между собой с помощью книц или непосредственно.
Балки, испытывающие осевое сжатие, например пиллерсы, должны рассчитывать-
рассчитываться на устойчивость.
При расчетном определении размеров балок набора используется метод последо-
последовательных приближений; определив размеры в первом приближении, проверяют кон-
конструкцию на прочность, если надо, уточняют размеры и т. д.-
Балки набора стального корпуса, приваренные к наружной обшивке, палубному
настилу или обшивке переборок, работают вместе с присоединенным пояском, т. е.
с примыкающей полосой обшивки или настила, как двутавровые балки. При расчетах
прочности балок набора ширина присоединенного пояска берется меньшей из трех
следующих величин: среднего расстояния между одноименными соседними балками,
1/6 пролета балки или 50 толщин присоединенного пояска.
Поскольку шпангоутные и другие рамы являются статически неопределенными,
то для раскрытия их статической неопределимости необходимо определить моменты
в узлах- соединения балок и в районе опор, т. е. в районе установки поддерживающих
перекрестных балок. Это можно сделать с помощью уравнений трех моментов. Проле-
Пролеты балок, составляющих шпангоутную раму, принимаются равными расстояниям
между точками пересечения осей балок (по хорде). Кницами можно пренебречь. Схема
действующих на шпангоутную раму сил и эпюры изгибающих моментов для стержне-
стержневой рамы показаны на рис. 15.2. Нижние концы шпангоутов для упрощения расчетов
можно считать жестко заделанными во флорах. При расчете флоров их можно считать
свободно опертыми на борта.
Продольные перекрестные балки рассматриваются жестко заделанными на пере-
переборках, но если длины смежных отсеков или величины приходящихся на них местных
нагрузок существенно отличаются друг от друга, может потребоваться вычисление
опорных моментов этих балок. Если перекрестная балка заканчивается на переборке,
то ее конец можно считать свободно опертым, делая при этом ошибку в безопасную
429
6)
Рис. 15.2. Схема сил, действующих на шпангоутную раму: а - расчетная схема;
б — зпюра изгибающих моментов
сторону. Продольные ребра жесткости рассчитываются как балки, жестко заделанные
на опорах (поперечных рамных балках и переборках).
Допускаемые напряжения в отдельных конструкциях устанавливаются в долях
от предела текучести материала:
Наружная обшивка (в опорных сечениях пластин) 0,9
Вертикальный киль и днищевые стрингеры 0,8
Флоры — нормальные напряжения в поясках 0,8
» касательные » в стенке 0,45
Продольные ребра жесткости борта и днища 0,8
Бортовой набор при поперечной системе набора 0,8
Стальной палубный настил '0,6
Палубный набор в районе жилых помещений .' 0,8
о » « » машинного отделения 0,6
Особо рассматриваются и рассчитываются конструкции, которые у проектируемо-
проектируемого судна вследствие специфики эксплуатации будут испытывать действие повышенных
нагрузок.
Другой способ определения размеров связей — пересчет по прототипу.
Момент сопротивления одноименных балок, работающих на изгиб, можно опреде-
определить по формуле
W=Woapl2l(aoPolo), A5.3)
где а, а о — средние ширины оболочки, передающие нагрузку на данную балку; р,
Ро — усовные расчетные нагрузки; /, / 0 - пролеты балок. Индекс „ноль" здесь и в по-
последующих формулах относится к параметрам прототипа.
Если размеры балок прототипа и проектируемого судна одинаковы, а материал
разный, то пересчет выполняется по формуле
При пересчете толищины листов, рассчитываемых только на поперечные нагрузки,
в зависимости от изменяемых параметров можно использовать одну из формул:
s = soa/ао; s = s0 \/(oaonJoaon); s =WO/Po)
A5.5)
430
Таблица 15.2. Размеры конструктивных элементов стальных моторных лодок
и катеров довоенной, постройки
Главные разме-
рения, м
В Н
Шпация,
мм
Толщи-
Толщина об-
обшивки,
мм
Размеры, мм
бруско-
брускового
(слой-
(слойчатого)
киля
фор-
форштевня
флора
шпангоута
бнмса
Толщи-
Толщина пере-
переборок,
мм
5,5
6,5
7,5
8,0
9,0
10,0
11,0
12,0
13,0
14,0
9,0
10,0
11,0
12,0
13,0
14,0
14,0
15,0
1,50
1,60
1,70
1,85
1,85
2,00
2,10
2,20
2,50
2,80
0,65
0,75
0,90
1,00
1,00
1,05
1,10
1,15
1,25
1,40
2,10
2,30
2,40-
1 ЛЛ
2,50-
/,оо
2,60-
0 ЯЛ
Zto\j
2,80
3,00
3,30
1,13
1,21
1,30
1,45
1,40
1,42
1,50
1,62
300-400
300-400
350-450
350-450
350-450
350-450
350-450
350-450
350-450
350-450
300-450
300-400
250-400
300-450
300-450
300-450
300-450
300-450
2,0-2,5
2,0-2,5
2,5-3,0
2,5-3,0
2,5-3,0
3,0-4,0
3,0-4,0
3,0-5,0
3,0-5,0
3,0-5,0
3,0-4,0
3,0-4,0
3,0-4,5
4,0-5,0
4,0-6,0
4,0-6,0
4,0-6,0
4,0-6,0
Легка]
50x8
60x8
60x8
60x10
60x10
65x10
70x10
70x12
75x12
80x16
i конструкция
50x8
60x8
60x10
60x10
60x10
60x10
70x13
75x16
75x16
80x10
130x1,5
140x2,0
150x2,0
150x2,5
150x2,5
150x3,0
160x3,0
160x3,0
160x3,0
170x3,0
Нормальная конструки
60x13
60x13
70x13
70x16
70x16
70x16
70x16
80x15
70x18
70x18
75x19
80x20
80x20
80x20
80x20
90x22
150x2,5
160x3,0
160x3,0
160x3,0
175x3,0
180x3,0
180x3,0
180x3,0
25x25x3
25,х25хЗ
25x25x3
25x25x3
30x30x4
30x30x4
30x30x4
30x30x4
35x35x4
35x35x4
ИЯ
30x30x4
30x30x4
30x30x4
30x30x4
35x35x4
40x40x4
40x40x4
40x40x4
20x30x3,0
20x30x3,0
25x35x3,0
25x35x3,0
25x35x3,0
30x40x4,0
30x40x4,0
30x45x4,5
30x45x4,5
40x50x4,5
30x40x4,0
30x45x4,5
30x45x4,5
30x45x4,5
40x50x4,0
40x50x4,0
40x50x4,0
40x50x4,0
1.0'
1,5
1,5
2,0
2,0
2,0
2,5
2,5
3,0
3,0
2,0
2,5
2,5
3,0
3,0
3,0
3,0
3,0
Таблица 15. 3. Размеры шпации, мм
Поперечная
характеристи-
характеристика Д/2 + #,
м
1,0-1,2
1,2-1,4
1,4-1,6
1,8-2,0
2,0-2,2
2,2-2,4
2,4-2,6
2,6-2,8
2,8-3,0
3,0-3,2
3,2-3,4
3,4-3,6
3,6-3,8
3,8-4,0
4,0-4,2
Средняя часть судна
при шпангоутах
облегчен-
облегченных
290
300
320
350
360
370
380
390
400
410
420
430
440
450
460
усиленных
280
290
300
320
330
340
' 350
360
370
380
385
390
400
410
420
Носовая
чюсть судна
при шпангоутах
облегчен-
облегченных
240
250
260
270
280
290
300
305
310
315
320
325
330
335
340
усиленных
220
230
240
255
260
270
275
280
290
295
300
305
310
310
315
Таблица 15.4. Зависимость
размеров брускового киля от
длины судна
Длина судна
I.M
6-7
7-8
8-9
9-10
10-11
11-12
12-13
13-14
14-15
15-16
16-17
17-18
- 18-19
19-20
Размеры киля,
мм
68x11
71x12
75x12
78x13
81x14
85x14
88x15
91x16
95x16
98x17
101x17
105x18
108x19
112x19
431
Таблица
Продольная
характеристика
(Д/2+Я)?ср, м
10-16
16-21
21-27
27-34
34-41
41-49
49-57
57-65
65-73
73-81
81-90
90-99
99-108
• 108-117
117-127
15.5. Размеры обшивки
Толщина днищевой и борто-
вой обшивки, мм,
конструкции
облегченной
1,50
1,75
2,00
2,25
2,50
2,75
3,00
3,25
3,50
3,75
4,00
4,25
4,50
4,75
5,00
усиленной
1,75
2,00
2,25
2,50
3,00
3,25
3,50
3,75
4,00
4Д5
4,50
4,75
5,25
5,50
5,75
в средней части
Ширина
шпунтового
ПЛСГЛП ж. ЛЧк Ж
пояса, мм
300
320
330
340
360
380
400
430
450
470
490
520
540
560
590
длины судна
Толщина
пояса, мм
2,00
2,25
2,50
2,75
3,00
3,50
3,75
4,00
4,50
4,75
5,00
5,25
5,50
6,00
6,25
шпангоутного
, конструкции
VPMJTP ННПЙ
2,25
2,50
2,75
3,00
3,50
4,00
4,25
4,75
5,00
5,25
5,75
6,00
6,50
7,00
7,25
Поперечная
характеристика
Я/2 + Я, м
1,0-1,2
1,2-1,4
1,4-1,6
1,6-1,8
1,8-2,0
2,0-2,2
2,2-2,4
2,4-2,6
Таблица
15. 6. Характеристика флоров
Высота флора, мм,
конструкции
облегченной
50
55
60
70
80
90
100
105
усиленной
80
90
100
ПО
115
120
130
' 140
Поперечная
характеристика
В/2 + Я, м
2,6-2,8
2,8-3,0
3,0-3,2
ЗД-3,4
3,4-3,6
3,6-3,8
3,8-4,0
4,0-4,2
Высота флора, мм,
конструкции
Облегченной
ПО
120
130
135
140
150
160
170
усиленной
150
160
170
180
190
200
210
220
Поперечная
характеристика
D f> i U
в/2 + Я, м
1,0-1,2
1,2-1,4
1,4-1,6
1,6-1,8
1,8-2,0
2,0-2,2
2,2-2,4
2,4-2,6
Таблица
15. 7. Характеристика шпангоутов
Момент сопротивления
шпангоутов W, см3
облегченных
0,46
0,60
0,78
0,96
1,19
1,50
1,88
2,24
усиленных
1,25
1,63
1,88
2,24
2,62
3,00
3,25
3,87
Поперечная
характеристика
В12 +Я,м
2,6-2,8
2,8-3,0
3,0-3,2
3,2-3,4
3,4-3,6
3,6-3,8
3,8-4,0
4,0-4,2
Момент сопротивления
шпангоутов W, см3
облегченных
2,62
3,00
3,38
3,75
. 4,12
4,62
5,00
5,50
усиленных
4,37
4,87
5,25
5,88
6,38
7,00
7,62
8,12
432
Таблица 15.8. Характеристика бимсов
Ширина палубы
В, м
До 14
1,5-2,0
2,0-2,5
2,5-3,0
3,0-3,5
3,5-4,0
4,0-4,5
Момент сопротивления бимсов W, см3
без пиллерсов
0,75
1,52
2,67
4,22
6,22
9,07
12,00
с одним пиллерсом
0,216
0,438
0,769
1,270
1,790
2,610
3,460
с двумя пиллерсами
0,104
0,211
0,371
0,587
0,864
1,250
1,670
Таблица 15.
Поперечная
характеристика
В/2 +#, мм
10-16
16-21
21-27
27-34
34-41
41-49
49-57
9. Размеры палубных стрингеров при деревянном палубном настиле
Ширина,
мм
140
150
160
170
180
200
220
Толщина стринге-
стрингеров,
облегчен-
облегченных
1,50
1,75
2,00
2,25
2,50
2,75
3,00
мм
усилен-
усиленных
1,75
2,00
2,25
2,50
3,00
3,25
3,50
Поперечная
характеристика
В12 +Я, мм
57-65
65-73
73-81
81-90
90-99
99-108
108-117
Ширина,
мм
230
250
270
290
300
320
350
Толщина стринге-
стрингеров,
облегчен-
облегченных
3,25
3,50
3,75
4,00
4,25
4,50
4,75
мм
усилен-
усиленных
3,75
4,00
4,25
4,50
4,75
5,25
5,50
Если судно-прототип отличается от проектируемого размерами, воспринимаемы-
воспринимаемыми нагрузками и характеристиками материала, то при пересчете последовательно ис-
используют приведенные выше формулы.
Наиболее простым и достоверным способом определения размеров связей являет-
является статистический метод. При этом можно ориентироваться на данные табл. 15.2-15.11.
В источниках [9, 15] моменты сопротивления некоторых балок приведены без
присоединенного пояска, в данном же справочнике они даны с присоединенным пояс-
пояском.
Ниже даны некоторые рекомендации Д. А. Курбатова по элементам стальных
яхт.
Таблица 15. 10. Размеры обшивки
водонепроницаемых переборок
Отстояние
нижней кромки
от палубы, м
1,00
1,25
1,50
1,75
2,00
2,25
2,50
Толщина,
мм, при расстоянии
между стойками
400
2,50
2,50
2,50
2,50
2,75
2,75
3,00
500
2,75
2,75
2,75
3,00
3,00
3,25
3,50
600
3,00
3,00
3,25
3,50
3,75
3,75
4,00
Примечание. Толщина форгшковых пере-
переборок увеличивается на 0,25 мм.
Таблица 15. 11. Характеристика пере-
переборочных стоек
Длина стойки
/, м
1,00
1,25
1,50
1,75
2,00
2,25
2.50
Момент
см', прн
сопротивления W,
расстоянии
стойками, мм
400
0,80
1,56
2,70
4,29
6,40
9,10
12,50
500
1,00
1,95
3,38
5,36
8,00
11,40
15,60
между
600
1,20
2,34
4,05
6,43
9,60
13,60
18,70
Примечание. Момент сопротивления
стоек форпиковых переборок увеличивается
на 25 %. "
433
Зависимость минимальной толщины наружной обшивки стальной яхты от ее длины
и шпации:
Средняя длина яхты ? ср,м .... 6 13 16 19
Шпация 340 380 400 430
Минимальная толщина
наружной обшивки 2,5 3,0 3,5 4,и
Зависимость момента сопротивления стальной яхты от пролета шпангоута и шпа-
шпации:
Пролет шпангоута, мм 1,2 1,8 2,4 3
Шпация.мм 340 380 400 20
Момент сопротивления W, см3 . . 2 3 4 20 /
Метод выбора размеров связей зависит от его достоверности и соответствия раз-
размерам, назначению, типу судна. Морские суда длиной 12 м и более следует набирать
по Правилам Регистра СССР, набор судов меньших размерений определяется по стати-
статистическим данным или данным судна-прототипа и расчетными методами. Можно допу-
допустить и экстраполяцию Правил Регистра СССР на суда несколько меньшей длины с по-
последующей расчетной проверкой размеров связей. В любы* методах в неявной форме
заложен некоторый запас на износ конструкции от коррозии и эрозии. Для лучшей
ориентации при выборе размеров связей можно воспользоваться конструктивными
чертежами судов-прототипов, некоторые из них приведены ниже. Результаты, получен-
полученные разными, методами, полезно проанализировать и принять размеры по наиболее
достоверному либо на основе компромиссного решения. При крупносерийной построй-
постройке можно изготовить опытный образец и проверить его прочность в жестких условиях
эксплуатации.
Рекомендации по проектированию набора. Концентрация напряжений опасна при
больших номинальных напряжениях, а также в местах действия вибрационных и удар-
ударных нагрузок. Чтобы уменьшить концентрацию напряжений при обрыве балок, их
концы следует срезать „на ус" на длине около 1,5 высоты балки и заканчивать вблизи
связей другого направления так, чтобы длина участка листа обшивки или настила
между концом обрываемой балки и стенкой ближайшей связи другого направления
была возможно меньше (рис. 15.3). Такое окончание можно применить для продоль-
продольных днищевых, бортовых и палубных ребер жесткости, для стоек и ребер переборок,
для промежуточных шпангоутов, устанавливаемых для местного усиления борта.
В районах повышенной вибрации, а также воспринимающих силовые ударные
нагрузки, концы обрываемых балок следует приваривать к стенкам связей другого
направления (рис. 15.4). Рамные балки следует заканчивать на жестких перпендику-
перпендикулярных связях (переборках, рамных балках другого направления), за которыми плав-
плавно уменьшать их сечение на длине не менее 1,5 высоты балки, а концы приваривать
к связям другого направления (рис. 15.5). Это относится к днищевым стрингерам,
карлингсам, поддерживающим бортовым стрингерам. Аналогично обрываются фальш-
фальшборты, скуловые кили и другие связи.
Рис. 15.3. Конструктивное оформление конца обрываемой балки: а
для продольных ребер жесткости; б - для переборочных стоек
434
Рис. 15.4. Конструкция окон-
окончания промежуточных шпан-
шпангоутов
Рис. 15-5. Обрыв рамных
балок
Если вследствие изменения действующих нагрузок или длин пролета нужно из-
изменить сечение многопролетной балки, то переход от одной высоты к другой делают
на длине не менее 5 разностей высот. При зтом сварные стыки стенок и поясков не
следует совмещать. Они должны быть разнесены в соответствии с рис. 15.6. Концен-
Концентрацию напряжений в районе излома пояска меньшей по высоте балки можно умень-
уменьшить постановкой по стенке балки в районе излома вертикальных ребер жесткости,
как показано на рис. 15.6, или совмещение излома с перпендикулярной жесткой связью.
В этих случаях длину переходного участка можно уменьшить. Сварные швы полосе-
бульбовых профилей выполняются в месте изменения сечения с разделкой головки
профиля под сварку.
Свободные пояски обрываемых тавровых балок должны срезаться „на ус", как
показано на рис. 15.7. Изломы балок набора как в поперечной, так и в продольной
плоскости не должны превышать 15°, при этом, если излом больше 5°, он должен
выполняться на жестких связях. <
Все вырезы в балках набора должны иметь скругленные углы и гладкие кромки.
Не рекомендуется делать вырезы вблизи опор, где стенки рамных балок восприни-
воспринимают большую перерезывающую силу. Высота вырезов редко превышает 0,5 высоты
стенки балки в районе выреза. Оформление неподкрепленных вырезов показано в
табл. 15.12.
Вырезы шириной более 0,25 высоты балки должны подкрепляться, если они вы-
выполняются в районе опорных сечений (на участках, равных 1,5 высоты балки, в каждую
сторону от опорного сечения, в районах изменения сечений балок и излома их оси,
в средней части вертикального киля, в районе установки книц и пиллерсов. Подкрепле-
Подкрепление вырезов осуществляется постановкой вертикальных или горизонтальных ребер
жесткости по краям выреза или приваркой полосы до периметру выреза. Однако это
требует дополнительных затрат труда, и можно пойти на некоторое утолщение листов,
чтобы не приваривать подкрепляющих ребер или полос.
\ Не менее 0.5Ь,
Рис. 15.6. Конструктивное оформление изменения сечений балок
Рис. 15.7. Срезание
пояска тавровой балки
при ее свободном окон-
окончании
435
O\
Таблица 15. 12. Оформление вырезов в стенках стальных балок набора
Эскиз выреза
R или г
Область применения
А '
^
Г
г
г
Ф
I
1 1
aw й/Л им 2Омм,что Польше
\ие менее' oph
[не менее0,1h или 20mm,y/710 Польше
\ \
\не менее 04-h
—г i
@,25^- 0,5 0)й
A,5-^2,0N
@,10^-0,25N
@,10^-0,25N
0,56
0,5-1,0
@,5-^0,8N
0,56
@,15-г- 0,25) й
@,2^-0,4) й
Не более й @,2-^0,4N
^- 2,0) й
2й
Флоры, вертикальный киль
и днищевые стрингеры
Рамные бимсы, карлингсы,
шпангоуты, стойки перебо-
переборок, продольные полосо-
бульбовые балки для про-
прохода трубопроводов
и электротрасс
Для прохода балок главного направления в стенках перпендикулярных балок или
переборках делаются вырезы, которые должны по возможности иметь скругленные
углы для уменьшения вероятности появления трещин (рис. 15.8). Передача усилий
от главных балок на рамные связи осуществляется через непосредственное сварное
соединение стенок балок. При большой высоте стенки рамной балки и относительно
малой ее толщине рекомендуется установка перпендикулярных к ее пояску ребер жест-
жесткости (см. рис. 15.8) или книц, которые будут обеспечивать не только передачу усилий
от балки главного направления на рамную балку, но и устойчивость стенки балки.
В районах повышенных, особенно переменных и ударных нагрузок, а также вблизи
опор рамной балки, стенки которой испытывают большие касательные напряжения,
рекомендуется установка заделок, обеспечивающих более симметричную передачу
усилий от балок главного направления и частично компенсирующих вырез в стенке
рамной балки. Площадь сечения заделок должна быть не менее 0,8 площади сечения
балки главного направления. Заделки могут быть вварены встык (см. рис. 15.8) и
внахлестку (рис. 15.9). Устройство свободного выреза, как зто показано на рис. 15.10,
облегчает сборку, не требует точной подгонки одних балок к другим. При проходе
продольных ребер жесткости через непроницаемые конструкции, например продоль-
продольных балок через поперечные переборки, шпангоутов через платформы и продольные
переборки цистерн, должны устанавливаться непроницаемые заделки (рис. 15.11).
В конструкции корпуса следует избегать жестких точек, возникающих в обшивке
или настиле при опирании на них концов книц или других жестких конструкций. На
рис. 15.12, а показана конструкция с жесткой точкой 1, а на рис. 15.12, б, в — кон-
конструкции, в которых установлены соответственно горизонтальные и вертикальные
ребра, ликвидирующие жесткую точку. Жесткие точки возникают также и при окон-
окончании балок или книц на значительном расстоянии от жестких перпендикулярных
связей. Следует избегать и жестких точек 1 типа ножевой опоры (рис. 15.13), в районе
их возможного возникновения нужно устанавливать ребра или кницы.
Концы книц, крепящих балки к высокой рамной балке, расположенной в той
же плоскости, следует доводить до ребер, подкрепляющих Стенку рамной балки. Это
позволит предохранить стенку рамной балки от потери устойчивости и появления тре-
трещин (рис. 15.14). На рис. 15.15 показаны варианты правильного соединения шпан-
шпангоутов со скуловыми кницами или флорами.
Во избежание появления трещин в поясках пересекающихся рамных балок одина-
одинаковой высоты в районах повышенной вибрации или действия ударных нагрузок ре-
рекомендуется использовать крестовидные вставки (рис. 15.16).
Следует также избегать совмещения конструктивных и технологических (сварные
швы) концентраторов напряжений (рис. 15.17). Все балки набора рекомендуется
замыкать в рамы.
Выбор системы набора и шпации. На малых судах предпочтительной является
поперечная система набора как более технологичная. При поперечной системе упро-
упрощаются разметка, стыковка блоков и секций. Судно лучше воспринимает поперечные
нагрузки, возникающие при швартовке, посадке на мель, ударе волны в борт и т. д.
Больше будет полезный объем помещений в связи с отсутствием рамных шпангоутов
и рамных бимсов. Однако при продольной системе набора лучше обеспечиваются устой-
устойчивость пластин и общая продольная прочность. Если при этом сохранить число продоль-
продольных ребер жесткости по всей длине неизменным, то их шпация в носовой части умень-
уменьшится, что благоприятно скажется на восприятии повышенной в этом районе расчет-
расчетной нагрузки.
В случае сомнения при выборе системы набора следует спроектировать два вариан-
варианта конструкции: с поперечной и продольной системами, оценить их по выбранному
критерию и в ыбрать лучший.
Нормальная шпация, мм, для судов длиной от 12 м и выше определяется по фор-
формуле а о =0,2L + 480, где L — длина судна, м. Допускается изменить шпацию на 25 % по
сравнению с нормальной.
437
Рис. 15.8. Форма вы-
выреза для прохода
несимметричного по-
полособульба в про-
проницаемой конструк-
конструкции
Рис. 15.9. Приварка за-
заделки внахлестку
Рис. 15.10. Свободный вырез
для прохода таврового
профиля
Рис. 15.11. Непроницаемая заделка при
проходе полособульба
Рис. 15.12. Узел с жест-
жесткой точкой (а) и ва-
варианты (б, в) правиль-
правильного конструктивного
оформления
Рис. 15.13. Узлы с жесткими точками типа ножевой опоры
Рис. 15.14. Крепление бал-
кн к рамной балке с вы-
высокой стенкой
438
a)
Рис. 15.15. Варианты крепления шпангоутов к скуловым кницам и флорам: а - встык (в, =0,65Л.
/ =1,25А , с < 5s); б -встык (/ =1,5Л , с < 5s); в - внахлестку (в, > 0.25Л , ат = 0,75Л , / =
= 1,5Л ,с <Ss); г -внахлестку (в, > 0.7Л ,в,> 0.25Л ,/ ?1,5Л ,с < 5s)
На судах длиной менее 12 м шпация обычно принимается 300—500 мм, но от этих
цифр могут быть и отступления. Следует иметь в виду, что при уменьшении шпации тол-
толщина листов обшивки и размеры балок набора уменьшаются, но увеличиваются число
балок набора и общая протяженность сварных швов. Так что выбор шпации является
одной из задач оптимизации корпусных конструкций.
Соединения элементов корпусных конструкций. Все листовые конструкции, как
правило, свариваются встык, а набор приваривается угловыми швами. Расчетная тол-
толщина угловых сварных швов для судов длиной более 12 м при ручной и полуавтома-
полуавтоматической сварке может быть определена по Правилам Регистра СССР по формуле
a =aps, где а — коэффициент прочности, принимаемый в зависимости от ответствен-
ответственности сварного соединения в пределах 0,10—0,45; 0 — коэффициент, принимаемый
равным для двустороннего непрерывного шва — 1; шахматного, цепного и гребен-
гребенчатого — ///, одностороннего непрерывного — 2 и одностороннего прерывистого — Щ1;
s — меньшая из толщин соединяемых деталей» мм; t — шаг шва, мм; / — длина при-
приварки, мм. /
С некоторой экстраполяцией можно использовать Правила Регистра СССР и для
определения расчетных толщин угловых швов судов несколько меньшей дли-
длины (8—12 м). К наиболее ответственным относятся соединения флоров с вертикаль-
ным килем, палубного настила с обшивкой. Наименее ответственными являются соеди-
соединения ребер жесткости с подкрепляемой обшивкой, стоек с переборками.
Прерывистые швы не рекомендуются в районах повышенной вибрации (вблизи
двигателя, гребного винта), в носовой оконечности и в других районах, испытываю-
испытывающих ударные нагрузки. Односторонние швы не рекомендуются в районе ударных на-
нагрузок, а также если угол между стенкой балки и обшивкой отличается от прямого
Рис. 15.17. Пример совмещения конст-
конструктивного и технологического кон-
концентратора напряжения.
1 — скуловая кница или флор; 2 —
трещина по сварному шву;- 3 — шпан-
шпангоут
Рис. 15.16.Варианты пересечения поясков
тавровых балок: а - приварка встык;
б - соединение с крестовидной вставкой
1 — рамная стойка; 2 — шельф; 3 -
вставка
439
Рис. 15.18. Поперечное сечение стального катера „Кальмар" {LxBxH =
= 6,5 х 2,1 х 1,1 м)
/— горизонтальный киль, 3 х 200 м; //— скуловой брызгоотбоиник 1=
= 1,5 мм; /77 - скуловой угольник, 2 х 80 мм
15*60 Линолеум
Сосна \ „//Л"
Ст. 3
Рис. 15.19. Поперечное сечение катера „Сом" (Z, хВ х
хЯ=6х1,9х1,02м)
440
более чем на 10°. При использовании прерывистых швов концы балок на длине,
равной 2 высотам балки, но не менее чем на длине приварки книц должны приваривать-
привариваться двусторонним сплошным швом.
Сварка элементов толщиной 2,5—3,0 мм не представляет собой затруднений, но при
сварке листов толщиной 1,5—2,0 мм возможны прожоги и сильное коробление. Во
избежание этого можно использовать подкладные планки или приварить листы
к утолщенным листам или угольникам внахлестку, как это выполнено, например,
на стальном варианте катера „Кальмар" (рис. 15.18). Использование точечных швов,
установка шпангоутных угольников полкой к обшивке, как это сделано на катере
„Сом" (рис. 15.19), и другие меры приводят к снижению сварочных деформаций. Во
избежание прожогов можно воспользоваться и газовой сваркой, но при этом неминуем
значительный прогрев металла, прилегающего к сварному шву, и, как следствие, боль-
большие остаточные деформации корпусных конструкций.
Замена сварки на клепаные соединения тонколистовых конструкций исключает
коробление, но требует больших затрат труда и установки уплотнительных прокладок
из ткани для обеспечения водонепроницаемости. Поэтому клепка в малом стальном
судостроении в настоящее время практически не применяется.
15.3. Конструирование элементов корпуса
Обшивка днища, борта и переборки. Обшивка раскраивается из листов, обычно
располагаемых длинной стороной вдоль судна. Пазы (продольные соединения) листов
должны по возможности делаться без уступов, образуя поясья. Стыки листов также
рекомендуется располагать в одной поперечной плоскости с целью уменьшения внут-
внутренних напряжений и деформаций обшивки от сварки. Однако на малых судах пазы,
число которых обычно не более двух-трех, и стыки зачастую выполняются с уступами.
Габариты листов выбираются с учетом технологических соображений: общая трудоем-
трудоемкость гнутья листов, обработки кромок, сборки и сварки должна быть минимальной.
Правила [59] рекомендуют принимать расстояние между параллельными стыковыми
швами не менее 200 мм, между параллельными угловым и стыковым швами — не
более 75 мм и угол между двумя стыковыми швами — не менее 60°. Для судов дли-
длиной менее 12 м от этих требований можно отступить.
Сварные пазы и стыки следует располагать в наименее напряженных сечениях
корпуса, возможно дальше от мест резкого изменения сечений связей, вырезов и т. п.
При выборе толщины листов обшивки нужно учитывать действующие на них нагрузки,
возможность обработки и сварки листов, требования к1 долговечности корпуса и т. п.
Предварительную разметку стыков и пазов можно сделать на проекции „корпус"
теоретического чертежа, затем следует изготовить деревянную блок-модель корпуса
в масштабе 1:10 или 1:25 по теоретическому чертежу для половины судна. На блок-
модель условными линиями нужно нанести все сварные швы, которыми изнутри при-
приварены набор, переборки, платформы и другие конструкции, после чего приступить
к нанесению пазов и стыков с учетом вышеупомянутых требований. Затем следует
вычертить чертеж растяжки обшивки, на котором в масштабе будут показаны
только ширины листов, а длины их (особенно в оконечностях) искажены (рис.
15.20).
Верхняя кромка бортовой обшивки обычно выступает над палубой. Она не должна
иметь неровностей и заусенцев. Рекомендуется к ней приваривать профили по одному
из вариантов, показанных на рис. 15.21. Учитывая, что разметка и гнутье листов об-
обшивки двоякой кривизны — весьма сложная работа, необходимо стремиться к тому,
чтобы обшивка имела поверхности, разворачивающиеся на плоскость. Жесткость
тонколистовой обшивки можно увеличить за счет кривизны, а также гофрировки
листов.
441
40 38 36 34 JZ JO 28 26 24- It
Рис. 15.20. Растяжка
Днище малых стальных судов подкрепляется флорами и вертикальным килем
(средним кильсоном). При ширине судна более 4,0—4,5 м дополнительно ставятся
днищевые стрингеры (боковые кильсоны). Флоры могут выполняться в виде сварных
тавров переменной высоты (рис. 15.22, а) либо из листов с отогнутым фланцем (рис.
15.22, б). Ширина отогнутых фланцев берется от 10 до 18 толщин флора. Высота флоров
принимается не менее 1/18 ширины судна, измеренной между точками пересечения
продолженной линии пояска (фланца) флора и обшивки. Момент сопротивления флора
для судов длиной от 12 м и более определяется по формулам, приведенным в работах
[59,60].
Вертикальный киль представляет собой тавровую балку, свободный поясок кото-
которой примерно в два раза больше пояска флора. Внизу вертикальный киль приваривается
либо к горизонтальному килю, либо к брусковому килю, который защищает днище-
днищевую обшивку от повреждений при посадке на мель, а также улучшает устойчивость
судна на курсе. Вертикальный киль на переборках обычно разрезается и крепится
либо вертикальными кницами, либо уширением пояска вдвое (рис. 15.23). Днищевые
стрингеры выполняются разрезными на флорах (интеркостельными), а флоры обыч-
обычно разрезаются на вертикальном киле. В районе машинного отделения вертикальный
киль обычно прерывается и заменяется двумя стрингерами, служащими продольными
А-А
ш ш ш
Рис. 15.21. Варианты окан-
окантовки верхней кромки об-
обшивки: а - круглым профи-
профилем; б - сегментовидным
профилем; в - трубой
Рис. 15.22. Флоры: а - в ви-
виде сварных тавров; б -
с отогнутым фланцем
442
ПалуБа
18 16 Ш 12
наружной обшивки -"
фундаментными балками, а флоры имеют переменную высоту и играют роль попереч-
поперечных фундаментных балок.
Днище в корме может иметь туннельную форму для уменьшения осадки с учетом
гребного винта. К днищу привариваются кронштейны гребного вала и руля или дейд-
дейдвуды. Шпангоуты могут присоединяться либо непосредственно к флору, либо с по-
помощью скуловых книц. Во флорах большой высоты могут быть овальные вырезы для
облегчения, высота которых не должна превышать 0,5 высоты флора в данном месте.
При продольной системе набора днища и бортов продольные балки опираются на флоры
и рамные шпангоуты, высота которых должна быть достаточной для восприятия усилий,
передаваемых продольными балками (по крайней меречне менее 1,6 высоты продоль-
продольных балок). Продольные балки проходят через флоры и рамные шпангоуты (рис. 15.24).
В носовой части, машинном отделении, а также под пиллерсами днищевой наоор реко-
рекомендуется усиливать.
Бортовой набор малых судов с поперечной системой набора обычно состоит только
из шпангоутов одинакового профиля. В носовой части, особенно если судно имеет боль-
большой развал бортов, шпангоуты усиливаются с расчетом на удары волн. Практикуется
установка флоров через 2—3 шпации, а между ними — профильных балок такого же
размера, как и шпангоуты, или близкого к ним.
Взамен шпангоутных рам по концам отсеков устанавливаются поперечные пере-
переборки. Нижний лист переборки должен быть несколько толще, так как он интенсивнее
корродирует и испытывает повышенные нагрузки. Переборки обычно подкрепляются
стойками, концы которых при
длине менее 3 м можно кница-
кницами не крепить. Для переборок
используются и гофрированные
листы. При вертикальном распо-
расположении гофры заменяют стой-
стойки (рис. 15.25).
Бортовые цистерны выде-
выделяются продольными переборка-
переборками ограниченной длины. Эти пере-
переборки должны быть несколько
прочнее, чем обычные (аварий- Pilc- 15-23- Крепление вер-
ч е г\ тикального киля на по-
ные) поперечные переборки. Они перечной „^6,^ a _
подкрепляются стойками, уста- кницей; 0-уширением
новленными в плоскости шпан- пояска
а)
А
5)
К
\
1
443
Рис. 15.24. Поперечное се-
сечение катера с продоль-
продольной системой набора
Рис. 15.25. Конструкция гофрированной переборки
444
гоутов, а их обшивка нарезается на шпангоуты с обеспечением непроницаемости. Борто-
Бортовой набор внутри цистерн рекомендуется усилить установкой бортового стрингера,
как это сделано, например, на буксирном катере (рис. 15.26).
Палубы и надпалубные конструкции. Стальной палубный настил укладывается
на бимсы и полубимсы, выполняемые из угловых или полособульбовых профилей.
В качестве полубимсов могут быть использованы кницы. Листы палубного настила
следует располагать в соответствии с общими правилами расположения стыков и пазов.
Утолщенный палубный стрингер для малых судов применяется редко. В районе палуб,
простирающихся от борта до борта, для поддержания бимсов могут быть установлены
карлингсы таврового или другого профиля, опирающиеся на переборки и пиллерсы
(рис. 15.27). Эти карлингсы, если высота помещений недостаточна, следует сдвигать
к бортам за пределы пола помещений (за пределы пайолов). Карлингсы могут быть
продолжением комингсов люков или стенок рубок. Комингсы и стенки рубок на их
длине служат опорами для концов полубимсов и заменяют карлингсы.
На стальные бимсы может быть уложен деревянный настил или настил из бакели-
зированной фанеры. В этом случае бимсы следует выполнить из углового профиля
и расположить горизонтальной полкой вверх, с тем чтобы она служила qnoproft поверх-
поверхностью для настила. Вариант крепления досок к бимсу показан на рис. 15.28. Другой
вариант крепления деревянного настила, покрытого линолеумом, применен на катере
,,Сом" (см. рис. 15.19). На этом же рисунке показан и вариант жесткого привального
бруса. По концам палубных вырезов ставят усиленные концевые бимсы. Посредине
длины вырезов для обеспечения поперечной прочности и жесткости судна рекомен-
рекомендуется установка поперечной балки, связывающей борта.
Рис. 15.26. Конструктивный ми-
мидель буксирного катера
445
I
Рис. 15.27. Поперечное сечение рейдового пасса-
пассажирского катера для портопунктов Кольского
полуострова
5=2
S=3 (Г 5=
Рис. 15.28. Крепление досок па-
палубного настила
Рис. 15.29. Поперечное сечение трал-
тралбота длиной 16 м
Рис. 15.30. Сечение по форштевню
На судах длиной около 15 м и более устанавливают палубные рубки, в которых
размещают пост управления судном и другие помещения. Над машинным отделением
делают капы (палубные возвышения), закрываемые сверху остекленными крышками.
Стенки рубок и капов подкрепляют стойками. По продольным стенкам стойки ставятся
в плоскости полубимсов и привариваются к' ним либо непосредственно, либо с по-
помощью книц. Поперечные стенки рубки желательно располагать над поперечными
переборками или над усиленными шпангоутными рамами. Особенно прочными должны
быть лобовые стенки рубок. Для стенок и крыши рубок могут быть использованы
гофрированные листы. Гофры будут заменять стойки стенок и бимсы крыш рубок.
Для облегчения корпуса и увеличения остойчивости можно рубки выполнить из
алюминиевых сплавов. В этом случае алюминиевые стенки свариваются со стальными
Стойки и p.m.L32»20»3
W 38 36 34- 31 30 28 26 24 22 20
Шпангоуты Г5
Кар ли нгс ±.6*80
бимсы Г5
8)
ВМ.5-5,поясон8'120 Стдфцнд. SanoKs
.з-». поясок, S»80
448
комингсами (полосами, приваренными к настилу) с помощью биметаллических полос
или крепятся на болтах либо заклепках. Вариант стальной рубки, установленной на
капе, показан на рис. 15.29.
Фальшборты, штевни, выходы валов и прочие конструкции. Фальшборты состоят
из листов, устанавливаемых вертикально или с некоторым завалом внутрь (на судах,
швартующихся на волне к высокобортным судам) . К верхней кромке листа привари-
приваривается планширь (полоса или полособульб). Лист фальшборта для увеличения проч-
прочности может привариваться к верхней кромке листов бортовой обшивки, но может
крепиться к корпусу только стойками. Во втором случае между нижней кромкой
фальшборта и бортом остается щель для стока воды. Стойки фальшбортов выполняют
Рис. 15.31. Конструктивные чертежи рейдового пассажирского катера для
портопунктов Кольского полуострова: а - разрез по ДП; б — по палубе и кры-
крыше капа; в - по КВЛ
Стойки, 132*20*3
8*20
Бимсы крыши капа. L 32 *20*3
I .7»
Нарлингсы.1 tt.
I 3*120
ИарлингсХ-В'8
Бимсы, Г 5
ДП
15 Зак. 738
449
из листов с отогнутым фланцем и устанавливают над бимсами через две-три шпации.
Форштевни выполняют из прямоугольных брусков, круглого проката, равнобоких
угольников/ (с соответствующей малковкой), а также из листовой стали. Они должны
надежно перевязываться с килем и подкрепляться горизонтальными бракетами (бреш-
(брештуками), доведенными до ближайшей пары шпангоутов (рис. 15.30).
Специальные ахтерштевни на малых судах устанавливаются редко. Подошву ахтер-
штевня для рулей, имеющих опору в нижней части, обычно образует продолжение
брускового киля, нижнего листа дейдвуда или других конструкций (рис. 15.3]).
Носовой конец деидвудной трубы закрепляют на переборке или на флоре, а кор-
кормовой поддерживается листами либо специальными кронштейнами обтекаемого про-
профиля.
Для защиты борта от повреждений на уровне палубы устанавливают наружные
привальные брусья или буртики, которые могут быть деревянными, резиновыми либо
стальными (из полутруб).
16. СУДА ИЗ ПЛАСТМАСС '
16.1. Характеристика материалов
Стеклопластик — композиционный материал, основными составляющими которо-
которого являются связующее — полиэфирные или эпоксидные смолы с добавками и различ-
различные виды стеклоармирующего материала — стекложгуты, стеклохолсты, стеклоткани.
Конструкционные и эксплуатационные качества стеклопластика, обусловившие
его применение для изготовления корпусов судов, приведены ниже:
Положительные
Сравнительно высокие прочностные
характеристики материала
Возможность получения сложных
форм
Возможность варьирования прочно-
прочностных характеристик в различных ча-
частях конструкции, что позволяет соз-
создавать более рациональные типы кон-
конструкций.
Стойкость против гниения и корро-
коррозии
Отрицательные
Низкий модуль нормальной упруго-
гости, что требует специальных конструк-
конструктивных мер по обеспечению жесткости
конструкций
Высокая чувствительность к концен-
концентрации напряжений, что ведет, в част-
частности, к требованию минимального числа
соединений в конструкции
Невозможность осуществления контро-
контроля качества конструкции в процессе ее
изготовления
Зависимость качества конструкции от
качества хранения материалов и точности
обеспечения технологических параметров
в процессе изготовления конструкции. Го-
Горючесть. Токсичность применяемых смол.
Относительно высокая стоимость исход-
исходных материалов.
Смолы, используемые в качестве связующего (табл. 16.1) .позволяют объединить
в единое целое волокна армирующего материала, защитить его от разрушающего дей-
действия влаги, определить степень горючести, токсичности, теплостойкости и ползучести
стеклопластика. Вязкость связующего регулируется различными тиксот^опными до-
добавками.
Для уменьшения плотности стеклопластика в состав связующего вводят напол-
наполнитель в виде стеклянных полых микросфер. Этим способом можно получить стекло-
450
Таблица 1 6. 1. Физико-механические свой-
свойства отвержденных смол
Та б л и и а 1 6.2. Физико-механические свой-
свойства стеклонаполнителей
Вид и марка
смолы
Эпоксидная
ЭД-20
Полиэфир-
Полиэфирная:
ПН-1
ПН-3
ПН-609-2Ш
ПН-609-27
ПН-609-29
Предел прочности,
МПа
при изгибе
80-130
80-110
60-85
80-90
60-80
70-80
при сжа-
сжатии
110-150
80-110
80-125
100-130
120-130
70-90
Модуль
нормальной
VITD VFOCTH
МПа-10*
0,25-0,30
0,22-0,28
0,20-0,25
0,29
0,20
—
Вид и марка
материала
Стеклянная
сетка СЭ-0-1
, Конструк-
Конструкционная ткань
из стеклян-
стеклянных комп-
комплексных ни-
нитей Т-11-ГВС-9
Стекложгут
ТР-0.56-ГВС-9
Толщина,
мм
0,20
0,30
0,56
Масса
1 м2,кг
0,200
0,385
0,700
Прочность
на раз-
разрыв, Н,
не менее*
637/539
1764/931
2940/2450
*В числителе — прочность по основе, в зна-
знаменателе — по утку.
пластик с плотностью меньше 1 т/м3, правда, за счет 3-4-кратного снижения прочност-
прочностных характеристик. Основное влияние на величину физико-механических характе-
характеристик стеклопластика оказывает стеклонаполнитель (табл. 16.2).
Стеклохолсты — хаотически расположенные рубленые стекловолокна, связанные
между собой либо механически (простегиванием), либо химически (специальными
эмульсиями), — легко пропитываются смолой, значительно дешевле стеклотканей.
Стеклопластик на основе стеклохолстов характеризуется сравнительно невысокими
прочностными характеристиками, которые практически не меняются по всем направ-
направлениям в плоскости листа.
Более прочные стеклопластики изготовляют на основе стеклотканей. Различают
стеклоткани полотняного, сатинового переплетения и кордные. Наибольшими проч-
прочностью и жесткостью обладают стеклопластики, армированные сатиновыми тканями.
Эти ткани эластичны, легко укладываются по обводам формы, хорошо пропитываются
смолой, что обусловило их широкое применение для изготовления конструкций из
стеклопластика.
Кордные стеклоткани.составлены из стеклонитей, идущих преимущественно в од-
одном направлении, при сравнительно малочисленных поперечных нитях. Кордную ткань
применяют для получения стеклопластика с повышенными прочностью и жесткостью
в одном направлении.
Сравнительно малая толщина стеклохолстов и стеклотканей облегчает укладку
И пропитку их при изготовлении конструкций.
При изготовлении конструкций большой толщины для сокращения времени набора
необходимого количества слоев применяют жгутовую стеклоткань — стекложгут. Из-за
больших толщины и жесткости их пропитка и прикатка занимают много времени; не
всегда удается удалить воздушные пузыри и предотвратить расслоения в готовой кон-
конструкции, особенно при наличии высадок, гофров и других криволинейных элементов.
Наиболее высокие однонаправленные прочностные характеристики дает применение
стекложгутов, которые часто используют для местного усиления конструкции.
Для армирования первого — декоративного слоя связующего, наносимого на по-
поверхность формы, используют стеклосетку. Этот слой, как правило, наносится с пиг-
пигментом и в дальнейшем определяет цвет и внешний вид изделия. При отсутствии стекло-
сетки на внешней стороне декоративного слоя после полимеризации связующего про-
проступает фактура нижележащей стеклоткани. В процессе эксплуатации декоративный
слой без стеклосетки быстрее повреждается и скалывается.
15*
451
Таблица 16. 3. Физико-механические свойства стеклопластиков на основе различных стекло-
наполнителей и полиэфирного связующего
Тип армирова-
ни я
Стеклохолст
Стеклосетка
Стекложгут
(параллельное
армирование)
Тоже
Стеклосатин*
(параллельное
армирование)
То же
Содержание
LieKJi
полнителя, %
по мас-
массе
25
30
45
50
55
45
49
52
по
объе-
объему
15
18
28
32
37
28
31
34
Средняя
плот-
плотность,
кг/м
1450
1500
1600
1640
1700
1600
1640
1670
Модуль,
нормаль-
ной уп-
ругости
0,60
0,70
1,30
1,50
1,70
1,7/1,1
1,8/1,2
1,9/1,3
МПа-104
сдвига
В ПЛО-
скости
листа
0,22
0,26
0,21
0,25
0,29
0,28
0,30
0,32
Коэффи-
циснт
Пуассона
0,35
0,35
0,12
0,12
0,12
0,15/ОДО
0,15/0,10
0,15/0,10
Предел
при растя-
же ни и
80
90
170
200
230
270/170
290/180
300/190
прочности
при ежа-
тии
ПО
120
105
ПО
115
200/150
210/160
220/170
, МПа
при
сдвиге
в пло-
плоскости
листа
40
50
60
70
80
80
85
90
"Для материала на основе стеклосатина характеристики прочности даны в направлениях по
основе (числитель) и утку (знаменатель).
Часто используют не один вид стеклонаполнителя, а их различные комбинации, что
позволяет снизить трудоемкость изготовления конструкций и стоимость материала.
Стеклоармирующий материал в конструкции можно располагать в определенном поло-
положении, чтобы получить требующиеся свойства. Таким образом, в отличие от конструк-
конструкций из металла и дерева, в конструкциях из стеклопластика конструируется и структу-
структура материала — задается тип его армирования.
Физико-механические свойства стеклопластика при прочих условиях зависят от cor
держания стеклонаполнителя в материале (табл. 16.3). Чем больше стеклонаполнителя,
тем выше прочность стеклопластика. На прочностные свойства стеклонаполнителей
отрицательно действует влага. Для защиты от увлажнения и улучшения сцепления
стекловолокон со связующим стекломатериалы в процеессе изготовления покрывают
различными гидрофобно-адгезионными составами. Каждому типу смолы соответствует
тот или иной гидрофобно-адгезионный состав, что следует учитывать при выборе стек-
стеклонаполнителя.
Преобладающее большинство стеклопластиковых судов изготавливается контакт-
контактным методом, который позволяет получить материал с высокими физико-механи-
физико-механическими показателями, не требует высокой квалификации исполнителей и больших
затрат на подготовку производства. Его недостаток — непосредственный контакт испол-
исполнителя (отсюда название метода) с исходными материалами и ручной, не механизиро-
механизированный труд. Все механизированные способы изготовления изделий из стеклопластика
накладывают те или иные ограничения на конструкцию изделия и свойства материала.
Ниже приведены характеристики контактного метода и двух механизированных —
напыления и прессования:
Контактный
Послойная укладка
пропитанного связующим
стеклонаполнителя на по-
поверхность оснастки с после-
последующим его уплотнением
Напыление
Сущность
Одновременное нанесение
с помощью сжатого воздуха
рубленого стекложгута и свя-
связующего на поверхность ос-
оснастки с последующим уплот-
Прессование
Укладка сухой 'заготовки
стеклонаполнителя в матрице,
заливка матрицы порцией свя-
связующего с последующим смы-
смыканием пуансона и матрицы,
452
с помощью валиков или
торцевых кистей
Простота технологии
формования изделий. Срав-
Сравнительно низкая стоимость
и простота применяемого
оборудования и оснастки.
Возможность изготовления
цельноформованных крупно-
крупногабаритных изделий слож-
сложной конфигурации. Низкие
требования к квалификации
рабочих, занятых на формо-
формовании изделия
нением (прикаткой) напылен-
напыленного слоя катками
Преимущества
Высокая производитель-
производительность применяемого оборудо-
оборудования. Использование наиболее
дешевых армирующих мате-
материалов - стекложгута. Срав-
Сравнительная простота перехода
от формования одного изделия
к другому
обеспечивающим пропитку за-
заготовки и отверждение связую-
связующего ,
Использование высокопроиз-
высокопроизводительного оборудования и
механизация основных техноло-
технологических операций формования.
Возможность применения деше-
дешевых связующих на основе
быстроотверждающихся стиро-
лосодержащих смол, применение
которых в других случаях огра-
ограничено выделением вредных ле-
тучих.Стабильное качество стекло-
стеклопластика и двусторонняя деко-
декоративная поверхность изделий.
Минимальные затраты на венти-
вентиляцию. Высокая эффективность
используемой производственной
площади.
Требования к оснастке и изделию
Рабочая поверхность ос-
оснастки должна иметь тот же
класс чистоты обработки,
что и лицевая поверхность
изделия. Для обеспечения
съема изделия оснастка долж-
должна иметь уклон не менее 3°.
При сложной конфигурации
изделия оснастка должна
быть разъемной. Минималь-
Минимальные радиусы скрутления
2—3 мм
Применение ручного
малопроизводительного
труда. Контакт работающих
с токсичным связующим
Требования к рабочей по-
поверхности оснастки такие же,
как при контактном методе.
Вертикальные стенки оснастки
должны иметь уклон не менее
10°. Минимальные радиусы
скруглений: наружу — 10,
внутрь - 20 мм. Все высадки
должны быть открытыми по
форме с отношением ширины
к глубине не менее 10
Недостатки
Ручное уплотнение напылен-
напыленного слоя стеклопластика и
контакт при этом работающего
со связующим. Разнотолщин-
ность стеклопластика и неста-
нестабильность механических
свойств. Необходимость герме-
герметизации процесса напыления
из-за повышенного выделения
вредных летучих. Забрызги-
ваемость оборудования связую-
связующим и стекложгутом, трудоем-
трудоемкость его очистки
Требования к рабочей поверх-
поверхности оснастки такие же, как
при контактном методе. Рабо-
Рабочая поверхность оснастки не
более 9-12 м2. Прочность
парной формы должна обеспе-
обеспечивать удельное давление фор-
формования не менее 0,5 МПа
E кгс/см2). При смыкании
парных форм должно обеспе-
обеспечиваться получение рабочей фор-
формующей полости. Вертикальные
стенки форм должны иметь вы-
высоту не более 300-400 мм и тех-
технологический уклон не менее
10°, глубина местных высадок
не более 50—60 мм. Радиусы
скруглений не менее 3 мм.
Невозможность изготовления
изделий, имеющих большое ко-
количество высадок, местных утол-
утолщений, набор и т. п. Минимально
допустимый зазор в рабочей
полости между формами 4 мм.
Высокие требования к точности
смыкания форм.
Сравнительные прочностные характеристики стеклопластиков, изготовленных раз-
различными методами из разных составляющих, приведены в табл. 16.4.
При разработке конструции из стеклопластика необходимо учитьшать следующие
характерные свойства материала:
453
Таблица 16.4. Сравнительные физико-механические характеристики стеклопластиков,
изготовленных различными методами и из разных составляющих
Срав-
НИВЗе-
мые
пары *
1
2
3
4
5
6
Метод формо-
формования
Контактный
Прессование
Контактный
Прессование
Контактный
Напыление
Контактный
"
Контактный
»>
Контактный
Со став ляющие
связующее
ПН-3
НПС-609-21М
ПН-3
НПС-609-21М
ПН-3
НПС-609-2Ш
стеклопластика
стекло напол-
наполнитель
Стеклорогожа
Стеклохолст
Стекложгут
Стеклорогожа
Стеклосатин
Стеклохолст
Стеклосатин
>>
Со-
двр-
жэнив
стек-
стекла по
массе
0,60
0,50
0,30
0,25
0,30
0,30
0,60
0,50
0,30
0,50
0,50
0,50
Плот-
кг/м
1,00
0,94
1,00
0,76
1,00
0,97
1,00
0,97
1,00
1,14
1,00
1,00
Модуль
нор-
МЭЛЬ-
ной
упру-
упругости
1,00
1,07
1,00
0,63
1,00
0,56
1,00
1,00
1,00
1,94
1,00
1,07
Предел прочности,
ЛЯП о
при
растя-
растяжении
1,00
1,10
1,00
1,10
1,00
1,00
1,00
1,17
1,00
2,66
1,00
1,14
при
сжа-
сжатии
1,00
1,00
1,00
0,91
1,00
0,91
1,00
1,36
1,00
1,91
1,00
1,40
при
из-
изгибе
1,00
0,73
1,00
0,85
1,00
0,73
1,00
1,58
1,00
2,33
1,00 .
1,17
"Характеристики материалов даны в сравнении попарно, за единицу принята первая строка.
практическое отсутствие пластических деформаций в конструкции вплоть до разру-
разрушения;
низкие величины модулей нормальной упругости и сдвига;
зависимость от марок связующего и стеклонаполнитеЛя, их количественного соот-
соотношения и структуры армирования; /
зависимость от качества хранения исходных материалов, способа изготовления
и точности соблюдения технологических параметров;
неравнопрочность соединений стеклопластика основному материалу;
склонность к ползучести, возрастающая с повышением температуры;
анизотропия упругих и прочностных свойств.
В конструкциях судов из синтетических материалов достаточно широко приме-
применяются пенопласты (табл. 16.5). В качестве формообразующих элементов при изго-
изготовлении ребер жесткости они легче. Они технологичнее и надежнее в эксплуатации,
чем дерево, металл либо резина. Применение пенопластов обеспечивает простоту из-
изготовления и надежность в эксплуатации блоков плавучести малотоннажных судов.
Таблица 16.5. Свойства основных видов пенопластов
Вид и марка пенопласта
Плиточный ПХВ-1
Полистирольный плиточный:
ПС-1
ПС-4
Полиуретановый
жесткий само затухающий ППУ-ЗС
Плотность, кг/м3
85
115
70
100
150
200
350
600
40
60
65
50-60
100-120
200-220
Предел прочности
при сжатии, МПа
0,40
0,70
0,30
0,80
1,50
3,00
5,00
5,00
0,17
0,30
0,40
0,20
0,80
2,50
Водопоглощение,
кг/м*
0,25
0,25
0,30
0,30
0,30
0,30
0,30
0,30
0,60
0,50
0,30
0,50
0,40
0,20
454
Пенопласты используют для изготовления корпусов с двух- и трехслойной обшивкой.
Такая конструкция позволяет более рационально использовать материал, имеет более
высокую работоспособность, чем однослойная конструкция одинаковой массы. Двух-
и трехслойная конструкции, как правило,обладают плавучестью (т. е. не требуют допол-
дополнительных конструктивных мер по обеспечению их непотопляемости) и удобны в экс-
эксплуатации — набор не загромождает внутренних объемов, не мешает уборке помещений.
Из-за невозможности контроля в процессе изготовления и эксплуатации качества
среднего — пенопластового — слоя трехслойные конструкции в настоящее время не при-
применяются. Ниже будут рассмотрены только двухслойные конструкции, состоящие
из двух несущих слоев, соединенных между собой какими-либо ребрами, с заполнением
пространства между несущими слоями пенопластом, используемым как формообразо-
ватель и заполнитель межслойного пространства.
Следует иметь в виду, что полистирольные пенопласты растворяются полиэфирны-
полиэфирными смолами. Чтобы избежать этого, нужно защитить заполнитель, покрыв его эпоксид-
эпоксидным компаундом, клеем ПВА, восковой эмульсией либо обернув целлофаном.
Для постройки судов длиной до 5 м за рубежом широко применяют АБС-пластики,
которые относятся к так называемым термопластам. Это пластические массы, размяг-
размягчающиеся при нагревании и затвердевающие при охлаждении. Способность к пластиче-
пластической деформации при нагреве позволяет применять при изготовлении и ремонте корпу-
корпусов из термопластов тепловые методы обработки материала — термоформование,
гибку, сварку, что, в свою очередь, открывает возможности для механизации процесса
изготовления корпуса. Сравнительная простота механической обработки (резки,
строжки, сверления), стойкость против гниения и коррозии, малая плотность позволили
термопластам потеснить стеклопластик, дерево и металл, хотя их физико-механические
характеристики сравнительно невысоки (табл. 16.6).
К недостаткам термопластов следует отнести низкий модуль нормальной упругости,
потерю прочности под нагрузкой и резкую потерю прочности под действием солнечной
радиации. Для защиты от радиации применяют стабилизаторы (сажа) либо защитные
пленки из акрила или поливинила. Термопласты в виде полиэтилена в отечественной
практике использовались лишь для выпуска лодок „Дельфин" и опытной партии лодок
„Автомобилист".
Изложенным не исчерпывается все разнообразие синтетических материалов, исполь-
используемых для изготовления корпусов малотоннажных судов. На основе связующего
из полиэфирных смол, армированных нитями из углерода или бора, создают угле-
и боропластик. Эти материалы имеют еще более высокие физико-механические характе-
характеристики, однако высокая стоимость не позволяет широко использовать их в мало-
малотоннажном судостроении. За рубежом для строительства яхт и каноэ применяют новый
Таблица 1 6.6. Свойства термопластичных материалов
Наименование материала
Полиэтилен:
ВЫСОКОЙ ПЛОТНОСТИ
НИЗКОЙ ПЛОТНОСТИ
АБС-пластик:
общего назначения
теплостойкий
ударопрочный
Плотность,
кг/м3
' 940-960
910-920
1030-1060
1050-1060
1030-1060
Удлине-
Удлинение, %
_
_
3
8
7
Предел прочности,
МПа
при растя-
растяжении
30,0
9,5
30-60
52-56
30-50
при сдви-
сдвиге
20-30
20-30
50-80
-
—
Модуль, МПа • 104
нормальной
упругости
0,08-0,11
0,01-0,03
0,2-0,25
-
0,25-0,27
сдвига
_
0,11
_
0,07
0,065
455
материал кевлар-49, представляющий собой композицию на основе полиэфирных смол,
армированных арамидными волокнами. Этот материал несколько легче и прочнее
стеклопластика.
'!-!. '-. /h'i.isiE'1 ¦ -г,;. fpysuu>«i щ-л i'.v-ь: и." соединении
Выбор схемы армирования производится в зависимости от способа изготовления,
формы и размеров конструкции, ее нагруженности, количества и характера конструк-
конструктивных элементов — высадок, гофров, вырезок и т. п. Для судов длиной до 4—5 м об-
обшивку можно изготовлять из стеклохолстов. Они наиболее дешевы, их низкая по срав-
сравнению с другими стеклонаполнителями прочность заставляет набирать большее коли-
количество слоев, что благотворно сказывается на жесткости конструкции. Для обшивок
большой толщины (более 6 мм) предпочтительнее армирование жгутовой стекло-
стеклотканью с наружными слоями из стеклосатина и первым слоем из стеклосетки. Стыки
армирующего материала должны иметь перекрой не менее 40 мм и быть разнесенными
в соседних слоях не менее чем на 100 мм.
Местные усиления в виде накладок (утолщений) в стеклопластике следует выпол-
выполнять, выкладывая по два-три слоя между слоями основного материала. Переход от
одной толщины к другой должен быть плавным, разнесенным на участке длиной не
менее 20-кратной разности толщин.
В связи с тем что прочность соединения деталей из стеклопластика ниже, чем из
основного материала, конструкции желательно делать цельноформованными, т. е.
выполненными за один технологический прием выклейки. Для малых судов это вполне
возможно.
Именно стремлением к цельноформованной конструкции объясняется широкое
использование в судах из стеклопластика в качестве ребер жесткости всякого рода
высадок и гофров, число которых может быть достаточно большим, наприглер при ими-
имитации клинкерной обшивки деревянных судов. Проектируя гофры и высадки, следует
помнить о необходимости обеспечения выема изделия из оснастки.
Отличительной особенностью конструкций малых судов из стеклопластика являет-
является также применение коробчатых профилей набора, которые, уступая в работоспособ-
работоспособности тавровым, Г-образным или полособульбовым профилям, обеспечивают более
надежное цельноформованное соединение с обшивкой, обладающее большей прочностью
на отрыв. Максимальное распространение получили несложные в изготовлении трапе-
трапециевидные коробчатые профили (рис. 16.1). Регистром СССР рекомендуются опреде-
определенные соотношения элементов трапециевидного профиля в зависимости от его высоты:
а = A,4-^2,0)А; & = @,7-М ,0) А ; s, = A/20-М/15)А ; s2 =3sj.
В процессе изготовления конструкции после получения необходимой толщины
обшивки на нее укладываются формообразователи, по которым сразу же формуют
ребра жесткости. В качестве формообразователя используют заранее приготовленные
профили из легкого сплава, стеклопластика, дерева или, чаще всего, пенопласта.
Дерево в качестве формообразователя сравнительно тяжело, оно требует более
тщательной подгонки к обводам, способно к загниванию в конструкции. Металличе-
Металлический формообразователь необходимо делать разрезным. В процессе эксплуатации
при упругих деформациях пластмассовой конструкции металлический профиль может
получить остаточные деформации, избавиться от которых без нарушения конструкции
невозможно. Укладка небольших (длиной 100 мм) элементов профиля трудоемка,
кропотлива и не всегда качественна. Стеклопластиковые профили требуют специаль-
специальной оснастки и времени для изготовления. Их необходимо тщательно зачищать перед
установкой на место для улучшения адгезии с наформовываемым материалом. Пено-
Пенопласт же легок, обработка его не вызывает трудностей, при небольших размерах легко
456
деформируется по обводам формы, т. е. небольшие зазоры могут быть устранены при-
прижатием его в процессе формования.
Интересно применение для изготовления цельноформованного набора профилей
из резины, которые легко удаляются из конструкции после ее полимеризации, если
хотя бы один конец профиля будет свободным. Это позволяет получить конструкцию без
„лишних" деталей, какими по существу являются формообразователи.
На небольших судах возможно изготовление цельноформованного Г-образного
набора. Так, на мотолодке „Юг-2500" опоры банок напылялись в процессе изготовления
корпуса с помощью съемной оснастки (рис. 16.2).
Конструкции из стеклопластика изготовляются с припуском для последующей
обрезки и в чистый размер. Обрезанные кромки должны обязательно защищаться
от проникновения влаги внутрь конструкции путем покрытия связующим, предпочти-
предпочтительно на основе эпоксидных смол.
Прн изготовлении конструкции из стеклопластика в чистый размер припуск стекло-
наполнителя заворачивается в обратном направлении и укладывается на основной мате-
материал. Этот узел получается лучше, если стеклоткань заворачивать через заполнитель
из пенопласта (или другого материала), который обеспечивает фиксацию кромки
(рис. 16.3).
Рассмотрим соединения деталей из стеклопластика.
При постройке судов из стеклопластика наряду с традиционными видами соеди-
соединений — болтовыми и клепкой — используют и специфические виды — разнообразную
приформовку.
Для болтовых соединений деталей из стеклопластика принимаются:
диаметр болта, равный толщине наиболее толстого из соединяемых элементов;
отстояние болта от кромки листа не менее 3 диаметров болта;
шаг болта не менее 4 диаметров болта;
диаметр шайб под гайку и головку болта не менее 2,5 диаметров болта, толщина
шайбы не менее 0,1 диаметра болта, но не более 1,5 мм.
Требования к заклепочному соединению аналогичны требованиям к болтовому.
Применяются только алюминиевые заклепки во избежание повреждения декоративно-
декоративного слоя или самого стеклопластика, особенно при малой его толщине.
Чаще всего для соединения деталей корпуса из стеклопластика используют про-
пропитанные связующим стеклохолст, стеклоткани или стекложгут. Такие соединения
плохо работают на отрыв, поэтому нужно проектировать их так, чтобы они работали
на сдвиг.
Рис. 16.1. Элементы трапециевидного
профиля
\
Рис. 16.2, Цельноформованный узел
опоры банки.
1 -обшивка днища; 2 — опора банки;
3 — съемная оснастка
457
Рис. 16.3. Изготовление обшивки в чистый размер.
/ —оснастка для изготовления обшивки; 2 — об-
обшивка; 3 — заполнитель
Стыковые соединения (рис. 16.4) выполняют с помощью приформовок, состоящих
из последовательно накладываемых полос стеклоткани, пропитанных связующим.
Каждый последующий слой должен быть на 20-30 мм шире предыдущего, что улучшает
работу соединения, снижает концентрацию напряжений, уменьшает массу, придает
соединению лучший вид. Суммарная толщина соединения должна быть- не меньше
толщины соединяемых деталей. При толщине соединяемых деталей более 6 мм рекомен-
рекомендуется их кромки срезать „на ус" или, предпочтительнее, разделать ступеньками, на
которые укладывают по два-три слоя стеклоткани. Основные размеры стыкового
соединения могут быть определены из зависимостей, мм, sn ^0,5s; /п = (Ют 20)sn +
'+ A00^ 200). Обозначения параметров ясны из рис. 16.4.
В связи с тем что прочность такого соединения ниже прочности материала соеди-
соединяемых деталей, а внешний вид оставляет желать лучшего, в конструкции малых судов
их используют очень редко, однако без них не обойтись при заделке пробоин обшивки.
Угловые и тавровые соединения, изготовленные по этому же принципу с помощью
приформовочных угольников, используются часто для соединения ребер жесткости
с обшивкой, переборок с бортами и днищем и т. п. Толщина приформовочного уголь-
угольника должна быть не менее 0,5 толщины присоединяемой детали для двусторонних
тавровых соединений либо не менее толщины присоединяемой детали для угловых
односторонних соединений (рис. 16.5). Ширина полки приформовочного угольника
должна быть не менее 30 мм. Регистр СССР устанавливает более сложную градацию
размеров приформовочных угольников.
Для соединения деталей из стеклопластика внакрой может быть использована
прошивка из стекложгута (рис. 16.6). На малых судах ее удобно использовать для
соединения корпуса и палубы. Во фланцах корпуса и палубы, предварительно собран-
собранных на технологических болтах или струбцинах, сверлятся отверстия. Пропитанный
связующим стекложгут укладьшается сверху на фланце палубы и проволочным крюч-
крючком протягивается сквозь отверстие до образования под фланцем головки высотой
6—7 мм. После полимеризации связующего снимаются технологические болты, про-
пространство между фланцами корпуса и палубы, изнутри забивается „мокрым" (т. е.
Рис. 16.4. Стыковое соединение деталей:
а - без разделки кромок; б - с разделкой
кромок „на ус"; в - со ступенчатой раздел-
разделкой кромок
Рис. 16.5. Тавровое и угловое соединения
деталей.
1 —обшивка; 2 — присоединяемая деталь из
стеклопластика; 3 — при формовка; 4 — запол-
заполнитель
458
Рис. 16.6. Соединение прошивкой.
1 — палуба; 2 — корпус; 3 — прошивка (стекло-
жгут, пропитанный связующим)
А-А
пропитанным связующим) стекложгутом для устранения возможных щелей. Соеди-
Соединение достаточно надежно, отсутствие корродирующего крепежа упрощает уход за
судном.
Для соединения деталей из разных материалов применяют болтовые или заклепоч-
заклепочные соединения. При клепке используют только алюминиевые заклепки диаметром
4—6 мм, причем закладную головку ставят со стороны стеклопластика (обязательно
с шайбой).
Как правило, малые суда из стеклопластика состоят из двухосновных элементов —
собственно корпуса и палубы. Сборка их осуществляется на фланцах (рис. 16.7). Тип
соединения — на болтах, винтах, заклепках или прошивкой. При механическом способе
соединения между фланцами перед сборкой укладывают „мокрую" прокладку из
полос стеклохолста, пропитанных связующим. Для обеспечения товарного вида и за-
защиты фланцев от повреждений соединение прикрывается привальным брусом — метал-
металлической полосой, пластмассовым профилем, полиэтиленовой (или резиновой) трубой,
разрезанной вдоль, деревянным профилем. У небольших судов можно обойтись и без
привального бруса, надежность и внешний вид соединения здесь достаточно хороши.
Все вышесказанное относится к однослойным конструкциям, но может быть ис-
использовано в той или иной мере и при изготовлении двухслойных. Обшивки могут
выполняться отдельно или одновременно с конструкцией.По одному из распространен-
распространенных способов сначала на решетчатом пуансоне из пенопласта набирается средний слой,
затем он снаружи обформовывается стеклопластиком, снимается с пуансона и обфор-
мовывается стеклопластиком изнутри.
Близкая по принципу конструкция использована при изготовлении пластмассовой
надстройки научно-исследовательского судна „Изумруд" (рис. 16.8). На оснастке
набиралась необходимая толщина наружной обшивки, на которую укладывались блоки
заполнителей из пенопласта, предварительно обернутые стеклотканью, пропитанной
связующим. Поверх заполнителей укладывалось необходимое количество слоев внут-
Рис. 16.7. Соединение корпуса и палубы однослойной конструкции: а - вертикальными фланцами
с металлическим привальным брусом; б - горизонтальными фланцами с привальным- брусом -
трубой из полиэтилена (резины); в - горизонтальными фланцами без привального бруса (с дере^
вянным брусом); г - горизонтальными фланцами с привальным брусом из поливииилхлорид-'
ного профиля.
1 — палуба; 2 — корпус; 3 — „мокрая" прокладка; 4 — заклепка; 5 — металлический нривальный
брус; 6 — труба из полиэтилена; 7 — деревянный привальный брус; 8 — профиль из поливйнил-
хлорида
459
Рис. 16.8. Обшивка двухслойной конструкции.
1 — наружная обшивка; 2 — обформовка; 3 — запол-
заполнитель; 4 — усиление флора; 5 - внутренняя обшив-
кя
Рис. 16.9. Обшивка двухслойной конст-
конструкции с надувными шпангоутами.
1 — наружная обшивка; 2 — внутренняя
обшивка; 3 — надувной шпангоут; 4 —
полиэтиленовый рукав; 5 — заполнитель
ренней обшивки. Как видно на рис. 16.8, необходимые подкрепления в виде ребер
жесткости изготовлялись аналогичным образом.
Другой принцип положен в основу двухслойной конструкции отечественных пласт-
пластмассовых спасательных и рабочих шлюпок (рис. 16.9) - здесь внутренний набор обра-
образуют надувные шпангоуты. Основные детали корпуса - наружная и внутренняя об-
обшивка - выполняют контактным методом. После полимеризации и обрезки припуска
внутренняя обшивка устанавливается вверх килем на сборочную оснастку. На заранее
размеченные и зачищенные места внутренней обшивки укладываются рукава из стекло-
стеклоткани, пропитанной связующим. Внутри каждого рукава располагают полиэтиленовый
рукав, конец которого присоединяют к магистралям сжатого воздуха. Над внутренней
обшивкой на определенном, заданном чертежом, расстоянии устанавливается и раскреп-
раскрепляется оснасткой наружная обшивка. Сжатый воздух из магистрали подается в поли-
полиэтиленовые рукава, которые, раздуваясь, расправляют рукава из стеклоткани и при-
прижимают их к обшивкам. Система находится иод давлением до полимеризации связую-
связующего в рукавах. Этот метод обеспечивает надежное соединение наружной и внутренней
обшивок и их совместную работу в процессе эксплуатации шлюпки. Трудоемкость
изготовления корпуса такой конструкции ниже, чем однослойной наборной конструк-
конструкции или двухслойной с формованным по заполнителям набором. После полимеризации
надувных шпангоутов пространство между обшивками заполняется вспенивающимся
пенопластом, что обеспечивает шлюпке непотопляемость.
Открытая сверху часть борта корпуса двухслойной конструкции может быть
закрыта по-разному (рис. 16.10). Вариант „я" сравнительно прост, но выступающие
фланцы увеличивают габарит, могут быть повреждены при швартовке. Скругленный
наружный фланец по варианту „б", использованный на спасательных шлюпках, меньше
повреждается при швартовке, вертикальный внутренний 'фланец не загромождает
объем. Вариант „в" использован на рабочих шлюпках, которым чаще других приходится
швартоваться. Поэтому конструкция защищена привальным брусом, в качестве которо-
которого используется канат, хорошо амортизирующий удары. В случае повреждения замена
era не составит затруднений.
При установке насыщения на однослойную конструкцию крепление его может
осуществляться болтами, винтами, заклепками или приформовкой. Болтовое или за-
заклепочное крепление аналогично подобным креплениям к металлическим либо деревян-
деревянным конструкциям с учетом дополнительных требований, о которых говорилось выше.
Приформовку (рис. 16.11) следует вести на эпоксидном связующем с тщательной
зачисткой места крепления и обезжириванием приформовываемой детали. Надежность
такого крепления при строгом соблюдении технологии достаточно велика, но внешний
вид не особенно привлекателен. Для повышения надежности крепления во фланце при-
приформовываемой детали иногда делают отверстия.
460
Рис. 16.10. Соединение наружной и внутрен-
внутренних обшивок корпуса двухслойной конст-
конструкции: а — на горизонтальных фланцах;
б - вид соединения обшивок. на спаса-
спасательных шлюпках; в - то же, на рабочих
шлюпках.
/ - наружная обшивка; 2 - „мокрая" про-
прокладка; 3 - планширь; 4 — заклепка; 5 -
заполнитель; 6 — внутренний корпус; 7 —
привальный брус
При установке насыщения на двухслойную конструкцию или на обшивку блока
плавучести применяется узел крепления со стальной закладной деталью (рис. 16.12).
Места установки закладных деталей размечают на оснастке, где делают углубление
либо ставят накладную планку. Если накладки могут помешать выему изделия из ос-
оснастки, их делают съемными, вынимаемыми вместе с изделием. Кромки накладки
или высадки должны быть скошены.
При формовании обшивки после набора необходимой толщины укладывается
закладная деталь с заполнителем из пенопласта; все это обформовывается стекло-
стеклопластиком. Обформовка фиксирует закладную деталь и ограничивает распространение
воды, которая может фильтроваться через резьбу. Заполнитель необходим для обеспе-
обеспечения нужной глубины сверления закладной детали и защиты обформовки от поврежде-
дения сверлом. _.
5 4 3 2
Рис. 16.11. Приформовка насыщения.
/ — обшивка; 2 — прнформовка; 3 —
деталь насыщения
Рис. 16.12. Установка насыщения на заклад-
закладных планках: а - на палубе; б - на днище.
/—обшивка несущей конструкции; 2 —
закладная планка; 3 — заполнитель заклад-
закладной планки; 4 - прнформовка закладной план-
планки и ее заполнителя; 5 — заполнитель; 6 —
деталь насыщения; 7 - винт
461
Рис. 16.13. Крепление трубопровода к корпусу: а - в вырезанном во внутренней обшивке и запол-
заполнителе углублении; б — в заранее отформованном во внутренней обшивке углублении; в — к зара-
заранее отформованному на корпусе патрубку.
1 — наружный фланец; 2 — наружный корпус; 3 —внутренний корпус; 4 — обформовка; 5 —
стакан; б — трубопровод; 7 — внутренний фланец; 8 — дюритовое соединение
При установке закладной планки на вьтуклую поверхность формуемой обшивки
(узел на рис. 16.12,6) не всегда удается четко зафиксировать ее, особенно на вертикаль-
вертикальной поверхности. При установке закладной планки в углубление формуемой обшивки
(рис. 16.12, а) ее фиксация не вызывает затруднений, однако изготовление этого узла
в оснастке сложнее и не всегда возможно из условия обеспечения съема изделия. На
палубе целесообразно устанавливать насыщение по варианту ,р", чтобы избежать скоп-
скопления воды в углублениях, а на днище лучше применять вариант ,Д", так как он позво-
позволяет утопить в обшивку фланцы устанавливаемой детали.
Если по каким-либо причинам закладную планку нельзя установить в процессе
формования конструкции, ее можно приформовать на готовую конструкцию. При-
формовку в этом случае следует вести на эпоксидном связующем.
Рис. 16.14. Крепление трубы дейдвуда (а), гельм-
• портовой трубы (б) и кингстона (в).
1 — труба дейдвуда; 2 — наружный фланец;
3 — прокладка; 4 — наружный корпус; 5 — внут-
внутренний корпус; 6 - обформовка; 7 - заполни-
заполнитель; 8 — закладная планка; 9 - гельмпортовая
труба; 10 — резьбовой фланец; И — корпус
кингстона; 12 — заборная решетка
462
При установке деталей насыщения по отверстиям в них на месте делаются сверле-
сверления и нарезается резьба для виитов или болтов крепления.
На рис. 16.13 представлены различные варианты присоединения трубопровода
к корпусу из стеклопластика. Первый и второй варианты схожи между собой, они раз-
различаются только способом заделки выреза в двухслойной конструкции: в варианте
„а" это обформовка, выполняемая на месте, в варианте „б" — заранее, сделанная в об-
обшивке внутреннего корпуса высадка, в которой и размещается обформовка. Второй
вариант несколько сложнее в исполнении, но оформление его чище.
Другой характер носит вариант „в": с помощью съемной оснастки вместе с корпу-
корпусом выклеивается Патрубок, к которому впоследствии с помощью дюрита присоеди-
присоединяется трубопровод. Такое соединение может быть использовано не только для одно-
однослойной, но и для двухслойной конструкции с обформовкой выреза во внутренней
обшивке.
На рис. 16.14 показаны узлы крепления дейдвудной и гельмпортовой труб, кингсто-
кингстона. Дейдвудная и гельмпортовая трубы крепятся с помощью закладных деталей,
кингстон — по типу крепления трубопроводов.
16.3. Особенности конструировения корпуса плестмассового судна
Принципиально конструкция корпуса пластмассового судна не отличается от кон-
конструкции металлических и деревянных судов, в ней можно выделить те же основные
элементы: днище, борта, палубу, переборки, банки и т.,п.
Для уменьшения числа соединений днище, борта и транец выклеивают совместно,
а палубу - заодно с банками или переборками.
Работа над конструкцией корпуса малого судна из стеклопластика начинается на
ранней стадии проектирования. Уже в теоретическом чертеже необходимо наметить
основные секции корпуса, местд и виды их соединения, определить места расположения
гофров и высадок, учесть основные требования принятой технологии.
Общими для всех методов требованиями технологии, которые должны быть учтены
при проектировании корпусных конструкций, предусматривается необходимость:
выполнять вертикальные стенки конструкций, высадок и углублений с уклоном
1-3° для обеспечения съема изделия с оснастки;
исключать формование конструкции в потолочном положении;
прерывать ребра жесткости переборок и других плоских конструкций в виде гоф-
гофров и высадок, не доходя до кромки конструкции на 50—100 мм;
проектировать комингсы вырезов, гофры, высадки и другие элементы с учетом
возможности их выполнения в процессе формования конструкции.
После определения основных элементов конструкции корпуса намечается их кон-
конструктивная схема: толщина и тип армирования обшивки, система, размеры и типы
армирования набора. Системы Набора у малых судов из пластмасс те же, что и у судов
из традиционных материалов. Необходимость применения той или другой системы на-
набора определяется в каждом случае исходя из типа судна, его размеров, схемы общего
расположения, формы корпуса и других факторов. Регистром СССР для судов из стек-
стеклопластика рекомендуется шпация, равная 350 мм.
Определение размеров связей корпуса у судов из синтетических материалов про-
. изводится по той же методике,.что и у судов из традиционных материалов: определя-
определяются внешние нагрузки, рассчитывается уровень напряжений в связях корпуса и срав-
сравнивается с уровнем допускаемых напряжений, которые устанавливаются как опреде-
определенная доля опасных напряжений. Связи, работающие на сжатие, проверяются на устой-
устойчивость.
Во всех расчетах прочности и устойчивости конструкций из стеклопластика следует
учитывать анизотропию прочностных свойств материала, зависящую от типа применен-
463
ного стеклонаполнителя и способа армирования. При расчете общей прочности сравни-
сравнительно больших судов с корпусами из стеклопластика следует учитывать различные
прочностные характеристики связей, изготовленных из различных стеклонаполнителей
или с различными системами армирования, путем введения редукционных коэффи-
коэффициентов к = E/Ev, где Е — модуль нормальной упругости материала рассматриваемой
связи; Ео — модуль нормальной упругости материала, принятого за основной.
Величины допускаемых напряжений устанавливаются как доли соответствующего
предела прочности. При назначении норм допускаемых напряжений для стеклопластика
учитываются разброс физико-механических характеристик материала иэ-за влияния
технологических факторов, увлажнения конструкции и возможности их нагрева до
60 °С. Эти нормы приведены ниже:
Напряжения
нормальные касательные
Напряжения от общего изгиба:
кратковременные для стеклоткани 0,30»в 0,30гв
" " для стеклохолста 0,25% 0,25гв
длительные 0,10ав 0,10тв
Местный изгиб связей для набора и обшивки:
из тканых материалов 0,30ав 0,30гв
" стеклохолстов 0,25% 0,25 гв
Наибольшие сжимающие напряжения при
проверке устойчивости 0,56of -
В отличие от судов с корпусами из традиционных материалов для судов из стекло-
стеклопластика обязательна проверка величин деформаций. Стрелка прогиба корпуса в целом
не должна быть более 1/400 его длины, для балок набора — не более 1/100 пролета,
для пластин обшивки — 1/50 их пролета. Деформации корпуса нужно определять с уче-
учетом деформаций от перерезывающих сил.
Ширина присоединенного пояска набора принимается равной 1/6 пролета балки
набора, но не более расстояния между параллельными балками набора. При параллель-
параллельном типе армирования обшивки (т.е. укладка всех слоев стеклоткани с одним направ-
направлением волокон) ширину присоединенного пояска следует брать равной 1/10 пролета.
У малых судов из стеклопластика проблема обеспечения прочности упрощается
в связи с тем, что толщина обшивки корпуса с армированием из стеклосатина не может
быть менее 3 мм, с армированием из стеклохолста - менее 4 мм. Поэтому для судов
длиной около 3 м достаточна проверка только местной прочности. Материал в составе
таких корпусов нагружен мало, поэтому их целесообразно изготовлять из дешевых,
менее прочных стеклохолстов. Корпуса этих судов, как правило, имеют однослой-
однослойную безнаборную конструкцию, с высадками и гофрами для повышения жесткости
оболочки. Такая конструкция обеспечивает минимальную трудоемкость изготовления
корпуса и достаточно высокую надежность его в эксплуатации.
Для судов длиной до 6 м общая прочность достигается при условии обеспечения
местной прочности. Конструкция корпуса таких судов может быть однослойной с на-
набором либо двухслойной. Система набора, как правило, .поперечная, так как при этой
системе проще выполнять цельноформованный набор.
Расчет связей корпуса двухслойной конструкции представляет достаточно слож-
сложную проблему и, в случае необходимости, должен выполняться по действующим норма-
нормативам. Можно рекомендовать методику Регистра СССР, используемую для расчета
*Ов — меньшая из величин предела прочности при растяжении или сжатии для данного типа
стеклопластика.
**оэ — при расчете критических эйлеровых напряжений в связях расчетные значения модулей
нормальной упругости и сдвига принимаются равными 0,6 исходных значений.
464
толщин связей корпусов спасательных шлюпок из стеклопластика. Выполняется расчет
для однослойной конструкции, затем,,для наружной оболочки двухслойной обшивки
принимают толщину, равную 75 '%, а для внутренней — 50 % расчетной толщины. Не-
Недостаток этой методики в том, что двухслойная обшивка всегда будет тяжелее одно-
однослойной.
Рассмотрим конструкцию корпуса судов из пластмасс на конкретных примерах
из отечественного пластмассового малотоннажного судостроения.
Серийная гребиая лодка „Бычок-2" (рис. 16.15, 16.16) вместимостью 3 человека имеет кон-
конструкцию, рассчитанную на изготовление корпуса методом напыления, что обусловило большие ра-
радиусы скругления углов, достаточно большое раскрытие гофров. Режим эксплуатации лодки и ее
размеры позволили применить однослойную б«знаборную конструкцию корпуса, поэтому для
повышения продольной жесткости добавлены гофры на днище и слом на борту. Поперечная жест-
жесткость обеспечивается средней банкой, носовым и кормовым блоками плавучести, образующими
носовую и кормовую банки. Конструкция лодки предельно проста и содержит минимум деталей.
Мотолодка „Юг-2500" (рис. 16.17, 16.18) предназначена для прогулок, рыбной ловли. Мощ-
Мощность подвесного мотора не свыше 14,7 кВт, вместимость — 3 человека. Корпус мотолодки имеет
традиционные глиссирующие изогнуто-килеватые обводы с малой килеватостью в корме и значи-
значительным подъемом скулы у форштевня. Корпус мотолодки состоит из двух деталей - собственно
корпуса и палубы, изготовляемых методом напыления.
Небольшие размеры судна, необходимость максимальной экономии его массы заставили приме-
применить однослойную наборную конструкцию корпуса. Обшивку днища подкрепили двумя опорами
банок и днищевыми стрингерами. Напыление опор производилось на съемную деревянную оснастку,
а стрингеров - на формообразователь из легкого сплава.
Для образования острой скулы, характерной для глиссирующих судов, по ее периметру после
напыления слоя стеклопластика определенной толщины укладьшались и вдавливались в напыленный
стеклопластик коротыши из алюминиевого уголка длиной 100 мм. Напыление продолжалось до
набора полной толщины стеклопластика. Жесткость и прочность палубы обеспечивались толщиной
и формой изделия.
Характерным для корпуса мотолодки „Юг-2500" было то, что изготовление обшивки и ее под-
подкреплений производилось одновременно, т. е. это — цельноформованная конструкция.
Конструкция корпуса мотолодки сравнительно проста, детали не имеют глубоких гофров,
высадок, и тем не менее в первых образцах этого судна разнотолщинность на палубе достигала
значительных величин (от 0,9 до 9,5 мм при толщине по чертежу 2 мм), что объясняется отсут-
отсутствием опыта операторов. На корпусе разнотолщинность была меньше.
Рис. 16.15. Конструктивный чертеж гребной лодки „Бычок-2".
транцевая доска; 2 — кормовой блок плавучести; 3 — корпус; 4 — банка; 5 — план-
планширь; б — носовой блок плавучести
./
Рис. 16.16. Конструктивные узлы корпуса гребной лодки „Бычок-2".
1 — планширь из погонажного профиля; 2 — банка; 3 — кронштейн; 4 - герметик
Соединение корпуса и палубы осуществлялось прошивкой стекложгутом. В процессе эксплуата-
эксплуатации этих мотолодок замечаний по прошивке не было.
Мотолодка „Дракон" (рис. 16.19, 16.20) предназначена для туризма и прогулок. Вместимость
ее - 6 человек, допускаемая мощность подвесного мотора 36,8 кВт. Обводы корпуса повышен-
повышенной кипеватости позволили изготавливать детали корпуса мотолодки методом прессования. Способ
изготовления определил конструкцию корпуса — однослойную безнаборную, с обеспечением не-
необходимой жесткости элементами обводов (на корпусе это — продольные реданы днища и слом на
борту, на палубе — фланцы борта, поперечные банки и подмоторная ниша).
Приформованный по продольному редану днища настил обеспечивает дополнительную жест-
жесткость днищу, закрывая небольшой днищевой блок плавучести и исключая необходимость примене-
применения традиционных деревянных пайолов. Настил имеет углубление (колодец) для сбора воды со
съемной крышкой.
Рис. 16.17. Конструктивный чертеж мотолодки „Юг-2500".
1 — корпус; 2 - палуба; 3 — блок плавучести; 4 — опоры банок; 5 - тран-
транцевая доска; б — ребро жесткости
466
Бшп.
2шп.
U
VI
Рис. 16.18. Конструктивные узлы корпуса мотолодки „Юг-2500".
/— прошивка из стекложгута; 2 — уголок из АМг5 длиной 100 мм; 3 — формо-
образователь ребра жесткости из АМг
Соединение корпуса с палубой - на заклепках с прокладкой из тиоколовой ленты. Сверху
на фланец надевается труба из полиэтилена.
Мотолодка „Дракон" обладает хорошими ходовыми и мореходными качествами, однако
толщины корпуса завышены из-за необходимости обеспечения требуемого зазора между парными
формами при прессовании.
Катер „Лада" (рис. 16.21, 16.22) разрабатывался как судно со стационарным двигателем
СМ-557Л для р'ыбаков, охотников и туристов. Корпус этого катера - пример однослойной наборной
конструкции из стеклопластика, состоящей из собственно корпуса и палубы, соединяемых на флан-
фланцах заклепками.
Ребра жесткости лалубы формовались на-заполнителях нз пенопласта прямоугольного сечения.
2
Ч 5
Рис. 16.19. Конструктивны^ чертеж мотолодки „Дракон".
1 —корпус; 2 — палуба; 3 — заполнитель блоков плавучести; 4 — настил кок-
кокпита; 5 — крышка настала
467
бшп. Транец
см. В нос см. 8 нос
А-А
6-6
II
Рис. 16.20. Конструктивные узлы корпуса мотолодки .Дракон".
/ — корпус; 2 — сливная пробка; 3 — настил; 4 — заполнитель; 5 — транцевая доска;
6 — оковка транца; 7 — привальный брус; 8 — палуба; 9 — „мокрая" прокладка;
10 — приформовочный угольник; 11 — оковка привального бруса
Это облегчило заготовку заполнителей и уменьшило количество отходов пенопласта, но потребовало
более тщательной прикатки сырого стеклопластика в углах ребер жесткости.
Проем двери в переборке изготовлен сразу в чистый размер, без обрезки облоя, с необходимым
усилением (сечение Б-Б). Фланцевое соединение корпуса с палубой на прокладке из сырого стекло-
стеклопластика достаточно просто в изготовлении и надежно в эксплуатации, но фланцы увеличивают
габариты судна.
Шлюпка РШПМ-5,5 (рис. 16.23, 16.24) предназначена для перевозки грузов и экипажа судов
морского флота. Условия эксплуатации достаточно тяжелы, поэтому для обеспечения необходимой
/ - ¦
'<.•• ' ^.21. Конструктивный чертеж катера „Лада".
'..':;¦'"" с рубкой; 3 — флоры; 4 — блок плавучести; 5 — переборка;
; 7 — рундук; 8 — полупереборка на 8 шп.
Чшп.
Рис. 16.22. Конструктивные узлы корпуса катера „Лада".
/-обшивка; 2 - палуба; 3 — прокладка; 4 — заполнитель ребра жесткости; J-
обформовка; 6 — корпус; 7 - заклепка; 8 - привальный брус; 9 - деревянная проб-
пробка; 10 - переборка; 11 - приформовка; 12 - рундук
надежности использована двухслойная конструкция корпуса с внутренним набором, который обра-
образуют надувные шпангоуты.
Внутренняя и наружная обшивка соединяются по периметру борта стекло пластиковым план-
планширем, который присоединяется к обшивкам на заклепках или винтами. Детали насыщения крепят-
7 2 3 U 5 В 7 8. .
Рис. 16.23. Конструктивный чертеж шлюпки РШПМ-5,5.
/-внутренний корпус; 2 — кормовая банка; 3 - надувной шпангоут; 4 —
днищевой стрингер; 5 — ограждение бака; 6 — поперечная банка; 7 — носовая
банка; 8 — носовая палуба
469
5шп. lain.
Рис. 16.24. Конструктивные узлы
корпуса шлюпки РШПМ-5,5.
/ — внутренний корпус; 2 — план-
планширь; 3 - наружный корпус; 4 -
заполнитель; 5 — ограждение бака;
6 — закладная планка; 7 — при-
формовка; 8 — обшивка стрингера
ся к корпусу с помощью стальных закладных планок, в которых по месту нарезается резьба. Фун-
Фундамент двигателя крепится к корпусу аналогично (см. рис. 16.24, III). •
Катер „Нимфа" (рис. 16.25, 16.26) - комфортабельное судно для дальнего туризма. Корпус
катера, палуба с надстройкой, переборки и выгородки, капот двигателя и другие, более мелкие
Рис. 16.25: Конструктивный чертеж катера „Нимфа".
/ — корпус; 2 - палуба с рубкой; 3 — шпангоут; 4 — настил кокпита; 5 - выго-
выгородка пульта управления; б — местный шкаф; 7 —рундук; 8 — ниша-шкаф; 9 —
ниша для якоря; 10 — днищевой стрингер; // —флоры; 12 — заполнитель блоков
плавучести; 13 — иастнл салона; 14 — выгородка камбуза
470
8шп.
Шип.
Рис. 16.26. Конструктивные узлы
корпуса катера „Нимфа".
1— корпус; 2—блок плавучести; 3 —
рубка; 4 — выгородка рундука; 5 —
привальный брус; 6— „мокрая про-
прокладка"; 7 —прошивка из стекло-
жгута; 8 — закладная планка; 9 — об-
формовка; 10 — заполнитель
детали (двери, дверцы, крышки и т. и.) изготовлялись контактным методом из стеклопластика.
Обшивка корпуса формовалась с поперечно-продольной системой армирования. Поперечный набор
корпуса формовался на заполнителях из пенопласта со шпацией 300-350 мм. Кроме того, попереч-
поперечная жесткость корпуса обеспечивается выгородками и переборками.
Продольными связями служат стенки диванов, переходящие в продольные переборки и фун-
фундаментные балки (в районе кокпита). Для обеспечения жесткости борта применен слом шириной
25 мм, отформованный в обшивке.
Конструкция корпуса катера „Нимфа" была одобрена Речным Регистром РСФСР. Следует от-
отметить, что применение однослойной наборной конструкции привело к усложнению корпуса, боль-
большому числу деталей и соединений. Двухслойная конструкция не могла быть применена из-за неболь-
небольших расчетных толщин обшивки и необходимости жесткой экономии массы. .
Соединение корпуса с палубой выполнено прошивкой стекложгутом. Никаких замечаний
при эксплуатации катера по этому узлу не было.
Лодка „Дельфин" (рис. 16.27) - отечественная серийная лодка, изготовляемая из термо-
термопласта — листового полиэтилена низкого давления. Низкий модуль нормальной упругости заставил
максимально использовать для обеспечения жесткости конструкции разного рода гофры, зиги,
высадки. Пневмоформование в качестве основного метода изготовления наложило определенные
ограничения на форму изделия и его элементов. Конструкция корпуса - двухслойная безнабориая.
Гофры на наружной обшивке направлены вдоль корпуса, а на внутренней — поперек. В совокуп-
совокупности они создают достаточно жесткую конструкцию. Соединение обшивок производилось методом
контактно-прессовой сварки.
50 по контуру
oof
op
10 9 8 7 6 5
3 2 10
2100
Рис. 16.27. Конструктивный чертеж
лодки , Дельфин".
/ — наружный корпус; 2 — внут-
внутренний корпус
471
17. СУДА ИЗ АРМО- И СТЕКЛОЦЕМЕНТА
17.1. Армоцементные суда
Характеристика материала. Армоцемент — это конструкционный материал, состоя-
состоящий из нескольких слоев стальной тканой сетки, замоноличенных мелкозернистым
цементно-песчаным бетоном. Мелкозернистый бетон состоит из портландского цемента,
воды и песка. В пакет тканых сеток возможно включение стержневой арматуры, как
по соображениям прочности, так и технологии изготовления. Толщина армоцементных
конструкций малых судов составляет 9—30 мм.
Отличительными чертами армоцементных корпусов являются значительная доступ-
доступность их постройки, малые построечные и эксплуатационные расходы. Из армоцемента
строят рыболовецкие суда, крейсерские яхты, разъездные и служебные катера.
Широкое распространение армоцемент получил в крейсерском яхтостроении. На
армоцементных яхтах совершены кругосветные плавания с огибанием мыса Горн,
выигран ряд крупных океанских гонок. Страховая компания английского Ллойда
отнесла армоцементные яхты к судам высшего класса надежности.
В СССР центром армоцементного судостроения является Киевский крейсерский
яхт-клуб. Им разработаны и опубликованы Временные правила классификации и по-
постройки армоцементных корпусов крейсерских яхт — первый отечественный норматив-
нормативный документ по строительству малых судов из армоцемента.
Свойства армоцемента. Главными факторами, определяющими прочность армо-
армоцемента, являются достаточная прочность бетона (марок 400—500) и насыщение его
ткаными сетками (расход стали Gs = 300-^500 кг/м3, Кп = 2-ьЗ см2/см3, рис.17.1).
Ниже приведены технические характеристики армоцемента:
\
Модуль упругости при сжатии Епр , МПа 22 000
Модуль сдвига G = 0,4?"с, МПа 8 800
Коэффициент Пуассона ц 0,12
Плотность уа11,кг1м3 A м2 армоцемента тол-
толщиной 10 мм - 27 кг) 2 700
Коэффициент удельной поверхности сегки./Сп , см2/см3 1,45-3,00
Коэффициент армирования
б МПа
во
20
7
J
Кп. си/си1
2-4
За нормативные напряжения (табл. 17.1) при растя-
растяжении и растяжении при изгибе приняты напряжения,
соответствующие раскрытию трещин на величину 0,01 мм
при толщине защитного слоя 2 мм, а при сжатии и сжа-
сжатии при изгибе — напряжения, равные прочности
бетона.
Прочность конструкции считается обеспеченной,
если суммарные напряжения не превосходят допускае-
допускаемых напряжений (табл. 17.2).
Материалы для армоцемента. Для изготовления
армоцементного судна используются стальная тканая
сетка (табл. 17.3), вязальная проволока, стержневая
арматура (необязательно), цемент, песок,вода. Пружин-
Пружинные сетки для армоцемента непригодны.
Для увязывания тканых сеток в пакет применяется
Рис. 17.1. Изменение предела вязальная проволока диаметром 1,0-1,5 мм, идущая
прочности армоцемента в чави- на эти же цели при изготовлении железобетонных конст-
симости от Кп. рукций. Перед производством работ она отжигается
/ - растяжение; 2 - изгиб на костре или в печи для придания ей мягкости, пла-
472
Таблица 17.1. Характеристика армоцемента
на бетоне марки ,300" (Кп=2 см2/см3)
Вид напряжен-
напряженного состоя-
состояния
Растяжение
Сжатие
Растяжение при
изгибе
Сжатие при
изгибе
Скалывание
Срез
Нормативное
сопротивле-
сопротивление Л, МПа
7,2
35,2
13,2
35,2
7,2
11,0
Модуль
упругости
Е, МПа
5 000
22 000
5 000
15 000
—
-
Таблица 17.2. Нормы допускаемых напряжений
для армоцемента (в долях от нормативных сопро-
сопротивлений)
Расчетная
нагрузка
Постоянная;
постоянная и слу-
случайная
Случайная
Аварийная
Достижение нор-
нормальными напря-
напряжениями расчет-
расчетной величины
Наруж-
Наружная об-
обшивка,
карлинг-
сы, шпан-
шпангоуты,
палубы
0,65
0,75
0,85
Попереч-
Поперечные пере
борки,
фунда-
фундаменты
0,75
0,80
0,90
Достиже-
Достижение главны-
главными растя-
растягивающими
НаИрпЖспИН
ми предель-
предельной вели-
величины
0,55
0,65
0,70
стичности. По технологическим сообра-
соображениям и для усиления судовой кон-
конструкции внутрь сеток может заклады-
закладываться стержневая арматура диаметром
3—12 мм из низкоуглеродистой мягкой
стали. Для армоцемента принят порт-
портландцемент марки не ниже 500.
Цементно-песчаный бетон изготовляется на природных кварцевых песках с от-
отсевом фракции крупнее 2,5 мм, без примесей пыли, глинистых и органических включе-
включений. Лучшими для этой цели являются промытые речные пески.
Для затворения бетонной смеси и поливки бетона в процессе его созревания долж-
должна применяться пригодная для питья вода, не содержащая глинистых и илистых при-
примесей, жиров, нефтепродуктов и сахаристых веществ. Промышленная, а также мор-
морская вода для этих целей не используется.
Конструирование армоцементного судна. Допускается использование во всех слоях
одинаковых тканых сеток или комбинации сеток с различными характеристиками
(рис. 17.2, а). Лучшей считается сетка с ячейкой 10 X 10 мм из проволоки диамет-
диаметром 1 мм.
Стержневая арматура диаметром 3—5 мм возможна внутри пакета сеток
рис. 17.2, б) в районе днища, киля и деталей набора корпуса, а стержни диаметром
6—12 мм предусмотрены вдоль соединений наружной обшивки с палубой, транцем
и у штевней (рис. 17.3).
В пакете должно быть не менее 4 слоев сетки (иначе не будут обеспечены прочность
и трещиностойкость) и не более 8 (иначе будет затруднено бетонирование).
Армирование армоцементных элементов корпуса судна принимается в соответ-
соответствии с табл. 17.4, а также по приводимым ниже эмпирическим формулам*
Таблица 17.3. Характеристика рекомендуемых тканых сеток (пбЧМТУ-4-297-69)
Размер
ячейки
а , мм
6x6
6x12
10x10
10x20
Диаметр
проволоки
/, мм
0,7
0,7
1,0
1,0
Площадь поперечного
сечения 1 пог. м сеткн,
см2
по основе
0,58
0,58
0,71
0,72
по утку
0,58
0,30
0,71
0,37
Кп, см2/см3*
0,66
0,56
0,57
0,44
Мл.**
0,58
0,58
0,71
0,71
Масса 1 м2
сетки Сп,
кг
0,90
0,70
1,20
0,86
"При одном слое сетки на 1 см толщины элемента.
¦Формулы взяты из Временных правил постройки армоцементных судов норвежской фирмы
„Дет Норске Веритас"
473
a)
1 1
6)
Рис. 17.3. Установка стержневой арматуры
Рис. 17-2. Сечение армоцементного
элемента, армированного: а - только
ткаными Сетками; б ' пакетом тканых
сеток с прокладкой внутри него
i стержневой арматуры.
1 — тканая сетка; 2 — цементно-песча-
ный бетон; 3 - стержневая арматура
для армоцемента, состоящего только кз сеток,
Kn = S9dnl(at) см2/см3; д п = \.25Knd %: Gs = 10nGn/t кг/м3;
для армоцемента, где в пакет сеток заложена прутковая сталь,
Kn = 59dn/ [a (t-2D)] см2/см3; Kt =3\,4D/tA + Кп(\ - IDjt) см2/см3;
дп = 1,25Жп%; iit =7&,5 D2/(tА) +д„ (l-2D/t) %;
Gs = 10nGJt +61,&2D1ltA кг/м3.
Таблиц.. 17.4. Рекомендуемое армирование основных
Конструктивный элемент
Палуба, рубки, поперечные пере-
переборки, кокпит, выгородки
То же и наружная обшивка.
Палуба, стрингеры, наружная об-
обшивка
Палуба, наружная обшивка
Наружная обшивка
То же и трднец
Килзвая коробка (для яхт)
То же
Шпангоуты, флоры
Толщина
элемента t
мм
8
11
12
14
16
18
22
24
27
14
конструктивных элементов
Диаметр проволоки
и размер ячейки о ,
мм
0,7; 6x12
0,7; 6x12
0,7; 6x12
1; 10x10
1; 10x10
1; 10x10
1; 10x10
1; 10x10
1; 10x10
0,7; 6x6
Количество
слоев и
4
, 5
6
5
6
7
6
6
6
4
474
Рис. 17.4. Конструкция соединения элемента
набора с наружной обшивкой.
1 — стержень; 2 — вязальная проволока
Рис. 17.5. Конструкция элемента набора с
дополнительным армированием стержнями
/ — вязальная проволока; 2 — тканая сетка;
3 — наружная обшивка
¦r____--j
Для элементов набора (шпангоут, стрингер и др.) предусмотрены 4—6 слоев сетки,
внутри которых проходит по свободной кромке элемента арматурный стержень (рис.
" 17.4. Стрингеры и рамные шпангоуты, ширина которых более 10 толщин, армируются
дополнительно диагональной решеткой из стержней, сечение которых на 20 % меньше
сечения стержня, идущего по свободной кромке. Этот пруток приваривается к первому
и связывается с пакетом арматуры вязальной проволокой (рис. 17.5). Расчет армиро-
армирования указанных элементов производится для случаев отклонения выбранного профил»
от рекомендованного в табл. 17.4 как по диаметру стержня, так и типу сеток и коли-
Диаметр стержней
и ячейки решетки
нз стержневой арма-
арматуры, мм
-
-
_
3; 50x50
4; 75x75
5; 75x75
5; 70x200
Толщина защит-
защитного слоя с каж-
. дой стороны,
мм
1,5
2,0
2,0
2,0
2,0
2,0
.2,0
2,0
2-3
2,0
Удельная
поверхность
армирования, см1/см3
сетки Кп
2,40
2,35
2,50
2,10
2,20
2,30
2,20
2,22
2,08
2,86
сетки н
стержня К(
2,40
2,35
2,50
2,10
2,20
2,30
1,73
1,65
1,47
2,04
Коэффициент
армирования
II Of
2,10
2,05
2,20
2,62
•2,75
2,87
2,65
2,78
1,74
2,31
Плотность
арматуры
СГ,кг/м3
330
320
340
430
450
470
430
350
420
480
475
честву их слоев; при этом диагональная решетка принимается как один слой сетки:
Kn = 39(D/a) [n/(t-D)] см2/см3; Kt=31,4D/tA +Kn(l -D/t) см2/см3;
ц п = 1,25dKn %; ц t = 78,5 D2/ tA + At п A - D/t) % - вдоль стержня;
ц t =ц п A — D/t) % — поперек стержня;
Gs = XOnGJt + 61,8 D2/ tA кг/м3.
При больших толщинах продольных и поперечных стержней решетки стрингеров
или шпангоутов обтягивать их сеткой необязательно.
Размеры конструктивных элементов корпуса яхты определяются в зависимости
от величины шпации:
5 = 1000+ ?(?-25) мм,
A7.1)
где 5 — при поперечной системе набора расстояние между шпангоутами, при продоль-
продольной системе набора — расстояние между стрингерами или между .стрингером и линией
борта; ? — в метрах. •
Шпация может быть принята отличной от полученной по формуле A7.1), однако
толщины наружной обшивки и сечение элементов набора должны рассчитываться ис-
исходя из ее расчетной величины.
Жесткие опоры наружной обшивки (места примыкания к обшивке стрингеров,
шпангоутов) целесообразно располагать по линиям наименьшей ее кривизны, с тем
чтобы неподкрепленная часть наружной обшивки представляла возможно большую
выпуклость. Участки наружной обшивки должны представлять собой сферические
панели, в которых возникают сжимающие напряжения от внешней нагрузки.
При наличии сферических участков обшивки их толщины, полученные расчетом,
могут быть снижены введением в соответствующие формулы коэффициента F
(рис. 17.6), определяемого из выражения F= [1 - (fx + /2)/B<Si)] [1 — (f3 +A)/
/ BS2) ] . При этом F не может быть менее 0,7.
Рис. 17.6. Учет кривизны панели обшивки.
1 — ребро жесткости
Рис. 17.7. Обозначения размерений армо-
цементного корпуса.
I, П - стрингеры
, 0.58„и„
nWrSO
476
Помимо шпангоутов или при их отсутствии на протяжений коробчатого киля,
плавника или фальшкиля, а также в районе фундаментов двигателя, дейдвуда и рудер-
рудерпоста устанавливаются флоры высотой не менее 0,15 Н. Расстояние между флорами
принимается конструктивно. Кривизна флора определяется радиусом R из точки А,
которая находится на пересечении с ДП перпендикуляра к касательной к максималь-
максимальной кривизне 1 наружной обшивки днища (рис. 17.7).
Флор должен быть не менее толщины шпангоута, а в местах, где шпангоут отсутст-
отсутствует, — не менее 15 мм. При толщине обшивки более 10—15 мм по свободной кромке
бесшпангоутных флоров должно быть утолщение за счет увеличения диаметра арматур-
арматурного стержня на 20 %. Во флорах допускаются облегчающие отверстия и должны быть
предусмотрены шпигаты.
Днищевая обшивка в средней части судна устанавливается в пределах 0,4 Z,BJ1
в нос и корму от миделя и по ширине до высоты 0,15 Я. Толщина днищевой обшивки
Гдн должна приниматься большей из полученной по формулам ?ДН1 = 155 (// —
- 0,45)F мм; гдн2 = 0,745 (L + 15) мм; где 5, L - в метрах.
Площадь поперечного сечения днищевой обшивки
содн=0,556[4/Aвл-4)+2](Ямид11л/#1)см2,
где Hi — не более 0,93 Н. Однако содн не может приниматься менее произведения пери-
периметра днищевой обшивки на среднюю ее толщину.
Толщина бортовой обшивки t6 принимается равной 0,93 Г дн. Если бортовая обшив-
обшивка имеет кривизну, то к f s применяется коэффициент F, но при всех условиях г б не
может быть менее 0!,85 ?дн. Допускается уменьшение толщины бортовой обшивки
в оконечностях судна на 10 %.
Толщина палубы tn6 должна быть не менее большей из величин гпб1 = 11,35 (Я —
— 0,45)F мм; tn62 =0,745 @,9 Z,BJ1 + 12) мм, где 5 — расстояние между бимсами, м.
В оконечностях tn6 может быть меньше на 10 %, но не менее 9 мм.
Стенки и крыша рубок принимаются толщиной 0,85 tn6>но ие менее 9 мм.
Минимальная площадь поперечного сечения палубы
ы„б=0,556[4/Aвл-4)+2](Дмн„12„УЯ,)сма. . A7.2)
По формуле A7.2) получают площадь поперечного сечения палубы в районе выре-
вырезов для кокпита, рубок, люков и т. п. В эту площадь включаются площади поперечного
сечения карлингсов, комингсов рубок и люков, если их длина не менее 0,25/,. Толщина
палубы в данном сечении устанавливается делением ее площади на Ъп.
У вырезов палубы должны быть выполнены скругления радиусом At для снижения
концентрации напряжений. Отверстия в палубе, наружной обшивке, переборках диа-
диаметром более двух толщин подкрепляются металлическим обрамлением.
Расчетная нагрузка на шпангоут и стрингер для определения момента сопротивле-
сопротивления их поперечного сечения принимается по формуле q = (L/100 + 0,5J,5#! м, где
Я, > 2/ЗЯ.
Момент сопротивления поперечного сечения шпангоута
И>=16,7/25<7см3, A7.3)
где 5 — в метрах.
Для шпангоутов, подкрепленных пиллерсами или стрингерами, / определяется
в соответствии с рис. 17.8, а при отсутствии указанных подкреплений, когда шпангоут
имеет закругление по радиусу R или по радиусу с дополнительной кривизной, —
с рис. 17.9:
если R величина не постоянная,
477
Рис. 17.8. Длина свободного пролета
шпангоута, подкрепленного пиллерсом
или стрингером.
1 — пиллерс; 2 — флор; 3 — стрингер
/ = /о-3/+0.3Л,
где I о — длина прямой части шпангоута;
если R величина постоянная,
/ =/0 +0..3Д .
"Рис. 17.9. Длина свободного
пролета шпангоута, не под-
подкрепленного пиллерсом или
стрингером
(П.4)
A7.5)
По формуле A7.5) определяется величина / при S-образной форме шпангоута
(рис. 17.10).
Выше скулы W при Н\ =1 может быть уменьшен на 40 %, но не менее чем определе-
определено по формуле A7.3).
В носовой части судна, где шпангоут имеет слегка вогнутую, выпуклую или S-об-
разную форму, '
W= 16,7/iV 2Sq см3,
A7.6)
где /^=2-для S-образного и вогнутого шпангоутов (рис. 17.11); Кл -2 — 40///,
но не менее 1 - для выпуклой формы шпангоута с выпуклостью/. Переход шпангоута
от флора должен быть хорошо скруглен.
Рис. 17.10. Длина свободного
пролета S-образного шпангоута.
/ — флор
Рис. 17.11. К определению W вогну-
вогнутого шпангоута (К, =2)
478
Момент сопротивления поперечного сечения стрингера, расположенного на 0,15#
выше киля,
2Sq см3.
A7.7)
Если стрингер имеет выпуклость /, то Kt =2 - 40/// в пределах 0,4/-. При отсут-
отсутствии выпуклости стрингера Kt =1.K2 = 0,15/, + 1 в пределах 0,4/- у миделя; в оконеч-
оконечностях К2 может быть линейно уменьшен до 1. При расположении стрингера ниже
0,15HW увеличивается пропорционально изменению этой величины и уменьшается,
если стрингер находится выше 0,15#. При необходимости установки второго борто-
бортового стрингера момент сопротивления его поперечного сечения принимается равным
0,65 нижестоящего. Стрингеры должны продолжаться по длине корпуса непрерывно
с редуцированием их сечения в оконечностях на 40 %.
Соединение палубы и транца с бортовой обшивкой осуществляется в виде непре-
непрерывного перехода армирующих сеток с радиусом скругления 40 мм. Аналогично вы-
выполняется переход палубы в стенки рубок, а последних — в крышу рубок, палубы—
в стенки кокпита и т. п.
Несение палубной нагрузки на малых судах не предусмотрено. Расчетная нагрузка
на палубу для определения.ее прочности принимается q = 0,5(Н — Г), но не менее 0,4 т.
Момент сопротивления поперечного сечения бимса W6 = 25K1l2Sq см3, где К^ -
= 2 - 40///, но не менее 1 (рис. 17.12).
Момент сопротивления поперечного сечения карлингса WK = 33,3K2l2Sq см3,
где К2 =0,015/ + 1 в пределах 0,4 1ВЛ у миделя с линейным уменьшением до 1 воко--
нечностях.
Арматурные работы. При стыковании арматурные стержни перекрывают друг
друга на длине 12D и соединяются электросваркой; при этом должны быть приняты
меры для предохранения от пережога проволок сетки.
Стыкование тканых сеток производят внахлестку не менее чем на 60 мм. Стыки
одного слоя сетки нужно смещать относительно стыков других слоев, чтобы в любом
сечении ие было более одного стыка. Связывание сеток в пакет осуществляется с шагом
60-120 мм. '
Выпуски стержневой арматуры, используемые для соединения элементов конструк-
конструкции и для крепления закладных деталей, следует заводить между ткаными сетками на дли-
длину не менее 2QD. Все остальные детали, выходящие из армоцемента (кроме изготовлен-
изготовленных из нержавеющей стали), должны быть оцинкованы горячим способом или окраше-
окрашены. Отверстия диаметром более 2г обрамляются закладной шайбой из стержневой стали,
прочно увязанной вязальной проволокой с тканой сеткой.
Анкеры, увязываемые в сетку, должны быть из низкоуглеродистой мягкой стали.
Увязывание в сетку для замоноличивания деталей из цветных металлов недопустимо.
Крепление закладных элементов и увязывание сеток необходимо производить
таким образом, чтобы была обеспечена возможность проникновения бетона во все
полости армирования, гарантирующая отсутст-
отсутствие раковин и пор. Плотность армирования
должна быть по возможности равномерной.
Не допускается сдвиг проволок сеток вплотную
по несколько штук.
До начала омоноличивания корпуса все
закладные детали следует установить на место
и скрепить с арматурой, для чего применяют
дополнительное армирование.
Дейдвудная труба.рулевые устройствадолж-
ны быть заблаговременно отцентрированы по =1,5А ).
СВОИМ ОСевЫМ ЛИНИЯМ И Надежно Зафиксированы. / - бимс; 2 - карлингс; 3 - шпангоут.
Рис. 17.12. К определению W бимса (/? =
479
Крепление к сеткам закладных деталей, расположенных внутри пакета, нужно осу-
осуществлять так, чтобы усилия отрыва этих деталей были направлены вдоль сеток.
Крепление плавникового киля должно соответствовать условиям его работы.
В дополнение к армированию днища оболочку плавника следует насыщать стержневой
арматурой, суммарная площадь поперечного сечения которой должна равняться не
менее двойной площади поперечного сечения болтов крепления балластного фальшки-
фальшкиля к деревянным корпусам. Концы этих стержней должны отгибаться на днище не
менее чем на 20 диаметров стержня и связываться с арматурой днищевой обшивки
и флоров,
Вант-путенсы необходимо изготовлять из арматурного прутка в виде скобы и про-
пропускать через сетку палубы в середину пакета арматуры борта или переборки на длину
не менее 30 диаметров (рис. 17.13). Утолщение наружной обшивки в районе вант-
путенсов должно производиться с внутренней ее стороны.
При арматурных и бетонных работах необходимо обеспечить доступ ко всем участ-
участкам для возможности увязывания и рихтовки сетки, омоноличивания и заглаживания
бетона.
Крепление палубных рымов, уток, кнехтов, лебедок следует осуществлять в плос-
плоскости бимсов и карлингсов или в непосредственной близости от них с устройством
подпалубных подкреплений после бетонирования в готовом корпусе на болтах. Фун-
Фундамент двигателя крепится к усиленному набору (рис. 17.14).
Во избежание протекания и коррозии деталей в местах их крепления отверстия
в армоцементе, через которые проходят болты различных деталей, просверливают и гер-
герметизируют цементным раствором с волокнистым наполнителем (асбестом, стекло-
стекловолокном) или традиционными герметиками.
Бетонные работы. Перед началом бетонирования все подготовительные работы долж-
должны быть полностью закончены. Бетонирование следует осуществлять при температуре
воздуха не ниже +5 °С и не выше +20 °С, относительной влажности воздуха не ниже 60%.
качество материалов для бетона должно быть заранее известно. Состав бетона
нужно подобрать предварительно. Технические характеристики бетона марки 500:
Расход цемента, кг/м3 800
Соотношения:
вода/цемент 0,4-0,6
цемент/песок 1 : 1>5-1 : 1,75
Плотность, кг/м3 2250
Водопоглощение, % 8,55
-w
Рис. 17.13. Вариант крепления вант-
гтутенса 1 на армоцементной яхте
Рис.17.14. Фундамент двигателя на армоце-
ментном судне.
1 - шпангоут усиленного сечения; 2 - двигатель;
3 - стальной фундамент; 4 - анкерные болты;
5 - дополнительная арматура из стержней диа-
диаметром 3-4 мм; 6 - армоцементные стрингеры
480
Предел прочности при сжатии, МПа:
после 7 дней твердения 28
на 28-й день 50,3
Необходимо стремиться к уменьшению соотношения вода/цемент, однако без ущер-
ущерба для удобоукладываемости бетона. Дозирование количества цемента и песка в преде-
пределах рекомендуемого соотношения — по массе.
Перемешивание бетона должно производиться в растворомешалках не менее 5 мин.
Приготовленный бетон следует укладывать в конструкцию не позднее 1 ч после начала
его затворения водой. Неуложенный своевременно бетон дальнейшему использованию
не подлежит. Разбавление загустевшей бетонной смеси запрещено. '
Перед приготовлением и укладкой бетона необходимо убедиться, что сетка не
загрязнена пылью, маслом, песком, стружками и т. п., а также не деформируется под
действием массы укладываемого бетона.
Заглаживание бетона нужно заканчивать не позже, чем закончится процесс схваты-
схватывания. Оно осуществляется вручную штукатурным инструментом (кельмами, терками,
полутерками и т. п.). Бетонирование осуществляют путем тщательного вдавливания
бетона кельмой в сетку или с помощью вибраторов так, чтобы не оставалось неуплот-
неуплотненных участков и раковин. При использовании вибраторов необходимо следить за тем,
чтобы смесь не расслаивалась.
Бетонирование корпуса нужно стремиться закончить за один прием. В случае пере-
перерыва в бетонировании следует полностью загладить уложенный бетон.
Стык свежего бетона с уже затвердевшим можно осуществить только в том слу-
случае, если в стыке выступает арматура, а на поверхности затвердевшего бетона нет грязи,
масла и т. п. Предварительно следует хорошо обработать абразивным камнем или сталь-
стальной щеткой и смочить те места затвердевшего бетона, к которым примоноличивается
свежий. В особо ответственных местах поверхность стыка смазывают эпоксидной
смолой, после чего укладывают свежий бетон. До набора бетоном прочности 30 МПа
забетонированный корпус судна должен быть недвижим. Твердение бетона в естествен-
естественных условиях осуществляется в течение 28 сут при температуре 15—20 °С и постоян-
постоянном увлажнении в укрытом от прямых солнечных лучей и ветра месте.
Твердение может быть ускорено пропаркой. Однако этот метод рекомендован
только при соблюдении всех условий пропаривания тонкостенных армоцементных
конструкций.
Технологические методы постройки армоцементного судна. Армоцементноё судно
строится из частей. Отдельно изготовляются: оболочка корпуса или две его зеркальные
половины (деление по ДП); переборки (если переборка ломаной конфигурации, то
они расчленяются на плоские элементы); палуба, цельная или расчлененная на секции
между переборками.
Сборные элементы соединяются за счет связывания выпусков сетки и последую-
последующего бетонирования стыков.
Корпус судна или его части изготовляются на пуансоне килем вверх либо на вы-
выставленных лекалах с использованием продольных технологических реек или сталь-
стальных стержней. В последнем случае судно может закладываться как вниз, так и вверх
килем.
Порядок производства работ при постройке на пуансоне:
1) изготовление пуансона (деревянный, бетонный, земляной, использование кор-
корпуса существующего судна);
2) обтягивание пуансона требуемым количеством сетки и связывание их в общий
арматурный ковер, тщательная рихтовка сетки и обеспечение ее равномерного при-
прилегания к пуансону;
3) бетонирование;
4) твердение бетона корпуса и отдельно параллельное изготовление палубы, пере-
переборок и др.;
16 Зак. 738 481
5) снятие отформованной армоцементной оболочки корпуса с пуансона;
6) установка набора и переборок и крепление их к корпусу за счет связывания
выпусков сетки в переборках или полос пакетов сетки шпангоутов с выпусками сетки
из корпуса в соответствующих местах. Эти выпуски сетки закладываются в углубле-
углубления (канавки) в пуансоне перед укладкой сеток обшивки. Для увязывания переборок
и шпангоутов с сеткой обшивки можно разбить по линии стыка оболочку корпуса
и очистить от осколков бетона сетку. При этом нельзя допустить деформации корпуса
за счет многочисленных разрушений бетона;
7) монтаж на корпусе отдельно изготовленных или изготовление на месте палубы
и рубки;
8), обстроечные работы;
9) покрасочные работы.
При постройке судна по лекалам с помощью технологических реек или стержней
порядок операций следующий:
1) установка деревянных или металлических лекал (вверх или вниз килем);
2) установка между лекалами заранее изготовленных переборок;
3) укладка на лекале требуемого количества слоев сеток;
4) укладка вдоль корпуса поверх уложенной сетки деревянных реек или сталь-
стальных стержней диаметром 14—16 мм с шагом 100—150 мм и крепление их через сетки
к лекалам (гвоздями, вязальной проволокой);
5) привязывание вязальной проволокой сеток корпуса к рейкам, связывание
сеток в пакет (между рейками), увязывание выпусков сетки переборок к сеткам
обшивки, армирование шпангоутов и стрингеров;
6) тщательная рихтовка сеток;
7) бетонирование корпуса изнутри; при этом необходимо принять меры против
возможной его деформации под действием все увеличивающейся массы бетона;
8) по мере набора бетоном прочности снятие реек, откусывание торчащей про-
проволоки, сбивание наплывов бетона и бетонирование корпуса снаружи;
9) постепенное снятие технологических лекал и бетонирование мест их контакта
с сеткой;
10) монтаж палубы и рубки;
11) обстроечные работы;
12) покрасочные работы.
Покраска армоцемеитного судна. Готовый корпус должен быть окрашен снаружи
и изнутри. При необхо/гимости используются шпаклевки, в том числе эпоксидные
для наружных поверхностей и особенно для подводной части корпуса. Окраска под-
подводной части производится этинолевыми и эпоксидными красками. При использова-
использовании зтинолевых красок нужно учитывать их быстрое старение на свету, поэтому покрас-
покраску следует производить перед непосредственным спуском судна на воду, за 3—4 раза.
Надводный борт и палубу окрашивают пентафталевыми эмалями и лаками. Внут-
Внутренние поверхности корпуса грунтуют этинолевой краской ЭКЖС-40, а затем окраши-
окрашивают пентафталевыми красками.
Места судна, где возможно воздействие на армоцемент масел, кислот, щелочей,
сахара, соли, рекомендуется окрашивать эпоксидно-этинолевыми или эпоксидными
красками.
17.2. Стеклоцементные суда
Характеристика материала. Стеклоцемент — это композиционный анизотропный
материал, состоящий из стеклянного волокна в виде отдельных нитей, прядей, сеток
или тканей, склеенных цементным либо полимерцементным клеем. По структуре
стеклоцемент подобен стеклопластикам. По назначению стеклоцемент может быть
конструкционным, гидроизоляционным и декоративным материалом.
482
Из конструкционного стеклоцемента строятся тузики, шлюпки, крейсерские яхты,
глиссирующие и водоизмещающие катера. Стеклоцемент также используется для из-
изготовления отдельных конструкций (переборок, палубы и др.) в армоцементных судах
и для ремонта деревянных судов.
Толщина стеклоцементных конструкций составляет 5-15 мм. Масса стеклоцемент-
ного листа толщиной 10 мм — 16—17 кг. Основными достоинствами стеклоцемента
являются: высокая удельная прочность (ар/у= 100/0,017-г 1200/0,017 = 6000-г 75 000),
простота формования на сложных криволинейных поверхностях, короткие сроки строи-
строительства, негорючесть, нетоксичность, низкая плотность A,6-1,7 т/м3). Недостатки —
высокая чувствительность материала к незначительным отклонениям от технологиче-
технологических регламентов, свойств сырья и условий эксплуатации конструкции.
Исходными материалами для стеклоцементного судна являются:гипсоглино-
земистый расширяющийся (ГОСТ 11052—74) и портландский (ГОСТ 10178—76) цемен-
цементы, вода, стеклянное волокно, полимерные добавки.
Для обеспечения длительной стабильной прочности стеклоцемента необходимо,
чтобы максимальная величина динамического модуля упругости Ем цементной матри-
матрицы (цементного камня) не превышала 16 000 — 17 000 МПа. Этого можно достигнуть
например, введением в состав цементных матриц минеральных или органических доба-
добавок, обладающих низким модулем упругости. Рассчитать потребное количество добав-
добавки можно по формуле Ем -Еп KVn к + EnVn. В качестве добавок могут использовать-
использоваться: двуводный гипс, вбдные эмульсии полимеров (ПВАЭ, латексы и др.).
Порошкообразные добавки вводятся в сухом виде в состав цемента, а водные
эмульсии полимеров — выводу для затворения цементной матрицы. Вода применяется
пресная, при условии отсутствия в ней кислот, щелочей, масел, сахаристых и других
вредных примесей. Во всех случаях требуется тщательное перемешивание.
Применяются стекловолок,нистые материалы конструкционного назначения раз-
различных видов и структур (ровинг, ткани, сетки, холсты, маты) на основе алюмоборо-
силикатного или специального щелочестойкого (цирконосодержащего) волокна, пред-
предназначенного специально для стеклоцемента. При выборе стекловолокна с целью дости-
достижения высокой стабильной прочности предпочтение следует отдавать волокнам' боль-
большого диаметра E0—150 мкм). Это позволяет достичь высокого содержания армирую-
армирующих материалов, что определяет прочность стеклоцемента при изгибе и растяжении.
Механические свойства стеклоцемента. Прочность и деформативность стеклоцемен-
стеклоцемента зависят от следующих факторов:
количества армирующих стекловолокнистых материалов;
ориентации волокон относительно действующих усилий;
вида и марки цемента;
модуля упругости матриц;
возраста стеклоцемента;
условий внешней среды при эксплуатации стеклоцемента;
качества уплотнения стеклоцемента (с увеличением плотности прочность растет) ;
температуры и влажности в процессе изготовления {оптимальными условиями
являются: температура 15—20°С, относительная влажность 100%).
Для определения прочности стеклоцемента при различном содержании волокна
(Рст/^м) и матрицах с различными модулями упругости (Есг/Ем) целесообразно
использовать диаграмму на рис. 17.15.
Изготовление стеклоцементного судна. Судостроительные стеклоцементные кон-
конструкции могут быть изготовлены теми же способами, что и стеклопластиковые: при
использовании рулонных материалов (сетки, ткани, холсты) и методом напыления
при применении стеклоровинга.
Контактное формование заключается в ручной послойной укладке, пропитке це-
цементным клеем и уплотнении каждого слоя стеклоцемента. Требуемая толщина стекло-
стеклоцемента достигается за счет непрерывной укладки соответствующего количества слоев.
16* 483
Ч/о?
I
4 85
15
У
'>
<7
О 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 Ко
Рис. 17.15. Диаграмма стабилизировавшейся
прочности на растяжение вдоль волокон
стеклоцементов на основе алюмоборсиликат-
ного волокна диаметром 10—130 мкм и мат-
матриц с различным модулем упругости в зави-
зависимости от величины К, = УСТЕСТ/ VMEM.
1 — выдерживание на воздухе; 2 — выдержи-
выдерживание в воде
Толщина каждого слоя в зависимости от вида стекловолокнистого материала состав-
составляет 0,2-1,2 мм.
Уплотнение стеклоцемента производится тщательным торцеванием каждого слоя
капроновыми щетками, исключающим воздушные пузыри и обеспечивающим хорошую
пропитку стекловолокнистых материалов.
Механизированное изготовление стеклоцемента осуществляется методом напыле-
напыления компонентов (волокна и цементного клея). В этом случае применяется стекло-
ровинг, который с . помощью специального пневматического пистолета-напылителя
разматывается из бобины, рубится на отрезки 30-60 мм и струей сжатого воздуха
напыляется на формуемую поверхность. Одновременно или последовательно через
форсунку волокно покрывается цементным клеем и уплотняется торцеванием.
В отличие от использования рулонных материалов напыление стеклоровинга по-
позволяет механизировать рабочий процесс. Однако при этом прочность стеклоцемента
ниже, чем при применении рулонных стекловолокнистых материалов, из-за более
низкого содержания волокна.
Поверхность пуансона или матрицы, на которой формуется конструкция, покры-
покрывают разделительным слоем (полиэтиленовые пленки, парафиновая обмазка, машинное
масло и др.), чтобы стеклоцемент не прилипал к ней.
Наружные поверхности корпуса, палубы и надстроек могут быть оклеены одним-
двумя слоями эпоксидного стеклопластика. При изготовлении стеклоцементных судов
в матрице удобно сперва укладывать слой стеклопластика, а затем непосредственно
на сырую смолу — стеклоцемент.
Для обеспечения реакции твердения цемента необходимо сохранить в нем воду,
исключив ее испарение. Это достигается путем укрытия стеклоцементных конструкций
пленками, мокрой ветошью или, при возможности, погружением их в воду спустя
несколько часов после изготовления .
Достижение проектной прочности матрицы при температуре 15—18 °С на гипсо-
глиноземистом цементе происходит через 3 сут, на портландском цементе - через
28 сут. Элементы набора судна образовываются путем соответствующих утолщений
стеклоцемента,
Соединение стеклоцементных элементов между собой производится : склеиванием
(место стыка оклеивают несколькими слоями стеклоцемента или стеклопластика);
металлическим крепежом (болты, шурупы); прошиванием стыка проволокой диа-
диаметром 1—2 мм с последующим омоноличиванием стеклоцементом.
Соединение стеклоцементных элементов с металлом, деревом, армоцементом
следует осуществлять так, как это принято делать в деревянных, армоцементных,
металлических судах (заклепки, шурупы, болты, крепление вязальной проволокой).
На рис. 17.16—17.21 даны основные конструктивные узлы стеклоцементного судна.
Стеклоцемент используется как гидроизоляционный и гидроизоляционно-кон-
струкционный материал при ремонте армоцементных и деревянных судов, прогнившие
части обшивки которых заполняются стеклоцементом.
484
В-Б
Рис. 17.16. Монолитная конструкция стекло-
цементного судна с набором
Рис. 17.17. Конструктивная схема стекло-
цементной яхты сборной конструкции
Рис. 17.18. Устройство анкерных крепле-
креплений (вант-путенсов) яхты
Рис 17.19. Конструкция фундамента под двигатель
на стеклоцементном судне.
на стеклоцементном судне.
1 — шпангоуты; 2 — продольные утолщения и
лоцемента; 3 — анкерный болт; 4 — стальной
лер
из стек-
стальной швел-
швелРис. 17.20. Вариант крепления
руля на стеклоцементном
судне
Ряс. 17.21. Крепление сталь-
стального гельмпорта на стекло-
стеклоцементном судне.
1 — стальная труба; 2 — ан-
анкеры диаметром 6—8 мм,
приваренные к трубе
РАЗДЕЛ VI
ДВИГАТЕЛЬНЫЕ УСТАНОВКИ
18. СТАЦИОНАРНЫЕ ДВИГАТЕЛЬНЫЕ УСТАНОВКИ
Судовая двигательная установка состоит из двигателя, реверсивно-разобщительного
устройства, валопровода и движителя.
18.1. Судовые дизели
ГОСТ 4393—82 предусмотрена единая система маркировки двигателей с помощью
букв и цифр:
Ч - четырехтактный;
Д — двухтактный;
ДД - двухтактный двойного действия;
Р - реверсивный (при отсутствии в обозиачении буквы „Р" - нереверсивный);
К - крейцкопфный (при отсутствии в обозиачении буквы „К" - трокковый);
Н - с наддувом (при отсутствии в обозначении буквы „Н " — без наддува);
С - с наддувом с реверсивной муфтой;
П - судовой средукториой передачей.
Цифра впереди букв обозначает число цилиндров, дробь после букв (числитель) —
диаметр цилиндра (в см), знаменатель - ход поршня (в см). Например 4ЧСП8.5/11 -
двигатель судовой четырехцилиндровый четырехтактный нереверсивный тронкрвый
без наддува с реверсивно-редукторной передачей (РРП), диаметром цилиндра 85 мм и
ходом поршня 110 мм.
Таблица 18.1. Технические
Марка дизеля
140110,5/13 (К-860)
240110,5/13 BДС-5)
4СП8,5/11 выпуска:
до 1980 г.
после 1980 г.
44018,5/11-3
44OI8.5/11-4 („Каспий-23")
4ЧСП8.5/11-5 („Каспий-30")
440110,5/13:
К-167-2
К-167-3
49,5/11:
64СП9.5/11; 64019,5/11-2;
64019,5/11-3
412/14:
К-661-2; К-551-2; К-661-3; К-551-3
К-666-2; К-666Л-2; К-666-3; К-666Л-3
64OI15/18:
ЗД20; ЗД20Б
ЗД6; ЗД6Л; ЗД6С; ЗД6СЛ
6ЧНСП15/18 (ЗД6Н-235, ЗД6СН-235)
Номиналь-
Номинальная мощ-
мощность,
кВт
7,35
14,7
17,0
18,4
17,0
17,0
25,0
29,5
29,5
44,0
66,0
110,0
173,0
110,0
173,0
Частота
враще-
вращения,
с-1
25,00
25,00
25,00
25,00
25,00
25,00
31,75
26,50
26,50
30,00
25,90
25,00
. 36,75
25,00
25,00
Среднее
эффектив-
эффективное дав-
давление,
МПа
0,534
0,534
0,580
0,600
0,580
0^80
0,650
0,565
0,565
0,650
0,540
0,910
0,600
0,460
0,730
Средняя
скорость
поршня.
м/с
6,50
6,50
5,50
5,50
5,50
5,50
6,50
6,50
6,50
6,65
7,23
7,00
_
_
-
Степень
сжатия
17,5
17,5
17±1
17±1
17±1
17±1
17±1
_
_
17,0
15,0
13,5
15,8
14-15
14-15
486
Помимо маркировки, по ГОСТ 4393—82 применяются и заводские маркировки,
например дизель 44018,5/11-5 имеет заводское обозначение „Каспий-30", а дизель
44СП8.5/11-ДС-25.
На судах малотоннажного флота в качестве главных двигателей нашли широкое
применение отечественные судовые дизели типов 48,5/11; 49,5/11; 410,5/13; 412/14;
415/15 и415/18 (табл. 18.1). На их базе выпускаются дизели: одно- и двухцилиндровые
140110,5/13 и 240110,5/13; четырехцилиндровые 44СП8.5/11 и 440110,5/13; шести-
цилиндровые 64СП9.5/11, 64СШ2/14, 64НСП12/14, 64СП15/15, 64СП15/18 и
64НСШ5/18. .
Одно-' и двухцилиндровые дизели. Судовые двигатели 140110,5/13 мощностью
7,35 кВт и 240110,5/13 мощностью 14,7 кВт созданы на базе четырехтактных вихрека-
мерных дизелей типа 410,5/13. Они оборудованы реверс-редуктором двухдискового
типа с передаточным числом на переднем ходу 1:2,5, на заднем - 1:3,25. Реверс-редук-
Реверс-редуктор состоит из фрикционной муфты и редуктора с двумя комплектами зубчатой пере-
передачи. Механический КПД реверс-редуктора на переднем ходу 0,968.
Четырехцилиндровые двигатели. Малоразмерные дизели типа 48,5/11. Предназначе-
Предназначены для установки на рабочих и спасательных шлюпках, катерах и рыбопромысловых лод-
лодках. Модели, предназначенные для установки на спасательных шлюпках, оборудованы си-
системой пуска вручную, осушительным насосом, проточной системой охлаждения. По тре-
требованию заказчика на ней могут быть установлены дополнительный генератор для пита-
питания бортовой радиостанции и механизм отбора мощности с носового конца коленчатого
вала. Дизели спасательных шлюпок эксплуатируются на маловязких маслах. В отличие
от других моделей они имеют малый ресурс до переборки и капитального ремонта.
Дизели 48,5/11 спроектированы с вертикальным рядным расположением цилинд-
цилиндров и имеют единый ход поршня и диаметр цилиндра. У всех моделей унифицированы
втулки цилиндров, поршни, поршневые пальцы и кольца, шатуны, головки цилиндров
характеристики судовых дизелей
Удельный расход
г/кВт •«
топли-
топлива
300
300
262
260
292
268
268
256
256
300
250
244
230
252
220
масла
9,50
9,50
3,15
1,76
5,50
5,40
3,40
7,40
7,40
8,05
4,50
3,26
7,00
4,60
4,00
Масса, кг
дизеля
сРРП
425
525
• 430
420
500
450
450
890
915
570
1330
1660
1100
1715
176Q
РРП
160
160
54
54
70
54
54
227
245
90
230
410
—
Габаритные размеры,
мм
Длина
980
1160
1220
1220
1767
1270
1270
1740
1740
1630
2139
2139
1852
2464
2464
Ширина
600
'560
610
610
650
650
650
780
780
585
787
787
1150
886
886
Высота
630
630
970
970
1000
1000
1000
1310
1310
930
1128
1128
757
1163
1248
Допусти-
Допустимый
упор
гребного
вала, кН
-
5,25
5,25
4,00
4,00
4,50
10,00
10,00
6,0-9,0
10,8-12,7
24,50
-
Ресурс, ч
до пере-
переборки
—
5000
7000
500
500
500
4000
4000
1500
6000
3500
2000
3500
3500
до капи-
капитального
ремонта
-
" -
12 000
12 000
9 000
15 000
12 000
7 000
10 000
10 000
487
и установленные на них детали клапанного механизма, коренные и шатунные подшип-
подшипники, шестерни газораспределения, маслоотражатели и ряд деталей систем и механиз-
механизмов, а также реверсивно-редукторные передачи, масляные насосы, регулятор и топлив-
топливные насосы, крышки распределительных шестерен. На верхних плоскостях блока ци-
цилиндров размещены чугунные головки цилиндров, общие на два цилиндра. Для уплотне-
уплотнения между блоком цилиндров и каждой головкой установлена специальная асбосталь-
ная прокладка. На головках находятся детали клапанно-распределительного механизма,
закрытые алюминиевыми крышками.
Механизм газораспределения — верхнеклапанный. Каждый из клапанов пе-
перемещается в чугунных направляющих втулках, запрессованных в головку ци-
цилиндров. Распределительные валы и насосы — топливные высокого давления,
масляные, пресной и забортной воды, а также осушения шлюпки — приводят-
приводятся в движение от косозубой цилиндрической шестерни коленчатого вала через соот-
соответствующие шестерни.
Для установки поршня первого цилиндра в ВМТ при выполнении регулировок,
а также для установки момента подачи топлива насосом высокого давления на махови-
маховиках выполнена соответствующая градуировка, а на картерах маховиков предусмотрены
специальные отверстия и указатели.
Блок цилиндров отлит из чугуна, имеет четыре вставные втулки цилиндров, отли-
отлитые из специального чугуна с повышенной твердостью. Наружные поверхности втулок
цилиндров, омываемые водой, хромированы. Уплотнение водяной части в местах за-
запрессовки втулок цилиндров достигается в верхней части прижатием притертого бурти-
буртика втулки к блоку, в нижней части — двумя уплотнительными резиновыми кольцами,
уложенными в канавки втулок. Нижняя поверхность блока цилиндров находится на
110 мм ниже оси коленчатого вала. Вдоль стенок по обеим сторонам расположены лапы,
которыми дизель крепится к фундаментной раме.
В отверстиях перегородок блока цилиндров параллельно оси коленчатого вала со
стороны поста управления в бронзовых втулках размещен трехопорный распределитель-
распределительный вал. У дизелей, выпущенных после 1976 г., в передней опоре распределительный вал
вращается в бронзовой втулке, запрессованной в блок цилиндров, а в средней и кормо-
кормовой частях — непосредственно в расточках блока цилиндров. От смещения назад распре-
распределительный вал удерживают упорные буртики, выполненные на ступице шестерни и
втулке, передней опоры. Осевое перемещение вала вперед ограничено подпятником.
В нижней части боковых продольных стенок блока цилиндров предусмотрены люки
для доступа к шатунным подшипникам. Над распределительным валом в блоке имеется
отсек, в котором размещены толкатели, штанги, декомпрессионный валик и отверстия
для отвода картерных газов под крышку головки цилиндров.
Коленчатый вал дизеля — четырехколенный, с расположением колен под углом
180°, с пятью коренными и четырьмя шатунными шейками. От осевых перемещений ко-
коленчатый вал удерживается двумя парами полуколец, установленных на штифтах у
третьего коренного подшипника. Коренные шатунные подшипники представляют собой
тонкостенные биметаллические вкладыши. У носового конца коленчатого вала преду-
предусмотрена косозубая шестерня для привода распределительных шестерен. Выход носово-
носового конца коленчатого вала уплотнен каркасным самоподжимающимся резиновым саль-
сальником.
На кормовом конце коленчатого вала предусмотрен фланец, к которому прикреп-
прикреплен маховик. На фланце выполнена маслосгонная резьба и напрессован маслоотража-
маслоотражатель. С торца во фланце коленчатого вала сделана расточка под шарикоподшипник вала
реверс-редуктора.
На кормовой стороне дизеля к блоку цилиндров через паронитовую прокладку
прикреплен картер маховика. Непосредственно к нему монтируется реверс-редуктор.
Между передней стенкой блока цилиндров и алюминиевой крышкой расположены ше-
шестерни распределения.
488
Снизу к блоку цилиндров, к крышке распределительных шестерен через пробковые
прокладки и к картеру маховика через паронитовую прокладку крепится болтами
масляный поддон, в котором размещен сетчатый фильтр приемника масляного насоса.
Порядок работы цилиндров: 1—3—4—2.
Конструктивная компоновка д>оелей обеспечивает свободный доступ к основным
узлам и агрегатам, а смотровые люки с левой и правой сторон блока цилиндров и сверху
реверс-редуктора позволяют осматривать и при надобности заменять детали шатунно-
поршневой группы, не снимая дизель с фундамента. Конструкция дизелей обеспечивает
также возможность продолжительной их эксплуатации при крене и дифференте.
В настоящее время в эксплуатации находятся четыре модели судовых четырех-
цилиндровых малоразмерных дизелей (рис. 18.1): 4ЧСП8,5/11; 4ЧСП8,5/11-3;
4ЧСП8,5/11-4; 4ЧСП8,5/11-5 (три последних-для спасательных шлюпок).
Дизели 4ЧСП8,5/11 имеют двухконтурную (водо-водяную) систему охлаждения,
комбинированную систему смазки, систему топливоподачи, двухпроводную 12-вольт-
12-вольтную злектростартерную систему пуска.
Дизель оборудуется реверсивно-редукторными передачами типов РРП-20-1,5,
РРП-20-2, РРП-20-3, РРП-15-1,5 или РРП-15-2, различающимися передаточным отноше-
отношением редуктора и конструктивным исполнением.
На правой стороне дизеля расположены: топливный насос высокого давления в
сборе с регулятором и топливоподкачивающим насосом; форсунки; трубопроводы вы-
высокого и низкого давления; свечи накаливания, датчики тахометра, термометра и мано-
манометра масла; фильтр-маслозаборник; пробка слива масла из поддона; маслозаливная
горловина; щуп-масломер дизеля; фильтр грубой очистки масла; топливный фильтр
тонкой очистки; рукоятка управления реверс-редуктора; змеевик охлаждения масла
в редукторе.
Рис. 18.1. Вид дизеля 4ЧСП8.5/11 справого борта.
1 — реверс-редуктор; 2 - маслозаливная горловина РРП; 3—5 — положения рукоят-
рукоятки РРП; 6 — панель приборов; 7 - воздухоочистители; 8 — фильтр тонкой очистки
топлива; 9 — расширительный бачок; 10 — фильтр грубой очистки масла; 11 —
фильтр тонкой очистки масла; 12 — насос циркуляционной воды; 13 — насос за-
забортной воды; 14 - сливной краник; 15 — поддои; 16 - сливиая пробка; 17 —
щуп-указатель; 18 — маслозаливная горловина дизеля; 19 — змеевик охлаждения
масла в РРП ,¦
489
s
S3)
к
610
Si
Цг
/I J
v-C
Li
T
Д
\
\
193 ,185,
П -5-
¦ Точки
крепленая дизеля
n
Рис. 18.2. Габаритные размеры дизеля 4ЧСП8.5/11.
1 — маслозаливные горловины РРП н дизеля; 2 — подвод топлива; 3 — фланец выпускного трубопровода; 4 — рукояь
ка РРП; 5 — датчик термометра масла; 6 - патрубок подвода забортной воды; 7, 8 — слив масла из дизеля и РРП;
9 — фланец редукторного вала; 10 — слив воды из холодильника; 11 — краники слива воды; 12—14 — положения ру-
рукоятки РРП; 15 — патрубок отвода воды к дейдвуду; 16 — патрубок слива забортной воды
На левой стороне дизеля находятся: выпускной коллектор; стартер; зарядный ге-
генератор; воздушные фильтры; кран для слива циркуляционной воды; пробка для сли-
слива масла из корпуса реверс-редуктора; щуп-масломер редуктора.
На переднем торце дизеля размещены: насосы забортной и циркуляционной воды;
масляный насос; водо-водяной холодильник с расширительным бачком; фильтр тонкой
очистки масла.
Датчик термометра воды установлен в трубке, соединяющей выпускной коллектор
с расширительным бачком.
Корпус реверс-редуктора монтируется непосредственно к картеру маховика и име-
имеет с левой и правой сторон лапы для крепления к фундаментной раме. Над реверс-
редуктором размещен пулы управления с рукояткой управления подачей топлива,
рукояткой выключения подачи, выключателем стартера, свечой накаливания и панелью
приборов (рис. 18.2).
Дизели 4ЧСП8,5/11-3 (рис. 18.3) отличаются от дизелей 4ЧСП8.5/11 улучшенны-
улучшенными пусковыми качествами, что достигнуто: установкой электростартера СТ212А мощ-
мощностью 3.52 кВт взамен электростартера СТ15 мощностью 1,32 кВт; увеличением цик-
цикловой подачи топлива на время пуска до F0 -г 80)- 10~6 кг/цикл; заменой плунжерных
пар диаметром 6,5 мм в топливном насосе на плунжерные пары диаметром 8 мм; обо-
оборудованием дизеля приспособлением для впрыска легковоспламеняющейся пусковой
жидкости; применением маловязкого загущенного моторного масла с пологой вязкост-
вязкостно-температурной характеристикой и устройства для декомпрессии цилиндров.
Рис. 18.3. Вид дизеля 4ЧСП8.5/11-3 с правого борга.
/ -реверс-редуктор; 2-4 - положения рукоятки РРП; 5 - инструкция по пуску
дизаля; б — валоповоротное устройство; 7 — панель приборов; 8 - пусковое
приспособление; 9 - рукоятка; 10 - расширительный бачок; // - фильтр тонкой
очистки масла; 12 - насос циркуляционной воды; 13 - насос забортной воды;
14 - поддон; 15 - лапы РРП
491
ftic. 18.4. Вид дизеля 4ЧСП8.5/11-4 с правого борта.
1 — реверс-редуктор; 2, 3 — маслозаливиые горловины;
4 - пусковое приспособление; 5 - валоповоротное уст-
устройство; б — топливный иасос; 7 - подвод топлива;
8 — иасос забортной воды; 9, 10 — слив масла
Пуск дизеля вручную осуще-
осуществляется усилиями четырех че-
человек при помощи привода с
двумя рукоятками. Привод руч-
ручного пуска монтируется вдоль
дизеля над головками цилинд-
цилиндров. Усилие от рукояток переда-
передается на коленчатый вал с по-
помощью цепной передачи и зубча-
зубчатого колеса, связанного с вен-
венцом маховика. Устройство пре-
предусматривает наличие элементов,
гарантирующих безопасность ра-
работы людей; передаточное отно-
отношение ручного привода 1:2,2.
В остальном конструкции ди-
дизелей 4ЧСП8,5/И и4ЧСП8,5/11-3
идентичны.
Дизели 4ЧСП8.5/11-4
(рис. 18.4) с номинальной мощ-
мощностью 16,8 кВт при частоте вра-
вращения 25 с, в отличие от двух
предыдущих, имеют проточную
систему охлаждения непосредственно забортной водой, поэтому они не оборудуются
насосом циркуляционной воды, водо-водяным холодильником и расширительным бач-
бачком. В системе смазки отсутствуют фильтр тонкой очистки масла, датчик и указатель
температуры масла. Дизель оборудован реверсивно-редукторной передачей типа
РРП-15-2. Вместо громоздкого двухступенчатого механизма ручного пуска применена
одноступенчатая малогабаритная система, состоящая из вала со съемными рукоятками,
предохранительной фрикционной и обгонной муфт и цепной передачи.
Дизель имеет навешенный водоотливной насос подачей 2,78 кг/с и по требованию
заказчика дополнительно оборудуется специальным генератором для питания бортовой
радиостанции и устройством отбора мощности для привода насоса орошения танкерной
спасательной шлюпки.
По требованию заказчика дизель изготовляется с навешенным или выносным (на
расстояние 2 или 7 м) щитком приборов.
Дизель не имеет датчика и указателя частоты вращения коленчатого вала. Эти узлы
поступают в запчасти и могут подсоединяться к дизелю на время выполнения ремонт-
ремонтных или регулировочных работ. Для этого в передней части на крышке распределитель-
распределительных шестерен предусмотрены место подсоединения и привод датчика тахометра.
Дизели 4ЧСП8,5/11-5 (рис. 18.5) с полной мощностью 25 кВт при частоте вращения
коленчатого вала ЗГ.75 с выпускаются с реверсивно-редукторной передачей типа
РРП-15-2 и предназначены для установки только на спасательные шлюпки морских
судов.
В качестве базового прототипа был принят созданный ранее дизель 4ЧСП8.5/11-4,
в конструкцию которого внесен ряд изменений и усовершенствований. Увеличение
мощности дизеля достигнуто как за счет улучшения наполнения цилиндров, так и путем
форсирования по частоте вращения коленчатого вала. Конструктивные изменения вне-
внесены также в регулятор топливного насоса высокого давления.
В качестве вспомогательных средств облегчения запуска вручную, так же как и на
дизеле 4ЧСП8.5/11-4, используются легковоспламеняющаяся пусковая установка
„Холод Д-40", пусковое приспособление для ее впрыска и устройство для декомпрес-
декомпрессии цилиндров. В отличие от дизеля 4ЧСП8.5/11-4 дизель 4ЧСП8,5/11-5 оборудован
492
Рис. 18.5. Вид дизеля 4ЧСП8.5/11-5 с правого борта
гидравлическим пусковым обогатителем, который монтируется в регулятор топливно-
топливного насоса высокого давления и сообщается с системой смазки дизеля.
Для облегчения слива масла из поддона дизель оборудован ручным маслоотливным
насосом. В остальном конструкции дизелей 4ЧСП8.5/11-4 и 4ЧСП8.5/11-5 идентичны.
Дизель 4ЧСП8,5/11-5, так же как 4ЧСП8.5/11-4, по требованию заказчика дополни-
дополнительно оборудуется устройством для отбора мощности (до 7 кВт) с носка коленчатого
вала и специальным генератором для питания бортовой радиостанции. Генератор монти-
монтируется с левой стороны дизеля — ниже стартера — к картеру маховика и приводится
в действие через пластмассовую шестерню от зубчатого венца маховика.
Дизели типа 410,5/13. На базе дизелей 410,5/13 промышленность выпускает судо-
судовой главный двигатель 4ЧСП10,5/13 с реверсивно-редукторной передачей типов РРП-20-2
или РРП-20-3 (передаточное отношение на переднем ходу 1:2,037) и камерой сгорания
в поршне. Мощность дизеля 29,5 кВт при частоте вращения коленчатого вала 25 с.
Дизель 4ЧСШ0,5/13 оборудован муфтой дополнительного отбора мощности (до
7,35 кВт) со свободного конца коленчатого вала и всережимным регулятором. Дизель
и реверс-редуктор смонтированы на общей подмоторной раме.
Запуск дизеля осуществляется электростартером. Для облегчения пуска холодного
дизеля между надставкой и впускным коллектором устанавливается проволочный воз-
воздухоподогреватель. Для зарядки аккумуляторных батарей дизель имеет зарядный ге-
генератор, реле — регуляторную коробку и вольтамперметр с выключателем возбуждения
зарядного генератора.
Шестицилиндровые двигатели. Дизели типа 49,5/11. Судовые шестицилидровые ма-
малоразмерные дизели типа 6ЧСП9,5/11 изготовляются путем конверсии дизелей
649,5/11-1, которые дополняются угловой реверсивно-редукторной передачей, устройст-
устройствами для более удобного управления подачей топлива и декомпрессором.
493
2 3 4 5
71
Рис. 18.6. Вид дизеля 6ЧСП9.5/11 с правого борта.
/ — реверс-редуктор; 2—4 — положения рукоятки РРП; 5 - рукоятка управления
топливным насосом; 6 — форсунка; 7 - воздушный фильтр; 8 - расширительный
бачок; 9 - насос циркуляционной воды; 10 — насос забортной воды; // - патрубок
подвода забортной воды; 12 — поддон; /3 — слив масла; 14 - маслозаливная гор-
горловина
Дизель имеет двухконтурную водо-водяную систему охлаждения, комбинирован-
комбинированную систему смазки, двухпроводное 24-вольтное электрооборудование, электростар-
терную систему пуска и реверсивно-редукторную передачу. Порядок работы цилиндров
дизеля: 1-5-3-6-2-4.
Промышленностью выпускаются три модели дизелей этого типа: 6ЧСП9.5/11,
64019,5/11^64019,5/11-3 (рис. 18.6,18.7).
11 12
494
Рис. 18.7. Вид дизеля 6ЧСП9.5/11-3 с левого борта.
1— блок цилиндров; 2 — насос забортной воды; 3 — слив забортной воды из
холодильника; 4 -насос циркуляционной воды; 5 — зарядный генератор; 6 —
водозаливная горловина; 7 — расширительный бачок; 8 — воздушный фильтр;
9 — выпускной трубопровод; 10 — фильтр тонкой очистки масла; // — механизм
отбора мощности; 12 — реверс-редуктор; 13 - стартер; 14 - холодильник воды
С правой стороны дизеля находятся: пульт управления; топливный насос высокого
давления в сборе с регулятором, а также ручным и механическим топливоподкачиваю-
щим насосом; топливопроводы высокого и низкого давления; форсунки; свечи нака-
накаливания; фильтр тонкой очистки топлива; фильтр грубой очистки масла; маслозалив-
ная горловина; щуп-масломер; пробка для спуска масла; датчик термометра масла;
змеевик для охлаждения масла в реверс-редукторе.
С левой стороны дизеля расположены: датчик термометра воды; зарядный генера-
генератор; впускные и выпускные трубопроводы; стартер;- водо-водяной холодильник;
щуп-масломер редуктора. С передней стороны дизеля монтируются: насосы — масля-
масляный, циркуляционной и забортной воды; расширительный бачок; счетчик моточасов;
датчик тахометра. В кормовой части дизеля к головке цилиндров прикреплен фильтр
тонкой очистки топлива, а к блоку цилиндров и картеру маховика — панель приборов.
Корпус реверс-редуктора монтируется непосредственно к картеру маховика.
К фундаментной раме катера дизель 6ЧСП9.5/11 крепится в шести точках, реверс-
редуктор — в двух. По требованию заказчика дизель оборудуется реверсивно-редуктор-
ной передачей типов РРП-25-1,5,РРП-25-2 или РРП-25-3.
Компоновка узлов на дизелях 6ЧСП9.5/11-2 и 6ЧСП9,5/11 с правой и левой сторон,
а также в передней части одинаковая. В кормовой части дизеля 6ЧСП9,5/11-2 располо-
расположены фильтр тонкой очистки масла, карданный вал и угловой реверс-редуктор, кото-
который соединен с дизелем посредством карданного вала. К фундаментной раме дизель
6ЧСП9,5/11-2 крепится в шести точках, реверс-редуктор — в восьми.
Контрольно-измерительные приборы: стрелочный указатель частоты вращения ко-
коленчатого вала, стрелочные указатели датчиков давления и температуры, а также термо-
термометр воды, вольтамперметр, контрольная спираль и трехпозиционный включатель све-
свечей накаливания и стартера — размещены на щитке приборов катера.
В отличие от дизеля 6ЧСП9,5/11 дизель 6ЧСП9,5/11-3 имеет реверсивно-редуктор-
ную передачу с дополнительным механизмом отбора мощности, который выполнен в
виде специальной проставки, устанавливаемой между дизелем и реверсивно-редуктор-
ной передачей. Механизмы отбора мощности изготовляются по требованию заказчика с
передаточным отношением 1:2,727 или 1:1,750.
Выходной фланец механизма отбора мощности расположен елевой стороны дизеля
и получает вращение от ведущей шестерни через промежуточную и ведомую шестерни и
электромагнитную фрикционную муфту. Корпус механизма отбора мощности монти-
монтируется непосредственно к картеру маховика. С другой стороны к корпусу механизма
отбора мощности прикреплен корпус реверсивно-редукторной передачи.
Дизели типа 412/14. На базе дизелей 412/14 промышленность выпускает судовые
главные двигатели 6ЧСП12/14 и 6ЧНСШ2/14 (с наддувом).
Дизели 6ЧСШ2/14 с реверс-редуктором РРП-40-2 (передаточное отношение на пе-
переднем ходу 1:2,037) имеют заводское обозначение К-161-2, а сРРП-40-3 (передаточное
отношение на переднем ходу 1:3,037) - К-161-3. Дизели 6ЧСП12/14 с реверс-редукто-
реверс-редуктором РРП-70-2 (передаточное отношение на переднем ходу 1:2,04) с левым и правым
постами управления имеют заводское обозначение К-166Л-2 и К-166-2 соответственно,
а с РРП-70-3 (передаточное отношение на переднем ходу 1:3,04) с левым и правым по-
постами управления — соответственно К-166Л-3 и К-166-3.
Конструкция РРП-40 и РРП-70 обеспечивает как ручное, так и дистанционное управ-
управление реверсом, длительную эксплуатацию дизеля на режиме номинальной мощности
как при работе на переднем ходу, так и на заднем. Пуск дизеля осуществляется элек-
электростартером (основной) или сжатым воздухом (дополнительный).
Дизели выпускаются с правым и левым постами управления. Пост управления име-
имеет: пусковую кнопку электростартера; кнопки включения свечей накаливания или спи-
спирали воздухоподогревателя; кран пуска сжатым воздухом; рукоятку управления по-
подачи топлива; рукоятку выключения рейки; щит контрольно-измерительных приборов
с аэротермометрами воды и масла, манометрами давления масла и забортной воды,
злектротахометром, вольтамперметром и счетчиком моточасов.
495
По особому заказу на дизели могут быть установлены также муфты отбора мощно-
мощности с носового конца коленчатого вала и трюмный (водооткачивающий) насос.
Дизели типа 415/15. Четырехтактный шестицилиндровый двигатель 6ЧСШ5/15 с во-
водяным охлаждением применяется для работы непосредственно на винт или через ревер-
сивнофедукторную передачу. Номинальная мощность 175 кВт, частота вращения колен-
коленчатого вала 36,6 с. Двигатель имеет V-образное с большим углом развала A20 ) рас-
расположение цилиндров, блок-картер туннельного типа, коренные опоры на роликовых
подшипниках, шатунный механизм центрального типа, верхнее расположение клапанов
по четыре в каждом цилиндре, привод к газораспределению и агрегатам цилиндрически-
цилиндрическими шестернями, полнопоточный масляный фильтр, двойную систему пуска (электро-
(электростартером и сжатым воздухом).
Расположение агрегатов в развале блоков и другие конструктивные особенности
определили получение высокого уровня технико-экономических показателей дизеля,
а малые габариты (длина без РРП 1822, ширина 1150 и высота 757 мм) и масса (не бо-
более 780 кг без РРП) позволили использовать его на легких быстроходных катерах
(например, „Невка").
Двигатели оборудуются планетарной реверсивно-редукторной передачей соосного
типа с гидравлическими тормозами управления и. передаточными числами 1,67; 2,2
или 3. Соответственно выпускные дизели получают заводские обозначения ЗД20Ср-1,67,
ЗД20Ср-2,2 и ЗД20Ср-3. Двигатели 6ЧСШ5/15 с частотой вращения коленчатого вала
30 с имеют номинальную мощность 140 кВт и выпускаются с заводским обозначе-
обозначением ЗД20БСР-1.67, ЗД20БСР-2,2 и ЗД20БСР-3.
Дизели типа 415/18. На базе дизелей 415/18 промышленностью выпускаются судо-
судовые рядные двигатели 6ЧСП15/18 с реверс-редуктором, насосом забортной воды,
охлаждаемым выхлопным коллектором, холодильниками масла и воды и устройством
отбора мощности с носового конца коленчатого вала.
В качестве судовых главных двигателей применяются следующие модификации
дизелей 6ЧСШ5/18:
судовой главный двигатель с заводским обозначением ЗД6, имеющий блок-картер,
кожух маховика и корпус ревер-редуктора, отлитые, из чугуна. Дизель имеет правое
вращение ведомого вала реверс-редуктора, т. е. ведомый вал вращается по часовой
стрелке, если смотреть со стороны РРП на переднем ходу;
судовой главный двигатель с заводским обозначением ЗД6С, имеющий блок-кар-
блок-картер, кожух маховика и корпус реверс-редуктора, отлитые из алюминиевого сплава.
Дизель также имеет правое вращение ведомого вала РРП на переднем ходу./
судовые главные двигатели с заводскими обозначениями ЗД6С и ЗД6СЛ, отличаю-
отличающиеся от двигателей ЗД6; и ЗД6С лишь левым вращением ведомого вала РРП при
переднем ходе. Дизели правого и левого направлений вращения по внешнему виду
отличий не имеют;
судовые главные двигатели с наддувом 6ЧНСШ5/18 с заводским обозначением
ЗД6Н-235.
Основанием двигателя является чугунный картер, состоящий из двух частей: верх-
верхней и нижней. Верхний картер несет семь подвесных подшипников коренных шеек ко-
коленчатого вала. Нижний картер служит маслосборником и несет передачу к водяному,
масляному и топливоподкачивающему насосам.
Пуск дизеля осуществляется электростартером СТ710 напряжением 24 В — при ос-
основной системе запуска или сжатым воздухом — при дополнительной. В комплект элек^
трооборудования дизеля входят зарядный генератор Г73 мощностью 1,2 кВт, напряже-
напряжением 24 В, аккумуляторная батарея типа 6СТЭ128, реле-регулятор РР24 и пусковое реле
стартера РС400.
Дизели оборудованы несоосным одноходовым реверс-редуктором с фрикционной
двухдисковой муфтой и шестеренным редуктором. Передаточное отношение РРП 2:1
или 3:1.
496
18.2. Конвертированные и судовые транспортные двигатели
В 1950-1970-е гг. выпускали одно-, двух- и четырехцилиндровые четырехтактные
бензиновые двигатели семейства „Л" мощностью 2,25; 4,5; 9 кВт (табл. 18.2); они
Та бл и ц а 18.2. Технические характеристики стационарных лодочных двигателей
Марка
двигателя
5
ё
О.
•о о
О о
s *-
S 3
о о
X S
В я
i §
В1 К
и g
>. в
Примечание
Л-3/2
Л-6/3
Л-12/4М
СМ-255Л
СМ-557-А
65,0
65,0
65,0
67,5
67,5
90
90
90
70
69
298
596
1192
251
494
2,20
4,41
8,82
4,41
10,00
36,6
36,6
36,6
54,0
57,0
450
450
450
560
518
84
100
145
33
43
Стационарные карбюратор-
карбюраторные двигатели с водяным ох-
охлаждением - (производство
прекращено в 1962 г.)
Двухтактный двигатель с
РРП; передаточное отношение
1:1,63 (производство прекра-
прекращено в 1965 г.)
Двухтактный двигатель с
РРП; передаточное отноше-
отношение: на переднем ходу
1:1,64, на заднем - 1:1,26
(производство прекращено в
1972 г.)
эксплуатируются и в настоящее время, особенно часто на деревянных лодках народной
постройки. Эти двигатели были сняты с производства в связи с выпуском одно- и двух-
двухцилиндровых двухтактных бензиновых двигателей СМ-55Л и СМ-57Л мощностью 4,5 и
10 кВт, которые, однако, отличались малой надежностью и низкой топливной экономич-
экономичностью; их выпуск также был прекращен.
Проблему двигателя для малых судов на практике частично решают путем конвер-
конвертирования автомобильных и тракторных двигателей в судовые. Таким путем без капи-
капитальных затрат на организацию нового производства удается оснастить суда современ-
современными, выпускаемыми крупными сериями, двигателями.
Вместе с тем автотракторные двигатели имеют ряд недостатков: они не рассчитаны
на эксплуатацию в условиях повышенной влажности и поэтому подвержены коррозии
(особенно узлы и детали электрооборудования); имеют меньший, чем специальные
судовые, ресурс до переборки и капитального ремонта; не совсем удобны для монтажа
и демонтажа к судовому фундаменту; требуют значительной переделки систем охлажде-
охлаждения и смазки.
Двигатель, конвертированный в судовой, не оборудуется дополнительным отбором
мощности с носового конца коленчатого вала, осушительным насосом, дополнительным
генератором для питания бортовой радиостанции и поэтому может рассматриваться
только как частичное решение задачи — поиска подходящего судового двигателя.
Вместе с тем многие фирмы, выпускающие автомобильные или тракторные двига-
двигатели, по отдельным техническим условиям изготовляют и поставляют их специальные
модификации для переоборудования в судовые. В этом случае удается избежать многих
из перечисленных недостатков. ,
Для конвертированного двигателя устанавливается определенный режим работы,
характеризуемый как снижением частоты вращения коленчатого вала, так и понижен-
пониженной, по сравнению с номинальной, мощностью.
497
Судовые конверсии автомобильных и тракторных двигателей массового производ-
производства по объему и сложности принято разделять на три вида:
простейшая конверсия, при выполнении которой к двигателю добавляется лишь
минимально необходимое для его работы в судовых условиях. Эксплуатация такого
двигателя на катере сопряжена с некоторыми неудобствами, зато простейшую конвер-
конверсию можно осуществить в небольших мастерских силами любителей и она не требует
значительных затрат;
нормальная конверсия, при которой конвертируемому двигателю придается все,
что необходимо для его полноценной работы на катере. Добавляемые в этом случае до-
дополнительные узлы и детали сравнительно Сложны по конструкции и изготовляются на
специализированных предприятиях. Изменения самого двигателя при нормальной кон-
конверсии не носят принципиального характера;
полная конверсия, которая по существу предусматривает создание специального
судового двигателя для катера на базе автомобильного или тракторного. В этом случае
переделке могут подвергаться практически любые детали и узлы, без изменения сохра-
сохраняются лишь отработанный и проверенный рабочий процесс двигателя и его основные
детали, такие как поршень, поршневые кольца, шатуны, клапаны, их приводы.
Объем переделок и дополнительных работ при простейшей конверсии минимален
и зависит от типа и мощности двигателя. В качестве разобщительного устройства и
реверс-редуктора в некоторых случаях могут быть использованы существующие авто-
автомобильные или тракторные коробки передач.
Крепление к судовому фундаменту производят либо непосредственно с использова-
использованием существующих на двигателе фундаментных отверстий, либо при помощи переход-
переходных лап. Охлаждение двигателя осуществляется забортной водой. Систему смазки обыч-
обычно не изменяют, но двигатель устанавливают под углом не более 5—6 к горизонту,
с тем чтобы не нарушать смазку трущихся частей, расположенных в передней его части.
Без изменений остается система запуска, управления и контроля за работой двигателя.
Выхлопной коллектор лишь изолируется экраном из листового металла и асбеста, а в
выхлопную трубу для ее охлаждения отводится часть забортной воды, выходящей из
системы охлаждения. Вместо воздушного фильтра на входном отверстии карбюратора
устанавливают простейший пламегаситель.
Нормальная конверсия автотранспортного двигателя включает в себя следующие
работы. Реверсивно-разобщительное устройство со встроенным упорным подшипником
выполняется в блоке с мотором (иногда отдельно, например при использовании углово-
углового реверс-редуктора). В зависимости от необходимой оптимальной частоты вращения
гребного винта РРП может быть выполнена в виде разобщительно-реверсивной муфты
с прямой передачей на винт, либо в виде реверс-редуктора с различными передаточными
отношениями. Установку двигателя производят при помощи специальных траверс и
опорных лап, нередко с амортизаторами, уменьшающими передачу вибрации на корпус
катера. При использовании тяжелых реверс-редукторов кормовую часть двигателя до-
дополнительно крепят с помощью специальных лап, отлитых заодно с реверс-редук-
реверс-редуктором.
Система охлаждения подвергается значительной переделке. Вместо воздушного' ра-
радиатора оборудуется замкнутая система, состоящая из насоса пресной воды с приводом
от двигателя при помощи клинового ремня или зубчатой передачи, теплообменника с
терморегулятором, прокачиваемого приводным насосом забортной воды, и расшири-
расширительного бачка.
Применяемая в современных автомобильных двигателях комбинированная система
смазки также подвергается некоторой переделке. Добавляется смазка реверс-редук-
реверс-редуктора, устанавливается простейший маслоохладитель, система приспосабливается для
обеспечения нормальной смазки при рабочих углах наклона двигателя до 8—10°, а иног-
иногда до 12—16°. Двигатель снабжают специальным выхлопным коллектором, охлаждаемым
прокачиваемой через его полости водой; вместо воздушного фильтра устанавливают
498
пламегаситель. Система пуска и управления — местная или простейшая дистанцион-
дистанционная. Дополнительно устанавливают приборный щиток для контроля за работой двига-
двигателя, рымы для подъема двигателя и т. д.
При полной конверсии переделке подвергают вочти все основные детали и узлы
двигателя. Для того чтобы двигатель хорошо вписывался в обводы судна, особенно если
его устанавливают наклонно и ближе к кормовой части катера, маховик переносят в но-
носовую часть двигателя, а масляный поддон двигателя и реверсивной муфты делают об-
общим и как можно менее высоким. Двигатель получается компактным, упрощается си-
система смазки реверс-редуктора, а размещение маховика в носовой части дает возмож-
возможность отбора мощности от носового торца двигателя (для привода лебедки, пожарного
или водоотливного насосов и др.). Такая конструкция требует переделки коленчатого
вала, блока двигателя, поддона, кормового торца двигателя и ряда других основных
деталей.
Форму нижней части картера приспосабливают для судовых условий. Реверсивную
муфту или реверс-редуктор с различными передаточными отношениями монтируют
большей частью в блоке с двигателем. Система охлаждения замкнутая, с автоматиче-
автоматическим температурным контролем. Система смазки приспособлена для работы двигателя
с наклоном оси коленчатого вала до 14-18° к горизонту и включает в себя масляный
холодильник с температурным контролем и масляный фильтр. Применяется специаль-
специальная судовая система пуска и управления с дистанционным включением стартера, дистан-
дистанционным управлением реверсом, дроссельной заслонкой карбюратора или подачей
топлива (у дизелей). Вместо воздушного фильтра устанавливают пламегаситель.
Выхлопной коллектор заменяют на специальный, охлаждаемый водой. Приборы монти-
монтируют на щитке. Электрооборудование применяют в морском исполнении.
В настоящее время в СССР производятся преимущественно простейшая и нормаль-
нормальная конверсии. Технические характеристики отечественных автомобильных двигателей,
конвертированных в судовые, приведены в табл. 18.3.
Двигатели типа М84СПУ100 и М84СПУ 100-1. Изготовлены путем конверсии авто-
автомобильного двигателя 3M3-S3, имеют водяную систему охлаждения. Предназначены для
установки в качестве .главных двигателей на быстроходные катера, эксплуатирующиеся
в условиях умеренного климата, — исполнение „У", тропического климата — исполне-
исполнение „Т" и морского климата — исполнение „М".
Двигатели имеют одинаковые технические характеристики и конструкцию; отлича-
отличаются они только исполнением соединительного вала, предназначенного для соединения
выходного вала РРП с ведущим валом угловой передачи.
Номинальная мощность автомобильного двигателя 3M3-S3 85 кВт при частоте вра-
вращения коленчатого вала 53,5 с. При конвертировании в судовой частота вращения ко-
коленчатого вала снижена на 12,5 %, номинальная мощность при этом составляет 66 кВт.
Двигатель работает на бензине марки А-76 с удельным расходом топлива 326 г/ (кВт • ч).
В эксплуатации имеются также судовые двигатели, выпушенные промышленностью
путем конверсии автомобильных четырехтактных бензиновых двигателей ГАЗ-51,
ГАЗ-652, ЗИЛ-120, ГАЗ-53, МЗМА402, M3MA4J2 с водяной системой охлаждения.
Это судовые шестицилиндровые двигатели М51УМ мощностью 46 кВт, М53УЛ, М652У и
М120СР мощностью 52 кВт, а также четырехцилиндровые двигатели АМ402СРЗ мощ-
мощностью 16 кВт и МЗМА412 мощностью 46 кВт. Они снабжены угловыми реверс-редукто-
реверс-редукторами, ведущий вал которых соединен с валом двигателя через кардан, а ведомый - при
помощи фланца с валом гребного винта. Передняя и задняя опоры служат для установ-
установки двигателя на фундамент.
Двигатель ЯАЗ-204ВСР2,5. Двухтактный судовой дизель, изготовленный путем кон-
конверсии автомобильного двухтактного четырехцилиндрового дизельного двигателя
ЯАЗ-М204 с водяной системой охлаждения. Выпускается для установки на катерах в ка-
качестве главного двигателя.
499
Таблица 18.3. Технические характеристики автотракторны)
Марка двигателя
М8ЧСПУ1001
М51УМ
М53ФУЛ
М652У
М120СР
АМ402СРЗ
МЗМА407
МЗМА412
ВАЗ-2103
М21
ЗИЛ-130
ЗИЛ-375
ЯАЛ-204В
Д-20 "I
Д-22 1
Д-37 Г
Д-50 J
Тип двигателя
Карбюраторный
4-тактный
Дизель
2-тактный
Дизель
4-тактный
V—V-образное, Р — рядное, цифра
Число
и располо-
расположение ци-
цилиндров*
V8
Р6
"
Р4
»i
" **
»•
»»
V8
Р4
Р2
РЗ
Р4
Мощность,
кВт
66,5
45,0
51,5
51,5
51,5
, 16,2
33,0
55,2
56,6
51,2
110,0
132,0
59,0
13,25
31,0
42,0
47,0
- число цилиндров.
Диаметр
цилиндра,
мм
92
82
82
82
101,6
72
76
82
76
92
100
108
108
125
105
105
НО
Ход
поршня,
мм
80
ПО
ПО
ПО
112,3
75
75
70
80
92
95
95
127
140
120
120
125
с двигателей.
Рабочий
объем
цилиндров,
л
4,25
3,48
3,48
3,48
5,55
1,22
1,36
1,48
1,45
2,45
5,98
7,00
4,56
1,71
3,12
4,16
4,75
18.3. Системы передачи мощности на движитель
Существующие системы передачи мощности на движитель различают по типу соеди-
соединений коленчатого вала двигателя с гребным винтом или водометом. Можно выделить
следующие системы передачи мощности на движитель:
с помощью валопровода напрямую (при этом коленчатый вал двигателя соединяют
с движителем через глухую или эластичную муфту);
с помощью валопровода через разобщительную муфту (при этом между коленчатым
и гребным валами размещают разобщительную муфту, позволяющую разъединять их без
остановки двигателя);
с помощью валопровода через реверсивно-редукторную передачу, обеспечивающую
разобщение коленчатого и гребного валов, снижение частоты вращения гребного вала и
реверсирование движителя;
через угловую колонку.
Соединение коленчатого вала двигателя с гребным винтом напрямую или через разоб-
разобщительную муфту может применяться только при совпадении номинальной частоты вра-
вращения коленчатого вала с оптимальной частотой вращения гребного винта. Кроме того,
для обеспечения заднего хода судна требуется реверсивный двигатель. Поэтому первые
два типа соединений двигателя с движителем для малых судов широкого примене-
применения не нашли.
В зависимости от расположения двигателя на судне различают валопроводы: наклон-
наклонный (при установке двигателя в носу или корме) ; угловой (при установке двигателя в
корме); вертикальный (в подвесных двигателях и угловых колонках). Схемы применя-
применяемых на практике систем передачи мощности на движитель приведены на рис. 18.8.
Наиболее простые схемы получаются при установке двигателя, реверсивно-редуктор-
ной передачи, гребного вала и винта по одной линии (рис. 18.8, а—г). В этих схемах двига-
двигательные установки занимают много места, и поэтому они целесообразны только для
судов, имеющих достаточные размеры.
500
конвертированных в судовые или пригодных для судовой конверсии
Частота
вращения
коленчатого
вала, с
46,50
46,50
50,00
50,00
33,30
53,30
75,00
96,60
93,00
47,25
53,75
53,75
30,00
26,75
30,00
30,00
28,30
Масса,
Кг
360
370
380
380
660
210
133
140
140
145
447
435
1235
300
320
390
420
Степень
сжатия
6,7
6,2
6,7
6,7
6,2
7,0
7,0
8,8
8,5
6,7
6,5
6,5
16,0
15,0
17,0
17,0
17,0
Удельный
расход
топлива,
г/(кВт-ч)
342
380
390
390
400
424
424
310
310
400
390
390
310
280
238
238
238
Применяе-
Применяемое топли-
топливо
А-76
А-72
А-76
А-72
А-76
АИ-93
"
А-76
Дизельное
топливо
То же
Порядок работы цилиндров
1-5-4-2-6-3-7-8
1-5-3-6-2-4
1-5-3-6-2-4
1-5-3-6-2-4
1-5-3-6-2-4
1-3-4-2
1-3-4-2
1-3-4-2
1-3-4-2
1-2-4-3
1-5-4-2-6-3-7-8
1-5-4-2-6-3-7-8
1-3-4-2
1-2
1-3-2
1-3-4-2
1-3-4-2
а)
д)
^щ?
Рис. 18.8. Схемы установок для передачи мощности на движитель: а - г — на
одной линии; д,е — угловые; ж — с откидной колонкой: з — с водометом
501
Рис. 18.9. Установочные размеры водопровода двигателя 4ЧСП8.5/11, мм:
А . .
Н . .
. 1500
. 760
2000
960
2000
1160
2600
1360
Угловые (V-обр'азные) схемы установки с применением углового реверс-редуктора
или редуктора с параллельными валами и изломом в двойном карданном шарнире
(рис. 18.8, д, е) требуют меньше места, чем предыдущие, и применяются на судах, пред-
предназначенных для движения в переходном режиме, и на глиссирующих катерах.
Установка с откидной колонкой (рис. 18.8, ж) имеет неоспоримые преимущества
с точки зрения удобства компоновки и защищенности. Еще большей защищенностью
характеризуется схема с водометным движителем (рис. 18.8, з). Вместе с тем последняя
схема с точки зрения компоновки проигрывает схемам, представленным на рис. 18.8,г,ж.
Кроме того, при применении водометного движителя расход топлива на пройденный ки-
километр пути повышается на 30—50 %.
Валопровод состоит из гребного вала, дейдвудной трубы, кронштейна гребного вала,
упорного подшипника (если РРП двигателя не воспринимает упора движителя), соедини-
соединительной муфты н сальника. Общий вид валопровода двигателя 4ЧСП8.5/11 представлен
на рис. 18.9. При постоянном уклоне двигателя до 5° РРП обеспечивает расположение
оси выходного вала редуктора на 108 мм ниже оси коленчатого вала. Двигатель устанав-
устанавливают на жесткий судовой фундамент и центруют относительно гребного вала. При этом
между опорными поверхностями лап двигателя и фундаментом устанавливают специаль-
специальные прокладки, подобранные по измерениям. Допустимый зазор между опорной поверх-
поверхностью любой лапы и прокладки при незажатых болтах крепления не превышает 0,05 мм.
После установки прокладок двигатель закрепляют с помощью четырех болтов. Два
болта крепления, расположенные по диагонали, должны быть призонными. Отверстия под
эти болты в лапах двигателя и в судовом фундаменте обрабатывают совместно после
центровки двигателя относительно гребного вала. При Соединении с двигателем центро-
центровочный буртик полумуфты гребного вала устанавливают в расточку полумуфты РРП диа-
диаметром 65А3, а шесть отверстий диаметром 10,5 мм полумуфт разворачивают совместно
до ф 1L4. Затем полумуфты крепят шестью призонными болтами.
В процессе работы в элементах валопровода помимо постоянных напряжений от пере-
передачи крутящего момента двигателя возникают знакопеременные напряжения, связанные
с неравномерностью работы двигателя и неравномерностью крутящего момента, погло-
поглощаемого движителем. Кроме того, под действием таких возмущающих факторов, как
массовая и гидродинамическая неуравновешенность винта, неравномерность распределе-
распределения нагрузки в упругих муфтах, небольшой изгиб вала и т. д., возникает заметная вибра-
вибрация узлов валопровода. Это приводит к увеличению вибрации судна и нарушает нормаль-
нормальную работу сальниковых устройств и контрольно-измерительных приборов. Весьма опас-
опасными являются резонансные режимы, которые возникают при крутильных резонансных
колебаниях.
502
Если двигатель крепится жестко к корпусу, возмущающие силы вызывают вибрацию
не только двигателя, но и всего судна. Если же двигатель укреплен на мягких амортиза-
амортизаторах, амплитуда вибраций самого двигателя увеличивается, а вибрация корпуса судна
резко снижается. В этом случае существенное осложнение вызывают явления резонанса.
На практике гребные валы изготовляют из конструкционных сталей марок 50, 40Х
или 2X13 с коэффициентом запаса прочности 2,5—3,0. Минимальный диаметр гребного
вала ds, см, определяют по формуле ds = B,0 + 2,5) yjN/ п, где N -- мощность двигателя
на выходном фланце РРП, кВт; п — частота вращения выходного вала РРП, с'.
Для уменьшения вероятности появления усталостных трешин и повышения корро-
коррозионной стойкости для рабочих шеек и нерабочих поверхностей вала необходимо обеспе-
обеспечить малую шероховатость, а переходы от шейки вала к промежуточным участкам выпол-"
нять радиусом, равным @,3 + 0,5)dB.
Длина вала обычно ограничивается опасностью возникновения резонансных изгибных
1
колебаний. Критическую частоту вращения, с, вала находят по формуле P
= 0,2 • l06ds/l , где / - расстояние от фланца РРП до опорного подшипника, см. При из-
известных номинальной частоте вращения и диаметре вала его наибольшую допустимую
длину, см, можно определить по формуле /Наиб = 45O\/dB/n.
Расстояние от выходного фланца РРП до опорного подшипника для валов, имеющих
фланцевое крепление к РРП, рекомендуют выбирать не более @,95-^ 1)/Иаиб или 60с/в,
а для валов, крепление которых к РРП осуществляется посредством упругой муфты или
карданного шарнира, — не более 0,8/наиб или 50ds.
В большинстве случаев гребной вал подсоединяется к РРП при помощи жесткой
фланцевой муфты. Диаметр муфты выбирают равным 3—4 диаметрам вала. Количество
болтов для крепления полумуфт определяют по формуле / = 15N/ (n22R), где N— мощ-
мощность двигателя на фланце РРП, кВт; п — частота вращения фланца РРП, с; d — диаметр
болтов, см; R - расстояние от оси вала до оси болтов, см.
Схема прямого валопровода с расположением двигателя в центре судна Оказывается
весьма неудачной с точки зрения как центровки, так и компоновки. На практике нашли
широкое применение более компактные и обеспечивающие кормовую центровку угло-
угловые V-образные передачи. Они включают в себя либо два карданных шарнира в сочетании
с цилиндрическим редуктором, либо специальный угловой редуктор с коническими или
винтовыми зубчатыми колесами.
Рис. 18.10. Внд дизеля 6ЧСП9.5/11-2 с правого борта.
1 — угловой реверс-редуктор; 2 — рукоятка управления топливным насосом; 3 - свечи накали-
накаливания; 4 — фильтр тонкой очистки топлива; 5 — фильтр грубой очистки масла; 6 — топливный
насос; 7 — патрубок подвода забортной воды; 8 — подвод топлива; 9 - рукрятка выключения
подачи топлива; 10 — картер маховика; 11 — карданный вал; 12-14 — положения рукоятки РРП
503
Рис. 18.11. Поворотно-откидная колонка
ПОК-55.
1 - гидроцилиндр; 2 - верхний редук-
редуктор; 3- опорная плита; 4 - нижний
редуктор
V-образные схемы установки с применением углового
ются с дизелями 6ЧСП9.5/11-2 (рис. 18.10), двигателями М8ЧС^Ш0^М8ЧСПуЖ
Т Основными преимуществами угловых колонок являются хоро-
ZbZ JL? ВШТа' ВОЗМОЖНОСТЬ значительного уменьшения осадки катера при
подъеме колонки, возможность осмотра и смены гребного винта на плаву малый объ
ем, занимаемый двигателем, хорошая управляемость У>
Поворотно-откидная колонка ПОК-55 (рис. 18.11) с
даГТВкИоНа 6~ЫСТР°ХОДНЫХ м0««- (US
™ Р " туЖЯТ ШЯ Передачи кРУТящего момента от двигателя к
у винту, реверсирования направления вращения гребного винта снижения ча*
стоты его вращения по отношению к частоте вращения коТенчатого вала дГга^я и
управления катером. Ниже приведены технические характеристики колонки:
П0ДВОДИМая к колонке ПРИ частоте W«««
^ момент," передаваемый ведущим валом,' Н '. м. '. '. '. ПО
р гребного винта, воспринимаемый колонкой Н-
на переднем ходу ' ¦
заднем " ivvv
Передаточное отношение от ведуидего вала к гребному валу 1 ^°cV
Направление вращения гребного вала иа переднем ходу (ест смотреть ' " "
со стороны гребного винта) п
Допустимая частота вращения коленчатого вала двигателя с'1'-
при реверсировании _ ' '
на заднем ходу '.'.''. 1.25-1,33
504
Угол поворота колонки влево и вправо при
рулении, град 30
Угол откидывания колонки, град 55
Расстояние между осями ведущего и греб-
ыихо валов, мм 600
Марка масла АС-8 (М8Б), ГОСТ 10541-63
Марка масла для гидросистемы АС-8 (М8Б),ГОСТ 10541-63
Емкость системы смазки, л 3
Вместимость системы гидравлики, л 1,5
Ресурс, ч:
до первого ремонта 600
до капитального ремонта 1000
Масса колонки, кг:
сухая 75
в рабочем состоянии 80
Основными узлами колонки являются: редукторы нижний и верхний, плита опор-
опорная, гидроцилиндр.
Управление механизмом реверса и поворотом колонки ручное. Реверс осуществляет-
осуществляется переключением конических зубчатых колес при помощи конусной муфты. Колонка
откидывается при наезде на препятствие, а также при помощи гидроцилиндра и насоса.
Смазка рабочих частей колонки осуществляется разбрызгиванием с принудительной цир-
циркуляцией масла между нижним и верхним редукторами.
18.4. Реверс-редукторы
Реверс-редукторы (табл. 18.4) предназначены для передачи вращения от дизеля к
гребному винту, понижения скорости и изменения направления вращения (реверсирова-
(реверсирования).
Реверс-редукторы выполняются со следующими передаточными числами: 1,5:1
(РРП-15-1,5; РРП-20-1,5; РРП-25-1,5; УРРП-25-1,5), 2:1 (РРП-15-2, РРП-20-2;
РРП-25-2; РРП-40-2; РРП-70-2), 3:1 (РРП-20-3; РРП-25-3; РРП40-3; РРП-70-3).
Принцип действия, конструктивное исполнение и кинематическая схема реверс-
редукторов с различными степенями редукции одинаковы. Различаются они числом зубь-
зубьев ведомых шестерен переднего и заднего хода, величиной коррекции зубьев шестерен
переднего хода и размерами корпуса и крышки.
Реверс-редукторы типов РРП-20, РРП-25, РРП-15, РРП-40 и РРП-70 состоят из односту-
одноступенчатого шестеренного редуктора и фрикционного механизма сцепления, объединенных
в общем корпусе. Рассмотрим их конструктивные особенности.
Реверс-редуктор РРП-20 (рис. 18.12) состоит из барабана 10 с фрикционными 7, 8
и средним 9 дисками, трех нажимных устройств 6 и каретки включения 13 с вилкой 12.
Диски трения имеют приклепанные накладки из фрикционного материала.
Редукторная часть состоит из шестерен 4, 77 переднего хода и 3,18 заднего хода, ре-
дукторного вала 19, комплекта шарикоподшипников 23, 24, 25 и колеса 21 переднего и
заднего хода. Шарикоподшипники 23, 24 и 25 редукторного вала являются упорными и
служат для восприятия и передачи на корпус осевых усилий, возникающих при работе
гребного винта на переднем или заднем ходу. Осевое усилие, создаваемое гребным винтом
на переднем ходу, воспринимается двумя радиально-упорными шарикоподшипниками
24 и 25, а на заднем ходу — одним радиально-упорным шарикоподшипником 23.
Корпус 11 реверс-редуктора отлит из алюминиевого сплава и крепится к кожуху ма-
маховика через проставочное кольцо с помощью десяти шпилек, а барабан к маховику ди-
дизеля — через промежуточный диск 1 при помощи шести болтов, застопоренных специаль-
специальными отгибными шайбами.
С обеих сторон на корпусе реверс-редуктора выполнены лапы для крепления его к
судовому фундаменту. На боковых стенках полости фрикционного механизма имеются
приливы с отверстиями для установки приводного валика управления реверс-редукто-
505
Та блица 18.4. Технические
Характеристика
I
Ё
I
а.
а.
Степень редукции:
на переднем ходу
" заднем ходу
Максимальный упор
гребногс винта, кН
Максимальный крутя-
крутящий момент, передавае-
передаваемый РРП, Нм:
на переднем ходу
" заднем ходу
Направление вращения
выходного вала РРП на пе-
переднем ходу (если смог-
реть со стороны фланца)
Масса РРП, кг
Масса масла в РРП, кг
Срок смены маек», ч
* П - правое.
**Л - левое.
1,57
1,37
5,25
150
100
II*
54
1,7
600
2,13
1,81
5,25
150
150
П
54
1,7
600
1,565
2,0
9,0
200
120
П
70
1,8
20Ю
2,158
2,0
9,0
200
120
П
70
1,8
200
2,947
2,888
9,0
200
120
П
70
1,8
200
1,565
2,0
6,0
250
160
П
80
1,8
200
2,158
2,0
7,5
250
160
П
80
1,8
200
ром. В нижней и верхней наклонной стенках предусмотрены люки для сборки, обслужи-
обслуживания и вентиляции полости муфты. Люки закрыты крышками и уплотнены прокладка-
прокладками. В крышке люка реверс-редуктора выполнена маслозаливная горловина 16.
В нижней части корпуса реверс-редуктора помещены змеевик 22 для охлаждения
масла и резьбовая пробка для слива. На левой стороне корпуса выполнен прилив с отвер-
отверстием, куда вставляется маслоуказатель.
Шарикоподшипники 75, 20, 23, 24 и 25 смазываются маслом, разбрызгиваемым ше-
шестернями. Для смазки шарикоподшипников 2 к-5 передних опор валов заднего и перед-
переднего хода предусмотрены масленки, через которые шарикоподшипники периодически
набиваются смазкой. Диски сцепления изолированы от масляной ванны перегородкой в
корпусе реверс-редуктора, а в месте прохода вала 4 — манжетой 14. Такое же уплотнение
имеется на редукгорном валу 19 в месте его выхода из реверс-редуктора.
Все шестерни реверс-редуктора для уменьшения шума выполнены косозубыми из
легированной стали 15ХГНВА. Рабочие поверхности зубьев цементированы на глубину
0,6-0,8 мм, закалены до твердости HRC50-60 и отшлифованы.
Реверс-редуктор работает следующим образом. При холостом ходе средний диск 9
находится в нейтральном положении, а рычаг ручного переключения муфты — в среднем
положении. При нейтральном положении среднего диска зазоры между дисками 7 к 8
трения и прилегающими к их торцам плоскостями среднего диска, барабана и промежу-
промежуточного фланца составляют в сумме по 3—3,5 мм на каждый диск. В этом случае валы пе-
переднего 4 и заднего 3 хода неподвижны. Ролики нажимного устройства 6 находятся в вер-
вершинах прорези кулачков, муфта выключена.
Для выключения переднего хода необходимо снизить частоту вращения коленчатого
вала дизеля до 10,0—13,3с и повернуть рычаг включения в сторону дизеля примерно на
угол 18° усилием не более 160 Н, быстрым, без рывков движением до упора. При этом
вилка включения 12 передвигает каретку 13 назад до упора в стопорное кольцо. Каретка
через серьги поворачивает нажимные устройства 6 вокруг их осей в кронштейнах. Ролики
нажимных устройств выходят из вершин прорезей кулачков и, нажимая вперед, повора-
506
характеристики реверс-редукторов
m
РРП-2
2,947
2,888
9,0
250
160
П
80
1,8
200
-
УРРП
1,5525
• 1,910
5,0
250
130
Л*
80
5,0
100
су
о
РРП-4
2,037
1,923
11,0
402
235
П
230
5,0
600
m
6
0.
0.
3,037
2,963
13,0
402
235
П
245
5,0
600
су
О
РРП -1
2,04
2,04
25,0
745
745
П
410
4,0
500
т
о
РРП-1
3,04
3,04
25,0
745
745
П
432
4,0
500
2,5
о
"?
СРРП
2.4657
2,9
10,0
500
300
Л
2,3
100
•7
РР-26
1,545
1,36
4,0
260
150
Л
2,5
150
6
УП-4
1,0
1,0
_
л
1,5
150
чивают кулачки вокруг оси. Кулачки увлекают за собой назад тяги, которые через сред-
средний диск 9 прижимают диск 7 к фрикционной поверхности барабана 10.
Фиксация переднего хода осуществляется за счет того, что при крайнем положении
рычага включения между осью нажимного устройства и плечом кулачка образуется тупой
угол и пружина нажимного устройства несколько разжимается. Чтобы выключить муфту,
необходимо создать усилие для сжатия пружины.
Диск трения посредством зацепления вращает вал переднего хода; заодно с ним вра-
вращается шестерня переднего хода, которая находится в постоянном и непосредственном
зацеплении с колесом переднего хода, насаженным на редукторный вал. Вал 3 заднего
хода с диском трения 8 вращается вхолостую в противоположную сторону.
Для переключения реверс-редуктора с переднего хода на задний необходимо повер-
повернуть рычаг включения в положение холостого хода, а затем назад от дизеля до упора на
угол 18° от положения холостого хода.
При переключении на задний ход вращение передается на редукторный вал через диск
трения 8, вал 3, шестерню 18 заднего хода и промежуточную шестерню, изменяющую на-
направление вращения. Вал 4 переднего хода при этом вращается вхолостую в противопо-
противоположном направлении.
В зафиксированном положении рычага включения на переднем или заднем ходу
диски трения зажимаются исключительно силой упругости пружин нажимных устройств.
Этими же пружинами фиксируется рычаг включения в крайних положениях; в среднем
положении он удерживается фиксатором.
Диски трения вместе с фрикционными накладками из асбестового картона имеют
толщину 8,5_Од мм. Суммарный их износ по толщине (с двух сторон) не должен превы-
превышать 1 мм, в противном случае не будет обеспечиваться необходимая сила сцепления для
передачи максимального крутящего момента дизеля. Поэтому при износе до толщины
7,5_o,i мм диски необходимо заменить.
Реверс-редуктор РРП-25 изготовлен на базе реверс-редуктора РРП-20 и предназначен
для передачи крутящего момента до 250 Н • м на переднем ходу и 130 Н • м на заднем.
507
25 Zt Z3 22 21 20
Рис. 18.12. Продольный разрез реверс-редуктора РРП-20
Он имеет такие же шестерни, подшипники качения и степени редукции, как и РРП-20.
Количество нажимных устройств увеличено с трех до четырех, в связи с этим внесены
конструктивные изменения в барабан и каретку.
Реверс-редуктор УРРП-25 (рис. 18.13) —угловой одноступенчатый с цилиндрически-
цилиндрическими косозубыми шестернями и синхронизаторами. Предназначен для передачи крутящего
момента до 250 Н • м на переднем ходу и 130 Н • м на заднем, а также для снижения ча-
частоты вращения гребного винта по сравнению с частотой вращения коленчатого вала ди-
дизеля в 1,5525 раза на переднем ходу ив 1,91 раза на заднем.
Реверс-редуктор УРРП-25 крепится к судовому фундаменту в восьми точках и соеди-
соединяется с дизелем посредством карданного вала. На редукторный вал 23 при помощи
шпонки 16 насажена полумуфта 15, к которой присоединен вал гребного винта. Ведущий
вал 5 редуктора установлен на роликоподшипнике 8 и шарикоподшипнике 32. При помо-
помощи шпонки на вал 5 насажена коническая шестерня 9, которая сцепляется с конической
шестерней 10, посаженной на валу 14 при помощи шпонки и пружинного кольца. Вал 14
установлен на радиальном роликоподшипнике fl и радиально-упорном подшипнике 13.
На хвостовике конической шестерни 9 укреплена при помощи шпонки ведущая шестерня
6 переднего хода, а на ведущем валу 5 — ведущая шестерня 33 заднего хода. Ведомый
вал 23, несущий большие осевые нагрузки, имеет на концах радиально-упорные подшип-
подшипники 19 и 28. На ведомом валу установлены шестерни ведомая 21 переднего хода
508
' 2 3 it
25
? 8 9 Ю ff 1г fJ
24 23 22
Рис. 18.13. Продольный
% , разрез реверс-редуктора
21 20 19 18 17 16 УРРП-25
и ведомая 27 заднего хода. Каждая ведомая шестерня посажена на вал на двух радиаль-
радиальных подшипниках. Ведущие и ведомые шестерни находятся в постоянном зацеплении,
причем ведущая 6 и ведомая 21 шестерни переднего хода сцеплены непосредственно,
а ведущая 33 и ведомая 27 шестерни заднего хода - через промежуточную шестерню.
Между шестернями на ведомом валу расположена соединительная втулка 24, которая
при помощи кареток 22 и 25 соединена с двумя синхронизаторами, служащими для со-
согласования частоты вращения гребного вала и ведомых шестерен переднего и заднего
хода.
Каретки 22 и 25 движутся по ведомому валу по шлицам и имеют торцовые зубья,
при помощи которых могут быть попеременно сцеплены с одной из ведомых шестерен.
При движении соединительной втулки 24 влево каретка 25 после синхронизации сцепля-
сцепляется с ведомой шестерней заднего хода, а при движении соединительной втулки вправо
каретка 22 после синхронизации оборотов также сцепляется с ведомой шестерней перед-
переднего хода. ( '
Смазка подшипников и шестерен в реверс-редукторе осуществляется разбрызгивани-
разбрызгиванием. Масло заливается через горловину 4. Для слива масла в нижней части корпуса преду-
предусмотрена пробка 20. Для охлаждения масла используется забортная вода, передвигаю-
передвигающаяся по трубке змеевика 26. Управление реверс-редуктором производится при помощи
рычага переключения. Уход за реверс-редуктором состоит в проверке уровня и доливке
масла, периодической смене масла и очистке картера редуктора. Масло в редуктор зали-
заливают до верхней метки указателя; наливать масло выше верхней метки не рекомендует-
рекомендуется во избежание перегрева редуктора и выбивания масла из-под крышки и через уплотне-
уплотнения. Менять масло нужно через каждые 100 ходовых часов.
Необходимо периодически проверять и очищать отверстия трубки, подводящей воду
к змеевику реверс-редуктора, а также следить за температурой масла в редукторе, не
допуская ее повышения сверх 1,32 ° С.
Чтобы отсоединить реверс-редуктор от двигателя, необходимо отвернуть и вынуть че-
четыре болта М14, соединяющих полумуфту промежуточного вала 14 реверс-редуктора с
карданным валом, а затем сдвинуть карданный вал по шпицам в сторону дизеля.
Реверс-редукторы РРП-40 и РРП-70 в отличие от РРП-20 имеют по шесть нажимных
устройств, расположенных через 60°, вместо трех, расположенных через 120°, у реверс-
редукторов РРП-20 и РРП-15. В отличие от РРП-40 реверс-редуктор РРП-70 оборудован
приводом дистанционного управления с гидравлическим сервоприводом реверсирования
и имеет отъемный фланец вала редуктора.
Реверс-редукторы РРП-40 и РРП-70, так же как и РРП-20, объединяют одноступенча-
одноступенчатый шестеренный редуктор и фрикционный механизм сцепления, устанавливаемые в об-
общем корпусе.
Для возможности дистанционного управления реверс-редуктором он оборудуется
гидравлической системой. Насос МЗН-2 подает масло из масляной ванны реверс-редукто-
реверс-редуктора к распределительному крану управления реверсом. При помощи троса и ролика,
расположенного на пробке крана, рукояткой дистанционного управления пробку можно
устанавливать в три различных положения: передний ход, задний и холостой. При этом
масло поступает во внутренний канал пробки крана и направляется в верхнюю и нижнюю
полости сервомотора или же в обе полости одновременно.
Система дистанционного управления реверс-редуктором использует насос МЗН-2,
служащий для прокачки системы смазки дизеля перед пуском. Клапан выполнен таким
образом, что давление масла в системе сервомотора достигает 0,7 МПа. Это давление
обеспечивает переключение реверс-редуктора.
При реверсировании (на работающем дизеле) масло, подаваемое насосом МЗН-2,
поступает в систему гидропривода. В систему смазки масло не поступает или поступает
незначительно, преодолевая противодавление пружины клапана. Включение насоса МЗН-2
для переключения реверс-редуктора осуществляется кнопкой со щита дистанционного
контроля и управления.
510
Рис. 18.14. Сервомотор
Сервомотор (рис. 18.14) представляет собой гидравлический цилиндр с двусторон-
двусторонним поршнем 2, который под действием давления масла может перемещаться или в ман-
манжете 3, или совместно с манжетой в корпусе 1, Перемещаясь, поршень поворачивает
(на угол около 26°) шатун 7, который насажен на втулку 5 и зафиксирован шпонкой 6.
На втулке 5 имеются кулачки, которые входят в пазы полумуфты, установленной на
приводном валике. При повороте шатун 7 через валик воздействует на каретку и меха-
механизм нажимного устройства и переключает в заданное положение реверс-редуктор. На ко-
коробке 4 сервомотора установлены два болта с контргайками, которые служат для ограни-
ограничения поворота рычага.
Управление дизелем производится рукояткой дистанционного управления, которая
посредством муфты и вала через систему роликов и тросов связана с краном управления
и регулятором топливного насоса.
Для включения реверс-редуктора на передний или задний ход либо для изменения ча-
частоты вращения дизеля надо нажать на кнопку и установить рукоятку в необходимое
положение. Кнопку при реверсировании следует держать нажатой до момента загорания
сигнальных ламп включения переднего или заднего хода. При отключении кнопки рабо-
работа насоса МЗН-2 прекращается.
18.5. Электрооборудование и системы управления
В качестве основного источника тока применяется зарядный генератор двигателя,
а в качестве резервного — аккумуляторная батарея.
Схема электрооборудования двигателя М8ЧСПУ100 (рис. 18.15) выполнена по одно-
проводной системе с номинальным напряжением в сети 12 В; отрицательный полюс
источника тока выведен на корпус. Источником тока служит зарядный генератор Г250Г1,
работающий параллельно с аккумуляторной батареей и совместно с реле-регулятором
РР362. Потребителями тока являются стартер СТ230А, система зажигания и приборы на
панели приборов.
Трехфазный переменный ток, вырабатываемый генератором, преобразуется в посто-
постоянный ток посредством шести кремниевых диодов, соединенных в трехфазную мосто-
мостовую схему. Диоды смонтированы в крышке со стороны контактных колец — три диода
отрицательной полярности типа Д242АП установлены непосредственно в крышке генера-
генератора, три диода положительной полярности типа Д242А — на изолированном от корпуса
радиаторе-теплоотводе. Для выпрямления переменного тока в генераторе может быть
применен встроенный выпрямительный блок типа ВБГ1, состоящий из трех секций,
имеющих по два диода, включенных последовательно.
511
РЧ P5
I 83
Рис. 18.15- Однопроводная схема электрооборудо-
электрооборудования.
В1, В4, В5 — датчики давления и температуры мас-
масла; 52 — датчик температуры воды; ВЗ — датчик
указателя уровня топлива; В6 — показывающий
прибор тахометра; ВТ, В8 — датчики сигнализации
аварийного давления масла и перегрева воды; El —
Е8 — свечи зажигания; Е9 — прерыватель-распреде-
прерыватель-распределитель; G1 — генератор; GB1 — аккумуляторная
батарея; HI, Н2 - сигнельные пампы; Kl, K2 - реле-регулятор и реле стартера; L1 — катушка
зажигания; Ml - стартер; Р1 —РЗ — указатели давления масла и температуры воды; Р4, Р5 -
указатели температуры масла; S1 - выключатель; РА - амперметр; С - конденсатор
Реле-регулятор РР362 служит для автоматического поддержания напряжения генера-
генератора в заданных пределах. Он содержит два электромагнитных элемента: регулятор
Таблица 18.5. Основные электроагрегаты
Марка двигателя
44018,5/11-3; 44018,5/11-4;
44OI8.5/11-5; 44СП8,5/11
64019,5/11; 440110,5/13;
6ЧО112/14; 64СП15/15;
6ЧСП15/18
Электростартер
Марка
СГ212А
СТ25
Мощность,
кВт
3,52
5,15
Напряже-
Напряжение, В
12
24
Аккумуляторная батарея
Марка
6СГ128
6СГК180МЗ
Количе-
чество
1
2
Таблица 18.6. Основные электроагрегаты систем
Марка двигателя
ЯАЗ-204СР2,5
М84ШУ100
М53ФУЛ
М51УТ
МЗТА412
ВАЗ-2103
Электростартер
Марка
•
СГ25
СТ230А
СТ230А
СТ8
СТ117А
СТ221
Мощность,
кВт
5,15
1,10
1,10
0,96
0,50
040
Напряже-
жение, В
24
12
12
12
12
12
Аккумуляторная батарея
Марка
6СТ-128
6СГ-75
ЗСГ-70
6СТ-55
Количе-
Количество
2
1
1
2
1
1
512
напряжения РН и реле защиты РЗ. Пуск двигателя осуществляется при помощи установ-
установленного на нем стартера СТ230А с электромагнитным реле.
Основные электроагрегаты систем зажигания, запуска и зарядки приведены в
табл. 18.5 и 18.6. Двухпроводная система электрооборудования напряжением 12 и 24 В
дизелей типов 48,5/11 и 49,5/11 показана на рис. 18.16.
Минимальное сечение электропроводки 0,5—1,0 мм2; провода с таким сечением
предназначены для соединения контрольных приборов с датчиками и для ламп внутрен-
внутреннего освещения. Ходовые огни с лампами мощностью 6—15 кВт лучше подсоединять
проводами сечением 1,5—2,0 мм2, а для фары-прожектора мощностью 60—100 Вт ис-
использовать провод сечения не менее 6 мм2. Если длина проводов более 2—3 м, сечение
их желательно увеличить. Аккумулятор со стартером соединен двумя специальными
многожильными проводами с поперечным сечением не менее 40 мм2, так как ток, по-
потребляемый стартером, может превышать 150—200 А.
Повышенная влажность на катере приводит к уменьшению сопротивления изоля-
изоляции, появлению тока утечки и разряду аккумуляторов. Чтобы предотвратить это, необ-
необходимо установить общий выключатель для всех потребителей, например автомобильный
выключатель ВК318. Такой выключатель необходимо разместить в непосредственной
близости к аккумулятору.
Системы управления. Управление регулятором топливного насоса дизельного двига-
двигателя, дроссельной заслонкой карбюраторного двигателя или реверс-редуктором обычно
осуществляют с помощью простейших рукояток рычажного типа и тросовой либо штан-
штанговой проводки. Рукоятки управления двигателем и реверс-редуктором рекомендуется
располагать на одной оси у борта на расстоянии 400-420 мм впереди спинки сиденья во-
водителя и на 50—80 мм выше его горизонтальной части; длина рычага от оси рукоятки
должна составлять 250—280 мм.
Максимальное усилие для перемещения рукоятки управления дроссельной заслонкой
или регулятором топливного насоса не должно превышать 0,5 кг, чтобы обеспечивалась
достаточно точная установка частоты вращения коленчатого вала двигателя.
систем зажигания, запуска и зарядки дизелей
Зарядный генератор
Марка
Г108
ГСК1500Ж
Мощность,
кВт
0,2
1,0
Напряжение,
В
12
27,5
Реле-регулятор
РР24Г2
РК1500Р
Вспомогательные устрой-
устройства облегчения запуска
СНДЮОБЗ; „Холод Д-40"
СНДЮОБЗ, воздухонагре-
воздухонагреватель
зажигания и зарядки бензиновых двигателей
Масса зарядного
генератора (напря-
(напряжение 12 В, мощ-
мощность 0,4 кВт)
Г8Г107
Г250Г1
»
Г108Г
Г250Ж1
Г221
Реле-регулятор
РР107
_
РР362
РР23Г
РР362А
. РР38О
Свечи зажигания
АН
А10НТ
М12У
А20Д1
А17ДВ
Катушка зажигания
_
Б115
Б114
Б1
Б115В
Б117
Распределитель
зажигания
_
Р133
Р13Д
Р20
Р118
Р125Б
17 Зак. 738
513
Рйс. 18.16. Двухпроводная схема электрооборудования: а - 12-вольтная; б - 24-вольтная.
1 - свечи накаливания; 2 - контрольные элементы; 3 -дополнительные сопротивления; 4, б, 11 -
выключатели; 5; 9- вспомогательные реле; 7 - амперметр; 8 — реле-регулятор; 10 — подвижный
контакт; 12 - аккумуляторные батареи; 13 - стартер; 14 — удерживающая обмотка; 15 — реле;
16 - вольтамперметр; 17 - зарядный генератор; 18 — сетевой фильтр
Рукоятка привода реверс-редуктора должна иметь три фиксированных положения,
согласованных с положением фиксаторов рабочего органа РРП путем изменения длины
установленных на нем рычагов. Усилие, прилагаемое водителем к рукоятке управления,
не должно превышать 6— 12 кг.
Усилие от рукоятки к исполнительному механизму помимо тросового привода мо-
может быть передано штанговым, гидравлическим или электромеханическим приводами,
которые, как правило, являются более жесткими, но конструктивно более сложными,
чем тросовый привод.
19. ПОДВЕСНЫЕ ЛОДОЧНЫЕ МОТОРЫ
Расположение подвесных моторов за бортом лодки и способ крепления их посредст-
посредством кронштейна к транцу, вертикальное положение оси коленчатого вала двигателя и пе-
передача мощности на горизонтальный вал гребного винта через подводную часть, в кото-
которой расположен редуктор, существенно отличают подвесные лодочные моторы от стацио-
стационарных, выделяя их в особую группу.
Преимущества подвесных лодочных моторов перед стационарными: компактность,
транспортабельность и меньшая масса; отсутствие постоянных трудно демонтируемых
связей с судном и простота монтажа мотора; расположение вне внутреннего объема лод-
лодки, способствующее наиболее рациональному использованию полезной площади судна,
удобству в обслуживании и ремонте, меньшему загрязнению обитаемой части корпуса
лодки; приспособленность для перехода через мели благодаря откидыванию подводной
части; лучшая маневренность моторного судна с подвесным мотором; возможность
использования спаренной установки для большей безопасности и надежности плавания —
все это обеспечивает широкое применение подвесных моторов на малых судах самого
различного назначения.
514
Подвесные лодочные моторы по назначению могут быть разделены на две группы:
общего пользования (потребительские, транспортные, хозяйственные) и специальные
(спортивные, гоночные).
В отечественных подвесных лодочных моторах используются двухтактные бензино-
бензиновые двигатели. Они имеют высокие мощностные показатели, сравнительно несложную
конструкцию и практичны в эксплуатации.
Наряду с двигателем внутреннего сгорания для подвесных лодочных моторов малой
мощности используют электродвигатели. Электрические подвесные моторы с питанием
от аккумуляторной батарей обладают рядом преимуществ перед бензиновыми: просто-
простотой устройства и безотказностью в работе, повышенным моторесурсом, бесшумностью
и безопасностью обслуживания. Однако моторы этого типа широкого распространения не
получили из-за низкой мощности (менее 0,736 кВт), малой продолжительности работы
аккумуляторной батареи без подзарядки B—4 ч) и сложности ее зарядки в условиях пла-
плавания, необходимости специального хранения и ухода за батареей.
В настоящее время в эксплуатации находятся лодочные моторы мощностью от 1,5 до
22 кВт; „Салют" („Спутник"), „Стрела", „Прибой", „Москва" („Москва-М"),
„Ветерок-8", „Ветерок-12", „Привет", „Нептун", „Вихрь", „Вихрь-М" и „Вихрь-30".
С 1983 г. производятся пять моделей подвесных лодочных моторов с двигателем внут-
внутреннего сгорания: „Салют-М", „Ветерок-8Э", „Нептун-23", „Вихрь-М", „Вихрь-30" и
одна модель электрического подвесного лодочного мотора „Снеток". ^
19.1. Основные узлы и системы подвесного мотора
Подвесной лодочный мотор состоит из следующих основных механизмов и узлов
(рис. 19.1): двигателя 5 (называемого также моторной головкой) с обслуживающими
его системами; передачи на гребной винт в виде вала, заключенного в дейдвудную тру-
трубу 4; подвески 3; привода 2 гребного винта 1 и бензобака 6, как правило, расположенно-
расположенного вне двигателя.
Рйс. 19.1. Подвесной лодочный мотор.
ftic. 19.2. Способы продувки двигате-
двигателей подвесных лодочных моторов: а -
петлевая дефлекторная; б - двухканаль-
ная возвратно-петлевая; в — трехканаль-
ная возвратно-петлевая
а)
17*
515
Двигатель. Поршневой двухтактный карбюраторный бензиновый двигатель внутрен-
внутреннего сгорания отечественных подвесных лодочных моторов характеризуется применени-
применением кривошипно-камерной продувки двух видов: поперечной петлевой дефлекторной
и возвратно-петлевой двух- или трехканальной (рис. 19.2).
Петлевая дефлекторная продувка применяется на моторах „Ветерок", „Москва",
„Вихрь-20", „Прибой" всех моделей. К ее положительным качествам относятся более
удобная компоновка цилиндров (в двухцилиндровом исполнении), лучшая технологич-
технологичность из-за простоты обработки круглых продувочных и выхлопных окон. Вместе с тем
она характеризуется большой массой, сложной формой камеры сгорания и поршня,
увеличенным расходом топлива, повышенной тепловой напряженностью поршня.
Двухканапьную возвратно-петлевую продувку, применяемую на моторах „Нептун",
„Салют", отличают прямоугольная форма окон и расположение продувочных каналов,
обеспечивающее направление потоков смеси в цилиндре вдоль стенки к головке цилинд-
цилиндра и лучшую очистку цилиндра от продуктов сгорания; за счет этого достигаются мень-
меньшая тепловая напряженность и повышенная экономичность двигателя.
Трехканапъная возвратно-петлевая продувка применяется на моторах „Вихрь-М",
„Вихрь-30", „Привет-22" и „Нептун-23". За счет дополнительного канала улучшаются
очистка цилиндра от выхлопных газов, наполнение свежей смесью и температурный
режим поршня.
В двигателях отечественных подвесных лодочных моторов используются две системы
впуска горючей смеси в картер: золотниковый механизм („Салют", „Привет-22", „Неп-
„Нептун", „Вихрь") и устройство с автоматическими лепестковыми пластинчатыми клапана-
клапанами („Москва", ,3етерок", „Прибой"). В отличие от поршневого распределения, харак-
характерного для двигателей мотоциклов и выпускавшихся ранее лодочных моторов ЛМ-1,
ЗИФ-5 („Стрела"), золотниковый или клапанный впуск более сложен, требует примене-
применения дополнительных деталей, но позволяет получить более высокие технико-экономиче-
технико-экономические показатели мотора.
Двигатель подвесного мотора состоит из неподвижных деталей—цилиндров, голо-
головок, картера и подвижных — коленчатого вала, поршней, шатунов, маховика (рис. 19.3).
Цилиндры двигателей выполняются из алюминиевого сплава в виде блока („Вете-
(„Ветерок", „Нептун", „Вихрь", ,.Москва") либо каждый отдельно („Салют", „Привет-22")
с залитыми или запрессованными гильзами из серого чугуна. Цилиндры со стороны ВМТ
закрываются головкой, отливаемой из алюминиевого сплава в одном блоке или отдельно
на каждый цилиндр.
Картеры двигателей отливаются из алюминиевого сплава и конструктивно выполня-
выполняются с одним или несколькими разъемами в плоскости, перпендикулярной к оси колен-
коленчатого вала („Салют", „Вихрь", „Нептун", „Привет-22"), по оси коленчатого вала
(„Москва") или туннельного типа без разъемов („Ветерок") . Полость картера использу-
используется в качестве насоса, в который поступает горючая смесь для предварительного сжатия
перед подачей ее по продувочным каналам в цилиндры двигателя, что предъявляет серь-
серьезные требования к качеству уплотнений. В средней части картера („Вихрь", „Нептун",
„Привет-22") расположен впускной канал, расходящийся на верхнюю и нижнюю криво-
кривошипные камеры, впуск смеси в которые производится через золотниковые шайбы, вра-
вращающиеся вместе с коленчатым валом (см. рис. 19.3). На двигателях с клапанным
впуском („Ветерок", „Москва", „Прибой") к картеру крепится клапанная перегородка
с пластинчатыми клапанами, открывающимися при образовании достаточного разрежения
в кривошипной камере.
Коленчатые валы двигателей подвесных лодочных моторов изготовляются цельными
при разъемных нижних головках шатунов (,,Ветерок", Прибой", „Москва") или состав-
составными при неразъемных головках („Вихрь", „Нептун", „Привет-22", „Салют"). Разбор-
Разборные коленчатые валы двухцилиндровых двигателей состоят из двух кривошипов, соеди-
соединяемых между собой с помощью оси („Нептун"), торцовых шлиц („Вихрь") или цанговым
соединением| („Привет-22"). На верхнем клапане коленчатого вала предусматривается
516
Рис. 19.3. Двигатель подвесного лодочного мотора „Привет-22".
1 —головка; 2—верхняя крышка нижнего картера; 3 — про ставка; 4 — нижняя крышка верх-
верхнего картера; 5 — гильза; б—цилиндр; 7 - поршень; & —поршневое кольцо; 9 — поршневой
палец; 10 — шатун; 11 — коленчатый вал; 12 - верхняя крышка верхнего картера; 13 — распре-
распределительный диск (золотник) ; 14 — нижняя крышка нижнего картера
конус со шпонкой для посадки маховика. Нижний конец для соединения с вертикальным
валом имеет отверстие со шлицами („Ветерок", „Москва", „Прибой", „Нептун") или
квадратный хвостовик („Вихрь", ,Дривет-22", „Салют"). Коленчатые валы штампуются
из легированной хромоникелевой стали.
Маховики двигателей подвесных лодочных моторов помимо основного назначения —
уменьшения неравномерности вращения коленчатого вала — используются для размеще-
размещения магнитной системы магнето. В обод маховика заливаются („Ветерок", „Москва")
или крепятся с помощью винтов („Вихрь", „Нептун", .Дривет^") постоянные магниты
с полюсными наконечниками.
Шатуны штампуются из легированной стали. Их стержни вьшолняются двутаврового
сечения, хорошо противостоящего изгибу. Разъемная кривошипная головка шатуна име-
имеет крышку с фиксирующим изломом, соединяющуюся с телом шатуна двумя шатунными
517
болтами. Неразъемная конструкция головки обеспечивает более высокие жесткость и
надежность кривошипно-шатунного механизма, но вызывает необходимость замены
всего узла (коленчатого вала с шатуном) при износе или повреждении одной из деталей.
Шатунные подшипники в двигателях подвесных лодочных моторов выполняются ролико-
роликовыми или игольчатыми со свободными иглами („Ветерок", „Салют") или с сепаратором
(„Нептун", „Привет-22", „Вихрь", „Москва-25"). В поршневую (верхнюю) головку
шатуна запрессовывается бронзовая втулка, служащая подшипником скольжения для
поршневого пальца (кроме мотора „Привет-22" с игольчатым подшипником верхней
головки шатуна).
Поршни отливаются из алюминиевых сплавов. Днище поршня в зависимости от типа
продукции может быть выпукло-сферической формы или со специальным козырьком
(дефлектором). Уплотнение зазора между цилиндром и поршнем производится двумя-
тремя поршневыми кольцами, изготовляемыми из высокопрочного мелкозернистого чу-
чугуна. Для исключения проворачивания колец и поломок из-за попадания их замков в
просветы окон кольца фиксируются общим или индивидуальными для каждого кольца
стопорами.
Поршневые пальцы, как правило, плавающей конструкции — вращаются не только
в,верхней головке шатуна, но и в бобышках поршня. От перемещений в осевом направле-
направлении палец фиксируется двумя пружинными стопорными кольцами, устанавливаемыми по
его концам в канавки бобышек поршня. Изготовляются поршневые пальцы из цементи-
цементируемой низкоуглеродистой стали.
Дейдвудом, дейдвудной трубой или промежуточным корпусом в подвесном лодоч-
лодочном моторе называют неподвижную деталь, соединяющую двигатель с подводной частью
и подвеской. К дейдвуду при помощи пружинных или резиновых амортизаторов крепит-
крепится узел подвески мотора. Внутри дейдвуда размещены вал (рессора) привода гребного
винта, тяги управления, трубка охлаждения, водяная помпа. Дейдвуд используется для
забора и выброса охлаждающей воды, отработавших газов и выполняет роль глушителя.
Подвеска обеспечивает крепление мотора к транцу лодки, поворот относительно вер-
вертикальной оси для изменения направления движения и откидывание при задевании под-
подводной части за препятствия. Для удержания мотора в откинутом состоянии при длитель-
длительных остановках и движении на веслах в подвеске имеется подпружиненный упор. Для
установки мотора под нужным углом относительно транца в зависимости от загрузки
лодки и угла наклона транца подвеска снабжена устройством, позволяющим ступенчато
регулировать этот угол. У моторов с реверс-редукторами имеются устройства, исключаю-
исключающие откидывание мотора при работе на задний ход.
Привод гребного винта подвесного лодочного мотора представляет собой реверсив-
реверсивный или нереверсивный редуктор, служащий для передачи крутящего момента от колен-
коленчатого вала двигателя, имеющего вертикальную ось вращения, к горизонтальному валу
гребного винта. В реверсивном редукторе („Вихрь", „Нептун", „Привет-22", „Москва")
размещается устройство для разобщения гребного и коленчатого валов с целью получе-
получения холостого хода, а также для изменения направления вращения гребного винта с
целью получения заднего хода. Редуктор моторов „Ветерок" имеет только холостой ход,
у мотора „Салют" отсутствует холостой и задний ход.
Реверс-редуктор (у моторов „Вихрь", „Нептун", „Москва-25", „Москва-30",
„Привет-22") состоит из одного или двух отлитых из алюминиевого сплава корпусов, со-
соединенных между собой винтами, шестерен переднего и заднего хода с торцовыми зубья-
зубьями, ведущего вала — шестерни, храповика, рычажного привода к муфте переключения,
подшипников и сальников (рис. 19.4).
Гребной винт подвесного лодочного мотора отливается из алюминиевого сплава, со-
соединяется с гребным винтом посредством предохранительного штифта через резиновый
демпфер, благодаря чему это соединение является упругим.
Пусковое устройство подвесных лодочных моторов оборудуется механизмом с само-
самоубирающимся шнуром. Можно выделить два конструктивных решения пускового
518
устройства лодочных моторов: меха-
механизм верхнего расположения, в кото-
котором зацепление с маховиком произво-
производится посредством собачки или соба-
собачек, расположенных на шкиве-блоке
(„Вихрь", „Нептун", „Москва", „Са-
„Салют"), и механизм нижнего располо-
расположения, пусковая шестерня которого
входит в зацепление с зубчатым обо-
ободом маховика (,3етерок", ,Дри-
вет-22", „Прибой"). В качестве ава-
аварийного на всех моторах предусмот-
предусмотрен запуск с помощью шнура, наматы-
наматываемого на верхнюю часть маховика.
Лодочные моторы „Вихрь-30" и
,,Москва-25АЭ" („Москва-ЗОЭ") снаб-
снабжены электрозапуском. В моторе
с электрозапуском ,,Вихрь-30" систе-
система электропитания дополнена аккуму-
аккумуляторной батареей 6СТ42 FСТ45),
выпрямителем для подзарядки акку-
аккумуляторной батареи ВБГ-ЗА и элек-
электростартером типа СТ369 (или СТ353,
СТЛ-100ТВ).
В систему питания и смесеобразо-
смесеобразования двигателей подвесных лодочных
моторов входят топливный бак, гиб-
гибкий соединительный топливный шланг
с ручной подкачивающей грушей, топ-
топливный насос, карбюратор и соедини-
соединительные шланги (рис. 19.5). Более
просто устроена система питания ма-
маломощных одноцилиндровых подвесных лодочных моторов („Салют", „Стрела") со
встроенным бензобаком и поступлением топлива самотеком.
Карбюраторы поплавкового типа оборудованы системами и устройствами, обеспечи-
обеспечивающими обогащение топливной смеси при пуске двигателя, работу в эксплуатационном
диапазоне нагрузок и быстрый переход от малой нагрузки к полной, стабильность качест-
качественного состава смеси при полной нагрузке и экономичность. Карбюратор мотора
,,Салют-М" — с центральной поплавковой камерой и цилиндрическим золотником. Кар-
Карбюраторы КЗЗБ („Ветерок-8Э") и КЗЗВ („Ветерок-12Э") -горизонтального типа, с бо-
боковым расположением поплавковой камеры - максимально унифицированы между
собой и отличаются размерами диффузора. Карбюратор типа К36 — поплавкового типа с
горизонтально расположенной камерой - используется на моторах „Нептун-23" (К36Л)
и „Москва-25", „Москва-30" (К36Н). Карбюраторы моторов семейства „Вихрь" и мотора
,,Привет-22" — поплавкового типа с горизонтальным расположением поплавковой каме-
камеры. Они отличаются диаметром проходного сечения главного жиклера и диффузора, мм:
Рис. 19.4. Реверс-редуктор мотора „Вихрь".
1 — корпус; 2 — пластина водяного канала; 3 —
манжета; 4 - шарикоподшипник 202; 5 — вал-
шестерня; б — роликоподшипник 304; 7 — шестерня
переднего хода; 8 — шестерня заднего хода
Главный жиклер. . .
Воздушный жиклер.
Диффузор.
Вихрь''
1,2
0,52
25
„Вихрь-М"
1,25
0,52
25
Вихрь-30"
1,5
0,52
26,5
„Привет-22"
1,2
0,52
25
В двигателях подвесных лодочных моторов системы питания и смазки совмещены -
масло добавляется непосредственно в топливо и подается в двигатель по общей топливной
519
1Л
О
Рис. 19.5. Система питания подвесного ло-
лодочного мотора „Ветерок".
1 — пробка бака; 2 — винт; 3 — заборник;
4 — подкачивающая груша; 5 — шланг; 6 —
муфта; 7 — штуцер; 8 — диафрагма; 9 —
отстойник; 10 — серьга упора; 11 — гайка
с накаткой; 12 — камера поплавка; 13 —
дозирующая игла; 14 — корпус карбюратора;
15 — распылитель; 16 — воздушная заслонка;
17 — трубка компенсационного жиклера; 18 —
воздушный канал малого газа; 19 — дроссель-
дроссельная заслонка; 20 — пластинчатый клапан; 21 —
крышка блока; 22 — проставка
21 21
системе. Смесь бензина с маслом распилива-
распиливается в карбюраторе, смешивается и засасыва-
засасывается в картер, где масло оседает на поверхно-
поверхности деталей, покрывая их тонкой пленкой.
Масляный туман, образующийся в картере
при вращении кривошипа, смазывает шатун-
шатунные и коренные шейки коленчатого вала,
подшипники верхних головок шатуна, порш-
поршневые пальцы, зеркало цилиндра.
Система охлаждения отечественных под-
подвесных лодочных моторов — водяная, про-
проточная, состоящая из водозаборника, насоса
и трубопроводов (рис. 19.6). Охлаждающая
вода подается в двигатель насосом, в качест-
качестве которого используется преимущественно
помпа коловратного типа. Коловратная пом-
помпа состоит из корпуса и резиновой крыльчат-
крыльчатки, в ступицу которой залита латунная втул-
втулка („Ветерок", „Москва", „Нептун",
„Вихрь"), На моторах ,Дривет-22", „Са-
лют-М" водяной насос бесконтактного вихре-
вихревого типа.
Система электрооборудования включает
в себя маховичное магдино, представляющее
собой прибор, в котором под действием
Рис. 19.6. Система охлаждения подвесного
лодочного мотора „Нептун".
1 — правый патрубок; 2 — экран левого пат-
патрубка; 3 — экран правого патрубка; 4 —
левый патрубок; 5 — контрольное отверстие
I V 5 6 7 6 9 10
1 --'^^ЛЛ-\--Л7\
Рис. 19.7. Система электрооборудования
подвесного лодочного мотора „Вихрь-30"
3 4 5 6 7 в 9 10
Рис. 19.8. Электрическая схема блока
зажигания.
электронного
1 — катушка питания зажигания; 2 — 1 — управляющая обмотка катушки зажигания; 2 —
конденсатор; 3 — кулачок; 4 — прерыва- накопительная обмотка катушки зажигания; 5-5 —
тель; 5 - катушка освещения; 6 - высо- диоды КД2О9А; 6 - тиристор КУ2О2М; 7 - резистор
ковольтные трансформаторы; 7 - све- ОМЛТ-0,5 (S1 Ом); 8 -конденсатор МБГО A мкФ,
чи; 8 - стартер; 9 — аккумулятор; 10 — 400 В) ; 9 — трансформатор Б300; 10 — свеча зажигания;
кнопка „Стоп" на пульте; 11 -кнопка 77-обмотка катушки освещения; 12 -лампа нака-
„Пуск" на пульте; 12 — кнопка „Стоп" ливания
на поддоне; 13 — блок ВБГ-ЗА
521
переменного магнитного поля индуцируется ток низкого напряжения, трансформируе-
трансформируемый затем в ток высокого напряжения. В систему электрооборудования мотора
(рис. 19.7) кроме магдино входят высоковольтные трансформаторы, расположенные от-
отдельно от него („Вихрь", „Нептун", „Привет-22", ,,Салют-М", „Ветерок-8Э" и „Вете-
рок-12Э") или размещенные на основании под маховиком (,,Ветерок-8", „Ветерок-12",
..Москва"), и свечи зажигания. Магдино моторов „Вихрь" (МВ-1), „Нептун" и „При-
„Привет-22" (МН-1) унифицированы по основным элементам — прерывательным механизмам,
конденсаторам и отличаются диаметром обработки магнитопровода и конструктивным
исполнением основания.
На лодочных моторах „Ветерок-8Э" и „Ветерок-12Э", а также на моторах „Вихрь-
электрон" применяется электронная бесконтактная система зажигания. В связи с отсут-
отсутствием механических контактов электронное магдино не подвержено износу, не требует
регулировки и обслуживания, более надежно и долговечно.
Бесконтактная электронная система зажигания (рис. 19.8) моторов „Ветерок-8Э"
и „Ветерок-12Э" состоит из маховичного магдино с двумя выносными высоковольтными
трансформаторами Б-ЗОО и двух свечей зажигания.
Электронное магдино моторов „Вихрь-электрон" имеет тиристорную схему с на-
накоплением энергии в конденсаторе. На основании магдино установлены катушка освеще-
освещения для питания бортсети судна, генераторные катушки, вырабатывающие энергию для
искрообразования, и электронный блок с датчиком. "Электронный блок системы зажига-
зажигания моторов „Вихрь-электрон" в отличие от системы моторов „Ветерок-Э" выполнен на
бескорпусных элементах, защищен компаундом и, вследствие этого, неремонтопригоден
и разборке не подлежит.
19.2. Технические характеристики отечественных подвесных лодочных моторов
Отечественные подвесные лодочные моторы (табл. 19.1—19.4, рис. 19.9, 19.10) рас-
рассчитаны на лодки с высотой транца до 380—405 мм и могут эксплуатироваться в водое-
водоемах глубиной не менее 0,5—0,8 м.
Мотор „Салют-М" („Спутник") пригоден для установки на разнообразные разборные
и неразборные лодки и байдарки, преимущественно грузоподъемностью до 3 человек.
На прогулочной лодке при загрузке 240 кг мотор обеспечивает скорость 8—10 км/ч; на
парусном швертботе водоизмещением до 600 кг мотор, используемый в качестве вспомо-
вспомогательного двигателя, сообщает скорость судну около 6 км/ч.
Двигатель — двухтактный одноцилиндровый с возвратно-петлевой продувкой и
впуском топливной смеси в картер через дисковый золотник. Бензобак, обеспечивающий
непрерывную работу мотора на максимальном режиме в течение 1,5 ч, крепится непо-
непосредственно на моторе.
Мотор имеет только прямую передачу. Предусмотрены откидывание мотора при уда-
ударе о подводное препятствие и регулировка угла установки; на рукоятку румпеля выве-
выведена электрическая кнопка „Стоп". Модификация „Салюта" — мотор „Спутник" со
складной дейдвудной трубой.
Моторы семейства ,?етерок" (рис. 19.11) удобны для установки на среднескорост-
ные суда водоизмещающего типа, легкие полуглиссирующие мотолодки, на надувные и
портативные лодки. Используются также в качестве вспомогательных двигателей на па-
парусных яхтах.
Моторы „Ветерок-8" („8Э") и ,,Ветерок-12" („12Э") выполнены по одной конструк-
конструктивной схеме и имеют высокую степень унификации деталей. У них взаимозаменяемы
подводные части (дейдвуд, подвеска, редуктор), агрегаты систем зажигания и питания
(кроме карбюратора), кожухи, ряд деталей пускового механизма и др.
Моторы „Ветерок-8" и „Ветерок-12" комплектовались контактным магнето типа
МЛ-10-2с, а с 1978 г. выпускаются с электронным бесконтактным зажиганием и системой
522
Таблица 19,1. Технические данные отечественных подвесных лодочных моторов
Характеристика
Максимальная мощность
двигателя, кВт
л. с.
Частота вращения коленча-
коленчатого вала при максимальной
мощности, с\ 7
Диаметр цилиндра, мм
Ход поршня, мм
Рабочий объем, см3
Степень сжатия:
геометрическая
действительная
Расход топлива при макси-
максимальной мощности, кг/ч
Масса сухая, кг
Зажигание
Свечи зажигания
Наивыгоднейший срок опере-
опережения зажигания
Освещение
Управлени е мотором
Топливо и масло
Вместимость бензобака, л
Передаточное отношение-
редуктора
Гребной винт:
диаметр X шаг, мм
число лопастей
Тяга на швартовах, Н
„Салют-М "
1,47
2
83,33
38
40
45
7,8
-
1,1
12,5
Магнето
МС-1
А10Н-Т
3,2-3,5 до
ВМТ
-
Румпелем
„Вете-
рок-8Э"
5,9
8
80
50
44
173
-
6
3,5
25
„Вете-
рок-12Э"
8,8
12
80
60
44
249
-
6
5
26
Магдино МБЭ-1 с транс-
трансформаторами БЗОО
АН
АН
30° + 1° C,2-3,7 мм
до ВМТ)
12В,
30 Вт
Румш
Автомобильный бензин А-72 или
(ГОСТ 17479-72)
2
12:22
140X120
2
200
"Масса моторов с системой апектрозапуска.
20
13 .-21
202X190
3
600
20
13:21
210X225
- 3
800
„Привет-22"
16,2 ± 1,1
22+ 1,5
83,33 ± 3,33
61,75
58
346
9,0
-
7,6
39+2'°
—1 5
Магдино МН-
„Нептун-23"
17
23
83,33+1,66
61,75
58
346
9,25
-
6,5
44
с трансфор-
маторами ТЛМ
СИ-12РТ
26°
12В,
тем, предусм
СИ-12РТ
29°
*0Вт
отрено подкл
А-76 с добавлением масла
22
12 : 20
235 Х285;
250 X 250
3
-
20
15 : 26
230 X 300
230 X 280;
230X220
3
1400
„Москва-
25А"
18,4 ±0,75
25 ±1
80
72
60,6
496
8,4
-
10,5
48 E2*)
,,Москва-30"
22
30
85
72
60,6
496
8,5
-
11
48 E2*)
2-искровое магнето
А17В
42°
-
ючение диет
М8В1,М8П
22
15 : 23
232X250
230X280;
228 X 300
3
1400; 1300
А17В
39°
-
анционного уп
,,Вихрь-М"
18,4+ 1,1
25 ± 1,5
83,33 ± 3,33
67
60
422
8,5
-
9,5
45 + 2
Магдино МВ-
„Вихрь-ЗОР"
22 ± 1,5
30+2
83,33 ± 3,33
72
60
488
8,5
-
11
45,5 +
+ 2 D9 + 2*)
с трансфор-
маторами ТЛМ
СИ-12РТ
30° ± 1° (f
СИ-12РТ
,02 мм до
ВМТ)
12В,
давления
(ГОСТ 10541-78), М10Б1
22
15 :23
232X250
230X280;
228 X 300
3
1500
22
14: 24
240 X 300
3
-
40 Вт
М10В1
22
14 :24
240 X 300
3
-
Т а б л и и а 19.2. Габаритные и монтажные размеры подвесных лодочных моторов, мм
Характеристика
Габаритная ширина
" длина
" высота
Ширина поддона (капота)
Длина поддона с,ручками
Расстояние до ручки
запуска
Расстояние от верха
транца до оси гребного валика
Расстояние от оси гребно-
гребного валика до низа шпоры
Расстояние от верхнего
транца до антикавитационной
плиты
Расстояние до оси рум-
румпеля
Расстояние от антикави-
антикавитационной плиты до конца
лопасти в нижнем положении
Ширина по осям винтов
струбцин
Ширина по струбцинам
Вылет рычага переключе-
переключения реверса
Высота струбцин
Расстояние до низа ручки
зажимного болта
Г Обозначение
на рис. 19.9
А
Б
В
Г
Д
Е
Ж
3
И
К
Л
м
н
О
п
р .
„Салют",
„Салют-М"
310
570
860
218
382
250
462
86
376,5
80
115
80
96
-
100
100
„Спутник"
310
570
884/560
218
382
250 '
486
86
400,5
80
155
80
96
-
100
100
ft
350
680
1050
276
500
130
570
115
452
60
205
90
140
-
125
115
м
«ч
и
н.
425
820
1065
310
555
120
570
140
452
82
235
130
158
-
193
123
„Нептун-23"
360
820
1088
305
590
365
565
135
I
425
100
272
155
215
-
195
130
„Вихрь",
„Вихрь-М",
„Вихрь-ЗО"
370
835
1100
315
600
360
550
135
427
107
249
189
256
-
266
93,5
„Москва-25"
„Москва-30'
380
890
1140
322
680
405
567
133
436
91
247
165
188
50
203
136
Таблица 19.3. Размеры транца, рецесса и
Характеристика
Рекомендуемая высота
транца, мм
Расстояние от транца До
оси откидывания, мм
Расстояние от в ерха
транца до оси откидыва-
откидывания, мм
Максимальный радиус
при откидывании мотора, мм
Максимальный габарит
откинутого мотора от
транца, мм
Обозначение
на рис. 19.10.
А
Б
В
Г
д
„Салют",
„Салют-М",
„Спутник"
380
10
25
370
250
„Be терок-8",
„Ветерок-12'
380
62
25
470
280
предельные углы наклона транца
„Привет-22"
405
50
15
495
300
„Нептун-23"
380
62
25
550 "
330
„Вихрь",
„Вихрь-М",
„Вихрь-Зб"
380.
46
28
500
360
„Москва-25",
„Москва-30"
365-
405
73
28
583
430
524
Продолжение табл. 19.3.
Характеристика
То же, от верха транца, мм
Максимальное рекомен-
рекомендуемое расстояние от в ерха
транца до низа рецесса, мм
Минимальная рекомен-
рекомендуемая длина рецесса, мм
Минимальный наклон
транца, обеспечиваемый
перестановкой упора в
струбцинах, град
Максимальный наклон
транца, обеспечиваемый пе-
перестанов кой упора в струб-
струбцинах, град
Максимальный угол
поворота мотора, град
Максимальный габарит
при крайних положениях мо-
мотора, мм
Минимальный рекомен-
рекомендуемый вырез в транце для
мотора, мм
Рекомендуемое расстоя-
расстояние между моторами, мм
Минимальный рекомен-
рекомендуемый вырез в транце для
двух моторов, мм
ачение
. 19.10.
аз и
В я
а
Е
Ж
3
И
к
л, м
н
О
п
р
I 1 *
Н 4 5
70
250
300
4
24
360
545
120
400
-
| о,
200
160
400
0
10
50
650
250
450
700
ет-22"
„Прив
220
125
455
3
15
40
455
540
500
1040
fH-2 3"
Р
5
и
260
130
400
5
15
35
820
220
550
770
рь",
ь-М",
ь-ЗО"
х а а
s х х
230
100
435
5
15
40
760
Не менее 420
500
920
ja-25",
ва-ЗО"
i 8
„Moi
„Mo
220
250
450
3
15
40
750
400
670
900
Таблица 19.4. Регулировочные и основные справочные
Характеристика
Зазор между контактами прерывателей,
мм
Зазор между электродами свечи, мм
" в зацеплении шестерен редуктора,
мм
Диаметр диффузора карбюратора, мм
Уровень топлива в поплавковой камере
карбюратора (ниже верхней плоскости
камеры), мм
Фазы газораспределения, град:
выпуск
продувка
впуск
Размеры сальников (диаметр посадоч-
посадочного гнезда х диаметр вала х ширина саль-
сальника), мм
двигателя:
¦ верхнего
нижнего
редуктора:
водяной помпы
вертикального вала
горизонтального вала
„Салют-М",
„Спутник"
0,30-0,35
0,50-0,60
0,12-0,35
13
-
144
142
—
32x17x7
32x17x7
22x11,5x5
28x12x7
28x12x7
данные подвесных
„Ветерок-8Э"
лодочных моторов
„Ветерок-12Э"
0,40-0,55 (магнето МЛ-10)
0;80-Q,95
0,16-0,28
16
16-19
140
ПО
—
31x20x8
31x20x8
26x12,5x8
35x16x10
0,80-0,95
0,16-0,28
19
16-19
140
ПО
—
31x20x8
31x20x8
26x12,5x8
35x16x10
525
Рис. 19.9. Габаритные размеры подвесных моторов (см. табл. 19.9)
освещения. Маховики и посадочные места основания магнето моторов с контактной и
электронной системами зажигания одинаковы. Тип двигателя — двухтактный двухци-
двухцилиндровый с кривошипно-камерной дефлекторной продувкой. Впуск топлива — через
автоматические пластинчатые клапаны. Моторы снабжены муфтой холостого хода, держа-
держателем мотора в откинутом положении, устройством регулирования угла его установки,
пружинной подвеской.
Продолжение табл. 19-4.
„Привет-23"
0,30-0,35
0,50-0,60
0,13-0,25
25
19-21
142
109
199
40x25x10
40x25x10
28x14x8
35x17x9
„Нептун-23"
0,35-0,45
0,50-0,60
0,15-0,35
24
21
152
121
35x25x5
35x25x5
25x15x5
35x16x8
„Москва-25А"
0,35 -0,45
0,60-0,80
0,15-0,35
28 (К36Н)
21
148
119°20'
120°20'
46x27x7
Нет
20x15x4
23x15x6
42x25x11
„Москва-30"
0,35 -0,45
0,60-0,80
0,15-0,35
28 (К36Н)
21
156
124
118
46x27x7
Нет
20x15x4
23x15x6
¦42x23x11
„Вихрь-М"
0,3-0,4 (ма
0,50-0,60
0,13-0,25
25
19-21
144
ПО
177° 30'
45x27x8
32x15x7
25x14x8
30x17x7
„Вихрь-ЗО"
"дино МВ-1)
0,50-0,60
0,13-0,25
26,5
19-21
148
106
177° 30'
45x25x8
32x15x7
25x14x8
30x17x7
526
Рис. 19.10. Присоединительные размеры подвесных моторов
(см. табл. 19.10)
8,8A2)
VA1)
7,Ф)
6,6(9)
5,9(в)
5,1G)
3,7E)
/
/
\
/
/
/
у
у
ff
>
i —
-
7
¦—¦
¦—«
60
C000)
66,56
(W00)
0,J6S[4S0]
0,157[Ш]
0,132[350]
63,33' п,с~'(ад/мин)
Eb00)
Рис. 19.11. Внешняя характеристика моторов
„Ветерок-8Э" (кривая 1) и „Ветерок-12Э"
(кривая 2)
24-
IS
11
л
>
N
2>>
N
3
ч
чч
5'
6^
>
\
0,8
1,6
2А 3,2 Р9,нН
Рис. 19.12. Зависимость скорости
мотолодки типа „Казанка" от на-
нагрузки, элементов гребного винта
(DxH) и передаточного отношения
i редуктора для моторов:
,,Ветерок-8Э"; ,,Вете-
рок-12Э"
527
В небольших количествах были выпущены модификации моторов „Ветерок" с удли-
удлиненной ногой и в грузовом исполнении. Моторы „Ветерок-8У" и „Ветерок-12У" с удли-
удлиненной ногой рассчитаны для установки на лодки с высотой транца до 500 мм. Моторы
,,Ветерок-8М" и „Ветерок-12М" в грузовом исполнении отличаются от базовых моделей
редуктором с уменьшенным передаточным отношением @,444 вместо 0,6) и гребными
винтами (в грузовом варианте диаметром 250 мм и шагом 190, 225 и 250 мм).
Представление о тяговых характеристиках моторов дает рис. 19.12, на котором пред-
представлены зависимости скорости мотолодки ,.Казанка" от элементов гребного винта
(D х Я) и передаточного отношения i редуктора:
№ кривой... / 2 3 4 5 6
D\H,m... 0,25x0,25 0,25x0,225 0,21x0,225 0,25x0,192 0,25x0,21 0,202x0,19
i ... 0,444 0,444 0,6 0,444 0,444 . 0,6
Как видно из графика, при большой загрузке лодки частота вращения мотора „Вете-
рок-12" с серийным редуктором существенно падает. Грузовой редуктор позволяет по-
повысить частоту вращения и получить большую мощность на гребном винте. Несколько
улучшает работу мотора „Ветерок-12" на водоизмещающей лодке с большой загрузкой
использование в качестве грузового гребного винта мотора „Ветерок-8".
Мотор „Нептун-23" является дальнейшим развитием лодочных моторов „Нептун"
и „Нептун-М". Увеличение мощности на моторе „Нептун-23" получено заменой двухка-
нальной системы продувки на трехканальную и изменением фаз газораспределения.
Двигатель этих моторов — двухцилиндровый двухтактный с кривошипно-камерной воз-
возвратно-петлевой продувкой и впуском смеси в картер через золотниковое устройство.
Внешняя характеристика мотора „Нептун-23" приведена на рис. 19.13.
Наличие шеститочечной подвески на резиновых амортизаторах обеспечивает легкое
управление мотором и малую вибрацию судна. Развитая площадь антикавитационной плиты
проставки реверс-редуктора „Нептун-23" позволяет успешно применять установку двух
моторов на судно и совершать
сложное маневрирование. Мотор
полностью реверсирован: имеют-
имеются ход вперед, назад и нейтраль.
п,С'(об/мин)
17.5B4)
16.2B1)
1Щ20)
13,3A8)
6,9A2)
Ое.фВтс)
[фб1
Ш[500]
/
¦>»
/
/
N,
/
Мк
3х
¦ва*
=
Е—
Ог,«г/ч(г/с)
2.21(8)
1.35A}
1.66F)
1ЛE)
1.12A)
SO 66.66 BU3 п,с''ы/мич)
i'JOOO) A000) E000)
Рис. 19.13. Внешняя характеристика
мотора „Нептун-23"
Мк.Нм(кгсм)
36(Щ
31C.17)
83,3
66,7
,,кН(кгс)
1,0
0 1
E000)
(WOO)
А
¦(jfoo)-
*•*
1)
я—
Я0*
л
г
к
А
г
- 3
=
?
у
1
10
Z
у*
at
у
20
,7
7*
-*¦
(
2.*
>
К
У
у*
^
1
s
У
/
V
4-
у
<
•<•
S?
s
'^
М)
п
-
1
0,6
0,А
0А
0,3
0,2
0,1
Рис. 19.14. Эффективный упор Ре и пропульсивный
КЦД пе гребных винтов на моторе „Нептун-23".
1 - 3 - полированные винты @,24 х 0,30, 0,23 х 0,28 и
0,226 х 0,250 м соответственно); 4 — окрашенный виит.
@,23 X 0,28 м)
528
Топливный бак мотора в виде канистры с быстросъемной крышкой удобен в
эксплуатации. На моторе „Нептун-23" можно использовать гребные винты от мо-
мотора „Москва-25", бензонасос от моторов „Вихрь", поршневые кольца от мотоцикла
„Ковровец" („Восход"), поршневые пальцы от мотороллера „Тула". Среди других
положительных качеств мотора можно отметить: удобство разборки и сборки при ре-
ремонте; взаимозаменяемость шестерен переднего и заднего хода; разъемную тягу ре-
реверса, позволяющую ремонтировать редуктор, не снимая двигателя; надежный редуктор
с подшипниками качения.
Пропульсивные качества мотора могут характеризовать результаты испытаний, про-
проведенных в опытовом бассейне ЦАГИ (рис. 19.14) с тремя гребными винтами.
Наиболее подходящими для сравнительно легких мотолодок со средней загрузкой
(например, „Казанка" с четырьмя людьми на борту) является гребной винт размерами
D х Н = 0,23 х 0,28 м, который поставляется с мотором „Нептун-23" как основной.
Оптимальная скорость мотолодки с этим винтом 30—34 км/ч. Второй штатный винт
0,24 х 0,30 м позволяет „Казанке" с одним водителем двигаться со скоростью до
40 км/ч, но на больших скоростях упор этого винта значительно уменьшается.
Винт с диаметром и шагом 0,220 м оказался наиболее эффективным для водоизме-
щающих или движущихся в переходном режиме тяжелых глиссирующих лодок со ско-
скоростью до 22 км/ч. Упор этого винта на швартовах на 230 Н, а при скорости 22 км/ч —
на 110 Н больше, чем у винта 0,226 х 0,250 м.
Мотор ,Дривет-22" имеет высокие удельные показатели: удельную массу 2,37 кг/кВт,
литровую мощность- 47 кВт/л, удельный расход горючего - 470 г/ (кВт -ч). Двигатель -
двухцилиндровый двухтактный с раздельными взаимозаменяемыми цилиндрами с трех-
канальной возвратно-петлевой продувкой и механизмом впуска с дисковыми золотни-
золотниками. Внешняя характеристика мотора представлена на рис. 19.15.
В моторе „Привет-22" примене-
применены игольчатый подшипник в верх- п с
ней головке шатуна и стандартные '
шариковые подшипники в корен-
коренных опорах коленчатого вала.
16B1,7)
15B0Л)
ft (IS)
13A7.7)-
12A6.3)
0.Щ371]
\
**>
s
"¦¦¦
.«»¦
s
\
***
4
•
Ни/юСМ)
35C,57)
(
33C.37)
32C.26) '
31C.16)
30A06)
29B.96)
Gj,s/c-(кг/ч)
2.0G,2)
1.9F.Sf)
ЩШ)
ЩE000)
66,1D000)
13000)
Pe, if H If re)
1,5A50)
1,0A00)
n Kfuni
"P
У
5?
I**
I4
,i
¦i
...
и
Jf
4
/
_J
f
s
L
s
/
*
>
y*
¦?
t
1
4*
¦•
X
A
у
и
i
=
У
f
-5
t^
V
k
1
J
la
2
i
10
20
30
0,6
0,5
¦0Л
¦0,3
¦иг
¦0,1
,о
5B,33 66.66 75 ШЗ 91,56п.с'Шмин)
C500) CiOOO) DS00) E000) E500/
Рис. 19.15. Внешняя характеристика
мотора „Привет-22"
v, км/ч
Рис. 19.16. Эффективный упор и пропульсив-
ный КПД трехлопастных/гребных винтов, иссле-
исследованных иа моторе „Привет-22".
1 — окрашенный штатный винт @,235 х 0,285 м) ;
2 — полированный штатный винт; 3 — полиро-
полированный винт @,23 х 0,18 м) ; 4, 5 - полиро-
полированные вииты @,25X0,25 м, Л/Л</ = 0,53;
0,25X0,23 м, /4/4^ = 0,53 соответственно)
529
Корпус редуктора — безразъмный с небольшим поперечным сечением, подводная часть
имеет малое гидродинамическое сопротивление.
В системе охлаждения использован бесконтактный вихревой насос, требующий ми-
минимального отбора мощности и позволяющий запускать мотор на берегу без опасения
повредить резиновую крыльчатку помпы. Мотор полностью реверсирован: имеются ход
вперед, назад и нейтраль.
Его существенным отличием от других отечественных моторов является левое
направление вращения гребного вала, что делает невозможным применение винтов от
других моторов.
Результаты испытаний мотора в опытовом бассейне, проведенных с пятью различ-
различными гребными винтами, представлены на рис. 19.16. Оптимальным гребным винтом
для лодок, развивающих скорость до 40 км/ч, можно считать трехлопастный с диамет-
диаметром и шагом до 0,25 м.
В качестве грузового винта при скоростях 25—30 км/ч можно рекомендовать винт
размерами 0,25 х 0,23 м, дающий больший эффективный упор, чем штатный винт
@,235 х 0,285 м), поставляемый с мотором. Испытания показали, что штатный винт 2
(см. рис. 19.16) не позволяет некоторым лодкам с полной нагрузкой выйти на глисси-
глиссирование. Установка винтов 4 и 5, обеспечивающих больший эффективный упор, превы-
превышающий максимальную величину сопротивления лодки на горбе, позволяет существен-
существенно повысить скорость при полной нагрузке. Испытания показали также, что оптималь-
оптимальный набор гребных винтов для мотора , Дривет-22" состоит из трех винтов одинакового
диаметра 0,25 м с шагом 0,23, 0,25 и 0,28 м соответственно для грузового, штатного и
скоростного винтов.
Моторы ,JBuxpb", ,?ихръ-М", „Вихръ-30"выполнены по одной конструктивной схе-
схеме, большинство их деталей и узлов унифицировано. Отличие моторов „Вихрь-ЗОР" и
„Вихрь-30" от мотора „Вихрь-М" заключается в увеличенном диаметре цилиндров, и,
как следствие этого, блоки цилиндров, блоки головок, глушители и другие имеют соот-
соответствующие конструктивные отличия. Моторы „Вихрь-30" и „Вихрь-ЗОР" отличаются
друг от друга только наличием системы электрозапуска у „Вихря-30" и ручного старте-
стартера у „Вихря-ЗОР".
Двигатель моторов „Вихрь" - двухцилиндровый двухтактный с кривошипно-
камерной дефлекторной („Вихрь") и возвратно-петлевой трехканальной („ВихрьЗО")
продувкой и впуском смеси в
Ни,кВт(/>.с)
'50,33
C500)
21C0)
№25,
П,7B0)
11Ы
/
Ч
/
>*
>
¦?
й
У
>
/
У"
[*•
к»
0*
*•*
j
9
.*"
66,66
(W00)
75
(№00)
03,33 п.
Eб00)
де,г/(кйт-с)
0,15К?H)
0,132C50)
,с~'(об/мин)
Рис. 19.17. Внешняя характеристика моторов.
1 - „Вихрь-30"; 2 - „Вихрь"; 3 — „Вихрь-М"
картер через золотниковое уст-
устройство. Внешняя характеристи-
характеристика моторов „Вихрь" дана на
рис. 19.17.
Для уменьшения шума вы-
выпуска все двигатели оборудова-
оборудованы отдельным глушителем, в ко-
который направляются отра-
отработавшие газы из выпускных
окон цилиндров. На моторе
„Вихрь-30" применена система
настроенного выхлопа, выпол-
выполненная в виде насадка, располо-
расположенного в дейдвудной трубе.
Реверсивный привод гребного
винта обеспечивает передний и
задний ход лодки, а также допу-
допускает работу моторов вхолостую.
Моторы оборудованы систе-
системой отбора электроэнергии
530
к источникам света и устройствам для подзарядки аккумулятора в процессе работы
двигателя. Моторы „Вихрь" и „Вихрь-М" до октября 1972 г. комплектовались магнето
типа МГ-101 или магдино МП01А с высоковольтными тнансформаторами ИЖ56сб39,
а затем магдино МВ-1 с высоковольтными трансформаторами ТЛМ. Системы можно за-
заменять одну иа другую, но только комплектно с маховиками соответствующей конст-
конструкции для первой: № 4.119-000 B.119-000), для второй - № 4.119-700. При замене
должен быть обеспечен соответствующий угол опережения зажигания. Электронная си-
система зажигания МВ-2, внедренная в серийное производство в 1982 г., позволила повы-
повысить надежность работы мотора, уменьшить шумность и расход топлива.
С 1975 г. моторы „Вихрь-М", „Вихрь-30" комплектуются редуктором новой конст-
конструкции с увеличенным моторесурсом, взаимозаменяемым в сборе с редуктором старой
конструкции. Моторы, выпускающиеся с конца 1981 г., снабжены модифицированным
карбюратором, оборудованным устройством, предотвращающим выливание топлива
в воду при подкачке перед запуском и откидывании мотора на стоянке.
До последнего времени моторы снабжались только одним окрашенным трехлопаст-
трехлопастным винтом (кривая 1 на рис. 19.18). Испытания мотора „Вихрь-М" показали, что для
скорости 36 км/ч этот винт тяжел и двигатель не добирает до номинальной частоты вра-
вращения 14 с, т. е. на прогулочных мотолодках с этим винтом не используется около
3,7 кВт.
Полировка поверхностей лопастей обеспечивает некоторое увеличение частоты вра-
вращения с одновременным ростом эффективной тяги — упора винта. Если уменьшить ди-
диаметр серийного (с полированными лопастями) винта с 0,24 до 0,22 м, то иа скорости
40 км/ч можно получить увеличение упора примерно на 25 %. Такой винт пригоден
и при установке двух моторов, когда скорость превышает 40 км/ч. Для мотора
„Вихрь-М" близким к оптимальному на глиссирующих мотолодках, максимальная ско-
скорость которых с обычной загрузкой не превышает 32 км/ч, является винт с шагом
0,24 м. Это касается таких мотолодок, как „Обь", .Днепр", „Казанка", „Прогресс"
с четырьмя людьми на борту. Для мотолодок, эксплуатируемых на скоростях, близких
к 40 км/ч, можно рекомендовать винт с шагом 0,27 м. На тяжелых лодках, рассчи-
рассчитанных на движение со скоростью
п,с~7(о5/мин) 20—25 км/ч, целесообразно использо-
использовать винты с еще меньшим шагом (Н =
= 0,21 м при /3 = 0,24 м), развивающие
больший эффективный упор.
В6,7
1,5
1,0
w
III
II
000)
000)
'¦C000
A
К
<*
г
¦4
Г
I.
\
П
J^
Л
>
3^
-1
,,
У
\
>
r^
,к5т(/\.с.)
0
10
¦20
JO v,km/4
Рис. 19.18. Эффективный упор Ре гребных
винтов на моторе „Вихрь-М".
1 — окрашенный серийный винт @,24 х 0,30 м) ;
2 — полированный серийный винт; 3 — серий-
серийный винт, полированный и обрезанный до
0 = 0,22 м; 4 — полированный винт @,24 х
х 0,24 м)
?г,г/т(/гг
2MSI
-2,2F)
1,95G)
Рис. 19.19. Внешняя характеристика моторов
„Москва-25" (кривая 1) и „Москва-30" (кри-
(кривая 2)
531
Моторы „Москва-25А" и „Москва-30" максимально унифицированы между собой:
различаются только блоки цилиндров, поршни, корпус распределителя и головки блока
с крышкой и прокладкой. Повышение мощности при том же рабочем объеме цилиндров
на моторе „Москва-30" получено за счет лучшей организации рабочего процесса — изме-
изменена форма дефлектора, расширен тракт всасывания, изменены фазы газораспреде-
газораспределения.
Двигатель моторов - двухцилиндровый двухтактный карбюраторный с кривошип-
но-камерной дефлекторной продувкой и впуском смеси в картер через автоматические
пластинчатые клапаны. Внешние характеристики моторов приведены на рис. 19.19.
Моторы оснащены устройством для откачивания воды из лодки. Они полностью
реверсированы: привод винта имеет ход вперед, назад и нейтраль. Рычаг управления ре-
реверсом сблокирован с ручкой румпеля, что исключает возможность включения реверса
на повышенных оборотах. Мотор имеет три гребных винта, позволяющих производить
эксплуатацию судна с рациональной загрузкой и получать максимальную скорость.
В торговую сеть поставлялось дистанционное управление газом-реверсом возвратно-
поступательного действия с проволочным сердечником в оболочке, специально приспо-
приспособленное для моторов типа,,Москва".
Мотор „Снеток" (ЭПЛ-2-45) предназначен для установки на мотолодки желательно
длиной не более 4 м и водоизмещением не более 300 кг (два пассажира и груз) с целью
обеспечения необходимой скорости лодки и маневренности. Питается он от автомобиль-
автомобильного 12-вольтного аккумулятора.
Мотор имеет два режима работы. С аккумулятором емкостью 72 А • ч на первом ре-
режиме мотор может работать 3,5—4,0 ч, на втором, экономичном, — 5,5—6,0 ч. Мощность,
потребляемая от аккумулятора, — 90 и 60Вт соответственно. Минимальная емкость для
питания мотора — 42 А • ч.
Конструктивно мотор выполнен следующим образом: электродвигатель в герметич-
герметичном корпусе прикреплен к вертикальной штанге, внутри которой проходит кабель пита-
питания от коробки управления. На штанге подвижно установлен вертлюг со струбциной,
которой мотор крепится к транцу лодки. Мотор может быть установлен и зафиксирован
на любой высоте; рекомендуемое заглубление 10—15 см ниже днища. Штанга может по-
поворачиваться на 360° и тем самым осуществляются маневрирование и реверс лодки.
Крепление вертлюга к струбцине также поворотное, мотор может быть откинут и за-
зафиксирован в горизонтальном положении, например для очистки винта от водорослей.
Масса мотора без источника питания — 6,5 кг.
19.3. Установка подвесного мотора на лодку
При установке мотора на лодку следует учесть два условия его эффективной рабо-
работы: заглубление антикавитационной плиты и угол наклона мотора. При нормальной
установке антикавитационная плита должна быть ниже днища на 5—15 мм. При мень-
меньшем заглублении возникает кавитация на гребном винте и нарушается работа системы
охлаждения. При слишком большом погружении винта теряется мощность двигателя
из-за увеличения противодавления воды на выхлопе, возрастает сопротивление подвод-
подводной части мотора. '
Оптимальная глубина погружения оси винта зависит от типа обврдов корпуса и угла
откидки мотора от транца; обычно она уточняется при доводочных испытаниях судна.
Средние значения высоты транца от днища в месте установки мотора: для „Вихря",
,Москвы-25" и „Москвы-30" - 390 мм; „Нептуна", „Привета-22" - 400; „Ветерка",
„Салюта" — 410 мм.
Кавитация гребного винта возникает также при наличии выступающего наружного
киля или (при установке двух моторов) совпадении продольного редана с осью мотора.
В этом случае необходимо срезать киль или редан под углом на длине примерно 500 мм
либо несколько сместить мотор от редана. >
532
Рис. 19.20. Схема установки двух подвес-
> ных моторов
Мотор должен быть установлен точно
по середине транца, иначе нарушается устой-
устойчивость движения, затрудняется управле-
управление. Два мотора на лодку следует устанав-
устанавливать так, чтобы гребные винты при работе
не мешали один другому, минималь-
минимальное расстояние между концами лопастей
винтов должно составлять около 0,1 SD
винта.
Расстояние между осями подвесных мо-
моторов (рис. 19.20) рекомендуется при-
принимать не менее 1,40 гребного винта (для
„Ветерка" _ 370 мм; „Нептуна", ,Дри-
вета-22", „Москвы-25", ,ДОосквы-30",
„Вихря" - 420 мм).
Разносить подвесные моторы шире чем на S00 мм нецелесообразно. На лодках со
значительной килеватостью днища, получающих заметный крен на циркуляции, близкое
к борту расположение мотора может оказаться причиной прорыва воздуха к винту и
вследствие этого работы мотора „в разнос", потери управляемости лодки.
Приведенные рекомендации по оптимальной глубине погружения оси винта относят-
относятся к установке мотора непосредственно на транце лодки, когда на работу винта опреде-
определенное влияние оказывает днище. Если мотор навешивается на выносном кронштейне,
условия обтекания подводной части мотора и работа винта иные. Может потребоваться
увеличение высоты верхней кромки подмоторной доски на IS—20 мм для уменьшения
брызгообразования или даже установка специального щитка, отражающего брызги,
вырывающиеся из-под транца, вниз.
Правильная установка угла наклона мотора относительно транца определяется поло-
положением антикавитационной плиты под углом атаки по отношению к встречному потоку
воды в пределах 0—2°. При слишком большом наклоне или чрезмерном поджатии мото-
мотора к транцу возникает дополнительная сила сопротивления движению, направленная на-
назад и уменьшающая полезный упор мотора. Правильность установки мотора можно про-
проверить с помощью линейки (или ровной рейки): ее прикладывают к антикавитационной
плите мотора, замеряют зазоры между рейкой и днищем у транца и в 1 м от транца в нос
(рис. 19.21). Разность этих замеров а = 10 -г 15 мм обеспечивает параллельность антика-
антикавитационной плиты днищу с учетом упругих деформаций амортизаторов подвески и
транца.
Угол наклона мотора уточняется при движении лодки с определенной загрузкой пу-
путем перестановки упора в подвеске (рис. 19.22). Для правильной установки мотора
Неправильно
Рис. 19.21. Проверка правильности расположения анти-
антикавитационной плиты относительно днища подки
(а =10*15 мм)
Рис. 19.22- Направление силы тяги гребного винта при
различном положении мотора на транце
533
можно использовать деревянные прокладки, которые крепятся к верхней кромке тран-
транца или снаружи его под нижние концы струбцин, если угол откидки мотора не удается
отрегулировать с помощью отверстий в подвеске.
Установка подвесного мотора на ряде судов со специальными обводами имеет свои
особенности. На лодках с обратной килеватостью днища типа „морские сани" для борь-
борьбы с поверхностной аэрацией применяют большее заглубление оси винта, поджимают
мотор к транцу настолько, чтобы ось винта была параллельной линии свода днища в ДП.
Используется также смещение оси подвесного мотора в сторону от ДП и создание не-
небольшого C—5°) крена лодки на один борт за счет смещения пассажиров и запаса горю-
горючего. При одновинтовой установке можно использовать клин, закрепленный на своде
туннеля перед гребным винтом, отводящий аэрированную среду к бортам (рис. 19.23).
Ширина такого клина на транце должна составлять примерно 1.2D гребного винта,
а высота его боковых граней должна выступать ниже уровня боковых килей на
10-12 мм.
Перед транцем, на который навешивается подвесной мотор, на лодках, за исключе-
исключением самых небольших, должна быть предусмотрена дополнительная переборка, позво-
позволяющая сохранить нормальную высоту надводного борта. Образующийся отсек, исполь-
используемый, как правило, для хранения запасов горючего в стандартных баках или канист-
канистрах, не является, однако, оптимальным решением, так как в него набирается вода, кото-
которую нужно удалять. Более рационально размещение мотора в подмоторной самоотлив-
самоотливной нише-рецессе, представляющей собой воднепроницаемый отсек со сливными шпига-
шпигатами в транце. Размеры ниши должны обеспечивать свободное откидывание мотора, по-
поворот его на 35° на каждый борт, удобство ручного запуска, особенно при нижнем рас-
расположении рукоятки запуска.
Установка подвесного мотора на кронштейне, смонтированном на транце, позволяет
увеличить полезную площадь лодки, однако делает моторы более уязвимыми при ма-
маневрировании в стесненных гаванях, менее удобными в обслуживании на плаву. Мотор
оказывается удаленным от кромки днища на транце, вследствие чего изменяется обте-
обтекание подводной части, увеличивается брызгообразование.
В некоторых случаях, когда подвесной мотор играет вспомогательную роль (напри-
(например, на парусной яхте или резервный мотор малой мощности на катере), применение
кронштейна неизбежно. Конструкция его должна быть достаточно жесткой и прочной,
чтобы выдержать удар мотором при наезде на мель. Подмоторная доска для возмож-
возможности регулировки угла установки мотора должна иметь наклон к вертикали 5—7°,
а расстояние от нее до транца должно быть достаточным для полного откидывания мо-
мотора. На яхтах, имеющих большую высоту транца, применяют разного рода кронштей-
кронштейны, позволяющие поднимать мотор из воды на уровень палубы. Размеры, указанные на
рис. 19.24, соответствуют креплению мотора „Ветерок". Размеру! выбирается исходя из
положения верхней кромки подмоторной доски на 440 мм выше КВЛ.
Определенные преимущества дает установка подвесного мотора в колодце, располо-
расположенном внутри корпуса (защищенность от повреждений при швартовке, доступность
для ремонта на плаву). Размеры колодца должны позволить мотору свободно откиды-
откидываться.
При установке мотора на лодку рекомендуется застраховать его от соскальзывания
с транца. Страховка производится с помощью троса, привязываемого одним концом к
задней ручке мотора или охватывающего дейдвуд в верхней части, а другим концом —
Рис. 19.23. Клин, отводящий аэриро-
аэрированную воду от лопастей гребного
винта на мотолодке с обводами „мор-
„морские сани"
534
Рис. 19.24. Общий вид и принцип
работы кронштейн:)
к рыму или утке на корме лодки. Может быть применена металлическая или деревянная
планка, .прикрепленная к транцу изнутри выше шайб струбцин.
В процессе эксплуатации подвесного лодочного мотора необходимо выполнять сле-
следующие правила, обеспечивающие его надежную и долговечную работу:
1) не давать мотору полной нагрузки до окончания обкатки;
2) не допускать работу мотора в водоемах глубиной менее 0,5 м („Сапют-М", „Ветерок") и
0,8 м („Привет", „Нептун", „Москва-20", „Москва-30", ,3ихрь");
3) после запуска до выхода на полный газ в течение 2-3 мин производить прогрев мотора на
малом газе:
4) после запуска и периодически во время работы проверял выход воды из контрольного от-
отверстия системы охлаждения;
5) остановку мотора производить после предварительного охлаждения его на малых оборотах
в течение 2-3 мин;
6) поворот рукоятки румпеля как на увеличение, так и на уменьшение оборотов осуществлять
плавно;
7) переключение рукоятки включения гребного винта выполнять на минимально устойчивых
оборотах;
8) проворачивать коленчатый вал двигателя только в направлении его вращения (по часовой
стрелке, если смотреть сверху) при помощи пускового механизма или за маховик^ проворачивать
двигатель за гребной винт не следует во избежание заворачивания лопастей крыльчатки водяного
насоса;
9) при эксплуатации мотора в морской воде после окончания работы поместить его в бак с
пресной водой, запустить и дать проработать 2-3 мин, затем обмыть наружную поверхность мотора
пресной водой и протереть насухо;
10) не оставлять неработающий мотор в воде на продолжительное время;
11) после эксплуатации в холодную погоду слить воду из системы охлаждения, вынуть мотор
из воды и медленно прокрутить пусковым механизмом 6-8 раз, чтобы вода вышла из двигателя;
12) не прокручивать мотор при незамкнутых на массу высоковольтных проводах во избежание
пробоя изоляции обмоток трансформаторов;
13) не допускать работу моторана больших оборотах холостого хода.
Рекомендации по проведению регламентных работ по уходу и смазке подвесных
лодочных моторов и по определению возможных неисправностей (рис. 19.25):
Перед выездом;
1) произвести наружный осмотр мотора, удалить масло, грязь с наружных поверхностей;
2) проверить электропроводку, убедиться в хорошем состоянии органов управления;
3) проверить затяжку зажимных винтов крепления подвески к транцу.
Через 25 ч работы:
1) проверить затяжку наружных болтов, винтов и гаек;
535
Мотор не запускается
X
X
X
X
X
X
X
X
X
X
X
X
Мотор запускается, но вскоре глохнет
X
X
X
X
X
X
X
X
X
X
X
X
Лотор работает с перебоями, неравномерно
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
Мотор перегревается
X
X
X
X
X
X
X
X
X
Мотор
X
СТуЧИ!
г
1еустойчивый холостой ход
X
X
X
X
X
X
X
X
X
X
X
[исло оборотов мотора выше нормального
X
X
X
X
Число
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
оборотов мотора ниже нормального
Скорость ниже нормальной
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
Топливный бак не подсоединен
Топливный бак пуст
ie отвернут винт в крышке топливного бака
Топливопровод засорен
Топливный фильтр в бензобаке или бензонасосе засорен
Карбюратор засорен или разрегулирован
4еподходяший сорт масла в тошшвиой смеси
Неподходящий сорт бензина в топливной смесн
Недостаточно масла в топливной смесн
Слишком много масла в топливной смеси
Карбюратор переполнен (пересое топлива1)
Повреждены впускные пластинчатые югапаны или золотник
Утечка воздуха в двигателе (негерметичность i
Попадание воды в цилиндр или топливную смесь
Неисправна свеча зажигания
Неподходящая свеча или неправильный зазор в свече
Нет искры (пробит конденсатор, оборваны систе-
системы зажигания, пробита обмен ка катушки зажигания;
Слабая или с перебоями искра (плохие контакты в системе
зажигания, неверные зазоры)
Неправильное подсоединение проводов зажигания
Разрегулированы (изношены) контакты прерывателей
магнето
Засорена система охлаждения
Не работает водяная помпа
Слишком высокий транец
Слишком низкий транец
Велик угол опережения зажигания
Мал угол опережения зажигания
Неподходящий гребной вннт
Кавитация, срыв потока с гребного винта
Поврежден гребной винт
Рис. 19.25. Возможные неисправности подвесного мотора и их причины
536
2) проверить наличие масла и отсутствие воды в редукторе, при необходимости заменить
смазку;
3) проверить зазор и состояние свечей зажигания;
4) проверить и при необходимости отрегулировать о.бороты холостого хода.
Через 50 ч:
1) промыть отстойник и сетчатый фильтр бензонасоса, поплавковую камеру карбюратора;
2) смазать любой машинной смазкой шестерни и оси румпеля, резьбу зажимных винтов подвес-
подвески, подшипники и пружину пускового механизма;
3) смазать 2-3 каплями турбинного масла „Л" или другого подобного масла смазочное устрой-
устройство (войлочный фитиль) и оси прерывателей магнето;
4) проверить зазор между контактами прерывателей магнето и при необходимости зачистить
контакты;
5.) проверить регулировку карбюратора;
6) проверить затяжку гайки крепления маховика.
Через100ч:
1) смазать любой машинной смазкой посадочное место основания магнето, ось подвески, кула-
кулачок зажигания;
2)-очистить и промыть топливный бак;
3) очистить от нагара цилиндры, головки цилиндров, поршни, поршневые кольца, выхлопные
патрубки.
Вконцекаждогосезона:
1) проверить компрессию двигателя;
2) законсервировать мотор.
Общие рекомендации:
1) редуктор заполняется трансмиссионным маслом марок ТАД-17И (ТУ 38.101.39—72), ¦
ТАп-lSB (ТУ 38.101.176-74) или другим автомобильным трансмиссионным летним маслом. Менять
масло рекомендуется после обкатки мотора и не реже одного раза в месяц при его эксплуатации.
При замене масла в редукторе его необходимо промыть бензином;
2) гайку маховика рекомендуется затягивать ударами молотка по рукоятке ключа;
3) перед снятием нагара с деталей рекомендуется отмачивать их в керосине. Если нагар снимают
без разборки двигателя, то разогретый мотор нужно установить Свечными отверстиями вверх и по-
поставить поршни в такое положение, чтобы выхлопные окна обоих цилиндров были закрыты. Через
отверстия в каждый цилиндр заливают смесь, состоящую из двух частей ацетона, одной части кероси-
керосина и одной части масла для двигателя. Когда прекратится вспенивание смеси, ввертывают свечи и ос-
оставляют мотор в таком положении на 8—10 ч, затем смесь спивают, запускают мотор, дают ему пора-
поработать несколько минут.
19.4. Приборы для контроля за работой подвесного лодочного мотора
Тахометр и спидометр (ТС) для мотолодки позволяют измерять частоту вращения
в диапазоне 500—6000 об/мин с точностью ± 3 %, скорость лодки в пределах от 20 до
67,5 км/ч. Работа спидометра основана на измерении гидродинамического давления
встречного потока воды, набегающего на датчик — капиллярную трубку. Указателем
скорости" служит манометр, шкала которого отградуирована в единицах скорости.
Тахометр измеряет среднее значение импульсного тока, которое пропорционально
частоте вращения коленчатого вала двигателя. Шкала миллиамперметра М-4200 градуи-
градуирована в оборотах в минуту. Размеры приборного щитка 90 х 220 х 70 мм. Масса без упа-
упаковки 2 кг. Оба прибора смонтированы на пластмассовом щитке, который устанавливает-
устанавливается на панели мотолодки. Они позволяют оперативно, без проведения трудоемких испыта-
испытаний, с достаточной точностью подобрать элементы гребного винта, соответствующие со-
сопротивлению лодки без превышения максимально допустимой частоты вращения колен-
коленчатого вала двигателя. С их помощью можно оценить эффективность регулировок и усо-
усовершенствований как лодочного мотора, так и мотолодки. В процессе эксплуатации
прибор позволяет следить за тем, чтобы мощность мотора была постоянной, находить
оптимальные глубины погружения и угол установки подвесного мотора и т. п.
Прибор ДЛМ-1 позволяет контролировать частоту вращения коленчатого вала в пре-
пределах 100—6000 об/мин и температуру двигателя в диапазоне 30—100 °С. Контроль ча-
частоты вращения основан на измерении частоты импульсов, поступающих от прерывате-
прерывателей системы зажигания. Температура контролируется измерительным мостом, в одном
537
из плеч которого включено термосопротивление, в монтированное в болт М8, установлен-
установленный в теле двигателя и являющийся термодатчиком. Источником питания могут слу-
служить переменный ток напряжением 15-30 В, получаемый от генераторных катушек мо-
мотора, или постоянный ток напряжением 6 либо 12 В — от бортовой сети мотолодки.
Возможно -также использование четырех элементов („373" и „Марс"), размещаемых в
специальной кассете. Их емкости хватает на 50 ч непрерывной работы прибора.
На рис. 19.26 дана схема тахометра, который может быть применен на подвесном
моторе, оборудованном магнето МН-1 (МВ-1) с генераторными катушками системы
электроосвещения. Работа схемы основана на измерении среднего значения проходяще-
проходящего через конденсатор тока /ср, который определяется как /ср = CUf. Емкость конденса-
конденсатора С и напряжение U— величины постоянные, поэтому величина среднего тока являет-
является функцией только частоты /.
Благодаря низкому выбранному уровню стабилизации напряжения и схеме парамет-
параметрического стабилизатора с применением ламп накаливания работа тахометра не зависит
от формы и амплитуды напряжения на генераторных катушках. Шкала тахометра —
микроамперметра градуирована от 0 до 6000 об/мин (верхнее значение соответствует
пределу 30 мкА). При постройке на вход тахометра любого стандартного генератора
звуковой частоты подается напряжение 9—18 В частотой 166,6 Гц. При помощи потенци-
потенциометра R1 стрелку микроамперметра Р устанавливают на отметку 500 об/мин (83 с"').
Подавая на вход тахометра напряжение с другими значениями / шкалу микроампер-
микроамперметра градуируют в частотах вращения:
0
0
33,3
16,6
66,6
33,3
100
50
133,3
66,6
166,6
83,3
200
100
Для предварительной настройки приемлем вариант подачи переменного напряжения
9-18 В частотой 50 Гц (через трансформатор от городской сети). При зтрм стрелку мик-
микроамперметра устанавливают на 1500 об/мин. Однако этот вариант менее предпочтите-
предпочтителен, так как не позволяет, достичь высокой точности измерения.
При использовании элементов, указанных на схеме рис. 19.25, обеспечивается хоро-
хорошая температурная стабильность. Конструктивно все элементы схемы размещаются на
печатной плате, которая устанавливается на задней крышке микроамперметра. При раз-
размещении печатной платы в корпусе микроамперметра можно использовать для подсвет-
подсветки шкалы в ночное время свечение лампочек.
HU
К ген
HL2
2JV/
\'jV2
vj-vs
Рис. 19.26. Принципиальная схема электронного
тахометра.
VI, V2 - стабилитроны KCI39A; K?t. . .,К6 - диод-
диодные матрицы КД906А; R1 - подстроенное сопро-
сопротивление СП5-23 C кОм) ; С1 -конденсатор БМ-2
@,033 мкФ, ISO В) ; Р — микроамперметр М42005
C0 мкА); HL1, HL2 - лампы накаливания
НСМ-9-60-2 (9 В, 50 мА) или HCM-10-55-2
A0 В, 50 мА)
Рис. 19.27. Установка датчика спидо-
спидометра на мотолодке „Нептун-23".
/ — трубка датчика (медь или латунь) ;
2 — резиновая или полиэтиленовая труб-
трубка; 3 — винт М2 х 8; 4 — пружинная
шайба; 5 — планка 1,5 х 5 х 15 мм; 6 —
бобышка
538
Спидометр состоит из датчика — металлической капиллярной трубки с внутренним
диаметром 1—2 мм, направленной отверстием навстречу движению лодки, и индика-
индикатора- манометра низкого давления на 1,0—1,5 кгс/см2, соединенных между собой по-
полиэтиленовой или резиновой трубкой с внутренним диаметром 2—3 мм. Датчик может
быть закреплен как на транце лодки, так и на подводной части мотора. Второй способ
предпочтительнее, так как водозаборник оказывается лучше защищенным от поврежде-
повреждений.
В простейшем виде датчик представляет собой изогнутую медную или латунную
трубку (рис. 19.27). Для ее крепления на моторе „Нептун-23" в двух брызгоотражаю-
щих пластинах дейдвуда сверлят соосно два отверстия диаметром 5 мм. Трубка крепит-
крепится фиксатором, который размещается между брызгоотбойными пластинами и наклад-
накладной планкой и предотвращает осевое и угловое смещение датчика относительно дейдвуда.
Ориентировочно скорость v можно определить но зависимости v = 50,4л/Р~кы/ч,
где Р — показания манометра, кгс/см2:
р.
V ,
кгс/см2...
км/ч...
0,05
11,3
0,1
15,9
0,2
22,5
0,3
27.6
0,4
31,9
0,5
35.6
0.6
39.0
0.7
41.2
0,8
45.1
0.9
47,8
1.0
50,4
Однако градуировку шкалы манометра в км/ч лучше произвести на мерном участке
длиной 200-500 м, проходя его с разной скоростью, так как приведенная таблица не
учитывает потери давления от влияния корпуса мотолодки (попутный ноток), непа-
непараллельность датчика набегающему потоку и-т. п.
19.5. Дооборудование подвесных лодочных моторов
Система зажигания и электрооборудования. Причиной отказа системы зажигания
может быть попадание воды на электрооборудование, особенно на его высоковольтную
часть. 'Очистка всех контактов бензином и защита оголенных деталей консистентной
смазкой типа ЦИАТИМ-201 или техническим вазелином существенно снижают вероят-
вероятность отказа электросистемы.
Пленка грязи на поверхности деталей и проводников в высоковольтных цепях си-
системы зажигания способствует появлению токов утечки. Высоковольтный провод необ-
необходимо отсоединить от трансформатора, снять с его концов изоляцию на длине 3 мм и
жилки загнуть веером по торцу изоляции. Гнезда для провода в трансформаторе и нако-
наконечники свечи заполняются смазкой, в них вставляется провод, излишки масла уда-
удаляются.
Причиной исчезновения искры на свече может быть попадание воды под экранирую-
экранирующий наконечник свечи, вследствие чего высокое напряжение замыкается на массу.
Наконечник должен быть всегда чистым и защищенным смазкой. При наличии повреж-
повреждений внутренней поверхности колпачка (царапин, выбоин), способствующих проска-
киванию искры (что можно обнаружить по наличию нагара), колпачок следует заменить.'
Для проверки работы свечей зажигания, а также во избежание пробоя катушки за-
зажигания при продувке двигателя рекомендуется изготовить держатель для свечей. Он
может быть выполнен в виде металлической пластины с резьбовыми отверстиями под
свечи. Толщина пластины и место ее крепления выбираются так, чтобы проскакивание
искры было хорошо заметно при солнечном освещении. Образец несложной конструк-
конструкции держателя, изготовленного из пружинной 2-миллиметровой проволоки, представлен
на рис. 19.28. Он крепится на средней шпильке головки цилиндров близ бензонасоса и
закрепляется гайкой (размеры даны применительно к мотору „Ветерок"). В кольца ди-
диаметром 14 мм, которые, если нажать на конец проволоки, легко разжимаются, встав-
вставляются свечи. В держателе можно постоянно хранить запасные свечи.
При выходе из строя трансформатора магнето МЛ-10-2с, а также с целью повыше-
повышения надежности системы зажигания и увеличения мощности искры на моторах „Ветерок"
539
Рис. 19.28. Держатель для свечей.
1 — хомутик; 2 — обжимка из жести
Рис. 19.29. Схема подключения вы-
выносных высоковольтных трансфор-
трансформаторов к магнето МЛ-10-2с мото-
моторов „Ветерок" и „Москва"
выпуска до 1979 г., „Москва" и „Стрела" можно заменить штатный трансформатор,
установленный на основании магнето, на выносные индукционные катушки типа ТЛМ
от моторов „Вихрь", „Нептун", „Привет-22" или на мотоциклетный трансформатор
типа БЗОО (используется также на моторах „Ветерок-Э"). На сердечниках магнето
остаются низковольтные обмотки, выполненные проводом ПЭЛ диаметром 0,57 мм
с числом витков 180 (рис. 19.29).
На моторах „Ветерок-8Э" и „Ветерок-12Э" во избежание выхода из строя элек-
электронной системы зажигания подключение кнопки „Стоп" необходимо выполнять по
прилагаемой схеме (рис. 19.30). В качестве кнопки „Стоп" используют кнопку лю-
любого типа, имеющую две группы на замыкание, или тумблер с двумя группами на
переключение.
Для предохранения свечи зажигания нижнего цилиндра мотора „Нептун-23" от
забрызгивания водой можно сделать экран в виде пластинки из линолеума, закреп-
закрепленной винтом М4х 15 к задней части поддона (рис. 19.31).
Система питания. Простой способ очистки бензина от металлических примесей —
поместить кусочек магнита в отстойнике бензонасоса. Очистка магнита производится
одновременно со спуском отстоя (рис. 19.32). ,
Рис. 19.30. Подклю-
Подключение кнопки
„Стоп" к электрон-
электронному магдино
МБЭ-1 лодочных мо-
моторов „Ветерок-8Э"
и „Ветерок-12Э".
/ — корпус мотора;
2 — кнопка „Стоп"
Рис. 19-31. Экран для предохранения
свечи нижнего цилиндра мотора „Неп-
„Нептун-23" от забрызгивания.
1 — отверстие для слива воды; 2 —
нижняя гайка головки блока; 3 —
поддон;' 4 — экран из линолеума; 5 —
замок капота
540
Чтобы карбюратор мотора ,,Ветерок" не обледе-
обледеневал при низких температурах, рекомендуется за-
закрыть отверстия в нижнем кожухе и максимально
уплотнить места его" соединения с верхним кожу-
кожухом и картером. Кроме того, можно подвести к кар-
карбюратору часть горячих выхлопных газов. Для это-
этого в крышке выхлопа следует просверлить отвер-
стие под резьбу М12 для крепления отводной труб- ^ 19ж Мапщт в отстойнике
ки. Трубку ввинтить в это отверстие, дополни- топливного насоса,
тельно крепление уплотнить пркладками или под- ;_отстойник. 2-магнит; 3-
ЖИМНЫМИ ГаЙКаМИ, Затем СОГНуТЬ Трубку И ПОД- сливной патрубок
вести ее конец к входному отверстию карбюратора.
Для устойчивой работы подвесного мотора на малых оборотах и легкого его за-
запуска важно, чтобы уровень топлива в. поплавковой камере карбюратора был опти-
оптимальным. Для контроля уровня может быть применено устройство, состоящее из
резинового шланга со стеклянной трубкой, снабженного штуцером, который в дон-
донной части поплавковой камеры ввинчивается на место пробки.
Простой способ улучшения фильтрации бензина в бензонасосе моторов ,$ихрь" —
углубить на 3 мм проточку диаметром 28 мм в корпусе бензонасоса. Площадь фильт-
фильтрации увеличивается без изготовления новых деталей.
Отдельные детали. Шум подвесного лодочного мотора можно уменьшить путем
улучшения герметизации кожухов за счет устранения зазоров между нижним кожу-
кожухом и двигателем („Ветерок"), уплотнения стыков, заделки отверстий, а также
оклеиванием внутренней поверхности верхнего кожуха шумоизоляционным мате-
материалом (лучше всего поролоном толщиной 5—10 мм). Чтобы снизить вибрацию, ко-
которая от мотора передается на лодку и является еще одним источником шума, по-
полезно поставить на транце в месте крепления струбцин мотора резиновую про-
прокладку.
Золотниковые шайбы на моторе ,.Вихрь" имеют два отверстия, служащие для
фиксации при надевании шайб на коленчатый вал. При работе двигателя, когда поршень
движется к НМТ (в картере повышается давление), а большое отверстие находится
напротив впускного канала, через это отверстие часть смеси из картера просачива-
просачивается наружу— к карбюратору. Если изготовить шайбы с несквозными фиксатора-
фиксаторами, то наполнение картера, а следовательно, и цилиндров горючей смесью улучшится
(рис. 19.33).
Крепление румпеля к поддону или плите управления на большинстве мо-
моторов осуществляется посредством двух полуосей с пружинными шайбами. Полу-
Полуоси не имеют жесткого крепления, поэтому обычно после 3—5 лет эксплуата-
эксплуатации увеличивается люфт в креплении румпеля и нарушается зацепление шесте-
шестерен передачи управления дроссельной заслонкой карбюратора. Если изготовить
два кронштейна с приваренными к ним новыми полуосями, расточить отвер-
отверстия под полуоси до диаметра 14 мм и прикрепить кронштейны к поддону болтами
М6х25, то такая конструкция будет надежно работать в течение многих лет
(рис. 19.34).
С помощью дополнительного упора, устанавливаемого в подвеске мотора, можно
приспособить мотор для эксплуатации на мелководных участках. Дополнительный
упор для моторов „Ветерок" представляет собой литую алюминиевую пластину с при-
приклепанной к ней плоской пружиной. Он крепится к штатному упору подвески мото-
мотора и при ходе на глубокой воде устаналивается в нерабочее вертикальное положение.
При необходимости пластина поднимается до упора в площадку кронштейна под-
подвески откинутого мотора и надежно фиксирует его в откинутом положении
(рис. 19.35). Движение лодки возможно на малцх оборотах при глубине воды
20-25 см.
541
06,2
Рис. 19.33. Герметизация отверстия
в jojioiiuikoboH шайбе.
/ — золотниковая шайба; _? - колен-
коленчатый нал
c. 19.34. Узел крепления румпеля к поддону.
1 - румпель; 2 - полуось: 3 - кронштейн;
4 — поддон
Упор В нерабочем
состоянии
Рис. 19.35. Установка упора для прохождения мелководья на моторе
„Ветерок"
6,5
J.
I
„ 4
...
7 .
100
i
to
\
Рис. 19.36. Ограничительповорота кронштейнов подвески.
/ - передний ручка мотора; 2 — пластина крепления мотора к подвеске;
3 - планка-ограничитель (дюралюминий 4 — 5 мм) : 4 — винт Мб с гайкой-
барашком
542
Свободно проворачивающиеся кронштейны мотора ,$ихрь" затрудняют установку
мотора на транец. Применив ограничитель поворота (рис. 19.36), можно зафиксировать
их положение. Приспособление состоит из планки с продольным пазом, винта Мб с по-
потайной головкой, вворачиваемого с обратной стороны в планку кронштейна, и гайкой-
барашком. Для фиксирования кронштейна планка поднимается вверх до входа широ-
широкой части в переднюю ручку и зажимается гайкой.
ПРИЛОЖЕНИЕ
НАВИГАЦИОННОЕ ОБОРУДОВАНИЕ МАЛЫХ СУДОВ
1. Общие определения
1С навигационному оборудованию малого судна относятся источники электропитания, навига-
навигационные приборы, метеоприборы, средства связи и сигнализации, спасательные средства.
Состав навигационного оборудования определяется типом судна (табл. П. 1), его автоном-
Таблица П.1. Номенклатура навигационного оборудования
Наименование
Источник электропитания
Компас
Лаг, эхолот, лот
Радиопеленгатор
Спутниковая навигационная аппаратура
Секстан
Измеритель времени
Ми кро кал ькул ято р
Прокладочный инструмент
Карты, книги, пособия для плавания
Кренометр
Гидрометсоириборы
Ходовые и якорные огни
Фонари, светосигнальные устройства
Радиолокационный отражатель
Звуковые сигнальные средства
Пиротехнические средства
Спасательные средства '
Штормовое страховочное снаряжение
Маркерная веха
Аварийный радиобуй
Водоотливные и противопожарные средства
Морская
крейсер-
крейсерская яхта
+ '
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Катер
+
+
+
+
+
. +
+
+
+
+
+
+
+
+
+
+ •
+
малых судов
Мото-
Мотолодка
+
+
+
+
+
+
+
+
Шлюпка
+
+
+
+
+
+
+
+
+
ностью и районами плавания. Такие суда, как морские яхты, для обеспечения навигационной
безопасности плавания должны иметь оборудование, позволяющее плавать в любых гидрометео-
навигационных условиях, вести навигационную прокладку, определять место судна и расходиться
со встречными судами.
2. Источники электропитания
На малых судах, как правило, в качестве источников электроэнергии используют 6- и 12-вольт-
12-вольтные аккумуляторные батареи, которые обеспечивают безопасность, экономичность и возможность
непосредственного подключения переносной электроосветительной, навигационной, радиоэлектрон-
радиоэлектронной и измерительной аппаратуры массового производства. Иногда для получения напряжения 12 В
применяют пару одинаковых б-вольтных последовательно включенных батарей. В зависимости
от условий эксплуатации на малых судах применяют различные аккумуляторы (табл. П. 2). Акку-
Аккумуляторы на парусных судах должны обладать большой емкостью, необходимой для обеспечения
работы навигационных огней, приборов и минимального освещения кают в условиях длительного
плавания. На яхтах преимущественно используются 12-вольтные щелочные (кадмиево-ннкелевые
и железоникелевые) аккумуляторы. Для моторных катеров, где имеется возможность подзаряжать
аккумулятор от генератора на ходу, требования к емкости батарей ниже.
Для расчета аккумуляторной установки производят суммарную оценку расхода электроэнер-
электроэнергии всеми потребителями с учетом их мощности и длительности использования в течение суток
(табл. П. 3). Энергия аккумуляторной установки Аа оценивается произведением емкости ее эле-
элементов в ампер-часах (Q=H) на напряжение всей батареи U в вольтах: Аа = С//Г • 3600 Дж.
544
Таблица П.2.
Тип аккумулятора
Кислотные:
6СТ-45
6СТ-55ЭР
бСт-82 •
6СТК-135
6ТСТ-182ЭМС
ЗСТ-65ПМ
Щелочные:
2ФНК10
5НК13К
10НК28Кт
5НК55К
I0HK55K
10НК80КТ
5HKI25K
Герметичные:
ЮЦНК-0,45
10КГН-3.5Д
Серебряно-цинковь
СЦ-120
8СЦ-45
Основные характеристики аккумуляторов, применяемых на малых судах
Напря-
Напряжение,
В
_
_
12,6
_
-
6,3
2,5
6,25
12,5
6,25
12,5
12,5
6,25
12,5
12,5
е:
1,5
12
Ем-
Емкость,
А ч
45
55
82
135
182
65
10
13
28
55
55
80
125
0,45
3,5
130
50
Ток, А
разряда
^н/Лпах
2,25/135
2,75/255
4,2/246
12,2/396
9,1/546
3,3/195
2,5/-
1,25/13
2,75/28
5,65/55
5,65/55
7,5/80
12,5/125
0,045/-
0,1/-
120/650
45/200
заря-
заряда
1 ¦ '' i " -
4,5
5,5
8,2
14
19
6,5
3,3
3,3
7
14
14
20
31
0,045
0,33
12
4
Габаритные
размеры, мм
240x179x222
261x173x223
391x186x237
552x292x262
552x282x243
175x178x237
75x92x131
151x92x131
521x165x257
375x165x257
717x189x257
655x189x393
513x189x393
35x105x40
78x175x99
71x55x237
200x110x160
Масса,
кг
20
21,5
32,5
68
70
14,2
1,5
3,2
20,6
16,8
32,6
51,3
39,3
0,3
2,5
1,9
6,5
Чис-
Число
ба-
банок
—
-
6
_
-
3
2
5
10
5
10
10
5
10
10
1
8
Объем
электро-
электролита, л
3,2
3,8
6,0
8,5
11,0
2,2
0,25
_
2,7
2,25
4,5
7,5
6,3
—
-
_
-
Суммарный расход энергии всеми потребителями не должен превышать полной энергии, на-
накопленной аккумуляторной установкой. Качество аккумуляторов оценивается коэффициентами,
характеризующими отдачу энергии или заряда.
Щелочные аккумуляторы. Щелочные кадмиево-никелевые и железоникелевые аккумуляторы об-
обладают большой прочностью, высокой надежностью в эксплуатации и неприхотливостью в уходе,нечув-
ствительностью к перезарядкам, недозарядкам и продолжительному нахождению в разряженном со-
состоянии. Они отличаются длительным сроком службы A0-12 лет) и поэтому очень удобны для работы
на малых судах, где не требуются импульсные токовые нагрузки при стартерных и других режимах.
Таблица П.З. Энергопотребление на яхте
Потребители энергии
Отличительные:
правый
левый
Кормовой
Толовый (при работе двигате-
двигателя на ходу)
Гип лампы
Нар
А12-21
А12-21
А12-21
Мачтовые (на ходу под парусами):
красный
зеленый
Клотиковый якорный
Фара салинговая
Камбуз
Салон
Стол штурмана
Форлик
Кормовой отсек
Компас
Эхолот
Лаг
Радиоприемник
Анемометр
Стартер двигателя
А12-6
А12-6
А12-6
А12-6
Вн
А12-6
А12-21
А12-6
А12-6
А12-6
МН26-35
-
—
-
—
—
Мощность,
Вт
у ж н ы е о
19
19
19
7,5
7,5
7,5
7,5
утренние
7,5
19
7,5
7,5
7,5
Ток, А
гни
1,52
1,52
1,52
0,56
0,56
0,56
0,56
огни
0,56
1,52
0,56
0,56
0,56
Приборы
1
-
—
-
—
—
Примечание. При емкости аккумулятора 125 А
ния в течение примерно S сут без подзарядки.
0,08
0,15
0,15
0,1
ОД
150
Время рабо-
работы в сутки,ч
2
2
2
I
1
6
0,5
Итого: '
0,5
1
4
0,2
0,2
Итого:
4
1
18
8
4
Итого:
3.0,15
Всего:
I
ч обеспечивается питание
Электроем-
Электроемкость, А.ч
3,04
3,04
3,04
0,56
0,56
3,36
0,28
15,4
0,28
1,52
2,24
0,11
0,11
4,26
0,32
0,15
2,7
0,8
0,4
. 4,37
0,05
24,09
электрооборудова-
18 Зак. 738
545
Номинальный режим разрядки щелочных аккумуляторов - восьмичасовой. При разрядке
необходимо следить за тем, чтобы температура электролита не поднималась выше 40° С» При но-
номинальной разрядке следует прекращать разряд при снижении напряжения до 1 В на элемент, а при
5 -7-часовой и 1-часовой разрядках - соответственно до 0,8 н 0,5 В.
Электролитом в щелочных аккумуляторах служит раствор химически чистого едкого кали
в дистиллированной воде. Для заполнения новых или хранившихся в сухом виде бывших в упо-
употреблении аккумуляторов рекомендуется применять раствор плотностью 1,19-1,21 г/см3 при
температуре 15° С.
Для приготовления электролита необходимое количество едкого кали стальными щипцами
или пинцетом кладут в чистый стальной, чугунный или глиняный сосуд и запивают дистиллирован-
дистиллированной водой, масса которой должка быть в три раза больше массы едкого кали. Стеклянной или
стальной папочкой размешивают жидкость до полного растворения едкого кали, раствор при этом
нагревается. После охлаждения раствора до 16-20° С его запивают в аккумулятор. Плотность
электролита регулируют добавлением едкого кали или дистиллированной воды. При запивании
раствора в аккумуляторы пользуются чистой воронкой. После приготовления электролита банку
с едким кали необходимо запаять.
Электролит в аккумуляторы запивают с таким расчетом, чтобы уровень его после двухчасо-
двухчасовой пропитки был выше пластин на 5-12 мм. После того как установлен нормальный уровень
электролита, аккумуляторы включают на зарядку.1 Ее производят в две ступени продолжитель-
продолжительностью по 6 ч: на первой - током в четыре раза менее емкости самого аккумулятора (нормальным
током), на второй — током, составляющим восьмую часть емкости аккумулятора. Разряд акку-
аккумуляторов следует производить током второй ступени в течение 4 ч. В указанном режиме произво-
производят два-три цикла, после чего аккумуляторы можно эксплуатировать.
Температура электролита при нормальной зарядке не должна превышать 30° С. При темпе-
температуре ниже -10° С (до -30° С) зарядку аккумуляторов производят нормальной силой тока
в течение 7 ч. Окончание зарядки определяется по напряжению A,9-2,0 В на элемент) и по уста-
установившейся плотности электролита.
Один раз в месяц аккумуляторы заряжают по описанному выше режиму, а раз в сезон меняют
в них электролит. Для замены электролита батарею разряжают нормальным током до напряжения
1 В на элемент, промывают дистиллированной водой и после высыхания снова запивают электро-
электролитом. Рекомендуется не реже одного раза в год проводить измерение электрической емкости
каждого аккумулятора в батарее. Элементы, отдающие менее 80% номинальной емкости, подлежат
замене.
При переводе на длительное хранение (свыше одного года) аккумулятор разряжают до 1 В
током нормального восьмичасового разряда, выливают электролит и, не промывая, плотно закры-
закрывают крышкой. Периодически бездействующие аккумуляторы можно хранить с электролитом
до 1 года в разряженном или полузаряженном состоянии. Заводы-изготовители выпускают аккуму-
аккумуляторы готовыми для хранения. Хранить аккумуляторы следует в сухом вентилируемом помещении
при температуре 15—25° С. При вводе в эксплуатацию аккумуляторов после хранения с электро-
электролитом до одного года замену электролита не производят; при более длительном хранении электро-
электролит необходимо заменить.
Кислотные аккумуляторы. По сравнению со щелочными кислотные аккумуляторы имеют
более высокий КПД, меньшее внутреннее сопротивление, большую кратность допустимого разряд-
разрядного тока, меньшее влияние изменения температуры на величину емкости и меньшую стоимость.
Они применяются как для сетей освещения и электродвигателей, так и в качестве стартерных, так
как обладают значительно лучшими стартерными качествами и прекрасной отдачей как по зфяду
(89-90%), так и по энергии F5-70%). Однако для них требуется более сложный и частый уход,
а срок их службы обычно составляет 3—4 года.
Отрицательный электрод кислотных аккумуляторов представляет собой пластину из губчатого
свинца, а положительный — из пластин, содержащих двуокись свинца. В электролите, представляю-
представляющем 30%-ный раствор серной кислоты в дистиллированной воде, в результате реакции окислов
свинца на всех пластинах образуется тонкий слой сульфата свинца PbSO4. На отрицательных пласти-
пластинах в процессе зарядки сульфат свинца восстанавливается в губчатый свинец, а на положительных
образуется двуокись свиица. Электролит участвует в реакции, и его плотность уменьшается при
разрядке аккумулятора. При слишком глубоком разряде свинцового аккумулятора (менее 1,8 В
на банку) на пластинах образуется труднорастворимый белый налет солей свинца, что повышает
внутреннее сопротивление аккумулятора, и он может быть выведен из строя.
Электролит для заливки батарей готовят путем вливания в дистиллированную воду чистой
серной кислоты (а не наоборот!). Плотность электролита должна соответствовать заводской инст-
инструкции на данный тип аккумулятора. Для приготовления раствора следует использовать керами-
керамическую, стеклянную или эбонитовую посуду. Уровень электролита должен быть на 12-15 мм выше
кромок пластин, а температура при запивке не должна превышать 25° С. Зависимость плотности
электролита от степени разряженности батареи приведена в табл. П. 4.
Первую зарядку аккумуляторной батареи можно производить при незаряженных пластинах
через 4—6 ч после запивки, при заряженных — через 3 ч. Продолжительность зарядки 25—30 ч для
546
Аккумулятор
заряжен
' на 100%
1,310
1,285
1,270
1,250
1,240
Аккумулятор разряжен
на 25%
1,270
1,245
1,230
1,210
1,200 ,
на 50 %
1,230
1,205 ¦
1,190
1,170
1,160
батарей с незаряженными пластинами и 5-8 ч- Таблица П.4. Плотность, г/см3, электролита
с сухозаряженными. При температуре электролита кислотных аккумуляторов, приведенная
более 45 ° С зарядку следует временно прервать к 20° С
или снизить силу зарядного тока, чтобы обеспе-
обеспечить охлаждение электролита.
При зарядке кислотных аккумуляторов вы-
выделяется значительное количество вредных газов,
паров кислоты, а при загрязнении электролита
солью, морской водой — и хлор. Поэтому акку-
аккумуляторы следует заряжать в хорошо вентили-
вентилируемом помещении, а пробки снимать и устанав-
устанавливать их на место только через 3—4 ч после
окончания зарядки. Свинцовые аккумуляторы
очень чувствительны как к перезарядке, так
и к недозарядке, в связи с чем обязательным
условием зарядки является строгий контроль
этого процесса и своевременное его окончание.
Окончание зарядки батареи определяется по обильному газовыделению и постоянству плот-
плотности электролита и напряжения, практически остающимся неизменным в течение 2 ч. После первой
зарядки следует, разрядить батарею током, соответствующим 10-часовому режиму разрядки. Ба-
Батарею можно считать подготовленной к эксплуатации, если в режиме разрядки она отдает около
90% своей емкости. В противном случае следует провести еще несколько циклов зарядки —
разрядки.
При эксплуатации кислотных аккумуляторов следует обеспечивать нормальные режимы
разрядки и зарядки. Во избежание чрезмерной разрядки батарей необходимо наблюдать за напря-
напряжением и плотностью электролита, сравиивая их зиачения при контроле со значениями при заря-
заряженных батареях. Одновременно следует замерять температуру электролита, с тем чтобы вводить
в полученные с помощью ареометра значения плотности соответствующие температурные поправки
согласно табл. П. 5. Срок службы кислотных аккумуляторов допускает не менее 200 циклов.
Таблица П.5. Поправки к показаниям ареометра в зависимости от температуры электролита
Температура
электролита,
°С
45
40
35
30
25
Поправка к по-
показанию арео-х
метра
0,0175
0,0140
0,0105
0,0070
0,0035
Температура
электролита,
°С
20
15
10
5
0
Поправка к по-
показанию арео-
ареометра
0
-0,0035
-0,0070 ,
-0,0105
-0,0140
Температура
электролита,
°С
-5
-10
-15
-20
-25
Поправка к по-
показанию арео-
ареометра
-0,0175
-0,0210
-0,0245
-0,0280
-0,0315
Серебряно-цинковые аккумуляторы по своим эксплуатационным свойствам близки к кислот-
кислотным, хотя и работают иа щелочном электролите. К недостаткам их следует отнести склонность
к внезапным внутренним коротким замыканиям и высокую стоимость.
3. Навигационные приборы
Компасы! В соответствии с Правилами по конвенционному оборудованию, морских судов
все суда оснащаются магнитными компасами (МК) независимо от наличия на них других навига-
навигационных средств, причем на малых судах магнитный компас является единственным измерителем
курса. По принятой терминологии [85, 137, 150] магнитный компас — это компас, магнитный
чувствительный элемент (МЧЭ) которого основан на использовании свойств горизонтальной состав-
составляющей индукции магнитного поля Земли (МПЗ).
По принципу действия первичных измерительных преобразователей МК могут быть стрелоч-
стрелочными, индукционными, холловскими и квантово-оптическими, по наличию дистанционной пере-
передачи — визуальными и дистанционными, а по назначению — морскими, авиационными, ручными
и т. п. Морские МК подразделяются иа судовые, катерные и шлюпочные; судовые и катериые,
в свою очередь, — на главные и путевые. Путевые компасы служат для курсоуказания, а главные,
помимо этого, и для измерения направлений на ориентиры.
Наиболее распространенными иа маломерных судах по их стоимости и надежности являются
стрелочные магнитные компасы. Типы стрелочных МК устанавливаются в зависимости от диаметра
их картушек. Так, на малых судах используются стрелочные МК отечественного производства с
диаметрами картушек 127,100, 75 и 69 мм (табл. П. 6, рис.П. 1 и П. 2). Малогабаритный сферический
18*
547
Та бл и и а П.6. Магнитные компасы отечественного производства^ используемые на к:алых судах
Марка
компаса
УПК-МШ
УПК-МЗМ
УПК-М10
КМ-100-1
КМ-100-2
КМ-100-3
КТ-М1М
КТ-М2М
КМ-69-1
КМ-69-2
КМ-69-3
КМ-48
Диаметр
картуш*
ки,мм
127
127
127
100
100
100
75
75
69
69
69
48-
Оборудование
Нактоуз
Высокий
Низкий
_
Высокий
Низкий
-
—
Высокий
-
_
—
-
Девиа-
ционный
прибор
+
+
+
+
+
—
-
+
+
+
—
-
Пелен-
Пеленгатор
+
+
-
+
+
-
-
+
+
+
' —
-
Осве-
Освещение
электри-
электрическое/
масля-
масляное
+/+
+/+
+/+
+/+
+/+
-/+
-/+
+/+
+/-
+/-
-/-
—/—
Цена
дел с ни я
картуш-
картушки, град
1'
1
1
2
2
2
2
2
2
2 '
2
5
Масса,
КГ
68
64
12
42
20
7
4
45
7
5
2,5
0,5
Назначение
Судовой
Катерный
Шлюпочный
Катерный
Для спор-
спортивных су-
судов, яхт,
шлюпок, ка-
катеров и пр.
МК (масса 0,5 кг) с диаметром картушки 48 мм (рис. П. 3) специально предназначен для катеров
и яхт.
МК каждого типа имеют ряд модификаций, отличающихся друг от друга назначением'и соста-
составом функциональных устройств. Номера модификаций обозначаются арабскими цифрами через
дефис после обозначения типа компаса, например компас КМ100-3 -третья модификация компа-
компаса КМ-100.
Главной частью любого МК является котелок с МЧЭ. Помимо него в зависимости от модифи-
модификации компаса в его комплект могут входить пеленгатор, нактоуз, девиационный прибор и уст-
устройство освещения. Основной частью
котелка является МЧЭ. Магнитная си-
система МЧЭ состоит из собранных по
определенным правилам магнитных
стрелок. * Она стремится расположить
свою ось N-S в плоскости компасного
меридиана на судне и в плоскости маг-
магнитного меридиана на берегу. Картушка
посажена своей агатовой топкой на
шпильку и для повышения чувствитель-
чувствительности помещена в компасную жидкость,
заполняющую полость котелка, чем
достигается значительное снижение мас-
массы картушки и уменьшение трения
топкн о шпильку. В качестве компас-
компасной жидкости у 127- и 75-мм компасов
применяется 43%-ный раствор этилового
спирта в дистиллированной воде, а
у 100-, 69- и 48-мм компасов - крем-
нийорганическая жидкость. Компасная
жидкость обеспечивает работу компасов
при температуре от —40 до +60° С
и демпфирует картушку в условиях
рыскания и качки. Работоспособность
компасов конструктивно обеспечена при
качке до 30°, а для" компаса КМ-48
(яхтенного варианта) практически не
ограничена. Для компенсации изменения
объема жидкости при перепадах темпе-
температуры в котелке предусматривается
устройство температурной компенсации.
Для этого используются мембраны или
8
Рис. П.1. Магнитные компасы на нактоузе: а - судовой
компас КМ-100-1; б- катерный 75-мм компасКТ-М2М.
1 — котелок; 2 — масляный фонарь; 3 — защитный
колпак; 4 — компенсатор четвертной девиации; 5 —
крышка, закрывающая доступ к компенсатору полу-
полукруговой девиации; 6 — гнездо продольного допол-
дополнительного магнита; 7 — крышка, закрывающая доступ
к дополнительному креновому магниту; 8 — нактоуз;
9 — девиационный прибор
548
a)
б)
Рис. П.2. Магнитные компасы без нактоуза: а - КМ-100-2; б - КМ-69-1.
1 —защитный кожух котелка; 2 — осветитель; 3 — кронштейн; 4 —
кожух, закрывающий доступ к компенсатору девиации; 5 — котелок
сильфоны, а также воздушные объемы, заключенные в эластичные оболочки или размещенные
в компенсационных камерах.
Поплавок и груз, в качестве которого часто используются магниты, представляет собой физи-
физический маятник, выполняющий функции горизонтирующего устройства МЧЭ. Восстанавливающий
момент физического маятника во много раз (на 1-2 порядка) превышает восстанавливающий
момент магнитного маятника, поэтому погрешность удержания МЧЭ в плоскости горизонта даже
при максимальных изменениях вертикальной составляющей индукции МПЗ не более ± 2°. При
горизонтальном положении МЧЭ он находится под действием только горизонтальной составляющей
индукции МПЗ.
Отсчетным устройством МК является шкальное устройство. Оно состоит из шкалы-картушки
с градусными, цифровыми и буквенными отметками, а также курсового указателя. Картушка
крепится на МЧЭ в горизонтальной плоскости, проходящей через его точку опоры. Картушки мор-
морских МК, предназначенных для судов ограниченного и неограниченного районов плавания в
Рис. П.З. Компас КМ-48.
1 — котелок; 2 — барабанная шкала; 3 — курсовой указатель для барабанной
шкалы; 4 — то же, для плоской шкалы; 5 — компенсационная камера; б — проб-
пробка; 7 — фланец
549
соответствии с требованиями ИСО и ИМО*, градуируются через 1°. Их оцифровка выполняется
через 10° трехзначными цифровыми отметками. Главные румбы обозначаются также литерами
N, E, S, W ; четвертные румбы также могут обозначаться соответствующими буквенными литерами:
NO, SO, NW, SVV. Градуировка и оцифровка картушек МК для шлюпок, катеров и т. п. плавсредств
обычно упрощается. Курсовой указатель крепится на котелке. Он выполняется в виде нити, черты,
отметки и т. п.
Отсчетное устройство должно обеспечивать съем показаний МК как.в светлое, так и в темное
время суток .с расстояния 1 и 1,4 м соответственно на судах ограниченного и неограниченного района
плавания. Для облегчения съема показаний МК часто снабжаются съемной компасной лупой. Для
обеспечения съема показаний в темное время суток в МК предусматривается осветительное устройст-
устройство, снабженное регулятором освещения.
Эксплуатация МК на малых судах часто сопровождается различного рода механическими воз-
воздействиями: качкой, статическим креиом, ударами и вибрациями. Удержание МЧЭ в плоскости
горизонта при качке и статических кренах осуществляется с помощью упомянутого выше физи-
физического маятника, а воздействие вибраций и ударов ослабляется противоударными и противовиб-
рационными амортизирующими устройствами.
Пеленгатор МК представляет собой устройство для визирования предметов, позволяющее
одновременно произвести отсчет по картушке или измерить курсовой угол по азимутальной шкале.
Магнитный компас на судне (в том числе и на малом) находится под воздействием возмущаю-
возмущающих магнитных полей, вызывающих магнитную девиацию. По характеру проявлений магнитная
девиация МК может быть постоянной, полукруговой, четвертной, креновой и широтной. Постоянная
девиация неизменна на любом курсе судна. Полукруговая девиация дважды, а четвертная четы-
четырежды меняют свой знак при изменении курса На 360 .
При крене, дифференте или качке судна проявляется креновая девиация, а при значительном
изменении географической широты возникает широтная девиация.
Компенсирующие устройства, входящие в комплект многих компасов, служат для уничтоже-
уничтожения девиации. Они создают в области МЧЭ компенсирующие магнитные поля, векторы магнитной
индукции которых равны и противоположны возмущающим. В различных МК могут использоваться
компенсаторы полукруговой, четвертной, креновой и широтной магнитной девиации. На судах,
обладающих электромагнитным полем, возникает проблема уничтожения электромагнитной де-
девиации.
При установке компасов необходимо руководствоваться специальными требованиями:
главные компасы обязательно, а прочие по возможности следует размещать в ДП судна, при
невозможности - параллельно ей;
вблизи компасов (не менее 1 м) не должно быть устройств, создающих магнитные поля;
нактоузы располагают дверцами в корму;
главный компас не должен иметь „мертвых" углов обзора;
компас устанавливают таким образом, чтобы его продольная плоскость, определяемая линией
0-180° азимутального круга или вертикальной'плоскостью, проходящей через носовую и кормовую
линии, совпадала с ДП судна;
доступ к компасу должен быть удобным.
В соответствии с Правилами Регистра СССР компасы должны отвечать следующим требованиям:
цена деления картушки судового компаса должна быть не более 2°;
застой картушки компаса не должен быть более 1 °;
должно быть предусмотрено автономное освещение картушки.
При использовании магнитных компасов не допускается смещение компенсационных магнитов
и брусков мягкого железа. Азимутальный круг и пеленгатор компаса необходимо периодически
протирать и смазывать вазелином. По окончании навигации котелки компасов необходимо выни-
вынимать на зимнее хранение и контрольную проверку [ 85, 150].
На малых судах прибрежного и внутреннего плавания часто используют авиационные полу-
полукомпасы КИ-11 и КИ-13, монтируемые непосредственно на приборной панели перед рулевым. Эти
компасы обеспечивают курсоуказание при крене до 15°. Они имеют встроенные антидевнацион-
ные компенсаторы. В связи с тем что эти полукомпасы рассчитаны на работу в условиях сильных
вибраций, их картушки при использовании на неподвижной платформе могут иметь застой до 5—7°,
а поэтому их рекомендуется устанавливать только на моторных судах.
Лаги. На малотоннажных судах для определения пройденного расстояния и скорости применяют
вертушечные, гидродинамические н индукционные лаги. Они определяют движение судна отно-
относительно воды.
На рассматриваемых малых судах часто применяются самодельные лаги, обычно вертушеч-
ноготипа [1371.
На яхтах наиболее распространенными являются польские лаги YL-12 и YL-22 -импульсные
вертушечные клинкетные динщевые. Модификации этих лагов обеспечивают измерение скорости
* ИСО - Международная организация по стандартизации; ИМО - Международная морская
организация.
550
судна и пройденного расстояния в диапазоне скоростей от 0 до 14 уз при точности соответственно
1% и 0,1 уз. Лаги работают от судовой сети 12 В и потребляют 0,15 А. Их клинкетное устройство /
позволяет при необходимости иметь легкий доступ к вертушке для ее осмотра, чистки и смазки. '
Выносной индикатор скорости и пройденного расстояния имеет регулируемую подсветку.
Гидродинамические штевневые и индукционные лаги обладают преимуществом перед вер-
тушечными: их датчики практически не выступают за днище оудна. Кроме того, индукционные
лаги имеют большие чувствительность н точность измерений.
При установке лагов необходимо руководствоваться следующими основными требованиями:
подводный механизм*гидромеханического лага размещают возможно ближе к центру вращения
судна, но не менее чем на расстоянии 0,3 длины судна от форштевня. Это делается с таким расчетом,
чтобы при наименьшей осадке судна и наличии качки подводный механизм не обнажался и не вноси-
вносились бы ошибки в показания лага из-за искажения проточных струй форштевнем или подсоса воды
винтами;
впереди подводного механизма не должно быть выступающих частей, приемных и отливных
отверстий, которые могут повлиять на параллельность струй;
основной прибор лагов размещают вблизи ДП судна в местах наименьших вибраций и амплитуд
качки; места расположения приемных отверстий лагов не должны оголяться при качке судна.
К гидромеханическим, гидродинамическим и индукционным лагам Правилами Регистра СССР
предъявляются такие основные требования:
начальная чувствительность электромеханического и гидродинамического лагов должна быть
не более 2 уз, а индукционного - 0,2 уз;
погрешность гидродинамического лага в определении пройденного пути не должна превышать
± 5%, а индукционного лага ± 2% фактического пути для эксплуатационной скорости судна. По-
Погрешность этих лагов в определении скорости не должна превышать 0,3 уз;
расхождение между счетчиками и репитерами пройденного расстояния допускается ие более
0,01 мили, а между репитерами — не более 0,02 мили;
расхождение в показаниях скорости между репитерами и основным прибором гидродинамиче-
гидродинамического лага не должно превышать ± 0,25 уз, а для индукционного лага ± 1,5% верхнего предела ско-
скорости, измеряемой лагом.
В настоящее время популярными становятси доплеровские лаги, основанные на измерении
доплеровского сдвига излученной с судна частоты акустического луча, отраженного от диа моря.
Доплероиские лаги являются абсолютными, так как они измеряют параметры движения судна
относительно дна, с их помощью можно также определять вектор течения. Однако эти лаги сложны
в изготовлении и дороги, поэтому на малых судах пока применения не имеют.
Лоты. Для измерения глубин на малых судах применяют ручные лоты и эхолоты. Ручным
лотом измеряют малые глубины при скорости судна не более 5 уз или при стоянке на якоре для
определения дрейфа. Длина лотлиня ручных лотов - 25 и 50 м, масса гири - 3-4 кг.
Эхолоты (табл. П. 7) основаны на использовании пьезоэлектрического или магнитострик-
ционного эффекта. Установка и эксплуатация эхолотов регламентируется Правилами Регистра
СССР:
вибраторы эхолота должны размещаться в местах наименьшей вибрации на днище судна с уда-
удалением от бортов и штевней на расстояние, исключающее их обнажение при качке;
рекомендуется устанавливать вибраторы на расстоянии от 0,1 до 0,5 длины судна от носа и
вблизи ДП судна;
вблизи вибраторов не должны находиться ультразвуковые излучающие устройства других
приборов, работающие одновременно с эхолотом, а также выступающие части корпуса, приемные
и отливные отверстия, которые могут создавать помехи работе эхолота;
излучающая и принимающая поверхности должны находиться на одном уровне и быть парал-
параллельными горизонтальной плоскости;
поверхности вибраторов не. должны закрашиваться и подвергаться механическим воздействи-
воздействиям (ударам, жесткому трению и т. п.);
для устранения электромагнитных помех линия вибратор - приемник - усилитель должна
быть удалена от линии вибратор - излучатель на расстояние не менее 1 м и от других параллельно
идущих кабелей на 0,5 м.
Указанные требования относятся также и к переносным вибраторам.
Радиопеленгаторы. Эти приборы обеспечивают навигацию судов как средство контроля счисле-
счисления при плавании вне видимости берегов, а также в тумане и при плохой видимости, исключающих
возможность визуальных способов определения места в море. Для спортивных и туристских судов
отечественная промышленность выпускает супергетеродинный переносной радиопеленгатор
„Баркас" (рис. П. 4). Его питание от судовой сети напряжением 24 В (или аккумуляторных бата-
батарей) осуществляется током до 80 мА.
Радиопеленгатор имеет встроенную поворотную ферритовую антенну и рассчитан на прием
сигнала с уровнем в точке приема 0,5 мВ/м в диапазонах 250-370, 370-550,1600-а350кГц. Стре-
Стрелочный и слуховой индикаторы позволяют получать при благоприятных условиях точность пеленго-
пеленгования 3-7°. На малых судах получили признание ручные радиопеленгаторы прямого усиления
551
Таблица П.7. Основные параметры эхолотов отечественного производства, устанавливаемых
на маломерных судах
Параметр
Диапазон измерения
глубин, м
Поддиапазоны
Погрешность измере-
измерения, м
Предельная скорость,
уз
Масса комплекта, кг
Тип антенны
Параметры питания:
напряжение, В
частота, Гц
НЭЛ-МЗА
0,2-200
0-20
0-200
0,3 при
Ж 20 м
1,5 % при
#>20м
40
65
НЭЛ-М4
0,2-36
0-20
16-36
0,1 при
Ж5м
1,5 % при
Я>5 м
25
52
Тип эхолот:
НЭЛ-7
0,8-500
0-100
0-500
0,3 при
Ж 25 м
1,5 % при
Я>25м
30
80
Магни то стрикци онная
220/127
50, 400
220/127
50
24 A10)
400,
1
„Кубань"
0,2-20
0-20
0,15 при
Ж 5 м
1,5 % при
Я>5 м
19
42
„Яэь" пере-
переносной
рыбопоисковый
0,5-160
Самописец
0-40, 40-80,
80-120,120-160
0,3 при
Ж 15 м
1,5 % при
Н > 15 м
2
18
Пьезокерамическая
24A10,
220)
50
6,3
85
со встроенным компасом, ручной настройкой, визуальным стрелочным и телефонным нуль-инди-
нуль-индикатором и светодиодным (например, радиопеленгатор „Сификс"). За рубежом выпускаются более
совершенные радиопеленгаторы, например „Аптель" DDF-300, позволяющие без поиска нажатием
кнопки устанавливать необходимую для настройки на радиомаяк частоту и показывающие отсчет
времени цикла работы радиомаяка с помощью встроенного кварцевого таймера.
В качестве радиопеленгатора можно использовать транзисторный приемник после несложной
его предварительной доработки. Для этой цели более всего подходят приемники ВЭФ-12, ВЭФ-202,
ВЭФ-204, ВЭФ-206, „Океан", „Спидола", „Кварц-404". Доработки в основном производятся с целью
повышения чувствительности приемника и сопряжения пеленгационной антенны с компасом.
Спутниковая навигационная аппаратура (СНА). Эта аппаратура обеспечивает навигацию судов
всех классов. Процесс решения задачи определения места судна полностью автоматизирован и прак-
практически не требует вмешательства оператора. При наличии на судне компаса и лага с дистанцион-
дистанционной передачей курса и пройденного расстояния СНА может вести автоматическое счисление пути
судна с выдачей на дисплей счислимых. координат места. Масса некоторых образцов подобных
СНА вместе с антенной и автономным блоком питания не превышает 10 кг [ 85 ].
СНА, работающая с использованием спутников системы „Цикада" и „Транзит", позволяет
определять координаты судна через интервалы времени около 1 ч в любой точке Мирового океана
и в любых метеоусловиях. Оте-
Отечественная СНА „Челн" дает воз-
возможность определять координаты
с точностью не хуже 100 м с исполь-
использованием указанных двух систем.
При применении спутников системы
„Глонасс" и „Навстар" [85] обеспе-
обеспечивается непрерывное определение
места судна и его скорости также
в глобальных географических и
метеоусловиях.
На рис. П. 5 показан внешний
вид СНА марки JLR-4000 систе-
системы „Навстар". В комплект этой
аппаратуры входят антенна (высота
43 см, диаметр 6 см, масса 0,7 кг)
и приемник-вычислитель (размеры
21 х 13 х 32 см, масса 6 кг). Пита-
Рис. П.4. Радиопеленгатор „Баркас" ние осуществляется постоянным
552
4
Рис. П.5. Приемоиндикатор и антенна спутниковой глобальной
навигационной системы „Навстар"
током 10-40 В, потребляемая
мощность до 30 Вт. Среднеквад-
Среднеквадратичная ошибка обсервации —
30 м, а скорости - 0,1 м/с.
Аппаратура полностью автома-
автоматизирована и по простоте ее
эксплуатации доступна морепла-
мореплавателю любой квалификации.
Данные о месте судна обнов-
обновляются каждую секунду. Коор-
Координаты места непрерывно инди-
индицируются на дисплее СНА. По
запросу оператора аппаратура
выдает следующие сведения:
расстояние, пеленг и время дви-
движения (при фактической ско-
скорости) от настоящего места до
заданной точки по маршруту
плавания; величину отклонения
судна от заданного пути (по
нормали к линии пути); сигнал
о приходе в заданную точку
маршрута и об отклонении от заданного пути; общее пройденное расстояние.
Секстаны. На малотоннажных судах могут применяться навигационные секстаны, служащие
для измерения высот светил над видимым морским горизонтом и углов между береговыми пред-
предметами для целей кораблевождения, и промерные секстаны, предназначенные преимущественно
для измерения горизонтальных углов при гидрографических работах.
В настоящее время промышленность выпускает навигационные секстаны с осветителем в тро-
тропическом исполнении СНО-Т, хотя используют также секстаны прежних выпусков: СН-ЗШП, СНО,
СН-2м. Правила эксплуатации секстанов детально изложены в Правилах штурманской службы № 1
и в технических формулярах секстанов.
Измерители времени. При движении судна со скоростью до 12 уз в интересах точной навигации
время достаточно измерять с точностью до 1 мин, а со скоростью до 24 уз — с точностью до 0,5 мин.
В случае определения поправки компаса по светилу время измеряют с точностью до 0,2 мин, при
определении места по высотам светил — с погрешностью не более 1 с. Указанные точности измерения
времени обеспечиваются механическими часами, которые необходимо проверять по радиосигналам
времени не менее двух-трех раз в сутки, а также кварцевыми и электронными часами, ие требующими
ежесуточной проверки. Для измерения интервалов времени до 30 мин применяют секундомеры.
Метеорологические приборы. Степень оснащенности судов метеорологическими приборами
зависит от их типа, автономности и дальности плавания. При автономном морском плавании любое
судно должно быть укомплектовано приборами для измерения давления, температур воздуха и во-
воды, направления и силы ветра и иногда - для измерения влажности воздуха. В прибрежном плавании,
а также на прогулочных спортивных судах и мотолодках эти приборы обычно не нужны.
Для измерения атмосферного давления чаще всего применяется на судах барометр-анероид.
Шкала его градуирована в миллиметрах ртутного столба, а в приборах производства последних
лет — в гектопаскалях (гПа). Показания снимают, не вынимая барометра из футляра, и исправляют
поправками из паспорта прибора.
Непрерывную запись атмосферного давления, на специальной бумажной ленте — барограмме —
ведет барограф. Этот прибор позволяет судить об изменении атмосферного давления во времени,
иначе, о барометрической тенденции. Наиболее удобны барографы М22-Н с недельным оборотом
барабана. Барограмма такого прибора имеет сетку, на которой нанесены по горизонтали временные
интервалы - часы и сутки, а по вертикали — давление в миллибарах.
Прибор повышенной чувствительности — микробарометр МБЦ фиксирует барометрическую
тенденцию с компенсацией начального уровня давления.
Транзисторный электротермометр ТЭТ-2 для дистанционного измерения температуры воды
и воздуха в диапазоне от -40 до +80° С в некоторых случаях вытесняет обыкновенные ртутные
и спиртовые термометры.
Ручные и дистанционные анемометры служат для измерения силы ветра. На малом судне более
эффективны дистанционные анемометры.
Анеморумбометры с комбинированными датчиками, монтируемыми на топе мачты с чашечной
вертушкой и двухперым флюгером, устанавливают на крейсерских яхтах и моторно-парусных
судах.
553
4. Средства сигнализации и связи
Все суда независимо от размеров и назначения должны быть оборудо-
оборудованы и снабжены средствами сигнализации и связи в соответствии с Пра-
Правилами Регистра СССР, Международными правилами для предупреждения
столкновений судов в море (МППСС) и Правилами плавания пЪ внутренним
судоходным путям (ППВСП). Малые суда должны быть оборудованы всеми
огнями и средствами подачи звуковых сигналов, предписанными указан-
указанными Правилами.
В зависимости от типов судов и района плавания малые суда могут быть
укомплектованы различными визуальными, звуковыми или радиотехни-
радиотехническими средствами сигнализации и связи. К визуальным относятся сигналь-
сигнальные флажки для отмашки и флажного семафора, Международный свод
сигналов, радиолокационный отражатель и светосигнальные устройства для
связи по азбуке Морзе, а также для привлечения внимания к своему судну
яркими вспышками. Для этих целей применяют различные газоразрядные
лампы типа ИФК, цветные люминесцентные сигнальные лампы и осветитель-
осветительные люминесцентные лампы типа ЛБ. Из пиротехнических средств исполь-
используются ракеты разных цветов ¦
Маркерная веха относится к визуальным средствам сигнализации. Она
предназначена для отметки места падения человека или имущества с судна с
целью облегчения его поиска. На топе вехи имеются вымпел и фонарь на
высоте 120 см над уровнем моря. Масса вехи 4 кг, запас плавучести 5,5 кг.
Фонарь начинает работать при сбрасывании вехи в воду, режим работы
импульсный, продолжительность 42 ч.
Звуковые сигналы передают свистками, сиренами, воздушными ти-
фонами или туманным горном и колоколом. Кроме того, для связи иа
малых судах используют мегафон и электромегафон.
Радиотехнические средства устанавливаются на малых судах в целях
обеспечения радиотелефонной УКВ связи с берегом и другими судами,
приема широковещательной радиотрансляции и сигналов времени, а также
для передачи сигналов аварии. Этими средствами оснащаются главным
образом некоторые крупные катера и морские яхты.
Аварийные радиобуи (АРБ) предназначены дли своевременного опо-
оповещения о бедствии с целью последующего проведения спасательных работ.
Согласно требованиям Поправок к Международной конвенции по охране
' человеческой жизни на море 1974 г. (СОЛАС-74), принятых в 1983 г. ИМО,
все суда в обязательном порядке должны оснащаться аварийными радио-
радиобуями, являющимися одним из элементов спутниковой системы для определения места потерпев-
потерпевших бедствие судов и самолетов КОСПАС - САРСАТ.
АРБ серийно выпускаются в СССР и за рубежом. Радиобуй „Поиск-Б" имеет две рабочие часто-
частоты — 121,5 и 243 МГц, излечение сигнала на них происходит одновременно. Конструктивно буй
выполнен в виде цилиндра длиной 570 и диаметром 84 мм; его масса 2,2 кг. Кроме того, отечествен-
отечественной промышленностью разработаны более совершенные АРБ, работающие на частоте 406 МГц, их
масса 5 кг (рис. П. 6). В АРБ на борту судна вводится информация, имеющая постоянную и пере-
переменную части. Постоянная часть включает коды, указывающие тип и название объекта, потерпевшего
бедствие, его государственную принадлежность, переменная — тип аварии и время в.часах, прошед-
прошедшее с ее момента. Постоянная часть на судне вводится заблаговременно, переменная - при сбрасы-
сбрасываний буя. АРБ начинает излучать информацию при включении (автоматически или вручную) и сбра-
сбрасывании в воду. Время непрерывной работы буя 48 ч. С вероятностью 0,95 координаты АРБ опреде-
определяются спутником системы за одно его прохождение; после определения координат начинается этап
спасательных работ. Точность определения координат при использовании АРБ, работающем на
частоте 406 МГц, составляет 2,7 мили, а с использованием АРБ на частоте 121,5 МГц - 8-10 миль. В
настоящее время АРБ оснащены более 10 тыс. судов.
Радиотехнические параметры АРБ A21,5 МГц)
Излучаемая мощность, МВт 75-100
Время работы, ч 48
Поляризация . ' Линейная
Вид модуляции Амплитудная
Глубина модуляции, % 80-100
Частота модуляции, Гц 300-1600
Радиотехнические параметры АРБ D06 МГц)
Излучаемая мощность, Вт 5
Рис. П.6. Внешний
вид АРБ-406 и блока
ввода информации
554
Стабильность, Гц " - N
за 100 мс , 110~9
" 15 мин . . 3-5
" 5 лет
Стабильность, кГц 2
Фазовая нестабильность (в полосе 50 Гц), град 10
Время паузы (период повторения) ,с 50 ±5
Полное время передачи, мс:
короткая посылка 40 ± 1 %
длинная посылка 520 ± 1 %
Скорость передачи информации, бит/с 40 ± 5
Длительность смодулированной несущей, мс 160 ± 1 %
Цифровое сообщение, мс 280 ± 1 %
, '.). CndC.I rt.IUiHbiU ОрнДСПЫ
Индивидуальные спасательные средства — спасательные круги, жилеты и костюмы — предназ-
предназначены для того, чтобы поддержать спасающегося на плаву в течение некоторого промежутка вре-
времени и предохранить его от переохлаждения.
Спасательный круг представляет собой жесткий пенопластовый объем, обшитый тканями синте-
синтетического волокна. Его внутренний диаметр должен быть не менее 400 мм, а наружный — ие более
800 мм. Спасательный круг должен быть способен поддерживать на плаву железный круг массой
14,5 кг в течение суток и не подвергается вредному воздействию морской воды, нефтепродуктов
и солнечных лучей. Он не должен загораться, будучи помещенным на 2 с в открытое пламя. С на-
наружной стороны спасательный круг имеет леер длиной порядка 30 м. Каждый второй спасательный
круг должен быть снабжен автоматически зажигающимся огнем. Промышленностью выпускаются
также круги, снабженные самоактивирующимися дымовыми сигналами.
Спасательные жнлеты изготавливаются из синтетической прорезиненной ткани ярко-оранжевого
цвета. Основную часть жилета составляют камеры плавучести (рис. П. 7). Жилет имеет поясной
и подъемный ремни, а также систему газозаполнения, состоящую из баллончика, заполненную
жидкой углекислотой под давлением 200 атм, и головки с устройством заполнения. При вытяги-
вытягивании верхней части головки жилет заполняется газом за 2-3 с. В верхней части жилета находится
трубка поддува, позволяющая надуть камеру жилета при неисправности автоматической системы
газозаполнения. С наружной стороны жилета имеется сигнальная лампочка, которая может вклю-
включаться в ночное время; для этого надо открыть пробку доступа морской воды к батарейке. В спе-
специальном кармане имеется свисток.
В настоящее время для спортсменов разработаны и начали выпускаться спасательные жилеты
новой конструкции (рис. П. 8), которые обеспечивают: надежную фиксацию на теле человека,
исключающую одергивание его даже в аварийной ситуации; постоянную плавучесть воротника;
переворачивание человека лицом вверх и поддержание лица выше уровня воды; надежную за-
защиту тела (и особенно позвоночника) от ударных нагрузок.
Жилеты состоят из двух полочек, спинки и воротника. Между полотнищами прорезиненной
с внутренней стороны ткани расположены пластины из полиуретанового поропласта, обеспечиваю-
обеспечивающего необходимую поддерживающую силу жилета и7защищающего тело от ударных нагрузок.
Основные характеристики спасательных жилетов (соответственно для водомоторников, яхтсменов
и детей) : положительная плавучесть - 11,5; 7,9 и 5,6 кг; масса - 2,2; 1,2 и 0,9 кг; стоимость 43, 32
и 23 руб. '
Спасательные костюмы в основном предназначены для предотвращения переохлаждения спасаю-
спасающихся или работающих в холодной воде людей. Они изготавляются из водонепроницаемой ткани,
не подверженной разрушающему воздействию нефтепродуктов, стойкой к гниению и к солнечным
лучам, а также не поддерживающей горения.
Рис. П.7. Надувной спасательный жилет.
1 —вспомогательные связи; 2 - сигнальная
лампочка,- 3 — петля подъемного ремня; 4 —
трубка поддува; 5 — камера плавучести; б —
свисток; 7 — поясной ремень; 8 — пеньковый
штерт; 9 — баллончик системы гаэозаполне-
ния; 10 — карман для хранения жилета
555
Рис. П.8. Спасательные жилеты для спортсменов
Имеются два типа костюмов. Один из них надевается поверх зимней одежды и обеспечивает
необходимый для сохранения жизни человека микроклимат. Скорость охлаждения тела человека
в костюме примерно 1° С в час. Для поддержания иа поверхности воды человека, одетого в костюм
поверх зимней одежды, дополнительно на него надевают спасательный жилет.
Второй тип спасательного костюма не требует использования спасательного жилета; он обладает
достаточными изолирующими свойствами, обеспечивающими при шестичасовом пребывании чело-
человека в ледяной воде понижение температуры его тела не более чем на 2° С. Костюм этого типа
обеспечивает безопасность человека при спрыгивании в воду с высоты до 5 м, а также его безопас-
безопасное при потере сознания положение в воде вверх лицом при расстоянии от поверхности воды до рта
не менее 10 см. Костюм снабжен средствами сигнализации (лампочкой и свистком) и наклеенной
на видных местах отражающей пленкой, облегчающей, его поиск. Конструктивно костюм выполнен
таким образом, чтобы его можно было надеть без посторонней помощи за 2 мин.
Надувные спасательные плоты являются коллективным средством спасения. Ими оснащаются
главным образом морские яхты. Для изготовления плотов применяют однослойную прорезиненную
синтетическую ткань, капрон и нейлон, иногда многослойную хлопчатобумажную ткань с резиновой
прослойкой. Днище плота из нескольких слоев ткани с воздушной прослойкой и двухслойное
закрытие обеспечивают термо- и влагозащиту. Спасательные плоты снабжены системой газозапол-
газозаполнения. Скорость заполнения плота газом при температуре 18—20° С порядка 1 мин, а при темпера-
температуре -30° С - около 3 мин. В качестве наполнителя используется углекислый газ, к которому
добавляется примерно 5% азота. Плот разделен на камеры плавучести, каждая из которых имеет
предохранительный клапан, стравливающий излишнее давление, и клапан для ручной под-
подкачки.
В нижней части плотов расположены водяные карманы, увеличивающие их остойчивость и
уменьшающие дрейф. Заполненные водой карманы наветренного борта обнажаются и создают вос-
восстанавливающий момент. Сверху на тенте находится фонарь, питаемый от водоналивной батарейки.
Там же имеется устройство для сбора дождевой воды.
Плоты на палубе яхты могут крепиться в контейнерах или без них. Существенным преиму-
преимуществом надувных спасательных плотов является их компактность. С малых судов плоты иа воду
сбрасывают вручную после из заполнения газом. Характеристики отечественных и английских
надувных спасательных плотов приведены в табл. П. 8.
В штормовую погоду в целях предупреждения падения за борт, особенно ночью, на яхтах и
некоторых других малых судах пользуются специальным страховочным снаряжением. Это снаряже-
Таблица П.8. Характеристики спасательных надувных плотов
Марка плота
ПСН-6М
ПСН-ЮМ
RFB4MM
RFI>6MM
Вмести-
Вместимость
6
10
4
6
Форма
Овальная (дли-
(длина 3 м)
Круглая
Диаметр или
ширина, м
1,85
2,35
1,84
2,22
Высота, м
1,20
1,35
1,14
1,14
Масса с кон-
контейнером, кг
100
145
57,1
71,2
556
\
нис заводского производства или изготовляется само-
самостоятельно из капроновой ленты в виде обвязки вокруг
груди (рис. П. 9) и страховочного линя с карабином,
который крепят к леерам, обушкам и т. п.
Малые суда должны быть обеспечены водоотлив-
водоотливными и противопожарными средствами. К водоотлив-
водоотливным относятся мото- и ручные помпы, ведра, лейки
и т. п. Все суда в зависимости от их класса должны
быть снабжены противопожарным инвентарем: топо-
топорами, ведрами, кошмами, матами, ломами, баграми,
пешнями и огнетушителями. На малых судах чаще
применяют углекислотнь!е огнетушители ОУ-2 и ОУ-5.
Они заряжены углекислым газом, который при исте-
истечении из баллона образует снежную массу и поглощает
большое количество теплоты. Огнетушитель ОУ-2 ра-
работает 40-45 с н дает полезную струю длиной до 1,5 м,
а ОУ-5 — соответственно 90 с и 2 м. Полнота зарядки
проверяется раз в 3 мес. Масса заряженного ОУ-2 —
7 кг, незаряженного — 5,6 кг, масса заряда — 1,4 кг;
для ОУ-5 соответственно 14,4; 10,8; 3,6 кг. При уменьшении массы заряда неиспользованного
огнетушителя на 15% его необходимо перезарядить.
Рис. П.9. Штормовое страховочное сна-
снаряжение
6. Средства автоматизации вычислений на малых судах
Для автоматизации навигационных и эксплуатационных расчетов на малых судах могут при-
применяться малогабаритные специализированные ЭВМ - СЦВМ (например, типа „Контакт-Н",
„Клейстер-Н") и программируемые микрокалькуляторы (ПМК) типа „Электроника" марок БЗ-34,
МК-54, МК-61, МК-52. Эти ПМК имеют единое программное обеспечение. К МК-52 может быть
дополнительно подключен блок расширения памяти типа БРП-2 с навигационными программами.
СЦВМ „Клейстер-Н". Предназначена для решения навигационных задач при ручном вводе исход-
исходных данных на языке общематематических и стандартных навигационных термннов. Автоматически
вычисляет элементы любых линий положения: стадиометрических, азимутальных, гиперболических
радионавигационных, астронавигационных (для Солнца и звезд - без Морского астрономического
ежегодника). По любым двум и более линиям положения вычисляет обсервованные координаты
места судна и оценивает его точность. Вычисляет курс и расстояние для выхода в заданную точку,
координаты точки прихода по курсу и расстоянию от исходной точки, вектор путевой скорости
по серии обсерваций. Возможно решение математических задач общего типа. Характеристика СЦВМ
„Клейстер-Н" следующая:
Питание:
частота, ГЦ ~50
напряжение, В 220 или 127
Рабочая среда:
температура, "С 0—40
влажность, % до 97
Потребляемая мощность, Вт не более 160
Масса, кг 24
Габаритные размеры, мм 560х450х 210
Ресурс до заводского ремонта, ч 10 000
Продолжительность непрерывной работы
(с последующим перерывом не менее
30 мин), ч до 8
ПМК МК-54. При использовании блока питания типа Д-2-10 м возможна круглосуточная работа,
а от элементов А-316 - „Квант" - до 3 ч. Близкие параметры имеют ПМК БЗ-34 и МК-61. Пред-
Предназначен для инженерных, в том числе навигационных, научных и статистических расчетов. Характе-
Характеристика калькулятора следующая:
Питание:
частота, ГЦ ~50
напряжение, В 220
Рабочая среда:
температура, "С 10—35
влажность, % до 65
557
Потребляемая мощность, Вт 0,5
Масса, кг • 250
Габаритные размеры, мм 167x78x36
Программы навигационных и эксплуатационных вычислений на ПМК приводятся в справоч-
справочных изданиях (см., например, [ 85 ]); они могут быть составлены и самим судоводителем.
Например, для вычисления истинного пеленга светила при определении поправки компаса
и счислимой высоты светила при астронавигационной обсервации целесообразно применение формул
линейного интерполирования экваториальных координат светил, приводимых на 00ч каждых кален-
календарных суток в Морском астрономическом ежегоднике (МАЕ, изд. ГУНнО МО):
в =«,«, + [(«,«-6,,)/241 Ггр;
'м = Г* +.[ С* - '•• + 360)/24] Ггр 1 \*w + г *
где 60(,, tao -склонение и гринвичский часовой угол светил на момент ОО'ООминОО0 заданной
гринвичской даты; б,4 и f,4 - то же на момент 00ч следующей гринвичской даты; Ггр - момент
наблюдений светила по всемирному времени; Хс - долгота точки, принятой для вычисления пе-
пеленга и высоты светила; г * - звездный угол (звездное дополнение) светила, выбранный из МАЕ;
для Солнца т *=0.
Далее по широте, принятой для вычислений точки <рс, и склонению 6 и местному часовому углу
Гм светила методом перехода к полярной системе координат р- ф вычисляю* высоту й с, азимуталь-
азимутальный угол Ф и истинный пеленг светила ИПС:
х = со$>рс sin б - sin^ccos6 cos?M; у =¦ - cos6 sin fM;
p = y/x* + y*; +A =arccosp; ± ф =arctg (y/x); ИПс = 360° ± ф± 180°.
Программа вычислений по приведенным выше формулам на ПМК типа БЗ-34, МК-54, МК-61
дана в табл. П. 9. Для ее ввода в ПМК необходимо предварительно нажать клавиши В/О F ПРГ.
Правильность ввода программы проверяют, вновь нажав клавиши В/О F ПРГ и затем последователь-
последовательно нажимая клавишу ЙГГ. Порядок ввода исходных данных в регистры памяти ПМК и организация
вычислений показаны в табл. П. 10.
Инструкция для вычислений высоты и азимута светила (пример)
Находясь в счислимой точке с координатами ^с = 34° 41,3'JV;- A.c = 155° 59,8'Е,-а момент
по всемирному времени Ггр =19чО9мииЗЗс 3 октября 1981 г. измерили компасный пеленг звезды
а Большой Медведицы КП — 35,7"; обсервованная высота звезды была h — 39" 24,7'. Определить
поправку компаса и элементы высотной линии положения.
Решение:
1. Широту ч>с выразить в градусах и их десятичных долях (южной широте придать знак „минус"),
ввести ее по адресу ПО.
2. Долготу Хс выразить в градусах и их десятичных долях (западной долготе придать знак
„минус"), ввести ее по адресу П1.
3. Выбрать из МАЕ величины t 00, «00, t ,4, б,4, выразить в градусах и их десятичных долях
(южному склонению придать знак „минус"). Ввести эти величины по адресам, указанным
табл. П. 10.
4. По адресу П6 ввести момент Ггр наблюдения светила, выразив его в долях часа; по адресу
П7 ввести обсервованную высоту светила, выразив ее в градусах и их десятичных долях. Если
наблюдали Солнце, то по адресу П9 ввести 0. При наблюдениях звезд по этому адресу вводят из
ежегодника звездный угол (звездное пополнение) г*, склонение звезды вводят дважды - в П4
и в П5, часовой угол точки Овна-в П2 ив ПЗ.
5. По адресам памяти 8, А, В, С, Д вводят указанные в табл. П.10 константы, после чего ПМК
пускают на счет.
6. После первого останова счета на табло видно местное звездное время rvM, используемое
ври необходимости для установки звездного глобуса с целью опознания наблюдавшейся звезды
или планеты. Счет продолжают нажатием клавиши с/п.
После второго останова счета на табло и по адресу ИП А находится местный часовой угол све-
светила; если он получился более 360*, то из него операциями на пульте надо исключить 360° и полу-
получить t Щ < 360°, который затем ввести по адресу ПА. Продолжить счет нажатием клавиши с/п.
После третьего останова счета на табло и по адресу ИП В находится истинный пеленг светила
ИПс из счислимого места у>с; Хс, а по адресу ИП 8 определяется положительная счислимая высота
светила h c. Перенос высотной линии положения от счислимого места, равный разности обсервован-
ной и счйслимой высот светила, в морских милях и их десятичных долях получают после выполне-
выполнения на пульте ПМК следующих операций:
558
На табло получается перенос n=h — hc, используемый совместно с ИПС для прокладки линии поло-
положения на карте.
При необходимости определить поправку компаса ИПС светила сравнивают с его измеренным
компасным пеленгом: Д/С = ИПС -/Ш*= 35,0 - 35,7 = - 0,7°.
ПМК МК-52. Питание от блока типа БП-2-ЗК, подключаемого к сети ~50 Гц, 220 В, или от
элементов А-316 „Квант". Мощность не более 0,8 Вт. Масса 250 г, размеры 212 х 78 х 34 мм. Объем
энергонезависимой памяти 512 шагов программы, сохраняемой до 5000 ч. Объем памяти самого
Таблица ПЗ. Программа вычисления высоты и истинного пеленга светила
Шаг
00
03
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Команда
ИП5
ИП4
_
ИП А
ИП6
X
ИП4
+
ПС
ИП 3
ИП2
-
ипв
+
ИПА
ИП6
X
ИП2
+
ИП1
+
с/п
ИП9
+
ПА
с/п
ипо
Fcos
ИПС
Fsin
X
Код
65
64
11
6-
,13
66
12
64
10
4С
63
62
11
6L
10
6-
13
66
12
62
10
61
10
50
69
10
4—
50
60
1Г
6С
1С
. 12
Итог
6
'м
Шаг
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
Команда
П8
ИПО
F sin
ИПС
Fcos
X
ИПА
Fcos
X
1-1
ИП8
+
П1
ИПС
Fcos
ИПА
Fsin
X
1-1
ПС
Fx1
ИП1
Fx1
+
FsT
Fcos"'
ИПС
ИП1
Ftg"»
ПС
Fx> 0
Код
48
60
1С
6С
1Г
12
6-
1Г
12
0L
68
10
41
6С
1Г
6-
1С
12
0L
4С
22
61
22
10
21
1-
48
6С
61
13
1L
4С
59
В
X
У
р
hc
Ф
Шаг
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
Команда
80
ипд
ИПА
-
F> 0
77
ИПС
ипд
+
пв
с/п
ИПС
пв
с/п
ипд
ИПА
I -
Fx > 0
92
ИПД
2
X
ИПС
+
пв
с/п
ИПС
ипд
+
пв
с/п
F АВТ
Код
80
6Г
6-
11
59
77
6С
6Г
10
4L
50
6С
4L
50
6Г
6-
11
59
92
6Г
02
12
6С
10
4L
50
6С
6Г
10
4L
50
Итог
-
,ипс
ипс
ипс
ипс
559
Таблица П. 10. Прохождение информации в микрокалькуляторе МК-54
Аргументы,
константы
?>с
*с
'..
'24
«о.
s24
И
0
0; т*
.24
360
0
180
Адрес памяти
0
1
2
3
4
5
6
7
8
9
А
В
С
д
Тест
(пример)
34°41,3'JV
155 59,8?
11 36,6
11 35,7
61 51,(W
61,5 ЮЛ'
19чО9мЗЗс
39°24,7'
0
19421,9
Табло ПМК
*
34,6883
155,9967
11,61
12,595
61,85
61,85
19,1592
39,4117
0
194,365
24
360
0
180
Решение
1останов: 455,7805° ='м
Постанов: fM < 360° хПА
III останов :ИП= 35.006
П-х8: Л с =39,4496°
Вычисление переноса:
П->х739,4117
П->х 839,4496
60
n=h — h c = -2,3 мили
Примечания: 1. Для повторного решения восстановить данные по адресам регастров памяти
1,4, 8, А, В, С.
2. В табл. П.9 и П.10 использованы символы пультов ПМК „Электроника" БЗ-34 и МК-54. Их
соответствие:
БЗ-34 МК-54 (МК-61, МК-52)
ИП П^х
П х^П
t
arcsin
aiccos
arctg
fit
sin
cosy
ПМК для записи программ равен 105 шагам (при 15 адресуемых регистрах памяти). Предназначен
для индивидуального выполнения инженерных, научных и статистических расчетов при возможности
хранения исходных данных и программ при выключенном питании до 200 сут.
Наличие полупостоянного запоминающего устройства (ППЗУ) с энергонезависимой памятью
существенно увеличивает эффективность применения ПМК МК-52 при навигационных и эксплуата-
эксплуатационных расчетах, позволяя вводить заранее несколько программ, потребующихся в конкретных
условиях предстоящего плавания. Например, кроме программы для расчета элементов высотных
линий положения из табл. ГГ.9 может быть введена программа вычисления координат обсервованно -
го места судна <ро; \о по двум высотным линиям положения, показанная в табл. П.11.
При этом решение задачи двух высот может быть выполнено в двух вариантах:
1. „Солнечный метод" - каждая высотная линия положения вычисляется для своей расчетной
точки, являющейся счислимым местом судна в момент измерения высоты светила. Вычисленные
обсервованные поправки координат Д<ро; Д\о прибавляют к счислимым координатам на момент
вторых наблюдений и получают обсервованные координаты судна на второй момент судового вре-
времени:
где №с — номер часового пояса, принятый для счета судового времени.
2. „Звездный метод" — элементы обеих высотных линий положения вычисляют для одной и той
же расчетной точки ipc; \c (например, на момент наблюдения второй высоты), но тогда первую
высоту приводят к месту вторых наблюдений исправлением ее поправкой ДА z = V (Т2 - Г,) созКУ j,
где V - скорость судна, а КУ\ — курсовой угол первого светила. Этот метод пригоден при интервале
времени Г, - 7\, за который судно пройдет не более 20 миль. ,
Решение задачи двух высот по программе из табл. П. 11 выполняется в следующем общем
порядке:
1. По адресу хП а вводится счислимая широта ipc.
2. По адресу х П в вводится счислимая долгота Хс.
3. По адресу х П 6 вводится первый перенос п^ (в минутах дуги и их десятичных долях).
4. По адресу х П 7 вводится первый ИП с (в градусах и дуговых минутах).
5. По адресу хП 8 вводится второй перенос пг.
6. По адресу х П 9 вводится второй ИП с.
560
Таблица П.11. Программа вычисления обсервованного места судна по элементам двух высотных
линий положения на МК-52*
Шаг
00
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
Команда
К +
хПв
К +
хПа
0
с/п
К +
лП9
Ю
хП8
FQ
К+
лП7
хП6
Ш8
ГЪ7
F cos
X
Пхб
ГЪ9
Fcos
• х
_
ГЪ9
'Пх7
_
F sin
лП2
Код
26
AL
14
26
4-
00
50
26
49
25
48
25
26
47
14
46
68
67
1Г
12
66
69
1Г
12
11
69
67
11
1С
42
Итог
\с
?>с
ИПС2
пг
ИПС1
Шаг
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
5
53
54
55
56
.57
58
59
Команда
№а
F cos
хПЗ
6
0
Пхв
+
хП 1
К\х\
1
8
0
-
Fx< 0
59
Пх1
КЗН
/-/
3
6
0
X
Пх1
+
xXll
Пхб
Код
13
6-
1Г
13
43
06
00
13
6L
10
41
31
01
08
00
14
11
5С
59
61
32
0L
03
06
00
12
61
10
41
66
Итог
Д*о
Шаг
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
Команда
Пх9
Fsin
X
Пх8
№7
F sin
X
Ш2
хП2
6
0
Пса
+
лПО
Кб
Пх1
Кб
с/п
БП
80
FABT
Код
69
1С
12
68
67
1С
12
11
62
13
42
06
00
13
6-
10
40
33
61
33
14
50
51
80
Итог
д?>о
?>о
^Программа составлена В. Н. Костиным.
Таблица П.12. Операции на пульте МК-62 при решении задачи двух высот
Команда на пульте
1057684
Atti
Се
39.20
Bt
31.15/-/
в/о с/п
0,4 /-/
Bt
197.06
Bt
1,0
Проводимая операция
Набор адреса программы в ППЗУ
Запись программы из ППЗУ в оперативную память
TVMK
1IXV114
Подготовка к вводу данных
Набор *><; = 39° 20' /V
Ввод tpc в стековую память
Набор Х.с = 31° 15' W
ВвоД|рс; \свОЗУ
Набор первого переноса п^ = —0,4'
Ввод п, в стековую память
Набор первого пеленга ИПС = 197° 06'
Ввод ИПС в стековую память
Набор второго переносам, = +1,0'
Тест (пример на табло)
105 7684
1057684
0
39.20
39.2
-3L.15
0
-4-01
-4-01
197.06
197.06"
1.0
561
Команда на пульте
Bt
109.02
с/п
с/п
1
Проводимая операция
Ввод п, в стековую память
Набор второго пеленга ИПС =109° 02'
Вычисление <ро
Вычисление \, ,
Продолжение табл. П.12.
Тест (пример на табло)
1.0
109.02
39.20084
-31.13595
Результат: ?>О = 39О20,1'N; \, =ЗГ13,6' W.
Результаты вычислений находятся:
,ро - на табло и по адресу Их 0; \, - на табло и по адресу Их 1;
&ро - по адресу Пх 2; Д\, - по адресу Пх 3.
Содержание операций на пульте ПМК МК-52 (при условии, что программа из табл. П. 11 была
введена в ППЗУ по начальному адресу 1057684) показано в табл. П. 12.
Другие навигационные программы для MK-S2 можно найти в „Астронавигационном альма-
альманахе на 1986-1990 гг." (ГУНиО МО, 1987), а также в техническом руководстве по эксплуатации
блока расширения памяти МК-52 БРП-2 „Электроника-Астро".
При работе с МК-52 в режиме использования ППЗУ и БРП-2 происходит большое потребление
мощности и, если значение напряжения элементов питания „Квант" близко к границе разряда, могут
наблюдаться неверное считывание или неверная запись информации. Поэтому рекомендуется пред-
предусмотреть питание ПМК от аккумулятора с напряжением 5 -6 В при силе тока 0,1-0,2 А.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ*
Аварийный радиобуй (АРБ) 554
Азимутальный круг 550
Анизотропные материалы 454
Антикавитационная наделка 277
Антикавитационная плита 128
Армоцемент 472
Аутригер 246
Ахтерштевень 355
Аэрация руля 127
Аэродинамическая подъемная сила 162
Аэродинамическое качество 166
Бакштаг 164
Балластная самоотливная цистерна 278
Барказ 246
Батокс 21
Бейдевинд 166
Бермудские паруса 40
Бизань 40
Бимс 346
„Блегг" (обводы) 268
Блупер 166
Бортовые були 276 •
„Бостонский китобой" 16
Брызгоотбойники 274
Буер 164
Буксировочная мощность 73
Бульбкиль 244
Вант-путенсы - см. путенсы
Ватервейс 362
Ватерлиния 230 ¦
Вельбот 249
Вельботные обводы 233
Вентиляция зареданного пространства 279
Ветер вымпельный 161
" - истинный 161
Винтовая характеристика двигателя 214
Внешняя характеристика двигателя 211
Внутренний крен на циркуляции 138
Водоизмещающее судно 75
Водоизмещающий режим движения 230
Возвратио-петлевая продувка ПМ 516
Всхожесть на волну 258
Вторая стадия кавитации 190
Гафельный парус 40
Геометрическое подобие 73
Геометрический шаг ГВ 177
Гидродинамическая подъемная сила 124
Гидродинамический момент 93
Гидродинамическое качество 94
Гидролыжа 276
Гик типа „парк-авеню" 168
Гик-уитбон 168
Глиссирование 250
Гоночный балл 41
Грот 40
Гуари 52
Давление ветра на парус 164
Двухслойные паруса 168
„Джонбот" 260
Дейдвуд 355
Диаграмма управляемости 140
Диаграммы для расчета ГВ 181
Динамическое подобие 74
Дисковое отношение 177
Дифферент 9
Дифферент стояночный (построечный) 133
Дифферент ходовой 133
Дифферентовочная автоматическая
система 278
Дрейф 162
Дрейфа сила 162
Дрифтер 166
„Жабры" 276
Забрызгивание 257
Закрутка днища 252
Закрылок ПК 205
Зарыскивание судна 241
Засасывающая сторона лопасти ГВ 179
Захват судна попутной волной 146
Изолированный руль 143
Индуктивное сопротивление паруса 166
Интерцептор 279
Кавитация 190
Кавитация руля 128
Кажущийся ветер - см. Вымпельный ветер
Каркасные лодки 63
Карлингс 345
Картоп 8
Катамаран 244; 267
Катер 27
Кафедрал - см. Обводы
Килеватости угол 252
Киль 340
Кильсон 442
Кинематическое подобие 74
Клиренс катамарана 267
Кокпит 235
Кноп 352
Колодец ПМ 20
* Цифры, указанные вслед за термином, означают страницы справочника, на которых ему
дано наиболее полное толкование. В указателе приняты сокращения: ВД — водометный движитель;
ГВ - гребной винт; МК — магнитный компас; ПК - подводные крылья; ПМ - подвесной мотор.
563
Колодец швертовый 50
Компасы 547
Конверсия двигателя 497
Контактное формование корпуса 483
Контрпропеллер ВД 226
Кормовой подзор 133
Косое обтекание ГВ 189
Крейсерская корма 234
Кривые действия ГВ 181 ¦
Кривые действия ГВ ВД 225
Критическая относительная поступь ГВ 191
Критический угол атаки 164
Критический угол перекладки руля 141
Критическое число кавитации 212
Курсовой угол 163
Коэффициент боковой силы 132
влияния корпуса судна на ГВ 190
динамической нагрузки 94
" засасывания ГВ 188
момента ГВ 179
" нагрузки ГВ 181
" общей полноты 89
¦ поджатая струиВД 222
" подъемной силы 164
Коэффициент волнового давления ветра на
парус 164
попутного потока 188
" продольной полноты
призматический) 233
" пропульсивный 189
" силы дрейфа 164
" силы сопротивления 164
" силы тяги паруса 164
" статической нагрузки 94
упора ГВ 179
Кэт 40
Кэч 40
Лавировка 165
Лавировочные паруса 166
Лавировочный угол 166
Лаг 550
Легкий ГВ 213
Лобовое сопротивление 123
Лот 551
Магнитный чувствительный элемент (МЧЭ)
компаса 547
Математическое описание парусного судна 162
Матрица 484
Метацентрическая высота 174 ,
Метацентрическая формула остойчивости 174
Микромотолодки 8
„Мокрый" угольник 8
Момент ГВ 179
Моногедрон - см. Обводы
Монотип 40
Морской нож 270
Мотолодка 7
Надувные лодки 67
Наклонные стабилизаторы 304
Нактоуз 548
Народной постройки лодки 249
Наружный крен на циркуляции 137
Непотопляемость 254
Непроницаемые переборки 437
Обводы корпуса вогнутокилеватые 261
выпукло-вогнутые 262
выпуклокилеватые 261
" " V-образные 240
глубокое V 260
кафедрал 268
круглоскулые 263
" " малокилеватые 252
" " многореданные 269
" " многоскулые 241
" " моногедрон 260
" " остроскулые 251
" " плоскодонные 260
" " плоскокилеватые 259
" " повышенной киле-
ватости 252
простые 252
" " радиальные 241
" " реданные 269
" сложные 253
Обводы корпуса S-образные 238
" " трапецеидальные 241
" трехточечные 266
" " туннельные 262
" " умереннокилеватые 252
Ц-образные 241
Обратная управляемость 144
Обратное качество 94
Окружная вызванная скорость 227
Остойчивость динамическая 253
начальная 253
" на больших углах крена 253
на циркуляции 253
Отгиб днища 276
скулы 274
Относительная поступь ГВ 179
Относительный радиус лопасти ГВ 178
Относительная толщина руля 121
Относительное удлинение 122
Параль 180
Паральный метод расчета ГВ 209
Парусный треугольник 162
' Паспортная диаграмма ГВ 211
Патент-риф 47
Пеленгатор МК 550
Первая стадия кавитации ГВ 190
Переходный режим движения судна 75
Период циркуляции 120
Петлевая дефлекторная продувка ПМ 516
Пиллерс 47
Плавниковый киль, плавник 241
Плавучая дача 39; 231
Плавучесть 253
Планширь 342
Плот спасательный 536
Поворотливость 255
Погон гика- (стаксель-) шкотов 167
Пограничный слой 189
Подвесной парус 61
Подводные крылья 383
взаимодействие 289
564
Подводные гидродинамические характе-
характеристики (ГДХ) 284
двукрылая схема 298
кавитация 291
килеватость 295
критическое число
кавитации 291
кромочный угол атаки 283
малопогруженные 289
однокрылая схема 299
прямоугольные 290
размах 283
стартовые 418
стреловидные 293
стреловидности угол 283
трапециевидные ПК 295
удлинение (относительный
размах) 283
" этажерочные 295
Подлегарс 345
Подмоторная ниша 21
Подъемная сила 162
Полубимс 445
Полукомпас авиационный 550
Поляра паруса 164
Полярная диаграмма скоростей 164
Поперечная гидродинамическая сила 170
Поступь ГВ 179
Правила обмера крейсерско-гоночных яхт 41
Привальный брус 342
Приформовочный угольник 458
Проа 52
Продукционные классы яхт 41
Пуансон 481
„Пузо" паруса 165
Путенсы (вант-, штаг-) 480
Радиус циркуляции 120
Радиопеленгатор 551
Разборная лодка 63
Развал бортов 234
Реверсивно-рулевое устройство (РРУ) ВД 145
Реверс-редуктор 505
Реданы (поперечные, продольные) 274, 275
Рейковые паруса 40
Рейнольдса число 74
Релинг 16
Решетка контрпропеллера ВД 227
Рудерпост 123
Руль балансирный 123
" за рудерпостом 123
" небалансирный 123
" подвесной 123
" полуподвесной 122
" простой 123
Рысканье 258
Сани морские 264
" Тила 264
" Фокса 265
" Хикмана 264
Свободные классы яхт 41
Седловатость 246
Секционные лодки 63
Серфинга режим движения 166
Система зажигания электронная ПМ 531
Система набора корпуса поперечная 336
" " продольная 336
" " " смешанная 336
Система настроенного выхлопа ПМ 530
Скеговая трехточка 266
Складные лодки 63
Скольжение ГВ 179
Скорлупные конструкции 246
Скоростной напор 250
Скручивание паруса 166
Скуловые кили 243
Смолы полиэфирные, эпоксидные 451
Смоченная длина
Смоченная поверхность 76
Совместная работа парусов 168
Сопротивление воды движению судна 73
аэродинамическое 87
брызговое 93
волновое 76
выступающих частей 85
остаточное 76 /
трения 78
формы 80
Спинакер 166
Спонсон 276
Спутниковая навигационная аппара-
аппаратура (СНА) 552
Средняя толщина лопасти ГВ 178
Стаксель 40
Стеклоармирующие материалы (стекложгут,
стеклоткань, стеклохолст) 450
Стеклоцемент 483
Степс 47
Стрингеры бортовые 342
" днищевые 342
" скуловые 341
Строевая по шпангоутам 232
Суперкавитация 190
Суперкавитирующие ГВ 198
Тендер 40
Теорема курсов 162
Термопласты 655
„Тонные" классы яхт 42
Транец 350
Транцевые плиты 279
Триклин 268
Тримаран 267
Триммер 242
Тяги сила 162
Углы аэро-, гидродинамического сопротивле-
сопротивления 162
Угол атаки 165
Угол крена на циркуляции 187
Угол перекладки руля критический 141
Угол установки паруса к ДП 165
Удлинение корпуса судна 89
Удлинение паруса 166
Удлинение руля 125
Упор движителя 179
Управляемость 119
Установившаяся циркуляция 137
Устойчивость на курсе 119
565
Фальшборт 362
Флор 347
Форшпигель (носовой транец) 358
Форпик 19
Форштевень 352
Фруда число 74; 94
Фундамент двигателя 367
Футоксы 346
Центр бокового сопротивления (ЦБС) 168
Центр Давления (ЦД) ветра 169
Центр давления гидродинамический 124
Центр парусности (ЦП) 168
Центровка яхты 168
Циркуляция 119
Частичная управляемость 144
Число кавитации 253
Шаг нулевого упора ГВ 180ч
" " момента ГВ 180
Шаговое отношение ГВ 180
Шайба 275
Шверт 40
Швертбот 42; 49
Шлюп 40
Шпангоуты натесные 346
" рамные 347
" составные 346
Шпринтовые паруса 40
Шхуна 40
Эрозия ГВ 190
Эхолот 551
Ял 246
Яхта килевая 42
Яхта-компромисс 47
Яхта со скуловыми килями 49
СПИСОК ЛИТЕРАТУРЫ
1. Александров М. Н. Безопасность человека на море. Л.: Судостроение, 1983.
2. Ананьев Д. М. О захватывании судна попутной волной // Мат-лы по обмену опытом
НТО им. акад. А. Н. Крылова. Л.: Судостроение, 1966. Вып. 73. С. 169-175.
3. Антонов Д. „Кафедралы", „эйрслоты", „тридины" ... что еще? // Катера и яхты, 1974.
№6 E2). С. 43-47.
4. Апухтин П. А., Дубровин О. В. Глиссирующие и мореходные катера. Л.: Изд. ЛКИ, 1958.
5. Артамохин Н. И., Шаронова М. С. Применение клеев для склеивания изделий из неметал-
неметаллических материалов // Клеи и технология склеивания. М.: Оборониздат, I960. С. 35-47.
6. Архангельский Б. А. Пластические массы: Справочное пособие. Л.: Судпромгиз, 1962.
720 с.
7. Архангельский Б. А., Павлов А. И. Клеи и деревянные клееные конструкции в речном
судостроении. М.: Речиздат, 1953. 126 с.
8. Атлас гидродинамических характеристик судовых рулей // Тр. НИИВТ. 1972. Вып. 72.
9. Афрамеев Э. А., Вейнберг В. В. Проектирование и расчет подводных крыльев // Катера
и яхты, 1964. № 3. С. 34-49.
10. Афремов А. Ш. Определение поворотливости и крена на циркуляции быстроходных
судов // Мат-лы по обмену опытом НТО им. акад. А. Н. Крылова. Л.: Судостроение, 1968.
Вып. 105. С. 11-116.
11. Ашик В. В. Проектирование судов. Л.: Судостроение, 1975. 352 с.
12. Баадер X. Разъездные, туристские, спортивные суда. Л.: Судостроение, 1976. 381 с.
13. Баранцев Ю. А. Стреловидный редан на плоскодонной мотолодке // Катера и яхты,
1971. №4/32/. С. 30-31.
14. Басин А. М. Ходкость и управляемость судов. Мл Транспорт, 1977. 254 с.
15. Басин А. М., Анфимов В. Я. Гидродинамика судна. Л.: Речной транспорт, 1961. 318 с.
16. Басин А. М., Миниович И. Я. Теория и расчет гребных винтов. Л.: Судопромгиз, 1963.
760 с.
17. Белавин Н. И. Экранопланы. Л.: Судостроение, 1977. 230 с.
18. Белинский В. Г., Черный И. М. Ходкость и управляемость водометных судов. Киев.
Наукова думка, 1966. 325 с.
19. „Блегт-480" - гибрид тримарана и морского ножа // Катера и яхты, 1980. № 4 (86).
С 42-44.
20. Блюмин В. И., Иванов Л. А., Масеев М. Б.. Транспортные суда на подводных крыльях.
М.: Транспорт, 1964. 420 с.
21. Богданов В. И., Мордвинов Б. Г., Мищенко И. Н. Международная спутниковая система
поиска и спасания КОСПАСгСАРСАТ // Человек, море, техника. Л.: Судостроение, 1984.
22. Брике Ф. А. Мелкое судостроение. Ли ОНТИ, 1933. 257 с.
23. Быковский В. М. Деревянные клееные конструкции. М.: Машстройиздат, 1949. 271 с.
24. Ваганов А. М. Проектирование скоростных судов. Л.: Судостроение, 1978. 279 с.
25. Ванин С. И. Древесноведение. М.: Машстройиздат, 1949. 158 с.
26. Вейнберг В. В. Глубокое V - „за" и „против" // Катера и яхты, 1973. № 4. D4). С. 49-
55; №5 D5). С. 48-55.
27. Вейнберг В. В. Крылья для „Прогресса" // Катера и яхты, 1971. № 4. F2) . С. 90-96;
№5 F3). С. 91-95.
28. Вейнберг В. В., Черняк 3. Ф. Сопротивление выступающих частей быстроходного суд-
судна //Катера и яхты, 1978. № 2 G2). С. 52-56.
29. Веселовский Р. А. Регулирование свойств клеев с помощью поверхностно-активных
веществ: Новые методы получения и исследования полимеров. Киев, Наукова думка, 1978.
С. 78-79.
30. Войткунский Я. И. Сопротивление воды движению судов. Л.: Судостроение, 1964.
412 с.
31. Войткунский Я. И., Перший И. Я., Титов И. А. Справочник по теории корабля. Л.:
Судостроение, 1973.682 с.
32. Гаврюк М. И. Использование малых вычислительных машин при решении задач судо-
судовождения. М.: Транспорт, 1980.
33. Гонченко Г. Д. „Прогресс" на крыльях // Катера и яхты, 1975, № 5 E7). С. 42-45.
34. Горбань В. Г. Длительная прочноетъ полимерных композитных материалов // Произ-
Производство и переработка пластмасс и синтетических смол, 1982, № 4. С. 9-11.
567
35. Горбань В. Г., Мирошниченко Э. Ф., Пушкарский В. К. Из опыта изготовления поли-
полиэтиленовых лодок // Катера и яхты, 1974, № 5 E1). С. 22-23.
36. Городецкий А. 3., Соколов В. П. Некоторые результаты экспериментального исследо-
исследования ходкости и мореходности глиссирующих катамаранов // Мат-лы по обмену опытом НТО
им. акад. А. Н. Крылова. Л.: Судостроение, 1979. Вып. 300. С. 107-115 .
37. Городецкий А. 3., Соколов В. П. О ходкости и мореходности глиссирующих катама-
катамаранов и однокорпусных судов // Тр. ЛИВТ, 1982. Вып. 175. С. 39-42.
38. Гофман А. Д. Теория и расчет поворотливости судов внутреннего плавания. Л.: Судо-
Судостроение, 1971. 256 с.
39. Григорьев Н. В. Центровка яхты // Катера и яхты, 1979, № 3 G9). С. 47-48.
40. Губенко А. Б. Клееные конструкции из досок. М.: Стройиздат, 1^49. 216 с.
41. Губенко А. Б. Применение фанеры в строительстве. М.: Стройиздат, 1948. 186 с.
42. Егоров И. Т., Буньков М. М., Садовников Ю. М. Ходкость и мореходность глиссирую-
глиссирующих судов. Л.: Судостроение, 1978. 317 с.
43. Егоров И. Т., Соколов В. Т. Гидродинамика быстроходных судов. Л^ Судпромгиз,
1950.424 с.
44. Емельянов Ю. В. Малые туристские суда. Л.: Судостроение, 1967. 368 с.
45. Емельянов Ю. В., Крысов Я. А. Справочник по малым судам. Л.: Судпромгиз, 1950.
396 с.
46. Ерлыкин И. И., Привалов Э. И., Павленко А. Н. Катер с водометным движителем.
Л.: Судостроение, 1969. 127 с.
47. Ермаш Л. П., Иванов И. П., Нейман П. 3. Клееная древесина в судостроении. Л.: Суд-
Судпромгиз, 1950. 152 с.
48. Ефремов Г. В. Сборщик деревянных судов. Л.: Судостроение, 1968. 316 с.
49. Жаров А. П. Устройство и эксплуатация подвесных лодочных моторов. М; Транспорт,
1969. 248 с.
50. Жученко М. М., Иванов В. М. Гребные винты коммерческих судов. Л.: Изд. ЛКИ,
1954.
51. Жученко М. М., Иванов В. М. Расчет гребных винтов. Л.: Машгиз, 1952. 346 с,
52. Зайцев Н. А., Маскалик А. И. Отечественные суда на подводных крыльях. Л.: Судо-
Судостроение, 1967. 208 с.
53. Зальянц Г. И., Губко Н. В. Термопластовые лодки: проблемы и перспективы // Кате-
Катера и яхты, 1974,№ 5 E1). С.20-23.
54. Злобин Г. П., Смигельский С. П. Суда на подводных крыльях и воздушной подушке.
Л.: Судостроение, 1976. 263 с.
55 . Зобнин Б. А. Малые разъездные катера на подводных крыльях // Судостроение, 1959.
№ 10. С. 7-10.
56. Иванов Ю. М. Определение несущей способности деревянных конструкций методом
ЦНИПС. М.: Стройиздат, 1940. 62 с.
57. Иванов Ю. М. Предел пластического течения древесины. М.: Стройиздат, 1948. 195 с.
58. Кардашев Д. А. Синтетические клеи. М.: Химия, 1976. 286 с.
59. Карлов Б. И., Певзнер В. А., Спепенков П. П. Учебник судоводителя-любителя. М.:
Изд-во ДОСААФ, 1972. 323 с.
60. Катера, лодки и моторы в вопросах и ответах: Справочник / Под ред. Г. М. Новака.
Л.: Судостроение, 1977. 288 с.
61. Кацман Ф. М., Дорогостайский Д. В. Теория судна и движители: Учебник. Л.: Судо-
Судостроение, 1979. 476 с.
62. Кацман Ф. М., Пустошный А. Ф., Штумпф В. М. Пропульсивные качества морских судов.
Л.: Судостроение, 1972. 510 с.
63. Кейн П. Быстроходные катера. Л.: Судпромгиз, 1960. 527 с.
64. Коврижных Л. Д. Приближенный расчет границ устойчивости глиссирования плоско-
килеватой пластины // Тр. ЦАГИ. Вып. 2272. 1985. С. 36-44.
65. Колызаев Б. А., Косорукое А. И., Литвиненко В. И. Справочник по проектированию
судов с ДПП. Л.: Судостроение, 1980. 276 с.
66. Константинов К. С. Сани Фокса - успехи и неудачи // Катера и яхты, 1975, № 1 E3).
С. 26- 32.
67. Кравченко И. П. Из опыта ремонта пластмассовых корпусов // Катера и яхты, 1974,
№3 D9). С. 43-44.
68. Кривоносое Л. М. Гребной винт к твоей лодке. М.: Изд-во ДОСААФ, 1970. 164 с.
69. Кротова Н. А. О склеивании и прилипании. М.: Изд-во АН СССР, 1960. 127 с.
70. Крючков Ю. С, Лапин В. И. Парусные катамараны. Л.: Судостроение, 1970. 271 с.
71. Куликов С. В., Храмкин М. Ф. Водометные движители. Л.: Судостроение, 1970. 271 с.
72. Курбатов Д. А. 15 проектов судов для любительской постройки. Л.: Судостроение,
1984. 238 с.
568
73. Либефорт Г. Б. Механические установки быстроходных катеров. Л.: Судостроение,
1966. 294 с.
74. Лучанский И. А., Яновский А. А. Суда на крыльях. Л.: Судпромгиз, 1960. 180 с.
75. Мавлюдов М. А., Русецкий А. А., Садовников Ю. М. Движители быстроходных судов.
Л.: Судостроение, 1982.
76. Мартынов А. И. Глиссеры. М.: Речиздат, 1940 . 112 с.
77. Мархай Ч. Теория плавания под парусами. 2-е изд. М.: Физкультура и спорт, 1970. 403 с.
78. Масеев М. Б. Гидродинамические исследования двухрежимных обводов // Катера и ях-
яхты, 1975, № 6 E8) . С. 37-39.
79. Махаринский Л. Г. Беспалубные мотолодки // Катера и яхты, 1976, № 4 F2). С. 10-14.
80. Махаринскип Л. Г. Лодка по типу „джонбота" // Катера и яхты, 1978, № 6 G6).
С. 86-88.
81. Милованов Э. В. Современное состояние и перспективы развития судов на подводных
крыльях//Судостроение, 1972, №9. С. 10-17.
82. Миронов В. Г., Войтович В. А. Некоторые пути совершенствования эпоксидных клеев
для деревянных конструкций // Полимерные строительные материалы: Межвуз. сб. / Казан.
инж.-строит. ин-т. Казань, 1978,№ 2. С. 86-88.
83. Михайлов В. И., Ткачук Г. Я. Влияние шероховатости корпуса судна иа сопротивление
воды. Л.: Судостроение, 1971. 152 с.
84. Многокорпусные суда / Под ред. В. А. Дубровского. Л.: Судостроение, 1978. 304 с.
85. Мордвинов Б. Г., Кондрашихин В. Т., Скубко Р. А. Средства навигации малых судов.
Л.: Судостроение, 1986.
86. Морозов А. Я, Петров Б. Н. Ремонт декоративного покрытия судов из стеклопла-
стеклопластика // Катера и яхты, 1977, № 2 F6) . С. 38.
87. Муругое В. С, Яременко О. В. Морские суда на подводных крыльях. М.: Морской
транспорт, 1962.
88. Мухин Ю. Н, Синелыциков Б. Е. Автомобильный двигатель на катере. Л.: Судострое-
Судостроение, 1980. 214 с.
89. Немзер А. П., Русецкая Л. В. Экспериментальные исследования гидродинамических
характеристик серии изолированных рулей и рулей за гребными винтами // Мат-лы по обмену
опытом НТО им. акад. А. Н. Крылова. 1982. Вып. 363. С. 61-73.
90. Немзер А. И., Русецкий А. А., Тумашик А. П. Об определении подъемной силы судо-
судового руля // Судостроение, 1984,№ 4.
91. Норвуд Дж. Быстроходные парусные суда / Пер. с англ. Л.: Судостроение, 1983.101 с.
92. Осминкин Б. А., Вологдин Д. В. Морской катер на крыльях „Невка" // Катера и яхты,
1970,№2 B4). С. 14-16.
93. Павленко А. С, Соловей С. Б. Гидродинамика морских саней // Катера и яхты, 1970,'
№1 B3). С. 14-20.
94. Павленко В. Г. Элементы теории судовождения на внутренних водных путях.: Учеб.
пособие. Ч. 2. М.: Транспорт, 1964. 119 с.
95. Павлов А. И. Все о клеях // Катераи яхты, 1975, № 2 E4). С. 40-47.
96. Павлов А. И. Детали деревянных корпусов // Катера и яхты, 1968', № 13. С. 40-46.
97. Павлов А. И. Клеи для мелкого судостроения // Катера и яхты, 1964, № 3. С. 207-216.
98. Павлов А. И. О прочности и технологии изготовления клееных конструкций // Тр. ЛКИ,
1953. Вып. XII.
99. Павлов А. И. Основы технологии постройки малых судов // Катераи яхты, 1963,№ 1.
С. 197-202.
100. Павлов А. И. Прочность' клееных судовых конструкций. Л.: Судпромгиз, 1955. 184 с.
101. Павлов А. И. Клееные судовые конструкции. Л.: Судостроение, 1965. 283 с.
102. Павлов А. И. Судовые конструкции из алюминиевых сплавов. Л.: Судостроение,
1973.263 с.
103. Павлов А- И., Старобинский В. Б., Френкель М. И. Гидродинамический расчет крыль-
крыльев//Катераи яхты, 1967,№9. С. 2-7.
104. Папир А. Я, Водометные движители малых судов. Л.: Судостроение, 1970. 256 с.
105. Папмель Э. Э. Практический расчет гребиого винта. Л.: Изд-во НИВК, 1936.
106. Папмель Э- Э., Шедлинг Ф. М. „Морские сани" // Мелкое судостроение, 1940, № 4.
107. Пейн П. Еще раз о морском ноже // Катераи яхты, 1979,№ 2 G8). С. 36-38.
108. Перельмутр А. С. О брызгообразовании глиссирующих катеров. М.: Изд-воЦАГИ,
1942.
109. Перестюк И. Е. Требования эргономики при проектировании малого судна // Катера
ияхты, 1981,№5 (93). С. 35-36.
110. Першиц Р. Я., Немзер А. И. Об управляемости судна на течении // Мат-лы по обмену
опытом НТО им. акад. А. Н. Крылова.1971. Вып. 169. С. 89-108.
111. Пишка А- Псоектирование катеров //Пер. с нем. Л.: Судпромгиз, 1963. 304 с.
569
112. Плесси X. дю. Малотоннажные суда из стеклопластика / Пер. с англ. Л.: Судострое-
Судостроение, 1979.
113. Правила классификации и постройки морских судов: Регистр СССР. Л.: Транс-
Транспорт, 1974.
114. Правила классификации и постройки судов внутреннего плавания: Речной Регистр
РСФСР. М.: Транспорт, 1975.
115. Правила по конвекционному оборудованию морских судов: Регистр СССР. Л.: Транс-
Транспорт, 1977. v
116. Прохоров Б. Ф., Зильберман А. С, Студенецкий В. Н. Опыт эксплуатации пластмас-
пластмассовых конструкций на НИС „Изумруд" // Технология судостроения, 1980,№ 2. С. 41-45.
117.Реданный катер // Катераи яхты, 1968, № 14. С. 58, 62, 63.
118. Ржаницын А. Р. Расчет составных стержней строительных конструкций. М.: Строй-
иэдат, 1946. 258 с.
119. Ржаницын А. Р. Теория составных стержней строительных конструкций. М.: Строй-
иэдат, 1948. 218 с.
120. Рейнке К., Лютьен Л., Мус И. Постройка яхт / Пер. с англ. Л.: Судостроение, 1982.
366 с.
121. РоманенкоЛ. Л., Щербаков Л. С Моторная лодка. Л.: Судостроение, 1972. 445 с.
122. Романов Н. К. Краткий технический справочник по клеям. М.: Оборонгиэ, 1946. 280 с.
123. Русецкий А. А. Движители судов с динамическими принципами поддержания. Л.:
Судостроение, 1979.
124. Русецкий А. А. Оборудование и организация гидродинамических лабораторий. Л.:
Судостроение, 1975. 152 с.
125. Русецкий А. А., Жученко М. М., Дубровин О. В. Судовые движители. Л.: Судостроение,
1971.287 с.
126. Селюженок Е. Ф. Крылатые суда. М.: Воениэдат, 1964.
127. Семенов Е. #., Страшкевич Р. В. Моторы „Вихрь" на лодке. Л.: Судостроение,
1978.143 с.
128. Семенов-Тян-Шанский В. В. Статика корабля. Л.: Судпромгиэ, 1940. 575 с.
129. Смирнова М. К. Прочность корпуса судна из стеклопластика. Л.: Судостроение,
1965. 331 с.
130. Соболев Г. 5.'Управляемость корабля и автоматизация судовождения. Л.: Судострое-
Судостроение, 1976. 478 с.
131. Соколов' И. А. Пластмассовые покрытия в качестве зашиты деревянных и металли-
металлических судов // Мат-лы по обмену опытом НТО им. акад. А. Н. Крылова. Л.: Судостроение, '
1963. Вып. 52. С. 169-175.
132. Справочник по катерам, лодкам и моторам. Л.: Судостроение, 1979. 384 с.
133. Справочник по судовым устройствам. Т. 1. Л.: Судостроение, 1975.
134. Справочник по теории корабля. Т. 1-3 / Под ред. Я. И. Войткунского. Л.: Судо-
Судостроение, 1985.
135. Стенсел Т. А. Перспективы гражданского применения системы глобальной навига-
навигации // Тр. инженеров по электронике и радиотехнике. TV71. № 10. М.: Мир, 1983. С. 87-96.
136. Судовождение автоматизация судовых технических средств: Сб. науч. трудов. Л.:
Транспорт, 1985. ,
X, .. 137. Тараторкин Б. С. Приборы для яхт и катеров. Л- Судостроение, 1984.
138. Терентьев Г. Б. Морские деревянные суда. Л.: Судпромгиз, 1961. 248 с.
139. Титов И. А., Егоров И. Т., Дробленков В. Ф. Ходкость быстроходных судов. Л.: Судо-
Судостроение, 1979.
140. 300 советов по катерам, лодкам и моторам. Л.: Судостроение, 1974. 320 с.
141. Фокс У. О „нерыскающих" катерах с трехкилевыми обводами // Катераи яхты, 1974,
№ 1 E3). С. 32-34.
142. Хейфец Л. Л. Гребные винты для катеров. Л.: Судостроение, 1980. 200 с.
143. Хейфец Л. Л. Двавинта на катере // Катераи яхты, 1970, № 5 B7). С. 26-27.
144. Хейфец Л. Л. Испытания катера и доводка гребного винта // Катера и яхты, 1971,
№3 C1). С. 31-34.
145. Хейфец Л. Л. Катер на одном крыле // Катераи яхты, 1974, № 4 E0). С. 19-23.
146. Хейфец Л. Л. О подборе гребного винта для катера // Катераи яхты, 1980,№ 3 G9).
С. 52-53.
147. Чугунов А. С. Крылья для „Казанки" с „Вихрем" // Катера н яхты, 1970, № 4 B6).
С. 25-26.
148. Чудинов С. Д. О подъемной силе подводного крыла конечного размаха. // Тр. -
ВНИТОСС, 1955. Т. VI. Вып. 2.
149. Шахтарин Г. Г. Электронно-механический лаг для яхты // Катера и яхты, 1978,
№2 G2). С. 93-95.
570
150. Школа яхтенного капитана / Под ред. Е. П. Леонтьева. М.: Физкультура и спорт, 1983.
275 с.
151. Эпштейн Л. А. Методы теории размерностей и подобия в задачах гидромеханики су-
судов. Л.: Судостроение, 1970. 207 с.
152. Якушенков А. А. Развитие спутниковых навигационных систем для обеспечения
эксплуатации морского транспортного фпота СССР: Судовождение и автоматизация судовых
технических средств // Сб. науч. тр. ЦНИИМФ, Л.: Транспорт, 1985. С. 97-100.
153. Якшаров П. С. Малые стальные суда. Л.: Судостроение, 1980. 152 с.
154. Якшаров П- С. Особенности расчетов прочности малых судов // Катера и яхты, 1968,
№15. С. 44-48.
155. Clement Е. P. Graphs for pedicting the ideal high speed risistance of p'laning catamarans//
Intern. Shipbuilding Progress, 1962, Nov. Vol. 9.
156. Clement E. P., Pope I. D. Stepless and stepped planing hulls - Graphs for performance
prediction and design // Intern. Shipbuilding Progress, 1961, Aug.Vol. 8. N 3. P. 344-360.
157. Fry E. D., Graul T. Design and application of modern high speed catamarans // Marine Tech-
Technology, 1972. Vol. 9. N 3. P. 345-357.
158. Fuwa Т., Sugai K., Yashina T. An experimental study on broaching of a small high speed
boat // Papers of Ship Research Institute. 1982. N 66.
159. Howard - Williams. Sails. Granada Publishing. 1983.
160. Motora S., Fugino M., Fuwa T. On the mechanism of broaching — to phenomena /'/ 2-nd
Intern. Conference on Stability of Ships and Ocean Vehiles. 1982.
СОДЕРЖАНИЕ
Предисловие 3
Основные условные обозначения 4
Раздел I. Типы малы х судов ' 7
1.Суда с механическим двигателем ^
1.1. Мотолодки 1
1.2. Катера '. 27
1.3. Плавучие дачи 36
2. Парусные суда 40
2.1. Яхты 42
2.2. Швертботы 49
2.3. Многокорпусные суда ¦ 52
3. Гребные лодки 58
4.Портативныелодки 63
4.1. Разборные лодки 63
4.2. Надувные лодки °7
Раздел IL Ходов ые качества малого судна 73
5.Сопротивление движению малого судна 73
5.1. Основные понятия и определения 73
5.2. Составляющие сопротивления движению судна . , 76
5.3. Сопротивление водоиэмещающих судов . 88
5.4. Сопротивление глиссирующих судов '. 92
5.5. Приближенные способы расчета сопротивления движению малого судна* 101
6.Управляемость малого судна 119
6.1. Основные понятия и определения 119
6.2. Гидродинамика органов управления малых судов 121
6.3. Гидродинамические характеристики корпуса судна 131
6.4. Расчет поворотливости и крена судна на циркуляции 135
6.5. Устойчивость нрямолинейного движения судна 140
6.6. Частные случаи расчета управляемости судна , 143
6.7. Примеры расчета управляемости малых судов 147
6.8. Определение гидродинамических сил и моментов, действующих на судовой руль ... 157
7. Гидроаэродинамика парусного судна 161
7.1. Основные понятия и определения 161
7.2. Аэродинамика паруса 164
7.3. Гидродинамика парусного судна 169
7.4. Ходкость парусного судна , . 171
Раздел III. Движители 177
8. Гребные винты 177
8.1. Основные понятия и определения 177
8.2. Диаграммы для расчета ГВ 181
8.3. Коэффициенты взаимодействия винта и корпуса 188
8.4. Кавитация ГВ 190
8.5. Проектирование ГВ 195
8.6. Расчет гидродинамических характеристик ГВ и построение паспортных
диаграмм 206
8.7. Спрямленный контур и прочный профиль лопасти 214
8.8. Выбор количества ГВ, направления их вращения и расположения относительно
корпуса 216
8.9. Рекомендации по подбору и доводке ГВ 218
9. Водометные движители 220
9.1. Основные понятия и определения 220
9.2. Определение наибольшей скорости судна и основных элементов ГВ водомета 224
572
9.3. Расчет кривых действия ГВ водомета и паспортной диаграммы ' 225
9.4. Приближенный расчет контрпропеллера 226
9.5. Определение формы выходного сопла 228
Раздел IV. Обводы кЪ рпуса малого судна 230
10. Водоизмещающиесуда 230
10.1. Основные понятия и определения 230
10.2. Суда с механическим двигателем 234
10.3. Парусные суда 238
10.4. Гребные суда 246
П.Глиссирующиесуда 250
11.1. Основные понятия и определения 250
11.2. Влияние формы обводов на мореходные качества и общепроектные
характеристики глиссирующих судов 253
11.3. Эксплуатационно-технические качества глиссирующих судов 259
11.4. Вспомогательные элементы обводов и устройства, способствующие повышению
мореходных качеств глиссирующих судов 274
11.5. Теоретические чертежи глиссирующих судов 280
12. Суда на подводных крыльях .' 284
12.1. Основные понятия н определения 284
12.2. Основные особенности работы подводных крыльев ' 287
12.3. Кавитация подводных крыльев 291
12.4. Определение основных элементов крыльевого устройства 295
12.5. Разработка формы профилей крыльев и стоек 307
12.6. Определение буксировочного сопротивления катеров на подводных крыльях 309
12.7. Пример расчета элементов крыльевого устройства и ГВ 314
РазделУКонструкция корпуса малых судов 322
13.Суда из древесины и фанеры 322
13.1. Характеристика материалов и соединений 322
13.2. Конструирование корпуса и определение размеров связей 336
13.3. Детали набора корпуса 340
13.4. Обшивка. Настил палубы 355
13.5. Соединение деталей набора 364
13.6. Конструкции корпуса судов из древесины и фанеры 370
14. Суда из алюминиевых сплавов 382
14.1. Характеристика сплавов. Полуфабрикаты. Защита от коррозии 382
14.2. Соединения в конструкциях из алюминиевых сплавов 390
14.3. Трехслойные конструкции 397
14.4. Клепаные конструкции 400
14.5. Сварные конструкции 412
14.6. Особенности конструкций разборных судов 422
15.Стальныесуда 426
15.1. Характеристика материала 426
15.2. Расчет связей набора 428
15.3. Конструирование элементов корпуса 441
16.Суда из пластмасс 450
16.1. Характеристика материалов 450
16.2. Детали конструкции и типы их соединений 456
' 16.3. Особенности конструирования корпуса пластмассового судна 463
17. Судаиэармо-истеклоцемента 472
17.1. Армоцементные суда 472
17.2. Стеклоцементные суда 482
Раздел VI. Двигательные установки 486
18. Стационарные двигательные установки , . . . 486
18.1. Судовые дизели 486
18.2. Конвертированные и судовые транспортные двигатели 497
18.3. Системы передачи мощности на движитель 500
573
18.4. Реверс-редукторы 505
18.5. Электрооборудование и системы управления 511
19.Подвесные лодочные моторы 514
19.1. Основные узлы и системы подвесного мотора 515
19.2. Технические характеристики отечественных подвесных лодочных моторов 522
19.3. Установка подвесного мотора на лодку 532
19.4. Приборы для контроля за работой подвесного лодочного мотора 537
19.5. Дооборудование подвесных лодочных моторов 539
Приложение. Навигационное оборудование малых судов 544
1. Общие определения 544
2. Источники электропитания 544
3. Навигационные приборы 547
4. Средства сигнализации н связи 554
5. Спасательные средства 555
6. Средства автоматизации вычислений на малых судах 557
Предметный указатель 563
Список литературы 567
Аливагабов Малик Манафович, Бирюкович Дмитрий Львович,
Бирюкович Константин Львович, Бирюкович Юрий Львович,
Васильев Владимир Иванович, Махаринский Лев Георгиевич,
Мирошниченко Эдуард Федорович, Мордвинов Баррикадо Георгиевич,
Немзер Александр Ильич, Павлов Александр Иванович,
Разгоняева Ирина Александровна, Сквирский Давид Ильич,
Скубко Роман Андреевич, Соколов Виктор Петрович,
Фишбайн Ефим Иосифович, Хейфец Лейба Лейбович,
Я к шаров Павел Сергеевич
СПРАВОЧНИК ПО МАЛОТОННАЖНОМУ СУДОСТРОЕНИЮ
Составитель Мордвинов Баррикадо Георгиевич
Заведующий редакцией Д. В. Павлов
Научный редактор В. П. Гудимович
Редакторы: Н. Г. Смирнова, 3. Я. Якимова
Технический редактор Е. А. Полякова
Корректоры: Т. С. Александрова, С. Н. Маковская, Е. А. Русакова
Художественный редактор О. П. Андреев
Оформление художника Ю. Б. Осенчакова
ИБ№1013
Подписано в печать 25.09.87. М-32273. Формат 70 х I 00/I 6. Бумага типогр. № 2. Печать
офсетная. Усл. печ. л. 46,8. Уч.-изд. л. 55,2. Усл. Кр.-отт. 93,89. Тираж 53 800 A-й завод
1-20 000) экз. Изд. № 4020-84. Заказ № 738. Цена 3 р. 20 к.
Набрано в издательстве „Судостроение" на наборно-печатающих автоматах операторами
И. В. Дроздовой, Т. В. Лебедевой и Ю. Л. Подольным
Издательство „Судостроение", 19106S, г. Ленинград, ул. Гоголя, 8.
Ленинградская типография № 2 головное предприятие ордена Трудового Красного
Знамени Ленинградского объединения „Техническая книга" им. Евгении Соколовой
Союзполиграфпрома при Государственном комитете СССР по делам издательств, поли-
полиграфии и книжной торговли. 198052, г. Ленинград, Измайловский пр., 29.